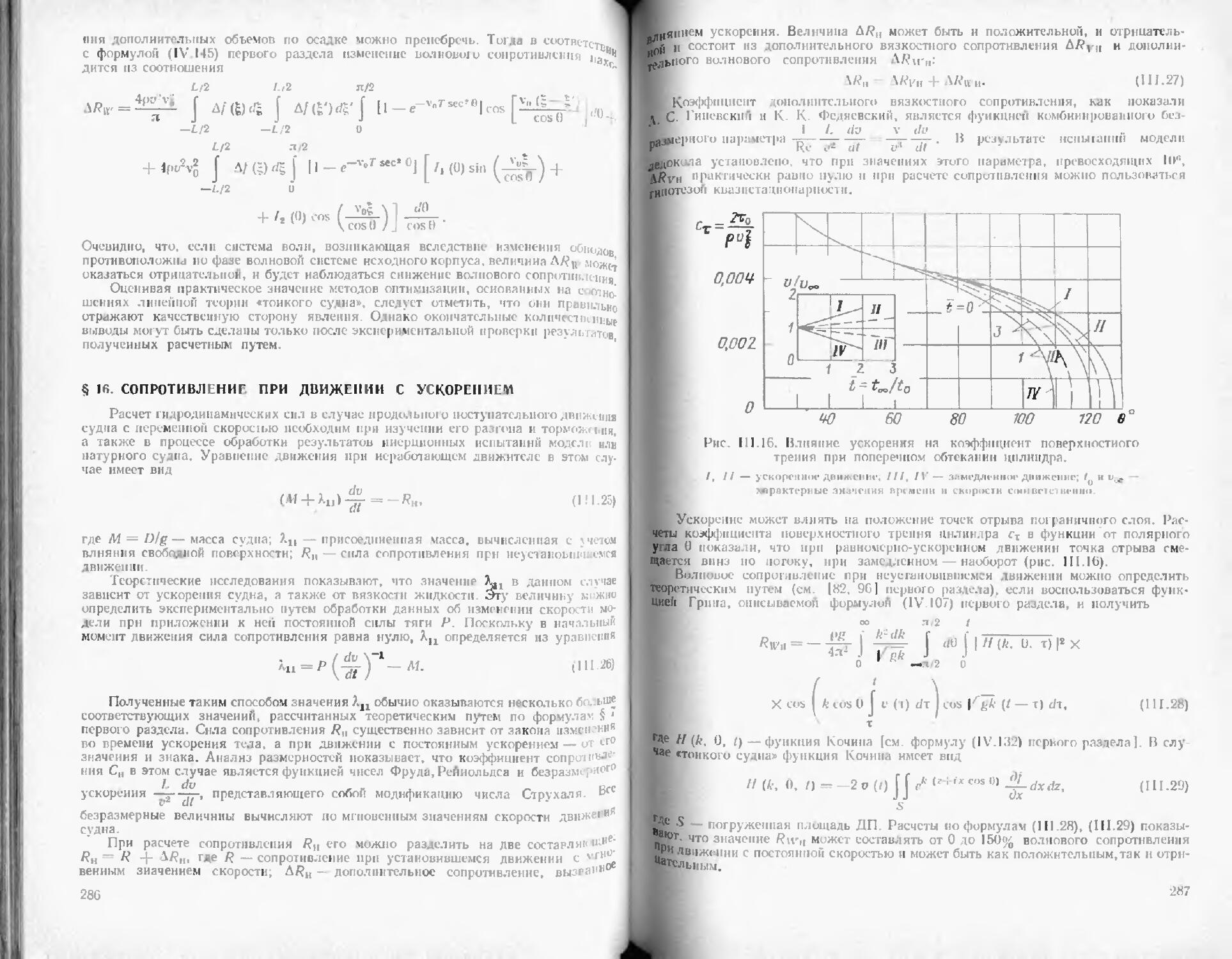
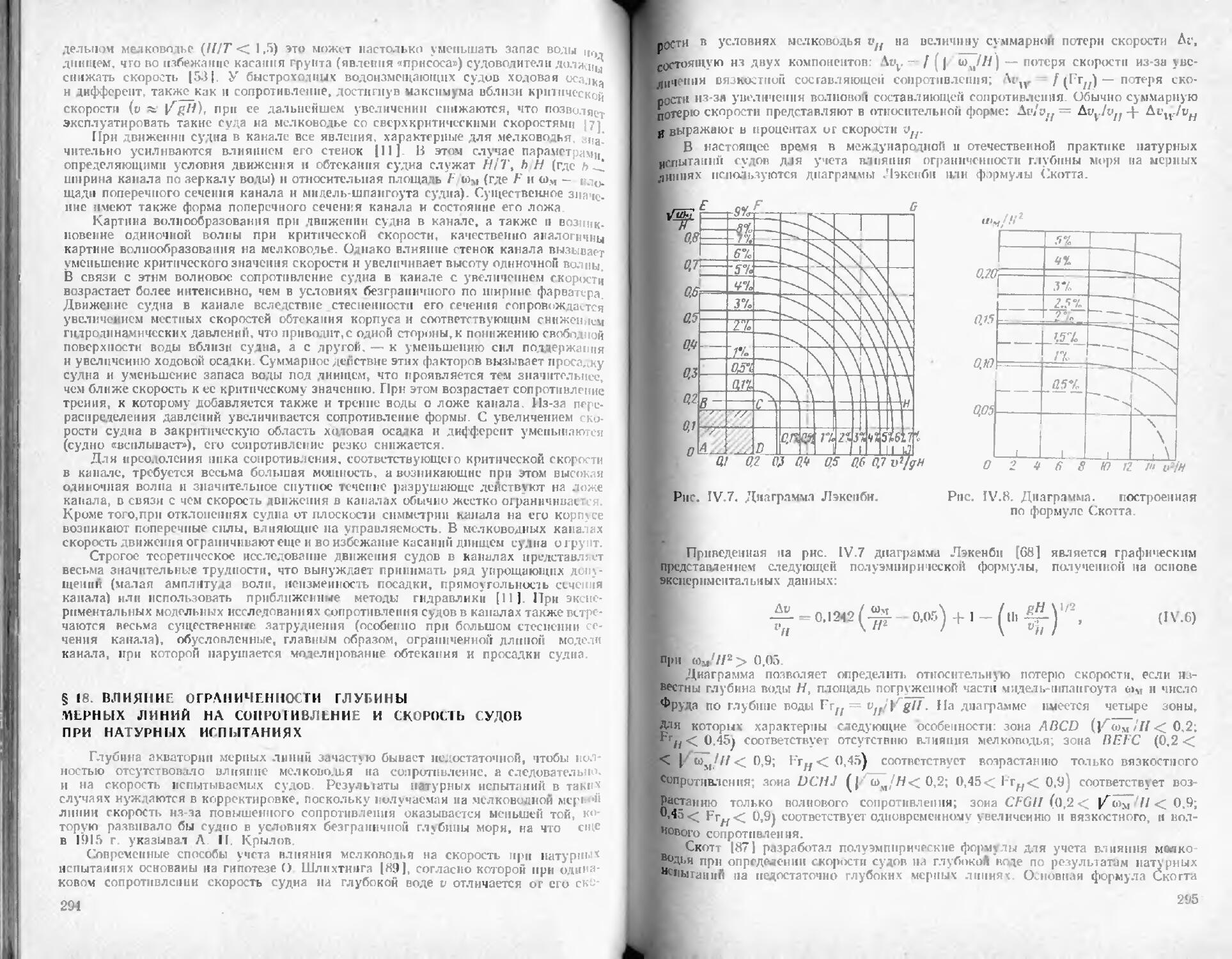
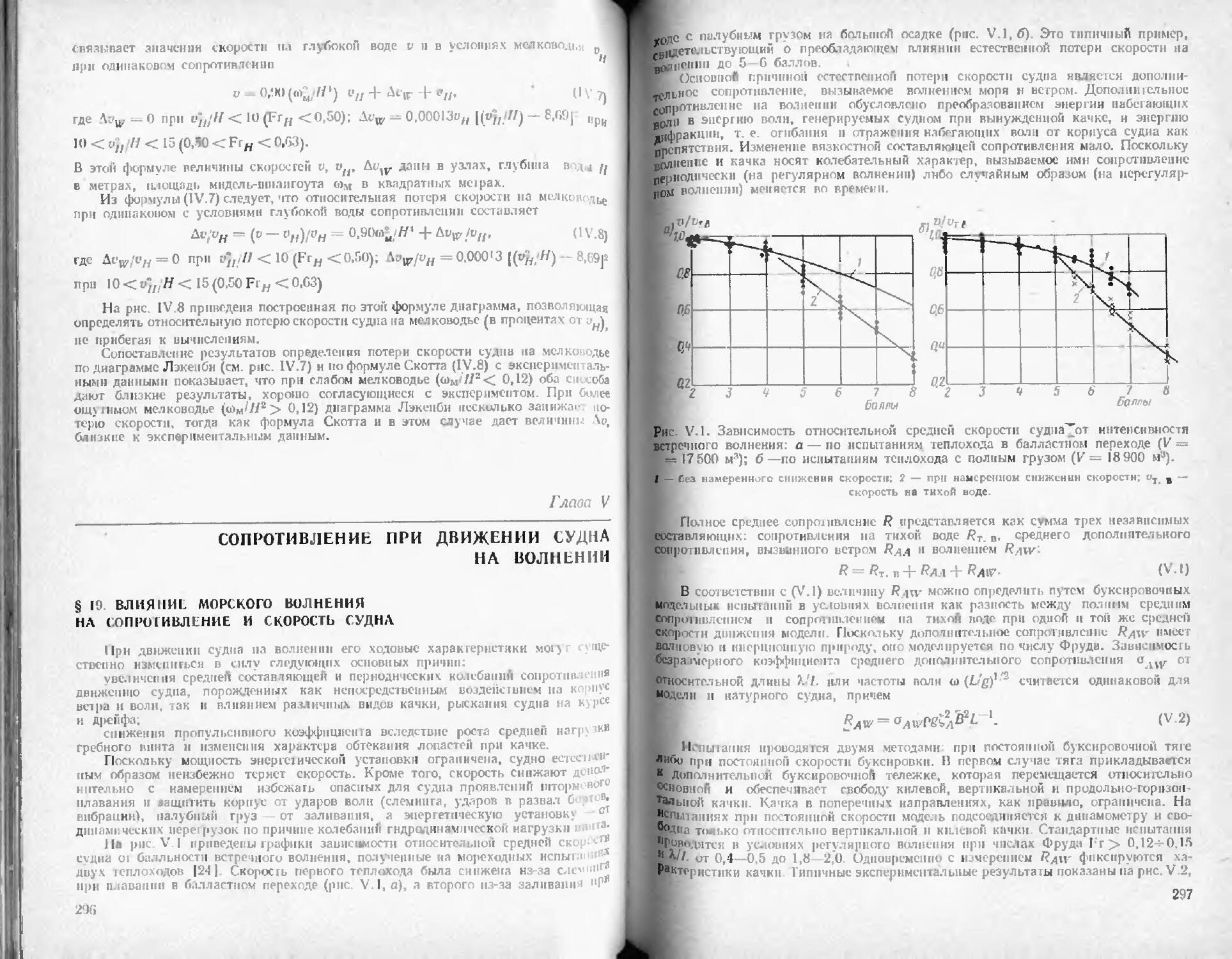
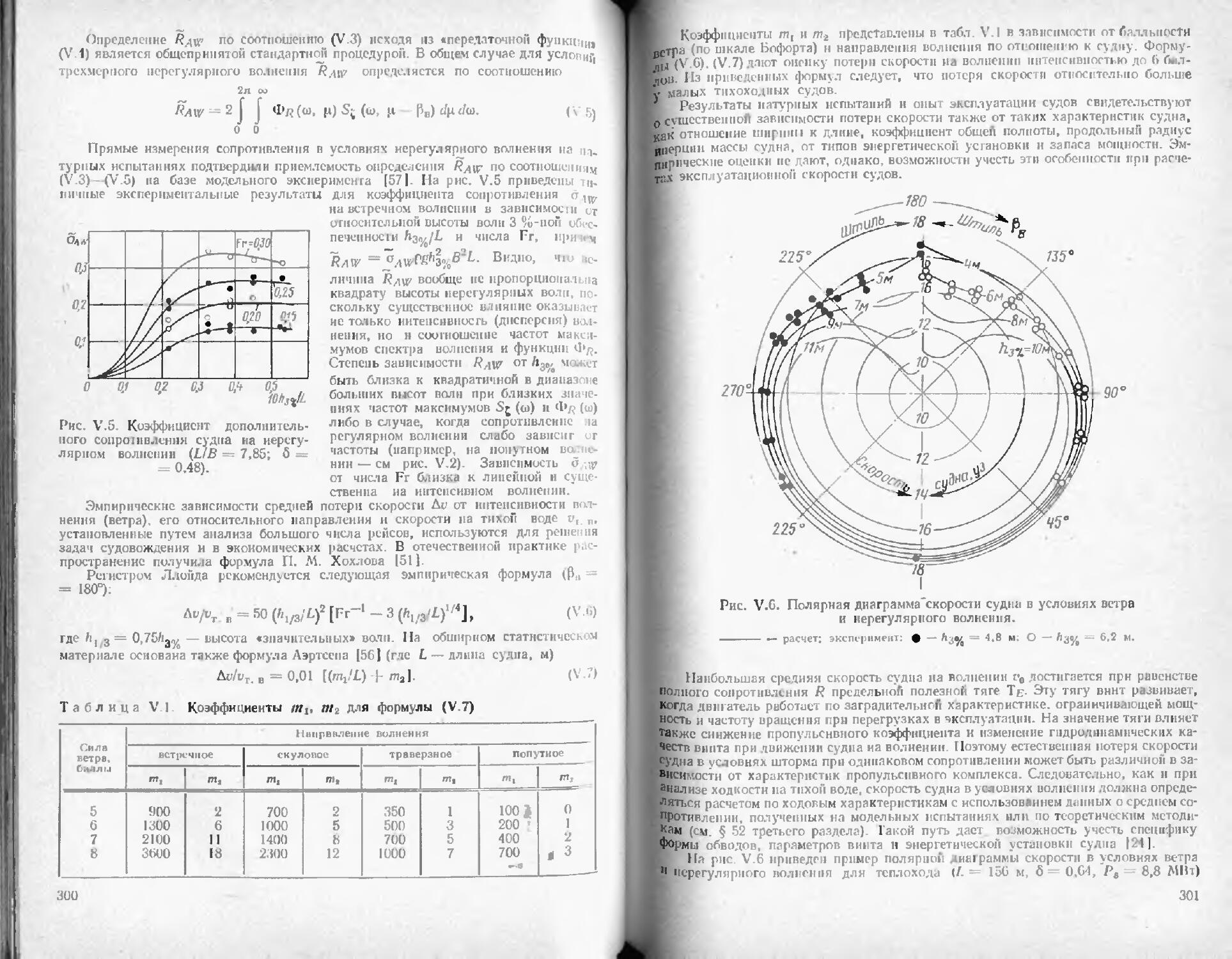
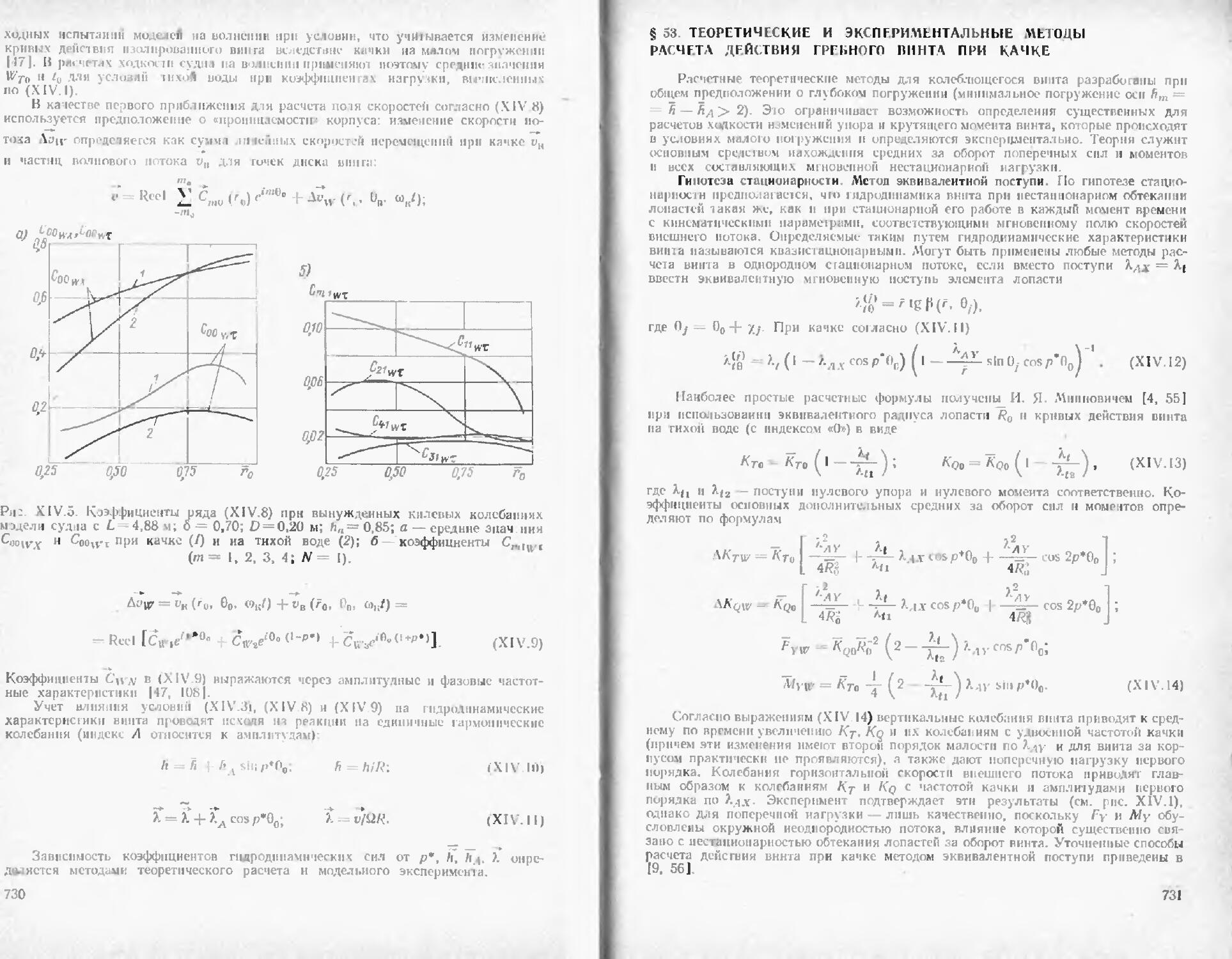
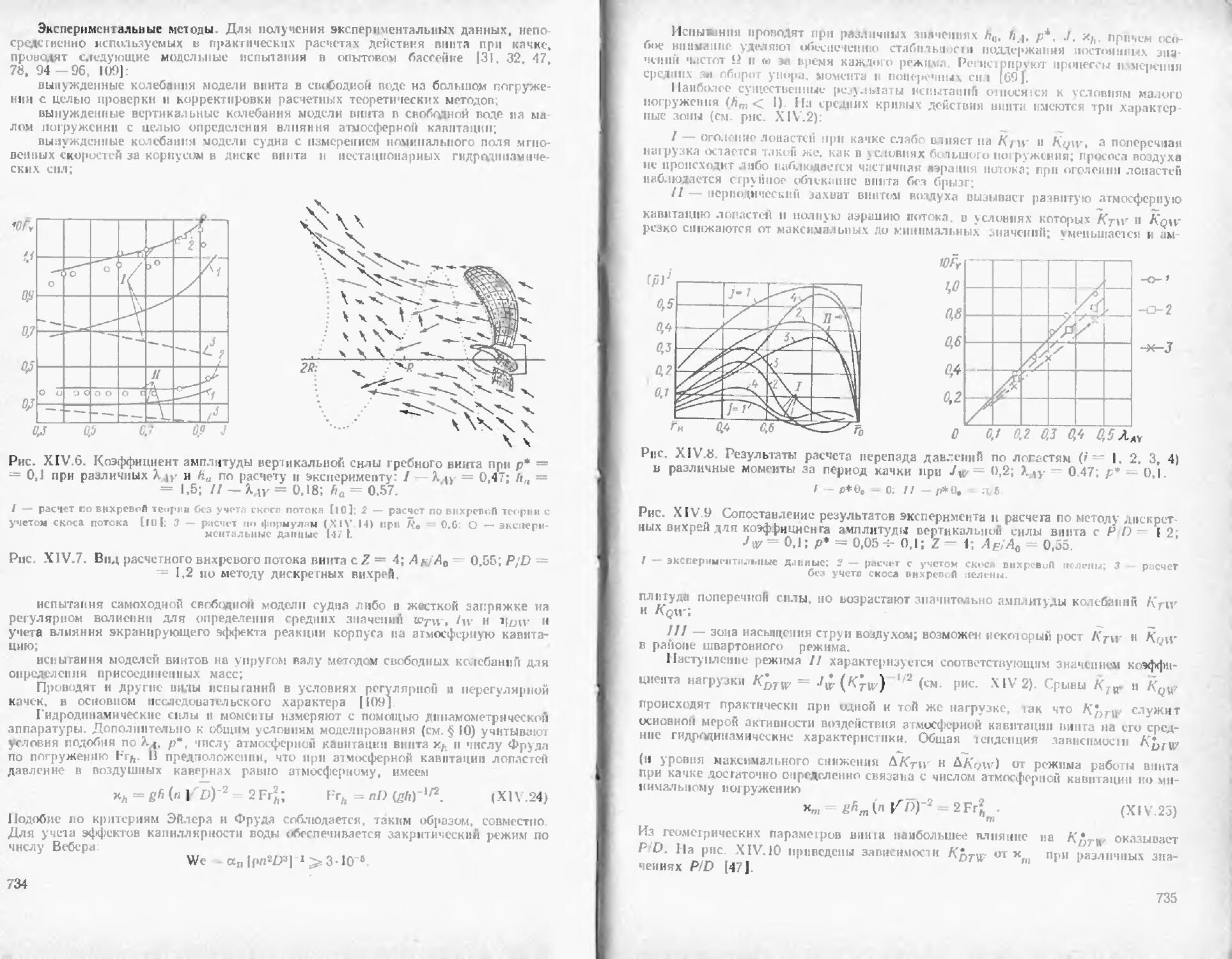
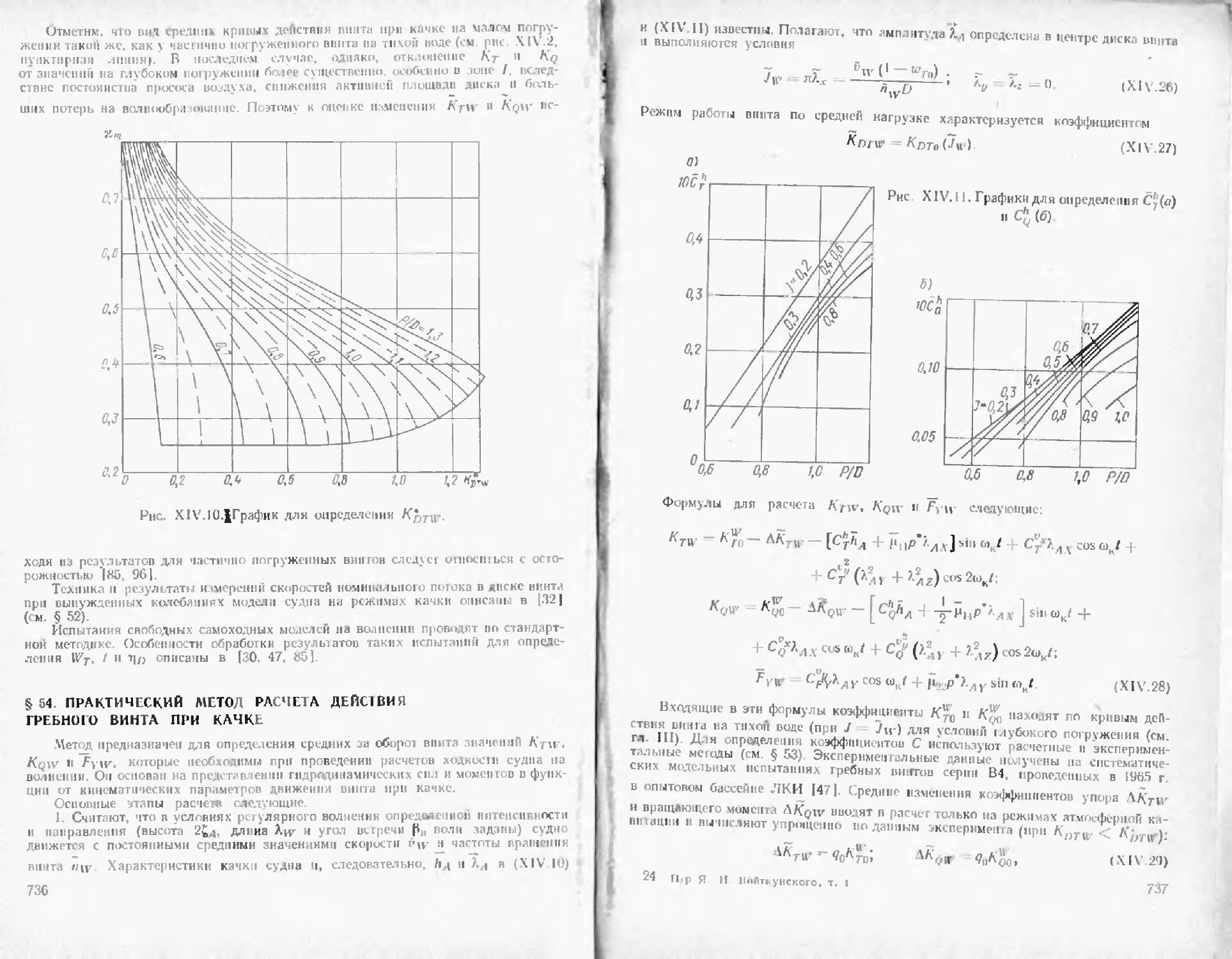
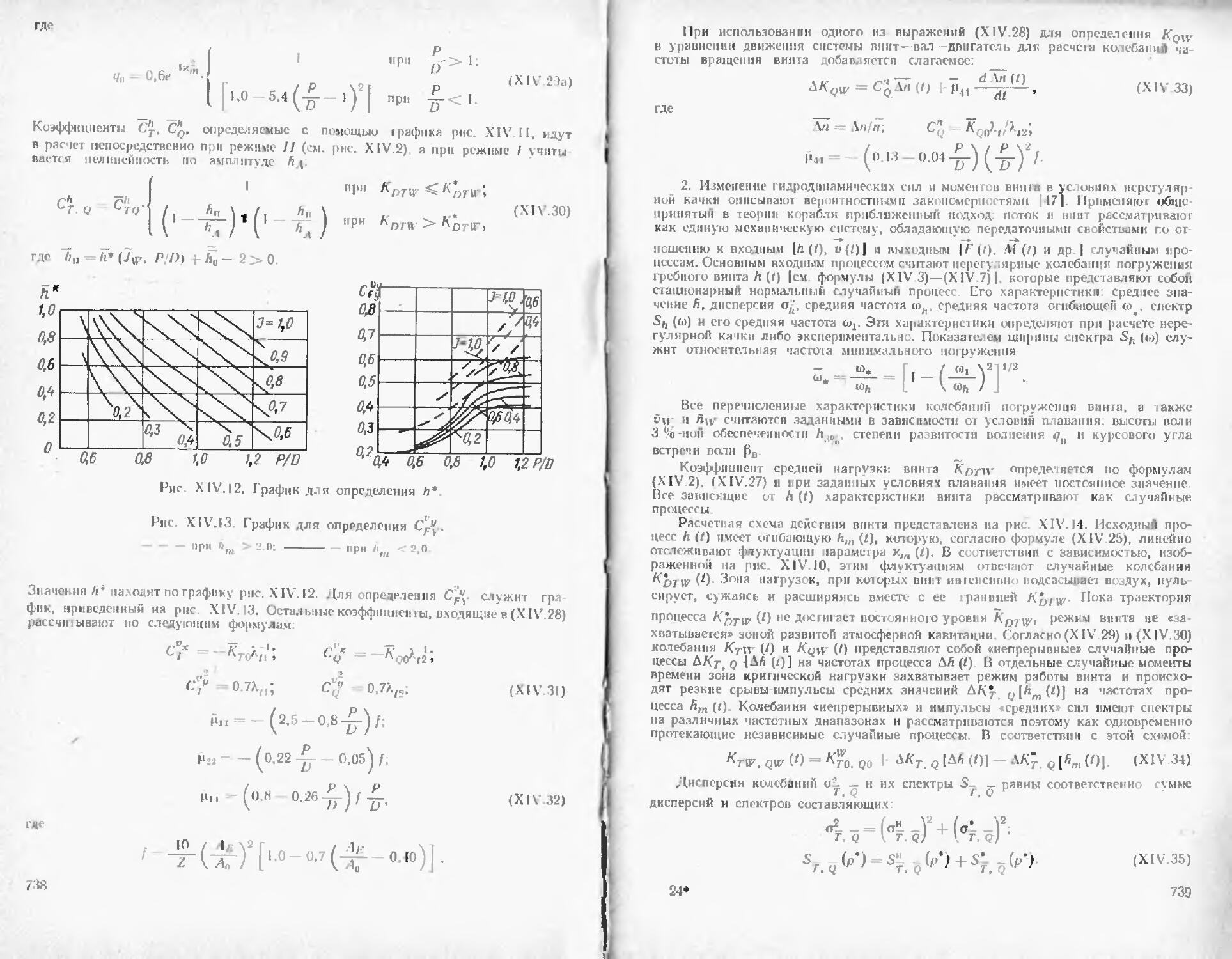
/










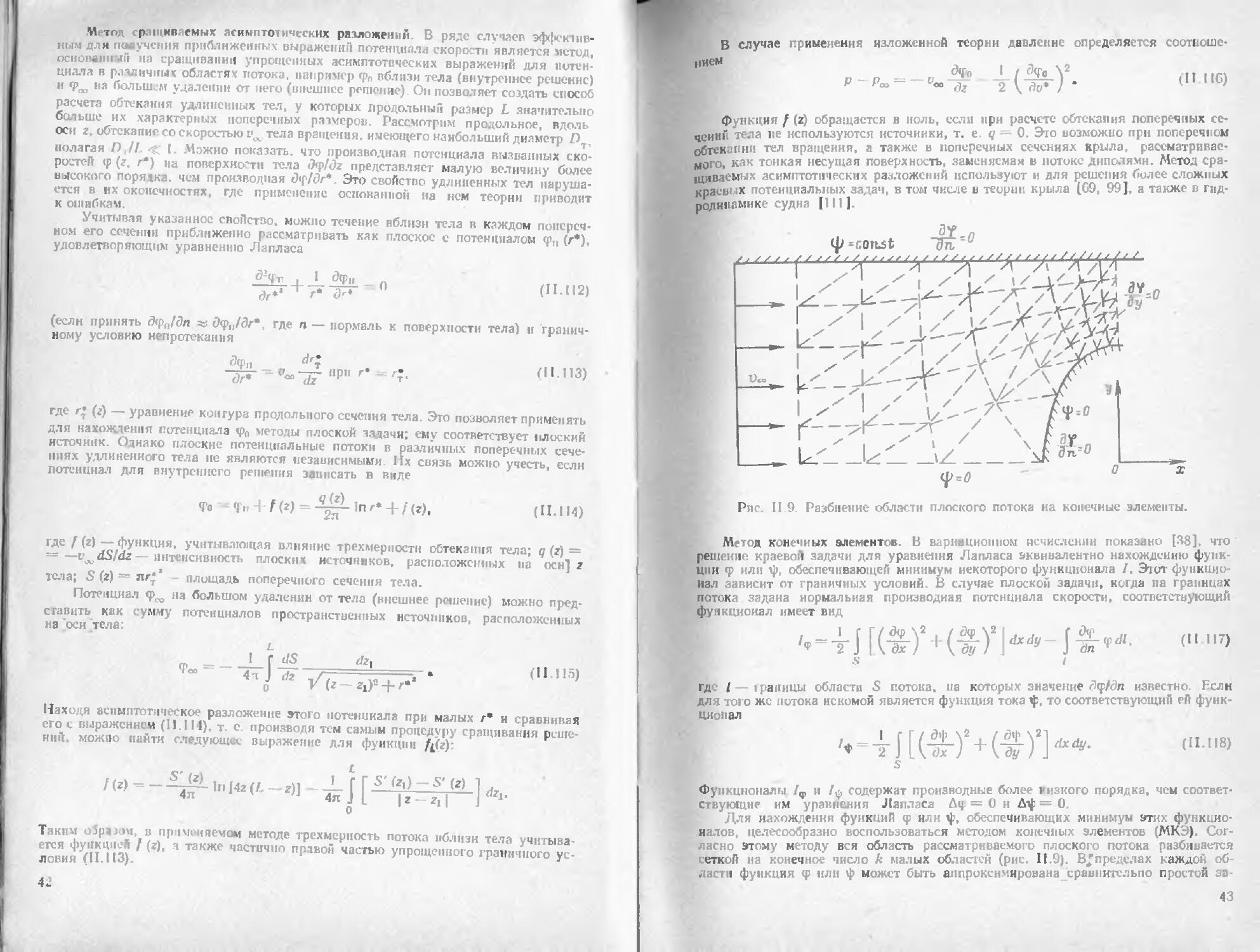









































































































































































Author: Войткунский Я.И.
Tags: гидромеханика механика жидкостей и газа водный транспорт корабли
Year: 1985



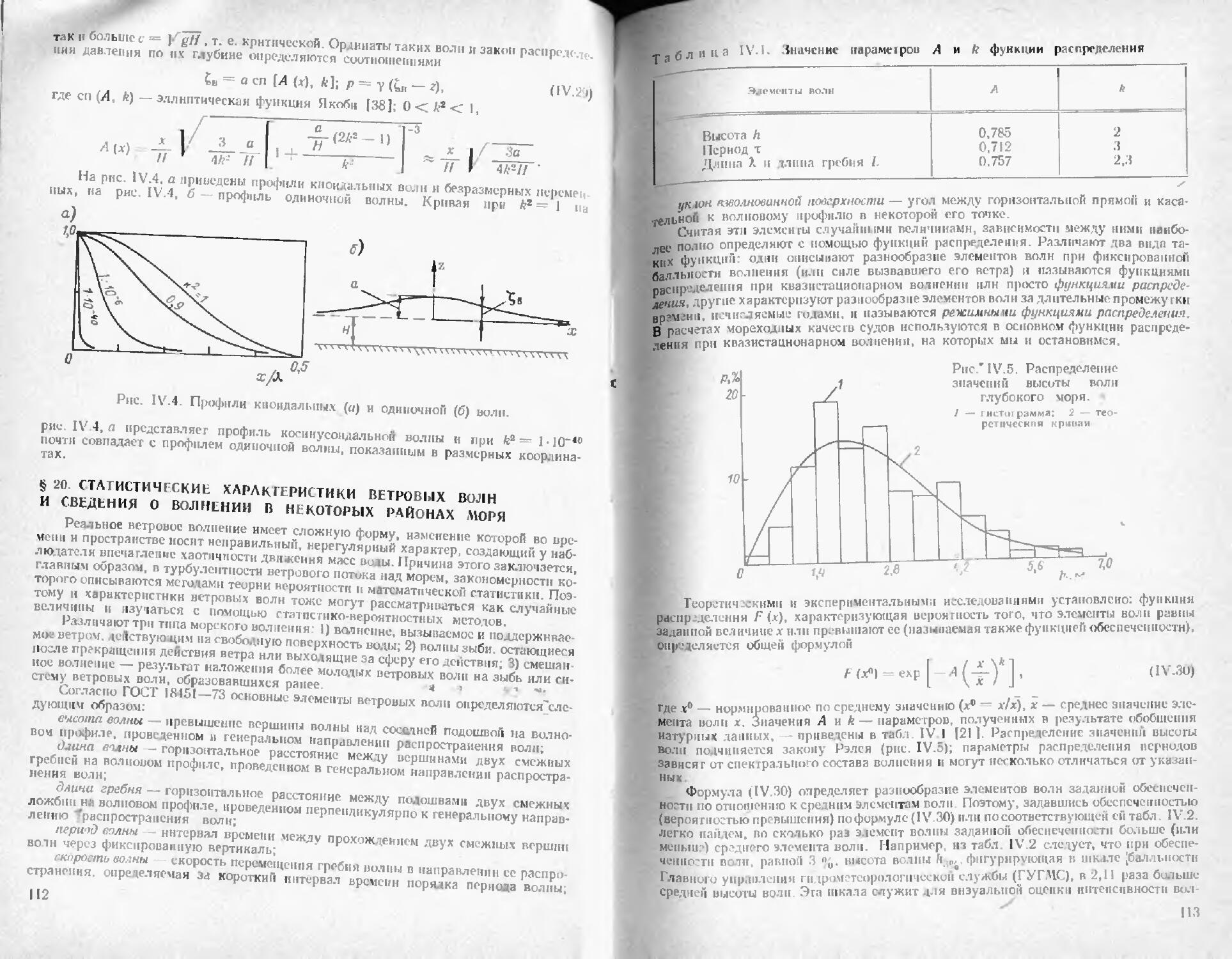
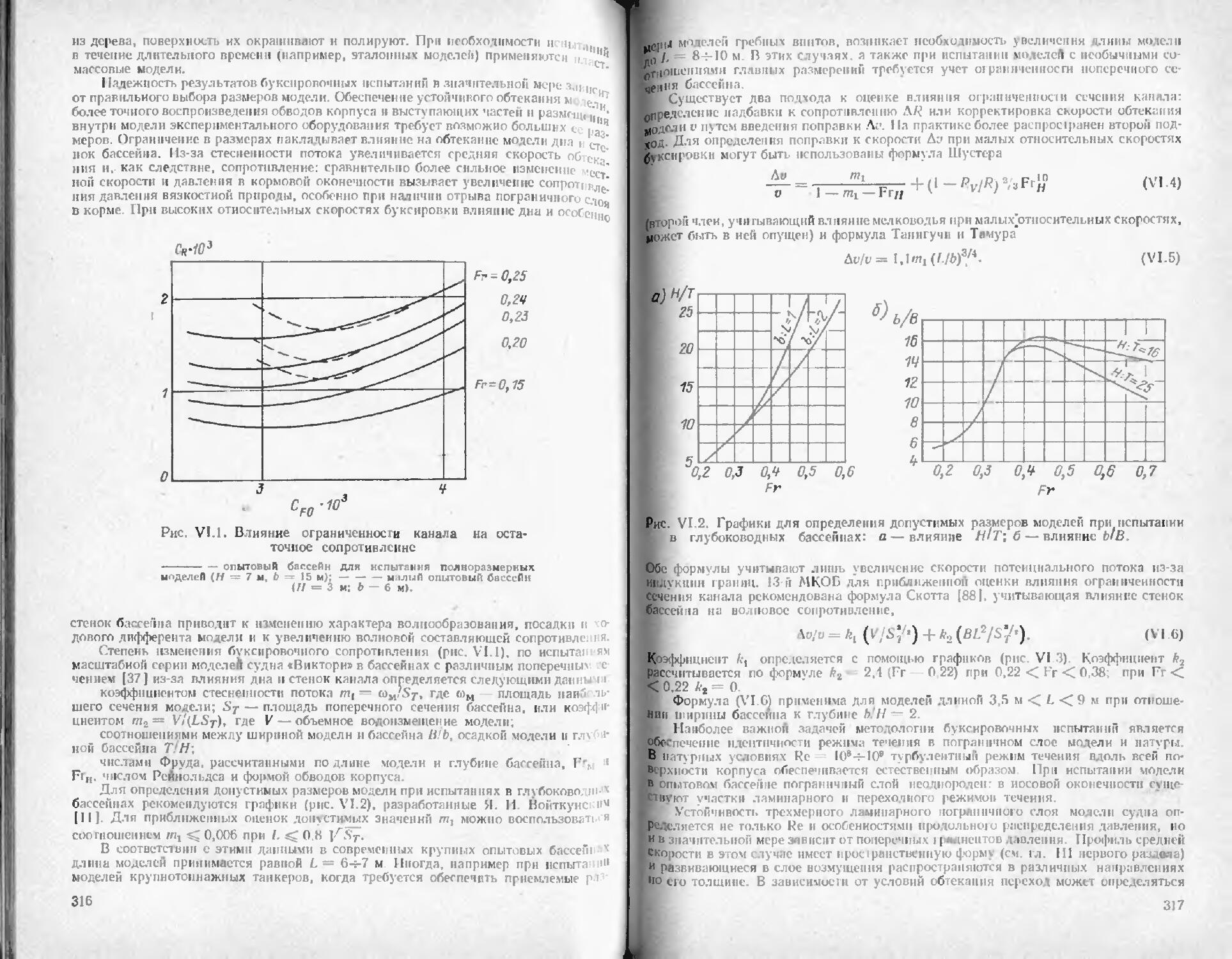
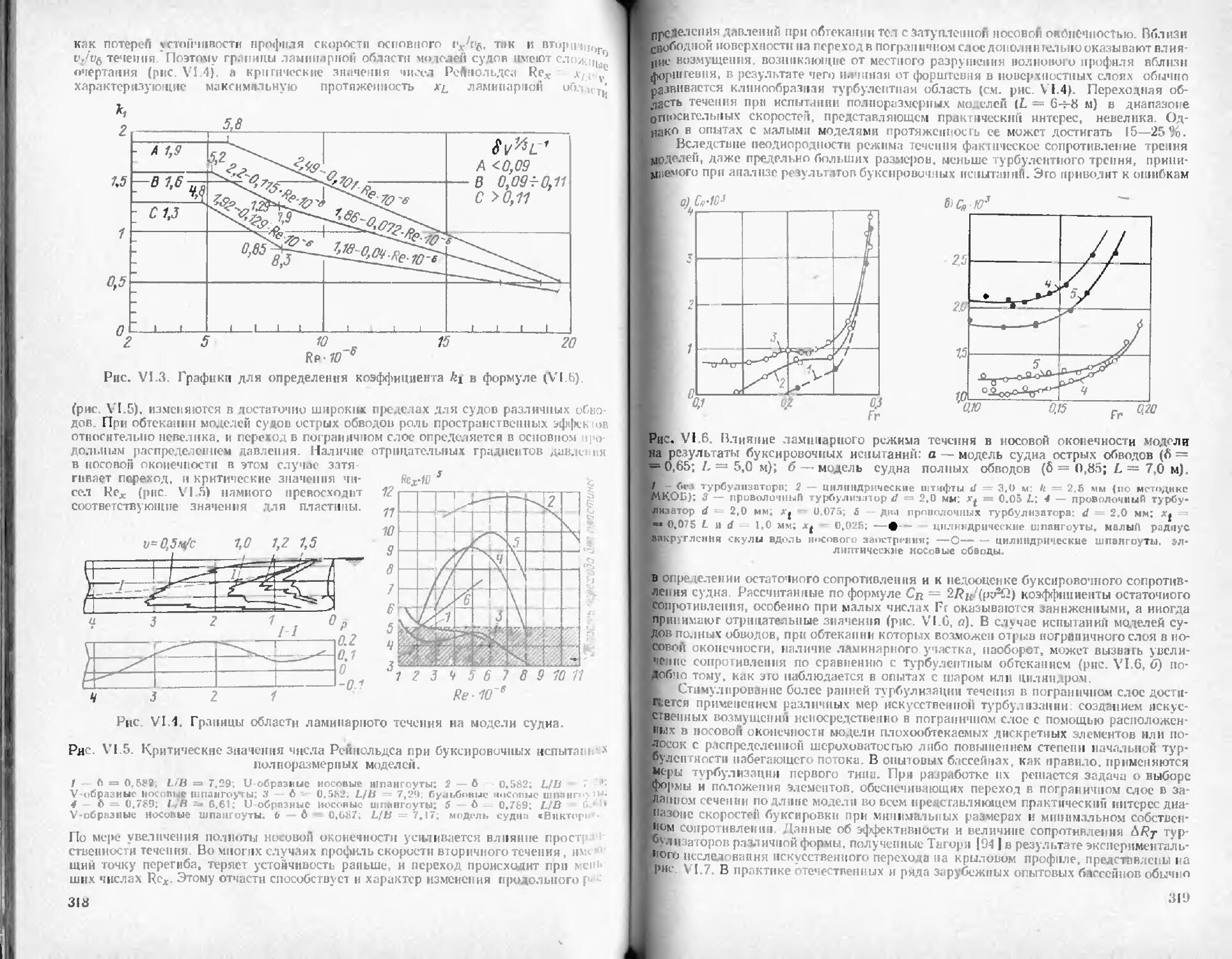
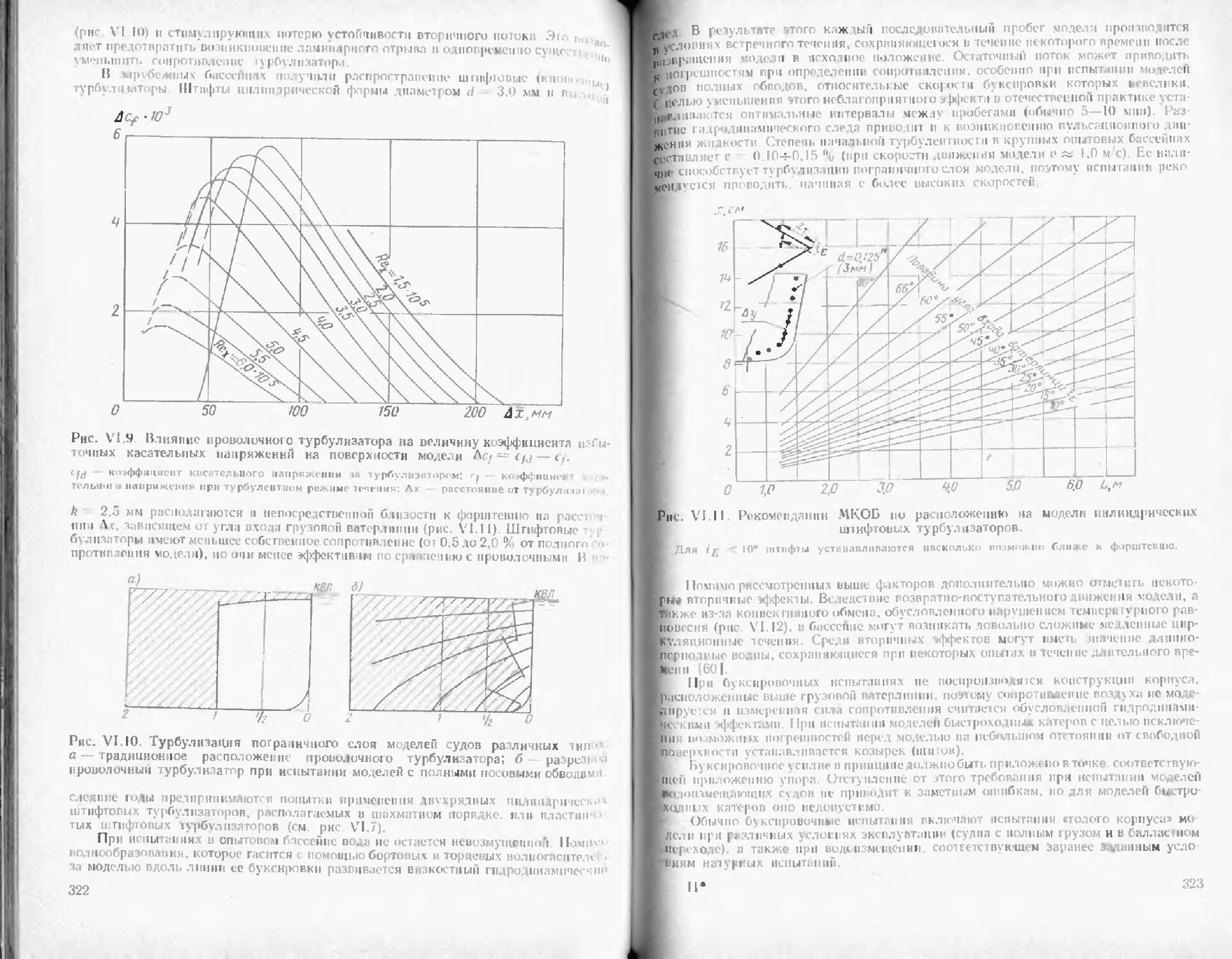
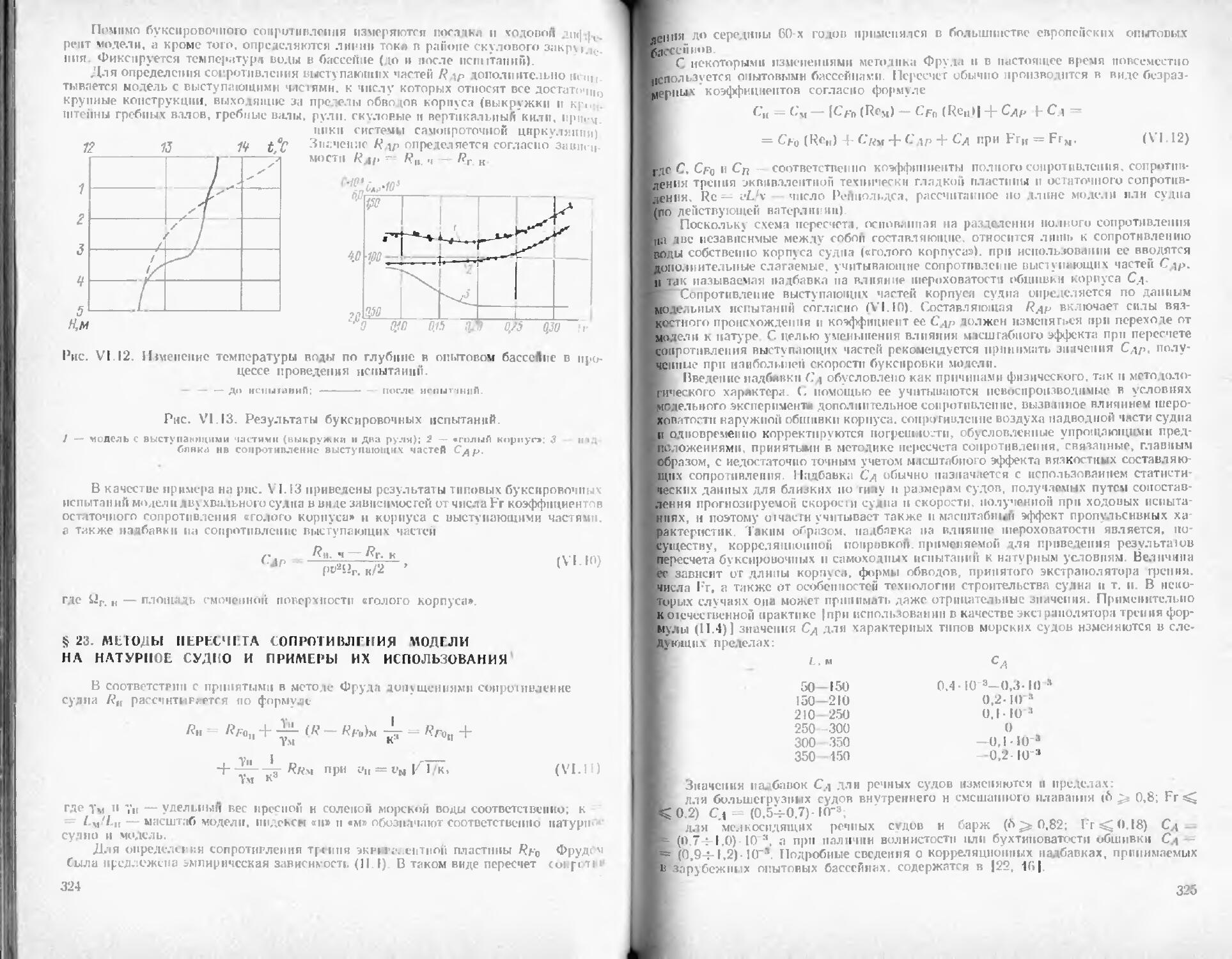
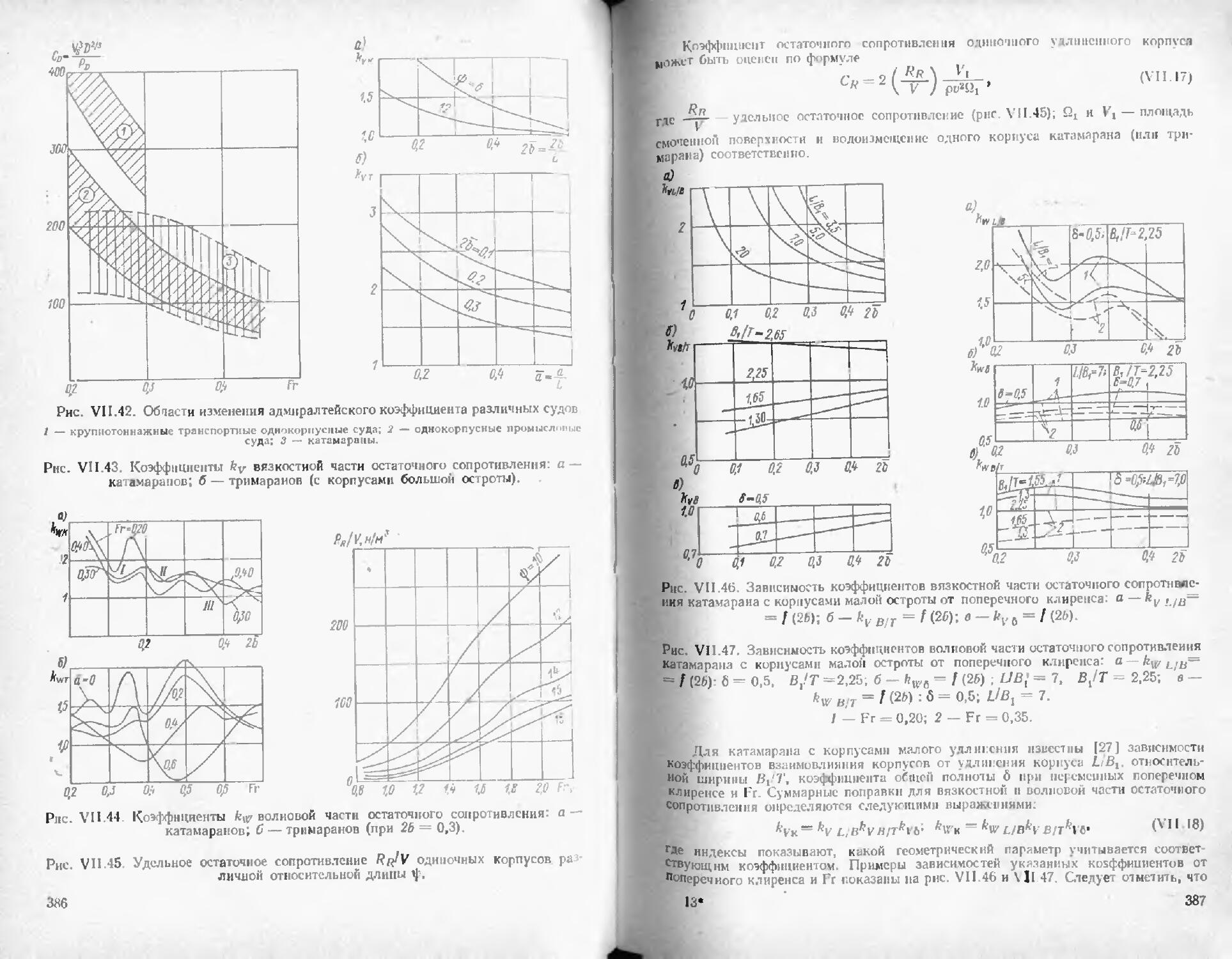
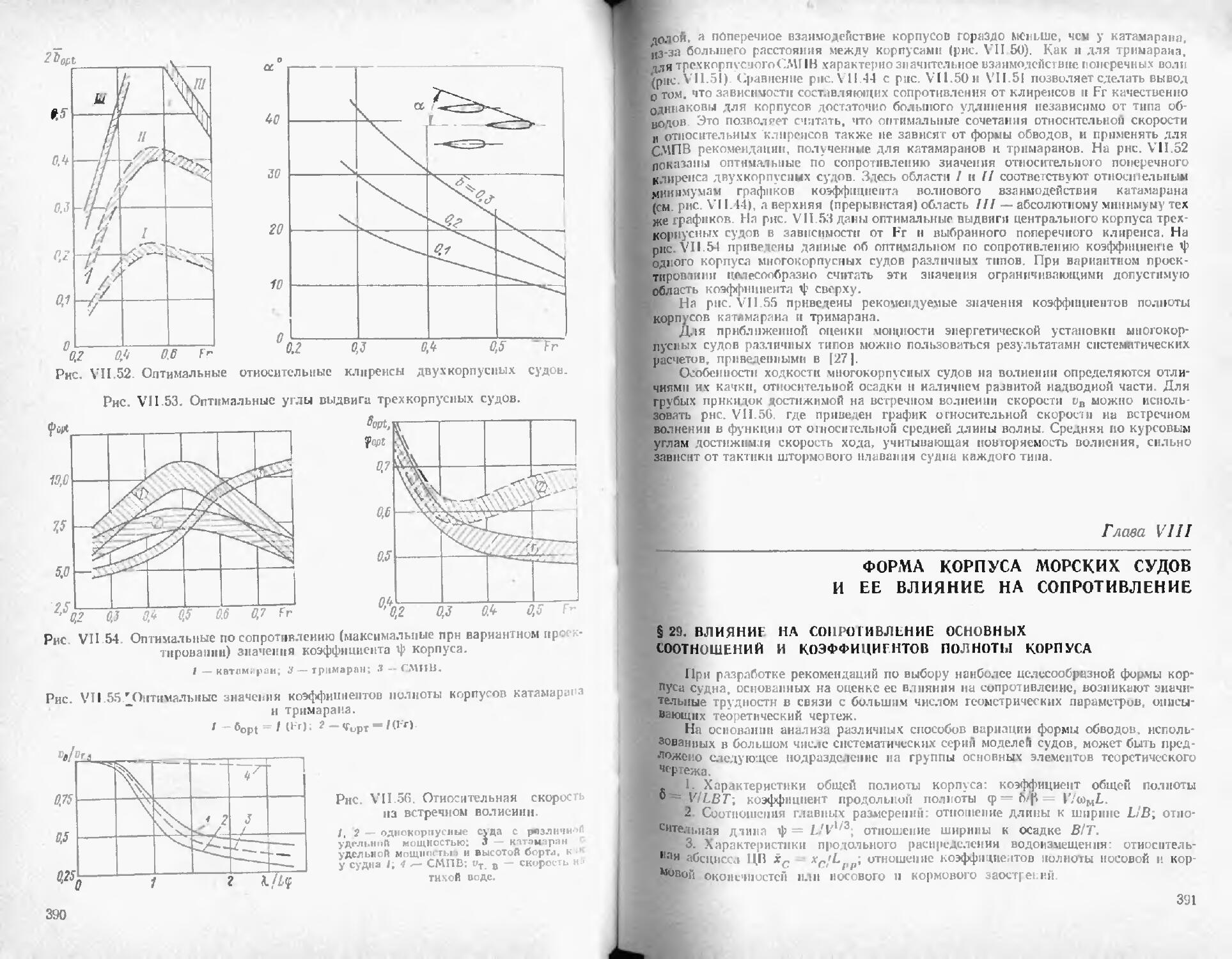
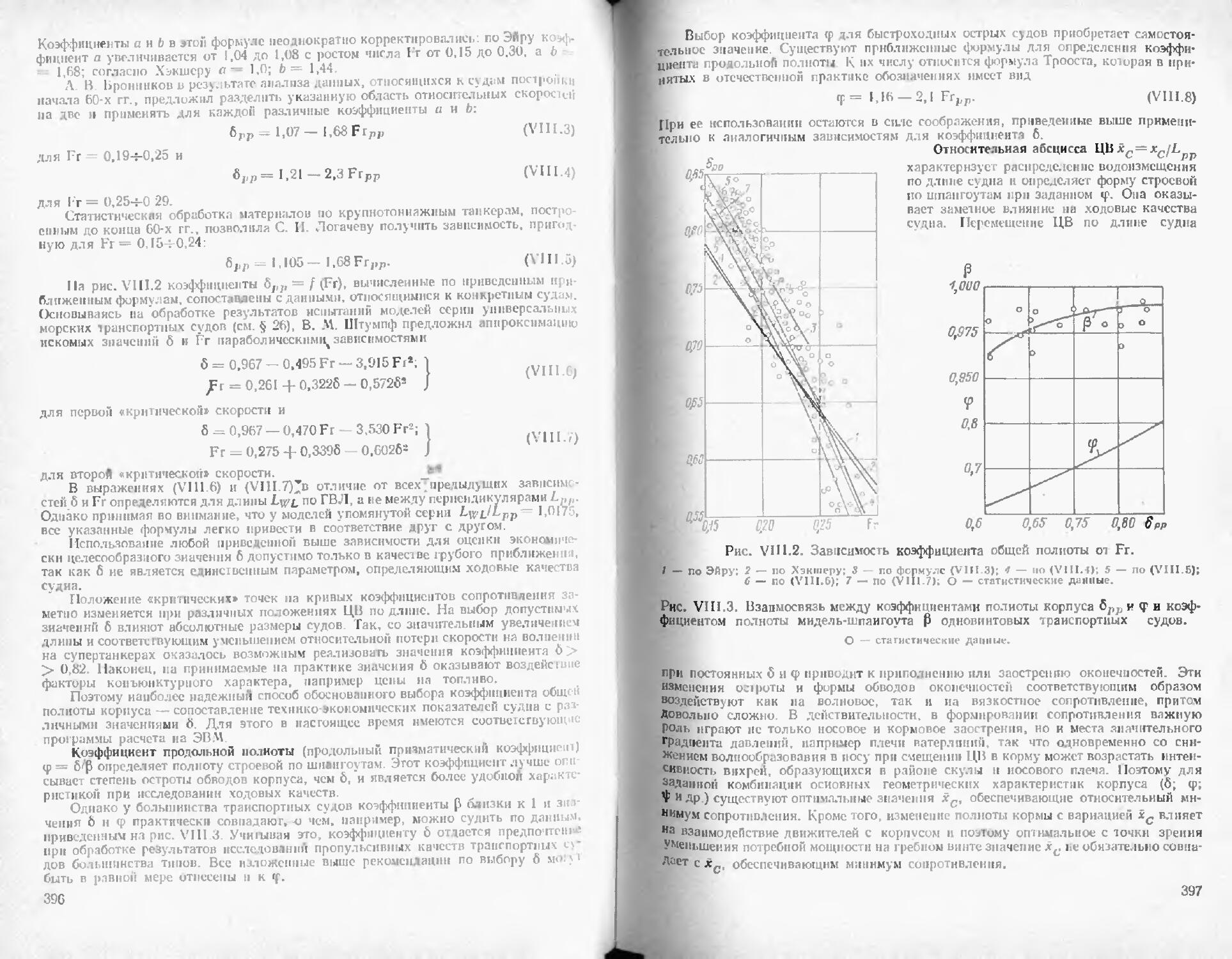
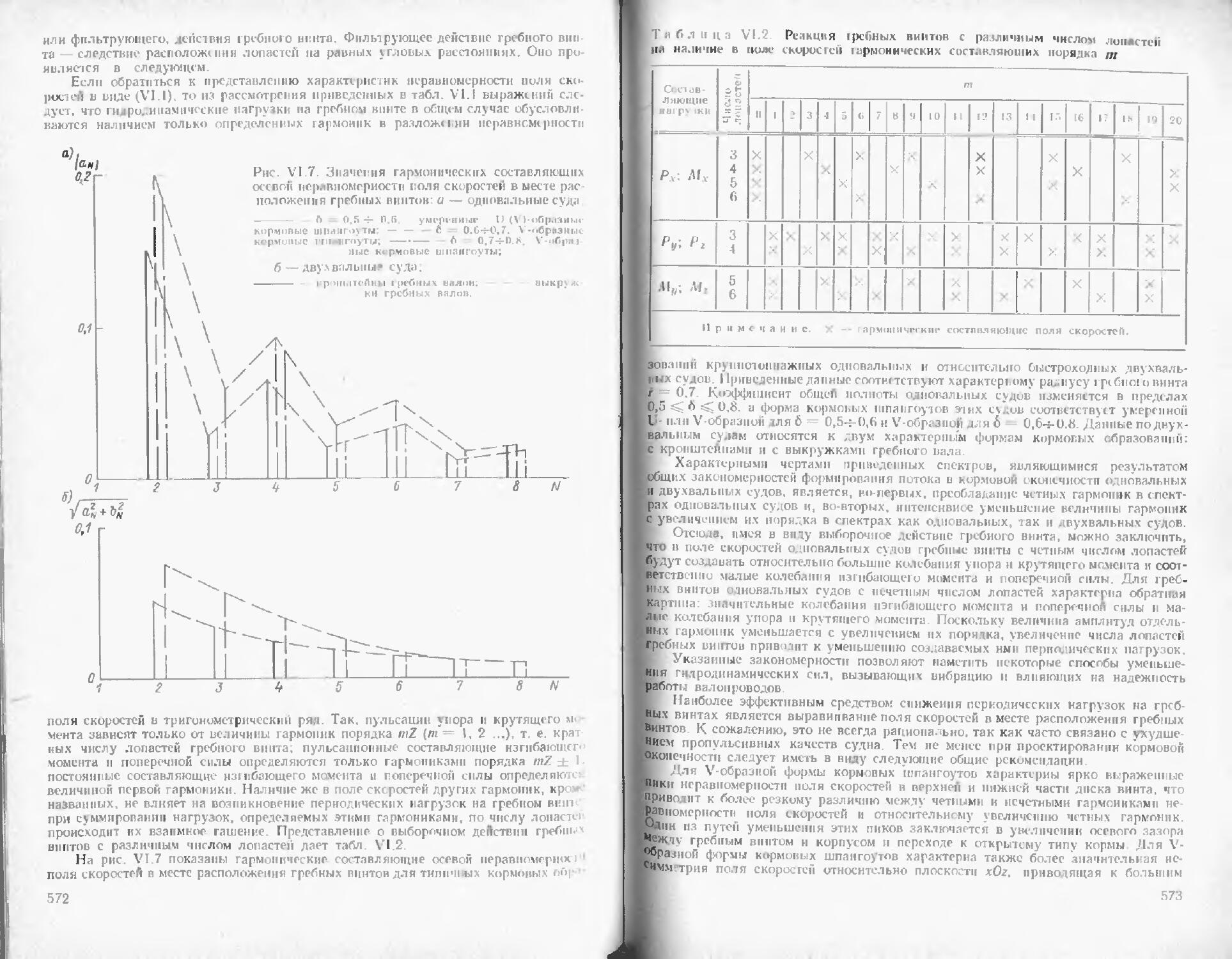
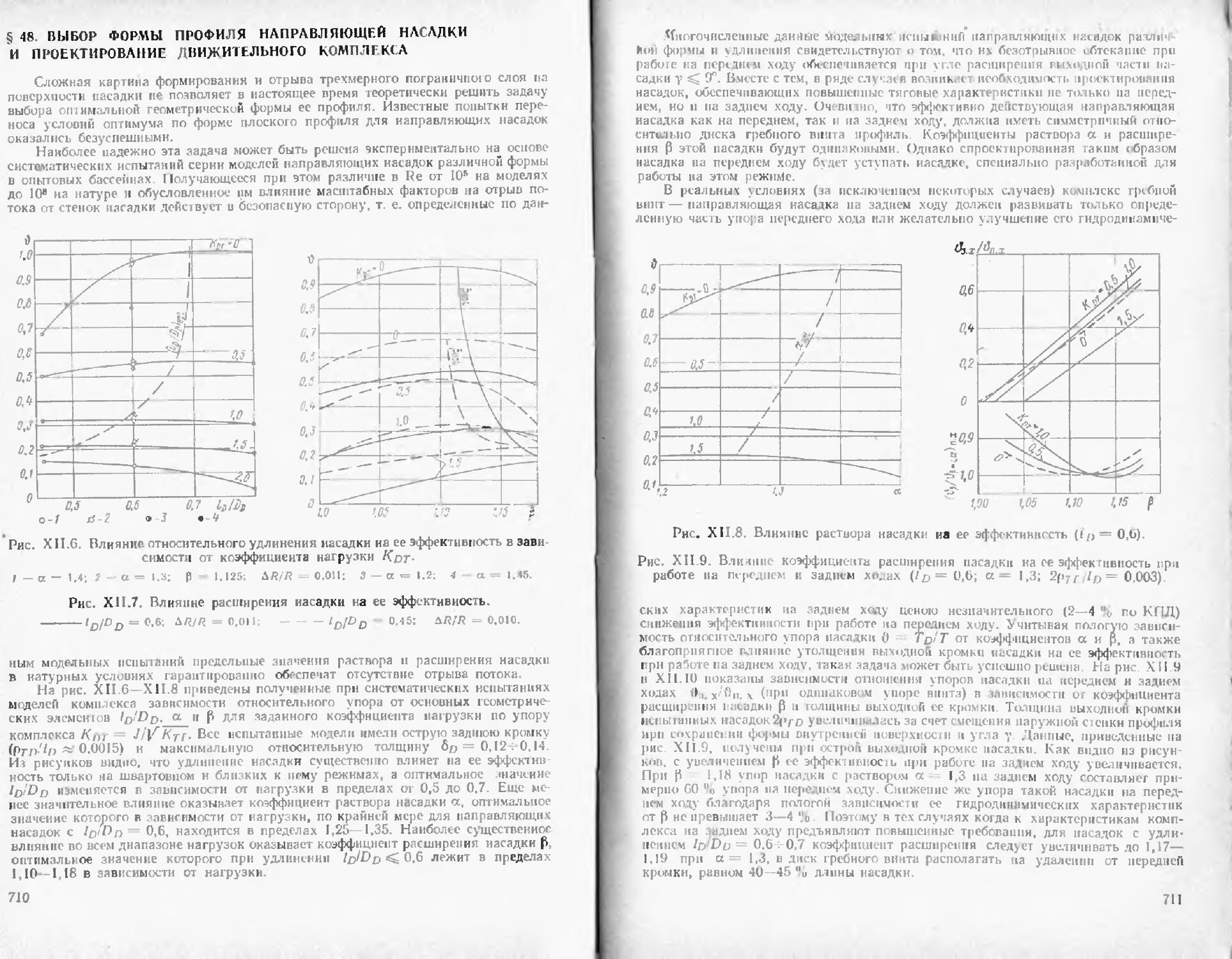
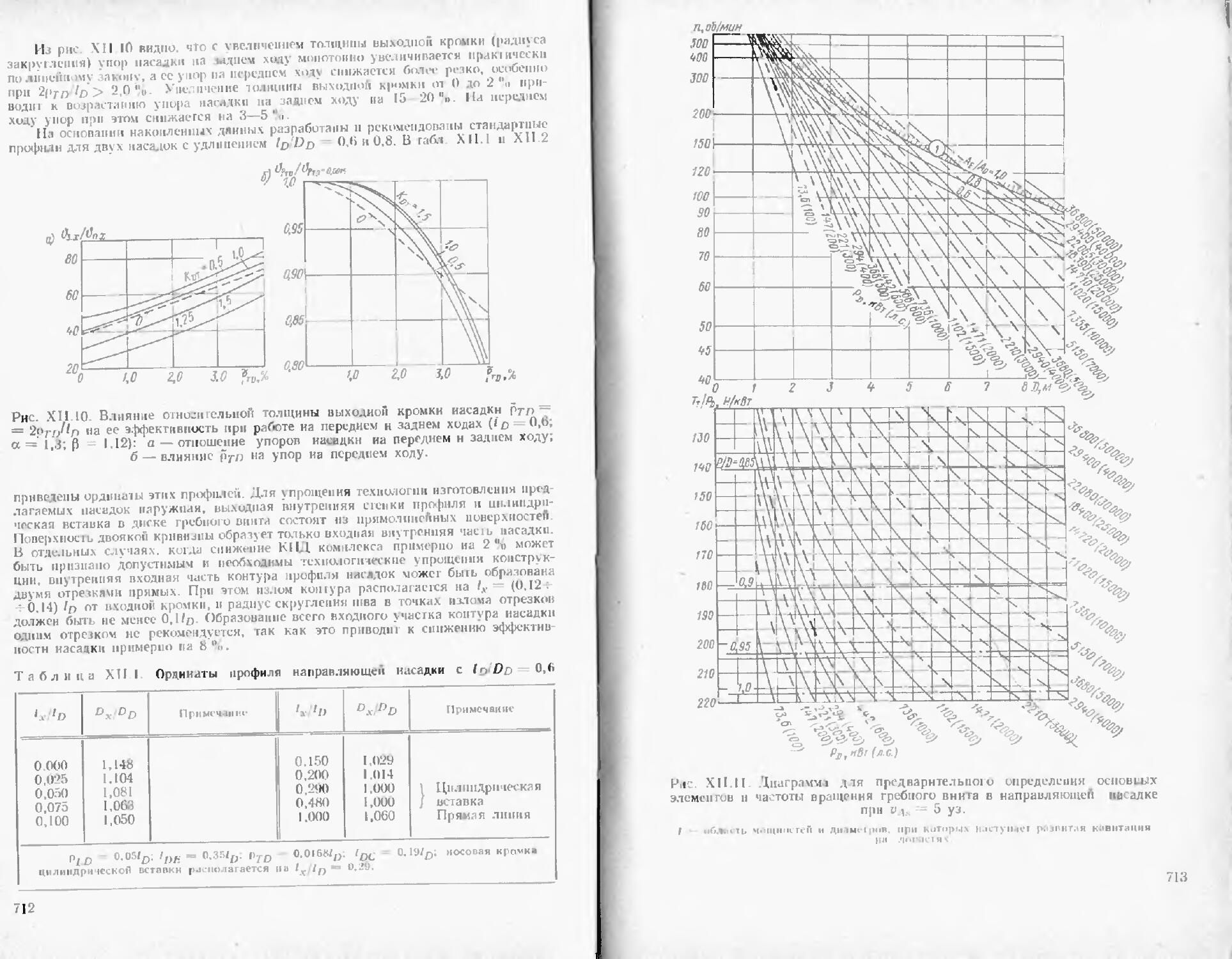
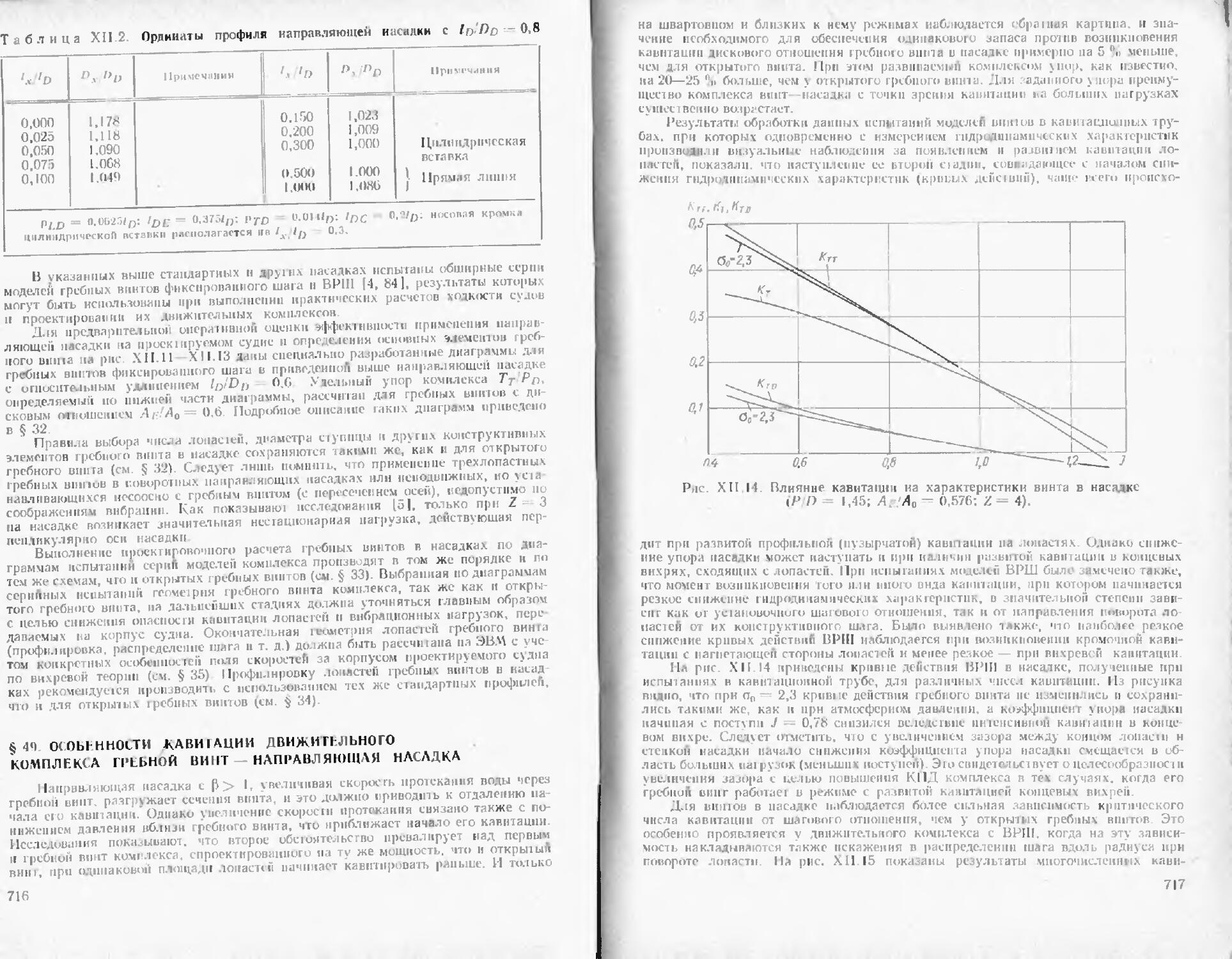
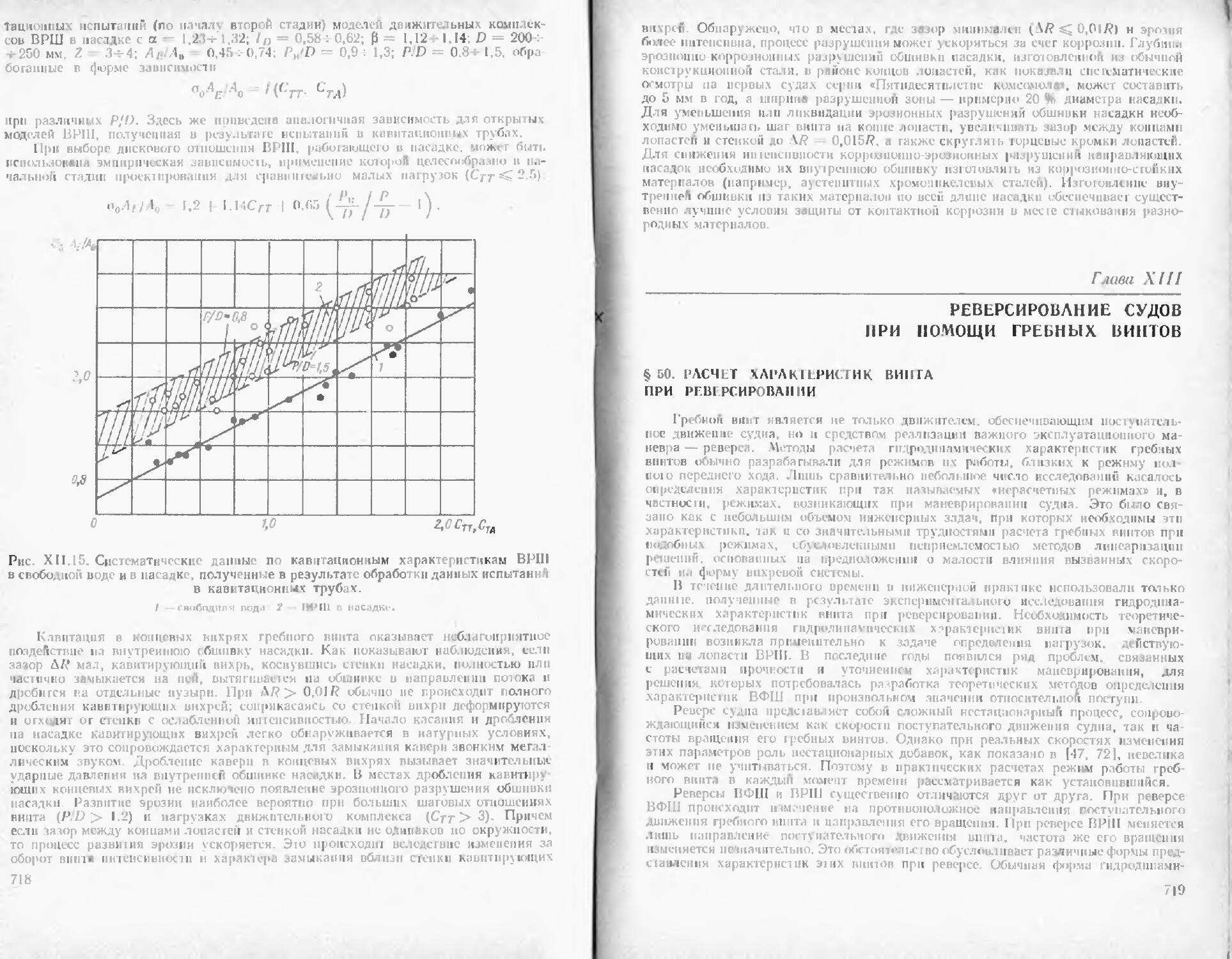
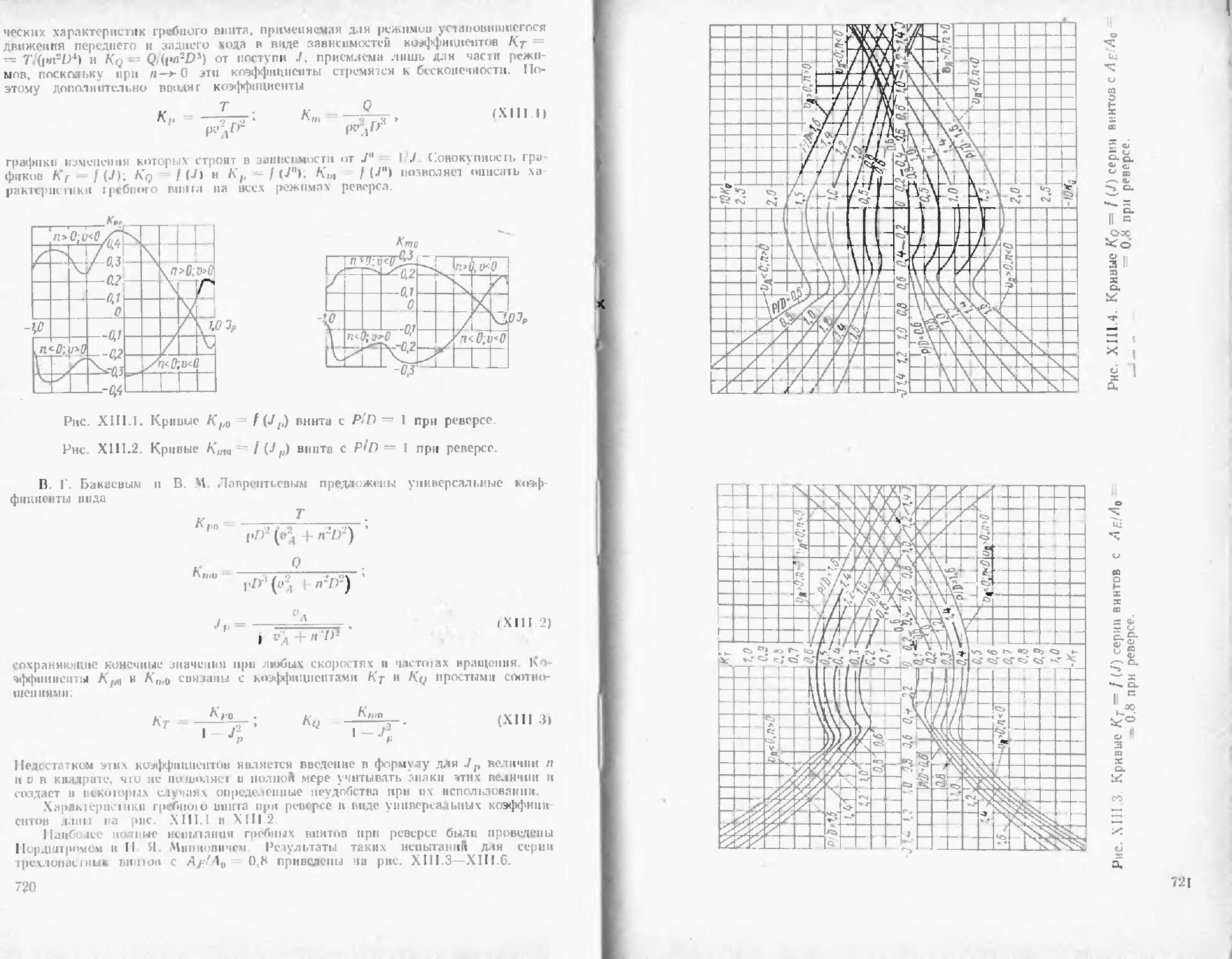
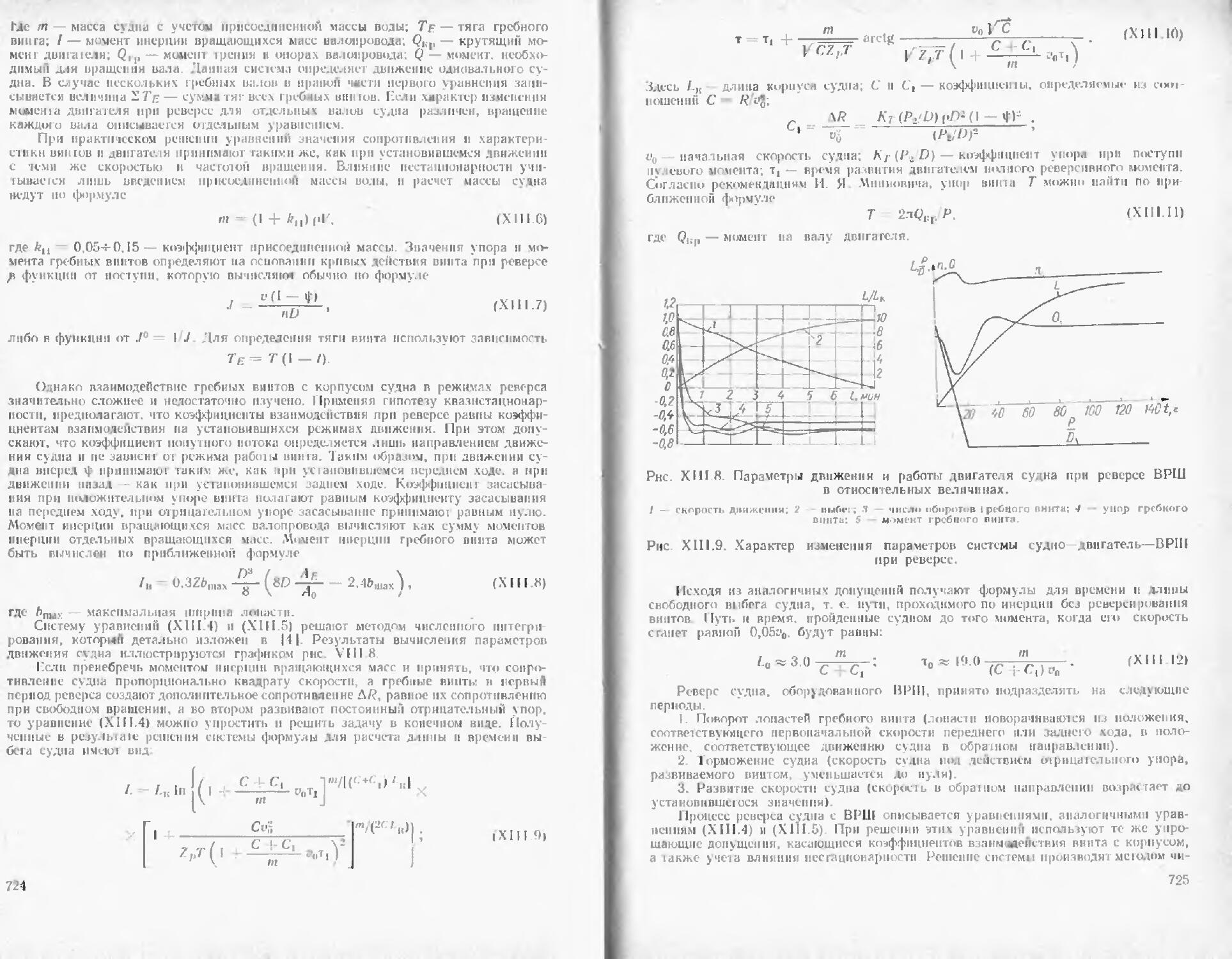
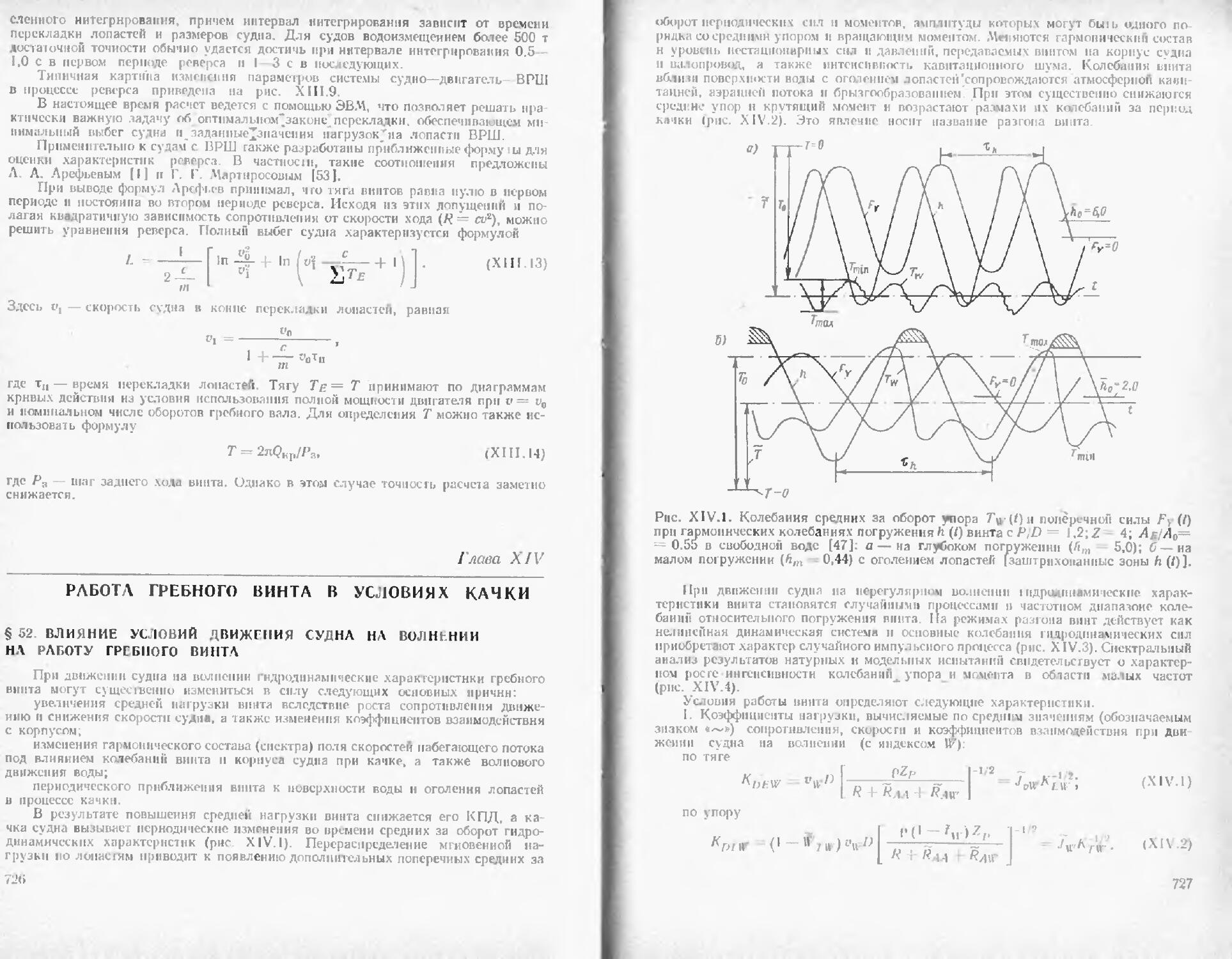
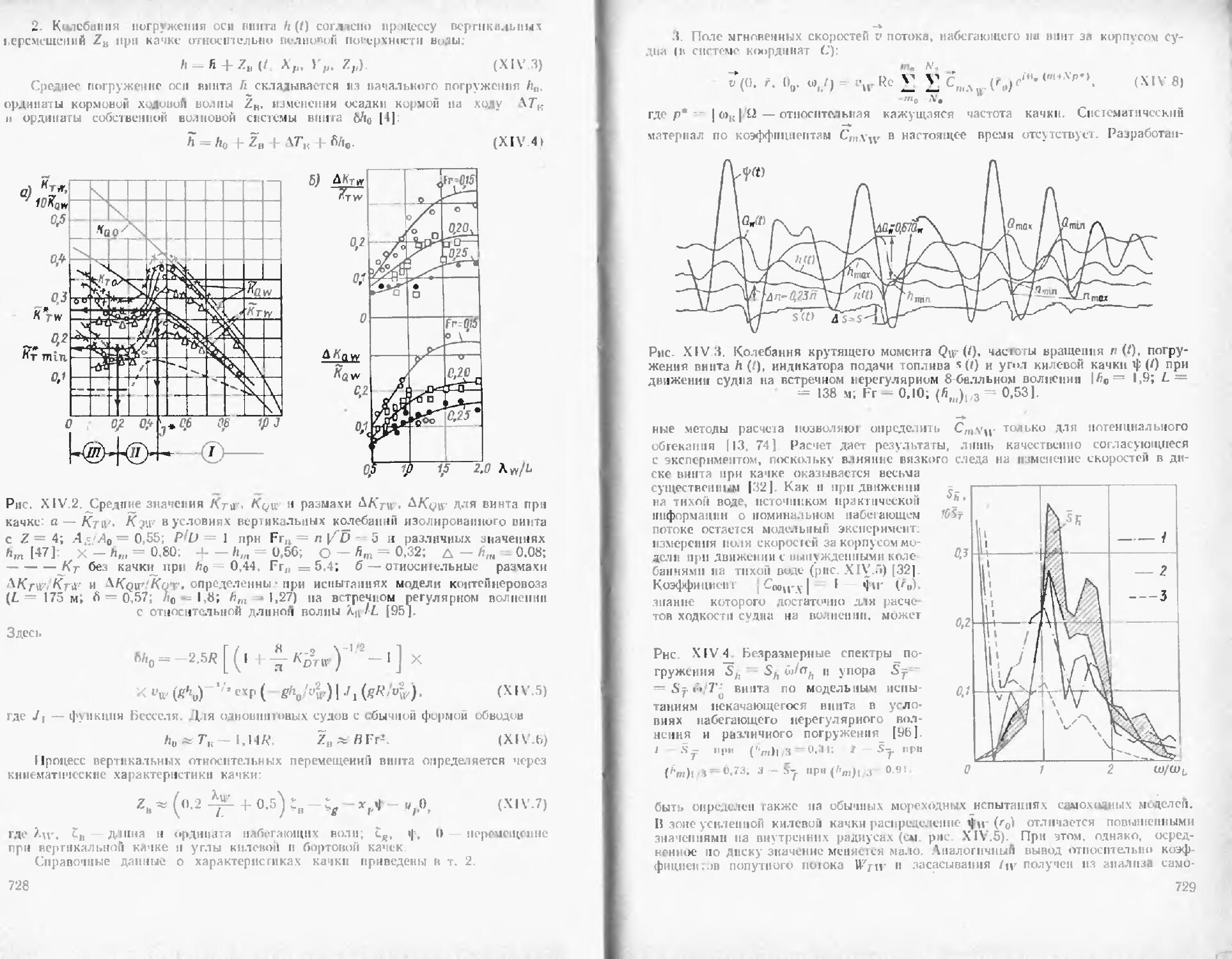
Text
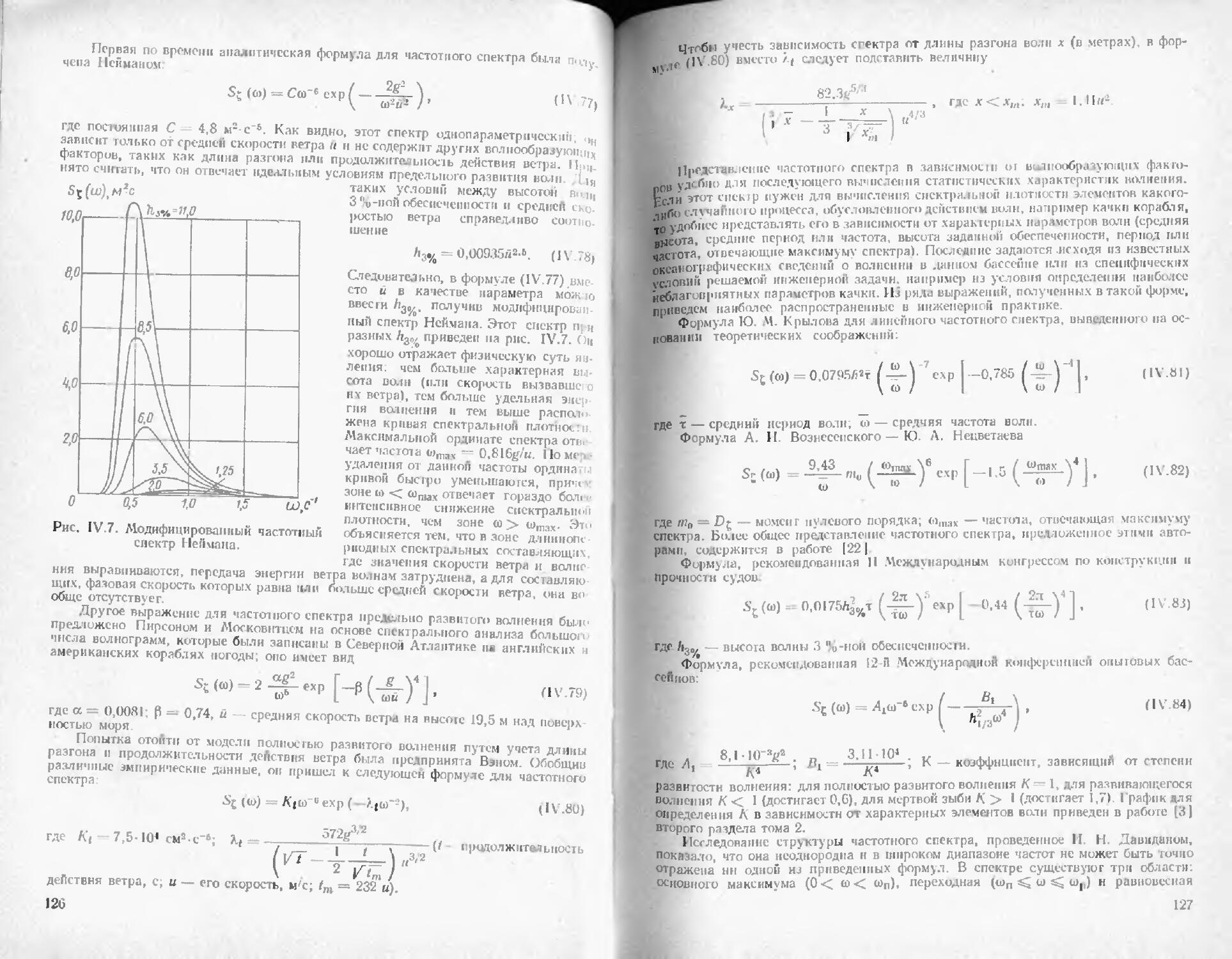
СПРАВОЧНИК ПО ТЕОРИИ КОРАБЛЯ
В трех томах
Под редакцией
Я И Войткунского
Гидромеханика
Сопротивление движению судов Судовые движители
Том первый
Ленинград „Судостроение ’* 1986
ББК 3942-01
С74
УДК |629.12.001.II 5321(031)
от НАУЧНЫХ РЕДАКТОРОВ
Научные р ед а х тир и: д-р техн наук лроф Я. И Войткунсьмй, д-р техн, наук преф. Л А. Р&ссцкий
Sh Р Theory Handbook. Ed» by Y I. VoilkounskL In 3 Volumes. Vol. ]. Hydromechanics, Resislante of Ship» Ship Propulsion Devices Leningrad «Sudoslroenie» 1985. 768 p., ill ISBN
Th» book contain* the method* of elrccmllned bodies calculation with respeef ol free *urlace. boundary layer and cavitation Influence Pnutti the principle* of » № *T“i ’Jw d*i* on ”гис|иге °* »»*«• flow near the *ЙП • huh, resist «rice or *hlp calculation method*. Discussed are different type* ol propulsion device* and raaio result* of their theory» method* of calcuhMUon of *h p propelled variable-pitch propellers, propeller — norrle syalems and *o on
Intended lor shipbuilding eglneering nnd research atntf and for «tudenla ol technics collrgta.
Справочник no теории корабля. В трех томах Том 1. С74 Гидромеханика Сопротивление движению судов. Судовые движители/Под ред. Я. И. Войткунского — Л.: Судостроение, 1985. — 768 с., нл.
ИСБН
Приведены способы расчета обтекания тел с учетом влияния свобод кой поверхности, пограничного слоя и каактациа сведсняя по теории свободных воли н о морском ветровом полиса» данные о структуре потока вблизи корпуса судии методы с ределеыня его сопротивления Рассмотрены различные типы днижитгле! м ос ионные результаты их теории.- методпкм расчета гребного винта «mi тов регу-ляругчгого шага, систамы винт Посадка» крыльчатых движителей о aSkEt. °. “*у““ •»•«».«« .
_ 3605030000—059 30.42-01
048(01)—85
© Издательство «Судостроение», |085 г
I «Справочник по теории корабля» состоит из трех томов, содержащих следующие р идолы том 1—«Гидромеханика». «Сопротивление движению судов», «Судовые ,-движители» том 2 — «Статика судов», «Качка судов»; том 3 — «Управляемость водо-нэмощэющих судов» а Гидродинамика судов с динамическими принципами поддержании г-в Справочник является практическим пособием для инженеров и научных работ 'ников занимающихся гидроаэродннамикоЙ, динамикой, проектированием н вксплу атаимей судов ок также может быть использован студентами кораблестроительных №|с’цнальнос1сй. Pai ее изданные справочники по теории корабля (С. Н. Благовещен-. скнй Статика н качка. Л., Судпромгнз, 1950; С. И Благовещенский нА И. Холо-fдолин. Статика н качка Л » Судостроение, 1975, Я II Btйткунский Р. Я. Першиt к И. А Титов. Ходкость и управляемость Л , Судпромгнз. I960; Я Н. Войткун-сний.Р Я Перший И И. Л Титов Судовые движители и управляемость Л , Судо-CTpoci it® 1975) завоевали широкое признание научно-технической общественности и учащихся вузов Данный трехтомник охватывает основные разделы вышеназванных справочников и помимотрлдниненных разделов теории корабля включает новый разде «Гидродинамика судов с динамическими при ним памп поддержания*. об< Сщем-ные данные по которому до t их нор отсутствовали
Значительному изменению подверглось изложение прежних разделов Это вызвано нс только появлением новых эффективных теоретических подходов и методов pncicra различных мореходных качеств судов, но и значительной псрсорцсптаплсй выполнения таких расчетов ив ЭВЧ, что позволило включить многие ранее лрнктн чески трудно реализуемые методы в инженерную практику Однако программы слож пых расчетов могут быть различными, к тому же при современном быстром прогрессе П области вы 1нсвительнон техники о ш часто устаревают еще до выхода книги в свет, поэтому в соответствующих разделах трехтомника содержатся лишь общие сведение о составлении исходной информации Наряду с широким освещением отечественных достижений в области гидромеханики судна в книгу пключеиы итоги ряда зарубеж иых разработок» опубликованных в трудах международных конференций и в периодической печати Ряд материалов Справочника представляет результаты по пученные авторами данного издания Приводимые в конце каждого раздела указатели литературы содержат в основном наиболее общие или последние по времени публикации
Изложение сведений рассчитано на читателя» знакомого с основами гндромехв-ьикн судив Соответствен но назначению книги расчетные формулы большей чпетью Даются в виде окончательного результата. Тем не менее в тексте указываются прнн-Енпиальмые положения И исходные допущения, принятые в основу рекомендуемых методов и формул а также пределы их применимости Описана физика рассматриваемых явлений и процессов
В последние годы значительное внимание за рубежом и в СССР удслялскь унификации обозначений в области гидроме хан в к н судна Такая унификация была раз работа на между на [годным конференциями опытовых бассейнов (МКОБ) Однвко данная система обозначений еще не нашла повсеместного применения в отечествен ной практике Учитывая нецелесообразность полного отступления от традиционных систем отечественных обозначений» принятых в гидромеханике и проектировании судов, в Справочнике лишь частично применвется стема близкая к рекомендован
5
ной МКОБ это позволит ©ценить степень ее эффективности л не будет затруд» ять использование рамсе изданной литературы.
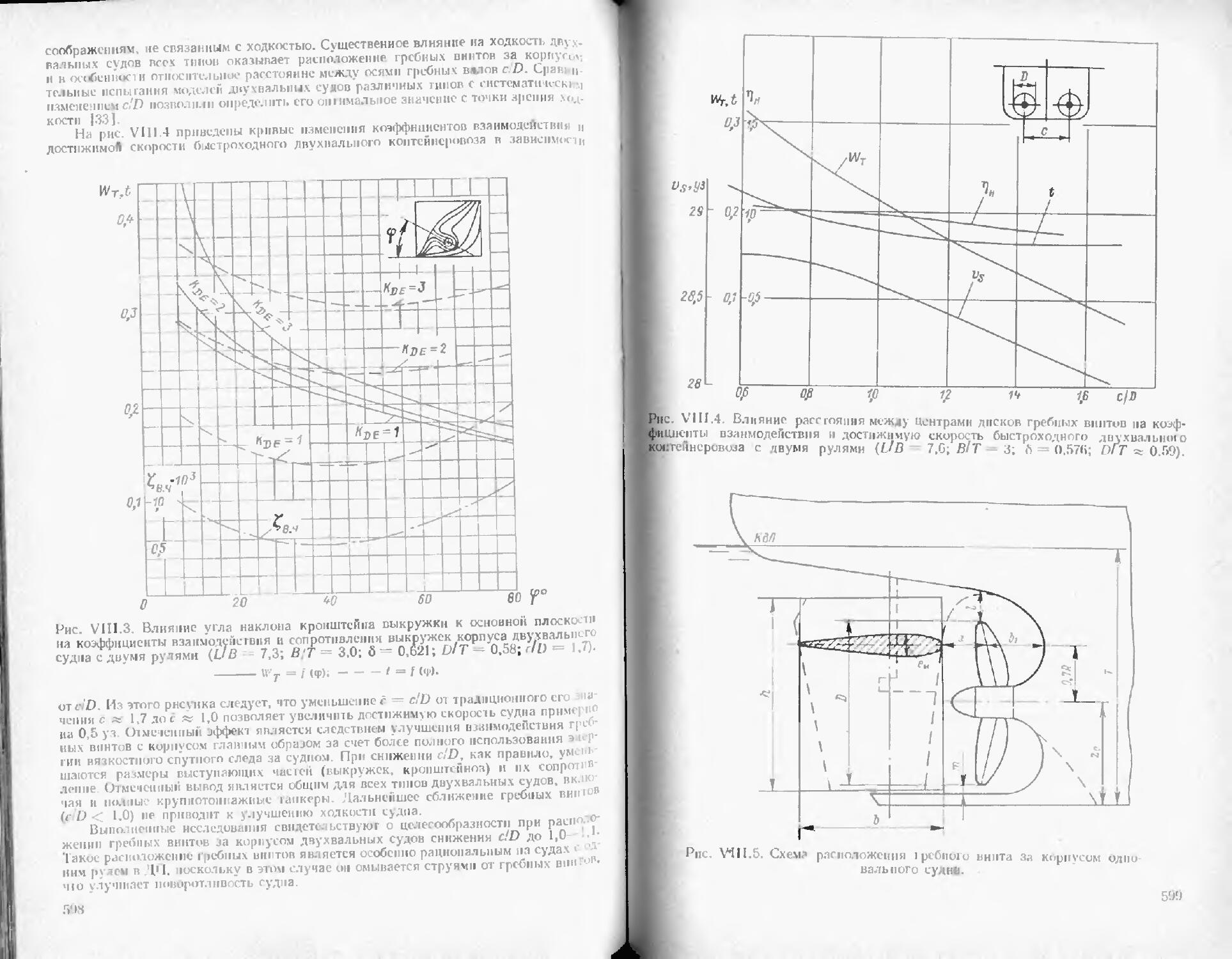
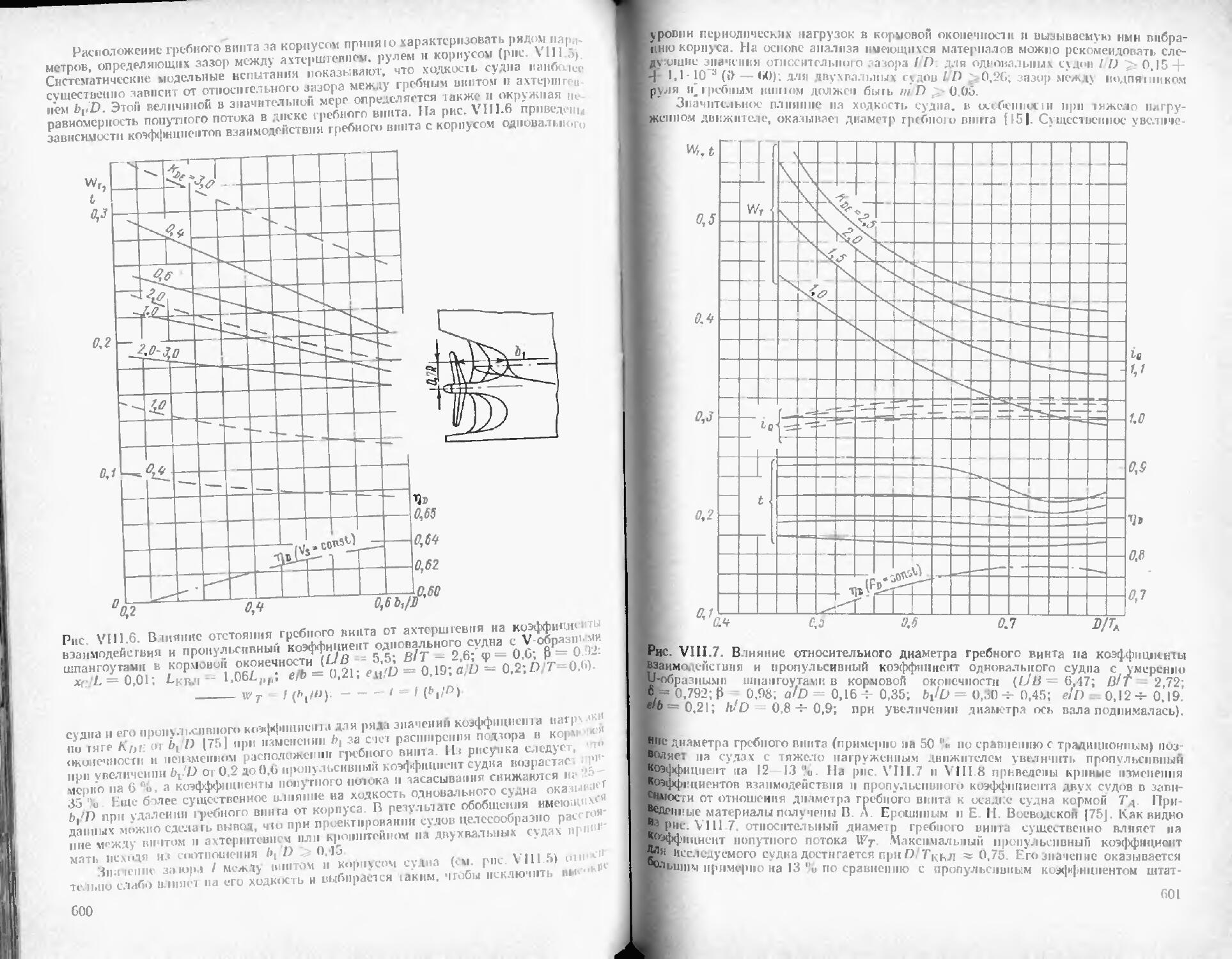
Авторы первого раздела: Я. II. В о й т к у н с к н П (5 1—7. 10—19. 24—28)-. Н-,? ?? "Л*. .8 ЗО-ЗД: в. В. Л у г о в с к и й (5 20-21); А. Н. С м о р о. Дин 5 22—23); И. А. Титов (5 33—40); Н. II. Поляков н В. В Ток. 01 е в с к и й (5 29); А. Н. III е б а а о в (5 8. 9).
Авторы в ого раздела- Я- И- В о й т к у н к н й (5 1—3). В А Л о б-ровекяй (5 28); И. Д. Желтухин ft 12); Э. П Л е б е д е в ' « 101-В. В. J я п н с (§ 19 21); О. П. Орлов к I А. ф. Пустошный! (5 4—8 «н.?.
-J. Б А Б и с к у л в н" Ю* з(°сн™"ые обозначения и системы коордиият,43} 2. 3^ ?8"В40,Л4|”-Н К> Завидовский и В. Г. М и ш к е в к ч (4 7— Е П Г е л о г и » « А- С. г°Рш“°в в 26—30); Т. К II враг нм о а/К 381-ге. Б. Л и п к с (§ 62—55); В. Г. Мншкевнч (§ 5, 6. 9. 11, |2 |7 34—fW * Гп М " Ш “ е » "Х-" Александр А» к'с’е ев J , р у7е ц Г(}^ О. П. Орлов н|А. Ф. Пустошный (5 13-16); Александр Ален-оап»РОвнч Русенкнй (521); Александр Алексеевич Р vJ с е цк н й ($ 1 0.19. 39 44-46. 5°. Si). В. К. Ту рвал « 3|-Лз 47 48>* М. Ф. X р а м к н н (§ 1.4. 49, 56. 57).
И н’Ув!5го!»Е5!!?в?"Н н?стоашего ™“» являются докт. техн, иауя про*.' А д 1cpBIJfi ,н а рой разделы) н докт. техн, наук про*.
^AC03e™«HHe гляТ'ей Х-°ЭДСЛ)' ₽аэ1аво1"н пл,и тома. определено основ-.Л ос)тестплено научное наблюденге прн подготовит ол-
лсктпвом авторов материалов тома
Раздел первый
ГИДРОМЕХАНИКА
ОСНОВНЫЕ ОБОЗНАЧЕНИЯ
а — амплитуда волны.
В — вектор количества движения жидкости. b — хорда профиля
С — постоянная логарифмического закона скорости в турбулентном потоке.
Cq — коэффициент центра давления крыла.
Ср — коэффициент сопротмвле «ня трепня Ci — коэффициент индуктивного сопротивления, Сх — коэффициент сопротивления тела или крыла. Св — коэфшцнент подъемной силы крыла Су — коэффициент вязкостного сопротнвлс вня.
Сур — коэффициент соп|ютнвлеиня формы (вязкостного сопротивления давлении).
С\у — коэффнш сет волнового сопротивления. с — скорость распространения воли.
еа — скорость звука
с/ — местный коэффнцие гт трепня
ст — отстояние наибольшего сечения профиля от его передней кромки
Ср. Су — теплоемкость при постоянных давлении н объеме.
Dg — дисперсия волновых ординат.
е — максимальная толщина профиля,
— относительная скорость деформации жидкой частицы.
F — вектор напряжения массовых сил.
F — функция распределения
/ — форм-параметр пограничного слоя.
[- относительная стреляв прогиба профвля.
G - функция Грнна
Я — ускорение свободного падения.
п — глубина воды. h — высота волны.
/ — интенсивность вихревой трубки.
i, /, * — единичные векторы (орты).
/ — вектор момента количества движения жидкости.
К — качество крыла.
* — частота формы волны (волновое число).
* — высоте бугорков шероховатости ku — коэффициент присоединенной массы.
£ — линейный размер тела (длина)
L — вектор момента количества движения телп.
I ~ размах крыла.
— путь турбулентного перемешивания.
А! — гидродинамический момент.
7
Л!и — инерционный гидродинамический момент. т — момент диполя.
mf — момент частиниго спектра волнения порядка г fnt ifiy, тп_ — коэффициенты момент* и крыла
л«- единичный вектор нормали к поверхности Р •- гндроднннчн КГМХ ДНОТГПНС.
р„ — давление п Каверне.
Р*- Рж- Pv Р- — векторы напряжений кнут] синих сил Q — юн спорность источника.
О — вектор количества движения тела
R„ — инерционная гидродннпмнчссквя сило
R Rx. Ry, Rt — гияроднипинческая реакция н се составляющие.
f. 0. а - сферические координаты
r-i — текущий ]ЮДНус тела вращения
г*, я, 0 цняиндрнчсские координаты
S поверхность; площадь крыла (в плане).
.S- энергетически! спектр полпенни (спектральная плотность), s — уловкиая энергия волн (ил единицу площади)
Т. I — характерное время; темп* рт тури ' Тл — кинетическая энергия житкости.
(п — таг решетки и — нотепцнзл массовых сна и потенциал ускорений
цг ~ групповая скорость иол»1 У — объем
I'. vx. Vy. v вектор скорости потока и его составляющие
р*. у,. у, — пульсиининная скорость турбулентного потоке и ее составляющие.
fen — срстняя скорость потока.
w (г) — характеристическая функция плоского потока.
х. у i — дскартопы координаты.
хц — абсцисса перехода пт ламинарного к турбулентному пограничному слою.
т х iy — комплексное число а — угол агвкн крыла.
etg — угол ну Левой подъемной силы профиля.
а. — Угол волнового склона.
ая постоянная вязкого подстоя.
со — индуктивный угол скоса потока у крыла, р угол скосл свободных нихрей Г циркуляция скорост I.
Y — удельный вес; интенсивность вихревого слоя.
уп — коэфе^нцнент перемежаемости.
А — оператор Лапласа.
б. б . б*’. — характерные толщины пограничного слоя.
ег — степень турбулентности £в ординаты поли
Н. И\ О*** — характерны»1 нлощиди пограничного слоя.
И — угол распространения вели.
и — постоянная турбувснтносгн
л—длина волны; опоен тел i нос уювнисннс крыла.
Zf., — прж^М'лнненпая масса a |t. II — эллиптические координаты. |t лннамнчсскти вязкость у кцнсхмтнческая вятк*чт1>. р ГМОТШКТЬ ЖНДК(К*1Н о — чисто клпнтлн.нн.
о,, — поверх пост нос натяжение
<1>. «ч — плотность простого и двойного слоев.
т — период волны
Т)у— вязкостное напряжение
тт — турбулентное пап ряженке
Та - касатевьпое нзприжснис ни стенке
Ф. ф — потенция т скорости
‘И. if — функция томя
С)у, ш- — вектор угловой скорости и его составляющие и — частота воли
Глава /
ОБЩИЕ СВЕДЕНИЯ ПО ГИДРОМЕХАНИКЕ
f I ОСНОВНЫЕ СВОЙСТВА
И ФИЗИЧЕСКИ! XAPAKTFi*lfCniKI1 ЖИДКОСТЕЙ
I Жидкостью называется физическое тедо. которое обладает текучестью, обуслоя-Кснно легкой подвижностью частик Нарячу с теку (сетью жидкости зырлктерн-зротся сжимаемостью. вязкостью, поверхностным натяжением. мсктропроводностъю н другими свойствами. оказывающими влияние па структуру их те гения
F • Жидкости можно разделить шт лапе гимна и газообразны? (ушел! ныс жидкости.
Нфпрпчср вода, мяло сжимаемы и всчетстпие значительного ш жмолек ул яркого взан-«действия способны образовывать свободную поверхность Газы, например воздух, благодаря меньшему меж>>лскул яркому взаимодействию сравнительно легко сжимаются Стремясь заполнить объем сосуда, в который они помещены, газы росши-ряют . нс обрззуя свободной поверхности Клпел1ныс и газообразные жидкости симесзт молекулярную» структуру учет ее влияния на их свойства производятся в кн-ИЬртмчес сори и В гидроаэромеханике жидкость принято рассматривать как Кыюкшую, легко деформируемую среду и не учитывать со молекулярную структуру.
Моде, жидкости основанная на представлении imc сплошности. позволяет считать все фтзкческнс характеристики, ькоржтн. ускорения и действующие в ней евлы tie-Пре юр сыын функциями координат «ростртигли где течет жидкость
I Основными физически мн характеристиками жидкости являются птотность р. Кделлшй вес у динамическая вязкость р (киэффннмент динамической вязкости), ки-иемптмчсскпя вязкость v (коэффициент кинематической вязкости), поверхностное ^нвтвж о4 Размерности этих величин в ранее применившихся системах елнннц приведены в работе | 16 |
L В системе СП единицей нзче])сння давления р и напряжений в жидкости с лужит I паска. [ Пн 111м* При измерении давления обычно используют более крупные единицы — гсктппаскаль (I гПч -100 Н/м*) или бар (равен 1-10* Па) В расчетах к при градуировке аппаратуры («пользовались для измерения давления атмосферы: I гехннческлв атмосфера |лт| ртвняя I кгосм3. т е. 1 10* кге'ч*. или 0.981 бар ^соответствует в снстехге СИ давлению 9.81-10* НЛэ*, т е 981 гПа Давление, равное М ат, создается в основании столба пресной воды высотой Юм нтн ртутного столба Кеотой В.7356 м при t — Ot;
. нормаль чан иди фнз|чсская жмосфсрз (атм). равняя 1,033 кге-см* (I 0I3X Нк1(Н H/м», т с 1013 гПп или 1.013 блр), соответствует давлению в основании ртут-
Иог_ столбк высотой 760 мм при t » 0,'С н плотности ртути р ш 13.595 *«?.
в Удельный вес жидкости связан с ее плошостъю соотношением
т - ге. (1-И
где g 9.81 м4ь* уск1 ранне свабидпого пячения.
В «инородных жидкостях р опрсделнетсв как отношение массы жидкости к ее объем Липкость капельных жидкостей мало зависит от заиления р в жидкости.
9
Таблица 1.1. Зависимости плотности пресной воды и давления ее насыщенного пара ог температуры
f *с р, кг/м* Рс. П. t, *с р. кг/м’ %- П1
0 999,9 0,61 25 997.1 3,16
5 1000,0 0,87 30 995.7 4,23
10 999,7 1,23 40 992,3 7,37
15 999,1 1,70 50 988,1 12,3
20 998,2 2,33 60 983,2 19,9
70 977,8 31,1
Таблица 1.2. Зависимости плотности и кинематической вязкости воздуха от температуры при р = 1 ат
Г, °C р„ i/c№ V. м*7с /, °C Р, г/см3 V. м’/с
-50 1,582-10 3 0,92-10-® 20 1,205 1.50
0 1,293 1,32 30 1,165 1.60
10 1,247 1.41 40 1,127 1,69
15 1,225 1,45 60 1.060 1,88
Таблица 13 Зависимость кинематической вязкости пресной и соленой воды от температуры по данным IX МКОГ>
1. "С V. 10*, м’/с t. ’С V- 10е, м9/с
Пресная вода Соленая вода Пресная вода Соленая води
2,2 1,658 15,0 1,139 1,187
3.8 1,571 .— 17,2 1 075 1,124
5.0 1,517 1,560 20,0 1,003 1,053
7.2 1.417 1,462 22,2 0,951 1 002
10.0 1,306 1,352 25.0 0,893 0,943
12,2 1,227 1,274 30,0 0,801 0,851
поэтому их можно практически рассматривать как несжимаемые. Связь между плотностью и давлением при данной температуре для воды определяется соотношением
Р = Ро
р + 3000
3001
>/7
(12)
где р0 — плотность при атмосферном давлении; р — давление, ат.
Для пресной воды при / — 4 °C р = 1000 кг/м3 (в системе МК.ГСС р = — 102 кгс-с2/м4). Плотность воды внутренних морей {Черное, Балтийское) 1010— 1015 кг/м3, а океанов 1020—1028 кг/м . Более подробные сведения о плотности морской воды даны в гл. II первого раздела второго томя
Удельный вес пресной воды при < = 4 °C равен 9810 Н/м3 (в системе МКГСС у = 1000 кге/м3) В табл. 1.1 указаны зависимости плотности пресной воды и давления pv ее насыщенного пара от температуры.
Плотность воздуха и других газов зависит как от температуры, так и от давления и определяется уравнением состояния; для совершенных газов, к которым с достаточной точностью можно отнести воздух:
р = pi'(RT), (1.3)
10
где газовая постоянная R = 8,3144 Н-м/(град-моль), Т — абсолютная температура. Если известна плотность газа ра при (в и давлении р0, то при других значениях / и р плотность определяется по формуле
Р (273.1 + /„) р„ (273,1 4-/) ‘
(1.4)
При температуре 15 °C и давлении 1013 гПа (1.033 ат) для сухого воздуха р = — 1,220 кг/м3 (в системе МКГССр = 0,125 кгс-с2/м4) Этому значениюр соответствует м = 12,02 Н/м3 (1,226 кге/м3). Значения р = / (/) при р — 1 ат даны для воздуха в табл 1.2
Кинематическая г и динамическая р вязкости связаны зависимостью v _р/р. Еди-иниеЛ измерения динамической вязкости Ji в системе СИ служит пуаз (П): / П = = 0.1 II-с/м3, а кинематической вязкости v — стокс (Ст): 1 Ст = 1 -104 м2//с.
Рис. ской
1 1 Значения кинематнче-вязкости пресной (/) и соленой (2) воды.
Рис. 1.2, Зависимость кинематической вязкости воздуха от температуры и давления
Вязкость жидкости зависит от температуры, а также от давления. Значения кинематической вязкости пресной и океанской воды при р = 1028 кг/м3 приведены в табл. I 3 и показаны в функции от температуры на рис. 1.1. Эти значения v рекомендованы IX Международной конференцией опытовых бассейнов (МК.ОБ); их можно рассматривать, как практически независящие от давления и касательных напряжений. Для расчета коэффициента р (в сантипуазах) пресной воды при атмосферном давлении можно применять формулу
. 230.29.8 . ,,
( + 126.303 -1-5668’ (Г5)
где t — температура. °C Изменение динамической вязкости ир пресной воды при t = Ю° по отношению к р, при р = 1 бар характеризуется следующими значениями:
р, бар............... 1 40 80 100 200
Рр/щ ................. I 0000 0,9990 0,9982 0,9977 0,9955
Для определения динамической вязкости воздуха при р = I ат можно, применяя систему СИ, пользоваться формулой
р. =« (1700 + 5,8( - 0,011/2) 10-’. (1.6)
На рис. I 2 показаны зависимости кинематической вязкости воздуха от температуры и давления, а в табл 1.2 даны значения v [ (/).
И
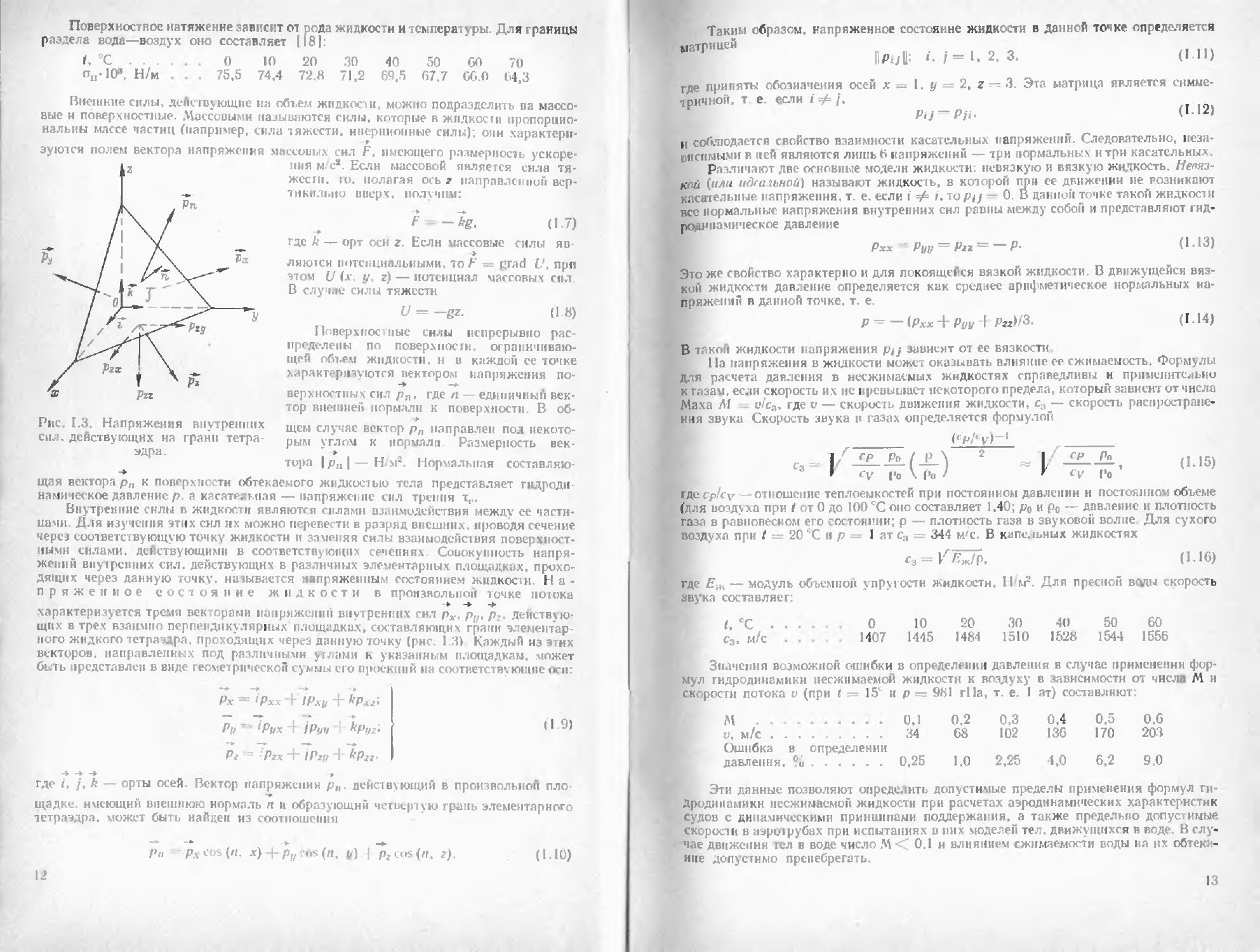
Поверхностное натяжение зависит от рода жидкости и температуры. Для границы раздела вода—воздух оно составляет |18]:
t, °C............. О 10 20 30 40 50 60 70
пп-10", Н/м . . . 75,5 74,4 7*2.8 71,2 69,5 67.7 66.0 64,3
Внешние силы, действующие на объем жидкости, можно подразделить на массовые и поверхностные. Чассовыми называются силы, которые в жидкости пропорциональны массе частиц (например, сила тяжести, инерционные силы); они характеризуются полем вектора напряжения массовых сил F, имеющего размерность ускоре-г пня м/с1. Если массовой является сила тя-
1 жести, io, полагая ось г направленной вер-
Рис. 1.3. Напряжения внутренних сил. действующих на грани тетраэдра.
THKtt.Ti.iio вверх, получим:
F (1.7)
где k — орт осн г Если массовые силы яв ляются потенциальными, то F = grad при этом U (х. у. г) — потенциал массовых сил В случае силы тяжести
= (1-8)
Поверхностные силы непрерывно распределены по поверхности, ограничивающей объем жидкости, н в каждой се точке характеризуются вектором напряжения по-—*
верхностных сил ря, где п — единичный вектор внешней нормали к поверхности. В общем случае вектор рп направлен под некоторым углом к нормали Размерность вектора | р„ | — Н хг. Нормальная составляю
щая вектора рп к поверхности обтекаемого жидкостью тела представляет гидродинамическое давление р. а касательная — напряжение сил трения т„.
Внутренние силы в жидкости являются силами взаимодействия между ее частицами. Для изучения этих сил их можно перевести в разряд внешних, проводя сечение через соответствующую точку жидкости и заменяя силы взаимодействия поверхностными силами, действующими в соответствующих сечениях. Совокупность напряжений внутренних сил. действующих в различных элементарных площадках, проходящих через данную точку, называется напряженным состоянием жидкости. К а -пряженное состояние жидкости в произвольной точке потока характеризуется тремя векторами напряжений внутренних сил рх, р;/, р,, действующих в трех взаимно перпендикулярных площадках, составляющих грани элементарного жидкого тетраэдра, проходящих через данную точку (рис. 1 3) Каждый из этих
векторов, направленных под различными углами к указанным площадкам, может быть представлен в виде геометрической суммы его проекций на соответствующие оси:
Рх — ipxx + ipxy +
Рц п ‘Рух Ч 1Руу ~|~ Ар/уг!
Рг ~ Ргх + iPxif 4 РРгг-
(1.9)
где (, /, k — орты осей. Вектор напряжения р„. действующий в произвольной площадке. имеющий внешнюю нормаль п и образующий четвертую грань элементарного тетраэдра, может быть найден из соотношения
Рп рх cos (и. х) + •.•ns (п, V) 4- рг cos (п. z).
(1.10)
12
Таким образом, напряженное состояние жидкости в данной точке определяется
матрицей
||Pl7||: I. /=1.2,3.
(I Н)
где приняты обозначения осей х = 1 у = 2, г — 3 Зга матрица является симметричной, т е. если i Ф J.
П |2>
и соблюдается свойство взаимности касательных напряжений. Следовательно, независимыми в ней являются лишь 6 напряжений — три нормальных и три касательных.
Различают две основные модели жидкости невязкую и вязкую жидкость. Невязкой (или идеальной} называют жидкость, в которой при ее движении не возникают касательные напряжения, т е. если i =/= i. тори ~ О- “ Данной точке такой жидкости все нормальные напряжения внутренних сил равны между собой и представляют гидродинамическое давление
Рхх ~ Руу — Ргг ~ Р- (1-13)
Это же свойство характерно и для покоящейся вязкой жидкости. В движущейся вязкой жидкости давление определяется как среднее арифметическое нормальных напряжений в данной точке, т. е.
Р = — (Рхх + Руу I Pzz)/3. (I 14J
В такой жидкости напряжения р,j зависят от ее вязкости
11а напряжения в жидкости может оказывать влияние се сжимаемость. Формулы для расчета давления в несжимаемых жидкостях справедливы и применительно к газам, если скорость их не превышает некоторого предела, который зависит от числа Маха Л1 и/с3, где и — скорость движения жидкости, с3 — скорость распространения звука Скорость звука в газах определяется формулой
________ (ср/‘ у)-1 ________
Сз 2 (i.,5)
’ I'o \ I'o > ' CV I'o
где cpky — отношение теплоемкостей при постоянном давлении и постоянном объеме (для воздуха при t от 0 до 100 СС оно составляет 1,40; и р0 — давление и плотность газа в равновесном его состоянии; р — плотность газа в звуковой волне Для сухого воздуха при t — 20 “С и р = 1 ат Са = 344 м'с. В капельных жидкостях
с3= /7?^7р, (1.16)
где Я,,, — модуль объемной упругости жидкости. Нм2. Для пресной воды скорость звука составляет;
I, еС.............. 0 10 20 .30 40 50 60
с3, м/с . . . 1407 1445 1484 1510 1528 1544 1556
Значения возможной ошибки в определении давления в случае применения формул гидродинамики несжимаемой жидкости к воздуху в зависимости от числа М и скорости потока v (при t = 15е и р = 981 rlla, т. е. I ат) составляют:
М ....................... 0,1
о, м/с.................... 34
Ошибка в определении давления. %...............0,25
0,2 0,3 0,4 0,5 0,0
68 102 130 170 203
1.0 2,25 1,0 6,2 9 0
Эти данные позволяют определить допустимые пределы применения формул гидродинамики несжимаемой жидкости при расчетах аэродинамических характеристик судов с динамическими принципами поддержания, а также предельно допустимые скорости в аэротрубах при испытаниях в них моделей тел, движущихся в воде. В случае движения гел в воде число М< 0.1 и влиянием сжимаемости воды на их обтекание допустимо пренебрегать.
13
§ 2. КИНЕМАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ
ПОТОКОВ ЖИДКОСТИ
При изучении диижепия жидкости можно пользоваться методом Лагранжа или методом Эйлера. Метод Лагранжа состоит в рассмотрении характеристик движения (координаты в пространстве, скорости и ускорения) частиц жидкости. В случае применения этого метода необходимо вводить параметры, позволяющие выделить рассматриваемую частицу из всей массы жидкости. В качестве параметров могут служить, например, начальные координаты частицы а, Ь, с в тон или иной системе координат; эти параметры называются переменными Лагранжа Уравнения движения частицы, записанные г переменных Лагранжа, имеют следующий вид;
xt = fl (а. !>. с. /); ( = 1,2,3. (117)
Метол Эйлера состоит в изучении характеристик потока в различных точках пространства через которое течет поток жидкости. Этот метод позволяет использовать в (идромехаиике теорию поля и является наиболее удобным.
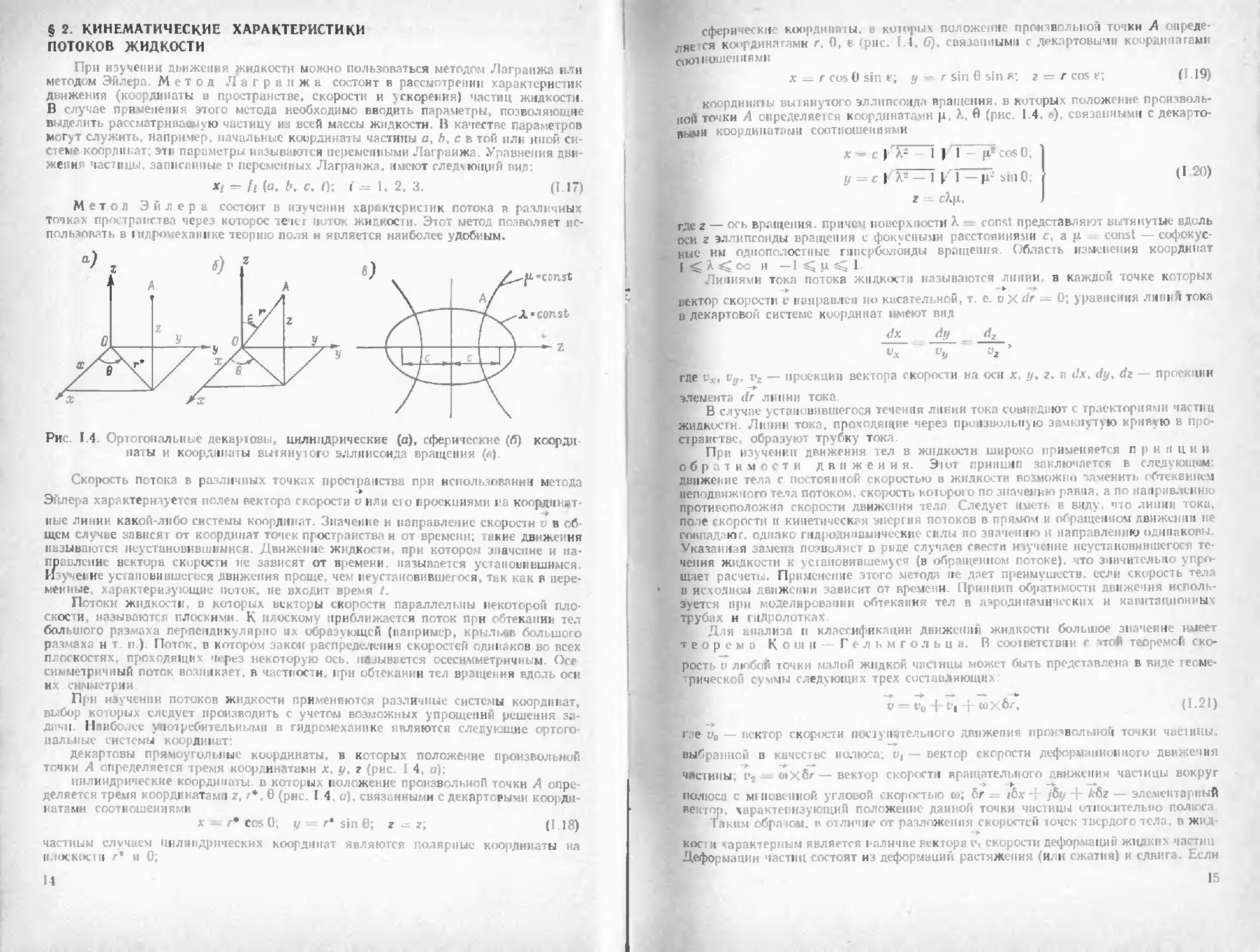
Рис I 4 Ортогональные декартовы, цилиндрические (а), сферические (б) коордн каты и координаты вытянутого эллипсоида вращения (л).
Скорость потока в различных точках пространства при использовании метода Эйлера характеризуется полем вектора скорости и или сю проекциями на координатные линии какой-либо системы координат. Зиачен! е и направление скорости v в общем случае зависят от координат точек пространства и от времени; такие движения называются пеустановившимися. Движение жидкости при котором значение и направление вектора скорости не зависят от времени называется установившимся. Изучение установившегося движения проще, чем иеустановившегося, так как в переменные, характеризующие поток, не входит время /.
Потоки жндкост! в которых векторы скорости параллельны некоторой плоскости, называются плоскими. К плоскому приближается поток при обтекании тел большого размаха перпендикулярно их образующей (например, крыльев большого размаха и т п.) Поток, в котором закон распределения скоростей одинаков во всех плоскостях, проходящих через некоторую ось. называется осесимметричным. Осе симметричный поток возникает, в частности, при обтекании тел вращения вдоль оси их симметрии
При изучении потоков жидкости применяются различные системы координат, выбор которых следует производить с учетом возможных упрощений решения задачи. Наиболее употребительными в гидромеханике являются следующие ортогональные системы координат:
декартовы прямоугольные координаты, в которых положение произвольной точки А определяется тремя координатами х. у, г (рис. I 4, а);
цилиндрические координаты в которых положение произвольной точки А определяется тремя координатами г, г*, в (рис. 1.4. и), связанными с декартовыми координатами соотношениями
х г* cos 0 (/ г* sin б; г - г, (118)
частным случаем цилиндрических координат являются полярные координаты на к.тоскосiti г* и 0;
14
сферические координаты. в которых положение произвольно 1 точки А определяется координатами г, 0, е (рис. 1.4, б), связанными с декартовыми координатами соот ношен иями
х — г cos 0 sin е; у г sin fi sin к г = г cos е; (1.19)
координаты вытянутого эллипсоида вращения, в которых положение произвольной точки А определяется координатами р, X. б (рис. 1.4. в), связанными с декартовыми координатами соотношениями
х - с ) X2 1)1 ц" cos 0 1
у = с I X2-л )-Л1 — и2 sin0. | <* 2°)
г - с), у, )
где z — ось вращения, причем поверхности X — const представляют вытянутые вдоль оси г эллипсоиды вращения е фокусными расстояниями с, а р const — софокус-ные им однополостные гиперболоиды вращения. Область изменения координат I ’С X ©о и — 1 ц 1
Линиями тока потока жидкости называются линии, в каждой точке которых -► -►
вектор скорости v направлен ио касательной, т. е. u X dr — 0; уравнения линий тока в декартовой системе координат имеют внд
dx dy dz
где t'.r, v„, vz — проекции вектора скорости на осн х, у, г, a dx, dy, dz — проекции элемента dr линии тока.
В случае установившегося течения линии тока совпадают с траекториями частиц жидкости. Линин тока, проходящие через произвольную замкнутую кривую в пространстве, образуют трубку тока.
При изучении движения тел в жидкости широко применяется пр к и ни и обратимости движения. Эют принцип заключается в следующем-движение тела с постоянной скоростью в жидкости возможно заменить обтеканием неподвижного тела потоком, скорость Koiopoi о по значению равна, а по направлению противоположна скорости движения тела Следует иметь в виду, что линии тока, поле скорости и кинетическая энергия потоков в прямом и обращенном движении не совпадают, однако гидродинамические силы по значению и направлению одинаковы. Указанная замена позволяет в ряде случаев свести изучение неустаионившегося течения жидкости к установившемуся (в обращенном потоке), что значительно упрощает расчеты. Применение этого метода не дает преимуществ, если скорость тела в исходном движении зависит от времени. Принцип обратимости движения используется при моделировании обтекания тел в аэродинамических и кавитационных трубах и гнДролотках
Для анализа и классификации движений жидкости большое значение имеет теорема К о ш и — Гельмгольца. В соо!ветствии с этой теоремой скорость и любой точки малой жидкой частицы может быть представлена в виде геометрической суммы следующих трех составляющих
v = 1'0-|-t-4 + <ох6г. (1-21)
где у0 — вектор скорости поступательного движения произвольной точки частицы, выбранной в качестве полюса; и, — вектор скорости деформационного движения частицы г2 о>хбг—вектор скорости вращательного движения частицы вокруг полюса с мгновенной угловой скоростью <о; бг = ibx + /бр + k6z — элементарный вектор, характеризующий положение данной точки частицы относительно полюса
Таким образом, в отличие от разложения скоростей точек твердого тела, в жидкости характерным является наличке вектора е, скорости деформаций жидких частиц Деформации частиц состоят из деформаций растяжения (или сжатия) и сдвига. Если
15
деформации частиц отсутствуют, то законы движения жидкости аналогичны законам движения твердых тел Деформационную часть движения жидкости принято хяракте-рнзовать относительными скоростями деформаций растяжения частиц вдоль соответствующих осей еп. е>22 и еяз н угловыми скоростями скашивания углов, расположенных в плоскостях, перпендикулярных соответствующим осям Г|2.е13.ее|.егя. с31 и г32, имеющими размерность единица в секунду и образующими симметричную матрицу относительных скоростей деформации:
Пв=|к<у!: 1=1+3; /=1+3. (1.22)
Для вычисления ее компонентов в декартовой системе координат служат формулы:
а проекции вектора ct на осн координат определяются согласно соотношению ц,=Псб7. (124)
Все течения жидкости делятся на дна класса — вихревые н безвихревые Вихревыми называются течения, в которых угловые скорости вращения элементарных жидких частиц не равны нулю. Безвихревыми называются течения жидкости, в которых угловые скорости вращения частиц равны нулю, т. е. и 0 Деформации частиц возможны как при вихревом, так и при безвихревом течениях.
Вектор rot v 2о> называется вихрем скорости; его размерность 1 с. 1(роскции вектора вихря скорости определяются по формулам:
на оси декартовой системы координат
. •- дег dvu . -* За, го1д.ц —i--------Л. ; Ю1„о - ——-
Оу дг w t)z
{1.25)
<)л дх dy '
в цилиндрической системе координат
. 1 дог Л'п , •*
rot = —- —г--------------—i.; rot0t)
r г* 30 dz
г* аг*
dz dr* ’ dvr.
'~d0~'
(1.26)
в сферической системе координат
rotr; = —1— ______________________________
г slue tte rsine сЮ
-* 1 d (fDe) I dvr .
rolot,- — —-------------- — .
rot.7 = _J— ** _L
r sin e ед) r dr
(1.27)
Безвихревые движения являются потенциальными. Это означает, что при без вихревом течении скорости потока могут быть выражены при помощи функции <р потенциала скорости. Вектор скорости при безвихревом движении является градиентом этой функции, т. е. v — grad ф. Потенциал скорости ср в случае неустаиовив-шегося течения является функцией от координат и времени, его размерность гЛ'е.
16
1 dvt .
'(ли определения проекции скорости на любое направление п при помощи потенциала
ел ж нт соот ношение
'•'п ~ дф’дл.
(I 24)
В соответствии с этим проекции скорости на координатные линии определяются ра веиствп.ми:
в декартовых координатах
пг = d<p/dx; vH . drp/d;/; vz dq 'dz; (1.29)
в цилиндрических координатах
<)<Р l’o 1 di, r* 90 d<{- . ; tr — —--. 2 дг ’ (1-30)
в сферических координатах du 1 Л| 1 дер .
Vr дг ' 1(1 гипс (I) ’ Уе г дг ’ в системе координат вытянутого эллипсоида вращения
1
V,- —
« < X- — 1 <)1| .
\ V-р- г». ’
1 I f ~ I1’ •
с I 9.- — )is др
(1 31)
(1.32)
_______________1____________________
с ) л- — I | 1 — ft2
Линин тока при безвихревом движении перпендикуляр пл поверхностям, вдоль которых <[> = const, тек поверхностям равного потенциала скирос1и. Физически произведение (—рф) представляет собой импульс давления, который нужно приложить к соответствующим точкам жидкости для создания безвихревого течения с данным потенциалом <[.
Всякое движение жидкости должно удовлетворять уравнению неразрывности, выражающему закон сохранения массы. В случае неоднородной сжимаемой жндко-ciu, у которой плотность р / (х. (/, г. I). это уравнение в дифференциальной форме имеет вид
— | div и <>
р di
(I 33)
где производная плотности но времени определятся соотношением dp Op , Op . dp др
dt ~ dt +Vx Ox 1,1 dy V* dz ’
В случае потока однородной несжимаемой жидкое!н уравнение неразрывности
div v -- 0. (I 34)
т е. в декартовой системе координат
+ <135)
дх ду дг
В случае осесимметричного иотока, для которого ось г является осью симметрии, имеющею в цилиндрических координатах лишь компоненты скорости t>r, и уравнение (1.34) мож ю записать в пите
Л’г. , т’г. , диг (I 3G)
— + ~ + ~дГ
17
Уравнение неразрывности можно записать в интегральной форме. В случае неоднородной жидкости суммарный массовый расход через замкнутую поверхность S равен нулю, т е.
[рн„<Й = 0. (1.37)
s
Если жидкость однородна, то J vn dS = 0 Вдоль трубки тока условие 5 нерлзрыв-s
ности потока для однородной жидкости имеет вид
(1.38)
Величина су,, — средняя скорость жидкости в данном поперечном сечении S трубки тока, определяющая ее объемный расход Q = ty.pS.
При безвихревом движении уравнение неразрывности (1.34) будет
А<| = О,
(1.39)
где Л — оператор Лапласа; (1.39) называется уравнением Лапласа. Функции, удовлетворяющие этому уравнению, именуются гармоническими; следовательно, потенциал скорости есть гармоническая функция.
В ортогональных криволинейных координатах (],, q2. q3, связанных с декартовыми зависимостями г,- = ft (q,, q2, <7Я). где i = 1-г-З, уравнение Лапласа для потенциала ip (д,. q2, q3) имеет вид
1 Г t) I Ч2И-а Дф \ , д / \ , д / Н2Нг дц> \ 1 _
HrHtH3 I (>qt \ dqt ) ' rty., \ Н2 dq.t } dq3 \ Н3 dq3 )
(1-40)
а проекции скорости vq. на координатные липни определяются зависимостями
1 Др
V —-----------—-.
«1 Hi ()qt ’
где коэффициенты Ламе
Уравнение Лапласа в различных системах координат имеет следующий вид* в декартовых
д-ф , <>Ф , d-tf „
дх- т ду2 dz-
в цилиндрических
\ । * 1 * * * дгФ ^ф 0 г* dr* \ dr* ) ~г г*‘- Л)'- ' dz-
(1-41)
(I 42)
в сферических
г1 dr \ dr J' гаып2е <Х» г2 sine de \ de / ‘ '
в системе координат вытянутого эллипсоида вращения
к-'>-£]- и *-]+<>.. *•„«/' «
(1.44)
18
В качестве характеристики плоских и осесимметричных течений жидкости можно использовать функцию тока ф.Эта функция позволяет найти уравнения линий тока и скорости в различных точках потока При иеустановившемся течении функция тока 1] зависит от координат и от времени. В плоском потоке функция тока ф удовлетворяет уравнению
Уф , Уф . дх2 + ду- г'
(1.45)
а проекции скорости на оси координат определяются из соотношений
дх
(1-46)
Уравнение семейства линий тока находят, приравнивая функцию тока постоянной, т. е. ф С. На одном из твердых границ или на свободной поверхности потока постоят иую С полагают равной нулю. Разность значении функции тока в двух точках плоского потока равна объемному расход жидкости в единицу времени между этими Вчкамп Размерность функции тока плоек го потока м2/с.
В случае плоского безвихревого течения функция тока удовлетворяет уравнению Лапласа Аф Он связана с потенцна юм скорости следующим образом-
_с^_ = _дф. _ЙР___ _£Ф_
Ах ду ’ ду дх ' ' '
Семейство линий ф const и ф — const образует на плоскости ортогональную сетку течения. В случае осесимметричного течения функция тока ф (г, г*) в цилиндрической системе координат, ось z которой совпадает с осью потока т. е. rotr, u = rot^o = = 0, удовлетворяет соотношению
УЧ
1 ДФ , УФ г* дг* дг-
Г* ТО1()О.
(1-48)
а проекции скорости определяются по формулам
В системе эллиптических координат ф (?., р) и
= Р|> = ' *L. (М9а)
1=1?-1 dll csl Лг — рЧ 1 — р2
В случае безвихревого осесимметричного течения потенциал скорости ф удовлетворяет уравнению Лапласа, а функция юка — иному уравнению, т. е. ф не является гармонической функцией:
Уф । 1 дф Уф 0
сг*2 г* дг* дг2
д-ф 1 йф сРф
дг*~ r* дг* ' dz2
(1-50)
^Трехмерные пространственные течения нельзя описать одной скалярной функцией тока. Ускорение частиц жидкости при использовании метода Эйлера для описания потока, определяется зависимостью
dv dt
dv dt
dv
dv , (hi
~dy "I” C'2 ~dz ‘
(1.51)
В этом выражении первое слагаемое cb/d/ называется местным, или локальным, ускорением; оно не равно нулю, лишь когда течение неустановнвшсеся Сумма следующих
19
трех слагаемых представляет конвективное ускорение, не равное нулю, если пате скорости в пространстве является неоднородным.
Циркуляцией скорости Г называется линейный интеграл, вычисленный по произвольному замкнутому контуру I, выделенному в жидкости:
Г j v-dr J ocos(n. dl)dl, (1-52)
I I
гдг dr — направленный элемент контура, a dl | dr | При определении циркуляции контур I обходится в таком направлении, чтобы его внутренняя область оставалась слева. Размерность циркуляции мг/с.
Связь между циркуляцией и вихрем скорости устанавливается теоремой Ст окса: циркуляция скорости по замкнутому контуру, ограничивающему одно-связную область жидкости, равна потоку вектора вихря сквозь произвольную поверхность S. опирающуюся на этот контур, т е.
Г [ rota-л <7.5 2 | ш-ndS, (1-S3)
S S
где л — направление нормали к поверхности .S'
Одиосвязиой называется всякая область, в которой произвольный замкнутый контур можно последовательными деформациями беспрепятственно стянуть в одну точку В случае мнопгвязных областей теорема Стокса остается справедливой, если циркуляция Г вычисляется не 1олько ио внешней, но и по внутренним границам области (например, по контурам гел, ограничивающим изнутри объем жидкости). Знание циркуляции скорости необходимо для вычисления гидродинамических енл, дей-сшуюшик при движении тел в жидкости. Если течение потенциальное. то в случае однозначного потенциала циркуляция Г ио замкнутому контуру равна нулю. Если потенциал — многозначная функция, т. с. при полним обходе замкнутою контура меняет свое значение, то Г <рк— <ць т е. равна разности значении потенциала в конце <рк и в начале <[„ обхода контура.
Свойство циркуляции скорости определяется теоремой Т о м с о и а. в невязкой однородной несжимаемой жидкости, находящейся под действием потенциальных массовых сил, циркуляция скорости по произвольному замкнутому жидкому контуру постоянна во времени, т. е.
dl'/dt =0. (1 54)
Жидким называется контур, который все время состоит из одних и тех же частиц и движется вмеси* с потоком. В соответствии с этой теоремой обеспечивается сохранение безвихревого или вихревого характера движения.т. е. невозможен переход от одного тина движения к другому в невязкой жидкости Для вязкой жидкости теорема Томсона несправедлива.
Вихревыми нитями называются линии, в каждой точке которых вектор вихря скорости rot v — 2w направлен по касательной, т е. rot v;< dr — 0 Система вихревых нитей, проходящих через произвольную линию в пространстве, образует вихревой слой. Совокупность вихревых нитей, проходящих через произвольный контур, называется вихревой трубкой Произведение
/ 2с<>5> (1.55)
называется интенсивностью трубки; интенсивность равна циркуляции скорости ио контуру, охватывающему сечение трубки (3' — площадь поперечного сечения вихревой трубки).
Поле вихря удовлетворяет уравнению неразрывности
div rot v = 0. (1 56)
Вихри, распределенные в объеме V, создают иоле скоростей
v = rot I Ы dV I* ^'1
,) 2лг
20
Свойства вихревых трубок в несжимаемой жидкости характеризуются тремя теоремами Гельмгольца:
1) интенсивность вихревой трубки постоянна вдоль се длины:
2) интенсивность вихревой трубки в невязкой жидкости не зависит or времени:
3) вихревая трубка в невязкой жидкости в течение всего времени движении состоит нз одних и тех же частиц жидкости.
Вторая и третьи теоремы справедливы только при условии, что массовые силы, действующие на однородную, несжимаемую жидкость, являкяся потенциальными. В вязкой жидкости происходит процесс диффузии вихрей, сопровождающийся нзме пением их интенсивности.
В cooiBCTCTBUH с первой теоремой Гельмгольца вихревые трубки н нити не могут начинаться или кончаться внутри жидкости; они либо замкнуты, либо опираются на границы жидкости. Изолированная вихревая нить или вихревой слой образуют вокруг себя безвихревой поток, в котором циркуляция скорости по любому контуру, не охватывающему вихревую нить или не пересекающему вихревой слой, равна нулю.
Рис. 1 5. Скорость, индуцируемая вихревой питью.
Рис. I 6 Поверхность вихревого слоя.
Скорость, вызываемая (индуцируемая) вихревой нитью произвольной формы, имеющей длину /. и циркуляцию Г. может быть вычислена по формуле Бно-Савара (рис 1 5)
Г [ Г (у - y,)dzt (г
4л J [ г3 г3
L
Г f f (г (х xl)dzl
4.1 J [ /» г*
L
г_ [ Г (X — x,)rfy, _ (у—y,)rfar,
4л J L г3 г3
L
(1.59)
где | г | /(х х,)2 (у-у|)2 + (г г,)2 . dr ( dx\ -р j dyt |- k dzt
В случае когда ось вихревой нити прямолинейна и нить простирается от —оо до +сю, скорость и вычисляется по формуле
|г>| Г'(2лт)
(1.60)
Если прямолинейная нить простирается от 0 до —оо, то скорость в. вызванная этой нитью в точках плоскости, перпендикулярной нити н проходящей через ее начало, равна
| v| — Г/(4пг) (161)
В случае кольцевого вихря, имеющего радиус R и циркуляцию Г, расположен Чего в плоскости хОу с Петром н начале координат, возникающее течение жидкости
21
является осесимметричным Функция тока этого потока в цилиндрических координатах г*, г определяется по формуле
Г )'/?<*
г'4
2л
(1.62)
л/2
Г*2 + (« + <*)»
I 1 — A~sinae
Е(Ь) =
Я/2
VI — A2 sin2 е de— полные эллиптические интегралы первого и вто-
о рого рода
Составляющие скорости vr, и vt вычисляют по формулам (1.49). Вокруг вихревого кольца возникает течение с потенциалом скорости
Г/?2г£ (А)1
л(1-Л)1 1+Л (гэ + г*2 + К2)3'2 ’
(I 63)
проекции скорости находят по формулам (I 30).
В случае кругового цилиндра бесконечной длины и радиуса поверхность которого образована вихревым слоем интенсивностью у, скорости потока внутри цилиндра равны нулю. В области вне цилиндра папе скоростей аналогично полю скоростей от вихревой нити, которая расположена в центре цилиндра и имеет циркуляцию
Г = 2nRy;
(1.64)
расчет скорости производится по формуле (1.60).
Если в жидкости есть поверхность S, при переходе через которую касательная к ией составляющая скорости V/ терпит разрыв (рис. 1.6), то такая поверхность в кинематическом отношении эквивалентна вихревому слою с интенсивностью у = dT/dl, равной разности скорости иа нижней о,_ и верхней о/+ поверхности у = и, — v( Оси элементарных вихрен направлены вдоль такой поверхноаи перпендикулярно вектору скорости v в данной ее точке.
Поля скорости, индуцируемые как одиночной вихревой нитью, так и вихревым слоем, являются потенциальными
Глава 11
гидромеханика невязкой жидкости
§ 3 УРАВНЕНИЯ ДВИЖЕНИЯ НЕВЯЗКОЙ ЖИДКОСТИ И ИХ ИНТЕГРАЛЫ
В невязкой жидкости отсутствуют касательные напряжения, поэтому нормальные напряжения представляют гидродинамическое давление р, значение которою в данной точке потока не зависит от направления Уравнение движения невязкой жидкости имеет вид
dv -i 1
-di = F~ — grad/A
(П.1)
где F « (Fjt 4“ jFjj kFz — вектор напряжения массовых сил; оно называется уравнением Эйлера. Левая часть этого векторного уравнения содержит ускорение и может быть представлена в развернутом виде в соответствии с формулой (1.51) Во мио-
гиХ случаях ее удобно также представлять в форме, предложенной II С. Громеко:
-S'=^+grad(4)+2“x'J’ (IL2)
где <» — вектор угловой скорости вращения частиц жидкости. В этом выражении ррн безвихревом течении третье слагаемое правой части обращается в пуль.
В случае сжимаемой неоднородной жидкости к уравнению Эйлера необходимо присоединить уравнение неразрывности (1.33) и состояния (1.3), чтобы образовать замкнутую систему; в однородной несжимаемой жидкости следует рассматривать совместно систему уравнений (II. 1) и (1.34). В обоих случаях кинематическое граничное j словно вдоль неподвижных твердых границ следует записывать в виде
и-п = 0, (11.3)
где п — направление внешней нормали к твердой границе.
На подвижных твердых границах
v-n — vTn. (11 4)
Здесь От — вектор скорости данной точки подвижной границы. Оба условия [(Т 1.3) и (11.4)1 обеспечивают пепротекание жидкости через твердую границу.
Для уравнений Эйлера известно несколько интегралов, устанавливающих пря-ыио связь между скоростью и давлением в потоке невязкой жидкости. Рассмотрим эти интегралы, полагая, что массовой силой является сила тяжести, а течение изучается в неподвижной системе координат.
Интеграл Бернулли представляет связь между скоростью и давлением при установившемся вихревом течении для точек, расположенных на одной линия тока.
р + т? + -— =С (Н. 5)
ИЛИ
I f+Zi+v=v+Za+i- (Ц 6)
В последней форме записи все слагаемые имеют размерность высоты; р'у называется пьезометрической высотой, z — высота точки над плоскостью сравнения, а u®/(2g) — высота скоростного напора. Соотношение (11.6) представляет закон сохранения удельной механической энергии для частиц, расположенных на данной линии тока. Для разных линий тока постоянная в выражении (11.3) не одинакова. В случае покоящейся жидкости иа основании равенства (II.6) можно получить выражение для гидростатического давления
P = YOo —г) + Ро (П.7)
(?о — высота над плоскостью сравнения поверхности жидкости, где давление р0).
Интеграл Лагранжа выводится в предположении, что течение жидкости неуста-новившееся потенциальное'
I /’4?г + -у- + р-^- = /(0- (ПЛ)
Фу ткцня / (/) в данный момент времени имеет одинаковое значение для всех точек поток В случае потенциального установившегося течения потенциал <р не зависит от времени и интеграл (II 8) переходит в интеграл Эйлера
₽ + И» + ^-»С. (Ц.9)
который по форме совпадает с интегралом Бернулли (11.5), но отличается тем, что постоянная в правой части его сохраняет свое значение для всех точек потока, иеза-
23
diiciimo от того, па как ид линиях тока они расположены. Это означает, что в потенциальном потоке удельная энергия всех частиц одинакова.
Если необходимо вычислить лишь часть давления, вызванную движением жидкости, т е. избыточное гидродинамическое давление, можно в выражениях (II.5, 11.6, 11.8, 11.9) отбросить слагаемое уг и применить, например, интеграл (11.8) в форме
p + ^+p-J—НО- (II.10)
В некоторых случаях удобно рассматривать течение жидкости используя подвижную в пространстве систему координат, движение которой характеризуется вектором скорости поступательного движения начала координат о0 н угловой скоростью вращения ы0. Если поле абсолютной скорости жидкости в данной точке пространства характеризуется векторами va и <>>,,, то уравнение Эйлера, с учетом преобразования Громеко (II.2). в подвижной системе координат имеет вид
<Jva . , — *,
-gp I- g‘ ad I -g--vu (v0 4- wu X r)
I Ba — (t'o 4” X г)| X 2wl( —
J- grad p.
(H.ID
где r — ix -/;/ \kz — радиус-вектор точки жидкое in относительно начала по-двпжной системы координат, a dvatit — производная, которая также вычисляется в этой системе. Полагая течение потенциальным, т. е. ь>и = 0 и и„ = grad <р, можно получить интеграл Лагранжа в подвижной системе координат для избыточного давления:
2
р+^~ — рц>(ц> + ыи х г) 4-1’/ <0; (II. 12т
в случае поступательного движения системы координат вдоль оси х со скоростью
Щ 'Т’и
(II.13) причем в формулах (11.12) п (11.13) производная <>р/<1/ вычисляется в подвижной системе координат.
§ 4 ПОТЕНЦИАЛЬНЫЕ ТЕЧЕНИЯ
Потенциальные течения возникают в невязкой жидкости под влиянием импульсов давления, в том числе приложенных к ней с поверхности движущихся или (Обтекаемых потоком неподвижных тел. Течения невязкой жидкости, вызываемые находящимися в иен вихрями, вне области расположения вихрей также потенциальны. В потенциальных потоках вектор скорости v = grad <р, а потенциал скорости р удовлетворяет уравнению Лапласа (1.39). При потенциальном течении достаточно найти одну функцию <р (х, у, г. /), чтобы определить все его характеристики: скорость, а с ее помощью посредством интегралов Лагранжа (11.8) или Эйлера (11.9) значения давления, интегрируя которые можно найти гидродинамические реакции. Если потенциальное течение является плоским или осесимметричным, то наряду с потенциалом q зля него существует функция тока ф, в плоском потоке опа удовлетво ряег уравнению Лапласа. Потенциал скорости <( как гармоническая функция харак геризуе|ся рядом свойств; их c.ieayei учитывать при расчете потенциальных течений
21
Если в потен цнадь ном потоке выделить замкнутую поверхность S. то
I’JlLdS O <И.14>
J Л« s
ще п — направление внешней нормали к данной поверхности С помощью этой зависимости можно доказать, что потенциал скорости не имеет максимума или минимума внутри объема жидкости. Экстремум потенциала н максимум скорости достигаются лишь на границах потока. В замкнутом объеме жидкости, на всех границах которого соблюдается условие Фр дп 0 (пенротеканпя). потенциальное течение отсутствует.
П| взводные . юбых порядков по координатам от гармониче ой функции <р * также удовлетворяют уравнению Лапласа, т. е могут рассматриваться. как потеп-I циалы некоторых новых безвихревых течений Поскольку уравнение Лапласа является линейным, для пего справедлив принцип наложения (суперпозиции) решений, согласно которому
Ч Ут Сурл, (11.15)
л|
где <р, - ряд известных решений уравнения Лапласа, С/, — постоянные, или функции «времени.
'Метод построения более общих решений с помощью зависимости (И. 15) нрсдсгав-ляет принцип сложения потенциальных потоков, широко используемый в гидромеханике Для его реализации необходимо, чтобы граничные условия, коюрым удовлетворяют функции ч и if/, были линейными.
Известен ряд основных решений уравнения Лапласа. Они позволяют, используя принцип наложения потоков, решать задачи об обтекании различных тел. Эти реше-I пня несколько различаются в случае пространственных и плоских потоков
Пространственные потенциальные течения. I Однородный ноток в пространстве, г Потенциал однородного потока имеет вид
Ч—Ук/ (11 .16)
I где a,*, = ]. -г 4- —постоянная скорость однородного потока. В случае
когда скорость потока направлена вдоль осн х,
Ч ЧхЛ. (4 17)
а функция тока этого осесимметричного потока в цилиндрических координатах (х, г*)
ф Ул.т*а-2. (11.18)
2. Источник и сток в пространстве. Потенциал источника или стока в сфериче-г, скнх координатах, расположенного в их начале,
Ф ±4г —, <" 19)
4л г
| где Q интенсивность источника (стока), м3.с. Знак «+» относится к стоку, а «—» — I к источнику. Скорость в любой точке пространства определяется соотношением
В начале координат, т. е. в центре источника (стока), при г—►О скорость в—>-оо; это особая точка. Если центр источника (стока) расположен в точке с декартовыми ^координатами х,, yt, г>, то в формуле (II. 19) следует полагать г =
- |/(х I (у (г — г()г Ноток источника и стока осесимметричной
и в цилиндрических координатах г. г* функция тока энтго потока
[ ±т11+Т7^Ь "|2"
Функция
<p = hr (11.22)
называется потенциалом единичного источника и рассматривается как фундаментальное решение уравнения Лапласа
3. Диполь в пространстве. Потенциал т cos(л, г> * = ------------------------------------------
(11.2.3)
описывает течение вокруг диполя; он представляет предел потенциалов источника и стока равной интенсивности, расположенных на оси п вблизи один от другого; на
Рис. II. I Диполь в пространстве.
пранленис п от стока к источнику представляет собой ось диполя (рис. 11.1). Если центр диполя совпадает с началом цилиндрической системы координат.
Рис. II.2. Простои слой
а его ось с осью г этой системы, то потенциал скорости и функция тока имеют вид т г
V ~ “ST (г* н г*2)3/2 : <11
т г*2
~ (г2 + г*2)3''2 ' (U.25)
Постоянная т называется моментом диполя, а точка, где г—► 0 (особая точка), — центром диполя Функция
д 1
<11.26)
представляет потенциал единичного диполя с осью, имеющей направление л. Потенциалы вида
drii, дпг, .... дпц г '
где nlt п2. ••• nh — различные направления в данной точке, описывают потоки, создаваемые единичными мультиполями порядка k, т. е. сложными комбинациями источников н стоков, расположенных в данной точке В сферических координатах потенциал (11.27) имеет вид
«Р
У/, (0. е.)
(11.28)
где F;, — сферические функции.
2G
Источники, стоки, диполи п мультиполи называются гидродинамическими особен костями, вак как в их центре скорость стремится к бесконечности и неразрывность потока там нарушается.
4. Простой слой. Непрерывное распределение пв неквтврпй поверхности S слоя источников (или стоков) с интенсивностью О! (хь Zj.) — размерность в м/с — создает в точках пространства с координатами х, у, г потенциал скорости, называемый потенциалом простого слоя:
т = (”7 d5 <П-2Э>
s
Характерными свойовами его являются непрерывность функции q и ее производной OtfJdl по направлению касательной I (рис. 11 2) к поверхности, где расположен простой слой Производная по нормали к этой поверхности dtfidn терпит разрыв, причем разность нормальных производных с внешней «+» и внутренней «—» по отношению к нормали стороны поверхности
Й(|> t)(p
HI 30)
Таким образом, если на поверхностях в жидкости нормальная составляющая скорости потока терпит разрыв, то действие на поток таких поверхностей можно заменить простым слоем с интенсивностью
°1 (11.31)
5. Двойной слой. Непрерывное распределение на поверхности диполей с интенсивностью о, (x-j, уъ Zi) — размерностью м1 2/с. оси которых в каждой ее точке совпадают с внешней нормалью п, создает потенциал двойного слоя:
Ф 1 [о d_LdS _ ‘ (11.32)
4л J дп г 4л J г- ' '
S S
В точках внешней стороны поверхности S значение этого потенциала
<Ч-ЗД
S
а при переходе с внешней «+» иа внутреннюю <—» сторону поверхности S потенциал (11.32) терпит разрыв
ф+ ф_ — —Oj. (11.34)
Нормальная производная ду/дп этого потенциала на поверхности S непрерывна, а касательная d<f/dl терпит разрыв
т. е.
дф 5g _ dat
dl+ dl_ ~ dl ’
das vu~vi-^-dF-
(II 35)
(II 36)
Так как поверхность разрыва касательной к ней составляющей скорости эквивалентна вихревому слою, то потенциал двойного слоя описывает безвихревое движение, возникающее вне поверхности, на которой расположен вихревой слой.
В теории потенциала [38] показано, что в общем случае потенциал скорости в любой точке пространства, ограниченного изнутри замкнутой гладкой поверхностью S (поверхность Ляпунова), может быть представлен через его значения Ф и дф/дл в точках этой поверхности с помощью зависимости
1 f 5Ф I If 0 1
ф = —— I ТГ-------dS----1—I Ф "л------(П37)
4л J дп г 4л J дп г ’
S S
т е в виде суммы потенциалов простого (с интенсивностью Oj — Зф/дл) и двойного (с интенсивностью о8 = ф) слоев
27
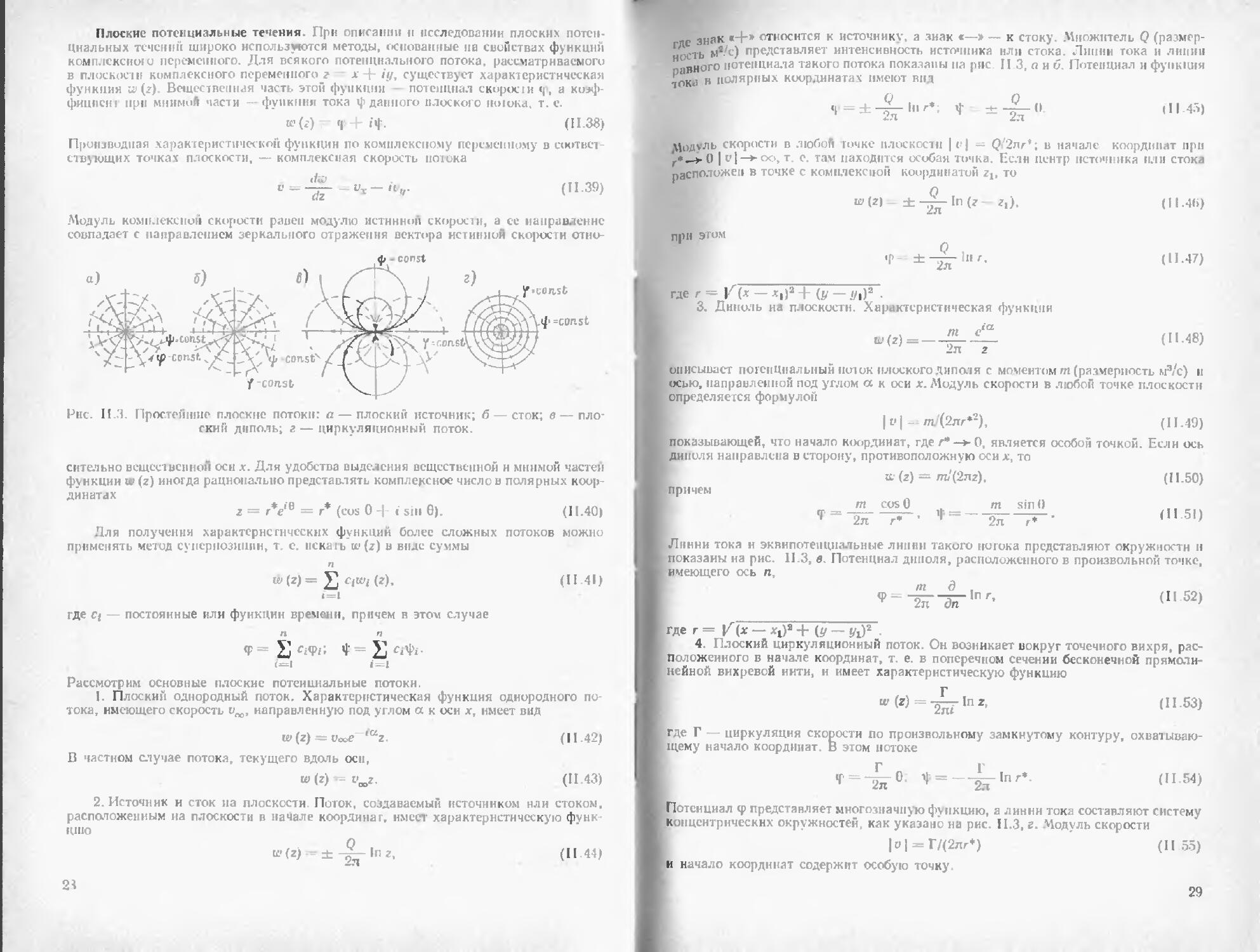
Плоские потенциальные течения. При описании и исследовании плоских потенциальных течении широко используются методы, основанные на свойствах функций комплексною переменного. Для всякого потенциального потока, рассматриваемого в плоскости комплексного переменного г х + iy, существует характеристическая функция и (г). Вещественная часть этой функции — потенциал скоросы <р, а коэффициент при мнимой части - функция тока фданного плоского ноюка, т. е.
