















































































































































































































































































































































































































































































































































Author: Меньшаков Ю.К.
Tags: формообразование со снятием стружки молоты и прессы разделительные операции без образования стружки, дробление и измельчение, обработка листового материала, изготовление резьбы радиоэлектроника радиотехника информационная безопасность разведка
ISBN: 978-5-7038-3019-2
Year: 2008




►' , • * ’ • *
‘ , . • • •• •
Ю.К. Меньшаков
Теоретические
основы
технических
разведок
Издательство МГТУ им. И.Э. bays
Ю.К. Меньшаков
Теоретические
основы
технических
разведок
Под редакцией Ю.Н. Лаврухина
Допущено Учебно-методическим объединением по образованию
в области информационной безопасности
в качестве учебного пособия для студентов
высших учебных заведений, обучающихся по специальностям
«Информационная безопасность»
Москва
Издательство МГТУ им. Н.Э. Баумана
2008
УДК 621.96(075.8)
ББК 32.0
М51
Рецензенты: канд. техн, наук, ст. науч. сотр. В.Г. Герасименко;
зав. каф. «Информационная безопасность» МГТУ им. Н.Э. Баумана
д-р техн, наук, проф. Н.В. Медведев
Меньшаков Ю.К.
М51 Теоретические основы технических разведок: Учеб, пособие / Под ред.
Ю.Н. Лаврухина. - М.: Изд-во Ml ТУ им. Н.Э. Баумана, 2008. - 536 с.: ил.
ISBN 978-5-7038-3019-2
Рассмотрены вопросы, связанные с различными направлениями и разновид-
ностями технической разведки. Определены задачи, объекты и организация техни-
ческой разведки. Приведены основные направления и классификация технической
разведки по видам, источникам информации и используемой аппаратуре. Подроб-
но рассмотрены все возможные направления и разновидности разведки.
Содержание учебного пособия соответствует курсу лекций, который читается
в МГТУ им. Н.Э. Баумана.
Для студентов и аспирантов, обучающихся по специальностям в области
информационной безопасности.
УДК 621.96(075.8)
ББК 32.0
Учебное издание
Меньшаков Юрий Константинович
ТЕОРЕТИЧЕСКИЕ ОСНОВЫ ТЕХНИЧЕСКИХ РАЗВЕДОК
Редактор В.М. Царев
Художник Н.Г Столярова
Компьютерная графика Т.Н. Аверчивой
Технический редактор Э.А. Кулакова
Корректор Р.В. Царева
Компьютерная верстка А.К). Ураловой
Подписано в печать 24.12.2007. Формат 70x100/16. Бумага офсетная. Печать офсетная.
Усл. печ. л. 43,55. Уч.-изд. л. 44,63.
Тираж 1000 экз. Заказ
Оригинал-макет подготовлен
в Издательстве МГТУ им. Н.Э. Баумана
Издательство МГТУ им. Н.Э. Баумана
105005, Москва, 2-я Бауманская ул., 5
Отпечатано в ГУП ППП «Типография «Наука»
121099, Москва, Шубинский пер., 6
© Ю.К. Меньшаков, 2008
© МГТУ им. Н.Э. Баумана, 2008
© Оформление. Издательство
ISBN 978-5-7038-3019-2 МГТУ им. Н.Э. Баумана, 2008
ПРЕДИСЛОВИЕ
Информационная безопасность является проблемой национального уровня
для любого государства.
Из «Концепции национальной безопасности Российской Федерации» следу-
ет, что одной из важнейших задач является защита государственного информа-
ционного ресурса. Другими словами, существуют информационные угрозы раз-
личного характера, на которые государство должно реагировать.
Понятие информационной угрозы неразрывно связано с каналом утечки ин-
формации, под ним подразумевают совокупность источника информации (объекта
разведки), технического средства разведки, с помощью которого добывается ин-
формация об объекте, и физической среды, где распространяется информацион-
ный сигнал.
Предлагаемая работа посвящена систематизированному и углубленному рас-
смотрению теоретических основ перечисленных выше составляющих канала
утечки информации и физических принципов построения аппаратуры разведки.
В основу исследований сущности технической разведки положены возмож-
ные физические информационные поля, возникающие при функционировании
тех или иных объектов. Это, безусловно, правильный и продуктивный подход к
решаемой проблеме.
Представленная работа выполнена на актуальную тему и позволяет запол-
нить существующий пробел в общедоступной литературе в области информаци-
онной безопасности. Ее новизна обусловлена отсутствием аналогов в открытых
отечественных и зарубежных публикациях, а также методическим и системным
подходом при работе над материалом.
В целом работа будет полезна как практическое пособие специалистам в об-
ласти информационной безопасности и учебное пособие для студентов соответ-
ствующих специальностей.
ВВЕДЕНИЕ
Изменения, происходящие в России в последнее время, свидетельствуют о
начале подъема экономики страны и возрождении оборонной промышленно-
сти. Это определяет необходимость расширения задач по защите информации
от технических разведок с учетом охраны государственных тайн в области
создания новых видов вооружения и военной техники, а также обеспечения
боевой деятельности войск и сил флота. В связи с этим становится актуальной
комплексная защита различных объектов и информации от технических разве-
док, особенно при создании и использовании новых видов вооружения и воен-
ной техники. Проблема комплексной защиты объектов и информации охваты-
вает широкий круг вопросов.
Важной составляющей частью ее является наличие информационных физи-
ческих полей, которые возникают при функционировании различных объектов и
являются источниками информации о них. В связи с этим появляется необходи-
мость классификации и теоретического анализа построения аппаратуры развед-
ки, работающей по различным физическим полям объектов.
Решение проблемы защиты от технических средств разведки (TCP) предпо-
лагает также знание существующих видов и средств иностранных технических
разведок, которым необходимо противодействовать. Без знания этого невоз-
можно грамотно и эффективно решать вопросы защиты.
Разработка и осуществление практических мер защиты - главное звено в
рассматриваемой проблеме. Задачами защиты при этом могут быть скрытие
факта создания нового вида вооружения, характеристик образцов вооружения и
военной техники, сведений о военно-промышленных объектах, навязывание
противоположной стороне ложного представления о скрываемых объектах.
Для качественной и эффективной защиты от TCP в каждом конкретном слу-
чае необходимо проводить тщательный анализ сведений о скрываемых объектах
и учитывать возможность их проявления через соответствующие демаскирую-
щие признаки (ДП). Поэтому так важно выявление источников информации для
TCP, анализ ДП скрываемых объектов и возможных каналов утечки.
Необходимо учитывать также условия, влияющие на процессы ведения раз-
ведки и защиты объектов. Условия, ограничивающие получение информации с
помощью TCP и способствующие необнаружению скрываемого объекта, опре-
деляются физическими свойствами и состоянием среды, разделяющей объект и
средство разведки. Поэтому при анализе ДП и оценке возможностей TCP особое
значение приобретает изучение различных факторов, влияющих на обнаружение
и распознавание скрываемых объектов, и в первую очередь среды, разделяющей
объект и средство разведки.
Неотъемлемая часть защиты скрываемых объектов и информации от TCP -
технический контроль эффективности и надежности принимаемых мер. Без ка-
4
чественного технического контроля невозможно грамотно и эффективно решать
вопросы защиты. Важным элементом технического контроля являются норма-
тивные показатели по максимально допустимым значениям параметров скры-
ваемых физических полей объектов. При определении их в качестве исходных
данных могут быть приняты потенциальные возможности TCP по точности из-
мерения тех или иных характеристик скрываемых объектов, а также уровни
маскирующих естественных и искусственных шумов.
Изложенное свидетельствует о необходимости системного и комплексного
подхода к защите объектов и информации от TCP. Изучение существующих ма-
териалов показывает отсутствие в открытой литературе обобщенных и система-
тизированных сведений в этой области. В известной мере этот пробел заполняет
вышедшая в 2002 г. книга «Защита объектов и информации от технических
средств разведки» (Ю.К. Меньшаков). Однако вопросы, связанные с теоретиче-
скими аспектами технических разведок, их видами и средствами, представлены
достаточно схематично и в ограниченном объеме. Задача полного и системати-
зированного освещения проблемы защиты от технических разведок весьма акту-
альна, однако осветить все перечисленные выше вопросы в одной книге невоз-
можно. Поэтому автор решил изложить весь материал в трех книгах, каждая из
которых есть логическое завершение отдельной проблемы:
- теоретические основы технических разведок;
- виды и средства иностранных технических разведок;
- теоретические основы практической защиты объектов и информации от
технических разведок.
Первая книга посвящена теоретическим аспектам технических разведок.
В ней рассматриваются вопросы, связанные с задачами технических разведок, ее
объектами, возможными направлениями и разновидностями. При написании
книги использованы открытые отечественные и зарубежные источники.
Книга может быть полезна преподавателям и студентам оборонных специ-
альностей вузов, слушателям и курсантам военных академий и институтов, а
также специалистам в области информационной безопасности.
Автор выражает благодарность за оказанную помощь Ю.Н. Лаврухину,
Ю.К. Макарову, М.П. Сычеву.
Список основных сокращений
АР - акустическая разведка
АСОД - автоматизированная система обработки данных
АЧХ - амплитудно-частотная характеристика
В и ВПО - военный и военно-промышленный объект
В и ВТ - вооружение и военная техника
ТАР - гидроакустическая разведка
ГАС - гидроакустическая станция
ГЛС - гидролокационная станция
ДНА - диаграмма направленности антенны
ЗГРЛС - загоризонтная радиолокационная станция
ИСР - измерительно-сигнатурная разведка
КР - компьютерная разведка
ЛР - лазерная разведка
ММР - магнитометрическая разведка
НК - надводный корабль
ОР - оптическая разведка
ОЭР - оптико-электронная разведка
ПВО - противовоздушная оборона
пко - противокосмическая оборона
пл - подводная лодка
ПРО - противоракетная оборона
пэмин - побочные электромагнитные излучения и наводки
РДР - радиационная разведка
РЛР - радиолокационная разведка
РЛС БО - радиолокационная станция бокового обзора
рр - радиоразведка
РТР - радиотехническая разведка
РЭБ - радиоэлектронная борьба
РЭР - радиоэлектронная разведка
РЭС - радиоэлектронное средство
СР - сейсмическая разведка
ТЛВР - телевизионная разведка
TCP - техническое средство разведки
УНЧ - усилитель низкой частоты
УРЧ - усилитель радиочастоты
ФР - фоторазведка
ХР - химическая разведка
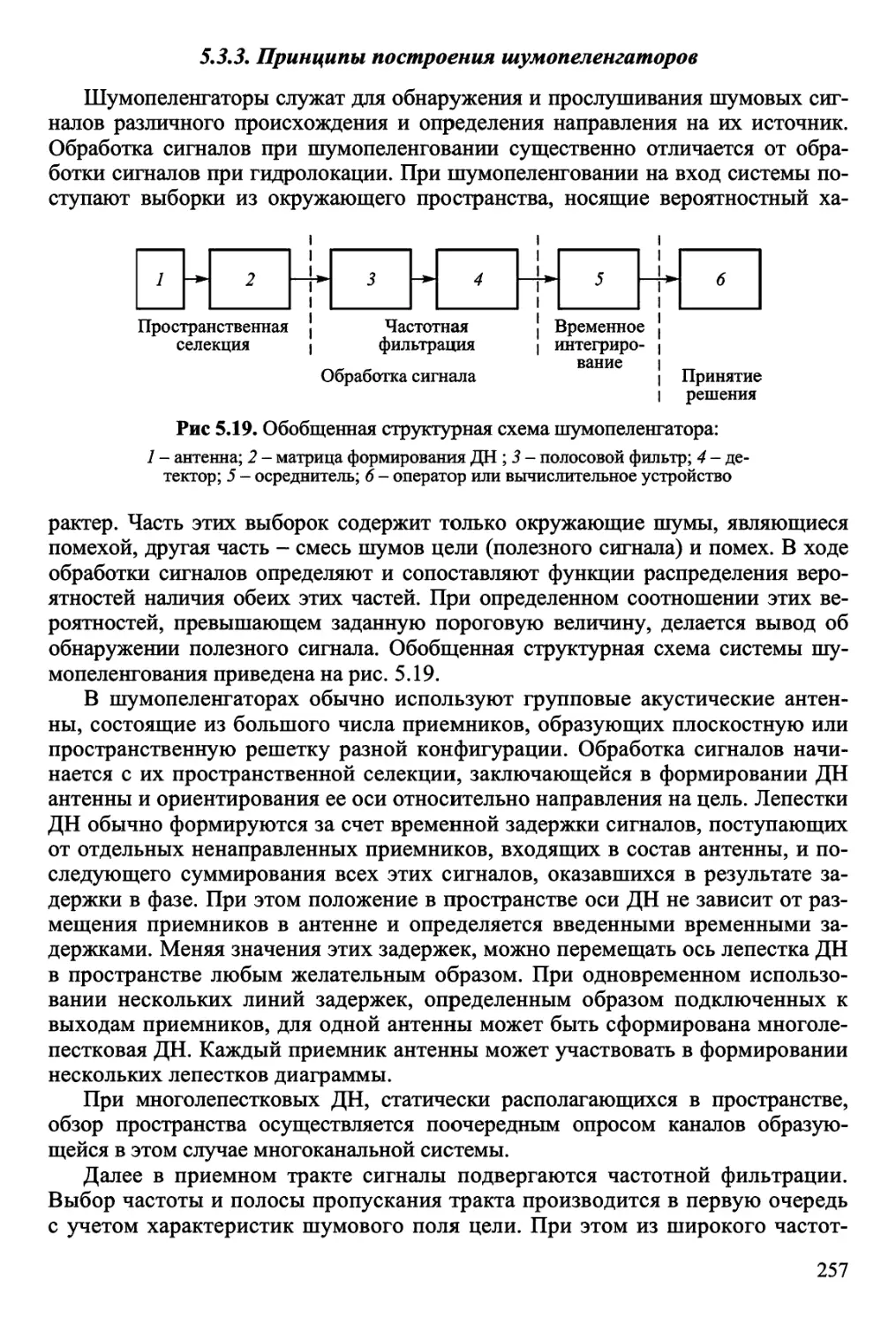
шп - шумопеленгатор
эдс - электродвижущая сила
ЭЛТ - электронно-лучевая трубка
эмв - электромагнитная волна
ЭМИ - электромагнитное излучение
6
1. ОБЩАЯ ХАРАКТЕРИСТИКА ТЕХНИЧЕСКОЙ РАЗВЕДКИ
1.1. Цели и задачи технической разведки
Под технической разведкой (ТР) понимается целенаправленная деятельность
любого государства против другого государства по добыванию с помощью тех-
нических средств соответствующих сведений в целях обеспечения военно-
политического руководства своевременной информацией по разведываемым
странам и их вооруженным силам.
Задачи технической разведки - добывание и последующая обработка сведений:
- о содержании стратегических и оперативных планов вооруженных сил, их
боеспособности и мобилизационной готовности, создании и использовании мо-
билизационных ресурсов;
- о направлениях развития вооружения и военной техники, научно-иссле-
довательских и опытно-конструкторских работах по созданию и модернизации
образцов вооружения и военной техники;
- о количестве, устройстве и технологии производства ядерного и специаль-
ного оружия;
- о тактико-технических характеристиках и возможностях боевого примене-
ния вооружения и военной техники;
- о дислокации, численности и технической оснащенности вооруженных сил;
- о степени подготовки территории страны к ведению боевых действий;
- об объемах поставок и запасах стратегических видов сырья и материаль-
ных ресурсов;
- о функционировании промышленности, транспорта и связи;
- об объемах, планах государственного оборонного заказа, выпуске и по-
ставках вооружения, военной техники и другой оборонной продукции;
- о научно-исследовательских, опытно-конструкторских и проектных работах;
- о технологиях, имеющих важное оборонное или экономическое значение;
- о сельском хозяйстве, финансах, торговле;
- о внешнеполитической и экономической деятельности государства;
- о системе правительственной и иных видов специальной связи, о государ-
ственных шифрах.
В результате сбора, накопления и обработки данных по перечисленным выше
вопросам можно получить достаточно полную информацию о состоянии и перспек-
тивах развития военного, экономического и научно-технического потенциала раз-
ведуемого государства, определить основные направления его внутри- и внешнепо-
литической деятельности [1].
1.2. Принципы организации и ведения технической разведки
В целях успешного решения поставленных задач ТР организуется и ве-
дется по определенным принципам [1]: целенаправленности, централизации
руководства, размещению технических средств разведки (TCP) вблизи госу-
7
дарственных границ и на территории разведываемой страны, использованию
неразведывательных систем и средств, формированию целевых систем развед-
ки, коллективному использованию добытой информации TCP, привлечению
ученых к обработке информации.
Целенаправленность в организации ТР заключается в том, что ее деятельность
объединена и направлена в основном против государства - потенциального про-
тивника.
Объединение усилий разведок США и других государств происходит в рамках
различных блоков и двухсторонних соглашений и выражается в совместной разве-
дывательной деятельности, обеспечении США своих партнеров по НАТО техниче-
скими средствами добывания, передачи и обработки разведданных.
Централизация руководства заключается в координации высшими политиче-
скими функционерами деятельности национальных и ведомственных органов раз-
ведки в целях повышения ее результативности и устранения дублирования.
Размещение TCP вблизи государственных границ и на территории разведы-
ваемой страны предполагает использование для целей разведки территорий со-
предельных государств, акваторий, находящихся вблизи территориальных вод,
зданий посольств, консульств, разрешенных для полетов воздушных междуна-
родных трасс над территорией разведываемой страны и маршрутов торговых,
пассажирских и рыболовецких судов.
Использование неразведывательных систем и средств состоит в привлече-
нии для добывания разведданных целого ряда систем и средств различной ве-
домственной принадлежности:
- систем раннего предупреждения о ракетно-ядерном нападении;
- плавучих и наземных командно-измерительных комплексов ракетных
полигонов;
- систем научно-исследовательских сейсмических станций;
- судов пассажирского, торгового, рыболовного флотов, заходящих в терри-
ториальные воды и открытые порты;
- космических аппаратов национального управления по аэронавтике и ис-
следованию космического пространства, используемых для геофизических ис-
следований и наблюдения за окружающей средой.
Целевые системы разведки создаются для получения информации об объек-
тах определенного класса.
К постоянно действующим целевым системам разведки относят:
- системы разведки космических аппаратов (КА) на орбитах;
- системы разведки наземных испытаний ядерных средств;
- системы разведки объектов-целей для нанесения ядерных ударов;
- системы разведки РЭС, используемых в государственном и военном
управлении и в комплексах вооружения.
Коллективное использование добытой информации означает ее доведение до
заинтересованных органов высшего политического и военного руководства, раз-
работчиков систем вооружения и командующих вооруженными силами (ВС) на
театрах военных действий (ТВД).
Привлечение ученых и специалистов к обработке разведывательной информа-
ции предполагает сотрудничество органов разведки с учеными и специалистами
университетов и научно-исследовательских организаций для качественного анализа
8
разведывательной информации и получения оценок более высокого уровня, осо-
бенно по вопросам перспектив развития вооружения и военной техники.
Основными принципами ведения ТР являются комплексность, оператив-
ность, непрерывность, глобальность, плановость и скрытность.
Комплексность означает, что для добывания наиболее полных данных о кон-
кретном объекте применяют различные сочетания разведаппаратуры, основанной
на использовании различных физических полей. Принцип комплексности ведения
ТР очень важен с точки зрения получения развединформации по различным кана-
лам (физическим полям объекта), повышающим ее надежность и позволяющим по-
лучать наиболее достоверные сведения об объектах.
Оперативность ведения ТР предполагает решение поставленных задач в
минимально короткие сроки. Известно, что информация со временем теряет
свою ценность, поэтому очень важно своевременно добыть и доставить ее в
центр сбора и обработки данных.
Непрерывность ведения ТР - добывание разведданных постоянно, в любой
обстановке и при любых условиях. Особенно важно при наблюдении за объек-
тами, строящимися или уже создающими угрозу ядерного нападения.
Глобальность ведения ТР заключается в охвате разведывательной деятель-
ностью значительных районов земного шара с одновременным решением разно-
образных задач. Принцип глобальности получил наиболее полную реализацию с
появлением космических средств разведки. Космическая разведка дает возмож-
ности получать информацию об объектах в любой точке Земли.
Плановость ведения разведки означает, что добывание разведывательной
информации ведется в соответствии с заранее разработанными программами.
В США ежегодно разрабатывается до 200 таких программ. При возникновении
каких-либо критических ситуаций или конфликтов осуществляется корректи-
ровка разведывательных задач.
Скрытность ведения ТР заключается в использовании для добывания раз-
вединформации в основном пассивных (по принципу действия) технических
средств разведки, в маскировке и камуфлировании разведаппаратуры, широком
использование мероприятий по созданию легенд и засекречиванию разведыва-
тельных операций.
1.3. Классификация технической разведки
Техническая разведка классифицируется по видам, решаемым задачам и ис-
пользуемым в качестве источников информации физическим полям объектов.
По видам ТР подразделяется на космическую, воздушную, морскую и на-
земную, т. е. по месту размещения аппаратуры.
По решаемым задачам различают стратегическую, оперативную и тактическую ТР.
При классификации ТР по информационным физическим полям положены
физические принципы построения аппаратуры разведки на их основе. В соот-
ветствии с этим подходом они делится на оптическую (ОР), оптико-
электронную (ОЭР), радиоэлектронную (РЭР), гидроакустическую (ГАР), аку-
стическую (АР), химическую (ХР), радиационную (РДР), сейсмическую (СР),
магнитометрическую (ММР) и компьютерную разведку (КР).
На рис. 1.1 представлена классификационная схема возможных источников
информации о скрываемых объектах и разновидностей ТР, с помощью которых
добывается информация.
9
Источники информации
о скрываемых объектах
Электронные базы ЭВМ Компьютерная разведка (КР)
ЭМИ ультра-
фиолетового,
видимого
и инфракрасного
диапазонов
ЭМИ
радиодиапазона
Акустические поля в водной среде Акустические поля в воздушной среде
Химические
выбросы
и отходы
в окружающей
среде
Радиоактивные излучения Дефор- мационные и сдвиговые поля в земной коре
Локальные
изменения
магнитного поля
Земли
Оптическая и оптико-электрон- ная разведки
ОР ОЭР
Радиоэлектрон-
ная разведка
(РЭР)
(TAP)
Гидроакусти-
ческая разведка
Акустическая разведка Химическая разведка
(АР) (ХР)
Радиационная
разведка
Сейсмическая
разведка
Магнитометри-
ческая разведка
ЕС
s
tn
(РДР)
(СР)
(ММР)
f
i
ей
§
3
g &
о
д
5
I
CQ
1
й
д
ч *
3
3
Р-н
S
о &
S
5
3
§
о
с ю
I й
p-< IX
В
1ЙЬ
£8.
£ я
' £V
s s
g at?
& is гц
i!
4)
g
I
£
Is
д
§
8 s
£2 Я
« Д
CU о
и
S
Рис. 1.1. Классификация TP по информационным физическим полям
При классификации ТР по информационным физическим полям необходимо
учитывать также новое направление, которое появилось в американской техни-
ческой разведке - измерительно-сигнатурную разведку (ИСР) - МАСИНТ
(MASINT - Measurement And Signature INTelligence). США прибегли к ИСР при
наблюдении за атомной подводной лодкой (АПЛ) «Курск» в ходе учений Северно-
го флота ВМФ РФ. ИСР является многонаправленной, т. е. комплексно использует
набор различных информационных каналов и поэтому является наиболее информа-
тивным направлением технической разведки. Она позволяет наиболее полно реали-
зовать принцип комплексности ведения технической разведки.
В соответствии с опубликованными документами идеология и цели этого
направления технической разведки формулируются следующим образом: изме-
рительно-сигнатурная разведка ведется в интересах обеспечения успеха военных
операций вооруженных сил США, создания новых поколений вооружения и во-
енной техники, определения направлений модернизации вооруженных сил, кон-
троля за распространением оружия, окружающей средой, а также выполнением
военных договоров.
Классификация диапазонов спектра излучений, которые принципиально мо-
гут нести информацию о различных объектах, представлена в табл. 1.1.
В последующих главах детально, в соответствии с классификацией по ин-
формационным физическим полям объектов, рассматриваются перечисленные
выше разновидности ТР.
Таблица 1.1
Область спектра Длина волны
Низкочастотные колебания Инфразвуковые и звуковые колебания Свыше 18000 м
Радиоволны Длинные средние Промежуточные короткие Ультракороткие Микроволновые 18000... 2000 м 2000 ...200м 200... 50 м 50... Юм 10 м ... 1 см 1см... 0,75 мм
Инфракрасное излучение Длинноволновое Средневолновое Коротковолновое 750... 15 мкм 15 ... 1,5 мкм 1,5... 0,75 мкм
Видимое излучение Красное Оранжевое Желтое Зеленое Голубое Синее Фиолетовое 750... 620 им 620... 590 нм 590... 560 нм 560... 500 нм 500... 480 нм 480... 450 нм 450... 400 нм
Ультрафиолетовое излучение 400... 10 нм
Рентгеновское излучение 100... 0,04 А
Г амма-излучение 0,04 А и менее
11
2. ОПТИЧЕСКАЯ РАЗВЕДКА
Под оптической разведкой понимается добывание информации с помощью
оптических средств, обеспечивающих прием электромагнитных колебаний
ультрафиолетового, видимого и инфракрасного диапазонов, излученных или
отраженных объектами и предметами окружающей местности. Оптическая раз-
ведка позволяет решать следующие задачи:
- поиск военных (В) и военно-промышленных объектов (ВПО) и определе-
ние их координат;
- выявление начала строительства В и ВПО, периодическое наблюдение за
ним в целях определения назначения;
- выяснение профиля оборонных предприятий, вида выпускаемой продук-
ции и производственной мощности;
- контроль за выполнением договоров и соглашений по ограничению страте-
гических вооружений;
- периодическое наблюдение за коммуникациями для обнаружения крупных
перевозок военной техники и грузов;
- съемка территории для картографирования местности;
- выявление проводимых учений, маневров войск и сил флота, а также ис-
пытаний вооружения (В) и военной техники (ВТ).
Оптическая разведка подразделяется на визуально-оптическую разведку
(ВОР) и фотографическую разведку (ФР).
2.1. Визуально-оптическая разведка
Визуально-оптическая разведка - это процесс получения информации при
непосредственном наблюдении объектов невооруженным глазом и с использо-
ванием наблюдательных оптических приборов.
Визуальное наблюдение может использоваться во всех видах разведки: на-
земной, морской, воздушной и космической.
Воздушное наблюдение с передачей данных по радио считается наиболее
оперативным способом разведки, который позволяет получать разведыватель-
ные сведения о войсках и их действиях на большую глубину и в кратчайшие
сроки.
Наземное наблюдение ведется с наблюдательных постов в любой обстановке
и является важным способом добычи разведданных.
Визуальное наблюдение является также одним из основных способов ве-
дения разведки при действиях диверсионно-разведывательных групп и аген-
туры.
Эффективность его связана с характеристиками зрительного восприятия.
12
2.1.1. Характеристики зрительного восприятия
Зрительные ощущения, возникающие у наблюдателя в результате воздейст-
вия света на его зрительный аппарат, позволяют судить о яркости и цвете на-
блюдаемых объектов, определять их форму и взаимное расположение, отличать
объекты от окружающего фона.
Основными характеристиками зрения, которые существенно влияют на воз-
можности визуального обнаружения маскируемых объектов, являются спек-
тральная, контрастная и световая чувствительность, разрешающая способность,
а также порог глубинного (стереоскопического) восприятия.
Знание этих характеристик позволяет в каждом случае оценивать возможно-
сти разведки наблюдением и выявлять специфические требования, предъявляе-
мые к средствам имитации и скрытия.
Спектральная чувствительность. Глаз является селективным (избиратель-
ным) приемником лучистой энергии: в разных областях спектра равные по
значению лучистые потоки от объектов наблюдения воспринимаются неоди-
наково, их видимая яркость различна. Глаз не реагирует на инфракрасные и
ультрафиолетовые лучи. Он воспринимает излучения в области спектра, огра-
ниченной колебаниями с длиной волны от 0,38 до 0,76 мкм. В пределах этого
участка спектра чувствительность глаза неодинакова. Она максимальна для
желто-зеленых излучений с длиной волны 0,555 мкм и уменьшается до нуля на
границах видимой области.
Спектральная чувствительность зрения выражается в относительных едини-
цах и называется относительной видностью.
При этом чувствительность глаза к излучениям с длиной волны 0,555 мкм
принимается за единицу. Зависимость относительной видности от длины волны
излучений для дневных условий наблюдения показана на рис. 2.1 сплошной линией.
Рис. 2.1. Относительная видность излучений
Сравнивая по графику относительные видности для волн 0,555 и 0,65 мкм, заме-
чаем, что видность при X = 0,65 мкм примерно в 10 раз меньше. Это значит, что
при одинаковых лучистых потоках, отраженных поверхностью в желто-зеленой
(X = 0,555 мкм) и красной (X = 0,65 мкм) областях спектра, видимая яркость по-
верхности в красной будет в 10 раз меньше, чем в желто-зеленой. При наблюде-
нии ночью кривая видности сдвигается в коротковолновую часть спектра.
13
Контрастная чувствительность. При визуальной разведке любой объект
наблюдается на фоне местности. Как правило, войсковая техника и маскировоч-
ные конструкции по цвету мало отличаются от фона. При наблюдении с боль-
ших расстояний цветовые различия между ними нивелируются вследствие
влияния атмосферной дымки. Поэтому часто наблюдатель отличает замаскиро-
ванные объекты от фона только по их яркости.
Количественное различие в яркостях объекта наблюдения и фона принято
характеризовать контрастом, определяемым относительной разностью яркостей:
D _ D D
K = ^wc----min пни К = 1---min
D D
-°тах -°тах
(2.1)
где Втт и Втах - меньшая и большая яркости контрастирующих поверхностей объ-
екта и фона; причем обе величины могут быть отнесены как к объекту, так и к фону.
Опытным путем установлено, что обнаружение объекта облегчается при
увеличении его контраста с фоном. Минимальное значение контраста, при кото-
ром еще отмечается различие в яркостях объекта и фона, т. е. когда объект еще
обнаруживается, называют пороговым контрастом 8. Величина 1/8, обратная по-
роговому контрасту, называется контрастной чувствительностью зрения.
Численное значение порогового контраста зависит от того, известно ли на-
блюдателю, где объект расположен. Если линия зрения направлена точно на
объект разведки, то пороговый контраст имеет одно значение. Если местонахо-
ждение объекта неизвестно и его приходится искать в некотором пространстве,
то пороговый контраст должен быть больше. Хорошо известно, что наблюда-
тель, следящий за целью, может долго ее видеть, даже если объект наблюдения
находится на крайне слабом пороговом восприятии. Но стоит лишь на миг бро-
сить взгляд в сторону, как цель теряется, а обнаружить ее уже невозможно.
Таким образом, различают два пороговых контраста:
а) контраст исчезновения объекта 8ИСч, который характеризует максимальную
чувствительность человеческого зрения (при фиксированной линии наблюдения);
Глаз наблюдателя б) контраст обнаружения 8обн, характери-
зующий контрастную чувствительность зре-
ния при поиске объекта.
При разведке наблюдением противник
вынужден вести поиск объектов. Поэтому
5- возможности вскрытия объектов маскировки
определяются порогами обнаружения 80бн,
которые больше порогов исчезновения 8ИСЧ
как минимум в 3 раза.
При ведении разведки днем пороговый кон-
_______ траст объекта зависит лишь от его формы и уг-
ловых размеров. С больших расстояний мелкие
.х х детали не наблюдаются, а видимая форма объ-
zmax екта приближается к геометрически правиль-
ной (круг, эллипс, квадрат, прямоугольник),
Рис. 2.2. Угловой размер объекта
наблюдения
которую можно характеризовать отношением
ширины объекта к его длине 1^: /щах (рис. 2.2).
14
Рис. 2.3. Номограмма для определения размеров объектов наблюдения
Угловым размером 5 называют угол, под которым видна проекция меньшей
стороны объекта из точки расположения наблюдателя. Практически угловые
размеры объектов разведки малы и не превышают долей градуса. Поэтому вели-
чину 5 определяют в угл. мин по формуле
5 = 3440^,
Н
(2.2)
где Zmm - проекция меньшей стороны объекта на плоскость, перпендикулярную
линии зрения наблюдателя; Л - дальность (высота) наблюдения.
Угловые размеры объектов при ведении противником наземной, воздуш-
ной или космической разведки можно найти также по номограмме (рис. 2.3).
Так, автомобиль (Zmin = 2,3 м) при воздушном плановом наблюдении с высоты
Н = 2 км имеет угловой размер 5 = 4 угл. мин. Зависимость пороговых кон-
трастов обнаружения для объектов различной формы и угловых размеров
приведена на рис. 2.4. Из этой номограммы следуют два очевидных вывода:
1) протяженные объекты визуально обнаруживаются легче, т. е. при мень-
ших контрастах, чем объекты компактные «1:1);
2) с увеличением угловых размеров пороговые контрасты обнаружения сни-
жаются, следовательно, уменьшается контраст, при котором наблюдатель впер-
вые может заметить объект.
15
Рис. 2.4. Значения пороговых контрастов обнаружения для объектов
различной формы и угловых размеров
Разрешающая способность зрения характеризуется минимальным разре-
шаемым углом 8mm, т. е. наименьшим угловым размером объекта, его деталей
или промежутков между ними, при котором эти объекты или детали еще видны
раздельно, не сливаясь один с другим (рис. 2.5)
Рис. 2.5. Минимальный разрешаемый угол
Значение минимального разрешаемого угла зрения зависит от формы объектов
или деталей и контраста их с фоном. Численное значение 8mm при ведении развед-
ки наблюдением (с поиском объектов) можно найти по номограмме на рис. 2.4.
Для этого нужно знать контраст деталей объекта с фоном К и их форму (/min- 4пах).
Знание разрешающей способности зрения необходимо для определения размеров
маскировочных конструкций (масок, макетов) и маскирующих окрасок, рассчи-
танных на получение маскировочного эффекта с заданных расстояний, или для
16
решения обратной задачи - определения дальности, с которой объект не опозна-
ется. Наименьший размер /щш, при котором объект или его деталь обнаруживается
на удалении Я при минимальном разрешаемом угле зрения 8mm, определяется как
mm 344() ? )
где 8mm - в утл. мин. Дальность или высота опознавания объекта определяется как
Н< 3440-^4 (2.4)
^min
Световая чувствительность характеризует свойства глаза по обнаружению
источников света и освещенных поверхностей ночью. Необходима для расчета
маскировочного освещения и определения дистанций, с которых противник но-
чью может обнаружить войска и маскируемые объекты по световым демаски-
рующим признакам.
Световая чувствительность глаза при обнаружении освещенных или светя-
щихся поверхностей определяется наименьшей (пороговой) яркостью, при кото-
рой впервые может быть обнаружена ночью с заданной вероятностью (75 %).
8, угл. мин
Рис. 2.6. Пороговая яркость поверхностей при наблюдении ночью
17
Пороговая яркость Впор зависит от угловых размеров наблюдаемой поверхно-
сти и яркости фона. На рис. 2.6 показана такая зависимость для световых пятен
компактной формы при ведении разведки в темную ночь, когда природная осве-
щенность не превышает 0,001 лк, и в полнолуние (при освещенности 0,1 лк). Не-
трудно видеть, что пороговая яркость поверхностей при наблюдении их темной
ночью значительно меньше, чем в лунную [2].
С уменьшением видимых угловых размеров поверхности пороговая яркость воз-
растает. Это значит, что, уменьшая яркость освещения поверхностей, можно повы-
сить уровень допустимой маскировочной освещенности и тем самым создать прием-
лемые условия для выполнения войсками инженерных работ в ночное время суток.
Пороговая яркость световых пятен с размерами менее 10 угл. мин обратно
пропорциональна квадрату их углового размера, т. е.
в
ЛП°Р д2 ’
(2.5)
где 5 - угловой размер светового пятна, угл. мин. Например, при уменьшении
линейных размеров освещенной поверхности в 2 раза пороговая яркость увели-
чивается в 4 раза; значит, и допустимая освещенность в местах проведения ра-
бот может быть увеличена также в 4 раза.
Источники света (лампы, фонари, фары, сигнальные знаки) при наблюдении
с больших расстояний имеют ничтожно малые угловые размеры и воспринима-
ются как светящиеся точки. В этих условиях световую чувствительность зрения
уже нельзя характеризовать пороговой яркостью. Ее принято оценивать наи-
меньшим значением освещенности, создаваемым источником света на зрачке
глаза наблюдателя, при котором источник света впервые может быть обнаружен
с заданной вероятностью. Эта величина называется пороговой освещенностью
на зрачке наблюдателя (пороговым блеском) Е’пор.
При наблюдении источников белого света в темную ночь пороговый блеск
£’пор = 2х10-8 лк.
Чувствительность глаза к излучениям цветных источников света, например,
светосигнальных знаков, характеризуется двумя величинами: пороговым бле-
ском Е’пор, при котором источники обнаруживаются в виде бесцветных точек, и
цветовым пороговым блеском Е’пор, цв, при котором наблюдатель опознает их
цвет. Расчетные значения этих величин для сигналов разного цвета имеют сле-
дующие значения [2]:
Цвет сигнала Пороговый блеск, £гюр, лк Цветовой пороговый блеск Епор. цв, лк
Зеленый 2 х Ю8 5 х Ю’7
Желтый 6 х Ю8 9 х 10’7
Красный — 4 х 1(Г7
Белый 2 х 1(Г8 —
Возможности зрения по обнаружению красных сигналов определяются толь-
ко цветовым блеском, так как для них не существует бесцветного промежутка.
Красные сигналы либо не обнаруживаются, либо не опознаются.
18
Понятие порогового блеска используют в
расчетах по световой маскировке. По нему опре-
деляют допустимую силу света источника, при
которой его нельзя обнаружить с заданного рас-
стояния.
Порог глубинного (стереоскопического) зре-
ния характеризует возможность восприятия глу-
бины пространства. При наблюдении предметов
на сетчатке каждого глаза отпечатываются само-
стоятельные изображения, которые в сознании
наблюдателя сливаются в одно. Как показано на
рис. 2.7, расстояние b между глазами (в среднем
65 мм) приводит к тому, что изображения разно-
удаленных предметов сдвигаются с идентичных
мест сетчатки. Этот сдвиг изображений и обу-
словливает восприятие наблюдателем глубины
пространства.
Способность оценивать наименьшее взаим-
ное смещение AD объектов по дальности харак-
теризуется разностью параллактических углов Л w
д w Рис. 2.7. Схема бинокулярного
Av, при которой объекты еще воспринимаются зрения
разноудаленными. Эту разность Av и называют
порогом глубинного зрения. Днем порог глубинного зрения зависит от контра-
ста наблюдаемых объектов, их формы и может изменяться от 5 до 15 угл. с.
Для решения практических задач порог глубинного зрения удобно выразить
линейным расстоянием между предметами на местности АД при котором еще
воспринимаются различия между ними по дальности.
Из рис. 2.7 следует, что
Av = \|/2 - Vi = (90°- v2) - (90°- vi) = vi - v2.
Поскольку углы V1 И V2 ничтожно малы
A b Ъ
Av = V1 - v2=---------.
D D + AD
Тогда
(2.6)
где ЛсТ - радиус стереоскопического зрения, т. е. предельно большое расстояние
до ближнего предмета, далее которого наблюдатель не различает взаимного
расположения предметов по глубине вследствие стереоэффекта.
Зависимость радиуса стереоскопического зрения от контраста показана на
рис. 2.8 [2].
19
Рис. 2.8. Зависимость стереоскопического
радиуса зрения от контраста
При наблюдении с помощью биноклей и стереотруб радиус стереоскопиче-
ского зрения
^Тпр
(2.7)
где П = — Г - пластика бинокулярного прибора наблюдения; В - база прибора,
b
т. е. расстояние между центрами входных окон прибора; Ь - расстояние между
центрами зрачков глаз; Г - увеличение прибора.
2.1.2. Видимость объектов
Видимость объекта при наблюдении днем зависит от многих факторов: кон-
траста К с окружающим фоном, угловых размеров 5 и формы объекта, времени
наблюдения £ При уменьшении контраста, угловых размеров или времени на-
блюдения видимость объектов ухудшается.
Время наблюдения может меняться в широких пределах в зависимости от
того, ведется ли разведка с воздуха или с Земли. На практике принято рассчиты-
вать на худший случай, когда время наблюдения объектов неограничено.
Угловые размеры 5 и форма наблюдаемых объектов влияют лишь на одну
величину - пороговый контраст зрения 8.
В связи с этим видимость объекта, оцениваемую как интенсивность зритель-
ного восприятия (ощущения) различий объекта и фона, принято выражать чис-
лом И, которое показывает, во сколько раз действительный контраст больше по-
рогового контраста 8 для объекта данной формы и угловых размеров. На рис. 2.9
представлены кривые, позволяющие сравнивать контраст К с порогом исчезно-
вения объекта 8ИСЧ, содержащимся в данном контрасте К [2].
Поэтому видимость V принято характеризовать количеством пороговых кон-
трастов (порогов) исчезновения объекта, содержащихся в данном контрасте К:
К=—. (2.8)
с
^исч
20
8, угл. мин
Рис. 2.9. Номограмма для определения порогов 8ИСЧ объектов
наблюдения
Ориентировочные значения видимости объектов днем и соответствующие
им качественные характеристики интенсивности зрительного восприятия приве-
дены в табл. 2.1.
Таблица 2.1
Общая характеристика интенсивности зрительного восприятия V порогов
Объект невидим (яркость объекта и фона воспринимаются одинаковыми) 1
При фиксированном наблюдении объект едва замечается в виде слабого силуэта; при поиске не обнаруживается 2
При фиксированном наблюдении объект обнаруживается сразу; при поиске может не обнаруживаться 2,5-3
При времени поиска 15-20 с объект обнаруживается в виде слабого силуэта 4-5
Объект обнаруживается быстро; видны его крупные детали 5-8
Удовлетворительная видимость; видны крупные детали объекта 10-25
Хорошая видимость; воспринимаются различия по цвету 25-35
Очень хорошая видимость 35-50
2.1.3 Оптические средства повышения видимости объектов
Для повышения видимости объекта до значения, когда его можно обнаружить
и опознать, необходимо увеличить контраст объекта с фоном К и уменьшить поро-
говый контраст 8. При ведении разведки эти задачи решаются с помощью свето-
фильтров и оптических приборов наблюдения.
21
Светофильтры - это цветные стекла или пленки, которые прозрачны для види-
мого света лишь на определенных участках спектра. Предназначены для увеличения
яркостных и цветовых контрастов наблюдаемых объектов вследствие отличий
спектральных характеристик их и фона. Различают два вида светофильтров: од-
нополосные и цветоконтрастные (спектрозональные). Однополосные свето-
фильтры прозрачны в какой-то одной части спектра и позволяют увеличить ярко-
Рис. 2.10. Спектральные характеристики
светофильтров:
1 - зеленого; 2 - желтого; 3 - оранжевого;
4 - красного
стный контраст. Цветоконтрастные светофильтры имеют две полосы прозрачно-
сти и служат для повышения цветового и яркостного контрастов объектов. На рис.
2.10 приведены характеристики однополосных светофильтров, применяемых при
разведке [2].
При наблюдении через цветоконтрастные светофильтры (ЦКФ) с двумя об-
ластями прозрачности все предметы приобретают искусственные цвета. Объяс-
Рис. 2.11. Принцип действия цветоконтрастного светофильтра:
а - относительная видность и спектральные характеристики: освещения е^, фона
и объекта ; б - определение яркости составляющих цветов для фона и объекта
няется это тем, что цвет поверхности в данном случае является результатом
смешения излучений двух цветов, пропускаемых фильтром. На рис. 2.11 эти об-
ласти соответствуют зеленому 1 и красному 2 цветам [2].
Если спектральные коэффициенты яркости фона и маскировочного материа-
ла в пределах полос прозрачности фильтра неодинаковы, а это практически все-
22
гда так, то составляющие цвета объекта и фона смешиваются в разных пропор-
циях, что и приводит к появлению цветового контраста объекта и фона.
На рис. 2.11, а показаны кривые спектральных коэффициентов яркости рас-
тительного фона Гфх и зеленого маскировочного материала гобх, которые визу-
ально, без светофильтра, по цвету не различаются. Сравнивая спектральные ко-
эффициенты яркости фона и объекта, замечаем, что обе поверхности отражают
зеленый цвет в одинаковой степени, однако взятый нами маскировочный мате-
риал отражает красные лучи значительно хуже, чем растительность. Кривые ви-
зуальной спектральной яркости для этого случая показаны на рис. 2.11, б.
Яркость составляющих цветов наглядно иллюстрирует рис. 2.11, б, где она
изображается площадью фигуры, ограниченной соответствующей кривой спек-
тральной яркости и осью абсцисс в пределах областей прозрачности фильтра.
Поскольку яркость фона в красном свете значительно больше, чем в зеленом,
при смешении излучений цвет фона остается красным или изменяется незначи-
тельно. Наоборот, яркость объекта в зеленом свете больше, чем в красном, по-
этому цвет его через ЦКФ будет зеленым или бурым.
Таким образом, для оценки возможностей визуального обнаружения замас-
кированных объектов требуется располагать данными по спектральной прозрач-
ности применяемых при разведке светофильтров.
Оптические приборы наблюдения (бинокли, стереотрубы, перископы) пред-
назначены для рассматривания удаленных предметов в увеличенном виде. По-
скольку с увеличением видимых угловых размеров наблюдаемых объектов по-
роговые контрасты обнаружения уменьшаются, видимость объектов повышает-
ся. Поэтому основной характеристикой приборов наблюдения, которую нужно
принимать в расчет при маскировке объектов, является увеличение прибора или
его кратность Г.
Угловые размеры предметов, наблюдаемых через оптический прибор, имеют
значение (угл. мин)
5пр = 5Г = 3440-^-Г,
где /щй - проекция меньшей стороны объекта на плоскость, перпендикулярную
линии зрения; D - дальность наблюдения.
Определив угловой размер предмета Зпр, находят для него по графику (рис. 2.4)
пороговый контраст обнаружения 8 и затем по формуле (2.8) - видимость. Зна-
чение контраста при наблюдении через оптические приборы днем практически
то же, что и при наблюдении без приборов.
Возможность различения отдельных деталей объектов определяется разрешаю-
щей способностью приборов наблюдения. Эта величина характеризует тот наи-
меньший угловой размер 8min деталей объекта или промежутков между ними, при
котором они еще отображаются прибором отдельно, не сливаясь один с другим.
Таким образом, независимо от кратности прибора детали объекта не обна-
руживаются, если их угловые размеры меньше разрешающей способности при-
бора наблюдения: 3 < 8mm-
23
Выражая Smin в угловых секундах, запишем условие скрытия деталей объекта:
7
^min < °min /2 Q\
D 2Ю5
Наконец, следует иметь в виду, что бинокли, стереотрубы и другие биноку-
лярные приборы увеличивают возможности оценки взаимного расположения
объектов и маскировочных конструкций по дальности. В частности, они позво-
ляют при наземном наблюдении легче отличить замаскированные объекты от
вертикальных фонов. Основные характеристики оптических приборов наблюде-
ния приведены в табл. 2.2 [2].
Таблица 2.2
Характеристики приборов наблюдения
Наименование приборов Увеличение (Г) Разрешающая способ- ность 5min, утл. мин. Пластика (П)
Бинокли 7-12 8-5 12-25
Стереотрубы 10-20 6-4 25-100
Перископы 10-30 3-2 -
Оптические прицелы 2-4 15 —
2.2. Фотографическая разведка
Фоторазведка имеет существенные преимущества перед другими способами
разведки, поскольку она позволяет получать оптические изображения объектов
наиболее высокого качества. Изучение фотографических изображений дает наи-
больший объем информации по сравнению с визуальным, телевизионным или
радиолокационным наблюдением, а также при использовании средств инфра-
красной разведки.
Средства фотографической разведки широко используют при ведении кос-
мической, воздушной, морской и наземной разведок.
2.2.1. Характеристики фотографирующих систем
Основными характеристиками средств фоторазведки служат масштаб фото-
графического изображения, спектральная чувствительность системы, контраст-
ность получаемого изображения, разрешающая способность [2].
Масштаб фотографического изображения характеризует степень уменьше-
ния изображаемых на снимке объектов. При фотосъемке объекты разведки
обычно располагаются на большом удалении от фотоаппарата, а их изображение
получается в фокальной плоскости объектива. Если обозначить линейные раз-
меры фотографируемого объекта /, а его изображения то масштаб изображе-
ния, как видно из рис. 2.12, будет
М = - = -^. (2.10)
I н
24
Масштаб фотографического изображения определяется только фокусным рас-
стоянием применяемого объектива и высотой (или дальностью) фотографирова-
ния. Используя фотоаппараты с различными фокусными расстояниями объектива,
противник теоретически может производить фотографирование объектов в любом
масштабе с любых высот. Однако практически масштаб фотографирования выби-
рается с таким расчетом, чтобы не только получить достаточную детализацию
изображения, но и обеспечить необходимую полосу захвата местности, отобра-
жаемой на одном снимке. Ширина захвата 1^ зависит от размера кадра фотоап-
парата /' и масштаба изображения:
'захв
м*
(2.П)
Чем меньше масштаб, тем больше полоса захвата.
Воздушное площадное фотографирование при тактической разведке проводится
обычно в масштабе 1: 20 000 - 1: 10 000. Отдельные объекты могут фотографиро-
ваться в масштабе от 1: 5000 до 1: 2000.
Спектральная чувствительность фотоматериалов определяет участок
спектра, используемый для разведки. Все светочувствительные материалы, при-
меняемые для фотографической разведки, имеют неодинаковую чувствитель-
ность к излучениям разных длин волн. По-
этому противник может вести разведку в
различных зонах оптического спектра и вы-
являть такие различия в спектральной отра-
жательной способности объектов и фонов,
которые визуально не воспринимаются.
В соответствии с цветностью получае-
мого изображения светочувствительные ма-
териалы делятся на две группы: черно-
белые и цветные.
Кривые спектральной чувствительности
черно-белых фотопленок, применяемых для
фоторазведки в армии США, показаны на
рис. 2.13. Самый распространенный черно-
белый фотоматериал - панхроматическая
фотопленка - имеет два максимума чувстви-
тельности в областях 0,44...0,45 мкм и
0,6.. .0,65 мкм, затем чувствительность резко Рис 2.12. Определение масштаба
снижается. Поэтому пределом используемой фотографического изображения
длинноволновой зоны будет 0,67...0,68 мкм.
Съемка на пленке панхром ведется с желтым, оранжевым или красным свето-
фильтрами, которые повышают контрастность изображения вследствие того, что
они непрозрачны в коротковолновой области и существенно уменьшают влия-
ние излучений световоздушной дымки. Кривые спектрального пропускания аэ-
росъемочных светофильтров показаны на рис. 2.14.
25
Рис. 2.13. Спектральная чувствитель-
ность черно-белых фотоматериалов:
Рис. 2.14. Спектральная прозрачность
аэросъемочных фильтров:
1 - панхроматических; 2 - изохроматических; 1 - желтого; 2 - оранжевого; 3 - красного;
3 - инфрахроматических 4 - темно-красного
Изохроматическая черно-белая пленка по сравнению с панхроматической
имеет добавочный максимум, который приходится на 0,6 мкм, а ее спектральная
чувствительность распространяется до 0,7 мкм. Съемка на изохроматическую
пленку производится с желтым и оранжевым светофильтрами.
Для съемки в ближней инфракрасной части спектра применяется черно-белая
инфрахроматическая пленка, имеющая также два максимума чувствительности:
один - в видимой области, второй - в инфракрасной. Съемка на пленку инфрахром
ведется только с красными светофильтрами и ее чувствительность в видимой об-
ласти не используется. Применение инфрахроматической пленки может сущест-
венно облегчить дешифрирование объектов, расположенных на растительных
фонах. Если покрытие маски отражает инфракрасные лучи хуже, чем естествен-
ная зелень, то на снимке замаскированные объекты получаются темными и хо-
рошо заметными на светлом фоне растительности.
В настоящее время известны два типа цветных фотоматериалов. Первый из
них - цветная фотопленка для правильной передачи цвета фотографируемых
объектов и второй - спектрозональная, предназначенная для получения изобра-
жений объектов в условных (искаженных) цветах. Цветная фотопленка исполь-
зуется при разведке весьма ограниченно, так как при съемке с больших высот
цветовые различия объекта с фоном нивелируются, и потому дешифровочные
свойства цветных снимков хуже черно-белых.
Спектрозональное фотографирование применяется специально для обна-
ружения замаскированных объектов. Сущность его заключается в одновре-
менном фотографировании объектов в двух различных зонах спектра на дву-
слойную фотопленку (рис. 2.15, а). Верхний светочувствительный слой плен-
ки воспринимает только инфракрасное излучение в области 0,7...0,8 мкм,
нижний чувствителен к видимому излучению в области 0,5...0,6 мкм. Под
действием излучений различных длин волн при фотосъемке в каждом фото-
слое возникают скрытые изображения, интенсивность которых определяется
отражающими свойствами фона и объекта в зонах светочувствительности
фотослоев.
После проявления спектрозонального фотоматериала в каждом слое возни-
кают изображения своего цвета: верхний может иметь зеленый цвет, а нижний -
26
красный. Эти изображения оптически совмещаются и рассматриваются глазом
одновременно. Результирующая видимая яркость и цвет изображения опреде-
ляются наложением составляющих цветов каждого фотослоя.
Пусть, как показано на рис. 2.15, в, объект и фон отражают видимый свет
одинаково, а инфракрасные лучи - различно (фон - больше, а объект - мень-
ше). Тогда яркость изображения фона в верхнем слое (зеленого цвета) будет
значительно больше, чем у объекта. В нижнем слое (красного цвета) яркости
Рис. 2.15. Спектрозональное фотографирование:
а - разрез фотоматериала (7 - верхний светочувствительный
слой; 2 - нижний фоточувствительный слой; 3 - подложка);
б - спектральная чувствительность фотослоев; в - яркости
составляющих цветных изображений
фона и объекта одинаковы. В результате сложения цвет фона существенно не
изменится, т. е. останется зеленым. Объект на спектрозональном фотоснимке
будет иметь красный цвет, резко контрастный по отношению к зеленому, что
повышает его видимость и облегчает дешифрирование.
Таким образом, на спектрозональных фотоснимках объекты отличаются
от фона по цвету, когда между ними имеется различие по отражательной
способности в одной из зон чувствительности применяемого спектрозональ-
ного фотоматериала. Поэтому условием скрытия объекта от разведки с при-
27
менением спектрозонального фотографирования является близкое соответст-
вие спектральных характеристик объекта и фона в зонах чувствительности
фотоматериала.
На спектрозональных снимках легко обнаруживаются любые нарушения рас-
тительного покрова, дороги, мосты, фортификационные и другие инженерные
сооружения; лиственные породы леса отличаются от хвойных. Последнее обстоя-
тельство нужно иметь в виду при маскировке объектов растительностью.
Контраст фотографического изображения определяется соотношением эф-
фективных яркостей объекта, фона, атмосферной дымки и коэффициентом кон-
трастности фотографирующей системы у. Его находят по формуле
Квид=1-
(2-12)
Эффективные яркости объекта, фона и дымки определяют с учетом спектраль-
ных характеристик применяемых фотопленок и светофильтров. Коэффициент кон-
трастности фотографирующей системы зависит от типа используемой фотопленки
и условий ее обработки. Применяемые за рубежом фотопленки имеют коэффициент
контрастности от 1,5 до 2,5. С увеличением высоты фотографирования обычно ис-
пользуют более контрастные фотоматериалы. Это объясняется стремлением ком-
пенсировать снижение контраста изображения вследствие влияния атмосферной
дымки, которое возрастает с увеличением высоты съемки.
Крупные объекты можно обнаружить на фотоснимке при условии, что визу-
ально воспринимаемый контраст между изображениями фона и объекта больше
порогового контраста зрения, т. е.
КВИД > 80бн«
Напомним, что пороговый контраст человеческого зрения зависит от угло-
вых размеров 5 и формы рассматриваемых объектов. Линейный размер изобра-
жения Г объекта на фотоснимке, выраженный через его натуральный размер I и
масштаб фотографирования 10:
н
Фотоснимок при дешифрировании рассматривается с расстояния наилучшего
зрения (около 250 мм), поэтому угловой размер изображения, согласно (2.2), будет
5 = 3440—«14/',
250
(2.13)
где Г - размер изображения на снимке, мм.
При дешифрировании с лупой, имеющей кратность Г, угловой размер изо-
бражения увеличивается в Г раз:
28
8луп = Г5«14Г/'.
(2.14)
Разрешающая способность фотографирующей системы характеризует спо-
собность фотослоя воспроизводить мелкие детали объектов фотографирования.
Она определяет требования к приемам и средствам маскировки, при использо-
вании которых затрудняется или исключается опознавание объектов.
Разрешающая способность фотоснимка выражается максимальным чис-
лом раздельно передаваемых фотослоем параллельных штрихов на белом
фоне, приходящихся на 1 мм снимка. Для ее определения используют специ-
альный тест-объект, или миру (рис. 2.16), состоящую из нескольких групп
черных линий (штрихов) и белых промежутков между ними. Промежутки
между штрихами равны ширине штрихов. Для каждой группы ширина штри-
хов различна.
Рис. 2.16. Мира для определения разрешающей способности фотографирующей системы
29
При определении разрешающей способности фотографирующей системы
миру соответствующего размера устанавливают на местности и фотографируют.
Рассматривая в лупу изображение миры на фотоснимке, находят ту группу, на
которой еще можно различить отдельные штрихи, т. е. когда они не сливаются.
Количество R предельно различимых штрихов (линий), приходящихся на 1 мм
снимка, является численной характеристикой разрешающей способности и вы-
ражается в лин/мм.
Разрешающая способность фотографирующей системы определяется качеством
применяемого объектива, зернистостью фотопленки и условиями фотографирова-
ния. Один и тот же фотоаппарат, установленный на дрейфующем аэростате и ско-
ростном самолете-разведчике, дает снимки разного качества. Во втором случае
условия съемки менее благоприятны, так как происходит сдвиг изображения, а фо-
тографирование ведется сквозь плотный слой воздуха, обтекающего фюзеляж са-
молета. Плотность воздуха и коэффициент его преломления перед объективом ап-
парата непрерывно меняются, что вызывает ухудшение качества снимка. Поэтому
Рис. 2.17. Зависимость разрешающей
способности от контраста фотогра-
фируемых деталей
при решении практических задач необходимо
знать разрешающую способность фотографи-
рующей системы в реальных условиях приме-
нения. Она всегда будет в 2—4 раза меньше,
чем разрешающая способность фотопленки
или объектива.
Большое значение имеет качество вос-
произведения на фотоснимках малоконтраст-
ных деталей изображения, к которым относят
и замаскированные под фон местности объек-
ты. Известно, что объекты с малым контра-
стом передаются на фотоснимке хуже, чем
контрастные. Практика показывает, что при
фотографировании миры, штрихи которой
выполнены не черными, а серыми, т. е. с ма-
лым контрастом, количество воспроизводимых штрихов, видимых раздельно на
одном миллиметре снимка, всегда меньше, чем для миры высокого контраста.
Опытным путем установлена следующая зависимость для разрешающей
способности фотографирующей системы при воспроизведении деталей малого
контраста:
RK
= кк_цр^—
N2-K
(2.15)
где /?к =1 - разрешающая способность при контрасте деталей К = 1; К - контраст
деталей по эффективным яркостям.
На рис. 2.17 показана зависимость разрешающей способности от контраста
фотографируемых деталей [2].
Используя понятие разрешающей способности, определяем наименьшие на-
турные размеры объекта или его деталей, которые еще воспроизводятся на фо-
тоснимке.
30
Найдем вначале минимальную ширину линии штриховой миры, при которой
она еще видна на снимке. Если разрешающая способность фотографирующей сис-
темы при контрасте К равна то на одном миллиметре фотоснимка изображаются
раздельно, не сливаясь одна с другой, /?к темных линий и столько же промежутков
между ними (рис. 2.18). Ширина изображения одной линии на снимке будет
_1мм
nin~2RK'
При масштабе фотографирования М ширина линии миры на местности составит
1
4nin
4nin
м
27?к _ Н
<^об 2/?к/^б
(2.16)
Н
Эта величина называется линейной
разрешающей способностью фотографи-
рующей системы на местности.
Опытом установлено, что одиночные
объекты и их детали воспроизводятся на
снимках, имея размеры меньше разрешаю-
щей способности, определенной по штри-
ховой мире. В то же время геометрическая
форма опознается по изображениям объек-
тов и деталей на снимках при больших раз-
мерах. Поэтому в (2.16) вводится коэффи-
циент С, учитывающий форму детали или
объекта и сложность решаемой дешифров-
щиком задачи (обнаружение детали или
Рис. 2.18. К определению размера
минимальной детали фотографиче-
ского изображения
опознавание формы). Итак, наименьший размер объекта (или его детали), при ко-
тором еще воспроизводится его изображение на снимке, будет
н
2Лк/об’
(2-17)
где Н - высота (дальность) фотографирования, м; R - разрешающая способ-
ность, 1/мм;Уоб - фокусное расстояние, мм.
Коэффициент С имеет следующие значения:
0,1—0,2 - обнаружение протяженных линейных объектов (например, грунто-
вых дорог);
0,2-0,6 - обнаружение протяженных деталей с соотношением сторон 1 : 10 и
более;
0,6-1,5 - обнаружение компактных деталей и объектов с соотношением сто-
рон 1 : 1 и более;
31
1,5-4,0 - опознавание геометрических форм простых компактных объектов
(квадрат, круг, треугольник, прямоугольник).
Формулу (2.17) можно представить также в виде, удобном для выполнения
расчетов,
U=C-^, (2.18)
2КК
Н
где т =---.
fo6
2.2.2. Средства фотографической разведки и их возможности
Важный способ разведки в современных условиях - воздушное и космиче-
ское фотографирование. Космическая фоторазведка ведется с искусственных
спутников Земли, которые выводятся на круговые или эллиптические орбиты
высотой 180...260 км. На разведывательных спутниках Земли могут устанавли-
ваться фотографирующие системы с фокусным расстоянием объектива от 1000
до 3600 мм, что обеспечивает возможность получения фотоснимков в масштабе
1:50000 - 1:300000. Разрешающая способность фотографирующих систем при
съемке из космоса может составлять от 30 до 70 лин/мм. Это позволяет разли-
чать на фотоснимках малоконтрастные объекты размером до 2.. .3 м.
Фотографирующие системы для воздушной разведки могут быть установ-
лены на пилотируемых или беспилотных самолетах, вертолетах и автомати-
ческих дрейфующих аэростатах. На каждом носителе монтируют один или
несколько аэрофотоаппаратов, которые позволяют вести одновременно пла-
новую и перспективную съемку в различных масштабах. При фотографиро-
вании с больших высот (10...20 км) применяют фотоаппараты с фокусным
расстоянием объектива 600...2400 мм, что обеспечивает получение снимков в
масштабе 1:10000 - 1:20000. Съемка важных одиночных объектов может
проводиться и в более крупном масштабе 1:4000 - 1:5000.
Фотографирование с малых высот (0,3...3 км) выполняется фотоаппаратами
с фокусным расстоянием объектива 75...300 мм. Разрешающая способность фо-
тографирующих систем в полете не превышает 20.. .40 лин/мм (для контрастных
объектов).
На автоматических дрейфующих аэростатах применяют фотоаппараты с фо-
кусным расстоянием объектива 150...600 мм. Разрешающая способность систе-
мы в полете 30...55 лин/мм, масштаб фотографирования 1:40000 - 1:200000.
Наземное фотографирование позволяет получать крупномасштабные фото-
снимки объектов и фотопанорамы местности. Для этой цели в войсках зарубеж-
ных государств имеются специальные фотоаппараты с фокусным расстоянием
объектива до 2500 мм. На фотоснимках, сделанных таким аппаратом с расстоя-
ния 10 км, хорошо дешифрируются боевые и специальные машины.
Агентура может вести наземное фотографирование с помощью обычных или
специальных малоформатных фотоаппаратов, снабженных телеобъективами с
фокусным расстоянием 300...500 мм. Разрешающая способность снимков при
съемке контрастных объектов составляет 28...35 лин/мм.
32
3. ОПТИКО-ЭЛЕКТРОННАЯ РАЗВЕДКА
Под оптико-электронной разведкой (ОЭР) понимается процесс добывания
информации с помощью средств, включающих входную оптическую систему с
фотоприемником и электронные схемы обработки электрического сигнала, ко-
торые обеспечивают прием и анализ электромагнитных волн видимого и инфра-
красного диапазонов, излученных или отраженных объектами и местностью.
ОЭР предназначена для решения следующих задач:
- выявления военных и военно-промышленных объектов;
- определения их формы, размеров, состояния и боеготовности;
- раскрытия характера выпускаемой ВПО продукции, ее объема и др.;
- съемки территорий в целях картографирования местности;
- разведки метеообстановки в заданных районах.
ОЭР подразделяют на телевизионную разведку (ТЛВР), инфракрасную разведку
(ИКР), лазерную разведку (ЛР) и разведку лазерных излучений (РЛИ). Аппаратура
ОЭР устанавливается на космических и воздушных носителях, а также может при-
меняться в наземных условиях, например при ведении технической разведки.
Принцип работы аппаратуры ОЭР основан на приеме собственного инфра-
красного излучения объектов и фонов или отраженного от них излучения Солн-
ца, Луны, звездного неба и искусственных источников подсвета местности.
Аппаратура ОЭР позволяет обнаруживать объект на окружающем фоне при
условии, что его яркость превышает яркость фона.
Аппаратура ОЭР делится на пассивную и активную. Пассивная основана на
приеме собственного или переотраженного излучения объектов разведки. Ак-
тивная предполагает использование для подсвета местности собственного излу-
чателя. Зондирующее излучение рассеивается объектами, местными предметами
и местностью, часть этого излучения поступает на вход оптической системы ап-
паратуры разведки с последующим его преобразованием, обработкой и индика-
цией на соответствующих устройствах.
Аппаратура пассивной ОЭР подразделяется на телевизионную, инфракрасную и
разведку лазерных излучений. Аппаратура телевизионной разведки охватывает уст-
ройства на ЭЛТ и на ПЗС. К аппаратуре ИКР относят тепловизоры, телепеленгато-
ры, радиометры и ПНВ. Аппаратура разведки лазерных излучений предназначена
для обнаружения, определения местоположения и распознавания средств вооруже-
ния и военной техники, в состав которых входят лазерные излучатели.
Аппаратура активной ОЭР подразделяется на лазерную со сканированием
зондирующего светового луча и инфракрасную с использованием ИК-излучателя
для подсвета местности.
Для оценки предельных возможностей фотоприемников аппаратуры ОЭР по ре-
гистрации ЭМИ используют понятие пороговой чувствительности, определяемой
минимальной мощностью светового сигнала (потоком мощности), еще восприни-
33
маемого на фоне помехового излучения. Диапазон длин волн, в пределах которого
может работать фотоприемник, определяется его спектральной чувствительностью.
Аппаратура ОЭР характеризуется также разрешающей способностью, т. е.
способностью передавать и воспроизводить мелкие детали изображения с за-
данным контрастом. Разрешающая способность зависит как от параметров оп-
тической системы, так и от характеристик используемых фотоприемников и ок-
ружающих условий функционирования аппаратуры разведки.
3.1. Телевизионная разведка
Под ТЛВР понимается добывание информации с помощью аппаратуры, осу-
ществляющей прием сигналов в видимом и ближнем ИК-диапазонах, отраженных
объектами и предметами окружающей среды, с последующим преобразованием и
обработкой принятых сигналов в целях формирования изображения объектов и
местности. Электрические сигналы, соответствующие изображению местности,
передаются по радиоканалу в центр сбора и обработки данных, где формируется
изображение объектов и местности, над которыми пролетает носитель.
3.1.1. Схема и принципы телевизионной передачи
Использование в телевидении электрического канала связи для передачи
изображений предопределяет наличие определенных устройств, которые обес-
печивают преобразование оптических изображений в электрические сигналы и
обратное преобразование электрических сигналов в видимое изображение.
Общая схема телевизионной передачи показана на рис. 3.1. Излучение, от-
раженное объектами и фоном, пройдя через атмосферу, попадает на объектив и
1 Предающее устройство 11риемное устройство
Рис. 3.1. Схема телевизионной передачи:
1 - передающая телевизионная камера; 2 - объектив; 3 - передающая телевизионная
трубка; 4 - устройства, обеспечивающие работу передающей трубки; 5 - радиопере-
датчик; 6 - передающая антенна; 7 - приемная антенна; 8 - приемник; 9 - приемная
трубка (кинескоп); 10 - устройства, обеспечивающие работу кинескопа
34
фокусируется им на светочувствительном слое передающей телевизионной
трубки. Последняя преобразует яркости отдельных участков изображения в
электрические сигналы, т. е. в изменения электрического тока. Объектив, пе-
редающая телевизионная трубка и устройства, обеспечивающие ее работу, со-
ставляют передающую телевизионную камеру [2]. Электрические сигналы по-
ступают далее к передатчику и излучаются антенной в направлении пункта
приема. Принятые антенной сигналы усиливаются приемником и с помощью
приемной телевизионной трубки (кинескопа) превращаются в световое изо-
бражение.
Чтобы охарактеризовать телевизионное изображение в целом, необходимо в
каждый момент времени передавать информацию о распределении яркостей
многочисленных элементов изображения. Однако по радиоканалу одновременно
можно передавать только один сигнал. Поэтому в телевидении используется
специальный метод разложения изображения на отдельные элементы, называе-
мый разверткой, когда сигналы яркости каждого элемента передаются и воспро-
изводятся не все сразу, а один за другим в определенной последовательности.
В системах военного телевидения используется строчная развертка, когда
передаются последовательно горизонтальные строки изображения - строка за
строкой сверху вниз. Движение развертывающего луча по строке происходит с
постоянной скоростью, а переход от строки к строке совершается скачком,
мгновенно. Совокупность всех строк, на которые разложено изображение, со-
ставляет один кадр. В процессе развертки изображения средняя яркость каждого
элементарного участка преобразуется в электрический ток, т. е. телевизионный
сигнал. При телепередаче подвижных объектов развертка изображения осущест-
вляется с очень большой скоростью.
Одновременно с разверткой изображения на передающей трубке воссоздает-
ся световая картина на экране телевизионного приемника. С этой целью свето-
вая точка, образованная электронным способом на экране кинескопа, приводит-
ся в движение по тому же закону, что и луч развертки на передающей трубке.
При этом яркость бегающей световой точки определяется телевизионным сиг-
налом, приходящим в данный момент по радиоканалу. Поэтому на экране при-
емника воссоздается распределение яркостей, подобное распределению на све-
точувствительном слое передающей трубки. В силу инерции зрения глаз не
замечает движения развертывающего пятна и воспринимает слитное световое
изображение. Движущиеся изображения в системах военного телевидения пе-
редаются с частотой 25-30 кадров в секунду.
Передача движущихся изображений в многокадровом телевидении, приме-
няемом при тактической разведке, производится на ультракоротких радиовол-
нах, которые распространяются практически прямолинейно. Поэтому макси-
мальная дальность такой телевизионной передачи ограничивается кривизной
поверхности Земли и составляет
D = 4,1(VH +7й“), (3.1)
где D - дальность передачи, км; Н - высота передающей антенны над поверхно-
стью Земли, м; Лпр - высота приемной антенны, м.
35
В военном телевидении в качестве передающих трубок кроме суперортико-
нов и видиконов используют трубки на основе приборов с зарядовой связью.
В начале 1970-х годов был открыт и реализован новый принцип построения
безвакуумных твердотельных преобразователей светоэлектрического сигнала,
так называемых приборов с зарядовой связью (ПЗС). В основу таких приборов
положены свойства структуры металл-оксид-полупроводник, называемой
МОП-структурой (рис. 3.2).
Рис. 3.2. Схема фрагмента ПЗС
Фотокатод или мишень ПЗС представляет линейку или матрицу из ячеек с
МОП-структурами с горизонтальными и прозрачными вертикальными токопро-
водящими электродами. Размеры каждой ячейки соответствуют размерам эле-
мента изображения. Разрешающая способность ПЗС определяется количеством
ячеек, размещающихся в поле изображения.
Считывание зарядов, образующихся в каждой ячейке ПЗС под действием
света точек изображения, производится путем последовательного перекачивания
зарядов с ячейки на ячейку под действием управляющих сигналов, подаваемых
на электроды. В результате на выходе ПЗС образуется последовательность элек-
трических сигналов, амплитуда которых соответствует значению заряда на
ячейках мишени.
Стратегическая телевизионная разведка может проводиться только с исполь-
зованием малокадровых систем, работающих на коротких и средних волнах. Та-
кие системы способны передавать лишь неподвижные изображения с интерва-
лом в несколько секунд, обеспечивая дальность передачи 1000 км и более.
3.1.2. Характеристики телевизионных систем
Основными характеристиками телевизионных систем, определяющими каче-
ство получаемого изображения, являются спектральная чувствительность пере-
дающих телевизионных трубок, масштаб изображения и его контрастность, раз-
решающая способность телевизионной системы [2].
Спектральная чувствительность светочувствительных слоев (фотокатодов)
передающих телевизионных трубок определяет оптическую область спектра, в
которой действуют средства телевизионной разведки. Фотокатоды суперортико-
нов действуют как элементы с внешним фотоэффектом. Они изготавливаются
сурьмяно-цезиевыми, висмутоцезиевыми или кислородно-цезиевыми и предна-
36
значены для работы в видимой и ближней инфракрасной области спектра в пре-
делах 0,4. ..1,3 мкм.
Фотокатоды видиконов, использующие внутренний фотоэффект, наиболее
пригодны для разведки в инфракрасной области, так как чувствительны к излу-
чениям до 2...3 мкм. Кривые спектральной
чувствительности для некоторых фотокатодов
передающих телевизионных трубок приведе-
ны на рис. 3.3. Таким образом, телевизионная
разведка может проводиться противником как
в видимой области, так и в инфракрасных лу-
чах, причем в более широком диапазоне, чем
фотографирование.
Масштаб телевизионного изображения
на экране кинескопа определяется двумя
факторами:
1) размером изображения, которое созда-
ется объективом на фотокатоде передающей
трубки;
2) соотношением размеров кадра на фотока-
тоде передающей трубки и на экране кинескопа.
Масштаб оптического изображения на фотокатоде Мопт находится аналогич-
но (2.10). Его значение зависит от высоты (дальности) ведения разведки Яи фо-
кусного расстояния применяемого объектива/Об-
Рис. 3.3. Спектральные характери-
стики фотокатодов передающих
телевизионных трубок:
1 - сурьмяно-цезиевый; 2 -висмуто-
цезиевый; 3 - кислородно-цезиевый;
4 - сернисто-свинцовый
Мопг = %.
Соотношение размеров кадра экрана кинескопа h3 и фотокатода ЛфК характе-
ризует электронный масштаб телевизионной системы Мт.с:
М,с=
^фк
Масштаб изображения объектов на приемном экране телевизионной системы
определяется произведением
М = могомт.с=^-^-. (3.2)
Н Афк
Это выражение справедливо, когда размер изображения объекта или его де-
тали на экране кинескопа больше элемента разложения. В противном случае все
мелкие детали будут иметь размеры элемента разложения.
В системах военного телевидения используют объективы с фокусным рас-
стоянием от 50 до 300 мм. Высота кадра на фотокатоде передающей трубки для
суперортиконов - 24 мм и видиконов - 9,5 мм; экраны кинескопов могут иметь
высоту кадра от 100 до 500 мм.
37
Способность телевизионной системы передавать и воспроизводить мелкие
детали изображения с заданным контрастом оценивается ее разрешающей спо-
собностью.
В отличие от фотоснимка качество телевизионного изображения зависит как от
способа развертки, так и от полосы пропускания радиоканала, по которому переда-
ется телевизионный сигнал. Полагая, что передача сигналов по радио производится
без искажений, считаем, что воспроизведение на телевизионном изображении мел-
ких деталей, отличающихся по яркости, связано только с числом элементов разло-
жения, которое зависит от количества строк развертки в кадре.
Если количество строк в кадре составляет z, то наибольшее число деталей,
расположенных поперек строк и воспроизводимых раздельно, составит z/2. Из
рис. 3.4 видно, что минимальное значение таких раздельно воспроизводимых
деталей или промежутков между ними l'h будет равно ширине строки на экране
кинескопа /' , т. е.
СТРэ
, > h
lh =1^э =^- (а)
Как и в фотографии, разрешающую способность можно характеризовать
числом R раздельно передаваемых на телевизионном изображении параллель-
ных штрихов на белом фоне, приходящихся на 1 мм экрана кинескопа. Тогда
поперечную разрешающую способность телевизионной системы, т. е. с распо-
ложением деталей поперек строк, можно представить в следующем виде:
^попер
1
2/а
1 _ Z
24трэ 2/^
(33)
При расположении деталей объекта вдоль строки разложения, формирование
телевизионного сигнала отличается от предыдущего случая, когда детали объек-
та располагались поперек строк. Наименьший размер деталей вдоль строк Гв,
при котором они еще воспроизводятся раздельно на экране кинескопа современ-
ной телевизионной системы, не менее
“ О’ 7/^э.
(б)
Соответствующая продольная разрешающая способность телевизионной
системы (при расположении деталей вдоль строк) будет
_ 1 _ 1 _ z
Я в 2-0,7—
z
(3.4)
Сопоставляя (3.3) и (3.4), видим, что продольная разрешающая способность
телевизионной системы выше поперечной. Поскольку расположение изображе-
38
Рис. 3.4. Определение поперечной
разрешающей способности теле-
визионной системы
ний маскируемых объектов относительно строк развертки может быть произ-
вольным, то в маскировке ведут расчет на худший случай и полагают разре-
шающую способность телевизионной системы
равной ее продольной разрешающей способ-
ности.
Количество строк разложения z, входящее
в формулу (3.4), составляет для современных
телевизионных систем от 600 до 1000.
Приведенное выше выражение (3.4) опре-
деляет разрешающую способность телевизи-
онного изображения для контрастов, близких к
единице. С уменьшением контраста между
объектом и фоном разрешающая способность
снижается.
Контраст телевизионного изображения
определяется возможностями телевизионной
системы по передаче различий в яркости меж-
ду фоном и объектом или его деталями.
Особенность телевизионного изображения
заключается в том, что вследствие строчной развертки наблюдаемые на экране
приемника мелкие детали объектов, размеры которых сопоставимы с элемента-
ми разложения, всегда имеют меньший контраст, чем крупные. Это обстоятель-
ство нужно учитывать при маскировочных расчетах, так как оно затрудняет опо-
знавание объектов и облегчает их маскировку.
При делении объектов маскировки на крупные и мелкие исходят из размеров их
изображений на приемном экране. Крупными считают такие объекты, изображения
которых в 3 раза больше элемента разложения. Определим минимальную натурную
величину I крупного объекта, для которого контраст вследствие развертки изобра-
жения еще не снижается. Пользуясь телевизионным масштабом (3.2) и выразив
размер элемента разложения Г в через количество строк z (а), (б), получим
V н h
1 = 31 =з!в- = з—---« 2— —
м /об f06 Z
Н Лфк
(3.5)
где 1в - натурная величина элемента разложения на местности.
Контраст телевизионного изображения для крупных объектов зависит от со-
отношения эффективных яркостей фона, объекта, дымки и коэффициента кон-
трастности телевизионной системы. Его значение определяется по (2.12):
ДЭф -4- ЛЭ$
jv-вид _ 1 -°min ~г -°Д
5эф +Вэф
^тах^^д у
(3.6)
Существенным отличием средств телевизионной разведки от фотографиче-
ских является возможность изменения коэффициента контрастности системы у в
39
процессе ведения разведки, что позволяет увеличивать в некоторых пределах
контраст наблюдаемых объектов или уменьшать контрастность теней, т. е. ме-
нять условия наблюдения по своему усмотрению. В системах военного телеви-
дения коэффициент контрастности может плавно изменяться от 0,5 до 3.
Контраст мелких деталей телевизионного изображения определяют по
контрасту крупной детали (3.6) с аналогичными фотометрическими характери-
стиками и умножают эту величину на коэффициент а, который меньше единицы:
17-ВИД _ jv-ВИД
^мел и,г<мел‘
(3.7)
Коэффициент а снижения контрастности мелких деталей зависит как от со-
отношения линейных размеров детали объекта и элемента разложения ///5, так и
от значения контраста К^. Такая зависимость для современных телевизион-
ных систем приведена на рис. 3.5. Натуральную величину элемента разложения
1в, необходимую для определения коэффициента а, можно найти из (3.5).
Визуальное обнаружение объектов по их телевизионным изображениям оп-
ределяется в конечном счете возможностями человеческого зрения. Известно,
Рис. 3.5. Коэффициент снижения
контраста мелких деталей телеви-
зионного изображения
Рис. 3.6. Пороговый контраст об-
наружения объектов на телевизи-
онном экране
что объект визуально обнаруживается, когда контраст его с окружающим фоном
больше порогового, воспринимаемого глазом, т. е.
К вид
>еобн-
Пороговый контраст зрения зависит от угловых размеров наблюдаемых объ-
ектов и их формы. В свою очередь угловой размер рассматриваемого объекта оп-
ределяется отношением его линейного размера к расстоянию наблюдения (3.2).
Практика показывает, что наилучшие условия наблюдения телевизионного эк-
рана возникают при удалении от него наблюдателя на расстояние Н, равное ут-
роенной высоте экрана йэ,
40
H~3h3.
Если размер наблюдаемого изображения объекта равен то соответствую-
щий угловой размер будет
5 = 3440—«1150—. (3.8)
Н h3
На рис. 3.6 показана зависимость порогового контраста зрения от углового
размера изображения объекта, наблюдаемого на телевизионном экране [2].
3.2. Инфракрасная разведка
Под инфракрасной разведкой (ИКР) понимается получение информации пу-
тем приема и анализа электромагнитных сигналов ИК-диапазона волн, излучен-
ных или отраженных объектами и предметами окружающей местности.
ИК-разведка делится на видовую и параметрическую. Видовая ИК-разведка
обеспечивает получение информации в виде изображений различных объектов и
местности, а параметрическая обеспечивает добывание информации, содержа-
щейся в пространственных и излучательных характеристиках различных объек-
тов и местности.
Анализируя отраженное объектами ИК-излучение Солнца, Луны, звездного
неба, можно сделать вывод, что диапазон этого излучения приходится на уча-
сток спектра до 3 мкм. Часто эту длину волны считают граничной, разделяющей
отраженную и собственную составляющие ИК-излучения объектов. Поэтому
можно считать, что в ближней части ИК-спектра (до 3 мкм) определяющей при
ведении разведки является отраженная составляющая, и распределение лучисто-
сти по объектам зависит от распределения коэффициентов отражения и облу-
ченности. Для ИК части спектра больше 3 мкм определяющим является собст-
венное излучение объектов, а распределение лучистости зависит от распределе-
ния коэффициентов излучения и температуры [1].
В соответствии с этим современные средства разведки работают на принци-
пе приема отраженного объектами излучения специальных излучателей, Луны,
звездного неба (приборы ночного видения) или - приема собственного излуче-
ния объектов (тепловизоры, теплопеленгаторы, радиометры).
3.2.1. Схемы приборов инфракрасной разведки
Современные средства инфракрасной техники по принципу работы могут
быть активными и пассивными. К активным относят электронно-оптические
приборы наблюдения с подсветкой местности инфракрасными лучами от специ-
альных источников.
Пассивные средства не имеют облучающих устройств и обеспечивают обна-
ружение объектов либо в условиях естественного ночного освещения (электрон-
но-оптические приборы без подсветки), либо по их собственному тепловому из-
лучению (приборы тепловой разведки, тепловые устройства самонаведения
управляемых снарядов). В последнее время основное внимание за рубежом уде-
41
ляется разработке и внедрению пассивных средств, в первую очередь аппарату-
ры для ведения разведки с самолетов и беспилотных средств, ночных прицелов
и наземной разведывательной аппаратуры.
Электронно-оптические приборы ночного видения с подсветкой действуют,
как показано на рис. 3.7.
Местность облучается инфракрасными лучами специального прожектора, за-
крытого инфракрасным фильтром, а наблюдение ведется в электронно-оптичес-
кий прибор, состоящий из объектива, электронно-оптического преобразователя
Рис. 3.7. Схема электронно-оптического прибора ночного видения
с подсветкой:
1 - объект наблюдения; 2 - объектив; 3 - электронно-оптический преобразова-
тель; 4 - окуляр; 5 - блок высоковольтного питания; 6 - аккумуляторная батарея;
7 - инфракрасный прожектор; 8 - лампа; 9 - отражатель; 10 - инфракрасный
светофильтр
(ЭОП) и окуляра. Электронно-оптический преобразователь представляет собой
электровакуумную трубку с фотокатодом на одном конце и люминесцирующим
экраном на другом. Он служит основным элементом смотрового прибора, с по-
мощью которого изображение, создаваемое объективом на фотокатоде, превраща-
ется в видимое изображение на экране. Изображение преобразуется с помощью
фокусирующего электростатического поля, возникающего между фотокатодом и
экраном. Инфракрасные лучи, попадая на фотокатод, высвобождают электроны,
которые под влиянием электрического поля устремляются к экрану. Под воздей-
ствием электронов экран начинает светиться и на нем появляется изображение
местности и наблюдаемых объектов. Яркость изображения соответствует распре-
делению интенсивности инфракрасных лучей на фотокатоде. Полученное изо-
бражение рассматривается в увеличенном виде через окуляр.
Приборы ночного ведения применяют для наземной разведки наблюдением,
а также в качестве ночных прицелов для стрелкового оружия и артиллерийских
противотанковых средств. Дальность видимости приборов с подсветкой зависит
от мощности инфракрасного прожектора и составляет:
для стрелковых прицелов.................................200.. .250 м
артиллерийских прицелов.....................................до 1 км
приборов наблюдения ....................................1,0... 1,5 км
42
Включенные прожекторы приборов ночного видения могут быть обнаруже-
ны с помощью приборов аналогичного типа или индикаторов инфракрасного
облучения (бинокль БИ-8 и другие).
Пассивные приборы ночного видения, действующие без подсветки, позволяют
наблюдать ночью при естественной освещенности. Принцип действия приборов
основан на усилении яркости изображения объектов, освещаемых светом ночного
неба, Луны и звезд. Прибор без подсветки состоит из объектива, электронно-
оптического преобразователя, который работает как усилитель света, и окуляра.
Для увеличения чувствительности электронно-оптических преобразователей при-
меняют последовательное соединение двух или нескольких ЭОП, чтобы свет, из-
лучаемый экраном первого ЭОП, попадал на фотокатод второго и т. д. Приборы с
последовательным соединением нескольких ЭОП получили название каскадных
(рис. 3.8/ Усилитель света в виде каскадного ЭОП с мультищелочным фотокато-
дом увеличивает яркость наблюдаемых предметов до 40 тыс. раз.
Бесподсветные приборы ночного видения используют в качестве прицелов и
приборов наблюдения при наземной разведке; они обеспечивают дальность ви-
димости ночью до 1 км и более.
Пассивные средства тепловой разведки (тепловизоры) предназначены для
получения видового изображения земной поверхности и наземных объектов,
имеющих различную температуру или излучательную способность. Тепловая
Объект 1 2 3 4 1 2 3 4 1 2 3 4 1 Усиленное по яркости
изображение объекта
Рис. 3.8. Схема каскадного электронно-оптического преобразователя:
1 - волоконная оптика; 2 - фотокатод; 3 - фокусирующие электроды; 4 - экран
разведка может проводиться в любое время суток, но более эффективна ночью,
когда наземные объекты не отражают солнечный свет. Задача непосредственного
преобразования тепловых изображений в видимые с помощью электроннооптиче-
ских преобразователей технически еще не решена. Поэтому в приборах тепловой
разведки используется принцип механического разложения (сканирования) тепло-
вой картины на отдельные элементы и последовательного воспроизведения опти-
ческого изображения. Приборы тепловой разведки осуществляют развертку изо-
бражения местности по телевизионному принципу - построчно в прямоугольном
кадре. В сканирующих устройствах, устанавливаемых на летательных аппаратах,
производится построчный просмотр местности перпендикулярно линии полета,
а движение носителя создает кадр.
Упрощенная схема устройства прибора тепловой разведки местности с воз-
духа показана на рис. 3.9. Прибор состоит из многогранной призмы с зеркаль-
43
ными гранями, вращаемой мотором 7, объектива 2, приемника излучения 5,
усилителя 4, источника света 5 и фотокамеры с пленкой 6. Тепловое излучение
от сканируемого элемента местности или объекта направляется нижним зерка-
Рис. 3.9. Прибор для тепловой разведки местности с воздуха:
а - схема сканирования; б - схема устройства прибора (1 - скани-
рующие зеркала; 2 - объектив; 3 - приемник инфракрасных лучей;
4 - усилитель; 5 - источник света; 6 - фотопленка; 7 - мотор)
лом 1 на объектив 2 и фокусируется на приемную площадку приемника (фото-
сопротивление, болометр, термопара). Сигнал с приемника 3 после усиления
поступает в блок управления газоразрядной лампой 5. Свет лампы после отра-
жения от верхнего сканирующего зеркала фокусируется на фотопленку 6. Ток
приемника 3 колеблется в зависимости от мощности (температуры) излучения
отдельных участков местности и меняет интенсивность свечения лампы 5,
а следовательно, освещенность фотопленки и степень ее почернения вдоль стро-
ки. Так тепловое излучение объектов преобразуется в фотографическое изобра-
жение. Пленка в камере движется непрерывно, скорость ее протяжки устанавли-
вается в зависимости от высоты и скорости полета носителя. Приборы тепловой
разведки могут обнаруживать объекты, температура которых отличается от фона
на 1 град и меньше.
Основным узлом тепловизора является сканирующая ИК-камера. На рис. 3.10
более детально представлена ее структурная схема [3]. В основу принципа дей-
ствия положен термографический метод, при котором полученное ИК-
изображение объекта (тепловая картина) создается вследствие различия темпе-
ратур отдельных частей, а также окружающей среды. При этом регистрируется
весь ИК-спектр излучения, прошедшего через атмосферу и воспринимаемого
приемником. Основные элементы камеры: ИК-фотоприемник с усилителем 2,
помещенный в фокусе оптической системы с малым углом зрения У; разверты-
вающее зеркало 3 для поэлементного обзора большого сектора пространства и
регистрирующее устройство 4 для записи интенсивности изображения каждого
44
элемента просматриваемого пространства на фотопленку 5. Для этого электри-
ческие сигналы с выхода усилителя приемника 2 модулируют по интенсивности
Рис. 3.10. Сканирующая инфракрасная камера:
1 - зеркально-линзовый объектив; 2 - болометр с предусилите-
лем; 3 - развертывающее зеркало; 4 - система записи; 5 - фото-
пленка; 6 - источник света; 7 - блок управления
синхронно перемещающийся по фотопленке луч от источника света 6, что при-
водит к изменению степени почернения фотоэмульсии.
При подаче электрических сигналов с выхода приемника на электронно-
лучевую трубку на ее экране создается изображение объекта, соответствующее
тепловой картине. Тепловое изображение на экране ЭЛТ может быть сфотогра-
фировано с помощью фотоприставки.
Для определения интенсивности принимаемого излучения в состав скани-
рующей ИК-камеры включают эталонный источник ИК-излучения.
Теплопеленгаторы предназначены для обнаружения объектов по их собст-
венному ИК-излучению. Теплопеленгатор позволяет не только обнаружить объ-
ект, но и определить направление на него. На рис. 3.11 приведена структурная
типовая схема теплопеленгатора [3].
Инфракрасное излучение 4 от нагретого объекта воспринимается приемной
оптической системой 2 (обычно вогнутое параболическое зеркало) и фокусиру-
ется на приемнике 3. Поступающее излучение по интенсивности модулируется с
помощью установленного перед приемником механического модулятора, вы-
полненного в виде вращающегося диска с прорезями. Электрические сигналы с
выхода фотоприемника поступают в усилитель 5 и далее в синхронизатор 6, оп-
ределяющий угловые координаты объекта. С выхода синхронизатора сигналы
положения объекта подаются в индикаторный блок. Направление на объект (пе-
ленг) может быть определено по отклонению светящейся точки на экране ЭЛТ
от эталонного или фиксироваться в виде светящихся цифр на табло. Для наблю-
дения за объектами в определенном секторе пространства оптическая система
45
теплопеленгатора позиционируется с определенной скоростью в заданном сек-
торе с помощью электропривода 1.
Дальность действия теплопеленгатора зависит от температуры обнаружи-
ваемых объектов, их излучающей поверхности и чувствительности фотопри-
Рис. 3.11. Структурная схема теплопеленгатора:
1 - электропривод вращения параболического зеркала;
2 - параболическое зеркало; 3 - приемник лучистой
энергии с механическим модулятором; 4 - тепловое
излучение от нагретого объекта; 5 - усилитель; 6 - син-
хронизатор; 7 - вычислительное устройство; 8 - инди-
каторный блок
емника, применяемого в устройстве. Основным требованием к теплопеленга-
тору является обеспечение необходимой дальности действия при заданной
вероятности обнаружения и определения пеленга на источник теплового из-
лучения.
Радиометры и радиационные пирометры применяют для обнаружения ИК-
излучения объектов и измерения его интенсивности. Радиометр определяет
мощность излучения объектов, а радиационный пирометр - его температуру.
Для работы в различных диапазонах ИК-спектра используют ИК-фильтры, вы-
деляющие нужный участок. В большинстве приборов применяют компенсаци-
онный метод измерений. В соответствии с ним на фотоприемник поочередно
направляются излучения от объекта и эталонного источника. Изменяя мощность
излучения эталонного источника, добиваются получения нулевого сигнала на
выходе прибора, что соответствует равенству лучистых потоков от объекта и
эталонного источника на входе фотоприемника. В качестве эталонного источни-
ка для калибровки приборов используют черное тело, нагретое до известной
температуры.
Структурная схема радиометра показана на рис. 3.12 [3]. Инфракрасное из-
лучение от объекта фокусируется оптической системой 1 на неселективном
фотоприемнике (болометре) 4. При помощи секторного диска-модулятора 6,
вращаемого двигателем 5, на фотоприемник поступают поочередно ИК-
излучения от объекта и эталонного источника 2. Для этого поверхности секто-
ров диска-модулятора, обращенные к приемнику, выполняют зеркальными.
Применение модуляции лучистых потоков позволяет усиливать сигналы с вы-
хода приемника узкополосным усилителем 5, что существенно повышает чув-
ствительность радиометра. Модулирующий диск 6, вращаясь, одновременно
перекрывает сигнальную лампочку, освещающую фототриод, входящий в схе-
му генератора опорных напряжений 7. Этот генератор формирует синхронизи-
рующие импульсы, которые управляют переключателем сигналов синхронного
выпрямителя 9. При измерениях обработанные модулятором 6 сигналы от эта-
лонного источника и объекта поступают поочередно на измерительный прибор
10 и сравниваются.
46
Для определения интенсивности ИК-излучения от объекта температура эта-
лонного источника 2 меняется до получения на измерительном приборе нулево-
го отсчета.
Наведение радиометра на исследуемый объект осуществляется при помощи
оптического визира с перекрестием, установленного на оси оптической системы 1.
Чувствительность радиометра такого типа составляет 1(Г10... 10-11 Вт/см2. Такая
Рис. 3.12. Схема ИК-радиометра:
1 - оптическая система; 2 - эталонный источник; 3 - зеркало; 4 - болометр; 5 - электро-
двигатель; 6 - модулятор (механический прерыватель); 7 - генератор; 8 - усилитель;
9 - синхронный выпрямитель; 10 - измерительный прибор
чувствительность позволяет различать между собой объекты с разницей темпе-
ратур 0,01 °C. Инерционность прибора составляет 16 мс.
Принцип действия радиационного пирометра поясняется структурной схе-
мой, представленной на рис. 3.13.
Основной частью пирометра является оптический телескоп. Телескоп радиа-
ционного пирометра наводится на объект при помощи встроенного оптического
Контрольный прибор
Рис 3.13. Схема работы радиационного пирометра
визира с перекрестием. Объектив телескопа фокусирует ИК-излучение от объек-
та на рабочую площадку приемника (термостолбика), и на выходе возникает на-
47
пряжение, которое измеряется милливольтметром со шкалой, оттарированной в
градусах Цельсия, или автоматическим потенциометром, производящим запись
измеряемой температуры на бумажную ленту. Градуировка пирометра осущест-
вляется по черному внешнему телу.
3.2.2. Характеристики электронно-оптических
и тепловых приборов наблюдения
Основными характеристиками электронно-оптических приборов ночного
видения являются спектральная чувствительность электронно-оптических пре-
образователей, увеличение приборов, контрастность изображения, разрешающая
способность [2].
Спектральная чувствительность электронно-оптических преобразовате-
лей определяется материалом применяемого фотокатода. В приборах с под-
светкой фотокатоды изготавливают кислородно-цезиевыми, а в бесподсветных
приборах - многощелочными. Первый тип фотокатода более чувствителен к
инфракрасным лучам, которые используют при подсветке местности, и обес-
печивает действие средств ночного видения в диапазоне 0,76-1,2 мкм.
Приборы без подсветки работают в видимом свете, захватывая неболь-
шую область инфракрасных лучей с длиной волны до 0,9 мкм. Спектральная
чувствительность средств ночного видения иллюстрируется графиками на
рис. 3.14 [2].
Увеличение или кратность приборов определяется отношением видимых уг-
ловых размеров объектов при наблюдении с помощью прибора и без него. Крат-
Рис. 3.14. Спектральная чувствительность фотока-
тодов электронно-оптических преобразователей:
1 - приборы ночного видения с подсветкой; 2 - беспод-
светные приборы; 3 - чувствительность глаза
ность Г любого электронно-оптического прибора зависит от фокусного расстоя-
ния объектива и окуляра, электронного увеличения преобразователя и находится
по формуле
г = /об г
Х /• ЭЛ ’
J ок
(3-9)
где />б,Уок - фокусное расстояние объектива и окуляра; Гэл - электронное увели-
чение ЭОП.
Если объект размером I наблюдается с расстояния D, то его видимый угло-
вой размер будет
5 = 3440—Г.
D
(3.10)
48
Выражение (3.10) справедливо во всех случаях, когда угловые размеры 8
объекта или его деталей больше минимального разрешаемого угла 5min.
Контрастность изображения определяется соотношением яркостей фона и
объекта на экране электронно-оптического преобразователя. Ее находят по ос-
новной формуле для оптического контраста (2.1). При этом необходимо иметь в
виду следующее:
1) коэффициент контрастности у для ЭОП приборов ночного видения равен
единице;
2) влиянием дымки при наблюдении в приборы ночного видения можно пре-
небречь, так как инфракрасные лучи рассеиваются атмосферой незначительно, а
приборы имеют сравнительно небольшую дальность действия;
3) при отсутствии облучения экран ЭОП светится. Эта паразитная или, как ее
называют, темновая яркость экрана Втем накладывается на яркость изображений
фона и объекта, что снижает видимый контраст.
Таким образом, контрастность изображения объектов, наблюдаемых в при-
боры ночного видения, будет
К вид
дэф вэф
_ । ^шш -^тем
53* + 5эф ’
-^тах 1 -^тем
(3.11)
где 5^ - темновая яркость экрана ЭОП, выраженная в эффективных единицах.
Известно, что объект обнаруживается, когда его контраст с фоном больше
порогового. Для получения последней величины в зависимости от угловых раз-
меров объекта наблюдения можно воспользоваться графиком на рис. 3.6, так как
средние яркости свечения экранов ЭОП и телевизионных кинескопов, к которым
адаптируется глаз наблюдателя, имеют значения одного порядка.
Разрешающая способность приборов ночного видения определяется тем
предельно малым углом Зть, при котором наблюдатель может отличить изобра-
жения близко расположенных точек (линий) контура объекта. Значение этого
угла зависит в основном от линейной разрешающей способности экрана элек-
тронно-оптического преобразователя и может быть найдено по формуле
1700
^э/об^эл
(3.12)
где R3 - разрешающая способность экрана ЭОП, лин/мм; /об - фокусное рас-
стояние объектива прибора, мм; Гэл - электронное увеличение ЭОП.
В современных электронно-оптических преобразователях разрешающая спо-
собность при абсолютном контрасте не превышает 40-50 штрихов на 1 мм; оп-
тическое увеличение ЭОП для приборов с подсветкой 0,5-1,0, а для бесподсвет-
ных приборов 0,3 - 0,6.
Разрешающая способность электронно-оптических преобразователей снижается
с уменьшением контраста наблюдаемых объектов и их освещенности. На рис. 3.15
приведена зависимость линейной разрешающей способности ЭОП для приборов с
49
подсветкой от контраста объектов и их освещенности (в белом свете). Средства ин-
фракрасной подсветки создают на объектах освещенности в пределах 0,5... 1,0 лк.
График показывает, что в этих условиях разрешающая способность значительно
меньше паспортной, т. е. определяемой при контрасте, равном единице, и освещен-
ности на объекте около 100 лк.
В качестве приемников инфракрасных лучей в средствах теплового обна-
ружения используют преимущественно фотосопротивления, т. е. устройства,
Рис 3.15. Разрешающая способность
электронно-оптических преобразова-
телей для приборов с подсветкой в
зависимости от контрастности объек-
тов и освещенности (в белом свете)
Рис. 3.16. Спектральная чувстви-
тельность фотосопротивлений:
1 - сернисто-свинцового; 2 - селени-
сто-свинцового; 3 - сурьмяно-индиевого;
4 - германиевого
которые при воздействии на них лучистой энергии меняют свое электрическое
сопротивление. Изменения сопротивления преобразуются далее в изменения
электрического тока для получения световых отметок теплового изображения.
В зависимости от типа применяемых приемников длинноволновая граница
чувствительности средств обнаружения (рис. 3.16) простирается до 3...8 мкм
при использовании фотосопротивлений из сернистого или селенистого свинца
и селенида индия или до 12 мкм при использовании германиевых фотосопро-
тивлений [2].
Возможность раздельного обнаружения наземных объектов средствами теп-
ловой разведки характеризуется минимальным разрешаемым углом прибора,
значение которого зависит от размеров приемной площадки фотосопротивления а
и фокусного расстояния оптической системы />б-
я — а
°min — г
(3.13)
Очень важным параметром приемников инфракрасного излучения является
порог чувствительности. Эта величина по аналогии с пороговым блеском опре-
деляется минимальной облученностью Fmm, измеряемой в Вт/м2, которую может
обнаружить приемник. Чем меньшая мощность инфракрасного излучения может
быть зафиксирована приемником, тем больше расстояние, на котором обнару-
живается объект.
50
В справочниках обычно приводят данные
о порогах чувствительности инфракрасных
приемников относительно излучателя с тем-
пературой 300 К. При другой температуре
излучателя чувствительность селективного
приемника, каким является фотосопротивле-
ние, будет иной, так как приемник по-
разному реагирует на излучения различного
спектрального состава, что происходит при
изменении температуры нагретой поверхно-
сти. Поэтому пересчет порога чувствитель-
ности для данного типа приемника произво-
дят с учетом его спектральной характери-
Рис. 3.17. Графическое определение
коэффициента использования излу-
чений приемником
стики. Для этого определяют коэффициенты а использования приемником излу-
чений с температурой 300 Кис данной температурой t (рис. 3.17) [2]:
а _B^JbXtSldk_Fl
‘ В? F2’
(3.14)
где В^, В™ - эффективная и энергетическая яркости излучения, отн. ед.; F\, F2 -
площади на графике рис. 3.17, соответствующие эффективной и энергетической
яркостям.
Порог чувствительности приемника к излучениям с температурой t находят
по формуле
Е -Е азоо° (3 1
minz nmin300o а •
Для фотосопротивления из сернистого свинца, например, порог чувстви-
тельности к излучениям с температурой 200 и 100 К возрастает по сравнению с
паспортным порогом (при 300 К) соответственно в 3 и 20 раз.
Чтобы повысить чувствительность и увеличить дальность действия средств
теплового обнаружения, применяют различные оптические системы в виде линз
из специальных материалов или вогнутых зеркал. Порог чувствительности при-
емника при наличии оптической системы определяют по формуле
1 Г Y
, (3-16)
^ОПТ \ ^опт >
где т0ПТ - прозрачность оптики для инфракрасных лучей; б?пр, ^Опт - диаметры
приемной площадки фотосопротивления и оптической системы.
Зная значение порога чувствительности, можно установить, с какой дально-
сти обнаруживаются незамаскированные объекты тепловыми средствами раз-
51
Рис. 3.18. К определению допустимой силы теплового
излучения объектов
ведки и до какого уровня требуется снизить тепловое излучение маскируемых
объектов, чтобы обеспечить их скрытие.
Допустимую силу теплового излучения точечного объекта в направлении
средства разведки (рис. 3.18) найдем по закону обратных квадратов для ос-
вещенности [2]:
А1ОП
E^D1 2
(3.17)
^атО
где Е™^ - порог чувствительности средства разведки, Вт/м2; D - расстояние
между объектом и средством разведки, м; татд- прозрачность слоя атмосферы
толщиной D для инфракрасных лучей.
Зависимость допустимой силы теплового излучения объектов от дальности
для данного типа приемника можно изобразить графически в виде семейства
кривых, показанных на рис. 3.19.
5,м2
Рис. 3.19. Зависимость допустимой си-
лы теплового излучения объекта от рас-
стояния
104
103Ь
1021-
ю1 -
10° -
кг’ -
1(Г2 -
О 200 400 600 800 1000 Г,°С
Рис. 3.20. Дальность теплового обнаруже-
ния объектов в зависимости от площади и
температуры их поверхностей:
1 - 80 км; 2-60 км; 3-40 км; 4-30 км; 5-20 км;
6-15 км; 7-10 км; 8- 5 км
Силу теплового излучения можно представить как произведение эффектив-
ной яркости объекта на площадь его проекции, наблюдаемую из точки располо-
жения приемника:
52
Т _ Ерф rr
допг допг пр*
(3.18)
Поскольку эффективная яркость объекта в конечном счете, определяется
температурой его поверхностей, зависимость /доп, = f(D) можно представить
в другом виде, более удобном для практических расчетов, в виде зависимости
дальности обнаружения объекта от площади и температуры нагретых поверх-
ностей (рис. 3.20) [2].
3.3. Лазерная разведка и разведка источников лазерного излучения
3.3.1. Основные направления применения лазеров в военной технике
В настоящее время существенно возросло использование лазерных приборов
в системах вооружения и военной техники. В частности, широкое применение
лазерные приборы находят в системах дальнометрирования, локации, разведки,
связи, навигации, подсвета и целеуказания, наведения средств поражения, сило-
вого воздействия (рис. 3.21).
Первыми устройствами военного назначения, которые были созданы на
основе лазерных приборов, были дальномеры. В настоящее время в армиях
практически всех государств имеются на вооружении лазерные дальномеры
различного назначения (артиллерийские, танковые, самолетные, разведыва-
тельные и др.). Дальномеры могут работать как в импульсном, так и непре-
рывном режимах. Длины волн лазерных излучений, на которых работают
дальномеры, приведены в табл. 3.1 [4].
Важным направлением использования лазерных излучателей является опти-
ческая локация. Малый угол расхождения луча лазера и высокое значение им-
пульсной мощности выходного излучения обеспечивают ряд преимуществ оп-
тических локаторов по сравнению с радиолокаторами:
- большую дальность действия при одинаковой мощности;
- более высокую разрешающую способность, позволяющую воспроизводить
контуры цели;
- более высокую точность определения координат;
- лучшую помехоустойчивость.
В настоящее время широкое распространение получили обзорные оптиче-
ские локаторы, локаторы для анализа и измерения загрязняющих химических
примесей в атмосфере (лидары), оптические локаторы обнаружения и сопрово-
ждения целей [5].
Существующие радиолокационные системы сопровождения целей обладают
рядом недостатков, основными из которых являются ограниченная точность из-
мерения координат цели, недостаточная разрешающая способность, громозд-
кость и высокая стоимость. Использование в локаторе сопровождения в качестве
излучателя лазера позволяет преодолеть отмеченные недостатки. Так, например,
автоматическая лазерная система сопровождения воздушных целей и измерения
дальности, разработанная фирмой Sylvania (США), обеспечивает точность со-
провождения по азимуту около 20 угл. с и по углу места 40 угл. с. Точность из-
мерения дальности соответствует 15 см.
Длины волн, на которых работают оптические локаторы, представлены в табл. 3.1.
53
Дальнометрия
Дальномеры:
- артилле-
рийские;
- танковые;
- самолетные;
- топографи-
ческие
Основные направления
применения лазеров
Локация Связь Навигация Разведка Наведение средств поражения Целеуказание и подсветка Силовое воздействие
Локаторы: - обзора; - обнаружения и сопровож- дения; - обнаружения химических примесей в атмосфере Системы связи: - через атмосферу; - по волокон- но-оптичес- ким кабелям Лазерные гироскопы, дисл, системы посадки самолетов, высотомеры Лазерные сканирующие камеры, обнаружители лазерного излучения, лазерные подслуши- вающие устройства Головки самонаве- дения, работающие по рассеян- ному целью лазерному излучению Целеуказание лазерным лучом, подсвет местности для ПНВ Тактическое и стратеги- ческое лазерное оружие
Рис. 3.21. Основные направления применения лазеров в военной технике
Таблица 3.1
Условия Дальномеры Локаторы Системы связи Системы навигации Системы разведки Системы целеуказания и наведения Системы подсвета пнв Системы оружия Системы опознавания, «свой-чужой»
Режим Импульсный Импульсный Импульсный — Импульсный Импульсный Импульсный Импульсный Импульсный
Непрерывный Непрерывный Непрерывный Непрерывный Непрерывный — — Непрерывный Непрерывный
Длина волны, мкм 0,69; 0,85; 1,06; 1,54 0,45...0,53; 0,69; 0,85 0,85; 1,06 - 0,45...0,51; 10,6 0,85; 1,06 0,85; 1,06 0,69; 0,53 1,06
2,1; 10,6 10,6 3,39; 10,6 0,63; 10,6 0,63; 10,6 — — 1,06; 5,0; 10,6 10,6
Важное направление применения лазеров в военной технике - их использова-
ние в линиях связи тактического оперативного и стратегического назначения.
Использование лазеров в высокоинформативных оптических системах связи
через атмосферу на короткие расстояния позволяет разгрузить действующие ка-
налы радиосвязи, которые работают с большим напряжением. Весьма перспек-
тивно использование лазеров в космических линиях связи на большие расстоя-
ния, а также в волоконно-оптических системах связи.
Проведенные исследования показывают, что наиболее подходящими для ла-
зерных систем связи являются: газовые лазеры на СО2 с длиной волны излуче-
ния 10,6 мкм, на Аг (0,45-0,51 мкм) и He-Ne (0,63 и 1,15 мкм); твердотельные
лазеры на ИАГ с примесью неодима (1,06 мкм) и полупроводниковые лазеры
(0,8...0,9 мкм).
Весьма перспективно использование лазерных приборов в системах навига-
ции. В настоящее время широко применяют лазерные доплеровские измерители
скорости (ДИСЛ) и лазерные гироскопы.
Наиболее оптимальным диапазоном длин волн для ДИСЛ, предназначенных
для работы в пределах земной атмосферы, является 8... 14 мкм, так как в этом
диапазоне имеется одно из атмосферных окон прозрачности. Кроме того, на
волнах этого диапазона когерентное детектирование позволяет получить весьма
высокую чувствительность приемного устройства. Поэтому все последние раз-
работки в области аппаратуры доплеровского измерения скорости базируются
на ССЬ-лазерах, работающих в непрерывном режиме на волне 10,6 мкм.
Одной из проблем воздушной разведки всегда было обеспечение ее в ночных
условиях. Появление лазерных излучателей позволило решить эту задачу. В на-
стоящее время созданы и успешно функционируют лазерные сканирующие ка-
меры, которые устанавливают на самолетах-разведчиках и используют для по-
лучения видовой информации в ночных условиях. В ближайшее время следует
ожидать появления лазерных сканирующих камер, предназначенных для косми-
ческих аппаратов. Возможные длины волн лазерных излучателей, предназна-
ченных для лазерных сканирующих камер, приведены в табл. 3.1 [4, 5].
Применение лазерных приборов в системах целеуказания и наведения по-
зволяет в значительной степени повысить эффективность поражения наземных
целей. Так, применение в Ираке и Югославии американскими вооруженными
силами ракет и бомб с лазерным наведением позволило увеличить количество
прямых попаданий до 80.. .90 %.
Использование лазерных излучателей для подсвета местности существенно уве-
личивает дальность действия и помехозащищенность приборов ночного видения.
Лазер в этом случае играет роль периодически включаемого прожектора
подсветки. Синхронное с импульсами подсвета включение ПНВ и стробирова-
ние в остальные моменты времени позволяет защитить его от засветок вспыш-
ками выстрелов, разрывов снарядов и факелами маршевых двигателей УРС.
С начала появления лазеров ведутся непрерывные исследования в области
создания оружия силового воздействия на их основе. Исследования проводятся в
двух направлениях:
- создание систем лазерного оружия тактического назначения, предназначенно-
го для воздействия на органы зрения, оптические системы, фотоприемники и т. д.;
- создание стратегического лазерного оружия, которое можно было бы ис-
пользовать в системах ПВО и ПРО для уничтожения ракет и самолетов.
56
Что касается первого направления, то в настоящее время приняты на вооруже-
ние несколько систем тактического лазерного оружия, предназначенных для вывода
из строя или разрушения оптических элементов и фотоприемников ИК-излучения
дневных и наблюдательных ночных приборов, ослепления солдат противника на
поле боя, противодействия работе инфракрасных систем наведения ракет.
Наряду с ослепляющим действием лазерного оружия большое значение име-
ет фактор теплового воздействия излучения лазера на кожный покров, ткани
внутренних органов, одежду и т. д.
Создание стратегического лазерного оружия для систем ПВО и ПРО натал-
кивается на существенные технологические трудности, связанные с решением
следующих проблем:
- разработкой высокомощных лазеров с энергией выходного излучения, дос-
таточной для разрушения корпусов самолетов и ракет;
- созданием высокоточных систем наведения и удержания лазерного луча на
цели;
- разработкой новых оптических элементов и просветляющих покрытий,
способных выдерживать большие плотности энергии лазерного излучения;
- изучением эффектов взаимодействия мощного лазерного излучения атмо-
сферой и различными веществами.
3.3.2. Демаскирующие признаки лазерных систем
К демаскирующим признакам (ДП) аппаратуры с использованием лазерных
излучателей можно отнести (рис 3.22) [1]:
- когерентное световое излучение;
- некогерентное световое излучение источников накачки;
- побочное излучение на частотах радиодиапазона, обусловленное работой
источников накачки и всевозможных модуляторов и синхронизаторов;
- рентгеновское излучение, присущее некоторым типам лазеров;
- загрязнение окружающей среды побочными продуктами функционирова-
ния некоторых лазерных систем;
- акустические и сейсмические эффекты;
- внешний вид устройств испытательного и полигонного оборудования.
Следует отметить, что перечисленный набор ДП обобщен по всем видам ап-
паратуры с использованием лазерных излучателей. Это означает, что конкретная
лазерная система может не иметь всех признаков.
Рассмотрим несколько подробнее каждый из перечисленных ДП. Когерент-
ное излучение в зависимости от режима работы лазерного средства может быть
импульсным или непрерывным, но независимо от режима работы характеризу-
ется такими общими параметрами, как длина волны, диапазон ее перестройки,
мощность (энергия) излучения, вид поляризации и модуляции, структура сигна-
ла. Импульсное излучение, кроме того, характеризуется длительностью и часто-
той следования импульсов.
Некогерентное световое излучение накачивающих устройств может содер-
жать сведения:
- о спектральном составе излучения накачки, позволяющем установить тип
лазера и длину волны его излучения;
57
Рис. 3.22. Демаскирующие признаки аппаратуры и информация, которую они содержат
- о режиме работы (импульсный, непрерывный);
- о виде используемой модуляции и некоторых параметрах модулирующего
сигнала;
- о длительности и частоте следования импульсов накачки, соответствую-
щих режиму работы лазерного излучателя и, следовательно, несущих информа-
цию о назначении устройства и некоторых его характеристиках;
- о направлении на источник излучения.
Аналогичная информация содержится в побочных излучениях радиодиапа-
зона, обусловленных работой блоков накачки и модуляции.
Рентгеновское излучение свойственно электроионизационным газовым лазе-
рам, полупроводниковым и газовым с накачкой электронным лучом. Замеры
рентгеновского излучения дают возможность определить его интенсивность и
спектральный диапазон.
Полученные в результате анализа данные позволяют сделать вывод о типе
используемого лазера, длине волны излучения, ориентировочном значении
мощности лазерного излучения и местоположении источника.
Акустические и сейсмические эффекты могут содержать информацию о ре-
жиме работы устройства, источника накачки, ориентировочным значением мощ-
ности лазерного излучения, направлении на источник излучения.
При работе некоторых лазерных систем происходит загрязнение окружаю-
щей среды побочными химическими продуктами, выделяющимися при их
функционировании. Анализы проб воздуха, грунта, воды позволят определить
типы загрязняющих примесей, их концентрацию и изменение ее во времени, на-
правление на область с максимальной концентрацией примеси.
Внешний вид устройства, испытательного и полигонного оборудования мо-
гут дать сведения о назначении устройства и некоторых его характеристиках.
Не все параметры излучаемых сигналов, демаскирующих то или иное сред-
ство, содержат равноценную информацию о его назначении и характеристиках.
Поэтому при определении параметров лазерных систем, которые необходимо
скрывать от разведки противника, целесообразно проанализировать их инфор-
мационную ценность. Под информационной ценностью параметров в данном
случае понимается объем полезной информации, необходимой для определе-
ния назначения системы и ее ТТХ в целях последующей разработки средств
подавления.
Проведем качественную оценку информационной ценности параметров ла-
зерных сигналов.
Назначение средства в ряде случаев характеризуется длиной волны излуче-
ния. Так, например, можно достаточно точно сказать на каких длинах волн ра-
ботают лазерные дальномеры, системы целеуказания, разведки, локации и т. д.
В некоторых случаях системы могут работать на одинаковых длинах волн.
Поэтому для их распознавания необходимо изучение дополнительных характе-
ристик, к которым относятся:
- вид модуляции и параметры модулирующего сигнала;
- мощность (энергия) излучения;
- длительность и частота следования импульсов;
- поляризация сигнала.
Так, например, наличие в принятом сигнале ЧМ с линейным или синусои-
дальным изменением частоты свидетельствует о том, что разведуемое средство
59
относится к локационным системам, предназначенным для точного определения
координат и скорости движения цели. При этом линейная ЧМ характерна для
локаторов обнаружения и целеуказания; а синусоидальная ЧМ - для локаторов
слежения за целью.
Девиация частоты в ЧМ-сигнале характеризует полосу пропускания прием-
ного устройства и разрешающую способность по дальности, а период модуля-
ционного сигнала - возможности системы по измерению скорости движения
целей.
Мощность (энергия) принимаемого сигнала позволяет оценить примерную
мощность излучателя разведуемой системы (при известном расстоянии) и сде-
лать предположения о назначении системы и ее дальности действия. Поляриза-
ция принимаемого излучения также позволяет иногда судить о назначении сис-
темы и ее возможностях. Так, по наличию изменения поляризации излучения в
соответствии с бинарным кодом можно сделать вывод о том, что система ис-
пользуется для передачи цифровой информации.
Наличие круговой поляризации свидетельствует о способности системы ра-
ботать в плохих метеоусловиях, а также в случае использования пассивных по-
мех в виде облака мелких зеркальных отражателей.
Частота следования импульсов содержит информацию о назначении разве-
дуемой системы и ее дальности действия. Так, при частоте следования импуль-
сов от нескольких в минуту до 1 Гц можно предположить, что система относит-
ся к классу артиллерийских или танковых дальномеров. При частоте следования
импульсов в пределах 30... 100 Гц разведуемое средство может быть отнесено к
системе целеуказания; при частоте следования от 100 Гц до нескольких кило-
герц возможная классификация средства - локационная система.
Длительность импульса излучения может определять такие тактические и
технические характеристики, как разрешающая способность по дальности, точ-
ность измерения расстояний, минимальная дальность действия, ширина полосы
пропускания приемного устройства. Знание полосы пропускания приемника
разведуемого средства имеет весьма важное значение в случае разработки
средств противодействия разведуемым системам. Эффективность используемой
для подавления помехи повышается, если ширина ее спектра согласована с по-
лосой пропускания подавляемого приемника.
Полоса пропускания приемного устройства у различных лазерных систем
определяется различными параметрами излучаемых сигналов. Например, в
дальномерах, целеуказателях, локаторах без дополнительной модуляции полоса
пропускания А/ может быть определена по длительности импульса т:
1-2
т
Полоса пропускания устройств с непрерывным излучением, например, доп-
леровских систем измерения скорости, определяется в основном шириной спек-
тра доплеровских частот АВ:
Af = AB = 2V^f/C,
60
где Ицппп - минимальная скорость цели; f - частота, на которой производится
измерение (несущая, поднесущая); С - скорость света.
Полоса пропускания локационных лазерных систем с ЧМ определяется де-
виацией частоты В: Af = В, где В =f-f^.
Важной характеристикой лазерной системы, представляющей интерес для
разведки противника, является структура кодовой посылки. Так, если лазерная
система целеуказания или дальнометрирования использует кодированный ре-
жим работы, в соответствии с которым измерения дальности до цели прово-
дятся по пятому импульсу в серии, то для создания эффективного средства
подавления необходимо с помощью технических средств разведки вскрыть
режим работы.
Таким образом, комплексный анализ таких характеристик принимаемых
сигналов, как длина волны, мощность излучения, поляризация, вид модуляции и
т. п., позволяет получать закрытые сведения о назначении тех или иных систем
и других их основных ТТХ: дальности действия, точности измерения координат
цели, разрешающей способности, режимах работы и т. п.
Указанные сведения являются исходными для разработки и эффективного
использования средств подавления.
3.3.3. Обнаружение источников лазерного излучения
Широкое использование лазерных приборов в военной технике определило
необходимость создания соответствующих средств разведки источников лазер-
ного излучения и противодействия их работе [7].
Несмотря на большое разнообразие направлений применения лазерных уст-
ройств в военном деле выбор длин волн лазерного излучения для практических
систем ограничен, что облегчает решение задачи по разработке средств разведки
лазерных излучений. Так, в системах дальнометрирования применяют лазеры,
работающие на фиксированных длинах волн: 0,69; 0,84; 1,06; 1,54 и 2,1 мкм
(см табл. 3.1). В системах целеуказания и подсвета, как правило, используют лазе-
ры, работающие на длинах волн 0,84 и 1,06 мкм; в системах воздушной разведки
0,45...0,51 мкм; в системах связи 0,84...0,9; 1,06; 3,39 и 10,6 мкм; в системах на-
вигации - 10,6 мкм. Поэтому при создании средств разведки необходимо ориен-
тироваться на указанные выше значения длин волн.
Для обнаружения лазерного излучения систем дальнометрирования, лока-
ции, связи, подсветки, разведки, наведения средств поражения, работающих на
длинах волн до 1,1 мкм, можно использовать ПНВ с кислородно-цезиевыми фо-
токатодами, диапазон спектральной чувствительности которых лежит в преде-
лах 0,4...1,2мкм. Из отечественных приборов для этой цели могут быть
использованы ПНВ следующих типов:
- НСП-2 (поле зрения 8°, увеличение 2,2);
- ТНП-1 (поле зрения 6°, увеличение 5,5);
- ТКН-3 (поле зрения 8°, увеличение 4,5);
- ТНВ-2 (поле зрения 22°, увеличение 1).
Ночные бинокли типа «блик» непригодны для обнаружения лазерных из-
лучателей ПК-диапазона, так как в них используют ЭОП с мультищелочными
61
фотокатодами, диапазон спектральной чувствительности которых составляет
0,4...0,85 мкм.
Общим недостатком всех ПНВ в случае их использования для обнаружения
лазерного излучения можно считать:
- отсутствие угломерного устройства, позволяющего определять направле-
ние на источник излучения;
- невосприимчивость к лазерному излучению на длинах волн более 1,2 мкм.
Поэтому их дальнейшая модернизация при использовании для разведки и
контроля должна быть направлена на устранение отмеченных недостатков.
Наиболее сложной задачей является разработка фотокатодов на длины волн
более 1,1 мкм.
С точки зрения расширения спектрального диапазона чувствительности фото-
приемников и исключения их механического сканирования в пространстве весьма
перспективными являются мозаичные фотоприемники. Двумерные мозаики по-
зволяют создавать приборы, сочетающие свойства сканирующего радиометра и
аппаратуры фотографического типа, которая охватывает одновременно все поле
зрения. Мозаики обеспечивают высокую чувствительность на всех длинах волн,
пропускаемых входной оптической системой, высокое угловое разрешение, а от-
сутствие движущихся частей значительно повышает их надежность.
В настоящее время в США создана светочувствительная мозаика, состоящая из
фотоприемников размером 0,38 мм. Светочувствительным материалом фотоприем-
ников служат сернистый свинец и ртутный теллурид кадмия, диапазон спектраль-
ной чувствительности которых составляет 1.. .25 мкм. В мозаике каждый фотопри-
емник имеет свой собственный усилитель. Электронная схема каждого усилителя
использует структуры металл - оксид - полупроводник (МОП), обеспечивающие
высокую плотность размещения и малую потребляемую мощность.
3.3.4. Лазерная разведка
Под лазерной разведкой понимается процесс получения видовой информации
путем облучения местности зондирующими лазерными сигналами с последующим
приемом и анализом отраженного от местности и объектов лазерного излучения.
Лазерная разведка решает те же задачи, что и фотографическая. Однако по
сравнению с последней она обеспечивает следующие преимущества:
- возможность скрытного ведения разведки в ночных условиях;
- оперативную обработку и передачу разведывательной информации на пункт
сбора и обработки.
В настоящее время средства лазерной разведки используются только на воз-
душных носителях. Однако в соответствии с программой НАСА создается ла-
зерная система, которую предполагают использовать для ведения разведки из
космоса. Для этого конструируется специальный лазер, работающий в режиме
излучения коротких импульсов с большой пиковой мощностью.
Принцип действия лазерной системы воздушной разведки заключается в
следующем. Узконаправленный луч лазера с помощью вращающейся много-
гранной зеркальной призмы сканирует местность перпендикулярно направле-
нию полета самолета (рис. 3.23). Одновременно с лучом лазера действует при-
емная оптическая система с фотоприемником (ФП), которая воспринимает от-
62
Рис. 3.23. Упрощенная функциональная схема лазерной системы воз-
душной разведки с воспроизведением изображения на экране ЭЛТ
отраженные объектами и местностью лазерные сигналы и фокусирует принятое
излучение на ФП. ФП преобразует лазерное излучение в электрические сигналы,
амплитуда которых меняется в соответствии с интенсивностью принятого
лазерного излучения. После соответствующей обработки сигналов формируется
строка изображения местности, над которой пролетает носитель разведыватель-
ной аппаратуры [1]. Развертка изображения местности по кадрам осуществляет-
ся за счет перемещения носителя по курсу.
Изображение местности в лазерных системах разведки может регистриро-
ваться на фотопленку либо воспроизводиться на экране ЭЛТ. Возможна также
передача данных лазерной разведки на Землю по радиоканалу.
63
Длина волны зондирующего излучения лазера должна совпадать с окнами
прозрачности атмосферы и лежать в области максимальной контрастности объек-
тов разведки и фонов. Выбор ФП для конкретной системы разведки проводится
исходя из минимальной пороговой чувствительности для данного спектрального
диапазона. Постоянная времени и частотная характеристика ФП выбирается в со-
ответствии с параметрами передающей и приемной оптики, т. е. ФП с усилителем
не должен снижать разрешающую способность лазерной системы.
Основными ТТХ лазерной системы разведки являются высота применения
Н, угол сканирования или поперечный захват местности, разрешающая способ-
ность системы, допустимый диапазон изменений отношения скорости полета
носителя к высоте полета V/Н, рабочие длины волн и ограничения по метеоро-
логическим условиям.
Высота применения зависит от многих факторов: мощности лазера, чувстви-
тельности ФП, коэффициента ослабления лазерного излучения в атмосфере, уг-
ловой разрешающей способности системы и других параметров. Жестко с ней
связан и диапазон изменения отношения VIН. Угол сканирования зависит от ти-
па сканирующего устройства, угла поля зрения приемной оптики, мощности ла-
зера. Разрешающая способность лазерной системы определяется шириной зон-
дирующего лазерного луча и углом поля зрения приемной оптики. В системе
линейного сканирования при фиксированных значениях ширины луча и поля
зрения приемного объектива линейная разрешающая способность является
функцией высоты и угла сканирования.
Лазерные камеры с линейным сканированием дают высококачественные
изображения местности в ночных условиях без каких-либо иных источников
освещения кроме лазера.
Совершенствование разведывательных систем с лазерным сканированием
идет по следующим направлениям:
- разработка многоволновых лазерных камер, в которых используется не-
сколько лазеров с различными длинами волн излучения, обеспечивающих лучшее
обнаружение целей, обусловленное различием их поглощающей и отражающей
способности;
- создание трехмерной лазерной сканирующей камеры, в которой к изобра-
жению, полученному при линейном сканировании, добавляется третья состав-
ляющая - показание измеренной с помощью лазера высоты;
- разработка лазерной камеры со сканированием местности от горизонта до
горизонта в целях панорамного обзора.
Создана лазерная камера переднего обзора растрового типа, работающая в
реальном масштабе времени. Она аналогична инфракрасным или телевизион-
ным системам обзора, за исключением того, что в лазерной камере используется
освещение наблюдаемой местности собственным излучением. Подобная система
обеспечивает получение изображений с большим контрастом по сравнению с
ИК-камерами переднего обзора.
Кроме того, дальнейшее развитие аппаратуры лазерной разведки направлено
на повышение разрешающей способности, расширение полосы разведки, увели-
чение высот и диапазона скоростей боевого применения.
В настоящее время используются устройства, предназначенные для обна-
ружения пассивных систем низкоуровневого телевидения и тепловой разведки.
64
Обнаружение подобных систем осуществляется по бликам, возникающим при
накрытии их входной оптики лазерным зондирующим лучом. По отраженным
от оптики сигналам можно определить тип системы и рабочую длину волны.
Аналогичный метод может быть применен к решению задачи инспекции
ИСЗ военного назначения. Обследование таких ИСЗ с помощью активных ла-
зерных средств обеспечивает достаточно полезную информацию относительно
оптической и оптико-электронной аппаратуры спутника. Например, при оптиче-
ском сопровождении в течение некоторого времени можно обнаружить закры-
тие затворов фотокамер и тем самым выявить назначение спутника. Если же
движений затвора не обнаружено, но наличие оптики определено методом об-
ратного отражения, то это означает, что на спутнике используется аппаратура
пассивного непрерывного обзора с помощью фотоприемников ИК-излучения
или система низкоуровневого телевидения.
Другое направление лазерной разведки связано с перехватом речевой ин-
формации. Принцип работы подобных устройств основан на снятии информа-
ции с вибрирующих под воздействием информационного акустического поля
оконных стекол. Лазерный луч, падающий на вибрирующее стекло, модулирует-
ся при отражении микровибрациями стекла. Перехватывая отраженный луч с
помощью входной оптики устройства разведки и преобразуя с помощью фото-
приемника световые сигналы в электрические, можно воспроизводить разгово-
ры, ведущиеся в помещении.
4. РАДИОЭЛЕКТРОННАЯ РАЗВЕДКА
Радиоэлектронная разведка (РЭР) - это процесс получения информации в ре-
зультате приема и анализа электромагнитных излучений (ЭМИ) радио диапазона,
создаваемых работающими радиоэлектронными средствами (РЭС).
ЭМИ, создаваемые объектами разведки, могут быть первичными (собствен-
ными) или вторичными (отраженными).
Излучения РЭС - это прежде всего их основные (собственные) излучения,
обеспечивающие функционирование РЭС. Особенность основных излучений -
детерминированный характер их пространственной, временной и спектральной
структуры (диаграмма направленности излучения, длительность и период сле-
дования излучаемых импульсов, частота, вид амплитудного и фазового спек-
тров, ширина спектра и т. д.).
Наряду с основными при работе передатчиков РЭС существуют и неоснов-
ные излучения, которые лежат вне полосы частот, необходимой для передачи
информации или создания помех, и содержат определенную информацию о из-
лучающих объектах.
Вторичные ЭМИ - это излучения, возникающие в результате отражения
(рассеяния) электромагнитных волн (ЭМВ), облучающих объект. Падающие на
объект ЭМВ рассеиваются им во всех направлениях, в том числе и на источник
зондирующего излучения.
Для вторичного излучения реальных объектов (самолет, корабль, танк) ха-
рактерна зависимость его параметров (интенсивности, спектра, поляризации,
наклона фазового фронта) от отражательной способности, геометрической фор-
мы и размеров объекта, поляризации падающей волны, взаимной ориентации
источника излучения и объекта и, наконец, от параметров их относительного
движения.
Наличие первичных и вторичных ЭМИ объектов позволяет вести разведку
объектов и их распознавание.
РЭР позволяет решать следующие задачи:
- обнаруживать объекты, определять их местоположение и параметры дви-
жения;
- определять параметры объектов и характер их изменения во времени;
- определять назначение объектов и их типы;
- перехватывать передаваемую по каналам связи информацию.
Средства РЭР работают в пассивном или активном режиме (без излучения
ЭМВ или с излучением) в широком диапазоне спектра радиочастот.
РЭР имеет ряд отличий:
- охватывает большие районы, пределы которых зависят от особенностей
распространения ЭМВ различных участков спектра;
- функционирует непрерывно в любое время года и при любых метеоусловиях;
66
- действует без непосредственного контакта с объектами разведки, что опре-
деляет ее недосягаемость для средств поражения противника;
- обеспечивает получение достоверной информации, поскольку она исходит
непосредственно от противника (за исключением случаев дезинформации);
- позволяет получать большое количество самой разнообразной информации
об объектах противника;
- обеспечивает получение информации в кратчайшие сроки и чаще всего в
реальном масштабе времени, так как время доставки определяется скоростью
распространения радиоволн.
В зависимости от типа носителя РЭР делится на космическую, воздушную,
морскую и наземную.
По применяемым принципам и объектам она подразделяется на:
- радиоразведку (РР);
- радиотехническую разведку (РТР);
- радиолокационную разведку (РЛР) - видовую и параметрическую;
- радиотепловую разведку;
- разведку побочных электромагнитных излучений и наводок (ПЭМИН).
4.1. Радио- и радиотехническая разведка
РР и РТР - пассивные разновидности РЭР, использующие аппаратуру при-
емного типа.
РР предназначена для получения данных о противнике путем поиска, пере-
хвата, пеленгования и анализа излучений его РЭС связи, радиотелеметрии, ра-
дионавигации и осуществляется с помощью специальных разведывательных
станций, радиопеленгаторов и комплексов.
В результате разведки определяют содержание передаваемой информации,
местоположения и ТТХ радиостанций, интенсивность их работы за некоторый
период времени, систему сетей связи, плотность размещения в определенных
районах. Анализ данных РР позволяет:
- получать информацию о морально-политическом и экономическом поло-
жении страны;
- получать информацию о взаимосвязях промышленных и научных органи-
заций;
- вскрывать структуру сетей связи, дислокацию узлов связи;
- определять местоположение военных и военно-промышленных объектов
(В и ВПО), их принадлежность, профиль и характер деятельности;
- выявлять системы управления и связи;
- вскрывать отработку новых систем связи, определять виды сигналов и ха-
рактеристики систем;
- определять параметры новых образцов ракетной техники по данным пере-
хвата телеметрической информации, передаваемой с борта ракеты (при испыта-
тельных пусках);
- вскрывать группировки и боеготовность войск и сил флота.
РТР обеспечивает получение сведений о противнике путем обнаружения и
анализа сигналов, излучаемых РЭС локации, навигации, управления и РЭБ, а
также радиоизлучений технических устройств и технологического оборудова-
ния, электрогенераторов и электродвигателей, трансформаторов, реле коммути-
67
рующих устройств, систем зажигания двигателей внутреннего сгорания и т. д.
Средства РТР используют для решения следующих задач:
- определения назначения, типа и местоположения РЭС по данным измере-
ния параметров принятых сигналов;
- вскрытия дислокации и назначения В и ВПО;
- определения состава группировок и деятельности вооруженных сил;
- вскрытия систем радиотехнического обеспечения ПСО, ПРО и ПКО;
- определения состояния и перспектив развития радиоэлектронного вооружения.
4.1.1. Обобщенная структурная схема радио-
и радиотехнической разведки
При ведении РР и РТР подлежат измерению координаты разведуемого РЭС
(дальность, азимут, угол места); параметры принимаемых сигналов: несущая
частота сигнала, длительность импульса, частота следования импульсов, поля-
ризация сигнала, скорость вращения антенны, вид диаграммы направленности
антенны, спектральный состав сигнала и т. д.
Основными показателями средств РР и РТР являются:
- вероятность разведки, т. е. вероятность того, что сигнал разведуемого
средства будет принят и обработан;
- максимальная дальность разведки, представляющая собой наибольшее
расстояние между РЭС и станцией разведки, при котором сигналы РЭС обнару-
живаются на фоне собственных шумов разведприемника с заданными вероятно-
стями правильного обнаружения и ложной тревоги;
- сектора ведения разведки в горизонтальной и вертикальной плоскостях;
- частотный диапазон ведения разведки (коэффициент перекрытия);
- точность измерения, характеризующаяся обычно среднеквадратическим
значением ошибки измерения параметра;
- разрешающая способность по измеряемому параметру, определяющая воз-
можность раздельного наблюдения двух одновременно существующих сигна-
лов, отличающихся значениями какого-либо параметра (разрешающая способ-
ность оценивается минимальным различием параметров двух сигналов, при ко-
тором эти сигналы еще наблюдаются раздельно).
Для ведения РР и РТР применяют одинаковую аппаратуру разведки. Разница
заключается в используемых оконечных устройствах. Структурная типовая схе-
ма станции РР и РТР состоит из антенной системы, пеленгационного устройст-
ва, приемника, устройства панорамного обзора, блока анализа и измерения па-
раметров сигнала, канально-демодулирующего устройства, блока управления,
запоминания и обработки с устройством документирования выходной информа-
ции, блока передачи разведанных и приема управляющих команд, блока питания
и контроля работоспособности (рис. 4.1).
Антенная система осуществляет прием и пространственную селекцию сиг-
налов, излучаемых объектами разведки. Она должна быть широкополосной,
обладать высокой пространственной селекцией и обеспечивать пеленгацию
источников ЭМИ с требуемой точностью. Кроме того, диаграмма направленности
антенны (ДНА) должна иметь минимальный уровень боковых лепестков. Удовле-
68
Рис. 4.1. Структурная схема станции РР и РТР
творить всем указанным требованиям с помощью одной антенны не всегда воз-
можно. Поэтому в станции разведки обычно используется набор антенн, обеспе-
чивающий перекрытие всего диапазона частот. Для пеленгации используют спе-
циальные антенны с остронаправленными диаграммами.
Приемник станции разведки служит для селекции принятых сигналов РЭС
по частоте, а также для преобразования и усиления принятых сигналов. Он ха-
рактеризуется следующими основными параметрами:
- перекрываемым диапазоном частот;
- временем перестройки по частоте (пропускной способностью);
- чувствительностью (способностью к приему слабых сигналов);
- точностью измерения частоты и разрешающей способностью по несу-
щей частоте;
- способом поиска разведываемого сигнала по частоте и вероятностью его
обнаружения.
Наиболее важен перекрываемый диапазон частот, в котором можно осуще-
ствлять поиск разведываемых сигналов.
Пеленгационное устройство предназначено для определения угла прихода ра-
диоволн с последующим определением местоположения источника ЭМИ. В его
состав входят направленная антенна, пеленгатор и устройство отсчета пеленга.
69
Наиболее важные характеристики пеленгационного устройства - высокая точность
отсчета пеленга, хорошая пространственная разрешающая способность, быстродей-
ствие (в идеале - возможность измерения пеленга по одному импульсу).
Устройство панорамного обзора предназначено для своевременного обнару-
жения источников радиоизлучений во всем диапазоне частот и позволяет:
- вести панорамный обзор всех радиосигналов в заданном диапазоне частот;
- определять несущие частоты наблюдаемых в полосе обзора радиосигналов;
- устанавливать степень загрузки эфира действующими источниками радио-
излучений в полосе обзора;
- контролировать характер и порядок работы тех или иных источников из-
лучения, а также устанавливать начало и конец их работы;
- выделять любой наблюдаемый сигнал для слухового приема, анализа или
регистрации.
В качестве индикатора устройства панорамного обзора используется ЭЛТ с
частотной разверткой.
Анализатор параметров принимаемого сигнала служит для их измерения и
оценки в целях последующего распознавания образа разведываемого РЭС. С его
помощью могут измеряться временные, спектральные и энергетические пара-
метры сигналов, а также определяться их поляризация.
К временным параметрам относят длительности сигналов и временные
интервалы между ними, вид модулирующей функции (при непрерывном из-
лучении); к спектральным - высокочастотный спектр сигнала и спектр его
огибающей.
Энергетической характеристикой принимаемого сигнала служит функция
его спектральной плотности или распределение спектральных составляющих
сигнала по мощности.
Анализаторы подразделяются по количеству измеряемых параметров, диапа-
зону измерений, точности и разрешающей способности.
Канально-демодулирующее устройство (КДУ) предназначено для выделения
телефонных и телеграфных передач из группового спектра многоканальных ра-
диолиний. В многоканальных радиолиниях связи используют два метода уплот-
нения каналов: частотный и временной. В соответствии с этим КДУ разделяют
на два типа - с частотным и временным разделением каналов.
Блок управления, обработки и хранения информации обеспечивает:
- автоматическое управление работой станции разведки по заранее разрабо-
танным программам;
- обработку и запоминание параметров принятых сигналов (несущей часто-
ты, длительности импульсов, периода следования импульсов, скорости враще-
ния антенны, поляризации);
- распознавание образа РЭС.
РЭС распознаются на основе данных с выхода анализирующих устройств
путем сопоставления с имеющимися эталонами, для чего служит ЭВМ, в память
которой заложены программы управления станцией и данные по характеристи-
кам РЭС противника.
Принимаемые сигналы и их характеристики регистрируются с помощью
приборов различного типа (магнитофоны, фотоприставки, электромеханические,
электротермические, электрохимические регистраторы).
70
Блок приема команд и передачи разведывательной информации предназна-
чен для приема команд дистанционного управления станцией разведки и пере-
дачи разведданных в пункт сбора и обработки.
4.1.2. Способы определения местоположения источников
электромагнитного излучения
Одной из задач, которые решают при ведении РР и РТР является определе-
ние местоположения (МП) источника электромагнитного излучения на плоско-
сти или в пространстве. Источниками ЭМИ являются при этом РЭС различного
назначения. Ниже приведен ряд способов, позволяющих решить эту задачу [1].
Геометрические величины, определяющие МП источников ЭМИ. Ме-
стоположение источников ЭМИ на плоскости определяется с помощью линий
положения, а в пространстве - поверхностей положения.
Линией (поверхностью) положения называют геометрическое место точек,
для которого геометрическая величина, определяющая возможное положение
объекта (источника ЭМИ), имеет постоянное значение.
Линиями положения могут быть:
- линия пеленга или прямая, соединяющая средство разведки и источник ЭМИ;
- окружность с радиусом, равным расстоянию от средства разведки до ис-
точника ЭМИ;
- гипербола, параметрами которой служат разности расстояний от двух то-
чек наблюдения, являющихся фокусами гиперболы, до источника ЭМИ.
Местоположение источника ЭМИ на плоскости определяется по пересече-
нию нанесенных на карту минимум двух линий положения.
Поверхностями положения могут быть плоскости, сферы, гиперболоиды
вращения.
Местоположение источника ЭМИ в пространстве определяется по пересече-
нию поверхностей положения. Для этого необходимо воспользоваться как ми-
нимум тремя поверхностями положения.
На практике для определения координат источника ЭМИ на карте достаточ-
но знать только линии положения. Их пересечение покажет МП объекта.
В основу определения геометрических величин источников ЭМИ радиотех-
ническими методами положены закономерности распространения электромаг-
нитных волн (ЭМВ). В свободном пространстве ЭМВ распространяются прямо-
линейно и с конечной постоянной скоростью.
Так как траектория распространения ЭМВ прямолинейна, то с помощью
средств РР и РТР можно определить направление на работающее РЭС, т. е. ли-
нию пеленга.
Постоянство скорости распространения ЭМВ позволяет измерять разности
дальностей от МП источника ЭМИ до фиксированных точек наблюдения. Изме-
рение разности дальностей сводится к измерению временных интервалов - раз-
ности времен распространения ЭМВ от источника до точек расположения
средств разведки.
В зависимости от используемой закономерности распространения ЭМВ из-
мерители геометрических величин (линий, поверхностей положения) подразде-
ляются на угломерные (пеленгационные) и разностно-дальномерные (гипербо-
лические).
71
Измерительные устройства пеленгационного типа используют поисковые и
беспоисковые способы определения направления на источник ЭМИ, а затем и
его МП. Рассмотрим эти способы.
Поисковые способы определения направления на источник ЭМИ. По-
исковые способы пеленгации позволяют определить направление на источ-
ник излучения путем последовательного обзора пространства с помощью на-
правленной антенны. Определение пеленга требует в этом случае некоторого
времени.
В зависимости от радиосигнала, используемого для определения пеленга,
методы радиопеленгации подразделяются на амплитудные и фазовые.
Амплитудная пеленгация может осуществляться: по максимуму/минимуму
ДНА по использованию равносигнального направления.
Пеленгация по максимуму ДНА. Структурная схема пеленгационного устрой-
ства показана на рис. 4.2, а. Схема пеленгатора состоит из направленной антен-
Рис. 4.2. Структурная схема амплитудного пеленгатора (а);
сущность метода максимума (б)
ны, усилителя частоты (УРЧ), амплитудного детектора (АД), усилителя низкой
радиочастоты (УНЧ), индикатора, механизма поворота антенны с датчиком угла
поворота. При пеленгации по максимуму ДНА антенна станции разведки враща-
ется с некоторой угловой скоростью (рис. 4.2, б).
Направление на источник излучения будет соответствовать максимальному
уровню принимаемого сигнала. В этот момент производится отсчет пеленга-
ционного угла фн от направления, связанного с началом отсчета (меридиан,
направление на север, курсовой угол летательного аппарата). Основными дос-
72
тоинствами метода максимума являются: простота определения пеленгацион-
ного угла, а также максимальное отношение сигнал/шум в момент точного пе-
ленга.
Недостатком метода является относительно низкая точность измерения уг-
ловых координат, обусловленная небольшими изменениями в силе принимае-
мого сигнала при малых угловых перемещениях ДНА относительно истинного
направления на источник излучения. На практике точность измерения угловых
координат составляет примерно 20-25 % от ширины ДНА по уровню половин-
ной мощности.
Как правило, пеленгование по максимуму применяется в аппаратуре раз-
ведки сантиметрового диапазона, так как узкая направленность антенны это-
го диапазона позволяет существенно увеличить точность измерения угловых
координат. Использовать метод максимума в метровом диапазоне затрудни-
тельно из-за широкой направленности антенны, следовательно, ошибок пе-
ленгования.
При пеленгации по минимуму ДНА в метровом диапазоне длин волн исполь-
зуется антенна с ДН в виде «восьмерки» рис. 4.3, а. Такую диаграмму имеет ра-
Рис. 4.3. Сущность метода пеленгации по минимуму в метровом
диапазоне (а), устранение неоднозначности отсчета (б)
мочная антенна. Пеленгование осуществляется по минимуму слышимости сиг-
нала или по пропаданию сигнала на электронно-лучевом индикаторе. Диаграмма
направленности в виде «восьмерки» имеет два минимума, отличающихся один
от другого на 180°. Поэтому необходимо принимать дополнительные меры для
устранения неоднозначности отсчета. Для этого следует иметь ДНА с одним
минимумом приема. Такая ДН может быть получена, если использовать совме-
стно направленную и ненаправленную антенны, сигналы от которых должны
быть равны по амплитуде (рис. 4.3, б). Фаза наведенного сигнала в ненаправлен-
ной антенне не зависит от направления на излучатель. Фаза наведенного сигнала в
направленной антенне («восьмерочная» ДНА) меняется на 180° при переходе че-
рез направление нулевого приема. Поэтому в направлении приема сигналов РЭС,
указанном на рис. 4.3, б, ЭДС сигналов в двух антеннах оказываются в противо-
фазе и будут вычитаться. В противоположном направлении ЭДС сигналов ока-
зываются в фазе и будут складываться. В результате суммарная ДН будет иметь
форму кардиоиды с одним минимумом, смещенным в пространстве на 90° по
73
отношению к минимуму «восьмерочкой» диаграммы. Необходимо отметить, что
минимум кардиоиды значительно тупее минимума «восьмерки», поэтому кар-
диоидная характеристика используется для устранения неоднозначности после
определения пеленга с помощью ДН «восьмерочного» типа.
При определении пеленгационного угла методом минимума в сантиметро-
вом диапазоне может использоваться система из двух направленных антенн,
смещенных одна относительно другой на соответствующий постоянный угол. В
результате образуется суммарная ДН антенной системы с резко выраженным
направлением нулевого приема (рис. 4.4).
При пеленгации источника ЭМИ антенная система поворачивается до тех
пор, пока линия нулевого приема (00') не совпадает с направлением на объект
(ОИ). В принципиальном отношении точность метода минимума должна быть
значительно выше точности метода максимума, так как небольшому отклоне-
нию направления на объект от линии нулевого приема соответствует резкое из-
менение амплитуды принимаемого сигнала.
Метод равносигнального направления. При этом методе используется антен-
ная система, состоящая из двух направленных антенн смещенных одна относи-
тельно другой на некоторый постоянный угол так, что их ДН перекрываются и
Рис. 4.4. Сущность метода миниму- Рис. 4.5. Сущность равносигнального
ма при пеленгации в сантиметровом метода пеленгации
диапазоне
образуют равносигнальное направление (рис. 4.5). В этом случае прием сигна-
лов от РЭС производится по очереди то на одну, то на другую антенну, что
обеспечивается специальным антенным коммутатором, установленным на входе
приемника. Если излучающий объект находится в направлении ОБ, то амплиту-
да сигналов, принимаемых на первую антенну, больше, чем на вторую. Если
объект находится в направлении ОС, то амплитуда сигналов, принимаемых на
вторую антенну, больше, чем на первую. Только в направлении 00' амплитуды
сигналов, поступающих на первую и вторую антенны, одинаковы. Поэтому при
пеленговании вращают антенную систему таким образом, чтобы обе антенны
принимали сигналы одинаковой интенсивности. Сопоставление амплитуд при-
нимаемых сигналов может производиться на экране электронно-лучевого инди-
катора.