и'(<) - ч 4- |ф. (11.38)
Производная характеристической функции по комплексному переменному в с<к>твет-етвующих точках плоскости, — комплексная скорость потока
(11.39)
° ~~dT
Модуль комплексной скорости равен модулю истинной скорости, а ее направление совпадает с направлением зеркального отражения вектора истинной скорости отно-
Рнс. 11.3. Простейшие плоские потоки: а — плоский источник; б — сток; в — плоский диполь; г — циркуляционный поток.
сительно вещественной оси х. Для удобства выделения вещественной н мнимой частей функции I» (г) иногда рационально представлять комплексное число в полярных координатах
z = г*е'в = г* (cos 0 -|- < sin 6). (11.40)
Для получения характеристических функций более сложных потоков можно применять метод суперпозиции, т. е. искать ш (z) в виде суммы
w(z)= (II 41)
1=1
где Cf — постоянные или функции временн, причем в этом случае
<Р= S 4- 2j
i=l
Рассмотрим основные плоские потенциальные потоки.
I. Плоский однородный поток. Характеристическая функция однородного потока, имеющего скорость vw, направленную под углом а к осн х, имеет вид
w(z) = txx,e ‘“z. (11.42)
В частном случае потока, текущего вдоль оси,
w (z) = t^z. (П43)
2. Источник и сток на плоскости Поток, создаваемый источником или стоком, расположенным на плоскости в начале координат, имеет характеристическую функцию
О
ч-'(г) -= ± — In г, (1144)
24
е знак «+» относится к источнику, а знак «—» — к стоку. Множитель Q (размерность Ма/с) представляет интенсивность источника или стока. Липин тока и липин „явного потенциала такого потока показаны па рис II 3, о и б. Потенциал и функция тока н полярных координатах имеют вид
н=: t *-£г" "| 43>
Модуль скорости в любой точке плоскости | с>| = Q’’2nr*; в начале координат при г*—> 0 | 1 —► оо, т. е. там находится особая точка. Если центр источника пли стока расположен в точке с комплексной координатой zb то
ю(2) ±-^-1п(г г,). (П.4(>)
при этом
'Р- (Н.47)
где г = |<(х — Х|)2 + ((/ — i/i)2 .
3. Диполь на плоскости. Характеристическая функция
w(2) =----(11.48)
2л г
описывает потенциальный поток плоского диполя с моментом т (размерность №/с) н осью, направленной под углом а к оси х. Модуль скорости в любой точке плоскости определяется формулой
1t»| - mj(2nr*2), (11.49)
показывающей, что начало координат, где г* —> 0, является особой точкой. Если ось диполя направлена в сторону, противоположную оси х, то
a- (z) = /п/(2лг), (11.50)
►причем
т cost) _ т sin О
T = -2^—• ’Г=-^Г — HI 51)
Линии тока и эквипотенциальные липин такого потока представляют окружности н показаны на рис. 11.3, в. Потенциал диполя, расположенного в произвольной точке, имеющего ось п,
т д ,
<р=-2?Г-аГ,г,г’ <1152)
где г = l^(x — xt)2 + (т/ — j/t)2 .
4. Плоский циркуляционный поток. Он возникает вокруг точечного вихря, расположенного в начале координат, т. е. в поперечном сечении бесконечной прямолинейной вихревой нити, и имеет характеристическую функцию
Г
tt'(z) = -^-Inz, (11.53)
где Г — циркуляция скорости по произвольному замкнутому контуру, охватывающему начало координат. В этом потоке
ф = L-0. t-=—^т,пг*- <и-54)
Потенциал <р представляет многозначную функцию, а линии тока составляют систему концентрических окружностей как указано на рис. 11.3, г. Модуль скорости
|о| = Г/(2лг*) (Н55)
и начало координат содержит особую точку.
29
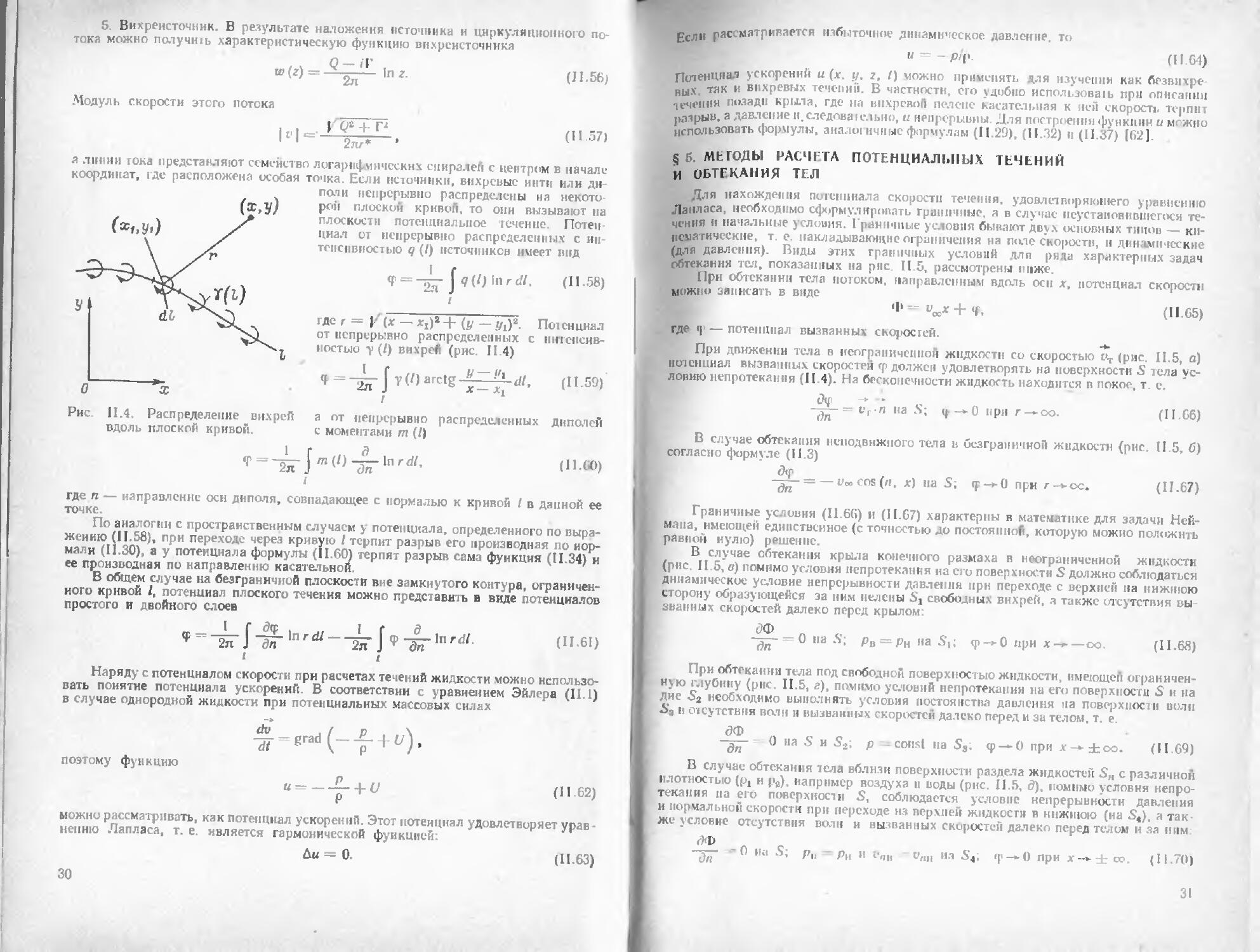
5 Вихреисточник. В результате наложения источника и циркуляционного потока можно получить характеристическую функцию внхреисточника
Ш= 2Т |П 2 (П.56;
Модуль скорости этого потока
м=-
+ г 2лт*
(11.57)
я липни тока представляют семейство логарифмических спиралей с центром в начале координат, где расположена особая точка. Если источники, вихревые инти или ди-
поли непрерывно распределены на некото рой плоской кривой, то они вызывают на плоскости потенциальное течение. Потен циал от непрерывно распределенных с интенсивностью q (I) источников имеет вид
= j<7(/) InrtW, (11.58)
I
где г = р (х — Xj)a + (у — т/1)2. Потенциал от непрерывно распределенных с ннтепсив-иостыо у (/) вихрей (рис. II 4)
Ч J V (0 arctg dl, (11.59) I
Рис 11.4 Распределение вихрей вдоль плоской кривой.
а от непрерывно распределенных диполей с моментами т (/)
,f=4rJ'n(Z)^rlnrd/-
i
(ii.а>)
где п — направление осн диполя, совпадающее с нормалью к кривой / в данной ее точке.
По аналогии с пространственным случаем у потенциала, определенного по выражению (11.58), при переходе через кривую I терпит разрыв его производная по нормали (11.30), а у потенциала формулы (11.60) терпят разрыв сама функция (11.34) и ее производная по направлению касательной.
В общем случае на безграничной плоскости вне замкнутого контура, ограниченного кривой I, потенциал плоского течения можно представить в виде потенциалов простого и двойного слоев
। i
Наряду с потенциалом скорости при расчетах течений жидкости можно использовать понятие потенциала ускорений. В соответствии с уравнением Эйлера (II. 1) в случае однородной жидкости при потенциальных массовых силах
^--grad (—+ поэтому функцию
«»—£ + (/ (1162)
Г
можно рассматривать, как потенциал ускорений. Этот потенциал удовлетворяет уравнению Лапласа, т. е. является гармонической функцией:
Ди = 0.
(11.63)
30
Если рассматривается избыточное динамическое давление, то
и — - р/р. (1164)
Потенциал ускорений и (х. у. г, /) можно применять для изучения как безвихревых таК В * * 11 в,1ХРевых течений. В частности, его удобно использовав при описании чеченпя позади крыла, где на вихревой пелене касательная к ней скорость терпит разрыв, а давление н.следова1слы1о, и непрерывны. Для построения функции и можно использовать формулы, знало| нчные формулам (11.29), (11.32) и (11.37) 162].
§ б. МЕТОДЫ РАСЧЕТА ПОТЕНЦИАЛЬНЫХ ТЕЧЕНИЙ
И ОБТЕКАНИЯ ТЕЛ
Для нахождения потенциала скорости течения, удовлетворяющего уравнению Лапласа, необходимо сформулировать граничные, а в случае иеустаиовнвшегося течения и начальные условия. Граничные условия бывают двух основных типов — кинематические, т. е. накладывающие ограничения на поле скорости, и динамические (для давления). Виды этих граничных условий для ряха характерных задач обтекания тел, показанных на рис 11.5, рассмотрены ниже
При обтскаинн тела потоком, направленным вдоль осн х, потенциал скорости можно записать в виде
УоЛ+ <г, (11.65)
где <р — потенциал вызванных скоростей.
При движении тела в неограниченной жидкости со скоростью цт (рис. II.5, а) потенциал вызванных скоростей ср должен удовлетворять на поверхности S тела условию непротекания (И.4). На бесконечности жидкость находится в покое, т. с.
-^j-=vr-n на -S; <у —► 0 при г —оо- (II 66)
В случае обтекания неподвижного тела в безграничной жидкости (рис 11.5, б) согласно формуле (11.3)
-^~ = — v«»cos(rt. х) на S; ср->0 при г-*-ос. (II.67)
Граничные условия (11.66) н (11.67) характерны в математике для задачи Неймана, имеющей единственное (с точностью до постоянной, которую можно положить равной нулю) решение.
В случае обтекания крыла конечного размаха в неограниченной жидкости (рис. II.5, о) помимо условия непротекания на его поверхности S должно соблюдаться динамическое условие непрерывности давления при переходе с верхней на нижнюю сторону образующейся за ним пелены Sj свободных вихрей, а также отсутствия вы званных скоростей далеко перед крылом:
с>Ф
— = Oiia,S’; pB = pHnaSI; <р -► 0 при х -------co. (11.68)
При обтекании тела под свободной поверхностью жидкости, имеющей ограниченную глубину (рис. И.5, г), помимо условий непротекания на его поверхности S и на дне 52 необходимо выполнять условия постоянства давления на поверхности волн 6'3 н отсутствия волн и вызванных скоростей далеко перед и за телом, т. е.
<)ф
~ 0 на S и S.>; р const на Ss, <р—- 0 при .v-*-±oo. (11.69)
В случае обтекания тела вблизи поверхности раздела жидкостей S,, с различной
плотностью (р! н р8), например воздуха и воды (рис. 11.5, д), помимо условия непротекания на его поверхности S, соблюдается условие непрерывности давления и нормальной скорости при переходе нз верхней жидкости в нижнюю (на St), я также условие отсутствия волн и вызванных скоростей далеко перед телом и за ним
РФ
-0 на 5; у, р(1 и г,|(1 ц,,,, и.з S4, гр —О при х —± оо (11.70)
31
Г.сли тело обтекается с каверной, в которой давление рн постоянно, то па части его поверхности S, не охваченной каверной (рис. 11.5, с). соблюдается условие пепро-текання, а на границе каверны S5, обккас.мой потоком, давление постоянно:
<)Ф
— 0 на .$ it рк на Зь: <|> -О при х -* ± со. (II 7|>
В ряде нредшавленных случаев граничные условия заданы на поверхноешх, фирма которых заранее неизвестна (вихревая пенена, свободная поверхность, поверхность раздела, поверхность каверны); это вызывает дополнительные трудности при
Рис. II.5 Характерные случаи потенциального обтекания тел а — движение тела в неограниченной жидкости, б — обтекание тела в неограниченной жидкости; е — обтекание крыли в неограниченной жидкости; г— обтекание тела с волнообразованием на свободной поверхности, <7 — обтекание тела с волнообразованием на по верх гости раздела; е — обтекание тела с кавитацией
решении таких смешанных краевых задач о потенциале скорости, так как приводит к нх нелинейности. Иногда возможно упрощение нелинейных условий за счет переноса их на поверхности, вид которых заранее известен (например плоскости) и устранения в них произведений производных искомой функции <( такой прием лииеарнза ции задач позволяет применять принт суперпозиции при нх решении.
Разработано несколько методов решения потенциальных краевых задач Некоторые методы позволяют получить аналитические решения в замкнутой форме, однако во многих практически интересных случаях необходимо использовать численные методы, поэтому реализация решений возможна лишь с помощью ЭВА). Для решения задач потенциальных течениях применяют следующие основные методы: I) наложения простых потоков, 2) конформных отображений 3) разделения перемен пых; 4) интегральных уравнений; 5) функций Грина; 6) сращиваемых асимптотических разложений; 7) конечных элементов; 8) конечных разностей. 9) аналогий Рассмотрим основные особенности и области применения этих методов.
32
Метод наложения про тых потоков Метод наложения п зволяет решать задачи , обтекании некоторых простых по форме тел потоком безграничной жидкости в слу-аяс осесимметричных и плоских потоков. При этом тело в потоке заменяется денст-' ,м источников, стоков, вихрей или диполей. Для получения тел, ограниченных замкнутой поверхностью или контуром, необходимо, чтоб!, суммарный расход заменяющих их источников и стоков был равен нулю В т.зб» 11.1 показаны результаты решения нескольких характерных задач, полученные методом наложения дискретных гидродинамических особенностей.
При решен! i задачи об обтекании тела заданной формы подбор заме |яющнх его гидродинамических особенностей и выбор мест их расположения вызывает большие трудности. Эти трудности можно преодолеть, если рассматривается обтекание тонких- тел Топким называется тело, у которого характерный продольный размер
(длина L, хорда b профиля) значительно больше характерного поперечного размера (ширины й, толщины) Действие таких тел на поток допустимо приближенно заменить гидродинамическими особенностями, расположенными на их серединной плоскости Тада судовой формы можно заменить в потоке источниками, расположенными в диаметральной плоскости Здп, т. е. простым слоем [см формулу (II.29)] с интенсивностью
о, - 2иоо-^, (II 72)
дх
где у = f (х, г) — уравнение ординат поверхности S тела (рис II С). Тогда потенциал обтекания тела при в безграничной жидкости
* '•‘+-S-J ‘"73)
Ад. п
Обивканис тонких крыльев изучают, заменяя их действие вихревым слоем.
Метод конформных отображений. Этот метод можно использовать для расчета только плоских потенциальных потоков Он состоит в применении функции, позволяющей преобразовать рассматриваемое течение в плоскости комплексного нс] сменного г х + iy во вспомогательную плоскость комплексного переменного £ = £ + + п], где оно будет иметь более простой вид.
Обы ио при расчете обтекания плоских контуров щут преобразующую функцию г ~ f (£), отображающую внешность круга в плоскости £ на внешность данного контура в виде ряда Лорана
г = + Ь-у-+-£§- + ••- (И 74)
2 П/р Я И Войткун скоро, т. 1
33
К таблица 11.1, Характеристические функции и потенциалы обтекания простейших плоских и осесимметричных тел
гд₽ 1П[ _ постоянные (в общем случае комплексные) коэффициенты. Для определенности отображения достаточно соответствия либо трех точек плоскостей z и £, либо p^ihiH точки и одного произвольного направления.
** Иногда, особенно при расчете струйных течений, образом границы потока во вспомогательной плоскости могут быть фигуры не в виде круга (полуплоскости, плоскости с разрезом и т. п.), для построения преобразующей которых требуется применять функции формулы Шварца—Крнстофеля [38).
Зная характеристическую функцию w (£) обтекания круо (т. е. кругового цилиндра) радиусом/? в плоскости £ потоком под утлом ос к вещественной оси, t t
можно наитн характеристическую функцию исследуемого потока в плоскости г, если из системы соотношений исключить вспомогательное переменное £:
^£е ,ctД_ еа*) +-JX In £;
2 = /(£).
(11.75)
где «•’ , — скорость потока в плоскости £ на оо, Г — циркуляция скорости вокруг цилиндра Для этого следует обратить преобразующую функцию т. е. наитн зависимость £ = /, (z), и в функции »• (£) сделать замену переменных. Комплексная скорость в соответственных точках плоскостей г и £ связана зависимостью
da (г) _ <М£) ь’£ _ <fa>(£) I .. 7f
dz ~ d£ dz dt, dzfdi ' 1 '
Это соотношение можно использовать для расчета скорости dwldz, если исключение переменного £ произвести не удается. В соответствии с зависимостью (II 76), если преобразующая функция имеет вид (11.74), тоскорость потока в плоскости ги^, = = Чтобы векторы скорости в плоскостях z н £ на бесконечности были равны
иоо =иоо • необходимо m = I При конформном отображении циркуляция скорости вокруг контуров не изменяется т. е. I'. = I'j = Г; не изменяется и интенсивность источника’ Q~ = Q?.
Задача об определении коэффициентов п, ряда Лорана (11.74) для контура произвольной формы представляет значительные трудности [91 ].
Семейство симметричных форм контуров, близких к очертаниям шпангоутов судов, можно получить с помощью преобразующей функции, предложенной Льюисом
г = т i£ “I
mi
£
(П.77)
Для расчета асимметричных (накрененных) контуров шпангоутов (см с. 59) допустимо использовать «реобразующую функцию
г=Нт!-+-^+-^> (и.78)
ь ъ" ь
коэффициенты ггц которой связаны с тремя параметрами накрененного шпангоута зависимостями установленными И Л. Кудрявцевой [45] Применение преобразующих функций для расчета*обтекания профилей крыльев рассмотрено в § 25
Метод разделения переменных. Метод разделения переменных (метод Фурье) дает возможность получить в аналитическом виде частные решения уравнения Лапласа, которые в случае применения принципа их суперпозиции позволяют строить общи?? решения уравнения в виде рядов Характеристические числа и коэффициенты последних определяются с помощью граничных условий задачи. При использовании этого метода в зависимости от системы координат, выбор которой обусловлен характером изучаемого течения, частные решения нмекгГ различный вид. Метод можно применять как для решения пространственных, так; и, плоских задач Существо метода состоит в представлении искомого частного решения}уравнения Лапласа в виде
2* 35
произведения независимых функций выбранных ортогональных координат <?£, q2, Чз- т. е.
ф = Ф1 (<71> Ф» (%) Фз to). (П.79)
что позволяет свести это уравнение в частных производных к системе трех обыкпо венных дифференциальных уравнений, каждое из которых определяет свою функцию <рг-. Рассмотрим виды решений при использовании наиболее часто применяемых в ги дромеханике координатных систем.
1. Декартовы координаты (х, у, г) Записав частное решение в виде <р = ф1 (х) X X фа (у) фз (г), можно показать, что уравнению (1.41) удовлетворит функция
Ф (А’'*,х Be ,k'x)(Ce'ktV + De (Еек,г + Ге (11.80)
где fej, kt, k3 — характеристические числа, связанные зависимостью
^4-W=^r (II.8I)
причем 4, и 4а — произвольные постоянные. Используя принцип суперпозиции,общее решение уравнения (1.41) можно представить в виде бесконечных двойных рядов Фурье по = О, I, 2, 3... и к2 — 0, 1, 2, 3 ...» постоянные А/, В)-, С/.. D^, Eh, Fh которых определяются из граничных условий
Построение потенциала с помощью функций (П.80) удобно, если границы потока параллельны координатным осям. В частности, соотношение (11.80) применяется при изучении волн относительно малой амплитуды на глубокой, мелкой воде и в прямоугольных каналах.
2 Цилиндрические координаты (z, г*, 0). Частное решение ф = ф( (г) ф2 (0) х X ф8 (г*), удовлетворяющее уравнению (1.42) и условию периодичности ф2 (0) = = фг (0 ф 2Л). имеет вид
ф (Аекг । Be кг)(Ссеят0 + FKm(r'k)], (11.82)
где Jm(r*k) и Km(r‘k) — функции Бесселя первого и второго рода порядка т; k и т — характеристические числа (fe — 0, I, 2 ...; т = 0,1,2). Если решение должно быть ограничено при г* = 0, то постоянную F в формуле (11.82) следует положить равной нулю. Если течение симметрично относительно осн г, то и= (I и частное решение
Ф = (4еАг + Ве кг) Jn (/•>), где k - 0. I. 2, (1183)
Общие выражения для потенциала могут строиться в виде двойных рядов, состоящих из членов типа указанных в формуле (11.82), или ординарных рядов в случае решения (11.83). Исследование течений, создаваемых кольцевыми и в виде дисков источниками, диполями, а также концентрических воли, вызываемых точечными возмущениями, и расчет обтекания осесимметричных тел в трубах можно производить. применяя потенциалы вида (11.83).
В случае полярных координат (г*, О) на плоскости частное решение уравнения Лапласа ф = фх (г*) ф2 (0) имеет вид
Ф (/1г*А+ (cos И) + Л sin 40). (И84)
где 4= 1, 2, 3, .. — характеристические числа. При 4=0
Ф = (СО ф D) (A In г* В) (II .85)
Это частное решение позволиет выделить потенциалы плоского источника и циркуляционного потока
3. Сферические координаты (г, 0. в). Частное решение ф= ф, (г) фч (0) ф3 (е) уравнения (I 43), конечное при любых значениях е, имеет вид
Ф - (Аг" + В/гл+1) (С cos гпО Г) sin шО) (cos е),
где характеристические числа л = 0, I, 2...; т ~ 0, I, 2..., а Р'" (соз е) представляет присоединенную функцию Лежандра первого рода степени л, порядка т 36
Комбинация таких решений позволяет получить частное решение более общего вила
?=х(.4гп 4- В/г',+1) У„ (0, г).
(II 86)
где поверхностные сферические функции степени л
У'„ (0, е) = £ f^1 (cos г) [С,„ cos niO 4- Пт sin пб]. /?1“0
Общее представление для потенциала может быть построено в виде ряда по числам л, постоянные Л„ н Вп в котором определяются из граничных условий задачи.
4 Координаты вытянутого эллипсоида вращения (X, р, 6). Частное решение, ограниченное при р "±1, имеет вид
<Г = *0% IX) Р? (|i) cos m0. (II 87)
где /п н zr — характеристические числа (ш — О, I, 2 л =0, I, 2 ...); Р"‘ (р) и Q™ (X) определяют присое*»еивые функции Лежандра первого и второго рода порядка т степени л.
В случае симметричного относительно оси г потока, потенциал которого ограничен,
<Г = АРп <р) Qn (X); « = 0.1.2.................... (11.88)
где Рн (р) и Qn (X) — полиномы Лежандра и функции Лежандра второго рода Построение <р в виде рядов с помощью суперпозиции частных решений (11.88) позволяет получить потенциал скоростей продольного обтекания тел вращения вдоль осн г в виде
Ф — ОосГ/.р Ц- ОооСДцРп (р) Qn (X), (II 89)
и <=и
а с помощью (1187) — потенциал обтекания их поперек оси вращения
Ф^о^с! A2— I I 1 — P2cos0+ У1, (и) Qj, (X) cos 6. (11.90)
п-l
Коэффициенты Л„ этих рядов определяются с помощью граничных условий иепроте-капия жидкости на поверхности тел (49]
В случае продольного обтекания эллипсоида вращения, у которого X = Хо = — а/с, где а продольная н b— поперечная полуоси, с—V^o*--fc* — его линейный эксцентриситет, в формуле (1189) лишь Л,#=0 н
1 i In Х + 1
Ф = VocfXp — ОоосХоР |
2с 1° I — е 1 — е3
причем скорость па сто поверхности
Н'
и —
V - v“-----1-е1 ,
'-----
(II «О
(П 92)
где е = с!а — l/Xj.
37
При обтекании эллипсоида вращения поперек полуоси а, в воответствни с формулой (11.90)
= Г'эсС |'V - 1 /| — цс I +
?‘п \ 2 1 - 1 + 1 — X* )
о * 1 In "I"1
2~7Г=Т’"ТАп
cost).
(II 93)
Обтекание трехосных эллипсоидов удобно изучать с применением эллиптических пространственных координат [42, 55).
Метод интегральных уравнений Этот метод основан на замене действия тел на поток гидродинамическими особенностями — источниками, диполями или вихрями, непрерывно распределенными по поверхности тела, а для некоторых тел (тонкие тела) по мало отличающейся от их поверхности плоскости или вдоль их осн симметрии (тела вращения).
Если тело имеет произвольную форму н движется в неограниченной жидкости (см. рис II 5 а), то потенциал его вызванных скоростей в любой точке жидкости можно представить в соответствии с формулой (11.37), где функции д<р/дп характеризуется условием (11.66). Чтобы определить потенциал, следует найти его значения в точках поверхности тела. Для этого необходимо решить интегральное уравнение
<"-м>
S S
в котором правая часть представляет известную функцию. Подставив полученные значения ср во второе слагаемое правой части формулы (11.37), найдем решение задачи
Иной путь при изучении обтекания тела произвольной формы состоит в замене его действия на поток слоем источников с интенсивностью <т1г непрерывно распреде лениых по его поверхности S. Потенциал обтекания тела
Ф = ^х+-±-|-Як^. (П.95)
х
Удовлетворяя на поверхности 5 условию непротекания (11.67), получаем интегральное уразненне для определения функции Oj (xv у,. zj, где xf, ylt zt — координаты точек поверхности тела,
ni = ~^~ J ni -^--y-dS-b 2иа> cos (п, г). (11.96)
S
Уравнения (II 94) и (11.96) представляют собой интегральные уравнения Фред Гольма второго рода с ядром
K=_J_________L =____t cosfn, г)
2л дп г 2л г»
где п — внешняя нормаль в данной точке к поверхности S, а г — расстояние от этой точки до любой другой точки поверхности. Известно, что решение таких интегральных уравнений существует и является единственным, если поверхность гладкая (поверхность Ляпунова). Интенсивность источников должна удовлетворять условию
[о!<(Х = 0. (11.98)
$
Получить в замкнутом аналитическом виде решение уравнений (11.94) н (II 96) даже для тел простой формы не удастся. Применяются два основных пути получения решения,' которые требуют использования численных методов и ЭВМ Первый путь состоит в удовлетворении уравнения, например (II 96), в дискретных точках
38
ita поверхности S. Это позволяет свести решение его к системе линейных алгебраических уравнений вида
г Л’
=-2t>„cos(w. -V.)---У Ot[ Ll>S — lV»fe ирн (Il 99)
Fi r‘k
где olfc — значение интенсивности в A ii точке на площадке ДЗд. Второй путь представляет метод итераций, согласно которому интенсивность г\ определяется в виде сходящегося ряда
<т1 = 2a’r- (II 100.)
л -о
где а( Ko, dS . . . o,n = [ Л'п, ^dS, при чем
1 S ° ” S
о,о - 2-jmcos(п, х). (II. 101)
Методы получения решений уравнения (II 9(>) разработаны для тел произвольной формы Гессом н Смитом [1051, Л А. Масловым [53], В II. Хоиичевым [93].
Рис. 11.7. Обтекание тела вращения.
В случае расчета продольного обтекания тела вращения по его поверхности распределяют кольцевые источники Потенциал обтекания (II 95) в цилиндрических координатах (рнс. II.7) _______
1 т /. < •
2l'. Р •! (Л Ит I 1 + г*
Ф^и^гг— -----------И ° -K'(k)dzt, (11.102)
n J > (--м +(<; "'V
о
а безразмерная интенсивность кольцевых источников i| (zj определяется с помощью интегрального уравнения, полученного ич условия непротекания на поверхности тела вращения:
аг*г*' = — лг]г; I + /*; 4- j W U1 • ЮЗ)
b
к' ........ \ . _ [;/: (/<•) - к (fe)i
/(z-x.r + fc +'•)
39
где г* (г) — радиусы обвода LT тела вращения;
1* * т ---------:-----:---;
/ (2_г1г-|-(гЧ-г;)
К (ft) и А (ft) — полные эллиптические интегралы первого и второго рода.
Способ решения уравнения (11.102) путем сведения его к системе алгебраических уравнений был разработан Институтом математики СО АН СССР ПН. а также Вандреем [ 115]Ji Л. А. Масловым. На рис. II 8 показан результат расчета скорости
Рис. 11.8. Распределение скорости и коэффициента давления вдоль поверхности тела вращения.
I — обвод тела.
н коэффициента давления р на поверхности тела вращения, выполненного этим методом в Сибирском отделении АН СССР Метод расчета продольного и поперечного обтекания тел вращения, основанный на замене поверхности тела в потоке непрерывным распределением но ней кольцевых вихрей и определением их интенсивности с помощью интегральных уравнений, разработан А Н. Патрашсвым 163].
Расчет продольного обтеканияЗтел вращения, основанный на замене их действия в потоке диполями, непрерывно распределенными вдоль оси г тела, с интенсивностью т (г), позволяет записать функцию тока в цилиндрических координатах:
» £»
V = -^ г*1 - — f ,n<z»>rfzi (ПИИ»
’ «Jib г,У + ,-'Г-- '
Условие непротекаппя на поверхности тела Чг 0 приводит к уравнению Фредгольма первого рода для определения функции
интегральному т (ztl
т dit________
*.)2 + <Г*
- 2jw~.
(11 105)
40
где г* (?) ~ уравнение обвода тела вращения, a Lt — Lt 1. отрезок оси, на котором расположены диполи [106].
' В более общем случае, когда задана нормальная производная потенциала ф вызванных скоростей на поверхности, касательная производная dyldl (т. е. касательная составляющая вызванной скорости) по любому направлению I вдоль поверхности S определяется с помощью интегрального уравнения
4-J-(4-f‘4-4±rf/dS- ' (4-4±js. (Н.Ю6) i)l 2л J dl J On 01 г 2л J on dl r
л i S
где Im — максимальное значение, достигаемое криволинейной координатой I на поверхности S (например, на ее границе).
Метод функций Грина. Функции Грина G (х, у, г, xv yv zj — функция источника — представляет собой потенциал единого источника, расположенного в точке с координатами х, yt г,, удовлетворяющий уравнению Лапласа ДО = О и всем граничным условиям рассматриваемой краевой задачи, кроме условия иепро-текания на поверхности S тела, обтекание которого рассчитывается. Функцию Грина можно записать в виде
G=I/r+GI, (11.107)
где Gt — гармоническая во всей области, занятой жидкостью, функция. В неограниченной жидкости G, = 0 Нахождение функции 1 рила краевой задачи при сложных граничных условиях, показанных на рис 11.5, г, д, е, связано с большими трудностями; для некоторых задач с волновыми граничными условиями функции G даны в гл. IV.
При изучении обтекания тела вблизи плоской границы (г = 0), где Лр/дл = 0 или ф — 0, функция G, представляет потенциал зеркально отраженного относительно этой плоскости источника (при дчр/дп = 0) или стока (при ф — 0), г. е.
G = —± —, (II.108)
г Г1
где
Г — Хг)- н- (у - у О- |- (z z[F; Г! = /(X — Х|)2 + (у — у,)* + (z + 2й)2.
z. — h расстояние центра источника или стока от плоскости z = 0 Функция Грнна позволяет строить потенциал обтекания тела, ограниченного поверхностью^, в виде
Ф c'«.J + 4 i °lGtlS- (П 109>
S
Интенсивность источников сгх определяется из условия непротекапия ОФ/дп 0 па поверхности тела, позволяющего получить интегральное уравнение Фредгольма второго рода
а, — -Д- [ о, itS — 2о cos (п. х) (НПО)
1 2л J 1 Он °°
.ч
В случае обтекания тела вблизи твердой стенки, совпадающей с плоскостью хоу оно примет вид
•S’
Методы решения этих интегральных уравнений аналогичны изложенным для уравнения (1196). Метод функций Грина может быть'использован и для решения плоских краевых задач.
41
Метод сращиваемых асимптотических разложений. В ряде случаен эфс|юк1ив-ным для получения приближенных выражений потенциала скорости является метод, основанный на сращивании упрощенных асимптотических выражений для потенциала в различных областях потока, например <рп вблизи тела (внутреннее решение) и fpm на больш м удалении от пего (внешнее решение). Он позволяет создать способ расчета обтекания удлиненных тел, у которых продольный размер L значительно больше их характерных поперечных размеров. Рассмотрим продольное, вдоль осн г, обтекание со скоростью пл тела вращения, имеющего наибольший диаметр Р полагая Г) ,JL I Можно показать, что производная потенциала вызванных скоростей <р (г, г*) на поверхности тела <>p/Oz представляет малую величину более высокого поряхка. чем производная chf'/cV* Это свойство удлиненных тел нарушается в их оконечностях, где применение основанной на нем теории приводит к ошибкам.
Учитывая указанное свойство, можно течение вблизи тела в каждом поперечном его сечении приближенно рассматривать как плоское е потенциалом ф„ (г*), удовлетворяющим уравнению Лапласа
й-<йт . 1 дфн дг*' г* О'*
(II.112)
(если принять <?<рп/дл « О<р„/Эл*, где п — нормаль к поверхности тела) и граничному условию непротекания
где г* (г) — уравнение контура продольного сечения тела. Это позволяет применять для нахождения потенциала <р0 методы плоской задачи; ему соответствует плоский источник. Однако плоские потенциальные потоки в различных поперечных сечениях удлиненного тела не являются независимыми Их связь можно учесть, если потенциал для внутреннего решения записать в виде
Фо - фи + f (г) = ~~ in г* + f (г),
(II.114)
где f (z) — функция, учитывающая влияние трехмерности обтекания тела; q (г) = = —т\,dSIdz—интенсивность плоских источников, расположенных на осн] г тела; S (z) = пг‘ — площадь поперечного сечения тела.
Потенциал <рга на большом удалении от тела (внешнее решение) можно представить как сумму потенциалов пространственных источников, расположенных на 'оси тела:
1 Г dS____
и аг /(z-zir + r
(11.115)
Находя асимптотическое разложение этого потенциала при малых г* и сравнивая его с выражением (II. 114), т. с производя тем самым процедуру сращивания решений. можно найти следующее выражение для функции Д(г)
Таким oJpiJoxi, в применяемом методе трехмерность потока вблизи тела учитывается функцией f (г), а также частично правой частью упрощенного граничного условия (II. 113).
4.
В случае применения изложенной теории давление определяется соотноше-
нием
дг
I / Д<Го Хг
2\dv*)‘
(II IIG)
Р - рта = ----------- I'oo
Функция f (z) обращается в ноль, если при расчете обтекания поперечных сечений тела не используются источники, т. е q — 0. Эго возможно при поперечном обтекании тел вращения, а также в поперечных сечениях крыла, рассматриваемого, как тонкая несущая поверхность, заменяемая в потоке диполями. Метод сращиваемых асимптотических разложений используют и для решения более сложных краевых потенциальных задач, в том числе в теории крыла [69, 99], а также в гидродинамике судна {111].
Рис. II 9. Разбиение области плоского потока на конечные элементы.
Метод конечных элементов. В вариационном исчислении показано [38]. что решение краевой задачи для уравнения Лапласа эквивалентно нахождению функции <р или ф, обеспечивающей минимум некоторого функционала /. Этот функционал зависит от граничных условий. В случае плоской задачи, когда на границах потока задана нормальная производная потенциала скорости, соответствующий функционал имеет вид
'.--И [(£)'+($)>"-f "||17>
•S /
где I—(рапиды области S потока, иа которых значение fltffdn известно. Если для того же потока искомой является функция тока ф, то соответствующий ей функционал
(II.118)
S
Функционалы и содержат производные более низкого порядка, чем соответствующие им уравнения Лапласа Дц. = 0 и Дф = 0.
Для нахождения функций <р или ф, обеспечивающих минимум этих функционалов, целесообразно воспользоваться методом конечных элементов (МКЭ). Согласно этому методу вся область рассматриваемого плоского потока разбивается сеткой иа конечное число k малых об. гей (рис. 11.9). В'пределах каждой области функция <р или ф может быть аппроксимирована сравнительно простой за
43
висимостью. Следовательно, интегралы в функционалах /ф и заменяются конечной суммой
k
>Ч (” "«)
Потенциал (или функцию тока) в области одного конечного элемента фе .можно 3
аппроксимировать линейной зависимостью 4>i^i (*. '')• функции Л';
1 = 1
которой могут быть выражены через координаты вершки треугольника и текущие координаты X, у
Рис 11.10. Разностный метод
Используя выражение (II.119). запишем функционал (П.117) или (11.118) для каждого элементарною треугольника и выполним требование его минимизации, т. е. г
-д-Ф- = 0 или -г--- = 0 при i = 1, 2, 3. (11.120)
<Л[,- <)<|д
В результате будем иметь систему трех линейных алгебраических уравнений относительно неизвестных значений функций q>( или ф( в вершинах Поступая аналогичным образом для всех треугольников, можно получить систему алгебраических уравнений для определения значений искомых функций фг или ф, во всех выделенных точках области течения. Формировать матрицы, содержащие коэффициенты этих уравнений, и решать системы уравнений следует с помощью стандартных программ на ЭВМ. В качестве конечных элементов, в зависимости от формы границ потока, можно использовать также треугольники с криволинейными сторонами (нли иные фигуры), а точки, где разыскиваются функции q, н фг, принимать не в вершинах, а на их сторонах.
Метод М1\Э позволяет решать также задачи осесимметричною и пространственного обтекания тел. Более удобно использовать его в случае, когда область течения является ограниченной. Возможно обобщение метода для расчета течений с циркуляцией скорости и с волнообразованием на свободной поверхности [31, 37[.
Разностные методы. При численном решении этими методами уравнения Лап ласа для потенциала скорости или функции тока (плоская задача) требуется разбиение области течения с помощью сетки. В случае прямоугольной или квадратной сетки, связанной с декартовыми координатами (рис II.10), уравнение Лапласа Дф = 0 в окрестностях точки Otl, (х, у) можно с погрешностью порядка h2 аппроксимировать в виде центрально-разностного оператора:
ф|+1> * ~ 2’1Г1Л + Vf-x. * Фь fc.i — 2ф(п + ф;.
Дф --------------------------- + ------------_------------
44
T Ф« + н I. + Фг-l. h + Фь Л+1 + Ч'1> Л-1 — 4ф;д = О (11.121)
Оставляя такие уравнения последовательно для всех узлов сетки и полагая граничив-значения функции ф известными, получим систему линейных алгебраических ‘ авпепий для определения значений ф;л в узлах.
" В случае необходимости использования неравномерной сетки (в области резкого изменения ф или вблизи границ) оператор Лапласа принимает вид
ДФ [*»< 111 я(| +а) +1* '-'’Т+а (3(1 -Ы) 1Т+р’-
- Ч'п. (,,|22)
При решении задачи Неймана для функции <р, когда на твердой границе задано условие гЛр/Эл = 0, дли построения оператора можно воспользоваться введением фиктивной, т. е. за стенкой, части течения, продолжив туда сетку (см. рис. 11.10) и полагая «P/ц. и = Ч>,-. 1 Иными словами, оператор в этой области потока примет вид
2Ъ+1.г. + Ф1,1ы|+Чг.|1_1 Чл = 0- (11.123)
Возможно использование н других видов разностных операторов, в том числе основанных на применении треугольных или иных элементов сетки. Разностные методы применяют и в случае расчета осесимметричных и трехмерных течений. Для реализации сеточных методов необходимо использовать ЭВМ при решении систем алгебраических уравнений |38. 72, 74].
Методы аналогий. Метод исследования готенциальных плоских и пространственных потоков с помощью электрогндродинамичсской аналогии (ЭГДА) основан на том, что ноля потенциала скорости <р н электрического потенциала напряжения и3 удовлетворяют уравнению Лапласа, т. е.
Аф = 0 и Диа = 0. (11.124)
Вектор плотности электрического тока ia аналогичен вектору скорости потока: psgradq; = — гя grad u.„ (II. 125)
где сэ — коэффициент электропроводности Кроме того, существует аналогия в условиях нспротекания на твердой границе и через неэлектропроиодную поверхность: _^L о п -^-=0. (11.126)
дп дп '
Поверхности <р = const и ц, = const совпадают. Это дает основание заменить исследование поля потенциала скорости исследованием ноля потенциала в ванне с неподвижным электролитом (или па электропроводной бумаге в плоской задаче) Контур или тело, обтекание которого исследуется, выполняется из диэлектрика, что позволяет выполнить иа его поверхности условия (II 126) Электрическое поле создается подключением источника постоянного тока к проводящим шинам.
расположенным поперек исследуемого потока па достаточном расстоянии перед и за телом Размеры электролитической ванны выбирают такими, чтобы обеспечить с достаточной степенью точности выполнение граничных условий изучаемой задачи. Значения напряжения м> или плотности тока /, в точках потока снимают
с помощью щупов, соединенных с соответствующими нзмерительньмн приборами
Значения коэффициента давления потока, если = const, вычисляй»? по формуле
(II 127)
где значение плотности тока вдали от исследуемого тела.
45
Метод ЭГДА позволяет изучать как бесциркуляционные, так и циркуляционные плоские потоки; он эффективен при изучении обтекания пространственных тел вблизи твердых границ произвольной конфигурации пли одних тел вблизи Других.
Для исследования потенциальных Потоков можно применять магнитно-гидродинамическую аналогию (МАГДА) |85]. Ток i3, проходящий ио криволинейному проводнику, создает вокруг него магнитное поле с напряженностью /7.,, причем связь между И, и 7, такая же, как скорости v н циркуляция Г. и определяется формулой Вно-Савара (I 58). Это дает основание для осуществления МАГДА, в которой анало) ом вихревой нити является проводник, аналогом циркуляции Г—ток а аналогом вектора скорости — вектор напряженности Н-, магнитного поля.
§ 6. МЕТОДЫ РАСЧЕТА ГИДРОДИНАМИЧЕСКИХ РЕАКЦИИ
Вычисление результирующей R гидродинамических сил, действующих со стороны жидкости на тело, н се момента Л) — важнейшая задача гидродинамики; методы ее решения применительно как к вязкой, так н к невязкой жидкости можно разделить на две группы, q ”
К первой группе относятся методы, основанные непосредственно на интегрировании элементарных тдродинамнческих сил, приложенных к поверхности тела; это, в свою очередь, требует предварительного расчета поля скорости вблизи поверхности тела Применение этих методов возможно также в случае, когда экспериментально измерено распределение давления к касательных напряжений при обтекании тела в вязкой жидкости. Основные расчетные формулы для вычисления гидродинамической реакции и ее момента при движении тела в вязкой жидкости пли его обтекании следующие:
R \pndS; «= [ (7xp„)rfS. (II.128)
s s
♦
где p,L — вектор напряжений поверхностных сил, определяемый согласно формуле (I.I0); г — ix ф- jif ф- fez—радиус-вектор точки поверхности тела относительно начала связанной с ним системы координат.
В невязкой жидкости результирующая сила давления и ее момент составляют:
R = —jpn«AS 11 — [р(гх«Ы$. (11.129)
s s
Входящее в эти формулы гидродинамическое давление в невязкой жидкости должно быть вычислено с помощью интегралов Бернулли (1L5) или Лагранжа (II.8).
Вторая группа методов позволяет вычислить гидродинамические реакции и их моменты если известны характеристики потока на некотором удалении от тела. К ним относятся формулы, основанные на применении законов количества движения и моментов количества движения. Использование этих законов особенно эффективно, если обтекание тела установившееся В этом случае закон количества движения можно сформулировать следующим образом: поток количества движения сквозь неподвижную замкнутую поверхность S, равен главному вектору всех сил, приложенных к жидкости, заключенной внутри этой контрольной поверхности, т. е.
р vv„ <IS j р„<7.$ R. (11.130)
-s', S\
где v n — проекция скорости па направление внешней нормали п к данной точке контрольной поверхности; R — главный вектор гидродинамических сил, действующих на твердое тело, расположенное внутри контрольной поверхности. К реакции R необходимо добавить Архимедову силу поддержания.
41
В случае невязкой жидкости, когда рп =—рп, _ R = — р | ot'n dS — рп dS
F Si &t*
паи. если исключить давление с помощью интеграла Бернулли, R =>р I (/! --------------------------------vvn'jdS.
s.
(11.131)
(II.132)
Применяя закон моментов количества движения для установившегося течения, получим
р j (Г Хе) vndS = j (rxPn)dS — Л1. (11.132)
S, S,
где II — момент гидродинамической реакции относительно начала связанной с телом системы координат.
В случае невязкой жидкости
И = — р [ (Г X V) vndS — j р (г х П) dS s, S,
или
(II 133)
Л! — £ [ [(г X «) -^--------(г X v) v„J dS.
s,
Обычно соотношения (11.130)—(11.133) используют в виде их проекций на координатные оси. Если течение жидкости неустановившееся, то в левой части уравнении (11 130) необходимо дшюлпитсльно учесть изменение количества движения во времени внутри се объема V, т. е.
R = -p j То,, dS+ ( pndS-р-^- j vdV. (П.134)
S, s, V
В случае плоской задачи при установившемся течении невязкой жидкости для вычнлеипя сил и моментов можно пользоваться формулами С. А. Чаплыгина. Согласно первой формуле Чаплыгина действующая на тело, ограниченное контуром I, комплексно-сопряженная гидродинамическая реакция определяется соотношением и а * И МПJ
Rx-iRy i-L^^dz. (11.135)
I
Эта реакция имеет модуль
|к,-'Л1 14 -1
—>
а се направление представляет зеркальное отображение вектора R гидродинамической реакции относительно вещественной Ъсн комплексного переменного z. Вторая формула Чаплыгина позволяет определить момент М реакции А* относительно начала координат:
Л1 »__L Reel J zdz. (II.136)
t
Для использования формул (11.135) it (11.136) требуется знание комплексной скорости ita/dz потока. Контур интегрирования в случае потеиипалыюго течения может быть выбран в виде любого замкнутою контура /,, охватывающего тело.
4'
Если плоское течение — вихревое, при вычислении комплексно-сопряженной реакции используют функцию тока ф (г). Тогда
ох — 'Оу = и Rx iRy---------------2р/ j dz
l
Если комплексную скорость представить в виде разложения ее в ряд Лорана
do . , Л. Ж
^ + -у- + -г+ (II.137)
где Л(1 =J г" 1 dz, то коэффициент Ло = v^e ttt — комплексная ско-'/?
рость потока на бесконечности, направленная под углом а к оси х; Л, - Г/2л( (Г — циркуляция скорости вокруг контура обтекаемого твердого тела); 1р — кои-тур большого круга радиусом R с центром в начале координат.
Н соответствии с формулами Чаплыгина (11.135) и (11.136), а также разложением (II 137) получим
/7?у =:/рГс^е-'0; (11.138)
Л1 - — Reel ((Л2е_,а). (II. 139)
Коэффициент Л2 зависит от формы обтекаемого контура
Формула (II 138) представляет теорему Н. Е. Жуковского: при обтекании профиля иа нем возникает гидродинамическая реакция, модуль которой | RI — а направление можно определить, если вектор скорости v повернуть иа угол 90° в направлении, противоположном циркуляции.
Для вычисления гидродинамической реакции и момента при неустановивше.мся движении плоского контура I служат формулы Л. И. Седова. Если используется подвижная система координат, начало которой имеет скорость о0 = vOv ф- iva^, а угловая скорость ым, то реакция R Rx ф- iRy и ее момент относительно начала координат определяются зависимостями:
Rx + iR„ = ФеоГ (fu-m Д1_ + /Г. Ц .gLy (7г r
I
d [" d(Szc) с* . • f
+ Л Р~— p^'o + lp ^zdz ;
I
М = - | w„. -g- + Reel I - (Д ( ф i j -gL г dt1
(Il 1411)
(11.141)
где S — площадь контура /; г,- — комплексная координата его центра тяжести; гт — координата точки контура, с которой сходит вихревой след, а производная вектора по времени относительно подвижной системы координат (например, вектора о) имеет внд
da
& —dt ~ ll"°n В *
В случае поступательного движения контура с постоянной скоростью из зависи-
мости (II 140) получается формула теоремы Жуковского
48
Edit при расчете пространственного обтекания тела его действие иа поток за меняется распределенными источниками с интенсивностью ot (хр yv гх), т. е. по-теициа-1 вызванных скоростей имеет вид
<Г --47 J-y-^(11.142) s
(<р« — гармоническая во всем пространстве функция, учитывающая влияние границ рассматриваемого потока на поле вызванных скоростей), то для вычисления действующих на тело гидродинамической реакции и ее момента можно применять формулы М. Г. Крейна [39]:
Я = - Р J ni (*i У| - *i) gr-’d |Ф* (*1 • У\. ) - V] dS; '
Al = — р | О, (Лр Ур zj [г X grad (<р* — JS, s
(11.143)
где Oj (Xj. t/j, zt)— известная интенсивность источников; г ixl + jy1 fez,— радиус-вектор точки поверхности S тела относительно начала связанной с ним системы координат.
Когда в установившемся потеже невязкой жидкости вне поверхности S тела находятся гидродинамические особенности — источники, диполи, вихри, то под их влиянием на геле возникает гидродинамическая реакция и момент, для определения которых можно использовать формулы Лагалли [107]. В случае дискретных внешних по отношению к гелу гидродинамических особенностей эти формулы имеют вид
N N КМ 4
Р У; QjVco I Р У. 4 Р У ОД - I' У, Гт J Vm X <ir.
i*=l /=| k^l т=1 Lm
[vno X dr] +
.V К
+ P У Qi (b X »») + P У ">ь (Пк X i’fc) +
M
+ P У ri'k (rh x nfcV-o*) — p У Гт J rnl x km X dr], k=l m- I Lm
(11.144)
где — интенсивность источников; — скорость потока на бесконечности;
vrl, Ун — скорость в местах расположения центров источников, диполей и осей вихревых нитей, которые создаются в них телом и всеми другими особенностями, ► •>
кроме данной; ткПк — моменты диполей с осями, орты которых п*; Гт— циркуляции вокруг вихревых нитей длиною Lnl и с направленным элементом dr; г(>,, —
расстояния центров особенностей или точек осн вихревой нити от начала координат;
Формулы Лагалли могут быть обобщены и на случай непрерывного раси|>еделе-ния особенностей в пространстве вне тела, а также для учета влияния мультиполей,
W
расположенных в потоке [40]. Формулы Лагал ли целесообразно применять при изучении процессов взаимодействия тел в жидкости и влияния границ потока на их обтекание.
§ 7 ВЫЧИСЛЕНИЕ ИНЕРЦИОННЫХ ГИДРОДИНАМИЧЕСКИХ
РЕАКЦИЙ И КИНЕТИЧЕСКОЙ ЭНЕРГИИ ЖИДКОСТИ
При движении тел в жидкости с ускорением в число сил и моментов, действующих на них, входят гидродинамические силы и моменты инерционной природы. Учет инерционных гидродинамических сил и моментов необходим также, когда при движении изменяется форма или объем тел, погруженных в жидкость.
J -1 Io.mhmo формы тела па указанные силы влияет закон изменения скорости тела во времени, наличие свободной поверхности жидкости и твердых границ, а также вязкость жидкости В настоящее время наиболее полно разработаны методы расчета инерционных сил для движения тел в сплошной невязкой жидкости. Непосредственный расчет инерционных гидродинамических сил и моментов возможен путем интегрирования нестационарной части давления по поверхности движущихся в жидкости тел. Однако более широко распространено нх определение с помощью присоединенных масс.
Движение твердого тела в жидкости можно изучать, составляя уравнения его движения либо в подвижной системе координат х, у, г, связанной с телом, либо в системе координат х,. у^, неподвижной в пространстве.
Если рассматривать движение тела в связанной с ним системе координат, то при наличии ускорения к нему будут приложены векторы инерционной гидродинамической силы Ru ц гидродинамического нне.рцпонпого момента относительно начала координат ЛГЦ, определяемые нз соотношений:
» дВ -> -►
/?п — ®т X В,
Ы -* ? * t
--------—-------<1>г X J — v9y. В.
(II.145)
где В — вектор количества движения жидкости, окружающей тело; wr — вектор мгновенной угловой скорости вращения тела; J — вектор момента количества дин-жения жидкости; t>0 — вектор мгновенной скорости начала координат.
Уравнения движения тела в этом случае имеют следующий вид:
-^- + «тХ$ = ^ + R„.
dt -> -* ► > -* >
—|- <1)х X L -|- X Q = <М + 41и
(Il I4G)
где Q н L — векторы количества движения и момента количества движения тела;
R н М — главный вектор н главный момент внешних сил. приложенные к телу.
К внешним относятся силы и моменты, приводящие тело в движение, а также гидродинамические силы и моменты, аналогичные тем, которые действуют на тело при его движении в жидкости кбез ускорения.
Для вычисления векторов В и J удобно воспользоваться нх проекциями на оси координат, связанные с телом. С этой целью вводят систему обозначений:
Вх В,; B.J- B1. Вг В3. Jx = Bt; Jy fl.,; J, - Во;
''ох г % - е». еОг с,: шТд. = t>4. wT(/ iy, oTj = i>,.
50
Тогда Bi вычисляется по формуле
G к I
(II 147)
а проекции 1 идродинамнческих инерционных сил и моментов в соответствии с выражениями (11.145) — по формулам:
Л’п., --^7---ь>1хЙз +Wr.Bsl
R“« дГ ~ Wl,Cl + WtaC,;
Яцл =-----— <1>тд.в2 -j- wTtfBi;
Ип, =-----— шту®в + О)ГлЛз— 1ои^з +
<Иц(;-------------Wt.BiH- в)ТдВв — + 1'оЛбз
4(ц. —-----— Oo^Bi + l\^i
(II .148)
в которых В-, можно заменить на Л,(([ н щ. согласно формуле (11.147).
Величины Л/ называются обобщенными присоединенными массами для данного тела Они характеризуют количество движения и момент количества движения жидкости при движении в ней тела и позволяют выразить проекции вектора количества движения и вектора момента количества движения жидкости через составляющие скорости поступательною и вращательного движения твердого тела. Величины ?.(1[ с разными индексами могут иметь различные единицы измерения в зависимости от того, какой частный вид движения тела сообщает жидкости соответствующее количество движения Если движение тела поступательное, то количество движения характеризуется присоединенной массой; при чисто вращательном движении количество движения жидкости определяется присоединенным моментом инерции. В случае сочетания поступательного и вращательного движения для вычисления количества движения необходимо дополнительно учесть присоединенные статические моменты масс. При этом Ли. 1я8, А|?, Л13, Лм имеют единицы измерения массы; 114. Л15, А1в, Л24, XjE, Ам, ?.Я4, Л36, — единицы измерения стати-
ческого момента; XS5, А.ов, Хи, Xsl, >мй — единицы измерения момента инерции масс
Значения зависят от выбора связанной с телом системы координат. Для теоретического вычисления присоединенных масс при потенциальном движении
жидкости служит общая формула
U = -P J-^-<Phd5.
(11.149)
где ф| и <Pd — потенциалы вызванных скоростей составляющих движения жидкости, соответствующих поступательному и вращательному движению тела относительно осей координат со скоростями равными единице; S — поверхность тела. Предварительно решают задачу о нахождении потенциалов <р1? после чего суммарный потенциал q> вычисляют по формуле
Ч
С
VJf/L’,. (II 150)
cwl
51
Для определения составляющих потенциалов необходимо найти решения уравнения Лапласа Дф/ = 0. Эти решения подчиняют следующим граничным условиям на поверхности тела:
- У1 COS (л. х). 11 2 = cos (п. у); :| cos (л, г);
on On t)n
Лг j , Лац
-0" - yws(n, z) г cos (и, у)-, — г cos (л, х) — xcos (я, г);
-dj1 = xcos (л, у) у cos (л, х|, |
(II.151)
а в безграничной жидкости условию ф, 0 при г-» ос. Для решения данных задач можно воспользоваться методами § 5.
Знание присоединенных масс п составляющих о, скорости движения тела позволяет вычислить кинетическую энергию жидкости Тл.. окружающей тело, согласно формуле
6 6
Т* = 4~V V (11.152)
i I k I
Проекции вектора количества движения и момента количества движения жидкости на соответствующие оси подвижной системы координат определяют при помощи кинетической энергии;
* = (i1.153)
Кинетическая энергия твердого тела
Tt * 4“ t"' (L'« ++ £'з) Ь 2mvi Kvc ‘W:) + 2пи,2 (^с ~ »А) +
+ 2то3 (^с - t-5xc) 4 4- /?.2 - 2/^tfe - 2/„и,о6 - 2/х1/Ч,и5].
(И 154)
где m — масса тела; х,-, у,-. г; — координаты центра инерции тела; /т, ly, f. — моменты инерции массы тела относительно соответствующих осей координат; 1 Дху- Лег — центробежные моменты инерции тела. Поэтому полная кинетическая энергия системы тело—жидкость определится как сумма величин
Т = Г, 4- Тш. (11.155)
В случае поступательного движения тела вдоль оси х со скоростью с0 = i't полная кинетическая энергия системы жидкость—телп составит
~ fn 4- ।
Т —------5—— t’o- (III 56)
а при вращении тела в жидкости вокруг оси г со скоростью ыт = <о4
(П|57)
В общем случае движения твердого тела число значений присоединенных масс равно 36. Однако в неограниченной жидкости для них справедливо свойство взаимности, т е. симметрии матрицы i~ I-j-6, k 14-6:
(Il 158)
следовательно, число независимых величин XZ1.: снижается до 21.
Изменением направления осей и положения начала системы координат можно достичь того, что 1IS «= 113 = Хзз = о, а также Х1в = Х2в - А-
Система координат, для которой справедливы эти равенства, называется главной 52
lejiTpa-iBHoft системой Точка твердого тела, совпадающая с началом этой системы, называется центральной точкой. **“
Для тела, симметричного относительно двух плоскостей хоу и xoz ие_ равны к«лю только восемь значении присоединенных масс: Ап. А^, ?.33, ?-41. Ащ, Х<() » , Азь Для тела, симметричного относительно трех плоскостей координат, не равны нулю шесть величин: Аи, V, Ам, А41, Хвв.Для симметричного тела вращения. V которого осью служит ось х не равны нулю лишь пять значений прнсоеди ценных масс: А43, ^-зз. ^ьа» А44, причем 3 А33 и Аьь
В случае движения плоского контура, когда циркуляция скорости равна нулю, инерционные гидродинамические силы п моменты в системе координат, связанной с контуром, вычисляют по формулам
_ —jT" Л/Т 0>Т ^x'jVnx + XW-Wt);
Л’от - Г"“ИГ dv4r
I А
^“1 ?-т
, dv4g % - -h ~dT
~ л"м ~~Г
—p- - —”v «
t M ~ ~dt ''Уы ~
— (\j — К») — (Avlu% — r.x<uuu„) U»T,
где vBk — tij, ffly = t’s, wT — t'e — проекции скорости поступательного движения начала координат и угловая скорость вращения тела около начала координат; для присоединенных масс использованы обозначения Ап а^; Аи = А?; Хвв = Aui;
s Ajfy; )а Ах(м, Агв — А9Ы.
Кинетическая энергия жидкости в этом случае
= -у- +-^~ vt + -V- + \„о0 п0 + Vo «. + %<Л“т. (Н.160)
х< х — у л у к у
Если от связанной с телом системы координат хоу перейти к системе х'оу', также связанной с телом, но начало которой в прежней системе имеет координаты х0, Е. а угол между осями х и х' равен 0, то в новых осях значения присоединенных мае можно вычислить по формулам перехода
Хх. = Хд. cos2 0 4 Ау sin» 0 -f- lxu sin 20;
Ау. = Ал sin» 0 + ).у cos3 0 - кху sin 20;
~ 4" —мsii1 2р+cos 2^:
At.b). — AXp*0 + AXC3) cos 0 (Ajr^i/o — + ^у<л) s*n P’
= — (> xL>0 - A,9x0 + sin 0 + (XxyyB + kyx0 + А9(1>) cos 0:
Aw- = Mo + + 2 (^Уо- }ио>хо) + h>-
wr (AxVoa. ~l‘ ^xyVo,/ ~b A.a.m0)t);
--- (^yi»V0g ~ ^-X<JjyUw) e’r,
T
(11.150)
(II 161)
8. ЗНАЧЕНИЯ ПРИСОЕДИНЕННЫХ МАСС ТЕЛ РАЗЛИЧНОЙ
Присоединенные массы при движении тела в невязкой жадности в случае без-огрывиого единичные трехосных рис. 11.11
§
ФОРМЫ
обтекания могут быть вычислены по формуле (II. 149), если известны потенциалы обтекания. Такая задача для пространственного обтекания эллипсоидов была решена М. И Гуревичем и С. И. Риманом. На приведены вычисленные ими коэффициенты присоединенных масс
(II 162)
а и a puc.
Ап— Ац/fpV); й2в — Аи/(р1-); ftja Хлз/(р1').
11.12—коэффициенты присоединенных моментов инерции ^14 — *-44//х! ^SS — ^вв~~Ам//г,
(Il 163)
53
где pV — масса; /х. 1у, {, — моменты инерции жидкости заключенной в объеме V данного тела относительно соответствующих осей [67].
На рис. П.13 приведены значения коэффициентов присоединенных масс и моментов инерции эллипсоида вращения (Ь = с) в функции от отношения Ыа.
Ь -
4jtyal>J * “ 4лро6- (а- +Л-) *
При Л/я= 1 будем иметь£сферу и, следовательно. йи = h22 — 0,5; /?м=0.
Рис. 11.11. Коэффициенты присоединенных масс трехосных эллипсоидов.
Присоединенные массы и моменты инерции известны для класса хорошо обтекаемых тел вращения. не имеющих поперечной плоскости симметрии (рис. II 14). Поверхность таких тел можно выразить полиномом 6-й степени
у = aLx -f- a-,xl -f- a3is -ф а4х4 + а*хь + пвх*, (II. 164)
где х = х/1, у — у/d (L — длина тела; d — наибольший диаметр). Коэффициенты полинома а, зависят от характеристик формы тела, за которые при расчете были приняты^ Z./rf — относительное удлинение; хт — абсцисса наиболее полного сечения R = LR/cP, г LrldP — безразмерные радиусы кривизны в носу и корме;
I Г / Я X • 1
ч. V
коэффициент продольной полноты (V’— объем тела).
65
Рис 11.13. Коэффициенты присоединенных масс и присоединенных моментов ниерццц эллипсоида вращения (Л22 = kss, ku = О ^Sb = ^ee}-
Рис. 11.11. Обвод тела вращения.
Таблица 11.2. Коэффициенты присоединенных масс обтекаемых тел вращения не имеющих поперечной плоскости симметрии
Характеристика тела Коэффициенты присоединеннык масс Коэффициент присоединенного момситя иперцпн
L/d хт Я Г V
4 0,40 0,50 0,10 0,65 0,0866 0.854 0,598
5 0,40 0,50 0,10 0,65 0,0629 0,889 0.693
6 0.40 0,50 0,10 0,65 0,0480 0,913 0.757
7 0,40 0,50 0,10 0,65 0.0381 0,930 0.802
8 0,40 0,50 0,10 0,65 0.0310 0,912 0,835
10 0,40 0,50 0,10 0,65 0 0219 0,958 0,880
7 0,36 0,50 0,10 0,65 0 0385 0,929 0,800
7 0,44 0.50 0,10 0,65 0,0378 0,930 0,803
7 0,43 0,50 0,10 0,65 0,0.375 0,93! 0,805
7 0.52 0,50 0,10 0,65 0,0374 0,931 0,805
7 0,40 0,50 0,10 0,55 0,0404 0,927 0,814
7 0,40 0,50 0 10 0,(40 0,0382 0,930 0,810
7 0,40 0,50 0,10 0,70 0,0395 0,928 0,791
7 0,40 0 0,10 0,65 0.0399 0,927 0.795
7 0,40 0,30 0,10 0,65 0,0384 0,929 0.801
7 0,40 0,70 0,10 0,65 0.0383 0,929 0,801
7 0,40 1,00 0,10 0,65 0,0394 0,928 0.796
7 0,40 0,50 0 0,65 0,0389 0,928 0,798
7 0,40 0,50 0,05 0.65 0,0385 0,929 0,800
7 0 40 0.50 0.15 0,65 0,0377 0.930 0,803
7 0,40 0.50 0.20 0.G5 0,0374 0,931 0,804
7 0 40 0,50 0.10 J) <50 0,0632 0,889 0,704
7 0,40 0,50 0,10 0.55 0.0670 0,885 0.710
7 0,34 0,50 0,10 0,65 0,0387 0,929 0,799
7 0,40 0,50 0,30 0,65 0,0369 0.923 0’806
7 0,40 0,50 0,40 0,65 0,0365 0.932 0,808
7 0,40 0,50 0,50 0,65 0,0369 0,933 0,809
7 U,28 0,50 0 0,55 0,0527 0,907 0.762
7 0.36 0.50 0 0.55 0.0417 0 924 0.805
8 0,36 0,50 О 0,55 0.0340 0,937 0 838
10 0,40 0,50 0 0 65 0,0224 0,958 0.Я82
56
Рис II 15. Коэффициенты присоединенных массйп> кы, кт и прпсоедя пенного момента инерции kib эллипсоидов прошения, движущихся вдоль плоской стенки.
57
Г
Таблица П.З Влияние близости стенки на значения присоединенных масс для эллипсоида вращения
и.Ь Clb Н(1> ^11 А’3<
со 0,0130 0.963 0.194 0 0
5 0,01.34 0,971 0 195 —0,00087 0
12 5 1 2 0,0156 1,031 0,200 -0,00-163 0
1.5 0,0166 1,096 0,208 —0,00717 0
1,25 0,0174 1,175 0,217 —0,00963 0
5 0,00680 2,42 0.549 —0,00028 -0,00003
19 К Л Р1 2 0.00773 2,51 0,559 - 0.00148 - 0,00057
и, и 1.5 0,00815 2,61 0.571 - 0.00227 —0,00158
1,25 0.00845 2,73 0,585 - 0,00298 - 0,00337
СО 0,0084 0,490 0,095 0 0
95 9 2 0,089 0,310 0,097 —0,0093 0,0013
1,5 0,0096 0,556 0,103 —0,0145 0,0030
1,25 0,0104 0,626 0.110 —0,0202 0,0070
СО 0.0300 0,94 0,167 0 0 *
е 1 2 0,0324 0,98 0,177 —0,0081 0
о 1.5 0,0348 1,05 0,184 -0,0102 0
1,25 0,0367 1,13 0,192 —0,0141 0
СО 0,0180 0.480 0,088 0 0
1А о 2 0.0194 0.506 0,091 —0,0127 0,0020
1 о 1.5 0.0211 0,587 0,097 —0 0194 0.0045
1 25 0.0229 0,625 0,104 —0,0282 0,0090
со 0 0410 0,92 0,154 0 0
A 9R 1 2 0,0440 0,96 0,165 —0,0097 0
1 1.5 0,0509 1,02 0 168 —0,0117 0
1,25 0,0539 1,10 0,176 —0,0167 0
со 0.0260 0,470 0.083 0 0
19 £ 2 0.0280 0 505 0.088 —0,0155 0,0026
1х,О Z Т,5 0,0318 0.558 0,092 —0,0230 0,0058
1,25 0,0341 0,621 0,099 —0,0320 0,0107
Значения коэффициентов присоединенных масс /г,, и 1сзл и присоединенного момента инерции (от hkhic.tliio поперечной осн приходящей через точку x = L/2) приведены в табл 11.2. Сопоставление с рис 1 .13 показывает, что для многих тел присоединенная масса Ли несколько больше, чем для соответствующих эллипсоидов. Зависимость коэффициентов присоединенных масс kti, kn, k33 и присоединенного момента инерции эллипсоида вращения от расстояния Н до стейки, полученная В. С. Сабанеевым, показана на рис. II 15 В табл. 11.3 приведены коэффициенты присоединенных масс и статических моментов для трехосного эллипсоида с полуосями а, Ь и с, совершающего движение в плоскости, параллельной стенке и отстоящей от нее на расстоянии Н.
58
Рис II 16. Коэффициенты Z?tl (а) и &22 (б) присоединенных масс трехосного эллипсоида при движении его между параллельными стенками.
? Н = 2h; h — расстояние между центром эллипсоида н стенкой;
' L = 2а — длина «ллилсоцда; Т = с.
Рис П.18 Формы сечений прямых (а) н накрененного (б) шпангоутов.
59
0,5 0.6 OJ 0,3 0,9?
Рис. II. 19 а. Коэффициент присоединенной массы ku в функции от параметров 0, у и Н для прямых (у = 0,5) и накрененных шпангоутов.
Рис. 11.19 6. Коэффициент присоединенной массы ku, и функции параметров 0, у и Н для прямых (у = 0,5) н'на-кренснных шпангоутов.
На рис. 1116 указаны значения коэффициентов присоединенных масс Ьп и k трехосного эллипсоида с полуосями а, Ь и с (а > Ь > с) при движении его между двумя стенками, когда а!Ъ 0,15.
Для прямоугольной пластины коэффициенты присоединенных массы и м< мента инерции следующие (рис. 11.17)-
__ 4Z.il . , 48л,-6 ... 1ГГ “ лгЬ-1 ’ kii ~ л?ЬЧя ' (Н lft’>
В случае плоского движения жидкости, рассматриваемого в плоскости xot, число присоединенных масс сокращается до шести, а кинетическая энергия жидкост i определяется выражением (11.160). Для эллиптического цилиндра с полуосями а и Ь Ах пр*3; ?.„ = ярд, iu = n3p(ei — b )2/8; >.ху = Zr„ = = 0. (И.166)
Значения присоединенной массы для круга (а — b = R)
= яр/?8. (11.167)
для пластины (Ь — 0)
К,, про3, Х,0 = 9лра‘/8. (II.168)
Для с 1мметрячного профиля, имеющего хорду Ь. максимальная толщина кото рого расположена на расстоянии 2а от хвостика, значения присоединенных масс характеризуются зависимостями (б — bl а):
Ах--^(6-2) (Л 4-1); К|, = -Г^-(4-|-(е 2)(б4-1)1;
^ху ~ = 0;
X..-£=£-(»+1).
(II 169)
Имеются решения [45] по определению присоединенных масс плоских сечений, близких к шпангоутам формам. Эти решения основаны на использовании метода конформных отображений с помощью функций (11.77) и (11.78)
На рис. П 18, а и б изображены половины симметричных и накрененных контуров шпатоутов, рассчитанных с помощью таких функций Графики коэффициентов приведены на рис. II 19а—П.19в:
Ь _ . tyv • I, _ ?»<> - t 2) у
* ~ рлГ' ’ “ рЛ ’ ~
Характеристикой песимметрпн служит у — BJB (см рис 11 18, б). Очевидно, при -у 0 5 получается симметричный контур Параметр Р коэффициент полноты шпангоута.
§ 9 ВЛИЯНИЕ НА ПРИСОЕДИНЕННЫЕ МАССЫ
СВОБОДНОЙ ПОВЕРХНОСТИ жидкости
Свободная поверхность жидкости оказывает значительное влияние на при соединенные массы Движение те» а вблизи свободной поверхности вызывает водно вые движения жидкости В этом случае к граничным условиям для потенциала выз ванных скоростей на поверхности тела добавляются граничные условия на свободной поверхности жидкости. Если поместить начато координат на свободной поверхности. ось х направить но движению тела а ось z вертикально вверх, то граничное условие на свободной поверхности для аолн относительно малой амплитуды имеет вид
-^у- + г-^-=0 при z=0 (11170)
Если тело совершает колебательное движение с частотой <о, то граничное условие на свободной поверхности будет
дт
v<f 0 при г 0, (II 171)
62
де v • ы’/g При вычислении присоединенных масс с учетом этих граничных условий можно выделить три случая движения гела в жидкости; I) с мадий споро стыо, или колебание с малой частотой, 2) с большой скоростью или колебание с большой частотой, 3) с конеч юй скорость >, или колебание с конечи й частотой.
В случае малой скорости движения тела свободная поверхность i траст роль твердо11 тонки, вдоль которой соблюдается равенство нулю нормальной по отношению к стенке составляющей скоростей частиц жидкости. При очень малой частоте колебаний ь»0 и согласно выражению (11.171) граничное условие па свободной поверхности жидкости принимает вид д'[!дг = 0 при z 0. t
При поступательном движении иол у погружение! тела присоединенные массы 1 и ?.а2 соответственно равны половине присоединенных масс движущегося в пео-
Рис. 1120 Коэффициенты присоединенных масс и моментов инерции полу но ружейных эллипсоидов: а — экваториальная плоскость совпадет со свободной по- f верхиостыо; б — экваториальная плоскость перпендикулярна свободной поверхности.
" граинчеиной жидкости двойного тела, для которого свободная поверхность служит пдескостью симметрии; присоединенная масса при вертикальном движении ?.», равна половине присоединенной массы двух симметрия: о расположенных го отно-
I шеяию к ватерлинии тел, движущихся в противоположных направлениях
»• Э. Л. Блохом были найдены коэффициенты присоединенных масс и моментов инерции полупогружепного эллипсоида вращения с граничным услов|см иа сво-
Г бедной поверхности dyldz = 0:
l За и , ЗХяз
“ 2ярс/И ’ 33 ~ 2;ipafc ’
д 15Z« «,__________|5?«т
“ 2лраЬ- (az + Ь-) ’ 36 2яроб-(o ’+ft )
Значения этих коэффициентов показаны на рис 11 20 а и б в зависимости’от параметра х == 1/(1 4- alb) для двух случаев движения 1) экваториальная нлоски-коегь (на рисунке заштрихована) совпадает со свободной поверхностью 2) экваториальная плоскость перпендикулярна свободной поверхности
Относительные значения k° присоединенной массы при малой скорости двнже кия для шпангоутов судна в функции от коэффициента полноты шпангоута ф и от ’ношения В/Т приведены на рис. II.21
HaJpHc. II 22 показана зависимость коэффициента присоединенной массы /гм для клина при вертикальных колебаниях его на поверхности жидкости, предполага ется, что жидкость тяжелая н деформации свободной поверхности ие происходит.
СЗ
В другом предельном случае, при очень больших значениях частоты (со-»-с<) или скорости движения тела (с со), т. с. если v -»• ос, граничные условия па свободной поверхности (11.170) и (11.171) преобразуются в следующее:
(11.172)
Ф — 0 при z=0
Рис. 11.21. Значения присоединенной массы («) и присоединенного статического момента (б) шпангоутов судна, отнесенные к соответствующим значениям для полу-эллипса
Рис II 22. Коэффициент присоединенных масс при вертикальных колебаниях клипа.
Граничное условие (II 172) справедливо, когда влиянием весомости жидкости допустимо пренебречь (например при ударе тела, плавающего в жидкости).
Можно показать, что в случае удара тела в вертикальном направлении его присоединенные массы X*. Х^ и X* равны половине значений Ху, X и. Хй)
64
дублированного относительно свободной поверхности тела при его движении в безграничной жидкости. а присоединенные массы для горизонтального движения — половине их значений для двух одинаковых тел, соскальзывающих в безграничной липкости ио плоскости нх симметрии с противоположной по направлению скоростью
При безотрывном горизонтальном ударе цилиндрического тела, подводная часть которо о ограничена дугой эллипса с полуосями с и Ь, присоединенные массы вычисляют по формулам
>> = 2рЬ?/я; /.>' = р.то2/2;
= 1-6 (я2- *2)/3; X* = РЯ («2-Яг/16.
(11.173)
В частности, при Ь — 0 получим формулы для удара плоской пластины
X* = рлог/2; Х^ = ряс’- 3; > * = (.ла4/16. (1114)
Рис. 11.23. Значения коэффициентов присоединенных масс при горизонтальном ударе плавающего эллипсоида: а — ski ториальиая плоскость эллипсоида совпадает со свободной поверхностью; б — экваториальная плоскость перпендикулярна свободной поверхности.
В случае удара плавающего тела обтекание может иметь и'отрывной характер, а присоединенные массы эллиптического цилиндра составят:
X* = 1,12р«>2/л; XJe= !,2раЛ/л; л** = —0,2р6 (б2 — а2)- (II. 175)
Следовательно, при отрывном обтекании н горизонтальном ударе плавающей вертикальной пластинки с глубиной погружения Ь будем иметь
/*== 1,12р62М; лУш = —р1>3Л.19. (II.176)
Коэффициент присоединенной массы сферы радиусом R, наполовину погруженной в жидкость, при горизонтальном ударе равен fej — 0,273. Э. Л. Блох решил задачу о горизонтальном ударе плавающего эллипсоида вращения. Результаты расистов приведены па рис. 11.23, а и б в функции параметра % (положения эллипсоида соответствуют указанным на рис. 11.20).
В практических расчетах значения присоединенных масс судна, движущегося в поперечной плоскости (боковой спуск, поведение при шквале, ударе), можно вычислить по следующим приближенным формулам
= 0,67pV'F/S; Хл = 0,44Р4Т/3; Хх(, - Х^, - 0; > г 11 (77)
1Хло,-0.125р1'Ч1-3,6(Г/ЗГ]/Г, X<e^6,02»pWS£l-3,6(/75J»r//r:,-1 j ’ ’
3 п/|> Я- II. Войткуиского. т.1 65
1 де P — объем погруженной части судна; Л — площадь погруженной части et
ДП; S — площадь ватерлинии. м
Расчетов присоединенных масс тел, плавающих с произвольной скоростью или колеблющихся на пли под свободной поверхностью с произвольной частотой со,
Рис. 11.24. Коэффи1щеиты присоединенных масс колеблющегося под свободной поверхностью кругового цилиндра.
выполнено значительно меньше, нежели для уже рассмотренных выше предельных случаев. Для кругового цилиндра радиусом R, колеб лющегося под свободной поверхностью жидкости в вертикальной плоскости с частотой со, Ур-селом были найдены значения ku — KyKpnRH.) в зависимости от безразмерной частоты aPRIg при разных значениях относительного погружения h/R цилиндра (Z.—длина цилиндра в поперечном направлении). Результаты этих вычислений показаны на рис. 11.24.
На рис. 11.25 приведены значения для прямоугольного и кругового цилиндров, расположенных на свободной поверхности и совершающих вертикальные колебания с частотой <о, в функции об безразмерной частоты колебания co*7?/{2g).
Коэффициенты присоединенных масс круговых 11 прямоугольных цилиндров, погруженных под свободную поверхность, показаны иа рис. 11.26, а и б. Изменение этих характеристик для цилиндров с круговыми и квадратными поперечными сечениями в функции от параметра погружения h/a носит одинаковый характер, однако, если пронормировать значения присоединенной массы ие величиной nd?/2.
а площадью сечения и сопоставить с аналогичными данными для кругового цилиндра, то присоединенная масса квадрата получится примерно иа 20 % больше.
С целью приближенного учета зависимости присоединенной массы от частоты можно использовать графики, приведенные па рис 11.27. На этих графиках в фуик-
Рнс. 11.25. Коэффициенты присоединенных масс для прямоугольного (а) и кругового (б) цилиндров при вертикальных колебаниях
ции от безразмерной частоты шгВ1(‘2§) даны относительные значения присоединенных масс Xjj и при бесконечно большой частоте для и ?.,и (X,,).
Ким рассчитал коэффициенты присоединенной массы Ли= Хи/(раа) и присоединенного момента инерции XSj/(pas) эллипсоидов с полуосями а. Л, с, совершающих гармонические колебания с частотой со иа поверхности жидкости бесконечной глубины. Некоторые результаты этих расчетов приведены на рис. II 28, a—в Зиа чения коэффициента присоединенной массы k33 в случае вертикальных колебаний с частотой со полупогружеиной стойки при разных значениях ее геометрии и осадки даны на рис 11.29.
66
rjli рис. 11.30 приведены коэффициенты присоединенных масс при горизои-тьиых h2i, вертикальных колебаниях и вращении вокруг продольной оси
Двоенного плоского элемента, являющегося характерным поперечным сечением по-
Рис. 11.26. Коэффициенты присоединенных масс круговых (а) и прямоугольных (6) цилиндров.
Рис. II 27. Зависимость присоединенных масс от частоты: а — эллиптического цилиндра, совершающего боковые горизонтальные колебания; б — горизонтальной пластины, совершающей угловые колебания вокруг продольной оси; е— эллиптического цилиндра, совершающего боковые горизонтальные и угловые колебания В — ширила пластины плн цилиндра.
Рис II 28. Коэффициенты присоединенных масс (о н б) и присоединенного момента инерции (tj эллипсоидов, колеблющихся на поверхности бесконечной глубины
лупогружениой платформы. Из рисунка видно, что присоединенная масса сдвоенных полупогружеиных элементов с учетом их взаимодействия не равна удвоенной присоединенной массе изолированного элемента.
Рассмотрим влияние скорости поступательного движения тела на его присоединенную массу Решение задачи о движении со скоростью v под свободной поверх-
3*
67
Рис. Il 30. Коэффициенты присоединенных масс kt2 (а), (б) и (в) поперечного
сечеиня полупогружепиой платформы
68
_ \_ \ .h/R'1,5
Y Д-\ \ \ ч. Ъ=у№Т
Рис. II.31. Коэффициент присоединенной массы движущегося под поверхностью жидкости кругового цилиндра.
Рис 11.32. Коэффициент присоединенной массы k33 эллипсоида вращения h!d = 1.
Рис. 11.33. Поправочные коэффициенты Cj (в) и е, (б) для учета трехмерности обте кання в случае применения метода плоских сечений
69
ностью ла глубине h кругового цилиндра, совершающего вертикальные колебания, получено Ямото Результаты его работы приведены на рис. 11.31, где показано изменение коэффициента присоединенной массы цилиндра A'2S ^„/(рлЛ2) для трех значений: ух = u>Fr = 0; */4; оо (Fr » и l'gR). При = ’/4 наблюдается разрыв непрерывности кривой.
Экспериментальные данные о влиянии частоты вертикальных колебаний иа коэффициент присоединенной массы kx3 эллипсоида вращет пя. движущегося вблизи свободной поверхности (Fr = upg/). представлены па рис 11.32.
Зная присоединенные массы плоских фигур, во многих случаях можно достаточно точно определить присоединенные массы удлиненных пространственных тел. Такой расчетный метод, называемый методам плоских сечений, основан иа допущении, что линии тока прн обтекании тела представляют собой плоские кривые, совпадающие с плоскостями поперечных сечений. Поэтому присоединенная масса, приходящаяся на единицу длины тела, определяется как для бесконечно длинного цилиндра, перемещающегося перпендикулярно его оси и имеющего ту же форму контура, что и тело в данном случае. Полная присоединенная масса тела определяется интегрированием по длине:
L L L
J кд dx; — Fi J куЫ dx; ?.зэ — Fj J лг dx;
оо о
L L I.
>-4» = Fi I = f2 J hx' dx' >-а« рг j "к:^ dx, (11.178)
0 0 0
где ку, ку„, км—значения присоединенных масс, статических моментов, моментов инерции соответствующих плоских контуров; кх, Fa поправочные коэффициенты, учитывающие трехмерность обтекания и определяемые по графикам на рис. П.ЗЗ, а и б. Этот метод будет тем точнее, чем меньше продольное растекание жидкости, т. е. чем больше удлинение тела.
В первом приближении присоединенные массы удлиненных тел можно определить путем их замены соответствующими эллипсоидами, построенными на главных размерениях тел.
Глаш III
ОБТЕКАНИЕ ТЕЛ ВЯЗКОЙ ЖИДКОСТЬЮ
§ 10 ТЕОРИЯ НАПРЯЖЕНИЙ
И УРАВНЕНИЯ ДВИЖЕНИЯ ВЯЗКОЙ ЖИДКОСТИ
В потоке вязкой жидкости возникают нормальные и касательные напряжения Матрица напряжений [см формулу (I.l IjJ в случае вязкой жидкости может быть записана в виде
11Р<Л1 = -рби + ||тО|[; i. /1.2.3. (Hi I)
где р — давление; — единичный тензор (fitj 1 при i j; — 0 при / =# ¥= /'); Цт,-j|| — симметричная матрица нормальных к касательных вязкостных напряжений.
Уравнение движения вязкой жидкости
(Ш2)
at р \ Ох ду 0г 1
Чтобы расчет потоков с помощью соотношений (HI I) и (111 2) н уравнения неразрывности стал возможным, необходимо установить связь между компонентами 70
. матрицы вязкостных напряжении н скоростями потока. Вид этой связи зависит Кг реологической модели, используемой для описания рассматриваемой жидкости.
* Наиболее распространенной в гидроаэромеханике является модель вязкой жидкости, предложенная Ньютоном. Согласно этой модели компоненты матрицы вязкостных напряжений определяются соотношением
т,; 2(1.,;, (II 1.3)
где сц — соответствующие компоненты матрицы скоростей деформации ]см. формулу (1-22)1. В простейшем сдвиговом потоке, где f (у), a vy vz= О,
Ххи T(/t x = pdvx!dy. (111.4)
Это соотношение называется формулой Ньютона. Жидкости, для которых справедлива зависимость (111.3), называются ньютоновскими. К. иим относятся пресная и соленая вода, большинство других капельных жидкостей, а также воздух и прочие газы. Однако имеются вязкие жидкости, так называемые неньютоиовские, для которых соотношение (111.3) несправедливо (8, 9, 89].
Для вязких степенных неныотоиовских жидкостей характерна зависимость
н I
^/=2}1И/ 2 tij. (HI.5)
где |лп и п — эмпирические постоянные данной жидкости;
/ = 2(е?, е?, L^)+e;2+t'f3 + e?3.
В простом сдвиговом течении
—и. (-$-)"• <ш-6>
При п = 1 получается формула Ньютона. К степенным пеиьютоновским жидкостям относятся некоторые растворы и расплавы полимеров, суспензии, пульпы и др.
Помимо вязкости на структуру течения ряда жидкостей влияет упругость Такие жидкости называются вязкоупругими Для mix характерно возникновение нормальных напряжений tev т г<ттх в простом сдвиговом течении; в вязких жидкостях нормальные напряжения в таких потоках не возникают. Кроме того, в вязкоупругих жидкостях наблюдается процесс постепенного затухания во времени (релаксации) напряжений после остановки потока, также отсутствующий в вязких жидкостях. К вязкоупрутим жидкостям относятся многие растворы и расплавы полимеров, смолы, насты, гесто и нр Для описания вязкоупругих жидкостей предложено несколько реологических моделей.
В модели Максвелла связь между компонентами матриц вязкостных напряжений и скоростей деформаций имеет вид
Т/> + => 2^IJ. (П1.7)
где 6д — характерное время (время релаксации). В жидкостях, описываемых этой зависимостью, после внезапной остановки их простого сдвигового течения, касательные напряжения убывают во времени-
Время релаксации для воды и других чистых жидкостей ()L 10"12-i-10"10 с,
в то время как для растворов полимеров в зависимости от их концентрации Oj == 10 4-j-10 3 с. Скорость распространения возмущений в вязкоупругой жидкости составляет
В модели, предложенной Уолтерсом а также В В. Амфилохиевым и В Л Павловским,
то 2|1<«ь - 2х* D^(} , (111 9)
71
tue х* — характеристика вязкоупругих свойс+в жидкости. Согласно модели, рас-ыотрешюй Сприггсом и Олдрондом и представляющей частный случай более общих реологических зависимостей,
П j I 01 - 2ц (щ,- + О, , (ШЛО)
где 0я — второе характерное время (время ретардации), описывающее процесс затухания деформаций частиц после снятия напряжении в жидкости (02 < 0J. В соотношениях (III.7), (111.9) и (III.10) символ DlDt означает коитрвариантпую конвективную производную Олдройда от соответствующих компонентов тензоров Ц^г/И ч связанную с проекциями скорости и координатами зависимостью Deij deij diij dvi dvi ,,, ,,
Dt ~ 01 + m Oxm dxm tm дх^€т}; <IH H)
Использование соотношений (III.j) и (III.3) позволяет с помощью формулы (111.2) получить уравнение движения ньютоновских вязких жидкостей — уравнение Навье — Стокса. В векторной форме оно имеет вид
•~й~ = F — -^-gradp -Ь v&v, (111.12)
причем левая часть этого уравнения, т. е. ускорение, определяется зависимостью (1.51). Если к уравнению (111.12) присоединить уравнение неразрывности (1.34), то образуется замкнутая система, в которой неизвестными являются скорость и давление р Для интегрирования этой системы уравнений при постановке конкретной задачи необходимо сформулировать начальные и граничные условия. Динамические граничные условия состоят в задании нормальных и касательных напряжений на границах потока. Характерным кинематическим условием на твердых границах потока любой вязкой жидкости является прилипание ее частиц к твердой поверхности; это означает, что вдоль всех неподвижных твердых границ v - 0, -► -* -л-
а на подвижных v = от, где цт — скорость точек твердой поверхности.
С помощью (111.12), полагая массовые силы потенциальными, можно получить уравнение, описывающее изменение поля вихрей в вязкой жидкости и образующее с уравнением Дф —2ю замкнутую систему
-*
—_ = (®.ф)7 Ь vAcu,
<9 * d — о ->
Где V = i -5— + 7 -д--------1- k -3—; v — rot ф
Ox dtf dz
Расчет плоского течения вязкой жидкости, когда ы = о., сводится к решению системы уравнений
Дф = —2со, J
где ф (х, у, 0 — функция тока плоского потока. Зная функцию тока, можно найти давление. С этой целью используют уравнение Пуассона
&Р , &р Г <Рф Д-ф / д3ф yi
дха • дул ZP [ dyi \дхду ) \ '
Методы расчета плоских течений с помощью таких уравнений основаны иа применении различных конечно разностных их аппроксимаций (72).
В потоке вязкой жидкости происходит процесс диссипации энергии. Поэтому для уравнения (111.12) нельзя получить интегралы, аналогичные известным в гидродинамике для невязкой жидкости (Бернулли, Лагранжа). Уравнение (111.12), описывающее ламинарные вихревые течения, нелинейное в частных производных, 72
• V-'К,иср,
(111.14)
Г1 его решение при расчете обтекания тел сопряжено с большими математическими Й уаностями [24. 49] Эго уравнение можно упростить, если обтекание тел проис-rJ’-liT : малыми скоростями (малые числа Рейнольдса) и с большими скоростями И/йольшие числа Рейнольдса) Уравнения движения для иеиьютоновских жидкостей [шиведены в работах [8, 9).
1 Установившиеся течения в трубопроводах и открытых руслах можно рассчитать с помощью уравнения Бернулли для потока вязкой жидкости, полученного г учетом баланса его энергии:
pl I - , акЛр, Pt , „ , ак,гср, , —+ г>+~^---------------7 + г’ + —2Г- + л°-
Здесь Pi. Pt — давление в точках 1 и 2; и г2 — ординаты над плоскостью сравнения соответствующих точек поперечных сечений 1 и 2 потока, расположенных па расстоянии L одно от другого; оср1 и осрч — средние скорости в этих сечениях, связанные зависимостью (1.38). В случае применения Этого уравнения, справедливого как при ламинарном, так н при турбулентном течении, сечения 1 и 2 должны быть расположены н местах, где линии тока — параллельные прямые или близки к ним между сечениям г структура потока произвольна. Коэффициент ак > 1 учн-тыпает влияние неравномерности распределения скорости по сечению на величину кинетической энергии: в круглой трубе при ламинарном течении ак = 2, а при турбулентном «2= 1,()>-ь1,15. СлагаемоеЛп учитывает потери напора, связанные с преодолением потоком сопротивлений на участке L. Они состоят из потерь Лд по длине на трение о стенки и местных потерь h4, создаваемых расширениями, сужениями, поворотами потока, арматурой и т. и. При расчетах используют принцип независимое? < потерь," согласно которому
п
т
Для вычисления йд и Лм служат формулы:
2 2
h = с л =г^Е_
hL~ct S 2g ’ 2g ’
где с/ — местный коэффициент трения [см. формулу (III.48)J; {; — коэффициент местного сопротивления; FB — периметр стенок сечения 5. В случае круглой трубы применяют формулу
a
i- d 2g ’
где X -= 4с/, ad— диаметр сечения трубы.
Сведения о коэффициентах С/, Л, и С и их зависимости от параметров потока можно найти в работе [4].
Если течение пеустаповившееся и огр = / (/), то в правую часть уравнения Бернулли следует добавить слагаемое
Ли —
а* д!
L
представляющее инерционный напор. Коэффициент a* .as 1,03-4-1,05 учитывает влияние неравномерности распределения скорости в соответствующем сечении па количество движения потока
§ и. ТУРБУЛЕНТНЫЕ ТЕЧЕНИЯ ЖИДКОСТИ
Турбулентное движение характеризуется неупорядоченным перемешиванием масс жидкости, сложными, меияюцичися во времени траекториями частиц и свя-за in jmii с этими явлениями хаотическими во времени и по пространственным координатам пульсирующими изменениями поля скорости и давления. Статистические
73
методы позволяют описать осредпеппые характеристики таких потоков. Турбулент ное движение можно рассматривать как результат наложения вихрей различных размеров и ннтенсивисити. Верхний предел масштаба этих вихрей зависит от условий их зарождения (размеры тел, каналов), а минимальное значение определяется влиянием вязкости, способствующей их затуханию (диссипации). Турбулентность, порождаемая в результате действия вязкости вблизи поверхности тел. называется пристенной, а возникающая в процессе течения слоев жидкости с различными скоростями при отсутствии твердых стенок (например, в струях) — свободной. Структура этих двух видов турбулентности различная.
В океане турбулентность порождается разрушением ветровых и внутренних волн, а также неустойчивостью ветровых, придонных течений и связанной со стратификацией плотности [561. Верхний перемешанный океанский слой, имеющий в зависимости от времени года толщину от 10 до 100 м и более, характеризуется пульсациями скорости порядка I см/с; они убывают с глубиной В океане турбулентность сосредоточена в пятнах, площадь которых на глубинах от 100 до 300 м составляет от 1 до 5 % площади поверхности воды.
Турбулентность называют изотропной, если ее статистические характеристики в данной точке потока не зависят от направления. Если они одинаковы во всех точках пространства, то турбулентность потока однородна. Турбулентность потоков вблизи поверхности тел и в трубах, где имеется градиент скорости, анизотропна.
Для потоков жидкости, изучаемых в гидромеханике судна, турбулентный режим течения более характерен, чем ламинарный, который иногда наблюдается, например, в процессе экспериментирования с использованием моделей.
Переход от ламинарного к турбулентному режиму течения допустимо рассматривать как потерю устойчивости ламинарного течения. При теоретическом изучении ее можно использовать методы, разработанные в теории гидродинамической устойчивости движения. Соответствующие положения этой теории и анализ условий, способствующих переходу от ламинарного к турбулентному обтеканию тел, приведены в работах [36, 47 и 97].
На условия перехода от ламинарного к турбулентному течению существенно влияет число Рейнольдса (Rc) потока, наличие и интенсивность малых случайных возмущений поля скоростей в потоке и градиента давления. Значение чисел Re, при которых возможна потеря устойчивости движения в потоке называются критическими.
Для характеристики поля скоростей в турбулентном потоке вводят понятие об осреднеииых во времени б н пульсационных v скоростях в данной точке прострап-т
ства. Осредиенная во времени скорость определяется из соотношения й = j vdtJT, о
где Т — достаточно продолжительный интервал времени, в течение которого фиксировалось изменение истинной скорости потока к в данной точке пространства. Проекции истинной скорости на оси координат и давление, могут быть записаны в виде следующих соотношений:
''«•= c'i I р р 1-р'- (Н1.15)
Таким образом, пульсационная скорость представляет собой отклонения истинной скорости от осреднеииых во времени значений, а турбулентный ноток может рассматриваться как результат наложения осредиенного во времени и пульсирующего потоков. Огребенные времени значения пульсационной скорости и давления равны нулю (о' = 0; р' — 0)
Для изучения поля пульсационной скорости турбулентного движения пользуются статистическими характеристиками турбулентности Степенью, или интенсивностью. турбулентности в данной точке потока называется отношение средней квадратичной пульсационной скорости к осредиеиной скорости потока, т е величина
ет = ]/'о’’ /б. (111.16)
Оиз характеризует отношение кинетической энергии пульсационного и осредиенного во времени потоков
74
Для характеристики структуры ноля пульсационных скоростей н их связи в раз-ппчньтх точках Л и В потока пользуются понятием моментов корреляции скорости Двойным моментом корреляции называется осреднением? во цремснн произведение пульсаций скорости ид u v'B или их компонентов Од и v’B
Ъя vav'h,
Ф l(Hy ~ УлУн^
(111.17)
Корреляции Фд р пульсационной скорости образуют матрицу из девяти компонентов, с помощью которых можно определить Ф1П. Тройным моментом корреляции между компонентами пульсационной скорости в точках А и В называется величина
£д в ~ ^лУл^Ув •• I. k, j — I, 2, 3. (111.18)
I't J I H J
Тройные моменты образуют матрицу из 27 членов. Коэффициентами корреляции называются безразмерные ве-
личины
и
(III.19)
I Ч vX V
Коэффициенты Rjj и Г,- j являются функциями расстояния между [точками А и В потока и изменяются от нуля до единицы; нулевое значение соответствует полному отсутствию статистической связи между компонентами пульсационной скорости в сравниваемых точках пространства Величина <1’дИ в изотропном турбулентном потоке может быть определена через продольную (в направлении АВ) корреляцию скорости Ф/11н1 и одну из поперечных (относительно АВ) Фл в = Чч.в, корреляций.
Если коэффициенты корреляции продольной /?Л fl и поперечной R д в скорости такого потока известны, то в качестве интегральных характеристик структуры турбулентности можно использовать понятия продольного и поперечного Lt интегральных масштабов турбулентности:
СЮ сю
Л] = J d?' ^2= J ^д,в, ^г‘ (111.20)
0 о
где г — расстояние от точки А до В.
Перечисленные характеристики турбулентного потока могут быть определены путем экспериментального изучения поля пульсационной скорости Методы экспериментального исследования турбулентных потоков изложены в работах (88 и 92J Теоретически структура потоков при помощи этих характеристик изучается на основе статистической теории турбулентности [57 и 921
Используя принцип осреднения во времени, Рейнольдс получил дифференциальные уравнения осредиенного движения жидкости в турбулентном потоке
I + <•••-«>
где х, — х, ха у, ха - г, а черта означает осредлепную во времени скалярную величину. В случае ньютоновской жидкости
11^/11= -А/ + 2р||^||-рЦ^||. (III.22)
В соответствии с соотношением (111.22) в турбулентном потоке помимо вязкостных напряжений, определяемых через осредненную во времени скорость, возникают дополнительные турбулентные нормальные и касательные
75
напряжен и я. Они описываются симметричной матрицей, содержащей моменты корреляции Ф1; = проекций пульсационной скорости в данной точке. Эти напряжения возникают в потоке вследствие турбулентного перемешивания и связанного с ним обмена количеством движения соприкасающихся областей жидкости. Во внутренней эоне турбулентного потока они во много раз превосходят по своим
значениям соответствующие вязкостные напряжения.
В случае плоскопараллельного турбулентного потока вдоль твердой стенки с компонентами скоростей
Рис. II 1.1. Распределение скорости в турбулентном потоке.
I — по формуле (II 1.30): 2 — по формуле (III 29); 3 — по единому непрерывному закону-
= бх 4- t£; Vy = (III 23) касательное напряжение определяется зависимостью
<fdx -т т
(HI.24)
Если, следуя Бусснпеску, ввести понятие турбулентной вязкости vT, то это соотношение примет внд
t = p(v + v1.)-^E-, (111.23)
причем vT поперек потока непостоянно и зависит от закона распределения ос-редиеипой скорости vx.
Для расчета турбулентных напряжений необходимо установить связь между ними и осредиеииой во времени скоростью; эта связь устанавливается теориями турбулентности, для замыкания
уравнений которых необходимо исполь-
зовать эмпирические постоянные. В плоскопараллельном потоке при отсутствии про-
дольного перепада давления турбулентное касательное напряжение тг может быть вычислено по формуле
тг = = pi?
dvx dy
l_^x 1
I dy I’
(111.26)
где /т —линейная величина, называемая длиной пути турбулентного перемешивания. Для практического применения этой формулы используют приближенные аппроксимации величины Согласно предложению Прапдтля в случае пристенной турбулентности
1т = ху, (111.27)
где эмпирическая постоянная х = 0,40, а у — расстояние от стенки В соответствии с формулой Ван-Дриста
/т xy(l—е’~), (III 28)
Где постоянная А = 26, a V* = Кто/р (т«— касательное напряжение иа твердой стенке). При больших значениях у по Этой формуле получается значение (т, соответствующее выражению (III.27). В свободных турбулентных струях I, практически постоянна поперек потока и зависит лишь от ширины струи, т. с. от х; /т = х,6, где 6 — ширина струи, ах, — постоянная.
В плоскопараллельном турбулентном потоке, где Ор/дх — 0 и т = tq = const, применение формул (111.26) и (111.27) позволяет получить закон распределения ос-ре диенпой скорости в виде
t-x V* -|-с). (111.29)
76
r ₽сь С__эмпирическая постоянная. Однако этот логарифмический закон не
‘ пане тчв вблизи стенки, где у -> 0. В дайной зоне доминируют вязкостные напря-ия Ограничиваясь в формуле (111.24) первым слагаемым, можно получить
(Ш.зо)
На некотором расстоянии у — 6Я соотношения (III.29) и (Ш.ЗО) сопрягаются: эхо расстояние, где v*&Alv — ал определяет границу условного вязкого подслоя (а। = 114-12; С = ал — -i- 1пал « 5,2^ .
Совокупность законов (III.29) и (111.30) представляет двуслойную модель тур-булетного потока вдоль плоской стейки. Единый непрерывный закои распределения скорости такого потока можно получить, если использовать формулу (111.24) с полной правой частью и определить /, по формуле (111.28). Сопоставление этого решения с решением для двуслойной модели показано на рнс. 111.1.
§ 12 ДИНАМИЧЕСКОЕ ПОДОБИЕ ПОТОКОВ ЖИДКОСТИ
И ОБЩИЕ ФОРМУЛЫ ДЛЯ ГИДРОДИНАМИЧЕСКИХ СИЛ
Для исследования гидродинамических сил н моментов, возникающих при обтекании судов, движителей, рулей, широко используются результаты опытов с моделями этих тел в бассейнах, аэродинамических трубах и иа других экспериментальных установках. Чтобы по результатам испытаний моделей можно было судить о гидродинамически х силах, возникающих на моделируемых натурных объектах, потоки, обтекающие натурный объект и его модель, должны быть динамически подобны 124, 75. 98].
Потоки жидкости, обтекающие геометрически подобные тела, являются динамически подобными, если подобны картины их линий тока и равны безразмерные гидродинамические силы, действующие в соответствующих точках потоков.
Для соблюдения динамического подобия, помимо обеспечения геометрического подобия натурного объекта и его модели, в том случае, когда объект находится в Ограниченном потоке, обязательно также геометрическое подобие г раинц потоков. Это означает, например, что исследуя движение судна в канале, его модель следует буксировать в канале с геометрически подобным профилем при сохранении соответствия с натурой относительных размеров модели и канала.
Динамического подобия потоков можно достичь, если обеспечить равенство критериев подобия у модели и натуры. Критерии подобия налагают ограничения на скорость потока в зависимости от масштаба модели и физических свойств жидкостей, обтекающих модель и натурный объект. Теорией подобия установлено, что критериями динамического подобия для потоков вязкой несжимаемой жидкости являются следующие безразмерные числа:
число Эйлера
Ей = 2р/(ри2); (111.31)
число Фруда Fr = t'/|/"gZ. ; (III 32)
число Рейнольдса Re — vL/v; (II 1.33)
число Струхаля Sh = L/(vT), (111.34)
где о — характерная скорость потока; L — характерный линейный размер; Т — характерный промежуток времени. В качестве характерной может быть выбрана, например, скорость движения тета, скорость набегающего потока иа значительном удалении впереди тела и т.д При выборе характерного линейного размера следует учитывать особенности рассматриваемого движения Исследуя сопротивление
77
движению, чаще всего в качестве L выбирают длину тела в направлении потока, а в ряде случаев, в том числе при изучении глиссирования, — ширину й или ве личину V2'3, где V объемное водоизмещение судна На мелкой воде движение характеризуется глубиной воды II, через которую нередки выражают число Фруда
Число Эйлера представляет собой отношение давления в данной точке потока к скоростному напору. Эю число играет важную роль при моделировании явления кавитации, когда для обеспечения динамического подобия потоков следует соблюдать равенство чисел кавитации модели и натуры. Число кавитации
0Г==2(Р«, —(Ш.35) где рк — давление в каверне; число кавитации по существу представляет собой число Ен, выраженное через разность давлений. Коэффициент давления
р = 2(р-рм) /(pt/2,) (III .36)
где рто н давление и скорость в иевозмущеииом потоке, также является модификацией числа Ен
Если движение тела ие сопровождается возникновением кавитации, то равенство р и чисел Ен в соответствующих точках потоков у натуры и модели при условии соблюдения равенства прочих критериев подобия, т. е. чисел Fr, Re и Sh, обеспечивается. Поэтому критерий Эйлера в таких случаях самостоятельной роли не играет. Если жидкость цсвязкая и отсутствует волнообразование, равенство коэффициентов давления р у геометрически подобных тел при установившемся движении достигается на любой скорости движения без нып<и пения каких-либо дополнительных требований.
Число Фруда характеризует отношение инерционных сил и сил тяжести, действующих в потоке жидкости. Равенство чисел Fr у монели и натуры обеспечивает пропорциональность этих сил, и его следует добиваться во всех случаях, когда в потоке играют существенную роль явления, вызванные весомостью жидкости. Сзедовательно, при соблюдении равенства
v*t _ t-'it
(III.37)
картины волнообразования около модели и натуры при их движении будут геометрически подобны (индекс «м» относится к модели, а «н» — к натуре), вызванные волнообразованием силы пропорциональны отношению куба, а гидродинамические моменты — четвертой степени отношения их линейных размеров
Скорость движения модели исходя из равенства чисел Fr модели и натуры можно вычислить по формуле
®м —г’иИк< (111.33)
где к — Еч/£.ц — линейный масштаб модели. Так же находят скорость движения моделей судов при их испытаниях в опытовых бассейнах; эта скорость меньше скорости судна. Для тел, движение которых под свободной поверхностью воды не сопровождается волнообразованием, соблюдение равенства чисел Fr при испытании моделей ие является необходимым.
Число Рейнольдса характеризует отношение инерционных сил к силам вязкости в потоке жидкости. Для сохранения пропорциональности данных сил у модели и натуры следует обеспечить равенство нх чисел Re, т е.
При выполнении этого равенства картины вихреобразовапия и пограничные слои модели и натуры будут геометрически подобны, если одновременно соблюдается одинаковая относительная протяженность ламинарных участков пограничного слоя, которая, помимо числа Re, зависит от состояния поверхности тела и степени турбулентности набегающего внешнего потока. Из условия равенства чисел Re скорость движения модели определяется по формуле
Г’м --и„• (ШЛО)
7 М Vil
78
Ои ласпо этой формуле скорость движения модели при испытании ее в жидко-Г с той же плотностью и вязкостью, в какой движется натурный объект, ока-сТд,йтся больше в 1/к раз по сравнению со скоростью натуры, а силы вязкостной Зпиродь1, действующие на модель и на натуру, будут равны. Практически обычно явенсгво чисел Re при испытании моделей судов, движителей и рулей как в бассейнах. так и в кавитационных и аэродинамических трубах осуществить не удается. И -осуществимо н одновременное соблюдение равенства чисел Fr и Re, которое ^Лбустся при испытании моделей надводных судов, в этом случае вязкость жидкости Лля испытании модели определяется формулой vM — г„к 2.
Подобрать жидкость, вязкость v4 которой позволит выполнить данное условие, практически невозможно. Поэтому при испытании моделей тел, движущихся вблизи или на свободной поверхности жидкости, осуществляют частное моделирование, определяя скорость движения модели только из условия равенства чисел Fr. Чтобы уменьшить влияние несоответствия чисел Re в процессе таких испытаний, применяют модели достаточно больших размеров, позволяющих учесть это влияние с некоторым приближением расчетным путем. г
Число Струхаля представляет собой условие подобия движений жидкости, зависящих от времени, т. е. неустаиовпвшихся движений. При изучении установившегося движения необходимость в учете данного критерия подобия отпадает. В случае периодического движения в качестве характерного промежутка времени в числе Sh следует выбирать период Т явления. При одновременном соблюдении равенства чисел Fr и Sh
тм Т„Кк. (111.41)
Для вычисления гидродинамических сил R и моментов Л4 служат общие формулы:
R=C^~~S\ (111.42)
М -Cm-^-SL. (11143)
Безразмерный множитель С называется коэффициентом гидродинамической силы, а Ст — коэффициентом гидродинамического момента; S — характерная площадь; L — характерный линейный размер. Коэффициенты С и С,„ определяются либо экспериментально, либо путем теоретических расчетов Оба эти коэффициента зависят от формы тела, его положения относительно направления движения и являются функциями критериев динамического подобия, т. е.
С ft (Fr, Re, Sh); Сги =/а (Fr, Re, Sli). (Ill 44)
Частные случаи:
установившееся течение вязкой жидкости
С = Л (Fr, Re); Cm = /2 (Fr, Re); (111.45)
движение тела с постоянной скоростью при отсутствии волнообразования
С-Л (Re), Cnl = /2(Re); (III.46)
движение тела с постоянной скоростью в невязкой жидкости при волнообразовании
С = Л(Гг); Cm = /s(Fr). (Ill 47)
Если потоки, обтекающие натурный объект и его модель, динамически подобны, то у модели и натуры равны коэффициенты гидродинамических сил и гидродинамических моментов
Для тел некоторых форм (пластины, расположенные поперек потока, шары, круговые цилиндры и т п ), движущихся в сплошной жидкости вдали от свободной поверхности, в значительном диапазоне изменения чисел Re коэффициенты гидродинамических сил и моментов практически являются постоянными величинами. Это означает, что картины обтекания .тайных тел не зависят от скорости. Потоки, в которых коэффициенты гидродинамических сил не зависят от чисел Re или других критериев подобии, называются автомодельными. Если натурный объект
79
движется с числами Re, соответству ощими зоне автомодельности, то его обтекание моделируется при любых Re, нс выходящих за пределы этой зоны Для надводных тел при очень большой и ма toft скорости движения возможна автомодельность потоков также и по отношению к числам Fr.
Для расчета касательных напряжений (сил трения) та, действующих вдоль поверхности тела, обтекаемого вязкой жидкостью, применяют формулу
т0 = Cj^/2, (Ш.48)
где Cf — местный коэффициент трения; этот безразмерный коэффициент является функцией числа Re.
Если особенности потоков зависят от свойств жидкости, не учитываемых в гидродинамике несжимаемой жидкости, то для моделирования таких потоков и возникающих в них сил необходимо принимать во внимание соответствующие дополнительные критерии подобия. В потоках сжимаемой жидкости дополнительными критериями по ;обия являются: число Маха
М=и/с3 (III.49)
(fj — скорость распростри гения звука) и число Прандтля
. Рг=цср/Хт, (Ш.50)
где ср — удельная теплоемкость при постоянном давлении; Ат — теплопроводность.
В потоках, где значительная роль принадлежит силам поверхностного натяжения жидкости (а„ — поверхностное натяжение жидкости) критерием подобия служит число Вебера
We= ou/(pr*Z.). (Ш.51)
В турбулентных потоках их характеристики и гидродинамические силы зависят от степени турбулентности вт потока определяемой соотношением (III.16)
В жидкости, для которой характерна зависимость (Ш.5), критерием моделирования служит обобщенное число Рейнольдса
а2-"/.пр
Re0 =-------L. (111.52)
Рл
Критерием подобия стратифицированных по вертикали потоков является ч и с ло Р ичардсоиа
r,
р дг \ дг /
В океане cto/dz t 1-10'в г/см4, в атмосфере при измен» ни / на 1 град/м др/дг х я?4-10'8 г/см1.
Изу гая процессы взаимодействия потока с упругими конструкциями (гидроупругость, движение во льдах), в качестве критерия подобия используют число Коши
Ch=pu«/E, (Ш.53)
где Е — модуль упругости материала конструкции или льда
В потоках вязкоупругих жидкостей, для которых характерно время релак-сации’бр дополнительным критерием подобия служит число Дебора
De = £>0^2., (Ill 54)
где L — характерный линейный размер в направлении скорости потока
При воздействии соответствующих свойств жидкости на структуру потока коэффициенты гидродинамических сил и моме itob будут функциями также н этих дополнительных критериев подобия Помимо перечисленных выше критериев в ряде случаев рационально использовать иные безразмерные числа, состоящие из их комбинаций. Применение удачно выбранных комбинированных критериев подобия, от которых в свою очередь зависят коэффициенты гидродинамических сил п моментов, может способствовать обобщению результатов обработки экспернмешальных и теоретических материалов
80
(3 ПОГРАНИЧНЫЙ СЛОЙ И ЕГО СВОЙСТВА
При Ьбтсканнн тел вязкой жидкостью в случае больших з (ачеинй чисел Re ь юток можно условно разделить, как показано на рис. III 2, иа три зоны:
Bt I) пограничный слой, представляющий область потока вдоль поверхности теча, в которой возникают значительные силы вязкости;
2) поток вне пограничного слоя; силы вязкости в нем незначительны, поэтому движение происходит в соответствии с законами течений невязкой жидкости;
Д 3) область гидродинамического следа за телом, где иа структуре потока существенно сказываются характер течения жидкости и явления, про гсходящне в пограничном слое.
0 со
Рис. III.2. Пограничный слой при обтекании профиля. /- 111 — зоны потока.
В процессе изучения плоского и осесимметрично о пограничного слоя обычно полагают, что ось х совпадает с поверхностью тела, а ось у i аправлена по нормали к соответствующей точке поверхности
Поперечные размеры пограннч юго слоя малы по сравнению с длиной тела, и в нем происходит н пенсии юе изме «епие скорости от нулевого значения на поверхности тела до скорости потока иа в копи й rpai вне погранично о слоя. Для Пхарактеристики поперечных ра меров пограничного слоя пользуются понятием его _____толщины б (см. рис. Ill 2), которая определяется как расстояние от стенки до точки, где скорость составляет 99.5 % скорости внешнего потока. Эго понятие является условным. Точность определения 6 зависит от совершенства техники экспе-римент Более общие понятия—интегральные характеристики пограничного слоя — приведены ниже.
Толщиной вытеснения называется величина
А
6* = j (П1.55)
о
где vx — скорость в пограничном слое на расстоянии у от поверхности тела; v (х) скорость потока иа внешней границе пограничного слоя. Она характеризует откло пение линий тока внешнего потока под влиянием пограничного стоя по сравнению с линиями тока при обтекании тела невязкой жидкостью, т е без пограничного слоя
Толщина потери импульса
в
о
характеризует потерю количества движении потока в связи с преодолением сил вязкости в пограничном слое.
81
Толщиной потерн энергии называется величина
(III 57)
определяющая потерю кинетической энергии в пограничном слое, вызванную ее диссипацией под влиянием вязкости.
В случае продольного обтекания тел вращения для описания осесимметричного пограничного слоя в качестве интегральных характеристик можно использовать понятия его площади 0, площади вытеснения G*, площади потери импульса 0° и площади потери энергии 0***, которые в пределах угла цилиндрн-
Рис. 1113. Пограничный слой тела вращения.
ческой системы координат, равного одному радиану, определяются зависимостями
где г — гт у сочр (рис. III.3).
В случае когда не только б <£ £., ио и б г,. пограничный слой можно рассматривать как относительно «тонкий» па всем протяжении длины тела вращения, а зависимости (111 58) представить приближенно в виде
0 бг,; 0* - б*г.г; 0** б**гт; 0*** = б***гт. (11159)
В интегральных характеристиках верхний предел интегрирования б допустимо заменить бесконечностью, так как вне Гранины пограничного слоя подынтегральная функция обращается в нуль.
Для описания структуры пограничного слоя пользуются числом Рейнольдса, выраженным либо через отстояние данного сечения х от носовой оконечности тела, либо через толщины 6, б* и 6**, т. е.
Rex=ux/v; Reg = гб/v; Re*=v6*/v; Re** u6**/v. (I II.60) Между этими видами чисел Рейнольдса можно установить однозначную связь. В зависимости от значения местных чисел Re. изменяющихся вдоль пограничного слоя, поток в нем может быть как ламинарным, так и турбулентным; различают ламинарный и турбулентный слон, законы движения жидкости в которых различны. Нередко в передней части тела слой ламинарен, а далее вслед за переходной областью (рис III 4), турбулентен; такой пограничный слон называется смешанным
Давление в каждом поперечном сечении пограничного слоя можно считать постоянным и равным давлению во внешнем потоке на границе пограничного слоя.
82
ТакнМ образом, закон изменения давления вдоль пограничного слоя совпадает с за-* !1!(jm изменения давления в потоке вдоль внешней границы пограничного слоя. Чако" распределения давления вдоль пограничного слоя определяют экспериментально, измеряя давление вдоль поверхности тела, его можно найти в первом риближении теоретически — путем расчета обтекания тела потенциальным нотою м, пользуясь методами, указанными в § 5.
Влияние пограничного слоя приводит к перераспределению давления по поверхности тела по сравнению со случаем обтекания его невязкой жидкостью, однако у тел удлиненных, с небольшими продольными перепадами давления, это влияние
1 — турбулентный по, раничиыП слой; У — переходная область; 3 — ламинарный погрвиич-ный слой; -4 волны возмущений, 5 продольные викри; 6 местные отрывы и выбросы в пограничный слой; 7 — турбулентные пятна; — толщина условного вязкого подслоя.
Рис. I1I.5. Схема обтекания полутела, невелико. В итоге перераспределения давления, вызванного влиянием вязкости, возникает результирующая сил давления иа направление движения тела, которая называется сопротивлением формы тела Ry?; результирующая сил трения на направление движения называется сопротивлением трения Rp- Сумма сопротивления формы и сопротивления трения составляет вязкостное сопротивление тела
Ry = Ryp + Rf
Обратное влияние пограничного слоя па распределение давления вдоль поверхности удлиненных тел можно учесть, если, пользуясь предложением Л. Г. Лон-цянского, рассчитать распределение давления при обтекании потенциальным потоком полутела, образованного наращиванием на тело и па нулевую линию тока в его гидродинамическом следе толщины вытеснения 6* (рис II 1.5), рассчитанной в первом приближении по эпюре давления, соответствующей обтеканию тела невязкой жидкостью.
Если продольный перепад давления вдоль поверхности тела значительный, то вниз по потоку за точкой, где эпюра давления имеет минимум, возможно явление отрыва пограничного слоя. В точке отрыва плоского и осесимметричного погра пнчного слоя касательная к эпюре .скоростей совпадает с нормалью к поверхности тела, т. с. здесь dvxh)y 0, а следовательно, и касательное напряжение па стенке
83
To=0. В точке отрыва берут начало вихревые дорожки, образующиеся за плохо обтекаемыми телами. У хорошо обтекаемых удлиненных тел с малыми продольными перепадами давления вдоль поверхности отрыв пограничного слоя может не наступить. Положенно точки отрыва пограничного слоя зависит от режима течения жидкости в слое; у ламинарного пограничного слоя она ие зависит от скорое iи обтекания тела н расположена выше по потоку, т. е. ближе к носу тела, чем у турбулентного.
Пограничный слой, возникающий при обтекании цилиндрических тел большою размаха (крыльев, цилиндров, пластин и т. п), является плоским. Движение жидкости внутри плоского ламинарного пограничного слоя вдоль тела, кривизна поверхности которого невелика, может быть исследовано при помощи уравнении Праидтля и уравнения неразрывности:
дих , „ ди* , „ dvx _ 1 др (Рр,
dt х дх ' и ду р дх ' ду" ^-=0; + =
ду дх ду
(Ill Gt)
(III.G2)
Для осесимметричного ламинарного пограничного слоя система имеет вид
dvx , , dvx 1 др <Pvx
dt +Vx дх ду ~ р дх V ду2 ’
= 0; -4— (vxr) + -4- (tyj = о, ду дх *' ду и
причем, еслв 6 С гг, то уравнение неразрывности в системе (III.62) упрощается:
д*х । дяи д »'х drT _ дх + ду + гт dx ~
В установившемся течении производная dvjdt = 0 При интегрировании систем (III.GI) и (III.62) функция dpldx должна быть известна и определена одним из вышеуказанных способов. Граничные условия состоят в том, что на поверхности тела при у = О = vu — 0, а на удалении от тела при у-*- оо vx = v
В случае исследования плоского турбулентного пограничного слоя уравнения Праидтля можно записать в виде
, - dvx dvx I др I д , -г-г. , 1 От .
dt * дх и .ду р дх р дх ( * р ду ’
1 гдр , I д -7-7-
+ pVJ = °>
уравнений
(111.63)
где vx и йи — осреднеиные по времени значения проекций скоростей в данной точке турбулентного пограничного слоя, а т определяется по формуле (III.2-1). Обычно в этих уравнениях пренебрегают производными, содержащими — pv‘xvx н “РЧХ-
Многие методы расчета ламинарного и турбулентного стационарных погранич них слоев основаны на применении интегральных соотношении. Эти соотношения имеют форму обыкновенных /Дифференциальных уравнений — в отлично от уравнений в частных производных (111 61)—(111.63)—н более удобны для интегрирования.
Первое интегральное соотношение основано па применении к пограничному слою закона количества движения. Для плоского пограничного слоя оно имеет следующий безразмерный вид:
«** /„ б* \ тп .
дх dx v \ ’’ 6** / рц- ’
(111.64)
84
я сЛУчае осесимметричного слоя
..Н0— — -22. (2 + ——''i = г, -Д-, <111.65)
dx ' dx v \ 0** / pV‘
а для тонкого осесимметричного тираничного слоя, когда 6<гт, _d£_(-2 +-^-Л + = -Д-. (Ш.66)
dx dx v \ 6** / 1 rT dx ро2
В частном случае продольного обтекания плоской пластины др!дх — 0 и интегральное соотношение (III.64) упрощается'
= (III.67)
dx pv-
Прнменяя к пограничному слою теорему об изменении кинетической энергии, можно получить второе интегральное соотношение для плоского пограничного слоя
и
Его правая часть характеризует диссипацию энергии в пограничном слое.
Используя уравнение неразрывности для зоны потока в пограничном слое, получают интегральное соотношение сохранения массы, которое для плоского пограничного слоя имеет вид
— -^-[о(6-6*)] = -^--—^, (111.69)
v dx 1 ' dx v '
а в случае осесимметричного слоя
—4-[г’(0-е*)] = -?--—, ЦЧ.70)
игй dx 1 " dx v ’
)где vut> — поперечная составляющая скорости на внешней границе пограничного слоя, Г(, — радиус его внешней границы. Правая часть в формулах (III.69) и (III.70) называется функцией захвата массы и, как показывают' исследования, зависит от параметров (6 — 6*)/6** или соответственно от (0 — 0*)/0**.
Применяя к зоне плоского пограничного слоя закон моментов количества движения, получают интегральное соотношение моментов
[ 4- ’•J’('-rL)-^‘"]+
О j
оо / у \ со
о X о / о
Все перечисленные интегральные соотношения справедливы как для ламинарных, так и турбулентных пограничных слоев; в случае турбулентного течения под vx следует понимать осреднениую во времени скорость потока в noi рапичном ► слое, а т представить в соответствии с формулой (III 24).
Чтобы с помощью одного или совокупности нескольких интегральных соотношений произвести расчет пограничного слоя, следует использовать дополнительные зависимости — закон распределения скоростей оЛ- (х, г/) в пограничном слое и закон сопротивления, устанавливающий связь между распределением скорое!и в пограничном слое и касательным напряжением т0 на стенке. Эти законы обычно представляют в виде функций таких характеристик пограничною слоя, как 6*, 6** или 6 (или 0*, 6**, G), которые наряду с тв являются искомыми величинами в про-
85
Цсссе его расчета. Аппроксимация законов распределения скорости, сопротивления, а также функции захвата массы и диссипации энергии производится иа осио-папин обработки материалов теоретических или экспериментальных исследовании
§ 14 ЛАМИНАРНЫЙ ПОГРАНИЧНЫЙ СЛОЙ
Ламинарный пограничный слон можно рассчитать путем интегрирования уравнений (111.61) или ПИ.62). Однако сложность этих уравнений приводит к тому, что получить их точные решения для случаев обтекания даже простых форм тел не удается, и известно лишь ограниченное число решений для потоков с простейшими законами распределения скорости о (х) вдоль внешней границы их пограничного слоя [49]. Среди таких решений важное значение имеет расчет харак теристик ламинарного слоя вдоль иолубесконечной тонкой пластины для которой дрЮх = 0, выполненный Блазиусом. Согласно этому решению для интегральных характеристик слоя вдоль плоской пластины и его толшины следует использовать соотношения
б* 1.73 1 —; «»* = 0.664 I —; 6 5.2 | . (III,71)
I ' Voa | v<x>
Касательные напряжения на поверхности пластины определяются формулой
1/ МРпХ, ,/ (III.72)
где — скорость набегающего потока; х — отстояние от передней кромки. Коэффициент сопротивления трепня Ср пластины, имеющей длину L,
Ср= 1,328 J<R?, (111.73)
где Re = v^L/v, а сопротивление трения вычисляется по формуле (111110). Экспериментальная проверка показала, что эти формулы можно использовать, если числа Re< (2.0-Т-2.5)- 10s.
Для расчета с помощью уравнений (Ш.61) и (III.62) ламинарного пограничного слоя вдоль поверхности профилен или тел вращения с заданными обводами и известным распределением скорости v (х) вдоль их поверхности необходимо использовать численные методы К ним относятся различные модификации разностных схем, реализуемые с помощью ЭВМ. Расчеты выполняются в безразмерных переменных и в случае полностью ламинарного пограничного слоя оканчиваются либо на задней хромке, либо в точке поверхности тела, где т0 = 0, т. е. в точке отрыва пограничного слоя. Иа рис 111.6 показан результат расчета пограничного слоя вдоль поверхности тела вращения, выполненного в СО АН СССР с помощью численного интегрирования уравнений (111.62) Для расчета пограничного слоя использована найденная теоретически с помощью формулы (11 102) эпюра распределения скорости v (х) и коэффициента давления р (х) этого тела.
Для приближенных расчетов плоского н осесимметричного ламинарного или начального ламинарного участка смешанного пограничного слоя удобно применять методы, основанные на интегральных соотношениях и, в частности, определяемые формулами (I II .64)—(111 66) В этом случае в качестве закона сопротивления используется формула Ньютона т0 = цдих1ду при у = 0 Закон распределения скоростей v.v (х, у) может быть представлен в виде приближенных зависимостей, удовлетворяющих граничным условиям на внешней и внутренней границах пограничного слоя, таким как
. сРо* dv „ т
= ° и v-^5- = -v-Zr при у = 0;
л л (,П 74>
vx = и, —— = 0 и —~-т=0 при у = 6.
ду dyi 1
С целью аппроксимации закона применимы также результаты точных решений, полученные для частных случаев ускоренных и замедленных внешних потоков с ло-
86
ю интегрирования уравнений (III.61) Во всех случаях закон распределения *wJJiOcTH может быть представлен в виде vx — vFt (у, f. . f,). где у — безразмер-сК ордината, г fa — безразмерные форм-параметры, учитывающие влияние формы ^текавмого тела иа структуру его пограничного слоя через характеристики спешат, потенциального потока. В зависимости от выбранного числа i таких параметров не* н распределения скорости может быть одно- или многопараметрическим |49| [Тлибоасс простыми и вместе с тем достаточно эффективными являются однопара-Вжические методы, разработанные Н Е Кочнным, Л. Г. Лойцянским, Твейтсом н другими авторами.
Рис. III 6 Ламинарный пограничный слой тела вращения.
Если в качестве форм-параметра принять величину
(Ш.75) v dx ’
т. е представить закон распределения скорости в виде vx vF^y/fi**, f), то уравнение (III.66) можно преобразовать к виду
(Х---2 —) + — (a -bf). (111.76)
dx \ V Гг / V интеграл которого
/ = Ly 'at. dii.77)
rrv /
Здесь штрих означает производную по координате х. Расчет начинается от передней критической точки, где х = 0 и
/ (0) = a/b, (III.78)
т. е. в этой точке в соответствии с формулой (III 75)
I •“ Гтт7- "п.га>
87
Характеристики пограничного слоя вычисляются, после расчета / (х),
С** 8* = б*‘//(/);
6 = С**/Я**(/); т0 = -Д-?(/).
по формулам
(HI Ни)
Функции II (f), II** if), С (/), постоянные а и Ь, как и значение критического форм-иараметра /0, при котором £ = 0, т. е. т0 = 0, и наступает отрыв ламинарного пограничного слоя, зависят от выбранной аппроксимации поля скоростей vx (7) и у разных авторов несколько различаются. Согласно исследованиям Л. Г. Лой-цянского можно принять а — 0,44, b — 5,48, f0 = —0,089, а для функций II, II** и £ пользоваться формулами
И = 56/а — 9/ + 2,01;
II** = —2,22/» -0,28/4-0,11; ^ = -6,3/4 1,9/4-0.219.
(Ш.81)
При значениях абсциссы х где / = /о, расчет слоя следует закончить, так как за точкой отрыва расчет пограничного слоя не имеет смысла. Расчет плоского пограничного слоя иа профиле следует выполнять отдельно для верхней и нижней стороны. При этом в формуле (III.77) следует положить гт = Г, остальные расчетные зависимости, постоянные и функции II, Н** и £ сохраняют вид и значения, характерные для осесимметричного пограничного слоя.
§ 15 ТУРБУЛЕНТНЫЙ ПОГРАНИЧНЫЙ СЛОЙ
Переход от ламинарного к турбулентному течению в пограничном сдое обусловлен потерей устойчивости ламинарного течения по отношению к возмущениям, по-
1500
— 0,50 0,75 5со
(75 - /5 —Й л.и
0/ О,os о -и,os j, -0,1
Рис. II 1.7. Определение абсциссы точки перехода х„ в пограничном слое по Вап-Дрнсту и Блу-
ступающим в пограничный слой. Эти возмущения могут поступать извне и тогда их ннтеисив ность связана со степенью тур булентностн ет внешнего потока Внутри пограничного слоя они могут порождаться бугорками шероховатости, расположенными иа поверхности тела, а также местными отрывами ламинарного слоя в области резких пиков разрежения на поверхности Профиля. В последних двух случаях абсцисса точки перехода к турбулентному течению соответствует положению бугорка шероховатости (турбулизатора) или точке местного отрыва. Разин тис поступающих извне возмущений, появление «пятен» турбулентности и их слияние в турбулентное течение, охватывающее весь пограничный слой, происходит в области перехода, расположенной вдоль поверх-
меру.
ности тела (см. рнс. III 4). Положение ее начала и протяженность зависят от интенсивности внешних возмущений, а также от числа Кс и закона изменения давления вдоль поверхности тела (т. е. др.'дх) Обычно при расчетах смешанного пограничною слоя предполагают, что начало турбулентного участка его расположено в некоторой условной точке, находящейся внутри области перехода и характеризуемой абсциссой хц, в которой
88
Г между ламинарным «л» и турбулентным <т» участками пограничного слоя 'Вта|щвзнваегся с помощью соотношения
бл* = С> т- е- Rc"^Re7-
(111.82)
выполнения данного условия ввиду
законов
ско-
Н С]
Для приближенного определения абсциссы хи в плоских и осесимметричных пограничных слоях можно пользоваться графиком значений Re** (f, e.J, построен-пьм по данным Ван-Дрнста и Блумера и приведенным на рпс. III.7 или построен-I иым В. В. Дрибленковыы н Г. И. Каневским (рис, III.8). На график следует наложить рассчитанную для данного числа Re = v^L/v зависимость Re*’ (/) при ламинарном обтекании профиля или тела вращения; точка пересечения ее с кривой £г = const, соответствующей заданной степени турбулентности внешнего потока, dv
| определяет значение форм-параметра /п — —--а следовательно, абсциссу хц
и значение б** в точке перехода
В области €т = 0,3 : 0,7 % значения Re* * можно вычислить с помощью пара-f метра Н — 6*/6* • по формуле
Re** =?41Э И-7Н. (II 1.83)
Получаемые с ее помощью значения л„ при данном Re предсказывают несколько более поздний переход, чем получающийся по рис III.й.
89
Для области перехода, а также н области турбулентного пограничного ел 1(1 близкой к его внешней границе, характерно чередование в данной точке прост) сева турбулентного и ламинарного режимов течения, т. е. прохождение через нее «пятен» турбулентности. В'турбулентном пограничнохГслос это приводит к necia
бнльносгн внешней его границы, отчетливо вн. дим.ой из его моментальных снимках. Процесс чередования режимов в данной точке характеризуют коэффициентом перемежаемости у н представляющим отношение времени, в продол! жеиие которого течение турбулентно, к общему интервалу времени измерений. На рис Ill g показано распределение коэффициента Уи поперек турбулентного пограничного слоя плоской пластины по данным Клебанова и др., свиде тельствующее о росте нерегулярности турбулентного режима по мере приближения к внешней границе слоя. Это явление сказывается на законе изменения турбулентной вязкости по толщине пограничного слоя.
Для расчета турбулентного пограничного слоя можно воспользоваться системой уравнений, которая получена с помощью уравнений (111 63): . дох , _ dvx до д 0
z дх V» ду 1 дх V ду* ду ~дх
4^ + ^- о. дх ду
Здесь скорость внешнего потока о (х) считается известной Последнее слагаемое в первом из уравнений, содержащее разность нормальных напряжений, обычно отбрасывают, хотя в предотрыаной области и в зоне отрыва пограничного слоя его роль может быть значительной [70. 71).
Чтобы интегрирование системы (111.84) сделать возможным, необходимо установить связь величины — vjv с осреднениыми характеристиками потока. Для этого часто используют ее представление с помощью турбулентной вязкости.
тт dvx ~~VXVU VT •
x y T dy
Значения vT определяют во внешней области пограничного слоя при yif>> 0,15+ +0,20 с помощью зависимости
vr = Au8*y11, (II 1.86)
где k — постоянная, составляющая по данным разных авторов от 0,016 до 0,022 (большие значения соответствуют области «Эр/сЪг > 0), а уп может быть принят ио данным рис. 1119 или вычислен но формуле
Yn= [I+5,5(г//6)"Г«; (II 1.87)
вблизи стенки при т//6< 0,15+0,20 можно пользоваться соотношением vt — хг*(/, где v* — ] rVp
Выражая тт через путь перемешивания ,» dvx V ’ ду ’ согласно предположению Патанкара и Сполдинга можно принять
Рис. 111.9. Распределение коэффициента перемежаемости в пограничном слое пластины
ZT = 0,4«/\l — е 2SV /г = 0,096
при 0 <0,228.
при 0 228 < у < 8
(I II.84)
(111.85)
(111 88)
(III.89)
Уравнения (III 84) решают с помощью ЭВМ, применяя различные численные методы, в том числе основанные па конечно-разностных соотношениях 190]
90
цдя использования при расчете турбулентного пограничного стоя ннтеграль-f соотношений необходимо знание закона распределения скоростей В так на-ИКтнаемых равновесных пограничных слоях безразмерные профили скорости, слидовательпо, н функции /* (yib) дефекта скорости [* — (е vx) 'v* не зависят от продольной координаты х. Однако подобные слон существуют лишь при условии что форм-параметр
'-"VW <ш.»>
g нцх имеет постоянное значение; частным случаем нх является пограничный едой вдоль плоской пластины, где dp dx = О Вдоль поверхности тел4 вращения
а) vx/v‘ V "хJ"
Рис ШЛО. Законы распределения скорости в турбулентном пограничном слое а — др!дх >0, б — др'дх = 0; в — др'дх <• 0.
I — по формуле (111.30); ’ — по формуле (111.29).
и профилей слой не является равновесным, и при переходе от одного сечения к другому вид безразмерной эпюры скорости изменяется На рис. ШЛО о безразмерных координатах vx/o* — [ показаны законы распределения скорости в пограничном слое при др 'дх < 0, др!дх 0 и др!дх > 0
Вблизи стенки, где доминирующую роль в формуле (111.24) играют вязкостные напряжения р dvx.'dy, закон распределения скорости выражается соотношением
= + > /_2L_^p \ , (П, 91)
V* v 2 У dx ] \ v ) ' 1 '
причем в случае dp'dx = 0
~ Ifif'/v,
а в точке отрыва, где т0 = 0, т. е. с * — О,
[ <|П®»
Дтя плоских пластин зависимость (Ш 30} справедлива при pt)*/v<5 В зоне, |де 6< уп*А’< 30, наряду с вязкостными существенную роль играют турбулентные напряжения, вне этой зоны доминируют турбулентные напряжения Область потока, где у< ЗОг’/v*. называется переходной. При 30v,'v* < у<. 0,206 действует
91
логарифмический закон распределения скорости (III.29). Опыты показывают, что на значение постоянных х и С этого закона продольный перепад давления ока: вает слабое влияние. Соотношение (II 1.29) называется «законом стенки» в турб-.. лентном течении. Вне зоны у у- (0,154 0,20) 6 профиль скорости становится во*мш> гом аналогичным профилю в свободной турбулентной струе или следе к на нста оказывает значительное влияние продольный градиент давления. Для представ,^, ння профиля скорости поперек пограничного турбулентного слои Коулс приложил использовать универсальную зависимость — сумму закона стейки (111 29) и слагаемою, аналогичною полю скорости турбулентного следа за телом, т. е
->=4-,п^+с+4ш- <п1л*)
где х = 0,4; С = 5,2. Если необходимо уточнить поле скорости в зоне у—>6 в эту формулу можно ввести дополнительное слагаемое и записать ее в виде
В приведенных формулах II (г) — безразмерная функция, учитывающая влия ине перепада давления др!дх на поле скорости внешней части пограничного слоя (II as 0,55 при др'дх — 0), i£i — безразмерная функция поля скорости следа Для аппроксимации функции и> можно воспользоваться либо зависимостью, пред ложенной Хинце:
и
ш=1 — cos л-у, (111.95)
либо близким к иен соотношением
и=б(т)2-4(т)3-
Формуле (III.93) соответствует выражение для «дефекта» скорости в виде v — I и П
-T^ = -TInf+ —<ш-97>
В сечении пограничного слоя, где происходит его отрыв, касательное напряжение на стенке т0 — 0 и закон распределения скорости вне переходной области в отличие от (II 1.29) имеет вид
Сзс=4(т“^)1 +Св‘ (,|,98)
Аналитическое выражение для распределения скоросш можно получить, если известен закон распределения касательных напряжений т (у) поперек слоя; его вид зависит от перепада давления др!дх, как указано па рис. III. II. Для аппроксимации этого закона удобно использовать, следуя К. К. Федяевскому, зависимость
f =т® S(т) ’ (1П99)
коэффициенты сп которой определяют из граничных условий т = т0 и dxldii = = dpldx при у = 0, а также т = 0 и (t,'x0)!dy- = 0 при у — 6. Применяя для т формулу (III.2G) и используя тс нли иные аппроксимации для пути перемешивания If, можно получить уравнение, характеризующее закон распределения скорости.
Важную роль при расчете пограничного слоя с помощью интегральных соотношений играет «закон сопротивления», устанавливающий связь между местным коэффициентом трепня на стенке Cf, скоростью потока на его границе и характе ристинами турбулентного пограничного слоя. В области чисел I • 10э < Re** < < 4-10* можно использовать формулу Людвига и Тнльмана
c/ = 0,246Re‘* °-2В8.1О‘о>678//, (III 100)
92
r.e fi = 6*/6**. Закону распределения скорости (Ш.93) соответствует закон со-нротнчзення ____ ___________________
[ JL =JL|n (ке6 J C (HI 10!)
Для замыкания интегральных соотношений при расчетах турбулентного по-раничиого слоя часто используют дополнительные эмпирические зависимости. В лучае применения интегрального соотношения энергии (II 1.68) Труккенбродт предложил использовать следующее выражение для диссипации энергии в его правой части:
О
[—f £*-\_L_dif^5,6.I0-3Re**-’/'. (III. 102)
J ду \ v ) ро-
як °
Рис. III.II. Зависимость распределения касательных напряжений поперек турбулентного пограничного слоя от перепада давления: а — 0р!дх > 0, б—др/дх=6.
• — глпдкая пластика; О — шероховатая.
Величина 6*** согласно Впгхардту определяется соотношением
б***= 1.2696* *НЦН — 0,379). (III.103)
Правая часть формулы (III.69), т. е. функция захвата массы, согласно Хэду может быть представлена в виде
</6 VVn /6 — 6* \-0.653
_^__£_=о.°зог.(-^—3) • (1И104)
Турбулентный пограничный слой вдоль плоской пластины Этот слон вдоль тлоской гладкой пластины приближенно исследуют с помощью закона распределения скоростей в виде степенной зависимости
6x = ”«(W. (III. 105)
Опыты показывают, что в формуле (III. 105) показатель степени с ростом числа Re изменяется (л = l/6-s-l/Il). Связь между интегральными характеристиками и толщиной пограничного слоя в этом случае такова
6* = 6п'(1 | и); б*‘= 6п/|(1 + п) (1 + 2л)] (III.106)
Для области изменения’kRc > 3-10а, по данным Фолкнера, показатель степени можно принять п = 1/ц Тогда
6^0,2i7x’/’(v/foo),/’; (III. 107)
tg 0.00655(11)^,Re»*-'/*; (HI Ю8)
С г = 0,0307 Re ,/г. (Ill 109)
93
Сопротивление трения пластины площадью S определяется по формуле
Rf = Ср(ШЛО,
Более точным оказывается применение, для расчета турбулентного пограничного слоя пластины логарифмического закона распределения скоростей (III 29) в сочетании с формулой (111.30) для вязкого подслоя. Такая двуслойная модель позволила Праидтлю и Шлихтиигу, используя значения постоянных х = 0,394 и С = 5,56, получить следующие соотношения |97]:
о ра'
T0 = (2lgRex- 0,65)-е>3 —g—, где Rex = v^x/v; (IH.lIli
Ср = 7,-’4V-ж ' (111.112)
(lgRe)-5e
Формула (111.112) обеспечивает при Re> I - IO" хорошее согласование с данными экспериментальных исследований сопротивления трения гладких пластин н находит широкое применение в технических расчетах.
Турбулентный пограничный слон вдоль профиля и тела вращения, Существует значительное число полуэмииричсских методов расчета плоского и осесимметричного турбулентного слоя, основанных на использовании одного нлн одновременно двух интегральных соотношений с применением различных аппроксимаций закона распределения скорости и закона сопротивления [71, 901. Для реализации наиболее точных (многоиараметрнческнх) методов требуется использовать ЭВМ, так как расчет характеристик пограничного слоя сводится к необходимости интегрирования системы обыкновенных дифференциальных уравнений.
Достоверные результаты расчета пограничного слоя, в том числе и в области значительных положительных перепадов давления, позволяет получить метод, разработанный Левковнчем и его сотрудниками [461. Для расчета пограничного слоя в этом методе используются: интегральное соотношение количества движения, сохранения массы (II 1.70) с учетом зависимостей (111 59) и аппроксимацией его правой части в виде выражения (III. 104), закон распределения скорости в виде соотношения (111.93), с аппроксимацией функции w по формуле (111.95) или (III.96), а также закон сопротивления (III. 101). Связь между интегральными характеристиками пограничного слоя и его толщиной в случае использования профиля скорости |см. формулу (111.93)1 с функцией w [см. формулу (111.96)1 имеет вид
6* = ыьО,6; (III 113)
где ю0 = v*/v = Gi — --1- '• = (2 Ь 3,1667П р 1.4857113)/к3.
Искомыми при использовании этого метода являются <оо, 6 и 11 вдоль пограничного слоя; после их определения 6* н 6** находят с помощью соотношений (III ИЗ). Для определения этих функций служат три обыкновенных дифференциальных уравнения, где G3 (3.1667 + ЗПр'х^
(Gj - w„Gg) + (-1- - WoG3) «ofi + (Gt - 2<ooG«) +
rfrT 6** 2WuG.)<0,6.
dx rr u v dx ' 1 u -
<4,5 ИП G g rfrop x dx 1 dx
(Ш.114)
v dx 1 u 1
^--^-(l-cOoG,) 6+ 0,0306 (
1 — topG[ WpGj — to’G.
I HIT /________1 x X tftou 1 dv
6 dx dx ‘ \ ш0 ' / dx ~~v~ dx
94
П-рвое из них соответствует уравнению (111.66), второе — соотношению (III 70) TticTie уравнение можно получить из выражения (111. 101). дифференцируя его * , v Величины 6* и 6** из первых двух уравнений исключены с помощью завнен-ш’тщеи (III- * 1^)- В случае расчета плоского слоя следует в первых двух уравнениях опустить слагаемые, содержащие drjdx. Чтобы начать расчет, необходимо знать щчальные значения искомых функций 6П, с/и, !!„. Если использовать условие
([П.82), то сначала нужно произвести пограничного слоя по методам § 14 и определить абсциссу х„ точки не рехода. Далее для нахождения начальных значений искомых функций можно воспользоваться зависимости ми. полученными с помощью фор пул (111.101) и (III.113) при условии, что II (хн) ~ 0,5
I 1 1., II П 7 -f
х 3,75 — 24,72о0
с__________________п______________
11 “ 3,75ш0 — 24,72<i)l7 *
Первая из этих зависимостей представляет трансцендентное уравнение относительно io0. Значения постоянных при расчетах принимают следующие х — 0,40. С 5.2.
Систему (III 114) удобно решать в безразмерных переменных х — x!L, v v,vx,< & — используя метод Рунге—Кутта, и с помощью стандартных подпрограмм. Парис. III.12 сопоставлены результаты расчета по этому методу пограничного слоя профиля и данные опытов Шубауэра и Скремстедта (опыт 2100 Стенфордской конференции? 11121.
Метод Левковича был обобщен В. Б. Амфплохневым, В В. Дроблен-
расчет начального ламинарного участка
Рис. III. 12. Результаты расчета турбулентного пограничного слоя профиля и данные опытов по его измерениям (о — Re**,-)—q; • —Я).
новым и II П Мазаевой для расчета турбулентного пограничного слоя тел вращения без предположения, что &'гт <?: 1 [6]. Не предполагая относительной тонкости пограничного слоя по сравнению
с местным поперечным радиусом тела вращения, авторы применяют в качестве, исходных уравнения (III 65) н (111.70) с использованием зависимости (HI.104) и заменой в ней 6, 6* и 6** иа 0, 0* и 0** В качестве закона распределения скорости принимается формула Коулса (III.93) с дополнительным слагаемым, учитывающим влияние поперечной кривизны поверхности тела вращения:
V*
(III.115)
и соответствующий ей закон сопротивления
1/ 2 1 . fD l/ cf \ . 2П 0,46 |/Т" ,,.k
1/тг=т1лге« I 2 ;+С |"^—
Третье уравнение находят, дифференцируя по х уравнение (III. 116) Полученная система трех обыкновенных дифференциальных уравнений решается относительно
95
псреммшых coo, П и о методами, аналогичными описанным выше. На рис. III. показаны результаты расчета относительно толстого и тонкою пограничных слоен выполненного для тела вращения с /.7) 6,2, которое было испытано Пжп.нм
и Патанкаром при Re — 1,26-10е; расчетные н экспериментальные значения , и 6/£ толстого слоя иа всей поверхности тела хорошо совпадают. •
Рис. III 13. Результаты расчета параметров турбулентного пограничного слоя тела вращения.
/ — обвод тела;-------толстый пограничный слой;---------тонкий пограничный
слой: О к 4- — экспериментальные длнние.
§ 16. ОБТЕКАНИЕ ШЕРОХОВАТЫХ ПОВЕРХНОСТЕЙ
Шероховатость поверхности тел может оказать существенное влияние на характеристики нх пограничного слоя и вязкостное сопротивление. Ниже будет рассмотрено влияние общей шероховатости, непрерывно распределенной по всей поверхности, обтекаемой жидкостью. В зависимости от геометрических особенностей различают правильную регулярную и техническую шероховатость. Правильная шероховатость создается искусственно. Опа характеризуется одинаковой формой и высотой к(\ равномерно распределенных бугорков и позволяет систематически экспериментально исследовать влияние их па характеристики потока. К правильной относится зернистая шероховатость, создаваемая частицами песка одинаковых размеров, расположенных вплотную одни к другим, шероховатость, вызванная расположенными иа поверхности сетками и т. п. Техническая шероховатость возникает в результате обработки, окраски поверхности, а также разрушения ее покрытия или коррозии металла. Геометрические параметры такой шероховатости носят случайный характер. В качестве статистических характеристик шероховатости, получаемых в результате обработки профи лограмм, используют понятия средней арифметической высоты бугорков
п
^б. ср = —- 7
Г=1
(111.117)
96
вредней квадратичной их высоты
| Г
СР--в - | ——
пли дисперсию
“ V S (*'1 ~ *б- с₽)2'
(lil I18)
(III 119)
определяющую среднее арифметическое квадратов отклонений их высоты от /?(,. ср; аналогичные характеристики можно использовать для описания углов наклона фо поверхности бугорков. По своей геометрической структуре техническая шероховатость близка к мнкроволннстости. Опыты показывают, что влияние правильной и
Рис. II .14. Влияние технической шеро- Рис. III.15. Вид функции Дбх/о* для ховатости иа поле скорости. различных типов шероховатости.
1 - -pr = : 2 = 2-441,1 —Ь технической шероховатости на пате
+ 5.0; 3 — v — 15,9 м/с; 4 — v 22.3 м/с; скорости и сопротивление а основном
5 — и = 49,.з м/с. различно, по в некоторых случаях
В проявляется одинаково.
Эксперименты свидетельствуют, что в ламинарном течении влияние шерохова- тостн на сопротивление трения не наблюдается. При турбулентном течении степень проявления этого влияния зависит от соотношения высоты бугорков и толщины I переходной зоны. Шероховатость не оказывает влияния иа поле скорости вя кого подслоя и пристеночной области турбулентного пограничного слоя, где справедлив логарифмический закон распределения скорости |см. формулу (III.29)], в случае I правильной зернистой шероховатости, если kf,v*/v sj 5; обтекание бугорков происходит при этом плавно, безотрывно. В зоне 5 Sj A’bc*/v sj 70 наблюдается начало влияния зернистой шероховатости иа иоле скорости переходной зоны и потока вне I ее, а также иа сопротивление. При fego*/v> 70 наступает третий режим обтекания бугорков, характеризуемый развитым отрывным их обтеканием, разрушением ' структуры поля скорости переходной области, значительным ростом сопротивления г трения шероховатой поверхности по сравнению с гладкой. Характерные для ука I занных трех режим в границы значении параметра fc$v*/v зависят от геометрнче-I ских н статистических параметров шероховатости, однако описанные явления типичны и для технической шероховатости.
Влияние шероховатости на поле скорости турбулентного пограничного слоя ограни швается зоной ^^0 155, где справедлив закон (III 29). Это видно иа рис. III 14, где показаны некоторые результаты опытов Карлссона с технической шероховатостью, имеющей Аб. Cf(=l48 мк (микрон).
На структуру поля скорости внешней части пограничного слоя шероховатость практически не влияет. Для учета влияния шероховатости на поле скорости
4 П/р Я. И. Войткунского, т. 1 97
во внутренней области пограничного слоя соотношение (III.29) можно записан в виде
в г 1 , ци* , „ Лё_
7*-^'"— ("*•'*»
где Дея/и* (см. рис. 111.14) представляет параллельный сдвиг относительно лот-.к рифмнческого закона гладкой стенки, учитывает влияние шероховатости поверхности и является функцией параметра k^e*!v, а постоянные х и С имеют те же значения, что к в случае гладкий поверхности. Вид функции \fx/v* — f (k^/'A зависит от геометрической структуры шероховатости. Па рис. III. 15 показаны результаты обработки экспериментов ио определению вида длиной функции для правильной / и технической 2 шероховатости Абсциссы, при которых Svxlv* 0.
Рис III 16 Характеристики турбулентного пограничного слоя гладкого (/) и шероховатого (2) тела вращения.
соответствуют началу влияния шероховатости па сопротивление. Третьему режиму обтекания бугорков па рисунке соответствуют участки зависимостей в виде наклонных прямых
Вт
0* X V
(111 121)
Значения ср. при которых Лох т>* = 0, составляют для технической шероховатости от 3 до 7, a Bt — от 2,6 до 3,5. В случае расчета пограничного слоя на шероховатой поверхности поправку следует ввести в формулу (III.94), т е записать ее в виде
-4=±1П_££_ П* X V
+ В + -3-ю, 1 х
(III 122)
где функция шероховатости В = С— &vx/v*.
Для определения &vx!v* Маскер и Левкович предложили зависимость
V*
I *б;’'
1 . kbv* , -c.-v
— In + с
(III 123)
Значения постоянных в этой формуле зависят от вида шероховатости н выбора константы С, а также от того, какая высота бугорков (Лр. €р илн fee. ср. ив) выбрана в качестве характерной; для свежеокрашенной судовой поверхности при fee. ср — 93
50 мк П С =5,2. с, 0,04, сг=0.01. Закон сопротивления, соответствующий дормуяам МП 122) и (III 123), имеет вид
(III.124)
ииф|)>еренц,1]»уя выражение (III 124) по продольной координате х, можно получить дифференциальное уравнение, которое совместно с зависимостями (111.64) и (III.69) составит систему для расчета характеристик 11, с/ и 6 плоского пограничного слоя вдоль поверхности при заданной шероховатости. Связь между 6, II, б* и 6**
Рис. 111.17. Коэффициенты сопротивления трения пластин с однородной зернистой шероховатостью.
вэтом случае определяется более сложными, чем в формулах (II! 113), завнеимо-С1ЯМН Используя для турбулентной вязкости выражение
тт — хуи*,
(III. 125)
А Д Лльтшуль получил закон распределения скоростей в пристенной области около шероховатой поверхности в виде
о» = _1_ ln I + xyv*/v
и* х 1 ь xka, -jv*/v
+ Рп.
(III.126)
где po = 7,2-t-7,5 для пограничных слоев, а я — средняя эквивалентная высота бугорков. Эту зависимость можно использовать вместо (III 120) в формуле (П1 122), а также при построении закона сопротивления. На рис. III. 16 сопоставлены результаты расчетов пограничного слоя гладкого (fen = 0) и шероховатого - 5 Ю4) тела вращения, у которого L'D = 6,2 |7]. Влияние шероховатости учитывалось с помощью соотношения (III. 126).
На рис. III.17 показаны значения коэффициентов сопротивления трения СУ пластин с однородной зернистой шероховатостью, рассчитанные Прандтлем н Шлпх-тингом Влияние технической шероховатости представлено на рис 11.40—11.42 второго раздела.
4:
99
§ 17. TI’tXMFPHblfl ПОГРАНИЧНЫЙ СЛОЙ
Для изучения пространственного обтекания вязкой жидкостью тел требуется умение рассчитывать трехмерный пограничный слой. Теория пространственного трехмерного пограничного слоя, ламинарного и турбулентного, значительно слож нее, чем плоских или осесимметричных пограничных слоев.
Понятие пограничного слоя как относительно тонкой области потока вдоль поверхности тела, в которой возникают силы вязкости, применимо при больших числах Re и для пространственных потоков. В этом случае сохраняется свойство постоянства давления поперек слоя по нормали к данной точке поверхности тела; оно равно давлению на внешней границе слоя. Вдоль и поперек линий тока внешнего трехмерного потенциального потока существует градиент давле ния. Поперечный относигсльно линий тока внешнего потока градиент давления создает внутри пограничного слоя поперечное течение, которое называют вторичным. Скорости вторичного течения, направленные в центр кривизны линий тока, вызывают в пограничном слое, вплоть до поверхности тела, поперечные касательные напряжения. Таким’образом,
Рис III.18. Вторичное течение в трехмерном пограничном слое.
направление касательного напряжения на поверхности гйла в общем случае не совпадает с направлением линий тока внешнего потока, Поле скорости вторичного течения имеет сложную структуру и может изменять свое направление но толщине слоя Появление вторичного течения приводит к отклонению направления линий тока внутри слоя относительно линий тока внешнего потока.
Рис. III 19 Схемы отрыва трехмерного пограничною слоя.
В трехмерных слоях использсют понятие предельных линий тока, расположенных в непосредственной близости от поверхности тела и совпадающих с направлением касательных напряжений, действующих на его поверхности (рис III. 18)
Весьма сложен и имеет различные формы отрыв трехмерного пограничного слоя (рис. HI. 19) В трехмерном слое он происходит по линии /, к которой предельные линии тока 2 касательпы, т. е. она является их огибающей Вдоль линии отрыва касательные напряжения не равны нулю, они могут обращаться в нуль лишь в от дельных точках, лежащих на этой линии. Изложенное определение линии отрыва нс позволяет непосредственно использовать для ее нахождения условие т0 = О и приводит к трудностям в теоретических расчетах отрыва трехмерного пограничного слоя
100
При теоретической расчете трехмерных пограничных слоев часто используется система ортогональных криволинейных координат, в которой оси х н z расиоло-жены на поверхности тела, причем х направлена вдоль линии тока внешнего потен циального потока, а ось г по эквипотенциальным линиям, т. е по нормали к ней, указано иа рис. 111.18. Оценка роли слагаемых в уравнениях 11авье—Сюкса При больших значениях чисел Re позволяет получить следующую систему уравнений относительно тонкого трехмерного пограничного слоя вдоль поверхности малой кривизны при установившемся течении
vx Л’х „ <^х vt dvx __
77Г“ + ~дГ + "я?~ + 13 х Ajl г) “
I I Дтк . др 0
pHt дх р ду ’ ду
vx ди, , диг v, dv, , ,, , ,
~Щ~дГ +^~д^^~Щ~дГ + {Kt'Vz ~ К1Э°Х* Vx
1 I 1 dr*
~ pH3 dz p dy
Уравнение неразрывности имеет вид
-7ПГ Nr+ ("Л) ] + '5г = °'
П j П з L J
Значения геодезической кривизны линий х const и z = const.
к________1 дНх . __1_____ дН^_
А1а НгН3 дг ’ Лз1 Н,Н3 дх '
(III 1281
(111.129)
Коэффициенты Ламе Ц„ Н2 и Н3 соответствуют принятой ортогональной криволинейной системе координат. Давление р (х, г) представляет известную заранее из расчета потенциального обюкапия тела функцию.
Уравнения (III 127), если положить в них тА — pdvx/dy хг— pdvJOy, справедливы для расчета трехмерного ламинарного пограничного слоя при условии прилипания на поверхности тела, т. е. vx = »г = О при у = 0. Если под vy, понимать осреднеииые во времени значения скорости и принять
до, , . дог -г~г
то уравнения (111 127) можно использовать и для расчета трехмерного турбулентного слоя.
Для интегрирования уравнений (III. 127) в случае турбулентного пограничного слоя необходимы дополнительные замыкающие систему зависимости, устанавливающие связь между турбулентными напряжениями и осредиеннымн во времени скоростями потока Указанные зависимости основаны на применении полуэмпири-ческих теорий турбулентности использующих понятия пути перемешивания или турбулентной вязкости [88].
Интегрируя уравнения (111 127) вдоль оси у и принимая во внимание (III 128), можно получись интегральные соотношения пространственного слоя;
1__^[ дх
I йб“ 1 1 dtf)
+ «з дг дх 11 дг
Л'АЛ , 1 Л’вх А, ,
иГ -J* * ,"та| о* 4 л 1 I Ом 0 >* ———
1 вй//8 дг \ Vfl
Ч г/ н
+ ^|3
(HI. 130)
v^Hi дх
101
где
1 йб2* . 1 бМ) , । 3(и«) х.. ,
Нв дг + Н. дх + дг °2” + „2Я| дх 21 +
1 dvr. 1 dv* /
~—Дбг 4- —Lбг 4- к„ (б;2« -б;«
v6H3 дг v6Hi дх 13 \
+ л31(б.?1*+бГ2-+_^бг)-^, \ 'б / р„ь
6f j 4-
(III.131)
6« 0 оо б*.* = й 0 со 62=-^1(Ч“е0^: 0 W °° б*2*=—f (^х- С'х)1'гаУ’ 6 0 (111.132)
оо ОО
0 0 622* = ~2~ [ (% “ М Г'С 0J
L'o=VvL+l,^; г0 = тхС + ^0. }
Здесь i'o — скорость внешнего потенциального потока; и^г = 0, если ось х емвпа-дает с его линиями тока. В этой системе уравнений неизвестными служат 6j, б^, 6U > ^12, ®21* > , тх0, тг0. В качестве замыкающих зависимостей при ее решении
могут быть использованы аппроксимации закона распределения скоростей, соответствующие нм законы сопротивления, а также уравнение сохранения массы. В случае турбулентного пограничного слоя закон распределения продольных скоростей может быть аппроксимирован формулой Коулса (III.93) или простейшей степенной зависимостью (III. 105). Для вторичных скоростей можно применять формулу Магера
бг=г’*1Еро1!-(У/6)]2. (III. 133)
где Ра — угол между линиями тока — предельной и внешнего потока. В качестве закона сопротивления может быть использована формула Людвига и Тнльмана (III.100) илн соотношение (III.101), соответствующее формуле Коулса [119].
§ 18 ТУРБУЛЕНТНЫЕ СТРУИ
И ГИДРОДИНАМИЧЕСКИЙ СЛЕД ЗА ТЕЛОМ
Струйные течения, турбулентные и ламинарные, возникают в результате взаимодействия потоков вязкой жидкости, имеющих разную скорость. Примерами таких течений служат область взаимодействия потоков с различной скоростью (рис. III.20,а и б), свободная струя, вытекающая из сопла в спутный поток (рис. 111.20, в), и гидродинамический след за телом (рис 111.20, г). Наибольший интерес с позиции гидродинамики судна представляет случай, ко>да течение в струе турбулентно. В гидродинамическом следе за плохообтекаемыми телами срывающиеся дискретные вихри постепенно рассеиваются, образуя на некотором удалении за телом турбулентное струнное течение.
В настоящее время достаточно полно разработана теория плоских и осесимметричных турбулентных струйных течений в неограниченной вязкой жидкости [1, 15, 25, 97] Струйные турбулентные течения имеют свойства, характерные для турбулентного пограничного слоя; их поперечная протяженность (толщина б) 102
ма.чя 110 сравнению с продольной координатой х Давление в поперечном сечении “ ,™уи. а также вдоль нее считается постоянным (за исключением зоны гндроди-иамического следа пеносрсдствепно за телом) При расчетах турбулентных струй
I влиянием вязкостных напряжений на структуру нх поля скорости можно пре-
Йебречь соответствии с sihmii свойствами система уравнений движения в плоской I турбулентной струе или следе на удалении за телом имеет вид
v + с, <?Jx - — .^з.. _ о. (1U134)
ж дх + у ду р ду дх ду
Рис. Ill 20 Типы струйных турбулентных течений: а и б—область взаимодействия потоков с различной скоростью в — свободная струя, вытекающая из сопла в спутный поток, г гидродинамический след за телом.
где т,. определяется формулой (III.26), пли используется в соответствии с выражением (111.25) понятие турбулентной вязкостиз’т В турбулентных струях длина пути иеремешниа пня
/т=их6(х), (111135)
где эмпирическая постоянная уч 0,095 для плоских и Xj як 0,085 для осесимметричных струн. Для определения турбулентной вязкости в струях и следах можно пользоваться формулой 11рандтля
VT = Х26 (t’x щах — vx min)- (111. 136)
где xa 0.0094 : 0 010 ёж п,ах н vx mln — соответственно максимальная и минимальная скорость в данном сечении струп.
Вследствие того, что струей захватывается масса жидкости нэ внешнего потока, где течение не турбулентно, вблизи внешних границ струп пабпюдаются невысокие значения коэффициента перемежаемости (рис. 111.21). На этом рисунке по осн абсцисс отложено отношение i//y0>5; УО1Ь соответствует ординате, где Дйх = = <1х — t')'(t>x п,ах — о) = 0,5.
103
Законы изменения ширины струн 6 и максимальных значений скорости па ее осн 1'хшах или оси следи иЛ|П1лч как функции х за телом различны при пло скнх и осесимметричных сгруих. Сопоставление этих законов в случае [урбуленг него и ламинарного гечепнп жидкости дано в табл 111.1.
В турбулентной струе, развивающейся на i ранние раздела двух поюкок жидкости, текущих со скоростями Oj н с'2 (рис. 111 20. б), Гертлером с использованием зависимости (III 136) и уравнений (III 134) был получен следующий зако! распределения осреднениых скоростей
(III.137)
Рис 111.21. Значения коэффициента перемежаемости в турбулентной струе.
/ — круглая струя; 2 — плоская струя; 3 — плоски Л след.
Таблица III 1 Законы изменении ширины и максимальной скорости в струях н следах
Струи п следы Лямки при ое течение Турбулентное течение
Ширина Скорость "х max ИЛИ Г| *х тих Ширина Скорость lx max ИЛИ f'l л max
Начальный участок струн (см. рис. 11120, в) Гх х° х° *•“
Плоская струя (см. рис. 111.20, s) J Xй 1/»'Х X i/|/7
Осесимметричная струя X 1/х X iix
Плоский гидродинамический след (рис. III.20, г) V* 1/ | А' V* iVi
Осесимметричный гидродинамический след Гх \'х 1 х l/i х»
101
t <i„t/x (эмпирическая постоян ian cru = 13,5). Границы области смешения соответствующие рис. II 1.20, а, где с'2 = О, a = и, описываются прямым । !/i = 0,083х и у3 — —О 173.x, т. е. 6 ~ 0,256х.
В случае плоской турбулентной cipyn (см. рис, III 20, в) получено:
^ = JT-| ^(1-^4);
= и, П)|,
(ill 138)
PC’
где r] = ct^i x (эмпирическая постоянная п, 7,67); A’n = | Sjj dy— заданный
-<х
постоянный по длине струи кинематический импульс.
Рис. III.22. Распределение скорости в поперечных сечениях плоских и осесимметричных струй и следов.
Для осесимметричной струи при заданном импульсе ее Ао
----------------------- 8л е,х (1 + ф2/4)2
(111.139)
оо г___ ___
где Кс = 2л | v-xydy, в. O.OIbl | Ч Г и
Вычисления но всем приведенным выше формулам при принятых значениях постоянных хорошо соответствуют результатам опытов Описываемые нмн законы распределения скорости — афинпы, т. е. в безразмерных координатах представляют каждый одну кривую.
Используя представление закона распределения касательных напряжений поперек турбулентной струн в виде ряда
т У и„цп, rieQ
(III.НО)
105
коэффициенты Вп которого определяются из граничных условий на осн и внешней ранние струи, и применяя зависимость (III 136). Л. С Гтшсвский получил без размерный закон распределения скорости в виде зависимости (25|:
——------—— = 1 6if + Зг]я Зт]4, где (Ill 1411
и.х max — 1'6
Эта кривая показана на рнс. 111.22 Здесь приведены также результаты экспериментальных исследований плоских и осесимметричных струй и следов. Вес опытные данные достаточно хорошо описываются этой обобщенной .зависимостью. Значению Айд; 0.3 соответствует упь = 0,3856. Отклоняются от этой зависимости профили скорости в следе па уда.тейин за плохообтекаемыми осесимметричными телами (рис. III.23).
Рис 111.23. Профили скорости в следе за нло.хообтекасмымн осесимметричными телами.
• конус; О — диск.
Зная характеристики гидродинамического следа па бесконечном удалении за профилем, где давление такое же, как в иевозмущенном потоке, определяют вязкостное сопротивление
«г
(ill 142)
— толщина потерн импульса на бесконечности в следеу Если обтекание профиля безотрывное, то следуя Сквайру и Юнгу, формулу (III. 142) можно преобразовать к вицу
*г = Р”~5к* (Вк^«,)г,5+‘’,5Я",
(III.143)
где б** — сумма значений толщины потери импульса пограничного слоя вдоль верхней и нижней сторон профиля на задней его кромке; t»H — скорость потока па границе пограничного слоя над задней кромкой — 1,04-0,78); lll{ = = 6*/6**. В случае безотрывного обтекания тела вращения его вязкостное сопротивление
'А' --р«1"к‘('^'^Г.
(Ill 144)
По Сквайру ii Юнгу т 2,5 4 0,5//.,, а согласно Пателю ш = О 125-[7 (//., |-+ 2)+3], где //к 0^Г-
10b
Глава IV
ВОЛНЫ И ГИДРОДИНАМИЧЕСКИЕ СИЛЫ волновой ПРИРОДЫ
5 19 ХАРАКТЕРИСТИКИ ПЛОСКИХ РЕГУЛЯРНЫХ ВОЛН
Волновые движения возникают под действием внешних возмущений и представляют процесс их распространения в жидкости В зависимости от того, какие силы способствуют волнообразованию, волны можно подразделить на гравитационные, капиллярные и упругие.
Гравитационные волны возникают вследствие того, что жидкость находится в поле силы тяжести; выведенная из состояния равновесия внешними воз-
Рис IV. 1. Характеристики плоских правильных волн.
мущениямп она совершает колебания. К гравитационным относятся ветровые волны, волны вызываемые движением тел. волны внутренние, возникающие иа границе раздела жидкостей с разной плотностью или в неоднородных (стратифицированных) жидкостях, волны цунами, а также приливные, создаваемые притяжением Луны и Солнца.
Капиллярные волны обусловлены действием сил поверхностного натяжения поимеют вид ряби, порождаемой ветром или движением тел. Они могут существовать одновременно с граннтацноипыми.
Упругие волны возникают вследствие сжимаемости жидкости; к ним относятся звуковые и взрывные волны.
Для судостроения имеют наибольшее значение гравитационные волны па свободной поверхности или поверхности раздела сред.
Поверхностные волны с периодически повторяющимися характеристиками называются правильными, или регулярными Если картина волновою движения одинакова в параллельных плоскостях, то такие волны называются плоскими. В отличие от плоских волны ветровые и создаваемые движущимся судном имеют трехмерный характер, однако знание характеристик плоских волн способствует описанию трехмерного волнения. На рис. IV I показаны плоские правильные волны.
Профиль волны в плоскости, перпендикулярной образующим, описывается такими основными характеристиками, как длина к, высота h и период т Длиной /» волны называется расстояние между соседними вершинами или подошвами, высота h волны представляет расстояние от подошвы до вершины. Величина а - /г/2 правильных периодических волн является их амплитудой. Угол аЕ, образуемый касательной к данной точке профиля с горизонтальной поверхностью покоящейся жидкости, называется углом взволнованной поверхности или волнового склона. Максимальное значение угла волнового склона (в градусах) можно определить по формуле
aB=57,3n/iA. (IV. I)
107
Промежуток времени т между прохождением через неподвижную вертикаль после, нательных вершин или подошв волны называется ее периодом. Отношение ш= 2л 7, представляет частоту волны. Волны можно подразделить на прогрессивные и стоячн< Профиль прогрессивных волн перемещается в пространстве со скоростью с, кото| называется скоростью их paci роетранения, или фазовой скоростью, у регулярн волн с = %/т. К прогрессивным относятся ветровые н корабельные волны.
Профиль стоячих воли не перемещается в пространстве и лишь изменяет свои ординаты в данной ег о области; такие волны могут возникать, например, в результате отражения прогрессивных волн от берегов.
Ветровые волны и волны, вызываемые движением тел в жидкости или действием импульсов давления на ее поверхность, называются вынужденными. Рассматривают также свободные волны, характеристики которых нс изменяются с течением времени, а высота зависит от начальных условий их возникновения; к ним близки волны мо, ской зыби. Влияние вязкости жидкости на процессы формирования и затухания во н обычно не велико, поэтому теорию волн большей частью разрабатывают, полагая жидкость невязкой, а ее движение потенциальным.
Рассмотрим основы теории прогрессивных волн. В этом случае потенциал скорости ср (*, у, г, () в неподвижной системе координат, имеющей начало на иевозмущен-ной свободной поверхности, удовлетворяет уравнению Лапласа А<р = 0, а также кинематическому и динамическому граничным условиям на свободной поверхности при z = £в (х, у, /) и иепротекания на плоском дне водоема
д<р/дг~0 при z — -Н
(IV.2)
Система граничных условий (IV 2) используется при разработке нелинейной теории волн. Уравнения (IV.2) несколько упрощаются в случае плоских прогрессивных волн (см рис. IV.1), где потенциал <р (х, г, I) н £в (х, () Разработка нелинейной теории связана с большими математическими трудностями.
Солее простой является линейная теория, основанная иа предположении, что
волны имеют относительно малые амплитуды н параметр 1-^этом СЛУ"
час задача сводится к решению уравнения Д<р — 0 с соблюдением упрошенных граничных условий, отнесенных к невозмущеппой поверхности при г — 0:
dtp 1 . I г)ф
dz “ g -n *‘~~g~dT
(1V.3)
а также иа дне при г = —Н Oq/dz = О. Система уравнений (IV.3) является, наряду с уравнением Лапласа, линейной и допускает применение метода суперпозиции решений.
Потенциал плоских прогрессивных воли относительно малой амплитуды, распространяющихся вдоль положительного направления осп х имеет вид
Ч- cllA<z %/) cos (<о( — Ах). (IV.4)
где k— 2л/к — частота формы волны, харак!ернзующая число волн, укладывающихся иа отрезке осн х длиной 2л м. Профиль £в (х, Z) волн, соответствующий этому потенциалу
£n = a sin (с»/ — Ах)
с углами волнового склона
2 л о
ЦТ «в---------у—cos(<o( Ах) * а,,
Частота волн связана с их длиной зависимостью
ю2 = git th It И,
(1V.5)
(1V.6)
(1V.7)
I Ой
скорость распространения волн
и 2пН
111—
(1V.8)
Чистины жидкости движется незамкнутым эллиптическим траекториям, уравнение которых
х~ Л'° \8 + (-------г~г9.-------\2 = j, (IV.9)
cli k (Zo + Н) I Tl sh 1г (гп +- И) I
а J \а shW/ J
гас Го и г« — координаты равновесного положения частиц.
Характерной особенностью воли относительно малой амплитуды является то, что нх длина и фазовая скорость не зависят от амплитуды. Энергия волн, приходящаяся на участок длины, равный I, представляет сумму кинетической Т;в и потенциальной /7а; энергии (в рассматриваемых волнах Тл, = И»);
Э = + Ня: =л. (IV.10)
Перенос энергии в волнах происходит с так называемой групповой скоростью ur:
“г
2А/Г \ sh2fcH Г
(IV.II)
т. е. в общем случае иг < с.
В предельном случае для жидкости неограниченной глубины, когда II -*-оо,
потенциал и другие характеристики волн имеют вид
<с = cos (о>( - fcx) - - ekl Reel / ^~кх\ (I V. 12)
w-— gA. т e- т = 0,8 | н X= 1.56т2; (IV 13)
c = l/gX/2ii= I.25FT; • (IV. 14)
ur~c/2. (IV. 15)
Уравнение ординат свободной поверхности и формула для вычисления энергии совпадают с выражениями (IV.5) н (IV. 10). Траектории частиц в случае глубокой жидкости имеют вид окружностей с уравнением
(х - х„)2 + (z - z0)2 = <#“.• (IV. 16)
По мере увеличения глубины погружения радиусы траекторий убывают:
2иг„
с = ае > . (IV.17)
Скорость движения частиц по данной окружности постоянна:
2лт,
> . (IV. 18)
При z0 = 0 vic 2лл/Х и, следовательно, v<f.
В другом предельном случае, когда Н С X, согласно этой теории «г ~ с, z скорость распространения волн
t /gti. dv io)
Давление в жидкости при волнах относительно малой амплитуды вычисляется с помощью зависимости
Р =Рат + р , (IV.20)
где определяется согласно выражениям (IV.4) или (IV 12)
109
Если волны распространяются по поверхности раздела жидкостей с различной ПЛО1Н0СТЫ0, причем рп — плотность верхней, р„ — плотность нижней жидкости <Ри < Ри). то вдоль такой поверхности должно соблюдаться условие неразрывности нормальной скорости и давления; после линеаризации в случае волн относительно малой амплитуды эти условия при г 0, т. е. па псвозмушспной поверхности раздела, имеют вид
дг
о ( ' I с d<fl' А
1 " р/г 4 8 дг )
дфн .
дг
( д2Ъ, । дЧц\ (,Ч дГ- + f! дг )
(1\21)
Если слой верхней жидкости имеет конечную толщину й,, а нижний — бесконечную глубину, то по свободной поверхности верхней жидкости н поверхности раздела могут распространяться волны двух различных типов Частота волн первого типа ©1 = Kgfe, а скорость q = J.- gA /2л ; волны второго типа имеют частоту <оа —
— у gk , * скорость их распространения
P1I Рп
th А
(IV.22)
Отношение амплитуд волн второю типа на поверхности разделан., и па свободной поверхности ас составляет
3-1 а, I
°р/°е. = Рв1’ / (Рп Ри)- (IV.23)
т. е. прн Рн-^Рп величина alt/av весьма велика Если слон верхней и нижней жидкости имеют бесконечную толщину, то
С = 1/ Лк (*' ~ Ри
z 2л р(1 р„
(IV.24)
На скорость распространения волн, особенно при малой их длине, могут оказать влияние силы поверх постного натяжения. Для жидкости, имеющей глубину //, поверхностное натяжение <т„, скорость распространения волн с учетом влияния капиллярности
• <*•»>
Существует мпннмальновозможнаяскорость ст,п распространения капиллярных волн; в случае глубокой воды ст|П = 0,235 м/с.
С помощью нелинейной теории получить зависимости, описывающие характеристики волн конечной амплитуды в замкнутом виде, нс удается. Потенциал скорости плоских нелинейных прогрессивных волн можно представить в виде ряда <р = = Л<Р! + h2<ps + /13<р3 , где <fn потенциалы последовательных приближений.
Теория второго приближения, в которой сохранены первые два члена этого ряда, позволила Впгелю для жидкости конечной глубины получить потенциал
AZ ch k (г + Н) . ,, ,, 3 я/i- ch 2k (г Н) п .
<Г "2Г ~т-----------S‘“ (kx ~ + “ЙГ —-------JhW/ s,“ 2 <** “ o/)-
где первое слагаемое соответствует линейной теории. Ординаты волн второго приближения определяются соотношением
h лй2 / 3 \
£ —-j-cos (Лх — ш/) 4-I 4- \ ctli кН erts 2 (kx — о>/). (1V.26)
ПО
Hi Pllc сопоставлены ординаты этого профиля с профилем воли по линейной Lqohh. Траектории частиц в нелинейных волнах незамкнуты и скорость переноса ы н направлении волн, убывающая по глубине, составляет
n®/i* ch 2k (г 4- W) г" ~ ~2тЛ ЛГ777 ’
Характерной особенностью волн конечной амплитуды является связь скорости их распространения не только с длиной, но и с амплитудой. Скорость распространения таких волн на глубокой воде можно определить по формуле .1 II. Сретенского
< IV-27)
Предельные значения относительной высоты, до которых вовможно существование волн конечной амплитуды, составляют на глубокой волне 2а/к~ 0 142 при больших значениях относительной вы соты происходит разрушение вершин волн.
Рис. 1V.2. Профили воли по линейной (/) п нелинейной (2) теории
Рис IV.3. Сопоставление расчетных н экспериментальных (+) ординат одиночной волны.
ВСогласио приближенной нелинейной теории волн, теории «мелкой воды», отношение глубины к длине волны НА считается малым [84, 117[. На основе этой теории получены зависимости, описывающие одиночную волну, представляющую бугор, бегущий по поверхности жидкости конечной глубины. Теоретическое доказательство существования таких воли дано М. А. Лаврентьевым [86J. Для расчета ординат tn W по отношению к иевозмущецпой поверхности и скорости с распространения одиночной волны Лэйтоном [117] получены зависимости
t = ° _ Л. ц ( — V2 -______________!_______;
“ е112/1оХ 4 \ И / cli®/iox (I — sh4/i„x)
г-Г « 3,«Vb
„ I I / -3л 1, 5 a \
Де Aft 2H Г H I 8 11 ) ’
На рис. IV.3 сопоставлены результаты расчетов по Лэйтону с экспериментальными Данными для профиля одиночной волны Предельно допустимая с позиций се устой Чивости относительная высота одиночной волны составляет а!Н = 0,72. чему соответствует с 1,28 lrgll 11з формул (I V.28) следует, что одиночные волны возникают Только при с> \rgH, т. е. в сверхкрнтнческой зоне чисел 1.
Кортсвегом » де Врисом было показано, что на мелкой воде, т. е при 7/ X, возможно возникновение к ион дальних воли, для которых одиночная волна является предельным случаем [82] Скорость их распространения может быть как меньше,
III
так к большее = J- gti , т. е. критической. Ординаты таких волн и закон распредо. е. ния давления по их глубине определяются соотношениями
Св = а сп [Л (х), fc]; р = у (Li — Д (IV.2<i)
где сп (Л, k) — эллиптическая функция Якоби [38]; 0 < /г2 < 1,
Л (л)
I За
I 4Z-2// '
На рнс. IV.4, а приведены профили кпоидальпых волн и безразмерных переменных, на рие. IV.4, б — профиль одиночной волны. Кривая при k2 = 1 на
°-)
Рне. IV.4 Профили кпоидальпых (а) н одиночной (б) воли.
рие IV 4, а представляет профиль косинусоидальной волны н при fe3 = 1 10~40 почти совпадает с профилем одиночной волны, показанным в размерных координатах.
§ 20. СТАТИСТИЧЕСКИЕ ХАРАКТЕРИСТИКИ ВЕТРОВЫХ ВОЛН И СВЕДЕНИЯ О ВОЛНЕНИИ В НЕКОТОРЫХ РАЙОНАХ МОРЯ
Реальное ветровое волнение имеет сложную форму, изменение которой во времени и пространстве носит неправильный, нерегулярный характер, создающий у наблюдателя впечатление хаотичности движения масс волы. Причина этого заключается, главным образом, в турбулентности ветрового потока над морем, закономерности которого описываются методами теории вероятности и математической статистики. Поэтому и характеристики ветровых волн тоже могут рассматриваться как случайные величины н изучаться с помощью статистико-вероятностных методов.
Различают три типа морского волнения. I) волнение, вызываемое и поддерживаемое ветром, действующим на свободную поверхность воды; 2) волны зыби, остающиеся после прекращения действия ветра или выходящие за сферу его действия, 3) смешанное волнение — результат наложения более молодых ветровых воли на зыбь или систему ветровых волн, образовавшихся ранее. ч 1 ? '*'
Согласно ГОСТ 18151—73 основные элементы ветровых воли определяются'сле-дующнм образом:
высота волны — превышение вершины волны над соседней подошвой на волновом профиле, проведенном и генеральном направлении распространения воли;
длина волны — горизонтальное расстояние между вершинами двух смежных гребней на волновом профиле, проведенном в генеральном направлении распространения волн;
длина гребня — горизонтальное расстояние между подошвами двух смежных ложбин на волновом профиле, проведенном перпендикулярно к генеральному направлению ^распространения волн;
период волны — интервал времени между прохождением двух смежных вершин вот через фиксированную вертикаль;
скорость волны скорость перемещения гребня волны в направлении ее распространения. определяемая за короткий интервал времени порядка периода волны, 112
T in чс ис на аме-ipou А и k функции распределения
Элементы воли А k
п |Я Высота h 0,785 2
Период т 0,712 3
Длина X и длина гребня 1 0.757 2,3
уклон взволнованной поверхности — угол между горизонтальной прямой и касательной к волновому профилю в некоторой его точке.
Считая эти элементы случайными величинами, зависимости между ними наиболее полно определяют с помощью функций распределения. Различают два вида таких функций: один описывают разнообразие элементов волн при фиксированной балльности волнения (или силе вызвавшего его ветра) и называются функциями распределения при квазнстациопарном волнении илн просто функциями распределения, другие характеризуют разнообразие элементов воли за длительные промежу i кн времени. исчисляемые годами, и называются режимными функциями распределения. В расчетах мореходных качеств судов используются в основном функции распределения при квазнстациопарном волнении, на которых мы и остановимся.
Теоретическими и экспериментальным,! исследованиями установлено: функция распределении F (х), характеризующая вероятность того, что элементы воли равны заданной величине х или превышают ее (называемая также функцией обеспеченности), определяется общей формулой
F (х"1 — ехр j । (IV..3U)
где х° — нормированное по среднему значению (х® — х/х), х — среднее значение элемента волн х. Значения А и k — параметров, полученных в результате обобщения натурных данных, приведены в табл IV I [21 ]. Распределение значении высоты волн подчиняется закону Рэлеи (рис. IV.5); параметры распределения периодов зависят от спектрального состава волнения и могут несколько отличаться от указанных
Формула (IV.30) определяет разнообразие элементов волн заданной обеснсчен-ногти по отношению к средним элементам волн Поэтому, задавшись обеспеченностью (вероятностью превышения) поформулс (IV.30) или по соответствующей ей табл. IV.2. легко найдем, во сколько раз элемент волны заданной обеспеченности больше (или меньше) среднего элемента волн. Например, из табл. 1V.2 следует, что при обеспеченности волн, равной 3 %, высота волны й („,, фигурирующая в шкале [балльности Главного управления гн (рометеорологическон службы (ГУГМС), в 2,11 раза больше средней высоты волн Эга шкала служит для визуальной оценки интенсивности вил-
113
Табл и на IV.2. Зависимость отклонения относительно средних племен той водн от обеспеченности
Нормированные элементы волн Обеспеченность %
0,1 1 Л 5 10 30 50 70 90 *>3
Высота h° 2,97 2,42 2.11 1,95 1.71 1.24 0,94 0,67 0,37 0,26
Период т° 2,13 1,86 1.70 1,61 1.48 1.19 0,99 0,79 0,53 0,42
Длина волн А и гребней воли L° 2,62 2,19 1.95 1,62 1,62 1.22 0,96 0,72 0,42 0,31 I
1 а б л it ц a 1V.3. Шкала балльности волнения
Балл степени волнения Высоты волны. ЙдГ/ , Я J 'О Словесная характеристика волнения Балл степсни вол ней ня Высоты волны. ft3%' м Словесная характеристика волнения
0 0 Отсутствует V 2,0-3,5 Сильное
I До 0.25 Слабое VI 3,5-6,0 »
11 0,25-0,75 Умеренное VII 6,0-8,5 Очень сильное
III 0,75—1.25 Значительное VIII 8,5-11.0 » >
IV 1,25-2.0 > IX н.о Исключительное
Таблица IV.4- Соотношение между тиачениями средней высоты и обеспеченностью волн
Обеспечен -кость, % А1/п/Л Обеспечен-кость, % " 1'л/'1 Обеспеченность. % Л 1/п/'*
I 2.68 10 2,02 70 1,24
3 2.39 30 1,63 90 1,08
5 2.24 50 1,41 95 1,05
нения; она приведена в табл. IV.3. Наибольшая высота волн, принимаемая равной высоте волны с обеспеченностью 0,1 %, превышает среднюю в 2,97 раза.
В зарубежной практике для оценки интенсивности волнения часто применяется понятие «значительной высоты» волн, которая определяется как средняя от одной трети наиболее высоких (из всей совокупности) волн. Это понятие используется для визуальной оценки состояния моря: по мнению иностранных океанографов, именно такие волны четко фиксирует на поверхности моря невооруженный глаз наблюдателя. Между средней высотой волн й и «значителыюй^высотой» ht 3 существует соотношение:
й1/3=1,6Я, (IV.31;
откуда высота волны 3 %-ной обеспеченности
^*3% ~ ' •*^*|/з (1V. 32}
Таким образом, высота волны h %, фигурирующая в шкале балльности волнения ГУГМС. заметно превышает значительную высоту волн. Это нужно иметь в виду при оценке степени балльности волнения с использованием данных визуальных наблюдений Отношение между средней высотой воли и средней высотой й. , заданного числа наиболее высоких волн при разной обеспеченности приведено в табл. IV 4.
1Ц
ррделеиие элементов смешанного волнения в общем случае может отличаться от РЕувлнвасмого формулой (IV.30); для высоты волн это отличие, как показывают У^рные данные, обычно незначительное, закон распределения периодов при ука-И. шых в табл IV * параметрах может заметно отличаться от приведенного.
за Цноыа обеспеченность высоты волн выражают с помощью формулы, вытекающей и3 распределения Рэлея:
Л’(Л) - exp f —
(IV.33)
р.—дисперсия волновых ординат. Отсюда любая характерная высота волны оказывается пропорциональной корню квадратному нз дисперсии — стандарту высоты волны В частности, средняя высота волны
й 2.5(IV.34) высота волны 3 %-ной обеспеченности
Л3% = 5,3 , (IV.35)
значигельная высота волны
Л1/3=4.ОЮ)С.
< I V.36)
Для водоемов ограниченной глубины распределение высоты воли оказывается несколько иным [26]:
(IV.37)
где // — средняя глубина воды.
В практике оценки мореходности судов иногда нужно знать вероятность появления воли, которые характеризуются заданным сочетанием высоты Л. длины X и периодов т. Они определяются функциями совместного распределения элементов воли, в частности функцией обеспеченности F (й. х, Л). Существует два основных подхода к построению этих функций. Первый основан па предположении, что элементы волн являются независимыми случайными величинами; тогда вероятность их совокупности равна произведению вероятностей каждого:
Г (й, х, Л) = Г (Л) Г (х} Г (>.). (1 V.38)
По мнению автора работы [43], это представление удовлетворительно согласуется с натурными данными. Однако более поздние исследования показали, что оно может эначигельно отличаться от натурных данных Поэтому рекомендуется второй подход к построению функций совместного распределения, основанный па использовании условных распределений F (xiy), характеризующих вероятность значений элемента ваш х при фиксированном значении другого элемента у.
Анализ натурных экспериментов показал, что условные распределения элементов ваш подчиняются общему закону:
Г (х"/уп) = ехр |—(I V.39)
где х° = х/х, у° и/у, А1/0 н Л(/, — параметры распределения, а х^ — среднее зна-
чение элемента волн при фиксированном ч"
Рассчитав по приведенным в работе [21] формулам и таблицам вначале параметры. а затем и сами условные распределения, можно найти двумерные распределения элементов волн с помощью выражений (IV.30) и (IV.34) по формуле
ОО
/=(*”, (Л [ F dt(х"} х«
(IV.40)
115
Таблица IV.5. Двумерная обеспеченность нормированной высоты и период^ волн, %
Лв -1°
0 0,25 0.50 0.75 1.0 1,23 1,5 1.7.1
0 100 99 91 74 49 25 9 2
0,25 95 91 90 72 49 24 9 2
0,50 82 81 «0 70 48 2.3 8 2
0.75 С| 01 63 58 43 20 5 I
1.0 16 46 49 44 32 18 5 1
1.25 29 29 29 27 22 12 4 1
1,50 17 17 17 16 14 8 3 1
1.75 9 9 9 8 6 4 1 .—
2,0 4 4 4 4 3 2 1 .—
2,25 2 2 2 2 2 1 — •—
Таблица IV.6. Двумерная обеспеченность высоты и длины волн, „
лс
0 0.25 0.5 0,75 1.0 1.25 1,5 1.75 2.0 2.23
0 100 98 96 70 48 26 16 7 3 1
0.25 96 90 86 70 48 26 16 7 3 1
0.5 82 82 80 G2 46 24 12 7 3 1
0 75 66 66 65 60 43 23 10 6 2 1
1,0 46 46 45 42 32 19 10 6 2 1
1,25 30 30 29 28 23 14 7 5 2 1
1.5 15 15 15 14 13 9 6 2 1 —
1,75 10 10 8 8 7 4 2 1 I —
2,0 5 5 5 5 5 3 1 1 1 —-
2,25 2 2 2 2 2 2 1 1 1 —
2,5 1 I I 1 I 1 — — — —
Результаты расчетов двумерной обеспеченности нормированных значений высоты н периодов приведены в табл IV 5, а нормированной высоты и длины волн — в табл IV 6 Из этих таблиц, в частности, следует, что обеспеченность совместного появлении относительно высоких и длинных волн очень мала. Если, например, вы сита и длина волны в два раза превышают средние значения (Л° 2, 7.° = 2), то их двумерная обеспеченность равна всего 1 %. Прочерки в таблицах отвечают весьма малым значениям обеспеченности (менее 0.5 %)
Для анализа двумерного распределения длины волн н периодов натурных данных пока недостаточно, поэтому обычно пользуются линейной теорией плоских прогрессивных волн [см формулу (IV 13)]. Функции обеспеченности смешанного волнения также могут значительно отличаться от приведенных в табл IV 5 и IV. 15, особенно в тех случаях, когда характерные периоды ветровых воли и волн зыбн существенно различаются.
Замечено, что при всей хаотичности волнового движения в ветреную погоду среди последовательно бегущих волн зачастую можно выделить так называемые группы волн пли волновые пакеты, которые вначале нарастают до максимальной высоты, а затем у'бывают. иногда до полного затишья воли. Образование таких групп, по-впянмому. связано с интерференцией волновых систем соответствующего спектрального состава с близкими средними периодами
116
у а б п и Ц a IV 7 Обеспеченность нормированных значений Н' и Т
!|О|'>Ч|Г'1','‘1 ,,1К и-рпстинн Р(>ГС11С'Н?И1И*С1Ь, %
3 5 10 30 50 70 90 95
11' 2,62 2,19 1,95 1,82 1.62 1,22 0.96 0.72 0 42 0 31
г° 3.29 2,63 2,26 2.07 1.79 1.25 О 92 (1.63 0.32 —
Таблица IV 8. Уровни hhichchuhocth группы волн и и соответствующие им значения //^ и ^/\ч
X
Показатели 1,43 1,71 1.94 2.11 2,12
Лй 1 79 2,03 2.24 2,38 2.66
0,098 0,079 0,067 0,062 0,051
Основными характеристиками групп волн являются: число волн в группе т, период группы Т — время прохождения группы через фиксированную вертикаль, наибольшая высота волн в группе h, ее период т, разность Н, между наибольшей и наименьшей высотой воли в группе Как показал анализ натурных данных [51]. величины Н, и Т распределены но закону (IV 30) с параметрами Л//= 2,3; ку = = 1,8; Ап == 0,757, Ау ~ 0 81 Обеспеченность нормированных по средним значениям Н‘* — НГ1НГ и Та Tl Т приведена в табл. IV.7. Вероятнссть тот о, что в т руппе будет m волн и более, определяется в первом приближении по формуле
F (т) = ехр [-2- lO'W.], (1V.4I)
где m = 2, 3... Независимо от типа и интенсивное^ волнения число волн в группе колеблется от 2 до 15, a cpcjtiee их число равно 5—6. Для рассмотрения статистики наибольших волн в группах последние целесообразно подразделить на категории, Жоторые характеризуются уровнем интенсивности группы вол их = hlh, т. е. отнесенной к средней высоте наибольшей волны в группе. Если зафиксировать ряд определенных уровнен х, то для функции распределения значений нормированной высоты наибольших волн - hlh справедлива приближенная формула:
Ех(й») = exp |А|х-- (A")-|J. (IV.42)
Соответствующие этому распределению средине значения li° и дисперсия для ряда характерных уровней интенсивности х приведены в табл. IV 8. Данные таблицы показывают, что для достаточно высоких уровней интенсивности высота наибольшей волны в группе более чем в два раза превышает среднюю высоту волн. 11<*рноды наибольших волн в группах распределены при фикенрованныхх позакопу, выраженному формулой (IV.34) При этом оказывается, что среднее значение нормированных-периодов т° т/f не зависит от к и вычисляется по формуле т£р — 1 15т.
Определенный практический интерес представляет также знание статистических характеристик промежутка времени между прохождением через фиксированную вертикаль наибольших волн соседних групп. Этот интервал S = s/t, пор.ч>|рова1шый ио среднему периоду волн, зависит от уровня интенсивности х н типа волнения.
117
Таблица IV 9 Зависимость интервала $ от уровня интенсивностями типа волнения
Тип волнения У ро нем ь н пт ем г и вности
1,43 1,71 1,95 2.11
Штормовое Умеренное ветровое Смешанное 9 10 9—10 14 16 16-18 13 18 22-25 28—32 25-30 32—33 36—42 48—49
Таблица IV. 10. Зависимость среднего периода волн от балльности волнения
Балл полненИЯ Средн и П период, с Г» вял волнения Средний период, с Балл волнения Средний период, с
I 1-2 IV 1 -5 VII 9-11
11 2-3 V 5—7 VIII 11—12
III 3—4 VI 7-9 IX 12 и более
Таблица IV.II. Значения повторяемости волнения в различных районах
Наименование бассейна Повторяемость (в %) при балльности волнения
0-III IV—V VI и более
Океаны: Атлантический ( 11— 41 39 20
Индийский 44 зс. 20
Тихий 43 38 19
Моря: Балтийское 81 18 1
Баренцево 63 23 7
Берингово 70 27 10
Каспийское // 18 5
Охотское G3 27 10
Северное 55 33 12
Черное 76 19 5
Японское 70 25 5
Его средине значении приведены в табл IV.9. Величины S,.p возрастают с увеличением уровня интенсивности; онн хорошо аппроксимируются выражением 151 ]
4ср — ехр (2,1х — 0,7). (IV.43)
Можно считать, что дли уровней х, указанных в таблице, величина £ср сосредоточена в пределах от 5 до 33.
Приведенные выше сведения о статистических характеристиках морского волнения относятся в основном к элементам волн, нормированным по их средним значениям. Поэтому для оценки абсолютных значений элементов воли заданной обеспеченности нужно знать их средине значения В расчетах мореходных качеств судов эти значения в зависимости от цели расчета определяют различным образом.
Если рассчитываются характеристики мореходности на волнении заданной балльности, го непосредственно по шкале степени волнения 1’УГМС (см табл IV 3) выбирают высоту волны 3 %-ной обеспеченности и разделив иа указанную в формуле
НН
<5 Л ii ii a IV 12 Распределение повторяемоети волн З'и-ной обеспеченности
Высота волн. м
Время
1 Я°ГС года 1 С 1.25 1.25 —2.0 2.0-3.0 3.0-5,0 5.0—7.0 более 7
м Зима 64 15 11 8 2 0,5
Весна Hi 9 7 3 0,5 0
Лето 84 8 5 3 0,5 I 0
Балтийское Осень 72 12 9 6 0
Средняя 75 11 8 5 I 0
за гол
Зима 36 17 16 21 7 3
Весна 53 15 13 15 4 0.5
Баренцево Лето 72 II 9 7 1 0
Осень 50 14 14 17 4 1
Средняя 53 14 13 15 4 1
за год
Зима 67 12 II 8 о 0,5
Весна 78 9 8 4 1 0
Каспийское Лето Осень 78 69 9 12 8 И 4 7 1 1 0 0,5
Средняя 73 10 10 6 1 0,5
за год
Зима 40 21 18 14 4 3
Весне 56 18 14 7 3 2
Скотское Лето Осень 66 42 15 20 10 17 6 12 3 5 0 4
Средняя 51 19 15 9 4 2
за гид
Зима 71 13 8 4 2 1
Весна 87 6 4 2 1 0
Черное Лето Осень «8 79 6 II 3 5 2 3 1 о 0 0
Средняя «0 10 5 3 2 0,3
за год
f ♦ Зима 53 15 14 12 3 3
Весна 64 15 10 7 3 1
Японское Лето Осень 69 60 15 16 8 11 5 8 3 4 0 1
Средняя 62 15 II 8 3 1
за год
1 Зима* декабрь март, песк а: апрель - МЛ Л; Лето: июнь август, осень: сои-
тябрь ноябрь
(IV 40) цифру, находят среднюю высоту воли h Для назначения периода можцп воспользоваться данными табл IV 10 причем в указанных диапазонах перпо. <,й целесообразно ориентироваться па значения, близкие к значениям периодов соб< •. венных колебаний судна.
Для оцеиот мореходности судна в определенном водном бассейне характерные балльность и элементы волн следует назначать с учетом повторяемости волнения различной интенсивности как в среднем за год, так и по временам года. Значения повторяемости волнения различной баллыюсти в важнейших бассейнах Мирового океана, осредненные по всем временам года, приведены в табл. IV II Данные таблицы показывают, что наиболее бурными являются оксаны, наиболее спокойными -закрытые моря Последнее объясняется двумя причинами: во-первых, длина участков поверхности моря, иа протяжении которых действует ветер одного направления (длина разгонов), в закрытых морях сравнительно невелика; во-вторых,повторяемость штормов того направления па котором существует достаточно большая дли из разгонов, гораздо меньше чем повторяемость штормов в данном бассейне Распре деление повторяемости ноли 3 % ной обеспеченности в разные времена года в морях, омывающих берега СССР, приведено в табл. IV.12 Подробные сведения о повторяемости н обеспеченности высоты н периодов воли во многих районах Мирового океана приведены в разработанных под руководством И Н. Давндана справочных данных Регистра СССР [21 ], получивших применение в судостроительных расчетах.
Достоверная количественная цепка средних Элементов волн во всех водных бассейнах непосредственно согласно данным натурных наблюдений в пастояще< время еще невозможна ввиду отсутствия по ряду районов Мирового океана надежных экспериментальных данных. Поэтому необходимые сведения получают расчетш теоретическим путем, а результаты корректируют по материалам натурных наблю деинй. Существует несколько методов такого расчета, которые с разной степенью точности учитывают физические факторы, влияющие на образование н развитие вол! Подробный обзор и анализ этих методов содержится, например, в работах [20, 661
Для приближенной оценки средних элементов волн могут быть также исполь зовапы эмпирические формулы, предложенные разными авторами
для установившегося волнения
Д5-.0<№«)“’; 4-0,70 (#)«; 0V.44,
для пеустановиншегося волнения
4^-== 0.0013 4у- —0,34 (— V,2j. (IV.45)
д- \ и J и‘ \ и / ' '
Время, необходимое для полного развития волн на разгоне d при заданной средней скорости ветра и, определяется формулой
= 0,2835 . (IV.4C)
Эти формулы широко применяются для расчета параметров воли в гидрометеослужбе
§ 21 СПЕКТРАЛЬНЫЙ МЕТОД ИС.СЛЕДОВАЦИЯ
И СТРУКТУРА МОРСКОГО ВЕТРОВОГО ВОЛНЕНИЯ
Спектральный метод исследования и расчета морских волн основан на суперпозиции простых гармонических воли, н качестве которых принимаются плоские прогрессивные волны относительно малой амплитуды Если нерегулярное волнение имеет двумерный характер, т с. длина гребней очень велика, то ордината волнового профиля
гю
Ен У at cos (kiX — Wit 4- (IV. 17)
i i
где а,- н 6, — лмплптудл и начальная фаза i ft спектральной составляющей волнения; kf и (0; - ее волновое число и круговая частота, х — горизонтальная координата, отсчитываемая в направлении бега воли; t — время.
120
Трехмерный характер ветровых волн можно отразить, складывая плоские про-^-chbi'iwc волны распространяющееся в различных направлениях Обозначив rP g3 угол, образуемый направлением бега Z-ii гармо! ичсской составляющей с осью и результате сложения бесконечно большого числа таких составляющих полу-
пим
tn = Xj 2j a‘jtuS **coS dj ~ ,J sln fl>) ~ №‘j‘ + бы1-. I /---I
(IV 48)
Отсюда видно, что ординаты поверхности моря г= 1Н (лс, у, t) меняются как в паправ-пеипн бега вол11 (координата х) так и вдоль их гребней в направлении иу, перпендикулярном 14 ох.
7 Для количестве! ной опенки процесса волнения с гонг,шью представления (lV.4b) используются энергетические соси пони и и я В соответствии с теорией плоских прогрессивных воли энергию каждой / й гармонической составляй щей волнения, входящей в структуру (IV.48) и имеющей j е направление, можно представить в виде £. — pgc, '2. С другой стороны, обозначив через s удельную энергию во/н, приходя шуюся иа единицу площади поверхности моря, определим энергию i’-й гармонической состав, яющей с/-м направлением иа бесконечно малых интервале частот До и угле распространения ДО как Ец s (со, fl) Дю ДА. Тогда амплитуда этой составляющей L,., = 1 - I' Дсо-Afl или, вводя обозначение Sr -sможем запи-
ы * pg ь pg
сеть: __________ _________
atj V 2Sj (co. fl) | Дсо-Afl.
(IV. 49)
Тем самым амплитуды гармонических составляющих волнения определяются через его удельную энергию.
Функция S-- (со, fl), характеризующая распределение удельной энергии волн по частоте и направлениям распространения, называется двумерной спек|ральной [плотностью волнения, или двумерным энергетическим спектром С его помощью можно количественно оценивать трехмерное морское волнение. Проинтегрировав функцию Sj (со. А) по всем возможным углам распространения 0, например от О до 2л, получим одномерный энергетический спектр Sr (со), называемый также частотным. Он служит для описания двумерног волнения либо колебаний ypoei я воды в точке. Размерность спектральной плотности LaT. В зарубежной литературе энергетическим спектром иногда называют величины S (си, А), а иногда 2s (io fl)/'g, от чего суть структурного представления морского волнения, конечно не меняется.
Однако зависимость ((V 49) определяет процесс изменения ординат волнового профиля (IV 48) не полностью неизвестны фазы отдел! них гармонических составляющих В спектральном методе считается, что в интервале углов от 0 до 2л эти фазы равновероятны, тем самым в описание морского волнения в явном виде bhoci тся эдеме! т теории вероятности. Это позволяет установить количественные завпспь ости между’ спектральными п статистическими характеристиками волнения, ргссматри-'ваемого как случайный процесс, т. е как случайная функция времени
В большинстве практических приложений, связанных с изучением морского волнения и мореходных качеств судов, оказывается достаточным знать основные ве-гроятностные характеристики случайных фу iiKilnft времени — математическое ожидание, дисперсию и корреляционнуюфункпию Случайная функция £в (Z> называется стацно lapitoH. если ее вероятностные характеристики не зависят от времени /. Следовательно, математическое ожидание и дисперсия такой функции — величины постоянные, а корреляционная функция Ji (т) зависит только от временного интервала т Стучайная функции обладает эргодическим свойств м, если ее вероят! остпые характеристики, вычисленные по множеству реализаций, равны соответствующим характеристикам, найденным по одной продолжительной реализации.
В теории стационарных случайных процессов получены соотношения между спектральной плотностью процесса S- (ь>) и его корреляционной функцией /? (т):
со ео
Sj (го) =-—J 7?(t)cos wTdT Я(т) j Sj (ы) cos ыт rfee (IV.50)
о о
121
Зная одну из этих величин, легко определить другую Для использования ЗЯв симостеЛ (IV.50) при изучении морского волнения последнее нужно считать стацчН' парным случайным процессом. Эго несправедливо, если рассматривать прои, ^" ветрового волнения в целом, начиная с ранних стадий его развития и кончая з»гу^с ином пли обращением в мертвую зыбь. Однако при практической оценке мирехо. ,' качеств судов обычно нитсресуютсн характеристиками квазнстацпопариого во.тцр. ния, т. е. волнения определенной балльности. Эти характеристики оцениваются ,1Q регистрации процесса за ограниченный промежуток времени (порядка 30 мни), в ;с.
челне которою математическое ожидание и дисперсия волнения изменяются, как ,ра. вило, незначительно Поэтому с некоторой долей условности запись волнения ука.
запнон продолжительности можно рассматривать как реализацию стационар! (,Го случайного процесса и результаты ее обработки использовать на основе теории ста. ппоиарпых случайных процессов
Рис IV.6. Распределение ординат воли глубокого моря.
Анализ многочисленных записей волнения, проведенный разными исследователями в различных бассейнах, показывает, что ординаты ветровых волн глубокого моря практически всегда распределены в соответствии с нормальным законом Гаусса Это иллюстрирует ряс I V.G, на котором эмпирическое распределение — гисто! рамма ординат воли — сопоставлено с теоретической кривой Гаусса (плавная кривая). То, что процесс волнения является нормальным (гауссовым) случайным процессом, можно показать н теоретическим путем, используя одну из основных теорем теории вероятности — центральную предельную теорему (44]. Применяя эту теорему, а также, представления (IV.18) и (IV.49), нетрудно установить связь между дисперсией волновых ординат и двумерным энергетическим спектром
ос Л
| j st(u> OjiWd. (IV.51)
0 л
Переходя к одномерному (частотному) спектру, получим
со
(со) (IV.52)
б
Эта формула является частным случаем зависимости (IV.50) для корреляционной функции, если в последней принять т — 0 Но высота волны распределена по закону Рэлея и связана с дисперсией формулой (IV.33); следовательно, формулы (IV.5I)
122
52) определяют связь между такими статистическими характеристиками перепето волнения, как средняя высота, или высота волны заданной обеспеченности, '/его энергетический спектр.
1 Для установления более сложных зависимостей между статистическими и спс-к-тпалЫ1ЫМН характеристиками волнения используется понятие момента спектра. Моментом порядка г частотного спектра Sj (со) называют величину
ОО
mr — j Sj (си) (ог (!ы; г 0. (IV.53)
с
Понятие момента двумерного спектра удобнее ввести, представив ординату поверхности моря, покрытой трехмерными волнами, в виде
св(О = X L + viV 4>ijt (1V.54)
где u A cos v, v — k sin v, a k — волновое число в направлении v.
Энергия каждой составляющей, приходящаяся на бесконечно малый интервал волновых чисел Ди и До: -у pga1 (uj, u;j = s (и, a) Au- До, где s (u, v) — удельная энергия воли. Поэтому функцию
с . , s(u, о) а-(и. и) ,,,,,,,
Sr (и, о) = — ------ = —д—т—, (IV 55)
pg 2 AuДо
характеризующую распределение удельной энергии в зависимости от волновых чисел и и V, тоже называют двумерным энергетическим спектром.
Между спектрами S- (со. у) и Sr (и, i) существует простая связь. Так, для случая глубокой воды, когда u= (cuJ/g)-cos 0; v (<fts/g)-sir О, имеем
S» (со. -О) - Sr cos ~~ sln • (IV.56)
Теперь можно ввести, аналогично понятию момента частотного спектра, понятие момента двумерного спектра Моментом порядка р, q спектра Sr («. t) называют выра-[ жсннс вида
СО СО
тг<1 = J jSj(u, v\upvq dudv. (IV.57)
-во -со
Из формул (IV 52) и (IV.53) видно, что момент нулевого порядка (г = 0) частотного спектра определяется той же формулой, что н дисперсия волновых ординат, т. е.
me=Dr. (IV.53)
Значит, статистические характеристики высоты волны однозначно выражаются через момент спектра нулевого порядка. В частности, средняя высота волны
Я — 2,5 |/’я|(>; (IV 59)
[ высота волны с обеспеченностью р %
йр% =/„ (Р)/'«<» (IV.СО)
где в соответствии с законом Рэлея
1п (р> = 2 [-2 |п (>V 61)
Для определения среднего периода подсчитываются промежутки времени между последовательными прохождениями процесса £ (/) через нулевое (среднее) положение, пли, как говорят, нули функции £в (() Если ее ординаты распределены но эа-I кону Гаусса, то средний период
т 2л | ,
(IV.62)
123
где Dj—дисперсия производной dtjdt. Тогда с учетом спектрального представ 1е, пня (1V.48), (IV 49) и формулы (IV.51) получим
оо п
J J .S» (<о. й) t/w dft
и -я________________________
си Л
J J S» (и, 0) <о2 </<о 40
(IV АЗ)
Интегрируя по направлениям распространения спектральных составляющих и переходя к частотному спектру, в соответствии с выражениями (IV.52) > (IV 5S) найдем
т = 2п \^тй!т2, (1V.64)
где момент спектра второго порядка
ОО
т2 — J St (ы) ю24ш. (IV 65)
о
Таким образом, средний период волн однозначно определяется моментами частотного спектра нулевого и первого четного порядков Рассматривая вместо процесса изменения волновых ординат iJH (() процесс св (/), можно подсчитать средний промежуток времени между двумя последовательными максимумами
fn, = 2л (LV.66)
где. момент спектра четвертого порядка
ОО
rnt = J Sj (ft)) da>. (IV.67)
о
Формула (IV 66) учитывает возможное наличие вторичных экстремумов, в частное ш отрицательных максимумов, обращенных выпуклостью к нулевой средней линии процесса Сп (Г). Число отрицательных максимумов определяется формулой [52 ]
I — -у 11 — (m2/|^mo«i)l- (IV.68)
Число I связано с характеристикой ширины спектра е зависимостью
I =4-0 - К। — е3). (IV.69)
где
« — И 1 — (m?//n,m1). (IV.70)
Таким образом, подсчитав моменты нулевого, второго н четверюго порядка, можно количественно оценить ширину спектра.
Для установления связи между пространственными характеристиками волнении н энергетическим спектром используются понятия моментов спектра в форме (IV 57). Средняя длина волны
X 2п Кшзд/щ,
max • (IV.7I)
а средняя длина гребня
И 2л К wijo/Wj uiini
(IV 72)
124
Г5е
OL оо
m»o = J [л’: (“• f) dv-
-оо -со
(IV 73)
т max = — I«’jv + I' (m><i — "’uaf + 4/»п + ти Г, min --= -у ("ь > ~ Kfff'ao — /no-J: + 4т'й + м,.?1;
(IV 74)
и) и- du civ;
м
v) ии du dv;
г) о- dti dv.
(IV 75)
Отсюда легко найти среднее значение показателя трехмерности волнения К / Аналогичным путем через моменты спектра можно выразить среднюю фазовую скорость воли, а также дисперсии скорости н ускорения орбитального движения поверхностных частиц волнующейся жидкости [50]. Зная энергетический спектр волнения, нетрудно рассчитать практически все необходимые для оценок мореходных качеств средние характеристики воли, по которым с учетом законов распределения элементов волн [см. § 20] вычисляются высота, период, длина заданной обеспеченности.
1 Для двумерной спектральной плотности в практических расчетах обычно используется приближенное представление, базирующееся иа обобщении экспериментальных данных [44 |
Ss (ю. fl) =SC (io)S; (fl), (IV.76)
где S- (e>) — частотный спектр волнения; 5- (Й) — его угловой спектр.
Таким образом, для определения двумерной спектральной плотности можно вычислять частотный и угловой спектры по cooibctctbviouihm расчетным формулам Гораздо обстоятельнее изучен частотный спектр, анализ которого базируется на записях волнографов, накопленных за последние десятилетня в большом количестве.
[ Существуют два основных способа получения аналитических зависимостей одномерной спектральной плотности волнения от частоты Первый из них, широко применяющийся как океанографами, так и судостроителями, состоит в построении расчетных формул непосредственно для спектральной плотности на основе анализа записей волнения и структурных зависимостей, правильно отражающих физические особенности волнообразования. Второй способ, применявшийся в 50 е годы, по-вндн-мому, только судостроителями, заключается в предварительном анализе корреляционной функции, полученной но записям волнографа, аппроксимации ее приближенной аналитической зависимостью и последующем выводе формулы для частотного спектра из соотношения (IV.5G). Таким путем были подучены, например, формулы Н, II. Рахманина п Г. А. Фирсова [52], которые широко использовались при оценке мореходности.
Остановимся подробнее па первом способе, пр имен я ищемся рядом авторов для построения приближенных формул Различные авторы по-разному отражали записи мость частотного спектра от спектральной частоты и параметров, характеризующих Мстояипе моря в штормовую погоде. В качестве этих параметров некоторые авторы принимали характеристики ветра над морем (волиообразующие факторы), другие характерные элементы волн, чаще всего их среднюю высоту н средний период (или частоту).
125
Первая по времени аналитическая формула для частотного спектра была полечена Нейманом
Sj («) = С<о'* схр/----<П 7?)
где постоянная С 4,8 *г-с'*. Как видно, этот спектр однопараметричсскип; ,,н зависит только от средней скорости ветра и и не содержит других волиообразу1ощпх факторов, таких как длина разгона пли продолжительность действия ветра. II..1Ь пято считать, что он отвечает идеальным условиям предельного развития ноли ц, таких условий между высотой ш щ 3%-пой обеспеченности и средней ско-ростыо ветра справедливо соотно-шенне
Л3% = 0,009.35«2Л (IV.78)
Следовательно, в формуле (IV 77) вместо й в качестве параметра можно ввести получив модифицированный спектр Неймана. Этот спектр при разных Л3„, приведен иа рис. IV.7. Он хорошо отражает физическую суть явления, чем больше характерная высота волн (или скорость вызвавше е нх ветра), тем больше удельная энер гия волнения и тем выше расположена кривая спектральной плотности Максимальной ординате спектра отв. чаетчлетоза wmM — 0,816g/u. 11ом< удаления от данной частоты ординат j кривой быстро уменьшаются, причт'-зоне то < шп)ах отвечает гораздо болте интенсивное снижение спектральной плотности, чем зоне то > ш|Пах. Это объясняется тем. что в зоне длнннопс риодных спектральных составляющих, где значения скорости ветра и волне
ния выравниваются, передача энергии ветра волнам затруднена, а для составляю щих, фазовая скорость которых равна или больше средней скорости ветра, она во обще отсутствует.
Другое выражение для частотного спектра предельно развитого волнения было предложено Пирсоном и Московитцем на основе спектрального анализа большое числа волнограмм, которые были записаны в Северной Атлантике на английских и американских кораблях погоды; оно имеет вид
= 2 -TF-ехр [-₽
где а = 0,0081; fl — 0,74, й — средняя скорость ветра на высоте 19,5 м над поверх костью моря
Попытка отойти от модели полностью развитого волнения путем учета длины разгона н продолжительности действия ветра была предпринята Вэном. Обобщив различные эмпирические данные, он пришел к следующей формуле дли частотного спектра
\ (е>) = Atio ^exp (—
(IV. 80)
где Л| — 7,5-10’ см2 с-6; =
572g3'2
----[I продолжительность и3-2
действия ветра, е, и — его скорость, м'с; tm — 232 и).
120
Чтобы учесть зависимость спектра от длины разгона волн х (в метрах), в фор-,f (IV.80) вместо следует подставить величину
гдех<х,„; х„,
I.11«*
]1|>сдстав.1еиие частотного спектра в зависимое: и or витиообразующнх факго-nou VW>I,(> лля последующего вычисления статистических характеристик шхтиеиия. Гели этот сиекгр нужен для вычисления спектральной плотности элементов какого-чц'бо случайного процесса, обусловленного действием ноли, например качки корабля, то удобнее представлять его в зависимости от характерных параметров волн (средняя высота средине период или частота, высота заданной обеспеченности, период пли частота, отвечающие максимуму спектра). Последние задаются .исходя из известных океанографических сведений о волнении в данном бассейне или из специфических условии решаемой инженерной задачи, например из условия определения наиболее неблагоприятных параметров качки. Из ряда выражений, полученных в такой форме, приведем наиболее распространенные в инженерной практике.
Формула Ю. М. Крылова для линейного частотного спектра, выведенного па основании теоретических соображений:
Sf (со) = 0.0795й2т
(I V.8I)
где т — средний период воли, со — средняя частота волн. Формула А. И. Вознесенского — Ю. Л. Нецветаева
(IV.82)
где «?(, = £>£ — момент пулевого порядка; <о1ПЯК —частота, отвечающая максимуму спектра. Более общее представление частотного спектра, предложенное этими авторами, содержится в работе |22|
Формула, рекомендованная II Международным конгрессом по конструкции и Прочности судов.
5» (га) 0,0175Лз^т
(IV 83)
где Лзо/ — высота волны 3 %-нон обеспеченности.
Формула, рекомендованная 12 й Международной конференцией опытовых бассейнов:
Sj (си) = AjtiT* схр
(IV 84)
8,110-3«г . „ 3.I1101 .
. Ki- Ki
где А,
К — коэффициент, зависящий от степени
развитости волнения: для полностью развитого волнения К 1, для развивающегося волнения К < I (достигает 0,0), для мертвой зыби Д’ > I (достигает 1,7). График для определения Л в зависимости от характерных элементов волн приведен в работе [3| второго раздела тома 2.
Исследование структуры частотного спектра, проведенное II. Н. Давнданом, показало, что она неоднородна к в широком диапазоне частот не может быть точно отражена ин одной из приведенных формул. В спектре существуют три области: основного максимума (0 < со < соп), переходная (<оп ш,,) и равновесная
127
(си > Юр) В каждой из них ординаты спектральной плотности волнения могут 6ц г рассчитаны но формулам
\ (<о) -x,„v(<оп)«-се5Р {-1.2 | (-^)5 - (~)5 ]} «Фи о,hlit.
где
<1\ .85)
Sv (w) - S (шн) Н—-— (й>".- (и — ш„) при о,, <; <о < (iv top ton >
Sj («) ~ 7.8-1,1 V<”'“ ГР*« w > «Р- (IV.87)
1Г^„ — 0.3л<1)п 2л(о>-+0,3^1ах)’
m0 (Юн) =
/и
to„ = 1,045—^—(1 +2-10-4):
Op— l,I<i)u: Cdjpax — 0,81ш ( 1 + -
Однако на практические оценка мореходности различие в частотных спектр.,\, рассчитанных по разным формулам в большинстве случаев влияет незначительно*
Рис. 1V.8. Сопоставление различных частотных спектров для С балльного волнения, рассчитанных по формулам А. И. Вознесенского и Ю. В. Нецветаева (/), Г. Л. Фирсова (2), II Международного конгресса по конструкции и прочности судов (3), Неймана (•#).
цип и прочности судов. Там же нанесена кривая эмпирического спектра, полученная А И Вознесенским и Ю А Нснветаевым по результатам анализа натурных записей волнения. Несмотря на заметное различие кривых в низкочастотной зоне и в районе максимума спектра, вычисленные по ним с помощью спектрального метода амплитуды бортовой качки 2 %-ной обеспеченности оказались одного порядка и разница между ними не превысила 20
Расчетные зависимости для углового спектра S<b (О), характеризующего распределение удельной энергии воли по направлениям распространения спектральных составляющих, базируются на анализе результатов аэростереофогосъемки и записей самоориентирующихся волномериых буев, позволяющих измерять уклоны в Двух 128
(IV.88)
" 0 перпендикулярных направлениях. Наиболее простой и распространенном
®Эа1|'женсР| ых Рас**ета-Х является формула;
S- (»)) cos* fl,
__Л < О =С -у. т- е- элементарные волновые гармоники, бегущие навстречу
-„ей скорости петра, отсугсгвуют. Эта формула справедлива при умеренном вол-СР<* В случае сильного шторма рекомендуется формула [21] jjCB"11* J
Я
S- (0) —- cos1 0.
Оказалось, что в зависимости от балльности волнения, а также от стадии его пязвнтпя угловой спектр приближенно описывается функцией cos"0, где для ветровых волн 2 п 5, а для мертвой зыби п достигает 10.
(IV.89)
Рис. IV.9 РаспределениеТудсльнон энергии волн по частотным и угловым интервалам.
Рис IV 10 Сопоставление частотных спектров волвення на глубокой воде (/) н мелководье (2). Расчетный спектр (3).
Болес детальные исследования структуры зависит и от спектральной частоты:
1.8 Г Г2(~^ + —
S- (0) = 2 -L /.*%-r-^-(cos«) , (IV.90)
n(vH)
где w, — ы.'ш — безразмерная частота. Таким образам, S- (0) = f (то, 0).
Согласно результатам натурных наблюдений |20] угловой спектр зависит также от интенсивности волнения н может быть определен по формуле
х^ехр [-х|0| (-?!)-]
S; (0) =-----------*------ ( . • (1V.9I)
2(ш,-Ц)*р-екр[-Я 2(<Ot+n-j}
где u>j = е>/и>1ЛВХ, а параметр х зависит от волнового числа fcmax= отвечающего максимуму частотного спектра, и уменьшается с увеличением последнего; в ча стиостн, при fimax — 0,016 рад'мх = 8, при/гтах 0,036 рад/м х = 5, принтах
0,144 рад.’м х 3. 5
5 П/р Я. И РоАткунского, т 1 129
Для получения двумерной спектральной плотности волнения нужно частоте^? спектр, вычисленный пи одной из формул (IV.79)—(IV.84), умножить на угловой* определяемый формулами (IV.8H)—(IV.§1). В итоге основная часть энергии будет сосредоточена в довольно узком угловом н частотном диапазонах вблизи макси-мума спектра. Это иллюстрирует рис. IV.9, иа котором показано распределение спец, тральной плотности волнения по угловым и частотным интервалам.
Энергетический спектр смешанного волнения существенно отличается от pdC. смотренного: он, как правило, имеет два максимума, которые приближенно соответствуют максимумам каждой из волновых систем, составляющих смешанное волнение Максимум спектра зыби обычно располагается в низкочастотной области, максимум ветровых волн — в зоне более высоких частот.
На спектральный cocian морского волнения заметное влияние оказывает ограниченность водоема, в частности близость берма и мелководье. Теоретическое исследование иа базе теории рефракции нерегулярных воли и спектральный анализ синхронных записей волнения в разных точках прибрежной зоны позволили выяснить [44], как изменяются частотный и угловой спектры при выходе волн па мелководье. На рис. IV. 10 приведены эмпирические частотные спектры волнения на глубокой воде (кривая/) ; в прибрежной зоне (кривая 2) при относительной глубине водоема ///Ло= 0,2 (Я — глубина воды, л0 — средняя длина волн на глубокой воде) и угле между направлением береговой черты и генеральным направлением фронта волн 20,'< а< 4 °. Там же изображен соответствующий расчетный спектр (кривая 3). Видно, что удельная энергия волн при выходе на мелководье заметно уменьшается.
На рис. IV. 11 показаны эмпирический угловой спектр волнения на глубокой воде (кривая 1), расчетный угловой спектр на мелководье (кривая 2) при W/?o=O,2 и а = 50°, а также эксперимен тальные точки для соответствующих значений этих параметров. Очевидно, процесс трансформации волн в прибрежной мелководной зоне сопровождается заметным сужением углового спектра и приближением характера волнения к дву мерному. Эмпирические нерасчетные данные хорошо согласуются, поэтому рассма трпвасыый процесс можно описывать линейной спектральной моделью. По мерс приближения к берегу каждая спектральная составляющая частотного и угло вого спектров деформируется по законам гидродинамической теории волн без значительных потерь энергии, вплоть до начала обрушения гребней, которое наступает, согласно натурным данным, при fi = 0,5//. Это условие можно представить н в более удобной для расчетов форме
Рис. IV.11. Угловые спектры волнения на глубокой во-
huQy/h0 — 0,5бо ///>ч),
(IV.92)
где Яобр — средняя высота волн к началу обрушения гребней; Ио — средняя высота волн иа подходе к прибрежной зоне; б0= /г0/Л0'_— условная средняя крутизна волн. При й> Лобр волны разрушаются, процесс перестает быть стационарным, и закономерности, вытекающие)иа спектральной теории, теряют силу. Для этой зоны авали тнческие выражения, определяющие динамическое действие волнения, отсутствуют, и при оценке пользуются эмпирическими данными, полученными в океанографии, гидротехнике и теории корабля.
§ 22 ПОСТАНОВКА ЗАДАЧИ О ВОЛНОВОМ СОПРОТИВЛЕНИИ
И ЕЕ ФУНКЦИИ ГРИНА
В процессе движения тел или каких-либо иных источников возмущения вблизи свободной поверхности, а также поверхности раздела слоев различной плотности возникают волны которые приводят к появлению волновой скорости, давления и связанных с ними дополнительных гидродинамических сил и моментов. При разработке методов их расчета жидкость предполагается невязкой, а ее течение потеициаль-
130
цЛ Эго предположение, как и в случае исследования свобод плх волн (см. § 19), ’’’’^воляет свести задачу к нахождению потенциала скорости Ф, который удовлетво-Ет уравнению АФ 0 и граничным условиям — кинематическим и динамическим, В случае неустановнвшегося движения — также начальным условиям. При этом а свободной поверхности должны выполняться условия (IV.2).
14 р]а твердых границах водоема и поверхности погруженных в жидкость тел должно
вип<М|,ятьси Услов,:е непротекания
ЙФ
= -X— — О, дп
(IV.93)
- нормаль к поверхности. В качестве начальных условий могут быть заданы потенциала Ф и его первых производных на границах жидкости в некоторый
где п -значения момент времени.
Решение сформулированной выше нелинейной граничной задачи осложняется тем, что форма свободной поверхности, на которой должны выполняться условия (IV.2), заранее неизвестна и должна быть получена в процессе решения. Наиболее простой путь преодоления этой трудности состоит в линеаризации граничных условий. Тогда следует потребовать выполнения условий (IV.3) на плоскости г—О. Уравнение ДФ = 0 в сочетании с граничными условиями (IV.3) н (IV.93) формули
Рнс. IV. 12. Обтекание тела под свободной поверхностью.
рует нестационарную задачу линейной теории волн. Волновые задачи об установившемся движении тел могут быть сведены к ciamioiiapHUM и рассматриваться в подвижной системе координат х, у, г связанной с телом или источником возмущения. Тогда
Ф (-«о. !/о- *0. О = — vx + ф (х, у, г).
(IV.94)
где х0, i/0, z0 — неподвижная система координат (рис IV 12); а — скорость невоз-кущетюго потока в обращенном движении; х = xQ — vt\ у = р0; г = гв.
Потенциал вызванных скоростей ф удовлетворяет уравнению Дф = 0 и системе граничных условий:
на погруженной части поверхности тела
— = t>cos(n, х) (IV.95)
или
( а? \ dj а<р dj _
к дх ) дх + ду г дг дг
где у = if (х, г) уравнение поверхности S. Приведенные условия даны в предположении, что тело (судно) сохраняет статическую посадку. Формулы для более общего случая можно найти в работе [78];
иа дне водоема при г — —Н
4г=°: UV.96)
на свободной поверхности, ординаты которой г = (с, у}.
(±Р______Л Аг_+ =. о ,IVQ7y
\ дх ) дх + ду ду дг j7>
5'
131
н
£sn - v (gr.xl <p)’ = 0,
(I\ .9yj
где (gradq)-
Чтобы исключить возможность наложения па решение свободных прогрессивных волн, необходимо потребовать отсутствия вызванных скоростей далеко впереди при х-* оо, где grad (f — 0. В жидкости бесконечной глубины grad <р = 0 при г -* — со.
Условия (IV 47) и (IV.98) можно объединить, тогда [ 1091
Г/ д<р о \ Д . 0<| d О I (grade;)- г Д<р
1Д дх ) дх ду ду дг дг J 2 с дх- * дг
при z ?„(х, »/).
(IV.'Cij
В случае глубоко погруженного тела, а также «тонкого» судна, у которого ум ы наклона поверхносш корпуса к плоскости// -9 малы, возможна линеаризация гр. ничиых условий (IV.98) ti (IV 99);
g дх |z=o
<?-<f_____£ Дф I
дх1 v- дг IzO
(IV. 100)
(IV.101)
а граничное условие (IV.95) для «топкого» судна принимает вид
Oq- 0/ I
W ±о^г1-о- <1V-,O2>
Если поток состоит из двух слоев жидкости различной плотности рп и f >,, (р„ — плотность верхнего слоя, рц — нижнего; ;>п < рп), то к граничному условию (IV 101) нужно добавить условие па границе раздела этих слоев, которое в линеаризованной форме записывав! ся следующим образом
/ «Рфв , £ <>4i. X „ ( <52q„ g Лр„ \|
дх‘ +~ дг ) (’"\Гд^~ ----5ГЛг=-Н. ° (,VI03)
где грв и ф|, — потенциалы вызванных скоростей верхнего и нижнего слоев, Н“ — толщина верхнего слоя жидкости. Условие (IV. ЮЗ) следует из предположения о не прерывности изменения гидродинамического давления и вертикальных скоростей при переходе через границу раздела
Для решения задач о движении тел вблизи свободной поверхности широко применяются функции Грина, представляющие собой потенциалы волнообразующих гидродинамических особенностей. Фржшя Грина, зависящая от времеч i |, описывает потенциал источника единичной интенсивности, который возникает в момент времени G в точке (0, 0. г,) неподвижной жидкости конечной глубины и сохраняется далее без изменений Потенциал такого источника, удовлетворяющий уравнению Д<?0 = 0, а также .....ним условиям (IV.3) и (IV.'Md. nxieer вид
G
о
0 (7 — <) Г Ch k (г, + I/) 2л J ch кН
о
sh kz -
где 0 (t — G)
ch k tz II} ch кН
1 I при t lt, l о при / c G;
-coso(/~/,)]
1 4 у- ; о gk th kll-
(IV. 104)
Для построения потенциала исто..... движущегося по произвольной траекто-
рии с перченной скоростью, удобно ввести понятие единичного импульсного источ
132
Hill'S,
потенциал Gu которого можно получить,
дифференцируя выражение (IV. 101):
ОО
б11 = б (/ - (, ) Чо - j ми О Л) А (кг) (1V. 105)
о
ГДС 6 (Z — G) — дельта-функция Дирака;
2 °° I
। V V ( п"'н
<Гп -7--- 7 ’ --- - ......-
। г2 [2/л//+ (-!)“ г | г,|-’
I ( sh Azchfc (л +//) ~ “ J ch кН
о
(IV.IOG)
Е (г, 2|) =
ch к (z + II) < li /г (z, Ь //)
ch" kll
Формулы (IV. 104) и (IV.IOG) справедливы при |z|< |zt|; в противном случаеz и z, следует поменять местами. Водоем бесконечной глубины получается из формул (IV. 104) и (IV. 105) в результате предельного перехода при Н -*• ос.
к, Движение источника интенсивностью Q (/) можно рассматривать как результат наложения возмущений от импульсных источников, которые в каждой точке проходимого источником пути выделяют объем жидкости Q(/t)tf'|. Тогда для источника, расположенного в точке (0, 0, ?,) связанной системы координат п начинающего движение из состояния покоя со скоростью с (I) в положительном направлении оси х, получается следующее выражение потенциала вызванных скоростей’
Г оо
Gt = Q (П то - J Q (It) dt, j kr(z~z'} sin a (I - tj Jo (fe Г(х sy- + «/-] dk. о 0
(IV. 107) t
rues— J с (t) </t. Полагая, что источник интенсивностью Q= const из состояния 11
покоя начинает двигаться с постоянной скоростью с = v. для ординат воли па свободной поверхности с помощью формулы (IV'. 107) можно получить
оо I
- 1 f a ch а (I + f r . ------------------
«в = “рГ~ J ---cha ) А) [« I (* + 'i Vrn)- + У"] cos ni'i dit d*’
" о 0
(IV. 108) где Sb 2ng//<„ (Qu), a 1 кН, x = x II, у — у H,
z, zjH. Vrn — v'\rKll, a, Katha, t t Vuilh I, ~ (I — I,) )r^HI.
Выражение (IV 108) дает возможность исследовать структуру и основные свойства воли, возникающих при движении любого источника возмущений (н судна, в частности) асимптотическим методом (79]. В гаком приближении стационарная часть волнового следа, состоящая из поперечных и расходящихся волн (рис. IV 13), ограничена сбоку двумя лучами, расположенными под углом О = 2 arctg |/(сс*)], где / (а,) — максимальное значение функции f (<х)
ft2FrH-ni (ccFrH-°i -Jr) <1V IO9> при ll-t-co f (a,)
Задняя граница стационарной части волнового следа представляет собой замкнутую кривую, внутри которой поперечные вс*тиы отсутствуют Эга кривая описывается
133
Рис IV 13. Система волн при движении точечного источника возмущения.
134
Соотношениями
л
г- > Л1!
aFrn °г^Г. aFr„
|у| rfoi 1/ц21?гл/-°1
t da aFrH
(IV. ПО)
Область существования зависящей от времени составляющей волн, которыеубы-вают пропорционально £*, ограничена окружностью + (“J-) ~
Нестационарная составляющая включает так называемые «впереди бегущие волны» передняя граница коюрых в жидкости ограниченной глубины перемещается с критической скоростью v — gj! . Эти волны в случае испытания модели в опытовом бассейне обгоняют модель. Последнее следует иметь в виду при экспериментальном исследовании поля вызванных CKopocieft и буксировочного сопротивления, поскольку такие волны могут искажать картину установившегося движения модели и птиводигь к затухающим колебаниям волнового сопротивления, если время движения модели от начала разгона до момента измерения сопротивления непродолжительное- При t оо зависящая от времени составляющая потенциала (IV. 107) стремится к нулю; этот переход дает потенциал вызванных скоростей при установившемся движ:нии источника, представляющий собой функцию Грина граничной задачи (IV. 101), которую можно записать в виде, предложенном Хэвслоком:
то А
If f„. . exp [ia (xcosO + у slnO)] in ( „ 1114
----лли" I a tfa I £ (z, zj-------9-----ст-?-------------dv I • (* » HI)
4 /7 u c o2 — a2 Fr2, cos2 0 j
Контур С должен обходить особые точки 0< = ± arccos [ap'faFrw)] («’ = 1. 2) при 0> 0 снизу, а при 6 <0 сверху. Более компактная форма функции Грина G для случая Н ->-сх> была получена Н. Е. Кочниыы [41]:
4-;RecI 2(VO j
4л
Л/2
Е cos’ 0
-Л/2
л a f e-£a f
e^'de* М е* cos40
где = /(х Xj)2 + {у — ух)~ + (z -F zj2 ; г = V(x — xtf -F (у—уу)3 -F (z — zj';
v0 = elv-\ a = e(^" [i (z + Zj) — (x — xj cos 0 — (y — yj sin 6].
Непосредственное использование для расчетов потенциала (IV.Ill) осложняется наличием особых точек в знаменателе внутреннего интеграла Представление, свободное от указанного недостатка, может быть получено путем замены переменных Р = exp (|0). В результате для случая бесконечно глубокой жидкости (//-►со) при Q= I можно получить [80]
6
G(x~Xl, у — уъ z, zt) = -^------_1_+Vg*; (IV 112)
л=1
I
j ехр[(| —/2)£ —( l)‘v/l I—I2] cos ({ I I /*’)<// (/=1,2);
(IV. 113) co
CJ==-^-f e.xpKl + r2)Dl sin (II—(—I)Z n'l I 1 +<2I<// (/ = 3,4); (IV.114) 0
135
I XI
61
О «
G« | ^ , ( I)'" sin (2rn arcfgf) F (m, l+/2)df; О яи=|
F {т, s) ехр (<) cos (2«if) J.lm (sp); j - v0 (z { z,);
•Г ^clg(ij I); | v0(x-л,). q = v0(y— yt). p2 t2 + T-
(IV.1|. j
Для расчетов при достаточно больших значениях >) предпочтительнее пользоваться функцией Грина, которую можно получить из решения Мичслла 139]:
С, (х — лу. у — уь г. г,) = ----А- + 2Ga + 2G3 Ь G-. (IV 117)
где
ОО 1 _______
г — 2vo f —fir, f , , , г < I- 2 — t~ cosfi* I-p( l — t-)- sinB*
G, = - — J e * dp J cos |p (1 - (-) ?|--—t di.
0 0
/ _______________________________________________________
t)>0; 0* = Cpf |<2-P. (IV.118)
При достаточно болыпих значениях Е для расчетов удобен вид функции G. который получается при переходе во внешнем интеграле правой части (IV. 111) к интегрированию по мнимой осн:
б(х-х,, у-у,. г, -------I (G3 GJ [I - S1fin (|)J + Gs.
(IV.119) где
OO I __
C, — 2y° Г — I Sip j I r , / ) 2 —f- cos Pf — p sin B*
G« - J e " dp J cos [p (I - /-) >||-——4—^--------I— tdl
о о
(IV. 120)
Согласно расчетам на ЭВМ оптимальный расход машинного времени достигается, если формулу (IV. 117) применять при |ц|> 1, формулу (IV.119)—при |£| > 1’, а при | с | > 15^20 нользовагься асимптотическими разложениями. Па рис. IV. 14 показано для примера, клк изменяется вызванная скорость вблизи источника при разных значениях £ и г = 0.
Дифференцирование по х приведенных выше выражений для 6 дает возможность получить потенциал вызванных скоростей при движении единичного диполя, а интегрирование но Р] от b зо -|- b при б — со—потенциал плежкого источника. Так, из формул (IV. 119) и (1\ 120), если заменить координату г на у, для плоского источника при х< 0 можно получить
G
4л | х-- + (у 4- у,)» |
1 <I п Ь'М-рмнрСу+у,) .
р (I 4- РД-----dp + 2<?t s,n *
(1\ 121)
При х> 0 последний член выражения (IV. 121) следует опустить.
136
решение плоской задачи о движении гидродинамических особенностей в лиией-- постановке может быть получено с помощью комплексной характеристической
функции ш (?) [41]. Для этого граничное условие (IV.3) следует преобразовать
, e& <L [ dz Jt 1
I 6
1 1
1 1 1 M 1 >t
H J 1
i j V J f\r
/ /X — /rS-
- c \ у f %\\ 0
/ 1 / \ l , f 1 г
;--3*z Л । -2
4.
-7
Рис. IV. 14. Значения вызванной скорости точечного источника под свободной поверхностью.
в условие для комплексной скорости ds/d? и применить формулу Коши Тогда для вихренсточннка, расположенного в точке z1 = г, + тр,. имеем
<h> 1 / I- н<? г —г-.-Q _IVcZ f
dz 2л1 \ г — zt г zt / л u< J t — г1
Co
137
где 51 = jcl — ii/, Гидродинамические силы можно определить с помощью формулы Чаплыгина (11.135). В частности, для вихря она позволяет получить
= F>x = _ -11_в2'’и1/1. (IV. 122)
оГ2 уГ*
= рЬ'Г + -fe- + -Ъ- c2V’y'Ei <2vo I *11) (,V 12 V
(где Ei — интегральная показательная функция), а для цилиндрического тела произвольной формы при наличии циркуляции
Я(Г = —Р'о | Н (v0) |3; (IV 124)
« 1
Ry = - 4г j 1 ” Р ) |2 Л + v' р’ J 111 к (1 - W -у- + YK о —
(IV. 125)
где Н(?.) = J е ‘,г,о (?,) с/г, — функция Кочииа.
X,
В качестве контура интегрирования S, при вычислении функции II можно при пять любой расположенный под свободной поверхностью замкнутый контур, охва тывающий тело, на котором известны значения комплексной скорости v (z,), в том числе и контур поверхности тела. Однако поскольку определить эту скорость заранее обычно невозможно, II. Е. Кочин предложил в качестве первого приближения принимать ее значения при обтекании тела в неограниченной жидкости.
В случае наличия в жидкости поверхности раздела слоев различной плотности при построении функции Грина для пространственного источника интенсивностью Q, расположенного над поверхностью раздела, должно удовлетворяться условие (IV. 103). Тогда, перенося начало координат па эту поверхность, можно для области верхнего слоя жидкости получить следующий потенциал, предложенный В. В. Васильевой (19]
Г Л/2 ..
Q I I а — I 1 а (I — а) г ie Л)
Св=ТГ —- —TTT + Recl 2v°“(TT^- J -7^0"
L -л/2
— 2о__112.----0_ Г v р С /рр.-i) -----_____ uv [26)
я (c+1)2 J J e к cos’3» ’ (IV.12b)
—7t —co
где a = fi = -* -° |(z + z,) i - (x — x,)cos 0 — (y - t/>) sin 0).
В случае плоского вихренсточника, расположенного в точке г. = х, — (у, над поверхностью раздела жидкостей (ось у направлена вниз), Я И Войгкунскнм получено следующее выражение для комплексной скорости верхней жидкости:
Q — i Г rfz ~ 2л (г — Zi)
Q I iT
1 2л
СО
(с-1) j о
(А-у0)е-'*<*-*-*> k — ve + a (A -f- v0)
dk 4-
+ (Q + <T) voe-‘ft« <г I '-l,
(1 -f- aj-
где
Сопротивление источника
RX ~ Р..Ф - РВ<22 -в,(1+ср- ,
138
a внхрп
Вертикальная сила, действующая на вихрь, d г „ Г 7 (Д—1)(А v0) е~2к'-'1
и
i!k.
§ 23 ВОЛНООБРАЗОВАНИЕ
И ГИДРОДИНАМИЧЕСКИЕ СИЛЫ ВОЛНОВОЙ ПРИРОДЫ
ПРИ ПОСТУПАТЕЛЬНОМ ДВИЖЕНИИ ТЕЛ И СУДОВ
Используя функцию Грина G (IV III), можно найти решение задачи о потенциале <р вызванных скоростей и силах волновой природы при движении тел вблизи свободной поверхности жидкости. Такое решение для полностью погруженного тела в линейной постановке было получено II. Н. Кочииым [41] с помощью формулы Грина:
Ч (*. У, г) = j [ G - ф—) .IS, (IV. 127)
S,
ГД® \— произвольная замкнутая поверхность, охватывающая поверхность тела 5 и нс пересекающая свободную поверхность. Интеграл в правой части (IV. 127) представляет собой непрерывное распределение по поверхности S| волнообразующпх источников и нормальных диполей В качестве поверхности S] может быть принята также поверхность тела. Распределение диполей нз формулы (IV. 127) можно исключить, тогда
<р(х, у. z) = j j q(£, П. t)G(x — t // »]. z. t)dS, (IV. 128) s
Где q — интенсивность источников, которая может быть определена с помощью интегрального уравнения, аналогичного выражению (II 110). являющегося следствием граничного условия (IV.93).
Для гвдродипамическнх сил в случае глубокой воды
я/2 __________
Rr = /гх = _-М. f |ц , о) Г—(IV.129) * х п J I \ COS3 0 / I cos3 и ' 7
о
л/2 оо
^ = TV—j г/е|й|Н(*,0)|М£ + 0 о
+-S- f—^Tnv ₽- f 111 Г v°П 7НЛ)-, о] Г <п.. (IV.1зо)
2л£ J cos4 0 J | L cos- 6 J | А ' '
—Л —со
Здесь И — функция Кочнна вид которой зависит от использованных выражений потенциала <р:
для формулы (IV. 127)
н 0)=Чп J J + *cos ° cos Х) ~ С0® г)] + Si
I i sin I) Гcos (п, у) — (я, z) I | dS; (IV. 131)
139
для формулы (IV 128)
11 (7г. ())—=— J J С1Скг+1кы JS, (IV. 132)
S
гДе w = xcosfl4-psin0.
В том случае, когда поверхность тела пересекается со свободной поверхностью формула Грина позволяет подучить
4 г) JJ (-^Г G ~ -^Г'») dS + J J (’ G-$-) rf’b П V. 131)
$ F
гдсЗ — поверхность тела (или корпуса судна) при г 0;f — невозму щепная свободная поверхность; и нормаль, направленная внутрь области, занятой жидкостью G — Gix - у — I], г, £)— потенциал источника единичной интенсивности, помещенного в точку (с I], С), который описывается соотношениями (IV 112)—(IV. 120). Далее все величины считаются безразмерными- <р отнесено к vt (/ = £/2), G — кГ1, а величины линейной размерности — к I.
Если ввести функцию 1102 ]
//) = [-> I HV.131)
где
- gl/v*.
(IV.135)
то принимая во внимание, что потенциал G удовлетворяет линеаризованному граничному условию вида (1\. 101), можно путем преобразования интеграла по поверх пости Г в контурный получить
У- г> = И (^rG--^^‘,s +
S
I ( / dG \ I Iff
"V .’hr6 0<,,|“~IJ Y(?.’1)O<'^’1, (IV.I36)
Лвл Л-
где Z-h. j замкнутый контур статической ватерлинии судна, проходимый по часовой стрелке (в случае полностью погруженного тела интеграл по контуру L^rj исчезает).
Для функции у (х, I/) иа основании (IV 99) имеем
v(x и\-[— —_____d (> 1 (ега(1ч)2 I
[\ dx ) дх ду ду dz дг J 2 k-:B(x,v)
?„ u)
f dr d-m , . du 1 ,
J Л"Гг- <lv,37>
о
Далее задачу .можно упростить, если ввести допущение о порядке малости искомых величин. Таким путем развивают две приближенные нелинейные теории теорию «тонкого судна», т. е судна, у которого ширина мала по сравнению с длиной и осадкой, и теорию «малой скорости», применимую для судна произвольных обводов, но движущегося с достаточно малой скоростью В первом случае предполагается, что существуют разложения вида
<р = фч>Е + ф'5>е’+ .... (IV.138)
справедливые и дтя производных функции «р по координатам. Здесь е — малый параметр, смысл которого раскрывается соотношением
I (х г) - е[ » (х, z).
(IV 139)
140
t i>(x,z)—имеет порядок единицы. Тогда безразмерные вызванные скорости а Л <2ф
04' , —— и ординаты воли с,в можно считать величинами, малыми посрав-
’ <ty "г
сяпю с единицей, и из формулы (IV.99) с точностью до ея получить
у <*. у)«4-(griid 4)2 -?и -i- &+-S-) L=0 ’ (,vho)
.____। I
где^'~ к„ дх L .о’
(IV 141)
Используя граничное условие (IV.95), после разложения С (х — £, у — f, z, Г) и G (х — t, У + f, z, ?) в РЯД Маклорепа около у 0 из формулы (IV. 136) можно получить
т<«.I
So со со
--J rfn [ y(g. i|)Gds-4 (IV. 142)
—оо —со
Здесь So — проекция S на ДП, где у — U. Из структуры правой част выражения (IV. 142) следует, что
ф* т=_2 j UV.143)
so
есть величина первого порядка малости <р’1 'е; <р“ представляет собой потенциал Мнчелла |39] и дает решение задачи о движении «тонкого судив» при линеаризованном граничном условии иа свободной поверхности. Остальные слагаемые (IV. 142) имеют второй порядок малости, поэтому при их вычислении <р можно заменить на <р*. Таким образом, формула (IV. 142) позволяет решить задачу о «тонком судне» с точностью до малых третьего порядка.
Наряду с теорией «тонкого судна» разработана теория «удлиненного судна», т. е судна, у которого малой по сравнению с. длиной считается также и осадка. Несмотря на то, что предпосылки этой теории лучше отражают соотношение главных размерений реальных судов, результаты, получаемые с ее помощью, хуже, чем те, которые дает теория «топкого судна» первого порядка, поскольку в ней из геометрических характеристик корпуса фактически учитывается только распределение водоизмещения судна по длине, т е. строевая ио шпангоутам.
Для определения волнового сопротивления можно воспользоваться формулой Лагалли
Rv = pv-l* J j У (x, zt-^dxdz. (IV.144)
S
( 0 г / (Др . \ д Г <?«p 1 ] df
где q(x, г)^-^ J ~ ~dx~
Для решения Мнчелла. В последнем случае
л/2
Р1'=РЛО Г ... ... dO
«И - —] (' (,х-,4э>
- .т/2 где
141
Ординаты поли далеко позади за судном (х—»- —оо) определяются следующим д. разом:
л,<2
Си (*.!/)= ( (ZiCQSttffl + /: sin tofl) , (IV.1V,
< Ь J СОЪ v J
-л/2
где «о = A-o (x cos 0 + у sin 0) see2 0.
Формуле (IV. 145) можно придать более компактную форму, если воспел:.ю-ваться функцией Кочниа (IV. 132) при у — 0. В этом случае И (/г0 sec2 0, 0) = /, _ + iZ2, волновое сопротивление будет определяться формулой (IV. 129).
В теории «малой скорости» [109] параметром малости является число Фруда. Поскольку в случае судна конечной ширины вызванные скорости могут быть соизмеримы со скоростью судна, из формулы (IV.98) следует, что есть величина второю порядка малости. Но тогда согласно соотношению (IV.97) jtp/Ог также, есть малая второго порядка, и, следовательно, в качестве первого приближения можно принять
|г=0=°. (1V.H8)
dif
~дг
4L+4).
(IV. 119)
_ <)<[,, I <?<Го I
Здесь и0 — • д* 0; vo ~ 0» То — потенциал обтекания дублирован-
ного корпуса, удовлетворяющий условиям (IV.95) и (IV. 148). Соответствующая этому решению функция Кочина имеет вид
ВД-тИКтг-'*т£г)'‘'+'*-« +
$
+ f ~ ik C0S 2 ) U e‘^dtJ ~ £вл
1 Г f Г сЦ) Т' (х, у) ]
~^~П (,v-i5o>
F
где
>F(x. I)] + ~[vr (£- I)]; (IV.15I)
"г = «о ~ 1 = vr = v0' 4r - («о — 1 )2 + «-o-
При k ku sec2 G из формулы (IV 130) можно найти [109 J
H (k0 sec- 0, 0) =• J j v (x, y) exp [Z£o sec2 6 (x + у tg 0)J dx dy. (IV. 152)
Для получения волнового сопротивления достаточно подставить выражение (IV. 152) в формулу (IV. 129).
Наряду с рассмотренными выше последовательными нелинейными теориями волнового сопротивления существуют также менее строгие подходы к решению рассматриваемой проблемы. К ним относится решение задачи о волновом сопротивлении судна произвольной формы при линеаризованном граничном условии иа свободной поверхности (задача Неймана Кельвина). Оно может быть получено, 142
в потенциальной функции (IV 136) положить у (х, у} = 0. Полученную таким е5л'я ом потенциальную функцию представляют в виде распределения источников ^поверхности S и контуру ватерлинии Ецд:
ф(*. У’ г> =
JJ <?№. Л l)GdS + J q(l, f, 0)cos(n, x)Gdi\, s свл
(IV. 153)
тис интенсивность источников q определяется интегральным уравнением Фредгольма 2-го рода, получаемым с помошыо граничного условия (1V.96). Несмотря на противоречивость такого подхода, заключающуюся в учете только части нелинейных членов, можно ожидать, что обтекание корпуса вблизи днища моделируется лучше, чем в теории Мнчслла.
Решение задачи Неймана—Кельвина обобщают путем добавления к нему распределения особенностей по свободной поверхности из потенциала (IV. 136)’
<р (X. (/. г) J j q (s. /, i) 0 dS-------------J j у (g, tj) G d* dr\.
S °F
(IV. 154)
Благодаря использованию распределения источников по поверхности S, потенциал (IV. 154) можно применять при произвольной форме корпуса, но должно выполняться условие малости произведений потенциала ф и его производных по сравнению с ф. Поскольку в случае судна конечной ширины второе слагаемое в формуле (IV. 154) ие будет с принятой степенью точности (е3) автоматически удовлетворять граничному условию (IV.95), интегральное уравнение для определения q должно иметь следующий вид:
+ f J 9 №. /Л) </S = cos («. л) -I-s
(IV. 155)
Поскольку потенциал (IV 154) построен на основе последовательного решения нелинейной задачи, можно ожидать, что все эффекты, связанные с пересечением свободной поверхности корпусом судна, будут учитываться вторым слагаемым (IV. 154).
Формулы (IV.155) и (IV 154) могут служить основой для организации итерационного процесса, если значения q, полученные при решении интегрального уравнения (IV.155), в котором при вычислении у принято ф = в.фг1', подстввпть в формулу (IV 154). Рассчитанные таким образом значения потенциала дают возможность вычислить у во втором приближеиш! и т. д.
Другое приближенное нелинейное решение задачи было предложено Гюйо-тоиом [1031 В основе его лежит преобразование с помощью специальной графоаналитической процедуры реального корпуса судна конечной ширины в «линеаризованный корпус», волновое сопротивление которого можно определить по формуле Мичелла (IV. 145).
Приведенные выше результаты относятся к случаю неограниченного водоема. Для решения задачи о движении судна в канале в линейной постановке к граничным условиям (IV. 101) и (IV. 102) следует прибавить условия непротекания (IV.93) па стенках канала. Если эти стенки вертикальны, то решение задачи получается суммированием потенциалов идущих строем фронта судов, каждое из которых представляет собой зеркальное отражение соседнего относительно стенок канала.
Если в жидкости имеется поверхность раздела сред различной плотиосги, обусловленная, например, температурным скачком пли наличием слоя пресной воды над соленой, на поверхности раздела могут возникнуть длиниопернсинне внутренние волны. Образование последних приводи! к резкому увеличению буксировочного сопротивления судна Волновое сопротивление «тонкого судна» в этом случае можно
143
оценить, решая потенциальную задачу (IV 101) н (IV 102) с учетом граничного уел -вин (IV. 103) Тогда, согласно В В. Васильевой-
Rw = 2
nFr2
(TV. 156) где h — толщина верхнего слоя жидкости плотностью ри; у — kh — безразмерное волновое число; а = (>н/рц;
h ] Г Г Г cos j _ д]
./f j = J J U = I. 2);
Sn
flt — I y/Fr; a3 = J yrn Fr; IT v | gT. = I j/2A0;
C, = C2 = [(V (•• 1 i) + ae-y (z—I) + (I _ e) e~V (OBJ.
Величина yn есть корень трансцендентного уравнения
I — a eVo — e"v° ____ r________
m — j , _ ---------:--------= Fr - y0, если Fr* = Fr J L/h <1'1— a,
eV, + 7+7'’’'
и To = 0. если Fra = Fr J L/й > F'l — a.
Глава V
ТЕОРИЯ КРЫЛА
§ 24. ГЕОМЕТРИЧЕСКИЕ И ГИДРОАЭРОДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ КРЫЛЬЕВ
Крылом называется тело, подъемная сила которого во много раз больше силы сопротивления. Форма плоского крыла в плане может быть прямоугольной, эллиптической, стреловидной нт д Наряду с плоскими иногда применяют Y образные, Х-образные, кольцевые, винтовые н другие пространственные крылья Если принять связанную с плоским крылом правую поточную систему координат, как указано на рис. V 1, то проекция Rx равнодействующей R гидродинамических сил иа ось х представляет сопротивление, а проекция Rr/ подъемную силу крыла. Плоское крыло характеризуется площадью 3 его проекции в плайе и размахом /.
Сечение крыла плоскостью ход называется профилем крыла, Па рис V 2 показаны некоторые характерные формы профилей. Отрезок прямей, соединяющий крайние переднюю и заднюю точки профиля, называется хордой b крыла
Форма профиля крыла характеризуется следующими геометрическими пара метрами. Относительной толщиной профиля ё называется отношение максимальной 144
IIIIlbI e профиля к его хорде Ь, которое выражается в процентах ее длины ё % = ^(с.Ь)-100 °«, обычное ё < 20т-25 %. Крылья, у которых ё < 10 V называются
тонкими-
Рис V.I. Система координат плоского крыла.
Положение максимальной толщины относительно переднем кромки профиля ст выражается в долях его хорды с % = (Ь'с,,,)-100 %. Форма профиля задается в виде ординат уп и ун, отсчитываемых от хор ды до его спинки и нижней стороны.
Плавная кривая с ординатами </|Г-= («I* + .Vni) 2 называется средней ли иней профиля. .Максимальная ордината f этой кривой представляет ее стрелку прогиба Отношение максимальной стрелки прогиба к хорде называется отпосн-тельпой кривизной профиля / % = (f b)-100 Относительная кривизна обычно составляет /<24-3% Положение максимальной стрелки прогиба средней линии профиля характеризуется величиной С[, т. с. в безразмерной форме cf — cfib. У некоторых профилей средняя линия имеет возле задней кромки обратную вогнутость. Такие профили называют обычно S-образнымп S-образных профилей под относительной кривизной понимают I — h b, а под обратной относительной кривизной отношение [г:Ь Положение /t и обратной кривизны ft характеризуется координатами с\ и с2
Средняя геометрическая хорда ЬГ1, представляет отношение площади проекции крыла в плане к его размаху />Ср == Sil. Важной геометрической характеристикой крыла служит его относительное удлинение — отношение размаха крыла к средней хорде
X - = Р 5.
Рис V.2. Характерные формы профилей крыльев
(V.1)
У прямоугольного в плане крыла А — lb. Крыло, размах которого / бесконечно велик по сравнению с его хордой, носит название крыла бесконечного размаха (А - оо). Крыло с размахом больше двух, называется крылом конечного размаха (А> 2), а если А< 2, — крылом малого удлинения
145
Положение крыла относительно набегающего иа него потока характеризуется углом атаки « между направлением скорости потока бесконечно далеко перед Крч. лом и хордой крыла (см. рис. V. 1). Если углы атаки по размаху крыла постоянны' крыло называется гидродинамически незакрученным. Если же углы атаки измс' няются по размаху вследствие особенностей его геометрии или условий обтекания' то крыло будет гидродинамически закрученным. '
Силы п моменты, действующие на крыло, существенно зависят от его угла атаки Обычно рассматривают не сами силы, а их безразмерные коэффициенты. Коэфф|ф цнент сопротивления крыла определяется соотношением
с.
(V.2)
а коэффициент подъемной силы
су — Ry.
(V.3)
Иногда удобнее рассматривать силы, действующие на крыло ие в принято1} ныше системе координат, а в системе xlt у(, zj, связанной с крылом (см. рис. V.I). В этом случае рассматривают две составляющие силы — нормальную Rn и тангенциальную Rt и соответственно два безразмерных коэффициента: ' нормальной силы
Сп — Rn
2 6/’
тангенциальной силы
,2
с‘= —
Коэффициенты Си и Сх связаны с Сп и Ct соотношениями Сп = Су cos а -ф Сх sin а; Ct = Сх cos а — Си sin а.
(V.4)
(V.1)
Для оценки эффективности крыльев используют понятие их гпдроаэродинамиче-ского качества
Л — Ry/Rx — Су!Сх.
Для крыльев при няивыгодпейшпх углах атаки Л’ — 10-г-20.
П общем случае равнодействующая гидродинамических сил, действующих на крыло, создает относительно осн z момент Л1г, который характеризуется коэ(]>фг-циентом момента
т2 =
K’io
2
Sb
Момент Мг можно выразить как
(V.7)
(V «)
где х1д — расстояние от точки D приложения равнодействующей до осн г. Точка I) приложения равнодействующей называется центром давления профиля (см. рис. V I). Отношение Сп = xlDlb называется коэффициентом центра давления.
Если ось z совпадает с передней кромкой профиля, то коэффициент момента тг относительно этин оси тг СпСп-
Значения безразмерных гидродинамических коэффициентов крыла существенно зависят от угла атаки Характер зависимостей Сх, Су, Сп, н К от угла а показан на рис. V.3.
Угол атаки ссщ, соответствующий нулевому значению коэффициента подъемной силы, носит название угла нулевой подъемной силы. Как видно из приведенного графика, коэффициент подъемной силы крыла и коэффициент монета вначале с уве-146
чени£М угла атаки возрастают по законам, близким к линейным. Это позволяет Представлять их в следующем виде:
_ dCy , drrii ,,, ...
C»=-/3I;n« = fflr. + -*-el> М
где dC Ida ~ C^ и dm/da = m* — тангенсы углов наклона кривых Сд и тг. а ___ угол атаки с учетом угла нулевой подъемной силы, т. с. — а — а^. При угле ** = “«Р ха1’актеР кривых Си (а) и т. (а) резко изменяется, и в случае дальнейшего увеличения угла атаки кривая непрерывно надает. Угол а1!р носит название критического угла атаки, или угла срыва. Этому углу соответствует максимальнее значение коэффициента подъемной силы.
ки крыла в функции от угла атаки.
Значение О]!р н соответствующий ему максимальный коэффициент подъемной силы Cv тах зависят от числа Re (Re = потока, обтекающего крыло: с увеличением этого числа они возрастают. Как следует из результатов опытов, при Re> (1н-1,5)-10° коэффициент подъемной силы, если а<а1;р, перестает зависеть от числа Re, т. е. крыло попадает в зону автомодельное ги. Величины а0, С* и т? от числа Re практически не зависят. Поскольку сопротивление трения составляет значительную долю от общего сопротивления Rx, автомодельная область для коэффициента сопротивления Сх крыла отсутствует; он уменьшается с увеличением числа Re (см. рпс. V.10).
В некоторых случаях оказывается удобней представлять коэффициенты Сх и С9 не в функции от угла атаки, а в виде зависимости Су = / (Сх). Такой график приведен на рис. V 4 и носит название поляры крыла. Тангенс угла наклона прямой 1, проведенной из начала координат в данную точку поляры, представляет качество крыла при угле атаки, соответствующем этой точке (в случае, когда масштабы Сх и Cv выбраны при построении поляры одинаковыми). Тангенс угла наклона касательной 2, проведенной из начала координат к поляре, характеризует Максимальное качество крыла.
Центр давления крыла с увеличением утла атаки медленно смещается к хвостовой части профиля: для симметричных профилей он располагается в области 0,2—• 0,5 хорды от передней кромки. Если в качестве осп, относительно которой определяется момент реакции R, принять произвольную ось zlt параллельную z н расположенную на расстоянии Xj от нее, то при малых углах атаки
= тг<1 ф ф CtJxf/b. (V. 10)
117
Точка, момент реакции /? относительно которой не зависит от угла атаки ,а зыиается фокусом крыла Ее абсцисса х-|ф определяется зависимостью
1ф = -*</<£.
6 II;
Момент Л1ф реакции относительно фокуса составляет
pel.
Чь = Sb.
Форма крыла существенно влияет на его гидродинамические характсрисп кн-особенно сильно влияет ил них изменение его относительного удлинения Л. С ро iojJ относительного удлинения возрастает наклон кривых С“, увеличивается качеств > ц уменьшается критический угол атаки. Угол пулевой подъемной силы крыла остается неизменным. На рис V.3 показаны соответствующие зависимости для серии прямо, угольных крыльев различного удлинения.
Рис. V 5 Влияние относительного удлн нения крыла иа коэффициент подъемной силы.
Рис. V 6. Влияние относительной толщн-
Влняппс изменения относительной толщины ё профиля на коэффициент представлено па рис. V.6; угол же нулевой подъемной силы с ростом толщины профиля практически не изменяется.
Изменение относительной кривизны / значительно влияет иа угол ай нулевой подъемной силы; зависимость Оу от относительной кривизны профиля можно выр.т зить cootiionieTiном а0 = —87,5f; величина С“ остается при этом постоянной.
Во многих случаях необходим учет влияния на гндролэродитигмнческие хс рактернстики крыльев малых внешних возмущений кинематических параметрит их движения, имеющих вид периодических вертикальных или угловых колебаний крыла, которые накладываются на его поступательное движение. Наличие таких вертикальных и угловых колебаний с периодом Т и угловой скоростью приводи к периодическим изменениям его угла атаки. В этом случае для определения С и шг можно использовать следующие выражения:
d<i>j
dm, .
-
О . а , dm. . , dtn2 m m | ma 4- a |- —-------------------------ы -r
1 г 1 d<i dw, г dm
(V.12)
где
da b Uzh dii, b;
d‘ Uno di vL.
148
г
соответствуют движению крыла, нс совершающего колебания. Величины
С<1 _ ЛСи с": = dcv = (IC’J-
№ da ’ </<ог * </о»; *
dm- ш, din,- "s dm:
---Д' : /и — —; , «, - Г. ~ da dw2 г аыг
Взываются вращательными производными крыла и являются функциями от числа cd| вращательные производные момента зависят от выбора положения осн г В слу-ас колебании крыла в других направлениях вид разложении (V.I2) усложнится счет введения дополнительных производных 114 (.
Рис V.7. Влияние движения крыла над твердым экраном (и) и под свободной поверхностью (б) на его подъемную силу.
Гидроаэродинаынчеекис характеристики крыла существенно изменяются при его Движении вблизи границ потока. 11а рис. V.7 показано влияние движения над твердым экраном и под свободной поверхностью на коэффициент подъемной силы крыла.
§ 25 РАСЧЕТ ГИДРОАЭРОДИПАМИЧЕСКИХ ХАРАКТЕРИСТИК
ПРОФИЛЯ КРЫЛА
При расчете крыла бесконечною размаха, у которого все сечения плоскостями, параллельными хпу, одинаковы, исходят из обтекания его профиля плоскопараллельным готском. Силы и момент, действующие на крыло в плоскопараллельном потоке, определяют, пользуясь формулами (11.138) н (11.139). В частности, на основании теоремы Н. Е. Чуковского для одиночного профиля
R„ -Р1'ТОГ. R* = о (V |3)
Таким образом, для вычисления подъемной силы должна быть известна циркуляция скорости Г вокруг крыла. Для се определения используют предположение о том, что задняя острая кромка профиля является линией плавного схода потока и скорость в ней имеет конечное значение. Указанное предположение представляет постулат С. А. Чаплыгина—Н. Е. Чуковского.
Если задача расчета обтекания и вычисления подъемной силы профиля решается при помощи конформного отображения внешности этого профиля на внешность круга, то циркуляция скорое tn Г вокруг крыла определяется из условия Соответствия критической точки на окружности задней кромке крыла. В соответ
149
стони с постулатом Чаплыгина—Жуковского общее выражение для цирку,1T>iu.„I вокруг произвольного профиля имеет вид 11
Г = - 4л:>тегл_,/? sin (а а0), (V.i4)
где т_{ — первый коэффициент разложения преобразующей функции в ряд Лорана [см. формулу (11.74)]; R — радиус окружности во вспомогательной плоскости-а — а0 — угол атаки профиля по отношению к его липни пулевой подъемной енлц’
Общее выражение для Су профиля следующее:
Р
Су = 8лт_, -у sin (а — а0). (V jg)
Наиболее простым является исследование обтекания так называемых теорегц. веских профилей, предложенных Н. Е Жуковским. А. С. Чаплыгиным, А. И Не, красовым, Карафолн, Мизесом и др., для которых преобразующая функция может быть представлена в замкнутом виде [27, 34 ]
Обгскапне профилей Н. Е. Жуковского исследуют путем решения системы уравнений (11.75) с применением преобразующей «функции
2 — £ + г&/ь> 16)
где г0 — постоянная. Циркуляция скорости вокруг профиля Жуковского
Г = — 1л/? vx sin (а — а0)) (V. 17)
Здесь 7? — 1 ф- । Коэффициент подъемной силы профиля малой
кривизны
С^2л(1 +-(У^С-) sin (а- ай). (V.IS)
Частным случаем профиля Жуковского является тонкая плоская пластина, для которой хорда Ь, расположенная на оси х, равна 4гв. Если начало координат npi -пять посередине хорды, то при углах атаки, когда sin a as а,
Cv ~ 2ла; тг=— ла/2; Ср =—1/4. (V.19)
Поверхность такой пластины эквивалентна в потоке вихревому слою с интенсив и остью
т/ (* —2х)
У («) = У -(b~+2x) • (V 2°)
Скорость на передней кромке пластины стремится к бесконечности н на пластине возникает направленная вдоль иее подсасывающая сила, коэффициент которой Сп = СуО. Появление подсасывающей силы отмечается при теоретических расчетах пр<>филей н крыльев с острой передней кромкой. Фактическое возникновение этой силы, снижающей силу сопротивления, возможно лишь в случае соответствующего профилирования (малого скругления) передней кромки крыла
Недостатком профилей Жуковского является то, что угол 5К при их острой задней кромке у профиля конечной толщины равен нулю. Этот недостаток можно устранить, если применить преобразующую функцию
(V.2>)
2 + Wo \ £ + /fl /
которая в случаен = 2 соответствует функции (V.I6). Обобщенные профили Жуковского, получаемые с помощью (V 21), имеют внутренний угол при их задней кромке 6,: = л (2 — и).
Известно несколько методов расчета с помощью конформных отображений обтекания профилей крыльев заданной формы В нх числе методы С. Г Нужина 159), Я. М Серсбрийского и Теодорсена. Во всех методах используются прибли женные способы построения преобразующей функции.
Весьма эффективным, позволяющим применять для его реализации ЭВМ. являемся метод, основанный иа применении тригонометрической интерполяции [911-150
Г псно этому методу функцию, обеспечивающую отображение внешности сдинич-^K\;nvra г = R — 1 на внешность рассчитываемого профиля, представляют в виде цОГО ря,1а
т~ 2
(V.22)
коэфф ,ц“е1|ТЫ К0Т0Р010 С п~ Л-п+ iH~n--типичную окружность С= е‘° в плоскости те»'К этим точкам окружности в плоскости 5-у!-]-ij/t, У которых согласно формуле
Для определения коэффициентов С_п С = гс'^ разбивают на 2/п равных ча-г соответствуют узловые точки гд — (V.22)
т—2
хд — (Л_п cos л Oh 4- В_п sin лО*); и —1
т—2
Ук == У (—А-п SiH «Од + В п COS Лбд)
п=-1
(V.23)
где k= 1,2..... т. Эта система уравнений обращается относительно неизвестных
коэффициентов A_j, B_j(j = —1, О, I, 2, . . т — 2):
т
А-l = — V (х/, cos /Од — yh sin /Oh),
A=t m
8-) = 2] (Xft sin /Ofc + tjk COS /Oh).
h=t
(V.24)
Соотношения (V.24) позволяют no известным координатам хд! Ук вычислить коэффициенты ряда (V.22). Однако в начале расчета положение узловых точек неизвестно, поэтому для нх определения строится итерационный процесс. Он позволяет
найти с заданной степенью точности их координаты н обеспечить снос точек иа кон-
тур профиля. При k — 60-5-100 достигается высокая точность воспроизведения контура профиля [30]. Дальнейший расчет комплексной скорости обтекания профиля dw dw dz j ijy
производится no формуле-^- ~ где величина dziat может быть найдена
с помощью формулы (V.22), а известная комплексная скор<кть обтсквиия круга
<fcii
~dT~V'
(V.25)
Для расчета обтекания профилей используют и мсгод интегральных уравнений |24, 6! 1 Заменяя действие профиля иа поток присоединенным вихревым слоем с интенсивностью у(/), распределенным непрерывно но его поверхностн (рис V.8), можно показать, что в каждой точке контура / профиля у (/) = с1/ (Г), т. е. равна местной скорости его обтекания. Потенциал скорости и функция тока потока вокруг профиля имеют вид
<р v№ (х cos а 4- у sin а) 4- J у (/) arctg * dl;
I
Ф = 1’<» (y^os а — * sin а)-----J у (/) In г dl,
I
(V.2G)
V
Г I
2лг t
151
где г — [<л(х— л,)2 (у—р()г. Для определения интенсивное]н у (I). а следг,ца тельно, и скорости и/ можно получить интегральное уравнение Фредгольма втоы.г рода ' °
-%-----J V (0 ( arrlg у _ ) dl = [cos [I, х) cos а + cos (I, у) Sif, -Л],
(\ 27) Чтобы обеспечить единственность решения этого уравнения, необходимо выпит, нить постулат Чаплыгина—Жуковского в задней острой кромке, положив скорость в этой точке рапной пулю, г е. у,. — 0 При решении уравнения (V.27) его заменяют конечной системой алгебраических уравнений, разбивая для этого контур профиля на Л’ дискретных отрезков А/,- и выполняя условие (V.27) в точках на их
Рис V.8. Замена профиля вихревым слоен, распределенным по его поверхности
середине. Интеграл в формуле (V.27) заменяют суммой .¥ слагаемых. Чисто делений контура порядка 120—150 обеспечивает необходимую точность решения систем, алгебраических уравнений для определения у( с помощью ЭВМ Циркуляция ск<
Л’
рости вокруг профи, я Г j vi dl V у, Xlt.
I *=!
Значение циркуляции вокруг профиля, найденное описанными методами, не учитывает влияния вязкости Способ учета эюго влияния разработан В В. Дроб-ленковым н Г. И Каневским. Используя результаты расчета потенциального обтекания профиля, рассчитывают сто пограничный слой для заданных числа Re и степени турбулентности внешнего потока При этом необходимо выполнить условия равенства потоков завихрениосш и давления поперек пограничного слоя на задней кромке профиля
Л_и ®и
j tui'x<fy = J u>vxdy. ри = рц. (V.28J
о о
(де Лп и 6Н толщина верхнего и нижнего пограничных слоев у задней кромки. Полагая давление поперек слоя постоянным, эти условия можно заменить соотношением
«вв -= %„ (¥.29)
где Од — скорость на внешней границе пограничного слоя у задней кромки. Для выполнения этого равенства требуется применять последовательные приближения при расчете пограничного слоя. В результате можно определить циркуляцию скорости 1 вокруг профиля На рнс. V.9 сопоставлены результаты расчетов C,f профиля NACA GC при е 0 05 н / — 0,01 для двух чисел Re, а также без учета влияния вязкости
152
Коэфф||||,,е!,т С0ПР тивления Сх Cv помни > геометрии профиля и угла атаки ненг от режима течения жидкости в его пограничном слое, на который, в свою 3‘'®„,.а., влияет степень турбх етттностн внешнего но ока. Па рис V. 10 показаны <жр* •*’ • - -
Рнс. V 9. Влня ine вязкости жидкости на Су.
I — расчет без учета влияния вязкости
Рис. V. 10. Влияние числа Рейнольдса па Сх.
результаты расчетов Сх для профиля \'АС\ GG. Дтя приближенного определения коэффициента С»- профилей можно воспользоваться зависимостью (11.20) и рнс. 11.10 из второго раздела этого тома Справочника
§ 26. ЛИНЬЙНЛЯ ТЕОРИЯ КРЫЛА КОНГЧНОГО РАЗМАХА
I Подавляющее большинство встречающихся в реальных конструкциях крыльев имеет конечный размах При расчете обтекания эти крылья можно заменить системой присоединенных вихрей, расположенных на поверхности крыла Участки этих вихрей, простирающиеся за пределы крыла, подхватываются потоком и в виде Дискретных вихревых шнуров или непрерывной пелены свободных вихрен распространяются в бесконечность за крылом.
Система присоединенных н свободных вихрей создает в потоке, натекающем на крыло, поле индх титрованных скоростей е,. порождающих скос потока, обтекающего крыло Формирование новых участков свободных вихрей при перемещении крыла Сопровождается ростом кинетической энергии жидкости; в результате на крыле возникает допаши тельная сила сопротивления ег движению — индукт ивное сопротивление R,. Этот вид сопротивления в сумме с вязкостным сопротивлением составляет силу Rx крыла конечного размаха. У крыла бесконечного размаха свободные вихри и индуктивное сопротивление отсутствуют
Связь между циркуляцией Г в данном сечении крыла конечного размаха н коэффициентом подъемной силы профиля этого сечения устанавливается зависимостью
Г = С i> b.2. (V.30)
» 0“
Если вертикальные составляющие индуктивных скоростей малы, то приближенно можно полегать, что свободные вихри за кризом располагаются вдоль линий тока певозму щетн иго потока, натекающего на крыло. Это предположение, справед
153
ливое при малых углах атаки а. используется при разработке лпнсЛпой теопи крыла конечного размаха. и
Течение жидкости вне области потока, занятой присоединенными и свободным вихрями крыла, является безвихревым, т. е. потенциальным, однако при переход11 через соответствующие вихревые поверхности потенциал должен претерпен^6 разрыв. ь
Рис. V.1I. Вихревые модели крыльев конечного размаха: а—П образный внхрь-б—несущая линия; в—несущая поверхность.
В зависимости от степени схематизации структуры обтекания крыла конечного размаха можно рассматривать три основные вихревые модели его, показанные на рис. V. 11. В схемах иа рис V.U, а и б крыло заменяется одним присоединенным вихрем с постоянной Г или переменной Г (г) вдоль размаха циркуляцией. В схеме иа рис. V.II, о внхрсвая система состоит из присоединенного и двух свободных вихрей, т. е. образует один общий П-образный вихрь; эта модель крыла является весьма приближенной. В схеме, на рис. V.11, б, представляющей модель крыл i как несущей линии во всех точках присоединенного вихря, где меняется циркуля Пня, с пего сходят свободные вихри, образующие, если Г (г) — непрерывная фу ик ция, сплошную пелену свободных вихрей.
В схеме иа рис. VII, в крыло заменяется непрерывным присоединенным вихревым слоем с интенсивностью у (х, г), расположенным иа поверхности 5 крыла и плане, и сплошной пеленой сходящих с этой поверхности свободных вихрей это модель крыла как несущей поверхности.
При построении моделей, показанных на рис. V.II, б и в, предполагается, что при переходе через пелену свободных вихрей давление и вертикальные индуцировал ные скорости непрерывны а компоненты скорости вдоль размаха крыла, т е ог, терпят разрыв
154
Теория крыла, как несущей линии Расположим ось г вдоль размаха крыла Лф11Соединеиного вихря, ось х вдоль скорости набегающего потока v^.,, ось у напра-м вертикально вверх и начало координат примем посередине ра маха крыла J.\t рис VI 1.6). Плоская полубескопечпая пелена свободных вихрей вызывает район6 расположения присоединенного впхря при обтекании сечения крыла инду-® }роваиную скорость Vy V; (рис V. 12). В результате возникает скос потока па угол Если положить значения V. малыми, то а( = сь vv. Возникновение этого «гла приводит к уменьшению угла атаки сечения крыла, причем сс,= а — а,, и отклонению подъемной силы профиля на угол а, от вертикали. В итоге возникает проекция dRx = dR, этой силы на ось х, представляющая индуктивное сопротивление профиля Применяя теорему Жуковского и учитывая, что sinж cos«; ~ силу индуктивного сопротивления и подъемную силу крыла конечного размаха следует вычислять по формулам
IR
Rt = pt'oo [ г (*) а, <2)
-Z/2
I.2
= J Г(?)Л.
-7/2 )
(V.3I)
где
г/2
1 Г dr dz,
4л J dzt г — г,
-Ш
(V.32)
Для определения функции I (г) можно, используя формулу (V 14) и учитывая в ней скос потока aj, получить иитегродиффереицнальное уравнение
Г = n-j^c*b а, (г)
1,2
1 Г t/Г dzt
4ла„ J dzL 2 — Zx
(V.33)
где b (?) — хорды различных сечений крыла, а с* — I + 0,77ё (I — 0,бе) Решение этого уравнения можно искать в виде ряда
Г = 21о0. J] /1nsin«0, (V.34)
П=1
где cos 0 = —г/0,5/. Используя (V 34), можно уравнение (V 33) привести к виду
—у-n-|-sinO^ Лп sinnO ---------^-ajSinO. (V.35)
п—1
Ограничиваясь конечным числом Л' членов ряда и записывая его для соответству-Пощего числа точек по размаху крыла, это уравнение сводят к системе N алгебраических уравнений для определения коэффициентов /1П. Представлению циркуляции в виде ряда (V 34) соответствуют следующие расчетные зависимости
СО
VI л sinnO . „ , .
Су яМ1:
п 1
(V.36)
155
В cooibctctbiih с теорией несущей линии при данной значении С,, иавдсныцп индуктивное сопротивление будет у крыла с эллиптическим распределением нц 1(v ляцип вдоль размаха. У такого крыла, имеющего эллиптическую форму в n.t,1;|c
dCu _ 2ла . ,v
da 2 ф- л ’ ' лА ’ ’'
а угол скоса потока постоянен по его размаху п составляет а, = С/лА.
(V ЗЯ)
С помощью формул (V 37) н (V.38) можно для крыльев, близких по форме к эллшпи-ческпм, пересчитывав нх характеристики с одного размаха па другой.
Развитие теории несущей линии при использовании метода сращиваемых разложений позволило Ван-Дайку [171 уточнить соотношение для определения dC,t da эллиптического крыла.
da \ А П4 А1 А*
Теория несущей линии не дает возможности учесть влияние изменения а на момент А4г, а также получить распределение нагрузки по площади крыла Дтя А< 2 наблюдается существенное отклонение значений Су и С,, вычисленных и > этой теории, от экспериментальных данных.
Теория крыла, как несущей поверхности В теории несущей поверхности крыло заменяется непрерывным присоединенным вихревым слоем с интенсивностью У (х. z), распределен ним ио площади S его проекции в luaue Разность давления на нижней р и па верхней р+ стороне в данной точке поверхности
₽_ — ₽+= — (*. •?);
циркуляция в сю сечении Г = | у dx, а Ь*(г)
1,2 1/2
Г(г)
(V.39)
<Я dz, , -Г---------:—dz.
dz, z— zx
= J Ri =
<W.x = I <P- — P+) z dS: Мг = | (p, — p+) xdS. 5 J
Выполняя условие непротекання в точках плоской поверхности S, т. е.
v-------и а
и °* •
(V 4(
1 при
/ = () (V.4I)
получают сингулярное интегральное уравнение для определения интенсивности у (х, z) вихревого сдоя
1 f Т(*ь Z,) I х—х, 1
4- “77 TV 1 , =4-. dx, dz, — v'x. (¥.42)
| (X—Xjf 4-(z —Zj)4 1 1
Решение этого уравнения можно представши в виде ряда
ос се»
V (01- ti) А>п cte S,H «О, + Н/1;| sin Мц sin rtOt,
« i k=i n-l
(V.4.3)
где cos 0[ 2Z|//(x); cosex-----2x(/b (z); — постоянные коэффициенты.
Этот ряд обеспечивает обращение у в нуль па задней и боковых кромках крыла. Ограничиваясь числом членов k Аил X' и удовлетворяя уравнению (V.4I) в конечном числе A.V контрольных точек (точек коллокации), шчегральное уравнение сводят к системе решаемых па ЭВМ алгебраических уравнений, содержащих
156
йвесп ые коэффициенты Д,п. Потенциал вызванных скоростей в области вне крыла и вя.хрев°й пелены имеет вид
у
t!xi dzi
1*1. ?i)
Ч 4 т
И* хуН + У' + и — г,)2
| Весьма распространен при расчете гидродинамических характеристик крыльев ЬетоД. основанный на непосредственной замене несущей поверхности системой конечного числа расположенных на ней дискретных вихрен. Разработке эффект явных Kfi реализации этого метода способствовали работы С. М. Белоцерковского и его Кгдников [12, 14 [. В качестве дискретного принимается вихрь с циркуляцией Г{
Kic.V.13), состоящий из присоедп-Jiciijoro вихря с размахом и двух сходящих с него прямолинейных нолу-бссконечиых свободных вихрей. Заме няя рассматриваемою несущую поверх пасть 5 системой конечного числа таких вихрей со свободными вихрями, расположенными в плоскости xoz и вы но. няя в дискретных точках поверхности крыла условие пепротскання [см. [формулу (V.4I)|, задачу сводят к on редсдекию циркуляций Г,-этих вихрей.
Схема замены стреловидного крыла пнекретнымн вихрями показана на
bi/^n.
I 4U
Рис. V 1.3. Дискретный вихрь с циркуляцией Г i
Рис \ 14 Схема замены крыла дискретными вихрями.
рис.V.14. Полуразмах крыла разбивается иа А'полос шириной /, /.(2.V), а местная хорда b (?) па п панелей. В результате иа поверхности S образуется М '2nN площадок. Присоединенный вихрь с постоянной в пределах данной площадки циркуляцией 11 располагают па расстоянии 14 длины площадки вдоль оси хот ее передней кромки, а свободные вихри - вдоль продольных кромок площадок. Условие нспротекаиия (V 41) удовлетворяется в .4 контрольных точках, находящихся посередине размаха каждой площадки па расточник 3/4 длины ее or передней кромки (иа рисунке обозначены знаком «+»). При таком выборе контрольных точек обеспечивается конечное il в них ицдуцнроваииы.х вихрями скоростей и выполнение постулата Чаплыгина—Жуковского на задней кромке крыла.
Суммируя вертикальные индуцированные скорости vl/hj от каждого k го дискретного вихря в j и контрольной точке, согласно условию непротекания при у г- 0 ПОЛУЧИМ
м
V, v„ = — о а. (V 44)
В результате образуется система М алгебраических уравнений для определения Циркуляций Г, дискретных вихрей. Индснпроваииая скорость в плоскости у О
<V45)
157
от дискретного вихря, показанного на рнс. безразмерная скорость v® имеет вид
V 13, вычисляется но формуле (I
58);
„0 =________!______I £ sin X — V cos X + 1/cos X .
" 5 cos X-I-С Sin х[ /(£ + igxH-HI-t)s +
। C cos x — j sin X_+ । /cos x ] _ 1 [ ( ___g + tgx
Hs-tgxH + (i+QS 1 '-= L + ТЛЕ4-t&x)3 — (1 — £)« J
I ,4___________% —tgx______] ...
’+d ) (£-tgx)2+(i+o3 г
где E = 2x'7j; £ = 2г//,; X — местный угол стреловидности дискретного вихря.
Рис. V.15. Значения и прямоугольных крыльев конечного размаха, вычисленные но линейной теории, и (/) по формуле (V.77).
Подъемная сила вихря вычисляется, после определения Г;, по формуле RVi — м
~ а Д‘1Я всего крыла Ru -- рн^'^ Умножая значение /?„ на соот
i=I 1
ветствующие плечи и суммируя зти произведения, можно получить момент, действующий на крыло относительно соответствующей осн. Необходимые для обеспечения достаточной точности расчетов число панелей п и полос Л' зависит от К. Для крыльев, у которых 1 < ?. < 5, достаточно принимать л~ 5 и N= 15 20. У крыльев сложной формы в плане необходимое число делений возрастает. На рис. V.15 приведены рассчитанные С. М. Белоцерковским значения С® и для прямоугольных в плане крыльев конечного размаха. Значения гидроаэродниамнческих характеристик крыльев различной формы приведены в работах [12, 14]
158
g 2 НЕЛИНЕЙНАЯ ТЕОРИЯ КРЫЛА КОНЕЧНОГО РАЗМАХА
Экспериментальные данные свидетельствуют, что с уменьшением величины X в[1симост । Су (а) и тг (*х) отклоняются от линейных, соответствующих теориям 31гущей липни н несущей поверхности, в которых предполагалось, что углы скоса, у3’ванные вихревой системой крыла, малы. Отказ от этого предположения харак ® е для нелинейной теории крыла. Несмотря на большое число исследований in 34) разработку данной теории нельзя признать закопченной; к тому же области ппнмеиения схем, предложенных различными авторами, ограничены. В нелинейной Теории крыла малого удлинения можно выделить направления, основанные на замене крыла системой вихрей с неизвестной интенсивностью, а также на использовании циркуляционно-отрывной схемы обтекания.
В теориях первого направления исходят нз того, что при соблюдении безотрывного обтекания передней и задней кромок крыла сходящие с боковых и задней кро-
Рис. V. 16. Схема обтекания крыла по нелинейной теории;
= f (а, л) крыла конечного размаха.
мок свободные вихри ие остаются в плоскости крыла и образуют со скоростью шотока угол р, переменный по хорде крыла (рис. V. 16); этот угол должен определяться в процессе расчета крыла. В ряде теорий вводятся предположения, позволяющие упростить нахождение значений р.
В нелинейной теории, разработанной Н. Н. Поляковым и А. И. Пастуховым, тонкое прямоугольное крыло заменяется в потоке вихревым слоем, расположенным на поверхности S крыла, с интенсивностью
т
у (х, z) - Ло etg 4- £ yn/n sin ле, (V.47)
лм!
где cos в = —2x/ft. При надлежащем выборе функций ",'п (г) такое представление Функции у (х, г) обеспечивает соблюдение граничных условий на задней и боковых кромках пластины. Свободные вихри предполагаются расположенными вдоль скорости еа, т. е Р = 0. Коэффициенты ряда Ап определяют с помощью интегрального Уравнения, получаемого нз условия непротекания на поверхности крыла. Коэффициент подъемной силы по этой теории получают с помощью зависимости
Си = 2л (0,795 + 0,07?.) (Л , + 0,5/0, (V.48)
где Ао + 0,5/1 = f (а, А.) находят с помощью рнс. V 7. Коэффициент момента относительно передней кромки пластины
где к (а, X) и /0+ 0,5/2 ft (а- ?) показаны на рнс V 18 и V 19 В пределах л> 0,4 эта теории обеспечивает совпадение с экспериментом
159
Для расчета структуры обтекания крыльев и возникающих сил с учетом пелц, псЛных эффектов, таких как конечность углов атаки, индуцированных скир^сн-й переменность углов |3 и сворачиваемость пелены свободных вихрей находит прпХ1е1 пенне метод дискретных вихрей [ 13). Реализация его трудоемка и связана с нс к, ц, зоааннем последовательных приближений при определении истинной структуру
Рис. V.19 Зависимость Лй 4~ 0.5Л2 = /(а, ?.) крыла конечного размаха.
вихревой пелены. С помощью этого метода возможны расчеты обтекания крыльев как без отрыва, так и с отрывом потока на их передней кромке (рнс. V.20.I Коэффициенты Cv и ги., рассчитанные таким методом для тонких крыльев при I, соответствуют экспериментальным данным.
Полуэмпирнческая циркуляционно-отрывная теория крыла малого удлинения разработана К К. Федясвскнм Нелинейность гидроаэродииамнческнх характеристик крыла данная теория объясняет появлением поперечного отрывного обтекания со скоростью vw sin я боковых кромок крыла, вызывающего появление иа нем нор-мал! ной к поверхности S крыла дополнительной силы отрывной природы. Эта сила
160
а) У >
«.=J0
Pii . V.20. Структура вихревой пелены при безотрывном (и) обтекании прямоугольного крыла (X Г, а = 30°) и отрывном (б) обтекании треугольного крыла (А.
= 1.5. а = 20е).
Рис. V.2I Зависимость k «= [ (А) крыла малого удлинения.
П/р Я. И. Нойткунсхого. т. I 161
увадичивает Сх, Си и щг такого крыла за счет добавок к их значениям, вымпеле 1Н по линейной теории [24]. Согласно этой теории 41»
Сх =’ + + 2sin3a; Clf — т sin a 4-2 sin2 a cos a;
= '"гл . т. si" a + sil>2«. (V У,)
где Су — коэффициент вязкостного сопротивления профиля крыла, определен по формуле (11 20) второго раздела; С^л т и t т находят по линейной теорщ, с помощью графиков рис. V. 15; коэффициент k = f (/.) показан па рис. V.21
§ 28. ОБТЕКАНИЕ, ПЛОСКИХ РЕШЕТОК ПРОФИЛЕН
Совокупность идентичных профилен, расположенных одинаково по отношению к некоторой прямой, на равных расстояниях одни от другого, составляет бесконечную плоскую решетку. Эта прямая представляет ось решетки, а расстояние 1„ между соседними профилями — ее шаг (рнс. V.22). Совокупность профилей, образующих решетку, получается, например, при развертке па плоскость соосной цн.1Нидрите-ской поверхности, рассекающей лопасти гребного винта, пропеллерного насоса лопатки турбины и т. п.
Рнс. V.22 Решетка профилей.
Харчктсрным свойством плоской решетки является различие в величине и направлении скорости потока Cj далеко впереди н v2 далеко позади решетки, если циркуляция Г скорости вокруг ее профилей не равна пулю. Вследствие этого пло ская решетка может использоваться в качестве направляющего поток устройства. На профиле решетки при обтекании его установившимся потоком невязкой жидко сти возникает гидродинамическая реакция, определяемая по теореме Н. Е. Жу ковского для решетки. |7?| = (>есрГ, направленная перпендикулярно вектору оср vCp — (?i + В вязкой жидкости, помимо этой силы возникает сопротивление 162
шрП |Г'Г») Между компопешамн векторов скорости г2. г,.р а также нирку-и • вокруг профиля существуют следующие зависимости t,lv = r'2x = ccPx, 1>11( + Г/(2/р); v.,v v1(/+ Г//р, т е. г, у= v2, если Г=#0. Циркуляция Г
Впе.тслясгся с помощью постулата Чаплыгина—Жуковского
«^Простейшей схемой решетки служит бесконечный ряд вихрей с одинаковой пКудяиней Г. имитирующих присоединенные вихри профилей (рнс. V.23, о). \ * па'ктеристпческая Функция потока такой решетки в плоскости комплексного КсМСИНОГО z
(V-51)
где у- — n!ti>-
, , Г . sh иг W (z) == -т—- 1п
Рис. V.23. Решетка вихрей (а)
и пластин (6)
В случае обтекания решетки составленной из
В случае обтекания решетки составленной из плоских иластич, установленных под углом Р к оси х (рис V.23, б), задача обтекания может быть решена при использовании метода конформных отображений. Функция, преобразующая бесконечно-связанную область в плоскости z иа один рн.маиов лист миоголистиой области С, имеет вид
С—е‘2₽ ,п
(V.52J
С ее помощью устанавливается соответствие внешности круга единичного радиуса и внешности пластины, точки z = ±оо преобразуются в точки t — ±\, в которых расположены вихреисточникн с интенсивностью Г, Q и —Г, —<?, где Г — циркуляция вокруг пластин, a Q — объемный расход между соседними пластинами. При этом
1 / 1 4-(г 4-2/, cosa0 . „ . „ . 2/.sinae \
— ( cos р In , Т ‘ + 2 sin р arctg —1 /- ),
я \ r I -|- Ц — 2/1 cos do 1 r /j — I ) ’
z =
(V.53)
Ь____J
Гр я
где tg а0 = (Р — 1) tg р/(/2 -|- I). Для редких решеток I » 4tplnb. Циркуляция скорости вокруг пластины в составе такой решетки
4г'ер*рЛ Sin a* cos «о Гр= (/]+!) cos 0 где а" — угол между оср и осью у.
6»
(V.54)
163
Зависимость — I' /I л для плоских плисит, где — циркуляция вокруг аналогичной пластины в неограниченной жидкости, в функции от параметров шетки Р и tv.'b показана па рис. V.24 Как видно из рисунка, влияние решетки нож^ как увеличивать, так и уменьшать циркуляцию вокруг пластины. В случае часгод решетки, когда tpib мало, /j ~ I и
Кг, ® 2/,. n&cos р. (V ',5)
Для расчета обтекания решетки, состоящей нз профилей произвольной формы можно использовать либо методы, основанные на применении конформных отоо м!
Рис. V.24. Влияние параметров решетки иа циркуляцию вокруг пластни.
j v/фр dl + Vi cos ощ/ — L
женин [ал, yi j, лноо на сведении зада щ к решению интегрального уравнения |г-Ч).
Метод интегральных уравнений и. нова и на замене профиля в решетке вихревым слоем с неизвестной интенсив ностыо у (/), распределенным по его кон туру /; при этом у (/) равна скорости с( потока в точках поверхности кошууа Вдоль поверхности профиля выполняйся условие непротекання, а на его задней острой кромке — постулат Чаплыгина -Жуковского, г. е. ь>/ = 0. Характеристическая функция обтекания произвольного профиля в составе решетки имеет вид
w(*)=»cP* +
I Г ln slix(z —я) 1 2л/ .1 х
(V.5G) где IrfKi'djj | = t'j; z, — координаты точек поверхности профиля. Выполняя услов к-постоянства функции тока этого поток., вдоль поверхности профиля, учнтыв. соотношения между см. огр и Г также, что Г = J vt dl можно получить
I
интегральное уравнение Фредгольма пер вого рода относительно скорости в/:
Bicosai +~2f— j о/йЛ x = C, (V.57,.
где ядро уравнения
_ 1 ch2x(x—х,) —cos2x(y—yt) .
vP- in 4л 5Г *
x, у и x,, У1 — координаты точек контура профиля. Прн решении уравнение (V.57i удовлетворяют в Л' дискретных точках и заменяют системой алгебраических урав нений. Система уравнений содержит N — I значений (в задней кромке су (1) и постоянную С.
Но аналогии с расчетом обтекания профиля потоком неограниченной жидкости, можно свести задачу к решению интегрального уравнения Фредгольма второго рода вида (V.27), по с другим ядром
Л/______L f,, JL Г агс1Р 1 л _
2 2л J dl [ etlix(x—*!> J
I
«BJcosa1cos(/, x)4-v,sinaIcos(Z, у)+-^— [Р/Лсоз(/, у). (V58)
164
Методы решения этого уравнения связаны с рациональным пыбором переменной 'итерирования и coctimi в замене его системой алгебраических уравнений; они рассмотрены в работах Мартинсона, Якоба н др |61 ].
с 29. ТГОРИЯ HtCIАИИ0НАРН010 ДВИЖЕНИЯ КРЫЛА
Для изучения ряда вопросов гидромеханики судов требуется знание нестацио-
нарных гидродинамических характеристик крыла в различных случаях его движения. Примерами могут быть поступательные н угловые колебания, работа лопасти гребного впита в неоднородном потоке, движение вблизи искривленной границы
раздела сред, разгон из состояния покоя и ДР- Рассмотрим движение профиля в невязкой несжимаемой жидкости со скоростью поступательного движения vc =
-К-
с. iVr + К'с,, И С угловой скоростью W.
Величины vc и w будем считать неремеп-ными во времени. Начало связанной с профилем системы координат поместим в точку с (рнс. V.25). Если циркуляция вокруг [профиля Г изменяется в процессе его нестационарного движения, то за профилем [образуется нестационарный вихревой след; интенсивность вихрей этого следа
JT I <1Г
ds vr dl ’
Рнс. V.25. Системы осей координат.
где ds — элемент следа. Наличие нестационарного вихревого следа и есть
главная особенность обтекания про
фнля при его । естаипоиарном движении с переменной циркуляцией.
Полагая течение потенциальным, найдем выражение для гидродинамического давления. действующего в точках профиля Используем интеграл Лагранжа (II 10) и будем считать, что жидкость па бесконечности покоится. Тогда
<ю- Ар
1 p-dF
(V.59)
где <f и v — потенциал н скорость абсолютного возмущенного движения жидкости. Структурно потенциал скорости <р в подвижной системе координат может быть представлен в виде
ф = ислЧ1(х- У) + %<Г2 (*• !/) + «фа (х f/) + rq.4(*. y) + <Ps(*. У- 0- (V 60)
где член % учитывает влияние следа. Используя эту формулу для потенциала, можно с помощью выражения (V.59) получить
Р = Р« + Р[(%
"W) »х + (t^ - w.r) V„] -
P
1 dt
р (t'./h + %'i2 + ю«|.з -1- Гчц).
(V£l)
2
Суммарные силы, действующие на контур I профиля:
А = — j р dy - —ргс Г — рю | * + 4г f (°£ “ dy + t У I I
Р f f д Ф j
+ — j 2»^ dx р J dy; i i
j p dx = pi'c Г — рю j У d<{ + -g- j ( 2 — t'2 ) dx —
I l I
P f f d'v <
— — J dy — P J ~дГ
I I )
где
= -^T- + Tit'c,. + f'2% + <ГзШ + <р4Г; d(f =vxdx + vx dy
Первые слагаемые формул (V.62) представляют собой проекции силы Жуковскогс на оси связанной системы координат. Они соответствуют мгновенным значениям vCy, иСи и Г н выражают квазнстационарные составляющие сил. Вторые слагаемые силы, связанные только с вращением профиля; обозначим нх Хы и Ии. Они суш -ствуют и тогда, когда I’ — 0. В случае <рв = 0 эти силы выражаются через присое.и ценные массы.
г4 д w , г* 1 ч
Еслн воспользоваться представлением + <р4Г 4—, где <р,„ = =
^c/l’i 4*1’с„ф2 4~ мЧз. то части сил, связанные с д<рт/д1, можно записать в вид
х„ -- р j ~^п ^у--------------------^ii^cv — — ^-1зй;
i
У|[ = Р J —dx = -—A12tiPjc -- ^83W«
I
(V.63)
где л.ц = —p j tfidy и т. д. — присоединенные массы крыла. Таким образом, Х„
I
и Еи являются силами инерционной природы, определяемыми присоединенными массами и ускорениями. Эти силы существуют и в случае бесциркуляционного дви жения профиля
Члены <р4Г н <tys'dt определяются нестационарным вихревым следом за про филем, а также формой последнего. Обозначим соответствующие им силы X, и Предпоследние слагаемые в формулах (V.62) связаны с индукцией вихревого следа на профиле и дают компоненты силы
х« = ~2~ J [(^ - *£) аУ 4- ^xvv dx]; I
r«=4г J i(^ - *^)dx 2vxvydy] > i
вектор которой выражается формулой
Л = р j (Щ < Yn) dl
I
(V.64)
(V.65)
166
r,ccf — индуктивная скорость, вызываемая вихрями следа на профиле; уп — ннзен-5jiBiocTb иных вихрей, распределенных по контуру I профиля. Вели-
, ина Ri включает подсасывающую силу В случае стационарного движения крыла '-оиечного размаха Ri дает индуктивное сопротивление. Д я плас типы бесконечного размаха = 0.
г Таким образом, общие выражения для сил, действующих па профиль при не-cWunoHapi ом движении, могут быть записаны в виде
A Xjk -'и + 'ш +
У = jk 4- + Уы + Н + Г„, I
(V.C6)
Рис. V.26. Схема обтекания топкого профиля.
где три последних члена зависят от нестационарного следа. Формула для продольного момента Л12 имеет вид
Mz = Wft F ,W„ + Л1г. + .И,- + ,-И . (V.67)
Здесь Л(„ — момент, соответствующий мгновенным значениям циркуляции и параметров движения (без учета влияния следа); /М„ определяется присоединенными массами. Три последних члена зависят от влияния нестационарного следа, причем .Ир, представляет собой момент силы pej’’ (Г'—дополнительная циркуляция, которую надо наложить на профиль, чтобы удовлетворить постулату Чаилшнна— Жуковского при обтекании профиля потоком, создаваемым вихревым следом); Л1, и Л1Я аналогичны членам У, н У’,.
Тонкое крыло бесконечного размаха. Практическое определение давления н сил на профиле в нестационарном движении базируется обычно на той или иной вихревой .модели крыла. Наибольшее распространение получили две схемы Бирнбаума— Кюссиера и Кармана- Сирса Рассмотрим тонкий профиль с хордой Ь — 2а, обтекаемый ноюком со скоростью v^. Профиль имеет малый угол атаки а н совершает малые перемещения в поперечном направлении с частотой т.
Теория Бирнбаума—Кюсснера. Профиль заменяется системой вихрей (рис.V.26), расположенных параллельно размаху и имеющих интенсивность т) (х, /). Поскольку интенсивность т) изменяется во времени, то в неподвижной точке ,4, около которой проходит элементарный вихрь т] (*', /'), изменивший в момент времени С свою интенсивность на Дт[, в силу теоремы Томсона образуется элементарный свободный вихрь Ле =----Д/. Предполагается, что свободные вихри в дальнейшем остаются в тех
точках пространства, где они образовались. Так как свободные вихри начали образовываться в точке Л с момента времени 10, когда через нее проходил носик профиля ( -а), то к моменту времени I, когда точке .4 будет соответствовать координата я профиля интенсивность суммарного свободного вихря в этой точке будет 8 (л, /)
I
г—j I -<//'. Так как профиль смещается относительно свободного вихря
jf jp* dx'
t0 скоростью то х'—x—vx(t'—Z); Г — t------------------------; dt'=——;
eo ^co
167
Sc
. I f d I , . x —x' \ , r.
efx, /) =-----| —— H (x. t- ------------I dx . Интенсивность вихрен
^oo J * \ /
—a
профиля в момент времени t определяется интегрирован нем по всей хорде профиля.
т'й- -5Г J ТГ’ (’’ ^-)м'
—а
где с, — абсцисса вихря в следе.
Для определения интенсивности у вихрей на хорде, так же, как и в случае стационарного движения, используется условие иелротекаиия, т е. равенство нулю суммы нормальных составляющих индуктивных скоростей и скорости набегающего потока в точках профиля. Это условие приводит к интегральному уравнению относительно у = т] + 8:
Решение этого уравнения как н других аналогичных уравнений теории несущей поверхности, должно удовлетворять определенным краевым условиям [58, 1081. В частности, 1] должно обращаться в нуль на задней кромке, что обеспечивав выполнение постулата Чаплыгина—Жуковского.
Уравнение (V 68) имеет решение в замкнутом виде для случая, когда величина изменяется по гармоническому закону: = Reel (x)e,v/l. Использо-
Л . . п. ZI
вав замену переменных х.я = cose, xva — cost» и представив q в виде тригонометрического ряда
,п. п I — cos 0 , л ап , „
11 (G) = 2я« • sin» + 4 2j ~ °’
n=i
Кюсснер получил решение в виде л
Ч(°1 = j 11—е + С (Sh) (I + cosв)] 1 6----
и
siu 0 Z S11 Г 1 — cos (г + 0) 1 )
~ COS 0 -С~5 8 — МП * [ 1-005(8-0/J j V~n <8> (,е- (V’69>
Здесь С (Sh) = j( . +(^ и. (S||)' — функция Теодорсеиа. где и Н|=> -
функции Ганкеля второго рода, Sil — число Струхаля. Значения подъем-
ной силы н момента профиля определяют по формулам
а а
Rv —j t)dx. И, = —ргм | 1](х, t)xdx
—а —а
Первая из этих формул является обобщением теоремы Жуковского на случай нсуста-новнвшегося движения топкого профиля Характерная особенность схемы Бирн баума заключается в том, что подъемная сила н момент зависят только от pact ре-делен ня вихрей 1), связанных с профилем
Теория Кармана и Сирса. Предполагается, что потная вихревая интенсивность на профиле у состоит из двух слагаемых у Ye+Vi- Интенсивность Yn называется квазистацнонариой и соответствует значению угла атаки в каждый рассматриваемый момент времени (без учета вихревого следа). Интенсивность у, обусловлена наличием следа.
168
В силу теоремы Томсона имеется условие
J у0(х, J Ti(-v. O^+Jvc(5. (>‘£ =°-—о a a
т где Ye (S, <). кяк 11 Pa,lce> интенсивность вихрей следа. Подъемная сила сое юнг н । трех слагаемых:
^ = ^+^1+^4- (V-70>
Здесь R, — —РЧ»1'о — подъемная сила, вычисляемая по квазнстационарному а а
значению циркуляции. Го ~ j у (х, 0<fx. Величина Ryl == р--- J у0 (х, t)xdx
—а —а
определяется присоединенными пассами и ускорением, а — влиянием нестационарного вихревого следа:
ОО
*у.=-j а
Т<-(й, ГЕ2 —о2
Для случая гармонических колебаний профиля формула (V 70) приводится к виду
а
Rv = — ГЦ» j [c(Sli| — iSh-i- у0(х, t) dx,
—a
где C (Sh) — функция Теодорсена.
А И. Некрасовым [58] сопоставлены результаты, полученные на основе схем Кармана—Сирса и Бирнбаума Кюсснера. "Показано, в частности, что
Го + Г, = Г„ + Ге (V.71)
и что формулы для сил и моментов приводятся к одному и тому же виду.
Укажем иную форму выражений для сил, когда составляющие разделены в зависимости от точки нх приложения на профиле:
/?в = R,Jv + RUll + RVh.
(V.72)
Слагаемое RUl, — 2пС (Sh) ba —включает силу Жуковского н силу, обусловленное следом. Она приложена в переднем фикусе, т. е. па хорды от носика. Через а обозначен мгновенный угол атаки в этой точке (он может изменяться по ni‘b- d2y
хорде при сложном движении) (.ила /?Вц = —определяется присоединенной массой и ускорением d^yidl2 в середине хорды, где и приложена. Возникно-
вение силы R = tr^v^ обусловлено угловой скоростью со; она приложена h 4
в заднем фокусе (а 4 хорды от иоенка). Кроме суммы указанных сил на профиль
г „ пр u dl£>
будет действовать момент М, = —Ь* .
Izo al
Тонкое крыло конечного размаха. Рассмотрим прямоугольную пластину конечною размаха, считая циркуляцию присоединенных вихрен постоянной по размаху. Тогда модель пластины будет состоять из П образных вихрен, свободные части которых сходят с торцов крыла. Если использовать схему Бирнбаума, то при изме нении интенсивности связанных с крылом П образных вихрей будут образовываться свободные П образные вихри, смещающиеся по потоку со скоростью
169
Условие иепротекаипя в продольном сечении крыла имеет вид
I Г Л'т (*./),, I 7 K.Yc (ъ- О
2л J х,-х dx+ 2л J х, —g ^ + ^(*1. Л =ve>n(xl, /), (V.73j —а а
Коэффициенты Л' и Кг в этой формуле отражают конечность размаха попереч, х присоединенных и поперечных свободных вихрей, член е,п даст нормальную сое
Рис. V.27. Вихревая модель крыла конечного размаха, изменение циркуляции Побразпых вихрен и их положение в различные моменты времени.
ваяющую индуктивной скорости от свободных продольных вихрен. Для средней по размаху' продольного сечения крыла
Последнее выражение соответствует случаю гармонических колебаний >|
Reel [»)*e,v,J. В случае переменной по размаху циркуляции свободные вихри будут сходить е крыла также по всему размаху, и в формуле для vin величину з]* следует заменить на о>)*/е>д, поскольку поперечные и продольные свободные вихри в каждый момент времени должны образовывать замкнутую систему. Кроме того, vin будет зависеть от поперечной координаты г. Решение основного интегрального уравнения (V.73) топкого крыла конечного размаха можно получить в квадратурах методом последовательных приближений, приняв ряд упрощающих предположений.
Схема тонкого крыла с переменной циркуляцией по размаху наглядно интерпретируется как распределение по площади крыда элементарных Побразпых вихрей. Рис V 27 иллюстрирует эту схему в варианте Бирнбаума. Такое представление удобно при форме крыла в плайе, отличной от прямоуго 1ьной В этом случае решс-170
основного интегрального уравнения выполняется численными методами с соблю-1,ие.,см необходимых краевых условий.
ДеН*профиль конечной толщины. Если необходимо рассмотреть нестационарное Ш. ₽кание профиля с учетом телесности, он заменяется вихрями интенсивностью
Л, распределенными по всему его контуру. Следуя схеме Бирнбаума, предноло-’1 I что при изменении интенсивности г) в точках пространства, мимо которы х эки"
Рис. V.28 Положение связанных и свободных вихрей в различные мо-
движется крыло, образуются свободные вихри Ле —-------- Лг (рис. V 28). Эти вихри,
обогнув профиль, пополняют вихревой след, не изменяя далее своего положения я пространстве. Конфигурацию следа, из условия его плавного схода с контура, можно рассматривать как нулевую линию тока в стационарном движении.
На основе рассуждений, аналогичных приведенным выше для пластины, полу-
чим следующее интегральное уравнение:
ц(8, /) + е(з. О r(S. S,)
I- , 1 [ Yc (£• Л
l’~n(sl- ')• (V-741
Здесь s, Е, — координаты вихрей контура и меда; Si координата точки, где вы полияется условие непротскапия; г, г, — расстояния между вихрями контура (следа) и точками Sj
171
В случае гармонических колебаний
voofI — Reel [о* (s ) e ]; q (s. f) Reel [if (s)
Решение исходною уравнения после сокращения па множители е"‘ может бигн получено численными методами, нспользуехилт в задачах о стационарном ;1ниж< пии. Распредйлеиие давления находя! с помощью интеграла Лагранжа.
Рис V 29. Относительный коэффициент подъемной силы крыльев различного удлинения при движении над взволнованной поверхностью щ = : ф —фазо
вый угол Сц относительно профиля волны, h — текущая высота над границей, Sli — w.b'v (<!> — кажущаяся частота волны».
n w ' К J
Движение над взволнованной поверхностью раздела Влияние плоской недефор-мнруемон границы раздела при нестационарном движении крыла моделируется, как и в стационарных задачах, зеркально отображенной системой вихревых особен иостсй, заменяющих реальное крыло Если крыло движется над взволнованной поверхностью моря, то его характеристики будут иестацноиарнцми даже в случае прямолинейного равномерного движения крыла с постоянным углом атаки. К граничным условиям на поверхности крыла необходимо добавить условие иепротека-172
Рис. V.30. Коэффициенты гидродинамических производных подь- Рис. V.3I. Коэффициенты гидродинамических производных проемной силы крыла бесконечного размаха в зависимости от числа дольного момента крыла бесконечного размаха в зависимости Струхаля (Sh = ыЬ/ию). от числа Струхаля (Sh -
173
Рис. V 32. Сосгавляюпще^коэффициснтов гидродинамических про- Рис V.33. Составляющие коэффициентов гидродинами-
изводных подъемной силы крыла бесконечного размаха в зависи- ческнх производных продольного моменте крыла веско-
мости от числа Струхаля; С’ = + С'у^ + . печного размаха в зависимости от числа Струхаля; mrf _=
174
табл и ц а VI. Гидродинамические х Кричного звлинения при малых числах арлктсристию Sh = мЬ. прямоугольных крыльев
1 У Л'|
к ----- ! 0,25 0,4194 0.1759 0,1759 —0.0712 -0,0279
» 0,5 0,8271 0.3126 0,3126 - 0.1101 —0,0558
1.0 1,5547 0,5071 0,507! —0,1351 —0,1112
1 > 2,1410 0,6150 0,6450 - 0.1349 —0,1646
Г 2.5 2,9970 0,6345 0,8345 О 1194 —0.2611
4,1350 1,0640 1,0840 —0.0839 — 0,4,392
L 10 5,0220 1,2600 1.2800 —0,0484 -0,6354
са тЛ £<bz toz /л /мсиА>
у Z и
I 0,25 0.3495 0,0022 0.0022 - 0,0186 -0.2001
0.5 0,6050 0,0027 0,0027 0,0299 —0,1940
1.0 0.8565 —0,0131 —0.0134 0,0431 —0.1757
1.5 0,6675 —0,0566 —0,0566 - 0,0585 —0.1571
2,5 0 5012 —0,1915 —0,1945 —0,0971 —0,1225
5 —0,9656 -0,5947 —0,5947 0,1969 —0,0591
10 —3,3840 -1.2060 — ,2060 —0,3496 0.0001
нпя на искривленной поверхности раздела S(l, которую можно в первом приближении считать недеформпруемой:
(V.75)
(где — нормальная к поверхности раздела составляющая скорости, обусловленной наличием крыла, включая его нестационарный след. Условие (V.75) можно выполнить, распределяя простой слой источников Oi (Зр) по границе раздела. Для определения ot служит интегральное уравнение
01 . If cos (л, г) „ /с .
+ —- | <>,----------------dS (V.76)
где I —- расстояние между источниками и точками нл крыле Решая это уравнение совместно с уравнением Инга (V 73) непротскапня ил поверхности крыла (с учетом индуктивной скорости от зеркально отображенной системы), можно получить рас Шраделетпге вихревой плотности по поверхности крыла н его гидродинамические характеристики.
Па рис. V.29 показаны результаты расчетов М. Н. Аввакумова по приведенной схеме. Они иллюстрируют влияние параметров волн иа амплитуду и фазу коэф фнцнента подъемной силы крыльев различного удлинения
175
Практическое использование результатов теории нестационарною лвнямщ. крыла обычно базируется на представлении [см. формулы (V. 12)| его харлкгерцСТ|* в виде линейной части разложения гидродинамических сил и моментов в ри , кинематическим параметрам движения. Многочисленные расчеты этих коэфф. П| ентов выполнены С. М. Белоцерковским и его сотрудниками [14] Зависим.» Т(1 коэффициентов гидродинамических производных от числа Струхаля для тонкого крыла бесконечного размаха приведена на рис. V.30 и V.31. Рис. V.32 н V.33 и ,-К) стрируют влияние числа Струхаля на составляющие подъемной силы и момента _ квазистанионарную, инерционную и обусловленную вихревым следом. |]а рис. V.30—V.33 ось вращения и начало координат расположены на середине хорды. Влияние плоской границы раздела показано на рнс. V.34.
Коэффициенты гидродинамических производных при малых числах Струха. я, соответствующие прямоугольным крыльям различного удлинения, приведены в табл. V.I. /Для прямоугольных крыльев весьма малого удлинения и при на,-числах Струхаля коэффициенты гидродинамических производных выражаются следующими формулами.
С* = жА/2; С* = л//2; С" -- эй/4; С" = О
/п* — лл/4; т* = 0; гл“ = — лЛ/8; тп“ = —л?./21
Все эти данные соответствуют положению начала координат на середине хорды
Приведенные выше примеры решения нестационарных задач базировались на вихревых моделях крыла. Распространены также, особенно за рубежом, схемы с использованием других гидродинамических особенностей, например диполей [101
Рнс. V 34 Коэффициенты гидродинамических производных крыльев различного удлинения над плоским экраном (/) н под свободной поверхностью (//), h — hlb — безразмерное расстояние от поверхности разделав
176
J
Продолж. рис V.34 (?. 5),
177
Глава \’j
КАВИ1АЦия
§ 30. ПРИРОДА КЛВИ1АЦИИ И ЕЕ ВИДЫ
Возникновение кавитации связано с появлением разрывов сплошности жгдКо стн В местах нарушения сплошности появляются полости (каверны), занолиг. ц14е парами жидкости и газами Каверны возникают при понижении давления в жн/.ьц. сти до некоторого предела или при ее нагревании. Они могут также возпнкн\1ь вследствие выделения газов каким-либо газообразующнм источником в прост, «ц. ство, заполненное жидкостью, или же при иодаче газа извне (например, при под и,д. нам газовыхлопе на судах).
Кавитация судовых конструкций приводит в большинстве случаев к отрнца. тельным явлениям: например, снижению коэффициента полезного действия дни жителей, их эрозии снижению подъемной силы н увеличению гидродииамичесю го сопротивления рулей и подводных крыльев, повышению вибрации корпуса судна вследствие кавитации гребных вингов, возникновению кавитационного шума и т н. Кавитация, создаваемая искусственно путем подачи газа извне к поверхности кор. пуса судна или выступающих частей, может быть пснользопаиа для получения положительных эффектов: например, для снижения гидродинамического сопротивления судов, управления подъемной силой подводных крыльев и т. п Ниже рассмв-трепы процессы возникновения и развития так называемой гидродинамической кавитации, обусловленной понижением давления в жидкости при обтекании раз личных тел.
В чистых жидкостях связь между молекулами является настолько прими т что для ее разрыва согласно теоретическим данным необходимо прикладывать р, с-тягиваютне напряжения порядка нескольких десятков тысяч ньютонов ил квадратный сантиметр. В большинстве же практически важных случаев разрыв часто возни каст даже при положительных значениях давления близких к значениям давления ее насыщенных паров. Основная причина большого снижения прочности Ж1 т-кости — наличие в пен перастворенных газов.
Газовые включения при рассмотрении кавитационных процессов называют ят рами кавитаипп Если предположить, что ядра имеют форму сферических газовых пузырьков, то их радиус оценивается величиной порядка 10“’—10 * м. Ядра в потоке кавитационных и гидродинамических труб могут быть значительно больших р. меров.
Ядра кавитации под действием сил, обусловленных давлением заключенного в них газа, поверхностным натяжением и статическим давлением в потоке, могу находиться в состоянии равновесия и перемещаться вместе с частицами жидкосп Попаи же в зону пониженного давления, они начинают увеличиваться в размерах
1хли давление понижается сравнительно медленно, то объем газового пузырька (ядра) растет также медленно за счет его расширения под действием пониженно! давления и диффузии газа внутрь пузырька из окружающей жидкости Такое явле ние принято называть газовой кавитацией
При быстром и большом понижении давления устойчивое равновесие пузырька может нарушиться. Тогда он будет расширяться очень быстро, «взрывоподобио» достигая максимальной величины за время порядка К) а с. Вследствие медленного развития диффузии за это время внутрь пузырька попадет лишь незначительное количество газа из окружающей жидкости, и каверна, достигшая максимального размера, будет заполнена в исшитом паром жидкости В процессе развития кави тации в потоке, обтекающем твердые тела, возможны оба отмеченные выше случая роста пузырьков нз ядер.
Для характеристики степени развития кавитации используют безразмерный параметр — число кавитации
Рсо Ей-, i4».'2 ’
(VI и
178
л rt нр соответственно статическое давление в невозмутенном потоке и нско-tr де / ь
Кде характерное давление; р — плотность жидкости; — скорость певозмущен-Кго потоки.
Кдк следует из формулы (VI.I). число Kainiiaiuin можно изменять за счет нзмс-
iiciiHh ПРИ постоянном значении рм или измеч синя при постоянном i>W1. а । е временного изменения обоих параметров. В лабораторных
делениях при опытах в гидродинамических н кавитационных трубах низкие значе-йяя о достигаются в основном уменьшением по сравнению с атмосферным да
влением.
| Если под Р|.; подразумевать напряжение, характеризующее кавитационную прочность жидкости, то число кавитации будет о|ража1ь условия в невозмешенном потоке (ста 1 ическое давление н скорость), при которых возникает кавитация. Соот-^Кгвующес число кавитации называют критическим. При рассмотрении так илзы-
! Рис VI 1 Зона локального отрыва потока вблти но, нка профиля.
Рис \ I 2. Присоединенная капер-па в носовой оконечности iicMiyie.ia.
ваемых развитых кавитационных течений в качестве р1; принимают давление в каверне. которое в большинстве случаев имеет порядок давления насыщенных парив жидкости (см тайл. 1.1).
L Характер возникновения н развитой кавитации существенно зависит от наличия в потоке ядер кавитации и от распределения скорости и давления в потоке, обтекающем ело. Возникающие разные виды кавитации различаются структурой границ каве| и и гидродинамическим воздействием каверн па течение. Ниже рассмотрены картины кавитационного обтекания тел и трех случаях, а именно, когда в докавн-пционном режиме иа поверхности тела имеются зоны локального отрыва погрзинч-пого слоя, зоны развитого отрыва и когда отрывов пограничного слоя нет. Эти случаи позволяю) составить представление практически о всех видах кавитации при обтекании тел.
I С возникновением зон локального отрыва ио1ршшчпого слоя па практике чаще всси приходится встречаться при обтекании тонких крыльев с малыми углами атаки, тел. имеющих участки с сильным изменением кривизны поверхности вдоль лпьиД тока и т п П результате отрыва пограничного слоя и последующего его пписоедн leniiH к поверхности тела образуются так называемые отрывные «пузыри*, лока 1нзованныс в зонах небольшой протяженности Внутри пузыря находится вихрь, положение которого по отношению к поверхности тела остается с течением времени практически неизменным.
I Поскольку вблизи осп вихря давление оказывается пониженным по сравнению с другими областями течения, то кави1ация чаще всего возникает именно там вследствие роста ядер кавитации до видимых глазом размеров На рнс. VI.I схематически показана носовая чисть профиля крыла и зона локального отрыва вблизи его носика Сечение кавитационных пузырьков изображено в виде темных точек. По мерс понижения числа кавитации давление в зоне отрыва понижается, объем кавитационных пузырьков увеличивается, и в некоторый момент они сливаются в единую каверну, передняя часть границы которой присоединяется к телу, а в ее хвосто-нои чести образуется возвратная струйка Такая каверна называется присоединенной. На рис. VI 2 схематически показана присоединенная каверна, образовавшаяся "а п щутелс со сферической головкой. При дальнейшем уменьшении числа кавн-Тациц размеры каверны увеличиваются, а каннiанионное течение до некоторого Моме па качественных изменений не претерпевает.
j При некоторых значениях чисел кавитации течение может приобретать сугубо нестационарный характер Каверна начинает периодически разрушаться; от псе
179
отделяются большие пузыри, соизмеримые с самой каверной Па крыльях такие режимы наблюдаются при длине каверн, равной приблизительно половине хорды На неиесущнх телах указанные режимы существенно зависят от формы тел. Но к ц том и в другом случае сугубо нестационарные режимы наблюдаются при так пнзыпае Moil частичной кавитации, т е. при такой длине каверн, когда хвостовая часть нх замыкается в пределах тела. При наступлении суперкавитации, характеризую. ЩСЙСЯ замыканием хвоста каверны вне тела вниз по потоку, вновь наступает сравни тельио стационарный режим течения.
Развитие каптан пн в свободных вихрях крыла конечного размаха в начальных стадиях происходит так же, как в зонах локального отрыва iioipaiiHMiioro с л фи, т. е. путем роста пузырьков в центрах вихрей. В последующих стадиях пузырьки слипаются в единую каверну, имеющую поперечное сечение, близкое к поперечному сечению кругового цилиндра Каверна простирается от конца крыла вниз по потоке При этом головная часть се может замыкаться непосредственно па крыле пли же находиться на некотором расстоянии от его конца (рнс. VI.3). По мере понижения числа кавитации диаметр каверны возрастает.
Рнс. VI .3. Кавитация в свободных вихрях крыла конечного размаха
I каверна. 2 крыло.
В случае развитого отрыва пограничного слоя, который наблюдается прн обтс каипн таких тел. как диск, тиар, конус образуются вихри. Они сносятся вниз но потоку, образуя вихревой след. Ядра кавитации в потоке вырастают до видимых глазом размеров в центральных областях указанных вихрей, где давление понижен По мере уменьшения числа кавитации общий гЛъеч газовых пузырьков в зоне отрыва пограничного слоя и вихревого следа за телом увелнчнпается до тех нор. пока не образуется единая присоединенная каверна
В случае обтекания тел с плавным распределением давления. когда в докавь тлционпом режиме нет отрыва пограничного слоя, кавитация может возникать н развиваться двояким образом, в зависимости от размера и количества ядер кавитации, содержащихся в набегающем потоке.
Если в набегающем на тело потоке нет достаточно крупных ядер кавитации. то в докавигационном режиме на поверхности тела может существовать отрицательное давление, достигающее иногда больших значений по абсолютной величине. В этом случае при некотором значении числа кавитации возникает сразу присоединенная каверна значительного размера При повышении числа кавитации ина внезапно исчезает Таким образом, наблюдается кавитационное течение со скачкообразным процессом возникновения и исчезновения присоединенной каверны.
Если в потоке имеются достаточно крупные ядра кавитации, то при режимах течения, предшествующих возникновению присоединенной каверны, может появиться так называемая пузырьковая кавитация Начальная ее стадия характеризуется возникновением вблизи поверхности тела в области минимума давления кавитационных пузырьков приблизительно сферической формы, вырастающих за очень короткое время. Пузырьки сносятся потоком, обтекающим тело, в область повышен кого давления, где схлопываются, производя характерный шум. По мере уменьшения числа кавитации количество кавитационных пузырьков вблизи поверхности тела увеличивается. На рис VI 4 показаны кавитационные иузырькн вблизи поверхности крыла для достаточно глубокой стадии пузырьковой кивитацни Прн некотором значении числа канитацип возникает присоединенная каверна; опа не всегда хорошо просматривается сквозь слой воды, заполненный каши апнойными пузырьками, которые образуются вверх по потоку от головной части этой каверны.
180
«рп дальнейшем снижении числа кавитации размеры присоединен ной каверны ра-Кт. а область, занятии пузырьками, уменьшается до тех пор, пока не исчезнет совсем , ,
Г В процессе обтекания тел с плавными обводами при достаточно больших зна-чеИнях чисел Re первые вспышки пузырьковой кавитации иногда наблюдаются „ зоне перехода ламинарного пограничного слоя в турбулентный
' Рассмотренные выше раз; ичные случаи кавитационного обтекания тел позволяют вИде. нть четыре основных вида кавитации:
I) кавитация в вихрях;
Рис VI.4. Кавитационные пузырьки вблизи поверхности крыла.
| 2) кавитационные течения с присоединенной каверной, которые в дальнейшем
будут называться развитыми;
Г 3) нестационарные кавитационные течения с периодическими разрушениями границы каверны;
4) пузырьковая кавитация
Физическая картина возникновения кавитации в вихрях ясна н описана выше. Однако надежных методов определении критического числа кавитации, характерн-зВпщеги момент ее возникновения, пока нет.
В настоящее время разработана математическая модель так называемой «ндеаль ной, кавитации, удовлетворительно отображающий развитые кавитационные течения Указанная модель, а также основанные на ней расчетные методы приведены В§ 31. Методов расчета нестационарных кавитационных течений с периодическими разрушениями границы каверны пока нет Однако для большого числа практически Важных случаев можно опрегелить расчетным путем значения чисел кавитации, йрн которых образуются сугубо нестационарные каст анионные течения в случае Стационарного набегающего потока. Указанные течения возникают вследствие раз-Pyuiei ня границ каверп развитой кавитации на режимах, когда последняя оказывается мало устойчивой в целом, т. е. когда малым изменениям (возмущениям) числа витацнн соответствуют большие изменения геометрических параметров каверны. ₽ги режимы можно установить в результате анализа расчетной зависимости от числа
181
кавитации длины каверны, поскольку она наиболее чувствительна к изменения», числа кавитации по сравнению с другими ее геометрическими характеристика^, В качестве примера на рис VI.5 приведена указанная зависимость для профЦл‘ в виде плоской пластины, справедливая для малых углов атакн. По осн ордиц'Л отложены значения длины каверны в дадя» длины пластины, а по оси абсцисс —- * пня отношения угла атаки к числу каВцТ~ ции. "г-------------------------------------------- -------------- ----------"
зиаче.
Точка пересечения штриховой лш|(||)
Рис VI.5. Зависимость относительной длины каверны I = 1,,/Ь от числа кавитации для плоской пластины.
Рис. V1.6. Схем» течения в OKpeci пости точки отрыва границы капер цы.
с осью абсцисс соответствует значению числа кавитации, при котором каверна разрушается. В действительности режиму разрушения соответствует некотор и< диапазон изменения чисел кавитаиин, лежащих слева и справа от точки пересечения
Нестационарные кавитационные течения наблюдаются также при обтекании л с развитой зоной отрыва пограничного слоя, когда кавитация первоначально возникает в вихрях. В этом случае существуют переходные режимы от вихревой канита ции к развитой. Они характеризуются короткими кавернами, границы к. > рых периодически разрушаются мощными возвратными струйками, образующимися в их хвостовых частях. Механизм разрушения каверн ясен, ио расчетные методы опреде. > пня диапазона чисел кавитации, характерных для указанных режимов, пока не созданы.
Возникновение пузырьковой кавитации связано с потерей устойчивости ядрами кавитации и последующим быстрым ростом об| зовавшихся из них кавитационных пузырь ков Для потери устойчивости необходимо, чтобы ядро попало в область понижении! о давления и находилось там некоторое врем: Чем больше объем ядра, тем при больш м давлении оно теряет устойчивость Для in терц устойчивости мелкими яд амн необх димы более низкие значения давления, л лаже отрицательные, иногда большие п<> абсолютному значению Возник овеиие отри нательного давления невозможно объяснить идеальной кавитации, согласно которой в точ
ках отрыва । раницы каверны от тела совпадают касательные к поверхности тела i границе каверны, а в каверне дацаеиие имеет постоянное значение и достигает своего минимума. Последнее допущение носит название принципа Бриллюэна и елх жнт для определения положения точек отрыва границы каверны при обтекании тел с плавными обводами |1&].
Рис. VI.7 Распределение коэффициента даалеиня вдоль поверхности эллипсоида вращения
с помощью общепринятой модели
182
Л действительности вследствие влияния капиллярности и вязкости жидкости Иптина течения в окрестности точек отрыва имеет вид, схематически показанный рис VI.6 Утолщенной линией изображен контур тела, гонкой — передняя "'Ll, границы каверны. Касательные к границе каверны и контуру тела в точке 43Luua составляют угол, равный краевому. Величина последнего зависит от смачн-Ьлмостп тела на границе раздела грех фаз — жидкой, газообразной и твердой. |Е£гсДН головной части границы каверны образуется зона вязкою отрыва которая г рисунке заштрихована. Как показывают расчеты и опыты, такая картина тече-111 я u окрестности головной части каверны криво нт к смешению точек отрыва се "паиицы вниз по потоку по сравнению с теоретическими значениями, полученными ].д основании принципа Бриллюэна. При этом минимум давления будет находиться „с в каверне, а га теле впереди точек отрыва. Важным следствием указанной картины Кепи* является запаздывание возникновения присоединенной каверны но сравие-Н| ю с предсказаниями, основанными иа модели идеальной кавитации, а также воз-можпость существования на теле областей с отрицательными значениями давления, чг,> обеспечивает условия для возникновения пузырьковой кавитации.
На рис VI.7 приведена кривая изменения коэффициента давления иа поверхности эллипсоида вращения, обтекаемою в направлении большой оси. Соотношение осей 2:1. краевой угол— 180° (он соответствует металлу, смачиваемому водой). По ос1 отложено расстояние от передней критической точки в долях длины
э.тлйпсонда. по оси ординат — значения коэффициента давления р. На участке эллипсоида, соответствующем каверне, давление, а также р постоянны. Положение точек отрыва определено расчетом [51 для числа Вебера We [см. формулу (111.51)1, равною 10-6. Как показывают расчеты и опытные данные, с уменьшением числа We. иКюженис точек отрыва приближается к расчетному, определенному с использованием принципа Бриллюэна и модели идеальной кавитации, а диапазон значений чисел кавитации, при которых возникает пузырьковая форма кавитации, уменьшается
§ 31. РАСЧЕТ РАЗВИТОГО КАВИТАЦИОННОГО
ОБТЕКАНИЯ ТЕЛ
В большинстве случаен для расчета обтекания тел установившимся потоком в режиме развитой кавитации используется модель так называемой идеальной кавитации (151, которая удовлетворительно соответствует реальному явлению, когда точки отрыва границы каверны фиксированы Они обычно совпадают с точками разрыва касательной к поверхности тела При рассмотрении обтекания гладких тел также наблюдается удовлетворительное согласование опыта и расчета, если положение точек отрыва границ каверны определять не с помощью принципа Бриллюэна, а каким-либо иным путем, например из опыта или расчетом [51 с учетом влияния вжкостн и капп тлярпости.
В основу модели идеальной кавитации положены следующие допущения: жидкость невесомая, невязкая, несжимаемая, i раницы каверны непроницаемы, течение вне тела и каверны потенциально, давление в каверне постоянно. При выполнении последнего условия невозможно в общем случае построить замкнутую каверну конечных размеров со стационарными границами, поэтому прибегают к схематизации течения в хвосте каверны, которая выражается в замене реальною нестационарного течения стационарным
г К настоящему времени предложено значительное количество схем плоских кавитационных течении Подробные сведения о них можно получить в монографиях П5, 28. 32. 61, 76] На рис VI 8 приведены схемы Эфроса — Гнльбарга, Рябухин кого, Жуковского—Рошко. Кузнецова. Тулина. В схеме иа рис. VI.8, в ^Bocmtiirt части каверны имеется возвратная струйка. На рис VI 8, в и г гра 11 чы каверны замыкаются иа чве параллельные пластинки уходящие в бсекоисч »<кть. На рис VI.8, <) в точках смыка! ия хвостовой части границы каверны с внешним потоком помещены особенности |76] С некоторыми коррективами часть схем «ожет быть использована при рассмотрении осесимметричных п трехмерных кавн тациониых течений
^Решение задачи о кавитационном обтекли ih тела заключается в определении °рмы каверны и поля скоростей в жидкости. В силу допущения о иотеиииаль-
183
иости тс'1? ши лектор скора?тн вне каверны н тела luicfl ср— нсиснцнэлом скорости
будет определяться фМ1к
u^grad'i'. (V| 2j
11отенццал удовлетворяет уравнению Лапласа
Дгр-О. (VI 3)
Таким образом, математическая формулировка задачи сводится, по существу к стаиовке краевых условий и условий на «бесконечности», которые в совокупности с выражением (VI.3) используются для решения кавитационной задачи
Одно из краевых условий, обычное при рассмотрении обтекания тел невязкой жидкостью, сводится к условию непроницаемости границ каверны и тела:
<?4»/c7i==0 (VI.4J
Рис VI S Схемы плоских кавитационных течений а — Эфроса— Гильбарга; б — Рябушинекого; в — Жуковского—Рошко; г — Кузнецова; д — Тулина.
В формуле (VI. 11 буквой п обозначена внешняя нормаль к поверхности тела и i ранние каверны
Другое краевое условие является специфическим в кавитационной задаче и вытекает из постоянства давления в каверне. Вследствие допущения о невесомости жидкости его можно заменить условием постоянства скорости на границе каверны rty/ds =: v0, (VI 5)
где s — дуговая координата произвольной точки границы каверны; с0 — скорое на границе каверны Кроме этого, функция <р должна удовлетворять условию отсутствия возмущении скорости впереди тела г каверны иа «бесконечности».
В общем случае в кавитационных задачах приходится вводить еще дополните, ь-ные условия, связанные со схематизацией течения в хвосте каверны Они являются, по существу, условиями разрешимости кавитационной задачи Например, дли схем Жуковского — Рошко в качестве таковых можно использовать условия совпадения ординат концов верхней и пиж 1сй границ каверны с ординатами концов пластиг иа которые должны замыкаться границы каверны Эти условия позволяют определить положение каждой пластины по отношению к телу При рассмотрении плоски задач, как и в случае бескавнтатю! ного обтекания тела, дополнительно возиика<_ вопрос об однозначности решения, связанный с выбором определенного значения циркуляции скорости по контуру охватывающему тело н каверну.
В случае плоских кавитационных течений решение задачи, описываемой уран ненцем (VI.3) и кра:вы.ми условиями (VI 4) и (VI 5) можно yi ростить, рассматривая вместо функции ф характернст щескую фупк шю
а»(г) <р (?) -|- (г) (VI.6)
При этом комплексная скорость в произвольной точке поля течения определяется как dwtdz
1Й1
Введение в рассмотрение функции w (г) дает возможность при решении кавй-Еионных задач воспользоваться аппаратом теории фу1 кипи комплексною пере.меи-В'случае бескавнтационио о обтека шя можно носгр нть обтекание профиля „зволыюй формы путем конформного отображения области вне профили в фи ческой плоскости иа область изменения to. При рассмотрении кавитационных Зчтач такой.способ JpeiueiiiiH^HeHocp дственно применить нельзя так как границы Иображземон ^области в физической и.чогкост! заранее неизвестны, поскольку ДКавестна фирма границ каверны. Чтобы избежать эти трудности в случае реше-нля задач о струйном обтекании |ренятствнн, Кнрхг фол было i спользовано кон-jLnMiioe отображение «а область и монет я и» вспомогательной функции dwh. Для ^Еиональных препятствий границы последней оказываются известными, так как на твердых rpai н tax имеет постоянное зпачеии аргумент dw/t/z a ia границах ка
верны — модуль скорости.
и Дальнейший прогресс при рент. ши струйных задач был достигнут в работах Жуковскою благодаря введению в рассмотрение функции <Оо = U —In IJj/fyodz) ] и параметрического переменного, изменяющегося в верхней полуплоскости. В результате конформного отображения областей изменения функций ш и\йр на указанную полуплоскость получается решение в параметрическом виде [28].
В методе Ча (лыгина области изменения параметрической переменной могут
ограничиваться или прямыми, или tyiaMi окружности, или темп н другими вместе. П [ этом функции ыв или dw/t'tfiz и w строятся согласно особенностям (по нулям и полюсам! в области течения и области параметрической переменной.
В методе Леви Чпвита в кач с ве об асти изменения параметрической переменной берется полукру единичного радиуса С помощью этою метода можно также определять струнное обтекание криво инейных препятствий, для чего функция соо представляется в виде
03
«О и>ЬЛ У, п ' л.’О
(VI.7)
где Ркл—функция <о0, определенная для прямощекого клина; С„—постоянные коэфф| циенты; £ — независимая параметрическая переменная. При вычислениях берете конечное значение п, а дтя определения коэффициентов Си составляются дополнительные уравнения, позволяющие установить их связь с кривизной препятствия в заранее выбранных точках.
Упомянутые в аше методы решения адач струйною обтекания препятствий соответствуют схеме Гельмгольца — Кирхгофа, описывающей предельный случай кавитационного течения при числе кавитац! н, рав| ом нулю, i ipaitimax каверны, уходящих в бесконечность Для коиеч tux значений чисел кавитации при решении кавитационной задачи необходимо учитывать специфику выбранной схемы течения в хвостовой ЧЛС1И каверны В работах (15, 28, 76 j рассмотрено значительное количество решений различных канита шовных задач Однако ввиду больших математических трудностей удалось получить pemeni я и произвести численные расчеты только для профилей простейшей формы таких как прямощек! и клин, крут, плоская пластина, с.пабоизогиутая дужка и т. п.
В последние г<»ы в инженерной практик нашли широкое применение методы числен юго расчета кавитациош ого обтекания профилей, основанные на использовании интегральных уравнений. Указанны; мето из п зволяют производить расчеты обтекания профилей произвольной формы Процедура расчетов мало изменяется при рассмотрении ра личных задач сунсркашпацш , частит ой кавитации, кавитации профилен вблизи твердых rpai ни. профилей в составе решетки и т. п., а также осесимметричных кавитационных течет й
Пнтегралып.к уравнения получаются при построении потенциала обтекания 'тела в виде суммы потенциалов гидродинамических особенностей, распределенных Непрерывным образом но его поверхности н поверхности каверны. С этой целью Сражение для указанного потенциала подставляется в граничные условия (VI.4) и (VI.5). Полученные интегральные уравнения устанавливают связь между координатами тела н границы каверны с интенсивностью гидродинамических особенностей. Если в качестве особен i стен нспользив ть вихри для плоских задач и вихревые Кольца для осесимметричных, то интегральное ypaBieiuie, составленное иа основе формулы (VI.5), превращается в равенство, согласно которому иа границе каверны
185
скорость равна интенсивности вихревого слоя, что может существенно уир , т решение задачи. Равенство скорости интенсивности слоя соблюдается и и ной части поверхности тела. Это дает возможность при составлении интеграл уравнения кавитационной задачи вместо краевого условия (VI 1) использова ,°Гу границе тела и каверны условие а
0<p/ds=y. (V11))
где У — интенсивность вихревого слоя. Составляя интегральные уравнении, чожц также использовать выражения для функции тока ']> слоя особенностей. Тогда riia° яичное условие пл границе гела и каверны будет
Ф=0. (V ; )>
а условия на границе тела и каверны, аналогичные (VI.1) и (VI.8);
d^lds- О и 5ф/ол = у. (VI.IQ)
Таким образом, используя различные типы особенностей, различные форм;.' краевых уеловий, а также bi ряжения или для потенциала, или для функции ток. указанных особенностей, можно составить различные интегральные уравнен»; Ниже приведены два нз них, наиболее широко применяемые в практических расчетах плоских и осесимметричных кавитационных течений.
Для плоских течений:
Т(«) । Г sin (г;. Z)
~2тГ J ----7]----V(S1) <bl ~ г'« 05 т- I 11 •
7
где г, — расстояние по прямой между точкои с текущей дуговой координатой к, на контуре тела или каверны ц точкой с фиксированной координатой s; (z(, Z) угол между отрезком гх н касательной t к контуру тела в точке s; т — угол между указанной касательной и вектором скорости набегающего потока; i нтегргрованпе производится но всей длине / контура тела и каверны (рнс. VI 9)
Для осесимметричных течений (у — ординаты точек контура тела и Гранины каверны)
(S) “ j Т (s- s>> I<2 - ^) К (k) 2Г. (k)\ (к, 0; (VI 12) I
P + c). G=~i/ + i| k ty'\’P
где x, у, 5, т] — декартовы координаты фиксированной и текущей точек контура меридионального сечения тела и каверны (ось х совпадает с осью снх;метрни тела). Л" (k) и Е (к) полные эллиптические интегралы соответственно второго и первого рода.
1Й6
указанные уравнения обычно используются для решения так называемых 1мых и обратных задач. В первом случае находят вихревую интенсивность (ско-,) на заданном конторе, во втором заданной величиной считается вихревая ИКщсппность (скорость), а определяется соответствующий ей контур При рассмотрении кавитационных задач на участке контура, соответствующем смоченной ясти телз- неизвестной величиной считается вихревая интенсивность, а па остальном контуре — координаты границы каверны.
Методы аналитического решения интегральных уравнений кавитационной
задачи пока неизвестны Поэтому в расчетной практике используются численные методы- Одни нз них заключается в замене интегральных уравнений системой транс цен-Дентиых, решаемых затем путем последовательных приближений. Для соста доения указанной системы hi тервал интегрирования разбивается на конечное число отрезков Н ре ках, соответствующих смоченной части тела, аппроксимируется функция у. а на остальных — форма границы каверны. Для аппроксимации вы-бнраютс простые зависимости, например полиномы с неизвестными коэффициентами Удовлетворение интет рального уравнения с помощью этих зависимостей в контрольных точках, расположенных внутри отрезков, приводит к^системе транс-иенделтнях уравнений для определения указанных коэффициентов.
В настоящее время в расчетной практике широко используется метод решения ^итационной задачи, сводящийся к последовательному решению прямой и обратной задач [2, 32] В рассматриваемом методе граница каверны строится путем последовательных приближений. Сначала задается так называемая пробная транни- Форма ее может быть назначена с большой свободой нз числа достаточно гладких кривых. После этою с помощью любого из интегральных уравнений типа (VI II). (VI 12) численно решается прямая задача, т. е. определяются значения Скорости на смоченной части тела и пробной границе каверны. Поскольку пробная Гранина каверны в общем случае не совпадает с действительной, то скорость па ней будет отклот яться от постоянного значения. По этим отклонениям в результате решения обратной задачи строится граница каверны первого приближения Поскольку обратная задача решается приближенно, в линеаризованной постановке,
требуется вновь решить прямую задачу для определения «невязок» по скорости. Численно прямую задачу в принципе можно решить с любой степенью точности, поэтому отклонение скорости на границе каверны соответствуют его приближения от постоянного значения может быть определено с высокой степенью точности, что в конечном счете и определяет точность решения кавитационной задачи. Гели отклонения превышают заранее заданное значение, то опять следует решать обратную задачу и строить границу каверны второго приближения и т, д
| Обратная задача решается с использованием уравнения
= /i_i(s); г = 1,2,3..'., (VI 13)
1 Г Ч(*1 )«**•’
Л J s — S1
где Ду' (s) тангенс угла между касательными к границам каверны двух последовательных приближений; (s) — функция, характеризующая отклонение скорости на границе каверны (I — 1)-го приближения от постоянного значения (Д соответствует пробной границе каверны);
Л1М = 1--^Н, (VI.14)
Г Ц)Н-1>
гДе В| j ск рость иа границе каверны (i— 1)-го приближения; oO(j 1( — постоянная скорость на границе каверны (i — 1)-го приближения. Значение с0<>-1> определяется из условия замыкания хвоста каверны и в принципе изменяется от приближения к приближению Прн V|.i - Оо if-i> уравнение (VI.13) тождественно удовлетворяется, т. е. граница каверны 6го приближения совпадает с Истиниой.
Известны н другие методы решения нелинейных кавитационных задач. На гример, метод конечных элементов и сеточный метод (100, 113|. Задач, решенных первым методом, н честно пока мало. Вторым методом были выполнены по схеме рябушинского расчеты кавитационного обтекания диска, конуса и тара, помещенных в круглой трубе
187
Решение кавитационной задачи можно существенно упростить, если ш<Г|0Л] 1 зоваться линеаризацией и ввести допущение о малости вызванной скорссти ,L4* ' обтекании тела с каверной но сравнению со скоростью иевозмущеииого п тО|[. 1 Стедствнем указанного допущения является малость углов между касательной к h(1^ туру тела и каверны п вектором скорости иевозмущеииого потока. Последнее > ятельство позволяет в случае плоского течения перенести граничные условия । отрезок прямой, являющийся проекцией контура тела и каверны на ось. лельную вектору скорости невозмущеиного потока. Таким путем преодемсва<1г' основная трудность в решении кавитационных зтдач, связанная с не<йхиднм1кТЬ1а в нелинейных задачах удовлетворять граничным условиям на заранее неизвестной контуре. Методы решения линеаризованных задач, а также результаты расчете» изложены в работе [10].
В монографиях [48, 981 рассмщре ны полуэмпнрические методы определе пня суммарных гидродинамических ха рактернетнк тел при обтекании в режл ме суперкавитацни Главная особенность Ц!( заключается в использовании уравнении энергии и теоремы импульсов, а также ряда физических соображений о характере кавитационного течения с целью экстраполяции экспериментальных или ти ре, тпчсских результатов, полученных для частных значений параметров, определяю них течение, па широкую область измене ния этих параметров. Указанные методы можно с успехом применять при решении многих инженерных задач для анализа общих закономерностей обтекания тел в режиме суперкавитацни и оценки гидродинамических сил н размеров каверны
Влияние кавитации иа гидродинамические характеристики профиля крыла можно представить из рассмотрения расчетных зависимостей коэффициентов подъемной силы Си и кавитационного сопротивления С\. от числа кавитации На рнс VI.10 такие зависимости привечены 5°. Изображенные на рисунке кривые имеют
Рнс. VI. 10. Зависимость коэффициентов подъемной силы Су и сопротивления С, tg а от числа кавитации для плоской пластины.
для плоской пластины при угле атаки 5°. Изображенные на рисунке кривые имеют две ветви Левая ветвь соответствует режиму супсркавнтации. а правая — частичной кавитации Диапазону чисел кавитации, заключенному между штриховыми ли нкями, соответствуют режимы нестационарного течения, при которых в опытах наблюдаются сильные колебания каверны и гидродинамических сил
По ряду причин, к основным из которых относится сложный механизм влияния стенок экспериментальных установок на кавитационное обтекание крыла, затруднителен анализ данных опытов и их сравнение с расчетами. Однако отмечается качественное соответствие расчетов и опытов
При частичной кавитации (см. рнс. VI. 10) с уменьшением числа кавитация наблюдается рост подъемной силы по сравнению с подъемной силон, соответству ющей бескавитациоцииму обтеканию. В случае режима суперкавитацни с уменьш иием числа кавитации подъемная сила существенно уменьшается.
На рис. VI 11, о приведена зависимость относительной длины каверны f от числа кавитации тля профиля NACA-66, имеющего относительную максимальную толщину ё = 0,0-1 н кривизну средней линии 0.03, при нескольких значениях угл । атаки а На рнс. \ 1 11.6 для этого профиля при угле атаки 2° показана зависимосг от числа кавитации отношения приращения коэффициента подъемной силы ДС(> обусловленного кавитацией к коэффициенту подъемной силы, соответствующему бескавитациоиному обтеканию С,,
На телесных профилях со скрутлениой передней'каемкой и цжнмс'частичг< й кавитации можно получить очень тонкие каверны и малое кавитационное сопроти влеиие. Пл части профиля, занятою каверной сопротивление трепня будет близко 188
Г ,Vfljo. В результате снижение сопротивления трения на профиле может оказаться х ль'не кавитационного сопротивления и суммарное сопротивление кавитирующего Елфнля будет меньше сопротивления профиля пекавнтирующего. На этом эффекте, ** частности, основано большинство способов снижения гидродинамического сопро-В влепия судов путем образования на нх поверхности газовых каверн.
Рис VI 11 Зависимость для профиля ГчАС.А-бб от числа кавитации: а — относительной длины каверны; б —коэффициента подъемной силы
S)
32 ИСКУССТВЕННАЯ
КАВИТАЦИЯ
тации,
Искусственная кавитация является разновидностью гидродинамической кави-
когда разрывы сплошности жидкости
сжиженного давления на поверхности тела
создаются путем подвода газа в места и образуется присоединенная каверна.
Одна из особенностей искусственной кавитации заключается в том. что давление
в каверне может быть значительно выше давления насыщенных паров жидкости. При определенных условиях оно может даже превышать статическое давление в пе-
§
Рис.. VI. 12. Контуры кавериы за диском
Рис VI 13. Обтекание клина с образованием волнового шлейфа.