74
Сопоставляя равносигнальный метод с методом максимума, необходимо от-
метить, что равносигнальный метод более точен. Это объясняется двумя причи-
нами: во-первых, при пеленговании равносигнальным методом рабочими участ-
ками служат боковые скаты ДН, где небольшие отклонения от равносигнального
направления сопровождаются резким изменением интенсивности принимаемого
сигнала; во-вторых, при равносигнальном методе сравниваются амплитуды двух
одновременно наблюдаемых сигналов, в результате процесс установки точного
пеленга облегчается.
Можно считать, что равносигнальный метод по точности на порядок превос-
ходит метод максимума. Кроме того, равносигнальный метод позволяет опреде-
лить направление отклонения объекта разведки от линии равных сигналов, что
облегчает задачу его сопровождения. Недостатками равносигнального метода
являются:
- меньшая дальность действия, так как в момент пеленгации максимум ДНА
отклоняется от направления на объект;
- более сложное устройство.
Фазовый метод пеленгации. При использовании метода сравнения фаз ан-
тенны с идентичными ДН разносятся на некоторое расстояние d - базу пеленга-
Рис. 4.6. Упрощенная структурная схема
фазового пеленгатора
тора (рис. 4.6). В результате ЭМВ, принимаемые антеннами Ai и А2 с направле-
ния, определяемого углом ф, проходят различные расстояния, разность между
которыми составляет
\d = d sirup.
При этом разность фаз высокочастотных колебаний принимаемого сигнала в
антеннах Ai и А2 будет
А о \d 2nd .
Аф = 2 тс— =---БШф,
(4.1)
75
откуда
АфХ
8Шф = ——,
(4.2)
. z X А ч
ф = arcsm(---Аф),
2nd
(43)
где к - длина волны принимаемого сигнала.
Из формулы для ф следует, что для измерения угла прихода ЭМВ необходи-
мо определить разность фаз ЭДС Аф в антеннах Ai и А2.
Существенным недостатком однобазовых фазовых пеленгаторов является
неоднозначность отсчета пеленга, обусловленная функцией вшф. Этот недоста-
ток можно устранить при использовании антенной системы с несколькими раз-
ными по значению базами.
Вероятность обнаружения (пеленгации) РЭС при поисковом способе оп-
ределения направления. Особенность поисковых способов - вероятностный
характер обнаружения излучающего объекта, а следовательно, и определение
его пеленга.
Допустим, что разведуемым РЭС является РЛС, работающая в режиме кру-
гового обзора. Антенна РЛС имеет ДН с шириной 06 и вращается с угловой ско-
ростью (рис. 4.7).
Рис. 4.7. Поисковый способ определения пеленга
При круговом вращении антенны РЛС в точке приема П получим серии им-
пульсов, следующих с частотой Fc (период Тс),
2л
(4.4)
Длительность серии импульсов тс - это время облучения РЛС данного на-
правления. Она определяется шириной ДНА 0С и угловой скоростью вращения
антенны Qc:
0С ©X
— ——- ZZZ с с
с 2л
(4.5)
Время, в течение которого антенна пеленгатора может принимать сигнал
РЛС, определяется шириной ДНА 0„ и угловой скоростью вращения
76
, _ Q» _
" Q„ 2л
(4.6)
Прием сигналов РЛС будет происходить в моменты совпадения ДНА РЛС
и пеленгатора. Таким образом, вероятность обнаружения (пеленгации) зависит
от &с и 0Л, а также соотношения скоростей вращения антенн пеленгатора и
РЛС (Qc и Q„).
В зависимости от соотношения между и различают медленный и бы-
стрый поиск сигнала по направлению.
При медленном поиске скорость вращения антенны пеленгатора выбирается
такой, чтобы за время тл ее прохода угла, равного ширине основного лепестка
ДН (Q„), антенна РЛС сделала хотя бы один оборот, т. е. тл > Тс - условие мед-
ленного поиска.
При быстром поиске скорость вращения антенны пеленгатора выбира-
ется такой, чтобы за время тс прохода антенной РЛС угла, равного ширине
основного лепестка ДН антенны (0Д она сделала хотя бы один оборот,
т. е. - условие быстрого поиска.
Определим формулы расчета вероятности обнаружения (пеленгации) для
медленного и быстрого поиска по направлению. Из теории известно, что веро-
ятность обнаружения при п оборотах антенны РЛС (антенны пеленгатора) опре-
деляется формулой
(4.7)
где Р\ - вероятность обнаружения за один оборот антенны.
1. Медленный поиск т„ > Тс, £1п <
В этом случае вероятность перехвата сигнала за один оборот антенны РЛС
_ Тс ®с?с
-L] -if
Тп 2пТп
и следовательно,
РПс=1-е~^~
(4-8)
(4-9)
где пс =—; пс - число оборотов антенны РЛС за время разведки tp.
Тс
Окончательно
®с*р
РП =1-е2пТп
77
2, Быстрый поиск
Тс Тп, £1п > Q6.
Для этого случая вероятность перехвата сигнала за один оборот антенны пе-
ленгатора определится соотношением
р1=у или =
ел
2тсГс
(4.Ю)
и, следовательно,
2пТс
(4.П)
пп - число оборотов антенны пеленгатора за время ведения раз-
ведки Zp.
Окончательно
Р^ = 1-е
"п
2пТс
(4.12)
Формулы для Рп при медленном и быстром поисках показывают, что вероят-
ность обнаружения (пеленгация) стремится к 1 при увеличении общего времени
ведения разведки Zp, ширины ДНА пеленгатора 0„ и скорости вращения (умень-
шения Гл). Поэтому необходимо увеличивать Zp. Однако в ряде случаев по условиям
ведения разведки рост гр может быть ограничен. Поисковая антенна должна иметь
по возможности более широкую ДН. Но увеличение 0« приводит к уменьшению
коэффициента усиления антенны, что снижает возможную дальность ведения раз-
ведки, пространственную разрешающую способность и точность пеленгования.
Увеличение скорости вращения антенны пеленгатора ограничивается ме-
ханической прочностью конструкции вращающейся антенны. Кроме того, ско-
рость должна выбираться таким образом, чтобы за время принять хотя бы
один импульс РЛС, т. е. возникает условие тл > Ти (Ти - период следования им-
пульсов РЛС).
Следовательно, с точки зрения оптимизации величины Рп в каждом конкрет-
ном случае выбор указанных выше параметров поиска определяется условиями
ведения разведки и поставленными задачами.
Беспоисковые методы определения направления на источник ЭМИ.
Реализация беспоисковых методов пеленгация предполагает обзор пространства
без сканирования антенной системы. В простейшем случае беспоисковое опре-
деление направления на источник излучения может быть осуществлено с помо-
щью многоканального пространственно-избирательного устройства. Оно состо-
78
ит из антенн (Аь А2,..., Ал), каждая из которых подключена к своему приемнику
(ПрМ1, Прм2,...,Прмл ) с индикаторами (Hi, И2,..., Ил).
ДН антенн Fi(a), F2(a),..., Fn(a) примыкают одна к другой и в совокупности
перекрывают весь заданный сектор разведки Ор (рис. 4.8):
= ^тах — ^min = S^z ’
z=l
где az - ширина ДН i-й антенны.
Рис. 4.8. Беспоисковый метод определения направления:
а - суммарная диаграмма направленности; б - многоканальное
пространственно-избирательное устройство
Направление на РЭС определяется по номеру канала, в котором появляется
сигнал. Максимальная ошибка измерения пеленга в этом случае
а az
А(Хтях =—•
Шал
Высокая точность измерения пеленга может быть обеспечена с помощью
большого количества антенн с узкими ДН. Обычно задается допустимая ошибка
измерения направления, тогда ширина ДН каждой антенны
осг- < 2Аостах.
Количество необходимых антенн для перекрытия заданного сектора развед-
ки будет
N-ap - ар
а, 2Аатях
I Шал
79
Рис. 4.9. Функциональная ампли-
тудная пеленгация
Основные достоинства беспоискового метода:
- возможность определения направлений на несколько РЭС одновременно
(при их разнесении по углу не менее чем на 00;
- вероятность обнаружения и пеленгации
равна единице;
- практически мгновенное определение
направления.
При беспоисковых методах определения
направления применяют функциональные пе-
ленгационные устройства, основанные на ис-
пользовании зависимости амплитуды или фа-
зы сигнала на выходе пеленгатора от угла
прихода радиоволн.
Принцип действия функционального фа-
зового пеленгатора не отличается от описан-
ного выше.
При функциональной амплитудной пе-
ленгации (метод сравнения амплитуд) приме-
няют как минимум две смежные антенны, имеющие одинаковые ДН. Их разме-
щают так, чтобы направления максимумов приема были смещены на некоторый
угол. При этом ДН этих антенн перекрывают некоторый сектор (рр, в котором
ведется разведка (рис. 4.9).
Нормированную ДН первой антенны можно представить в виде
-(Ф-Ф1)2
Л(<р) = е «2
(4.13)
где В - некоторая постоянная, связанная с формой ДН; (pi - направление макси-
мального приема, отсчитываемое от выбранного начального направления.
Для ДН второй антенны можно записать
~(Ф~Ф2)2
F2(<p) = e * ;
(4-14)
здесь (р2 - направление максимального приема для второй антенны, при этом
Ф2 = <Р1 + ¥.
Подставляя значение (р2 в формулу (4.14) и делая несложные преобразова-
ния, получаем
-у2 -(Ф-Ф1)2 Жф-фО
F2=e*e в2 е
или
-V2 2у(ф-ф])
F2(<?) = F^)eB2 е *2 . (4.15)
80
Амплитуды сигналов, принятых с направления на разведываемую РЭС (ф*),
пропорциональны ординатам соответствующих ДН. Поэтому можно записать
о У2(ф*~ф1)
В2
U. W)
-у2 У2(ф*-Ф1)
d2 п2
— е ° е °
(4.16)
Логарифмируя (4.16) и выполняя несложные преобразования, получаем
(4-17)
При известных В2,4х, ф1 величина ф* является однозначной функцией In
t/2
£2
*
ф
(4.18)
Функциональные пеленгаторы имеют высокую точность определения на-
правления. Они успешно применяются в диапазонах метровых и сантиметровых
волн в наземных станциях РР и РТР. Использование их в метровом диапазоне на
самолетах наталкивается на серьезные трудности, связанные с габаритами ан-
тенн. Кроме того, функциональные пеленгаторы успешно могут использоваться
только в тех случаях, когда одновременное воздействие сигналов двух и более
РЭС на пеленгатор маловероятно.
Триангуляционный метод определения местоположения источников
ЭМИ. Триангуляционный (угломерный) метод основан на определении направ-
лений (пеленгов) на источник ЭМИ в двух точках пространства с помощью ра-
Рис.4.10. Триангуляционный метод определения местоположения источника ЭМИ
на плоскости (а), в пространстве (б)
81
Если источник ЭМИ располагается в горизонтальной или вертикальной
плоскости, то для определения его местоположения достаточно измерить два
азимутальных угла: <раз1 и <раз2 или два угла места: (py.Mi и фу.М2- Местоположение
источника излучений определяется точкой пересечения (?1И и О2И (двух линий
положения).
Для определения местоположения источника в пространстве измеряются уг-
лы азимута <разi и (раз2 в двух разнесенных точках О\ и О2 и угол места в одной из
этих точек или, наоборот, углы места (py.Mi и фу.М2 в двух точках приема и угол
азимута в одной из них (рис. 4.10, б).
По измеренным пеленгационным углам путем несложных расчетов, исполь-
зуя теорему синусов, можно определить дальности из точек приема до источни-
ка ЭМИ на плоскости:
‘ sin(<Pas2-<Pa31) ’
Z>2 =—fSm<Pa31 (4.20)
sin^-tPasl)
и в пространстве
D =------:(4.21)
cos(py.M1 (coscp^i -smqj^ctgq)^)
Достоинство триангуляционного метода заключается в простоте его техниче-
ской реализации, поэтому он широко применяется при ведении РР и РТР.
Существенным недостатком метода является наличие ложных обнаружений
несуществующих источников при большом количестве излучающих объектов в
зоне действия пеленгатора (рис. 4.11). Как видно из рисунка, наряду с определе-
нием координат трех истинных источников Иь И2, И3 - обнаруживается и шесть
ложных: ЛИ!... ЛИб.
Исключить ложные обнаружения при использовании триангуляционного
метода можно с помощью дополнительной информации о пеленгуемых источ-
никах, что достигается увеличением количества разнесенных радиопеленгато-
ров или опознанием принадлежности получаемой информации определенному
источнику. Опознание может быть проведено при сравнении принимаемых
сигналов по несущей частоте, периоду и длительности импульсов. Дополни-
тельную информацию можно получить и в результате взаимно корреляцион-
ной обработки сигналов, принимаемых в разнесенных точках пространства.
Разностно-дальномерный метод определения местоположения источ-
ников ЭМИ. Разностно-дальномерный метод определения МП источников
ЭМИ основан на измерении с помощью РЭС разности расстояний от разнесен-
ных в пространстве точек наблюдения до источника ЭМИ и построении по
82
У
Рис. 4.11. Ложные обнаружения
при использовании триангуляционного
метода
Рис. 4.12. Разностно-дальномерный
способ определения местоположения
источника ЭМИ
Рис. 4.13. Угломерно-разностно-
дальномерный метод
ним соответствующих гипербол. Точка пересечения двух гипербол определяет
МП источника излучения (рис. 4.12).
Для решения указанной задачи необходимо иметь три разнесенные в про-
странстве точки наблюдения (приема): Л1? Л2, Л3, принадлежащие различным
базам Л1Л2 и А2А3. Фокусы гипербол совпадают с точками наблюдения. Разности
расстояний Ji2 = D\ - D2 и d23 = D2- D\ являются параметрами гипербол, по ко-
торым осуществляется их построение. Пространственное положение источников
ЭМИ определяется по трем разностям дальностей, измеряемым в трех-четырех
приемных пунктах. МП источника - точка пересечения трех гиперболоидов вра-
щения. Точность определения местоположения
РЭС данным методом достаточно высока,
ошибки составляют около десятков метров.
Рассматриваемый метод применяется в пассив-
ных импульсных (временных) и корреляцион-
но-базовых системах определения МП источ-
ников ЭМИ.
При использовании пассивных разностно-
дальномерных систем также возможно обна-
ружение ложных несуществующих источников
ЭМИ в тех случаях, когда источник излучает
периодические сигналы с малым периодом
следования (с малой скважностью). На временном интервале, равном разности
времени распространения сигнала от источника до приемника, укладывается
несколько периодов излучаемых сигналов.
В результате система измеряет большое количество разностей дальностей и
определяет соответственно большое количество гиперболических поверхностей.
Многие из них являются ложными.
Устранить подобную неоднозначность можно путем разнесения источников
по угловым координатам, т. е. совместным применением разностно-дальномер-
ного и триангуляционного методов.
83
Угломерно-разностно-дальномерный метод определения местоположения
источников ЭМИ. Угломерно-разностно-дальномерный метод определения МП
источников ЭМИ предполагает измерение с помощью РЭС разности дальностей от
источника ЭМИ до двух разнесенных пунктов приема и измерение направления на
источник излучения в одном из этих пунктов.
Для определения координат источника на плоскости достаточно измерить
азимут р и разность дальностей АД = Д1 - Д2 от источника до точек приема. МП
источника определяется точкой пересечения гиперболы и прямой.
Для определения МП источника в пространстве необходимо дополнительно в
одной из точек приема найти угол места источника ЭМИ. МП источника находится
как точка пересечения двух плоскостей и поверхности гиперболоида вращения.
4.1.3. Способы определения частоты сигналов разведуемых
радиоэлектронных средств
Одним из важнейших параметров сигналов разведуемых РЭС, подлежащих
определению, является несущая частота Ун- Для ее определения разведыватель-
ный приемник должен принимать сигналы во всем заданном диапазоне разве-
дуемых частот Л4). Для обнаружения радиосигналов по частоте и последующе-
го определения их несущих частот просматривается заданный диапазон.
Просмотр может осуществляться последовательно во времени или одновре-
менно во всем диапазоне частот. В соответствии с этим различают поисковые
и беспоисковые способы обнаружения сигналов по частоте и определения не-
сущей частоты.
Поисковый способ требует соответствующего времени на просмотр диапа-
зона Д4), так как полоса пропускания разведывательного приемника А/пр всегда
меньше диапазона разведуемых частот. Указанный способ реализуется в пано-
рамных одноканальных приемниках прямого усиления и супергетеродинных
приемниках, перестраиваемых по частоте.
Способы обнаружения сигнала по частоте и определения его несущей при
одновременном просмотре всего заданного диапазона реализуются в много-
канальных приемниках прямого усиления или супергетеродинного типа, при-
емниках оптико-электронного типа (с мгновенным преобразованием Фурье) и
в приемниках функционального типа (интерференционные и корреляцион-
ные) [1].
Поисковые способы определение несущей частоты сигналов. Сущность
поискового способа можно пояснить с помощью рис. 4.14.
Просмотр заданного диапазона частот при реализации поискового способа
осуществляется периодически, обычно по пилообразному закону. Основными
характеристиками перестраиваемого разведывательного приемника являются:
- диапазон разведуемых частот, А/, =fmax -/min;
- полоса пропускания приемника, Л/щ,;
- период перестройки приемника в полосе разведуемых частот 7};
- время перестройки приемника в пределах полосы пропускания или время
приема сигналов на фиксированной частоте Т^;
- разрешающая способность по частоте
- среднеквадратическая ошибка измерения частоты Gf.
84
Время приема сигналов на фиксированной частоте зависит от Л/пр, Л/р Tf и
определяется по формуле
(4.22)
•/р
Разрешающая способность по частоте определяется полосой пропускания
приемника 8/ = А/^,, а среднеквадратическая ошибка измерения частоты обычно
составляет
<V=(O,1 -0,2)4/^. (4.23)
Поисковые способы обеспечивают обнаружение и измерение несущей часто-
ты непрерывных сигналов с вероятностью, равной единице.
Обнаружение и определение несущей частоты импульсного сигнала носит
вероятностный характер. Вероятность обнаружения импульсного сигнала за
Рис. 4.14. Сущность поискового способа определения
несущей частоты радиосигнала
один цикл перестройки приемника зависит от соотношения между периодом
перестройки Tf9 полосой пропускания приемника Л/щ,, диапазоном разведуемых
частот Л/р, длительностью импульсного сигнала ти и периода следования им-
пульсов Ги.
В зависимости от соотношения между этими параметрами различают три
вида поиска импульсного сигнала: медленный, быстрый и средний.
При медленном поиске время перестройки приемника на ширину его полосы
пропускания T^f должно быть больше периода следования импульсов:
Тпр/ > ТИ .
Медленный поиск обеспечивает в этом случае вероятность обнаружения пе-
риодического импульсного сигнала, равную единице, за время перестройки Tf
85
при условии, что время облучения ГОбЛ станции разведки импульсами разведуе-
мой РЭС не менее периода перестройки Tf:
Тобл Tf.
Недостатки медленного поиска - большое время обслуживания, малая про-
пускная способность и малая вероятность обнаружения кратковременно рабо-
тающих РЭС.
Для уменьшения времени ведения разведки при заданном диапазоне частот и
скорости перестройки необходимо расширять полосу пропускания приемника.
Поэтому разведывательные приемники с медленным поиском являются, как
правило, широкополосными. Ширина полосы пропускания таких приемников
обычно составляет А/щ, = (0,1 - 0,2)
Точность определения fn с помощью таких приемников невелика:
= 0,5А/пр = (0,05-0,1)Д/р.
(4.24)
Чувствительность приемных устройств с медленным поиском из-за широко-
полосное™ не может быть высокой.
При быстром поиске перестройка приемника во всем диапазоне частот осуще-
ствляется за время, не превышающее длительность принимаемого сигнала: Tf< ти.
Выполнение этого условия приводит к тому, что вероятность обнаружения
сигнала по частоте становится равной единице независимо от времени облуче-
ния станции разведки сигналами разведуемого РЭС. Это важное достоинство
быстрого поиска.
Скорости перестройки приемника в случае быстрого поиска очень большие
(сотни и тысячи МГц/мкс). Такие скорости могут быть реализованы только с
помощью электронных способов перестройки.
Любой приемник характеризуется амплитудно-частотной характеристикой
(АЧХ). Форма АЧХ определяется характеристиками резонансных элементов
приемного тракта. Ширину АЧХ полосы пропускания приемника обычно оп-
ределяют по уровню 0,7, однако при быстрой перестройке приемника вследст-
вие инерционности резонансных элементов приемного тракта переходные
процессы в них не успевают завершиться за время действия импульсного сиг-
нала. Поэтому выходное напряжение при перестройке приемного тракта меня-
ется не в соответствии с формой статической АЧХ, а определяется ее динами-
ческой характеристикой.
Вид динамической АЧХ зависит как от параметров резонансной системы (на-
пример, ширины статической полосы пропускания), так и от скорости перестрой-
ки приемника или скорости изменения несущей частоты принимаемого сигнала.
Скорость перестройки есть производная от частоты по времени у = dfldt. По мере
увеличения скорости перестройки у динамическая АЧХ начинает видоизменять-
ся (рис. 4.15).
Кривые динамических АЧХ характеризуются значениями уь у2, уз, Уд. Случай
У1 = 0 соответствует статической АЧХ (yi < у2 < уз < Уд).
Из рассмотрения формы динамических АЧХ можно сделать следующие выводы:
86
- с ростом у максимум характеристики сдвигается в сторону увеличения
частоты, а выходное напряжение уменьшается;
- ширина полосы пропускания на уровне 0,7 с ростом у увеличивается;
- в АЧХ появляются дополнительные максимумы.
Указанные явления ухудшают точность определения несущей частоты и раз-
решающую способность приемника, снижают его чувствительность, искажают
форму и длительность принимаемого сигнала.
Для разведывательных приемников с быстрой перестройкой частоты
можно определить оптимальную взаимосвязь между полосой пропускания
Рис. 4.15. Динамические АЧХ приемника с быстрой
перестройкой
резонансной системы и скоростью перестройки, когда искажения передавае-
мого сигнала минимальны. Оптимальная полоса пропускания определятся
выражением А/1р = 1/ти.
При скорости перестройки у длительность отклика приемника примерно
равна ти = А/пру-1. Отсюда следует Д/пр = д/у.
Таким образом, каждой скорости перестройки соответствует своя оптималь-
ная полоса пропускания.
Для уменьшения динамического эффекта необходимо при неизменной ско-
рости перестройки увеличивать полосу пропускания резонансной системы, но
это в свою очередь ведет к уменьшению чувствительности приемника и точно-
сти измерений.
Одновременное обеспечение значительной скорости перестройки, высокой
чувствительности, разрешающей способности по частоте и точности ее изме-
рения успешно может быть достигнуто в приемнике со сжатием импульсов.
Здесь используется тот же принцип увеличения разрешающей способности,
что и в широкополосных РЛС с кодированием. На рис. 4.16 изображены вре-
менные диаграммы импульсов на выходе УПЧ, поясняющие возможность
87
улучшения разрешающей способности по частоте в приемнике со сжатием им-
пульсов.
Если на разведывательный приемник воздействуют два непрерывных сигна-
ла с различными частотами f\ и^, то в результате быстрой перестройки гетеро-
Рис. 4.16. Временные диаграммы, поясняющие возможность улучшения разрешающей
способности по частоте в приемнике со сжатием импульсов
дина по линейному закону на выходе УПЧ образуются частотно-модулирован-
ные импульсы длительностью тИ1 и Ти2.
При суммировании этих импульсов в обычном панорамном приемнике обра-
зуется один импульс длительностью тсум. В этом случае нет возможности разде-
лить принимаемые сигналы по частоте.
88
В приемнике со сжатием импульсов сигналы с выхода УПЧ поступают на
дисперсионный фильтр. В дисперсионном фильтре время задержки сигнала
зависит от его частоты. Данная зависимость выбирается обратно закону изме-
нения частоты заполнения радиоимпульсов, формируемых на выходе смесите-
ля. При этом составляющие более высоких частот, пришедшие раньше, задер-
живаются на большее время, а составляющие более низких частот, пришедшие
позже, на меньшее. Благодаря этому все частотные составляющие смещаются
во времени к концу импульса, т. е. последний сжимается до длительности тсж.
В результате (см. рис. 4.16) импульсы сигналов с частотами f\ и/2 не перекры-
ваются во времени и поэтому разрешаются по длительности, а следовательно, и
по частоте. Таким образом, разрешающая способность по частоте увеличивает-
ся. Установлено, что это увеличение пропорционально корню квадратному из
коэффициента сжатия (компрессии). Например, приемник со сжатием импуль-
сов, перестраивающийся в частотном диапазоне со скоростью у = 100 МГц/мкс
и обладающий коэффициентом сжатия 100, имеет разрешающую способность
по частоте, равную 1 МГц, т. е. в 10 раз более высокую, чем разрешающая
способность типовых панорамных приемников, имеющих ту же скорость пе-
рестройки. Блок-схема приемника со сжатием импульсов представлена на
рис. 4.17.
Воздействующий сигнал усиливается широкополосным усилителем высокой
частоты УВЧ и поступает на смеситель См, куда поступает также напряжение
Рис. 4.17. Блок-схема разведывательного приемника со сжатием импульсов
гетеродина, периодически перестраиваемого по частоте. Изменение частоты ге-
теродина производится с помощью схемы перестройки, которая управляет также
схемой формирования частотной развертки. В результате преобразования сигна-
лов в смесителе на входе УПЧ получаются сигналы с линейно изменяющейся по
времени частотой.
Для преобразования импульсов с линейно изменяющейся частотой в сигналы
с меньшей длительностью и большей амплитудой в приемнике применяют схе-
му сжатия (дисперсионный фильтр), представляющую собой высокочастотную
линию задержки с отводами, в каждый из отводов включен полосовой фильтр.
После схемы сжатия сигнал детектируется, усиливается и подается на верти-
89
кально отклоняющие пластины электронно-лучевой трубки. Частота сигналов
определяется по положению импульса на частотной развертке.
Кроме медленного и быстрого возможно применение и вероятностного по-
иска (поиска со средней скоростью), обеспечивающего лучшие условия для
компромисса между скоростью перестройки и точностью определения частоты
при заданной вероятности РТР.
Поиск со средней скоростью позволяет найти определенный компромисс
между скоростью перестройки и точностью определения частоты. При поиске со
средней скоростью должно выполняться следующее условие:
Ти > ти.
Отличительной особенностью поиска со средней скоростью является его ве-
роятностный характер, т. е. обнаружение импульсного сигнала будет происхо-
дить лишь в некоторые периоды перестройки приемника. Иными словами, веро-
ятность обнаружения разведуемого сигнала по частоте всегда меньше единицы
(Л)бн <1). Оценим эту вероятность.
Вероятность обнаружения за один период перестройки зависит от соотноше-
ния между Гпр/ и Ги. Можно показать, что вероятность обнаружения по частоте
импульсного сигнала за один цикл перестройки будет
(4.25)
А/р
Вероятность обнаружения за п циклов перестройки
^бн=1-е’иР°б". (4.26)
За время ведения разведки Zp будет сделано п = циклов перестройки.
Подставляя в формулу для 7^н значения и п получим
Рп
1 обн
— А/пр zp
= 1 - е Л^р Ги
(4.27)
Анализ формулы показывает, что РОби возрастает при увеличении Zp, Л/пр и
уменьшении Д/р.
Приемники, реализующие поисковые методы измерения частоты. При
реализации поисковых методов определения частоты находят применение пере-
страиваемые приемники прямого усиления и супергетеродины.
В приемнике прямого усиления (рис. 4.18) применяют два синхронно пере-
страиваемых фильтра Ф1 и Ф2. Фильтр Ф1 ограничивает полосу пропускания
приемника до полосы пропускания усилителя радиочастоты (УРЧ). Фильтр Ф2
ограничивает полосу пропускания после УРЧ, что приводит к существенному
90
Рис. 4.18. Поисковый приемник прямого усиления
уменьшению мощности шумов с выхода УРЧ и, следовательно, повышению
чувствительности приемника.
Перестройка фильтров осуществляется с помощью схемы управления пере-
стройкой (СУП). Эта же схема используется для введения данных о текущем
значении частоты настройки фильтров в схему измерения частоты (СИЧ), кото-
рая состоит из схемы горизонтальной развертки (СГР) и электронно-лучевой
трубки (ЭЛТ). При использовании в качестве индикатора ЭЛТ напряжение с вы-
хода СУП запускает горизонтальную частотную развертку ЭЛТ. После детекти-
рования сигнала с выхода Ф2 в амплитудном детекторе (АД) и усиления проде-
тектированного сигнала в видеоусилителе (ВУ) он поступает на вертикальные
отклоняющие пластины ЭЛТ. В результате на экране индикатора мы наблюдаем
принятый сигнал и по его положению на частотной развертке определяем несу-
щую частоту сигнала.
В качестве устройства измерения частоты может использоваться счетчик
масштабных импульсов. В этом случае СУП запускает генератор масштабных
импульсов (ТМИ), которые поступают к схеме счета импульсов (ССИ). Счет
прекращается в момент поступления на ССИ сигнала с выхода ВУ. Показания
счетчика будут пропорциональны частоте настройки фильтра, следовательно,
соответствовать частоте принятого сигнала.
Супергетеродинный приемник состоит из усилителя радиочастоты (УРЧ) с
входным фильтром, смесителя (СМ) с гетеродином (Г), усилителя промежу-
точной частоты (УПЧ), амплитудного детектора (АД), видеоусилителя (ВУ) и
схемы измерения частоты (СИЧ), аналогичной приемнику прямого усиления
(рис. 4.19).
Рис. 4.19. Поисковый приемник супергетеродинного типа
91
Смеситель с гетеродином образуют преобразователь частоты, который осуществ-
ляет перенос спектра радиосигнала с частотой fc на постоянную для данного прием-
ника частоту f„p = \fc ±fr |. Спектр сигнала переносится в полосу пропускания УПЧ.
Настройка приемника на заданную частоту fc производится путем настройки
гетеродина на частоту fT=fc ±Лр-
Основное усиление и избирательность полезного сигнала осуществляются
УПЧ. К достоинствам супергетеродинного приемника относятся высокая избира-
тельность и чувствительность. К недостаткам - сложность и наличие, кроме ос-
новного, побочных каналов приема (зеркальный канал, канал на/пр)- Избиратель-
ность по зеркальному каналу улучшается путем использования настраиваемого
входного фильтра Ф и УРЧ (преселекторов). Для уменьшения влияния помех на
/гр используют заградительные фильтры.
Беспоисковые способы определения частоты сигналов. При беспоиско-
вых способах обнаружения сигнала по частоте и вычислении его несущей весь
диапазон разведуемых частот разделяется системой входных (канальных)
фильтров на ряд поддиапазонов, ширина которых определяется полосой пропус-
кания (прозрачности) отдельных фильтров, которые, примыкая друг к другу, все
вместе перекрывают диапазон разведуемых частот (рис. 4.20).
Рис. 4.20. Полосы пропускания канальных фильтров беспоискового приемника
Каждый канальный фильтр имеет относительно узкую полосу прозрачности
А/. Полоса прозрачности фильтра характеризуется коэффициентом перекрытия
max
min
Диапазон разведуемых частот в этом случае определяется суммой полос про-
зрачности канальных фильтров:
п
f=l
92
Если полосы прозрачности всех фильтров одинаковы и равны Л/J, то
4<р = «ДА-
Такое построение приемника обеспечивает одновременный прием сигналов
во всем диапазоне разведуемых частот. Обнаружение сигналов разведуемых
РЭС и определение их несущих частот происходит практически мгновенно с
вероятностью, равной единице. Частота принятого сигнала принимается равной
средней частоте полосы прозрачности соответствующего фильтра.
Точность измерения частоты и разрешающая способность по частоте опре-
деляются шириной полосы прозрачности канального фильтра.
Максимальная ошибка измерения несущей частоты fn в этом случае равна
Д/max - (Afi/2), а значение среднеквадратической ошибки измерения fH может
быть принято в предположении равновероятного распределения возможных
значений частоты сигнала в полосе прозрачности с фильтра равным
Число канальных фильтров в приемнике беспоискового типа определяется
заданной максимальной ошибкой А/^ и диапазоном разведуемых частот:
4/р
п =---—.
д^ош
max
Разрешающая способность по частоте при беспоисковых способах обнару-
жения зависит от полосы прозрачности отдельного канала 8f=
В некоторых случаях для уменьшения числа каналов можно применять
входные фильтры, полосы прозрачности которых увеличиваются по мере воз-
растания номера канала. Коэффициенты перекрытия каждого канала остаются
при этом постоянными (см. рис. 4.20).
Приемники, реализующие беспоисковые способы определения частоты.
Многоканальный приемник основан на разбивке диапазона разведываемых час-
тот на ряд поддиапазонов. Другими словами, в нем используется набор однока-
нальных приемников, амплитудно-частотные характеристики которых, примы-
кая друг к другу, перекрывают заданный диапазон частот. Отдельный приемный
канал включает полосовой фильтр Ф/ с крутыми срезами, амплитудный детек-
тор, видеоусилитель и индикаторное устройство, с помощью которого фиксиру-
ется попадание сигнала в данный канал. Одна антенна может обслуживать не-
сколько каналов (рис. 4.21).
Для повышения чувствительности приемного тракта после антенны может
быть включен малошумящий усилитель (МШУ). В состав многоканального при-
емника входит также регистрирующее устройство, к которому подводятся вы-
ходные сигналы от всех каналов. С помощью регистрирующего устройства
осуществляется обнаружение сигналов на выходе каждого канала и регистрация
частот обнаруживаемых сигналов.
93
Многоканальные приемники могут быть также построены по схеме суперге-
теродина. Такой приемник состоит из общей ВЧ части, гетеродина и смесителя,
трансформирующих входные сигналы в область промежуточных частот. Далее
диапазон промежуточных частот разделяется системой фильтров на ряд поддиа-
пазонов, затем для каждого поддиапазона проводятся стандартные операции
Рис. 4.21. Структурная схема многоканального приемника прямого усиления
усиления по промежуточной частоте, детектирования и усиления низкочастот-
ных сигналов.
Многоканальные приемники применяют, как правило, в станциях общей об-
зорной разведки для грубого определения несущей частоты и типа разведуемого
РЭС. Число каналов в них может достигать несколько десятков, а иногда и со-
тен. Основное достоинство многоканальных приемников - их простота и надеж-
ность. Применение микроэлектронной элементной базы позволяет создавать
многоканальные структуры с очень большим количеством каналов при малых
габаритах, весе и потреблении энергии.
Матричный приемник является модификацией многоканального, позволяю-
щей существенно сократить число каналов, обеспечив высокие показатели по
точности измерения частоты и разрешающей способности.
Структурная схема матричного приемника содержит п столбцов по т строк в
каждом (рис. 4.22).
От антенн принятые сигналы поступают к т фильтрам Фц...Ф1т, имеющим
одинаковые полосы пропускания A/J. Эти фильтры разбивают диапазон разве-
дуемых частот на т равных частей: Л/1 = (Д/р/т), образуя первый столбец мат-
ричного приемника. Резонансные частоты настройки фильтров сдвинуты от-
носительно друг друга на полосу пропускания фильтра. Колебания на несущей
94
1-й столбец 2-й столбец 3-й столбец
Рис. 4.22. Структурная схема матричного приемника
частоте, прошедшие через любой из фильтров, с помощью гетеродинов первого
столбца преобразуются в колебания на первой промежуточной частоте и
подводятся к УПЧ1 с полосой пропускания Д4Р1. Если сигнал имеет частоту fc и
проходит через фильтр Ф/? то после преобразования по частоте в смесителе См у
с помощью гетеродина Г п частота сигнала будет находиться в пределах
/npi fc - /п/ /пр1 • (4.28)
Фильтры второго столбца, имеющие полосу пропускания Д/г, делят полосу
Д/i также в т раз:
т т2
С помощью гетеродинов второго столбца сигнал, прошедший через любой
фильтр Ф2/ преобразуется по частоте и поступает в УПЧ2, который имеет полосу
пропускания Д/г. На выходе УПЧ2 имеется т каналов с полосой пропускания
каждого канала
= Д4_
3 *
т т
Рассмотренные частотные преобразования сигналов для п = 3 и т = 3 пояс-
няются графиками, представленными на рис. 4.23, где k2(f), k(f) - час-
тотные характеристики фильтров первого, второго и третьего столбцов
соответственно.
95
К1(Л
Zinin /11 ср /12ср /13ср /max
Рис. 4.23. Амплитудно-частотные характеристики фильтров матричного приемника
Точность измерения частоты сигналов и разрешающая способность матрич-
ного приемника по частоте определяются полосой пропускания фильтров по-
следнего столбца. Если, например, сигнал проходит через z-й фильтр первого
столбца,/-й фильтр второго столбца и Ar-й фильтр третьего столбца (предполага-
ется, что в приемнике имеются три столбца), то измеренное значение частоты
сигнала (с точностью до половины полосы пропускания фильтра последнего
столбца) будет
/с =/min + (Z - 1 )AZi + (/ - 1)Л/2 + (Аг- 1)А/з + А/з/ 2 (4.29)
или
Л=Am+о -1)^+о- -1)^-+с* -1)^+4р (4-з°)
т т m 2
Определение несущей частоты принятого сигнала с помощью формулы
(4.29) поясняет рис. 4.24.
Полоса пропускания фильтра последнего столбца при числе столбцов, рав-
ном п, определяется выражением
96
дг
^п=—
тп
(4.31)
Прохождение сигнала через тот или иной фильтр фиксируется с помощью
соответствующей индикаторной цепи, которая включает амплитудный детектор,
Рис. 4.24. Пояснение определения несущей частоты с помощью формулы (4.29)
усилитель и сигнальное устройство (например, неоновую лампочку). Индикато-
ры сводятся на табло, имеющее вид матрицы из т х п ячеек (таблица).
Матричный индикатор
Столбцы
Строки 1 2 3 ♦ * п
1 11 21 31 * * п\
2 12 22 32 * * п2
3 13 23 33 * * пЗ
* * * * * * *
* * * ♦ * * *
т \т 2т Зт * * пт
97
Матричные приемники позволяют осуществить измерение частоты с заданной
точностью и обеспечить высокую разрешающую способность при значительно
меньшем числе каналов, чем их потребовалось бы в простом многоканальном при-
емнике при прочих равных условиях. При использовании т х п фильтров матрич-
ный приемник обеспечивает разрешение по частоте 8f= /^р1т, тогда как многока-
нальный приемник для такого же разрешения потребовал бы тп фильтров.
Основной недостаток матричного приемника состоит в том, что при одно-
временном приеме двух или нескольких сигналов возникает неоднозначность
отсчета частоты. Если, например, используется матричный приемник с тремя
столбцами, то при наличии на входе двух сигналов однозначно можно указать
путь сигналов лишь через фильтры первого столбца.
В соответствии с этим матричные приемники целесообразно использовать
для разведки РЭС, характеризующихся малым временем облучения цели, когда
вероятность одновременного облучения разведывательного приемника двумя
или несколькими сигналами оказывается достаточно малой.
Интерференционный измеритель частоты. В основу интерференционного
способа определения частоты положена зависимость напряжения или тока на
выходе устройства от несущей частоты принимаемого сигнала. Принцип рабо-
ты интерференционного приемника можно пояснить с помощью структурной
схемы (рис. 4.25) и некоторых математических соотношений. Принятые антен-
Рис. 4.25. Структурная схема интерференционного измерителя несущей частоты
ной сигналы поступают на входной фильтр Ф, полоса прозрачности которого
соответствует диапазону разведуемых частот. Сигналы, отселектированные
входным фильтром, поступают к широкополосному усилителю УРЧ, далее к
амплитудному ограничителю и затем на вход волноводного тракта.
В сечении А-А волновод разветвляется и сигнал распространяется по раз-
ветвлениям волновода. Длины разветвленных участков волновода несколько
различаются (у одного она А, а у другого L + AZ). В сечении Б-Б разветвленные
участки вновь соединяются в единый волновод. В конце волновода включается
согласованная нагрузка, чтобы обеспечить в волноводном тракте режим бегу-
щей волны. Наличие в волноводе отраженных волн существенно влияет на точ-
ность измерения частоты.
98
Напряжение сигнала на входе волноводного тракта можно записать в виде
(7 (Z) = (7ocos (щД (4.32)
где сос - угловая частота сигнала.
Напряжения сигналов на выходе разветвленных участков
(7i (/) = Uq cos[coc (t + L/V)],
U2 (0 = (70 cos{coc [t + (L + AL/P)]}? (433)
где V- скорость распространения ЭМВ принятого сигнала в волноводном тракте.
В сечении Б-Б эти напряжения складываются:
{7бб (0 = (71 (0 + U2 (!) = 2(70 cos(cocAi/2n cos + <р')=» (434)
Это напряжение действует на входе детектора D2. Напряжение на его на-
грузке будет иметь вид
UD2 = (70 cos (С0с Ai/2F). (435)
Из этой формулы видно, что Udi является функцией несущей частоты приня-
того сигнала. Однако Ud2 не может быть использовано для непосредственного
измерения частоты сигнала, так как амплитудное значение напряжения Uq зави-
сит от интенсивности принимаемого сигнала. Для исключения этой зависимости
необходимо произвести нормировку (7m относительно амплитуды напряжения
принятого сигнала. С этой целью осуществляется детектирование части сигнала,
действующего в сечении А-А.
Напряжение на нагрузке детектора D\ будет
J7di = Со-
процесс нормировки заключается в операции деления (7т/(7щ, которая осу-
ществляется в специальном нормирующем устройстве. В результате получаем
UD2! Um= cos [(©с Д£)/2Р]. (4.36)
Полученная зависимость является функцией только частоты сигнала. Ко-
синус является многозначной функцией частоты сигнала. Для получения одно-
значного отсчета частоты исходят не только из необходимости перекрытия оп-
ределенного диапазона разведуемых частот входным фильтром Ф, но и выбора
его центральной частоты настройки на оси частот.
99
Формулу (4.36) можно преобразовать в целях получения явной зависимости
от отношения напряжений. В результате
сос = (2К/ДА) arcos(%2/ UD}).
(437)
Установим, в каких пределах можно однозначно определить несущую часто-
ту принимаемых сигналов. Однозначное определение частоты возможно, когда
2и-1 . _ _
аргумент косинуса принимает значение от —-—л до ил, где п = 1, 2, 3...
Минимальная и максимальная частоты принимаемых сигналов определяются
из следующих соотношений:
ДАсо^ 2л-1 2и-1 V
2V ~ 2 ~ 2 АЛ
или
(438)
ДАсо^ . V
Диапазон разведуемых частот, в пределах которого возможно однозначное
измерение несущей частоты, зависит только от ДА (скорость распространения
радиоволн V постоянна). В результате имеем
^=f^-f^=VI(2SL).
(4.39)
Диапазон разведуемых частот можно охарактеризовать также коэффициен-
том перекрытия kf.
= 2и / (2и - 1).
(4.40)
Рис. 4.26. Зависимость диапазона
разведуемых частот Д/р от ДА
При заданном значении ДА kf зависит от и, т. е. от используемого участка
на оси частот. При п = 1 kf достигает максимального значения, равного 2. При
и СО, kf^> 1.
Изменяя значение ДА, можно изменять ширину диапазона разведуемых час-
тот Л/р. Зависимость Д£ от ДА приведена на
рис. 4.26.
При уменьшении ДА диапазон разведуе-
мых частот возрастает, однако в этом случае
ухудшается точность измерения частоты, так
как уменьшается средняя крутизна функции.
Интерференционный измеритель имеет
следующие достоинства:
- практически мгновенное измерение не-
сущей частоты принятого сигнала;
100
- сравнительно широким и регулируемый диапазон частотных измерении;
- относительная простота используемой аппаратуры.
К недостаткам относят:
- невозможность определения частоты при одновременном приходе двух
или более сигналов;
- снижение точности измерений и разрешающей способности при расшире-
нии диапазона разведуемых частот;
- относительно низкую чувствительность приемника из-за широкой полосы
пропускания, которая соответствует всему диапазону разведуемых частот.
Увеличение чувствительности приемника может быть достигнуто за счет
применения широкополосных усилителей, например на ЛБВ.
Корреляционный измеритель частоты. В основу принципа работы корреля-
ционного измерителя несущей частоты положена зависимость значения авто-
L_____________________________________________________I
Рис. 4.27. Структурная схема корреляционного измерителя несущей частоты
корреляционной функции от частоты принимаемого сигнала. Структурная схема
корреляционного измерителя частоты представлена на рис. 4.27.
Сигнал, принятый антенной, поступает в широкополосный усилитель, а за-
тем на схему умножения. Этот же сигнал через линию задержки также поступа-
ет на схему умножения.
Выражения для напряжений имеют вид
С7н(0 = Uo cos (сос/ - То),
(4.41)
и3 (0 = Uq cos [сос(* - Тз) -То],
где Uq, сос,Т0 - амплитуда, частота и начальная фаза принятого сигнала, т3 - вре-
мя задержки сигнала в линии.
Выражение для напряжения на выходе умножителя имеет вид
ту2
Цм(0 = 14(0 (0 = {cos(®c Тз) + cos[®C(2Z - Тз) - г'Ро]}. (4.42)
101
После прохождения сигнала через фильтр низких частот выражение для на-
пряжения сигнала будет
U2
С7Ф = Хф cos(coc т3),
где Кф - коэффициент передачи фильтра.
Из полученной формулы видно, что значение автокорреляционной функции
периодического процесса при фиксированном значении т3 зависит от амплитуды
и частоты исходного процесса. Для исключения зависимости от Uq вводится
дополнительный канал квадратичного детектора, напряжение на выходе которо-
го имеет вид UD = kDUl> где - коэффициент передачи детектора. Вычисли-
тельное устройство позволяет определить отношение напряжений
иф/ UD = k cos(coct3), (4.43)
где к = K®/kD.
Последнее выражение показывает, что при корреляционном приеме, как и при
интерференционном способе, однозначное измерение несущей частоты возможно
2и-1 . _ _
при изменении аргумента сост3 в пределах от —-—л до п л, где и = 1,2, 3...
Определим минимальную и максимальную частоты диапазона разведки:
_ (2и-1)л _ 2и-1
^cmin^3 “ 5 J cmin ~
ИЛИ
(4.44)
ЩстахТз И Л,
стах
П
а диапазон частот разведки
Д/р Jстах ,/cmin “1/ Т3.
Для увеличения точности можно применять регулируемую линию задержки
и изменением времени задержки добиваться нулевого значения С7ф. В этом слу-
чае дополнительного канала квадратичного детектора не требуется.
Приемники с реализацией мгновенного преобразования Фурье (МПФ). При-
емники с МПФ используют сочетание оптических и радиоэлектронных методов
обработки сигналов. Данная схема, по сути, реализует принцип построения мно-
гоканального по частоте приемника-спектроанализатора. В ней входной сигнал
после переноса на промежуточную частоту в полосе разведуемых частот посту-
пает на акустооптический (АО) модулятор - дифракционную ячейку Брэгга, со-
102
стоящую из лазера и электрооптического кристалла с пьезоэлектрическим пре-
образователем (ПЭП) (рис. 4.28). При этом в кристалле возникает бегущая аку-
стическая волна, создающая переменный вдоль направления ее распространения
коэффициент преломления.
В результате осуществляется модуляция коэффициента преломления кри-
сталла. Изменение коэффициента преломления в зависимости от частоты воз-
действующих на пьезоэлектрический преобразователь радиосигналов создает в
кристалле дифракционную решетку. Лазерный луч, проходя через кристалл,
А
Рис. 4.28. Структурная схема приемника с МПФ
оказывается пространственно промодулирован. Угол отклонения луча лазера
от оси распространения будет определяться частотой воздействующего на пье-
зоэлектрический преобразователь радиосигнала. Чем выше частота, тем на
больший угол отклоняется луч. При одновременном поступлении на вход при-
емника нескольких сигналов РЭС с различными частотами дифракция света
будет происходить под различными углами, соответствующими значениям
частот этих сигналов.
Оптическое устройство позволяет преобразовывать сигналы на различных
частотах с выхода широкополосного радиоприемника в пространственно разне-
сенные оптические сигналы, каждый из которых промодулирован соответст-
вующим радиосигналом.
Для преобразования светового луча в аналоговые электрические сигналы ис-
пользуется решетка фотодетекторов (ФД), реализуемая, например, на приборах с
зарядовой связью (ПЗС). Сигналы с выхода фотодетекторов считываются с по-
мощью коммутатора (К) и тактового устройства (ТУ). Скорость считывания ре-
гулируется путем изменения тактовой частоты. Интерфейс предназначен для
преобразования аналоговых сигналов в цифровые и сопряжения оптического
процессора с ЭВМ.
Управление устройствами ввода, вывода и индикацией осуществляется с по-
мощью микропроцессора.
Число каналов этого приемника равно числу фотодетекторов. Так как все ка-
налы работают практически одновременно, то вероятность приема сигналов час-
103
тот - от нескольких десятков мегагерц до гигагерц. Разрешающая способность
приемника по частоте зависит от числа фотодетекторов в одномерной решетке.
Для получения высокой разрешающей способности по частоте необходимо ис-
пользовать как можно больше фотодетекторов.
Один из недостатков подобной схемы - малая длительность обрабатывае-
мых сигналов (десятки микросекунд), что связано с ограниченностью размеров
апертуры АО-модулятора. Возможен другой подход, когда спектральный ана-
лиз с временным интегрированием проводится на основе накопления отклика
на данной частоте в интегрирующей линейке фотодетекторов. Это позволяет
обрабатывать сигналы большой длительности (десятки миллисекунд). Даль-
нейшее развитие данная схема получила на основе использования гибридных и
монокристаллических схем в интегральном исполнении. При этом лазер, ячей-
ка Брэгга и фоточувствительные элементы размещают на одной плоской под-
ложке. Совершенствуются принципы обработки сигналов с использованием
акустооптико-электронной (АОЭ) техники при построении беспоисковых по
частоте приемников.
АОЭ-приемники на ячейках Брэгга широко применяют в создаваемой аппа-
ратуре РТР и РР. Например, разведприемник фирмы Siemens имеет диапазон
рабочих частот 2,6...3,1 ГГц, ширину рабочего диапазона частот 500 МГц, дина-
мический диапазон 35 дБ.
Большой интерес вызывают возможности построения АОЭ-приемников бес-
поисковых как по частоте, так и по направлению. Здесь главным фактором,
обеспечивающим решение проблемы, является многоканальность АО-
модулятора по частоте и возможность компоновки нескольких акустических
преобразований в общей двумерной плоскости, через которую пропускается ко-
герентное световое излучение. Схема обработки, реализующая одновременное
определение пеленга и частоты, впервые предложена Ламбертом. В ней сигна-
лы, принимаемые элементами антенной решетки, после соответствующих пре-
образований в приемнике поступают на многоканальный АО-модулятор, аку-
стооптическая решетка которого по числу элементов соответствует антенной.
Когерентный пучок света от лазера, предварительно расширенный системой
линз, освещает модулятор и дифрагирует на ультразвуковых волнах, распро-
страняющихся в нем (рис. 4.29). Далее световое излучение фокусируется в плос-
кости регистрации /, (р. При этом по оси f отклонение пятна дифракции первого
порядка пропорционально частоте входного сигнала. С другой стороны, ди-
фракционное распределение света вдоль оси (р пропорционально диаграмме
направленности антенной решетки, фазированной в данном направлении, поло-
жение максимума распределения соответствует направлению прихода сигнала.
Результаты работы приемника регистрируется с использованием матрицы ПЗС-
фотоприемников.
Помимо рассмотренной схемы беспоискового определения частоты и на-
правления известны схемы, реализующие амплитудный способ пеленгования, но
с использованием в каналах обработки сигналов антенных многоканальных по
частоте элементов малогабаритных АОЭ-приемников. Еще один вариант реали-
зует определение направления на основе измерения относительной задержки
сигналов, поступающих с выхода двух разнесенных антенных элементов, по-
104
средством сигналов, поступающих с выхода двух разнесенных антенных эле-
ментов, и вычисления взаимно корреляционной функции сигналов в многока-
нальном по частоте АОЭ-приемнике-корреляторе.
Использование акустооптической дифракции позволяет производить широ-
кополосный спектральный анализ сигналов без сканирования по частоте. Даже
Рис. 4.29. Схема определения частоты
при одновременном приеме большого количества сигналов можно выполнить
анализ широкополосного спектра сигналов в реальном масштабе времени с вы-
соким разрешением по частоте и в широком динамическом диапазоне.
4.1.4. Способы запоминания несущей частоты
радиоэлектронных средств
В зависимости от характера решаемых РР и РТР задач использование данных
о несущей частоте может быть различным.
При ведении общей разведки, разведданные - параметры - сигнала исполь-
зуются для распознавания РЭС и определения их назначения, оценки радиоэлек-
тронной обстановки и т. д. В этом случае числовое значение несущей частоты
удобно представлять в виде кода в памяти ЭВМ либо числа, фиксируемого на
фотопленке или магнитной ленте.
При исполнительной разведке важно не измерение абсолютного значения
несущей частоты, а возможность ее запоминания, чтобы создать помехи на не-
сущей частоте РЭС. В этом случае несущая частота должна быть представлена в
виде, удобном для настройки передатчика помех на нее.
При приеме сигналов продолжительно работающих РЭС эта задача может
решаться непосредственно оператором путем запоминания несущей частоты и
последующей настройки передатчика помех.
При приеме сигналов кратковременно работающих РЭС задача запоминания
несущей частоты должна выполняться автоматически.
105
Можно выделить два способа запоминания несущей частоты: долговремен-
ное и кратковременное.
Метод, сохраняющий значения несущей частоты принятых радиосигналов
или обеспечивающий запоминание ее значений в виде соответствующего кода в
течение времени, необходимого для проведения анализа сигнала, называется
долговременным запоминанием частоты.
Метод, позволяющий сохранить значение частоты сигналов на время, необ-
ходимое для настройки передатчика помех, называется кратковременным запо-
минанием частоты.
К количественным характеристикам устройств запоминания частоты относят
время настройки, время запоминания (памяти), точность настройки, точность
удержания частоты, диапазон запоминания, пропускную способность (способ-
ность одновременной настройки нескольких частот).
Кратковременное запоминание частот. Примером устройства кратковре-
менного запоминания частоты сигналов является управляемый рециркулятор
(рис. 4.30). Рециркулятор включает широкополосный усилитель, линию задержки в
цепи обратной связи, схему управления и два коммутатора (на входе и выходе).
Обратная связь осуществляется через направленные ответвители. Принцип
кратковременного запоминания в данном случае заключается в создании и под-
держании в рециркуляторе колебаний на запоминаемой частоте. Эта задача ре-
шается переводом усилителя в режим генерации.
Для того чтобы в системе возникли и достаточно долго поддерживались неза-
тухающие колебания, необходимо сохранять баланс амплитуд и баланс фаз. Если
произведение коэффициентов усиления усилителя и линии задержки больше или
равно единице (КурЧ > 1), то условие баланса амплитуд выполняется.
Рис. 4.30. Структурная схема управляемого рециркулятора
Условие баланса фаз заключается в том, что фазовый сдвиг между напряже-
ниями сигнала на входе и выходе на входном коммутаторе должен соответство-
вать 2 ли, где п = 1, 2, 3 ... , т. е. щ т3 = 2ли, где т3 - время задержки в линии.
При этом пренебрегаем задержкой сигнала в усилителе. Из условия баланса
фаз получаем щ = (2ли) / т3 или = п / т3, где fi - частоты, на которых может са-
мовозбуждаться усилитель.
106
Различие между соседними частотами
самовозбуждения определяется, если поло-
жить п = 1. В этом случае Л/= 1/т3.
Предоставленная самой себе система рас-
смотренного типа стала бы случайно самовоз-
буждаться на любой из частот, определяемых
условием баланса фаз, но в пределах полосы
Рис. 4.31. Амплитудно-частотная
характеристика управляемого
рециркулятора
пропускания усилителя и независимо от воз-
действия принимаемых сигналов РЭС (рис.
4.31). Для исключения произвольного само-
возбуждения используют схему управления,
которая открывает усилитель только при воздействии импульсного входного
сигнала. В этом случае усилитель возбуждается на частоте, близкой к частоте
действующего на входе рециркуляторе сигнала (эффект «затягивания»).
По завершении действия входного импульса колебания будут существовать
в схеме на запомненной частоте Уз в течение некоторого времени /зап. Длитель-
ность запоминания частоты в подобной системе не может быть большой. Любые
флюктуации напряжения питания приведут к нарушению фазовых соотношений
в возбужденных колебаниях и изменению частоты на другую, для которой вы-
полняются лучшие энергетические соотношения.
Долговременное запоминание частоты. Примером технической реализа-
ции способа долговременного запоминания частоты является многоканальное
устройство (МКУ) и схема автоподстройки частоты (АПЧ).
МКУ - разновидность многоканального приемника, но в отличие от него на
выходе каждого канала есть схема запоминания частоты, которая состоит из ре-
ле и генератора, настроенного на среднюю частоту канала (рис. 4.32).
Рис. 4.32. Структурная схема многоканального устройства долговременного запоми-
нания несущей частоты
При приеме сигналов РЭС в соответствующем канале срабатывает реле, по-
дающее питание на схему генератора запоминания средней частоты. Точность
107
запоминания частоты при многоканальном способе определяется шириной по-
лосы пропускания входных фильтров каналов. Основным достоинством много-
канальной системы запоминания является неограниченное время запоминания.
Запоминание частоты путем автоподстройки частоты генератора сводится
к сравнению частоты принятого сигнала с частотой управляемого генератора и
Рис. 4.33. Структурная схема автоподстройки частоты
изменению последней под воздействием управляющего напряжения, пропор-
ционального разности сравниваемых частот, с выхода частотного дискримина-
тора. Схема состоит из входного усилителя УРЧ, частотного дискриминатора
(ЧД), интегратора, схемы управления перестройкой и управляемого генератора
(рис. 4.33).
Основным элементом схемы является частотный дискриминатор, с ампли-
тудно-частотной характеристикой (АЧХ), приведенной на рис. 4.34.
Схема работает в двух режимах: слежение и поиск.
В режиме слежения за частотой входных импульсных сигналов на входе ЧД
одновременно действуют напряжение входного сигнала и напряжение с выхода
управляемого генератора. На выходе ЧД вырабатывается управляющее напряже-
ние, амплитуда и знак которого соответствуют значению и знаку расстройки Af
управляемого генератора относительно несущей частоты входного сигнала. Это
напряжение поступает через интегратор на вход
управляемого генератора, вызывая изменение
его частоты в сторону уменьшения расстройки,
чтобы в пределе свести ее к нулю. В паузах ме-
жду входными импульсами управляющее на-
пряжение запоминается интегратором и воздей-
ствует на управляемый генератор до прихода
следующего импульса и т. д.
В режиме поиска частоты частота генера-
тора варьируется при помощи схемы управле-
ния перестройкой, в которой вырабатывается
пилообразное напряжение, изменяющее часто-
ту выходного напряжения генератора по пило-
образному закону. Когда разность частот сиг-
нала и управляемого генератора станет мень-
ше определенного значения Af, соответствующего диапазону работы ЧД, подача
пилообразного напряжения с выхода схемы управления прекращается и схема
переходит в режим слежения за частотой.
Рис. 4.34. АЧХ частотного
дискриминатора
108
Ошибки в запоминании частоты могут возникать из-за нестабильности рабо-
ты управляемого генератора, постоянной разряда интегратора, а также частоты
следования входных импульсных сигналов.
4.1.5. Анализ структуры сигналов разведуемых радиоэлектронных средств
При ведении РР и РТР измеряют параметры радиосигналов РЭС, которые
дают о них наиболее полное представление и позволяют их распознать. Так,
при анализе импульсных РЭС наибольший интерес представляют временные
параметры импульсной последовательности: длительность импульса ти, период
(частота) повторения импульсов Tn(Fn), период (пачка) импульсов Тпач, дли-
тельность серии (пачки) импульсов тПач, число импульсов в пачке #Пач, законы
(виды) внутриимпульсной модуляции, импульсные коды, частота и вид скани-
рования антенны.
При приеме непрерывных сигналов определяются вид и параметры модуля-
ции, временные, спектральные и корреляционные характеристики модулирую-
щих сигналов.
Измеренные параметры радиосигналов используются непосредственно опе-
ратором или ЭВМ для выяснения ценности полученной информации, распозна-
вания РЭС или записываются и хранятся в устройствах оперативной и долго-
временной памяти.
Существующие в настоящее время методы измерения параметров можно
классифицировать по принципу действия измерителей и способу отсчета изме-
ренных величин. В соответствии с этим измерители параметров подразделяют
на аналоговые, цифровые и комбинированные.
Аналоговая аппаратура обеспечивает представление параметров сигналов в
виде соответствующих функциональных зависимостей.
Цифровая аппаратура вырабатывает дискретные кодовые сигналы, соответ-
ствующие измеренным параметрам. Представление выходной информации осу-
ществляется в цифровой форме.
Комбинированная аппаратура содержит в различных сочетаниях аналоговые
и цифровые измерители параметров с индикацией результатов измерений как в
аналоговой, так и цифровой форме.
Для запоминания измеренных параметров сигнала для их последующего анали-
за и распознавания образа РЭС применяют следующие способы регистрации:
- преобразование в цифровой код и ввод в запоминающее устройство;
- запись на магнитную ленту или фотопленку;
- вывод на экран ЭЛТ с фотографированием экрана;
- запись электрохимическим, электротермическим и другими методами.
Дискретные способы измерения временных параметров. Автоматизация
процессов ведения разведки и применение для этих целей электронно-
вычислительной техники требуют преобразования измеряемых временных па-
раметров к виду, удобному для введения в ЭЦВМ. Аналоговый параметр в
этом случае преобразуется в цифровой код. Такое преобразование осуществля-
ется квантованием (дискретизацией) аналогового параметра а(/) по времени и
уровням (рис. 4.35).
109
Рис. 4.35. Дискретизация функции
по времени и уровням
Чем меньше интервалы дискретизации Д и
Гд, тем точнее отображается исходная функ-
ция а(7), однако растет количество обрабаты-
ваемой информации, что требует увеличения
как объема памяти, так и быстродействия уст-
ройства ее обработки.
Рассмотрим несколько вариантов цифро-
вых схем измерения временных параметров
радиосигнала [1].
Измерение длительности импульсов. Для
измерения длительности применяется метод
счета эталонных импульсов в течение времени
действия входного импульсного сигнала (рис. 4.36, а).
Измеритель состоит из входной дифференцирующей цепи ДЦ, триггера Т,
генератора эталонных импульсов ГЭИ, схемы совпадения (СС) и счетчика им-
Рис. 4.36. Цифровой измеритель длительности импульсов (а),
временные диаграммы его работы (б)
пульсов (СИ). Принцип работы измерителя поясняется временными диаграмма-
ми его работы (рис. 4.36, б). Длительность измеряемого импульса
ги=^Г0, (4.46)
где N - количество импульсов эталонного генератора на выходе схемы совпаде-
ний; То - период следования импульсов эталонного генератора.
110
Максимальная ошибка измерения длительности импульса равна периоду То.
Измерение периода следования импульсов. При измерении периода следова-
ния импульсов используется также метод счета эталонных импульсов. Основ-
ными элементами схемы являются триггер Т, схема совпадения СС, генератор
эталонных импульсов ГЭИ, счетчик импульсов СИ (рис. 4.37). Принцип работы
Рис. 4.37. Цифровой измеритель периода следования
импульсов (а), временные диаграммы его работы (6)
измерителя периода следования импульсов поясняется временными диаграмма-
ми его работы. Триггер запускается первым входным импульсом, который пода-
ется на одно плечо, следующий импульс поступает на другое плечо триггера и
останавливает его.
Период следования
Тс^То,
где N - количество импульсов эталонного генератора на выходе схемы совпаде-
ний; То - период следования импульсов эталонного генератора. Максимальная
ошибка измерения Тс равна периоду 7Ь.
111
Измерение периода синусоидальных колебаний. При измерении периода си-
нусоидальных колебаний Тх могут использоваться цифровые измерители, рас-
смотренные выше. В процессе измерения Тх необходимо выделить границы пе-
риода по моментам переходов синусоидальных колебаний через ноль. Эта опе-
рация выполняется усилителем-формирователем, структурная схема которого
приведена на рис. 4.38, а.
Для исключения зависимости длительности от амплитуды синусоиды не-
обходимо увеличить ее крутизну в области переходов через ноль. Это достига-
а
Рис. 4.38. Структурная схема устройства измерения периода
синусоидальных колебаний (а), временные диаграммы его
работы (б)
ется усилением сигнала в усилителе У, его ограничением в ограничителе Ог на
определенном уровне и дифференцированием полученного сигнала дифферен-
цирующей цепочкой ДЦ. Для управления работой последующего ключа обычно
112
используют типовой триггерный узел (рис. 4.38, а), на вход которого через дио-
ды Д проходят только импульсы отрицательной полярности, на последние реа-
гируют триггеры узла. При достаточно больших значениях коэффициента пере-
дачи усилителя форма ограниченного сигнала близка к прямоугольной, т. е.
можно считать, что передний фронт импульса после дифференцирования прак-
тически совпадает с моментом перехода измеряемого сигнала через нулевой
уровень (рис. 4.38, б). На выходе триггерного узла имеем прямоугольный им-
пульс, длительность которого равна периоду синусоиды Гх. Для измерения дли-
тельности сформированного импульса можно использовать схему измерителя,
описанную выше.
Аналоговые способы измерения временных параметров радиосигнала.
Существует ряд аналоговых способов измерения временных параметров радио-
сигналов: с использованием ЭЛТ со ждущими развертками, метод заряда кон-
денсатора и т. д.
Измерители на основе ЭЛТ с калиброванными ждущими развертками ши-
роко используются в станциях РР и РТР. Структурная схема измерителя вре-
менных параметров радиосигналов приведена на рис. 4.39.
Широкий диапазон значений измеряемых временных параметров (от наносе-
кунд до десятков миллисекунд) приводит к необходимости одновременного ис-
пользования нескольких разверток, имеющих различные длительности (различ-
Рис. 439. Структурная схема аналогового устройства измерения временных
параметров радиосигнала
ные скорости). При этом могут применяться ЭЛТ с одним или несколькими
лучами. Если используют ЭЛТ с одним лучом, схемы развертки CPi, СР2, СР3
запускаются принятым сигналом последовательно. Одновременно с запуском
разверток формируется напряжение вертикального сдвига строк, смещающее
луч на экране ЭЛТ на фиксированное расстояние, на время длительности данной
развертки (схема СС).
Если в качестве индикатора используют многолучевую ЭЛТ, то отклонение
каждого луча по горизонтали осуществляется своим напряжением развертки.
113
В этом случае все схемы развертки запускаются одновременно (пунктирные ли-
нии на рис. 4.39).
Сигналы разведуемых РЭС могут представлять не только последовательно-
сти одиночных импульсов определенной частоты следования, но и кодовые
группы импульсов. Если на запуск схемы развертки поступит такая кодовая
группа, то первый импульс запустит схему, а последующие могут вызвать сбои в
ее работе. Для устранения влияния последующих импульсов кодовой группы
используется схема парализации (СП).
Измерение длительности импульса периода следования осуществляется по
калибрационным меткам, которые вырабатываются генератором меток (ГМ) для
каждой из разверток. Напряжение меток подается на управляющий электрод
ЭЛТ и модулирует луч по яркости, создавая на горизонтальной развертке элек-
тронную шкалу измерения временных интервалов.
Первая и вторая развертки ЭЛТ используют для определения формы и дли-
тельности приходящих импульсов. Третья и последующие (если они есть) - для
измерения периода следования импульсов.
Измеренные параметры могут регистрироваться с помощью фотоприставки,
которая фиксирует на фотопленку изображения экрана ЭЛТ, а также показания
других приборов.
Рассмотренная схема позволяет определить временные параметры по одной
принятой серии импульсов, что является ее достоинством. К недостаткам можно
Рис. 4.40. Структурная схема измерения методом заряда
конденсатора
отнести: необходимость участия оператора, относительно большое время изме-
рения параметров и сложность используемой аппаратуры.
Измерение временных параметров радиосигнала методом заряда конденса-
тора. Рассмотрим работу схемы, предназначенной для измерения периода сле-
дования. Структурная схема измерителя представлена на рис. 4.40.
114
Входной импульс поступает на первую дифференцирующую ДЦ1 исклю-
чающую влияние длительности входных сигналов на работу схемы. Первый по-
ложительный импульс с выхода ДЦ1 запускает схему формирования импульсов
подсвета (ИП), которые подаются на управляющий электрод ЭЛТ, в результате
яркостная отметка на экране появляется только в моменты поступления этих
импульсов. Параллельно импульсы подсвета поступают на вторую дифференци-
рующую цепочку ДЦ2.
Отрицательный импульс с выхода ДЦ 2 запускает схему формирования импуль-
сов разряда (ИР), которые подаются на схему развертки. Основным элементом
схемы развертки является конденсатор, заряжающийся от источника питания в
промежутке между соседними импульсами последовательности. Напряжение раз-
вертки снимается с конденсатора и подается на горизонтальные отклоняющие
пластины ЭЛТ, вызывая отклонение подсвеченной точки от начала развертки.
Импульс подсвета подается на управляющий электрод ЭЛТ в промежуток време-
ни, соответствующий окончанию цикла заряда конденсатора. Максимальное на-
пряжение на конденсаторе пропорционально периоду следования импульсов, сле-
довательно, подсвеченная точка отклонится от начала развертки на расстояние,
соответствующее периоду следования импульсов.
Рис. 4.41. Временные диаграммы работы измерителя
временных параметров сигнала
Постоянная времени заряда конденсатора выбирается достаточно большой с
учетом максимально возможного измеряемого периода следования импульсов.
После завершения цикла заряда конденсатора и поступления на схему развертки
импульса разряда происходит быстрый разряд конденсатора. После этого схема
готова к следующему циклу. Работа измерителя поясняется временными диа-
граммами на рис. 4.41.
115
В случае нерегулярной импульсной последовательности крайние положения
отметок позволяют определять пределы изменения временных интервалов меж-
ду импульсами. Метод заряда конденсатора может быть использован и для из-
мерения длительности импульса.
Определение вида и параметров модуляции непрерывных сигналов. При
ведении РР и РТР кроме измерения временных параметров импульсных после-
довательностей приходится определять вид и параметры модуляции непрерыв-
ных сигналов. В современных РЭС широко используют амплитудно- и частотно-
модулированные радиосигналы. Определить вид модуляции, как правило, не-
Рис. 4.42. Измерение параметров модуляции непрерывных сигналов
сложно. Для этого необходимо принятый сигнал подать на амплитудный (АД) и
частотный (ЧД) детекторы (во втором случае предварительно ограничив по ам-
плитуде). Структурная схема приведена на рис. 4.42.
С выходов АД и ЧД напряжение сигнала через коммутатор К поступает на
вертикально отклоняющие пластины ЭЛТ. Если на вход приемника поступает
ЧМ-сигнал, то на выходе ЧД будет переменное напряжение, а на выходе АД -
постоянное и наоборот. Форму и параметры модулирующего сигнала можно оп-
ределить, наблюдая его на экране ЭЛТ. Период модуляции определяют с помо-
щью калибрационных меток, которые от генератора масштабных меток (ГММ)
подаются на управляющий электрод ЭЛТ.
Определение частоты сканирования антенны РЛС АСЦ. Важными ха-
рактеристиками РЛС автоматического сопровождения целей (АСЦ) являются
вид и параметры сканирования антенны. Для определения угловых координат и
автоматического сопровождения цели в РЛС АСЦ обычно используют метод
конического сканирования, при котором информация о координатах цели со-
держится в огибающей принимаемых радиосигналов и ее фазе. Частота оги-
бающей принятого сигнала соответствует частоте сканирования антенны РЛС
АСЦ. Знание частоты сканирования антенны позволяет создать помеху на этой
частоте и тем самым нарушить режим автосопровождения цели. Структурная
схема устройства, предназначенного для измерения частоты сканирования ан-
тенны разведуемого РЭС, представлена на рис. 4.43, а.
Входные радиосигналы, промодулированные по амплитуде с частотой
сканирования антенны, после усиления поступают на амплитудный детектор,
который выделяет огибающую входного сигнала. Напряжение с выхода де-
116
a
t
Рис. 4.43. Схема измерения частоты сканирования антенны (а),
временные диаграммы, поясняющие ее работу (б)
t
тектора поступает на фильтр, ширина полосы пропускания которого опреде-
ляется возможным диапазоном частот сканирования антенн разведуемых
РЭС (рис. 4.43, б).
Определение формы диаграммы направленности антенны. Форму и пти-
рину диаграммы направленности антенны (ДНА) определяют в горизонтальной
и вертикальной плоскостях.
Форму ДНА можно исследовать при по-
мощи панорамного приемника. Сигналы,
принятые его антенной, после преобразова-
ния и усиления подаются на вертикально
отклоняющие пластины. Луч, перемещаясь
по экрану ЭЛТ, образует развернутое изо-
бражение ДНА (рис. 4.44).
По наблюдаемому изображению опреде-
ляют форму ДНА, угол раствора основного
лепестка, а также оценивают размер боковых
Рис. 4.44. Диаграмма направленности
антенны:
1 - основной лепесток; 2 - боковой лепесток
лепестков. Ширину ДНА можно определить, измеряя скорость вращения антенны
£2а и длительность серии импульсов тс, т. е. время, в течение которого антенна раз-
ведуемого РЭС облучает данное направление:
0 = тс
Определение поляризации излучения. В РЭС используют следующие виды
поляризации излучения: линейную горизонтальную и вертикальную, вращающуюся
(круговую, эллиптическую). При ведении разведки в метровом и дециметровом
диапазонах длин волн поляризация принимаемого излучения определяется с помо-
щью двух взаимно перпендикулярных антенн (с горизонтальной и вертикальной
117
поляризацией). Последовательно подключая антенны к приемно-индикаторному
устройству, наблюдают принятый сигнал. О поляризации излучения судят по мак-
симальному уровню одного из сигналов, принимаемых антеннами.
Поляризацию можно определить и с помощью одной антенны, например,
полуволнового вибратора. Вращая вибратор в вертикальной плоскости, опреде-
ляют его положение, при котором наблюдается максимум сигнала, что и соот-
ветствует его поляризации.
В сантиметровом диапазоне длин волн поляризацию принимаемого сигнала
определяют с помощью поляризационных фильтров, помещаемых в волновод,
соединяющий антенну и приемник. Поляризационные фильтры обеспечивают
прохождение сигнала только с определенным видом поляризации.
В качестве фильтров могут использоваться, например, поляризационные решет-
ки, состоящие из нескольких параллельных вертикальных или горизонтальных
стержней. При вводе в волновод решетки с вертикальными стержнями прием гори-
зонтально поляризованных колебаний прекращается. Сигналы с вертикальной по-
ляризацией проходят через фильтр на вход приемника. При приеме сигналов с вра-
щающейся поляризацией наблюдается пульсация сигнала на входе приемника.
4.1.6. Анализ спектров радиосигналов
Спектр радиосигнала в некотором диапазоне частот определяется совокуп-
ностью амплитуд напряжений различных частот. Следовательно, устройства
анализа спектров должны обеспечивать измерение амплитуды и частоты каждой
составляющей исследуемого процесса.
При частотном анализе периодический сигнал может быть представлен ря-
дом Фурье:
5(0 = J Ск cos [(<оо/ + kCi^t - Уд ],
£=1
(4.47)
где Ск - амплитуда; со0 - несущая частота; Qi - частота повторения; V# ~ на-
чальная фаза сигнала; К = ± 1, ± 2,...
Периодические сигналы всегда имеют дискретные спектры, образованные
равноотстоящими спектральными составляющими.
Для анализа спектров радиосигналов используют цифровые и аналоговые
спектроанализаторы.
Цифровой анализатор спектра. Для анализа спектра цифровым анализато-
ром используют алгоритм дискретного преобразования Фурье (ДПФ), который
позволяет пересчитать совокупность временных отсчетов в комплексный дис-
кретный спектр:
М-1
ak = £ h(i)S(iAt)cos(2nik / М),
i=i
М-1
bk = £ h(i)S(iM)sin(2nik/M),
i=i
(4.48)
118
где ак и bk - вещественная и мнимая части комплексного коэффициента ряда
Фурье; к - номер гармонической составляющей спектра анализируемого процес-
са; h(i} — весовой коэффициент, определяемый объемом выборки; М- объем вы-
борки; — дискретный процесс, описывающий входной сигнал; Д/ - интер-
вал времени отсчета.
По полученным коэффициентам ак и Ьк вычисляют коэффициенты спектра
амплитуд:
Ск =^ак2+Ьк2.
(4.49)
В совокупности коэффициентов Ск содержится вся информация о распреде-
лении энергии сигнала по частотам.
Цифровые методы анализа позволяют также вычислить фазочастотный
спектр (ФЧС) анализируемого процесса:
fk = - arctg(Z>* / а*).
(4.50)
Коэффициенты ФЧС широко используют для восстановления временных ха-
рактеристик одного или нескольких узкополосных сигналов из всей совокупно-
сти излучений, попадающих в полосу анализа. ФЧС радиосигналов могут ис-
пользоваться при распознавании РЭС. Структурная схема цифрового анализато-
ра спектра приведена на рис. 4.45.
Рис. 4.45. Схема цифрового анализатора спектра
Для обработки отсчетов по алгоритму ДПФ необходимо накопить реализа-
цию длительностью Г, т. е. получить М отсчетов сигнала. Это осуществляется
буферным накопителем, на вход которого поступают кодовые комбинации с вы-
хода аналого-цифрового преобразователя.
После умножения анализируемой реализации на требуемую выделяющую
функцию h(i) отсчеты сигнала поступают в блоки, производящие вычисления
по алгоритму ДПФ. По полученным отсчетам ак и вк рассчитывают коэффици-
119
енты спектра амплитуд Q. При этом объем вычислений, а следовательно, и
время, затраченное на него, определяются числом одновременно обрабатывае-
мых отсчетов М.
В настоящее время разработаны алгоритмы, позволяющие значительно
уменьшить объем вычислений. Такие алгоритмы получили название быстрое
преобразование Фурье (БПФ).
Пересчет полученных в результате ДПФ коэффициентов комплексного спек-
тра Фурье ак и вк в коэффициенты спектра амплитуд Q проводится по алгорит-
му (4.49).
В ряде случаев требуется оценить не сам спектр реализации, а спектральную
плотность энергии или мощность сигнала. В этом случае используют коэффици-
енты, для получения полной совокупности которых в соответствии с алгорит-
мом (4.49) требуется дополнительно М операций умножения и МП операций
сложения.
Результаты окончательного вычисления спектра сигнала могут отображаться
на экране ЭЛТ. Предельная разрешающая способность цифрового анализатора
спектра определяется только максимально возможной длительностью Т обраба-
тываемой реализации. Существующие цифровые анализаторы спектра позволя-
ют получать разрешающую способность в десятые и сотые доли герца.
Аналоговые устройства спектрального анализа. Аналоговые спектраль-
ные анализаторы подразделяют на устройства параллельного, последовательно-
го и комбинированного типа.
Рис. 4.46. Анализатор спектра сигнала параллельного типа
Сущность параллельного частотного анализа заключается в том, что все
составляющие в определенной полосе частот, называемой полосой обзора,
выявляются одновременно и практически мгновенно (рис. 4.46).
В широкополосном приемном тракте (ШПТ) происходит усиление состав-
ляющих анализируемого спектра до уровня, необходимого для нормальной ра-
боты анализатора. В смесителе (СМ) спектр сигнала трансформируется в об-
ласть более низких частот. С выхода смесителя преобразованный спектр сигнала
120
л
Рис. 4.47. Анализатор спектра последовательного типа
подается на систему узкополосных фильтров (Ф). Точность измерения частот
спектральных составляющих определяется шириной полосы пропускания от-
дельного фильтра. Общее число фильтров должно быть таким, чтобы их сум-
марная полоса пропускания соответствовала полосе обзора.
Последовательный спектральный анализ заключается в том, что частотные
составляющие исследуемого радиосигнала в определенной полосе частот (об-
зора) выявляются последовательно. В устройствах последовательного анализа
широко используют панорамные приемники с перестройкой резонатора и с
перемещением спектра по оси частот (рис. 4.47).
В процессе перестройки резонатор последовательно настраивается на час-
тотные составляющие спектра исследуемого радиосигнала.
Перестройка резонатора согласована с генератором развертки, который вы-
рабатывает напряжение горизонтальной развертки, пропорциональное частоте
настройки резонатора. В результате, наблюдая на экране ЭЛТ импульсы, соот-
ветствующие спектральным составляющим сигнала, по положению на развертке
можно определять частоты.
Устройства последовательного спектрального анализа применяют при ис-
следовании процессов, характер которых меняется достаточно медленно по
сравнению с временем анализа.
При исследовании быстроменяющихся процессов или радиоизлучений крат-
ковременно работающих РЭС последовательный анализ возможен только при их
периодическом повторении. При этом периодичность повторения должна быть
выше или соизмерима с периодом просмотра полосы обзора.
Комбинированный частотный анализ основан на комплексном использова-
нии в одном панорамном приемнике параллельного и последовательного анали-
заторов спектра.
При комбинированном анализе можно реализовать преимущества каждого
анализатора, сочетая их в различных вариантах. Например, анализ ведется одно-
временно с помощью большого числа фильтров, но напряжение с них снимается
последовательно (поочередно) (рис. 4.48).
Комбинированный анализ используют, когда необходимо сократить время
или когда последовательный анализ невозможен из-за очень широкой общей
полосы обзора.
121
Рис. 4.48. Схема анализатора комбинированного типа
Для спектрального анализа радиосигналов разведуемых РЭС могут также
использоваться описанные ранее оптико-электронные приемники с мгновенным
преобразованием Фурье.
4.2. Радиолокационная разведка
РЛР - активная разновидность РЭР, обеспечивающая получение информа-
ции путем облучения объектов и окружающей среды зондирующими радиосиг-
налами с последующим приемом и анализом части рассеянного объектами зон-
дирующего излучения.
РЛР делится на видовую и параметрическую. Видовая РЛР обеспечивает до-
бывание информации, содержащейся в изображениях различных объектов мест-
ности, а параметрическая РЛР связана с получением информации, которая со-
держится в пространственных, скоростных и отражательных характеристиках
космических, воздушных, наземных и морских объектов.
РЛР предназначена для обнаружения, определения координат и параметров
движения наземных, воздушных и космических объектов; радиолокационной
съемки территории в целях картографирования местности; определения метео-
условий в заданных районах.
Для ведения РЛР применяют в основном пять типов РЛС:
- бокового обзора, устанавливаемые на космических и воздушных носителях
и обеспечивающие получение видовой информации о местности и объектах, над
которыми пролетает носитель аппаратуры;
- наземные загоризонтные, предназначенные для обнаружения низколетя-
щих целей и запусков баллистических ракет (БР);
- обнаружения объектов в космическом пространстве;
- разведки движущихся наземных целей и засечки минометных и артилле-
рийских позиций по рассчитанной траектории полета снаряда;
- разведки метеоусловий в заданных районах.
Широкое применение РЛС для ведения разведки обусловлено рядом пре-
имуществ радиолокационного наблюдения:
- возможностью ведения разведки в любых погодных условиях (дымка, об-
лака, туман, дождь, пыль, снег, дым);
122
- ведение разведки, не зависящей от освещенности земной поверхности, что
обеспечивает возможность наблюдения в любое время суток;
- возможностью наблюдения объектов, замаскированных от оптической раз-
ведки;
- возможностью селекции движущихся объектов на фоне неподвижных
предметов, создающих помеховые сигналы;
- возможностью обнаружения объектов на больших расстояниях (сотни и
тысячи километров).
Основные характеристики аппаратуры РЛР:
- несущая частота или длина волны излучаемых колебаний;
- длительность и период следования импульсов;
- средняя и пиковая мощность зондирующего излучения;
- форма и ширина диаграммы направленности антенны (ДНА), коэффициент
усиления антенны;
- законы сканирования ДНА в пространстве;
- чувствительность приемного устройства;
- разрешающая способность по дальности и угловым координатам;
- точность измерения координат объектов.
Длина волны к является основной характеристикой излучения РЛС. В подав-
ляющем большинстве современные РЛС работают в диапазоне частот от 75 до
30 000 МГц (от 0,8 до 400 см). Исключение составляют загоризонтные РЛС, ра-
ботающие в диапазоне коротких волн.
Длительность зондирующих сигналов и период их следования определяют
возможности РЛС по разрешающей способности и дальности действия, а также
возможность работы РЛС в разных условиях. Современные РЛС излучают им-
пульсы длительностью от сотых долей наносекунды до миллисекунды.
Мощность излучения РЛС в пределах ДНА неодинакова. Она имеет наи-
большее значение вдоль оси ДНА и убывает при отклонении от оси. Если отло-
жить вдоль радиусов, расходящихся из точки расположения станции, отрезки,
пропорциональные мощности излучения в данном направлении, и соединить их
концы плавной кривой, то получим ДНА РЛС. Ее угловую ширину принято ха-
рактеризовать углом 0, в пределах которого мощность излучения уменьшается
не более чем в 2 раза по сравнению с излучением вдоль оси.
Коэффициент усиления антенны (коэффициент направленности антенны) G
РЛС показывает, во сколько раз повышается плотность излучения электромаг-
нитной энергии по оси радиолуча по сравнению с равномерным излучением
мощности передатчика по всем направлениям. Коэффициент усиления антенны
G зависит от длины волны излучения. Наибольшее значение достигается в диа-
пазоне сантиметровых и миллиметровых волн.
Чувствительность приемника РЛС характеризуется наименьшей мощно-
стью принятого антенной сигнала, отметку которого еще можно обнаружить на
экране индикатора на фоне шумов. Приемники современных РЛС имеют чувст-
вительность 10"11... 10"14Вт.
Разрешающая способность по дальности характеризует минимальное рас-
стояние между двумя объектами на местности (взятое по направлению на РЛС),
при котором эти объекты еще наблюдаются раздельно на экране индикатора.
123
Разрешающая способность по дальности 8D зависит от длительности зонди-
рующего импульса и может быть определена по формуле
8D = с ти / 2,
где ти - длительность импульса, с - скорость распространения ЭМВ.
Например, при ти = ОД мкс, 8Z> = 15 м.
Разрешающая способность по направлению (азимуту) определяет тот мини-
мальный угол в горизонтальной плоскости, при котором два соседних объекта,
находящиеся на дуге одного радиуса от станции, наблюдаются раздельно. Раз-
решающая способность по азимуту 8©г определяется шириной ДНА в горизон-
тальной плоскости:
80г = Ог.
Аналогично разрешающая способность по углу места (в вертикальной плос-
кости) будет определяться шириной ДНА в вертикальной плоскости, т. е.
80в = Ов.
Чем лучше разрешающая способность РЛС, тем более четкое изображение
объектов будет на экране индикатора и выше точность измерения дальности. При
практических расчетах 80 удобно выражать в линейной мере, т. е. как линейное
расстояние 8^ между двумя объектами на местности (равноудаленными от РЛС на
расстояние Z>), при котором эти объекты еще наблюдаются раздельно:
8^= ®d.
4.2.1. Параметрическая радиолокационная разведка
Как уже отмечалось, параметрическая радиолокационная разведка (РЛР)
предназначена для обнаружения, определения координат и параметров движе-
ния космических, воздушных и наземных объектов, определения метеоусловий в
заданных районах.
Радиолокационные методы определения координат объектов основаны на
использовании явления отражения радиоволн от границ двух сред, обладающих
различными электрическими свойствами.
Для определения координат объектов радиолокационными методами ис-
пользуют радиолокационные станции. Блок-схема радиолокационной станции
показана на рис. 4.49.
Как следует из блок-схемы, радиолокационная станция состоит из передат-
чика, приемника, приемопередающей антенны с антенным коммутатором, инди-
катора и блока синхронизации. Передатчик станции с помощью передающей
антенны излучает радиоволны, доходящие до объекта, местоположение которо-
го требуется определить. Объект, если его размеры достаточно велики или одно-
го порядка с длиной облучающей радиоволны, а электрические свойства отли-
чаются от свойств воздуха, отражает падающие на него радиоволны. Отражен-
ные от объекта радиоволны улавливаются антенной радиолокационной станции
124
Рис. 4.49. Блок-схема радиолокационной станции с общей приемопередающей
антенной
и подводятся к входу приемника, а полученные на выходе приемника сигналы
подаются на индикатор, где и используются для определения координат объек-
тов. Блок синхронизации управляет работой остальных элементов станции.
При помощи радиолокационной станции, установленной в точке А (рис. 4.50),
местоположение объекта, находящегося в точке В, может быть полностью опреде-
лено тремя его координатами:
1) наклонной дальностью г;
2) азимутом а, т. е. углом между меридианом и направлением на объект в
горизонтальной плоскости;
3) углом места р, т. е. углом между горизонтальной плоскостью, проходящей
через радиолокационную станцию, и направлением на объект в вертикальной
плоскости.
Вместо угла места в качестве третьей координаты можно определять высоту
объекта, т. е. расстояние от объекта до горизонтальной плоскости, проходящей
через радиолокационную станцию.
Радиолокационная станция может быть рассчитана на определение как трех,
так и двух и даже одной из координат объектов.
Принцип определения азимута объекта радиолокационной станции может
быть пояснен следующим образом. Приемопередающая антенна (или антенны)
Рис. 4.50. Координаты объекта, определяющие его местоположение
радиолокационной станции выполняется так, чтобы ее характеристика направ-
ленности в горизонтальной плоскости приняла форму узкого луча.
Специальные механизмы перемещают антенну так, что ее луч поворачивает-
ся в горизонтальной плоскости в пределах заданного сектора обзора. При нали-
чии объекта в секторе обзора сила отраженных сигналов на выходе приемника
будет максимальной тогда, когда луч антенны направлен на объект. Отмечая
положение антенны, соответствующее максимуму силы отраженных сигналов,
мы определяем азимут объекта.
125
Принцип определения угла места объекта может быть пояснен подобным
образом. В данном случае приемопередающая антенна радиолокационной стан-
ции выполняется так, что ее характеристика направленности в вертикальной
плоскости имеет форму узкого луча. Механизмы перемещают антенну так, что
ее луч поворачивается в вертикальной плоскости в пределах заданного сектора
обзора. Сила отражения сигналов будет по-прежнему максимальной, когда луч
антенны направлен на объект. Отмечая соответствующее положение антенны,
мы определяем угол места объекта [2].
Обнаружение объектов в радиолокации
Основное уравнение дальности радиолокации. Как для обнаружения объекта,
так и для определения его координат мощность отраженного сигнала на входе
приемника радиолокационной станции должна быть не ниже пороговой мощно-
сти приемника Pnpmin- Пороговой мы будем называть минимальную мощность
сигнала, которую надо подвести к входу согласованного с антенной приемника
для нормального приема. Поэтому нам весьма важно знать, чем определяется
значение мощности отраженного сигнала. Мощность отраженного сигнала зави-
Рис. 4.51. К выводу основного уравнения дальности
сит от условий распространения радиоволн, мощности, излучаемой передающим
устройством РПер? коэффициента направленности передающей Gnep и приемной
GITp антенн, размеров отражающего объекта и расстояния г между объектом и
радиолокационной станцией.
При ненаправленном излучении передающего устройства радиолокационной
станции (рис. 4.51) и отсутствии потерь энергии в процессе распространения плот-
ность потока мощности сигнала облучаемого объекта определяется выражением
Р
П' - пер
111 “ Л 2 *
При направленном излучении плотность потока мощности объекта возраста-
ет до
126
П!
p
= G
пер4кг2
Плотность потока мощности отраженного сигнала приемной антенны радио-
локационной станции определяется выражением
ПА
^2л 2’
4лг
где S3 - эффективная площадь рассеяния объекта, определяемая его размерами,
отражающими свойствами (для данной длины волны) и положением относи-
тельно фронта облучающей радиоволны.
Мощность отраженного сигнала, подводимая к входу приемника, согласо-
ванного с антенной, будет
с с
Р = П 9 = р G э и?
пр ±±2°пр гперепер ^^2^4 ’
(4.51)
где £пр - эффективная площадь приемной антенны.
На предельной дальности действия станции (г = rmax) Рпр = Лтрть- Тогда из
(4.51) получаем основное уравнение дальности радиолокации
г
max
Р Q
= J пеР G 9
лЧ р ^пер°пр 2 *
У *npmin 1 б я
(4.52)
Обычно радиолокационная станция использует общую антенну для передачи
и приема сигналов. Значение коэффициента направленного действия антенны
связана с ее эффективной площадью Sa соотношением
X2
(4.53)
Заменяя в формуле (4.52) Gnep в соответствии с (4.53), получаем
r - J ^пер $э
\ Р . I2 4п'
у 1 npmin
(4.54)
Значения S3 ряда простейших случаев могут быть рассчитаны теоретиче-
ски. Для более сложных случаев значения £э определяют экспериментально.
Для приближенных рассчетов дальности действия станции можно пользо-
ваться средними значениями S3 различных отражающих объектов, приведенны-
ми в табл. 4.1.
127
Таблица 4.1
Средние значения эквивалентной площади рассеяния S3 различных объектов
Объект З^м2
Самолет-истребитель 10
Легкий бомбардировщик 25
Тяжелый бомбардировщик 150
Снаряд орудия калибром 75 мм 1
Небольшая подводная лодка в непогруженном состоянии 40
Большой корабль 15000
Эффективные площади S3 большинства антенн увеличиваются с ростом гео-
метрических размеров. Из формулы (4.54) следует, что при заданных размерах
антенны дальность действия радиолокационной станции увеличивается с укоро-
чением рабочей волны. Однако следует учесть, что с укорочением волны падает
максимально возможная излучаемая мощность Рпер и растет минимально дости-
жимая пороговая МОЩНОСТЬ Приемников Pnpmin-
Может показаться, что при неизменной средней мощности передатчика
дальность действия станции увеличится за счет повышения мощности, излучае-
мой в импульсе РПер5 с соответствующим уменьшением длительности зонди-
рующих импульсов т. Однако, уменьшив т, мы должны соответственно увели-
чить полосу пропускания AF приемника радиолокационной станции, так как для
получения минимума пороговой мощности приемника необходимо соблюдение
условия xAF = const = с. Из выражения для пороговой мощности [2]
Pnpmin = кТ°ЫПшП = kT°^-NmD, (4.55)
где к - постоянная Больцмана; Т 0 - абсолютная температура приемника; -
коэффициент шума приемника; D - коэффициент различимости сигналов, сле-
дует, что с уменьшением т Pnpmin растет. Заменяя в выражении (4.54) Рпрть, со-
гласно (4.55), получаем
г -4 р т *$А________*э =4 Р р _____
““ \ пер kT°cNmD 4тЛ2 \ ° кТ°сМшО4п)2’
(4.56)
здесь Т - период следования импульсов радиолокационной станции.
Из (4.56) видно, что дальность действия станции остается неизменной при
постоянной средней мощности передатчика Pq и не может быть увеличена по-
вышением мощности в импульсе с соответствующим укорочением длительности
импульсов.
Наоборот, при постоянной мощности в импульсе дальность действия стан-
ции может быть увеличена за счет повышения длительности импульсов т с соот-
ветствующим уменьшением полосы пропускания AF, а значит, и пороговый
мощности Pnpmin приемника.
128
Измерение расстояний до объектов
1. Общие сведения. Измерение расстояний до объекта - одна из основных за-
дач радиолокации. Иногда она является единственной задачей станций, напри-
мер, различных радиодальномеров, высотомеров и т. п.
В радиолокации можно использовать три метода измерения расстояний:
1) импульсный,
2) частотный,
3) фазовый.
В основе всех трех методов лежат явления, обусловленные конечной скоро-
стью распространения радиоволн в пространстве.
2. Импульсный метод измерения расстояния. Импульсный метод - основной
метод, применяемый в радиолокации для измерения расстояния.
При импульсном методе измерения расстояния передатчик радиолокацион-
ной станции периодически излучает кратковременные зондирующие радиоим-
пульсы (серии колебаний высокой частоты), разделенные относительно боль-
шими интервалами времени (паузами), как показано на рис. 4.52.
Зондирующие радиоимпульсы доходят до облучаемых объектов и отража-
ются от них. Приемник радиолокационный станции обычно отключается от ан-
тенны на время излучения передатчиком зондирующих радиоимпульсов. В пау-
зах между посылкой зондирующих радиоимпульсов приемник подключается к
антенне и ведет прием импульсов, отраженных от объектов. Расстояние до объ-
екта определяется измерением временем t от момента излучения зондирующего
радиоимпульса до приема соответствующего отраженного радиоимпульса. Оп-
ределив время t и зная скорость распространения радиоволн v0, мы легко под-
считаем расстояние до объекта по формуле
vo£
2
(4.57)
Заметим, что измерение времени должно проводится весьма точно. Если
расстояние г должно быть определено с погрешностью Аг < 15 м, то время необ-
ходимо измерять с погрешностью
. 2Аг 2-5
АГ<----=-------
v0 3-108
= 10“7с.
129
Преимуществом импульсного метода является простота одновременного из-
мерения расстояния до большого числа объектов при достаточной разрешающей
способности и точности измерения расстояния (до 10... 15 м).
Основной недостаток импульсного метода - невозможность измерения очень
малых расстояний. Это объясняется тем, что во время излучения зондирующих
радиоимпульсов прием отраженных сигналов невозможен. Минимальное рас-
стояние, которое может быть измерено, определяется выражением
г
'min ’
где т - длительность зондирующего радиоимпульса. Например, при т = 1 мкс мы
получаем > 150 м.
3. Частотный метод измерения расстояния. При измерении расстояния ме-
тодом непрерывного излучения один из параметров непрерывного колебания
меняется по определенному закону (частота или фаза).
На рис. 4.53. изображена блок-схема станции, использующей метод непре-
рывного излучения с частотной модуляцией для измерения расстояния до объек-
та. На этом принципе работают многие радиовысотомеры. Передатчик с частот-
ной модуляцией излучает колебания, которые облучают объект и вызывают по-
явление отраженных радиоволн.
К смесителю приемника подводят сигналы от передатчика и отраженных ра-
диоволн. За время Z, затраченное радиоволнами на пробег от станции до объекта и
обратно (на расстояние 2г), частота колебаний передатчика успевает измениться
по сравнению с частотой колебаний отраженной радиоволны. Поэтому на выходе
1 Предающая
антенна
Рис. 4.53. Блок-схема радиолокационной станции с непрерывным
излучением и частотной модуляцией, предназначенной для изме-
рения расстояний
смесителя мы получим колебания разностной частоты, которые усиливаем и по-
даем на частотомер. Измеряя значение разностной частоты, зависящее от расстоя-
ния г, определяем расстояние от станции до объекта. Если допустить, что частота
передатчика станции меняется по закону, изображенному на рис. 4.54, то разност-
ная частота биений F6' составит
130
5/пер 2А/М 2г_8гА/м
=-----г —------—------
6 dt Т/2 v0 7v0
откуда
г _ F6^V0 _ F6V0
8Д/М 8FA/M’
(4.58)
где Упер - частота колебаний передатчика; АД, - амплитуда изменения частоты
передатчика при модуляции; F- частота модуляции; Т - период модуляции.
Преимущества метода непрерывного излучения с частотной модуляцией -
возможность измерения весьма малых расстояний и простота аппаратуры, обу-
словленная ее узкополосностью.
Рис. 4.54. Временная диаграмма, поясняющая принцип
измерения расстояния радиолокационной станцией, блок-
схема которой представлена на рис. 4.52
Недостатком метода является относительная сложность одновременного оп-
ределения расстояний до нескольких объектов, облучаемых станцией.
4. Фазовый метод измерения расстояния. При измерении расстояния в РЛС с
непрерывным излучением можно использовать фазовый метод. Сущность фазово-
го метода измерения расстояния заключается в следующем.
Пусть в точке А находится радиолокационная станция (рис. 4.55), объект
расположен в точке Б, расстояние от радиолокационной станции до объекта
равно г. Передатчик непрерывно излучает радиоволны частотой f в направлении
объекта. В приемник поступают два сигнала: прямой - непосредственно от пе-
редатчика и отраженный - от объекта.
131
В некоторый момент времени t мгновенное значение фазы колебаний прямо-
го сигнала
<Р1 =2тг/?-<р0,
где фо - начальная фаза.
Очевидно, мгновенное значение фазы колебаний отраженного сигнала будет
_ . 2г
Ф2=Ф1-2тс/-----у,
Vo
где Vo - скорость распространения радиоволн; 2itf-запаздывание по фазе за
Vo
счет прохождения радиоволнами расстояния 2г; у - угол, учитывающий измене-
ние фазы на поверхности объекта.
Разность фаз прямого и отраженного сигналов
_ .2г
Ф1-Ф2=2л/— + у.
Vo
В общем случае
Ф1 - ф2 = Z • 2ти + ф,
где Z — некоторое целое число полных циклов изменений разности фаз на 2ти; ф -
значения разности фаз в интервале 0.. .2к; ф - некоторый фазовый угол.
Окончательно имеем
Z-2n + \|/ = 2тс/—+ у. (4.59)
v0
Таким образом, разность фаз колебаний прямого и отраженного сигналов,
обусловленная конечной скоростью распространения радиоволн, зависит от рас-
стояния до отражающего объекта. Эта зависимость положена в основу фазового
метода измерения расстояний и в общем виде отражена соотношением (4.59).
А
Рис. 4.55. Блок-схема фазовой радиолокационной станции
132
Однако непосредственно использовать соотношение (4.59) в целях измерения
расстояния нельзя, так как в него входят величины Z и у, определить которые
прямым путем с помощью измерительного прибора не представляется воз-
можным.
Для исключения неизвестных Z и у можно поступить следующим образом:
частоту f плавно изменять от fx до /При этом разность фаз прямого и отра-
женного сигналов меняется в соответствии с формулой (4.59) от начального
значения
2г
Z • 2тс + \|/} = 2;c/j — + Yj
vo
до конечного
2г
(Z + N)2ti + \|/2 = 2nf2 — + у 2,
vo
(4.60)
(4.61)
где (pi и (p2 - начальный и конечный углы, задаваемые фазометром; yi и у2 - углы,
учитывающие изменение фазы на поверхности объекта при частотах f\ и f2; N -
число полных циклов изменения разности фаз при переходе от частоты f\ к/2.
При относительно небольших изменениях частоты f (у! « у2), вычитая (4.60)
из (4.61), получим
2г
Ar-27r + V2-Vi = 2тг(/2-/1)—,
Vo
откуда
г = (#-2тг+Ду)-^-,
4лД/
(4.62)
где Д\|/ = V2 “Vi; д/ = /2-/1-
Этот же результат можно получить, если сопоставление прямого и отражен-
ного сигналов производить на не высокой, а на промежуточной частоте.
Из формулы (4.62) видно, что для определения расстояния г необходимо при
плавном изменении частоты от f\ до/2 определить число N полных циклов изме-
нения разности фаз, а также зафиксировать начальный и конечный углы i и \|/2,
задаваемые фазометром.
Операции, связанные с перестройкой передатчика, и последовательность
определения углов \|/х и \|/2 во времени снижают оперативность работы и соз-
дают серьезные затруднения при измерении расстояния до перемещающихся
объектов.
Время определения расстояния можно уменьшить, заменив плавное измене-
ние частоты введением только двух фиксированных частот fi и f2. При этом для
133
устранения неоднозначности при определении расстояния общее изменение фа-
зового сдвига сопоставляемых радиоволн не должно превышать 360°, т. е. N
должно быть равно нулю. Формула для определения расстояния в данном случае
принимает более простой вид:
г = ДхИ-^7- (4.63)
4тиД/
Для определения дальности необходимо измерить \|/i при частоте f\ и угол \|/2
при частоте f2. Затем вычисляют Д\|/ = v|/2 - Vi и по графику или таблице, по-
строенными на основании формулы (4.63), находят искомое расстояние.
Дальнейшее улучшение метода можем получить, устранив необходимость
отсчета углов ц/i и \|/2. Фазометр должен сразу измерять значение Д\|/, что по-
зволит проградуировать его шкалу непосредственно в единицах длины.
Указанная задача может быть решена, если облучение объекта производить
одновременно на двух частотах и в целях измерения расстояния использовать
разность фаз отраженных колебаний.
Как уже отмечалось, во многих практических случаях радиолокационная
станция и объект перемещаются один относительно другого. При этом на отра-
женные колебания оказывает влияние эффект Доплера.
Физическая сущность эффекта Доплера заключается в том, что непрерывное
изменение расстояния между радиолокационной станцией и объектом сопряже-
но с дополнительным изменением во времени фазы отраженных колебаний (со-
ответственно частоты отраженных колебаний, так как со = d<p / di).
Поскольку рассматриваемый метод основан на определении сдвигов фаз, то
всякие дополнительные фазовые изменения приводят к ошибкам измерения
дальности. Однако в системах с двумя частотами действие эффекта Доплера
значительно ослабляется, поскольку дополнительные приращения фаз обоих
колебаний имеют одинаковые знаки и при вычитании взаимно компенсируются,
что существенно улучшает характеристики двухчастотных систем.
Основные достоинства фазового метода измерения расстояний следующие.
1. Возможность измерения весьма малых расстояний. Наименьшие разли-
чаемые расстояния зависят главным образом, от разрешающей способности
аппаратуры, измеряющей минимальные фазовые сдвиги сопоставляемых ко-
лебаний.
2. Достаточно высокая точность измерения. Точность тем выше, чем боль-
ший фазовый сдвиг соответствует максимальному измеряемому расстоянию.
Для этого желательно работать на возможно более коротких волнах и измерять
разности фаз, превышающие 2ти.
Недостатки фазового метода следующие.
1. Трудно осуществимо практически одновременное измерение расстояний
до нескольких объектов.
2. Сложность аппаратуры, обусловленная необходимостью учета всех влия-
ний отдельных узлов радиолокационной станции на фазовые соотношения со-
поставляемых колебаний.
134
3. При относительно большой мощности излучаемых колебаний и неразне-
сенных передатчике и приемнике весьма труден прием слабых отраженных сиг-
налов.
Определение направлений на объекты. В большинстве случаев РЛС
должна определять не только дальность, но и направление на объект. Определе-
ние направления на объект называется пеленгацией и сводится к установлению
угловых координат объекта: азимута и угла места.
Как известно, существует три основных метода определения направлений на
объект:
- максимума;
- минимума;
- равносигнального направления.
Применение указанных методов определения азимута при ведении радиоло-
кационной разведки мало отличается от соответствующих методов радио- и ра-
диотехнической (см. 4.1.1). Поэтому ограничимся рассмотрением только мето-
дов определения угла места объектов при ведении РЛР.
1. Общие сведения. Третьей координатой, определяющей пространственное
положение объекта, является угол места либо высота. Достаточно знать одну из
этих величин, другая при необходимости всегда может быть найдена тригоно-
метрически по наклонной дальности (рис. 4.56)
ft = rsinp, (4.64)
где h - высота; г - наклонная дальность; р - угол места.
Существует много методов определения угла места (высоты) объектов. Однако
в принципиальном отношении все эти методы можно разделить на две группы:
а) методы, в которых как полезное свойство используется отражение сигна-
лов от земной поверхности;
б) методы, в которых отражение сигналов от Земли не используется и даже,
наоборот, является вредным.
Рис. 4.56. Определение высоты объекта
Первая группа методов применяется преимущественно на более длинных
волнах радиолокационного диапазона (метровые волны), где антенны не обла-
дают достаточно высокой направленностью, и поневоле приходится считаться с
отражениями от земной поверхности.
Вторая группа используется преимущественно в диапазоне наиболее корот-
ких волн радиолокационного диапазона (сантиметровые волны), где высокая
135
степень концентрации луча антенны позволяет устранить влияние земной
поверхности на форму диаграммы направленности.
2. Определение угла места и высоты с использованием отражения от зем-
ной поверхности. Наиболее прост метод определения угла места (высоты), осно-
ванный на использовании многолепестковой диаграммы направленности в вер-
тикальной плоскости (рис. 4.57); такая диаграмма, как известно, получается при
наличии отражений от земной поверхности.
Рис. 4.57. Определение высоты объекта с помощью много-
лепестковой диаграммы направленности
Можно заметить дальность, на которой впервые был обнаружен объект,
дальность первого и остальных пропаданий сигнала и по ним определить угол
места (высоту).
Этот метод относительно удобен на море и плох на Земле, так как форма диа-
граммы направленности зависит от коэффициента отражения окружающей поверх-
ности. На море поверхность сравнительно однородна и диаграмма направленности
более определенна, чем на суше. На Земле трудно найти достаточно однородную
поверхность, поэтому на разных азимутах диаграмма может иметь разную форму.
Кроме того, электрические свойства поверхности Земли зависят от изменения пого-
ды. В результате при использовании данного метода в наземных станциях необхо-
димы частые корректировочные полеты самолетов. Сам процесс определения угла
места (высоты) занимает слишком много времени. Затруднена расшифровка ре-
зультатов измерений, если объект при полете меняет свой курс или высоту.
Более совершенным является метод сравнения сигналов, принятых на разне-
сенные по высоте антенны. Над поверхностью Земли на разных высотах поме-
щают две антенны. Лепестки этих антенн частично перекрывают друг друга.
Нижний из лепестков каждой антенны изображен на рис. 4.58.
У антенны 2 лепесток сильнее прижат к Земле, чем у антенны 1, так как вто-
рая находится на большей высоте по сравнению с первой.
Предположим, что антенны 1 и 2 подключаются к входу приемника по-
очередно.
Пусть Ai - сигнал на выходе приемника от первой антенны, — сигнал на
w ТГ Al
выходе приемника от второй антенны, К =— - число, характеризующее, во
Л
сколько раз прием на первую антенну сильнее, чем на вторую.
136
Б(объект)
Рис. 4.58. Нижние лепестки диаграмм направленности
двух разнесенных по высоте антенн
Величина К является функцией угла места р:
д
tf=-L=<p(0).
4
В частном случае при р = р0 К = 1.
Следовательно, зная отношение — = К, можно определить угол места р.
4
3. Определение угла места и высоты плоским лучом. Зависимость работы стан-
ции от характера окружающей местности является нежелательной. От нее можно
избавиться, если угол места определять методом луча с переменным углом возвы-
шения. При этом луч антенны должен быть сжат в вертикальной плоскости до такой
степени, чтобы при определении угла места диаграмма направленности не соприка-
салась с земной поверхностью. Наиболее распространенная форма такого луча изо-
бражена на рис. 4.59.
Рис. 4.59. Определение угла места методом луча
с переменным углом возвышения:
Р - поверхность Земли; Q - вертикальное сечение луча;
ОБ - ось луча; ОА - проекция луча на плоскость Р;
а - азимут; р — угол места
137
Луч имеет вид плоского конуса с вершиной в точке расположения радио-
локационной станции. Его вертикальное сечение Q по форме близко к эллипсу,
вытянутому вдоль горизонтальной оси. Ширина луча по точкам половинной
мощности в вертикальной плоскости обычно имеет порядок от долей градуса
до 1...2°, ширина луча в горизонтальной плоскости зависит от вида обзора
пространства и обычно находится в пределах от нескольких градусов до десят-
ков градусов.
Наиболее просто определение угла места можно произвести по методу мак-
симума. Изменяя угол наклона луча, добиваются максимальной силы приема
отраженных сигналов, что соответствует направлению оси луча на объект; в
этот момент с помощью угловой шкалы и указателя, связанного с механизмом
управления лучом, производится отсчет угла места.
Управление лучом осуществляется либо электрически - путем изменения
фазы питания отдельных частей антенной системы, либо механически - поворо-
том всей системы. Амплитуда отраженного сигнала наблюдается на экране элек-
тронно-лучевой трубки с индикацией отклонения луча.
Станция, определяющая угол места, обычно работает совместно с поисковой
радиолокационной станцией кругового обзора. Поисковая станция обнаружива-
ет объект, определяет его дальность и азимут, после чего измеряют угол места.
Работа обеих станций координируется с помощью специальных отметок азимута
и дальности, что дает возможность при наличии многих объектов в секторе об-
зора правильно выбрать тот, угол места которого должен быть найден.
Если требуется более высокая точность определения угла места, применяют
равносигнальный метод. При этом процесс определения угла места ничем прин-
ципиально не отличается от процесса определения азимута методом максимума.
Точно так же производится перекидывание луча из одного крайнего положения
в другое, на экране индикатора с амплитудной отметкой наблюдаются два им-
пульса, равенство амплитуд которых соответствует точному пеленгу.
Описанные выше методы определения угла места имеют два существенных
недостатка: во-первых, процесс определения занимает много времени, во-
вторых, невозможно одновременное определение угла места многих объектов.
Желание устранить эти недостатки привело к созданию устройств с непрерывным
обзором по углу места. При этом отраженные от объектов сигналы воспроизво-
дятся на электронно-лучевой трубке с яркостной модуляцией в прямоугольной
системе координат «дальность - угол места» (рис. 4.60). Развертка изображения
по дальности в таком индикаторе осуществляется путем подачи пилообразного
напряжения на горизонтально отклоняющие пластины трубки. Перемещение ли-
ний развертки дальности вдоль оси угловой координаты производится подачей
на вертикально отклоняющие пластины напряжения, пропорционального углу
поворота луча относительно горизонтальной плоскости. Это напряжение выра-
батывается в электромеханическом устройстве, связанном с механизмом управ-
ления лучом антенны.
В большинстве практических случаев от радиолокационной станции требу-
ется определение высоты объекта. С этой целью на прозрачный светофильтр,
расположенный перед экраном трубки, кроме шкал дальности и углов места на-
носят линии постоянной высоты йь й2, йз и т. д. (рис. 4.60). Для обеспечения
138
Отражения от местных объектов
Рис. 4.60. Экран индикатора «дальность - угол места»
большей точности измерения при расчете линий постоянной высоты необходи-
мо учитывать кривизну Земли и рефракцию. Формула для расчета высоты с уче-
том кривизны Земли и рефракции имеет вид
г2
h = hK +rsmB +---,
17000
(4.65)
где h - высота объекта; Л а - высота антенны радиолокационной станции над по-
верхностью Земли; г — наклонная дальность; р - угол места.
Если высота антенны много меньше измеряемых высот ЛА « й, а дальности
до объектов не слишком большие, Земля может считаться плоской и явлением
рефракции можно пренебречь, то линии постоянной высоты без существенных
погрешностей могут быть рассчитаны по формуле (4.64):
h = г sinp.
Для малых углов места угол sinp можно заменить углом р:
й = гр.
(4.66)
В этом случае линии постоянной высоты являются гиперболами. Однако оп-
ределение высоты по индикатору «дальность - угол места» нельзя признать
удобным, так как линии постоянной высоты являются кривыми.
Более удобен для определения высоты индикатор с разверткой изображения
в прямоугольных координатах «дальность - высота» (рис. 4.61). Здесь линии
139
Сигналы.
отраженные от объектов
Отражения от местных объектов
Рис. 4.61. Экран индикатора «дальность - высота»
постоянной высоты образуют систему параллельных горизонтальных линий, что
позволяет получить лучшие результаты по точности и скорости отсчета.
Рассмотрим, каким образом создается развертка в координатах «дальность -
высота».
Откладываемые вдоль оси X расстояния определяются известным соотношением
2 ’
где vo - скорость распространения радиоволн.
Это соотношение можно записать в виде
(4.67)
где к- коэффициент пропорциональности.
Вдоль оси Y откладываются высоты. Допустим, что существуют условия,
при которых формула (4.64) достаточно точно определяет значение высоты
объекта. С учетом соотношения (4.67) эта формула может быть представлена
в виде
(4.68)
Чтобы вдоль оси X откладывались расстояния г, а вдоль оси Y - высоты й,
необходимо приложить к отклоняющим пластинам напряжения
UX —
140
UY =A:0/smp,
(4.69)
где Ux - напряжение, прикладываемое к горизонтально отклоняющим пласти-
нам; Uy - напряжение, прикладываемое к вертикально отклоняющим пластинам;
ко - коэффициент пропорциональности.
Ясно, что уравнения (4.69) справедливы только в интервале времени О.../р,
где tp - длительность прямого хода развертки дальности. В момент времени t = tp
напряжения Uxn Uy достигают своих максимальных значений:
“ *(/р,
(4.70)
^тахГ =^pSinP-
Из соотношений (4.69) и (4.70) видно, что для создания развертки «дальность -
высота» необходимо на горизонтально отклоняющие пластины подавать пилооб-
разные напряжения, а на вертикально отклоняющие пластины такое же пилообраз-
ное напряжение, но промодулированное по амплитуде по закону sinp. Последнее
достигается при помощи электромеханического устройства, связанного с механиз-
мом управления лучом. В качестве такого электромеханического устройства при-
меняется, например, сельсин-трансформатор, питаемый напряжением развертки
дальности, ротор поворачивается синхронно с качанием луча антенны по углу места.
Если от станции требуется определение наземной дальности г0 (дальности
вдоль поверхности Земли), то напряжение, прикладываемое к горизонтально
отклоняющим пластинам, должно изменяться по закону
=facosp, (4.71)
поскольку между наклонной и наземной дальностью существует зависимость
r0=rcosp. (4.72)
Метод определения угла места и высоты лучом с переменным углом возвы-
шения является более совершенным по сравнению с методами, основанными на
использовании отражений от земной поверхности. При использовании этого ме-
тода пределы измеряемых углов значительно шире. Ограничение заметно только
для малых углов, при которых начинают появляться отражения от поверхности
Земли. Нижний определяемый угол места должен быть немного больше полови-
ны ширины луча в вертикальной плоскости, чтобы отражения от Земли не вно-
сили значительных ошибок.
Точность измерения угла места и высоты методом луча с переменным углом
возвышения может быть более высокой, чем в методах, использующих отражения
от Земли, поскольку зависит главным образом от поддающихся учету факторов,
таких, как ширина луча, точность электромеханического устройства, передающего
значения угла к индикатору, конструкции индикаторного и шкального устройств.
141
Существенным достоинством плоского луча является возможность примене-
ния индикаторов «дальность - угол места» и «дальность - высота». Эти индика-
торы дают наглядное представление о всей воздушной обстановке в просматри-
ваемом секторе обзора и позволяют сравнительно быстро определить угол места
и высоту многих объектов.
Определение угла места методом луча с переменным углом возвышения
принципиально можно проводить как на метровых, так и на сантиметровых вол-
нах. Однако создание плоского луча на метровых волнах требует слишком
больших габаритов антенны, что препятствует широкому применению подоб-
ных систем. Известно, например, что в некоторых станциях метрового диапазо-
на антенное устройство по высоте занимало несколько десятков метров, дости-
гая в отдельных случаях 40...80 м. По этим причинам системы с плоским лучом
получили преимущественное распространение в сантиметровом диапазоне волн,
так как можно получить достаточно хорошие результаты при сравнительно не-
больших габаритах антенны.
Одновременное определение расстояния, азимута и угла места
1. Общие сведения. Во многих практических случаях, особенно при наблю-
дении за воздушными объектами, необходимо определять быстро и надежно все
три координаты объекта: расстояние, азимут и угол места.
Расстояния обычно определяют импульсным методом. Для поиска угловых
координат можно использовать любую комбинацию методов, применяемых для
определения азимута и угла места.
Устройства, обеспечивающие определение трех координат, имеются на всех
волнах радиолокационного диапазона: метровых, дециметровых и сантиметро-
вых. Однако преимущественное распространение получили устройства санти-
метрового диапазона, как более точные и компактные. При этом определение
угловых координат производится методом максимума с помощью иглообразно-
го луча, поворачиваемого по азимуту и углу места.
Такой метод дает достаточно высокую точность определения угловых коор-
динат и, кроме того, позволяет повысить дальность действия радиолокационной
станции за счет высокой концентрации энергии излучения в узком луче.
2. Обзор пространства иглообразным лучом. Существуют различные виды
обзора пространства иглообразным лучом. Наиболее распространенными из них
являются:
1) винтовой;
2) пилообразный;
3) зигзагообразный;
4) спирально-конический;
5) поступательно-конический.
Рассмотрим кратко каждый из названных видов обзора.
1. Винтовой обзор (рис. 4.62, а): — - постоянно. Обзор по а = 360°, р мед-
dt
ленно меняется в заданном секторе обзора. Траектория, описываемая лучом,
изображена схематически на рис. 4.62, б.
Винтовой обычно применяется в наземных станциях, когда требуется обеспе-
чить обзор по азимуту на 360° и по углу места в небольших пределах (около 20°).
142
Рис. 4.62. Винтовой обзор
Сектор обзора можно перемещать по углу места, что позволяет просмотреть лю-
бую часть пространства.
Sot
2. Пилообразный обзор (рис. 4.63, а):--постоянно. Обзор по а < 360°, р
dt
изменяется в заданном секторе обзора быстрее, чем а.
Качание по углу места производится либо по зубчатым уступам, либо по
равнобедренному треугольнику. Применяется в наземных станциях. Для увели-
Рис. 4.63. Пилообразный обзор
чения сектора обзора по углу места иногда осуществляется двухходовой обзор.
Траектория такого обзора схематически изображена на рис. 4.63, б.
on
3. Зигзагообразный обзор (рис. 4.64): — - постоянно. Обзор по р < 360°,
dt
а изменяется в заданном секторе обзора быстрее, чем р. Применяется в са-
Рис. 4.64. Зигзагообразный обзор
143
молетных станциях. Угол в горизонтальной плоскости составляет несколько
десятков градусов в ту и другую сторону от оси самолета, в вертикальной
плоскости угол обзора составляет 10...20°. Скорость обзора - порядка 30
циклов в минуту.
4. Спирально-конический обзор (рис. 4.65): — - постоянно, 0 - медленно
dt
меняется в заданных пределах. Применяется в самолетных станциях. Например,
в одной из подобных станций луч, начиная движение, описал окружность радиу-
Рис. 4.65. Спирально-конический обзор
сом 3°, затем радиус описываемой окружности постепенно увеличивался до 45°,
после чего луч возвращался в исходное положение. Скорость вращения луча во-
круг оси самолета равнялась 1000 об/мин. Колебания по углу 0 происходили с
частотой приблизительно 1 Гц. Ширина луча составляла примерно 6°, длина
волны X = 10 см. Спирально-конический обзор можно рассматривать как част-
ный случай винтового, если предположить, что винтовой обзор производится в
секторе, прилегающем к оси вращения Y.
5. Поступательно-конический обзор (рис. 4.66): 0 - постоянный, — - по-
dt
стоянно, а - меняется в заданных пределах. Применяется в тех случаях, когда
Пределы поворота антенны
Пределы обзора
Рис. 4.66. Поступательно-конический обзор
угол обзора по углу места мал. Его особенностью является увеличение угла об-
зора по азимуту на 20 по сравнению с углом поворота антенны.
Для определения координат объектов можно использовать несколько типов
индикаторов, например, в станциях с пилообразным, зигзагообразным и посту-
пательно-коническим обзором можно применить для отсчета всех трех коорди-
нат комбинацию из двух индикаторов: «дальность-азимут» и «дальность-угол
места» или «дальность-азимут» и «дальность-высота».
144
Возможно также применение индикатора «азимут-угол места» с добавлени-
ем отдельного индикатора для определения расстояния. Экран индикатора «ази-
мут-угол места» изображен на рис. 4.67.
Отметка (яркостная) создается в момент прихода отраженного от объекта сиг-
нала. Положение пятна на экране индикатора зависит от соотношения напряжений,
действующих на вертикально отклоняющих пластинах электронно-лучевой трубки.
Сигналы, отраженные
от самолетов
Азимут, град
Рис. 4.67. Экран индикатора «азимут—угол места»
Эти напряжения создаются с помощью электромеханических устройств, связанных
с механизмами вращения луча антенны по азимуту и углу места. Поэтому по поло-
жению пятна можно судить об угловых координатах объекта.
В наземных станциях с винтовым обзором удобно применять индикатор круго-
вого обзора совместно с индикатором «дальность-угол» или «дальность-высота».
В самолетных устройствах при спирально-коническом обзоре можно приме-
нить один трехкоординатный индикатор. Для создания такого индикатора удоб-
но использовать радиально-круговую развертку. По радиусу, как обычно, откла-
дывается дальность. Причем каждая развертка дальности прочерчивается от
центра экрана в направлении, соответствующем мгновенному положению про-
екции луча антенны на плоскость, перпендикулярную геометрической оси кону-
са обзора. Поэтому при перемещении луча антенны по одному витку спирали
радиус совершает полный оборот на экране индикатора. Если объект находится
на оси конуса обзора (ось конуса обзора обычно совпадает с линией полета са-
молета), он одинаково облучается при любом положении луча антенны на внут-
реннем витке спирали, и его изображение на экране индикатора проявляется в
виде светящейся окружности (рис. 4.68, а}.
Радиус окружности зависит от расстояния до объекта. При смещении объ-
екта с оси симметрии обзора светящаяся окружность разрывается, так как луч ан-
145
тенны будет освещать объект не на всем витке. По мере увеличения отклонения
объекта от оси обзора длина светящейся дуги будет уменьшаться. Центр дуги
характеризует отклонение объекта по азимуту и углу места относительно линии
полета самолета, а радиус определяет расстояние.
Иногда для одновременного определения всех трех координат применяют
так называемый двухточечный индикатор (рис. 4.68, в). В этом случае периоди-
Рис. 4.68. Трехкоординатные индикаторы:
А, Б, В - отметки объектов; а - индикатор с радиально-круговой разверткой;
б - спиральный обзор; в - двухточечный индикатор
чески, через цикл работы станции (в течение каждого второго периода посылки
зондирующего импульса), от схемы, связанной с механизмом поворота луча по
углу места, поступают на индикаторные устройства два напряжения. Одно из
них, постоянное по значению, смещает начало развертки на некоторый отрезок
вправо по азимуту. Другое, пропорциональное синусу угла места, смещает нача-
ло развертки по вертикали в том направлении, куда отклоняется луч антенны
относительно оси самолета. В результате по левому пятну можно определить
дальность и азимут объекта, а по наклону условной линии, соединяющей пер-
вую точку со второй, ориентировочно судить об угле места.
Трехкоординатные индикаторы не дают высокой точности определения уг-
ловых координат, однако они удобны для наблюдения при небольшом числе
объектов и позволяют сократить количество приборов, что особенно важно для
одноместных самолетов.
4.2.2. Видовая радиолокационная разведка
Видовая радиолокационная разведка ведется с помощью радиолокационных
станций бокового обзора. В настоящее время существует два основных типа ра-
диолокационных станций бокового обзора (РЛС БО): с вдольфюзеляжной ан-
тенной (РФА) и с синтезированной апертурой (PCА) [3].
РЛС с вдольфюзеляжной антенной. В РЛС БО РФА для увеличения раз-
решающей способности по азимуту используют длинную приемопередающую
антенну, позволяющую сформировать в азимутальной плоскости узкую диа-
грамму направленности. Длина антенны достигает 10... 15 м, что при рабочей
146
длине волны X = 3 см позволяет сформировать ДН шириной около 10 угл. мин
и обеспечить линейную разрешающую способность в десятки метров.
Антенна такого большого размера может быть установлена вдоль фюзеляжа
самолета, внутри или в специальном подвесном контейнере. Обзор земной по-
верхности лучом ДН за счет механического вращения в такой системе невозмо-
жен. Поэтому антенна закрепляется неподвижно таким образом, что ее луч пер-
Рис. 4.69. Схема обзора местности РЛС с вдольфюзеляжной антенной
пендикулярен траектории полета самолета и обзор осуществляется в результате
перемещения антенны в процессе полета (рис. 4.69).
Для увеличения площади просматриваемого за один полет участка обычно
используют две антенны: правого и левого борта. Каждая имеет относительно
широкую ДН в вертикальной (угломестной) плоскости Фо, что позволяет про-
сматривать две полосы местности шириной АО каждая, параллельные курсу по-
лета самолета.
При полете самолета по прямолинейной траектории луч РЛС перемещается
вместе с ним так, что на индикаторе формируется изображение в прямоугольных
координатах «наклонная дальность - путевая дальность». В результате разреше-
ние целей осуществляется по двум координатам: по путевой дальности X за счет
узкого в горизонтальной (азимутальной) плоскости луча ДН и по наклонной
дальности D за счет импульсного режима работы.
Разрешающая способность по путевой дальности равна линейной ширине
ДН в азимутальной плоскости. При увеличении расстояния от антенны до цели
размер разрешаемого элемента 8Х линейно увеличивается, что не позволяет по-
лучить детальные изображения на больших расстояниях.
Разрешающая способность по наклонной дальности при использовании им-
пульсного зондирующего сигнала определяется длительностью импульса ти:
8д = с ти / 2 cosa,
где a - угол места.
Разрешение 3d тем хуже, чем ближе цель к линии пути самолета, поэтому
ближнюю границу просматриваемой полосы выносят, как правило, на расстоя-
ние, превышающее высоту полета Н9 что соответствует a = 45°.
147
Для обеспечения достаточно высокой разрешающей способности по дальности
необходимо использовать зондирующие импульсы длительностью менее 0,1 мкс,
что снижает дальность действия РЛС.
Получение высокой разрешающей способности без снижения дальности дей-
ствия можно достигнуть, используя метод сжатия импульса за счет внутриим-
пульсной линейной частотной модуляции (ЛЧМ).
На линию
Рис. 4.70. Функциональная схема РЛС с РФА
Упрощенная функциональная схема РЛС с РФА представлена на рис. 4.70.
РЛС состоит из импульсного передатчика, вырабатывающего зондирующие
сигналы двух (левой и правой) приемопередающих антенн, положение кото-
рых в пространстве определяется системами стабилизации зоны обзора и
управления обзором; приемника и двух индикаторов - оперативного и регист-
рирующего - на базе электронно-лучевых трубок ЭЛТ-1 и ЭЛТ-2 соответст-
венно. В регистрирующем индикаторе применяется оптическая система записи
изображения на движущуюся пленку.
Передатчик вырабатывает импульсные зондирующие сигналы, которые че-
рез антенный переключатель поступают в одну из антенн или в обе одновремен-
но и излучаются ими в открытое пространство. Отраженные от местности сиг-
налы поступают через антенну в приемник. При одновременной работе антенн
правого и левого борта возможно применение двух идентичных приемных кана-
лов или разделение во времени работы одного приемного канала на два индика-
торных блока.
После усиления и обработки в приемнике сигналы поступают в регистри-
рующее устройство. Луч в ЭЛТ-2 модулируется по яркости принимаемым сиг-
148
налом. Развертка по дальности осуществляется вдоль одной строки на экране
индикатора. Задержка и длительность развертки соответствуют дальности от
^min ДО
Экран ЭЛТ-2 фотографируется на движущуюся фотопленку. Отраженные от
местности сигналы в каждом периоде повторения создают на фотопленке одну ли-
нию-развертку по дальности, располагающуюся поперек. При синхронном движе-
нии самолета и пленки регистрируется совокупность примыкающих друг к другу
разверток по дальности, образующих радиолокационное изображение местности.
Изображение местности, записанное на пленку, как правило, дешифрируется
на Земле после проявления.
Для оперативного наблюдения радиолокационного изображения на борту
самолета может применяться специальный индикатор ЭЛТ-1, выполненный на
трубке с длительным послесвечением экрана и возможностью стирания запи-
санного изображения. На экране этого индикатора изображение от строки к
строке перемещается вдоль оси Х9 соответствующей путевой дальности, син-
хронно с движением самолета. Изображение на экране сохраняется в течение
необходимого времени после его заполнения, затем стирается и начинается за-
пись изображения нового участка местности.
В РФА может быть предусмотрена также линия оперативной передачи изо-
бражения по радиоканалу на Землю.
Наиболее сложным узлом РФА является антенная система. К ней предъяв-
ляют следующие требования:
- обеспечение узкой ДН в азимутальной плоскости;
- возможность использования одной антенны при передаче и приеме сигналов;
- получение высокого коэффициента направленного действия для обеспече-
ния большей дальности действия;
- формирование ДН, обеспечивающей прием отраженных сигналов с интен-
сивностью, не зависящей от расстояния до целей, что связано с необходимостью
равноконтрастного изображения целей в заданном диапазоне дальностей;
- стабильность выдерживания ДН в пространстве.
Наиболее полно указанным требованиям удовлетворяют зеркальные антенны,
формирующие в вертикальной плоскости ДН косекансного типа. Для такой ДН чем
больше дальность (угол места), тем больше усиление принимаемого сигнала.
В процессе полета происходят случайные изменения углов крена, курса и
тангажа, что приводит к колебаниям ДН и в конечном счете к ухудшению изо-
бражения. Для компенсации этих колебаний используется система стабилизации
положения зоны обзора. В эту систему поступают сигналы от инерциальных и
радиолокационных датчиков угловых колебаний самолета. По сигналам датчи-
ков система с помощью электромеханических устройств стабилизирует положе-
ние антенны в пространстве.
Система управления обзором управляет работой антенного переключателя и
коммутатора зон обзора и, кроме того, по командам оператора изменяет положение
зоны обзора по дальности, зависящего от положения ДН в угломестной плоскости.
РЛС с синтезированной апертурой антенны (PCА). Радиолокаторы с РФА
позволяют получать детальные радиолокационные изображения только на отно-
сительно небольших дальностях. При выносе полосы разведки на десятки кило-
метров от самолета необходимо использовать антенны длиной в десятки и сотни
метров, размещение которых на самолете невозможно.
149
Для преодоления этого затруднения используется метод синтезирования апер-
туры антенны, заключающийся в запоминании отраженных от цели сигналов на
участке траектории полета, длина которого равна требуемой длине антенны. После-
дующая обработка зарегистрированных сигналов в бортовой или наземной аппара-
туре позволяет получить радиолокационное изображение с высокой детальностью.
Принцип формирования синтезированной апертуры антенны с узкой ДН в
азимутальной плоскости заключается в создании искусственной антенной ре-
шетки. Одним из основных условий ее создания является строго прямолинейная
траектория полета самолета.
Особенностью аэродинамики самолета является то, что при полете в спокойной
атмосфере без маневра он благодаря своей значительной массе изменяет траекто-
рию достаточно медленно. Поэтому в течение короткого промежутка времени (се-
кунды) можно считать, что он движется по строго прямолинейной траектории.
Известно, что ДН антенны формируется в результате когерентного (с учетом
фазы) сложения радиоволн, принимаемых отдельными элементами антенны.
Рис. 4.71. Обзор земной поверхности с помощью РСА
Так, если система состоит из 10 рядом расположенных одинаковых антенн раз-
мером d (линейная решетка) и сигналы, принимаемые каждой антенной, коге-
рентно суммируются, то решетка имеет такую же узкую ДН, как и антенна, раз-
мером 10J. Следовательно, повышение угловой разрешающей способности воз-
можно путем когерентного суммирования сигналов антенн, расположенных в
пространстве на прямой линии, т. е. путем создания искусственной антенной
решетки. Принцип создания РСА основан на использовании прямолинейного
движения антенны РЛС для последовательного формирования антенной решет-
ки на траектории полета (рис. 4.71).
150
В РЛС применяется небольшая антенна, широкая ДН которой неподвижна
относительно самолета и направлена перпендикулярно линии пути (боковой об-
зор). При полете антенна последовательно занимает в пространстве положения
1, 2, 3... на прямой линии (траектория полета самолета), тем самым формируя
искусственную (синтезированную) антенную решетку.
Запоминая ряд сигналов, последовательно принимаемых антенной РЛС в
каждой точке на участке траектории (1-10), затем когерентно их суммируя, по-
лучаем узкую ДН искусственно сформированной антенной решетки. Размер
синтезированной апертуры равен длине участка траектории, на котором произ-
водится запоминание и когерентное суммирование сигналов.
Размер апертуры можно изменять так, чтобы ширина синтезированной ДН
уменьшалась пропорционально увеличению дальности. Это позволяет получать
радиолокационные изображения с постоянной разрешающей способностью не-
зависимо от удаления просматриваемого участка местности.
Разрешение по наклонной дальности в РСА обеспечивается, как и в других
РЛС, за счет импульсного режима работы.
Радиолокационное изображение в РСА получается в прямоугольных коор-
динатах «наклонная дальность - путевая дальность».
При обработке принятых сигналов и формировании радиолокационного изо-
бражения возможны три различных метода: антенный, селекции сигналов по
доплеровским частотам и голографический, связанный с оптической обработкой
сигнала.
Наибольшее распространение в настоящее время получили оптические ме-
тоды обработки сигнала (рис. 4.72).
В основе оптических устройств обработки лежит голографический метод,
при котором записанные на пленку радиосигналы (радиоголограммы) исполь-
зуются для формирования изображения.
а
Рис. 4.72. Схема голографической регистрации световой волны:
а - ход лучей; б - распределение интенсивности света на фотопластинке
151
Рассмотрим процесс голографирования в оптическом диапазоне. Обязатель-
ным условием голографирования является когерентность источника излучения.
В оптическом диапазоне источником когерентного излучения служит лазер.
Если пучком света от такого источника осветить точечный объект Л, то часть
излучения отразится и возникнет так называемая сигнальная волна, распростра-
няющаяся к фотопластинке. Эта волна имеет сферический фазовый фронт. Для
регистрации голограммы на ту же фотопластинку необходимо направить опор-
ную волну. Эта волна должна быть когерентна с сигнальной волной, т. е. иметь
ту же частоту. Это обычно достигается использованием одного излучателя.
Предполагается, что опорная волна представляет пучок параллельных лучей с
плоским фазовым фронтом. В этом случае фаза колебаний опорной волны будет
одна и та же в каждой точке фотопластинки. Фазы колебаний сигнальной волны
в каждой точке пересечения ее с пластинкой различны и зависят от расстояния,
которое прошла волна от объекта до данной точки. Так как опорная и сигналь-
ная волны когерентны, разность фаз между ними в каждой точке фотопластинки
неизменна во времени.
При сложении на фотопластинке двух волн разность фаз между ними приводит
к пространственной амплитудной модуляции (интерференции). Полученная интер-
ференционная картина регистрируется на фотопластинке в результате достаточно
длительной экспозиции. После проявления на фотопластинке будем иметь изобра-
жение, которое называется голограммой точечного объекта Л (рис. 4.72, б).
Голограмма позволяет восстановить изображение объекта. Для этого ее не-
обходимо облучить опорной волной (рис. 4.73). Опорная волна, проходя через
Рис. 4.73. Получение изображения объекта с помощью голограммы
голограмму, создает изображение объекта А точно в том месте, где он находился
в момент записи голограммы. Изображение А будет несколько размытым. Раз-
мер пятна 8%, обусловливающий детальность создаваемого изображения, опре-
делится из формулы
152
8x=hR/X,
где X - длина волны опорного излучения; R - расстояние от голограммы до объ-
екта; X- линейный размер голограммы.
Оптическая голография позволяет обеспечить чрезвычайно высокую разре-
шающую способность, так как длина волны светового излучения во много раз
меньше размера голограммы. В случае если объект представляет сложное тело,
на голограмму записывается совокупность голограмм всех точек объекта. Вол-
новой фронт, формируемый при восстановлении такой голограммы, равен сумме
волновых фронтов от каждой точки объекта, т. е. идентичен волновому фронту
от самого объекта.
Одно из важных свойств голограммы состоит в возможности изменения
масштаба изображения. Если одновременно изменить в одно и то же число раз
линейный размер голограммы и длину волны восстанавливающего изображение
пучка света, то в соответствующее число раз изменится и масштаб создаваемого
изображения. Это свойство позволяет записывать голограммы на одной длине
волны, например, в радиодиапазоне, а восстанавливать волновой фронт и на-
блюдать изображение на другой волне, в оптическом диапазоне.
Если изменения длины волны и масштаба голограммы непропорциональны,
то изображение тоже будет сформировано, однако в нем возникнут масштабные
искажения. Во многих практических применениях эти искажения не играют су-
щественной роли.
Процесс синтезирования апертуры в самолетной РСА можно пояснить с по-
мощью рис. 4.74.
Рассмотрим случай, когда в зоне обзора РЛС есть только один точечный от-
ражающий объект А. Самолет-носитель летит строго по прямолинейной траек-
тории с постоянной путевой скоростью Ип. Передатчик, подобно лазеру в опти-
ческой голографии, облучает когерентной волной объект А.
Антенна РЛС имеет относительно небольшую длину, а следовательно, дос-
таточно широкую в азимутальной плоскости ДН 0О. Отраженные от цели сигна-
лы (сигнальная волна) поступают в РЛС в течение всего времени, пока объект
находится в луче антенны, т. е. на участке траектории длиной Xq.
Отраженный сигнал после преобразования в приемнике РЛС поступает на фазо-
вый детектор, где складывается с опорным (опорной волной), формируемым пере-
датчиком. Значение сигнала на выходе фазового детектора и$л (интенсивность ин-
терференционной картины) определяется амплитудой и фазой отраженного сигнала.
Отраженный от точечного объекта А сигнал образует сферический фазовый
фронт, а опорный сигнал при неизменной во времени (а значит, и вдоль траекто-
рии полета) начальной фазе имитирует плоскую опорную волну. Поэтому сигнал
на выходе фазового детектора является голограммой точечного объекта А вдоль
оси X (см. рис. 4.72, б). Длительность этого сигнала То равна времени, в течение
которого самолет пролетает участок синтезирования: 7Ь = Xq / Vn (рис. 4.74). Эта
радиоголограмма соответствует антенне длиной Xq.
В большинстве современных РСА используется система регистрации сигна-
лов с выхода фазового детектора на фотопленку. В результате на фотопленке
образуется уменьшенная оптическая копия радиоголограммы.
153
Функциональная схема РСА с оптическим устройством обработки приведена
на рис. 4.75. Аппаратура РСА состоит из бортовой и наземной частей. На борту
размещен импульсный передатчик с высокой стабильностью несущей частоты
генерируемых сигналов, что необходимо для их когерентной обработки. Сигнал
передатчика поступает в приемопередающую антенну (либо в две антенны, если
обе боковые полосы являются рабочими).
Принимаемые сигналы после усиления в приемнике поступают на фазовый
детектор, куда подается и опорный сигнал. Если траектория полета самолета не
строго прямолинейна, фаза опорного сигнала корректируется от датчиков изме-
нения траектории (компенсатор траекторных нестабильностей) так, что полу-
чаемая голограмма соответствует прямолинейному полету.
Сигнал с выхода фазового детектора модулирует по яркости луч ЭЛТ. Каж-
дому периоду повторения зондирующего импульса соответствует одна строка
развертки по дальности на экране ЭЛТ. Изображение такой строки проектирует-
ся объективом на движущуюся фотопленку. Скорость движения фотопленки
синхронизирована со скоростью полета самолета. По мере движения пленки на
ней формируется запись интерференционной картины взаимодействия отражен-
ных сигналов с опорным (радиоголограмма). Для точечной цели на фотопленке
регистрируется одномерная голограмма.
Совокупность сигналов от всех целей в зоне обзора образует на первичной
пленке сложное амплитудное распределение, соответствующее сумме голо-
грамм точечных целей.
154
Компенсатор
траекторных
нестабильностей
Синхро-
низатор
Импульсный
>- когерентный
передатчик
I
Датчик
опорного
сигнала
Приемник
Фазовый
детектор
Антенна “I
Переключатель
прием-передача
Модуляция луча по яркости
Бортовое
оборудование
Генератор
развертки
по дальности
Цилиндрическая
линза для
формирования
изображения
по дальности
Наземное оборудование
Диафрагма
Лазер
Пленка с записью изображения
Фото-
химическая
обработка
ЭЛТ
Объектив
1 Пленка с записью
радиолокационных сигналов
J
Рис. 4.75. Функциональная схема РСА
После проявления, как правило, в наземных условиях первичная пленка с запи-
сью голограммы в оптическом корреляторе освещается лучом лазера (см. рис. 4.73).
Ширина освещаемого участка ограничивается диафрагмой, размер которой про-
порционален длине синтезируемой для данной дальности апертуры антенны. На
движущейся вторичной фотопленке формируется радиолокационное изображение
местности. На этом изображении все объекты, находящиеся на одной наклонной
дальности, но отличающиеся путевой дальностью, разрешаются за счет фокусиров-
ки лазерного излучения голограммой в системе обработки. Каждая голограмма то-
чечного объекта фокусирует свет в свою точку. На изображении объекты видны
раздельно, если расстояние между ними больше размера элемента разрешения.
Для разрешения объектов, находящихся на разных наклонных дальностях,
используется, как и в РФА, импульсный метод работы. Начало развертки даль-
ности поперек пленки соответствует времени прихода сигнала от ближнего края
зоны обзора, конец - от дальнего. При формировании изображения с голограм-
мы используется цилиндрическая линза, которая без искажений переносит изо-
бражение строки по дальности на выходную пленку. Эта линза не влияет на фо-
кусирование изображения по путевой дальности.
4.2.3 Загоризонтные радиолокационные станции
В основу принципа действия загоризонтных радиолокационных станций (ЗГ
РЛС) положено сверхдальнее распространение радиоволны за счет тропосфер-
155
ного рассеяния, рефракционных явлений в ионосфере и отражения от ионизиро-
ванных метеорных следов.
Представляется целесообразным предварительно рассмотреть распростране-
ние радиоволн с учетом указанных явлений.
Механизмы распространения радиоволн. Радиоволны по способу распро-
странения делятся на распространяющиеся в свободном пространстве (прямые),
земные, тропосферные и ионосферные [4—6].
Радиоволны, распространяющиеся в однородной или слабо неоднородной
среде (в частности, в космическом пространстве) по прямолинейным или близ-
ким к ним траекториям, называют свободно распространяющимися, или прямы-
ми волнами. На их распространение не сказывается влияние Земли, но при про-
хождении сквозь атмосферу их траектория может незначительно искривляться
(явление рефракции), возможны рассеяние и поворот плоскости поляризации.
Земные радиоволны - радиоволны, распространяющиеся в непосредствен-
ной близости от поверхности Земли и частично огибающие земной шар вследст-
вие дифракции (дифракционные волны).
Радиоволны, распространяющиеся на значительные (примерно до 1000 км)
расстояния из-за рассеяния в тропосфере и направляющего (волноводного) дей-
ствия тропосферы, называют тропосферными [4].
Радиоволны, распространяющиеся на большие расстояния и огибающие
земной шар в результате однократного или многократного отражения от ионо-
сферы (X > 10 м), а также волны, рассеивающиеся на неоднородностях ионосфе-
ры и отражающиеся от ионизированных следов метеоров (в диапазоне метровых
волн), называют ионосферными, или пространственными [4].
Область прямой видимости простирается до радиогоризонта Dn.B и в общем
случае характеризуется наличием волн трех типов - прямой, отраженной от
земной поверхности и поверхностной (земной).
Прямая и отраженная волны возникают в том случае, когда антенны подняты
на высоты, превышающие длину волны X. При высоте подъема меньше волны X
всех диапазонов - распространяются как земные [4-6].
Дальность радиогоризонта (прямой радиовидимости) определяется по фор-
муле [5]
/)п.в + л/^2^5
(4.73)
где /?з - радиус Земли, км; h\, Л2 - высота подъема антенн над поверхностью
Земли, м; Аз - отношение эквивалентного радиуса Земли, учитывающего реф-
ракцию волн в тропосфере, к действительному.
Отношение Аз определяется через градиент индекса рефракции dN/dh (м-1),
учитывающий вертикальное распределение коэффициента преломления атмо-
сферы А [5]:
А3 =1/(1 + R31()-* dN/dh).
(4.74)
Для нормальной (стандартной) атмосферы dN/dh = - 0,04 м \ ^2А3А3 «4,12
и формулу (4.73) можно записать в виде [5]
156
Непосредственно за радиогоризонтом следуют области полутени и тени
(рис. 4.76) - области земной поверхности, где отсутствует прямая волна, а рас-
пространение происходит за счет огибания волной земной поверхности или
неровности рельефа местности.
Область полутени - промежуточная между областями прямой видимости и
тени (дифракции) [5]:
^Лт.т = (0,8... 1,2)2)пв-
Область дифракции, или тени - область земной поверхности, где отсутствует
прямая волна, а распространение происходит за счет огибания волной земной по-
верхности или неровностей рельефа местности.
Дифракционными способностями обла-
дают волны гектометрового и декаметрового
диапазонов (/> 30 кГц). Волны дециметро-
вого диапазона практически дифрагируют
только на неровностях, соизмеримых с дли-
ной волны X [4-6].
В этой области поле содержит две со-
ставляющие: обусловленную рассеянием ра- Рис 4 76 Зоны освещенноста> тени
диоволн в тропосфере и дифракционную. и полутени при дифракции радио-
Уровень первой составляющей на расстояни- волн вокруг земного шара
ях примерно до 80... 100 км незначителен,
поэтому ею обычно пренебрегают и рассчитывают в основном поле дифракци-
онной волны [4]. Это справедливо до тех пор, пока значения множителя ослаб-
ления с учетом средних условий рефракции превышают 40...50 дБ. При меньших
значениях множителя ослабления начинает преобладать дальнее тропосферное
распространение волн, т. е. переизлучение
электромагнитной энергии неоднородной
атмосферой.
Область дифракции простирается при-
мерно до расстояний (3...5) £>пв [5].
Область дальнего тропосферного рас-
пространения радиоволн простирается от
100 до 1000 км [4-6]. Распространение волн
в этой области происходит из-за рассеяния
в тропосфере (рис. 4.77). Как тропосферные
волны могут в основном распространяться в
диапазоне 40... 10000 МГц [4-6].
В области дальнего тропосферного рас-
сеяния механизм распространения радио-
волн обусловлен несколькими факторами,
одним из которых служит сверхрефракция в
тропосфере, ведущая к образованию при-
Рис. 4.77. Схема создания поля в
месте приема за счет отражения и
рассеяния волн от неоднородно-
стей в атмосфере
157
земных и приподнятых волноводов, захвату волн в этих волноводах и распро-
странению электромагнитных волн на расстояния, в десятки раз превышающие
расстояние прямой видимости.
Условие образования волноводов dN/dh > 0,157 м"1 [5]. Чтобы волна могла
быть захвачена волноводом, его высота йв должна соответствовать следующему
условию [5]:
ав3/2* ХкрЮЧз,
где Хкр - критическая длина волны, выше которой волноводное распространение
отсутствует, м.
Поскольку обычно высота волноводов не превышает нескольких десятков
метров (в отдельных случаях до 300 м), волноводное распространение может
наблюдаться только в диапазоне сантиметровых и дециметровых волн [5]. В не-
которых случаях (при образовании определенных условий рефракции в тропо-
сфере) возможно волноводное распространение для волн длиннее 1 м. Вероят-
ность возникновения волноводов достаточно велика (особенно над морями и в
приморских районах), что необходимо учитывать при оценке (расчете) зон воз-
можной разведки сигналов РЭС.
Наряду со сверхрефракцией причинами дальнего тропосферного рассеяния
могут быть рассеяние на турбулентных неоднородностях тропосферы и отраже-
ние от слоистых образований в тропосфере.
Уровень сигнала при дальнем тропосферном рассеянии подвержен суточным
и сезонным изменениям и зависит от вида подстилающей поверхности, метео-
рологической обстановки, длины волны, свойств используемых антенн, длины
трассы, географического положения РЭС и т. д.
В области ионосферного рассеяния волны распространяются из-за рассеяния
на неоднородностях ионосферы. Рассеяние может происходить также из-за от-
ражения от ионизированных следов метеоров. Область ионосферного рассеяния
простирается на расстояние 800...2400 км и захватывает диапазоны 30...100 МГц
при рассеянии от неоднородностей ионосферы и 50... 150 МГц - при отражении
от следов метеоров [4-6].
Ионосферу образуют верхние слои земной атмосферы, в которой газы час-
тично (до 1 %) ионизированы под влиянием ультрафиолетового, рентгеновского
и солнечного корпускулярного излучений. Ионосфера электрически нейтральна,
она содержит равное количество положительных и отрицательных частиц, т. е.
является плазмой. Достаточно большая ионизация, оказывающая влияние на
распространение радиоволн, начинается на высоте 60 км (слой D), увеличива-
ется до высоты 300—400 км, образуя слои Е, F2, а затем медленно убывает
(рис. 4.78). Максимальная концентрация электронов соответствует слою F2. За-
висимость N от высоты меняется со временем суток, года, солнечной активно-
стью, а также широтой и долготой [13].