возмущенном потоке В этом случае реализуется кавитационное течение с границами, обращенными выпуклостью внутрь каверны. Таким течениям соответствуют отри
нательные значения чисел кавитации
Другая важная особенность искусственной кавитации состоит в том, что присоединенные к телу каверны можно получать при малых значениях скорости набега ющего потока, которым соответствуют малые числа Fr, построенные по характер «ому поперечному размеру тела П этом случае оказывается существенным влияние
сил тяжести, которое приводит к всплыванию каверны, а в случае плоских тече-
189
ний — к образованию волновых шлейфов. На рнс. VI.12 приведены в двух игч.,Ри пнях контуры каверны за диском, плоскость которого перпендикулярна вектор скорости невозмущеипого потока. Каверна сразу же за диском начинает терять , , вую симметрию вследствие всплывания и деформации поперечных сечений. II хв. же каверны образуются две вихревые трубки, по которым из нее уходит газ. ца рис VL13 показано плоское обтекание клипа, расположенного на нижней стор()це горизонтальной пластины, с образованием волнового шлейфа
При обтекании стоек быстроходных судов, подводных крыльев, 1ребных винтов рулей и других выступающих частей нередки случаи прорыва воздуха со свобод поверхности и образования воздушных каверн. Указанные режимы искусствен кавитации часто называют вентиляцией. Вентиляция может осуществляться не только за счет самопроизвольного прососа воздуха, ио и вследствие его прицудН. тельной подачи.
С позиции гидродинамического воздействия на обтекаемое тело искусственная кавитация приводит к тем же эффектам, что и естественная, если в том и другом случаях числа кавитации одинаковы. Указанное обстоятельство можно использовал, для управления подъемной силой крыла при фиксированном значении угла атаки путем регулирования давления в каверне.
Искусственная кавитация нашла практическое применение для снижения гидродинамического сопротивления судов. В результате установки на корпусе су, па кавитаторов (см. рис. VI.13) и подачи к ним воздуха можно создавать каверны, с помощью которых часть смоченной поверхности изолируется от контакта с потом м воды. Для достижения положительного эффекта необходимо, чтобы кавитаиноинэе сопротивление кавнтатора было меньше снижения сопротивления трения воды за счет образования кавсри. Т аким путем удается снизить 1ндроди> ампческое сопротивление большегрузных речных судов на 15—17 %, а судов глиссирующего типа -на 30—35 %.
Более подробные сведения об искусственной кавитации моЖ| о найти в раб тах [29. 33].
Глава VI!
УСТАНОВКИ ДЛЯ ЭКСПЕРИМЕНТАЛЬНЫХ ИССЛЕДОВАНИИ В ОБЛАСТИ ГИДРОДИНАМИКИ СУДНА
§ 33. ОБЩИЕ СВЕДЕНИЯ
Во второй половине прошлого века в связи с начавшимся применением в судо строении паровых машин возникла необходимость достаточно точного определения потребной мощности для достижения заданной скорости судна. Однако существовавшие в то время методы, основанные на теоретических соображениях и натурном опыте, ие позволяли достаточно надежно количественно оценить влияние различных факторов на сопротивление корпуса судна и работу его движителей. Проблема была решена в результате создания гидродинамических лабораторий, в первую очередь опытовых бассейнов Непосредственной предпосылкой для их постройки явился предложенный В Фрудом метод моделирования, согласно которому в специальных лабораториях для изучения сопротивления воды движению судов и выяснения многих других вопросов гидродинамики проводятся испытания моделей судов.
Известно, что для обеспечения подобия с натурным судном необходимо вы держивать постоянными значения чисел Гг и Re.
Удовлетворить этим условиям одновременно для модели и судна невозможно, поскольку исходя из требования постоянства числа Re скорость модели должна 190
^ьышать скорости судна, а исходи из требования постоянства числа Fr она должна Льггь мс,1ЬШС ск0?00111 натурного судна. Полное механическое подобие прн сохра-KjHHt постоянными guv невозможно. Однако без существенной погрешности Слияние числа Re можно учесть с помощью расчетов. Поэтому на практике до на-*£,ящего времени выполняют моделирование по числу Fr.
При решения задач о движении несжимаемой жидкости давление в некоторых областях может оказаться отрнпятсльным Па практике жидкость неспособна яосПри,,имать растягивающие усилии. Давление в потоке не может установиться Еже некоторого предельного значения, поэтому там, где оно падает до указанного предела, нарушается сплошность течения и возникает кавитация. Степень ее развития характеризуется числом кавитации о. Оно приобретает существенное значение вслучае возникновения кавитации. Его следует вводить наряду с числами Fr н Re в качестве основного критерия подобия при моделиропаиип
В обычных опытовых бассейнах моделирование по числу кавитации затруднено поэтому для изучения движения тел в жидкости прн высоких значениях скорости в условиях кавитации вслед за опытовыми бассейнами были созданы кавитационные грубы, в которых при заданной скорости потока можно создавать различное давление и варьировать число кавитации Несколько позже были созданы первые Нора орни для изучения качки, мореходности н управляемости судна. В последнее время для решения специальных задач гидродинамики стали появляться «гибридны»» установки — опытовые бассейны, в которых можно варьировать число кавитации путем изменения давления, и большие кавитациош ые трубы, или гидрологии, котор ’ по размерам рабочего участка приближаются к опытовым бассейнам (в них также можно варьировать число кавитации). Такие хстановкн относятся к наиболее сложным в эксплуатации и дорогостоящим [73, 81].
34. ОПЫТОВЫЕ БАССЕЙНЫ
I Центральное место среди гидролинам! веских лаборатории до сих пор занимают обычные опытовые бассейны для проведения буксировочных испытаний и испытаний самоходных моделей. Это связано с тем, что основные параметры корпуса судия в бозыниистне случаев выбирают па основании результатов испытании, проведенных в бассейнах именно такого типа Испытания в остальных лабораториях служат для определен ня элементов винта и руля, а также для оценки мореходности и управляемое Сводами подводной части корпуса, обычно выбираемыми исходя
из условия обеспечения нанлучших ходовых качеств на тихой воде. В обычных опытовых бассейнах, правда с некоторыми ограничениями, можно исследовать качкз, мореходность и управляемость судов многих типов.
* Опытовые бассейны подразделяются на три основные группы:
Г а) большие опытовые бассейны длиной 250—400 м н более; максимальная скорость буксировки моделей длиной 5—7 м —до 5 7 м/с;
’ б) средине бассейны длиной 100—200 м; максимальная скорость буксировки Моделей длиной 5—7 м —до 5—7 м/с;
в) малые бассейны длиной менее 90 м, .максимальная скорость буксировки Моделей длиной 3 5 м — до 4—5 м/с. В случае оборудования такого бассейна Жобига ft легкой тележкой в некоторых случаях обеспечивается скорость буксировки 10—-12 м/с и более.
В Помимо бассейнов указанных типов существуют скоростные бассейны со ско ростьо буксировки до 30—70 м с, имеющие малое поперечное сечение, и мелководные бассейны.
I К нерпой группе относится бассейн в Фелтеме, принадлежащий Национальной физической лаборатории (Англия). Он был построен в 1959 г Примером бассейна второй группы может служить опытовый бассейн в Тронхейме (Норвегия), построенный в 1939 г К тре>ьей группе относится опытовый бассейн Национального центра Подводных исследований в Сан Диего (США). Задачи, которые можно решать в бассейнах различных типов, и приближенная оценка эффективности эгих решений по-Условной пятибалльной системе приведены в табл. VII.I. Из таблицы следует, что большой бассейн первой категории целесообразно иметь в случае необходимости Развития транспортного судостроения и проведения широких исследований судов любых г инов. Для решения практических вопросов гидродинамики.
191
Таблица VII I Оценка эффективности бассейнов различных типов
Испытания Тки бассейна
характер модели милый сред-Н If Й большой быстр г, ч‘чи< Ы1]
Буксировочные Морских транспортных судов 3- 4 5 г> ” а 9
» Речных судов 2 3-4 5 2
Самоходные Морских транспортных судов 3 5 5 2
Речных судов 2 3-4 5 2
Буксировочные Быстроходных водоизмеща-ющпх судов 3 3—5 5 2
» Погруженных тел 2 2—3 5 о
Самоходные Быстроходных водопзме1ца- Ю1Ц11Х судов 2—3 3—5 5 9
S Погруженных тел 2 2-3 5 2
Буксировочные Судов с Д1п(одическимн принципами поддержания 2 2 3- 1 5
Самоходные То же 2 2 3-4 4—5
специфических при проектировании транспортных судов, достаточно иметь срадш i опытовый бассейн второй категории М.тдые бассейны со скоростными тележкам.! служат для решения специальных задач. Большая же их часть ценоз ьзуется в учеб ных заведениях, а также для промышленных целей при отсутствии более крупны лабораторий.
Общее количество в мире опытовых бассейнов длиной свыше .30—50 м к концу 70-х годов составляло около 120—130 Из них больших бассейнов (длиной свыше 200 м) было около 30—35. Примерно !акое же количество имелось средних бассейнов (длиной 100—200 м).
В табл. VI 1.2 приведены данные ряда зарубежных опытовых бассейнов Масса буксировочных тележек этих бассейнов составляет 2 50 т Для опытовых бассейнов, имеющих длину 100 250 м и скорость буксировки моделей до 1(1 12 м/с масса буксировочных тележек находится в большинстве случаев в пределах 10—20 т Средняя статистическая зависимость максимальной длины моделей от длины бассейнов групп а и б может быть приближенно выражена зависимостью / и ~ |-z/-/2,2, где £м длина модели, м, Б длина бассейна, м. Суммарная мощность приводных двигателей тстежкн обычно составляет 50 500 кВт ,’[тя опыто вых бассейнов длиной 150 - 250 м и при максимальной скорости т%зежк>| чо 10 м с эта величина составляет обычно 100—300 кВт 11редставден11ые в табл. VII.2 опы товые бассейны снабжены, как правило, ватноирояукторами, позволяющими про водить испытания на полпенни.
192
^аблича VI 1.2.
Опытовые бассейны с самоходной буксировочной тележкой
Размеры чаши, м Наибольшая К > «г О
ПО- скорость * 3 Приме-
I Местом а хожде ние строй- глубина буксировочной '2^ = чаппи
длина рНиа тележки, м с
Австралия Сидней 1953 57 2,7 1,22 5.0
Австрия
I Вена Англия 1914 180 10,0 5.0 7,5 6,1 —
Дамбартон 1884 101 6,8 2,7 9,1 6,1 —.
Глазго 1963 76 4,6 2.4 6,1 5,2 —.
1 Клайдбанк | Осборн 1903 124 6,1 3,1 6,1 5,1
1972 196 4,6 1.7 15,2 — Скорост-
ной
I Сеи-Олбепс 1911 137 6,9 3,4 5,1 5,5
Теддннгтон 1911 153 9.1 3,7 4,3 6.1
» 1932 137 6,1 2,7 7,3 6,1
Фарнборо 1933 198 2,7 1,4 12 — Скорост-
ной
Фслтем 1959 396 14,6 7.6 15,3 9,2
Хаслар 1887 169 6,2 2,7 7,6 4,9
> 1932 271 12,2 5,5 12,2 6.1 —
Аргентина Буэнос-Айрес 1962 72 3,6 2,0 4,1 3.1 —
Западный( Берлин 1903 250 8,0 4.9 7.5 7.0 —
1958 120 8,0 0 1,1 4.2 7,0 Мелководный
Бразилия Сан-Пауло 1956 141 6,7 4 5,0 3,7 __
ГДР
Берлин 1953 281 9,0 44 7,9 7,9
Росток 1957 37,2 4,7 2,8 2,8 1.8 —
Голландия 1 Вагепингеи 1932 253 10,5 5,5 8,5 7,6
1 » 1958 1963 217 222 15,8 0-1,2 4,6 7.6 Мелководны!!
1 * 4,8 4.0 12,2 — Скорост
I Дельфт 1955 142 4,2 2,5 8,1 3.1 нои
1955 85 2,8 0 0.5 2,7 3,1 Мелководным
Дания
Лгонгбп 1959 240 12,0 5,5 14,0 9.1 —
ll/р Я- И. Войткунского. т, I
193
Продолжение т а б л. \-ц 2
Местом а кож де н не Год постройки Размеры чаши, м Наибольшая скорость букем< ровочной тележки, м/с Наибольшая длина мидели, м Приме чан и ч
длина ширина глубина
Израиль
Хайфа 1967 45 2,5 1,5 3,1 2,4 .—
И и д п я
Карахпур 1951 91 4,1 2,4 4,0 —
Мадрас 1970 62 32 0-2,5 5,5 — Мелководный
Пупа 1954 152 3,7 2,1 6,1 4,7
35 1965 250 10 5,0 6,0 — —
Испания
Мадрид 1934 320 12,5 6,4 11,0 7,6
X I9G4 53 3,8 2,0 3,5 2,1 —
Италия
Генуя 1947 49 2,9 1.5 2.8
Неаполь 1972 136 9,0 4.2 10
Рнм 1930 275 12,5 6,5 12,0 6,1
1971 270 13,5 6,8 15,0 —
> 1971 220 9.0 4 10 —
Триест 1956 50 3,1 1,6 3 — —
Канада
Оттава 1942 1.37 7.6 3,0 6,1 7.6
» 1942 137 7,6 3,0 8.0 — —
Норвегия
Тронхейм 1939 170 10,5 5,6 9.2 7,6 —
> — 27 2,5 1,0 2.6 — —
НРБ
Варна 1977 200 16 6,5 20,0
В 1977 200 16 0-1,5 6,0 — Мелководный
ПНР
Гданьск 1974 250 12,0 6,0 12,0 — —
СФРЮ
Загреб 1959 277 12,5 6.5 12,0 7,6
» 1959 303 5,0 3,4 20,0 3,0 —
США
Аннаполис 1975 117,5 8,6 5,3 15 — _
» 1975 40 2,6 1,8 6,0 —
Лип Арбор 1904 110 6,5 2,44 2,8 6,1 4 3
Беркли 1954 61 0-1,5 3,0 — Мелководный
Вашингтон 1941 271 15,5 6,7 12,8 9,2 —
В 1941 92 15,5 0—3,0 4,0 9,2 Мелководный
В 1941 405 6.4 4,9 30,0 До 6,0 Скорост ной
194
Десгон а х о ж дсп к г
Вашингтон »
Кембридж
Лаурел Денгли-Филд
> >
Миннеаполис »
Ричмонд (шт Кали форнпя)
Сан-Диего »
Турция
Стамбул
Ф и и л я и д и я
Хельсинки
Франция
Париж > х>
Тулуза
ФРГ
Гамбург
» > »
Дуйсбург
»
Швеция
Гётеборг
Южная Корея j Сеул 1
Япония
Л каши
* Иокогама
Продолжение табл VII.2
Год постройки Размеры чаши, м Наибольшая скорость буКСИ-ровочней тележки. М/С Наибольшая длина мо* дели, м Примечания
длина ширин а глубина
1941 43 3,1 1,7 3,1 2,4 —
1947 575 14,5 6,7 12,8 9,2 —
1958 33 2,6 1,25 2.5 ——
1968 94 7,4 3,06 6,0 — — —
1931 854 7,3 3,7 24 0 3.7 Скоростной
1942 527 5,5 1.8 27 0 — То же
1956 671 2,4 1.5 70 — >
1938 76 2,7 1.8 76 1.5 ——
1954 11 2,74 1,8 7,6 — —
1954 61 2,4 1.8 1.8 1.5 —
1955 97,5 3,7 1.8 30.0 3,7 —
I9G4 55 4,6 4,978,2 12,8 — —
1955 77 6,1 3,8 3,0 3,7 —
1967 200 11,0 5.5 8,0 — .—
1906 160 9,8 40 5,5 7,0 .
1950 155 8,0 0-2,0 5,0 7.0 Мелководный
1958 220 13,0 4.0 10,0 7,0 ——
1952 1200 5.6 2.8 — — —
1953 80 4,0 0-7,0 5,0 7.9 Мелководный с течением
1953 80 5,0 3.0 5.0 7,9 —•
1957 300 18,0 6,0 8,0 7,9 —
1962 343 2,1 1 0 2,8 — —
1454 190 9,8 0-1,1 5 6 1 С течением
1954 128 2.8 2,8 2,1 — То же
1940 259 10,1 5,2 14,0 7,3 —
1983 210 14 6,0 7,0
1971 70 5,0 2,7 2.5 — —
1973 220 13 6.5 5,0
1966 229 10,0 5.0 4,7 7,0 —
7»
195
Продолжение т а б л. \’| [ j
Местона хождем не Г<»Д постройки Размеры чаши, м Наибольшая скорость буксировочной тедежки, м/с Наибольшая длина модели, м Примг. чаи ня
Длина ширин а глубина
Иокогама 1971 46 2,5 1,8 2.0
Коба 1972 70 6 0,5—1,2 4,0 — Мелководный
Мете у я 1972 3G 3 2 1,5 — —
Нагасаки 195.3 124 6.7 3,7 4,5 7,0 —
> 1953 177 12,5 6,5 10.0 7.0 —
» 1972 190 30 3,5 3,0 — —
Осака 1958 70 3.0 1,8 3,0 2.5 —
> I9G2 80 7,0 3,7 4,0 6.0 —
> 1970 100 7.8 4,35 5.0 — —
Токио 1927 200 10,0 6,0 8.0 6.0 —
» 1932 ад 4,0 2,0 2,5 2,5 —
» 1932 ад 4,0 1,9 2,2 — —
» 1937 86 3,5 2,6 60 2,5 —.
1941 207 8,0 4,0 8.0 6,0 —
» 195G 103 3,5 2,3 7,0 — —
х> 1958 177 12,5 7,8 10,0 — —
х> 1958 347 6,0 3,0 20,0 — Скоростной
1966 400 18,0 8,0 15,0 60
» 1972 150 7,5 0-3,5 60 — Мелководный
Фукуока 1956 60 1,5 1,2 2,0 — —
> 1963 80 8,0 3,5 5.0 —— —
» 1967 118 2,66 3 5 — —
Хи росима 19G7 80 5,0 3,5 6,0 3,0 —
§ 35. КОНСТРУКЦИЯ и ОБОРУДОВАНИЕ
ОПЫТОВЫХ БАССЕЙНОВ
Опытовые бассейны с самоходной буксировочной тележкой являются основными гидродинамическими лабораториями для исследования ходкости судна. Поскольку такие бассейны обычно имеют значительные размеры, обеспечивается малая погрешность опытов, уменьшается воздействие .масштабного эффекта при пересчете результатов испытаний на натурное судно. Буксировочные бассейны с самоходной тележкой могут быть глубоководными (предполагается, что влияние в них дна на гидродинамические характеристики модели исключено), а также мелковицпыми Последние применяют для проведения испытаний моделей с учетом влияния дна на сопротивление корпуса, взаимодействие его с движителями, ходовой диффермт и т. д. Буксировочные бассейны с несамоходной тележкой используют для проведс ния скоростных испытаний моделей и в тех случаях, когда по различным причинам размеры бассейна не могут быть выбраны достаточно большими. Ниже приведен" описание наиболее типичных буксировочных бассейнов.
Глубоководные бассейны с самоходной буксировочной тележкой. Характер! ым является, например, бассейн Национальной физической лаборатории (Англия) Этот бассейн построен в 1959 г. Основные его элементы даны в табл. VII.2, а пла* показан на рнс. VII I На верхней части железобетонной чаши бассейна смонтир> ваны рельсы, по которым перемешается буксировочная тележка По стыкам чаи:Н на уровне поверхности воды расположены волногасители. В начале и конце имеюген
196
Управляющие для герцевых волногасителей. В одной из торцевых частей бассейна и .яусмстреиы доки для удиффереитовки и монтажа моделей. В другом конце бас "и'нЧ! размещается волнопродуктор. Буксировочная тележка {рис. VII.2) при-цтся в движение с помощью четырех электродвигателей, которые вращают ко 8”.а Применение четырех пар ходовых колес обуслоачеио значительной массой Стежки (42 т). Поперечные смещения тележки ограничиваются роликами с вср-нкадьиыми осями, перемещающимися вдоль подрельсовых балок чаши бассейна. Питание электродвигателей осущсстатяется с шинных троллеев, смонтированных * наружной стене чаши (бывают и другие способы крепления троллеев — под фермами |ерекРЬ1тия бассейна или на кронштейнах, установленных на стене здания
Рис. VI 1.1. План опытового бассейна в Фелтеме.
I — главный бассейн; ? доки главного бассейна; 3 — помещение доковой части; 17 — каналы для транс юртировки м -дм П 5 бассейн для хранения моделей; 6 бассейн для нсследопания управляемости. 8, 9, 10. 11, 12 - мастерские; 13 -Имерялы ые помещения: Н — здание ка- внтационных труб и гидрология.
в передней части тележки. В некоторых
бассейна). Пульт управления находится в передней части тележки. В некоторых случаях пульт управления располагается на борту бассейна. Для поддержания заданной скорости с точностью до ±0,1 % тележка оборудована электрическим регулятором электропривода. Торможение тележки осуществляется несколькими способам I. В центральной части тележки (в ее окне) монтируется установка с электромеханическими датчиками для измерения сил, поступательной скорости модели, ’•слоты вращения гребных винтов и т п. Модели в рассматриваемом случае транспортируются на плаву через канал, соединяющий бассейн с модельной мастерской и бассейном для хранения моделей Это сделано для изоляции модельных мастерских от влажного воздуха и осуществлено нс во всех бассейнах. Чюбы исключить развитие в воде планктона и водорослей, окна, если они предусмотрены, располагаются в бассейне обычно с северной стороны.
Мелководные опытовые бассейны с самоходной буксировочной тележкой. Указанные бассейны имеют отношение ширины чаши к наибольшему значению переменной глубины 4 13, длину чаши 80—220 м, наибольшую скорость тележек 4 0— 5.5 м/с. Одним из наиболее крупных мслковоД! ых бассейнов является бассейн в Голландии (см. табл. VII 2) Масса буксировочной тележки этого бассейна составляет около 40 т В днищевой се части имеется во всю ширину бассейна рабочее °кно, в котором в попереч> ом направлении перемещается ферма с площадкой дли Динамометрических установок н экспериментаторов Эта площадка может, в свою {•черед перемещаться в вертикальном направлении. Тележка имеет ходовые да и га
197
телн и электропривод для поперечных и вертикальных перемещений устро' Q и площадки внутри ее рабочего окна На дне чаши предусмотрены окна для наблюдения за обтеканием днища моделей
Скоростные опытовые бассейны. Максимальные значения скорости буксировки обычные для глубоководных бассейнов (5—10 м/с), оказываются недостаточными испытаний моделей судов с динамическими принципами поддержания, некоторых подводных объектов. При эксперименте с ними скорость буксировочной те. еЖки должна быть примерно 25 м с н выше.
Примером скоростного бассейна может служить опытовый бассейн в Вашнигп Не (СШ\), принадлежащий Морскому научно-исследовательскому и опытио-коистр ц-
Рис VII 2. Буксировочная тележка главного бассейна в Фслтеме (Хиглия).
торскому центру Этот бассейн имеет прямоугольное и поперечное сечения; длин бассейна 905 ширина 6 4, глуби ia 3 м на протяжении 355 м и 4,9 м ia протяжении остальных 550 м. Стены бассейна изготовлены из мочолигны.х бетонных секции Вдоль счен проложены рельсы, по которым движутся буксировочные тележки Рельсы прикреплены болтами к чугунным рельсовым подушкам, отличающим я высокой прочностью, а рельсовые подушки соединены болтами с бетонным основа иием. Используются рельсы железнодорожного типа. Точность их установки ±0.013 см Вода бассейна очищается песчаным фильтром что позволяет npoi водить подводное фотографирование через смотровые окна Волны, образующиеся при движении тележки, гасятся с поуопцю волногасителей. Всего предусмотрены две тележки. Одна из них имеет максимальную скорость 40 уз, другая — 60 уз Установлены динамометры и. друтие устройства, а также регистрирующая апла ратура.
§ 30 ГИДРОДИНАМИЧЕСКИЕ ЛОТКИ
Основным достоинством гцдролотков является возможность проведения в них испытаний с неподвижной моделью в течение неограниченного времени Улучшаются также условия для наблюдения отсутствует вибрация, возбуждаемая на модели движущейся тележкой. Недостаток гндролотков заключается в увеличении сто имостн проведения эксперим нта из за большой потребной мощности приводных
198
г1СКтпоДВ11гателсй. Возникают сложности при создании достаточной степени одно-Кдности поля скоростей в рабочем участке. Для обеспечения исвоэмущепной свободой поверх юсти в рабочем участке приходится применять специальные устройства, Н частности управляемые козырьки.
® Наибольшее количество гндролотков построено в течение последних 15 20 лет к Японии (около десяти). Тем не менее наиболее крупные гндрологыг построены 8 США. Западном Берлине и Англии Гидрологок в Кардсроке (СШ \) построенный 8 |945 г., имеет рабочий участок длиной 18,3 м ври шприце G и глубине 2 7 м. цинпмалытая скорость потока в рабочем участке составляет 3.1 м с. а мякенмаль J aH, которую можно поддерживать в течение не более 8 мин, 5,1 м/с Гидролоток ^положен вертик льно Его корпус изготовлен из же..езобетона облицованного нутрп стальными листами, рабочий участок ыирологка стальи й. Перед работм .,частно имеется усилитель, высота к торого и три раза больше, чем у рабочего участка. Между ними находится конфузор. В успокоительном участке располагается Готовый выпрямитель с ячейками 56 X ' ) мм Для визуальных наблюдений
Рис. VII 3. Схема гидролотка в Западном Берлине.
I — М ФФ з р з.з рнбочим /частном: 2 — измерительный участии: 3 — конфузор, 4 — диффузор; 5 — фундамент; 6 направляющая крестовина; 7 ctji ица. В — импеллер.
имеются 9 смотровых окон. Над рабочим участком находится мостик с установленной на нем измерительной аппаратурой.
Рабочий участок гидролотка в Фелтеме (Англия) предусмотрен длиной 17,7 м и сечением 3,7 X 2,5 м Максима тькая скорость поюка в нем составляет 3 0 м/с Корпус гидролотка расположен горизоггальни, поскольку не создается вакуум для проведения кавитационных испытании Рабочий участок оборудован пьшим числом смотровых окоп, расположенных в бортах и днище Регулируемое фалыцдно служит для изменения глубины и уклона потока.
Гидро, оток построенный в 3ai адиом Берлине имеет длину свыше 50, высоту около 40 м, ширину и высоту рабочего участка соответственно 5 и 3 м Длина Рабочего участка составляет около 10 ы 1 ерметнчный корпус гидролотка расположен в вертикальной плоскости. Его внутренняя поверхность имеет резнювое покрытие для проведения акустичесю х испытаний самоходных моделей с>дов Предусмотрены насосы для создания вакуума и фальшдно в рабочем участке. Схема гидролотка показана на рис. VII 3.
Кавитационная труба крупных размеров, построенная в Гётеборге (Швеция) в 1968 г, .может также рассматриваться в качестве вакуумного гнДрблоТка. Его Длина достшает 22, а ширина 14 х. Такая установка предназначена, главным обра з°м, для проведения кавитационных испытаний самоходных моделей судов, когорые *1еред этим испытываются в обычном опытовом бассейне. Длина моделей 6,5 8,0 м. Поперечное сечение рабочего участка имеет ширину 2,6 и высоту 1,5 м. Длина Рабочего участка 9,Ь м. Мощность привода имиед тера, достигающая 1000 л. с.,
199
Рис. VI 1.1. Большая кавитационная труба в Гё еборгс; справа малый смеши й участок с винтовым динамометром (о); схема расположения кавитационных труб и бассейна (б).
обеспечивает максимальную скорость потока на рабочем участке 6,5 м с. Имеется смежный рабочий учас ок меньших размеров, в котором наибольшая скорость потока составляет 23,5 м/с. Общий вид и схема расположения установки показаны соот ветственио иа рнс. VII.4, о и б.
§ 37. КЛВИТАЦИиННЫГ ГРУБЫ
Первоначально кавитационные трубы были созданы для обнаружения и Birv альиого изучения кавитации, приводившей в ряде случаев к потере скорости и ш тенсивиой эрозии гребных винтов. До последнего времени основным назначением кавитационных труб являлось получение данных для нахождения оптимальных характеристик движителей проектируемых судов. В дальнейшем увеличение мощности энергетических судовых установок и возросшие требования к снижению шума и вибрации гребных винтов обусловили необходимость проведения испытаний м> делен гребных винтов в присутствии корпуса судна или его выступающих частей Помимо этого возникла потребность в экспериментальном изучении кавитации ил различных корпусах н крыльевых конструкциях. В настоящее время имеется несколько видов кавитационных труб Их можно объединить в следующие группы
1. Большие трубы, в которых проводят испытания моделей винтов диаметром До 0,60—0,65 м или же испытания самоходной модели судна с гребными винтами диаметром 0,15—0,20 м Кавитационные трубы такого тип? необходимы для релюния комплексных задач в обдас-тн кавитации при проектировании гребных винтов судов различного назначения.
200
Л нН a vll. . Характеристики больших кавитационных труб
Г—'—' Мес’ ОН « NO ж ДР11 ИС \стГп,1а* город) Высота в осях, м Сечение рабочего участки Наибольшая скорость потока. м/с Поди* птис конфузора Расш прение диффузора Нлнбольшн Л диаметр мо-1 дели винта, ы
Длина в осях, м форма диаметр, м длина, м
Австралия
3,2 Круглая 0,46 9.8 15,5 0,20
Аделаида 18,3 2,44 "8J5
Л и г л п я 7,7 Прямоугольная 1,01X0,81 7,3 5,0 0,40
Ныокэстл 10,8 3,66 тз~
54,9 Круглая 1 12 7,4
фрлтем 26,6 2,33 17,0 0,46
Хаслар 7,16 8,59 Квадратная 0,61 5,8 12,2 4,78 1,56 0,38
9,0 2,41Х 1,2 8,0 3 03 0,60
14,5 Прямо- 5,4
угольная
Испания 7,0 Квадратная 0,40 11,0 6,0 0,45
Мадрид
11.8 4,7 1.4
Канада
Оттава 4,69 8,14 Круглая 0,5 2.2 13,0 6,0 2,0 0,25
Норвегия
Тронхейм 10,0 1,2 18 6,26 0,60
22,1 2,08 2,0
4,99 0.36 6,5 6,0 0,25
3,18 0,53 1,56
СФРЮ
.Загреб 5,7(1 19,4 Квадратная 1,0_ 3,6 11,3 G 2 0,50
4 7 Круглая 0.5 8,0 6 0,25
США 8,15 2,43 2
Вашингтон 5,8 0,69 17,0 9,2 0,45
12,6 1,22 2,2
8,7 0,91 25,7 9,0 0,675
18,9 1,07 3,0
ФРГ
Гамбург 12,0 Круглая 0,75 19.5 8 0 40
16,6 2,25 3,24
5.0 Квадратная 0,40 5,3 3,5 0,21
5,03 1,5 1,12
Мюнхен — Круглая 0,40 2,0 6,0 9.0 3,0 0,40
Япония
1 (агасаки 5,5 8 15 Прямоугольная 0,5 2,2 11.0 6,06 2Д)3 0,25
201
2. .Малые трубы, предназначенные для испытаний моделей винтов диаметр до 0,20—0.25 м. Эти труби в основном обеспечивают проектирование днижит< ief для транспортных судов традиционного типа.
3. Скоростные кавитационные трубы для испытаний моделей выс.тупакицп» частей корпуса, крыльев, рулен, а также для физических исследований.
Всего в эксплуатации находится свыше ста кавитационных труб, В табл. \ Ц g приведены основные характеристики типичных больших кавитационных тр\б а также некоторые данные о кавитационных трубах, предназначенных для нсиита’ инй гребных винтов диаметром около 0,20 м [1101.
§ 38. КОНСТРУКЦИЯ И ОБОРУДОВАНИЕ
КАВИТАЦИОННЫХ ТРУБ
Кавитационные грубы для испытаний моделей гребных винтов представляют собой замкнутые вертикально расположенные кольцевые трубы переменного по-перечного сечения (рнс. VI).51. Давление в кавитационных трубах регулируется в широком диапазоне. В средней части верхнего горизонтального канала трубы находится рабочий участок, в котором устанавливается испытуемая модель вийта. За рабочим участком но потоку в диффузоре уменьшается скорость и повышается давление в жидкости. Для предотвращения кавитации лопастей импеллер располагаемся в нижней части кавитационной трубы. Перед рабочим участком и конфузором размещается сотовый выпрямитель, предназначенный для гашения тапгс-ii-
Рнс. VI 1.5. Общая схема винтовой кавитационной труби.
/ — рабочий уч «ciок; 2, 9 — диффузоры; Л, 5, 20, 2'2 — yi левые колени; "4 — вертикальная секция; б — нижняя горизонтальная секция; 7 — имнелл< р б — спрямляющий аппарат; 22 — щ р-тнка.чьиый участок: /3 — шахта для регулирования давлении; 24 — сотовый выпрямитель; 25. 26 — конфузор!.!*
циальпых скоростей, вызванных работой импеллера. Назначение конфузора состоит в обеспечении равномерного поля скоростей в рабочем участке и уменьшении степени турбулентности потока
h настоящее время установлено, что гидродинамические характеристики гребных винтов существенно зависят от характера поля скоростей, в котором он» работают. Значительная часть современных кавитационных труб достигает внушительных размеров, что, в частности, связано с црницнпиальнымп погрешностями при имитации переменного поля скоростей сетками, специальными клапанами, поскольку данные системы не отражают истинного характера взаимосвязи между номинальным и эффективным попутным потоком. Для более точной имитации обтекания корм 4 судов необходимо испытывать самоходную модель судна, что и приводит к большим размерам кавитационных труб. В некоторых случаях для испытаний нснатьзуюг укороченные модели судов в комбинации с сетками (рнс VII 6) Ниже приведено описание некоторых кавитационных труб.
Большая кавитационная труба английского исследовательского центра Адмиралтейства, построенная в 1913 г. в Гамбурге, была затем демонтирована и установлена в Хасларс (рнс. VI 1.7). По площади поперечного сечения рабочего участка до ввода в строй большой кавитационной трубы в Гётеборге (Швеция) эта установка была самой большой в мире. Размеры поперечного сечения рабочего участка соста вляют 2,42 X 1,2 м с большой стороной в горизонтальной плоскости, что обеспечн
202
сТ удобство при испытаниях в кавитационной трубе самоходных моделей. В трубе Жкно проводить испытания изолированных гребных винтов диаметром до 0,6 м
т ,кж<’ моделей гребных впитав диаметром до 0,3 м в косом потоке. Привод само-Ljjnoili мидели располагается обычно внутри модели. Независимо от этого могут Kji, проведены испытания модели судна при использовании внешнего привода греб-
рис V1I6. Установка для ими тацнн обтекания кормовой оконечности одновинтовою танкера в кавитационной трубе.
него винта. Низкий коэффициент поджатия потока способствовал некоторому сокращению при проектировании габаритных размеров кавитационной трубы В этой кавитационной трубе и кавитационной трубе меньших размеров, также расположенной в Хасларе. в течение последних 20—25 лет были проведены обширные исследования малошумиих гребных винтов. На рис. VII.8 показана самоходная модель
Рнс. VI 1.7. Большая кавитационная труба, установленная в Хасларе (Англия).
надводного судна, проходившая испытания в большой кавитационной трубе. В процессе исследований были получены систематические данные о кавитационных характеристиках гребных винтов различных конструкций и, в частности, при подаче воздуха на лопасти Разработаны критерии для пересчета экспериментальных данных па натуру.
L До сих пор значительный интерес представляет большая каннтацноииац труба Пенсильванского университета (рис. VI 1.9). Труба оборудована большим рабочим Участком диаметром 1,27 н длиной 4,3 м Скорость потока достигает 24 м с при ыиннмалы1ом числе кавитации 0,25—0,30. В этой трубе выполняются исслсдоиаиня самоходных моделей торпед и подводных лодок диаметром до 0,6 м. В процессе испытаний используются компактные и дгчаточно мощные электроднпгагелн н
203
гидравлические турбины в качестве привода гребных винтов. Вследствие болыц0г скорости потока, прн которой проводятся испытания (и соответственно болывпь частоте вращения гребных винтов), для моделей винтов диаметром 0.2 м нс,. ।
Рис. VII.8. Модель для испытаний в кавитационной трубе Хаслара.
эуются электродвигатели мощностью 18 кВт, а для моделей диаметром 0.3 м — мощностью 52 кВт. Предусмотрена возможность проведения испытаний под уг >м атаки и в условиях моделирования распределения масс по длине модели.
Рнс. VII .9. Большая кавитационная труба Пенсильванского университета.
1 — конфузор; 2 рабочий участок; 3 — модель с работающим движителем: 4,9 — дифф зоры; 5. 6. 7, 10, 11 — yi ливне колена; 8 — импеллер изменяемого шага
§ 39. КАВИТАЦИОННЫЕ БАССЕЙНЫ
Для исследования кавитационных явлений наряду с кавитационными трубам i в ряде случаев используют кавитационные бассейны, в которых создается вакуум на свободной поверхности. Буксировочная тележка этих бассейнов снабжаете дистанционным приводом, для обслуживания ее предусматривается дистанционная аппаратура. Такие бассейны имеют некоторые преимущества перед кавитационным i трубами и вакуумными тидролоткамн (большие поперечные сечения бассейна, зиа чигелыю меньшая потребная мощность приводных движителей по сравнению с гп 204
.олоткам!). Недостатками кавитационных бассейнов являются кратковременность снытанпя, а также значительные помехи от движущейся тележки при проведении гидроакустических исследований.
" Первый кавитационный бассейн длиной 55 м с движущейся тележкой был построен в СШ \ в 1962 г. Железобетонная чаша бассейна имеет в поперечном сечении -.«рнну 11 высотУ 5.2 м. Глубина воды в основной части составляет 4,6 м. Три «частк чаши глубиной 7,0, 7,6 н 10 м, предназначенные для пуска моделей ракет Е торпед, могут закрываться щитами. Верхняя часть чаши заключена в цилиндрический герметичный корпус диаметром 8,4 м, изготовленный нз стали и подкреплен-
ный снаружи стальным набором. С помощью ваку\иных насосов давление внутри корпуса снижается до 0,05 атм. Скорость буксировочной тележки может изменяться в диапазоне 1,5—15 м/с. Бассейн оборудован пласшичатым волнопродуктором, а также устройствами для вертикального пуска моделей ракет и горизонтального выбро моделей торпед.
Отечественный кавитационный бассейн, построенный в 1965 г., имеет длину 60. Ширину 6 п глубину 3,5 м. Этот бассейн предназначен для испытаний моделей судов, движителей, рулен и подводных крыльев. Максимальная скорость буксировки Моделей с помощью тележки, оборудованной дистанционным управлением, составляет 8 м с.
Большой кавитационный бассейн построен в 1971 г. в В а геи ин гене (Голлан-* Дня). Он имеет длину 240, ширину 18 и глубину 8 м (рис. VI 1.10). Его назначение — Исследования влияния кавитации на ходкость управляемость и гидроакустические качества судов Максимальная скорость обитаемой буксировочной тележки 4 м<с. Наибольший вакуум при проведении испытаний составляет 95 %.
§40. ОПЫТОВЫЕ БАССЕЙНЫ ДЛЯ МОРЕХОДНЫХ ИСПЫТАНИЙ СУДОВ
Первоначально мореходные испытания моделей судов проводились исключительно в обычных опытовых бассейнах, имеющих волнопродукторы для создания Воли. Как правило, волпопродукгоры, установленные в одном из .торцов бассейна, 205
обеспечивали испытании моделей только при движении иа встречном и поп тио», волнении Поэтому возникла необходимость создать специализированные опытов^» бассейны, позволяющие проводить мореходные испытания при произвольных кур. совых углах по отношению к фронту воли. Такие бассейны могут быть раздели, па две группы в зависимости от испытания на волнении
1) моделей с помощью буксировочных устройств;
2) автономных самоходных моделей с автоматическим или дистанционным уп а. вленнем
Рис. VII.II. Во.шолродукторы а — пластинчатый, б пневматический; в — плунжерный.
I — эксцентриковый механизм; 2 — волиообразующнй щит; 3 - центробежный выпилят 3 распределительное устройство; 5 — волнообразующий колокол.
В первой группе бассейнов изменения курсового угла волны обеспечиваются применением специальных волнопродукторов или изменением направлен пи движем модели с помощью поворотных 4юрм устанавливаемых в верхней части бассейна Для бассейнов второй группы задача решается заданием модели требуемого курса движения.
Для создания волн применяются главным образом плунжерные, пластинчатые пли пневматические мпогосекционпые волиопродукторы Схематическое изображен и таких волнопродукторов показано на рис VII.11 В случае использования ллун жерных и пневматических волнопродукторов высота н длина волны регулируютс изменением эксцентриситета эксцентрикового механизма и частотой колсбаии плунжера или пластины
206
Р случае применения пневматического волнопродуктора, состоящего из центро-В оГ0 вентилятора, волнообразующего колокола и соединительных магистралей, Ведические изменения давления осуществляются распределительным устрой-Очевидно, амплитуда воли, создаваемых волиопродуктором, зависит в данном К'оаё от давления подаваемого воздуха, а длина волны от частоты переключения регулятора.
Рис. VII. 12 Волногасители опытовых бассейнов (торцевые)
При работе волнопродуктора образуются волны, отражающиеся от стенки я противоположном конце бассейна. Они взаимодействуют с системой волн, образуемых волиопродуктором, и нарушают заданный характер волнения Чтобы избежать этого, в торце бассейна устанавливают волногасители. Типичные конструкции волногасителей показаны на рис VII. 12.
Глубоководные бассейны обычно оборудуют бортовыми волногасителями для гашения волн, создаваемых моделью. Такне волногасители искажают систему воли
Рис. VII. 13. Общая компоновка мореходного бассейна в Ва-гениигепе: а — сечение; б — план.
/ — вплнопро дуктор. 2 — Волновые сеточные фильтры; 3 буком рсвочная тележка. 4 — опорные колонны рельсового пути; 5 вол-Ж ногаентель.
от работы волнопродуктора, и поэтому их при его использовании демонтируют или поднимают. В некоторых случаях бортовые волногасители устанавливают несколько ниже уровня воды и придают им специальную форму для устранения нх вредного влияния при мореходных испытаниях моделей.
Типичным бассейном, оборудованным буксировочным устройством, является Мореходный опытовый бассейн в Вагенингеис. Этот бассейн введен в эксплуатацию [В 1956 г. Железобетонная чаша бассейна имеет размеры 95 X 24,5 м и глубину от 0,5 до 2,5 м. Буксировочная тележка перемещается с помощью электропривода. Бассейн оборудован секционным волиопродуктором, расположенным вдоль двух смежных его сторон (рис \ 11.13). Как и у тех типовых бассейнов, имеется дик для УДИ(|х)>ерен вки, загрузки и закрепления модели над тележкой, а также монтажный
207
208
мзсток для оборудования моделей измерительными приборами и аппаратурой, л'тгобениос-п.ю бассейна является укладка рельсового пути на двух двутавровых iTnK3x, каждая нз которых поддерживается вертикальными колоннами. Это сделано ля уменьшения размеров буксировочной тележки. Волны создаются многосекцнон-ЕдМ пластинчатым волнопродуктором, причем каждая секция имеет независимый привод- Для проведения испытаний на встречном илн попутном волнении используются лишь торцевые секции.
К мореходным бассейнам для испытания автономных моделей относится бассейн Р Токио. Бассейн представляет собой открытый водоем размером ЙО X 80 X 4,5 м <5ез буксировочного устройства. Автономные модели имеют длину 4,0—6,0 м и обо-
Рис. VII 15 Схема трехкомпо-иентпого динамометра.
/ 11 В — датчики боковой силы и сопротивления; Ч — датчик момента; 3 — тяга; 4 механизм, исключающий поворот рамы; 5 — шарнир; (j — рама, 7 — державка модели
рудуются всем необходимым для движения, управления п измерений Модель управляется оператором по радио С помощью волнообразоват&ая пластинчатого типа Кидаются двухмерные регулярные волны длиной от 1 до 10 м и высоток 0,6 ы; возы кно получение нерегулярного волнения.
I Для измерения воин используются емкостные и ультразвуковое нреобразова тели. Угол волнового склона определяется с помощью датчиков возвышения воды. Положение модели во время испытаний устанавливается с помощью двух ультра Звуковых приемников, которые находятся под водой и воспринимают импульсы, создаваемые индикатором положения модели. Бассейн оборудован системой автоматической регистрации данных измерений.
Бассейны для изучения управляемости судов могут быть подразделены на открытые водоемы и бассейны для испытаний автономных самоходных моделей. Изучение управляемости судов в открытых водоемах производится с помощью автономных самоходных моделей. При этом открытые водоемы оборудуются средствами, 'позволяющими фиксировать параметры движения модели Водоем должен иметь Док под крышей для подготовки моделей к испытаниям Типичной лабораторией Указа того типа может служить лаборатория по исследованию управляемости судов ГОсакского университета (Япония).
Более сложными и дорогими являются бассейны закрытого th ia с ротативными Установками для исследования управляемости. Их 1репмущество состоит в возмож
209
HocTir круглогодичной эксплуатации. Наиболее важный элемент таких бассейнов ротативная установка, представляющая конструкцию, которая вращается ( ' поверхностью воды в бассейне в горизонтальной плоскости Привод, расположенцц£ в центре вращения или же в периферийной части установки приводит ее в дви>кег;1с. Испытываемая модель связана с ротативной установкой динамометром, с помощь^ которого определяются гидродинамические силы. Для испытаний надводных н п >д. водных моделей используются соответственно трехкомпопеитиые и шестнкомпопеьг. пые динамометры.
Одним из наиболее крупных бассейнов с ротативной установкой являе , ч круглый бассейн научно-исследовательского центра в области судостроения в | рижс. Здание бассейна имеет диаметр 77,3 м; чаша бассейна — 65 м Глубина ч«шц составляет 5,5 м. Имеется волногаситель по периметру чаши для гашения волн вызванных движением модели. Стальная ферма ротативной установки опирается nj рельс диаметром 6,7 м и иа круговой рельс диаметром 4 м, установленные на колонне в центре бассейна, где также предусмотрены волногасители. .Максимальная скорость на конце фермы составляет около 10 м/с. Тележка, служащая для буксирован модели, опирается на ферму н может быть зафиксирована в любой точке ц0 се длине. Все динамометрическое оборудование, необходимое для измерения гид, действующих па руль н модель, размещено на тележке.
В некоторйх случаях, в отличие от рассмотренных, чаша бассейна делается прямоугольной, что позволяет совместить испытания на управляемость с испытаниями по определению мореходности судна. Такими являются, например, опытовые бассейны в Кардероке (США) н Хасларе (Англия). В последнем из этих бассейнов, имеющем размеры 122 X 61 м и два волнопродуктора, расположенные перпендикулярно один к другому вдоль стенок чаши, установлена консольная рота шпиля установка, максимальный рабочий вылет которой составляет 29 м (рис. VI 1.14» Принципиальная схема трехкомпоненгного динамометра показана на рис. VII 15 Из этой схемы следует, что модель соединяется державкой с рамой, свободно пере мешающейся в двух взаимно перпендикулярных направлениях. Державка может поворачиваться в подшипниках в раме. Ее поворот ограничен датчиком 2, регистрирующим значения действующего иа модель момента. Рама подвешена на тягах с иир-пнрамп. Для исключения поворота рамы используется механизм 4. Регистрация боковой силы и сопротивления осуществляется датчиками 1 и 8.
УКАЗАТЕЛЬ ЛИТЕРАТУРЫ
I. Абрамович Г. И. Теория турбулентных струй. М.. Физматгяз, 1360.
2. Александров К- В. Частичная кавитация произвольного профиля. — В сб.; Всесоюзная научно-техническая конференция по применению ЭВМ я численных методов в гидромеханике судна. Л.» Судостроение. 1977, с. 76—77.
3. Алешков Ю. 3. Теория воли па поверхности тяжелой жидкости Л., Нзд-во ЛГУ. 1981.
4. Альтшулъ А. Л. Гидравлические потерн на трение в трубопроводах. М.. Госэисрп изд ат. 196,3
5. Амромин Э Л Иванов А Н. Определение положения точек отрыва границы к. верны от телл с учетом вязкости и капиллярности жидкости. — ДАН СССР. 1982, т. 20 , № 4. с 823-826.
6. Амфи.шхисн В. Б.. Дроблснков В В.. Мазаева II. II. Интегральный трехпарам трпчсскнЛ метод расчета осесимметрично! о турбулентного пограничного слоя. — Труды ЛК? Гидромеханика и теория корабля. Л., Л КМ. 19/9. с. 3—9.
7. Амфнлохнсв В. Б., М а таена К. П. Исследование методов А. Д Адьтшуля и М Д. Миллнонщнкова для расчета плоского и осесимметричного пограничного слоя к шероховатой поверхности. — Труды Л КН Гидромеханика и теория корабля. Л . ЛКИ. 1980. с. 12—24.
8. Артюшков Л. С. Динамика неныотоновских жидкостей. Л., ЛКИ, 1979.
9. Летарнта Дж.. Маруччм Дж. Основы гидромеханики неныотоновскнх жидкостей М.. Мир 1978.
10. Басин Л1. А., Шадрин В. П. Гндроаэ родни амнка крыла вблизи границы раздел । сред. Л., Судостроение. 198(1.
11. Беаоносов С. м., Михайлов Н. Г , Тэтянко В. А., Цсцохо В. А. Расчет потев икалi-ного обтекания тел вращения Новосибирск. Си АН СССР, 1962
12 Белоцерковский С. М. Тонкая нссущвя поверхность в Дозвуковом потоке газа. М . Науки. 1965
tJ. Белоцерковский С. М., Ни шт ,М. И. Отрывное и безотрывное обтекание крыльег ндевлыки! жидкостью. М- Наук/], 1978.
210
|4 Белоцерковский С. М. 1 крипа1! Б. К Табачников В Г. Крыло в мест:ционарном Гала М . Наука, 1971.
В |5. Биркюф Г.. Гараитомсяло Э. Струн, следы п каверны. М. Мир. 1У<И.
Ьурдун Г Д. Справочник по международной системе единиц. М . Изд-во станддр-
Л|1 1980
И*’ ]7. Ван-Дайк Лк Методы возмущений в механике жидкости. Лк. Мир. 1967.
г 18. Варгафтмк Н. Б. Справочник по теплофизнческим свойствам жидкостей и газов.
. НфкЗ’ и,7;-
л ’ 19 Васильева В.В. Движение тел над поверхностью раздела в идеальной жидкости. — д сб.: Сопротивление движению и мореходность судов. Л.» Судостроение, вып. 89. с 31 — 37.
№ 20. Вероятностные характеристики волнения, методы их анализа и расчета. И. Н. Давн-
млй. В- А Гож ков. Б М. Андреев. Л. И. Лопатухин, 1О А. Трапезников — Груды ТОНН. В Гидрож-тсопздпт, 1971. вып. 97. с. 3—186
г 2! Кетер н волны а оксантх и морях Справочные данные. Л.. Транспорт. 1974.
I 22 Вознесенский Л. И., Исцветасв К). Л. Нормированный энергетический спектр Влрского полнения. — Труды НТО Суди ром a. J1.. Судостроение, 1963, вып. 47. с. 22—39.
£1. ВопткунскиЙ Я. 11. I горня волн и вилкового сопротивления. Л.. .9КН. 1939.
I 24 ВвЯткуисмий Я И. Фаддеев Ю И., Фсдиевский К К Гидромеханика. .1., Судо-гтросгие. 1982.
К 25. Синопский А. С. Теория турбулентных струй и следов. М , Машиностроение. 1969.
I 26. Глуховский Б. X. Исследование морс koi о ветрового полпенни. Л.. Гидромгтсопздат,
|0б «
к 27. Голубев В- В- Лекции по теории крыла. №.. ! Ill ГЛ. 1949.
28 Гуревич М, И. Теория струй 1|дгалыюн жидкости. №.. Филматгиз, 1971.
I 29. Егоров И. Т., Садовников IO. М.. Исаев Н. 11. и др. Искусственная кавитация.
Л Судостроение. Н‘7!.
| 30. Завадовский 11. К)., Руссккий Л Л Метод расчета давлений на лопастях гребных щитов. — Труды НГО Судирома. Л.. Судостроение. 1977» вып. 253, с. 66 -75.
Щ 31. Зенкевич О. Метод конечных элементов к технике. М.. Мир.. 1975.
I 32. Иванов А. ||. Гидродинамика развитых кавитационных течений. Л., Судостроение.
1980
' 33. Иванов А. II., Бутузов Л. А.т Оленин Ю. Л. Вопросы кавитации в задаче снижения Гидродинамического сопротивления судов. — В кн : Проблемы прикладной гидромеханики судна. Л.. Судостроение. 1975. с 151-178.
I 31. Карафолн Е. Aj родинамнка крыла самолета. М., АН СССР. 1956.
I 35= Кюпн Р., Дитли Дж., Хеммнт Ф. Кавитация. №.. Мир, 1974.
36. Козлов Л. Ф. Теоретические исследования пограничного слоя. Киев, Мзукова думка. 1982.
К 37. Коннор Дж., Бреббна К. Метод конечных элементов в механике жидкости. Л., Судостроение, 1479.
। 38. Корн Г., Корн Т. Справочник по математике для научных работников и ннжене-^И, М., Наука, 1978.
I 39. Костюков Л. Л. Теория корабельных волн и волнового сопротивления. Л., Суд-Пром из, 1939.
Ц 40. Костюков Л. А. Взаимодействие тел. движущихся в жидкости. Л.. Судостроение, 1972.
I 41. Кочни II F. О волновом сопротивлении и подъемной силе погруженных в жидкость тел. - Собр. соч., т. II, Л1. —Л.. АН СССР. 1949.
I 42. Кочин Н. Е.г Кмбсль Н. А.. Розе II. В. Теоретическая гидромеханика. Ч. I и II. М., Фиаматгнз. 1963.
43. Крылов Ю. >1. Статистическая теория и расчет морских ветровых волн — Труды Л., Гидромстеоиздат. 1958, вып. 42. с. 3—68.
44. Крылов Ю Лк Спектральные методы теории и расчета ветровых волн. Л., Гидро-Кетеоиздат. 1966.
45. Кудрявцева Н. А Гидродинамические силы и моменты инерционной природы. Действующие иа плавающее тело при малых числах Фруди. — Груды НАГИ, М , 1958. вып 716
I 46. Лсвкович А. к . Ходлм Д„ Хорлок Дж . Перкинс X. Семейство интегральных методов для расчета турбулентного пограничного слоя. — Ракетная техника и космонавтика, 1976. т 8. № 1. с. 51 — 59
к 47. Линь Цзи-Цзяо. Теория гидродинамической устойчивости. №.. И Л. 1958.
f 48. Логвнновнч Г. В. Гидродинамика течений со свободными границами. Киев. Паукова Дум кн, 1969.
| 49. ЛоГщяискнЙ Л. Г. Механика жидкости и газа. №.. ГИТТЛ. 1970.
К 50. Лоте-Хиггинс М. Статистический анализ случайной движущейся поверхности. — В кп.: Ветровые волны. М , МЛ, 1962. с. 125—217.
I 5!. Лопату хин Л. И Вероятностные характеристики «интенсивных групп» воли. — Труды ГОНИ. Л.. Гидрометеоиздат. 1972. аып. 11», с. 148 - 160.
i 5 2. Луювский В В. Динамика моря. Л.. Судостроение. 1976.
53. Маслов Л А Расчет бесциркуляционного обтекания корпуса судна при малых Числах фр мда. — Труды НТО Суди рома. Л.. Судостроение. 1966, нын. 73, с. 73—8!.
54. Миллионщиков М. Д. Турбулентные течения в пограничном слое и трубах. Лк, Наук.», 1969.
к 55. Мнтн-Томсон Л. №. Тсоретическня i идроДнмамнкя. М Мир. 1964
Г 56 Монни Л. С., Озмидов Р- В. Океанская турбулентность. JL. Гндрометеопздат, 1981.
к 57. Монин Л. С , Я|лом А М. Статистическая гидромеханика. Ч I и II №.. Наука, ’Ч . и 1967.
| 58. Некрасов Л. И. Теория крылв в нсетеннокарпом потоке. М . АН ССЛ’.Р, 1947.
59 Нужно С. Г. Пост| пение потенциальнпго котика несжимаемой жидкости около ртрыльсвых профилей произвольной формы Прикладная математика н механика, 19и.
Х1, вып. 1.
60. Океанология. Т 1. Гидрофизика океана,Под род. В. М Кпмонсковнча и А. С. м кина. М.« Наука. 1978.
61 - ~ "
Павловой Г. А. Методы расчета обтекания сечен нА крыла идеальным иссжичВ1.м Потоком. — Труды ЦЛП1. М , 1971. вып. 1344 62. Панченков отд.» 1976.
63. Патрашев . Военнздлз, [970.
64. Перннк Л.
65. Поляков Н Изд-во ЛГУ. i960.
Л. II. Теория потенциала ускорений. Новосибирск, Паука, Сибирец^ А Н., Кивай и Л. Л , Гожий С. И Прикладная гидромеханика, и
Д. Проблемы кавитлиин. Я , Судостроение. I96G.
। II. Теория нестационарных диижениА несущей поверхности. /|
66. Ржеплннский Г. В. Исследование режимов ветровою волнения океанов и расчет., параметров волн. — Груды ГОНЯ, Л . Гидроыстеонздат, [972, вып. Ill, с. 3 '
67. Риман И. С., Крекс И. Л. Присоединенные массы тел различной формы. — Тъе». ЦЛП>, М.. [917, вин. 631.
68 Рождественский В. В. Кавитация. Л.» Судостроение. 1977.
69. Рождественский К. В. Метод сращиваемых асимптотических рмзложеннй в гндр0. динамике крыла. Л., Судостроение, [979.
70. Романсик» П. И. Гидродинамика и тепломассообмен в пограничном слое. М.в Эиел гия» 1974. 1
71. Ротта И К- Турбулентный пограничный слой в несжимаемой жидкости. Л.» С\д0. строение, 1967.
72 Роуч И. Вычислительная гидродинамика, М . Мир. 1980.
73. Русецкнй А. А. Оборудован ио и организация гидродинамических лабораторий Я . Судостроение, 1975
*4. Самарский А. А.. Николаев Н. Методы решения сеточных уравнений. М . В 19/6.
75. Седов Л. II. Методы подобия и размерности в механике М.» Наука. 1967.
76. (Хдов Л. И. Плоские задачи гидродинамики и ллродмнлмнкм. М., Паука. 19G5.
77. Седов Л. И. Механика сплошной среды. Т. 1 и II. М.. Паука, 1970.
78. ('.илов В. К- К теории волнового сопротивления судов иа тихой воде. — Нлв. АН СССР. ОТН «Механика и маш и построен иг», 1961, № 1» с. 73—85.
79. Смородин А И. О применении асимптотического метода для анализа воли при неустя. повившемся движении источника. — Прикладная математика и механика, 1965, т. 29. выг I С. 148— 15 2.
80. Смородин А. И. О волнах иа поверхности жидкости при движении погружен г ого Эллипсоида вращения — Прикладная математика и механика, 1972. т. 36, вып. I, с 62- 69.
81. Современные зарубежные судостроительные гидродинамические лаборатории Под рсд. Г. А. Матвеева и Ю. II. Прнщемпхннз Я., Судостроение, 1969.
82. Сретенский Л. II. Теория волновых движений жидкости. М.. Наука, 1977.
83. С тепанов Г. Ю Гидродинамика решеток турбомашин М , Физматгнз, 1962.
81. Стокер Дж. Волны на воде. М ИЛ. 1959.
85 Сунцов Н. И. Методы внвлогиЙ в аэродинамике. М., Физмат! in, 1958.
86. Теория поверхностных воли/Под рсд. М. Л. Красносельского н II. II. Моисеева М, ПЛ. 1959.
87. ТрещсвскнЙ В. Н., Волков Л. Д., Коротким А. II. Аэродинамический эксперимент в судостроении. Я.» Судостроение. 1976.
88. Турбулентность. Принципы и применен не/Нод ред. У. Фроста и Т. Моулдеиа М , Мир., 1980.
89. Уилкинсон У. Л. Нецьютоновские жидкости. М.. Мир, 1964.
90. Федяеве кий К. К-. Гн невский А. С., Колесников А. П. Расчет турбулентного пограничного слоя несжимаемой жидкости. Л.. Судостроение, 1973.
91. Фильчакова В. II. Конформные отображения областей специального типа. Киев, Паукова думка, 197*2.
92. Хинце Н/ О. Турбулентность. М., Физматгнз, 1963.
93. Хоннчеп В. Н. Численное решение задач» о потенциальном обтекании простр н-ствснных тел. — Иза. СО АН СССР. Серия тсхнич. наук. 1973, № 8, вып. 2, с. 23—2S
9| Черкесов Л. В Гидродинамика поверхностных и внутренних волн. Киев, Паук пз думка. 1976.
95. Шсбалов А Н. Присоединенные массы. Л., ЛКП, 1975
96. Шсбалов А II Теория волн и волнового сопротивления тел при неустанпвнниш и режимах движения. Л.. ЯКИ» 1981.
97. Ill внхтпнг Г Теория пограничного слоя. М., Науке, 1969.
98. Эпштейн Л. А. Методы теории размерностей и подобия и гидромеханике суд’° Л., Судостроение, 1970
99. Эшли X., Лэндал М Аэродинамика крыльев И корпусов летательных аппарата М.. Машиностроение 1969.
100 Вгеппеп С. A numerical Solution of axlsimmctrlc cavity Flows Jorn. Fluid Med . 1969. v. 37. pt. 4. p. 116—127.
101 Djojodihardjo R , Widnall Mi. A numerical Method for the Calculation of nonlinear unsteady Lining Potential Flow Problems. — AJA A 71lh Aerospace Sc. Meeting. Nru* York. 1969
102. Eggers K. Second-Order Contributions on Ship Waves and Wave Resistance. Proc of lhe 6lh Simp, on Nava] Hydrodynamics, Wiishinglon. 1966. p. 619—679.
103. Giillloton R. L’cluoc thcorlque du bateu en flulde par (alt. Bull, de Г Association Technique Maritime A6ronau!iqe. 1964, v. 64, p. 537- 519
104. Hess J. The Problem of three — dimensional Lilting Potential Flow and Its Solutif’n by means of Surface Singularity Distribution Compnler Methods. Appl. Mechanics ami Fug. ! 1974. p. 283-319.
I0u. Hess J. and Smith A. Calculation of Non-1 illlng Potential Flow about Aihil .’ГУ Ihree-Dimenstoiial Bodies Jorn of Ship Research. 1964. v 8. N 2. p 22—44
212
106. Kirsch Л1. De Vertclfung der Geschu Idlgkeit urn /Hinder und Rotatton^kOrpcr in Hforrcnzlen Fliissigkelt Schill und Hafen. J 14. Hell II. l962. S. 936—958.
Г 1H7. Legally M Bercchnung dvr Kralte und Memento, die stromende Flussigkeilcn auf .. e Begreiiznng ausdben. Zcitso.lirift lur Angewandte Mathcmatlk und Mechatifk, Bd. 2, Heft 6, S 402—422.
P: |CR Laurmann J , Roblnsau A Wing Theory, Cambridge, 1956.
I ]U9. .Manio II., Suzuki K. Wove Resistance of a Ship dl Finite Beam Predicted by the «mi Sneed Theory. Nav. Arch, and Ocean Frig., v. 16, 1978. p. 61—67.
L 110. Mazarredo 1.. Cat slog of Experimental Facilities 13 ITTC, Proceedlnds. v. 2. Ber-.;r_Ifambuig. p. 1419—1445.
j Hl. Ogilvie F. Singular-Perturb a 11 UH Problems in Ship Hydrodynamics. Adv. In Applied Mechanics, v. 17, Academic Press. New York. 1977
г 112. Stanford Conference on Сотри I al ion oi turbulent Boundary Layer. Proceedings, „ 1 and ?. AFOSR — I ER. Stanfoid. 1968.
^113. Street R. A Review of numerical Methods for Solution ol !hree-dlmenllonal Cavity plow Problems. Proc. Second: In! Crmf. on Numcr. Ship Hydrod.. Berkely. 1977.
r 111. Tulin M Supercavitaling Hows small-perturbation Theory, — Jorn. Ship Ros., 961, 7. V 3, p. 37—43.
115. Vandrey F. A Method for calculating Ihe Pressure Distribution of a Body ol revol n* Hon moving in a circular Path through a perfect Incompressible Fluid. — ARC, Rep. and Mem.. W3139. London, i960.
116. Ward G. Linearized Theory of steady High-Speed Flow. Cambridge Univ. Press. ^*117. Weliaiisen J., Laitonc E- Encyclopedia of Phyvics, v. IX, Surface Wave*. Berlin. Springer Verl.. i960.
I 118. Weliaiisen J. The Wave Resistance of Ships. — Adv. In Applied Mechanics, v. 13, Acad. Press. New York. 1973» p. 93—245.
119. Workshop on Ship Boundary Layers SSPA-ITTC, GSteborg, 1980-
Раздел etnopaa
СОПРОТИВЛЕНИЕ ДВИЖЕНИЮ СУДОВ
ОСНОВНЫЕ ОБОЗНАЧЕНИЯ
Н — ширина судна но действующей ватерлинии.
С иди Сх — коэффициент сопротивления.
Сд — надбавка на шероховатость (корреляционная поправка).
Сдр — коэффициент сопротивления выступающих частей.
коэффициент сопротивления трения.
коэффициент сопротивления вырезов, коэффициент остаточного сопротивления.
вязкостного сопротивления
сопротивления формы (вязкостного сопротивления
е’н
Су — коэффициент Сур — коэффициент давления).
Cir — коэффициент
Стур — коэффициент
С, — коэфх
cs — । : . ______
Сд.| — коэффициент сопротивления воздуха движению судна.
Сео — коэффициент сопротивления трения эквивалентной гладкой пластины.
волнового сопршивлсния.
сопротивления or разрушения судовых волн.
»|циеит индуктивного сопротивления.
коэффициент брызгового сопротивления.
Cg — адмиралтейский коэффициент буксировочной мощности.
cj, ст — местные коэффициенты трения.
Г) — сила тяжести судна, диаметр тела
Fr — число Фруда, отнесенное к длине по действующей ватерлинии.
Ггу — число Фруда, отнесенное к объемному водоизмещению.
Frw — число Фруда по глубине воды.
I’t — площадь проекции надводной части корпуса па плоскость мидс-ль-шпангоута.
Н — глубина воды.
к — масштаб модели.
k — коэффициент влияния формы тела на вязкостное сопротивление (форм фактор).
feg/g; — коэффициенты влияния.
/гсч — коэффициент счала.
I wl — длина судна по действующей ватерлинии.
1 рГ, — длина судна между перпендикулярами р — коэффициент давления.
р — гидродинамическое давление.
Рд — мощность, потребляемая гребным винтом.
Ре буксировочная мощность.
R- Рх — полное сопротивление.
Рла — сопротивление воздуха.
Rp — сопротивление трения
Pro — сопротивление трепня эквивалентной гладкой пластины. Rp — сопротивление давления.
214
R/? — остаточное, сопротивление.
Rv — вязкостное сопротивление.
Rvp — сопротивление формы (вязкостное сопротивление дав,тения).
Rlr — волновое сопротивление.
₽нгп —сопротивление от разрушения судовых волн.
Ri — индуктивное сопротивление.
Rs — брызговое сопротивление.
Rc — отрывное кавитационное сопротивление.
R/IP — сопротивление выступающих частей.
Raw — Дополнительное сопротивление, вызванное волнением моря.
Re— число Рейнольдса, вычисленное по длине тела.
Rex — число Рейнольдса, вычисленное по текущей координате.
Т — средняя осадка судна.
1 V = D/y — обьемное водоизмещение.
v — скорость, м/с.
va — скорость судна, уз.
хс, 2С—абсцисса и ордината центра величины
а. — коэффициент полноты ватерлинии.
Р— коэффициент полноты мидель шпангоута
Рв — угол встречи волн.
6 — коэффициент общей полноты.
Сд — амплитуда вади.
Св — ордината вади.
т — касательное напряжение в потоке.
т« — касательное напряжение на твердой стенке.
| ff — 6, р — коэффициент продольной полноты, у = б, а— коэффициент вертикальной полноты.
ф — Li'y И — относительная длина судна.
ом — площадь мидель-шпангоута.
52 — площадь смоченной поверхности.
Глава I
ОБЩИЕ СВЕДЕНИЯ
О СОПРОТИВЛЕНИИ ДВИЖЕНИЮ СУДОВ
§ 1. сопротивление движению судна
и ЕГО СОСТАВЛЯЮЩИЕ
I Для оценки одного из важнейших мореходных качеств судна — ходкости — Способности судна перемещаться с заданной скоростью при наиболее эффективном нспадьзооанип мощности силовой установки, т с. развивать наибольшую скорость прн |аданной мощности установки, необходимо уметь определять два ее основных Вклеме i сопротивление движению судна и эффективность его движителей. Знание их позволяет связать гидродинамические характеристики судна и движителей с ха рактеристиками его главных двигателей в процессе проектировании и эксплуатации судна и, следовательно, дает возможность установить его ходовые качества.
Работа движителя (гребного винта, водомета к т и) влияет на структуру обтекания корпуса и изменяет сопротивление его движению. Однако обычно принято в качестве исходного рассматривать сопротивление корпуса без учета влияния па чего работы движителя, а это влияние, так же как и сопротивление самого движителя учитывать отдельно, прн расчете эффективности движителя.
i Сопротивлением движению судна называют проекцию Rx действующих на него ^Щроаэродинамнческнх сил на направление скорости его движения. Ойо возникает А Как результирующая проекций па это направление Давлений р и касательных на
К 215
пряжении тв, действующих па его поверхность со стороны обтекающих ее пшг* воды н воздуха. Распределение р и т0 по поверхности подводной и надводной час,0? судна зависит от структуры этих потоков, на которую главное влияние оклзыцд форма корпуса, значение скорости судна и ее направление по отношению к > ,ет метралыюй плоскости (ДП), а также то, движется ли судно по поверхности, вбл (а' нее или глубоко под водой Значительное изменение структуры обтекания, а слез'1 вателыю, и сопротивления может быть вызвано воздействием внешних условий движения судна, таких как глубина и ширина фарватера, ветер, волнение и тем ц (г наличие льда, изменение дифферента н средней осадки, обрастание подводной части корпуса в процессе рейсов п стоянок, разгон и торможение н т. п.
При расчетах .ходкости основным является определение [сопротивления ;удц, со свежеокрашенным корпусом при его движении вдоль ДП с постоянной .скоростью на глубокой воде при отсутствии волн, ветра и течения. Учет перечисленных пыще
дополнительных факторов производится по мере необходимости в соответствии с назначением и предполагаемыми районами плавания судна.
В зависимости’от скорости для надводных судов возможны различные режю ы их движения Па режиме плавания, характерном для большинства транспорт ix судов, действующая на них сила тяжести практически полностью уравновешнваеп я архимедовой гидростатической силой поддержания. Этот режим соблюдается ее и число Фруда, отнесенное к водоизмещению судна: Fry = v/i//g),l'‘3 < 1, где Г -объемное водоизмещение. В переходном режиме, когда 1< 1’гу< 3. наблюдается возникновение значительной вертикальной гидродинамической силы, вызывающей изменение средней осадки и дифферента судна. В зоне Fr > 3 начинается рцжн I глиссирования, при котором сила тяжести практически полностью уравновешпваекя гидродинамической подъемной силой, роль архимедовой силы поддержания незнг чптельиа и судно скользит по поверхности воды. Переходный режим и глнеенров. ние характерны для быстроходных кораблей п катеров Переход от одного режим.i движения к другому оказывает большое влияние на закон изменения сопротивления в зависимости от скорости.
При расчетах ходкие гн судов применяют связанную с судном систему коордн наг, ось х, которой направлена в иос, ось yt — на правый борт, ось zt— вверх, а начало расположено в плоскости мидель-шпангоута в месте ее пересечения с грузовой ватерлинией (ГВЛ) (рнс. I I). Если наряду с этой системой использовать поточную систему координат, в которой ось х направлена по скорости v движения судна, а ось г — вертикально вверх, то ири его движении вследствие нзмеиспи посадки оси х и хх могут составлять между собою угол ф, равный углу дифферент::.
( вязь между соаавляющими гпдроаэродинамнческой силы R, действующ! и на корпус судна прн его поступательном движении вдоль оси v, вычисленными в сви 210
niioii системе координат, и силой сопротивления движению судна Rx определяется
лютеннем
Rx — R*! cos 4’ + R;t ЯЙ1 *1'.
(Il)
«удящие L Зление по ", дав. chi я
isiy формулу проекции сил могут бить вычислены, если известно распре-подводиой и надводной поверхности S корпуса касательных напряжений
Rx ~ j То ccs (то. х) ds + J Р с°8 (р, х) dS. (I 2)
р системе координат, связанной с корпусом,
/<д. = [ T0cos(Tt, x,)dS + I pcos(p, x^dS,
(1-3)
PZ1 = | T0 cos (Tc« 2t)dS + j pcos(p, Z|) dS. s s
I Формула (1.2) позволяет произвести разделение суммарной силы сопротивления на две составляющие: сопротивление трения Rr = J т0 cos (т0, х) rfS и сопроти-В s
влепне давления RP = J р cos (р, л) dS.
а
I Сопротивление трения возникает вследствие влияния вязкости жидкости, обусловливающей прилипание се частиц к поверхности судна и появление касательных напряжений т0. Сопротивление давления появляется из за воздействия различных физических процессов, возникающих в потоке, обтекающем судно, на закон распределения давлении вдоль его поверхности. Влияние вязкости приводит к перераспределению давления вдоль корпуса по сравнению с давлением при обтекании его невязкой жидкостью, особенно существенному в районе кормовой оконечности, где пограничный слой, формирующийся вдоль судна, достигает наибольшей толщины. Появление отрывов пограничного слоя, сопровождаемое образованием систем крупных^ вихрей, способствует еще большему изменению распределения давления вдоль корпуса. Часть сопротивления давления, возникающая вследствие влияния вязкости, называется вязкостным сопротивлением давления пли сопротивлением формы Ryp. Сумма сопротивлений трения и формы представляет вязкостное сопротивление Rv — Rr + Ryp. Работа, связанная с преодолении»! вязкостного сопротивления, затрачивается на формирование вдоль корпуса пограничного слоя и вихревых систем (в случае появления его отрыва), образующих за судном спутную струю (гидродинамический след).
На распределение давления по поверхности корпуса оказывает значительное влияние волнообразование, вызываемое движением судна. Часть сопротивления Да аення, возникающая вследствие влияния корабельных волн, называется волновым сопротивлением R\v. Работа, совершаемая для преодоления этой силы, затрачивается на создание энергии системы воли, формируемых судном. Еслн вблизи корпуса, особенно в носовой оконечности полных судов, происходит разрушение возникающих Bain, то этот процесс порождает в потоке около корпуса области турбулентного течения, распространяющиеся за судном в виде дополнительных зон его спу гной струи. Часть волнового сопротивления, обусловленная формированием Разрушившихся волн, называется сопротивлением от разрушения волн RWB.
: В некоторых случаях выступающие части корпуса судна (кронштейны, кили И т. п.}, а иногда и сам корпус обтекаются как крыло конечного размаха, т. е. Кривлением вторичных поперечных течений. Вследствие этого за шшн формируются продольные вихри, вызывающие перераспределение давления на корпусе •^появление индуктивного сопротивления R{. Работа, связанная с его преодолением, затрачивается на создание энергии продольных вихрей, расположенных в следе За судном, а сама сила R( может рассматриваться как дополнительная часть вязко-ктног j сопрот пилення.
217
У быстроходных судов на погруженных в воду выступающих частях, а та10к' на участках корпуса возможно формирование кавитационных каверн, влияюцп?® на распределение давления и вызывающих появление отрывного кавитацнопцо/ сопротивления R(-. Замыкаясь, каверны создают позади себя зоны турбулентности0 также переходящие в гидродинамический след судна.
Формирование брызговых струн, характерное для движения с большими ск^, роегями, приводит к появлению на корпусе реактивной силы, вызывающей поив.те. ине брызгового сопротивления Rs.
Таким образом, сопротивление давления можно представить в виде суммы:
Rp = Rvp t- Rv.7 + Rvrn + Rt + Rc + Rs <1.4
Два последних слагаемых характерны, главным образом, для быстроходных судов Процессы формирования погранично-
го слоя, вихреобразовання, волиообразо- %> \
ваиия и разрушения волн происходят в 1110г- ,———————_
жидкости одновременно и оказываю! влня-
Рис 1.2. Схема разделения
сопротивления движению.
Рнс 1.3. Относительная роль основных составляющих сопротивления транспортного судна и его модели.
/ — зона вязкостного сопротивления: // — зона волнового сопротивления;----модель,
к = I ; 24;------судно.
ине друг на друга. Степень этого влияния, как показывают результаты исследований, зависит от формы корпуса судна и его скорости, однако в большинстве случаев она невелика. Это дает возможность использовать гипотезу о независимости составляющих сопротивления в том числе основных для обычных судов, т. е. Rv и /?ц , полагая, что Rx — Ry -j- /?«-. Эта гипотеза позволяет при теоретических расчетах вязкостного сопротивления применять в качестве основы теорию пограничного слоя, а для расчетов волнового сопротивления — теорию волновых движений невязкой жидкости.
Так как судно лишь частично погружено в воду, сила сопротивления является суммой сопротивления воды и сопротивления воздуха Плотность воздуха весьма мала, поэтому для небыстроходиы.х судов взаимодействием процессов, происходящих в потоке воды и воздуха, можно пренебречь, рассматривая сопротивление воздуха как независимую составляющую, и полагать, что полное сопротивление
R Rx = Rv + Rv + Л.тд. (1,5)
Сопротивление воздуха в общем случае, так же как и сопротивление воды, состоит из вязкостной, волновой и индуктивной составляющих, однако у пебысгроходиы.х судов в нем доминирует вязкостное сопротивление.
Общая схема разделения сопротивления воды на составляющие с указанием, куда переходят энергетические затраты, связанные с их преодолением, представлена иа рис. 1.2.
218
I Для водонзмсщающсго судна роль отдельных составляющих сопротивления К u j общем его балансе существенно зависит от скорости движения (рис. I 3). Кпрвделония этих составляющих несколько различаются у судна it его модели Едотвне разных законов изменения вязкостного и волнового сопротивлений
рн<-. 1.4 Влияние к эффнцисита общей пол-иа Роль составляющих сопротивления для скоростей полною хода.
• зона сопротивления трения: II — зона вяз-Жетного сопротивления длнлепип, III — зона вшившего сопротивления
в зависимости от скорости п шероховатости судовой поверхности. Соотношение между составляющими сопротивления зависит также от формы корпуса судия (рис. 1.4).
Как показывают рис. 1.3 и 14, для транспортных судов основную роль в общем балансе играет вязкостное сопротивление. Сопротивление воздуха движению таких судов при практическом отсутствии ветра невелико и в зависимости от скорости, а также формы надстроек составляет 1,5—3 % полного.
ОБЩИЕ ФОРМУЛЫ ДЛЯ СОПРОТИВЛЕНИЯ и БУКСИРОВОЧНОЙ МОЩНОСТИ
В соответствии с принципами теории подобия, изложенными в гл. Ill первого раздела сопротивление воды движению судна может быть вычислено по общей формуле
I «=C-*y-S, (1.6)
где С — безразмерный коэффициент сопротивления, р — плотность жидкости; о—скорость судна; S— характерная площадь.
Аналогичные формулы, выраженные через соответствующие коэффициенты, справедливы и для вычисления составляющих сопротивления. Коэффициент сопротивления можно представить в виде суммы:
С — Ср + Сур + Ci ф- CV + Cjfb — Су С\у )- С\уц.
(1.7)
В соответствии с гипотезой о независимое;и составляющих сопротивления можно полагать, что при движении судна с постоянной скоростью коэффициент вязкостного сопротивления Cv является функцией только числа Рейнольдса Re, а коэффициент волнового сопротивления, равный сумме Сц- и Сц-д, — функцией числа Фруда 1т. Если скорость судна зависит от времени, то обе эти составляющие являются также Функцией числа Струхаля S11.
£ При применении формулы (1.6) для расчета сопротивления воды движению ®ОДОи. мещаюшнх судов в качсс|ве характерной площади S принимают площадь В<очс|)иой поверхности R их «голого» корпуса без хода, соответствующего дайной Ссадке, т. е. площадь выступающих частей обычно нс учитывают. Если в качестве Характерной принята площадь погруженной части мндель-шпапгоута о>м или объем догруженной части корпуса V3'3, то связь между коэффициентами сопротивления By* Сг«/, и С определяется соотношениями
С - Сш <о„,42; С С .. и2-3/Й. (I 8)
Ы V ’
219
При вычислении Fr — vWgL., Re = vL'v и Sli = U(yT) (T — характерное в 1ем . в качестве характерной принимают длину L -судна пли его модели в стаг 1Ческ положении но ГВЛ. соответствующей данной осадке 4
При расчетах ходкости наряду с сопротивлением определяют буксиро|юЧ1и мощность (в ваттах пли киловаттах) которую необходимо затратить, чтобы б, ровать судно с данной скоростью Ре = Ра. Формулу для определения буксир'овоч* иой мощности (в л. с.) можно записать п в ином виде, иногда применяемом г„*. проектировании судов
р£=^п2'3/с£> (i.9)
где 4S — w’0,514 — скорость судна в узлах; D — в тоннах;
Се = 150 (0,514)ЛМ'(СрО) — (| |0)
адмиралтейский коэффициент буксировочной мощности. Коэффициент Се фор> ц (1.9), которую называют адмиралтейской, представляет размерную величин',-' н так же как С, является функцией чисел Re и Fr.
Рис, 1 5. Схема обтекания судна.
Сравнительную оценку ходкости различных судов можно производить, Си ставляя значения нх удельного сопротивления R,D при равных числах Fr.
Сопротивление движению судна можно определить, если известны характс; стики потока за ним (рис 1.5). Рассматривая поперечное сечение S, на некотором удалении от судна, включающее формирующиеся за судном гидродинамический след и волны, и используя закон количества движения, можно записать выраж i i для силы сопротивления воды движению судна:
Я = [ [ Рух (” - °л) - Р - - pi'l2 + 2р dy dz + -5- f £ dy +
S| |r —GO
+ И j dxdy, (111)
sn или
Я = J [t (ffu — ff) + -y ( — 4- 4^ + I'fJ + — t* ] dy dz 4-
+ T J + ~STdxdy t1121
-°° SH
где у — удельный вес жидкости; р. — динамическая вязкость;
у// р х yz 4- -L (Vx — 1')г 4- с-^ 4- и®; J
полный напор; уНа fa-i'2 — скоростной напор, = t'x — о, q , v± — вызва шые скорости потока.
220
Если глубина жидкости не ограничена, третье слагаемое в формулах (I 11) л 12). учитывающее касательные напряжения иа дне, равно нулю. При исполь-K.naHi'11 этих формул часто пренебрегают двумя последними слагаемыми в подин Вралыюй сумме первого интеграла по сечению S,. представляющими вязкостные Ii Дрбулентиые нормальные напряжения. В случае невязкой жидкости при нотеп-дальном течении в соответствии с интегралом Эйлера II /10 и, следовательно.
S,
4-о?
1 'и
(I 13)
q,0 выражение определяет волновое coiipoi паленке в невязкой жидкое пт
При движении тела в неограниченной вязкой жидкости и достаточном удалении от тела сечения S,. где давление р в следе равно рх, формула (I II) становится Кзивалентной соотношению (III 142) первого раздела.
$ з. расчет ПЛОЩАДИ СМОЧЕННОЙ ПОВЕРХНОСТИ СУДИЛ
Поверхность подводной части корпуса судна обы чно не удается точно описать явной функцией от координат, поэтому аналитически вычислить ее площадь затруднительно Это приводит к необходимости использования различных приближенных методов расчета. Достаточную для практических целей точность обеспечивают способы, основанные иа приближенном интегрировании длин I п)
полупернметров погруженных час чей шпангоутов судна, снятых с «Корпуса» его теоретического чертежа посредством курвиметра пли циркуля делителя. Если для этого используется теоретический чертеж с равноотстоящими шпангоутами, то согласно правилу трапеций
о 2L V /o~fn Y (i.i4)
п J 2 1
\ 1—0 /
где п — число промежутков между шпангоутами (обычно принимают л = 20). Если используется чертеж с чебышевскими шнангоу гамн, то в соответствии с правилом Чебышева
I й 4S"- (1|5>
1-1
где т — число чебышевских шпангоутов. Формулы (1.1-4) в (1.15) недостаточно учитывают влияние продольной кривизны обводов корпуса, особенно существенной в оконечностях судна, однако для обитых обводов оно невелико, п поправок к значениям £2, вычисленным ио этим формулам, как правило, не вносят.
Г Расчет площади смо-еииой поверхности производят для нескольких значений осадки Т, и строят зависимость Q f (Г) одновременно с грузовым размером судна. На начальных стадиях проектирования, когда известны лишь основные элементы судна, для этого используют приближенные формулы
| Для судов с невысокими значениями коэффициента общей полноты 6 расчеты хожио производить по формуле С П. Мурагнна
£2 - LT (1,36 | 1,1360 Г), (I 16)
Для транспортных судов с большими значениями б по формуле В. Л Семеки:
£2 f Т[2 4- 1 37 (Л 0,274)0 7’]; (117)
Для промысловых суд в различных типов по формуле В А Ерошина
$2 - Lvp (0,50 + Т) (0,55 + 1,526,,,,) (1.18)
221
(!-рр и Ърр — длина между перпендикулярами н соответствующий ей xo'x]H|>iiitiIl.| общей полноты); для речных судов без тоннелей— по формуле А Б. Карил Т
Q = у2/3 (5.1 -|-0,074 ^-0 15 ) (1Л!))
Эп< формулы обеспечивают точность расчета Q в пределах отклонений, не превыш-, ющих 2—4 % значений, определенных по формулам (1.14) и (1.15).
Смоченная поверхность выступающих частей (кронштейнов или выкрут гребных валов, рулей, скуловых килей) может быть вычислена, если имеются сеют ветствующис чертежи. В зависимости от конструкции для двухвинтовых судов Cvv угарная площадь кронштейнов может составлять 0,8—2,5 %, выкружек l-t" скуловых килей 1—3 % площади смоченной поверхности «голого» корпуса. Сумч.тп! пая площадь всех выступающих частей у одно- и двухвинтовых судов может составлять 1 5—7.0 ?и площади смоченной поверхности «голого» корпуса
Гласи I/
ВЯЗКОСТНОЕ СОПРОТИВЛЕНИЕ СУДНА
§ 4 ХАРАКТЕРНЫ Г, ОСОБЕННОСТИ ТЕЧЕНИЯ
В ПОГРАНИЧНОМ СЛОЕ СУДНА
Условия и закономерности развития пограничного слоя определяются внеш-ним потенциальным потоком, который при обтекании судна имеет трехмерный характер. Трехмерное течение наблюдается и в пограничном слое судна. Общая картина развития пограничного слоя вдоль корпуса судна, как н в случае двухмер ьио слоя, обусловлена в основном особенностями продольного распределения давления. Значение коэффициента давления р и степень его изменения в продольном направлении dpldx зависят от геометрии корпуса, главным образом от распределе! ия по длине судна объемов погруженной части корпуса (строевой по шпангоутам), а для относительно быстроходных судов и от числа Fr, характеризующего фс; му волнового профиля вдоль борта судна. При обтекании судов с достаточно протяженной цилиндрической вставкой и резким изменением площади шпангоутов в окон ’ -ногтях эпюры продольного распределения давления р (х) имеют два минимума. Соответственно на корпусе возникают два участка ускоренного и замедленного течений Подобным же образом изменяется давление н по длине судов е умеренной длиной цилиндрической вставки, хотя значения минимумов давления ртп и пр -дольных градиентов давления dy/dx в этом случае заметно меньшие Распределе! с давления по поверхности судов острых образований, у которых площади попсрс i-иых сечений плавно уменьшаются ог мидель-шпангоута к оконечностям, ио тш у соответствует распределению, получаемому при обтекании эллипсоидов, т. е. с м г ннмумом тавдения в средней части Характерные эпюры продольного распределения давления для су, ов различных типов показаны на рнс 11 I Поперечное из менсние давления вдоль контуров шпангоутов связано с изменением объемов погруженной части по осадке и наиболее ярко выражено в оконечностях судна. Полезную дополнительную информацию об особенностях распределения давления дают планы изобар р conet (рис. II 2). позволяющие судить и об общих тенденциях и возможности локальных изменений в развитии пограничного слоя
Форма погруженной части судна обычно такова, что линии тока потенциального потока вблизи его поверхности расходятся в носовой оконечности и одновременно. иескотько изгибаясь, отклоняются вниз, частично переходя на линии (рис. II 3). В кормовой оконечности наблюдается противоположная картина: подъем и схождение линий тока Дополнительное искривление линий тока в посуй в корме, а при высоких числах Fr и на бортовой поверхности в середине корпуса обусловлено воздействием поперечных градиентов давления
Пространственный характер течения в пограничном слое выражается в изменении его параметров ие только в продольном, но и в поперечном направлении 222
' в возникновении дополнительных явлении, которые не наблюдаются при двух-в |1ОМ течении Это обусловлено несколькими нижеперечисленными факторами. **е‘ I Неодинаковым распределением поверхностного давления вдоль различных линий тока
2. Особенностями взаимного расположения линии тока потенциального по-ftl(a В случае расхождения линии тока происходит растекание жидкости в попереч-тои направлении и утоньшенне слоя. Ь8оборо , в районе поджатия линии £ja слон утолщается. Влияние под-жатня линии тока особенно сказыва Sea на участках положительного про-додьного градиента давления н может Кгь соизмеримо с влиянием изменена давления в продольном направлении.
I 3. Развитием в слое вторичных течений. При движении жидкости вдоль криволинейных линий тока вектор скорости в пограничном слое по мере приближения к поверхности корпуса постепенно отклоняется от его направления на внешней границе слоя в сторону центра кривизны линий тока под действием сильно изменяющихся по толщине слоя центробежных сил. Профиль средней скорости приобре-таетсложную пространстве! иую форму и, как показано па рис. III.18 первого раздела, описывается двумя составляющими: профилем относительной скорости основного течения (в направлении линий тока) потенциального
потока vjvf, и профилем скорости вторичного (поперечного) потока vzlvf,. Степень ^Ивления пространственных эффектов зависит от геометрии корпуса и Fr.
Особенности развития пограничного слоя модели танкера среднего водоизмещения (6 0,78, LIB = 7,1) исследованы Л Л. Гориным, А. Н Дубенским
Рис. II 1 Распределение давления вдоль поверхности корпуса.
I — танкер; 2 — сухогрузное судно; быстроходное судно.
3 —
Рис. II 2 Распределение давления но поверхности модели танкера среднего водоизмещения (б — 0 78 Fr — 0 18).
И А Ф Пустошным |14, 16] В носу модели на днищевой поверхности в результате местного поджатия линий тока образуются утолщеиия пограничного слоя (рис II 4) Под действием вторичных течений они постепенно смешаются в сторону Ст ДП Относительная толщина пограничного слоя 6/х в носовой оконечности изменяется в поперечном иаправле! ни от I до 3 % В корме изменение толщины слоя 'вдоль периметров шпангоутов значительнее (от 1 до 5 %). Здесь пограничный
223
Рнс II 3. Линии тока вблизи поверхности корпуса модели танкера с 6=0,78.
-------поверхностные (предельные) линии тока;---------линии тока потенциалыюгс потока.
Рнс. II 4 Распределение изотах (yxlv6 = const) ОС* новного течении в носовой оконеч и о-сти модели танкера.
1) — расстояние от Гднища.
Рис. II.5. Распределение скоростей вторичного течения в носовой оконечности.
224
пой )же нельзя считать toikum, перепад гидродинамического давления по его тол-[Тыне может достигать &р — 0,10-5-0,15. Возможно существенное влияние погра-ичного слоя па внешний потенциальный поток.
” Профили скорости основного течения йг = vjvf, на большей части корпуса К форме не слишком отличаются от набл1одаемых в двухмерном слое. П|!офнли Ьорос ей вторичного течения vz — vjvf, в носовой и средней частях корпуса
Рис. II.6. Планы продольных и поперечных скоростей в кормовой оконечности ч—в плоскости 19-го шпангоута, б — на расстоянии Дх = 0,05/. от кормового i перпендикуляра.
Размеры стрелок соитвегствушт масштабу безразмерной поперечной скорости укззян-№ ному на рисунке.
имеют форму, близкую к параболической (рис. II.5). Более сложные вторичные потоки возникают в кормовой оконечности При рассмотрении планов поперечных скоростей (рис II.6). видно, что в корме на некоторых участках, главным образом вблизи скулы, вторичные течения в пограничном слое но мере приближения к поверх пости корпуса изменяют направление и должны описываться знакопеременными профилями. Характер распределения безразмерных поперечных скоростей
8 Пр Я И. Войткунского т 1 225
Рнс И 7 Общая картина распределе пая поверхност пых линий нэка в носу (о) и корме (б) модели
22G
районе скулового закругления свидетельствует о наличии в этой области нирку-В щпонного течения, которое обусловливает последующее формирование дискрет-IbiX вихрей с продольно ориентированиями осями. Общее представление о харак-^ре распределения и интенсивности вторичных течений вблизи поверхности корпуса Кет сопоставление поверхностных (предельных) линий тока н линий тока пщен-циального потока (см. рнс II 3) На некоторых участках различие в направлении пиний тока на стенке и внешней границе слоя, определяемое предельным утлом скоса потока Ро, достигает 20— 3()°. В корме в области положительных продоль L.J градиентов давления поверхностные линии тока почти ортогональны нотснци-рльнмм ливням тока. Как видно из рнс. II.7, на котором приведены результаты визуализации с помощью красок поверхностного течения, в районе скулового за-круглеиня в корме происходит формирование скуловою отрыва, присущего только трехмерному пограничному слою
Качественно такая же картина развития основного и вторичного течений в по
граничном слое многих типов морских транспортных судов имеет место и в натурных условиях. При обтекании судов с коэффициентами полноты б > 0,8 пространственные эффекты в пограничном слое развиты сильнее.
На судах' с острыми обводами скорости вторичного течения невелики и неоднородность характеристик слоя в поперечном направлении обусловлена в основном особенностями взаимною расположения (расхождением или поджатием) линий тока
внешнего потенциального потока.
Получение экспериментальных данных о трехмерном пограничном слое, необходимых для уточнения представлений о закономерностях изменения вязкостного И?ротивления судов, является трудоемкой и сложной задачей. Такие опыты пока (проводят лишь в отдельных случаях для исследовательских целен (72 79]
§ 5 СОПРОТИВЛЕНИИ ТРЕНИЯ ПРИ ПЛОСКОМ
И ОСЕСИММЕТРИЧНОМ ОБТЕКАНИИ ТЕЛ
При анализе составляющих сопротивления вязкости и природы, исследовании закономерностей изменения вязкостного сопротивления и характеристик пограничного слоя судов при изменении числа Re широко используют зависимости, полученные для объектов более простой формы: пластин, крыловых профилей, тел I вращения.
Пограничный слой и сопротивление трепня плоской пластины. Простейшей схематизацией потока при исследовании основной составляющей вязкостного сопротивления— сопротивления трепня судна — является турбулентный пограничный слой и сопротивление трения продольно обтекаемой Шастины бесконечного размаха при нулевом градиенте давления.
Первоначальные экспериментальные данные о сопротивлении трения пластин Rf0 получены в опытовых судостроительных бассейнах во второй половине XIX в. Наиболее известны систематические испытания серин пластин длиной ®=О,3->15,4 м и шириной В -0,48 м, выполненные В. Фрудом (10]. Выведенная Фрудом формула ля /?го. позже, откорректированная н приведенная к метрической системе единиц, имеет вид
I <"'>
Коэффициенты трения А, рассчитывают с помощью аппроксимирующей эависн-mocti
Ат — ^0.1392 + 2У58-Г^Ц +0.0043(15-/)] (П.2)
где I — температура воды, °C. В настоящее время формула Фруда представляет в основном исторический интерес
Наибольшее распространение в судостроении за рубежом получила формула Шенхерра, основанная на ряде известных в 30 40-х гг экспериментальных данных
0 24°
= lg (Re Cf0) (113)
г CFo
8*
227
Большинство экспериментальных данных о сопротивлении трения пл, поверхности, полученных при испытаниях пластин и понтонов, не свободны лого ряда методологических погрешностей. При испытании пластин и понтонов м. ч-длины могло проявляться влияние ламинарных участков течения в нх not j । q ном слое. Пластины или понтоны являются пространственными телами, пиэтох.у при их испытаниях мог иметь место «кромочный эффект», выражающийся в счщ ственном увеличении касательных напряжений вблизи продольных кромок в станс пространственного характера течения в этой области. Кромочный эф|[ йт проявляется в ограниченной по ширине пластины зоне (заштрихованной обл ( рнс. II.8, с), соизмеримой с толщиной слоя 6, однако, как показали результаты опытов с большой серией мелкосидящих понтонов (30- 104 Re 2,5- 10s), вы о.- , ценных Хьюзом, влияние его на сопротивление трепня удлиненных тел может Г[ ть
Рис. II 8 Влияние кромочного эффекта иа сопротивление трения понтонов с область проявления кромочного эффекта н распределение коэффициентов касате.1|. пых напряжений с/ в поперечном направлении; б—зависимость коэффиииш сопротивления трения Сг„ от относительного удлинения IJB н числа Re.
/ — предел ьи и я кривея коэффициента сопротивления трения пластины; 2 — расчеты формуле (II.3); • — расчгты ио формуле (11.G); ( — опыты Хьюза с понтонами
Недостатком всех формул, полученных эмпирически, является то, что при оценке сопротивления трения натурных объектов необходимо экстраполировать получении зависимости в область чисел Re, лежащую далеко за пределами опыта.
Методы полуэмнирнчсской теории турбулентности (см. гл. III первого раздел дают возможность получать вполне надежные данные о распределении коэффицисн а касательных напряжений с10 — т(|
лентного трения Cf() пластины бесконечного размаха в широком диапазоне чп
и коэффициента сопротивления турбу
сел Re, включающем значения, соответствующие обтеканию натурных обьск oi Опп позволяют также рассчитать профили скоростей и характерные толщины слоя b 6* и б**.
Впервые полуэмпнрическая зависимость для сопротивления трения пластш была получена Нраидтлем в предположении о справедливости логарифмическое закона распределения скорости (см формулу (ill 29) первого раздела] по всей тол шине слоя. Для найденных нм значений Сдв Г Шлихтингоы была предложи интерполяционная формула (см. (III.112) первого раздела]
Сго
0.455
(lg Re)2"58 ’
а для местного коэффициента трения зависимость
I
C,t> (2 1gRex 0.65)-з-
(П.4)
(11.5!
228
С«смотря иа весьма приближенную аппроксимацию профиля скорости и заметное Иедствие этого завышение значений С/с и </0 по сравнению с предельной кривой 1 И рнс. П 8). формула (И 4) получила широкое распространение в гидромеханике ДКна .
с}' В настоящее время предложен ряд иолуэмпирических зависимостей для харак-fcniicTHK турбулентного пограничного слоя пластины, более точно учитывающих Ербсниоети распределения скоростей поперек слоя Достаточно близкие к опытным езультаты (см. рис. II 8, 6) дают зависимости, полученные Л. Ф Пустошным и К,(. Котловнчем [при значениях постоянных х = 0,4 и С — 5,2 в логарифмическом законе распределения скоростей (I J1.29) первого раздела ]. аппроксимированные
следуюшнми формулами 122].
В Сгп
0,323
(11.6)
0.201
q" (Ш1-53 ’ (И /) °’8
б 6 X Ъ* 6* X Для расчета 0.344 (11.8) ж- (П.9) скорости
(Ig Rev)1-" 0.392 (IgRM • профиля
рекомендуется формула Коулса [см. (111.93) первого раздела 1. хорошо Кшсыв ая распределение скоростей по всей толщине слоя На рис. 11.9 пока аны рассчитанные по этой фор ^Влс (для х 0,4; С — 5,2 и II
К 0.4) графики безразмерного про филя скорости для различных значений числа Re,-= l'fr»7v.
Для приближенных оценок про филя скорости может быть использо
Ч 0,5 0,6 О,
7
0,8 0.9 ux/uf
0,3 0,
вана степенная зависимость
I //-1
, . HI. 10)
(«//о)
Рнс. 11.9. Зависимость безразмерного профиля средней скорости в пограничном слое пластины or числа Rex.
где Н = б*/6**.
Сопротивление трения крыловых профилей. Влияние на пограш чный слой формы профиля (его телесности) связано с особенностями продольного распределения давления р (х) В носовой части профиля в области отрицательного градиента мвлеиня (dp/dx < 0), где внешний потенциальный ноток сообщает жидкости дополнительную кинетическую энергию, пограничный слой тоньше, чем на пластине. напряжения т0 трения на стенке выше, а безразмерный профиль скорости vx/v{, полнее Вблизи выходящей кромки профиля вследствие подтормаживания потока возрастающим в нанраваеннн движения давлением —> 0^ толщина слоя 6 возрастает, напряжения трения падают, а безразмерный профиль скорости становится менее полным по сравнению с профилем у пластины. Распределение дефекта Вскорости (Ufi — Vy'jlv* поперек слоя в отличие от пластины не является универсальным а образует в различных точках профиля семейство кривых, форма которых зависит от характера распределения давления и может быть охарактеризована формпарамстром пограничного слоя / (// 1) с,/2|. где с1 — 2т0 pvjy. т. е
(t'6 o.v)/«* F (у/Ъ, /). (Н. II)
Как показывают опыты [221. закон дефекта скорости в форме (II.II) остается пра-^кгнчееки постоянным о широком диапазоне чисел Re (10“<Re-< 1(1*).
229
Рис II 10 Зависимость коэффициентов кр и k крылового профиля от е!Ъ
------ расчеты В. Г. Мишкевнча и Д. И. Шахопа: — — — — расчеты По формуле (11.20).
Современные методы расчета плоского турбулентного пограничного слоя п.. наличии продольного градиента давления (см гл. Ill первого раздела) обеспечив?!? достаточную точность определения характерных толщин слоя 6, 6*, 6**, Kacare.iJ пых напряжений т0 и позволяют рассчитать распределение скоростей поперек , .1о' в различных точках крыла, используя формулу Коулса. Для приближенных от 101( возможно применение степенной зависимости (11.10).
Сопротивление трения крылового профиля на единицу длины его размаха |!С. сколько превышает сопротивление трення пластины из-за влияния продо.п,ц(,1() градиента давления, но главным образом вследствие более высокой средней по хг-р.-ц, скорости ь’б внешнего потенциального потока но сравнению со скоростью тл По данным расчетов коэффициент полного сопротивления турбулентною т|ц. ння Ср прн изменении числа Re приблизительно пропорционален коэффициенту сопротивления трення пластины:
Ср — 2 (I + /гк) Сри. 111 12)
При анализе коэффициентов сопротивле. ння профилей необходимо учитывать что для крыльев в качестве характерной площади принимают не смоченную поверхность, а площадь крыла в плане. Этим объясняется введение множителя 2 в формулу (II 12). Коэффициент пропорциональности kf. зависит от формы профиля крыла н, главным образом, от его относительной толщины е/b, где е - максимальная толщина; b — хорда профиля (рис. II 10).
Сопротивление трения тел вращения. Пограничный слой прн продольном обц-капин тел осесимметричной формы пр ; ставляет частный случай пространстве! него пограничного слоя. I )омимо продо > пого градиента давления на его формирование оказывает влияние изменение по длине тела радиуса поперечных сечений Как и в случае пространственных течений, липин тока в носовой оконечности
тела вращения расходятся, вследствие чего происходит уменьшение толщины слоя 6 и возрастание касательных напряло инй т0 но сравнению с плоским течением (рис. II 11). В корме из-за поджат я линий тока пограничный слой утолщается В непосредственной близости к кормовой оконечности, как л в случае крылового профиля, определяющую роль в развитии слоя играют силы давления.
Из приведенных на рнс. II. II результатов расчетов пограничного слоя пл ского профиля, выполненных В. Г Мишкевнчем и Д И. Шаховым, и расчет' пограничного слоя тела вращения с одинаковым продольным сечением, сделаннь Э. J1. Амроминым и И. А Чичериным, видно, что влияние «телесности» на с противление трения оказывается более слабым Коэффициент сопротивления три ння тела вращения, как видно из рис. П.10 и 11.12, лишь незначительно превос ходит коэффициент сопротивления трения пластины, и, так как значения kp малы, для оценки Ср тела вращения могут быть использованы зависимости для эквнвз леитион пластины.
Более существенно влияние пространственности течения на толщину слоя в кор мовой оконечности. Эффект поджатия линий тока намного превосходит влияние положительного градиента давления. В результате этого толщина слоя вблизи выходящей кромки тела вращения, несмотря на меньший градиент давления, сугцест пенно больше, чем в случае обтекания крылоного профиля Распределение скоросте‘1 поперек слоя на большей части поверхности тел вращения с умеренным относитель ным удлинением (UD IO-s-15) хорошо описывается формулой Коулса. Эта фор мула, однако, недостаточно точна для описания распределения скоростей в непо-
2.30
нидств г ной близости к кормовой оконечности вследствие влияния Поперечной Кйзны.
" kjxJiCKT поперечной кривизны практически не сказывается на суммарном со-ртияленнн трення тел вращения умеренного относительного удлинения. Псперсч-кривизна тела играет заметную ршь в формировании пограничного слоя при ^Ацдолыюм обтекании цилиндров большого удлинения (L/D '> 204-50) н приводит дополнительному увеличению их сопротивления трення (см. [90] первого раздела).
^Сияние поперечной кривизны па сопротивление трепня удлиненных круговых цилиндр00 может быть определено с помощью кривых, приведенных на рис. 11.13(
Ри . 11 II Характеристики пограничного слоя симметричного крылового профиля нТтела вращения одинакового сечения'(e'fe- 0,15) а — коэффициенты давления;*’— коэффициенты I рения; в — относит ел ы ая толщина пограничного слоя;
а — относительная толщина вытеснения пограничного слоя.
.--------крыловой пр1>фплI»: — голо вращения (прн ouvnxe влияния продольного
градиента давления путем рве чета плеккпго notpai нчногп слоя).
'«ибо с помощью обобщающих их формул, предложенных В. M. Кот.товичем:
I kr - Cf CFn Cfo (L'D}2'3 IO(lgWe,)b-’ (11.13)
1 к> Cf - Cfa Cln (IgRer)" (П-14)
kt>' ~ f>‘ - 6* oc< (*Q) °-04 (Ig Rer)’' (11.15)
справедливых при LID < 100 и IO*<—10» (индекс «0* соответствует пла-стиие).
Экспериментальное определение местных сил трения На практике наиболее распространен предложенный Клаузером (см [71 I первого раздела) метод, основанный на анализе логарифмического участка измеренного профиля средней ско-Кстн Логарифмическое соотношение для закона стенки [см. формулу (111.29) первого раздела], описывающее течение в этой области, можно представить в виде
их/ос = ст 2 ( V ,П "V” + 1П Сх/2) + С Сх'2
(II.IG)
231
Д.11,
С помощью этой формулы рассчитывают семейство кривых 1>х; 2т
различных значений <-т =--~ (рис 11.14). Нанесенный на полученную дна ।
экспериментальный профиль скорости позволяет достаточно точно определить ь(Л., фнниент касательных напряг; |Ч|‘ Результаты зависит, однако, <>т rq!H' нятых в (11.16) констант х и с ;^г’
Рис. 11.12. Влияние относительного удлинения на коэффициенты kp и k тела вращения
---------расчеты Я. Л. Амрамина к И. А. Чичерина; — — — расчеты по формуле (11.21)
Рис. 11.13. Коэффициенты сопротивления треиия при продольном обтек; ни круговых цилиндров (но данным расчеши Е Е. Солодкнна) (Re rval rv)
обстоятельство необходимо учитывать при сопоставлении полученных данны ч с материалами других авторов.
Престон [15] предложил более простой способ определения <т, основанный на измерении полного напора Н — pos/2 р с помощью полнонапорной трубки, 1фн-
со с.в j,u Д/ j,v J,6' Щуи,/:')
Рис. II. 14 Диаграмма для определения коэффициента касательных напряжений по методу Клаузера.
О — экспериш-итвльпые значения ско-ростн в пограничном слое.
Рнс. 11.15. Датчик для намерения местных сил i рения.
1 электромагнит; 2 - упругие нлпетип к»; 3 — датчик перемещении: 4 — повершить модели; S - диск; й — Ш1Дик.-п>>г перемещения; 7 — индикатор силы.
ложенной вплотную к поверхности тела, и поверхностного давления р. Как и в методе Клаузера, в этом способе используют зависимость (111.29) первого раздела для описания профиля скорости в пристеночной области турбулентного пограиич иого слоя. Основываясь на законе местного динамического подобия, можно полу чить соотношение
И~Р р ( W2 \
pv1 \ pva /’
232
Иг я — иаруж n.n'i диаметр трубки. Результаты экспериментальных исследований ’Называют, что при 1g [(Н — р) оа/(4р\®)1 > 0 н отношении внутреннего диаметра Прубкн к наружному rfn,t/rf « 0,6 имеет место логарифмическая зависимость
|П-|7>
для определения сг достаточно одного измерения. В практическом отношении этот Е^од более удобен, в особенности если требуется определить касательные ианряжс-
,||Я в° многих тачках, но менее точен по сравнению с методом Клаузера.
1 . Для приближенных оценок ст можно при наличии экспериментального иро-айЛЯ скорости воспользоваться эмпирической зависимостью Людвига и Тильмана П1 160) первого раздела] либо формулой О П. Орлова и А. Ф Пустошного (22 I
''7(V
1g (0,267// Re**)
6,05- К)’-
(11.18)
где Re** = oft6**/v.
В исследовательских работах иногда находит применение метод прямого взвешивания местных сил трепня. Этот метод заключается в измерении силы трения, действующей иа малый «плавающий» элемент поверхности, соединенный с силоизме-рнтельиым электрическим датчиком, расположенным внутри тела. Одни из таких приборов [15] показан иа рис. 11.15. Применение этого метода ограничивается измерением сил трения у пластин или участков поверхности удлиненных тел с небольшими продольными перепадами давления
§ 6 ВЯЗКОСТНОЕ СОПРОТИВЛЕНИЕ КРЫЛОВЫХ ПРОФИЛЕЙ И ТЕЛ ВРАЩЕНИЯ
Вязкостное сопротивление давления RVP при обтекании крыловых профи лей и тел вращения обусловлено обратным влиянием пограничного слоя на внешний потенциальный поток. Развитие слоя вызывает отклонение линий тока по сравнению с невязкой жидкостью и, как следствие, изменение давления. Сопротнв-
Рис. II 16 Изменение распределения давления вдоль тела осесимметричной формы r0 = 1 = в зависимости от числа Re [22].
О — экспсримеигалльные точки (Re 10’).
Инне давления составляет у удлиненных тел относительно небольшую долю от сопротивления трения Поэтому экспериментальное определение его требует высокой Точности измерения давления Методы расчета сопротивления давления основаны |та применении схемы Л. Г. Лондонского (см. § 13 первого раздела). Результаты Расчета по этой схеме, выполненного А Ф Пустошным, показаны иа рис. II 16 I 233
Как видно из рнс. II.16, влияние вязкости проявляется в основном в районе кор, мовон оконечности в пределах (0,154-0,20) В результате интегрирования дав.кчц^ установлено, что коэффициент сопротивления давления Сур удобообтека удлиненных тел как в случае плоского, так и при осесимметричном обтекании умець> шается с ростом числа Re пропорционально коэффициенту сопротивления трец|)я пластины Сур = kpCm- Этот вывод подтверждается также и результатами рас. четов лозного вязкостного сопротивления с помощью методов, рассмотрен!,щ в гл III первого раздела Следовательно.
Су =»= —j——-— Сур 4- Се = (I 4* kp + kF) Се0 — (I -f- k) Cm,
Ш |9)
где k = ftp -|- kt-коэффициент. учитц.
вающин влияние формы тела на вязкостное сопротивление (форм-фактор).
Для приближенных оценок вязкост. ного сопротивления профилей используют формулу Шольца
'Сх = Су = (2 4- 2,4е 6 4-1/ (г'*)4] СГо.
(11.20)
Для осесимметричных тел
Су = [ I 4- 0.5D/Z 4- 3 (О/£)»1 С,.,
(II 21) диаметр я Результаты как В! но из приведенного на рис. II 10сопоставления, хорошо согласуются с результат ми расчетов В. Г Мншксвича и .1 II Шахова. Формула (11.21) неточна в области тел (см рис. II. 12), сопротивление кото| их к сопротивлению иглы, а не пластины [см. формулу
Рис. 11.17. Зависимость коэффициента сопротивления крылового профиля от числа Re и угла атаки а
/ — результаты продувок крылового профиля (по данным Гольдштейна): 2 — удвоенный коэффициент еппрпгнплгния турбулентного трения пластины; 3 — удвоенный коэффициент runpniпиления ламинарного трения пластины.
где D и L — максимальный длина тела соответственно, расчетов по формуле (11.20).
малых D/L, т. е для очень удлиненных в пределе стремится (П 13)1
Все приведенные выше формулы и результаты расчетов соответствуют пот-ностью турбулентному обтеканию. Наличие ламинарных и переходных участков в носовой части тел может оказывать существенное влияние не только на значения, но и на характер изменения С* = /(Re). Представление об изменении сопротивления в зависимости от числа Re дают показанные иа рнс II 17 резе -таты продувок в аэродинамической трубе крылового профиля (е/6=0,1 Несмотря на то что при малых числах Re, равных (14- 2)-106, сопротивление трения из-за влияния ламинарного и переходного течения доляис быть значительно ниже но сравнению с турбулентным, а в некоторых случаях м< жет соответствовать практически полностью ламинарному обтеканию, измерен!! >е сопротивление оказывается достаточно высоким за счет увеличения сопротивлен я давления вследствие отрыва пограничного слои. При Re > (24-5)-10е сопротивление профиля обусловлено в основном силами трения; коэффициент сопротивлен! давления Сур не превосходит 15 %. В случае турбулентного режима обтекаю [Re :> ((>4-Н)-10г| | сопротивление профиля практически совпадает с расчетным-
§ 7. ВЯЗКОСТНОЕ СОПРОТИВЛЕНИЕ ПЛОХООБТГКАГМЫХ ТЕЛ
возникает OTp-J£
При обтеЯннш тел с большой кривизной поверхности в области значнтельнь' положительных градиентов поверхностного давления пограничного слоя Явление отрыва сопровождается отделением и отклонением
234
ид тока от поверхности тела с последующим образованием в пристеночных слоях л (дкостн области обратных течений, содержащей дискретные нестационарные Керн. В точке отрыва эпюра средней скорости имеет перегиб. В случае плоского ^осесимметричного пограничного слоя касательные напряжения на поверхности в этой точке равны нулю;
—с 0 при у == U и с/ = 0.
(11.22)
Отрыв потока вызывает резкое увеличение толщины слоя в корме и образующегося ,а телом гидродинамического следа. В отличие от плавного (безотрывного) обтека-К наблюдается сильное взаимодействие оторвавшегося слоя с внешним потенци-альнмм потоком, проявляющееся ие только в области отрыва, но и па участках по-рерхностп расположенных вверх по потоку Это наглядно иллюстрируется приведенным» на рнс II 18 эпюрами распределения кож] (риннеита давления по поверх пости кругового цилиндра |84] и шара |55]
I Давление по поверхности тела в области отрыва остаетсяt практически П0С1ШННЫМ. Вследствие сильного обратного влияния слоя иа распределение давления существенно возрастает сопротивление давления вязкостной природы, а । случае циркуляционного обтекания смепьшается подъемная сила. Для кругового цилиндра сопротивление давления kVP составляет в среднем 98 %, а сопротивление трения R/-- — всего лишь 2 % полного сопротивления.
I Возникновение отрыва и положение его по длине тела зависят не только от сум
парных потерь энергии на трепне, но и от характера распределения осреднеиных скоросте! в пристеночной части пограничного слоя. Несмотря на меньшие потери, отрыв ламинарного пограничного слоя наступает при меньших положительных градиентах давления, чем турбулентного, так как при турбулентном течении эпюра скорости их (у) вблизи стенки полнее н пристеночные слои жидкости обладают боль-|веп кинетической энергией. С этим связано возникновение так называемого «кризиса сопротивления, выражающегося в резкам уменьшении по мере возрастания
R1 •> \
у рсгыпих ), »де <и,|1ЯК - площадь максимального поперечного сечения.
i Особенности явления кризиса сопротивления рассмотрим на примере поперечного обтекания кругового mi.iui .ipa. Выделяют четыре режима обтекания цилиндра (Рнс II 19).
I. Докризисный режим (Re Dv/v^ 103) когда течение в пограничном слое Ламинарное вплоть до места отрыва Положение точки отрыва в этой области практически не изменяется с ростом числа Re н определяется координатой = 78-=-*60“ Коэффициент сопротивления также мало изменяется. По данным разных ав-
235
торов, его значение, составляет 1,1—I 2. В районе отрыва форма линий тока в1.,ц { лая и ширина гидродинамического следа превосходит диаметр цилиндра. В сл₽д’ за цилиндром четко различима цепочка вихрей (дорожка Кармана). Число Струх _1я характеризующее частоте п возмущений в следе за цилиндром, постоянно и ращ,’ Sh = nD/v — 0,21. ' °
2. Кризисный режим (10s •< Re •< 6-10Л). В области кризиса коэффициент сопротивления резко уменьшается, а число Sh возрастает (до 0,4). Граница отрцПа перемещается в корму в точку с координатой 0я = 135-ь 140° Значения Re, цри которых наступает явление кризиса сопротивления цилиндра и других плохообте. каемых тел с нефиксированной точкой отрыва, уменьшаются с ростом степени р. булентности натекающего потока, вызывающим более ранний переход в norpainnii слое. Критические числа Рейнольдса могут быть существенно уменьшены путем п менения мер искусственной турбулизации пограничного слоя. При наличии пи ро-
ховатостн поверхности тела явление кризиса н возникновение транскритнческиго режима обтекания достигается i ри меньших значениях Re по сравнению с гидродинамически гладкой поверх чо-стью (рис. 11.20)
Рис. 11.19 Зависимость коэффициента сопротивления и числя Sh кругового цилиндра от числа Re
I ДокризнсныЛ режим: 2 — кризисны!) режим: 3 — фшрмянсныЛ режим; «i транскрнтичсский режим.
Рис II 20. Зависимость коэффпцие та сопротивления цилиндра от степени шероховато) тн поверхности (по данным Ахенбаха).
1 — *C/D = 1.1 10“ : 2 — *0 D = 4.5 X 10-’: 3 — AC,D = 9- 10-’
3. Закризисный режим (5- 10s < Re < 3,5-10°) Здесь после небольшой области Re, где Сх изменяется слабо и его можно считать постоянным, происхо. нт резкое увеличение коэффициента сопротивления Сх от 0,3 до 0,75 и уменыи пие числа Sli до 0,27. Это явление связано с постепенным перемещением точки н рехода вверх по потоку и увеличением протяженности предшествующей отрыву области турбулентного течения В начальном участке области отрыва форма лш 11 тока вогнутая и ширина спутной струи меньше диаметра цилиндра В за критический области, как и в области кризиса, нет столь четкой картины внхреобразоваи в следе, по крайней мере в его начальном участке, которая наблюдается при лам
парном отрыве.
4. Транскрцгнческий режим (Re >• 3,5-10'). Отрыв слоя происходит в точ 6, 110-ь 120°. Внхреобраэоваине в следе вновь становится более упорядоченным
Коэффициент сопротивления п число Sh в трапскритической области очень слаб
изменяются, поскольку переход в пограничном слое происходит на достаточном удалении от точки отрыва (0, 65° прн Re 3,6-10*) н положение се в дальиенпк -!
мало изменяется с ростом числа Re Именно в этой области с достаточной для практики точностью сопротивление цилиндра можно считать автомодельным
Все указанные выше количественные, данные относятся к случаю цилиндра бе. конечного удлинения Коэффициент сопротивления цилиндра конечного размаха уменьшается по мере увеличения отношения X L/D (рис. 1121)
Картина отрыва осесимметричного пограничного слоя подобна наблюдаемой прн плоском обтекании. В месте отрыва происходит отделение потока и затем развит» области обратных течений, содержащей дискретные кольцеобразные вихри В точю отрыва выполняется условие (11.22). На некотором расстоянии от точки отрывт вниз но потоку площадь поперечного сечения поверхностей тока внешнего потеиш
236
ГльЦОг° течения изменяется незначительно и поверхностное давление, также как и Ен плоском обтекании, практически постоя in о Явление кризиса обтекания про-Едюстриронано । а рнс II 22 u II 23 результатами опытов с шаром |551 |1'" По данным Кемпфа и других исследователей, критический угол наклона кон । ,.па меридионального сечения в корме а . обеспечивающий условие безотрывного мгёкання тел вращения удлиненной формы, изменяется в диапазоне 18—20°.
Рис 11.21. Влияние относительного удлинения на сопротивление кругового miff лнпдра.
; - зякрнзисныИ режим обтекания Re 8. (1С*-Г- IO”) (пи дяиньм опытов Л. II Коротки!. и I Ь Перегуде I. 2 дикрн.тнсныП режим обтекания (пи данным опытов Гольд-
И штеПип). I/O.
Рис. 11.22. Зависимость коэффициента сопротивления Сх шара от Re.
I Из приведенного анализа закономерностей изменения сопротивления в условиях кризиса обтекания следует что наиболее благоприятный режим имеет место тогда, когда область ламп iiapi о турбулентного перехода располагается непосредственно перед началом отрыва Явление кризиса наблюдается и прн обтекании более Удлиненных тел (рис. 11.2-1). В этом случае прн переходе от ламинарного режима те-
Рис. 11.23. Зависимость относительного сопротивления трения шара Ct ‘Cx от Re.
Me. II 24 Зависимость Сх от Re при отрывном б ска шн цилиндрических тел Ьазл1Ч11ой формы а — крыловой профиль (/), б — стойка (2); в — чечевнце-1 образный профиль С9; г — эллипс (4—V)
В- 1>,'С — 4.0: 2 - */е •« 3.S9; 3 — 6/е-- 4.05: 4 — bit 4,5; S — b/e = 4,0; 6 b/е = — 3.5: 7 — Ь,'г — 3,0; 8 6,'е =- 2.5. S — Ь.'С 2.0.
чення к турбулентному влияние отрыва иа сопротивление уменьшается, а иногда, Например при обтекании крыловых профилей, точка отрыва смещается в кормовую критическую точку и тело становится хорошообтекаемым.
F У плохообтскаемых тел с острыми кромками, которые фиксируют положенно |рчки отрыва, кризис сопротивления отсутствует. Характерными примерами таких Тел служат пластина, поставленная поперек потока, продольно обтекаемый цилиндр,
237
диск. На рис. 11.25 дана зависимость коэффициента сопротивления поставленных по. перек потока пластин от отношения сторон В/L. Влияние относительного удлинения LJD на сопротивление продольно обтекаемого кругового цилиндра показано ца рис 11.26 Коэффициент сопротивления Сх диска, расположенного поперек потока, постоянен п равен 1,12. Подробные сведения о сопротивлении тел плохообтекаемоц формы содержатся в [52 н 64]
Помимо отрыва потока, связанного с общим характером распределения даз-лепия в корме, возможно возникновение локальных отрывов плоского или осесЛм-
Рнс, II 25. Влияние относительного размаха пластины па ее сопротивление
Рнс. 11.26. Относительный коэффициент сопротивления цилиндра при сг । продольном обтекании.
метричного пограничного слоя в носовой оконечности при наличии значительных положительных градиентов давления, а также в месте расположения выступоь. углублений (вырезов) или изломов контура тела (рис. II. 27). Локальный отрыв обычно сопровождается образованьем дискретного вихря Для этого типа отрыва характерно наличие замкнутой области установившегося вихревого течения, отдг ляемой от основного потока некоторой поверхностью, н последующее прнсоеди ненне потока к поверхности тела.
С точки зрения обтекания судна больший интерес представляют пространственный пограничный слон и пространственный отрыв, отличающиеся большим разно-
Рнс 11 27 Формы локального отрыва пограничного слоя а — в носовой оконеч пости б — в месте расположения выступов, в — в месте расположения углублений г — в месте изломов контура.
образием форм. Важную роль в их формировании, помимо продольного градиента давления, играют поперечные градиенты давления, геодезическая кривизна линий тока потенциального потока я развивающиеся в слое вторичные течения. Характер иым примером про транствеппого отрыва пограничного слоя служит отрыв npi косом обтекании эллипсоида вращения исследованный Уонгом При малых углах атаки (а — 3-5-6°, рис II 28) картина течения в области отрыва в общих чертах не слишком отличается от наблюдаемой при продольном обтекании осесимметричного тела Под действием возрастающего вдоль линий тока давления скорости жидкости направлены навстречу основному течению. Происходит отделение потока. Резко увеличивается толщина пограничного слоя в корме. Но в отличие от двухмерного течения здесь нет линии отрыва, характеризующейся нулевыми значеш ими мест кого трения. При подходе к границе отрыва поверхностные линии тока (рнс. П.28, б) отклоняясь от направления основного течения, стремятся к некоторой предел!.
2.38
11иП И1нчн, условно называемой «огибающей» поверхностных липни тока, но не пересекают ее Аналогично и расположение линий тока, выходящих из кормовой критической точки. По мере увеличения угла атаки до а — 12ч-15° помимо области ргрыва в корме 5—5, отличающейся от предыдущего случая лишь протяженностью
Рис. 11.28. Расположение линий тока при косом обтекании эллипсоида вращения:
— линии тока потенциального потока; б — поверхностные предельные линии тока (эксперимент)
на боковой поверхности тела образуется еще одна область отрыва /?—R. Это обусловлено повышением роли поперечных градиентов давления при увеличении угла атаки. Вблизи границы области отрыва R R, расположен ной на некотором расстоянии за лииней минимума эпюры поперечного распределения давления, линии тока также стекаются к некоторой предельной (огибающей) линии, вдоль которой т0 О
Рис 11.29 Схема развития отрыва при обтекании стойки, расположенной в пограничном слое кори са.
i — линии юна uni гнил ллыпго потека; ‘2 — Гранина облретн отрыва: 3 — поверхностные предельные линии тока; 4 поди о н<>нб резвый вихрь.
[В районе отрыва наблюдается местное утолщение слоя но отделения потока от поверхности корпуса не происходит. Отлнчитетьиой особенностью отрыва слоя на
1 боковой поверхности является образование незамкнутых линий отрыва Поверхностные Тинин тока, расположенные по разные стороны i рашшы отрыва, в этом слу чае выходят из иосовой критической точки Вдоль линии <трыва образуется вторичная завихренность потока и формируется дискретный вихрь с осью, ориентированной в продольном направлении Возможность образования циркуляционных [Течений в области бортового отрыва подтверждена экспериментально и теоретиче
239
ски для случая ламинарного слоя [52]. При увеличении угла атаки а до 40 дно преобладающее значение имеет отрыв па бортовок поверхности, подобный до н< к, торой степени отрыву при поперечном обтекании цилиндра
О|рывные явления, возникающие при косом обтекании тел врашс! ия. наил . ются н на многих других объектах, в том числе и на корпусе судна.
Иной тип пространственного отрыва наблюдается при обтекании расположенной в двухмерном пли пространственном пограничном слое стойки (например, ui.i лающих частей корпуса судна, крыльев и оперения самолета). Изменение нродо.С ных л поперечных градиентов давления перед преградой, установленной на по-верхпостп тела, вызывает искривление потенциальных линий тока. При движет и жидкости вдоль криволинейных линий гока в условиях положительных градиента давления в пограничном слое тела возникают интенсивные вторичные потоки. а
Рис. 11.30. Пространственный отрыв вблизи стойки, установленной ня п верхпостп пластины [l|. a h б — 5.0; б — й.'б = О.(Ki; й — распре,-> лсннс давления перед стойками
в ограниченной области в носовой части стойки — встречное течение, в резул. тате чего происходит пространственный отрыв слоя, схема развития которого in казака на рис. 1129 [52, (>4|. Образующаяся вблизи границы области отрьиы вторичная завихренность вызывает сворачивание линий тока и формирован!! подковообразного «подпорного» вихря 4 В отличие от воздействия отрыва при & теканни двухмерной преграды (см. рнс. II 27) влияние этого типа отрыва на пограничный слой не ограничивается локальной областью. Значительные возмущен!-в слое существуют и на большом удалении за преградой.
Дополнительное увеличение сопротивления обусловлено не только затратами энергии иа вихреобразование, но и вторичным влиянием распространяющих! по потоку вихрей на пограничный слой тела. Данные о сопротивлении стоек разлн । noil формы содержатся в [64 | Перераспределение осевых н поперечных скорости в пограничном слое тела в результате воздсйс1вия подпорных вихрей может таюк приводить к неблагоприятным эффектам при работе движителя и других ycipoflcru-
Положение границы отрыва и циркуляции вихрей зависят от размеров в формы поперечного сечения преграды отношения ее висоты h к толщине по граничного слоя корпуса и формы в плане (рис 11 30) Наклон передней части стойки наличие галтели в месте соединения стойки с корпусом и уменьшение ее отпоен гелыюй высоты способствуют уменьшению продольных градиентов давления перс.' стойкой ii интенсивности внхреобразования. При обтекании треугольной в плат преграды циркуляция вихрей существенно уменьшается, а в некоторых случаи' (например, при обк'канни выкружек гребных валов) вихреобразование практически отсутствуй
240
ВЯЗКОСТНОЕ СОШЮТИВЛЕНИГ СУДНА
I Вязкостное сопротивление судна /?у равно сумме сопротивления трения А?/-, -пределенного с учетом влияния продольной и поперечной кривизны поверхности конуса на значения и на правления касательных напряжений, н сопротивления «авдепия вязкостного происхождения (сопротивления формы) Ryp. обусловленного обратным влиянием пограничною слоя иа распределение давления по поверхности Корпуса н явлением отрыва Коэффициенты составляющих вязкостного сопротивления зависят от Re, формы обводов и от характера волнообразования при движении судна, т. е от Fr Су (Re, 1т) == Ср (Re, IT) -|- Сур (Re. Fr).
Г Существенно расширяют возможности исследования вязкостного потока вблизи корпуса судна методы теории пространственного турбулентного пограничного слоя. Как видно из приведенных на рнс II 31 результатов расчетов «относительно тонкого пограничного слоя судна, выполненных А .'I. Гориным, в ряде случаев эта ТС( ;,ця обеспечивает возможность количественных оценок характеристик слоя и
Рис, 1131 Характеристики пограничного слоя модели сухогрузного судна (6 = 0.G75) в районах 10-го (а) и 18 го шпангоута (б).
1 - результаты рисчета ipocip.uicTDCiiiinrc турбулентного и н раннчного слоя Lil):
. ----- — эксперимент ллытие Данные 1/2 I
касательных напряжений па большей части поверхности судна за исключением участка, расположенною в непосредственной близости к кормовой оконечности Результаты подобных расчетов показывают, что влияние кривизны поверхности па сопротивление трения корпуса не велико коэффициент влнят ня формы корпуса иа ^Кютивле тне трепня hi—(Ср— Сри)''Ср„, составляет 0,02 0,04. Поэтому при определении сопротивления трапп я судна можно пользоваться зависимостями для эквивалентной пластины
[ Для приближенных о,цепок влияния кривизны поверхности на сопротивление трепня судна применима формула Хорна
I Ср [| - 0.01 ll.2 j——+2.5) (1.3 0.1В 7") (0.35 4-<р) CFo. (11.23)
При безотрывном обтекании корпуса сопротивление трения составляет основную чцсть вязкостною сопротивления (75—85 %). Сопротивление давления Ryp «"оставляет примерно такую же долю вязкостного сопротивления, как и при обтекании крыловых профилей; значительное влияние иа него может оказать отрыв пот р шинного слоя
I При обтекании судна могут существовать отрывы пограничною слоя иесколь-кпу форы, которые в различной степени изменяют сопротивление судна и характе-1’11 теки потока пблтни корпуса преимущественно в кормовой оконечности в месте расположения движнтслыто-рулсвого комплекса. Оснопиос влияние иа вязкостное Непротивление оказывают два типа отрыва прост ранет венного тираничного слоя: Отрыв на бортовой поверхности в кормовой оконечности (рис. 11.32) П отрыв слоя ИГ скуле кормовых тинатн оутов и месте выхода линии тока из-под днища на борте-|вую поверхность сопровождающий я тбризованнсм скуловых вихрей (см. § 4).
241
Рис 11.32. Расположение поверх постных линий юка в области <1Т, рыва пограничною слоя в кор(,1(, судна.
Рис 11.33. Влияние формы обводов на протяженность области отрыва морене< транспортных судов но данным модельных испытаний |37|: a LB 6,8,5 О хс/Л = 2,0%: б —£/В = 6,8; Л 0.825; xeIL = 2,25 %, b — Ul3 =6.8; 5
0,85; xc/L - 2,5 %; г — LlB =-6.8; 6 0,85; х(./£ 1,5%; д Li В = 5Л-
6 = 0,85, xjL — 2,5 % (---------граница зоны отрыва).
242
I Интенсивность развития отрыва на бортовой поверхности в корме морских анспортных судов, как видно из приведенных на рнс. II 33 результатов система™ ких исследований. зависит от общей полноты корпуса и отношения UB, но в основном определяется относительным удлинением кормового заострения L^'B и Углами заострения кормовых ветвей ватерлиний, а речных — крутизной кормовых 'етвей батоксов. Интенсивность кормовых скуловых вихрей зависит от радиуса ску-впВОго закругления и формы кормовых шпангоутов. Скуловой отрыв более выра-i₽n на сУЛах полных обводов с \-образными кормовыми шпангоутами. Наличие корпусе острой скулы или изломов поверхности при применении упрощенных пбво корпуса может привести к существенному увеличению индуктивного сопротивления поэтому указанные конструктивные элементы корпуса должны рас полагаться в соответствии с общим направлением липни тока. Представление о вли" я11'ии радиуса скулового закругления па циркуляцию вихрей и индуктивное сопро-
Рнс. II 34 Распределение попе речных скоростей при прямоугольных шпангоутах (а) и относительном радиусе скулового закруглении гс1В — 0.12 (б); зависимости относительного ни дуктивного сопротивления Rt'R.. и циркуляции Г вихрей от rjB (в) (по данным опытов Титинкло).
тивленпе дают показанные нл рнс. 11.34 результаты экспериментальных исследований поля скоростей ня модели с прямоугольными шпангоутами и параболическими ватерлиниями Поданным исследований, основанных на измерении поля поперечных Скоростей в следе за судном (см. § 24), индуктивное сопротивление кормовых^скуловых вихрей может изменяться от 3 до 8 % полного вязкостного сопротивления судна. Степень увеличения вязкостного сопротивления за счет образования скуловых вихрей в носовой оконечности, как правило, невелика и составляет 2—3%.
Для предотвращения отрыва в корме необходимо сместить центр величины (ЦВ) судна в нос за счет приводнения носовом оконечности. Это может привести кгаоз| икиовепию локального отрыва и одновременно к усилению скуловою носового отрыва. Основным параметром, определяющим возможность отрыва такого типа, помимо коэффициента полноты носовой оконечности, является радиус носового скулового закругления Обычно па практике удается избежать появления отрыва на бортовой поверхности в корме морских транспортных судов даже с достаточно высокими коэффициентами полноты (6 = 0,81-т-0,83) и обеспечить сравнительно небо ынне значения индуктивного сопротивления. Однако па речных судах и судах Вмешанного плавания с полными обводами не всегда возможно исключить отрыв
Корме при движении иа мелководье. Пон перемещении па предельном мелководье ^Матпвлспис формы Ryp таких судов, как исказили опыты Е. Ф. Сахно. соизмерим или даже превосходит сопротивление iрения.
Г При анализе причин увеличения сопротивления и отработке рациональных ‘«Сводов корпуса необходимо считаться с в можностью отрыва пограничного слоя Корпуса в месте установки выступающих частей, сопровождающегося образова-
243
пнем «подпорных» вихрей (см. § 7), а также образования свободных вихрей при текаиии элементов корпуса, расположенных под углом к натекающему nrn,1|fv Большое зпнчепие в проблеме вязкостного сопротивлении в носледнег цр,.’ приобретают вопросы транцевого отрыва, так как кормовые ебводы сопрем -ц 14ч трансштртпых судов все чаще выполняют с транцем В статическом положении нец практически нс погружен В процессе движет ня, и особенности быстрое. , ’ контейнерных судов, вследствие волнообразования и ходовою дифферента транец начинает омываться водой, в результате чего образуется система внх . , уменьшается давление в корме При высоких скоростях хода наступает стру нтн* обтекание транца. Для некоторых судов, например лнхтеровозов. характерно ,ца. чителыюе погружение транца и в статическом положении. В этом случае возможно существен нос увеличение вязкостного сопротивления
Влияние Цюрмы обводов на вязкостное сопротивление может быть охар.зкнрн. Зовано разностью между полным вязкостным сопротивлением и сонротпн.к ш (,м трения эквивалентной пластины:
Ср — Cfo = Сур -|- (Ср — Cm) = Сур ф \Ср.
В этой разности основную роль играет коэффициент сопротивления давления низ костной природы Сур, поскольку влияние кривизны поверхности корпуса на сопротивление трепня невелико. Степень влияния формы обводов корпуса на вязкостное сопротивление обычно оценивается коэффициентом влияния формы (форм фц;. тором)
k (Су — Ср„) Сри. (П >4)
который определяется но результатам модельных буксировочных испытаний и малых числах Fr. когда влияние волнообразования и ходового дифферента на сопротивление мало Иногда коэффициент k определяют путем продувок в аэродинамической трубе дублированной модели или испытаний дублированной мод и в опытовом бассейне ири достаточно большом Погружении ее под свободной нош . иостью При равных значениях числа Re оба метода дают близкие, но не всегда < в-падающие значения коэ|«|>пццепта к. так как характер обтекания надводной но.ш-измещающеЛ модели ие вполне совпадает с характером обтекания дуб.тироват > и модели вследствие деформаций свободной поверхности жидкости пенолиовон п н-роды, различных в носовой и кормовой оконечностях судна.
Прн приближенном вычислении вязкостного сопротивления но форм, с (11.24) для определения k можно использовать эмпирические зависимое i Для морских судов при водоизмещении, соответствующем полной загрузке, и i ношении Л Г<3 применимы формулы Грэнвпллл
ь !8,7('Гв)2’ ,г = зя-8йе (Л Г)1Т в- 01
Для судов с полными обводами можно воспользоваться формулой Ватанибс
k 0,017 + 0,20 —- _ ,6г___. (11
(/ о)- |/й т
или формулой Сасадзпма, учитывающей, помимо основных параметров. отн> тельную длину кормового заострения у, #'/|:
где р, 1= 22,буе —23,7yjJ—IGy^— Ю.5ук При этом ук может быть определен! с помощью приближенного соотношения
Тк В,/.к (В.Л)[1,3(1 б)+0,031хсГ', (П >
где хс = lOOXpjL
Для детального изучения составляющей сопро1нвлепия вязкостной прпрон» получили распространение методы, основанные на применении теоремы количеств» движения и результатов измерения скорости потока и давления в следе за модсл судна (см § 24), позволяющие нс только определить вязкостное сопротивление Л’т 214
ква
245
с учетом влияния волнообразования, но и получить информацию об особенпостя формирования и структуре вязкостного сопротивления На рис. 11.35 показЯц’ результаты измерения полного и вязкостного сопротивлений моделей судов р.т ц,,14 них типов. Коэффициент вязкостного сопротивления Су модели контейнеров, *' с острыми обводами (рис. 11.35, а) монотонно уменьшается с ростом относительно? скорости; в обследованном диапазоне Гт не обнаруживается сколько-пибу дь За метного влияния волнообразования на вязкостное сопротивление При малых волновых» значениях 1 г вязкостное сопротивление, полученное по данным нзме;>с-» |-я
характеристик потока в следе, совпадает с измеренным полным сопротивле ц,?11 Аналогичным образом изменяется и вязкостное сопротивление модели таи ра’ 11нон характер изменения коэффициента вязкостного сопротивления паблю.„>ется при обтекании модели судна с необычными соотношениями главных размере! i<g (рис. II 35, б) Здесь имеет место достаточно сильная зависимость вязкостного сопротивления от числа |-г, что объясняется влиянием изменения площади отрыва при обтекании кормы транцевого типа В статическом положении транец распода.
гается выше грузовой ватерлинии; на ходу' он омывается потоком из-за измен< ниц посадки, ходового диф<|>ере11та и деформации свободной поверхности в корме.
Несмотря на трудоемкость методов определения составляющих сопротивления
потока, они все чаще применяются при г>т-
по данным измерения характеристик работке обводов корпуса судна.
§9 ВЛИЯНИЕ ШЕРОХОВАТОСТИ ОБШИВКИ НА СОПРОТИВЛЕНИЕ
Поверхность наружной обшивки судна всегда шероховатая. Поверхность моделей судов, испытываемых в опытовых бассейнах и аэродинамических труб х, обычно подвергается такой обработке, чтобы ее можно было в процессе модельного эксперимента рассматривать как гидродинамически гладкую
Шероховатость обшивки корпуса обычно подразделяют на общую п мостку го. Общей называется шероховатость, распределенная относительно равномерно ио всей наружной поверхности судна. К ней относят технологическую шероховат :ть листов и волнистость поверхности обшивки, возникающие в процессе построй и корпуса судна, а также эксплуатационную шероховатость, обусловленную разрушением защитного покрытия и обрастанием обшивки. В категорию местной шероховатости включают отдельные неровности подводной поверхности: свар: те швы, пиши и глухие вырезы в обшивке, выступающие детали донно-забортной арматуры и т п
Технологическая шероховатость листов обшивки зависит от способа обработки поверхности, материала лакокрасочного покрытия и методов его нанесения. Экснл атацнонная шероховатость является следствием физико-химических процессов взаимодействия лакокрасочного покрытия с окружающей водной средой и определяется следующими основными (факторами: соотношением стояночного и ходовы о времени, районом плавания и условиями загрузки судна. При длительных cpoi х между докованиямн судна в случае утраты лакокрасочным покрытием своих заш i иых свойств начинаются биологические процессы обрастания обшивки морскими организмами и водорослями.
Шероховатость, образующаяся в результате окраски обшивки и ее изменения во время достройки и эксплуатации судил, является полем случайных микроне ровностей. Общее представление о геометрии шероховатой поверхности может бг получено из рассмотрения нрофнлограмм, снятых в различных районах обшивки Типичные профнлограымы шероховатости свежеокрашенной поверхности корпуса и ее последующих изменении приведены па рис. 11.36. В качестве высотных параметров, характеризующих шероховатость данного типа, в судостроении принят kb — «средняя кажущаяся амплитуда», представляющая собой среднее ио корпусу расстояние по высоте между наибольшими выступом н впадиной нрофнлограмм. снятых на заданной базовой длине, и йо. с. < — среднеквадратичное отклонение ординаты профнлограммы от средней линки, равное
о
24G
я уеЖДУ,|аРг>Д|,0Й практике в качестве базовой принята длина / трассы измерений, Kniiae 50 мм (см. рис. П.ЗС). Для определении средних ио корпусу значений Лп Лб с к рекомендуется выполнить 500—1000 измерений в разных районах об-" ивки и осреднить результаты измерений.
Анализ профилограмм шероховатости листов наружной обшивки, выполненный Ф ДО. Кацманом и С. А. Фокиным, позволяет считать, что ее ординаты распре-«слены по закону, близкому к нормальному, в связи с чем для ее полного описания кроме приведенных высотных параметров необходимо задавать корреляционную гспектральную функции Имеющиеся материалы по измерению шероховатости свежеокрашенных корпусов судов позволили установить, что значение k(> существенно
Рис. П.ЗС. Профнлограммы поверхностей наружной обшивки судна: а — свежеокрашенной; б — в начале эксплуатации, о — после длительной эксплуатации.
зависит от технологии нанесения покрытия и на практике изменяется в пределах 70—230 мкм. Для определения k,-,_ г. „ по измеренному k$ можно воспользоваться приближенным соотношением Д’г,. г. „ = к,уЪ.
Учет влия! ия шероховатости окрашенной поверхности корпуса на сопротивление судов может быть выполнен по аналогии с расчетом сопротивления трепня с использованием понятия эквивалентной шероховатой пластины, имеющей состояние оверхностн. соответствующее судовой обшивке. При этом основным методом не-Внщовапия сопротивления трения шероховатых пластин является полуэмпирнче-
. . , _ / Ду,и* \
скнй подход с определением так называемой функции шероховатое!и В 1———) логарифмическом профиле средних скоростей в турбулентном пограничном слое
(III.120) первого раздела). Функция шероховатости В = С — Дфх/о* для каждого типа шероховатости является единственной и сугубо индивидуальной, и ее (установление по существу решает задачу о сопротивлении трения шероховатых оверхностей.
В опытах Пнкурадзе функция шероховатости была получена для течений я тру Fix с равномерной так называемой «песочной» («зернистой») шершоннтостыо стенок. Недует, однако, иметь в виду, что в общем случае функция В Для судовой
247
_ f kf,V* \ поверхности существенно отличается от В ( ——I для пык-рлпостн с пес.тчнчд шероховатостью ввиду различного их влияния на сопротивление трепня в пр «уточном режиме проявления шероховатости. В связи с этим попытки уставов Ленин песочной шероховатости, гидродинамически эквивалентной судовой, представ Линнея неправомерными. Однако в настоящее время песочная шероховатость Чи таетси эталоном для автомодельного по числам Re режима течения.
Как показали отечественные и зарубежные исследования реальная mepuxQ. ватость окрашенной обшивки судов влияет иа сопротивление трения в пром у, точном режиме проявления, в котором равноправны в качестве критериев подо, бия как Re = vL/v, так и ReK6 = Поэтому наиболее приемлемые резуль аты по определению функции В --------- и сопротивления трения эквивалеипкл,
пластины применительно к судовой шероховатости могут быть получены эксперт
Рис 11.37. Изменение относительного размера шероховатости кб. с. 1Аг>. с. к» н зависимости от длительности пребывания судна иа главу.
ментально на опытных образцах с состоянием поверхности, идентичным реальному. Одно из первых таких исследований было выполнено В. И. Михайловым при буксировке окрашенных и гладких пластин в опытовом бассейне и экстраполяции этих данных до Re, соответствующих натурным объектам [26]. Однако некоторая не-строгость экстраполяции результатов по числу Re, принятая в работе, затрудняет практическое использование указанных материалов
В последние годы за рубежом были проведены исследования гидродинамического проявления реальной шероховатости на основании замера характеристик течения в шероховатых трубах и плоских каналах [931. Однако при этом возникла сложная техническая задача но созданию на внутренней поверхности трубы (ш-нала) шероховатости, соответствующей фактическому состоянию обшивки судов.
/ krU* \
В работе [18] функция В (—-—J определялась по результатам испытаний вращающихся дисков. При этом были получены данные как для свежеокрашен иых поверхностен, так и при изменении их шероховатости после выдержки в виде в различных условиях, зависящих от времени, сезонности, глубины. Изменение высотного параметра шероховатости Ас. с отнесенного к его первоначальному значению kr,.нп, для свежеокрашенной поверхности в зависимости от времени ир бываиня обшивки в воде показано на рнс. П.37 При воздействии воды па лакокр. • сочное покрытие изменяется це только высотный параметр, по и структура шер ховатостн, в связи с чем вид функции В как видно из рис. II 38, сущест-
венно зависит от времени
С использованием определенных из эксперимента значений функции В были рассчитаны но схеме Ротта (см [711 первого раздела) приведенные i рнс. 11.39—11.41 зависимости коэффициента сопротивления зрения пластиш (включая сопротивление гладкой пластины) Сг от числа Re п относительного ра 1 мера шероховат i с к для различи го времени пребывания покрытия в в 2-18
Диализ полученных результатов показывает, что в первые полгодв пребыва-я нового покрытия в воде высотный параметр его увеличивается относительно глабо (примерно на 20 %) и преобладающую роль играют процессы изменения структуры шероховатости В дальнейшем изменение С1руктуры замедляется и приблизительно к 11 мес. практически прекращается (см рис. 1138), вследствие чего данные, приведенные на рнс. 11.41, могут быть распространены на более продолжительное время пребывания обшивки в воде вплоть до начала ее обрастания расчет дополнительного вязкостного сопротивления судна из-за наличия общей ц1ероховатости обшивки производится с использованием зависимости
ДСр = (Сг-Оп)(1 +А), (11.29)
Рис II.38. Функция шероховатости для различной геометрии микроиеровиостей.
I — нвежсокряшсннос лякокрнсочнос покрытие: 2 — лакокрасочное покрытие после 3 мес. Пребыв.пня в воде; 3 — лакокрасочное покрытие нигде 11 мес пребынл ккя в воде; 4 — песочная (зсрнистпя) шероховатость (опыты Ннкурадзе. с. к = — — аппрокенма-
I , Г _ ^б. С. Kv* *б.С.Кр* I ^б г к11* 'i'l | цня зав ценностью вида В 5,2 — “bi| I + Ct----------J-Lt--—--cxpl —Св----------I |
где C>i — коэффициент сопротивления трения эквивалентной шероховатой пластины, определяемый по графикам рис. 11.39—11.41; Сри—коэффициент сопротивления трения эквивалентной гладкой пластины, снимаемый с кривых 1р, (Af, ,у7) = — —оо рис 11.39—11 41 А -коэффициент влияния формы па вязкостное сопротивление (форм фактор) (см. § 8).
При отсутствии данных о геометрии шероховатости обшивки конкреп ого судна, значение А’п. <- определяют по рис. 11.37. причем значение Аб. с. ко Для свежеокрашенной обшивки устанавливают по результатам измерений, выполненных Перед спуском судна на воду, или по статистическим данным. Например, с некоторым Sanaco Ап. <-. ко = ^0 ыкы-
| За рубежом для ориентировочных оценок влияния разрушения лакокрасочного покрытия в течение первого года эксплуатации принято, что на каждые 10 мкм Роста Аб приходится увеличение мощности на I % Анализ с использованием диаграмм рис. 11—39—11.41 подтверждает приемлемость этого соотношения дли гнутая, когда одновременно с указанным увелнчс гнем высотного параметра учитывается изменение структуры геометрии шероховатости, т. с. производятся оцс-пки одного объекта при различной длительности его эксплуатации Сравнение разных судов только по высотному параметру шероховатости оказывается неправомерным. Так. для свежеокрашенной обшивки при изменении Ар на 10 мкм изменение мощности составляет лишь 0,3 %.
249
X9(cf-w’?
Рис 11 39 Зависимость коэффициента трення пластины Ср от числа Re и оти> гп-тельной шероховатости Ай. Р. 1;/А. для свежеокрашенной поверхности.
250
1 Выполненные исследования показывают что поверхности, окранк-i иые но И(цятой штатной схеме, сохраняют свои противосбрасгающис свойства в тече-11Р |5—18 мес. Начинающееся обрастание обшивки судна представляет собой сложное явление ввиду многообразия видов обраста!елен и большого • нсла Экторов влияющих па их развитие. Поэтому оценки воздействия этого процесса я изменение сопротивления судна представляют значительные трудности, а опу-Е,нкованпые по этому вопросу сведения, как правило, случайны н относятся к от-Кльным судам и специфическим для них условиям эксплуатации Перенос этих JiiiHUX на Другое объекты обычно не представляется возможным. В качестве общей Сцепки часто принимают, что в эксплуатации среднее суточное увеличение сопро-
Рис П.41. Зависимость Ср от Re и Ag.c. время пребывания в воде 11 мес. н более.
тивлення за счет обрастания составляет от 0,5 % в теплой воде до 0,25 % в воде с (шеренной температурой 122].
1 Помимо влияния внешних факторов (сезонности и продолжительности стоявок, биологических особенностей различных акваторий) гидродинамическое проявление обрастания зависит также от типа и размеров судна. Па рис. 11.42 приведены данные о потере скорости при эксплуатации из-за обрастания различных танкеров японской постройки, из которых следует, что с увеличением размеров судов Потеря их скорости заметно возрастает. Это объясняется ростом роли вязкостной поставляющей сопротивления при меньшей относительной скорости у судов большей длины и близких значениях исходной скорости движения
Хотя прогнозирование изменения сопротивления из-за обрастания обшивки Конкретного судна затруднено, однако расчетные оценки увеличения сопротивлс-вия по измеренному фактическому обрастанию для одной из наиболее распространенных его <]юрм — обрастания баляиусами — практически возможны, что обусловлено экспериментально установленным фактом автомодельности по числу Re гидродинамического проявления такой шероховатости В этом случае, как отмечалось Выше допустима замена действительной шероховатости некоторой эквивалентной Ло влиянию на сопротивление однородно распределенной регулярной шерохова-'°стью например песочной Тогда задача определения дополнительного сопро-
251
тнвлепия обросшей обшивки сводится к установлению размеров зерен песка IJf ветствующпх средней высоте обрастателей Для обрастания баляиусами т ь ' связь с эквивалентной песочной шероховатостью, полученная в результате, hcih. ^ ния вращающихся дисков с различной степенью обрасгання [18], приведен,-! рис 11.43 По высоте зерна А-„ определенной по графику этого рисунка, i . Н(? ляют сопротивление трения эквивалентной шероховатой пластины с. заданной От^ поентелыюй шероховатостью с помощью диаграммы Прапдтля—Шлнхтннга i,M рис 111.17 первою раздела).
При наличии на обшивке корпуса районов с различным состоянием пик-рх. пости, включающих отдельные участки обрастания, коэффициент суммарное волнительного вязкостного сопротивления определяется как
\1 , Q.
= 7 , 1 И.Зо)
где. AC’vi — коэффициент дополнительного сопротивления, обу :ловленного Шери, ховатостью f-ro райоив обшивки, определяемый по рис. 11.39—11.41 или с цс.
пользованием рис. 11.43 для обросших райо нов; — смоченная поверхность т-го района обшивки.
Поскольку увеличение шероховатости обшивки в эксплуатации является основ-
танкер >в.
Рис 11.42. Потеря скорости хода вследствие обрастания обшивки
----дедвейт 33 00В т;------------дсдиейе 75 ООП т; — дедвейт (30000 т.
Рис. 11.43. Зависимость размера зерна эквивалентной песочной шероховатое и fcj от средней высоты баляпусов Iiq. ср.
ним источником снижения скорости или увеличения расхода топлива, заме юе обрастание корпуса считается недопустимым Для его исключения принимают .меры по продлению срока действия противообрастающих покрытий, а также периодической очистке обшивки как на оливу, так и при очередных докованиях судна
Окраска судна в доке после очистки обшивки обычно применяемыми способами (струей воды, механическими среде! на ми), которые приводят к снятию верхних слоев разрушенного нротпвообрастаюшего покрытия, не восстанавливает исходного состояния покрытия Поэтому потеря скорости после нескольких доковаиий может стать значительной. На рис 11.44 приведены данные Лекенби но нроцеитиомч увеличению потребной мощности двух однотипных танкеров дедвейтом 18 000 т измеренному на ходовых испытаниях до и после каждого доковання Как видно из |>п сунка. после очистки и окраски обшивки в доке мощность снижалась на 6—15 “о и превосходила исходные значения, полученные па сдаточных испытаниях, для су дна А иа 6—8, для судна Б — на 20—32 %. Сравнение указанных па рис. II 14 значений kt,, определявшихся до и после очередных доковаиий (исходные значении kr> составляли для судна А 191, для судна Б 152 мкм), подтверждают отмечет тй выше вывод, что высотный периметр не является единственной характеристикой гидродинамического проявления шероховатости
Приближенная оценка процентного увеличения сопротивления трепня из-за старения обшивки и влияния обрастания может быть произведена по формуле Ньютона
'“ТГ- <" "
Rf о + а с
252
|К ,1 и fr — коэффициенты, зависящие от эффективности противообрастающсго г пития; <1 — число дней после очередного докования; d0 — число дней после спу-г‘ и или выхода из дока вновь построенного судна; с— коэффициент, зависящий от Жьективности первоначальной и последующих подготовок обшивки перед окра-Первое слагаемое в формуле (11.31) учитывает влияние на сопротивление об-L.-tjiiiih, второе — старения обшнпкн корпуса. Ориентировочные средние значения эмпирических коэффициентов a. fr и с для судов различных типов, соверша Suitiix рейсы в разных районах, приведены в табл. II I Постоянное значение коэффициента с и соответственно изменение ио линейному закону в зависимости от вре-енн '4 Дополнительного сопротивления из-за старения будут иметь место при ка
„(ствеипой очистке н окраске обшивки со снятием только наружных слоев старого
рис. 11.44 Зависимость увеличения мощнее 1 и однотипных .танкеров 01 времени зке-муатацип до и после дико-gS вапия
лакскрасочного покрытия. В случае удаления всего покрытия до чистого металла .тестон обшивки, обычно достшаемого с использованием пескоструйного способа очистки коэффициент с возрастает настолько, что влияние старения можно не учитывать Такую очистку корпуса рекомендуется |22J применять при очередном Доковаиий после 5—10 лет эксплуатации судна, когда потребная мощность превышает исходное значение более чем па 20 % при отсутствии заметного обрастания обшивки. Использование формулы (1131) допустимо в тех случаях, когда харак-^Ристнкн судна, для которого производят оценки дополнительного сопротивления, ЗДвкн к указанным в табл. II I
| Помимо видимого обрастания, смоченная поверхность судна во время пребывания в воде покрывается слизистой пленкой, состоящей нз микроорганизмов, не Подверженных воздействию применяющихся противообрастающнх покрытий Для судов влияние слизистой пленки иа сопротивление, по видимому, не имеет существенного значения, поскольку она быстро смывается, однако пленка может оказывать заметное воздействие иа результаты испытаний в опытовых бассейнах судо-#Ых моделей. Как показали опыты В М Котловича с парафиновой моделью таи-**ра ди после пребывания ее в воде более недели иа поверхности обра-
зуется :лизистая пленка. Через 8 недель коэффициент дополнительного сопротив-•1е>|ия ДСумодсли составил примерно 0,25-10 3, что соизмеримо с «надбавкой иа Шероховатость». принимаемой при пересчете* на натуру результатов модельных Испытаний. Поэтому при длительном храпении моделей па плаву, нх поверхность “Сред испытаниями необходимо очищать от слизи
253
Таблица II I Средние значения коэффициентов а, b и с формулы (Ц для судов различных типов
Тип судна Скорость судии, уз Длинн L, м Рейсы из Европы а ь
Грузовое судно 17,0 133,5 В Индию, Восточную Африку 44 70 91)
То же 15,0 136.0 В Америку, Африку 22 185 80
> 16,5 146.2 В .Америку, Африку 21 180 100
Грузопассажирское судно 16,5 156 0 В Западную Африку 20 190 130
Рудовоз 16,0 218,0 В Северо-Западную .Африку 20 250 НО
Большое канальное судно 22,0 108,5 Через пролив Ла-Манш 130 650 ООО
Большой рыболовный траулер 15,0 65,5 В Южную Африку 140 320 100
К категории общей шероховаюсти относят также волнистость обшивки судна. Основные ее геометрические параметры — длина волны 2. н высота 2а — зависит от системы набора корпуса и технологии сборки. У сварных корпусов высота волнистости обычно составляет 2а = 1.5->5,0 мм, причем с совершенствованием технологии постройки судов ее значение приближается к нижнему пределу. Длина волны имеет величину порядка шпации — обычно 1 = 501)4-1000 мм. Наличие волнистости приводит к перераспределению давлений по поверхности обшивки и тем самым увеличивает сопротивление судна При обтекании вершин со срывом вихрей дополнительное сопротивление, связанное с наличием волнистости, практически не зависит от числа Re.
В результате экспериментальных исследований В. Н. Михайлов получил формулу Для оценки коэффициента дополнительного сопротивления волнистых поверхностен с плавным очертанием вершин:
ЛСц/,7 = 0,2 . (II 32)
где ftivu' — площадь смоченной поверхности, имеющей волнистость. Расчетные оценки, выполненные с использованием (11.32), показывают, чю вклад) ЛСн в в значение дополнительного сопротивления пренебрежимо мал (ДСтгтг « 0,01 / X 10"а).
Основным источником дополнительного сопротивления, связанного с мес:ной шероховатостью, кроме ниш и вырезов, влияние которых рассматривается в § 10. являются сварные швы Обтекание швов связано со срывом вихрей с. их вершин, поэтому коэффициент сопротивления сварного шва Сц-у не зависит от числа Re На основании экспериментальных исследований Н Н. Фоминой предложена следующая формула для определения Сц-у:
Ciry= 1,3-^!-, (1133)
где hwj и b\yj высота и ширина шва соответственно Дополнительное ссиро* тивлеине от наличия шва определяется как
-2
Rwj = (Il 34)
где —-------скоростной напор воды; /ц-у—длина шва; у угол наклона ,чН
шва к направлению линии тока Наибольшие трудности при вычислении Rwj 11 254
'' -л' * pt/ ф. -
фОрЯУ'ле (И 34) представляет нахождение значений —11 V. которые, строго Илря. должны определяться в результате расчета характеристик простраиствен-пограничного слоя па корпусе судна в месте расположения каждого элемента На основании большого количества расчетов характеристик пограничного
Р(О,70» _
--------•. В среднем для поперечных швов ft == Тогда
принять. что---y2-
fjO^inO’, для продольных y-2
2 (>-: 12°.
_ I'w/
R\tj
нц>7 I
- 0.637 — — (<u д sinyi F Лкм Sin Y*)f (11.35)
где /tV/i и Лг>2 — длина поперечных и продольных швов соответственно.
Как показывают оценки. ЛСп-у обычно составляет (0.10+ 0,15)-10"3. причем Е последи :е время наблюдается тенде! пня к снижению указанных значений в связи ( применением в судостроении листов крупноразмерного проката Несмотря на большую протяженность продольных швов, их вклад в АСц-у в связи с малым значением составляет 20—.30 % Поэтому затраты на зачистку поперечных швов сфпаклся в течение первого года эксплуатации, а продольных - за 3—4 года.
Приведенные выше материалы прнюдпы для анализа результатов натурных испытан тй, а также позволяют выполнить сравнительные оценки экономической эффектпвиостп различных мероприятий, направленных па улучшение состояния поверхности корпуса.
В практических расчетах буксировочною сопротивления судна обычно учнты-^^Куммарныс надбавки на шероховатость, определяемые на основании корреляционного анализа результатов натурных п модельных испытаний (см § 23).
§ 10. СОПРОТИВЛЕНИГ ВЫРЕЗОВ
Вырезом называют местное нарушение сплошности корпуса судна, связанное с необходимостью размещения различных устройств Примерами вырезов являются буровые шах гы. приемные и выпускные патрубки различных систем, использующих Кборт) ую воду, рецеегы для размещении в походном положении резервных твнжителен. каналы подруливающих устройств и т п.
^опротпалеиие. обусловленное иалипшм выреза, связано с нарушением в этом месте плавного обтекания корпуса, образованием дополнительных вихрей во впут ренней полости п вихрей, сходящих с кромок выреза, и прохождением потока жидкости через сечение выреза. Размеры вырезов могут быть значительными, поэтому их сопротивление необходимо учитывать при расчетах ходкости.
Можно выделить два основных типа вырезов: глухие i сквозные. Первые рас-*адагаю1сн как правило в днищевой части корпуса и представляют собой глухие рецсссы. На рнс 11.45, а показан глухой вырез для размещения в походном поло-денип поворотной колонки обеспе швающей движение и управлясмос|Ь судна "а Малых ходах Примером сквозного выреза является поперечный капал в корпусе гУДна для г: др нвающего устройства (рнс. 11.45. б).
Определение сопротивления глухого выреза на моделях судов представляется ^Рулнптельиым из а его малых абсолютных размеров в масштабе модели. Поэтому ^обходимо использовать результаты систематических исследований, выполненных "а крупномасштабных моделях изолированных вырезов [26].
Физическая картина обтекания выреза показана на рнс. П.46. Внешний но-Ж с<1|;11Икасается с ж,,лкостыо внутри выреза н сообщает ей движение. Прн этом ^•разуются две вихревые зоны у передней и задней кромок выреза. Сопротивление уЧ>ед<Мяе1ся потерями энергии прн внезапном расширении внешнего потока у пе-ЧНюй кромки и его последующем сужении у задней кромки выреза. Такое обтека-имеет место у относительно мелких вырезов, глубина которых ие превышает hi их длины (см. рнс. II 46, 61 В случае доемточно глубокого выреза жидкость Ч|)?тРн него приводится во вращательное движение. Это вихревое движение при
Г И 255
большой глубине выреза может служить источником образования второго в который индуцирует последующий и т. д. (см. рнс. 11.46, о). По мере увели н • глубины интенсивность вихрей снижается вследствие трения о стенки и диссшщщ 4 энергии. Практически уже на глубине, превышающей две длины выреза, об]^’1 ется застойная зона и дальнейшее увеличение глубины нс приводи! к заметному лнчению сопротивления выреза. Таким образом, в общем случае козффнцие!ц’Cf('
Рис. П.45. Типы вырезов в корпусе судна: и - глухой; б — сквозной.
противления выреза является функцией размеров выреза и толщины погр.пт'иого слоя на корпусе в месте его расположения:
_ Rh б h I \
"|1,)
где Rh — сопротивление выреза; /, b, h —длина ширина и глубина выреза < ответственно; о — скорость певозмущенпого потока; 6 — толщина пограничного т inn у передней кромки выреза. Кроме того, на коэффициент сопротивления выреза
оказывают влияние его форма, а также утлы наклона передней CfSj) и задней 1У щенок к направлению набегающего потока (см. рис. II 46) При р, > л.2 вьеишпп поток проникает в полос 1Ь выреза, что обусловливает вовлечение в вихревое тс и-пне масс жндюсти на большей глубине и соответственно увеличение сопротивлений выреза. Увеличение угла fi. свыше л/2 приводит к более плавному обтеканию внешним потоком задней кромки выреза, и его сопротивление несколько еппжашея.
Предполагая, что неравномерный поток, имеющий место в пограничном слое, можно заменить эквивалентным равномерным потоком, имеющим скорость, раину10 средней скорости в пограничном слое, В И. Михайлов |2б] получил следуют' приближенную формулу для коэффициента сопротивления выреза:
(II 4')
256
Зависимость <Гт = / ' ~fT
Р л — координата выреза. Ke* = vxfv.
L 1147
S' Результаты расчетов при I b = I по формуле (II 37), приведенные на рнс. 11.48, Ьлрош ' согласуются с экспериментальными данными для относительно глубоких вурезэв- 1рн меньшей глубине вырезов расхождение расчетного п действительного •оэф!1111 центов сопротивления может оказаться значительным. Корректировка расчетного коэффициента может быть осутце
приведена на
сТцлсна но формуле Си = Снрасчу0 За «ценность Yo 01 отношения глубины и «родо-зьного размера выреза показана на рис П **£?- Следует отмстить, что при h I L 0.64-0.7 наблюдается резкое возраста пне сопротивления по сравнению с более глубокими и. более мелкими вырезами (для вырезов круговой и квадратной формы оноI составляет 2 и более раз), поэтому при проектировании следует избегать таких значений относительной глубины.
Для приближенных расчетов коэффициента сопротивления мелких вырезов pi// 0,3), имеющих форму параллелн-пштедз может быть принята постоянная величина Сц = 0,0282, установленная опытным путем.
В значительной степени сопротивление выреза зависит от его формы в плане. Наименьшее сопротивление при равной площади имеет- прямоугольный вырез с рас-пол жением большей стороны прямоуголы ика перпендикулярно направлению ско-рост! внешнего потока, наибольшее — вырез треугольной формы с направлением потока от вершины к основанию. Вырезы круговой, квадратной, прямоугольной формы с расположением длинной стороны вдоль потока, а также треугольной
Ъ V 1,0 W 0,6 0,4
О
0,5 1,0
Рис. П.47. Зависимость <рл = f (lib).
Рис. 11.48. Коэффициент сопротивления глухого выреза при lib = I.
Кривые (сверху вниз) для Rex 10’®, 10*, 10*. 10*
Рис. 11.49. Зависимость Ye = f (Ml).
при направлении внешнего, потока от основания к вершине создают практически одинаковое сопротивление Уменьшение сопротивления прямоугольного выреза по сравнению с сопротивлением квадратного выреза, имеющего те же площадь Р глубину, составляет около 40%, увеличение сопротивления треугольного, иептированиого вершиной против направления скорости потока, — около 60 %.
Формула (11.37) получена применительно к вырезам, расположенным на плохой поверхности, и ле учитывает влияния па их сопротивление градиента давления всл:дствне кривизны обтекаемой поверхности, которая в действительное г it имеет Место при расположении вырезов о носовой или кормовой оконечностях судна. ВтатюиЛсно, что в носовой оконечности корпуса судна в зоне отрицательного гра-
® Ч/р Я И. Войткуискпго, т. I
257
днснта дайлен ня сопротивление выреза оказывается несколько выше, а в корм,)!1П, ниже, чем в случае плоской поверхности. Коэффициент сопротивления пос.щц4 вырезов следует увеличивать но сравнению с данными рис 11.18 примерно на _>ц и на столько же уменьшать коэффициент сопротивления выреза в корме 11
Внутреннее заполнение выреза затрудняет движение жидкости в п<п».ч| „ соответственно приводит к увеличению к зэ рфнцнет та сопротивления. Однако 1Ь увеличение сравнительно невелико.
При большом количестве или большой площади вырезов нх сонротивлсшн жет существенно увеличить общее сопротивление корпуса. В этом случае нсоблозцЧц предусматривать закрытие вырезов, либо установку па них решеток. Решетк । ра) деляют вырез па мелкие ячейки, что затрудняет взаимодействие внешнего и<> ,-,к с жидкостью, находящейся в полости выреза. При коэффициенте проницаемости ' представляющем собой отношение площади решетки в свету к площади вырез.т, J]’ ном 0,7, может был. достигнуто снижение сопршии тения выреза на 40 %. Н.чцбо-лее целесообразным с этой точки зрения является поперечное расположение ст. ней решетки таким образом, чтобы вырез представлял собой ряд коротких пр» мть угольных вырезов, ориентированных короткой стороной вдоль потока и имеющих как было указано выше, минимальное сопротивление Согласно рекомендациям 23 j при ki, 0,5 коэффициент сопротивления выреза при наличии решетки может быть приближенно определен как
Сц = 0,02Я2А>11, (11.18)
При наличии на корпусе нескольких вырезов возможно их взаимное влияние; оно заметно только при относительно близком расположении вырезов, когда расе оя-||ця между ними равны их размерам.
Через сквозной вырез может проходить поток жидкости, который приведет к дополнительному увеличению сопротивления судна, так как жидкость, попал.» > щля в капал, приобретает скорость движения судна, па создание которой должна быть затрачена энергия. Это дополнительное сопротивление может быть найдено ио формуле
&Rh р(>, (11. Н)
где Q — расход жидкости через сквозной вырез. Коэффициент дополннтелтлтого сопротивления равен
Мн 2с-, V
Из выражения <11.40) видно, что уже при малых скоростях течения а, через скн- 1 ной вырез добавка к сопротивлению может быть значительной. Причинами возит иовения течения через сквозной вырез в условиях эксплуатации судна может я т ляться разность давлений на различных бортах судна вследствие его рыска ния или исспмметрця корпуса в местах расположения вырезов. ВыхоДящт и из выреза ноток, взаимодействуя с внешним, вызывает уменьшение давления в районе его расположения, которое, очевидно, приведет к дальнейшему увеличат J скорости течения в вырезе и увеличению его сопротивления Эго явление обнаружено при модельных испытаниях судов со сквозными каналами для носовых ш i рулнваютцих устройств 1231, когда фиксировалось увеличение сопротивления •' 10 15 "и по сравнет ню с буксировочным сопротивлением тон же модели при закрт-том канале устройсзва.
Очевидно, что увеличение гидравитческого сопротивления течению жид?:ое1 и в канале уменьшает расход жидкости через сквозной вырез и Соответственно умет шаст \Сн- Нрн этом сквозной вырез можно приближенно рассматривать как дв-т глухих, сопротивление которых определяется но формуле (11.37).
Экспериментально установлено, что размещение в канале нодрулнваюш* устройства невращающегося гребного винта существенно снижает conpoiпиленш сквозных вырезов. Таким образом, дополни тельное увеличение сонрогивлеи и>* сквозного выреза для канала подруливают» то устройства практически нс наб лю дается, если приняты меры по предотвращен ню саморотацин гребного впита и вс п ствие больших гидравлических потерь течение через сечение канала отсутствуй
258
п случае применения в качестве рабочего органа подруливающего устройства винта ||СгуЛ1'РУсмог0 шага (ВРШ) для исключения его ротации па ходовых режимах, 'когда устройство не используется, целесообразно устанавливать лопасти на нуле-
вой шаг.
Уменьшение соц ютпвлеиия канала подрули р-нотего устройства путем установки вертикаль H'|JX решеток из стержней оказывается малоэффективных из да большого коэффициента проницаемости 0.1) и обтекаемой формы поперечного сечения стержней, обусловленных необходимостью ибесиече-n|iS минимальных гидравлических потерь в канале ррп работе подруливающего устройства. Болес рациональным оказывается размещение стержней вдоль ли пай тока или параллельно ватерлинии. Наибольшее уЬмнченне буксировочного сопротивления судна (до 5 % от полного) отмечается для судов с большим углом заострения ватерлинии, что является следы «нем образования уступа в обводе ватерлинии в месте со. пересечения с каналом. Снижение сопротивления выреза в 2—3 раза может быть достигнуто посреди вом местной ложкообразной выемки в корпусе за капа лом подруливающего устройства (рнс. 11.50). Выемку
Рнс. 11.50. Выемки д я снижения сопротивления канала подруливающего устройства.
следует согласовать с направлением линии тока в
этом месте корпуса, которые могут не совпадать с направлением ваюрлнпнн. Для
слов с острыми ватерлиниями делать выемку нет необходимости.
’ Па основании обобщет ня результатов экспериментов по определению дополпи-тел .кого сопротивления вырезов подруливающих устройств различных типов для ориентировочных расчетов можно рекомендовать значение Си = 0,066.
§ 11. СОПРОТИВЛЕНИЕ ВОЗДУХА ДВИЖЕНИЮ СУДНА
Сопротивление воздушной срезы движению судна ио физической природе представляет собой вязкостное сопротивление, воздействующее иа надводные конструкции судна (надстройки, мачты, трубы, надводную часть корпуса), оно определяется аэр. динамическим сопротивлением корпуса при безветрии и, главным образом, влиянием ветра иа полное сопротивление судна. Но этой причине сопротивление возтуха является одним из существенных факторов воздействия иа судно погодных условт it и играет заметную роль в сопротивлении его движению при ветре значительной интенсивности, выраженной обычно в баллах по шкале Бофорта Связь между скоростью истинною ветра т0, определяемой в неподвижной системе координат, и ею силой в баллах приведена в табл. II.2.
При оценке воздействия ветра на судно, движущееся со скоростью а, необходимо принимать относительную (кажущуюся) скорость воздушного потока п.д в системе координат, связанной с судном, равной
= |/ и2 + о*-J-2rru cos у0. (II 41)
[где у0 — угол между направлениями действия ветра н движения судна, отсчитываемый от носа.
В общем случае, если ветер не встречный (у =£ 0’>) н не попутный (у =/= 180е), на надводную часть судна,помимо продольной силы аэродинамического сопротивления Raa, действуют поперечная сила и момент рыскания При этом прямоли-тейное движение судна возможно только с дрейфом под углом Рис переложенным Рулем на некоторый средний угол 6^, необходимый для удержания судна на заданном курсе Тогда угол уд между вектором относительной скорости воздушного потока и ДП (за 0° принято направление встречного потока) может- быть определен из соотношения
5П1(тд-ЬР} ’° sin у„ (1142)
I
9'
259
Таблица 11.2. Шкала Бофорта
Сила ветра» баллы Скорость ветра и0» м/с Характеристика ветра Сила ветра, баллы Скорость ветра l'o, м/с Характеристик., ветра
0 0 0.5 Штиль 7 12,3—15,2 ~ - X Крепкий
1 0.6 1,7 Тихий 8 15,3-18.2 Очень крепкий
2 1,8-3,3 Легкий 9 18.3—21.5 Шторм
3 3,4- 5,2 Слабый 10 21,6-25,1 Сильный шторм
4 5,3—7,4 Умеренный 11 25,2—29.0 Жестокий шторм
5 7,5 -9,8 Свежий 12 >29 Ураган
6 9,9-12,4 Сильный
причем в этом случае сопротивление, обусловленное действием негра, включаег аэродинамическое сопротивление надводной части, дополнительное гндродинампче ское сопротивление подводной части из-за наличия дрейфа и сопротивление переложенного руля. Сравнительные расчеты для судов различных типов показывают, что при траверзных направлениях действия относительного ветра (15°< у 1 < < 135°) вклад аэродинамической н гидродинамической составляющих дополнительного сопротивления соизмерим, однако абсолютная величина суммарного >-противления при этом ис превосходит 4 % полного сопротивления. При леи ствпи ветра со встречных курсовых углов (уд < 45°) полное сопротивление воздуха может составлять 10 % и более сопротивления воды движению судна, но при эл. м даже в случае крепкого ветра силой 7—8 баллов доля гидродинамических составляющих нс превышает 4 % полного сопротивления воздуха. По этой причине а также из-за ограниченного количества данных, позволяющих оценить совместнее влияние на сопротивление дрейфа и переложенного рули, в практических расчет как правило, сопротивление от действия ветра отождествляют с аэродинамическим противлением надводной части судна, т. с. полагают 0 = = 0, и сопрог пи-
ление воздуха определяют как
^аа — Саа^‘^а1'Г' f*1 W
где Сдд — коэффициент сопротивления воздуха; р, — плотность воздуха, при иимаемая в расчетах равной 1,226 кг/м3; /’р — площадь проекции надводной част на плоскость мидель-шпаигоута
Коэффициент СдА зависит от формы надводной части корпуса, типа и конфигурации надстроек, а также от их ориентации относительно воздушного потока Его значение определяют экспериментально в результате продувок в аэродниамн i скнх трубах под различными углами к набегающему потоку (круговых продувок) моделей надводной части корпуса. Модели изготовляют сдвоенными отиосительн > плоскости ГВЛ или испытывают иа плоском экране, иммитирующем влияние свободной поверхнос и. Испытания проводят при достаточно высоких числах Re (Re > (2-f-3)-10"L обеспечивающих закритический режим обтекания отдельных koi г струкций корпуса (см 187] первого раздела).
Наибольшая точность определения коэффициента обеспечивается прн испытании .модели судна, для которого производится расчет, однако такой экс не римент достаточно трудоемок и выполняется сравнительно редко. Обычно исполь зуюг результаты испытаний модели судиа-прототипа, имеющего аналогичные раз меры и расположение надстроек, мачт и другой оснастки. На рис. 11.51—11.3-1 приведены полученные Лаге зависимости коэффициента Слл or Т.4 для судов различных современных архитектурных типов. Как видно из рисунков, наиболт пже значения коэффициента воздушного сопротивления отмечаются в случае дел ствия воздушного потока с относительной скоростью, направленной под углом Тл = 20+ 30° с носа и уд = 150+ 160° с кормы. Для судов с устаревшими очертаниями надводной части корпуса, например с надстройками трехостровного типа, коэффициент Слл может заметно превышать указанные на рисунках значения, достигая 1,0—1,2. Батьшой экспериментальный материал по коэффициентам аэр "
260
«ннамкческого сопротивления, относящийся к судам различных типов, содержится в I221
При отсутствии достаточно близкого прототипа для определения С,4д можно воспользоваться резу тинами выполненной Ишервудом обрабогкп большого ко-
рне. II 51. Зависимость коэффициента аэродинамического сопротивления судов Саа от направления воздушного потока.
1 — тиккер (f рр — 172,5 и, В — 25,5 м. Т — В.23 mJ: 2 - к<-нгейиерош>з с контейнерами lLpp •» 144.78 м В — 23,10 м, Т - 8.69 ы). 3 — контейнеровоз без контейнеров
Рис. 1.52. Зависимость Сдд от направления воздушного потока.
ВW — сухогрузное судно с полным грузом (/ рр = 127,5 м, В — 18,5 ы. 7 = 7.32 м); 2 — сухогрузное судно в балласте (7*цв 2.58 м 7К — 6,3 м); 3 - сухогрузное судно с кормовым расположением иядстройки (/рр = 143 25 м В — 21.34 м, Т 8.76 м)
|В1чества данных аэродинамических испытаний моделей транспортных судов с по-рощыо регрессивного уравнения [66]
Слл л''£ + л-т + Л1-Т-+',-тЬ+л‘Т57 + л‘"’<|1и|
гДе Loa 11 В — наибольшая длина и ширина судна соответственно; Гд и FT площади продольной и поперечной проекций надводной части соответственно; S
261
периметр продольной проекции надводной части за исключением ватерлинии и мач с — расстояние от носа до центра площади парусности, М — число отчетливо paj: лнчпмых в продольной проекции мачт и стоек
Значения коэффициентов полинома (11.44) в зависимости от курсовот ,Гл относительного ветра у, приведены в табл. II .3. Геометрические параметры, в 1я
Рнс II 53. Зависимость С да от направления воздушного потока.
I — пассажирский лайнер (^-рр = 118 М, В —• 19,9 м. 7 = 5 м); 2 — паром (f-pp
В 13.3 м. Т -1 ы>; 3 — рыболовный траулер (/-лр = 22,26 м. В - *,« ы, Т 2.5
щне в уравнение (11.44), определяют по чертежам судна, для которого прои расчет. Прн отсутствии чертежей) значения указанных параметров moi ут бьп 1Ь пяты по табл. 11’4 в которой приведены их средине значения для судов различи го назначения архитектурного типа и условий загрузки
Натурный ветровой поток движется над вод «ой поверхностью, вследствие ч о над пей образуется пограничный слон с распределением скоростей, показа! м на рис. II 54 Высота i (Диодной части корпу н надо'роск соиз.мерн. а с толщиной слоя н поэт му-скорость обтекающего их потока меньше скорое г и ветра, измеренной приборами, которые по возм -ж-ностн выносят за пределы резкого перепада скоро, стей. Определение сопротивления воздуха по фор муле )II 43) без учета указанного изменения ростсн воздушного потока может привести к еы чизельной переоценке аэродинамического сонр> влей ня. Поэтому в формуле (11.43) рекомендуй ,я вместо ил принимать среднюю скорость ь'^, с <>т-ветствующую фактн юскому распределению скоростей воздушного потока обтекающего надводные конструкции корпуса Значение ь1^ можно установить по графику рнс. 11.54 для некоторой экви валентной высоты над троек, определяемой по фо мулам: г —0 5^+0,4й — для судов с прерыви отыми надстройкам! г — 0,5ft,—для судов с и -прерывными надстройками, где [ — высота надвит-него борта на мндель-шлангоуте; ft — высота на: стройки над ватерлинией; ft,—средним высота непрерывной надстройки над ватерлинией
Сдд. определяемые при испытании моделей в однородном потоке аэродинамической грубы, также отличаются от натурных Эти р лпчня, однако, невелики, и корректировку Cjj применительно к натурным уело вияы обычно не производят, что приводит к вычислению с некоторым запасом соп| тивлення, связанного с действием ветра
Рис 1154 Профиль скорости воздушного потока вблизи свободной поверхности воды
Значения коэффициента
262
Иа б л и П Значения коэффициентов формулы (11.44)
| ° Л Я Я, -4. 1. Л, .1.
V 2,152 —5,00 0,24.3 —0.161
1 10 1.714 —3,33 0,145 -0.121 —
20 1.818 —3,97 0.211 0.143 — 0.03.3
30 1.905 - 4,81 0,24.3 - 0.154 — 0.041
40 2,333 —5,99 0.247 - 0.190 — 0.042
50 1,726 —6,54 0.189 -0.173 0.318 — 0.048
' 60 0,913 —4.68 — -0.104 0 482 — 0.052
70 0,157 —2.88 — - 0 068 0 316 0.04.3
В 80 0,341 - 0,91 —0.031 — 0,032
В 90 0,355 — — — —0.247 0,018
1 100 0,601 — — — —0,372 0.020
по 0,651 1 29 —— —- -0.582 —0,0.31
I 120 0.564 2.54 — — 0.748 — —0,024
I 130 —0 142 3.58 — 0.047 —0 700 — —0,028
1 10 -0.677 3,64 — 0,069 0,529 — —0,032
Г 150 —0.723 3,14 — 0,064 0,475 — —0.032
160 —2.148 2,56 — 0,081 — 1,27 -0.027
170 - 2.707 3,97 —0,175 0.126 — 1.81 —
I 180 - 2,529 3,76 -0.174 0 128 — 1,55
Таблица II 4 Средние значения входящих в формулу (II 44) 1еометрнческих
параметров судов
Тип судна, условии злгруяки । ^i. 'оа 2Г^г к $ *-0,1 < 1 О А м
Пассажирские суда и паромы 0.192 1.95 7,66 1,44 0,492 2
Грузовые суда со средним расноложс-ппем машинной установки с полным грузом 0.1 II 1 67 7,80 1,51 0,490 4
ру.зояыс суда со средним раснолпжс пнем машинной установки в балласте 0 1 19 2,04 7,80 1,58 0,489 4
Грузовые суда с кормовым расположением машинной установки с полним грузом 0,122 1.75 7,80 1,51 0 550 5
Грузовые суда с кормов! м расположением машинной у lanoBKH в балласте 0,151 2,06 7,80 1.58 0.526 5
11 анкеры п рудовозы со средним р.те-1но.|ожением надет ройки с полным грузом 0.076 1.03 7,46 1 33 0,547 .3 3
Танкеры и рудовозы со средним расположением надстройки в балласте 0 117 1 43 7,46 1,40 0,522
Танкеры и рудовоз!» с кормовым расположением надстройки с полным тру 1 эом 0.100 1.59 7 4 । 1 33 0.568 3
Танкеры и рудовозы с кормовым расно лодкецпем надстройки в балласте 0,121 1,68 7.46 1.40 0,537 3
Траулеры 1 Буксиры L 0, НИ. 1.80 6.47 1 45 0,4 6 2
(1 236 I 43 4,05 1,86 0,405 1
Ь
§ 12 ПУТИ СНИЖЕНИЯ ВЯЗКОСТНОГО СОПРОТИВЛЕНИЯ СУДОВ
При больших значениях Re вязкостное сопротивление авнжущнхся в вод< 1С.Л может быть снижено за счет рационального выбора формы обводов с целью Учрц-нения нлн сокращения зон отрыва турбулентною пограничного стоя и цел ссоси'р него уменьшения смоченной поверхности, а также путем уменьшения местной и распределенной шероховатости. Использование указанных возможностей onpJ1B_ дано, если оно не вызывает увеличения других составляющих сопротивления, цл_ пример волнового.
Вязкостное сопротивление хорошо обтекаемых тел при гидромеханически гладкой поверхности незначительно отличается от сопротивления турбулентного трет ня эквивалентной плоской пластины н может быть доведено до уровня, лежащега ниже этого естественного предела, прн применении средств искусственного ттиз-действня иа пограничный слой.
Снижение сопротивления трения может быть осуществлено за счет изменения свойств жидкости у стенки (посредством воздушной смазки, применения полимеров) или за счет ламинаризацки пограничного слоя
Рнс. 11.55. Схема формирования искусственной каверны: а — ьа тихоходном судче с. плоским днищем; б — на быстроходном судне.
1 козырек капититор; 2 — каперна; 3 — кили для предотвращения утечки воздуха; ! обшив к» судна; 5 — рсдак.
Воздушная смазка корпуса. Исследования, выполненные А. А. Бутузовым. А. Н. Ивановым н др. показали, что течение со сплошной воздупыой пленкой можна описать с помощью уравнений движения невязкой жидкости. В процессе решения этой задачи подлежит определению свободная линия тока, давление на которой постоянно и равно давлению газа в воздушном слое — искусственной кавер i . Характеристики искусственной каверны слабо зависят от схемы подвода воздуха в поток, т. е от способа создания требуемого давления в каверне, и определяются числами канитаиии и Фруда Начало искусственной каверны формируют, уставав лнвая на поверхности движущегося в воде тела козырек-кавнтатор, отклоняют)! поток от поверхности. Образующаяся за кавнтатором зона постоянного давлени заполняется воздухом. В ряде случаев искусственная каверна может быть образована без применения козырька, например за точкой резкого изменения кривизя i обводов в форме редана (рнс. 11.55)
Эффект снижения сопротивления определяется соотношением между виигры шем в трении, связанном с долей изолированной от воды поверхности, и некоторым проигрышем за счет сопротивления кавитаюра. Существенным требованием являете:, обеспечение необходимой силы поддержания судна с воздушной смазкой, что в ря случаев сводится к требованию получения достаточного давления в каверне.
Устойчивость границы раздела воздух вода на большей части ее длины обуг ловлена наличием положительного градиента давления, направленного внутрь жидкости. Теоретические и экспериментальные исследования форм и размеров иску, ственны.х каверн, образующихся за кавнтатором на плоском днище, показали, что длина каверны не может без разрушения превзойти некоторого предельного значения /|( — 0,34d2 (/к — в неграх, ь> — в метрах в секунду) (рнс. 11.56), поэтому в необходимых случаях возможно применение совокупности воздушных пленок, следе ющих друг за другом
Практическая возможность существенного (до 20 % от иашого) снижения со
264
пОотнв-1е1,,,я за счет таким способом образованной воздушной смазки была под Церждена натурными испытаниями ряда речных судов с плоским днищем
, иС П 57). При этом мощность, затрачиваемая иа поддув, не превосходила 3 % [отнести двигателя судна.
V У судов, движущихся в переходном режиме и режиме глиссирования, иа днище ^Ксст быть создана одна каверна необходимой протяженности, для формирования
7 и Ч
Рис. 11.56. Расчетная форма плоской каверны при разной ее длине
козы|нк-кап11тптпр: 2 фиктивный кавнтатор. используемый при расчетном определении характер!! гнк каверны: 3— каверна небольшой длины (! !к); 4 каверна пре-
!делык й длины, угол ее касания к стейке равен нулю; 5 — нереализуемая нв практике форма каверны: 6 — каверна, существующая при больших значениях расхода.
доторо: требуется один редан. За счет рационального профилирования днища удаетс обеспечить необходимое давление и каверне и снизить сопротивление (рис П 58) [35|.
Применение полимеров. В 4()-х тг. было обнаружено, что трение о твердые стенки, оказываемое турбулентным течением слабых водных растворов полимеров с линейной структурой макромолекул, таких как полноксы, полиакриламиды и др , и молекулярной массой Л1 = Ю’-ь10’, может быть примерно втрое меньше, чем трение воды
Рис. II 57. Зависимость мощности главных двшателей грузового речного теплохода от его скорости.
I •— без воздушной смазки; 2-е воздушной смазкой корпуса по схеме рис. 11.55, с.
Рис. 11.58. Буксировочное сопротивление модели масштаба к = 1 ; 10 речного пассажирского судна водоизмещением D 24 т, имеющего скорость около 55 км/ч.
I 1 мидель обычных обводив; 2— с воздушной смазкой по схеме рис. 11 55, б.
f без примесей (рис. 11.59) Эгот эффект наблюдается при столь малых концентрациях ^КЯЦест что плотность и вязкость растворов не отличаются от таковых для воды, д Опыты с растворами в трубах показывают, что малые добавки полимеров не вызы Ьают увеличения критического числа Re Эффект снижения сопротивления прояв-
ляется после превышения порогового значения трения на стенке, и по мере роста {• напряжения трения т0 достигает максима; ьного значения, которое, если отсутствует I Механическое разрушение полимерных молекул в потоке, определяется концеи-I [грацией раствора с, видом полимера и его молекулярной массой. Снижение сопро-I тнвления обусловлено утолщением переходной зоны пристеночного течения, которое I вызывает (рис II 60) смещение логарифмического участка профиля на величину Во
Полимеры, незначительно изменяя продольную составляющую пу.1ьсацно1и{)!-скорости, приводят к резкому уменьшению поперечной ее составляющей н, еле ватсльио, турбулентного обмена вблизи стенки (рис. 1161).
И. ,1. Повх и др. обнаружили, что близкими свойствами обладают турбу. дентине течения воды с добавками поверхностно-активных веществ (напрнм* метаупона), однако для получения аналогичного иазимерам эффеюа их требуется существенно большее (примерно в 1000 раз) по массе количество *.
о 5 6 7 Re-:0~6
с-10-
Olfi 0.10 0.21 0.20 0.26 Fr
Рис. II.59. Снижение сопротивления пластины длиной 0,9 м, буксируемой в растворе полимера (нолиокса) концентрацией 15 г/м3 (по данным Леви и Дэвиса, а), и
модели судна длиной 2,44 м (по измерениям Эмерсона, б).
1 длниыс испытаний в опытовом блсггйнс, заполненном год», fl; 2 — данные nci!i>u.uuir't в опытовом бассейне, заполненном раствором иол»! икса концентрацией 5 г^м1.
Расчет трепня в случае введения растворов па поверхность движущегося в иоде тела может быть выполнен (41] па основе выражения, описывающего профиль скорости турбулентного пограничного слоя [ср. с формулой (III.93) первого раз дела ]:
Э- vlnJV- + C + Bo + VK^6) (1,4Г’1
Рис. II.СО. Распределение скоростей при течении в трубе (по данным Л А. Чеки ловон и Ю Ф Иваиюты) *.
1 — вязкий подслой; 2 переходная зона в подо; 3 — то же при течении рпстворя; 4 — закон с генкн в воде; 5 — то же при течении раствора; О - пода; • — раствор полимера.
Рис II 61 Относительные среднеквадратичные значения продольной (и) и поиереч нон (б) пульсаций скоростей при течении воды (/) и раствора полимера в трубе (2) (по измерениям Е. М Хабахлашевой) 1
При этом функция Н„ считается известной для растворов данного полимера по резулыатам их испытаний в трубах В качестве расчетного значения концентра цяи с используют ее значение вблизи стопки с = ст»-.
1 Пилипенко В. Н. Влияние добавлк нл пристенные турбулентные течения. - В сб Механика жидкости н газа. т. 15 М . ВИНИТИ, 1980. с. 157—261.
266
| обобщение опытных данных по течению растворов полимеров в трубах и георе-|ческое решение задачи снижения сопротивления может быть реализовано иа Eciitwe использования реологических моделей вязкоупругих жидкостей, рассмотреи-
в гл. Ill первого раздела (работы Я. И. Войткупского, Я. С. Ходорковского, о А Городцпва н др ) 1.
К' |1. Д. Желтухин использовал модель движения жидкости с внутренним вращением Для которой реологическое уравнение плоского сдвигового течения, где t\. - f(y. 0. имеет вид |21|
,+n.i. „[£. + (i + 01.46)
д! \ ду \ р / dt ду J
При таком подходе физической причиной снижения турбулентного трения считается демпфирование нестационарной пульсационной еостаиляюшсЛ завихренной и из-за
параметров от ко*|н|я1циента (б).
минималык'С (пирги иное) значение, при котором В„ 0 и наблюдается снижение coitpa- тиялеипя,
несовпадения угловых скорое!ей вращения частиц жидкости и полимеров. Демпфирование имеет место, если время подстройки вращения частиц к вихревому движе нню жидкости — эффективное время релаксации 0( удовлетворяет условию (u*s0i/v)n,,|, (рис. 11.62), Мерой демпфирования выступает относительная jВращательная вя Кост ЦнР, ко о ая для слабых растворов являе ся -iiruefti 1
Ф> 1кцпей их концентрации: pr/ii = |V При надлежащем подборе двух постоянных 0t н р для данного полимера (рис. I! 63) может быть получено согласие расчетных данных с результатами измерений в трубах. На рис 1164 представлена расчетная зависимость снижения сопротивления плоской пластины движущейся в растворе полимера,от параметров pr/p, V u Re I (отрсбимс для его обеспечения значения концентрации для трех видов полимеров можно определить по рнс 11.63.
Исследование различных снос бов введения растворов полимеров иа иоверх-I ность движущегося в воде тела показало, что оптимальным является вдув растворив через наклоненную к поверхности щель нлн ряд щелей, елчвующих друг за другом с определенным шагом. На рис II.G5 точками показаны результаты измерений спи Кения сопротивления при вдувс растворов нолиокса па поверхность пластины. Там же в виде сплошной кривой приведены данные расчетов, проведенных ио схеме. ^Нпользующсй уравнение импульсов |см- формулу (111.64) первого раздела], закон I распределения скоростей (II 45), зависимость от различных параметров (см. ‘ Рис, 11.62) и выражение для = 2</(РцбаВ). где у — расход сухого полимера, (‘в — плотность полимера (г/м3), В ши и <а пластины. Пересчет применительно к I числам Re, соответствующим движению судов, показывают, что для полимеров
Mil 1 См сноску 11.1 v ?61).
267
типа полиокса снижение трения в условиях гладкости поверхности обшивки спета, вит около 50 % при значениях г/ (рпт€2) — 0,02 ; 0,04 или расходе сухого полти а равном нескольким тоннам п час; из-за высокой стоимости полимеров нх использовщ нне для снижения сопротивления судов может оказаться невыгодным
Рис. 11.63. Зависимость коэффициента pr'ji от концентрации полимеров различной природы по опытным данным, относящимся к течению в трубе
1 — полнокс (6, — 1.1.1Q-* с): ? — полнакриллмид (О, = 0.65- 10“’ с); 3 — гуаровая смола о, = 0 19 io-" с).
Рис. 11.6! Зависимость снижения сопротивления от параметра t^Op'v.
1 — Re — 10*. цг,'и — 15: 2 — Re 10’; = 15; 3 — Re =10’. нг/ц = 3; 4 Re —IO*.
Hr/|i 3.
Ламннаризация пограничною слоя. Осуществление ламннариэанин возможно лишь при устранении сильных возмущений от турбулентности набегающего поток, и в пограничном слое, от шероховатости поверхности, вибрации и местных отрывов
Рнс. 11.65. Сравнение рассчитанной по полуэмпнричсской теории зависимости снижения сопротивления плоской пластины от параметров расхода полнокса с результатами измерений Фрумеиа и Тулина.
---------расчет; • измерения.
Рис. И.66. Расчетная зависимость критического числа Рейнольдса от параметра Н = б*/6** для ламинарного пограничного слоя.
Н = 2.59 — течение с иулспым градиентом давления; И = 2 — течение с распределенным отсасыванием.
пограничного слоя Указанное требование является, однако, недостаточным. Лям к парные течения обладают неустойчивостью к малым возмущениям, приводящей к их росту н, в конечном итоге, переходу к турбулентному течению, который сопровождается резким увеличением трении.
268
f Теория позволяет рассчитать число Re* потери устойчивости (или критическое чисто ReJp ~ b*v6!v}, соответствующее началу указанного процесса (рнс. 11.66).
В некоторых пределах чисел Re требуемое изменение R • может быть эсуще-
Ьрвленоза счет рационального выбора формы обводов (ламннаризованиых обводов), В частности, смещения максимальной —................... “ ----- —.........
толщины тела к корме в целях увеличения протяженности области с отрицательным градиентом давления (// = 6*/6**< 2.59), где устойчивость потока возрастает (рнс. 11.67).
Другая возможность изменения Re’p заключается в нагревании обшивки движуще-
0,8 v./v
рис. 11.67. Зависимость коэффициента сопротивления С — 2R<(pV?'’V) от скорости и числа Re (по данным Маккормика).
I — тело вращения с меридиональным сечением, соответствующим профилю NACA-B6. Нлиисинем /ув 3,33 (л.тминарпзовлнные обводы): О — результаты пспнтаннй всплы-^Нцей модели: • — то же с турбулизатором: 2 — тело ираир-кия иных очертаний и экпн-ь валентного объема
Рис. II 68. Расчетная зависимость критического числа Рейнольдса на нагреваемой пластине от значения кинематической вязкости па стенке гц-. отнесенного к ее значению в потоке т.
гося в воде тела; в этом случае вместе с увеличением кривизны профиля скоростей из-за снижения вязкости тц,' в пристенной зоне уменьшается по той же причине эффективность вязкого демпфирования возмущении. Расчеты А. II. Короткнна [81 показали (рнс. 11.68). что наибольшее увеличение R<3*p достигается при = = 0.5.
Рис, 11.69. Схема отсасывания жидкости из пограничного слоя с целью ламипа-ризации в нем течения.
I участок естественного ламинарного слоя; 2 — изменение толщины слоя при отсасывании через щели 6; 3 — область турбулентного слоя; 4 — значение толщины слоя, соответствующее ReK[1; J — нижняя граница, соответствующая турбулнзирующему действию шероховатости
Принципиальная возможность организации ламинарного течения прн сколь Угодно больших значениях числа Re обеспечивается отсасыванием части жидкости из пограничного слоя Лахманн предложил производить отсасывание через систему Щелей на поверхности тела (рис. 11.69), следующих друг за другом с таким шагом, чтобы при заданных значениях расхода число Re* не превзошло соответствующего Re*. Наибольшая эффективное! ь достигается при распределенном отсасывании
269
со скоростью bn через пористую проницаемую поверхность: кривизна профиля ск . рост при этом увеличивается столь сильно, что Re*p достигает значения око.ъ, 70 (XX): количество отсасываемой жидкости, а следовательно, н потери на она сываине оказываются минимальными. Теория предсказывает высокую эффектна ность снижения сопротивления в этом случае (рнс. И 70).
Рис. 11.70. Схема распределенного отсасывания па плоской проницаемой пластине и относительное снижение сопротивления (С—СОТ(.)/'С при наиболее выгодном режп- е отсасывания, когда vjv = 1,2-Ю'1.
Рис. II 71. Зависимость Re*(i от Л’ для податливой поверхности (но расчетам Л. И. Короткнна, см. |8| первого раздела).
Наконец, теория гидродинамической устойчивости прогнозирует возможное, ь сохранения ламинарной формы течения до высоких значений Re при использов, инн податливых поверхностей. Па рис. 11.71 показано, каким образом определенное расчетом [8| значение Re;p зависит ог коэффициента податливости Л'
Рнс. П.72. Коэффициент сопротивления трепня при ламинарном (/), переходном (2), турбулентном (3) обтекании жесткой поверхности и при обгекании различных податливых покрытий нз пенополиуретана (7—7) [4|.
Рис. 11.73. Схема образования вихрей за вихрегенератором в виде крыла, установленного в пограничном слое, и результаты опытного определения разменов “б-ластн отрыва па модели судна с полными обводами и L/R = 4,0 без (/) и с вихрег*-нераторами (2).
поверхности в законе связи у = Крр‘п, Л’-= Л'(»<'- б между деформацией поверхности ‘1 и пульсацией давления р при оптимальном значении их угла сдвига 0 60
Из приведенных на рис 11.72 опытных данных следует, что для каждого из опр<> боваиных покрытий чфхфекг проявляется в ограниченном диапазоне Re и не всегда обусловлен ламнпарнзацней течения, а может быть вызван взаимодействием тхрб>-лентною потока и податливой стспки.
270
I Практическое осуществление возможности ламичаризаиин затруднено необхо-Иктостыо удовлетворения чрезвычайно жестких требований к гладкости поверх-Кости' число Ке распределенной шероховатости должно удовлетворять условию < 100-;-200, а высота местных бугорков шероховатости должна составлять L.более одной трети толщины вытеснения 6*. В силу указанных причин нозмож ность ламинаризатиш в судостроении до настоящего времени не реализована.
Возчействне на отрыв. I! тех случаях, когда за счет варьирования обводами
е удастся обссяечнть безотрывное обтекание, для воздействия на отрыв с целью снижения вязкостного сопротивления можно использовать крыльевые устройства, 10И вихрегеиераторы, располагаемые перед зоной отрыва иа корпусе судна. Раз-КрЫ этих устройств и их расположение по отношению к набегающему потоку надирают таким образом, чтобы .за счет влияния сбегающих с крыльев свободных вихрен обеспечить усиление турбулентного обмена в пограничном слое и сокращение' вследствие этого зон отрыва. Лабораторные исследования свидетельствуют об эффективности таких устройств на судах с полными кормовыми очертаниями: согласно |3] установка двух впхрсгсисраторов позволила сократить область отрыва с 20 до 5 ?и длины модели и снизить коэффициент сопротивления С на <1.5-10 3 в диапазоне чисел 1г = 0,14<-0,30 (рис П.73).
Глава III
влиянии ВОЛНООБРАЗОВАНИЯ И УСКОРЕНИЯ НА СОПРОТИВЛЕНИЕ ДВИЖЕНИЮ СУДНА
§ 13. ХАРАКТЕРНЫЕ ОСОБЕННОСТИ ВОЛНООБРАЗОВАНИЯ
И ВОЛНОВОГО СОПРОТИВЛЕНИЯ СУДОВ
I Движение судна, также как н всякого тела в жидкости, сопровождается иовы-шетнем давлений в его оконечностях и понижением в средней части. При наличии Евободт оп поверхности это приводит к образованию на ней корабельных воен; указанный процесс связан с весомостью жидкости. При равномерном н прямолиней иом движении судна форма свободной поверхности представляет собой волновой рельеф. который движется одновременное судном стой же скоростью, что и у судна, и не изменяет своей конфигурации. Поскольку основными волнообразующими центрами являются участки корпуса со значительной кривизной поверхности, возни лают две системы волн — носовая и кормовая
) В носовой н кормовой системах различают расходящиеся н поперечные волны Расходящиеся волны состоит из рядов сравнительно коротких, слегка вогнутых Вебисй располагающихся симметрично относительно Д11 судна. Фронт каждой волны образует с ДП угол а„, величина которого иа глубокой иоде не изменяется при изменении скорости судна.
К В зависимости от остроты носовой ветви ватерлинии судна угол а„ составляет ^•-40 (рнс II 1.1) 1 ели соединить центры гребней расходящихся волн, то можно получить прямую, составляющую с ДП угол, равнин 0,5ан. При илавании на нс ограниченном фарватере расходящиеся волны носовой и кормовой систем не изап Модстклвуют между собой, а высеян составляющих их волн при удалении от судна Меняются мало. Поперечные волны образуют прямой угол с ДП судна и их гребни (также практически прямолинейные, за исключением концевых участков) располагаются внутри сектора, ограниченного расходящимися вантами Так как запас энергии этих ванн и их длина остаются постоянными, а величина энергии нолиы пропорциональна квадрату амплитуды,амплитуда этих воли уменьшается по мере Удаления от судна приблизительно обратно пропорционально корню квадратному *’з расстояния от места их возникновения. Длит этих вант можно определить по Формуле
Г Л - (III I)
где v—скорость судна м с
271
Рис. II1.1, Схема волнообразования при движении судна на глубокой воде.
Энергия, заключающаяся в системе корабельных волн, приобретается в резуль тате работы судовой энергетической установки. Несмотря на то, что размеры конфигурация воли при данной скорости судна остаются неизменными, botu^/J сопротивление наблюдается и при установившемся движении судна; связано ЭГ( с тем, что скорость передачи энергии в волнах меньше, скорости распр'о. странсния волн. По этой же прнчцне при конечном времени движения судна волновой след простирается только на половине расстояния, пройденного судном (при неограниченном фарПа. тере, в противном случае длина следа зависит or глубины воды).
Носовая поперечная волна возни кает несколько позади форштевня н начинается с вершины, а так как длина волн увеличивается с ростом скорости судна, при различных скоростях па место образования впадины первой кормовой поперечной волны будет попеременно налагаться вершина или подошва носовой поперечной волны,
и амплитуда волн за кормой судна будет определяться наложением (ипте|>фе-реициен) обеих систем воли. Поскольку энергия волн пропорциональна квадрату нх амплитуды, существуют благоприятные скорости судна, при которых вследствие интерференции амплитуды результирующих волн за кормой уменьшаются, н ииi 1
Рис. III.3. Зоны благоприятных и неблагоприятных чисел Фруда судна в зависимости от <р
--------неблагоприятные зоны для судов без цилиндрической встввкн:-— то же при наличии цилиндрической встипкл; — •—благоприятные зоны для судов без цнлнндрнч1 ской вставки: —го же при наличии цилиндрической вставки.
272
вцосгь роста волнового сопротивления замедляется, а также неблагоприятные P0.10t и. при которых амплитуды волн возрастают. В связи с этим на кривых, Шпажаюш. IX зависимость коэффициента волнового сопротивления судна С(у от Кела Фруда Гг г Vf!l, заметны вогнутые н выпуклые участки или даже впадины ^Ктры. наложение которых соответствует благоприятной и неблагоприятной " ^рференшпт носовых и кормовых поперечных волн (рис. II 1.2). У судов традн-Iiuoi ны.х-типов кривые коэффициента См- имеют бугры при значениях числа Фруда Като 0,22, 0,25, 0.30 и 0,50. Бугор при Fr « 0.50 является для судов обычных o6bMjc абсолютным максимумом коэффициента волнового сопротивления, после которог он убывает. Бугры при других in указанных выше чисел Фруда бывают обыню выражены слабо Ппн малых значениях чисел Фруда волновое сопротивление невелико и, если Fr < 0,1-1-0,15, его обычно считают равным нулю.
П рдяарительная опенка положения зон небл гоирплт тых скоростей, при которых козиожм усиленный рост волнового сопротивления. и благоприятных скоростей для морских транспортных судов может быть сделана с помощью зависимостей, полученных Г. Е Павленко теоретическим путем (рис III 3). В области больших значении коэффициента продольной полноты <|» этот путь даст практически такие же результаты, как старое правило Кейта |33]
| Абсолютные значения коэффициента волнового сопротивления в большой степени зависят от формы корпуса п. в первую
черед эт полноты обводов (рис. III.2). Осо бенности изменения волнового сопротнвле кия в зависимости от скорости судна к формы обводов необходимо учитывать тон проектировании судов и выборе их экенлуата-цион ы.х скоростей.
При обтекании носовой оконечности очент полных судов с цилиндрическими, таранио коническими и другими современными обводами, для которых характерны тупые ватерлинии с углом входа, близ кич к прямому, амплитуда носовой волны
сильно возрастает п одновременно увеличивается крутизна ис тового склона. Вследствие этого движение частиц жидкости в волне становится неустойчивым, и она разрушается, образуя характерный пенный бурун на поверх юсгн воды, распространяющейся ио обе стороны за судном Сопротивление: при этом увеличивается, аквойственный волновому движению механизм передачи энергии нарушается, и вс» энергия волны рассеивается, переходя в возмущения вихревого типа Эту энер гич нельзя определить путем анализа волнового следа за моделью; связанное с пей
Рис. II 1.4 Коэффициент остаточного сопротивления при различном погружении эллипсоиде вращения (IJD =- 8)
1 - h<JD - 2: h„/D = 3: 3—h„/D -4. 4 Л./Ю=.В, 5 —*,/0—10.
сопротивление выделяется в отдельную составляющую, называемую сопротивлением оз разрушения носовой подпорной волны /?п-ц.
Исследование вязкостного следа показывает, что при наличии разрушения Иоеов и подпорной водны на эпюре noiepn полного напора, помимо основной части, сяяз- той с потерей количества движения в пограничном ело* корпуса, имеются Я1Ц. две расположенные в приповерхностном слое жидкости симметрично ДП зоны поз ери полного напора. Как показывают визуальные |аб подеиня, положение этих зон совпадает со следом от образующихся в носовой части пенных бурунов Величину сопротивления от разрушения иосоиой подпорной водны можно оценить, шттегрп Рун iioicpio полного напора по сече.шпо этих дополнительных зон вязкостного сттеда. gIa составляющая сопротивления зависит от числа Фруда.
Сзпротгв сине от разрушения носовой по. нормой полны может быть и у судов Чет.ыией полноты при необычных соотношениях главных размерений и специфической фюрме носа, однако в эзо.м случае оно относительно невелико
I Рассматриваемая сое та вл яющая сопротнвле итя существенно зависит от формы Чосив 1 оконечности н наличия бульба. Этим в основном объясняется эффективность 273
применения носовых бульбов иа судах с большой полнотой обводов корпуса ,lh малых числах Фруда. ' Ри
Волнообразование при движении полностью погруженных тел апало, волнообразованию прн движении судна; волновой рельеф прн э,ом также сч-т,,/’ из расходящихся и поперечных волн. Однако, помимо скорости н формы тела, ачпт||Т туды волн и коэффициент волнового сопротивления существенно зависят от ,лх/ бнны погружения тела и уменьшаются по мере его роста (рис. 111.4) Глубина tli> гружения йп, прн которой волновым сопротивлением можно пренебречь, в <>< ..ов пом зависит от скорости движения тела н в меньшей степени от его формы Ее м >d4ll^ определить с помощью приближенной формулы h0 (1.1Гг 0,15) L, справедл, нл.-,
при 0,15< Fr< 0,70 |Н]. 1
При наличии в жидкости поверхностей раздела слоев различной п.'нпщ. ,и связанных с образованием непсремешнвающихся масс воды разной coaeitociи 111в температуры, движение судна может вызывать, помимо поверхностных пати, „ояв.. ленне внутренних волн на поверхности раздела. Эти волны имеют большею a.,,lllv п приводят к резкому увеличению сопротивления судна, существенно С1,пж.т1опцчц-его скорость. Эго явление так называемой (мертвой воды,:- впервые было замечено в норвежских фиордах п исследовано Экманом.
§ 14 ПРИМЕНЕНИЕ ТЕОРИИ ВОЛНОВОГО СОПРОТИВЛЕНИЯ
Рассмотренные в § 23 первого раздела решения позволяют расс.чнтыш и, шиповое сопротивление судна в невязкой жидкости, профиль ваш на свободной верхпости, распределение вызванных скоростей и давлений около корпуса сх.ша, а также представить картину линий тока. Исе эти расчеты, за исключением тп ления волнового сопротивления «гонкою судна- в первом приближении, отлпчл, оси значительными трудностями вычисли ,елы,ого порядка, нескольку требуют нах -ж денпя всех составляющих потенциала, а не только вызванных скоростей в волновом следе далеко за моделью [см. формулу (IV.114) верного раздела |. Достаточно полные результаты практического характера могут быть получены лишь но теории «топкого ехдиа» первого порядка и прн решении задачи Неймана- Кельвина. Расчеты гаг го типа, также как п выполняемые с применением более точных решений вторя, о „ и-ближения, требуют вычисления вызванных скоростей, индуцируемых гидром, > нпчсскими особенностями, которые распределены по корпусу судна или свобод ой поверхности. Так, для первого случая потенциал скорости имеет вид
<Рч(л-, р, г) = [ [ дЦ. /, l)G(x-£, y-f.z. L)dS. (111.2)
где G определяется соотношениями (IV 112)—(IV. 120) первого раздела
Поскольку значения функции I puna G и се пропзве дпых могут быть определены только численно, интегрирование в правой части (HI.2) также возможно осуществить лишь с помощью численных методов. При эюм следует иметь в вил» та обстоятельства во первых, функции G при х - <j, у = >] и z — , имеет особенное,!, тина Ьг, поэтому квадратурные формулы обычного вида не могут примении.ея в точках поверхности Л’. а тикже в непосредственной близости от нее, и, во-вюр ' при х -- t < 0 G содержит осциллирующую часть, описывающую волновой с. ед Вместе с тем, как следует из (II 1.1), даже поперечные волны прн числах Фр\'.а, которые представляют практический интерес, имеют достаточно высокую час гну (Fr"2), поэтому шаг квадратурных формул должен быть весьма малым
Трудности, связанные с наличием названной особенности в точках поверх ст,! S, могуг быть прсодо. еиы так же, как это де iacrc>i в случае расчета обтеки! ия глубокопогружепного тела. Для интегрирования волновой составляющей потешны та вместо квадратурных ф рмул можно воспользоваться приемом, состоящим в рази, т-UIII1 области интегрирования на малые четырехугольные элементы
Дл>. Дх,
м-— *+ —
<('</(*. У. z) =
|G (л- ;. v — /. z, (.) +
*•
+ c —i, y + h г, tji % (5. f. i) rfg
274
(здесь ?о = "J' 1 + “г- Я f- j ” применении к каждому слагаемому
горемн о среднем значении. В зависимости от того, что прн этом выносится за знак т .тетрада, можно up дложить два способа pci гения поставленной задачи. Согласно одному из них
ч,(* •'/. z)= У л-г*.«/-/%. г. :?)-
-G-(\ - 5*. I/ П*. г ;*)] [ dt [ 9„('. Л£)г£. (III.4)
, Лл~; рг-ь* - г X Ла~* , &г,‘ , х Лг,‘ Г* Т ft* .**)
где •*( 2 ' ' г* 2“" --~ ’ 'it l^i’hh
а интеграл в правой части вычисдяеюя обычным путем.
I формула (III.4) соответствует замене непрерывного распределения гндродииа-мичесм X особенностей на кажд<»| элементе поверхности корпуса точечным источником суммарной интенсивности Недостаток этой формулы в том, что вследствие стремления к бесконечности некоторых производных волновой составляющей потен! нала G прн г-r i.—> 0 получаемые таким способом результаты оказываются зависящими от количества элементов, иа которые делится корпус, а прн уменьшении размера элементов результаты расчета не стремятся к надлежащему пределу.
Избежать указанного недостатка удается при другом подходе, когда за знак интеграта выносится интенсивность эквивалентных особенностей В этом случае К< расчетах неволь уклея элементарные pad ределения источников постоя иной интснсинности. которые более регулярны, чем сосредоточенные особенности. Если, кроме того, аргумент // t f волновой составляющей потенциала G в пределах элемента считать величиной постоянной, равной его значению в центре элемента, а деление корпуса иа элемен1ы принять равномерным, го оказывается возможным использовать вычисляемые заранее 1 16.1 и цы вызванных скоростей простого слоя волнообразуюшнх источников |351, что существенно снижает расход машинного временя. При этом интенсивности особенностей в пределах элемента аппроксимируются линейными функциями Тогда
/ К
q.f(x, У. z)=-^ V У JJ (±-±)V(t. ±/, £)</$ +
1 = 1—7 А=!
k I m-l п 1 t 1
.« + (- z + ?A-(-Dn#-]. ин ь)
где Ax /./(2/) \г T К; Q,-A. = I . ?*) +
В +^-[vu(V /Г+,.А. ^)-ч0 7* .,А-
В(х, У, г) (х. у, г) - G* (х, у. -г0) (г9>0);
г х
G«(^. у. г) I J G( Ъ. у О,;)г^ (х УХ, ц ху, г уг).
(III.G)
275
При этом, когда i > / н i < ) — I, qn = -^-—0. Функция G^ дает вычислишь в точке (0, у, 0) значение потенциала стоко» единичной интенсивности, распред ленных по части вертикальной плоскости, которая сверху на уровне г ограни/j’ лучом ( со, — х). Явное выражение О’,, zma.ioi пчпое представлению (IV.lIj^ (IV. 116) первого ра чела, имеет вид
<-v- V. г) '* <11 l-и
k 1
где
о* MVL ,.m (I к/)2"'-' - (l-/)2'"+l
' л J j-J Г ' (l (?)"‘
0ml' 7
f* (ffl.
(11 .4)
CO ©c
G*6 =-^-J If-l)'/l 72 sin [(2/zi I) arctg/| - /| F‘(m. 1 . Г-) dt
0 rn- 1
(111.11
F* (m. s) exp (sz) os |(2/zr p I) i| | Jim+1 (rs) Г- (7* x- y-).
Выражения для G* - - G* не приводятся, поскольку мо ут быть получены (f i г. мальным интегрированием (IV.113) и (IV.114) по g и С. (хютветствуктие форме, ы для | х | > 1 и |z/|> I можно _иолучить интегрированием соотношений I'lV.lljh и (IV.120) первого раздела по ь и t. Для х<—I имеем
(л*, zz, г) 2 (G* + G4’) - G*. (IJ1.11)
dG'x
При вычислении к правой части (III. 10) нужно прибавить 1/2л[ arclg (|//|/л)|.
Поскольку -у-(—------— 'j не обращается в нуль при г 0. для вычислен i я
ъх \ r ri / вертикальной составляющей dlзванных скоростей предпочтительнее использа ль другое представление потенциала : — s
G^(x. у, г)---- | | [С<~Е. У, О. с)-^г-] (IИ 1 >
для которого во всем нижнем полупространстве (z sj 0) справедливо ссстнсна i ге
dz
дх1-
(111.121
Тогда имеем при | х | I
дг дг
In
х' -|- у- 4- Z-
ГРТТ2
(111 1 1
при X 1
дг
(.Jz
со I
=• [ 6 *ir,dp j cos |( I
о о
-ripal 11.S <Js,nP* HPeosj^ J<2 t- (2F 4 ) p2)
(III.I II
276
„ря*^ 1
—
мЕ дг \ дг "И дг / дг
С помет 0
соотношения (III.12) можно получить
i к
Лр дг
ч /. £)</$ +
1
Ах ~2~ ’
Л±1/2,Л' гк
XV(--1)"‘+',AC- v_|_(_!)///fe, , + Zft-(-!)"^] +
n- 1
+ . (HI 15)
Аналогичные соотношения для вычисления вызванных скоростей индуцируемых источниками, распределенными по элементам свободной поверхности, могут быть получены с помощью потенциала горизонтального простого слоя
№ оо —X
у. г) = f Л] | G(—l. 1], 0, г) dz. (III.16)
У —<х>
Явное выражение для наиболее сложной с вычислительной точки зрения области вблизи начала координат имеет вид
(>
а" (х, у. г) = У, Gt*, (III. 17)
k =1
где
4 2( -j F** (m. (III IS)
j Nj ( I)"1-11^2 sin2 (tn arctg /)+ t., 1 Г j F* * (m, I + dt;
U ni=2
(III.19)
Г** (m, t) = exp (w) sin (2miT) 2,n (sf) (s/)-1.
Нальные слагаемые G’’, также как и представления для больших значений х 11 У, могут быть получены формальным интегрированием оответствующнх выраже-чЧи из формул (IV. 112) - (IV. 120) первого раздела.
Рассмотрим результаты теоретических расчетов.
На рнс. III.5 для примера показано изменение производных потен пиала при различных значениях х и г при у 3. На рис. III 6 н II 1.7 пррведсш зультаты расчстоп профиля свободной поверхности (см. [НО] первого ра и волнового сопротивления погруженного эллипсоида вращения. Рнс. Ш.Ь ц<> вает рассчитанные профили воли вдоль борта и при у = 0 для модели с ко-ф| । том обшей полноты 6 = 0,733
G<
Pa '•1Л) ЗЫ. "IC-lt,
Аналогичные расчеты по более точи! im теориям оказываются практически г • чожнымн только для волнового сопротивления Для сравнительной оценки воз.м. *
ноеген этих методов и соответствия их эксперименту на рис. III.9 а, б привел* кривые изменения коэффициента волнового сопротивления параболической моде
ы
.1 с
у = ±(0/2) [ I - (2VZ.)’ ] [ 1 - (z/Г)’- ] (111 :’О1
при H/L 0.1 и TIL = 0,0625, а иа рнс. III.10 а. б аналогичные данные модели 60 й серии с коэффици итом общей полноты 0,6. В табл. 1111 даны иомн-1 формул использованных при расчетах. Анализ приведенных кривых пол зывает, что по мере уточнения решения расчетные значения коэффициента волнош > сопротивления в средне*! становятся ближе к экспериментальным кривым, одн.ть
278
К, всех расчет тих кривых при числах Фруда, представляющих практический tepee, характерны ярко выраженные горбы и впадины. Некоторое нх уменьшение 1,1 .1О/кио при использовании уточненной теории малой скорости. Поскольку эти
CW-1O3
орбы и впадины связаны с ни теифереицией носовой и кормовой систем волн, на их вели чипу существенное влияние должна оказывать вязкость реального потока около корпуса судна, которая по-разному воздействует иа носовую и кормовую системы волн. Доказать это, однако, пока не удалось, по-тому что попытки расчета вол-
' Литого сопротивления в вязкой жидкости |8I I не дали ожидаемых результатов. L Выедств! е этого иекотор<к- распространение получили полуэмпирическис методы, пВотирых особенности реального потока учитываются путем введения в георети-^скис решение для невязкой жидкости поправочных коэффициентов, полученных н* Эксперимента
да 0.5 Цб 0.7 Fr
Рнс. II 1.7. Коэффициент волнового сопротивления погруженно го эллипсоида вращения (I Г) = = 8)-
1 — ft0/D 2: 2 — h„/TJ = 3; 3 —
h,i/D •» 4
-------линейна» теория (первого порядка); нелинейная
теория (второго порядка).
Рнс. 111.6. Рельеф свободной поверхности при движении погруженного эллипсоида вращения (7. D — 8; 1т = 0,4; Л11д «г= _ 0.39)
Линии >ровни соответствуют по-стоянии» значениям ^g't;1.
279
Для этого волновое сопротивление следует представить в виде суммы
Rv ~ Rsjm 4" ^?u'n ~Ь Rwk< (111.21)
»е Rm — волновое сопротивление носовой части судна, вычисленное в предположении, что кормовая часть заменена бесконечно длинным цилиндром, наличие которого <? вызывает образования волн; R„K — волновое сопротивление кормовой Кети, полученное таким же образом, /?Х11 — волновое сопротивление, обусловлен-я00 взаимодействием носовой и кормовой систем волн. ;
1 В вязкой житкости вследствие формирования пограничного слоя волнообразование около кормовой части меньше, чем в невязкой жидкости Это уменьшение Можно учесть некоторой системой поправок, полученной для реальных форм корпуса применительно к решению задачи Неймана- Кельвина (без учета линейного интеграла по КВП) [35] При этом коэффициент волнового сопротивления в вязкой жидкости определяется формулой
^ = 7^ = О|С“",(1?Г) Ь^(НГ,1 +-°C»h(FH. (111.22)
= (1 +в) Fr*; s = (1.8 Гт»2 ехр (0,0009 Fr*"1) ; р exp (— (J,0005Fr*-1); 0 4Fr*5exp (—0,00425 Fr*-1), а коэффициент о дается диаграммой, приведенной “а ри . [II П.
Эмпирические коэффициенты р, 0, ено определены путем сравнения результатов расчета волнового сопротивления с данными буксировочных испытаний основ-ЧКх моделей 00 и серии,
| Для практического использования формулы (III 22) при расчете остаточного Сопротивления к Сцг следует прибавить коэффициент сопротивления формы
281
Рис. 111.11. Зависимость коэффициента о от числа Фруда при различных знлче-инях коэффициента 6
Рнс. 111.12. Схема корректировки форм-фактора для расчета коэффициента остаточного сопротивления (модель 60-й серии, 6 = 0.8J.
I — сопротивление формы без кирргктирепки форм-фактора; 2 — эксперимент. 3 г ре. тнвление формы шк-ле корректировки форм-факторз; 4 — результаты расчета по.;»,, сопротивления Ио формуле (111.22); • - результаты расчета ост«т,тч|1ог<> Смирагивл
Сг-Ю3
Ч
Рис. Ill 13. Сравнение результатов расчета коэффициента ссылочного сонроин*.^' ния с экспериментом для моделей серии контейнерных судов (6 — 0.55. BIT 3.S)-
Рнс. 111.14. Сравнение результатов расчета коэффициента остаточного coupon i-7*’" ния с экспериментом для серии моделей быстроходных судов (6 0,575; L'B = 6.5I-
282
Ijfi.niua III I Методы расчета волнового сопротивления
[ Позиции ’рч<-- 111.9. “ 111.10 Способ рЭСЧГТЭ Основные формулы разделу первого
1 8 2 1 3 4 I 5 6 L 7 | 8 | 9 I 10 1 11 I 12 Теория Мнчелла Нелинейная теория «тонкого судна» По распределению источников для глубокопогруженноп дублированной модели Дублированная модель с учетом контурного интеграле Задача Неймана — Кельвина без учета контурного интеграла Задача Неймана — Кельвина с учетом контурного интеграла Теория малой скорости Уточненная теория малой скорости Приближенная (асимптотическая) теория малой скорости Метод Гюйотопа Эксперимент (разность между полным и вязкостным сопротивлениями) Волновое сопротивление, полученное из анализа волнового следа Формулы (IV. 143) и (IV. 145) Формулы (IV 142) и (IV. 14 4) Формулы (IV 128) и (IV-129) Формулы (IV. 154) и (IV-155) при Т (?• Ч* — 0 н формула (IV 144) Формулы (IV.153) и (IV.144) Формулы (IV. 152) и (IV. 129) Асимптотическое представление формулы (IV.152) и формулы (IV 129) Формула (IV. 145)
Cvl, ’.С форм-фактор Zt при этом может быть получен по одной из известных эмпирических формул (см § 8). Следует, однако, иметь в виду, что поскольку форм-фактор определяется через величину остаточного сопротивления при 1т = 0,084-0,15, а вол-сопротивление при малых числах Фруда примерно пропорционально Fr4, сох противление формы, рассчитанное через форм фактор, включает часть волнового, и форм-фактор нужно откорректировать на величину (1'г°)/А’/ч, (Fr0) (рис. 111.12).
I Рис. 111.13 и III.14 иллюстрируют степень соответствия эксперименту ре-Кьтатои расчета описанным методом коэффициента остаточного сопротивления.
Другой путь расчетного определения волнового сопротивления в реальной Кидке ти состоит в использовании при расчете результатов измерения ординат воли за моделью судив в опытовом бассейне (см. гл. VI).
§ 15 ПУТИ СНИЖЕНИЯ ВОЛНОВОГО СОПРОТИВЛЕНИЯ
I Для определения влияния формы обводов судна на величину волнового сопрс» тнвления можно воспользоваться результатами, которые дает теория волнового Кротнвлеиня (см § 23 первого раздела). Сложность этой связи, однако, позволяет применить для указанной цели только теорию «тонкого судна» первого порядка, Именно соотношения (IV.145) и (IV. 146) первого раздела при — 2о-^-. Правая част выражения (IV 145) является квадратичным функционалом от функции ординат поверхности корпуса / (х, г), допускающим применение классических методов вариационного исчисления для нахождения условий, обеспечивающих минимум ^ФПювог сопротивления при заданном водоизмещении или каких либо других огра-«ичениях.
283
Интегрируя по частям и /2 по переменной дг, функционал (IV. 145) можно п di ''н-
пости к виду, содержащему вместо непосредственно ординаты корц^
f lx. г). В этом случае условие оптимальности формы судна сводится к ните ра„ пому уравнению для определения / (х, г) следующего вида:
о /у2 оо
J dv j / (?• dj | (7( 'cos |v05. (x — £)] — = eon J (111.23
-r - I.,2 i I л- — I
при дополнительном условии о : /2
V = 2 j dz j f (x, z) dx const.
—т 2
(Hl 24)
Можно показать, что оптимальное судно должно быть снммстрпчпьм с. телыю .мндель-шпаигоута и что у такого судна отношение изменения волнового сопротивления, обусловленного местным изменением формы корпуса, к нзм< кпию водоизмещения от такого изменения есть величина постоянная для всех точек По. верхиости корпуса.
При решении вариационной задачи (111.23)—(111.24) следует иметь п виду, что вследствие наличия в (III 23) множителя exp (v0Asz) аналитического минимума в отношении распределения объема по глубине не существует: волновое сопротивление будет тем меньше, чем глубже размещен объем судна. Вследствие этого сравнение поверхности корпуса следует представить в виде ¥ — ft (х), [а (г) и заранее задать функцию/г (г), в частности, можно положить ft(z) ~ I.
Расчеты, выполненные Г. Е. Павленко, показали, что при 0,325 Fr с 0.333 оптимальные ватерлинии имеют S-образную форму; при Fr — 0.333 ватерлинии в оконечностях становятся прямыми, а при больших скоростях — выпуклыми, и коэффициент их полноты возрастает.
Исследование, выполненное М Г. Крейном, показало, что при ограниченной площади ДП минимум сопротивления в случае надводного судна доел i j ти с помощью функций, имеющих на концах особенности вида (х) const |^(0,5Z.)! х*. Поскольку такие особенности интегрируемы, интерпретируя / (х. г) как ните i в-ность диполей, можно получить искомую форму корпуса Одрако такие рас нты связаны со значительными трудностями вычислительного порядка и практически возможны только при достаточно высоких скоростях (Fr> 0.35).
Изложенными методами можно минимизировать также полное сопротив.п не. если площадь смоченной поверхности определять приближенной формулой |35)
I !2
J
-L/2
Так как волновое сопротивление определяется в основном формой носовой ок неч_ пости, а форма кормы выбирается исходя из требований размещения движителе» и их благоприятного взаимодействия с корпусом, можно решать вариационную задачу только для носовой части корпуса, полагая кормовые обводы заданными
В последнее время для решения задачи об оптимальной форме корпуса стал» применяться методы математического программирования |35], которые позволяют ввести ограничения типа неравенств на величину ординат корпуса, углов наклона, коэффициентов полноты и т. п. Эти методы дают вполне приемлемые формы корпус», в том числе с носовым бульбом. В качестве примера па рис. III. 15 показана фор»1* корпуса модели 60-й серии (6 = 0,7; Л/Я = 7; В/Т — 2,5), у которой оптпмнзнр0-вались носовые обводы при Fr = 0,216. При этом расчетные значения коэффициенте» волнового и полного сопротивления, которые у исходной модели составляли Civ = 1,71.10“* и С 4,38-10"’. снизились до Сц-— 0,98-10“ • и С = 3,64 t0"
Описанные выше методы оптимизации требуют проведения весьма трудоемки'' расчетов, поэтому для предварительных оценок влияния носового бульба на во-Ш0, ное сопротивление можно использовать путь, основанный на суперпозиции снстс*,ы
284
^Кцпык ' -in и вели, создаваемых носовым бульбом. Последний рассматривается изолированное тело, которое можно заменить диполем пли распределением ^иподс ‘делим волновой профиль далеко за судном по формуле (IV. 147) 'Lpporo раздела, и которой функции 1г (0) и /2 <**) вычисляются с помощью (IV.146) 11Д, находятся по результатам измерений волнового следа методами волнового Г*1
III. 15. Результаты оптимизации носовой оконечности модели 60-й серин: о — заданные кормовые ватерлинии; б — исходные носовые ватерлинии; в — опти-мнзпрованные носовые ватерлинии.
анализа (см. гл. VI). Ординаты волнового следа за тем же судном при наличии бульба (или какого-либо другого изменения обводов) можно представить в виде
ИВ Л/2
[ {III (0) + «г (fl)l sin Wo + Hi (0) + » (0)1 ebs Wo) co^g,
В — •’•'2
где
В L12 0
<1(6)1 г Г / УрГ \ cos jj^_l
i2(6)J л J в J '(.-v) p \ cosst> / sin (cosB J ‘
— L/2 ~T
(s. t) — приращение ординаты корпуса вследствие изменения обводов или интенсивность соответствующего ему распределения диполей.
В Поскольку волновое сопротивление характеризуется в основном распрсделс-водоизмещения по длине, а рассматриваемые изменения величины сопротивления относительно малы, при вычислении этих изменении влиянием распределе-
Д 285
пня дополнительных объемов по осадке можно пренебречь. Тогда в соотвеТст с формулой (IV 145) первого раздела изменение волновою сопротивления ь^11 дится из соотношения Хг"
L/2 1.Л л/2
Д/?г = ^ f f [1 - е-'"Г ис’°| COS /„-о.
J J J I COS U
—L/2 -L/2 О
L/2 л/2
+ 1(>А’о J А/ (i) rig I 11 — е~''°т “с* °] [/, (0) sin +
—Z./2 U
+((J) cos (-ЦЛ -Д-.
1 1 ' \ cos 0 / J cos В
Очевидно, что, если система воли, возникающая вследствие изменения обводе® противоположна по фазе волновой системе исходного корпуса, величина Д/?й ысод' оказаться отрицательной, и будет наблюдаться снижение волнового сопротивленца
Оценивая практическое значение методов оптимизации, основанных на с omHoi шениях линейной теории «тонкого судна», следует отметить, что они правильно отражают качественную сторону явления. Однако окончательные колнчс Т1н1ц!ые выводы могут быть сделаны только после экспериментальной проверки результатов полученных расчетным путем.
§ 16. СОПРОТИВЛЕНИЕ ПРИ ДВИЖЕНИИ С УСКОРЕНИЕМ
Расчет гидродинамических сил в случае продольного поступательного движения судна с переменной скороен.ю необходим при изучении его разгона и торможения, а также в процессе обработки результатов инерционных испытаний модс.и или натурного судна. Уравнение движения при неработающем движителе в этом случае имеет вид
(И + Хи) = — RH, (111.25)
где М = Dig—масса судна; ?,п— присоединенная масса, вычисленная с учетом влияния свободной поверхности; RH — сила сопротивления при иеустаноьпвшемся движении
Теоретические исследования показывают, что значение 1ц в данном случае зависит от ускорения судна, а также от вязкости жидкости. Эту величину можно определить экспериментально путем обработки данных об изменении скорости модели при приложении к ней постоянной силы тяги Р. Поскольку в начальный момент движения сила сопротивления равна нулю, Лн определяется из уравнения
= 1,11 26)
Полученные таким способом значения Лп обычно оказываются несколько бо.:ы№ соответствующих значений, рассчитанных теоретическим путем по формулам § 1 первого раздела. Сила сопротивления R„ существенно зависит от закона изменения во времени ускорения тела, а при движении с постоянным ускорением — от ег° значения и знака. Анализ размерностей показывает, что коэффициент сопротпвл^' ння Си в этом случае является функцией чисел Фруда, Рейнольдса и безразмер-''ог0
L dv , _ _
ускорения представляющего собой модификацию числа Струхаля.
безразмерные величины вычисляют по мгновенным значениям скорости двпжегий судна.
При расчете сопротивления RH его можно разделить на две составляв и-,,е’ R„ — R + г»е R ~ сопротивление при установившемся движении с vfl1^ венным значением скор i ARH — дополнительное сопротивление, вызван*10® 286
дцЯ1 н м ускорения. Величина Л/?,, может быть и положительной, и отрннатель-“pjj и состоит из дополнительного вязкостного сопротивления Д/?уц и донолни-^дьпог волнового сопротивления Д/Лгн-’
\/гЕ1, 4-АА’и И. (111.27)
Коэффициент дополнительного вязкостного сопротивления, как показали Гиневскнй и К. К. Федяевский, является функцией комбинированного без-s’ I L dv v </t>
размерного параметра ----------— —i—” результате iiciiMiaiiini модели
дедок ;ла установлено, что прп значениях этого параметра, превосходящих 1оя, у)? теки равно пулю п при расчете сопротивления можно пользоваться
Вютезой квазистацнонарпостп.
Рис I 1 16. В пяпис ускорения на коэффициент поверх юстиого трепня при поперечном обтекании цилиндра.
/, II — ускоренное движение. Ill, IV — зл медленней» дни ж сине; к — характерные значения времени н скорости аммветезнгнно
I Ускорение может влиять на положение точек отрыва not раничного слоя. Расчеты к эф рхностиого трепня цилиндра сх в функции от полярного
угла 0 показали, что нрн равномерно-ускоренном движении точка отрыва см цается югоку, при замедленном — наоборот (рос. 111.16).
Волновое сопротивление при неусгаиовившемея движении можно определить теоретическим путем (см. [82, 96 [ первого раздела), если воспользоваться функцией Грина, описываемой формулой (IV 107) первого раздела, и получить
ОО л/2 /
—тМ 7= J л[|ЖТГТ>|.х
0 1 -.12 0
Ц ( * \
X cos k cos 0 J е ( |) с/т I cos (Z — т) dr, (111.28)
т
гДе Ц (k, 0, Z) — функция Кочипа [см. формулу (IV. 132) первого раздела]. В слу чае «тонкого судна» функция Кочипа имеет вид
Н (k, (», t) = -2 v (I) J j <•* (г ; * cos °’ $- dxdz, s
(111.29)
Ир погруженная площадь ДП. Расчеты по формулам (111.28), (111.29) показы-
- „vimcizi пли.цидс ЛЛ1Х. >1U ^IVpmy.'Kl.M IlCJKllOUI"
Ют, что значение /?iv,| может составлять от 0 до 150% волнового сопротивления цР^чвнжеини с постоянной скоростью । может быть как положительным, та к н отрн-
287
На рис. III. 17 в качестве пример! приведены результаты расчетов для схема. тизированной модели судна, имеющей LIB «= 8, В/Т = 3 и движущейся с ускорь' dv пнем —— = 0,5 м с2. at
Pic. 111.17. Зависимость коэффициента волнового сопротивления при песта (попарном движении от мгновенного значения числа Фруда.
I — стационарное движение; 2 — нестационарное движение.
Если величину Rwu объединить с инерционной силой, определяемой через присоединенную массу, то уравнение движения (II 1.25) ыэжпо записать в виде
W(1 4-л)-^---/?.
(111.30)
?U + Rwk / -df
п ----------------- коэффициент, зависящий от Fr, Re и от без-
размерного ускорения. Обычно значения я, полученные в опытовом бассейне, со-
Рнс. II 1.18. Зависимость коэффициента я отф= Ly V при рлз-лнч1 ых числах Фруда.
гласуются со значениями, определяемыми ia натурных испытаниях На рис I 1 18 показаны средние значения коэффициента я, полученные в результате натур! н* н модельных инерциони ях испытаний на глу окоп воде. П скольку эти велич! ь1 практически одинаковы при ускоренном н замедленном движении, указанный ip* фнкможю использовать для обоих случаев Б >лее точные данные для кажд й фо ы обводов судна можно получить, если провести инерционные пробеги судна или СК° модели с непрерывной записью н менения скорости во времени.
288
Глава IV
СОПРОТИВЛЕНИЕ ПРИ ДВИЖЕНИИ СУДНА НА ОГРАНИЧЕННОМ ФАРВАТЕРЕ
§ 17. СОПРОТИВЛЕНИЕ СУДНА
НА МЕЛКОВОДЬЕ И В КАНАЛЕ
Наличие дна, ограничивающего глубину акватории, изменяет по сравнению с [условиями глубокой воды характеристики течения, вызываемого в окружающей ЖИД движением судна. При этом изменяются и действующие на судно со сто-КиЫ жидкости гидр динамические реакции вязкостной и волновой природы, проекции кот рых на направление движения образуют соответствующие составляющие сопротивления, а вертикальные проекции изменяют ходовую осадку н дифферент. Механизм влияния ограниченности глубины иа отдельные составляющие сопротивления судна различен, а степень его воздействия зависит от относительной глубины воды ШТ или Н/L и числа Фруда. Важной характеристикой движения судна в условиях мелководья служит также число Фруда по глубине воды
VrH = vV^H Fri Z/77. (IV. 1)
I Влияние мелководья на волновую составляющую сопротив. ення судна является следствием зависимости свойств волнового движения жидкости от глубины акватории.
Из теории волн известно, что длина прогрессивных волн в условиях мелководья больше, чем длина воли па глубокой воде, если скорость их распространения одинакова
Ms и ^7/ — длина волн на глубокой воде и на мелководье соответственно.
При одинаковой длине воли скорость их распространения на мелководье меньше, чем на глубокой воде.
vH/vm = Kth(2n///X). (IV.3)
где и vfl — скорость волн на глубокой воде и на мелководье, и снижается по мерс уменьшения относигельиой глубины /7/Х. В условиях предельною мелководья когда Н мало по сравнению с X) скорость воли не зависит от их длины, составляет = \TgH и соответствует скорости перемещения одиночной волны. Огра-^Кнность глубины акватории сказывается н на скорости переноса энергии волн, которая в условиях глубокой воды вдвое меньше скорости их распространения. По мерс уменьшения глубины воды значения этих скоростей сближаются.
Все этн свойства присущи и системе судовых волн, с трансформацией которых на Мелководье связано изменение волнового сопротивления Скорость судна на мелководье а |/ §7/, при которой образуется одиночная волна называется критической; ей соответствует критическое число Фруда по глубине Fth ~ 1. П связи этим диапазон скоростей vH < VgH и чисел Фруда Fr^ < I является докрити-ческнм, а диапазон vH > J- gH и Гг/у> I — эакритическнм (или свсрхкритиче-скнм).
При движении судна на мелководье со скоростью vH < 0,4 gH (т. е. при Ну! < 0,4) волнообразование и волновое сопротивление практически такие же, *<ак на глубокой воде, и в этом смысле влияние мелководья пренебрежимо мало По мере увеличения скорости судна в условиях мелководья длина волн возрастает больше, чем на глубокой воде; при этом угол между фронтом расходящихся волн Диаметральной плоскостью судна увеличивается. Ходовая осадка судна и амплитуда судовых во; и такж возрастают значительно сильнее, чем в условиях неограниченной глуб и ы, что связано с увеличением разряжений на средней части суд| а Ю П/р Я- 11 Войткуиского, т. 1 289
it градиентов давления в оконечностях. Вее это вызывает интенсивный рост rlf)1| ' вого сопротивления ио мерс приближения к критической скорости (рис. IV. >
При достижении критической скорости судна расходящиеся волны прсвращак^ в одиночную поперечную волну, которая перемещается вместе с судном вблпщ ( я форштевня; ходовая осадка и дифферент иа корму возрастают на столько, чти И[|° малом запасе воды под килем (///7’^ 1,3) судно может касаться дна фарпатеп (явление «присоса»). Волновое сопротивление при критической скорости максц малыю, чему соответствует резкий «горб» па кривой коэффициента волнового сопр^ тивления. Критическое значение FrH, которому соответствуют образование одни01). ной волны и максимум волнового сопротивления, у водопзмещающнх судов оГи,|,||10
О/ 0,4 Q5 ЦБ (l7FrKIH/T-i:i'
Рнс. IV. 1. Характерные кривые относительного волнового сопротивления л одели судна на глубокой воде (7) и в условиях мелководья при Н/Т — 1,5(2)
Рнс IV.2. Кривые коэффициента полного сопротивления эталонной модели морского транспортного судна (Uli 7,3- 6 = 0,65) при различной глубине води
1 — HJT — 22; 2 — Н/Т = 5,5; 3 «— Hi Г = 1.7: 4 — кривая трения экнивалснтннЛ пластины 1ло формуле (11.4)1
несколько меньше единицы (0.80<Fr/7 < 1,0) и зависит от оп осидельной глубины воды HIT, а также от обводов судна
В диапазоне закритнческих скоростей Frw > 1, > Уgli) образуются то. ько
расходящиеся волны, угол между которыми сокращается по мере увеличения скорости, при этом ходовая осадка существенно уме! ьшается и становится мм ьше статической (судно «всплывает»). Волновое сопротивление, максимальное при критической скорости, с увеличением Frw в закрнтическом диапазоне сначала рс ко уменьшается, а затем начинает постепенно возрастать, по может оказаться меньше, чем при той же скорости на глубокой воде (ем. рнс. IV.1).
Теоретическая задача о волновом сопротивлении «тонкого судна» иа мелководье решается в предположениях линейной теории волн теми же методами, как и в случае неограниченной глубины (см. гл IV первого раздела) Дополнительным граничным условием является условие непротекания на дне
о1 = -^- = 0 при г =—11 (IV.4)
В такой постановке Л Н Сретенский (43] для судна, поверхность которого задана функцией у = f (х, г), получил следующую формулу для волнового сопротивления:
п йлр/? f f2 + Ji . Vfo
v3 J d? у/7 /th у// ’
(l\ c)
290
0 Z. 2
J j ch у (г-|-//) cos
-Г -Z.'2
F dv dz;
O 1/2 __________.
[/*= | j ch у (г | -Я) sin (x J- -p- th yH: j F dxdz; — T LJ2
v r)f , 2л dx ’
.,__переменная интегрирования.
Г При Fr,., < I (докритическис скорости) у0 вещественный корст ь трансцендентного уравнения th уН = уН I'rj.,.
I При Fr > 1 (закр 1тнческие скорости) уи = О
I Результаты расчетов по формуле (IV 5) качественно согласуются с результатами Всиерпмептальпых исследовании волнового сопротивления при cpaei ительпо больших относительных глубинах Н/Т. Однако при малых значениях Н/Т и вблизи
ось гребного вала, модели двухвального судна смешанного плавания при различной глубине воды.
I It Г = 10. Fr (117-=- 0,21; 2 — Н/Т 2, Гг 0 17, Ггн = 0,64, 3 — 1ЦТ 2; Fr 0,21. Ггн = 0,80.
критической скорости (Fr,, «= 1) теоретические расчеты приводят к значительному завышению волнового сопрот 1влення, что является следствием допущений линейной теории, а также неучтенных влияния вязкости и изменения ходовой посадки судна
| Сопротивление вязкостной природы, состоящее из сопротивления тры ня и сопротивления формы, определяется давлениями и напряжениями трепня на корпусе. которые подвержены существенному влиянш мелконодья. Увеличение вязкостного с< и] от пилении может быть ощутт мым уже в условиях относительно слабого мелководья (ШТ б), о чем свидетельствуют полученные при различной глубине воды кривые коэффициента полного сопротивления модели судна (рнс. IV.2). Которы при малых числах Фруда (Fr < 0.1) полностью определяются вязкостной Составляющей сопротивления
Исследования [38, 391 позволили выявить особег пости влияния мелководья На характеристики обтекания судов и вязкостную составляющую их сопротивления
[ Под влиянием мелков дья р ipewei ня иа зпачнтельи й длине корпуса существенно возрастают, вследствие чего местные скорости обтекания и касательные Напряжения трения на этой части судна больше, ч м на глубокой воде при одинаковой скорое и. Кроме того, в отличие от условий глубокой воды, на мелководье ^Вшчина коэффициента давления /5 в фиксированных точках при Н;Т — const ^^Илвается зависящей от скорости движения (рис. IV 3) Это свидетельствует 4 том что в условиях м< ководья сопротивление <]юрмы и сопротив пение трепня Завц и числа Рейнольдса и глубины воды, ио и от числа Фруда.
j Положительный градиент давления в кормовой оконечности уветичивается мере уме! мнения глубин фарватера, а ирг Н/Т = const ои возрастает с увелн-
10*
291
чонием скорости движения (см. рнс. IV.3). Однако, если в условиях глубокой во,щ положительный градиент давления обычно распространяется до крайней кормовой точки, что характерно для безотрывного обтекания корпуса, то в условиях слра. пнченпой глубины (при HIT si 2) кривая р (л) в корме имеет участок, где р =-— const, что указывает на отрыв пограничного слоя, который связан с потерями кинетической энергии вследствие подтормаживания потока, движущегося в нагрев-
Рис. 1V.4. Визуализация обтекания кормовой оконечности методом нитей на модели-судна смешанного плавания: а — Н1Т = 5,15; Fr = 0,17; б— HIT = 2, Fr = 0,17, Fr// = 0,64.;
Ленин резко возрастающего давления. Модельные исследования с визуализаций обтекания (рнс. IV 4) показывают, что размеры области отрыва пограничного слоя в кормовой оконечности возрастают с уменьшением глубины акватории и с увеличением скорости движения То же самое происходит и с толщиной зоны отрыв! i го течения, о чем свидетельствуют измеренные профили скоростей в пограничном слое (рнс. IV.5). Возникающее при отрывном обтекании интенсивное внхреобразованпе существенно увеличивает вязкостную составляющую сопротивления судна на предельном мелководье {ШТ 2).
Следует указать еще на одну причину увеличения вязкостного сопротивления судна в условиях предельного мелководья. Когда запас воды под килем невелик (//Д'< 1,5). вызываемые движением судна скорости распространяются до . на водоема, на котором при этом возникает пограничный слой_с поперечными градиен-
292
тамн скоростей, соизмеримыми с соответствующими градиентами на корпусе. Рас-цСТы этого пограничного слоя показывают, что трепне иа дне фарватера может ощу-тнмо увеличивать составляющую сопротивления вязкостной природы.
К Таким образом, вязкостное сопротивление судна на мелководье содержит до-* Ьолиительныс компоненты (трепне иа дне и сопро явление отрыва), которые при безграничной глубине воды у того же судна отсутствуют. Это исключает возмож- иость использования свойства аффинности (11.19) при расчете вязкостного сопротивления в этих условиях
Проблемы, связанные с моделировапи м составляющих сопроп влепня на мелководье, изучены еще недостаточно и в настоящее время не существует физически обоснованного метода пересчета сопротивления модели иа натурное судно, который бы соответствовал специфическим особенностям обтекания и сопротивления в усло-виях ограниченной глубины фарватера. Это вынуждает для мелководья использо-
Рис. IV.5. Профили скорости в пограничном слое кормовой оконечности модели двухвального судна при буксировке на глубокой воде и па мелководье (сечение в месте расположения движителя).
Гг = 0,21: Re «= 7,5.10"; • — Fr — 0,17; Re = 6.10’; j/OTp — размер области отрыва ж пограничного слоя по мормплк к поверхности корпуса.
Рнс. IV.6 Изменение ходовой осадки ДТ/Т и дифферента па корму ф (в градусах) модели суд ia смешанного плавания при различной глубине воды.
вать традиционный метод Фруда, изложенный в гл. VI. При этом в остаточное сопротивление наряду с волновой составляющей оказываются включенным! и пере-Дносятся на натурное судно по критерию гравитационною подобия значительно
ббльшие, чем в случае глубокой воды, силы вязкостной природы Такой подход в нзвсст! ой мере оправдан тем, что эти силы содержат сопротивление отрыва, суше-’ сгвепио зависящее от числа Фруда. Область отрыва пограничного слоя па мелко-
водье (ШТ < 3) неустойчива, нередко наблюдается периодический сход крупных вихрей с кормовой оконечности которые в следе за моделью образуют дорожку Кармана. В этих условиях сопротивление модели нестабильно, что вызывает аиачн-Тельный разброс экспериментальных точек, вносит элемент неоднозначности в результаты испытаний, вынуждая прибегать к их осреднению, и снижает точность
Прогноза сопротивления судна. У^иатурпых судов неустойчивость об екания и ие-I стабильность сопротивления па предельном мелководье проявляется еще сильнее
Вследствие таких факторов, как неровности дна, рыскание, течение п т. п.
В условиях мелководья вследствие разряжений i • днище судна его ходогая । °еадка и дифферент возрастают с увеличением скорости значительно сильнее, чем
иа глубокой воде (рнс IV 6) У доходных судов внутреннего плавания на пре
293
дельном мелководье (ШТ < 1,5) это может настолько уменьшать запас воды Ц,-дннщем, что во избежание касания грунта (явления «присоса») судоводители должны снижать скорость [531. У быстроходных водонзмещающпх судов ходовая оса.ц^ и дифферент, также как н сопротивление, достигнув максимума вблизи критической скорости (о st VR4), при ее дальнейшем увеличении снижаются, что позволяет эксплуатировать такие суда на мелководье со свсрхкрнтическими скоростями [у]
При движении судна в канале все явления, характерные для мелководья, 311а.' чнтельно усиливаются влиянием его стенок III]. В этом случае параметрами определяющими условия движения и обтекания судна служат ШТ, h Н (где ft ширина канала по зеркалу воды) и относительная площадь F (где F и <оч — щади поперечного сечения канала и мндель-шпаигоута судна). Существенное зиа ц. ине имеют также форма поперечного сечения канала и состояние его ложа
Картина волнообразования при движении судна в канале, а также и возник-повеиие одиночной волны при критической скорости, качественно аналогичны картине волнообразования на мелководье. Однако влияние стенок канала вызывает уменьшение критического значения скорости и увеличивает высоту одиночной волны В связи с этим волновое сопротивление судна в канале с увеличением скорости возрастает более интенсивно, чем в условиях безграничного по ширине фарватера Движение судна в канале вследствие стесненности его сечения сопровождается увеличением местных скоростей обтекания корпуса и соответствующим снижен км гидродинамических давлений, что приводит,с одной стороны,к понижению свобод эй поверхности воды вблизи судна, а с другой, — к уменьшению сил поддержания и увеличению ходовой осадки. Суммарное действие этих факторов вызывает просадку судна и уменьшение запаса воды под днищем, что проявляется тем значительнее, чем ближе скорость к ее критическому значению. При этом возрастает сопротивление трения, к которому добавляется также и трепне воды о ложе канала. Из-за перераспределения давлений увеличивается сопротивление формы. С увеличением скорости судна в закрнтнческую область ходовая осадка н дифферент уменьшаются (судно «всплывает»), его сопротивление резко снижается.
Для преодоления инка сопротивления, соответствующего критической скорости в канале, требуется весьма большая мощность, а возникающие при этом высокая одиночная волна и значительное спутное течение разрушающе действуют на доже канала, в связи с чем скорость движения в каналах обычно жестко ограничивается. Кроме того,при отклонениях судна от плоскости симметрии канала на его корпусе возникают поперечные силы, влияющие па управляемость. В мелководных каналах скорость движения ограничивают еще и во избежание касаний днищем судна о грунт.
Строгое теоретическое исследование движения судов в каналах представляет весьма значительные трудности, что вынуждает принимать ряд упрощающих допущении (малая амплитуда воли, неизменность посадки, прямоугольное? ь сечения канала) или использовать приближенные методы гидравлики [И]. При экспериментальных модельных исследованиях сопротивления судов в каналах также встречаются весьма существенные затруднения (особенно при большом стеснении сечения канала), обусловленные, главным образом, ограниченной длиной модели канала, при которой нарушается моделирование обтекания и просадки судна
§ 18. ВЛИЯНИЕ ОГРАНИЧЕННОСТИ ГЛУБИНЫ
МЕРНЫХ ЛИНИЙ НА СОПРОТИВЛЕНИЕ И СКОРОСТЬ СУДОВ
ПРИ НАТУРНЫХ ИСПЫТАНИЯХ
Глубина акватории мерных линий зачастую бывает ие. остаточной, чтобы полностью отсутствовало влияние мелковощя на сопротивление, а следовательно, и на скорость испытываемых судов Резулыаты натурных испытаний в таких случаях нуждаются в корректировке, поскольку получаемая па мелководной мер» « линии скорость из-за повышенного сопротивления "оказывается меньшей той, которую развивало бы судно в условиях безграничной глубины мори, на что еще в 1915 г. указывал Л. II. Крылов.
Современные способы учета влияния мелководья на скорость при натурных испытаниях основаны на гипотезе О Шлпхтинга [89], согласно которой при одинаковом сопротивлении скорость судна на глубокой воде v отличается or его скд-
294
ости в условиях мелководья v/f
на величину суммарной потери скорости Ас, Состоящую и.ч двух компонентов Xvv - [ ( ым///) — потеря скорости из-за увс- дичепия вязкостной составляющей сопротивления; Др1Г f (^тц)— потеря еко-’ ростт из-за увеличения волновой составляющей сопротивления. Обычно суммарную потерю скорости представляют в относительной форме: Xvlv,{ = &cw/vH
и выражают в процентах от скорости
I В настоящее время в международной п отечественной практике натурных I испытаний судов для учета влияния ограниченности глубины моря на мерных линиях используются диаграммы Лэкенби иди формулы Скотта.
Рис. IV.8. Диаграмма. построенная по формуле Скотта.
Приведенная на рис. IV.7 диаграмма Яэкенбн [68] является графическим пред меняем следующей полуэмннрической формулы, полученной на основе экспериментальных данных:
— = 0.1242 0,0.гЛ 4- 1 - fth (IV.6)
\ Ш \ vn I
при > 0.05
l Диаграмма позволяет определить относительную потерю скорости, если известны глубина воды Н, площадь погруженной части мидель-шпапгоута и число Фруда по глубине воды Iг^ = v}J jfgll. На диаграмме имеется четыре зоны, Дзя которых характерны следующие особенности: зона ABCD (j'*ro)M///< 0,2;
< 0.45j соответствует отсутствию влияния мелководья; зона BEFC (0,2 < < | ь>м//7<0,9; FrH< 0,45) соответствует возрастанию только вязкостного Кпротивлснпя зона DCHJ (|,/ь>ч/Н< 0,2; 0,45 < 1'гн< 0,9) соответствует воз-Иртанню только волнового сопротивления; зона CFGII (о,2< М < 0,9;
С 0,9) соответствует одновременному у сличению и вязкостного, и нол-l»iOBoi сопротивления.
। Скотт |87] разработал полуэмппрнческие формулы для учета влияния м<йко 80 ья при определении скорости судов па глубокой воде по результатам натурных Испытаний па недостаточно глубоких мерных линиях. О i obi я формула Скогта
295
связывает значения скорости па глубокой воде v и в условиях мелково.ц.„ при одинаковом сопротивлении 4
tr —0/N» («’///') 1'ц + Лец- -|- Оц, (IV 7)
где Лт'ц, — 0 при v‘[t/H < 10 (Fr/f < 0,50); = 0,00013vfl [(у^/П) — 8.G9] ||рн
10 < vjt // < 15 (0,50 <FrH < 0,63).
В этой формуле величины скоростей v, v.{, длим в узлах, глубина в д,а ц в метрах, площадь мидель-шпангоута о>м в квадратных морах.
Из формулы (IV.7) следует, что относительная потеря скорости на мелконод^ при одинаковом с условиями глубокой воды сопротивлении составляет
Д17"Н = (и — он)/»н = 0,90«*//Г 4- fvH, (1 V.8)
где Дсю,/Рн = 0 при Ор/Я < 10 (FrH <0,50); bvv/vH = 0,000'3 [(ун,Н) - 8,69р при 10 < v'n Я < 15 (0,50 FrH <0.G3)
На рнс. IV 8 приведена построенная по этой формуле диаграмма, позволяющая определять относительную потерю скорости судна на мелководье (в процентах от о^) не прибегая к вычислениям.
Сопоставление результатов определения потери скорости судна иа мелководье по диаграмме Лэкенбн (см. рнс. IV.7) и но формуле Скотта (IV.8) с экснернмси аль-ными данными показывает, что при слабом мелководье (<ом.7/2< 0.12) оба сшеоба дают близкие результаты, хорошо согласующиеся с экспериментом. При более ощутимом мелководье (ом/Я2> 0,12) диаграмма Лэкенбн несколько занижай, потерю скорости, тогда как формула Скотта и в этом случае дает величины \v, близкие к экспериментальным данным.
Глава V
СОПРОТИВЛЕНИЕ ПРИ ДВИЖЕНИИ СУДНА
НА ВОЛНЕНИИ
§ 19 влияние МОРСКОГО ВОЛНЕНИЯ
НА СОПРОТИВЛЕНИЕ И СКОРОСТЬ СУДНА
При движении судна на волнении его ходовые характеристики moijf существенно измениться в силу следующих основных причин:
увеличения средней составляющей и периодических колебаний сопротивления движению судна, порожденных как непосредственным воздействием на корпус ветра и волн, так и влиянием различных видов качки, рыскания судка на курсе и дрейфа;
снижения пропульсивного коэффициента вследствие роста средней нагрузки гребного винта и изменения характера обтекания лопастей при качке.
Поскольку мощность энергетической установки ограничена, судно естествен” иым образом неизбежно теряет скорость. Кроме того, скорость снижают депо.’" нительно с намерением избежать опасных для судна проявлений шторм' чего плавания и защитить корпус от ударов волн (слеминга, ударов в развал бортов, вибрации), палубный груз - от заливания, а энергетическую установку °т динамических перегрузок по причине колебаний гидродинамической нагрузки а<
На рис V I приведены графики зависимости относительной средней скор:4-0' судна от балльности встречного волнения, полученные на мореходных нспыта и«* двух теплоходов 12*1] Скорость первого теплохода была снижена из-за слст'пига при плавании в балластном переходе (рис. V. I, о), а второго из-за заливания "Р” 2’16
Лфде с палубным грузом на большой осадке (рис. V.1,6). Это типичный пример, Ев1иетельствующий о преобладающем влиянии естественной потерн скорости на Egiie.iinii до 5 6 баллов.
И[ Основной причиной естественной потерн скорости судна является дополни-[-рльнос сопротныение, вызываемое волнением моря н ветром. Дополнитслыюе Дпротивлепие на волнении обусловлено преобразованием энергии набегающих Клн в энергию волн, генерируемых судном при вынужденной качке, и энергию .кфракшш, т. е огибания и отражения набегающих ваш от корпуса судна как препятствия. Изменение вязкостной составляющей сопротивления мало. Поскольку волнение и качка носят колебательный характер, вызываемое ими сопротивление периодически (на регулярном волнении) либо случайным образом (на нерегулярном волнении) меняется во времени.
Рис. V. 1. Зависимость относительной средней скорости судпа^от интенсивности встречного волнения: а — по испытаниям теплохода в балластном переходе (У = ’ = 17500 м3); б —по испытаниям теплохода с полным грузом (И = 18900 м3).
I — Cea намеренного снижения скорости; 2 — при намеренном снижении скорости; от в — ’ скорость на тихой воде.
® Полное среднее сопротивление R представляется как сумма трех независимых составляющих: сопротивления на тихой воде /?т. п, среднего дополнительного сопротивления, вызванного ветром /?дд и волнением R.-iw
R = Ят. в+ /?А4 + ^Л1Г (V.I)
КВ соответствии с (V. 1) величину R.|w можно определить путем буксировочных модельных испытаний в условиях волнения как разность между полним средним сопрогип.тсннем и сопротивлением на тихой подо при одной и той же средней скорости движения модели Поскольку дополнительное сопротивление Raw имеет волновую н инерционную природу, оно моделируется по числу Фруда. Зависимое!ь резра шорного коэффициента среднего дополнительного сопротивления о от Относительной длины КН. пли частоты волн о> (£§)’ ! считается одинаковой для «одели и натурного судна, причем
[ (V 2)
Испытания проводятся двумя методами при постоянной буксировочной тяге Либо при постоянной скорости буксировки. В первом случае тяга прикладывается к Дополнительной буксировочной тележке, которая перемещается относительно Мовной и обеспечивает свободу килевой, вертикальной н продольно-горнзоп-’йыгой качки. Качка в поперечных направлениях, как правило, ограничена. На Испытаниях при постоянной скорости модель подсоединяется к динамометру и сво-0<1ЛИа только относительно вертикальной и килевой качки Стандартные испытания Проводятся и условиях регулярного ватпепия при числах Фруда I г> 0.12-Э-0.15 от 0,4—0,5 до 1,8 2,0 Одновременно с измерением Raw фиксируются ха-
Кктеристнки качки Типичные экспериментальные результаты показаны па рнс. V.2,
297
где приведены зависимости л v от Ml. при различных 1г п курсовых углах встречи ноли Рв. Даипие полечены для судна контейнеровоза (L — 175 м; fi = 0.559; Fr = 0,28) [65).
В результате экспериментальных, а также теоретических исследований мож |() считать установленным, что Л.пг не зависит от сопротивления на тихой воде
связано в основном с продольной качкой и имеет максимум в ее резонансной зоне (см рис. V.2), а также меняется с изменением скорости судна и курсового угла встречи волн. С ростом скорости максимальное значение увеличивается. При отклонении курса от строго встречного (0В = 180г) до р„ = 150: 140° величина может возрастать, затем резко снижается на траверзном волнении к составляет небольшую величину на попутных курсовых углах. Принципиальное значение имеет экспериментальный факт, что R 1Н- с хорошим приближением можно считать пропорциональным квадрату амплитуды сд волны, по крайней мере, при
298
2‘xI-< 1 15 (рис. V.3). Следовательно. од1Г практически не зависит от высоты волн. Возрастание величины л п1, в области коротких волн (см. рис. V.2) явно 'выражено для судов с большой полнотой обводов и иа больших числах Фруда, а также в условиях попутною волнения Это явление обусловлено влиянием ди фракции воли.
I Для различных судов Рдп- зависит от формы обводов, соотношения главных азмереннй и продольного распределения грузов. Существенное влияние оказывают Отношение ширины к длине В L. коэффициент общей полноты 6 н относительный продольный радиус инерции массы судна ry L, увеличение которых приводит К росту дополнительною сопротивления. При одинаковой интенсивности волнения R-\\v относительно больше у судов е полными обводами и меньшей длиной.
Рнс V.3. Зависимость от относительной высоты воли (в логарифмическом Л »г
масилабс).
Рис. V 4 Сопоставление значений коэффициента дополнительного сопротивления во измерениям на нерегулярном волнении S^Vi" ,1а РегУляРПО»1 волнении о иг
согласно (V.3). с, ц.< = Кд \р/Г(|>/2) f-Tv*}.
В опытовых бассейнах для мореходных модельных испытаний дополнительное сопротивление измеряется также в условиях двухмерного нерегулярного волнения с заданным спектром Sr («>). Многочисленные эксперименты показали, что непосредственные измерения дополиитиаьного сопротивления на нерегулярном волнении хорошо согласуются с данными, полученными путем пересчета измерений на регулярном волнении по соотношению
. 00
R,\<? = 2 I <I>r (со) Sr 1Ы) </и>, (V.3)
() где
Ф7< (то) = ал1ГрКЙ2д-1 = R ,щ,. (co)/ti (V 4)
t-оператор, характеризующий передаточные свойства судна по отношению к среднему дополнительному сопротивлению Пример, подтверждающий этот эксперн-Р*енталы1ыГ| факт, приведен пи рис. V.4.
2УУ
Определение по соотношению (V.3) исходя из «передаточной функции, (V 1) является общепринятой стандартной процедурой. В общем случае для условий трехмерного нерегулярного волнения /?дц? определяется по соотношению
2л си
[ Фд(ш, ц) S; (щ, уь рв)ф</ш. (<5)
о о
Прямые измерения сопротивления в условиях нерегулярного волнения на щ. турпых испытаниях подтвердили приемлемость определения /?дц- по соотношениям (V.3)--(V.5) на базе модельного эксперимента [57]. На рис. V.5 приведены типичные экспериментальные результаты для коэффициента сопротивления ст 1К. наветренном волнении в зависимое i и ит относительной высоты волн 3 %-tioii обеспеченности h&yjL и числа Fr, при к-м
R/ltF = В,!Д,1°' 4W IC-
лнчнна вообще не пропорциональна квадрату высоты нерегулярных воли, поскольку существенное влияние оказывает не только интенсивноегь (дисперсия) волнения, но н соотношение частот максимумов спектра волнения и функции Фд. Степень зависимости Raw от может
Рис. V.5. Коэффициент дополнительного сопротивления судна на нерегулярном волнении (LIB = 7,85; 6 = _ 0.48).
быть близка к квадратичной в диапазоне больших шкот волн при близких значениях частот максимумов Sj (ы) и Фд (ш) либо в случае, когда сопротивление ia регулярном волнении слабо зависит иг частоты (например на попутном во. н> нин — см рис. V 2) Зависимость б от числа Fr близка к линейной н существенна иа интенсивном волнении.
Эмпирические зависимости средней потерн скорости До от интенсивности волнения (ветра), его относительного направления и скорости на тихой воде и, „, установленные путем анализа большого числа рейсов, используются для решения задач судовождения и в экономических расчетах. В отечественной практике распространение получила формула П. М. Хохлова (511.
Регистром Ллойда рекомендуется следующая эмпирическая формула (Р., = = 180°).
в = W (Л1/3/ 92 [Гг“‘ ~ 3 (fti/3,L)1/4l, (V“>
где h ] /3 = 0,75/i3yo — высота «значительных» воли. На обширном статистическом материале основана также формула Аэртсена [56] (где L — длина судна, м)
До/ьг. в = 0,01 [(mJL) -[- ma| (V -7)
Таблица VI Коэффициенты щ, т2 для формулы (V 7)
Сила ветра, балл м Направление волнения
встречное скуловое траверзное попутное
т, тл т, т,
5 900 2 700 2 350 1 1001 0
G 1300 6 1000 5 500 3 200 1 1
7 2100 И 1400 8 700 5 400 2
8 3600 18 2300 12 1000 7 700 д з
300
В I Коэфф' цненты ffl| и т2 представлены в табл V. I в зависимости от балльности астГ (По и,кале Бофорта) и направления волнения no отношению к судну. Форму-
qii (V.C). (V.7) дают оценку потерн скорости на волнении интенсивностью до 6 бвл-«чов Из приведенных <]юрмул следует, что потеря скорости относительно больше ^^Калых тихоходных судов.
5И Результаты натурных испытаний и опыт эксплуатации судов свидетельствуют _в<хтиестве той зависимости потерн скорости также от таких характеристик судна, как отношение ширин)i к длине, коэффициент обшей полноты, продольный радиус йнеринн массы судна, от типов энергетической установки и запаса мощности. Эмпирические оценки не дают, однако, возможности учесть эти особенности при расчетах эксплуатационной скорости судов.
Рис. V G. Полярная дпаграмма'скорости судна в условиях ветра и нерегулярного волнения.
------ —• расчет; эксперимент: • — Л % = 4.8 м: О — Лд% = 6.2 н.
Наибольшая средняя скорость судна на волнении постигается при равенстве полного сопротивления R предельной полезной тяге Те- Эту тягу винт развивает, когда двигатель работает по заградительной характеристике, ограничивающей мощ-I ность и частоту вращения при перегрузках в эксплуатации. На значение тяги влияет также снижение пропульсивного коэффициента и изменение гидродинамических качеств винта при движении судна на волнении. Поэтому естественная потеря скорости судна в условиях шторма при одинаковом сопротивлении может быть различной в за-Внсимости от характеристик пропульсивного комплекса. Следовательно, как и при анализе ходкости па тихой воде, скорость судна в условиях волнения должна определяться расчетом по ходовым характеристикам с использованием данных о среднем со-I против пепин, полученных на модельных испытаниях или по теоретическим методикам (см. § 52 третьего раздела) Такой путь даст возможность учесть специфику Формы обводов, параметров винта н энергетической установки судна |24].
На рис V.6 приведен пример полярной диаграммы скорости в условиях ветра 11 нерегулярного волнения для теплохода (/. — 156 м, 6 0,61, Р2 8,8 ДНИ)
301
[25]. Скорость определена по ходовым характеристикам исходя из результатов б к справочных испытаний ня регулярном волнении Учтена только естественная щпх и скорости, вызванная ростом сопротивления вследствие ветра и волнения, а также . огвететвующнм снижением пропульсивного коэффициента судна. Такой харак, .р зависимости средней скорости от высоты и курсового угла встречи волн типичен ,1ч крупных транспортных судов.
§ 20. МЕТОДЫ ОПРЕДЕЛЕНИЯ ДОПОЛНИТЕЛЬНОЮ СОПРОТИВЛЕНИЯ СУДНА НА ВОЛНЕНИИ
Теоретические методы определения дополни тельного сопротивления octioi щ4 иа анализе потенциального обтекания судна, движущегося на поверхности псвя t жидкости под воздействием регулярных прогрессивных волн. Наиболее общие ре-шелия этой сложной задачи получили М. Хлскинд |48[. В 1 Сизов [78 нерв го раздела I. Питерс и Стокер [86 первого раздела!. Маруо [73 |, Ньюман [134 второго раздела т 2 [.
Периодическая составляющая сопротивления ДЯдцр представляет собой нь дродииамическую силу, вызывающую продольно горизонтальные колебания су ,а ил волнах Согласно общей структуре возмущающих сил А/?..цг содержит главную часть (определяемую по гипотезе V Н. Крылова) и составляющие, связанные с imep-ционно-демнфирующнмн и дифракционным компонентами гидродинамической нагрузки. Главная часть определяется путем интегрирования но смоченной поверх ности корпус*Q давления прогрессивных волн не возмущенного присутствием сх ..па
&Raw (О =
—Т L/2
[ •^•Схр-^1г + ‘ (XC0S₽B+y slnP»)lrfj:rf2
О — L/2
X
X С.хр (ib>A7), (V.8)
где irn — ордината поверхности Й ниже равновесной ватерлинии.
Как нидно из (V.8). частота колебании сопротивления равна кажущейся час е набегающих волн, амплитуда является линейной функцией высоты волн и не зависит от скорости судна. Эти качественные зависимости вполне подтверждаются измерениями колебаний сопротивления на буксировочных испытаниях моделей в услонн ix регулярного волнения.
Для расчета амплитуды колебаний сопротивления, исходя из (V.8), М. Д. Хаскина [95 второго раздел* т. 2] использовал параболическую аппроксимацию обвотон корпуса судна, симметричного относительно миделя, н редукционные коэффшшс! ы продольной качки по Г. Е Павленко. Расчетная формула имеет вид
ААдцу — — Ади 4 Sln W/.Z, (\
где/?11Г4 — Dv.j V.j гш-7д) cos рп; хг—функция влияния относительной оса. и T1L при различных коэффициентах вертикальной полноты /. — функция влияния относительной длины L!a и мла встречи волн р„ при различных коэффициентах п л-ноты ватерлинии а (рнс. V V).
Для определения у? можно использовать следующую приближенную форму У
*7 = 1
2л2
3(3 2Z)
Величина /?ди-д наибольшая на встречных или попутных курсовых углах рв и равна пулю при ри = л,'2. На рис. V.8 приведен пример зависимости модуля вс личины |О (Сд1)] от частотного параметра <о (Л'д)1 2(илн отношения '/ I-) при р|, = 18б3 Расчет выполнен для диапазона значений Т I 0--0.10. Вп но. что А ди д имеет основной пик иа резонансных н более длинных волнах, но колеи шя сопротивления могут проявляться и в области коротких воли
Расчет АА’ди? по формуле (V 9) хорошо совпадает с измерениями на модель п-<х испытаниях, поэтому можно считать, что для практических целей достаточно опре ! ' лить главную часть величины Р.щ-д Отмстим также, что при исследовании об i ей
302
Li.xa'iit гидродинамики качки методом малого параметра формула (V.9) оказывается Есзультатом линейного приближения для «тонкого судна» па встречном волнении.
Наиболее полное выражение для среднего дополнительною Сопротивления /?/щ-полтчено М. Д. Хаскнпдом путем применения теоремы о количестве движения |48]. ро. учив решение линейной гидродинамической задачи качки для потенциала возмущенного движения стойкого судна» путем распределения по диаметральной плос-
Л/4
Рис. V.7. График для определения функции X/..
Рис. V-8. Относительная амплитуда колебаний сопротивления судна на волнении.
— расчет ПО формуле (V.9) I T/L 0; 2 — T/L = 0.10: О — по эксперименту;
TIL о.ое.
юсти $Д пульсирующих источников, М Д Хаскнид привел выражение для RAW
к виду
^ = 0^77 Reel ' йг ол т
Hk- | Н [k, I» Г2 dO dk cos 0 (/г — k'J (k — Л’)
—я О
— pjjwcos ft,, Reel [if (kf. Ри)],
(V. 10)
где k — k 4-j 2 определяются с учетом коэффициента диссипативных
сил через корни уравнения
к г cos2!)/?-А; (I 2т соя ())* + *; 0. (VII)
[ Ф нкцня II Н Козина Н (к, 0) в (V. 10) связана с амплитудой q (х, у, г) пульсирующих особенностей соотношением
Я (k, 0) = | J 9 exp (г + *х cos + 1!А sil1 W (V. 12)
! 5'-’
Нзформул (V. 10), (V. 12) видно, что R представляет собой квадратичную форму В1 амплитуд качки н набегающих both, поскольку q (х, у г) и, следовательно, функ-И 303
цня Копина зависят от них линейно. Анализ этих выражений приводит к пред, ставлепню Raw в виде трех составляющих Эти составляющие отдельно учитывают влияние вынужденной качки судна на тихой воле, дифракции (т. е. огибания и отражения волн от судна как твердой пре1рады) н взаимное влияние качки и дифракции воли М. Д. Хаскинд показал, что в области максимума сопротивления основное влияние оказывает составляющая от вынужденной качки на тихой воде, при' ч в первом приближении для судна без хода из (V. 10} получено
Raw * (w cos Рв/р) (F0V + Л40й)% (V. 13)
где Fo, -Мд — главный вектор и главный момент возмущающих сил, определяемые по гипотезе А. Н. Крылова; V, Q — вектора составляющих линейной и угловой скорости качки; * означает осреднение по времени за период.
Следовательно, величину Raw можно оценить и’по гипотезе А. II. Крылова если учесть сдвиг фаз между колебаниями возмущающих сил и соответствующих скоростей качки Из <|юрмулы (V. 13) вытекают в частных случаях результаты Хаве-лока и Ватанабе [4HJ.
В дальнейших исследованиях В Г. Сизова и Маруо было учтено, что в общем случае движения «тонкого судна» произвол,.ним курсом по отношению к волнам течение индуцируется простым и двойным слоем пульсирующих особенностей. Формула для определения Raw приведена к следующему расчетному виду:
Г -е, fair = 2лр j
Л/2 Зя,2
fa cos 6—kn cos ft,,) H rf0 (I -4tcosO)*A 1
где
1-Я/2
fa cos 6 — *q cos fl„) (1 — 4 т cos 0)1Л
(V 14)
0
arc cos
при
при | т | > i/4:
kif a = g (2u2 cos2 0) 1 [I 2т cos 0± (I— 4т cos 0)' I — корни уравнения (V.I I)
Расчет сводится, таким образом, к определению интенсивности источников и диполей, входящих в формулу (V.12) При решении этой задачи по теории малых возмущений («тонкое» и «удлиненное») судно используются различные упрощенные но; ходы—способ распределения особенностей полиции [911, метод изолированных осо бснностей [65], метол плоских сечений |ffi| с привлечением асимптотических пере ходов по частотному параметру (достаточно малая пли большая относительная чл стота колебаний судна) В любом случае в соответствии с граничными условиями задачи интенсивность особенностей прямо пропорциональна относительной скорости перемещений корпуса судна на волнах. При этом интенсивность источников зависит от составляющей скорости продольных перемещений вследствие килевой, вертикаль ной и продольно-горизонтальной качки, а интенсивность диполей — от составляющей скорости поперечных перемещений вследствие бортовой, поперечно-горизонтальной качки и рыскания. Формулы (V. 10), (V.I4) могут быть преобразованы, как уже оз менялось, к квадратичной форме безразмерных амплитуд различных видов качки Stj с учетом сдвигов фаз ец и дифракционных составляющих ((, j — 0):
aAW ~ Xi FIjj-SjS, cos Cjу (I, f = 0, I...., 6). (V 15)
i. I
Коэффициенты Dij зависят от характеристик судна, числа Фруда Fr, безразмерно!! частоты о (Li'q)11 (или ?./(.) и курсового угла встречи волн ()п. Вычисление ьоэффп imeiiroui/,y проводится с помощью ЭВМ Для расчета необходимо предварительн" определить характеристики качки.
304
Пример расчетов величины оЛ1упо методу изолированных особенностей в сопо-.влсиии с экспериментом для контейнеровоза (6 0,56, LIB — 6,9, LIT — 20,6)
^введен па рис. V.9 (волнение встречное. рв — 180°) [65]. Результаты расчетов евн-^Мьствуют, что основной вклад в суммарную величину Raw «а различных курсоры* углах встречи воли вносят составляющие, обусловленные килевой, вертикальной рачком и нх взаимодействием. Влияние дифракции существенно на попутном волнении для судов любых форм обводов, а также на вегречиых и косых курсовых углах «лЯ судов с большой полнотой обводов (б> 0,75) в области относительно коротких волн (ML <Z 0,6). Коэффициенты Djj, связанные с поперечными колебаниями, пре-^жежимо малы даже при положении судна лагом к волнам. Коэффициенты Dij
Рис V.9. Сопоставление результатов теоретического расчета о/ИГс экспериментальными данными для контейнеровоза в условиях встречного волнения (PD = 180°) при различных числах Фруда.
------ — расчет; • — эксперимент.
— 0, 1. 2), вносящие основной вклад в величину Одцг, для условий встречного Волнения могут быть вычислены по следующим формулам [91].
f’co = exp ( 2feeXT) J s (т) С (т) /» (га + dm;
т
Dlt = -L Fr» J (т + СЙ1)» S (т) С1 (т) I1 (га) dm; т
(k0L)- Fr3 J (га 4- wi)3 S(m) С3 (га) J- (т) dm; rn
D12 =------Fr3 J (m + coi)3 S (m) C (tn) I (m) J (m) dm;
m
Din = - — ,?r CXP *«ХЛ x
(V 16)
305
X j (m + o>i) -S (tn) C (tn) 1 (nt) I dtrr,
m
Diu - — Fr exp (—kv'/T) X
X j (m -|- fi) S (m) C (m) J (m) I dm,
m
где S (tn) = (от -| Wj)- (от + ^(m 4- W|/ — -L2IL.J Z* ;
C (m) = exp 8x (in (B,)2 Fr2 J ;
/ («1) = f b (x) cos (ntx) tlx.
J (m) = - j?-, j xb (x) sin (mx) dx,
k' 00
. - - I f I Г • , r ®S/ 2л/ .
ш - аз — kt, L/2
k’ =-L Fr-2 [I + 2т + (I + ;
b (x) — полуширина корпуса в каждом сечении на уровне ватерлинии.
Расчетная формула для учетом формул (V.I5), (V. 16) имеет вид
° A IF ~ £\)0 “Ь ^11^1 + ^22^2 + ^12^1^2 C0S *12 + ^10^1 COS С10 + ^20^2 COS е20-
(V 17) где\= С<Л/5Л; Еп = fiio — ®2П: Fi<r F>o~ сдвиги фаз вертикальной
и килевой качки по отношению к набегающем} во ineniuo.
Достаточно общая картина сопоставления расчетных и экспериментальных зульгатов приведена на рис V 10 |'*1 |. На графиках представлены зависимости величины о u|,otZ/L для условий встречного волнения Данные относятся к моделям сутов 60-й серии, имеющим 6 0,70, I./B = 7,0 и В.'Т = 2,5 (рис. V. 10, а) и Л
= 0,80, LiH = 6,5 и В>Т 2.5 (рис. V. 10, б). Экспериментальные точки получены в различных опытовых бассейнах. Заштрихованная зона отвечает результатам теоретических расчетов по общим формулам при различных подходах к определен ню i i-тенсивности пульсирующих источников Отмечая, что общий характер частотной внсимости олп,по теории и эксперименту одинаков, следует признать, что количественные различия могут быть значительны в области максимума и малых относите, i них длин волн.
Гидродинамическая теория даег также возможность использовать результаты морения профиля нестационарною волнения, возникающего вдали от корпуса мп c.iU вследствие излучения при вынужденной качке и рассеивания набегающих В', н при дифракции, для непосредственной оценки входящих в (V. 14) функций К11’ чина Приведенные в [781 результаты свидетельствуют о хорошем согласовании ценной теории с экспериментом для функции Кочнна в рабочем диапазоне стот и скоростей даже применительно к судну с полными обводами
11мея в виду этот вывод, можно усмотреть возможное! и уточнения расчета и учс ‘ составляющих силы Raw второго порядка, определяемых но теории малых возмуи-1 306
М| (см. |49] второго раздел* т. 2. |48. 77]). К Таким составляющим относятся частности. дополнительные члены, обусловленные изменением смоченной поверх-1||(: т( судна в процессе его перемещений на волнении. Очевидно также, что точное! > тсоре гического определения /фщ-су шесгвенио зависит ог точности предварительного Гр.тсчета характеристк качки судна.
V Зная частотные характеристики средней составляющей дополнительного сопро-кцвлсння п амплитуды его периодической составляющей R^wa для условий регулярного волнения, моащо рассчитать среднюю величину /? 1W-и дисперсию колебаний Ьополнптетьного сопротивления для условии движения судна иа нерегулярном вол пепин с заданным энергетическим спектром. Согласно (V 9) по отношению к колеба-
Рнс. V. 10. Сопоставление расчетных и экспериментальных зависимостей одП, от для судов 60-й серин: а — при б = 0.70; б — при 6 = 0,80.
пням сопротивления судно можно рассматривать как линейную динамическую систему, следовщельно,
«Зк'л = J | (Ы) ['$t (») (V. IS)
о
Характеристика 7? .;1>л/илслужит передаточной функцией колебаний сопротивления судна на волнении.
1 Расчет величины среднего сопротивления Т?^. как правило, проводят по соот-1ношопию (V.3), причем исходят из априорного предположения о структуре оператора (<>>) в форме (V.4), подт верждениой экспериментально и аналитическим путем с привлечением теории нелинейных преобразований случайных процессов [91, 98].
j Идентификация нелинейной реакции судна по отношению к дополнительному coi port влеиию как строго квадратичного преобразования стационарного нормальною случайного процесса нерегулярного морского волнения (с последующим осред-Впнем ио времени) приводит к определению Ф^ в следующем общем виде:
q.₽ (оз, - ст) = -91, (V.19)
8.S£ (to)
Где (2(0, 0) — вещественная часть взаимного биспсктра процессов дополнительного сопротивления и ординат нерегулярного волнения
1 Функция определяется через преобразование Фурье от взаимной бикор-Ре- я пион нон функции R^r процессов сопротивления и волнения
«даМ IM' I TOM' т2) мН’ (' 20)
307
Функции Bqr и могут быть определены непосредственно по снихрощ с» Записи процесса дополнительного сопротивления и ординат волн на модельных пытаниях (методом постоянной скорости) в условиях нерегулярного ВОЛНещ,,,' Эго позволяет, с одной стороны, най| и оператор Фд с определенным спектром псх,, Дн из результатов испытании на нерегулярном полпенни для последующего нспо.ц,ЛОе вання при определении R,\w в различных других внешних условиях плавания судНа а с другой стороны, проверить справедливость соотношения (V 4) Псследов Р. 3. Кишева свидетельствуют о хорошем согласовании определения Ф/? нсх . 3
соотношений (V.4) и (V. 19) (рис. V II)
Среди экспериментальных методов определения дополнительного сопротнгси П118 наиболее распространены испытания методом постоянной скорости в условиях |С.
Рис. V.11. Функция Фр по измерениям иа регулярном и нерегулярном волнении и по рвечету
О — согласно (V.4); А — согласно (V.I9); ----- — теоретически Л расчет.
гуляриого волнения, поскольку результаты измерений /?дгг могут быть непосредственно использованы для пересчета по отношению (V.3), в котором скорость играет роль параметра. При отработке техники эксперимента основное внимание уделяется обеспечению измерений в условиях наибольшей свободы перемещений модели иа о.т нах. В этом отношении отдается преимущество испытаниям самоходных моделей с автоматической стабилизацией двпжеп ня на ку рее. Испытания проводят при постоя! й средней скорости судна с непосредственным измерением средних значений упора, момента сопротивления и частоты вращения винта. Величина Рдц/ может был > ч-ределсиа через средний упор Tj\w и коэффициент засасывания па тихой воде '<
Ravi — (• — <о) Taw- (V 21)
Такой пересчет не вносит значшельной погрешности практически па всех режимах, исключая движение в балласте при резонансной качке, когда винт выходит из воды.
Используя результаты модельных испытаний, следует иметь в виду, что погрешность измерении Raw 1ыи Тдцр возрастает в области их малых значений на нерезо-иапсных режимах Разброс экспериментальных точек связан также с пестаби. ь-постью параметров генерируемых волиопродуктором волн которая проявляется а пропульсивных испытаниях в большей степени, чем на измерениях качки.
Указанные обстоятельства дают основание для применения осредненных аппроксимаций экспериментальных результатов при разработке методов приближенно0 расчета дополи птаяыюго сопротивления па базе серийных модельных испытаний.
308
। 21. ПРИБЛИЖЕННЫЙ УЧЕТ ВЛИЯНИЯ МОРСКОГО ВОЛНЕНИЙ |]Д СОПРОТИВЛЕНИЕ ДВИЖЕНИЮ СУДНА
Приближенные теоретические методики определения среднего доио нителыюго противления движению судна па волнении основаны, как правило, на расчете величины Raw через кинематические и гидродинамические характеристики продольной качки Для условий встречного волнения такую методику разработал Н Н Юр-цов (см [98] второго раздела т 2). В способе, предложенном Геритсмон и Бекель-цаком [611, расчетная формула для определения Raw получена следующим путем. Пользуясь гипотезой плоских сечений, можно определить среднюю энергию Е* Кднаипи воли, вызванных продольной качкой судна. Поскольку энергия £♦ равна дополнительной работе, производимой силой па пути Z/cos flB за период тд = Ъ= Хт/Щд. то
(V.22)
О — L/2
tic к'зз — коэффициент демпфирования при вертикальных колебаниях сечений корпуса судна, ll/м2; vz— вертикальная составляющая относительной скорости сечений корпуса судна, м/с.
! 11 р н этом
= w к
(V.23)
где
= [ o’|’x - coA [Kf Sin (kox cos Pu) - - хф2] ] +
+ i [ [xz cos (kax cos pfi) - ?gl - xfj};
Cgl, .— соответственно вещественные и мнимые части комплексных ампли-
туд вертикальной и килевой качки. Можно выделить влияние скорости судна на величину v33 (х), имея в виду, что
VS3 (*) = Раз W - V [tftss (x)/rfxj. (V.24)
соотношение (V.24) входят коэффициенты демпфирования р (х) и присоединенные Иссы Z (х) сечений корпуса для судна без хода. Подставив в (V.22) выражения 23), (V.24), после интегрирования по частям получим
I 1/2
RAW = ^ J (P33t’IA + 2t,X33^d)t’IA^-к l-i.,2
— ° Р‘ЗЗв2а)-£, 1 (V 25)
торой член в фигурных скобках нужно учитывать в тех случаях, когда о (±Е/2) =/= О, например для судов с бульбовымн обводами иоса или кормы. Определение Raw для условий нерегулярного волнения проводится по соотношению (V.3) Результат расчета Raw по этому способу в сопоставлении с экспериментальными данными для контейнеровоза приведен на рис. V. 12. Расчет несколько завышает ’личину Raw вблизи максимума и не дает возможности учесть влияние дифракции • области коротких воли.
Приближенные способы определения дополнительного сопротивления, осиовен-{•ые на обработке систематических серийных модельных испытаний, предложены А. И Вознесенским и Г. А. Фирсовым, В. Я Ткачевым и В. С. Шилковым (II ], « Б Жннкнпым и В. Фердинанде (см |98] второго раздела т. 2), Л. С Шифриным 154 ] Муром н Мюрдэем [75], Миямото |/4 1 _
J Наиболее потный материал для определения Raw по результатам модельных испытаний содержится в работах [25, 74, 75].
309
Соотношение (V 3) приводится к виду
«3
«ап 2<"l] 4>RWS.(u)du, <\ >t.}
О
где и а!и>1 — (I /) , wz = (2лд.£)1,2— частота волны длиной ?. = I. Оператор Фя (и) представляется через его нормированную величину Ф/г
O/? = Cm(Fr, рв, Z./B. «....) Фд(-^-, "j, (V.27)
где Ст — максимальное значение Фд (ы), соответствующее ы — <о,п: хп — о>„, <,>z а/хр = ы'сйщ.
Рнс. V. 12. Сопоставление результатов определения о П1-расчетом по формуле (\ 25) н по эксперименту.
---------расчет; эксперимент' • Fr = 0.25, О - Fr 0.15.
Функция Фд характеризует форму Фд (и) при двух параметрах —хд и п. зависящих от Рг, Рв и в общем случае от характеристик судна. Обработка результатов серийных модельных испытаний свидетельствует о возможности следующей аппроксимации:
% = (Мд.)-4" сх₽ И" [(“ЛлГ*~ U • <v ?8>
График функции Фд показан на рнс. V.I3. где приведены также эксперимепгильные данные (точками) для различных судов и чисел Фруда в условиях ветрсчш го волнения. В каждом частном случае (особенно для су лов е полными обводами) ф пк-ция Фя может иметь специфический вид (см пунктирную линию на рнс. V 13 , во в общих чертах аппроксимация (V.28) отражает характер распределения экспериментальных значений Фд по относительным частотам в области, существенной для расчета Raw по соотношению (V.26)
В качестве расчетного использовался типовой двухпараметрический спектр волнения, рекомендованный 12-й МКОБ в форме, содержащей коэффициент развитое’!* волнения fln. равной К- в форме (IV.84) первого раздела. При этом средний период волн t и вы ота 3 %-поЛ обеспеченности связываются соотношением
т- {I0n2/g)i7B/i311/>. (\ -’°)
В результате расчетный спектр волнения представлен в виде
Ss 8;л (L/I00)2 (l/wz </' ) Jc (и, с), (V»
где Sj (и, a) u"5 exp (—0,177.'tru’). a qlt (10/13„д/7.).
ЗЮ
I Характеристики шепенн развитости волнения qn с вероятностью 75 % меняется I днапаз не от 0,7 до 1,5, причем для полностью развитого волнения цв I, для раз-*в пощегося <7n < I, для ослабевающего qn > I. В пртРгнческцм расчете уп рассма-рдвается как варьируемый параметр. Параметр а учитывает влияние средних ста Кстнческпх элементов двухмерных нерегулярных волн, причем относительная вы-сота воли hffyjL и коэ<|х|)ипиент степени развитости волнения учитываются совместно.
| На базе соотношении (V.26)—(V.30) предложены следующие два способа расиста Raw-
Рис. V. 13. Нормированная функция Ф/?, полученная расчетом по формуле (V.28) и по эксперименту.
---расчет по формуле (V.2&); О — эксперимент; • — эксперимент для судна ЬО-Й
I сер 1( К (й 0.70).
Первый способ Подстановка (V.27), (V 28) u (V.30) в (V.2G) дает h
Raw (lOO/igo^/Zj1/Л (Я, tj), (V.3I)
•гда = W-" я(^т; Л = 2,34
функция /ц(Л, л) по физическому смыслу характеризует отклонение завис!-К>стн /?1w(A3w)ot квадратичной. График 1п (.4, п) дан на рнс. V.I4.
I Параметры Cfi, хп н п определены по результатам испытаний японской серин, •поящей из восьми самоходных моделей судов современные типов (б — 0,534-0.80;
- 5,04-6,5, В/Т 2,18 : 4,18). Эмпирические соотношения для Сп ихп следующие:
I х(^8у
311
*R —
0.17 Fr
1.0+ JO-^-FrY6— I
T ,0), /
L i
+ 0,19,
(V 33)
где тл — собственный период килевой качки, с.
Величина Xr может быть вычислена также по формуле
х^ = (1,2 0, la'7*) — (2,9а Л — 1,9) Fr, (V.’q,
где а — коэффициент полноты ватерл инии. В расчет вместо %ф можно ввести продо ц,. ный радиус инерции массы судна rv но приближенному соотношению
(т I0)(gT),/«=2.35(rv/A)a-‘. (V.35)
Величина п для условий встречного волнения оказывается в диапазоне от 3 до 5. Поскольку в этом диапазоне значений влияние п на функцию Iп невелико, рекомендуется принимать п ~ 4.
Среднее дополнительное сопротивление при произвольном курсовом угле ветре и воли определяется по соотношению
^4W' = X₽^?1W’» (V.'b)
где — сопротивление, рассчитанное для встречного волнения (P„=lf<!Q) по формулам (V.3I)—(V.35); zp—функция влияния курсового угла.
Для расчета р в зависимости от угла рв рекомендуются графики на рис V.I5 параметрами которых служат величины а = ^0Лз%/L и xfi (25].
Второй способ. Величина Яхту- определяется по результатам об .г ботки данных серийных модельных испытаний, проведенных в Англии Муром и Мюрдэем Серия составлена нз моделей скоростных сухогрузных судов с коэффнциен* тами 0,55 <5 6 0,71 н моделей танкеров и судов для навалочных грузов с большой
полнотой обводов: 0,76^6^0,88 (всего 42 модели). Носовая оконечность шести моделей была бульбообразион формы, остальные имели обычные посовые образов ’ иия корпуса. Ill испытаниях измерялся средний упор на тихой воде, на регуляр! к и нерегулярном встречном волнении.
312
Используя обработку результатов этих экспериментов, можно рекомендовать
расчетную формулу:
Где дующую
= Р£(1 ~ 'о) (А/Ю0>3 (!/<?’) (Ли + 100 (6 -0,5)s Д, 4- Д2 (L/B) +
Л (Л/107) + А, (лс;Ю/.) + ЮД8 (<„//.) + Б [Дв + Я, (Б, Ю7)| + 10Д8 Fr), (V.37)
где *с
абсцисса центра величины судна, м;
(1 при бульбовон форме носа судна;
0 при обычной форме носовой оконечности.
Рис. V.I5. Графики для определения функции влияния курсового угла встречи волн.
Коэффициенты Я/ в формуле (V.37) определяются в зависимости от а =
<7в(1РЛз%//-) по аппроксимации экспериментальных данных б
VI 10A-,c.
{I 0,1,..., 8). (V.38)
m 1
коэффициенты В;„, приведены в табл. V.2.
( Для расчета при произвольном курсовом угле встречи волн рекомендуется Впользовать соотношение (V.36) н графики на рис. V. 15. Входящая в формулу JV.37) составляющая, учитывающая влияние носового бульба, может быть выделена F Целью дополнения расчета по первому способу.
313
Таблица V.2. Значения Ё1ГП в формуле (V. 38)
т .—
i 1 2 3 <
0 13.1320 — 103,7100 222,0(300 — 170,7800 44,9810
1 — 1.6109 33,4420 - 49,2910 35.4960 -9.9726
2 1.5981 — 14,9000 7.8786 —0,6628 -0,0218
,3 0 1151 6,5282 —7 6263 5,0745 -1 5134
4 5,5428 48,5920 —74.5600 52,5470 - 14.0310
5 — II 1200 98,9780 - 152.0700 105,2500 —27 5260
6 —7,5139 51,6.370 - 58.0050 28,5910 —5,1947
7 2,0858 —16,26.30 -17,7170 —9,6519 2,2724
8 —8,8430 62,3.3.30 -73,3620 —37,0750 —6,7179
Сравнительные расчеты проводились для судна 60-й серии со следующими основными характеристиками: L = 152,4 м, В = 21.8 м Т — 8,7 м Л б 70 rv',L = = 0,25; Б = 0 при Fr == 0,215; qD I. Дополнительное сопротивление Ядтр па встречном нерегулярном волнении различной интенсивности определялось четырьмя способами (рис. \ .16, о)
Рис V.16 Результаты сравнительных расчетов /?ЛИ. для судна 60-й серии (6 = = 0,70) а — при различной высоте волн; б — при различных курсовых углах: в — при различной степени развитости волнения.
I — непосредственно ио экспериментальной функции Фр (Л) па основе (V.3); 2 — по первому способу согласно (V.31)—(V.35): 3 — по второму способу согласно (V.37); 4 — по мет -Дике, рекомендованной в [7] третьего раздела.
Характер влияния курсового угла встречи волн согласно р. счету по первом способу с учетом (V.36) показан на рис. V. 16, б. На рис. V. 16, в приведены резу.ч таты расчета но второму способу для различной степени развитости волнения
Расчеты лают близкие к экспериментальным результаты применительно к услс виям слабого и умеренного волнения. Для условий интенсивного волнения все эмпирические методы расчет* могут иметь заметную погрешность. Характер распределения расчетного дополнительного сопротнвтеиня по курсовому углу соответствует наблюдаемому на опыте.
314
Глава VI
ИССЛЕДОВАНИЕ СОПРОТИВЛЕНИЯ ВОДЫ ДВИЖЕНИЮ СУДОВ ПУТЕМ ИСПЫТАНИИ МОДЕЛЕЙ
[§22. РАСЧЕТНО-ЭКСПЕРИМЕНТАЛЬНЫЙ Ml ТОД
ОПРЕДЕЛЕНИЯ СОПРОТИВЛЕНИЯ ВОДЫ ДВИЖЕНИЮ СУДИЛ ПО РЕЗУЛЫЛТЛЛ1 ЬУКСИРОВОЧНЫХ ИСПЫТАНИЙ
I Гидромеханика пока еще не позволяет теоретически предсказать с требуемой . ля практики точностью кинематические и динамические характеристики пот< ка вблизи поверх! о:ги судна и ею сспротивление Для количественных опенок этих характе ристик используется модельный эксперимент.
Решение задачи моделирования гидроднн; мнческих характер! стик при установившемся движении те в жидкости требует наряду с условней геометрического ^Вобня удовлетворения равенства чисел Рейнольдса Re = vL v и Фруда Fr = !«/|/’gL-При модельных испытаниях обычно не удается выполнить условие ReM = Re,,. вЪобенности в случае движения тела вблизи свобод юн поверхности, когда необходимо гдновремепп е удовлетворение и условия FiM Ггп; ьслсдствке этого безразмерные коэффш генты исследуемых характера тик при переходе от модели к натуре ie ^Ианяются постоянными. Расхождения между ними, создающие масштабный эффект зависят от диапазона изменения немоделируемого критерия Поэтому практ!-ческие схемы прогнозирования гидро.и намнческих характеристик i атурных объектов по результатам модельных нс гыг; пни, применяемые в гндромехан! кесу,ц а представляют собой схемы частичного моделирования.
I Впервые метод опфеделешя сопротнвлсп! я воды движению судна на основе результатов буксировочных и пытаний геометричес i п обной моте. и в опытовом бассейне был разработай в 70 х годах прошлого века В Фру (ом Этот метод основан на предположении о возможности разделения полного сонротивле.1 !я R па две независимые составляющие: coupe ивлепиетрения и остаточноесонрс ив. еине Сопротив-трения Rp предполагается равным сопротивлению трепня эквивалентной (имеющей у же длину L и площадь смоченной поверхп стн Й. что н модель или су но) ^родш ам! чески гладкой пластины Rf0 при турбулентном режиме течения в погра-‘иичном слое. Вс и uiiia его оценивается расчетом с помощью зависну осте! основанных на теории пограничного Слоя, —«экстраполяторов трения» Остаточное сопро-тивлеше Rr определяется по данным модельных буксировочных испыт-1 пй
Rg= R-Rn- (VI I)
Иптастся, что при равных числах Фруда коэффициенты остаточного сопротивления модели । натурного судна равны между собой
С км = Cru при Ггм 1-г„. (\ 1.2)
I Таким образом, оститочиое сопротивление пересчитывается по кубу масштаба, Tie,
Run — Яям1.к3- (VI.3)
Испытания модели в опытовом бассейне выполняются в необращенном дв 1женнн Щпроцессе опыта измеряется величина буксировочного сопроп влсиия А? н скорое > буксировки модели о. В соответствии с принятыми предположениями пог.ерхность ^Кели должна быть гидродинамически гладкой, а течение в пограничном слое турбу-лентным Вода в бассейне должна б лть спокойной.
I Модель для испытаний в опытовом бассейне обыч i о изготовляется из смеси пара-^Ва и натурального воск» (90 : 10), что обиегчает обработку се поверхности и поз-•Воля т производить переделку модели при отработке обводов корпуса. Для обсспе-Мп1я общей прочности предусматривают специальный деревянный набор — скель-toi Поверхность изготовленной моде; и полируют. Шероховатость поверхности не превосходит I —15 мкм Допускаемая волнисюсгь поверхности вследствие ошибок Ври н 1готовлепн1| модели составляет 2а 0,2 мм. Модели могут изготовляться и
315
из дерева, поверхность их окрашивают и полируют. При необходимости и ц в течение длительного времени (например, эталонных моделей) применяются ,нй массовые модели. 07'
I 1адежпость результатов буксировочных испытаний в значительной мере зцщ.-от правильного выбора размеров модели. Обеспечение устойчивого обтекания м С?1Т более точного воспроизведения обводов корпуса и выступающих частей и размг-щ,.' *’• внутри модели экспериментального оборудования требует возможно больших е .’1Ч меров. Ограничение в размерах накладывает влияние на обтекание модели дна । нок бассейна. Из-за стесненности потока увеличивается средняя скорость об щЛ ния и,- как следствие, сопротивление: сравнительно более сильное изменение !0Д' ной скорости и давления в кормовой оконечности вызывает увеличение conpoTi ния давления вязкостной природы, особенно при наличии отрыва пограничного с.ю' в корме. При высоких относительных скоростях буксировки влияние дна и осоСеццЯ
Рнс. VI.1. Влияние ограниченности канала на остаточное сопротивление
--------опытовый 6: <-:ейн для испытания полноразмерных моделей (Н = 7 м, b = 15 м);-----малый опытовый бассейн
(/7 = 3 м: Ь — 6 м).
стенок бассейна приводит к изменению характера волнообразования, посадки и ходового дифферента модели и к увеличению волновой составляющей сопротивления.
Степень изменения буксировочного сопротивления (рнс. VI. 1), по испыта! ням масштабной серии моделей судна «Внктори» в бассейнах с различным поперечных е чением [37 ] из-за влияния дна и стенок канала определяется следующими давни 11 коэффициентом стесненности потока mt = где ым площадь наиб и>-
шего сечения модели; Sj- — площадь поперечного сечения бассейна, или ко ф и-цнеитом т2 — V1(LST), где V — объемное водоизмещение модели;
соотношениями между шириной модели и бассейна ШЬ, осадкой модели и глх ной бассейна ТН\
числами Фруда, рассчитанными подлине модели и глубине бассейна, Ргм « FiI}, числом Рейнольдса и формой обводов корпуса.
Для определения допустимых размеров модели при испытаниях в глубоково. ш-'Х бассейнах рекомендуются графики (рис. VI.2), разработанные Я. И. Войткунскп'1 [II]. Для приближенных оценок допустимых значений т, можно воспользоваться соотношением /rij ? 0,006 при 7. О 8 рл5'г.
В соответствии е этими данными в современных крупных опытовых бассеГн х длина моделей принимается равной L— 6-5-7 м Иногда, например при нспыта н> моделей крупнотоннажных танкеров, когда требуется обеспечить приемлемые
316
Bein'* моделей гребных впитое, возникает необходимость увеличения длины модели Г, /1= 8:10 м В этих случаях, я также при испытании моделей с необычными со-tjiomeiниямн главных размерений требуется учет ограниченности поперечного се-чеЦ(я бассейна.
К Существует два подхода к оценке влияния ограниченности сечения канала: редслснис надбавки к сопрот 1влеиню AR или корректировка скорости обтек:,, ия Идо» V путем введения поправки Ап. На практике более распрос1ранен второй подвод. Для определения поправки к скорости Дп при малых относительных скоростях буксировки могут быть использованы форму ла Шустера
Да v
1 — mi — Fr//
+ (l_pv//?)2,3FI'°
(VI.4)
второй член, учитывающий влияние мелководья при малых’отпосительиых скоростях, цож т быть в ней опущен) и формула Тапнгучи и Тамура
(VI.5)
Др/р=
Вс. VI.2. Графики для определения допустимых размеров моделей при испытании в глубоководных бассейнах: а—влияние Н'Т', б — влияние ЫВ.
Обе формулы учитывают лишь увеличение скорости потенциального потока из-за ^К'киии границ. 13-й МКОБ для приближенной оценки влияния ограниченности Сечения канала рекомендована формула Скотта [881. учитывающая влияние стенок Мссей ia на волновое сопротивление,
\v;v = k (V/S, ) b (BJL2/S7 ) (VI 6)
Коэффициент /q определяется с помощью графиков (рис VI 3) Коэффициент k2 рас нтывастся по формх'ле Ьг 2,1 (Fr 0 22) при 0,22 < Fr < 0,38; при Гг < < 0,22 = 0.
I Формула (VI 6) применима для моделей длиной 3,5 м<1<9 и при отношении ширины бассейна к глуби! е Ь.'Н — 2.
Наиболее важной задачей методологии буксировочных испытаний является обеспечение идентичности режима течения в пограничном слое модели и натуры. В иатхрных условиях Re 10е-т-10’ турбулентный режим течения вдоль всей поверхности корпуса обеспечивается естественным образом При испытании модели 1Кпытовом бассейне пограничный слой неоднороден: в носовой оконечности сутце-Ьвуют участки ламинарного и переходного режимов течения.
/ г Устойчивость трехмерного ламинарного пограничного слоя модели судна определяется не только Re и особенностями продольного распределения давления, но К в значительной мере зависит от поперечных i раднеитов давления. Профиль средней скорости в этом случае имеет iipocipaucTBcunyio форму (см. гл. ill первого раздела) и развивающиеся в слое возмущения распрос раняются в различных направлениях I но его толщине. В зависимости от условий об екаиня переход может определяться
317
как потерей устойчивости профиля скорости основного так и вторпи,, v.'vq течения Поэтому границы ламинарной области моделей судов имеют слои-лц/1 очертания (рис. VI .4). а критические значения чисел Рейнольдса Rex х/Су характеризующие максимальную протяженность х'£ ламинарной иблКТ|;
О L—I---1------1--1--1--1------1-----’-1------1---1--1--1--
г 5 ю _ 15 го
Re-10 е
Рис. VI 3. Графики для определения коэффициента kt в формуле (Vl.fi)
(рис. VI.5). изменяются в достаточно широки* пределах для судов различных обводов. При обтекании моделей судов острых обводов роль пространственных эффекте
относительно невелика, и переход в пограничном слое определяется в основном ро-дольным распределением давления. Наличие отрицательных градиентов давления
в носовой оконечности в этом случае затя гнвает переход, и критические значения чисел Rex (рис. VI 5) намного превосходит соответствующие значения для пластины.
Рис VI 1 Границы области ламинарного течения на модели судна
Ряс. VI.5. Критические значения числа Рейнольдса при буксировочных испытай * полноразмерных моделей.
I — Л = 0,689, t/И = 7.29. U-образвыс носовые шпангоуты; 3 — С 0.582. L/D
V образные носопыс шпангоуты; 3 — б 0.582; L/D = 7,29; буаьбовые нпсопыс шнэнпо
4 — 6 0.789; ЮН =* G.6I; U-образныс носовые шпангоуты. 5 — 6 0.789; LID б 1
V-образиые носовые шпангоуты. 6 —6 0,687. L/D =7,17. модель судна сВнктог
По мере увеличения полноты носовой оконечности усиливается влияние пространственности течения Во многих случаях профиль скорости вторичного течения, им> щий точку перегиба, теряет устойчивость раньше, и переход происходит при мень шнх числах Rcx. Этому отчасти способствует и характер изменения продольного р
ла
проведения давлений при обтекании тел с Затупленной носовой оконечностью. Вблизи свободной поверхности на переход в пограничном слое дополнительно оказывают влияние возмущения. возникающие от местного разрушения волнового профиля вблизи форштевня, в результате чего илчиная от форштевня в поверхностных слоях обычно [развивается клинообразна и турбулентная область (см. рис. VI.4). Переходная область течения при испытании полноразмерных моделей (L — 6-S-8 м) в диапазоне относительных скоростей, представляющем практический интерес, невелика. Однако в опытах с малыми моделями протяженность ее может достигать 15—25%.
Вследствие неоднородности режима течения фактическое сопротивление трения моделей, даже предельно больших размеров, меньше турбулентного трепня, принимаемого при анализе результатов буксировочных испытаний. Эго приводит к ошибкам
Рис. VI.6. Влияние ламинарного режима течения в носовой оконечности модели на результаты буксировочных испытаний: а. — модель судна острых обводов (6 ~ = 0,65; Ъ~ 5,0 м); б — модель судна полных обводов (6 = 0,85; L= 7,0 м). / —' бел турбулизатора: 2 — цилиндрические штифты d = 3,0 м: k — 2,5 мм (по методике МКОБ); 3 — проволочный турбулизатор d = 2.0 мы: ~ 0.05 L\ 4 — проволочный турбу-Вйзатор d = 2.0 мм; 0,075; & — ди.1 проволочных турбулизатора: d — 2.0 мм: = >0.075 L и d 1,0 мм; х^ 0.025; -—ф- — цилиндрические шпангоуты, малый радиус закругления скулы вдоль носового заострения; —О— — цилиндрические шпангоуты, эл-
I лнптичсские носовые обводы.
Vb определении остаточного сопротивления и к недооценке буксировочного сопротнв-Слепня судна Рассчитанные по формуле Сц = 2/?к/(р^й) коэффициенты остаточного •'сопротивления, особенно при малых числах Fr оказываются заниженными, а иногда принимают отрицательные значения (рис. VI.6, о). В случае испытаний моделей су-дов полных обводов, при обтекании которых возможен отрыв пограничного слоя в ио-совои оконечности, наличие ламинарного участка, наоборот, может вызвать увсли-I'lenne сопротивления по сравнению с турбулентным обтеканием (рис. VI.6, б) по-Гбчо тому, как это наблюдается в опытах с шаром или цилиндром
Г Стимулирование более ранней турбулизации течения в пограничном слое достигается применением различных мер искусствен пой турбулизации созданием искусствен тых возмущений непосредственно в пограничном слое с помощью расположенных в носовой оконечности модели плохообтекаемых дискретных элементов или по-лосок с распределенной шероховатостью либо повышением степени начальной турбулентности набегающего потока В опытовых бассейнах как правило применяются керы турбулизации первого типа. При разработке их решается задача о выборе фо| мы и положения элементов, обеспечивающих переход в пограничном слое в заданием сечении подлине модели во всем представляющем практический интерес диа-пазопс скоростей буксировки при минимальных размерах и минимальном собственном сопротивлении Данные об эффективности и величине сопротивления тур-1 бхлизаторов различной формы, полученные Тагора [94 | в результ те эксперименталв-, ,|оги исследования искусственного перехода па крыловом профиле, представлены на H»ie \ 1.7. В практике отечественных и ряда зарубежных опытовых бассейнов обтлп о
319
Рис. VI 7 Основные типы турбулизаторов, значения чисел Re.v, определяющие фиксацию перехода в пограничном слое в месте их установки (а) и коэффициент сопротивления турбулизаторов Ст (б).
Цилиндрические штифты la — kid “ О.Б; 16—kjd — 1.0; 1в — kid = 2.0. Пластинчатые штифты: 2а — k/b = 0,6 (А — 1.6 мм; b — 2,5 мм; t — 1,0 мм): 26 — k/b = 1,0 (А — 2,5 м*: Ъ 2.5 мм: / “ 1,0 мы) Треугольные штифты 3. Проволочные турбулизаторы: 4а — <1 ' » 1,0 мм 46 — d 1.5 мм ыы — площадь максимального поперечного сечения гур< затора. Кед—I'fcA/V.
320
0.05/. При наличии значительного подреза форштевня (суда ле-турбулнзатор и конце подреза.
М^сгодьзуются проволочные турбулизаторы, устанавливаемые по периметру носовых ^ангоутов. Такне турбулизаторы обладают высокой эффективностью (рис VI.7). V, ||ilKo И собственное сопротивление нх сравнительно велико Для безграднспгного И1',1С nisi (продольноеобтекание пластины) цымстр проволоки </, обеспсчиваюиши перс W хот г* пограничном слое 11 месте ее установки, определяется из условии Кед, vtid с
L 400 или vd.'v 900 (с'д — скорость в ламинарном пограничном слое на рассюя-Н1И1 № v ~ скорость буксировки модели). Иногда оптимальный диаметр и но-пожёние турбулизатора по длине тел различной формы находят методом проб.
Для выбора диаметра турбулизатора при испытании моделей судов могут быть Жспользоваиы графики, показанные на рнс. VI.8. Па моделях судов острых образо-EaiiBii н умеренной полноты, обводов турбулизатор устанавливается, как правило, па расстоянии х, 0.05/ 1
нового плавания) дополнительно устанавливается На моделях с развитыми бульбами, вынесенными за носовой перпендикуляр, дополнительный турбулизатор (обычно меньшего диаметра, чем основной) располагается в районе нулевою шпангоута или максимальной толщину бульба.
[Сопротивление турбулизатора \R t при обработке результатов испытаний полноразмерных моделей обычно не учитывается, поскольку оно относительно невелико н отчасти компенсируется уменьшением трения ARf, по сравнению с турбулентным за счет ламинарного течения па участке поверхности Al>t расположенном перед турбулизатором
АСГ/ = [СТО, (Rej CfoMReJ] <J <VI.7> -
где Re/. = Xfcf" v — число Рейнольдса, вычисленное по средней протяженности ламинарной области.
[ При выполнении исследовательских работ и вюсобет пости при испытании малых моделей (/ 2+4 м) такая оценка необходима. Надбавка 1
жет быть рассчитана с помощью зависимости. полученной А Ф Р С Громовым,
ЛС<1 pv-U.2
Рис VI.8 Зависимость эффективного диаметра проволочного турбулизатора d от длины модели н Fr.
к сопротивлению модели АС,/ мо-Пустошны.м, и
-(0,6 : 0,7/-^-,
(VI.8)
где /—длина турбулизатора
Исследования пограничного слоя моделей судов |3б| показывают, что в неко-Jropo । области, расположенной вниз по потоку за проволочным турбулизатором, касательные напряжения т0 превосходят получаемые в условиях естественного перехода вследствие более интенсивных пульсаций потока Величина избыточного местного сопротивления трения модели Ас/ оценивается с использованием графиков зависимости Дс/ — f (Rex, Дх), показанных на рис VI 9. Для моделей длиной L > 5 м этой надбавкой можно пренебречь.
Суммарная поправка ACr на величину которой должен быть уменьшен коэффициент остаточного сопротивления модели, равна
I ДСк = ЛС-„-ЛС/.х. (VI 9)
(’ Для моделей судов полных обводов по мере увеличения их полноты водоизме-Вшя турбмлиэптор цилс.-ообрино смещать в корму (Ах< 0.075/.) Но при очень полной носовой оконечности и цилиндрических обводах обычное расположение Урб'-лнзатора может оказаться неэффективным ввиду возможности ламинарного отрыва в районе скулового закругления (перед турбулизатором) В этом случае более |эффе\ ивиы турбулизаторы в виде отдельных проволок, располагаемых в непосредственной близости к форштевню нормально поверхностным линиям тока
И П р Я Ч Ройткунского, т. 1 321
(рис VI Io) и стимулпруюшях потерю устойчивости вторичного потока 3t. t„, лист предотвратить возникновение ламинарного отрыва и одновременно суще п „ ' у мсиыпить сопротивление гурбулизатора.
В ыруЛежпых бассейнах получили распространение штифтовые <кп<ин. 1? турбулпмторы. Штифты цилиндрической формы диаметром d - 3.0 мы н пц.,,,
JQ. • 10J
Рис. V1.9 Влияние проволочного турбулизатора на величину коэффициента избыточных касательных напряжений иа поверхности модели — с,.
Cfd — коэффициент касательного напряжении ла турбулизатором: г. — кодффнинеи тольП'Н и напряжения при турбулентном режиме течения; Лг расстояние от турб ул из ;п ..»
k 2,5 мм располагаются н непосредственной близости к форштевню па расстг ч пни Лс. зависящем от угла входа грузовой ватерлинии (рис. VI.11) Штифтовые т' р булпзаторы имеют меньшее собственное сопротивление (от 0,5ло 2,0 % от полного > противления модели), но они менее эффектив im по сравнению с проволочными Н
Рнс. VI 10 Турбулизация погра(ичпого слоя моделей судов различных тип1' а — традиционное расположение проволочного турбулизатора; б разрез) ' проволочный турбулизатор при испытании моделей с полными носовыми обводами
следпне голы предпринимаются попытки применения двухрядных цилиндрически' штифтовых турбулизаторов, располагаемых в шахматном порядке, или пластин। тых штифтовых турбулизаторов (см рис VI.7).
При испытаниях в опытовом бассейне вода не остается невозмущеппой. Помп*1 волнообразования, которое гасится с помощью бортовых и торцевых волногасителе за моделью вдоль линии ее буксировки развивается вязкостный гидродинамический
322
If1, В результате этого каждый последовательный пробег «одели производится условиях встречного течения, сохраняющегося в течение некоторого времени после КЕдврашепия модели в исходное, положение. Остаточный ноток может приводить Кпо|решпостяи при определении сопротивления, особенно при испытании моделей Гггдов полных обводов, относительные скорости буксировки которых иевелики. If целью уменьшения этого неблагоприятного эффекта в отечественной практике уста-|№1 |»з зтея оптимальные интервалы между пробегами (обычно 5—10 мин). Развитие гидродинамического следа приводит и к возникновению пульсационного дни-К|ця жидкости. Степень начальной турбулентности в крупных опытовых бассейнах ^я-пвляст с 0.10-5-0,15 % (при скорости движения модели и» 1,0 м с). Ее налп-чн< пособствует турбулизации пограничного слоя модели, поэтому испытания реки 1«ентрется проводить, начиная е более высоких скоростей
Рис. VI.И Рекомендации МКОБ пи расположению на модели цилиндрических ' штифтовых турбулизаторов
Для if < 10” штифты устанавливаются насколько возможно ближе к форштевню.
1 Iomhmo рассмотренных выше факторов дополнительно можно огмешгь пекото-рыэ вторичные эффекты. Вследствие возвратно-поступательного движем (я модели, а ^кже из-за копиек гпииого обмена, обусловленного нарушением темперитурпого рав- повесня (рис \ 1.12), в бассейне могут возникать довольно сложные медленные цир-к ул я иконные течения. Среди вторичных эффектов могут иметь значение длппно-^Ксрподцые водны, сохраняющиеся при некоторых опытах и течение длительного вре-Вк'ип [601.
II и буксировочных испытаниях не воспроизводятся конструкции корпуса, расположенные выше грузовой ватерлинии, поэтому сопротивление воздуха не моде-Ктируется и изморе) пая сила сопротивления считается обусловлет ион гидродииами чс кпми эффектами. При испытании мотелей быстроходных катеров с целью нсключе-» ния возможных погрешностей перед моделью па небольшом отстоянии от свободной поверхности устанавливается козырек (ши ок).
Буксировочное усилие в принципе должно быть приложено в точке, соответствую- шей приложению упора. Отступление от этого требования при испытании моделей I Во |опзмещлю|цпх судов не приводит к заметным он ибкам, но для моделей бистро- хо.пи х катеров оно недопустимо
| Обычно буксировочные испытания включают испытания «голого корпуса м< 11 Делп п| п р; зли11 >ix услог.1 ях экенлуат. цни (судна с полным грузом и в балластном | переходе), а также при водоизмещении, соответствующем заранее заданным уело I РВмям натурных испытаний.
II
323
Помимо буксировочного сопротивления измеряются посадка н кодовой .цфи., рейт модели, а кроме того, определяются линии ток» п районе скулового зиктм,1с’ нпя Фиксируется температуря воды в бассейне (до и после испитапни).
Для определения сопротивления выступающих частей /? Р дополнительно щ-щ, тывается модель с выступающими частями, к числу которых относят все достаточно крупные конструкции, выходящие за пределы обводов корпуса (выкружки п кри-,. штейны гребных валов, гребные вады. рули, скуловые и вертикальны 1 кили, прц,.ч пики системы самонроточпой циркуляции) Значение Rдр определяется согласно завш-ц. мости R.ai> = /?„ ,, - Rr „
Рис. VI. 12. Изменение температуры воды по глубине в опытовом бассейне в процессе. проведения испытаний.
— — — До исшлаиий; ------- после испытаний.
Рис. VI. 13. Результаты буксировочных испытаний.
/ — модель с выступающими частями (выкружки и два руля); 2 — «голый корпус»: 3 нвд блика нв сопротивление выступиющнк частей С др.
В качестве примера на рис. \ 1.13 приведены результаты типовых буксировочных испытаний модели дву хвального судна в виде зависимое гей от числа Fr коэффициентов остаточного сопротивления «голого корпуса» и корпуса с выступающими частями, а также надбавки на сопротивление выступающих частей
С’др
^11. Ч --- ^?г. к
pn2S’r. к/2
(VI. 10)
где Ь1Г. „ — площадь смоченной поверхности «голого корпуса».
§ 23. МЕТОДЫ ПЕРЕСЧЕТА СОПРОТИВЛЕНИЯ МОДЕЛИ
НА НАТУРНОЕ СУДНО И ПРИМЕРЫ ИХ ИСПОЛЬЗОВАНИЯ
В соответствии с принятыми в методе Фруда допущениями сопротивление судна R„ рассчитывается по формуле
Rn = ^Fo„ + < W — R/-u)m = A?foh +
+ при С'и = vM и'1/к, (VI.II)
гм к
где тм п ’,’ц — удельный вес пресной и соленой морской воды соответственно; к Еч'/.и — масштаб модели, ппдекен «и* н «м» обозначают соответственно патурш судно и модель.
Для определения сопротивления трепня экви-г. ентной пластины RrQ Фрудсч была предложена эмпирическая зависимость (111) В таком виде пересчет coi.prTi г
324
Имения Л° середины 60-х годов применялся в большинстве европейских опытовых Tftic :йи«»в.
С некоторыми изменениями методика Фруда и в настоящее время повсеместно Bien дуется опытовыми бассейнами Пересчет обычно (ропзводится в виде безразмерных коэффициентов согласно формуле
6Н — (.ч—(C/.-ft(Re>|) Cfn (Ren>| |- Cap F C.i =
= Cp0 (Re,,} + CIiv + Сдр + Сд при Fr,f = FrM.
(VI 12)
где С. Ср0 и Сц соответстпе! но коэффициенты полного сопротивления, сопротивления трепня эквивалентной технически гладкой пластины и остаточного сопротивления, Re — eL/v число Рейнольдса, рассчитанное ио длине модели или судна
(по действующей ватерлп! ни)
Поскольку схема пересчета, основанная на разделении полного сопротивления п-i W независимые между собой составляющие, относится лини, к сопротивлению I воды собственно корпуса судна («голого корпуса»), при использовании ее вводятся •дополнительные слагаемые, учитывающие сопротивление выступающих частей Сдр.
и так называемая надбавка па влияние шероховатости обшивки корпуса Сд.
е | Сопротивление выступающих частей корпуса судна определяется по данным модельных испытаний согласно (VI. 10) Составляющая Rap включает силы вязкостного происхождения и коэффициент ее Сдр должен изменяться при переходе от модели к натуре С целью уменьшения влияния масштабного эффекта при пересчете Сопротивления выступающих частей рекомендуется принимать значения Сдр, полу-чс util? при наибольшей скорости буксировки модели.
г Введение надбивки Сд обусловлено как причинами физического, так н методоло-Иического характера. С помощью ее учитываются невоспроизводимые в условиях модельного эксперимента дополнительное сопротивление, вызванное влиянием шероховатости наружной обшивки корпуса, сопротивление воздуха надводной части судна it одновременно корректируются погреишостп, обусловленные упрощающими пределе ожеииями, принятыми в методике пересчета сопротивления, связанные, главным I образом, с иедос аточио точным учетом масштабного эффекта вязкостных составляю-
щих сопротивления. I (адбавка Сд обычно назначается с использованием статиети-| четких данных для близких по силу и размерам судов, получаемых путем сопостав- лення прогнозируемой скорости судна и скорости, полученной при ходовых псныта-•ннях, и поэтому оiчасти учитывает также п масштабный эффект пропульсивных ха-|ЬктеГистпк. 'Гакам образом, надбавка па влияние шероховатости является, по-
рущестну, корреляционной поправкой, применяемой для приведения результатов Пересчета буксировочных и самоходных испытании к ватерным условиям Величина Ьс зависит от длины корпуса, формы обводов, принятого экстраполятора трения, числа Fr, а также от особенностей технологии строительства судна н т. и В нско-Втирых случаях опа может принимать даже отрицательные значения. Применительно к отечественной практике |прн использовании в качестве экстраиолятори трения формулы (11.4)] значения Сд для характерных типов морских судов изменяются в следующих пределах:
Т.м С„
50-150 0.4-10 3-(),3-1(1 '
150—210 0,2-10 '
210 250 0,1-10 •’
В 250 -300 О
300 350 — 0,1-10 3
350 150 0,2 10 3
Значения надбавок Сд дли речных судов изменяются и пределах:
В I для большегрузных судов внутреннего н смешанного плавания |6 0,8; Fr
|С 0.2) Сд = (0.5^0,7)-IO-3
| j для мелкосидящих речных судов и барж (Л 0,82; Fr^O.18) Сд — К- (П 7 :-1.0) 10 я, а при наличии волнистости пли бухтиповатости обшивки Сд -
(0,9-т-1,2)-1(Г3. Подробные сведения о корреляционных надбавках, принимаемых ^зарубежных опытовых бассейнах, содержатся в |22, 161
325
В качестве примера в Табл VI I приведен расчет сопротивления и буксир,,, ночной мощности судна
/? = Сре«й'2; (VI и,
Рр = Цц = Срп3Й/2. (VI 11)
В Cobcickom Союзе температура воды в натурных условиях принимается рани и t 4 С. за рубежом пересчет обычно выполняется для t — 15°C. Плотность м ;; ской воды принимается рн -- 1025 кг.'м3.
Сопротивление пересчитывается для идеализированных условий, прслпо.-. гается что корпус судна свежеокрашен, влияние ветра н волнения пренебрежимо мало
Для определения коэффициентов сопротивления трения эквивалентной и.;, стннц в опытовых бассейнах Советского Союза используется формула Прандтля Шлихтиига (II 4).
В опытовых бассейнах США и ряда других стран получила распространение зависимость Шенхерра (11.3), известный как «кривая АТТС-47» Вследствие этого вс-
Рис. VI. 14. Результаты буксировочных испытаний масштабной серии моделей судна типа «Виктори*.
V = 15 020 м’. L - 135.3 м. Л 0.671 Л/В » 7.17. В Т 2.18 I - кривая 11 ТС; .’ кривая Прандтля — Шлихтинга
личины коэффициентов Ср0, используемых в качестве экстраполяторов трепня в ра< личных бассейнах, несколько различаются, особенно в диапазоне Re. соответствую тих условиям модельных испытаний.
Наиболее существенным недост; тком используемой в настоящее время методню пересчета сопротивления модели на натурное судно следует считать включение в остаточное сопротивление части сил вязкостной прпродг (сопротивления формы) п моде лпроваппс их по критерию гравитационного подобия без yneta их зависимости о числа Rc. Как видно из приведенных на рнс. VI. 14 результатов испытаний масштпб ной серии геометрически подобных моделей сухогрузного судна, коэффициенты ост. точного сопротпвлс! ня С1{ заменю уменью. ются по мере увеличения длины ыодел! даже в сравнительно небольшом диапазоне чисел Re, соответствующем условиям модельного эксперимента. При переходе к натуре эти различия более выражен особенно для судов полных обводов (6 > 0.В0)
При уточнении методики пересчета использован полученный с помощью теории турбулентного пограничного слоя вывод о том, что в случаях плоского и осеспммс тричпого обтекания коэффициент вязкостного сопротивления подчиняется аффт пой зависимости (II 24), т е Су (1 к) Сгл
Возможность применения этого соотношения для экстраполяции вязкостного сопротивления подтверждается результатами экспериментального исследован и вязкостной составляющей сопротивления путем измерения характеристик поток в следе и данными испытаний дублированных моделей судов в области чисел Re получаемых в лабораторных условиях
При разработке стандартного экстраполятора трения пластины было устано лево, что применяемые бассейнами экстраполятиры определяют слишком низки 326
^Licinin коэффициентов трения при чнс.-.дх Re < К’. Это и. ,псстрпрус:ся ня
VI 15 результатами анализа МПСШТабпых серии |37] в предпиложснн.п об гф Kiiiiom измепспин вязкостного сопротпвлсмия Foci,мой конференцией опытотлх бас Вейнов (8й МКОГ») была рекомендована затчи ь-дость. названная скрнной 1ТТС».
1 С/о = 0,075/<lg Re 2)-. (V1.I5)
у га формула не имеет фнзнчехсого обоснования, по обеспечивает согласование ре-згльтагон буксировочных исиытппнй в больших и малых бассейнах
’ ' Формула (VI 15) принята в качестве стандартной при провелеивн совместных рвбот странами СЭВ и СФРЮ.
В уточненной методике протезирования сопротивления судна по данным модельных испытаний. рекомендованной 15 п МКОБ, использован принцип разделения сопротивления на две независимые составляющие /?у i 7?ц
С - Сд „ (Re)-Ь Cue (Ьг> - (I +/г)Ст0 + Сй'о- (VI.16)
I Рис. VI. 15. Анализ вязкостного сопротивления масштабных серий судов.
j ] крнмпя коэффициент» сонр/линлеиня трепня пластинн по формуле Прлндтля 1||лих-тнига 2 — откорректированная кривая сопротивлении трения иластиин СpQ "F
j — вязкостное сопротивление серии модглеГ. судка * Врангель*; Т -- то же но д»н-Ким буксировочных испытаний дублированной модели: 5 — вязкостное сопротивление серин Наслсй судна «Никтари»; ДС/.-ц — поправка к кривой Прлндтля ТПлихтнига (по данным Г анализа результат» исиытппнй масштабных серий)
[Птд расчетным вязкостным сопротивлением СГн понимается буксировочное сопро-тпнлет не при милых числах Гг. когда влияние волнообразования на сопротивление судна про сСрежнмо мало Предполаг.чется. что вязкостное сопротивление СГп не завис и от чисел Fr. Кр/ффи (нен пропорциональности k в (\ I 16) учитывающий ВЛНЯ1 и» формы на вязкостное сопротивление, определяется по данным букспровоч-рых (езьпапий модели в «доголновом» диапазоне чисел (рнс \’1.16) как отношение
k (С —(./о) С[о (А I 17)
Т«коп спо об онре .слепив вязкостного сопротивления ipeuyeT обеспечения иилеж-ой турбтлнтаипи пограничного слоя мпдели при малых скоростях буксировки. Kin резздьтаты буксировочных испытаний в области доводновых чпес.т Гг не вполне шлежн коэффициент k может бьпь най ci по сопротивлению модели i шеренному при । ссколько более высою х числах Г г с помощью зависимости
А-=-|((7 -Си.)/Сл„| - 1. (\ I 18)
г.к Си вГг" коэффициент волнового с< ротивленпя |83| Показатель степени и 1 в случае fi < 0 75 и п - 6, если б > 0,75 Коэффициенты а п к определяются Ктодом нацмепыппх квадратов но данным измерений букепровочиого сопротивления в ди; пазопе малых чисел Fr.
327
Pg. кВт см — ос ел Xi с о 17 О1 -г г- {?J С <ст х ст. — со ст 10 « - ОС- СТ СЧ ”1’ II р II м е ч а II н «• V = 117 700 и*. Лц.'д = 230 м. Т = И... м; £2 14 570 м’; 6 0.SI6: t = 4 «С; р = 1 025 ki.m’i V 1.0b 10-*. м! с. Сдр 0.05-КГ3; Сд = —0,05-10-’
/?= C-^-Q. к II сиэ СТ tC О 10 СЧ ”Г О Cl -г 'тГ 10 <х> Г' ОС СТ> •— СЧ СО *Г СО
«01 + + + — =«огз со СТ Ю О СО 1— CJ ОС — 1" Ю со V 1.ОЮ О <0 СТ оГ сч см ем” ем сч ci
«01 -0<э со ст io ст со сч -т об сч сч — — 10 10 10 Ю L.O ио О
К 1,04-10“ 1,12-10" 1,20-10“ 1,24-10“ 1,28.10" 1.32 •10" 1,36-10°
сл.|0-(по Данным испытаний) СЧ Г- СТ 10 -ef СМ ст ст -I0!"* ФС —
X lQ^?cO—’COCMC-г-? тГ 10 CD СО Г- Г- О* С О О О О О
V*. м* с® О т о X) СО CJG СО r ec CD СО 1-* О 10 ТГ — СТГО!^ |О -г 10 10 СО СО
1*. м/с Ст СТ =4 зс со Ст» 10 Р СЧ С- Ст СЧ ’Т г-се с- t- г- эс X эб
п •ч •J о ст_ ст 10 о 10 о Г~ Т 10 10 о СО t'-
328
Коэффициент Cir0 в формуле (VI. 16). характеризующий «расчетное» волновое ^противление. помимо составляющей Cir, обусловлеиппй развитием гравитацнон пик волн, может включать сопротивление от разрушения носовой подпорной во. i'!>i Cwb- брызговое сопротивление С$. а также некоторую надбавку ЛСуту. учи-Tbiu?iwuiyio изменение вязкостной составляющей в зависимости от Ft;
С» о б'ц. -J- Сув Сл 4- (\ 1 19)
В окончательную формулу пересчета в дополнение к рассмотренным выше составляющим вводятся поправки, учитывающие сопротивление выступающих частей Сдр, Сопротивление воздуха Сдд н увеличение вязкостного сопротивления в результате влияния шероховатости корпуса \Cf Для некоторых стандартных условий'
Си — I1 + Сра + С^х'о + Сдр 4- Сдд + ЛСд при Frn = FrM. (VI 20)
[Рис. VI.16. Сравнительные результаты пересчета коэффициента сопротивления [модели танкера на натуру по традиционному методу Фруда и по методике МКОБ а — модель; б — натура.
/ — полное сопретивлсяпс модели С: ! расчетное во. и вое сопротиплеиие Т-’ц-’о; 3 — пере-сче! :опротнвлсиия на натуру по методу Фруда (гладкий корпус); 4 пересчет с учетом сопротивления пыступаюшнх частей Сдр и надбавки на влияние шероховатости Сд; 5
I пересчет сопротивлении па натуру по методике МКОЬ (гладкий корпус); б — пересчет с уче-тоы выступающих частей Сдр. сопротивления воздуха Сд д н шер тховатости поверхности
В корпуса ЛСр.
Для расчета трения пластины рекомендована формула (VI. 15). но могут применят! с я и экстраноля горы (II 3), (II 4) Для определения коэффициента сопротивления воздуха (в штилевых условиях), отнесенного к площади смоченной поверхности, Sipe (лагается приближенная зависимость
-4£7Г = 4'0-3. (''121)
I
где Гр — проекция птощ.пп поперечного сечения надводной части корпуса на плОС Икост! мидсль-шнангоута В случае необходимости более точного определения Сд.4 могут быть использованы данные, приведенные в § 11, либо результаты продувок I в аэродинамической трубе. Сопротивление выступающих частей Сдр, как н в традн Цпо и ох методе, пересчета, определяется непосредственно но данным модельных нс I п 4та| ин без учета масштабного эффекта Надбивка па влияние шероховатости об-Мшнвкн корпуса рассчитывается с помощью приближенной статистической зависн-kktiII
АС/ = 1105 (/.-с//.),/з — 0,641 10~3, (VI .22)
справедливой для свежеокрашенного корпуса (высота бугорков шероховатости 1гр, == »=- 150.10" м)
В IВложенная уточненная методика пересчета сопротивления модели па натур шэе судно , беснечинает более падежное пре ick,панне сопротивления судна и позво- ляет правил!.нее оцепить роль отдельных составляющих в натурных условиях. К 329
Типовая схема пересчета «о ней длил в табл VI.2. Показанные па рис. \ | |г сопоставительные результаты перемета «голого корпусам мидели ганкерн уклзыг. 1(||' и» 3*пышенпе сопротивления судза при применении метода Фру.и и объясняю, обходнмоси. ввезеиня очень малых нлн даже с тришнсльных на б; сок на влпя п, шероховатости дли судов полных обводов.
Чстоаика MftOli не вполне строга при моделировании сопротивления it миоговальиых судов из-за возможного масштабного эффекта сопротивления ;| ступающих частей С величина которого может составлять 15—25 % к<»чфф|щ1|г.|| Г|| вязкостного сопротивления корпуса.
Трудности моделирования сопротивления выступающих частей обусловлены лымн их размерами, т е малыми зна гсииямя чисел Re и разнообразием их форм
Используя гипотезу плоских сечении, коэффициент сопротивления выступ. к> тих частей можно записать в виде
(,1Р
R ip ।
огЧ2,2 <>
+ AC’v. (VI 2 lj
где (Re} — коэффициент вязкостного t>x(1/.Re)—скороеit натекающего потосп
сопротивления сечения i го элемеч
н м’-те рлспзлож.’пия конструктив:! (Го
элемента; ft; (у)— хорда сечения элемента па расстоянии у от поверхности корпуса; АСу — изменение вязкостного сопротивления из-за перераспределения давления по корпусу в месте установки выступающих частей; Re (у) — ft,i'x \
Вязкостное сопротивление сечепиЛ конструктивных элементов, установлен! ых но потоку, при турбулентном режиме течения (в натурных условиях Re 10т 4-4-10'') может быть определено с помощью приближенных зависимостей (II 20) и > графиков (рис. 11.10) Анализ надбавок па сопротивление выступающих частей и данные теоретических п экспериментальных ir:ледованнй сопротивления крылош. профилей приводят к 3.1КЛЮЧСННЮ о наличии протяженных ламинарных и перехо пых участков в пограничном слое чх моделей. В этом случае может существенно увс личинагься eonpotпаление вследствие отрыва ламинарного пограничного слоя. Во ножные пределы изменении сопротивления различных выступающих частей н х рак 1срныс диапазоны Re показаны па рис VI 17 Стишком малые размеры модстев выступающих ч.-ччей и малые числа Re практически исключают эффективное применение средств ncKvcCTueinioil турбулизации
Есин явления отрока нет н сопротивление выступающих частей определяется силами зрения, то, учигыпая увеличение средней скорости натекающего на них п< тока па 5-8% и» .за уменьшения в натуре отио-. нтельпой толщины пограничном! слоя корпуса о б х а также влияние на сопротивление пх шероховатости, мож и> предполагать. что масштабный эффект Кдр не будет значительным. В случае уста повкп выстхнтощнх частей иод некоторым углом к натекающему потоку и возникни вепия при пх обтекании продольных вихрей дополнительное пнД)ктивноеconpoiни зеине также не имеет значительною масштабного эффекта
Методика WKOB ie вполне применима и для прогшюнроваипя сопротнвле.ч* судов, при обтекании корпуса которых возможен отрыв пограничного слоя в корме или образование интенсивных скуловых вихрей. В этом случае для вязкостного со противления не характерно свойство аффинности Поэтому при пересчете сопротин ления судов острых обводов с погруженным транцем (тнхтеровозов, речных букс, ров-толкачей) более обоснованно применение традиционного метода Фруда. Трад! ниоппый метод предпочтителен и для речных судов с полными кормовыми обводами в условиях движения пх па выраженном мелководье, когда сопротивление, вызванное отрывом, составляет большую часть сопротивления формы. Роль кормового отрыва в вязкостном сопротивлении современных морских транспортных судов с высокими коэффициентами полноты видоизменения (б > 0,80) незначительна; доля сопротивления ог скуловых вихрей также, как правило, невелика. Хотя закон и? мепеиня C,(Rc) не установлен, можно полагать что пересчет сопротивления таких судов ио формуле (VI 16) пе приведет к большим ошибкам.
При иренношровапни сопротивления н.!охооб|еклемых плавучих средств, когда сопротивление. обусловленное отрывом, и волновое сопротивление составляют о<
330
новиую часть сопротивления, а потери на трепне относительно невелики, прппн мается предположение и постоянстве коэффициенте полного сопрел пиления Сп — К См ври ГГц Ргм Тогда сопротивление суя на
! ^’и - См (Ри^|'|/2) Vr2,-3 при Сц — t'yj Г I к, (vl.24)
т с полное сопрел явление переспи ты няетси ио кубу масштаба
R» (1 к3) Км (рн ’<>„) ври i'u = vM (VI .25)
‘Рис. VI.17. Пределы изменения коэффициентов сопротивления различных типов «изолированных» выступающих частей при модельных испытаниях и в натуре.
71*— кривая турбулентном» трепня пластины [формул* <11.4) L ? — кривая ламинарного трс* ним пластины* 3 —••— пределы изменения вялкоггиага €1>нрптив.1ения лапы кронштейна при числах Re, соптпстггвуцицик условиям буксировочных испытвннЙ и натурным условиям
— то же руля: .5 --------ти же выкружки: • — ре-
I I зультагн продуман нзал * ров.»иных моделей рулей в пэродимимической грубо.
В качсстс характерной площади принимают площадь максимального поперечного II сечения е>и, либо объемное водоизмещение Vй При модельных испытаниях плохо-Вобтекаемых тел должен быть обеспечен докризисный режим обтекания.
Если плохообтекаемос тело движется с малыми скоростями пли глубоко ногру-жеио под свободной поверхностью (волиообрязоваипе пренебрежимо мало), то его сопротивление автомодсльпо и
I /?„ = (1/к I A>M(uJ г\,)(Рн;(.ы)
IV 1.26)
Форму а (VI 26) может быть применена и для определения сопротивления воздуха по данным испытаний модели судна в аэродинамической трубе
§ 24 МЕТОДЫ ЭКСПЕРИМЕНТАЛЬНОГО ОПРЕДЕЛЕНИЯ СОСТАВЛЯЮЩИХ СОПРОТИВЛЕНИЯ
В практике рабо)ы опытовых бассейнов наряду с буксировочными испытаниями применяются экспериментальные методы непосредственного определения составляющих сопротивления вязкостного Ry , сопротивления, обусловленного развитием скуловых вихрей Rt, и волнового
Экспериментальное определение вязкостною сопротивления Применение за [кона количества движения к объему жидкости, ограниченному стенками бассейна.
331
свободной поверхностью воды и поперечными плоскостями Sn н S (рис. VI.IS) следующее соотношение для полного сопротивления:
/? /?ГН /?и- J j (/'с I (>1 Л )<Л j j(/’+ (\ . St)
S„ s
С целью исключения из полного соироп1влепия волновой составляющей рассматрц. вае|ся условное потенциальное течение, характеристики которого (t>T(. i',M, о;1 и р j вне пограничного слоя н вязкостного следа щ моделью совпадают с характеристик- ц исследуемого поюка (ev, v,,. vz и д), Такое течение может бцть построено. если н и Л, разнес 1нть систему неiочников, создающих волновое сопротивлениеRiri 11 тягу А',,,. •
। + Яист~ | ( > + Р-%) | j (Pi - I* (VI 2S,
Предполагаемся, чю волновое синротпиление этих источников /Лг| А*и
Рис. VI. 18. Схема экспериментального определения вязкостного сопротивления
Дополнительно полагая, что в пределах вязкостного следа р = р,. исключав в (VI.28) скорость «у. с помощью уравнения Бернулли и пренебрегая квадратам! поперечных скоростей, подучаем
с> * тН J • ( * 1 - Лр - I I -4//- А/>)1 *. (VI 2У)
где \П — (По — //)'|(р 2) о„| — потеря полного капора в вязкостном следе. //,,
Ро (Р 2) с2,. а II - р + (р'2) а2 (где о2 = о2 + т>2 + е2); Др (р
— l'L| перепад давлении, определенный с помощью трубки Пито
Прандтля или многоточечного зонда. Выражение для коэффициента вязкостного со противления Ср в форме (VI.29) получено (J. II. Орловым |30| и Шарма 1901 Несмотря на ряд предположении, найденное таким способом вязкостное сопротивление хорошо согласуется с результатами буксировочных испытаний
Для обеспечения приемлемой точности результатов обычно требуется определить величину полного напора Н и давления р в.390—400 точках в пределах спутной струн Поскольку измерения характеристик потока в непосредственной близости к поверхности воды ненадежны и поэтому необходима экстраполяция результатов, дополни тельно в процессе испытаний следует фиксировать волновой профиль с„ (у) в исследуемом сечении хц Характерные эпюры потерн полного напора ЛИ (у) для судов ра личных типов, которые, как видно из формулы (VI 29). определяют основную час исследуемого сопротивления, показаны на рис. VI. 19. Для судов острых обводов <и имеют такую же форму. как и при обтекании крылового профиля При обтекании м< делен танкеров с достаточно высокими коэффпцнеитамн полноты водоизмещения а также, быстроходных контейнерных судов эпюры ЛИ (v) вблизи свободной повер пости имеют «трехостровнук» фирму (рис. VI 19,6. в). Цсшрнлышя их част!
332
условлена вязкостными потерями; боковые ветви эпюры а», характеризуют допол-|цтслы111е потери напора, вызванные образованием турбулентного следа при разрушении полипного профиля (подпорной волны в носовой оконечности танкера или бныз-ов<н'| пелены не модели контейнерного одна. рис. VI 20) Такны образом измерение характеристик потока н следе за моделью позволяет определить по только вязкостное противление тела, движущегося по поверхности жидкости, но и некоторые составляющие сопротивления, связанные с влиянием свободной поверхности- сопротивление от разрушения подпорной волны, брызгоиое сопротивление. Метод позволяет Также оценить зависимость оч чисел Fr составляющей вязкостного сопротивления, буслоиленнои отрывом погока при обтекании транца (см. рис II 35).
Рис. VI.Н. Распределение потери полного напора ДН (у) на различных заглубле Еях в следе за моде.т ю: и — быстроходное судно (6 = 0,60; Fr ~ 0,27): б — танкер типа «София» (6 = 0,756; Fr ~ 0,25); в — контейнерное судно (А - 0,5 4 Fr
• 0,325). Заглубления (сверху вниз): 0; 0,25 Т 0 5 7’; 7’.
Т оеадк,- м< д<лп; Н рнннн» области потери пилшис> н*иир«.
Экспериментальное определение индуктивного сопротивления от скуловых вихрей. Методы определения составляющей индуктивного сопротивления, вызванной образованием скуловых вихрей о< повиваются на использовании теоремы энергии и результатов экспериментального исследования поля тангенциальных скс [рос н в следе за моделью судна
Согласно теореме о кинетической энергии работа сил индуктивного сопротивлении модели равна изменению кинетической энергии жидкости Е за единицу врех-знн и работе сил давления
/?.,<• г’ [ | I’ "Т ' I (р ‘Т’ + iiS-
X 5
(\ 1 30)
333
Рис V! 20. Разрушение волнового профиля при обтекании моделей судов (по ;|И иым |2|) а модель танкера (1-'г = 0,25); б— модель контейнерного’седин (I = 0,32).
334
’ jlnrcrpiipoBjtmc производится в области вихревого след» в плоское! и, рленоложен-K'jfl пл некотором расстоянии Vv за моделью (рис. \ I .21); i>(, и t\- cooTBeictijeiiiio tan ге11Пналы1ая и осевая скорости. По данным экспериментальных оценок оклад oi второю члена в правой части (VI.30) не превышает 1—2 и им можно пренебречь. ^Ксдполагается. что образующиеся за моделью дискретные вихри распространяются
В направлении скорости а ее дв 1жснии. Свободная поверхность жидкости заменяется Втверяоб границей. В результате задача сводится к опенке приращения квиетической Жпергнн жидкости за единицу времени при поступательно»! движении системы п цдр лнпенных иодубесксиечных вихрей, в к< то; oii щрк\ля uni отображенных вих-
реп.Г; Г, «РЧс VI 21)
I Величина виду минного сопротивления может быть иредс!лв.«епа в виде суммы
. /-Н V 2 \£С(. (VI.31)
। I
где Г.в — приращение эиерннт вне ядер вихрен, г > г0; \бг; — яриращецие кинети-
ческой энергии жидкости внутри ядра вихря г <2 гя.
Рис. VI.21. Схема определения сопротивления, обусловленного развитием скуловых вихрей.
Поскольку циркуляция исковой системы скуловых вихрей относительно невелика,
ограничиваются оценкой сопротивления только кормовых вихрей В этом случае приращение энергии в потенциальной области
1-и
рГ.з 1_'_ , . !(<> —G.) + /Ь- - г||
2л I 2 | (б + г„) -| КМ пШ
I , I (б 4 г ,j + /А- — г(1Г 4- 4</ | - ---- 1П --------------------' ----—; --------- .
1(6 r0) I- \ГЬ - Г’Г + 4-4’ I
Обозначения величин б н</ показаны на рис VI.21; Г» циркуляция скорости вне вихря в потенциальной области течения
При оценке энергии в ядрах вихрей А£с; используется модель согласно которой жидкость внутри ядра вращается как твердое тело с постоянной угловой скоростью, а радиус ядра г0 предполагается малым. ТЗмда
Из эксперимента (рис. VI 22) находят ноле составляющих поперечных скоростей . t'z, положение ядер вихрей b и -/ и величину циркуляции скорости Ги в потенциал, u.’j Потоке за границей вязкостного ядра
Г« = | v. Л -г vudy. <\ I j.(j
i
При определении Го интегрирование производится вдоль прямоугольною контура за пределами ядра.
Рис. VI.22. Распределение поперечных скоростей в плоскости диска гребного вп а модели (по данным опытов Л. Н Чубенского) \u,t. - vvJv).