Данные ряда экспериментальных исследований в России и за рубежом
показывают, что изменения уровня радиосигнала в зависимости от концен-
трации электронов в ионосфере носят как регулярный, так и нерегулярный
характер.
158
К регулярным изменениям уровня сигнала относят его суточный и сезонный
ход, зависимость от солнечной активности, длины и географического положения
радиолинии, а также от рабочей частоты.
К нерегулярным изменениям уровня сигнала, которые нужно учитывать при
прогнозировании дальности действия, относят его флюктуации относительно ме-
дианного за месяц значения для данного часа суток, изменения в период возму-
Л, км
Ночь
День
600 -
500 -
400 -
300 -
250 -
200 -
150 -£
Е
100
90 -
80 -D
70 -
s
w
g Za1216A
Е
Ультрафиолетовое^
излучение 1025 А
Ультрафиолетовое
излучение
300 ...910 А
Рентгеновское излучение 10 ... 100 А
Рентгеновское излучение < 10 А
60 -
50 1----------1---------1----------1---------1----------1
101 102 103 104 105 ЛГ,эл/м3
Рис. 4.78. Ориентировочное распределение электронной
концентрации (электронный профиль ионосферы) по высоте
дня и ночи
щенного состояния ионосферы, появление отражений (или рассеяния) от областей
полярных сияний и спорадического слоя Е, а также быстрые замирания [5].
Вероятность появления аномальных выбросов сигналов, обусловленных
ионосферным рассеянием, определяется вероятностью возникновения ионо-
сферных возмущений, вероятностью отражения от слоя F2 и спорадического
слоя Е3 [4—6].
159
Наряду с флюктуациями часовых средних отношений сигнал/шум от дня к
дню наблюдаются флюктуации в пределах часа относительно своего среднего
значения. Статистический анализ показал, что среднеквадратическое отклонение
от часового среднего значения (на пяти семиминутных интервалах) не превыша-
ет 1 дБ [5].
В диапазоне метровых волн нерегулярные изменения сигнала происходят
также из-за отражения радиоволн от ионизированных следов метеоров. Поскольку
длительность существования ионизированных следов ограничена и обычно ко-
леблется в пределах 0,1... 100 с, то сигналы возникают на фоне равномерно флюк-
туирующего сигнала ионосферного рассеяния в виде сильных всплесков, число
которых определяется чувствительностью приемного устройства [5].
Метеорные отражения радиоволны связаны с тем, что метеорные частицы
при попадании в атмосферу сгорают, оставляя в ней следы с повышенной кон-
Рис. 4.79. Схема метеорного отражения радиоволн
центрацией ионов. Такие ионизированные следы образуют кратковременные
направленные экраны, способные отражать радиосигналы. Поскольку такие эк-
раны имеют острую диаграмму направленности, отраженный сигнал характери-
зуется высокой точностью прихода в определенную точку (рис. 4.79).
Статистика проведенных наблюдений показывает, что метеориты массой бо-
лее 0,001 г проникают в ионосферу с интенсивностью до 100 млн в сутки, а наи-
более пригодные для радиолокации и связи метеорные следы образуются на вы-
сотах 80... 120 км.
Особенности распространения коротких волн. Подобно длинным и сред-
ним, короткие волны (декаметровые) могут распространяться, как земные и как
ионосферные.
Вследствие значительного поглощения коротких волн в полупроводящей по-
верхности Земли земные волны распространяются на расстояния, не превышающие
нескольких десятков километров (для более коротких волн диапазона).
При распространении в качестве ионосферных, т. е. путем однократного или
многократного отражения от ионосферы, короткие волны можно использовать
для связи на сколь угодно больших расстояниях, поскольку при отражении от
160
ионосферы они поглощаются слабо в отличие от поглощения грунтом: тем сла-
бее, чем выше частота.
При нормальных условиях распространения коротких ионосферных волн
каждая из областей ионосферы выполняет вполне определенную функцию:
области D и Е являются поглощающими, а
слой F - отражающим (рис. 4.80), элек-
тронная концентрация области Е оказыва-
ется недостаточной для отражения корот-
ких волн. Поглощение их при отражении
от слоя F2 значительно меньше испыты-
ваемого короткими волнами при прохож-
дении сквозь области DuE (на пути туда и
обратно).
Для радиосвязи и радиолокации на ко-
ротких волнах должны одновременно вы-
Рис. 4.80. Траектория волны при нор-
мальных условиях распространения
радиоволн
подняться следующие условия:
1) применяемая частота меньше максимального значения, определенного для
заданных длины радиолинии и ионизации отражающего слоя;
2) напряженность поля в месте приема достаточна для уверенного приема
сигналов.
Первое из условий говорит о том, что на радиолинии в заданное время года и
суток могут применяться радиоволны, частота которых не превышает некоторо-
го максимального (критического) значения, что ограничивает диапазон исполь-
зуемых частот сверху.
Второе из условий ограничивает диапазон применяемых частот снизу, так
как чем меньше используемая частота, тем больше поглощение в пути.
Применяемые для радиосвязи и радиолокации на больших расстояниях ко-
роткие волны удобно в свою очередь разбить на три поддиапазона [5]:
а) дневные волны (от 10 до 25 м);
б) ночные волны (от 35 до 100 м);
в) промежуточные волны (от 25 до 35 м), используемые в период полуосве-
щенности.
Применение дневных волн возможно вследствие того, что днем электронная
концентрация в слое F2 достигает больших значений, и от этого слоя могут от-
ражаться радиоволны высоких частот. В то же время волны такой высокой час-
тоты испытывают незначительное поглощение в сильно ионизированных в
дневные часы областях D и Е.
Применение ночных волн возможно благодаря тому, что с наступлением
темноты электронная концентрация в слое F2 уменьшается и для соблюдения
первого условия частота используемых волн должна быть понижена. С наступ-
лением темноты уменьшается и электронная концентрация области Е, а область
D вообще исчезает, поэтому поглощение радиоволн даже относительно низких
частот не будет чрезмерно большим.
Рис. 4.81 и 4.82 характеризуют условия распространения коротких волн
при несоблюдении одного из условий [6].
Случай применения дневных волн в ночные часы, когда нарушается первое
условие, показан на рис. 4.82. Если с наступлением темноты продолжать работу
161
Рис. 4.81. Траектория радиоволны в тех
случаях, когда рабочая частота превыша-
ет максимально применимую
Рис. 4.82. Траектория волны при по-
вышенном поглощении в слоях D и Е
на дневной волне, то вследствие постепенного уменьшения электронной кон-
центрации области F наступит момент, когда рабочая частота делается больше
критической и радиоволна перестанет отражаться от слоя, лишь частично ис-
кривляясь, будет пронизывать слой F2 насквозь.
Схема распространения коротких волн при использовании ночных волн
днем, когда нарушается второе условие, показана на рис. 4.82. Поскольку часто-
та ночных волн заведомо меньше критического значения, то днем они будут от-
ражаться от слоя F2.
Однако, проходя сквозь сильно ионизированные в дневные часы области D и
Е, ночные волны будут испытывать очень большое поглощение, так как коэф-
фициент поглощения резко возрастает по мере уменьшения частоты. Поглоще-
ние ночных волн в светлое время обычно столь значительно, что создающаяся в
месте приема напряженность поля оказывается, как правило, недостаточной для
уверенного приема.
На трассах протяженностью 2000...3000 км в дневные часы основным отра-
жающим слоем часто является область Е. В этих условиях так называемое неот-
клоняющее поглощение происходит в слое D, а отклоняющее - при повороте
волны, в области Е.
Нормальные условия распространения коротких радиоволн могут быть на-
рушены при возникновении спорадического сильно ионизированного слоя Fv,
который может возникнуть в любое время и обладает в ряде случаев весьма зна-
чительной электронной концентрацией. Поскольку спорадический слой распо-
ложен на уровне нормального слоя Е, т. е. ниже слоя F, он становится отражаю-
щим и слой F2 перестает распространять короткие волны.
Короткие радиоволны, отражаясь от слоя F2, структура которого непостоян-
на, не обладают стабильностью условий распространения, которая присуща
средним, длинным и сверхдлинным волнам.
Непостоянство слоя F2 двояким образом влияет на процессы распростране-
ния коротких волн:
во-первых, наблюдаются глубокие замирания, гораздо более сильные, чем на
средних волнах. Эти замирания вызывают искажения передаваемых сигналов,
которые сильно затрудняют их прием;
во-вторых, изменчивость ионосферы, а также подверженность слоя F2 влия-
нию ионосферных возмущений приводят к тому, что уровень сигналов также
подвергается значительным колебаниям.
162
Процессы распространения коротких волн характеризуются также наличием
зон молчания.
Зоной молчания называют образующуюся вокруг работающего коротковол-
нового передатчика кольцевую область, в которой отсутствует прием сигналов.
Такая зона не возникает в диапазоне средних волн, так как там в ночные часы
зоны действия земных и ионосферных волн перекрывают одна другую, что при-
водит к замираниям.
В диапазоне коротких волн такого перекрытия не происходит. С одной сто-
роны, короткие волны как земные поглощаются в почве значительно сильнее
средних, с другой стороны, лучи, угол возвышения которых превышает крити-
ческий угол возвышения (3, пронизывают
ионосферу и от нее не отражаются, а луч, 4 4
составляющий угол р, попадает и точку С J J
(рис. 4.83). Более пологие лучи попадают 0^1
соответственно в более удаленные точки на V**
поверхности Земли. Если обозначить через В \ / / / \ \
точку, в которой напряженность поля зем- / / /Ч/р \ \
ных волн принимает пороговое значение, / / \ \
при котором еще возможен прием сигналов, Л А
то область ВС будет изображать (в разрезе) \
протяженность зоны молчания.
Внутренний радиус зоны молчания опре-
деляется условиями распространения земных Рис. 4.83. Образование зон молчания
волн. При заданной мощности передатчика
он, естественно, не зависит от времени суток, а только от частоты: чем выше
частота, тем меньше внутренний радиус зоны молчания.
Внешний радиус определяется условиями распространения ионосферных волн:
он зависит и от времени суток, и от частоты. При заданной частоте и уменьшении
электронной концентрации из-за наступления темноты для сохранения неизменных
значений /тах, угол Р должен быть уменьшен. Следовательно, при наступлении
темноты от ионосферы отражаются только более пологие лучи с меньшим значени-
ем угла возвышения, которые попадают в более удаленные пункты. С наступлением
темноты внешний радиус зоны молчания возрастает.
Таким образом, по мере увеличения частоты размеры зоны молчания в целом
возрастают за счет увеличения внешнего радиуса зоны. При уменьшении часто-
ты и переходе к диапазону средних волн внешний и внутренний радиусы снача-
ла принимают одинаковые значения, после чего внутренний радиус делается
больше внешнего и зона молчания исчезает.
На распространение коротких волн существенное влияние оказывает солнечная
активность. Удобно наблюдаемым признаком изменения солнечной активности
является измерение относительного (среднегодового) числа солнечных пятен.
Измерение магнитных полей солнечных пятен показывает, что они изменяют
свою полярность каждый 11-летний цикл, поэтому астрономы считают более
правильным говорить о 22-летнем периоде солнечной активности.
С увеличением солнечной активности возрастает электронная концентра-
ция во всех ионизированных областях атмосферы. В наибольшей степени это
163
проявляется во внешней части атмосферы, т. е. в области F2, в наименьшей - в
области Е.
При усилении солнечной активности поддиапазоны ночных, промежуточных
и дневных волн сдвигаются в сторону более высоких частот. Кроме того, в пе-
риоды высокой солнечной активности условия распространения коротких волн в
целом улучшаются, что можно объяснить общим увеличением ионизации верх-
них слоев атмосферы.
Среди многообразных видов геомагнитных возмущений на условия распро-
странения коротких волн влияют четыре: общие ионосферные возмущения, свя-
занные со всемирными магнитными бурями, поглощения в зоне полярных сия-
ний, в полярной шапке и внезапные.
Общие ионосферные возмущения создаются происходящими время от вре-
мени на Солнце извержениями потока заряженных частиц, которые, вторгаясь в
атмосферу Земли, вызывают нагревание верхних слоев и нарушают нормальную
структуру ионизированной области атмосферы, в основном самой верхней ее
части - области F2. Приближаясь к Земле и вступая во взаимодействие с ее маг-
нитным полем, корпускулярные потоки отклоняются от прямолинейных перво-
начальных траекторий, закручиваются и попадают, главным образом, в поляр-
ные районы. Этим определяется географическое распределение ионосферных
возмущений, которые в наибольшей степени проявляются в кольцевой зоне во-
круг магнитных полюсов. Интенсивность ионосферных возмущений заметно
снижается по мере уменьшения геомагнитной широты.
Потоки вторгающихся в атмосферу Земли частиц помимо ионосферных воз-
мущений вызывают магнитные бури и полярные сияния. Длительность магнит-
ных бурь и связанных с ними ионосферных возмущений колеблется от несколь-
ких часов до двух суток.
Во время ионосферных возмущений электронная концентрация в области F2
резко уменьшается, а действующие высоты (под действием нагревания) возрас-
тают, что приводит к уменьшению максимальных частот. Нарушается правиль-
ная структура области F2 - она приобретает многослойную конфигурацию. При
наиболее сильных возмущениях ионизация F2 уменьшается столь значительно,
что эта область теряет способность отражать короткие волны.
Описанные изменения и структуре области F2 приводят к резкому наруше-
нию условий прохождения коротких волн. Во время ионосферных возмущений
возрастает поглощение коротких волн, уменьшаются значения максимальных
частот, которые до начала возмущения использовались на данной трассе, и, на-
конец, при самых сильных бурях в высоких широтах полностью прекращается
прохождение коротких волн.
Принципы работы загоризонтных (ЗГ) РЛС. В основе принципа действия
ЗГ РЛС лежит способность радиоволн декаметрового диапазона распростра-
няться за линию видимого горизонта посредством поверхностной (земной) или
пространственной (за счет ионосферной рефракции) волны.
Существует два типа ЗГ РЛС - с обратным и прямым рассеянием радиовол-
ны. Первая разновидность, использующая метод возвратно-наклонного зонди-
рования, является импульсно-доплеровской однопозиционной РЛС. Вторая -
двухпозиционная (с разнесенными передатчиком и приемником) РЛС с непре-
рывным излучением.
164
ЗГ РЛС с обратным рассеянием при использовании поверхностной волной
имеет относительно небольшую дальность действия - 200...300 км, что в 4—5 раз
Рис. 4.84. Зоны обнаружения воздушных целей (в вертикаль-
ной плоскости) существующей обычной и перспективной заго-
ризонтной РЛС:
1 - зона действия существующей РЛС, работающей в УКВ-диапазоне;
2 - зона действия ЗГ РЛС над линией прямой видимости; 3 - линии
прямой видимости; 4 - область ненадежного обнаружения существую-
щими РЛС; 5 - зона действия ЗГ РЛС ниже прямой видимости
превышает дальность действия обычных РЛС по низколетящим целям. Даль-
ность действия ЗГ РЛС с пространственной волной (по самолетам и крылатым
ракетам) лежит в пределах от 800 до 3300...4000 км (при односкачковом распро-
странении) и более 4000 км при многоскачковом поочередном отражении от ио-
носферы и Земли. Поскольку дальность обнаружения воздушных целей ЗГ РЛС
в обоих случаях не зависит от высоты их полета, для низколетящих целей она во
много раз больше, чем обычными РЛС (рис. 4.84) [7].
ЗГ РЛС с возвратно-наклонным зондированием обеспечивает наблюдение за
воздушным и космическим пространством, прилегающим к огромным площа-
дям, в несколько десятков раз превышающих площади, которые соответствуют
зонам обзора обычных РЛС. Считается, что преимущество ЗГ РЛС состоит в
том, что они способны обнаружить цели над районами, практически недоступ-
ными для обычных (например, над океанами).
Другими достоинствами ЗГ РЛС считают практически полную неуязвимость
от противорадиолокационных ракет и трудность создания (в рабочем диапазоне
частот РЛС) покрытий самолетов, поглощающих радиолокационные сигналы и
снижающих вероятность их обнаружения. Первое объясняется невозможностью
разработки на современном этапе развития науки и техники головок самонаве-
дения УР, предназначенных для поражения ЗГ РЛС, поскольку сигнал распро-
страняется за счет отражения от ионосферы, что исключает возможность непо-
средственного определения направления на передатчик станции. Второе под-
тверждается тем, что поглощающие покрытия в KB-диапазоне имеют большие
толщину и массу, препятствующие их использованию на летательных аппара-
165
тах. Что касается радиоэлектронного подавления ЗГ РЛС, то, по расчетам спе-
циалистов НАТО, перед противником встанет проблема создания принципиаль-
но новых, громоздких и весьма дорогостоящих, средств.
ЗГ РЛС с обратным рассеянием работает следующим образом (рис. 4.85).
Зондирующие сигналы передатчика, излученные под углом £ к горизонту, рас-
пространяются прямолинейно до одного из слоев ионосферы. Отразившись от
ионосферы в точке А, волна распространяется по направлению к земной поверх-
Ионосфсра
Рис.4.85. Распространение радиоволн для РЛС с обратным
рассеянием
ности, где происходит вторичное отражение в сторону ионосферы и т. д. Рас-
стояние DCK по земной поверхности от точки излучения до точки возвращения
к Земле после однократного отражения от ионосферы называют дальностью
скачка.
В зависимости от угла £ и высоты отражающего слоя дальность скачка изме-
няется от 1500 до 3500 км. Если распространяющаяся волна встретит на своем
пути цель, то возникнет отраженная волна, распространяющаяся тем же путем,
но в обратном направлении.
Обработка отраженного сигнала позволяет оценить расстояние Du по лома-
ной линии ОАЦ и азимут цели. Зная угол £ и высоту Ни отражающего ионизи-
рованного слоя, можно по расстоянию /)ц рассчитать дальность D3 до цели по
проекции траектории луча на земную поверхность.
Для измерения дальности используется импульсный режим работы передат-
чиков РЛС. Частота следования зондирующих импульсов, зависящая от условий
однозначного определения дальности, не должна превышать нескольких десят-
ков герц.
Для измерения азимута цели применяют антенны направленного действия
(фазированные антенные решетки).
В ЗГ РЛС прямого рассеяния передатчик и приемник разнесены по Земле на
большое расстояние (рис. 4.86). В состав ЗГ РЛС входят передающий, приемные
и пункт управления.
Передающий пункт состоит из антенны, передающей аппаратуры, устройст-
ва формирования диаграммы направленности луча и ЭВМ управления работой.
В качестве передающей антенной системы используют фазированную антенную
решетку (ФАР).
166
Рис. 4.86. Распространение радио-
волн для РЛС прямого рассеяния
Формирование зондирующего сигнала начинается в задающем генераторе,
откуда он поступает в маломощное устройство формирования передающего лу-
ча. Сканирование луча по направлению -
электронное, а по дальности - за счет изме-
нения частоты зондирующего сигнала. Все
необходимые для работы передающего уст-
ройства команды вырабатываются ЭВМ.
Приемный пункт состоит из антенны,
устройства формирования луча, приемной
аппаратуры и процессора обработки сигнала.
В качестве приемной антенны также исполь-
зуется ФАР с электронным сканированием
луча. Прием отраженных от цели сигналов
ведется одновременно по большому набору элементов (каналов). Приемник по-
строен по многоканальной схеме. Принятые антенной сигналы поступают на
входные малошумящие усилители, повышающие общую чувствительность ап-
паратуры. На выходе канальных усилителей устанавливают преселекторы, пере-
крывающие частотный диапазон работы РЛС. В последующих схемах приемни-
ка производится усиление, фильтрация, преобразование по частоте с последую-
щим усилением по промежуточной частоте, преобразование выходного сигнала
в цифровую форму и обработка его в процессоре.
Используемая в приемном устройстве доплеровская обработка сигналов по-
зволяет РЛС сопровождать низколетящие цели, уровень сигналов от которых
значительно ниже уровня шумов от подстилающей поверхности.
Пункт управления обслуживает команда операторов. Взаимодействие ме-
жду операторами, каждый из которых имеет консоль со встроенными устрой-
ствами отображения, осуществляется под руководством старшего оператора с
использованием быстродействующей ЭВМ. Каждая операция (анализ усло-
вий распространения радиоволн, обнаружения и сопровождения целей и т. д.)
выполняется специально выделенным для этого оператором. Например, опе-
ратор анализа условий распространения радиоволн устанавливает на набор-
ном поле своей консоли диапазон необходимых для излучения частот и
выдает эти данные другим. Диапазон выбирается исходя из дальности про-
сматриваемой зоны и состояния ионосферы, причем анализ проводится в ре-
альном масштабе времени специальными станциями ионосферного зондиро-
вания, информация от которых поступает в процессор пункта управления.
Для получения частотно-высотных характеристик ионосферы эти станции
излучают сигналы мощностью до 5 кВт в диапазоне 2...30 МГц с периодом
повторения 100 кГц. Их работа синхронизирована с помощью станции ра-
дионавигационной системы ЛОРАН-С.
Оператор оценки характеристик осуществляет сравнение амплитуд сигна-
лов, отраженных от целей, с уровнем шумов и таким образом судит о воз-
можности захвата на сопровождение конкретных целей и получения их ха-
рактеристик. Данные, поступающие в процессе сопровождения целей, выда-
ются на устройство отображения, где высвечиваются географическая сетка и
контуры материков. Отметки от целей отображаются в виде коротких верти-
кальных линий.
167
Для опознавания целей оператор корреляции и идентификации обеспечива-
ется информацией о маршрутах полетов самолетов, проходящих через рабочий
сектор РЛС, выдаваемой системой управления воздушным движением. Эти дан-
ные ежедневно вводятся в память ЭВМ. Помимо стационарных ЗГ РЛС большое
внимание уделяется созданию тактических транспортабельных (самолетных или
корабельных) вариантов ЗГ РЛС, предназначенных для ВМС и интервенциони-
стских сил быстрого развертывания. Сообщается, что фирма «Рейтеон» с 1984 г.
ведет разработку такой станции. По мнению американских экспертов, такая ЗГ
РЛС может быть доставлена в любой район земного шара, в котором отсутству-
ют средства дальнего обнаружения. РЛС будет иметь меньшие, чем стационар-
ная, габаритные характеристики и дальность действия (ориентировочно в преде-
лах 900...3000 км).
В настоящее время ведутся также работы по экспериментальному исследо-
ванию и проектированию ЗГ РЛС, использующих для обнаружения воздушных
целей поверхностную волну. Это вызвано принципиальной возможностью
применения их для обнаружения низколетящих самолетов, КР и баллистиче-
ских ракет подводных лодок. Считается, что при обнаружении целей ЗГ РЛС,
работа которых основана на явлении дифракции, имеются лучшие условия,
поскольку в данном случае отсутствуют ионосферные эффекты. Большая
дальность обнаружения обеспечивается в длинноволновой части декаметрово-
го диапазона и при распространении сигнала над поверхностью моря. Однако
западные специалисты полагают, что для этих РЛС потребуются довольно
большие антенные решетки, а их надежная работа будет обеспечиваться лишь
при излучении высоких мощностей. Дальность действия таких РЛС может
достигать 250...300 км. Английские военные специалисты считают, что в пер-
спективе ЗГ РЛС с поверхностной волной могут быть размещены на берегу
моря или на надводных кораблях.
Согласно сообщениям иностранной печати, английская фирма «Маркони»
разрабатывает ЗГ РЛС, использующую явление дифракции, а также недавно
открытое явление горизонтального распространения радиоволн в тонком слое
воздуха непосредственно над морской поверхностью. Такой характер распро-
странения предположительно связывают с электрическими свойствами мор-
ской воды, обусловленными наличием в ней диссоциирующих солей. При этом
для радиолокации может быть применима рабочая частота вплоть до 90 МГц.
Полагают, что самолеты и крылатые ракеты с помощью такой ЗГ РЛС будут
обнаруживаться на дальности 320 км.
Еще одно направление работ связано с использованием ЗГ РЛС с поверхно-
стной волной для частичного устранения так называемой зоны молчания, возни-
кающей при работе ЗГ РЛС с возвратно-наклонным зондированием.
4.2.4. Станции, использующие радиолокационные принципы
разнесенного приема
РЛС, основанные на принципе разнесенного приема, могут быть бистатиче-
скими и многопозиционными. В первом случае используют один передатчик и
один приемник, которые размещают на разных позициях. В многопозиционных
РЛС используется несколько передающих и приемных устройств, разнесенных в
168
пространстве и связанных между собой широкополосными линиями. Важным
условием нормального функционирования таких РЛС является синхронизация
работы всех устройств системы.
Одним из перспективных вариантов многопозиционных РЛС считается сис-
тема с переменной базой (под ней понимается расстояние между приемником и
передатчиком) [8].
Опыт эксплуатации радиолокационных систем с расположением их элемен-
тов на подвижных носителях был положен в основу при разработке качественно
новых многопозиционных РЛС, потребность в которых, судя по сообщениям
западной печати, вызвана бурным развитием средств радиоэлектронной борьбы,
а также широким применением противорадиолокационных управляемых ракет.
Такой вариант РЛС, по мнению зарубежных экспертов, в современных условиях
станет практически единственным способом создания в высокой степени устой-
чивого надгоризонтного радиолокационного поля, формируемого в целях обес-
печения командования информацией о воздушно-космической обстановке в ре-
альном масштабе времени [8].
Это объясняется принципами построения многопозиционных РЛС, в кото-
рых высокая живучесть передающих устройств достигается за счет размещения
вне зон досягаемости активных средств поражения, а сложность обнаружения
позиций приемных устройств - благодаря пассивному режиму работы. Кроме
того, подобные станции открывают путь к более широкому внедрению адаптив-
ных методов работы в условиях активного радиопротиводействия путем опти-
мального размещения их различных элементов и применения самых современ-
ных технологических и конструктивно-схемных решений для формирования и
обработки сложных радиолокационных сигналов.
Считается, что для определения местоположения движущихся целей в мно-
гопозиционных РЛС могут использоваться не только методы, основанные на
измерениях угловых координат, дальности и скорости, реализуемые и в других
типах РЛС, но и специфические, основанные лишь на измерении дальности,
суммы или разности дальностей либо доплеровских сдвигов частоты посредст-
вом корреляционной обработки соответствующих данных. В этом случае значи-
тельно повышается вероятность правильного обнаружения целей в условиях ис-
кусственно созданных и естественных помех, увеличивается точность их сопро-
вождения, а также приобретается дополнительная информация, необходимая для
распознавания и селекции целей. Зона действия многопозиционных РЛС опре-
деляется взаимным расположением приемных и передающих устройств.
Особые преимущества многопозиционные РЛС имеют в ситуациях, когда
цели располагаются на одной линии между передающим и приемным устройст-
вами, угол, образованный двумя прямыми относительно обнаруживаемой цели и
этими устройствами, оказывается равным или близким к 180°. Тогда значитель-
но возрастает отношение сигнал/шум на входе приемных устройств, что в итоге
приводит к повышению точности радиолокационных измерений.
Ряд преимуществ многопозиционных РЛС связан с тем, что в результате
разнесения в пространстве передающего и приемного устройств в них возможно
комбинированное применение как непрерывных, так и импульсных сигналов,
скважность которых может меняться в значительных пределах за счет варьиро-
вания их длительности и частоты повторения, а также исходя из обстановки и
требуемых значений разрешающей способности и точности.
169
Зарубежные специалисты отмечают, что основная сложность создания и
оперативного использования многопозиционных РЛС состоит в необходимости
обработки значительного числа радиолокационных измерений для устранения
неоднозначности, что требует обеспечения высокой степени синхронизации ра-
боты разнесенных элементов станций, наличия широкополосных линий связи и
быстродействующих электронно-вычислительных машин (ЭВМ) с большими
объемами постоянной и оперативной памяти.
Развитие техники связи и устройств передачи данных, создание фазирован-
ных антенных решеток (ФАР), обладающих возможностью формировать зна-
чительное количество лучей по нескольким направлениям одновременно, а
также реализация цифровых способов обработки радиолокационной информа-
ции с учетом новых методов математического обеспечения на базе современ-
ных ЭВМ создают реальные предпосылки для создания многопозиционных
РЛС и принятия их на вооружение. Судя по сообщениям западной печати, в
настоящее время усилия специалистов направлены главным образом на выра-
ботку оптимальной структуры подобных РЛС, включая определение варианта
базирования приемных и передающих устройств, выбор алгоритмов обзора
пространства для обнаружения и измерения параметров движения большого
количества целей, практическое освоение методов триангуляции, интерферо-
метрии и корреляции данных.
4.2.5. Пассивная многопозиционная радиолокация
На протяжении двух последних десятилетий американские разработчики
средств разведки воздушных целей и их западно-европейские коллеги занима-
ются интенсивными исследованиями по созданию технических систем, которые
позволяли бы эффективно обнаруживать и сопровождать воздушные цели, оста-
ваясь в то же время практически невидимыми для противника.
При рассмотрении различных вариантов достижения поставленной цели
американские и французские ученые в конце 1990-х годов признали оптималь-
ным вариантом использование достаточно известного метода пассивного много-
позиционного режима радиолокации.
Как известно, в режиме активной локации РЛС облучает цели, а затем по от-
раженным сигналам получает о них необходимую информацию. Главным не-
достатком при этом является то, что РЛС может достаточно легко обнаружи-
ваться техническими средствами разведки противника, а затем выводится из
строя как противорадиолокационными ракетами, так и другими средствами ог-
невого поражения.
В многопозиционном режиме РЛС работает не на излучение, а только на
прием (используется как пассивная), извлекая информацию о цели из отра-
женных сигналов, когда та облучается другой станцией, находящейся в иной
зоне пространства. Однако хотя при этом способе и обеспечивается более
высокая живучесть РЛС, для выполнения поставленных перед ней задач тре-
буется использование еще ряда станций, которые также могут быть выведены
из строя [9].
При применении нового нетрадиционного метода пассивной многопозици-
онной радиолокации информацию о воздушных целях предполагается получать
с помощью специализированной приемной станции из отраженных от воздуш-
170
ных целей сигналов широковещательных телевизионных или УКВ-радио-
передатчиков, функционирующих в районе полетов. Таким образом, полностью
отпадает необходимость в активных РЛС. Излучения радио- и телевизионных
средств, работающих практически круглосуточно, обеспечат перекрытие около-
земного пространства на значительных удалениях. Приемная станция будет об-
наруживать, распознавать и сопровождать такие потенциальные цели, как, на-
пример, самолеты, вертолеты, крылатые ракеты путем выделения и обработки
отраженных от них сигналов.
Достоинства нового способа обнаружения воздушных целей для районов с
высокоразвитой инфраструктурой теле- и радиовещания очевидны. Во-первых,
широко разветвленная сеть телевизионных передатчиков и ретрансляторов, в
отличие от находящихся на вооружении РЛС, делает практически бессмыслен-
ным использование против них противорадиолокационных ракет и других
средств поражения. Во-вторых, поскольку приемные станции не работают на
излучение и являются мобильными, их обнаружение и уничтожение представля-
ет собой трудно выполнимую задачу.
Причины использования именно телевизионных и УКВ-радиопередатчиков
обусловлены следующими факторами. Как известно, значительная часть со-
временных РЛС работает в диапазоне метровых волн. Особенность этого диа-
пазона, с точки зрения специалистов в области радиолокации, состоит в том,
что он является оптимальным в плане получения информации о точечных це-
лях (их наличии, классе, координатах, скоростях движения и т. д.). Точечными
называют цели, размеры которых незначительно увеличивают длительность
отраженного от них сигнала по сравнению с облучающим (зондирующим).
К их числу относят самолеты, танки, корабли малого водоизмещения и авто-
мобили. Как известно, сигналы телевизионных станций в большинстве стран
мира передаются также в метровом диапазоне радиоволн. При этом для спе-
циалистов в области обработки радиолокационной информации телевизионные
видеосигналы представляются более информативными как с точки зрения оп-
ределения относительной скорости движения их источника, так и измерения
расстояния до него. Примерно то же самое можно сказать и о сигналах широ-
ковещательных УКВ-радиостанций, работающих в режиме фазовой модуляции
(ФМ). Таким образом, по мнению американских и французских ученых, метод
пассивной многопозиционной радиолокации может успешно использоваться
для обнаружения воздушных целей и слежения за ними.
Претворение в жизнь данного способа обнаружения воздушных целей по-
требовало решения ряда технических проблем. Одной из основных, которую,
по мнению западных ученых, необходимо решить разработчикам, является вы-
деление отраженных от цели сигналов на фоне прямых сигналов теле- и ра-
диопередатчиков (ослабление уровня сигнала составляет 104-107 раз). Кроме
того, для определения угловых координат целей требуется аппаратура высоко-
скоростного измерения и обработки амплитудных и фазовых характеристик
сигналов, принятых от нескольких антенн, обеспечивающих работу станции. В
результате указанные факторы и обусловили то, что до появления процессоров
со сверхвысоким быстродействием теоретические исследования в области пас-
сивной многопозиционной радиолокации не находили практического вопло-
щения.
171
Со второй половины 1990-х годов в США и Франции благодаря успехам в
создании нового поколения микропроцессорной техники с высоким быстродей-
ствием исследования в данной области перешли в плоскость НИОКР.
В США фирма «Локхид-Мартин» изготовила экспериментальный образец
приемной станции для новой системы, получивший наименование «Сайлент
Сентри». Первые испытания станции по обнаружению и сопровождению само-
летов с эффективной площадью рассеяния около 10 м2 на дальностях до 180 км
проводились в воздушном пространстве аэродрома Даллеса (Вашингтон) в
конце 1998 г. Источником излучения была радиовещательная станция УКВ-
диапазона, расположенная на удалении около 50 км от приемной. По результа-
там испытаний американские специалисты в настоящее время проводят дора-
ботку станции, чтобы она могла решать задачи идентификации воздушных
целей, а дальность их обнаружения и сопровождения увеличилась до 220 км.
Предполагается, что в случае обеспечения обработки сигналов от нескольких
облучающих широковещательных передатчиков (не менее трех) можно будет
обнаруживать и сопровождать до 200 воздушных целей одновременно. В на-
стоящее время прорабатывается концепция установки приемной станции сис-
темы «Сайлент Сентри» на самолеты и беспилотные летательные аппараты. По
предварительной оценке разработчиков, стоимость оперативного образца мо-
жет составить около 5 млн долл.
Во Франции работы по созданию системы разведки воздушных целей прово-
дятся в рамках программы «Дарк» головным разработчиком - фирмой Томсон-
CSF. Недавно завершены испытания экспериментального образца приемной стан-
ции «Дарк» в стационарном варианте. Станция, которая размещалась в Палезо
(пригород Парижа), выполняла задачу обнаружения самолетов, совершавших по-
леты с парижского аэропорта Орли. Радиолокационная информация о целях
извлекалась из переотраженных сигналов телевизионного передатчика, разме-
щенного на Эйфелевой башне (расстояние от приемной станции свыше 20 км), а
также телевизионных станций в городах Бурже и Осер, более чем в 180 км от Па-
рижа. Данные о точности измерения координат и скорости движения воздушных
целей не стали достоянием гласности, однако по заявлению руководителей проек-
та, они сопоставимы с аналогичными показателями классических РЛС обзора воз-
душного пространства.
Согласно планам руководства компании в ближайшее время работы по соз-
данию новой системы будут направлены на повышение технических характери-
стик приемных трактов и выбор наиболее эффективной операционной системы
вычислительного комплекса станции. Одним из наиболее убедительных аргу-
ментов в пользу этой системы, по мнению разработчиков, является невысокая
стоимость, так как в ходе ее создания применяются достаточно отработанные
технологии в области радио- и телевещания. В частности, при проведении экс-
перимента в приемной станции использовались директорные антенны «Уда-
Яги» типа «волноводный канал» стоимостью не более 400 франков. После до-
водки прототипа приемной станции «Дарк» в 2001-2003 гг. планировалось про-
вести ее комплексные испытания.
Появление новых средств радиолокации может привести к революционным
преобразованиям в области обнаружения и слежения за летательными аппарата-
ми и стать одними из наиболее эффективных средств разведки.
172
4.3. Радиотепловая разведка
Радиотепловая разведка основана на обнаружении и определении местопо-
ложения наземных, морских, воздушных и космических объектов по их тепло-
вому излучению в радиодиапазоне. Характеристики радиотеплового излучения
(интенсивность, спектральный состав, спектральная плотность) зависят от физи-
ческих свойств вещества и температуры излучающего объекта.
Реальный радиотепловой сигнал, излучаемый объектом, представляет собой
непрерывный шум с очень широким сплошным спектром (от метрового до мил-
лиметрового диапазона волн) и низкой спектральной плотностью. Интенсивность
радиотеплового излучения объектов составляет в милли- и субмиллиметровых
диапазонах сотые и десятые доли процента, а в санти- и дециметровом диапазонах -
сотые и тысячные доли процента от общей интенсивности теплового излучения.
Поэтому для увеличения мощности принимаемого сигнала применяют приемные
устройства с очень широкой полосой пропускания по высокой частоте - сотни и
тысячи мегагерц. Благодаря этому мощность излучения, принимаемого
радиотеплолокационной станцией (РТЛС), может достигать 1(Г10 Вт.
Существенными преимуществами радиотепловой разведки являются абсо-
лютная скрытность ведения и независимость от метеоусловий. Скрытность обу-
словлена пассивным режимом работы средств разведки, что затрудняет против-
нику разведку параметров РТЛС и организацию ее радиоэлектронного подавле-
ния. Всепогодность радиотепловой разведки обеспечивается за счет работы в
диапазонах сантиметровых и миллиметровых волн. Зависимость условий рас-
пространения от состояния среды в этих диапазонах не столь значительна по
сравнению с ИК-диапазоном.
4.3.L Физическая сущность теплового излучения и его законы
Как известно, любое вещество (твердое, жидкое или газообразное) помимо
электрически нейтральных частиц содержит в своем составе большое количест-
во заряженных - электронов и положительных ионов. Эти частицы находятся в
непрерывном хаотическом движении, причем их средняя скорость тем больше,
чем выше температура вещества. В процессе движения заряженные частицы не-
прерывно сталкиваются друг с другом и с нейтральными частицами; при столк-
новениях часть их кинетической энергии переходит в энергию электромагнитно-
го излучения, скорость же несколько уменьшается.
Таким образом, кинетическая энергия частиц, пропорциональная степени на-
грева тела, частично превращается в энергию электромагнитного поля. В созда-
нии теплового излучения принимает участие очень большое число хаотически
сталкивающихся частиц, в одни моменты времени происходит большее количе-
ство столкновений, в другие - меньшее. Кинетическая энергия, преобразующая-
ся в излучение, неодинакова в разные моменты времени.
Интенсивность теплового излучения непрерывно меняется, причем значение
и скорость этих изменений точно предсказать невозможно. То же можно сказать
и о спектральном составе излучения: так как частота излучения, возникающего
при торможении заряженных частиц, зависит от их кинетической энергии, кото-
рая для различных частиц неодинакова, то интенсивность излучения на опреде-
173
ленной частоте (спектральная плотность излучения) также будет непрерывно и
хаотически колебаться.
Из всего этого видно, что тепловое излучение отличается от искусственно
генерируемых тем, что, во-первых, оно занимает очень широкий диапазон волн,
а во-вторых, его мощность и спектральная плотность не остаются постоянными
и непрерывно флюктуируют. Тем не менее несмотря на хаотичность поведения
отдельных частиц средние характеристики очень большого количества частиц
могут быть рассчитаны с высокой точностью. Такими методами и были опреде-
лены законы теплового излучения.
Одним из наиболее важных законов теплового излучения является закон,
выражающий зависимость спектральной плотности излучения от его частоты и
температуры излучателя. Этот закон описывается формулой Планка:
р 2nf3h
Ло =---------
2
" hf
с^\_ект -1_
(4.75)
где h = 6,62 • 10 ”34 - постоянная Планка, Дж • с; с = 3 • 105 - скорость распро-
странения электромагнитных волн, км • с; К = 1,38 ”23 - постоянная Больцмана,
Дж • град; Т- абсолютная температура излучателя, К;/- частота, Гц; Rq - спек-
тральная плотность излучения, равная мощности, излученной на частоте f в по-
лосе 1 Гц с 1 м2, Вт/(Гц • м2).
С повышением температуры спектральная плотность излучения на всех час-
тотах возрастает, а значит, растет и общая мощность излучения. Суммируя спек-
тральные плотности излучения по всем частотам, получим формулу для инте-
гральной плотности мощности теплового излучения во всем диапазоне электро-
магнитных волн:
Р = <зТ4,
где о = 5,71 • 10”8 - постоянная Стефана - Больцмана, Вт/(м2 • град4).
Суммарная мощность теплового излучения может быть очень большой, од-
нако на радио диапазон приходится лишь очень малая ее часть. Так, при комнат-
ной температуре идеальный излучатель площадью 1 м2 излучает мощность, рав-
ную 478 Вт; максимум спектральной плотности приходится на волну 9,6 мик-
рон. На волнах длиннее одного миллиметра, в этом случае излучается мощность
всего 8 мВт, т. е. немногим более тысячной доли процента общей мощности.
Часть мощности, которая может быть воспринята приемником, еще меньше, так
как современные приемники не могут одновременно принимать сигналы во всем
радиотехническом диапазоне. В приведенном примере часть мощности, которую
может воспринять приемник, лежит в пределах 20 мкВт...З МВт. С увеличением
температуры излучателя доля мощности, приходящаяся на радиодиапазон,
уменьшается, так как спектральная плотность в области ИК и световых волн
растет гораздо быстрее, чем спектральная плотность мощности в радиотехниче-
ском диапазоне. Однако несмотря на относительно малую мощность теплового
радиоизлучения и благодаря высокой чувствительности современных радиопри-
емников, малому затуханию радиоволн в атмосфере тепловое радиоизлучение
174
удается принимать на расстояниях выше, чем более мощные ИК и световые из-
лучения.
Необходимо отметить, что формула (4.75) справедлива лишь для идеального
излучателя, так называемого абсолютно черного тела (АЧТ), для всех реальных
излучателей спектральная плотность излучения ниже, чем у АЧТ, нагретого до
той же температуры.
Интегральная плотность излучения для реальных объектов (серых тел) в со-
ответствии с законом Стефана - Больцмана определяется выражением
В = ЕгоТ4,
где - безразмерный коэффициент излучения поверхности объекта или степень
ее черноты; о - постоянная Стефана - Больцмана; Т — температура объекта.
Коэффициент зависит от температуры, материала и состояния поверхно-
сти объекта. Окисленные и шероховатые поверхности металлов излучают в 3-
4 раза больше, чем гладкая поверхность.
Значения ет в зависимости от материалов и температур приведены в табл. 4.2
[11].
Таблица 4.2
Наименование материала Г, К
Алюминий полированный 500 - 850 0,04 - 0,06
Алюминий с шероховатой поверхностью 300 0,06 - 0,07
Вольфрам 500 0,05
Вольфрам 1800-2500 0,31
Железо полированное 700- 1300 0,15-0,38
Железо, покрытое красной ржавчиной 300 0,61-0,85
Кирпич красный 300 0,88 - 0,93
Вода (слой толщиной более 0,1мм) 273 - 373 0,96
Лед гладкий 273 0,97
Песок 300 0,60
Сажа, нанесенная на твердую поверхность 370-550 0,96
Снег 273 0,80
Стекло 300-373 0,94-0,91
Сукно черное 300 0,98
Поле ржи — 0,93
Рассмотрим особенности теплового излучения в диапазонах радиоволн (для
краткости будем называть его просто радиотепловым излучением). Прежде все-
го заметим, что для вычисления спектральной плотности излучения в сантимет-
ровом и миллиметровом диапазонах волн нет необходимости пользоваться гро-
моздкой формулой Планка.
Действительно, на частотах радиодиапазона показатель степени числа е
(см. (4.75)) становится очень малым: при/= 100 000 МГц (длина волны 3 мм)
и Т= 400° hf!КТ = 0,012.
Воспользовавшись известным приближенным равенством
175
£* = 1 + X,
справедливым при х « 1, легко привести формулу Планка к виду
2тс
Ъ=^кТ,
Л
(4.76)
где к - длина волны излучения.
Мы получили формулу Рэлея-Джинса, по которой можно довольно точно
оценивать спектральную плотность излучения в сантиметровом и миллиметро-
вом диапазонах волн для тел, имеющих температуру больше 100 К.
Из этой формулы видно, что мощность радиотеплового излучения прямо
пропорциональна температуре излучателя и обратно пропорциональна квадрату
длины волны.
Таким образом, для радиотеплолокации выгоднее использовать волны мил-
лиметрового и субмиллиметрового диапазонов, чем сантиметрового и децимет-
рового, на которых излучение значительно слабее.
Так как причиной радиотеплового излучения являются шумовые токи сверх-
высоких частот, то, следовательно, интенсивность излучения должна зависеть от
электрических характеристик вещества излучателя - проводимости и диэлек-
трической проницаемости. Проводимость вещества в значительной степени оп-
ределяет его поглощающие свойства, а чем сильнее тело поглощает энергию по-
стороннего излучения, тем лучшим тепловым излучателем оно является.
Так, например, очень малой проводимостью обладают высококачественные
диэлектрики, поэтому их радиотепловое излучение мало. Значительно большей
проводимостью (на сверхвысоких частотах) обладают противорадиолокацион-
ные покрытия, которые способны почти полностью поглощать падающее на них
СВЧ-излучение, поэтому интенсивность их радиотеплового излучения по срав-
нению со всеми другими материалами наиболее высока и приближается к ин-
тенсивности излучения АЧТ.
Однако интенсивность радиотеплового излучения зависит не только от по-
глощающих свойств вещества излучателя. Часть излучения, исходящего из тол-
щи излучателя, отражается от его поверхности и вновь преобразуется в тепло.
Это отражение тем сильнее, чем больше диэлектрическая проницаемость излу-
чающего вещества.
4.3.2. Количественные характеристики радиотеплового излучения
Спектральная плотность излучения реальных тел зависит от двух физиче-
ских характеристик: коэффициента поглощения и абсолютной температуры Т.
Оперировать двумя разнородными характеристиками не всегда удобно, особен-
но когда приходится сравнивать между собой различные излучающие тела (це-
ли). Поэтому в радиотеплолокации принято использовать одну величину, рав-
ную произведению коэффициента поглощения на абсолютную температуру:
Гя = аГ.
176
Величину Т называют радиояркостной температурой данного излучателя,
она равна абсолютной температуре идеального излучателя, создающего излуче-
ние такой же спектральной плотности, как и данный. В отличие от спектральной
плотности излучения в выражение для радиояркостной температуры не входит
длина волны. Практически радиояркостные температуры некоторых тел и объ-
ектов могут зависеть от длины волны из-за влияния ее на значение коэффициен-
та поглощения.
Ранее уже упоминалось о том, что хорошо отражающие объекты не создают
сильного собственного излучения. Так, радиояркостная температура металличе-
ских объектов и покрытий не превышает 10...20 К. Тем не менее металлические
объекты могут интенсивно переизлучать (отражать) падающее на них радиотеп-
ловое излучение протяженных (фоновых) источников (земной поверхности, об-
лаков). Суммарную спектральную плотность собственного и отраженного излу-
чений можно записать в виде
2тс, ч 2тс
^=тт(^ + РТа)=—Тк,
А А
Гк=аГ + рГп,
(4.77)
где р - коэффициент отражения тела; Тп - радиояркостная температура подсве-
чивающего излучения; Тк - кажущаяся температура излучателя.
Аналогично определению радиояркостной температуры кажущаяся равна
абсолютной температуре идеального излучателя, создающего собственное излу-
чение, равное суммарному реального излучателя.
В отличие от радиояркостной температуры кажущаяся может быть больше,
чем абсолютная температура излучателя. Значениями радиояркостных и кажу-
щихся температур удобно пользоваться при сравнении различных реальных из-
лучателей.
Большой интерес представляет вычисление мощности, излучаемой тем или
иным объектом. Мощность радиотеплового излучения зависит не только от ка-
жущейся температуры и площади объекта, но и от его формы, степени гладкости
поверхности и ряда других трудноучитываемых факторов. Однако для объектов
простой конфигурации ими можно пренебречь. Тогда выражение для мощности
излучения может быть записано в следующем виде:
2 тс
-^kTKS^f,
к
(4.78)
где £ц - площадь объекта; Af- полоса частот, в которой оценивается излучаемая
мощность.
Все вышеизложенное касалось энергетических характеристик излучения -
яркостной температуры, кажущейся температуры, мощности. Однако знания
одних этих характеристик недостаточно, чтобы оценивать возможности обнару-
жения радиотепловых излучателей. Для этого надо знать, каковы ДН радиотеп-
ловых излучателей и какая поляризация антенн требуется для приема.
177
В отличие от ДН радиолокационного переизлучения, которые для боль-
шинства объектов имеют изрезанную лепестковую структуру, ДН радиотепло-
вого излучения обладают гораздо большей равномерностью. Это вполне по-
нятно, ведь излучение объекта складывается из совершенно независимых
излучений отдельных участков. Поэтому в диаграммах собственного радиоте-
плового излучения принципиально не может быть нулевых провалов, и в пер-
вом приближении будем считать, что радиояркостная температура объектов
несложной формы, выполненных из однородного материала, не зависит от на-
правления. Совершенно так же обстоит дело для площадных (фоновых) излу-
чателей с мелкими по сравнению с длиной волны неровностями поверхности
(шероховатые излучатели). Если поверхность излучателя совершенно гладкая
или высота неровностей намного больше длины волны, то коэффициент излу-
чения, а вместе с ним радиояркостная и кажущаяся температуры будут зави-
сеть от направления, под которым этот отражатель рассматривается
радиотеплолокатором.
4.3.3. Радиотепловое излучение естественных и искусственных объектов
Реальные радиотепловые излучатели (искусственные и естественные) часто
имеют свойства, сильно отличающиеся от свойств идеального излучателя -
АЧТ. Поэтому кажущаяся температура реальных излучателей может варьиро-
вать при изменении длины волны и вида поляризации.
Кроме того, кажущаяся температура объектов может зависеть и от направле-
ния, с которого эти объекты наблюдаются. Наконец, на кажущуюся температуру
будут влиять время суток, года и метеорологические условия, особенно степень
влажности поверхности объекта.
Металлические объекты излучают очень слабо, поэтому их кажущаяся
температура в основном определяется яркостной температурой подсвечиваю-
щего фона. Радиояркостная температура металлического листа во всем диапа-
зоне углов наблюдения не превышает 10... 18 К, причем полированная поверх-
ность излучает слабее, чем неполированная. Кажущаяся температура не увели-
чивается и при нанесении на металл тонкого слоя краски. Можно сделать
вывод, что металлический лист является своеобразным зеркалом, в котором
отражается более горячее небо. По экспериментальным данным на волне 8 мм
кажущаяся температура металлических объектов, расположенных на земной
поверхности, гораздо ниже, чем в четырехмиллиметровом диапазоне, и не пре-
вышает 50 К. Это объясняется меньшей радиояркостной температурой неба в
восьмимиллиметровом диапазоне. По этой же причине в сантиметровом диа-
пазоне волн кажущаяся температура наземных металлических объектов будет
еще ниже. Заметим, что кажущаяся температура металлических объектов поч-
ти не зависит от их физической температуры, поэтому с помощью радиотепло-
локаторов не удается отличать нагретые металлические объекты от холодных,
что возможно, например, с помощью ИК-аппаратуры.
Значительно выше (230...250 К) кажущаяся температура зданий и различных
искусственных сооружений, выполненных из неметаллических строительных
материалов. Большинство этих материалов представляет собой диэлектрики с
большими потерями, поэтому их коэффициент излучения сравнительно велик.
Излучение асфальтовых и бетонных покрытий является характерным признаком
178
многих военных, промышленных и транспортных объектов (дороги, взлетно-
посадочные полосы, ракетные позиции и т. д.). Так как эти покрытия представ-
ляют собой плоские и относительно гладкие поверхности, их кажущаяся темпе-
ратура сильно зависит от угла наблюдения.
Кажущаяся температура асфальта может принимать значения от 100 до 300 К.
Кажущая температура бетона колеблется в пределах 0.. .290 К.
Важным условием, необходимым для обнаружения объекта по его радиотеп-
ловому излучению, является отличие кажущейся температуры объекта от кажу-
щейся температуры поверхности, на фоне которой он расположен. Проведенные
исследования радиотеплового излучения типовых фонов земной поверхности
показали, что кажущиеся температуры различных участков земной поверхности
довольно слабо зависят от длины волны и вида поляризации [12].
Кажущиеся температуры участков земной поверхности, поросших лесом,
сельскохозяйственными культурами, травой, не очень сильно отличаются. Та-
ким образом, в сантиметровом и миллиметровом диапазонах волн лес и травя-
ной покров излучают почти так же, как идеальный излучатель - абсолютно чер-
ное тело. Излучение поверхностных излучателей довольно сильно зависит от
степени их влажности. Так, в дождливую погоду кажущаяся температура ас-
фальтированных и бетонированных покрытий возрастает на 3...7 К. Так как фи-
зическая температура поверхности Земли меняется при смене времен года и в
течение суток, изменяются и кажущиеся температуры земной поверхности. На-
пример, в десятисантиметровом диапазоне максимальная кажущаяся температу-
ра зимнего леса в течение суток меняется от 227 К (7 ч) до 243 К (16 ч) [12].
Кажущаяся температура водных поверхностей (рек, озер, морей) сильно за-
висит от угла наблюдения, вида поляризации, степени волнения.
Волны на поверхности воды способствуют увеличению ее кажущейся тем-
пературы, так как пенистые верхушки гребней имеют более высокий коэффици-
ент излучения, чем сама вода.
Как известно, для радиолокационной маскировки металлических объектов
могут применяться поглощающие покрытия. Совершенно очевидно, что радио-
тепловую маскировку такие покрытия не будут обеспечивать, так как они хоро-
шие радиотепловые излучатели.
Мощными источниками радиотеплового излучения являются факелы ракет-
ных двигателей. При работе ракетного двигателя вследствие высокой температу-
ры образующихся газов их молекулы интенсивно ионизируются, образовавшиеся
при ионизации свободные электроны резко повышают электрическую проводи-
мость газов. Факел при этом можно рассматривать как проводящее тело с боль-
шими электрическими потерями. Вследствие этого коэффициент поглощения в
факеле в сантиметровом и миллиметровом диапазонах волн достаточно велик
(0,5.. .0,7); температура же факела достигает значений 3000.. .4000 К. Отсюда вид-
но, что радиояркостная температура факела имеет значения 1500...2800 К, т. е.,
грубо говоря, в 10 раз выше, чем для наземных объектов [12].
При уменьшении давления окружающего воздуха плотность электронов
быстро падает, коэффициент поглощения, следовательно, уменьшается. По-
нижается коэффициент поглощения и с укорочением длины волны. Пропор-
ционально коэффициенту поглощения меняется и радиояркостная температу-
ра факела.
179
При горении топлива излучение пламени происходит не только из-за иони-
зации газов - продуктов сгорания, но и вследствие того, что в пламени находит-
ся много частиц несгоревшего топлива. Каждая такая частица является радиоте-
пловым излучателем.
Размеры излучающих частиц могут быть разными - от тысячных до деся-
тых долей миллиметра; на волнах примерно такой же длины излучение будет
Частота, ГГц
Рис. 4.87. Затухание радиоволн мил-
лиметрового диапазона в атмосфере
наиболее интенсивным - частицы как бы
настраиваются в резонанс. Таким образом,
кажущаяся температура будет возрастать с
укорочением длины волны. Наиболее ин-
тенсивное излучение пламени происходит в
миллиметровом диапазоне волн [12].
Интенсивное радиотепловое излучение
создает плазма, образующаяся при полете
различных объектов в атмосфере со скоро-
стями, в несколько раз превышающими ско-
рость звука. При этом поверхность тела и
прилегающий к ней слой воздуха нагревают-
ся до температуры в несколько тысяч граду-
сов и воздух в слое, содержащем частицы испаряющейся обшивки тела, почти
полностью ионизируется, а нагретый и сильно ионизированный газ является хо-
рошим радиотепловым излучателем.
Важной проблемой радиотеплолокации является поглощение теплового радиоиз-
лучения в атмосфере. Поглощение теплового радиоизлучения существенно зависит
от выбора рабочего диапазона длин волн, а также от условий их распространения.
На рис. 4.87 представлено затухание радиоволн сантиметрового и миллимет-
рового диапазонов, а в табл. 4.3 - окна прозрачности и участки поглощения в
этом диапазоне [13].
Таблица 4.3
Поддиапазоны, ГГц Окно прозрачности Участок поглощения
Центральная частота, ГГц Центральная длина волны, мм Центральная частота, ГГц Центральная длина волны, мм
30-51,4 51,4-66 35 8,6 60 5
66-105 105-134 94 3,2 120 2,5
134-170 170-190 140 2,1 180 1,7
190-275 230 1,3
Если говорить об условиях распространения и их влиянии на дальность действия
системы, то можно привести следующий пример. В ясную сухую погоду различие в
коэффициентах ослабления на частотах 20 и 100 ГГц составляет 0,1.. .0,8 дБ/км, а при
небольшом дожде (2,5 мм/ч) приближается к 16 дБ. Наиболее сильно меняются ха-
рактеристики систем инфракрасного и радиочастотного диапазонов в условиях
плотного тумана (видимость 30 м). В этом случае ослабление ИК-систем достигает
порядка 100 дБ/км, а для радиоизлучений даже на частоте 90 ГГц эта величина не
превышает 2 дБ/км [10].
180
4.3.4. Характеристикирадиотепловых сигналов
Если поместить в поле радиотеплового излучения антенну, то на ее клеммах
появится шумообразное напряжение. Это напряжение было бы не совсем пра-
вильно называть радиотепловым сигналом, так как его частотный спектр гораздо
шире, чем полосы пропускания современных приемных устройств.
Приемник, подключенный в данном случае к антенне, будет воспринимать
лишь сравнительно небольшую область спектра входного напряжения, соответ-
ствующую этой области часть входного напряжения и будем называть радиоте-
пловым сигналом.
Из такого определения видно, что в отличие от радиолокационных сигналов
характеристики радиотеплового зависят от характеристик приемника.
Так, мощность радиотеплового сигнала прямо пропорциональна ширине по-
лосы пропускания приемника по высокой (или промежуточной) частоте. Именно
поэтому в радиотеплолокации стремятся применять приемники с очень широ-
кими полосами пропускания, достигающими сотен, тысяч и даже десятков тысяч
мегагерц. При этом мощность радиотепловых сигналов увеличивается и в неко-
торых случаях может достигать значения 1(Г10 Вт. Сигнал такой мощности ха-
рактерен, например, для радиотеплолокаторов обзора земной поверхности. Для
сравнения напомним, что в РЛС дальнего обнаружения воздушно-космических
объектов мощность принимаемых сигналов зачастую не превышает 1(Г20 Вт.
При расчетах часто оказывается удобным выражать интенсивность сигнала
не в единицах мощности, а в единицах спектральной плотности. Такая оценка
более объективна, так как в отличие от мощности спектральная плотность не
зависит от полосы пропускания приемника. Как и при вычислениях спектраль-
ной плотности излучения, спектральную плотность радиотепловых сигналов
выражают в температурных единицах.
Спектральная плотность и мощность сигнала связаны следующим отношением:
Pc=kTcbf,
тс=—.
kbf
Величина кТс представляет собой спектральную плотность мощности сиг-
нала; величину Тс называют температурой сигнала, она численно равна физиче-
ской температуре активного сопротивления, создающего шумовое напряжение
со спектральной плотностью, равной спектральной плотности мощности данно-
го сигнала. Часто используется также термин «антенная температура». Здесь
имеется в виду температура сигнала непосредственно на выходе антенны. Необ-
ходимо подчеркнуть, что в отличие от шумов активных сопротивлений спек-
тральная плотность некоторых радиотепловых сигналов зависит от частоты. На-
пример, температура сигналов от малоразмерных объектов повышается с увели-
чением частоты. Это явление может быть использовано для селекции сигналов и
распознавания их источников. Ширина полосы частот, занимаемая сигналом,
является очень важной его характеристикой; от нее зависит не только мощность
181
сигнала, но и точность измерения времени прихода сигналов в многоканальных
радиотеплолокационных системах.
Длительность радиотепловых сигналов зависит от продолжительности нахо-
ждения цели в пределах главного лепестка ДН антенны. В зависимости от ре-
жима обзора и характера цели длительность сигнала может колебаться от еди-
ниц миллисекунд до нескольких минут. Энергия сигнала пропорциональна его
длительности, поэтому с увеличением длительности улучшаются возможности
его обнаружения и точность измерения амплитуды.
В двухканальных радиотеплолокаторах увеличение длительности сигналов
способствует повышению точности измерения разности доплеровских сдвигов
частоты сигналов.
43.5. Особенности приема радиотепловых сигналов.
Принцип действия радиометра
Основная трудность при приеме слабых сигналов связана с необходимостью
их выделения на фоне собственных шумов, создаваемых первыми каскадами
приемников. В связных и радиолокационных приемниках влияние собственных
шумов уменьшают путем применения частотной селекции и временного строби-
рования. При этом уже на выходе высокочастотной части приемника может
быть достигнуто достаточное превышение мощности сигнала над мощностью
шума. При приеме радиотепловых сигналов частотную селекцию и временное
стробирование применять нельзя, так как сигналы сами имеют шумоподобный
характер. Поэтому приемники радиотепловых сигналов выполняют в виде точ-
ных измерителей уровня шума. Такие приемники принято называть радиомет-
рами.
Простейший радиометр (рис. 4.88) состоит из усилителя высокой частоты
(УВЧ), детектора и сглаживающего фильтра нижних частот (ФНЧ), т. е. пред-
ставляет собой обычный приемник прямого усиления. Усилитель высокой час-
Рис. 4.88. Функциональная схема простейшего
радиометра
тоты необходим для ослабления влияния шумов детектора и последующих кас-
кадов, поэтому его собственные шумы должны быть малыми. Для увеличения
мощности радиотеплового сигнала полосу пропускания УВЧ стремятся делать
возможно более широкой. С выхода УВЧ усиленный радиотепловой сигнал по-
ступает на квадратичный детектор. Выходное напряжение детектора кроме
постоянной составляющей содержит интенсивную шумовую составляющую,
маскирующую выделенный полезный сигнал. Для подавления этой шумовой
составляющей и служит ФНЧ, который в простейшем случае представляет со-
бой интегрирующую /?С-цепочку [12].
Основной особенностью простейшего радиометра является его способность
надежно принимать сигналы, мощность которых много меньше мощности соб-
ственных шумов. Эта способность обусловливается сочетанием широкой по-
182
лосы пропускания по высокой частоте и узкой полосы пропускания последе-
текторного ФНЧ. Такое сочетание характерно для большинства современных
радиометров.
Рассмотрим прохождение сигнала и шума через каскады простейшего ра-
диометра. На входе радиометра мощность сигнала и шума равны:
Рс = кТс^
рш=ктш\/= к(ш- 1)тсд/;
где Тш = (Ш - l)?^ - шумовая температура УВЧ; Тс = 300 К - стандартная темпе-
ратура; Ш - коэффициент шума УВЧ.
Отношение мощности сигнала к мощности шума на входе радиометра
Р Т
<7вх=/=^- (4.79)
Нетрудно убедиться, что отношение мощности сигнала к мощности шума
(для краткости будем называть его просто отношением сигнал/шум) не изменит-
ся после усиления по высокой частоте:
?увч -
^с^УВЧ
^ш^УВЧ
т
1с __
р “ ^ВХ*
(4.80)
Физический смысл заключается в том, что УВЧ одинаково усиливает и соб-
ственные шумы и шумоподобный сигнал. Даже в случае применения малошу-
мящих УВЧ температура их шумов, как правило, значительно превышает тем-
пературу сигнала; следовательно, отношение сигнал/шум на входе детектора
меньше единицы. При этом в детекторе происходит подавление сигнала шумом
и отношение мощности продетектированного сигнала (постоянной составляю-
щей) к мощности шумов на выходе детектора будет
(т Y
~ 2 _ 2 I
~ ?УВЧ “ ^ВХ ~ гр
(4-81)
Теперь обратим внимание на то, что шум на выходе детектора сохраняет
свой широкополосный характер, но его спектр переносится в область нижних
частот (рис. 4.89).
Действительно, высокочастотный шум до детектирования можно рассматри-
вать как результат модуляции несущей низкочастотным шумом со спектром,
лежащим в пределах 0...Д/; в результате детектирования и выделяется этот мо-
дулирующий шум. ФНЧ имеет полосу пропускания AF, значительно меньшую,
чем полоса пропускания tyf. УВЧ пропустит лишь малую часть этого шума, не
препятствуя в то же время прохождению полезной постоянной составляющей.
Как видно из рис. 4.87, мощность шума на выходе ФНЧ в \fl\F раз меньше
183
мощности шума на входе ФНЧ. Таким образом, выходное отношение сиг-
нал/шум
а =а ^ = а2 А/
^детдр J др ^вх AF’
(4.82)
В современных радиометрах отношение \fl\F достигает 107...109, что обес-
печивает получение большого выходного отношения сигнал/шум при входном
меньше единицы.
Однако безграничное увеличение выходного отношения сигнал/шум за счет
сужения полосы пропускания ФНЧ невозможно вследствие ограниченной дли-
Рис. 4.89. Влияние ширины полосы пропускания по ВЧ и НЧ
на уровень шума на выходе радиометра
тельности радиотеплового сигнала. Как известно, в результате детектирования
такого сигнала образуется импульс постоянного напряжения, спектр которого
занимает полосу частот O...FC, а ширина ее обратно пропорциональна длитель-
ности сигнала:
При уменьшении полосы ФНЧ до значения меньше, чем AFC, вместе с шума-
ми будет подавляться и сигнал, т. е. увеличения отношения сигнал/шум не бу-
дет. Таким образом, достижимое наибольшее отношение сигнал/шум будет
ДЛс-
(4.83)
Заметим, что формула справедлива только для идеализированного простей-
шего радиометра, у которого отсутствуют потери сигнала на участке от выхода
антенны до входа приемника, частотная характеристика УВЧ имеет прямо-
угольную форму, детектор квадратичный, а ФНЧ идеально согласован с дли-
тельностью и формой огибающей принимаемого сигнала. Поэтому в реальных
184
радиометрах при тех же значениях Тс, Тш, Af, tc выходное отношение сигнал/шум
в 5-10 раз меньше, чем у идеализированного радиометра.
Основной технической характеристикой любого радиометра является чувст-
вительность. Она характеризует способность радиометра принимать слабые ра-
диотепловые сигналы. Чувствительность радиометра численно равна температу-
ре сигнала, при подаче которого на вход выходное отношение сигнал/шум равно
единице. Формулу чувствительности простейшего радиометра легко получить
из (4.83), приравняв ее правую часть единице:
5Т =
(4.84)
Один из основных принципов построения радиометрических приемников -
использование во входных цепях усилителей с низким уровнем шума - малошу-
мящих усилителей (МШУ). Применение в первом каскаде усилителя с малой
шумовой температурой и высоким коэффициентом усиления способствует рез-
кому уменьшению шумовой температуры приемника, даже если последующие
каскады обладают высокими шумовыми температурами. Кроме того, при ис-
пользовании МШУ в ряде случаев отпадает необходимость использовать супер-
гетеродинный прием. Основными типами МШУ являются:
- специальные ЛБВ;
- параметрические усилители;
- квантово-механические усилители (КМУ);
- усилители на туннельных диодах.
Современные серийные ЛБВ трехсантиметрового диапазона имеют шумовые
температуры 900... 1000 К и полосу пропускания, равную 20...30 % несущей.
При использовании таких ЛБВ во входных каскадах радиометров обеспечивает-
ся чувствительность, равная нескольким сотым градуса.
Весьма перспективными считаются параметрические усилители, особенно
параметрические усилители на полупроводниковых приборах. Современные
усилители этого типа имеют шумовые температуры 80... 100 К, а охлаждае-
мые до -50 К при коэффициенте усиления 10...20 дБ и полосе пропускания
50...100 МГц.
Наиболее низкими шумовыми температурами обладают КМУ порядка 10 К.
Их применение в отдельных случаях позволяет снизить шумовую температуру
радиометра до 15 К [14].
Усилители на туннельных диодах отличаются схемной простотой, эконо-
мичностью, высокой надежностью, устойчивостью к внешним воздействиям. В
настоящее время освоен выпуск туннельных диодов, обеспечивающих шумовые
температуры порядка нескольких сотен градусов при работе в сантиметровом
диапазоне и длинноволновой части миллиметрового диапазона. Дальнейшее по-
нижение шумовых температур возможно за счет охлаждения диодов до низких
температур. Так, при охлаждении усилителя до температуры жидкого азота его
шумовая температура понижается почти в 2 раза.
Качество приемника радиотеплового излучения кроме чувствительности оп-
ределяется также угловым разрешением, которое зависит от ширины главного
лепестка ДН антенны:
185
®а = 1/ d,
где X - длина волны излучения; d - размер апертуры (раскрыва) антенны.
Ввиду того, что радиоволны на много порядков длиннее оптических, угловое
разрешение даже при очень большом раскрыве антенны не превышает углового
разрешения невооруженного глаза.
Для оптимизации параметров радиометра (чувствительности, разрешающей
способности) используют два вида устройств: с полной и незаполненной апер-
турой. Радиометры с полной апертурой собирают энергию радиотеплового из-
лучения со всей геометрической площади антенны. К таким антеннам относят
зеркальные и антенные решетки, состоящие из диполей.
Наиболее распространены радиометры с зеркальными параболическими и сфе-
рическими антеннами, собирающими параллельный пучок падающих на антенну
лучей в фокусе, где располагается облучатель. Такие антенны позволяют принимать
радиоизлучения вплоть до сантиметровых и даже миллиметровых волн.
В отличие от параболоида сферическое зеркало собирает энергию в опреде-
ленном объеме (из-за сферической аберрации) и для фокусирования излучения в
одну точку применяют вторичное зеркало. Преимущество сферического зеркала
заключается в том, что оно может быть неподвижным, следовательно, более
точным. Изменение направления (при сканировании) в этом случае осуществля-
ется перемещением вторичного зеркала с облучателем, т. е. для работы исполь-
зуют различные участки сферического зеркала [14, 15].
Частным случаем зеркальной антенны является перископическая система с
усеченным параболическим или сферическим зеркалом и с плоским переотра-
жающим зеркалом. Луч по углу места перемещается с помощью плоского зерка-
ла, а в азимутальной плоскости - облучателя.
Оптимальное отношение чувствительности и углового разрешения было ус-
тановлено для устройств с неполной апертурой. Простейшей системой данного
типа является радиоинтерферометр, состоящий из двух небольших антенн, раз-
несенных на большое расстояние друг от друга и соединенных между собой вы-
сокочастотным кабелем.
Радиоинтерферометр имеет многолепестковую диаграмму направленности.
Ширина лепестка определяется расстоянием В между антеннами. Угловое раз-
решение устройства в этом случае зависит от этого расстояния:
®п = X / В.
В отличие от обычного радиометра интерферометр измеряет не яркостную
температуру, а одну из гармоник в спектре пространственных частот распреде-
ления радиояркости. Номер гармоники, измеряемой интерферометром, опреде-
ляется длиной базы В. Наблюдая источник на радиоинтерферометре, одна из
антенн которого занимает последовательно различные точки на большой пло-
щади (заполняет апертуру), можно измерить весь спектр пространственных час-
тот, характеризующих распределение радиояркости объекта. Затем по данному
спектру восстанавливается (обратным Фурье-преобразованием) распределение
радиояркости объекта с угловым разрешением, соответствующим угловому раз-
решению устройства с апертурой, полученной синтезом последовательных из-
мерений во всех ее точках [14, 15].
186
Устройства апертурного синтеза получили широкое распространение, с их
помощью достигнуто высокое разрешение.
В технике радиотеплолокации часто возникает необходимость сравнивания
двух или нескольких сигналов. При этом из сигналов может быть получена до-
полнительная информация, например, установлен факт движения цели и опре-
делены ее угловые координаты, что невозможно при использовании простейше-
го радиометра. Радиометры, предназначенные для совместного приема двух ра-
диотепловых сигналов, называются корреляционными (рис. 4.90, а). Как видно
из рисунка основным отличием корреляционного радиометра от простейшего
является наличие двух УВЧ и схемы перемножения сигналов вместо квадратич-
ного детектора. Если на входы УВЧ поступает один и тот же радиотепловой
сигнал, то корреляционный радиометр работает так же, как и простейший, по-
скольку перемножение двух одинаковых сигналов эквивалентно квадратичному
детектированию любого из них. Однако если один из входных сигналов запаз-
дывает относительно другого, то выходное напряжение будет уменьшаться и
станет равным нулю при относительной задержке сигналов равной четверти
периода средней частоты сигнала. С дальнейшим увеличением задержки выход-
ное напряжение меняет знак и растет вплоть до момента, когда t3 равно полупе-
риоду средней частоты; затем снова убывает, переходит через нуль, принимает
положительное значение и т. д. Другими словами, при непрерывном изменении
t3 выходное напряжение периодически принимает положительные и отрицатель-
ные значения. Такой характер изменения напряжения объясняется тем, что схе-
ма перемножения по существу является фазовым детектором, а разность фаз
сигналов пропорциональна их временной задержке.
Зависимость выходного напряжения от t3 приведена на рис. 4.90, б. Обраща-
ет на себя внимание то обстоятельство, что с увеличением t3 величина максиму-
мов постепенно убывает; при t3 = 1/Д£ выходное напряжение, вернее его посто-
янная составляющая, становится равным нулю. Это связано с шумоподобным
характером входного сигнала. Так как его частота непрерывно и случайно меня-
ется, то отрезки сигнала на интервале, большем, чем 1/Д/ будут иметь отли-
чающиеся частоты, а сигналы с различными частотами не могут создать посто-
янного напряжения на выходе фазового детектора.
Попутно заметим, что изображенная на рис. 4.90, б зависимость С/вых =Д/3) пред-
ставляет собой не что иное, как функцию автокорреляции сигнала, являющуюся
важной его характеристикой. Интервал 4 = 1/Д4 соответствующий спаду функции
автокорреляции до определенного очень малого значения, называют интервалом
корреляции. Из предыдущего следует, что если одинаковые сигналы сдвинуты на
время, большее tk то корреляционным радиометром они не фиксируются. Не фик-
сируются и одновременно поступающие от разных источников радиотепловые сиг-
налы, так как их мгновенные частоты изменяются по разным законам.
Для измерения времени относительного запаздывания сигналов, поступаю-
щих на 1-й и 2-й входы радиометра, используется линия с переменным време-
нем задержки (рис. 4.90, а). Время задержки сигнала в линии изменяют до тех
пор, пока выходное напряжение радиометра не станет максимальным. Время
187
Рис. 4.90. Корреляционный радиометр:
а - блок-схема; б - зависимость выходного напряжения от времени задержки
задержки сигнала в линии при этом оказывается равным времени относительно-
го запаздывания сигналов.
С помощью корреляционного радиометра можно измерять также сдвиг час-
тоты сигналов. Такая необходимость возникает, например, при приеме радио-
тепловых сигналов движущихся целей на разнесенные в пространстве антен-
ны. Сигналы на выходах антенн при этом имеют различный доплеровский
сдвиг, и эта разность сдвигов, характеризующая скорость цели и расстояние до
нее, может быть измерена корреляционным радиометром. В этом случае вме-
сто ФНЧ к выходу радиометра подключают полосовые ФНЧ, полосы пропус-
кания которых перекрывают возможный диапазон изменений разностного до-
плеровского сдвига.
Для вычисления отношения сигнал/шум и чувствительности корреляционно-
го радиометра с некоторым приближением могут быть использованы те же фор-
мулы, что и для простейшего радиометра. Необходимо, однако, учитывать, что
мощность шумов в корреляционном радиометре вдвое больше, чем в простей-
шем. Поэтому при использовании корреляционного радиометра в одноканаль-
ном режиме выходное отношение сигнал/шум меньше в 4 раза, а чувствитель-
ность - в 2 раза по сравнению с простейшим радиометром.
43.6. Радиотепловые сигналы как переносчики информации
Назначение любой локационной системы сводится к получению определен-
ных видов информации о цели. Переносчиками этой информации являются сиг-
188
налы, в параметрах которых закодированы координаты и характеристики целей.
Так, информация о дальности до целей кодируется во временную задержку сиг-
налов, скорость целей определяет доплеровский сдвиг частоты сигнала, интен-
сивность сигнала в некоторых случаях характеризует размеры цели и т. д. Есте-
ственно, что лучшими являются те локационные системы, которые позволяют
получать о целях большее количество информации.
Количество информации, которое может переносить сигнал, существенно
зависит от его свойств. Теоретическими и экспериментальными исследования-
ми установлено, что это количество пропорционально произведению полосы
частот сигнала на его длительность, а для получения наибольшей информации
о нескольких целях необходимо, чтобы сигналы от этих целей были взаимоне-
зависимы.
Нетрудно видеть, что радиотепловые сигналы удовлетворяют этим требо-
ваниям в большей степени, чем радиолокационные. Радиолокационные сигна-
лы значительно уступают радиотепловым по широкополосности, а требованию
взаимной независимости не удовлетворяют принципиально, так как имеют
общий источник - генератор подсвечивающего цели излучения. Таким обра-
зом, с помощью радиотепловых сигналов можно получить больше информа-
ции о целях, чем с помощью радиолокационных. Однако здесь надо сделать
одну существенную оговорку. Дело в том, что для эффективного извлечения
информации из принимаемых сигналов их надо сравнивать с опорными. На-
пример, в радиолокации таким путем определяется дальность до целей и их
скорость. В радиотеплолокации использование опорных сигналов невозможно,
так как их источниками являются сами цели. Поэтому в радиотеплолокации
приходится либо использовать более сложные (основанные на взаимном срав-
нивании) методы обработки сигналов, принимаемых на разнесенные в про-
странстве антенны, либо примириться с потерей части информации.
В настоящее время наибольшее распространение получили простейшие одно-
канальные радиотеплолокаторы, измеряющие лишь среднюю мощность сигналов
и угловые координаты целей. Такие радиотеплолокаторы не могут определять
дальность и скорость цели, однако способны весьма точно измерять интенсив-
ность излучения целей, что недоступно для радиолокаторов. Таким образом, в
данном случае информационная избыточность радиотеплового сигнала затрачива-
ется на повышение точности измерения мощности сигналов. Еще сильнее пре-
имущество радиотеплового сигнала сказывается в двухканальных радиотеплоло-
каторах, которые могут определять дальность до целей и их скорость.
Из вышеизложенного следует, что методы получения информации, в частно-
сти методы определения дальности и скорости, принятые в радиотеплолокации,
отличаются от радиолокационных. Некоторое исключение составляют лишь ме-
тоды определения угловых координат, которые, как и радиолокационные, осно-
ваны на использовании остронаправленных антенн.
4.3.7. Энергетические соотношения в радиотеплолокации
Вывод энергетических соотношений начнем с пояснения одного очень важ-
ного обстоятельства, а именно: определим максимально достижимое значение
температуры радиотеплового сигнала. Для этого воспользуемся рис. 4.91.
189
На рисунке изображена наиболее благоприятная ситуация приема радиотеп-
лового сигнала, когда излучение очень большого (фонового) излучателя прини-
мается с помощью остронаправленной антенны. Будем считать антенну идеаль-
ной, т. е. предположим, что у нее есть только один главный лепесток, в пределах
которого коэффициент направленного действия неизменен и равен G. КПД ан-
тенны равен единице, а боковые лепестки отсутствуют.
Рис. 4.91. Иллюстрация к выводу
формулы антенной температуры
для случая цели большой площади
Как видно из рисунка, антенна воспринимает только излучение участка S,
так как все другие участки излучающего фона лежат вне пределов ДН. Тогда
поток мощности излучения от маленькой площадки AS\, падающий на прием-
ную антенну, будет
1
X2 2nD2 2itD2
где A/^i - мощность радиотеплового излучения в полосе 1 Гц с площадки ASi.
На выходе антенны поток мощности АП! создает сигнал мощностью
4тШ
где А = GX2/4tt - эффективная площадь антенны при работе на прием.
Для того чтобы определить мощность полного сигнала от всего участка S,
надо просуммировать сигналы от всех площадок AS:
Ра = ДРа1 +ДРа2 +...+ДРШ. +...+ лр„ =
кТяО
8лО2
(Д51+Д52 + ... + Д51.+... + Д5„).
190
Как видно из формулы, мощность будет пропорциональна площади S:
а 4л£>2
(4.85)
Чтобы получить окончательную формулу, укажем, что S/D2 представляет со-
бой не что иное, как телесный угол, занимаемый лепестком диаграммы направ-
ленности. Значение этого телесного угла связано с коэффициентом направлен-
ного действия простым соотношением
А^ант d2 g
Последнее выражение как раз и означает, что КНД показывает, во сколько
раз главный лепесток уже полного телесного угла, равного 4л стерадиан.
Выполнив подстановку, приходим к неожиданном результату:
Ра = кТа = кТя;
Т =Т
я’
(4.86)
т. е. температура радиотеплового сигнала на выходе антенны равна кажущейся
температуре излучателя и не зависит ни от дальности, ни от направленных
свойств антенны.
Рис. 4.92. Прием излучения цели большой площади на разных дальностях
и на антенны с различными КНД:
а - случай разных дальностей; б - случай разных КНД
В том, что это справедливо, убеждает и рассмотрение рис. 4.92. Действи-
тельно, увеличив расстояние до объекта, например в два раза, мы получим
4-кратное увеличение площади S, т. е. ту же самую мощность и температуру
сигнала.
191
Из рис. 4.92 видно, что нельзя получить приращение температуры сигнала и
за счет КНД, так как при этом площадь S уменьшается и величины Ра и Га оста-
ются неизменными. Увеличить Га сверх значения Гя не удается никакими други-
ми способами; не помогает здесь и параллельное включение нескольких антенн.
Равенство (4.86) основано на физическом принципе, непосредственно связанном
со вторым законом термодинамики: его нарушение говорило бы, что можно на-
греть сопротивление нагрузки антенны от холодного источника излучения, т. е.
создать вечный двигатель второго рода. Таким образом, равенство (4.86) дает
значение предельной температуры радиотеплового сигнала, превзойти которое
никакими способами невозможно.
Для реальных антенн равенство (4.86) принимает вид
Та = Т| (1 - р)Тк, (4.87)
где Г| - КПД антенны; р - так называемый коэффициент рассеяния, характери-
зующий влияние боковых лепестков ДН.
Из выражения (4.87) следует, что для реальных антенн температура сигнала
всегда ниже кажущейся температуры излучателя.
43.8. Структурные схемырадиотеплолокаторов
Функциональная схема обзорного радиотеплолокатора (РТЛ) приведена на
рис. 4.93. Как видно из рисунка эта схема включает те же элементы, что и функ-
Рис. 4.93. Функциональная схема обзорного РТЛ
циональная схема обзорной РЛС, за исключением передатчика, антенного пере-
ключателя и синхронизатора.
В обзорных РТЛ чаще всего применяют антенны с ДН игольчатого типа; это
обеспечивает возможность определения двух угловых координат цели, но не-
сколько усложняет приводные устройства антенн. В РТЛ могут применяться
различные виды обзора: строчный (растровый), спиральный, циклоидальный.
Особое место занимает так называемый однострочный обзор, применяемый
в бортовых обзорных РТЛ (рис. 4.94). При однострочном обзоре игольчатый ан-
192
Рис. 4.94. Однострочный обзор
тенный луч сканируется в плоскости, перпендикулярной оси летательного аппа-
рата, обеспечивая обзор по обеим сторонам от траектории полета. Обзор вдоль
направления полета осуществляется за счет движения летательного аппарата.
Схема обзора воздушного пространства РТЛ приведена на рис. 4.95.
Основными характеристиками обзорного РТЛ являются дальность действия
и разрешающая способность.
Дальность действия РТЛ для обзора воздушного пространства может быть
определена по формуле [12]
5TUSU
D = 0,135 —S-t 4------
у АТдт у \|/0ДфД0
(4.88)
где £ц - площадь цели, м2; 5Гц = Тц - Тф - радиояркостный контраст цели и фо-
на, К; qm - входное отношение сигнал/шум, соответствующее заданной надежно-
сти (коэффициент различимости); ДТ - чувствительность радиометра, К; Т^3 -
заданное время обзора зоны, с; \|/, 0 - угловые зоны обзора по азимуту и углу
места, град; Дф, Д0 - ширина диаграммы направленности по азимуту и углу
места, град.
193
Рис. 4.95. Растровый обзор
Углы раствора диаграммы направленности в данном случае берутся по нуле-
вому уровню.
Расчеты по формуле (4.88) показывают, что дальность действия обзорных
радиотеплолокаторов может быть довольно большой.
Во многих случаях дальность действия ограничивается не чувствительно-
стью радиометра, а неравномерностями кажущейся температуры фона, которые
в процессе обзора создают дополнительный шум подобно флюктуациям коэф-
фициента усиления радиометра. Некоторое улучшение может быть достигнуто
за счет применения специальных низкочастотных фильтров, отделяющих корот-
кие сигналы малоразмерных целей от более длительных выбросов, вызванных
неоднородностями фонового излучения.
Второй способ компенсации вредного влияния фоновых неоднородностей
основан на использовании записи выходного напряжения радиометра в течение
нескольких циклов обзора. С помощью специального устройства записи сосед-
них циклов обзора попарно вычитают, в результате вычитания фон компенсиру-
ется, а запись полезного сигнала сохраняется.
Обзорный радиотеплолокатор описанного типа предназначен для обзора
воздушного пространства. Несколько отличающееся устройство имеют борто-
вые радиотеплолокаторы обзора земной поверхности. В этих радиотеплолокато-
рах используется режим однострочного обзора (рис. 4.94) и дальность действия
будет выражаться другой формулой [12]:
£> = 0,12 3)
ад]
1
Ж\|/ДфА0*
(4.89)
Эта формула отличается от (4.88): во-первых, появилась зависимость от ско-
рости полета; во-вторых, сильнее влияние ширины ДН антенны, контраста и
194
площади цели, что объясняется более сложной зависимостью длительности сиг-
нала от величин Дф, Д0 и \|/.
Важным параметром РТЛ обзора земной поверхности является его разре-
шающая способность, т. е. минимальное расстояние между двумя целями на ме-
стности, при котором эти цели еще наблюдаются раздельно. Значение разре-
шающей способности зависит от ширины ДН и дальности до целей следующим
образом [12]:
Д^аз = Dsin Дф - 2)Дф;
_яшД0 _ ДО
ALVM =D-------D
ум w
cos —
2
(4.90)
V
cos—
2
При увеличении дальности азимутальная разрешающая способность ухуд-
шается быстрее, следовательно, на краях зоны обзора детальность получаемого
изображения земной поверхности будет хуже, чем в середине.
Наилучшая разрешающая способность, равная
ДАаз = Н sin Дф - ЯДф,
у м w ш
cos— cos—
2 2
(4.91)
будет при нулевом азимутальном угле. Это означает, что наиболее четко будут
воспроизводиться участки местности непосредственно под летательным аппара-
том, на котором установлен РТЛ. Это серьезное преимущество обзорного РТЛ
перед панорамными бортовыми радиолокаторами, у которых, как известно, на
малых дальностях разрешение очень низкое. Заметим также, что при небольших
дальностях и достаточно узких ДН разрешающая способность РТЛ составляет
единицы метров и меньше, что практически недостижимо для радиолокаторов.
Многоканальные обзорные радиотеплолокаторы. Расширение зоны умень-
шает дальность действия радиотеплолокаторов. Кроме того, с расширением зо-
ны растет время обзора, что часто бывает нежелательным.
Для устранения этого недостатка радиотеплолокаторы делают многоканаль-
ными, при этом общая зона обзора делится на несколько зон меньшего размера.
Если вместо одного канала взять п одновременно действующих каналов, то
дальность действия обзорного РТЛ с многострочным обзором увеличится в \/й ,
а дальность действия бортового обзорного РТЛ -в у/п раз.
Необязательно выполнять каждый канал в виде самостоятельного РТЛ. Совре-
менная антенная техника позволяет конструировать антенны с несколькими разне-
сенными диаграммами направленности. Такие антенны и используют в многоканаль-
ных РТЛ. Индикаторное устройство также может быть общим. Значит, необходимы
лишь несколько отдельных радиометров. Важное преимущество многоканальных
195
РТЛ - их повышенная надежность, так как при выходе из строя одного канала мно-
гоканальный РТЛ сохраняет работоспособность за счет исправных.
Если взять число каналов очень большим, то можно осуществлять обзор про-
странства без сканирования (рис. 4.96). Такой способ обзора называется радиови-
Мною лучевая Радиометры Индикатор
антенна
дением. Термин радиовидение не случаен.
Дело в том, что радиотепловое излучение так
же, как и световое, некогерентно и широко-
полосно. Поэтому радиотепловые изображе-
ния участков местности сильно напоминают
изображения этих же участков, видимые гла-
зом. Радиовидение - это сложная техническая
проблема главным образом потому, что необ-
ходимое число приемных каналов очень ве-
лико - сотни или даже тысячи.
Следящие радиотеплолокаторы. Следя-
щие радиотеплолокаторы предназначены для
„ автоматического сопровождения одиночных
Рис. 4.96. Принцип радиовидения радиотепловых целей по у^вым К00рдина-
там. Принцип действия и функциональная
схема следящего РТЛ во многом схожи с принципом действия и функциональ-
ными схемами следящих радиолокаторов. Чаще всего в следящих РТЛ применя-
ется коническое сканирование. Функциональная схема такого РТЛ приведена на
рис. 4.97.
Как и в следящем радиолокаторе, входной сигнал оказывается промодулиро-
ванным по амплитуде за счет вращения ДН, причем глубина модуляции возрас-
тает при удалении источника излучения от оси вращения, а фаза модуляции оп-
ределяется направлением смещения источника. В следящем РТЛ нет необходи-
Рис. 4.97. Функциональная схема следящего РТЛ с коническим
сканированием
мости применять модуляционный радиометр, так как принимаемый сигнал уже
промодулирован; поэтому после детектирования сигнал подается на узкополос-
196
ный УНЧ, настроенный на частоту модуляции, к выходу которого подключены
синхронные детекторы.
На выходах синхронных детекторов формируются постоянные напряжения,
пропорциональные значению углового рассогласования между осью вращения
ДН и направлением на пеленгуемый источник. Эти напряжения и используют
для управления приводными механизмами антенны, обеспечивая тем самым ав-
томатическое сопровождение пеленгуемого источника радиотеплового излуче-
ния. Основные характеристики следящего РТЛ - дальность действия и точность
определения угловых координат.
Формулы для определения дальности действия РТЛ и ошибки углового со-
провождения имеют соответственно вид [12]
D- 0,1
_ад_
дт^дсрде
(4.92)
= 0,4
Ф
(4.93)
где - среднеквадратическая ошибка углового сопровождения, обусловленная
действием собственных шумов радиометра РТЛ; tc - длительность сигнала (вре-
мя просмотра одного элемента).
4.4. Разведка побочных электромагнитных излучений и наводок
4,4.1, Общие сведения
Физические явления, лежащие в основе появления различных каналов утеч-
ки информации, в основном связаны с электромагнитными излучениями.
Электромагнитные излучения радиоэлектронных устройств можно в общем
плане разделить на основные и неосновные. Основные радиоизлучения
предназначены для передачи полезного сигнала и характеризуются несущей
частотой, мощностью излучения (напряженностью поля), шириной полосы
излучаемых частот, параметрами модуляции. Неосновные излучения лежат вне
полосы полезного сигнала и подразделяются на побочные, внеполосные и
шуъйя&в/ные излучения - это неосновные излучения, обусловленные любым не-
линейным процессом за исключением модуляции (манипуляции).
Внеполосные излучения - это неосновные излучения в полосе частот примыкаю-
щей к необходимой и возникающие в процессе модуляции (манипуляции) сигнала.
Шумовые излучения - это неосновные излучения, создаваемые источниками
шума в элементах передатчика (автогенераторами преобразователей, усилите-
лями, синтезаторами).
Наиболее опасными, с точки зрения образования каналов утечки информа-
ции, считаются побочные излучения. Основными их видами являются излучения
197
на гармониках и субгармониках основной частоты, комбинационные и интермо-
дуляционные.
Побочные радиоизлучения на гармониках - это излучения на частотах в целое
число раз больших частоты основного излучения. Радиоизлучение на субгармони-
ках - излучение на частотах, в целое число раз меньших частоты основного.
Комбинационное излучение возникает в результате взаимодействия на нели-
нейных элементах радиоэлектронных устройств колебаний нескольких несущих
и их гармонических составляющих при формировании основной частоты.
Интермодуляционное излучение появляется в результате взаимодействия на
нелинейных элементах высокочастотного тракта генерируемых колебаний и ко-
лебаний внешнего электромагнитного поля.
Строго говоря, существующее понятие - побочные электромагнитные из-
лучения (ПЭМИ) - не охватывает всех возможных каналов утечки информа-
ции, возникающих при функционировании разнообразных технических
средств передачи, обработки и хранения информации (ТСПИ). Рассматривая
возможные каналы утечки информации, связанные с электромагнитными из-
лучениями, кроме ПЭМИ необходимо учитывать наводки информационных
сигналов на соседние провода, воздействие акустических информационных
полей на электродинамические элементы технических средств, модуляцию
информационными сигналами излучений гетеродинов радио- и телевизионных
приемников, генераторов стирания и размагничивания магнитофонов, пара-
зитную генерацию усилителей при их самовозбуждении, а также токи, проте-
кающие в контурах заземления.
Для обеспечения деятельности организации, учреждения, предприятия ис-
пользуют широкий набор самых разнообразных ТСПИ. К таким средствам отно-
сятся электронно-вычислительная техника, информационные системы, АСУ,
вспомогательное оборудование.
С точки зрения конфиденциальности обрабатываемой информации все ис-
пользуемые средства можно разделить на две группы: основные ТСПИ, в кото-
рых циркулирует секретная информация, и вспомогательные технические сред-
ства и системы (ВТСС), которые непосредственно не участвуют в обработке за-
крытой информации, но используются совместно и находятся в зоне действия
электромагнитных полей основных ТСПИ.
В перечень вспомогательного оборудования, широко используемого для
обеспечения деятельности промышленных, военно-промышленных и военных
объектов входят разнообразные системы:
- внутренней (внутриобъектовой) телефонной связи (директорская, диспет-
черская, внутренняя служебная и технологическая с выходом и без выхода в го-
род, переговорные устройства);
- звукоусиления, звукозаписи и звуковоспроизведения (усилители, магнито-
фоны, диктофоны);
- проводной радиотрансляционной сети и приема программ радиовещания и
телевидения (абонентские громкоговорители, системы радиовещания и опове-
щения, телевизоры, радиоприемники);
- электрочасофикации (вторичные электрические часы);
- специальной охранной сигнализации (на вскрытие дверей, окон, на про-
никновение в охраняемую зону посторонних лиц);
198
- пожарной сигнализации (дымовой, световой, тепловой, звуковой);
- звонковой сигнализации (вызов секретаря, входная сигнализация);
- кондиционирования (датчики температуры и влажности);
- электроосвещения и бытового электрооборудования (светильники, люстры,
настольные вентиляторы, электронагревательные приборы, проводная сеть элек-
троосвещения);
- оргтехника (электронные печатающие устройства, некоторые виды множи-
тельной техники, электронно-счетные устройства).
Физические процессы, происходящие при функционировании указанных сис-
тем, создают ряд технических каналов утечки секретной информации, которые в
той или иной степени связаны с ее обработкой (рис. 4.98).
Утечка секретной информации при эксплуатации основных ТСПИ и ВТСС
возможна за счет:
- возникающего электромагнитного поля;
- электромагнитных наводок информационных сигналов в цепях, уходящих
за пределы контролируемой территории;
- возникновения информативного электрического поля в зоне контура за-
земления;
- возникновения паразитной высокочастотной генерации в усилителях, ко-
торая может быть промодулирована информационными сигналами;
- модуляции информационными сигналами гетеродинов радио- и телевизион-
ных приемников, а также генераторов стирания и подмагничивания магнитофонов;
- возникновения огибающей речевого сигнала в цепи электропитания;
- воздействия акустических информационных полей на электродинамиче-
ские элементы технических средств.
Излучателями электромагнитных полей в диапазоне речевого сигнала явля-
ются аппаратура звукоусиления, звукозаписи и звуковоспроизведения, а также
видеозаписи и воспроизведения, оконечные устройства, провода, кабели.
Наводки информативных сигналов в цепях, уходящих за пределы контроли-
руемой территории, происходят при наличии их параллельного пробега с цепя-
ми, в которых циркулируют токи информационных сигналов. В речевом диапа-
зоне частот взаимные влияния между неэкранированными цепями в основном
определяются электрической составляющей электромагнитного поля. При ис-
пользовании экранированных кабелей взаимные влияния будут определяться
только значениями магнитных связей.
Электрическое поле в контуре заземления возникает при подключении обо-
рудования к контуру заземления для обеспечения электробезопасности обслу-
живающего персонала и снижения уровня помех. В этом случае токи речевого
сигнала вследствие асимметрии трактов передачи информации будут протекать
в контуре заземления. Опасный сигнал может быть перехвачен как в заземляю-
щем проводе, так и в «потенциальной» зоне вокруг заземления. Перехват ин-
формации в последнем случае может быть осуществлен путем расположения
одного из электродов аппаратуры разведки в зоне нулевого потенциала и пере-
мещения другого электрода в «потенциальной» зоне заземлителя.
Паразитная высокочастотная генерация опасна тем, что при самовозбужде-
нии УНЧ за пределами рабочего диапазона несущая паразитного сигнала мо-
жет модулироваться низкочастотными информационными сигналами на
199
Рис. 4.98. Типовая схема слаботочного оборудования военно-промышленного объекта
и возможные каналы утечки информации, возникающие при его эксплуатации
нелинейных элементах усилителя по амплитуде, частоте и фазе. Утечка ин-
формации в этом случае возможна за счет непосредственного излучения в
эфир электромагнитных колебаний элементами монтажа и соединительных
проводов, а также в результате наводок на цепи, уходящие за пределы контро-
лируемой территории.
200
Опасным каналом возможной утечки секретной информации является моду-
ляция излучения высокочастотных генераторов, входящих в состав различных
устройств при воздействии на них акустических, магнитных и электрических
полей информационного сигнала.
Работа средств вычислительной техники также сопровождается электро-
магнитными излучениями, которые являются источниками опасного сигнала,
способного образовать определенные каналы утечки информации. Источника-
ми образования каналов утечки могут быть дисплеи, накопители, принтеры,
плоттеры, каналообразующая аппаратура и др. Однако основным источником
высокочастотного электромагнитного излучения является дисплей, созданный
на базе электронно-лучевой трубки. В составе персонального компьютера име-
ется специальная видеосистема, предназначенная для формирования изобра-
жений, наблюдаемых на экране монитора. Ее основу составляют специализи-
рованные схемы для генерирования электрических сигналов, управляющие
монитором. Эти схемы получили наименование видеоадаптеров (далее просто
адаптеры).
Источниками излучения видеосигнала дисплея могут быть элементы обра-
ботки сигнала изображения и электронный луч кинескопа. В отличие от других
сигналов, существующих в дисплее, видеосигнал усиливается до нескольких
десятков вольт для подачи на ЭЛТ. Следовательно, именно его излучение явля-
ется наиболее опасным. Эксперименты показали, что уровень широкополосного
излучения дисплея зависит от числа букв на экране; уровень узкополосных со-
ставляющих не зависит от заполнения экрана, а определяется системой синхро-
низации и частотой повторения светящихся точек. Следовательно, видеоусили-
тель является наиболее мощным источником широкополосного излучения, а
система синхронизации - узкополосного.
Информация, отображенная на экране дисплея, может быть восстановлена с
помощью ТВ-приемника.
Применение в средствах ВТ импульсных сигналов прямоугольной формы и
высокочастотной коммутации приводит к тому, что в спектре излучений будут
компоненты с частотами вплоть до СВЧ. Энергетический спектр сигналов убы-
вает с ростом частоты, но эффективность излучения при этом увеличивается и
его уровень может оставаться постоянным до частот в несколько гигагерц. Резо-
нансы из-за паразитных связей могут вызвать усиление излучения на некоторых
частотах спектра [18].
Излучение дисплея, принимаемое ТВ-приемником, не содержит информации
о синхросигнале, поэтому изображение на его экране перемещается в горизон-
тальном и вертикальном направлениях. Качество приема может быть улучшено
с помощью внешнего генератора синхросигналов, подаваемых на ТВ-приемник.
С такой приставкой к обычному телевизору можно восстановить информацию с
дисплея почти любого типа при условии достаточно высокого уровня излучения.
Сигналы на выходе генератора должны иметь частоты 15...20 кГц для синхрони-
зации строк и 40.. .80 Гц синхронизации кадров.
Ориентировочные дальности обнаружения радиоизлучений широко распро-
страненных ПЭВМ зарубежного производства приведены в табл. 4.4 [15].
201
Таблица 4.4
Блоки ПЭВМ Дальность обнаружения, м
электромагнитного поля электрического поля
Системный блок 2-40 1-30
Дисплей 25-120 10-55
Клавиатура 15-50 15-30
Печатающее устройство 5-35 10-80
Данные таблицы соответствуют приему ЭМИ на ненаправленную антенну
для ПЭВМ в пластмассовом корпусе. Использование направленных антенн по-
зволяет увеличить дальность перехвата в несколько раз.
В любых технических средствах существуют те или иные физические преоб-
разователи, выполняющие соответствующие функции, основанные на опреде-
ленном физическом принципе действия. Знание всех типов физических преобра-
зователей позволяет решать задачу определения возможных неконтролируемых
проявлений физических полей, образующих каналы утечки информации.
Преобразователем в общем понимании является прибор, который преобразу-
ет изменения одной физической величины в изменения другой. Преобразователь
обычно определяется как прибор, преобразующий неэлектрическую величину в
электрический сигнал и наоборот.
Примером конкретной реализации преобразователей является звукоусили-
тельная система, в которой микрофон (входной преобразователь) превращает
звук (воздействующую физическую величину) в электрический сигнал. Послед-
ний передается и усиливается усилителем низкой (звуковой) частоты (преобра-
зователь по мощности), а затем поступает на громкоговоритель (выходной пре-
образователь), воспроизводящий звук существенно более громкий, нежели тот,
который воспринимается микрофоном.
Каждый преобразователь действует на определенных физических принципах
и образует присущий этим принципам побочный канал передачи информации -
канал утечки.
Основным элементом любого преобразователя служит датчик - чувстви-
тельный элемент, реагирующий на воздействующее физическое поле и выраба-
тывающий соответствующий отклик.
Наиболее важными характеристиками датчиков являются следующие:
чувствительность (отношение изменения выходного сигнала к изменению
сигнала на его входе);
разрешающая способность (наибольшая точность, с которой осуществляется
преобразование);
линейность (равномерность изменения выходного сигнала в зависимости от
входного);
инерционность или время отклика (время установления выходного сигнала в
ответ на изменение входного);
полоса частот (показывает, на каких частотах воздействия на входе сиг-
нал еще воспринимается преобразователем, создавая на выходе допустимый
уровень).
Таким образом, основными источниками образования технических каналов
утечки любой, в том числе конфиденциальной, информации являются:
202
- преобразователи физических величин;
- излучатели электромагнитных колебаний;
-паразитные связи и наводки на провода и элементы электронных уст-
ройств.
Каждую из этих групп в свою очередь можно разделить по принципам преоб-
разования или иным параметрам. Так, преобразователи могут быть классифици-
рованы как индуктивные, емкостные, пьезоэлектрические и оптические. При этом
по виду преобразования они могут быть и акустическими, и электромагнитными.
Излучатели электромагнитных колебаний разделяются по диапазону частот
на низкочастотные, высокочастотные и оптические.
Паразитные связи и наводки проявляются в виде обратной связи (наиболее
характерна положительная обратная связь) и как утечки по цепям питания и за-
земления.
Ниже рассматриваются физические основы возникновения перечисленных
каналов утечки информации [18].
4.4.2. Акустические преобразователи информационных сигналов
При разговоре, на совещании каналами утечки информации могут быть аку-
стический, виброакустический, гидроакустический и акустоэлектрический сиг-
налы; при телефонном разговоре (дополнительно к предыдущему) - электросиг-
нал в линии и различные наводки и влияния; при радиотелефонном разговоре
(дополнительно к предыдущим) появляется электромагнитный сигнал; в случае
речевой почты добавляется акустический шум принтера (пишущей машинки).
Акустическая энергия, возникающая при разговоре, может вызвать акусти-
ческие (т. е. механические) колебания элементов электронной аппаратуры, что, в
свою очередь, приводит к появлению электромагнитного излучения или к его
изменению при определенных обстоятельствах. Наиболее чувствительными
элементами радиоэлектронной аппаратуры к акустическим воздействиям явля-
ются катушки индуктивности и конденсаторы переменной емкости [17].
Индуктивные датчики. Если в поле постоянного магнита поместить ка-
тушку индуктивности (рамку) и вращать ее хотя бы под воздействием воздуш-
ного потока, то на ее выходе появится ЭДС индукции.
Воздушный поток переменной плотности возникает и при разговоре. Раз
так, то можно ожидать, что во время разговора (под воздействием воздушно-
го потока) будет вращаться и катушка (рамка), что вызовет пропорционально
изменяющуюся ЭДС индукции на ее концах. Так,
можно связать акустическое воздействие на провод
в магнитном поле с возникающей ЭДС индукции на
его концах. Это типичный случай для индукцион-
ных акустических преобразователей. Примером мо-
жет служить электродинамический преобразователь
(рис. 4.99).
Рассмотрим акустическое воздействие на катушку
индуктивности с сердечником. Механизм и условия
возникновения ЭДС индукции в такой катушке сво-
дятся к следующему. Под воздействием акустического
давления появляется вибрация корпуса и обмотки ка-
Рис. 4.99. Устройство
электродинамического
преобразователя
203
тушки. Вибрация вызывает колебания проводов обмотки в магнитном поле, что
и приводит к появлению ЭДС индукции на концах катушки
£ = -4(Фс+Фв)>
at
trq Фс - магнитный поток, замыкающийся через сердечник; Фв - магнитный по-
ток, замыкающийся через обмотки по воздуху. Она зависит от вектора магнит-
ной индукции, магнитной проницаемости сердечника, угла между вектором и
осью катушки, угла между вектором и осью сердечника и площадей поперечных
сечений сердечника и катушки.
Индуктивные преобразователи подразделяют на электромагнитные, электро-
динамические и магнитострикционные.
К электромагнитным преобразователям относят такие устройства, как гром-
коговорители, электрические звонки (в том числе и вызывные звонки телефон-
ных аппаратов), электрорадиоизмерительные приборы.
Примером непосредственного использования этого эффекта для акустиче-
ского преобразования является электродинамический микрофон (рис. 4.100).
ЭДС на выходе катушки определятся по
формуле
Мембрана Подвижная
где L = 4Ьсц0ю2 ’ S/1 - индуктивность; к - ко-
эффициент, зависящий от соотношения пара-
метров; I - длина намотки катушки; Цо - маг-
нитная проницаемость; S - площадь попереч-
Рис. 4.100. Электродинамический ного сечения катушки; ® - число витков.
микрофон Возникновение ЭДС на выходе такого
преобразователя принято называть микро-
фонным эффектом. Можно утверждать, что микрофонный эффект может прояв-
ляться как в электродинамической, так и в электромагнитной, конденсаторной и
других конструкциях, широко используемых в микрофонах самого различного
назначения и исполнения.
Микрофонный эффект электромеханического звонка телефонного аппарата.
Электромеханический вызывной звонок телефонного аппарата - типичный при-
мер индуктивного акустоэлектрического преобразователя, микрофонный эффект
которого проявляется при опущенной телефонной трубке. На рис. 4.101 приведена
схема телефонного аппарата, а на рис. 4.102 - вызывного звонка.
ЭДС микрофонного эффекта звонка может быть определена по формуле
где р - акустическое давление; ц = FSwwSJd 2zM - акустическая чувствитель-
ность звонка (здесь F - магнитодвижущая сила постоянного магнита; S - пло-
204
Рис. 4.101. Схема телефонного аппарата
Рис. 4.102. Схема вызывного звонка
щадь якоря (пластины); ро - магнитная проницаемость сердечника; о - число
витков катушки; SM - площадь плоского наконечника; d - значение зазора; zM -
механическое сопротивление). На таком же принципе (электромеханического
вызывного звонка) проявляется микрофонный эффект и в отдельных типах элек-
тромеханических реле различного назначения (рис. 4.103). Акустические коле-
Рис. 4.103. Схема работы реле:
КС - контактная система; К - катушка; С - сердечник; Я - якорь
бания воздействуют на якорь Я реле. Колебания якоря изменяют магнитный по-
ток реле, замыкающийся по воздуху, что приводит к появлению на выходе ка-
тушки реле ЭДС микрофонного эффекта.
Микрофонный эффект громкоговорителей. Динамические головки прямого
излучения, устанавливаемые в абонентских громкоговорителях, имеют доста-
точно высокую чувствительность к акустическому воздействию (2...3 мВ/Па) и
равномерную в речевом диапазоне частот амплитудно-частотную характеристи-
ку, что обеспечивает высокую разборчивость речевых сигналов. Схема динами-
ческой головки представлена на рис. 4.104. ЭДС микрофонного эффекта дина-
мической головки
Ем.э= ПР,
где Т| = BIS / zM - акустическая чувствительность (/ - длина проводника, движу-
щегося в магнитном поле с индукцией В, S - площадь поверхности, подвержен-
ной влиянию давления акустического поля; zM - механическое сопротивление).
205
Известно, что абонентские громкоговорители бывают однопрограммные и
многопрограммные. В частности, у нас в стране достаточно широко распростра-
нены трехпрограммные абонентские громкоговорители.
Трехпрограммные абонентские громкоговорители в соответствии с ГОСТ
12.286-88 (приемники трехпрограммные проводного вещания) имеют основ-
ной канал (НЧ) и каналы радиочастоты (ВЧ), включенные через усилитель-
преобразователь. Усилитель-преобразователь обеспечивает преобразование
ВЧ-сигнала в НЧ-сигнал с полосой 100...6400 Гц за счет использования
встроенных гетеродинов. Так, например, в трехпрограммном громкоговори-
теле «Маяк-202» используют два гетеродина для второй и третьей программ
ВЧ. Один вырабатывает частоту 78, другой 120 кГц.
Наличие сложной электронной схемы построения трехпрограммных громко-
говорителей (обратные связи, взаимные переходы, гетеродины) способствует
прямому проникновению сигнала, наведенного динамической головкой, на вы-
ход устройства (в линию). Не исключается и излучение наведенного сигнала на
частотах гетеродинов (78 и 120 кГц).
Микрофонный эффект вторичных электрочасов. Исполнительное уст-
ройство вторичных электрочасов представляет собой шаговый электродвига-
тель, управляемый трехсекундными разнополярными импульсами напряже-
нием ±24 В, поступающими с интервалом 57 с от первичных электрочасов.
Микрофонный эффект вторичных часов, обусловленный акустическим эф-
фектом шагового электродвигателя, проявляется в основном в интервалах ожи-
дания импульсов управления. Схематически устройство шагового двигателя
представлено на рис. 4.105.
Степень проявления микрофонного эффекта вторичных электрочасов суще-
ственно зависит от их конструкции: в пластмассовом, деревянном или металли-
ческом корпусе; с открытым или закрытым механизмом; с жестким или мягким
креплением [17].
Рис. 4.104. Схема громкоговорителя Рис. 4.105. Устройство шагового двигателя
Микрофонный эффект электроизмерительных приборов. В магнитоэлек-
трическом измерительном приборе имеются неподвижный постоянный магнит и
подвижная рамка, которая поворачивается вокруг своей оси под воздействием
собственного магнитного поля, создаваемого измеряемым напряжением, и маг-
нитного поля постоянного магнита. Рамка соединена со стрелкой, конец которой
перемещается по шкале измерения (рис. 4.106).
Если акустические колебания воздействуют на рамку, она вращается под их
давлением и на ее концах возникает ЭДС индукции.
206
Практически аналогичная ситуация будет при воздействии акустических ко-
лебаний на электромагнитный измерительный прибор. Различие между магнито-
электрическим и электромагнитным приборами
сводится к тому, что в электромагнитном приборе
вместо постоянного магнита используется элек-
тромагнит.
Следует отметить, что ЭДС микрофонного
эффекта возникает и в состоянии покоя прибора,
когда он не используется для конкретных изме-
рений.
Микрофонный эффект трансформаторов.
Примером индукционных акустоэлектрических
преобразователей являются различные транс-
форматоры (повышающие, понижающие, вход-
ные, выходные, питания и др.).
Трансформатор состоит из замкнутого сер-
дечника из мягкой стали или феррита, на кото-
Рис. 4.106. Устройство магни-
тоэлектрического измеритель-
ного прибора
ром есть как минимум две изолированные одна от другой катушки (обмотки) с
разными числами витков.
Акустическое влияние на сердечник и обмотку трансформатора (например,
на входной трансформатор усилителя звуковых частот) приведет к появлению
микрофонного эффекта. Если ЭДС индукции появляется в первичной обмотке,
то во вторичной обмотке она увеличивается в соответствии с коэффициентом
трансформации.
Магнитострикционные преобразователи. Магнитострикция - изменение
размеров и формы кристаллического тела при намагничивании - вызывается
изменением энергетического состояния кристаллической решетки в магнитном
поле и как следствие расстояний между узлами. Наибольших значений магнито-
стрикция достигает в ферро- и ферритомагнетиках, в которых магнитное взаи-
модействие частиц особенно велико.
Обратное магнитострикции явление - Виллари-эффект - изменение намаг-
ничиваемое™ тела при его деформации. Виллари-эффект обусловлен изменени-
ем под действием механических напряжений доменной структуры ферромагне-
тика, определяющей его намагниченность. В усилителях с очень большим ко-
эффициентом усиления входной трансформатор на ферритах при определенных
условиях вследствие магнитострикционного эффекта способен преобразовывать
механические колебания в электрические [17].
Емкостные датчики. Емкостные преобразовывающие элементы превращают
изменение емкости в изменение электрического потенциала, тока и напряжения.
Для простейшего конденсатора, состоящего из двух пластин, разделенных
слоем диэлектрика (воздух, парафин и др.), емкость определяется по формуле
C = zS!d,
где 8 - диэлектрическая проницаемость диэлектрика; S - площадь поверхности
каждой пластины; d - расстояние между пластинами.
Из соотношения следует, что емкость конденсатора зависит от расстояния
между пластинами. При наличии в цепи емкости постоянного источника тока и
207
Рис. 4.107. Устройство кон-
денсаторного микрофона
нагрузки воздействующее на пластины акустическое давление, изменяя рас-
стояние между пластинами, приводит к изменению емкости. Изменение емко-
сти приводит к изменению сопротивления цепи и
соответственно сопротивления и падению напряже-
ния на сопротивлении нагрузки пропорционально
акустическому давлению. Эти зависимости исполь-
зуют в конструкции конденсаторных микрофонов.
Принципиальная схема конденсаторного микрофо-
на приведена на рис. 4.107.
Когда на микрофон действует волна звукового
давления /?, диафрагма Д движется относительно не-
подвижного электрода - жесткой пластины П. Это
движение вызывает переменное изменение электрической емкости между диа-
фрагмой и задней пластиной, а следовательно, производит соответствующий
электрический сигнал на выходе.
Конденсаторы переменной емкости с воздушным диэлектриком являются
одним из основных элементов перестраиваемых колебательных контуров ге-
нераторных систем. Они устроены так, что система пластин вдвигается в
другую систему пластин, образующих конденсатор переменной емкости. На
такой конденсатор акустическое давление оказывается довольно просто, из-
меняя его емкость, а следовательно, и характеристики устройства, в котором
он установлен, и приводя к появлению неконтролируемого канала утечки
информации [17].
Пьезоэлектрические датчики. Изучение свойств твердых диэлектриков по-
казало, что некоторые из них поляризуются не только с помощью электрическо-
го поля, но и в процессе деформации при механических воздействиях на них.
Поляризация диэлектрика при механическом воздействии на него называется
прямым пьезоэлектрическим эффектом. Этот эффект имеется у кристаллов
кварца и всех сегнетоэлектриков. Чтобы его наблюдать, из кристалла вырезают
прямоугольный параллелепипед, грани которого должны быть ориентированы
строго определенным образом относительно оси. При сдавливании параллеле-
пипеда одна его грань заряжается положительно, а другая - отрицательно. Ока-
зывается, что в этом случае плотность поляризованного заряда грани прямо
пропорциональна давлению и не зависит от размеров параллелепипеда. Если
сжатие заменить растяжением параллелепипеда, то заряды на его гранях меняют
знаки на обратные.
У пьезокристаллов наблюдается и обратное явление. Если пластину, выре-
занную из пьезокристалла, поместить в электрическое поле, зарядив металличе-
ские обкладки, то она поляризуется и деформируется, например сжимается. При
перемене направления внешнего электрического поля сжатие пластинки сменя-
ется растяжением (расширением). Такое явление называется обратным пьезо-
электрическим эффектом.
Чтобы воспринять изменение заряда или напряжения, к пьезоэлектрическо-
му материалу подсоединяют две металлические пластины, фактически обра-
зующие пластины конденсатора, емкость которого определяется соотношением
С = Q!U, trq Q - заряд; U- напряжение.
208
Рис. 4.108. Устройство
пьезоэлектрического
микрофона
На практике в качестве пьезоэлектрического материала используют кристал-
лы кварца, рочелиевую соль, синтетические кристаллы (сульфат лития) и поля-
ризованную керамику (титанат бария).
Кварцевые пластины широко используют в пьезоэлектрических микрофонах,
охранных датчиках, стабилизаторах генераторов незатухающих колебаний. На
рис. 4.108 показано устройство пьезоэлектрического
микрофона. Когда звуковое давление р отклоняет
диафрагму 7, ее движение вызывает деформацию
пьезоэлектрической пластины 2, которая, в свою
очередь, вырабатывает электрический сигнал на вы-
ходных контактах [17].
Оптические преобразователи. К оптическим пре-
образователям относят приборы, преобразующие све-
товую энергию в электрическую и обратно. Простей-
шим прибором этого типа является светодиод, излу-
чающий свет при пропускании через р-я-переход тока
в прямом направлении. Обратный светодиоду прибор именуется фотодиодом. Фо-
тодиод - это приемник оптического излучения, преобразующий его в электриче-
ские сигналы. Кроме того, фотодиод, преобразующий свет в электрическую энер-
гию, используется и как источник электрической энергии - солнечный элемент.
Более сложными оптическими преобразователями служат электронно-
оптические преобразователи (ЭОП) и передающие телевизионные трубки раз-
личного исполнения (ПЗС, видиконы).
Опасным техническим каналом утечки информации в оптических системах
может быть акустооптический эффект. Акустооптический эффект - это явление
преломления, отражения или рассеяния света, вызванное упругими деформа-
циями стеклянных отражающих поверхностей или волоконно-оптических кабе-
лей под воздействием звуковых колебаний.
Основным элементом оптического кабеля волоконно-оптических систем яв-
ляется световод в виде тонкого стеклянного волокна цилиндрической формы.
Волоконный световод имеет двуслойную конструкцию и состоит из сердцевины
и оболочки с различными оптическими характеристиками (показателями пре-
ломления п\ и и2). Сердцевина служит для передачи электромагнитной энергии.
Назначение оболочки - создание лучших условий отражения на границе сердце-
вина-оболочка и защита от излучения в окружающее пространство.
Передача волны по световоду осуществляется за счет отражений ее от границы
сердечника и оболочки, имеющих разные показатели преломления (щ и л2). В отли-
чие от обычных электрических проводов в световодах нет двух проводников, и пе-
редача происходит волноводным методом в одном волноводе посредством много-
кратного отражения волны от границы раздела сред. Наибольшее распространение
получили волоконные световоды двух типов: ступенчатые и градиентные.
В современных волоконно-оптических системах в процессе передачи ин-
формации используется модуляция источника света по амплитуде, интенсивно-
сти и поляризации.
Внешнее акустическое воздействие на волоконно-оптический кабель приво-
дит к изменению его геометрических размеров (толщины), что вызывает изме-
209
нение пути движения света, т. е. приводит к изменению интенсивности, причем
пропорционально значению этого давления.
Волоконные световоды являются источником утечки акустической инфор-
мации за счет акустооптического (или акустоэлектрического) преобразования -
микрофонного эффекта в волоконно-оптических системах передачи информации
(используется также в охранных системах).
При слабом закреплении волокон в разъемном соединителе световодов про-
является акустический эффект модуляции света акустическими полями. Акусти-
ческие волны вызывают смещение соединяемых концов световода один относи-
тельно другого. Таким образом, осуществляется амплитудная модуляция излу-
чения, проходящего по волокну. Это свойство находит практическое примене-
ние в гидрофонах с колеблющимися волоконными световодами.
Глубина модуляции зависит от конструкции и свойств волокна, а также от
давления.
Чувствительность световода к давлению определяется значением соотноше-
ния Ч = Аф/фАр, где Аф - сдвиг фазы, вызываемый изменением давления Ар.
4.4.3. Излучатели электромагнитных колебаний
Каждое электрическое (электронное) устройство является источником маг-
нитных и электромагнитных полей широкого частотного спектра, характер ко-
торых определяется назначением и схемными решениями, мощностью устрой-
ства, материалами и конструкцией.
Известно, что характер поля меняется в зависимости от расстояния до пере-
дающего устройства. Оно делится на две зоны: ближнюю и дальнюю. Для
ближней зоны расстояние г значительно меньше длины волны электромагнитно-
го сигнала (г « X), поле имеет ярко выраженный магнитный (или электриче-
ский) характер, для дальней (г » X) поле носит явный электромагнитный харак-
тер и распространяется в виде плоской волны, энергия которой делится поровну
между электрической и магнитной компонентами.
Так как длина волны определяет ближнюю и дальнюю зоны излучателя, его
устройство, принцип работы и другие характеристики, то все излучатели элек-
тромагнитных сигналов правомерно классифицировать как низкочастотные, вы-
сокочастотные и оптические.
Низкочастотные излучатели. Низкочастотными излучателями электромагнит-
ных колебаний в основном являются звукоусилительные устройства различного
функционального назначения и конструктивного исполнения. В ближней зоне та-
ких устройств наиболее мощно проявляется магнитное поле опасного сигнала. Та-
кое поле усилительных систем достаточно просто обнаруживается и принимается
посредством магнитной антенны и селективного усилителя звуковых частот.
Высокочастотные излучатели. К группе высокочастотных (ВЧ) излучателей
относятся ВЧ-автогенераторы, модуляторы ВЧ-колебаний и устройства, генери-
рующие паразитные ВЧ-колебания по различным причинам и условиям.
Источниками опасного сигнала являются ВЧ-генераторы радиоприемников,
телевизоров, измерительных генераторов, мониторы ЭВМ [17].
Модуляторы ВЧ-колебаний, как и элементы, обладающие нелинейными ха-
рактеристиками (диоды, транзисторы, микросхемы), могут создавать нежела-
тельные составляющие высокочастотного характера.
210
Довольно опасным источником высокочастотных колебаний могут быть
усилители и другие активные элементы технических средств в режиме самовоз-
буждения за счет нежелательной положительной обратной связи.
Источниками излучения высокочастотных колебаний в различной радиотех-
нической аппаратуре являются встроенные в них генераторы, частота которых
по тем или иным причинам может быть промодулирована речевым сигналом.
Встроенные генераторы (гетеродины) обязательно имеются в радиоприемниках,
телевизорах, магнитофонах, трехпрограммных громкоговорителях и ряде элек-
троизмерительных приборов. К ним примыкают различные усилительные сис-
темы - усилители низкой частоты, системы звукоусиления, способные по тем
или иным причинам войти в режим самовозбуждения (т. е. стать неконтроли-
руемым генератором).
В качестве примера модуляции речью частоты автогенераторов можно рас-
смотреть микрофонный эффект гетеродинов радиоприемников бытового назна-
чения. Основным элементом гетеродина радиоприемника является колебатель-
ный контур с конденсатором переменной емкости.
Период собственных колебаний гетеродина определяется условием равенст-
ва реактивных сопротивлений катушки индуктивности и конденсатора: XL = хс.
Частоту со0, при которой выполняется это равенство, называют собственной час-
тотой колебательного контура. Ее значение определяется из выражения со0 =
= \/4lC . Под воздействием акустического давления будет меняться расстояние
между пластинами воздушного переменного конденсатора гетеродина, что при-
ведет к изменению емкости, соответственно частоты гетеродина по закону аку-
стического давления (произойдет частотная модуляция частоты гетеродина аку-
стическим сигналом).
Кроме конденсаторов акустическому воздействию подвержены катушки ин-
дуктивности с поперечными сердечниками, монтажные провода значительной
длины, в результате они также создают мик-
рофонный эффект.
Практика показала, что акустическая ре-
акция гетеродина возможна на расстоянии
до нескольких метров, особенно в помеще-
ниях с хорошей акустикой. В зависимости
от типа приемника прием такого сигнала
возможен на значительном расстоянии,
иногда достигающем 1...2 км [17].
Источником излучения высокочастот-
ных колебаний в аппаратуре звукозаписи
является генератор стирания-подмагни-
чивания (ГСП), частота F которого может
быть промодулирована речевым сигналом
за счет нелинейных элементов в усилителе
записи, а также из-за наличия общих цепей
электропитания.
Структурная схема магнитофона и пути
Рис. 4.109. Принципиальная схема
магнитофона (Ф — фильтр; ИП -
источник питания)
прохождения сигнала ГСП частотой 50... 120 кГц в элементы усилителя воспро-
изведения (УВ) и усилителя записи (УЗ) представлены на рис. 4.109 [17].
211
пер — 1 зв
Рис. 4.110. Модулирование
низкочастотным сигналом
В цепях технических средств, находящихся в зоне
воздействия мощных высокочастотных излучений
Fnep, наводятся сигналы с напряжением до единиц и
даже десятков вольт. Если в указанных цепях имеются
нелинейные элементы (НЭ), параметры которых (ин-
дуктивность, емкость или сопротивление) изменяются
под действием низкочастотных сигналов F3B, то в ок-
ружающем пространстве будет создаваться вторичное
поле высокочастотного излучения Fc, модулированное низкочастотным сигна-
лом (рис. 4.110).
В качестве НЭ могут выступать телефон, различные датчики (ВЧ навязыва-
ние по проводам), приемники, магнитофоны (ВЧ-навязывание по эфиру) [17].
4.4.4. Паразитные связи и наводки
Элементы, цепи, тракты, соединительные провода и линии связи любых
электронных систем и схем постоянно находятся под воздействием собственных
(внутренних) и сторонних (внешних) электромагнитных полей различного про-
исхождения, индуцирующих или наводящих в них значительные токи. Такое
воздействие называют электромагнитным влиянием или просто влиянием на
элементы цепи. Коль скоро такое влияние образуется непредусмотренными свя-
зями, то говорят о паразитных (вредных) связях и наводках, которые также мо-
гут привести к образованию каналов утечки информации.
Основными видами паразитных связей в схемах электромагнитных уст-
ройств являются емкостные, индуктивные, электромагнитные, электромехани-
ческие и через источники питания и заземления радиоэлектронных средств.
Удобно рассмотреть паразитные связи и наводки на примере широко распро-
страненных усилительных схем различного назначения [17].
Паразитные емкостные связи. Эти связи обусловлены электрической емко-
стью между элементами, деталями и проводниками усилителей, несущими потен-
циал сигнала. Так как сопротивление емкости, создающей паразитную емкостную
связь, падает с ростом частоты (хс = 1/у/азС), проходящая через него энергия уве-
личивается. Поэтому паразитная емкостная
связь может привести к самовозбуждению на
частотах, превышающих высшую рабочую
частоту усилителя.
Чем больше усиление сигнала между
цепями и каскадами, имеющими емкостную
связь, тем меньшей емкости достаточно
для его самовозбуждения. При усилении в
105 раз (100 дБ) для самовозбуждения усили-
теля звуковых частот иногда достаточно па-
разитной емкости между входной и выход-
ной цепями Сп.с = 0,01 пФ (рис. 4.111).
Паразитные индуктивные связи. Такие
связи обусловлены наличием взаимоин-
^пс
—II—
о —
Рис. 4.111. Схема транзисторного
усилителя
212
дукции между проводниками и деталями усилителя, главным образом между
его трансформаторами. Паразитная индуктивная обратная связь между
трансформаторами усилителя, например между входным и выходным транс-
форматорами, может вызвать самовозбуждение в области рабочих частот и
на гармониках.
Для усилителей с малым входным напряжением (микрофонные, магнито-
фонные и др.) очень опасна индуктивная связь входного трансформатора с
источниками переменных магнитных полей (трансформаторами питания).
При расположении такого источника в нескольких десятках сантиметров от
входного трансформатора наводимая на вторичной обмотке трансформатора
средних размеров ЭДС может достигнуть нескольких милливольт, что в сот-
ни раз превосходит допустимое значение. Всего слабее паразитная индуктив-
ная связь проявляется при тороидальной конструкции входного трансформа-
тора. Паразитная индуктивная связь ослабляется при уменьшении размеров
трансформаторов.
Паразитные электромагнитные связи приводят к самовозбуждению отдель-
ных каскадов звуковых и широкополосных усилителей на частотах порядка де-
сятков и сотен мегагерц. Эти связи обычно возникают между выводными про-
водниками усилительных элементов, образующими колебательную систему с
распределенными параметрами на определенной резонансной частоте.
Паразитные электромеханические связи проявляются в устройствах, корпу-
са которых имеют жесткую механическую связь с включенным на выход усили-
теля громкоговорителем, в усилителях, расположенных близко от громкогово-
рителя, а также в усилителях, подвергающихся вибрации (сотрясению). Меха-
нические колебания диффузора близкорасположенного громкоговорителя через
корпус последнего и шасси усилителя, а также через воздух передаются усили-
тельным элементам. Вследствие микрофонного эффекта эти колебания вызыва-
ют в цепях усилителя появление переменной составляющей тока, создающей
паразитную обратную связь.
Транзисторы почти не обладают микрофонным эффектом, поэтому паразит-
ная электромеханическая связь проявляется в основном в ламповых усилителях.
Обратная связь в усилителях звуковых частот. Обратная связь представляет
собой передачу сигналов из последующих цепей в предыдущие, т. е. в направле-
нии, обратном нормальному, например из выходной цепи усилительного эле-
мента или усилителя в его входную цепь.
Для оценки обратной связи воспользуемся следующими обозначениями: к -
коэффициент усиления усилителя без обратной связи, равный отношению его
выходного {7ВЫХ напряжения к входному С7ВХ, и р - коэффициент передачи на-
пряжения цепи обратной связи, равный отношению ее выходного напряжения
С7св к выходному напряжению усилителя С7ВЫХ5 являющемуся входным напряже-
нием цепи обратной связи:
^ = ^вых/^вХ; ₽ = ^св/^вых-
Обратная связь может вызываться:
- физическими свойствами и конструкцией усилительных элементов (такую
обратную связь называют внутренней обратной связью);
213
- паразитными индуктивными, емкостными и другими связями между вход-
ными и выходными цепями (такую обратную связь называют паразитной об-
ратной связью).
Паразитные обратные связи не всегда поддаются расчету и могут сущест-
венно изменить свойства усилителей. Если напряжение обратной связи (7Св сов-
падает по фазе с входным напряжением С7ВХ и имеет с ним одинаковое направле-
ние, обратную связь называют положительной. При положительной обратной
связи коэффициент усиления
*св = ^вых /(^вх - исв ) = к /(1 - С/св / U ) = к /(1 - 0£).
Это уравнение показывает, что положительная обратная связь при < 1
увеличивает коэффициент усиления. Из него же видно, что при положительной
обратной связи и = 1, к^ становится бесконечно большим. В этом случае даже
при отсутствии сигнала на входе усилителя ничтожно малые составляющие на-
пряжения его собственных шумов усилятся до полной амплитуды выходного.
Такое явление называют самовозбуждением усилителя. При положительной об-
ратной связи и значении р£ > 1 усилитель обычно самовозбуждается и перехо-
дит в режим паразитной генерации.
Самовозбуждение может возникнуть и в усилителе с отрицательной обрат-
ной связью из-за того, что на частотах, где усилитель вместе с цепью обратной
связи вносит сдвиг фазы 180°, отрицательная обратная связь превращается в
положительную. Если на этих частотах значение р£> 1, то усилитель самовоз-
буждается. Самовозбуждение усилителей обычно происходит на очень низких
или очень высоких частотах, выходящих за пределы рабочей полосы. В этом
случае акустические сигналы, поступающие на усилитель, модулируют часто-
ту самовозбуждения и излучаются в эфир усилителем как обычным радиопе-
редатчиком.
В системах с обратной связью, используемых в качестве усилителя, терми-
ном устойчивость определяют наличие или отсутствие в системе собственных
установившихся колебаний. В то время как система, не имеющая цепей обрат-
ной связи, всегда устойчива, введение обратной связи может оказаться причи-
ной возникновения колебаний в системе.
Амплитудные и фазовые характеристики усилителя и цепи обратной свя-
зи являются функциями частоты и по этой причине обратная связь может
быть положительной при одних частотах и отрицательной - при других. Сле-
довательно, система, имеющая отрицательную обратную связь в среднечас-
тотном диапазоне, может оказаться системой с положительной обратной свя-
зью при частотах, удаленных от этого диапазона, т. е. быть каналом утечки
информации.
Паразитные обратные связи через источники питания. Обратные связи
через источники питания в многокаскадном усилителе возникают вследствие
того, что источник питания имеет внутренне сопротивление. Так, выходной
ток сигнала /вых усилителя, изображенного на рис. 4.112, проходя через источ-
ник питания /Гпит, создает на внутреннем сопротивлении z последнего падение
напряжения U = Это напряжение вместе с постоянной составляющей на-
214
пряжения источника питания подается на предыдущие каскады, а затем через
элементы межкаскадной связи попадает на входы усилительных каскадов, соз-
^вых
Рис. 4.112. Паразитная обратная связь через источник
питания
давая в усилителе паразитную обратную связь. В зависимости от фазы по от-
ношению к выходному сигналу это напряжение может увеличивать напряже-
ние обратной связи и при достаточном значении привести к самовозбуждению
усилителя.
Опасный сигнал может попасть в цепь электрического питания, создавая ка-
нал утечки информации. В линию электропитания высокая частота передается за
счет паразитных емкостей трансформаторов блоков питания (рис. 4.113).
Утечка информации по цепям заземления. Заземление - это устройство, со-
стоящее из заземлителей и проводников, соединяющих заземлители с электрон-
Рис. 4.113. Схема утечки информации по це-
пям питания (В — выпрямитель; ВТ — входной
трансформатор)
ными и электрическими установками, приборами, машинами. Заземлителем назы-
вают проводник или группу проводников, выполненных из проводящего материа-
ла и находящихся в непосредственном соприкосновении с грунтом. Заземлители
могут быть любой формы - в виде труб, стержня, полосы, листа, проволоки и т. п.
Заземлители в основном выполняют защитную функцию и предназначены для
соединения с Землей электрических приборов защиты.
Отношение потенциала заземлителя U3 к стекающему с него току /3 называется
сопротивлением заземлителя R3, Значение сопротивления Г » I__________
заземлителя зависит от удельного сопротивления грунта и h r3 П и3
площади соприкосновения его с Землей (рис. 4.114). JL г----
Взаимные влияния в линиях связи. Для анализа резуль-
татов влияния друг на друга параллельно проложенных рис. цд Эквива-
линий связи приняты следующие основные определения лентная схема
(рис. 4.115): заземления
215
Рис. 4.115. Сигналы в цепях от вза-
имных влияний
- влияющая цепь, т. е. цепь, создающая
первичное влияющее электромагнитное поле
(цепь I);
- цепь, подверженная влиянию, - та, на
которую воздействует влияющее электро-
магнитное поле (цепь П);
- непосредственное влияние - сигналы,
индуцированные непосредственно электро-
магнитным полем влияющей цепи.
Помимо непосредственного влияния происходит косвенное (вторичными
полями за счет отражения) и др.
В зависимости от структуры влияющего электромагнитного поля и конст-
рукции цепи, подверженной влиянию, различают систематические и случайные
влияния. К систематическим относят взаимные наводки, возникающие по всей
длине линии. К случайным - возникающие вследствие ряда случайных причин и
не поддающиеся точной оценке.
Степень ослабления излучения кабеля в зависимости от расстояния и часто-
ты определяется по формуле
Z> = 201g(47ttZ/X),
где d — расстояние от кабеля; X - длина волны излучения.
В дальней зоне (начиная от расстояний от источника возмущения, больших
6Х) электрическое поле принимает плоскую конфигурацию и распространяется в
виде плоской волны, энергия которой делится поровну между электрической и
магнитной компонентами.
Сильные магнитные поля, как правило, создаются цепями с низким волно-
вым сопротивлением, большим током и малым перепадом напряжений, а интен-
сивные электрические поля - цепями с большим сопротивлением, высоким на-
пряжением и малым током.
С определенной степенью обобщения множество каналов утечки информа-
ции может быть обусловлено следующими причинами и явлениями:
- микрофонным эффектом элементов электронных схем;
- магнитным полем электрических схем и устройств различного назначения
и использования;
- электромагнитным излучением низкой и высокой частоты;
- паразитной генерацией усилителей различного назначения;
- взаимным влиянием проводов и линий связи;
- высокочастотным навязыванием мощных радиоэлектронных средств и
систем.
Кроме того, утечка может происходить по цепям питания и заземления элек-
трических систем.
Каждый из этих каналов в зависимости от конкретной реализации элементов,
узлов и изделий будет иметь определенное проявление, специфические характе-
ристики и особенности образования в зависимости от условий расположения и
исполнения.
216
4.4.5. Способы несанкционированного подключения к информационным линиям
Самым простым способом незаконного подключения является контактное,
например параллельное подключение телефонного аппарата, широко распро-
страненное в быту. Но контактное подключение такого типа легко обнаружива-
Рис. 4.116. Подключение к телефонной линии с помощью согла-
сующего устройства
ется вследствие существенного падения напряжения, приводящего к ухудшению
слышимости в основном телефонном аппарате. Технически метод контактного
подключения заключается в непосредственном включении в провода телефон-
ного либо телеграфного аппарата.
Более совершенным является подключение к линиям связи или проводам с
помощью согласующего устройства (рис. 4.116).
Известен способ контактного подключения аппаратуры к линиям связи с
компенсацией падения напряжения. Прослушивающая аппаратура и компенси-
Рис. 4.117. Подключение к телефонной линии
с компенсацией напряжения
Рис. 4.118. Перехват телеграфных передач
при помощи реле
рующий источник напряжения при этом способе включаются в линию последо-
вательно, как это показано на рис. 4.117.
Используется способ перехвата телеграфных передач при помощи включе-
ния в линию чувствительного низкоомного реле (рис. 4.118). Контакты реле бу-
217
дут замыкать местную цепь телеграфного аппарата в соответствии с током, про-
ходящим по линии. Механическое реле может применяться на низких скоростях
телеграфирования, на высоких же скоростях (факс, линии передачи данных) ис-
пользуют электронные реле. При этом для устойчивости работы аппаратуры пе-
рехвата не исключается использование усилителей тока.
Бесконтактное подключение к линии связи осуществляется двумя путями
[17]:
- за счет электромагнитных наводок в рамке, параллельно приложенной к
проводам;
- с помощью сосредоточенной индуктивности, охватывающей контролируе-
мую линию.
В обоих случаях прослушивание реализуется за счет электромагнитной ин-
дукции.
На рис. 4.119 Л, Л - токи в двухпроводной телефонной линии TJI, a d\9 dz, d3
и - расстояния между рамкой и проводами прослушиваемой линии. Л инду-
цирует в рамке Р ток одного направления (стрелки без оперения). /2 индуцирует
___________
__ /2 тл
I 1 < — Рис. 4.119. Прослушивание двухпровод-
v v I 1 —► Р ной линии на рамку
z I
V V
в рамке ток противоположного направления (стрелки с оперением). В рамке бу-
дет циркулировать ток /, равный разности индуцированных токов. Этот ток, по-
падая в усилитель поста прослушивания, усиливается и поступает на головные
телефоны и магнитофон. ЭДС, наведенная в рамке, будет тем больше, чем
больше активная длина рамки /, чем больше разнос проводов двухпроводной
линии и чем ближе к линии находится рамка.
Если вблизи телефонной линии расположить симметричный индукционный
датчик (рис. 4.120), выполненный в виде трансформатора, то в нем наводится
Рис. 4.120. Подключение к линии индукционного датчика
ЭДС, значение которой будет определяться мощностью передаваемого по ли-
нии сигнала и близостью обмоток к линии. Принятый индукционным датчиком
сигнал может быть усилен специальным (селективным) усилителем звуковых
частот.
218
Качество принимаемого сигнала определяется подбором характеристик ин-
дукционного датчика, самим процессом усиления и настройкой усилителя низ-
кой частоты, обязательно с регулируемой полосой пропускания. Это позволяет
отфильтровать другие сигналы наводок и помех и качественно выделить интере-
сующий сигнал.
В связи со слабым влиянием индуктивного датчика на параметры телефон-
ной линии обнаружить его техническими средствами практически невозможно.
Отсутствие гальванического контакта и надежная изоляция проводящих элемен-
тов датчика от телефонной линии в зоне подключения делают невозможным его
выжигание.
Контактное и бесконтактное подключение возможно и к линиям волоконно-
оптической связи (ВОЛС). Для контактного подключения удаляют защитные
слои кабеля и изгибают его на необходимый угол (рис. 4.121, а).
Наличие изгиба в световоде вызывает явление дифракционного рассеяния света
в этом месте. Устанавливая в месте изгиба фотоприемник (ФП) с входной оптикой,
можно перехватывать рассеянное излучение с
последующим преобразованием в электриче-
ские сигналы. После соответствующего усиле-
ния и фильтрации электрических сигналов
можно прослушивать передаваемые сообщения.
При таком подключении к ВОЛС обнару-
жить утечку информации за счет ослабления
мощности излучения бывает очень трудно, так
как при существующих приемных устройствах
несанкционированного доступа достаточно ото-
брать всего 0,001% передаваемой мощности,
чтобы прослушать переговоры, а дополнитель-
ные потери при изгибе кабеля составляют всего
0,01... 1,0 дБ в зависимости от величины изгиба.
Принципиальная схема бесконтактного под-
ключения к ВОЛС приведена на рис. 4.121, б.
В качестве элемента съема светового сиг-
нала используется стеклянная трубка, запол-
ненная жидкостью с высоким показателем
преломления и с изогнутым концом, жестко
фиксированная на оптическом кабеле, с которого предварительно снята экран-
ная оболочка. На отогнутом конце трубки устанавливается объектив, фокуси-
рующий световой поток на фотодиод, а затем на усилитель звуковых сигналов
подается электрический сигнал с фотодиода.
Съем информации с телефонной линии можно осуществить и методом высо-
кочастотного навязывания.
Под высокочастотным навязыванием понимается способ, при котором в те-
лефонную линию в сторону прослушиваемого телефона от специального генера-
тора подаются высокочастотные колебания.
Эти колебания за счет нелинейности элементов телефонного аппарата взаи-
модействуют с речевыми сигналами при разговоре (поднятая телефонная труб-
ка) или с ЭДС микрофонного эффекта звонка (опущенная трубка). Звуковой и
219
высокочастотный сигналы образуют сложную полиномную зависимость, так как
нелинейность выполняет роль модулятора. Получается квазителефонная радио-
закладка, в которой генератор ВЧ-колебаний вынесен, а нелинейность аппарата
выполняет роль модулятора [17].
Излучение модулированного сигнала в свободное пространство обеспечива-
ется телефонным шнуром, соединяющим микротелефонную трубку с телефон-
вчг
К микрофону
и телефону
зв
ф
Рис. 4.122. Реализация ВЧ-навязывания
на телефонный аппарат (ВЧГ-ВЧ-генератор;
Ф - фильтр; Зв - звонок)
ным аппаратом, или самим аппаратом. ВЧ-навязывание может направляться как
на громкоговорители, так и на другие элементы, обладающие микрофонным эф-
фектом. Принцип реализации ВЧ-навязывания на телефонный аппарат при опу-
щенной микротелефонной трубке приведен на рис. 4.122.
4.4.6. Средства разведки ПЭМИН
Разведка ПЭМИН обеспечивает добывание информации, содержащейся
непосредственно в формируемых, передаваемых или отображаемых (телефон-
ных, телеграфных, телеметрических и т. д.) сообщениях и документах (текстах,
таблицах, рисунках, картах, снимках, телевизионных изображениях и т. д.)
с использованием радиоэлектронной аппаратуры, регистрирующей электро-
магнитные излучения и электрические сигналы, наводимые первичными элек-
тромагнитными излучениями ЭМИ в токопроводящих цепях различных
технических средств.
Для ведения разведки ПЭМИН используют в основном средства радио- и ра-
диотехнической разведки, а также различные радиоизмерительные устройства.
К таким средствам относят [16]:
- портативные сканерные приемники, различные цифровые анализаторы
спектра, селективные микровольтметры, радиотестеры и комплексы для измере-
ния параметров приемопередающих устройств;
- специальные средства для контроля радиотелефонов и сотовой связи;
- программно-аппаратные комплексы, построенные на базе сканерных при-
емников;
- портативные радиопеленгаторы;
- средства компьютерного шпионажа.
Сканерные приемники можно разделить на переносные и перевозные. К пере-
носным относят малогабаритные приемники весом 150...350 г. Они имеют авто-
номные аккумуляторные источники питания и могут скрытно размещаться под
одеждой. Несмотря на малые размеры и вес подобные приемники позволяют вес-
ти разведку в диапазоне от 100 кГц до 2000 МГц. Они обеспечивают прием сигна-
лов с амплитудной и частотной модуляцией. При этом чувствительность прием-
ников при отношении сигнал/шум, равном 10 дБ (относительно 1 мкВ), составляет
при узкополосной частотной модуляции 0,35... 1 мкВ, а при широкополосной час-
тотной модуляции 1.. .6 мкВ.
220
Малогабаритные сканерные приемники имеют от 100 до 1000 каналов памя-
ти и обеспечивают скорость сканирования от 20 до 30 каналов в секунду, при
шаге перестройки от 50.. .500 Гц до 50... 1000 Гц.
Перевозные сканерные приемники отличаются от переносных большими ве-
сом (от 1,2 до 6,8 кг), габаритами и большими возможностями. Они, как прави-
ло, устанавливаются в помещениях или в автомобилях. Имеется возможность
управления от ПЭВМ.
Сканерные приемники (как переносные, так и перевозные) могут работать в
одном из следующих режимов:
- автоматическое сканирование в заданном диапазоне частот;
- автоматическое сканирование по фиксированным частотам;
- ручной.
Слуховой контроль обнаруженных сигналов может осуществляться операто-
ром через головные телефоны или встроенный громкоговоритель.
Наряду со сканерными приемниками для радио- и радиотехнической развед-
ки могут использоваться различного вида цифровые портативные анализаторы
спектра и селективные микровольтметры.
Портативные анализаторы спектра при сравнительно небольших габари-
тах и массе (от 9,5 до 20 кг) позволяют принимать сигналы в диапазоне час-
тот 30 Гц - 9 кГц ... 1,8-40 ГГц и анализировать их тонкую структуру. Точ-
ность измерения параметров сигналов очень высока. Погрешность измерения
частоты составляет 15...210 Гц для частоты 1 ГГц и 1... 1,2 кГц для частоты
10 ГГц, а погрешность измерения амплитуды сигнала составляет 1...3 дБ.
Ширина полосы разрешения может меняться от1...30Гцдо2...5 МГц. Чув-
ствительность портативных анализаторов спектра составляет -125... 145 дБ
(относительно 1 мВт).
Селективные микровольтметры позволяют принимать сигналы на частотах
до 2 ГГц и измерять их амплитуду с погрешностью 1 дБ и частоту с погрешно-
стью 10... 100 Гц. Чувствительность селективных микровольтметров составляет
0,25...0,89 мкВ.
Для ведения радио- и радиотехнической разведки используют и специаль-
ные приборы контроля радиосвязи (радиотестеры), позволяющие измерять па-
раметры сигналов самых современных средств связи. В состав приборов вхо-
дят анализатор спектра, цифровой запоминающий осциллограф, устройство
кодирования и декодирования, память для ввода данных, генератор сигналов и
т. д. Приборы компьютеризованы, что позволяет автоматически проводить
стандартные измерения, и имеют встроенный принтер. Для решения специаль-
ных задач возможно программирование режимов и запись программ в карты
памяти. Радиотестеры работают со всеми видами модуляции (в том числе и
однополосной) в симплексном и дуплексном режимах, проводят спектральный
и гармонический анализы сигналов, измеряют амплитудно-частотные характе-
ристики. Приборы имеют стандартные интерфейсы для подключения к ПЭВМ
или принтеру, что позволяет документировать результаты измерений. Они
удобны для использования, имеют цифровой дисплей, на котором представля-
ется вся необходимая информация.
Созданные на базе сканерных приемников программно-аппаратные ком-
плексы позволяют решать широкий спектр задач радио- и радиотехнической
221
разведки и контроля в автоматизированном режиме. Использование внешней
ПЭВМ с программным обеспечением существенно расширяет возможности
комплекса. Высокая степень автоматизации позволяет производить поиск, обна-
ружение, распознавание и регистрацию сигналов РЭС, а также перехват и реги-
страцию сообщений, передаваемых по каналам радиосвязи.
Комплексы позволяют проводить анализ радиоэлектронной обстановки, вес-
ти базу РЭС и используются для обнаружения новых РЭС.
Для определения местоположения источников ЭМИ используют специаль-
ные радиопеленгаторы. Наиболее характерным является мобильный широкопо-
лосный доплеровский радиопеленгатор RA-555. Он позволяет определять на-
правление на источник ЭМИ в диапазоне 20.. .1000 МГц с ошибкой не более 2°.
Современные системы радио- и радиотехнической разведки позволяют пере-
хватывать информацию, обрабатываемую в ЭВМ. Примером такой системы яв-
ляется американская система 4625 - COMINT, которая без непосредственного
подключения к ЭВМ, только за счет перехвата побочных электромагнитных из-
лучений, восстанавливает информацию, обрабатываемую в ней. Система имеет
100 каналов памяти, в которых накапливается и анализируется перехваченная
информация. После обработки перехваченная информация восстанавливается в
том виде, в котором она выводилась на экран дисплея ЭВМ. Система работает в
диапазоне частот 25 МГц...2 ГГц, чувствительность приемного устройства со-
ставляет 0,15 мкВ.
Наряду со специальными средствами перехвата побочных электромагнитных
излучений ЭВМ для съема информации используют аппаратные закладки.
Под аппаратной закладкой обычно понимают электронное устройство, не-
санкционированно и скрытно установленное в ЭВМ с целью обеспечить в нуж-
ный момент времени утечку информации, нарушение ее целостности или блоки-
рование.
Перехватываемая с помощью аппаратных закладок информация может пе-
редаваться в реальном масштабе времени или записываться на специальные
устройства с последующей передачей по команде. Причем команда на сброс
информации может передаваться из автомашины, самолета или наземного цен-
тра через специальный спутник связи. Как правило, информация, сбрасывае-
мая по команде, передается с использованием аппаратуры быстродействия. В
центре сбора и обработки перехваченная информация восстанавливается и
анализируется.
Аппаратные закладки собирают из стандартных модулей, используемых в
ЭВМ, и устанавливают таким образом, чтобы имелся доступ к входной или вы-
ходной информации, например к информации, выводимой на экран дисплея
ЭВМ. В некоторых случаях аппаратные закладки могут быть выполнены в виде
отдельных модулей, установленных в корпусе ЭВМ и подключенных к тем или
иным ее элементам.
Наиболее вероятна установка закладок в ЭВМ иностранного производства,
сборка которых осуществляется за пределами России и которые целенаправлен-
но поставляются на предприятия или в учреждения.
Предварительно в упаковку или непосредственно в ЭВМ возможна установ-
ка радиомаяков, с помощью которых спецслужбы выясняют, куда конкретно они
доставляются и где предполагается их использовать.