К недостаткам изложенного метода следует отнести неточный учет распре ления поперечной скорости внутри ядра н некоторую неопределенность при выбо| гв. Анализ результатов измерения поперечных скоростей и распределения цирк) ляции в радиальном направлении показывает, что размеры ядер кормовых вихре при числах Re. соответствующих условиям испытаний полноразмерных модс.'п (Re vf./v I07). в некоторых случаях соизмеримы с радиусом гребного винта Течение в ядро вихря оказывается более сложным но сравнению с принятой моделью и имеет турбулентный характер Подобно турбулентному пограничному слою j;iei ь можно выделить область, аналогичную ламинарному подслою (постоянная углипа'* скорость). область логарифмического распределения циркуляции и «висиппон область (pue VI 23) 336
(рутой метод оценки энергии в ядрах вихрей основывается на использовании фактического распределения циркуляции и скоростей сц (д), показанного на рНС. VI.23, б. Значения Г (г) и \£с, в области ядра г< г0 определяются по формулам (VI 34) н (VI 33). Обычно используются осредиенные характеристики для двух взаимно перпендикулярных радиусов
Сопоставление индуктивного сопротивления крыла конечного размаха, полученного по второму методу, с данными силовых измерении показывает, что точность Кценкп индуктивного сопротивления в этом случае составляет 10—15 %. Это вполне приемлемо для инженерных целен, если учитывать относительно небольшую роль составляющей /?, в полном сопротивлении судна.
Рис. VI.23. Распределение тангенциальных скоростей Зц (г) и циркуляции Г (г) в ойдасти ядра вихря: а - распределение поперечных скоростей; б — распределение относительной циркуляции (эксперимент).
I теоретическое распределение <*0(г> f иепязкоП жидкости; 2 внешняя потенциальная область течении; 3 рлсп редел свис поперечных скоростей в ядре по линейному закону.
4 — эксперимента Ы1<м< распределение- (г), / рис пределен) не Г(| в ядре скулового вихря
модели танкера (Гп 1.1 .м*/с). fl — распределение Г„ в ядре нихря и сноб типу потоке (Го 0.07 м*/с).
Экспериментальное определение волнового сопротивления В практической работе часто используется приближенный метод определения волновой составляющей согласно формуле (VI. 16)
СГо = С —Cvo- С — <1 -- Л) Cf(,
Во многих случаях согласно (VI.19) Сц-(| включает не только Сц но и сопротивление, обусловленное разрешением воли, брызгонос, а также часть вязкостного сопротивления. зависящую от Fr, в особенности при наличии кормового отрыва или при обтекании погруженного транца. Поэтому сопротивление Сц 0 не может служить надежной основой при проверке теоретических решений и исследовании закономерностей изменения волновой составляющей.
Известны методы непосредственного определения волновой составляющей С’п , основанные на использовании зависимостей линеаризованной теории волнового сопротивления и результатов измерения волновых профилей на некотором расстоянии от модели либо вдоль линий, перпендикулярных к ее движению (метод поперечных сечений), либо параллельных диаметральной плоскости модели (метод продольных сечений) (рис VI.21)
И методе поперечных сечений используется связь между волновым сопротивлением деформацией свободной поверхности Ц1( за телом в невязкой жидкости (I 13) Потенциал скорости гр па достаточном удалении за моделью в глубоком канале (// ) шириной b может быть представлен в виде ряла
I 4X1
ч ~ V, Ki bin (»„Х> Р„ cos (.e,vvi| ..-os , (VI 35)
Ч
337
где 1 при «¥=0; х„ | у, 4 |/" v2 ; j ; и„ - . 2лп/Ь; ш”, (vz,,f
(v>/: ) |1 + ]/1 + (4"' v’)|-
Тогда
V / 2я/1
Гк Ur У) 7 , *п«п (4 cos \ п ж>П
(VI.3(J
где п„ а,, <<»s (:;„.4 0n sin (tr„x>.
Giothoiiichiic (VI (>) предполагается справедливым и в вязко!" если ко^ффии «епты разложения а„ и рп определены по результатам ординат волнового профиля (х/, и) (см рис VI 2-1) II к мыс величины
ЖИДКОСТИ, измерения
Рнс. VI 24 Схема экспериментального определения волнового сопротив iciiiim а — расположение измерительных сечений; б — волновые профили £в (р) в пип речных сечениях в следе за моделью быстроходного судна (б — 0,56; Fr = 0.32 й
! — метод поперечных сечений: 2 — метод продольных сечений; 3 — стенки биссеАн.1
ап и pft можно рассматривать как коэффициенты разложения в ряд Фурье an == an cos (af^x,-) - fjn sin (t£inXj) =
t‘/2
j £< (Х.Ч) cos ^2nn d>] (VI.3Z)
—bl 2
Значения их для каждого п могут быть найдены ио данным измсрс! ня волною профилей в двух поперечных сечениях х,-. Вследствие пензбсж> ых погрешностей эксперимента число сечений приходится увеличивать и иол^чаемую в этом случае избыточную систему уравие шн (VI 37) решать методом наименьших квадратов, минимизируя сумму квадратов ошибок Тогда
336
Требуемое количество измерительных сечений т — 3-i-5. а число членов разложения л 40—50. Волновой профиль измеряется в связанной системе коорди (ат tcncpi ментальная установки состоит из паирав. яющен балки, <акре (лепной на (укспроючг н тележке, каретки, перерешающейся поперек бассейна с помощью привод, вдоль направляющей, и волн (Графа, укрепленного па каретк В лповое протпвлеш е опред< яется ио формуле
/?и
л. и
(VI.39)
где йп и Т>„ — осре, ценные значения коэффициентов разложения (VL.37) Обычно его величина меньше, чем R\v0 (рис. VI.2")
В мет дс (родильных сече! ни в качестве исходных таг ных используется профиль волновой поверхности -и (х. у,). измеренный вдо 1. лн( uii, параллельных лини" движения модели н от с т ящей от нее на расстоянии ( ; (рнс. \ 1 24).
В этом случае необходимо вычислить
интеграл
С (£3, у.) I 'S (И-1, J((l и 00
I ?ь(' У/) СХР (VI.40)
I
Важным в мето ie продольных сечений является выбор необходимой д. н пы волнового разреза и оптимального Ьтстояния лиг пн измерения от диаметральной плоскости модели. Нз.мсрс ния производятся в неподвижной си стеме координат Волнограф укреп ляют на штак с, установленной па дне или па борту бассейна, поэтому волновые профили могут пределяться на раллсльно с буксировочными испыта пнями.
При подстановке заинсами г яри филя волны в (\ 1.40) его следует огра почить моментом прихода к вок о (графу отраженной полны. Отсекаем; я при этом ча гь закиси учи ываетсяапя литическим ну м с поме щы а им (го тцческих формул.
Волновое сопротпвтс! не. выра жспвоо через функции С н .*», рас считывается но формуле
Рнс VI.25. Результаты экспериментального определения волнового сонротнвле-I ня.
I буК€ II []<№() Ч lit »Г<> Cot 1111 >111В Ле-
нин С; 2 коэффициент сопротивления треннн пл л г । ины 3 коэффициент расчетнлго
ВЯЗКИСТНП1Т) соиротпиления Ср'О* 4 — коэффициент расчетного волнового сопротивления <-ц <j С -- Сгп- J — коэффициент волнового сопротивления С ц-/ определенный методам полисного а дал нэп (ион* --речные сечения).
Rw = j | С * °, У if + S (“> !'()- 1 | (' 1 41)
1
Помимо изложенных выше методов, иногда применяется так называемый Д’— у метод, предложенный Уордом Этот метод основан на I змерении в процессе движения модели R и и R, и компонентов сил, действующих на частично погруженный неподвижны! вертикальный цилиндр, расположенный па некотором рас-(стоянин от линии буксировки модели
Особ (нос । применения методов н шов го анализа рассмотрены в р;бо-№ 132. 591.
В качестве примера, иллюстрирующего возможности ме- дов пепосрсдстгсн ною определен! я составляющих сопротивления, в табл VI 3 представлены резуль [ таты комплексного экспериментального следования сопротивления модели твн-
.3.39
Таблица VI 3. Результаты экспериментального исследования сопротивления мидели IHHKCpti
У с л п hi -.я же пе р и мен т а
<'оста плч юпи :«• -» 18 уз; Fr - 0.191; Re W. 13- 10® 1-. 19 уз; Г г 0.205; рс 9.6 1П*
Тип носовых оОподоп
триди iuhmi II 1.1 И 6уЛ1>б«М)Г|рЛЗ- II ЫН Т|*лДн1|Я1»11-нмН бу.1|»б4М>б<» И UU
Ko3i|xpitniieiiT полного сопротивления С (по данным бу Kcnpi.Bo' пых испытаний) Коэ(|х|1пшент сопрот целения трения экннзалептной пластины С/ о по формуле (VI. 15» Коэффициент вязкостного сопротивления Ср (по данным измерения характерп стик следа) Коэффициент поднови! о сопротивления Сцг (по дан ным измерения волновых профилей) Коэффициент сопротивления от разрушающейся подпорной волны (»° данным измерения характеристик следа) 4,51-Ю'3 3.05-10-3 3.55-10 3 0,18-10 3 0,67-Ю 3 3,83 10'3 3.05 10 3 3.55-10“3 0,11-10 3 0 1,72-10 3 3,02-10 3 .3.52-10 3 0.2Ч- КГ3 0.85 К)"3 -1,0-1-10 ’ 3,02 • 10 1.52-Ю 0,27- Н) •' 0
^Отношение (Ср + Сц.-д + + Сц ) С 0,98 0.95 0.99 0,94
Г1 г it v е ч * и и е. Водоизмещение - - 30 % Г: 6 0.76; L.13 —
кера. Полученные данные дают представление не только о структуре сопротивлси я в cool ношения между отдельными составляющими, ио и позволяют е£>т>ясн1пь npi чины изменения соиротивл* пня при вариации обводов корпуса Применение б\.н бовых образования носовой оконечности па судне полных обводов способству! существенному снижению сопротивления, обусловленного разрушением подпор»111 волны, и почти не оказывает влияния на волновую составляющую. Сумма состав лякицих сопротивления, определенных по данным измерений характеристик потока в следе и волновых профилей, в рассмотренном примере практически равна изм» репному буксировочному сопротивлению, т. е. Ср С|пз + Civ ~ С. Вместе с тем. при испытании моделей судов умеренной полноты н особенно быстроходных копти первых судов острых обводов, когда доля волновою сопрелпглсния Селите, таки соответствия не наблюдается. Суммарное сопротивление, определенное с помбшыо методов, основанных на исследовании характеристик потока, обычно меньше буь спровочиого па 5—К) %. Различие обусловлено в основном несовершенством методов волнового анализа. Вязкостная составляющая, как правило, хорошо col. . суется с буксировочным сопротивлением при малых числах Фру да (см. рис. II >-) Можно предполагать, однако, что в волновом диапазоне 1-’г возможны иезпачигс. i иые ошибки и в определении Су из-за недостаточно точного учета влияния дсфо| • мании свободной iioBepxiiucrit па вязкостное сопротивление
340
Глава VII
СПОСОБЫ ПРИБЛИЖЕННОГО РАСЧЕТА СОПРОТИВЛЕНИЯ ДВИЖЕНИЮ СУДНА
§ 25 КЛАССИФИКАЦИЯ ПРИБЛИЖЕННЫХ СПОСОБОВ
РАС II ГЛ (ОПРО1И1МИ НИЯ
Наиболее точное определение сопротивления судна в настоящее время обеспечивается испытанием его модели в опытовом бассейне с последующим пересчетом измеряемого при этом сопротивления на натуру Проведение испытаний, однако, не всегда оказывается возможным, особенно на ранних стадиях проектирования, что заставляет применять различные приближенные способы расчета сопротивления которые основываются на использовании результатов рапсе проведенных испытаний моделей, представляемых в достаточно обобщенном виде
Лаже при наличии результатов испытаний модели I рототипа отшгптельпо близкого по форме обводов и скоростному режиму плавания к проектируемому судну, возникает необходимость в учете влияния па coitj»cxi пиле пне несоответствия в геометрических элементах сопоставляемых судов. При выборе размерений, коэффициента общей полноты и других параметров корпуса в начале проектирования Вьна ставится еще более сложная задача об оценке без проведения испытаний гидродинамических характеристик ряда рассматриваемых вариантов судов, теоретические чертежи которых отсутствуют.
Применяемые в этом случае способы приближенною определения сопротивления могут быть подразделены па следующие группы: методы расчета полною со-Иотпвлеиня или буксировочной мощности, методы расчета остаточного сопротивления, методы пересчета остаточного сопротивления с прототипа.
К первой группе относятся расчетные методы, основаннье па использовании формулы (I 9), т. е. адмиралтейских коэффициентов
’ 10,6г7 ’ I
tF Ре и с ’
(\ и л
и различных ее модификаций, производимых с целью выделения в ятем виде влияния некоторых геометрических элементов корпуса К числу таких способов относятся известные методы Э. Э Паимсля, Эйра, Дайсона и др [6. II. 12]. Все эти методы основаны на допущении, что при одинаковых геометрических характеристиках и числах Фруда коэффициент полного сопротивления для геометрически подобных судов одинаков, т. е. все сопротивление следует гравитационному закону подобия Применяемая иногда корректировка зависимости (VII I) с целью частичного учета влияния числа Рейнольдса при изменении абсолютных размеров судов не меняет существа вопроса Таким образом, в этих методах вносятся дополнительные [ошибки, связанные с неточным определенном сопротивления трепня. 1-дипствсиное преимущество указанных способов заключается в их простоте. Однако в настоящее время, особенно в связи с широким использованием вычислительной техники при обработке результатов испытаний моделей систематических серий, это качество Утратило решающее значение. Поэтому методы первой группы как привило, 1еперь пе применяют, и потому они ниже не приводятся.
Методы второй группы в принципе позволяют рассчитать соп| ичнвлепие с до статочпо высокой точностью, поскольку погрешности при этом связаны только с опре Делением остаточного сопротивления Сопротивление трения определяется с той же точностью, что и при пересчете па натуру результатов испытаний модели судна.
Методы третьей группы основаны на использовании кривой ке 3(|<]цциента °статэчпого совротивлеш я судна прототипа В случае, если пи большинству геометрических характеристик и общему характеру формы обводов судно, для которого [Производится расчет, и прототип близки, сопротивление может быть определено с Достаточно высокой точностью.
.341
Табл и Ud VII Перечень основных систематических серин моделей МорсИн
п п.
Систематически > ц.1Г.
Наименование серии. Основные вопросы. русчыг rroMt'TpB ч< .
место и прем и проведения испытаний исслсдоппнные и серии характеристик, пределы их ИЧМСЦ» ( ч
(.хрия 60. Бассейн нм. Тейлора (США), 1953- Вл шипе па сопротивление и пропульсивные характе-
1957 и . |97] ристики: коэффициента общей ; полноты ) fi 0,60. (1.65 0,70; 0,75, O.Hi
cooTiiouiei nifi главных ] размерений 1 1. В 5,5 : 8,5; ВТ 2,5. 3,0; 3.5
। родильного положения 1 цешра величины 1 х- = —0.025L, --0.035L,,,,
2 Серии моделей универсальных сухогрузных судов, среднего инаж пых танкеров и рудовозов (СССР), 1955— 1958 п. [12. 4G] Влияние на сопротивление коэффициента общей ] полноты отношение длины к ши ( р IIIC / продольного положения ( центра величины I 6 = 0,60; 0,65; (1.70; 0,75, 0,80 UB 6.0 8.5 х. - - 0.025/.,,,-.- -4-0.030/
к эффнЦ||епт£| вертикалы О|Г ПОЛНО Ы НОСОВОЙ оконечности (формы носовых шпангоу тов) коэффициента бульбо-образпостн 1vf= 0.83-4-0.96 (носовые шпмпимы от резко \ -обранп1Х до резко U образных) соо ым 0; 0,04; 0,(К 0.12. где w0 — площадь 1С" вого шлангом ‘
3 Серни моделей быс ро-ХОДНЫХ 0Д1К ВНИИ вых грузовых судов (Яио 1,ня) 19(>1 1966 гг |Ю0| Влияние на сопротивление коэффициента общей полноты соотношений главных раз мерен lift продольного положения центра величины 6 = 0,55; 0,575, 0.601 0,625; 0,65 IJB = 6,5; 7,0; 7,5. >ч-°-В/7'= 2 1; 2,4, 2.7 0 007/ j>j - 0.0I3L, - O.OlO/.H’ 0,025/
312
Ьнкпортиых судов
Пределы и мгнепня [ 1 соотношений глав ы.\ I рэзуерснкЛ и огненны коэффициенте 7 о етнче-| с кого чертежа Снедения и моделях н условиях пси ытанни Способ обработки II представления результвтоя испытаний
t® 13 Т Д, V' 3 б г
₽ss₽"— g СС 1 8 |Л о ю СО 1 S сч 4.555—7 498 0 60—0 80 0,614 0 805 Парафиновые модели 1. - 6.1 м (20 фут). Турбулизатор — проволока 0 — 0,036 дюйм Сопротивление трения но формуле Шеихерра (11.3) с надбавкой С|= 0,4-10"3. Обработано в в |де: /?й/Р / (₽Л’Х * ив- В'Т), С / (К), Л; /. В; В Г); С f (х<) при К» соответствующем эксплуатационной скорости и скорости на испытаниях" @“/ (К) для л'г in i
8 00 1 о о Сэ «0 «а <6 ri 4 96 7 50 ' О X © 8 сГ 0,612—0,815 Парафиновые модели L = 7,0 м. Турбулизатор — проволока 0 1,5 мм Сопротивление трения по формуле Прандтля Шлих п ига (114) Обработано в виде: Cfi = i (<s Гг); Cfi = f (х.; Ул л ; Fr)
2.10-2,70 5,37-7,81 0,55—0,65 0 58-0,66 11арафнновые модели L — 6,0 м. Турбулизаторы — штифты CoiipoTiiBieinie рения по крн вой 1Т1С [формула (VI. 15)]. Обр ботапо в виде Cf Cl>' ‘ /(б: / /1: В/T, л.; Fr) 1 I 1 IV’r; i|.? h.6: UB- B/7, X . Fr)
13
Е С Наименование серин, мест» и гремя проведения испытаний Основные вопросы, исследованные в серии Систем дт и чсеки вари ., русмые геометр»! чес к.... характеристики )i пределы их измененп ц
4 Серия моделей судов с большой полнотой обводов (танкеры, рудовозы). (СССР), 196§ г. 146] Влияние на сопротивление коэффициенте общей полноты соотношения главных размерении продольного положения центра величины ф[)|ШЫ НОСОВЫХ II кормо вых шпангоутов 6 = 0,800; 0,82' 0.850. 0,875 1. В = 5,8; 6,2, 6.8 8,3; В'Т = 2,2; 2.7; 3,5 х{ = H-0.015L,,,. H-0.0225Z.pp. H-C.030Z.pp; -1-0.0351,,,.: -Ю.0441 Z.,,,, Носовые обводи: \ .г. разные цилиндр! е ские. бульбообра.-пн.е, гараино-конические Кормовые обводы: V-11 Сообразные, сигарообразные
5 Серия моделей крупно тоннажных танкеров, (Япония). 1967— 1969 гг. [101| Влияние па сопротивление коэффициента общей полноты отношения длины к ширине продольного положения центра величины формы бульбовой носовой оконечности 6 == 0.80. 0.82; 0,8 i Li'B 5.5, 6,0; 6,5; 7 0 х„ = Н 0.016/. | 0,025Z./lfI; “г 0.035Z.J.J. Коэффициент бульбо-образиостп o>nVoXJ 0,06; 0,08; 0,09, 0.12 1
6 Серия моделей быстроходных и среднсгко-ростпых универсальных сухогрузных, контей первых и трейлерных судов (СССР), 1972 г. 1461 Влияние на сопротивление коэффициента общей полноты соотношения главных размерений фирмы носовых шиапгоу гов 6 0.50; 0.55. 0 1 0.G5 Ь'В 4.8, 5 5; 6,2. 7.0; В'Т 2,0; 3,5; Носовые шпанго'. V образные, бульб "'б разные
344
Продолжение т а б л. VII. I
ПрСЛСЗЫ II кя 1 conTHOUlvlHIit г.ипных ! размерений и основных. Г коэффициентов теоретического чертежа Сведения о моделях и условиях испытаний Способ обработки и представлении результатов нс пит ан и Ik
1 Ч и т ' v' -’ Л ф
сс 1 сс 1Л СО ео 1 ci «5 1 □0 0,800-0,875 0.81-0,88 _____ Парафиновые модели L — 7,0 м. Турбулизатор — проволока 0 1,5 мм in 1-м шпангоуте Сопротивление трения во формуле Прандтля — Шлпх-тпига (II -1) Обработано для различных форм носовых к кормовых обводов в виде: Crt f (f>. В.'Т; хс; Г ); 1Г = f (Cj я-. Fr); f = I (Ста. Fr)
5,5-7,0 о СО 1 СО С1’ (X и I > -г □с о 1 о 0.805—0,851 Парафиновые модели L — 6,0 м Сопротивление трепня по кривой 1ТТС. Обработано для различных варьируемых параметров в виде: R„ c/iv *3- /0 г); pv Г 1 — Г. 1 - IV 1) ? — / (Fr)
О 7 □о 2,0-5,0 1 1Г 0,50—0,55 ю 1g o' 1 § о Парафиновые модели L 6,0 м Турбулн за гор проволока 0 1 5 мм па 1 Чг м шпангоуте Сопротивление трепня по формуле Прандтля — Шлих тнпга. Обработано в виде: С/J f (6 L, B; |-г); k . = C(i П‘Т СГ< (В Т=2.5) -ЦВ;Г. Fr); Г= /(6, L В, knE. Fr): t 1 (6, L, В; kVE Г )_
345
Наименование серин, место и времи проведен ня испытаний
Основные вопросы, нселгдонсдипые в серии
Систематически влр».,. руемые геометрнч<*и. , характеристикн и пределы их изменении
Систематические серин Британской судостроительной исследователь слой ассоциации 11SRA 1901 — 1966 гг. 169, 761
Влияние из сопротивление: коэффициента общей 1 полноты j
относительной длины
отношения ширины к 1 осадке /
продольного положе- 1 пня_центра величины I
6 — 0,65; 0,70; 0,7.У 0,80
L V*'» = 4,2-?6,35
ВТ - 2,13; 2,52; 2.96;
3,43; 3,92
= -0.02£ .
Ч-+0.035Лр;,
Во всех указанных методах влияние геометрических харакн]. нстик форм> корпуса на его сопротивленце учитывается, как правило. i a ociioiauiiii результ тов испытаний серин моделей с систематическом вариацией соотнеи еннй главны размерений и коэффициентов теоретического чертежа.
В табл. Vll.I приведены сведения о наиболее крупных отечественных и зар; бежных стигматических сериях моделей морских транспортных судов, результат испитаiiiui которых приставляются наиболее достоверными с точки зрения современной техники и методики эксперимента.
При решении задач более общего характера в качестве определяющих пар; метров обычно используются соотношения главных размерений и коэффициент! полноты обводов при ряде исходных форм корпуса, типичных для судов различного назначения Примерами таких серий в табл. VII.1 являются серия 60 (и I), отсч ствснпые серии универсальных судов (и. 2) и комплекс серий Британской судостроп телыюй исследовательской ассоциации BSRA (п. 7)
Исследования частного характера проводятся на основе исходных обводов, присущих судам изучаемого тина; соотношения главных размерений и коэ<]финн енты'полноты варьируются в ограниченном диапазоне При этом уделяется доста точно большое внимание получению зависимостей сопротивления от параметрон определяющих особенности формы обводов. К таким исследованиям в табл VII. I относятся серия крупнотоннажных танкеров и рудовозов (и. 4), серия контеЛпсрпы' судов (п. 6) и др
Результаты буксировочных испытаний моделей серий чаще всего обрабатываю! I1O традиционной схеме разделения сопротивления согласно зависимое! н (VI !2i и представляют в виде дна! рамм коЭ(| фнцпента остаточного сопротивления Сц в функции от варьируемых параметров и числа Фруда В английских и некоторых други' иностранных сериях (отчасти серии 60) результаты испытаний обработаны в вп зависимости размерного коэффициента буксировочной мощности для судна стандартной длины (обычно L — 400 фут)
С С РЕ 0,047 (1> Df/‘) С
Продолжение т а б л. VII. I
Пределы изменен л я соотношений главных размерений и основных коэффициентов теоретического чертежа
Сведения о моделях 11 условиях мспытпний
Способ обработки и представления результатов испытали 0
l.b
BIT
d
ф
Модели L = б 0 м (модели с 6 — 0,70;
L ж 5,5 м)
£
с©
8
lO
Cl
ci
Cl
Сопротивление трения по формуле Фру,та (H.I) с корректирующими । для пересчета по 1ТТС. Обработано © f (6; v) судна
графиками
• формуле в виде:
400 (122 м) при стандартных чепнях (Я; ВТ и х,, правочных коэффициентов на изменение IJV ’, ВТ и хс в зависимости от Л и v
ДЛЯ
ipp —
Фут
ЗИЙ’
по-
от безразмерных относительных скоростей
i = = или К =--------:^= = 0>£818-^-,
1 / и V w I- L / D '•
4л
I где «ч—скорость судна, уз; С Р и Н так называемые коэффициенты в «кружках’..
В последнее время материалы испытаний серий иногда обрабатывают в форме регрессионных уравнений, удобных при использовании вычислительной техники.
Для разных серин использовались различные зависимости для сопротивления трепня пластины (см. табл VII I), что необходимо иметь в виду при их практическом применении.
Существуют диаграммы, построенные не на основании испытании моделей систематической серии, а в результате статистической обработки большою числа данных об испытании одиночных моделей, проводившихся в разнос время в опытовом бассейне. Из таких диаграмм наиболее известны разработке иые но данным Гсл-ландского опытового бассейна графики Лапа [12]. расширенные позднее для Ссль-пшх значений коэффициента продольной полноты <р > O.tO и малых он ссптслы|ЬХ скоростей о„ | <pL < 0,5 |67|. Гульдхаммером и Харвалкдом в результате анализа материалов испытаний как отдельных моделей, так п некоторых систематических серий (например, серии Тейлора [121 н серии 60), а также с использованием графиков Лапа, созданы диаграммы зависимости коэффициента Сн от относительной Клипы ф и коэффициента ер [63] Естественно, что случайные отклонения в геометрия и условиях испытаний различных моделей служат источником де голш тельных погрешностей что снижает точность определения сопротивления но таким диаграммам.
При использовании материалов систематических серий паилучшпе резуль-| таты обеспечиваются в случае расчета по серии, в кете,рей ферма ебводев моделей близко соответствует обводам проектируемого судна, а услслня испытания моделей
347
ис вызывают возражений методоло! ичсского характера (высокие значения чисел Рейнольдса, гадежгые ср< детва турбулизации пограничного слоя).
Для расчета буксировочной мощности судна при отсутствии теоретического чертежа необходимо располагать приближенными значениями площади смоченной поверхности подводной части корпуса Q Для определения Q по основным геоме-ц ческим параметрам судна могут быть использованы: для морских транспорт! судов формула (1.17), для быстроходных судов всех типов формула (I 16). для речных судов, в том числе несамоходных, формула (1.19), для промысловых судов р;<. личных типов формула (1.18) Пи всем этим формул 1М определяется смоченная in . верхиость корпуса без выступающих частей.
§ 26. СПОСОБЫ ПРИБЛИЖЕННОГО ОПРЕЛ! ЛЕНИ Я ОСТАТОЧНОГО СОПР0ТНВЛ1 НИЯ СУДНА
НА ОСНОВАНИИ СЕРИЙНЫХ ИСПЫТАНИЙ МОДЕЛЕЙ
Серия быстроходных и среднескоростных судов. Для расчета сопротивления судов с низкими значениями коэффициента общей полноты о могут быть использованы результаты испытаний моделей систематической серии Японской судостроительной исследовательской ассоциации н отечественной серин быстроходных и ере нескоростных судов (табл. VII 1). Отечественная серия предназначена для опрете-ления сопротивления судов с малыми 6 и отношением L1В и большими значениями отношения ШТ, преимущественно контейнерных и трейлерных судов, в том числе с горизонтальным способом погрузки, а также лнхтеровозов.
Приведенные на рис. VII.1 чертежи корпуса и штевней исходной модели сер и выполнены применительно к одиовалыюму варианту' расположения движительпого комплекса, однако без изменения обводов «юлого корпуса» они могут быть использованы и для двухвальных вариантов, что было осуществлено при самоходных испытаниях моделей серии. Основные геометрические характеристики корпуса приведены в табл. VII 1. Продольное положение центра величины х, изменялось в пределах х,- = -- 0 025-=-0.028 для V-образиых носовых обводов и х, — —0.017-5-0 620 для б) пьбовых, смещаясь в корму с уменьшением коэффициента 6.
При расчете сопротивления судна но материалам данной серии с использованием традиционной схемы разделения сопротивления на составляющие KO34*x]iiirxiieiiT остаточного сопротивления определяется по формуле
С^ = CR (6) 1'j j k в у ’ (А II -О
Коэффициент С.п (6)1 снимается с рис. VII.2 или VII.3 в зависимости от формы носовой оконечности Коэффициент влияния несоответствия отношения L/В опрс дсляется из pnc. VI 1.4 или VI 1.5 как отношение значений коэффициента Сд для расчетного значения 1.1В н стандартного L/B 5,64; k, в — CR [L цу/Ск (/ ,и_5 е1
Коэффициент влияния kH/T, учитывающий несоответствие расчетного и станда)'' кого значений Т./Т = 3.5, непосредственю снимается с диаграммы рис. VII
Результаты испытаний моделей серии могут быть использованы и для расчета сопротивления но схеме, основанной па физических п[ пнцииах разделения на с< ставляющне (см § 23) В этом случае коэффициент расчетного волнового сопротивления Си-о в зависимости (VI. 16) определяется по формуле
Сдо ~ о щЬнгг- ।1
Коэффициент Си о снимается с рнс. VII.2 или VII.3 как разность значений к эффнциеитов Сп, соответствующих расчетному Гг и минимальному на графике 3i чеишо Fr 0,1/ Сц-0 = CR (Гг| CR (FrM)I7J
’ Хотя в серии и качестве варьируемого параметр* принято Ъ . ПРИ <Н?работкс резуль тагов ио ытппмй в соответствии с отечественной практикой, использован коэффициент рассчитанный Для длины судия по грузовую ватерлинию
348
349
Рис. VII 2ЛЗаиисцмость Сц от fi для судов с V-образноЛ носовой окоиеч ностыо (Uli = 5,64; В/Т = 3,5).
350
P'lC- VII.5, Зависимость Сц от UB для судов с бу.тьбообраяюи носовой оконечностью (BIT = 3,5).
351
Коэффициент k'L,H рассчитывается как отношение коэффициентов Ctf ll для рас. четного ЦП и стандартною LIB 5.64. определенных по графикам рис V11 4 или VII.5, аналогично определению коэффициента С’ц (116)
- lCR iFr) (Гг=4).17)|I-.H
'lH lCA'(Fr) <-'/?{Fr-TI.I7)]'/H-S,<H
Коэффициент влияния k'B,T снимается с графика па рис. VII.7. При опрсде.ц.. пин сопротивления в соответствии с зависимостью (VI.16) коэффициент влияния формы корпуса на вязмк'тпое сопротивление k рассчитывается но формуле
Рис. VII.6 Зависимость коэффициента влияния {И 1 )
от ШТ.
При этом k (6) определяется по рис. VII 8 в зависимости от фюрмы носовой оконечности Коэффициент Kk(UB) рассчитывается как отношение значений форм фаг тора k для расчетного значения LIB и стандартного LIB = 5,64 Л\.(; /п - Лт./в1й/./в=5б4' снимаемых с графика на рис. VI 1.9. Коэффициент Кцн п вычисляется аналогичным образом как Кк(В/т^ 1гн.т,к»1Т=>л,я по значениям определяемым из рис. VII .10 при расчетном значении L В.
В качестве примера в табл VII.2 выполнен расчет буксировочной моши ги судна с горизонтальным способом погрузки со следующими основными элементами L — 128,7 м; L В — 6,71, В/Т «= 3,2; 6 = 0.604; £2 = 2726 ма и V-образными носовыми обводами. Здесь н в последующих примерах (» - 1026 кг.'м8.
Серия судов с умеренной полнотой обводов Область значений коэффппке а 6 = 0,604-0,80 охватывает большею часть морских ipmicriopTiiux судов различи' ' типов и назначения, включая универсальные сухогрузные суда, среднетониажш танкеры и рудовозы, суда для каботажных перевозок, а также транспортные с а флота рыбной промышленности. Для расчета сопротивления указанных судов могут
352
быть применены материалы 60-й серии н серий. BSRA (табл VII. 1, n. 1, 7). Тем же целям отвечает комплекс отечественных систематических серий (табл. VII.I, п. 2), известный иод названием «Серия морских транспортных судов! (12]. Указанный Кимилекс серий можно условно подразделить на основную серию (вариация соот-
ношений главных размерений н коэффициента б) и ряд вспомогательных серий, охватывают; изменение геометрических характеристик формы обводов корпуса Основные геометрические характеристики моделей названных серий приведены в табл. VII.1. Изменение хс в зависимости от 6: х,=— (0,025-:-0,005) при 6= 0,60,
0,5 0,55 0,6 0,65$
Рис. VII 8 Зависимость формфактора k от f>(L)B = 5,64; В>Т~ 3,5).
1 — V-образиая исковая оконечность; 2 — бульбообратиая носовая окопечшюь
Рнс. VII.9. Зависимость формфактора к от L'B (В/Т = 3,5).
I — V-обраэннн носовая оконечность, 2 —бульбообралнпя носовая оконечность
~ —0,005-:—(-0,015 при 6 = 0,70 и хе — 4-0,01 =4-0,03 при 6= 0,80. Изменение относительной длины составляло ф = l./VllS— 5,00=7,50. Формы носовых шпангоутов U-образные, промежуточные и V-образные.
Форма обводов моделей серии иллюстрируется рис Vll II (6=0.70).
При частичном использовании результатов испытаний моделей серий ''R по традиционной схеме Фруда (VI 12) рассчитывается по формуле
Cr Cr (®) (VII 5)
И/Р Я. И. Войти)некого, т 353
Коэффициент Cr (6) снимается с анаграммы рис. VII. 12 Коэффициент учитывающий влияние относительной длины i] = LtV вычисляется как = л,!— отношение значений коэффициента СЛ(Ч) ^/?<ч е.О)’ снимаемых с диаграммы рис. VII.13 соответственно для расчетного значения относительна У1Ш1Ы т|> к стандартного значения ф0 (ty, определяемого нз рис VII 12. Коэффициенты kH 7 и а,. г_ произведение которых учитывает влияние отличия расчетного значения BIT от принятого в серии [BIT —2,5), определяются по графику на рис. VII 14 Коэффициент учитывающий влияние па СЛ различий между расчетными значениями хс и стандартными -0,013 для 6 = 0.60; х
Рис. VI 1.10. Зависимость форм-фактора k от отношений UB н BlT.
=-0.005 для 6 0,70; xtu — 0,02 для б — 0,80)
Ч С«<\+:С«(Ч)'
снимается с графиков рис. VII 15 Выбор соответствующего графика определяется расчетным значением коэффициента 6.
По результатам испытаний моделей серив универсальных транспортных судов можно произвести приближенный расчет сопротивления при разделении его на Таблица VII.2. Расчет буксировочной мощности по материалам серин
быстроходных и среднескоростных судов
X-ц/п. Обозначенно расчетных величии Численные значения
1 Уз 13 14 15 16 17 18
2 V, м/с 6,70 7,20 7,73 8,24 8,75 9,27
3 о2, м®/с2 44.89 51.84 59,60 67,90 76,56 85,93
4 Ft = V. КgL 0,190 0,202 0.218 0,232 0,248 0,262
5 С ft-I03 f (5) (см. рис. VI 1.2) 0,790 0,840 0.980 1,170 1,360 1.550
6 kLJB ~ 0,705 0.703 0,778 0,776 0,745 0.774
7 (см. рис. kB т 1,018 1.020 1,019 1,022 1 012 I.0O3
= (a/T=3.2p'CR (D/7-3,5) (см рис VII.6)
8 Cj?10» = [51(61-171 0,567 0,602 0,777 0,928 1,025 1,20'1
9 Re-10 8 = (pL'v)-10 8 5,356 5,756 6,179 6,587 G.995 7,410
10 Сро = / (Re) I по формуле (11 4)] 1,699 1,684 1.668 1,654 1,642 1,630
II Ci-10* 0,30 0,30 0,30 0,30 0,30 0,30
12 Сдр "103 0,15 0,15 0,15 0.15 0,15 0,15
13 С IO3 =[81 [101 + + IH1+ 112) 2,716 2.736 2 895 3,032 3,117 3,283
14 R = (р/2)Й [3| |13|, кН 171 04 198,24 241,55 288,96 4,98 394,38
15 Ре — [21-114], кВт 1146 1427 1867 2381 2931 3656
354
Рис VII.II. Теоретический корпус и штевни моделей серии универсальных морских транспортных судов (6=0,70): а — С-образная носовая оконечность; б — V-об-разная носовая оконечность.
Рис VII 12. Зависимость коэффициента остаточного сопротивления и стандартных значений относительной длины от 6 (В;Т — 2,5).
12*
355
физические составляющие согласно (VI. 16). В этом случае коэффициент Стго otipi делается по форм} ле
= (®) ^^г13ПаИ/Т^хс 11.6)
Коэффициент Си « (6) вычисляется как разность значений коэффициентов Сг снимаемых с графика на рис. VII.12 для расчетного числа Fr и минимального иа диаграмме Fr= 0.104-0.15:
Коэффициенты Лф и kDljaD т определяются по графикам рнс. VI 1.13 и VII. 14 аналогично расчету по формуле (VII 5) Для нахождения поправочного коэффициента k'x^ на несоответствие в значениях х,- служат диаграммы на рис. VII 16, каждая из которых относится к соответствующему значению коэффициента 6.
Коэффициент влияния формы корпуса иа вязкостное сопротивление к рассчитывается по формуле
fe = fe (6, Хс) k^kD,тав:т. (VII 7)
где k (б, х) определяется по графику иа рнс VII 17 интерполяцией по коэффи ниенту д между кривыми b const. Поправочные коэффициенты к^ и кг та , т снимаются с графиков па рис. VII.13 и VII.14 соответственно, также как при расчете по формуле (VII 5)
356
в прнве. ei ном выше пособе расчета сопротивления по материалам отечествен-poii систематической серии опущены диаграммы, позволяющие учесть влияние Коэффициента вертикальной полноты носовой оконечности х,-Д (формы носовых шпангоутов). Это представлялось возможным ввиду более слабого влияния послед него иа Сл по сравнению с другими варьируемыми характеристиками. Предпола гается, что зависимости поправочного множителя отх,, построенные для моде-iefl с U-образными шпангоутами остаются в силе и для других обводов носовой Оконечности Полный комплект диаграмм и схема расчета позволяющие учесть совместное влияние на сопротивление хс и Худ. приведены в (12).
Рис. VII. 14. Зависимость коэффициентов влияния k/1T и alt т от В;Т\ 1аН Т ~ СR tti ТЪ/'Cr (Я 7=2.5)'
В качестве примера в табл VII 3 выполнен расчет буксировочной мощности рыбопромысл в н базы со следующими основными элементами: L. 186,5 м;/./В = = 7.18; PIT - 3,34; гр - 6,25; хс - 1.4 %!.,,] 0,725; £2 5780 м* и уме-
ренно U-образными носовыми обводами.
Серия судов полных обводов. Крупнотоннажные танкеры к рудовоз j с коэффициентами общей полноты 6 > 0.80 начали применяться сравнительно недавно Поэтому известно относительно небольшое количество экспериментальных исследований сопротивления этих объект в Помимо систематической серии моделей, испытанной исследовательским институтом судостроения в Токио (см. табл. VII.1, и. 6) (101], наиболее крупным исследованием в этой области является отечественная серия судов с большой полнотой обводов (см табл VII I, п 4) [46]. Основные геометрические характеристики судов этой серин приведены в табл. VII 1.
Теоретические чертежи корпуса моделей для исследованных вариантов обводов носовой и кормовой оконечностей приведены на рис VII 18 и VII 19 соответственно На рис. VII 20 изображены контуры штевней тех же моделей.
Как видно из перечня варьируемых параметров (табл. VII.I), в серии большое Внимание уделялось исследованию различных форм носовой и кормовой оконечностей По гидродинамическим особенностям воздействия на обтекание корпуса н его сопротивление, рассматриваемым в гл VIII все исследованные носовые обводы можно подразделить па обводы с заострением ГВЛ (бульбовые) н обводы с притуплением носовой ветвн ГВЛ (цилиндрические, таранно-конические).
К При расчете сопротивления судна в соответствии с традиционной схемой разделения иа составляющие коэффициент Си для всех рассматриваемых форм обводов ^Определяется по формуле
£/? = CR (б, I./B) kBl-i-kxkA. (VI1.8)
357
Рис. VII.15. Зависимость кс?фФ8
358
м
Iric — коэффициент, учитывающий различия в форме кормовых обводов по ▼ сравнению с U-образной, принятой в качестве основной.
г коэффициент Ся IJty снимается с диаграмм рис. VII 21 — VI 1.23 для соот-® веТстпующсй формы носовой оконечности с линейной интерполяцией по коэффш-^^EfTV Коэффициент учитывающий несоответствие расчетною и стацдарт- цОГо значений BlT, для всех вариантов носовых обводов определяется по графику ||а рис. VI 1.24. Коэффициент А.Л.. - йЛ.’«д-( вычисляется как отношение значений ^^Кфициента влияния ох — CR (х^/Сц .п 022',) определяемых дли расчетного значения х£ н стандартного значения х1 , указанного для различных 6 па рнс. VII. 21
V11.23 Коэффициенты влияния аДс для носовых обводов с заострением и притуплением ГВЛ снимаются с диаграммы рис. VI 1.23. В случае, если кормовые обводы отличаются от U-образиы.х, вводится поправочный коэффициент kA
СщА) (U-обрахиаяг значения которого находятся по табл. VI 1.4.
Приближенное определение сопротивления но схеме, основанной на разделении его на физические составляющие с использованием материалов серин производится по следующей формуле:
С1Г0 — С^ц (6, L В) kv Tk'xk’A.
(VI 1.9)
Коэффициент C\vn (6. 1JH} определяется как разность значений коэффициентов С к для расчет! ого числа Fr н минимального значения Fi 0,10; Сц-п(0. I !В}~ — С (F ) о юр снимаемых с диаграмм рис. VI 1.21 VII 23 с линейной
интерполяцией по 5. Коэффициент kl1/T определяется для всех вариантов носовых обводов по графику рис. VII.24. Аналогично расчету по формуле (Vll.fi), коэффициент кд находится как отношение k‘x = Коэффициенты ад< н сни-
маются для расчетногон стандартного значений х,.и хс с диаграмм на рнс VII.26, построенных для носовых обводов с заострением н притуплением ГВЛ соответственно. Коэффициент влияния формы кормы = Сго (Л) Сц-0(и обраэнпя) определяется по табл. \ 11.5.
4иепта влияния kXf от хг
359
°'14 > 1 t O.2O i ’ Z7?V —"
Гг=0 25 6= 0,60 0,18,6 19 i 0,2 J7 i 4^ 0,22 C'Z6
,0,12 ///'
0,19,0 23 02/; o,n
0,26 0,18; 0,21
0,20 Q2-1 0,28^
к 2 /d,2L 1.0,31
0}29;0t30;(l' । Fr = C 130
-0,025 z=^0i5 0.28 | -0,010 -0,005 xc
Рис. VI1.16. Зависимость к<-фФ"
360
Коэффициент влияния формы на вязкостное сопротивление рассчитывается цо формУЛ€
k = k№ LIB} k^A. (VII.10)
Коэффициент ft (6, IJB) определяется no дна1раммам на рис VI 1.27 для соответствующей формы носовой оконечности. Коэффициент hkx^~ акхjakx^ рассчитывается так же, как аналогичные коэффициенты в формулах (VI 1.8) и (VII.9), причем коэффициенты акХс и СахСо снимаются с графика на рнс. VII 28 в зависимости от характера носовых обводов. Коэффициент й(1Д, применяемый в тех случаях, когда кормовы обводы отличаются от 11-образных, bkA^kA!kV еОрвша» «ахОЛИТеЯ по графику на рис. VII.29 для соответствующей формы кормовой оконечности. Г В табл VII 6 приведен пример расчета по материалам серин судов полных обводов буксировочной мощности крупнотоннажного судна для перевозки нефти и наввлочных грузов со следующими элементами: 1 — 244,4 м; ЦБ = 6,3; BIT ₽ 2,67; 6=0,80; х, 0,0358; Q— 13 960 м®; цилиндрическими носовыми и V-образнымн кормовыми обводами.
Серия 60. Одно из крупных зарубежных снстематнчесю х исследований сопротивления и взаимодействия гребною винта с корпусом морских транспортных судов было проведено опытовым бассейном им. Д Тейлора и известно под названием «Серия 60» [97] Исходные модели серии отличаются пятью значениями коэффициента общей полноты (брр = 0.60; 0,65, 0.70; 0,75 н 0,80). Форма обводов исходных моделей характеризуется L-образными носовыми шпангоутами, значительным заострением носовых ветвей ватерлиний, кормовыми обводами крейсерского типа [12]. Результаты испытании моделей серии пригодны для расчета сопротивления универсальных сухогрузных судов н среднетоннажных танкеров без носового бульба.
Помимо коэффициента <5/;1 в серии варьируются LtB= 5,50ч- 8,50 или ф — — Ll\'},z 4,5ч-7,5; ВГГ = 2,50; 3,00; 3.50; х,- = - 0,025ч-0,005 (брр = 0.60);
х,- - —0,025ч-О 014 (6.,.. 0,65); х —0,0214-0,025 = 0,70); хс = 0.005ч-
4-0,035 (6/>р = 0,75); х; - 0,008+0,035 (брр = 0,80).
Чиента'Л' от
ЗГI
Рнс. VI1.17. Зависимость форм-фактора А: от Л и
Общее число испытанных моделей — 62. Характерный теоретический чертеж одной модели представлен иа рис. VII 30. Сведения об условиях испытаний моделей приведены в табл. VI 1.1, п. I. В оригинальной обработке результаты испытаний представлены в виде дна рамм достоянных значений удельного остаточного сопротивления Rn/D в функции от f>r,p и LpjjB, относительной скорости v I^L и одно-
Таблица VII.Л. Расчет буксировочной мощности по материалам серии сулоп с умеренной полнотой обводов
№ п/п. Обозначенне расчетных величии Численные значения
1 о5, уз 12 13 11 15 16 17
2 v, м/с 6.18 6.70 7,20 7,72 8,24 8.78
3 V2, №/с® 38.19 44.89 51,81 59,60 67,90 76.56
4 Fr = uil'rgL 0,144 0,156 0,168 0,180 0,193 0,201
5 С^-Юа = /(6) (см. рнс. VII 12) 0,760 0.780 0 840 0,840 0,980 1,100
6 йх<_ (см. рнс. VI 1.15) 1.000 1.010 1,010 1,040 1.065 1,0+
7 /гФ = <см Р|,с- VII.13) 0,78 0,78 0,78 0,78 0,78 0,78
8 kBIT°B 7 = CR (В Г=3,34)/^7? (В/Г=2.-5) (см. puc. VII 14) 1.012 1.012 1.042 1 042 1.042 1.012
9 C4-I0s= 15]. [6]. [7|-(8| 0,618 0,640 0,689 0 794 0,848 0,965
10 Re-10 8= (o/Jv)-10 8 7,15 7,76 8,34 8,94 9,55 I0.I'-
11 Сго-Ю3 = / (Re) (по формуле (11-4)1 1,638 1,621 1,606 1,592 1,579 1,568
12 C.4-I03 0.20 0.20 0,20 0,20 0,20 0,20
13 С4Р- 10я 0.10 0.10 0,10 0,10 0.10 0,10
14 С-10я |9( - ШИ- П21 + + И3| 2.556 2.561 2,595 2.686 2.727 2,833
15 R = (рА?) й [3] (14 1, кН 289,4 340,9 398 9 474 7 549,1 613,2
16 Ре = (21 |15|, кВт 1790 2280 2870 3660 4520 5630
362
5 £
>i X
_ CL
10—12дп it-10 ДП 12-10 • Д1
Рис. VII. 19 Теоретические корпуса кормовой оконечности моделей серии крупнотоннажных танкеров и рудовозов: а — li-образная оконечность; б — V-образная оконечность; в — си горообразная оконечность.
363
шення BIT. При этом использовались английская система мер, а в качестве экстра-полятора трения — формула Шенхерра (П.З).
С. 11. Мурагин! м материалы 60-й серии были переработаны с целью представления результатов в форме, принятой в отечественной практике. При этом сопро.
Рис, VI 1.20. Очертания штевней моделей серин крупнотоннажных танкеров и рудовозов.
1, 3, 3 — цилиндрическая, бульбивая к таранно-коническая носовая оконечность соответ-стш'нно; 4 — U- и V-ибраэныс кпрмпвыс гкгшечшм*тн; 5 — сигарообразная кормовая оконечность.
тивлепие трения моделей определялось по формуле (II.4). Поэтому каких-либо поправок при использовании приведенных ниже диаграмм вводить не требуется.
При расчете по диаграммам С П Мурагина коэффициент остаточного сопротивления Сit определяется по формуле
«РР. дт-)^с. (vii.ii>
Таблица VII 4 Поправочные коэффициенты kA на влияние формы кормовых обводов
Fr С = 0,800 6 0.8’Э С = 0.850
V-оГфяз-ная Сигарообразная V-образная Сигарообразная V-образ-ная СнгаросГ» разная
0,12 0 914 1,096 0,696 0,752 0.784 0,602
0,1.3 0,809 1,020 0.689 0 769 0811 0,610
0 14 0,758 0,969 0.696 0 787 0 834 0 624
0.15 0.750 0,969 0.724 0 794 0,875 0 700
0.16 0.758 1 060 0.740 0,802 0,890 0.746
0.17 0,838 0,956 0,795 0,7Ь9 0,920 0 780
0.18 0.900 0,908 0,831 0,880 0,941 0.839
0,19 0.900 0,945 0,875 0,884 0,998 0,860
0,20 0.868 0,972 0,867 0,867 0,941 0.825
0,21 0,938 0,938 0,831 0,884 0,916 0,825
0.22 0,922 1,030 0,880 0,955 0,926 0,855
0,23 0,914 1,070 0,702 0,740 0,795 0,610
Для определения Сц (т|., 6рр, BIT) используется комплект диаграмм на каж дой из которых приведена зависимость коэффициента Сц от относительной длины Ф или отношения иВ (в качестве £ принята длина по грузовой ватерлинии) при фиксированном значении дрр. Группа из пяти диаграмм относится к постоянному очно-
364
6,0 6,5 7.0 7,5 8,0 L/B
Рис. VII 21 Зависимость C/j от L/B (6 — 0,800; Bll — 2,7; хСо— 0,020)! о — цилиндрическая носовая оконечность; б — бульбообразная носовая оконечность; в - таранно коническая носовая оконечность.
365
Е
Рнс. VII 22 Зависимость Cr от LJB (6= 0 825; BlT = 2,7; =
=- 0,0225) а — цилиндрическая носовая оконечность; б — бульбооб разная носовая оконечность; в — таранио к ншческая носовая оконечность.
366
Рис. VI 1.23. Зависимость С/? от LIB (Л = 0,850; В/7’=2.7; .<-<0 — = 0,025) а — цилиндрическая носовая оконечность; б бульбообраз-ная носовая оконечность; в — тарапно коническая носовая оконечность.
367
Таблица VII.5. Поправочные коэффициенты kA на влияние формы кормовых обводов
Гг 0 = 0,800 в = 0,825 в = 0,850
V-образная Сигарообразная V-образная Сигарообразная V-образная Сигарообразная
0,14 0,450 0,580 0,990 1,62 1,00 0,670
0,15 0,450 0,450 1,02 1 50 1,20 0,80
0.16 0,150 0,543 1,00 1,55 1,24 1,03
0.17 0,500 0,600 1,06 1,33 1,14 I 10
0,18 0,607 0,576 1,28 0,965 1,15 1,08
0,19 0,892 0,600 1,17 0,964 1,13 1 12
0,20 0,883 0,766 1.И 1,06 1,18 1,08
0,21 0,825 0.870 1,01 0,970 1,02 0,940
0,22 0,962 0.837 0,915 0,970 0,970 0,910
0,23 0,925 1,002 0,970 1,05 0,975 0,942
шсиню В/Т, а именно: В/Т 2,50 — рис. VI 1.31; В/Т = 3.0 — рнс. VI 1.32; BIT — — 3,5— диаграммы рнс. VII.33. При этом применяется линейная интерполяция по брр и В/Т.
Коэффициент = Ср Ср ( v< вычисляется как отношение коэффициентов Cfj, определяемых для расчетного значения хс и базового \ , указанного на каждой диаграмме рис. VII.3I—VI 1.33 (в качестве базовых приняты оптнмаль-
Рис. VII.24. Зависимость коэффициента влияния kB/T =CR li1.Tyl'CR /В/Т=ч 7) от В! Г.
ные значения хс для каждого 6р₽). Коэффициент j снимают с графиков рис. VII-34, выбирая диаграмму, соответствующую значению 6рр, наиболее близ кому к расчетному.
Сэбит произвел обработку результатов испытаний моделей (И) й серии, также как и серии BSRA (табл. VII.I, и. 7), в форме уравнений регрессии, позволяющих вычислять коэффициент полного сопротивления судна стандартной длины 400 фут [501 Эти материалы с корректировкой на фактическую длину судна могут быть использованы при расчете сопротивления с применением ЭВМ
Серни рыбопромысловых супов. Первое отечественное систематическое иссле дованпе сопротивления и характеристик ходкости промысловых судов различных 368
Таблица \II.6 Расчет буксировочной мощности по материалам серии судов полных обводов
369
xc i тя носовых обводов: а - с заострением ГВЛ; б — с притуплением ГВ Л.
370
Рис. VII.26. Зависимость коэффициента влияния ,р*^'1РО(хс^-0.0225)
от х< для носовых обводов: а — с заострением ГЕЛ; б — с притуплением ГВЛ.
Рис. VII.27. Зависимость форм-фактора’й^ог 6 и L/В: а — цилиндрическая носовая оконечность; б — бульбообразная носовая оконечность', о — таранно-коническая носовая оконечность.
371
типов выполнено В А. Брошиным. Были испытаны модели трех серий: больших рыболовных траулеров, среднетоинажных (19] н малых [20] промысловых судов. Ниже в виду наибольшей перспективности приводятся материалы двух ц<ь
следних серий.
Исходные модели серий средне?) ц важных и малых промысловых судов При различных начениях отношения 7/; ц имеют одинаковую базовую форму
Рнс. VII 28 Зависимость коэффициента влияния eA ^(xc)/^(jtc—0.0225) от Ас для различных типов носовых обводов.
1 носовые обводи с пр и» у плешк м ГВЛ; 2 — носовые обводы с мшетреиием 1 ВЛ.
Рис. VII.29. Зависимость коэффициента влияния й* । от 6 для различных форм кормовой оконечности
I V пбриммя <1и>|1>1.1 кормы: 2 — сигарообразная форма кормы.
обводов, которая может быть охарактеризована теоретическим корпусом, приводи ным на рис. VII.35. В обеих сериях варьируются одни и те же основные геометрические параметры корпуса (<р;,р, Lvr/B, BIT. Р, х<), однако пределы их изменения
Рис.VII.30. Теоретический корпус модели серии 60(7; В = 7,5; 6= 0,Ь).
различны в серии среднетоинажных промысловых судов 0,55 < фри <0,70; 3.5 < Lpp/B < 5,0; 2,3 < BIT <3,2; 0,65 < р < 0,92; 0,03 < хс <0,01; в серии
малых промысловых судов 0,50<фри<6,72; 2,5 < / „,,/Д < 3,5; 2,6<В/7’< < 4.0; 0,75 < р < 0,92; —0,05 < х,- < 0,01.
Результаты буксировочных испытаний моделей серий в виде зависимости Коэф фициента Сп от каждого варьируемого параметра при фиксированных базовы»
372
Рис VII 31. Зависимость С1{ от ф и ЫВ при различных значениях Ср., и
В/7'=-2,5
fif 1,0 15 SC 85 Sfi ~gs~ ~Tfi ^5 gfi
L/B . . , ,L/g
Рис. VI1.32. Зависимость C/j orij> и 1JB при различных значениях 6,,,, и В/Т — 3,0.
374
Рнс. VI1.33. Зависимость Сд отт|> н UB при различных значениях 6рр н В/Т = 3,5.
375
Рис. VI 1.84. Зависимость
Cr от xt. при’различиых значениях врр.
Ср-Ю1
Рис. VI 1.34. Зависимость Cr от при различных значениях 6Рр
Рнс VIL35. Теоретический корпус базовых моделей «ерий ареднетоинажных и малых промысловых судов.
Рнс VII 36. Зависимость Cr от <ррр для промысловых судов: а — средне тоннажных; б - малых
37Я
Рис. VII.37. Зависимость Сц от Lpl/B для промысловых судов: а — среднетоннажных; б - малых.
tic VI 1.38. Зависимость Сд от 'Т для промысловых судов а среднетоннажиых; б — малых
379
Рис. VII.39. Зависимость Сг> от Р для промысловых судов: а — сред нетоннажных; б — малых.
0,75 0.80 Sf> 0,00 fl
Рис. VI 1.40. Зависимость Сд от х для
промысловых судов: а — среднетоннаж пых; б —малых.
180
значениях остальных для средиотоииажных н малых судов приведены на Inc. VII.36—VII.40. Такая форм* представления результатов позволяет наглядно выявить характер влияния каждого геометрического параметра на Сд и рассчитать коэффициент Сц, пользуясь зависимостью
Q|«Tp IV = (^₽й)0. Ро •’ч
kCr|4o> (!'рр B)i' Ро> Гг]СЯ [%’ </'₽p/fi>0’ I6'7”);- Ро’ Fr] Х
X
хСк|Фо. (! рр'в\- ^Пг Р,- Fqt-«l'Po. Ыв)о- (в'г)о. Ро- 1г] X
X С/7*Р0’ (^рр'й)о’ Iй'7 V Ро. хс0- Fr] ’ (VI 1.12)
г е индексом «» обозначены относительные геометрические параметры корпуса, для которого производится расчет, а индексом «О» аналогичные параметры базовой формы корпуса.
Г В качестве базовых в серии средиетониажиых судов приняты. LpJllИ = 4,2о; В/Т — 2.6; фр/, 0.6; 0 •- 0.833; х, =—0,01 В серин малых промысловых судов базовая форма обводов имеет отношение В 3,0; остальные значения параметров те же, что и в серии средиетониажиых судов.
Применение формулы (VII. 12) эквивалентно расчету Сд с введением коэффициентов влияния на различие в значениях четырех из пяти варьируемых параметров в каждой серии
§ 27. СПОСОБЫ ОПРЕДЕЛЕНИЯ ОСТАТОЧНОЮ
СОПРОТИВЛЕНИЯ ПУТЕМ ПЕРЕСЧЕТА С ПРОТОТИПА
Методы приближенного определения сопротивления но прототипу основаны на использовании полученной в результате модельных испытаний зависимости коэффициента остаточного сопротивления Сц (Ft) для судна с формой обводов, аналогичной принятой для рассчитываемого объекта, и но возможности с небольшими различиями в основных геометрических характеристиках корпуса. При этом влияние на остаточное сопротивление несоответствия геометрических параметров, как правило, соотношении главных размерений LIB. BIT. ф, коэффициентов полноты 6, ф, а иногда абсциссы центра величины х<-. учитывается введением системы корректирующих поправок в исходные значения С л для прототипа. Применение указанных поправок обычно основывается на допущении о независимом влиянии на остаточное сопротивление каждого геометрического параметра из числа различающихся у проектируемого судна и прототипа, при этом остальные полагаются постоянными.
На практике при пересчете коэффициента Сп с прототипа применяются два способа введения корректирующих поправок: в виде суммы поправок к величине Сд прототипа или так называемых «коэффициентов влияния». В первом случае искомый коэффициент остаточного сопротивления определяется из следующей зависимости [11 ]:
Ся - + S П ‘ (Я ~ П<) (VII 13>
Г=1 i=l
где Сд — коэффициент остаточного сопротивления прототипа при заданном числе Fr П,- и П; значения безразмерных геометрических параметров данного судна • прототипа, на влияние которых производится корректировка (например, LIB', ° 7 ф; С и др.); Сщ и Cps коэффициенты остаточного сопротивления, определяемые при заданном числе Fr, как правило, по графикам, построенным по результатам испытании моделей систематических серий, при соответствующих значениях Учитываемого параметра 11л и И 2. При выборе значений Tlft и П|2 необходимо
381
исходить из условия, что Пп <П,.<11(2 и Пп < FTJ < П(2, причем между величинами Сщ и Сщ допустима линейная интерполяция
Другим, более удобным на практике способом, оказывается способ, основан, иын на использовании «коэффициентов влияния», представляющих собой по-.ц . вочиые множители к величине прототипа, учитывающие влияние различий ц В(!. личинах какого-либо геометрического параметра II/ при неизменных значениях прочих параметров и заданном числе Fr:
(VII.I4)
гдо С«п,
н ,—коэффициенты остаточною сопротивления, определяемые при
заданном числе IT по результатам нспьнаннй моделей систематических серий (ля значений учитываемого геометрического параметра проектируемого судна II, и прототипа П[. В частном случае корректировки коэффициентов остаточного сопро-
тивления прототипа на отклонение в величинах соотношении главных размерений и коэффициента общей полноты (II, = /-'в. П2= В!Т, Ия = 6) коэффициент Сп проектируемого судна определяется ио формуле
СН ~ CRfen,kIl/n, —
Для определения коэффициентов влияния могут быть использованы (рафики, построенные со материалам любой систематической серии. Предпочти не при этом следует отдавать той серии, в которой исходная форма обводов моделей наиболее близка к разрабатываемой для проектируемого судил, а основные геометрические элементы корпуса, на влияние которых предполагается вводить поправочные множители, соответствуют варьируемым параметрам серии.
В качестве примера такого пересчета в табл. VI 1.7 выполнен расчет буксировочной мощности универсального сухогрузного судна со следующими элементами: L = I2I.8 м; UB — 6.35; В/Т = 2,56; б = 0,640. й = 3070 м2 и бульбообразными носовыми обводами. В качестве прототипа выбрано контейнерное судно с элементами- L = 128,9 м; L/В — 6,67; В'Т — 3,20; 6 — 0.614 и бульбообразными носовыми обводами
Для определения поправочных коэффициентов в данном случае использованы диаграммы серии быстроходных и ср шескорост (ых судов (§ 26), при выборе которых принималось во внимание наличие у моделей серии бульбовой носовой оконечности.
Результаты испытаний моделей систематических серин часто также обраб; гы-ваются с использованием «коэффициентов влияния». Примерами этому moivt с.тужить формулы (VI 1.2), (VII.5), (VII.8) предыдущего параграфа, когда в качестве данных «прототипа» используются диаграммы, определяющие коэффициент Cr для исходных моделей серии обычно в зависимости от коэффициента 8 (иногда также L/В или ф) Такой прием позволяет при ограниченном числе испытываемых моделей учесть влияние большего числа геометрических параметров.
Помимо использования для расчета коэффициента Cr по прототипу непосредственно материалов систематических серий в оригинальной обработке, существ лот комплекты графиков построенных специально для определения «коэффициентов влияния» Обычно по таким графикам вычисляют от основных безразмерных геометрических параметров, характеризующих полноту обводов и соотношения главных размерений. Из них наиболее известны диаграммы, построенные И В Гнрсом в результате обработки материалов серий Тейлора и С П. Мурапша н определяющие коэффициенты <?nf, учитывающие влияние ф, ф = U V1-13 н В/Т [12, 13]. Существуют диаграммы, в которых в качестве параметра приняты 6, UB и В/Т, напрн мер графики О. В. Дубровина, созданные по матер и клан испытаний серии моделей в бассейне Ленинградского кораблестроительного института, которые могут быть применены для пересчета с ирототи 1а остаточного сопротивления морских буксиров, ледоколов и рыбопромысловых судов [ 17 ].
382
Табл и ц а \ 11.7. Расчет буксировочной мощности способом пересчета коэффициента остаточного сопротивления по прототипу
383
§ 28 СОПРОТИВЛЕНИЕ МНОГОКОРПУСНЫХ СУДОВ
И ПРИБЛИЖЕННЫЕ СПОСОБЫ ЕГО РАСЧЕТА
Многокорпусным называется судно, силл поддержания которого обеспсчип.п не менее чем двумя чочотмс'цлю.цнмн объемами О.-обеиности буксировочного . противления таких' судну по сравнению с одиокорпуснымн определяются отличи (| формы и соотношений размерений состав тощих судно корпусов а также их гидр,-,, динамическим взаимовлиянием.
Многокорпусное судно может состоять на одинаковых или различных но (|xipMc и соотношениям размерений корпусов, а также из одной или нескольких водно । ч гондол, соединенных с надводной платформой стойками обтекаемого сечения (рис. VII.41). Набор геометрических параметров, характеризующих Mi>orOKopiyciII)c судно, обширнее, чем для однокорнусного, и пределы изменении характеристик формы первого значительно шире
При разделении буксировочного сопротивления R на составляющие трения A’F, формы Rvp » волновое Rw можно отметить некоторые особенности этих составляющих, характерные .для многокорпусного судна. Удельная площадь смоченной поверхности такого судна обычно больше, чем однокорнусного судна такого же водоизмещения (если последнее не отличается большой относительной шириной); на 3—5 % выше скорость обтекания внутренних бортов многокорпусного судна В целом удельное сопротивление трения многокорпусного судна, как правило, выше, чем олнокорпусного того же водоизмещения. Сопротивление формы мгого-корпусного судна всегда больше, чем то же сопротивление составляющих судно корпусов. Волновое сопротивление определяется сочетанием чиста Фруда и ы -имиого расположения корпусов и может быть как больше, так и меньше суммы волновых сопротивлений составляющих корпусов Чем более интенсивно гндрота памическое взаимовлияние корпусов, тем больше как возможный выигрыш, так и проигрыш в волновом сопротивлении.
До настоящего времени и основном изучено буксировочное сопротивление мл лых н среднетоннажиых катамаранов. Значительно меньше исследовано сопроги-вленне двухкорпусных судов с малой площадью ватерлинии (СМПВ). которые чали строить с конца 70-х гг. Еще меньше данных о сопротивлении судов с лутрп герами и тримаранов.
Сравнение ходовых качеств построенных катамаранов и однокорпусных судов (рис. VII.42) показывает, что первые могут иметь преимущество при достаточ, высокой относительной скорости холл и большом удлинении корпусов.
Сопротивление многокорпусного судна может быть определено, если известии коэффициенты остаточного сопротивления составляющих корпусов и имеются ные о влиянии на эти коэффициенты взаимодействия корпусов. Поправки на шероховатость и выступающие части принимают по данным для однокорпусных судов
С учетом взаимовлияния корпусов коэффициенты остаточного сопротивления корпуса большого удлинения в составе катамарана или тримарана соответственно равны
Сд,, = С\ pkyK + Сп"А’1гк; (V11.15>
С/?х — С|,р4д/Т + CuzA’itT» (Vll.in)
где Сур — коэффициент сопротивления формы изолированного одиночного корпуса, принимаемый равным коэффициенту остаточного сопротивления Ср того ке корпуса при Fr 0 15; kvr — коэффициенты, учитывающие воздействие со i них корпусов на вязкостное сопротивление катамарана и тримаранi соответствен > зависящие от расположения корпусов (рис VII.43); С\у Ся — Сур; Ац-ц, kyy, -коэффициенты, учитывающие воздействие соседних корпусов на волновое соиро тивленне катамарана и тримарана соответственно, зависящие or Fr и расположения корпусов (рис. VII.44).
При абсолютном минимуме коэффициента kwu волновое сопротивление к< марана для данного числа I г меньше ня 15—20 %, чем волновое сопротивление сг став.1Яюших корпусов, движущихся изолированно одни от другого При оптнм.. пом выдвше а волновое сопротивление тримарана может быть меньше, чем то сопротивление его изолированных корпусов, до S раз (по данным А. Г. Ляховшг кою). Эго связано с благоприятной интерференцией поперечных воли в широю"1 диапазоне Гг, но особенно при I г ~ 0,5.
384
Рис VII 41 Схемы многокорпусных судов и их характерные размерения: а — катамаран; б — тримаран; в — двухкорпусное СМПВ (дуплус).
26 — поперечный клиренс; hB — вертикальный клиренс: а — продольный KHiipeiK, или лыдвиг.
13
Пр Я II. ЕоПткуиского. т I
385
Рис. VIL42. Обтасти изменения адмиралтейского коэффициента различных судов
1 — крупнотоннажные транспортные однокорпуспые суда; 2 — однокорпусные промысловые суда; 3 — катамараны.
Рнс. VI 1.43. Коэффициенты kv вязкостной части остаточного сопротивления: а — катамаранов; б — тримаранов (с корпусами большой остроты).
Рис. VII.44. Коэффициенты волновой части остаточного сопротивления: а — катамаранов; б — тримаранов (при 26 — 0,3).
Рис. VII.45 Удельное остаточное сопротивление RrfV одиночных корпусов различной относительной длины ф.
386
Коэффициент остаточного сопротивления одиночного удлиненного корпуса
пожег быть оценен по формуле
С - 9 ( Л5-\ —Е1— Су ~ \ V J pv4it *
(VII. 17)
где
удельное остаточное сопротивление (рнс. VI 1.45);
и Vj — площадь
смоченной поверхности и водоизмещение одного корпуса катамарана (пли три марана) соответственно.
Рис. VII.46. Зависимость коэффициентов вязкостной части остаточного сопротивления катамарана с корпусами малой остроты от поперечного клиренса; а — kv , /в= = / (26); б - kv в;т = f (26); в - kv б = / (26).
Рнс VI1.47. Зависимость коэффициентов волновой части остаточного сопротивления катамарана с корпусами малой остроты от поперечного клиренса; а~kw ь'В~ ~ f (26) 6 = 0,5, Br'T =2,25; б — = f (26) , UB{ = 7, BjT = 2,25; в —
b‘t = f (26) : 5 = 0,5; UB^ = 7.
I — Fr = 0,20; 2 — Fr = 0,35.
Для катамарана с корпусами малого удлинения известны [27] зависимости коэффициентов взаимовлияния корпусов от удлинения корпуса Li'Bx, относительной ширины Bi'T, коэффициента общей полноты 6 при переменных поперечном клиренсе и Гг Суммарные поправки для вязкостной и волновой части остаточного сопротивления определяются следующими выражениями;
Чк~ 11 v l,i^vн;ткч>' к ~ l/b^vв/т^\в1 (VII. 18)
Где индексы показывают, какой геометрический параметр учитывается соответ-ртвующим коэффициентом. Примеры зависимостей указанных коэффициентов от Поперечного клиренса и Fr показаны на рис. VII.46 и \ 11 47. Следует отметить, что
13* 387
Таблица VII.8. Значения коэффициентов регресс-анализа (при L/B, 4^. 9.
Коэффициент Fr
0.20 0,22 0.24 0,26 0,28
—19,9249 — 18,8808 —13,6882 12,0690 —40,5294
—0 9334 -1,1791 —0,9585 — 1 4256 —1,0694
2,8764 3,5284 4,7716 5,4022 8,2532
с4 72,8001 69,33.31 42,8899 38,2245 111,321
—8,2434 -8,6314 —8,09.31 —4,4313 —3,2532
0(1 0 0603 0,0583 0,0473 0,0463 0,0533
Оу —0,3033 — 0,5451 —0,9800 — 1.2215 — 1.2146
Cig —18,5000 -14.6131 4,8052 11,4375 -27.3711
ая 0,3730 0,5207 0,4022 0.3010 0,1507
ам 0,8129 0,9168 0,8952 1,0570 1.1331
«и —3,1771 —3,0292 —2,8706 —2,6112 —3.6696
«12 —0,3066 —0.4547 —0,6460 —0,7751 —0.7902
— 11,6185 —12,2122 — 10,8031 — 11,9121 — 17,1368
«14 —0,0182 —0,0240 -0,0294 -0,0278 —0,0228
13,6963 15,9902 18,3546 14,6241 13,3194
заметного благоприятного взаимодействия можно ожидать только при достаточно большом L/B (7 и более) и при достаточно малом коэффициенте общей полноты (6 = 0,5-ь0,6)
Влияние асимметрии корпусов катамарана отражается на его сопротивлении. Она может вызвать увеличение площади смоченной поверхности (на 5—10%) и
Рис. VH.48. Коэффициент волнового сопротивления одиночной гондолы под свободной поверхностью (й0 = l,85dr).
Рис. VII.49. Изменение коэффициента волнового сопротивления гондолы при установке двух стоек по оконечностям гондолы (/) и одной длинной стойки на миде е гондолы (2).
коэффициента сопротивления формы (от 15 % до 3 раз), а также привести к спи женню взаимного влияния корпусов, вследствие чего сопротивление в зонах неб. гопрнятного взаимодействия уменьшится (на 5—10 %) н в районах благоприятное > взаимодействия — повысится (до 15 %).
388
fair = 1,3^-2,5; 6 0,5.0,7; 26 = 0,2-0,5)
0.30 0.32 0,3* 0.36 0,33 0.40
_S2,68I0 —0,7338 10.8551 30,4651 0,5804 14.2501
-1,5346 -5,4293 —7,1018 - 8.3142 —7 6040 —4,5027
2,7288 —7,9090 -8.3818 13,5381 —1,6452 —1,7211
87,7293 120,6994 107,636 68.2001 110,827 40,5466
—17,9288 —60,3819 -61,7521 - 27,7995 — 10,3335 8,5185
0,0479 0,0181 0,0204 0,0502 0,0816 0,1149
— 1,5164 —1,9034 —2.0081 —2,3984 —2,4769 —1,9566
—31,3409 — 132,719 -127,716 -92,4152 —84,6190 — 1,5353
0,6494 —0,4927 -0,7558 —0,560-1 —0,3137 —0,1246
1,0014 0,8991 1,1608 1,6559 1,7960 1,8722
—2,7136 4,0263 5,5156 4.7847 2,4398 —3,0713
-0,5492 —0,5690 —0,6249 - 0.6026 — 1,0788 —1,9792
—6,1872 12,3637 — 11,3106 16,3239 — 1,2665 —5,2231
—0,0201 0,0142 0,0391 0,0594 0,0869 0,1183
30,9351 94,5143 94,7484 43,1487 24,0460 9,4645
4” Чй*
При вариантном проектировании катамаранов, когда необходимы серийные расчеты сопротивления с применением ЭВМ, можно использовать результаты регресс-анализа данных о коэффициентах остаточного сопротивления;
Cr ~ a-i + Cj -щ- -|- °s + а626 + ce ( В,\) +
. / В. V, а- , , С , Lf> , 2L6 ,
" °’ \Т~) °''” + ««45- -J- ак + «и + Пн ——F
4 ai3 —Ь ~f-------Ь °is265.
Значения коэффициентов at приведены в табл. VII 8.
Рис. VII.50. Влияние взаимодействия корпусов на волновое сопротивление двух-корпусного СМПВ.
Рис. VII.51. Влияние взаимодействия корпусов на волновое сопротивление трехкорпусного СМПВ (77/ = 0,105, b = 0.15).
Приближенная оценка сопротивления СМПВ может быть выполнена методом суперпозиции [27]. На рис VII 48 н VII 49 показаны данные о коэффициенте волнового сопротивления одиночной гондолы с удлинением от 5 до 20 и о влиянии стсек на во.щоВое сопротивление гондолы. Особенностью двухкорпусиого СМПВ является т°> что основное влияние на сопротивление оказывает взаимодействие стоек с гон-
389
Рнс. VI 1.53. Оптимальные углы выдвига трехкорпусных судов.
Рнс VII 54 Оптимальные по сопротивлению (максимальные при вариантном проси-тпровапнн) значения коэффициента ф корпуса.
I—катамаран; 'J— тримаран; 3--CMIIB.
Рис. VII 55’Оптимальные значения коэффициентов полноты корпусов катамарана и тримарана.
' - Oopt = I Ю) • 2 - Торт - /<’ г»
Рнс. VII.56. Относительная скорость на встречном волнении.
/, 2 — однокорпусные суда с рязлнчн><1 удельной мощностью; 3 — кзтзнаран удельной мощнг»-ты> н высотой борта, К ' у судна /. Т СМПВ; vT в — скорость н> тихой воде.
390
1<1<мой, а поперечное взаимодействие корпусов гораздо меньше, чем у катамарана, из-за большего расстояния между корпусами (рис. VII 50). Как и для тримарана, 'для трехкорпусчогоСМПН характерно значительное взаимодействие поперечных воли Кие. VII.51). Сравнение рис. VII.44 с рис. VII. 50 и VII.51 позволяет сделать вывод о том. что зависимости составляющих сопротивления от клиренсов и Fr качественно одинаковы для корпусов достаточно большого удлинения независимо от типа обводов Это позволяет считать, что оптимальные сочетания относительной скорости н относительных клиренсов также не зависят от формы обводов, и применять для СМПВ рекомендации, полученные для катамаранов и тримаранов. На рнс. VI 1.52 показаны оптимальные по сопротивлению значения относительного поперечного клиренса двухкорпусиых судов. Здесь области 1 и II соответствуют отиосшельиым минимумам графиков коэффициента волнового взаимодействия катамарана Еи. рис VI 1.44), а верхняя (прерывистая) область III — абсолютному минимуму тех же графиков. На рис. VII 53 даны оптимальные выдвнги центрального корпуса трех-кориусных судов в зависимости от Fr и выбранного поперечного клиренса. На рнс. VI 1.54 приведены данные об оптимальном по сопротивлению коэффициенте ф одного корпуса многокорпусных судов различных типов. При вариантном проектировании целесообразно считать эти значения ограничивающими допустимую область коэффициента ф сверху.
На рис. VI155 приведены рекомендуемые значения коэффициентов полноты корпусов катамарана и тримарана.
Для приближенной оценки мощности энергетической установки многокорпусных судов различных типов можно пользоваться результатами систематических расчетов, приведенными в [271
Особенности ходкости многокорпусных судов на волнении определяются отличиями их качки, относительной осадки и наличием развитой надводной части Для грубых прикидок достижимой на встречном волнении скорости ов можно использовать рнс. VII.56 где приведен график относительной скорости иа встречном волнении в функции от относительной средней длины волны. Средняя по курсовым углам достижимая скорость хода, учитывающая повторяемость волнения, сильно зависит от тактики штормового плавания судна каждого типа.
Глава VIII
ФОРМА КОРПУСА МОРСКИХ СУДОВ И ЕЕ ВЛИЯНИЕ НА СОПРОТИВЛЕНИЕ
§ 29. ВЛИЯНИЕ НА СОПРОТИВЛЕНИЕ ОСНОВНЫХ
СООТНОШЕНИЙ И КОЭФФИЦИЕНТОВ ПОЛНОТЫ КОРПУСА
При разработке рекомендаций по выбору наиболее целесообразной формы корпуса судна, основанных на оценке ее влияния на сопротивление, возникают значительные трудности в связи с ботьшим числом геометрических параметров, описывающих теоретический чертеж.
На основании анализа различных способов вариации формы обводов, использованных в большом числе систематических серий моделей судов, может быть предложено следующее подразделение на группы основных элементов теоретического чертежа
К 1. Характеристики общей полноты корпуса- коэффициент общей полноты 0— VILBT-, коэффициент продольной полноты <р — б/|4 17<ом£.
2. Соотношения главных размерении отношение длины к ширине L/В, относительная дтина ф = отношение ширины к осадке В/Т.
3. Характеристики продольного распределения водоизмещения относительная абсцисса ЦП хс хс1^1,р< отношение коэффициентов полноты носовой и кормовой оконечностей или носового и кормового заостре! ни
391
4. Характеристики вертикального распределения водоизмещения: коэффнцц. енты вертикальной полноты носовой %VF н кормовой 7Ч<1 оконечностей, форма иос0. вых и кормовых шпангоутов.
5. Характеристики формы мидель шпангоута: коэффициент полноты мидель шпангоута f>, относительный радиус закругления скулы г = т,| В Г.
При проектировании транспортных судов, особенно сухогрузных и наливных для обеспечения заданной грузоподьсмности и грузовместимости принимают высокие значения коэффициентов общей полноты (б = 0,65-5-0,84), намного превосходящие значения, соответствующие относительному минимуму волнового сопро ,i-влення. Поэтому для судов с б> 0,60 характеристики группы I являются оире ляющимн по степени влияния иа сопротивление. В случае 6 = const влияние на сопротивление характеристик группы 2 значительно слабее. Исключение составляют только крупнотоннажные танкеры с LiВ < 5,5, а также рыболовные траулс] ы с LiВ < 5,0.
Характеристики группы 3 в первом приближении определяют форму строевой по шпангоутам для заданного коэффициента <р. Обычно продольное положение ЦВ выбирается вблизи значения, оптимального для соответствующего Fr. Однако в тех случаях, когда для обеспечения заданной посадки судна необходимо значительно сместить ЦВ от оптимального положения, увеличение полного сопротивления может быть заметным.
Влияние параметров группы 4 на сопротивление обычно возрастает с увеличением относительной скорости, но может ощутимо проявляться и у тихоходных судов, например танкеров и рудовозов с большой полнотой обводов, что делает изменение этих параметров но степени воздействия на сопротивление сопоставимым с перемещением водоизмещения ио длине.
Геометрические характеристики, относящиеся к последней группе и изменяющиеся в пределах i = 0,75-5-0.93 у судов различных типов, слабо влияют ни противление. Для средиетониажиых транспортных судов обычно принимают сред ине значения коэффициента р — 0,98. На крупнотоннажных танкерах и рудовозах Р увеличивают до 0,995. чтобы при большой полноте корпуса несколько уменьшить <[i и по возможности заострить чрезмерно полные оконечности.
Форма и угол входа грузовой ватерлинии зависят от параметров первых четырех групп и потому не могут рассматриваться отдельно от них.
Некоторые геометрические характеристики на разных групп также взаимосвязаны. Как следует из соотношения
это прежде всего относится к параметрам групп 1, 2 и 5.
Необходимо отметить, что до настоящего времени снижение сопротивления часто рассматривали как основной критерий выбора формы обводов. Однако рекомендации. основанные па этом критерии, могут не совпадать с соображениями, направленными на достижение наибольшего пропульсивного коэффициента и улу» шепие условий работы гребного винта за корпусом. Поэтому при разработке теор> тического чертежа необходимо исходить из оценки влияния формы корпуса на ходи* вые качества судна в целом. Влияние геометрических параметров на взаимодействие движителей с корпусом рассматривается в третьем разделе.
Соотношения главных размерений. Значения главных размерений L, В, Т и нх соотношений L/В и Bi Г, а также относительной длины ф •= L.'V1 Зпрн проектировании транспортных судов принимаю!, как правило, исходя из удовлетворения целому ряду требовании, способствующих как упрощению п удешевлению постройки, так и доинжецню заданных грузоподъемности и грузовместимости, повышению остойчивости и управляемости и пр. При этом соображения снижения сопротивлс ния и даже уменьшений погребной мощности силовой установки обычно не являются определяющими.
В 60 х гг.. когда цепы на топливо били относительно низкими, наметилась тез еицня к строительству' крупнотоннажных танкеров дедвейтом более 300 000 т
392
с /.'В = 5.04-6,0 и 6 = 0,83 (<tno.inoKopoTKiix> судов) В последние годы роль эпер-геги-гескпх затрат существенно возросла, вследствие чего наряду с общим снижением дедвейта танкеров у этих судов в случае низких значений LIB v 5,5 прннн-jh.iiot 6^080 н. наоборот, при 6 >0.82 назначают Uli > 6,0.
Г. Как следует из выражения (VIII I), невозможно изменить только L, В или Т, а также один из безразмерных параметров, определяющий отношение главных размерений, независимо от других размерений пли коэффициента 6. Такне изменен «я могут быть осуществлены за счет вариации различных параметров и нх комбинаций. Эта неоднозначность преобразования геометрии корпуса приводит к разному воздействию на сопротивление и характеристики взаимодействия движителей с корпусом и затрудняет учет влияния иа ходовые качества судна главных размерений при их выборе в начальных стадиях проектирования.
Общие тенденции влияния на ходовые качества изменения главных размерений и водоизмещения (коэффициента 6) могут быть проиллюстрированы данными, приведенными в табл VIII I для быстроходных контейнеровозов и судов типа ро-ро и в табл. VIII 2 для крупнотоннажных танкеров и рудовозов [991. В таблицах указано процентное снижение потребной мощности двигателя при постоянной скорости хода в случае изменения соответствующего геометрического параметра на Ю % от исходного значения для двух принципиально различных способов вариации: при постоянном и переменном коэффициенте 6. При первом способе вариации любых размерений, включая уменьшение В и Т, изменения осуществлялись с одио-времеи нам увеличением длины /. и отношения UB. Вариация при переменном 6 производилась путем увеличения каждого из размерений пропорционально уменьшению 6 при неизменных других параметрах. Это объясняет, почему в обоих способах вариации наибольший эффект изменения главных размерений достигается для полных судов (танкеров, рудовозов), характеризуемых как высокими значениями 6. так и малыми L/В Результаты приведенных оценок свидетельствчют также, что увеличение L оказывает несколько большее влияние па пропульсивные качества, чем изменение В и Т и уменьшение водоизмещения.
Увеличение L при неизменных 6 и В'Т приводит к пропорциональному росту ф и к более сильному возрастанию (в 1,5 раза) отношения I !В. связанных между собой, как следует из зависимости (VIII. I), следующим образом:
Iх
В общем случае такого изменения L при V'= const волновое сопротивление уменьшается тем сильнее, чем выше Гг, т е. интенсивнее у быстроходных судов, но одновременно возрастает площадь смоченной поверхности, что приводит к увеличению сопротивления трения. Вследствие этого имеет место область минимума полного сопротнвл; н я в зависимости от L/V,/3 и IJB. Однако обычно принимаемые в судостроении значения указанных параметров значительно меньше значений, соответствующих минимуму сопротивления, так как увеличение длины существенно ухудшает ряд экономических и эксплуатационных показателен судна.
Не всегда верно мнение, что варьирование В и Т не оказывает, по сравнению с изменением заметного влияния ил сопротивление судна Из табл. VII 1.2 видно, что изменением любого из размерений пропорционально 6 достигается приблизительно одинаковое снижение потребной мощности силовой установки. Исключение составляют только суда с очень большой полнотой > 0,83) и с такими значениями углов наклона ватерлиний в корме, возрастающими с увеличением В. при которых возможен отрыв пограничного слоя.
Неоднозначность влияния изменения главных размерений и их соотношений Видна иа примере вариации В/Т. Сравнение приведенных в гл. VII материалов испытаний моделей с изменением BIT из разных серий приводит к противоположным результатам. Так, на рис. VII 6 коэффициент kti ,т влияния изменен ня В!Т на сопротивление с ростом В/Т уменьшается, тогда как на рнс \ II 14 тот же коэффициент возрастает с увезнчснисм В,'Г. Эго кажущееся несоответствие результатов в действительности объясняется различными способами вариации В'Т, принятыми в указанных сериях (см табл VII 1) В первой из них и качестве варьируемых параметров кроме В/ Т приняты L'B и 6, вследствие чего согласно формуле (\ 111.1»
393
Таблица VIII 1. Уменьшение мощности контейнеровозов и судов с горизонтальным способом погрузки прн изменении главных размерений и водоизмещения на 10 % от исходного значения
Способ изменения исходных геометрических характеристик прн переменном & i? <о° X И и
£ °дх ’Л °л °Л
К © о г° е> ь к Ь ь.
а? е> о to ее ч ч Ч Ч
-j л л -31
Множитель вариации X 1.1 1,1 1.1 0.9
Сносе б изменения исходных геометрических характеристик при 6 — const
к х-,/,Г0 х~'!'Тл хТл х'^Та
а? х '!,Вй хВ, лг_1/,В0 х'%
о ‘7./Л °7. ,|7г/1_ х О']Х
Множитель вариации * — О СП СП — ОСО
л Ц о с.£°' о = § с 2"° Л ~ а - s 2 н о о •чт* О О Ю СО — О С
Уменьшение мощности прн 6 — const, "о со t>j о со см сч сч in
Основной изменяв* мый параметр L, м В, м Т, м И, м3
2
X
£
о.
2 •о н н О Xj т ч
о хо
о. н *1 2 О о о У Хх *•4 J
U 3 й о X Е. о с Е-м е> ь. г о
X р о © аз о 05 И CQ ©
X о X о 2 п X ех X Я О. >4 е> о О ©
Способ X Миожи- тель 118-рнацкн я — сГ
X о о 5а-Ч
3J V н 2 о ф С- <л С о и II к ьТ 1 К И ХТ о ~Ч
исходных ггик при б о ? ч о Q? Ч о ? 1 ч х' 'Вв
к X 2 а. о X « сх « л о о •> 1 о «• 1 Ч 1
Способ X к о X Z* тель вариации X 0,9 0,9 0,9
Умень- шейке МОЩНО' сти при переменном б. % 40.0 О 1Д 37,0 38,6 ।
Уменьшение мощности при в = const, % 27,7 1G.9 12,8 5,0
е с X г нор изменяемый параметр L, м В, м Т, м Я
изменение В Т производилось пропорционально L/ V1'3, тогда как во второй серин варьируется параметр L/’V'I/'1n В Т изменяется за счет I.IB. Как следует из соотио-ше1 ия (VIII.1),
остаточного сопротивления быстроходного судна от Fr и коэффициента общей полноты б/1р.
/ — первая «критическая» скорость; 2 — вторая «критическая» скорость.
н,т ' (ЪВ)г ’
откуда видно, что в случае увеличения BIT прн 6 = const A'V1^3 возрастает a L. В уменьшается; это приводит к качественно различному эффекту с точки зрения изменения сопротивления. Данный пример показывает, как важно правильно оценивать влияние изменения соотношений главных размерений на сопротивление при его расчетах на основании данных по рйеющамуея прототипу.
Коэффициент общей полноты 6 является одним из важных геометрических параметров корпуса, причем его роль определяется нс только степенью влияния па пропульсивные качества, по также и тем, что при заданных главных размерениях он ха растеризует грузоподъемность судна. Согласно (VIII. I) изменения соотношений главных размерений п коэффициента 6 взаимосвязаны. Воздействие изменения последнего на сопротивление было частично рассмотрено выше
Относительное влияние на сопротивление коэффициента 6, изменяющегося во всем диапазоне значении, принимаемых как для быстроходных, так и тихоходных судов (0,50 <6 < < 0,85), существенно различно и начинает проявляться при 6, превышающих некоторое минимальное значение б яз « 0,б0-т-0,65, причем оно возрастает с увеличением числа Fr. Для судов с более низкими б, т. е. для быстроходных транспортных судов, более существен-
ное влияние на сопротивление оказывает относительная длина ф Поэтому представляется недостаточно справедливым существующее мнение о доминирующем воздействии б на ходовые качества транспортных судов всех типов, в том числе и 'быстроходных лайнеров.
Известно, чго па графиках коэффициентов остаточного или полного сопротивления имеют место резкие возрастания этих коэффициентов при некоторых значениях числа Fr. Эго обусловлено увеличением волнового сопротивления с ростом числа 1т и неблагоприятной интерференцией волновых систем в определенных диапазонах относительных скоростей. Некоторые авторы, называя «критическими» или «экоио-‘ мическнми» значения относительных скоростей, соответствующих точкам крутого подъема кривых этих графиков |28], предлагали использовать их в качестве критерия для определения предельно допустимых значений коэффициента полноты 6.
На рис. VIII 1 показано положение «критических» скоростей на кривых коэффициента Cjt дтя быстроходных грузовых лайнеров с различными коэффициентами брр.
Как правило, скорости транспортных судов располагаются между «критическими» значениями, в силу различных причин приближаясь к нижнему или верхнему пределу, а иногда и превосходя их. Эти обстоятельства послужили основанием для разработки приближенных формул, связывающих коэффициент б и рациональное значение числа Fr. Наибольшее распространение получили линейные зависимости типа формулы Александера б^,р — и — fcFrpj,.
(VIII.2)
395
Коэффициенты а и b в этой формуле неоднократно корректировались: по Эйру коэф, фнциеит а увеличивается от 1,04 до 1,08 с ростом числа Fr от 0,15 до 0.30, а Ь 1,68; согласно Хэкшеру я -= 1.0; Ь= 1,44.
А В Бронников в результате анализа данных, относящихся к судам постройки начата 60-х гг., предложил разделить указанную область относительных скоростей па две н применять для каждой различные коэффициенты а и Ь:
6ГР = 1,07—1,68 FrPJ, (VIII.3)
для Fr = 0,194-0,25 и
6РР = 1,21-2,3 Frpp (VHI.4)
для 1т = 0,25-4-0 29.
Статистическая обработка материалов по крупнотоннажным танкерам, построенным до конца 60-х гг., позволила С. II. Логачеву получить зависимость, пригодную для Fr = 0,15-4-0,24:
брр = 1,105—I,68Frpp. (VIII.5)
На рис. VIII.2 коэффициенты брр = / (Fr), вычисленные по приведенным приближенным формулам, сопоставлены с данными, относящимися к конкретным судам. Основываясь на обработке результатов испытаний моделей серин универсальных морских транспортных судов (см. § 26), В. М. Штумпф предложил аппроксимацию искомых значений б и Гг параболическими^ зависимостями
6 = 0,967-0,495 Fr-3,915 Fi1. ) _
. „ ) (VIII.61
Дт = 0,261 + 0,3226 - 0,5726s J '
для первой «критической» скорости и
6 = 0,967 — 0,470 Fr — 3,530 Fr2; 1 (
Fr = 0,275 + 0,3396 - 0.6026- J
для второй «критической» скорости.
В выражениях (VIII.6) и (VIII 7)Jb отличие от всех .предыдущих зависим:-стей б и Fr определяются для длины по ГВЛ, а не между перпендикулярами £рр. Однако принимая во внимание, что у моделей упомянутой серия £«'£/£рр — 1,0175, все указанные формулы легко привести в соответствие друг с другом.
Использование любой приведенной выше зависимости для оценки экономически целесообразного значения 6 допустимо только в качестве грубого приближения, так как 6 не является единственным параметром, определяющим ходовые качества судна.
Положение «критических» точек па кривых коэффициентов сопротивления заметно изменяется при различных положениях ЦВ по длине. На выбор допустимых значений 6 влияют абсолютные размеры судов Так, со значительным увеличением длины и соответствующим уменьшением относительной потерн скорости на волнении на супертанкерах оказалось возможным реализовать значения коэффициента б> > 0,82. Наконец, на принимаемые на практике значения б оказывают воздейсшпе факторы конъюнктурного характера, например цены на топливо.
Поэтому наиболее надежный способ обоснованного выбора коэффициента общей полноты корпуса — сопоставление технико-экономических показателей судна с различными значениями б. Для этого в настоящее время имеются соответствующие программы расчета на ЭВМ
Коэффициент продольной полноты (продольный призматический коэффициент) Ф = £ р определяет полноту строевой по шпангоутам. Этот коэффициент лучше опн сывает степень остроты обводов корпуса, чем 6, и является более удобной характеристикой при исследовании ходовых качеств.
Однако у большинства транспортных судов коэффициенты Р близки к 1 и значения 6 н Ф практически совпадают, о чем, например, можно судить по данным, приведенным на рис. VIII 3. Учитывая это, коэффициенту 5 отдается предпочтешь при обработке результатов исследований пропульсивных качеств транспортных ст-дов большинства типов. Все изложенные выше рекомендации по выбору б мо.у т быть в равной мере отнесены и к tp.
39G
Выбор коэффициента <р для быстроходных острых судов приобретает самостоятельное значение. Существуют приближенные формулы для определения коэффициента продольной полноты К их числу относится формула Трооста, которая в принятых в отечественной практике обозначениях имеет вид
Ф = 1,16 — 2,1 Fr,,p. (VIII.8)
При ее использовании остаются в силе соображения, приведенные выше применительно к аналогичным зависимостям для коэффициента 6.
Относительная абсцисса ЦВх(, = хс/£рр характеризует распределение водоизмещения по длине судна н определяет форму строевой по шпангоутам при заданном <р. Опа оказывает заметное влияние на ходовые качества судна. Перемещение ЦВ по длине судна
коэффициента общей полноты от Fr.
I — по Эйру; 2 — по Хэкшеру; S — по формуле (VIII 3); 4 — no (VIII.4); 5 — по (VIII 5); С — no (VIII.6); 7 — по (VIII.7); О — статистические данные.
Рнс. VIII.3. Взаимосвязь между коэффициентами полноты корпуса и <Г и коэффициентом полноты мидель-шпаигоута Р одновинтовых транспортных судов.
О — статистические данные.
при постоянных б и ф приводит к приводнению или заострению оконечностей. Эти изменения остроты и формы обводов оконечностей соответствующим образом воздействуют как па волновое, так и на вязкостное сопротивление, притом Довольно сложно В действительности, в формировании сопротивления важную Роль играют нс только носовое и кормовое заострения, но и места значительного гРаднента давлений, например плечи ватерлиний, так что одновременно со снижением волиообразовавня в носу при смещении ЦВ в корму может возрастать интенсивность вихрей, образующихся в районе скулы и носового плеча. Поэтому для заданной комбинации основных геометрических характеристик корпуса (б, <р; Ф и др.) существуют оптимальные значения хс, обеспечивающие относительный минимум сопротивления. Кроме того, изменение полноты кормы с вариацией *с влияет на взаимодействие движителей с корпусом и поэтому оптимальное с точки зрения Уменьшения потребной мощности на гребном винте значение хс не обязательно совпадает с хс, обеспечивающим минимум сопротивления.
397
Рис. VIII.4. НанвыгоднеЛшее продольное положение ЦВ по различным рекомендациям.
/ — по Эйру; 2 — по Троосту; 3 — по Фолкеру; 1 — по данным «серии 60»; 5 — по Хэкшеру;
6 — по" рекомендации Евгении енского опытового бассейна; 7 — по Боклсру.
Рис. VI 11.5. Зависимость хс t от числа Fr для различных форм носовых шпангоутов (6 — 0.G).
I — U-образные носовые шпангоуты (Хрр “ 0.019); 2 — промежуточные носовые шпангоуты (У-VF 0.87tj: 3 — V-образные носовые шпангоуты (XVF 0,830).
Рис. VIH.G. Зависимость хс t от Fr для различных форм носовых шпангоутов (б = 0,7).
1 — U-образные носовые шпангоуты (Xvf = 0,857); 2 — промежуточные носовые шпангоуты (ZpF = 0,917); 3 — V-образные носовые шпангоуты (XyF 0,879)
Рис. VIII 7. Зависимость хс , от Fr для различных форм носовых шпангоутов (6 = 0,8).
7 — U-образные носовые шпангоуты (XWF = °.96°): 1 ~~ промежуточные носовые шилигпутЫ (Хуг 0,931); 3 - V-образные носовые шпангоуты (Хур ~ 0.911)-
308
Влияние хс на сопротивление было объектом большого числа исследований; Некоторые их результаты приведены на рис. VII 1.4, из которого видно, что с ростом б (и соответствующим уменьшением Fr), как правило, ЛГор1 смещается в нос. Вместе с тем, наблюдается различие в значениях xCnpt, рекомендуемых различными исследователями при одинаковом 6 (более 3 % Lpp) Причины этих расхождений объясняются взаимосвязью влияния на сопротивление изменения хс и других гео-
Рис. VIII.8. Наивыгоднейшее продольное положение ЦВ для носовых обводов различных типов.
/ — обводы с уменьшением углов входя ГВЛ; И пбводы с притуплением по совой ветви ГВЛ.
метрических элементов корпуса, а не только коэфф щнента б, как это предполагалось большинством исследователей. Важную роль при фиксированном значении хс играет форма шпангоутов и ГВЛ.
В результате исследований, выполненных В. М. Штумнфом. были получены зависимости хс t от Для судов, имеющих традиционные формы носовых шпангоутов, с б— 0,6; 0,7 и 0,8, приведенные иа рнс. VIII.5—VIII.7 соответственно 146]. Как видно из этих рисунков, с уменьшением xVF, т. е. с увеличением развала Шпангоутов и иринолненнем носовой ветви ГВЛ (переходом к V-образпмм шпангоутам), оптимальное положение ЦВ смещается в корму
399
Еще сильнее отмеченные различия означениях *Copt при разных формах обводов наблюдаются у судов полных обводов с б > 0.8, особенно при наличии носовых бульбовых обводов с заострением носовой ветви ГВЛ и обводов с притуплением носовых ватерлиний (цилиндрических, таранно-конических обводов). Результаты испытаний серии моделей судов с большой полнотой обводов (см. § 26) позволили конкретизировать зависимость *спр1 = / (Fr) для указанных принципиально отличных форм носовых обводов (рнс. VIII.8) [35] Как следует из рис. VIII.8. притупление носовой оконечности делает желательным смещение ЦВ в нос, что может также уменьшить вероятность отрыва пограничного слоя в корме.
Для обеспечения необходимой посадки судна иногда надо знать, насколько возможно отступать отхСо без существенного ухудшения ходовых качеств По дап-
Рнс. VII1.9. Зависимость допустимой относительной длины цилиндрической вставки от б и числа Fr.
------Для 0 = [ (Гг). определенных по формуле (VIII.б).
ним испытании моделей «серин 60» с 6 - 0,60-ь0,80 отступления от хс t на ± (0,5—1.0) %1.рр увеличивают сопротивление не более чем на I %. На рнс. VIII 8 заштрихованы пределы изменения абсциссы ЦВ для полных судов (танкеров, рудовозов) различного дедвейта £>1Г, в которых уменьшение скорости не превосходит 0,1 уз.
На основании результатов испытаний моделей «серии 60» с целью выявления влияния на условия взаимодействия движителя с корпусом и пропульсивный коз! фициеит было произведено сопоставление значений -*CO|>t. определенных как н< условия минимума сопротивления, так и потребной мощности на гребном винте [97 I Результаты такого анализа показали, что разница между этими значениями заметна только в случае малых коэффициентов 5 = 0,60-г-0,65 когда для достижения иан-лучших ходовых качеств ЦВ следует смещать на 0,2 — 0,3 % 1.рр в корму от хС( определенного по минимуму буксировочной мощности.
Протяженность цилиндрической вставки. Применение цилиндрической вставки на судах с 6 > 0,62 связано с рядом строительных и эксплуатационных пренмт ществ. До некоторых размеров но длине наличие цилиндрической вставки иеоказь вает отрицательного влияния на сопротивление. Волее того, использование цилнн дрнческон вставки при заданных 6 и if позволяет несколько уменьшить полнот} оконечностей н заострить их Однако при чрезмерной длине Lp цилиндрической 400
вставки наличие крутых плеч в местах ее сопряжения с оконечностями может уве-дичнва ъ сопротивление, иногда значительно.
Г На рис. VIII.9 приведены зависимости от 6 и Fr относительных длин Lp!Lpp, ле снижающих сопротивление [16].
В качестве общей рекомендации можно указать, что с увеличением Lp цилиндрическую вставку желательно смещать в нос так, чтобы две трети ее длины при-ходилнсь на носовую оконечность.
§ 30. ФОРМЫ ОБВОДОВ КОРПУСА И ИХ ВЫБОР
При заданных грузоподъемности или дедвейте н известных главных размерениях коэффициентах полноты н характеристиках строевой по шпангоутам задача проектирования теоретического чертежа судна сводится по существу к выбору рационального вертикального распределения водоизмещения, которое определяется Ермой носовых и кормовых шпангоутов, описываемой либо условными обозначениями шпангоутов (U , V-образные, бу.тьбовые и др ), либо численными значениями коэффициентов вертикальной полноты носовой н кормовой оконечностей 'f_VF и 7.VA при фиксированных коэффициентах 6 и ф. При заданной строевой по шпангоутам форма шпангоутов и характеристики ГВЛ (коэффициент полноты а и углы входа и схода) тесно взаимосвязаны и выбор формы поперечных сечении корпуса по существу определяет основные особенности ГВЛ. и наоборот.
Кроме того, у большинства типов транспортных судов вследствие низких относительных скоростей п наличия цилиндрической вставки локальные возмущения жидкости, вызываемые носовой оконечностью, сравнительно слабо влияют па характеристики потока в корме. Исключение составляют быстроходные острые суда и суда с малыми отношениями L'B (менее 5), когда нельзя игнорировать влияние носовой оконечности на условия взаимодействия гребного винта с корпусом и пропульсивные качества судна.
Форма носовых обводов. Выбор носовых обводов определяется в основном соображениями снижения сопротивления Взаимосвязь характеристик ГВЛ и формы носовых шпангоутов дается формулой Лнделя:
а=сф2/3 (VIII.9)
На основании данных, относящихся к судам с традиционными носовыми обводами, в этой формуле коэффициент а = 0,97-5-1,02, причем меньшие значения соответствуют U-образным шла |гоутам, а большие V образным. Это объясняется возрастанием площади и полноты ГВЛ с увеличением развала носовых шпангоутов.
Существенное значение для выбора формы носовых обводов имеет и угол входа ГВЛ 1Е Углы входа (в градусах), определяемые из предложенной Троостом экспериментальной формулы
21е = 69.5 — 260<рг (I — <pf) (VIII.10)
(где гр^. — коэффициент продольной полноты носовой оконечности), приблизительно соответствуют значениям г£ принятым в «серии СО», в которой {юрмл носовых шпангоутов может быть охарактеризована как умеренно U-образная и считается удо-вветвори зьпой для судов с умеренной полнотой обводов.
О влиянии на сопротивление традиционных форм носовой оконечности со шпангоутами U-, V-образного и промежуточного типа можно судить по приведенным 8 § 26 результатам испытаний моделей серии морских транспортных судов. В общем *к>жпо указать, что с уменьшением б и соответствующим увеличением Fr применение И’Образных шпангоутов с одновременным .заострением носовой ветви ГВЛ становится предпочтительнее использования обводов с V-образнымн шпангоутами, тогда как нРи 6 ojo последние обеспечивают несколько меньшее сопротивление.
Не только в указанных пределах изменения коэффициента 6, но и для быстро *°АИых судов с и = 0,5 :-0,6, а также для тихоходных полных судов вплоть до ” 0,82-5-0.83 большой эффект снижения сопротивления доел гасгея в случае при-
менения развп ых бульбовых обводов с заострением носовой ветви ГВЛ и выносом “Ульба вперед за носовой перпендикуляр. В отечественной практике с успехом
401
применяют предложенные В. Н. Бегпзовым и показанные на рнс VII I, VII. 18, б и VII.20 бульбовыс обводы с максимальным обужением ватерлиний выше ГВЛ. ориентированным примерно по фактическому волновому профилю с учетом ходовог j дифферента судна.
У острых судов с малыми б эффективность носовых бульбов в основном обусловлена благоприятной интерференцией волновых систем, создаваемых собственно корпусом и бульбом. У более полных судов, для которых при высоких б и малых 1-характерно разрушение воли в пределах носового заострения, доминирующим во влиянии бульбового носа иа волнообразование является уменьшение угла входа и заострение носовой ветви ГВЛ, что достигается переносом части объемов в выпесеи-
Рис. VIII.10. Зины эффективности применения носовых обводов различных форм на судах с большой полнотой обводов.
I — «реимутество обводов с заострением ГВЛ: II — преимущество обводов с затуплением ГВЛ; -------
ХС = -А--* % ^рр’’ ХС ~ 3.0% ^рр'1 ~
ХС ~ 3.S % Lpp-
Рнс. VIII.Н. Рекомендуемое изменение относительного радиуса закругления скулы Г подлине носового заострения судна с цилиндрической формой обводов (х — x/Lpjl}.
иый вперед бульб. Эффект снижения полного сопротивления при применении косо вых бульбов в некоторых случаях может достигать 15 % и более в зависимости от безбульбовых обводов Это превосходит значение волновой составляющей сопротивления для судов большинства типов н свидетельствует о наличии благоприятного воздействия бульба и пл вязкостное сопротивление. Последнее, по-видпмому. связано с более плавным сходом липин тока в районе носовой скулы в случае применения бу inба и приводит к снижению интенсивности образующихся при этом скуловых вихрей
У крупнотоннажных танкеров и рудовозов с увеличением полноты носового заострения сверх некоторых предельных значений при условии хс к. const бульбо-впе обводы с заострением ГВЛ становятся неэффективными из-за резкого возрастания кривизны носовых плеч ватерлиний, что способствует как увеличению водно образования в этом районе, так и формированию интенсивных скуловых вихрей В таких условиях более рациональными становятся носовые обводы с притупление носовой ветви ГВЛ, к которым относятся таранно-конические и цилиндрические обводы (см. рис. VII 18, а, с). В результате обработки материалов цены нпй серии судов с большой полнотой (см. § 26) были определены пределы их целе сообразного применения, показанные па рис. VII 1.10.
Тарянно конические обводы носа, разработанные Е А. Виноградовой, Д. Г. ( кодовым В С. Шлаковым и В. М Штумнфом (см. рис. VII. 18, с), характеризуются большим развалом шпангоутов и иршупленнсм ватерлиний в районе ГВЛ в сочета ннн с вынесенным за носовой перпендикуляр тараном и заострением действующи'
402
ватерлиний при балластной загрузке. При таких обводах для различных состояний загрузки достигается снижение полною сопротивления до 8—10 %.
Применявшийся до последнею времени наиболее упрощенный вариант цилиндрических обводов с малыми и постоянными подлине радиусами закругления скулы и форштевня (см. рнс. \ II 18. а и VI 1.20) при положительных результатах для судна с полным грузом значительно уступает по сопротивлению сопоставимым бульбовым и тарашю-коническиы обводам при его балластной загрузке. Это объясняется неблагоприятным обтеканием скулы вблизи форштевня с возможным местным отрывом потока в этом районе, особенно при наличии дифферента
Основное условие создания удовлетворительных цилиндрических обводов — увеличение радиуса закругления скулы по мере приближения к носовому перпендикуляру с переходом к закруглению форштевня радиусом г = г Т = 0,44-0,5. Рекомендуемые минимальные значения г вдоль носового заострения судна даны ня
Рис. VIII.12. Цилиндрические носовые обводы с увеличенным радиусом закругления форштевня («эллипсоидальные» обводы).
рис. VIII.II. В шведском опытовом бассейне была разработана показанная на рнс. VIII. 12 носовая оконечность «эллипсоидальной» формы [99], соответствующая приведенным выше рекомендациям.
Форма кормовых обводов. Выбор формы кормы обусловлен не только соображениями снижения сопротивления, но и улучшением условий работы гребного винта.
Применительно к кормовым обводам традиционных типов (U- и V-образпых, см рис. VII. 19, а и б) могут быть отмечены следующие общие тенденции. В сопоставимых условиях использование V-образных шпангоутов обычно уменьшает сопротивление, тогда как L'-образные шпангоуты улучшают взаимодействие движителя с корпусом и повышают пропульсивный коэффициент При этом суммарный эффект, обусловливающий преимущество U-образных обводов по ходкости, обычно незначителен. Однако последние во всех случаях обеспечивают более равномерное поле скоростей в месте расположения гребного впита, вследствие чего при разработке кормовой оконечности по возможное!и отдается предпочтение умеренно L образным Шпангоутам.
Одно из важных условий успешного проектирования кормовых обводов судов с большой полнотой (б > 0,82) заключается в предотвращении отрыва пограничного слоя Следует отметить установленное А Ф 11устошпыы и Ю. С Базилевским положение, что для исключения отрыва углы наклона касательных к ватерлиниям в корме традиционных обводов должны быть менее iR — 33°. Японские исследователи [95] Для предотвращения отрыва длину кормового заострения /.f и его коэффициент Полноты бд регламентируют условиями: &LR 0,404-0,42; бд st" 0,675.
Определенный интерес для полных судов i редставляют сигарообразные кормовые обводы (см. рис. VI 1.19, в), п<1 которых в условиях буксировочных испытаний
403
раньше наступает отрыв пограничного слоя, однако на него оказывает эффективное воздействие гребной винт, вследствие чего для судов с большими б (более 0,8) может быть достигнуто увеличение пропульсивного коэффициента 135 ]. Для крупнотоннажных судов с большой полнотой, имеющих двухвальную силовую установку, перспск-
Ряс. VIII.I3, Двухскеговые кормовые обводы корпуса с большой полнотой.
тнвным оказывается так называемый двухскеговый вариант кормы (рнс. VIII. 13) Такне обводы при практически вертикальном расположении выкружек — скегов — вследствие меньшего сопротивления и увеличенного попутного потока обеспечивают по сравнению с обычным двухвальным вариантом уменьшение потребной мощное и на 10—12%.
Рис. VIII. 14 Кормовые обводы быстроходного двухвинтового судна с развитыми выкружками гребных валов.
Для быстроходных крупнотоннажных контейнеровозов (б = 0,50-5-0,07) с дву v вальной установкой возможно применение предложенной Л. А. Снротпиковой. А. II. Смородиным, В. К. Турбалом, В. К. Нвжепко, Ю. Г. Каменецким и Р. С. Квит ковскпм кормовой оконечности с развитыми выкружками бу левого типа (рнс VIII II
404
Удачным размещением утолщенной части выкружки (заштрихована на рисунке) можно снизить сопротивление до 3—6 % за счет .благоприятной интерференции с волновой системой корпуса и обеспечить формирование потока в диске движителя, повышающее пропульсивные качества судна.
На средиескоростных контейнеровозах и трейлерных судах с 6 < 0,65 сравнительно небольшого водоизмещения применяют одновальные энергетические уста-
Рнс. VI 11.15. Кормовые обводы контейнеровозе в и трейлерных судов со «свободным» гребным винтом.
носки. В этом случае кормовым шпангоутам в районе расположения гребного впита придают Ll-образную форму и значительный развал по мере приближения к ГВЛ (см. рис VII. I) При таких обводах поле скоростей в диске гребного винта оказы-впется существенно неоднородным, а коэффициенты попутного потока малыми.
Рнс. VIII.16. Зависимость площади погруженной в воду части транца Ды,.(/) и относительного коэффициента дополнительного сопротивления транца ЛСу/б?(2) быстроходного судна от Fr.
Вильямс для устранения этих недостатков предлагает обводы кормы «баржевого» тип.з, у которых липин тока располагаются приблизительно в плоскости батоксов, в сочетании с так называемым «свободным» винтом, показанные на рис. VIII.15 |99].
В отличие от применявшихся в течение многих лет кормовых обводов крейсерского типа в последнее время на различных транспортных судах кормовые оконечности обычно завершаются транцем, что даст определенные экономические преиму
405
щества Вместе с тем, при погружении на ходу значительной части транца в Воду что возможно в основном у быстроходных судов, сопротивление может зц-штельно возрастать в связи с иаличнсА! фиксированного oipuiia пограничного c.loq на кроуках транца. Па рис. VIII.16 показано изменение дополнигслыюго козффц. цпента вязкостного сопротивления ЛСу судна, обусловленное указанным отрывом в зависимости от изменения погруженной в воду oti осительной площади трапга Ди>т (шт — <Bro) ’<L>ro. где ыт0 — погруженная площадь транца по ГВ.1,
§ 31 СОПРОТИВЛЕНИЕ И ФОРМА ВЫСТУПАЮЩИХ ЧАСТЕЙ
К выступающим частям относятся круч ные детали корпуса выходящ! е за пре делы его основных обводов: вертикальный н скуловые кили рули, конструкт ц выходов из корпуса гребных валов (дейдвудное утолщение у одновинтовых судов, выкрчжкн или кронштейны н сами греб| ые валы у двухвинтовых)
Сопротивление выступающих частей /?лр имеет вязкостную природу н обусловлено сложным взаимодействием формирующегося на них пограничного слоя с трехмерным потоком образованным пограничным слоем основного корпуса. Поэтому выступающие части могут оказывать влияние па распределе» не сил трения и давле пня на корпусе в месте их расположения, т е. изменять вязкостное сопротивление самого корпуса. За исключением развитых выкружек булевого типа, показанных на рнс. VHI.I4, влияние выступающих частей на волновое сопротивление пренебрежимо мало.
Сложный характер формирования потока, обтекающего выступающие части, затрудняет расчетное определение их сопротивления, хотя его приближенные оценки по формуле (VI 23) в принципе возможны. Основным способом определения А’1(> служит сравнительный эксперимента опытовых бассейнах, а иногда и в аэродинамических трубах, проводимый на моделях судна с выступающими частями и без них («голом корпусе»). Поскольку Лдр в основном вызвано вязкосп ымп свойствами жидкости, его значение, определенное в результате модельных испытаний, следует пересчитывать на натуру в функции от числа Re. Однако сложный и индивидуальный характер гидродинамического проявления вызванного различными выступающими частями, а также относитовьио небольшой вклад их сопротивления в полное сопротивление (Rap <0,15/?) обусловили возможность переноса на натуру измеренных на моделях значений Rap с использованием гипотезы автомодельности по числу Ro.
Существуют две схемы определения коэффицие ста сопротивления выступающих частей Сдр. Первая схема основана на зависимости
С.1Р= ., ------------, (VIII. II)
Р°М
-^(Йг.к + Пв.ч) -2^-Йг.н
где /?св. ч —сопротивление модели с выступающими частями; Rr_ к —сопротивте-ние «голого корпуса» модели, £2Г. к — площадь смоченной поверхности «голого коз пуса» модели; &в. ч— площадь смоченной поверхности выступающих частей м > дели. Вторая схема использует соотношение (VI. 10) и является более простой п предпочтительной Из-за сильного влияния иа Сдр модели числа Re для натуры в качестве коэффициента сопротивления выступающих частей принимают асимптотическое значение, к которому стремится Сдр модели в диапазоне наибольших скоростей ее буксировки.
Наибольшую долю в R \р составляет сопротивление выходов гребных валов, которые конструктивно могут оформляться различно На рациональный выбор нх геометрии существенное влияние оказывает не только стремление снизить сопротивление, но н необходимость улучшить их взаимодействие с греб» ымн винтами (см. третий раздел).
У одновинтовых судов для уменьшения сопротнвле! ни и повышения пропулы енвных качеств, помимо сглаживания кромок ахтерштевия. важен правильный выбор относительной толщины руля eiD и отстояния его от винта a D, причем сечения руля должны выполняться профилированными (а — отстояние передней кромки руля от винта на относительном радиусе г 0,7 в верхней части диен D—диаметр впита). При тонких рулях (e.'D 0,15) для обеспечения удовлеп
406
рнтелыюй ходкости и приемлемой вибрации a D должно бить не менее О 20. С у тол uiei нем гуля и D следует увеличивать, однако е Г> не должно был, больше 0.25. р|ред«1ьио допустимые з шченпя с D в зависимости от задора a D можно определить из эмшц пиеской зависимости [4G]
ejD 0,22 + 0,3 - 0,2^ .
{VIII. 12)
У двухвинтовых транспортных судов выходы валов обычно оформляются в виде выкружек У острых быстроходных судов, мелких катеров и судов с ограниченной осадкой предпочтительней применение мортир с кронштейнами.
При проектироваинп выкружек существе! ное значение имеет выбор'гформы поперечных сечений и yi.ia наклона выкружки к основной плоскости т0 (см рис VIII.14). Как общий принцип обеспечения минимального сопротивления выкружек можно рекоае! довать установку нх по линиям тока «голого корпуса». В этом случае сопротивление выкружек мало отличается от их сопротивления трения.
Рис. VIII. 17. Различные формы выкружек двухвинтовых судов.
Однако при наименьшем coup лнвлепип не всегда обеспечиваются ваилучшпе пропульсивные к. чества судна Так, симметричные выкружки с авиационным профилем продольных сечений (рис. VIII 17. а) соответствуют меньшему сопротивлению, но отступлю не от симметрии создаст закручивание потока, которое, если его направление обратно вращению винта, может увеличить пропульсивный коэффициент и компенсировать некоторое возрастание сопротивления. Поэтому применение выкружек, изображена! х па рис. VIII.17, б, целесообразно в случае вращения винтов «наружу», т. е. при вращении винта правого борта по часовой, а левого — против часовой стрелки, если смотреть с кормы Использование выкружек, приведенных на рис. VIII 17, в, возможно только при противоположном вращении винтов «во внутрь». Поэтому выбор формы выкружек в каждом конкретном случае желательно производить после модельных испытаний.
• По данным В. А Первова угол у>0 наклона выкружки (см. рис VII1.14), обеспечивающий наймет, нее сопротивление, составляет Зэ 45°. Однако при наружном
вращении винтов уменьшение yv при незначительном увеличении сопротивления
улучшает коэффициенты взаимодействия нингои с кор! усом, вследствие чего в этом случае рекомендуется принимать у0 20-5-40° При внутреннем вращении винтов Желательно выбирать у’„ х 70° и даже более (вертикальные скеги).
Кронштейны, мортиры и вращающиеся гребные валы создают сопротивление, соизмеримое с сопротивлением выкружек и равное 6 -8 % вязкостного сопротивления «голого корпуса». Основное требова те при их проектировании расположение лап кронштейнов ио направлению п тока, которое может быть установлено при испытании моделей с помощью флюгеров. При этом снижается не только сопротивле-Ине, но и подъемная сила и соответственно поперечная нагрузка на лапы кронштейнов. Рекомендуется симметричный профиль поперечных сечений лап с относительной тол1цнпой (отношением ширины к длине сечения), равной в среднем 0.20, ио не более 6,25. Во и бежаппс в зпикновення кавит. цпп желательно, чтобы профили сечений
лап имели нанбоч ртв< мерно распределение давле тй вдоль хорты профиля П2[ ipiiu д ны тб.тип 4 th HTc.Ttiutx р niii пек орых из рек мендуемкх профплей
407
Обводы втулки кронштейна, перехода ее к валу, а также сопряжение лап крон штейнов с втулкой и корпусом должны выполняться плавными. Для исключения повышенной вибрации корпуса угол между лапами не должен быть равным или кратным углу между лопастями гребного впита.
Скуловые кили следует располагать по линиям тока иа «голом корпусе», а угол сопряжения их с обшивкой должен быть близок к 90°. Тогда коэффициент сопротивления скуловых килей будет полностью определяться их сопротивлением трепня, составляя Сдр — (0,054-6,10)-10'3. Протяженность килей обычно равна 35—40 ° Ерр, и у полных судов с большой цилиндрической вставкой выполнение указанных условий нх размещения не вызывает затруднений У острых судов линии тока па поверхности отличаются большой кривизной, а из-за трехмерности потока наблюдается значительное изменение направления вектора скорости в пределах высоты киля. В этом случае для экспериментального определения целесообразного направления килей желательно использовать флюгеры, а не метод красок. При значительной кривизне линий тока возможно применение разрезных килей, когда часть киля в этом, районе располагтется по липин тока, эквидистантной направлению основной части скулового киля.
Значения коэффициентов сопротивления выступающих частей приведены в § 23 (см. рис. VI. 17).
§ 32. АНАЛИТИЧЕСКИЕ МЕТОДЫ ОПТИМИЗАЦИИ
ФОРМЫ ОБВОДОВ
Форма обводов судна, имеющая минимальное сопротивление, может оказаться неоптимальной по другим характеристикам, таким как остойчивость, мореходность, вместимость и др. Поэтому задачу оптимизации формы обводов следует решать с учетом факторов, определяющих по какому-либо специальному критерию экономическую эффективность судна и ограничений, налагаемых на геометрические и иные xapai теристикн корпуса и формулируемых в виде равенств или неравенств. Такая задача требует применения интенсивно разрабатываемых в последнее время методов математического программирования [34], особенностью которых является итеративный характер используемых процедур. Это вызывает необходимость рассмотрения зна чнтельного количества вариантов формы, т. е. многократного расчета функции критерия и ограничений. Последовательность этих вариантов формируется спенияль ным образом, что п составляет суть алгоритма решения. Обычно для этого приходится на каждом этапе рассчитывать значения частных пропзвотных функций критерия и ограничений по всем переменным. Отсюда вытекает необходимость создании экономичных способов расчета на ЭВМ сопротивления, коэффициентов взаимодействия винта и корну а и т. п., а также достаточно гибкой математической модели судовой поверхности, которая при ограниченном числе обобщенных или интегральных параметров позволяла бы путем нх вариации получать разнообразные судовые обводы при приемлемом расходе машинного времени.
Для формулирования принципов оптимизации формы корпуса н элементов судна может быть использована математическая модель задачи в следующем виде
Л= [лд, i £ Z) — вектор элементов теоретического чертежа судна (главны размерений, коэффициентов полноты, абсциссы ЦВ, размеров и положения по длине основных отсеков и т. п );
~ / € 7} — вектор параметров формы; ими являются входные пара-
метры математической м дели судовой поверхности (длина и положение цилиндр! ческой вставки, углы заострения ВЛ в носу и в корме, степень развала бортов и т. п )
Е :лн f (X, Хд) —• критерий экономической эффективности судна, например приведенные затраты на 1 т перевозимого груза, a gs (X, X/,) — функции, описывающие его качества, то условия
/ (V, X*) > Hiin; (VIII 13»
(VIII. 14)
40»
Определяют обобщенную математическую модель задачи оптимизации. Функ! и I gt (X. Л\) могут, в частности, выражаться следующим образом
gi (X, X,.) = D (X) - U Pt [X, Л\) = Р -
требование равенства водоизмещения судна D сумме масс Pi, составляющих его нагрузку (здесь Р — заданная грузоподъемность);
(X. Xft) = U7 (X, Xh) цР — требование к грузовместимости судна (здесь р — удельная погрузочная кубатура);
ёз (X, Х\) — —L —^triax
ограниченно длины судна;
£4 (X, Xfc) = —Т —Тmax oi раничонне наибольшей осадки.
Рис. VII 1.18. Исходная форма корпуса'танкера {а) и форма, полученная в результате оптимизации (б). _/
Другие функции gs (X, Xh) отражают требования к надводному борту' по правилам грузовой марки, к наименьшему и наибольшему значениям начальной метацентрической высотыГк осадке носом н кормой п т. д.
Следует отметить, однако, что в таком общем виде задача оптимизации даже при наличии приемлемой математической модели'судовой поверхности требует проведс-пня'вычислспий весьма'значительного объема, поэтому необходима такая декомпозиция общей задачи, при которой отдельно рассматриваемая задача о форме корпуса давала бы решения, повышающие эффективность судна без ущерба для других его качеств. Для этого задачу (VIII 13) -(VIII. 14) можно представить в виде двухуровневой системы задач. На верхнем уровне (ВУ) решают задачу (VIII.13)—(VIII.14)
—* —>
Относительно вектора X, не рассматривая детальных параметров формы А'ь и соответственно обобщенных параметров формы а;, (Xft), характеризующих судовую поверхность в ее математической модели, полагая Хк = XjJ и ар — ар (XJ), где X* — первоначально принятые параметры формы корпуса. Иа нижнем уровне (НУ) решают а дачу оптимизации формы, т. е. выбора оптимального Хд при фиксированных Основных элементах судна X = Х°, где Х° — оптимальное решение задачи ВУ.
Суть используемых метотов оптимизации состоит в том что после тою как выбрап набор независимых переменных X каждая задача переводится в иростраи-
409
ство этих переменных, й котором функция 1{ (Л'|, например представляющая собой буксировочное сопротивление, образует семейство поверхностей уровня Тогда ,;Л([ того чтобы в общем случае выявить положение точки .№, которая соотве|етв\гт экстремуму R (Л), в допустимой области рассматриваемого n-мериого пространства следует двигаться к точке Л'° в направлен пн антнграднента R (X). Иа границах допустимой области, т. е. па поверхностях уровня функций ограничений, это |.; . правление может выводить за пределы допустимой области, поэтому его нужно корректировать и осуществлять движение вдоль границы ио направлению убывания R (X).
В качестве иллюстрации применения описываемых методов рассмотрим вопрос целесообразности создания танкера с относительно малым удлинением. Снижение расхода металла для судна с меньшим удлинением будет тем больше, чем больше будет уменьшена его длина. Поскольку задачу решаем при условии, что дедвейт постоянный, уменьшение длины приведет к увеличению В'Т, если принять неизменным коэффициент общей полноты. Прн этом провозоспособность может ухудшиться до такой степени, что общий эффект даже при снижении металлоемкости такого судна будет отрицательным. Поэтому следует найти такие сочетания L п б, при которых скорость оставалась бы постоянной. Оказалось, для того чтобы достижимая скорость по крайней .мере не уменьшилась по сравнению с прототипом, имеющим L!B = 7,3, необходимо значительно уменьшить 6. В то же время уменьшение б при равенстве дедвентов сдерживает уменьшение длины судна Таким образом, оптн мальпым решением рассматриваемой задачи должен быть компромисс между этими тенденциями. Для одного из исследованных удлинений (Lift = 5,7) было установлено, что при уменьшении длины на 1 м необходимо снизить 6 на 0,0018
После выбора основных элементов корпуса решается задача оптимизации форм г обводов. На рис. VIII. 18 в качестве примера приведены результаты такой оптимнз.1 Ш1Н. Контрольные модельные испытания показали, что полученная форма корпуса (рнс. VII 1.18, б) при том же дедвейте и сохранении мощности энергетической уст ковки позволяет по сравнению с танкером прототипом (рис. VIII 18, а) имеющим LIB = 7,3, получить выигрыш в скорости, равный 0,8 уз. прн сокращении веса металлического корпуса и судовых систем приблизительно на 5%.
Глава IX
СОПРОТИВЛЕНИЕ СУДОВ ВНУТРЕННЕГО И СМЕШАННОГО ПЛАВАНИЯ
§ 33. ФОРМЫ ОБВОДОВ СУДОВ ВНУТРЕННЕГО
И СМЕШАННОГО ПЛАВАНИЯ ОСОБЕННОСТИ
ИХ СОПРОТИВЛЕНИЯ И МЕТОДЫ ЕГО ОПРЕДЕЛЕНИЯ
Особенности судов внутреннего и смешанного (река—море) плавания обусловлены экономическими требованиями и специфическими условиями эксплуатации Их размерения жестко ограничиваются глубиной фарватера, габаритами шлюзов и извилистостью судового хода внутренних водных путей. Вместе с тем, для этих судов характерна крупносеринность постройки, что способствует снижению их строительной стоимости. В ре том судостроении широко распространена унификация, т. с. проектирование и постройка судов различного назначения (сухогрузов, танкеров и др.) в одинаковых или близких по форме корпусах.
Современные большегрузные (водоизмещением более 2000 т) суда внутреннего и смешанного плавания, эксплуатируемые па магистральных водных путях, имеют полные обводы корпуса (0 78 6 <1 0,87), большую относительную ширину (В/'Г >
410
20 19 18 17 16 9 3 2 1 Vz % °
Рис. IX.2. Теоретический чертеж танкера смешанного плавания типа еМаныч» с бульбообразными носовыми обводами и кормовыми обводами эллиптического типа.
411
> 3) и значительную длину цнлнп прической вставки (до 60 % /_). Ос, >д ка таких судов составляет при плав., нпи в реке 3,0—3,6, в морс 3,5—4.5 м. а ширина равна 13—16,8 м. Длина корпуса большегрузных судов пзме няется в пределах 90—145 м, чему соответствуют отношения 6,5^Т'/)<^
9. Как правило, все эти суда двух-вальиыс.
Наиболее распространенной фор. мой носовой оконечности судов вгу -треииего и смешанного плавания является традиционная форма носовых обводов типа «глубокая ложка < (рнс. IXI) с V образными шпапгоу тами. наклонной линией форштевня и слегка выпуклыми ватерлиниями, ко торые притыкаются к ДП под острым углом. Длина носового заострения типа «глубокая ложка» составляет обыш i s4),3L. В последнее время па некоторых судах смешанного плавания стали применяться бульбообразпые носовые образования (рис. IX.2) позволяющие при тех же размерениях корпуса увеличить водоизмещение судна на 4—5 % по сравнению с лож кообразпым носом. Еще большее увеличен нс грузоподъемности судов внутреннего и смешанного плавания при их ограниченных размерениях моли дать цилиндрическая форма носовой оконечности с резко выраженным! U-образнымн шпангоутами, вертикальной линией форштевня и выпуклыми ветвями ватерлиний, притыкающимися к ДП под прямым углом. Для судов с такой цилиндрической формой иосо вого заострения характерно наличие подпорной волны, что заметно увеличивает их сопротивление.
Традиционными кормовыми оби' дамп речных большегрузных судов являются санеобразпые обводы с и< большой килеватостыо (рис. IX.3), • у судов смешанного плавания — лож кообразные обводы (типа «мелк. > ложка») с U-образнымп шпангоутам <, днищевые ветви которых иногда пр молнпейны (см. рнс. IX.1) В после ние годы иа большегрузных судах все чаще находит применение перс пективиая форма кормовых обводов с эллиптическими шпангоутами ,и пологими батоксами (см рис. 1X2). которая обеспечивает благоприятные условия для рациональной компоновки двнжительио-рулевого комплекса и повышения пропульсивного коэ£ фнцнента. На речных ^толкачах 11
412
буксирах, а также на мелкосидящих речных судах с Т < 3 м обычно применяют тоннельные или полу-тоннельные кормовые обводы (рнс. IX 4), позволяющие разметать движители, диаметр которых близок по значению к осадке. При таких обводах осн тоннелей обычно несколько изогнуты к бортам, что улучшает подток воды к движителям в условиях предельного мелководья, а во избежание прососа [воздуха к движителям (иа заднем ходу) тоннелям придают кормовые свесы. На большегрузных судах тоннельные кормовые обводы не применяют.
Большегрузные суда внутреннего и смешанного плавания относительно тихоходны — в условиях глубокой воды их эксплуатационная скорость хода составляет
Рис. IX 4. Теоретический чертеж кормовой оконечности мелкосидящею речного судна с тоннельными кормовыми образованиями.
18—22 км/ч (1?г = 0,164-0,20). Несмотря на большую полноту этих судов, их кормовая оконечность (ложкообразной, санеобразпой пли эллиптической формы) при г двнжен и । а тубокой воде и на слабом мелководье (ШТ > 3) обтекается, как правило, безотрывно; иногда могут возникать лишь небольшие локальные отрывы под I воздействием работающих движителей. При этом подавляющая часть сопротивления «голого корпуса» (75—85 %) имеет вязкостную природу, волновая же составляющая I неветнка (13—25 %). При определении сопротивления таких судов на глубокой воде посредством пересчета данных модельных испытаний по методу Фруда доля остаточного сопротивления составляет 30—45 %, а сопротивление трения эквивалентной Iпластины 55-70 %.
Па мелководье сопротивление судов внутреннего и смешанного плавания в зависимости от глубины фарватера изменяется весьма существенно. На рнс. IX.5 [приваде типичный график изменения коэффициента остаточного сопротивления I большегрузного судна при различной относительной глубине воды. Как видно из I рисуик о ттточпое сопротивление па мелководье по сравнению с условиями глу-[ бокой воды может возрастать в несколько раз. Причины этого были рассмотрены | в гл. IV, где указывалось и на отрыв пограничного слоя.
Как показали н ледоваиня, в условиях предельного мелководья развитый отрыв пограничного слоя возникает при любых формах кормовых образований, при-I меняемых на большегрузных судах внутреннего и мешанного плавания, при этом область отрыва, как правило, вытянута вдоль диаметрального батокса. Поэтому I гребные винты таких судов не могут оказывать существенного влияния на стнмули-
413
руемое мелководьем отрывное обтекание кормовой оконечности, которое нс только приводит к увеличению сопротивления, но и существенно снижает эффективность рулей, если они установлены в ДП судна, где толщина области отрыва может достигать значения, сопоставимого с половиной осадки.
Сопротивление судов внутреннего и смешанного плавания на глубокой во те и в условиях мелководья наиболее достоверно может быть определено посредства^ буксировочных молельных испытаний в опытовом бассейне. Однако для решения многих практических задач, особенно на ранних стадиях проектирования судов, важное значение имеют приближенные методы определения их сопротивления.
К сожалению, серьезных серийных испытаний моделей судов внутреннего и смешанного плавания па глубокой воде практически не проводилось, а использование для этих судов диаграмм, разработанных применительно к морским транспорт-
ным судам, может приводить к значительным ошибкам; то же относи юя н к графикам коэффициентов влияния изменения соотношений главных размерений и элементов теоретического чертежа.
В этих условиях для приближенного опре. деления сопротивления большегрузных судов внутреннего н смешанного плавания па глубокой воде производят пересчет буксировочной мощно, стп судна-прототипа в предположении, что при равных Fr адмиралтейские коэффициенты буксировочной мощности проектируемого судна и судна-прототипа одинаковы:
<,х"
Рис. IX.5. Зависимость коэффициента остаточного сопротивления модели большегрузного судна смешанного плавания с носовыми и кормовыми обводами ложкообразной формы от глубины воды.
где Pei, Di, L( — буксировочная мощность прн некотором Fr, водоизмещение и длина по ватерлинии проектируемого судна соответствен но; Pe;u, Du. Llt — те же величины (при том же числе Fr) судна-прототипа.
Проверка показала, что если судио-про-тотип и проектируемое судно имеют однотипные обводы и близкие значения коэффициента общей полноты, то даже при существенной
разнице в размерах «хдов погрешность пересчета буксировочной мощности по формуле (IX I), как правило, не превышает 5—7%. При значительных различиях в обводах и полноте корпуса эта погрешюсть может достигать 10—12 %.
Вследствие унификации рассматриваемых судов (стандартные ширина и осадка. традиционные формы оконечностей) корпус вновь проектируемого судна перед w может отличаться от корпуса судна прел ествующего проекта только длиной, i з-мененной за счет цилиндрической вставки. В таких случаях зависимость сопротивления судна от его длины для условий глубокой воды аппроксимируется соотношением
R Ro —- Lq,
(IX 2.1
где R — сопротивление судна длиной по ватерлинии при скорости v, = f0; Ro сопротивление судна длиной по ватерлинии Lo при скорости v0; — коэффициент
пропорциональности. Как показали результаты модельных исследований при рз -личных формах обводов, значения коэффициента Для большегрузных судов внутреннего и смешанного плавания в диапазоне 6 ЫВ 10 и скоростей 16 С v 21 км/ч близки к единице (0,94 /гд 1,07). Поэтому для приближенных расчетов при v = coiibt можно пользоваться формулой
R — Ro^t^o,
(I X 3)
если корпус проектируемого судна отличается от прототипа только длиной по ватер линии прн одинаковых ширине, осадке и формах носового и кормового заострение
414
§ 34. ПРАКТИЧЕСКИЙ УЧЕТ ВЛИЯНИЯ МЕЛКОВОДЬЯ НА СОПРОТИВЛЕНИЕ СУДОВ ВНУТРЕННЕГО И СМЕШАННОГО ПЛАВАНИЯ
Во многих случаях при приближенных расчетах и сравнительных оценках ходкости необходимо определять сопротивление судов не только на глубокой воде, ио и в условиях мелководья. Метод пересчета коэффициента остаточного сопротивления с условий глубокой волы на мелководье разработан Е. Ф Сахно на основе результатов скстематн icckiix испытаний моделей со следующими формами обводов:
Носовая оконечность Кормовая оконечность
«Глубокая ложка» Бульбообразиая Цилиндрическая
Ложкообразная Санеобразиая Эллиптическая
Рис. IX.6. Диаграмма A'=/( IT, Гг}^) для судов с носовыми обводами типа «глубокая ложка» и ложкообразными кормовыми обводами.
Рнс. IX.7. Диаграмма /С = / Fr, г для судов с носовьмн обводами типа «глубокая ложка» и санеобразиымн кормовыми обводами.
Типичные для этих обводов теоретические чертежи представлены на рис. IX.1 — IX.3). Различные комбинации таких форм оконечностей соответствовали 9 сериям моделей. В каждой серии прн неизменных обводах носового и кормового заострений варьировались отношение 1.,’В (6,8 U В 11,9) и коэффициент общей полноты (0,76 6 sj 0,89). Базовая модель каждой серин имела следующие относитель-
ные размерения: LIB — 8,5; BIT = 3,7 Все мол ли испытывались прн значениях глубины воды 1,25 Я/7'^<10. В результате испытаний были получены графики
зависимости коэффициента остаточного сопротивления Си от Fr, одни из которых приведен на рис. IX.5. Затем были определены значения коэффициента увеличения остаточного сопротивления по формуле
К = С^н/СКао (IX.4)
(Спи — коэффициент остаточного сопротивления модели на мелководье прн глубине воды Н и Fr — v/yrgL; CRal — коэффициент остаточного сопротивления тон же Модели на глубокой ваде прн том же Fr) и построены диаграммы в осях К и Гг//т иа которых дискретным Fr соответствуют свои кривые К — f (Fr^J.
Серия диаграмм, соответствующих базовому значению (£/В)0 = 8,5, выделена в качестве основных и представлена на рис. IX.6—IX.14. Для учета отклонений отношения (£/В), от базового (LIB)0 введена поправка
h(L/B) = Fr<°>/Fr<p, (1X5)
415
где Fr,J’ ~ o0/j g//0 — эквивалентное число Фруда для однотипного по обводам судна с базовым отнонеппем (LIB)0, которому при Fr 0) — Fr(,> соответствует такое же значение коэффициента увеличения остаточного сопротивления Ло Л ,
Рнс. IX.8. Диаграмма./С = I [Гг, Гг^')для судов с носовыми обводами типа «глубокая ложка» и эллиптическими кормовыми обводами.
Рис. IX.9. Диаграмма Л' = / Fr, Fr}1,') для судов с,бульбообразными носовыми и ложкообразными кор.мовыми обводами.
число Фруда судаа произвольной относительной длины (LIВ'*, которой соответствует коэффициент увеличения остаточного сопротивления /С,. Значения поправок ₽t для различных обводов представлены в функции от I/В на рис. IX.15.
Рис. IX. 10. Диаграмма K — f[Fi, Fr^j для судов с бульбообразцымн носовыми и санеобразнымн кормовыми обводами.
Рис. IX II. Диаграмма К — /(Fr, Fr^J для судов с бульбообразнымн носовыми И эллиптическими кормовыми обводами.
Диаграммы К = f (Fr, FrH) и графики кривых fх = / (LIB) позволяют перг читывать значения коэффициента остаточного сопротивления большегрузных с с произвольным отношением L/В с глубокой воды на мелководье. Практически Это делают по следующей схеме.
416
Заданы размерения судна, типы его носовых и кормовых обводов, значение коэффициента остаточного сопротивления CRtx> на глубокой воде при некотором числе Fr. Требуется определить значение коэффициента остаточного сопротнвлс-
Рис. IX.12. Диаграмма ft = /(Fr, FrJJP'l для судов с цилиндрическими носовыми н ложкообразными кормовыми обводами.
Рис. IX.13- Диаграмма К = f (Fr, FrJJ1 j для судов с цилиндрическими носовыми и санеобразнымн кормовыми обводами.
ння Спи при том же числе Fr и глубине воды Н, которым соответствует число Фруда по глубине Fr„.
Если отношение Li В судна отличается от базового, равного 8.5, то по кривой ₽,= f(L/B), соответствующей данному типу обводов (см. рис. IX.15), определяют поправку Рр после чего по формуле
FrJ^pjFr,, (1Х.6)
находят эквивалентное, т. е. приведенное к базовому L/В, значение числа Фруда по глубине. Затем по диаграмме К = / (Fr, Fr^) Для данного типа обводов (см. рис. IX.6— IX.14) определяют коэффициент увеличения остаточного сопротивления К и по формуле
С/?// —КС/?оо (IX .7)
вычисляют значение коэффициента остаточ кого сопротивления судна на мелководье. . Если отношение L/В судна равно базовому(L/B 8,5),ToPi— I,тогда Frl9;=
Рнс. IX 14. Диаграмма К ~ f (Fr, Fr^P) для судов с цилиндрическими носовыми и эллиптическими кормовыми обводами.
Е Fry/ и операции упрощаются.
Эта методика позволяет с помощью тех Же Диаграмм К = / (Fr, Fr^'J и графиков Pi = / (ЦВ) пересчитывать коэффициент оста точного сопротивления судна с условий мел-к°водья на условия глубокой воды. В этом случае исходным является значе-
Н,1е а искомое значение Ся<ю находят но формуле.
(IX.8)
14
П/р Я II Войти у некого, т 1
417
1?слн необходимо пересчитать коэффициент остаточного сопротивления с одц()|; ограниченной глубины на другую, а кривая / (Гг) отсутствует, то спада, следует выполнить пересчет на глубокую воду по формуле (IX 8), а затем получен» . значение пересчитать па новые условии мелководья.
Рис. IX.15. График поправок 0i = f (iJB) для учета отклонении отношения [.И судна от ею базового значения: а — суда с носовыми обводами типа «глубокая ложка»; б — суда с бульбообразными носовыми обводами; в - суда с цилиндрическими носовыми обводами.
— ложкообразные кормовые обводы: —------эллиптические кормовые 6в »д|.г
-------сэнеобразные ксфмовые обв>>ды.
§ 35. COIIPO1ИВЛЬНИЕ СОСТАВОВ
При перевозке грузов несамоходными судами нх соединяют в составы, которые водят либо способом буксировки на треке, либо способом толкания. Такне составы могут формироваться как из обычных барж (баржевые составы), так нз судов-секций, специально предназначенных для этой цели (секционные составы). Как правило, эти суда тихоходны и имеют полные обводы. При движении в одиночку нх обтекание характеризуется наличием отрывных явлений и интенсивного впхреобразования при незначительном волнообразовании. В связи с этим подавляющая часть сопротивления таких судов имеет вязкостную природу. Е .
Гидродинамическое взаимодействие судов в составе оказывает существенное влияние па обтекание каждого судна в зависимости от места расположения сто в составе, а также от формы и размеров последнего. Наличие спутного следа от впереди расположенных судов приводит к уменьшению скоростей ебтекаиия и сии жепнго сопротивления трепня. Наряду с этим вследствие взаимодействия полей давлений па близко расположенных судах в составе изменяется сопротивление дав. с ния. По этой же причине между судами, расположенными в кильватер, вознпнмиг значительные силы расталкивания, которые для состава являются внутренними (они воспринимаются сцепными устройствами и взаимно* уравновешиваются) и поэтому в сопротивление состава не входят. >.
В целом сопротивление состава зависит от его формы, обводов, размеров и взаимного расположения входящих в него судов. У буксируемых составов сопротивлг е с может зависеть от длины буксирного троса (влияние струн гребных винтов буксира), а у толкаемых — от расположения толкача относительно состава. В большинство случаев сопротивление состава меньше суммы сопротивлении одиночных судов, из которых он сформирован
На сопротивление состава оказывает влияние зазор между оконечностями расположенных в кильватер судов — так называемый шалман. Увеличение этого зазора снижает гидродинамическое взаимодействие судов и обычно приводит к возрастанию сопротивления остава. Практически значение шалмана зависит от обводов судов н конструкции сцепных устройств. В обычных баржевых составах оно больше, чем в секционных, где транцевые оконечности секций позволяют стыковать нх почти
418
без зазора и дптцс одной секции сопрягается с днищем другой. По существу кильватерный секционный состав при определении сопротивления можно рассматривать как монолитное судно, чего нельзя сказать о кильватерном баржевом составе. Вследствие этих факторов сопротивление секционных составов обычно ниже, чем баржевых, при одинаковой грузоподъемности и формуле составов, хотя сопротивленце одиночной секции существенно больше, чем одиночной баржи
Значительное влияние на с противление многониточных (пыжсвых) составов оказывает зазор между бортами соседних виток ЛЬ (междубортовый зазор) Как свидетельствуют результаты исследований (40], минимальным сопротивленцем /?0
обладают миогоннточные составы при нулевом междубортовом зазо ре (те когда суда в составе соприкасаются бортами, что возможно при отсутствии привальных брусьев) С увеличением междубор-тового зазора сопротивление состава при с const возрастает и достигает максимума при зазорах, которые составляют около 2 % ширины дву.хннточпого состава (т. е. 0,4—0.6 м). При дальнейшем уве лнчеиип зазора сопротивление состава уменьшается, оставаясь все же больше, чем при нулевом зазоре (А!г = О). Такая закономерность иллюстрируется графиком иа рнс. IX. 16, который построен по результатам модельных и натурных испытаний с систематическим изменением между бортового зазора Эти исследования показали, что вызываемое влиянием мещдубортового зазора увеличение сопротивления в точке максимума может быть весьма значительным (до 40 % гоп-ротивлеиия при нулевом зазоре). В условиях мелководья влияние зазора возрастает, а при наличии толкача за одной из ниток состава — несколько снижается. Распо-
Рис. IX.J6. Зависимость относительного изменения сопротивления двуниточных составов от между бортового зазора.
-------модельные испытания дпукбаржепого еостяиа |/.,.(2К) 5.3); —---натурные испы-
тания чстырехссктюипого спст»в.1 |б/(2Д) = 9,81.
ложенис толкача за двухпиточным
(Составом в его ДП существенно (почти вдвое) уменьшает влияние между бортового зазора: максимум сопротивления в этом случае на 15—17 % больше, чем ес.претпрле-нис при отсутствии зазора. При заданных обводах и размерен! ях барж (или секций) и заданной форму е состава относительное изменение его сопротивления в функция от относительного междубиртового зазора практически не зависит от скорости движения. С увеличением относительной длины //(2Я) двухкптечного состава влияние зазора иа сопротивление проявляется сильнее.
Наиболее простым сиособсм приближенней сценки епротивлеыя составов является использование коэффициента счала k,.4, который представляет собой отношение сопротивления состава Rc к сумме сопротивлений всех одиночных судов У, Rt, из которых он сформирован
A’,.., R R<
(1X9)
Коэффициенты счала широко используют главным образе*! при расчетах сопрелнвле пня баржевых составов, которые в от.н чпе от секционных могут формироваться из различных барж и по разным формулам. Значение /ггч зависит от тех же факторов, которыми определяется н сопротивление состава Для всех кильватерных составов, формируемых из одинаковых судов, и для мношх пыжовых составов значения Лгч Меньше единицы и уменьшаются с увеличением количества судов в составе. Наличие
14* 419
толкача за составом улучшает обтекание кормовой оконечности концевого (последнего в составе) судна н тем самым снижает коэффн тент счала, т. е. при прочих равных условиях Лсч толкаемых составов всегда меньше, чем буксируемых. Поэтому для толкания состава требуется меньшая мощность, чем для его буксировки на тросе. Влияние мелководья, как показывают данные модельных испытаний, приводит обычно к некоторому' уменьшению kC4. Это связано в основном с тем, что стимулируемый мелководьем отрыв пограничного слоя, возникающий в кормовой оконечности одиночных судов, в составе проявляется слабее.
К настоящему времени опубликовано много данных о коэффициентах счала [5, 9, 47]. Однако их значения у различных авторов не всегда одинаковы, что связано как с погрешностями эксперимента, так и с влиянием формы обводов судов, зазоров в составе, скорости движения, глубины воды. Вследствие этих причин имеют место существенные расхождения (до 25 %) в значениях kcч для одинаковых составов
Большинство опубликованных значений коэффициента счала ограничены следующими пределами:
Толкаемые составы Бк’кснрусмыс составы
Форыула состана Асч Формула состава *<-ч
1+Т 0,85—0.95 1 1,00
1+14-Т 0.75—0.ад 1 н 0,78—0,90
Ц-1-Ы1 Т 0,67—0.82 1 м+1 0.75-0,85
2+Т 0,84—0,94 2 0.95-1,10
2ф2+ Т 0,74—0,85 2 | 2 0,80—0,96
2-1- 2+2 | Т 0,64—0.80 2 | 2 I 2 0,70-0,87
3|-Т 0,75—0.95 3 1,05-1,18
з+з+Т 0,65—0,75 з+з 0,70—0,95
Примечание. Цифры в формуле состава означают количество судов в составе, буква Т — наличие толкача.
Более надежно сопротивление состава может быть определено посредством модельных испытаний в опытовом бассейне при условии, что длина моделей судов £м > 5 м, а поперечное сечение бассейна достаточно велико. Однако даже в этом случае точность прогноза сопротивления состава ниже, чем точность аналогичного прогноза для одиночных судов.
Если в опытовом бассейне испытана модель состава, а также одиночные модели входящих в него судов, то по этим данным нетрудно определить fer4. Однако при переходе к натурному составу может быть допущена ошибка вследствие масштабного эффекта Теоретические оценки, основанные на предположении, что коэффициент счала имеет вязкостную природу и изменяется в зависимости от числа Re аффинно коэффициенту полного сопротивления, показали |5], что при масштабе модели I : 65 коэффициент счала при переходе от модели к натурному составу может уменьшаться примерно иа 8 %. По другим данным полученным при испытаниях моделей одиночных барж и состава 1 + 1 + Т, выполненных в масштабе 1:10, оказалось, что использование fec4, полученного для этих моделей, без каких-либо поправок на масштабный эффект завышает сопротивление натурного состава на 2—3 % но сравнению с пересчетом по методике которая изложена ниже.
Эта методика, применяемая для обработки результатов модельных букенровоч ных испытаний кильватерных составов и их пересчета на натурные составы, представляет модификацию традиционного метода разделения полного сопротивления судна на остаточное сопротивление и сопротивление трения эквивалентной гладкой пластины. Трение эквивалентной пластины для каждого судна, входящего в состав, определяют по формуле (11.4), как для одиночного судна, движущегося со скоростью состава, а влияние спутной струп от идущих впереди судов учитывают путем умно женив коэффициента трения па поправочные множители k/ sj I. значения которых определяют расчетом пограничного слоя на пластинах, расположенных в кильватер одна за другой с зазорами, равными зазорам между судами в составе В практических расчетах рекомендуется и для моделей, и для натурных составов принимать следующие осредиеиные значения Л, (I — порядковый номер судна в составе, считая
от носа) i................................. I 2 3 4
kt ................. 1,00 0,94 0,92 0.90
420
Согласно такой методике обработку результатов модельных испытаний кильватерах составов н нх пересчет на натуру производят по следующей схеме
Коэффициент полного сопротивления модели состава рассчитывают по результатам модельного эксперимента
См. с - - Pw- г-------(IX.10)
-Н £й««-
где~#м. с — сопротивление модели состава; им — скорость движения модели состава; — суммарная площадь смоченной поверхности всех моделей судов
в составе
Коэффициент сопротивления трения модели состава находят осреднением коэффициентов сопротивления трения моделей, входящих в состав:
s* f^iCFc /IV ill
Cfm.c=----------------> (IX.II)
—j
где CfomI — коэффициент трения эквивалентной пластины для одиночной модели с/дна, определяемый по формуле (II.4).
Коэффициент остаточного сопротивления модели состава С/гм. с и равный ему коэффициент остаточного сопротивления натурного состава С/г„. г при FrM = FrH (Fr,f — число Фруда модели, FrH — число Фруда натурного состава) вычисляют как разность:
Ср м. с — Cr ц. с — См с ~ Cfo м. с- (IX 12)
Коэффициент сопротивления трения натурного состава определяют путем осреднения коэффициентов сопротивления трения входящих в состав судов:
г, ______ S (CRniii *4* Сд.-) Qu)
е-Гоп. с - -------уа -----------> (1Л. Iо)
“н!
где Cfo,u — / (Re) — коэффициент трения эквивалентной пластины для каждого одиночного судна; С,„ — корреляционная надбавка, учитывающая погрешности моделирования, а также влияние шероховатости обшивки, принимаемая для стальных барж равной (0,84-1,0)-10"’, а для толкачей и буксиров (0.64-0,8)-10"*; £2щ— площадь смоченной поверхности каждого судна в составе.
Коэффициент полного сопротивления натурного состава равен
Сд = Cr и, с -j-Cfq н. с» (IX 14)
а его сопротивление
Rc = Сг Р V Яш’. (IX. 15)
При модельных испытаниях кильватерного секционного состава, если зазоры Между транцами секций отсутствуют, его следует считать монолитным судном, а при наличии толкача рассматривать состав, сформированный из этого монолитного судна и толкача.
УКАЗАТЕЛЬ ЛИТЕРАТУРЫ
I. 1>а зилевский Ю. С., Коротки!! Л. II., Николаспков В. Н. и др. Визуализация потока я явление отрыва перед цилиндром, расположенным в пограничном слое пластины. — Труды *>ТО Судпрома. 15180. иыи 313, с, 14—19.
2. Базнтсаскин IO. С. и др Механизм формирования вязкостного потока >< сопротивления современных транспортных судов. — Труды ЦНИИ нм. акад. Л. Н Крылова 1975, с 12—28.
3. Базилевский 1<>. < , Пустошный Л. Ф. Применение пассивных устройств для управления отрывом турбулентного пограничного слоя. — Труды НТО Судпрома. JL, Судостроение, 1969. вып 127, с. 99- 105
421
I. БабенкоВ. В. Воздействие инстмчюй границы на пограничный слой. — Идц УССР. ДОМ. сер Л № I. с. 46—49.
Г>. b.iLini А. М. Ходкость и упрвнлясмость судов. М. Транспорт. 1977.
6 . Васин А ЛА.. Анфимов В. Н. Гидродинамика судна. Л . Речной транспорт. 19»|
7 . Басин А. Л1. н др. Гидродинамика гудов на мелководье. J1.. Судостроение. I97G
8 . Басин Л М. и др Управление пограничным слоем судив. Л , Судостроение, 19{>х
9 Богданок Б. В. н др. Проектирование тг>лк«емык составов я составных судов Судостроение, 1981
10 Ван-Ламмерен н Др. Сопротивление, пропульсивные качества и управляемость судов. Л . Судпромгнз. 1937
II Впйткунский Я. II. Сопротивление воды движению судив. Л.. Судостроение. 19G1
It . Во|1ткунскнй Я. И. и др. Справочник по теории корабля. Л.. Судпромгнз, 19 9 в
13 . Гире И. В. Расчет остаточного сон роти влепи я корабля при помощи коэффициентов влияния. — Судостроение. 1937. X- 3. с. 1 — 5.
14 Горин Л. .1!.. Пустошный А. Ф. Влияние формы носовых обводов на течение в noj p.i-ничиом слое морских транспортных судов. — В сб.: Гидродинамика транспортных судов ЦНИИ юм. акад. А II Крылов?. 1980, с. 54 68.
- 15. Горлин С. XI . Слеппи ер И. И. Аэродинамические измерении. Методы н приборе.! ЛА , Наука, 196 k
16. Дубенский Л. Н Пусюшный А. Ф. Экспериментальное определение составляющей сопротивления судна, обусловленной образованием скуловых вихрей. — Труды НТО Суд пром а Т.. Судостроение, 1978. вып. 280. с. 18—27.
17. Дубровин О В К вопросу об определении буксировочной мощности по протот ту для судов с малым удлинением и малым коэффициентом полноты водоизмещения. — Труды Л КН. I9M. кип. XIV. с. 83 — 89
!8. Душина Л. Н , Каневский Г. И „ Штумпф В. М. и др. Влияние шеро.коввтости наружной оби*.лвки корпуса на сопротивление транспортных судов. — В сб.: Гидродинамики Транспортных судов ЦНИИ нм. акад. Л. II Крылова. !98!. с. 53 — 61.
19. Брошин В. А. Влияние относительных параметрон формы корпуса на сопротивление среднетоннижных промысловых судов. — Веб.; Вопросы судостроения, 1972, выл 1. с Г> 12
20. Прошин В. А. Исследование характеристик ходкости м.4шх промысловых судов -В сб.: Вопросы судостроения. 1975. вып. 8. с. 29 — 37,
21. Желтухин Н. Л. Полуэмпиричсгкая теории турбулентного движения слабых растворов полимеров. — Тезисы докладов 90-х Крыловских чтений. Л.. Судостроение. 1971.
22. Кацман Ф. М. и Др. Пропульсивные к лчестна морских судов. Л., Судостроен не. 197 2.
23. Лебедев Э. П Першиц Р Я.. Русецкнй А А н др. Средства активною управления судами. Л., Судостроение. I960.
24. Липпе В. Б. Гидродинамика гребного впита при качке судив. Л., Судостроение. 1975.
25. Линне В. Б. Расчет дополнительного сопротивления движению судна на нерегулярном волк ей ни. — Труды ЦН1И1МФ. Л.» Транспорт. 1977. вып. 221, с. 43 -61.
26. Михайлов В. II.. Ткачук Г. Н. Влияние шероховатости корпуса судна на сопротивление воды. Л.» Судостроение. 1971.
27. Многокорпусные суда Под ред Дубровского В. Л. Л.. Судостроение. 1978.
28. Ног ид Л М Проектирование формы судна н построение теоретического чертеж 1. Л., Судпромгнз. 1962.
$9. Определение пропульсивных качеств судов по данным модельных испытаний Мировое судостроение и флот. 1965, № 5. 0.
30. Орлов О II. Определение вязкостного сопротивления моделей надводных водовзм^-щающкх судов в опытовом бассейне — В сб.: Гидродинамика транспортных судов. ЦНИИ им. аквд. Л Н Крылова. 1971, С. 44 — 57.
31. Орлов О. П , Пустошный Л Ф Экспериментальное исследован нс вязкостною сопротивлении морских транспортных судов. Экспериментальная гидромеханика судна. — Труды НТО Судпрома 1973, вып 193. с. 36—46.
32. Орлов О. II. и др. Он ре де л ей не волнового сопротивления поданным измерения волн За моделью судна. — В сб : Гидродинамика транспортных судов ЦНИИ им акад. А. И Крылова, 1971. с. 36—43.
33- Павленко Г. Е. Ген противление воды движению судов. М.. Мореной транспорт. 19аб.
34. Пашин В. Лк. Л1ИЗНП И- О. Согласован»ля оптимизация формы корпуса и основя-х элементов судна — В сб Гидпоыеханнка транспортных судов ЦИПИ нм зк,д. Л Н Кры лова, 1981. с. 27—44
35 Проблемы прикладной гидромеханики судна./Под рсд И А-Титова. 21 . Судостроение. 1975
36. Пустошный Л. Ф. Исследование характеристик пограничны о слоя н местных сил Трения на моделях судов в условиях искусственного турбулнзцроваиног о потокв. — Труды НТО СудггрнмД. J1 , Сч-дпромгиз. 1963. вин. 46. е. 91—111
37. Пустошный А. Ф Ан.-’.л’.т некоторых м.сштабвых серий. Гидромеханика судна. Труды НТО Судпрома. Л., Судпрюмгнз. 1963. вып. 46. с. 62 9«>
38 Сахно Е. Ф Характеристики обтекания и взаимодействия корпуса с движителями судов внутреннего и смененного плввяппя в условиях мелководья. — 13 сб. Гидродинамика транспортных судов. И HI III им. акэд. А. И. Крылова. 1980. с. 14—23.
39. Сахно Е. Ф. Специфика обтекания корпуса судна и его сопротивления на мелко водь с — В сб.: Доклады конференции «Поведение судов в ограниченном фарватере», т Варив 1982.
40. Сахно В. Ф. Об одной особенности сопротивления воды движению мпогоннточиыве составов — В сб.: Доклады канференннн «Мореходные качества судов н плавучих техмн чгских сооружений», т. 2. Варна. 1983.
41. Седов Л. Н. и др О расчетах турбулентных пограничных слоев с милыми добавками полимеров. — В сб.: Турбулентные течения. М . НЭука, 1974. с. 205—219.
42. Смородин А. Н., Шилкина Е. Ю. Экспериментально-теоретические методы опрел» ленив волнового сопротивления судна — Веб." Гидродинамика транспортных судов ЦНИ < нм акад А. Н Крылова, 1961, с. 148 160.
422
43. Сретенский Л. II. Т горечи чес кос исследован не о волновом соп роти в л ей ин.— Труды ЦДГН» 1937, вып. 319.
•14. Сретенский Л. Н. О пол но пом сопротивлении корабля при неустаповиишемся д«и-ясспнн Труды HAITI, 1937. вып. 3(4
45. Сретенский .11. Н. К теории волновою сопротивления — Труди ЦАГИ, 1939. выгь 458.
46. Турбал В. К и др. Проектирование обводов и движителей морских транспортных судов. Л . Судостроение. 1983.
Р 47. Фомкинский Л. И. Методика тяговых расчетов при обосновании судов речного флота. — Труды Ц1111ИЭБ1, М., Транспорт, 1972, вып. 66.
48. Хаскинд АС Д. Теория сопротивления прн движении судна на волнении — Изв. дН СССР. I9i9. Аа 2. с. 46-56.
49. Хаскинд М. Д. Гидродинамическая Теория к. чкц корабля №.. Наука. 1973,
50. Хоренко В. И. Автоматизации р‘счетов ходкости на основе математических моделей. Л . Судостроение, 1977
51. Хохлов II. М. Учет воздействия волнения на судно. — В сб.. Судовождение, ЦБНТИ ММФ. М., 1969, вып. 6 (31), с. 9-51.
52. Чжен II. Отрывные течения, т 1 —3. М.. Мир, 1972.
53 Шанчуров П Н н др. Управление судами я составами М., Транспорт. 1971.
54. Шифрин Л. С. Моделириваипс на ЭВМ дополнительною сопротивлении судна в условиях морскою волнения. — Судостроение, 1975. .V 1. с 13—18.
55. Achenbach Е. Experiment on the Flow Past Spheres al Very High Reynolds Num bers. — J- blind Meeh , 1972, vol. 54, pari 3, p. 565—575
56. Acrtsscn G« Service Performance and Trails al Seas Report of 12th ITTC. Performance Comm il tec. Rome. 1969.
57. Caiiham il. Resistance, Propulsion and Wake Tesls with UMS «Penelope». — TRI NA, 1975. N 117. p 61 — 84.
56. Eckert E., Sharma S. Bngwulsle fdr langssme, volligc Shiite Shift it nd Haien. Jahrgang Г2, December 1970, Helt 12.
59. Eggers K., Sharma S.f Ward L. An Assessment of Some Experimental Methods lor Determining the Wavcmaking Characteristics of Ship Form. —TSNAME. 1967. p. 112—157.
60. 1 ukase T. The Effeels of Seiche on lhe T. nk Tests. — Proceedings of Ihr I 3 TC, Ottaw a, 1975. p. 115 153.
61. Gerrltsma J., Bekeltnzni W. Analysis o! the Resistance Increase in Waves of a fast cargo Ship. — Inf. Shipbuilding Progress, 1972, vol 19. h 217. p. 285—293
62. Gross A Watanabe K. Form Factor. — Proceedings of the 13 ITTC. Berlin — Hun burg 1972, vol. I. p. 2-11 — 263.
63 Gnldhammer H.r H.irvald S Ship Resistance. Effect of Form and Principal Dimensions Akadcmisk Fortag, Copenhagen, 1970
61. lloerner S. Fluid Dynamic Drag — Published by atilhot. 1965.
65 Hosoda R. The added Resistance of Ships in regular oblique Waves.— Journal of SNAJ, 1974. vol. 12. p. 1 — 20.
66. Islierwood R. Wind Resistance of Merchant Ships. — TRIKA, 1973. vol. 1(5. p. 327— 335.
67. Keller W. Extended DS grims tor Determinings the Reslslance and Regulrcd Power for Single-screw Ships. — Ini Shipbuilding Progress. 1973, vol. 20, N 225, p. 133 142.
68 Ijickcnby H. The Effect of Sh How Waler on Ship Speed. — The Shipbuilder and Marine Enginchuilder, September 1963, p. 13—19.
69. L.ickeiiby H , Parker M. The DSRA Melhodical Series, Variation of Resistance with Breadth-draughl Ratio and Lenglh-displ.icemenI Ratio. — IRINA, 1966, vol. 108, hi 4, p. 363 388
70. Landweber L Effecl ol Tank Walls on Ship-Model Resistance. Report of the Resistance Committee, Appendix 6. — Proceedingsol lhe 1 Uli 1 ТТСЪ Ottawa, 1975, vol. 3. p. 62—91.
71. Lap A. Ship Resistance in Shallow and Restricted Waler. Report of Resistance Committee, Apeiidix 5 Proceedings of lhe 13th ITTC. Berlin — Hamburg. 1972. p. 95—123.
72. Larsson L. Experiinent.il Investigation ol the Three-Dimensional Turbulent Boundary Layer on a Ship Model — Swedish Maritime Research On Ire (SSPA), 1976, N 76. p. 1 — 45.
73 Manio IE Resistance in waves Research on seakeeping qualities of Ships In Japan, ch 5. — SNAJ, 1963, vol. 8, p 67-102.
74 Mijumolo M On the approximate Calculation of Thrust Increase iri Irregular head Waves. — JKSNA. Japan. 1972 N 145, p. 62 7-1
75. .Moor O., Munday D. Mol Ions and Propulsion of single screw Modules in head seas. — TRINA. 1968. vol. 110, N 4. p. 403—446; 1970, vol 112. N 2. p. 121 — 161.
76. Moor D. et al The BSRA Methodical Series, Geometry of Forms end Variations of Resistance w ith Block Coefficient and l.ongitudimat Centre of Buoyancy — TRI NA, 1961, Vol. 103, N 4 p. 329 4 19
77. Newman J. N. A Linearised Theoiy for Ihr motion of Thin Ship in Regular Waves. — Journal ol Ship Research, 1961. vol. 5. N I, p. 34 — 55.
78 Ohkusu M Added Resistance hi Waves in Ihr light of unsteady Wave Pallern analysis.— J3lh Symposium on Navel Hydrodyii.. OcI. 6—10 1980, vol 2, p IV’3.1 IV.3-12.
79. Okuno T. Distribution of Will Shear Stress and Cross-Flow In Three-Dimensional Boundary Lr.vcr on Ship Hull SNAJ, 1976, vol 139. p. 1—12
8lJ Prise hemih in J , Poosloshuy! A I lives'icat ion of Turbulence Stimulation In lhe Boundary Layer ol Ship Models. Tested In Towing Tank. — Proceedings of the 9lh ITTC, Paris, IS60. p 170 187.
В 81. Proceedings of the Workshop on Ship Wave Resistance Compulations. David W. Taylor Naval Ship Research and Development Outer, USA, 1979. vol 1 — 2.
82. Report of Performance Committee. — Proceedings of lhe 13ih ITTC, Hague, 1978
83. Rcporl ol Resist»iK*r Cuinmilire Proceedings uf lhe (3th 1 ГтС. Berlin—Hamburg,
k ₽2. p. 115-4 10.
423
84. Roshko A. Experiment on the Flow Past a Circular Cylinder a! Vjry High Reynolds Number. — J. Fluid Much., 1961, vol. |U, N 3, p. Л15—356.
8$. Sdlvesen N., Tuck E., l alllnscn U. Ship Motions and Sea loads. — TSNAME. 197(1 vol. 78. N 4. p. 250—286
86. SasaJIma II., Tanaka J.r Suzuki T., Oglno S. On Stern Flow Field ol Full Ship Forms and Induced Drag cine lo Bilge Vortices. — SNA.I, 1970, vol. 128. p. 43—52.
87. ScoIt I. R. A Shallow Waler Speed Corrector. Quarterly Transactions ol the Royal Institution ol Naval Architects. October 1966. vol. 108, N 4, p. 431—410.
88. Scott I. R. On Blockage Corrector and Extrapolation to Smolh Ship Resistance. -TSNAME. 1970. vol. 78. N 4. p. 288-389
89. Schllchling O. Shiflswiderstand aul Beschranklcr Wassertlefe. Wld erst and von Secs-chilfcn aul flachen Wasser. Jahrbuch STG. 1934. Bd. 35, p. 127 148.
90 Shiirrrm S. Zur Problems! tic tier Aulleihing des Shiflswiderstandes In Z£h!gkelts uibl wellenbedlngte Anlclble. Jahrbuch STG. 1965, Bd. 59. p 458—508.
91 Strom-Fcjsen J., Yeh H., Moran I). Added Resistance in Waves. — TSNAME. 19. vol. 81. p. 109—138.
92. Stumpf V., Poosioshnly A., Bazilevsky Y. A Study of Hull Form Effect on lhe Resistance of Large Tankers. — RINA. London, 1969. p. 11—19.
93. Surface Roughness- — hit. Symposium on Ship Viscous Resistance, SSPA, G6teborg 1978, p. 91—11.20.
94. Tagorl T. A Study ol the Turbulence stimulation Device in lhe Model Experiment on Ship Form. — Proceedings of the 10th 1TTC, 1963. p. 17.
95. Tanlguchl K., WaUnabe К.» T.imur* K. On a New Method of Designing Hull Form of Large Full Ship, based on the SeparabiUly Principle of Ship Form. — The society ol Naval Architects of Japan, 1966, N 120, p. 137—146.
96. Tatlnclaux J. Experimental Investigation of the Drag Induced by Bilge Vortices. — Schlllslcchnik, 1970, vol. 17. p. 37—44.
97. Todd 1. ct al. Series *60». — TSNAME. 1953, vol. 61. p. 516—589; 1956. vol 64. p. 64—68 1957, vol. 65. p. 445—589
98. Vasslloponlos L. The application of Statistical Theory of nonlinear Systems to Ship Motion Performance In random Seas. — Ini Shipbuilding Pt ogress, 1967. vol. 14, N I3«». p 54 — 65.
99. Williams Л, Some Recent Trends hi Hull Forms for Merchant Ships. — SSPA, Goteborg. 1978. N 80
100. Yokoo K. ct al. Design Charts for the Propulsive Performances ol High Speed Cargo Liners. — The 45lh Research Committee. The Shipbuilding Research Association of Japan, 1964; 1966
101. Yokoo K. et al. Investigation Inlo the Propulsive Performance ol Super Tankers with Bulbous Bow. — Report of Ship Research Institute, 1967, vol. 4, N 5. p. I — 31; I960, vol. 6. N 2. p. 1 — 31.
Раздел третий
СУДОВЫЕ ДВИЖИТЕЛИ
ОСНОВНЫЕ ОБОЗНАЧЕНИЯ
И СИСТЕМЫ КООРДИНАТ, ИСПОЛЬЗУЕМЫЕ ПРИ ОПИСАНИИ СУДОВЫХ ДВИЖИТЕЛЕЙ
Безразмерные величины обозначаются прямой чертой сверху. При переходе к безразмерным величинам линейные величины относят к/? (г = riR,f> — b/R нт. д.); скорости -ко (эх — ол./у, йх - wx/v); интенсивность вихревого слоя_— к v (у — ₽ у/е); циркуляцию скорости — к vR (Г = Г/и/?); давления — к ри2/2 (р* = 2р/ре2); силы к pn2D4 (Fx — Fx/(Mi2D*); моменты — к рл2О5 (Л4Х = мощности —
к рл3Л5 = Р^/рч’О5).
Линейные величины, связанные с сечением на данном радиусе, можно относить к половине хорды Такне безразмерные величины обозначаются волнистой чертой сверху (;= 2£/ft, ?s= 2cs Ь н т. д.). Далее приводится перечень основных условных обозначений, применяемых в третьем разделе справочника.
Геометрия гребною винта
Лп — площадь диска гребного винта.
Ar — площадь спрямленной поверхности лопастей.
—площадь цилиндрического ссчсння лопасти.
b — ширина спрямленного контура лопасти, длина хорды профиля сечеиня лопасти.
— отстояние середины хорды профиля сечения от осевой линни (с^> 0, если середина хорды смещена от плоскости (х, у) в поло жнтельном направлении осн £
Г), R — диаметр, радиус гребного винта.
d/7, гИ — диаметр, радиус ступицы.
е — наибольшая толщина сечеиня лопасти.
f — наибольшая стрелка прогиба средней линни поофпля сечения лопасти.
/10 — глубина погружения оси гребного винта под свободную поверхность.
Р - шаг сечения лопасти (шаг винтовой координаты).
Х(„ Zp - координаты центра диска гребного винта в системе координат .4 .
xfl —• смещение вдоль оси гребного винта сечений лопасти, или характеристика откидки лопасти, абсцисса точки пересечения координаты & с плоскостью (х, у)
х смещение вдоль оси гребного винта середины сечеиня лопасти (абсцисса середины хорды сечения в системе координат Е). Z — число лопастей гребного впита
Z • — количество гребных валов.
б — (относительная толщина профиля сечения лопасти, б = е/Ь. бс'—^относительная величина стрелки прогиба средней линии профиля сечения лопасти (кривизна средней линии), fi„ = fK['b.
|]. — ордината средней линии профиля (в системе координат F). i|, —местная толщина профиля (в системе координат F).
425
Ц* — ордината засасывающей поверхности профиля (в системе коор.
» динат F)
»)" - ордината нагнетающей поверхности профиля (в системе коордн. нат F).
угол саблсвидности лопасти (угловая координата середину хорды сечения в системе координат Е).
PL, Рт — радиусы кривизны входящей и выходящей кромок.
Ф — шаговый угол сечения лопасти.
ф5//, фян — углы наклона вала в горизонтальной и вертикальной плоскостях.
У.р — Угол наклона осевой линии лопасти Измеряется от плоскости (у. г). Положителен при наклоне лопасти в корму.
X; — угловое смещение /-Й лопасти, х> — 2njlZ, / = О I.Z — 1.
Скорости и циркуляции скорости
iT, iq — коэффициенты влияния неравномерности поля скоростей на упор ц крутящий момент.
J — относительная поступь гребного винта, J = v.\l(nD).
Jr — кажущаяся относительная поступь гребного впита, J„ — v!(nD). it — частота вращения гребного винта.
I — коэффициент засасывания, t = 1 — R / У' Тп. / zp о, vs — скорость судна, м/с, уз.
t>4 — поступательная скорость гребного винта.
— результирующая скорость потока (с учетом вызванных скоростей), натекающего на элемент лопасти.
v — вектор скорости внешнего потока в месте расположения гребного винта
—►
w — вектор скорости, вызванной винтом.
Wf—коэффициент расчетного попутного потока, а или а,- — кромочный угол атаки профиля сечения лопасти.
— индуктивный угол атаки, а; = ф ]- аг — Р;
а0 — угол нулевой подъемной силы (угол между хордой и направлением нулевой подъемной силы).
Р— угол поступи сечения лопасти, Р = агс!ц (t./lf).
IP,— Угол индуктивной поступи, р; —- агс1д (kj/г)
—интенсивность вихревого слоя. м/с.
Г — циркуляция скорости вокруг профиля цилиндрического сечения ’ лопасти.
| А,—индуктивная поступь гребного винта, А, — г (v v шДуР.г — u'fl) относительная поступь грибного винта Aj = J/л
оп -число кавитации гребного винта, о0 = 2 (рв— р,)/(ри2).
Ф — коэффициент номинального попутного потока за корпусом судна Ф/ — коэффициент номинального попутного потока трения ф„ — коэффициент потенциального попутного потока корпуса.
Я — угловая скорость вращения гребного впита.
Динамические характеристики
В — гидродинамическая характеристика сечения лопасти. В = 0.5ЬСу Су — коэффициент сопротивления элемента лопасти, Сд- = 2Л‘.(рь'д,6-1).
С, — коэффициент подъемной силы элемента лопасти, Су
2 У (pvKl> I)
426
Ср a — коэффициент нагрузки гребного винта по мощности Ср$ “ - 2₽о НИо)-
С, i — коэффициент нагрузки гребного винта по упору. С/\ =
= 2Г (l,L'.Hn)-
F — вектор гидродинамических сил, действующих на лопасть гребного винта.
К de — коэффициент нагрузки гребного винта потяге, К. de. ~ 7р/|/ Ке*= = vd
Kdq — коэффициент нагрузки гребного винта по мощности, потребляе-
1 75J3
мой нм при постоянном диаметре, Коц J' =
О,2738г
I PiAI'va) ‘
Кот — коэффициент нагрузки гребного винта по упору при постоянном диаметре, Kltl J | Кг Е>ил/1‘ Т/р.
Ке—коэффициент тяги гребного винта, Kf—Tf.
Kvq — коэффициент нагрузки гребного впита по мощноои, готрсбляс-
..
мон им при постоянной частоте вращения, A.vq = | ~2jiKq
0,5233е . я_ ___ А
I " I рп г)
К\т — коэффициент нагрузки гребного винта по упору при псстояппой частоте вращения, Kxl = J f р' Kt= vA/( j п | 77р).
A'q, Kqu — коэффициенты крутящего менента гребного винта в свободной воде и за корпусом судна, Kq — Q.
Л',-, Кть — коэффициенты упора гребного винта в свободной воде и за корпусом судна, Кт~ Т.
М — вектор момента гидродинамических сил, действующих на лопасть гребного впита
Ро — мощность, потребляемая гребным винтом, кВт, Pn—&QlCra. Ре—буксировочная мощность судна, кВт, Ре = vR- Ю'8.
P.s — мощность иа выходном фланце двигателя или редуктора. кВт. р*—давление на засасывающей стороне лопасти.
р~ — давление иа нагнетающей стороне лопасти.
Ро—давление на оси гребного винта.
Q, Qlt — крутящий момент гребного винта в свободной воде н за корпусом. R — полное буксировочное сопротивление судна.
Rs— сила сопротивления элемента лопасти.
Т, Тп — упор гребного впита в свободной воде и за корпусом.
Те — тяга гребного винта При установившемся движении у*, Te—R-
ZP
в — коэффициент обратного качества элемента лопасти, ъ— Сх/Су. i|0 — КПД гребного винта в свободной воде, По = P-i/2) (Rt/Rq) i|o— пропульсивный коэффициент, т]п= pe.Pd~‘ ’Ши '*<? <),. — коэффициент влияния корпуса, 1)^ = (1 — /)/(! — 1КД.
— индуктивный КПД гребною винта.
коэффициент механических потерь при передаче мощности на гребной винт.
127
В разделе используются следующие системы координат.
Система координат А: О, X, Y, Z (рис. I). Правая прямоугольная корабельная система координат А связана с судном. Используется при определении размснтц, гребного впита относительно корпуса. Начало координат расположено к ючце пересечения плоскостей мидель-шпаигоута конструктивной ватерлинии и дпаме. трали. Ось X лежит в диаметральной плоскости и направлена в нос. Ось У лежит в плоскости конструктивной ватерлинии и направлена на правый борт. Ось Z лежит в плоскости мидель-шпаигоута и направлена вниз.
Система координат В: О0, х0, yt, Zo (рис. 1, 2). Правая прямоугольная система координат В связана с судном. Использ}ется при определении коля скоростей в д| ске гребного впита, а также для задания угла поворота лопасти Начало кссрдшьт
системы ^'совпадает с началом координат системы D, используемой для oi ределсш.я геометрии гребного винта. Ось ха направлена вдоль оси гребного винта в нес судна (в сторону перемещения гребного винта при ходе судна вперед). Положение осн л'о относительно системы А задается углами наклона линии вала нфъН. Угол <pSH (долгота) определяет поворот относительно осн Z проекции оси х0 на плоскость (X. У). Угол <рА.н отсчитывается от оси X и принимается положительным при отклонении положительного конца осн х0 па правый борт. Угол (широта) равен углу между осью х0 и сс проекцией на плоскость (А', У). Положительный уголья соответствует подъему положительного конца оси х0 относительно плоскости (Д', У).
Переход от системы В к системе Л определяется соотношениями
А' = хо + cos Ч$ц cos х0 cos <pS7 sin y0 — sin <рЛ/Л;
У = Уо + sin <pOT cos 4’s/f*o— sin 4sh 5111 Ъ/ Уо + cos Wo:
Z = Zo - sin Wo ~ cos Wo-
Система координат C: 001 jt0. /ь,г0о (см. рис. I, 2). Цилиндрическая система координат, соответствующая^прямоугольноЛ системе В.
428
Переход от системы С к системе £ определяется соотношениями
-v.
у0 = r0 cos 0и;
zn r0 sin 0о.
(2)
Система координат D: О, х, у, г (рнс. 2). Правая прямоугольная система координат D связана с гребным впитом. Используется для определения геометрии гребного винта. Начало координат системы D условно называется центром диска гребного впита. Ось у направлена так, чтобы осевая линия нулевой лопасти лежала в плоскости (х, у). Система D совпадает с системой С, если совмещены оси у0 и у, т. е. если угол поворота Ор гребного винта равен нулю.
Переход от системы D к системе В определяется соотношениями х0 — х;
у0 = у cos Op - z sin 0p;
гй = у sin Op + z cos Op. ,
(3)
Система координат E: О, x, r, 0 (рис. 2). Цилиндрическая система координат, Соответствующая прямоугольной системе D. В случаях, когда это не может вызвать путаницы, индексы этой системы используются вместо индексов системы С при обозначении проекций вектора поля скоростей.
Переход от системы Е к системе D определяется соотношениями:
х = х,
у г cos б; г = r sin 0.
(4)
Система координат F: 05, £, т] (рис. 3). Локальная прямоугольная правая система координат, связанная с цнлнш рнческим сечением лопасти. Используется
429
При определении геометрии профиля сечения лопасти. Начало координат системы расположено в середине хорды спрямленного цилиндрического сечения лопасти Координата с, направлена вдоль хорды к входящей кромке и предгтаглист собой винтовую линию, лежащую на поверхности цилиндра радиуса г с осью х и имеющую шаговый угол, равный шаговому углу данного сечения Координата i| в начале коор дннат перпендикулярна к £ и направлена в сторону засасывающей поверхности профиля.
Переход от системы F к системе Е определяется соотношениями х xs — £ sin <р 4- т| cos <р = хд + (cs £) sin ц 4 i| cos <р;
О = 0л 4- (Е сое <Р — т) sin <р)'г = |(с$ 4- cos гр - n sin <р]/г,
где xs, rs, 0s — координаты начала системы F в системе Е.
Системы координат для гребных винтов левого вращения Системы коорлн-нат D, Е и /•’ приспособлены для определения геометрии гребного винта правого вращения. При определении геометрии грибного винта левого вращения целесообразно вместо системы 1) ввести левую систему координат £>', сохраняя направления осей X и у.
Глава I
ОБЩИЕ СВЕДЕНИЯ О ДВИЖИТЕЛЯХ
§ I ПРИНЦИП ДЕЙСТВИЯ и КЛАССИФИКАЦИЯ ДВИЖИТЕЛЕЙ
Прямолинейное равномерное движение судна происходит под действием движущей силы Те, равной и противоположно направленной силе сопротивления корпуса судна R. При движении судна со скоростью v сила Т i совершает работу, которая в единицу времени характеризуется полезной или буксировочной мсщнпстью
Pr.= Tcv. (1.1)
Движущая сила Те буксирного судна преодолевает не только собственное сопротивленце буксира, но и сопротивление буксируемого судна (воза) Таким образом, в общем случае
Те R |- К„,
(1.2)
430
rie Rn — тяга на гаке, равная сопротивлению буксируемого судна (воза). Движение самоходного судна обеспечивайся с помощью источника механической энср! ин — двигателя, а также устройства, преобразующего эту энергию в энергию поступательного движения судна. Устройство, обеспечивающее указанное преобразование н создающее силу Тг, носит название движителя.
Степень эффективности движителя характеризуется величиной пропульсивного коэффициента
В*
Для реальшдх движителей этот коэффициент лежит в диапазоне 0.4 0,8.
I! большинстве случаев практически применяемые движители являются реактивными, т. с их тяга создается в результате отбрасывания масс рабочей среды
в сторону, противоположную движению. Среда может отбрасываться либо с помощью лопастного механизма, либо вследствие непосредственного преобразования энергии сжатого газа. Вели реакция отбрасываемых масс воспринимается, главным образом, лотшезным механизмом, движитель называется лопастным. Движитель, у которого реакция воспринимается как лопастным механизмом, так и неподвижными элементами проточной части, называется водометным. Дш жители без лопастного механизма, тяга которых формируется только па неподвижных элементах, называются газоводометнымп
Реактивные судовые двт жители в качестве рабочей среды, как правило, используют воду, т. е. являются гидравлическими. Только воздушные винты, применяемые на СВП, используют в качестве рабочей среды воздух.
Воздушными являются также активные движители, к числу которых в первую (очередь должны быть отнесены паруса, использующие энергию относительного движения воздуха для получения движущей силы. По существу эта сила создается в результате реакции потока воздуха, отклоняемого парусами от направления своего первоначального движения.
Общая схема классификации судовых движителей приведи а на рнс. I I
В настоящее время наиболее распространены лопастные движители, из числа которых преимущественное применение получили требиые виши. Высокая эффк-к тцвкость, простота конструкции и передачи мощности от Двигателя, низкая стоимость
431
изготовления, надежность в эксплуатации делают гребной винт самым экономичным судовым движителем. Обычно размещение винта иа судне не требует каких-либо существенных отступлений от иаивыгодпеншнх обводов. Типичная схема размещения гребного винта на современном судне показана иа рис. 1.2.
По существу единственным недостатком гребиых винтов является жесткая зависимость их гидродинамических характеристик от режима работы, что затрудняет его совместную работу с двигателем. Для преодоления этого недостатка используются гребные винты регулируемого шага (ВРШ), лопасти которых поворачиваются относительно их осей.
Установка ВРШ иа судне показана иа рис, 1.3. Подобные винты получили преимущественное распространение на судах с переменными режимами работы двигл-тельно-движительного комплекса, таких как траулеры, тральщики, кабельные суда, буксиры.
Поскольку с помощью ВРШ можно добиться экономии топлива и иа установившихся режимах, в последние годы они начинают применяться иа транспортных
Рнс. 1 2. Размещение гребного винта на современном судне.
Рис. 1.3. Установка ВРШ иа судне.
грузовых судах. ВРШ также обеспечивают значительное улучшение маневренных качеств судна.
Дополнительным средством повышения эффективности гребных винтов, особенно при малых скоростях движения и больших нагрузках движителей, являются направляющие насадки, представляющие собой кольцевые крылья, устанавливаемые иа гребном винте. Выигрыш в тяге от применения насадок может достигать 30—40 %. В тех случаях, когда направляющие насадки выполняются поворотными, он в обеспечивают также улучшение управляемости судна (рне I 4)
Ограниченное распространение получили соосные гребные впиты, которые могут либо вращаться в противоположные стороны, либо иметь одинаковое направление вращения, в последнем случае они называются винтами тандем. Впиты противоположного вращения обеспечивают повышение КПД на 8—10 %, однако имеют сложную конструкцию валопровода и редуктора привода.
Для обеспечения повышенных маневреииых’качеств судна применяются крыльчатые движители (КД) Они представляют собой поворотные барабаны, установленные заподлицо с днищем судна, по окружности которых закреплены поворотные лопатки в виде консольных крыльев 15),
Регулируя закон управления поворотом лопаток, можно изменять величину упора, создаваемого движителем, и его направление по отношению к диаметральной плоскости. Из-за сложности конструкции максимальная агрегатная мощность КД составляет 2500—3000 кВт.
Крыльчатые движители несколько уступают по эффективности гребным винтам (на 3-5;%) и обладают худшими кавитационными характеристиками Поэтому наибольшая ско,и:гь судов, которые оборудуются крыльчатыми движителями, не превышает 15—10 уз.
432
Одним из наиболее старых лопастных движителей является гребное колесо. Гребное колесо частично погруженный движитель, горизонтали ая ось вращения которого перпендикулярна к направлению движения (рнс. Г6^. По периферии колес расположены лопатку— плицы, которые, находись ГТыжней "асти окружности
Рнс. 1.4 Судно с поворотной направляющей насадкой.
Рис. 1.6. Общий вид крыльчатого движителя.
колеса, взаимодействуют с водой. Плицы могут быть неподвижными и поворотными,
поворот плиц осуществляется для оптимизации углов входа плнц в воду и выхода нз’нее, что обеспечивает повышение КПД движителя. Гребные колеса несколько
уступают гребным пиитам по эффективности, в условиях ограниченной осадки они широко применяются на речных судах. Недостатком гребных колес является их плохая защищенность от ударов волн и неравномерная работа в условиях качки. Поскольку для эффек тивпой работы гргбиых колес требуются низкие значения чисел оборотов, они примени •лись совместно с паровой машиной. По мерс внедрения двигателей дизел я область их применения сокращалась, в настоящее время суда с гребными колесами почти не строятся. Г ""За последнее время более широкое рас Ч1ространеиие получили водометные движп Тели, главным образом в связи с созданием новых типов судов, в частности судов на под водных крыльях. Роль водометов возросла
но благодаря, удобству размещения
Рис I б. Схема гребного колеса.
также благодаря их применению как средств
активного управления судами и прежде всего — в качестве подруливающих уст ройств типа гребной винт в поперечном, продольном пли вертикальном (подвод-
ные аппараты) каналах. Широко применяются водометы иа катерах различного назначения (разъездных, туристских, спортивных и т. д.).
Водометные движители можно подразделить иа движители с осевыми насосами (гребными винтами) и центробежными насосными установками. Корма судна ил под В'ЩПых крыльях, оборудованного водометом показана на рнс 1.7.
Газоводометиые движители, у которых ускорение потока, а следовательно, и реактивная тяга создаются в результате подачи в поток воды (внутри движителя)
433
сжатого холодного газа пли вследствие подвода тепла с образованием парогазоводя-„ой смеси, практического распространения нс получили.
Принципиально известны два варианта газоводомстного движителя непрерцц-иого действия- так называемые прямоточные и пульсирующие. В число движителей использующих в качестве рабочей среды воздух, входит активные движители (паруса и роторы) и реактивные (воздушные впиты).
После создания механических движителей и до недавнего времени паруса при-менялись только на учебных и спортивных судах. Лишь в последнее время в связи
Рнс. 1.7. Корма судна, оборудованного водометом с осевым насосом
с ростом цеп па топливо начались попытки применения парусов в качестве вспомог.) телыюго движителя на судах с механическими двигателями.
Наряду с парусами предпринимались попытки применить роторные воздушные движители, выполненные в виде вращающихся цилиндров, использующие эффект Магнуса. Однако нх применение не вышло за рамки строительства отдельных опытных судов.
Воздушные впиты при умеренных скоростях судна благодаря меньшей плотности среды существенно уступают гидравлическим движителям по эффективносп Поэтому они применяются лишь на судах, работающих без контакта с водой, например па судах на воздушной подушке
§2 ИДЕАЛЬНЫЙ ДВИЖИТЕЛЬ
Движитель любой конструкции развивает упор и совершает при перемещении полезную работу вследствие изменения кинетической энергии набегающего на пего потока Создаваемые движителем дополнительные скорости в то же время являют).я источником энергетических потерь. Основные закономерности работы движителей могут быть проще всего проанализированы с помощью схемы идеального движителя, т. е. движителя, создающего вызванные скорости лишь в направлении, противоположном его перемещению Теория идеального движителя важна прежде всего тем, что позволяет определить продельные значения КПД движителей. Приводимая ниже простейшая схема идеального движиГсЛя предложена Рэпкипым {37]. В ня
434
сТОЯШее время имеются схемы, учитывающие влияние свободной поверхности, кй-витации лопастей, качки и другие факторы
j Жидкость, в которой работает движитель, принимается безграничной, невязкой и несжимаемой. Считается, что осевой протяженностью движителя можно пренебречь (рис 1-8) За счет подводимой энергии от внешнего источника между засасывающей (обращенной в сторону движения) к нагнетающей поверхностями диска образуется перепад давлений Ар — р* — р" Интеграл ог перепада давлений, взятый по всей поверхности диска, даст величину унора движителя
R 2л
Т = J | ЛргЛОФ-. (1.4)
о б
Применение закона количеств движения и теоремы о сохранении энергии наряду с использованием интеграла Бернулли позволяет получить следующие основные соотношения для упора и потребляемой мощности идеального движ1иеля:
R 2.1
Рис 1.8 Схема идеального движителя.
а также зависимость taAt) = шлси 2 (теорема Фруда—Фннстервальдера), где
Щто—вызванные осевые скорости в сечениях х-*-—сю и х = О соответственно.
Теряемая иа создание вызванных скоростей мощность Р—Tv * при заданном упоре будет наименьшей, если вызванные скорости одинаковы во всех точках поперечного сечения струи Движитель, удовлетворяющий такому условию, называется оптимальным. Упор, потребляемая мощность н КПД оптимального идеального движителя определяются формулами
Т 2л/^рюд0 4- а-д0);
= ? (ил "I- й'л0 *
^1/ = ' (Ч-^о/^)-
(1-7)
Для оценки режима работы движителя используются безразмерные величины, пазы васмые коэффициентами нагрузки по упору, н мощности
Ста =
2Т
Ср 1
2Рд> _ P'V'l
(1 8)
Вызванная скорость в диске оптимального движителя связи! а с коэффициентом нагрузки по упору соотношением
^4(«+<W'z-,b/2 но)
Струя движителя по мере удаления от него сжимается н в пределе (при х -» —с<):
1^-] , > + _ 1 + гта. ,, ,
\ к I “Л I >» 2 KI + Сгл
Относительное сжатие струн увеличивается с ростом нагрузки.
135
Поле скоростей идеального движителя при Суд-»- 0 эквивалентно: вне струи „ течению, вызванному диском стоков с интенсивностью ьу1О0, а внутри струи — ТСЧе. кию от того же диска стоков с наложенным на него полем осевых скоростей
КПД оптимального движителя может Сыть выражен через коэффициенты ци. грузки:
*1, ~ ^ТЛ.!сга'
•1, = 2/('+ I Н^)
Ч/ = (2. с/>д)'/3 1(> + Ч)1'3 -I- (I -4),/31-
(I И)
(' 2)
где 9=11 + 16/(27 CpJ]i/<
При нулевой нагрузке КПД идеального движителя 1) = I. С ростом нагрузки КПД падает (рис. 1.9). Увеличение радиуса движителя при неизменном упоре приводит к уменьшению коэффициента Су 4 и соответственно к росту КПД. Этот вывод справедлив лишь для идеального движителя. КПД реальных движителей увеличивается с ростом радиуса до тех пор, пока радиус нс достигает некоторого оптимального значения. Затем реальный КПД начина -т снижаться, поскольку с ростом радиуса увеличиваются не учитываешье в
схсме идеального движителя потери на создание окружных вызванных скоростей и потери, обусловленные вязкостью воды. Потерн на создание
Рнс. 1.9. Зависимость КПД идеального и реального движителя, а также коэффициента качества от коэффициента пагруз-
кн. окружных вызванных скоростей при
блнженно учитываются в схеме идеального гребного винта.
Гидродинамическая эффективность реального движителя может быть оценена с помощью коэффициента качества С = т]п'т) < 1, который представляет собой отношение КПД реального движителя к КПД идеального движителя, определенных при одинаковых значениях коэффициентов нагрузки по упору.
По формуле
£о — О,5т]о И -}- (I т)0Ср.4),,/г{ (1.13)
коэффициент качества определяется при известных значениях Т|о и СРд реального движителя.
§3 ГЕОМЕТРИЯ И КОНСТРУКЦИЯ IPEbHOlO ВИН1А
Гребной винт представляет собой систему лопастей, расположенных иа равп ix угловых расстояниях одна от другой и закрепленных на ступице. Числолопастей современных винтов колеблется от 2 до 8. При работе гребной винт совершает поступательное движение вдоль своей оси и одновременно вращается относительно нее. При этом каждая точка лопасти движется в пространстве по винтовой линии. Лопасти винта представляют собой тела, образованные профилями, средние линии которых являются винтовыми. Поверхность лопасти гребного винта, обращенная в корму судна, называется нагнетающей. При установившемся движении судна передним ходом на пей возникает повышенное давление Противоположная (обращенная в нос) поверхность лопасти, па которой в тех же условиях развивается пониженное дагл< ние, называется засасывающей.
436
Линия пересечения нагнетающей и засасывающей поверхностей называется контуром лопасти Площадь круга, построенного на диаметре гребного винта, носит название площади диска винта .%. Область притыкания лопасти к ступице называется корнем, расстояние от корневого сечеиня до копна — длиной лопасти. Различают гребные винты правого и левого вращения. У грвбнчго винта правого вращения правая кромка находящейся в верхнем вертикальном положении лопасти, более удалена от наблюдателя, чем левая, у гребного винта левого вращения — наоборот.
Геометрия лопастей определяется путем задания форм нх сечений цилиндрами, соосными с гребным винтом. Такне сечения называются цилиндрическими сечениями пли просто сечениями лопасти. Они имеют форму крылового профиля.
Профиль сечения лопасти может быть задан с помощью ординат засасывающей (г]*) и нагнетающей (i|~) сторон, отсчитываемых от координатной оси. Удобно условиться задавать эту ось таким образом, чтобы входящая и выходящая кромки профиля
Рис I 10. Профиль сечения лопасти гребного винта.
/ — входящая кромка; 2 — выходящая кромка; 3— средняя линия.
лежали на ней. При этом перпендикуляры к координатной оси, проведенные в точках пересечения этой осн с контуром профиля, сю не пересекают (рис. I 10). Указанное
условие далее будет считаться выполненным. Отрезок b координатной оси, лежащий между кромками, называется хордой профили. Длина хгрды профиля совпадает, та-ким'образом, с длнной'профяля^сечспия лопасти. Эту длину называют также шириной лопасти иа данном радиусе.
Профиль сечения может быть задан распределением вдоль хорды толщин ту, = т)* —т]~ и ординат средней линиит]с = 0,5 (i|* -f- ij“). Хорда средней линии и хоода 1 профиля (так, как она определена выше) совпадают.
Профили сечений бывают с закругленными и острыми кромками. Для профилей с закругленными кромками на чертежах часто указывают радиус закругления, который следует трактовать не как радиус вписанной в профиль окружности, а как радиус кривизны профиля в точке, соответствующей кромке. —__________ —
~Для определения формы профиля независимо от его абсолютных размеров нс- V iпользуют нормированные ординаты толщины FT и средней линии Гс: т)г= efT; 1)с=
= [мРс, причем шах FT ~ max I; е—наибольшая толщина профиля; /у— стрелка прогиба средней линии.
Хорда профиля каждого цилиндрического сечения представляет собой отрезок правильной винтовой линии, взвитой па соответствующий секущий цилиндр. С этой В винтовой линией совпадает координатная ось профиля. Поэтому далее она будет иа-Р зываться координатной винтовой линией данного сечения. Шаг координатной винтовой линии называется шагом сечеиня лопасти. Угол наклона этой винтовой линии к плоскости, перпендикулярной к оси цилиндра (гребного винта), называется шаговым углом Связь между шагом и шаговым углом определяется соотношением
Р 2л г tg q; или Р/D - nr tg <j>. — (1.14) A
437-
Положение каждого сечения в пространстве должно быть определено с помощью радиуса секущего цилиндра н шага а также еще двух параметров — откидки лопасти хГ( и саблевидное™ лопасти с5. Для того чтобы задать этн параметры, фиксируют две плоскости. Первая плоскость, перпендикулярная к оси гребного винта, называется базовой плоскостью или плоскостью диска гребного винта. В плоскости диска гребного винта лежат прямолинейные осн лопастей, котор!*е пересекаются с осью винта в точке, называемой центром гребного винта. Вторая плоскость провидится через ось винта и ось одной из лопастей Она называется продольной базовой плоскостью. Введенные плоскости используются в качестве координатных при построении системы координат!). Параметр откидки xR определяет отстояние от пло-
Рис. 1.11. Теоретический чертеж гребного винта.
I — габарит; ? — условное сечение по линии наибольших тшпцин; 3 — контур спрямлеипсЛ проекиии лопасти.
скости диска гребного винта точки пересечения координатной винтовой линии рассматриваемого сечения лопасти с продольной базовой плоскостью. Направление отсчета совпадает с направлением, введенным на осн винта Саблевидность сч — эго расстояние от середины хорды до продольной базовой плоскости, измеренное вдоль винтовой линии рассматриваемого сечения (рис 3).
Величина с\ положительна, если середина хорды смещена от продольной базовой плоскости в сторону вращения гребного винта.
"Хорды лопастей образуют винтовую поверхность, называемую номинальной.
Отношение суммы площадей номинальных' поверхностен лопастей к площади диска винта называется дисковым отношением AilAa. Величина дискового отношения лежит в диапазоне 0,4—1,5.
^Геометрия грешного винта определяется в процессе проектирования и задастся либо с помощью теоретического чертежа, либо путем математического представления его поверхности. Теоретический чертеж гребного винта определяет форму it размеры лопастей и ступицы, а также класс гребного впита.
438
На теоретическом чертеже (рнс I I) показывают нормальную проекцию контура лопасти (на плоскость, ncpi енднкулярную к осп) н боковой вид ( 1 секцию на про-| дельную базовую плоскость). Иногда дополнительно строится третья — вертикальная проекция лопасти. Кроме того, строится спрямленный контур лопасти (величины1 и b откладываются перпендикулярно к осевой линии лопасти) и сечения лопастейД Методы построения теоретического чертежа подробно описаны в [43].
В математическом представлении поверхности лопасти используются следующие уравнения
** = *« + (?s + 0,5б|) sin <р + <JUFC -I 0 5ef ) cos ;
и - = l(ss + 0 f0S 'f' ~ (/ л/с ± )sin '• ]/f •
где знак « [-» соответствует засасывающей поверхности, а знак «—» — нагнетающей. Независимыми переменными в этих уравнениях являются координаты Г g |rH, 11 и £ € [-1. П
Если входящие в уравнения (1.15) величины Fc и г г не зависят от г, то говорят, что лопасть имеет единый профиль.
Уравнения номинальной поверхности, образуемой хордами цилиндрических сечений, получаются из общих уравнений, если положить в них Fc = FT— 0. Уравнения серединной поверхности, образуемой средними линиями сечений, также получаются из уравнений (I 15) если положить в них Fr= 0
Уравнения (1.15) определяют следующие формулы для единичного вектора внешней нормал! к поверхности лопасти п = nxi-\-nui + П.А где *’» Ь — орты осей системы координат D;
пх = -4<//А; пи = Zfy/A лг = Cq/Л.,
. сН]*
/1 cos <р------V- sin гр;
R - Qi sin 0t +<?гcos О*; (1.16)
С - --(?! cos 0х 4- Q3 sin 0*;
|ф = 1 — прн вычислении нормали к засасывающей стороне; q —I — при вычислении нормали к нагнетающей стороне);
Qi sin <р + ——
cos гр; Q. = Г\ + —!— иг-, <7^
- — г dr) -
ц - - +°ч (£л + р -л]cos *| -I- —s,ri f ;
>>г = ач |(<:s + S) + ,'i±^'-2-'4cos<r-i ("/? + 2М±) sin4' + cs + 0.5c'I;
лч. - b cos <| (2г);
I = ц rc * W"T4 t„ ± IW
«fr* = (f., ± 0.5e -^1.) 2 'c.
<?i \ /
В формулах i-тя нормали штрихом обозначено дифференцированиеdltlr Такое же обозначение будет применяться в параграфе и далее.
439
Формулы (I. IG) верни лишь для регулярных точек 1 поверхности лопасти. В частности, на острых кромках, если таковые имеются, направление нормали зависит от пути, по которому осуществляется предельный переход из регулярной области поверхности к ребру.
Нормаль к закругленной кромке нельзя непосредственно вычислить по общим соотношениям В этом случае следует использовать следующие формулы;
п qE sin </ Л£;
пи ' — (cos *Р Sl" °н + ®е cos °е)/Ль: л, - qE (cos <р cos 0£ Qe sin 0£) Л£.
(I 17)
где qE - 1 иа входящей кромке (£ — I); qE--1 на выходящей кромке (£ = — I);
°£ = av tfs + qi:)' ®e ~ ~°E cos Ф + *«sin T + rs 4- O,55'<7£; Л£, = (1 + Q-),/2.
При Qe — 0 кромка является отрезком радиально направленной прямой.
Вершиной лопасти принято называть точку с координатами г = I, * = 0, ij — 0. Если лопасть завершается сечением с конечными размерами b и е, то нормаль к этому торцевому сечению направлена по радиальной координате
пх - 0; «^ = 0030; ns = sinO, (1.18)
где G = (?s + 0,5£i) cos <р — т] sin <р.
Нормаль к вершине в этом случае вычисляется по той же формуле при 0 = = cs cos q>. Нормаль остается радиальной и при отсутствии сечения конечных размеров на конце лопасти, если только конец лопали скруглен.
Нормаль к серединной поверхности, направленная в сторону засасывающей поверхности лопасти, имеет направляющие косинусы, определяемые соотношениями
~ ~ Вс, Л£; пСг = Сс/(I 19)
где
4 = cost- ;
В с = Qci Sin 0( + Qcs cos 0e;
Cc — — Qci cos 0r Qci sin 0r;
Ac = [i4-Q?24-fl(^)2],/2;
0e = ((cs + 0,5Ci)c°s<p Qci = sill <p 4- fM cos <p 07?o'<^;
ZJ£1 = - (x^ 4- a,( (c6.4 i) P'/2n] cos <p 4- sln'’ Ф~ /~Л1Гс “ Гм dFc/d'<
dc2 = av +1) + Ги/?ср72л] cos Ф 4- (*« 4- 2п/Л1Г'f) sin <p 4- cs 4- 0,5?|.
Внешняя поверхность ступицы гребного впита является поверхностью враще-
ГШ = гт ж 1Ж/Д’
гдсг/Г/ — местный радиус ступицы; xwi, хи, — координаты кормовою н носового среза ступицы соответственно.
В уравнениях поверхности лопасти за радиус ступицы принимается г/{ - minr/f/(x).
Точек, в которых отсутствуют изломы поверхности.
440
Интегральные геометрические характеристики цилиндрических сечений лопасти определяются по формулам:
' площадь сечения
ё/'д,(7); (121)
координаты центра тяжести сечения
= ebgt (r)!As - g, (r)/gj (r);
’Ig (r)/As = 6W-A <r);
моменты инерции сечения
/j = /£/?’4 == eb [ftg., (7) +?gs (7] .
Г,, = et’g, (г);
В соотношениях (1.21)—(I 23) использованы следующие обозначения:
(1.22)
(1.23)
(1.24)
Заметим, что величины gt. I, 2......7 в случае лопасти с единым профилем
являются постоянными, определяемыми типом |рофиля.
Интегральные характеристики лопастей (без учета галтелыюго перехода) вычисляются по формулам:
дисковое отношение
pcff; (125)
ГН
441
объем лопастей
1
•= j J5 dr = Z j ebgt lr) dr. (1.2b
G/ rH
Гребные впиты обычно изготовляются путем литья с последующей механической . обработкой- Различают цельнолитые к сборные гребные винты. Помимо винтов регулируемого шага к сборным винтам относятся винты со съемными лопастями. Нх-щно-товдяют для эксплуатации в тяжелых ледовых условиях. I Iomkmo облегчения ремонта съемные лопасти позволяют регулировать в узких пределах угол установки лопастей Съемные лопасти крепят к ступице с помощью фланцевого или прессового соединений
Диаметр ступицы цельного гребного винта принимается примерно вдвое больше диаметра гребного вала и составляет обычно (0,18—0,21) D. У сборных гребных вин тов диаметр ступицы равен (0,25—0,30) D. Длину ступицы назначают несколько больше величины максимальной осевой протяженности лопастей, что позволяет при изготовлении и транспортировке гребного винта ставить его на торцы ступицы. Иногда длину ступицы увеличивают по сравнению с указанной для обеспечения необходимой надежности соединения гребного винта с валом. Как правило, к сту пнце крепят обтекатель, форма которого согласуется с формой ступицы.
Поверхность лопасти цельного гребного винта плавно сопрягают с поверхностью ступицы. Радиус кривизны поверхности сопряжения, называемой также поверхностью галтелыюго перехода, выбирают примерно равным наибольшей толщине лопасти вблизи ступицы. Ступица имеет внутреннюю коническую расточку для крепления на гребном валу. Передача крутящего момента осуществляется с помощью шпонок (I—2) или ! рессовой посадки. Последний способ, устраняющий концентрацию напряжений в валу, применяется все шире.
Гребные винты изготовляют из бронзы, латуни, нержавеющей стали и титана. Изготовление гребных винтов из углеродистой стали нецелесообразно из-за низких эксплуатационных качеств таких винтов. Прочностные характеристики применяемых материалов даны в § 38. Применяются также пластмассовые винты и композитные конструкции (основная часть лопасти пластмасс вая, а кромки — металлические).
Класс металлического гребного винта (по ГОСТ 8054—81 определяет допуски на его изготовление и необходимую чистоту поверхности. Области применения гребных винтов различного класса указаны ниже.
Класс гребного пинта
Особый . ... . Быстроходные суда морские, суда внутреннего плавания
Высший ...............Суда морские, суда внутреннего плавания, суда рыб<
промыслового флота неограниченного района плавания
Средний ..............Суда морские, суда внутреннего плавания, шлюпки
со скоростью менее 15 уз
Обычный .... (’.уда в плавучие среде ва морские, для которых ско-
рость не является определяющим параметром, суда внх-
треннего плавания
§ 1 (КНОБЫ ГИДРОДИНАМИКИ ГРЕЬНОГО ВИНТА
Гребной винт в процессе работы вращается вокруг своей оси и перемещается в осевом направлении. Величина перемещения гребного винта за один оборот иазг -вается абсолютной поступью и определяется соотношением hp — v А1'п. Отношение абсолютной поступи hp к диаметру винта I) называется относительной поступью
1) ~ nD
и рассматривается как основная безразмерная кинематическая характеристика, определяющая режим работи винта в жидкости. Наряду с поступью иногда используются понятия об абсолютном и относительном скольжении. Абсолютное скольже-
442
мне есть разность /’ — /г(„ а относительное скольжение связано с величиной J соотношением
(1.28)
Гребной впит при работе воздействует иа воду, протекающую через его рабочее сечение, таким образом, что поток в осевом направлении ускоряется и закручивается в сторону вращения винта Перед впитом поток прямолинеен, вода на достаточном удалении от впита движется со скоростью его осевого перемещения навстречу винту. , В теории । ребного впита 1>бычио рассматривают действие элемента лопасти в потоке, имеющего в радиальном направлении длину dr и находящеюся иа расстоянии г от осп вращения. Будем считать элемент лопасти неподвижным, а жидкость — набе-
Piic. 1 12 Треугольник скоростей гребного впита.
тающей на него с осевой скоростью i> k и окружной и ~ 2ягп. Обтекание элемента лопасти, рассматриваемого как элемент несущего крыла, сопровождается появлением вы'ванной скорости, которая может рассматриваться как сумма Двух составляющих осевой (шД|) и окружной (tc'oi) скоростей. Направление скорости совпадает с направлением v v а направление скорости и>01 совпадает с направлением вращения н, следовательно, противоположно направлению окружной скорости н= £2г. Геометрическая сумма скоростей и и с учетомш является результнрующей скоростью потока v#, набегающею на элемент лопасти (рис. I 12). Скорость v[t, определяемая формулой ин = | р.'А-| шх1)г , (£2г и'щ)2- образует
с элементом лопасти некоторый угол атаки сс; Принимается, что при равных углах атаки силы, действующие на данный элемент лспастн. равны силам, возникающим на элементе крыла того же ирс(| иля. Подъемная сила (!¥ элемента лопасти перпендикулярна к скорости vfl, а сила профильного сопротивления dX противоположна по направлению Uj . Безразмерные коэффициенты этих сил, которые спредсляютси соотношениями
r с!У г dX
у р 2) b dr ' х р 2) b dr ’ (1-23)
Для докавитационных режимов обтекания, являются функцией суммы угла атаки а и угла нулевой подъемной силы <z0. который! отсчитывается от направления потока, при котором коэффициент подъемной силы Су = 0 Эю направление принято пазы-Кать направлением нулевой подъемной силы (ННПС) (см. рис. 1.13). Как правило,
443
элемент 4 лопасти винта работают при углах атаки меньше критических, поэтому в практических расчетах можно использовать зависимость с dCY „ Су — da
(I 30)
Согласно теоретическому решению задачи об обтекании Крила невязкой жидкостью я^2л а для реальной жидкости <2л. В невязкой жидкости для шиповых да да
профилей
dCy
-7-!-- 2л (1 4-0,876). (1.31)
й(Х
Упор элемента лопасти гребного винта выражается суммой проекции сил на иаправ ленне ноступатетьн го движения винта:
dT = dY cos — dX sin 0, =
= dY cos0y (1 — e tg 0J, (1.32)
где e — dX/dY.
Аналогично, проектируя эти силы на направление окружной скорости гы ц умножая касатетьную силу на плечо г, получаем выражение момента, необходимого для вращения элемента лопаете,
dQ = г с/т = г dY sin 0; (I 4* е с,& ₽;)- (1.33)
Выразив значения элементарного упора к момента через безразмерный коэффициент Су и проинтегрировав полученные выраже-
Рис I 14 Режимы работы винта.
Puc, I.I3. Кривые действия гребного винта.
ння в пределах радиуса лопасти, а затем умножив интегралы на число лопастей Z, получим выражения суммарного упора и момента
R
Т Z J ((./2) СУЬ^ cos 0j (I elgp;)*; (134)
ги
? sir
Q ~ Z I (p/2) Cybt^eos pz (I ф e cig 0;) r dr. (I 35)
гн
444
Вынося за знак интеграла в (I 34) произведение рР4/’ а в формуле (13) — рР1/1, получаем зав ichmocth для вычисления упора н момента
1
J 4r(.»)(£),.4(i-.W(.C); (IJ4
I
'и«
Интеграл в формуле (I 36), обозначаемы!" через Л'г, называется коэффициентом упора винта, а интсграл в формуле (I 37), обозначаемый через Kq, — коэффициентом момента винта С учс ом этого формулы (1.36) и (1.37) принимают вид
Т = Кт(тЮ\ (I 38)
Q= KqPiM)*. (1.39)
I Мощность потребная для вращения впита, может быть подсчитана по формуле
Ро = Q<> KqP-ч Р’2 пп — 2лЛ'(}рл3Р®. (140)
Коэффициент полезного действия ви гга с учетом формул (1.38) и (1.39) может быть представлен как
ГсЛ _ K,J
PD KQ2n’
(I 41)
Безразмерные динамические характеристики винта Л'т К ? и T)o, представленные в виде кривых в функции от относительной поступи J, называют кривыми действия гребного винта (рнс. 1.13), которые характеризуют упор, момент н КПД при различных реж! мах работы винта ^Значения Кт и Kq имеют наибольшее значение при J = 0 •(швартовный режим), поскольку углы атаки элементов лопасти достигают при этом максимальных вели ши КПД имеет нулевое значение при J — 0, поскольку отсутствует перемещение винта. С увеличением J возрастают углы индуктивной поступи ₽z на всех элементах лопасти и соответственно уменьшается их угол атаки что приводит к уменьшению сил. действующтх на каждом элементе лопасти, а следовательно, — к снижению коэффициентов Кт и Kq. Динамические характеристики винта с увеличением J изменяются таким образом, что при некотором значеипн J = Jf коэффициент упора Кт обращается в нуль прн положительном значении коэффициента Цтмента Kq, т с Т 0г я Qy 0 Режим целевого упора элемента лопасти dT = 0 определяется условием, когда cos f>z = dX sin p/ (рнс. I 14, п). КПД npi режиме нулевого упора равен нулю Шагом нулевого упора !\ или «гидродинамическим» шагом называется путь, проходимый винтом за оборот в сеевом направлении прн режиме нулевого упора Обычно Р^> Р Соответственно J = PJD называется шаговым отношением нулевого упора пли гидродинамическим шаговым отношением. При нулевом угле атаки (а -|- afl 0; J — на элементе лопасти не создается олъемная сила (dY = 0). В этом случае элемг in работает на режиме нулевой подъем-ИЮй силы (рнс. I 14 б). прн этом режиме упор его отрицателен' Поступь назы-вают поступью нулевой подъемной силы, а линейную постуки Ро — шагом нулевой (Подъемной силы. Дальнейшее увеличение относительной поступи винта ведет к изме-* Нению знака Су и увеличению отрицательного упора. При некотором значении J = = JtKQ обращается в нуль (рис. 1.13) Эют режим называется режимом нулевого Момента - ч этого режима справедливо равенство <Д sin dXcosp; при
э) Линейная поступь Pt называется шагом нулевего момента (обычно Pt >
445
> Ро > Р|) Значение ./а = /’>. D называется шаговым отношением пулевого момента причем Рс Г) > f\.l) При J > J2 коэфф| цнент момента становится отрицать ып,^ (Л'^СО), элементом лопасти сщдается момент, па !равлен11ый в сторону врано inir винта, т е. tlQ < О
В диапазоне относительных поступей О < J < Jt гребной впит работает как дВц. житель, создают! н положительный упор. Прн J > J3 винт работает в турбинном режиме, создавая вращающий момент. Прн У, < J < Jt винт не может испозц,. зоиа1ься ini как дв (житель (Т < 0) пн как 1урбн ia (Q > 0)
Протяженность области Р2 — Pt зависит от величины обратного качества эде. мента лопасти (увеличивается с ростом е).
Глава J[
ВИХРЕВАЯ ТЕОРИЯ ГРЕБНОГО ВИНТА, РАБОТАЮЩЕГО В ОДНОРОДНОМ ПОТОКЕ
§ 5. ВИХРЕВАЯ ТЕОРИЯ 1РЕБНОГО ВИНГА
Из гидромеханики известно, что взанмодейс1вне жидкости с движущимся в ней телом .может быть описано с использованием системы гидродинамических особенностей; в частности, при анализе гидродинамических явлений, характеризующихся наличием циркуляции скорости в жидкости, удобно воспользоваться внхревь.м i особенностями. Интенсивность и расположение вихрей в пространстве определяй тся теоремами идромсхапикн о вихрях и принятой вихревой моделью. Теория, в ю рой гидродинамика гребного винта изучается на основе вихревых моделей, назы-
Рнс. II.I. Визуализация осевого н концевых вихрей гребного винта в кавитациопп трубе.
вается вихревой теорией гребного винта При этом обычно пред! влагается, что жидкость невязкая и несжимаемая.
Основы вихревой теории гребного винта были заложены II. Е. /Куксим я в 1912—1918 гг. [27]. Толчком к построению вихревой теории послужили фотогр; фин кан! гг руюших концевых и осевого вихрен греби говн (та Аналогичная фото! «Ьпя, т moi стрнрующая вихревую систему гребного винта, приведена на рн . I П. Е. Жуковский исследовал вихревую модель гребного винта, состоящую из . присоед! цепных симметрично расположенных радиальных вихрей постоянной ни* тененв IOCTH Г заменяющих его лопасти, Z свободных полубесконеч! ых винтовых вихрен, сходящих с концов присоединенных вихрей н имеющих ту же интенсивность
44b
I1 11 и осевой своботный полубескоиечный вихрь интенсивности 2Г (рис. П.2, о)1. Такля вихревая модель получила название винта НЕ/К. Изучая скорости, вызван-|ыс этим винтом, II. Е Жук вскин рассмотрел только нх средние по окружности значения.
В дальнейшем были построены и изучены вихревые модели винта, в которых каждая лопасть заменяется одним присоединенным вихрем с переменной вдоль радиуса циркуляцией (см. рнс. II.2, б, в). Указанные модели (см. рис II 2, о, б, в) являются основой вихревой теории несущей . иннн гребного винта. Эта теория оказывается достаточной для определения вызванных скоростей, а также сил и моментов, возникающих на узкол снастных винтах типа авиационных. Для изучения относительно шнроколонастных судовых (ребных винтов необходимо привлечение вихре-в >ц модели и теории несущей поверхности (рнс. II 2, г). В этой модели каждая ло-
Рис. II.2. Вихревые модели гребного винта: а — впит НЕЖ с бесконечно большим числом лопастей; б винт ПЕЖ с конечным числом лопастей; в — винт с перемен-Цой вдоль радиуса циркуляцией; г вихревая модель гесущей поверхности (линейная теория); д вихревая модель нелинейной теории.
пасть гребною винта заменяется системой присоединенных вихрей, имеющих псре-Mei ную вдоль радиуса и хорды цилиндрических сечений интенсивность В каждой точке присоединенных вихрей начинается по, уСссконо нь.й виитогей свободный вихрь, имеющий интенсивность, равную/изменению интенсивности присоединенного вихря.
Заметим, что вихревые мо ели нестацио! яркого обтекания лопастей (см § 18) пополнительно включают свободные продольные вихри, появление которых сбус-лов. ено н менекнем во времени интенсивности присоединенных вихрей.
В завнсв.мостн от принятия т го или иного допущен! я о псря, ке вели1 ни гьз-ванных скоростей гребного винта различают теории слабснагружсш ого, умеренно-нагруженного и тяжелоиагружениого гребного ввита
В теории слабспагруженного гребюго винта, являющейся линейной, принимается допущение о том, что вызванные скорости пренебрежимо малы го сравнению с величиной переносной скорости vE — J. + (Or)Это допущение используется при построении мо ели вихревых теорий гребного винта и выводе интеграла Бернулли табл. 11.1) Следствием принятия такого д пуще шя является то, что пелена свободных вихрей образует правильную втптсвую говерхнссть, имеющую шаг Р => ^2nr (g р 2nvjQ.
В вихрен.>й теории умереннонагруженного гребного винта форма пелены свободных вихрей определяется с учетом вызван 1ЫХ ск ростей. В этой теории испо. ьзуется Допущение о том, что квадраты вызванных скоростей пренебрежимо малы по сравнению с величиной и£(при этом сами вызванные скорости не отбрасываются). В вихре-
I ’ В соответствии со своим определением, присоединенным вихрем называется пнхрь,
11 а котором прн взаимодействии с жидкостью развивается сила, на свободных вихрях сил “Ч Возникает
417
4-18
I вых моделях умсренноиагруженного гребного винта допускается изменение шага свободных вихрен вдоль радиуса, но считается, что шаг н отстояние от осн пинта этих внхрсП вдоль оси не изменяются.
I В теории тяжелонагруженного гребного винта нс делается пре, положении относительно величин вызванных скоростей они полностью учитываются при построении вихревой модели и при вычислении сил, действующих на лопасть. Пелена свободных вихрей, построенная с полным учетом вызванных скоростей, образует неправильную винтовую поверхность, сворачивающуюся у краев (рис. II 2, d). Теория тяжелонагруженного гребного винта является нелинейной. В пределах этой теории присоединенные вихри могут располагаться i.a срединной поверхности лопасти (если их толщина достаточно мала) либо но новерхносгн лопастей В последнем случае телесность лопастей учитывается автоматически.
Основные теоремы и соотношения вихревой теории. Обозначим через vr вектор относительной скорости, через vF — о 4 -|- ЙХг вектор переносной скорости, а через w вектор абсолютной (вызванной) скорости. Тогда уравнение абсолютного движения жидкости в связанной с винтом подвижной системе координат можно записать в виде (без учета сил гравитации)
— vR х rot и? = - grad [р/р + к> (w/2 — oj], (II I)
Приведем следующие основные теоремы вихревой теории гребного винта
Теорема 1 Пниии вихрей абсолютного движения жидкости располагаются вне лопастей вдоль линий тока относительного движения. Принимается, что движение жидкости в связанной системе координат стационарно, т. е. d'wldt = 0. Вдоль линий тока трехчлен в квадратных скобках равен постоянной, не зависящей от линии тока, и vn X rot w = 0. Последнее выражение есть математическая ф эрму; и-ровка указанной теоремы о вихрях.
Таким образом, на рис. 11.1 видны линии тока относительного движения, вдоль которых движутся воздушные пузырьки, втянутые низким давлением в область ядер вихрей.
Теорема 2. Суммарная интенсивность свободных вихрей, сошедших с лопасти между сечениями на радиусах rt и гя, равна разности циркуляций вокруг лопасти па этих радиусах
J yfdl-= Г (г,) — Г (г,). (П.2)
1т
Здесь — интенсивность свободных вихрей в точках задней кромки лопасти; dl - элемент дуги задней кромки. Устремляя расстояние .между сечениями к нулю и вводя векторные величины, можно получить
./Г (/)
V/ ~ ОТ
и ли = -
г/Г (/,) г//.
(11.3)
где т;-— единичный вектор, перпендикулярный к линии задней кромки, dlt— днффе-* Реициал дуги, касательная к которой перпендикулярна к вектору у/ в точке иа линии
задней кромки (рис. 11.3). Формула (П.З) справедлива для всех вихревых моделей гребного винта. Для моделей слабо- или умереннонагруженной несущей линии и несущей поверхности гребного винта она переходит в формулу
. . ‘1Г
гб П/р Я. И. Войткуиского, т. I
449
Теорема 3. Циркуляция скорости вокруг лопасти на данном радиусе Г (а связана с величиной средней окружной вызванной скорости Ир зависимостью
2л
zr (г) = г, | too = 2лггш0 (г,), В
(П >)
где точки М (г, 0) и N (/-р 0,) лежат на одной линии тока (вихревой липин) (рис. 11.4). Для слабо- или умереннонагружеиного гребного винта предполагается что
Г= Гр
Рис. II 3 Векторы скорости и завихренности в точке на задней кромке лопасти.
Рнс. II 4 К связи между циркуляцией около лопасти и средней окружной вызва> -ной скоростью.
§ 6 ВИХРЕВАЯ ТЕОРИЯ НЕСУЩЕЙ ЛИНИИ
Вихревая теория несущей линии строится на предположении о том, что каждая лопасть заменяется одним радиальным вихрем. При этом линии тока жидкости оказываются лежащими на поверхностях соосных с винтом цилиндров (для слабо и умереннонагружеиного движителя). Гидродинамическое влияние соседних сечений
на обтекание некоторого выделенного цилиндрического сечения про-ц, является, как и в теории несущей линии крыла конечного размаха, через индуктивный скос потока, одинаковый дли всего сечения Величина этого скоса определяется путем вычисления вызванных ско-* ростей от всей вихревой системы в точках, принадлежащих несущему вихрю. При этом вычислять скоро сти от самого несущего вихря не требуется.
Таким образом, в теории несущей линии обтекание произвольного профиля цилиндрического сечения лопасти рассматривается как плоское, причем величина скоро сти натекания на профиль равна
Рис. II.5 План скоростей на элементе лопасти в соответствии с вихревой теорией несущей линии.
а угол атаки равен а, ~ <р + «0 Р
t при угле индуктивного скоса —р (рис. 11.5). Подъемная сила, развивающаяся на профиле, имеющем хорду b в размах dr, равна
dY f>CyV^?b dr.
(И и)
450
ЗДесь
коэффициент подъемной
сиды определяется по формуле dCy
СУ ~кГ^ + а^’
(11 7)
। яс dCylda и а0 — градиент и угол нулевой подъемной силы профиля в плоском потоке.
Поскольку вызванные скорости определяют значение а, их вычисление является одной из главных задач теории несущей линии гребного винта. Определение вызванных скоростей в произвольной точке пространства может быть необходимым при решении задач взаимодействия гребного впита с окружающими еготелами.
Определение вызванных скоростей слабонагруженною гребною винта. Примем, чю распределение циркуляции вдоль присоединенных вихрей, заменяющих лопасти, описывается функцией Г (г). С каждой точки радиально направленного присоединенного вихря сходит полубссконечный винтовой вихрь, интенсивность которого определяется пофюрмуле (II 4) (см рнс. II 2, б). Вся совокупность свободных вихрей лопасти образует правильную винтовую поверхность шага 2лвд/Й. Вызванные скорости в произвольной точке пространства в связанной с винтом системе координат могут быть вычислены по следующим формулам, полученным с использованием формулы Био—Савара
tc'x (х, г, 0) =
К гт=Э О
Z—I R ш
1 уч Г г/Г , Г Г' —Г cos (П-О'-х,,)
4л j dr' ' J S3r
*=0 о о
(II.8)
K-’Q (X.
xcos(0 — х,,) j ,
•’-----73------dr -
pgP[r—r'cos(0 O'-X;,))-(x-c'O'tgP)sin(U 0' XJ
I ------------------------------------------------------ar ; (11-У)
.1
0
wr (x, r, 0) ~
f <* - И>> tg p) cos (° ~ Ы ~ r'lg P Sin <° ~ °' ~~ X'-> di)- dr- (11 10»
J S2*
0
где Slfe = [r2 + r'2 — 2r'r cos (6 — Xfc) + *’ Г *:
•%,, [r* + r'2 — 2rr' cos(0 — 0' - xh) + (x — r'0' ig pp|l/2,
а значение tg p берется на радиусе г'.
В формулах (118) (11.10) первые слагаемые соответствуют присоединенным вихрям, а вторьте полубесконечным свободным
Вызванные скорости винта обладают следующими свойствами:
1 Без учета ступицы
15*
451
I. Вызванные скорости от присоединенных вихрей равны нулю на больших pdc. стояниях от диска винта, в точках на несущих вихрях (от соседних нрисоеднш i пых вихрей), а также в диске винта в точках посередине между присоединенными вихрями.
2. Осевая и окружная вызванные скорости в точке на присоединенном вихре равны половинам соответствующих скоростей в точке на пелене далеко на беско1.сч-ности за винтом при условии, что обе точки лежат на одинаковом расстоянии от осн.
3. Далеко на бесконечности за винтом течение носит двумерный характер, так как зависит только от двух переменных: г и Е 0 — ilx/vЛ В частности, потенциал вызванио! скорости от Z бесконечных винтовых вихрен единичной напряженности и радиуса г' равен
с)
4----V fkz (a/ji ) Kkz (AZp) sin kZi -
к- I
для |1>р' (внешнее ноле);
- (A’ZH ‘х-л sinkZ^-
fc-U
р для ц<ц' (внутреннее иоле).
(И И)
гдер' — Ог7чЛ; р — Qr/vл; /л?, Kh7~ модифицированные функции Бесселя 121].
Анализ формул (II 11) показывает, что осевая и окружная вызванные, на бесконечности скорости являются четными, а радиальная скорость — нечетной функцией переменной g; в точках вихревой пелены радиальная вызванная скорость равна нулю.
4. В точках на присоединенном вихре и на пелене далеко на бесконечности за винтом вектор вызванной скорости без учета радиальной составляющей перпендикулярен к поверхности пелены:
«ер (0, г, 0) (0, г, 0) — — tg р.
(П.12)
5. Скорость вблизи свободного винтового вихря может быть представлена в виде суммы регулярной и особой составляющих Последняя стремится к бесконечности при приближении к вихрю и состоит нз двух частей: соответствующей прямолинейному вихрю, касательному квинтовому, и логарифмической, пропорциональной кривизне винтового вихря.
Средние по окружности вызванные скорости слабонагруженного гребного винта могут быть вычислены по формулам, приведенным в работе (87] Они используются при расчетах соосных гребных винтов, винтов в насадках и т. п.
Средние по окружности скорости имеют (помимо вышеперечисленных) следующие свойства:
I. Средние по окружности вызванные скорости Z-лопастиого винта с распределением циркуляции вдоль радиуса Г (г) равны вызванным скоростям от бесконечно-лопастного винта с тем же распределением 2Г (г) вдоль радиуса.
2. Осевая и радиальная средние вызванные скорости от присоединенных вихрей всюду равны нулю.
3 Окружная средняя вызванная скорость от присоединенных вихрей антисимметрична относительно плоскости диска винта, при переходе через диск терпит разрыв, а в точках самого диска ока равна нулю; латная окружная вызванная скорость равна нулю всюду вне струи винта.
4. Средняя осевая вызванная скорость в точках вне струи винта антисимметрична относительно диска впита.
5. Средняя радиальная вызванная скорость симметрична относительно диска винта.
6. В случае, если циркуляция на конце лопасти нс равна нулю [Г (/?) =/=
0], осевая вызванная скорость терпит скачок равный ZI при переходе
через границу струи
7. Для случая постоянного вдоль радиуса распределения циркуляции осевая i радиальная скорости соответствуют вызванным скоростям слабоиагр поенного идеального движителя (см § 2).
452
В табл. II.2 и II.3 приведены значения средних по окружности и радиальной Bbi3iia iHi.tx скоростей пинта с переменным распределением циркуляции, близким к оптимальному:
Г- Г.(од/?) Аг |'1 — г, (11.13)
Для принятого закона распре деления циркуляции постоянная
.1 ^л/нСп/Z, (II 14)
uZ
где ('п — коэффициент нагрузки но упору слабонагруженного винта, к-
(I
Па рнс. 11.6 приведены эпюры распределения осевых и радиальных оерсдиенпых по окружности вызванных скоростей Видно, что в точках вне струн вызванные скорости практически не зависят от закона распределения циркуляции вдоль радиуса.
Рнс. П.6. Эпюры распределения средних по окружности вызванных скоростей винта: а — осевые вызванные скорости; б— радиальные вызванные скорости.
— переменное распределение циркуляции: куляаин.
постоя шин? рас пределен иг цнр-
Скорости на несущем вихре могут быть вычислены с помощью формул (II 8), (11.9), (П.10). Прн этом в соответствии со свойством (1) вызванных скоростей необходимо лишь вычислить скорости от полу бесконечных свободных вихрей. Свойство (5) позвотяет представить скорость от винтового вихря через скорость от прямолиней него вихря касательного винтовому С у стом этого свойства Морння и Канада ввели понятие факторов индукции i„ u it. равных отношению скоростей, индуцированных полубесконечным винтовым вихрем, к половинам соответствующих скоростей, индуцированных бесконечным прямолинейным вихрем, проходящим касательно к винтовому. С. использованием факторов индукции вызванные осевые и окружные скорости на несущем вихре могут быть вычислены но формула» (без учета влияния ступицы)
R
<П15>
О
/?
we>(O = Jf4r—(Н !б) 4л J dr г — г
и
453
<gi Таблица II 2 Средняя по окружности осевая вызванная скорость (х, винта с переменным распределением цир-
куляции
г R x/R
— оа -2.0 - 1,0 -0.5 -0.1 0 0,1 0,5 - 1.0 2.0 ОО
0 0 0,026 0,072 0,130 0 122 0 —0,122 -0,130 -0,072 —0,026 0
0,1 0 0,026 0,072 0,130 0,136 0,078 0,020 0,026 0,084 0.130 0,156
0,2 0 0,026 0,072 0,131 0,165 0,147 0,128 0,163 0,222 0,268 0,294
0,3 0 0,026 0,070 0,131 0,197 0,206 0,215 0,281 0,342 0,386 0,412
0,4 0 0,025 0,068 0,129 0,224 0,254 0,285 0,379 0,440 0,483 0,508
0,5 0 0,025 0,066 0,126 0,242 0,290 0,338 0,454 0,515 0,555 0,580
0,6 0 0,024 0,062 0,119 0,250 0,311 0,373 0,503 0,561 0,598 0,622
0,7 0 0,023 0,058 0,110 0,242 0,315 0,387 0,519 0,571 0,606 0,630
0,8 0 0,022 0,054 0,098 0,215 0,293 0,372 0,489 0,533 0,564 0,586
0,9 0 0,022 0,050 0,085 0,162 0,233 0,305 0,382 0,417 0,445 0.4GG
1,0 0 0,021 0,045 0,070 0,088 0 —0,088 —0,070 —0,045 —0,021 0
1.1 0 0,020 0,040 0,057 0,040 0 —0,040 0,057 -0,040 —0,020 0
1,2 0 0,019 0,036 0.046 0,022 0 —0,022 —0,046 -0.036 —0.019 0
1,5 0 0,016 0,025 0,023 0,007 0 —0,007 -0,023 —0,025 —0,016 0
2,0 0 0,011 0,013 0,009 0,002 0 -0,002 —0,009 - 0,013 -0,011 0
3,0 0 0,005 0,004 0,003 0,001 0 —0,001 —0,003 - 0,004 —0,005] 0
5,0 0 0,002 0,001 0,001 0,000 0 —0,000 0,001 -0,001 —0,002 0
Таблица ИЗ. Средняя по окружности радиальная вызванная скорость wr(x. г)ЦъдСт1) винта с переменным распределением циркуляции
r.'R X/'R
0 ±=0,05 *0.1 *0,2 ±0,4 *0,6 *0,8 *1,0 -1.5 *2 Й: ао
0 0 0 0 0 0 0 0 0 0 0 0
0,1 0,060 0.036 0.020 0 004 -0,006 —0,007 —0,005 —0,004 —0,002 -0,001 0
0,2 0,075 0,044 0.025 0,002 -0,013 -0,014 —0,011 -0,009 —0,004 - 0.002 0
0.3 0,056 0,032 0.014 —0,008 —0,022 —0,021 —0.017 —0,013 —0.006 —0,003 0
0,4 0,023 0,006 —0,008 —0,025 —0,033 —0,029 —0,022 —0,017 —0,008 —0,004 0
0,5 —0,015 —0,031 —0,040 0,048 -0,046 -0,037 —0,027 —0,020 -0.010 -0,005 0
0,6 -0,075 —0,077 —0,078 —0,075 —0,060 —0,044 - 0,032 —0,024 —0.011 -0,006 0
0,7 -0,140 -0,128 —0,121 —0,103 —0,072 —0,051 —0,037 —0,027 —0,013 —0.007 0
0,8 —0,212 -0,183 —0.163 -0.128 -0.083 - 0,056 —0.040 - 0,029 - о.оы -0,008 0
0,9 —0,278 —0.234 —0,196 —0.144 —0,088 —0,059 —0,042 -0,031 -0,015 -0.008 0
1.0 —оо —0,238 —0,191 —0,142 —0,089 —0,060 —0.043 —0,0.32 —0,016 —0,009 0
1.1 —0,175 —0,167 —0.155 -0,126 -0,084 0,059 -0,043 —0,032 0,017 0,009 0
1.2 -0,132 —0,125 —0,120 —0.106 —0,078 —0,057 —0,042 —0,032 —0,017 —0,010 0
1.5 —0,069 —0,068 —0,067 —0,064 —0,055 —0,045 —0,036 -0,029 —0,017 —0,010 0
2,0 —0,036 —0,035 —0,034 —0,034 —0,032 —0,029 -0,025 0,022 -0,015 -0,010 0
3,0 -0,014 -0,014 —0,014 —0.014 —0,014 -0,014 -0,013 -0,012 - 0.010 —0,008 0
5,0 —0,005 -0,005 —0,005 - 0,005 —0,005 —0,005 —0.005 —0,005 —0,004 —0,004 G
Здесь f„, it —соответственно осевой и окружной факторы индукции, являющиеся непрерывными неотрицательными функциями аргументов г г' 7, tg ft При г | if—>S!iip; i„—>cosP.
Пронзиодные факторов индукция по радиальной координате имеют в точке г г' логарифмическую особенность, т. е. не являются непрерывными функциями
В силу перпендикулярности вектора вызванной скорости к вихревой нелещ (свойство 4) между окружным и осевым факторами индукции существует связь
• i = 2 (г',г I). (II 17)
Для окружного фактора индукции справедливо приближенное равенство |']|
f 2 (I — г'/г) (I | fl, г> г';
I —2(1—r'/r)f, г О',
(И 1«)
rnef=J 1 * [т4~^ । -I МП In (1 - <7) ] ; g = exp ( 2|//-i/'|);
i/ = | ГР7- -4-mt^+l.
и I + H“ — 1 2 II +|Г“— I
Более громоздкие н точные формулы для фактора индукции имеют вид |3|
(Z(t-r’ir)(l + VZf„2), r>f; I 2Z1 (1 — г/г) pi fp 2, г < г',
(Il.lba)
sign (г — г') / г£ X1/2 Г 1 _ sign (г - г ) I 9ц'~ Д- 2 Зи2 — 2
2Zp.' \ и ) v — 1 24Z u-s и3 )Х
sign (г — г') =
и = V 1 -ь р2; «' = I I -f- ц'г;
/Н— 1 И' yZsIgn(r-z')
V=(-IT7^l) exp{Z|a —и|}
Подынтегральные функции в формулах (11.15) и (11.16) обращаются в бескоисч иость при г' = г, и соответс вуюшне интегралы являются сингулярными Тем не менее эти интегралы имеют конечные значения, если их понимать в смысле Коши Прн вычислении таких интегралов целесообразно использовать квадратурные формулы для сингулярных интегралов полученные А. А Корнейчуком |40. 59]. Прн учете ступицы можно приближенно считать, что она имеет цилиндрическую форму и бес конечную длину. Вызванные скорости в точках на несущем вихре в этом случае вы чиеляются по формулам |3]
Н
гн
R
tt'Oi (г) = -777 \ “У7-dr ~ —^ГН> , (11.2(0
4л J dr r — i 4nr
rH
15G
Tjerrl — радиус ступицы, i^, i't обобщенные факторы индукции, учитывающие ус-iobiic неиротек; пин через поверхность ступицы. Окружной обобщенный фактор индукции вычисляется по формуле
'/ = ‘t + 4 =
= 4 (</ + ./'-2^);].
(II 21)
где Ун = I Н Ph—7,п(| 1+Ph + 0+‘2’ 1,1 (t 1 Ph-1)' l*H
₽ Йг^/Пд . Связь между обобщенными осевым и окружным факторами индукции дается формулой (II. 17).
Определение вызванных скоростей умереннонагружеиного (ровного винта. Если нагрузка гребного винта умеренная, то прн определении шага свободных вихрен Р (г') следует учитывать вызванные скорости:
Р(г') =2лг‘ tgP/ = 2nr' [0д + «чД1(г')]ДЙг — и'01(т')|- (Ч 22)
Из формулы (11.22) видно, что в общем случае шаг свободных вихрей умеренно-нагруженного винта изменяется вдоль радиуса. При этом вектор вызванной скорости оказывается неперпендикулярным к вихревой поверхности. В частном случае, когда шаг свободных вихрей умереинонагруженного винта постоянен вдоль радиуса (оптимальный винт. см. § 9) свойство перпендикулярности сохраняется.
Использование формул (II.8). (II.9), (II. II), (11.15)—(11.21) допустимо и для случая умеренной нагрузки, если в них угол Р заменить на угол p/f определенный из формулы (11.22), а вместо г>4 и Ur подставить величины t>4 + счд1 и Яг — а'в1 соответственно.
Представление функции распределения циркуляции Выражения (11.19) и (I 20) могут быть представлены в следующем безразмерном виде
+1
tt'xi (х) —1 1 ‘41 dx,
v , I — г,, ' dx' х — х
Я 11 v
-I
+1
a-'fli (Ж) I ( dGA '/ . , ZGa ( —1)
l'/i 1 “ fn J dx> x~x' 2r
-i
(II 23)
(H 24)
где rH = rlfiR', x = (27 — I — rH)/(I — fHj; G t = Г/(пР₽д). Здесь безразмерная переменнаяхвведена таким образом, чтобы ступице (с = ?н) соответствовало значение х - 1а концу лопасти (г = I)—значение х = 1.
Если функция распределения циркуляции Сд задана, то вычисление вызванных [скоростей по формулам (11.23) и (11.24) связано с вычислением сингулярных интегралов тина Коши. Из теории таких интегралов известии, что для конечности их величии подынтегральная функция должна удовле(виря1ь ряду требований. Применительно к рассматриваемому' случаю этим требованиям удовлетворяет, в частности, следующий вид производной функции распределения циркуляции
!- (1 - х)“ (1 + х)₽ V апр(^ ₽) (х) (11.25)
л J (л—0
где Р^ PI (х) — полином Якоби, ортогональный на промежт гкс |—I. I] с весом (1 — х)а (I л')1', аир — параметры могущие принимать значения а, Р 1/2 или а. р > 0 |45|.
457
Па практике обычно принимается такое распределение циркуляции, при котором около конца лопасти (г—> 1) производная циркуляции оказывается неогрянн leinioii (как у оптимального винта) пли равной нулю. Из условия иепротекання жидкости через поверхность ступицы следует, что
dG
_^1=о при х = -1 ((•=/„).
(11.26)
Всем поставленным требованиям \ довлетворяют следующие распределения производной циркуляции вдоль радиуса
для неограниченного значения производной около копна лопасти (а — I 2 Р = । 2)
_____ М Л|
= I ' V^cos^U;
dx I 1 — ._J " " sin (1/2 шл 1
/1=0 n=U
(11.27)
для нулевого значения производной около копцз лопасти
fr A! Af
i-A = у [ _ У C/ipO.'2-1/2> (х) = d„ sin (л |- I) О, (11.28)
/1=0 /1=0
гае 0 агссоь х. Формуле (11.27) соответствует распределение циркуляции .м
Gz, (х) =а — а0 (/1 — х1 + arccos х) — 1 (I — х),/2 (Н- х)3/г Р%~- 3’-’(х) =
/1-1
__4(Л„ + „,-4. V + (1129|
/1=1
з формуле (11.28)
О/ (*) —----у- (arcios х — х ]z 1 — х2)-(1
хг)3/2
Д|
V^Lp(%2.3/2)(x)
.м
= ^<»,..20-201 + -1-УоГД1^!»_^1. („и,
л=|
Инте1родиффереициальиое уравнение теории несущей линии Если функция распределения циркуляции вдоль радиуса неизвестна, то выражение (11.23) или (11.24) представляет собой интегро дифференциальное уравнение относительно 6д(х). Интегроднфференциальное. уравнение поверочного расчета уыеренионагруженного гребного впита строится на основе уравнения связи потока с лопастью
Г(г)=4"Су^
(II 31.)
н линейной зависимости коэффициента подъемной силы Су от угла атаки (11.7).
Здесь v*n = | 4-О' ,)'+ (Qr—щ01)‘—скорость натекания на профиль
сечеиня лопасти (см. рис. II 5)
458
Интегродифференциальное уравнение поверочного расчета имеет вид
F -^+4 ",з2)
l—ZGA (?и) sin 0/z'(2f0£) — индуктивный скос потока: . Величина угла
Индуктивной поступи Р; вычисляется в этом выражении на относительном радиусе Л, соответствующем значению переменной х.
§ 7. ТЕОРИЯ СТАЦИОНАРНОЙ НЕСУЩЕЙ ПОВЕРХНОС1И
В современны* методах расчета гребных винтов теория несущей липин исполь-[зуется, как правило, лишь в качестве вспомогательного аппарата. Непосредственное применение теории несущей линии к судовым гребным винтам не может дать удов-летворнтельнон точности из-за относительно большой ширины лопастей [4].
По указанной причине расчеты гребных винтов в настоящее время базируются на теории несущей поверхности.
До появления теории несущей поверхности и достаточно мощных ЭВМ влияние ширит। лопасти учитывалось приближенно, путем введения поправок, основанных
на расчетах нарастания вдоль осн вызванных скоростей идеального гребного винта (Э. Э Папмель, Ф. Ф. Болотин) или полученных с помощью представления о решетке крыльев, эквивалентной рассматриваемому цилиндрическому сечению лопастей гребного внии (Н. И. Поляхов, И. Л. Титов, Гутше).
Основы 1сорни несущей поверхности гребного винта заложены в работах Г. И. Майкапара, II. II. Полякова, В. М Лаврентьева, Спарепберга и др. (например, [44, 57, 102[). Широкое практическое применение методов несущей поверхности в расчетах гребных винтов началось после появления ЭВМ и связано с работами Людвига и гГинцеля, Пиена, Моргана, Бреслина, В. Ф Бавина [3, 93]
Рис. II.7. Системы коордт пат F и Fi
1—среднииля поверхность; 5 —. опорная поверхность.
В теории несущей поверхности умсреннонагружеииого гребного винта гидродинамические особенности, моделирующие обтекание лопасти, располагаются на опорной винтовой поверхности с шаговым углом 0Z *. На каждом цилиндрическом сечении опорной поверхности ввозится система координат Fj (рис. II 7)
Направляющие косинусы нормали к опорной поверхности определяются следу-
ющими соотношениями:
—cosP^Ay (11.33)
nlv—~ (Wycos р; cos 0 - sin ру sin 0) Ар (11.34)
nIz = — (D cos 0Z sinO + sin Py cos0)/A/, (11.35)
К&. A, = (I + cos2 p/Dy),/2; Dt = dxRlldf \-ftdkJdr-, 0 = a (cs/ + Ej; a =
~ 0,55cosРу/г» = c$cosa, -|- (5Z2 c^) ~ (5/3
| XtgaJ/cosp/; at q>- Pr
1 О способах определения углов j см S 6.
459
На опорной поверхности могут быть введены ортогональные координаты (г v) Координата v связана с координатами 6 и Е, формулами:
t) exp {—/(И)
V - \ sin р, cusp, —СХр (/ (Г,)} — 'н
(II 36;
( “xfn dr
v "Cs, 1-г/)«Р(Л I ) sillP,cosP,-^-exp (/(r,)}-^, (1137)
где
f
I [r) - | sinp(cospz-^--^-. (11.38)
J ' drt r.
Коэффициенты .Паме системы (r. у)
Hv = f exp(—f (/-JJ/cosp,; //f A, (11.39)
Орты координат (/, v):
ev — sin p, i — cos p, sin 0 j 4- cos p, cos 0 k;
er -^-cos’^p/i + -L-(cosO I-sin0 smp, cos p,D,) 7+ (H 4Q)
I
4—(sfiiO — cos 0 sin p, cos PjI->,) k
При отсутствии откидки (dxHlldr — Oj и постоянном шаге (di.^dr = О) поверхнос ги v= 0, т. с. линии г = const и 0 = const образмот на такой поверхности ортогональную сетку.
При построении гидродинамической модели на опорной поверхности выделяются две области. Л, = {| £ | <Е I. г£ (г„, 11| и Л2 = < I, г С [rH, 11|. Область
Л] называется несущей поверхностью или вихревой лопастью, а Л2 — областью вихревого слета. В каждом то1 ке несущей поверхности развивается перепад давлеш й между ее засасывающей и нагнетающей сторонами.
При стационарном обтекании лопастей гребного впита его вихревую систему образуют два видя вихрей
присоединенные вихри с поверхностной интенсивностью yj, каждый элемент ко торых нерпепчикулярен к относительной скорости vn
свободные винтовые вихри с новерхностноп интенсивностью yyv, осн которых параллельны о_.
Принимается, что скорость ип каким-либо образом осреднсна вдоль Ё,, зависит только ог радиуса г и направлена вдоль ev (вдоль линий г = const) 1
В пределах несущей поверхности (г, £. £ .4,) суммарная интенсив! ость вихревого слои
Y-V, +Y/Z-
Вне А| уь = 0 Вне At-4- At tfv S 0.
1 О возможном способе определения гм. $ ъ«
4(Ю
Интенсивности уд. и уь связаны между собой (во внутренней части /Ц) соотношением, вытекающим нз условия неразрывности завихренности (div у — О)
Л а ,
77("Л’лГ (И 43>
I Ii тс |сив||ость свободных bi хрен при известной величине у;, может быть определена по следующей формуле
'7. rfv I
V'v,Л '* J 'УИ'* + -77Г-7Г V_V/ 7"<с v'> (Н 44)
где х( == V (£, 1^ нл lenne координаты v на входящейкромке.
Инте ней kiiocti уд может быт! определена и другой, эквивалентной Л\щей. формулой
1 7>Г (г, v)
VA’~ l!r dr
прсды-
(П 45)
VL
где Г (г v) | yf (г. x jll^dv циркуляция скорости по koi туру, охватываю-
V
тему присоединенные вихри, расположенные между входящей кромкой и точкой (г. ')
Скачок давлений при I срсхо ie от нагнетающей к засасывающей стороне несущей поверхности определяется величиной интенсивности присоединенных вихрей (теорема II Е. Жуковского «в малом»! Ip] (MV/r Па свободных вихрях (/?]= py'.vwr, где wf — радиальные вызванные скорости
Телесность (толщина) ло истей в теории несущей поверхности моделируется распре телепнем простого сдоя (слоя источников и стоков) по области А, Интенсивность । ростого слоя вследствие линейности теории принимается равной линеаризован! ому скачку нормальной скорости при переходе от нагнетающей стороны к засасывающей стороне лопасти Указанная нн сисив.тость .может быть определена но формуле
q(r, v) (11.46)
dj Ao
где Ае = (I + cos2 qО2)12 Do - dxR dr )- dP/df.
Прямые значения скоростей, вызванных гидро динамическими особенностями, моделирующими обтекание лопастей, в точке Q £ А, определяются суммой скоростей, вызванных присоединенными и свободными вихрями, а также простым слоем, w (Q) = Г 4-
Прямые значения скоростей вызнанных вихревой системой вычисляются с по мощно формулы Ено—Савара
*!.” (Q) = - -L [ yfc (г*. v‘) 7 ( )•, Q) H‘vH‘r dv‘ dr*; л,
fO) j (r«, v»)7’x (Q*, Q'jll'fl'dv'dr*;
Z I Z I
I 0
(11 47)
(11 48)
(T*, V*).
461
звездочками помечены величины, вычисленные в точке Q*
= *ri ~ *м + z/n - — б cos 0 — r* cos (0* + x.).
S/z=rsinO— r*sin(<l* 4-xJ:
^/= [(•*/?/ *Rl) + Ъ®— ^7® J" + c-+ r*2 — 2rr cos (0 — 0 —X )]'2
Прямые значения скоростей, вызванных простым слоем, вычисляются по формуле
%(<?)- J «, (< V*) T^Q'. {)Н',1Гг(1х'dr\ (П.49)
Z -I
Для вычисления нормальных к опорной поверхности скоростей следует соответствующие векторы спроектировать на нормаль wn — wnf Прн этом интегралы, определяющие, нормальные скорости, вызванные вихревой системой, становятся сингулярными со скалярными ядрами: п -Тт (Q*, Q) и п Tv Q).
Нормальные к опорной поверхности вызванные скорости должны удовлетворять граничному условию непротекання
wn{ -|- ё^лс = 0 или й’;1 = —й^лс. (II.50)
Необходимо обратить внимание па то, что вызванные скорости вычисляются в точках опорной вихревой поверхности и проектируются на нормаль к ней. а скорость набегающего потока проектируется па нормаль к срединной поверхности лопасти. В величиих й>„ входят лишь прямые значения нормальных к опорной по верхносди скоростей, вызванных распределенными по ней источниками
Интенсивность присоединенных вихрей должна удовлетворять:
условию Чаплыгина—Жуковского на выходящей кромке
Тл(г, v7) 0; y>r v(g = —I); (11.50a)
условию равенства нулю циркуляции на конце лопасти
Г (г = 11 = 0; (П.506)
условию, необходимому для обеспечения непроницаемости ступицы.
= 0. (II 5()в)
' тн
дУь | dr
Для полного учета ступицы следует внести в гидродинамическую модель гребного винта дополнительные особенности, расположенные на поверхности ступицы и (иди) внутри нее
В теории несущей поверхности гребных винтов ставятся две основные задачи прямая и обратная Прямая задача зто поверочный расчет (см. § 36), а обратная -проектировочный расчет (см. § 35)
Для расчета легконагруженпого гребного винта теория несущей поверхности становится полностью линейной. Соответствующие формулы легко получить, положив в соотношениях настоящего параграфа р( Р и un coscc Р
Если несущая поверхность /Ц является правильной винтовой поверхностью постоянного тага, то формулы (II 39) дают 11 r 1 Hv r.'cos Р(. v = О В этом слх 4(2
чае интенсивность свободных вихрей может быть определена из следующих соотношений
с1Г(г. 0)
ТЛ, (т, 0)----------
где Г (г, 0)
0L (О
J Vf)(r, 0)
о
rdO
CUS0/ '
Граничное условие неи роте кап ня (11 50) и формула (II 46) для интенсивности ИСТОЧНИКОВ ПРИНИМАЮТ вид
(11.51)
Ч ~ KJ = Vf-. > (,, 52>
где »я = 0,5 (u* u£) — прямое значение вызванной нормальной к несущей по-
верхности скорости; |wu| — —• и>~—скачок вызванной нормальной скорости
При проведении поверочного расчета гребного винта (прямая задача гидро" динамики) плотность распределения присоединенных вихрен уь неизвестна. Она на" холится из граничного условия нспротекапия (И 51). которое можно переписать в виде
= (1153)
Подставив в (11.53) выражения (II 47). (И 48) и учитывая связь между нитененв-иостгм! присоединенных и свободных вихрей (11.45), можно получить сингулярное иптегроднфференциалы1ое уравнение относительно функции V/, Оно должно решаться при граничных условиях (II 50 а б, в).
Прн проведении проектировочного расчета (обратная задача гидродинамики) гребного винта интенсивность присоединенных вихрей уь, функция распределения толщины лопасти т]г (г, j) известны, и определению подлежат шаговый угол ф и ординаты средней линии 1]с (г, £). Эти неизвестные находятся также нз граничного Условия (11.50) пхтсм интегрирования выражения
“+ 4г = w>‘/vf (IL54)
вдоль хорды (пи £). В результате получим
ft/2
«1=4- j (Н-55)
-6/2 £
ь;2
В формулах (1155) и (11.56) величина «„ вычисляется но формулам (11.471, (II 48), причем при задании интенсивности присоединенных вихрей следует учитывать условия (11.50 а. б, в).
Как в поверочном, так и в проектировочном расчете гребного винта искомые величины зависят от интенсивности источников-стоков (толщины лопастей) поскольку прямое значение wqn Ф 0. Это обстоятельство является отличительной чертой гидродинамики гребного винта 1
1 В линейной теории крили конечного размаха все гидродинамические особенности находятся на части плоскости и, как следе i вне этого, — 0. и течения, вызванные nai ру кой (вихрями! н телесностью (источннкнми стоками! являются независимыми.
463
Моргал, Шиловнч и Денин [931 произвели систематические проектировочный расчеты по теории несущей поверхности гребных винтов.
Элементы гребных винтов, использованных в |93| при систематических расчетах по теории несущей поверхности
- b Z - Ъ 7. Г> лЕ,л. ' 1> л!-,лп 0,2 1.634 0,7 2,232 0.3 1,808 0.8 2,172 0,4 1,965 0.9 ),893 0,5 2.097 0.95 1,536 0,6 2,193 1.0 0 Z — 4. 5, 6; лл = 0,4 .-2.0; ЛР'А„ 0,354-1,15; 0J 04-21°; е / 1* о о (r)'D
- («0 Г) - 0.003) (I — г) 4- 0.003; cs (r)/D = 2 — |Л — (с - 0.2)'-’ = 0.32/5, 4-0,5S’,; 5, = 0* (град) [57,3 cos (г 1)] н.
Распределение нагрузки вдоль радиуса было принято оптимальным (см. §9|, распределение нагрузки вдоль хорды — 'но типу NACA а = 0.8. т. с. постоянное на 80 и/9 хорды от передней кромки и затем линейно падающее до нуля к зад
Рнс П.8. Поправки иа несущую поверхность Л’<
464
Hiil кромке В плоском потоке невязкой жидкости тако? распределение нагрузки будет наблюдаться у тонкого <рофнля, который установлен под углом атаки (в градусах)
ai2 1.54Су (11.57)
Н имеет максимальную стрелку прогиба средней линии (отнесена к хорде), равную бС2 = 0,(И>79Су. (II 58)
Здесь Су — расчетный коэффициент подъемной силы. Ординаты средней линии вычисляются по формуле = 2f b 26 ,F (£). где Fr (Z) приведена в § 34.
В составе лопасти гребного впита расчетный коэффициент подъемной силы при заданном распределении нагрузки вдоль хорды будет достигаться при
(11.59)
(11.60)
а( = коа£й 1а/г;
6с — Agdea»
Каг (-- -Z 4, - Z 5, Zb).
46 е
где Ка п Кг — поправки на несущую поверхность (трехмерность потока) a a..f дополнительный угол атаки, па который нужно повернуть профиль, чтобы компенсировать скос потока, вызнанный индукцией системы источников н стоков модели рующнх толщину лопастей.
Величина угла может быть представлена в виде
а1Т~Кл т^п!^'
гдее0 D условная относительная толщина лопасти на осн винта, а Кат — коефф,. цнент. зависящий от относительного радиуса и геометрических характеристик гребного винта В частности, в расчетах Моргана распределение толщины профилен было принято по типу NACA-G6mod (см. § 34)
Анализ систематических расчетов Моргана, Шнловнча. Денин показал что значения поправочных коэффициентов А'с п Ка зависят в основном от отиоше тя
Л/-;.4О , . ...
—2 , параметра неенмметрпп контура лопасти (саблевпдности) и относительного радиуса г. При этом зависимость указанных коэффициентов от индуктивной поступи (шага) оказалась весьма слабой. В то же время зависимость коэффициент.! Кат °т геометрических параметров оказалась сложной. На рнс. (I 8 приведены значения поправок иа несущую поверхность Л’,-. Л'а, Кат- которые позволяют осуществлять проектирование оптимальных и близких к ним гребных пиитов (см. § 35).
В настоящее время теория несущей поверхности применяется для проектиро вания слабо- п умереннонагруженных судовых гребных винтов, у которых Af'Ao'Z > 0 05.
§ 8 СИЛЫ И МОМЕНТЫ ИА ГРЕБНОМ ВИНТЕ
Благодаря симметрии гребного винта в однородном потоке на next возникаю силы, приводящиеся к осевой силе (упору) и осевому моменту (крутящему моменту)
В общем случае упор и крутящий момент гребного винта определяются интегрированием по поверхности лопастей давлений и касательных напряжений. Применяемые для расчета упора н крутящего момента формулы зависят от выбранной ги дродннамнческон модели гребного винта
Коэффициенты упора п крутящего момента ребного впита, работающего в невязкой жидкости, при использовании нелинейной модели с распределенной по п верхности лопастей завихренностью, определяются выражениями:
КТ1----I" f 1 (ИЙ* х V) dSt>'
KQ! = iZJv J
Sb
(II.61)
(11.62)
где S.—поверх! ость лопасти; иД1 — вектор относительной касательной скорости;
у — rot w — вектор поверхностной завихренности 52 — (х. у, г) — радиус-вектор; dSb — элемент поверхности Sfr.
В расчетах умереннонагруженного гребного винта по теории несущей поверх нести коэффициенты упора и крутящего момента могут быть вычислены как сумм сил и моментов трех категорий
Кт — Кр 1
____ > (11
4-/6*. j
466
Величины Kjf' и K'q ‘обусловлены возникающими на лопастях подъемными сидами
V
кт ’ = - -у ZJ? j IV ехр I-/ (r)l J Y* (Vv) dvdr: <H G4>
fll VT
! vt
= --g-ZJe ] M/2tgP/exp|-7(r)J j yb(t’J>jdvdr, (11.65) rH vr
где В» — коэффициент, учитывающий влияние вязкосш па цирк} аяцню (см. § 34).
p<Zv ” — П 'Нлг/./,)2]1'2 4 причем й> — прямое значение вызванной скорости.
Величины A'p* и обусловлены силами вязкостного сопротивления
42» =-~ ZJ2 J С/ tg ₽, ехр [ / (л)| j (TJV)2 ", Л’ df. (П 66) fH VT
1 V£
= - — ZJ2 j CA-r2exp [-/ (r)] J (Vv)2 " dv <*' (11.67)
fH vr
где Cx коэффициент сопротивления профиля сечения лопасти (см. § 34).
Величины Л'у31 и Kq' обусловлены подсасывающей силой, возникающей иа входящей кромке несущей поверхности
43>--i-.4J2 j G2f6nLEidF-. (1168)
'//
I
^3,=-^-nJ2 (II 69)
rH
где nLF нормаль к входящей кромке, S£ — радиус-вектор точек входящей кромки;
0i7. = lim
[l l-iYb(7.i)]/cos(4£, ^.).
Для умереннонагруженного гребного випга в расчетах, использующих схему несущей линии, упор и момент определяются следующими соотношениями
R R
cos
A,
P,rfr = (>Z j Г(йт —w01)dr;
fct»^cos = pz j rH 'H
(11.70) Л R
P; cM = pZ j Гr<j*E sin |i, dr = pZ | I (пЛ Д uixl) dr,
H (11 71)
SHI
rH
где Г (с) циркуляция скорости около
I’H- j
сечения лопасти на радиусе г. z>/2
(II 72)
-М2
467
^’ei —вызванные скорости на несущей липни, р/ —относительная скорость н индуктивный угол поступи, определяемые по теории несущей луиин
Коэффициенты упора н момента, соответствующие выражениям (II 70) н (11 71 , имеют вид
I
«т, J с4 (n'lJ ~ Va) df- (11 ?3*
I
КО1 " VnZji j (7'(И Г '1 ’ llr'
rll
КПД гребного пиита в повязкой жидкости совпадает со значением индуктивною КПД винта в невязкой жидкости
Н1Д элемента лопасти выражается формулой
’10/г = iiCl ^СР, = Ь/Ал + Кл1) I |(С' “ol)/9' I = Ч? b *g РГ <11
При расчете умеренно- или тяжелоиагружепных движителей в ряде случаев учитывают влияние центробежных сил иа величину упора гребного впита. Для этого используется выражение для определения величины уменьшения давления в струе движителя, обусловленное наличием окружных скоростей.
Лоо
(Ро. ~ Ро)/Р = ^Р'Р = I Qr« ~ °-5“'о «) “’б « ~ (“л + °-5х\оо) ~ = J “ 0 «Л
(И 76) где оо означает, что куличика рассматривается далеко на бесконечности за винтом. При учете центробежных сил свойство перпендикулярности векторов вызванной i относительной скоростей отсутствует.
Действие центробежных сил вызывает уменьшение упора гребного вин га, кото рое может быть определено по формуле
I
АТ = j Ар rw (11.77)
Для оптимального по Бетцу гребного винта (см. § 9) относительное уменьшение упора вычисляется по формуле
Д7/Г = 0,5ля (л, - /. ) )^КТ | (1 - г;, „)/(1 + J -
-I’ ('+?•/ ) ('//« +>} )| (11-7*)
где и гноо определяются как
/?„f/? = 1 - 1.ЗЫйДг J TTxi); -rH (11-79)
Па рис. 11.9 приведены результаты расчетов по формуле (II 78) для оптнмаль пого четырехлон.чстного винта |G( |
Уменьшение упора, обусловленное центробежными енллми, может быть ip« проектировании гребного винта компенсировано соответствующим увеличением М Яа индуктивной поступи:
*Е ₽; 1 + Ар/[ 1 (-2г — 0,5u’u j*,) ц-0
где — угол нилуктнвпон поступи гребного винта с учетом центробежных си
468
Результаты расчетов по формуле (11.80) приведены на рнс. II 10 для оптимального четырех.юпастиого гребного винта. Анализ рис. 11.10 показывает, что центробежные силы окацвают наибольшее влияние на гидро динамические характеристики грсбюго винта на внутренних радиусах вблизи ступицы. Закон распределения циркуляции слабо влияет иа величину уменьшения упора винта, ио оказывает заветное влияние на распределение потерь по радиусу.
Коэффициенты упора и момента в схеме несущей линни с учетом вязкости определяются соотношениями
Кт -1- nZJ2 J G 4 (г) (лг J 1 - к tg р,) dr; 'И
Рис. 11.9. Зависимость уменьшения упора гребного винта, вызванного центробеж. ными силами от параметров режима работы (оптимальный винт, Z=4;r/y—0,2) -------------------------------винт НГЖ: Kj -0.25.
Рис. 11.10 Относительное увеличение тангенса угла индуктивной поступи гребного
I винта, вызванное центробежными силами (оптимальный винт; Z 4; гц ’0,2).
КПД элемента лопасти в вязкой жидкости равен
П,)г = (dT/dQ) (VjjQr) Tl/rT|t.r, (11.83)
где т]^ — элементарный индуктивный КПД
•1/r = -'к'ет «')/(> + = P'teРг (" «4)
*1ег—элементарный конструктивный КПД1
’!, = (! -Blgp,)/(H-eclgP;). (11.85)
КПД гребного винта равен
’la = TvaIpd (Kt;Kq) = 1 /’I,,. (11 S6)
469
где T)z — индуктивный КПД гребного винта:
П/ = «2п)(КГо^); (II.«7)
Кт0 = -у nZj2 I °* (r> (nr ;J ~ wetivA)l!r-
KQ0 = vnZj2 j CA (o? (1 +
rH
i]e — конструктивный КПД винта, равный
Че = (’ “ ei те M'V + r2 с,« F/): <Ч 8Ь)
Рис. 11.11. Распределение гидродинамических характеристик вдоль лопасти гребного винта из серии В4-70 при различных числах Рейнольдса (J=0,4)
--------НСПЯЗК.1Я жидкость. — — — — 1,1. 10’.--------Г?Ср = 3,2. 10*.
Ej, fs— некоторые средине (для упора и момента соответственно) но лопасти значения коэффициента обратного качества; можн > считать, что ej принимается но профилю на г = 0,6-=-0,8, а ег — иа г — 0.7-=-0,8.
Величины КТо и Kq° можно понимать как соответственно коэффициенты упора и момента, определяемые по параметрам потока в вязкой жидкости, но без учета вязкостного сопротивления; они зависят только от циркуляции п индуктивных скоростей.
На рнс 1111в качестве примера приведены распределения гидродинамических характеристик гребного винта из голландской серин В4-7О с гидродинамически гладкими лопастями при двух числах Рейнольдса, равных bnD2AE'AQ(Zv) = 3,2 X X 10’ (модель), и 1,1-10’ (натура), а также в невязкой жидкости. Соответствующие суммарные х< ра <тсристики приведены в табл. П.4.
470
f а б. и на II 1 Суммарные гидродинамические характеристики гребного винта из голландской серии В4-70 при Р D 0,8 и J - 0,4
Коэффициент!.! упор-" и момента н КПД пиита Нер
3.2- 10» (модель) 1.1- Ю’ (натура) СО (ненялкз?! ЖИДКОСТЬ)
Яг 0,2039 0.2118 0,2208
Л'о 0,02649 0.02604 0,02493
ЯГ1> 0,2073 Н.2139 0.2208
0,02286 0.02387 0,02493
0,4899 0 5177 0,5638
'1/ 0,5772 0,5704 0,5638
1 " 0,8487 0.9076 1
§ 9. ГРЕБНОЙ ВИНТ
С НАИМЕНЬШИМИ ИНДУКТИВНЫМИ ПОТЕРЯМИ
Ид всего множества распределений циркуляции вдоль лопасти, обеспечивающих заданный упор гребного вита, лишь одно распределение соответствует минимуму потребляемой мощности и тем самым обеспечивает максимум КПД. Такое распределение циркуляции называется оптимальным.
Бетц нашел необходимое и достаточное условие того, чтобы слабонагруженный гребной винт имел в невязкой жидкости максимальный КПД, т. е был оптимальным. Это условие формулируется (без учета ступицы) следующим образом: поле скоростей оптимального винта далеко на бесконечности совпадает с полем скоростей, вызванным затвердевшей вихревой пеленой, двигающейся в осевом направлении со скоростью
w* == kf„/cos f, (II .89)
где К4„ — нормальная к пелене вызванная скорость; и* — некоторая постоянная для винта величина, зависящая от режима его работы.
L Строгое доказательство теоремы Бетца дал 11. Н. Поляхон. Прандтль обобщил это условие на случай расчета умеренноиагруженного винта, считая, что отпоситсль-иые скорости далеко перед и за винтом равны. План скоростей оптимального уме-кинонагруженного винта приводен на рис. 11.12.
Оптимальный винт обладает следующими свойствами
I Индуктивный КПД элемента лопасти постоянен вдоль радиуса и равен индуктивному КПД винта в целом:
V = tgP/lgР, = VC’a I О-бЩ*) = \/?-, = 9,. (П-90)
где — индуктивная поступь винта, равная
= Г tgp/= tgp/(/ = I); л, - (II 91)
. 2. Век юры полной вызванной скорости в диске гребного винта и на бесконеч-ностц перпендикулярны к вектору относительной скорости аД и вихревой пелене. Вызванные осевая и окружная скорости в диске гребного винта связаны с величиной to* зависимостями (см. рис II 12):
к>л.| >vA 0,5tt* cos2 р, !va - [ r2/(r2 + *?)Ц(л, - Л )/л, J (II 92) 0,5w‘cosp/sinpro l 1) rZ,/(rJ I ZJ), (1193)
где to* е^ — 2 1).
471
Циркуляция бесконечнолопастного оптимального книга равна
Wz = 4лг»'Н1 = 2л#?а;’ г*ч (г* + Mi-
di -М)
.3. Условие оптимума (II 89) и распределение циркуляции бескопечнолоиастпого
гребного впита (11.94) остаются справедливыми и для случая, когда учитывается влияние ступицы и (или) трубы, окружаю
щей гребной впит. При этом ступица моделируется бесконечным цилиндром, на поверхности которого выполняется условие испротскапня.
Рис II 12 План скоростей оптимального умерениоиагруженного гребного винта
Рнс II 13 Универсальная диаграмма для определения поправки иа конечное число лопастей (Z > 2; А, I; С// = 0,2).
При f ц > 0.2 дилграммоА можно пользоваться для г > 4- 0,3.
-1. В случае, если на части лопасти распределение циркуляции (в общем случае пеоптимальное) задано, то для достижения максимального индуктивного КПД вин а необходимо на оставшейся части лопасти обеспечить постоянство индуктивной И< ступи (величины w*) |2].
Распределение циркуляции и другие гидродинамические характеристики оитн мального винта могут быть найдены аутем решения краевой задачи о движении твер дой правильной бесконечной винтовой поверхности либо путем решения инчегроднф ферспниального уравнения теории несущей липни (П .32) (см § 6) с правой частью, определяемой выражениями (II.92)—(11.93)
472
Первым путем воспользовался ГольдштеЛн. который получил для оптимального винт» без ступицы значения поправки па конечное число лопаосп. равной отношению средней по окружности радиуса г вызванной скорости к ее значению на несущей .шипи на том же радиусе |4|
X = _Z£_ "т* (II.95)
4ялв01 2rwQ};vA
На рис. 1113 привезены значения и для оптимальных винтов с учетом ступицы, полученные методом решения ннтегродифферсициальиого уравнения [3]
Рис 11.15. Зависимость функции BZlKri от Z, Кп и г.
7 = 3;--------Z = I.------------Z 5;--------Z С,
На рнс. II 14 в качестве примера приведены распределения циркуляции и другие характеристики оптимального гребного винта при 7 4 Видно, что циркуляция принимает па ступице ненулевое значение, причем лишь при tн —> 0 (11 ►()
Гидродинамическая характеристика В, равная
b 2Г 2лСл
D vrD v‘r'v а ’
(11.96)
макет быть определена для оптимального винта по графику рнс 11.15 или из приближенных зависимостей
ZB
Кп
1.93. 1.70, 1.47, 1,23, 0.88,
г 0.5;
Г 0.6;
г -0.7;
Г — 0.8;
г = 0,9.
(II 97»
В первом приближении значение циркуляции на г 0,6 можно определить по формуле
(г = 0,6) =' 0.27А'Г/ | 1 + 3.55,7» ‘Z (II .98)
Формулы (II 97), (II 98» н график рнс II 15 справедливы для Z 2, гп<0,3.
Суммарные гидродинамические характеристики оптимальных гребных винтов
г>гут быт определены с помощью дна! рамм В. М. Лаврентьева (рис 11.16) Для при-
473
Рис. II. 16. Диаграмма Кт/ — ДлЯ
блаженного определения индуктивной поступи по этим диаграммам могут быть ис пользованы формулы Т. Ю. Притемихииой.
Z 3:К[ = 0.26Х; + (1.20А'|, ~ 0,5А'г/ + 0.897) X, —
0.15№г+ 0.5^4 0,0131;
Z = -1 : X, - 0.26Х; 4 0.812Х, + 0,0276 + 0,38Л'т/;
Z = 5 : X, = 0,2С.?4 + 0,812/.( +0,0321 +0,35Кг/;
Z _ 6 : X, - 0.26XJ + 0.812?., + 0,0306 + 0,34Аг/.
(11.99)
В случае, если известна величина Кт. то под веян*.... Кп в приведенных форы -
лах и графиках следует понимать значение Kt о равное KTt — Кт /[(1 — е 1g ру)] X гь где ?| = 0,64-0,8.
474
оптимальных гребных винтов (гц = 0,2).
Глава III
ЭКСПЕРИМЕНТАЛЬНОЕ ОПРЕДЕЛЕНИЕ КРИВЫХ
ДЕЙСТВИЯ ГРЕБНЫХ ВИНТОВ
§ ю. методика динамических испытаний
МОДЕЛЕЙ ГРЕБНЫХ ВИНТОВ
Теоретические методы расчета гребных винтов не всегда позволяют определять нх характеристики с достаточной для практических целей точностью, и уточнение [этих характеристик осуществляется иа основе эксперимента. Испытания метелей гребных винтов проводятся в опытовых бассейнах и кавитационных трубах, причем •Условия проведения испытаний должны обеспечивать получение данных, па основе
475
которых можно с достаточной степенью достоверности прогнозировать характера стики натурного гребного винта.
Для практического использования результатов модельных исньпанни необхо димо, чтобы прн их проведении с возможно большей полнотой соблюдались законы динамического подобия, предполагающие предварительное соблюдение геометрического н кинематического подобия. 11ри этом геометрическое подобие должно распространяться не только на элементы самой модели, но и на ее расположение относительно границ потока. Для соблюдения кинематического подобия потока, обтекающего геометрически подобную модель гребного винта, необходимо, чтобы в с.хо ответила точках моделируемых потоков скорости были направлены одинаково и находились в постоянном отношении.
Принимая в качестве характерных скоростей скорость поступательного движения с'л и окружную скорость конца лопастей л[)п. можно показать, что это условие соблюдается прн равенстве относительных постх neii J натурного впита н модели.
При наличии геометрического и кинематического подобия динамическое подобие между системами обеспечивается равенством критериев подобия, а именно-критерия Фруда
Fr = v [,гцЬ-. (Ill 1)
критерия Рейнольдса
Re = vl, v; (111.2)
критерия Струхаля
Sli = I. •! (II 1.3)
где т — характерный отрезок времени
Поскольку выражение относительной поступи
J = v'nD (II 1.1)
есть форма записи критерия Струхаля, в качестве условий динамического подобия должны рассматриваться лишь критерии Фруда и Рейнольдса.
Применение закона подобия Фруда необходимо для потоков, в которых существенную роль играют силы инерционной природы Опытным путем установлено, что для гребных винтов подобие по числу Фруда должно соблюдаться лишь в тех сл\ чаях, когда погружение оси винта под свободную поверхность <^D.
Счпт я, что характерным размером является диаметр впита,а характерной ск -ростью vA или nDn, можно число Фруда записать в различной форме:
Fr vA gD; (111.5)
Fr — n\'rD- (111.6)
Условие равенства чисел Фруда обусловливает следующую связь между частотами вращения н скоростями натурного винта н его модели*
Реализация этих скоростей ^при практическом моделировании затруднений и* встречает, хотя оно необходимо лишь при погружении осн liB < D Подобие сил вяз костной природы определяется критерием Рейнольдса, который для винта, если прн ннмать в качестве характерного размера его диаметр, записывается в виде
Ren = 5------/--?- (Ш
* v Аа Z '
476
Исходя из равенства чисел Re для натурного винта н модели, получаем следую щую связь между их частотами вращения'
пм =• ns — м 6
(III.10)
На основе этого соотношения легко показать, что при испытании в жидкостях с одинаковой вязкостью тля соблюдения подобия no Rcy необходимо, чтобы упор модели был бы равен упору натурного винта. Очевидно, что это свидетельствует во невозможности соблюдения подобия по Re,, прн пснытат ин гребных винтов. Поскольку подобие по силам вязкостной природы при испытании моделей не соблюдается, в гидродинамические характеристики, полученные при .модельных испытаниях! должны быть введены поправки, учитывающие так называемый масштабный эффект.
Опыт модельных испытаний показывает, что, если число Рейнольдса превосхо дн некоторое критическое значение, погрешности, обусловленные масштабным эф-|фектом, невелики п могут в первом приближении не приниматься во внимание. Более подробно этот вопрос рассмотрен в § 12. Критическое число Rep. вычисленное по г формуле (III.9), лежит в диапазоне (3-=-5)-105.
Прн докритическнх числах Refl масштабный эффект значителен и результаты, полученные в этих условиях, в расчетах ходкости использовать не рекомендуется
Испытания моделей винтов в опытовом бассейне проводят на специальных установках, позволяющих получать их характеристики в «свободной воде» т е позволяющих практически исключить влияние на характеристики впита гондолы, через которую осуществляется подвод мощности.
I Модели впитой испытывают двумя способами: при постоянной частоте вращения In различных значениях скорости поступательного перемещения, а также прн по-^Иояииой скорости и различной частоте вращения. Предпочтение отдается первому способу, обесточивающему практически постоянное значение числа Rep и дающему 1возможность получить изменение относительной поступи в широком диапазоне, вплоть до J 0.
Иногда испытания проводят по первому способу при двух-трех значениях ча-стоты вращения, поскольку прохождение всего диапазона поступей при одной частоте вращения не обеспечивается пределами измерений динамометрической аппаратуры.
В процессе испытаний измеряются упор Т, момент Q, частота вращения л и ско-ктость поступательного перемещения v4, необходимые для вычисления безразмерных коэфф! I Kq, поступи J и КПД т]0. Значения скорости н частоты вращения
^^Нжны обеспечивать заданный диапазон изменения поступи от J = 0 до J — P^lD.
I Результаты испытаний представляются графически в виде кривых действия — зависн лей Кт, Kq, т]0 от J.
§ II РЕЗУЛЬТАТЫ СЕРИЙНЫХ ИСПЫТАНИЙ МОДЕЛЕЙ ГРЕЬНЫХ ВИНТОВ
I Расчет хо кости судов и выбор основных элементов гргбпого винта в 1 астоящсе (Время производятся на основе данных испытании систематических серин моделей Гребных винтов в опытовых бассейнах и кавитационных тр\Сах Па их основе епре-Л1еляются также исходные данные для детального расчета геометрии лопастей гребных bihitqb на ЭВМ с использованием вихревой теории несущей поверхности
В табл. II 1.1 приведены oci овные элементы и условия испытании для ряда ис-Вользуемых в отечественной практике серий моделей гребных винтов.1
Широкое распространение в мировой практике проектирования гребных винтов получили серии, разработанные и испытанные в Голландском опытовсм бассейне (так называемые серии В нлн серии Трооста) [01 ] Основным достоинством этих ^Янй гребных винтов является широкая вариация неметрических элементов и надежность полученных данных по гидродинамическим характеристикам, а также Наличие сквозной (но шаговому и дисковому отисшеииям числа лопастей) математи-Вской аппроксимации кривых действия степенными функциями. Гребные винты
477
Таблица III I Основные элементы серий гребных винтов
Профилировка Ави ацнон но-сегментная NACA-66, а = 0.8 На базе NACA—66 с утолщением кромок
Лаборатория, число Рейнольдса Голландский опытовый бассейн к.,-!.,"* £; Отечественная кавитационная труба, ReD» « (2-1-5)-10s Отечественный опытовый бассейн, Rep « (2,5-ь -т-4,5) -105
Элементы серий 1 O'd ci со to со о о о о о 0,6—1,5 0,6-1,5 0,9—1,4 0,9—1,4 -ф "ГГ СО СО СО “77777 С0 <О СО in 1Л Ш О О О О О О
*R ю ш ю ю ю 0 0 15 15 in Ш »Л Г"- >• t"-
а,пз 0,045 0,045 0,045 0,040 0,040 О О Ю Ю g g 3 3 О С э О 8 § 8 3 3 § о О О о о С
з: о <о СО СО о о о о о о оо оо оо оо о о о о ! 0,20 0,20 0,20 0,18 0,18 0,18
о to О in Q to 1П Г- 00 со о о о о о 0,58 0,75 0,85 1,00 Щ Щ Ш СО О 04 о оа <х> г-, г- с о о о о о
N -ф -ф «ф ш ш -Ф ’Г тг -Ф <О Г- 00
Условное название серин Ш О Ш О to inr-oocot^-•Г Ч* Tf lO a ffl DO EQ со 3 £ £ § -4* Н Н М N М4-65 М4 85 М4-75 Т6-68 Т7-70 Т8-72
С — ci со m со ь* со он О OJ СО ио
478
серий обеспечивают эффективную (с достаточно высоким КПД) переработку полвиди-мощности.
Профиль сечений лопастей серин — авиационный на внутренних радиусах и сегментный с плоской нагнетающей стенкой па наружных радиусах. Шаг оное отношение гребных винтов серии В огсчитывастся от внешней ио отношению к профилям ХорДы1 касающейся нагнетающей поверх пости. Все гребные винты, за исключен нем ( четырехлопастных, имеют постоянный шаг вдоль радиуса. У серин чстырехлопастных линтов шаг уменьшается на 20 % к ступице.
Геометрические элементы н гидродинамические характеристики гребных винтов серии В приведены в работах 114, 91]
Кривые действия моделей гребных винтов серии В были аппроксимированы полиномами вида
(Ш И)
(111 12)
где Mj = 19, Мя = 25 для Z = 4 и Л(, = 17, Л4# = 18 для Z = 5. Коэффициенты Л*, В/, и показателя степени х^, yk, были найдены с использованием регресс-анали-за и приведены для Z = 4 и 5 в табл 1112, II 1.3.
Таблица II 1.2 Коэффициенты полиномов аппроксимации для винтов серии В4
k Л г *<?
Ак >к Uk Bb xk bk xk
0 -0,719975 -02 0 0 0 0 964375— 02 0 0 0
1 —0,790916 01 I 0 0 —0 104103—01 1 0 0
2 —0,179541+00 0 0 1 0,512431—02 2 0 0
3 —0,625748—01 1 0 1 0,109936—01 3 0 0
4 —0,311639—00 0 0 2 —0,453419—02 0 0 1
5 0,143160 -00 2 0 3 0,216078- 01 1 0 1
1 6 0,531326+00 0 I 0 —0,507337-01 0 0 2
' 7 —0 114389+00 1 1 1 0,377970—01 1 0 2
[ 8 0,625376-01 0 1 9 —0,549486 -01 3 0 3
। 9 0,125537 1 00 0 1 3 -0,507319-01 2 1 0
10 -0,523821-01 1 1 3 0.368649 -01 0 1 I
1 —0,207108- 00 0 2 0 - 0,106520 f 00 1 1 I
12 0 270781- 00 1 2 0 0.465315 -01 3 1 2
13 0 134182 -00 0 2 1 0,883010 01 2 1 3
14 -0 121086 -00 I 2 1 0,112619 01 0 2 0
15 —0 189764 -01 3 2 I 0,1048254-00 1 2 0
16 -0 4.39535 -01 3 2 2 —0 449154—01 1 2 1
1 -0,624937-01 0 2 3 0,378780- 01 2 2 I
18 0,496939 02 2 6 0 0,177304—01 0 2 2
19 0,115986-01 2 6 1 —0,164687—01 1 2 2
20 II —— — —0,344328—01 2 2 2
21 — — — —0,249132—01 3 2 2
22 — — — —0,233007-01 1 2 3
' 23 — — — — —0,120209-02 0 6 0
24 — — — — -0,118997—02 3 6 0
25 — — — — 0,458094—02 1 6 1
«.
479
Таблица III 3. Коэффициенты полиномов аппроксимации для пиитов
серии ВЯ
А Кт Ко
Лк хк ’-'к »А «А хк к гк
0 —0,191226-01 0 0 0 O.52O6GG 02 0 0 0
1 —0,860251 01 2 0 О 0,627259-01 2 0 I
2 —0,598290- 02 3 0 0 —0,337780-01 3 0 1
3 —0,181301->-00 0 0 1 -0,518101—01 0 0 2
4 —0 4572174 00 0 0 2 0,396494 —01 1 0 2
5 0,562903—01 3 0 2 —0,848886- 02 0 0 3
6 0,990584-01 2 0 3 0.317571—01 3 0 3
7 0,431314-00 0 1 0 0,130016—01 0 I 0
8 0,189210 00 1 I 0 -0,340161—01 1 1 0
9 —0,254103 -00 I 1 1 0,624821 -01 0 1 1
10 0,413600 —00 0 1 2 -0.239G57--00 1 1 1
11 —0,1263*0 - 00 2 1 2 0,801838—01 2 1 1
12 —0,865914 -01 0 2 0 0,119589 -01 0 1 2
13 0,856485 -01 1 9 О — 0,477400 -01 3 1 2
14 0,113060—00 0 9 1 0,133699-00 1 2 0
15 —0,1465264-00 0 9 2 —0,382898 -01 2 2 0
16 —0,792780 02 0 (j 0 0,270494 01 1 2 I
17 0,669308 02 1 6 1 —0,381406—02 1 6 0
18 —- — — — 0,2417'10 02 3 6 0
Аппроксимации JII. 11> и (III 12) справедливы в следующем диапазоне i мс-hci ия параметров: 0,4 /1)? Л» 1,0; 0,5 1,4; 0 J 1,5
Гидродинамические коэффициенты Кг. Kq серии В были также пересчитаны Остервельдом н Осаненом но методу Лербса на стандартное число Рейнольдса К>. = 2-10е н подвергнуты сквозной аппроксимации ио числу лопастей, дисковому и шаговому отношениям, а также относительной поступи |75|
34
Кт= У Ак (Z)Q'< (7)г* (111.13)
0
№
л О = v Bh (Z)Q'<
А—0
(ill о
где 2 7; 0.4 А£Л40 1,05; 0,5 < Р/D < 1,4: 0 sC J С 1,5,
Коэффициенты аппроксимации Ад, О/, и показатси пепени Сд, хк, ук, 2к nIJI ведены в табл. Ill 4
Учитывая приближенность метода Лербса, формулы (II 1.13) н (III 14) можп рекомендовать лишь для оценки влияния различных геометрических элемсптО! на гидродинамические характеристики винтов серии В
Аналитическое представление кривых действия гребных винтов в виде полппо мов позволяет автоматизировать расчеты, связанные с определением параметров ходкости судов.
В иностранных источниках результаты испытаний винтов серии В обычн представлены в виде диаграмм Ut. —Р D при постоянных б' Для перехода к Д'1 |/ *•? аграммам Кт — J следует использовать соотношения: 33,07 I/ ~j--
~ 114,3 KkQ. К 101,3/7
480
Таблица II 1.4. Коэффициенты полиномов аппроксимации для иитов
серин В
k Ak xk Vk 2k 1 Qk «ft xk Vk Tft Qft
0 0,00880496 0 0 0 0 0,00379368 0 0 0 0
1 —0,204554 0 0 1 0 0,00886523 0 0 2 0
2 0,166351 0 1 0 0 -0,032241 0 I 1 0
3 0,158114 0 2 0 0 0,00344778 0 2 0 0
4 —0,147581 1 0 2 0 - 0,0408811 1 1 0 0
5 —0,481497 1 1 1 0 - 0,108009 1 1 1 0
6 0,415437 1 2 0 0 -0.0885381 I I 2 0
7 0.0144043 0 0 0 1 0,188561 1 2 0 0
8 —0,0530054 0 0 9 1 -0,00370871 0 0 1 1
9 0,0143481 0 1 0 1 0,00513696 0 1 0 1
10 0,0606826 0 1 1 1 0,0209449 0 I 1 1
11 —0,0125891 1 0 0 1 0.00474319 0 1 2 1
12 0.0109689 1 0 1 1 —0,00723408 1 0 2 1
13 —0,133698 0 3 0 0 0 00438388 1 1 1 1
14 0,006338407 0 6 0 0 —0,0269403 1 2 0 1
15 —0,00132718 0 6 2 0 0,0558082 1 0 3 0
16 0,168496 1 0 3 0 0.0161886 I 3 0 0
17 —0,0507214 2 0 0 0 0,00318086 1 3 1 0
18 0,0854559 2 0 2 0 0,015896 2 0 0 0
19 —0,0504475 2 0 3 0 0,0471729 2 0 1 0
20 0,010465 2 6 I 0 0.0196283 2 0 3 0
21 —0,00648272 2 6 2 0 - 0,0502782 2 1 0 0
22 —0,00841728 0 3 0 1 0 030055 2 1 3 0
23 0,0168424 0 3 I 1 0,0417122 2 2 2 0
24 —0,00102296 0 3 3 I —0,0397722 2 3 0 0
25 —0.0317791 1 3 0 1 —0,00350024 2 6 0 0
26 0,018604 2 0 1 1 —0,0106854 0 0 3 1
27 —0.00410798 2 2 0 1 0,00110903 0 3 3 1
28 —0,000606848 0 0 0 2 —0,000313912 0 6 0 1
29 -0,00-19819 0 0 1 2 0,0035985 1 0 3 1
30 0,0025983 0 0 2 2 —0,00142121 1 6 0 1
31 0.000560528 0 0 3 2 —0,00383637 2 0 1 1
32 —0,00163652 0 2 1 2 0,0126803 2 2 0 1
33 -0,000328787 0 6 1 2 -0,00318278 2 3 2 1
34 0,000116502 0 6 2 2 0,00334268 2 6 0 1
35 0,000690904 1 0 0 2 -0,00183491 0 1 1 2
36 0,00421749 1 1 3 0 2 0,000112451 0 2 3 2
37 0,0000565229 1 6 3 2 - 0.0000297223 0 6 3 2
38 —0,00146564 2 3 0- 2 0,000269551 1 0 1 2
39 —. — — — 0,00083265 1 0 2 2
40 -— — — — 0,00155334 1 2 0 2
41 . — — — — 0,000302683 1 6 0 2
42 .— — —0,0001843 2 0 0 2
43 — — —0,000425399 2 3 0 2
44 — — — 0,0000869243 2 3 3 2
45 — —0,0004659 2 6 0 2
46 — — 0,0000554194 2 6 1 2
16 П р Я И. ВоПткуискО!», т. 1
Таблица III 5. Коэффициенты полиномов аппроксимации для винтов серий Т4-58, Т4-75
а** — 1,5915967—00 —3,2742921+00 1,5539374 1-00 1,7190482—03 -5,8707979-02 1 1ПЯ0440—09 1.4549098+00 — 1,9170760-00 7,0800893-01 —8,7458405—02 6,6496686- 01 —4,4381203—01
со S О’ с с 8,2106377+00 —3,7934212+00 -1,3593496-01 3,0304252—01 —5 ПЯ9ПЯ56—09 1 —3,4996168 (-00 4,5774423+00 — 1,8114796+00 6,8402678—01 —2,8104554-г-00 1.7025904+00
СЧ с с g § 1Г се о -6,0102998+00 2,6672602+ 00 1,3237937—01 -2,2675890-01 — 1 Я9556.ЧХ—П? 2 3 X с о —3,3825806+00 1,6477705+00 — 1,3021156+ 00 4,0326074+00 — 2 26522144-00
- С г О ° 1,1593933+00 -4,1871173-01 — 1,0845492-02 -6,5568406-02 fi 7Л6ЛЧ19—09 г — 1,1039747+00 1,2326262+00 —8,7047820—01 8,0919516-01 —2,2547726+00 1,1707706+00
о с о с' S а 6,9275618-01 — 1,3762381—01 — 1,3838157--02 4 6020458-02 3,3002988—02 Г" с с о t’ С' и- 3,5684311-01 1,9301002—01 -1,5320831-01 3,8702314-01 — 1 9X61322—П1
О ~ С4 О •—« СМ О —" сч О — CJ
Коэффициенты Л'г Л'о Кт
Серия винтов Т4-58 Л1, = 4 Л12 = 2 Т4-75 Mi = 4 Л!, = 2
482
В Советском Союте И А. Титовым были произведены испытания гребных винтов с близкими к предложенной Троостом формой сечений п контуром лопасти (сепии 14-58, 14 75) 114). Основное отличие заключается в большей по сравнению с серией В толщиной лопастей. В силу особенностей профилировки относительная кривизна профилей серин 11. Л. Титова также превышает аналогичные велнчпнц для серии В Этим по всей вероятности обьяснястся несколько большее значение KILL гребных винтов серий Т4-58, 14 75 по сравнению с серией В.
[ еометрпческне и гидродинамические характеристики серий моделей Т4-58 и Т4-75 приведены в [141
Аналитическая аппроксимация кривых действия винтов серий имеет вид полн-,домов по степеням Р Т) [58 [
М, Л1,
| кт. q -- v, atj (Pi'DY (J)' =аж + a„tJ + a^J2 +-----------1- a0M/Ml +
i-=o /=о
+ (°10 + + • • + °|.чУ ' ) + • • +
+ (°V,0 I аЛТ,1^ 1“ °Л1,2^ ” "b ” ’' "b °Л1,мУ 'f') (Р/®) !t- (III.15)
Коэффициенты ajj для серии Т4-58 и Т4-75 приведены в табл. III.а. Аппроксимация (111.15) справедлива в следующем диапазоне параметров: 0,6^ Р D < 1,5; 0,3 < J < 1.5.
Гребные впиты серий В и И. Л. Титова проектировались и испытывались в 40 60 х гг., и заложенные в них конструктивные решения соответствовали уровню развития гидродинамики тех времен. Сравнительный анализ гидромеханических характеристик винтов указанных серий показывает, что при удовлетворительной эф сктнвпости (КПД) эти винты, как правило, не могут обеспечить при прочих равных условиях достаточную величину запаса против возникновения кавитации при работе в неравномерном потоке за корпусом современных и перспективных транспортных судов. Выдвигаемые на современном этапе развития судостроения требования к движителям по эффект явности н виброактивиости вынуждают искать новые конструктивные, решения разгрузку концевых сечений лопастей, введение существенной асимметрии их контура, применение ламинпризованных профилей, [устойчивых к возникновению кавитации в неравномерном потоке, н т. д.
Ниже приводятся материалы по геометрическим и гидродинамическим характеристиках! моделей гребных винтов современной геометрии (п. 8—15 табл. 111.1). Модели серии были спроектированы с использованием вихревой теории несущей Поверхности и имеют профилировку по типу профилей NACA-66mod Серни Z4 85, Z4-100 |281, TG 68. Т7 70 н Т8-72 [681, спроектированы как оптимальные по Бетцу, ^мсерпн MI-65, М4 85 п М4-75 характеризуются некоторой гидродинамической разгрузкой концов лопастей. Контур лопастей серии М4-75 отличается большой саблевндностью (неенмметрией), а у остальных серий контур умеренно саблевидный.
На рнс 111 I — III I и в табл. Ill 6 приведены геометрические характеристики Гребных винтов серий Z4-85 и Z4 100 [28]. Сечения лопастей представляют собой профили типа NACA-66 со средней линией а = 0,8 (см. § 34).
Таблица 1116. Геометрические характеристики гребных винтов
Г Ь/Р ЛЕ1Л0 с,;Ь c'D Г АЕ/Ли с,ъ с/П
0.18 0,2 1 0,3 0,4 0,5 0,6 0,403 0,415 0,468 0.512 0.537 0.548 0,375 0,380 0,415 0.445 0,468 0.490 0,0378 о;оз7о 0,0330 0,0290 0,0250 0,0210 0.7 0,8 0,9 0,95 1,0 0.536 0,491 0,322 0,305 0 0.525 0,554 0.622 0,672 0,0170 0,0130 0,0090 0,0070 0,0050
1и»
483
484
Рнс. III.2. Распределение относительной кривизны сечений лопастей гребных винтов серии Z4-85.
Рнс. Ill 4 Распределение относительной кривизны сечений лопастей гребных винтов серии Z4-100.
485
Таблица III 7. Коэффициенты полиномов аппроксимации для випюв
серии Z4-85, Z1-100
Коэф-ф.< цн-сн ты аН
С гр и я ВЛИТОВ 1
0 I 2
0 —0,29123695 —0,88301581 0,33759271
Аг 1 0,98799606 0,72483639 -0,575-13487
Z4-85 2 —0,17224243 —0,32578679 0,24394612
Ah 2
Л1( - 2 0 0,10090121 -0.43332776 0.2224052
Aq 1 0 20792632 0,80429954 —0,46639983
2 0,17281694 —0.40232424 0.2226377G
0 —0,70506018 0,90475108 --0.98330516
Кт 1 1,76971107 2,33036490 1,61712200
Z4-I00 2 —0,53251456 0,96614191 0,66228857
Af> = 2
Л12 = 2 0 —0,023182039 0,065192810 —0,12177603
Kq 1 0,028653350 0.097383655 0,1514 552
2 0 068961008 —0,013003875 —0 44915)11
Гидродинамические характеристики приведены в виде диаграмм i a pi с Ill. IIl.fi. Значения шаговых отношении, указанные на диаграммах, соответствую г — 0,7. Элементы винтов Z = 4; ги =0,18. е0 D =0,045. Отношение = 0,85 для диаграмм рнс. II 1.5 и III.6, Л/..'ЛП— 1,0 для диаграмм рнс. 111л 111.8. Влияние кавитации па кривые действия гребных винтов серин можно оцепить с помощью рнс. V.6. В табл. II 1.7 даны значения коэффициентов аи прокси май полиномами вида (III.15). Допестнмые диапазоны параметров: 0,9 PiD < 1.4; 0,5 < J < 1,3.\ ' ’‘•Ъ *’ *
Геометрические и гидродинамические характерноики моделей гребных винтов серий М4-65, М4-85 и .44-75 сведены в табл. III.8 и рис. III.9—III.20. Па днаг раммах указаны значения PfD прн г 0,7. Сечения лопастей винтов серин >14 *>:> и М4-85 имеют распределение толщины ИК-75, кривизны — НК: а = 0,8, b ' 0,05, а серия М4 75 спрофилирована иа ба е профилей I1K-80 со средней линией ИК : а = 0,8, h = 0,05 (см. § 34).
С целью предотвращения неблагоприятных с точки зрения кавитации и ехпо-логпчности и готовлеиия искажений геометрии лопастей («ложкообразности ) серп с большой саблевпдностыо ('14 75) было введено искривление образующей При эт м
186
Рнс III 5. Диаграмма J — Кт для расчета гребных винтов серии 24-85(2 = 4; Ае/А0 = 0,85; ?ц = 0,18; e^D ~ 0,045).
487
отклонение образующей от плоскости диска винта вычисляется по формуле (положительное значение соответствует смещению в нос)
« 6 cos <р0
где cs (г) — отстояние середины спрямленного сечеиня лопасти от осевой липин, положительное при смещении середины в сторону входя щен кромки; <р0 — шаговый угол иа г = 0,9.
°СЛ 0? С.6 0.7 0$ 09 ' IP V /2 j 1р
Рис. Ш.6. Диаграмма J ЮХп для расчета гребных винтов серин Z4 85 (г = 4; Ас/Ап = 0,85; г// = 0,18; ejD = 0,045).
Коэффициенты аппроксимации кривых действия серий приведены в табл. 111.9; допустимые диапазоны 0,6 < P.D < 1,4; 0< 1,4 Кавитационные качества
винтов серии (по начальным и развитым стадиям) можно оценить, используя данные § 20.
Геометрические и гидродинамические характеристики миоголопасгных гребных винтов [68) приведены в табл. Ill 10, III. I и на рис. 111.21—III.30. Значения шаговых отношений, указанные на диаграммах, соответствуют г = 0,7.
Кавитационные качества моделей многолопастных гребных винтов приведены па рнс. V.6 в виде зависимости критического значения коэффициента нагрузки, при котором наступает «отвал» кривых действия, от дискового отношения и числа кавитации.
488
Рис. Ill Диаграмма J—Кт для расчета гребных винтов ceptm Z4 100 (Z = 4, Ае/Ац— 1,0; ?ц~ 0,18; ea'D = 0,045).
480
4r’O
Таблиц III.8 Геометрические характеристики моделей гребных винтов серий М4-65, М4-85, М4-75
Г M l С5 Mi-а» M4-73
b/'D с,.£> e/D b.l) cit'D ID b,D q/D f/D
0,2 0,264 0.1.32 0 0489 0 344 0,172 0,0442 0,262 0 131 0 0492
0,3 0,295 0,140 0,0431 0,378 0,192 0,0399 0,324 0 155 0,0438
0,4 0,322 0,121 0,0378 0,422 0.207 0.0348 0,373 0 171 0,0384
0,5 0,347 0,165 0.0323 0,452 0,217 0,0297 0,410 0 176 0.0330
0,6 0,365 0.167 0.0267 0 476 0,222 0,0247 0,433 0 166 0.0276
0,7 0,372 0,161 0 0212 0 486 0,218 0.0197 0,437 0 135 0,0222
0,8 0,359 0,144 0.0156 0 168 0,198 0,014(1 0,415 0.076 0,0168
0,9 0,295 0,099 0 0101 0,392 0,147 0,0096 0,338 --0.026 0,0111
0,95 I 0,238 0,063 ( .0070 0 305 0 096 0,0070 0,254 —0,105 0 0087
0.975 0,177 0,028 0.0059 0.230 0.055 0,0058 0,189 —0.156 0 0073
1,0 0 —0,061 0 0045 0 0 064 0,0045 0 —0,270 0 0060
Таблица 1119 Коэффициенты полиномов аппроксимации для винтов серии М4-С5, Ш-85, М4-75
Ct p и я пинтоп Коэффициенты ач
। j
0 ' 1 2
ЛИ 65 <Wj 2 Мг 2 Кт 0 I 2 —0,15479427 0,81541839 —0,17311932 0 0G9478720 —0,087327498 0,41293339 —0,41659550 0.66804193 —0 30059742
Kq 0 1 2 - 0.009023072 0,029819270 0.017197883 0,028147417 —0,085226424 0.014364172 0,028533985 0,026204714 —0,009603993
М4 5 ATt 2 Л12 2 Кт О 1 2 —0.12707450 0.74711162 - 0 09831168 —0.095703570 —0,53770971 0 18487162 —0 27265471 0,37310127 0 13172548
Kq 0 1 2 0.0053864431 —0.0051399192 0.0728998849 —0,015438526 0,011112041 —0.045078870 —0,001173272 — 0,031600614 0,023081450
М4-75 Л1, - 2 Л12 2 к*—~ _ Кт 0 1 2 —0,15120610 0,79621433 -0,13673820 —0,04505889 —0,62825763 0,21919730 —0,32217171 0,47450045 —0,16336839
Kq 0 1 2 0,000555437 0,097727806 0.056919774 —0,020535509 0,028118853 —0,047327865 0,002279019 0,041437562 0,030190481
491
492
Таблица Ш.10. Геометрические характеристики гребных винтов серий Тб-68, Т7-70, Т8-72
L. винтов Характеристики 7
0,26 0.3 0,4 0,5 0,6 0,7 0,8 0,9 0,95 0.98 1,0
b/D 0,187 0,196 0,213 0,230 0,243 0,251 0,245 0,214 0,190 0
Тб-68 C-JD 0,110 0,112 0,116 U.H7 0,116 0,110 0,0925 0,060 0,035 — —0,065
e/D 0,0355 0,0332 0,0285 0,0240 0,0202 0,0165 0,0127 0,00925 0,0075 — 0,0055
b/D 0,166 0,174 0,189 0,203 0,215 0,220 0,222 0,200 0,169 0,129 0
Т7-70 cjD 0,096 0,099 0,102 0,103 0,103 0,0985 0,0845 0,056 0,031 0,0040 —0,0575
e!D 0,0320 0,030 0,0250 0,0210 0,0170 0,0135 0,010 0,0075 0,0060 0,0055 0,0050
b/D 0,148 0,157 0,172 0,183 0,194 0,200 0,200 0,180 0,152 0,116 0
Т8-72 cjD 0,087 0,0895 0,0920 0,093 0,0935 0,088 0,076 0,050 0,028 0,0020 —0,050
elD 0,0295 0,0270 0,0220 0,0175 0,0140 0,0110 0,0085' 0,0060 0,0055 0,0050 0,0045 ,
II III
Рис. И 1.9. Распределение шагового отношения гребных винтов серий M4-G5, М4-85.
Рис. 111.10. Распределение огноси1ельной кривизны сечений лопастей гребных Bin тов серин М1-65.
491
[Рис, HI.11. Распределение относительной кривизны сечений лопастей гребных винтов серин М4-85.
4)5
Рис III.13. Распределение относительной кривизны сечений лопастей гребных винтов серин М4-75.
Рис. III. 14 Зависимость гидродинамического качества гребных винтов серий М4-65, М4-85 и М4-75 на швартовах при D — const ( Kj/Kq3) и п — const {Kt/KqS) от ph).
1 серия М I 65; 2 серия M4-S5; 3 — серия 4-175. ---- ^t/Kq3;
------kt/kAq5.
V '6
»
497
66fr
Рис. Ill 16. Диаграмма J—10 Ко для расчета гребных винтов серии М4-65 (Z = 4; Ле/А0 = 0,65; гн = 0,2; e/D = 0,06).
Рис. III 17. Диаграмма J— Кт для расчета гребных винтов серии М4-85 (Z 4, Л ?/А0 = 0,85; Гц = 0 2; ejD = 0,055).
rSiL-l V^-35 LiJrSLr
Л». /К. 1*ч 1
Otf____________________________
/
’>! 'i (роя „
-----------
да-4----
^'\7 <s
Vx
Яп'Г
0,3 iW 0,5 0,6 0,7 О' 0.9 1,0 1,1 1,2 £5 1,4 J 1,5
Рис. Ш 19. Диаграмма J — Кт для расчета гребных винтов серии М4-75 (7. = 4; Ае!Ал = 0,75; гц = 0,2; е0Ю = 0,06).
g
502
Рис. II 1.22. Распределение относительной кривизны сече ний лопастей гребных винтов серш Т7-70.
503
Рис III 23. Распределение относительной кривизны сечений лопастей гребных винтов серии Т8-72.
Рис. III.24 Зависимость гидродинамического качества гребных винтов серий Т6-68, Т7-70 и Т8-72 на швартовах при D = const
(Кг/К^3) и п= соп^(^т/^дБ] от р!Р>-
1 — серия TC-CS; 2 — серия Т7-70: 3 — серия Т8-72.-Ку/Кц3;
------Kt/kq"’.
504
Рис III.25. Диаграмма J—Кт для расчета гпебиых винтов серии Т6-68 (Z — 6; Л£/Ло=0,68, ?н=0,1Э; e0/D= 0,045).
505
Рис 1П 27. Диаграмма J—Кт для расчета гребных винтов серии Т7-70 (Z = 7; AfJAq - 0,70; /77 — 0,18; eQ'D= 0 041)
Рис. Ill 29. Диаграмма J—Кт для расчета гребных винтов серии Т8-72 (Z = 8; А^А0= 0,72; гн — 0,18; ea/D = 0,039)
§ 12. МАСШТАБНЫЙ ЭФФЕКТ ГИДРОДИНАМИЧЕСКИХ
ХАРАКТЕРИСТИК ГРЕБНЫХ ВИНТОВ
В инженерной практике вплоть до последнего времени принималось, что при экспериментальном определении гидродинамических характеристик гребного вши а с обеспечением закрнтнческих значений чисел Rep нет необходимости вводить по правки на масштабный э4-|1ект Однако полученные в последние годы результаты показывают, что непосредственное использование данных модельных испытаний в расчетах ходкости вед т к погрешностям, обусловленным как собственно масштабным эффектом, так и различием в состоянии поверхности лопастей натурного вина и его модели
В настоящее время разработаны приближенные расчетные методы оценки масш табного эффекта н влияния состояния поверхности лопастей, основанные на провед нни сравнительных поверочных расчетов по вихревой теории (см. §36) при модельном и натурном числах Рейнольдса. Используемые при этом зависимости для коэф фнциентов подъемной силы и сопротивления винтовых профилей должны учитывать наряду с влиянием числа Рейнольдса и состояние поверхности. На рнс. III.31 приведен пример зависимости коэффициентов подъемной силы и сопротивления гнпн* ною винтовою профиля от Re и состояния поверхности при а = 1°
Пересчитать данные модельных испытаний гребных винтов на условия сдаточных испытаний судна можно в предположении, что в натурных условиях поверхность лопастей является гидродинамически гладкой Такое допущение оказывается сира ведДнвым, если гребной винт изготовлен по высшему или особому классу и сдаю’ ные испытания производятся без задержки. В противном случае поверхность лотт-
5Ю
стен нельзя считать гидродинамически гладкой. В частности, 15-я конференция МКОБ [97] рекомендует считать, что в сдаточных условиях шероховатость лопастей гидродинамически эквнвтлентназерпнстоА шероховатости со среднеквадратичной величиной бугорков Л,-, = 30-10 • м.
Шероховатость поверхности может быть обусловлена технологией производства, эрозноино коррозионными разрушениями н обрастанием. В каждом из этих случаев шероховатое ib характеризуется своим особым гидродинамическим проявлением н характерной именно для этого типа шероховатости связью между фактической высотой бугорков шероховатости и высотой бугорков эквивалентной зернистой шероховатости A'g.
Рассмотрим случаи гидродинамически гладких и шероховатых лопастей.
Рис. II 1.31. Зависимость коэффициентов подъемной силы Су (нижние кривые) и сопротивления Су винтового профиля КАСА—66 (а - 0,8, 6= 0,05, 6С — 0.01) от числа Рейнольдса.
— гладкая поверхность:-------------шероховатая поверх носи.; > 10 1 (по
данным В. В. Др Аленкова и Г. И. Кансвскшс 125]).
Гидродинамически гладкие лопасти. В условиях, ’когда лопасти являются гидродинамически гладкими, переход от модельных чисел Рейнольдса к натурным фактически всегда приводит к увеличению коэффициента подъем noli силы н уменьшению коэффициента сопротивления винтовых профилей (см. рнс. 111.31). След сгвием этого является возрастание коэффициента упора прн относительно меньшем изменении коэффициента момента. Такая картина наблюдается вследствие того, что при росте числа Рейнольдса увеличивается как циркуляция скорости около лопа-f гей, так п величина 1 — е tg входящая в выражение для коэффициента упора В<- формулу (11.81) § 8]. Прн этом величина I + е etg Р; уменьшается, что компенсирует увеличение циркуляции, и коэффициент момента изменяется незначительно [см формулу (11.82) § 8|. Величину масштабного эффекта можно оценить "по результатам поверочных расчетов гребных винтов с контуром и максимальной [толщиной лопастей, характерных для голландской серии В. Эти результаты приведены в виде зависимостей величин I — KylKri и I — Чо-Чо/ от числа Рейнольдса винта Re и Кт- Здесь число Рейнольдса для гребного винта вычисляется по формуле (П1.9), а символ «/г соответствует невязкой жидкости. Соответствующие аппроксимирующие зависимости имеют вид [26]
l._^L = 0>72Ue-°'6S8Kr Rep-0,160 А 77
1----— = 1,550е-7КГ Re.,-0,102
’Io/
(III.16)
oil
1 —0.7211Г°-Г’ЮХГ КегГС-,6С Аг/
1 - -212- = 2,70.’ C-0K’’ Rep-0*"3 По/
1 - - ОЛЯОс-1,575^ Re,,-®’151
лг/
1 Ло=1№-5-'»АгКер-0.ИЗ
Т|0/
(III 17)
(III.IS)
Приведенные зависимости справедливы в следующих диапазонах параметров: 0,05 %.
Кт 0,35; 3- 10s < Rep < 3-10’; 0,55 < ЛЕ/А0 < 0.Я5.
Последовательность расчета масштабного эффекта с использованием приведенных материалов следующая. Пусть известны характерно 1икн Крм), Kq11, J и число RCpM* для модели гребною винта. Требуется определить гидродинамические характеристики для натурного числа Рейнольдса Rej,s>. Вначале по известным величинам К^ и рассчитываются по формулам(II1.16), (II1.17), (111.18)(1— Кт/Кц) (И1
и (1 — т)с/Ча/) <м)> а затем характеристики в невязкой жидкости
Rtp
Далее по величинам 0,5 (К(7м) 4- КТ1) и Re^5’ находятся зиаченш (1 — Kr/Krl) ($) •• (1 ~ По/ОоГ) (5) кер кеР •
Гидродинамические характеристики при натурном числе Рейнольдса определяются из выражений:
Значения, полученные по формулам (111.20), можно в дальнейшем уточнить, используя вместо 0,5 (Л'|м) + К77) величину К^, однако величина вносимой при этом поправки обычно очень мала, и ею можно пренебречь.
Масштабный аффект при проявлении шероховатости поверхности лопастей Величина масштабного эффекта в этом случае существенно зависит от типа и высот бугорков шероховатости. В частности, по данным Ф. М. Кацмана, эксплуатационная шероховатость винтов, вызванная эрозионно-коррозионными разрушениями, близка по типу к зернистой шероховатости и может быть охарактеризована след} ющимн величинами среднеарифметической высоты бугорков: Ар = 3 + 3(U Н 4- 8,5х (х — I) 4- 0,1 Wx (х — I) (* + I) Для латуни; Ар == 3 4 20*4- 3,5х (*
512
L- t) + 0,667л (х — I) (х 4 I) для бронзы; А,-, — 90-| 160ж + 95х (х4 1)4-4 26,7 с' (л— I) (г 4 I) для углеродисто» стал»; А> = 2,7x4 3,5 для нержавеюще» стал», где х — /,'6; / время эксплуатации, мес.
Масштабный эффект для гребных винтов с шероховатым» лопастям» рассчшы дается в два этапа. Сначала определяется масштабный эффект в предположен»»
о том, что лопает» гидродинамически гладкие Этот расчет осуществляется с использованном маге риалов предыдущего пункта. Затем производится поверочный расчет
Рис. 111.32. Изменение коэффициентов упора к момента гребного винта танкера типа «Великий Октябрь^ от высоты бугорков эквивалентной зернис ой шероховатости.
Ряс. 111.33. Масштабный эффект гидродинамических характеристик гребного винта на серии В4-55, P/D = 1,0.
--------Rep •= 2,5-10* (модель);--------Rep = 8.1.10“ (натура, гидродн таыически гладкие лопасти);—•---------------------Rep = 8.4.10“, k^/Ь = 10“’ (натура, шероховаты лопасти).
гребного винта при натурном числе Рейнольдса в режиме установившегося нроявле-ния шероховатости. Прн этом считается, что коэффициент сопротивления профилей изменяется па величину
ДСХ = 2 (1 4 26) ДСд, (III.21)
где ДО = Сл> - CFu, CFr =( 1,89 + 1,62 1g -£-\-2,5; cFa = .
К X А-с/ (lg Re)-®8
Таблица Ill 12 Результаты расчета ходкости судна при учете масштабного эффекта <арактеристик винта и попутного потока
Масштабный эффект винта
Мп ы
ио КЗ
—
1 Не у ен,
I <>.32
[Учтен по методике МКОБ, I К 0,305
нс учтен
!__»==
v,~ 18,93 уз
PiD-0,914
if5= 18,84 уз
PiD= 0,955
учтен
( ндродннами-чески гладкие лопасти)
Vj= 19.12 уз />/£>=0,942
ts -19,03 уз
PiD 0,954
учтен, V = Ю-
us=19,0 уз />/£>=0,938
и3= 18,91 уз
P/D~ 0,950
учтен (шероховатые лопасти fio МКОБ [97])
vs— 18,98 уз
P/D “0,948
us= 18,89 уз
Р/£>=0,959
17
П/р Я. И. Войткуиского, т. |
513
Коэффициент подъемной силы при проявлении шероховатости уменьшается (см рнс. 111.31) по сравнению с таковым в случае гидродинамически гладкого профиля. Согласно гипотезе Ф М. Кацмана и А. Ф. Пустошного [351, это уменьшение пропорционально увеличению сопротивления трения и равно
ДСГ = - [2пп (1 + 2d) (а + а0) -| 26СЛ (1 4- 26) C,,J ACf, (III.22)
где а 8,4; b — 14 — эмпирические коэффициенты; а—кромочный угол атаки; Су, «о — соответственно коэффициент подъемной силы и угол нулевой подъемной силы при натурном числе Рейнольдса и гидродинамически гладкой поверхности профиля
На рнс. Ш.32 приведен пример расчета изменения коэффициентов упора и мо мента натурного винта танкера при проявлении шероховатости, а иа рис. Ш.ЗЗ полный масштабный эффект для гидродинамически гладкой и шероховатой поверх костей гребного винта.
В табл. Ш 12 приведены результаты расчетов ходкости сухогрузного суд! а водоизмещением 22 000 т (D = 5,8 м) при учете масштабного эффекта различными методами. Анализ этих данных показывает, что в случае i ндродниамически гладких лопастей учет масштабного эффекта характеристик винта приводит к некоторому увеличению достижимой скорости судна (или появлению запаса по мощности установки) при практически неизменном шаговом отношении. В случае проявления шероховатости лопасти величина прироста скорости уменьшается, а шаговое отношение гребного винта уменьшается.
Методика МКОБ учета масштабного эффекта является очень приближенной ввиду того, что она не включает влияние шероховатости на коэффициент подъемной силы Учет масштабного эффекта гидродинамических характерце гик гребных виг гон рекомендуется производить при расчетах ходкости совместно с учетом масштабно! а эффекта попутного потока (см. § 16) п с использованием аффинного закона вязкостного сопротивления.
Глава IV
взаимодействие гребного винта
С КОРПУСОМ СУДНА
§ 13 ОСНОВНЫЕ понятия
В условиях эксплуатации судна гребной втшт работает вблизи корпуса. Натекающий на пего поток возмущен корпусом, поэтому скорости в месте расположения гребного винта отличаются от скорости движения судна Местные скорое!!! в пределах площади диска винта могут отличаться по величине и по направлен!! ’> т. с. поле скоростей неоднородно. Распределение скоростей вблизи корпуса обусловлено как потенциальными, так и вязкостными свойствами жидкости. Роль каждого свойства в формировании поля скоростей в диске гребного винта завис и от типа судна, расположения движителя относительно корпуса, числа Фруда и числа РеЛнолъдса. Вязкостное течение в мнете расположения гребного винта одиовалын >‘» судна формируется из пространственного пограничного слоя в верхней части кормовой оконечности и участка пространственного гидродинамического следа в пнж! ей части ее. В области вязкостного потока могут существовать дискретные внхр»-образующиеся в результате отрыва пространственного пограничного слоя в районе скулы в месте выхода линий тока из-под днища на бортовую поверхность (рнс. I\ I
В теории гребного винта местные условия работы движителя обычно хар <ь-теризуют степенью отклонения местной скорости v(r, 0) от скорости движе! и” судна с. Разнос ы>
Дэ = t> —ч(г, б), (1\ >
514
где ё (г, 0) t?r (г, 0)-|-е(, (г. 0)-| vr(r, 0)—местная скорость, называемая скоростью попутного потока. В тех случаях, когда вызванная скорость обусловлена только обтеканием корпуса и не учитывается действие движителя, попутный поток называется номинальным.
Проекции скорости попутного потока па координатные осн цилиндрической системы координат характеризуют местные значения осевой At1,., окружной (тангенциальной) At'o и радиальной Ate скоростей попутного потока. Продольная ось этой системы координат совпадает с осью гребного винта.
Безразмерные коэффициенты
Ли0
(IV.2)
называются соотвеюшенно коэффициентами номинального осевого, окружного (тангенциального) н радиального нону того потока.
Рис. IV. 1. Ноле осевых (а) и поперечных (б) скоростей номинального потока в месте расположения гребного винта модели танкера (6 = 0,73).
В практических расчетах основное внимание уделяется осевому попутному потоку, влияние которого на характеристики гребного винта наиболее существенно.
Поскольку попутный поток обусловлен как потенциальным течением, так и вязкостью, аксиальную составляющую попутного потока удобно представить как сумму двух слагаемых:
Дгя = о — vx (у) == (п — + (с-6 — vx (^)] = Асхр + Ли,/, (1 V.3)
где t'j, (у) скорости соответственно па границе пограничного слоя и рассто-я |ня чу» от обшивки судна или диаметральной плоскости судна, А?Х), AvX/.— потенциальная и вязкостная составляющие скорости попутного потока.
Величины коэффициентов этих составляющих попутного потока записываются в виде
Т1-. V ~ С|> v ~ —
^ХР о V ’ хХ- V
(IV.4)
[ Разделение попутного потока на потенциальную н вязкостную составляющие З’Добно при исследовании влияния числа Рейнольдса па попутный поток. Несоответствие попутных потоков модели и судна из-за невыполнения в эксперименте Закона подобия Рейнольдса носит название масштабного эффекта. Совершено гвова-
17“ 515
пир знаний о работе гребного винта в неоднородном потоке делает проблему масппаб-ного эффекта нее более актуальной.
Соотношения (IV.4) для потенциального попутного потока и попутного потока трения справедливы, если гидродинамическое давление Др — р — рп постоянно поперек вязкостного следа или пограничного слоя. Если же давление изменяется поперек вязкостного следа, удобнее оперировать со скоростью в условном потенциальном потоке, давление в котором равно дав пению в реальной жидкости. Эта скорость определяется нт соотношения
Рнс. IV.2. Координатное устройство с многоточечным зондом для измерения скоростей и давлений номинального и эффективного потоков, разработанное под руководством IO. П. Оглеснова: а — размещение координатного устройства на модели; б — схема кольцевого многоточечного зондв.
Тогда уравнение (IV.4) можно переписать в виде
= 1 - Vp <</)•• Ч’х/ = (") ~ • О'’ г'>
Потенциальную составляющую коэффициента попутного потока также можно представить в виде суммы двух составляющих, одна из которых представляет собой попутный поток при отсутствии волнообразования, а вторая обусловлена водно вымн явлениями н зависит от числа Фруда
Фх/( = -I txpO'O- (IV 7)
Волновая составляющая потенциального попутного потока имеет значение лишь для быстроходных судов. Для определения величины номинального попутного ш тока измеряются скорости в месте расположения гребного винта. Измерения ирон водятся с помощью многоточечных зондов (рис. IV.2), позволяющих рассчитать ве тра пространственные составляющие вектора скорости. Непосредственно измеряют е1 давления в потоке, н по ним рассчитываются компоненты скорости. В зависимости от типа применяемых координатных устройств, обеспечивающих круговое перемещение зонда па заданном радиусе вокруг осн вала, могут либо непосредствен И'1 определяться составляющие скорости t)x, т'ц н vr, либо предварительно определяться составляющие скорости в прямоугольной системе координат vv, которые saieM пересчитываются иа цилиндрическую систему координат. По полученным и 516
Ким образом составляющим скорости рассчитываются местные значения коэффициентов попутного потока. При проведении расчетов ходкости наряду с местными значениями коэффициентов аксиального попутного потока i|\ (г, 0) необходимы [коэффициенты попутного потока, осредиенные по окружности заданного радиуса
(гj и диску гребного винта фг
I Эти величины находят с помощью следующих соотношений
(IV 8)
Гребной винт, работающий за корпусом судна, увеличивает скорость обтекания в районе кормовой оконечности и соответственно вызывает понижение давления на поверхности корпуса Эго приводит к появлению дополнительной силы сопротивления корпуса и перестроению исходною поля скоростей в месте расположения гребного винта.
К Поле скоростей, сформировавшееся прн работающем винте, называется эффективным.
Средний'по диску ’ коэффициент эффективного попутного потока определяют по данным самоходных испытаний через суммарные характеристики гребного винта. В отечественной практике его обычно называют расчетным попутным потоком. Значения эффективного (расчетного) попутного потока VT зависят нс [только от формы корпуса, ио н от нагрузки винта.
Дополнительное сопротивление корпуса судна, обусловленное работой движителя^ называется силой засасывания. Сила засасывания также включает две составляющие — трения (из-за увеличения скоростей обтекания в корме) н давления (из-за умет мнения давления на корпусе) Составляющая трения обычно мала но сравнению с составляющей давления, н ею можно пренебречь
Если обозначить через Т упор гребного винта и через 77 полезную тягу, равную буксировочному сопротивлению корпуса R~Tj_, то ситу засасывания можно представить в следующем виде.
\Т-Т—Те- (1V.9)
Для буксирующего судна
7£=Z+P, (IV 10)
где Z — тяга на гаке.
Безразмерный коэффициент !, равный отношению сипы засасывания к упору,
t=(T — Ti.)!T (IV 11)
называется коэффициентом засасывания. Отсюда следует другое выражение для полезной тяги
[ Те=Т(1—/). (IV. 12)
I Величина коэффициента засасывания, также как и коэффициента эффективного попутного потока, зависит от формы кормовой оконечности корпуса, расположении Гребного винта относительно корпуса и от нагрузки гребного винта.
Д Коэффициенты эфтфективи го попутного потока №]• и засасывания I называются коэффициентами взаимодействия гребного винта с корпусом судна. Величины этих коэффициентов связаны друг с другом.
517
В leupiui гребного винта для случая iioietimiri.ibiioro об|екаипя корпуса п движителя получено следующее соотношение между эффективным потенциальным попутным потоком в коэффициентом засасывания:
2 + -^’ v
(iv |;я
где к’гэд — осевая вызванная скорость движителя на бесконечности.
Связь между коэффициентами эф'|хкт явного н номинального попутного потоков в невязкой жидкости определяется уравнением
. в .V J
*>=Чч, + -27-'о.
(IV. 14)
где /и — значение коэффициента засасывания па швартовах. Таким образом,
Фхр-| tn(wrtx.'e)
I (iox <»/2и) '
(IV.Ij)
Пропульсивный коэффициент комплекса может быть записан в виде
Т pv
11 2.T7iQu ’
В результат взаимодействия движителя и корпуса пропульсивный коэффициент не равен КПД изолированного винта
т]у= TvAPnnQ. (IV. Ий
Связь между КПД винта и пропульсивным коэффициентом заппсывашся в виде
где j = QB/Q — коэффициент влияния неравномерности потока иа крутящий мо-1 — /
мент. Отношение -л---ттэ— = называется коэффициентом влияния корпуса.
1 — и у 11
Анализ выражения пропульсивного коэффициента показывает, что увеличение коэффициента засасывания всегда ведет к снижению эффективности комплекса.
Увеличение попутного потока может благоприятно сказываться на коэффи цнеите влияния корпуса, по сопровождается снижением КПД винта в результате
роста нагрузки движителя.
Из соотношения .между коэффициентами потенциального попутного потока и засасывания (IV. 15) видно, что нельзя добиться повышения пропульсивного коэффициента увеличением потенциальной составляющей попутного потока. Реальный выигрыш может быть получен только путем использования попутного потока трепня, поскольку движитель, расположенный в следе за корпусом на большом расстоянии от пего, практически не влияет на перераспределение давления в кормовой оконечности судна н не приводит к появлению силы засасывания.
§ 14. ЭКСПЕРИМЕНТАЛЬНО!: ОПРЕДЕЛЕНИЕ КОЭФФИЦИЕНТОВ ВЗАИМОДЕЙСТВИЯ ГРЕБНОГО ВИНТА С КОРПУСОМ СУДНА
Трудности гидродинамического и математического характера исключают в ы-стоящее время возможность точного определения коэффициентов взаимодейшвия аналитическим путем. Практические способы количественной оценки пролульспв пых качеств судна основываются иа результатах модельного эксперимента, проводимого в опытовых бассейнах.
518
Комплекс испытаний модели в опытовом бассейне включает буксировочные испытания, испытания винта в «свободной воде» и самоходные испытания.
В процессе буксировочных испытаний измеряется сопротивление модели /? л зависимости от ее скорости, в результате испытаний винта в «свободной воде» строятся зависимости /\'г н Л'<? от поступи J. На основе самоходных испытаний полечают зависимости коэффициентов К'тп н Kqn винта за корпусом от кажущейся поступи Jv, а также величину силы Z взаимодействия между моделью и буксировочной тележкой.
Результаты этих измерений позволяют определить характеристики взаимодействия винта с корпусом IF, t. iq. которые служат исходными данными в расчетах ходкости и позволяют определить мощность, потребную для обеспечения движения судия с заданной скоростью.
Рт> =
Ro
dv.1«)
Коэффициент попутного потока определяют путем сопоставления поступи впита в свободной воде н за корпусом при равных значениях коэффициентов Кт и Kq'-
v ~v. j„
\Vr . ------1. - ) _ . (IV.19)
и J
В отечественной практике попутный поток всегда определяют исходя из ра-веистна Кт = Ктп- Коэффициент засасывания I рассчитывают путем сопоставления упора Т с буксировочным сопротивлением R или сопротивления при работающем движителе с сопротивлением «голого корпуса», в зависимости от принятого метода । проведи пя испытаний
t = Т ~Те- - -Z ~ = 1 - , (I V.20)
т Т Ктв
где Kf — коэффициент полезной гиги; Z = /? -| Г+ (Г — Те) — тяга, т. е суммарная сила, воспринимаемая динамометром при проведении самоходных испытаний
В практике отечественных н зарубежных опытовых бассейнов применяют различные методы проведения самоходных испытаний |36|: континентальный, британский, «жесткой запряжки», «свободного самохода» п другие Все. они обеспечивают определение необходимых для расчетов ходкости исходных данных, однако отлп-В чаются степенью полноты получаемой информации и некоторыми деталями техники эксперимента, относящимися в основном к выбору режимов проведения испытаний.
В отечественной практике применяется, главным образом, метод «жесткой запряжки', при котором сила взаимодействия между тележкой и моделью меняется в широких пределах. Накопленный опыт проведения самоходных испытаний и результаты со11оыавн1С.<|Ы1ЫХ исследований различных экспериментальных схем ^Ииволпли уточить применявшуюся ранее методику испытаний в «жесткой запряжке», предложить более рациональное построение опыга н снижение его трудоемкости. Новая схема самоходных испытаний предусматривает сочетание одного режима «жесткой запряжки» при постоянных оборотах винтов и переменной скорости тележки (л = const) и одного режима при постоянной скорости движения модели (н = const), соответствующей спецификационной, и при переменных числах оборотов вннгов. Первый из этих режимов позволяет определить зависимость величины коэффициентов взаимодействия от числа 1т Второй режим дает возможность I Выявить характер кривых коэффициентов втаимодейсгвия, получаемых при постояи-ны числах Фруда.
1 Неоднократными экспериментами подтверждена важная для практической ^Вабиы особенность изменения кривых I — f (./) — нх эквидистантность при разлнч-ных скоростях, т е. различных значениях чисел 1т. Это позволяет определить Г Значения коэффициента / для режимов движения, нс обследованных при проведении || опыта. Использование результатов испытаний, полученных но рассмотренной схеме, ^^Впособ экстраполяции данных пл другие режимы ясны из схемы на рнс. IV.3.
519
Коэффициенты взаимодействия впита с корпусом. определенные в опытовом бассейне, до недавнего времени без корректировки принимались в расчетам ходкости судна, хотя было известно, что величина попутного потока могла и значительной степени изменяться в зависимости oi с< противления |рсиня обшивки или числа Рейнольдса
В последние годы учету влияния числа 1<е на попутный поток уделяется большое внимание. Практический метод учета масштабного эффекта IV’y рассмотрен в § 16.
Результаты имеющихся многочисленных самоходных испытании потвтхляют получить эмпирические зависимое in дтя ориентировочной оценки коэффициентов взаимодействия в зависимости от геометрических характеристик обводов корпуса. Детальная обработка этих данных с помощью ЭВМ. выполненная В М. Чумак [79| при использовании статистических методов, обеспечивает довольно хорошие про-
Рнс. 1V.3. Схема использования результатов самоходных испытаний и экстраполяция коэффициента засасывания на режимы с различными числами Фруда.
—- — эксперимент; — — — — экс граней я mi я.
гиозы искомых’ параметров. Для ручного счета можно рекомендовать более простые, но менее точные формулы, некоторые из которых приведены ниже.
Для коэффициента расчетного попутного потока одновинтовых транспортных судов может быть использована формула Шенхерра
о.и + 4л „_,-.эд + Т (-F-Т-««*)• <lv2,>
где L, В,\Г — соответственно длина, ширина и осадка судна м Е — высота гребного вала*над основной линией, м; X коэффициент вертикальной полноты; — коэффициент, равный 0,3 для судов с обычной кормой и 0,5 и 0,6 для судов с подрезанным дейдвудом; хг — угол наклона образующей лопасти, рад.
Для открытой кормы типа Хогнера полученные значения коэффициента попу г-ного потока должны быть увеличены на 10—15 %.
Японскими исследователями рекомендуется такое соотношение [36]:
(1/2,з \— о.даз
П>- /
(IV.22)
где бк — коэффициент полноты кормовой оконечности; LK — длина кормовой оконечности; со—площадь поперечного сечения мндель-шпашоута; V объемнее водоизмещение.
520
Для коэффициента попутного потока двухви itobijx судов Шенхерром рско цоидованы формулы:
при наличии выкружек гребных валов и вращении винтов наружу
Ку = 2^(1 6) 012 C0S'.’ _ о,о2;
(IV. 23)
с кронштейнами гребных валов
WT = 26' (1—6) |- 0,04. (1V.24)
В этих формулах 6 — коэффициент полноты судна; ф ц — угол наклона выкружек
К горизонту.
Для коэффициента засасывания двухвинтовых судов
С выкружками
1 = 0,25^7-1-0,14;
(IV.25)
с кронштейнами
t = 0,701Гг -|. 0,06.
(IV.26)
Для морских судов может быть кеппль-вонана также формула Э. Э. Папмеля [6G[
U’r 0,1 о: т]
3, V
--------All’r, (IV.27)
винта па коэффициент засасывания.
где tn = 1 для средних винтов, т= 2 для бортовых винтов; AW'у — поправка на влияние числа Фруда (вводится только для судов с относительной скоростью Гг > >0,2): ДГС7= О 1 (1 г — 0,2).
Для быстроходных судов с транцевой кормой, имеют ix скорости свыше 25— 30 уз (Fr > 0.354-0,40), величина коэффициента попутного потока близка к нулю
Если на судне имеются туннели, значение коэффициента засасывания, установленное па формуле (IV.26), должно быть увеличено на величину А/, которая может быть определена по графику рис. IV.4 Для быстроходных судов (Fr >0,35->0,40) I Гкоэффш пент засасывания составляет 0,10—0,12.
Обтекаемые рули, расположенные за гребными винтами, увеличивают коэффп-I циепт попутного потока и уменьшают коэффициент засасывания. Результаты нспыта- иий само 4Х моделей показали, что применение обтекаемых рулен за гребными винтами способствует увеличению пропульсивного коэ<|ч| пииепта и в большинстве I случаев делает нецелесообразным применение контри репеллеров, использующих для it тиительпой тяги энергию закручивания потока гребным винтом.
Величины расчетного попутного потока, определяемые соотношениями (IV.21), ((IV .22), (IV 27), относятся к условиям модельного эксперимента, поэтому для оценки W? в натурных условиях их необходимо откорректировать па масштабный эффект по формуле (IV.37).
§ 15 ВЛИЯНИЕ РАБОТЫ ГРЕБНОЮ ВИНТА НА ВЕЛИЧИНУ
И РАСПРГДГЛГМНЕ ПОПУТНОГО ПОТОКА
О характере обусловленного работой винта перестроения течения в кормовой ^Вэнечности судна можно судить но эпюрам (рнс. IV.5) распределения полного на. Пора /7 = цТ(г, 0)+р в сечениях перед iiickom винта. Величины напора измерялись и прн работающем винте и без него Как следует из этих эпюр, полученных для (судов различных обводов, увеличение расхода жидкости в пределах сгруи гребного ВРинт.1 более интенсивным подтеканием жидкости от внешней
1 границы вязкостного следа и уменьшением толщины спутной струи
Па одновальных судах более сильные изменения и погоне при работающем винте обычно наблюдаются в ннжисн части диска винта н меньшие — в верхней.
Результаты систематических модельных испытании, выполненные в различных опытовых бассейнах [70J. представленные на рис. IV.6, позволяю! получить общие
1 — полный напор помннального потока; 2 — полный напор эффективного потока; 3 — статическое давление в номинальном потоке.
представления о степени различия между номинальным и эффективным (расчетным) коэффициентами попутного потока судов различных назначений. Для приближенных оценок влияния работы гребного винта из коэффициент попутного потока в послед
Рнс. IV.6. Соотношение между эффективным IFг и поминальным фл. попутными потоками (но данным испытаний моделей судов раз
ЛИЧНЫХ ТИПОВ).
ине 1 оды в отечественной практике и за рубежом применяются инженерные «но собы, основанные на использовании результатов измерений номинальною п«ия скоростей и зависимостей теории гребного впита [70. 99]. Эти методы учитывают в основном вязко-цогеицнальное взаимодействие потоков корпуса и движители
522
(сужение струп перед винтом). Такой подход эквивалентен рассмотрению винта несколько большего диаметра либо некоторому поджатию исходного номинального поля в радиалы1шГ'Панрав.|е1Н1И.
Уменьшение попутного потока, обусловленное влиянием винта, обратно про порнионально корню квадратному из диаметра Согласно методу Титова — Пустошного величина эффективного попутного потока может быть вычислена по формуле
W'i = т ....-f —, (IV. 28)
। I+(®x/2h4j
где wA./2aA= | I +СГД— 1.
Результаты оценок суммарного эффективного попутно! о потока с использованием уравнения (IV 28) для танкера среднего водоизмещения согласуются с данными самоходных испытаний:
Методика Титова—Пустошного |70]...................й’г = 0.345
По данным самоходных испытаний...................IT?- = 0,350
I Геминальный попутный поток.......................фх = 0,390
При некоторых допущениях подобные методы {70, 99] применимы н для приближенной оценки окружного распределения эффективного попутного потока и в основном верно отражают тенденции в изменении характера обтекания в кормовой око! ечиостп при работе гребного впита. Однако они не позволяют учесть п оценить некоторые качественные изменения в пограничном слое корпуса, которые могут быть при работе винта: изменение циркуляции скуловых вихрей и их положения относительно корпуса судна, возможность предотвращения или уменьшения области ‘ отрыва в кор.ме при работе винта и, наоборот, возможность возникновения отрыва пограничного слоя над гребным впитом.
Па даш ом этапе изучения проблемы попутного потока определяющее значение имеет развитие экспериментальных методов. Экспериментальные методы определения суммарного коэффициента эффективного (расчетного) попутного потока путем про-ведения самоходных испытаний моделей рассмотрены в § 14. Поэтому в настоящем разделе рассмотрим лишь методы определения местных характеристик эффективно поля скоростей.
Г Сопоставление характеристик номинального н эффективного полей скоростей в фиксированной точке диска винта позволяет получить следующее соотношение.
Y~ (Ре ~ />) ~ (’Г ~ Ро) ~ “ 1’г) + *!• (1*•»)
где , ре, Ь0(., уГс — соответственно осевая скорость, полный напор перед впитом, статическое давление, тангенциальная и радиальная скорости эффективного потока, обез раз мере иные по скорости движения модели; vx.II, р, i'o, рг— аналогичные характеристики номинального потока
Уравнение (IV.29) дает наглядное физическое представление о возможных изменениях в потоке, обусловленных работой движителя в различных условиях. Например, в невязкой жидкости Utg — Н = 1,0 и перераспределение скоростей в Эффективном потоке по сравнению с номинальным должно быть связано лишь С дополнительным искривлением линий тока в кормовой оконечности из-за взацмо-I^Ictbuh винта с корпусом. Результаты теоретических расчетов [4] для осссиммс-ричного течения свидетельствуют о том, что в диапазоне нагрузок движители но Ирру Сгл б работа движителя практически не влияет на исходное иоле скоростей, а при 5 Cj-.-i 10 этим влиянием можно пренебречь при решении прикладных задач. Это свидетельствует о том. что в днапа one указанных нагрузок pt р.
ь-p, t'rc~ i'r. В первом приближении можно считать, что и в реальном потоке Kpi характеристики в эффективном и номинальном полях скоростей б едут близки Тогда различием мещду квадратами поперечных составляющих скоростей и гидродп-
523
иамичсских давлений номинального и эффективного потоков можно пренебречь и соотношение для реального течения написать в виде
/7)+с,х- (1V-30)
Из уравнения (1V.30) видно, что основные изменения поля скоростей в месте
расположения винта, связанные с работой движителя, характеризуются перераспределением полного напора в области вяз
костного течения.
Исследования влияния работы гребного винта на поле скоростей серии моделей судов различных типов, выполненные с использованием соотношения (IV.30), позволили получить представление о возможной степени изменения ноля скоростей в различных условиях. Существен пые. отличия в эффективном ноле скоростей по сравнению с номинальным отмечены в толстом, чувствительно*! к впеш-
Рис. IV.7. Сопоставление номинального (/) и эффект нового (2) полей скоростей одновальных судов: а — модель танкера среднего водоизмещения, б — 0,73; б модель танкера полных обводов, 6=0,83; в — модель рыболовного траулера.
Рнс. IV.8. Результаты измерения скоростей перед и за винтом при работающем движителе.
гл2 — осевая скорость в сечении 2—2\ Гд.| —осевая скорость в сечении / /; vx —скорость номинального потока; ы^/2 — осевая вызнанная скорость; —тангенциальная впзвннп.чя скорость; — поперечная скорость, индуцированная корпусом.
ним возмущениям, вязкостном следе танкера полных обводов (рнс. IV 7). Поле скоростей достаточно острой модели рыболовною траулера графически не и *:* пилось при работе движителя.
524
Определение эффективного ноля скоростей с использованием уравнения (IV.30) [допустимо, если работа гребного винта не вызывает качественных изменений п потоке например появления или устранения отрыва потока. 1 ели же результаты самоходных испытаний указывают на возможность таких ii3Mti>ci>iiii, целесообразен иной подход к решению задачи экепфименталыюго определения эффективного попутного потока, основанный на анализе данных измерений скоростей потока И полного напора в непосредственной близости перед винтом и за ним (сечения /—1 и 2—2 на рнс. IV.8).
Известно, что тангенциальная составляющая вызванной винтом скорости tc'o в свободной воде пропорциональна изменению полною напора прн переходе через диск гребною винта [41
pQw0 (г, 0) = //3 (г, 0) — //, (л, 0). (IV.3I)
Исследования, выполненные в работе [63], показали, что аналогичное соотношение можно получить и для впита за корпусом, если изменение тангенциальной [составляющей попутного потока корпуса Д<?о в пределах осевой протяженности ивижителя или между сечениями, в которых производятся измерения, пренебрежимо мало
Р (Qr I 2t,e) ~ 1{2 (г> — ;/1 ('• °)- (IV.32)
Результаты теоретических исследований вызванных винтом скоростей и данные опытов позволяют аппроксимировать изменение осевой составляющей вызванной скорости wx (х) в пределах осевою размера движителя линейной зависимостью. Можно предполагать, что изменение осевой составляющей эффективною попутного 1 поток в этой области незначительно и также подчиняется линейному закону. Тогда для определения искомой эффективной скорости в сечении хи, где выполняется условие
«’х(*0)=-~Ч (IV 33)
получим следующую систему уравнении:
_ ^хе (*о) + (к'х оо/2) SP/- Иг-да +770 ’
2
“У Г
•UP/ ’
(IV.34)
(IV. 35)
1'х (*0) — с’хе (*о) I -----“—Дх---------- -V1-!- (IV -36)
(где Р; — индуктивный угол; Дх — расстояние между сечениями 1—1 и 2—2\ Axt = = х0 — Aj — отстояние сечения 1—1 от расчетной точки.
Обычно в теории гребною винта предполагается, что указанное выше условие выполняется в плоскости диска гребного внита, соответствующей середине сечения Лопасти, а прн откидке лопастей — середине сечения лопасти на относительном радиусе f = 0,7. Однако результаты расчетов изменения аксиальной вызванной скорости о.'х (х) движителя с конечным осевым размером показывают, что в действительности сечение х0 должно располагаться вверх по потоку от плоскости диска [Гребного винта. Этот вывод подтверждается и результатами экспериментального Иссл довапня поля скоростей вблизи винта, работающего в свободной воле. С учетом Резу штатов этих исследований более обоснованно принять расчетную точку, соответствующую условию (IV.33), па входящей кромке лопасти. Известен ряд других (подходов к решению задачи об определении эффективного поля скоростей [G3, 107]. 1*1 одной из ранних работ в этом направлении [107], изложен практический метод определения эффективного ноля скоростей путем измерения скоростей потока перед Гребным винтом в «свободной воде* и за корпусом. Прп анализе результатов принята гипотеза квазпстацноиариости.
I 525
Рис. IV 9. Влияние масштабного эффекта и работы гребного винта иа коэффициенты гармоник поля скоростей.
1 модель, номинальное тюле; 2 — судно, нпммнллыюе поле (учет влияпич мясштпбиогп эффекта». 3 - модель, •рффсктннпос поле.
526
Различие между ПОМНИ.1.1Ы1ЫМ II эфф*КТП1Н1ЫМ нолями скоростей судов раз-.1H4HUX типов в области наиболее нагруженных сечений показано иа рнс. IV 7
Сопоставление коэффициентов разложения в ряд Фурье окружного распределения осевых екоростей номинального ноля и поля скоростей с учетом влияния Гребного винта для танкера среднего водоизмещения показано на рис. IV 9. из которого видно, что амплитуды гармоник, определяющих величины нестационарных ^гидродинамических сил и моментов, могут измениться в несколько раз. Изменение гармонического состава поля скоростей имеет достаточно сложный характер Поэтому при прогнозировании периодических сил и изучении вопросов, связанных с кавитацией, целесообразно учитывать изменение ноля скоростей, обусловленное работой движителя. Данные модельных испытаний о поле скоростей при работающем движителе необходимо далее откорректировать, внося поправку иа масштабный эфс]и.кт.
К В настоящее время в практических расчетах периодических сил, как правило, используется номинальное ноле скоростей.
§ 16. МАСШТАБНЫЙ ЭФФЕКТ ПОЛЯ СКОРОСТЕЙ
При увеличении числа Рейнольдса, соответствующем переходу от условий мо дельных испытаний к натурным область вязкостного течения около корпуса уменьшается (пограничный слон становится тоньше), а относительные скорости vx в пограничном слое и вязкостном следе увеличиваются. _ В результате этого вязкостная составляющая номинального попутного потока фХу и ее местные характеристики уменьшаются. Уменьшение среднего попутного потока при пересчете результатов модельных испытаний с достаточной для практики точностью можно связать с изменением общих потерь иа трение.
Аналогичным образом изменяется и расчетный попутный поток Согласованное решение относительно стандартной методики пересчета эффективного (расчетного) попутного потока принято иа 15-й конференции ЯКОВ (97| (Гаага 1978 г)
Конференцией рекомендована следующая формула для судов с одиовальпым расположением движителя
Су„
\ГГ(, = (( +0,04) + (ГГм - t - 0,04) . (IV.37)
Здесь п далее индекс «и» относится к натуре, а «м» к модели В значении вязкостного сопротивления Сун натурного судна учтено влияние шероховатости. Поправка 0,04 в формуле (IV.37) учитывает усредненное влияние руля за гребным винтом на по-| путный поток.
Ьо.тее сложной, не имеющей пока общепризнанного решения задачей является прогнозирование местных характеристик поля скоростей в месте расположения гребного винта. Общин подход к решению задачи удобно рассмотреть для случая номинального потока.
Установление зависимости от числа Рейнольдса местных скоростей номинального потока и разработка практических методов пересчета результатов модельных испытаний на натуру требуют более детального рассмотрения и учета особенностей пространственного потока в корме. Отсутствие падежных сравнительных данных модельных и натурных испытаний является одной из основных причин недостаточных знан 1Й о явлении масштабного эффекта и затрудняет разработку практических Методов его оценки.
Теоретической основой для пересчета номинального поля скоростей с модели Ki натуру является соотношение между сопротнилением и характеристиками потока, вытекающее из закона количества движения. Для наиболее простого случая пло-। ского речения его можно записать в виде
1
Су 2б„ J [(2й6 - I) Ас - Ас>«1 d (y/b). (I V.-38)
I 0
527
где бп = 6n/L — относительная толщина следа; рд— относительная скорость по. тенциалыюго потока на границе вязкостного следа; До — од — vxlv — относительная потеря скорости в следе; — местная скорость в следе; у — отстояние от осн следа.
Если профили потерн скорости в вязкостном следе аффинно подобны, то ид основании (IV.38) можно написать следующие структурные соотношения:
Ar(j//6„)~^,(Re); CJ-(Re); (2vft - l) ~ C^(Re). (IV.39)
Данные лабораторных исследований подтверждают выполнение условий (IV.39) для ряда частных случаев. В плоском следе далеко за телом (= 1,0) и потеря скорости Да, н относительная ширина следа 6 изменяются в зависимости от числа PWi-нольдса пропорционально С\Р. Поэтому соотношения (IV.39) используются па практике для разработки методов пересчета данных модельных испытаний на натуру.
В настоящее время не представляется возможным установление единого подхода к моделированию потока в диске гребного винта, и целесообразно рассмотреть несколько частных м делей течения Условно можно выделить следующие характерные. виды полей скоростей:
а) поле скоростей одновальпых судов умеренной полноты с V-образнымн нлц умеренно U-образиымн шпангоутами, прн обтекании которых роль скуловых вихрей невелика;
б) поле скоростей судов полных обводов (б' 0,8) с U-образиымн шпангоутами,
прн обтекании которых образуются интенсивные скуловые вихри;
в) поле скоростей судов очень полных обводов с кормовым отрывом;
г) поле скоростей быстроходных двухвальпых контейнерных судов, у которых вязкостная составляющая попутного потока представляет комбинацию потока в пограничном слое корпуса н вязкостного следа за выступающими частями.