222
Не исключена установка закладок в ЭВМ при устранении неисправностей
или доработках, проводимых иностранными фирмами в период сервисного и
гарантийного обслуживания.
Кроме съема информации аппаратные закладки могут использоваться и для
ее разрушения, уничтожения или вывода из строя ЭВМ. Как правило, это проис-
ходит в запрограммированное время, например, через определенное количество
включений ЭВМ или по команде. Для разрушения информации используют спе-
циальные компьютерные вирусы, а вывод из строя ЭВМ чаще всего происходит
за счет электрического пробоя схемы, механического или химического повреж-
дения отдельных ее элементов.
Наиболее полные сведения о портативных средствах радио- и радиотехниче-
ской разведки представлены в [16, 19].
5. ГИДРОАКУСТИЧЕСКАЯ РАЗВЕДКА
5.1. Основные положения
Под гидроакустической разведкой (ГАР) понимается получение информации
путем приема и анализа акустических сигналов инфразвукового, звукового и
ультразвукового диапазонов, распространяющихся в водной среде от надводных
и подводных объектов [1].
По принципу использования энергии акустического излучения средства ГАР
делятся на активные (гидролокаторы) и пассивные. Гидролокатор работает на
принципе излучения в водной среде зондирующих акустических сигналов с по-
следующим приемом и анализом отраженных от объектов и морского дна эхо-
сигналов.
При ведении пассивной ГАР используют шумопеленгаторы, которые прини-
мают и анализируют шумовые акустические излучения в водной среде, возни-
кающие при работе двигателей, гребных валов, машин и механизмов различных
агрегатов надводных кораблей (НК), подводных лодок (ПЛ) и других плав-
средств, а также средства разведки, предназначенные для приема и анализа аку-
стических сигналов, создаваемых гидролокаторами, эхолотами, системами гид-
роакустической связи и др.
ГАР решает следующие основные задачи:
- определение параметров первичных шумовых полей объектов, функциони-
рующих в водной среде, в целях выявления их классификационных признаков;
- определение параметров излучения активных гидроакустических средств
(ГАС) кораблей минно-торпедного оружия и средств гидроакустического подав-
ления в целях получения данных, необходимых для организации гидроакустиче-
ского подавления;
- определение уровня развития гидроакустической техники, выявление про-
филя ВПО и направления проводимых в прибрежных районах работ;
- определение гидролокационных характеристик ПЛ, НК, минно-торпедного
вооружения;
- перехват информации, передаваемой по каналам гидроакустической связи;
- картографирование рельефа дна на подходах к побережью, проливов и
фарватеров, военно-морских баз, а также выявление мест установки и элементов
конструкций подводных стационарных сооружений;
- выявление дислокации и маршрутов перемещения объектов ВМС по их
шумовым полям и сигналам активных ГАС;
- выявление подводных стартов ракет и торпед, определение их мест, глуби-
ны и количества.
В гидролокаторах и шумопеленгаторах прием полезных сигналов происхо-
дит на фоне гидроакустических помех различного происхождения. Кроме того,
при работе гидроакустической аппаратуры существуют сложные взаимосвязи
224
между аппаратурой, средой, в которой распространяется сигнал, и объектом раз-
ведки. Именно эти взаимосвязи определяют дальность действия аппаратуры в
реальных условиях.
Основными характеристиками аппаратуры Г АР являются:
- рабочая частота;
- акустическая мощность;
- ширина ДН акустической антенны;
- диапазон рабочих частот.
Сущность перечисленных характеристик не отличается от соответствующих
характеристик средств РЛС.
При оценке возможностей средств ГАР важную роль играют пространствен-
но-временные параметры среды распространения:
- распределение температуры и солености воды;
- гидростатическое давление;
- отражающие свойства морской поверхности и дна.
Кроме того, на дальность действия аппаратуры ГАР влияют отражающая
способность цели (сила цели), уровень создаваемого объектом шумового излу-
чения, взаимное расположение аппаратуры разведки и цели.
Большую, а в некоторых случаях и решающую роль играет уровень акусти-
ческих помех на входе приемною устройства.
Учет всех этих факторов и параметров необходим для оценки возможности
обнаружения подводных объектов.
Ниже более детально рассматриваются различные аспекты, связанные с ве-
дением гидроакустической разведки.
5.2. Акустические волны в морской среде
Плотность жидких и твердых тел чрезвычайно мало меняется при измене-
нии давления. Для решения многих задач их можно считать несжимаемыми,
однако ничтожные изменения плотности, возникающие при изменении давле-
ния, играют важную роль в акустике. Внутренние силы, сопротивляющиеся
изменению плотности, являются упругими; при снятии давления они приводят
тело в первоначальное состояние. Жидкости обладают только силами объем-
ной упругости, а в твердом теле, кроме того, могут существовать силы сдвиго-
вой упругости.
При смещении частиц из равновесного состояния в упругой среде под дейст-
вием какой-либо силы в некоторой области появляется избыточное давление, а в
соседней - пониженное. Упругие силы передают это смещение, а следовательно, и
давление соседним частицам, т. е. дальше и дальше. Таким образом, упругое воз-
мущение будет распространяться с определенной для данной среды скоростью.
Обычно создают периодическое или импульсное возбуждение перемещением ка-
кой-либо поверхности, увлекающей своим движением прилегающие к ней части-
цы воды. Эта движущаяся поверхность может быть и границей твердого тела, и
границей газовой плотности, и границей движущегося объема жидкости. В жид-
кости и газах из-за отсутствия сдвиговой упругости могут возбуждаться только
продольные волны. В твердом теле возникают, кроме того, еще и поперечные
волны, которые распространяются с меньшей скоростью, чем продольные, и бы-
стро затухают.
225
5.2.1. Основные понятия и величины
Будем рассматривать распространение звуковых волн бесконечно малой ам-
плитуды, т. е. предполагать, что скорость распространения возмущений не зави-
сит от их значения. Простейшим видом волнового движения является плоская
волна [2]. Возмущение среды в этом случае одномерно. В изотропной среде лу-
чи плоской волны всегда параллельны друг другу, волновые поверхности -
плоскости, перпендикулярные лучам. Для простейшего вида периодического
движения - гармонических колебаний - расстояние между двумя ближайшими
точками одинаковой фазы равняется длине волны. Длина волны X, скорость ее
распространения с, частота колебаний f связаны соотношением
\ = c/f (5.1)
Переменная часть давления, возникающая в среде при прохождении звуко-
вой волны, называется звуковым давлением Р. Это одна из главных величин,
характеризующих звуковое поле.
Единицей акустического давления в системе СИ является Паскаль - давле-
ние, вызываемое силой в 1 Н, действующей на площадку в 1 м2. В системе СГС
единицей давления является бар, равный силе в 1 дин, действующей на площад-
ку в 1 см2. Соотношение между этими единицами следующее: 1 Па = 10 бар.
Скорость К, с которой перемещаются частицы среды около своего положе-
ния равновесия при прохождении через нее звуковой волны, называется колеба-
тельной. В плоской бегущей звуковой волне
Р=Грс. (5.2)
где р - плотность среды. Значение V всегда много меньше с. В продольной вол-
не направления Кис совпадают.
Зависимость между акустической мощностью W и звуковым давлением имеет вид
W=p2A/2pc, (5.3)
где р - значение амплитуды звукового давления, А - площадь волновой по-
верхности, через которую протекает звуковая энергия; произведение ре на-
зывается акустическим или волновым сопротивлением среды, для воды оно
равно ~ 1,5 • 105 г / (см2с).
Единица мощности в системе СИ - Ватт. 1 Вт равен мощности, при которой
работа в 1 Дж совершается за 1 с. В системе СГС мощность измеряется в эрг/с.
Соотношение этих единиц равно 107.
Интенсивностью (силой) звука I называется средняя по времени звуковая энер-
гия, переносимая волной через единичную площадку, перпендикулярную к направ-
лению распространения, в единицу времени. Для рассматриваемого случая
I=pVI2=p2/2pc=V2pcl2. (5.4)
В стоячей волне I = 0.
226
До сих пор мы рассматривали плоские волны. Однако понятие плоской вол-
ны справедливо в редких случаях, например, волны вблизи колеблющейся пла-
стины, размеры которой много больше длины волны (в
так называемой ближней или прожекторной зоне). А вда-
ли от излучателя волны, строго говоря, никогда плоскими
не бывают.
В изотропной среде источником сферических волн, т.
е. волн, у которых поверхность одинаковой фазы - сфера,
является излучатель нулевого порядка - пульсирующая
сфера, или монополь [2]. В сферической волне интенсив-
ность звука на расстоянии R от источника мощностью W
I=W/4nR. (5.5)
Вдали от излучателя при определенных условиях
сферическую волну можно рассматривать как плоскую.
Для этого необходимо, чтобы на рассматриваемом участ-
ке волнового фронта разность хода любых лучей, падаю-
щих на площадку, перпендикулярную центральному лу-
чу, была много меньше длины волны, т. е. участок волно-
вого фронта должен быть плоским с точностью до значения, много меньшего
длины волны (рис. 5.1)
Для прямоугольного треугольника ОСА
(R + А/?)2 = R2 + a2, 2R&R = а2.
О
Рис. 5.1. Геометриче-
ские построения для
дальней зоны
Из требования Д/?<< X / 2 получаем
a«JkR.
(5-6)
Окружность радиусом а, перпендикулярная направлению распространения,
называется первой зоной Френеля. Разность хода любых двух лучей, падающих
на него, не превышает А/2.
Неравенство (5.6) является одним из важнейших для любых волновых явле-
ний. Расстояния R, удовлетворяющие неравенству
R » а2/к,
(5.7)
называется дальней зоной, или зоной Фраунгофера (необходимое условие R » а).
В ближней прожекторной зоне, которая определяется неравенством R « а2/к,
будет формироваться цилиндрический пучок лучей, поле в котором имеет ха-
рактер плоских волн, интенсивность их вдали от краев пучка постоянна по сече-
нию и не зависит от расстояния до поршня.
По мере приближения к расстоянию R « а2/к однородность поля по сечению
уменьшается, краевые эффекты перемещаются ближе к оси и поле приобретает
227
сложный интерференционный характер. При дальнейшем увеличении расстоя-
ния 2?, когда начинает выполняться неравенство (5.7) и точка наблюдения попа-
дает в дальнюю (фраунгоферову) зону относительно излучателя, пучок превра-
щается в сферически расходящуюся волну. Интенсивность ее спадает по закону
(5.5). При этом поле подчиняется законам геометрической акустики, а угловое
распределение интенсивности становится не зависящим от расстояния.
Следует подчеркнуть, что при проведении экспериментов и при теоретиче-
ских расчетах всегда надо четко представлять себе, в какой зоне, ближней или
дальней, находится точка приема. Неучет этого может привести к кардинальным
ошибкам, так как законы формирования волновых полей сильно отличаются от
того, в какой зоне происходит их формирование. Надо заметить, что приведен-
ные выше критерии дальней зоны были получены для регулярного поля. Для
случайных полей, например для поля, рассеянного шероховатой поверхностью
со случайными неровностями, критерий дальней зоны другой.
Точный расчет акустических полей в океане может быть получен методами
волновой акустики. Однако они, как правило, весьма громоздки, а недостаточ-
ность сведений обо всех характеристиках среды сводит на нет строгость волновых
методов. Многие задачи подводной акустики можно решать, используя прибли-
женные методы. Важнейшим приближением является лучевой метод. Иногда его
называют приближением геометрической акустики. Он применим, когда размеры
неоднородностей или неровностей много больше длины волны, т. е. на длине вол-
ны не происходит заметных изменений характеристик среды (скорости звука,
плотности и т. д.).
В заключение введем понятие о логарифмической шкале уровней - децибе-
лах (дБ) [10]. Такой масштаб часто используют в акустике. Это обусловлено, по-
видимому, тем, что чувствительность человеческого уха имеет логарифмиче-
скую характеристику, причина последнего кроется в весьма широком диапазоне
уровней давления, воздействующих на орган слуха человека. Логарифмическая
характеристика повышает чувствительность уха при малых уровнях звукового
давления и загрубляет ее при больших. Логарифмическая шкала удобна также
тем, что она сохраняет линейность относительного приращения при любой аб-
солютной величине.
Первоначально относительное акустическое давление выражали в неперах. 1 Нп
соответствует отношению давлений, равному основанию натуральных логарифмов
е ~ 2,72. Однако в настоящее время непер - понятие, почти архаическое. Все вели-
чины выражают в относительных десятичных логарифмических величинах - деци-
белах. Принято, что величина /2, связанная с энергией процесса (например, энер-
гия, мощность, плотность энергии, интенсивность и т. д.), больше (меньше) дру-
гой аналогичной величины 1\ на N дБ, если
У= 101g(/2//i). (5.8)
Учитывая, что давление в акустике и напряжение или ток в электричестве
связаны с энергетическими величинами квадратичной зависимостью, получим
(для акустики)
N = 101g (р22 /р2) = 10(^/р02 = 20 lg(p2/pi). (5.9)
228
В децибелах отношение как давлений, так и интенсивностей для двух процес-
сов выражается одной цифрой. Если одно давление превышает другое в 10 раз,
то N= 201g 10 = 20 дБ. Отношение их интенсивностей будет уже 100, хотя N =
= 101g100 = 20 дБ. Необходимо помнить, что децибелы - величина относитель-
ная, поэтому не следует забывать, относительно какой величины дан уровень в
децибелах. Например, если сказано, что уровень сигнала 30 дБ относительно
1 Па, то значит сигнал равен 30 Па, а если 30 дБ относительно 1 Вт, то значит
мощность равна 103 Вт.
Однако бывает иногда, что уровень акустических сигналов в дБ указывают
безотносительно к какой-либо величине. Тогда подразумевается, что это отно-
сится к уровню, принятому в свое время за пороговую чувствительность уха и
равную 20 мкПа = 2-1(Г* дин/см2. Хотя надо сказать, что в гидроакустике эта ве-
личина используется редко. Легко перевести значения, выраженные в неперах, в
децибелы - 1Нп = 8,686 дБ.
5.2.2. Скорость звука в морской среде
В настоящее время используются два основных метода описания акустиче-
ского поля: нормальных волн и приближенные, основанные на представлениях
лучевой акустики.
Наиболее точное и строгое описание процесса формирования акустического
поля может быть получено методами волновой акустики. Они базируются на
использовании фундаментальных уравнений гидродинамики, теории упругости
и т, д. Акустическое поле - это сумма нормальных волн, каждая из которых
представляет собой решение волнового уравнения, удовлетворяющее конкрет-
ным граничным условиям. Решения волнового уравнения даже для сравнитель-
но простых физических моделей канала весьма громоздки, требуют использова-
ния мощных ЭВМ и не всегда позволяют получить хорошо интерпретируемые
результаты.
Основой лучевой теории является представление о лучах, нормальных в лю-
бой момент времени относительно волнового фронта, вдоль которых осуществ-
ляется перенос акустической энергии. Лучевая теория описывает правильную
картину явления во всех случаях, когда размеры неоднородностей много больше
длины волны и на длине волны не происходит заметных изменений характери-
стик среды (скорости звука, плотности и др.).
Сравнительная простота, наглядность, возможность оценки поля практиче-
ски для любых профилей скорости звука определили широкое применение луче-
вой теории для решения многих задач прикладной гидроакустики.
На основе лучевых методов могут быть созданы некоторые стандартные мо-
дели среды. Они разрабатываются с использованием типовых распределений
скорости звука с глубиной.
Скорость звука является важнейшей акустической характеристикой океан-
ской среды. Поле скорости звука является определяющим фактором в формиро-
вании акустического поля в океане. Поскольку вертикальные изменения скоро-
сти звука на несколько порядков превышают горизонтальные, в большинстве
случаев можно полагать, что водная среда в океане представляет собой для аку-
стических волн горизонтальную слоистую среду, т. е. анизотропную по вертика-
229
ли и изотропную по азимуту. В этом приближении акустическое поле, образо-
ванное точечным источником звука, будет иметь осевую симметрию относи-
тельно вертикальной оси, проходящей через источник.
Морская вода отличается от пресной существенно большим содержанием
соли. Общее содержание растворенных солей составляет в среднем для откры-
тых частей Мирового океана 35 г на 1 кг воды, т. е. 0,035 кг; тысячные доли на-
зывают промилле и обозначают °/оо. Итак, средняя соленость воды Мирового
океана около 35 °/оо- Различные вещества растворены в морской вода весьма не-
равномерно - от единиц до миллионных долей промилле. Однако определяют
свойства морской воды вещества, растворенные в заметных количествах.
Установлено, что состав веществ, определяющих соленость воды, в любой
точке Мирового океана и на любом горизонте одинаков и находится в неиз-
менном процентном соотношении. Отсюда следует, что если удалось опреде-
лить содержание хотя бы одной из составляющих, то нам однозначно известны
и все остальные. В открытых частях океана соленость колеблется незначитель-
но (32...38 °/оо)? а в морях диапазон изменений существенно расширяется (на-
пример, 6 °/оо в Черном море, 42 °/Оо в Красном).
Температура вод в том или ином районе океана меняется в зависимости от
теплообмена с атмосферой, теплопередачи из соседних слоев, горизонтального
перекоса, обусловленного перемещением водных масс.
Тепловой эффект прямого солнца быстро затухает, уже на глубине 1 см он
в 100 раз меньше, чем на поверхности, а на глубине 1 м - в 8350 раз. Отсюда
видно, что перенос тепла обусловлен в основном вертикальными перемеще-
ниями водных масс, которые вызываются перемешиванием и конвекцией. Пе-
ремешивание происходят из-за ветрового волнения (до глубин 100...200 м) и
приливно-отливных течений, пронизывающих всю толщу океана. Конвекция
может как согревать нижние слои (если увеличение плотности происходит за
счет испарения), так и охлаждать (если увеличение плотности на поверхности
происходит за счет охлаждения воды). В первом случае конвекция проникает
неглубоко, в последнем - до глубины 400...500 м. Кроме того, на температуру
океанских вод влияет тепловой сток рек, ветровой режим побережий и поток
тепла из недр Земли.
Скорость акустических волн в морской среде, или для краткости, скорость
звука, зависит в основном от трех параметров: средней температуры, солености,
гидростатического давления. Другие факторы также могут влиять на скорость
звука, например, растворенные в воде газы, взвеси и др. Однако первые три па-
раметра являются определяющими.
Скорость звука в океане близка к 1500 м/с. Наиболее заметно она меняется в
зависимости от температуры. Учесть это влияние трудно, так как температура
верхних слоев воды в море зависит не только от волнения моря, течений, време-
ни года, но и от времени суток.
На большой глубине температура меняется мало и она устойчива в течение
всего года. На таких глубинах изменение скорости звука обусловлено возрас-
танием гидростатического давления. Следовательно, скорость с глубиной воз-
растает.
Опытные данные показывают, что в воде скорость звука изменяется от 1420
до 1520 м/с. Эти изменения приводят к ошибкам в определении дистанции до
230
цели [4]. Причина ошибок заключается в том, что при расчете гидролокацион-
ных устройств скорость звука принимается за некоторую среднюю величину,
отличную от реальной.
5.2.3. Затухание звука
По мере удаления акустической волны от источника уровень звукового дав-
ления постепенно падает. Ослабление звука с расстоянием называется затухани-
ем. Затухание звука определяется несколькими причинами.
Во-первых, оно связано с угловым расхождением звукового луча по мере
удаления от источника излучения. В результате энергия звуковой волны распре-
деляется на всю увеличивающуюся волновую поверхность. Для случая сфериче-
ской волны интенсивность звука с расстоянием R убывает по закону 1/R, а для
цилиндрической волны по закону .
Во-вторых, затухание звука вызывается его рассеянием на неоднородностях
среды и неровностях и неоднородностях ее границ - поверхности океана и его
дна. Рассеянная энергия распространяется в направлениях, отличных от направ-
ления распространения первичной волны, вследствие чего первичная волна те-
ряет долю энергии, рассеянную по другим направлениям, и затухает.
Наконец в-третьих, затухание звука в океане обусловлено поглощением, т. е.
переходом части энергии в тепло. Поглощение звука вызывается разными при-
чинами: наличием сдвиговой вязкости, релаксационными процессами, сущест-
вованием газовых пузырьков в верхних слоях океана, прохождением волн через
звукорассеивающие слои.
Основные потери в воде обусловлены сдвиговой и объемной вязкостью.
Сдвиговая вязкость вызывается силами трения, возникающими в результате от-
носительного перемещения слоев. Объемная вязкость обусловлена молекуляр-
ной перестройкой, вызываемой звуковым давлением. Изменение структуры мо-
лекул под влиянием давления происходит за определенное время, характерное
для данного вещества и называемое временем релаксации.
Потери звуковой энергии зависят от соотношения времени релаксации и пе-
риода звуковой волны. Если период много больше времени релаксации, то мо-
лекулы успевают за изменением давления и происходят потери звуковой энер-
гии. Если же период звуковой волны много меньше времени релаксации, пере-
стройка молекул не успевает произойти и потери практически отсутствуют. В
морской воде три релаксационных процесса играют основную роль в поглоще-
нии звука. Первый процесс связан с перестройкой молекул пресной воды, его
время релаксации составляет примерно 10-11с. Второй процесс связан с молеку-
лами сульфата магния - MgSO4, время релаксации примерно 10-5с. Третий обу-
словлен боратами - Н3ВО3, время релаксации примерно 10-3с.
Изменение структуры молекул (Н2О)Х, а также сдвиговое трение определяют
поглощение в морской воде лишь на частотах выше 1 МГц, когда поглощение в
морской воде и в пресной практически одинаково. На более низких частотах в
морской воде определяющим является поглощение, обусловленное релаксаци-
онным процессом, возникающим при диссоциации и рекомбинации молекул
MgSCU и Н3ВО3 при прохождении через воду звуковых волн. В отсутствие зву-
231
ковых волн процессы диссоциации и рекомбинации находятся в динамическом
равновесии. В области повышенного давления степень диссоциации молекул
возрастает, а в области пониженного давления растет их рекомбинация. При пе-
риоде звуковой волны, большем времени релаксации, восстановление динами-
ческого равновесия при изменении звукового давления несколько запаздывает
относительно последнего, что и приводит к потере энергии.
С феноменологической точки зрения релаксационное поглощение эквива-
лентно наличию у воды второй вязкости. Поскольку она проявляется в про-
цессах, связанных с изменением объема, то ее также называют объемной вяз-
костью.
Сложность измерений в морских условиях и затруднения в интерпретации
результатов долгое время препятствовали экспериментальному определению
поглощения. Тем не менее на основании большого числа данных, полученных в
диапазоне 1 кГц ... 10 МГц, удалось вывести эмпирическую формулу для коэф-
фициента поглощения в морской воде [7]:
13 = 8,686 х(1-6,54.10-р), (5.10)
(i+/7A)a а ' '
где f - частота, Гц. Первый член в квадратных скобках характеризует поглоще-
ние, вызванное процессами диссоциации в растворе солей. Здесь S - суммарная
соленость, выраженная в тысячных долях (промилле). Почти для любой морской
воды 33 < S < 37 °/оо- Потери на диссоциацию почти целиком определяются
сульфатом магния, хотя его доля не превышает 5 % от общего содержания со-
лей. Тем не менее в формуле фигурирует суммарная соленость, как это принято
на практике. Частота fT есть частота релаксации, которая приближенно опреде-
ляется из эмпирического выражения
/9-1520/)
/г=21,9-101 /т}
(5.И)
где Т - температура, К. Второй член в квадратных скобках в формуле (5.10) ха-
рактеризует поглощение, вызванное вязкостью, одинаковое для пресной и соле-
ной воды. Частота релаксации, по существу не имеющая отношения к этому
члену, используется здесь как удобное средство для выражения температурной
зависимости потерь из-за вязкости. Сомножитель в круглых скобках описывает
сравнительно слабую зависимость потерь от гидростатического давления р$, вы-
раженного в килограммах на квадратный сантиметр (или приближенно в атмо-
сферах). В действительности (3 уменьшается с ростом р$ экспоненциально, но на
практике линейная аппроксимация дает вполне достаточную точность.
Зависимость коэффициента поглощения от частоты приведена на рис. 5.2. В
области частот выше 1 кГц даны две кривые для температур 0 и 30 °C. Они были
рассчитаны по формуле (5.10) для S = 35°/оо и ps = 0.
232
В области частот ниже 1кГц расчет производился по эмпирической формуле [7]:
р = 1,610"3+910-6/.
(5.12)
Приведенная формула соответствует условиям большой глубины и холодной
воды (Т ~ 4°С). Она хорошо согласуется с формулой (5.10) для частоты 1кГц -
граничной частоты применения каждого из выражений.
В работах [2, 4] приведены более простые формулы для быстрого определе-
ния коэффициента поглощения:
з/
р = 0,036//2 (5.13)
и
0,11/^ 44/2
Р 1 + /2 4100 + /2’
(5.14)
где f - частота, кГц.
Первая формула справедлива для частот в диапазоне 5...60 кГц, а вторая - в
диапазоне 0,1... 3 кГц.
Кроме того, как уже говорилось, значительную долю могут вносить в погло-
щение газовые пузырьки. Правда, их роль заметна лишь в поверхностных слоях,
где пузырьков может быть достаточно много. Особенно сильно они поглощают на
Рис. 5.2. Коэффициент поглощения, вычислен-
ный по формулам (5.10) и (5.11), для 5= 35 °/оо
без учета гидростатического давления
своей резонансной частоте, которую можно примерно рассчитать по формуле
г, trq резонансная частотаfo считается в Гц, если радиус пузырька г вы-
ражен в сантиметрах. Эта формула справедлива для поверхностных слоев воды.
233
Следует учесть, что с увеличением глубины Н резонансная частота газового
пузыря растет примерно пропорционально у/н.
Если затухание, обусловленное расхождением, вызывает степенное спадание
интенсивности I с расстоянием R (I ~ R~n, где п зависит от характеристик сре-
ды), то рассеяние звука и его поглощение вызывают экспоненциальное затуха-
ние звука с расстоянием:
7 = 7о1Оч)’1рй,
(5.15)
где р - коэффициент затухания звука, выражается в дБ на ту единицу длины, в
которой выражено R.
Хотя в начале этого раздела было сказано, что затухание звука в океане обу-
словлено расхождением, рассеянием и поглощением, исторически в терминоло-
гии сложилось, что затухание, обусловленное расхождением звуковых волн, не
принято называть затуханием. Это уменьшение интенсивности с расстоянием
называют просто расхождением либо спаданием сигнала с расстоянием, либо
ослаблением сигнала из-за расхождения.
Так как ослабление звука, обусловленное как рассеянием, так и поглоще-
нием, происходит по одинаковому закону, то отделить одно от другого не
представляется возможным. Поэтому измеряют суммарный эффект, обуслов-
ленный поглощением и рассеиванием, и называют его просто затуханием или
поглощением.
5.2.4. Отражение и преломление звуковой волны
на границе раздела двух сред
На распространение акустических воли в морской среде особенно влияет
разница температур по глубине, приводящая к неравномерности распределения
скорости звука. Среду с неравномерным распределением скорости звука по глу-
бине можно условно разделить на горизонтальные слои с различной скоростью,
одинаковой в пределах слоя. Таким образом, появляются как бы границы или
поверхности, отделяющие одну среду от другой. Встречая такую поверхность,
звуковая волна меняет направление распространения. Часть энергии волны пе-
реходит в другую среду и из-за новой скорости звука в этой среде меняет свое
первоначальное направление, а часть энергии отражается от поверхности разде-
ла и распространяется в прежней среде, но по новому направлению.
Таким образом, из одной падающей или прямой волны на поверхности раз-
дела двух сред образуются отраженная волна, которая распространяется в преж-
ней среде, и преломленная волна, которая распространяется в новой среде. На
рис. 5.3 показана звуковая волна, переходящая из среды со скоростью звука С\ в
среду со скоростью Сг.
По отношению к нормали падающий, преломленный и отраженный лучи об-
разуют углы падения <Xi, преломления аг и отражения аз соответственно.
Из законов отражения и преломления звуковых волн известно: ai = аз, т. е.
угол падения равен углу отражения.
234
Л
Скорость
звука Ci
oil
I «з
Скорость
звука С2
а2
к
ж
&
Рис. 5.3. Отражение и преломление
звуковой волны на границе раздела
Если Ci > С2, то at > а2, т. е. направление
распространения преломленной волны при-
ближается к нормали поверхности раздела;
если Ci < С2, то at < а2 и преломленный луч
удаляется от нормали; в этом случае угол oci
может быть таким, что а2 = 90°, т. е. энергия не
будет проникать в среду со скоростью звука С2
и преломленный луч будет скользить по по-
верхности раздела двух сред.
Если после этого несколько увеличить
угол (Xi, то вся звуковая энергия отразится от
поверхности раздела. Угол at при котором
а2 = 90°, называется углом полного внутрен-
него отражения (ап). Для случая перехода
звука из воздуха в воду ап = 13°, для случая
перехода звука из воды в сталь Оп = 18°, из
воды в песок ап = 72°.
Во всех случаях падения волны на поверхность раздела двух сред энергия рас-
пределяется на энергию отраженной и преломленной волн. Кроме этого, энергия
преломленной и отраженной волн зависит от значения акустических сопротивле-
ний двух сред. Если акустические сопротивления двух сред одинаковы, то отра-
жения не будет.
Если акустические сопротивления двух сред отличаются друг от друга зна-
чительно, то большая часть энергии падающей волны переходит в энергию от-
раженной, а меньшая часть энергии проникает через поверхность раздела. Чем
сильнее различаются значения акустических сопротивлений двух сред, тем
большая разница существует между энергией отраженной и преломленной
волн.
Так, акустическое сопротивление воды почти в 5000 раз больше акустиче-
ского сопротивления воздуха, поэтому звук из воды в воздух и наоборот практи-
чески не проникает.
5.2.5. Реверберация в море
Каждый знает, что эхо - это отражение звуковой волны от поверхности раз-
дела двух сред, воспринимаемое наблюдателем. Когда звук отражается от не-
скольких отражающих поверхностей, находящихся на разных расстояниях, мы
слышим многократное эхо. Если время между отдельными отражениями меньше
0,1 с, вместо отдельных эхо мы слышим длительное непрерывное звучание. Яв-
ление непрерывного длительного, ослабевающего по силе звучания, являющего-
ся результатом многократных отражений от препятствий окружающего про-
странства, принято называть реверберацией.
При распространении звука в море происходит частичное рассеяние акусти-
ческих волн, вызываемое неровностями поверхности воды и дна и различными
неоднородностями в самой среде.
235
Рассеянные волны поступают к месту приема вначале от ближних неодно-
родностей, а затем, постепенно ослабевая, от удаленных. Из опыта работы на
гидроакустических станциях известно, что вслед за посылкой кратковременного
импульса в течение некоторого времени воспринимается спадающее по интен-
сивности непрерывное эхо, т. е. создается явление реверберации.
Объекты, на которых происходит рассеивание звуковых волн, могут быть
названы рассеивателями. Это могут быть пузырьки воздуха различных газов,
имеющихся в воде, взвешенные твердые частички, небольшие неровности по-
верхности дна моря, различные живые организмы, флюктуации плотности среды
(изменения неоднородности среды по времени), вызванные местными флюктуа-
циями температуры воды.
Рассмотрим, как создается реверберация. Допустим, что все рассеиватели,
обусловливающие реверберацию, одинаковы и распределены равномерно по
всему объему воды. Пусть в такую идеализированную среду излучается непре-
рывный звуковой сигнал. В этом случае каждый рассеиватель возвращает посто-
янное количество энергии в единицу времени, т. е. интенсивность воспринимае-
мой реверберации постоянна.
Интенсивность принимаемой реверберации прямо пропорциональна интен-
сивности излучаемого звука, так как от каждого отдельного рассеивателя воз-
вращается определенная часть звуковой энергии, падающей на него.
Если в такую же идеализированную среду послать короткий импульс, то ха-
рактер реверберации будет совсем другой - она спадет до малого значения уже
через несколько секунд, так как за это время излученная звуковая энергия успеет
удалиться на значительное расстояние. В этом случае нетрудно оценить ско-
рость убывания интенсивности реверберации, если не учитывать поглощения
звука средой.
По мере удаления звукового импульса от источника звук будет распреде-
ляться по все большему объему, однако энергия, заключенная в импульсе, оста-
ется постоянной.
Если интенсивность рассеянной энергии пропорциональна энергии импуль-
са, то по мере распространения импульса энергия, рассеиваемая за единицу вре-
Рис. 5.4. Зависимость интенсивности
реверберации от времени
мени, также остается постоянной. В то же
время из-за увеличения расстояния от рас-
сеивателей до места приема возвращаю-
щийся звук ослабевает так, что интенсив-
ность реверберации короткого импульса
обратно пропорциональна квадрату рас-
стояния до рассеивателей.
Поскольку расстояние, на которое рас-
пространяется звук, пропорционально време-
ни, спадание интенсивности реверберации
будет обратно пропорционально квадрату
времени. Время, протекшее с момента посыл-
ки до окончания звучания, называется време-
нем реверберации, или продолжительностью реверберации. Исходя из этого зави-
симость интенсивности реверберации от времени изображается плавной кривой,
показанной на рис. 5.4 пунктирной линией. Из рисунка видно, что сразу после
236
окончания излучения импульса реверберация имеет большую интенсивность, затем
она плавно спадает и, наконец, совсем затихает. Однако в действительности дело
обстоит не так. На рис. 5.4 сплошной линией показан типичный характер реальной
реверберации.
Особенность реальной реверберации - ее флюктуирующий характер, обу-
словленный суммированием отраженных сигналов от большого количества рас-
сеивателей.
Результирующая интенсивность реверберации в данных конкретных услови-
ях определяется положениями рассеивателей один относительно другого. По-
скольку в море пространственное распределение рассеивателей меняется от од-
ного места к другому, то реверберация в некоторые моменты времени будет
усиливаться, а в другие - ослабляться.
Есть и еще одно обстоятельство. Если бы корабль, несущий источник зву-
ка, и рассеиватели были неподвижны, то последовательность усилений и ос-
лаблений реверберации оставалась бы неизменной от импульса к импульсу. В
действительности корабль испытывает качку, рассеиватели свободно переме-
щаются в воде. Поэтому картина реверберации резко меняется от одного им-
пульса к другому.
Разбирая понятие реверберации, мы приняли распределение индивидуаль-
ных рассеивателей звука по всему объему воды равномерным. Такая ревербера-
ция называется объемной. Однако существует реверберация, обусловленная рас-
сеивателями, распределенными по морской поверхности и дну. Характеристики
этих трех видов реверберации - объемной, поверхностной и донной - сущест-
венно различны. Различно и время их появления: объемная реверберация начи-
нается одновременно с излучением импульса в воду, поверхностная и донная
реверберации - лишь после того, как импульс дошел до поверхности или дна
моря и возвратился обратно.
Звуковой импульс, излучаемый в воду, может быть различной длительно-
сти. Звуковые волны от начала импульса или его конца достигают разных дис-
танций вследствие неодновременности начала распространения. Следователь-
но, в какой-то момент времени звуковой импульс занимает некоторую область
водного пространства. Естественно, что с увеличением длительности излучае-
мого импульса эта область водного пространства расширяется, поэтому все
больше рассеивателей участвуют в одновременном отражении. В то же время
чем больше рассеивателей в этой части водного пространства, тем от большего
их числа одновременно приходят отраженные волны и больше интенсивность
реверберации.
Реверберация от длительного сигнала сильнее, чем от короткого, если срав-
нивать ее интенсивность через равные промежутки времени.
Поскольку реверберация маскирует полезный сигнал, она считается одним
из видов гидроакустических помех.
5.2.6. Рефракция звука
Одним из важнейших следствий изменения скорости звука является рефрак-
ция звуковых лучей, которая существенно влияет на дальность действия гидро-
акустических приборов.
237
Рефракцией называется искривление звуковых лучей, проходящих через
слои с различными скоростями распространения звука.
Чтобы определить дальность действия гидроакустического прибора, очень
важно знать, как распределяется скорость звука по глубине в данном районе мо-
ря. Разделим условно водную среду на ряд горизонтальных слоев, в которых
скорости звука, оставаясь постоянными в своем слое, меняются скачком от слоя
к слою. Преломление звуковых лучей подчиняется известному закону физики:
Q _ О? _ ^3
sinaj sina2 sina3 ’
(5.16)
где Ci, С2, С3 - скорость распространения звука в слоях; аь 0С2, а3 - углы паде-
ния звуковых лучей на границу раздела слоев.
Для теплого времени года наиболее типично такое распределение скорости
звука, при котором она с глубиной убывает. В холодное время года вследствие
охлаждения поверхностных слоев, наоборот, скорость звука с глубиной возрас-
тает. В соответствии с этим различают отрицательную и положительную реф-
ракции звуковых лучей.
При отрицательной рефракции лучи по мере удаления от источника звука
отклоняются в сторону дна (рис. 5.5, а). Действительно, так как С\ > С2 > С3, то и
sinai > sina2 > sina3, следовательно, ai > 0С2 > a3 и лучи стремятся отклониться в
сторону дна. С уменьшением скорости звука в зависимости от глубины распро-
Рис. 5.5. Направление распространения звуковых лучей
при отрицательной рефракции
238
странение звуковой энергии сопровождается отражениями от дна. При каждом
таком отражении часть энергии переходит в грунт. Особенно поглощают энер-
гию звука илистые грунты большой толщины. При твердых грунтах поглощение
звука меньше. На рис. 5.5, б показано направление распространения звуковых
лучей при отрицательной рефракции и наличии сильно поглощающего грунта.
При положительной рефракции лучи по мере удаления от источника звука
искривляются в сторону поверхности (рис. 5.6, а).
Если Ci < С2 < С3, то ai < 0С2 < аз и лучи стремятся отклониться к поверхно-
сти. Распространение энергии при этом сопровождается многократными отра-
жениями от поверхности моря (рис. 5.6, б). При отражении от поверхности моря
потери энергии ничтожны, так как существует поверхность раздела двух сред,
значительно отличающихся по акустическому сопротивлению. В случае поло-
жительной рефракции луч, постепенно отклоняясь в сторону поверхности, пре-
б
Рис. 5.6. Направление распространения звуковых лучей
при положительной рефракции
терпевает в некотором слое полное внутреннее отражение. Пользуясь законом
преломления, можно всегда определить угол выхода луча из источника, при ко-
тором в некотором слое с определенной скоростью звука наступит полное внут-
реннее отражение.
При положительной рефракции угол выхода звуковых лучей из источника
зависит от глубины слоя воды, в котором происходит распространение звука.
239
Характерно и еще одно распределение скорости звука с ростом глубины -
изменение положительной рефракции в поверхностном слое на отрицательную в
нижележащих слоях (рис. 5.7).
Как видно из рисунка, на горизонте изменения скорости происходит расще-
пление звуковых лучей. Луч, вышедший из источника под определенным углом,
на этой границе разделяется на два, один после полного внутреннего отражения
отклоняется к поверхности, а другой проникает в нижележащие слои и отклоня-
ется ко дну.
Большое влияние на распространение звука в море оказывает также так на-
зываемый слой температурного скачка. В летние месяцы море получает тепло от
Солнца и атмосферы и поэтому верхние слои воды оказываются более нагреты-
ми, чем нижние. Солнечная энергия проникает в воду неглубоко, и при спокой-
ном состоянии моря из-за медленного процесса теплопроводности образуется
значительная разность температуры в верхних и нижних слоях. В ветреную по-
году верхний слой воды может стать почти изотермическим и ниже него будет
наблюдаться более резкий перепад температуры. В слое скачка градиент темпе-
ратуры, т. е. изменение ее на единицу глубины, может достигать нескольких гра-
дусов на 1 м. В связи этим скорость звука также резко уменьшится.
Рис. 5.7. Форма звуковых лучей при изменении положи-
тельной рефракции на отрицательную
Следует заметить, что слой температурного скачка начинает обычно формиро-
ваться весной и исчезает осенью, когда верхние слои вследствие охлаждения стано-
вятся более тяжелыми, что приводит к конвекционному перемешиванию воды.
Кроме таких сезонных изменений температуры известны и суточные - за
счет нагревания поверхности днем и охлаждения ее ночью. Однако суточные
изменения температуры значительно меньше сезонных и, кроме того, они часто
носят случайный характер, так как сильно зависят от метеорологических усло-
вий (облачности, дождя и т. п.).
Слой температурного скачка значительно сокращает дальность действия
гидроакустических средств. Если подводная лодка погрузится под слой скачка,
то дальность обнаружения ее гидроакустическими приборами может умень-
шиться в несколько раз. Основными факторами, влияющими на уменьшение
дальности обнаружения целей под слоем скачка, являются резкое преломление
звуковых лучей при переходе через него за счет большого изменения темпера-
туры или плотности, а также сильное поглощение рассеяния звука на нем.
Если принять, что энергия звука распространяется в некотором малом телес-
ном угле с сечением S, то при переходе через слой скачка это сечение значительно
240
увеличивается Si за счет сильного преломления (рис. 5.8). Таким образом, проис-
ходит резкое расширение фронта волны и, как следствие, уменьшение интенсив-
ности сигнала под слоем скачка и соответственно дальности обнаружения.
Рис. 5.8. Расширение фронта волны при переходе через слой
скачка
Наибольшая дальность действия гидроакустических приборов в рассмотрен-
ных выше гидрологических условиях бывает при положительной рефракции.
Этим и объясняется, что в зимнее время года дальность действия гидроакусти-
ческих средств в несколько раз больше дальностей, наблюдаемых летом.
5.2.7. Подводный звуковой канал
Среди многообразия различных случаев распределения скорости звука по
глубине необходимо особо отметить явление звукового канала.
Подводным звуковым каналом принято называть область глубин моря или
океана, в которой звуковые лучи претерпевают за счет рефракции полное мно-
гократное внутреннее отражение от ее границ. Звуковой канал образуется в ус-
ловиях, когда отрицательный градиент скорости звука в верхних слоях перехо-
дит в положительный градиент в нижних, т. е. когда на некоторой глубине име-
ется минимум скорости звука (рис. 5.9, а).
За верхнюю и нижнюю границы канала принимают глубины с одинаковой
скоростью звука. Осью канала считается глубина, на которой скорость звука
минимальна. Толщина определяется как разность между глубинами нижней и
верхней границ канала.
Как уже отмечалось, звуковые лучи отклоняются в направлении более хо-
лодных слоев воды, потому что скорость звука там меньше. Отразившись от
границы двух слоев, они возвращаются обратно в первый и принимают направ-
ление, составляющее с границей угол, равный углу падения этих волн. Распола-
гая источник звука и место приема его на оси канала, всегда можно получить
некоторое количество лучей, выходящих из источника излучения под малыми
углами, которые пройдут путь, не претерпевая отражений ни от дна, ни от по-
верхности. Отклоняясь вверх и вниз, эти лучи всегда остаются в пределах канала
(рис. 5.9, б). Лучи, которые не претерпевают отражений от дна и поверхности,
241
несут в себе значительную долю энергии по сравнению с лучами, достигающи-
ми дна и поверхности и отражающимися от них, так как при каждом отражении
значительная часть энергии поглощается или рассеивается.
Возможность получения больших дальностей распространения звука за счет
лучей, проходящих большие расстояния без отражения от дна и поверхности, -
основное ценное свойство подводного звукового канала. Лучи, которые испы-
тывают полное внутреннее отражение на границах канала, принято называть
Скорость звука, м/с
Расстояние, км
Рис. 5.9. Скорость звука (а) и распространение звуковых волн (б)
в случае волнового канала
предельными. Лучи, вышедшие из источника под углами меньше предельного и
распространяющиеся в толще канала, называют канализуемыми. Луч, вышедший
из источника звука под нулевым углом выхода, распространяется вдоль оси ка-
нала. Лучи, вышедшие под углами больше предельного и испытывающие отра-
жение от дна и поверхности моря, называют отраженными лучами.
Лучи, вышедшие под различными углами, преодолевают различные пути,
распространяясь в слоях с различной скоростью звука.
Если место приема звука достаточно далеко, а источник излучает короткие им-
пульсы, то можно установить некоторые закономерности распространения звука.
Первыми в точку приема приходят предельные лучи, которые, хотя и прохо-
дят большой путь, распространяются в слоях с большой скоростью звука. По-
следним в точку приема приходит луч, распространяющийся по оси канала. В
момент прихода осевого луча интенсивность принимаемого сигнала достигает
максимального значения.
242
Длительность звучания сигнала в точке приема зависит от дистанции. По-
этому по длительности звучания сигналов можно приближенно судить о рас-
стоянии. Так, по американским данным, на основании опытов, проведенных в
Атлантике, расстояние от места излучения звука связано с продолжительностью
звучания в точке приема следующей формулой:
Д = 100Д/С,
(5.17)
где Д - дальность распространения сигнала, км; А/ - продолжительность звуча-
ния сигнала, с; С - скорость звука в море, С = 1,5 км/с. Следует различать слу-
чаи приповерхностного и глубоководного звукового каналов. Физическая при-
рода образования этих каналов различна.
Обычно ось приповерхностного звукового канала проходит на глубине
40...80 м. Этот канал представляет собой сезонное явление: он возникает весной
и исчезает осенью; его появление обычно зависит от формирования слоя темпе-
ратурного скачка.
5.3. Гидроакустические средства разведки и наблюдения
Гидроакустические средства разведки и наблюдения решают задачи обнару-
жения, определения местонахождения и классификации различных надводных и
подводных объектов.
По принципу использования энергии средства разведки и наблюдения делятся
на активные (гидролокаторы) и пассивные (шумопеленгаторы). В свою очередь ка-
ждое из них охватывает многочисленные типы аппаратуры, отличающиеся принци-
пами действия и построения, возможностями и техническими параметрами.
В гидролокаторах для обнаружения и определения координат цели исполь-
зуется облучение этой цели акустической энергией и прием эхосигнала, содер-
жащего часть излученной энергии, отразившейся от ее поверхности.
В шумопеленгаторах в качестве полезного сигнала используют шумы, не-
преднамеренно создаваемые целью в процессе ее функционирования.
Как в гидролокаторах, так и шумопеленгаторах прием полезных сигналов
происходит на фоне интенсивных гидроакустических помех различного проис-
хождения.
Важную роль в процессе ведения разведки играют состояние среды, разде-
ляющей объект наблюдения и средство разведки, распределение температуры и
солености воды, гидростатическое давление, коэффициент пространственного
затухания, отражающие свойства морской поверхности и дна и т. д.
При разработке средств ГАР и решении тех или иных задач наблюдения и раз-
ведки очень важен анализ характеристик среды распространения как составной час-
ти информационного гидроакустического канала.
5.3.1. Обобщенная модель гидроакустического канала
Гидроакустический канал включает источник акустического излучения, мор-
скую среду с ее неоднородностями и приемную антенну, преобразующую аку-
стические колебания в электрические сигналы [3].
243
На рис. 5.10 представлены две схемы канала, определяемые принципом ра-
боты ГАС и видом используемой энергии. Схема а правомерна для активных
гидроакустических средств, работающих в одном направлении (ГАС связи и
телеметрии). Ее можно распространить и на пассивные средства, осуществ-
Рис 5.10. Схемы гидроакустических кана-
лов применительно к пассивным (а) и ак-
тивным (б) ГАС:
1 - излучающая акустическая антенна; 2 - мор-
ская среда; 3 - приемная акустическая антенна;
4 - объект наблюдения
ляющие прием энергии первичных гидроакустических полей объектов наблю-
дения. В качестве излучающей акустической антенны в этом случае выступает
сам объект наблюдения. Схема, изображенная на рис. 5.10, б, соответствует
активным ГАС, осуществляющим прием энергии, отраженной целью. Отме-
тим, что современные корабельные ГАС используют совмещенные, приемо-
излучающие антенны.
Многочисленные исследования показали, что морская среда и ее границы
весьма неоднородны. В общем случае неоднородности могут быть регулярными
и случайными. Регулярные неоднородности вызываются изменениями в про-
странстве усредненных характеристик среды. Случайные неоднородности явля-
ются результатом отклонения характеристик среды от средних значений. Оба
вида неоднородностей существенно влияют на характер формирования акусти-
ческого поля. Регулярные неоднородности вызывают рефракцию акустических
лучей в океане, а случайные - рассеяние акустических волн.
В силу многочисленности факторов, определяющих неоднородность мор-
ской среды, наиболее плодотворны статистические методы описания процесса
распространения звука. Однако сказанное не отрицает в принципе применение
детерминированных подходов к оценке акустического поля, т. е. использование
физических моделей различной степени приближения к реальной.
Рассмотрим три модели канала - идеальный, приближающийся к идеально-
му и реальный (рис. 5.11).
В моделях, представленных на рис. 5.11, а, б, рассматривается полубеско-
нечная среда с абсолютно ровной и неровной верхними поверхностями. Рефрак-
ция лучей в обоих случаях не учитывается, источник и приемник считаются не-
подвижными.
В модели, приведенной на рис. 5.11, а, при постоянном сигнале и неизмен-
ных параметрах среды флюктуация сигналов отсутствует. Такая модель может
отождествляться с глубоким морем при относительно ровной поверхности и
низких частотах.
В модели, изображенной на рис. 5.11, б, неровная поверхность и неоднород-
ность самой среды вызывают интерференцию сигналов, характер которой изме-
няется во времени. Данная модель правомерна для канала с затягиванием сигна-
лов по времени.
244
Модель, представленная на рис. 5.11, в, является наиболее общей. Она учи-
тывает обе границы с присущими им неоднородностями, неоднородности самой
среды, а также движение источника и приемника.
Физические модели каналов можно представить в качестве фильтров с опре-
деленными параметрами. Основными характеристиками фильтра являются пе-
Рис. 5.11. Физические модели гидроакустических каналов:
а - идеальный; б - приближающийся к идеальному; в - реальный
редаточная функция K(J w) и связанная с ней преобразованием Фурье импульс-
ная переходная функция:
K(jw)= (5.18)
h(t) =^~ J K(jw)eJwtdw. (5.19)
Поскольку сигналы, распространяющиеся в среде, подвержены частотному и
временному расширению, ее можно представить в виде линейного фильтра с
переменными параметрами. Функции фильтра при этом должны рассматривать-
ся как случайная функция, обусловленная случайным характером среды.
Значения временных и частотных искажений должны учитываться при
разработке ГАС. При этом следует установить их связь с характеристиками
среды (многолучевостью, случайными неоднородностями, волнением по-
верхности моря, скоростью течений и т. д.). Знание этих искажений позволит
аргументировано подойти к выбору параметров ГАС, определяющих разре-
шающую способность по времени (длительности импульса) и частоте (выбо-
ре типа импульса).
В соответствии с моделью канала, представленной на рис. 5.11, в, гидроаку-
стическое поле в точке приема является результатом интерференции прямых
сигналов и сигналов, отраженных границами. Многолучевость распространения
вызывает как медленные, так и быстрые замирания.
245
Причинами быстрых замираний могут быть влияние волнующейся поверх-
ности моря, рассеяние звука на случайных неоднородностях морской среды,
качка излучателя и приемника звука.
Медленные замирания обычно связывают с наличием крупномасштабных
неоднородностей, обусловленных, например, гравитационными волнами гори-
зонтальной рефракции.
На основании рассмотренной модели канала суммарный сигнал в точке
приема в случае аддитивного характера помех можно представить в виде [5]:
w
*(0 = № [? - т> (0] + «(0> (5-20)
7=1
где N - число лучей в точке приема; az(Z), tz(Z) - амплитуда и временная задержка
z-ro сигнала; n(t) - помеха в точке приема.
Число лучей и время задержек могут быть определены с помощью лучевой
теории, статистические свойства амплитуд определяются экспериментально.
В случае узкополосных сигналов функции a(t) и т(/) представляют собой
медленно меняющиеся процессы по сравнению с частотой звуковых колебаний.
С учетом этого выражение (5.20) примет вид
w
z(t) = a^t - tz) + n(t). (5.21)
/=1
Движение источника и приемника со скоростями V\ и V2 вызовет смещение
сигнала по оси частот за счет эффекта Доплера. Принятый сигнал в этом случае
z(t) = faiS Г1_^СО8ашСТ_Г2^,пр1 + т. +л^ (522)
/=1 |д с с J J
где az - углы скольжения z-ro луча; с - скорость звука.
5.3.2. Принципы построения гидролокаторов
Обобщенная структурная схема гидролокатора приведена на рис. 5.12. Гене-
ратор передающего тракта вырабатывает сигнал, форма и параметры которого
определяются назначением конкретного устройства.
Применение импульсных сигналов с определенной амплитудой и длительно-
стью обеспечивает достаточно высокую разрешающую способность либо по
дальности, либо по частоте доплеровского сдвига, но не по обоим этим парамет-
рам одновременно. Для получения высокой разрешающей способности по даль-
ности используют короткие импульсы, по доплеровской частоте - длинные. По-
следние оказываются более пригодными и при работе аппаратуры в условиях
сильной шумовой помехи. При наличии сильной реверберационной помехи
лучшие результаты дает применение импульсов колоколообразной формы. Для
246
оптимизации использования гидролокатора в изменяющихся реальных условиях
длительность и форма излучаемых импульсов может в некоторых устройствах
меняться оператором. Большой интерес представляют импульсные сигналы с
линейной частотной модуляцией (ЛЧМ), в которых мгновенное значение часто-
ты заполнения линейно меняется во времени. Применение таких сигналов дает
хорошие результаты в условиях сильной реверберационной помехи и при малых
Рис. 5.12. Обобщенная структурная схема гидролокатора:
1 - приемоизлучающая акустическая антенна; 2 - коммутационное уст-
ройство; 3 - матрицы формирования диаграмм направленности; 4 - гене-
ратор; 5 - блок синхронизации; 6 - блок компрессии динамического диа-
пазона и нормирования сигнала; 7 - схема обработки сигнала; 8 - схема
выявления наличия сигнала; 9 - индикатор
значениях доплеровского сдвига. При использовании как тональных, так и
ЛЧМ-импульсов различной длительности оператор может выбрать оптимальный
вариант формы сигнала для любых условий работы гидролокатора.
Сигналы с псевдослучайной модуляцией обладают хорошей разрешающей
способностью одновременно по дальности и по доплеровскому сдвигу частот,
что позволяет успешно использовать их в условиях многолучевости распростра-
нения сигнала и сильной реверберации.
Непрерывное излучение сигналов с частотной модуляцией имеет существен-
ные преимущества перед импульсным. Важнейшими из этих преимуществ яв-
ляются следующие:
- непрерывное получение информации о дистанции до цели и ее изменениях;
- возможность усреднения эхосигналов, улучшение за счет этого помехо-
устойчивости системы;
- высокая разрешающая способность по дальности;
- возможность одновременного получения сигнала на визуальном индикато-
ре и прослушивания его.
Однако гидролокаторы с непрерывным излучением и ЧМ-сигналом имеют
ограниченную по сравнению с импульсными дальность действия. По этой при-
чине непрерывное излучение применяется главным образом в специальной ап-
паратуре, в частности, в гидролокаторах для глубоководных аппаратов или для
водолазов и аквалангистов.
Сигнал, выработанный генератором, поступает на матрицу, с помощью ко-
торой формируется лепесток ДН акустической антенны нужной ширины при
излучении, и ось диаграммы определенным образом ориентируется в плоскости
247
обзора или пространстве. Антенны гидролокаторов обычно могут работать в
режиме как излучения, так и приема.
В приемном тракте (рис. 5.13) сигнал с антенны поступает также на матри-
цу формирования диаграммы направленности, имеющую то же назначение, что
и матрица передающего тракта и строящуюся на тех же принципах. Однако в
общем случае ДН обоих трактов и формирующие их матрицы будут отличать-
Рис. 5.13. Обобщенная структурная схема приемного тракта гидролокатора:
1 - антенна; 2 - матрица формирования диаграммы направленности; 3, 4 - полосовой и
режекторный фильтры соответственно; 5, 6 - усилители; 7 - детектор-осреднитель; 5 -
блок АРУ; 9 - гребенка узкополосных фильтров; 10 - детекгоры-осреднители; 11 - схема
ИЛИ; 12 - блок нормирования доплеровского сдвига; 13 - последетекторный осреднитель
ся одна от другой. Для формирования диаграмм направленности при приеме за
последние годы все шире применяется цифровая техника. Используют и раз-
личные адаптивные методы формирования, позволяющие снизить влияние ко-
герентных акустических помех, таких, например, как шумы групповых целей,
а также влияние обратного рассеяния энергии и явления многолучевости
распространения сигнала; уменьшить воздействие собственных шумов и
помех, создаваемых преднамеренно. Для уменьшения влияния всех этих помех
применяется пространственная фильтрация сигналов. За счет такой
фильтрации могут быть улучшены отношения сигнал/помеха (согласованный
фильтр), минимизированы искажения сигнала (фильтр Вина); уменьшены
вероятности ложных тревог (фильтр Байеса). Далее в приемном тракте сигнал
поступает в блок регулировок и нормирования сигнала. На назначении и
структуре этого блока остановимся подробнее [8].
Приемный тракт гидролокатора должен иметь достаточно большой динами-
ческий диапазон, чтобы он мог реагировать как на очень слабые сигналы, так и
на еще не разделенную смесь сильного эхосигнала, реверберационной и шумо-
вой помех. В то же время для получения оптимальных условий обнаружения
сигнала на экране индикатора требуется, чтобы уровень сигнала во времени и
пространстве был постоянным. При соблюдении этого условия вероятность об-
наружения сигнала оказывается максимальной, чего нелегко достигнуть, так как
уровни реверберационных и шумовых помех изменчивы по направлению и во
248
времени. Подвержены случайным изменениям и свойства среды, в которой рас-
пространяется сигнал. В связи с этим в состав приемного тракта современных
гидролокаторов входит специальный функциональный узел, предназначенный
для преобразования сигнала с большим динамическим диапазоном на входе в
сигнал с ограниченным динамическим диапазоном на его выходе, выдаваемый
на индикаторы для устранения пространственной и временной вариации помех
на экране индикатора. Устранение вариации помех при одновременном поддер-
жании постоянного порогового уровня обеспечивает неизменное значение веро-
ятности ложных тревог. Блок, выполняющий эти функции, иногда называют
блоком регулировок и нормирования сигнала.
Одна из регулировок, осуществляемая в блоке, называется временной авто-
матической регулировкой усиления (ВАРУ). Как известно, реверберационная
помеха имеет максимальный уровень в момент окончания излучения зонди-
рующего импульса и со временем постепенно уменьшается по закону, близкому
к экспоненциальному. С помощью ВАРУ коэффициент усиления приемного
тракта изменяется обратно пропорционально уровню реверберации: будет ми-
нимальным в момент окончания излучения и достигнет максимума, когда ревер-
берация перестанет оказывать влияние. За время действия ВАРУ, составляю-
щее 0,5... 1,0 с, усиление приемного тракта возрастает на 35...40 дБ. Поскольку
различные виды реверберации - объемная, поверхностная, донная - неодина-
ково изменяются во времени, для обеспечения максимальной эффективности
регулировки в реальных условиях оператор может менять в определенных
пределах параметры схемы ВАРУ - глубину и постоянную времени регули-
ровки. В многоканальных приемных трактах ВАРУ осуществляется в каждом
канале независимо.
Другим видом является автоматическая регулировка усиления (АРУ). С ее по-
мощью динамический диапазон сигнала уменьшается с 70.. .80 дБ на входе тракта
до ~ 12 дБ на его выходе, выравнивается уровень выходного сигнала при флюк-
туации его на входе, обеспечивается поддержание заданного отношения сиг-
нал/помеха при изменении уровня помех на входе схемы. Управляет схемой АРУ
продетектированная и осредненная постоянная составляющая шумовых помех,
поданная в виде напряжения смещения в цепи обратной связи. Параметры схемы
выбирают так, чтобы импульсные помехи длительностью менее длительности из-
лучаемого гидролокатором импульса не воздействовали на нее и не вызывали
ложных срабатываний. С ростом постоянной составляющей помех коэффициент
усиления схемы уменьшается и улучшается отношение сигнал/помеха.
При обработке сигнала в ряде случаев оказывается полезным использовать
на входе схемы АРУ режекторный и полосовой фильтры. Режекторный
фильтр, настроенный на частоту излучаемого сигнала, подавляет ревербера-
цию и улучшает обнаружение сигналов, имеющих значительный доплеровский
сдвиг. При наблюдении за дальними целями с малым доплеровским сдвигом
режекторный фильтр отключается оператором. Такой фильтр уменьшает сиг-
нал с нулевым доплеровским сдвигом не менее чем на 40 дБ и на 3 дБ умень-
шает сигналы со сдвигом, вызванным перемещением с относительной скоро-
стью свыше 5 узлов.
По мнению некоторых зарубежных специалистов, хорошие результаты мо-
жет дать применение адаптивных фильтров, ширина полосы и глубина подавле-
249
ния которых будут меняться в зависимости от того, преобладает реверберацион-
ная или шумовая помеха. Такие фильтры повысят вероятность обнаружения
сигналов с малым доплеровским сдвигом в условиях ограничения ревербераци-
онной помехой.
При сильной реверберационной помехе схема АРУ не обеспечивает ее по-
давления. В этом случае схема, эффективная при борьбе с широкополосными
шумами, пропускает реверберацию со сравнительно узкой полосой частот. Так
как индикатор кругового обзора имеет ограниченный динамический диапазон,
оператору приходится регулировать усиление приемного тракта вручную. Одна-
ко при уменьшении коэффициента усиления (для устранения сильной ревербе-
рационной помехи) слабый сигнал от удаленной цели может быть потерян. Если
же коэффициент усиления велик и обеспечивает обнаружение слабых сигналов
от дальних целей, возможен пропуск ближних целей, маскируемых ревербера-
цией. Для устранения этого нежелательного явления иногда используют вторую
схему АРУ, расположив ее после детектора. Такая схема АРУ называется после-
детекторной.
В некоторых устройствах используют автоматическую регулировку усиле-
ния реверберации (АРУР). Отличие этой регулировки от ВАРУ заключается в
том, что управление восстановлением усиления приемного тракта в ней осуще-
ствляется не с помощью заранее установленных параметров схемы, а с учетом
реального изменения уровня реверберации путем подачи изменяющегося во
времени напряжения смещения, как это делается в схеме АРУ. Однако если на-
пряжение смещения в схеме АРУ может и возрастать и уменьшаться в зависи-
мости от изменения уровня шумовой помехи на входе схемы, в АРУР изменение
смещения имеет односторонний, необратимый, характер и только увеличивает
коэффициент усиления приемного тракта. При внезапном увеличении уровня
помехи коэффициент усиления не меняется. Схема АРУР достаточно эффектив-
на при работе на больших глубинах, где уровень реверберации плавно уменьша-
ется со временем. На небольших глубинах многократные отражения от дна и
поверхности моря вызывают частые всплески реверберации, поэтому лучший
результат дает АРУ, реагирующая на эти всплески.
Для поддержания постоянного уровня ложных тревог в условиях большого
динамического диапазона сигналов в гидролокаторах может использоваться и
приемный тракт с логарифмической амплитудной характеристикой, состоящий
из логарифмического усилителя, квадратичного детектора и фильтра нижних
частот с малой постоянной времени. Такой тракт не перегружается помехами и
сглаживает их флюктуации.
Для нормирования амплитуды сигналов в приемных трактах гидролокаторов и
шумопеленгаторов достаточно широко применяется и их двустороннее ограниче-
ние. Применение ограничения упрощает также согласование гидроакустической
аппаратуры с ЭЦВМ и другими устройствами, основанными на цифровой технике.
После регулировок и нормирования сигнала начинается его обработка, сущ-
ность которой заключается в выделении полезного сигнала из маскирующих
помех различного происхождения. Наибольшую трудность вызывает выделение
сигнала на фоне случайных помех, спектр частот которых перекрывает спектр
частот сигнала. В этом случае решающую роль приобретают статистические
свойства сигналов.
250
При когерентной обработке сигнал пропускается через гребенку доплеров-
ских фильтров. Каждый фильтр в этой гребенке является узкополосным, с поло-
сой пропускания AFb оптимальной для длительности импульса т, используемой
в гидролокаторе. Полосы пропускания всех фильтров гребенки перекрывают
общую полосу AF, необходимую для приема сигнала при наличии положитель-
ного максимального или отрицательного доплеровского сдвига. Принимаемый
сигнал, имеющий любой доплеровский сдвиг, лежащий в этих пределах, обяза-
тельно пройдет через какой-либо один или два смежных фильтра гребенки. При
такой обработке отношение сигнал/помеха на выходе узкополосного фильтра
улучшается примерно в 101ogAFT-51ogAFiT раз, где AF - общая полоса пропус-
кания, AFi - полоса пропускания отдельного фильтра, т - длительность зонди-
рующего импульса.
Использование гребенки фильтров превращает систему в многоканальную,
что увеличивает объем информации в приемном тракте. На выходе каждого ка-
нала помещается детектор огибающей.
Если к выходам каналов подключить специальный многоканальный индика-
тор (индикатор частотных составляющих), то оператор, осуществляя визуальное
«сканирование» отметок сигналов в каналах, будет определять канал, в котором
амплитуда сигнала максимальна. При этом из-за ограниченной пропускной спо-
собности оператора реальный выигрыш от оптимальной фильтрации в децибе-
лах уменьшается примерно вдвое против теоретического и возрастает число
ложных тревог. Для облегчения работы оператора к одноканальному индикато-
ру через логическую схему ИЛИ может подключаться только тот канал, в кото-
ром имеется сигнал. Это позволяет также упростить конструкцию индикатора и
уменьшить его габариты. Однако в таком случае возможна потеря сигнала из-за
управления схемой ИЛИ каналами с высоким уровнем реверберационной поме-
хи. Возрастает и вероятность ложных тревог. Общая потеря в уровне сигнала
при использовании схемы ИЛИ составляет 2.. .4 дБ.
При некогерентной обработке сигналов используется детектор-осреднитель,
включающий в себя детектор огибающей (квадратичный детектор) и интегратор
или фильтр нижних частот, согласованный с длительностью излучаемого гидро-
локатором импульса. Если полоса пропускания приемного тракта AF, а длитель-
ность импульса т, отношение сигнал/помеха в ходе обработки улучшается в
51ogAFx раз. Превышения усиления сигнала над уровнем реверберационной по-
мехи при такой обработке не происходит, так как полосы частот сигнала и ре-
верберации практически одинаковы.
В ряде случаев весьма полезной для первичного обнаружения и класси-
фикации сигналов является возможность их прослушивания. Совместное
использование слуховой и зрительной информации сигнала улучшает коэф-
фициент распознавания примерно на 6 дБ. Однако рассмотренные методы
обработки полностью преобразуют первоначальный сигнал, исключая воз-
можность его прослушивания, поэтому в состав гидролокаторов обычно вхо-
дит самостоятельный тракт прослушивания. На рис. 5.14 приведена типовая
схема такого тракта. В гидролокаторах кругового обзора для тракта прослу-
шивания формируется отдельная диаграмма направленности акустической
антенны. Эта диаграмма с помощью щеточного компенсатора поворачивается
251
оператором в направлении источника сигнала, первоначально полученном с
индикатора кругового обзора.
В специальном блоке осуществляется компенсация доплеровского сдвига
частот, вызванного собственным перемещением судна - носителя гидролокато-
Рис. 5.14. Обобщенная структурная схема слухового тракта гидролокатора:
1 - антенна; 2 - предварительные усилители; 3 - компенсатор; 4 - блок ком-
пенсации доплеровского сдвига; 5 - полосовой фильтр; 6 - усилитель с АРУ; 7 -
смеситель; 8 - звуковой усилитель
ра. За счет этой компенсации несколько сужается полоса пропускания приемно-
го тракта и повышается его помехоустойчивость. Сигнал проходит через усили-
тель с автоматической и ручной регулировками и преобразуется в смесителе для
получения средней частоты прослушивания порядка 800 Гц. Слуховой усили-
тель обеспечивает возможность использования динамика. На время излучения
посылки вход слухового тракта запирается.
Основным преимуществом слухового обнаружения является возможность
частотного разделения сигнала и реверберации, что существенно улучшает ко-
эффициент распознавания даже при незначительной разности частот. В свою
очередь тракт визуального обнаружения представляет собой систему с много-
мерной обработкой сигнала, включающей многоаспектную оценку и класси-
фикацию цели, и может сопрягаться с ЭЦВМ. Комбинация положительных
свойств обоих трактов, взаимно дополняющих друг друга, значительно повы-
шает возможности гидролокаторов в первичном обнаружении и классифика-
ции целей.
Структурные схемы основных разновидностей гидролокационных стан-
ций (ГЛС). ГЛС шагового обзора (рис. 5.15). Плоская антенна, работающая в
режимах излучения и приема, помещена в обтекатель и с помощью подъемно-
поворотного механизма перемещается в рабочее положение, стабилизируется на
качке и разворачивается на нужные направления в процессе обзора.
Коммутационное устройство на время излучения подключает антенну к ге-
нератору, во время паузы - к приемному тракту. Генератор вырабатывает мощ-
ные электрические импульсы рабочей частоты ГЛС. В усилителе приемного
тракта происходят обработка эхосигналов и преобразование их в форму, обеспе-
чивающую работу индикаторных устройств (электронных, электромеханических
и слуховых). Пульт позволяет управлять работой ГЛС, контролировать состоя-
ние элементов и узлов и согласовывать их работу [9].
252
Рис. 5.15. Обобщенная структурная схема
гидролокатора шагового обзора:
1 - акустическая антенна; 2 - обтекатель; 3 -
подъемно-поворотное устройство; 4 - комму-
тационное устройство; 5 - генератор; 6 - пульт
управления; 7 - приемный тракт; 8, 9, 10 -
соответственно электронный, электромехани-
ческий и слуховой индикаторы
ГЛС кругового обзора с всенаправленным излучением и быстросканирующей
ДН при приеме (рис. 5.16). Антенна ГЛС - цилиндрическая, состоит из отдель-
ных секций или приемоизлучателей. Коммутационное устройство при излуче-
нии соединяет все секции (приемоизлучатели) в параллель и подключает их к
генератору; при приеме каждая секция антенны подключается раздельно к сво-
ему предварительному усилителю. ДН антенны при приеме формируются для
двух независимых трактов: кругового обзова (КО) и слухового, с помощью бес-
контактных коммутаторов и подключаемых ими к секциям антенны задержи-
вающих цепей, образующих электрические компенсаторы. Лепесток ДН тракта
КО непрерывно вращается с требуемой скоростью, слухового - может повора-
Рис. 5.16. Обобщенная структурная схема гидролокатора КО со всенаправ-
ленным излучением и быстросканирующей ДН при приеме:
1 - цилиндрическая акустическая антенна; 2 - коммутационное устройство; 3 - гене-
ратор; 4 - блок синхронизации; 5 - компенсатор; 6 - усилитель слухового тракта; 7 -
предварительные усилители; 8 - блок формирования и сканирования; 9 - усилитель
КО; 10 - индикатор КО; 11 - генератор развертки
253
чиваться оператором в направлении обнаруженной цели и задерживаться на
время, нужное для прослушивания эхосигналов и шумов. Сигналы в трактах
усиливаются и преобразуются обычным путем. К выходам трактов подключены
соответственно индикатор КО и головные телефоны [9].
ГЛС с непрерывным излучением и частотной модуляцией сигнала (рис.
5.17). Антенны раздельные - излучающая и приемная. Генератор вырабатывает
колебания, частота которых в течение заданного периода меняется по пилооб-
разному закону. Эти колебания подаются на излучающую антенну и в смеси-
тель приемного тракта. В смесителе вырабатываются комбинационные часто-
ты излучаемых в данный момент и принимаемых, отраженных от цели, коле-
баний. С помощью фильтра выделяется разностная частота, пропорциональная
дистанции до цели. Неравномерность затухания частот спектра сигнала при
Рис. 5.17. Обобщенная структурная схема
гидролокатора с непрерывным излучением
и частотной модуляцией сигнала
1 и 7 - приемная и излучающая акустические ан-
тенны; 2 - смеситель; 3 - усилители; 4 - индика-
тор КО; 5 - видеоусилитель; 6 - многоканальный
анализатор спектра; 8 - генератор ЧМ-сигналов
распространении в среде компенсируется путем ограничения или выравнива-
ния при усилении. Далее сигнал поступает на динамик для прослушивания и
на многоканальный анализатор спектра. Выходы фильтров последовательно
опрашиваются, и через видеоусилитель сигналы подаются на управляющий
электрод ЭЛТ-индикатора кругового обзора. Синхронно с опросом каналов
анализатора происходит радиальная развертка луча. Одновременно, синхронно
с вращением антенны в плоскости обзора, луч на экране ЭЛТ разворачивается
по окружности. Положение отметки от цели на экране индикатора характери-
зует курсовой угол цели и дистанцию до нее [9].
ГЛС секторного обзора с быстросканирующей ДН при приеме (рис. 5.18).
Антенны раздельные - излучающая (обеспечивающая облучение всего секто-
ра обзора одной посылкой) и приемная (линейная секционированная). Гене-
ратор вырабатывает импульсы рабочей частоты. Такую же частоту имеют и
эхосигналы от цели, поступающие на приемную антенну. Выход каждой сек-
ции приемной антенны через свой преобразователь частоты подключается к
соответствующему отводу общей линии задержки, рассчитанной так, что на
рабочей частоте ГЛС сдвиг фаз между отводами составляет 2тг и на выходе
линии все принятые секциями сигналы складываются в фазе, что соответст-
вует расположению оси ДН, перпендикулярному базе приемников. При из-
менении частоты, вырабатываемой отдельным местным гетеродином по пи-
лообразному закону, по этому же закону будет меняться и комбинационная
частота, снимаемая с выходов преобразователей и поступающая на отводы
линии задержки. Сдвиг фаз между отводами станет отличным от 2я и будет
плавно изменяться, варьируя знак при переходе через значение 2тг. За счет
этого меняется направление полной компенсации приемной антенны, и лепе-
сток ДН быстро сканирует в пределах заданного сектора. Сигнал с выхода
254
Рис. 5.18. Обобщенная структурная схема гидролокатора сектор-
ного обзора с быстросканирующей ДН при приеме:
1 - излучатель; 2 - секционированная приемная антенна; 3 - смесители;
4 - линия задержки; 5 - управляемый гетеродин; 6, 8 - блоки развертки
по дальности и азимуту; 7 - схема управления частотой; 9 - индикатор;
10 - генератор; 11 - усилитель; 12 - детектор
задерживающей цепи усиливается, детектируется и подается на управляю-
щий электрод ЭЛТ-индикатора. Развертка луча на экране индикатора типа В
(курсовой угол - дистанция) происходит вдоль шкалы курсовых углов син-
хронно с изменением направления оси ДН, вдоль шкалы дистанции луч пе-
ремещается линейно, пропорционально времени, прошедшему после оконча-
ния излучения.
Основные показатели и параметры ГЛС. Применимость того или иного
образца ГЛС для решения конкретных задач определяется основными показа-
телями и параметрами, возможностью размещения аппаратуры на данном но-
сителе.
Показатели, характеризующие возможность ГЛС решать задачи наблюдения
за определенными объектами, называются тактическими. Важнейшие из этих
показателей таковы:
- способ обзора пространства и зона обзора, т. е. область пространства, в ко-
торой происходит обнаружение целей;
255
- максимальная дальность обнаружения - наибольшее расстояние между
ГЛС и целью, при котором соблюдаются заданные вероятности правильного об-
наружения и ложной тревоги. Для современных корабельных ГЛС эта величина
в зависимости от типа станции может быть от нескольких единиц до десятков
километров; для одной и той же ГЛС она может меняться в широких пределах в
зависимости от многих факторов, связанных с условиями наблюдения и харак-
тером цели;
- минимальная дальность действия или радиус мертвой зоны - минимальное
расстояние от ГЛС, на котором можно обнаружить цель и определить ее коор-
динаты с заданной точностью;
- разрешающая способность - возможность раздельно наблюдать близко-
расположенные цели. Разрешающая способность определяется по дальности -
минимальным расстоянием между двумя целями, находящимися на одном на-
правлении; по направлению - минимальной разностью угловых координат (пе-
ленгов, курсовых углов) двух целей с одинаковой дальностью, при которой эти
цели еще наблюдаются раздельно;
- точность измерения координат, характеризуется случайными ошибками
измерения;
- помехоустойчивость - способность станции выполнять свои функции в ус-
ловиях воздействия помех;
- надежность - способность работать в течение требуемого времени с со-
хранением всех заданных тактических показателей;
- степень автоматизации обработки и съема получаемой ГЛС информации.
К техническим параметрам ГЛС относят характеристики, обеспечивающие
получение необходимых тактических показателей станции. Важнейшие из них
следующие:
- рабочая частота - основной параметр, обеспечивающий получение макси-
мальной дальности действия ГЛС при определенном наборе параметров аппара-
туры, характеристик среды и цели. В современных ГЛС используют рабочие
частоты, лежащие в пределах от единиц до нескольких десятков килогерц;
- излучаемая акустическая мощность, определяемая значением подводимой
к антенне электрической мощности, вырабатываемой генератором, и КПД ан-
тенны. Мощность, излучаемая судовыми ГЛС, меняется от сотен ватт до сотен
киловатт; КПД излучателей 20...70 %;
- ширина ДН в горизонтальной и вертикальной плоскостях и коэффициент
осевой концентрации антенны при излучении и приеме;
- энергетический потенциал - произведение излучаемой мощности на коэф-
фициент осевой концентрации антенны при излучении;
- длительность и форма излучаемых импульсов;
- коэффициент усиления приемного тракта и полоса пропускания.
Эксплуатационные характеристики ГЛС отражают главным образом удоб-
ство работы с аппаратурой, наглядность отображения информации, необходи-
мые мероприятия по текущему уходу за ГЛС, ремонтопригодность, наличие в
составе станции вспомогательных устройств - лучеграфов, тренажеров, систем
технической диагностики и т. п.
Характеристики и параметры ГЛС приводятся в прилагаемой к ней техниче-
ской документации.
256
5.3.3. Принципы построения шумопеленгаторов
Шумопеленгаторы служат для обнаружения и прослушивания шумовых сиг-
налов различного происхождения и определения направления на их источник.
Обработка сигналов при шумопеленговании существенно отличается от обра-
ботки сигналов при гидролокации. При шумопеленговании на вход системы по-
ступают выборки из окружающего пространства, носящие вероятностный ха-
Рис 5.19. Обобщенная структурная схема шумопеленгатора:
1 - антенна; 2 - матрица формирования ДН ; 3 - полосовой фильтр; 4 - де-
тектор; 5 - осреднитель; 6 - оператор или вычислительное устройство
рактер. Часть этих выборок содержит только окружающие шумы, являющиеся
помехой, другая часть - смесь шумов цели (полезного сигнала) и помех. В ходе
обработки сигналов определяют и сопоставляют функции распределения веро-
ятностей наличия обеих этих частей. При определенном соотношении этих ве-
роятностей, превышающем заданную пороговую величину, делается вывод об
обнаружении полезного сигнала. Обобщенная структурная схема системы шу-
мопеленгования приведена на рис. 5.19.
В шумопеленгаторах обычно используют групповые акустические антен-
ны, состоящие из большого числа приемников, образующих плоскостную или
пространственную решетку разной конфигурации. Обработка сигналов начи-
нается с их пространственной селекции, заключающейся в формировании ДН
антенны и ориентирования ее оси относительно направления на цель. Лепестки
ДН обычно формируются за счет временной задержки сигналов, поступающих
от отдельных ненаправленных приемников, входящих в состав антенны, и по-
следующего суммирования всех этих сигналов, оказавшихся в результате за-
держки в фазе. При этом положение в пространстве оси ДН не зависит от раз-
мещения приемников в антенне и определяется введенными временными за-
держками. Меняя значения этих задержек, можно перемещать ось лепестка ДН
в пространстве любым желательным образом. При одновременном использо-
вании нескольких линий задержек, определенным образом подключенных к
выходам приемников, для одной антенны может быть сформирована многоле-
пестковая ДН. Каждый приемник антенны может участвовать в формировании
нескольких лепестков диаграммы.
При многолепестковых ДН, статически располагающихся в пространстве,
обзор пространства осуществляется поочередным опросом каналов образую-
щейся в этом случае многоканальной системы.
Далее в приемном тракте сигналы подвергаются частотной фильтрации.
Выбор частоты и полосы пропускания тракта производится в первую очередь
с учетом характеристик шумового поля цели. При этом из широкого частот-
257
ного спектра шумового сигнала выделяется та его часть, которая наиболее
существенно отличается от шумовой помехи. Для разных целей могут ис-
пользоваться разные участки диапазона рабочих частот и ширина полосы
пропускания.
Для выделения шумового сигнала на фоне помехи может осуществляться так
называемая субоптимальная фильтрация путем использования двух последова-
тельно включенных фильтров. Первый из этих фильтров «обеливает» спектр
шумовой помехи, преобразуя ее в белый шум с равномерным спектром мощно-
сти в полосе пропускания фильтра. Частотная характеристика второго фильтра
определяется спектром сигнала. Чем больше отличаются спектры мощности
сигнала и помехи, тем заметнее становится роль частотной фильтрации в про-
цессе обработки сигналов при шумопеленговании. Суммарный сигнал, прошед-
ший через фильтр, поступает на квадратичный детектор. Напряжение на выходе
детектора будет случайной величиной, так как вызвано принимаемыми сигнала-
ми, носящими случайный характер. Поэтому после детектора помещают инте-
гратор. Временное детектирование или осреднение шумов позволяет провести
их статистическую оценку и выделить на фоне сравнительно постоянной шумо-
вой помехи сигнал, уровень которого сравнительно быстро меняется во времени.
Требуемое время интегрирования зависит от флюктуации уровней помех и шу-
мов цели. Если на вход системы поступают только помехи, на ее выходе после
обработки будет только их постоянная составляющая. С появлением полезного
сигнала на выходе системы возникнет приращение выходного эффекта, свиде-
тельствующее о наличии цели.
На выходе приемного тракта помещают пороговое устройство, в котором
сопоставляется текущий выходной эффект с установленным уровнем. При пре-
вышении выходного эффекта над пороговым уровнем делается вывод об обна-
ружении цели. Порог срабатывания выбирается оператором с учетом одного из
условий:
- вероятность правильного обнаружения сигнала должна быть максималь-
ной, а вероятность ложных тревог - не превышающей заданного значения (кри-
терий Неймана - Пирсона);
- вероятность правильного обнаружения сигнала должна быть максималь-
ной, а вероятность ложных тревог - минимальной (критерий идеального на-
блюдателя).
Функции порогового устройства может выполнять наблюдатель, они же мо-
гут быть возложены на ЭЦВМ.
С возрастанием времени интегрирования флюктуации постоянной состав-
ляющей помехи уменьшаются, и даже относительно небольшое превышение
выходного эффекта, вызванное появлением сигнала цели, может быть зарегист-
рировано пороговым устройством.
Рассмотренный общий принцип построения шумопеленгатора обеспечивает
достаточно большую дальность обнаружения целей. Однако при использовании
ЭВМ возникает другой вид ограничения эффективности шумопеленгования -
оператор оказывается не в силах объяснить информацию, поступающую на по-
роговое устройство, так как в ходе обработки сигнал теряет присущие ему ха-
рактерные особенности, которые могли бы использоваться для классификации
цели на слух.
258
Конкретная реализация общих принципов построения шумопеленгаторов
может быть разной. Так, в некоторых современных шумопеленгаторах применя-
ется суммарно-разностная пространственная обработка сигналов, получаемых от
двух групп приемников. При этом формируется ДН с двумя смещенными на не-
который угол и частично перекрывающими друг друга лепестками. Такую диа-
грамму иногда называют диаграммой с расщепленным лучом. В этом случае
оказывается возможным определять направление на источник шума с высокой
точностью, а также управлять системой автоматического сопровождения цели. В
образующейся двухканальной системе сигналы ограничиваются по амплитуде,
фильтруются, коррелируются и выдаются для записи на регистрирующее уст-
ройство - рекордер пеленга, графически отображающее изменения курсового
угла на источник шума во времени. Так как на коррелятор поступают сигналы,
уже преобразованные в приемных каналах и ограниченные по амплитуде, кор-
реляционная функция зависит от положения оси диаграммы направленности и
достигает максимума, когда положение совпадает с направлением на цель. Для
контроля положения оси ДН служит электронный индикатор отклонения пелен-
га (ИОП).
Существуют и другие схемы построения шумопеленгаторов.
Структурные схемы некоторых разновидностей шумопеленгаторов
(ШП). Шумопеленгаторы со сканирующей ДН и автоматическим сопровожде-
нием цели (АСЦ) (рис 5.20). Крупногабаритная акустическая антенна состоит из
большого числа приемников или групп приемников. Снимаемые с приемников
Рис. 5.20. Обобщенная структурная схема
шумопеленгатора с трактом АСЦ:
1 - цилиндрическая акустическая антенна, пред-
варительные усилители; 3, 6 - двухканальные
компенсатор и усилитель; 4 - исполнительный
двигатель; 5 - слуховой усилитель; 7 - фазовый
детектор; 8 - усилитель сигнала рассогласования;
9 - указатель отклонения пеленга
слабые сигналы поступают в предварительные усилители, а затем на электриче-
ский компенсатор. При поиске цели оператор поворачивает лепесток ДН вруч-
ную или с заданной скоростью электромотором, обеспечивая КО. С помощью
фильтра выделяется нужная рабочая полоса частот приемного тракта, после чего
сигнал подвергается дальнейшей обработке перед подачей его на индикаторы
259
и в схему АСЦ. В качестве индикаторов можно использовать электронные инди-
каторы отклонения пеленга и регистраторы (рекордеры) пеленга. При работе ШП
в режиме сопровождения схема АСЦ при отклонении оси ДН от направления на
цель вырабатывает сигнал рассогласования - напряжение, управляющее двигате-
лем, поворачивающим ротор компенсатора. Компенсатор разворачивается так,
чтобы сигнал рассогласования стал равным нулю. Таким образом, схема АСЦ не-
прерывно удерживает ось ДН в направлении на цель. Оператор контролирует ра-
боту схемы АСЦ с помощью ИОП, который входит в ее состав. Сигнал сопровож-
даемой цели может приниматься оператором и на слух. Обычно КО осуществля-
ют независимо от сопровождения цели. Для этого в состав ШП вводят отдельные
компенсаторы.
ШП с веером статически сформированных лепестков ДН {рис, 5.21). Сигна-
лы, поступающие с приемников антенны, подвергаются селекции по частоте,
Рис. 5.21. Принцип формирования лепестков ДН с применением
элементов цифровой техники:
1 - приемники; 2 - входные цепи; 3 -регистры сдвига; 4 - фильтры;
5 - детекторы; 6 — выходные цепи
преобразуются с помощью усилителей-ограничителей в последовательность
прямоугольных импульсов и в виде выборок поступают на входы регистров
сдвига (каждый приемник или секция антенны присоединяют к своему отдель-
ному регистру). При отсутствии полезных сигналов состояние ячеек одинаковых
разрядов регистров сдвига всех каналов будет определяться поступившей на ан-
тенну шумовой помехой и носить случайный характер. При достаточно боль-
шом числе каналов примерно половина ячеек будет находиться в состоянии 1,
другая половина - в состоянии 0.
С появлением на каком-либо направлении источника сигнала в знаках выбо-
рок сигналов, поступающих на входы регистров, возникает определенная зако-
номерность. Так, при линейной антенне, если фронт волны параллелен линии
приемников, все ячейки одинаковых разрядов теоретически будут иметь одина-
ковые состояния (0 или 1). При отклонении фронта волны от направления линии
приемников число ячеек регистров, имеющих одинаковые состояния, в одинако-
вых разрядах уменьшается. Однако при этом можно найти ячейки, состояние
260
которых именно при данном направлении фронта волны оказывается одинако-
вым, и соединить их выходы. Такое соединение равносильно ориентированию
антенны на новое направление. Соединяя последовательно в определенном по-
рядке выходы по одной из ячеек каждого регистра и суммируя напряжения,
снимаемые со всех этих ячеек, можно сформировать нужное число лепестков
ДН антенны, перекрывающих всю зону обзора ШП. Количество формируемых
лепестков определяется числом каналов приемного тракта.
По мере продвижения выборок по ячейкам регистров напряжения на выхо-
дах сумматоров тех каналов, в которых фронт волны сигналов не совпадает с
переориентированной в пространстве базой антенны (равносильно отсутствию
сигнала в канале), будут лишь незначительно отклоняться от некоторого средне-
го значения, а после осреднения окажутся практически постоянными и не прой-
дут через фильтр.
В каналах, где есть полезный сигнал, напряжения на выходах сумматоров
будут меняться во времени и пройдут через фильтр на индикатор. Если осуще-
ствлять последовательный опрос каналов приемного тракта, подключая их к
электронному индикатору кругового обзора (ИКО) синхронно с разверткой лу-
ча, на экране ИКО появятся выбросы, показывающие направления на цели.
Основными тактическими показателями ШП являются:
- максимальная дальность обнаружения, которая меняется в широких преде-
лах и составляет для современных станций от нескольких единиц до сотен ки-
лометров;
- точность пеленгования, составляющая от десятых долей до 1...2°;
- разрешающая способность по направлению;
- помехоустойчивость;
- надежность;
- степень автоматизации работы станции.
Основные технические параметры:
- диапазон рабочих частот;
- ширина ДН и коэффициент осевой концентрации антенны;
- полосы пропускания диапазонов;
- коэффициент усиления приемного тракта.
5.3.4. Гидроакустические антенны
По принципу действия и структуре гидроакустические и радиоэлектронные
средства имеют много общего и различаются в основном входными (выход-
ными) устройствами - антеннами, так как в первом случае источником инфор-
мации является акустическое поле, а во втором - электромагнитные излучения
радиодиапазона. В гидроакустических средствах тракты усиления и обработки
электрических сигналов мало отличаются от соответствующих трактов радио-
электронных средств, поэтому ограничимся рассмотрением только гидроаку-
стических антенн.
Гидроакустической антенной называют устройство, обеспечивающее про-
странственно-избирательное излучение или прием звука в водной среде.
Гидроакустическая антенна обычно состоит из электроакустических преоб-
разователей (элементов антенны), акустических экранов, несущей конструкции
261
и линий электрокоммуникаций. Гидроакустические антенны можно классифи-
цировать по ряду признаков.
По способу создания пространственной избирательности антенны можно
разделить на интерференционные (непрерывные и дискретные), фокусирующие,
рупорные и параметрические [11, 12].
Интерференционными называют антенны, поле излучения которых форми-
руется в результате интерференции акустических колебаний, вызванных в точ-
ке наблюдения различными участками колеблющейся активной поверхности
антенны.
Непрерывными называют антенны, нормальная составляющая колебательной
скорости активной поверхности которых меняется непрерывно от точки к точке. К
дискретным антеннам или антенным решеткам относят антенны, состоящие из
отдельных преобразователей. Даже когда преобразователи расположены почти
вплотную (с минимальными зазорами), нормальная составляющая колебательной
скорости на активной поверхности дискретной антенны претерпевает разрывы.
Конструктивно непрерывная антенна может быть выполнена и из дискретных
преобразователей, если их излучающие поверхности соприкасаются с водой, на-
пример через общую металлическую накладку. Параметры дискретных антенн
при малых относительных расстояниях между центрами преобразователей могут
рассчитываться по формулам, справедливым для антенн непрерывных.
И непрерывные и дискретные антенны делят по конфигурации геометриче-
ского образования, объединяющего активные элементы, на линейные (антенны в
виде отрезка, дуги, окружности и др.), поверхностные (плоская, цилиндриче-
ская, сферическая, конформная и др.), объемные.
Фокусирующими называют антенны, пространственная избирательность ко-
торых образуется с помощью отражающих или преломляющих границ или сред,
производящих деформацию фронта волны (например, из сферического в пло-
ский) [10]. Фокусирующие антенны бывают зеркальными (рефлекторными) и
линзовыми. Дальнейшая классификация фокусирующих антенн может произво-
диться по конфигурации рефлектора или линзы.
Формирование пространственно-избирательных свойств рупорных антенн,
как и рефлекторных, осуществляется с помощью отражающих поверхностей,
однако в рупорной антенне не происходит деформации фронта волны и роль
отражающих стенок рупора сводится к канализации акустической энергии в не-
котором пространственном угле [11].
Направленность параметрических антенн создается путем интерференции
колебаний разностной частоты, возникающей при нелинейном взаимодействии
акустических волн близких частот [12].
По конструктивным особенностям антенны подразделяют на антенны с об-
щим для всех преобразователей контуром герметизации и с раздельной гермети-
зацией каждого преобразователя. Первые в свою очередь делят на антенны си-
ловой и компенсированной конструкции. По типу конструкции следует разли-
чать антенны, имеющие собственную несущую конструкцию и устанавливаемые
на носитель поэлементно или поблочно. По месту установки антенны могут
быть корабельными (носовыми, рубочными, килевыми, бульбовыми), береговы-
ми, донными, вертолетных станций, радиогидроакустических и гидроакустиче-
ских буев и т. д.
262
Антенны также могут быть излучающими, приемными или обратимыми, ра-
ботать в одном или нескольких режимах.
По способу обработки сигналов различают антенны аддитивные, мультипли-
кативные, самофокусирующиеся, адаптирующиеся, с синтезированной аперту-
рой и др. [12, 13].
Сигналы при формировании характеристик направленности обычно обраба-
тывают с помощью аналоговых устройств, в последнее время для этих целей
используют и цифровую технику [14].
Теория направленности антенн включает в себя решение прямых (анализ) и
обратных (синтез) задач. Наиболее разработан синтез антенн известной конфи-
гурации по заданной характеристике направленности [15].
В общем случае схема тракта излучения имеет вид, изображенный на рис. 5.22
({71, U2...Uq...Un - напряжения, подводимые к преобразователям; Fi, F2, • • • Vq.--Vn-
нормальные составляющие колебательной скорости преобразователей антенны).
Диаграммой направленности антенны D(u) в режиме излучения называют
зависимость отношения давлений, развиваемых ею в дальнем поле в текущем
направлении и и в некотором фиксированном направлении uq на одном и том же
расстоянии от центра антенны:
D(u) = R(u)eir(u), (5.23)
где R(u) — модуль ДН, называемый еще амплитудной ДН; г(и) — фазовая ДН.
Рис. 5.22. Структурная схема тракта излучения:
ЗГ - задающий генератор; ЛЗ - линия задержки; УМ -
усилители мощности; F... - преобразователи-
излучатели
И
ъ
Vq
Vn
Коэффициентом концентрации антенны К(щ) в некотором направлении щ
называют отношение интенсивностей, создаваемых в этом направлении антен-
ной и ненаправленным излучателем в дальней зоне на одном и том же расстоя-
нии г, при излучении антенной и ненаправленным излучателем активных одина-
ковых мощностей.
Коэффициент концентрации в направлении щ может быть определен по ДН
антенны:
(5.24)
263
Коэффициент концентрации Kq в направлении максимума равен коэффици-
енту концентрации К(цо) в направлении ио, когда оно определяет положение
максимума ДН. Учитывая сказанное, можно записать
K(ul) = K(u0)R2(ul).
(5.25)
Электроакустическим коэффициентом полезного действия антенны назы-
вают отношение излучаемой активной акустической мощности к активной элек-
трической мощности, подводимой к антенне.
Структурная схема гидроакустической антенны в режиме приема изображе-
на на рис. 5.23.
Диаграммой направленности антенны в режиме приема называется отноше-
ние напряжений на входе антенны (применительно к схеме рис. 5.23 - на сумма-
торе, т. е. волновом сопротивлении линии задержки) при получении сигнала от
излучателя, расположенного в направлении и и некотором выбранном направле-
нии 1/о, обычно соответствующем максимуму сигнала.
Гидроакустические преобразователи. Гидроакустический преобразователь -
непременный элемент гидроакустической антенны - представляет собой колеба-
тельную систему, предназначенную для излучения и приема акустических сигна-
лов в водной среде.
Рис. 5.23. Структурная схема приемного тракта:
П - преобразователь-приемник; ПУ - предварительный усилитель;
ОУ - основной усилитель; ЛЗ - линия задержки; И - индикатор
По назначению их делят на излучатели, приемники и обратимые преобразо-
ватели. По принципу преобразования энергии различают пьезоэлектрические,
магнитострикционные, электродинамические, электромагнитные и электроста-
тические. По структуре колебательной системы преобразователи делят на
стержневые, пластинчатые, цилиндрические, сферические. По конструктивному
выполнению подразделяют на силовые и компенсированные.
Стержневые системы содержат свободный активный (в электромеханиче-
ском отношении) стержень (рис. 5.24, а) или стержень с одной (рис. 5.24, б) либо
двумя (рис 5.24, в) накладками или с некоторым числом слоев из пассивного ма-
териала. В таких системах возбуждаются продольные колебания по оси стержня
264
Рис. 5.24. Типичные колебательные системы
с определенным распределением амплитуд и упругих напряжений, причем коле-
бания торцов считаются поршневыми.
Пластинчатые системы выполняют в форме прямоугольной (рис. 5.24, г)
или круглой (рис. 5.24, д) пластин, разных по толщине, а также в форме пла-
стин, опирающихся на две противоположные грани (рис. 5.24, е) или окружно-
сти (рис. 5.24, ж) и совершающих поперечные колебания изгиба.
В цилиндрических системах, выполненных в виде колец из активного мате-
риала, могут возбуждаться радиальные пульсирующие колебания (рис. 5.24, з),
осциллирующие (рис. 5.24, и) и изгибные с четырьмя узлами по окружности
(рис. 5.24, к).
Сферическая система представляет собой тонкую однородную сферическую
оболочку (рис. 5.24, л), совершающую практически радиальные пульсирующие
колебания.
В силовых конструкциях (рис. 5.25, а) забортное гидростатическое давление
благодаря механической трансформации вызывает в активном элементе 2 одно-
стороннее напряжение (сжатие), так как внутренний объем 3 корпуса 4 заполнен
воздухом при нормальном атмосферном давлении.
В компенсированных конструкциях (рис. 5.25, б) активный элемент испыты-
вает равномерное всестороннее сжатие, равное забортному гидростатическому
давлению, поскольку внутренний объем 3 заполнен газом или жидкостью при
этом же давлении.
265
Рис. 5.25. Силовая (а) и компенсированная (б) конструкции:
1 - рабочая накладка; 2 - активный элемент; 3 - внутренняя по-
лость; 4 - корпус; 5 - отверстие для выравнивания давления;
6 - компенсатор; 7 - акустическая развязка
Преобразователи-излучатели оцениваются следующими качественными по-
казателями работы:
- акустической мощностью Ра - количеством звуковой энергии, излучаемой
преобразователем в единицу времени. Величина Ра, отнесенная к единице площа-
ди излучающей поверхности, называется удельной акустической мощностью
или интенсивностью излучения J, Вт/м2. Эффективность излучателя в диапазоне
частот характеризуется частотной зависимостью акустической мощности;
- электроакустическим КПД Т|эа - отношением излучаемой акустической
мощности к активной электрической мощности Рэ, потребляемой преобразова-
телем от генератора возбуждения;
- входным электрическим сопротивлением Z - отношением приложенного
напряжения U к току / в цепи излучателя;
- характеристикой направленности, оценивающей пространственное распре-
деление поля и представляющей собой зависимость создаваемого излучателем
звукового давления в дальнем поле от угловых координат точки наблюдения,
отнесенное к максимальному значению;
- коэффициентом концентрации Ко - отношением интенсивности звука, соз-
даваемой излучателем по направлению главного максимума в точке дальнего
поля, к интенсивности ненаправленного излучателя с такой же излучаемой
мощностью на том же расстоянии.
Преобразователи-приемники характеризуются следующими показателями
работы:
- чувствительностью Л/, определяющей значение напряжения холостого хо-
да на выходе преобразователя при воздействии на него в свободном неискажен-
ном поле плоской волны звукового давления, равного 1 Па;
- электрическим сопротивлением Z, устанавливающим соотношение между
напряжением, развиваемым на выходе приемника, и током в его цепи;
- диаграммой направленности приемника - нормированным по отношению к
максимуму угловым распределением его чувствительности;
266
-коэффициентом концентрации Kq — отношением квадрата чувствительно-
сти в максимальном направлении к среднему квадрату чувствительности во всех
направлениях.
Для обратимых преобразователей коэффициенты концентрации в режиме
излучения и приема численно равны.
Все перечисленные параметры зависят от рабочей частоты.
5.3.5 Принципы получения информации
в гидроакустических информационных системах
Способы обзора пространства. При гидролокации и шумопеленговании
могут применяться различные способы обзора пространства, которые можно
свести к трем основным разновидностям: шаговый, круговой с всенаправленным
излучением и сканированием при приеме, круговой с направленным излучением
и статистической ДН при приеме.
В случае шагового обзора (рис. 5.26, а) при излучении и приеме формиру-
ется ДН со сравнительно узким в плоскости обзора лепестком. Обзор осуще-
ствляется облучением зоны пространства, охваченной ДН, и приемом эхо-
Рис. 5.26. Способы обзора пространства, применяемые в гидролокаторах:
а - шаговый; б - круговой со всенаправленным излучением и сканированием при прие-
ме; в - круговой с направленным излучением и статической диаграммой направленности
при приеме
сигналов от целей, оказавшихся в пределах этой зоны. Цикл такого обзора
занимает время
267
С
(5.26)
где rmax - ожидаемая дальность действия гидролокатора; с - скорость звука.
Перед каждой очередной посылкой антенна механически поворачивается на
новое направление, отличающееся от предыдущего на угол Д, называемый ша-
гом поиска. Обычно шаг поиска невелик и не превышаете 5... 10°. Полное время
обзора сектора £2 составляет
Q
= у'з (5-27)
д
и может быть довольно большим, возрастая с увеличением дальности дейст-
вия. Этот вид обзора наиболее прост и применяется главным образом в аппа-
ратуре, основными требованиями к которой являются простота устройства,
дешевизна, минимальные габариты и масса, например, в рыболокаторах для
малых судов. Преимущество такого обзора - эффективное использование
энергии при излучении. Важнейшими недостатками считают большие затраты
времени на обследование горизонта, полное отсутствие информации об обста-
новке за пределами зоны, охваченной ДН, необходимость механического по-
ворота антенны.
Круговой обзор свободен от этих недостатков. При таком обзоре непрерывно
просматривается все окружающее пространство в плоскости горизонта и могут
быть определены пеленги и дистанции до всех целей, находящихся в зоне обзо-
ра. Круговой обзор может осуществляться в двух основных вариантах.
Более простым с технической точки зрения является круговой обзор с всена-
правленным в плоскости обзора излучением и сканирующей узкой ДН при
приеме (рис. 5.26, б).
В этом случае через промежутки времени, равные /3, цилиндрической антен-
ной гидролокатора излучаются посылки длительностью т. С окончанием излуче-
ния электрическим путем формируется лепесток ДН приемного тракта шириной
0. Лепесток сканирует в плоскости обзора, вращаясь с постоянной заданной ско-
ростью. Число оборотов в минуту п ДН выбирают таким, чтобы за время сущест-
вования эхосигнала, примерно равного длительности посылки т, лепесток диа-
граммы успел совершить хотя бы один полный оборот. При соблюдении этого
условия часть энергии эхосигнала, приходящего с любого не известного заранее
направления, обязательно поступит в приемный тракт. Эта зависимость определя-
ется выражением
Тобз = — < т или п = — (5.28)
п т
(Тобз и т измеряют в секундах).
Так как сканирование происходит непрерывно, эхосигнал принимается лишь
в течение времени, когда лепесток ДН шириной 0 окажется развернутым в сто-
268
рону источника сигнала. Это время Тщ, составит лишь небольшую часть полного
времени существования эха т:
т=т—. (5.29)
пр 360о
Так, например, при 0 = 18° Тщ, = 0,05 т, т. е. в приемный тракт поступит лишь
5 % энергии полезного сигнала. Вся остальная, основная, часть окажется за пре-
делами лепестка диаграммы и не будет принята. Сокращение длительности при-
нимаемого сигнала требует расширения полосы пропускания, что в свою оче-
редь приводит к ухудшению отношения сигнал/помеха.
Таким образом, рассмотренному методу кругового обзора присущи весьма
значительные недостатки: нерационально расходуется энергия при излучении
и теряется большая часть энергии сигнала при приеме. В связи с этим в 1950-х
годах был разработан и внедрен метод обзора, свободный от этих недостатков.
Суть метода заключается в том, что окружающее пространство облучается
вращающимся с заданной скоростью лепестком ДН, сформированным для ци-
линдрической акустической антенны за счет фазирования сигналов, под-
водимых к отдельным излучающим секциям. Излучение происходит в течение
времени, за которое лепесток диаграммы совершает один полный оборот. При
таком излучении вся подводимая энергия концентрируется в пределах, ограни-
ченных лепестком ДН, в то время как в предыдущем случае энергия рассредо-
точивалась во все стороны. Таким образом, существенно повышается энерге-
тический потенциал гидролокатора при неизменной мощности его генератора
(см. рис. 5.26, в).
Частота вращения лепестка ДН при излучении выбирается такой, чтобы
каждое направление облучалось в течение определенного времени, называемо-
го эффективной длительностью посылки тэф. Исходя из этого определяется и
время оборота лепестка, равное полному времени Тиз работы генератора на из-
лучение:
Гиз=Тэф^. (5.30)
V
При 0 = 10° и тэф = 30 мс, Тиз = 10,8 с. Частота вращения, необходимая для
получения нужной эффективной длительности посылки (в мс), определяется из
выражения
п =—103.
6т .
эф
(5.31)
Для приема эхосигналов используют многоканальный тракт со статически
сформированными лепестками ДН, равномерно перекрывающими весь горизонт
или нужный сектор обзора. Происходит квантование зоны обзора по направле-
ниям - каждый лепесток ДН и подключенный к нему индивидуальный канал
269
обработки сигнала выдает информацию о целях, находящихся в зоне, охвачен-
ной данным лепестком. При этом сигналы поступают в канал в течение полного
времени своего существования. Обзор всего горизонта осуществляется за счет
последовательного опроса выходов всех каналов и подключения их к индикато-
ру кругового обзора. Такой способ построения приемного тракта исключает по-
тери энергии сигнала, неизбежные при сканировании, позволяет сузить полосу
пропускания, что делает тракт более помехоустойчивым. Возможен также ввод
поправки на доплеровский сдвиг частоты эхосигнала, вызываемый движением
носителя гидролокатора. Таким образом, этот метод кругового обзора имеет яв-
ные преимущества перед применяемым ранее.
Встречаются и иные способы обзора, применяемые при гидролокации - сек-
торный, боковой и др.
Обзор пространства при шумопеленговании может осуществляться любым
способом, применяемым в приемных трактах гидролокаторов.
Способы измерения дистанции до подводных целей. Системы определе-
ния местоположения подводных объектов могут быть одно- и многопозицион-
ными.
В однопозиционных системах для определения координат целей используют
единую приемную систему, в многопозиционных антенны разнесены в про-
странстве на расстояния, превышающие пространственный интервал корреля-
ции сигнала. При этом сигналы обрабатываются совместно для группы из
нескольких антенн, входящих в систему. Увеличение числа элементов в много-
позиционных системах способствует расширению возможностей определения
координат и элементов движения подводных целей [3].
Например, в двухпозиционной системе появляется возможность определения
координат пеленгационным и дальномерным способами, в трехпозиционной
системе кроме указанных применяют разностно-дальномерный, суммарно-
дальномерный и др. При дальнейшем увеличении числа элементов возможно
определять координаты и элементы движения целей, используя доплеровский
сдвиг частот и т. д. В свою очередь качественно меняются требования к акусти-
ческим антеннам, входящим в их состав. Если в однопозиционных системах
обязательна направленность, то в многопозиционных антенны могут быть нена-
правленными.
Импульсный метод определения дистанции основан на измерении интервала
времени между приемом отраженного сигнала и некоторым контрольным сиг-
налом, определяющим момент посылки зондирующего импульса. Если излучае-
мый сигнал описывается выражением
5(0 = u0 cos[2tt/Z + ФоL г0 < г < /0 + ти, (5.32)
то для отраженного сигнала справедливо соотношение
«э (0 = «О cos[2rc/ (t - ) + <р0], (5.33)
где тг = 2г/с - время распространения сигнала на расстояние г и обратно; с -
скорость звука в морской среде.
270
Схема устройства, реализующего импульсный метод, представлена на
(рис. 5.27). Если используется прямоугольный зондирующий импульс, то отра-
женный от цели не может быть идеально прямоугольным из-за конечной полосы
пропускания приемного тракта. Кроме того, форма импульса искажается под
влиянием помех, и происходит смещение момента перехода импульса через по-
роговый уровень обнаружения, в результате чего возникает ошибка в измерении
временного запаздывания Дтг. Ошибка в измерения дальности в этом случае
Дт = 1/2сДт.
(534)
Частотный метод основан на излучении и приеме непрерывных частотно-
модулированных колебаний. Время распространения сигнала до цели и обратно
Рис. 5.27. Схема импульсного изме-
рителя расстояния до цели
1 - акустическая антенна; 2 - коммутатор
приема-передачи; 3 - приемное устройст-
во; 4 - импульсный генератор; 5 - задаю-
щий генератор; 6 - синхронизатор; 7 -
устройство развертки по дальности; 8 -
индикатор
Рис. 5.28. Изменение частоты излу-
чаемых и принимаемых сигналов
пропорционально разности частот отраженного и зондирующего сигналов, как
показано на рис. 5.28. Частота биений (разностная частота)
2d
----
df с
(5.35)
При изменении частоты по пилообразному закону излучаемый сигнал имеет вид
КО = И0 - t2^fM /Тм) + ф0],
КО = w0 cos[2jc(/mhir + t2AfM / Тм ) + ф0 ] (5.36)
в нечетные и четные полупериоды модуляции соответственно. Дальность до цели определяется выражением 4/м (537)
271
Точность измерения дальности зависит от ширины спектра зондирующего
сигнала и отношения сигнал/помеха, точности измерения разностной частоты,
средней скорости звука. Эти факторы существенны при обнаружении непод-
вижных целей, для подвижных целей доплеровское смещение частоты является
основным фактором, снижающим точность оценки дистанции в однопозицион-
ных системах.
Наряду с активными методами в последние годы широкое развитие получи-
ли пассивные однопозиционные методы оценки дистанции до источников излу-
чения, основанные на использовании как лучевых, так и волновых моделей аку-
стических полей.
Метод оценки времени запаздывания прихода сигнала по лучам на неболь-
ших глубинах основан на особенностях распространения сигналов в акустиче-
ском волноводе, как показано на рис. 5.29. Здесь временные запаздывания воз-
никают в результате прихода сигнала по различным путям в точку приема: по
водному, отраженному от дна или поверхности. В случае разделения лучей,
Рис. 5.29. Ход лучей от источника
к приемнику в мелком море
приходящих с различных направлений в вертикальной плоскости, и измерения
временных задержек между прямым лучом Ti и отраженным от поверхности, а
также между прямым и отраженным от дна Т2 для определения расстояния мож-
но использовать выражение [3]
Г = {4(h2h2 + hlh2) + c2(x22hl + x2h2)}/2c(Xih2 + x2h{). (5.38)
Глубина источника равна
ha = -{с2х2 + 2сх2г-4h2}/4h2. (5.39)
При долгом наблюдения можно определить также расстояние от наблюдате-
ля до движущегося источника излучения, скорость его движения и текущие зна-
чения азимутов источника и отражателя.
Способы определения угловых координат подводных целей. Определе-
ние угловых координат подводных целей основывается в гидроакустике на ис-
272
пользовании направленных свойств приемных антенн. В акустике методы пе-
ленгования часто называют по параметру, выходной сигнал антенны которого
играет основную роль. Наиболее широко применяют в гидроакустических сред-
ствах амплитудный (максимальный), фазовый, фазово-амплитудный и корреля-
ционный методы.
При амплитудном методе пеленгования направление на источник опреде-
ляют по максимуму напряжения на выходе приемного тракта, которое можно
описать выражением w(a) = wmaxA(a), где R(a) - диаграмма направленности при-
емной антенны. В этом случае размеры антенны должны быть велики по срав-
нению с рабочей длиной волны, чтобы обеспечить достаточно узкую характери-
стику направленности.
Направление на цель определяется поворотом ДН в плоскости пеленгова-
ния. Пеленгационная характеристика, описывающая зависимость выходного
напряжения от отклонения направления на
цель, представлена на рис. 5.30. При дос-
таточно большом отношении сиг-
нал/помеха приемное устройство обеспе-
чивает изменение наблюдаемого сигнала
при малых изменениях угла. Это измене-
ние, характеризуемое пеленгационной
чувствительностью du/da = kdR(ti)ldu,
равно нулю при совпадении направления
на объект с максимумом характеристики
направленности, что существенно ограни-
Рис. 5.30. Пеленгационная характе-
ристика при амплитудном методе
чивает точность определения направления
на цель при небольших отношениях сиг-
нал/помеха. Практически максимальная
ошибка равна половине ширины характе-
ристики, направленной на уровне 0,5 по мощности (0,707 по напряжению).
Полагая ошибки распределенными по нормальному закону, среднюю квадра-
тическую можно считать в три раза меньше максимальной, как показано на
рис. 5.30. Поскольку ширина диаграммы направленности для используемых на
практике соотношений рабочих частот и размеров антенн достаточно велика,
достижение высокой точности пеленгования при реализации этого метода за-
труднительно. Другим недостатком метода является сложность построения
схем автоматического сопровождения целей.
Фазовый метод пеленгования основан на измерении разности фаз акусти-
ческих колебаний, принимаемых двумя антеннами, разнесенными в простран-
стве на расстояние d, как показано на рис. 5.31. Выражение для пеленгацион-
ной характеристики с учетом дополнительного сдвига в одном из каналов фазы
на 90° имеет вид
z ч . z2tuZ . ч
w(a) = £sm(-----sma).
X
(5.40)
Зависимость напряжения от угла рассогласования представлена на рис. 5.32.
Из рисунка видно, что точность пеленгования, определяемая крутизной пелен-
гационной характеристики, при фазовом методе значительно выше, чем при ам-
273
Рис. 532. Пеленгаци-
онная характеристика
при фазовом методе
Рис. 531. Структура фазового пеленгатора:
1,2- усилители; 3 - фазовращатель на 90°; 4 - блок
измерения разности фаз; 5 - устройство отображения
плитудном. Кроме того, достоинством фазового метода является возможность
его использования в устройствах автоматического сопровождения целей по уг-
ловым координатам. При гауссовых изотропных и стационарных некоррелиро-
ванных помехах, если отношение сигнал/помеха на входе пеленгатора больше
единицы, фазовая ошибка соответствует нормальному распределению. В этом
случае для оценки средней квадратической ошибки отклонения пеленга можно
воспользоваться выражением
Q — ’
) q
(5.41)
где q — отношение сигнал/помеха по мощности.
В реальных пеленгаторах большие отношения сигнал/помеха получают при
использовании значительных по площади акустических антенн, непрерывных
или дискретных, разделенных на две части в плоскости пеленгования. Такие ан-
тенны эквивалентны двум точечным приемникам, расположенным в центрах
обеих половин, их помехоустойчивость возрастает с увеличением концентрации
половины антенны.
Применение фазового метода требует абсолютной идентичности амплитуд-
ных и частотных характеристик обоих каналов, что на практике достигается с
большим трудом. Кроме того, непрерывное измерение текущей разности фаз,
например с помощью ЭЛТ, не позволяет увеличить время реализации принятого
критерия обнаружения (время накопления) и повысить за счет этого помехо-
устойчивость.
Фазово-амплитудный метод является разновидностью фазового и отличает-
ся от последнего тем, что напряжения, имеющие разные фазы, преобразуются в
синфазные с различными амплитудами, значения которых зависят от разности
фаз колебаний. Индикаторное устройство отображает информацию о разности
амплитуд сигналов с учетом ее значения и знака. Структура фазово-
амплитудного пеленгатора и векторные диаграммы, поясняющие его работу,
достаточно хорошо описаны в [16]. Можно лишь отметить, что практически
большинство схем АСЦ по пеленгу реализуют фазово-амплитудный метод.
Метод равносигналъной зоны заключается в том, что амплитудное пеленго-
вание проводится не по максимуму, а сравнением огибающих сигналов, полу-
274
ченных посредством формирования двух диаграмм направленности, максимумы
которых сдвинуты симметрично от равносигнального направления на угол сме-
щения ОсМ. Это осуществляется механически поворотом половин антенны на за-
данный угол либо электрически.
Одним из вариантов такого устройства является схема Гванеллы, изобра-
женная на (рис. 5.33) [17]. Эта схема на практике дополняется суммированием и
вычитанием принятых колебаний с последующей обработкой.
На выходе схемы Гванеллы формируется несимметричная корреляционная
функция входных процессов u(t) и u(t + т), определяемая как
1 +т
гкор(х) = Jim — J u(t)uXt + t)dt, (5.42)
гкор - корреляционная функция; знак < обозначает поворот фаз всех состав-
ляющих спектра на угол я/2. Вид несимметричной корреляционной функции, по
существу описывающей пеленгационную характеристику, представлен на (рис.
5.33, в). Точность пеленгования определяется крутизной кривой гкор (т), прохо-
дящей в точке т = О через нуль.
Рис. 5.33. Структура пеленгатора по методу равносигнальной зоны:
а - пояснение метода; б - схема Гванеллы (1 - фазовращатель на 90°, 2 - умножитель, 3 -
интегратор); в - пеленгационная характеристика
Корреляционный метод пеленгования основан на измерении взаимных кор-
реляционных функций между напряжениями, возникающими на выходах двух
или нескольких приемных антенн, как показано на рис. 5.34. Если полезный
сигнал и помехи некоррелированы, а расстояние между приемными группами
элементов такое, что помехи на выходе каждого приемника статистически неза-
висимы, напряжение на выходе интегрирующего устройства пропорционально
значению корреляционной функции пеленгуемого сигнала:
т d
гкор(а) = lim fu(t)u[t ч—sin а]А.
г-»°°* с
(5.43)
Однако благодаря конечности времени усреднения эффект на выходе корре-
ляционного тракта будет флюктуирующим. Поэтому в качестве отношения сиг-
275
нал/помеха на выходе корреляционного пеленгатора целесообразно брать отно-
шение квадрата корреляционной функции пеленгуемого сигнала к дисперсии
флюктуации выходного напряжения относительно своего среднестатистическо-
го значения.
В предположении, что расстояние до источника пеленгуемого сигнала вели-
ко по сравнению с расстоянием между приемниками базы, а приемники иден-
тичны и ненаправленны, для отношения сигнал/помеха справедливо выражение
(с/«)вых=а2ДЛ?вх>
(5.44)
если поле сигнала значительно меньше поля помехи. Как видно из (5.44), при
заданном отношении сигнал/помеха на входе превышение сигнала над поме-
хой на выходе корреляционного пеленгатора прямо пропорционально произве-
дению ширины полосы частот на время интегрирования Т. Если бы можно бы-
Рис. 5.34. Схема корреляционного
пеленгатора:
1 - устройство задержки; 2 - умножи-
тель; 3 - интегратор; 4 - индикатор
направленного приема, так как в
ло реализовать протяженное время интегри-
рования, то на фоне сколь угодно большой
помехи можно было выделить сколь угодно
малый сигнал.
С увеличением расстояния между прием-
никами базы и расширением полосы частот
направленное действие при приеме проявля-
ется лишь в небольшой части диапазона уг-
лов пеленгования, т. е. антенна такого пелен-
гатора имеет достаточно острую ДН.
Если пеленгуется узкополосный источ-
ник шума, антенна утрачивает способность
этом случае корреляционная функция явля-
ется косинусоидальной с многочисленными максимумами одинакового зна-
чения.
Корреляционный пеленгатор, основанный на совпадении знаков напряжений
в двух или нескольких каналах, представляет собой упрощенную модель корре-
ляционной схемы, поскольку частота знаковых совпадений пропорциональна
значению корреляционной связи между процессами в каналах. Его схема подоб-
на изображенной на рис. 5.34, если вместо схемы умножения использовать схе-
му совпадения, а на выходе каждого приемника установить усилители-
ограничители. Тогда ток на входе устройства отображения
z(t) = — 1+—arcsin/?(T)
4|_ я
(5.45)
Глубокое ограничение устраняет нежелательные влияния амплитудных флюк-
туаций помехи, т. е. уменьшает влияние нестационарное™ помехи при приеме.
Основные ошибки пеленгования в корреляционных пеленгаторах обусловле-
ны влиянием статистических связей помех, воздействующих на приемники ан-
тенны.
Определение местоположения подводных объектов в многопозиционных
системах. Как правило, многопозиционные системы применяют, чтобы обеспе-
276
чить обзор значительных по площади районов с использованием лишь пассив-
ных средств. Однако снижение уровней акустических излучений современных
подводных объектов обусловило также развитие методов акустической под-
светки слабо излучающих целей. Многопозиционные системы включают, как
правило, множество однопозиционных, позволяющих оценить местоположение
источника первичного или вторичного излучения с большой точностью.
Триангуляционный метод основан на одновременном или разновременном
пеленговании объекта из двух или более точек пространства. Местоположение
источника соответствует точке пересечения двух или нескольких прямых, яв-
ляющихся линиями положения (пеленгами на источник). Дальность до источни-
ка рассчитывается при измеренных углах pi, р2 и известной базе D:
r = D /(cos Pi - sin pj ctgp2 ). (5.46)
Точность пеленгования зависит от количества пеленгаторов, действующих
одновременно, углов, под которыми пересекаются линии положения. Поскольку
при малых углах пересечения точность определения местоположения невелика,
этот метод недостаточно эффективен при использовании, например, одного но-
сителя, имеющего ограниченные размеры. Одним из примеров технической реа-
лизации триангуляционного метода является применение в авиации для опреде-
ления местоположения источника акустического излучения [18]. Суть его пояс-
няет рис. 5.35. В данном случае место цели рассчитывается совмещением двух
Рис. 5.35. Реализация триангуляционного метода определения координат:
а - принцип определения местоположения; б - схема аппаратуры: 1 - рамочная радиоан-
тенна; 2 - ненаправленная передающая радиоантенна; 3 - переключатель; 4 - преобразо-
ватель радиочастоты в акустическую; 5 - переключатель; 6 - акустическая антенна; 7 -
вычислитель пеленга; 8 - радиопередатчик
пеленгационных треугольников, один из которых формируется в радиоканале и
соответствует месту летательного аппарата относительно двух пеленгаторов,
другой в акустическом канале соответствует месту источника излучения. При
совпадении треугольников ЛА находится непосредственно над источником из-
лучения. Достоинством подобной системы является малое влияние вращения и
277
перемещения буев на точность определения направления, поскольку они одина-
ково воздействуют на акустические и электрические пеленги.
Для направленных буев необходимо синхронизировать работу устройств вы-
числения пеленгов в радио- и акустическом каналах с учетом влияния поворота
антенн относительно, например, магнитного меридиана, который должен фик-
сироваться специальными компасными устройствами.
В каждой точке приема пеленг на цель может определяться различными спо-
собами, например по разности времени прихода сигнала путем вычисления вза-
имной корреляционной функции сигналов, принимаемых каждым буем из пары,
если в качестве приемника использовать два буя.
7777
Рис. 5.36. Структура устройства, реализующего угломерный метод определе-
ния координат:
1 - ненаправленные гидрофоны; 2, 3 - вычитающие схемы; 4, 5 - регулируемые
усилители; 6,7 - перемножители; 8 - фазовращатель на 90°; 9,10- интеграторы;
11 - индикатор пеленга и дистанций
Угломерные методы основаны на измерении направления на источник в раз-
личные моменты времени и акустического давления в различных точках. При из-
вестных параметрах маневрирования измерителя и предположении, что движение
измеряемого объекта прямолинейное и равномерное, можно рассчитать координаты
наблюдаемого объекта достаточно точно. Основные выражения и способы техниче-
ской реализации методов описаны в [18]. На рис. 5.36 приведена структурная схема
такого устройства. В ней используют ненаправленные приемные элементы, распо-
ложенные в вершинах квадрата, и один элемент в центре, которые через вычи-
тающие устройства, регулируемые усилители, перемножители и интеграторы со-
единены с электронно-лучевой трубкой. В процессе обработки входных сигналов
в регулируемых усилителях используют усиление, соответствующее измеренному
значению акустического давления в каждой конкретной точке, поэтому на экране
ЭЛТ расстояние до источника отсчитывают по шкале устройства ввода коэффици-
ента усиления, а пеленг - по отклонению линии от вертикали.
Разностно-дальномерные методы основаны на измерении времени задерж-
ки прихода сигналов на разнесенные в пространстве приемники. Эти методы
находят самое широкое применение в системах обнаружения, навигации, спасе-
ния экипажей терпящих бедствие самолетов (вертолетов) и кораблей. В различ-
ных вариантах метод может быть использован как в пассивных системах обна-
ружения, так и в системах акустической подсветки.
Одним из примеров технической реализации является система, включающая
несколько приемно-излучающих устройств, установленных в фиксированных
точках пространства и воспринимающих шумы источника таким образом, что
278
срабатывают генераторы в каждом устройстве и излучают кодированный сигнал
на пост обработки информации. Разность во времени срабатывания генераторов
позволяет строить гиперболические линии положения, пересечение которых на
карте для различных пар приемников дает местоположение объекта. Примерами
технической реализации разностно-дальномерного метода при непрерывном из-
лучении источника являются корреляционные системы. Типичная схема, пред-
ставленная на рис. 5.37, включает три ненаправленных в плоскости пеленго-
вания антенных устройства, например вертикальные цепочки гидрофонов,
Рис. 5.37. Корреляционная система, реализую-
щая разностно-дальномерный метод:
1 - приемные гидрофоны; 2 - широкополосные
управляемые линии задержки; 3 - коррелометры
удерживаемые на дне с помощью якорей. С каждой пары приемников сигнал
через широкополосную управляемую линию задержки поступает на соответст-
вующий вход коррелометра. Изменяя задержку, находят максимум взаимной
корреляционной функции, который по сдвигу времени соответствует разности
времени прихода сигнала к этим приемникам. Место можно уточнить, применяя
взаимную корреляционную обработку попарно со всеми приемниками, строя
таким образом три гиперболические линии положения, пересекающиеся в иде-
альном случае в одной точке.
Цели, принятые различными приемниками, идентифицируются путем оцен-
ки вторичной корреляционной функции между сигналами на выходах коррело-
метров. Сопровождение цели по пространству осуществляется специальным
устройством, схема которого и временные диаграммы, поясняющие принцип
работы, изображены на рис. 5.38. В этом устройстве при движении источника
излучения относительно приемников временные задержки изменяются автома-
тически, чтобы избежать временного смещения между корреляционными функ-
циями R\ и R'\, как показано на рис. 5.38, б. Рассогласование, соответствующее
разностному сигналу £i(Ti), устраняется изменением временной задержки в од-
ном из коррелометров. Эта задержка непрерывно и автоматически поддержива-
ется равной величине Тю, характеризующей гиперболу, на которой расположен
источник звука.
Принцип определения местоположения подводных объектов по разности
времени прихода к разнесенным в пространстве приемным антеннам может
также использоваться в системах обнаружения, где применяют акустическую
подсветку малозаметных с акустической точки зрения целей. Она может осу-
ществляться внешними источниками импульсного или непрерывного излуче-
ния, источниками взрывного типа и т. д. Для оценки местоположения цели
279
может осуществляться разнесенный прием как прямого сигнала «подсвечи-
вающего» источника, так и отраженного от оцениваемого объекта.
Дальномерный метод применяется в активных и пассивных системах при
использовании не менее двух ненаправленных в плоскости пеленгования антенн.
| I Дт Ti
S1 > К • 1
Рис. 5.38. Устройство сопровождения источника излучения:
а - структура; б - диаграммы, поясняющие работу схемы; 1 - приемни-
ки; 2 - устройства временной задержки; 3 - коррелометры; 4 - вычи-
тающее устройство
При этом на каждом устройстве может применяться любой из методов опреде-
ления дистанции или их совокупность. Линией положения, соответствующей
постоянной дальности до цели, является окружность с центром в приемной точ-
ке и радиусом, равным измеренной дальности.
Поскольку две окружности пересекаются в двух точках, определение коор-
динат с помощью двух приемных элементов связано с неоднозначностью воз-
можного положения цели в пространстве. Для исключения неоднозначности
необходимо использовать третью линию положения либо применять дополни-
тельные методы оценки какой-либо координаты. Точность определения места
цели дальномерным способом значительно повышается при использовании
более двух приемников, разнесенных в пространстве. Рабочие зоны деформи-
руются при изменении взаимного расположения приемников, поэтому уста-
навливать антенны следует с учетом достижения максимальной (или требуе-
мой) точности определения места цели в заданной зоне действия системы
обнаружения.
Доплеровский метод применяется для оценки местоположения только дви-
жущихся целей. Он основан на зависимости частоты излучаемых или отражае-
мых движущейся целью сигналов от вектора скорости. Активный метод опреде-
ления координат с использованием эффекта Доплера основан на приеме разне-
сенными в пространстве антеннами сигнала, отраженного движущейся целью с
последующим частотным анализом. Пространственное положение вектора ско-
рости движущегося объект различно для каждой приемной антенны, поэтому
280
принимаемые ими сигналы имеют различные частотные сдвиги, совместный
анализ которых позволяет вычислить точное место цели.
Наибольший интерес в гидроакустике представляет реализация доплеров-
ского метода анализа первичного поля движущегося объекта. Однако он приме-
ним, если цель имеет гармонический или квазигармонический сигнал в своем
спектре. Тогда информационным параметром, определяющим место цели, явля-
ются разности частот принимаемых в различных точках сигналов, если точки
приема разнесены на соответствующие расстояния.
6. АКУСТИЧЕСКАЯ РАЗВЕДКА
6.1. Общие положения
Под акустической разведкой понимается получение информации путем прие-
ма и анализа акустических сигналов инфразвукового, звукового, ультразвукового
диапазонов, распространяющихся в воздушной среде от объектов разведки. Аку-
стическая разведка (АР) обеспечивает получение информации, содержащейся
непосредственно в произносимой либо воспроизводимой речи (акустическая ре-
чевая разведка), а также в параметрах акустических сигналов, сопутствующих ра-
боте вооружения и военной техники, механических устройств оргтехники и дру-
гих технических систем (акустическая сигнальная разведка).
АР решает следующие задачи:
- дистанционный перехват смысловой речевой информации;
- определение технических и тактических характеристик вооружения (В) и
военной техники (ВТ) (оценка мощности взрывов боеприпасов и взрывчатых
веществ при испытаниях, определение параметров авиационных и ракетных
двигателей при стендовых испытаниях и т. д.);
- определение характера и направленности работ на военно-промышленных
объектах;
- определение шумовых сигнатур В и ВТ.
Для решения указанных задач АР использует портативную аппаратуру
приема и регистрации акустических сигналов и стационарную аппаратуру их
обработки и анализа. Аппаратура АР основана на использовании свойств среды
передавать звуковые колебания.
Возможными каналами утечки информации могут быть [1]:
- воздушная среда, через которую распространяются как речевые сигналы,
возникающие при ведении разговоров, так и шумовое акустическое излучение,
создаваемое работающими двигателями, военной техникой, вооружением,
взрывами и т. д.;
- вибрационные каналы, в которых средой распространения акустических
сигналов являются конструкции зданий, сооружений (стены, потолки, полы),
трубы водоснабжения, отопления, канализация и т. д.;
- каналы электроакустического типа, связанные с преобразованием акусти-
ческих сигналов в электрических элементах различных вспомогательных тех-
нических средств и систем (ВТСС), например, электромагниты вторичных
электрочасов, звонковые цепи телефонных аппаратов, трансляционные дина-
мики;
- каналы оптико-акустического типа, в которых с помощью зондирующе-
го лазерного луча осуществляется съем информации с вибрирующих в аку-
стическом поле тонких отражающих поверхностей (оконных стекол, картин,
зеркал);
282
- каналы параметрического типа, возникающие при воздействии акустиче-
ского информационного поля на все элементы высокочастотных генераторов
основных технических средств передачи, обработки и хранения информации
(ТСПИ) и ВТСС.
Для перехвата речевой информации при распространении акустических сиг-
налов через воздушную среду используют миниатюрные высокочувствительные
микрофоны, которые могут объединяться с портативными звукозаписывающими
устройствами (диктофонами) или миниатюрными специальными передатчиками.
Автономные устройства, конструкционно объединяющие миниатюрные
микрофоны и передатчики, называют закладными устройствами перехвата рече-
вой информации, или акустическими закладками.
Перехваченная закладными устройствами речевая информация может пере-
даваться по радиоканалу, оптическому каналу, сети переменного тока, соедини-
тельным линиям вспомогательных технических средств и систем, посторонним
проводникам (трубам водоснабжения и канализации, металлоконструкциям).
Информация, передаваемая закладными устройствами, принимается, как
правило, специальными устройствами. Однако встречаются устройства, инфор-
мация с которых принимается с обычного телефонного аппарата. Такие устрой-
ства устанавливают или непосредственно в корпусе телефонного аппарата, на-
ходящегося в контролируемом помещении, или подключают к телефонной
линии, чаще всего розетке. Подобные устройства конструкционно объединяет
миниатюрный микрофон и специальный блок коммутации. Блок коммутации
подключает микрофон к телефонной линии при дозвоне или подаче в линию
специального кодированного сигнала.
Использование портативных диктофонов и акустических закладок требует
проникновения на контролируемый объект (в помещение). В том случае когда
это не удается, для перехвата речевой информации используют направленные
микрофоны.
Для перехвата акустических сигналов по вибрационному каналу утечки ис-
пользуют контактные микрофоны. Контактные микрофоны, соединенные с
электронным усилителем, называют электронными стетоскопами.
По вибрационному каналу возможен также перехват информации с использо-
ванием закладных устройств. Для передачи информации в этом случае использу-
ется радиоканал, поэтому такие устройства часто называют радиостетоскопами.
Возможно использование закладных устройств с передачей информации по опти-
ческому, а также по ультразвуковому каналам (по металлоконструкциям зданий).
В каналах электроакустического типа перехват акустических информацион-
ных сигналов возможен за счет изменения параметров элементов ВТСС под воз-
действием акустического поля как результат микрофонного эффекта, а также
путем высокочастотного навязывания.
Микрофонным называется эффект преобразования акустических колебаний в
электрические. Из ВТСС, обладающих микрофонным эффектом, наибольшую
чувствительность к акустическому полю имеют абонентские громкоговорители
и некоторые датчики пожарной сигнализации.
Акустические колебания в данном канале утечки информации перехватывают
путем непосредственного подключения к соединительным линиям ВТСС, обла-
дающих микрофонным эффектом, специальных высокочувствительных низкочас-
283
тотных усилителей. Подсоединяя такие устройства к линиям телефонных аппара-
тов с электромеханическими вызывными звонками, можно прослушивать разго-
воры, которые ведутся в помещениях, где установлены телефонные аппараты.
Технический канал утечки информации путем высокочастотного навязыва-
ния может быть использован в результате несанкционированного контактного
введения токов высокой частоты от соответствующего генератора в линию,
имеющую функциональные связи с нелинейными или параметрическими эле-
ментами ВТСС, на которых происходит модуляция высокочастотного сигнала
информационным.
Информационный сигнал в таких элементах возникает вследствие нелинейно-
го электроакустического преобразования акустических сигналов в электрические.
Нелинейные и параметрические элементы ВТСС являются для высокочастотного
сигнала несогласованной нагрузкой, поэтому часть промодулированного высоко-
частотного сигнала отразится от нее и будет распространяться в обратном направ-
лении, а часть - излучаться в открытое пространство. Для приема отраженных или
излученных сигналов используют специальные приемники с достаточно высокой
чувствительностью.
Наиболее часто такой канал утечки информации используется для перехвата
разговоров, ведущихся в помещении, через телефонный аппарат, имеющий вы-
ход за пределы охраняемой (контролируемой) зоны.
Некоторые элементы ВТСС, в том числе трансформатор, катушки индуктив-
ности, электромагниты вторичных электрочасов, звонковых цепей телефонных
аппаратов, дроссели ламп дневного света, электрореле и другие, обладают свой-
ствами изменять свои параметры (емкость, индуктивность, сопротивление) под
воздействием акустического поля. Изменение параметров приводит к появлению
на данных элементах ЭДС, изменяющейся по закону воздействующего инфор-
мационного акустического поля, или к модуляции токов, протекающих по этим
элементам, информационным сигналом. Например, акустическое поле, воздей-
ствуя на якорь электромагнита звонковой цепи, вызывает его механическое ко-
лебание. В результате изменяется магнитный поток сердечника электромагнита,
что вызывает появление ЭДС самоиндукции в обмотке магнита, меняющейся, в
свою очередь, по закону изменения акустического поля.
Кроме указанных элементов ВТСС могут содержать непосредственно элек-
троакустические преобразователи. К таким средствам относятся датчики пожар-
ной сигнализации, громкоговорители трансляционной сети и т. д.
При облучении лучом лазера вибрирующих в акустическом поле тонких от-
ражающих поверхностей (стекол окон, картин, зеркал и т. д.) образуется оптико-
акустический канал утечки акустической информации. Отраженное от подобной
поверхности лазерное излучение оказывается промодулированным по амплиту-
де и фазе в соответствии с вибрациями поверхности. Часть отраженного излуче-
ния перехватывается оптической системой приемника и преобразуется в элек-
трические сигналы, после демодуляции которых выделяется речевая информа-
ция. Лазерный излучатель и приемник могут быть установлены в одном месте
или разнесены.
Для перехвата информации по данному каналу используют лазерно-акусти-
ческие локационные системы, работающие в ближнем инфракрасном диапазоне
волн.
284
В канале параметрического типа в результате воздействия акустического по-
ля меняется давление на все элементы высокочастотных генераторов техниче-
ских средств передачи, обработки и хранения информации и ВТСС. При этом
незначительно меняется взаимное расположение элементов схем, проводов в
катушках индуктивности, дросселей, что может привести к изменениям пара-
метров высокочастотного сигнала, например, к частотной модуляции его ин-
формационным сигналом.
Параметрический канал утечки информации может быть реализован и путем
облучения высокочастотным зондирующим сигналом помещения, где установ-
лены полуактивные закладные устройства, имеющие элементы, некоторые па-
раметры которых (например, добротность и резонансная частота объемного ре-
зонатора) меняются по закону изменения акустического (речевого) сигнала. В
этом случае при взаимодействии облучающего электромагнитного поля со спе-
циальными элементами закладки (например, четвертьволновым вибратором)
происходит переизлучение электромагнитного поля, а специальное устройство
(например, объемный резонатор) обеспечивает амплитудную, фазовую или час-
тотную модуляцию переотраженного сигнала по закону изменения речевого
сигнала.
Для перехвата информации по данному каналу кроме закладного устройства
необходим специальный передатчик с направленным излучением и приемник.
Очень часто наблюдается паразитная модуляция информационным сигналом
излучений гетеродинов радиоприемных и телевизионных устройств, находя-
щихся в помещениях и имеющих конденсаторы переменной емкости с воздуш-
ным диэлектриком в колебательных контурах гетеродинов. Промодулированные
информационным сигналом высокочастотные колебания излучаются в открытое
пространство и могут быть перехвачены средствами радиоразведки.
Для приема, регистрации и анализа акустических сигналов, присущих про-
мышленным и военно-промышленным объектам, а также различным видам бое-
вой техники, применяют звуко- и виброизмерительные приборы.
Дальность действия акустических приборов лежит в пределах от нескольких
десятков метров до нескольких километров и зависит от мощности акустических
сигналов и состояния среды распространения.
В качестве акустических разведывательных приборов используют:
- измерительные микрофоны, перекрывающие инфразвуковой, звуковой и
ультразвуковой диапазоны;
- прецизионные шумомеры, позволяющие с большой точностью измерять
уровни шумов, звука и вибраций в широком диапазоне частот (в комплекте с
анализаторами спектра акустических сигналов);
- геофонные датчики, измеряющие сейсмические волны;
- частотные анализаторы и спектрометры, обеспечивающие определение
АЧХ источников акустических шумов.
Принятые акустические сигналы могут обрабатываться и анализироваться с
помощью ЭВМ.
Возможности средств АР в значительной степени зависят от среды распро-
странения и уровня фонового акустического шума.
Ниже детально рассматриваются перечисленные выше вопросы, связанные с
ведением акустической разведки.
285
6.2. Акустические волны в воздушной среде
Акустическая волна, или звук - это распространяющиеся в воздухе или в
структурных конструкциях механические колебания, воспринимаемые органами
слуха или техническими средствами.
Источниками акустических сигналов могут быть разговаривающие люди,
механизмы, приборы, устройства и средства, воспроизводящие ранее записан-
ные звуковые сигналы.
Акустические волны как носители информации характеризуются рядом па-
раметров, особенностей и свойств. Физическая сущность их имеет много общего
с соответствующими характеристиками и явлениями при распространении аку-
стических волн в водной среде (см. гл. 5). Поэтому при рассмотрении этого во-
проса ограничимся общими сведениями.
6.2.1. Основные характеристики акустических волн
Распространяющиеся звуковые волны характеризуются звуковым давлением,
интенсивностью, громкостью, коэффициентами отражения, преломления и по-
глощения, скоростью распространения, а также рефракцией, дифракцией, ин-
терференцией и реверберацией.
Звуковое давление - сила, действующая на единицу площади, измеряется в
паскалях (Па). Звуковое давление в воздухе меняется от 10-5 Па вблизи порога
слышимости до 103 Па при самых громких звуках (шум реактивного самолета).
При средней громкости разговора переменная составляющая звукового давления
составляет около 0,1 Па.
Минимальное звуковое давление, на которое реагирует человеческое ухо, со-
ставляет 2 10Г5 Па, максимальное, воспринимаемое без ощущения боли, 102 Па.
Следовательно, диапазон динамических звуковых давлений, воспринимаемых че-
ловеческим ухом, составляет 107 Па.
Иногда для характеристики звука применяют уровень звукового давления,
выраженного в децибелах (дБ). Это отношение данного звукового давления Р к
пороговому Ро = 2-10"5 Па:
#=20 lg(P/P0).
Среднее по времени значение мощности звука, отнесенное к единице площа-
ди, называют интенсивностью. Интенсивность звука оценивается уровнем ин-
тенсивности по шкале децибел:
#= 10 1g (//То),
где I- интенсивность данного звука, /о = Ю-12 Вт/м2.
С интенсивностью звука связана громкость - величина, характеризующая
слуховое ощущение от данного звука. Громкость звука сложным образом зави-
сит от звукового давления (интенсивности), а также от уровня акустического
шума и фоновых помех. При неизменной частоте и форме колебаний громкость
звука растет с увеличением интенсивности (звукового давления). При одинако-
вом звуковом давлении громкость звука гармонических колебаний разной час-
тоты неодинакова, т. е. на разных частотах одинаковую громкость могут иметь
звуки разной интенсивности.
286
Громкость звука данной частоты оценивают, сравнивая ее с громкостью чис-
того тона частотой 1000 Гц. Уровень звукового давления (в дБ) чистого тона с
частотой 1000 Гц, столь же громкого, как и измеряемый звук, называют уровнем
громкости данного звука. За единицу уровня принимают 1 (один) фон, т. е.
£Дфон] = Z1Ooo Гц [дБ].
Чтобы получить уровень громкости в 4 фон на частоте 500 Гц, необходимо
звуковое давление в 20 дБ, а для такого же уровня громкости на частоте 20 Гц
необходимо звуковое давление в 60 дБ.
Весь диапазон интенсивностей, при которых волна вызывает в человеческом
ухе звуковое ощущение от 10-12 до 10 Вт/м2, соответствует значениям уровня
громкости от 0 до 130 дБ.
Среда распространения акустической волны может быть однородной (воз-
дух) и неоднородной, образованной последовательными участками воздуха,
дерева, кирпича, бетона, стекла и т. д. При падении акустической волны на гра-
ницу раздела двух сред с разными значениями акустического сопротивления
происходят явления ее частичного отражения, преломления (проникновения в
другую среду) и поглощения в среде проникновения.
Количественно указанные явления определяются коэффициентами отраже-
ния а, проникновения (звукопроницаемости) т и поглощения р:
a=WOT/W0, т^Жпр/lfo, Р= 1ГПОГ/ Жо,
где ffo — энергия падающей волны; W0T — энергия отраженной волны; Жпр - энер-
гия проникшей волны; РИПОг — поглощенная энергия.
При этом а + т + р = 1.
Введенные коэффициенты называют диффузными, так как характеризуют
усредненные эффекты отражения, преломления и поглощения акустических
волн, падающих на границу раздела под различными углами.
Скорость распространения звука в безграничной изотропной среде определяется
упругими свойствами среды. Приближенно ее можно определить по формуле
Гзв — -\J к/ р ,
где к - модуль Юнга (модуль упругости), р - плотность вещества среды распро-
странения.
Значения скорости распространения звука в некоторых типовых средах со-
ставляют [13,14]:
в воздухе 331,5... 344 м/с
в металле 4800...5160 м/с
в стекле 3500.. .5300 м/с
в дереве 4000... 5000 м/с
Учитывая, что скорость распространения звука в воздухе (331,5...344 м/с),
длина слышимых в воздухе звуковых волн колеблется от 1,5 см до 15 м.
287
Рефракция звука - это искривление направления распространения волн в не-
однородной среде. Рефракция звука в атмосфере обусловлена пространственны-
ми изменениями температуры воздуха, скорости и направления ветра.
Дифракция звука - это отклонение распространения звука от законов гео-
метрической акустики, связанное с неоднородностью среды, в которой движется
звуковая волна. Вследствие дифракции звук может огибать встречные препятст-
вия, попадать в область геометрической тени, концентрироваться на отверстиях
и т. п. Картина дифракции существенно зависит от соотношения между разме-
ром препятствия или отверстия и длиной волны.
Интерференция звука - это сложение в пространстве нескольких волн, при
котором в разных точках возникает устойчивое во времени усиление или ослаб-
ление амплитуды результирующей волны.
За счет многократных переотражений акустической волны в замкнутом про-
странстве возникает послезвучание - реверберация. Значение реверберации оце-
нивается временем Тр после выключения источника звука, в течение которого
энергия звука уменьшается на 60 дБ. Вследствие многократных переотражений в
помещении на барабанную перепонку человека или мембрану микрофона оказы-
вают давление акустические волны, распространяющиеся разными путями от ис-
точника звука. Интерференция волн с разными фазами может при достаточно
большом времени реверберации приводить к ухудшению соотношения сиг-
нал/помеха в точке приема и уменьшению разборчивости речи. Чем больше раз-
меры помещения и меньше коэффициент поглощения ограждающих поверхно-
стей, тем больше время реверберации. При большом времени реверберации
помещение кажется гулким. Однако при очень малом Тр на микрофон воздейству-
ет в основном быстрозатухающая прямая волна. В этом случае слышимость речи
при удалении от источника резко снижается, а тембр звуков речи за счет большего
затухания в среде распространения высоких частот обедняется. Время ревербера-
ции менее 0,85 с незаметно для слуха. Для большинства помещений время ревер-
берации мало (0,2.. .0,6 с) и его можно не учитывать при оценке разборчивости.
Распространение акустических волн в закрытых помещениях имеет свои
особенности. Своеобразие распространения акустических волн в закрытых по-
мещениях - сложность картины звукового поля в них.
Существенное влияние на дальность и качество приема акустических сигна-
лов оказывают фоновые шумы и помехи. Акустические шумы и помехи вызы-
ваются многочисленными источниками — автомобильным транспортом, ветром,
техническими средствами, разговорами в помещениях и т. д. Уровни шумов ме-
няются в течение суток, дней недели, зависят от погодных условий. Ночью и в
выходные дни шумы меньше. Средние значения акустических шумов на улице
составляют 60...75 дБ в зависимости от интенсивности движения автомашин в
районе расположения здания. Уровень шумов в помещениях по существующим
нормам не должен превышать 50 дБ.
6.2.2. Затухание воздушной акустической волны
Затухание звука - это уменьшение интенсивности звуковой волны (а сле-
довательно, и амплитуды) по мере ее распространения. Оно зависит от разных
причин:
288
- расхождения волны, в результате которого с увеличением расстояния от ис-
точника поток излучаемой звуковой энергии распределяется на все увеличиваю-
щуюся волновую поверхность и соответственно уменьшается интенсивность звука;
- рассеивания звука на препятствиях в среде и ее неоднородностях, размеры
которых малы или сравнимы с длиной волны;
- поглощения звука, происходящего в результате необратимого перехода
энергии звуковой волны в другие виды энергии (преимущественно в теплоту).
Для сферической волны энергия излучения расходуется на приведение в
колебательное движение частиц среды, расположенных на сферической по-
верхности. С увеличением расстояния эта поверхность увеличивается пропор-
ционально квадрату радиуса и, следовательно, интенсивность сферической
волны убывает обратно пропорционально квадрату расстояния. Для сфериче-
ской волны амплитуда убывает пропорционально 1/г, для цилиндрической
волны пропорционально \1гт.
Для направленного звукового пучка площадь его поперечного сечения, а
следовательно, и интенсивность звука практически не зависят от расстояния до
источника. Однако и в этом случае наблюдается затухание звука за счет погло-
щения и рассеяния.
При колебательных движениях частиц упругой среды между ними возникают
силы внутреннего трения (вязкость) и за счет работы последних часть звуковой
энергии непрерывно переходит в тепло. Кроме того, в звуковой волне в каждый
данный момент в соседстве находятся разогретые области сжатия и охлажденные
области разрежения. Вследствие теплопроводности среды разность температур
между этими областями выравнивается, что снижает максимальные давление и
разрежение, т. е. амплитуду звуковой волны. Это связано с уменьшением энергии
колебаний, переходящей в теплоту. Таким образом, внутреннее трение (вязкость)
и теплопроводность среды приводят к поглощению звуковой энергии и непре-
рывному уменьшению интенсивности распространяющейся звуковой волны.
Зависимость интенсивности звуковой волны от расстояния определяется
формулой [14]
Дг)=/оеЛ
где /о “ начальная интенсивность звука; £ - линейный коэффициент поглощения
звука в данной среде.
Величина £ возрастает пропорционально квадрату частоты звука, поэтому
низкие звуки распространяются дальше высоких. Особенно сильно поглощаются
ультразвуки. Так, при частоте 1 МГц = 106 Гц ультразвук распространяется в
воздухе на 5 см.
В пористых материалах (войлок, бархат, штукатурка) воздух заключен в огром-
ном числе канальцев неправильной формы. При звуковых колебаниях эти отдель-
ные объемы воздуха испытывают сильное трение о стенки канальцев, поэтому по-
добные материалы интенсивно поглощают падающие на них звуковые волны.
6.2.3. Структурные акустические волны
Распространение звука в зданиях происходит часто на довольно большие рас-
стояния за счет прохождения в различных структурных средах. В результате мо-
289
жет возникнуть достаточно опасный канал утечки акустической информации -
канал структурного звука.
Под структурным звуком понимают механические колебания в твердом теле
с частотой от 16 Гц до 20 кГц. Механические колебания стен, перекрытий, тру-
бопроводов, возникающие в одном месте или на большой площади, передаются
на значительные расстояния, почти не затухая. Подобные колебания хорошо пе-
рехватываются такими приемными устройствами, как стетоскопы.
На практике возможны два метода описания процессов возникновения и
передачи структурного звука [14, 15]:
- метод, в котором механическая система рассматривается как система из не-
скольких абсолютно жестких масс, соединенных между собой упругими элементами;
- метод, где интересующие объекты (например, тонкое бетонное перекрытие
в комбинации с множеством легких стен) рассматриваются как механическая
среда, в которой распространяются продольные и поперечные волны, отражаю-
щиеся во всех местах нарушения сплошной среды (особенно на краях свобод-
ных поверхностей и в местах соединении).
Оба метода используют для рассмотрения условий существования структур-
ного звука в здании. При этом необходимо иметь в виду, что утечка может про-
исходить в одномерной конструкции (например, по балке, трубе водяного ото-
пления и т. д.), двухмерной (плита, этаж) и трехмерной (между этажами).
При распространении структурного звука в здании отмечены следующие
особенности:
- снижение уровня структурного звука (затухание) из-за распределения
энергии по большой области (снижение с увеличением расстояния);
- преобразование структурного звука в теплоту (поглощение структурного звука);
- отражение в местах разрыва, например, при изменении поперечного сече-
ния, разветвления в углах, вида материала (изоляция структурного звука);
- преобразование типов волн, в виде которых распространяется структурный
звук, в другие (например, при переходе изгибных волн в продольные);
- наличие дисперсии изгибных волн;
- излучение в окружающую среду (например, в воздух);
- реверберационные искажения, снижающие разборчивость речи.
6.3. Общие сведения о закладных устройствах
Существует большое количество типов закладных устройств (ЗУ), отличаю-
щихся принципом функционирования, способом передачи информации, дально-
стью действия, размерами и внешним оформлением.
Все закладные устройства можно классифицировать по следующим призна-
кам (рис 6.1) [9]:
- способу передачи информации;
- способу восприятия информации (типу датчика);
- используемому источнику питания;
- способу управления;
- способу кодирования информации;
- виду исполнения;
- месту использования;
- месту установки.
290
Акустические закладки
Рис. 6.1. Классификация закладных устройств перехвата акустической (речевой)
информации (акустических закладок)
Рассмотрим отдельно каждый из признаков. В зависимости от канала передачи
информации различают следующие типы ЗУ (рис. 6.2): радиозакладки, инфракрас-
ные, с передачей информации по токоведущим линиям, с записью на магнитофон.
В радиозакладках для передачи информации используют электромагнитные
волны радиодиапазона.
В инфракрасных закладках для передачи информации используются также
электромагнитные волны, но инфракрасного диапазона (невидимая часть опти-
ческого спектра излучения).
Использование лазерных источников излучения обеспечивает его высокую
направленность (узкий световой луч), что создает большие трудности обнару-
жения подобного излучения.
Рис. 6.2. Классификация закладных устройств в зависимости от канала передачи
информации
Однако высокая направленность излучения усложняет практическое приме-
нение подобных ЗУ, так как инфракрасная закладка должна находится постоян-
но в зоне прямой видимости приемника оптического излучения, а случайно
попавший на линию визирования предмет или изменившиеся погодные условия
могут нарушить канал связи. Дальность передачи информации от инфракрасных
ЗУ достигает 500 м.
Закладки с передачей информации по токоведущим линиям используют
свойство электрических сигналов распространяться на значительные расстояния
по проводникам. Такие ЗУ обладают существенными достоинствами: высокой
скрытностью передачи информации, большой дальностью действия, отсутстви-
ем дополнительных источников питания. Кроме того, они хорошо камуфлиру-
ются под элементы электрических цепей и токоприемники (розетки, тройники,
электрические удлинители, настольные лампы и т. д.). В качестве токопроводя-
щих линий используют специально проложенные провода либо кабели электри-
ческих и телефонных сетей.
В случаях когда нет необходимости получения оперативной информации в
реальном масштабе времени и есть возможность скрытного извлечения и заме-
ны кассеты или магнитной ленты, закладка может оснащаться магнитофоном
вместо устройства передачи по одному из рассмотренных каналов.
Такой способ, как правило, применяется, когда есть потенциальная угроза
обнаружения объектом наблюдения канала передачи информации (например, с
помощью специальной аппаратуры контроля).
В зависимости от способа восприятия информации различают три типа ЗУ
(рис. 6.3): микрофонного типа; вибрационного типа; с подключением к комму-
никационным линиям.
292
Закладные
устройства
Рис. 6.3. Классификация закладных устройств по способу
восприятия информации
Принцип действия ЗУ микрофонного типа основан на преобразовании аку-
стических атмосферных колебаний в электрические сигналы и передаче их по-
требителю одним из перечисленных способов.
ЗУ вибрационного типа (стетоскопы) перехватывают акустические колеба-
ния твердых сред (вибрации), возникающие вследствие давления атмосферных
акустических волн на среды (рис. 6.4). В качестве чувствительных элементов в
таких устройствах обычно используют пьезомикрофоны, электронные микро-
Рис. 6.4. Применение стетоскопов для перехвата акустической информации:
а - с передачей информации по специально проложенным проводным линиям;
б - с передачей по радиоканалу
293
фоны или датчики акселерометрического типа. Они наиболее эффективны при
фиксации на тонких «площадных» поверхностях (межкомнатных перегородках,
стеклах, дверях и т. п.). Для передачи информации потребителю, как правило,
используется радиоканал, и такие ЗУ обычно называют радиостетоскопами.
ЗУ с подключением к коммуникационным линиям предназначены для пере-
хвата информации, циркулирующей в телефонных или волоконно-оптических
линиях. Они позволяют скрытно получать информацию о содержании телефон-
ных переговоров, а также текстовых сообщений (телеграфных, факсимильных,
электронной почты).
Для передачи информации с подключаемых ЗУ обычно используется радио-
канал, а устройства называют радиозакладными. По способу подключения к те-
лефонным линиям радиозакладки делят на две группы.
Первая группа - радиозакладки с непосредственным подключением. Они под-
ключаются одновременно к обоим проводам параллельно абоненту (рис. 6.5, а)
либо в разрыв одного из проводов (рис. 6.5, б).
Такие способы позволяют получить достаточно большой уровень сигнала
(хорошее качество) на входе радиозакладки, а также обеспечить питание от ли-
нии. Однако закладки с непосредственным подключением могут быть легко об-
наружены по изменению параметров линии.
Рис. 6.5. Виды подключения радиозакладных устройств к токопроводящим
линиям:
а - параллельное; б - последовательное; в - индукционное
Этого недостатка в значительной степени лишены устройства второй группы —
радиозакладки с индукционным подключением (рис. 6.5, в). В таких закладках чув-
ствительным элементом выступает специальным образом построенная антенна,
устанавливаемая вплотную к проводам телефонной линии. Электромагнитное поле,
окружающее телефонные провода, наводит в антенне токи, содержащие информа-
цию о характере сообщения. Эти токи усиливаются, преобразуются, полученная
информация передается на пункт регистрации.
Закладные устройства для снятия информации с волоконно-оптических ли-
ний принципиально отличаются от рассмотренных выше только способом сня-
тия информации. Для этих целей применяют специальные устройства сжатия
волоконных линий, вызывающие интерференционные процессы на поверхности
оптического волокна, которые и считываются фотоприемником.
По используемому источнику питания ЗУ можно разделить на два вида:
- с собственным источником;
- с питанием от внешнего источника.
К первому виду относят любые ЗУ, имеющие собственный встроенный ак-
кумулятор.
294
К второму - ЗУ с непосредственным подключением к коммуникационным
линиям.
В зависимости от мощности излучения и типа источника питания время ра-
боты ЗУ составляет от нескольких часов до суток и даже месяцев. При электро-
питании от сети непрерывного тока или телефонной линии время работы не
ограничено.
Большинство радиозакладок с автономными источниками питания имеют
мощность излучения до 10 мВт и дальность передачи информации до 100...200 м.
Однако встречаются закладки с мощностью излучения в несколько десятков
милливатт и дальностью передачи информации до 500... 1000 м.
При использовании внешних источников питания (например, электросети
или автомобильных аккумуляторов) мощность излучения может составлять бо-
лее 100 мВт, что обеспечивает дальность передачи информации до нескольких
километров.
В случае необходимости передачи информации на большие расстояния ис-
пользуют специальные ретрансляторы.
По наличию устройства управления ЗУ условно можно разделить на три
группы:
- с непрерывным излучением;
- с дистанционным управлением;
- с автоматическим включением при появлении сигнала.
ЗУ с непрерывным излучением наиболее просты в изготовлении, дешевы и
предназначены для получения информации в течение ограниченного промежут-
ка времени. Работа на излучение таких ЗУ начинается с момента подключения
питания. Если источник питания автономный, то, как правило, время работы
такого ЗУ не превышает 1...2 ч из-за большого потребления энергии на переда-
чу сигнала. Время работы ЗУ, питающихся от линий (силовых или телефонных),
практически не ограничено.
Общим существенным недостатком для всех ЗУ с непрерывным излучением
является возможность их обнаружения по излучению.
Существенно увеличить время непрерывной работы устройств с автономным
питанием и повысить скрытность позволяет применение дистанционного управ-
ления. Оно дает возможность переводить устройство в режим излучения только
в тех случаях, когда объект наблюдения ведет переговоры либо передает ин-
формацию по каналам связи.
Время излучения может быть дополнительно сокращено, если закладка со-
держит устройство накопления и сжатия сигнала.
Другим способом увеличения времени работы закладки является использо-
вание устройств автоматического включения передатчика при появлении сигна-
ла (акустического либо электрического в линии).
Устройства включения от голоса называют акустоматами. Иногда их назы-
вают системами VAS или VOX. Закладка, оборудованная таким устройством, в
обычном (дежурном) режиме работает как акустический приемник, потребляя
незначительный ток. При появлении сигнала, например в начале разговора
объекта наблюдения с кем-либо, подается напряжение на передатчик и тот пе-
реходит в режим излучения. При пропадании акустического сигнала (прекра-
щении разговора) через определенное время, обычно несколько секунд, пере-
295
датчик выключается, и закладка переходит в режим дежурного приема. При-
менение акустомата позволяет в несколько раз увеличить время работы за-
кладного устройства. Однако их использование приводит к потере первых слов
при каждом включении.
Для повышения скрытности работы используют сложные сигналы (напри-
мер, шумоподобные или с псевдослучайной перестройкой несущей частоты) и
различные способы кодирования информации [9].
Из способов кодирования чаще встречается аналоговое скремблирование ре-
чевого сигнала (как правило, инверсия спектра), при котором изменяются харак-
теристики речевого сигнала так, что он становится неразборчивым.
Наиболее сложный способ кодирования речевой информации заключается в
преобразовании ее в цифровой код с последующим шифрованием.
По виду использования ЗУ могут быть обычными и закамуфлироваными.
В обычном исполнении устройства имеют, как правило, металлический кор-
пус (окрашенный или нет) и форму параллелепипеда. Они достаточно универ-
сальны и применяются в различных условиях. Маскируются одеждой, предме-
тами интерьера (корзиной для бумаг, пластиковой коробкой, книгами, картиной
и т. п.) либо местными предметами, пропускающими акустические и (или) элек-
тромагнитные колебания (травой, смятым бумажным либо пластиковым паке-
том, куском доски, фанеры).
В закамуфлированном виде ЗУ применяют только в соответствии с конкрет-
ной обстановкой. Так, например, в виде силовой или телефонной розетки только
в том случае, если другие неиспользуемые розетки в помещении имеют такой же
внешний вид, в виде личных вещей (часов, зажигалки, заколки), если они соот-
ветствуют общему имиджу применяющего их человека.
Наиболее благоприятным для установки ЗУ является этап строительства или
реконструкции объекта, когда есть практически свободный и неконтролируемый
доступ в помещение, к системам освещения, сигнализации, связи и т. п. В этот
период могут быть установлены довольно сложные устройства, в том числе с дис-
танционным управлением, использующие для передачи сложные сигналы и коди-
рование информации. Это, как правило, сетевые закладки или радиозакладки,
питающиеся от сети переменного тока или от телефонной линии, т. е. закладки с
неограниченным временем действия, закладки с передачей информации по ин-
фракрасному каналу, а также системы скрытого видеонаблюдения. Они устанав-
ливаются в труднодоступных местах и хорошо камуфлируются.
В период строительства в стены здания могут быть встроены радиостетоско-
пы длительного времени действия, например, радиостетоскоп «Кирпич-2Ст»[5].
Этот радиостетоскоп выполнен в виде двух обычных кирпичей, которые уста-
навливают в строительные конструкции. Датчики акселерометрического типа
перехватывают вибрации, возникающие при ведении разговоров в помещениях,
в диапазоне частот 100 Гц ... 10 кГц. Двухканальная система объемного (сте-
реофонического) звучания позволяет улучшить разборчивость речи на 15 %. В
радиостетоскопе используются кварцевая стабилизация частоты, дистанционное
управление и кодирование передаваемой информации. Дальность передачи ин-
формации на частотах 430...470 кГц составляет до 500 м. Срок службы радио-
стетоскопа - до 10 лет.
296
Если доступ в помещение не контролируется, акустические закладки могут
быть установлены в интерьерах помещения, предметах повседневного обихода,
радиоаппаратуре, розетках электросети и электрических приборах, технических
средствах связи и их соединительных линиях. Наиболее вероятна установка за-
кладок при профилактических работах на системах электропитания, связи, сиг-
нализации или при уборке помещений. Нескольких минут достаточно для уста-
новки вместо обычной розетки сетевой или радиозакладки в настольной лампе.
Замена обычного тройника или удлинителя на подобные устройства, оборудо-
ванные закладками, потребует несколько секунд.
Телефонные закладки могут быть установлены в корпусе телефонного аппа-
рата, телефонной трубке или телефонной розетке, а также непосредственно в
тракте телефонной линии. Замена обычного микрофонного капсюля на анало-
гичный, но с установленной в нем закладкой, занимает не более 10 с. Причем
визуально их различить невозможно.
Телефонные закладки могут быть установлены в тракте телефонной линии
до распределительной коробки, находящейся, как правило, на одном этаже с по-
мещением, где установлен контролируемый аппарат, или в тракте телефонной
линии от распределительной коробки до распределительного щитка здания, рас-
полагаемого обычно на первом этаже или в подвале. Закладки устанавливают
таким образом, чтобы их визуальное обнаружение было затруднено.
Если доступ в помещение контролируется, то даже там в течение короткого
времени могут находиться посетители (чаще всего это кабинеты, приемные или
комнаты отдыха руководящего состава). В этом случае закладки могут быть ус-
тановлены или при замене предметов, постоянно находящихся в данном поме-
щении, на аналогичные, но оборудованные закладками, или непосредственно в
интерьере помещения, например под креслом или столом, под подоконником, за
занавеской, даже в смятой пачке сигарет, куске картона, брошенных в урну.
Закладки могут быть закамуфлированы в предметах и вещах, «случайно» за-
бытых посетителем, например, в авторучке, калькуляторе, портфеле, шляпе и т. д.
Конечно, посетитель через несколько часов или даже суток вернется за «забы-
тыми» вещами, но этого времени бывает иногда достаточно для получения важ-
ной информации, например, если такой посетитель находился в помещении не-
задолго до проведения важного совещания.
Закладки могут быть установлены в сувенирах или предметах повседневного
обихода, подаренных руководителю, в средствах иностранного производства,
поставляемых по предварительным заказам предприятий и учреждений. Они
также могут быть установлены в аппаратуру при гарантийном обслуживании
или ремонте.
Найти закладки, установленные в радиоаппаратуру и закамуфлированные
под типовые блоки и детали, без использования специальной рентгеновской
техники практически невозможно. Хотя в момент передачи информации радио-
закладкой можно установить факт ее наличия в той или иной аппаратуре.
Возможные места установки в помещении подслушивающих устройств по-
казаны на рис. 6.6 [7].
Если доступ в контролируемое помещение невозможен, но не исключен
доступ в соседние помещения, то для снятия информации могут использовать-
ся радиостетоскопы. Тактика их применения аналогична применению обычных
297
2
3
Рис. 6.6. Возможные места установки подслушивающих устройств в помещении:
1 - микрофоны, установленные на потолке и за портьерой; 2 - радиозакладка, установленная в
напольной вазе комнатного растения; 3 - радиозакладка, установленная в цветочной вазе на столе
для заседаний; 4 - портативный магнитофон с передатчиком, установленный среди книг на книж-
ной полке; 5 - микрофон, установленный в стене; 6 - радиозакладка, установленная под холо-
дильником; 7 - радиозакладка, установленная в коробке для писчей бумаги; 8 - радиозакладка,
установленная в корзине для мусора; 9 - радиозакладка, установленная под пишущей машинкой;
10 - радиозакладка, установленная в обложке папки для бумаг; 11 - радиозакладка, установленная
в корпусе телефонного аппарата
Рис. 6.7. Способы установки радиостетоскопов
стетоскопов, но наличие радиоканала исключает необходимость присутствия
агента или записывающей аппаратуры в момент снятия информации, что дает
возможность скрытно устанавливать радиостетоскопы в небольших по размеру
малодоступных местах. Способы установки радиостетоскопов приведены на
рис. 6.7 [4].
298
6.4. Радиозакладки
В практике ведения технической разведки широкое применение получили
устройства с передачей перехваченной информации по радиоканалу, радиоза-
кладные устройства (РЗУ) или радиозакладки.
С технической точки зрения закладные устройства могут работать практиче-
ски в любом радиодиапазоне. Однако с точки зрения конструктивных особенно-
стей наиболее используемым является диапазон частот 100... 1000 мГц. По
принципу формирования сигнала РЗУ делятся на активные, полуактивные и пас-
сивные. Наибольшее распространение получили активные РЗУ (рис. 6.8).
В основу принципа действия полуактивных РЗУ положено комплексное ис-
пользование внешнего специально сформированного мощного зондирующего
сигнала и энергии собственного источника питания. При этом энергия собствен-
Рис. 6.8. Структурная типовая схема активного
радиозакладного устройства
УУ - устройство управления (например, акустомат или
приемник сигналов от блока дистанционного управле-
ния); ЧЭ - чувствительный элемент (микрофон, вибро-
датчик или специальная антенна для перехвата элек-
тромагнитных полей коммуникационных линий и т. п.);
БНС - блок накопления и сжатия информации, предна-
значенный для уменьшения времени работы РЭУ на
излучение (до нескольких секунд за сеанс передачи);
ПРД - передатчик, работающий на частотах, лежащих в
диапазоне 100... 1000 МГц; А - антенна (как правило,
встроенная либо в виде отрезка изолированного прово-
да длиной 1 = А/4, где А, - длина волны излучения); ПЭ -
питающий элемент (может отсутствовать, если РЭУ
подключено к линии, находящейся под напряжением)
ного источника питания тратится только на модуляцию принимаемого высоко-
частотного сигнала и его усиление. В результате существенно увеличивается
время функционирования РЗУ (до 4000 ч). Так как подобные радиозакладки мо-
гут работать только при наличии внешнего зондирующего электромагнитного
сигнала, то они получили название аудиотранспондеры (аудиоответчики, от англ.
Audiotransponder).
Структурная схема полуактивного РЗУ представлена на рис 6.9. Полуактив-
ные РЗУ имеют чувствительные элементы, параметры которых под воздействи-
ем информационного акустического поля могут меняться. Например, в объем-
ном резонаторе РЗУ при воздействии акустического поля по его закону изменя-
ется добротность и резонансная частота.
В другом варианте РЗУ в качестве чувствительного элемента может исполь-
зоваться микрофон. В этом случае транспондер работает при облучении его
Рис. 6.9. Структурная типовая схема полу-
активного радиозакладного устройства:
ПрмА и ПрдА - приемная и передающая антенны
соответственно; М - модулятор; У - усилитель; ЧЭ -
чувствительный элемент; ПЭ - питающий элемент
299
мощным узкополосным зондирующим сигналом. Приемник транспондера выде-
ляет зондирующий сигнал и подает его на модулятор, где осуществляется узко-
полосная частотная модуляция принятого сигнала.
В качестве модулирующего используется сигнал, поступающий непосредст-
венно с микрофона или с микрофонного усилителя. Промодулированный высо-
кочастотный сигнал переизлучается передающей антенной.
Принцип действия пассивных РЗУ основан на облучении мощным высоко-
частотным сигналом помещения, в котором установлено такое закладное уст-
ройство. В последнем при взаимодействии облучающего электромагнитного
поля со специальными элементами закладки (например, четвертьволновым
вибратором) происходит образование вторичных радиоволн, т. е. переизлуче-
ние электромагнитного поля. Специальное устройство закладки (например,
объемный резонатор) обеспечивает амплитудную, фазовую или частотную мо-
дуляцию переотраженного сигнала по закону изменения речевого сигнала.
Достоинством подобных закладок является высокая скрытность, так как об-
наружить их можно только в момент передачи информации.
Отсутствие полупроводниковых приборов в таких закладках делает неэф-
фективным их поиск даже с использованием нелинейных локаторов.
Принципы применения пассивных и полуактивных радиозакладок иллюст-
рирует рис. 6.10.
Для приема информации, передаваемой с радиозакладок могут использо-
ваться портативные сканерные приемники, специальные приемные устройства,
приемники портативных радиостанций, бытовые радиоприемники.
Современные переносные малогабаритные сканерные приемники имеют
автономные аккумуляторные источники питания, карманные размеры и массу
Рис. 6.10. Схема применения полуактивной и пассивной радиозакладок:
1,2- передатчик и приемник, настроенные на частоту работы закладного
устройства; 3 - полуактивная либо пассивная радиозакладка; 4 - источник
акустического сигнала
150.. .350 г [2]. Несмотря на малые габариты и массу такие приемники обеспечива-
ют прием сигналов с амплитудой и частотной модуляцией в диапазоне 100 кГц...
1300 МГц. Портативные сканерные приемники имеют от 100 до 1000 каналов
памяти и обеспечивают скорость сканирования до 30 каналов в секунду. Чувст-
вительность приемников от 0,35 до 6 мкВ.
300
Для приема информации от радиозакладок используют и специальные уст-
ройства. Они выпускаются как в обычном, так и в камуфлированном под пред-
меты повседневного обихода или бытовые приемники виде. Некоторые прием-
ники оборудованы встроенными магнитофонами. В ряде случаев применяют
специальные комплексы, способные одновременно принимать информацию по
нескольким каналам и осуществлять запись на магнитофон или обеспечивать
прослушивание на внутренние динамики. Чувствительность специальных при-
емных устройств составляет менее 0,5 мкВ.
Для приема информации от радиозакладок, работающих в диапазонах
134... 174 МГц, 400...512 МГц, могут использоваться портативные радиостанции.
Они имеют высокую чувствительность (0,25.. .0,5 мкВ) и малые габариты.
Основным достоинством применения приемников радиостанций является
возможность приема кодированных сигналов, так как современные радиостан-
ции оборудуются встроенными скремблерами. Недостатком является то, что
приемники портативных радиостанций обеспечивают высокое качество приема
сигналов только от радиозакладок, имеющих узкополосную частотную модуля-
цию и использующих кварцевую стабилизацию частоты.
Для приема информации, передаваемой с радиозакладок, работающих в диа-
пазоне 88... 108 МГц, может быть использован любой бытовой радиоприемник,
имеющий FM-диапазон. Единственным условием нормального приема является
отсутствие (либо возможность отключения) системы автоматической подстрой-
ки частоты, в противном случае приемник будет перестраиваться от слабого
сигнала радиозакладки на мощный сигнал ближайшей стационарной вещатель-
ной станции.
6.5. Закладные устройства с передачей информации по оптическому каналу
Недостатком радиозакладок является возможность обнаружения их излуче-
ний специальным приемником контроля. В целях устранения этого недостатка
разработаны устройства, передающие информацию по оптическому каналу в
инфракрасном, невидимом глазу, диапазоне. Такие закладки иногда называют
инфракрасными. Инфракрасный передатчик преобразует акустические колеба-
ния в световые, используя при этом широтно-импульсную модуляцию. Для
приема информации, передаваемой такими закладками, используют приемники
оптического излучения. Дальность передачи информации для них составляет
несколько сот метров. Например, инфракрасный передатчик STG-4403 обеспе-
чивает передачу информации на расстояние до 500 м [12].
Обнаружить закладку, передающую информацию в инфракрасном диапа-
зоне, можно только имея специальный приемник оптического излучения. Од-
нако такие системы имеют один очень важный недостаток. Прием информации
от инфракрасной закладки возможен только при нахождении ее или переотра-
жающей инфракрасный сигнал поверхности (потолка, оконного стекла) в зоне
прямой видимости, т. е. в момент снятия информации закладка или переотра-
жающая инфракрасный сигнал поверхность должны наблюдаться через визир
приемника оптического излучения. Поэтому такие закладки устанавливают,
как правило, с внешней стороны оконных рам, в вентиляционных отверстиях,
что облегчает задачу их поиска.
Характеристики некоторых инфракрасных закладок приведены в [8].
301
6.6. Закладные устройства с передачей информации по электросети
Кроме радио- и оптического каналов для передачи акустической информа-
ции используют токоведущие линии. Наиболее широкое распространение полу-
чили закладки, использующие для этих целей электрическую сеть 220 В [2, 9].
Типовая схема негласного подслушивания с использованием электросети
приведена на рис. 6.11.
Как правило, подслушивающие устройства устанавливают в стандартную
розетку или любой другой постоянно подключенный к силовой сети электро-
Рис. 6.11. Схема применения закладного устройства с пере-
дачей информации по сети 220 В
прибор (тройник, удлинитель, блок питания радиотелефона, факс и т. п.), распо-
ложенный в помещении, в котором ведутся переговоры. Типовая схема такой
закладки приведена на рис. 6.12.
Чувствительность используемых в закладках микрофонов, как правило,
обеспечивает восприятие человеческой речи на удалении до Юм. Электриче-
ский сигнал с выхода микрофона усиливается в низкочастотном (НЧ) усилителе
и поступает на модулятор, в котором осуществляется амплитудная или частот-
ная модуляция несущей от задающего генератора. Промодулированный высоко-
Рис. 6.12. Структурная схема закладного устройства
частотный (ВЧ) сигнал усиливается и через специальное согласующее устройст-
во поступает в линию. Несущая частота в сетевых закладках выбирается, как
правило, в диапазоне 50.. .300 кГц.
Выбор данного участка обусловлен тем, что, с одной стороны, на частотах
ниже 50 кГц в сетях электропитания относительно высок уровень помех быто-
302
вых приборов, промышленного оборудования, лифтов и т. д. С другой стороны,
на частотах выше 300 кГц существенно растут потери сигнала в линии. Кроме
того, провода начинают работать как антенны, излучающие сигнал в открытое
пространство.
Для передачи информации могут использоваться и более высокие частоты
(3...7 МГц). В этом случае принцип работы сетевой закладки мало отличается от
принципа работы обычной радиозакладки, у которой в качестве антенны исполь-
зуется силовой провод. В этом случае для приема информации не обязательно
подключаться к силовой линии, достаточно поместить приемник рядом с ней.
Для передачи информации в сетевых закладках обычно используют простые
сигналы с узкополосной модуляцией. Однако некоторые сетевые закладки ис-
пользуют сигналы сложной формы или псевдослучайную перестройку несущей
частоты.
В сетевых закладках могут применяться устройства дистанционного управ-
ления, передающие кодированные сигналы на включение (выключение) пере-
датчика закладки также по электрической сети. Питание закладки осуществля-
ется от той же сети 220 В.
Дальность передачи информации находится в пределах 300... 1000 м.
Для приема информации от сетевых закладок используют специальные при-
емники, подключаемые к силовой сети через розетку.
Приемное устройство, расположенное вне пределов контролируемого поме-
щения и подключенное к той же сети, перехватывает информационный сигнал и
преобразует его в вид, удобный для прослушивания через головные телефоны, а
также записи на магнитофон.
Схема приемника приведена на рис. 6.13. Принимаемый сигнал поступает на
ВЧ-усилитель через согласующее устройство, затем детектируется и через НЧ-
усилитель подается на головные телефоны
или магнитофон. Чувствительность такого
устройства, как правило, лежит в пределах
3...100 мкВ, а питание осуществляется от
батареек (аккумуляторов).
В некоторых случаях для одновременно-
го прослушивания нескольких помещений
используют многоканальные системы. При
этом ЗУ работают на различных фиксиро- Рис* 6.13. Структурная схема при-
ванных частотах, а оператор выбирает на емкого устройства
приемном устройстве канал, необходимый
для прослушивания в каждый конкретный момент времени.
В целом устройства контроля акустической информации с передачей по сети
220 В обладают существенными преимуществами перед другими ЗУ. Так, напри-
мер, по сравнению с радиозакладками — повышенной скрытностью (поскольку
невозможно обнаружение с помощью радиоприемных устройств), а также прак-
тически неограниченным временем непрерывной работы, так как не требуют пе-
риодической замены источников питания.
По сравнению с обычными проводными микрофонами, использующими соб-
ственные проводники для передачи сигнала, практически невозможно точно вы-
явить место установки приемного оборудования.
Согласующее устройство ВЧ-усилитель
НЧ-усилитель Детектор
303
Однако при использовании данной техники возникают существенные про-
блемы. Во-первых, работа возможна только в пределах одной фазы электропро-
водной сети. Во-вторых, на качество перехватываемой информации влияют раз-
личные сетевые помехи. В-третьих, прибор, в который внедрено ЗУ, может быть
случайно отключен от сети переменного тока.
Поэтому применение этой техники обычно сопровождается тщательным
изучением схемы организации электроснабжения, наличия и типов потребите-
лей электроэнергии, выбором камуфляжа.
Технические характеристики некоторых сетевых ЗУ с передачей информа-
ции по сети 220 В приведены в [2].
Кроме сети электропитания для передачи информации могут использоваться
линии систем охранной и пожарной сигнализации, телефонные линии. При этом
могут применяться закладки, принцип работы которых аналогичен принципу
работы сетевых закладок, а также передающие информацию непосредственно в
речевом диапазоне.
Если для передачи информации используется телефонная линия, то в состав
закладки входят те же блоки, используется тот же частотный диапазон.
Отличительной особенностью является блок питания, предназначенный для
преобразования напряжения телефонной линии к требуемому уровню. В связи с
тем, что от телефонной линии нельзя потреблять более 2 мА, мощность пере-
дающих устройств не превышает 10...15 мВт.
Существуют определенные ограничения на применение подобных устройств.
Во-первых, необходимо подключать приемную аппаратуру именно к той теле-
фонной линии, на которой установлено устройство съема информации, что упро-
щает обнаружение пункта контроля (по сравнению с передачей по сети 220 В).
Во-вторых, устройство достаточно велико и его трудно использовать скрытно,
так как все возможные места установки (телефонный аппарат, розетки, распре-
делительное оборудование и т. д.) легко проверить в отличие от системы элек-
тропроводки.
Вышеперечисленные факторы привели к тому, что данные устройства прак-
тически не используют [2].
6.7. Телефонные закладки
Телефонными называют закладки, предназначенные для перехвата информа-
ции, передаваемой по телефонным линиям связи. Перехваченная информация
записывается на диктофоны или передается по радиоканалу с использованием
микропередатчиков.
Телефонные закладки, как и акустические, можно классифицировать по виду
исполнения, месту установки, источнику питания, способу передачи информа-
ции и кодирования, способу управления и т. д. (рис. 6.14).
Телефонные закладки могут быть установлены последовательно в разрыв
одного из телефонных проводов, параллельно или через индукционный датчик.
При гальваническом подключении к линии (как последовательном, так и па-
раллельном) обеспечивается неограниченное время работы закладки.
Последовательное подключение закладки можно обнаружить за счет изме-
нения параметров линии, в частности, падения напряжения. В ряде случаев ис-
304
Рис. 6.14. Классификация телефонных закладок
пользуется последовательное подключение с компенсацией падения напряже-
ния, но реализация этого требует наличия дополнительного источника питания.
Телефонные закладки с параллельным подключением к линии труднее
обнаружить, особенно если они обладают большим входным сопротивлением и
имеют внешний источник питания.
Выполняются они в виде отдельного модуля или камуфлируются под эле-
менты телефонного аппарата, например, конденсатор, телефонный или микро-
фонный капсюли, телефонный штекер или розетку и т. д. [1, 10, 11].
Наряду с контактным подключением возможен и бесконтактный съем ин-
формации с телефонной линии. Для этого используют закладки с миниатюр-
ными индукционными датчиками. Конечно, такие закладки питаются от авто-
номных источников, но установить факт подключения их к линии даже самы-
ми современными средствами практически невозможно, так как параметры
линии при подключении не меняются.
Телефонные закладки перехваченную информацию передают в большинстве
случаев по радиоканалу. Обычно в качестве антенны используется телефонный
провод.
Как правило, передача информации (работа на излучение) начинается в мо-
мент поднятия трубки абонентом. Однако встречаются закладки, производящие
запись информации и передающие ее по команде. Такие закладки встречаются
крайне редко и имеют сравнительно большие размеры.
В телефонных закладках, как и в акустических, передаваемая информация
может кодироваться различными методами [6, 10, 11].
Для приема информации от телефонных закладок используют такие же сред-
ства, как и от акустических.
Наряду с чисто телефонными и акустическими используют и комбинирован-
ные закладки, которые при ведении телефонного разговора осуществляют его
305
перехват, а по окончании - автоматически переключаются на перехват акусти-
ческой информации.
Телефонные закладки, выполненные в виде отдельных элементов схемы те-
лефонного аппарата, впаиваются в схему вместо аналогичных элементов или
маскируются среди них. Наиболее часто используют закладки, выполненные в
виде различного типа конденсаторов. Для установки таких устройств требуется
несколько минут, и проводится она, как правило, при устранении неисправно-
стей или профилактическом обслуживании телефонного аппарата.
Не исключена возможность установки закладки в телефонный аппарат еще
до поступления его в учреждение или на предприятие. Это относится в основ-
ном к телефонным аппаратам иностранного производства, когда спецслужбам
становится известно, куда конкретно они поставляются. Причем в этом случае
закладки выполняют в виде конкретных элементов и деталей схемы, и визуально
факт их установки обнаружить невозможно.
Чем меньше закладка, тем легче ее замаскировать. Однако небольшие по
размерам закладки в ряде случаев не обеспечивают требуемой дальности пере-
дачи информации. Поэтому для увеличения дальности передачи информации
используют специальные ретрансляторы, устанавливаемые, как правило, в труд-
нодоступных местах или в автомашине в радиусе действия закладки.
Характеристики более 60 телефонных закладок приведены в [8].
6.8. Направленные микрофоны
Для перехвата речевой информации на открытой местности и в помещениях
широко используют микрофоны направленного действия [2].
В наиболее общем виде любой направленный микрофон состоит из чувстви-
тельного элемента (собственно микрофона), осуществляющего акустоэлектриче-
ское преобразование, и некоторой системы (акустической антенны), обеспечи-
вающей направленные свойства комплекса в целом.
В зависимости от принципа действия микрофоны подразделяются на сле-
дующие типы:
- порошковые угольные;
- электродинамические;
- электростатические (конденсаторные и электретные);
- пьезоэлектрические;
- электромагнитные.
Принцип действия порошкового угольного микрофона основан на измене-
нии под воздействием акустических волн электрического сопротивления
угольного порошка, который находится между мембраной и неподвижным
электродом. Воздействующее акустическое поле колеблет мембрану микрофо-
на, вследствие чего меняется степень сжатия угольного порошка. В результате
этого сопротивление порошка и сила протекающего через него тока изменяют-
ся в соответствии со звуковым давлением (громкостью звука). В устройствах
съема информации они практически не используются из-за низкой чувстви-
тельности и большой неравномерности амплитудно-частотной характеристики
(АЧХ).
В электродинамическом микрофоне используется диафрагма из полисти-
рольной пленки или алюминиевой фольги. Катушка с обмоткой, сделанной из
306
тонкой проволоки, жестко связана с диафрагмой и постоянно находится в
кольцевом зазоре магнитной системы. При колебаниях диафрагмы под воздей-
ствием акустической волны витки катушки пересекают магнитные силовые
линии и в обмотке наводится ЭДС, изменяющаяся по закону действующего
акустического поля.
Конденсаторный микрофон представляет собой конструкцию, состоящую из
двух параллельных пластин - электродов, один из которых массивный, а другой
в виде тонкой мембраны. Электроды образуют конденсатор, емкость которого
зависит от площади пластин и расстояния между ними. К пластинам конденса-
тора подводится постоянное напряжение. При воздействии на мембрану звуко-
вых волн меняется расстояние между пластинами, что вызывает изменение ем-
кости конденсатора и протекания тока через него. Сила тока меняется в соответ-
ствии с действующим на мембрану акустическим полем.
Разновидностью конденсаторного микрофона является электретный мик-
рофон, мембрана которого выполнена из полимерных материалов, способных в
сильном электрическом поле и при высокой температуре заряжаться и сохра-
нять электрический заряд длительное время. Такие материалы называют элек-
третами. Роль неподвижной пластины конденсатора и источника постоянного
напряжения играет пластина из электрета. Поэтому в корпус такого устройства
встраивают токовый повторитель, что позволяет снизить выходное сопротив-
ление до 3...4 кОм.
Действие пьезоэлектрического микрофона основано на возникновении ЭДС
на поверхности пластинок из пьезоматериала, механически связанных с мем-
браной. Колебания мембраны под давлением акустической волны передаются
пьезоэлектрической пластинке, на поверхности которой возникают электриче-
ские заряды, соответствующие уровню громкости акустического сигнала.
В электромагнитном микрофоне акустические волны воздействуют на мем-
брану, жестко связанную со стальным якорем, находящимся в зазоре постоянно-
го магнита. На небольшом расстоянии вокруг якоря находится обмотка непод-
вижной катушки. В результате воздействия акустических волн на такую систему
в катушке возникает ЭДС. Электромагнитные микрофоны не получили широко-
го распространения из-за большой неравномерности АЧХ.
Обобщенные характеристики перечисленных типов микрофонов приведены
в табл. 6.1 [2].
Таблица 6.1
Основные характеристики акустических приемников-микрофонов
Тип микрофона Диапазон частотной характеристики, Гц Неравномерность воспроизводимых частот, дБ Осевая чувствительность на частоте 1кГц, мВ-м2/н
Порошковые угольные 300...3400 20 1000
Электродинамические 30... 15 000 12 1
Конденсаторные 30...15 000 5 5
Электретные 20... 18 000 2 1
Пьезоэлектрические 100...5000 15 50
Электромагнитные 300...5000 20 5
307
Чаще всего в направленных микрофонах применяют чувствительные эле-
менты (микрофоны) электретного типа, так как они имеют наилучшие электро-
акустические характеристики: широкий частотный диапазон; малую неравно-
мерность амплитудно-частотной характеристики; низкий уровень искажений,
вызванных нелинейными и переходными процессами, а также высокую чувстви-
тельность и малый уровень собственных шумов.
Направленное действие в соответствующем микрофоне обеспечивается аку-
стической антенной, назначение которой заключается в усилении акустических
сигналов, приходящих по основному направлению, и существенном ослаблении
сигналов со всех других направлений.
В настоящее время существует несколько типов акустических антенн, кото-
рые определяют следующие типы направленных микрофонов: комбинирован-
ные, групповые, с параболическим рефлектором.
В свою очередь групповые направленные микрофоны делятся на линейные
группы, трубчатые органного типа, трубчатые щелевые, фазированные решетки.
Основными техническими характеристиками направленных микрофонов яв-
ляются диаграмма направленности и индекс направленности (ИН).
ДН - это чувствительность микрофона в зависимости от угла 0 между рабо-
чей осью микрофона и направлением на источник звука. Ее определяют в преде-
лах заданной полосы частот. Обычно используют нормированную ДН:
Ео
Рис. 6.15. Характеристика на-
правленности микрофона
где Eq - чувствительность, измеряемая под углом 0, Е^ - осевая (максимальная)
чувствительность.
Графическое представление ДН обычно дают в полярных координатах (рис. 6.15).
Индекс направленности показывает выраженную в децибелах разницу
уровней мощности сигналов на выходе микрофона от двух источников звука:
одного (например, голос человека), расположенного на оси, и другого - источ-
ника рассеянных звуковых волн (например,
шум автотрассы), если оба создают в точке
расположения микрофона одинаковое акусти-
ческое давление. Иными словами, индекс на-
правленности показывает значение подавления
(дискриминации) шума, приходящего с боково-
го направления, по отношению к сигналу, при-
ходящему с направления, совпадающего с осью
микрофона.
Ненаправленный микрофон не подавляет
шум, поэтому его индекс направленности равен
нулю.
Коэффициент направленного действия по-
казывает выраженную в децибелах степень
увеличения уровня сигнала на выходе микро-
фона при замене ненаправленного микрофона направленным и постоянном
акустическом давлении.
308
6.8.1. Комбинированные микрофоны
Комбинированные микрофоны являются простейшим видом направленных
микрофонов, так как представляют собой систему, состоящую из двух типов
акустических приемников-микрофонов.
Обычно это приемники давления и градиента давления, реагирующие соот-
ветственно на значение и изменение значения акустического сигнала.
Простейшая комбинация этих приемников, наиболее часто применяемая на
практике, состоит из одного микрофона-приемника давления и одного микрофо-
2 3 4 5
Рис. 6.16. Виды характеристик направленности для
комбинированных микрофонов:
1 - окружность для приемника давления; 2 - кардиоида для
комбинированного приемника с одинаковой чувствительно-
стью приемников давления и градиента давления; 3 - супер-
кардиоида; 4 - гиперкардиоида; 5 - косинусоида (восьмерка)
для одного приемника градиента давления
на-приемника градиента давления, располагаемых как можно ближе один к дру-
гому (обычно один над другим) и так, чтобы их оси были параллельны.
Изменяя параметры микрофонов, можно получать различные характеристи-
ки направленности и соответственно индексы направленности (рис. 6.16.) всей
системы. Наибольший индекс достигается для случая, когда диаграмма имеет
вид гиперкардиоиды (0ЧК = 6 дБ).
6.8.2. Групповые микрофоны
К групповым акустическим приемникам относят линейные группы, трубча-
тые микрофоны и фазированные решетки.
Рассмотрим их более подробно.
Линейная группа приемников (микро-
фонов) - это несколько микрофонов, обыч-
но располагаемых в ряд по прямой горизон-
тальной линии так, чтобы их оси были па-
раллельны друг другу (рис. 6.17), иногда
микрофоны располагают по небольшой ду-
ге. Электрические выходы акустических
приемников последовательно соединяют в
специальном смесителе.
Рис. 6.17. Общий вид линейной
группы микрофонов
Характеристика направленности такой
линейной группы /?(0) из N элементов да-
ется как произведение характеристики на-
309
правленности одиночного приемника 7fi(0) на характеристику группы: /?(0) =
= Ri(0) [sin N х /(N sin х)], где х = 7c(d/X) sin0, a d - расстояние между отдель-
ными приемниками.
Чем меньше отношение длины волны X акустического сигнала к длине
группы I = (N - 1) d. тем уже будет основной лепесток диаграммы направлен-
ности и больше индекс направленности. Однако следует иметь в виду, что при
чрезмерной длине группы (сравнимой с расстоянием от приемника до источ-
ника звука) будут сказываться интерференционные явления из-за большой
разности хода звуковых волн от источника до входов отдельных микрофонов,
составляющих группу. Численное значение ширины основного лепестка опре-
деляется из соотношения
01 = arcsin(X/l).
Так, для группового приемника, состоящего из шести ненаправленных мик-
рофонов, расположенных по прямой линии с шагом d = 10 см (Z = 50см) и часто-
той принимаемого сигнала/= 1000 Гц (X = 33 см), ширина основного лепестка
составляет 01 = 41°. Расчет индекса направленности для этой группы дает 8 дБ.
Основной недостаток такого типа направленных микрофонов - обеспечение
направленных свойств только в плоскости, проходящей через оси микрофонов; в
ортогональной плоскости характеристика, как у одиночного микрофона.
Трубчатый микрофон органного типа также использует свойства групповых
антенн. Его вид схематично представлен на рис. 6.18.
Рис. 6.18. Строение трубчатого микрофона органного типа:
1 - звуковые трубки; 2 - срез трубок; 3 - капсюль микрофона;
4 - предкапсюльный объем
310
Такой микрофон имеет в своем составе несколько десятков тонких трубок I с
длинами от нескольких сантиметров до метра и более. Эти трубки собирают в
пучок - длинные по середине, короткие - по наружной поверхности. Концы
трубок с одной стороны образуют плоский срез 2, входящий в предкапсюльный
объем 4. Сам микрофонный капсюль 3 выбирается, как правило, электродина-
мического или электромагнитного типа (приемник давления) в зависимости от
требуемого частотного диапазона. Звуковые волны, приходящие к приемнику по
осевому направлению, проходят в трубки и поступают в предкапсюльный объем
в одинаковой фазе. Их амплитуды складываются арифметически:
N
i=\
где N- количество трубок, Ui - амплитуды звуковых волн.
Звуковые волны фонового шума, приходящие под углом 0 к оси, оказывают-
ся сдвинутыми по фазе, так как трубки имеют разную длину, поэтому амплиту-
ды этих волн складываются геометрически:
(7Z = U? + [/2, +1 - 2 Ut Ui+iCOsAtp,
где Аф - разность фаз для любой пары звуковых волн, пришедших по трубкам,
длины которых отличаются на величину d\
Аф = я (Ж)(1 - cos0).
Характеристика направленности для такого микрофона определяется из со-
отношения, аналогичного для линейной группы приемников:
/?(0) = sin№ /(N sinx),
где х = л (dmin/k) (1 - cos0), dmin - различие в длине между ближайшими по раз-
меру трубками.
Приведенные соображения справедливы, если в трубке не образуются резо-
нансные колебания. С этой целью входные отверстия трубок либо их концы у
капсюля закрывают пробками из пористого поглотителя.
Основным достоинством таких направленных микрофонов является высо-
кий ИН (около 8 дБ), при этом шумы, действующие с боковых направлений,
ослабляются по отношению к сигналу почти в 10 раз. Основной недостаток -
довольно большие геометрические размеры (максимальная длина трубок
около 90 см).
На сегодняшний день подобные устройства практически не используют.
Трубчатый щелевой приемник (иногда его называют приемником бегущей
волны) представляет собой трубку с отверстиями или сплошной осевой проре-
зью по всей длине. С некоторым приближением такую трубку можно рассмат-
ривать как множество трубок разной длины, поэтому трубчатый щелевой мик-
рофон относят к приемникам группового типа (рис. 6.19).
311
Если звук приходит по оси, то пути его распространения по трубке и через
отверстия одинаковы и составляющие звукового давления от пришедших ко-
лебаний синфазны и, следовательно, сумма их, воздействующая на диафрагму
Рис. 6.19. Трубчатый щелевой направленный микрофон:
1 - звуковые волны; 2 - ветрозащитный поролоновый чехол; 3 - щели; 4 - мик-
рофон; 5 - усилитель
микрофонного капсюля, максимальна. Если же звук приходит под углом 0 к
оси трубки, то разность пути звука по всей трубке и пути от входа в трубку до
входа в отверстие, находящееся на расстоянии d, обусловит сдвиг фаз, опреде-
ляемый как Дф = л (d/k)(l - cos0). В свою очередь это создает сдвиг фаз разно-
го значения между колебаниями, пришедшими через разные отверстия, что
приводит, как и в предыдущем случае, к уменьшению результирующего дав-
ления на диафрагму.
Следует отметить, что чем более высокую направленность требуется полу-
чить, тем больше должна быть длина звукоприемного элемента (трубки), так как
индекс направленности увеличивается с ростом отношения длины трубки к дли-
не волны принимаемого излучения. Для того чтобы не образовывалось стоячих
волн, наружный конец звукоприемного элемента (трубки) закрывают погло-
щающей тканью.
Данный тип направленного микрофона получил наибольшее распростране-
ние. Причин этому несколько:
- простота изготовления и, как следствие, низкая стоимость;
- наличие в стране нескольких производителей данной техники;
- простота в применении;
- возможность различных вариантов камуфляжа.
Следует отметить, что многие направленные микрофоны трубчатого типа
комплектуются ветрозащитным чехлом, обычно из поролона, благодаря чему
снижается чувствительность к помехам от ветровых атмосферных воздействий.
К фазированным решеткам можно отнести все описанные выше устройства,
но по устоявшейся в настоящее время терминологии к ним относят изделия,
имеющие плоскость, на которой расположены открытые торцы звуководов; они
обеспечивают синфазное сложение звуковых полей от источника в некотором
акустическом сумматоре, на выходе которого расположен микрофон (рис. 6.20).
Если звук приходит с осевого направления, то все сигналы, распространяющие-
ся по звуководам, будут в фазе, и сложение в акустическом сумматоре даст мак-
симальный результат. Если направление на источник звука не осевое, а под не-
которым углом к оси, то сигналы от различных точек приемной плоскости будут
разными по фазе и результат их сложения меньше. При этом число приемных
312
Рис. 6.20. Направленный микрофон типа «фази-
рованная решетка»:
1 - звуковая волна; 2 - торцы звуководов; 3 — зву-
ководы; 4 - акустический микрофон; 5 - микрофон;
6 - усилитель
точек может достигать нескольких десятков. Очевидно, что подобная решетка
менее громоздка, чем микрофон органного типа, но она существенно проигры-
вает последнему в направленных свойствах.
Коэффициент направленного действия для данного типа микрофона можно
приблизительно определить по формуле
Q = 4 л s/l2 = 4л№ (0,5 V) = nN2,
где S - площадь входной апертуры, м2; X - длина волны звука, м; N- число эле-
ментов решетки.
6.8.3. Направленные микрофоны с параболическим рефлектором
Принцип действия подобных устройств достаточно прост и понятен. Мик-
рофон размещен в фокусе отражателя параболической формы (рис. 6.21).
Звуковые волны с осевого направления, отражаясь от параболического зер-
кала суммируются в фазе в фокальной точке. Возникает усиление звукового по-
ля. Чем больше диаметр зеркала, тем большее усиление может обеспечить уст-
ройство. Если направление прихода звука не осевое, то сложение отраженных от
Рис. 6.21. Параболический направленный микрофон:
1 - звуковая волна; 2 - микрофон; 3 - усилитель
различных частей параболического зеркала звуковых волн, приходящих в фокус,
даст меньший результат, поскольку не все слагаемые будут в фазе. Ослабление
тем сильнее, чем больше угол прихода звука по отношению к оси. Создается,
таким образом, угловая избирательность по приему.
313
Коэффициент направленного действия для данного типа микрофона можно
приблизительно определить по формуле
0 = 4л5э/Х2,
где 5Э - эффективная поверхность антенны.
Понятие эффективной поверхности тесно связано с максимальной мощно-
стью, которая может быть извлечена приемной антенной из падающей плоской
акустической волны. При выполнении ряда условий (D > X, где D - диаметр
рефлектора; совмещение максимума диаграммы направленности с направлением
прихода волны и т. д.) можно приближенно считать, что D = S, где S - площадь
входной апертуры, м2.
Значения коэффициента направленного действия (КНД) антенны в зависи-
мости от диаметра зеркала и частоты принимаемого акустического сигнала при-
ведены в табл. 6.2.
Таблица 6.2
Значения коэффициента направленного действия антенны в зависимости
от диаметра зеркала и частоты принимаемого акустического сигнала
Частота, Гц КНД при диаметре зеркала 0,6 м КНД при диаметре зеркала 0,75 м
500 1 11
1000 15 17
5000 19 31
10000 35 37
Как правило, фирмами-изготовителями поставляется в комплекте блок уси-
ления с системой автоматической регулировки усиления и выходами на науш-
ники и магнитофон, иногда акустические фильтры. При работе параболическую
антенну с микрофоном можно держать в руках или закрепить на треноге.
Основные характеристики серийных направленных микрофонов приведе-
ны в [2].
Перспективы развития направленных микрофонов. Конструкция направ-
ленных микрофонов непрерывно совершенствуется, так как проблема дистанци-
онной записи речи становится все более актуальной в рамках развития систем
негласного съема информации. Однако революционного переворота (увеличе-
ния радиуса перехвата до километров) в данной области техники не предвидит-
ся. В то же время можно выделить следующие направления улучшения характе-
ристик направленных микрофонов.
1. Возможно появление приборов, способных к адаптивной пространствен-
но-временной фильтрации акустических помех. Объективной основой таких
приборов являются достижения в области цифровой многоканальной обработки
данных (специализированный компьютер станет такой же привычной составной
частью направленного микрофона, как наушники).
2. Прогресс в области высокочувствительных акустических сенсоров принци-
пиально позволяет в ближайшем будущем создать микрофоны с пороговой чувст-
314
витальностью 10... 15 дБ, что позволит повысить дальность перехвата акустиче-
ской информации (при отсутствии акустических помех и шумов).
3. Возможно появление принципиально новых устройств, использующих не-
линейные и параметрические эффекты для реализации органолептических скры-
тых антенн большого размера, способных повысить коэффициент направленно-
го действия до 25 дБ и более.
6.8.4. Особенности применения направленных микрофонов
Так как на дальность ведения разведки влияют не только параметры микро-
фонов, но и условия, в которых применяют эти устройства, следует знать неко-
торые особенности использования направленных микрофонов [2].
На открытой местности. К открытой местности обычно относят участки,
не имеющие ярко выраженных ограждающих конструкций, которые создают
замкнутый объем (улицы, площади, стадионы, дворы, парки, залы летних кафе,
пляжи и т. п). К работе на открытых площадках относят и прослушивание разго-
воров, ведущихся в помещениях, если перехват ведется через открытое окно,
форточку или опущенное стекло автомобиля.
Основными ограничениями на ведение негласного съема информации в та-
ких условиях являются затухание, которое испытывает сигнал при его распро-
странении, и высокий уровень фоновых шумов.
Затухание обусловлено рядом факторов, которые зависят как от характери-
стик самого звука, так и от свойств среды распространения. Все факторы делят
на две большие группы.
В первую входят факторы, связанные с законами распространения акустиче-
ских волн:
- при распространении в неограниченной среде от источника конечных раз-
меров интенсивность звука убывает обратно пропорционально квадрату прой-
денного расстояния;
- неоднородности среды (капли дождя, ветки деревьев и другие препятствия)
вызывают рассеяние звуковых волн, приводящее к ослаблению сигнала в основ-
ном направлении;
- на распространение звука в атмосфере влияют турбулентности, распреде-
ления температуры и давления, сила и скорость ветра, которые вызывают ис-
кривление звуковых лучей, а иногда в целом нарушают передачу звука.
Действительно, звуковая волна, попадая на границу раздела двух слоев ат-
мосферы с различными характеристиками, частично отражается, а частично
проникает в другой слой. При этом преломление волны происходит в соответст-
вии с законом физики, гласящим, что отношение угла падения фь к углу пре-
ломления <р2 определяется отношением скоростей распространения звуковых
колебаний в этих средах (слоях):
sin ф1 / sin(p2 = G / С2,
где Ci и С2 - скорости звука в обеих средах.
Если параметры слоев близки друг другу, то фактически вся энергия перехо-
дит из одной среды в другую и ф1 = ф2. Когда же параметры различны, происхо-
дит искривление звуковых лучей.
315
Именно по этой причине оператор часто вынужден размещать микрофон как
можно выше над поверхностью Земли, чтобы обеспечить максимальную даль-
ность перехвата акустических сигналов.
Вторая группа связана с физическими процессами в веществе - необрати-
мыми переходами звуковой энергии в другие формы (главным образом в тепло-
ту). Можно выделить следующие факторы, определяющие степень поглощения
звуковых волн:
- поглощение звука возрастает пропорционально квадрату частоты (поэтому
колебания с частотами выше 1000 Гц затухают особенно быстро);
- степень поглощения растет при уменьшении относительной влажности
воздуха.
Так, при влажности 50 % акустические сигналы с частотой 10 кГц затухают
только на 14 дБ на каждые 100 м, а при уменьшении влажности до 15 % затуха-
ние возрастает вдвое и достигает 28 дБ; ветер, дождь и снег могут добавить еще
8... 10 дБ на каждые 100 м.
Строго говоря, открытых пространств, в которых звуковые волны распро-
странялись бы беспрепятственно во всех направлениях, практически нет, так как
всегда имеют место отражения от земной поверхности, стен ближайших зданий,
предметов и т. п. Однако эти переотражения можно учесть, а иногда и просто
пренебречь ими, если они незначительны из-за высокого коэффициента погло-
щения (например, от снежного покрова).
Высокий уровень акустических шумов - особенность открытых пространств.
Для оценки влияния их на качество фиксации акустической информации ис-
пользуют понятие уровня громкости, под которым понимают уровень равно-
громкого с мешающим сигналом чистого тона на частоте 1000 Гц, выраженный
в децибелах. За единицу уровня принимают 1 фон, т. е. Lg [фон] = £юоо Гц [дБ].
В табл. 6.3. приведены уровни громкости различных шумов в зависимости от
дальности источника. Сравнивая приведенные значения с уровнем обычной ре-
чи, который составляет 65...75 дБ, делают вывод о степени влияния акустиче-
ских помех на качество перехвата [2].
Таблица 6.3
Уровни громкости различных источников шума
Источник шума и место его измерения Уровень громкости, дБ
Громкий автомобильный гудок на расстоянии 8 м 95...100
Электропоезд на эстакаде на расстоянии 6 м 90
Шум в поезде метро во время движения 85...90
Автобус (полный ход) на расстоянии 5 м 85...88
Трамвай на расстоянии 10.. .20 м 80...85
Троллейбус на расстоянии 5 м 77
Грузовой автомобиль на расстоянии 5.. .20 м 60...75
Легковой автомобиль на расстоянии 5.. .20 м 50...65
Шумная улица без трамвайного движения 60...75
Обычный средний шум на улице 55...60
То же, в момент затишья днем 40
Тихая улица (без движения транспорта) 30...35
Тихий сад 20
Деревообрабатывающая фабрика 96...98
316
Окончание табл. 6.3
Источник шума и место его измерения Уровень громкости, дБ
Зал при массовых сценах Шумное собрание Шепот на расстоянии 1 м Разговор на расстоянии 1 м громкий (обычный) Коридоры Кафе 75...98 65...70 20 65...70 (55...60) 35...40 50...52
Из сказанного следует, что на дальность фиксации речевой информации на от-
крытом участке местности влияют следующие факторы: направление и сила вет-
ра, температура и влажность воздуха, характер рельефа, наличие строений, расти-
тельность, уровни фоновых шумов. Дальность ведения разведки увеличивается,
если ветер дует со стороны источника звука, ночью и ранним утром, в пасмурную
погоду, особенно после дождя, у водной поверхности, в горах, зимой (при отсут-
ствии снегопада). Звук поглощается (становится слабее) в жаркую солнечную по-
году, во время снегопада, дождя, в лесу, кустарнике и на местности с песчаным
грунтом, при наличии искусственных и естественных препятствий.
Некоторые предельные дальности регистрации приведены в табл. 6.4 [2].
Таблица 6.4
Предельные дальности акустической регистрации
Вид деятельности Предел слышимости, м
Шаги человека по грунту 30... 100
Громкий разговор 200...300
Негромкий разговор 100...200
Резкая команда голосом 500... 1000
Громкий крик 1000... 1500
Следует еще раз подчеркнуть, что приведенные цифры относятся к идеальной
обстановке и открытому пространству, а в реальных городских условиях невозмож-
но проводить съем информации с расстояний, превышающих 10... 15 м на шумной
улице, 15...25 м - в остальных случаях (в загородных условиях - 30...100 м). Необ-
ходимо запомнить простое правило: если оператор без микрофона слышит речь, но
может разобрать лишь отдельные слова, то с помощью хорошего направленного
микрофона возможно осуществить перехват и звукозапись.
В помещении. Отличительной особенностью применения направленных
микрофонов в помещениях является более сложное звуковое поле полезного
сигнала, которое представляет собой суперпозицию составляющей прямого зву-
ка, созданной звуковыми волнами, не испытавшими ни одного отражения, и со-
ставляющих, созданных несколькими отраженными звуковыми волнами. Поле
отраженных звуковых волн почти всегда близко к диффузному.
Акустические шумы в помещениях так же, как и на открытой местности, суще-
ственно ограничивают динамический диапазон принимаемой информации, снижа-
ют разборчивость речи. Эти шумы создаются как людьми, так и вибрациями, про-
никающими в помещение извне (с улицы или из соседних помещений). Уровни
317
шумов, создаваемые людьми, зависят от их количества в помещении, громкости
разговоров и т. д. Уровни шумов (вибраций), проникающих снаружи, определяются
звукоизоляцией помещения и уровнями внешних шумов [2].
В табл. 6.5 приведены санитарные нормы допустимых уровней акустических
шумов, характерных для различных типов помещений. Приведенные цифры по-
зволяют составить представление об условиях перехвата речевой информации с
помощью направленных микрофонов. Здесь уместно еще раз напомнить, что
уровень обычной речи на расстоянии 1 м составляет 65...75 дБ.
Таблица 6.5
Уровни шумов, соответствующие санитарным нормам,
для жилых и рабочих помещений
Тип помещения Норма, дБ
Для сна и отдыха 35
Для умственной работы без собственных источников шума (конструкторские бю- ро, комнаты программистов, лаборатории для теоретических работ и обработки экспериментальных данных) 45
Для конторского труда с источниками шума (принтеры), а также помещения, где ис- точниками шума являются люди (кассовые и справочные залы) 55
Производственные помещения, гаражи, механические мастерские 80
В общем случае лучшее качество перехвата информации в помещении обес-
печивается при размещении направленного микрофона рабочей осью на источ-
ник сигнала (человека или группу людей), а тылом к источникам акустических
помех. При этом оператор должен стремиться занять максимально тихое место
(избегая углы, где особенно много переотраженных сигналов) в зоне действия
прямого звука.
6.9. Несанкционированная запись на диктофон
Осуществление негласной звукозаписи является наиболее распространенным
способом агентурного шпионажа. В этих целях используют специальные уст-
ройства, состоящие из микрофона и магнитофона. Подобные устройства полу-
чили названия диктофонов. Как правило, запись на диктофон производится в
помещениях.
Звукозапись в помещениях осуществляется в условиях акустических помех,
возникающих в результате переотражения звуковых волн от внутренней обста-
новки помещений, а также акустических шумов, создаваемых людьми, различ-
ного рода вибрациями, стуками и т. д.
Акустическое поле внутри помещения можно представить как суперпозицию
составляющих, не испытавших ни одного отражения, и составляющих поля, соз-
даваемых отраженными звуковыми волнами. Поле отраженных звуковых волн
почти всегда можно считать близким к диффузному, поэтому его часто называ-
ют диффузной составляющей.
Для оценки ее влияния на качество записи пользуются понятием акустиче-
ского отношения для установившегося режима, которое определяется как отно-
шение суммарного уровня отраженных волн к уровню прямой волны [2].
318
В реальных условиях акустическое отношение для удаленных от источника
звука точек помещения редко бывает меньше единицы, как правило, оно значи-
тельно больше, а иногда даже доходит до значения, равного 10...15, т. е. уровень
отраженных волн в помещении обычно выше уровня прямого звука. При аку-
стическом отношении больше четырех отраженный звук создает недопустимые
помехи для регистрации речевой информации.
Пороговое значение расстояния от источника звука, при котором акустиче-
ское отношение равно единице, называют радиусом гулкости, так как при боль-
шем расстоянии диффузная составляющая становится больше составляющей
прямого звука и в записанном сигнале появляется характерная гулкость.
Однако акустическое отношение полностью не характеризует качество вос-
приятия звука в помещении, так как не все переотраженные сигналы вносят
помехи, поэтому вводят еще одно понятие - четкость звучания. Под ним по-
нимают отношение плотности энергии прямого звука (/Тир), суммируемой с
плотностью отраженных звуковых волн, приходящих в данную точку помеще-
ния в течение времени t = 60 мс после прихода прямого звука Et = 60 мс и по-
тому воспринимаемых с ним слитно, к общей плотности энергии Ем:
Sr = (Е^ + Е^ 60)/Ем.
Таким образом, четкость звучания характеризует относительную величину
всей полезной энергии ЕПОл- В этом ее преимущество перед акустическим отно-
шением. Чем больше четкость звучания, тем меньше влияние помех от запазды-
вающих лучей из-за реверберации. Однако на практике существуют большие
трудности по измерению этой величины.
Что касается акустических шумов, то степень их влияния на звукозапись за-
висит от количества людей в помещении, громкости разговоров, а также уровня
шумов, проникающих извне.
Влияние акустических шумов на разборчивость речи и динамический диапа-
зон регистрируемой информации можно оценить значением порога слышимо-
сти. Порог слышимости определяется минимальным значением звукового дав-
ления, при котором еще возможно смысловое восприятие речевого сообщения.
Порог слышимости непосредственно связан с уровнем акустических шумов. В
условиях шума и помех порог слышимости называется акустической маскиров-
кой. Значение акустической маскировки определяется повышением порога слы-
шимости для принимаемого звукового сигнала.
Следует отметить, что при негласной звукозаписи кроме внешних необхо-
димо учитывать все окружающие шумы и в первую очередь создаваемые самим
оператором (дыхание, шум одежды при движении). Микрофон, спрятанный в
одежде, улавливает все, в результате записанный разговор сопровождается силь-
ным фоновым шумом.
Рассмотренные факторы являются принципиальными при негласной звуко-
записи и должны учитываться при выборе места для микрофона звукозаписы-
вающего устройства.
Существующие типы диктофонов комплектуются как встроенными, так и
выносными микрофонами. Выбор типа в каждом конкретном случае определя-
ется условиями ведения звукозаписи.
319
Встроенный микрофон делает устройство более компактным и эргономич-
ным. Однако возможности такого диктофона существенно ограничены.
Большие возможности имеют диктофоны с выносными микрофонами. В
этом случае микрофон легче закамуфлировать и установить в месте, обеспечи-
вающем высокое качество записи.
При выборе места размещения выносного микрофона необходимо учитывать
следующее факторы [2]:
- количество источников записываемых речевых сигналов,
- пространственную ориентацию микрофона,
- дальность до источника акустического сигнала.
Рассмотрим эти факторы. Для записи одного собеседника обычно применя-
ют односторонне направленные микрофоны на расстоянии 50-70 см. Реже ис-
пользуют двусторонне направленные микрофоны, тогда минимальная дальность
до источника возрастает до 80-100 см.
Для фиксации диалога подходят как двусторонне, так и односторонне направ-
ленные микрофоны. В первом случае микрофон располагают между собеседника-
ми, в последнем стараются установить так, чтобы оба объекта оказались симмет-
рично расположенными относительно рабочей оси акустического приемника.
Для фиксации разговора нескольких собеседников чаще применяют одно-
сторонне направленные микрофоны с большим перепадом чувствительности по
линии фронт - тыл. Их размещают таким образом, чтобы рабочая ось была на-
правлена на собеседников, а тыл - в сторону источников акустических помех.
Для записи беседы за круглым столом чаще используют односторонне на-
правленные микрофоны. В идеальном случае их помещают в центре в верти-
кальном положении с направлением нулевой чувствительности вниз.
Пространственная ориентация микрофона определяется зависимостью его
чувствительности от угла между рабочей осью и направлением на источник зву-
ка. Для большинства типов акустических приемников увеличение этого угла
сопровождается падением общей чувствительности, но особенно чувствитель-
ности на высоких частотах. Лишь у некоторых типов микрофонов, например,
двусторонне направленных (восьмеричных) и в меньшей степени односторонне
направленных, чувствительность на высоких частотах меняется при повороте
рабочей оси так же, как и чувствительность на низких частотах. Поэтому мик-
рофоны направляют рабочей осью не на источник только в тех случаях, когда
надо сделать запись этого звука менее громкой на фоне других или придать зву-
чанию большую мягкость и меньшую четкость.
Расстояние до источника определяется исходя из свойств помещения, в ко-
тором осуществляется аудиозапись, и свойств микрофона и источника.
Акустические процессы в каждой точке помещения довольно хорошо, как
отмечалось выше, определяются акустическим отношением. Восприятие же
источника зависит от того, в каком соотношении находятся расстояние от ис-
точника до микрофона и радиус гулкости помещения.
Если расстояние от источника до микрофона меньше радиуса гулкости, то при
воспроизведении кажущиеся размеры источника звука больше фактических, а раз-
меры окружающего пространства меньше фактических. При этом создается впечат-
ление близости и глубины звучания. При расстоянии микрофона от источника
больше радиуса гулкости, наоборот, размеры источника кажутся меньше фактиче-
320
ских, а окружающего пространства - больше. Общее впечатление от звучания -
объемность, воздушность, мощность. При расположении микрофона от источника
звука на расстоянии, равном радиусу гулкости, качество звучания при воспроизве-
дении промежуточное по сравнению с описанным выше.
При использовании диктофонов для негласной записи необходимо учиты-
вать такие факторы, как характерные щелчки из-за включения и выключения
магнитофона, перемотки ленты; емкость записи; низкое качество звукозаписи в
силу ранее упомянутых причин.
Для того чтобы избежать неприятностей с обнаружением факта негласной
звукозаписи из-за щелчков и переключений, используют профессиональные
средства, специально предназначенные для скрытой аудиозаписи. Главный не-
достаток таких средств - высокая цена.
Другой путь - использование современных малогабаритных цифровых дик-
тофонов с бесшумным включением и высоким качеством записи.
Для увеличения времени непрерывной записи используют реверсивные сис-
темы. Однако в этом случае могут быть использованы только устройства с бес-
шумным реверсом.
Иногда для экономии ресурсов используют функцию включения по голосу -
акустомат (см. п. 6.3). Но при этом неизбежен пропуск начала фразы, а если по-
рог срабатывания завышен, то пропуск целых предложений.
Для экономии носителя информации в ряде случаев применяется система дис-
танционного включения. В простейшем виде она представляет собой переключа-
тель, соединенный проводом с соответствующим разъемом на диктофоне, при от-
сутствии специального разъема используют доработанный вход по питанию.
Некоторое преимущество можно получить, применяя дистанционное вклю-
чение по радиоканалу. Такой способ используют в закладных устройствах зву-
козаписи.
Существенно увеличить время непрерывной звукозаписи позволяют дикто-
фоны с записью на жесткий проволочный носитель, изготовленный из специ-
альных сплавов. Их емкости хватает на сутки и более. Однако они едва ли най-
дут широкое применение из-за трудности соединения проволоки при монтаже и
обрывах, появления паразитной амплитудной модуляции сигнала вследствие
скручивания носителя, неудовлетворительной передачи верхних частот, высо-
кой стоимости, сильного износа головок.
Перспективным по-прежнему остается применение цифровых диктофонов, тем
более, появились диктофоны нового типа - с записью в память персональной ЭВМ.
Для улучшения разборчивости речи, полученной в результате скрытой зву-
козаписи, используют различные фильтры. Они особенно эффективны, если
фиксация информации осуществлялась на фоне мощных, но сосредоточенных
по спектру помех или специфически окрашенных шумов.
В простейшем случае можно использовать широко известные эквалайзеры.
Но как правило, применяют специально разработанные устройства, например,
цифровые нелинейные адаптивные фильтры, предназначенные для обработки
зашумленных речевых сигналов в реальном масштабе времени. При обработке
записей на фоне сосредоточенных помех фильтр позволяет улучшить разборчи-
вость речи в 1,5-5 раз. Однако он недостаточно эффективен, если помехой явля-
ется быстрая музыка, шум, речь.
321
Более совершенными считают програмно-аппаратные комплексы очистки
речи. Они используются для очистки живого звука и звукозаписи, повышения
разборчивости и качества речи в условиях неэффективных каналов связи, выде-
ления источника звука в условиях шумного производства.
Применение подобных комплексов обеспечивает обработку сигналов с из-
меняющимися во времени характеристиками шумов, одновременное устранение
нескольких типов помех, использование свойств восприятия (психоакустики)
при расшифровке теста и некоторые другие возможности.
Все типы портативных диктофонов для негласной звукозаписи должны иметь
следующие технические характеристики: частоты от 200...300 Гц до 3...5 кГц,
коэффициент детонации (коэффициент колебания скорости протяжки ленты) -
до 4 %, остаточный уровень шумов - 30 дБ, коэффициент гармоник - до 10 %,
разборчивость слогов 60.. .80 % при доверительной вероятности не хуже 0,9.
Технические характеристики ряда современных профессиональных и непро-
фессиональных диктофонов приведены в [2].
6.10. Устройства высокочастотного навязывания
Под высокочастотным навязыванием (ВЧ-навязыванием) понимают способ
несанкционированного получения речевой информации, основанный на зонди-
ровании мощным ВЧ-сигналом заданной области пространства. Он заключается
в модуляции электромагнитного зондирующего сигнала речевым в результате
их одновременного воздействия на элементы обстановки или специально вне-
дренные устройства.
Качество перехвата аудиоинформации с помощью ВЧ-навязывания зависит
от ряда факторов:
- характеристик и пространственного положения источника акустического
сигнала;
- наличия в контролируемом помещении нелинейного элемента (устройст-
ва), параметры которого (геометрические размеры, положение в пространстве,
индуктивность, емкость, сопротивление и т. д.) изменяются по закону акустиче-
ского сигнала;
- характеристик внешнего источника, облучающего данный элемент (уст-
ройство);
- типа приемника отраженного сигнала.
Принцип организации съема информации, основанный на зондировании, пока-
зан на рис. 6.22. Однако в некоторых случаях применяют и более сложные схемы.
Рис. 6.22. Организация перехвата акустической информа-
ции с использованием ВЧ-навязывания
322
Основные достоинства способа заключаются в активации модуляторов ВЧ-
сигнала (нелинейных элементов) только на момент съема информации, а также в
возможности (в ряде случаев) вести акустический контроль помещений без не-
посредственного проникновения для установки закладных устройств.
К недостаткам метода относят: малую дальность действия и высокий уро-
вень облучающих сигналов. Тем не менее ряд методов высокочастотного навя-
зывания получили достаточно широкое распространение.
Рассмотрим некоторые принципы ВЧ-навязывания, описанные в открытой
литературе [2].
6.10.1. Устройство перехвата речевой информации в проводных каналах
В настоящее время метод ВЧ-навязывания получил широкое применение в
телефонных линиях для акустического прослушивания помещений через мик-
рофон положенной на аппарат телефонной трубки.
Принцип реализации метода заключается в том, что в телефонную линию от-
носительно общего корпуса (в качестве которого, например, используют контур
заземления или трубы парового отопления) на один из проводов подают ВЧ-
колебания от специального генератора-передатчика (ПРД). Через элементы схемы
телефонного аппарата (ТА), даже если труб-
ка не снята, они поступают на микрофон и
модулируются речью ничего не подозре-
вающих собеседников (рис. 6.23).
Прием информации производится также
относительно общего корпуса, но уже через
второй провод линии. Амплитудный детек-
тор приемника (ПРМ) позволяет выделить
низкочастотную огибающую для дальней-
шего усиления и записи. Очевидно, что ка-
чество перехватываемой информации тем
выше, чем ближе подключен телефонный
аппарат (оконечное устройство). Это об-
стоятельство вносит определенные неудобства в использование данного метода.
Фильтр нижних частот (ФНЧ) в линии необходим для одностороннего распро-
странения высокочастотных зондирующих колебаний.
Принципиально ВЧ-сигнал в данном случае используется для преодоления ра-
зомкнутых контактов микрофонной цепи аппарата при положенной телефонной
трубке. Дело в том, что для зондирующего сигнала механически разомкнутый
контакт является своего рода воздушным конденсатором, сопротивление которого
будет тем меньше, чем выше частота сигнала генератора.
При воздействии ВЧ-излучения на телефонный аппарат нелинейные процессы
происходят в целом ряде элементов его электрической схемы. Однако наиболее
сильно они проявляются именно в микрофоне, сопротивление которого изменяется
по закону случайно воздействующего акустического сигнала, что и приводит к ам-
плитудной модуляции несущей. Для гарантированного возникновения указанного
эффекта уровень зондирующего сигнала в микрофонной цепи должен быть не мень-
ше 150 мВ, а выходное сопротивление генератора выше, чем у микрофона, в 5-10 раз.
Частота зондирующего сигнала должна лежать в диапазоне 30 кГц...20 МГц. Чаще
ее выбирают примерно равной 1 МГц, так как при этом создаются наилучшие усло-
Рис. 6.23. Принцип реализации ВЧ-
навязывания на телефонный аппарат
323
вия распространения. Дальность действия подобных устройств в реальных услови-
ях не превышает нескольких десятков метров.
В перспективе в области использования проводных каналов, вероятно, будут
осваивать способы зондирования не только телефонных аппаратов, но и других
устройств, в том числе по цепям питания, заземления и т. д.
6.10.2. Перехват речевой информации с использованием радиоканала
О работе устройств, использующих принцип ВЧ-навязывания через электро-
магнитное поле, частично уже упоминалось при описании пассивных и полуак-
тивных радиозакладок (п. 6.2). Рассмотрим их более подробно.
Автором и ведущим руководителем проекта первого пассивного закладного
устройства был выдающийся изобретатель Л.С. Термен.
Основой его устройства служит объемный цилиндрический резонатор, на дно
которого налит небольшой слой масла. Верхняя часть закрыта крышкой из пласт-
массы, прозрачной для радиоволн, но препятствующей проникновению акустиче-
ских колебаний. В крышке имеется отверстие, через него внутренний объем резо-
натора сообщается с воздухом помещения, в котором ведутся переговоры. В ука-
занное отверстие вставлена металлическая втулка, снабженная четвертьволновым
вибратором, настроенным на частоту 330 МГц. Размеры резонатора и уровень
жидкости подобраны таким образом, чтобы вся система резонировала на внешнее
19.1 мм
Рис. 6.24. Пассивный радиомикрофон:
1 - верхняя пластмассовая крышка; 2 - ферритовое кольцо;
3 - изолятор; 4 - антенна (четвертьволновой вибратор); 5 - со-
гласующий конденсатор; 6 - корпус; 7 - жидкость; 8 - медный
цилиндр (индуктивность); 9 - металлическая диафрагма
излучение с частотой 330 МГц. При этом собственный четвертьволновый вибра-
тор внутри резонатора создает внешнее поле переизлучения. При ведении разго-
воров вблизи устройства на поверхности масла появляются микроколебания,
вызывающие изменение добротности и резонансной частоты резонатора. Этих
изменений достаточно, чтобы влиять на характеристики переизлученного поля,
создаваемого внутренним вибратором. Сигнал становится модулированным по
амплитуде и фазе акустическими колебаниями. Работать такой радиомикрофон
может только тогда, когда он облучается мощным источником на частоте резона-
тора, т. е. 330 МГц (рис. 6. 24).
324
Главным достоинством такого радиомикрофона является невозможность его
обнаружения известными средствами поиска радиозакладок при отсутствии
внешнего облучения.
Кроме использования специальных средств, устанавливаемых на объекте,
теоретически возможно зондирование отдельных радиотехнических устройств
(телевизоров, приемников и т. д.), узлов бытовой техники, строительных конст-
рукций. Однако на практике это крайне сложная задача, так как требуется пере-
брать множество вариантов по направлению излучения, частоте зондирующего
сигнала, уровню, виду модуляции и т. п.
Перспективой развития подобных средств в радиодиапазоне может стать мо-
дернизация резонаторов в целях повышения индекса модуляции отраженного
излучения и рациональный выбор частоты. Приоритетным направлением разви-
тия является освоение высокочастотных диапазонов (вплоть до миллиметровых
волн). Можно предположить, что подобные резонаторы будут выполняться в
виде отдельных узлов различного оборудования (кондиционеров, радиоприем-
ников и т. д.) или элементов строительных конструкций.
6.10.3. Оптико-акустическая аппаратура перехвата речевой информации
Большой интерес вызывает использование лазерных микрофонов, первые
образцы которых были приняты на вооружение спецслужбами США еще в
1960-е годы.
Принцип работы этих устройств, получивших название лазерные системы
акустической разведки (Л С АР), заключается в следующем. Генерируемое лазер-
Рис. 6.25. Принцип работы лазерного микрофона
ным передатчиком излучение распространяется через атмосферу, отражается от
поверхности оконного стекла, модулируется при этом по закону акустического
сигнала, также воздействующего на стекло, повторно преодолевает атмосферу и
принимается фотоприемником, восстанавливающим разведываемый сигнал
(рис. 6.25).
Сама модуляция зондирующего сигнала на нелинейном элементе, в качестве
которого выступает оконное стекло, достаточно сложный физический процесс,
который упрощенно может быть представлен в следующем виде.
1. Звуковая волна, генерируемая источником акустического сигнала, падая
на границу раздела воздух - стекло, вызывает отклонения поверхности стекла от
исходного положения. Отклонения приводят к дифракции света, отражающегося
от этой границы.
325
Это заметно, например, при падении плоской монохроматической звуковой
волны на плоскую границу раздела. Отклонения границы от стационарного со-
стояния представляют собой бегущую вдоль стекла поверхностную волну с ам-
плитудой, пропорциональной амплитуде смещений среды в поле звуковой вол-
ны, а длина этой поверхностной волны
Хп = Ха / sin03,
где 0з - угол падения, а Ха - длина падающей акустической волны.
2. Отраженный от возмущенной поверхности свет содержит сдвинутые по
частоте дифракционные компоненты, распространяющиеся по дискретным на-
правлениям. При этом отраженное излучение содержит три вида модуляции:
- во-первых, частотную модуляцию, вызванную эффектом Доплера, вследст-
вие колебательных движений оконного стекла под воздействием акустических
сигналов.
Девиация частоты относительно центрального значения монохроматическо-
го излучения лазера подсветки
Дю = 2л/ХаГ„,
где Vn = Сз/зт0з - скорость распространения поверхностной волны; С3 - ско-
рость звука в среде;
- во-вторых, фазовую модуляцию, вызванную наличием в отраженном сиг-
нале как зеркально отраженного, так и дифракционных компонентов. (Результат
суперпозиции последних приводит к тому, что если поперечные размеры па-
дающего оптического пучка малы по сравнению с длиной поверхностной волны,
то в отраженном сигнале будет доминировать дифракционный пучок нулевого
порядка. В этом случае и окажется, что фаза световой волны будет промодули-
рована во времени с частотой звукового сигнала.);
- в-третьих, амплитудную модуляцию, вызванную колебаниями подсвечи-
вающего пучка относительно направления зеркального (максимального) отра-
жения, которые зависят также от пространственного перемещения оконного
стекла под воздействием акустического сигнала.
На практике чаще используют системы, работающие на восприятии именно
этого вида модуляции.
Для того чтобы работать с лазерными системами акустической разведки,
требуется большой опыт. В частности, необходимо правильно выбрать точку
съема, грамотно расположить аппаратуру на местности, провести тщательную
юстировку. Для обработки перехваченных сообщений следует в большинстве
случаев использовать профессиональную аппаратуру обработки речевых сигна-
лов на базе компьютера.
На сегодняшний день создано целое семейство лазерных средств акустической
разведки [2]. Достижения в развитии лазерной техники позволили значительно
улучшить технические характеристики и надежность работы данных систем. Дос-
таточно сказать, что появилась возможность дистанционной регистрации колеба-
ний стекла с амплитудой вплоть до 10-14...10"16м, имеются сообщения о потенци-
альной возможности работы по объектам на расстояниях до 10 км, а наработка на
отказ серийного гелий-неонового лазера составляет не менее 10 000 ч.
326
Качество работы лазерных микрофонов существенно зависит от большого
количества различных факторов: погодных условий, уровней фоновых шумов,
толщины и марки стекла, жесткости крепления стекла в раме, способа крепления
рамы к стене, длины волны, точности юстировки аппаратуры, обработки сигна-
ла, уровня речи в помещении и т. д. В связи с этим сложно говорить о дальности
перехвата информации вообще, можно рассчитать дальность съема информации
из конкретного помещения данной аппаратурой в заданных условиях. Кстати,
немецкие специалисты даже в рекламных проспектах отмечают, что дальность
действия лазерной аппаратуры составляет от единиц до сотен метров.
Дальнейшее развитие лазерных систем, вероятно, пойдет по пути уменьше-
ния размеров устройств за счет применения современных полупроводниковых
лазеров, оптических устройств и средств первичной обработки сигналов с ис-
пользованием ЭВМ.
В целом по методам высокочастотного навязывания можно сделать следую-
щие выводы:
1. Аппаратура, использующая принцип ВЧ-навязывания - реальное средство
несанкционированного получения речевой информации.
2. Эффективность применения зависит от уровня речи, расстояния до объ-
екта, характеристик аппаратуры и средств вторичной обработки сигналов, по-
годных условий, степени подготовки лиц, использующих технические средства
разведки.
3. Аппаратура ВЧ-навязывания в проводных каналах имеет хорошую пер-
спективу из-за сравнительной простоты и дешевизны.
4. Техническая реализация лазерных систем не вызывает серьезных затруд-
нений, и в обозримом будущем эти системы станут обычным средством несанк-
ционированного получения речевой информации.
7. РАДИАЦИОННАЯ РАЗВЕДКА
Под радиационной разведкой (РДР) понимают процесс получения информа-
ции в результате анализа радиоактивных излучений, связанных с выбросами и
отходами атомного производства, хранением и транспортировкой расщепляю-
щихся материалов, ядерных зарядов и боеприпасов, производством и эксплуата-
цией реакторов, двигателей и радиоактивным заражением местности.
При помощи РДР определяют:
- дозовые характеристики вокруг объекта разведки и их изменения во времени;
- маршруты перевозки источников радиоактивных излучений;
- районы с повышенным уровнем радиации;
- источники радиоактивных излучений в транспортном средстве;
- содержание отдельных видов изотопов в окружающей среде (почве, возду-
хе, природных и промышленных водоемах);
- изотопный состав излучателей, типы источников излучения, а также ведут
дозиметрический контроль атмосферы Земли.
Для лучшего представления физической основы получения информации об
объектах РДР рассмотрим некоторые свойства и характеристики радиоактивных
излучений.
7.1. Явление радиоактивности. Свойства радиоактивных излучений
Радиоактивность представляет собой самопроизвольный распад ядер ато-
мов, подчиненный определенному статистическому закону. Радиоактивные
превращения протекают с изменением строения, состава и энергетического
состояния ядра и сопровождаются испусканием или захватом заряженных
частиц и выделением коротковолнового излучения электромагнитной приро-
ды (у-из лучение).
В зависимости от рода частиц, испускаемых или поглощаемых ядром, разли-
чают:
1) альфа-распад;
2) бета-распад, электронный и позитронный;
3) электронный захват.
В случае альфа-распада ядро испускает положительно заряженную
а-частицу, состоящую из двух протонов и двух нейтронов, при этом атомный
номер элемента уменьшается на две, атомный вес - на четыре единицы. При
электронном бета-распаде в ядре происходит превращение нейтрона в протон, в
результате чего испускается электрон (р-частица), атомный номер элемента уве-
личивается на единицу, атомный вес практически не меняется. Позитронный
328
бета-распад характеризуется превращением протона в нейтрон и испусканием
позитрона (р+-частица). Электронный захват представляет собой разновидность
бета-превращений. Как и позитронный распад, он характеризуется превращени-
ем протона в нейтрон, но сопровождается захватом электрона из ТС-оболочки (К-
захват) или Z-оболочки атома (Z-захват). Заряд ядра уменьшается на единицу,
атомный вес практически не изменяется.
Кроме указанных основных видов радиоактивных превращений известны
спонтанное деление ядер и изомерный переход. В первом случае ядро раскалы-
вается на примерно равные половинки, во втором - меняется энергетический
уровень ядра, состав остается без изменения.
Различают естественную и искусственную радиоактивность. Естественные
радиоактивные элементы (U, Th, Ac, Ra и др.) повсеместно распространены в
природе. Искусственные радиоактивные элементы получают в результате тех
или иных ядерных реакций.
Для естественных радиоактивных элементов в равной мере характерны пре-
вращения с испусканием как а-, так и р-частиц, для искусственных - наиболее
часты превращения с испусканием последних. Af-захват сравнительно редок для
обоих случаев превращений, но для искусственных радиоактивных элементов он
встречается все же чаще.
Основные физические константы элементарных частиц указаны в табл. 7.1 [1].
Таблица 7.1
Основные физические константы частиц
Частица Масса Заряд
г а.е.м. 10“19 Кл (СИ) Ю-10ед. СГСЭ
а-частнца 6,69468 • 1Г24 4,031882 +3,20420 +9,60596
р-частица 9,1091 • 10’28 5,48597-10"4 - 1,60210 -4,80298
Позитрон 9,1091 • 1СГ28 5,48597-КГ4 - 1,60210 +4,80298
Протон 1,67252 10“24 1,007276 +1,60210 +4,80298
Нейтрон 1,67482 10“21 1,008665 0,000 0,000
Примечание. Атомная единица массы (а.е.м.) равна 1,66044 • 10 24 г.
у-кванты коротковолнового излучения, сопровождающего радиоактивный
распад, движутся со скоростью света с, обладают энергией Л ни импульсом
где v - частота электромагнитных колебаний; h - постоянная Планка, h =
= 6,6256-10’34 Дж-с = 6,6256-10’27 эрг-с.
Длины волн у-лучей, испускаемых естественными радиоактивными элемен-
тами, находятся в диапазоне 1,2-10-8- 4,7-10-11 см. Энергия у-квантов изменяется
от 0,01 до 2,6 МэВ (1 Мэв = 1,6024О-13 Дж). Они не имеют заряда, поэтому в
магнитном поле не отклоняются.
329
Таким образом, радиоактивность сопровождается возникновением двух ви-
дов излучений: корпускулярного, представляющего потоки быстро движущихся
частиц (а-, р-, нейтронное, протонное), и электромагнитного (у-излучение, рент-
геновское).
Природа частиц определяет свойства того или иного вида радиоактивных из-
лучений и их действие на окружающую среду. К числу свойств радиоактивных
излучений, так или иначе используемых в практике радиоактивных методов раз-
ведки, относят следующие [1]:
1) способность проникать через вещество;
2) ионизацию газов, жидкостей и твердых тел;
3) выделение теплоты при радиоактивном распаде;
4) действие на фотографическую пластинку;
5) способность вызывать свечение люминесцирующих веществ;
6) способность вызывать химические реакции и распад молекул (при дли-
тельном действии излучения изменяется окраска окружающих предметов).
Рассмотрим сравнительные характеристики свойств излучений естественных
радиоактивных элементов в указанной выше последовательности.
1. Примерное отношение проникающей способности а-, Р-, у-излучений [1]:
100 : 10 000. Полное поглощение ос-частиц достигается листом писчей бумаги или
алюминиевой фольгой толщиной 0,004...0,005 см, поглощение р-частиц - пласти-
ной А1 толщиной около 0,5 см, у-лучей - слоем А1 толщиной около 50.. .60 см.
В воздухе при нормальных условиях длина пути пробега ос-частиц естест-
венных радиоактивных элементов 2,5.. .8,5 см, р-частиц - 0... 13,0 м, у-квантов -
от десятков до сотен метров. Путь следования ос-частицы прямолинейный, с не-
большим искривлением лишь в конце пробега, траектория р-частицы криволи-
нейная, иногда зигзагообразная, у-лучи распространяются от источника прямо-
линейно.
Различная проникающая способность а-, р-частиц, у-квантов широко ис-
пользуется в практике радиоактивных методов для разделения излучений, выяс-
нения природы активности и количественных характеристик радиоактивных
элементов.
2. Ионизирующая способность а-, Р-, у-излучений также различна. Прибли-
женное отношение чисел пар ионов, образуемых соответственно на единице пу-
ти пробега частицы или кванта (удельная ионизация), 10 000 : 100 : 1. Так, на
пути 1 см в воздухе ос-частица образует около 4104 пар ионов, р-частица в зави-
симости от скорости движения v создает от 41 (v = 0,99 с) до 7600 пар ионов (у =
= 0,024 с), у-квант с энергией 2,6 МэВ образует две пары ионов. Однако количест-
во пар ионов, образующихся в воздухе на полном пути пробега а-, р-частиц и
у-кванта, различается незначительно. Так, на всем пути пробега а-частицы с энер-
гией 4,2 МэВ создается 1,2-105 пар ионов, Р-частицы с энергией 3,0 МэВ - около
0,9-105 пар ионов, у-кванта с Е = 2,6 МэВ — около 0,8-105 пар ионов.
Наряду с ионизацией газа наблюдается ионизация жидкостей и твердых тел.
Энергия, затрачиваемая на пару электрон-дырка в твердом теле, примерно на
порядок ниже, чем на пару ионов в газе.
330
Ионизирующее действие радиоактивных излучений является одним из
основных свойств, используемых в радиометрии. Благодаря этому свойству
удается обнаруживать радиоактивные элементы при поисках с помощью газо-
разрядных счетчиков и ионизационных эманометров, устанавливать природу
радиоактивности и определять содержание радиоактивных элементов в поро-
дах и рудах.
3. Теплота при радиоактивном распаде выделяется за счет поглощения ок-
ружающей средой кинетической энергии а- и р-частиц, у-лучей и лучей отдачи
(а-лучей) в сторону, противоположную направлению а- и р-частиц. Один грамм
урана выделяет около 1,1107 Вт или 9,510-5 кал/ч. Наибольший тепловой эф-
фект создается а-частицами: на их долю приходится около 90 % выделяющейся
теплоты.
4. На фотографическую эмульсию действуют все виды излучений. Они разла-
гают бромистое серебро подобно световым лучам, что при проявлении пластинки
вызывает ее почернение; ос-частицы, как менее проникающие, воздействуют лишь
на верхний слой эмульсии, порядка первых десятков микрон, оставляя четкий
след на своем пути, р-частицы способны проникать глубоко в эмульсию и произ-
водить разложение бромистого серебра по всему светочувствительному слою.
Относительное действие у-лучей на фотоэмульсию наименьшее.
5. а-, р-частицы и у-лучи, попадая на люминесцирующее вещество, вызыва-
ют яркие вспышки. Это явление носит название сцинтилляции. Наблюдая
вспышки, можно с помощью сцинтилляционной аппаратуры производить под-
счет испускаемых частиц, регистрировать интенсивность излучения, определять
энергию частиц и у-квантов.
Из фосфоресцирующего сернистого цинка с добавлением очень небольшо-
го количества солей Ra, MsTh или RaTh готовят слабосветящиеся в темноте
краски.
Некоторые соединения Ra, Io, Ас способны к самопроизвольному свечению.
При этом светится не только поверхность препарата, но и вся его масса. Со вре-
менем интенсивность свечения уменьшается за счет поглощения влаги, однако
при последующем обезвоживании первоначальное свечение соли восстанавли-
вается. Под действием a-излучения в случае концентрированных источников
светится воздух, окружающий препарат. Свечение вызывается действием ос-
частиц главным образом на азот воздуха. По радиусу светящейся зоны можно
определять длины пробега частиц.
Ряд солей и природных минералов U светится в ультрафиолетовых лучах.
6. Под действием а-, р-, у-излучений происходят химические превращения и
окрашивание некоторых веществ. Радиоактивные излучения более или менее
быстро разлагают все виды молекул. В соответствии с ионизирующей способно-
стью наибольшее химическое воздействие производят ос-частицы; р-частицы и
у-кванты проявляют себя слабее.
Под влиянием радиоактивных излучений окрашиваются некоторые природ-
ные минералы и чистые соли. Каменная соль приобретает голубой или желтый
цвет, алмаз - зеленый, доломит - красный и т. д. Соли Ra и Ва постепенно при-
331
нимают серовато-коричневый, а затем серовато-черный цвет. Интенсивность
окрашивания тем больше, чем больше радиоактивного вещества в кристалле и
чем длительнее жизнь минерала. Число наблюдаемых колец зависит от радиоак-
тивного элемента. При наличии Th отмечаются четыре окрашенные зоны,
U-пять. Радиусы окрашенных зон соответствуют пробегам а-частиц отдельных
элементов или групп элементов с близкими длинами.
Наряду со свойствами а-, р- и у-излучений коротко отметим основные свой-
ства нейтронов.
Во-первых, они отличаются высокой проникающей способностью, превос-
ходящей проникающую способность у-лучей. Так, например, наиболее жесткие
у-кванты ThC поглощаются наполовину слоем РЬ около 1,5 см, а для поглоще-
ния наполовину пучка нейтронов нужен свинцовый экран толщиной 5 см. При
прохождении через вещество нейтроны испытывают упругое рассеяние, неупру-
гое рассеяние и захват. Наибольшее поглощение нейтронов наблюдается в водо-
родсодержащих веществах.
Во-вторых, для нейтронов характерны дифракция, отражение от зеркала, по-
ляризация и т. д.
В-третьих, при взаимодействии нейтронов с ядрами большинства элементов
происходят различные ядерные реакции, сопровождающиеся испусканием заря-
женных частиц и у-квантов и образованием искусственных радиоактивных эле-
ментов. Бомбардируя нейтронами нерадиоактивное вещество, можно сделать его
радиоактивным. Вещества различного химического состава по-разному реаги-
руют на облучение нейтронами. Этот факт начинает использоваться в разведы-
вательной практике для выявления отдельных элементов в рудах или горных
породах.
В отличие от заряженных частиц нейтроны не ионизируют газы, однако ядра
элементов, захвативших нейтроны, могут испускать а-частицы или протоны,
способные выбивать электроны из оболочек атомов. Кроме того, вещество иони-
зируется ядрами отдачи в процессе рассеяния нейтронов.
В свободном состоянии нейтроны существуют недолго, так как легко захваты-
ваются ядрами и, будучи сами радиоактивными, распадаются с образованием про-
тона, электрона и нейтрона. Скорость распада свободных нейтронов высока.
Практически полный распад происходит за 2 ч (период полураспада Т= 11,7 мин).
Поэтому в свободном состоянии их не существует. Они могут появляться только в
результате различных ядерных реакций.
7.2. Основные характеристики радиоактивных излучений
и единицы их измерения
Основными характеристиками радиоактивности являются скорость радиоак-
тивного распада, количество (активность) радиоактивного вещества, доза излу-
чения, уровень радиации, степень заражения радиоактивными веществами [2, 3].
Скорость радиоактивного распада. В любом радиоактивном веществе про-
исходит постепенный распад всех ядер его атомов. При этом в единицу времени
распадается определенная часть общего числа ядер радиоактивных атомов. Чем
332
больше эта часть, тем больше скорость распада и наоборот. Скорость распада не
зависит от внешних условий и определяется лишь свойствами данного радиоак-
тивного изотопа. Поэтому для любого количества данного радиоактивного изо-
топа выполняется следующий закон: половина общего числа ядер радиоактив-
ных атомов распадается всегда за одинаковое время. Это время называется
периодом полураспада Т. Чем больше период полураспада, т. е. чем меньше ско-
рость распада, тем дольше живет данный радиоактивный изотоп, создавая ра-
диоактивное излучение.
Для разных изотопов период полураспада колеблется в широких пределах.
Так, например, период полураспада для стронция-89 составляет 54 дня, для ура-
на-235 - 710 млн лет. Основными источниками наведенной радиации в почве
являются изотоп марганца с периодом полураспада 2,6 ч и изотоп натрия с пе-
риодом полураспада 15 ч. Период полураспада характеризует скорость распада
радиоактивного вещества, но не определяет его количества.
Количество (активность) радиоактивного вещества. Измерение количества
радиоактивного вещества по его весу затруднительно, так как радиоактивные
изотопы находятся обычно в смеси с другими веществами. Кроме того, различ-
ные изотопы при одной и той же массе обладают различной радиоактивностью
(их радиоактивный распад происходит с различной скоростью). Поэтому коли-
чество радиоактивного вещества принято оценивать его активностью, под кото-
рой понимают число радиоактивных распадов атомов в единицу времени.
За единицу активности, т. е. количества радиоактивного вещества, принята
единица, названная кюри.
Кюри (Ки) - это такое количество радиоактивного вещества, в котором про-
исходит 37 миллиардов распадов ядер атомов в секунду:
1 кюри (Ки) = 37-109 распадов/с.
Производными этой единицы являются милликюри (мКи) = 0,001 с и микро-
кюри (мкКи) = 0,000001 с.
Активность, отнесенная к единице поверхности, массы, объема называется
удельной. Активность данного источника - величина не постоянная: она умень-
шается со временем за счет радиоактивного распада. За каждый промежуток
времени Т, равный периоду полураспада, количество радиоактивного изотопа
уменьшается вдвое, за 1 Г - в 2 раза, за 2Т- в 4 раза , за ЗТ- в 8 раз и т. д. Ак-
тивность радиоактивного вещества непосредственно не характеризует ионизи-
рующего действия излучения: при одной и той же активности ионизирующее
действие зависит от вида и энергии излучения, физических свойств облучаемой
среды и др. Ионизирующее действие излучений, характеризуется дозой.
Дозой излучения называется энергия излучения, поглощенная в единице объ-
ема или веса вещества за все время его воздействия. Энергия излучения, погло-
щенная веществом, затрачивается на его ионизацию. Следовательно, доза излу-
чения характеризует степень ионизации вещества: чем больше доза, тем больше
степень ионизации.
За единицу измерения дозы гамма-излучения в воздухе принят рентген.
Рентген (Р) - это такая доза гамма-излучения, при которой в одном кубическом
сантиметре сухого воздуха при нормальных условиях (температура 0 °C, давле-
ние 760 мм рт. ст.) образуется 2,08 миллиардов пар ионов. Более мелкими про-
333
изводными единицами дозы гамма-излучения являются: миллирентген (мР),
равный 0,001 Р и микрорентген (мкР), равный 0,000001 Р.
Доза излучения, измеренная в рентгенах, характеризует ионизационный эф-
фект гамма-излучений в воздухе. Количество же энергии различных излучений,
поглощенное в данной среде, характеризуется так называемой поглощенной до-
зой излучений. За единицу измерения поглощенной дозы в любом веществе не-
зависимо от вида излучения принят 1 рад.
Рад - это такая поглощенная доза, при которой количество поглощенной
энергии в одном грамме любого вещества составляет 100 эрг независимо от вида
и энергии излучения.
Производными этой единицы являются: миллирад (мрад), равный 0,001 рад,
и микрорад (мкрад), равный 0,000001 рад. При дозе излучения в 1 Р поглощен-
ная доза в воздухе составляет 0,87 рад, в воде почти столько же - 0,84 рад.
Уровень радиации (мощность дозы). Интенсивность гамма-излучения харак-
теризуется уровнем радиации. Уровень радиации представляет собой мощность
дозы излучения. Он равен дозе, создаваемой за единицу времени, т. е. характе-
ризуется в рентгенах в час (Р/ч), миллирентгенах в час (мР/ч), микрорентгенах в
секунду (мкР/с): 1 мР/ч = 0,001 Р/ч; 1 мкР/с = 3,6 мР/ч.
Степень заражения местности радиоактивными веществами характеризует-
ся плотностью заражения. Плотность заражения измеряется количеством радио-
активных распадов атомов, происходящих в единицу времени на единице по-
верхности, в единице объема или веса, т. е. единицами удельной активности.
В войсковой практике степень заражения чаще определяется количеством
распадов в минуту, отнесенным к единице поверхности, объема или веса иссле-
дуемого материала [3]:
число распадов число распадов число распадов
--------------, av =-----§-------, at=--------------.
см мин см мин г мин
Единицы величин ионизирующих излучений представлены в табл. 7.2.
Таблица 7.2
Единицы величин ионизирующего излучения
Величина и ее символ Наименование и обозначение единицы Соотношение между единицами Пересчетные соотношения
СИ внесистемной
Экспозиционная доза фотонного 0 излучения X Кулон на кило- грамм воздуха, Кл/кг Рентген, Р 1 Р = 87,3 эрг/г = = 2,58-104 Кл/кг -
Поглощенная доза 0 излучения D Грей, Гр Рад (radiation absorbed dose), рад 1 Гр = 1 Дж/кг 1 рад = 100 эрг/г = = 0,01 Гр 1 Гр = 100 рад DB = 0,873 Х9 Dr= 1,09 Z>B, DT = 0,95%, где DB, DT - поглощенная доза излуче- ния в биологической ткани и в воздухе соответствен- но, рад; X- экспозицион- ная доза, Р
334
Окончание табл. 7.2
Величина и ее символ Наименование и обозначение единицы Соотношение между единица- ми Пересчетные соотношения
СИ внесистемной
Мощность экс- позиционной дозы JT Кулон на кило- грамм в секун- ду, Кл/(кг с) Рентген в секунду, Р/с 1 Кл / (кг-с) - 1 А/кг = = 3,88 - 1(Г Р/с 1 мкР/с = 3,6 мР/ч Jf=l,45DB
Мощность поглощенной дозы D Грей в секун- ду, Гр/с Рад в секунду, рад/с 1 Гр/с = 100 рад/с DB = 0,873 D
7.3. Приборы для измерения ионизирующих излучений
Получение сведений об ионизирующих излучениях сводится к решению че-
тырех основных видов измерительных задач: измерение параметров и характе-
ристик ионизирующих частиц и квантов; характеристик потока или поля иони-
зирующих излучений; величин, характеризующих взаимодействие излучения с
веществом и передачу ему энергии, и измерение параметров и характеристик
источников ионизирующих излучений.
Приборы для измерения физических величин, характеризующих ионизи-
рующие излучения, разделены на четыре основные группы:
1) дозиметрические приборы (дозиметры), измеряющие величины, характе-
ризующие перенос и передачу энергии излучения;
2) радиометрические приборы (радиометры), измеряющие величины, харак-
теризующие источники ионизирующих излучений и количество испускаемых
ими в пространство частиц и квантов;
3) спектрометрические приборы (спектрометры), измеряющие распределе-
ния частиц и квантов по энергии, зарядам, массам, в пространстве и во времени;
4) универсальные приборы [4].
7.3.1. Радиометрические приборы
К радиометрам относят приборы, предназначенные для измерения активно-
сти изотопа в источниках излучения или плотности потока частиц и квантов ио-
низирующего излучения. Таким образом, радиометры обеспечивают решение
двух групп измерительных задач: определение параметров поля или характери-
стик источника излучения.
При измерении активности изотопа в источнике необходимо определить число
распадов в единицу времени. Освобождающиеся при распаде кванты или частицы
испускаются источником во всех направлениях. Следовательно, для определения
активности источника необходимо измерить общее излучение источника - поток
излучения Q, а также знать число частиц и квантов, образующихся при каждом акте
распада (выход частиц или квантов). Активность источника А = Q/P. При таких из-
мерениях источник излучения, как правило, располагают рядом с детектирующим
элементом (внутри детектора или в непосредственной близости от него). Размеры
источника соизмеримы с размерами чувствительной поверхности детектора. При-
335
бором определяют непосредственно или с коэффициентами, учитывающими гео-
метрию «детектор-источник» и другие факторы, поток излучения - число частиц
или квантов, испускаемых источником в единицу времени.
В другой группе задач, решаемых радиометрами, определяют параметры по-
ля, создаваемого источником ионизирующего излучения в точке расположения
детектора. В этом случае измеряют число частиц или квантов, прошедших через
единичную поверхность (поток Ф) или число частиц или квантов, проходящих
через единичную поверхность в единицу времени (плотность потока ф). Такие
измерения характерны для мощных протяженных источников радиации, источ-
ников излучения, достаточно удаленных от детектора (поток можно рассматри-
вать как равномерный) и т. п. В зависимости от измеряемых физических вели-
чин радиометры делят на подгруппы (табл. 7.3).
Таблица 7.3
Основные подгруппы радиометров
Наименование подгруппы Измеряемая величина Регистрируемое излу- чение
Радиометры для измерения ак- тивности изотопа в радиоактив- ном источнике Радиометры удельной массовой активности изотопа в радиоак- тивном источнике Активность изотопа Удельная массовая активность изо- топа «>₽>¥
Радиометры газов Объемная удельная активность
Радиометры аэрозолей Объемная удельная активность
Объемная удельная энергия
Радиометры жидкостей Объемная удельная активность
Радиометры загрязненности по- верхностей Удельная поверхностная активность
Радиометры потока ионизирую- щих частиц и квантов Поток ионизирующих частиц и кван- тов а, р, у, рентгеновское, нейтронное, тяжелые заряженные частицы
Радиометры плотности потока ионизирующих частиц и квантов Плотность потока ионизирующих частиц и квантов
Радиометры для измерения рас- пределений активности или плотности потока Временное или пространственное распределение активности или плот- ности потока
Радиометры комбинированные В зависимости от функции
С помощью измерителей активности и плотности потока определяют число
частиц или квантов, проходящих через чувствительный объем детектора в еди-
ницу времени. По существу различие проявляется в методе определения по этим
данным искомых величин (расчет полного числа испускаемых частиц или кван-
тов или нормирование к единичной поверхности). Следовательно, любой радио-
метр (за исключением измерителя потока) должен содержать детектор, парамет-
ры выходных сигналов которого функционально связаны с числом действующих
на него частиц или квантов, и измерительное устройство нормирующего типа,
336
определяющее количество электрических сигналов, возникающих в единицу
времени.
Функциональная связь между числом частиц или квантов, действующих на
детектор, и параметрами сигналов различна. Например, при измерении заряжен-
ных частиц, несущих определенный заряд q, число частиц, действующих в еди-
ницу времени, пропорционально создаваемому ими току.
В дискретных детекторах числу частиц или квантов, действующих в единицу
времени, пропорциональна средняя частота выходных сигналов. Измерение тока
или средней частоты импульсов позволяет определить число частиц или квантов,
действующих в единицу времени на детектор. Стабильность коэффициентов пре-
образования в детекторе числа частиц или квантов в ток или среднюю частоту
импульсов, достоверность этих коэффициентов, точность измерения указанных
параметров электрических сигналов определяют погрешность измерения потока,
активности или плотности потока.
Реально задача определения активности или плотности потока усложняется
тем, что помимо измеряемого (полезного) излучения на детектор воздействует
фоновое излучение, обусловленное посторонними источниками, или сопутст-
вующее излучение, создаваемое измеряемым источником. Отдельные узлы ра-
диометра (в том числе и детектор) являются источниками шумовых сигналов,
также проходящих по измерительному тракту. Кроме того, помехи создают
внешние электромагнитные поля. Для достоверного определения потока, актив-
ности источника или плотности потока в радиометре должна быть исключена
или предельно снижена вероятность регистрации сигналов помехи (фона, шума
и т. д.). Однако этим трудности не ограничиваются. В измеряемой пробе может
быть не один изотоп, а смесь различных, испускающих частицы и кванты разно-
го вида и энергии. Чаще всего необходимо определить активность конкретного
изотопа. Поле излучения также бывает не однородным, а смешанным, создан-
ным частицами и квантами разного вида и энергии. Задача радиометра - найти
плотность потока частиц или квантов определенного вида с энергией, соответст-
вующей некоторому интервалу значений.
Следовательно, одно из основных качеств радиометра - избирательность по
отношению к полезному, а также к фоновым или сопутствующим компонентам
излучения, шумовым сигналам и сигналам помехи. Эта избирательность дости-
гается различными способами на разных этапах преобразования информации в
приборе. Для получения лучших результатов необходимо использовать детекто-
ры с наибольшей эффективностью регистрации измеряемого ионизирующего
излучения и минимальной зависимостью от фонового излучения. Для каждого
вида излучения и фона оптимальным является тот или иной тип детектора, что
определяет многообразие их типов, используемых в различных радиометриче-
ских приборах. При определении активности изотопов в пробах для создания
преобладающего воздействия измеряемого излучения над фоном используют
специальные методы отбора проб, направленные на селективное выделение оп-
ределенных изотопов или повышение их концентрации.
Повышение избирательности радиометрических измерений достигается от-
бором по определенным признакам электрических сигналов с детекторов. Для
этого предпочтительно использовать пропорциональные дискретные детекторы.
337
В них параметры сигнала (амплитуда, геометрическая форма, время появления)
связаны с энергией, видом частиц или квантов, моментом их попадания в чувст-
вительный объем детектора. Пропуская сигналы с детектора через импульсные
фильтры, можно отобрать те, которые обусловлены полезным излучением, ис-
ключив или значительно понизив число сигналов, обусловленных фоном или
связанных с собственным шумом прибора или помехами. Помимо импульсной
фильтрации для снижения влияния фона используют и другие методы преобра-
зований потоков импульсов. Они основаны на выделении по каким-либо при-
знакам фоновых или сопутствующих сигналов или введении для измерения фо-
на дополнительного детектора с последующими каскадами преобразования им-
пульсов и вычитании импульсов, обусловленных фоном или сопутствующим
излучением, из результатов измерения по основному каналу.
Рис. 7.1. Типовая блок-схема радиометрического прибора
Типовая блок-схема радиометрического прибора приведена на рис. 7.1.
Энергия ионизирующего излучения с помощью детектора преобразуется в
импульсы электрического тока, которые поступают на импульсные фильтры и
затем на согласующий каскад. Линейный усилитель осуществляет усиление
отфильтрованных сигналов без изменения их амплитудного распределения.
Дискриминирующее устройство позволяет выделить из всего спектра импуль-
сов сигналы, амплитуда которых соответствует определенному диапазону на-
пряжений.
Импульсы, прошедшие через дискриминатор, формируются по амплитуде и
длительности с помощью нормализатора и подаются на регистрирующее уст-
ройство. В радиометрических приборах в качестве регистрирующих использу-
ются системы непосредственного счета импульсов либо системы, фиксирующие
среднюю скорость счета (количество статистически распределенных импульсов
в единицу времени). Для непосредственного счета наиболее широкое распро-
странение получили различные пересчетные схемы и электромеханические
счетчики (ЭМС). В многоканальных анализаторах для этих же целей применяют
арифметические устройства и блоки памяти на конденсаторах, ферритовых сер-
дечниках или потенциалоскопах. В простейших радиометрах имеются узлы зву-
338
ковой индикации, обеспечивающие прослушивание поступающих импульсов с
помощью телефона.
Скорость счета измеряется на основе интегрирования поступивших сигналов с
значениями постоянного напряжения, пропорционального среднему числу импуль-
сов в единицу времени. В качестве индикаторов в этом случае обычно используют
стрелочные микроамперметры, перопишущие приборы или фоторегистраторы.
Тип источников питания определяется областью применения приборов: в поле-
вых переносных радиометрах используют батареи, в приборах, предназначенных
для съемки в движении - аккумуляторы либо бортовую сеть, в стационарных уста-
новках - промышленную сеть. Стабилизированное напряжение питания подается
непосредственно на все узлы схемы. Высокое напряжение для питания детектора
излучения в современных приборах создается с помощью автономного источника,
состоящего из генератора, выпрямителя, фильтра и стабилизатора.
Конкретные электрические схемы отдельных типов приборов отличаются
большим разнообразием. Радиометры, предназначенные для пешеходных поис-
ков, имеют упрощенную схему, что обусловлено повышенными требованиями к
экономичности питания, портативности и весу. Это достигается путем объеди-
нения функций отдельных узлов в одном узле или исключения некоторых узлов
из блок-схемы.
7.3.2. Дозиметрические приборы
К дозиметрической аппаратуре относят приборы, предназначенные для из-
мерения энергии, переносимой ионизирующим излучением или передаваемой
объекту, находящемуся в поле излучения. Таким образом, к этой группе относят
приборы, измеряющие поглощенную дозу и мощность дозы излучения, экспози-
ционную дозу и мощность дозы у- и рентгеновского излучений, интенсивность и
другие величины, характеризующие поле и источники излучения или процессы
взаимодействия ионизирующих излучений с веществом.
В зависимости от измеряемых физических величин дозиметрические приборы
делят на следующие подгруппы: измерители поглощенной, эквивалентной и экс-
позиционной доз, кермы, мощности поглощенной, эквивалентной и экспозицион-
ной доз, мощности кермы, энергии ионизирующего излучения, переноса энергии,
потока энергии и измерители плотности потока энергии (интенсивности). Измери-
тели экспозиционной дозы и мощности дозы используют для определения энер-
гии, передаваемой веществу электромагнитным излучением, а измерители кермы
и мощности кермы, как правило, нейтронным и жестким электромагнитным излу-
чением. Остальные перечисленные дозиметры можно использовать для измерения
энергии, переносимой или переданной веществу любыми видами ионизирующих
излучений [4].
Общим для всех дозиметрических приборов является необходимость измере-
ния тех или иных энергетических величин, описывающих не отдельные частицы
или кванты, а их некоторую совокупность, находящуюся в пространстве в течение
некоторого времени. Поэтому построение дозиметрических приборов основано на
измерении тока или электрического заряда на выходе пропорционального детек-
тора, несущих информацию об энергии, потерянной ионизирующим излучением в
339
чувствительном объеме детектора. Интегрирование элементарных зарядов, созда-
ваемых в объеме детектора при воздействии отдельных частиц или квантов, произ-
водится как в самом детекторе или в его нагрузочной цепи, так и в измерительном
устройстве. При этом по значению суммарного заряда (эффекта), накопленного за
определенный промежуток времени, можно судить о дозе, энергии излучения и
т. п., а по значению тока - о соответствующем - мощности дозы, интенсивности и
других энергетических величинах, нормированных по времени. Необходимо лишь
обеспечить такие условия регистрации излучения, чтобы измеряемая величина в
необходимом диапазоне была пропорциональна или известным образом связана с
энергией, потерянной частицами в объеме детектора. Выполнение этого условия
во многом определяет качество дозиметрических приборов. Наиболее простое
решение указанной проблемы - создание детектора, чувствительный объем кото-
рого заполняет вещество, адекватное или эквивалентное по своим физическим
свойствам веществу, в котором необходимо измерить соответствующий эффект.
Однако создать такой эквивалентный детектор с необходимыми измерительными
параметрам удается не всегда. Поэтому часто задачу решают, используя в приборе
пропорциональный детектор с близкими к необходимым параметрам подбором
специальных условий регистрации, корректирующих отклонения, введением в
блоки детектирования поглотителей, рассеивателей, замедлителей, а также при-
меняя несколько детекторов с различными взаимодополняющими характеристи-
ками. Создать блок детектирования с необходимыми дозиметрическими характе-
ристиками сложно, однако при этом электронная часть аппаратуры существенно
упрощается. Второй способ обеспечения необходимых измерительных характери-
стик дозиметрических приборов - введение соответствующего управления реги-
страцией импульсов. Для этого необходимо знать функциональную связь пара-
метров сигналов, поступающих с пропорционального детектора, с измеряемой
величиной в требуемом диапазоне энергий регистрируемого излучения и добавить
в прибор электронные узлы, проводящие сортировку сигналов и введение при их
регистрации соответствующих поправочных коэффициентов [4].
Структурные схемы дозиметрических приборов в зависимости от выбранно-
го способа регистрации существенно различаются. При интегрировании элемен-
тарных зарядов в блоке детектирования сигнал, возникающий в цепи детектора,
измеряют регистратором с аналоговым входом - электрометром или цифровым
электрометром (при измерении заряда) и измерителями постоянного тока или
цифровыми измерителями постоянного тока (при измерении тока). При исполь-
зовании дискретного режима работы пропорционального детектора сигналы по-
ступают на устройство цифрового измерения элементарного заряда. Это устрой-
ство генерирует импульсы, число которых пропорционально амплитуде изме-
ряемых сигналов, т. е. энергии, потерянной частицей в чувствительном объеме
детектора. Поэтому информация о переносимой или передаваемой энергии пре-
образуется в этом устройстве в суммарное количество генерируемых импульсов,
которое измеряется дискретными регистраторами суммирующего типа (счетчи-
ками импульсов) при определении величин, аналогичных дозе, регистраторами
нормирующего типа (измерителями средней частоты) при определении величин,
аналогичных мощности дозы. Достоинство приборов, построенных по этому
принципу - относительная простота и надежность.
340
Перенесение процесса интегрирования из блока детектирования в электрон-
но-измерительные устройства позволяет автоматически вносить в результаты
измерения необходимые поправки, учитывающие не только характер регистри-
руемого излучения (его вид, энергию), но и особенности биологического воз-
действия. Достоинством построения дозиметрических приборов по такой схеме
является также то, что при использовании комбинированного детектора или не-
скольких детекторов, измеряющих различные виды излучения, и при введении
б
।-------------------------------------------------------------------1
в
Рис. 7.2. Структурные схемы дозиметров с измерением
заряда, прошедшего в цепи детектора (а, б) и с использо-
ванием цифрового электрометра (в)
необходимых коэффициентов преобразования и управления ими по заданной
программе можно обеспечить одновременное измерение нескольких дозиметри-
ческих характеристик, даже полей смешанного излучения. На рис. 7.2 приведе-
ны структурные схемы дозиметров с интегрированием в блоке детектирования и
дискретного типа.
341
При обеспечении высоких измерительных характеристик дозиметрических
приборов помимо основной погрешности в данном диапазоне величин весьма
важно также достижение минимальной зависимости результатов измерения от
энергии регистрируемых частиц. Рассмотрим это на примере измерения экви-
валентной дозы нейтронов. Для сравнения различных видов ионизирующих
излучений по ожидаемому биологическому эффекту при определении эквива-
лентных доз внешнего облучения используют коэффициенты качества (КК),
зависящие от вида излучения и его энергии. Так, для нейтронов в зависимости
от энергии коэффициент качества увеличивается от 3 для тепловых нейтронов
до 10,5 для нейтронов с энергией 1 МэВ. Поэтому лишь в этом диапазоне энер-
гий нейтронов для одного и того же значения поглощенной дозы эквивалент-
ная доза может меняться более чем в 3 раза. Соответственно если эквивалент-
ная доза определяется по поглощенной дозе D3 = DKKJE), то для обеспечения
независимости показаний прибора от энергии регистрируемых нейтронов не-
обходимо вводить поправки на зависимость коэффициента качества от энергии
нейтронов, иначе дополнительная погрешность, вызываемая этой связью, мо-
жет во много раз превысить основную погрешность измерения.
Обеспечение других характеристик дозиметрических приборов - минималь-
ного времени установления рабочего режима, высокой надежности, минималь-
ных дополнительных погрешностей при определении температуры, влажности,
давления - мало чем отличается от обеспечения аналогичных параметров для
других типов аппаратуры.
7.3.3. Спектрометры
К спектрометрам ионизирующих излучений относят приборы, устанавли-
вающие распределение частиц или квантов излучения по одному или несколь-
ким параметрам, например по энергиям частиц или квантов, виду излучения
(массе частиц и их заряду), а также по характеристикам движения частиц или
квантов в пространстве (угловой направленности, траектории). Соответственно
спектрометры разделяют на следующие подгруппы для измерения распределе-
ния излучений: по энергиям (энергетические спектрометры), по массам (массо-
вые спектрометры частиц), по зарядам (зарядовые спектрометры частиц), а так-
же для измерения пространственно-временных характеристик распределения
излучений (угловые спектрометры).
В некоторых случаях производят измерение не по одному, а по нескольким па-
раметрам, спектрометры для таких измерений носят название многопараметровых.
С помощью спектрометрических приборов определяют спектр, т. е. совокуп-
ность значений, которые может принимать данная физическая величина (энер-
гия, заряд, масса и пр.). Результаты измерений представляют в виде энергетиче-
ских, массовых, угловых и других распределений зависимости относительного
числа частиц или квантов в потоке или испускаемых источником излучения от
значения параметра. В зависимости от возможных значений параметра спек-
тральные распределения делят на дискретные и сплошные (непрерывные). Дис-
кретные распределения характеризуются несколькими отдельными значениями
параметра (энергии, массы, заряда). Если полное число зарегистрированных час-
342
тиц или квантов равно No, то доля частиц или квантов с параметром Д выража-
00
ется функцией f(A^ = NJNo, причем ^/(4) = 1. Следовательно, распределение
/=1
нормировано на полное число частиц или квантов No- В сплошном распределе-
нии имеются частицы или кванты с любым значением параметра А.
Рис. 73. Непрерывные дифферен-
циальное (а), интегральное (б)
и дифференциальное в виде гисто-
граммы (в) спектральные распре-
деления
^2 ^3 ^4 Л6 Л
в
Из полного числа частиц или квантов No можно выделить число частиц dNi с
параметром, заключенным в узком интервале значений - от Л, до Л, + dA. Доля
частиц, обладающих значением параметра, заключенном в единичном интервале
величин, ДЛ) = (l/2Vo) (dN(A)l dA), причем
00
о
Функцию f(A) называют дифференциальным распределением (рис. 7.3, а).
Помимо дифференциального иногда используют интегральное распределение
F(A), соответствующее доле частиц или квантов со значением параметра, пре-
00
восходящим Ai9 т. е. F(A) = j f(Ai)dA (рис. 7.3, б).
о
343
Как правило, для экспериментального определения спектрального распреде-
ления весь измеряемый диапазон параметра делят на некоторое количество ин-
тервалов - каналов. Затем измеряют число частиц или квантов, регистрируемых
прибором в каждом канале за определенное время, и на основании результатов
измерения строят гистограмму, в которой по горизонтальной оси отложено зна-
чение параметра, а по вертикальной оси - относительное число частиц или кван-
тов, приходящихся на каждый канал (см. рис. 7.3, в).
Измеренное распределение <р(Л) только приближенно отображает действи-
тельное спектральное распределение J(A), что обусловлено статистическими
флюктуациями коэффициентов преобразования и конечным значением интерва-
ла параметра А (т. е. тем, что гладкое спектральное распределение аппроксими-
руется ступенчатым распределением - гистограммой).
Если результаты измерения распределения по одному параметру представ-
ляют в виде плоского графика, то распределения, определяемые многопарамет-
ровыми анализаторами, представляют в трехмерном пространстве и в простран-
стве с большим числом измерений. Изображение зависимости числа частиц или
квантов становится объемным (многомерным) (рис. 7.4).
Из объемного распределения, найденного с помощью многопараметрового
спектрометра, можно получить множество плоских распределений частиц или
Рис. 7.4. Многопараметровое распределение сигналов
344
квантов по одному из параметров для ряда фиксированных значений другого
(или других) параметров. Для этого объемный спектр пересекают плоскостями,
параллельными координатным осям.
Наиболее важные характеристики любого спектрометра помимо его назна-
чения, т. е. вида измеряемого излучения, параметра, по которому измеряется
распределение, и диапазона изменения параметра - это точность определения
спектрального распределения и погрешность вычисления значения параметра,
соответствующего определенным участкам (пикам) в распределении. Эти харак-
теристики связаны с такими параметрами спектрометра, как число каналов, эф-
фективность, линейность, относительное разрешение (разрешающая способ-
ность).
Из-за особенностей взаимодействия некоторых видов излучения с веществом
детектора и флюктуацией коэффициента преобразования монохроматической
группе частиц или квантов соответствует изображение в спектре в виде некото-
рых распределений (узкого или протяженного), носящих название спектральных
кривых. Функцию, характеризующую экспериментально полученное распреде-
ление монохроматических частиц или квантов, называют формой кривой. Узкие
спектральные распределения называют обычно спектральными пиками. Спек-
тральные пики характеризуются базисной шириной (шириной пика у его осно-
вания) или шириной пика на половине его высоты - полушириной пика.
Из-за конечной ширины пики с близкими значениями параметра А на спек-
трограмме не могут быть разделены. Способность спектрометра разделить две
группы частиц или квантов, различающихся по значению параметра А, характе-
ризуют разрешением R. Под разрешением понимают тот наименьший интервал
измеряемого параметра А, при котором группы частиц или квантов еще воспри-
нимаются раздельно. Принимая условно, что два спектральных пика можно на-
блюдать раздельно, если они сдвинуты на половину их ширины, в качестве па-
раметра, характеризующего разрешение, используют величину полуширины пи-
ка. Чаще всего для численной оценки разрешения используют относительное
разрешение - Т|-полуширину пика, отнесенную к соответствующему этому пику
значению измеряемого параметра А и выраженную в процентах. Чем меньше
относительное разрешение, тем более тонкие детали спектра может выделить
спектрометр. Для различных видов спектрометров вводят понятия энергетиче-
ского разрешения, разрешения по массе, заряду, углового разрешения и др.
Важным параметром спектрометров считается их эффективность. От эффек-
тивности зависит время, необходимое для измерения спектра. Поскольку реаль-
но на спектрометр действует помимо измеряемого также мешающее (фоновое)
излучение, при малой эффективности спектральные пики могут маскироваться
фоном, и точность измерений ухудшается.
Как уже отмечалось, из-за ступенчатого представления гладкого распределе-
ния в результаты измерений спектра вносятся погрешности. Полученное рас-
пределение тем ближе к истинному, чем из большего числа ступеней состоит
гистограмма, т. е. чем больше число каналов спектрометра т. Если диапазон из-
меряемого параметра от начальной Ан до конечной величины Ак разделен равно-
345
мерно на т интервалов (каналов), то каждый интервал ЛА = (Ак - Ан)/т; эта ве-
личина названа шириной канала.
По результатам измерения спектра, т. е. по спектральным линиям, можно
установить значение параметра А частиц или квантов. Из-за несовершенства
спектрометра как измерительного прибора (погрешностей в коэффициентах
преобразования) между истинным значением параметра А и полученным из
эксперимента А' имеется расхождение - погрешность измерения. Связь между
величинами А' и А обычно выражают измерительной характеристикой. При
отсутствии систематических погрешностей связь между величинами А' и А
отображалась бы прямой линией. Отклонение измерительной характеристики
спектрометра от аппроксимирующей прямой называют интегральной нелиней-
ностью. Для точного воспроизведения исходного спектра в спектрометрах с
равномерным разделением интервала измерения на каналы необходимо, чтобы
ширина всех каналов была одинаковой. При различной ширине распределения
искажаются, в них появляются ложные пики или провалы, соответствующие
более широким или узким каналам. Однородность ширины каналов характери-
зуют дифференциальной нелинейностью - относительным отклонением шири-
ны канала от среднего значения.
Следует иметь в виду, что в общем случае все характеристики спектрометра -
разрешение, эффективность, интегральная и дифференциальная нелинейности -
зависят от значения измеряемого параметра и меняются в пределах диапазона из-
меряемых величин. Поэтому указанные характеристики следует рассматривать
как функцию значения параметра Л.
Спектрометры обеспечивают качественный (т. е. определение вида излуче-
ния, энергии и т. д.) или количественный (определение соотношений между
плотностями потока излучений разного вида, энергии, определение доли излу-
чения определенного вида или энергетического диапазона в общем потоке излу-
чения) анализ ионизирующего излучения. Качественный анализ осуществляется
по положению спектральных линий на спектрограмме, размеченной с помощью
предварительной градуировки в значениях измеряемого параметра А. Для коли-
чественного анализа необходимо знать эффективность диапазона измерений.
Энергетические спектрометры. Характерные области приме-
нения. Измерения энергетических распределений наиболее распространены в
спектрометрии ионизирующих излучений как в научных исследованиях и в ла-
бораторно-производственной практике, так и в радиационной разведке.
В экспериментальной ядерной физике энергетические спектрометры необхо-
димы для проведения широкого круга измерений, связанных с фундаментальными
исследованиями: определением сечения взаимодействия частиц или квантов, изу-
чением ядерных реакций и механизма деления, идентификацией новых элементов,
возникающих в реакциях, по испускаемому ими излучению, изучением энергети-
ческих уровней ядер в процессе радиоактивных превращений и т. п. Многие
исследования проводят на ускорителях заряженных частиц, что обусловливает
широкий диапазон измеряемых энергий частиц и квантов. Значительная группа
экспериментов выполняется на импульсных нейтронных потоках; так определяют
сечения взаимодействия нейтронов с различными ядрами, рассеяние нейтронов
346
разной энергии на различных мишенях и т. п. Таким образом, в число необходи-
мой аппаратуры входят спектрометры энергии у- и рентгеновского излучений (со-
провождающего внутреннюю конверсию возбужденных ядерных уровней про-
дуктов распада), спектрометры электронов (р-частиц), протонов, тяжелых заря-
женных частиц (в том числе а-частиц) и спектрометры нейтронов.
В исследованиях космического пространства и работах по физике плазмы
энергетические спектрометры являются основными приборами. Значительная
часть экспериментов, проводимых с искусственных спутников Земли и космиче-
ских кораблей, связана с измерениями радиации, в частности, с определением
энергетического распределения потоков частиц и квантов в околоземном и меж-
планетном пространствах. Аппаратура, используемая в космических исследова-
ниях, должна измерять энергию в широком диапазоне (от десятков электрон-
вольт до 1000 МэВ и выше) при значительной вариации плотностей потоков.
Объектом измерения служат заряженные частицы - электроны, протоны, ионы
гелия и более тяжелые ионы, а также нейтральные частицы (нейтроны, молеку-
лярные потоки) и электромагнитное излучение (ультрафиолетовое, рентгенов-
ское и у-из лучения). В плазменных исследованиях измеряют энергетические
распределения потоков частиц и квантов, испускаемых плазмой.
Для анализа взятых проб при ведении радиационной разведки используют ра-
диометрические измерения по отдельным компонентам излучения: частицам или
квантам, обладающим фиксированной энергией и обусловленным распадом неко-
торых изотопов. Подобные измерения проводят для определения содержания от-
дельных изотопов или их соотношения по а-, р-, и у- излучениям в диапазоне
энергий до нескольких мегаэлектронвольт. Отработка методик определения изо-
топов в препаратах, выбор оптимальных условий измерения, оценка влияния ве-
щественного состава препаратов на результаты определений тесно связаны с из-
мерениями энергетических распределений излучения, испускаемого препаратами.
Измерение энергетического распределения излучения (чаще всего у-излуче-
ния) также используется в радиационной разведке для идентификации изотопов и
определения их содержания в отбираемых пробах.
Методы построения спектрометров. Определение энергии частиц или квантов,
как правило, основано на измерении функции распределения по параметру, одно-
значно связанному со значением энергии. Можно выделить четыре основных ме-
тода измерения энергетических распределений: с линейным преобразованием
энергии частиц или квантов в амплитуду сигнала и определением полученного
амплитудного распределения, с измерением интервалов времени, в течение кото-
рых частицы проходят определенное расстояние (по времени пролета), с измере-
нием спектра удельных потерь энергии в веществе детектора (спектра линейных
потерь) и по координатам, через которые проходят частицы после их отклонения в
электрическом или магнитном поле. Все эти методы основаны на процессе взаи-
модействия излучения с веществом детектора и на прохождении его через элек-
трические и магнитные поля.
Рассмотрим наиболее распространенный метод, основанный на линейном
преобразовании энергии частиц или квантов в амплитуду сигнала. Спектромет-
ры с линейным энергетически-амплитудным преобразованием. Для реализации
347
этого метода необходимо использовать детекторы, в которых амплитуда выход-
ного сигнала пропорциональна энергии измеряемых частиц или квантов. Поми-
мо линейного (или квазилинейного) коэффициента преобразования энергия -
амплитуда в детекторе необходимо обеспечить также полную передачу энергии
частиц или квантов чувствительному элементу (полное поглощение энергии).
Тогда распределение f (Е) будет однозначно соответствовать распределению
f(A). Измерительные устройства спектрометра должны обеспечить измерение
амплитудного спектра сигналов с детектора и представление распределения
ф(Л). Для линейной связи распределений f(E) и ф(Л) необходимо использовать
детекторы, в которых коэффициент преобразования энергии Е в амплитуду
сигнала А не зависит от значения энергии (т. е. с малой нелинейностью коэф-
фициента преобразования Е —> А). Для достижения лучшего энергетического
разрешения нужно, естественно, чтобы полуширина пиков амплитудного рас-
пределения сигналов на выходе детектора, обусловленных воздействием моно-
энергетического излучения, была минимальной, т. е. детекторы обладали хоро-
шим амплитудным разрешением.
Спектрометр с линейным энергетически-амплитудным преобразованием в
простейшем случае, следовательно, должен содержать пропорциональный де-
тектор и амплитудный анализатор, в состав которого входят устройство, сор-
тирующее сигналы с детектора по каналам в зависимости от значения их ам-
плитуд, и устройство, измеряющее число сигналов в каждом канале (или их
относительную долю) и представляющее данные о полученном амплитудном
распределении (рис. 7.5)
Амплитудный анализатор
Рис. 7.5. Структурная схема спектрометра с линейным энергетически-
амплитудным преобразованием
Подобные спектрометры получили наибольшее распространение. Для пол-
ного поглощения энергии частиц и квантов в чувствительном объеме детектора
детектирующие устройства должны обладать определенными характеристика-
ми. Различие во взаимодействии с веществом заряженных частиц, нейтронов и
квантов электромагнитного излучения приводит к различию в этих характери-
стиках, а также в структурных схемах модификации спектрометров.
Непосредственно ионизирующее излучение - заряженные частицы (электро-
ны, протоны, более тяжелые ионы), двигаясь в веществе, постепенно тратят свою
энергию на ионизацию и возбуждение атомов, расположенных вдоль траектории
частиц. При полном пробеге частиц в детектирующем элементе суммарная потеря
энергии на ионизацию и возбуждение атомов равна первоначальной кинетической
энергии частицы. Таким образом, для линейного энергетически-амплитудного
348
преобразования должны быть выбраны детекторы с такой толщиной и плотно-
стью чувствительного объема, которые обеспечивают полное торможение изме-
ряемых частиц. Наибольшие значения энергий заряженных частиц, для которых
этот метод приемлем, определяются разумными размерами детекторов и состав-
ляют несколько мегаэлектронвольт; минимальные значения определяются соиз-
меримостью потерь энергии во входном окне или защитном слое детектора с на-
чальной энергией частиц Е.
Основным элементом всех рассмотренных выше измерительных приборов
является детектор ионизирующих излучений, т. е. устройство, преобразующее
энергию излучения в другие виды, удобные для регистрации.
Детекторы, применяемые в радиометрических приборах, различают по
принципу действия (используемому для преобразования энергии излучения
эффекту) и состоянию среды, в которой наблюдается эффект от действия
излучения.
Ниже будут рассмотрены основные методы регистрации ионизирующих из-
лучений и типы используемых детекторов [5].
7.4. Регистрация ионизирующих излучений
7.4.1. Общая характеристика методов регистрации ионизирующих излучений
Ионизирующие излучения можно зарегистрировать по результату их взаи-
модействия с веществом.
Следствием взаимодействия излучений могут быть:
упругое рассеяние, определяющееся изменением направления движения час-
тицы с постоянной суммарной кинетической энергией частицы и атома;
неупругое рассеяние, связанное с изменением кинетической энергии части-
цы и атома, а также с возбуждением и ионизацией атомов;
поглощение, в результате которого частица поглощается, а ее энергия полно-
стью передается взаимодействующей системе.
Этими процессами обусловлены различные эффекты в среде распростране-
ния ионизирующего излучения. К таким эффектам относят выделение тепла,
ионизацию и возбуждение атомов и молекул, химические изменения состава
вещества и др.
Так, заряженные частицы, проходя через вещество, вызывают ионизацию и воз-
буждение атомов среды. Сами у-кванты не создают ионизацию, но, взаимодействуя
с атомами среды, могут порождать электроны и позитроны, которые ионизируют
вещество. Нейтроны вызывают различные ядерные реакции, в ходе которых могут
возникать частицы, осколки деления или образовываться нестабильные ядра, кото-
рые можно обнаружить по их радиоактивности. Кроме того, быстрые нейтроны
создают в веществе при упругом рассеянии ядра отдачи, которые могут ионизиро-
вать вещество. В дальнейшем энергия, передаваемая излучением ядрам и электро-
нам среды, превращается в тепловую. Ионизация некоторых веществ способствует
протеканию в них химических реакций с образованием новых веществ. Возбужден-
ное состояние атомов и молекул среды приводит к высвобождению энергии в виде
световых фотонов в оптическом диапазоне длин волн.
349
Все эти процессы, заключающиеся в преобразовании энергии излучения в
другие виды, можно использовать для регистрации частиц. По эффекту, исполь-
зуемому в детекторе для преобразования энергии, состоянию среды, в которой
наблюдается эффект, определяют методы регистрации ионизирующих излуче-
ний (ИИ). В войсковой дозиметрии наибольшее распространение получили ио-
низационный, люминесцентный и химический методы.
Ионизационный метод основан на действии ионизирующих излучений.
Под воздействием любого ионизирующего излучения в веществе из ней-
тральных атомов и молекул образуются ионы - частицы, несущие положитель-
ные и отрицательные заряды. Положительные ионы возникают в результате от-
рыва от атома или молекул одного или нескольких электронов. Такие электроны
в зависимости от рода вещества остаются свободными либо присоединяются к
нейтральным атомам или молекулам, образуя отрицательные ионы.
Образованные под действием ионизирующего излучения ионы и электроны
увеличивают электропроводимость облучаемого вещества, и если к нему при-
ложить разность потенциалов, то в цепи внешнего источника питания появится
электрический ток. Амплитуда, длительность и частота следования импульсов
этого тока или сила его определенным образом связаны со свойствами ионизи-
рующих частиц и параметрами излучения, а также характеристиками
электрического поля и облучаемого вещества. В связи с этим измерение
параметров ионизирующих излучений может быть сведено к измерению
параметров электрических сигналов. В качестве детекторов в ионизационном
методе используют ионизационные камеры, газоразрядные счетчики,
полупроводниковые детекторы.
Сравнительная простота, достаточная чувствительность и точность иониза-
ционного метода измерения излучений определили его широкое применение в
войсковой дозиметрии.
Люминесцентный метод регистрации ионизирующих излучений основан на
измерении светосуммы или интенсивности световых вспышек, возникающих
под действием излучений в веществе при возвращении единичных возбужден-
ных атомов и молекул или их ассоциаций в основное состояние.
Явление люминесценции, которую возбуждают ионизирующие излучения, на-
зывают радиолюминесценцией, а люминесцирующие вещества - люминофорами.
По характеру проявления радиолюминесценцию, используемую для регист-
рации ИИ, можно разделить на:
-быстрые нестимулированные процессы, используемые для определения
интенсивности излучения, его спектрометрии и т. п.;
- остаточные стимулированные процессы, используемые для измерения до-
зы, флюенса и других интегральных величин.
В первом случае часть переданной веществу излучением энергии практиче-
ски немедленно (за время t < 1О-10 с) высвобождается в виде световой энергии
видимого диапазона (или преобразуется в энергию видимого света), т. е. прохо-
ждение ионизирующих частиц через люминофор сопровождается в случае их
взаимодействия с атомами вещества световыми вспышками. Регистрация по-
следних (как их количество, так и параметры отдельных вспышек) может быть
350
использована для выявления ИИ и определения его характеристик. Этот способ
нашел широкое применение после того, как были изобретены и усовершенство-
ваны фотоэлектронные умножители (ФЭУ), позволяющие регистрировать весь-
ма малые по длительности и слабые по интенсивности вспышки света.
Явления стимулированной люминесценции весьма разнообразны. Сущность
их заключается в том, что образованные в люминофоре под действием ионизи-
рующего излучения носители заряда (электроны и дырки) локализуются в цен-
трах захвата, благодаря чему происходит накопление поглощенной энергии, ко-
торая может быть затем освобождена в виде фотонов оптического диапазона при
дополнительном возбуждении. Дополнительное возбуждение может быть вы-
звано либо освещением люминофора светом определенного спектра, либо на-
гревом. Соответственно различают явление радиофотолюминесценции и радио-
термолюминесценции.
На основе нестимулированной люминесценции разработаны сцинтилляци-
онные детекторы ионизирующего излучения, а на основе стимулированной -
радиофотолюминесцентные и термолюминесцентные.
Одним из важных достоинств люминесцентного метода является возмож-
ность измерения ионизирующих излучений в широком диапазоне значений его
характеристик.
Химический метод регистрации ионизирующих излучений основан на опре-
делении химических изменений, происходящих в веществах при их облучении.
Продукты химических реакций определяются либо непосредственно по измене-
нию цвета, либо косвенно, с помощью методов химического и физико-
химического анализа. Количество продуктов, образующихся в результате таких
реакций, тем больше, чем больше доза излучения. С помощью химического ме-
тода можно измерять дозы от сотых долей грея до многих килогрей. К тому же
химический метод гораздо проще других.
В войсковой дозиметрии нашли применение водные растворы некоторых со-
лей, изменяющие цвет при облучении.
Существуют и другие методы регистрации ионизирующих излучений, та-
кие как калориметрический, фотографический, применение органических
полимерных пленок в качестве трековых детекторов, обладающих избира-
тельной чувствительностью к нейтронам, метод измерения заряда,
радиодефекционный и др. Так, калориметрический метод основан на
преобразовании энергии ионизирующего излучения при поглощении средой
в теплоту. Фотографический метод дозиметрии основан на свойстве
ионизирующего излучения воздействовать на чувствительный слой
фотоматериалов, аналогично видимому свету. В основе регистрации
излучения по заряду положен факт, что каждая заряженная частица имеет
определенный электрический заряд и при движении в вакууме создает ток,
который может быть измерен электрометрическим способом. При
радиодефекционном методе регистрации ионизирующих излучений
наблюдают повреждения (дефекты), вызываемые частицами в веществе. Эти
методы используют для регистрации ионизирующих излучений при работе на
ядерно-энергетических установках и в меньшей степени в войсковой
дозиметрии.
351
7.4.2. Общие характеристики детекторов ионизирующих излучений
Основные характеристики детекторов - эффективность регистрации, чувстви-
тельность, уровень собственного фона, временное и энергетическое разрешение [6].
Эффективность регистрации излучения е определяют отношением числа заре-
гистрированных сигналов к числу частиц или квантов, падающих на детектор, т. е.
е = N/(p s,
где N - число зарегистрированных импульсов; ф - плотность потока частиц или
квантов; 5 - чувствительная поверхность детектора.
Чувствительность детектора L - это отношение числа зарегистрированных
импульсов или силы тока к плотности потока частиц или квантов:
L = N/q> или L = 1/(р,
где /- сила тока.
Часто также пользуются понятием дозовой чувствительности, равной отноше-
нию количества зарегистрированных импульсов к единице экспозиционной дозы.
Зависимость эффективности регистрации от энергии у-квантов называют
спектральной эффективностью детектора.
Зависимость дозовой чувствительности от энергии регистрируемого излуче-
ния называют ходом с жесткостью.
Спектральную чувствительность детекторов можно менять, используя филь-
тры. Зависимость чувствительности от направления или угла падения излучения
называют полярной направленностью.
Среднее значение чувствительности детектора связано с его средней эффек-
тивностью соотношением
L = £5.
Эффективность регистрации - величина безразмерная, поэтому чувствитель-
ность во многих случаях имеет размерность площади и может рассматриваться как
эффективное интегральное сечение взаимодействия излучения с детектором.
Способность прибора регистрировать акты взаимодействия частицы или
кванта с веществом, разделенные малым промежутком времени, обусловлены
временными характеристиками: фронтом нарастания импульса или длительно-
стью импульса.
Фронт нарастания импульса - это промежуток времени, в течение которого
значение импульса возрастает от 0,1 до 0,9 его максимальной амплитуды.
Длительность импульса - интервал времени между началом и концом им-
пульса, измеренным на уровне 0,1 его амплитуды.
Временное разрешение детектора характеризуется минимальным промежут-
ком времени между двумя соседними актами регистрации, в течение которого
детектор остается нечувствительным к излучению.
Энергетическое разрешение определяют как отношение ширины дифферен-
циального амплитудного распределения импульсов на полувысоте к положению
352
его максимума при облучении детектора потоком моноэнергетических частиц
или квантов. Энергетическое разрешение уменьшается с ростом энергии регист-
рируемого излучения как \/^Е.
Собственный фон детектора обусловлен наличием радиоактивных веществ в
детекторе.
7.4.3. Ионизационная камера
Ионизационная камера - один из основных типов детекторов ионизирующих
излучений, применяемых в дозиметрической аппаратуре для измерения дозы и
мощности дозы излучения. Это обусловлено рядом положительных свойств, ко-
торыми ионизационная камера выгодно отличается от других детекторов иони-
зирующего излучения. К таким свойствам можно отнести следующие:
- простоту конструкции, высокую надежность и неограниченный срок службы;
-практически неограниченный верхний предел измерения мощности дозы
у-излучения;
- низкую погрешность определения дозы и мощности дозы ионизирующего
излучения;
- относительную простоту электронной схемы измерения выходных сигна-
лов ионизационной камеры.
Принцип действия ионизационной камеры. Ионизационная камера пред-
ставляет собой в простейшем случае устройство, состоящее из двух изолирован-
ных один от другого электродов, к которым подведено напряжение, т. е. являет-
ся разновидностью газового конденсатора. Ионизационные камеры такого типа
называются воздушными.
В обычных условиях газы практически не содержат свободных носителей элек-
трического заряда, вследствие этого электрический ток в цепи камеры отсутствует.
При воздействии ионизирующего излучения в газе ионизационной камеры об-
разуются носители свободного электрического заряда. Скорость новообразования
qi является величиной, пропорциональной мощности дозы D, Под действием элек-
трического поля образующиеся ионы перемещаются к электродам камеры: отри-
цательные ионы движутся к положительно
заряженному электроду, а положительные - к
отрицательно заряженному. Скорость движе-
ния ионов зависит от напряженности электри-
ческого поля и свойств газа.
Приходящие на электроды ионизационной
камеры ионы нейтрализуются: отрицательный
ион отдает свой липший электрон положитель-
но заряженному электроду, а положительный
ион заимствует у отрицательно заряженного
Рис. 7.6. Схема включения иониза-
ционной камеры
электрода недостающий у него электрон. При
этом под действием источника тока, включенного во внешнюю цепь камеры, элек-
троны перемещаются по внешней цепи, благодаря чему заряд и напряжение на
электродах непрерывно восстанавливаются (рис. 7.6).
353
Направление движения ионов в объеме ионизационной камеры и электронов
во внешней ее цепи называется ионизационным током камеры.
Обычно такой ток чрезвычайно мал и измерить его можно только с помощью
специальных измерительных приборов.
Если в поле излучения, характеризующемся неизменной мощностью дозы
излучения, скорость новообразования составляет ф, пара ионов/(ссм3), то иони-
зационный ток в установившемся режиме при условии, что все ионы достигают
электродов камеры, будет определяться суммарным электрическим зарядом ио-
нов, достигших соответствующих электродов в единицу времени. Этот ток на-
зывается током насыщения:
/нас — Qi
где /нас - ток насыщения, A; qt - скорость новообразования, пара ионов/(ссм3);
е - заряд иона, Кл; V - объем камеры, см3.
Однако в общем случае сила тока в цепи ионизационной камеры, обуслов-
ленная ионизацией, зависит от напряжения на камере, так как его значение оп-
ределяет долю зарядов, достигших электро-
дов. Такая зависимость называется вольт-
амперной характеристикой ионизационной
камеры (рис. 7.7).
В слабом электрическом поле (область I)
созданные излучением положительные и
отрицательные ионы могут рекомбиниро-
вать между собой и в связи с этим выбывать
из числа носителей зарядов, формирующих
электрический ток. Рекомбинация ионов
представляет собой нейтрализацию положи-
тельных и отрицательных ионов в объеме
камеры при их взаимном столкновении. При
малых напряжениях скорости ионов невелики, и для достижения ими электро-
дов требуется значительное время. В этих условиях вследствие взаимного при-
тяжения противоположно заряженных частиц у ионов всегда существует тен-
денция к рекомбинации. Те ионы, которые рекомбинируют, не участвуют в
создании тока. Чем больше ионам требуется времени для достижения электро-
дов, тем больше вероятность рекомбинации.
7.4.4. Газоразрядный счетчик
Газоразрядные счетчики широко применяют в дозиметрической аппаратуре,
предназначенной для измерения таких физических величин, как мощность дозы
излучения, плотность потока ионизирующих частиц. Основное их достоинство -
высокая чувствительность. Газоразрядный счетчик способен зарегистрировать
почти каждую ионизирующую частицу, проникающую в его объем из стенок
счетчика или из окружающего пространства. При этом на выходе счетчика воз-
Рис. 7.7. Вольт-амперная характе-
ристика ионизационной камеры
354
никает довольно большой электрический сигнал, что позволяет использовать
простую электрическую схему для регистрации ионизирующего излучения.
В настоящее время существует много типов газоразрядных счетчиков, отли-
чающихся по назначению, режиму работы, конструкции, механизму газового
разряда и т. п. В дозиметрии применяют в основном так называемые счетчики
Гейгера-Мюллера, работающие в режиме нестабильного самостоятельного раз-
ряда, в которых образующийся электрический заряд не зависит от первичной
ионизации.
1. Принципы работы газоразрядного счетчика. Газоразрядный счетчик,
как и ионизационная камера, является конденсатором, к электродам которого
приложено значительно более высокое напряжение. Принципиальное отличие от
ионизационной камеры состоит в том, что в газоразрядном счетчике использует-
ся усиление ионизационного тока за счет явления ударной ионизации.
Если на электроды счетчика подано небольшое напряжение, при котором до-
полнительная ионизация за счет соударения первичных ионов с нейтральными мо-
лекулами отсутствует, то он действует как ионизационная камера. Изменение по-
тенциала AU относительно катода счетчика будет определяться соотношением
AU=ne/C,
где и - число пар первичных ионов, образованных в рабочем объеме счетчика
ионизирующей частицей; е - заряд электрона, Кл; С- электрическая емкость
счетчика, Ф.
Ударная ионизация возникает при значительно больших по сравнению с ио-
низационной камерой значениях напряженности электрического поля между
электродами газового конденсатора. В этих условиях электроны, образованные
непосредственным действием ионизирующего излучения, приобретают такую
энергию, которая достаточна для ионизации атомов газа. Электроны вторичной
Рис. 7.8. Схема развития электронно-ионной лавины
ионизации вместе с электронами первичной в последующих столкновениях ио-
низируют другие атомы.
В общих чертах процесс образования вторичных электронов в газоразрядном
счетчике показан на рис. 7.8.
355
Освободившиеся новые электроны в свою очередь производят ударную ио-
низацию, и происходит лавинообразное размножение зарядов.
В данном случае каждый первичный электрон образует К добавочных пар
ионов. При этом значение импульса будет определяться как
MJ=K—.
С
Здесь множитель К характеризует газовое усиление и зависит главным образом
от приложенного к электродам напряжения, а также от газа-наполнителя и гео-
метрических размеров счетчика.
Из формулы видно, что при использовании в счетчиках ударной ионизации
можно получить импульсы с амплитудой, в К раз большей по сравнению с ам-
плитудой импульсов ионизационной камеры. Практически амплитуда импуль-
сов газоразрядных счетчиков может достигать нескольких вольт, что позволяет
регистрировать их сравнительно несложными электрическими схемами.
Существующие закономерности процесса лавинообразного размножения за-
рядов обусловливают некоторые конструктивные особенности газоразрядных
счетчиков, обеспечивающих явление ударной ионизации. К ним относят состав
и давление наполняющего газа, форму электрода.
Так, наилучшим образом развитие электронно-ионных лавин происходит в
инертных газах, атомы которых не могут присоединять к себе свободные элек-
троны. Поэтому межэлектродное пространство в газоразрядных счетчиках за-
полняется такими инертными газами, как неон, аргон, гелий или их смеси.
Для возбуждения ударной ионизации при относительно слабых электриче-
ских полях газ в объеме счетчика должен иметь достаточно низкое давление.
Это объясняется тем, что при низком давлении увеличивается путь электрона
между двумя столкновениями, на котором он приобретает необходимую кине-
тическую энергию.
На практике более удобно пользоваться как можно меньшими напряже-
ниями питания. В случае же плоских электродов в условиях равномерного
электрического поля для создания ударной ионизации питающие напряжения
могут достигать нескольких тысяч вольт. Поэтому в газоразрядных счетчиках
конфигурация электродов выбрана так, чтобы при данном давлении газа с по-
мощью сравнительно небольшого напряжения получить поле напряженностью,
достаточной для возникновения ударной ионизации. Этому условию удовле-
творяют электроды в форме тонкостенного цилиндра (катода) и тонкой метал-
лической нити, натянутой вдоль оси цилиндра (анода). Тогда напряженность
электрического поля Е в межэлектродном промежутке на расстоянии г от оси
анода определяется по формуле
£* =(7/(г 1п7?к//?а),
где RK и Ra - радиусы катода и анода счетчика соответственно.
Зависимость, соответствующая соотношению, приведена на рис. 7.9.
356
Рис. 7.9. Диаграмма напряженности электриче-
ского поля между электродами цилиндрическо-
го газоразрядного счетчика
Е
В непосредственной близости от нити - анода - напряженность электриче-
ского поля возрастает до такого значения, что электрон, попадающий в эту об-
ласть, приобретает на пути между двумя столкновениями кинетическую энер-
гию, достаточную для ионизации атомов газа. Причем достигается это при на-
пряжениях на таком счетчике всего в несколько сот вольт.
На рис. 7.9 показано минимальное значение напряженности электрического
поля Emm, при которой происходит ударная ионизация. Область, расположенная
на расстоянии (£} - 7?а) от поверхности анода, называется областью ударной ио-
низации.
Кроме ударной ионизации в газовом объеме счетчика происходят еще вто-
ричные процессы, которые усиливают ионизационный эффект. Так, нейтраль-
ные молекулы газа, возбужденные в лавине при соударениях с электронами, ис-
пускают кванты ультрафиолетового излучения. То же самое происходит при
нейтрализации положительных ионов газа на катоде. Часть из образовавшихся в
обоих случаях квантов ультрафиолетового излучения будет иметь энергию, дос-
таточную для вырывания из катода фотоэлектронов, которые начнут двигаться к
нити, порождая новые электронные лавины.
В дозиметрической аппаратуре чаще всего используют газоразрядные счет-
чики Гейгера-Мюллера. Коэффициент газового усиления в них достигает 1О10, а
амплитуда импульса AU= 1...10 5.
Счетчики Гейгера-Мюллера работают при таких напряжениях, когда один
раз возникнув, разряд становится незатухающим. Для нормальной работы такого
счетчика необходимо оборвать длительный газовый разряд сразу же после пер-
вого основного. Тогда появлению одной заряженной частицы в газе будет соот-
ветствовать один импульс напряжения.
Существуют разные способы гашения разряда. Одним из них является запол-
нение счетчиков Гейгера-Мюллера гасящей смесью газов - неона с примесью
аргона и незначительного количества (—0,1 %) одного из галоидов - хлора или
брома, потенциалы ионизации которых (13,2 и 12,8 В) ниже потенциалов иониза-
ции неона (21,5 В) и аргона (15,7 В). Так как молекулы газов-добавок имеют более
низкие потенциалы ионизации по сравнению с основными, положительные ионы
инертных газов, сталкиваясь с молекулами примесей, отнимают у последних
электроны и нейтрализуются. В результате вблизи анода, где сосредотачивается
подавляющая часть ионов гасителя (например, ВГ24), образуется чехол ионов, соз-
дающий большой положительный пространственный заряд, который снижает на-
пряженность поля ниже £тт, и газовый разряд прекращается.
357
Образовавшийся вокруг анода счетчика чехол малоподвижных положитель-
ных ионов гасителя под действием электрического поля перемещается к катоду.
При этом электрическое поле счетчика совершает работу, электрическая энергия
уменьшается и напряжение между его электродами падает. Уменьшение напря-
жения на электродах приводит к тому, что от источника питания течет ток, кото-
рый заряжает емкость счетчика. В результате на счетчике формируется отрица-
тельный импульс напряжения (рис. 7.11), который можно регистрировать.
При заряде емкости счетчика восстанавливается напряженность электриче-
ского поля, и при превышении ее значения Етт счетчик способен регистриро-
вать новую ионизирующую частицу, попавшую в его объем.
2. Основные характеристики газоразрядных счетчиков. Основной характе-
ристикой, которая определяет их качество и рабочее напряжение, является счетная.
Счетная характеристика счетчиков Гейгера-Мюллера представляет собой
зависимость скорости счета от приложенного напряжения при постоянной плот-
ности потока энергии ионизирующего излучения.
На рис. 7.10 показано напряжение начала счета С7нс, при котором создаются
Рис. 7.10. Счетная характеристика
газоразрядного счетчика
условия для развития газового разряда. С
увеличением напряжения на счетчике рас-
тет число импульсов, амплитуда которых
достаточна для регистрации.
В диапазоне UH...UK скорость счета ос-
тается практически постоянной. При этих
напряжениях каждая ионизирующая час-
тица вызывает импульс с достаточной для
регистрации амплитудой.
На данном участке счетной характери-
стики у идеально работающего счетчика
скорость счета не зависит от напряжения и
определяется числом актов взаимодействия
ионизирующего излучения с катодом в единицу времени, сопровождающихся
образованием электронов. В действительности с возрастанием напряжения на-
блюдается увеличение зарегистрированных импульсов. Это объясняется тем,
что с ростом напряжения увеличивается число ложных импульсов, возникаю-
щих в результате фотоэмиссии катода при нейтрализации положительных ионов
на его поверхности. При напряжениях, превышающих С7К, рост числа ложных
импульсов становится более резким.
Область напряжений (7н...С7к, где скорость счета остается почти независимой,
называется плато счетной характеристики, a UH и UK - напряжениями начала и кон-
ца плато соответственно. Плато является рабочей областью напряжений, при кото-
рых проводятся измерения. Наклон плато счетной характеристики определяет каче-
ство газоразрядного счетчика. Его принято выражать коэффициентом 5 - относи-
тельным изменением скорости счета в % на 1 В протяженности плато
5=-----100,
(UK-UH)(NK-Na)/2
358
где NH и NK- скорости счета, соответствующие началу и концу плато, с-1; (NK +
+ N№)/2 - средняя скорость счета в области плато.
У хороших счетчиков плато простирается на 100...200 В, а коэффициент 5 =
= 0,1...0,25 %/В.
Рабочее напряжение для газоразрядного счетчика выбирается так, чтобы оно
соответствовало середине плато счетной характеристики. В этом случае обеспе-
чивается наименьшее изменение скорости счета при флюктуациях напряжения
за счет нестабильности источников питания. Так, для галогенных счетчиков оно
составляет 350...600 В.
К важнейшим параметрам газоразрядных счетчиков также относят временные
параметры (рис. 7.11), эффективность, собственный фон, наработку счетчика.
К временным параметрам газоразрядного счетчика относят мертвое время,
восстановления и разрешающее.
Мертвое время - это интервал времени после возникновения разряда, в тече-
ние которого счетчик не способен регистрировать ионизирующее излучение.
После срабатывания в момент to = 0 счетчик теряет возможность обнаруживать
частицы до тех пор, пока напряженность поля не достигнет в момент t\ значения
£mm, (рис. 7.9). Это время полной нечувствительности счетчика.
С момента времени Л счетчик вновь регистрирует попадающие в него части-
цы. Однако амплитуда импульсов вначале ниже некоторого минимального значе-
ния AL/min, при котором измерительная аппаратура начинает фиксировать импуль-
сы. Амплитуда импульсов достигает этого порога чувствительности аппаратуры в
момент времени Период времени между /о и называется разрешающим вре-
менем.
Разрешающее время - это наименьший интервал времени между двумя по-
паданиями ионизирующих частиц в газоразрядный счетчик, при котором эти
частицы регистрируются раздельно. При использовании достаточно чувстви-
359
тельной измерительной аппаратуры разрешающее и мертвое время приблизи-
тельно равны.
На практике иногда используют величину, обратную разрешающему време-
ни, которую называют разрешающей способностью счетчика:
TVp = 1/^р.
В зависимости от типа счетчика разрешающая способность изменяется в
пределах 104... 105 имп/с.
Время восстановления - это интервал времени от начала разряда до момента
возникновения ближайшего импульса, амплитуда которого достигает макси-
мального значения, т. е. это время полного восстановления напряженности меж-
ду электродами счетчика.
Эффективность счетчика Ve - это отношение скорости счета импульсов на
выходе счетчика к числу ионизирующих частиц, попадающих в объем счетчика
в единицу времени:
е = Мф S,
где ф - плотность потока частиц, проникающих в счетчик, или квантов, попадаю-
щих на катод счетчика, см-2с-1; S - площадь поперечного сечения счетчика, см2;
N- частота следования импульсов, с-1.
Для p-излучения эффективность газоразрядных счетчиков близка к единице:
е=1(100%).
Эффективность счетчика по у-излучению зависит от материала катода, его
толщины и энергии излучения. На рис. 7.12 представлена зависимость эффек-
тивности счетчика от энергии у-излучения и материала катода.
Как видно из рис. 7.12, максимальная эффективность счетчиков по у-
излучению не превышает 2 %.
Рис. 7.12. Зависимость эффективно-
сти счетчика от энергии у-излучения
и материала катода
Собственный фон счетчика - это количест-
во импульсов, возникающих в нем в единицу
времени без внешних источников излучения.
Наработка счетчика (срок службы) измеря-
ется числом зарегистрированных импульсов
или количеством часов безотказной работы.
3. Применение газоразрядных счетчиков
для регистрации заряженных частиц. Мно-
гие газоразрядные счетчики кроме у-излу-
чения могут регистрировать и др. Однако
наибольшая эффективность регистрации
данного вида излучения достигается в случае
применения специальных счетчиков, напри-
мер, а-, р-излучения.
Счетчики, предназначенные для регистрации а- и р-частиц малой энергии
(до 0,1 МэВ), должны иметь входное окно, так как эти частицы обладают малой
360
проникающей способностью. Окно такого счетчика выполняется в его торце,
поэтому их называют торцевыми.
Окна торцевых счетчиков изготавливают из слюдяных или алюминиевых
пластин. Чувствительность подобных счетчиков зависит от толщины пластин и
расстояния между окном и источником излучения.
Для регистрации р-частиц с энергией от 0,2 МэВ и выше обычно используют
тонкостенные цилиндрические счетчики. Корпус такого счетчика, являющийся
его катодом, выполняется из алюминия или стали с толщиной стенки ~ 0,1 мм.
Газоразрядные счетчики для регистрации заряженных частиц используют в
дозиметрической аппаратуре для измерения активности препаратов или контро-
ля радиоактивного загрязнения различных поверхностей. В основу таких изме-
рений положена пропорциональная зависимость между скоростью счета на вы-
ходе счетчика Nи активностью А:
N=r\A,
где Т| - эффективность счета - коэффициент, показывающий, какая доля из об-
щего количества распадов, происходящих в исследуемом препарате в единицу
времени, регистрируется счетчиком.
Таким образом, измерение удельной активности Ат и поверхностной актив-
ности As может быть сведено к измерению скорости счета импульсов, снимае-
мых с выхода счетчика:
N=l\m Ат,
N=x\SAs,
где т -масса препарата; S- контролируемая счетчиком площадь объекта.
Из формул следует, что для определения величин Л, Ат, As кроме измеренно-
го значения частоты следования импульсов N необходимо знание эффективно-
сти счета Т].
Эффективность счета рассчитывается или находится экспериментально для
конкретных условий измерения. В современных радиометрах значение Т| заранее
определена и автоматически учитывается при снятии показаний прибора.
7.4.5. Полупроводниковые детекторы
1. Принцип действия полупроводниковых детекторов. В современной до-
зиметрической аппаратуре в качестве детектора ионизирующих излучений в по-
следние годы используют полупроводники.
Полупроводник в качестве детектора ионизирующих излучений выступает
как аналог газонаполненной ионизационной камеры, но в основе работы детек-
тора лежит ионизация атомов твердого тела.
Особенности работы полупроводникового детектора определяются электри-
ческими свойствами полупроводниковых материалов, применяемых для изго-
361
товления детекторов. Основными являются германий и кремний, так как к мо-
менту создания первых полупроводниковых детекторов они были наиболее изу-
чены и получены с низким содержанием примесей при высокой однородности
монокристаллов больших размеров.
Электрические свойства полупроводников определяются распределением
энергетических уровней электронов в кристалле. На рис. 7.13 схематически изо-
бражена структура и энергетическая диаграмма кремния.
Так, при наличии четырехвалентных электронов у атома кремния каждый
атом при формировании структуры полупроводника связывается парно-электрон-
Рис. 7.13. Структура и энергетическая диаграмма кремния:
а - структура кремния и образование подвижных зарядов элек-
трона (-) и дырки (+); б - энергетическая диаграмма и образо-
вание подвижных зарядов
ной связью с четырьмя соседними. Парноэлектронные связи условно обозна-
чены двумя параллельными прямыми, связывающими атомы, расположенные в
соседних узлах решетки.
В результате ионизации в полупроводнике появляются подвижные электроны.
Отсутствие электронов в валентной связи равносильно наличию в данном месте
положительного заряда, поэтому такой заряд и приписывается дырке (рис. 7.13, а).
В энергетической диаграмме отрыв электронов от связей с атомами отража-
ется как появление электронов в зоне проводимости и положительных дырок в
валентной зоне (рис. 7.13, б). Так как ширина запрещенной зоны в полупровод-
нике не превосходит нескольких электрон-вольт, то энергия, необходимая на
образование пары электрон - дырка, является величиной того же порядка. Это
одно из отличий от ионизационных камер, где средняя энергия на образование
одной пары ионов составляет десятки электрон-вольт.
Таким образом, в расчете на одинаковую поглощенную энергию в полупровод-
никовом детекторе образуются примерно на порядок больше носителей электриче-
ских зарядов, чем в ионизационной камере. Так как плотность вещества полупро-
водникового детектора на несколько порядков (103) выше, чем плотность газа в ио-
низационной камере, то и значение поглощенной энергии в полупроводниковом
детекторе на столько же порядков больше, чем в газонаполненных.
Это определяет их главное преимущество - высокую чувствительность при
малых размерах.
362
Важной особенностью полупроводниковых детекторов по сравнению с газо-
наполненными является высокая подвижность носителей заряда. Например, в
кремнии при t = 20 °C подвижность электронов равна 1300 см2/Вс, а дырок -
500 см2/В с; подвижность ионов в воздухе при нормальных условиях составляет
около 1 см2/Вс. Высокая подвижность носителей зарядов определяет малое
время собирания их на электродах и, как следствие, большую разрешающую
способность детектора в импульсном режиме работы. Малое время собирания
зарядов существенно снижает вероятность рекомбинации положительных (ды-
рок) и отрицательных (электронов) зарядов. При одинаковой напряженности
электрического поля эффект рекомбинации в полупроводниковом детекторе
пренебрежимо мал по сравнению с газонаполненными. Поэтому полупроводни-
ковые детекторы требуют меньшего на один-два порядка напряжения питания.
Основной недостаток полупроводникового детектора - значительная прово-
димость, возникающая в отсутствие облучения и называемая темновой. Она обу-
словлена сравнительно малой шириной запрещенной зоны, что делает возможным
появление подвижных электрических зарядов в зоне проводимости за счет тепло-
вой энергии. Высокие темновые токи и их зависимость от температуры препятст-
вуют в некоторых случаях применению полупроводников в качестве детекторов.
В основе возможного применения полупроводников в качестве детекторов
лежит явление ионизации. Рассмотрим природу и поведение носителей электри-
ческих зарядов в полупроводниках.
Через полупроводник течет электрический ток, когда в его зоне проводимо-
сти есть электроны. В зоне проводимости полупроводников при абсолютном
нуле нет электронов, следовательно, сопротивление равно бесконечности. Одна-
ко с повышением температуры вследствие теплового возбуждения электронов
сопротивление уменьшается, так как энергия валентных электронов возрастает,
и они могут перейти в зону проводимости. Последняя превращается в частично
занятую, а в ранее целиком заполненной валентной зоне появляются дырки.
Чем меньше ширина запрещенной зоны и выше температура полупроводни-
ка, тем больше электронов переходит в зону проводимости и больше дырок об-
разуется в валентной зоне. Таким образом, электрическая проводимость полу-
проводников возникает при поглощении тепловой энергии или при воздействии
ионизирующих факторов.
Одновременно с образованием электронов и дырок происходит процесс ре-
комбинации, заключающийся в обратном переходе части электронов из зоны
проводимости в валентную и восстановлении разорванных валентных связей
между атомами. В результате указанных двух процессов создается динамиче-
ское равновесие, которое при данной температуре характеризуется для опреде-
ленного полупроводника некоторой средней концентрацией (может иметь на-
звание стационарная концентрация) подвижных электронов иср и дырок рср.
В химически чистых (беспримесных) полупроводниках количество обра-
зующихся электронов и дырок одинаково, гц = pt. Проводимость их называют
собственной (типа /). Чистые полупроводники применяются сравнительно ред-
ко, поскольку они имеют малую проводимость и не обеспечивают вентильного
действия. Применение получили в основном примесные полупроводники.
363
2. Применение полупроводниковых детекторов для регистрации иони-
зирующих излучений. Такие качества полупроводниковых детекторов (ППД),
как высокая чувствительность к у-нейтронному излучению, линейность дози-
метрических характеристик, возможность регистрации одного вида излучения
на фоне другого, хорошее энергетическое и временное разрешение, малые габа-
риты, высокая точность, низкое напряжение питания и другие, определяют пер-
спективность их использования для решения задач дозиметрии. В настоящее
время некоторые типы полупроводниковых детекторов уже используют в дози-
метрической аппаратуре. Так, для измерения мощности дозы у-излучения при-
меняют полупроводниковые детекторы с /т-г-и-переходом, обладающие высокой
эффективностью по отношению к регистрации у-излучения. Как правило, их ра-
бота осуществляется в импульсном режиме. Учитывая, что ППД, как и другие
ионизационные детекторы, обладают энергетической зависимостью чувстви-
тельности, для снижения зависимости их помещают в специальные экраны или
устанавливают необходимые уровни дискриминации регистрирующих схем.
Для регистрации p-излучения обычно применяют ППД диффузионного и
диффузионно-дрейфового типа. По сравнению с поверхностно-барьерными де-
текторами, которые используют для регистрации тяжелых заряженных частиц,
они имеют ряд преимуществ:
- более широкий чувствительный слой, что обеспечивает при воздействии
р-частиц возникновение выходных импульсов достаточной амплитуды;
- меньшее напряжение питания;
- более слабую зависимость амплитуды выходных импульсов от питающего
напряжения;
- отсутствие контактных шумов.
ППД для регистрации p-излучения должны использовать усилители с низким
уровнем собственных шумов, так как амплитуды выходных импульсов ППД от-
носительно малы.
Для дозиметрии нейтронов применяют также поверхностно-барьерные по-
лупроводниковые детекторы (диоды), изготовленные так, чтобы п-р или р-п-
переход сформировался вблизи поверхности кристалла из кремния или герма-
ния. Это достигается поверхностной диффузией вещества одного типа внутрь
кристалла другого типа, например, диффузия фосфора в кристалл /?-кремния.
Электрический контакт с поверхностным слоем достигается с помощью тонкого
слоя золота.
Для регистрации быстрых нейтронов могут быть использованы кремниевые
диоды (р, и), а также кремниевые фотодиоды. При воздействии нейтронов в этих
диодах возникают радиационные повреждения, необратимо изменяющие их
электрические характеристики, что и является идентификационным признаком.
Так, у кремниевого /т-и-диода вследствие увеличения сопротивления кремния с
ростом дозы быстрых нейтронов монотонно растет прямое падение напряжения
при фиксированном токе через диод. Таким образом, измеряя прямое падение
напряжения на кремниевом диоде, можно определить поглощенную дозу быст-
рых нейтронов, по меньшей мере в диапазоне 0,5... 1000 рад.
364
Положительным свойством рассмотренных диодов является их нечувстви-
тельность к у-излучению, так как электроны не создают радиационных повреж-
дений в кремнии. Это обстоятельство используется при создании дозиметриче-
ских систем для раздельного измерения доз быстрых нейтронов и у-излучения в
их смешанном потоке.
ППД используются для у-спектрометрии. В настоящее время в полупровод-
никовой спектрометрии широко применяют германиевые ППД (Ge(Li)), которые
хранят и эксплуатируют при температуре жидкого азота, что создает определен-
ные неудобства. В последние годы разрабатывают неохлаждаемые ППД на ос-
нове CdTe и Hgh.
На основе полупроводникового метода у-спектрометрии может быть решен
целый ряд прикладных задач:
а) определение спектра у-излучения;
б) определение изотопного состава у-излучателей;
в) определение возраста продуктов ядерного взрыва;
г) определение в продуктах ядерного взрыва изотопов «наведенной активно-
сти», возникающих в грунте при воздействии на него нейтронов.
7.4.6. Сцинтилляционные детекторы
1. Принцип действия сцинтилляционного детектора. Сцинтилляционный
метод регистрации основан на использовании свойств некоторых веществ-
сцинтилляторов светиться под действием ионизирующих излучений.
Световые вспышки регестрируются с помощью фотоэлектронного умножи-
теля (ФЭУ) и электронной схемы.
Современный сцинтилляционный детектор представляет собой сочетание
сцинтиллятора, в котором энергия ионизирующих излучений преобразуется в
Рис. 7.14. Принципиальная схема сцинтилляционного детектора:
1 - ионизирующее излучение; 2 - сцинтиллятор; 3 - отражатель; 4 - световод;
5 - катод; 6 - диафрагма; 7 - баллон; 8 - диноды; 9 - анод; 10 - резисторы дели-
теля напряжения; 11 - резистор нагрузки
световую энергию, и оптически соединенного с ним ФЭУ, преобразующего све-
товую энергию в электрический импульс.
Принципиальная схема сцинтилляционного детектора приведена на рис. 7.14.
365
В общем случае принцип работы сцинтилляционного детектора сводится к
следующему. Под действием ионизирующего излучения в сцинтилляторе возни-
кают вспышки света, которые через световод или непосредственно воздейству-
ют на катод ФЭУ.
Фотоэлектронный умножитель представляет собой электровакуумный прибор,
в стеклянном баллоне которого размещены электроды-диноды. Роль катода ФЭУ
выполняет ближайший к сцинтиллятору электрод, на который нанесен тонкий
полупрозрачный сурьмяно-цезиевый слой. Под действием светового кванта из
этого слоя выбиваются фотоэлектроны, которые, пройдя фиксирующую диафраг-
му, устремляются к первому диноду, находящемуся под повышенным по отноше-
нию к катоду потенциалом. Каждый из достигших первый динод фотоэлектронов
в свою очередь выбивает из него от двух до десяти электронов, которые под дей-
ствием повышенного потенциала движутся к второму диноду. Последующие ди-
ноды ФЭУ находятся под еще большим потенциалом по отношению к катоду.
Лавинообразный процесс умножения электронов закончится при достиже-
нии ими анода, роль которого выполняет последний электрод ФЭУ. В результа-
те в цепи анода потечет ток и на нагрузочном сопротивлении появится импульс
напряжения, который в дальнейшем может быть зарегистрирован с помощью
электронной схемы.
Видно, что процессы, происходящие в детекторе, можно разделить на не-
сколько стадий, основными из которых являются:
- поглощение энергии ионизирующих излучений в сцинтилляторе, в резуль-
тате чего происходит возбуждение и ионизация его атомов и молекул;
- преобразование поглощенной энергии излучений в световую;
- поглощение фотонов света катодом ФЭУ и испускание фотоэлектронов;
- умножение электронов динодами ФЭУ.
При прохождении заряженных частиц через сцинтиллятор их энергия может
поглотиться полностью или частично. Для полного поглощения энергии заря-
женной частицы толщина сцинтиллятора должна быть равна или больше длины
свободного пробега частицы.
Поглощенная в сцинтилляторе энергия ионизирующих частиц ЕИЛ1 расходу-
ется на возбуждение и ионизацию атомов и молекул сцинтиллятора.
Переход молекул из возбужденного состояния в основное сопровождается
испусканием фотонов видимого или ультрафиолетового излучения. При этом на
образование фотонов света расходуется только незначительная часть поглощен-
ной в сцинтилляторе энергии Еим, большая ее часть переходит в теплоту.
Важную роль в процессе преобразования энергии излучения в энергию све-
товых квантов играет конверсионная эффективность сцинтилляторов, зависящая
от вида ионизирующего излучения, его энергии и типа сцинтиллятора и показы-
вающая ту часть поглощенной энергии, которая преобразована в световую. Кон-
версионная эффективность определяется соотношением
ЛЕ
Т| =---
Еяя
или как отношение энергии светового кванта hVK средней энергии е, затрачи-
ваемой на его образование в сцинтилляторе и сравнимой со средней энергией,
366
затрачиваемой на образование пары ионов в воздухе (составляет для хороших
сцинтилляторов от 15 до 60 эВ):
hv n&hv
^=--F ’
£ ^и.и
где - число фотонов, испущенных сцинтиллятором. По постоянству конвер-
сионной эффективности в широком диапазоне энергии выгодно отличаются не-
органические сцинтилляторы, однако заметный ход с жесткостью ограничивает
их применение. Значительно меньшим ходом с жесткостью обладают органиче-
ские сцинтилляторы.
Для оценки качества сцинтилляторов часто используют понятие относитель-
ного светового выхода, которое характеризует способность сцинтиллятора пре-
образовывать поглощенную энергию в световую по отношению к NaJ(TI) - для
неорганических и антрацену - для органических.
Важной характеристикой сцинтилляционного детектора является его доб-
ротность, представляющая собой энергию, поглощенную сцинтиллятором, кото-
рая затрачивается на образование одного фотоэлектрона.
Добротность сцинтилляционного детектора во многом определяется спектраль-
ной чувствительностью катода ФЭУ, которая должна соответствовать максимуму в
спектре флюоресценции. Максимум спектральной чувствительности сурьмяно-
цезиевых катодов современных ФЭУ лежит в диапазоне 350.. .450 нм.
Другими не менее важными характеристиками ФЭУ являются его интегральная
чувствительность, представляющая собой отношение анодного тока к световому
потоку, а также состояние динодной системы и наличие собственных шумов.
В основу процесса умножения электронов, выбитых из катода, положено яв-
ление вторичной электронной эмиссии на динодах ФЭУ, которая во многом оп-
ределяется качеством динодов и их конструкцией.
2. Области применения сцинтилляционных детекторов. Сцинтилляцион-
ные детекторы могут с успехом использоваться для регистрации у- и нейтронного
излучения, для счета числа частиц и определения их энергии. Причем чувстви-
тельность сцинтилляционных детекторов на несколько порядков выше ионизаци-
онных камер и газоразрядных счетчиков. При этом высокие чувствительность к
излучению и разрешающая способность делают эти детекторы незаменимыми в
ряде случаев для радио- и спектрометрии.
Свойства некоторых сцинтилляторов приведены в табл. 7.4.
Таблица 7.4
Свойства сцинтилляторов
Сцинтиллятор р, г/см3 П Длина волны максимальной интенсивности, нм т, с
/>терфенил в полистероле 1,1 0,01 390-430 210’9
/лтерфенол в ксилоле 0,86 0,015 450 2-Ю'9
Антрацен 1,25 0,04 440 2,7-10‘8
Nal(Tl) 3,67 0,08 410 2,5 1(Г7
ZnS(Ag) 4,1 0,2 450 КГ6
367
Так, для измерения мощности экспозиционной дозы у-излучения широко при-
меняют неорганические сцинтилляторы, толщина которых соизмерима с длиной
пробега вторичных электронов максимальных энергий спектра излучения.
Конверсионная эффективность неорганических сцинтилляторов не зависит от
энергии, что позволяет использовать их при измерении у-излучения низких энергий.
Конверсионная эффективность органических сцинтилляторов не остается
постоянной, поэтому использование их возможно, начиная с энергии вторичных
электронов 100... 150 кэВ и выше.
Из органических сцинтилляторов наибольшим световым выходом обладает
антрацен, но световой выход его со временем уменьшается. Кроме того, зависи-
мость светового выхода антрацена, стильбена и других органических сцинтил-
ляторов от температуры, сложность изготовления сцинтилляторов требуемых
размеров и формы, а также низкая радиационная стойкость ограничивают их
использование в войсковой дозиметрии и радиометрии.
Использование неорганических и органических сцинтилляторов в токовом
режиме ограничено еще и наличием хода с жесткостью, особенно заметного у
неорганических сцинтилляторов, атомный номер которых значительно больше
атомного номера кислорода.
Эффективным способом уменьшения хода с жесткостью является примене-
ние экранирующих фильтров, которые изготовляют из алюминия, стали и дру-
гих материалов и устанавливают вокруг сцинтилляторов.
Ход с жесткостью можно также уменьшить, если использовать комбиниро-
ванный детектор, состоящий из неорганического сцинтиллятора, у которого эф-
фективный атомный номер больше, чем у кислорода, и органического - с атом-
ным номером меньшим, чем у кислорода.
В последнее время широко применяют пластмассовые сцинтилляторы, пред-
ставляющие собой твердые растворы сцинтиллирующих органических веществ
в полимерах. Световой выход их составляет около 55 % от антрацена, а радиа-
ционная стойкость примерно в 50 раз выше. Время высвечивания пластмассо-
вых сцинтилляторов не превышает 2-10-9 с, что также очень важно при измере-
ниях, требующих высокого временного разрешения.
Добавление в пластмассовые сцинтилляторы различного количества ZnS(Ag)
позволяет получить не только воздухоэквивалентные сцинтилляторы, у которых
ход с жесткостью практически отсутствует, но и ткане- и костноэквивалентные
сцинтилляторы с атомным номером от 7,4 до 13,8. Световой выход таких сцин-
тилляторов остается неизменным или несколько превышает световой выход
пластмассовых сцинтилляторов без добавок.
Широкое применение нашел пластмассовый сцинтиллятор на основе поли-
стирола с добавкой /^-терфенила.
Такие сцинтилляторы могут успешно использоваться не только при дози-
метрии у-излучения отдельных изотопов или продуктов ядерного взрыва, но и
при радиометрических измерениях. При этом его толщина должна удовлетво-
рять условиям толстого сцинтиллятора.
Сцинтилляционные детекторы, кроме дозиметрических и радиометрических
измерений в счетном и токовом режимах работы, могут быть использованы для
спектрометрических измерений. Такая возможность объясняется пропорцио-
368
нальной зависимостью между энергией р-частицы или у-кванта и интенсивно-
стью световой вспышки в сцинтилляторе, а значит, и амплитудой импульса на
выходе ФЭУ. Спектрометрические измерения могут найти применение для оп-
ределения возраста продуктов ядерного взрыва, которыми заражены пробы про-
довольствия и воды при их радиометрическом анализе.
7.4.7. Люминесцентные детекторы
1. Принцип действия радиофотолюминесцентных детекторов. Радиофо-
толюминесценция (РФЛ) - это такое явление, когда вещество, первоначально не
люминесцирующее при возбуждении ультрафиолетовым светом, становится
чувствительным к нему после воздействия ионизирующих излучений. При этом
центры люминесценции практически не разрушаются при воздействии возбуж-
дающего света.
Явления РФЛ обнаруживаются в разбавленных затвердевших растворах солей
серебра, ионных кристаллах типа щелочных галоидов, а также в некоторых стеклах,
особенно алюмофосфатных, которые обладают сильной оранжевой люминесценци-
ей при возбуждении излучением на волне 365 нм, соответствующем ртутной линии.
РФЛ-детекторы (алюмофосфатные стекла, активированные серебром) имеют
в среднем следующий состав в мае. % : Ag - 4,3; Al - 4,7; Li - 1,9; Р - 33,7;
О - 52,3; Mg - 3,1. Эффективный атомный номер такого детектора около 17.
Ионизирующие излучения, взаимодействуя с РФЛ-детекторами, создают в
них несколько типов центров люминесценции, которые принято обозначать бук-
вами латинского алфавита. Например, F-центры - атомы нейтрального серебра;
С-центры - однозарядный ион серебра плюс дырка плюс вакансия положитель-
ного иона; D-центры - пара ионов серебра плюс электрон плюс вакансия отри-
цательного иона и т. п.
Оранжевая люминесценция возникает на сложных группах этих центров, в ко-
торых важную роль играют F-центры. Точные количественные соотношения, опи-
сывающие возникновение и превращения
центров люминесценции, пока не установле-
ны, однако известно, что как в процессе воз-
действия ионизирующих излучений, так и
после окончания этого воздействия, в РФЛ-
детекторах в течение определенного времени
происходит взаимное превращение центров
люминесценции. Это явление называют со-
зреванием люминесценции. Продолжитель-
ность созревания зависит от ряда факторов,
основными из которых являются концен-
трация серебра в РФЛ-детекторе и его тем-
пература. Характер зависимостей показан на
рис. 7.15. Это свойство РФЛ-детекторов по-
зволяет разрабатывать различные их типы в
зависимости от назначения.
Концентрация серебра. %
Рис. 7.15. Изменение интенсивно-
сти люминесценции в зависимости
от температуры и концентрации
серебра в стекле
369
Возникшие при облучении РФЛ-детекторов центры люминесценции обра-
зуют полосы поглощения в ближнем ультрафиолете. Возбуждение ультрафиоле-
товым светом в пределах этих полос вызывает видимую оранжевую люминес-
ценцию, интенсивность которой пропорциональна поглощенной дозе излучения.
Функциональная схема измерительного устройства показана на рис. 7.16.
При нормальной температуре центры люминесценции очень устойчивы и
могут сохраняться в течение многих лет. При повышенных температурах
Рис. 7.16. Функциональная схема устройства
для измерения интенсивности люминесценции
(дозы излучения):
1 - источник ультрафиолетового света; 2 - ультрафио-
летовый фильтр; 3 - РФЛ стекло; 4 - оранжево-крас-
ный фильтр; 5 - ФЭУ; 6 - электронная схема; 7 - из-
мерительный прибор
(более 100 °C) центры люминесценции медленно разрушаются. Например, при
температуре 400 °C разрушение центров происходит в течение 20-30 мин, прак-
тически независимо от дозы, которой были облучены детекторы.
Современные РФЛ-детекторы имеют различные геометрические формы. Это
могут быть иглы, цилиндры, пластины и т. д. Размеры детекторов зависят как от
химических и оптических свойств стекла, так и от параметров аппаратуры, на
которой производится измерение интенсивности люминесценции. Считается,
что оптимальная форма детектора должна приближаться к кубу. Наибольшее
распространение получили РФЛ-детекторы следующих размеров: 8х8><4,7 мм;
08x6 мм и др.
Независимо от геометрических размеров и формы все РФЛ-детекторы в на-
стоящее время имеют минимум две полированные взаимно перпендикулярные
поверхности: одна для пропускания ультрафиолетового света, другая для про-
пускания возбужденной люминесценции.
Дозиметрические характеристики РФЛ-детекторов оценивают по ряду ос-
новных параметров:
- химической устойчивости;
- зависимости чувствительности от энергии у-квантов;
- интенсивности додозовой люминесценции;
- зависимости чувствительности от мощности дозы излучения;
- чувствительности к p-излучению и нейтронам;
- диапазону измеряемых доз;
- погрешности измерения дозы.
370
Химическая устойчивость РФЛ-детектора, а под этим подразумевается устой-
чивость к воздействию внешних факторов окружающей среды (влажность, темпе-
ратура), сложным образом зависит от количественных соотношений входящих в его
состав элементов. Так как состав стекла определяет и все остальные параметры
РФЛ-детекторов, то в каждом конкретном случае должна быть найдена такая опти-
мальная композиция, при которой все или большинство важнейших характеристик
соответствовали бы заданным требованиям. В общем случае химическая устойчи-
вость может быть повышена путем помещения детектора в герметичный корпус.
В большинстве случаев это принципиально необходимо не только из соображений
удобства эксплуатации, но и для выравнивания чувствительности РФЛ-детекторов
к у-квантам различных энергий, что приходится делать из-за сравнительно высоко-
го эффективного атомного номера стекла. Обычно корпус имеет специальный
фильтр, который может быть изготовлен из разных материалов (олова, кадмия,
свинца и т. д.) и иметь конструктивные отличия. Чаще других применяют фильтры
из свинца толщиной 0,5... 1,0 мм. Плоскости фильтра, обращенные в сторону стекла,
дублируют алюминием толщиной несколько десятков или сотен микрон в целях
уменьшения влияния на чувствительность стекла отраженных электронов.
Одной из специфических характеристик РФЛ-детекторов является додозовая
люминесценция. Додозовая люминесценция - это параметр, зависящий от про-
цесса кристаллизации стекла при его изготовлении, во время которого образует-
ся некоторое количество центров люминесценции. Обычно эта люминесценция
эквивалентна дозе излучения в несколько рад. Ввиду того, что стекла одного
состава имеют практически одинаковую додозовую люминесценцию, она может
автоматически учитываться измерительным устройством и не влиять на резуль-
тат измерения.
Когда возникает необходимость измерения доз излучения, соизмеримых со
значением додозовой люминесценции, ее вычитают из показаний измерительно-
го прибора.
2. Принцип действия термолюминесцентного детектора (ТЛД). Под тер-
молюминесценцией понимают процесс, при котором накопленная в кристалле
энергия ионизирующего излучения преобразуется в энергию флюоресценции
под действием теплового возбуждения.
Теория термолюминесценции основывается на зонной модели электронных
состояний в твердых телах.
В чистом кристалле с вакансиями (отсутствие положительных и отрицатель-
ных ионов в решетке кристалла) под действием ионизирующего излучения соз-
даются центры F и V (рис. 7.17), обусловленные захватом электронов или дырок
вакансиями. Затем под действием тепла электрон, локализованный в центре F,
может перейти в зону проводимости (переход 1). Блуждая по кристаллу, он мо-
жет прорекомбинировать с дыркой, локализованной в центре V (переход 2); при
этом возникает люминесценция, а центр, созданный под действием ионизирую-
щего излучения, разрушается.
На практике создание дозиметра на основе чистого кристалла затруднитель-
но, так как эффективность и воспроизводимость F-центров в нем не соответст-
вует дозиметрическим требованиям.
На рис.7.18 приведена схема энергетических уровней кристалла с примесью
серебра в качестве активатора. Ионизирующее излучение освобождает электрон,
371
Рис. 7.18. Механизм термолюминесцен-
ции кристалла, активированного серебром
Рис. 7.17. Механизм термолюминес-
ценции беспримесного кристалла
который захватывается ловушкой с образованием F-центра. Образовавшаяся
дырка оказывается связанной с ионами серебра Ag+.
Последующее тепловое возбуждение освобождает электрон из ловушки и
переводит его в зону проводимости (переход 1). Затем электрон рекомбинирует
с дыркой (переход 2), в результате чего ион активатора Ag+ оказывается в воз-
бужденном состоянии. Возбужденный ион быстро возвращается в основное со-
стояние с испусканием люминесценции (переход 3), при этом спектр люминес-
ценции определяется природой активатора.
Измерение дозы термолюминесцентным дозиметром сводится к нагреву об-
лученного дозиметра, в процессе которого устанавливается интенсивность све-
чения люминесценции. Полная светосумма, выделившаяся в процессе нагрева,
является мерой поглощенной в детекторе дозы.
3. Применение люминесцентных детекторов для измерения дозы излу-
чения. В последние годы люминесцентные детекторы используют в измерите-
лях дозы различного назначения. РФЛ-детекторы позволяют мерить дозы излу-
чения от мрад до тыс. рад. Нижний предел измерений ограничен в основном
двумя факторами: додозовой люминесценцией и параметрами устройств.
Верхний предел ограничен областью пропорциональности кривой «доза излу-
чения - интенсивность люминесценции», которая имеет прямую пропорциональ-
ную зависимость только до значений порядка 104 рад, как это видно из рис. 7.19.
При больших значениях доз происходит уменьшение выхода люминесценции за
счет окрашивания детектора. Явление окрашивания детектора также может быть
использовано для измерения доз излучения, больших 104 рад.
7.4.8. Химические детекторы
В настоящее время все более широкое применение в практике дозиметрии
ИИ находят химические детекторы. Это обусловлено рядом положительных ка-
честв, выгодно отличающих последние от других детекторов, а именно:
372
- высокой тканеэквивалентностью;
- простотой конструктивного исполнения;
- удобством эксплуатации;
- возможностью снятия показаний с детектора визуально с помощью про-
стейших измерительных устройств, не требующих электрического питания;
- невысокой стоимостью детекторов и измерительного устройства.
Рис. 7.19. Зависимость выхода люмине-
сценции от дозы излучения:
а - полная кривая; б - участок кривой при
больших дозах
Принцип работы химических детекторов основан на определении химиче-
ских изменений вещества, их чувствительного объема, происходящих в резуль-
тате воздействия ионизирующих излучений. При этом следует помнить, что зна-
чение этих изменений зависит от количества поглощенной энергии рабочим
объемом детектора.
Например, при облучении хлороформа наблюдается разложение его на пен-
тахлорэтан и соляную кислоту. Выделившаяся соляная кислота может быть об-
наружена с помощью индикатора на кислоту
2СНС13 1— СС13 - СНС12 + НС1
Выход соляной кислоты прямо пропорционален мощности дозы. Количество
образовавшейся кислоты может быть определено по изменению окраски раствора.
На этом принципе построен химический дозиметр ДП-70, предназначенный
для измерения доз у-излучения от 50 до 800 Р.
Известно, что поглощенная веществом энергия ИИ зависит как от вида и
энергии, так и элементного состава вещества рабочего объема детектора. Из
всей поглощаемой веществом энергии излучения на химическую реакцию рас-
ходуется лишь некоторая часть. Остальная часть поглощенной энергии вызывает
возникновение других явлений и в конечном итоге превращается в теплоту. По-
скольку поглощенная энергия ИИ не может полностью превращаться в энергию
химических реакций, при использовании химических детекторов (как и всех
других, за исключением калориметрических), необходимо знать соотношение
373
между наблюдаемым эффектом и количеством поглощенной энергии излучения.
Это соотношение принято характеризовать значением радиационно-хими-
ческого выхода (РХВ) - числом молекул или ионов, образующихся или претер-
певающих изменения при поглощении веществом 100 эВ (10-18 Дж) энергии
ионизирующего излучения. На практике РХВ часто обозначают символом G и
определяют согласно следующему выражению:
G = nfa • 100,
где G - радиационно-химический выход, молек. / 100 эВ; п - число молекул про-
дукта радиационно-химической реакции, образующихся за некоторое время; G5 -
поглощенная веществом энергия излучения, эВ.
Если известны выход продукта радиационно-химической реакции G, концен-
трация этого продукта С и плотность р вещества, подвергавшегося излучению, то
поглощенная доза D может быть определена из следующего соотношения:
D = (W(Gp),
где К - коэффициент, зависящий от выбранной системы единиц.
Если РХВ выражать числом молекул или ионов, образовавшихся или пре-
терпевших изменения при поглощении веществом 110"18 Дж энергии ИИ, кон-
центрацию продукта в моль /м3, а плотность вещества, подвергшегося воздейст-
вию излучения в кг/м3, то коэффициент К численно равен 9,65-106, а само выра-
жение приобретает вид
Р = (9,65 106С)/((?р).
7.4.9. Фотографический метод детектирования
Фотографический метод основан на использовании воздействия излучений
на фотоэмульсию. При этом идет реакция
AgBr----^PjY----Ag _|_ gr
Чувствительный слой фотопленки состоит из большого числа мелких
кристаллов бромистого серебра AgBr. Под действием радиоактивных излу-
Рис. 7.20. Фотографический
метод детектирования
чений после проявления пленки бромистое се-
ребро восстанавливается до металлического се-
ребра. В результате засвеченные участки пленки
потемнеют, а незасвеченные - будут прозрач-
ными. Установлено, что плотность очернения
негатива пропорциональна дозе у-излучения. По
плотности почернения негатива можно опреде-
лить дозу у-излучений (рис. 7.20).
В простейшем случае плотность почернения, а
следовательно, доза облучения могут быть опреде-
лены путем сравнения плотности потемнения нега-
374
тива с имеющимися эталонами. При определенной дозе D плотность потемнения S
достигает максимума, при больших дозах уменьшается. Это может привести к гру-
бой ошибке, так как две абсолютно разные дозы Di и D2 (см. рис. 7.20) создают
одинаковую плотность потемнения. Во избежание ошибки необходимо применять
пленку такой чувствительности, чтобы ожидаемые дозы были меньше Dmax.
Этот метод не нашел применения в полевых условиях из-за недостаточной
точности и сложности обработки фотопленки.
7.5. Войсковая радиационная разведка
Радиационная разведка в войсках преследует следующие цели.
1. Получение информации об объектах с радиоактивными излучениями (спец-
боезаряды, расщепляющиеся материалы, места хранения и маршруты транспор-
тировки, атомные реакторы, предприятия атомной промышленности и т. д.).
2. Контроль облучения личного состава.
3. Радиационное наблюдение, в том числе дозиметрический контроль атмо-
сферы Земли.
4. Контроль радиационного загрязнения личного состава, техники и воору-
жения.
5. Контроль радиационного загрязнения воды, продовольствия, урожая.
В первом случае определяют:
- дозовые характеристики вокруг объекта разведки и их изменения во времени;
- маршруты перевозки источников радиоактивных излучений и места их
доставки;
- районы с повышенным уровнем радиации;
- наличие источников радиоактивных излучений в транспортном средстве;
- содержание отдельных видов изотопов в аэрозолях, атмосфере, жидкостях;
- изотопный состав излучателей, тип источника излучений.
Измерению подлежат все виды радиоактивных излучений.
Во втором случае устанавливают уровни воздействия ионизирующих излу-
чений на личный состав в целях определения радиационных потерь, оценки бое-
способности войск по радиационному фактору и первичной диагностики степе-
ни тяжести лучевых поражений. Основной измеряемой величиной является по-
глощенная доза излучения.
При ведении радиационного наблюдения решают задачи обнаружения ра-
диоактивного загрязнения и выявления фактической радиационной обстановки
на местности и в атмосфере.
Основной измеряемой величиной в данном случае является мощность дозы
у-излучения. В качестве дополнительных могут измеряться спектральные энер-
гетические характеристики, необходимые для определения спада во времени
активности и мощности дозы у-излучения на радиоактивно загрязненной мест-
ности.
Контроль радиационного загрязнения служит для определения уровней ра-
диоактивного загрязнения кожных покровов и обмундирования личного состава;
вооружения, техники, воды, продовольствия для оценки степени радиационной
375
опасности; качества проведения дезактивации и обеспечения радиационной
безопасности.
Основными измеряемыми величинами в этом случае являются поверхност-
ная и удельная активность, мощность дозы у-излучения и плотность потока а- и
p-излучений загрязненных объектов. В качестве дополнительных могут изме-
ряться спектральные характеристики излучений для установления возраста и
идентификации радиоактивных продуктов загрязнения.
Для решения перечисленных задач используют войсковые средства измере-
ния ионизирующих излучений (ВСИ ИИ), к которым относят нормированные в
метрологическом отношении технические средства и приборы качественного
определения величин, характеризующих ионизирующие излучения (ИИ).
Отличительными особенностями войсковых средств измерения ИИ являются
высокая стойкость к воздействию внешних факторов в боевых условиях, огра-
ниченные номенклатура физических величин и диапазоны их измерений, соот-
ветствующие характеристикам полей ИИ ядерных взрывов и критерии оценки
радиационной опасности при остром облучении большими дозами в условиях
военного времени.
Однако в связи с использованием ВСИ ИИ для решения перечисленных за-
дач и в мирное время в интересах обеспечения радиационной безопасности жиз-
недеятельности войск и населения в районах радиоактивного загрязнения и при
ликвидации последствий аварий на радиационно опасных объектах, они получи-
ли двойное назначение - для оценки радиационной опасности по критериям во-
енного времени и радиационной безопасности мирного времени. Это обстоя-
тельство привело к расширению номенклатуры и диапазонов измерений физиче-
ских величин и появлению в войсках новой группы приборов, предназначенных
для решения специфических задач в ходе ликвидации последствий аварий и ра-
диационного контроля. Они получили название приборов контроля радиацион-
ной безопасности.
Помимо решения задач, аналогичных решаемым ВСИ ИИ, эти приборы
обеспечивают поиск радиоактивных фрагментов и загрязненных участков, иден-
тификацию радиоактивных продуктов загрязнения и радиационный контроль по
нормам радиационной безопасности мирного времени.
Как уже отмечалось, все средства измерения ионизирующих излучений при-
нято разделять на дозиметры, радиометры и спектрометры.
Многие приборы являются универсальными и используются для проведения
комплексных измерений, например, дозиметрических и радиометрических, ра-
диометрических и спектрометрических и т. п.
В зависимости от способа использования средства измерения подразделяют
на носимые, переносные, стационарные, бортовые, авиационные.
Несмотря на широкую номенклатуру используемых в войсках средств изме-
рения ИИ, все они имеют общие конструктивные принципы.
Основным структурным элементом любого прибора является детектор
(рис. 7.21). В войсковых средствах измерения ионизирующих излучений при-
меняют следующие основные виды детекторов: ионизационные камеры, газо-
разрядные счетчики, полупроводниковые, сцинтилляционные и химические.
376
Параметры выходных сигналов детекторов функционально связаны с пара-
метрами ионизирующих излучений. Для их измерения применяют, как правило,
электрические методы и средства. Поэтому сигналы другой природы предвари-
тельно преобразуют в электрические.
В приборах, использующих химические детекторы, для измерения радиаци-
онного эффекта по изменению окраски химических растворов применяют коло-
Детектор
ИК
ГС
ппд
сд
ХД,РФЛ, тлд
Усилитель-
преобразователь
УПТ, УН
Усилитель-
нормализатор
Преобразователь
свет-ток
АЦП
Рис. 7.21. Обобщенная структурная схема ВСИ ИИ
риметры, принцип действия которых основан на визуальном определении опти-
ческой плотности. Однако и здесь разработаны современные электронные коло-
риметры, осуществляющие измерение оптической плотности растворов элек-
трическими методами.
Электрические сигналы на выходе детекторов имеют очень малый уровень
(10-9...10-15А), недостаточный для нормальной работы последующих измери-
тельных схем. Поэтому они усиливаются, а в некоторых приборах - предвари-
тельно преобразовываются в электрические сигналы другой формы: импульсные
или переменные.
Во многих приборах детекторы и каскады предварительных усилителей и
преобразователей конструктивно связаны в единые блоки, получившие название
детекторных.
Детекторный блок и последующие усилители и преобразователи выполняют
функции измерительных преобразователей и должны обладать метрологически-
ми характеристиками, обеспечивающими пропорциональные соотношения меж-
ду размерами единиц радиационных и электрических величин.
Основными параметрами электрических сигналов, несущими измерительную
информацию о характеристиках ионизирующих излучений, являются величина
напряжения или тока, амплитуда, частота или количество импульсов за опреде-
ленный промежуток времени.
Измерительная схема производит действие с информационными параметра-
ми электрических сигналов, определяет на их основе характеристики ионизи-
377
рующих излучений с учетом коэффициентов преобразований и выдает результа-
ты на оконечные устройства - регистрирующие, отображения, в канал передачи
данных, переносной блок памяти или непосредственно в ЭВМ. В некоторых
случаях измерительная схема осуществляет только первичную обработку ин-
формации, а окончательные расчеты производятся ЭВМ, куда информация по-
ступает непосредственно, через канал передачи данных или с переносного блока
памяти. Измерительная схема может находиться на некотором удалении. В этом
случае информация поступает в канал передачи данных.
Конкретный облик каждого средства зависит от вида измерения, типа детек-
тора и конструкторского решения. В приборах для измерения доз детектор кон-
структивно может быть объединен с измерительной и регистрирующей схемами
или выполнен отдельно. Для подготовки дозиметров к работе могут использо-
ваться отдельные зарядные устройства.
Современный парк ВСИ ИИ имеет приборы, построенные как на базе анало-
говых измерительных схем, так и на основе цифровых. Аналоговые схемы изме-
рительных приборов во многом исчерпали свои возможности по точности, ско-
рости регистрации, объему обрабатываемых данных. Для ввода в вычислитель-
ные средства информацию, получаемую с аналоговых приборов, необходимо
предварительно преобразовывать в цифровой код. Поэтому в средствах измере-
ния ИИ последних поколений реализована в основном цифровая обработка, по-
зволяющая не только автоматизировать отдельные измерительные и вычисли-
тельные операции, но и наращивать возможности аппаратуры путем расширения
номенклатуры измерительной информации, создания приборов и систем с эле-
ментами искусственного интеллекта.
Встроенные в приборы микропроцессоры и микроЭВМ позволяют преобра-
зовывать их в интеллектуальные устройства, способные обрабатывать информа-
цию, адаптированную к условиям измерений и потребностям получателей. В
перспективе такие приборы будут автоматически устанавливать пределы изме-
рений, периодичность отсчетов в зависимости от градиентов измеряемых вели-
чин, перестройку структуры приборов и отдельных узлов, корректировку по-
грешностей, первичную обработку данных, включая статистическую, буфериза-
цию информации и ее визуализацию, передачу по адаптивным каналам связи,
диагностику функциональных узлов, их тестирование, индикацию неисправно-
стей и т. д. Возможно и полное управление процессом измерения, включая пе-
ремещение роботизированных средств разведки и контроля в зависимости от
решаемых задач.
Элементная база электронно-измерительных устройств ВСИ ИИ не имеет
какой-либо специфики. Основу построения этих приборов, как и любой другой
измерительной аппаратуры, составляют радиоэлектронные компоненты и узлы.
Специфическими элементами и узлами являются детекторы и детекторные бло-
ки. От их характеристик зависят метрологические характеристики всей системы.
Статистический характер процессов, проходящих в детекторах, многообразие
факторов, влияющих на передачу энергии ионизирующих излучений в материа-
лах детекторов, нередко создают предел реально достижимой точности измере-
ний. Потерю какой-либо доли первичной информации никакой последующей
378
обработкой восстановить нельзя. В связи с этим при разработке измерительной
аппаратуры особое внимание следует уделять детекторному блоку.
Основные типы измерительных приборов, используемых при ведении ра-
диационной разведки, и краткая их характеристика представлены в табл. 7.5.
Таблица 7.5
Краткая характеристика приборов
Прибор Назначение. Диапазон измерения и энергия у-фотонов Масса, кг
ДП-5В Измерение мощности экспозиционной дозы у-излучения на местности. Контроль радиоактивного загрязнения объектов по у-излучению. Обна- ружение р-излучения. 50 мкР/ч ... 200 Р/ч 3,2
ИМД-5 Измерение мощности поглощенной дозы у-излучения. Контроль радиоак- тивного загрязнения объектов по у-излучению. Обнаружение р-излучения и измерение плотности потока р-излучения (приближенно). 50 мкрад/ч ... 200 рад/ч; 50 ... 50000 р-частиц/(мин см2) 3,5
ИМД-1 Измерение мощности экспозиционной дозы у-излучения, выдача звуково- го сигнала о превышении ею порогового значения. Контроль радиоактив- ного загрязнения объектов по у-излучению. Обнаружение р-излучения. Прибор имеет две модификации: ИМД-1 Р, ИМД-1 С. Р - носимый, С - стационарный. 10 мкР/ч ... 999 Р/ч. Порог сигнализации 0,1 и 300 мР/ч, 0,1 и 300 Р/ч 2,5
ИМД-2 Измерение мощности поглощенной дозы у-излучения при ведении радиа- ционной разведки (наблюдения). Прибор имеет три модификации: ИМД-2Н, ИМД-2Б, ИМД-2С. Н - носимый, Б - бортовой (наземная тех- ника, ЛА), С - стационарный. 10 мкрад/ч - 1000 рад/ч, (Оу = 0,08 ... 3 МэВ 1,6
ДП-ЗБ Измерение мощности экспозиционной дозы у-излучения при ведении радиационной разведки с подвижных объектов (УАЗ-469 рхб, БРДМ-2 рхб, ЛА). 0,1 ... 500 Р/ч, (Оу= 0,66 ... 1,25 МэВ 4,4
ДП-2 Рентгенметр, измерение уровней радиации на местности по у-излучению. 0,1 ... 500Р/ч -
ДП-42 Полевой а-радиометр, обнаружение a-излучений различных поверхно- стей и проб -
ИМД-21 Измерение мощности экспозиционной дозы у-излучения, выдача светово- го сигнала о превышении ею порогового значения при ведении радиаци- онной разведки местности с подвижных объектов (РХМ, вертолета). При- бор имеет пять модификаций: ИМД-21 Б, ИМД-21 С, ИМД-21СА. Б - бор- товой, С - стационарный, А - автоматизированный. 1 ... 9999 Р/ч. Уста- навливаемый порог сигнализации: 1; 5; 10; 50 и 100 Р/ч -
ДП-64 Постоянное измерение мощности дозы у-излучения (в ходе радиационно- го наблюдения), выдача звукового и светового сигналов при мощности дозы, равной или более 0,2 Р/ч 5
ид-1 Измерение поглощенной дозы у-нейтронного излучения. В комплекте десять измерителей дозы и зарядное устройство на пьезоэффекте. 20...500 рад при£>= 10...3,6 • 105 рад/ч, (Оу = 0,08...2,2 МэВ 2; 40 г - из- меритель дозы
ДП-22В Измерение экспозиционной дозы у-излучения. В комплекте 50 измерите- лей дозы ДКП-50А и зарядное устройство. 2.. .50 Р при X = 0,5.. .200 Р/ч, (Оу = 0,2...2 МэВ 5,6; 35 г- измеритель дозы
ИД-11 Измерение поглощенной дозы у-нейтронного излучения. В комплекте: 500 измерителей дозы (специальное стекло); измерительное устройство. 10 ... 500 рад. Продолжительность сохранения дозы - 12 мес. 18-устройство; 25 г - измери- тель дозы
379
Окончание табл. 7.5
Прибор Назначение. Диапазон измерения и энергия у-фотонов Масса, кг
ДП- 70МП Измерение дозы у-нейтронного излучения. Химические измерители дозы (500 шт. в ящике) и полевые калориметры ПК-56М (10 шт. в ящике), по- ставляются раздельно. 50...800 Р. Цветной эталон в крышке - 100 Р. Про- должительность сохранения дозы - 30 сут 40 г
ИД-02 Измерение поглощенной дозы у-нейтронного излучения. 0 ... 200 мрад —
КДТ- 02М Измерение эквивалентной дозы рентгеновского и у-излучений. В ком- плекте измерители дозы ДПГ-03 с термолюминесцентным детектором и пультом управления. 50 мкэв ... 103 эв, (Оу = 0,015... 1,25 МэВ -
ДП-12 Измерение мощности экспозиционной дозы у-излучения. 1...125 мР/г. Обнаружение p-излучения и измерение плотности потока р-излучения, 103... 5 • 106 р-частиц / (мин/см2) -
8. ХИМИЧЕСКАЯ РАЗВЕДКА
8.1. Основные положения
Под химической разведкой (ХР) понимается добывание информации путем
контактного или дистанционного анализа изменений химических свойств соста-
ва окружающей среды под воздействием выбросов и отходов производства, ра-
боты двигателей, в результате взрывов и выстрелов, преднамеренного рассеива-
ния химических веществ, испытаний и применений химического оружия.
ХР решает следующие основные задачи:
- обнаружение и анализ химического состава окружающей среды в целях
определения дислокаций предприятий по производству химической продукции
военного назначения;
- измерение концентрации химических веществ в воздухе в целях определе-
ния профиля производства, проводимых научных исследований и испытаний, а
также характеристик В, ВТ и их элементов (топлива, взрывчатых веществ и т. д.).
- получение информации о химическом заражении местности в условиях
возможного применения химического оружия;
- контроль химического состава окружающей среды на предприятиях хими-
ческой промышленности для обеспечения безопасности персонала.
ХР ведется с помощью аппаратуры, использующей как методы дистанцион-
ного анализа (дистанционная ХР), так и анализа проб (контактная ХР).
К аппаратуре дистанционной ХР относят: лидары, радиометры, ИК-
спектрометры. Аппаратура контактного анализа включает газоанализаторы, га-
зосигнализаторы, пробоотборные устройства и т. д.
Аппаратура дистанционной ХР использует принципы активной или пассив-
ной оптической локации. Примером аппаратуры, использующей принципы ак-
тивной локации, является лидар. Химические вещества в атмосфере обнаружи-
вают путем зондирования ее импульсами лазерного излучения и регистрации
эффектов взаимодействия лазерного излучения с веществом.
Радиометры используют принцип пассивной оптической локации. Они обна-
руживают вещества по их собственному тепловому излучению.
ИК-спектрометры также обнаруживают вещества путем анализа спектраль-
ного состава собственного излучения вещества либо переотраженного вещест-
вом излучения естественного источника (Солнца).
Применение приборов локального действия и устройств пробоотбора позво-
ляет определить химический состав веществ в районе разведки или в лаборато-
рии после отбора пробы и ее доставки к месту обработки.
Аппаратура ХР может устанавливаться на космических аппаратах (КА), ра-
кетах, самолетах, вертолетах, кораблях, автомобилях, а также использоваться в
портативном варианте.
381
На КА устанавливают радиометры и ИК-спектрометры. Добываемые данные
(спектр излучения) либо регистрируются на фотопленку с последующей достав-
кой в капсулах на Землю, либо передаются по радиоканалу.
Воздушная ХР ведется с применением пробоотборных средств в погранич-
ных районах. В качестве носителей до 20 км используют воздухоплавательные
средства, на высотах более 50 км - ракеты.
Для разведки используют фильтровально-воздушные установки, производи-
тельность которых достигает (2...5)104 м3/ч при времени непрерывной работы
(З...5)ч.
Аппаратура наземной и морской ХР включает приборы локального и дис-
танционного действия. В приборах локального действия обнаружение веществ
осуществляется путем отбора пробы анализируемой среды с последующим ана-
лизом физическим, химическим или биохимическим методами непосредственно
на месте взятия пробы. Типичным примером аппаратуры данного вида является
ИК-гидроанализаторы, позволяющие непрерывно автоматически анализировать
воздух с порогом чувствительности 10-5... 10"6 мг/л.
Разведка с применением аппаратуры в портативном варианте ведется путем
отбора проб, с последующим их анализом в лабораторных условиях.
Для обнаружения и распознавания химических веществ в пробах водной
среды, почвы и растительности применяют атомно-абсорбционные спектрофо-
тометры. Фирмы США выпускают несколько типов приборов (модели 103, 107,
300, 306, 403, 503). С их помощью могут быть обнаружены и определены до 70
различных химических элементов и соединений.
При работе атомно-абсорбционного спектрофотометра в режиме автомати-
ческого анализа обрабатывается до 60 проб в течение часа.
Для обнаружения и распознавания химических веществ в воздушной среде
применяют хроматографические анализаторы, мембранно-разделительные де-
текторы, масс-спектрометры, биолюминесцентные приборы и др.
Более детальное рассмотрение вопросов, связанных с ведением контактной и
дистанционной химической разведки, представлено ниже.
8.2. Методы и средства измерений при контактной ХР
Контактная ХР заключается в отборе проб атмосферного воздуха, жидкостей,
грунта, растительности с последующим их анализом различными методами.
Анализ загрязняющих воздух примесей относится к наиболее трудным за-
дачам аналитической химии, поскольку в пробе одновременно могут нахо-
диться сотни различных веществ, как органических, так и неорганических. Для
селективного определения отдельных компонентов требуется применение различ-
ных методов и технических средств анализа. Для установления концентрации ме-
таллов в атмосферных аэрозолях широко используют методы атомно-абсор-
бционного, плазменного, эмиссионного спектрального и рентгенофлюоресцентного
анализа, а также протонного возбуждения характеристического рентгенов-
ского излучения. Они позволяют исследовать большое число микропримесей
в воздухе.
Для определения концентрации газообразных веществ широкое развитие
приобретают методы хемилюминесцентный, флюоресцентный, УФ- и ИК-спек-
троскопии, корреляционной спектроскопии, пламенно-ионизационные и газовой
382
хроматографии. Как правило, все они требуют предварительной подготовки
проб: концентрирования на каком-либо носителе (спектральные методы); аспи-
рации через слой сорбента больших объемов воздуха и последующего извлече-
ния сконцентрированных примесей при нагревании ловушки (газовая хромато-
графия); отделения мешающих компонентов из-за недостаточной селективности
с помощью специфических фильтров (хемилюминесцентный, пламенно-
ионизационный) и очистки от пыли с помощью фильтров.
Реализуются методы химического анализа двумя группами приборов: для
отбора проб воздуха и для лабораторного анализа проб. В первую группу входят
поглотительные приборы (преимущественно электроаспираторы), во вторую -
приборы для лабораторного анализа.
8.2.1. Аппаратура для отбора проб воздуха
Наблюдение за уровнем загрязнения атмосферного воздуха химическими
методами осуществляется путем отбора проб и их анализа. При исследовании
атмосферного воздуха приходится выполнять анализы проб, в которых содер-
жатся очень малые количества веществ. Это вызвано высокой степенью разбав-
ления выбросов в атмосфере.
Поэтому методология и техника отбора проб воздуха при определении кон-
центрации вредных примесей в атмосфере - очень ответственный этап, тесно свя-
занный с последующим методом определения искомой примеси [1].
Количественный анализ атмосферных загрязняющих веществ проводится
после их концентрирования, которое осуществляется протягиванием анализи-
руемого воздуха через поглотительное устройство или фильтр. На рис. 8.1 пока-
Рис. 8.1. Структурная схема установки для отбора проб воздуха
зана структурная схема установки для отбора проб воздуха. В состав установки
входят побудитель расхода ПР, расходомер Р, поглотительный прибор ПП, за-
полненный поглотительным раствором, или фильтродержатель с фильтром Ф.
Под действием разрежения, создаваемого побудителем расхода, атмосферный
воздух всасывается и протягивается через поглотительные растворы, вещества
или фильтрующие материалы (фильтры), проходит через расходомер, побуди-
тель расхода и выбрасывается, преодолевая атмосферное давление. В целях пре-
дохранения расходомера от попадания в него брызг поглотительного раствора
перед ним рекомендуется включать защитный патрон ЗП, заполненный промы-
тым и просушенным силикагелем [1].
Точность измерения концентрации существенно зависит от точности изме-
рения объема воздуха, протянутого через поглотительные приборы. Этот объем
383
находят как произведение скорости аспирации, определяемой при помощи рас-
ходомера, на время отбора пробы или измеряется газовым счетчиком. Скорость
аспирации в системе устанавливается в соответствии с методом определения
искомой примеси и поддерживается в процессе отбора проб постоянной.
1. Поглотительные устройства. Жидкостные поглотительные
приборы. Вещества в газо- и парообразном состоянии обычно улавливают
жидкими поглотительными средами, в которых определяемое вещество непо-
средственно растворяется либо взаимодействует с поглотительным раствором. К
жидким поглотительным средам относят дистиллированную воду, органические
растворители, специальные поглотительные растворы. В процессе отбора проб
должно быть поглощено не менее 95 % определяемого вещества. Такая степень
поглощения должна обеспечиваться в большом диапазоне температур и концен-
траций вещества. Эффективность поглощения зависит от конструкции поглоти-
тельного прибора.
Для лабораторных исследований атмосферного воздуха используется боль-
шое количество поглотительных приборов. Существенное значение имеет мате-
риал, из которого изготовлены приборы: он должен быть инертен по отношению
к исследуемым веществам. Наиболее широкое применение получили два типа
жидкостных поглотительных приборов: U-образный с пористой стеклянной пла-
стинкой и Рихтера. Оба типа поглотительных приборов обеспечивают эффек-
тивное улавливание исследуемых веществ сравнительно небольшим количест-
вом раствора реактива (6 мл).
U-образный поглотительный прибор (рис. 8.2, а) представляет собой стеклян-
ную U-образную трубку с впаянным в виде пластинки фильтром. Фильтр сделан
из особо приготовленной спекшейся массы стекла с различными по размеру по-
рами. Воздух при помощи пористой пластин-
ки разбивается на множество мелких пузырь-
ков для обеспечения большей поверхности
соприкосновения с поглотительной средой.
Чем меньше пузырьки, тем больше поглоти-
тельная способность прибора. Входом погло-
тителя является отросток, подводящий воздух
снизу к колбе поглотителя, а выходом - верх-
ний отросток. Поглотительный раствор в при-
бор вносят через выходной отросток. Отбор
проб U-образными поглотителями осуществ-
ляется при скорости протягивания воздуха до
3 л/мин.
Поглотительный прибор Рихтера (рис. 8.2, б)
представляет собой стеклянный сосуд, внутри которого помещена цилиндриче-
ская трубка с расширениями. Центральный отросток является входом для иссле-
дуемого воздуха, а боковой отросток - выходом. Отбор проб прибором Рихтера
осуществляется при скорости протягивания воздуха до 10 л/мин.
В схему для отбора проб поглотительные приборы устанавливают следую-
щим образом. Входные отростки поглотительного прибора присоединяют при
384
помощи коротких отрезков резинового шланга встык к распределительной гре-
бенке, а выходные - к защитным патронам, устанавливаемым между поглоти-
тельным прибором и электроаспиратором. В некоторых случаях для задержива-
ния мешающих анализу аэрозолей или газообразных веществ перед поглоти-
тельным прибором устанавливают соответствующие ловушки, например фильтр
АФА-ВП-10, укрепленный в пластмассовом фильтродержателе.
Недостатком жидкостных поглотителей является невысокая скорость отбора
пробы из-за разбрызгивания и частичного уноса поглотительного раствора, за-
мерзания растворов в северных районах, хрупкости, громоздкости приборов.
Для поглощения газов и паров при отборе проб воздуха наиболее эффектив-
ным устройством является сорбционная трубка. Сорбционная трубка (рис. 8.2, в)
изготовлена из стекла, имеет длину 170 мм и диаметр 8... 10 мм; в один конец
трубки впаяны две перфорированные стеклянные пластины-перегородки. Про-
странство между пластинами заполнено стеклянными гранулами-носителями,
покрытыми невысыхающей пленкой специального раствора - сорбентом. Эта
пленка образует малолетучее соединение с улавливаемым веществом. Чтобы
раствор не высыхал, в него добавляют глицерин или этиленгликоль. Оказа-
лось, что слой сорбента толщиной 1...2 мкм является хорошим улавливателем
в широком диапазоне температур и концентраций. Такое поглотительное
устройство позволяет использовать высокие скорости прокачивания воздуха
(до 20 л/мин), сорбирующий раствор не замерзает при отрицательной темпера-
туре, его работоспособность сохраняется длительное время, отсутствует опас-
ность проливания.
Эффективность улавливания различных веществ из потока воздуха пленоч-
ными сорбентами определяется рядом факторов: размером гранул и объемом
слоя носителя, скоростью реакции поглотительного вещества с реагентом, рас-
творимостью поглощаемого вещества, его коэффициентом диффузии. Кроме
того, для измерения концентрации различных веществ требуются разные расхо-
ды анализируемого воздуха при отборе пробы. Поэтому необходимы сорбцион-
ные трубки с разными объемами слоя сорбента и диаметром гранул носителя.
Большинство газов при расходах 3...5 л/мин полностью улавливаются слоем
сорбента объемом 1 мл при диаметре гранул 1...2 мм. Однако иногда необходи-
мо использовать слой большего объема или более крупные гранулы носителя,
поэтому предусмотрено изготовление трубок разных диаметров.
Для отбора проб аэрозолей жидкостные поглотители и сорбционные трубки
не годятся. Токсичные вещества, содержащиеся в воздухе в виде аэрозоля, кон-
центрируют, как правило, аспирацией воздуха через фильтр, закрепленный в
специальном держателе - патроне. Размер аэрозоля, присутствующего в воздухе,
колеблется от 0,01 до 10 мкм, но малые частицы быстро коагулируют, а крупные
выпадают на поверхность. Принято считать, что в воздухе находятся частицы
размером от 0,1 до 6 мкм.
Для улавливания высокодисперсных аэрозолей - дымов, туманов, пыли -
используют различные фильтрующие материалы: плотные бумажные (беззоль-
ные), мембранные, стекловолокнистые фильтры и др. Для исследования воз-
душной среды чаще всего применяются аналитические фильтры АФА-ВП-40 и
385
АФА-ВП-20, изготовленные из волокнистых ультратонких полимеров - ткани
Петрякова. Их преимущество перед другими фильтрами состоит в высокой за-
держивающей способности, малом сопротивлении потоку воздуха, что позволя-
ет достигать больших скоростей аспирации (от 100 до 200 л/мин). Фильтры из
ткани Петрянова обладают небольшой массой, негигроскопичны, стойки к аг-
б
Рис. 8.3. Фильтры (а)
и фильтродержатель (б)
рессивным химическим средам, паро- и га-
зообразные примеси не задерживают. Об-
щий вид стандартных фильтров типа АФА
показан на рис. 8.3, а.
При отборе проб на фильтры использу-
ют фильтродержатели из фторопласта, не-
ржавеющей стали, дюралюминия или пла-
стмассы. На рис. 8.3, б показан общий вид
фильтродержателя для фильтров типа АФА.
Фильтродержатель состоит из корпуса 1 во-
ронкообразной формы с закрепленной в нем
сеткой 2, прижимного кольца 3 и накидной
гайки 4. Герметизация элементов фильтро-
держателя обеспечивается уплотнительны-
ми резиновыми кольцами.
2. Расходомеры. При исследовании ат-
мосферного загрязнения точность определе-
ния концентрации веществ в первую оче-
редь определяется точностью учета объема
воздуха, протянутого через поглотительное устройство. Поэтому к аппаратуре
для измерения расхода воздуха предъявляют повышенные требования, измере-
ния проводят с максимальной тщательностью. Наиболее часто в качестве расхо-
домеров используют реометры, ротаметры, газовые счетчики.
Реометры. Реометр (рис. 8.4) состоит из U-образной манометрической трубки,
верхние части ее соединены между собой горизонтальной манометрической трубкой,
Рис. 8.4. Реометр
в которую впаяна диафрагма 3 с калиброванным
отверстием. К концам манометрической трубки
подсоединяют побудитель расхода (конец 2) и
поглотительное устройство (конец 7). Реометры
заполняют манометрической жидкостью, в каче-
стве которой может использоваться водный рас-
твор глицерина, керосин и другие, имеющие
плотность меньше единицы.
Уровень жидкости в реометре контролиру-
ется по шкале 4, расположенной вдоль изме-
рительной (правой на схеме) трубки прибора.
При отсутствии воздушного потока (по-
будитель расхода не включен) давление в
обоих коленах (трубках) реометра одинаково; уровень жидкости также одинаков
(расположен у нулевого деления шкалы). При включении побудителя расхода
386
через горизонтальную трубку протекает воздушный поток, который вызывает
образование зоны повышенного давления перед диафрагмой (в левой части со-
единительной трубки) и зоны пониженного давления после нее.
Так как в левом колене реометра давление больше, уровень жидкости в нем
опустится, а в правом - поднимется. Разность уровней жидкости является мерой
расхода воздуха и определяется по шкале. Шкала рео-
метра градуируется по показаниям контрольного рас-
ходомера.
Ротаметры. Для измерения расхода воздуха и
газов при условии индивидуальной градуировки на
конкретный газ широко применяют поплавковые рота-
метры с местными показаниями типа РМ и РС-7.
Принцип действия ротаметра (рис. 8.5, а) основан на
восприятии поплавком 1 динамического напора потока
газа, проходящего снизу вверх по конусной трубе 2.
При подъеме поплавка проходной зазор между наи-
меньшим диаметром поплавка и внутренним диамет-
ром трубки увеличивается, в результате перепад давле-
ния на уровне поплавка уменьшается.
Когда перепад давления становится равным массе
поплавка, приходящейся на единицу поперечного се-
чения, наступает равновесие. При этом каждому поло-
жению поплавка соответствует значение расхода, оп-
ределяемое по шкале 3.
Ротаметр (рис. 8.5, б) состоит из конусной трубки 7,
установленной в металлическом корпусе 8. Уплотне-
ние по наружному диаметру трубки в верхнем и ниж-
нем концах достигается за счет резиновых прокладок 6.
Для ограничения хода поплавка 9 в верхнем и нижнем
концах трубки предусмотрены упоры 5. Присоедине-
ние ротаметра к системе для отбора проб воздуха осу-
ществляется посредством фланцев или штуцеров, уста-
новленных на входных 10 и выходных 4 отверстиях
прибора. В центральной части корпуса имеется про-
дольный вырез, защищенный стеклом, через которое
ведется наблюдение за положением поплавка в трубке.
На защитное стекло нанесена условная равномерная
шкала, по которой снимается отсчет показаний рота-
метра. Для определения расхода воздуха шкала рота-
Рис. 8.5. Ротаметр
метра предварительно градуируется.
В зависимости от расхода воздуха ротаметры выпускают семи базовых мо-
делей. Каждая модель имеет унифицированную ротаметрическую стеклянную
трубку. Шкала трубки - равномерная, условная.
3. Побудители расхода. Электроаспираторы. В качестве побудителей рас-
хода воздуха применяют компрессоры, ротационные и вибрационные насосы,
387
бытовые пылесосы и т. д. Побудители расхода используют в электроаспираторах
для протягивания воздуха через поглотительные устройства и фильтры, а также
в автоматических газоанализаторах.
В общем виде электроаспиратор представляет собой устройство, состоящее
из двух функциональных узлов: побудителя расхода воздуха и расходомера.
Электроаспираторы могут быть совмещенными, когда побудитель и расхо-
домер расположены в общем корпусе, и раздельными, где побудитель и расхо-
домер представляют собой автономные блоки. В обоих вариантах градуировка
электроаспиратора осуществляется попарно: побудитель - расходомер. Непар-
ные устройства не используют.
Объем пробы (л) определяется как произведение скорости аспирации (л/мин)
на время отбора пробы (мин), если в качестве расходомера в электроаспираторе
используется ротаметр, и как разность начального и конечного отсчетов (м3),
если счетчик газовый. Некоторые модели электроаспираторов имеют встроен-
ные реле времени, с помощью которых задается временная программа работы
прибора. При отсутствии реле времени отсчет ведется по секундомеру.
В ходе отбора проб необходимо следить за тем, чтобы скорость аспирации
поддерживалась на заданном уровне с максимально возможной точностью.
Электроаспираторы используют как самостоятельные приборы для отбора
проб воздуха или в составе технических средств в стационарных и передвижных
лабораториях.
Все электроаспираторы с ротационными побудителями расхода имеют об-
щие принцип действия и конструктивные признаки. На рис. 8.6 представлена
типовая функциональная схема четырехканального аспиратора модели 822,
ЭА-1А, ЭА-1. Прибор состоит из ротационной воздуходувки 2 с электроприво-
Рис, 8.6. Функциональная схема
четырехканального электроаспиратора
дом У, к которой подключены четыре рота-
метра 5, что обеспечивает отбор проб воз-
духа одновременно по четырем каналам.
Диапазон и погрешность измерения каж-
дого канала электроаспиратора определяются
техническими характеристиками побудителя
и ротаметров. Входные штуцеры 6 ротамет-
ров предназначены для подсоединения к
электроаспиратору внешних устройств - за-
щитных патронов с поглотительными прибо-
рами, а также фильтродержателей с фильт-
рами, а вентили 3 - для регулировки расхода
воздуха в каналах. Изменением с помощью
вентилей пропускной способности канала
устанавливается необходимая скорость аспи-
рации в каждом из каналов.
Для предотвращения перегрузки элек-
тродвигателя в режиме запуска аппарата и
регулировки разрежения воздуходувки предусмотрен разгрузочный клапан 4,
соединенный с воздуходувкой. В момент включения прибора клапан 4 открыва-
388
ют и протяжка воздуха происходит не только по газовым каналам, которые ока-
зывают сопротивление воздушному потоку за счет поглотительных устройств и
поплавков ротаметров, но и через открытый клапан, что обеспечивает облегчен-
ный режим запуска электропривода.
Электроаспиратор работает следующим образом. Под воздействием побудителя
расхода 2 в системе создается разрежение, в результате чего атмосферный воздух
всасывается через поглотительные устройства прибора 8, проходит через защитные
патроны 7, ротаметры 5 и выбрасывается наружу через побудитель расхода.
В качестве побудителя расхода в электроаспираторах описываемых моделей
используется ротационная воздуходувка.
8.2.2. Методы химического анализа
1. Спектрофотометрический метод. Отобранные с помощью поглотитель-
ных приборов и электроаспираторов пробы атмосферного воздуха подлежат
анализу физико-химическими методами. В состав атмосферного воздуха входят
вещества очень малой концентрации, поэтому при анализе должны применяться
высокочувствительные методы.
В настоящее время концентрации газов и паров в атмосферном воздухе оп-
ределяют разными фотометрическими методами. Чаще всего используется спек-
трофотометрический метод анализа, основанный на способности окрашенных
растворов поглощать свет в диапазоне волн от ультрафиолетовых до инфракрас-
ных. Поглощение зависит от свойств вещества и его концентрации. При спек-
трофотометрическом методе анализа исследуемый компонент переводится в со-
единение, поглощающее свет, затем измеряется количество продукта реакции по
световому потоку, прошедшему через раствор [1].
Современная аналитическая химия позволяет найти цветовую реакцию для
любого химического вещества - органического и неорганического. Однако на
практике фотометрические методы используют для определения содержания в
воздухе неорганических веществ.
Спектрофотометрические измерения обычно проводят при помощи спектро-
фотометров и фотоэлектроколориметров. Действие этих приборов основано на
изменении интенсивности светового потока при прохождении через раствор в
зависимости от толщины слоя, степени окраски и концентрации. Мерой концен-
трации является оптическая плотность D или светопропускание раствора т.
Спектрофотометры дают возможность охватить более широкий диапазон длин
волн, чем фотоколориметры; точность определения повышается благодаря ис-
пользованию монохроматического излучения.
Измерение коэффициента пропускания состоит в том, что на фотопреобразо-
ватели направляют световые потоки - полный и прошедший через исследуемую
среду - и определяют отношение этих потоков. Обозначив полный световой по-
ток Фо, а пропущенный через среду Ф, получим коэффициент пропускания т (%)
в виде отношения
т = ЮОФ/Фо.
Чем выше концентрация вещества в растворе, тем больше его оптическая
плотность и меньше светопропускание. Оптическая плотность окрашенного рас-
389
твора прямо пропорциональна концентрации вещества в нем. Оптическая плот-
ность должна измеряться при длине волны, на которой исследуемое вещество
имеет максимальное светопоглощение. Это достигается подбором светофильт-
ров и кювет для раствора.
Для определения концентрации вещества на фотоколориметре сравнивают оп-
тические плотности исследуемого и ряда стандартных растворов. С этой целью
сначала по прибору определяют оптическую плотность серии растворов, содер-
жащих различные заданные количества определяемого вещества, и строят на мил-
лиметровой бумаге зависимость оптической плотности от концентрации вещества
(градуировочный график прибора). Затем измеряют оптическую плотность иссле-
дуемого раствора и по графику находят содержание вещества в нем.
Спектрофотометрический метод анализа довольно прост в реализации. Ис-
пользуемые приборы - фотоколориметры - недороги и удобны в эксплуатации.
С помощью этих приборов определяется концентрация веществ в растворах в
видимой области спектра.
Фотоколориметры подразделяют на одноканальные и двухканальные. В од-
ноканальном приборе световые потоки Ф и Фо поступают на фотопреобразова-
тель поочередно по одному оптическому каналу. В двухканальном приборе све-
товые потоки освещают свои фотопреобразователи одновременно.
2. Метод газовой хроматографии. Анализ атмосферного воздуха, загряз-
ненного выбросами промышленных предприятий и автотранспорта, является
крайне сложной задачей. Даже при наличии избирательных химических мето-
дов исследование многокомпонентных смесей требует значительной затраты
времени. В последние годы для анализа воздушной среды, особенно определе-
ния органических веществ, широко применяют хроматографический метод,
основанный на разделении смеси веществ в динамических условиях. Из хрома-
тографических методов наиболее распространена газовая адсорбционная хро-
матография [1].
Процесс разделения и анализа смеси в газоадсорбционной хроматографии
заключается в следующем. Через колонку (трубку), наполненную сорбентом
(веществом, способным поглощать), пропускают инертный газ-носитель. В ка-
кой-то момент времени в колонку вводят газовую смесь, состоящую из несколь-
ких компонентов. Из-за различной сорбции (способности поглощаться) захва-
ченные газом-носителем компоненты анализируемой смеси продвигаются в слое
сорбента с разной скоростью, вследствие чего происходит разделение отдельных
компонентов на зоны. Как лучи света в спектре, так и компоненты смеси в газо-
вой колонке располагаются в определенном порядке. Каждый компонент смеси
перемещается вдоль слоя сорбента с постоянной скоростью, это позволяет иден-
тифицировать его при выходе из колонки и определить количественно.
Для детектирования выходящих из колонок веществ применяют детекторы.
Обычно лабораторные хроматографы подразделяют по их функциональному
назначению: для стандартных анализов, универсальные, специального назначе-
ния и др. Однако эта классификация условна, тем более что современные хрома-
тографы включают в себя большое количество блоков, из которых можно соста-
вить прибор любого назначения.
390
На рис. 8.7 приведена типовая схема газового хроматографа. Установка со-
стоит из блока распределительных колонок, источника газа-носителя и устрой-
ства для фиксирования разделенных компонентов - детектора. К установке под-
ключают вспомогательные приспособления для введения пробы, а также прибо-
ры контроля и регулировки давления газа и скорости газового потока.
Рис. 8.7. Функциональная схема газового электроаспиратора
Газ-носитель из баллона 1 через регулятор давления 2 и измеритель расхода
3 непрерывно поступает в хроматографическую колонку 11. Давление газа перед
поступлением в колонку измеряется манометром, а его расход - ротаметром.
Перед колонкой помещено устройство для введения анализируемой пробы, так
называемый дозатор-испаритель 5. Перед дозатором установлен фильтр 4 для
очистки газа-носителя.
Анализируемая проба, введенная с помощью микрошприца б в дозатор, за-
хватывается потоком газа-носителя (если анализируемая проба - жидкость или
твердое вещество, то она предварительно в дозаторе-испарителе переводится в
парообразное состояние) и подается в хроматографическую колонку 11. Газо-
хроматографическая колонка для сохранения постоянства свойств сорбентов по-
мещена в термостат 12, в котором поддерживается постоянная температура с по-
мощью терморегулятора 9. Непосредственно на выходе из колонки размещается
детектор 10, измеряющий количество компонента, находящегося в газе-носителе.
Изменение состава газовой смеси и связанное с ним изменение физических
параметров вызывает в чувствительном элементе (датчике) детектора соответст-
вующее изменение электрической цепи, в которую включен датчик. С усилителя 7
сигнал датчика поступает на самопишущий прибор 8, на ленте которого записы-
вается кривая изменения во времени электрического потенциала, пропорцио-
нального концентрации вещества в газе-носителе на выходе из колонки. По этой
кривой (хроматограмме) судят о качественном и количественном составе анали-
зируемой смеси. Градуировка хроматографа осуществляется по стандартным
смесям.
Газовая хроматография является высокочувствительным, селективным и быст-
рым методом анализа воздуха. Диапазон измеряемых концентраций в зависимости
от типа детектора для органических соединений составляет 5- КГ6... 1 • 10"12.
391
Отечественная промышленность выпускает газовые хроматографы с широ-
ким набором детекторов и вычислительной техникой для обработки хромато-
грамм, а также с приставками для концентрирования примесей, пиролитически-
ми ячейками для анализа нелетучих соединений.
3. Метод масс-спектрометрии и хромато-масс-спектрометрии. Принцип
масс-спектрометрии заключается в ионизации молекул органических веществ
под воздействием различных факторов (электронного удара, высокочастотного
искрового разряда, химической и полевой ионизации и др.) при сохранении ос-
новной молекулярной структуры. Образующиеся при распаде возбужденных
молекулярных ионов фрагменты разделяются в масс-анализаторе на пучки, со-
держащие заряженные частицы определенной массы и энергии, и регистрируют-
ся в виде соответствующих масс-спектров [1,2].
Наиболее распространенным в нашей стране является магнитный масс-
спектрометр типа МИ-1201. Прибор предназначен для дискретного анализа изотоп-
ного состава газов и паров твердых веществ, а также для контроля изотопного со-
става газовых смесей в промышленных условиях. Широкий диапазон измерений по
массовым числам, высокая разрешающая способность позволяют проводить изо-
топный анализ однолучевым методом практически любых элементов периодиче-
ской системы и двулучевым методом - элементов, относительная разность масс
изотопов которых 0,36-2 %. Однако аналитические возможности масс-спектро-
метра лучше всего реализуются при измерении концентрации изотопов, массы ко-
торых больше 80 [2].
Прибор имеет следующие технические характеристики:
порог чувствительности по цезию, г/л.................................. 5 - 1О-10
диапазон массовых чисел..............................................2.. .720
суммарная погрешность, %................................................0,1
масса прибора, кг.................................................... 20 000
Масс-спектрометрия дает возможность определять значительное число ком-
понентов, обладает высокой чувствительностью и быстродействием. Однако
удовлетворительные результаты получают при исследовании довольно чистых
компонентов. В случае анализа сложных смесей органических и неорганических
соединений для их идентификации необходимо четкое разделение соединений и
получение однозначных характеристик. Одновременное выполнение этих требо-
ваний обеспечит масс-спектральный анализ с предварительным хроматографи-
ческим разделением соединений и последующим масс-спектрометрическим де-
тектированием, так называемая хромато-масс-спектрометрия (ХМС).
Из имеющихся аналитических методов ХМС-анализ является наиболее уни-
версальным. Преимущества этого метода определяются высокой чувствительно-
стью, возможностью селективного детектирования, получения информации о
структуре вещества и возможностью количественных определений. К недостат-
кам метода следует отнести сложность оборудования, высокую стоимость,
трудности идентификации изомерных соединений в сложных смесях, ограниче-
ния, связанные с различной летучестью исследуемых компонентов.
ХМС-метод позволяет осуществлять как качественное, так и количествен-
ное определение всех соединений, присутствующих в данной пробе, иденти-
392
фицировать индивидуальные вещества или отдельные классы. Необходимость
проведения полного анализа вполне очевидна, так как для практических целей
при гигиенических исследованиях требуется информация обо всех компонен-
тах, входящих, например, в анализируемую пробу загрязненного воздуха. В
этом случае в ходе записи хроматограммы по изменению полного ионного то-
ка регистрируются масс-спектры веществ, соответствующих всем
хроматографическим пикам.
При определении отдельных веществ в исследуемой смеси более приемлем
так называемый мониторинг выбранных ионов. Такая техника проведения анализа
позволяет резко увеличить чувствительность. Увеличение продолжительности
детектирования выбранного иона позволяет регистрировать значительно большее
число заряженных частиц определенного вида. Масс-спектрометр, работающий в
режиме ионной масс-хроматографии, можно считать наиболее селективным из
всех существующих детекторов при хроматографическом разделении компонен-
тов сложной смеси. Контроль пиков молекулярных и фрагментных ионов возмо-
жен только с помощью ЭВМ с соответствующим программным обеспечением.
Применение вычислительной техники в хромато-масс-спектрометрическом ана-
лизе делает исследования менее трудоемкими и более дешевыми. С помощью
ЭВМ полученные данные можно обработать, т. е. нормализовать, представив в
виде графиков и таблиц, что значительно облегчает интерпретацию и делает ее
более корректной. Программное обеспечение позволяет идентифицировать неиз-
вестные соединения по нескольким выбранным пикам соответствующих ионов,
опираясь на справочные данные библиотек.
В настоящее время выпускается хромато-масс-спектрометр марки MX-132,
имеющий порог чувствительности по метил-стеарату 10"6 г; диапазон массовых
чисел 1...1000.
4. Метод атомно-абсорбционного спектрального анализа аэрозолей. Ме-
тод атомно-абсорбционного определения металлов (АА-метод) в аэрозольных
пробах, отобранных на фильтры Петрянова, основан на абсорбции (поглощении)
света атомами определяемых элементов при введении анализируемого раствора
проб в пламя смеси ацетилена с воздухом. Поглощение пропорционально со-
держанию определяемых элементов.
Атомно-абсорбционный спектрофотометр состоит из источника света, ато-
мизатора, монохроматора, фотоэлектрического детектора и регистрирующего
прибора. Свет от источника, испускающего линейчатый спектр определяемого
элемента, проходит через атомизатор (например, пламя, в которое впрыскивают
аэрозоль анализируемого вещества). Область спектра, соответствующую распо-
ложению измеряемой резонансной линии, выделяют с помощью монохроматора.
Излучение направляют на фотоэлектрический детектор, а выходной сигнал ре-
гистрируют на самописце или преобразуют в цифровую форму. Интенсивность
резонансного излучения измеряют дважды: до распыления анализируемого об-
разца в пламя и в момент его распыления.
Из методов атомизации наибольшее распространение получил пламенный. В
качестве распылителей используют пневматические и ультразвуковые, однако
их основным недостатком является нестабильность скорости. Используют также
непламенные методы атомизации в нейтральной или инертной среде. Для этой
393
цели применяют электрический подогрев образца в графитовой кювете. В каче-
стве внутреннего покрытия используют пирографит, образцы вводят как в виде
растворов, так и в твердом.
Современные атомно-абсорбционные спектрофотометры, выпускаемые
фирмами «Перкин-Элмер» (ФРГ), «Хитачи» (Япония), оборудованы микропро-
цессорами и автоматическими дозаторами для непрерывного анализа. Из отече-
ственных атомно-абсорбционных спектрофотометров лучшими для определения
микропримесей металлов являются «Сатурн», С-112 с пламенным способом
атомизации. Комплекс аналитический спектроскопический КАС-120, состоящий
из атомизатора АТ-12 с графитовой и кварцевой кюветами для беспламенной
электротермической атомизации и спектрофотометра С-115, позволяет повысить
чувствительность определения на 1-2 порядка.
Перечень атомно-абсорбционных спектрофотометров, выпускаемых отече-
ственной промышленностью, представлен в табл. 8.1 [2].
Таблица 8.1
Атомно-абсорбционные спектрофотометры
Прибор (область спектра, нм) Технические характеристики
Сатурн (190... 860) Атомизатор - пламя. Предел обнаружения, мкг/мл: А1 -0,2; Cd - 0,02; Са - 0,05; Си - 0,005; Мо - 0,5; Ni - 0,1; Sn - 8; Hg - 10; Pb-0,07; Zn-0,015
Сатурн-1 (190... 860) Атомизатор - графитовая кювета и пламя, определяет 14 элемен- тов. Предел обнаружения 10"4 ... 10-5 мкг/мл
СА-2 (190...800) Атомизатор - пламя, используют три типа спектральных ламп. Предел обнаружения, мкг/мл: А1 -0,4; Си - 0,02; Mg - 0,005; Sn - 1,4 ; Hg - 1,2 ; Pb - 0,1; Zn - 0,01
С-302 (190...800) Атомизатор - пламя. Определяет 35 элементов. Предел обнару- жения, мкг/мл: А1 -0,2; Си - 0,005; Fe - 0,01; Zn - 0,005
С-112 (190...800) Атомизатор - пламя, графитовая кювета, капсула - пламя. Опре- деляет 35 элементов. Предел обнаружения, мкг/мл: А1 - 51 (Г8 *; Си-20-5 К *Г6; Cd-0,5-1 О’6
ААС-А (190...850) Автоматизированный прибор; выполнен в виде единого блока. Атомизатор - пламя. Определяет 67 элементов. Предел обнару- жения, мкг/мл: Zn - 0,005; Си - 0,005; Мп - 0,005; Ni - 0,03.
С-115 (190...860) Атомизатор - пламя и графическая кювета. Предел обнаружения: А1 - 45 -10-6 (графитовая печь), 0,5 мкг/мл (пламя)
5. Люминесцентный метод. Люминесценцией называется излучение света
телами, превышающее тепловое при той же температуре тел и имеющее дли-
тельность более 1(Г10с. Это излучение может быть вызвано бомбардировкой ве-
щества электронами и другими заряженными частицами; пропусканием через
вещество электрического тока (нетепловое действие), освещением вещества ви-
димым светом, рентгеновскими и у-лучами, а также некоторыми химическими
реакциями в веществе. Люминесцентное излучение имеет локальный характер,
так как испускается сравнительно небольшим числом атомов вещества.
Люминесценция связана с переходом излучающих свет атомов, молекул и
ионов в возбужденное состояние вследствие поглощения энергии, приносимой
394
возбуждающими источниками энергии. Последующее их возвращение в нор-
мальное или менее возбужденное состояние сопровождается испусканием света,
т. е. атом возвращается в стабильное состояние, отдавая избыток энергии в виде
излучения. Длительность возбужденного состояния зависит от степени возбуж-
дения атома или молекулы и окружающей их среды. Обычно эта длительность
составляет около 10”8 с. При метастабильном состоянии возбуждения время
пребывания в нем атома или молекулы может достигать 10"4 с и более.
Люминесценция, сразу прекращающаяся после окончания действия возбуди-
теля свечения, называется флюоресценцией. Люминесценция, сохраняющаяся
длительное время после прекращения действия возбудителя свечения, называет-
ся фосфоресценцией. Люминесценция под действием света называется фотолю-
минесценцией, под действием бомбардировки электронами - катодолюмине-
сценцией, под действием электрического тока и поля - электролюминесценцией,
под действием химических превращений - хемилюминесценцией, под действи-
ем рентгеновских лучей - рентгенофлюоресценцией.
Люминесцентный относят к числу наиболее чувствительных эмиссионных
методов определения следовых количеств органических и неорганических при-
месей в воздухе. Приборы для люминесцентного анализа могут быть разделены
на две группы: флюорометры и спектрофлюорометры. Основное отличие между
ними состоит в том, что в флюорометрах используют светофильтры, а в спек-
трофлюорометрах - дифракционные решетки [1].
Для определения концентрации оксидов азота (NO, NO2), углерода (СО), се-
ры (SO2), озона (Оз), аммиака (NH4) применяют высокочувствительные газоана-
лизаторы, использующие принцип хемилюминесценции. В нашей стране разра-
ботаны хемилюминесцентные газоанализаторы для определения концентрации
оксидов азота и озона. Разработан также флюоресцентный газоанализатор диок-
сида серы.
Химические реакции, сопровождающиеся хемилюминесценцией, могут про-
текать как при повышенных, так и при комнатной температурах. Так, определе-
ние концентрации оксида углерода возможно за счет хемилюминесценции, воз-
никающей при горении оксида углерода в атомарном кислороде:
СО + О -> СО2 + Av,
где h - постоянная Планка, v - частота испускаемого света.
Хемилюминесцентное излучение обнаруживается в видимой области света
при длине волны X = 400 нм. Предел обнаружения СО - 0,5 мг/м3.
Концентрацию оксида азота определяют по экзотермической реакции (с вы-
делением тепла) между NO и Оз, в результате которой получают NO2, О2 и около
10 % электронно-возбужденного NO2. При переходе NO2 в невозбужденное со-
стояние возникает излучение, интенсивность которого пропорциональна коли-
честву NO в реакционной камере. При определении суммарного содержания NO
и NO2 в воздухе NO2 предварительно восстанавливают до NO.
Для анализа аэрозолей, собранных на фильтрах, перспективным считается
метод энергодисперсионной рентгенофлюоресцентной спектроскопии. Для воз-
буждения рентгеновских спектров используют маломощные рентгеновские
395
трубки, а сам рентгеноспектральный флюоресцентный анализ (РСФА) проводят
с помощью кристалл-дифракционной аппаратуры с полупроводниковым детек-
тором. Сочетание рентгеновского спектрометра с ЭВМ позволяет проанализи-
ровать до 170 проб аэрозолей за шесть часов.
В сравнении с другими физическими методами анализа (атомно-абсорб-
ционным, эмиссионным, спектральным, нейтронно-активационным) РСФА об-
ладает следующими преимуществами:
- возможностью одновременного определения большого числа элементов;
- неразрушаемостью образца и возможностью повторного анализа другими
методами (важно при различного рода арбитражных исследованиях);
- сравнительно низкой стоимостью прибора и его компактностью;
- малыми затратами труда на анализ, простотой обработки спектров, воз-
можностью использования ЭВМ;
- возможностью автоматизации.
Последние две особенности при проведении массовых анализов наиболее
важны.
6. Метод инфракрасной спектроскопии. Принцип состоит в измерении по-
глощения энергии излучения анализируемым газом.
Способностью поглощать излучение в ИК-области спектра обладают газы,
молекулы которых состоят из двух и более атомов или ионов, за исключением
кислорода О2, азота Na, водорода Н2. Одноатомные газы не поглощают ИК-
радиацию. Степень поглощения излучения каждым из газов меняется при изме-
нении длины волны ИК-радиации, падающей на слой газа. Это обусловливает
проведение избирательного анализа газов. Например, оксид углерода обладает
полосой поглощения 4660 нм.
Реализуется инфракрасный метод анализа двухлучевой аппаратурой с изби-
рательно работающим приемником излучения. Для описания метода воспользу-
Рис. 8.8. Функциональная схема
установки для ИК-метода анализа
емся рис. 8.8. Установка состоит из источни-
ка излучения ИЗ, фильтровой камеры КФ,
двух измерительных каналов - сравнительно-
го КС и рабочего КР и приемника излучения
ПИ[1].
Если в приемник излучения заключить
газ, соответствующий полосе поглощения
анализируемого газа, и подвергнуть его воз-
действию потока ИК-радиации, то за опреде-
ленный промежуток времени газ нагреется до
некоторой температуры, определяемой усло-
виями теплоотдачи. Одновременно произой-
дет соответственное повышение давления
газа.
Этот процесс схематически показан на рис. 8.9, а. При прерывании с некото-
рой частотой потока ИК-излучения в приемник ПИ будет попадать модулирован-
ный поток излучения и находящийся в приемнике газ будет периодически нагре-
ваться и охлаждаться, в результате чего возникнут колебания температуры и дав-
ления газа (рис. 8.9, б).
396
В приемник излучения ИК-радиация поступает по двум параллельно установлен-
ным каналам - сравнительному КС и рабочему КР (см. рис. 8.8). Через сравнитель-
ный канал пропускают газ сравнения (азот), а через рабочий канал - анализируемую
газовую смесь. Так как газ сравнения не поглощает ИК-радиацию, то в приемник из-
лучения из сравнительного канала всегда поступает максимальное количество энер-
гии, в результате чего в приемнике происходит максимальное повышение температу-
ры Т и давления Р газа; амплитуда колебания
этих параметров будет максимальной. Количест-
во энергии ИК-излучения, поступающее в при-
емник из рабочего канала - величина меняющая-
ся, она зависит от концентрации анализируемого
вещества в газовой смеси.
Если в канале КР отсутствует измеряе-
мый газ, то в нем не поглощается энергия
ИК-излучения, соответствующая полосе по-
глощения измеряемого газа и в приемник ПИ
поступает такое же максимальное количество
энергии, как из сравнительного канала; ам- „ „
гт, п г Рис. 8.9. Изменение температуры
плитуда колебания Т и Р в этом случае будет ( . яавпения г/n гХ
„ Т/--ГЧ lui и давления iи) хаза
максимальной. Если в канале КР появится
измеряемый газ, то он поглотит часть энер-
гии ИК-излучения, соответствующую полосе поглощения измеряемого газа, и
в приемник из рабочего канала поступит энергии ИК-излучения меньше, чем
из сравнительного. Это вызовет понижение температуры и давления газа в ПИ,
а следовательно, уменьшение амплитуды колебания ТпР.
Таким образом, при отсутствии в газовой смеси анализируемого компонента
соблюдается равенство потоков ИК-излучения, поступающих в приемник; при
наличии в газовой смеси анализируемого компонента это равенство нарушается,
что вызывает соответствующую реакцию чувствительных элементов ЭЧ, уста-
новленных в приемнике. Сигнал рассогласования с приемника обрабатывается
электронной схемой БЭ с показывающим прибором ИП или самопишущим по-
тенциометром ПС на выходе (см. рис. 8.8).
На результаты анализов, проводимых с помощью газоанализатора, оказыва-
ют влияние компоненты газовой смеси, полоса поглощения ИК-энергии которых
находится близко к полосе поглощения измеряемого газа (например, СО и СО2).
Для уменьшения этого влияния на пути следования ИК-излучения установлена
фильтровая камера КФ, наполненная мешающим компонентом. Вследствие это-
го энергия излучения, соответствующая полосе поглощения мешающего компо-
нента, в фильтровой камере поглощается, а часть ее, соответствующая полосе
поглощения анализируемого компонента, проходит без значительного поглоще-
ния. Выходным параметром газоанализаторов является напряжение, пропорцио-
нальное концентрации анализируемого газа в газовой смеси. Для получения вы-
ходных параметров в абсолютных физических единицах (концентрации, мг/м3)
осуществляется градуировка шкал приборов. С этой целью через рабочую кюве-
ту газоанализатора пропускают аттестованную газовую смесь, содержащую из-
вестную концентрацию измеряемого газа, и определяют цену деления на ленте
самописца или шкале прибора.
397
7. Плазменно-ионизационный метод. Для определения концентрации ор-
ганических примесей в воздухе широко используется пламенно-ионизационный
метод. Сущность метода заключается в том, что введение молекул органическо-
го вещества в водородное пламя вызывает образование ионов, которые под воз-
действием электрического поля перемещаются между электродами, образуя
ионный ток, пропорциональный концентрации органических веществ [1]. На
основе этого метода в 1957 г. разработан пламенно-ионизационный детектор
(ПИД). Определение концентрации углеводородов в воздухе с помощью ПИД
заключается в измерении тока ионизации, получаемого при введении в пламя
водорода молекул органических веществ.
В отсутствие органических примесей ионный ток, возникающий в чистом во-
дородном пламени, ничтожно мал (IO-12.. .10”13 А). При введении в пламя молекул
органических веществ ионный ток между электродами ПИД увеличивается (1(Г8 *
... КГ11 А). Высокоомный (1О10... 1012 Ом) измерительный преобразователь «ток -
напряжение» преобразует ионный ток в выходное напряжение 0... 1 В.
Газоанализатор выполнен по двухканальной схеме. Поток анализируемого
атмосферного воздуха делится на две равные части. На первый ПИД, располо-
женный в канале регистрации общей суммы углеводородов, анализируемый
воздух поступает без изменений. Другая часть потока проходит через устройст-
во разделения углеводородов, где происходит отделение метана от остальных
углеводородов. Второй ПИД регистрирует только метан. Значение концентра-
ции суммы углеводородов без метана - разность электрических сигналов с обо-
их датчиков.
Особенностью работы ПИД является его неодинаковая чувствительность к
различным углеводородам. Относительная чувствительность ПИД к некоторым
углеводородам такова:
Метан СН4 1,00
Этилен С2Н4 0,60...0,77
Ацетилен С2Н2 0,65...0,79
Пропан С3Н8 0,65...0,81
Пропилен С3Нб 0,50...0,71
Бензол С6Нб 0,65...0,82
Толуол С7Н8 0,53...0,74
Среднее 0,68±0,08
8. Метод протонного возбуждения характеристического рентгеновского
излучения. В последнее время за рубежом широко применяют метод протонно-
го возбуждения характеристического рентгеновского излучения. Он позволяет
определять все элементы с атомным номером больше 8. Этот метод, как и рент-
генофлюоресцентный, принадлежит к неразрушающим пробу. Сущность его
заключается в том, что пучок ионов (протонов), ускоренный в ускорителе до
энергии 2.. .4 МэВ и затем сфокусированный в ионопроводе, попадает на фильтр
с пробой аэрозолей и возбуждает атомы элементов, входящих в их состав. При
спонтанном переходе возбужденных атомов в стабильное состояние возникает
характеристическое рентгеновское излучение, с довольно простым энергетиче-
398
ским спектром, которое детектируется полупроводниковыми детекторами.
Спектры дешифрируются с помощью ЭВМ, которая выдает результат в виде
таблиц с концентрацией определяемых элементов [1].
Существенным затруднением при реализации метода является необходи-
мость привязки к генераторам пучков ионов типа Ван-де-Граафа, представляю-
щих собой громоздкие сооружения.
9. Плазменная эмиссионная спектроскопия. Одним из самых современных и
перспективных методов атомного эмиссионного анализа микроэлементов в воздухе
является высокочастотная индукционная плазменная спектроскопия (ВИП-
спектроскопия). В основе метода лежит детектирование спонтанного излучения
термически возбужденных высокочастотной плазмой атомов химических элемен-
тов. ВИП-спектрометры оснащают ЭВМ и источником высокочастотной индукци-
онной плазмы. ВИП-спектрометры выпускаются во Франции, Англии, США и ФРГ.
Эти приборы позволяют одновременно определять от 32 до 60 элементов.
Основным достоинством ВИП-спектроскопии является его высокая производи-
тельность - до 60 проб в час при определении 30 - 40 элементов, что связано с про-
стотой приготовления стандартных растворов. Однако проба должна поступать в
плазму в виде аэрозоля, образованного распылителем из анализируемого водного
раствора. Коэффициент полезного действия современных распылителей не превы-
шает 1 %, что существенно снижает абсолютную чувствительность метода (прибли-
зительно на два порядка). В США ведутся работы по прямому использованию ла-
зерного излучения для испарения проб с целлюлозных фильтров, на которые их со-
бирали. Так как аэрозольные фильтры не требуется испарять, то резко повышается
чувствительность метода при одновременном определении 25 элементов.
8.2.3. Автоматические средства обнаружения и измерения
В настоящее время большое внимание уделяется развитию автоматических
средств наблюдения за уровнем загрязнения атмосферы, которые позволяют
оперативно определять концентрацию, в том числе выявлять максимальные
концентрации загрязняющих веществ [1,2].
Автоматический газоанализатор представляет собой прибор, в котором от-
бор проб воздуха, определение количества контролируемого компонента, выда-
ча и запись результатов анализа проводятся автоматически по заданной про-
грамме без участия оператора.
В основу работы автоматических газоанализаторов положены различные фи-
зико-химические методы анализа: электрохимический, инфракрасный, люми-
несцентный и др.
К газоанализаторам предъявляют следующие требования.
Приборы должны иметь высокие чувствительность и избирательную спо-
собность. Это требование вытекает из положения, что в атмосферном воздухе
содержится значительное количество загрязняющих веществ, которые в процес-
се измерений оказывают влияние на показания прибора. В настоящее время раз-
работаны приборы и системы, обеспечивающие надежное измерение, сбор и об-
работку данных об уровне загрязняющих веществ в атмосфере.
Наиболее важным явилось создание измерительных комплексов, объеди-
няющих в единое целое приборы различного функционального назначения и
399
позволяющих проводить измерения концентраций вредных веществ различных
классов с применением современных методов.
Развитие отечественных средств комплексного контроля атмосферных загряз-
нений нашло отражение в разработке автоматических газоанализаторов вредных
веществ, создании комплексных лабораторий (типа ИАЗ-1), стационарных и пере-
движных лабораторий для контроля воздушного бассейна в городах и промышлен-
ных центрах («Пост-1», «Атмосфера-2»), создании автоматизированных систем
контроля загрязнений атмосферы - АСКЗА («Воздух-1») и автоматизированных
систем наблюдения и контроля за состоянием окружающей среды (атмосферы)
АНКОС-А.
Характеристики газоанализаторов и автоматизированных систем контроля
вредных веществ в атмосферном воздухе даны в табл. 8.2 и 8.3 [2].
Таблица 8.2
Автоматические газоанализаторы вредных веществ в атмосферном воздухе
Прибор Определяе- мый компо- нент Диапазон изме- рений, мг/м3 (погрешность, %) Техническая характеристика
Газоанализатор кулонометриче- ский переносной «Атмосфера-1», полуавтоматический непрерыв- ного действия, показывающий, в обыкновенном исполнении Диоксид серы 0-0,5; 0-2,0; 0- 10,0 (±20) Время начала реагирования не более 1 мин; габариты 495x200x265 мм; масса 10 кг
Сероводо- род 0-0,05; 0-0,5 (±50)
Газоанализатор кулонометриче- ский переносной «Атмосфера-2» полуавтоматический непрерыв- ного действия, показывающий, в обыкновенном исполнении Хлор 04),2; 0-1,0 (±20) То же
Озон 0-0,1; 0-0,5 (±20)
Газоанализатор кулонометриче- ский переносной «Палладий- 2М», автоматический непре- рывного действия, для эксплуа- тации в условиях передвижных и стационарных лабораторий Оксид углерода 0-3 (±25) 0-10 (±20) 0-30 (±10) 0-100 (±10) Стабильность показаний в течение 25 ч; габариты 520x198x535 мм, масса 20 кг; габариты преобразователя напряжения 310x200x350 мм, масса 9,12 кг; габариты потен- циометра 240x320x446 мм, масса 17 кг
Автоматический флюорес- центный газоанализатор типа 667 ФФ01 непрерывного дей- ствия, применяют автономно, и в составе АСКЗА Диоксид серы 0-5 (±20) Время выхода на режим 3 ч; температура окружающей среды 10-35 °C; питание от сети переменного тока; га- бариты 490x920x550 мм, масса 68 кг
Автоматический хемилюми- несцентный газоанализатор типа 652ХЛ01, применяют как автономно, так и в составе многоканальной АСКЗА Озон 0-0,05; 0-0,15; 0- 0,5; 0-1,5 (±20) Время выхода на режим 3 ч, время непрерывной работы без обслуживания 30 сут; питание от электросети; габариты блоков: БАУ1-001 490x170x550 мм; БЭ-003 490x170x550 мм; БА-400 490x290x570 мм; БПР 490x290x550 мм; масса прибора 80 кг
400
Окончание табл. 8.2
Прибор Определяе- мый компо- нент Диапазон измере- ний, мг/м3 (погрешность, %) Техническая характеристика
Автоматический хемилю- минесцентный газоанали- затор типа 645 ХЛ01, применяют как автоном- но, так и в составе АСКЗА Оксид азо- та 0-0,25 (±20) Время выхода на режим 3 ч; пи- тание от сети переменного тока; габариты блоков БАУ № 001 490x170x550 мм; БЭ-001 490x170x550 мм; БЭ-001 490x170x550 мм; БА-100 490x290x570 мм; БПР 490x290x550 мм; масса прибора 90 кг
Диоксид азота 0-0,75 (±20)
Сумма оксидов азота 0-2,5 (±20) 0-7,5 (±30)
Лазерный газоанализатор метана типа 323ЛА01, при- меняют в составе пере- движных лабораторий Метан 0-0,001; 0-0,01; 0-1% (об.) (±25) Время установления выходного сигнала 10 с, питание от бата- реи, температура окружающей среды от -10 до +40 °C; масса аналитического блока 700x310x240 мм, габариты 27 кг; дистанционный пульт 250x75x140 мм, масса 3 кг
Газоанализатор 623 ИН02 пламенно-ионизационный (в обыкновенном испол- нении), используют в составе АСКЗА или авто- номно Сумма уг- леводоро- дов 0-5; 0-15; Имеет два режима работы: ав- томатический и ручной; пита- ние от электросети напряжени- ем 220 В; время начала реаги- рования 10 с
Метан 0-50 (±15-20)
Газоанализатор типа ЛГА периодического действия, основанный на поглоще- нии метаном лазерного излучения, используют автономно или в системе, предназначенной для об- наружения утечки метана Метан 0-10“5; 0-10-4; 0-0,001; 0-1% (об.) (±50) Габариты фотометрического блока 850x396x396 мм, масса 25 кг; габариты измерительной стойки 800x600x530 мм, масса 53 кг; габариты основания 980x450x100 мм, масса 15 кг
Лазерный газоанализатор запыленности атмосферы типа ЛАЗА-1, применяют как автономно, так и в составе автоматизирован- ных систем контроля ок- ружающей среды Пыль 0,01-0,1; 0,1-1; 1-10(±30) Время прогрева не более 30 мин; питание от сети переменного тока; температура среды от -40 до +40 °C. Габариты блока пре- образователя, 484x508x168 мм, масса 24 кг; габариты блока ав- томатического управления 484x508x168 мм, масса 15 кг
Таблица 8.3
Системы контроля вредных веществ в атмосферном воздухе
Система Определяемый компонент Техническая характеристика
Лаборатории исследования атмосферных загрязнений типа ИАЗ-1 Вредные вещества, метеорологические параметры Блоки полярографии, фотометрии, спек- троскопии, анализа канцерогенных ве- ществ, отбора проб, фотоблок камераль- ной обработки; питание от электросети; площадь лаборатории 260 м2, масса ла- боратории 30 000 кг; производитель- ность 10 000 анализов в год
401
Окончание табл. 8.3
Система Определяемый компонент Техническая характеристика
Контрольно-измерительный комплекс «Пост-1», используют в системе гидрометеослужбы, на санитарно- эпидемиологических станциях и промышленных предприятиях Оксид углерода, диоксид серы, диок- сид азота, фенол, сероводород, фторо- водород, хлор, пыль, сероуглерод Блоки отбора проб, автоматического ана- лиза, метеопараметров; питание от элек- тросети; габариты в рабочем положении 2300x3600x7950 мм, масса 2300 кг. Про- изводительность при трехразовом отборе проб не менее 5500 отборов в год (на шесть ингредиентов)
Лаборатория комплектная «Пост-2», используют в сети наблюдений Госкомгидромета Оксид углерода, диоксид серы, сажа, пыль и другие веще- ства Павильон с устройствами автоматического контроля чистоты воздуха (анализаторы ГМК-3, ГКП-1, аспираторы ЭА-1, ЭА-2, ЭА-2С, воздухозаборник «Компонент»), контроля метеопараметров. Питание от электросети. Габариты в рабочем положе- нии 2200x2700x7100 мм, масса 3700 кг. Производительность лаборатории - 50 00С проб в год (при четырехразовом обслужи- вании в течение суток)
Передвижная лаборатория «Атмосфера-2», смонтиро- ванная на автомобиле УАЗ Диоксид серы, серо- водород, озон, хлор и другие вещества Комплекс приборов (ГКП-1, «Атмосфера-1», «Атмосфера-2», анемометры, психромет- ры, аспираторы), стенды жизнеобеспече- ния; питание от электросети; габариты 5300x3500x4300 мм, масса 2620 кг
Автоматизированные станции контроля атмосферных загряз- нений (АСКЗА, «Воздух-1») Диоксид серы, оксид углерода и другие вещества Блоки автоматического анализа, отбора проб, измерения метеопараметров, реги- страции информации; габариты 2200x4500x6670 мм, масса 5000 кг
Автоматизированная система контроля за загряз- нением воздуха АСКЗВ То же Измерительный комплекс, датчики и кон- трольно-замерные станции (КЗС), ком- плекс автоматических устройств, осуще- ствляющих на центральную станцию передачу по телефонному каналу накоп- ленной на КЗС информации; комплекс автоматических устройств, обеспечиваю- щих управление системой, прием и обра- ботку информации от КЗС, выходных устройств центральной станции
Автоматизированная система наблюдения и контроля за состоянием окружающей среды (атмосферы) АНКОС-А » Контроль параметров атмосферного воздуха с помощью АСКЗА, передача полученной информации в информа- ционно-управляющий вычислитель- ный комплекс с помощью аппаратуры передачи данных, обработка получен- ной информации и доведение резуль- татов обработки до потребителя
8.3. Дистанционная химическая разведка
Применительно к средствам химической разведки понятие «дистанционная
разведка» означает получение информации о химических примесях без непо-
средственного контакта.
Все известные методы дистанционной разведки можно разделить на актив-
ные и пассивные.
402
К активным относят метод лазерного зондирования атмосферы. Лазерное
зондирование основано на принципе оптической локации и, взаимодействии
зондирующего излучения с исследуемыми химическими примесями и регистра-
ции эффектов взаимодействия. Лазерное локационное устройство получило
название «лидар» (от англ. Light Detection and Ranging}.
Среди пассивных методов дистанционной разведки наиболее перспективны-
ми являются спектрорадиометрические. Радиометры используют принцип пас-
сивной оптической локации, с их помощью химические примеси обнаруживают
по их характерному тепловому излучению.
ИК-спектрометры также обнаруживают вещества путем анализа спектраль-
ного состава собственного излучения или переотраженного им излучения есте-
ственного источника (Солнца).
8.3.1. Методы лазерного дистанционного зондирования атмосферы
При лазерном зондировании атмосферы из-за малости длины волны оптиче-
ского излучения, особенно видимого и ультрафиолетового, отражателями локаци-
онного сигнала являются все молекулярные и аэрозольные составляющие, т. е.,
по сути, сама атмосфера формирует лидарный сигнал со всей трассы зондирова-
ния по любым направлениям.
Распространяясь по трассе зондирования, лазерный импульс испытывает рас-
сеяние и поглощение на аэрозолях и молекулах атмосферы. Часть излучения, рассе-
янная назад в направлении лидарной системы может быть собрана и сфокусирована
оптической приемной антенной на фотоприемнике, который преобразует оптиче-
ское излучение в электрический сигнал, пропорциональный падающему световому
потоку. При этом расстояние до любого рассеивающего объема на трассе зондиро-
вания однозначно определяется по временному интервалу между посылкой лазер-
ного импульса и приемом рассеянного назад сигнала. Интенсивность принятого
сигнала в каждый конкретный момент времени зависит как от свойств соответст-
вующего рассеивающего объема атмосферы, так и от характеристик всей трассы
зондирования на удвоенном пути от лидара до рассеивающего объема и обратно.
В настоящее время методы дистанционного лазерного зондирования основыва-
ются на таких эффектах, как рэлеевское, Ми, резонансное рассеяние, флюоресцен-
ция, поглощение, а также дифференциальное поглощение и рассеяние (ДПР).
Краткое описание каждого из методов можно найти в табл. 8.4 [3].
Таблица 8.4
Процессы взаимодействия излучения с веществом, используемые
в лазерном дистанционном зондировании
Метод Физическое описание
Рэлеевское рассеяние Лазерное излучение, упругорассеянное атомами или молекулами, на- блюдается на исходной частоте Туте- Виртуальный уровень //в Основной уровень
403
Окончание табл. 8.4
Метод Физическое описание
Рассеяние Ми Лазерное излучение, упругорассеянное малыми частицами (аэрозоля- ми), наблюдается на исходной частоте /г у hv Л~
Комбинационное рассеяние Лазерное излучение, рассеянное молекулами, наблюдается с некоторым частотным сдвигом, характеризующим данные молекулы (hv - hv* = Е) —уе—в—— Возбужденный уровень Основной уровень
Резонансное рассеяние Лазерное излучение на частоте определенного перехода в атоме рас- сеивается с большим сечением и наблюдается на исходной частоте -я—Виртуальный уровень V !/ к Ч у <J Колебательно- 41/ возбужденный Основной уровень уровень
Флюоресценция Лазерное излучение на час в атоме или молекуле прет чением на более низкой г уменьшить эффективное с< дается широкополосное изз Av н Основной тоте определенного электронного перехода ерпевает поглощение с последующим излу- гастоте; тушение при столкновении может учение этого процесса; в молекулах наблю- тучение — Колебательные уровни электронно- "V возбужденного 1 'V состояния 1 hv* уровень
Поглощение Ослабление лазерного пучка наблюдается, если частота излучения попадает в полосу поглощения данной молекулы -я Возбужденный уровень ‘V Основной уровень
Дифференциальное поглощение и рассея- ние (ДПР) Дифференциальное ослабление двух лазерных пучков определяется по их сигналам обратного рассеяния; при этом частота излучения в одном из пучков настраивается близко к частоте данного молекулярного перехода, в то время как частота второго - несколько в стороне от частоты перехода Avj -эт— Возбужденный уровень Av, \У Основной уровень
404
1. Метод упругих рассеяний. Метод оценки химических примесей в атмо-
сфере путем анализа светового излучения, рассеянного в результате упругих
взаимодействий, включает в себя рэлеевское - на атомах и молекулах - и Ми на
аэрозолях (пыль, водные капли и т. д.)? размеры частиц которых значительно
больше длины волны зондирующего излучения. Частота рассеянного излучения
в указанных случаях равна частоте сигнала лазера. Поэтому измерения с помо-
щью этих методов не обеспечивают прямого получения количественной инфор-
мации относительно молекулярного состава атмосферы. С помощью метода
упругого рассеяния дистанционно определяют содержание загрязняющих час-
тиц в атмосфере путем оценки интенсивности рассеянного назад излучения. На
основании полученных данных строят диаграммы относительных концентра-
ций вещества частиц в пространстве и их изменение во времени. Зондирование
атмосферы проводится с помощью импульсного излучения лазерного локатора
(лидара).
Основной характеристикой рассеянного излучения, которая определяет его
интенсивность, является поперечное сечение рассеяния назад каждого из
перечисленных эффектов (см. табл. 8.4.)
В частности, для рэлеевского рассеяния показатель ослабления рассеянного
назад излучения определяется выражением [5]:
yj,p) = 0,827#S3V,
(8.1)
где N - концентрация частиц, см 3; S - площадь поперечного сечения рассеи-
вающих частиц, см2; X - длина волны излучения, см.
В большинстве случаев рэлеевское рассеяние во много раз слабее, чем Ми-
рассеяние и им можно пренебречь. Показатель ослабления при Ми-рассеянии
определяется эмпирическим соотношением
-0,58V1/3
(8.2)
где V- метеорологическая дальность видимости, км; X - длина волны, мкм.
На рис. 8.10 приведены наблюдаемые диапазоны сечений рассеяния для
указанных в табл. 8.4 эффектов взаимодействия лазерного излучения с вещест-
вом [3].
2. Метод комбинационного рассеяния (КР). В основу метода положен эф-
фект КР при взаимодействии зондирующего излучения с исследуемой средой.
Сущность явления обусловлена специфическим обменом энергией между фото-
ном и рассеивающей молекулой, следствием которого является сдвиг частоты
рассеянного излучения относительно частоты падающего на значение, соответст-
вующее возможным значениям внутренней колебательно-вращательной энер-
гии, характерной для данной молекулы. Комбинационное рассеяние представля-
ет собой двухфотонный процесс, в котором в результате одноступенчатого взаи-
модействия практически мгновенно исчезает один фотон и появляется второй
405
IO’8
10’15
IO'20
io-25
IO’30
Рассеяние Ми
x'z=xz
Атомная
флюоресценция
(A.rf = XZ иА4 *Az)
Влияние
тушения
в атмосфере
Молекулярная
флюоресценция
(широкая полоса)
Резонансное
рэлеевское
рассеяние
(Az = Afl)
Влияние
тушения
в атмосфере
на флюорес-
ценцию
Резонансное
комбинационное
рассеяние
(Xz = Xa)
Комбинационное
рассеяние
(антистоксова
компонента)
Рэлеевское
рассеяние
(Az = Ae)
I
I
Лазерная
длина
волны (V)
Резонансное
комбинационное
рассеяние
(Az = Xa)
Комбинационное
рассеяние (стоксова
компонента)
Xrf=Xz + AV
Рис. 8.10. Типы оптических взаимодействий, используемых в лазерном зондиро-
вании (X2, V и Г - длины волн соответственно лазерного, детектируемого и по-
глощенного излучения)
с частотой, смещенной относительно начальной. В результате указанного взаи-
модействия происходит частичное отражение излученной энергии зондирующе-
го сигнала в обратном направлении с измененным частотным спектром, в кото-
ром кроме основной частоты зондирующего сигнала присутствует ряд линии
комбинационного рассеяния. Спектральные составляющие КР смещены относи-
тельно основной частоты излучения на определенные значения, однозначно свя-
406
занные со свойствами исследуемых компонент. Это позволяет осуществить
идентификацию загрязнителей атмосферы по смещению спектральных линий
КР в сигнале.
Особенностью КР является то, что его сечение на три порядка меньше моле-
кулярного рассеяния (см. рис. 8.10). В этой связи интенсивность отраженного
сигнала быстро падает ниже порога регистрации, что обусловливает небольшую
дальность работы лидаров, не превышающую 1...3 км. Сечение 0 обратного КР
пропорционально 1/Х4 (где X - частота излучения КР-лидара). Поэтому возбуж-
дение КР целесообразно в лидарных экспериментах проводить в ультрафиолето-
вой области спектра [6].
К достоинствам метода КР следует отнести высокую информативность, свя-
занную с однозначной интерпретацией результатов зондирования, и удобство
калибровки лидаров по естественным эталонам. Например, при измерении кон-
центрации газов сигнал КР сравнивается с реперным сигналом концентрации
азота, содержание которого в атмосфере на различных высотах известно с дос-
таточной точностью.
КР-лидары обладают высоким пространственным разрешением, которое оп-
ределяется выражением
AZkp = с/2(т0 + тд),
где тд - постоянная времени детектирования; то - длительность зондирующего
импульса лазера.
Метод КР реализуется на основе моностатической схемы зондирования. Это
открывает возможность создания мобильных систем, в том числе и на борту ле-
тательных аппаратов, с использованием одночастотных лазеров. Реализация ме-
тода КР накладывает ряд требований на лидарную установку. Спектральная об-
ласть 250...300 нм представляется наиболее удобной для создания КР-лидара,
поскольку в данной области практически отсутствует фон солнечного света, по-
глощаемого слоем стратосферного озона. В качестве лазеров КР-лидаров целе-
сообразно применять рубиновые с удвоением частоты излучения (347,2 нм),
азотные (337,1 нм), на алюмоиттриевом гранате (353 или 266 нм), а также экси-
мерные. При регистрации сигналов КР важно обеспечить высокое спектральное
разрешение (порядка 1 А) и подавление в 105... 1О10 раз несмещенной рэлеевской
компоненты и аэрозольного рассеяния. Регистрация КР осуществляется, как
правило, в режиме счета фотонов.
Основным недостатком метода, ограничивающим дальность лазерного зон-
дирования, является малое сечение рассеяния. Сечение рассеяния может быть
увеличено на несколько порядков, если длину волны зондирующего луча света
выбрать вблизи линии поглощения исследуемого газа. Этот вид рассеяния назы-
вается резонансным (предрезонансным) КР. К сожалению, только ограниченное
количество загрязняющих газов, имеющих линии поглощения в области про-
зрачности атмосферы, может быть обнаружено таким способом (среди них йод,
озон, диоксид азота, оксид азота, диоксид углерода, окись углерода).
3. Метод резонансного рассеяния (РР). Эффект резкого увеличения испус-
кания фотонов с частотой, равной частоте возбуждения, при совпадении длины
407
волны зондирующего излучения с линией поглощения РР широко используется
в лидарах для обнаружения в верхних слоях атмосферы (до 100 км) малых кон-
центраций элементов, например, калия и натрия. При РР компоненты исследуе-
мых сред интенсивно поглощают излучения лазера, когда частота попадает в
область полосы поглощения молекул и атомов этих компонентов. Спустя неко-
торое время поглощенная энергия излучения спонтанно переизлучается, а ее
часть, рассеянная в обратном направлении, детектируется фотоприемником. Ли-
дарные системы РР строят на базе лазеров на красителях, ширина линии излуче-
ния которых искусственно сужается до 5... 10 нм за счет установки в резонаторе
лазера комбинации интерферометра и дифракционной решетки.
Несмотря на то что сечение РР намного больше сечения молекулярного рас-
сеяния, дальность действия лидаров РР невысока при локации нижних слоев
атмосферы и имеет практически то же значение, что и у КР. Ограничение эф-
фективности и дальности действия метода РР обусловлено тушением РР в тро-
посфере. В нижних слоях атмосферы происходит уширение спектральных линий
вследствие столкновений, уменьшается сечение рассеяния, РР маскируется аэро-
зольным. Сечение РР для молекул значительно меньше, чем для атомов. Это ог-
раничивает применение лидаров РР для контроля загрязнений атмосферы газо-
выми компонентами.
Пространственно-временное разрешение метода РР определяется выражением
AZpp = с/2(т0 + тд + тР), (8.3)
где тр - время безызлучательной релаксации. Пространственно-временное раз-
решение метода РР хуже, чем метода КР, в зависимости от изменения параметра
тр может колебаться от 102 до 104 м.
4. Метод резонансной флюоресценции (РФ). Эффект РФ - двухступенча-
тый, поглощается фотон с частотой щ и испускается фотон на частоте о2. Явле-
ние РФ, наблюдаемое при селективном поглощении зондирующего лазерного
излучения молекулами загрязняющих атмосферу веществ, может быть исполь-
зовано и для дистанционного обнаружения. Измеряя длину волны и интенсив-
ность излучения РФ, можно определить типы загрязняющих примесей и их от-
носительные концентрации. Особенностью данного метода является необходи-
мость применения лазера, перестраиваемого в диапазоне длин волн.
При селективном поглощении молекулами и атомами зондирующего излу-
чения возможны два случая: возбуждение колебательно-вращательных перехо-
дов молекул в ИК-области спектра и электронных переходов атомов и молекул в
видимой или ультрафиолетовой части.
При РФ проще получать информацию о расстоянии до начала области за-
грязнения. Однако определение абсолютных концентраций в этом случае слож-
нее, чем при КР. Это особенно заметно на переходах в ИК-области, поскольку в
этом случае интенсивность рассеянного излучения нельзя сравнить с линиями
молекул N2 и О2 из-за отсутствия у этих молекул переходов в ИК-области. Так
как нет явной зависимости между интенсивностью рассеянного излучения и
концентрацией загрязнений, количественные измерения оказываются весьма
сложными. Неопределенность значений времени безызлучательной релаксации
колебательных состояний еще более усложняет абсолютные измерения.
408
Колебательно-вращательные переходы молекул используют для обнаруже-
ния некоторых газов и органических веществ промышленного происхождения в
атмосфере.
Разрешение по глубине, которое дает в этом случае метод РФ, определяется
формулой
AZpo = AZkp + ст/2,
где т - время безызлучательной релаксации. Для колебательно-вращательных
переходов при атмосферном давлении время для разных молекул находится в
пределах 10"Л.. 10”6 с. Учитывая это, можно считать, что AZPo изменяется от 0,15
до 15 км.
Электронные переходы атомов и молекул важны для обнаружения паров ме-
таллов, таких, как As, Be, Си, Zn, Na и Hg, а также некоторых газовых молекул,
в частности SO2, О3, NO, N2O, NH3, НСОН (формальдегид) и С6Н6 (бензол). Ука-
занные молекулы имеют электронные переходы в видимой и ультрафиолетовой
части спектра.
Время тушения флюоресценции для электронных переходов не превышает
наносекунды и разрешение по глубине сравнимо с соответствующим парамет-
ром при методе КР.
Метод РФ широко применяется в океанологических исследованиях. По сигналу
люминесценции морской воды, инициированной лучом лазера, определяют концен-
трацию хлорофилла, контролируют загрязнение моря нефтепродуктами и органиче-
скими веществами промышленного происхождения, исследуют процессы диффу-
зии в море путем слежения за трансформацией облаков красителей и т. д.
5. Методы резонансного поглощения (РП) и дифференциального погло-
щения с рассеянием (ДПР). Метод РП основан на явлении интенсивного погло-
щения лазерного излучения в среде при совпадении длины волны излучения со
спектральными линиями поглощения составляющих ее молекул. Полосы погло-
щения атмосферных газов содержатся в широком диапазоне длин волн (от санти-
метрового до вакуумного ультрафиолета). Для лазерной диагностики атмосферы
методом РП используется область 0,25... 10,0 мкм. В ИК-диапазоне поглощение
обусловлено колебательно-вращательными, а в видимой и УФ-областях - элек-
тронными переходами. В видимой области содержатся полосы поглощения паров
воды, удобные для диагностики влажности атмосферы (0,694 мкм), и молекул
диоксида азота (0,45 мкм). В УФ-диапазоне длин волн следует отметить полосы
диоксида серы (0,29 мкм) и озона (0,3 мкм). Для ряда практических задач мони-
торинга атмосферы особый интерес представляет ИК-область спектра, посколь-
ку здесь располагаются линии поглощения основных загрязняющих атмосферу
газов [4].
Сечение поглощения обычно значительно превышает как эффективное (с
учетом тушения) сечение флюоресценции, так и сечение комбинационного рас-
сеяния. Следовательно, на основе ослабления пучка лазерного излучения с соот-
ветствующим образом подобранной частотой можно создать чувствительный
метод определения средней концентрации искомой компоненты. Для того чтобы
выделить вклад поглощения интересующей нас молекулы в ослабление лазерно-
409
го пучка, обычно применяют метод так называемого дифференциального по-
глощения. Данный метод предполагает использование двух частот: одной в цен-
тре линии полосы поглощения интересующей нас молекулы, а другой - в ее
крыле. За редким исключением большинство полос поглощения, представляю-
щих интерес для дистанционного зондирования, лежит в ИК-области спектра и
соответствуют колебательно-вращательный переходам [3]. Хотя в принципе при
таком подходе используется бистатическая схема лидара, применение отража-
телей или топографических рассеивателей позволяет работать с более удобным
моностатическим лидаром. К основным недостаткам метода относят низкое
пространственное разрешение и малую чувствительность ИК-детекторов.
Высокие чувствительность и пространственное разрешение могут быть дос-
тигнуты при сочетании дифференциального поглощения с рассеянием (ДПР).
Этот метод впервые предложен и реализован на практике Счетлэндом в 1964 г.
для лазерного зондирования водяного пара атмосферы [4].
Метод основан на явлении резонансного поглощения в пределах контура се-
лективной линии атмосферного газа. В таком узком спектральном интервале
коэффициент молекулярного резонансного поглощения в зависимости от спек-
тральной частоты испытывает максимальные изменения, а коэффициент ослаб-
ления за счет нерезонансного рассеяния и поглощения практически не меняется.
Это позволяет при сравнении данных лазерного зондирования атмосферы на
двух близких спектральных частотах, одна из которых v0 расположена в центре
линия поглощения атмосферного газа, а вторая vi на ее крыле, выделить в чис-
том виде зависимость отношения данных зондирования только от резонансного
поглощения по трассе зондирования.
На практике зондирование атмосферы с использованием дифференциального
поглощения реализуется двумя способами: методом поглощения на длинных
трассах и лидарным методом поглощения.
Дифференциальное поглощение на длинных трассах. На рис. 8.11 изображены
две схемы трассового зондирования, использующие в качестве контротражателя
поворотное зеркало или диффузный рассеивающий отражатель, которым может
стать любой топографический объект (стена здания, склон горы или холма, плот-
ная чаща леса и т. д.). Схема с зеркальным отражателем (рис. 8.11, а), как правило,
реализуется с полным перехватом лазерного луча.
Требование полного перехвата ограничивает длину трассы зондирования
из-за расходимости лазерного излучения и турбулентного дрожания лазерного
пучка. Схема требует соблюдения точной оптической юстировки всей систе-
мы: лазерный передатчик, зеркальный отражатель, приемная антенна с фото-
детектором. Это ограничивает возможности оперативного изменения трассы
зондирования по направлению и длине. Однако безусловным преимуществом
этой схемы является возможность использования лазеров с малой мощностью
излучения, в том числе непрерывных лазеров, так как основные потери мощ-
ности, определяемые при регистрации пройденного по трассе излучения, обу-
словлены только пропусканием атмосферы:
Р(у, Az) = P0(v)x'(v)TH2o(v, Az)Tp20(v, Az), (8.4)
410
где P(v, Az) - регистрируемая мощность лазерного излучения с трассы зондиро-
вания; Pq(v) - излучаемая мощность лазерного источника; x’(v) _ полный коэф-
фициент эффективности всей оптической системы: передающей антенны - зер-
кального отражателя - приемной антенны; Тн20 (v, Az) и Гр20 (у, Az) - пропуска-
Рис. 8.11. Схемы трассового зондирования атмосферных газов методом
дифференциального поглощения с использованием контротражателя:
поворотного зеркала (а) или диффузно-рассеиваюшего отражателя (б)
ние атмосферного слоя протяженностью Az, учитывающее соответственно эф-
фекты нерезонансного (н. о) и резонансного (р. о) ослабления лазерного излуче-
ния. Квадрат пропускания учитывает тот факт, что лазерное излучение дважды
проходит одну и ту же трассу зондирования: от приемопередатчика до контр-
отражателя и обратно.
При работе с топографической целью (рис. 8.11, б) с трассы зондирования
регистрируется только та часть лазерного излучения, которая рассеивается от
цели в направлении назад и попадает в поле зрения приемной антенны:
P{v, Az) = P0(v)x(v)^gK(<2o(v, Az)7j0(v, Az), (8.5)
411
где x(v) - эффективность приемопередатчика; А - площадь приемной антенны;
g7I(v) - коэффициент рассеянного назад лазерного излучения от топографической
цели. Такая схема в отличие от предыдущей (рис. 8.11, а), с одной стороны, дает
свободу оперативного выбора в направлении и длине трассы зондирования, но с
другой - предъявляет более высокие требования к мощности лазерного источни-
ка, чувствительности фотодетектора и площади приемной антенны. В схеме, как
правило, используют импульсные источники. Согласно закону Бугера - Бэра [4]
z\
TL(V’ = ехР' “2J aH.o(v> z^dz *
< Z1
= exp|-2aH 0 (v, Az)Az},
z\ ____________________________ ________
Tp0(y, Az) = exp< -2 JN(z)a(y, z)dz > = exp{-2N(Az)a(Av, Az)Az},
. zi
(8.6)
(8-7)
где 0 (v? Az), <*(v, Az) и jV(Az) - соответственно коэффициент нерезонансного
ослабления, сечение резонансного поглощения молекулами атмосферного газа и
концентрация газа, усредненные по трассе протяженностью Az. Тогда из (8.4) и
(8.7), если зондирование на близких спектральных частотах Vo и vi происходит в
достаточно малом промежутке времени, в течение которого отсутствуют суще-
ственные временные изменения атмосферных параметров и отражательных ха-
рактеристик цели, можно получить простое соотношение:
P(v,Az)P0(V1) ^o(v0,4z) г — . .. 1
Az) Л.Г “Р{-2МАг)а'Д"
Ag(Av, Az) =g(Av0, Az) -g(Av1? Az).
(8.8)
(8.9)
Отношение TH.0(v0, Az)/ TH.0(v, Az) называется относительной спектральной
прозрачностью 0(Av, Az) атмосферного слоя Az, а произведение буквенных со-
множителей в показателе экспоненты в формуле (8.8) - дифференциальной оп-
тической толщиной At(Av, Az). Произведя в формуле (8.8) логарифмирование,
приходим к конечной формуле
2Ag(Av, Az) Az Pq (^ )Pq (v0 ,&z)
(8.10)
Эта формула отражает основную идею метода дифференциального поглоще-
ния на длинных трассах, согласно которой по отношению данных зондирования
в линии (vo) и вне линии (vi) поглощения атмосферного газа восстанавливается
его концентрация, усредненная по всей, иногда весьма протяженной, трассе зон-
дирования длиной Az.
412
Лидарный метод дифференциального поглощения позволяет получать ин-
формацию о пространственном распределении атмосферного газа вдоль трассы
зондирования. Предваряя описание этого метода, рассмотрим промежуточную
схему зондирования, характеризующую логическую связь между трассовым и
лидарным методом дифференциального поглощения [4].
На рис. 8.12, а изображена схема с распределенными по трассе зондирования
на расстоянии z и z + Az от лазерного приемопередатчика контротражателями.
Реализация ее на практике возможна либо путем повременного пересечения ла-
Рис. 8.12. Схемы пространственно-разрешенного зондирования атмосфер-
ных газов методом дифференциального поглощения с использованием рас-
пределенных по трассе зондирования контротражателей (а) и обратного рассея-
ния зондирующего излучения аэрозолями и молекулами атмосферы (б)
зерного пучка промежуточным контротражателем 2?i, либо небольшим смеще-
нием ДН лазерного приемопередатчика (попеременно с одного отражателя на
другой), разнесенных на незначительный угол.
Эта схема позволяет получить информацию об относительной спектраль-
ной прозрачности атмосферного слоя Az, удаленного от приемопередатчика на
413
расстояние z, по измерениям пропускания атмосферных слоев протяженностью
z и z + Az:
02(AV1 Z + Az) f
-------------= exp<-2
02(v, Az) *
z+Az
ЧА , I P(v0 z + Az)P(v, z)
N(z)Ao(v, z)dz) = —-----—--------—,
P(v, z)P(yx , z 4- Az)
(8.Н)
откуда
1 h P(yQ,z)P(yx z + Az)
2Ao(Av, z)Az P0(v0, z + z)
(8.12)
где z < z < z + &z указывает на усреднение значений в интервале Az. Формула
(8.12) иллюстрирует возможность дистанционного определения концентрации
резонансного поглощающего газа с пространственным разрешением Az при ис-
пользовании распределенных по трассе зондирования контротражателей.
В лидарном методе роль контротражателей, распределенных по всей трассе
зондирования, играют аэрозоли и молекулы атмосферы (см. рис. 8.12, б). Рассе-
янная ими в обратном направлении часть энергии лазерного импульса, распро-
страняющегося вдоль трассы зондирования, улавливается приемной антенной и
регистрируется в фоторегистрирующем тракте в виде лидарного сигнала:
Р(у(, z) = Po(v1)^%(v,.)4pit(vi’ z)T20(v/s 2)Гр20(гг, Z), (8.13)
Z
где с - скорость света; тс - длительность импульса лазерного излучения; 0л(г, z) -
объемный коэффициент обратного рассеяния зондирующего излучения молеку-
лами и аэрозолями атмосферы.
Если зондирование на двух близких спектральных частотах в линии (v0) и
вне линии (vi) поглощения атмосферного газа осуществляется за достаточно ма-
лый промежуток времени, когда ощутимых временных изменений сечений
взаимодействия атмосферы с лазерным излучением не происходит, то из (8.13)
вытекает, что
Р(у<>, z) P(vq)
P(yx,z) P(vt)
z
exp* -2 j
. zo
AT(z)Ao(Av, z)dz >,
(8.14)
где zo - координата точки стояния лидара, откуда N(z) в привязанной к лидару
системе координат (z0 = 0)
2Ao(Av, z) dz
P(v0,z)
(8.15)
414
Формула (8.15) показывает возможность восстановления непрерывного про-
филя N (z) при непрерывной записи лидарных сигналов. Однако на практике, как
правило, лидарные сигналы регистрируются в виде дискретного цифрового мас-
сива данных, получаемых через равные промежутки времени М, что соответст-
вует пространственному разрешению Az = c&t!2. Тогда из (8.14) для сигналов,
принятых из атмосферных объемов, удаленных по трассе зондирования на рас-
стояние z и z + Az, следует выражение
N(z) =------------In
2Ag(Av, z)Az
P(yQ, z)P(yx,z + bz)
P(v0, z + Az)P(vr, z)
(8.16)
6. Сравнительная характеристика различных методов лазерного зонди-
рования. Представляется целесообразным дать сравнительную оценку описан-
ных выше методов лазерного зондирования атмосферы.
Методы упругого рассеяния зондирующего излучения не обеспечивают пря-
мого получения количественной информации относительно молекулярного со-
става атмосферы и концентрации составляющих. С их помощью можно дистан-
ционно определить общее содержание загрязняющих частиц. На основании по-
лученных данных строят диаграмму относительных концентраций вещества
частиц в пространстве и их изменения во времени. При заданной плотности фа-
зового состояния частиц можно установить массовую концентрацию аэрозоля.
Возможности данного метода полезны для изучения процессов диффузии.
Для работы схем, основанных на комбинационном или резонансном рассея-
нии назад, требуются сложные оптические системы. Обеспечение достаточной
чувствительности возможно только при использовании мощных лазеров, прием-
ных зеркал с большой апертурой и дорогостоящих устройств обработки прини-
маемого сигнала. Методы комбинационного рассеяния и резонансной флюорес-
ценции на колебательных переходах могут быть использованы для контроля ис-
точников загрязнения на расстояниях порядка 100 м, однако они не годятся для
измерения загрязняющих веществ в атмосфере, так как их чувствительность не-
достаточно высока для обнаружения диспергированных веществ.
Следует отметить, что метод резонансной флюоресценции, возникающей на
электронных переходах, достаточно чувствителен для обнаружения как атомар-
ных, так и некоторых молекулярных загрязняющих веществ. Концентрации ато-
марных загрязняющих веществ лежат обычно в диапазоне КГ8.. ДО”11, в то время
как расчетная чувствительность метода, например для ртути, составляет 10-12 [7].
Методы комбинационного рассеяния и резонансной флюоресценции для
электронных переходов обеспечивают хорошую разрешающую способность по
глубине, которая ограничивается лишь длительностью лазерного импульса и
временем срабатывания фотоприемника. Однако для метода резонансной флюо-
ресценции в случае колебательно-вращательных переходов разрешающая спо-
собность по глубине составляет 0,15... 15 км, что обусловлено большим време-
нем безызлучательной релаксации, которое при атмосферном давлении для раз-
ных молекул составляет 10-4... 10-6 с.
Метод обнаружения загрязнений по резонансному поглощению выгодно от-
личается тем, что обладает высокой чувствительностью и требует минимальной
415
мощности возбуждающего излучения. Кроме того, системы, основанные на ат-
мосферном поглощении, менее сложны и более дешевы. Они не дают разреше-
ния по глубине, но являются единственными системами, чувствительность кото-
рых достаточна для обнаружения диспергированных веществ.
Основные методические трудности связаны с использованием резонансных
эффектов: не все интересующие компоненты имеют линии поглощения в подхо-
дящем участке спектра; сечение взаимодействия известно не точно вследствие
неконтролируемых изменений факторов тушения; спектры флюоресценции раз-
личных компонент перекрываются; на несмещенную линию излучения накла-
дывается рассеяние Ми.
Ни один из лидарных методов в отдельности не позволяет осуществить мно-
гопараметрический анализ атмосферы и гидросферы. Поэтому для получения
максимальной информации целесообразно комбинировать различные методы
резонансного поглощения и резонансного рассеяния назад. Добавив к системе на
резонансном рассеянии назад отражающее зеркало за исследуемым объектом, ее
можно превратить в систему резонансного поглощения. Указанные две системы
обнаружения могут давать взаимодополняющую информацию. С помощью ре-
зонансного рассеяния назад можно определять местоположение загрязнения,
тогда как более чувствительная система резонансного поглощения позволит из-
мерять интегральную концентрацию примесей.
8.3.2. Информативные спектральные участки для газоанализа
Для практического использования методов лазерного зондирования необходимо
совпадение сразу нескольких важных условий. Во-первых, молекулы зондируемого
газа должны обладать разрешенным спектром поглощения с достаточно сильными
линиями резонансного поглощения. Во-вторых, разрешенный спектр поглощения
зондируемого газа должен попадать в микроокна прозрачности атмосферы.
В-третьих, необходимо наличие эффективных перестраиваемых лазеров, частоты
излучения которых совпадают с резонансными линиями поглощения зондируемого
газа. Кроме того, выбранные спектральные интервалы должны быть естественно
обеспечены эффективными фотодетекторами. В этом смысле вполне обеспеченны-
ми в настоящее время можно считать спектральные диапазоны от 200 нм до 12 мкм
[4]. В них находятся и основные окна и микроокна прозрачности атмосферы. Здесь
же располагаются разрешенные полосы поглощения практически всех газов при-
родного и антропогенного происхождения.
На рис. 8.13 изображен спектр пропускания атмосферы для приземной трас-
сы протяженностью 1,2 км [4]. В верхней части рисунка приведены спектраль-
ные интервалы полос поглощения некоторых атмосферных газов, ранжирован-
ные по значениям интегральных интенсивностей. В УФ и видимом диапазонах
спектра расположены самые интенсивные полосы поглощения О3, SO2 и NO2.
Наиболее эффективными лазерными источниками в этих диапазонах спектра
являются эксимерные лазеры с преобразователями частоты излучения в длинно-
волновую сторону с помощью ВКР-ячеек высокого давления. Эти спектральные
диапазоны могут быть также эффективно перекрыты с помощью генераторов
гармоник излучения лазеров на активированных кристаллах с помощью совре-
менных высокоэффективных нелинейных кристаллов ВВО или LBO.
416
Sy, см/мол
O3
K)’16 X so2
•-•NO2
co2
IO-'7 -
HF
*СЩ
OCS*< •—- *-£.
so2
-PU3 H2(f----
co •—
NO
NH3
ОД
Оз
CO2
NHO3
IIC1
Оз
C()2
n2o<
кг18 -
no2
CII3C1
CH3C1
7; %
60 -
40 -
20
H2O
OH
cn4
HOC1
6
NH3
CO
□ экс.
•* ,»—• c2n42
1ПЗг
] акт. крист.
С021ЖЖ/1
□ кр. □ V7777X 2CO2
twn co+co,
3CO О V777A 3CO2
CO-CO2
4CO Q V77X 4CO2
1 I no
CC-NH3
InGaAs
PbSSc
PbSnTc
TnGaP
PbCdSe
0 1 2 3 4 5 6 7 8 9 10 11 12 k мкм
в
Рис. 8.13. Спектр пропускания атмосферы для приземной трассы протяженностью 1,2 км:
а - полосы поглощения атмосферных газов ранжированных по значениям интегральных интенсивно-
стей; б - спектр пропускания атмосферы для трассы 1,2 км; в - диапазоны длин волн излучения некото-
рых лазеров: экс. - эксимерные, акт. крист. - активированные кристаллы, кр - красители; ЦО - центры
окраски СО, СО2 и ЫН3-лазеры на молукулярных средах; 2СО, ЗСО, 4СО, 2СО2, ЗСО2,4СО2 - генера-
торы 2-, 3- и 4-й гармоник излучения СО- и СОг-лазеров; СО+СО2, СО-СО2, CO-NH3 - генераторы
суммарных и разностных частот излучения СО, СО2 и ЫН3-лазеров; JnGaP, JGaAs - диодные лазеры
417
В ближней ИК-области спектра доминируют по поглощению молекулы Н2О.
Наиболее интенсивными спектральными параметрами для зондирования паров
Н2О обладают полосы поглощения с центрами 0,72 и 0,93 мкм. Обе эти полосы
перекрываются спектром излучения самого популярного в настоящее время пе-
рестраиваемого лазера на сапфире с титаном. В области спектральной пере-
стройки излучения лазера на сапфире с титаном расположены также линии по-
глощения О2 в известной полосе 0,76 мкм.
В среднем ИК-диапазоне спектра, наиболее насыщенном полосами поглоще-
ния разнообразных газов, как явствует из рисунка, в основные окна прозрачно-
сти атмосферы попадают частоты излучения СО2-лазера, его вторых гармоник, а
также генераторов суммарных и разностных частот излучения СО2 и СО-лазеров
на основе нелинейных кристаллов из ZnGeP2, AgGaSe2 или TI3AsSes.
8.3.3. Аппаратура для лазерного зондирования
1. Обобщенная схема лидара. Для решения каждой атмосферной задачи,
естественно, используется конкретная схема лидара. Однако во всех случаях в
лидаре непременно присутствуют три основных блока:
1) лазерный источник излучения с передающей антенной;
2) приемная антенна с фотодетектором;
3) регистратор лидарных сигналов.
Для многих атмосферных задач необходимо селектировать собранный прием-
ной антенной лидарный сигнал по спектральным частотам или поляризации. В
этих случаях на выходе приемной антенны лидара устанавливают анализаторы
спектра или поляризации принимаемого оптического сигнала. Следовательно,
анализаторы спектра или поляризации лидарного сигнала также можно отнести к
основным блокам лидара. Кроме того, регистрация таких быстропротекающих
процессов, каким является лидарный сигнал, невозможна без использования бы-
стродействующих процессов. Как правило, для этих целей используют современ-
ные компьютеры, которые позволяют не только обрабатывать, хранить и визуали-
зировать лидарные данные, но и контролировать параметры и управлять всеми
компонентами лидара в автоматизированном режиме. Таким образом, обобщен-
ную схему современного лидара можно представить состоящей из пяти основных
блоков (рис. 8.14) [4].
Естественно, главным активным элементом лидара является лазерный ис-
точник излучения. Все основные энергетические, временные, пространственные,
спектральные и поляризационные характеристики лазерного излучения, как пра-
вило, реализуются непосредственно в самом лазерном источнике. Они обычно
проверяются на выходе с помощью блока контроля лазерного излучения. Чаще
всего такой блок используют для измерения опорного сигнала и выработки сиг-
нала запуска регистрирующей аппаратуры, а также для контроля длины волны
лазерного излучения.
При многочастотном зондировании могут использоваться различные комби-
нации лазеров, как перестраиваемых по частоте, так и с фиксированными часто-
тами излучения и разными типами преобразователей, среди которых наиболее
широко распространены генераторы гармоник (ГГ) и газовые ВКР-ячейки высо-
кого давления.
418
Для дополнительного уменьшения расходимости лазерного излучения
обычно используют оптические расширители пучка на основе линзовых или
зеркальных телескопов, в том числе внеосевых. Лазерный источник совмест-
но с передающей антенной составляют передатчик лидара (или лидарный пе-
редатчик).
Существуют две основные схемы лазерных систем дистанционного зондиро-
вания: бистатическая и моностатическая. В бистатической схеме передатчик и
Рис. 8.14. Принципиальная обобщенная схема лидара
приемник разнесены на заметное расстояние для того, чтобы добиться при опти-
ческом зондировании хорошего пространственного разрешения. В настоящее
время эта схема используется редко, поскольку лазеры с наносекундными им-
пульсами могут обеспечить пространственное разрешение порядка нескольких
метров при использовании моностатической схемы, которой и отдается пред-
почтение. В последнем случае передатчик и приемник устанавливают в одном
месте. Моностатический лидар может иметь как коаксиальное, так и биаксиаль-
ное расположение. В коаксиальной системе ось лазерного пучка совпадает с оп-
тической осью приемника, в то время как в биаксиальной лазерный пучок входит
в поле зрения приемника только на некотором, заранее определенном расстоя-
нии. Последняя схема, хотя и позволяет снять проблему излучения, рассеянного
в ближней зоне и вызывающего насыщение фотодетектора, все же менее эффек-
тивна по сравнению с коаксиальной.
Приемная антенна лидара представляет собой телескоп, чаще всего зеркаль-
ный, построенный обычно по схеме Ньютона (рис. 8.15, а) или Кассегрена
(рис. 8.15, б), в фокусе которого устанавливают полевую диафрагму. Она слу-
жит для сужения угла зрения приемной антенны ф, поскольку он определяется
419
Рис. 8.15. Зеркальные телескопы Ньютона (а) и Кассегрена (б)
отношением ф = djf где dQ - диаметр полевой диафрагмы,/ - фокусное расстоя-
ние телескопа. Уменьшение угла зрения приемной антенны позволяет снизить
уровень фоновых шумов, приходящих из атмосферы. Однако при этом необхо-
димо учитывать, что уменьшение ф всегда ограничено снизу углом расходимо-
сти ф зондирующего лазерного излучения, т. е. ф » у, откуда /min = ф/
Если необходима спектральная селекция собранного приемной антенной ло-
кационного оптического сигнала, то обычно используют монохроматоры, вход-
ные отверстия которых совмещают с полевой диафрагмой. В этом случае в
фокальной плоскости монохроматора наблюдаются монохроматические изобра-
жения входного отверстия, число и положение которых соответствуют спек-
тральным частотам принятого излучения. Кроме частот зондирующего лазерно-
го излучения в локальном сигнале можно обнаружить частоты комбинационного
рассеяния, резонансной флюоресценции, а также полосы люминесценции аэро-
золей. Разделенные в спектроанализаторе монохроматические световые потоки
посылаются затем на отдельные фотодетекторы.
Для снижения уровня фоновых шумов перед фотодетекторами, как правило,
устанавливают узкополосные интерференционные фильтры, поэтому расходя-
щиеся световые потоки сначала коллимируют, а после фильтра фокусируют на
фотодетектор.
Для уменьшения влияния с начала трассы зондирования мощной засветки
фотодетектора локационным сигналом используют ослабители излучения, спе-
циальные виньетирующие диафрагмы, а также оптические затворы, синхронизо-
ванные с импульсом генерации лазерного передатчика.
В качестве фотодетекторов лидарного сигнала в УФ и видимом диапазо-
нах спектра наибольшее распространение получили фотоэлектронные умно-
жители (ФЭУ). В ближнем и среднем ИК-диапазонах спектра используют
полупроводниковые фотодиоды. При этом чувствительные элементы фото-
420
диодов среднего ИК-диапазона необходимо охлаждать до криогенных темпе-
ратур, а в ближнем ИК-диапазоне фотодиоды, как правило, работают при
комнатной температуре.
Оптический локационный сигнал сначала преобразуется в фотодетекторе в
пропорциональный ему электрический, затем фиксируется с помощью специ-
альных быстродействующих регистраторов лидарных сигналов в виде массива
цифровых данных, который заносится в память компьютера.
2. Излучатели для лазерного зондирования. Лазер является основным уз-
лом, параметры которого во многом определяют технические характеристики и
возможности лидара в целом. К основным показателям лазера при использова-
нии его в системах зондирования атмосферы относят: мощность излучения, ши-
рину и стабильность линии излучения, спектральный диапазон перестройки
длины волны, длительность и частоту следования импульсов, расходимость лу-
ча. Кроме того, важное значение приобретают эксплуатационные характеристи-
ки лазеров (надежность, рабочий ресурс, потребляемая мощность, габариты и
вес). При выборе излучателя для лидарной станции необходимо ориентировать-
ся на высокую надежность и конструктивную простоту лазера и систем обеспе-
чения.
Основные требования определяются особенностями взаимодействия излуче-
ния и исследуемой среды, которое предполагается использовать при зондирова-
нии атмосферы или воды, а также конкретными условиями проведения измере-
ний. При изучении аэрозольного или молекулярного рассеяния методом одно-
частотного зондирования выбор длины волны и спектральной ширины линии
зондирующего излучения не имеет критического значения. В сравнении со спек-
тральным масштабом изменения оптических характеристик аэро- и гидрозолей
ширина линии генерации лазеров достаточно мала. При выборе излучателя для
конкретной задачи определяется спектральная область, в которой производится
зондирование, основное требование к рабочей длине волны - отсутствие значи-
тельного поглощения атмосферой (водой) в этой области спектра. Следует учи-
тывать также изменение соотношения вкладов молекулярного рассеяния части-
цами на разных длинах волн.
При многочастотном зондировании аэро- и гидрозолей необходимо обеспе-
чить измерение оптических характеристик в широком спектральном диапазоне.
В зависимости от размеров и состава рассеивающих частиц, точности измерений
существует оптимальный диапазон и число рабочих длин волн.
В лидарах, предназначенных для газового анализа атмосферы, источник
должен иметь узкую линию излучения. Резонансные методы зондирования (КР,
РП, РР) требуют использования перестраиваемых высокостабильных лазеров,
обеспечивающих настройку излучателя на длину волны резонансной линии ис-
следуемой газовой компоненты.
Основные виды лазеров, преимущественно используемые для зондирования
атмосферы и воды, представлены в табл. 8.5 [3].
Конкретный тип лазера, а также его конструкция определяются с учетом ус-
ловий применения лидара. Так, в лидарах, предназначенных для измерений од-
новременно в нескольких участках спектра, излучатель может быть изготовлен
на основе объединения нескольких лазеров.
421
Типы лазеров, используемых для дистанционного зондирования
Таблица 8.5
Тип лазера Твердотельные Газовые Жидкостные Полупроводниковые
Типичные примеры Рубин Неодим (ИАГ) Александрит ХеС1 (галид инертного газа) N2 (импульсный) HgBr2/HgBr (диссоционный) СО2 (молекулярный) Органические красители Родамин 6G Кумарин Крезил фиолетовый GaAs GaAsP InAs Pbj_xSnxSe
Основные методы накач- ки Лампа-вспышка Интенсивный газовый разряд Лампа-вспышка или лазер Сильноточная инжекция, приводящая к излучатель- ной рекомбинации п- и ^-носителей в п-р- переходе
Диапазоны длин волн и перестройки Рубин (694,3 нм) - темпера- турная перестройка ± 0,4 нм Nd - ИАГ (1,06 мкм). Алек- сандрит - перестройка в диапазоне 701 ... 818 нм. Генерация второй (треть- ей) гармоники возможна во всех трех типах лазеров Н2 (116,160 нм) Хег (170 нм) KrF (249 нм) ХеС1 (308 нм) N2 (337 нм) HgBr2/HgBr (503.. .504 нм) DF и HF (2,7 ... 4 мкм) СО (5,0 ... 5,7 мкм) СО2 (9,0 ... 11 мкм) HCN (337 мкм) Широкий набор красителей обес- печивает длины волн в диапазоне 340 нм... 1,1 мкм. Типичный диапазон перестройки для данного красителя ~ 40 мкм при ширине линии 0,1.. .0,01 нм, выделяемой с помощью устройств на решетках или призмах (+ эта- лон) GaAsP - Pbj.xSnxSe (550 нм ... 32 мкм). Перестройка возможна за счет изменения тока, давления или внешнего магнитного поля
Режим работы и длительность импульсов Модуляция добротности обеспечивает импульсы длительностью 10... 100 нс. Синхронизация мод может обеспечить им- пульсы длительностью 10 нс Импульсные разряды обеспечи- вают импульсы излучения дли- тельностью 1 нс ... 1 мкс. В не- которых типах молекулярных лазеров возможна модуляция добротности, в остальных - мо- дуляция добротности с импульс- ным открыванием резонатора При накачке И2-лазером длитель- ность импульсов 5... 10 нс. При накачке лампой-вспышкой длительность составляет 0,3 ... 1 мкс. Импульсное открывание резонатора в последнем случае может обеспечить импульсы дли- тельностью 30 нс Возможна длительность импульсов излучения 10 нс ... 1 мкс, возбуж- даемых импульсами тока при наличии эффективно- го охлаждения
Пиковая мощ- ность и дости- жимая энергия в импульсе Для лазеров на рубине в Nd-ИАГ: 10 6 ... 10 8 Вт и 1... 10 Дж при модуля- ции добротности; для лазеров на александрите - 107Вти0,5 Дж 104...107ВтиЮ'3...1 Дж 104... 106 Вт в узкой перестраивае- мой полосе и 0,1.. .3 Дж 100 Вт можно достичь с помощью матриц (паке- тов) диодных лазеров
3. Мобильные лидарные системы (МЛС). Специфика ведения дистанци-
онной химической разведки в сочетании с реализацией принципов глобальности
и непрерывности определила необходимость создания новых приборов - мо-
бильных ЛС, предназначенных для установки на автомобилях, кораблях, само-
летах и космических кораблях.
Эти лидары, сохраняя в принципе идентичность построения блок-схемы со
стационарными установками, отличаются рядом особенностей конструкторского
и схемотехнического исполнения. Прежде всего это повышение требований к
надежности, ограничению габаритов, веса и потребляемой энергии, а также к
необходимости обеспечения высокоинформационной производительности, пол-
ной автоматизации получения и обработки результатов эксперимента.
Характеристики многофункциональных лидарных систем. Двухволновый ли-
дар Л-1М (рис. 8.16) разработан для установки на борту самолета-лаборатории и
предназначен для измерения характеристик атмосферы на небольших расстояни-
ях. Модульный принцип построения МЛС позволяет при необходимости увели-
Рис. 8.16. Структурная схема лидара Л-1М
Л - лазер; БУ - блок управления; ОИЗ - оптический излучатель; T - телескоп;
ОД - оптический делитель; Ф - фильтр; ФЭУ - фотоэлектронный умножитель;
ИВС - информационно-вычислительная система; БИ - боковой иллюминатор
чить ее энергетический потенциал, что делает прибор универсальным. Лидар мо-
жет эксплуатироваться в разных условиях: на борту самолета, кораблях и автомо-
билях, а также в стационарной аппаратуре. Он включает приемопередающую
часть, состоящую из оптического излучателя и телескопа, блока управления лазе-
ра, модуля фотоэлектронного умножителя и информационно-вычислительной
системы [6].
В комплексе установки Л-1М применяют три лазера: Л1 на неодимовом стекле
с усилителем излучения, Л2 на неодимовом стекле без усилителя с удвоением
423
частоты излучения и ЛЗ на рубине. Лазер Л1 подключают, как правило, при ис-
пользовании лидара в качестве стационарной установки для увеличения дально-
сти зондирования. При работе на борту самолета-лаборатории основным факто-
ром, обеспечивающим возможность получения данных из обширных районов,
является мобильность самолета. Поэтому для уменьшения энергопотребления и
веса аппаратуры используют первый излучатель. Конструкция основания лидара и
сменных блоков позволяет проводить быструю замену излучателей.
Приемопередающая часть лидара состоит из двух модулей: телескопа Т с бло-
ком оптических делителей ОД1, ОД2, нейтральных и интерференционных фильт-
ров Ф1, Ф2, ФЗ, рассчитанных на прием излучения при X = 530; 694,3; 1060 нм, и
модуля фотодетекторов ФД на основе ФЭУ1, ФЭУ2, ФЭУЗ (использовались
ФЭУ-79, ФЭУ-83 и ФЭУ-84). Основные технические характеристики лидара Л-
1М представлены в табл. 8.6.
Таблица 8.6
Технические характеристики лидаров
Характеристика Самолетный лидар Л-1М Лидар для зон- дирования атмосферного аэрозоля и облаков Л-3 СЛМ для спек- трально-поля- рязационных ис- следований в атмо- сфере Л-2 Многочастотный лидар «Глория»
Рабочая длина волн, нм Энергия излучения в им- пульсе, Дж Расходимость излучения, угл. мин Длительность импульса, нс Частота посылки, Гц Диаметр телескопа, мм Количество длин волн, регистрируемых одно- временно * Измерение поляризации 530; 694,3; 1060 0,06; 0,2; 0,5; 1,5 4 30 0,1 210 2 Нет 530; 694; 1060 0,6; 0,5; 1-2 4 30 ОД 210 2 Есть 360-1100 0,01-0,15 3 25 од 300 1 Есть 434; 486; 546; 589; 694; 863;950 0,005; 0,05; 0,004; 0,12; 0,055; 0,063 3-4 25 од 300 4 Есть
В самолетном варианте атмосфера зондировалась через боковой иллюмина-
тор БИ, разделенный на два сегмента: через малый сегмент излучение направля-
лось в атмосферу, через большой регистрировалось. Оптическая изоляция сег-
ментов устраняла паразитную связь канала передатчика и приемника вследствие
рассеяния и переотражения света в иллюминаторе.
При использовании лидара Л-1М для зондирования с борта судна, автомобиля
или на полигоне приемопередающая часть размещалась на поворотном устройстве,
обеспечивающем зондирование по любому заданному направлению. Путем введе-
ния телескопической насадки TH уменьшалась расходимость излучения источника,
увеличивалась оптическая база лидара. Это позволяло исключить засветку фото-
приемников сигналом из ближней зоны и увеличить дальность зондирования.
Для поляризационных измерений в атмосфере на базе прибора Л-1М создан
лидар Л-3.
Излучатель в Л-3 имеет оптическую схему, аналогичную двухчастотному ла-
зеру лидара Л-1М. Оптическая схема приемного блока полностью изменена и по-
424
зволяет измерять как интенсивность рассеянного излучения на длинах волн X =
= 530; 694,3; 1060 нм, так и степень деполяризации рассеянного излучения на од-
ной из рабочих длин волн. Кроме того, для калибровки лидара предусмотрена
специальная призма, направляющая часть излучения лазера в приемную систему.
Для исследования спектральных зависимостей оптических характеристик
атмосферы в диапазоне 0,36... 1,1 мкм, а также измерения степени деполяриза-
ции отраженного атмосферой излучения разработан лидар Л-2 (рис. 8.17). Прие-
мопередающая часть лидара состоит из двух блоков: излучателя и приемной
части, оптически связанных системой подвижных зеркал.
Источником излучения лидара Л-2 служит лазер на красителях с перестраи-
ваемой частотой излучения. Приемная часть МЛС включает телескоп Т, блоки
Рис. 8.17. Оптическая схема лидара Л-2:
Д - диафрагма; НСФ - набор нейтральных светофильтров; УР - устройство раз-
деления; TH - телескопическая насадка; ПЗ - подвижное зеркало; НЗ - непод-
вижное зеркало; БУ - блок управления; Т - телескоп; Л - лазер
ФЭУ1, ФЭУ2, ФЭУЗ, ФЭУ4, устройство разделения УР излучения на две перпен-
дикулярно поляризованные составляющие, TH и систему поворотных зеркал. Зер-
кальный объектив телескопа типа Кассегрена состоит из главного и малого сфе-
рических зеркал. Малое зеркало наклеено на защитную пластину, изготовленную
из стекла К-8. В нижней части объектива размещены узлы переключения диа-
фрагм и нейтральных фильтров Ф, а также блок фотоприемников и сменный узел
анализатора.
425
Блок ФЭУ состоит из четырех ФЭУ (вида ФЭУ-83 и ФЭУ-84), обеспечи-
вающих регистрацию излучения во всем спектральном диапазоне. При работе в
режиме измерения интенсивности рассеянного излучения световой поток приз-
мой направляется на один из ФЭУ. В режиме измерения степени поляризации
световой поток разделяется призмой Волластона на два перпендикулярно поля-
ризованных компонента, которые затем регистрируются двумя ФЭУ.
TH является зеркальной и жестко крепится на корпусе объектива. Она
уменьшает расходимость излучения в рабочем диапазоне длин волн в 10 раз.
Излучение лазера направляется на входное окно TH посредством неподвижного
НЗ и подвижного зеркал (ПЗ). ПЗ вращается со скоростью в 2 раза меньшей ско-
рости вращения приемного объектива. Это позволяет сохранить параллельность
оптических осей приемника и излучателя при произвольном угле наклона трас-
сы зондирования.
Основные технические характеристики лидара Л-2 приведены в табл. 8.6.
Поскольку излучатель и приемная система - крупные обособленные блоки,
установка параллельности их оптических осей весьма трудна. Для проведения
точной юстировки в Л-2 предусмотрено оптическое устройство, включающее
дополнительный гелий-неоновый лазер.
Для исследования спектральных зависимостей оптических характеристик атмо-
сферного аэрозоля была создана многочастотная МЛС «Глория» (рис. 8.18) [6] -
полевой вариант многочастотной МЛС с сокращенной длительностью цикла изме-
рения оптических характеристик в рабочем диапазоне длин волн. В лидаре Л-2 цикл
измерений составляет Т = 20 мин, в лидаре «Глория» - Т = 20 с. Зондирование на
четырех длинах волн практически мгновенно. Все это расширяет область примени-
мости лидара и позволяет использовать его для изучения динамики быстропроте-
кающих процессов в атмосфере. Параметры МЛС приведены в табл. 8.6.
Лидар «Глория» состоит из приемопередающей части (рис. 8.18), ИВС, блока
управления и питания. В качестве излучателя используется многочастотная ла-
ФЭУ4
ИФ1-ИФ4
Рис. 8.18. Оптическая схема лидара «Глория»:
УСС - устройство спектральных светоделителей; ИФ - интерференционные
фильтры
426
зерная система. Основой приемной части является зеркальный телескоп Т с объ-
ективом, выполненным по схеме Кассегрена, с входным диаметром 300 мм и
фокусным расстоянием 1500 мм. Предусмотрено два режима работы: измерение
интенсивности рассеянного излучения на всех рабочих длинах волн за две
вспышки лазера и измерение степени поляризации излучения на одной из длин
волн. Смена режимов регистрации осуществляется при повороте зеркала.
В первом случае световой поток, собранный приемным объективом, направ-
ляется зеркалом на УСС, разделяющих излучение по спектральным компонен-
там, и далее на четыре фотоприемника ФЭУ1, ФЭУ2, ФЭУЗ, ФЭУ4 (ФЭУ-84 для
видимого диапазона и ФЭУ-83 для ИК-области). Дополнительная селекция из-
лучения производится интерференционными фильтрами ИФ1-ИФЗ, установ-
ленными перед фотоприемниками. Световой пучок, после отражения зеркалом
совмещен с осью вращения объектива по углу места. Это позволило встроить
приемный блок, включающий узел диафрагм Д, светоделителей, ФЭУ в вилку
основания прибора.
При измерении степени поляризации из общего светового потока, собранного
приемным телескопом, узкополосный фильтр выделяет исследуемый пучок, кото-
рый затем призма-анализатор делит на два перпендикулярно поляризованных
компонента. Поляризационные измерения можно проводить поочередно на всех
рабочих длинах волн. Узел измерения поляризации рассеянного излучения вы-
полнен в виде отдельного блока и крепится к объективу в нижней его части.
ИВС рассмотренных МЛС представляют собой высокоскоростные многока-
нальные измерительные комплексы, выполненные на базе микропроцессорной
техники и микроЭВМ управляющего типа и сочетающие функции измерения,
управления и обработки результатов эксперимента, а также функции контроля и
калибровки параметров МЛС.
8.3.4. Пассивная дистанционная химическая разведка
Принцип действия приборов пассивной дистанционной химической разведки
основан на приеме собственного теплового излучения химических примесей в
атмосфере или переотраженного ими солнечного излучения. Существуют две
группы приборов дистанционной пассивной химической разведки - радиометры
и спектрометры.
Для дистанционного определения химического состава горячих выбросов из
дымовых труб или выхлопных газов двигателей внутреннего сгорания можно
использовать пассивный метод, заключающийся в гетеродинном приеме терми-
чески возбужденного на колебательных переходах излучения.
Весьма перспективным считается метод многозональной аэрокосмической
съемки.
Метод многозональной аэрокосмической съемки основан на объективно су-
ществующей устойчивой корреляционной связи между параметрами загрязне-
ния объектов природной среды и характеристиками их изображений, получае-
мых путем энергетических и поляризационных измерений. Преимущество мето-
да заключается в высокой информативности, поскольку он дает возможность
практически одновременно наблюдать значительные пространства контроли-
руемых регионов и периодически их повторять. Для получения достаточно пол-
ной и достоверной информации о загрязнении природной среды могут исполь-
427
зоваться данные разномасштабных многозональных съемок в видимом, ИК- и
микроволновом диапазонах длин волн. Такие съемки проводят, например, с по-
мощью фотокамер MKF-6 и MSK-4, тематического картографа американского
спутника LANDSAT, многоканальных сканерных систем MSS и МКС-М, радио-
локаторов бокового обзора. Возможность определения загрязнения объектов
природной среды во многом зависит от эффективности обработки аэрокосмиче-
ский снимков, которая обычно осуществляются в интерактивном режиме и тре-
бует привлечения дополнительной информации.
Благодаря совершенствованию способов обработки и тематического анализа
многозональной аэрокосмической информации становится возможным парамет-
ризация данных спектральных дистанционных измерений, их представление в
виде набора физико-химических, биометрических и других параметров, в том
числе загрязнения воздуха, воды, почвы, снежного покрова.
Спектрометры. Спектрометр как прибор пассивного дистанционного обна-
ружения химического загрязнения окружающей среды позволяет обеспечить
оперативный анализ большого количества различных химических примесей пу-
тем перестройки по частоте в заданном спектральном диапазоне. Настройка на
длины волн собственных излучений термически возбужденных химических
примесей в атмосфере осуществляется с помощью специального устройства -
монохроматора. В зависимости от типа используемого монохроматора различа-
ют спектрометры на дифракционных решетках и клиновых интерференционных
фильтрах.
Спектрометры на дифракционных решетках. Классическим примером та-
кого прибора является спектрометр Михайлова. На рис. 8.19 представлена оп-
Рис. 8.19. Оптическая схема монохроматора
с однолучевой входной системой:
1,2- сферические зеркала; 3 - плоское зеркало; 4 - пре-
рыватель светового потока; 5, 6 - входная и выходные
щели; 7 - параболическе зеркало; 8 - лампа накаливания;
9 - плоские зеркала; 10 - копии решеток
тическая схема монохроматора с однолучевой входной системой. Применение
в монохроматоре сдвоенной дифракционной решетки позволяет расширить
рабочую область спектра без снижения светосилы монохроматора. Монохро-
матор комплектуется двумя парами дифракционных решеток. Для области
спектра 0,39... 1,5 мкм применяют пару решеток с 1200 и 600 штрихами на
миллиметр, а в области спектра 1,5...5,6 мкм - 300 и 200. Входная щель моно-
хроматора имеет высоту 10 мм при максимально возможной ширине 4 мм. Не-
посредственно за выходными щелями устанавливают соответственно две пары
приемников излучения ФЭУ-55 и PbS или PbS и РЬТе.
Развертка спектра производится вращением оправы с дифракционными ре-
шетками. Дважды за один оборот изменяется угловая скорость вращения. Во
428
время рабочего хода скорость значительно меньше, чем при смене решеток. Это
позволяет уравнять общее время смены и рабочего хода решеток. Максимальное
время одного оборота оправы 1 с. При вращении решеток вырабатывается три
типа импульсов: смены решеток, длины волны и начала рабочего хода каждой
решетки. Датчиками импульсов служат фотодиоды типа КФ ДМ, которые засве-
чиваются лампами типа СМ9-60-2 через отверстия дисков, жестко связанных с
оправой решеток.
Оптическая часть спектрометра включает два основных оптико-механи-ческих
блока: монохроматор и входную систему. Если принципиальные схемы монохро-
маторов отдельных приборов не имеют существенных различий, то входные сис-
темы могут значительно отличаться в зависимости от назначения прибора. Вход-
ная система превращается в устройство более сложное, чем монохроматор, если
прибор предназначен для решения широкого круга задач. Поэтому целесообразно
спектрометр комплектовать набором сменных входных систем.
Представленная на рис. 8.19 однолучевая система содержит следующие эле-
менты: объектив, контрольный источник и прерыватель светового потока. Два
сферических зеркала 1 и 2 создают общее фокусное расстояние 640 мм. В зави-
симости от размеров входной щели угол поля зрения объектива принимает зна-
чения от 3 х 6 до 22 х 54 (угл. мин).
Контрольный источник, содержащий подвижное плоское зеркало 5 и лампу
накаливания S, предназначен для периодического контроля чувствительности
спектрорадиометра. Прерыватель светового потока 4, выполненный в виде ме-
таллического диска с секторными вырезами, предназначен для формирования
частоты модуляции, равной 1000 Гц. Сигнал с фотоприемника после усиления и
фильтрации поступает на амплитудный детектор и далее на индикатор. Линей-
ность амплитудной характеристики обеспечивается в диапазоне 50 дБ.
Спектрометры на клиновых интерференционных фильтрах. Спектрометры
на клиновых интерференционных фильтрах обладают высоким быстродействи-
ем, компактны и экономичны.
Чтобы использовать прибор в полевых условиях, требуются два основных
качества: переменное поле зрения и достаточно большая скорость сканирования
спектра. В частности, флюктуации солнечного излучения и изменения геомет-
рических свойств естественных покрытий, например листвы при порывах ветра,
требуют, чтобы весь цикл сканирования занимал 1 с. Обычные лабораторные
спектрометры не обеспечивают такой скорости. Требование быстрого спек-
трального сканирования послужило основной причиной использования дисково-
го фильтра с переменной толщиной покрытия в качестве сканирующего элемен-
та. Дисковый фильтр состоит из жесткой дисковой подложки с многослойным
диэлектрическим покрытием, толщина которого линейно меняется в зависимо-
сти от угла поворота диска, оставаясь постоянной в радиальном направлении. В
соответствии со спектральными характеристиками дисковые фильтры действу-
ют как узкополосные интерференционные фильтры в любой точке окружности.
При вращении фильтра изменяется длина волны максимума пропускаемого им
излучения. Ширина полосы пропускания фильтра составляет 1...2 % от длины
волны максимума. Спектральное разрешение фильтра, ограниченное этой вели-
чиной, может регулироваться в сторону увеличения изменением ширины сек-
торной щели, стоящей за фильтром.
429
Чтобы избежать использования фильтров, отсекающих высшие порядки
пропускания, диапазон длин волн каждого сегмента дисковых фильтров ограни-
чен одной октавой, т. е. соотношение наибольшей и наименьшей длин волн про-
пускаемого излучения не превышает 2. Мгновенная ширина полосы пропуска-
ния определяется угловой шириной щели оптической системы и телесным углом
падающего на фильтр излучения. Применение дисковых фильтров в полевых
условиях дает два важных преимущества. Во-первых, они не требуют точной
юстировки, во-вторых, для отсчета длин волн можно использовать простой
шифратор угла поворота вала.
Спектрометр содержит два таких дисковых фильтра. Каждый из них распо-
ложен в отдельной оптической системе, которая собирает излучение и посылает
его на приемник. Общий преломляющий объектив устроен так, что позволяет
герметизировать оптическую головку во избежание попадания на нее пыли и
влаги в полевых условиях и предотвращает виньетирование в отражающих сис-
темах. Оптическая схема прибора приведена на рис. 8.20. Для коротковолновой
Рис. 8.20. Оптическая схема спектрометра:
1 - объектив; 2 - модулятор; 3 - эталонное черное тело;
4 - приемник излучения; 5,6- дисковые фильтры;
7 - приемник
системы используют линзы из кварцевого стекла из-за его хороших механиче-
ских свойств. В длинноволновой системе используют линзы из КРС-5, просвет-
ленные для получения максимума пропускания при 3 мкм. Линзы из КРС-5 про-
пускают хорошо не только в длинноволновой области, но и видимый свет, что
упрощает оптическую юстировку и позволяет быстро контролировать правиль-
ность работы прибора. Узел зеркал отклоняет под прямым углом центральный
луч пучка, идущий от первичного объектива 1 к модулятору 2. Первичный объ-
ектив может быть снят для увеличения поля зрения системы до 15°, но при этом
нарушается герметичность прибора.
Оптическая схема содержит модулятор 2, что позволяет использовать метод
обработки сигнала на стабильной частоте модуляции. Лепестки модулятора
имеют высокий коэффициент отражения с обеих сторон; сам модулятор распо-
ложен так, что на каждый из дисковых фильтров поочередно попадает излуче-
ние от первичной оптической системы и от черного излучателя.
430
Для исследования отражательных свойств объектов необходимо сначала по-
лучить спектральные характеристики падающего излучения. Для этого коротко-
волновая система содержит эталонную поверхность, представляющую собой
алюминиевый диффузно отражающий экран, освещаемый тем же излучением,
что и цель. Эталонная поверхность укреплена в поворотном подвесе и может
быть повернута так, чтобы излучение падало на нее под тем же углом, что и на
поверхность цели. Падающее излучение отражается от алюминиевой поверхно-
сти по закону Ламберта. Диффузно отраженное от эталонной поверхности излу-
чение направляется в основную оптическую систему с помощью дистанционно
управляемого зеркала. Следовательно, в коротковолновой системе может быть
зарегистрирован как спектр падающего излучения, так и излучения, отраженно-
го от поверхности объекта.
В коротковолновой системе применяют кремниевый и охлаждаемый при-
емники из PbS, а в длинноволновой системе используют приемники из JnSb и
CdHgTe. В области спектра 0,37...0,74 мкм применяют кремниевый прием-
ник, излучение в области 0,70...2,52 мкм измеряют приемником из PbS. Для
уменьшения вариаций чувствительности от температуры приемник из PbS
охлаждается до 77 К при помощи холодильника с циклом Джоуля-Томсона.
Спектральная интенсивность излучения в области 2,76...5,5 мкм измеряется в
длинноволновой системе с помощью приемника из JnSb. Приемник необхо-
димо охлаждать до 77 К, чтобы обеспечить восприятие длинноволнового из-
лучения до 5,5 мкм. Для измерения излучения в области спектра 7,04... 13,88
мкм используют фоторезистор из CdHgTe. Этот приемник также охлаждается
до 77 К.
Для длинноволновой системы частота модуляции более критична, чем для
коротковолновой. Оба длинноволновых приемника наиболее эффективно рабо-
тают при частотах выше 1000 Гц. Для обеих систем используется один и тот же
модулирующий диск.
В качестве эталонных источников используют черные излучатели. Для ко-
ротковолновой части черный излучатель представляет собой медный блок, из-
лучающая поверхность которого имеет вид системы двугранных канавок с чер-
неными гранями. Для длинноволновой области излучатель представляет собой
медный блок с регулируемой температурой, заключенный в теплоизолирующий
корпус, который содержит нагреватель и температурный датчик.
Электрическое питание к системе может подаваться от стационарной сети
220 В 60 Гц, а в удаленных пунктах - от портативного генератора со стабилиза-
цией частоты.
Все операции управления, кроме наводки оптических блоков, производятся с
пульта. Прибор сконструирован так, чтобы его можно было установить на само-
лете; при этом для соединения оптических блоков с пультом управления преду-
смотрены короткие кабели. Скорость сканирования достаточно велика (два пол-
ных цикла в секунду), чтобы можно было регистрировать спектры от целей
средних размеров. Опыт показывает, что для спектрорадиометрических измере-
ний природных объектов в полевых условиях требуется быстрое сканирование.
В свою очередь большая скорость сканирования требует применения более
сложной регистрирующей аппаратуры.
431
Выходной сигнал с приемника позволяет получить спектральную кривую
лучистой энергии, падающей на объект либо отраженной или излучаемой
объектом.
Гетеродинный метод регистрации теплового излучения химических
примесей. Пассивный метод обнаружения собственного излучения термически
возбужденных на колебательных периодах химических примесей в атмосфере с
использованием лазерного гетеродинирования был рассмотрен в 1971 г. в жур-
нале Science. Характерные линии инфракрасного излучения загрязняющих газов
обнаруживаются в результате смешения его с излучением перестраиваемого в
этом диапазоне лазера. Суть предложенного метода можно пояснить с помощью
рис. 8.21. Исследуемое излучение с частотойУи.и перехватывается входной опти-
ческой системой и через полупрозрачное зеркало поступает на фотоприемник.
Рис. 8.21. Метод лазерного гетеродинирования
Лазерное излучение с частотой /лг от лазерного гетеродина поступает на полу-
прозрачное зеркало, отражается от него и совмещается пространственно с ис-
следуемым лучом. Перестраивая частоту лазерного гетеродина в заданном уча-
стке спектра инфракрасного излучения загрязняющих примесей, добиваются,
чтобы разность частот /лт - попала в полосу пропускания системы фотопри-
емник - усилитель. При близких значениях частот /л,г и на чувствительной
поверхности фотоприемника образуются биения с частотой /лт - Электриче-
ский сигнал с разностной частотой/лт -f^ с выхода ФП через фильтр поступает
на усилитель и затем на индикатор.
Эксперименты показывают, что минимальная обнаруживаемая концентрация
С2Н4 и NH3 при температуре 50 °C составляет для данного метода несколько
миллионных долей.
В качестве гетеродина более всего подходит диодный лазер с перестройкой
длины волны излучения.
Можно показать, что требуемая мощность гетеродинного лазера в случае
фотоприемника на основе HgCdTe с охлаждением жидким азотом и кванто-
вой эффективностью 0,5 на волне 10 мкм при полосе пропускания приемника
500 МГц составляет 0,25 мВт. Это требование может быть удовлетворено с
помощью обычного одномодового диодного лазера с выходной мощностью
до 1 мВт.
9. СЕЙСМИЧЕСКАЯ РАЗВЕДКА
9.1. Общие положения
Под сейсмической разведкой (СР) понимается добывание информации путем
обнаружения и анализа деформационных и сдвиговых полей в земной поверхно-
сти, возникающих под воздействием различных взрывов.
Основное направление СР - разведка ядерных взрывов и определение их па-
раметров.
СР определяет: координаты эпицентра взрыва, мощность и время взрыва,
количество взрывов в группе.
Сейсмический метод обнаружения и идентификации ядерных взрывов получил
всеобщее признание как один из основных, кроме производимых в космосе и в воз-
духе на больших высотах (свыше нескольких десятков километров). Сейсмический
метод применим для обнаружения ядерных взрывов как на малых, так и на больших
эпицентральных расстояниях, достигающих 16 000... 17 000 км. Особенно эффек-
тивен этот метод при обнаружении и идентификации подземных и подводных
ядерных взрывов. Для обнаружения и идентификации подземных взрывов, про-
изводимых с полным камуфлетом, он пока является единственным.
Здесь и далее под термином обнаружение понимается установление по
сейсмическим данным факта и времени возникновения сейсмического явления,
координат эпицентра и определение его энергии (или магнитуды).
Под термином идентификация понимается установление по совокупности
характеристик зарегистрированных сейсмических волн явления: землетрясения,
подземного, подводного, контактного или воздушного ядерного взрыва.
При обнаружении ядерных взрывов сейсмическим методом наиболее слож-
ным является обнаружение и идентификация подземных.
В отличие от других видов ядерных взрывов при полностью скрытых - ка-
муфлетных - подземных взрывах на больших эпицентральных расстояниях не
удается получить бесспорных доказательств - обнаружить радиоактивные
продукты. Сейсмический метод в настоящее время является единственным
методом обнаружения и идентификации. Идентификация производится по
сейсмическим записям и основывается на различиях в динамических характе-
ристиках сейсмических волн взрывов и землетрясений. Эти различия-критерии
связаны с разным характером источников сейсмических колебаний при взры-
вах и землетрясениях [2].
Сейсмическая разведка является сложной динамической системой. В ней
происходят процессы преобразования энергии и информации, важнейшими из
которых являются возбуждение сейсмическим источником первичных волн,
распространение их в геологической среде с образованием на неоднородностях
вторичных волн, прием и запись упругих колебаний в точках наблюдения, обра-
ботка и интерпретация сейсмических записей. Целенаправленную последова-
433
тельность этих процессов можно рассматривать как сейсморазведочный канал,
преобразующий воздействие источника упругих колебаний (входной сигнал) в
сейсморазведочную информацию (выходной сигнал).
Сейсморазведочный канал состоит из трех последовательно действующих
систем (рис. 9.1) [1].
Первая система - сейсмогеологический канал - среда, в которой формируется
и распространяется волновое поле упругих колебаний. Сейсмическое волновое
поле служит входной информацией для второй системы - сейсморегистрирую-
Рис. 9.1. Структура сейсморазведочного канала
щего канала, включающего сейсморазведочную технику и методику, т. е. инст-
румент исследования. На выходе сейсморегистрирующего канала получают
сейсмические записи (сейсмограммы), которые являются входной информацией
для третьей системы - сейсмообрабатывающего канала, где сейсмограммы пре-
образуются в результирующий материал.
Сейсмообрабатывающий канал предоставляет набор обрабатывающих про-
цедур, позволяющих получить выходную информацию.
Решение задач сейсмической разведки основывается на изучении волнового
поля, возникающего при всех видах взрывов, а также землетрясениях. Весьма
эффективным методом в этом случае является спектральный анализ, который
позволяет выявить различия в характеристиках волновых полей взрывов и зем-
летрясений, а также полей микросейсм (помех), и на этой основе осуществить
селекцию информационных сигналов.
Ниже более подробно рассматриваются вопросы распространения, регистра-
ции и обработки сейсмического поля упругих колебаний.
9.2. Сейсмические волны в твердых средах
Основой сейсмического метода разведки является распространение упругих
волн в толще земной поверхности. Источником возникновения упругих волн
могут быть: землетрясения, различного рода взрывы и другие механические воз-
действия в горных породах.
Эти внешние силы воздействуют на горные породы, стремясь изменить их
размеры и форму. Им противостоят внутренние связи. Из-за их наличия тело
(горная порода) стремится возвратиться к первоначальному состоянию. Это свой-
ство горных пород сопротивляться изменениям размеров или формы и возвра-
щаться в первоначальное недеформированное состояние принято называть упру-
гостью.
434
Мерой изменения формы и размеров тела служит понятие относительной
деформации. Мерой воздействия на горные породы сейсмических источников
принято называть напряжение - силу, действующую на единицу площади. Ко-
личественная связь между напряжением и возникшей деформацией устанавли-
вается законом Гука. Если эта связь линейна, то такие тела принято считать аб-
солютно упругими. Если связь между напряжением и деформацией в теле имеет
более сложный, чем линейный, вид зависимости, то такие тела принято называть
пластическими или неабсолютно упругими. При малых и кратковременных де-
формациях большинство горных пород можно считать идеально (абсолютно)
упругими.
Возникшие в районе действия источника напряжения распространяются (пе-
редаются) от точки к точке во все стороны. Процесс распространения напряжений
(деформаций) в горных породах от источника принято называть распространени-
ем сейсмических волн в среде. Законы, описывающие этот процесс, определяются
известными законами физики о динамическом (подвижном) равновесии элемен-
тов среды. Основой для вывода уравнения динамического равновесия однородной
абсолютно изотропной среды является обобщенный закон Гука. Теория распро-
странения упругих волн показывает, что в безграничном изотропном пространст-
ве могут возникать и распространяться два независимых вида сейсмических волн.
Первый принято называть продольными сейсмическими волнами. Им присвоен
индекс Р, поскольку они являются наиболее быстрыми и приходят от источника к
данной точке наблюдения первыми (Гр - скорость распространения волны Р).
Второй вид сейсмических волн принято называть поперечными или S-волнами,
поскольку они на записях регистрируются вторыми (Vs - скорость распростране-
ния волны S). Кроме скорости распространения данные два типа волн различают-
ся и характером смещения точек среды в момент прохождения сейсмических
волн. Для продольных P-волн направление движения частиц среды параллельно
направлению распространения волны (рис. 9.2, а). Для поперечных волн направ-
ление движения частиц среды перпендикулярно направлению распространения
волны (рис. 9.2, б); Хв - видимая длина волны колебаний.
Продольные и поперечные волны с течением времени наблюдаются во все
более отдаленных точках от возбуждающего их источника, захватывая весь объ-
ем окружающей среды. Поэтому продольные и поперечные волны называются
объемными. В упругой безграничной среде могут существовать только объем-
ные волны.
Скорости распространения сейсмических волн в упругой безграничной изо-
тропной среде определяются упругими свойствами последней. При теоретиче-
ских исследованиях упругие свойства среды удобно характеризовать упругими
модулями Ламэ Хирн плотностью р. Через эти компоненты скорости упругих
волн определяются следующим образом:
?р- л------
V Р
(9.1)
Нередко вместо этих рассматривают связанные с ними другие модули, кото-
рые удобны при инженерных расчетах:
435
v = E • v = \E 1
F A|P (l + o)(l-2a)’ 5 \p2(l + o)’
(9-2)
где E - модуль Юнга (модуль упругости); G - коэффициент Пуассона.
Поскольку упругие модули всегда положительны, значения коэффициента Пу-
ассона всегда заключены в интервале 0...0,5, а отношения скоростей
В жидких средах модуль упругости равен нулю, а это означает, что ц = 0,5 и
скорость распространения поперечных волн равна нулю (5-волны в жидких сре-
дах не распространяются).
Все реальные среды можно рассматривать как абсолютно упругие только в
некотором приближении, позволяющем более или менее точно описывать изме-
хв
О
О
О
О
О
О
О
ООООО
ООООО
о о
О
О
О
о оофоо ООО оофоо о о
о оофоо ООО оофоо о о
Направление Направление распространения
движения Р-волны
частиц
а
о
о
о о
о о
ООО
ООО
о о
о о
о
о
Направление распространения 5-волны
Рис. 9.2. Характер смещения частиц почвы при прохожде-
нии продольных (а) и поперечных (б) волн
нения параметров волны при прохождении сравнительно небольших расстоя-
ний. Экспериментальное исследование процесса распространения упругих волн
на больших расстояниях от источника показывает их более сильное ослабление,
чем расчеты, основанные на формулах для абсолютно упругих сред.
Изменения интенсивности упругих волн сопровождаются значительным из-
менением формы их колебаний. Эти явления могут быть объяснены, если пред-
положить существование некоторого механизма поглощения энергии сейсмиче-
ских волн и перехода ее в другие виды, например, тепловую энергию. Среды, в
которых происходит такое преобразование энергии упругих колебаний, принято
называть поглощающими.
436
Все существующие в настоящее время теории, объясняющие процесс поглоще-
ния, приводят к выводу, что амплитуда смещения сейсмической волны в поглощае-
мом слое должна дополнительно ослабляться в соответствии с зависимостью
АР(г) = АР(Го)е-а^г-^,
(93)
где Ар (г) - амплитуда волны в расчетной точке; АР (г0) - амплитуда волны в опор-
ной точке; го - расстояние от источника до опорной точки; г > rQ - расстояние до
рассматриваемой точки; ар (со) - амплитудный коэффициент поглощения.
Из формулы видно, что коэффициент а(со), определяющий интенсивность
ослабления колебаний с расстоянием, зависит от частоты. Различные теории
указывают на разные формы этой зависимости. Теория вязкого трения требует,
чтобы эта зависимость была квадратичной вида
ар(©) = аосо2,
где а0 - постоянная поглощения, зависящая от свойств среды.
Теория упругого последействия приводит к зависимости
ар(©) = а1©,
(9-4)
(9.5)
где oq - постоянная поглощения.
В настоящее время отсутствует устоявшийся взгляд на эти вопросы. Однако
практика подтверждает, что в большинстве случаев для многих горных пород
возможная зависимость коэффициента поглощения близка к виду (9.5). Во всех
случаях коэффициент поглощения а(со) является возрастающей функцией час-
тоты. Это обстоятельство приводит к избирательному поглощению, при котором
происходит постепенное относительное ослабление высокочастотных состав-
ляющих сейсмического сигнала.
Все сказанное относится и к поперечным волнам. Свойства среды в этом
случае надо описывать коэффициентом поглощения поперечных волн а5(со).
При этом в большинстве горных пород поглощение поперечных волн происхо-
дит интенсивнее, чем продольных.
9.3. Основные особенности распространения волн в упругих средах
В современной сейсморазведке основное значение имеет исследование рас-
пределения скоростей распространения упругих волн в толще Земли. Для этой
цели достаточно определить время распространения фронтов упругих воли ме-
жду различными точками среды. Вопросы, касающиеся времени распростране-
ния упругих волн, рассматриваются в геометрической сейсмике. Последняя, по-
добно геометрической оптике, позволяет установить основные законы распро-
странения фронтов волн и исходя из общих принципов Гюйгенса-Френеля или
437
Ферма решать различные частные задачи, имеющие большое значение при
сейсморазведке.
Согласно принципу Ферма, форма сейсмического луча должна совпадать с
формой траектории (пути), вдоль которой время пробега волны экстремально
(чаще всего минимально). На основе этого принципа во многих случаях сравни-
тельно просто определить форму сейсмических лучей. Дан-
ные о форме сейсмических лучей позволят установить по-
ложение фронтов (вступлений) и других кинематических
характеристик волн.
В соответствии с принципом Гюйгенса, вдали от источ-
ников амплитуда колебания в точке наблюдения является
суммой колебаний, создаваемых элементарными (точеч-
ными) источниками, расположенными на поверхности
фронта. Принцип Гюйгенса в его простейшей форме можно
использовать для определения положения фронтов волн в
среде для разных моментов времени, если задано положе-
ние фронта в некоторый момент времени. Пусть фронт
волны в некоторый момент времени t = t\ представлен по-
верхностью Qi (рис. 9.3). Согласно этому принципу, форма
фронта волны Q2 в момент времени t2 = t\ + A t будет пред-
ставлять собой огибающую серии сферических поверхно-
стей радиуса Ar = AtVp, построенных с центром на по-
верхности Q\.
Рис. 93. Схема
построения фронта
волны на основе
принципа Гюйгенса
Важными характеристиками распространяющихся в упругих средах волн яв-
ляются изохроны, лучи, годограф, кажущаяся скорость. По мере распростране-
ния волны фронт ее занимает в последовательные моменты времени различные
положения в среде (рис. 9.4, а). Таким образом, каждому положению фронта
может быть приписан определенный момент времени Л, t2,..., U и, наоборот, в
каждый данный момент t фронт волны занимает вполне определенное положе-
ние в среде. Чтобы иметь возможность различать положения фронта волны в
различные моменты времени, вводят понятие об изохронах, т. е. поверхностях, с
которыми фронт волны совпадает в различные моменты времени. Каждая изо-
хрона характеризуется определенным значением времени t. Через каждую точку
той области среды, в которой распространяется волна, проходит одна или не-
сколько изохрон. Совокупность изохрон, принадлежащих данной волне, назы-
вают семейством. Область среды, в каждой точке которой определено время
прихода волны, называется полем времен.
Изображая семейство изохрон на чертеже, можно составить представление о
времени пробега волны до разных точек рассматриваемой области среды и, сле-
довательно, изучить поля времен этой волны. Понятие об изохронах и полях
времен используется для интерпретации материалов сейсморазведки.
Рассмотрим в качестве примера семейство изохрон сферической волны, соз-
данной точечным источником, расположенным в точке О (рис. 9.4, б). Среду, в
которой распространяется волна, будем считать однородной, т. е. предположим,
что скорость распространения волны во всей среде постоянна и равна, допустим,
1500 м/с. При этом условии фронт волны будет представлять собой сферу с цен-
438
тром в точке О. Следовательно, изохроны образуют семейство концентрических
сфер с центром в точке О. На чертеже изображены изохроны, для которых зна-
Рис. 9.4. Изохроны в трехмерном пространстве (а) и сферической волны в
двумерной однородной среде при точечном источнике (б)
значения времени соответственно равны 0,01; 0,02; 0,03 сит. д., т. е. изохроны
проведены через 0,01 с. При скорости распространения волны в 1500 м/с радиу-
сы двух соседних изохрон будут отличаться на 1500 х 0,01 = 15 м. В зависимо-
сти от формы фронта различают сферические, плоские и другие волны.
Исследуя семейство изохрон, можно полностью описать особенности рас-
пространения фронта изучаемой волны. Однако в некоторых случаях удобнее
для изучения распространения волн пользоваться понятием лучей как, обычно
поступают в геометрической оптике. Лучами называют такие кривые (или пря-
мые) линии, которые в каждой точке составляют прямой угол с изохронами. Лу-
чи представляют собой как бы линии, вдоль которых происходит распростране-
ние волны. В однородной среде лучи являются отрезками прямых линий. На
рис. 9.4, б изображены лучи, исходящие в виде прямых из точки О. В неодно-
родной среде, в которой скорость волны изменяется, лучи имеют криволиней-
ную форму.
Изохроны и лучи, исходящие из точечного источника, могут быть совмеще-
ны на одном чертеже. Такой график называют лучевой диаграммой. Лучевые
диаграммы находят применение при интерпретации сейсмических наблюдений.
При проведении сейсморазведочных работ непосредственное изучение коле-
баний внутри среды обычно невозможно. Сейсмические наблюдения, как прави-
ло, проводят вдоль прямых линий, расположенных на поверхности Земли, и в их
различных точках определяют время прихода волны. Зная положение точек на-
блюдения, в которых определяется время прихода волны, можно составить таб-
лицу или график, выражающий зависимость времени t прихода волны от коор-
динат х и у точек наблюдения. Такой график называется годографом соответст-
вующей волны.
439
Различают поверхностные годографы (рис. 9.5, а), т. е. графики, составлен-
ные по наблюдениям в ряде точек, расположенных на некоторой поверхности, и
линейные, составленные по наблюдениям, проведенным вдоль некоторых линий
(обычно прямых). В сейсморазведке в основном пользуются линейными годо-
графами. Они представляют собой кривые, построенные в прямоугольной сис-
теме координат (х, t) на так называемой плоскости годографов, где х - пикет
(координата) точки наблюдения, t - время прихода волны (рис. 9.5, б, в). Если
источник колебаний расположен па линии наблюдений, то соответствующий
линейный годограф называется продольным, в противном случае непродолъным
(поперечным).
С понятием годографа тесно связано понятие о кажущейся скорости. Предпо-
ложим, что наблюдение времени прихода волны проводится вдоль прямой линии
АВ (рис. 9.6). Время прихода отмечается в двух точках Ci и Сг, расположенных
Рис. 9.5. Годографы прямой волны:
а - поверхностный; б, в - линейные
Рис. 9.6. Связь между годографом
и кажущейся скоростью
вдоль этой линии на небольшом расстоянии одна от другой. Пусть плоский фронт
волны достигает точки Q в момент времени h и занимает положение C\DG, со-
ставляя угол а с линией наблюдения АВ. В некоторый последующий момент вре-
мени t2 = t\ + А/ фронт волны достигнет точки С2 и примет положение С2Е. На-
блюдателю, находящемуся на линии наблюдения, будет казаться, что поскольку
волна за промежуток времени А/ прошла расстояние С\С2 = Ах, ее скорость
vk = Дх/А/.
(9.6)
Величина vk называется кажущейся скоростью. Она представляет собой ско-
рость движения следа фронта волны вдоль линии наблюдения.
440
Найдем связь между кажущейся и истинной скоростью v распростране-
ния волны. Из рис. 9.6 видно, что в действительности фронт волны за время
А/, распространяясь со скоростью v, переместился на отрезок DC2 = AS.
Следовательно,
A/ = AS/v.
Однако из треугольника C1DC2 имеем
AS = Axsina.
Сравнивая два последних уравнения с (9.6), получим
vk = v/sina.
(9.7)
Формула (9.7) выражает так называемый закон кажущейся скорости или за-
кон Бенндорфа. Угол а называется углом падения. Иногда вместо угла падения
вводят понятие о дополнительном угле е, называемом углом выхода сейсмической
радиации. Тогда закон кажущейся скорости запишется следующим образом:
vk ~ v!cose-
(9.8)
Уравнения (9.7) и (9.8) показывают, что кажущаяся скорость обычно больше
истинной. Она может быть равна ей только в случае, если a = 90°, т. е. когда
фронт волны перпендикулярен линии наблюдения и, следовательно, волна рас-
пространяется вдоль линии наблюдения. Если фронт волны параллелен линии
наблюдения, то кажущаяся скорость становится бесконечно большой.
Кажущаяся скорость в отличие от истинной может иметь как положительные,
так и отрицательные значения. Если волна распространяется вдоль линии наблю-
дения в направлении принятого положительного отсчета расстояний, то кажущая-
ся скорость считается положительной. В противном случае она отрицательна.
Значение кажущейся скорости может быть определено по годографу. Пред-
положим, что требуется вычислить по годографу кажущуюся скорость в точке
С\ (см. рис. 9.6). Определяя приращение А/ вдоль кривой годографа на участке
Ах вблизи точки Ci, можно по формуле (9.6) вычислить кажущуюся скорость.
Если годограф обладает большой кривизной, то вместо отношения конечных
приращений Ах и А/ следует определить кажущуюся скорость по формуле
vk = dx/dt,
(9.9)
которая получается из (9.6) при переходе к пределу. Таким образом, кажущаяся
скорость численно равна угловому коэффициенту касательной к годографу. Зная
масштаб, в котором построен годограф, можно кажущуюся скорость выразить в м/с.
Помимо кажущейся скорости во многих случаях удобно пользоваться поня-
тием градиента времени вдоль линий наблюдения. Под градиентом т понимают
441
быстроту изменения времени вдоль линии наблюдения. Градиент измеряется в
секундах на метр (с/м) и представляет собой величину, обратную кажущейся
скорости:
Т = = (9.10)
9.4. Упругие волны в средах, содержащих границы раздела
Однородное безграничное пространство - это наиболее простая модель сре-
ды, облегчающая рассмотрение основных исходных положений теории распро-
странения сейсмических волн. Для практических целей эта модель среды мало
пригодна, поскольку в реальной среде всегда присутствуют сейсмические гра-
ницы. Сейсмические границы - это поверхность L произвольного вида, по раз-
ные стороны которой упругие свойства Vp, Vs и р имеют различные численные
значения. При этом разными могут быть как один или два из них, так и все три
одновременно. Форма границы раздела может быть любой, но чаще всего рас-
сматривают плоские границы раздела. При этом, всегда имеют в виду, что тако-
вой граница является только в окрестности рассматриваемой области. Число
границ в среде может быть произвольным, однако при этом должны соблюдать-
ся некоторые очевидные ограничения на их взаимное расположение. Часть сре-
ды, заключенную между двумя соседними границами Д и Li+i, принято называть
сейсмическим слоем. Упругие свойства в сейсмическом слое могут быть всюду
одинаковыми либо различными в каждой точке слоя. В первом случае говорят
об однородном сейсмическом слое, а во втором - о неоднородном.
Сейсмические границы различаются между собой по степени резкости
свойств среды по обе стороны от нее. Если при пересечении границы упругие
свойства среды меняются скачком (разрывно), то такая граница называется рез-
кой или границей разрыва первого порядка. При разрыве непрерывности первой
производной упругих свойств (по нормали к границе) говорят о границе разрыва
второго порядка, при разрыве непрерывности второй производной - о границе
разрыва третьего порядка и т. д. Все границы, где терпят разрыв непрерывности
производные упругих свойств, носят общее название нерезких.
Среди всех границ особое место занимает граница Zo, совпадающая с по-
верхностью Земли. В силу пренебрежимой малости (в сравнении с горными по-
родами) упругих свойств воздуха принято эту границу называть свободной. Она
играет особую роль в формировании поля упругих волн.
9.5. Упругие волны в однородном полупространстве
Однородное упругое полупространство - это наиболее простая сейсмическая
модель среды, имеющая более или менее близкое отношение к реальным. Эта
модель среды позволяет понять основные закономерности процесса распростра-
нения упругих волн при исследованиях на поверхности Земли.
Упругие волны, возбуждаемые сейсмическим источником, находящимся на
поверхности однородного упругого изотропного полупространства с упругими
модулями X, ц, р, впервые рассмотрены Лэмбом (задача Лэмба). Из решения
этой задачи вытекает, что в такой среде наряду с уже известными нам продоль-
442
ними Р и поперечными 5-волнами, распространяющимися соответственно со
скоростями Vp и Vs, появляется новый важный тип сейсмических волн - поверх-
ностные волны.
Характерной их особенностью является быстрое ослабление создаваемых ко-
лебаний при удалении от границы. Поэтому эти волны могут наблюдаться только
вблизи поверхности раздела сред, к которой они как бы привязаны. Существуют
различные поверхностные волны. Для сейсморазведки представляют интерес
главным образом волны, распространяющиеся вдоль поверхности почвы.
Наибольшее значение для сейсморазведки имеет наблюдаемая на поверхно-
сти Земли поверхностная волна Рэлея R (рис. 9.7, а).
Она характеризуется следующими особенностями.
1. Волна несет взаимно связанные деформации объема и сдвига. Колебания
частицы С поверхности Q совершаются в вертикальных плоскостях F, парал-
лельных направлению DE распространения волны (рис. 9.7, а). Частицы движут-
Рис. 9.7. Поверхностные волны:
а - Рэлея; б - Лява
ся вдоль эллиптических орбит, большая ось которых вертикальна и приблизи-
тельно в 1,5 раза превышает горизонтальную. Смещение частиц происходит как
в вертикальном, так и в горизонтальном направлениях. В этом отношении волна
Рэлея сходна с гравитационными, возникающими на поверхности воды, где час-
тицы движутся по круговым орбитам.
2. Скорость vR распространения поверхностной волны Рэлея определяется
приближенной формулой
v^=0,9vs. (9.11)
Следовательно, волна Рэлея распространяется медленнее, чем идущая по тому
же пути прямая поперечная волна S или, тем более, прямая продольная волна Р.
3. С удалением от поверхности Земли вглубь среды амплитуда колебаний,
связанных с волной Рэлея, в начале несколько возрастает, а затем уменьшается.
При глубине, равной приблизительно 1,5-2,0 видимым длинам поверхностной
волны, амплитуда колебаний в 10-20 раз меньше, чем на поверхности, и при
дальнейшем увеличении глубины очень быстро убывает. Мощность слоя, в ко-
тором можно наблюдать колебания, обусловленные волной Рэлея, возрастает с
увеличением ее видимой длины.
443
4. Видимые периоды колебаний поверхностной волны, как правило, зна-
чительно больше, чем видимые периоды колебаний, связанных с объемными
волнами, вызванными тем же взрывом. Спектр колебаний поверхностных
волн сдвинут по отношению к спектру колебаний объемных волн в сторону
низких частот.
Вдоль границы двух твердых сред, плотность и модули упругости которых
не сильно различаются, может распространяться поверхностная волна Стоунли,
состоящая как бы из двух рэлеевских (по одной в каждой среде). Фазовая ско-
рость волны Стоунли меньше фазовых скоростей продольных и поперечных
волн в обеих граничных средах.
Другим видом поверхностных волн, наблюдаемых на свободной поверхно-
сти Земли, является волна Лява (поперечная поверхностная волна). Она может
возникать, когда под тонким слоем I, характеризуемым скоростью v51 попереч-
ной волны, залегает пласт II со значением vS2 скорости поперечной волны в
нем. Волна Лява вызывает колебания частицы С поверхности Земли Q в гори-
зонтальной плоскости в направлении, перпендикулярном направлению DF рас-
пространения волны (рис. 9.7, б). Скорость vL волны Лява лежит в пределах
VS1<V£<4S2- (9-12)
С углублением в нижний пласт амплитуда колебаний быстро убывает.
9.6. Отражение и преломление плоских волн на границе раздела двух сред
Наличие границ раздела внутри полупространства приводит к существенно-
му усложнению структуры волнового поля. Чтобы понять основные закономер-
ности структуры волнового поля при наличии сейсмических границ в разрезе,
нам придется рассмотреть явления, имеющие место на границе раздела двух
сред, на упрощенном примере. Таким упрощенным примером может служить
модель среды с одной плоской границей раздела (контакт двух безграничных
полупространств с упругими различными свойствами) (рис. 9.8).
Падение продольной волны на границу раздела двух полупространств (двух
сред) вызовет образование четырех новых (вторичных) волн: двух отраженных
Р\Р\ и P\S\ и двух проходящих Р\Рг и P\Sz, Первая отраженная волна Р\Р\ назы-
вается отраженной продольной, а вторая P\S\ - обменной (измененной) попе-
речной. Аналогично во второй среде W2 волна Р\Рг называется проходящей про-
дольной, а волна Р151 - проходящей обменной (поперечной).
На рис. 9.8 ар, aps, арр, bps, bpp - амплитуды смещения в соответствующих
волнах; а, ар, ОрР, ррр, рл - углы падения, отражения и преломления соответ-
ственно.
Отношение амплитуд волн, отраженных от плоской границы, к амплитуде
падающей волны называют коэффициентами отражения'.
। - аРР л -aps
Ipp- , Aps - .
ар ар
(9.13)
444
Отношения амплитуд волн, прошедших границу, к амплитуде падающей
волны называют коэффициентами прохождения (преломления)'.
о _ ^РР о _^PS
Врр- , Bps~
Op Qp
(9.М)
Значения коэффициентов отражения и преломления сложным образом зави-
сят от свойств среды и угла падения. Поэтому анализ в общем виде затрудните-
Рис. 9.8. Лучевая схема, поясняющая процесс от-
ражения и преломления плоских волн на плоской
границе раздела двух полупространств
лен. На практике широко используют численные расчеты для получения необ-
ходимых зависимостей. Однако при нормальном падении исходной волны на
разделяющую границу анализ упрощается и можно показать [3], что
^PS
— BPS — 0;
Pl^ “Р2^Р2 .
Pl^ +Р2^Р2
(9.15)
_ 2Р1ГР1
РР Р1^+Р2^2
(9.16)
Это означает, что в случае нормального падения продольной волны отсутст-
вуют обменные; отраженная продольная волна возникает всегда, если выполня-
ется неравенство
Pl^ Р2^Р2’
где р - плотность среды.
445
Произведение плотности среды на скорость распространения волны называ-
ется волновым сопротивлением, или акустической жесткостью среды. Отражен-
ные волны всегда возникают на границе раздела волновых сопротивлений, в то
время как преломление продольной волны происходит на границе раздела ско-
ростей. Границы раздела волновых сопротивлений принято называть отражаю-
щими, а границы раздела скоростей - скоростными.
Амплитуда отраженной волны зависит главным образом от отношения вол-
новых сопротивлений по обе стороны границы. Когда оно велико (больше 0,5),
образуется интенсивная отраженная волна, а соответствующая граница называ-
ется сильной (резкой) границей. При небольшом различии акустических жестко-
стей (менее 0,05) на границе возникает отраженная волна небольшой амплиту-
ды, граница в этом случае называется слабой.
В зависимости от знака разности акустических жесткостей коэффициент от-
ражения может быть отрицательным либо положительным. Это означает, что
фаза отраженной волны может либо совпадать с фазой падающей волны либо
отличаться от нее на 180°.
Аналогично рассмотренному можно проанализировать задачу отражения и
преломления при падении плоской поперечной волны. Отдельно следует рас-
сматривать задачу о падении поперечной волны типа Sv (плоская волна поляри-
зована в плоскости падения) и волны типа SH (поперечная волна поляризована
перпендикулярно к плоскости падения). В первом случае (при падении волны
Sv) образуются следующие четыре вторичные волны: две отраженные SiSb S1P1
и две проходящие S1S2 и SiP2. При падении волны Sh на границе образуются
только две вторичные волны - отраженная Si Si и проход ящая SiS2.
Наличие двух границ раздела существенно усложняет волновой процесс и при-
водит к необходимости рассмотрения большого количества сейсмических волн.
9.7. Падение сферической волны на границу раздела сред
При падении на границу раздела двух сред сферической волны происходит
существенное усложнение общей волновой картины. Появляются новые типы
продольных и поперечных волн. В частности, если скорость распространения
падающей волны Р\ меньше скорости распространения возбужденной в среде W2
продольной волны Pi2 (Р1Р2) - Vp2 > Урх, то в некоторой точке Pi2 отрывается от
возбудившей ее Р\ и распространяется в дальнейшем самостоятельно. Самостоя-
тельное движение волны Pi2 вдоль границы вызывает в среде W\ образование
вторичных волн, которые называют головными волнами (Р\2\ - продольные и
Р\2$\ - поперечные).
Самостоятельное движение Р\2 вдоль границы вызывает также появление
поперечной волны в среде W2 (РуЗп)-
Фронты Р12Ь Р\2$\ и Р\2^г при плоской границе имеют коническую форму,
поэтому они относятся к категории конических волн.
Волновая картина усложняется еще больше, если vS2 > , так как в этом слу-
чае возникает возможность дополнительного образования волн типов P\S2P\ и PiS2i.
Еще сложнее картина, когда источник возбуждает не только продольную, но
и поперечную волну Sp В данном случае при выполнении условия воз-
446
никает волна типа SiP^Si. Если также существует условие < vs , то возможно
возникновение волны S121 и т. д. В среде W2 дополнительно возникает кониче-
ская волна SiP2$2-
Если скорости vp и vs оказываются зависимыми от координат точек среды, то
соответствующую среду называют градиентной. В градиентных средах возмож-
но возникновение рефрагированных волн.
При определенных условиях
<У?2И
где а - угол падения; ips - критический угол падения smzP5 =— , невозмо-
%
жен выход волны из слоя, где она распространяется, в полупространство. В этом
случае вся энергия, излучаемая источником, перераспределяется между кратны-
ми монотипными и обменными волнами различной кратности и переносится
ими внутри слоя, т. е. образуется волновой канал (волновод). Волны, распро-
страняющиеся внутри такого волновода, называют каналовыми.
В заключение можно сделать следующий вывод. Помимо обычных продольных
отраженных и преломленных волн к поверхности почвы приходят следующие:
- прямая продольная волна, распространяющаяся вдоль поверхности Земли.
В сейсморазведочной практике прямой волной часто называют также прелом-
ленную, которая образуется на поверхности коренных пород, подстилающих
верхний выветренный слой;
- поверхностные волны, распространяющиеся также вдоль поверхности поч-
вы с небольшой скоростью (от 100 до 1000 м/с);
- микросейсмы, т. е. беспорядочные движения почвы, вызываемые различ-
ными внешними причинами (ветром, дождем, морским прибоем, работой ма-
шин, движением транспорта и т. д.);
- многократные отраженные, отраженно-преломленные и преломленно-
отраженные волны, отразившиеся или преломившиеся более одного раза на
различных границах;
- дифрагированные волны, образовавшиеся от различных поверхностей (сбро-
сы, надвиги и т. п.), неровностей сейсмических границ, крутых изгибов границ;
- поперечные и обменные волны, пришедшие различными путями (отражен-
ные, преломленные и др.).
При наличии в геологическом разрезе большого числа сейсмических границ
образуется множество волн. Обладая примерно равной интенсивностью и при-
ходя к поверхности Земли одновременно, они интерферируют между собой и
образуют так называемые нерегулярные волны (нерегулярный фон помех взры-
ва). Для нерегулярных волн характерной является быстрая и незакономерная
изменчивость формы и амплитуды колебаний в близких точках земной поверх-
ности, что делает невозможной их корреляционное прослеживание. При не-
большом числе интерферирующих волн часто удается разделить нерегулярную
волну на составляющие ее простые при помощи различных аппаратных и мето-
дических средств. В противовес нерегулярным пользуются понятием регулярных
447
волн, т. е. таких, которые могут быть корреляционно прослежены на достаточно
протяженном отрезке наблюдений.
9.8. Затухание сейсмических волн
Большое значение при ведении сейсмической разведки имеет затухание
сейсмических волн в среде распространения. Интенсивность волн, наблюдаемых
на поверхности Земли, зависит от многих факторов. Главнейшими из них явля-
ются условия распространения.
Очевидно, что по мере удаления прямой волны от источника (пункта взрыва)
связанные с нею колебания захватывают все возрастающий объем среды. В слу-
чае сферических волн и однородной среды этот объем возрастает пропорцио-
нально объему сферического слоя с постоянной толщиной, т. е. пропорциональ-
но квадрату расстояния г2, пройденного волной. Поскольку общее количество
энергии, полученное волной при взрыве (в абсолютно упругой однородной сре-
де), остается постоянным, плотность энергии, т. е. количество энергии, прихо-
дящейся на единицу объема, убывает пропорционально величине 1/г2. Из теории
колебаний известно, что энергия гармонической волны пропорциональна квад-
рату ее амплитуды. Следовательно, амплитуда прямой волны в абсолютно упру-
гой среде вследствие возрастания поверхности фронта убывает обратно пропор-
ционально расстоянию. Этот же закон убывания амплитуды в зависимости от
расстояния г справедлив приближенно и для отраженных волн. Явление увели-
чения объема среды, захватываемого волной при ее распространении, называют
расхождением волны.
Значительно более сложной является зависимость амплитуды головной вол-
ны от расстояния, что обусловлено сложностью процесса ее образования.
При больших удалениях от источника, когда хм » х, это выражение имеет вид
«гол = с/х2, (9.17)
где С - постоянный коэффициент.
Таким образом, вследствие расхождения головная волна ослабевает с рас-
стоянием значительно быстрее, чем отраженная.
Геологические среды, в которых распространяются сейсмические волны, в
действительности не являются ни абсолютно упругими, ни однородными. В них
происходит явление поглощения колебаний вследствие трения между частицами
среды. Это явление особенно сказывается на высокочастотных составляющих
колебаний, которые поэтому быстро поглощаются и ослабевают, особенно в
рыхлой верхней части разреза. Вследствие наличия в среде мелких неоднород-
ностей (включений), соизмеримых с длиной волны, происходит ее частичное рас-
сеивание, которое также приводит к уменьшению общей энергии, переносимой
волной. Ослабление всех волн, вызываемое поглощением и рассеиванием, может
быть приближенно охарактеризовано множителем е-0^, где е = 2,72 - основание
натуральных логарифмов; г-длина пути волны; а - коэффициент поглощения.
Коэффициент поглощения характеризует поглощающие свойства среды.
Значение коэффициента поглощения в одной и той же среде возрастает с увели-
448
чением частоты колебаний, что и приводит к избирательному поглощению корот-
коволновых составляющих всех волн по мере их распространения. В большинстве
геологических сред коэффициент поглощения прямо пропорционален частоте ко-
лебаний. В этом случае вместо коэффициента поглощения часто применяют дек-
ремент поглощения 0, определяемый как
0 = аХ. (9.18)
Декремент поглощения определяет значение поглощения на пути в одну
длину волны.
Когда падающая волна достигает отражающих или преломляющих границ,
часть ее энергии расходуется на образование отраженных и преломленных волн.
В результате этого энергия проходящей волны уменьшается. Чем большее число
границ проходящая волна пересекла на своем пути, тем сильнее она ослабляется.
В большой степени интенсивность полезных волн определяется также и ха-
рактером сейсмических границ. Если сейсмическая граница разделяет среды с
резко различающимися скоростями или волновыми сопротивлениями, то возни-
кающие на ней преломленные или отраженные волны будут отличаться значи-
тельной амплитудой.
При очень большом различии в скоростях интенсивность преломленной вол-
ны уменьшается потому, что на границе образуется мощная отраженная волна,
на создание которой затрачивается большая часть энергии.
Чем меньше различие волнового сопротивления па границе, тем слабее обра-
зующиеся на ней отраженные волны. Поэтому интенсивность волн, прошедших
приблизительно одинаковые расстояния, может заметно различаться. Однако в
среднем амплитуда волн, особенно отраженных, пришедших с большой глуби-
ны, значительно меньше, чем образовавшихся вблизи поверхности.
Из изложенного выше следует, что амплитуды колебаний почвы, создавае-
мые различными волнами (или одной и той же волной при различных удалениях
от источника), могут сильно различаться. В среднем амплитуда колебаний убы-
вает с увеличением времени пробега.
Отношение амплитуд наиболее и наименее интенсивных полезных волн,
подлежащих изучению и измеренных в одной и той же точке поверхности Зем-
ли, называют естественным динамическим диапазоном регистрируемых коле-
баний. Последний зависит от геологического строения района.
9.9. Волновые поля сейсмических источников и их спектральные особенности
Совокупность колебаний, возникающих в геологической среде после воздей-
ствия на нее сейсмического источника, образует первичное векторное волновое
поле S (х, у, z, Г). Свойства и особенности векторного поля S (х, у, z, t) опреде-
ляются свойствами сейсмического источника и распределением упругих свойств
в геологической среде. При этом волновое поле можно рассматривать как ре-
зультат сложения полей отдельных сейсмических волн.
Первичное поле источника определяется его типом, способом реализации и
свойствами среды вблизи области возбуждения. При взрывах в неглубоких
скважинах возбуждаются продольные волны. Однако в силу неоднородности
449
среды, близости источника к поверхности Земли и других причин могут возни-
кать более или менее интенсивные поперечные и поверхностные волны.
Более сложным оказывается волновое поле, возбуждаемое невзрывными ис-
точниками колебаний. Они могут быть ориентированы на возбуждение либо
продольных, либо поперечных волн. Однако эти источники всегда возбуждают
не только объемные, но и интенсивные поверхностные волны.
Несколько проще оказывается первичное поле сейсмических источников,
используемых при работах на акваториях. Это объясняется тем, что в жидкостях
распространяются лишь продольные волны. Кроме того, водная среда всегда
достаточно однородна.
При распространении сейсмических волн вдали от источника в сложнопо-
строенной геологической среде с большим числом границ образуется множество
вторичных волн. Природа и структура вторичных волн сильно зависит от место-
положения области, в которой они распространяются.
В первой области - вблизи источника возбуждения упругих колебаний - ос-
новная роль в составе вторичных волн принадлежит отраженным. Во второй
области - вдали от источника колебаний - главная роль принадлежит прелом-
ленным волнам.
Вблизи источника важнейшее влияние на структуру волнового поля оказывает
распределение в геологическом разрезе коэффициентов отражения Ак. Интенсив-
ность каждой однократно отраженной волны существенным образом зависит от
коэффициента отражения на границе. Соответственно наиболее интенсивными
являются однократные отраженные волны, образующиеся на сильных и средних
по качеству отражающих границах. Число таких границ в разрезе обычно невели-
ко. Большинство сейсмических границ являются слабыми. Именно на них и воз-
никает наибольшее число отражений. Таким образом, в ближайшей зоне волновое
поле обычно представляет собой результат сложения небольшого числа более или
менее интенсивных однократно отраженных волн с многочисленными слабыми
однократными и многократными отраженными.
Во второй (дальней) зоне при наличии в разрезе вертикального градиента
скорости или преломляющих границ помимо отраженных волн существуют
рефрагированные и головные. При удалении от источника головные или рефра-
гированные волны выходят в область первых вступлений в заданную точку про-
странства. Это означает, что в этой части среды в начальной стадии формируе-
мого сейсмического поля существуют только головные или рефрагированные
волны. В последующих вступлениях (более позднее время) здесь также могут
рассматриваться однократные и многократные отраженные волны.
Особенности строения верхней части разреза нередко благоприятствуют
возникновению интенсивных поверхностных волн как в ближней, так и в даль-
ней зонах.
Частотный состав колебаний, возбуждаемых при взрывах, в большей степени
зависит от литологического состава и физического состояния пород, в которых
производится взрыв. Существующие теоретические представления приводят к
выводу, что частота возбужденных колебаний пропорциональна скорости Vs по-
перечной волны и обратно пропорциональна крепости пород в окрестности ис-
точника. Это соответствует экспериментальным данным [1].
450
Длительность колебаний, по-видимому, существенным образом зависит от
слоистости разреза вблизи источника, поскольку возникающие на границах вто-
ричные (главным образом отраженные) волны распространяются совместно с
прямой волной, создавая более протяженную интерференционную. Вторичные
волны, возникающие на близких к источнику границах, часто создают значи-
тельный фон помех, что затрудняет последующее выделение полезных волн.
Так, при взрыве выше резкой границы, образующиеся на ней вторичные волны
могут ослаблять прямую, идущую в глубь Земли, и в то же время возбуждать
сильные интерференционные волны, распространяющиеся вдоль земной по-
верхности. Такие же интерференционные волны, появляющиеся в результате
наложения многократно отраженных от границ слоя, могут возникать при взры-
ве внутри слоя, в котором скорость меньше, чем во вмещающей среде.
Преобладающая частота возбуждаемых в очаге колебаний зависит также от
массы заряда Q, убывая с его увеличением как £Г1/3. Однако при наблюдениях
вдали от источника различие в массе заряда становится слабо заметным вслед-
ствие поглощающего действия среды. Это приводит к тому, что наблюдаемые
вдали от источника колебания имеют независимо от массы заряда весьма сход-
ную форму. Только применяя очень большие заряды, можно обнаружить замет-
ное увеличение периода колебаний в точке приема. Поэтому часто можно счи-
тать, что форма регистрируемых колебаний не зависит от массы заряда.
Амплитуда регистрируемых колебаний а в некоторой постоянной точке на-
блюдения может быть связана с массой заряда соотношением
a = k'Qm,
где kf - постоянная величина.
По экспериментальным данным, величина т зависит от состава и состояния
пород, в которых производится взрыв, типа регистрируемых волн и массы заря-
да. Отмечается, что при малых зарядах коэффициент т достигает значений
1... 1,5, а при больших - убывает до 0,2...0,5. С увеличением массы заряда т
плавно убывает.
Первоначально спектр возбуждаемых сейсмических волн определяется свой-
ствами источника и прилегающей к нему области среды. Вследствие влияния
поглощения по мере распространения сейсмических волн их преобладающая
частота постепенно убывает.
При морских работах, где отсутствует зона малых скоростей, частоты обыч-
но выше и составляют 40... 100 Гц. Наиболее высокие преобладающие частоты
(до 150...200 Гц) наблюдаются при сейсмических работах в районах, верхняя
часть которых представлена мерзлыми или скальными породами. При работах с
использованием больших удалений от пунктов возбуждения колебаний преоб-
ладающие частоты продольных волн могут составлять 8.. .20 Гц.
Поперечные волны, как правило, характеризуются частотами в 1,5-2 раза
меньшими, чем для продольных волн, прошедших тот же путь. Особо низкими
преобладающими частотами характеризуются поверхностные волны типа Релея
и Лява. Они могут иметь преобладающие частоты в диапазоне 5... 15 Гц. Спек-
тральные особенности сейсмических волн показаны на рис. 9.9.
451
Ml
Рис. 9.9. Амплитудные спектры различных
волн:
1- продольных; 2- поперечных; 3- поверхностных;
4 - кратных; 5- реверберации; 6 - микросейсм
Все существующие виды сейсмических помех микросейсм можно условно
разделить на две категории: когерентные и некогерентные.
Когерентными мы будем называть помехи, которые прослеживаются по
крайней мере на нескольких соседних трассах и имеют похожую одна на другую
формы записи.
Некогерентными будем называть помехи (шумы) в записях, вид которых
случайным образом меняется от точки к точке (от трассы к трассе) и не может
быть предсказан в последующие моменты времени.
Когерентные подразделяют на помехи:
а) энергия которых распространяется главным образом горизонтально;
б) энергия которых подходит к сейсмоприемникам по направлениям, близ-
ким к вертикальному.
Когерентные помехи включают в себя поверхностные волны, отраженные и
отраженно-преломленные от приповерхностных структур, преломленные волны,
образовавшиеся на высокоскоростных приповерхностных слоях, помехи от
движения транспорта и т. п.
Некогерентный шум, является пространственно случайным и обладает свой-
ствами повторяемости на записях, он обусловлен рассеянием на неоднородно-
стях и приповерхностных слоях разреза. Источники такого шума столь малы и
расположены так близко к сейсмоприемникам, что входные сигналы на каждом
канале различны. Случайный неповторяемый шум обусловлен обычно ветром,
движением крон деревьев и т. п.
Для создания эффективных приемов борьбы с помехами и других целей важно
представление о форме полезного сигнала - сейсмического импульса. При этом
наиболее существенно правильно определить момент прихода волны в заданную
точку среды. К сожалению, у реальных сейсмических импульсов первый разли-
чимый максимум (или минимум) наблюдается с некоторой задержкой по отноше-
нию к моменту вступления (прихода) волны в заданную точку среды. Именно
поэтому все времена, определенные по четко выраженным экстремумам сейсми-
ческой записи, содержат систематические фазовые ошибки. Для их компенсации
приходится вводить специальные поправки - поправки на фазу. При этом следует
учитывать, что по мере увеличения времени прихода волны вследствие поглоще-
ния высоких частот видимый спектр регистрируемых колебаний сдвигается в сто-
рону низких частот. Это приводит к тому, что регистрируемый импульс нарастает
медленнее и меняется значение задержки между истинным временем вступления
волны и моментом ее регистрации. По этой причине возможно появление замет-
ных ошибок в конечных результатах сейсморазведки.
452
Для математического описания формы сейсмических импульсов в практике
сейсмической разведки применяется целый ряд формул. Наиболее широко в
отечественной практике используют формулы, предложенные Риккером, Берла-
ге и Н.Н. Пузыревым.
Импульс Риккера задается формулой
S2W = [l-27c72(z-ZBCT)2]exp[-Jr2/2(z-ZBcr)2], (9.19)
где f - частота колебаний; /вст - время вступления колебаний в заданную точку.
Импульс Берлаге описывается формулой
Sy(t) =
O;z<zBCT
«o(Z-ZBCT)^₽{WBCl)
sin©0(z-ZBCT);
Z > ZBCT
(9.20)
где a0, p - константы формы сигнала; COo - круговая частота колебаний.
Формула Пузырева имеет вид
53(Z) = a0e ₽(' <bct) sm[<o0(z-ZBCT) + <p],
(9.21)
где а0, р, ф - константы формы сигнала; C0q -
круговая частота сигнала.
Принципиально все сейсмические им-
пульсы подразделяются на два вида: ми-
нимально-фазовые и нуль-фазовые.
Минимально-фазовые импульсы ха-
рактеризуются тем, что основная доля
энергии сначала сосредоточена в началь-
ной фазе, а первый экстремум колебаний
близок к началу импульса (импульс Берла-
ге, рис. 9.10, а).
Нуль-фазовые импульсы симметричны
относительно основного экстремума, а
время его регистрации соответствует вре-
мени вступления волны (импульсы Рикке-
ра, Пузырева, рис. 9.10, б, в).
9.10. Сейсморегистрирующий канал
В зависимости от применяемого носи-
теля различают сейсморегистрирующие
каналы с воспроизводимой (промежуточ-
ной) и невоспроизводимой регистрацией.
Применение воспроизводимой, обычно
магнитной, записи позволяет восстанавли-
Рис. 9.10. Форма сейсмических
импульсов:
а - Берлаге; б - Риккера; в - Пузырева
453
вать записанные колебания и подвергать их последующей обработке на специ-
альных установках или ЭВМ.
Сейсморегистрирующий канал представляет собой совокупность последова-
тельно соединенных аппаратов, осуществляющих прием механических колеба-
ний почвы, их преобразование в электрические колебания, усиление и запись на
носитель. В качестве носителя записи используют светочувствительную бумагу
и пленку, магнитную ленту, электрохимическую бумагу и т. п. Состав и свойст-
ва аппаратов в канале зависят помимо конструктивных особенностей от приме-
няемого вида регистрации.
Невоспроизводимая регистрация исключает возможность применения аппа-
ратных средств выделения полезных колебаний при обработке. Поэтому сейс-
морегистрирующий канал должен содержать устройства, позволяющие выде-
лять полезные колебания. Канал состоит из сейсмоприемника СП, усилителя У,
фильтров Ф и регистрирующего устройства Р (рис. 9.11, а).
Сейсмоприемник устанавливают на поверхности почвы или внутри среды,
и возникающие в нем электрические колебания передают по кабелю (косе) в
сейсморазведочную станцию, где размещена регистрирующая аппаратура.
Рис. 9.11. Сейсморегистрирующий канал при прямой (а) и магнитной (б, в) регистрации
Сигналы попадают в усилитель У, здесь же системы автоматической или про-
граммной регулировки (АРУ, ПРУ) сокращают динамический диапазон
сигналов до уровня, допускающего их неискаженную запись на носитель.
Сигналы проходят через фильтры Ф, которые могут быть расположены перед
усилителем или после него либо включены в его схему. Фильтры обладают
широким набором регулируемых параметров, позволяющих эмпирически
подбирать наиболее целесообразную частотную фильтрацию в полевых усло-
виях, добиваясь максимального увеличения отношения амплитуды полезного
сигнала к амплитуде помех. После усиления и фильтрации колебания посту-
пают в регистрирующее устройство Р, где записываются на носитель. В каче-
стве регистрирующего устройства чаще всего применяют зеркальный гальва-
нометр; в этом случае носитель записи - светочувствительная бумага или
пленка. Иногда в качестве регистрирующего устройства применяют электри-
ческое перо, записывающее колебания на электротермическую или электрохи-
мическую бумагу. В других случаях в качестве регистрирующего устройства
используют ЭЛТ. При этом также возможна запись на светочувствительную
бумагу. Кроме того, применяют системы, в которых вообще не производится
запись на носитель, а результаты наблюдений (время пробега, амплитуда ко-
лебания) считываются наблюдателем непосредственно со счетчика импуль-
сов или экрана ЭЛТ.
454
При воспроизводимой регистрации колебания записывают на магнитную
ленту, с которой они могут быть воспроизведены в виде электрических колеба-
ний и подвергнуты обработке. При промежуточной регистрации колебания
можно записать в цифровой либо в аналоговой форме. При регистрации в анало-
говой форме сейсморегистрирующий канал, называемый в этом случае трактом
записи, содержит те же основные устройства, что и при невоспроизводимой ре-
гистрации (рис. 9.11, б). Некоторое отличие состоит в том, что применяют уси-
литель записи УЗ и в качестве регистрирующего устройства включают магнит-
ную головку МГ. Параллельно ей обычно присоединяют гальванометр Г, что
позволяет получать кроме магнитной сейсмограммы фотографическую.
При промежуточной регистрации к основному каналу добавляют ответвле-
ние, позволяющее воспроизводить полученную магнитную сейсмограмму для
оценки ее качества. Такое ответвление, называемое трактом воспроизведения,
состоит из магнитной головки МГ, с помощью которой считывается запись с
носителя Н, усилителя воспроизведения УВ, фильтров Ф и визуализирующего
устройства В (рис. 9.11, в).
Для повышения надежности и точности обработки сейсмических данных од-
новременно регистрируют колебания от одного источника в нескольких точках
наблюдения.
Сейсморегистрирующий канал должен удовлетворять определенным требо-
ваниям, зависящим от особенностей волнового поля.
Во-первых, сейсморегистрирующий канал должен быть линейной системой,
свойства которой описываются ее временной характеристикой.
Во-вторых, частотные характеристики сейсмоприемника СП и регистри-
рующих устройств должны обеспечивать пропускание колебаний в достаточно
широком диапазоне частот, содержащем основную часть спектра полезных ко-
лебаний.
В третьих, для извлечения возможно большего объема полезной информации
колебания волн после регистрации и аппаратной обработки должны быть преоб-
разованы так, чтобы среди них в возможно более отчетливой форме были пред-
ставлены полезные волны.
Для достижения этой цели уже в процессе регистрации принимают меры для
ослабления мешающих сигналов. Это достигается при многоканальной регист-
рации, если полезные и мешающие сигналы различаются между собой:
- направлением движения частиц среды в пространстве (поляризацией);
- спектральным составом;
- кажущейся (преобладающей) длиной волны на линии или плоскости на-
блюдения.
Разделение колебаний, обусловленных различными направлениями вектора
смещения в пространстве, проводится с помощью сейсмоприемников, обладаю-
щих различной ориентировкой их осей чувствительности в пространстве.
Разделение колебаний с разным спектральным составом реализуется, глав-
ным образом, электрическими фильтрами.
Разделение волн с разной кажущейся длиной волны производится интерфе-
ренционными системами.
Основным элементом сейсморегистрирующего канала является сейсмопри-
емник. Поэтому целесообразно рассмотреть его принцип действия и устройство.
455
9.11. Принцип действия и устройство сейсмоприемника
Сейсмоприемник является первым звеном сейсморегистрирующего канала и
представляет собой аппарат, воспринимающий механические колебания почвы и
преобразующий их в электрические сигналы. Поэтому всякий сейсмоприемник
состоит из механической и электрической частей. В настоящее время наибольшее
применение находят приемники, в которых используется инерционный принцип
измерения механического движения. Существуют также сейсмоприемники давле-
ния, которые воспринимают изменения давления, происходящие при распростра-
нении упругой волны.
Каждый инерционный сейсмоприемник состоит из механической части (ме-
ханического сейсмографа) и соединенного с ней электромеханического преобра-
зователя с электрической нагрузкой. Электрическая и механическая части сейс-
моприемников составляют единое целое, поэтому необходимо изучить их со-
вместное действие.
Рассмотрим схему устройства сейсмоприемника (рис. 9.12, а). Корпус сейсмо-
приемника устанавливают на поверхности почвы (или погружают в скважину).
Предположим, что движения корпуса в точности повторяют движения почвы.
К корпусу на пружине, обладающей жесткостью N, подвешен груз, так назы-
ваемая инертная масса М. Для ослабления колебаний инертной массы ее поме-
шают в вязкую жидкость или применяют другие меры. Электромеханический
преобразователь ЭП присоединен таким образом, что относительные перемеще-
ния корпуса Кр и инертной массы М создают на его электрических полюсах не-
которую электродвижущую силу Е (рис. 9.12, б).
Существуют разнообразные типы электромеханических преобразователей; в
каждом из них для преобразования колебаний используют разные явления: элек-
тромагнитную индукцию, магнитострикцию, пьезоэлектрический эффект и др.
а
Рис.9.12. Схемы устройства (а) и действия (б) индукционного сейсмоприемника
Каждому типу преобразователей свойственны некоторые специфические осо-
бенности, делающие их пригодными для использования в приборах разного на-
значения. В наземных сейсмоприемниках применяют главным образом индук-
ционные преобразователи, в которых механические колебания преобразуются в
электрические на основе электромагнитной индукции.
Индукционные электромеханические преобразователи устроены так, что при
перемещении инертной массы относительно корпуса меняется магнитный поток,
456
проходящий через витки катушки, являющейся частью преобразователя. В индук-
ционных сейсмоприемниках магнитное поле создается постоянными магнитами,
соединенными с корпусом прибора или его инертной массой. Обычно применяют
электродинамический преобразователь, представляющий собой катушку, которая
может перемещаться в постоянном поле магнита. При перемещении катушки в
магнитном поле в ее витках наводится электродвижущая сила.
Различают сейсмоприемники, которые регистрируют только вертикальную
или только горизонтальную компоненты движения грунта. Первые применяют
для регистрации продольных сейсмических волн, вторые - поперечных. Для ра-
боты в море используют специальные сейсмоприемники - пьезосейсмоприемни-
ки, реагирующие только на изменение давления в воде. Важнейшими эксплута-
ционно-техническими характеристиками сейсмоприемников являются чувстви-
тельность, массогабаритные параметры, качество воспроизведения сигналов,
устойчивость и надежность. Определив эти параметры, можно сравнивать раз-
личные конструкции приборов и выбирать наиболее подходящие для данных
условий работ. Отечественная промышленность выпускала три вида сейсмопри-
емников для регистрации вертикальных компонент поля (СВ1, СВ2, СВЗ) и один
для регистрации горизонтальных составляющих поля при работе в разных диа-
пазонах частот. Представление о параметрах наземных сейсмоприемников мож-
но получить по данным табл. 9.1, морских - табл. 9.2.
Таблица 9.1
Основные характеристики наземных сейсмоприемников электрического типа,
выпускаемых серийно
Характеристика Модель
СВ1- 10Ц СВ1- 20П СВ1- ЗОП СГ1-10 СВ2-05 СВ2- 10Ц СВЗ-60Ц свз- 100Ц
Собственная частота, Гц 10+0,6 20+0,8 30+1,2 10+0,6 5+0,4 10+0,5 60+3 100+5
Частота второго электромеханиче- ского резонанса 70 120 120 70 70 - - -
Коэффициент преобразования (В-м')/с 18±12% 18±12% 14,4±12% 20+12% 32±12% 21±12% 60 42
Степень затуха- ния 0,6±15% 0,6±15% 0,6±15% 0,6±15% 0,6±15% 0,6±15% 0,55±10%
Омическое сопро- тивление катушки индуктивности, Ом 285±10% 270+10% 270+10% 260+10% 230+10% 275±10% 1080+10% 780+10%
Масса, кг 0,22 0,155 0,155 0,16 0,6 0,2 0,15 0,15
Таблица 9.2
Основные технические характеристики пьезоэлектрических приемников давления
Характеристика ПДС-21 ПДС-7 ПДС-22
Акустическая чувствитель- ность, мкВ/Па 85-120 200-300 400
Чувствительность к ускорениям, мк*с2/см 1,5 0,5 0,2
457
Окончание табл. 9.2
Характеристика ПДС-21 ПДС-7 ПДС-22
Тип пьезоэлемента Цилиндр Диск Диск
Число пьезоэлементов 2 4 2
Емкость электрическая, мкФ 0,016 0,016 0,005
Диапазон рабочих глубин, м 0-100 0-50 0-50
Предельная глубина погру- жения, м 200 100 100
Габариты, мм:
длина 62 58 27
ширина — 30 —
высота — 12 —
диаметр 32 — 38
Масса, г 50 20 25
9.12. Структурная схема цифровой сейсморазведочной станции
Сейсморегистрирующий канал, применяемый в современной аппаратуре, со-
держит приборы как аналогового, так и цифрового действия. Последние более
широко распространены, чем аналоговые. Хотя принципы их работы сущест-
венно различаются, связь между сигналом на входе и выходе в обоих приборах
можно описать одинаково.
К настоящему времени сложилась определенная структура большинства
цифровых станций [3]. На рис. 9.13. представлена структурная схема цифровой
сейсморазведочной станции.
Сигналы от сейсмоприемников поступает на широкополосные аналоговые
предварительные усилители (ШПУ) 1 с трансформаторными входами. В каждом
усилителе осуществляется, помимо усиления, аналоговая частотная фильтрация
Тракт регистрации Тракт воспроизведения
В спомогатсльпыс
каналы
Рис. 9.13. Структурная схема цифровой сейсморазведочной станции
458
трех видов. Фильтр низкой частоты (ФНЧ) - антиаляйсинг-фильтр - подавляет
высокочастотные помехи. Фильтр высокой частоты (ФВЧ) реализует подавле-
ние интенсивных низкочастотных поверхностных волн-помех. Режекторный
фильтр (РФ) подавляет колебания с частотой 50 Гц (или 60 Гц). Сигналы с вы-
хода усилителя 1 подаются на коммутатор каналов 2, обеспечивающий кванто-
вание сигналов по времени путем последовательного циклического опроса всех
каналов со строго определенной частотой. Дискретизированные сигналы всех
каналов в виде амплитудно-импульсных выборок по единому тракту поступают
в основной усилитель 3, осуществляющий окончательное усиление сигналов на
основе системы мгновенной автоматической регулировки усиления (МАРУ). С
выхода усилителя 3 сигналы поступают на преобразователь «аналог-код» (ПАК)
4, осуществлявший квантование сигналов по амплитуде. Двоичный код каждой
выборки подается в устройство 5, обеспечивающее формирование кода сигнала
в соответствии с избранным для станции форматом записи. Код с форматтера 5
записывается магнитным регистратором 6. Магнитный регистратор снабжен
устройством для управления и контроля процесса записи, автоматической нуме-
рации записей и маркировки их начала и конца. Все указанные узлы работают
под управлением блока логики 7. Регистратор оканчивает тракт записи цифро-
вой сейсморазведочной станции.
Для осуществления оперативного контроля качества записи в полевых усло-
виях большинство сейсморазведочных станций имеют тракт воспроизведения.
Считанные с помощью тракта чтения регистратора 6 и усиленные схемами 8
кодовые сигналы подаются в систему восстановления динамического диапазона,
после чего подвергаются действию цифрового автоматического регулирования
усиления (ЦАРУ) 9 и преобразуются в аналоговую форму преобразователем
«код-аналог» (ПКА) 10. После демультиплексирования И аналоговые сигналы
подвергаются фильтрации ФНЧ и ФВЧ, регулированию 12 и подаются на элек-
тростатический плоттер (или осциллограф).
9.13. Аппаратура сейсмической разведки
Наиболее широкое применение получили отечественные сейсморазведочные
станции «Прогресс-1», «Прогресс-2», «Прогресс-3» и «Прогресс-96».
Основные технические характеристики
сейсморазведочной станции «Прогресс-1»
В режиме записи
Число сейсмических каналов..................................... 48
Число вспомогательных каналов................................... 5
в том числе для записи ОМ.................................... 1
для записи вертикального времени............................. 1
для записи текущего времени.................................. 1
резерв ...................................................... 2
Нижняя граница регистрируемых частот, Гц.................62,5±6,25
Верхняя граница регистрируемых частот, Гц................ 125±12,5
459
Фильтр высоких частот (ФВЧ):
граничная частота, Гц................................10±1; 14±1,4;
20±2; 28+2,8
крутизна среза, дБ/окт...................................... 18±2
Фильтр низких частот (ФНЧ):
граничная частота, Гц..................................62,5±6,25;
125+12,5
крутизна среза, дБ/окт...................................... 36±2
Режекторный фильтр (РФ)
подавление помех на частоте 50 Гц, дБ......................... 40
Максимальный входной сигнал, мВ ............................. 360; 180
Коэффициент усиления предварительных
усилителей, дБ ..........................................30±0,25;
36±0,25;
42±0,25;
48±0,25;
Диапазон автоматической регулировки
усиления, дБ ................................................. 84
Число разрядов ПАК ..........................................14+знак
Период квантования, мс .....................................2±0,0001
Длительность записи, с ................................. 2,048±0,003 +
31,744±0,005
с интервалом 1,024;
любая при управлении
вручную
Формат записи................................................... С-1
В режиме воспроизведения
Частотный диапазон, Гц......................................0...90+9
Фильтр высоких частот при периоде квантования 2 мс
граничная частота, Гц....................................12±1,2; 14±1,4;
20±2,0; 28±2,8;
40±4,0
Фильтр низких частот при периоде квантования 2 мс
граничная частота, Гц...............................45±4,5; 63±6,3;
90±9,0
Диапазон цифровой АРУ, дБ ........................................ 90
Диапазон ручной регулировки
усиления, дБ ................................................ 108
Интервал следования марок времени, с................0,01 с выделением;
0,1 и 1,6
Потребляемая мощность, Вт....................................... 600
Цифровая сейсморазведочная станция (ЦСС) «Прогресс-2»
ЦСС «Прогресс-2» отличается от станции «Прогресс-1» наличием дополни-
тельной стойки с накопителем сейсмической информации НЦС-40. Это позволя-
ет иметь следующие дополнительные возможности:
460
- накопление до 999 слабых воздействий;
- исключение импульсной помехи в каждом канале путем редактирования
входных данных по уровню стационарного шума;
- задержку пуска источников возбуждения между накоплениями в цикле от
О до 99 с с шагом 1 с;
- запись 24-канальных сейсмограмм длительностью до 31 с при шаге кван-
тования 2 мс, на 40 каналах - при шаге 4 мс, 48-канальные записи допускаются с
длительностью до 16 с.
Накопление осуществляется путем суммирования оцифрованных сигналов,
получаемых при повторных возбуждениях источников. При первом возбужде-
нии цифровой код сигнала поступает с выходов ОП и ПАК в арифметическое
устройство ЛУ накопителя, где суммируется с установленными ранее нулями.
Полученная промежуточная сумма запоминается оперативным запоминающим
устройством. При следующем возбуждении цифровой код сейсмических сигна-
лов поступает в АУ и из ОЗУ вызываются коды первого возбуждения. В АУ
происходит их суммирование, новая промежуточная сумма запоминается ОЗУ.
Аналогично идет процесс при всех последующих возбуждениях. Он может осу-
ществляться в ручном, полуавтоматическом и автоматическом режимах. В руч-
ном режиме происходит остановка станции после каждого воздействия. Полуав-
томатический обеспечивает запись заданного числа накоплений. В автоматиче-
ском режиме остановка станции не происходит до вмешательства оператора.
Цифровая сейсморазведочная станция «Прогресс-3»
ЦСС «Прогресс-3» может работать во всех режимах станций «Прогресс-1» и
«Прогресс-2» и дополнительно - с источниками вибрационного действия. Для
этого в ЦСС «Прогресс-3» предусмотрена возможность операции свертки (вы-
числения функции взаимной корреляции ФВК) записи сейсмических сигналов
по каждому каналу, полученных при работе с вибрационными источниками,
опорным сигналом (свипом) вибратора в месте излучения. Результат выполне-
ния свертки - коррелограмма - выдается в блок воспроизведения для оценки
качества записи. На магнитную ленту регистратора станции записывается толь-
ко виброграмма - запись сейсмических сигналов от сейсмоприемников. Вибро-
граммы, подлежат окончательной обработке в вычислительном центре. Для вы-
полнения экспресс-корреляции станция снабжается коррелятором СК-24,
имеющим следующие основные параметры:
число обрабатываемых каналов ................................. 24
период выборки, мс ............................................ 4
длительность коррелограммы, с.............................. 4,096
число разрядов информации на выходе....................... 17 (знак,
4 разряда кодов, 12
разрядов мантиссы)
усиление входного сигнала, дБ................................. 84
Для работы с вибрационными источниками типа СВ 10/100 в ЦСС устанав-
ливается генератор синхронизирующий (ГС), осуществляющий синхронизацию
работы вибраторов и передачу в станцию опорного сигнала (свипа). Опорный
сигнал представляет собой синусоидальное напряжение, частота которого в те-
461
чение одной посылки меняется от 10 до 100 Гц (или наоборот). Поскольку дли-
тельность коррелограммы составляет 4 с, максимальная длительность посылки
равна 28 с. Для обеспечения высокого быстродействия коррелятора в его составе
работают два арифметических устройства, одно из которых вычисляет ФВК для
1-12 каналов, а другое - для 13-24 каналов. ЦСС «Прогресс-3» имеет третью
дополнительную стойку с СК-24. Синхронизирующий генератор ГС устанавли-
вается в кузове около блока связи вместо шифратора системы ССВ.
Цифровая сейсморазведочная станция «Прогресс-96»
ЦСС «Прогресс-96» может работать в следующих режимах:
рабочие - для регистрации сейсмической информации на магнитную ленту с
одновременным воспроизведением на электростатической бумаге;
вспомогательные - для контроля линий сейсмической косы, уровня микро-
сейсм, выбора параметров канала воспроизведения и редакции бракованной записи;
теста - реализуют записи тестовых сигналов на магнитную ленту;
диагностические - при поиске неисправностей и наладке блоков станции и
отдельных функциональных узлов.
В станции предусмотрено три рабочих режима:
1) регистрация одиночных возбуждений 48 каналами с периодом квантова-
ния 2 и 4 мс и 96 каналами с периодом квантования 4 мс;
2) регистрация одиночных возбуждений 48 каналами с периодом квантова-
ния 0,5 и 1 мс и 96 каналами с периодом квантования 1 и 2 мс;
3) регистрация в режиме накопления слабых воздействий при любых согла-
сованных значениях канальности и времени квантования сигналов.
Первый режим предполагает запись информации на магнитную ленту в ре-
альном масштабе времени. При работе на втором и третьем режимах скорость
выдачи информации на выходе устройства кодирования превышает возмож-
ность магнитного регистратора. Поэтому информация предварительно записы-
вается в накопитель, а затем из него переписывается на магнитную ленту реги-
стратора с обычной для него скоростью.
Одновременно с записью на магнитную ленту на всех трех режимах сейсмо-
грамма может воспроизводиться на электростатическую бумагу группами по 50
каналов. Возможен также просмотр любого участка записи на экране видеокон-
трольного устройства.
Работу станции в диагностических режимах обеспечивает диагностический
процессор. В его состав входят следующие блоки:
- устройство обмена данных (УОД);
- цифровой фильтр (Ц5);
- центральный процессор (ЦП);
- двоично-десятичный преобразователь (ПДД);
- формирователь текстовой информации (ФТИ);
- устройство управления (УУ).
Диагностический процессор может работать в трех режимах:
автоматическом - задание конфигурации станции и ее параметров, парамет-
ры тестового генератора задаются автоматически без вмешательства оператора;
ручном - все вышеназванные операции устанавливаются оператором;
462
вспомогательном - все функции управления осуществляются автоматически,
кроме задания конфигурации и усиления У ОД, устанавливаемых вручную.
Основным режимом работы является автоматический, который используется
при контроле параметров станции в полевых условиях.
Основные технические характеристики
сейсморазведочной станции «Прогресс-96»
Число основных каналов.......................................48 и 96
Число вспомогательных каналов.................................... 5
в том числе, для записи ОМ.................................... 1
для записи текущего времени................................... 1
для записи вертикального времени.............................. 1
резерв ........................................................2
Число входных каналов коммутатора ОГТ ......................... 192
Период квантования, мс:
при 96 каналах.......................................... 1; 2; 4
при 48 каналах.........................................0,5; 1; 2; 4
Максимальный входной сигнал, мВ ...............................-724
Частотный диапазон регистрации, Гц........................... 3.. .500
Фильтр высоких частот (ФВЧ):
граничные частоты, Гц........................................ 10; 14;
20; 28
крутизна среза, дБ/окт....................................... 18
Фильтр низких частот (ФНЧ):
граничные частоты, Гц......................................62,5; 125;
250; 500
крутизна среза, дБ/окт.......................................>72
Разрядность выходного кода записи:
порядок, разряд............................................... 4
мантисса, разряд ........................................14+знак
Скорость движения магнитной ленты
в регистраторе, м/с......................................... 2,1
Режимы воспроизведешь на бумагу и экран ВКУ.......каналы 1-48,49-96;
только 1—48,
только 49-96;
все нечетные, затем все четные;
только все нечетные
только все четные
Напряжение питания станции, В................................... 24
Потребляемая мощность, Вт..................................... 1400
Средний срок службы, лет.........................................>6
9.14. Характеристики сейсмических волн при ядерных взрывах
и землетрясениях
В настоящее время сейсмический метод с большой эффективностью ис-
пользуется для обнаружения и идентификации подземных ядерных взрывов,
463
проводимых в разных частях земного шара. В частности, США создали свою
мировую сеть из 125 станций обнаружения, 65 из которых находятся вблизи
границ России [2].
Об огромном размахе исследований в областях обнаружения и идентифика-
ции ядерных взрывов можно судить по большому числу опубликованных работ.
В этой связи представляет большой интерес обобщение результатов прове-
денных исследований и рассмотрение следующих вопросов.
1. Типы сейсмических волн, которые регистрируются при различных видах
взрывов на разных эпицентральных расстояниях.
2. Спектральный состав волн, возбуждаемых взрывами и землетрясениями, а
также спектральный состав микросейсмических волн.
3. Оптимизация параметров сейсмической аппаратуры и пути повышения ее
эффективности.
4. Выбор районов, наиболее благоприятных для размещения сейсмических
станций.
5. Кинематические и динамические характеристики наиболее устойчиво ре-
гистрируемых волн.
6. Сопоставление характеристик волн взрывов с соответствующими характе-
ристиками волн землетрясений и использование выявленных различий в качест-
ве критериев для идентификации взрывов.
Ниже, на основе результатов работы И.П. Пасечника [2], посвященной ис-
следованию перечисленных вопросов, дан краткий анализ характеристик сейс-
мических волн при ядерных взрывах и землетрясениях.
9.14.1. Сейсмическая аппаратура, применявшаяся при регистрации
сейсмических волн от ядерных взрывов
Многолетними исследованиями установлена пригодность аппаратуры с
гальванометрической регистрацией, широко применяемой при наблюдениях над
землетрясениями, для надежного определения кинематических и динамических
характеристик сейсмических волн, в том числе смещений или скоростей, коле-
бательного движения почвы в сейсмических волнах, возбуждаемых ядерными
взрывами. Большим достоинством гальванометрического способа регистрации
является весьма устойчивая работа приемного канала в широком диапазоне пе-
риодов от сотых долей секунды до нескольких десятков секунд, высокая ее чув-
ствительность, неизменность параметров во времени, простота устройства и
эксплуатации. При настройке на суженную полосу пропускания (периоды от 0,1
до 1,5 с) увеличение аппаратуры может быть доведено до значений порядка 106,
а при использовании групп сейсмоприемников - до 107 и более. В этом случае
представляется возможным регистрировать весьма малые смещения почвы в
сейсмических волнах, составляющие всего несколько ангстрем. Благодаря отме-
ченным качествам аппаратура с гальванометрической регистрацией уже свыше
50 лет широко применяется при сейсмических наблюдениях за землетрясения-
ми, а в последние годы и взрывами.
Однако большим недостатком аппаратуры с гальванометрической регистра-
цией является сравнительно малый динамический диапазон (35...40 дБ) и в свя-
зи этим необходимость применения нескольких сейсмографов для получения
записей с различными увеличениями и фильтрацией, а также трудность форма-
464
лизации при обработке данных. Практика показывает, что при регистрации
сейсмических волн, возбуждаемых взрывами, необходим динамический диапа-
зон аппаратуры порядка 100 дБ.
Достигнутые дальности регистрация основных фаз объемных и поверхност-
ных волн, регистрируемых в тихом районе аппаратурой с гальванометрической
регистрацией, при взрывах, произведенных в разных средах (данные для объем-
ных волн приведены по записям короткопериодных сейсмографов, для поверх-
ностных - по записям широкополосных и длиннопериодных сейсмографов)
приведены в табл. 9.3 [2].
Таблица 9.3
Дальности регистрации волн
Вид взрыва Магнитуды Мощ- ность, кт Дальность регистрации для волн, тыс. км
т м Р SPS РКР SKS Lr
Подземные (h> 100 м)
В соли, граните и других кристаллических породах 4,8...5,0 6,1 3,0 3,8 1...2 80 5...10 12 2,0...2,5 5,0...6,0 17,0 17...18 — 2 5...10
В туфах 5,0 6,2 4,0 4,5 5 200 8 10...12 2,0...2,5 3...4 16,5 2 10
В аллювии 4,7 5,2 3,0 4,0 1...2 20 10 10...11 1,5 2...3 16,5 1 4
Подводные
h < 150 т 5,0 5,5 5 20 10...11 11 2...3 2...3 16 16 3 3...4
h> 150 т 5,5 6,5 4 30 11 11...12 4...5 10 16 17 14 4 12
Контактные 4,4 4,7 5,3 6,2 3,0 3,5 4,2 5,0 20 100 1000 15000 0,7...1,0 1,0; 2...3 4...5 10... 12 1,0 2...3 3...4 11 15...16 16 15 15 2 2,5...3 5...8 12
Воздушные
h > 1 км 2,8 з,о 3,8 4,5 20 100 1000 10000 1...2 з,о 4...6 10...11 1...1,5 2,0...2,5 2...3 10 2,О...З 3...4 4...5 13...13,5
h = 30...70 км 2,0 3,5 4,0 2,0 500 1000 0,3 0,7 5...7 о,з 1,5 5 0,5 2 10
Величины т и М в табл. 9.3 характеризуют интенсивность сейсмических
явлений, возбуждаемых взрывами. Величина т является сейсмической магни-
тудой, определяемой по объемным волнам, а величина М - сейсмической маг-
нитудой, определяемой по поверхностным волнам. Как видно из табл. 9.3,
дальность регистрации продольных и поверхностных волн для воздушных и
контактных взрывов сейсмографами СГ и СП при магнитудах М порядка
3,5...4,0 достигает 3000...5000 км, при М = 4,5...5,5 - 10000...12000 км, для
подводных и подземных взрывов при М > 5 дальность регистрации продольных
волн составляет 10000... 12000 км.
Проведенные исследования показывают, что для обнаружения и идентифика-
ции ядерных взрывов, проводимых в разных средах, необходима регистрация
волн разных типов (продольных, поперечных, поверхностных), периоды колеба-
465
ний которых при одном и том же взрыве различны. Более того, периоды одних и
тех же типов волн и соответствующие соотношения интенсивностей в объемных и
поверхностных волнах при неодинаковых видах взрывов значительно различают-
ся. Поэтому при одном и том же взрыве, особенно небольшой мощности, на эпи-
центральных расстояниях свыше 1000 км не всегда удается получить достаточно
достоверные записи объемных и поверхностных волн с помощью только одного
комплекта сейсмоприемной аппаратуры. Это связано с малым динамическим диа-
пазоном аппаратуры с гальванометрической регистрацией и наличием интенсив-
ных микросейсм, в частности микросейсм первого рода.
Поэтому на станциях обнаружения ядерных взрывов приходится устанавли-
вать несколько комплектов аппаратуры, каждый из которых настроен на опти-
мальные параметры для получения наиболее удовлетворительных записей объ-
емных либо поверхностных волн и, кроме того, производства их с разными
(обычно двумя) уровнями усиления.
Как уже отмечалось, недостатками аппаратуры гальванометрической регист-
рации являются сравнительно малый динамический диапазон измерений и труд-
ность автоматизации обработки данных наблюдений. От указанных недостатков
свободна аппаратура с магнитной записью.
В дальнейшем при использовании аппаратуры с магнитной цифровой запи-
сью, например типа КОД, разработанной в ИФЗ АН РФ и обладающей большим
динамическим диапазоном (порядка 60 дБ, а при двух уровнях чувствительности -
до 120 дБ), отпадает необходимость установки большого числа комплектов из-
бирательной аппаратуры на одной станции.
9.14.2. Применение спектрального анализа для изучения
динамических характеристик сейсмических волн
При сравнении некоторых динамических характеристик сейсмических волн
весьма перспективным является использование амплитудных спектров объем-
ных и поверхностных волн. Рассмотрение спектров сейсмических волн, возбуж-
даемых взрывами и землетрясениями, позволяет в ряде случаев выявить некото-
рые дополнительные динамические отличия в характере сейсмограмм, неразли-
чимые при сравнении самих записей. Это связано с тем, что различия в спектрах
импульсных колебаний, близких по форме, часто проявляются более резко, чем
различия в форме самих исходных импульсов. Для указанных выше целей могут
быть использованы амплитудные или энергетические спектры как отдельных
волн, так и всей записи колебаний на сейсмограмме.
Спектры сейсмических волн содержат информацию, по которой, как и по дру-
гим параметрам записи, можно идентифицировать характер источника, например,
отличить записи близких и удаленных подземных, подводных и воздушных ядер-
ных взрывов от записей большинства землетрясений и близких промышленных
взрывов. Однако в тех случаях, когда спектры волн взрывов и землетрясений от-
личаются не резко, использование их для указанных целей затруднено. Дело в
том, что характер спектра зависит от ряда причин: геологического строения в рай-
оне источника, станции и всего пути распространения волн; глубины, высоты и
мощности источника; затухания волн с эпицентральным расстоянием и др.
Используя отношения спектров волн разных сейсмических явлений, напри-
мер, подземных ядерных взрывов и землетрясений, распространяющихся по од-
466
ним и тем же или близким путям и регистрируемых на одних и тех же станциях,
можно исключить влияние среды в том числе до известной степени эффекты
затухания. Естественно, спектральные различия в волнах взрывов и землетрясе-
ний при идентификации следует использовать в сочетании с другими кинемати-
ческими и динамическими характеристиками записей.
При помощи спектрального анализа могут быть, например, решены следую-
щие задачи.
1. Изучение спектрального состава полезных сигналов - сейсмических волн
и помех - микросейсм. Знание спектров полезного сигнала и помех позволяет
определенным образом улучшить условия регистрации полезных волн:
а) выбрать оптимальные параметры аппаратуры для получения наибольшего
отношения амплитуды полезного сигнала к амплитуде помех или в ряде случаев -
для почти полного подавления помех;
б) выбрать оптимальные параметры группы сейсмографов в целях селекции
колебаний как по частотному признаку, так и по направленности или скорост-
ным характеристикам. Спектральные методы используют для поиска способов
подавления помех на единичной станции, оборудованной трехкомпонентной
установкой сейсмографов и в ряде других случаев.
2. Определение основных параметров спектров полезного сигнала (ширины
полосы спектра и крутизны спадания его склонов, соотношения амплитуд различ-
ных спектральных составляющих, так называемых спектральных коэффициен-
тов). Знание указанных параметров спектра необходимо, например, при селекции
полезных сигналов в точке наблюдения по спектральным характеристикам.
3. Определение спектров простых волн, составляющих интерференционное
колебание, по спектру интерференционной волны при условии различия в пре-
обладающих периодах спектров простых волн.
4. Определение спектров полезных сигналов, зарегистрированных широко-
полосной аппаратурой на фоне интенсивных помех, главным образом микро-
сейсм первого рода, что возможно при условии различия в преобладающих пе-
риодах полезного сигнала и помех. В этом случае спектры полезного сигнала и
помех разделяют на два или более обособленных участка, на которых видны
разрастания амплитуд в области максимумов спектров, отличающихся по пе-
риодам.
5. Идентификация сейсмических волн различных типов - продольных, попе-
речных, поверхностных - по их спектрам.
6. Различение по спектрам записей взрывов и некоторых похожих на них
землетрясений, происходящих в одном и том же районе и регистрируемых се-
тью одних и тех же станций. Для этого используют отношения спектров про-
дольных, поперечных и поверхностных волн или спектров всей записи колеба-
ний. Это основано на различии в механизме действующих сил в источнике в том
числе различных длительности действия источника и его размеров.
7. Изучение спектров основного толчка землетрясения и последующих аф-
тершоков в целях их идентификации.
8. Оценка поглощающих свойств среды в некотором диапазоне периодов и
определение зависимости коэффициента поглощения от частоты. Знание указан-
ных зависимостей позволяет оценить амплитуды колебаний в волнах на записях
фильтрующей по частотному признаку аппаратуры. Кроме того, определение ко-
467
эффициентов поглощения сейсмических колебаний в волнах, а также их зависи-
мости от частоты важно для изучения свойств земной коры, ее мантии и ядра.
9. Построение спектральных калибровочных кривых для энергетической
классификации землетрясений и взрывов.
Кроме перечисленных задач спектральные методы применимы для решения
других общесейсмических и специальных, например, определения отношений
мощности взрывов и др.
9.14.3. Микросейсмы и методы повышения чувствительности
сейсмической аппаратуры
Микросейсмические колебания всегда в той или иной степени присутствуют
на сейсмограммах. Они имеют весьма широкий спектр - от сотых долей до де-
сятков и сотен секунд. Однако их интенсивности в спектре распределены нерав-
номерно. В зависимости от периода и интенсивности микросейсмы условно
подразделяются на три группы:
1) микросейсмы первого рода с периодами от 2...3 до 6... 10 с (их также на-
зывают 4-6-секундными микросейсмами);
2) микросейсмы второго рода, или длиннопериодные, с Т» 12... 15 с;
3) короткопериодные микросейсмы - от сотых долей до 2.. .3 с.
Источники возбуждения указанных типов микросейсм в большинстве случа-
ев различны. В частности, микросейсмы первого рода обусловлены действием
циклонов над акваториями. Микросейсмы второго рода и короткопериодные
могут быть вызваны метеорологическими факторами, деятельностью промыш-
ленных предприятий и др.
Микросейсмы затрудняют, а в ряде случаев делают невозможным выделение
на их фоне малоинтенсивного полезного сейсмического сигнала - объемных
волн с амплитудами порядка нескольких миллимикрон и поверхностных волн с
амплитудами около нескольких десятков миллимикрон, возбуждаемых взрыва-
ми и землетрясениями. Наличие микросейсм усложняет применение критериев
для распознавания сейсмических явлений.
Указанные затруднения не исчезнут и при использовании широкополосной
магнитной записи. В особенности задача осложняется, когда периоды сигнала и
помех близки. Поэтому в процессе осциллографической и магнитной записи не-
обходимо стремиться уменьшить уровень помех и увеличить отношение ампли-
туды полезного сигнала к амплитуде помех, т. е. повысить эффективную чувстви-
тельность приемной аппаратуры. В первую очередь это удается обеспечить выбо-
ром благоприятных условий для установки сейсмографов как в смысле низкого
уровня микросейсм, так и максимальной амплитуды полезного сигнала.
Последующие мероприятия, обеспечивающие дальнейшее подавление по-
мех, сводятся к применению аппаратных средств или сочетанию этих средств с
методическими приемами: частотной селекцией - фильтрацией колебаний, се-
лекцией по направленности прихода колебаний путем группирования, корреля-
ционными и статистическими методами подавления помех и выделением на их
фоне полезного сигнала и т. д.
Для правильного выбора наиболее благоприятных условий установки сейс-
мографов и соответствующих способов подавления помех необходимо знать
спектральный состав полезного сигнала, помехи и зависимость спектра и интен-
468
сивности помех от таких факторов, как характер геологического строения в рай-
оне станции, грунтовые условия в пункте наблюдения, географическое положе-
ние района, в частности его близость к океанам, внутренним морям и озерам,
промышленным центрам, дорогам с интенсивным движением и др.
Изучению микросейсм посвящено много работ. Однако в большинстве слу-
чаев микросейсмы изучались в районах, в которых они достигали значительной
интенсивности, причем преимущественно микросейсмы первого рода и лишь в
небольшом объеме - короткопериодные микросейсмы. Практически не изучены
микросейсмы с периодами больше 12... 15 с.
В то же время области периодов порядка 1 с и свыше 12... 15 с представляют
наибольший интерес при регистрации продольных волн подземных и подводных
взрывов и поверхностных волн всех видов взрывов.
Для обнаружения и идентификации станции располагают в районах с мини-
мальным уровнем помех. К сожалению, для таких районов микросейсмы изуче-
ны недостаточно полно главным образом из-за необходимости регистрации их
на специальной высокочувствительной аппаратуре с увеличением от нескольких
десятков тысяч (микросейсмы первого рода) до нескольких десятков миллионов
(короткопериодные микросейсмы).
В связи с этим были проведены дополнительные исследования микросейсм
для более полного изучения их спектрального состава в широком диапазоне пе-
риодов - от сотых долей до нескольких десятков секунд и статических характе-
ристик пространственной структуры поля микросейсм в том числе энергетиче-
ских характеристик процесса в целом [2].
В результате исследований спектрального состава объемных и поверхност-
ных волн взрывов и микросейсм на станциях, располагавшихся в различных по
своему географическому положению и геологическому строению районах, сде-
ланы следующие выводы [2].
1. Для повышения эффективной чувствительности аппаратуры, устанавли-
ваемой на станциях обнаружения ядерных взрывов, необходимо стремиться в
процессе записи уменьшить уровень микросейсм. Для этого станции необхо-
димо располагать в тихих районах с низким уровнем микросейсм, не превы-
шающим 0,5... 1,0 мкм на периоде 1 с, и благоприятных для регистрации по-
лезных сигналов.
2. К тихим и благоприятным следует отнести платформенные районы и рай-
оны некоторых древних гор, а также области развития вечной мерзлоты.
3. Сейсмографы целесообразно устанавливать на выходах кристаллических
или метаморфических пород, в заглубленных в грунт помещениях, на постамен-
тах, жестко связанных с указанными породами, в сооружениях со стабильной
температурой окружающей среды, скважинах, шахтах, штольнях и др.
4. Перечисленное в п. 1-3, обеспечивает снижение уровня микросейсм в ши-
роком диапазоне периодов до 100 раз и более по сравнению с уровнем фона в
шумных районах, неблагоприятных для регистрации полезных сигналов.
5. Для дальнейшего снижения уровня помех в ограниченном диапазоне перио-
дов наряду с указанными способами целесообразно применение фильтрации,
группирования, а также корреляционных методов регистрации и выделения волн.
6. Для регистрации короткопериодных объемных (главным образом про-
дольных) волн подземных и подводных взрывов необходимо смещать максимум
469
увеличения в область периодов порядка 1 с, с более существенным понижением
увеличения в области больших периодов. Применение указанного рода фильт-
рации дает возможность поднять в ряде случаев увеличение единичных сейсмо-
графов на периоде 1 с до 105... 106.
7. Для выделения сигналов с периодами 0,5... 1,5 с при отношении его ам-
плитуды к амплитуде помехи с тем же периодом / Лпом=2,0 рекомендуется
применять группирование большого (и>20) числа сейсмографов, разнесенных
по площади или вдоль пересекающихся профилей. В этом случае группирование
может улучшить указанное отношение до 0, а также обеспечить достаточное
разрешение сигналов на записи и лучшее определение характеристик сейсмиче-
ских волн.
8. Для регистрации волн Р с амплитудами порядка 1...2 мкм на периоде 1 с
на территории России можно подобрать спокойные районы с невысоким фо-
ном помех. Тогда представится возможность регистрации волны Р во всей об-
ласти существования при подземных и подводных взрывах с магнитудой
zn>4,5...4,8.
9. Для регистрации поверхностных волн, а также некоторых типов объемных
целесообразно использовать длиннопериодные сейсмографы с полосой пропус-
кания от 12... 15 до 40...60 с с режекторными фильтрами на периодах интенсив-
ных микросейсм. Указанный способ фильтрации обеспечивает возможность ис-
пользования в благоприятных случаях увеличения в пределах указанной выше
полосы порядка (2...3)104. В этом случае регистрация поверхностных волн
сейсмических явлений с магнитудой М~ 2,0...2,5 будет возможна до расстоя-
ний 10000-11000 км.
9.14.4. Особенности кинематических и динамических
характеристик объемных волн
Области прослеживания объемных волн при взрывах условно разделяют на
четыре зоны: I зона с эпицентральными расстояниями до 800... 1200 км, II (зона
тени) - от 1200 до 2000...2500 км; III зона с эпицентральными расстояниями от
2000...2500 до 12000 км; IV зона от 12000 до 18000...20000 км [2].
Волны, регистрируемые в I зоне. При мощных взрывах, производимых в раз-
личных средах (в воздухе, на земле, под землей, под водой) регистрируют те же
продольные и поперечные волны, связанные со слоями земной коры, которые
наблюдают на соответствующих эпицентральных расстояниях в данном районе
и при мелкофокусных землетрясениях. При взрывах в I зоне зарегистрированы
следующие волны: прямые рефрагированные волны PQ, So, распространяющие-
ся в осадочных или осадочно-метаморфических породах; слабо рефрагирован-
ные преломленные волны Р , Р*, Рп, 5 , S*, Sn, распространяющиеся в основ-
ных слоях земной коры (гранитном, базальтовом), а также связанные с границей
верхней мантии - границей Мохоровича (граница М) [2].
Четко зарегистрированы запредельные отраженные продольные РпРп и по-
перечные SnSn волны от границы М. Допредельные отраженные волны от гра-
470
ницы М обычно малоинтенсивны и их, как правило, выделить и проследить на
записях при точечных наблюдениях не удается.
При подземных взрывах возбуждаются и присутствуют на записях обмен-
ные преломленные волны типа PkPtSk \ PkSjSk SkPjSk и, по-видимому, отра-
женные волны типа PkSk или SkPk. Здесь буквами к и I условно обозначены
как основные границы в земной коре (между осадочной толщей и гранитным
слоем, гранитным и базальтовыми слоями, подошвой базальтового слоя и
верхней границей оболочки), так и промежуточные границы в указанных выше
слоях и верхней мантии. Наиболее четкие обменные преломленные волны типа
PkP[Sk зарегистрированы при наличии резкой границы обмена в осадочной
толще, например, соль - терригенные породы и др. Относительно полно в I
зоне при мощных взрывах изучены кинематические и динамические характе-
ристики волн Р, Р*, Рп, S, 8*, Sn, РпРп и SnSn.
Анализ экспериментальных данных кинематических и динамических харак-
теристик объемных волн, отмеченных в I зоне, показывает:
1. Волновая картина при всех видах ядерных взрывов аналогична картине,
наблюдаемой при землетрясениях.
2. Кинематические характеристики рассматриваемых волн - годографы, ско-
рости распространения и области их регистрации при всех видах взрывов и мел-
кофокусных (с очагами в земной коре) землетрясениях практически совпадают.
Это позволяет использовать при регистрации взрывов методы определения
сейсмических элементов, разработанные в сейсмологии.
3. Для большинства динамических характеристик рассматриваемых волн,
возбуждаемых всеми видами взрывов и землетрясениями, установлено их каче-
ственное, а в ряде случаев и количественное сходство. Это сходство отмечено в
характере убывания с ростом эпицентрального расстояния амплитуд колебаний
и отношений амплитуд к периоду соответствующих волн, в значениях коэффи-
циентов поглощения и их зависимости от частоты, траекториях движения час-
тиц среды, в поляризации, а также углах выхода волн.
4. Установлены следующие основные различия в динамических характери-
стиках объемных волн взрывов и землетрясений:
а) периоды объемных волн при подземных и подводных взрывах на 20...30 %
меньше, чем периоды соответствующих волн землетрясений со сравнимыми
магнитудами, но крайние верхние значения периодов при взрывах перекрыва-
ются с соответствующими крайними нижними значениями при землетрясениях;
б) при подземных и подводных взрывах отмечена относительно меньшая ин-
тенсивность колебаний в области поперечных волн, чем для землетрясений;
отношение амплитуд поперечных волн к соответствующим значениям амплитуд
продольных волн As / Ар для взрывов меньше 2,5, в то время как для 90 % ис-
следованных землетрясений As / Ар> 2,5 ;
в) при землетрясениях наблюдается рост периодов колебании с увеличением
эпицентрального расстояния, что практически не отмечается или отмечается в
меньшей степени при взрывах;
г) при взрывах, в отличие от землетрясений, продольные волны обычно
вступают в фазе сжатия на всех станциях, окружающих эпицентр.
471
Волны, регистрируемые во II, III, IV зонах. Наиболее полная волновая картина
во П, Ш и IV зонах получена при мощных воздушных и контактных взрывах. При
мощных взрывах в пределах указанных выше зон были зарегистрированы сле-
дующие объемные волны: Р, РР, PPP, PPPP, РсР, PcS (ScP), PS (SP), PPS, PKP
(PKP\ PKPq), PKPPKP, S, SS, SSS, SSSS, ScS, SKS и др. При подземных и подвод-
ных взрывах картина менее полна, в частности прямые и отраженные поперечные
волны зарегистрированы только во П и в небольшом числе случаев в Ш зонах, а
обменные отраженные волны типа SP вообще не зарегистрированы [2].
В большинстве случаев идентификация волн Р, РР, РсР, SP, РКР и S прове-
дена по совокупности ряда признаков — времени пробега, характеру поляриза-
ции и убыванию амплитуды с ростом эпицентрального расстояния. Идентифи-
кация других волн проведена только по времени пробега и характеру поляриза-
ции. Во всех случаях время в эпицентре и координаты эпицентров взрывов были
точно известны.
Наиболее полно изучены характеристики волн Р, зарегистрированных при
всех видах взрывов. Эти волны наиболее важны для обнаружения и идентифи-
кации взрывов.
В зависимости от вида взрыва в характере записей объемных волн наблюда-
ются заметные различия.
При воздушных взрывах во всех трех зонах на записях регистрируют объем-
ные (продольные и поперечные) волны указанных выше типов. Примерно такие
же волны регистрируются и на записях мощных контактных взрывов. При под-
земных и мелководных взрывах мощностью порядка 20 кт поперечные волны
зарегистрированы только во II и начале III зон, а на расстояниях более
5000.. .6000 км отмечены только продольные волны.
При глубоком подводном взрыве изучение волнового поля усложняется в ре-
зультате возникновения многочисленных групп колебаний, по амплитуде соиз-
меримых с колебаниями в основных волнах, а также из-за наличия каналовых и
поверхностных волн Рэлея и Лява.
В зависимости от вида взрыва наблюдаются изменения соотношений ампли-
туд волн разных типов, отличия в видимых периодах волн и длительностях цу-
гов колебаний и появление некоторых новых групп колебаний, в частности, при
подводных взрывах. Однако время пробега, углы выхода, характер поляризации,
траектории движения частиц почвы и некоторые другие характеристики волн,
независимо от вида взрыва, остаются неизменными.
Анализ представленных данных позволяет сделать следующие выводы.
1. При воздушных и контактных взрывах во II и III зонах зарегистрированы
те же прямые, отраженные (монотипные и обменные) объемные волны, что и
при мелкофокусных землетрясениях. Области прослеживания волн такие, как и
для землетрясений.
2. Периоды в объемных волнах при воздушных и контактных взрывах близ-
ки периодам соответствующих волн землетрясений со сравнимой магнитудой и
мало меняются с эпицентральным расстоянием.
3. Характер убывания отношения амплитуды колебания к периоду с эпицен-
тральным расстоянием в волнах Р и S воздушных и контактных взрывов такой
же, как и для соответствующих волн землетрясений.
472
4. При подземных и подводных взрывах поперечные волны, как правило, ма-
лоинтенсивны и зарегистрировать их во всей области существования не всегда
возможно.
5. При подземных и подводных взрывах периоды в объемных волнах обычно
в 2-3 раза меньше, чем при землетрясениях со сравнимой магнитудой и в III и
IV зонах практически не меняются с увеличением эпицентрального расстояния.
Это связано в основном с тем, что при подземных взрывах длительность дейст-
вия сил в источнике на семь порядков, а размеры очага (радиус подземной по-
лости, образовавшейся в результате взрыва) примерно на два порядка меньше,
чем соответственно длительность действия сил и радиус кругового разрыва при
землетрясениях со сравнимой магнитудой.
6. Установлен факт слабой зависимости периодов Тр колебаний в объемных
волнах Р от тротилового эквивалента Q подземных ядерных взрывов для пород
типа туфа, аллювия и т. п.: Tp~0,9xtfQ.
7. При подземных взрывах отмечено преуменьшение значений А/Т в I зоне
для волн Р по сравнению с соответствующими значениями при землетрясениях,
т. е. зона тени. Наличие ее связывают с явлениями дифракции за счет более ко-
роткопериодного состава колебаний при подземных взрывах.
8. Средние значения отношений амплитуд поперечных волн к амплитудам
продольных волн Ag/Ар для взрывов и землетрясений различны. При контактных,
подземных и подводных взрывах эти отношения меньше, чем при землетрясени-
ях. Эти различия наряду с другими могут быть использованы при идентифика-
ции записей взрывов.
9. Форма колебаний в объемных волнах при всех видах взрывов представля-
ет собой короткий цуг, амплитуда колебаний в котором по обе стороны от мак-
симального значения спадает быстрее, чем при землетрясениях. Наиболее явст-
венно это отмечается для волн Р подземных и подводных взрывов.
9.14.5. Характеристики поверхностных волн,
возбуждаемых взрывами различных видов
При всех видах ядерных взрывов, кроме подводных, зарегистрированы относи-
тельно интенсивные поверхностные волны Рэлея LR и Лява Lq. В континентальных
районах зарегистрированы также каналовые поверхностные волны типа Zx, Д,
Rg и Rg^. При взрывах мегатонного класса мощности ( М ~ 4,5.. .5,5 ) поверх-
ностные волны Lr и Lq фиксировались на эпицентральных расстояниях, достигаю-
щих 12000-14000 км.
При воздушных взрывах поверхностные волны релеевского типа обычно
имеют наибольшую интенсивность по сравнению с другими типами объемных и
поверхностных волн. В подавляющем большинстве случаев для воздушных
взрывов мощностью в несколько десятков (в ряде случаев сотен килотонн) на
эпицентральных расстояниях А>2000...3000 км вообще удавалось определять
только волны этого типа. Поэтому естественно стремление исследователей ис-
пользовать поверхностные волны, в первую очередь рэлеевские, для обнаруже-
ния и идентификации ядерных взрывов, определения координат эпицентров
473
взрывов, времен в эпицентре, а также параметров взрывов - их тротилового эк-
вивалента и высоты.
Поверхностные волны несут информацию и о характере сил, действующих в
очаге, т. е. типе источника и его глубине.
Привлечение данных о характере распространения и дисперсии поверхност-
ных волн, возбуждаемых взрывами, особенно в сочетании с данными об объем-
ных волнах, открывает большие возможности для исследования строения и фи-
зических свойств земной коры и верхней мантии.
Для выявления различий динамических характеристик сейсмических волн,
возбуждаемых ядерными взрывами, производимыми в различных средах, были
изучены особенности поверхностных волн и проведено сравнение их характери-
стик с соответствующими характеристиками волн, возбуждаемых землетрясе-
ниями [2].
Изучены кинематические и динамические характеристики волн; время пробе-
гов, траектории движения частиц среды, дисперсионные кривые при взрывах и
землетрясениях, зависимость периодов максимальных колебаний и спектрального
состава волн от эпицентрального расстояния; спектрального состава колебаний от
вида взрывов и характера строения земной коры и верхней мантии на пути рас-
пространения волн; возможность определения координат эпицентров и др.
Анализ результатов исследований позволяет сделать следующие выводы.
1. При всех видах ядерных взрывов зарегистрированы те же типы поверхно-
стных сейсмических волн Лява, Рэлея, Lx, Lv Lg и Rg, которые обычно наблюдают
при мелкофокусных землетрясениях. При взрывах в воде, на воде или над ее по-
верхностью береговыми станциями отмечена волна, распространяющаяся в воде
со скоростью 1,47 км/с (фаза Г).
2. Новые типы сейсмических поверхностных волн при ядерных взрывах не
были отмечены. Для воздушных и контактных взрывов характерно наличие на
сейсмограммах записей инфразвуковых волн.
3. Одновременно зарегистрировать все указанные выше волны удается не
при всех видах взрывов. Наибольшей универсальностью в этом отношении об-
ладают обычно наиболее интенсивные рэлеевские волны. Эти волны регистри-
руют практически при всех видах взрывов. Поэтому рэлеевские волны, как и
объемные, имеют наиболее важное значение при обнаружении и идентификации
всех видов ядерных взрывов.
4. При всех видах взрывов на записях рэлеевских волн можно выделить три
группы колебаний:
а) наиболее длиннопериодные колебания, распространяющиеся в земной ко-
ре и верхней мантии;
б) более короткопериодный цуг интенсивных колебаний, распространя-
ющихся в земной коре;
в) цуг колебаний, связанных с осадочной или осадочно-метаморфической
толщей пород в районе станции.
5. Отношение амплитуд в рэлеевских волнах LR к амплитудам продольных Р
и поперечных S волн зависит от вида взрыва. Наибольшие отношения LR/S и
Lr/P, в несколько раз превышающие соответствующие при землетрясениях, от-
мечены при воздушных взрывах, наименьшие - при подземных.
474
6. При подземных взрывах и обвалах породы со сводов камер, образовав-
шихся в результате взрыва, форма цуга записи рэлеевских волн одинакова (за
исключением направления вступления). Это указывает на то, что характер запи-
си рэлеевских волн определяется не типом источника, а свойствами среды на
пути распространения волн.
7. В отличие от волн Рэлея волны Лява возбуждаются не при всех видах
взрывов. В частности, они не зарегистрированы при подводных и контактных
взрывах, а при воздушных отмечены не всегда. В ряде случаев эти волны не
удается зарегистрировать по всем азимутам, а их интенсивность при подзем-
ных взрывах сильно меняется при незначительном смещении эпицентра. По-
добная неустойчивость характеристик волн Лява в ряде случаев может быть
связана с вторичной природой их возбуждения, не вблизи источника, а на не-
однородностях в строении среды на пути распространения волн. Каналовые
волны Lg зарегистрированы вдоль континентальных путей распространения
при всех видах взрывов.
8. Установлено, что кинематические характеристики поверхностных волн
при взрывах такие, как и для соответствующих волн землетрясений. Сходен
также характер некоторых динамических характеристик волн (траектории дви-
жения частицы среды, зависимости амплитуды и периода колебаний от эпицен-
трального расстояния и др.). Это позволяет при определении сейсмических эле-
ментов и магнитуд сейсмических явлений (взрывов) использовать методы и
шкалы, разрабатываемые в сейсмологии применительно к землетрясениям.
9. Однако некоторые динамические характеристики поверхностных волн
(длительность цуга, форма огибающей, отношения интенсивностей рэлеевских и
объемных волн и некоторые другие) неодинаковы как для разных видов взры-
вов, так и для взрывов и землетрясений. Отмеченные отличия самостоятельно
или в сочетании с другими характеристиками записей используют для иденти-
фикации взрывов.
10. МАГНИТОМЕТРИЧЕСКАЯ РАЗВЕДКА
Под магнитометрической разведкой (ММР) понимается добывание информа-
ции путем обнаружения и анализа локальных изменений магнитного поля Земли
под воздействием объектов с большой магнитной массой.
ММР решает следующие задачи:
- обнаружение и определение объектов, находящихся на земле, в земле и в
водной среде;
- определение «магнитных портретов» объектов и проведение их классифи-
кации.
Поскольку основным источником информации для средств ММР являются
локальные изменения магнитного поля Земли, целесообразно предварительно
рассмотреть некоторые общие положения.
10.1. Основные характеристики магнитного поля
Магнитным полем называется форма материи, отличающаяся тем важным
свойством, что это поле действует на движущуюся заряженную частицу с силой,
зависящей от произведения ее заряда на скорость [1].
В качестве силовой характеристики магнитного поля используют понятие на-
пряженности. Напряженностью Н магнитного поля называется векторная физиче-
ская величина, характеризующая магнитное поле, созданное движущимися заря-
дами и токами и не зависящая от магнитных свойств среды.
В реальных условиях магнитное поле распространяется в материальной сре-
де, которая этим полем намагничивается. При этом разные среды пропускают
через себя магнитное поле по-разному. Эта особенность называется магнитной
проницаемостью ц среды, вещества.
Плотность магнитного потока в намагниченном материале определяется, как
вектор магнитной индукции В. Магнитная индукция также является силовой
характеристикой магнитного поля в материальной среде.
Магнитная индукция связана с напряженностью магнитного поля соотношением
В = Ц-Цо-Н,
где Н - напряженность магнитного поля; jllo - магнитная проницаемость вакуума
(в СИ Цо = 4тс10-2Гн/м); ц - относительная магнитная проницаемость вещества.
Величина, характеризующая связь намагниченности вещества с магнитным
полем в нем, называется магнитной восприимчивостью ае.
Магнитная восприимчивость связана с магнитной проницаемостью в СИ со-
отношением ц = 1 + ае.
Магнитная восприимчивость является важной характеристикой, в соответст-
вии с которой все вещества делят на диа-, пара- и ферромагнетики. Диамагнети-
476
ки обладают отрицательной восприимчивостью и поэтому они намагничиваются
против поля; парамагнетики и ферромагнетики, обладая положительной воспри-
имчивостью, намагничиваются по полю.
Магнитная восприимчивость диамагнетиков и парамагнетиков мала («10-4 ...
10"6), она слабо зависит от Н и то лишь в области очень сильных полей и низких
температур. Она достигает особенно больших значений в ферромагнетиках (от
нескольких десятков до многих тысяч единиц), причем очень сильно и сложным
образом зависит от Н.
Под влиянием магнитного поля напряженностью Н вещество намагничива-
ется, что характеризуется величиной J, которая называется интенсивностью на-
магничивания J = аеН. Эта намагниченность считается наведенной (индуциро-
ванной), поскольку создана полем Н.
Вектор J называют также магнитным моментом единицы объема вещества.
Тогда для объекта объемом V произведение JV = М определяет магнитный мо-
мент всего объема.
В СИ единицей напряженности магнитного поля является ампер/метр (А/м).
Такую же размерность имеет и вектор J. Магнитная восприимчивость ае и маг-
нитная проницаемость ц являются безразмерными величинами. Единицей маг-
нитной индукции В является тесла (Тл). Для магнитного поля Земли тесла -
очень большая величина. Поэтому в магниторазведке в качестве практической
единицы используют нанотеслу (нТл).
Напряженность магнитного поля рассматривается в физике как вспомога-
тельная величина, но в ММР именно напряженность считается основной харак-
теристикой магнитного поля. С учетом того, что в СГС единица напряженности
магнитного поля (эрстед) и единица магнитной индукции (гаусс) численно сов-
падают и имеют одинаковую размерность, переход от единиц напряженности
магнитного поля в СГС к единицам магнитной индукции в СИ осуществляется
просто: напряженность поля 1 гамма (у) соответствует индукции 1 нТл:
1 нТл= 1 у= 10’5Э.
В магниторазведке измерение поля чаще всего проводят в воздухе, иногда - в
воде. Воздух и вода очень слабомагнитные среды. Так, для воздуха ц = 1,0000001.
На практике принимают для воздуха ц = 1 (ае = 0). В этом случае связь между В и
Н упрощается:
В = Цо • Н или В = Цо Н • 109 = 1257 Н,
где В измеряется в нТл, а Н - в А/м.
10.2. Земной магнетизм и его элементы
Магнитное поле Земли - это пространство, в котором действуют магнитные
силы, связанные с намагниченностью Земли в целом. В первом приближении
магнитное поле Земли можно рассматривать как поле шара, намагниченного по
оси, расположенной под углом 11,5° к оси ее вращения. Магнитный момент
Земли равен 8,3-Ю25 ед. СГСМ [3].
477
Магнитное поле Земли характеризуется напряженностью, являющейся вектор-
ной величиной и обозначаемой в ММР Т, а в теории геомагнетизма Нт. В ММР
вектор Т непосредственно не измеряют. Определяют численное значение (модуль)
этого вектора Г = | Т | или приращение численного значения вектора АТ = | АТ [.
Рис. 10.1. Элементы земного маг-
нетизма
В промежутках времени, малых по срав-
нению с планетарными историческими эпо-
хами, магнитное поле Земли можно рассмат-
ривать как постоянное.
Вектор напряженности геомагнитного
поля может быть разложен на составляющие
(рис. 10.1). Для этой цели используют пря-
моугольную систему координат с центром в
точке измерения. Плоскость хОу принимают
горизонтальной, ось х направлена на геогра-
фический север, у - на восток, z - по верти-
кали вниз. Составляющие вектора Т по осям
обозначаются АГ, У, Z. Проекция полного
вектора напряженности поля Т на горизон-
тальную плоскость называется горизонталь-
ной составляющей Н = X + Y.
Вертикальная плоскость Oz, в которой
лежат вектора Н и Т называется плоскостью магнитного меридиана. Положение
магнитного меридиана используется для определения магнитного азимута како-
го-либо направления. Отсчет угла проводится по часовой стрелке от направле-
ния магнитного меридиана.
Угол D между плоскостями географического и магнитного меридианов на-
зывается углом магнитного склонения.
Угол / между вектором полной силы Т и горизонтальной плоскостью хОу на-
зывается углом магнитного наклонения.
Склонение £>, наклонение /, горизонтальную Н, вертикальную Z, северную X
и восточную Y составляющие называют элементами земного магнетизма. Эле-
менты Н, Z, X, Y измеряют в эрстедах (в СГСМ) и в гаммах (1(Г5 Э); D,I -в гра-
дусах.
Значение и положение вектора Т в данной точке пространства зависят от
трех величин, наиболее распространенные сочетания которых:
X,Y, Z,
- X, Z, D или X, Z, /,
-£>,/, Z или D, I, Н.
При изучении распределения напряженности геомагнитного поля на земной
поверхности измеряют Н, D и /, так как знания указанных величин достаточно
для вычисления всех составляющих по координатным осям и полного вектора Т:
X = HcosD, Y = HsinZ), Z = HtgZ.
В магнитной разведке используют обычно величины AZ, АТ, Т, реже Н, АН,
иногда Т.
478
10.3. Методы измерений элементов земного магнетизма и аппаратура ММР
В ММР в качестве меры, с которой сравнивается исследуемое геомагнитное
поле, используют поля постоянных магнитов или электрического тока (оптико-
механические магнитометры и индукционные магнитометрические приборы,
феррозонды). Более современные магнитометры - протонные и квантовые - ос-
нованы в первом случае на взаимодействии протонов с геомагнитным полем, во
втором - используется эффект Зеемана, выражающий взаимодействие измеряе-
мого магнитного поля с атомами рабочего вещества, обладающими магнитным
моментом.
Рассмотрим принципы действия перечисленных магнитометров.
10.3.1. Оптико-механические магнитометры
Оптико-механический магнитометр (ОММ) типа магнитных весов имеет
магниточувствительный элемент в виде постоянного магнита, укрепленного на
каркасе или металлической нити (ленте) с одной степенью свободы. Магнито-
метры на нитях (лентах) называют торсионными. Магнитные весы - это посто-
янный магнит, свободно вращающийся в вертикальной плоскости вокруг гори-
зонтальной оси [2, 3].
Магнитные весы позволяют измерить приращение вертикальной или гори-
зонтальной составляющей напряженности магнитного поля.
Принцип измерения магнитными весами основан на уравновешивании мо-
мента вращения, вызванного действием магнитного поля Земли, моментом силы
тяжести или кручения нити, на которой укреплен магнит. При почти горизон-
тальном расположении магнита наибольший момент вращения вызывает верти-
кальная составляющих, поэтому такие весы называют вертикальными. Их ис-
пользуют для измерения вертикальной составляющей напряженности поля.
В случае почти вертикального расположения магнитные весы наиболее чувст-
вительны к изменению горизонтальной составляющей, в связи с этим их называ-
ют горизонтальными. Такие весы применяют для измерения горизонтальной со-
ставляющей напряженности поля. Изменение угла наклона магнита служит мерой
напряженности магнитного поля. Работать с этим прибором неудобно из-за необ-
ходимости строгого ориентирования в каждой точке измерения.
От такой ориентировки можно отказаться, если применить компенсацион-
ный способ измерения, т. е. в каждой измерительной точке каким-то образом
приводить подвижный магнит в горизонтальное положение. В современных
магнитометрах для этого служат компенсационные магниты. Магнитное поле,
необходимое для возвращения подвижного магнита в первоначальное горизон-
тальное положение, равно по значению и противоположно по знаку прираще-
нию AZ земного поля, вызвавшему отклонение магнита от горизонта.
ОММ компенсационного типа являются в настоящее время основными на-
земными Z-магнитометрами.
Чувствительным элементом магнитометра (рис. 10.2) является подвижный
магнит с укрепленным на нем зеркалом, вращающийся на горизонтальной ме-
таллической нити. Центр тяжести магнита смещен по отношению к оси враще-
ния, поэтому равновесие устанавливается под действием вращательного момен-
479
та, создаваемого геомагнитным полем, моментов измерительного и диапазонно-
го магнитов, а также моментов упругих сил закрученной нити и гравитационно-
го поля Земли.
В пределах измерения поля 0,14...0,82 Э с помощью двух постоянных маг-
Рис. 10.2. Схема устройства магнитометра:
I- подвижный магнит с зеркальцем; 2 - магнит
с температурной компенсацией на биметалли-
ческой пластинке; 3 - юстировочный магнит;
4 - магнит ступенчатой компенсации (диапа-
зонный); 5 - металлическая нить; 6 - пружин-
ные амортизационные стойки; 7 - объективы;
8 - призмы; 9 - осветительные зеркала; 10 - оку-
ляр; 11 - неподвижное зеркало; 12 - писала; 13 -
магнит плавной компенсации (измерительный)
питов, вмонтированных в прибор, подвижный всегда может быть приведен в
горизонтальное положение. Компенсация небольших изменений поля в пределах
6000 гамм, осуществляется магнитом плавной компенсации, ручка которого вы-
ведена на кожух магнитометра. С магнитом жестко соединен диск, на котором
нанесены деления в гаммах.
Магнитный момент подвижного магнита зависит от температуры, поэтому
ОММ имеют систему температурной компенсации. Температурная компенсация
осуществляется автоматически с помощью магнита, укрепленного на биметал-
лической пластинке, которая составлена из металлов с разными коэффициента-
ми линейного температурного расширения. Изменение температуры вызывает
изгиб пластинки и перемещение магнита, в результате чего меняется его поле в
области вращения подвижного магнита.
10.3.2. Протонные (ядерные) магнитометры
Элементарные частицы материи, в том числе атомные ядра, кроме заряда и
массы характеризуются собственным моментом (спином) L и собственным маг-
нитным моментом ц. Последний позволяет рассматривать протон как элемен-
тарный магнит, способный взаимодействовать с внешним магнитным полем.
Магнитный ц и механический L моменты протона взаимосвязаны и отдельно не
существуют. Их векторы имеют одинаковое направление. Отношение магнитно-
го момента к механическому (гиромагнитное отношение) v= ц/L также является
атомной константой, не зависящей от внешних факторов [2].
480
Всякий магнит, находящийся в магнитном поле, испытывает действие пары
сил, стремящихся развернуть его по направлению этого поля. Момент пары вы-
ражает механическое воздействие магнитного поля на магнит. Аналогично при
наложении постоянного магнитного поля атомные ядра, являясь носителями
магнетизма начинают прецессировать (вращаться) относительно направления
приложенного поля с частотой, определяемой формулой Лармора
/=(у/2л)Я,
где f - частота прецессии ядра, Гц; Я - напряженность внешнего магнитного по-
ля^ - гиромагнитное отношение.
Поскольку гиромагнитное отношение является константой, частота прецес-
сии ядра будет определяться только напряженностью приложенного поля. Сле-
довательно, измеряя частоту прецессии, можно определить напряженность
внешнего магнитного поля. Это явление положено в основу принципа действия
протонных (ядерных) магнитометров.
Ларморову прецессию можно представить как конусооб-
разное движение вектора магнитного момента Ц вокруг век-
тора напряженности внешнего поля Т (рис. 10.3).
Прецессия протекает как затухающий процесс и прекра-
щается, когда магнитный момент протона сориентируется по
вектору внешнего поля Т.
Затухание прецессии придает измерениям циклический
характер. Поскольку гиромагнитное отношение (ядерная
константа) определено с очень высокой точностью и остает-
ся постоянным при изменении таких факторов, как темпера-
тура, давление, вибрации и т. д., результаты измерений, по-
лученные этим способом, характеризуются очень высокой
точностью и стабильностью.
Магнитометры, основанные на принципе протонной пре-
цессии относят к разряду модульных. Они позволяют измерить только модуль
полного вектора напряженности Т магнитного поля Земли. Рассмотренный
принцип исключает измерение каких-либо компонент этого вектора.
Ядерная прецессия - объективное явление. Прецессирует любой протон,
магнитный момент которого не совпадает с направлением поля. Однако полу-
чить ощутимый сигнал возможно, если наблюдать одновременную прецессию
множества протонов. Появляется, таким образом, необходимость определенной
организации явления или, другими словами, возбуждения прецессии одновре-
менно для большой совокупности протонов.
Измерения поля протонным магнитометром осуществляют циклически.
Цикл работы магнитометра состоит из двух частей: возбуждения прецессии и
последующего измерения частоты, по которой и определяют значение внешнего
поля. В свою очередь возбуждение прецессии включает три элемента - поляри-
зацию, фазирование и синхронность. В зависимости от способа возбуждения
различают две разновидности протонных магнитометров - со статической и ди-
намической поляризацией.
Рис. 10.3. Лармо-
рова прецессия
481
1. Протонные магнитометры со статической поляризацией. Магниточув-
ствительный преобразователь (датчик) протонного магнитометра представляет
собой сосуд (обычно цилиндрической формы) с рабочим веществом, охвачен-
ный многовитковой обмоткой.
Состав рабочего вещества определяется способом поляризации. В магнито-
метрах со статической поляризацией рабочее вещество представляет собой про-
тоносодержащую жидкость (дистиллированная вода, керосин). Принципиальная
схема магнитометра приведена на рис. 10.4 [4].
Поляризация осуществляется в целях придания магнитным моментам протонов
одинаковой ориентации. Для этого в обмотку датчика от источника 3 подается по-
стоянный ток, создающий поляризующее магнитное поле Тпол. Значение этого
Рис. 10.4. Принципиальная схема протонного
магнитометра:
1 - емкость с протоносодержащей жидкостью; 2 - катуш-
ка для поляризации, жидкости и приема сигнала; 3 - ис-
точник постоянного тока для поляризации; 4 - переклю-
чатель (а - поляризация, б - измерение); 5 - частотомер
поля выбирается достаточно болыпым (Тпол » Т). Под воздействием поляри-
зующего поля протоны приобретают согласованную ориентацию, и рабочее ве-
щество поляризуется (намагничивается). Поляризация магнитным полем Тпол,
созданным током, текущим в обмотке датчика, получила название статической.
Согласованное расположение элементарных магнитных моментов протонов
в поляризованном рабочем веществе создает суммарный магнитный момент -
макровектор М. При выключении поляризующего поля Тпол протоны оказыва-
ются только под воздействием измеряемого геомагнитного поля и синхронно
начинают прецессировать вокруг его вектора Т. Это означает одновременно и
прецессию макровектора М. При выключении поляризующего поля катушка
датчика подключается к измерительному тракту. Прецессия макровектора М
теперь индуцирует в катушке ЭДС, частота которой равна частоте прецессии
протонов и, согласно теории прецессии, используется для определения вектора
Т земного магнитного поля.
Измерение частоты прецессии будет тем успешнее, чем больше амплитуда
ЭДС, индуцируемая в обмотке датчика в ходе прецессии. Амплитуда этой ЭДС
непосредственно зависит от угла между векторами Т и Цр (см. рис. 10.3). Чем
больше угол а, тем больше амплитуда сигнала. Поэтому при возбуждении пре-
цессии магнитные моменты протонов необходимо отклонить от направления
вектора Т на возможно больший угол (а—>90°). В этом и заключается фазирова-
ние. Практически его можно выполнить в ходе поляризации. Для этого необхо-
димо поляризирующему полю Тпол придать направление, перпендикулярное век-
тору Т. Учитывая способ создания поляризируюшего поля, фазирование может
быть достигнуто ориентировкой датчика. В процессе поляризации ось его ка-
тушки должна быть ориентирована перпендикулярно вектору Т, т. е. широтно.
482
Таким образом, с учетом фазирования датчик протонного магнитометра при из-
мерениях необходимо ориентировать.
Чтобы обеспечить синхронность прецессии всех протонов, не разрушить
достигнутой поляризации, отключение катушки от источника постоянного тока
и ее подключение к измерительному тракту надо выполнить очень быстро. От
быстроты этого переключения сильно зависит синхронность последующей пре-
цессии и устойчивость макровектора М. Быстрое переключение катушки датчи-
ка, обеспечивающее синхронность прецессии, и составляет третий элемент про-
цедуры возбуждения. Процедура возбуждения прецессии (кроме фазирования) и
последующее измерение сигнала автоматизированы. Сигнал с катушки датчика
усиливается и преобразуется, а затем подается на частотомер, который обеспе-
чивает прямой отсчет магнитометра.
2. Протонные магнитометры с динамической поляризацией. Статиче-
ский режим поляризации достаточно энергоемок. Так, для создания необходи-
мого поляризирующего поля Тпол в обмотку датчика необходимо подавать ток
силой 0,5...0,8 А. Энергоемкость аппаратуры отражается на весе ее рабочего
комплекта. В целях сокращения энергоемкости разработан способ поляризации,
получивший название динамической поляризации ядер (ДЛЯ). При этом прин-
цип действия магнитометра и его назначение остаются без изменений.
В магнитометрах с ДЛЯ в отличие от приборов со статической поляризацией
используется более сложное рабочее вещество. Оно представляет раствор, в кото-
ром присутствуют два типа свободных носителей элементарного магнетизма - про-
тоны и электроны. Соответственно имеется совокупность протонных ЦР и электрон-
ных це магнитных взаимодействующих моментов, влияющих друг на друга [4].
В процессе ДЛЯ на рабочее вещество действует два типа магнитных полей -
постоянное, называемое подмагничивающим полем Тп и высокочастотное, или
ВЧ-поле. Каждое создается с помощью соответствующей катушки, размещенной
в датчике (рис. 10.5).
В жидкостях в отсутствие внешнего поля магнитные моменты свободных
электронов и протонов ориентированы случайным образом. При включении
Рис. 10.5. Принципиальная схема протонного
магнитометра с динамической поляризацией:
1 - емкость с рабочим веществом; 2 - катушка для
создания поля подмагничивания Тп приема сигнала;
3 - маловитковая катушка для создания ВЧ-поля; 4 -
ВЧ-генератор; 5 - переключатель (а' - поляризация,
б' - измерение); 6 - частотомер; 7 - источник посто-
янного тока для поля подмагничивания
поля подмагничивания Тп обстановка меняется. Это поле создается за счет про-
пускания постоянного тока через катушку 2 от источника 4 (рис. 10.5). Значение
Тп существенно меньше значения поля поляризации в магнитометрах со стати-
ческой поляризацией.
В магнитном поле каждый элементарный магнит может занимать два положе-
ния равновесия, ориентируясь по полю либо против. Следует подчеркнуть, что
483
два положения различаются и энергетически. Ориентация элементарного магнит-
ного момента против направления поля отличается более высоким уровнем энер-
гии. Таким образом, частицы (протоны или электроны), магнитные моменты
которых оказались ориентированными против поля, получили за счет поля несколь-
ко большую добавку энергии по сравнению с частицами, магнитные моменты кото-
рых разместились по полю. В итоге взаимодействие элементарных магнитных
моментов с подмагничивающим полем Тп приводит к расщеплению исходного со-
стояния системы протонов (а отдельно - и системы электронов) на различные по
энергии подуровни, известные в физике как подуровни Зеемана (рис. 10.6).
Пусть в рабочем веществе общее число протонов Np, а электронов Ne. Под
влиянием поля подмагничивания Тп часть протонов Np\ и электронов Ne\ ори-
ентируются своими магнитными моментами по полю. Их энергетическое со-
стояние отмечено на рис. 10.6 подуровнями с номером 1. Остальная часть
ПрОТОНОВ Npl И Эпрктплилп V rnnwpwTJTHVPTra гтпптгги гглпа Их ЭНерГвТИЧеСКОе
А
УР2---------|Ne2 --
У Р2 т--------1 NP2
УР1 JL--------4 np\ ypi----------f Ne\
a 6
Рис. 10.6. Ориентация ядерных (а) и электронных (б) магнит-
ных моментов под воздействием постоянного магнитного
поля (поля подмагничивания Тп)
тонов Np2 и электронов Ne2 сориентируется против поля. Их энергетическое
состояние схематически изображено соответственно уровнями с номером 2.
Для каждой системы элементарных частиц между возникшими подуровнями
существует разность энергий, обозначенная на рис. 10.6 соответственно ДЕР и
ДЕе. Известно, что подобная разность энергии, например для системы электро-
нов, определяется как
ЛЕе = h(toe,
где h - постоянная Планка, со - частота кванта, которым частицы могут обмени-
ваться при переходе между подуровнями 1 и 2.
В механизме ДЛЯ на двухуровневое распределение электронных моментов
одновременно с подмагничивающим полем Тп действует высокочастотное маг-
нитное поле Твч. Если частота этого поля будет соответствовать частоте перехо-
да электронов между подуровнями 1 и 2 энергетического расщепления, то про-
исходит поглощение электромагнитной энергии электронами. Это поглощение
увеличивает энергию электронов и заставляет их переходить с подуровня 1 на
484
подуровень 2. Другими словами, за счет ВЧ-поля будет происходить своеобраз-
ное накачивание электронов на верхний подуровень. В результате подавляющее
большинство электронов приобретет одинаковую ориентацию, а их магнитные
моменты, суммируясь, создадут в совокупности очень мощное поле, которое и
вызовет поляризацию протонов.
Ядерная поляризация за счет этого динамического процесса достигает боль-
ших значений. Для получения такого уровня поляризации в статическом режиме
потребовалось бы постоянное магнитное поле, в сотни раз превышающее значе-
ние поля в магнитометрах со статической поляризацией. Создание столь боль-
ших постоянных магнитных полей в реальных конструкциях магнитометров
практически невозможно.
Динамическая поляризация ядер по сравнению со статической существенно
снижает энергозатраты. Это не только уменьшает вес рабочего комплекта аппа-
ратуры, но и создает ряд преимуществ. Таким образом, протонные магнитомет-
ры с ДЛЯ отличаются от приборов со статическим режимом только способом
поляризации. Еще раз подчеркнем, что это различие не затрагивает принципов
измерения поля и назначения приборов. Остаются одинаковыми и два остальных
элемента процесса возбуждения - необходимость фазирования и синхронности
прецессии всех протонов после поляризации. Оба элемента обеспечиваются теми
средствами, что и в магнитометрах со статической поляризацией. В магнитомет-
рах с ДЛЯ, как и в предыдущем варианте прибора, фазирование совмещается с
поляризацией рабочего вещества. Для этого ось катушки датчика в ходе измере-
ний также ориентируется в направлении, перпендикулярном вектору Т. Тем са-
мым, как это отмечалось ранее, перед началом прецессии элементарные магнит-
ные моменты всех протонов будут отклонены от направления вектора Т земного
магнитного поля на возможно больший угол (а—>90°).
3. Блок-схема протонного магнитометра. Отсутствие принципиальных
различий в рассматриваемых модификациях протонных магнитометров объяс-
няет сходство блок-схем приборов. В соответствии с механизмом поляризации в
схеме магнитометра с ДЛЯ появляется дополнительный блок ВЧ-генератора.
Остальные блоки по назначению и функционированию одинаковы в обеих мо-
дификациях. Сходство отражено и в марке прибора. Обе модификации протон-
ного пешеходного магнитометра выпускаются отечественной промышленно-
стью под маркой ММП-203.
При запуске измерительного цикла оператором в магнитометре ММП-203 в
течение 1,57 с происходит поляризация рабочего вещества. По окончании этого
времени коммутатор 2 (рис. 10.7) быстро переключает катушку датчика на из-
мерительный тракт. С переключением изменяется режим работы катушки дат-
чика. Из режима возбуждения она переходит на измерение.
У сигнала, поступающего с катушки, должна быть замерена частота, которая и
характеризует вектор индукции Т земного магнитного поля. В электронном час-
тотомере (блок 5) измерение частоты производится следующим образом: под-
считывается число периодов сигнала за фиксированный и строго определенный
отрезок времени. Правда, в соответствии с затухающим характером свободной
прецессии протонов сигнал на выходе катушки датчика имеет вид синусоиды с
убывающей амплитудой. Такая форма сигнала не удобна для определения час-
тоты, поэтому поступающий с датчика сигнал не только усиливается, но и опре-
485
деленным образом формируется. Каждый период сигнала преобразуется в прямо-
угольный импульс, причем амплитуда всех импульсов делается одинаковой. Кроме
того, частота сигнала умножается в строго определенное количество раз (64 у
ММП-203). Умножение частоты повышает точность ее определения указанным
выше способом. Кратность умножения частоты относительно продолжительности
подсчета импульсов частоты выбирается так, что количество импульсов умно-
женной частоты за этот период численно равна значению поля в нанотеслах.
Таким образом, обеспечивается прямой отсчет магнитометра. Результат высвечи-
Рис. 10.7. Блок схема протонного магнитометра со статиче-
ской (а) и динамической (б) поляризацией:
7 - магниточувствительный преобразователь (датчик); 2 - релей-
ное переключающее устройство (коммутатор); 3 - источник посто-
янного тока в цепи поляризации; 4 - усилитель-формирователь;
5 - электронный частотомер; 6 - индикатор; 7 - ВЧ-генератор
вается на жидкокристаллическом индикаторе (блок 6) в виде пятизначного числа,
отражающего в нанотеслах значение модуля вектора Т в точке измерения.
Автоматизация измерительного цикла предельно упрощает порядок работы
оператора с магнитометром ММП-203 на точке наблюдения. Всякий раз опера-
тор устанавливает датчик непосредственно над точкой наблюдения. Высота ус-
тановки обычно составляет около двух метров. При установке для фазирования
датчик должен быть ориентирован. Ось его катушки располагается перпендику-
лярно направлению вектора Т, т. е. широтно. Поскольку допуск на эту ориента-
цию достаточно большой, она выполняется приближенно. После установки дат-
чика для запуска измерительного цикла оператор нажимает кнопку на пульте
магнитометра. Через промежуток времени чуть больше двух секунд после нажа-
тия кнопки (время, необходимое для поляризации и подсчета частоты) на дис-
плее прибора появляется результат, показывающий значение поля в нТл. Следу-
ет отметить, что пульты обеих модификаций магнитометра ММП-203 не только
сходны внешне, но и полностью взаимозаменяемы. Записав показание прибора в
полевой журнал, оператор переходит на следующую точку. Общее время работы
на точке с записью результата в журнал составляет менее пяти секунд.
486
Важным качеством протонных магнитометров является точность измерений,
сочетающаяся с высокой производительностью, а также отсутствие сползания
нуля, что существенно упрощает полевые измерения, позволяя проводить их без
создания опорных сетей. Простота конструкции чувствительного элемента (дат-
чика) и основных узлов регистрирующей части делает эти приборы вполне на-
дежными для полевой практики. По совокупности качеств протонные магнито-
метры наиболее удобны для полевых измерений. Именно эти приборы исполь-
зуют во всех видах полевых измерений.
Отсутствие в протонных магнитометрах движущихся частей делает возмож-
ным их применение на разных носителях - автомобилях, самолетах и т. д. Однако
при этом важно быстродействие прибора. У протонных магнитометров это каче-
ство непосредственно связано с цикличностью его работы. Так, у ММП-203 про-
должительность цикла одинакова для обеих модификаций и составляет до 3 с. Для
аэромагнитометра это недопустимо. Если прибор будет выдавать значения поля
через 3 с, то при средней скорости полета 160 км/ч измерения поля будут прово-
диться примерно через 130-140 м, что нельзя считать удовлетворительным.
Применение ДЛЯ открывает некоторые возможности для сокращения продол-
жительности цикла. Однако основным решением стало совмещение во времени
измерительной части предыдущего цикла с процессом поляризации в после-
дующем. Это решение реализовано в протонных магнитометрах с синхронной
поляризацией ядер. Синхронная поляризация позволила существенно сократить
промежуток между отсчетами. По такой схеме построен современный аэромаг-
нитометр ММВ-215. Прибор может работать с частотой одно, два или пять из-
мерений в секунду. При частоте одно измерение в секунду погрешность состав-
ляет ±0,05 нТл, при частоте пять измерений в секунду ±0,8 нТл.
10.33. Квантовые магнитометры
В основе принципа действия квантовых магнитометров лежит эффект Зее-
мана, выражающий взаимодействие измеряемого магнитного поля с рабочим
веществом магнитометра. В квантовых приборах в качестве рабочего использу-
ется вещество, атомы которого обладают магнитным моментом. К таким веще-
ствам, применяемым в мировой практике приборостроения, относят цезий, ру-
бидий (пары этих металлов), гелий. Поэтому по составу рабочего вещества маг-
нитометры иногда называются цезиевыми, рубидиевыми, гелиевыми. Есть и еще
одно общее название магнитометров этого типа - квантово-оптические или маг-
нитометры с оптической накачкой.
Как известно из квантовой физики, энергетические уровни атомов жидких,
газообразных и парообразных веществ, находящихся в магнитном поле, расщеп-
ляются на несколько подуровней, что при спектроскопическом излучении про-
является в возникновении дополнительных спектральных линий. Это явление
носит название эффекта Зеемана. Частота поглощения или излучения А/(Гц) при
переходе атомного электрона с одного подуровня на другой определяется
Д/= (цв//г) Я = 2,8 - 106Н,
где |ХВ - магнетон Бора; h - постоянная Планка.
487
В зависимости от того, вдоль магнитного поля или перпендикулярно ему на-
блюдают эффект Зеемана, различают продольный (Z-эффект) или поперечный
(Х-эффект). Указанные явления несколько различны.
Эффект Зеемана в сильном магнитном поле называют нормальным, в слабом -
аномальным.
Эффект Зеемана используют в квантовых магнитометрах с оптической на-
качкой атомов. Один из вариантов оптической накачки состоит в следующем.
Через сосуд А с парами какого-либо щелочного металла (натрия, рубидия, цезия)
или с инертным газом (гелий), находящимся в постоянном магнитном поле Н9
пропускают монохроматический пучок света с круговой поляризацией в направ-
лении действующего магнитного поля (Z-эффект) (рис. 10.8) [3].
Длина волны светового луча должна соответствовать одной из спектральных
линий данного металла.
Световой луч при прохождении через сосуд А будет поглощаться парами ме-
талла. В результате атомы металла возбуждаются и переходят с нижнего энерге-
тического уровня 351/2 на более высокий уровень 3Pi/2. На рис. 10.8, б показаны
энергетические уровни атомов натрия и возможные переходы с одного уровня
Рис. 10.8. Схема, поясняющая процесс оптической накачки:
а - взаимное расположение магнитных полей пучка света и сосуда с рабочим веществом; б - кванто-
вые переходы атомов рабочего вещества на различные энергетические уровни и подуровни: F -
квантовое число, характеризующее общий угловой момент атома, равный сумме его азимутально-
го, спинового и ядерного угловых моментов; для натрия в основном состоянии 3*51/2 и в возбуж-
денном ЗР1/2 соответственно F= 1 и F= 2 (расщепление каждого уровня на сверхтонкие структуры)
488
на другой. Из рисунка видно, что разрешены переходы со всех нижних подуров-
ней, кроме одного (т = +2). Обратный переход возможен с каждого верхнего
подуровня на любой нижний, в том числе и на подуровень т = +2. Поэтому на
подуровне т = +2 нижнего уровня 351/2 непрерывно будут накапливаться атомы,
у которых магнитные моменты ориентированы по направлению магнитного по-
ля, и пары натрия в целом окажутся намагниченными. Следовательно, под влия-
нием светового луча произошло избыточное заселение одного из подуровней.
Заселенность подуровня может достигнуть 99 %, что соответствует параметру
накачки 0,99.
После выключения светового луча вследствие тепловых флюктуаций засе-
ленность подуровня будет уменьшаться до определенного значения. Время ре-
лаксации для этого случая составляет 10-1 с, т. е. на несколько порядков больше,
чем при переходе атомов с разрешенных подуровней (10-6 с), что дает возмож-
ность наблюдать явление оптической накачки. После перехода под влиянием
оптической накачки практически всех атомов на подуровень т = +2 уровня 351/2
поглощение света прекращается, и яркость светового луча на выходе из сосуда А
достигает максимального значения.
Если воздействовать на сосуд А с парами металла переменным магнитным по-
лем h резонансной частоты, перпендикулярным постоянному полю (рис. 10.8, а),
произойдет стимулированный переход с подуровня т = +2 на более низкие поду-
ровни и снова начнется процесс поглощения света. Измеряя интенсивность свето-
вого луча на выходе из сосуда А при разных частотах переменного магнитного
поля, можно заметить резкое уменьшение интенсивности в момент резонанса.
Измеряя резонансную частоту переменного магнитного поля, можно определить
по известным соотношениям напряженность постоянного магнитного поля Н.
В реальных магнитометрах рассмотренный принцип измерения магнитного
поля реализуется в магниточувствительном преобразователе (МЧИ) специальной
и довольно сложной конструкции. Принципиальная схема такого преобразователя
показана на рис. 10.9. Источником света в МЧИ служит спектральная цезиевая лам-
па 3, возбуждаемая от автономного генератора 1. С помощью линзы Френеля 4
световой поток формируется в плоскопараллельный пучок. Проходя через поля-
ризатор 5 и четвертьволновую пластину 6, свет поляризуется по кругу и попадает
на ампулу с рабочим веществом 7. Пришедший через ампулу свет линзой 9 фоку-
сируется на фотодетектор 10. Все устройство МЧП заключено в термостат, обес-
печивающий необходимый тепловой режим для рабочего вещества [4].
Во время оптической накачки происходит интенсивное поглощение световой
энергии атомами цезия; ампула с рабочим веществом мутная. Когда атомы пере-
качаны на запрещенный подуровень, поглощение света не происходит, ампула
становится прозрачной. Фотодетектор 10 выдает максимальный фототок. Макси-
мум фототока свидетельствует об окончании оптической накачки.
При оптической накачке остается некоторая вероятность спонтанных пере-
ходов атомов с резонансной частотой fpe3. Эти спонтанные переходы приводят
к модуляции светового потока. Слабые поначалу модуляции с фотодетектора
поступают на усилитель 11 и через фазовращатель 12 в катушку обратной свя-
зи 8 (рис. 10.9), вызывая новые резонансные переходы атомов. В результате
происходит резкое усиление сигнала, который и передается для измерения
частоты в измерительный тракт магнитометра. Таким образом, в МЧП интен-
489
Рис. 10.9. Принципиальная схема МЧП квантового магнитометра:
1 - генератор возбуждения спектральной лампы; 2 - контур возбуждения; 3 -
спектральная лампа; 4 - линза Френеля; 5 - поляризатор; 6 - четвертьволновая
пластинка; 7 - ампула с рабочим веществом; 8 - катушка обратной связи; 9 -
фокусирующая линза; 10 - фотодетектор; 11 - усилитель; 12 - фазовращатель;
Т - измеряемое поле
сивность вектора индукции магнитного поля превращается в электрический
сигнал с частотой J^e3, которая пропорциональна модулю вектора Т.
Рассмотренный принцип действия указывает на одну важную особенность
работы квантового магнитометра. В этом приборе измерение магнитного поля
осуществляется циклически.
Измерительный цикл включает две части: оптическую накачку, а затем из-
мерение резонансной частоты fpe3 и определение значения поля.
Вторая особенность - зеемановское расщепление возникает как результат
воздействия на атомы рабочего вещества полного вектора индукции магнитно-
го поля. Отсюда резонансная частота fpe3 переходов между зеемановскими по-
дуровнями пропорциональна именно полному значению вектора индукций.
Поэтому квантовый магнитометр измеряет модуль полного вектора индукции.
Измерения каких-либо составляющих этого вектора в данном случае невоз-
можны.
Третья особенность работы квантового магнитометра касается ориентации
его МЧП относительно вектора измеряемого поля. Получение сигнала на выходе
МЧП возможно, если его оптическая ось составляет с вектором Т измеряемого
поля угол 45° (рис. 10.9). Это требование довольно жесткое; при несоблюдении
ориентации амплитуда сигнала на выходе МЧП быстро убывает и измерения
становятся невозможными. Поэтому при работе с квантовыми магнитометрами
необходимо постоянно следить за ориентацией МЧП.
Квантовые магнитометры получили широкое распространение. Они выпус-
каются промышленностью в разных модификациях - для пешеходной съемки, а
также дли измерений на подвижной платформе (автомобиль, самолет, корабль).
490
Для пешеходной модели наибольшую известность получил магнитометр М-
33. Это квантовый магнитометр, предназначенный, как и все приборы этого типа,
для измерения модуля вектора индукции геомагнитного поля. Прибор имеет ши-
рокий диапазон измерений (20000...80000 нТл). Значение измеренного поля в ви-
де пятизначного числа автоматически печатается на бумажной ленте.
Конструктивно М-33 включает МЧП, пульт и блок питания (батарея аккуму-
ляторов). В процессе работы МЧП и пульт соединены кабелем длиной 5...7 м.
Поэтому прибор обслуживается по время измерений бригадой из двух человек.
Рабочий переносит МЧП, а сзади на расстоянии, равном длине соединительно-
го кабеля, следует оператор с пультом и блоком питания. Общий вес рабочего
комплекта М-33 (с питанием) составляет 13,5 кг. Столь большой вес обуслов-
лен сложностью конструкции МЧП и большой энергоемкостью (потребляемая
мощность 15 Вт). Высокая энергоемкость объясняется затратами на работу
спектральной лампы и на термостатирование всего МЧП и блока кварцевого
генератора в пульте. Косвенным показателем энергоемкости является и то, что
для начала измерений необходим прогрев прибора в течение 45 мин. Естест-
венно, в ходе работы выключать питание нельзя. Зато измерения с М-33 могут
выполняться значительно быстрее, чем с протонным магнитометром. Измери-
тельный цикл квантового магнитометра значительно короче цикла протонного
магнитометра.
Измерительный цикл у М-33 также запускается нажатием кнопки на пульте.
Оптическую накачку рабочего вещества и последующее измерение резонансной
частоты и регистрацию результата в нТл обеспечивает автоматика.
При измерениях МЧП располагают над точкой наблюдения. Оператор должен
следить за ориентацией МЧП. Угол между вектором Т и оптической осью МЧП
составляет 45°. Допуск на установку этого угла достаточно жесткий - ±10°. За
правильностью ориентации оператор следит по амплитуде сигнала. Остальной
порядок наблюдений на точке предельно прост. После надлежащей установки
МЧП оператор нажимает пусковую кнопку и на ленте печатается результат.
В целях снижения требований к ориентации разработан вариант МЧП не с
одной (как в М-33), а с тремя камерами поглощения. Эта модификация получила
название ММП-303. Дальнейшее совершенствование пешеходного квантового
магнитометра получило развитие в модели ММ-60. Здесь несколько снижено
энергопотребление, а запись показаний ведется на магнитную ленту. Последнее
обстоятельство упрощает использование вычислительной техники для обработ-
ки результатов измерения. Все же сложность конструкции квантового магнито-
метра делает его достаточно дорогостоящим по сравнению, например, с протон-
ными. Так, М-33 почти вдвое превосходит по стоимости аналогичный ему по
классу протонный магнитометр ММП-203.
Короткий измерительный цикл (высокое быстродействие) один из основных
преимуществ квантовых приборов перед протонными, что особенно важно для
аэромагнитометров. По сравнению с пешеходным сложность конструкции аэро-
магнитометра повышается из-за необходимости систем автоматической ориен-
тации МЧП во время полета.
В заключение подчеркнем, что принцип действия, используемый в кванто-
вых магнитометрах, позволяет отнести эти приборы к разряду абсолютных. Оп-
ределяется полное значение модуля вектора индукции геомагнитного поля по-
491
средством измерения резонансной частоты квантовых переходов атомов между
подуровнями Зеемана.
10.3.4. Феррозондовые магнитометры
1. Теория и принцип действия феррозондовых магнитометров. Свое на-
звание эти приборы получили от чувствительного элемента оригинальной кон-
струкции, получившего название феррозонд (flux-gate). С помощью феррозонда
магнитное поле измеряют посредством определения потока магнитной индук-
ции, создаваемого полем [4].
Пусть сердечник, имеющий форму стержня, своей длинной осью ориентиро-
ван по направлению вектора напряженности Н измеряемого поля. Под воздейст-
вием этого поля в материале сердечника возникает поток индукции
Ф = 5В = 5ц|1оН,
где Н - напряженность измеряемого поля; S - площадь поперечного сечения
сердечника; jllo - магнитная проницаемость вакуума; ц - начальная магнитная
проницаемость сердечника.
Из равенства видно, что магнитный поток пропорционален полю и, следова-
тельно, может быть использован как мера этого поля. А сердечник нужен преж-
де всего для усиления эффекта (важно при измерении слабых полей, к которым
относят и земное поле). Действительно, если выбрать сердечник из материала с
большой магнитной проницаемостью, то даже слабое внешнее поле создаст в
нем солидный поток индукции, что в свою очередь позволит более надежно вы-
полнить измерение. Большую начальную магнитную проницаемость имеют так
называемые магнитомягкие материалы. Наибольшее распространение получил
железоникелевый сплав, называемый пермаллой; его магнитная проницаемость
очень высока-до 130000 ед. СИ.
С технической точки зрения поток магнитной индукции Ф удобнее измерять,
наблюдая электродвижущую силу в обмотке, охватывающей сердечник. Обычно
такая ЭДС в катушке возникает под влиянием переменного потока магнитной
индукции, т. е. когда Ф = Ф(£), где t - время. А магнитное поле Земли постоянно
во времени и создать переменный магнитный поток не может. Получить ЭДС в
катушке, пронизываемой постоянным магнитным потоком, можно, если придать
ей колебательные движения. Но механическая конструкция для полевого прибо-
ра громоздка и очень ненадежна. Было найдено весьма оригинальное решение.
Суть его в следующем. Переменный магнитный поток в сердечнике под влияни-
ем внешнего постоянного поля получить можно, если он обладает переменной
магнитной проницаемостью, т. е. ц = ц(/).
Таким образом, измерить постоянное магнитное поле по создаваемому им
потоку можно, если иметь устройство с переменной магнитной проницаемо-
стью. В свою очередь создание такого устройства возможно на основе нелиней-
ности намагничивания ферромагнитных материалов. Известно, что под влияни-
ем внешнего поля ферромагнитный материал намагничивается, и с ростом поля
намагниченность увеличивается. Однако при монотонном увеличении внешнего
поля намагниченность сердечника в начале возрастает быстро, а затем все более
492
и более замедляется; наступает магнитное насыщение: внешнее поле продолжа-
ет возрастать в прежнем темпе, а намагниченность едва меняется. Такое разви-
тие процесса позволяет сделать вывод, что магнитная проницаемость (а равно и
магнитная восприимчивость) сердечника есть функция намагничивающего поля.
В отсутствие такого поля сердечник обладает максимальной магнитной прони-
цаемостью, которая в этом случае называется начальной. С увеличением намаг-
ничивающего поля (независимо от его направления) магнитная проницаемость
сердечника уменьшается и достигает минимума, когда сердечник намагничива-
ется до насыщения. Схематически этот процесс показан на рис. 10.10 (упрощен-
ный вид намагничивания пермаллоевого сердечника).
Вследствие особенностей состава (79 % Ni, 3,8 % Мо, 17,2 % Fe) и термооб-
работки (отжиг в водороде при температуре около 1000 °C) пермаллой имеет
Рис. 10.10. Изменение магнитной проницаемости сердечников
феррозонда:
а - кривая перемагничивания (7) и магнитной проницаемости (2)
пермаллоевого сердечника; б - график изменения во времени прони-
цаемости сердечника под воздействием поля возбуждения; в - график
поля возбуждения
очень малую коэрцитивную силу, а его петля гистерезиса очень узка и условно
может быть представлена в виде линии (7 на рис. 10.10, а). Здесь же представлен
493
график 2 изменения магнитной проницаемости, соответствующий характеру на-
магничивания сердечника.
С учетом рассмотренных свойств и особенностей пермаллоевого сердечника
можно отметить следующее. Если такой сердечник намагничивать переменным
магнитным полем (например, синусоидальным), т. е. все время перемагничи-
вать, то его магнитная проницаемость будет меняться с течением времени, т. е.
станет функцией времени.
Подчеркнем, что переменное магнитное поле, перемагничивающее сердеч-
ник, нужно только для создания переменной магнитной проницаемости. Поэто-
му назовем его полем возбуждения. Выполняя свою функцию, поле возбужде-
ния не должно мешать последующим измерениям.
Поэтому устройство с переменной магнитной проницаемостью следует вы-
полнить в виде двух параллельных, жестко скрепленных и совершенно одинако-
вых элементов (рис. 10.11, а). Каждый из элементов представляет пермаллоевый
Рис. 10.11. Принципиальная схема феррозонда:
а - схема устройства с переменной магнитной
проницаемостью; б - электрическая схема ферро-
зонда: 1,2 - элементы феррозонда с обмотками
возбуждения; 3 - измерительная обмотка
сердечник с обмоткой возбуждения. Обмотки возбуждения обоих элементов со-
единены последовательно. Поэтому в любой момент времени направление поля
возбуждения в элементах взаимно-обратное. При этом для всего устройства в
целом суммарный магнитный поток, обусловленный полем возбуждения, равен
нулю. А все устройство (рис. 10.11, а) может быть уподоблено сердечнику с пе-
ременной магнитной проницаемостью ц = ц(/). Под воздействием внешнего по-
стоянного поля Я в устройстве возникает переменный магнитный поток
Ф(О = 5ц(ОЦоЯ.
Если оба элемента охватить общей измерительной обмоткой 3 (рис. 10.11, б),
то под воздействием этого переменного потока Ф(/) в обмотке возникает ЭДС.
494
Устройство, схема которого изображена на рис. 10.11, б, представляет собой
наиболее распространенный тип феррозонда-полемера.
Установим количественную зависимость между измеряемым внешним по-
лем Я и ЭДС в измерительной обмотке. Известно, что
e = -Wd®ldt = -WSdBldt,
где W - число витков измерительной обмотки.
Холостой ход. При отсутствии внешнего постоянного поля (Н = 0) на сер-
дечник каждого из элементов действует только переменное поле возбуждения
Я~. При этом в измерительной обмотке под воздействием каждого из элементов
индуцируется ЭДС
е1 = е2 = - WS dB/dt.
Производная dB/dt может быть представлена как
dB/dt = (dB/dH2) (dHJdf) = ц (dHJdf),
где ЭВ/дН~=ц, - дифференциальная магнитная проницаемость сердечника; е\ и е2 -
ЭДС, индуцируемые в измерительной обмотке под воздействием элементов 1 и
2 феррозонда. Равенство этих ЭДС в рассматриваемом случае (холостой ход
феррозонда) обусловлено идентичностью элементов. А так как их обмотки воз-
буждения соединены последовательно, то ех и е2 находятся всегда в противофа-
зе. Поэтому результирующая ЭДС в измерительной обмотке при отсутствии
внешнего постоянного поля (Н = 0) равна нулю.
Рабочий ход. Измеряемое постоянное магнитное поле действует на оба
элемента феррозонда одинаково. Поэтому если в одном из элементов магнит-
ная индукция обусловлена суммой полей (Н + Н_), т. е. В = В (Н_ + Н), то в
этот же момент времени второй элемент находится под влиянием разности
(Я_ -Я) нВ =В (Я.-Я) (см. рис. 10.11, б).
Измеряемое поле в реальных феррозондах значительно меньше поля возбу-
ждения. Выражение магнитной индукции в каждом из элементов феррозонда
можно представить в виде ряда Тейлора, при этом учитывая достаточно малое
значение Я, ограничимся тремя членами ряда:
В(Н_ ± Н) = 5(Я_) ± Цо Я(Э5/ЭЯ_) - ШоЯАд 2В/ЭЯ2~).
Соответственно для ЭДС в измерительной обмотке получим
ех = - WSdB(H-)lbt- WS^^Idt) @ВГдН2) - {l2WSQ^H)\dldt) (Э2В/ЭЯ2_),
е2 = - WSdB(H2)Qt + ЖУЦоИСЭ/ЭО @В1ЪН2) - (Э 2В/ЭЯ2_).
Результирующая ЭДС, в измерительной обмотке с учетом фазовых соотно-
шений между ci и е2 может быть найдена как
495
е = е2 - ei = 2WS^ (d/dt\(dB/dH^.
Как отмечалось выше, ЪВГдН~ = ц. Поэтому
е = 2^5|Щ)ЯЭр/Эл (10.1)
Из последнего равенства можно сделать следующие выводы:
1) феррозонд, устройство которого показано на рис. 10.11, б, является инди-
катором постоянного магнитного поля, так как под влиянием этого поля на вы-
ходе феррозонда появляется ЭДС;
2) значение появляющейся ЭДС пропорционально значению внешнего поля
и может быть использовано как мера поля;
3) фаза ЭДС в измерительной обмотке определяется направлением измеряе-
мого поля Н; при изменении направления вектора поля Н фаза ЭДС на выходе
феррозонда меняется на обратную;
4) частотная характеристика ЭДС в измерительной обмотке феррозонда оп-
ределяется частотой изменения магнитной проницаемости сердечников и от из-
меряемого поля не зависит.
Для оценки частоты изменения магнитной проницаемости сердечников об-
ратимся вновь к рис. 10.10. Изменение магнитной проницаемости достигается
посредством вспомогательного поля возбуждения. На рис. 10.10, б представлен
один период этого переменного поля. Перемагничивая сердечник, поле возбуж-
дения меняет в каждый момент времени его магнитную проницаемость. Харак-
тер изменения проницаемости сердечника за один период поля возбуждения
показан на рис. 10.10, в. Сопоставление графиков бив показывает, что по от-
ношению к частоте поля возбуждения изменение магнитной проницаемости
сердечника происходит в два раза быстрее, т. е. с удвоенной частотой (вторая
гармоника). Точнее, ЭДС на выходе феррозонда состоит из суммы четных гар-
моник, но для определения значения поля Н в большинстве случаев использует-
ся именно вторая гармоника. В рассматриваемом случае датчики поля получили
название феррозондов типа второй гармоники.
Кроме феррозондов типа второй гармоники известны и другие конструк-
ции, например, феррозонды пик-типа. Эти измерители отличаются по таким
важным параметрам, как чувствительность и стабильность работы. Не послед-
нее значение имеют и технологические сложности изготовления феррозондов
различных типов. Для наиболее распространенных феррозондов, определен-
ные технологические сложности представляет обеспечение полной идентично-
сти двух элементов и строго параллельной их установки при монтаже. Проще
одноэлементный феррозонд (пик-типа), но у него меньше чувствительность и
хуже стабильность работы.
2. Чувствительность и стабильность феррозондового магнитометра.
Чувствительность измерителя к исследуемому полю представляет весьма важ-
ную характеристику прибора. Она определяется значением сигнала на единицу
измеряемого поля. В феррозондах мерой изучаемого поля является амплитуда
ЭДС на выходе феррозонда. Поэтому его чувствительность определяется числом
милливольт на 1 нТл, т. е. имеет размерность мВ/нТл. Чувствительность впря-
496
мую связана с теми минимальными изменениями поля, на которые способен
реагировать измеритель. В реальных конструкциях приборов эта характеристика
находится как порог чувствительности, прямо определяющий самое минималь-
ное изменение поля в нТл. Для последней отечественной модели феррозондово-
го аэромагнитометра АМ-13 порог чувствительности составлял 4 нТл.
Другой важной характеристикой магнитометра является стабильность его
работы. Она определяется постоянством его показаний в одном и том же поле
или наличием ложного сигнала при отсутствии измеряемого поля. Чаще харак-
теристикой стабильности служит постоянство или, напротив, сползание нуля.
Чувствительность и стабильность противоречивые качества. Пусть прибор
имеет высокую чувствительность и способен реагировать даже на небольшие
изменения поля. Но из-за недостаточной стабильности его показания оказыва-
ются неточными, тогда реализовать его высокую чувствительность не удается.
Все это в наибольшей мере относится к феррозондам, где измерение поля осу-
ществляется на основе его взаимодействия с макросистемой.
На основе равенства (10.1), его чувствительность можно представить как
(7|Ло) = 2WS fyJdt.
Последний сомножитель можно заменить, используя равенство
Эр/Э^ = (Эр/Э/71)(ЭЯ1/Э0.
Тогда
(7цо) (деГдН2) = 2^(Эц/ЭЯ_) (ЭЯ_/Э/).
Из полученного выражения следует, что чувствительность феррозонда зави-
сит от материала сердечника (Эц/ЭЯ), т. е. подойдет пермаллой.
Далее видно, что чувствительность тем больше, чем больше площадь попе-
речного сечения сердечника.
Последний сомножитель ЭЯ~ /Э/ показывает, что чувствительность зависит от
режима возбуждения феррозонда, т. е. амплитуды и частоты поля возбуждения.
Чем выше частота, тем выше чувствительность. Но с ростом частоты увеличива-
ются вихревые токи в теле сердечника, что резко снижает стабильность. Для по-
вышения стабильности сердечники необходимо делать тонкими.
Примеры противоречивого сочетания чувствительности и стабильности мож-
но было бы продолжить. Отметим лишь одну весьма важную особенность. Чувст-
вительность феррозонда напрямую связана с усилительной функцией сердечни-
ков. Реальный сердечник определенных размеров и формы намагничивается не
внешним полем Не, а некоторым эффективным ЯЭф, меньшим внешнего на значе-
ние внутреннего поля. Последнее сильно зависит и от расстояния между полюса-
ми намагниченного сердечника, что в теории учитывается коэффициентом раз-
магничивания N. Таким образом, поле, намагничивающее сердечник, определяет-
ся выражением
Яэф = Не/\+ N х = ЯД + Я(ц - 1).
497
Для уменьшения коэффициента размагничивания сердечники делают
длинными и тонкими. Их размеры в поперечном направлении в сотни раз
меньше длины. Поэтому в продольном направлении коэффициент N сердечни-
ков феррозонда многократно меньше коэффициентов размагничивания в попе-
речных направлениях. По этой причине под воздействием одного и того же
поля Н сердечник вдоль его оси намагничивается в тысячи раз сильнее, чем в
поперечном направлении. Отсюда следует, что феррозонд может реагировать
лишь на поле, направленное вдоль его продольной оси. Справедливо и обрат-
ное утверждение: для измерения поля феррозонд должен быть строго ориенти-
рован. Правило ориентировки простое - своей длинной осью феррозонд дол-
жен быть сориентирован по направлению измеряемого поля. Это означает, что
феррозондом можно производить измерения не только по вектору Т. Без ка-
кой-либо переналадки, а только меняя ориентацию, феррозондом можно про-
изводить измерения любых составляющих вектора (Z, Н, X, У), т. е. компо-
нентные измерения. Это качество феррозонда оказалось не превзойденным
магнитометрами последующих поколений.
Еще одно важное отличие феррозондов - весьма малая инерционность и
возможность вести практически непрерывные измерения.
Крупным недостатком феррозондов осталась нестабильность нуля. Как пока-
зывает опыт, в измерительных макросистемах полностью устранить этот недос-
таток не удается.
3. Блок-схема феррозондового магнитометра. В отличие от модульных
компонентные измерения существенно повышают эффективность магнитораз-
ведки. Проще всего компонентные измерения проводить феррозондами. Поэто-
му и в мировой и в отечественной практике производство и применение ферро-
зондовых магнитометров не прекращается. Эти измерители отличает малая
энергоемкость, а современная элементная база и конструкционные материалы
позволяют делать магнитометры весьма компактными.
Существующие модели могут быть с цифровой и аналоговой регистрацией.
В качестве примера рассмотрим блок-схему феррозондового магнитометра с
аналоговой регистрацией (рис. 10.12) [4].
На выходе феррозонда измерительный сигнал представляет собой перемен-
ную ЭДС, у которой:
- амплитуда пропорциональна значению измеряемого поля;
- фаза отражает знак измеряемого поля;
- частота имеет фиксированное значение (2/), вдвое превышающее частоту f
поля возбуждения.
Следующие за феррозондом блоки построены и функционируют с учетом
указанных особенностей сигнала. Так, усилительный блок магнитометра являет-
ся избирательным - настроен на фиксированную частоту If.
Значение поля можно определить, измерив амплитуду ЭДС. При аналоговой
записи наилучшим измерителем является гальванометр. Поэтому поступающий
с феррозонда сигнал должен быть детектирован. Однако выпрямление должно
проводиться с учетом фазы сигнала, поскольку она отражает знак измеряемого
поля. Для этого предусмотрен блок фазочувствительного детектора. Полярность
выпрямленного сигнала на его выходе определяется фазой сигнала на входе.
498
Для выпрямления с учетом фазы необходима подача на детектор опорного сиг-
нала, осуществляемая от генератора. Генератор, подающий во внешние цепи ток
Рис. 10.12. Блок-схема феррозондового магнитометра
частотой f обеспечивает создание поля возбуждения феррозонда и опорный сигнал
для детектора. На выходе генератора не должно содержаться четных гармоник.
Выпрямленный и усиленный по мощности сигнал подается на регистратор.
В зависимости от конструкции прибора это может быть стрелочный индикатор
или самописец.
Особо следует отметить наличие цепи обратной связи. Как видно из блок-
схемы (см. рис. 10.12) в этой цепи протекает постоянный ток с выхода измери-
тельного тракта, направляемый на феррозонд. Помимо обмоток возбуждения и
измерительной имеется еще одна катушка цилиндрической формы, внутрь кото-
рой помещают весь феррозонд. Это катушка обратной связи, через которую и
протекает постоянный ток, направляемый по цепи обратной связи с выхода из-
мерительного тракта. Протекая по катушке обратной связи, этот ток создает по-
стоянное магнитное поле, направленное вдоль оси катушки соответственно оси
феррозонда. Соединения в цепи обратной связи выполнены таким образом, что
поле, создаваемое катушкой обратной связи, в любой момент противоположно
измеряемому. Таким образом, обратная связь в феррозондовом магнитометре
осуществляется по магнитному полю. Параметры цепи обратной связи подобра-
ны так, что поле, создаваемое катушкой образной связи, оказывается равным
измеряемому. Цепь обратной связи представляет собой автоматически рабо-
тающую компенсационную схему: измеряемое поле компенсируется магнит-
ным, создаваемым в цепи обратной связи. Мерой поля является значение посто-
янного тока в цепи обратной связи. Измерение, таким образом, проводится в
режиме полной компенсации. Феррозонд здесь выступает в роли индикатора
момента полной компенсации или нуль-индикатора.
Опыт применения феррозондов показывает, что в разных по значению полях
чувствительность феррозонда неодинакова. Измерение в компенсационном ре-
жиме обеспечивает для феррозонда неизменные и наиболее благоприятные ус-
ловия независимо от измеряемого поля. Применение компенсационного способа
499
измерений позволяет сохранять неизменной чувствительность феррозонда и
повышает стабильность его работы.
Обычно феррозонды применяют для измерения приращений составляющих
геомагнитного поля, например AZ, ЛЯ или АГ. Измерение полных значений так-
же возможно, однако сопровождается значительным ростом погрешностей.
Измерение приращений позволяет определить, на сколько магнитное поле в
очередной точке наблюдений отличается от поля в исходной или от исходного
поля. Если исходную точку выбрать в поле, соответствующем нормальному, то
прибор сразу будет показывать значения магнитной аномалии. Это удобно для
последующей обработки и анализа результатов. Для этого перед началом полевых
работ магнитометр устанавливают в точке с исходным значением поля и приводят
его показания к нулю. Очевидно, что для этого необходимо компенсировать маг-
нитное поле, действующее на феррозонд. Этой цели служит блок компенсации
начального поля. Он представляет собой еще одну цилиндрическую катушку,
внутрь которой помещен феррозонд. Катушка питается от регулируемого источ-
ника постоянного тока с очень высокой степенью стабилизации. Меняя силу тока
в этой цепи, оператор добивается компенсации нуля в исходной точке. Указанием
служит нулевой отсчет по шкале магнитометра. Регулятор силы тока жестко фик-
сируется. Ведь любое, даже незначительное, колебание тока в цепи компенсации
начального поля вызовет сползание нулъ-пункта магнитометра. Становятся по-
нятными повышенные требования к стабилизации тока. После компенсации ис-
ходного поля во всех других точках магнитометр будет показывать отклонения
магнитного поля в этих точках по отношению к исходному уровню. Значение и
знак этих отклонений определяются непосредственным отсчетом по шкале при-
бора; шкала имеет нуль, расположенный посредине.
Если магнитометр поместить в сильное аномальное поле, то может оказать-
ся, что не хватает пределов измерений на его шкале (аналоговая регистрация). В
этом случае в работу включается еще один блок, выполняющий функции ком-
пенсации части аномального поля, называемый иначе блоком расширения шка-
лы. Его основу составляет стабилизированный источник постоянного тока, пи-
тающий делитель напряжения. Ступенчатое перемещение движка делителя
обеспечивает поступление в компенсационную обмотку, охватывающую ферро-
зонд, строго определенных порций тока. Создаваемое этим током магнитное по-
ле также может ступенчато изменяться и компенсировать часть аномального
поля. Обычно ручка управления делителем (при ручном управлении) выводится
на панель прибора под названием «Диапазон».
Все рассмотренные блоки, начиная от феррозонда и кончая регистратором,
имеют между собой гальванические, проводные связи. Вместе с тем в феррозон-
довых магнитометрах обязательно есть еще один блок (блок ориентации), кото-
рый связан непосредственно с феррозондом, и связь эта механическая. Он пред-
назначен для ориентации, которая согласно конструкции феррозонда должна
строго соответствовать направлению измеряемой компоненты магнитного поля.
Для повышения производительности полевых измерений система обеспечивает
автоматическую ориентацию феррозонда в заданном направлении. Конструкция
системы зависит от назначения магнитометра. Самая простая - маятниковая
подвеска - представляет собой гильзу с утяжеленным низом, укрепленную в
карданном подвесе. Под влиянием силы тяжести гильза автоматически устанав-
500
ливается вертикально. Если внутрь поместить феррозонд, то он будет ориенти-
рован по Z-составляющей. Если перпендикулярно гильзе укрепить площадку и
на ней разместить горизонтально феррозонд, то такая система подвески может
быть использована в 77-магнитометре. При этом надо ось феррозонда ориенти-
ровать еще и в плане. В феррозондовых аэромагнитометрах используется сле-
дящая система, автоматически ориентирующая измерительный феррозонд по
направлению вектора Т. Чувствительными элементами этой следящей системы
являются два дополнительных (ориентирующих) феррозонда. Вместе с основ-
ным измерительным феррозондом ориентирующие крепят ортогонально на об-
щей платформе. Кстати, ориентирующая система на основе феррозонда исполь-
зуется и в современных квантовых магнитометрах для автоматической ориента-
ции МЧП по отношению к направлению вектора Т.
Градуировка магнитометра. Мерой изучаемого поля в феррозондовом маг-
нитометре является амплитуда ЭДС в измерительной обмотке. Для определения
поля необходимо установить связь между ЭДС в милливольтах и значением из-
меряемого магнитного поля в нТл. Даже при упрощенном подходе к теории
феррозонда эта связь включает много параметров. Сюда относится форма и раз-
меры сердечников, состав и состояние их материала, число витков и конструк-
ция катушек, тщательность монтажа при сборке феррозонда, режим его возбуж-
дения в ходе работы и др. Почти все эти величины и процессы не имеют точного
значения. По этой причине не удается аналитически вычислить итоговый коэф-
фициент, связывающий значение ЭДС со значением поля. В магнитометрах с
аналоговой регистрацией ЭДС отражается числом делений шкалы и, на которое
отклоняется стрелка индикатора. Коэффициент, связывающий отсчет по шкале
прибора со значением поля, называется ценой деления; ее размерность -
нТл/дел. Цена деления может быть определена только экспериментально. Для
этого выполняется градуировка магнитометра. Смысл ее в том, что на феррозонд
действуют магнитным полем известного значения и отмечают изменение отсче-
та по шкале прибора в делениях, соответствующих действующему полю. Для
градуировки используют специальные устройства - образцовые меры магнитной
индукции. С помощью калиброванных катушек и стабилизированных источни-
ков тока они создают однородное магнитное поле. Градуировке подлежит вся
шкала магнитометра и все ступени переключателя диапазона.
В настоящее время в отечественной практике феррозондовые магнитометры
применяют лишь для подземных измерений магнитного поля - в скважинах и
шахтах. Вот основные качества феррозондов, которые выгодно их отличают:
- высокая производительность и непрерывность измерения. Измерения про-
водятся в движении, например при спуске пли подъеме снаряда;
- передача информации об измеряемом поле в форме электрических сигна-
лов, обеспечивающая возможность дистанционного измерения;
- миниатюрность, необходимая для использования в скважинах алмазного
бурения;
- самое важное - компонентные измерения, позволяющие выявлять вектор
аномального поля Та и решать задачи по изучению объектов в пространстве
около скважины.
4. Используемые типы феррозондовых магнитометров. На практике при-
мененяют несколько марок скважинных магнитометров [4].
501
Трехкомпонентный скважинный магнитометр комплексный - ТСМК- 40 имеет
снаряды диаметром 40 мм. В комплект входят два снаряда Z-ae и ССТ. В снаряде Z-ae
имеется феррозонд и ае-датчик. Укрепленный на маятниковой подвеске феррозонд в
любой точке скважины занимает вертикальное положение и обеспечивает непре-
рывное измерение AZ, охватывая область, окружающую скважину.
Рис. 10.13. Схема расположения фер-
розондов в трехкомпонентных сква-
жинных магнитометрах:
а - ТСМК; б - КСМ; в - МСКЦ-1; ОС - ось
скважины
Чувствительным элементом ае-канала
является катушка индуктивности с ра-
зомкнутым сердечником. Катушка совме-
стно с постоянной емкостью образует ре-
зонансный контур и измеряет магнитную
восприимчивость пород в стенке скважи-
ны. С изменением магнитной восприимчи-
вости породы, окружающей катушку, ее
индуктивность, а вместе с ней и резонанс-
ная частота контура меняются. Резонанс-
ная частота контура смешивается с эта-
лонной частотой генератора О значении
ае судят по разностной частоте А/ = -
- fn. Снарядом Z-ae за один спуско-подьем
измеряют оба параметра.
Снаряд ССТ (снаряд составляющих
вектора Т) выполняет дискретные пооче-
редные измерения трех взаимно перпенди-
кулярных составляющих вектора геомаг-
нитного поля: Zc, X и Y. Эти составляющие
измеряют тремя взаимно перпендикуляр-
ными феррозондами, расположенными в
снаряде ССТ. Измерители построены по
осевой системе (рис. 10.13, а). Один из
феррозондов сориентирован по оси скважины и измеряет составляющую Z6. поля по
этому направлению. Перпендикулярно ему в плоскости наклона скважины распола-
гается второй феррозонд, измеряющий Х-составляющую. Третий феррозонд пер-
пендикулярен первым двум и измеряет Y-составляющую. Все измерения снарядом
ССТ ведутся за два спуска-подъема. Модификацией ТСМК-40 является аппаратура
ТСМК-30, предназначенная для измерений в скважинах алмазного бурения.
Большее удобство при обработке и интерпретации материалов обеспечивает
иная ориентация феррозондов в скважинном снаряде. Эта разработка Института
геофизики РАН реализована в аппаратуре КСМ-38. Здесь один феррозонд на
карданном подвесе располагается вертикально, два других - в горизонтальной
плоскости по осям X и Y (рис. 10.13, б). Тем самым обеспечивается измерение
составляющих z,Hx и Нг Все три феррозонда и ае-датчик смонтированы в од-
ном снаряде. Запись всех четырех величин непрерывна за два спуска-подьема
снаряда (по две величины раздельно за один спуска-подъем).
Оригинальная конструкция положена в основу магнитометра МСКЦ-1 (маг-
нитометр скважинный компонентный). Здесь, как и в ТСМК, измеряются со-
502
ставляющие Zc, X и Y. Однако в снаряде МСКЦ-1 применяется один феррозонд.
Его ось отклонена от оси снаряда (скважины) на угол у = 57°5'. С помощью спе-
циального двигателя феррозонд вращается вокруг оси снаряда (рис. 10.13, в).
Здесь уместно вспомнить, что феррозонд реагирует лишь на ту проекцию, кото-
рую вектор поля образует на его ось. Так, при вращении феррозонда при любом
его положении осевая составляющая дает на ось феррозонда одну и ту же про-
екцию Z^cosy Когда ось феррозонда совпадает с плоскостью наклона скважины,
максимальную по значению проекцию на его ось дает Jf-составляющая. Проек-
ция У-составляющей в этот момент равна нулю. При повороте феррозонда на
следующие 90° обстановка изменится — максимальной окажется проекция Y-
составля-ющей, а для Х-компоненты - уменьшится до нуля. Таким образом, на
выходе вращающегося феррозонда будет сложный сигнал, включающий инфор-
мацию о всех трех составляющих:
Zchth (®0 = Zc cosy + (X coscoz + Y sinco/) siny.
С помощью автоматической коммутации можно раздельно выделить состав-
ляющие этого сигнала.
103.5. Обобщенные данные по пороговой чувствительности магнитометров
Как уже отмечалось, известные в настоящее время методы измерения маг-
нитного поля основаны на взаимодействии этого поля:
- с постоянными магнитами (оптико-механические магнитометры);
- с магнитными моментами атомных ядер (протонные магнитометры);
- с магнитными моментами атомов (квантовые магнитометры);
- со спиновыми магнитными моментами при намагничивании магнитных
материалов (феррозондовые магнитометры);
- с движущимися электрическими зарядами (магнитометры на эффекте Холла);
- с вращающимися электрическими катушками или рамками с током (индук-
ционные магнитометры);
- с сверхпроводящими системами при сверхнизких температурах (криоген-
ные магнитометры).
Перечисленные магнитометры имеют следующую пороговую чувствитель-
ность [3]:
- оптико-механические магнитометры - 5 нТл;
- протонные магнитометры - 2 нТл;
- квантовые магнитометры - 210-2 нТл;
- феррозондовые магнитометры - 0,2 ... 2 нТл;
- индукционные магнитометры - 10-3 нТл;
- магнитометры на эффекте Холла - 30 нТл;
- криогенные магнитометры - 0,1 нТл.
103.6. Зарубежная аппаратура ММР
Современные магнитные обнаружители, состоящие на вооружении армий
США, Великобритании, Франции и других государств, обладают чувствитель-
503
ностью порядка 0,01 нТл, что позволяет обнаруживать подводные лодки на рас-
стоянии до 900 м. Магнитные обнаружители могут эффективно использоваться в
условиях противодействия гидроакустическим средствам разведки.
Основным их недостатком является подверженность помехам от местных
магнитных полей (собственного поля носителя, районов магнитных аномалий
и т. д.), в связи с чем эффективность действия магнитных обнаружителей
значительно уменьшается при использовании в районах магнитных аномалий,
мелководных районах и в северных широтах. Наибольшая эффективность об-
наружителей достигается при полетах воздушных носителей аппаратуры днем
на высотах около 30 м, а ночью - около 90 м.
Все противолодочные самолеты США оснащены магнитными обнаружите-
лями типа AM/ASQ-10 с дальностью действия до 300 м, а также AN/ASQ-81 с
более высокой чувствительностью (0,16 нТл) и дальностью действия до 1000 м.
Этими средствами оснащаются противолодочные самолеты Р-3 С, S-ЗА и проти-
володочные вертолеты SH-2D (F); SH-3 ВМС США.
Самолет «Атлантик» оснащен французским магнитным обнаружителем
DHAX-1 с дальностью действия до 300 м.
Наземная аппаратура ММР имеет чувствительность 0,1 нТл и позволяет раз-
личать образцы военной техники на расстоянии до 50 м.
В США используют наземный прибор ММР типа REWD, магнитные датчики
которого позволяют обнаруживать и идентифицировать прохождение техники и
людей на расстояниях свыше 15 м. Поступающие на датчик сигналы передаются
по радиоканалу на расстояние до нескольких километров.
Одно из важных направлений совершенствования средств ММР - создание
приборов обнаружения и распознавания образцов военной техники, подземных
военно-промышленных объектов и складов. Проведенные эксперименты пока-
зали принципиальную возможность обнаружения военной техники с высоты
50-75 м, подземных парков - до 80 м, подземных заводов и электростанций -
до 200 м, подземных складов - до 100 м.
Основными направлениями развития и совершенствования аппаратуры ММР
на ближайшее время станут:
- создание высокочувствительных магнитометров с компенсацией магнитных
полей носителей вариаций магнитного поля Земли;
- разработка градиентометрических систем с малыми базами;
- использование для обработки информации вычислительной техники, для
определения типов подводных объектов с низким уровнем собственного маг-
нитного поля;
- использование низкочастотных составляющих электромагнитного поля
объекта в диапазоне частот 1.. .5000 Гц.
11. КОМПЬЮТЕРНАЯ РАЗВЕДКА
11.1. Общие сведения
Понятия компьютерная разведка (КР) и информационная война (ИВ) тесно
связаны.
Впервые термин информационная война появился в отчете Томаса Рона
«Системы оружия и информационная война», подготовленном им в 1976 г. для
компании «Боинг» [1]. В нем автор, в частности, указывал, что информацион-
ная инфраструктура становится ключевым фактором экономики США, но она
одновременно превращается в уязвимую цель как в военное, так и мирное вре-
мя. Сама постановка проблемы весьма заинтересовала тех американских спе-
циалистов, которые связаны с секретными материалами. К 1980 г. уже сложи-
лось общее представление о том, что информация может быть как целью, так и
оружием.
В связи с появлением новых задач после окончания «холодной войны», тер-
мин информационная война был введен в документы министерства обороны
США [2].
В конце 1996 г. Роберт Банкер, эксперт Пентагона, на одном из симпозиумов
представил доклад, посвященный новой программе строительства и боевого при-
менения вооруженных сил США XXI столетия (концепция Force 21). В ее основу
было положено разделение всего театра военных действий на две составляющие -
традиционное и киберпространство, причем последнее имеет даже более важное
значение. Банкер предложил доктрину «киберманевра», которая должна явиться
естественным дополнением традиционных военных концепций, преследующих
цель нейтрализации или подавления вооруженных сил противника.
Таким образом, в число сфер ведения боевых действий помимо Земли, моря,
воздуха и космоса теперь включается и инфосфера. Как подчеркивают военные
эксперты, основными объектами поражения в новых войнах будут информационная
инфраструктура и психика противника (появился даже термин human network).
В октябре 1998 г. министерство обороны США вводит в действие Объеди-
ненную доктрину информационных операций (первоначально она называлась
«Объединенная доктрина информационной войны») [3], что было связано с не-
обходимостью различения понятий «информационная операция» и «информа-
ционная война», которые были сформулированы следующим образом.
Информационная операция - это действия, предпринимаемые в целях за-
труднения сбора, обработки, передачи и хранения информации системами про-
тивника при защите собственной информации и систем.
Информационная война - комплексное воздействие (совокупность информа-
ционных операций) на систему государственного и военного управления проти-
востоящей стороны, ее военно-политическое руководство, которое уже в мирное
505
время привело бы к принятию благоприятных для стороны-инициатора инфор-
мационного воздействия решений, а в ходе конфликта полностью парализовало
инфраструктуру управления противника.
Как указывают американские военные эксперты, ИВ состоит из мер, пред-
принимаемых в целях достижения информационного превосходства в обеспече-
нии национальной военной стратегии путем воздействия на информацию и ин-
формационные системы противника с одновременным укреплением и защитой
собственной информации, а также информационных систем и инфраструктуры.
Информационное превосходство определяется как способность собирать,
обрабатывать и распределять непрерывный поток информации о ситуации, пре-
пятствуя противнику делать то же самое. Оно может быть определено также и
как способность назначать и поддерживать такой темп проведения операции,
который превосходит любой возможный темп противника, позволяя доминиро-
вать на протяжении всего ее проведения, оставаясь непредсказуемым и опере-
жая противника в ответных акциях.
В связи с появлением концепции информационной войны в США выпущены
два полевых устава FM-100-5 и FM-100-6, излагающие основы информационной
войны и информационной операции.
В октябре 2001 г. Национальный центр защиты инфраструктуры США опубли-
ковал доклад «Кибернетические протесты: угроза американской информационной
инфрастуктуре». В нем отмечается, что за последнее десятилетие вместе с резким
ростом числа пользователей сети Интернет политическая активность общества по-
лучила новую область своего проявления. Данная деятельность в Интернете уже
имеет довольно широкий диапазон: от использования электронной почты и сайтов
политических и общественных организаций для координации действий своих чле-
нов до уничтожения web-страниц и кибернетических атак на сайты конкурентов.
Такая активность создала новый политически мотивированный тип нападе-
ний на информационные системы, называемый в зарубежной литературе «хак-
тивизм» (от англ, hacker - взломщик компьютерных систем).
Преимущество информационной войны перед традиционными боевыми дей-
ствиями - в высокой эффективности при минимальных затратах. В настоящее
время средства ведения информационной войны разрабатываются более чем в
120 странах. Информационная война ведется как в военное, так и в мирное вре-
мя. Вот несколько примеров умышленного нарушения информационной безо-
пасности, которые могут трактоваться как акты информационной войны:
- по данным министерства обороны США, военные системы с несекретной
информацией в течение 1995 г. подвергались атакам 160 тыс. раз. 29 декабря
1996 г. была взломана и разрушена web-страница ВВС США, что побудило Пен-
тагон отключить на время от Интернета почти все свои web-страницы [4];
- 4 августа 1996 г. стало известно, что ЦРУ осуществило хакерское про-
никновение в компьютеры Европейского парламента и Европейской комиссии,
чтобы выкрасть экономические и политические секреты. Персонал комиссии
обнаружил свидетельства того, что администрация США использовала добы-
тую информацию для получения преимуществ по Генеральному соглашению
по тарифам и торговле [4];
- после начала военных действий НАТО на Балканах в 1999 г. последовала
самая серьезная, по сравнению с ранее отмечавшимися, серия программных атак
506
на компьютерные системы министерства обороны США, которое каждый день
обнаруживало от 80 до 100 электронных взломов компьютерных систем. В прове-
денных атаках присутствовали признаки единого замысла и стиля реализации.
Электронная почта министерства обороны США на некоторое время была блоки-
рована макровирусом «Мелисса» и огромным количеством ложных сообщений,
поступавших с Балкан [5].
Важнейшая роль в достижении информационного господства отводится
виртуальной разведке - разведке в информационных потоках, которая в ги-
гантских размерах ведется всеми государственными и частными организация-
ми и лицами. Виртуальная разведка включает три основных источника:
информационно-вычислительные компьютерные сети, средства массовой ин-
формации, непериодические издания, в том числе открытые и так называемые
серые, т. е. не имеющие грифа секретности, но не предназна-ченные для мас-
сового распространения (отчеты о НИР, аналитические справки, деловая пере-
писка, диссертации и т. п.).
Разведка представляет собой целый комплекс взаимосвязанных действий
оперативного и технического характера. Важнейшей технической компонентой
виртуальной разведки является компьютерная.
Компьютерная разведка - это целенаправленная деятельность по добыванию
с помощью средств вычислительной техники и программного обеспечения ин-
формации в сетях и/или в отдельных средствах вычислительной техники, а так-
же активные действия, направленные на нарушение нормального функциониро-
вания информационно-вычислительных систем противника (рис. 11.1).
Разведку делят на добывающую, обрабатывающую и активную. В полевом
уставе США РМ 100-6 приводится иерархия ситуационной осведомленности
(рис. 11.2), представляющая собой пирамиду, в основании которой лежат дан-
ные. На втором уровне находится информация, получаемая путем обработки
данных. Изучение информации приводит к формированию знаний (следующий
уровень осведомленности), а знания посредством суждения способствуют пони-
манию (верхний уровень).
Задача добывающей разведки состоит в получении данных, а обрабатываю-
щей - в преобразовании данных в информацию и приведение ее в форму, удоб-
ную для пользователя. Добывающая разведка бывает предварительной и непо-
средственной. Задача предварительной разведки - получение сведений о самой
автоматизированной системе обработки данных (АСОД) противника. Цель
предварительной разведки - подобрать данные, необходимые для последующего
проникновения в АСОД противника.
Цели предварительной разведки достигаются путем добывания открытых и
закрытых сведений. К открытым можно отнести данные о характере и режиме
работы АСОД объекта разведки; квалификации его персонала; составе и струк-
туре самой АСОД; используемом программном обеспечении; протоколах управ-
ления и взаимодействия; средствах и методах защиты информации, используе-
мых в АСОД. Для получения этих сведений нет необходимости прибегать к
приемам оперативной работы (подкупу персонала, краже документации и т. п.).
Эти сведения, как правило, не являются закрытыми и могут быть получены при
перехвате сетевого графика интересующей АСОД либо при попытке установить
сетевое соединение непосредственно с самой АСОД, когда по характеру полу-
чаемого отклика можно сделать соответствующие выводы.
507
Рис. 11.1. Структурная схема компьютерной разведки
Отбор, сопоставление, логические увязки и обобщение
собранных открытых и закрытых сведений в целях —г
получения закрытой информации I
[ Элементы криптоанализа [- -I
I__________________________________________________________1
Методы уничтожения, изменения, блокирования
информации в АСОД
Методы несанкционированного копирования носителей
и взламывание защиты от НСД к программному продукту
Аппаратные закладочные устройства в АСОД и внедрение
в АСОД объекта аппаратного обеспечения
с незадекларированными возможностями
Разведка ПЭМИН в АСОД
Визуальное и акустическое наблюдение на объекте
вычислительной техники
Передача агентами развединформации через
информационно-вычислительные сети
Провокационная деятельность в информационно-вычисли-
тельных сетях (втягивание и телеконференции и т. д.)
О
&
i
I
!
я
3
03
а
§
Знание способствует пониманию,
ведущему к принятию командирского
решения, т. е. концепции операции
в процессе планирования или
немедленному приказу подчиненным
структурам в ходе операции
Разведка используется для получения
и обработки данных, а также для
преобразования информации в удобную
для пользователя форму в целях
увеличения знания командующего
о ситуации
Рис. 11.2. Иерархия ситуационной осведомленности и роль разведки в ее достижении
Установление первичного контакта с АСОД противника, как правило, не
дает доступа к интересующей информации. Для этого необходимо получить
дополнительные сведения закрытого характера. К таким сведениям относят
пароли, коды доступа, информацию о принятых в АСОД правилах разграниче-
ния доступа, сетевые адреса вычислительных средств противника. Для полу-
чения подобных сведений существуют разнообразные программные средства.
К ним относят, например, программы-демоны, перехватывающие все команды,
вводимые в АСОД. Другим средством являются снифферы - программы, счи-
тывающие первые 128 бит каждого файла, в которых нередко помещается
служебная информация о самом файле и АСОД [6]. Существуют также специ-
альные программы подбора паролей. Успеху подобных программ способству-
ют многочисленные ошибки в современном программном обеспечении, что,
по-видимому, объясняется его сложностью и относительной новизной. Поми-
мо ключей интерес представляет перехват кусков зашифрованного текста с
заранее известным содержанием. Это позволяет выделить из шифрограммы
секретный ключ, который используется для дальнейшего криптоанализа всего
текста. Сведения, собранные об АСОД противника подобным образом, откры-
вают путь к добыванию информации, интересующей заказчика, т. е. к ведению
непосредственной разведки.
На стадии непосредственной разведки, как и на всех остальных, добывают не
только закрытые, но также «серые» и открытые сведения. Роль открытых сведе-
ний в достижении общей ситуационной осведомленности о противнике доста-
точно велика. По мнению некоторых специалистов, от 60 до 80 % всех интере-
сующих заказчика сведений может быть получено из открытых источников, при
этом затраты на их получение составляют 20 % от затрат, которые ушли бы на
получение тех же сведений по закрытым каналам [7]. Ценность разведки откры-
тых источников состоит не только в ее низкой стоимости, но и в оперативности,
широте охвата проблемы, представлении конкурирующих точек зрения, легко-
509
сти для потребителя в обращении с полученной информацией. В вышедшем в
1995 г. в США пособии «Разведывательные ресурсы открытых источников» со-
общается: «возможно, беглый просмотр газетных отчетов о выборах в стране
или статья о природе длительных этнических конфликтов в регионе создадут
более ясное понимание проблемы, чем сверхсекретный доклад, напичканный
деталями о количестве стрелкового оружия, хранящегося в секретном бункере,
или о том, что только 57 из 64 вертолетов находится в состоянии боеготовно-
сти». Там же приводится мнение одного морского офицера: «сведения, получен-
ные вовремя, обладающие точностью 85 %, для меня гораздо полезнее, чем со-
вершенно секретное руководство, которое является слишком большим, слишком
старым, к тому же требует сейфа и трех охранников для перевозки в боевых ус-
ловиях» [7].
Важнейшим достоинством перехвата открытых сведений при ведении ком-
пьютерной разведки является то, что они могут быть получены без нарушения
принятых в АСОД правил разграничения доступа к информации. Сбором и ана-
лизом открытых сведений в сетях официально занимается множество организа-
ций, которые за определенную плату выполняют заказы на поиск той или иной
информации. Любой пользователь сети Интернет может самостоятельно вести
поиск и анализ требуемой информации с помощью известных поисковых серве-
ров, таких как Alta Vista, Rambler и др.
Понимание важности открытых источников, особенно при ведении компью-
терной разведки, нашло свое отражение в создании при разведывательном со-
обществе США офиса по программе открытых источников (Community Open
Source Program Office). В США регулярно проводятся конференции по проблеме
разведки открытых источников, в которых участвуют не только государствен-
ные служащие, но и сотрудники частных информационных служб. Существуют
планы создания «виртуального разведывательного сообщества», объединяющего
все организации США, связанные с обработкой информационных потоков (ра-
зумеется, не только открытых) [7].
При необходимости получения сведений закрытого характера организуется
непосредственная атака на объект с использованием данных предварительной
разведки. Именно эта форма нарушения безопасности информации, связанная с
незаконным проникновением в чужие средства вычислительной техники, нахо-
дится на острие современного информационного противоборства. Здесь скон-
центрированы усилия большинства хакеров, крэкеров и их оппонентов. Методы
взлома и защиты компьютерных сетей в настоящее время развиваются очень
динамично. Регулярно появляются сообщения о разработке мер противодейст-
вия тем или иным способам нарушения безопасности информации, однако арсе-
нал способов нападения также постоянно обновляется. Можно предположить,
что через определенное время установится баланс сил, который позволит обес-
печить приемлемый уровень безопасности информации для всех абонентов ин-
формационно-вычислительных сетей.
Добывание закрытых сведений всегда связано с несанкционированным дос-
тупом к информации противника. Получение закрытых сведений осуществляет-
ся как в самой АСОД объекта, так и в информационно-вычислительных сетях,
внешних по отношению к АСОД.
510
Во внешних сетях перехватываются те сообщения, которые объект разведки
пересылает внешним адресатам, либо, в случае виртуальной сети, те сообщения,
которые циркулируют между отдельными сегментами АСОД.
Можно выделить следующие способы перехвата закрытых сведений во
внешних сетях:
- изменение маршрутизации при пересылке сообщений, позволяющее про-
водить информацию через свой сервер, на котором производится перехват и за-
пись данных;
- чтение электронной почты, которая, как правило, является легкой добычей
на сервере отправителя и сервере получателя [8];
- фальсификация сервера-адресата, в случае успеха позволяющая добыть у
отправителя ту или иную закрытую информацию.
Программное проникновение в АСОД объекта в целях разведки может осуще-
ствляться несколькими способами. Отдельную группу таких способов составляет
проникновение через периферийные несетевые устройства (клавиатуру, дисково-
ды и т. п.). Набор методов проникновения достаточно широк и определяется ква-
лификацией взломщика и степенью совершенства установленных на объекте сис-
тем защиты от несанкционированного доступа. Считается, что абсолютно надеж-
ных систем защиты на сегодняшний день не существует. Например, известны
приемы нарушения нормальной работы криптографических микросхем в систе-
мах разграничения доступа, начиная от нагревания и облучения и кончая приме-
нением моделей стимуляции направленных ошибок, которые позволяют получить
секретные ключи, хранящиеся в памяти микросхем. Принципиальное отличие
проникновения через периферийные несетевые устройства от остальных методов
заключается в том, что необходимо физическое присутствие злоумышленника на
объекте вычислительной техники. Это позволяет защищающейся стороне приме-
нить хорошо отлаженный механизм организационно-технических мер защиты.
Вокруг объекта создается контролируемая территория, на которой не допускается
присутствие посторонних людей; к работам в АСОД допускается ограниченный
круг лиц; ведется тщательный учет и анализ всех производимых в АСОД работ;
учитывают используемые носители информации и т. п.
Наиболее многочисленная и динамично развивающаяся группа способов
программного проникновения в АСОД противника - это проникновение из
внешних сетей. Можно выделить два основных пути: проникновение с исполь-
зованием паролей и идентификаторов, найденных в результате предварительной
разведки, а также поиск ошибок (так называемых люков, черных ходов, лазеек) в
программном обеспечении, используемом в АСОД. Большое количество люков
объясняется прежде всего ошибками и непредусмотрительностью авторов про-
граммного обеспечения. В редких случаях авторы устанавливают люки для об-
легчения отладки программы, а потом забывают их ликвидировать.
Известны ситуации, когда люки оставляются автором программного обеспе-
чения преднамеренно, чтобы создать себе привилегии при дальнейшей эксплуа-
тации программы, а многочисленные хакеры находят эти люки и используют их
в своих целях в том числе для добывания сведений из системы пользователя. В
этом случае речь идет о внедрении в АСОД программного обеспечения с неза-
декларированными возможностями. Вариантов такого внедрения множество.
Некоторые фирмы-производители лицензионного программного обеспечения
511
распространяют свою продукцию, не предупреждая, что она может выполнять
какие-либо особые функции. Как правило, это связано с охраной авторского
права фирмы-изготовителя и защитой от пиратского использования, однако нет
гарантий, что подобные необъявленные функции не используют для съема ин-
формации. Программная продукция с незадекларированными возможностями
может попадать в АСОД объекта и по сетевым каналам. Наиболее распростра-
ненным является использование электронных досок объявлений (BBS) и част-
ных серверов, предлагающих бесплатные версии игр или полезных программ-
ных продуктов (например, архиваторы pkz300b.zip, pkz300.exe). Многие из та-
ких продуктов, называемых «троянскими конями», содержат необъявленные
функции. Возможны варианты, когда сама программа является вполне безобид-
ной, но внедряет в АСОД другую самостоятельную программу, выполняющую,
среди прочих, и разведывательные функции. Такая внедренная программа (на-
пример, та же программа-демон) называется программной закладкой.
Однако недостаточно лишь добраться до жесткого диска противника и скачать
с него несколько гигабайт данных. Необходимо восстановить удаленные файлы
противника, тщательно разобраться в полученных сведениях. Эту функцию вы-
полняет обрабатывающая разведка. Специальные программы позволяют опреде-
лить тип фрагмента когда-то удаленного файла (текстовый, графический, испол-
няемый и т. д.) и восстановить содержавшуюся в нем информацию; сопоставить и
логически увязать имеющиеся файлы; устранить дублирование; отобрать по клю-
чевым словам и ассоциированным понятиям только ту информацию, которая в
данный момент необходима заказчику. Обработке подвергают данные, получен-
ные как в отдельном средстве вычислительной техники, так и в информационно-
вычислительных сетях, при этом сеть представляет дополнительные возможности
обработки. Посредством анализа трафика можно контролировать гигантские по-
токи сведений, производить отбор, накопление и обработку не всех данных под-
ряд, а только тех, которые представляют интерес для конечного потребителя. Для
ведения экспресс-анализа в сети созданы специальные программы, так называе-
мые ноуботы - программные продукты, перемещающиеся от компьютера к ком-
пьютеру с возможностью размножения, которые отслеживают состояние дел и
передают сводную информацию по каналам обмена данными [6]. С помощью
компьютерной разведки можно не только анализировать конкретные данные,
циркулирующие в сети, безотносительно к их источнику, но и отслеживать дея-
тельность конкретных организаций и отдельных лиц.
Особо следует подчеркнуть, что обработке подвергают не только закрытые,
но и открытые сведения. Соответствующий анализ открытых источников позво-
ляет синтезировать информацию закрытого характера. По оценке Э.И. Абалма-
зова изучение 10 000 открытых документов позволяет при некоторых условиях
получить один документ высшей степени секретности [9].
В связи с высокой степенью угрозы безопасности информации, обрабаты-
ваемой в информационно-вычислительных сетях, все большее количество поль-
зователей сети применяют шифрование. По этой причине одной из задач обра-
батывающей компьютерной разведки является проведение элементов крипто-
анализа. Криптоанализ - наука о раскрытии алгоритмов шифрования, подборе
ключей и восстановлении информации из зашифрованного сообщения. По-
скольку в криптоанализе широко используют компьютерные методы обработки
512
информации, отчасти его можно отнести к обрабатывающей технической раз-
ведке. Например, несложные шифры могут быть взломаны компьютером авто-
матически, без участия человека. К качественному скачку в криптоанализе при-
водят современные информационные технологии. Так, если подбор ключа на
отдельном компьютере может занять много лет, то применение специальной
программы, перемещающейся по сети и негласно использующей свободные вы-
числительные ресурсы простаивающих в данный момент ЭВМ, позволяет задей-
ствовать параллельно десятки тысяч компьютеров и сократить время подбора
ключа до считанных недель. В то же время криптоанализ может быть отнесен к
компьютерной разведке лишь условно, поскольку в нем, как и в целом в крипто-
логии, человеческий фактор является принципиально важной составляющей.
При взломе сколько-нибудь серьезных шифров решающую роль играет подго-
товка, интуиция и опыт криптоаналитика.
Компьютерная разведка предполагает не только сбор информации, но и ак-
тивные действия, направленные на нарушение нормального функционирования
вычислительной техники и информационно-вычислительных сетей.
Активная компьютерная разведка решает задачи уничтожения, изменения,
хищения и блокирования информации. Кроме того, для маскировки несанкцио-
нированного доступа может модифицироваться некоторая служебная (второсте-
пенная с точки зрения добывания) информация в операционной системе и сред-
ствах защиты АСОД противника.
В принципе к активной компьютерной разведке можно отнести также визу-
альное и акустическое наблюдение в АСОД объекта; применение аппаратных
закладных устройств в средствах вычислительной техники; внедрение аппа-
ратного обеспечения с незадекларированными возможностями (например, цен-
тральных процессоров с функциями съема информации, заложенными в них
еще на стадии изготовления); разведку побочных электромагнитных излучений
и наводок в средствах электронно-вычислительной техники. Применяемые в
этом случае средства и способы используют и в других разновидностях
технической разведки.
То же самое можно сказать и в отношении специфических приемов исполь-
зования вычислительной техники. Например, в информационно-вычислитель-
ных сетях общего пользования можно встретиться с приемом, известным как
втягивание в телеконференции, когда ставится задача чем-либо заинтересовать
человека - носителя важной информации, вовлечь его в общение и попытаться
«раскрутить» на разглашение определенных сведений. В основу этого приема
положены методы оперативно-разведывательной работы с людьми.
Информационно-вычислительная сеть может также использоваться в качест-
ве канала связи с агентами для передачи соответствующих инструкций и разве-
дывательной информации.
11.2. АСОД и основные способы несанкционированного доступа
Типовая схема АСОД и возможные каналы несанкционированного досту-
па (НСД) к компьютерной информации приведены на рис. 11.3. Вычисли-
тельная система (ВС) содержит пять основных компонентов, привлекатель-
ных при НСД.
513
ЭВМ ШУ ШУ
Рис. 11.3. Состав типовой аппаратуры автоматизированной системы обработки данных:
АЦПУ - автоматизированный центральный пульт управления; НМБ и НМЛ - носители информа-
ции на магнитных барабанах и магнитных лентах соответственно; ШУ - пиша управления; ШП -
пиша питания; ОНИ - отходы носителей информации; ЭМН - электромагнитные наводки на со-
седние цепи.
Возможные каналы несанкционированного доступа', к терминалам и ПЭВМ; к средствам ото-
бражения информации (дисплей, табло); к носителям информации (АЦПУ, НМБ, НМЛ); к сред-
ствам загрузки ПО (НМБ, НМЛ); к информации при ремонте и профилактике аппаратуры (АЦПУ,
НМБ, НМЛ, ЭВМ, системный блок, табло); к внутреннему монтажу аппаратуры (ШУ); к линиям
связи аппаратуры и каналам связи; к информации за счет побочных электромагнитных излучений
(АЦПУ, НМБ, ШУ, НМЛ, ЭВМ, табло, дисплей, принтер); к информации за счет электромагнит-
ных наводок на соседние цепи; к технологическим пультам; к отходам носителей информации
1. Ввод данных. С этой целью используют различные устройства: считыва-
ния информации, удаленные терминалы, накопители на гибких и жестких дис-
ках и т. д. Очень часто НСД начинается с сознательного искажения вводимых
данных или изъятия важных входных документов.
2. Прикладное и системное программное обеспечение (ПО). Следует пом-
нить, что компьютер лишь шаг за шагом выполняет инструкции, заложенные в
его память человеком. Если программа содержит ошибки или измененные коды,
это неизбежно скажется на функционировании всей системы.
3. Центральный процессор осуществляет выбор данных и команд из опера-
ционной системы ЭВМ. Это наиболее важная часть компьютера, поскольку он
является «мозгом» и «нервной системой» ВС.
4. Оконечные устройства содержат важную выходную информацию.
5. Каналы связи. При эксплуатации ВС обмен данными происходит между
ЭВМ и терминалом, или они передаются от одного устройства к другому в обо-
их направлениях. Это процесс легкодоступен для постороннего вмешательства и
является слабым местом с точки зрения безопасности ВС.
Использование указанных каналов позволяет осуществить НСД к компьютер-
ной информации. К основным способам НСД следует отнести: преодоление про-
граммных средств защиты; несанкционированное копирование; перехват инфор-
514
мации в каналах связи; внедрение программных закладок и компьютерных виру-
сов; использование аппаратных закладок; перехват побочных электромагнитных
излучений и наводок (ПЭМИН), а также некоторые другие [10].
Естественно, что такое деление является в значительной степени условным
(как, впрочем, и любая классификация), так как практически каждый из приве-
денных способов может в определенных случаях выступать составной частью
любого из перечисленных.
Но все же под преодолением программных средств защиты обычно понимают
применение разных методов «взлома», использующих слабые места систем.
Несанкционированное копирование информации подразумевает копирование
с дискет и жестких дисков, к которым возможен случайный или подготовленный
доступ. Иногда копирование с жесткого диска применяют как способ обхода
систем защиты, не использующих кодирование хранящейся информации. С этой
целью вскрывают системный блок, извлекают жесткий диск, который подклю-
чают к другому компьютеру, например через scasy-адаптер. После чего перепи-
сывают всю необходимую информацию и жесткий диск возвращают на место.
Особо следует отметить возможность копирования файлов, удаленных за-
конным пользователем. При удалении уничтожается не файл, а только его имя
из таблицы размещения, содержание же остается на диске и затирается по мере
осуществления новых записей. Для поиска и восстановления незатертых файлов
можно пользоваться специальными утилитами Norton Utilities, QU или UnErase
Wizard, которые есть практически на любом загрузочном компакт-диске. Такие
утилиты позволяют осуществлять поиск и восстановление файлов по имени,
времени удаления и по ключевым словам. После восстановления файл может
быть скопирован на дискету, но затем должен быть вновь удален в целях скры-
тия факта восстановления.
Необходимо отметить, что некоторые компьютерные системы защиты ин-
формации предусматривают гарантированное удаление файлов, например, пу-
тем трехкратной записи единиц на освободившееся место. Таким свойством об-
ладает программно-аппаратная система Dallas Lock 3.1. Восстановление и копи-
рование файлов становится невозможным.
Способы перехвата информации в каналах связи аналогичны рассмотренным
ранее. Перехват возможен не только в проводных, но и в радиоканалах, так как
из-за быстрого внедрения систем мобильной связи можно использовать радио-
модемы.
Использование программных закладок позволяет решать задачи как перехва-
та конфиденциальной информации с копированием ее в заранее обусловленное
место, так и взлома систем защиты, например для перехвата паролей. Про-
граммные закладки обычно маскируют внутри других программных продуктов.
По принципу действия они попадают в разряд программ, известных как «троян-
ский конь».
В операционную систему они обычно внедряются в результате целенаправ-
ленно проведенной операции, после чего сами становятся частью защищенной
компьютерной системы и совершают действия, ради которых и были созданы.
Внедрение компьютерных вирусов близко к применению программных за-
кладок, отличие в том, что цель внедрения - модификация и уничтожение ин-
формации в системах конкурентов.
515
Аппаратные закладки - это специальные микросхемы, выполняющие те же
функции, что и программные закладки либо радиозакладные устройства, анало-
гичные описанным ранее. Они могут перехватывать информацию, например с
клавиатуры или видеокарты, либо фиксировать аудиоинформацию (переговоры
операторов), а затем передавать ее по радиоканалу в пункт приема. Известны и
радиозакладки, которые активизируют компьютерные вирусы по команде, пере-
даваемой с пульта дистанционного управления.
Кроме того, перехват аудио- и видеоинформации может осуществляться с по-
мощью технических средств, размещенных в том же помещении, что и компьютер.
Проблеме перехвата побочных электромагнитных излучений и наводок
(ПЭМИН) в современной литературе уделяется большое внимание ввиду важно-
сти этого технического канала утечки информации. Здесь мы только отметим,
что наиболее сильные электромагнитные излучения образуются от сигналов с
выхода видеокарты системного блока, для которых антенной служит кабель,
идущий к монитору. Для перехвата этой информации достаточно иметь прием-
ное устройство, работающее в диапазоне частот 50...500 МГц, специальный блок
согласования и портативный компьютер типа notebook. Дальность перехвата
информации таким комплексом составляет 100...150 м.
Наиболее специфичным способом получения конфиденциальной информа-
ции с компьютерных систем является преодоление программных средств защи-
ты и как его разновидность - преодоление систем парольной защиты. Рассмот-
рим их подробнее.
11.2.1. Преодоление программных средств защиты
В настоящее время известно огромное количество хакерских разработок,
предназначенных для преодоления программных средств защиты. Они обладают
разной эффективностью, но позволяют в той или иной степени решать задачи,
ради которых созданы.
Одни из таких программ предназначены для перехвата сообщений и полно-
мочий по доступу к ресурсам сети посредством незаконного подключения к ка-
налу связи, другие - для преодоления системы защиты персонального компью-
тера или корпоративной сети другим зарегистрированным пользователем.
Перехват с незаконным подключением к каналу связи может осуществляться
множеством способов, наиболее известны из которых:
- работа в сети в промежутки времени, когда законный пользователь остав-
ляет канал в активном режиме, отвлекаясь на другие задачи;
- работа параллельно зарегистрированному пользователю, но в моменты, ко-
гда нет непосредственного обмена информацией, в режиме «между строк» (ана-
логичен предыдущему способу, но более сложен в реализации);
- работа по завершении сеанса зарегистрированным пользователем за счет
перехвата сигнала об окончании.
Для преодоления систем защиты под видом зарегистрированного пользова-
теля хакеры часто применяют следующие методы:
- перебор возможных паролей, которые часто тривиальны и берутся из ру-
ководства по пользованию компьютером;
- поиск слабых мест (брешей), связанных с неудачным алгоритмом функ-
ционирования систем защиты или наличием программных ошибок;
516
- иногда брешь маскируется двумя-тремя дополнительными командами в
целях создания так называемого люка, который открывается при необходимости
(данный способ требует очень высокого профессионального уровня и готовится,
как правило, на этапе проектирования системы защиты);
- использование программ, имитирующих аварийные сбои и анализирую-
щих адекватность реакции системы.
Однако существует большое число программных продуктов, созданных со-
вершенно для иных целей, но которые могут быть использованы для преодоления
систем защиты, размещенных на жестких дисках. К ним, например, относятся
Norton Utilities, Miced Utilities, PC Tools, PS Shell, Hard Disk Manager и некоторые
другие, которые в интерактивном или автоматическом режимах используют ко-
манды считывания и записи секторов по абсолютным адресам на диске.
Также существуют разработки, которые позволяют создавать программное
обеспечение, способное выполнять просмотр и отладку программных продуктов
в режиме дисассемблера, а также просмотр и редактирование оперативной памя-
ти персональной ЭВМ. К таким программам относятся трансляторы с языков
низкого уровня (TASM и MASM), трансляторы с языков высокого уровня (MSC,
Turbo С, Turbo Pascal и др.), программы-отладчики The IBM Personal Computer
Fulscreen Debug (FSD), Advanced Fulscreen Debug (AFD) и Turbo Debugger, a
также работающие с оперативной памятью (Debug, Peck, Poke Resident) и др.
11.2.2. Преодоление парольной защиты
Один из наиболее распространенных способов разграничения доступа к ре-
сурсам вычислительных систем - введение паролей. В целом это достаточно на-
дежный способ защиты, однако необходимо представлять его возможности и ос-
новные способы преодоления, чтобы уберечься от неприятных последствий.
Так, в любом персональном компьютере можно условно выделить три вида
паролей:
- хранящиеся в CMOS-памяти;
- операционной системы;
- аутентификации пользователей в специально установленной системе защиты.
Рассмотрим способы преодоления каждого вида в отдельности [10].
Снятие паролей, хранящихся в CMOS-памяти. CMOS - аббревиатура анг-
лийских слов complementary metal oxide semiconductor, т. e. в качестве названия
вида памяти взято просто наименование материала, из которого изготовлена со-
ответствующая микросхема. В ней записывается вся необходимая информация
для загрузки компьютера, в том числе и пароли. Еще их называют паролями
BIOS по названию микросхем, контролирующих операции ввода-вывода.
Доступ к установкам CMOS осуществляется нажатием во время теста памяти
(при загрузке компьютера) одной из следующих комбинаций клавиш:
Del;
Esc;
Ctrl + Alt + Enter;
Ctrl + Alt + Esc.
При этом на экран выводится меню установок CMOS, среди которых при-
сутствуют два раздела:
517
SUPERVISOR PASSWORD (пароль диспетчера);
USER PASSWORD (пароль пользователя).
Владелец первого пароля может осуществлять как загрузку операционной сис-
темы, так и изменение опций в меню Установки BIOS; человек, знакомый только со
вторым паролем, может осуществлять загрузку операционной системы и входить в
меню Установки BIOS для изменения раздела USER PASSWORD.
Однако надежность такой парольной защиты кажущаяся. Существуют как
минимум два довольно простых метода ее преодоления.
Первый основан на том, что CMOS-память не может работать без питания от
батарейки, установленной внутри системного блока. Таким образом, если, от-
ключив от сети компьютер и вскрыв системный блок, извлечь батарейку, то в
памяти исчезнет информация о типе жестких дисков, числе и емкости флоппи-
дисков, размере оперативной памяти и т. д., в том числе информация о храня-
щихся паролях. Положение батарейки CMOS может быть разным, но найти ее
несложно по характерному внешнему виду: плоская маленькая в виде таблетки
либо кассеты из нескольких пальчиковых батареек.
После извлечения батарейку можно тут же вставить на место - память очи-
щена. Затем необходимо закрыть системный блок и включить компьютер. На
этапе тестирования памяти (при загрузке) следует войти в меню Установки
BIOS и восстановить установки CMOS, естественно, за исключением паролей,
иначе в ходе загрузки система выдаст на экран следующее сообщение:
Invalid System Setting - Run Setup (Неправильная системная установка - вы-
полните установку).
Чтобы выполнить эту процедуру, надо либо заранее выяснить все необходи-
мые сведения об установках, либо просто иметь определенные знания и опыт в
данной области.
Второй способ в принципе повторяет первый и специально предусмотрен
конструкторами на случай забывания пароля. Его применение даже описано в
руководстве пользователя.
Так, например, на системной (материнской) плате компьютера Pentium уста-
новлена специальная перемычка JP9 (рис. 11.4), предназначенная для очистки
CMOS. Нормальное положение перемычки соответствует замыканию контактов
1-2 (табл. 11.1)
Таблица 11.1
Значения положений JP9: перемычка сброса CMOS
Режим работы компьютера Номера замкнутых контактов
Нормальный 1-2
Очистка CMOS 2-3
Если необходимо снять неизвестный или забытый пароль, перемычка пере-
ставляется в положение 2-3.
После завершения очистки CMOS-памяти необходимо осуществить на-
стройку BIOS Setup (Установок BIOS) так же, как и в первом случае. Пример
взят для платы ТХ1 PHOENIX.
Преодоление паролей операционной системы. Разные операционные систе-
мы имеют разную стойкость к несанкционированному доступу.
518
Рис. 11.4. Расположение переключателя JP9 (очистки CMOS-
памяти) на системной плате компьютера Pentium
Одной из наиболее защищенных операционных систем по праву считается
Windows NT, обладающая уровнем зашиты С2, a Windows 95 из возможных
средств защиты предлагает только введение пользовательских паролей и шиф-
рование таблицы паролей. Однако эти пароли вообще не могут рассматриваться
как серьезное средство разграничения доступа. Дело в том, что их основное на-
значение - это обеспечение индивидуальной настройки рабочего стола для соз-
дания максимальных удобств пользователям при работе: зарегистрировался под
своим паролем - получил свои настройки.
Проблема заключается в том, что пользователи, которые имеют доступ к
средствам редактирования реестра, например к опции Password (пароли) из Con-
trol Panel (панели управления), легко могут отключить эту систему безопасно-
сти, блокировав применение пользовательских профилей.
Перехват паролей. Реальную защиту информации, хранящейся в компью-
терной системе, могут дать лишь специально разработанные программные и ап-
паратные способы защиты, так как преодолеть их могут только специалисты,
хорошо знающие атакуемую операционную систему, способы построения со-
временных систем защиты и методы взлома. Описывать эти методы не позволя-
ют ни этические соображения, ни цель книги, ни объем настоящей главы.
Однако многие, в том числе и хорошие системы ограничения доступа, ис-
пользуют пароли как средство аутентификации пользователей. Показать слабые
места парольной защиты и возможные способы раскрытия паролей - значит,
уберечь вас от возможных ошибок при выборе системы защиты.
519
Парольная защита - отнюдь не синоним понятия «плохая защита». Однако
она имеет как минимум две слабые стороны.
Первая связана с тем, что пароли, по которым осуществляется аутентифика-
ция пользователей, должны где-то храниться. Обычно это таблица паролей, вхо-
дящая в состав программного обеспечения операционной системы или системы
защиты. Следовательно, любой достаточно хорошо подготовленный пользова-
тель тем или иным способом может проникнуть в соответствующий файл, ско-
пировать или изменить его.
Учитывая данное обстоятельство, выбираемая вами система защиты должна
предусматривать кодирование таблицы паролей, что нивелирует ценность по-
пытки проникновения в таблицу.
Вторая связана с возможностью тайного внедрения программной закладки в
компьютерную систему, позволяющей злоумышленнику осуществлять несанк-
ционированный доступ к информационным ресурсам. Перехватчики паролей -
один из наиболее распространенных видов программных закладок. Они пере-
хватывают пароли, применяемые для регистрации пользователей операционной
системы, а также для определения их легальных полномочий и прав доступа к
компьютерным ресурсам.
Перехватчики - отнюдь не новое явление. В свое время они успешно разра-
батывались для OS/370, UNIX и DOS. Принцип действия у них достаточно тра-
диционен и заключается в фиксации пароля на этапе регистрации пользователя.
Далее пароль записывается в специальный файл, из которого может быть легко
извлечен. Различия между перехватчиками заключаются только в способах, ко-
торые применяются ими для получения пользовательских паролей.
Различают три типа перехватчиков паролей: имитаторы системы регистра-
ции, фильтры и заместители.
Программы-имитаторы системы регистрации достаточно легко реализуе-
мы и функционируют по следующему алгоритму.
Имитатор первым реагирует на желание пользователя зарегистрироваться и
предлагает ему ввести пароль. После того как пользователь идентифицирует се-
бя (введет кодовую комбинацию), программная закладка скопирует пароль в
специальный файл и далее инициирует выход из системы. В результате перед
глазами пользователя появится еще одно, но уже настоящее регистрационное
приглашение для входа в систему.
Обманутый пользователь, видя, что ему предлагают еще раз ввести пароль,
приходит к выводу, что допустил ошибку и повторяет всю процедуру ввода. Для
того чтобы притупить бдительность пользователя, на экран монитора может вы-
водиться соответствующее сообщение, например:
Неверный пароль! Попробуйте еще раз!
Такой тип перехватчика паролей обладает одним очень существенным не-
достатком - сообщение об ошибке возникает при каждой регистрации, что не
может не насторожить даже самого неискушенного пользователя. Более со-
вершенный тип закладки-имитатора может сам сообщать системе пароль без
вывода повторного приглашения. Выявить такую закладку можно только по
косвенным признакам.
520
Принцип действия программ-фильтров заключается в перехвате всей инфор-
мации, вводимой с клавиатуры компьютера, и анализе ее (фильтрации) в целях
выявления отношения к пользовательским паролям.
Известны несколько фильтров, созданных специально для различных версий
операционной системы DOS, Windows 3.11, Windows 95. По оценкам специали-
стов, это один из наиболее легко реализуемых видов программных закладок-
перехватчиков паролей. Дело в том, что в операционных системах Windows 3.11
и Windows 95 предусмотрен специальный программный механизм, с помощью
которого решается ряд задач, связанных с получением доступа к клавиатурному
вводу. Например, задача поддержки национальных раскладок клавиатур. Таким
образом, любой русификатор - это фильтр, призванный перехватывать все дан-
ные, вводимые пользователем с клавиатуры. Небольшая доработка позволяет
наделить этот фильтр дополнительной функцией - перехвата пароля. Задача об-
легчается еще и тем, что во многих учебных пособиях по Windows имеются ис-
ходные тексты программ-русификаторов.
В ряде случаев проблема сводится лишь к способу внедрения видоизменен-
ного текста русификатора вместе с подлинным. Если она успешно решена, то
вся информация с клавиатуры будет проходить через фильтр и проверяться на
принадлежность к паролям.
Заместители - программные модули, которые полностью или частично за-
меняют истинные, отвечающие в системе защиты за аутентификацию пользова-
телей. Существенным достоинством заместителей является возможность работы
в среде практически любой многопользовательской системы.
Недостаток - сложность создания и внедрения. По трудоемкости они опере-
жают имитаторы и фильтры, что делает применение этого типа перехватчиков
паролей практически маловероятным.
Получить пароли и другие идентифицирующие шифры можно:
- приобретением (подкуп персонала) списка пользователей со всей
необходимой информацией;
- обнаружением такого документа в организациях, где не налажен достаточ-
ный контроль за хранением;
- прослушиванием через телефонные линии.
Иногда случается, что пользователь с удаленного терминала подключается
к чужой системе будучи абсолютно уверенным, что работает с нужной.
Владелец системы, к которой произошло фактическое подключение, формируя
правдоподобные отклики, может поддерживать это заблуждение в течение
определенного времени, достаточного для получения соответствующей
информации, в частности паролей и кодов.
11.2.3. Использование программных закладок и компьютерных вирусов
Созданием программной закладки или вируса не завершается задача, постав-
ленная при их написании. Не менее сложно, внедрить программный продукт.
О важности и сложности этого свидетельствует тот факт, что внедрением зани-
маются даже государственные структуры некоторых стран. Такой «государст-
венный» подход не оставляет сомнений, что самые новейшие достижения в об-
ласти «имплантации» уже в скором времени станут достоянием разведыватель-
ных структур.
521
На сегодняшний день можно выделить три основные группы способов вне-
дрения программных закладок и компьютерных вирусов:
- на этапе создания аппаратуры и программного обеспечения;
- через системы информационного обмена;
- силовым или ВЧ-навязыванием.
Наиболее просто ввести вирус на этапе создания элементов компьютерных
систем. Современные программные продукты содержат примерно до полумил-
лиона строк, никто лучше авторов-программистов их не знает и проверить эффек-
тивно не может. Поэтому создатели программного обеспечения являются потен-
циальными объектами повышенного интереса определенных служб и компаний.
Однако более перспективным направлением, по сравнению с вербовкой програм-
мистов, эксперты считают инфицирование (модификацию) систем искусственного
интеллекта, помогающих создавать это программное обеспечение.
Другим направлением внедрения является использование систем информа-
ционного обмена. Здесь существует два способа - непосредственное и косвенное
подключение.
Непосредственное подключение (front door coupling) бывает прямое и не-
прямое.
Прямое заключается в повторяющейся трансляции вирусного сигнала или про-
граммной закладки в период приема конкурентом предназначенной ему полезной
информации. При этом можно рассчитывать, что в какой-то момент времени сме-
шанный с основной информацией указанный программный продукт попадет в сис-
тему. Недостаток такого способа - необходимость знания используемых алгорит-
мов шифрования и ключей при передаче в канале закрытой информации.
Более предпочтительным считается использование непрямого подключения.
Проникновение в информационную систему в этом случае происходит в самом
незащищенном месте, откуда вирус или программная закладка могут добраться
до назначенного узла. Благодаря широкому внедрению глобальных сетей такие
места всегда могут быть найдены.
Косвенное подключение (back-door) осуществляется рядом способов: от воз-
действия на систему через неосновные элементы (например, через цепи элек-
тропитания) до умышленной передачи конкуренту инфицированной техники
или программных продуктов.
Перспективным направлением внедрения программных закладок или виру-
сов в информационные системы представляется также использование методов
силового или ВЧ-навязывания, аналогичных рассмотренным.
Разработкой соответствующих средств, по сообщениям зарубежной печати,
занимается целый ряд компаний, например, Defense Advanced Reasearch Project
Agency (США), Toshiba (Япония) и др. Ожидается, что благодаря их усилиям
уже через пять лет окажется возможным внедрение программных продуктов
именно таким способом.
В наиболее простом виде процесс ВЧ-навязывания закладок и вирусов выгля-
дит примерно так. Мощное высокочастотное излучение, промодулированное ин-
формационным сигналом, облучает объект электронно-вычислительной техники.
В цепях компьютера или линии связи наводятся соответствующие напряжения и
токи, которые определенным образом детектируются на полупроводниковых эле-
ментах схемы вычислительного средства. В результате вирус или закладка оказы-
ваются внедренными в компьютер.
522
Далее, по заранее намеченной программе они осуществляют сбор, первич-
ную обработку данных и передачу их в заданный адрес по сети либо уничтоже-
ние или модификацию определенной информации.
Наиболее узким местом такого способа внедрения является подбор мощно-
сти, частоты, вида модуляции и других параметров зондирующего сигнала в ка-
ждом конкретном случае.
Характерным примером программной закладки может служить «троянский
конь» или «логическая бомба», которые срабатывают при выполнении определен-
ных условий и частично или полностью выводят из строя компьютерную систему.
Использование «троянского коня» состоит в тайном введении в чужую про-
грамму таких команд, которые позволяют осуществлять не планировавшиеся вла-
дельцем функции, но одновременно сохранять и прежнюю работоспособность.
Компьютерные программные тексты чрезвычайно сложны. Они состоят из
сотен, тысяч, а иногда и миллионов команд. Поэтому «троянский конь» из не-
скольких десятков команд вряд ли будет обнаружен, если на этот счет нет по-
дозрений. Но и в последнем случае экспертам-программистам потребуется мно-
го времени, чтобы обнаружить его.
Есть еще одна разновидность «троянского коня». Его особенность состоит в
том, что в безобидный на вид кусок программы вставляют не команды, выпол-
няющие «грязную работу», а формирующие их и после выполнения уничто-
жающие. В этом случае программисту, пытающемуся обнаружить «троянского
коня», необходимо искать не его самого, а команды, его формирующие. Разви-
вая эту идею, можно представить себе команды, которые создают команды и т.
д. (сколь угодное число раз), оставляющие «троянского коня».
Компьютерный вирус - это небольшая программа, обладающая способно-
стью саморазмножения (добавлением своей точной или несколько видоизменен-
ной копии к другим программам, документам, системной области диска, загру-
зочному сектору или оперативной памяти), а также выполняющая без ведома
пользователя различные действия, обычно нежелательные. При этом копии со-
храняют способность дальнейшего распространения.
На сегодняшний день в мире известно более 40 000 вирусов. Однако реаль-
ную угрозу представляют лишь около 500 из них, свободно распространяющих-
ся между компьютерами.
По деструктивным возможностям вирусы можно разделить на следующие:
1) базовые, т. е. никак не влияющие на работу компьютера (кроме уменьше-
ния свободной памяти на диске в результате своего распространения);
2) неопасные, влияние которых ограничивается уменьшением свободной па-
мяти на диске графическими и другими эффектами;
3) опасные, приводящие к серьезным ошибкам и сбоям в работе;
4) очень опасные, вызывающие потерю программ, уничтожение данных, не-
обходимой для работы компьютера информации, записанной в системных об-
ластях памяти.
Безвредные вирусы, как правило, производят различные визуальные или
звуковые эффекты. Диапазон проявления безвредных вирусов очень широк -
от простейшего стирания содержимого экрана до сложных эффектов перевора-
чивания изображения, создания иллюзии вращения или опадания (например,
вирус Cascade-1701).
523
Выполняемые вредными вирусами деструктивные функции тоже чрезвычай-
но разнообразны. В процессе распространения отдельные вирусы повреждают
или искажают некоторые выполняемые программы, дописывая в начало унич-
тожаемой программы некий код без сохранения исходной последовательности
байт. Некоторые вирусы при определенных условиях выполняют форматирова-
ние диска, точнее его нулевой дорожки, тем самым уничтожая важную инфор-
мацию о хранящихся на диске файлах. Другие через определенные (как правило,
случайные) промежутки времени перезагружают компьютер, приводя к потере
несохраненных данных. В последнее время появилось огромное количество ви-
русов, направленных на борьбу с антивирусными программами. Некоторые из
них при просмотре каталогов ищут программы, в именах которых имеются
фрагменты, характерные для антивирусных программ (ANTI, AIDS, SCAN), и
при обнаружении таковых пытаются нанести им какой-либо вред: стереть с дис-
ка, изменить код в массиве программы и др.
По структуре все вирусы могут быть разделены на две разновидности, обна-
ружение которых отличается по сложности: вульгарный и раздробленный вирусы.
Программа вульгарного вируса записывается единым блоком, и при возникнове-
нии подозрений в заражении ЭВМ эксперты могут обнаружить ее в самом начале
эпидемии (размножения). Эта операция требует, однако, крайне тщательного ана-
лиза всей операционной системы ЭВМ. Программа раздробленного вируса разде-
лена на части, на первый взгляд не имеющие между собой связи. Эти части со-
держат инструкции, которые указывают компьютеру, как собрать их воедино,
чтобы воссоздать и, следовательно, размножить вирус. Таким образом, вирус поч-
ти все время находится в распределенном состоянии, лишь на короткое время ра-
боты собираясь в единое целое. Как правило, создатели вируса указывают число
репродукций, после достижения которого он становится агрессивным.
Отдельно следует упомянуть о маскирующихся - stealth-вирусах и вирусах-
мутантах.
Stealth-вирусы нельзя обнаружить, просто просматривая файлы на диске.
Авторы этих вирусов применяют весьма разнообразные способы маскировки.
Просматривая файл, зараженный вирусом, в текстовом редакторе, вы не обна-
ружите и намека на заражение - вирус определяет, что вы просматриваете файл,
и удаляет себя из него. Закрываете файл - вирус опять на месте.
Вирусы-мутанты содержат в себе алгоритмы шифровки-расшифровки. Вне-
дряя свою копию в программу, такой вирус шифрует свой программный код,
поэтому вирус, заразивший два разных файла, не имеет ни одного повторяюще-
гося участка кода.
Варианты вирусов зависят от целей, преследуемых их создателем. Признаки
их могут быть относительно доброкачественными, например, замедление вы-
полнения программ или появление светящейся точки на экране дисплея (так на-
зываемый итальянский попрыгунчик). Признаки могут эволюционировать, тогда
«болезнь» будет обостряться по мере течения. Так, по непонятным причинам
программы начинают переполнять магнитные диски, в результате чего сущест-
венно увеличивается объем программных файлов. Наконец, эти проявления мо-
гут быть катастрофическими и привести к стиранию файлов и уничтожению
программного обеспечения.
524
По-видимому, в будущем будут появляться принципиально новые виды ви-
русов. Например, можно представить своего рода «троянского коня» в элек-
тронных цепях. В сущности, речь может идти не только о заражении компьюте-
ров, но и микросхем. Ведь они становятся все более мощными и превращаются в
подобие ЭВМ. И их необходимо программировать. Конечно, ничто не может
непосредственно «заразить» микросхему. Но ведь можно заразить компьютер,
используемый как программатор для тысячи микросхем.
К сожалению, при распространении вирусов часто отсутствуют какие-либо
очевидные симптомы. Проникая в операционную систему на рабочей станции,
вирус может выполнить любые инструкции, выбранные его создателем. Эти ин-
струкции могут предусматривать активизацию вируса после какого-либо собы-
тия (например, после определенного количества выполнений); в соответствии с
определенным временем (по наступлении определенной даты, например, в пят-
ницу 13-го числа или 1-го апреля) или в любое произвольное время.
Способы распространения компьютерного вируса основываются на способно-
сти использовать любой носитель данных в качестве средства передвижения. Все-
гда существует опасность, что ЭВМ создает большое число средств передвижения
(дискет, CD и DVD-дисков, флешей) и в считанные часы заразит огромное число
компьютеров. Удобными для распространения обширных эпидемий оказываются
телекоммуникационные сети. Достаточно одного соединения, чтобы персональ-
ный компьютер был заражен или заразил тот, с которым контактировал. Однако
самый частый способ заражения - это копирование программ, что является обыч-
ной практикой у пользователей персональных ЭВМ.
Специалисты предостерегают от копирования ворованных программ. Однако
и официально поставляемые программы могут служить источником заражения.
В печати часто проводится параллель между компьютерным вирусом и вирусом
AIDS. Только упорядоченная жизнь с одним или несколькими партнерами спо-
собна уберечь от этого вируса. Беспорядочные связи со многими компьютерами
почти наверняка приводят к заражению.
12. ИЗМЕРИТЕЛЬНО-СИГНАТУРНАЯ РАЗВЕДКА
Обстоятельства, связанные с трагической гибелью атомной подводной лодки
«Курск» выявили новое направление в американской технической разведке -
МАСИНТ (MASINT - Measurement And Signature INTelligence) [1]. США при-
бегли к нему при наблюдении за АПЛ «Курск» в ходе учений Северного флота
ВМФ РФ. Собственно объектом наблюдения была не сама АПЛ, а последняя
версия качественно новой торпеды «Шквал», носителями которой являются
АПЛ типа «Курск».
Разведывательная система МАСИНТ является многонаправленной - наибо-
лее информативным направлением технической разведки. Она позволяет полнее
реализовать важнейший принцип комплексности ведения технической разведки.
В соответствии с опубликованными документами идеология и цели этого
направления технической разведки формулируются следующим образом: «из-
мерительно-сигнатурная разведка ведется в интересах обеспечения успеха воен-
ных операций вооруженных сил США, создания новых поколений вооружения и
военной техники, определения направлений модернизации вооруженных сил,
контроля за распространением оружия, окружающей средой, а также выполне-
нием военных договоров» [1].
Сущность разведки МАСИНТ заключается в комплексном характере сбора
разведывательной информации: во-первых, измерение геометрических размеров
и соотношений статических, динамических и других физических характеристик
разведуемых объектов (стационарных и подвижных) и, во-вторых, регистрация
сигнатур характерных физических полей, создаваемых этими объектами (элек-
тромагнитных, магнитных, радиационных, акустических, сейсмических и дру-
гих), а также выявление химических и биологических агентов и даже состава
конструкционных материалов объектов и их элементов.
Используются все существующие датчики: оптические, радиолокационные,
лазерные, радиочастотные, акустические, сейсмические, радиационные, химиче-
ские, оптико-электронной и радиолокационной съемки с перекрытием практиче-
ски всего спектра электромагнитных колебаний.
Следует иметь в виду, что физические измерения и снятие сигнатур не явля-
ются самоцелью разведки МАСИНТ. Главное в ней выявление назначения, так-
тики применения, возможностей и основных характеристик, а также уязвимых
мест разведываемого объекта.
Например, разработана корабельная тактическая лазерная установка ПВО.
Измерительно-сигнатурная разведка должна будет прежде всего вскрыть, что
это - лазерное оружие, далее тип лазера и вид накачки, длину волны и режимы
излучения, мощность и ширину расходимости луча, скорострельность, способ
коррекции волнового фронта в атмосфере, ширину спектра обзора в пространст-
ве и скорость сканирования, принцип поиска целей и наведения, уязвимость
526
разных категорий воздушных целей, источники питания, архитектуру и функ-
циональное построение. Указанные параметры должны быть вскрыты до приня-
тия установки на вооружение.
Очень важная роль в системе МАСИНТ отводится области разведки новых
баллистических ракет стратегического назначения, особенно на этапах испыта-
тельных пусков. Разведка ракет нацеливается на вскрытие: дальности пуска, ви-
да траектории, возможности ее изменения, количества ракетных ступеней и ти-
пов двигателей, количества, мощности и типов головных частей, точности их
доставки к целям, методов и средств преодоления ПРО, радиолокационных и
оптических сигнатур в различных диапазонах волн на активном, среднем и ко-
нечных участках траектории полета, способов и мер обеспечения скрытности
базирования и применения, временных нормативов подготовки пуска, наличия
средств радиосвязи, по которым можно вести разведку огневой позиции ракеты.
Для решения указанных задач необходимы две категории средств:
- контроль пусков на начальном (активном) и среднем участках траектории
полета ракет;
- контроль на среднем участке (до формирования боевых порядков выводимых
ракетой блоков) и конечном участке (вход в плотные слои атмосферы) полета.
Первая категория объединяет наземные радиолокационные и средства радио-
и радиотехнической разведки внешнетраекторных измерений и перехвата ра-
диотелеметрии; спутниковые системы контроля пусков по излучениям факелов
ракет, а также средства перехвата сигналов команд и телеметрии; загоризонтных
РЛС наклонно-возвратного зондирования KB-диапазона. Сразу следует отме-
тить, что как в первой, так и во второй категории большую роль играют средства
космической разведки.
Во второй категории средств наземного, морского и воздушного базирования,
развертываемых в районах падения головных частей МБР, сосредоточиваются и
действуют системы космического траекторного наблюдения в радио-, инфракрас-
ном и видимом диапазонах. Послеполетный анализ записанных данных в указан-
ных диапазонах позволяет провести оценку многих характеристик испытываемой
ракеты. По цветности ореола при входе головной части в плотные слои атмосфе-
ры определяют материал оболочки боеголовки, а также наличие головок глубоко-
го проникновения с титановым корпусом для поражения заглубленных целей. По
результатам сопровождения вскрывается скорость боеголовки и возможность ма-
неврирования при преодолении системы ПРО. Степень стабилизации головок на
траектории и их точность оценивают по отношению значений скоростей полета и
вращения. Сопровождение фрагментов ракеты, окружающих боеголовку, позво-
ляет охарактеризовать существующий технологический уровень ракетного произ-
водства. Чем больше разведуемых диапазонов и шире их частотная полоса, тем
больше информации можно получить об объекте.
Система МАСИНТ использует супертехнологии в следующих областях.
В оптическом диапазоне вместо традиционной монохроматической и даже
двух- и трехдиапазонной съемки используется многозональная (от 19 до 300
диапазонов) аэрокосмическая съемка от ультрафиолетового до дальнего инфра-
красного диапазонов длин волн. В этом случае можно получить не только чет-
кий пространственно-видовой портрет изучаемого объекта, но и выявить его до-
полнительные скрытые признаки даже в условиях маскировки объекта.
527
В области средств радио- и радиотехнического наблюдения осваиваются вы-
сокочастотные фильтры на материалах низкотемпературной (температура жидко-
го азота) сверхпроводимости. Наборы подобных сверхузкополосных фильтров,
подключенных к выходу антенны, могут выделить строго заданные сигналы не-
преднамеренного излучения из спектра местных сильных мешающих излучений, а
также позволяют перехватывать такие сигналы на дальностях, в несколько раз
превышающих действие обычных приемников радио- и радиотехнической раз-
ведки, за пределами прямой видимости цели. Создаются сверхширокополосные
датчики, работающие в полосе частот 10 Мгц...10 ГГц и обнаруживающие не-
преднамеренное излучение не только радиотехнических средств, но и систем за-
жигания двигателей внутреннего сгорания, работающих электродвигателей, элек-
трогенераторов и т. д. С их помощью обнаруживается и классифицируется боль-
шинство видов военной техники, включая оружие направленной энергии.
Для разведки химического и биологического оружия разрабатывают и исполь-
зуют десятки разнообразных активных и пассивных устройств. Среди активных
большое распространение получили лазерные системы - лидары, осуществляю-
щие дистанционное зондирование лазерным лучом атомов и молекул загрязняю-
щих примесей с выделением их строго индивидуальных спектральных линий
дифференциального поглощения, фиксируемых оптическим измерительным при-
емником.
К пассивным детекторам дистанционного контроля относят спектроанализа-
торы со сложной обработкой сигналов, датчик на приборах ПАВ (поверхност-
ной акустической волны) с использованием волоконной оптики, спектрометры,
устройства измерения подвижности ионов, а также другие датчики химической
и биологической разведки.
Современные наземные необслуживаемые датчики, снабженные миниатюр-
ными средствами цифровой обработки принимаемых сигналов, радиосвязи и
определения собственного местоположения по космической радионавигацион-
ной системе «Навстар», объединяют в одну сеть с каналом дальней передачи
данных разведки.
Сеть обладает возможностью автоматического обнаружения, оценки теку-
щих координат и распознавания таких целей, как ракеты «Скад», ЗРК, мобиль-
ные командные пункты. В алгоритмы распознавания транспортных машин за-
кладывают тип двигателя и трансмиссии, количество осей колесной системы,
схемы размещения выхлопа отработанных газов, массу транспортного средства
и ее распределение.
Разработана и осваивается так называемая умная пыль, предназначенная для
решения таких задач, как наблюдение за пунктами базирования средств массо-
вого поражения, смена огневых позиций ракетных пусковых установок, ведение
радиационной, химической и бактериологической разведки. Пылинка диаметром
1 мм, представляющая собой сенсорное устройство с процессорным управлени-
ем и весьма малым потреблением энергии, программируется на дистанционное
измерение различных физических полей и их параметров. Рассеянное с высоты
10 000 м облако умной пыли может парить в воздухе 5 ч. Снабдив «пылинки»
аэродинамическими лепестками, подобно семенам клена, этот период можно
продлить до суток. Съем информации с облака производится сканирующим про-
странство лазерным лучом благодаря наличию в «пылинках» подвижных микро-
зеркал, управляемых микродвигателями.
528
Список литературы
Главы 1, 2, 3
1. Меньшаков Ю.К. Защита объектов и информации от технических средств
разведки. - М.: Изд-во РГГУ, 2002.
2. Маскировка. Основы технической маскировки. - М.: Воениздат, 1971.
3. Борисов Ю. Инфракрасное излучение. - М.: Энергия, 1976.
4. Меньшаков Ю.К. Применение лазеров в системах дальнометрирования и
целеуказания / Военная техника. ВИНИТИ. 1972. № 6.
5. Меньшаков Ю.К. Применение лазеров в системах разведки, наблюдения и
локации / Военная Техника. ВИНИТИ. 1972. № 10.
6. Меньшаков Ю.К. Об использование мощных лазеров в системах оружия /
Военная Техника. ВИНИТИ. 1972. № 7.
7. Меньшаков Ю.К. Средства и методы радиоэлектронного противодействия
и перспективы их развития / Военная Техника. ВИНИТИ. 1973. № 3.
Глава 4
1. Основы теории радиоэлектронной борьбы / Под ред. Н.Ф. Николенко - М.:
Воениздат, 1987.
2. Сиверс А.П., Суслов Н.А. Основы радиолокации. - М.: Сов. радио, 1956.
3. Радиолокационные станции воздушной разведки / Под ред. Г.С. Кондратен-
ко. - М.: Воениздат, 1983.
4. Долуханов М.П. Распространение радиоволн.-М.: Связь, 1972.
5. Электромагнитная совместимость радиоэлектронных средств и непред-
намеренные помехи / Сост. Д.Р.Ж. Уайт: Пер. с англ. 1971-1973. Вып. № 1. Об-
щие вопросы электромагнитной совместимости. Межсистемные помехи / Под ред.
А.И. Саприга. - М.: Сов. радио, 1972.
6. Хорев А.А. Теоретические основы оценки возможностей технических
средств разведки. - М.: МО РФ, 2000.
7. Фигуровский Д. О совершенствовании системы наблюдения за воздушным
пространством в НАТО И Зарубеж. воен, обозрение. 1988. № 8.
8. Павлов В.9 Гришулин С. Радиолокационные станции, использующие прин-
ципы разнесенного приема / Зарубеж. воен, обозрение. 1988. № 8.
9. Фиолентов А. Новые технические системы разведки воздушных целей И
Зарубеж. воен, обозрение. 2000. № 4.
10. Скольник Р.М. Справочник по радиолокации. В 4-х т.: Пер. с англ. М.:
Сов. радио, 1976.
11. Буров С.В., Чудненко В.А. Инфракрасные системы наведения. - М.: Изд.
МИРЭА, 1990.
12. Николаев А.Г., Перцов С.В. Радиотеплолокация. - М.: Воениздат, 1970.
13. 2>оков А. Использование миллиметрового диапазона в авиационных ра-
диоэлектронных системах И Зарубеж. воен, обозрение. 1985. № 9.
529
14. Физический энциклопедический словарь. - М.: Сов. энциклопедия, 1983.
15. Ярочкин В.А. Технические каналы утечки информации. - М.: Ось-89,1994.
16. Хорев А.А. Технические средства и способы промышленного шпионажа. -
М.: ЗАО «Дальснаб», 1997.
17. Ярочкин В.И. Безопасность информационных систем. - М.: Ось-89, 1997.
18. Петраков А.В. Основы практической защиты информации. - М.: Радио и
связь, 2000.
19. Каторин Ю.Ф., Куренков Е.В., Лысов А.В., Остапенко А.Н. Энциклопе-
дия промышленного шпионажа. - СПб.: ООО «Изд-во “Полигон”», 1999.
Глава 5
1. Меньшаков Ю.К. Защита объектов и информации от технических средств
разведки. - М.: РГГУ, 2000.
2. Житковский Ю.Ю. Введение в акустику океана. - М.: МФТИ, 1995.
3. Митько В.Б., Евтютов А.П., Гущин С.Е. Гидроакустические средства свя-
зи и наблюдения. - Л.: Судостроение, 1982.
4. Карлов Л.Б., Шошков Е.Н. Гидроакустика в военном деле. - М.: Воениз-
дат, 1963.
5. Рокотов С.Л.9 Титов М.С., О моделировании морской среды как канала пе-
редачи телеметрической информации / Тр. дальневосточного политехи, ин-та. -
Владивосток: Дальневост, политех, ин-т, 1972.
6. Четверткин Е.И. Гидроакустическая телеметрия в океанологии. - СПб.:
Изд-во Ленинград, ун-та, 1978.
7. Бэтчелдер Л. Гидролокация / ТИИРЭ. 1965. Т. 53, № 10.
8. Простаков А.П. Электронный ключ к океану. - Л.: Судостроение, 1978.
9. Справочник по гидроакустике. - Л.: Судостроение, 1988.
10. Глазанов В.Е. Экранирование гидроакустических антенн. - Л.: Судо-
строение, 1985.
11. Свердлин Г.М. Прикладная гидроакустика. - Л.: Судостроение, 1976.
12. Смарышев М.Д. Направленность гидроакустических антенн. - Л.: Судо-
строение, 1973.
13. Антенные решетки. Методы расчета и проектирования / Под ред. Л.С. Бе-
несона-М.: Сов. радио, 1968.
14. СкучикЕ. Основы акустики. - М.: Мир, 1976.
15. Жуков В.Б., Островский Д.П. Параметрическая надежность гидроакусти-
ческих антенн. - Л.: Судостроение, 1980.
16. Тюрин А.М., Сташкевич А.П., Таранов Э.С. Основы гидроакустики. - Л.:
Судостроение, 1966.
17. Зуфрин А.М. Адаптивные методы измерения текущих координат источ-
ников сигналов / Труды 3-й школы: Семинары по гидроакустике. 1972.
18. Телятников В.И. Методы и устройства для определения местонахожде-
ния источника звука И Зарубеж. радиоэлектроника. 1978. № 4.
Глава 6
1. Хорев А.А. Технические средства и способы промышленного шпионажа. -
М.: ЗАО «Дальснаб», 1997.
530
2. Каторин Ю.Ф., Куренков Е.В., Лысов А.В., Останенко А.Н. Энциклопедия
промышленного шпионажа. - СПб.: ООО «Изд-во “Полигон”», 1999.
3. Викторов АД., Генне В.И., Гончаров Э.В. Побочные электромагнитные
излучения персонального компьютера и защита информации // Защита инфор-
мации. 1999. № 5/3.
4. Миронычев С. Коммерческая разведка или промышленный шпионаж в
России и меры борьбы с ними. - М.: Дружок, 1995.
5. Специальная техника: Каталог. - М.: Прогресс, 1996.
6. Специальные технические средства: Каталог. - М: АО «Эльвира», 1998.
7. Технические средства разведки / Под ред. В.И. Мухина. - М.: РВСН, 1992.
8. Хорев А.А. Защита информации от утечки по техническим каналам. Техни-
ческие каналы утечки информации. - М.: Гостехкомиссия РФ, 1998.
9. Хорев А.А. Методы и средства поиска электронных устройств перехвата
информации. - М.: МО РФ, 1998.
10. Drahtlose Audiobertragungs-System: Catalog-Germany: Hildenbrand-Electronic,
1996.
11. Professional general export catalog. The Government supplies of surveillance
technology. Germany: PK Electronic International FRG. 1994. № 1.
12. Covert audio intercept. Catalog-USA: Surveillance Technology Group (STG), 1993.
13. Торокин А.А. Основы инженерно-технической защиты информации. - М.:
Ось-89, 1998.
14. Халяпин Д.Б. Защита информации. - М.: Изд. дом «Мир безопасности»,
2001.
15. Кравчун П.Н. Генерация и методы снижения шума и звуковой вибрации. -
М.: Московский университет, 1991.
Глава 7
1. Новиков Г Ф., Капков Ю.Н. Радиоактивные методы разведки. - М.: Недра, 1995.
2. Горицкий А.П. Приборы радиационной и химической разведки. - М.:
ДОСААФ, 1969.
3. Хижко В.П. Приборы радиационной и химической разведки. - Минск, Мин-
ское высш, инж.-зенитное у-ще, 1969.
4. Матвеев В.В., Хазанов В.И. Приборы для измерений ионизирующих
излучений. -М.: Атомиздат, 1972.
5. Методы и средства выявления радиационной обстановки / Под ред. С.М. Гу-
рова- М.: Воен. акад. хим. защиты, 1997.
6. Пруткина М.И., Шашкин В.Л. Справочник по радиометрической разведке
и радиометрическому анализу. - М.: Атомиздат, 1975.
Глава 8
1. Бронштейн Д.А., Александров НН. Современные средства измерения за-
грязнения атмосферы. - Л.: Гидрометеоиздат, 1989.
2. Муравьева С.И., Казинина Н.И., Прохорова Е.К. Справочник по контролю
вредных веществ в воздухе. - М.: Химия, 1988.
3. Межерис Р. Лазерное дистанционное зондирование. - М.: Мир, 1987.
4. Зуев В.А., Зуев В.В. Дистанционное оптическое зондирование атмосферы. -
СПб.: Гидрометеоиздат, 1992.
531
5. Протопопов В.В., Устинов Н.Д. Инфракрасные лазерные локационные сис-
темы. -М.: Воениздат, 1987.
6. Иванов И. Многофункциональные лидарные системы. - Минск: Универси-
тетское, 1986.
7. Меньшаков Ю.К, Применение лазеров для дистанционного контроля
загрязнения атмосферы. ВИНИТИ, 1973.
8. Борисов Ю. Инфракрасные излучение. - М.: Энергия, 1976.
Глава 9
1. ГурвичИ.И., Боганик Г.Н. Сейсмическая разведка. - М.: Недра, 1980.
2. Пасенчик И.П. Характеристики сейсмических волн при ядерных взрывах и
землятресениях. - М.: Наука, 1970.
3. Бондарев В.И. Сейсморазведка. Ч. 1, 2: Лекции Урал. гос. горно-геолог.
акад. - Екатеринбург: 1995.
4. Физический энциклопедический словарь. - М.: Сов. Энциклопедия, 1983.
Глава 10
1. Яворский Б.М.^Детлаф А.А. Справочник по физике. - М.: Наука, 1964.
2. Физический энциклопедический словарь. - М.: Сов. энциклопедия, 1983.
3. Магниторазведка. Справочник геофизика. - М.: Недра, 1980.
4. Дементьев Г.Я. Магниторазведка: Лекции Урал. гос. горно-геолог. акад. -
Екатеринбург: 1996.
Глава 11
1. Thomas Р. Rona. Weapons System and Information War. Boeing Airspace Co. -
Seattle, WA, 1976.
2. Гриняев С. Концепция ведения информационной войны в некоторых стра-
нах мира И Зарубеж. воен, обозрение. 2002. № 2.
3. Joint Pub 3-13. «Information Operations». DOD US. December, 1998.
4. Jet Info: Информационный бюллетень. 1997. № 9-10.
5. Модестов С., Сокут С. Байты вместо пуль: Пентагон воплощает доктрину
информационных операций И Независимое воен, обозрение. 1999. № 13.
6. Батурин Ю. Модестов С. Виртуальная разведка И Независимое воен, обо-
зрение. 1998. № 37.
7. Open source intelligence resources for the intelligence professional. The 43th
military intelligence detachment (strategic), 200 wintergreen avenue. New Haven, ct
06515, http://www/eajardines.com/434mid.html.
8. Тайли Э. Безопасность компьютера. - Минск.: Попурри, 1997.
9. Абалмазов Э.И. Методы и инженерно-технические средства противодей-
ствия информационным угрозам. - М.: Гротек, 1997.
10. Каторин Ю.Ф., Куренков Е.В., Лысов А.В., Остапенко А.Н. Энциклопе-
дия промышленного шпионажа. СПб.: ООО «Изд-во “Полигон”», 1999.
Глава 12
Х.АфиновВ. В паутине МАСИНТа И Независимое воен, обозрение. 2001. № 33.
532
ОГЛАВЛЕНИЕ
Предисловие ............................................................. 3
Введение................................................................. 4
Список основных сокращений............................................... 6
1. Общая характеристика технической разведки ............................ 7
1.1. Цели и задачи технической разведки............................... 7
1.2. Принципы организации и ведения технической разведки.............. 7
1.3. Классификация технической разведки .............................. 9
2. Оптическая разведка.................................................. 12
2.1. Визуально-оптическая разведка................................... 12
2.1.1. Характеристики зрительного восприятия .................... 13
2.1.2. Видимость объектов ....................................... 20
2.1.3. Оптические средства повышения видимости объектов ......... 21
2.2. Фотографическая разведка ....................................... 24
2.2.1. Характеристики фотографирующих систем..................... 24
2.2.2. Средства фотографической разведки и их возможности........ 32
3. Оптико-электронная разведка.......................................... 33
3.1. Телевизионная разведка.......................................... 34
3.1.1. Схема и принципы телевизионной передачи .................. 34
3.1.2. Характеристики телевизионных систем ...................... 36
3.2. Инфракрасная разведка........................................... 41
3.2.1. Схемы приборов инфракрасной разведки ..................... 41
3.2.2. Характеристики электронно-оптических и тепловых приборов наблю-
дения ........................................................... 48
3.3. Лазерная разведка и разведка источников лазерного излучения..... 53
3.3.1. Основные направления применения лазеров в военной технике...... 53
3.3.2. Демаскирующие признаки лазерных систем.................... 57
3.3.3. Обнаружение источников лазерного излучения................ 61
3.3.4. Лазерная разведка......................................... 62
4. Радиоэлектронная разведка............................................ 66
4.1 Радио- и радиотехническая разведка ............................. 67
4.1.1. Обобщенная структурная схема радио- и радиотехнической разведки 68
4.1.2. Способы определения местоположения источников электромагнитного
излучения........................................................ 71
4.1.3. Способы определения частоты сигналов разведуемых радиоэлектрон-
ных средств...................................................... 84
4.1.4. Способы запоминания несущей частоты радиоэлектронных средств... 105
4.1.5. Анализ структуры сигналов разведуемых радиоэлектронных средств. 109
4.1.6. Анализ спектров радиосигналов............................ 118
4.2. Радиолокационная разведка...................................... 122
533
4.2.1. Параметрическая радиолокационная разведка ................ 124
4.2.2. Видовая радиолокационная разведка......................... 146
4.2.3. Загоризонтные радиолокационные станции.................... 155
4.2.4. Станции, использующие радиолокационные принципы разнесенного
приема........................................................... 168
4.2.5. Пассивная многопозиционная радиолокация................... 170
4.3. Радиотепловая разведка.......................................... 173
4.3.1. Физическая сущность теплового излучения и его законы...... 173
4.3.2. Количественные характеристики радиотеплового излучения........ 176
4.3.3. Радиотепловое излучение естественных и искусственных объектов. 178
4.3.4. Характеристики радиотепловых сигналов .................... 181
4.3.5. Особенности приема радиотепловых сигналов. Принцип действия ра-
диометра ........................................................ 182
4.3.6. Радиотепловые сигналы как переносчики информации.......... 188
4.3.7. Энергетические соотношения в радиотеплолокации ........... 189
4.3.8. Структурные схемы радиотеплолокаторов .................... 192
4.4. Разведка побочных электромагнитных излучений и наводок.......... 197
4.4.1. Общие сведения ........................................... 197
4.4.2. Акустические преобразователи информационных сигналов...... 203
4.4.3. Излучатели электромагнитных колебаний..................... 210
4.4.4. Паразитные связи и наводки................................ 212
4.4.5. Способы несанкционированного подключения к информационным
линиям........................................................... 217
4.4.6. Средства разведки ПЭМИН................................... 220
5. Гидроакустическая разведка .......................................... 224
5.1. Основные положения ......................................... 224
5.2. Акустические волны в морской среде ............................. 225
5.2.1. Основные понятия и величины............................... 226
5.2.2. Скорость звука в морской среде............................ 229
5.2.3. Затухание звука........................................... 231
5.2.4. Отражение и преломление звуковой волны на границе раздела двух
сред............................................................. 234
5.2.5. Реверберация в море....................................... 235
5.2.6. Рефракция звука........................................... 237
5.2.7. Подводный звуковой канал.................................. 241
5.3. Гидроакустические средства разведки и наблюдения................ 243
5.3.1. Обобщенная модель гидроакустического канала .............. 243
5.3.2. Принципы построения гидролокаторов........................ 246
5.3.3. Принципы построения шумопеленгаторов ..................... 257
5.3.4. Гидроакустические антенны................................. 261
5.3.5. Принципы получения информации в гидроакустических информаци-
онных системах .................................................. 267
6. Акустическая разведка............................................... 282
6.1. Общие положения................................................. 282
6.2. Акустические волны в воздушной среде............................ 286
6.2.1. Основные характеристики акустических волн................. 286
6.2.2. Затухание воздушной акустической волны.................... 288
6.2.3. Структурные акустические волны............................ 289
6.3. Общие сведения о закладных устройствах ......................... 290
6.4. Радиозакладки................................................... 299
534
6.5. Закладные устройства с передачей информации по оптическому каналу.. 301
6.6. Закладные устройства с передачей информации по электросети ... 302
6.7. Телефонные закладки........................................... 304
6.8. Направленные микрофоны ....................................... 306
6.8.1. Комбинированные микрофоны............................... 309
6.8.2. Групповые микрофоны..................................... 309
6.8.3. Направленные микрофоны с параболическим рефлектором..... 313
6.8.4. Особенности применения направленных микрофонов ......... 315
6.9. Несанкционированная запись на диктофон ....................... 318
6.10. Устройство высокочастотного навязывания...................... 322
6.10.1. Устройство перехвата речевой информации в проводных каналах. 323
6.10.2. Перехват речевой информации с использованием радиоканала.... 324
6.10.3. Оптико-акустическая аппаратура перехвата речевой информации. 325
7. Радиационная разведка.............................................. 328
7.1. Явления радиоактивности. Свойства радиоактивных излучений..... 328
7.2. Основные характеристики радиоактивных излучений и единицы их изме-
рения ............................................................. 332
7.3. Приборы для измерения ионизирующих излучений.................. 335
7.3.1. Радиометрические приборы................................ 335
7.3.2. Дозиметрические приборы................................. 339
7.3.3. Спектрометры............................................ 342
7.4. Регистрация ионизирующих излучений ........................... 349
7.4.1. Общая характеристика методов регистрации ионизирующих излуче-
ний ........................................................... 349
7.4.2. Общие характеристики детекторов ионизирующих излучений....... 352
7.4.3. Ионизационная камера.................................... 353
7.4.4. Газоразрядный счетчик .................................. 354
7.4.5. Полупроводниковые детекторы ............................ 361
7.4.6. Сцинтилляционные детекторы ............................. 365
7.4.7. Люминесцентные детекторы................................ 369
7.4.8. Химические детекторы.................................... 372
7.4.9. Фотографический метод детектирования.................... 374
7.5. Войсковая радиационная разведка............................... 375
8. Химическая разведка ............................................... 381
8.1. Основные положения ........................................... 381
8.2. Методы и средства измерений при контактной ХР................. 382
8.2.1. Аппаратура для отбора проб воздуха...................... 383
8.2.2. Методы химического анализа.............................. 389
8.2.3. Автоматические средства обнаружения и измерения ........ 399
8.3. Дистанционная химическая разведка ............................ 402
8.3.1. Методы лазерного дистанционного зондирования атмосферы....... 403
8.3.2. Информативные спектральные участки для газоанализа...... 416
8.3.3. Аппаратура для лазерного зондирования................... 418
8.3.4. Пассивная дистанционная химическая разведка ............ 427
9. Сейсмическая разведка.............................................. 433
9.1. Общие положения............................................... 433
9.2. Сейсмические волны в твердых средах........................... 434
9.3. Основные особенности распространение волн в упругих средах.... 437
9.4. Упругие волны в средах, содержащих границы раздела ........... 442
535
9.5. Упругие волны в однородном полупространстве........................ 442
9.6. Отражение и преломление плоских волн на границе раздела двух сред . 444
9.7. Падение сферической волны на границу раздела сред ................. 446
9.8. Затухание сейсмических волн ....................................... 448
9.9. Волновые поля сейсмических источников и их спектральные особенности. 449
9.10. Сейсморегистрирующий канал ....................................... 453
9.11. Принцип действия и устройство сейсмоприемника..................... 456
9.12. Структурная схема цифровой сейсморазведочной станции.............. 458
9.13. Аппаратура сейсмической разведки ................................. 459
9.14. Характеристики сейсмических волн при ядерных взрывах и землетрясениях ... 463
9.14.1. Сейсмическая аппаратура, применявшаяся при регистрации сейсми-
ческих волн от ядерных взрывов.................................. 464
9.14.2. Применение спектрального анализа для изучения динамических ха-
рактеристик сейсмических волн................................... 466
9.14.3. Микросейсмы и методы повышения чувствительности сейсмической
аппаратуры ..................................................... 468
9.14.4. Особенности кинематических и динамических характеристик объем-
ных волн........................................................ 470
9.14.5. Характеристики поверхностных волн, возбуждаемых взрывами раз-
личных видов.................................................... 473
10. Магнитометрическая разведка............................................ 476
10.1. Основные характеристики магнитного поля........................... 476
10.2. Земной магнетизм и его элементы................................... 477
10.3. Методы измерений элементов земного магнетизма и аппаратура ММР ... 479
10.3.1. Оптико-механические магнитометры............................ 479
10.3.2. Протонные (ядерные) магнитометры............................ 480
10.3.3. Квантовые магнитометры ..................................... 487
10.3.4. Феррозондовые магнитометры.................................. 492
10.3.5. Обобщенные данные по пороговой чувствительности магнитометров ... 503
10.3.6. Зарубежная аппаратура ММР .................................. 503
11. Компьютерная разведка.................................................. 505
11.1. Общие сведения.................................................... 505
11.2. АСОД и основные способы несанкционированного доступа ............. 513
11.2.1. Преодоление программных средств защиты...................... 516
11.2.2. Преодоление парольной защиты................................ 517
11.2.3. Использование программных закладок и компьютерных вирусов .. 521
12. Измерительно-сигнатурная разведка...................................... 526
Список литературы.......................................................... 529