Модель «а». Результаты расчетов пространственного пограничного слоя судов {20] приводят к заключению, что при умеренных вторичных*потоках закономерности изменения от числа Re. характеристик осевого течения не слишком отличаются от полученных для двухмерного пограничного слоя. Поэтому прн разработке инженерных методов определения поля осевых скоростей в верхней частн{кормовой оконечности судна (сечение / -/ на рис. IV.I) без больших погрешностей могут бить применены схемы пересчета характеристик слоя, разработанные применительно к плоскому течению и основанные иа использовании законов подобия в пристеночной и внешней областях слоя. Для моделирования потока в области гидродинамического следа с некоторыми допущениями можно воспользоваться решением для плоского следа (см. § 18 первого раздела).
Практический метод пересчета, основанный на соотношениях (IV 39) и допущениях о пренебрежимо мялом влиянии изменения потенциальной составляющей при безотрывном обтекании корпуса предложен в [65]. Считается малым и влияние иа осевой поток изменения с возрастанием числа Re поперечной составом ощей ск< рости Исходные экспериментальные данные для модели определяются в декартовой системе координат в виде зависимостей распределения скорости или попутного потока от поперечной координаты у t/iL при различных постоянных значениях вертикальной координаты г ziL. В сходственных горизонтальных сечениях слет получаем
'I’-Vh = ’h/м [77“]' ' “Р" = const; (IV 1"'
*„ = Г-^2-]'72. (IV 11)
L Wom J
где Cf0 — коэффициент сопротивления трения эквивалентной пластины.
Такая схема моделирования позволяет учесть и изменение толщины следа б. и формы безразмерного профиля т>*/»в- Па приведенных па рнс. IV. 1 изотах ття модели танкера среднего водоизмещения (S' - 0.73) видно, что верхняя часть диска гребного винта располагается в области пограничного слоя корпуса. В святи с этт1'1 была предпринята попытка одновременно оценить изменение скоростей потока " только в области следа, по и в области пограничного слоя с использованием прнб ь "
528
жеинон методики |36], обеспечивающей достаточно хорошее согласование с данными натурных опытов и расчетов пространственного пограничного слоя. Результаты уточненного пересчета для данной модели в пределах диска гребного впита практически совпадают. Отклонения скорости до 3—4 % v наблюдаются лишь вблизи внешней границы области вязкостного потока в верхних ее сечениях (за пределами [диска вннга), однако в некоторых случаях, например при выраженных V-образных шпангоутах, пограничны.! слон корпуса может играть большую роль в 4юр.мнрова-пнн потока, и влияние его должно дополи iге.тьно учитываться. Аналогичные пн-^женерныс методики, основанные на более общих допущениях относительно законо-
японской
зу.н.тагы пересчета поля скоростей по отечественной и которых характерных сечении следи рассмотренной выше модели
методнке для пе-Как видно, япон-Икая’ методика приводит к более сильному сжатию гидродинамического следа прн пер оде к iатурс и не учитывает изменения дефекта скорости в диаметральной I плоскости судна Однако, за исключением ограниченных областей в районе 0“ О ^М|КОС, окружное распределение осевых скоростей vx (г. О), рассчитанное по обеим мет । ам. отличается незначительно (рнс. IV. 11). Существенные расхождения в районе (Г 0 и ИЗО*, обусловленные причинами, о которых говорилось выше, мог вызывать заметное изменение в гармоинческох оставе поля и особенно в ам-плнтхдах четных гармоник.
I | Модель «б». Образование скуловых вихрей с осями, ориентированными в направлении основного течения, в некоторых случаях, в особенности прн обте-^^ihh судов с И-образиыми кормовыми шпангоутами, может оказывать заметное влияние на структуру потока. Возникновение скуловых вихрен вызывает не только перераспределен ie тангенциальных скоростей в месте р гсноложеиия гребного винта, и изменение неоднородности осевого попутного потока. Всю область течения при ^Вничин скуловых вихрей можно и драздслип. mi три час и: об < сть турбх. ептног Вара, область влияния вихрен на пограничный слон корпуса и область невозыу-
Че п ли вихрем те шипя в н<л раиичном слое или следе (pin IV 12). Закономерное hi ^^менеиия относшельных скоростей и каждой области при переходе от модели к иа-ВСре различны.
529
Резулы<пи сравним.,naiux модельных и натурных uciiuiaiiiifi. предпринятых японскими исследователями 1631, Подтверждают существование скуловых вихрей и в натурных условиях, однако полученных материалов еще недостаточно для су ждепия о количественной стороне явления. Можно лишь отметить, что вызванные вихрями возмещения при обтекании судна менее выражены. В связи с этим, по видимому, оправдана попытка применения и в этом случае, т. е при наличии развитых скуловых вихрей, более общей модели (модели «а») или, но крайней мерс, установления пределов применимости этой модели потока. Определяющее значение здесь имеют сравнительные данные, полученные па модели и в натурных условиях.
Модель «в». Известные попытки расчетных и экспериментальных оценок
Рнс. IV II. Результаты оценки масштабного эффекта номинального поля скоростей.
I — модель. Re 1,3 10’: 2 — судно. Не 1,6 ТО1 (пп формулам (IV 10), (IV.41)]; 3 суди*», Йе -- 1,5-10* (по методу 110113
Рис. IV. 12. Поле скоростей в пограничном слое при наличии дискретных вихрей: а — липни постоянной скорости.
1 — область испозммкеиного течения; 2 — область влиянии вихря на пограничном ел* : 3 — ядро вихря;
б распределение скоростей в ядре.
------ эксперимент; — — — теория;
в — распределение циркуляции в ядре
------ — скулового вихри, Г 1,1 м'.'с; — — — вихри п свободном потоке, I 0,07 м
масштабного эффекта явления пространственного отрыва еще не позволяют сделав определенных выводов даже о качественной стороне явления и разработать хотя С -г самую приближенную схему опенки изменения в зависимости от числа Re не тольэт распределения скоростей но и средней величины попутного потока.
Ч о д е л ь «г» 11еоднородиость потока в месте расположения гребного ви двухпольного судна обусловлена, главным образом, пограничным слоем корпу н и дополнительной потерей скорости в следе за выступающими частями
фг LzJL' + | а = t + ф2 + Афж/>
' и v Vf. v Vf. V р л' '
(IV Г’
где t'x горичлнтп.п.ная составляющая местной скорости в исследуемой гочне потока. Щк горизонтальная составляющая скорости в пограничном слое «голого корпуса» в исследуемой точке потока; фл;, — потенциальный попутный поток; фх/ ’ вязкостный попутный поток обусловленный влиянием пограничного слоя корне '»
530
— надбавка, учитывающая дополнительные потери скорости в следе за выступающими частями.
Как показывают опыты, в области наиболее нагруженных сечений лопастей гребного винта, удаленных от ступицы, взаимодействие между пограничным слоем и следом за обтекателем с достаточной для практики точностью можно считать малым; пренебрежимо мало или вовсе отсутствхст и влияние подпорных вихрен в месте притыкания обтекателя, поскольку обычно обеспечивается плавный переход обтекателя к корпусу. Это позволяет раздельно исследовать моделирование каждой составляющей вязкостного попутного потока г)Л/ (Re) и Аф.г/ (Re), а при определении суммарного масштабного эффекта — применить метод суперпозиций. Для пересчетп попутного потока корпуса фЛу используется методика [36[ Ио данным визуализации течения, с достаточной для практики точностью можно считать, что линии тока па обтекателе располагаются эквидистантно поверхности корпуса, н при оценке масштабного эф<|ккта может быть принята гипотеза плоских сечений. Поэтому при моделировании составляющей понушого потока Афт/, обусловленной обтеканием выступающих частей, можно воспользоваться зависимостями теории свободной турбулентности (IV.40) u (IV.41).
Т Расчетные оценки показывают [ЮС]. что изменение степени неоднородности потока при переходе от модели к судну почти в равной степени обусловлено масштабным эффектом пограничного слоя корпуса и следа за обтекателем гребного вала. Средний по окружности осевой попутный поток уменьшается примерно вдвое.
1 Рассмотренные решения еще не обеспечивают во всех случаях надежного количественного определения ноля скоростей в месте расположения гребного винта судна, однако они позволяют уже сегодня получить более точные данные о потоке по сравнению с непосредственными результатами модельных испытаний.
I Для оценки масштабного эт]х|скга эффективного поля скоростей можно использовать соотношения (IV.40) и (IV.41), полученные для номинального потока. Вместе с тем следует иметь в виду, что результаты лабораторных исследований, выполненных в последнее время 192], указывают на то, что закономерности изменения эффективного поля скоростей в зависимости от числа Рейнольдса могут несколько отличаться от соответствующих зависимостей номинального потока.
§ 17. ОПТИМАЛЬНЫЙ ДВИЖИ1Р..ЧЬНЫЙ КОМПЛЕКС
КОРПУС — ДВИЖИТЕЛЬ
Проектирование гребного винта, приспособленного к распределению попутного потока за корпусом судна, следует производить с учетом условия обеспечения наибольшего значения пропульсивного коэффициента системы корпус — винт
(1V43>
[ Для этого необходимо решить задачу о гребном винте, который при работе в неоднородном поле скоростей корпуса судна обладает минимальными индуктивными потерями энергии
| Наивысший пропульсивный коэффициент комплекса корпус — движитель может бьиь достигнут при выполнении условия оптимума, накладываемого на распределение гидродинамической нагрузки вдоль радиуса гребного впита. Вид этого распределения зависит от поля скоростей жидкости около корпуса в районе рас положения движителя Оценки показывают, что ш пользование условия оптимума Для движителыюго комплекса при проектировании гребного винта приводит к выигрышу в величине пропульсивного коэффициента, составляющему примерно 2--3 % Напвыгоднейшпй движнтелытый комплекс рассмотрен в работах В. М. Лаврентьева, Л М. Басина, В М. Ивченко, С. Д. Стоянова, Лербса, Ватт Манена, оалхатта [3, 4] Ввиду большой сложности задача об оптимальном комплексе корпус — движитель решалась при упрощающих допущениях о малости нагрузки гребного винта, бесконечном числе его лопастей, осеснмметрнчттосттт следа Иорнуса судна При рассмотрении пропульсивного коэффициента это позволяет оперировать со значениями номинального попутного потока Для нахождения усло-®йя оптимума рассматривается течение на бесконечном удалении вниз по потоку ЭаЛв|1жнтельным комплексом
531
Наиболее просто задача об оптимальном комплексе решается в предположении об отсутствии вязкости жидкости. В этом случае полезная ТEfl и потребляемая впитом’ P/я мощности равны
г,.;и = ро [ »1.0D(^ + u’xno)^-«, = !•<’ [
Лю f,>
Рщ — Q/-- 2 J О** л ”Ь *D «) (^ "Ь tt'jr or) ^оо (IV.4|)
тi.i1' + “у ! (** » + о») p-s dFp-
1р
Здесь U'Xoo, K'0oo. Гте вызванные скорости и сечепне струи далеко за ко.-плексон; г'5 — скорость протекания жидкости через диск гребного впита. Миними зируя величину потребляемой мощности Рр/ при фиксированной полезной. Л. М. Басин получил, что условие оптимальности сводится к требованию о постоянстве пропульсивного коэффициента элемента движителя вдоль радиуса
и = d7>/ ।-НО _с.ж<
D/r афуй d<?/j i—Ф(0 L
(IV. 43)
Если предположить, что условие (IV.45) соблюдается при работе комплекса не только в невязкой жидкости, ио и в условиях неравномерного но радиусу реал лого попутного потока, то можно получить
« „ , (IV.4G)
>Dz */<• I — ф (г) tg 1 — ф (Г)
где т)/г — индуктивный КПД элемента гребного винта; 1g ₽ = t^/Яг; tg fi, = (оЛ I -|- wXBO'2ji(Qr—— тангенс угла индуктивной поступи. Условие оптимума (IV.46) можно переписать в виде
JEL_J__'-но 1V
tgp i ф(г) । t ’ 17
гдеф, t — средине по диску гребного винта значения коэффициентов попугного потока и засасывания.
Если воспользоваться эмпирическим соотношением Ваи-Маиеиа для одновинтовых судов
1-<(г) Г 1-ф(т) -11/4
1-* L i-ф J ’
то можно получить следующее условие для оптимального двнжительпого комплекса: Ы
tg Р/ tgp
В. М Лаврентьев, используя аналогию с оптимальным получил следующее выражение для условия
I
(IV.4-S)
11ЫМ винтом, корпусом'
изолированным i щб-оптимума винта за
tg Р/ I ( I - ф
tgP п,и-Ф(г)
строгой постановке условия оптимума для двнжителыгого комплекса
(IV #)
В более < ,______________ J___ _____J
в вязкой жидкости были получены В. М. Ивченко и С. Д. Стояновым. Имя б и 1,1 рассмотрены следующие выражения для полезной 7'д-и и потребляемой Рп двн*"" телсм мощности:
Т.н-
u1.
532
I Здесь = i> [I (л)], (г) — коэффициент попутного потока трения
далеко за комплексом, характеризующий потерю полного напора в потоке жидкости, обтекающей корпус. Условие оптимума, при котором потребляемая гребным винтом
Рис IV. 13. Условие оптимума для двнжи-тельпого комплекса за корпусом.
Рнс. IV 14 Результаты расчета ipeOnoro винта, спроектированного на условие оптимума.
мощность Р[) минимальна (прн постоянной полезной мощности), получено В. М. Ивченко в виде соотношения, справедливого на больших расстояниях вниз по потоку: vl со + «, + и’п no tg 0,/ = С = const. (I V.50)
Обоз (ачекня ясны из рнс. IV 13.
Отметим, что пропульсивный коэффициент элемента оптимального движителя
„ - V Sr ~~ (Ю0 °°/2) —______________________________!____________
ОГ v | ЙГ ’ , , 4
vf a» 2 1-----~2------b const!
(IV 51)
[няется вдоль радиуса.
Из плана скоростей оптимального движителя (см. рнс. IV. 13) можно получить ртощие выражения для вызванных скоростей и тангенса угла пидук!явной рСту in в диске гребного винта:
u’(|t» = w’*siiiP//cosP;/; к>д.ч m*cos-pH;
4-^-- С-СЛОЯ).
„ 1 — ^'яфф + x/2v)
tgp, =
(IV.52)
ЛГ сс 9
77
И — Ko3i|x]>uiuieiiT эффективного попутного потока.
533
Константу С назначают таким образом, чтобы обеспечить получение заданного коэффициента упора гребного винта В первом приближении можно принять
(,v-53)
где ?,/f.— индуктивная поступь, определяемая по диаграммам В. М. Лаврентьева (см. § 9 гл. 11} или по аппроксимирующим их зависимостям прн заданных Кт и J
На рнс. IV. 11 приведен пример’расчета гребного винта, спроектированного на условие оптимума (IV 50) и иа условие Бетца, справедливое для однородного потока (на средний подпеку попутный поток). Видно, что внутренние сечения лопасти гребного винта, спроектированного иа условие (1V.50). нагружены в больш н степени, чем у оптимального изолированного впита. Это обусловлено тем, что гребной винт, приспособленный к попутному потоку, в максимальной степени использует энергию вязкостного следа корпуса судна.
В табл. IV I сведены условия оптимума для комплекса винт — корпус, полученные различными авторами. Отмстим, что для постоянного вдоль радиуса распределения попутного потока вес они переходят в условие Бетца
Таблица IV.1. Условия оптимума для движигслыкно комплекса випт корпус
Автор Условие оптимума Пропульсивный коэффи -1Ц1СНТ элемента движителя вдоль радиуса Примечание
Бетц Л. М. Басни |(|юр мела (IV.45)] Ван Манен [формула (IV.-18)) tgp, 1 , i = = const tg р/ 1 I - t (г) I - ф 11е нзмс j 1ля однородно- | о потока
tgp 1 - У (г) 1-1 *g Р/ _ I г 1 — ф I • . няется 1 (олучеиы в предположении об отсутствии ВЯЗКОСТНОГО следа корпуса судна Z учетом вязкост torn следа кор riyc-i
’S Р ’1; L । - Ф (0 ।
В. М. Лаврентьев [формула (IV -19) | В М Ивченко [формула (IV.50)| tg Р, I ( I - ф . ig Р 'I, U — Ф (о v 11 - (г)! -1- -I- + Ь’Ооо 'g Рг/ CGIlst Поменяется
§ 1R ВИХРЕВАЯ ТЕОРИЯ ГРЕБНОГО ВИНТА, РАБОТАЮЩЕГО
В НЕОДНОРОДНОМ НО ОКРУЖНОЕ ГН ПОТОКЕ
Современные методы расчетов гребного вннга, работающего в неоднородном 1« окружности стационарном потоке, используют чаще всего схему вихревой несущей поверхности и следующие предположения: набегающий поток задан, его неоднородность и завихренность малы, нагрузка гребного винта «умеренная» (см. § 5); ло» 1 сто гребного типа гонкие.
534
11|)>11шм.1К>г также, что ноле скоростей v ипешпего потока злипент от двух координат системы ('. г„ н Эю пол* задают в виде мп:|сим<хтей от г„ гармоник по углу (\> всех трех составляющих:
е.х<> (ffl. Reel Л1 У, GiixC m_ <j t/wH„.
t'/o (fo. 1*в) = Reel 4 ZwrO,. r
I’Ov ('"о- °o) . Reel ЛГ У, Gi/ljC frt=-0 *
(IV.54)
где Reel — операция взятия веществен ioii части, г,„ = л,„ - г7>,„.
Во внешнее поле удобно включить переносную скорость сечения лопасти и принять: rttv = — I 4- я], (>0), еог = 0, бВ = —rAz.
Задача поверочного расчета гребного винта в неоднородном поле скоростей состоит в определении интенсивности распределенной по лопасти нагрузки р* —р~, а также сил и моментов, действующих па одну лопасть и винт в целом. Из-за не-
однородности потока искомые величины будут периодическими функциями времени или угла поворота лопасти Граничное условие иепротекаиия линеаризуют и выполняют на опорной поверхности с относительным тагом ?./. Из-за линейности это
условие распадается на 2.W + I условие для гармоник скоростей по углу поворота лопасти Ог:
Чн"/ + %''с °. m О. -М.
(I V.55)
где а),„ — вектор комплексной гармоники по 0;, вызванной скорости; vr„ — то же внешнего поля
iym (г. (’) == (c„,rcos 0 — cm0 sin 0) е~,т0; i’zm(r, 0) (с„|гsin0 + c„,pcos0)"”0; .
(I\ 56)
Лр nc — единичные векторы нормалей к опорной и срединной поверхностям.
При рассматриваемом нестационарном обтекании лопастей гребного винта вихревую систему образуют три вида вихрей (сравни со стационарным случаем §7): присоединенные вихри с поверхностной интенсивностью yv, каждый элемент которых перпендикулярен к средней относительной скорости t>n; свободные геликоидальные вихри yvf с осями, лежащими вдоль вектора >я свободные продольные вихри угу Й/ -L 4)
В пределах вихревой лопасти (у, Е, С .4,) суммарная интенсивность вихревого Клоя у = (уч, + y/r) ег + YivCv Вне лочастн О Вне .-1,-| А. (т е. вне вихревой лопасти и следа) у. - О Среднюю относительную скорость, с которой сносятся своб дпые вихри, принимают приближенно vp —ev (Qr/cos Ру), а шаг вихревых 1пелс : 7/ (7) « О,ЗР?2я 1 0,2/.zclx.
1 В соответствии с граничным условием иенронкапия интенсивности и представляют в иаде рядов Фурье
yb - Reel V Xbin(f, v)e"”!i; 7/ Reel (G v) (IV 57)
| nt—0 Pi G
каждую из гармоник ;v,n| определяют попвисимо от других
535
Помимо условия (IV.55) при решении задачи используют постулат Чаплыгина Жуковского в форме уьт (t = —0 = 0.
Основные уравнения задачи следуют из условия нспротекаипя. Для того, чтобы их получить, необходимо вычислить по формуле Био - Сонара скорости wm. вызванные вихревой системой. Замыкают задачу с помощью соотношений, связывающих интенсивности свободных вихрей с шпеиенвноегыо присоединенных. Эти соотги-шеиия следуют нз общих теорем о сохранении вихрен и имеют следующий вид:
V
У(гт('' v) *=“ime ' J Vfc„, (г. v2) exp {—rme 1 (v — vj)| dv., V
VL
V,^~J V2)lexP{-ime-/(v-v2)|rive +
V
+ ^77 ('• VJexp (v ~ vl)I
(IV. ’S)
Далее приведены выражения для коэффициентов Фурье скоростей, вызванных присоединенными вихрями
*<!’ «2) = - «И Ът (Л V-) Trm (Q*. <?) "W Л* dr*, (1\ .59} Л
Z -I
/ /7 'т —LWX,
—!-яа-----е >, другие величины введены в § 7;
5/
/-о
продольными свободными вихрями
м=- i f т/ив С’. '•) trm (<?•, о) //;//; </v’ ar- (iv ы))
Л, i Л,
винтовыми свободными вихрями
i J ylvn.(r' Q) fQi; dv‘dr' (IV > I)
Д, + гЧ
где
Суммарная вызв*иная скорость
-- (Q) + (Q) + (Q)-
Из приведенных соотношений следует, что искомые функции уьт должн р0 веек внутренних точках А, удовлетворять интегроднфрерсициалышм спигулярт уравнениям (IV.55) Для решения этих уравнений необходимо использовать какуЮ' либо аппроксимациюу-т приннмпющую на контуре лопасти те же значения, 11 °
536
Bvfrm* В качестве таких аппроксимаций d различных методах решения уравнений (1\ .55) принимают двойную конечную сумму вида
' к
" / о k и
(где C'mjh — комплексные числа, I‘j н (?/, — заданные функции, причем Q!l (—1) — О н при Е, I <?,-> оо н Qji>l -*0) либо дискретные вихри, а также кусочно-постоянные н.п! кусочио-лннейныс функции, задаваемые на плоских треугольных или прямоугольных элементах.
| Можно использовать н другие представления дляуьтп* позволяющие так же, как н названные, заменить задачу omcKai ни функции двух переменных задачей Ьгы пня конечного числа постоянных, определяющих аппроксимацию yim. При этом в силу линейности уравнений (IV.55) задача сводится к решению системы линейных алгебраических уравнений для каждого значения т После определения уьт(г< ') можно вычисли!ь силы и моменты, возникающие на лонас!И. При получении соответствующих формул применяется справедливая и в нестационарном луч ic формула Жуковского в «малом» [47].
Г Векторы подъемных сил и момента этих сил (см. § 8)
± J2 - V£
rH VT
л J2 ' V/- ,, .
M<n =-------J j Vft (Vv) X “/) llrllv dv df-
'H VT
(IV.62)
Л
8
где — б-ры»; векторы сил вязкостного сопротивления и момента этих сил
1 VL
[ [ Сх (vufv)‘exHrHvdv dr;
'Н VT
* J2 '
Л1<2) = IT j J с* х Н'Н',ь а'-
'tl VT
Суммарные силы и моменты. действующие па одну лопасть:
(IV.63)
Для анализа результатов, а также для удобства суммирования по числу лопастей, векторы Г и Л1 представляют в виде рядов Фурье:
± Л| л
F = Reel V] Fnie imni>;
/М=0
-U М ->
Л1 = Reel £ Мте-‘"‘°Р,
т~о
(IV.(H)
Г — рс = Мс | МГ
т 1 tn I nv tv,n\ ‘ 1П1 I 1 ипи
537
Главные векторы сил И моментов, действующих па гребной винт: Л(.
Г ~ 4 + У (К,cos тМр + 51,1 otZ,Ip):
„1-1
ли
Q ~ Уи + У, «в mZDp -| QSM sin mZOp), m I
гдеГ0 = 2Л0; Qo ZAf0; Tc„, zl‘,nZ; - ZAi;„z. П, = ZE’,z; <4 = Z</ Al, = eiitier [Al/Z|.
Хотя приведенные г[юрмулы позволяют решить в нестационарной постановке многие практические задачи, связанные с работой гребного винта в неравномерном потоке, вычислительные трудности, возникающие при решении этих задрч, щ н-водят в ряде случаев к необходимости при выполнении инженерных расчетов прибегать к упрощениям. Наиболее распространенным упрощением является рассмотрение работы винта в неоднородном потоке в кватистаиноиириой постановке.
Глава У
КАВИТАЦИЯ I РЕБНЫХ ВИНТОВ
§ 19. ФОРМЬ^ КЛВИГАЦИИ_И ЕЕ ВЛИЯНИЕ
НА ЭКСПЛУАТАЦИОННЫЕ ХАРАКТЕРИСТИКИ ГРЕБНЫХ ВИНТОВ
Гребной впит является судовой конструкцией, иа которой в 1894 г. впервые в инженерной практике столкнулись с явлением кавитации. Кавитация гребных винтов сопровождается рядом неблагоприятных последствий, приводящих к ухудшению эксплуатационных качеств винтов, а именно: нарушению соответствия механической установке, снижению КПД, появлению кавитационной эрозии, увеличению шума и вибрации н ряда других
Основным критерием, определяющим момент возникновения и развития кавитации гребных винтов, является число кавитации, которое для винта в целом рассчитывается ио обычной формуле (гл. IV первого раздела), а для элемента лопасти — по местной скорости, определяющей обтекание лопасти гребного вши а. Скорость обтекании элемента винта, расположенного на радиусе г, без учета вызванных винтом скоростей записывается в виде
oR==| Од + (2лгл)-. (V I)
Тогда число канцтэцпк элемента лопасти определяется соотношением
_ Ли — Ри _ _ ] ,\ «И
s~ (-К/2) ~ °
где <т0 — число кавитации, рассчитанное по поступательной скорости перемещения гребного винта; ри — давление насыщенных паров жидкости.
Известно, что нет жесткой связи между числами кавптацвн потока os и Оц 11 моментом возникновения кавитации, значения чисел кавнтанни, соответствуют"* началу кавитации, зависят от геометрии гребного винта и режима его работы |0‘ этому число кавитации <т.« позволяет определять характер развития кавптанп11 только для двух геометрически подобных гребных винтов, работающих при акал0' гнчиых режимах.
538
Кавитация гребного пинта начинается в точках, где наблюдаются наибольшие разрежения. Эти точки располагаются обычно не на самих лопастях, а в ядрах свободных вихрен, сходящих с их концов.
Таким образом, первоначально развивается не профильная, а вихревая кавитация (см. рнс. II.1) По мере увеличения скорости потока при сохранении неизменной поступи кавитация распространяется от концов лопастей но засасывающей поверхности к корню лопасти. При этом кавитация возникает в районе входящей кромки или середины профиля и постепенно распространяется в сторону выходящих кромок (рис V.I). Прн некотором значении скорости вся засасывающая поверхность охватывается кавитацией, и каверны начинают простираться за пределы лопасти. Если увеличение скорости сопровождается ростом относительной поступи
Рис. V I. Развитая кавитация гребных шипов.
в результате уменьшения угла атаки, может возникнуть кавитация нагнетающей стороны лопасти При проектировании гребных винтов следует избегать кавитации на этой стороне, по крайней мере, на длительных режимах эксплуатации.
| Кавитация засасывающей стороны лопасти может носить пузырчатый или пленочный характер В тех случаях, когда кавитация начинается с концевых вихрей, а на лопасти развивается от входящей кромки, она имеет обычно пленочную структуру.
Пузырчатая кавитация развивается в средней части лопасти н характерна для винтов у которых в результате уменьшения нагрузки концевых сечений кавитация свободных вихрей отдалена (рис V 2). Вопросы возникновения и перехода различных форм кавитации подробно рассмотрены в § 30 первого раздела.
i Прн начальной стадии кавитации изменения гидродинамических характеристик винта не наблюдается, эту стадию принято называть первой. Как правило, изменение гидродинамических характеристик винта наблюдается лишь в том случае, когда кавитация охватывает практически icio засасывающую сторону лопасти; Подобное развитие кавнтанни называют се втергй стадией.
Изменение гидродинамических характерней к (кривых действия) гребного Пинта обусловлено главным образом влиянием кавитации па значения козе]<| нцисн-т°в Су, Сд элементов, образующих лопасть Поскольку обратное качество крыла е== Сх/С\ при кавитации выше, чем на некавнтирующем профиле, влияние кавн *?Цйц приводит наряду со снижением коэффициентов упора и момента к падению •хПД греби винта Кривые действия гребного винта прн различных значениях чисел кавитации приведены на рис V 3.
539
Pnc. V.2. Пузырчатая кавитация ipe6noro винта.
540
Вблизи точек так называемого отвала когда начинается падение коэфф ициентоп упора п момента, возможно кратковременное увеличен! е этих коэффициентов, а также КПД винта Это связано с тем, что на крыльях с несимметричным профилем возможно местное увеличение коэффициента подъемной силы Су непосредственно перед началом его падения вследствие влияния кавитации
Описанное изменение кривых действия — падение гидродинамических харак мристик — приводит к необходимости дополнительно увеличивать частоту вращения гребного винта для достижения заданного упора. На графике рнс. V 4 приведена зависимость упора гребного впита и скорость судна в зависимости от частоты вра щения при наличии кавитации и без нее. Прн сильном развитии кавитации увеличение частоты вращения может вообще не приводить к росту упора винта и скорости. Хотя на первой стадии кавитации влияние ее на гнлро, пнамические характеристики впита не проявляется, эта форма кавитации представляет опасность с точки зрения кавитационной эрозии и шума, а также усиления вибрации. Поэтому в процессе ^проектирования пре; принимаются меры по отдалению кавитации за пределы рабочих режимов гребного винта. Поскольку кавитация возникает в тех случаях, когда коэффициент разрежения р в жидкости превосходит некоторое критическое значение, указанные меры связаны со снижением этого коэффициента. Последнее может быть обеспечено прн заданном значении путем достижения возможно более равномерной эпюры разрежении либо путем уменьшения коэффициента Су. который издается лопастью.
При проектировании i ребного впита с ычно задастся потребный упор Если иметь в виду, что упор элемента лопасти определяется формулой
dT = Z ((1/2) Cybv^ cos Р/ (l — ₽• tg Pf) ir, (V.3)
заданное значение упора при фиксированном режиме работы винта определяется роиззе. епнем С\Ь. Таким образом коэффициент р может быть уменьшен прн неизменном значении упора только увеличением хорды Ь, что для винта в целом соответствует увеличению дискового отношения При неизменном дисковом отношении снижение р обеспечивается выбором над ежащего распределения шага и профилировки лопает , включающей распределение кривизны и толщины вдоль хорды.
§ 20 МЕТОДЫ ПРОГНОЗИРОВАНИЯ КАВИТАЦИИ ГРЕБНЫХ ВИНТОВ
Наиб ее достоверней мет дом пр ih з ipoeai ня к вптацн i гребных винтов является испытание модели в кавитационной трубе или кавитационном бассейне (§ 37 -39 первого раздела). В процессе модельных испытаний проводятся динамометрические измерения с целью определения гидродинамических характеристик винта при наличии кавитации и регистрации начала второй стадии кавитации, г также визуальные наблюдения за моментом возникновения и развитием кавита-Шш. Динамометрические испытания проводятся обычно прн постоянной скорости потока в кавитационной трубе и различных фикенровт iux значениях числа кавн танин, величина которых определяется вакуумом устанавливаемом в рабочем участке тРубы Поступь гребного винта прн этих испытаниях регулируется путем изменения частоты вращения гребного вала, причем регистрируются значения упора и Момента при серин значений частоты вращения Результаты испытаний впита по Исдобн । методике приведены на рис. V.3. Иногда эти испытания проводятся при Постоянной частоте вращения и переменной скорости потока. В этом случае число Кавитации рассчитывается по формуле
I
Наряду с динамометрическими испытаниями проводятся визуальные иаблю-*с'Цця с цепью построения кавитационной диаграммы типн'и i й образец которой Риведен на рис. V.5. Левая ветвь диаграммы, соответствующая малой поступи винта, Ределяется либо вихревой кавитацией либо кавитацией засасывающей стороны ^изи входящей кромки лопасти, правая часть характ рпзуется обычно кавнта-
541
luicii нагнетающей стороны (в районе входящей кромки). Нижняя часть диаграмму соответствует так называемому безударному входу, когда кавитация развивается в средней части засасывающей стороны лопасти На осн ординат диаграммы обычно откладывается корень нз критического числа кавитации Oj, рассчитанного по окруж. пой скорости концов лопастей.
<1.1
2(Лп —Ре) (>Л“Л2Р2
(\ .5)
Как видно нз диаграммы, критическое число кавитаинн сильно зависит от режима работы впита, достигая минимального значения в диапазоне поступей, соответству. ющцх режиму безударного входа лопасти.
При построении кавитационных диаграмм обычно задают режим работы греб
ного винта по поступи и изменяют число кавитации путем регулирования даты
ния в кавитационной трубе. При этом, как правило, картину кавитации регистрируют не по моменту возникновения, а по исчезновению кавитации того или иного вида, поскольку это обеспечивает большую достоверность измерен н ii.
Рис V 5. Кавитационная диаграмма винта.
Рнс. V.G. Диаграмма для определения момента начала влияния кавитации па J вор и момент гребных винтов (по «отвалу» кривых действия).
1 — серн» D: 5 — серин Г1 58. TI 75; 3 — серии Z4-85 Z-1-100: 4 — серии M4-G5, Ml 85. М1-75. а — серии Т6-С8. Т7-70 Т8 72.
Динамометрические испытания в сочетании с визуальными наблюдениями позволяют получить следующие данные, необходимые для проектирования и расчета гребного винта
1. Момент возникновения кавитаинн н характер ее развития по мере повышения скорости судна.
2 Момент начала изменения гидродинамических характеристик винта, обусловленного влиянием кавитации (наступление второй стадии).
3. Гидродинамические характеристики винта при различной степени развития кавитации.
Однако испытания в кавитационной трубе могут быть проведены лишь на сравнительно поздней стадии проектирования, поэтому указанные выше данные долж»^ быть получены либо расчетным путем, либо иа основе результатов систематичс ки* модельных испытаний.
Информация о возникновении и развитии кавитации необходима для вы6<'1»я величины дискового отношения. Как правило, выбрать значение дискового отношения, исключающего возникновение начальных стадий кавитации, либо не 1 рсД-ставляется возможным, либо подобный выбор связан со значительным снижение'1
542
kthbiiocth гребного винта, В этих условиях большое значение приобретают ые о начале второй стадии кавитации гребного винта
В настоящее время известно большое число эмпирических формул и графиков, которые позволяют определять дисковое отношение, обеспечивающее отсутствие второй стадии кавитаинн на начальных стадиях проектирования.
И В отечественной практике широко применяется формула
Аь_ (1,5 4-0,357)7 0,2
Л (Рч +(>^о — Zpt’
(V.6)
ГДе ho “ заглубление осн гребного впита; Zp — число валов па судне. Указанная формула дает значение дискового отношения с некоторым запасом Для этой же цели может быть использован график рис V.6, на котором в зависимости от произведения ОоЛе/Ло показана величина нагрузки по упору, соответствующей началу вто
V кпвитания концевого вихря с засасывающей стороны; кромочная кавитация с нагнстающей стороны и пузырчжая кавитация ия засасыаанмдеЙ стороне;----------на-
чале» влияния кавитации на кривые действия винта. !е же обозначения приняты Г на рнс. V.8, V.9. V.I0.
рой стадии кавитации. При пользовании этим графиком рекоме |,туется принимать "расчетное значение нагрузки с запасом 15—20%.
Определенное таким образом дисковое отношение следует рассматривать как величину первого приближения, подлежащую уточнению на последующих стадиях проектирования. Использование формулы (V.6) и диаграммы рис V 6 не гарантирует отсутствия тех или иных форм кавитации на лопастях гребного особенно при работе его в неравномерном потоке. Так, на судне с'ол и овальным расположением двнжительиого комплекса при попадании лопасти в верхнюю Половину сметаемого диска, где величина попутного потока больше, может наблюдаться вихревая кавитация н кромочная кавитация засасывающей стороны. При [оризопта'И.Н0М положении лопастей кавитация может возникнуть на нагнетающей Стороне лопасти. Эти периодические явления кавитации, не приводя к существенному изменению суммарных характеристик гребного винта, могут быть источником Повышенного шума, вибрации и эрозии лопастей Для предупреждения этих неблагоприятных последствий кавитации необходимо при проектировании винта обращать Особое внимание на профилирование лопастей и определение нх ширины и шаго-Вого отношения. Поверочный расчет гребного винта на кавитацию и определение до-гим jx размеров кавитационных каверн могут быть произведены в соответствии
К Число кавитации, соответствующее моменту начала различных видов кавпта-Пиц в ПоТОКГ и ца лопастях гребного впита, работающего в однородном потоке, мо-
543
Рис. V.8. Диаграмма для определения момента начала кавитации на лопас1ях моделей гребных винтов серин М4-65 (диаметр моделей D = 0,2 м, п — 30 1/с).
0,2 0.J 0.4 О,: 0.3 !. ИЗ 0.9 1.0 V 1.2 IJ J
Рис. V.9. Диаграмма для определения момента начала кавитации на лопастях моделей гребных винтов серии М4-85 (диаметр моделей D = 0,2 м, п — 30 1'с).
544
jue-r быть определено с помощью диаграмм рис. V.7—V.10, полученных по данным испытаний моделей серий В4-85, 'П 65, 44-85. М4 75 и кавитационной трубе. К>метрнческне и гидродинамические характеристики гребных винтов этих серий приведены в § II На рис. \ 7- V 10 схрезкп, ui раничиваюшие снизу кривые начала влияния кавитации па спор и момент гребного винта, отсекают область, в которой прн данном давлении А/ и Ли ,1е могут достигнуть своих значений, полученных при атмосферном давлении во всем диапазоне изменения относительной поступи.
§ 21. РАСЧЕТНАЯ ОЦЕНКА МОМЕНТА ВОЗНИКНОВЕНИЯ КАВИТАЦИИ И ЗОН ЛОПАСТЕЙ. ОХВАЧЕННЫХ КАВИТЛЦИ1 И
В строгой постановке задача пределения размера и места расположения ка верп, возникающих на лопастях гребного пинта в неоднородном ноле скоростей, дйыкна основываться на решении трехмерной нестационарной задачи кавитационного обтекания лопасти. Известны ишь две работы Фрнденлунда-Персона и .Ин, .авторы которых использовали подобный подход в линейной постановке без учета вязких эффектов. Однако реализация этих методов требует использования уникальных । о мощности ЭВМ и больших затрат машинного времени, что ограипч) васт возможность их применения. В связи с этим обстоятельством практические методы основываются На сочетании результатов расчета по лпнсГи ой теории несущей поверхности с решениями тех или иных плоских нелинейных задач
Поверочный расчет гребного винта по теории тонкой несущей поверхности (см § 7) позволяет найти и ггеисивность вихревого слоя, моделирующего обтекание лопасти. Скорости, вызванные вихревым слоем, определяют давления, которые могут быть вычислены с помощью линеаризованного интеграла Бернулли
где Ро — статическое давление на глубине погружения рассматриваемого сечения (завит г тг угла поворота лопасти); — проекция на ось прямого значения скорости вызванного вихревой системой; vf |1 лл У)-)1 *.
Приведенная формула вблизи кр мок даег большую ошибку Поэтому определенный по ней к эффнциеит давления следует уточнить с помощью сращивания с плоским локальным решением задачи обтекании кромки. Прн расчете профилей с параболическим носиком можно воспользоваться, например, поправкой Лайт-хилла:
lcos(H;,;. /.) р ——-—-—-—р.
(V »)
где р| — уточненное значение коэффициента давления; — нормаль к входя Ыей кромке.
I Используя данные по распределению давления на лопастях винта, можно выполнить прогноз его кавитационных характеристик. Однако в настоящее время ьшее распространение получил метод, основанный на концепции так называемого эквив алентиого п рофнл я.
В этом методе исходная пространственная задача кавитационного обтекания Попасти сво> ится к серии плоских задач обтекания эквивалентных профилей, которые строятся для каждого цилиндрическою сечення гребного винта Вво,.ится “йЦующее определение эквивалентности: профиль крыла бесконечного размаха читаете эквивалентным данному цилиндрическому сечению лопасти, если они йеют одинаковые длины хорд и распределения нагрузок При этом вводятся следующие допущения-
В толщина профиля сечения лопасти гребного винта мала;
гребной винт работает на режимах, соответствующих малой или умеренной агРузке;
1й
° П/р Я И. ВоПткхнского, т I
545
вызванные вихревой системой скорости не приводят к значительному отк. пению линий тока от соосных с гребным винтом цилиндрических поверхностей;
давления и каверны, развивающиеся на эквивалентных профилях. идеитич давлен |ям и кавернам на соответствующих сечен! ях лопасти
В силу принятых допущении задача построения плоского профиля ia <х> ., данною определения эквивалентности сводится к ли leiiiioii задаче определения дуж с заданным распределением нагрузки, известным из поверочного расчета греби пиита по линейной нестационарной теории несу цен поверхности (см. § 18).
Предполагается, что шиеиспвпость iipiicoi чиненной шркуляцпп известна в виде ряда Фурье
А
Тир (г. £. 6) = Reel V Y1Ip; к .0
к
“S v"p/' ’ ^cosW’ + V?ip,J'’’
к 0
В свою очередь амплитуда каждой гармоники присоединенной циркуля! и представляется в виде двойного тригонометрического ряда
ш
vf’s — 7 sin n't
Vl,pfc i—
n=!
I
I COSp k(-4't Si 3 ~ P 4 I
sin p 4 + X-J ₽n I
p-l
Sin РЦ
где x = arccos
p = arccos (—£).
Рассмотрим нестационарную плоскую задачу обтекания тонкой дужки синусоидальным порывом Известно распределение интенсивности присоединенной лц> куляцпп тонкого профиля как функции времени п координаты вдоль хорды на oci он принятого определения эквивалентности. Требуется найти распределение норм., иых вызванных скоростей также как функцию времени н координаты вдоль хорды, а затем и форму дужки
Для рассматриваемой плоской задачи интенсивность, присоединенной циркуляции также характеризуется рядом Фурье
К К
Уил = Yup Keel У, ,7 П cos А<Н Л/sin АО i\ И
й—о *-о
Амплитуда каждой гармоники записывается аналогично (V.I0)
Y 2oJ 1 cos>x ^.4 V fo sinpp. 1 1
ПЛЛ ° sin р xj р
р 1
Коэффициенты рядов (V.l 1) и (V.12) ражоииямн:
связаны между собой следующим ви‘
*<’u sinny;
п
Р(1 р+1) 4/
У кС sni'iX.
Л—' "п
546
Распределение нормальных вызванных скоростей в рассматриваемой задаче также описывается рядом Фурье
X К
и Reel V v е/А'° = V of cosfeO + u' sin Ml. (V.ll)
- <r Z- 'l. 1 K(l
Амплитуда каждом гармоники нормальной вызванной скорости представляется в пиле ряда
I
% + (V l5) й р^1
Показано, что коэффициенты рядов (V.15) для нормальной скорости и (V 12) для интенсивности присоединенном циркуляции связаны между собой следующими 'рекуррентными соотношениями:
р о. о‘ = лАЛ^ + л*™^;
(V 16) р.п, Ор—рА1^- iO.5Sl, (Л*+| >»*_,)
где Т (Sli) 2б.‘ (Sh) 1 (см § 29 первое раздела).
I Коэффициенты a*, А* и функция Т (Sb) являются 'комплексными величинами, и для практического пспользогаппя ссотышсиий (V.16) необходимо выделить действительную и мнимую части Введем обозначения:
T’(Sh) T'(Sh) 4 iT"(Sh); 0,5[T(Sh)+ I] - T, (Sh) + (T. (Sb); j 0.5 [T (Sh) - 11 = T„ (Sh) 4 (7'4 (Sh), J
где T' T‘. TL Ts, T?., 7"4—дсйстаит1Л1,11.е величины.
С учетом принятых обозначений рекуррентные соотношения (V.I6) запишутся в следующем виде:
[ч* s^; I
при р -- (1 {
I 4- Mfr + ГА\ТЛ + МАТ3; (7)
p^4-0,5Shf^+1 MJLJ. !
при р 0 !
1'0* Р!Л* + О.5.Ч11['/|*+14-^*_1] J
Выражения (V 17) позволяют легко рассчитать коэффициенты ряда для интенсивности присоединенной циркуляции, когда известны коэффициенты разложения для нормальной вызванной скорости. В рассматриваемом случае необходимо решить обратную задачу, для чего следует обратить систему (V.17) относительно коз<]ф'И-циеитоа А*, М*. Наиболее просто выполнить это обращение мсто.чм прстсньи.
| Рассмотрим рекуррентные соотношения (V.17) при р = I. Коэффициенты Лр с Номерами, большими I, равны нулю, топа А/+1—0. С учетом этого обстоя ^тедьств получим следующие зависимости:
‘А> -т-+4г’<«; Ч (V.I8)
Далее, подставляя выражения (V.I8) в (V 17) при р— I— I, можно получить Формулы, позволяющие определить'Л* н SA* через СА * ( и 'А * Этот процесс следует продолжать ло р — I Уравнения прямей прогонки при произвольном р 0 могут быть записаны в ваде
Ils форм«л (V.IЛ) следует
X' Г, Sh/(2/),
F* —Sh/(2/).
Если подставить выражения (V 19) при р т в соотношения (V.I7) для р т- I и сравнить их с выражениями (V.I9) для р т— 1, можно получи! рекуррентные зависимости для коэффициентов прогонки А'„, Лрп. Ут, 1 (т
= 2, 3, . .. /)
Аж-| 4L1-<'-r>shA;.. 0.5 Sh
т 1 — 0,5 Sh У]п т — 1 + 0,5 Sh У®, Л' 21)
Ч,-|+0,5 SliA';„ 0,5 Sh
т — 1 0.5 Sh т - 1 —0.5 Sh )'Л!
Эти выражения в сочетании с (V 20) позволяют винислить коэффициенты нр< . гонки до т = 2. Далее в результате подстановки (V.13) для р = 1 в (V.17) при том же значении р и решения линейной системы двух уравнений, определяются ней., вестиые значения коэффициентов и 'Ао
sAk \/\. |Де
* (л -w (л+у;7’1) - (Т2+>Тз)
\ (Ч А7Л+А7Л)(Л + »’^)
№ - ЗД; ! |V '
Ч = (Л - П7.)(Ч*-А1Г4 а?7’з)
(^Н^з) (Ч-А'^з+А"Л)-
После того как коэффициенты 'Ag и sAg найдены, с помощью обратной прогонки с использованием формул (V 19) можно определить остальные неизвестнее коэффициенты СА* и *А*.
Для вычисления значений нормальных вызванных скоростей при заданном угловом положении лопасти необходимо в рядах (V. 14) и (V.15) поменять порядок суммирования, т. е. сначала выполнить суммирование по гармоникам. Тогда для заданною угла поворота лопасти получим
I
оу(р) Aq+2 V A® sin/41, (V.'i
6 = const p—1
К
где .4g = V CA* cos АО ф- sAg sin AO;
k~~-a
к
A(p = V cAkp cos AO 4- \Ap sin AO.
*“ 0
Таким образом, получены все необходимые формулы, 1шмюл£КШие <ю ' тельно сформулировать последовательность определения формы эквивалентного плоского профиля для заданного цилиндрического сечения гребного винта при »' ° работе в неоднородном потоке;
I. Для каждой нз рассматриваемых гармоник с номером «А» с помощью си» и10' шепни (V.I3) рассчитываются коэффициенты разложения в ряд гармонически
518
ставляющих интенсивности присоединенной циркуляции. (Считается, что результаты К|овер< кого расчета гребного винта no нее-ищнонариой теории несущей поверхности В уже известны )
2 С использованием формул (V.lfc)—(V.22) для каждой гармоники определится коэффициенты Л „ разложения и ряд гармонических составляющих нормаль-
и р
пых скоростей при этом 41 слоСтрухаля определяется поформуле Sh k cos f’
где Р/ — угол индуктивной поступи
[ 3 Для каждого утиного положения лопасти с помощью зависимостей (V.23) находится mi новен н? распределение нормальных скоростей
4 Интегрированием найденных и пре.,1 „ущем шаге нормальных скоростей определяется средняя линия эквивалентною плоского профиля в угол атаки
S
У« <<) | (Т) a, arc‘g|0,5j/ (I)]. (V.24)
5. Для получения формы эквивалентного плоского профиля в силу принятых допущений выполняется наращнвакне по нормали к хорде действительной толщины цилиндрического сечения гребного впита щ найденную среднюю линию.
Описанный выше алгоритм цсрволяст определять с учетом нсстацнонвриости связи между нагрузкой и вызванными нормальными скоростями форму экипиалсьт-ных плоских профилей при работе гребного винта в неоднородном потоке.
Таким образом путем введения эквивалентных профилей задача прогнозирования кавитационных характеристик гребных винтов сведена к задаче кавитационного обтекания плоских профилей. Ниже излагается способ ислиис-Фного расчета частичных каверн i а плоских профилях произвольной формы, основанный К использовании численного метода конформного отображения внешности произвольного профиля на внешность единичного круга, описанного в § 25 первого раздела. В основе' расе-а лежит предложенная А. И Ивановьм (гм §31 ncpi ого раздела) идея решения задач с пен (вестнымп евзбоднымн границами путем последовательных приближений. Ил каждом шаге сначала решается прямая задача в точной постановке об отыскании рлспределепня скоростей по профилю заданной формы. На первом шаге рассчитывается обтекание исходного профиля а на всех последующих шагах—профиля с каверной, найденной иа предыдущем шаге. Задача обтекания ^вфиля решается методом конформных преобразовании, описанном в первом разделе Затем на этом же шаге решается < братняя линеаризованная задача, с тем чтобы определять форму каверны и число кавитаинн, соответствующие текущему приближению Последовательные приближения продолжаются до тех нор. пока скорость на границе каверны нс окажется постоянной в пределах заданной точности. Погрсш-вносимые в расчет линеаризацией обратной задачи, на каждом последующем Шаге исключаются благодаря тому, что прямая задача обтекания профиля решается *041 ния каверны используется обобщенная схема Рябушннского.
Расчет выполняется ля заданной мины каверны Если задано число кавитаинн. выполняется серия расчетов для ряда длин каверн и интерполяцией определяется длина каверны, соответствующая заданному' числу кавитации.
I При решении линеаризованной обратной задачи, как и обычно в задачах со сво-®0ДШ4Ып границами, при математической формулировке рассматриваемой задачи следует выставить два основных rpai ичпых условия — кинематическое и Линами-^Ик°е. Условие непротекания (кинематическое условие) должно выполняться на Ранице каверны, замыкающем теле и части профиля, не охваченной ими Дннамн-^Всос условие постоянства давления должно выполняться на границе каверны. 7го условие получается из интеграла Бернулли тля линии тока, часть которой со-Ярвляст границу каверны В безразмерной форме динамическое условие дает связь •"Кду скоростью набегающего потока с на i ранние каверны и числом кавитации о0:
• Л - ••
О.бргг,
1,е = 1 । ^0.
(V.25)
549
Используя конформное преобразование z = / (£) внешности единичного круп на внешность профиля и умножая условие (V.25) на квадрат модуля нреобразующе*! функции, получаем условие иа границе каверны во вспомогательной плоскости £.
е;С) - и • <V 2'.I
Граничное условие ненротеканпя прн переходе в плоскость единичного крук, остается неизменным- Для того чтобы в плоскости £ не изменились параметр!, иг. бегающего потока иа бесконечности примем
IU •«
Для получения однозначного решения задачи необходимо помимо осповш, х граничных условий выполнить постулат Чаплыгина Жуковского на задней кромка
Рис. V.11. Плоскости конформного отображения: а — плоскость с; б — плоскость Z.
В линейной обратной задаче каверна считается тонкой, что позволяет заменить ее воздействие иа поток распределенными по дуге А'В' единичного круга в плоскости ? источниками. Интенсивность q (0) этих источников следует искать из уравнения (V.26), считая, что отображающая функция г~ / (£) известна нз предыдущего приближения (рис. V.U).
Характеристическая функция рассматриваемого течения может быть пред ставлена в виде суперпозиции обтекання единичного круга с циркуляцией в источников, распределенных по дуге А'В' единичного круга,
0fl
ч7 (□ =)+-£?1,1 +i J4 (ч,) 1п ~ 114 Л 271
Комплексная скорость —— определяется путем дифференцирования
комплекс-
(\ 28)
пого потенциала (V.27)
°д
ел
Из постулата Чаплыгина—Жуковского получается выражение для цирку-'1 ции скорости Г:
°C -JQ)
Г - 0,5 j 7(<p)c!g'£-T^</q Int^sinfa <»oj.
°Л
550
где "о — угловое положение точки на единичном круге, соответствующее задней кромке профиля.
Г Для обеспечения выполнения условия пепротекапня в плоскости единичного Кругл в центре iioc.ie.inero располагается источник И1Пе11сивиостыо
I °Л
” °.'г» ]-7(Ч1ь'<| .
I Цели подставить в выражение yV.Ai) t - с'1’, можно получить формулы для пКыальиоп и касательном составляющих скорости в точках, лежащих па границе единичною круга:
И с’л (”> 0,57(11); 1
| "в . |
ет(1) j?<T> ^tg-l^-.ciglL—I J<p ф/то(0) j (V.3O)
I
[ %(<» =2l'oo[,in((l0- a) —sin(ii—a(|, I
Подставив выражение для касательной скорости vx (V.30) в граничное условие (V 26), получим основное интегральное уравнение линеаризованной обратной задачи относительно неизвестной интенсивности источников q (0):
И "в
। । <► о <р — о,. 1
TF J <7«Г> -ctq-Ч—] ^Ф = Л<"). (V.3I)
К
где fi (if) а» (П> 1’с I -у-1
I Уравнение (V 31) представляет собой сингулярное интегральное уравнение с ядром тина I илберта такое уравнение заменой переменных может быть сведено к уравнению с ядром Коши. Эта замена соответствует конформному преобразованию пнеишисти единичного крута на верхнюю полуплоскость. Новые переменные определяются следующими соотношениями:
S = (do — etg %/2)/<7д; / (</0 — cig 0/2)/^. (V.32)
где </0 = 0 "• (ctj{ 0 .,/2 f-ср/0/(/2); <7, 0.5(с1«(1л/2 —clg(lw/2J
переменных s, t уравнение |V.3I > приобретает характерную форму иитепмла тина Коши '
।
(V.33)
ГЛс Ч (S> q (si/(s - /0); / (!) - f, (/)/(/ tu); /0 = t (0o) - (du _ ctg ()0)/c'x.
Ka ^*ue,,,K уравнения (V.3o) ищется в классе фу iKiuiii, ограниченных из концах J“oePHbi. Сама каверна получается прн этом незамкнутой, отхадявеей от профиля ^касательной к нему Указанное решение существует, если выно цястся следую
Условие обратимости:
(V-: О
551
Из условия (V.34) вытекает формула для определения числа кавитации ' . I : 141«
Последняя формула позволяет определить в замкнутом виде число кавитации, нс решая уравнения задачи и не находя формы каверны. Само решение уравнсши, (V.33) также определяется в замкнутом виде
q (s) = (S) - А ГГ=Г^ 1 ------- (\
•’ J | I — t* (/ si
Решение обратной задачи в замкнутом виде удалось только благодаря пспол! Зованню конфюрмиого отображения, что и обусловливает преимущество предлагав мой схемы расчета.
По найденной интенсивности источников с помощью формул (V 30) вычисляют, ч вызванные скорости о„ (0) n ег ('•)). Ординаты каверны в физической плоскости опр, дсляются с помощью следующей формулы, полученной путем интегрировании ур.и нения линии тока:
X (’
, f Ь'п «Й1 V — Dt (OS V I C'n IV V I Vt (1X .
(x) q i I ----------------------dx i/ t- ----------------—--— rf() i\
’tAF’ ’A J l'n COS V— Г'х SHI V 1 J V„ — VZ tv V </D
<1 ° A
Из формулы (V.37) следует условие замкнутости каверны
J ₽п — ут t8 v dU "А
Очевидно, что в общем случае условие (V.3fc) не выполняется, т. • каверна лучается незамкнутой. Замыкание Каверин осуществляется на каждом приблвл < нин кубической параболой в физической плоскости. Коэффициенты этой парабол д следует выбирать из условий ее сопряжения с каверной и профилем ио значениям ординат н их первых производных.
Таким образом, необходимо построить кубическую параболу у = G (л), описываемую уравнением G (х) = ах' ф- Ьх1 ф- ix ф- d н удовлетворяющую следующим
условиям:
(iG dy
X xlt.G(x} я(^). Un);
> dG dy
x = xc. G (X) у (xc) 77 Uc)
Коэффи!и1спп4 искомой кубической параболы определяются следующими отношениями:
21."р-.;> «/(*л а------------------------------------------------;
(хв -л;.-)я
1 di(X^ 2ЬХ/1'
d щхп) ахЪ bxj. сх„
552
Далее или найденного профиля с каверной вновь решается прямая задача определения значений скорости на профиле, п таким образом строится процесс последовательных приближений В ряде случаев, если не требуется определять форму каверны, для решения рассматриваемой задачи при длинах каверн, меньших 20 % уорДЫ, достаточно использовать соотношение (V.35). Это обстоятельство позволяет существенно уменьшить объем вычислений.
Г' При численной реализации разработанного метода сингулярные интегралы с ядром типа Коши вычисляются с помощью квадратурных формул Л. Л. Корнейчука (40 59]
Для однозначного решения задачи об определении параметров частичной каверны, возникающей иа плоском профиле, необходимо задаться точкой схода каверны Для идеальной жщкостн непротиворечивый результат может быть получен, если точку схода каверны отыскивать из условия Бриллюэна плавного схода каверны (кривизна профиля и каверны в точке схода должна совпадать). Математически это условие записывается следующим образом-
-^-1 =0. (V.40)
<70 |и .0,4
Если воспользоваться формулой (V.36), то это условие можно записать в виде <? (0) U„, = о
I Для удовлетворения этого условия необходимо стронть процесс последовательных приближений, т. е. задаваться различными положениями точки схода каверны и проверять выполнимость условия (V.40). Условие Бриллюэна эквивалентно другому условию, выполнить которое практически во многих случаях легче: точка схода должна выбираться таким образом, чтобы число кавитации, соответствующее зада iiioii длине каверны, было наибольшим по отношению к числам кавитации, получаемым прн той же длине каверны, но при других точках ее начала.
Вместе с тем, как показывают наблюдения, начальная точка реальной каверны далеко не всегда совпадает с точкой, определенной из условия Бриллюэна н в ряде случаев лежит ниже по потоку. Это обстоятельство естественно объяснять вязкими эффектами, не учитываемыми в схеме идеальной кавитации. Распределение давлений с учетом вязкости рассчитывается исходя из допущения о совпадении эпюр давления при равных значениях С\. Для определения точки схода каверны исполь зустся обобщенная гипотеза Хуанга Петерсона [90]. Согласно этой гипотезе главной причиной смещения начальной точки каверны по oti ошенпю к точке Бриллюэна являются пульсации давления, амплитуды которых особенно велики прн явлениях отрыва и перехода в пограничном слое. Положение максимума суммарных разрежений (среднееЧ-пульсацпи) может не совпадать с положением максимума средних разрежений. Положение точки схода каверны оказывается связанным с положением характерных точек пограничного слоя В связи с этим считается, что возникновение кавитации определяется результирующей средних разрежений па профиле и пульсаций давления в районах отрыва ламинарного пограничного слоя н егс перехода в турбулентный
В работе [90] приводятся результаты экспериментальных исследований по определению пульсаций давления, возникающих в пограничном слое. Показано, что прн отсутствии ламинарного отрыва в районе перехода уровень пульсаций, встречающихся не менее раза в одну секунду, составляет 0.1 (уровень пульсаций приведен * виду коэффициента разрежения), а в районе ламинарного отрыва в конце обра 3Ующейся застойной зоны — 0.33 Эти результаты и легли в основу излагаемой ниже расчетной схемы определения точки схоча каверны В ней для расчета пограннч вого слоя н его ламинарного отрыва использован метод Кочипа и -Пойцянского № 14 первого рэзд<-.т ) для определения точки перехода ламинарного слоя в тур вУЛент ый — приближенный способ Ван-Дриста (§ 15 первого раздела), а для деления длш i застойной зоны прн отрыве ламинарного слоя формулы работы
Как н обычно, нредн<>.131асгся. что каверна начинается в точке, в которой Давление с учетом упомянутых добавок равно давлению насыщенных паров воды. Врчпа каверны считается заданной.
^Существуют три возможные точки схода каверны: точка плавного схода ка-рны но Бриллюэну, точка перехода ламинарного пограничного слоя в турбулент-
553
нын, точка, соответствующая концу застойной зоны прн отрыве ламинарного погра инчною слоя.
Для выбора точки схода каверны в каждой нз «подозрительных» точек рассчн тывастся с помощью изложенною выше метода каверна заданной длины. При этом определяется соответствующее число кавитации с учетом пульсационных добавок За точку схода каверны принимается та точка, число кавитации для которой паи большее из указанных трех вариантов.
Безусловно, изложенная схема определения точки схода каверны не лишена некоторой схематичности. В действительности процесс образования каверны про исходит гораздо сложнее и для более точного расчета необходимо учитывать ряд
Рис. V.12. Сраанеиие расчетного и экспериментального способов определения размеров каверн, возникающих на i ребиом винте SRI-I43 в неоднородном щиоке (о„ 2.21; 7=1,2)
------— эксперимент. — — — р течет.
Рис V.13. Влияние масштабного эффекта на расчетную и экспериментальные кавн 1анионные диаграммы модели впита.
------- — эксперимент, D 200 ыч; —- — — расчет, О -- 200 мм; — — — змсигрнмс! . !) с= inc мм:----------------------------расчет, ~ 100 мм.
других факторов, например капиллярность. Однако предложенная схема, несмотря на свою простоту, дает результаты, удовлетворительно согласующиеся с экспериментальными данными и позволяет верно учесть влияние вязкости жидкости пл к витацпонные характеристики профиля.
Описанный выше метод расчета параметров частичной кавитации плоек' <• профиля в сочетании с методом построения эквивалентных профилей позволяет р., считать распределение давления по лопастям гребного винта, построить кавитацш* ную диаграмму гребного впита и определить зоны лопастей, охваченные кавигацн й для случая работы гребного винта как в однородном, так и неоднородном потоке.
Ниже приведены в качестве примера некоторые результаты расчетов каве 1 инейных характеристик гребных винтов в сравнении с экспериментальными данным'1 Па рнс. V. 12 изображены результаты расчета зон лопастей, охваченных квиитяип1'''* для гребного винта, работающего в неоднородном потоке, прн различных углов1' наложениях лопасти. Эти результаты патучены прн значении относительной и1 ступи J 1,2 и числа кавитации ая = 2,21. Как следует из рнс. V 12, пзлоЖ' ' пый метод дает вполне удовлетворительное совпадение с результатами эксперим»11' тальных наблюдений.
554
На рис. V 13 приведено сравнение результатов расчетов с экспериментальными кавитационными диаграммами д я моделей гребных винтов, отлн’ ающихся дру от дргга лишь диаметром Результаты находятся в удовлетворительюм согласии i cbi детсльствуют о наличии существенного масштабного эффекта.
§ 22 КАВИТАЦИОННАЯ ЭРОЗИЯ ДВИЖИТЕЛЕМ
И МЕРЫ ЬОРЬЬЫ С НЕЙ
Кавитационная эрозия наблюдается на лопастях гребных винтов, рабочих колес, насосов, а также па других деталях гидравлического и общесудового обору-Вдовапия В зависимости от характера и интенсивности повреждения разделяют на Кьрозионным наклеп, эрозионную сыпь и эрозию Определяющую роль в возникни вснпп и развитии эрозионных нонреждеппи in лает механическое ударное воздей 1 ствпе npi схлопывании кавитационных Kar.epi а электрический, тепловой, хнми ^biecK |й н Д| у нс фактор я. сопровождающие кавитационный процесс, являются со-
Рис. V.I4 Гребной винт СП1\ с эрозионными разрушениями.
тггоующим । Эрозия может возникать как прн стационарном так и нестацнонар нрХ1 обтек а и н и. В последнем случа inrieii ibhict ковре; шиий значительно выше. Эре । сбиых винтов, рабочих колес водометных движителей
рл внваются обы । ю п| и нестацнонарнсм об1ска| i i, вызнанном неравномерностью пот ;ка вблизи корпуса судна, выступающих частей, колонок, крыльев, наклонных увалов ит д Па рис V 14 и казан 1ребноЙ впит пассажирского ПК, работающий ^^Вгсловиях III Г I ПО о ЬЬ< л нот К П.1Т1 кт ОГ 10 иерЖС1Ы эр ЗИН
g j Скорость процесса эрозии меняется в зависимое и от продолжительности ка-»вцтацнокного воздействия (рис V.15) Разделяют четыре основных периода эро-
зионного разрушения. В первом, инкубационном, периоде потеря массы вследствие *Роз nt отсутствует, но наблюдается пластическая деформация материала - эро-
3,101 и. Второй период характеризуется возникновением эрозионного раз-
рушения и увеличением скорости процесса до максимума. В третьем периоде пптен-МИЫ' разрушении снижается. В leluepiOM периоде — периоде стабилизации — процесс тазпитою разрушения имеет постоянную ckoj ость Показано, что куб мак
555
симальной глубины эрозионных повреждений, а также потеря массы вследствю эрозии в установившемся четвертом периоде разрушения практически линейно за висят от продолжительности испытании Это обстоятельство ио известной карты г разрушений в процессе эксплуатации в течение фиксированного промежуткл времени позволяет прогнозировать дальнейшее развитие эрозионных поврел дсний.
Исследование процесса кавитационной эрозии нроводшся экспериментальным путем, общие закономерности разрушения, эрозионную стойкость материалов п<> думают на образцах; влияние на эрозию конструкции движителей, режимов работы, масштаба изучают обычно на их моделях. Испытания моделей движителей проводят в кавитационных трубах, в неравномерном потоке, имиiпреющем натурное пол. скоростей. Исследование эрозионных качеств может проводиться без воспроизведения повреждений, когда о возможности их возникновения судят лишь по характеру развития кавитаинн, и с воспроизвело чиехт эрозионных повреждений, используя материалы и покрытия с низкой эро-
Рнс. V 15. Зависимость скорости процесса Эрозии от времени кавитационного воздействия.
Рис. V.I6. Вид модели с эрозией лакового покрытия
Для изучения эрозионных характеристик движителей в случае, низкой ните снвности эрозионного процесса используют установку на исследуемые объекты п цок из отожженного алюминия, имеющего низкую эрозионную стойкость. Планки должны устанавливаться таким образом, чтобы геометрия объекта не нарушала. Широкое распространение при исследовании эрозии движителей в кавитационных трубах находят лаковые покрытия, которые могут быть нанесены на новер.хпл-1 и лопастей моделей. Двухслойное лаковое покрытие, не вступающее в реакцию с «-дой, позволяет выявить зоны с различной интенсивностью повреждений Первым слоем наносят лак ЭЦ106, вторым, наружным, лак ЭКГ В некоторых случаях покрытия наносят и при нсньпапни натургы.х гребных винтов на места, где ожидле я эрозия, а если зоны эрозии гарапее неизвестны, то на вею поверхность. Пл рис. \ н приводим вид модели гребною пинга с эрозией лаковою покрытия. Для получен! характеристик очагов эрозии материала лопастей или планки может быть нспо.и. '• ван специальный оттнековын материал — тиилсш, позволяющий долгое вр -ч хранить оттиски, отражающие рельеф поверхности. Тподоит состоит из двух и.> (белой и желтой), которые используют в еоотившении 3 1, добавляя иесколы капель воды и перемешивая до получения однородной массы |96|.
Для исследования эрозионных характеристик двпжц|едей в кавитациоп трубе создают в диске модели заданное неравномерное no.it- скоростей при соблк инн геометрического и кинематического подобия (о0, У' ~ const).
В условиях интенсивною кавитационного воздействия все материалы подпер гаются эрозионному разрушению В первом приближении эрозионная стойкость для ковких материалов, идущих на изготовление гребных винтов и их модел 1 определяется энергией деформации, которая характеризуется площадью диаграмм • напряжение - деформация вплоть до разрушения, полученной при uciiuiai и" 55G
их образцов Согласно приближенной формуле энергия деформации равна
Sc=(ob + Ot)(6/2), (V.4I)
где ар предел прочности; от — предел текучести; 6 — относительное удлп юпие материала. Основные гидродинамические параметры, определяющие пнтеиенв-ость эрозионных повреждений. — скорость и неравномерность потока. Показано L что интенсивность эрозии /' (при постоянном числе кавитации) /' — V" пропор-|циональна скорости потока в степени и. среднее значение которой может быть прн-I пято ~-6. Из результатов испытаний моделей иа эрозию следует, что в первую очередь представляется возможным воспроизвести эрозионные повреждения в корневых сечениях лопастей при увеличении скорости и относительной неравномерности может быть получена эрозия выходящих кромок лопастей. Повреждения в цеитраль-I ион части лопасти гротного винта воспроизвести сложнее, они наблюдаююя при I больших скоростях и значительной неравномерности потока.
Увеличение угла скоса потока приводит к увеличению диапазона режимов ра-I боты гребного винта, при которых может возникнуть очаг эрозии, а также к повы-I |ШС1П11о интенсивности разрушений.
С увеличением ширина лопасти (уменьшением числа лопастей) нптенсив-I посте эрозионных повреждений растет, что связано с увеличением зоны канн I тапни, замыкающейся в пределах лопасти. Увеличение шагового отношения греб II йоги винта первоначально приводит к повышению интенсивности очагов эрозии, I однако начиная с определенного шагового отношения интенсивность повреждений I снижается. У гребных винтов с сегментным профилем ин1енсн1П1ость эрозии существенно ниже, чем с авиационным. Увеличение кривизны средней липни сечений ло-I пастей приводит к уменьшению интенсивности эрозионных повреждений на заса-I рываилцей поверхности. Однако при этом возможно появление кавитации и эрозии I на нагнетающей поверхности, особенно в условиях скощенного потока. В случае I увеличения числа лоиасгсй 1рсбных винтов из-за уменьшения их ширины и соот-||ветствеппо размеров зоны каин гатит интенсивность эрозионных повреждений син-| жается.
Основные средства снижения шпеч спвноети эрозии движительных комплексов I следу ющие:
изготовление движителей из материалов с повышенной эрозионной стойкостью и поверхностное упрочнение материала;
воздействие иа структуру кавитации подача газа в места возникновения эро-I ЗИИ, катодная защита.
использование специальных конструктивных мер: сверление отверстии, шелей. установка интерцепторов, устройств, выравнивающих ноле скоростей в диске движителя;
! проектирование движителей с геометрическими элементами, обеспечивающими j Минимальную интенсивность эрозии в условиях неравномерного щхтя скоростей.
Могут быть использованы несколько способов одновременно, например специальное проекшрование. сверление противоэрозиониы.х отверстий, подача газа в места возникновения кавитации.
[ Способ борьбы с эрозией выбирают в зависимости от ыиleneiiui ос и и характера разрушения. Применение материалов с повышенной эрозионной стойкостью не по- зволяет устранить интенсивную эрозию,’поскольку эрозионная сюйкость материа-' Лов, из которых изгоюиляют движители, в частности быстроходных судов, нзме-I ияется в достаточно узком диапазоне. В табл. V I приведена сравнительная эрозиои- пая стойкость этих материалов, а также их прочностные характеристики. Движители быстроходных судов в настоящее время в основном изготовляют из бронзы А/КН9-4-4 и сплавов «Неваз. обладающих высокими механическими, эрозионными И коррозионными качествами.
Нанесение покрытий с высокой эрозионной стойкостью и упрочнение нонерх- постного слоя материала (закалка, легирование, наплавка и т. д.) пригодны как I средства защиты лишь при слабой пптеш hbhociii процесса разрушения.
( Выравнивание поля скоростей перед движителем — эффективный способ енн-< Жеиня интенсивности эрозионных повреждений. Однако практические возможности применения этого способа ограничены потерями скорости, связанными с установкой Выравнивающих устройств достаточно сложной конструкции
557
Таблица VI Сравнительная эрозионная стойкость и прочностные характеристики материалов винтов
Марка материала °1Г А. % Твердом 1» IID Потеря массы utfpauia . Mf
ЛМиЖ55-3-1 4,8 20 НО—140 157
ЛАМцЖ-67-5 2-2 6,2 12 140—180 55
Бронза Л.ЖН9-4-4 6.2 16 160- 140 • 32
Бронза «Лева 70> 7.0 16 170-220 50
Нержавеющая сталь 1Х11НДЛ 6,0 15 170-240 .37
Нержавеющая сталь 0Х17НЗГ4Д2ТЛ 6.5 15 160- 220 45
Нержавеющая сталь 0Х16Н4Г9ЛДФЛ 6.0 20 170-230 28
Подача воздуха к кавитационной подлети приводит к повышению в ней средне! давления и снижает усилия, возникающие при схлопывании клвери. Путей пода i . воздуха представляется возможным существенно ослабить или полностью устра нить эрозию. Способ применяется при значительной интенсивности эрозионных но вреждений. Для его реализации разрабатываются движители специальной коистру инн, предусматривающей подачу воздуха к местам схлопывания кавитацшчшы каверн через каналы в лопастях. При этом необходимо, чтобы воздух не оказыв существенного влияния па гидродинамические характеристики движителя.
а а
Рис. V.17. Схема нротивоэрозионпых отверстии.
Эффективное средство борьбы с эрозией корневых сечений лопастей движяв’ лей — пэотивоэрозиоиные отверстия. Обычно сверлят одно отверстие пли, если . пасти у корня достаточно широкие, два. Отверстия вызывают местные изменения в обтекании сечения (возникает пик разрежения в районе отверстия на засасыва <-щей поверхности), вследствие чего появляется кавитационный след отверстия, нарушающий схлопывание основной зовы кавитации на лопасти и приводящий к ос.. <>• лению или исчезновению эрозии Гидродинамические характеристики движителей при наличии сквозных отверстий в корневых сечениях лопастей практически не ' меняются. Противоэрознонные отверстия сверлятся перпендикулярно к осн днт-житсля, что при существующих шаговых отношениях винтов соответствует у> О' наклона отверстий к иагпетаютцей поверхности, равному 60—70°. Диаметр отв -стня обычно составляет 2/3 максимальной толщины сечения На рис. V 17 npitm 11 эскиз общего вида отверстий на профиле сечения гребного впита. Противоэрояш 1 ные отверстия обычно сверлят после испытаний головного судна, когда полу1 'lJ сведения о местоположении и размерах очагов эрозии и выяснена необходим '•* этого мероприятия.
Основным средством борьбы с эрозионными повреждениями в периферии ,и части лопасти является проектирование движителей с учетом сведения к миннмуЛ 558
возможности возникновения эрозии Оптимальное условие ликвидации эрозии ||рсдотвраще1П!е эрозии нагнетающей поверхности при максимально возможной кривизне средней линии сечений и замыкание каверн, развивающихся на лопастях, зл выходящей кромкой лопасти, последнее обеспечивается соответствующим выбо ром величины диского отношения. Интенсивность эрозии может быть также снижена путем увеличения числа лопастей движителя, если допустимо связанное с этим ухудшение пропульсивных качеств движителя.
Г Улучшенными эрозионными качествами, как показывают исследования последних лет, обладают гребные впиты со значительной откидкой входящих кромок лопастей, так как их конструкция менее чувствительна к неравномерности поля скоростей, н схлопывание основной зоны кавитации происходит за пределами лопастей.
1 В случае обнаружения эрозионных повреждений движителя по результатам их осмигра может быть подсчитана продолжительность его дальнейшей безопасной эксплуатации до следующего осмотра или ремонта При осмотре движителей следует фиксировать очаги эрозии как на засасывающей, так и па нагнетающей поверхности, замерять нх расположение па лопасти (радиус сечения и расстояние от входящей кромки), размеры (протяженность, ширину и максимальную глубину) (рис. V. 18). Необходимо также располагать данными о продолжительности эксплуатации дви-Кителя на полив:.' ходах (при частоте вращения ЛО полных тборотов и выше) как со дня установки, так и со дня последнего ремонта эрозионных повреждений.
I Предельно допустимые относительные величины эрозионных повреждений, прь которых возможны нормальная эксплуатация судна и ремонт движителя, не должны превышать величин, указанных в табл. V.2
К I Условие прочности движителя, учитывая потерянный вследствие эрозионных повреждений момент сопротивления н наличие противоэровнонпых отверстий, а также концентрацию напряжений вблизи них, в первом приближении можно представить в виде
V (М?) I ''/ц i2
<*•
pa a: iipoTMAviiiKxi!> очага j|i'!U!4 и.। jiini'Ai |МЛ1)усг, мм Л, пягИплынан кубика рассматриваемого очага эрозии, мм. с’ толщина лопасти в месте паибиль ***11 глубины эрозии на данном радиусе, мм. du диаметр иро1ивоэрозион11ого от-^ретия, мм. \g к э<]к| ициеит запаса (ир11 г > 0,4 Aj — 0,35; при г < 0,4 Ас Г= 0,32).
559
Таблица V 2. Таблица предельно допустимых величин эрозионных повреждений засасывающей поверхности гребных пингов
ХлрЯКТП pilC-THKS очага эрдои» Расположение очага эразипнного повреждения Предельно допустимые величины повреждг ни И пр»! диаметрах винтов, м
| 0,6-1.0 1 о 1,45-1.90 1 с> О 7 3,5— 1,7 более 1.7 |
Относительная глубина поражения Цсн1ра.1ьная часть лопасти. периферийные сечения лопасти корневые сечения лопасти 0,65 0.55 0,6 0,50 0,6 0,50 0,6 0,50 0,55 0.45 0.50 0,40 0,50 0-10
Кромки лопастей: кромки периферийных сечений и выходящие кромки корневых сечений входящие кромки сечений 1 0,7 1 0,7 1 0.7 1 0,7 1 0.7 1 0,7 1 0.7
Суммариля протяженность пораженных участков на данном радиусе в долях от ширины лопасти (2>'Чд Периферийные сечения лопасти Корневые сечения лопасти 0,65 0,55 0 65 0.50 0.60 0,50 0,60 0,50 0 55 0,50 0,55 С 45 0,5 0,40
П р II и е ч в И II Предельно допустимая величине для нагнетающей поверх пости лопасти составляет 80 % приведенных в таблице значений.
Коэффициенты пропорциональности, характеризующие максимальную г. 6iinv и протяженность повреждения, а также потерю прочности, определяются еле дующим путем-
L w J '
|\ I )
_________________-У,7________________
I £/i
—— + 0.2 I-------—
560
Для каждой группу очагов эрозии, расположенных па данном радиусе, подсчитываются коэффициенты пропорциональности. Величины (h'.c')m и (S5' {>),„ определяют с помощью табл. V.2. Пи минимальным значениям G1(liln, СщП1|1) и С„., которым соответствует наибольшая относительная величина эрозионных повреждений. подсчитывают максимально допустимый срок эксплуатации гребного винта При движении судна па полных ходах до следующего осмотра или ремонта движителей (/, ч):
(I - tB).
Кь
<А-„чп ')
Кь ~ 1 > ..
(V.44)
(t А,.».
Коэффициенты запаса равны: К' = 1,5 Л'д = 2,0; Л'1Г 3.0
Формулами, приведенными выше, можно пользоваться лишь в том случае, если предшествующая данному осмотру длительность эксплуатации движителя иа иол-5000
ных ходах /> -2t)() h и
Эксплуатационная характеристика
(V 45)
Величина /0, ч, соответствующая длительности инкубационного периода:
для № <_ 1000, fn
I для _Н > 1000. /„
1200
300 -h м ’
600
(\ 46)
И
Возможность появления эрозии гребных винтов в первом приближении онре-I деляется с помощью зависимости, предложенной О В Рождественским: эрозионные повреждения могут возникнуть, если nD> 1, где Д —индекс коэ<|м|>иниснга для [гребного винта, изготовленного из латуни, равнин 650, из бронзы — 730 из нелеги-1рованной стали 450 м мин.
Если известны элементы гребного винта, то расчет, позволяющий приближенно оценить, ПОЯ1П11СЯ ли кавитация и, как се следствие, эрозия, проводится по сле-ующей схеме.
I. Подсчитывают местные числа кавнтанни, соответствующие ее возникновению на входящей кромке засасывающей (О^ м<) и нагнетающей (с\11аг) поверхностей профиля в рассматриваемом сечении для заданных сглов атаки:
на засасывающей поверхности
п.Чап« (0,5—2*1^) I 35.
на нагнетающей поверхности
°ч наг —(0.5—6) (>х- 206J Ч- .36;
"sm.n 0 2-г 6 (0.56 Ф62).
(V 47)
Строят зависимость ст$ = f (а).
i 2. Определяют максимальное и минимальное значения относительной поступи В неравномерном поле скоргх тей, в случае скоса потока эти величины подсчитываются по формуле
,___________J LOS fe/z V
тщ I -I- (//«'') ЫН Фд// ’ ’
561
3. Определяют па основе поверочного расчета по вихревой теории (гл. 9 третьего раздела) зависимость (для профиля в рассматриваемом сечении) относительной по ступи от кромочного угла атаки а, а также колебания углов атаки профиля за одни оборот лопасти гребного впита.
4. Подсчитывают местные числа кавитаинн ns, соответствующие заданным чпе лам кавитации п0 ввита в целом, по формуле
°5* П“ •
(V.49)
5 Найденные предельные значения углов атаки для соотвектвувидепт числа навигации наносят па график зависимости п f (су Гели максимальное и мини мальное значения утлое атаки для определенной величины os располагаются по обе
сторозы прямой, соответствующей границе появления кавитации па входящей кромке в течение одного оборота лопасти гребною вин -та, то следует ожидать периодического возни кновения и исчезновения кавитации, и ни можно появление эрозии (рис. V. 19).
В настоящее время разработана мето дика прогнозирования кавитационной эро зин движителей в процессе проектирования па основании результатов испытания в кавн гационнон трубе моделей с покрытием, сила дающим низкой эрозионной стойкостью (I подобном натурному неравномерном пол, скоростей), а также испытаний образцов, изготовленных из материалов для винтов, материалов моделей, а также с покрытиями
Прогнозирование эрозии движителей про водится в следующей последовательности:
I. Пзготов 1яется модель i ребного винта, иа нес наносится двухслойное лаковое пи-
Рнс V.19. Диаграмма критических чисел кавитации гребного
винта. крытне, обладающее низкой эрозионной стой
костью. В кавитационной трубе в диске м<> дели гребного впита имитируемся ноле скоростей, аналогичное натурному.
2. Подсчитывается скорость, соответствующая натурной скорости при пслыт I ннп в кавитационной трубе с учетом масштаба модели, скорости и характсрнсти эрозионной стойкости материала натурного гребного винта п лакового покрыло модели, по формуле
1 м ~ Ц|
I
k
(V.50,
где к = 1,0 (ааю. 2,8 (баббит), 3,0 (енлхмип). 4,0 (латунь ЛМц Ж55-3-1). 4.3 (броп Ы ЛЖН9-4-4).
3. Определяется'для исследуемого режима (J, <т0 as const) при испытании в к., шпацноинон трубе пороговая скорость — та скорость, ниже которой при даши развитии кавитации (J, <т0 tons!) па модели гребного винта с лаковым покрыли-повреждения не возникают. Если Vjr'l'u'p > 1,0, то возникновение эрозии пату ного гребного пинта возможно При I'm'1'поп < 1,0 эрозионных поврежден» ожидать не следует.
4 Определяют местоположение и площадь очага эрозии на модели гребши винта (если )/M/l/uop> I). Нодсчн ляпается скорость эрозии требного впита по ф< муле
tlv dt
I -flop
—0,11-10 6
502
где SH — площадь очага эрозии натурного гребного винта; SH = SMml, где SM — площадь очага эрозии па модели; т — масштаб модели; % — удельная энергия де-Цюрмаинп материала натурного гребного винта.
Энергия деформации материалов винтов, У мм2
Баббит................................... 2,0
Алюминий ............................... 3.0
Сталь 3............................... 20.0
JIMiOK55-3-l ........................ G3.0
ЬрАЖИО 4 4 ............................ 100.0
('план «Нена» . 120.0
5 Рассчитывают среднюю /1, ,, глубину ii'Ho времени эксплуатации по формуле
эрознонлнт повреждений после задан
dv f i
dt L hr
(V.52)
ic t — продолжительность эксплуатации.
Получив данные об ожидаемых эрозионных качествах гребного винта, представляется возможным откорректировать его элементы с точки зрения снижения интенсивности эрозии в процессе проектирования и провести испытания поной модели Вредного впита е лаковым покрытием в неравномерном поле скоростей.
I Дальнейшие исследования в области эрозии движителей должны быть связаны с определением условии, при которых возникают повреждении, и разработкой кон-гтр\ иши движителей, характеризующихся минимальной интенсивностью повреждений.
Глава VI
ПЕРИОДИЧЕСКИЕ СИЛЫ И ДАВЛЕНИЯ, ПЕРЕДАВАЕМЫЕ ВИНТОМ НА ГРЕБНОЙ ВАЛ И КОРПУС СУДНА
§ 23 ГРЕБНОЙ ВИНТ КАК ИСТОЧНИК
ВОЗНИКНОВЕНИЯ ПЕРИОДИЧЕСКИХ СИЛ,
ПЕРЕДАВАЕМЫХ НА ГРЕГ.НОЙ ВАЛ И КОРПУС СУДНА
Работающий требной винт является источником вибрации судового корпуса, корпусных конструкций, валопровода. В условиях, близких к резонансным, повы-I Ulen ая вибрация оказывает отрицательное влияние на работу механизмов и оборудования, ухудшает условия обитаемости, приводит к повреждениям судовых конструкций и валопровода.
Различают две категории возмущающих сил, создаваемых гребными винтами:
сиды инерционной природы, обусловленные механической неуравновешенностью гребного винта, и силы I идродинамнческоп природы.
| Причиной возникновения инерционных сил могут служить механические повреждения гребного винта в процессе эксплуатации или неуравновешенность масс, Доне щепная при изготовлении винта. .Допустимая величина этой пеуравновешец-, Пегги определяется в процессе магической и динамической балансировок гребного винта в процессе его изготовления и регламентируется ГОСТ 8054 81 Отличитель чой характеристикой сил пнерцнош ой природы является то, что их частота равна частоте вращения гребного винта.
I h Среди сил гидродинамической природы различают неуравновешенные гидродинамические силы, вызнанные неточностью изготовления винта, и гнлродннами-
5G3
ческне силы, обусловленные конечностью числа лопастей винта и его работой в ш равномерном потоке за корпусом судна.
Если отклонения но шагу длине, ширине лопастей и относительному уг. между лопастями не превосходят предельных значений, оговоренных техническим! требованиями иа тнготов. ст не винтов. т<> гидродинамическая неуранноиешеит ос обусловленная теточиос ью изготовления инны, не оказывает существенного нлт пня на возникновение па гребт <>м винте сил вызывающих в тбргшшо.
Последние из указанных выше сил т идродтшамической и нтроды имеют он делающее значение в возник «шепни на гребном винте сил, вызывающих вибраи т
Как гидродинамический источник вибрации гребной впит действусг пл корцу судна двумя способами
передачей через гребном вал и его опорно-упорные подшипники периодически сил и моментов, которые возникают непосредственно на лопастях винта, работаю •него в неравномерном потоке' за корпусом судна:
созданием в окружающей жидкое in ттбласги периодических давлений и перст, чей этих давлений через жидкость на расположенные в потоке вблизи винта участь кормовой оконечности и выступающие части, следствием чего яв. яетея возникший Hire па корпусе судна периодических сид и моментов
Основная частота указанных периодических давлений, сит и моментов онрс.1 лястся тлстотой вращения типа л, умноженной на число ло тестей 7 (эта частот, называется допас т нон частотой), К роме того, в частот! ом спектре гпдродтшамичс ск пх возбуждений вннга могут наблюдаться гармоники более высокого порядка, так в общем случае / mnZ, т 1,2 ...
§ 24. МЕТОДЫ ОПРЕДЕЛЕНИЯ И СПОСОБЫ С1ШЖ1 НИЯ ПЕРИОДИЧЕСКИХ СИЛ И МОМЕНТОВ
ПЕРЕДАВАЕМЫХ ГРГГ.НЫМ ВИНТОМ НА ВАЛОПРОВОД
Периодические силы и мамонты, возникающие на гребном винте при раин в неравномерном потоке за корпусом судна, относятся к категории основных шит них нагрузок, учитываемых при проектирован шт валопроводов и расчетах их до. говечносттт. Информация о величине и частоте действия этих сил н моментов необходима также для суждения о вттбрацтт иных качествах проектируемого стана и ci т оптимизации с точки зрения этих качеств.
В настоящее время более распространены теоретические методы опредолет ня периодических сил и моментов на гребных винтах. Наиболее строгими являются методы, основанные на вихревой теории нестационарного движения несущей т верхнести IJ связи с тем. что эти методы (см., т аирпмер, (3, 69, 104 |) яиляюгс трудоемкими и требуют применения ЭВМ с большим объемом оперативной и втк ней тамятн, они в настоящее время имеют ограниченное применение. В тшженерн I практике применяются более приближенные, ио и менее трудоемкие методы, осн ванные па введении различных упрощающих допущений. Оправданность при' нения того или иного метода в этом случае зависит от конкретных поставленных т лей, требований к точности результатов расчета.
Ниже изложены дне рекомендуемые для практического псттольтовання рас* ные схемы определения периодических сил н моментов иа гребных винтах. Пер т схема (схема Л) приближенно учитывает ттсстатптонарн ктт обтекания лона штата при работе в неравномернс м потоке та ко| несом судна, а также влияние ос пых геометрических параметров гребного влита (дискового и шагового отношение умеренной саблевндиосги контура, числа лопастей) на создаваемые им периода скис силы н моменты Вторая схема (схема Б), основанная на гипотезе квазистан парности, удобна для сценки сил и мименгон, создаваемых гребными винтами т работе в полях скоростей с различными характеристиками неравномерности.
В качестве основного расчетного режима принимается режим установившет• движения судна прямым курсом на тихой воде Поле скоростей потока в коэмон * оконечности судна в месте расположения гребного винта принимается стационарны однако неравномерным ио плоскости диска пинта В связанной с корпусом су.'Шл цилиндрической системе координат Ол0гоОи (рнс 2) неравномерность осевых тту
(v—скорость судна) и касательных тТц ~~ - ~ составляющих ттодя сч 5G1
ростей натекающего потока иа окружности радиуса ? = г//? (R — радиус пиита) представляется п виде тригонометрического ряда:
оо
"л— ао 4 £.(иЛсо$Л'0 | bff sin Л’О)
A'=l
Йо = иоа + У, (o.vo с<* <V0 i.vosin Л'О).
Л1 I
(VI.1)
Положительное направление скорости йх соответствует направлению движения судна; положительное направленно скорости йр направлению вращения винта
Возникающие на гребном винте гидродинамические силы и моменты рассматриваются в связанной с корпусом судна прямоугольной системе коорднна! Ох01/07п 1
i (роекцин главного вектора и главного момента гидродинамических сил на оси координат этой системы для Z-лопастного винта представляю гея в безразмерном виде
+ £ (1x,„z"'Z" 4111 :
m 1
Ty i । 7 C » ",Zh + 7ymZ Si" mM 1 ;
in I
?г0 + £ Pcos "tZ0 + ^»iZ sf" mZt,K
T‘ (VL2)
Дс + S %nZ cos mZ" + MxmZ s’n «Л);
171 —I
+ B(^mzcosw20 I *'mZ S1" ",ZU);
A,r ~4-0 \ LU$ mZ0 4111 ",Z”)
hi=1 I
В практических расчетах периодических сил в иомен ов обычно ограничиваются первой (т I) или, как максимум, первой и второй (m - 1, 2) гармониками.
Расчетные формулы для определения входящих в выражения (VI.2) коэффициентов сил II моментов но схемам \ и Б представлен и в табл VI I2.
На рис. VI. 1 и VI 2 показаны необходимые для расчета по схеме А геометри-
еские и кинематические параметры гребного пинта
Коэффициенты, входящие в приведенные в табл. \ 1 I формулы, определяются следующими соотио1псииямп
В формулах расчетной схемы Л:
°Л-
fcx
,4V.S (Z-л)
snip,у;
cosp.y.
1
= к«х 4 “л.т «е+ p,v+'В2; * **
I 1 С целью ут'роцетия обозначений подарочные индексы «О». »|>редглн|оиц|е принадлежность составляющих вектора ы растя, силы и момента к системам координат Ох0д^»
** С'*«г0Н«. в § 24 в дальнеИи см опущены
’ Формулы схемы А получены Ю. М Андреевым.
5G5
Табл i’ ц я VI I ФормуЛы для определения составляющих периодических сил и моментов на гребных винтах
Составляю* щие нагрузки Обозначение Расчетная схема Л Расчетная схемн Б
Пульсации упора 1 - с J /р<>2 dr -Ап _ Г 1 /0wZ dr H
F5 xmZ 1 f J f/mZ dr rH —Л-н г i il>mZ dr H
Вертикаль пая сила и плоскости </0-’ РуО --T J f№ 1 4 гн kt+- [ 7TJ - (Jv + tio] dr p \ C-2 /
FymZ -H /т (b/nZ-l — bmZ-l) dr 1 J j r! ~=" (bmz i — ^m2+i) dr r 1
Fs * ymZ Cl 1 ft{tt'mZ-\—a'mZ-\)dr H - J 1)Сл 1 1 — (amZ-1 — Cfn2H) li
Продолжение табл. VI I
П р о д о л ж е п и е т а б л. VI 1
Составляющие нагрузки
Обо.ша-чек но
Рпсчстняя схсгл А
Расчетная схема Б
Изгиб аю-щнй чоменг в ПЛОСКОСТИ хОг
‘^vmZ
iimZ
'mZ—\
mZ—I Z~\
rrZ j-1
— а,
j !' (binz-i — <w+i> dr 'u
[ f'<aniz_j - a,H.74.t) dr
Изгибаю iHHrt момент в плоскости хОу
I
>/ j | . -
~j— | !r (umZ-1 OmZ+l)^r 'll
~ .1 lamZ-l + nmZ--l.) + /4 (fcmz-| — fynZ-l.l] c!r rH
^z
1
—p- | /'‘(bmZ-i-f-b/nz~i) dr 'll
Угол индуктивной поступи Р, находится из соотношения р; = <ро — «/. в ю, торо.м индуктивный угол атаки а; определяется по графику рис VI 3 для соотвсд ствующнх значений геометрического угла атаки а <|0 — В и угла ф0 Угол п\ левой подъемной силы находится из соотношения а(| — 806,. град.
(<\. — кривизна средней линии элемента лопасти).
В формулах расчетной схемы Б Кг, Кд — коэффициенты упора и крутящий момента гребного винта па расчетном режиме; q, <2— коэффициенты. определи мне по графикам на рис. VI.*1 и VI.5 в зависимости от соответствующих значении шагового отношения P.D и дискового отношения Л/- 4„ гребного впита.
Численные значения входящих в расчетную схему Б коэффициентов / Ирш» дены ниже.
г ............ 0,2 0,3 0,4 0.5 0,0 0,7 0,8 0,9 1.0
f ............ 0,255 0.498 0,787 1,104 1,425 1,717 1,925 1,935 0
Рис. VI.3. Зависимость индуктивного угла атаки а/ от геометрического угла атаки п и шагового угла элемента лопасти.
Во всех приведенных выше выражениях линейные размеры, отмеченные свср чертой, представлены в отношении их к радиусу гребного винта Л?
Для возможности выполнения расчетов по схемам А и Б необходимо распопа гать данными по характеристикам неравномерности потока в месте расиоложм гребного винта, определяемым коэффициентами ах, ЬЛ, aV[/, bNfj. Эти характ ристнки определяют но результатам измерения номинального поля скоростей (г поля скоростей, измеренного в месте расположения гребного винта при его от< ствип) при модельных испытаниях судна в опытовом бассейне. Для приближе. оценки эффективного поля скоростей (т. е. поля скоростей, образующегося в район кормовой оконечности судна при наличии работающего гребного винта) рекой» дуется использовать соотношение, позволяющее учесть радиальное сужение иош иалытого поля скоростей, обусловленное гидродинамической нагрузкой гребк винта,
где г — радиальная координата номинального поля скоростей; rs — радна.ч." координата эффективного поля скоростей.
570
В соответствии с формулой (VI.3) коэффициенты ау и Ъ1У ряда (VI.I), определенные на радиусе г, переносятся иа радиус г3.
Влияние работающего гребного винта иа характеристики касательной составляющей неравномерного поля скоростей приближенно учитывается введением поправочного множителя 1.7 к коэффициентам и bjij номинального поля.
Рис. VI.4. График для нахождения коэффициента С|.
Рис. VI.5. График для нахождения коэффициента с»
При определении гидродинамических изгибающих моментов в сечениях вала расположенных вне ступицы гребного винта (например, в сечении а—а, см. рис. VI.6. кроме изгибающих моментов, обусловленных висцентровы.м приложением упора (со ставляющис Л1у и М-), следуег учитывать действие изгибающих моментов, обуслов-
ило Мн—изгибающий момент, действующий в рассматриваемом сечении вала в горизонтальной плоскости; Л15--изгибающий момент, действующий в рассматри-
ваемом сечении вала в вертикальной плоскости; I — 1/R — относительное плечо приложения поперечной силы (см. рис VI.С); М — 1 (пли 2).
Приведенные в табл. VII формулы для составляющих гидродинамических сил и моментов являются аналитическим выражением так называемого выборочного, I 571
или фильтрующего, действия гребною впита. Фильтрующее действие гребного вин та — следствие расположения лопастей на равных угловых расстояниях. Оно при-ивлястся в следующем.
Если обратиться к представлению характеристик неравномерности ноля скоростей в виде (VI I). то из рассмотрения приведенных в табл. VI.I выражений следует, что гидродинамические нагрузки па гребном винте в общем случае обус.товли каются наличием только определенных гармоник в разложг вин неравномерности
%)
Vr
иыкр\ ж
Рнс. VI.7. Значения гармонических составляющих осевой неравномерности воля скоростей в месте расположения гребных винтов и — одповальпые суда
------- б 0,5 4- fi.fi, умеренные U (\ }-об раз лыс корчияые шпангоуты: — — — 6 0.64-0,7. X -•брлзныс
ксрмииыс 1-П1*иг«*уты;------- — Л 0,74-1).Я, V-nflpiu
пые кермовые шпангоуты;
б— двухвильни* суда.
1;р<Ш1|П(*Ань1 ребных валон, кн гребных валок.
0,1 г
поля скоростей в тригонометрический ряд. Так. пульсации упора и крутящего м< мента зависят только от величины гармоник порядка inZ (лг =1,2 ...) т е. крат пых числу лопастей гребного винта; пульсационные составляющие изгибающее момента п поперечной силы определяются только гармониками порядка mZ ± । постоянные составляющие изгибающего момента и поперечной силы определяют.-величиной первой гармоники. Наличие же в поле скоростей других гармоник, кр< названных, не влияет на возникновение периодических нагрузок на гребном впит при суммировании нагрузок, определяемых этими гармониками, по числу лопаете! происходит их взаимное гашение. Представление о выборочном действии гребны4 винтов с различным числом лопастей дает табл. VI.2.
На рис VI 7 показаны гармонические составляющие осевой неравномерных > поля скоростей в месте расположения гребных винтов для типпчидх кормовых ог>| 572
Таблица VI.2 Реакция ipcfiHux винтов с различным числом лопастей на наличие в ноле скорое ген гармонических составляющих порядка nt
Сглчаю
Лающие
ИЯГрч 1К11
Ре Лк
Ру\ Р
-- tармппичегкиг состлпляющис поля скоростей.
5
6
И,/. Л<,
|зон.1 iiiii крупнотоннажных одповальных и относительно быстроходных двухваль-1>ых судов. Приведенные данные соответствуют характерному радиусу гребною винта I гр= 0.7 Коэффициент общей полноты одповальных судов изменяется в пределах 0,5 6 ^0,8. а форма кормовых шпангоутов этих ссдов соответствует умеренной
I или V-образной для 6 0,5-j-0.fi и V-образпой для 6 0.6-5-О.8. Данные по двух-|валвиым судам относятся к двум характерным формам кормовых образовании: с кронштейнами и с выкружками гребного вала.
Характерными чертами приведенных спектров, являющимися результатом общ. х закономерностей формирования потока в кормовой оконечности одновальных н двухзальных судов, является, во-первых, преобладание четных гармоник в спект-| рах одповальных судов н, во-вторых, интенсивное уменьшение величины гармоник с увеличением их порядка в спектрах как одповальных, так и двухвальных судов.
I Отсюда, имея в виду выборочное действие гребного винта, можно заключить, что в поле скоростей одповальных судов гребные винты с четным числом лопастей будут создавать относительно большие колебания упора и крутящего момента н соответственно чалые колебания изгибающего момента и поперечной силы. Для гребных винтов одповальных судов с нечетным числом лопастей характерна обратная I картина: значительные колебания изгибающего момента и поперечной силы и малые колебания упора и крутящего момента. Поскольку величина амплитуд отдельных гармоник уменьшается с увеличением их порядка, увеличение числа лопастей греб [ х винтов привозит к уменьшению создаваемых ими периодических нагрузок.
' Указанные закономерности позволяют наметить некоторые способы уменьшения гидродинамических сил, вызывающих вибрацию и влияющих на надежность грабит валопроводов
Наиболее эффективным средством снижения периодических нагрузок на гребных винтах является выравнивание поля скоростей вместе расположения гребных инто К сожалению, это не всегда рационально, так как часто связано с ухудше нием пропульсивных качеств судна. Тем не менее прн проектировании кормовой оконечности следует иметь в виду следующие общие рекомендации
I Для V-образной формы кормовых шпангоутов характерны ярко выраженные пики неравномерности поля скоростей в верхней и пнжней части диска винта, что [Приводит к более резкому различию между четными и нечетными гармониками неравномерности поля скоростей и относительному увеличению четных гармоник. [Один из путей уменьшения этих пиков заключается в увеличении осевого зазора [Меж у гребным впитом и корпусом и переходе к открытому типу кормы Для V-°бра ной формы кормовых шпангоутов характерна также более значительная не-симм?трия поля скоросгсп относительно плоскости хОг. приводящая к большим
573
значениям коэффициента (ц и, соответственно, к большой величине постоянной сгавляющей изгибающего момента в вертикальной плоскости, действующего в h.i-правлении, иро1нвоположпом действию весового момента гребного типа.
Переход к U-образиым кормовым шпангоутам, сопровождающийся возник!« пнем кормовых скуловых вихрей, способствует, как правило, уменыгкпшо остр< и пикоа неравномерности поля скоростей, что приводит к уменьшен го раздпч между четными и нечетными гармониками, л значения коэффнци! ита О) нерсрасн; деляются но радиусу гребного впита таким образом, что момент Л1,п умешлиаст । и лаже может изменить знак При увеличении U-образности кормовых шпангоуте . интенсивность скуловых вихрей возрастает, вследствие’ чего увеличиваются местные таигенциа ч.ные скорости в диске гребною винта и может произойти отрыв скуловых вихрей от корпуса. То п другое нежелательно как с точки зрения пропульсивных качеств судна, так и с гички зрения сил. вызывающих вибрацию
Таким образом, умеренная V- и I'-образность кормовых шпангоутов, по-вн миму, является наиболее благоприятной для обеспечения невысокого уровня г.ерн. -дичсскнх сил и моментов на гребном винте. Во всех случаях отдаление гребни <> винта от корпуса (в осевом направлении) и придание кормовым образованиям occcir -матричной (относительно осн гребного впита) формы является эффективным средствоv снижения степени неравномерности ноля скоростей в диске гребного винта
Во многих практических случаях необходимость выравнивания поля скоросте i для уменьшения периодических сил н моментов на гребных винтах возникает, koi. л судно уже построено, и возможности изменения формы кормовых шпангоутов сутствуют. В этих случаях положительный эффект постигается установкой над гр ным винтом горизонтального крыльевого стабилизатора, ускоряющего пока в месте расположения гребного винта, пли установкой перед гребным винтом i скольких горнлоитальных стабилизаторов, направляющих па него поток. Показа ы также эффективность применения устанавливаемых перед гребным нинтом радиальных крыльев (вихрегсиераторов).
При заданной неравномерности поля скоростей эффективным средством умы пения периодических сил и моментов иа гребных винтах одновальпых и двухвал пых судов является увеличение, числа лопастей гребного винта. Вопрос об угелг-чении числа лопастей должен решаться с учетом требований сохранения высоких пропульсивных качеств винта Следует иметь в виду, что нрп больших нагрузи, х винта (Сг.4> 2.0ч-2.5). соответствующих, в частности, условиям работы гребных винтов одновальпых крупнотоннажных судов, увеличение числа лопастей о Z= 6—8 практически не приводит к ухудшению коэффициента полезного денет я винта.
Для снижения нагрузок, вызывающих нзгнбиые колебания валопроводов о вальных судов, рационально применение гребных винтов с четным числом лопастей.
Эффективным средством снижения нагрузок, пергданаемых гребным виг г м на валопровод, является применение несимметричных направляющих паса < к. У несимметричной направляющей насадки форма профиля каждого меридиана •> кого сечения отличается от остальных, а сам профиль устанавливается к осп грибного винта под своим углом, величина которого зависит от обводов корпуса суча н расноложезгня движителя относительно него. Спроектированная наллежашкм образом несимметричная насадка обеспечивает выравнивание поля скоростей в м те расположения гребного винта и значительное снижение периодических сил и моментов. Одновременно при умеренных*!! больших гидродинамических нагрузках движителя насадка повышает пропульсивные качества судна. Движнтельный комплекс с несимметричной направляющей насадкой применен на крупнотоннажных таик г;,х типа «Крым»
§ 25 ПЕРИОДИЧЕСКИЕ ДАВЛЕНИЯ НА КОРПУСЕ СУДНА, ОБУСЛОВЛЕННЫЕ ГИДРОДИНАМИЧЕСКИМ ДЕЙСТВИЕМ ГРГГ.НОГО ВИНТА
В связи с тем, что гребной винт имеет конечное число лопастей, создаваем1,10 им в жидкости возмущения (давления, скорости) иссят периодический хара» Эги возмущения реализуются иа находящихся вблизи гребного винта поверх! > 1 ,|к
574
кормовой оконечности корпуса и выступающих частях (рулях, кронштейнах гребных вадов, ахтерштевне) в виде периодических давлений и сил, которые являются причиной общей и Местной вибрации корпуса и отдельных корпусных конструкций
' Поэюму в процессе проектирования судна необходимо установить, обеспечивают ли принятые в проекте элементы гребною винта, а также зазоры между впитом и корпусом, получение допустимых уровней общей и местной вибрации
Ниже излагаются расчетные мы оды для определения периодических давлений в жидкости, возникающих от гидродинамического действия гребного винта. Приведенные формулы могут быть использованы для оценки внешних гидродинамических , сил в расчетах вибрации, вызванной работающим гребным винтом, а также для I сравнительного анализа вибрационной активности различных вариантов гребных винтов и компопонок кормовой оконечности проектируемого судна.
Основными факторами, определяющими амплитуду колебаний давления вфиксп-I росаиной точке внешнего ноля грибного впита, являются: число лопастей впита 1, Iвеличина гидродинамической нагрузки впита, степень неоднородности натекающего на винт потока, телесность лопастей впита, степень развития кавитации па лопастях винта, удаление рассматриваемой точки внешнего поля от винта, влияние I расположенной вблизи винта поверхности корпуса, а также свободной поверхности Г воды
При выводе приведенных ниже формул для определения давлений принимается упущение о том, что, хоти винт является гидродинамически нагруженным и лопа-сти винта обладают конечной телесностью, нагрузка п толщина лопастей невелика, т. е. вызванная винтом скорость |й| мала в сравнении со скоростью переносною 1 движения | [ | е г + QXr | (t>z - скорость поступательного движения винта;
U угловая скорость вращения). Жидкость считается невязкой и несжимаемой, течение обладает потенциалом. На основании этих допущений можно принять сле-дующее:
зависимость между вызванной скоростью и обусловленным ею изменением давления в жидкости является линейной;
вызванные работой винта давления могут быть представлены суперпозицией «силовой» (обусловленной гидродинамической нагрузкой винта) и «объемной» (обус-I «топленной телесностью лопастей) составляющих;
' входящие с лопастей свободные вихри, а также присоединенные гидродинамические особенности в пределах контура лопастей располагаются полициям тока переносного движения (но направлению скорости о..).
Рассмотрим вначале случай, koi да винт работает в однородном натекающем потоке, а кавитация лопастей отсутствует. В системе координат, движущейся пост Гпательно с винтом (рис. VI 8) линеаризированный интеграл Лагранжа имеет вид (см. § 5)
Г “
где Р—Ро — избыточное давление в жидкости; (> — плотность жидкости; t — время; фй= ф, _|_ фг потенциал течения, представляющий собой сумму двух потенциа-1л<ш обуслозлепниго гидродинамической нагрузкой пинта Фд н телесностью ло-• пастей Фу
I | Поскольку 0,, - 42/ (Ор — угол поворота лопасти (ем рис. VI.8)|, урав
пение (VI.б) приводится к пилу
X; — Jin — коэффициент поступи.
I Потенциал Фд может быть представлен в виде потенциала слоя диполей, распре Нкенных по опорной поверхности лопасти винта Л, и по свободной в их ревой поверх-чоетп Ла (оси диполей направлены по нормали к поверхности), а потенциал Фу
1 Число лопастей определяет также частоту колебаний давлении (см $ 23).
575
в виде потенциала слоя источников — стоков, расположенных в пределах опорной поверхности лопастн Af.
II у (Q) —1—</.Д; (VI>(
4л J J <*ЛО Lpq
Л,
Фг — [ 11 (VI •»»
4л J J Lf0
Л,
где у (Q) и у (Q) — соответственно интенсивности распределения диполей и иеточиг ков-стоков; Q — точка на винтовой поверхности, в которой находится гндродинамп
Рис. VI 8. Система координат для расчета периодических давлений.
ческая особенность; L/ю — расстояние между точками Р и Q; Р — точка, в которой определяется потенциал вызванных скоростей; и у — нормаль к винтовой поверх пости в точке Q.
Можно показать, что в пределах сделанных выше допущений давление в ж, кости, вызванное гидродинамической нагрузкой вин га, зависит только от распре те .тения нагрузки но опорной поверхности Я, Ограничимся рассмотрением относи дельно простого случая, когда опорная поверхность лопастн стянута в ради:, л ную линию (случаи представления лопасти как несущей линии) Выражение ля потенциала <1>р, имеет ви
Ф'- I Г(Г,Р + ^)2 <
6
7 a di dr
х I __ -j.,
с [<?u +v.4/)2+'2 +2"V°s(Q„-00 - Й/)] 2
где I’ (г) — циркуляция скорости вокруг лопасти на радиусе г: t — время. 576
Подставляя (VI. 10) в (VI.7) и производя замену переменной я = хи ф- vAt,
(VI.II)
Операция
ds dr
[S (- ? + rQ - 2„0 cos (o„ - »0 - + -*l) ] '
к дхв T Л(/< <)()p /
__________I_________________________ 1 2rrc«>S(0p-Oo-^+^)]2
для всех s, кроме s x0, дает нуль, так как при дифференцировании cos^Op— 0О — s . -V \
f— Т •jyp- J по 0/(и х0 получаем одинаковые члены с обратными знаками. Отсюда следует, что выражение (VI.II) имеет вид
Pl ~?о
1
Г (г) (г2 + Л2#2) 2 ---------------------!-------------------- dr (VI 12)
(? о --
х24-/2 ; г2 2/r0cos(Op —0о)] '
I
Имея в виду, что = (г2 -j- >2/v>- । 2 ( — г ———|- hlU-
’ '?«„ ’' ‘ ' \ дх„ г Мр )
после
суммирования по числу лопастей Z и приведения выражения (VI 12) к безразмерному виду получим
| 7. I
(r'A|).V()+rftSlll (On — О*)
---------------------------------3
j-*u + '3 + 'о- 2"оС(*(°О- е*)]2
(VI.13)
Где р _ Р----Pv ; G .. Г
(’Гд/2
₽есепы к ралнусу винта.
0ft + (2^/2) (Л — 1), а линейные размеры от-
10 П/р Я- И. Войткунского, т. I
Выражение (VI 13) показывает, чти силовая составляющая давления определяется только циркуляцией присоединенных вихрей Это является следствием доп щеипя о гом. что сходящие с лои.1ст.1 свободные вихри располагаются полициям тока переносного движения. Обобщение этою выражении на случай, когда лопасти пре । сгаиляюгся в виде участков опорной шиповой поверхности конечной ширины, дает
(г//.,) |X„ А(р) -j-~n s!n (Пл — Ofe — 0 - 0)
| (*о - XZ0)2 + ;2 + 3 - 2Гf0 ^'о °fc - " - {I)I
гДв g (f, 0) - интенсивность распределения циркуляции но поверхности лопает, ()1 (г) и 02 (г) — угловые координаты выходящей и входящей кромок лопает . Q (/) — угол откидки контура (измеряется в плоскости диска винта, положительное направление соответствует правому вращению).
Объемная составляющая давления определяется потенциалом скоростей Ф7 [см (VI .9) ]. Если для нахождения интенсивностей источников использовать извест dne <hnr
ное линейное соотношение q (Q) - | е7 | , ле-^----изменение местпои т-
щины профиля цилиндрического сечения лопасти по хорде, то выражение для iiotci -циала Ф/ запишется в виде
dll dr
(*b + г2 + го — 2"о cos(°0 — °р ~ 0
(VI I о
или, после подстановки (VI.15) в (V1.7), для винта в целом
Зтр. гдеЛ~
сечения ЛО1Л'11
нзмепецпе местной толщины профиля цилиндрического
по угловой координате 0.
При работе гребного винта в неоднородном натекающем потоке и (.алой его 1идрадиш*шчсской нагрузке связь между давлением в жидкости и интенсивностью присоединенных вихрен носит «квазнстацноиарпый» характер: давление связапос циркуляцией такой же зависимостью, как и прн работе винта в однородном потоке. Это означает, что для расчета силовой составляющей давления, па которую пеодпород-I тсть натекающего потока оказывает наиболее существенное влияние, могут быть слользоиаиы приведенные выше соотношения, в частности формула (¥1.13), однако циркуляция Г (г, Ор) при этом должна определяться с учетом нестаннопарности обтекания лопастей. Для приближенных оценок допустимо использование значения Г (г. 0,,), определенных на < с нонан ни квазистацноиарного расчета.
Кавнтанни оказывает наиболее существенное влияние па поле создаваемых гребным винтом периодических давлений. Частотный спектр давлений, обусловленных кавитацией, очень широк, однако тольк самые низкие частоты (лопастная н несколько кратных ей гармоник) имеют значение с точки зрения вибрационной активности гребного винта Величина периодических давлении па этих частотах определяется объемом образующихся на лопастях кавитационных каверн.
Если кавитирующий гребной впит работает в однородном потоке, то объем кавитационных каверн остается постоянным во времени Можно считать, что в этом случае кавитация приводит как бы к увеличению эффективного объел лопастей, (вызывая появление соответствующей дополнительной объемной составляющей давления. Вычисление этой состаачяющен может быть выполнено таким же способом, что н для некав1т1рую1цего винта [см. формулу (VI.16)] с топ лишь разницей, что объем вытесняемой винтом жидкости будет определяться объемом образовавшихся на лопастях каверн.
В неоднородном потоке размеры кавитационной каверны изменяются в зависимости от углового положения лопасти. Эти изменения нарушают условно замкнутости распределения гидродинамических особенностей по поверхности лопасти, которое выполняется для винта, работающего в однородном потоке, f q (Q) dA О, [что эквивалентно появлению пополнительных взаимно I скомпенсированных [источников и изменению закона затухания давлений с расстоянием.
Потенциал скоростей, вызванных возникновением кавитационных каверн и их пульсацией, может быть найден из (VI 9)-
I
Ф( = - А- ч(г о, Op + '^R2) 2Х
' о;
| (х0 - ktRf>Y + г + rg - 2„0cos (% - <|р - (I ())]
где rc SC г SJ R— зона распространения кавнтанни в радиальном направлении, О SC О"—зона распространения кавитации в направлении угловой координата
Нестационарная интенсивность источников находится из соотношения
dl)gr d»lec V А ( Д»1е Д']ег \
dt е d* i4R \ dUp dfl /
(VI. Ю
рЛс ij,,. ( , fl, 0;i) м с пая толщина кавитационной каверны; £ ось, совпадаю-чщя с х р (ой цилиидриче :кото сечет я лопас и
F 19* 579
После подстановки (VI. 17) и (VI.18) и (VI.7) и суммирования по числу лопасти! винта получим
л’о — Х,0 ro sin {0о — Од. — 0 — 0) 3
(Xt. А,О)2 | "г2 + - 2гг|( cos (00 — о* - 0 0) 2
(VI.19)
Формулы (VI 14), (VI 16) II (VI 19) определяют составляющие давления, обусловленные И1дродинамичсской нагрузкой, телесностью лопастей и кавитацией (если таковая есть) гребного впита. Общее избыточное давление в фиксироианпоп точке жидкости находится суммированием составляющих: р = Рд + р, + рс:.
Это давление, как периодическая функция угла поворота лопасти, может быть представлено рядом Фурье вида
р А. _|- V (р‘т cos otZ(»p + р'т sin mZOp). (VI 2<»
*“ Ла—I
где
Pm
Fl(Xn - ^'2л0 Sl!l (On Op — 0 0)
----———--------
[(x0 - Az0)2 + ? 4- rj - 2?7O cos (i’o - °P - 0 - °)] 2
x(^ + x2)2[C0S,”Zl,,><ft'^rf()„:
1 z' I sin mZdp ' — Г I nA.
Fi = nrg + F3; /3 j—
(VI.21)
0 - - flltr
/7з = ж(Пе + «1е.)--^-
(VI.22)
В общем случае расчет функций /•', достаточно сложен, так как для его выполнения необходимо знать распределение циркуляции g (г, О. 0(.) по поверхности лопасти винта, работающего в неоднородном потоке, а также размеры и форму кавитационных каверн в каждом угловом положении лопасти
Для сравнительных расчетов может быть применена упрощенная схема, основан пая на введении дополнительных предположений, а именно:
распределение циркуляции по радиусу винта вычисляется квазистацпоиариым методом;
распределение циркуляции по хорде лопасти считается равномерным;
профили цилиндрических сечений лопасти представляют собой симметричны двояковыпуклые двуугольники, образованные дугами окружностей, причем макси мальпая толщина двуугольника равна максимальной толщине лопасти па рассыатрн раемом радиусе, а длина двуугольника равна длине хорды сечения;
габаритные размеры кавитационных каверн (длина и максимальная толщина) в каждом угловом положении лопасти считаются известными (нз зкеперкмента или отдельного теоретического расчета);
580
контур каверны па заданном радиусе образован дугой окружности, причем I максимальная толщина этой схематизированной каверны равна максимальной тол-I шине реальной каверны
В этом случае выражения для /',• приводятся'к виду
где G (г, 0р) - безразмерная циркуляция скорости, вычисленная для различных у г-Iлевых положений лопастн; Ь (Г) — длина хорды цилиндрического сечения лопасти;
fi (г)— относительная толщина цилиндрического сечения лопастн; Л (г. 0р) = 1— е 1b -- относительная толщина каверны (с- (г. 0р) — максимальная толщина ка-t верны); Л„ (г, 0р) = b (г. fi^lb — относительная длина каверны.
Предполагается, что функции е, (г. О.,). Ь,-(г, ().,) и являются заданными.
Формулы (VI.21) (VI 23) позволяют рассчитать давления как для кавитирующего, так и для пекавитнрующего гребного винта. В последнем случае е,- = Ь, — 0. [ Если впит работает в однородном потоке, то G (0/) const, b, (6р) const, е,- (0р) = == const.
При выводе приведенных выше формул предпола! алось, что гребной винт ра-Iбота т в безграничной жидкости и в отсутствии вблизи него поверхности корпуса (судна Присутствие корпуса и близость свободной поверхности воды накладывают дополнительное граничное условие па потенциал вызванных скоростей впита (см (31): 0 на поверхности корпуса; р — const ра на свободной поверхности,
где п - нормаль к поверхности корпуса; ра — атмосферное давление, что приводит изменению амплитудных значений давлений
1 Влияние присутствия корпуса оценивается так называемым коэффициентом влия-|иня стенки, показывающим, во сколько раз истинная амплитуда силы на поверхности корпуса, возникающей от действия периодических давлении, превосходит ее величину, определенную без учета указанного граничного условия. Величина коэффициента влияния стенки находится в пределах от I до 2 н зависит от ориентации г рассматриваемого участка поверхности относительно гребного винта. Для пластины, параллельной оси винта, коэффициент влияния стенки равен 2. В настоящее время это значение коэффициента влияния стенки, как правило, используется в практических расчетах поверхностных сил для реальных судовых обводов Очевидно, что возникающая при этом ошибка будет наименьшей для случая бортового расположения винтов; для одповальпых судов такой прием приводит к завышению амплитуд поверх-^Костнон силы, н особенности ее проекции на ось х
Г Каких-либо количественных данных о влиянии свободной поверхности воды иа величину периодических давлений в настоящее время нет Можно лишь предположить, что поскольку при традиционном расположении гребных винтов на водонзме-Щающнх судах свободная поверхность волы удалена от винтов значительно больше, поверхность корпуса, ее влияние на величину возникающих на поверхности корпуса давлении будет несущественным
Холден и .трутне исследователи [88] предложили приближенные формулы для оценки амплитудных значений давлений на поверхности корпуса судна, вызванных
Рвотой гребного впита. Для получения этих формул был произведен регрессионный ^нализ результатов расчетов периодических давлений и измерений их в натурных условиях, выполненных для 72 судов. 1г
Формула для оценки амплитуды периодических давлений на лопастной чвпоте воздаваемых искавнтнрующим гребным винтом, имеет ВИД (в паскалях)
(Vi tn
681
где// = 1,8 0.4 (d.R) для d/R 5- 2,0, Н = 2,8для<//А > 2.G г,— макспма.п,
пая толщина лопасти на относительном радиусе г = 0,9; d — расстояние от точки, находящейся на относительном радиусе 0,9 в зоне максимального попутного ноток.,, до точки на корпусе судна, в которой вычисляется давление.
Периодические давления (в паскалях), изменяющиеся с лопастной частотой н вызванные кавитацией гребного винта, предлагается рассчитывать по формуле
\/V - 0,5Срл«о*(j, _ jM) f2 Л- , (V1.25»
где Н = 1,7 — 0,7 (d/R} для d/R < 1,0; /I - 1,0 для d/R > 1,0.
Входящие в формулу (VI 25) коэффициенты вычисляются следующим образом
J,M= о(1 —— относительная поступь, соответствующая максимальному значению номинального попутного потока в области г = 0,9-г-1,0;
Ji — JB + A J, где Jo — относительная поступь, соответствующая среднему расчетному значению попутного потока; А/ — поправка, учитывающая влияние различия в степени развития кавитации винта с заданным числом лопастей, дисковым отношением и длиной хорды сечения лопасти на относительном радиусе г = 0,9 в срав-
нении с базовым винтом; Д/ = А А’г „ ,. , .
ЬКт/AJ
Значения &Ky/&J зависят от числа лопастей ввита:
Z............. 3 4 5 б
ЛКТ/Ы ... 0.32 О.ЗС 0,42 0,48
Коэффициент АКг вычисляется по формуле ХКу = ——j—-— Ку. где Ку — коэффициент упора винта па расчетном режиме; определяется соотношением /, (Л£/Ло) у 2,13/2 .. .
- ’—Ь—t где (п0 0) t — длина хорды цилиндрического сечения лопасти п i (*u,obiZ
относительном радиусе 0,9;
(-4^ ------5---------------!----------------------’ <VL2b)
V /1„ /,v л/>- о,Брс’о 7 /0,235а + 0.063) [ 1,067 — 0,23 (P/D)o 8|
1
Т„ — упор винта; — окружная скорость на относительном радиусе 0,7; (P/D)o,e — лл (h . + 10 4)-1000
шаговое отношение на относительном радиусе 0,8; а = --!------------число кз-
0,5(47
внтации; ha — заглубление оси винта, м.
Входящий в формулу (VI.25) коэффициент [л определяется отношением /5 = (РЬа ,05/ где Р и /—соответственно шаг и стрелка прогиба средней липни
профиля сечения лопасти на относительных радиусах 0,95 и 0.80.
При известных значениях Ар0 и Арс результирующее давление находится пэ соотношения
j_
др = [М + 'р!—2др0 At>ccos (|8°—ф)] 2 ’ (' 1 1
где <р = Z 125 — arctg (г/р)]; г к у — координаты рассматриваемой точки в плоское! диска вннта.
Формулы (VI 24)—(VI 25) целесообразно использовать для оценки максимальных значений периодических давлений вблизи винта.
582
Г лава VII
гребной винт как источник шумности
§ 26. ОСНОВНЫЕ ФИЗИЧЕСКИЕ ПРИЧИНЫ, ВЫЗЫВАЮЩИЕ ШУМ ГРЕБНОГО ВИНТА
С развитием судостроения вопросам шумности в судоймх помещениях и внеш-I реи подводной шумности окатывают в<< большее внимание при ирг г кт прованнп новых судив. В ряду многочисленных нстгтиков вгутрнсудовой шумшетн, таких I как главные энергетические установки, вспомогательные судовые мехами-мы. сп-| стемы вентиляции и водоснабжения, устройства забора п сброса веды и воздуха, одним из наиболее значительных является гребной винт, расходующие основную часть мощности главной энергетической установки судка Уровни шумности в пас-сажирскпх помещениях и помещениях команды регламентируются требованиями
саннтзриы.х правил, удовлегворение кою рым представляет собой сложную ic-xiin г четкую задачу *.
В качестве примера на рис. All 1 приведены уровни шума в пассажирских поме гениях трех судов различных типов: пассажирского (/), грузового (2) и супертанкера (.3) [81 ] Во всех трех случаях г источником шумности является гребной внпт Для сопоставления пунктиром по каза ид течс-ственные нормы шумности <о СН -116 62 для служебных помещении (кривая •/) н голландские нормы для пас Исажпрскнх помещений (кривая 5Е
г Особо неблагоприятной и трудно-Густранимой оказывается шумность в нож них октавах звукового диапазона с цент ральиой частотой 63 и 125 I ц Меры шу моизоляцин помещений, применяемые в корги г пах связях и среде шхмнопоглощг ння внутри помещ, iniii [39 j. для этих часто г сложны и мал. эффективны Ио-этому наиболее действенным здесь ян-Вияется борьба с шумом в источнике путем исключения интенсивного излучения i реб ^вого пиит > .'hi г<> с образованием иа нем динамичных форм и стадии кавша
ьл1_______________________________________
10 10*
Рис. VII.I. Октавный спектр уровнен шума относительно 20 мкПа в пассажирских и служебных помещениях сулои.
инн, а также с низкочастотными изменениями объемов каверн иа лопастях гребного Винта, работают то в неоднородном потоке [3] Помимо санитарных- норм требования к уровням шумности возникают в связи с применением непрерывно усложняю •Цегося технологического оборудования Это, в частности, относится к внешней подводной шумности рыбопромысловых судов, судов но освоению и разработке богатств морскою дна п многих других плавсредств использующих современные гидро устпческис системы для э.холоцнроваиня, навигации, телеметрии, связи н телеуправления 5
Внешняя, т е. ходовая, ио (водная шумность судна па достаточном от него раленпп является важным фактором во многих отношениях В настоящее время нн-тенашность судоходства и насыщенность судов гидроакустической аппаратурой достигли такого уровня, при котором проц «водимое судами подводное акустическое из*
1 Критерии допустимых уровней шуми* мп и представлены в Санитарных правилах
СССР 1962 г. (СН 4И> <>‘э> и эпирсплсиы в соответствующих госудпрствснныж паи* *;,ртмк 1301. Аналогичные правил.'! для судов верх нше-в приняты з? рубежом.
583
лучение во многих случаях определяет уровни шумов моря [1001. Кроме экологнч<-скпх аспектов этого положения, важно и то, что стали ощутимыми перегрузки часто пых каналов работы iпдроакустического оборудования.
Погрешности снижения внешней ходовой шумности морских трапсиорши, средств во многом удовлетворяю)ся па базе нспа1ьзо1И))пя достижений щкпно. । кораблестроения в период второй мировой войны, которые получили освищи н< в ряде общедоступных публикаций |7б]. В последние годы развитию этого нанрш. лепия уделили внимание Международные конференции опытовых бассейнов (МКО(>j, включившие проблемы шумности гребных винтов и ее моделирования вжчнс.то р-гулярно рассматриваемых вопросов |99)
Выше отмечалась определяющая роль гребною винта среди источников шумности судна. Как к механизмы корабля, гребной впит производит излучение во внешнее поле, вызывая вибрацию различных элементов корпуса. Нов отличие от механизмов, гребной винт производит излучение в воду непосредственно поверхностями своих лопастей, а также порождает центры шумоизлучения в потоке жидкости при кавитации
Специфика вопросов шумности судовых гребных винтов существенно усложняет задачу подбора справочного материала, который отвечал бы практическим запросам конструкторов. Помимо прочего, эта трудность обусловлена изменчивостью шумности гребных винтов прн малых отступлениях от прототипов, вследствие чего задачи. решаемые конструкторами, как правило, требуют привлечения модельных исследований и трудоемких расчетов на ЭВМ. Поэтому приведенная в настоящей глаие информация о шумности, вызванной работой гребных винтов, касается главным образом принципиальных вопросов физики этих процессов В пей содержатся также общие рекомендации но мерам снижении шумности в о) раинчениос число преимущественно эмпирических формул для расчетных ее оценок.
Механизмы шумообразования на ходу судна^миогообра.зпы. Так. при^кавнтацнп могут возникать местные скорости, равные скорости звука в воде и сопровождающиеся образованием ударных волн. В основном же скорости, сопутствующие движению судна, малы по отношению к скорости звука и практически все остальные механизмы шумоизлучения обусловлены колебательными или автоколебательными процессами. например гармоническими колебаниями с дискретными частотами, приводящими к образованию в спектре дискретных гармонических рядов Имеется также большое число процессов шумообразования случайного характера, что сопровождается достаточно высокими уровнями в сплошной части спектра.
Основной наиболее, употребительной мерой шумности судна являются уровгл спектра мощности в широком диапазоне частот, включающем инфразвук с полосой частот 1—10 Гц; звук с полосой 10 10 000 Гц; ультразвук с полосой 10—100 кГц. Акустическая волна переносит механическую энергию в форме кинетической энер< пн перемещения частиц среды и потенциальной энергии упругих деформаций эвчг среды. В качестве энергетической меры излучения используется так называемая интенсивность волны
/ р’/рс. (VII. 1
где р — давление; р — плотность среды; с — скорость звука (в воде с л 1500 м/с).
На поверхности воды среднее атмосферное давление равно 1 ата * да 1011 мкПа. В системе СИ в качестве единицы акустического давления в воде принят 1 мкПа, составляющий одну стомнллиардпую долю атмосферы. Чтобы представить себе это значение образно, можно вырази ib I мкПа в миллиметрах водяною столба гидростатического давления. Нетрудно видеть, что 1 мкПа — 10-7 мм вол ст. т. е. одной десятитысячной микрометра водяного столба
Поскольку существуют процессы, в которых акустическое давление вблизи источника может достигать н долей атмосферы, диапазон изменения интенсивности шумов оказывается настолько широким, что для ее описания становится необходимы'1 применение логарифмической (децибельной) шкалы В этом случае дне интенсивности /', и /а отличаются иа
N JO 1g/,//,. (VII
где N измеряется в децибелах (дБ). В качестве эталонной в системе CI 1 рекомендован-"1 интенсивность волны, в которой звуковое давление равно I мкПа, прн этом у!1'’-
584
вепь звуковой волны по ее интенсивности равен Wen — 20 If! Р где р представляется в мкПа В слуховой акустике известен предел слышнмсхггн по звуковому давлению, который считают равным 20 мкПа. Принятие егоза единицу акустического давления дает Л'а Ncn — 26. В отечественной практике, если не оговаривается особо, подводная шумность часто также исчисляется по отношению к давлению в 20 мкПа.
Для подводной шхмпости характерным является падение акустического давления по мере удаления от источника (по законам сферической пли цилиндрической волны либо по более сложным законам) Ввиду этою для характеристики излучении источника принято параллельно с интенсивностью указывать фактическое либо стандартное расстояние, па котором произведено измерение или к которому приведен результат измерения
В качестве стандартного расстояния приведения в системе СИ используется 1 м. В отечественной практике часто применяется дистанция приведения 50 м. Если, как это обычно принято приведение осуществляется по сферическому закону рассеяния р------ то — Nmi — 20 1g 50 34 дБ.
С учетом сказанного о соотношении пороговых давлений и дистанций приведения для перехода от уровней, применяемых в настоящее время в отечественной практике, к рекомендованным в системе СИ при одинаковой ширине полосы анализа они должны быть повышены на 26+ 34 = 60 дБ.
При отсутствии других источников шумности уровень дискретного излучения не зависит от ширины полосы анализа Уровень же интенсивности излучения со сплошным спектром существенно меняется с изменением ширины полосы используемого анализа. Исходя из случайного распределения фаз при сплошном спектре излучения можно определить суммарную интенсивность двух источников как их арифметическую сумму. Это означает, что суммарное давление от двх х пли более источников равно корню квадратному из суммы квадратов давлений. Суммируя интенсивность источников со сплошным спектром в ограниченной полосе, можно получить
VА/, -. V\ft + 10 1g 4г-. (VI1.3)
I -4 2
где /, и /а — нижняя и верхняя граничные частоты соответственно Применительно к реальным спектрам, содержащим дискретные составляющие, плавно меняющуюся сплошную часть (белый шум), а также узкополосные составляющие с непрерывным спектром, пересчеты с одной полосы анализа на другую могут содержать принципиальные трудности. Поэтому применение спектров плотности в полосе I Гц является удобным главным образом для характеристики излучений со сплошным спектром, по становится малоэффективным прн наличии линейчатых дискретных и узкополосных сплошных спектров.
Для излучения со сплошным спектром связь спектральной плотности с широко применяемыми спектрами, имеющими частотно-зависимую полосу анализа, определяется формулой
^=67-6,,+ JOlgf, (VII.4)
где А/,,— уровень в частотно-зависимой полосе; G— спектральная плотность; kq — поправка на ширину полосы Индекс q= I для октавного, <7=2 для полу-октавного <7 3 для третьоктавцого спектра Связи между частотами Д, централь-
ной частотой f„'n шириной полосы анализа характеризуются соотношениями
/. 2‘ "I,. f„, г'^л.
«>1 Q __ ।
v, = z 2, л„.
Поправка па ширину полосы равна
В А/ 9,/« — I
К * lOln-LL - 10 1g 1 .
И <>i -«
яшблпженно ее можно внчне.ппъ но формуле k, 2</.
585
Выделяют следующие четыре основные составляющие ходовой подводной ипм-пости судна, связанные с работой гребного в.а, но существенно разлпчаюниией
по механизму шумоизлучения: кавитационный шум, звук и шум вращения: корпус ные перепал V4i’iin я динамических нагрузок гребною винта; «пенне» гребного шип; Гребной винт как источник шумности внутри судовых помещений характеризуется этими же четырьмя механизмами шумоизлучения. Вопросы распространения нзду чаемых колебаний внутрь помещений через воду и корпусные конструкции нашли потребное освещение в [541. где также приведены сведения о методах снижении п прогнозировании тзкой шумности на стадиях проектирования судов. Необходимы при этом характеристики винта как источника щиамнческпх нагрузок па гребном вале н па Bticiiiiieji поверхности корпуса судна и его гнету лающих частей могу быть уточнены поданным, приведенным в гл. VI.
Механизмы кавитационной шумности связаны с образованием, колебаниями ц захлопыванием каверн, нредшавляющпх собой разрывы сплошности воды При этом скорости движения лопастн могут быть весьма далекими от скорости звука, так ж< как может не возникать каких-либо колебательных, нестационарных движений ца твердых границах.
Звук вращения, напротин, является следствием периодической пестационар-пости в тех пли иных, внешних для гребного шина, граничных условиях Особенностью основною механизма образования звуке- н шумоизлучения в этом случае является то, что сам впит может не испытывать колебаний, ио сила его взапмодейст вия с потоком содержит переменную часть, образующуюся под воздействием неоднородности пли нестационарное™ набегающего потока.
Противоположная ситуация имеет место в механизме шумности, появляющейся при вынужденных колебаниях различных корпусных конструкций, в том числе упругих колебаниях лопастей гребного впита, возникающих под действием динамических нагрузок, представляющих собой пульсации относительно среднего упора и момента гребного винта.
Явление «тения» гребных винтов связывают с упругими автоколебаниями лопастей, которые могут возникать как в неоднородном, так и в однородном потоке при определенных соотношениях частоты и интенсивности вихревых дорожек в следе за лопастью, с частотами и формами собственных колебаний лопастн.
Кроме указанных основных составляющих шумности гребных винтов, мшу-быть названы и другие явления, которые также сопровождаются шумообразоваищм пли шумоизлучением гребного винта. К их числу может быть отнесено шумоизлучение, обусловленное пульсациями в пограничном слое, попаданием в диск винта пузырьков воздуха, конечной жесткостью лопастей и нх колебаниями при вращении, нарушением геометрии винта.
Этот список, по-видимому, мог бы быть продолжен, однако в настоящее время актуальными считают выделенные четыре основных механизма шумообразовлппя.
§27 ЗВУК ВРЛ1ЦГННЯ IPI ЬНОГО ВШИЛ
Как показано в гл VI. вблизи вращающегося гребною впита, кавитирующая или свободного от кавитации, образуется переменное во времени, т. е пестацнопл[ ное, ноле давлений. Причиной этому являются неоднородность и пвстациопарность набегающего на гребной винт потока, конечность числа лопастей, нх телесность Поле давлений вблизи впита было бы переменным во времени и в том случае, если 6i вода была несжимаемой и образование звуковых воли в пей было бы исключено Однако такие колебания гидродинамического давления при удалении от впита, как известно, затухают очень быстро В реальных условиях объемной сжимаемссти воды нссташюпарность поля давлений вблизи гребного винта неизбежно вызывает образе ванне акустических волн сжатия и разрежения, которые распространяются на бо.и шие расстояния и затухают за счет рассеяния сравнительно медленно - обратна пропорционально первой степени расстояния от гребного впита.
В целом образующаяся при этом картина акустических излучений, именуемы* звуком вращения [3] крайне сложна. При более детальном се рассмотрении удаен 11 выяснит!., что эффективность излучения в дальнем акустическом поле сильно снижается по мере увеличения порядка акустической особенности, которой соответствг< то или иное излучение [54] Так, наибольшей эффективностью обладало бы моно 58b
польное излучение, соответствующее колебаниям :бъемов. В условиях otcvtctb ’кавитаинн н с учетом реальной жесткости материала гребного винта моиопеин и'™ излучение по наблюдается. 01
Следующим по эффсктншксти является дипольное излучение, которое эквивалентно излучению переменной во времени сосредоточенной силы, приложенной К жидкости в точке. Это излучение характерно главным образом для иекапнтирукз-|Ц«го гребного винта.
Эффективность излучения более высоких порядков (квадруполыюго и выше), связанного с моментными и местными нагрузками на гребном винте, нс сказывающимися па зиаченин равнодействующей переменных сил. как показано в 154], является малой и в дальнем акустическом поле может не приниматься во внимание по сравнению с дипольным излучением.
Согласно формуле Лэмба звуковое давление в поле, создаваемом переменной силой F и угловой частотой со = 2л/, в точке, определяемой сектором J7(, равно
P = ^-<os(E. Rt}e!'w . (VII.5)
Здесь k = tu/r — волновое число; множитель cos (/', Pj) определяет диаграмму па-(правленностн поля, излучаемого силой F, а множитель е‘ — фазу волны.
Таким образом, для расчета звука вращения no (VII.5) необходимо знать только равнодействующую переменных сил на гребном винте Г как функцию времени. Для некавитнрующего гребного винта, работающего в стационарном неоднородней потоке за корпусом судна, решение задачи определения Г изложено в § 24.
Если гармоника с номером т переменной части упора определяется в зависимости от угла поворота винта fi= ь>( выражением Л“д. cos mZO -}- Е®„, sin mZO, то звуковое давление, излучаемое в дальнее поле, будет равно
Р,., =-^7-cos(^xj cos 2лт7.п -~) +
+ F*„. ,.д sin 2n«lZn (j — -ф-) J , (VII.6)
где Rt — у* -f- a2— расстояние до точки поля; (/?х*) — угол между направлением на точку поля н осью х.
Диаграмма направленности, определяемая множителем cosIPjX), характеризуется убыванием от максимального излучения вдоль осн х п нос и в корму' до нуля в траверсном направлении.
I Аналогично определяется и излучение в поперечных направлениях от пульсации Коко ых сил навпите. Поскольку эти формулы дают возможность вычислить нетолько амплитуды, но и фазы излучения, это позволяет определить по ним полную картину акустического поля звука вращения гребного винта во всех направлениях. Так как составляющие сил на гребном винте пропорциональны квадрату числа его оборотов (или квадрату скорости судна), из формулы (VI 1.6) следует, что акустическое давление звука вращения растет пропорционально третьей степени скорости судна. Из этой формулы следует также, что при прочих равных условиях уровень звука вращения должен расти пропорционально числу лопастей Z гребного винта. В действительности увеличение числа лопастей отфильтровывает, как было доказано в гл. VI, все большую часть наибольших по амплитудам низких гармоник окружной неоднородности поля скоростей в диске гребного винта. Этот спад амплитуд в гармониках поля скоростей оказывается более сильным фактором, поэтому 'увеличение числа лопастей в практических пределах обычно сопровождается не
ДОст м, а снижением излучаемого звука вращения.
Изложенное базируется па предположении, что гребной винт является жестким, решается и движется поступательно равномерно без динамического взаимодействия 587
с корпусом, а нестационарность возникающих на нем сил обусловлена только пеод. породностью набегающего потока.
В действительности картина носит значительно более сложный тлриктц:. м лиз которой дан в [Ь-1 ] С учетом взаимодействия винта с корпусом и конечной же, кости последнего можно приближенно считаю, что звук пращени.ч гребного ви> реализуется в зависимости от различных конкретных ситуации в дальнем внчн-нем поле с дисперсией, равной д 3 дБ Если Amjr = /'‘i + ~
ответствующей гармоники упора, то амплитуда давления звука вращения в направлении наибольшего излучения согласно (VI 1.6)
I п I .v ii-
।Р'" । 2Rc ' Х ’
Принимая дистанцию приведения R - I м, скорость звука с — 1500 м/с и учитывая, что давление в системе СИ по формуле <V11 6) получается в паскалях, а при вычислении уровня в децибелах пороговое давление равно I мкПа, получим
.V,,, 20 lg т + 20 1g п 4- 20 Ig Z + 20 Ig F,„x + 50. (V11 X)
Например, если для винта танкера с Z 5 и п = 120 об/мин = 2 Гц упор ши га Т — 1500 кН, а амплитуды пульсации упора на первой и второй гармониках частоты (т. е. /, = 10 Гц и /а = 20 Гц) составляю! 3 и 0,5 % от упора соответственно, то /а= 163 дБ н /а= 153 дБ При использовании часто употребляемого пороговою давления 20 мкПа и дистанции приведения 50 м полученные значения, как указывалось выше, надо снизить па 60 дБ. Наибольшая погрешность в приведенных расчетах обусловлена неточностью знания характеристик ноля скоростей, особенно возрастающая с ростом номера гармоники.
На различных скоростях судна отношение амплитуды нестационарной составляющей упора к его среднему значению (коэффициент <гтД) можно считать постоянным, следовательно
Fтх — /би/,А 1 ')
С учетом этого формула (VII.8) преобразуется следующим образом:
А'т =110 + 20 1g т + 20 Ig Z + 60 lg и 80 lg /J + 20 Ig (А-„,;.Аг). (VII 10)
Из формулы (VII 10) видно, что для данного судна уровни звука вращения интенсивно растут с ростом скорости судна (пропорционально третьей степени частоты вращения гребного винта) и что при увеличении линейных размеров судна весьма i тепсивно расют уровень звука вращения (пропорционально четвертой степени). Однако это справедливо только при постоянстве п. kmh " А'т Ь то же время из практики проектирования известно, что рост размеров судна (и его гребного винта) сопровождается снижением п, а оптимизация гребного винта может при увеличении /’ сопровождаться значительно более существенными снижениями k„th и Л’т-
Оютвстетвеппо механизму и основным закономерностям звука вращения наиболее эффективным методом снижения этого компонента шумности гребного щепа является уменьшение динамических составляющих нагрузок, действующих иа гребной винт (см. гл. VI) за счет:
повышения однородности и стационарности поля скоростей в диске гребио< и винта, приводящих к снижению гармоник окружной неоднородности поля скоростей, совпадающих по номеру пли кратных числу лопастей гребного винта, посредетнс'1 рационального выбора главных размерений коэффициентов полноты и архитскту! ной компоновки подводной части корпуса с выступающими частями, правильною размещения гребного винта но отношению к кориуму и выступающим частям, а так ;е с помощью специальных устройств для воздействия па поле скоростей в диске гребного винта.
приспособления коншрукщш гребного впита к характеристикам неоднородноеiи поля скоростей путем рационального выбора числа лопастей; применения фюрмы -|1>" пастей с большой откицсой контура лопает но потоку, чтобы обеспечить псидш»1»1,с'
588
ценное всей лопастью пересечение областей неоднородности потока (по аналогии с принципом малошумпых косозубых передач); применения гребных типов, полностью пли частично выходящих за пределы областей потока с бо.ц.нн п пеоднород-Кстыо п нестационарное шю.
§28- КАВИТАЦИОННЫЙ ШУЧ ГРЬВНОГО ВИН1А
Кавитация во всех ее формах является в той пли пион мерс ксстинпопарпнм процессом, геи по существу определяется создаваемая ею шумное)ь. Практически гребные впиты всех судов па зплчнтелыкя скороеш кавитируют, причем кавитационный шум гребных винтов обычно доминирует над шумами другого происхождения Однако шпепспнпость такого шумоизлучения существенно jbhiiciii 01 формы и степени развития кавитации, что сильно затрудняет соаданне общих закономерностей, характеризующих кавитационный шум. В гл. V были рассмотрены основные виды и стадии каннтапни винтов, однако для оценки кавитационной шумности нужна более детальная классификация, одна из которых приведена в габл. VII I Анализ шум ЮС111 покалывает, что наиболее интенсивным шумоизлучением обладают нестацпо
парные виды кап т а пи и вне зависимости от того, предопределен ли этот тип услов-впямп обтекания (36) или свойствами канпглционпого процесса (Зв).
В частности, высокая степень псстацнопарностп наблюдается при замыкании каверны иа прсхрпле — на участке от середины до выходящей кромки. В этом случае, именуемом иногда кавитационным бафтингом 1100], как н в случае .36, каверна за период колебаний се обьема значтелыю разрастается, а возвращаясь к исходному размеру разрушается, оставляя н следе ;-а собой достаточно однородное облако очень мелких пузырьковых каверн. Эю явление, носящее название облачной кавитации.
сопровождается наиболее интенсивными ударными давлениями, вызывающими эрозию, вибрацию и наиболее интенсивное шумоизлучение.
1 а б л и на VI 1.1 Классификация кавитации
[ № L п/п Признак классификации Типы и формы кавптвцин
1 По степени развития а) начальная стадия. б) первая стадия; в) вторая стадия кавитации
2 По местоположению ка верп а) вихревая на концах лопаегей; 6) вихревая в осевом вихре; в) кромочная; г) профильная
1 3 По степени сгабплыю-стн а) стационарные в стационарном однородном потоке; б) нестационарные вследствие, переменности скорости н давления набегающего потока; в) пульсирующие в однородном потоке с выраженной частотой
4 По структуре каверн а) пузырьковые переносимые потоком; б) пузырьковые присоединенные; в) плен иные присоединенные
( ,г> г— По роли паров п ме-конлепспрующпхся газов а) паровая; 6) газовая
589
Большое многообразие форм кавитации н сопровождающих ее явлений не но полнот на современном этане дать достаточно шыпос виз; нтнческое описание про цесса возникновения каши анионного шума. Поэтому при проектировании и оценю шумпсстп рсчнанчцую роль отолит экспериментальным мсюдзм Результаты теоретн ческн.х и эюнернмента.1ы1ы.х исследован mi в сочетании с натурными данными дали возможность получить эмпирические формулы, позволяющие производить 1( процессе проектирования приближенные оценки шумности.
Вихревая кавитация возникает при самых малых скоростях н является nan6o.u i ранним источником шума. При эисилуатанионных скоростях она получает уже
Рнс. VI 1.2. Рост и разрушение пузырь ковон каверны при следовании зародыша кавнтанни вдоль нулевой линии тока: а — эпюра давлений; б — изменение размеров каверны в стадиях сжа тня (/), роста (2), захлопывания (.’#» < повторного роста и разрушения (<), в — вызнанные каверной акустические давления в стадиях повышения (/) пони жения (2) давления и обратны пня ударных воли (Л).
Рис. VI 1.3 Спектр излучения едином ной каверны с ростом 6 дБ/октапу при f < fm и спадом равным примерно 6 дБ/октаву.
статочное развитие, более «лабильна п обладает меньшей шумностью Кроме ты при этих скоростях возникают кромочная или профильная кавитации, которые m рают большую роль в шумности впита иа этих режимах.
Распространенные средства отдаления вихревой кашмапни уменьшение шита гребного винта на копие лопасти и в корневом сечет и и i рн.меисипе спеппальп ' обтекателей стуннцы существенно повышают скорость судна, прн которой возни кает эта форма кавитации Однако на более высоких эксплуатационных скорое, х это может дать отрицательный эффект за счет появления менее развитых и, следи г телыю, более шумных форм вихревой кавитации. С учетом сказанного можно сде.ьпь вывод, что наибольшее значение для оценки шумности гребных внитон m рает ну и-кован форма профильной н ш кромочной кавитаций
Для оценки закономерное!ей возникновения кавитационной шумности пузырь ковон кавитации рассмотрим движение зародыша кавитации вдоль хорды профг я по траектории, близкой к пулевой липни тока (рнс. VI1.2I. Размер зародыше-*'" каверны сначала уменьшается (из-за повышения давления), затем растет до мак мальиого размера, достигаемого после его выхода из зоны разрежения, вслед ,л этим Каверин схлопывается с<» скоростями, близкими к скорости звука в воде и 1 1 большими се. Каверна может вновь выраон за ciei энергии сжатого газа, полу' ной им при предшествующем захлопывании капериы. и вновь захлопнуться, прг 4
590
Се объем коле-вдется. С определенным сдвигом по фазе по отношению к изменениям Окружающего давления каверна прн этом излучает попеременно то волны сжатия, то волны давления Существенным моментом указанною процесса является то, что при колебаниях объема Каверин у нее как у монопольного источника оказывается высокий коэффициент излучения При низком воздухосодержанпи каверны в акустп ческое излучение .может переходить более половины ее потенциальной энергии.
В § 22 был изложен метод, позволяющий рассчитать с нцмошыо ЭВ М кавитационную диаграмму, характеризующею момент возникновения кавигании на лопастях винта, а также области, охваченные кавитацией при различных режимах работы гребного винта. Для предварительных оценок может быть нспользонана приближенная формула для расчета критической скорости возникновения кавнтанни
== 2S /~ I-1-0,1/' , (VII II)
I
выведенная в предположении, что коэффициент разрежения на лопасти /> = (р^ — pyll'V- 2 в иеравпомер! ом потоке примерно равен 1 (здесь t> — наибольшая скорость конца лопасти, а II —минимальное заглубление верхнего конца) н что лопасти обтекаются безударно.
В ряде работ (3, 621 с различной степенью детализации выполнены расчеты акустического излучения одиночной каверны за время воздействия на нее импульса давления прн прохождении ее Коль профиля, а также расчеты соответ ствующсто спектра акустического излучения п показано, что нерегулярная по следователь! ос 1ь таких элементарных кавитационных процессов обладает таким же по форме спектром, что и спектр отдельного элементарною кавитационного процесса. Для одиночного процесса это енмумом в районе характерной части
Рнс. VI 1.4. Нарастание уровнен кавитационного шума по данным Росса.
Г-ГЛ1 > СТЛ1 > С1 13-
сплошной спеыр (рис. VII.3) с мак
L. "Fl (V1,,2)
I Р
где с!0 — максимальный размер каверны
В сблаетях низких частот рост уровней в спектре составляет 6—12 дБ па октаву а в области высоких частот, достигающих порядка сотен кштогерц, спад уровней не превышает 6 дБ на октаву.
J Как видно нз формулы (\ II 12), максимум в спектре излучения смещается в об ,4асть низких частот с ростом размеров каверны и в область высоких частот с их уменьшением Предполагается что в случае облачной кавитации размеры каверн могут составить or I мм до 0,3D; можно считать реальными ситуации, котла максимумы в спектре буду) располагаться на частотах 10—К) ООО Гц.
1 [ Зависимость уровней кавитационной шумности от скорости судна имеет Сложный характер. G ростом размеров каверн и их числа зависимоеib уровня кавитационного шума от скорости характеризуется показателем степени, теоретически значительно превышающим 10 |83| Это наблюдается в начальных стадиях кавнга-Цчн, ко1да сами уровни шумности еще малы (рнс. VII 4) Как показали расчеты, пВ1с|>снпых стадиях развития кавнтанни (eV, 1,.3ч-1,5) показатель степени спивается до 10—7 и только с наступлением развитой капитацип асимптотически умень-^►ит'я до 3. 15 денетвнтс.1Ы1ос1н уже е переходом ко второй стадии кавитации i ia6.no
Д-сгся пдсыщепщ уровней к-пппа uioiiiion шумности, а в разни 1 он eiainii как уже отмечалось, кашнанпоииая шумность может даже уменьшиться
591
С учетом результатов теоретических и экспериментальных псследоиаинй каш, тацнониой шумности предложено значительное число обобщающих натурные да, ные эмпирических формул для оценки кавитационной шумности судовых греби,, винтов.
В [100] для оценки общего интегрального уровни кавитационной шумности судовых гребных винтов во всем диапазоне частот начиная <>г 0,1 кГц и выше предложена формула
/-/>ол = 74 + 60 '«1’г + 9 1 Hi
где о,— скоростьиузлах. D,-—сила тяжести судна (втоннах). Указанный интегральный уровень Z.f ,0 j при характерных для кавитационной шумности законах спада спектральных уровней с ростом частоты ft связан со спектральной плотное т bio выражением
С +20 - 20 1g/. (VII.И,
Однако член формулы, учитывающий влияние водоизмещения судна, не всегда передает действительную картину, и этой формулой не следует пользоваться для крупных судов с водоизмещением, большим 30 000 т. Поэтому в ] 101 1 предложена другая формула
Lf>0A = 91 + 60 ‘й 11 + Ю 1g (-^-) • (VI1.13,
где, как и прежде, v - полная скорость обтекания конца лопасти, равная
Предполагается, что влияние водоизмещения на уровень кавитационном шумное н здесь учитывается через поступь J и произведение Z,, Z. причем поступь с ростом ,« допзмещенпя уменьшается, а произведение, характеризующее суммарное число лопастей, растет. Переход от этих зависимое гей к формулам, дающим частотное растц делептте спектральной плотности кавитационного шума, осуществляется по (VI. 14)
Переход от спектральной плотности к энергетическим спектрам кавитации,, пого шума в частотно-зависимых полосах анализа (октавном, нолуоктавиоы п трет, октавном спектрах) может быть произведен по (VII.4)
Для расчета третьокгавпых спектров кавитационной шумности в диапазоне т критической скорости до скорости, соответствующей второй стадии кавитации, после которой она не растет, можно использовать формулу линейной интерполяции
Т1 " Т) 1 л А, + -7--------7- № - А",). (VII Пт
Здесь .Vj третьоктавиый спектр дока вита пион ной шумности, анрикепмприваппий двумя прямыми.
v (120 4-30 lfi( 1+0.1//)+ 5 1g/, при 10</<100Гн; V1||S,
1 I 175 + 30 lg < I Г 0,1//) — 15 1g/ при I с / < 100 кГц.
Д’2 — третьей гавнт«й спектр развитого кавнгациотшого шума в начале второй стадш1 кавитаинн, аппроксимируемый прямыми:
U(, + 30 lg (I +0,1//)+ 10 1g £>+ 10 lg(Z —ZP)+ 10 lg/
_ при 10 </«100 1ц [[()
2 ~ 175 | 30 lg (I +0,1//) + 10 lg D + 10 lg (Z - Z,) + 5 lg /
при I < / < 100 кГц
В дттяпаюче 100—1000 Гц спектр может бып. представлен этими же прямимо ,т> пересечении, либо их плавным сопряжением Используемую в ш*ражепии (\ I
592
скорость vsl вычисляют по формуле (VII 11). а скорость начала второй стадии кавитации t>S2 — по формуле
.L Ак
v-= = 28 ]/ С " П + ° Ш)
(\ 11.20)
Иа рис VII.5 представлена серия рассчитанных ио формуле (VII. 17) спектров
гребного винта с Л0'Лк - 0.6; СГд = = 5.G уз; щ2~ 23 уз. Па рис. VI 1.6 те же данные представлены в виде зависимо {стен нарастания уровня шума в третьок Кавных полосах от скорости хода в диапазоне от критической скорости до наступят пня второй стадии кавитаинн.
Все приведенные эмпирические формулы дают, как правило, приемлемую по * точности оценку характер нс шк кавитационной шумности гребных винтов судов различных типов и размеров. Вместе с тем ие-g обходимо иметь ввиду возможность возникновения весьма значительных отклонений. В качестве наиболее характерных примеров могут быть названы следующие три.
1. При возникновении пестацноиар-
I; I) ~ 3,5 м; Z — I; Zp -- I, vsl =
нон облачной кавитаинн могут появиться дополнительные увеличения интенсивности нарастания шумности перед до-^кепием скорости, соответствующей |рой стадии кавитации, и далее за пре-...... уровней насыщения Повы-
1 шумность в этом случае отличается «белым» спектром в ультразвуковом диапазоне частот, иногда растущим вплоть до частоты 100 кГц.
[ 2. При вогнутой и плоской нагнетающей стенке профилен в концевых цилиндрических сечениях лопастей кромочная кавитация с этой стороны лопастн может быть
К
делам i шенн
Рис. VI 1.5. Рассчитанные по формуле (VI 1.17) и натурные третьоктавные спек1ры (/) кавитационного шума относительно I мкПа.
типа вихревого насадка над кромкой Для этого случая характерна аномально высо-
рассчитлпиыс п< форм) .к-(\ 11 171; О натурные денные.
593
кая шумность с максимумом уровней располагающимся на средних частотах ультра звуковою диапазона.
3. В начальных стадиях кавитации свободных концевых и осевого вихрей в сиг ipe обычно наб. подаете я четко выраженный максимум с уровнями, превышающим уровни, даваемые эмпирическими формулами, приведенными выше. С появлеппе-, такого вида кавитации уровни растут с ростом скорости судна практически скачк..
образно. Эта ситуация, когда она возникает, проявляется в очень узком диапазон скоростей cv'iia. С ростом скорости судна и развитием кавитация в свободных вп\ ря.х эта аномалия обычно исчезает.
§29. «ПЕНИВ» ГРЕГ.НОГО ВИНТА
Кромки гребных винтов подвергаются большим нагрузкам, например при рабою в.толовых условиях и загрязненном фарватере. Для упрочнения их часто делаю) у го i-щенными. Работа гребных винтов с утолщенными кромками может сопровождал « возникновением «пения: гребных винтов Это явление характеризуется тем, что upi отдельных значениях скорости судна со стороны гребного впита раскроет .а няется исключительно ннтснсншюе тональное излучение в звуковом диапазоне «а
Рис VI 1.7. Спектры шума относительно 0,2 мкПа модели гребного впита с -шип см» иа частоте 3,8 кГц при скорости потока о 6,8 м'с.
/—л 20.8 пб/с; 2 — п 21 об/r; Л — л - 26 лб/с.
сют. Его ингенспипость сравнительно быстро, но плавно ослабляется с увелнче! it'1 или уменьшением скорости, но частота, соответствующая «пению», при ч >м сохраняется неизменной. Это гичеглпво видно из рис. VII 7, представляющего г бон копню записи спектра шумов, излучаемых «ноющим» гребным впитом при йен и*' пнях его модели в кавитационной трубе.
В предвоенные и первые послевоенные годы изучению этого явления бы то у свяшсно большое число исследований |4] и предложены разнообразные меры бор 11,1 с ним.
В настоящее время общепризнанным является сбъясненпе механизма «ш ,!'1 IUUIIIIKUOBCIIHCM автоколебаний упругой лопасти под воддсйсгнием вихрений 11 рожки Кармана, срывающейся попеременно с разных сторон лопасти за достао ’•*
594
толстой выходящей кромкой Интенсивность вихревой дорожки усиливается, когда ДСстиснная частота какой-либо из форм свободных колебаний лопасти оказывается близком к (лрухалевоп частоте вихревой дорожки.
I Последовательное к Игна т венное описание всех назпаипых обстоятельств для
расчет пою определения режимов возможного возникновения «пения представляет Кобою достаточно сложную задачу гидроунрут-оетн. которая во многих отношениях изучена применительно к явлениям автоколебании проводных линий передач в воздухе и другим практическим ситуациям. Однако уже в 1950 х гг. интерес к «пению*
I гребных винтов пропал из-за тою, что было найдено эффективное и простое сред-|стн . которое на всех применяемых конструкциях гребных винтов исключило по-явление «нения» и не вызывает каких-либо существенных отрицательных последствий.
I Эт - .'редсгво заключается в заострении выходящих кромок лопастей па всем пх про-ктяжеппп от ступицы до копты лопасти.
I Для выбора конструкции заострения были экспериментально проверены различимые варианты оформления выходящей кромки Прн этом пыяспнлось, что наихудшим вариантом является скругление выходящей кромки. Значительно лучше оформление кромки и виде поперечного среза плоскостью или тянутой поверхностью.
IЗаострение же кромки с достаточно малым углом, как двухстороннее, так и одно-^Bipoiinee, практически полностью решает проблему на всех применяемых конструкциях гребных винтов.
В I Допатпшелын>1М средством, снижающим вероятность нозпнкновенпя «пения», является применение для изготовления пиитов сплавов с большим внутренним иог-иощеттпе.м типа марганцовистой бронзы «Соиостои». Это средство может оказаться полезным для винтов с болтаной откидкой контура лопасти, обладающих большим числом форм стмбодпы.х колебаний.
к I Дополнительное заострение входящей кромки лопасти для борьбы с «пением» не требуется
§30 МЕРОПРИЯТИЯ, СНИЖАЮЩИЕ ШУМ ГРЕБНОГО ВИНТА
Основные мероприятия по снижению шума являются составной частью общей Ктдачтт проектирования гребного винта и, как правило, не противоречат мерам, обес-1 почивающим *|тфекп1виосгь гребного винта но другим критериям.
I Возможности достижения низкой шумности гребного винта во многом предопределяются уже па стадии выбора архитектурного пита судна, его главных размерений и параметров энергетической установки, в частности числа гребных винтов, их диаметра н частоты вращения; формирования обводов кормовой оконечности и выступающих частей, обеспечивающих однородность н стационарность потока в месте рвсп хтоженпя гребных винтов. Уменьшение частоты вращения и увеличение дпа-мегри гребною винта при больших за юрах между коттами лопастей и корпусом благоприятно с точки зрения шумности и эффектнш тхпт движителя, но ведет к у.худше-«1110 массогаб.тртпттых характеристик энергетической установки. Снижение канита Циониой шумности требаото винта достигается наряду с рациональным выбором дна метра н час оты вращения путем уншпчепня числа тоиасгей, дискового отношения и профилирования лопастей е ценно обеспечения режима безударного входа.
Изложенные в гл. VIII методы проектирования винта, приспособленного к полю Скоростей. приводят к увеличению критической скорости и снижению шумности при больших скоростях судна. Дополнительным средством повышения критической скорое г I является применение законов распределения циркуляции, обеспечивающих снижение пацтузки на концах лопастей. Но этот путь, позволяющий отдалить внх-₽еи\ то кавитацию, ведет к снижению КПД на 3 4 ",i но сравнению с К11Д тчттнмаль-чо \) гребною впита. Могут быть нсиоль оваиы также методы активного воздействия ,,а уровень кавитационного шума, в частности подача воздуха на лопасти. Эффект финкення шума может быть связан с демпфированием попадающим в каверны воз-йУ-Хом высоких давлений прн захлопывании, поглощением энергии колебаний ка “ери счет перевода ее при сжатии пузырьков газа в тепло, которое с большой ско-И^стью пссппнрует в воду, а также за счет рассеяния акустических поли в смеси
| с воздухом Первый ти этих механизмов является т.тдвным также прн демпфп-Vuuaiiini воздухом пульсаций давления. генерируемых иа обшивке корпуса лопа-Вв 595
стяни гребного винта Количество подводимого воздуха в таких системах мало н не оказывает заметного действия на пропульсивные качества судна.
Ч ю касается шума вращения, то для снижения ею у ровня должны быть pea.ni ваны мероприятия, связанные с уменьшением амплитуды пульсаций давления, те курируемых вппом (см гл. \ I). При этом наряду с выбором надлежащей геометрии гребного виига должны быть приняты меры для вырлвиинаппн поля скорось.и в месте его расположения.
Глава I ///
ПРАКТИЧЕСКИЙ РАСЧЕТ ГРЕБНОЮ ВИНТА
§ 31. РЕКОМЕНДАЦИИ ПО РАСПОЛОЖЕНИЮ ГРГБНЫХ ВИНТОВ
Расположение та корпусом гребного впита и других деталей движигел ц<>-рулевого комплекса (рулей, выкружек, кронштейнов, насадок, «хтерштевня) существенно влияет на ходкость судна п условия работы гребного винта (внброакл,леность, нитенсивн ?ть кавнтанни). Выбор формы обведен кормовой оконечности, рациональных размеров и геометрии выкружек, кронштейнов, py.ieii, гребного шипа н их взаимного расположения па корпусе является одной из важных задач проемн-рованпя двнжнтелыю-рулевого комплекса, решение которой не является единственным н зависит от относительной скорости, полноты обводов корпуса судна, условий его эксплуатации, т. е. в каждом конкретном случае индивидуально и учптьпыет конструктивные особенности корпуса С наибольшей достоверностью эта задача может быть решена иа основе сравнительных буксировочных п самоходных нсныт;п ни модели судна с различными вариантами выступающих частей и расположения гртб-ны.х питов. Для рационального размещения выступающих частей н гребного винта проектируемого судна могут быть использованы данные но судам-прототпнам i..:n материалы испытаний систематических серий моделей. На основаинн накопленных в настоящее время материалов 114. 34, 75] по выбору рациональной формы обводов кормовой оконечности, геометрических характеристик выступающих частей н >.тс-положеншо гребных винтов могут быть даны некоторые общие рекомендации
I [рн заданном расположении гребного винта за корпусом едноналыюго с иа наиболее существенное влияние па распределение скорости в попутном потоке н ход кость оказывает форма ибнодои кормовой оконечности Известно, что окружная неравномерность попутного потока приводит к существенному увеличению коэффициента засасывания и, следовательно, к снижению ходовых качеств судна. Это происходит из за того, что лопасти гребного впита больше нагружаются в тех частях диска, которые примыкают к корпусу судна, и основная часть возмущенной шипом массы жидкости протекает вГщнн корпуса, снижая на нем давление.
На рнс VIII.1 приведена типичная кривея изменения отиоспюлыняо умора М лопасти гребного шипа ГТ, Г|) при изменении угла поворота за корпусом мотели быстроходного одповалыюго судна. Как видно из рисунка, упор па лопастях гребного впита изменяется примерно от 50 ” । среднего )||1,2Ра ПРИ 270 й до 1<>** “» при 0= (Г Систематические измерения величины TaiТЛ <,,на моделях различны-' судов показали, что она существенно зевнет от нагрузки пл гребной винт п формы обводов кормовой оконечности корпуса. На рнс. VIII 2 показаны кривые заЫ'С'1' мости Г.р Т,, от коэффициента нагрузки Кцг — — 1 для четырех значении «-
V Ктн
Из рисунка следует, что колебание относительного упора на лопастях у быстро од кого судна при нагрузке, характерной для полного свободного .хода, оказалось л-’11' большим.
Сравнительные модельные испытания показывают, что именно на быстро-хоД" иы.х судах с легкопагруженнымн гребными вишамн (Kdt^ 1-7, Сц 1,51 нС’ равномерность попутного потока, а следова1ельно, н форма обводов наиболее суЫ^ ственпо влияют на коэффициент засасывания. Поэтому выбору формы обводов и 1, к положению ДНИЖН1С.1Я на одповальных быстроходных гудах с леткоиагруженгы'* 5*16
винтами должно уделяться большое внимание. По имеющимся данным, па этих судах цс.тестюбразио применение в кормовой оконечности I'-образных и умеренно 1J-кбразпых шпангоутов. Пн гулах с большой полнотой обводов (б > 0,80) ц гиже.то-iiai ружейным гребным впитом, относи гол ыплй днамшр которою, как правило, невелик (£). Z'kp.ji 0.55), рационально использовать и кормовой оконечности умеренно V образные шпангоуты |75|. Приведенные па рис. VI! 1.2 данные е относительно I высокой степенью достоверности могут быть использованы в процессе проектирования судна для приближенной оценки колебания упора на лопасти гребного винта.
Еще более существенное влияние неравномерности попутного потока па взапмо [действие гребных винтов с корпусом наблюдается па дву.хвалытых быстроходных судах. В отличие. от одповальных па двух-
валы ы.х морских транспортиых судах сге цепь неравномерности попутного потока в дисках гребных вин тов относительно слабо рависит or формы обводов и в основном определяется расположением гребных вии-
Рн . VIII. 1. Зависимость относительного упора па лопасти гребного винта от угла попорота 0 за корпусом .модели одновалыюго судна с 1JВ = 7,15; В/1\кл = 2,24;
Л= 0,654; К пт = 2-
Рнс. VI 11.2. Зависимость относительного упора па лопасти гребного впита от Вэффициента нагрузки при заданных значениях угла поворота 0 па одповальных I судах.
р быстрохиднос транспортное судно с У-обралпыми шпангоутами (б/ТЗ 7,15: В, Т К2.24. 0 0.651):------танкер грузоподъемностью 10 тыс. т с умеренно V-образ-
ными шпангоутами (7 н «• 7.1; В Т *2.6 б 0,723; А'ру 1.4).------------кр> пнотои-
1Н"жиыП танкер с резке U образными шпангоутами (t В 6.8; ВТ 2.7 ft «» 0,8; 7<д у = 1)
|тов за корпусом и геометрией выкружек, гребных валов и частично кронштейнов. Как показывают исследования, с точки зрения ходкости на дву.свальных судах с тра-[дпцгоппой формой обводов рационально задавать вращение гребных винтов наружу, т. е. так, чтобы впит правого борта вращался по часовой, а винт левого борта — нро-тии часовой стрелки, если смотреть с кормы При этом коэффициенты взаимодействия гребных винтов с корпусом и ходкость судил завися г от угла наклона кронштейна Вмкружкп к основной плоскости.
I I Па рис. V1II.3 приведены зависимое!!! коэффициентов взатьмодействия и допол НИтсльиого коэффициента сопротшыення выкружек £ф.,| Сдр от утла наклона их .кронштейнов к основной плоскости, полученные В. А. Нерповым по данным систематических испытаний моделей двух вал ьпых судов. Из рисунка видно, что оитн-чумтоуглу <| находится в районе 30° На основе этих и других имеющихся данных рож 1О рекомендовать для двухвальных судов при вращении гребных винтов наружу Нол наклона кронштейна выкружек косновной плоскости <| — 20 4(Р. В тех случаях да по соображениям, не связанным с ходкостью, направление вращения гребных вуптов принимается вовнутрь, целесообразно принимать <| ~ 70°.
Форма и расположение кронштейнов требпых валон оказывают менее сущсст-Ве' чое влияние на ходкость судна н они могут выбираться конструктивно или по
597
соображениям не связанным с ходкостью. Существенное влияние на ходкость двух-вальных судов всех типов оказывает расположение гребных винтов за корпусuv, н в оабенност относительное расстояние между осями гребных вллов с D. Срав, ц тельные испытания моделей днухвальннх судов различных типов с гнстсматнчссю । изменением c!D позволили определить его оптимальное значение с точки зрения ход. кости |33].
На рнс. VI11.4 приведены кривые изменения коэффициентов взаимодействия и достижимой скорости быстроходного двухпалыюго контейнеровоза в зависнм<к|||
Рис. VIII.3. Влияние угла наклона кронштейна выкружки к основной плоскости на коэффициенты взаимодействия и сопротивлении выкружек корпуса двухвальпсто судна с двумя рулями (U В 7,3; В'Т = 3.0; б = 0,621; £>/Т - 0.58; r/Z) = 1.7).
-------U'-’j. = / (ф).-------t = f (ф).
otc’Z). Из этого рисунка следует, что уменьшение с = dl) от традиционного его а чепия с а 1,7 до с аг 1,0 позволяет увеличить достижимую скорость судна примеря0 на 0,5 уз Отмеченный эффект является следствием улучшения взаимодействия гребных винтов с корпусом главным образом за счет более полного использования э ьр-гин вязкостного спутного следа за судном При снижении dD, как правило, ум шлются размеры выступающих частей (выкружек, кронштейнов) и нх сопротивление Отмеченный вывод является общим дтя всех типов двухвальных судов, включая и шмные крупнотоннажные тикеры дальнейшее сближение гребных винтов (<• D <_ 1,0) не приводит к улучшению ходкости судна.
Выполненные исследования свидетельствуют о целесообразности при расположении гребных винтов за корпусом двухвальных судов снижения c!D до 1,0 Такое расположение гребных вш тов является особенно рациональным па судах ним рулем в 14. поскольку в этом случае он омывается струями от гребных вин 1 что улучшает поворотливость судна.
51W
Рнс. VIII.4 Влияние расстояния между Центрами дисков гребных винтов на козф- фици । гы взаимодействия и достижимую скорость быстроходного двухзальною 1 контейнеровоза с двумя рулями {LlB “ 7,G; BlT » 3; ft — 0.576; Г)ГТ 0.59).
Рнс. VII 1.5, Схема расположения гребного винта за корпусом одно валыюго судне.
599
Расположение гребного винта ла корпусом принято характеризовать рядом параметров, определяющих зазор между ахтершгевпем. рулем н корпусом (рис. VIII 5) Систематические модельные испытания показывают, что ходкость судна наиболее существенно зависит от относительного зазора между гребным винтом и a.xTepiiireu нем bt<D. Этой величиной в значительной мере определяется также и окружная щ. равномерность попутного потока в диске гребного впита. На рнс. VII 1.6 приведены зависимости коэффициентов взаимодействия гребного винта с корпусом одповалмк>Г()
Рис VII 1.6. Влияние отстояния гребного винта от ахтершгевня на коэффиннет взаимодействия и пропульсивный коэффициент одновального судна с У-обрязш-ми шпангоутами в кормовой оконечности (LtВ - 5,5; В/Т — 2,6; <р = 0,6; 3= 0.72: хг.-.’Л = 0,01; 7-кв.ч - 1.067.,,,,; е/Ь = 0,21; eu'D = 0,19; a,'D = 0,2;П/Г=0.<>).
------wT /(ft,/»)------------/ l(t>,;B}
судна и его пропульсивного ko3<|k|>iiuiichi.i для ряда значений коэффициента натру -,к|' по гяге Л’ог; от bt 1) |75] при изменении за счет расширения подзора в корм <11 оконечности и неизменном расположен пи гребного винта. Из рисунка следует, "Т" при увеличении bl D от 0.2 до 0,6 пропульсивный коэффициент судна возрастас. Р'!" мерно па 6 ”6. а коэфффнциенты попутного потока и засасывания снижаются на 25-35 % Еще более существенное влияние на ходкость одновального судна оказыЫ1’г b,1!) при удалении гребного впита от корпуса. В результате обобщения имею.цчхсЯ данных можно сделать вывод, что при проектировании судов целесообразно рассгоЯ' пне между винтом и ахтерштевнем пли кронштейном па двухвальных судах при' *" мать исходя из соотношения /»1 77 0.15
Значение з;»юр.» I между впитом и корпусом судна (ем. рис VIII 5> olii'*” Tc.ibuo слабо влияет па его ходкость и выбирается таким. чтобы исключить иыс<*1|е 600
уровни периодических нагрузок в кормовой оконечности и вызываемую ими вибрацию корпуса. На основе анализа имеющихся материалов можно рекомендовать следующие значения относительного зазора / 7) для одновальных судов / D 0.15 + f-j 1,1 • 10 3 (О — 1>О); для дну увальных су дои I D 0,2(1; зазор между нодпя i шком
руля if гребным ниш ом должен бьиь т D 0.05.
Значительное влияние, па ходкость судна, в особенна. 1 и при тяжело нагруженном движителе, оказывает диаметр гребного винта [15|. Существенное уве.тнче-
₽ис. VIII.7. Влияние относительного диаметра гребного винта на коэффициенты взаимодействия и пропульсивный коэффициент одновального судна с умеренно ^образными шпангоутами в кормовой оконечности (L/li = 6,47; В/Т 2,72; й = 0.792;Р 0.98; a'D 0,164-0,35; b^D = 0,30 4- 0,45; eiD 0,124-0,19.
«6=0,21; hJD 0.8 4-0,9; при увеличении диаметра ось вала поднималась).
НЧе диаметра гребного винта (примерно пл 50 % по сравнению с традиционным) позволяет на судах с тяжело нагруженным движителем увеличить пропульсивный
фнннент на 12 13%. На рнс. VIII.7 и \ III 8 приведены кривые изменения щциентов взаимодействия п пропульсивного коэффициента двух судов в зависимости от отношения диаметра гребного винта к осадке судна кормой Тд. При-иные материалы получены D А Ерошппым и Е. II Воеводскон [75]. Как видно йз рис. VI 11.7 относительный диаметр гребного винта существенно влияет па *с>>1+и 1НСНТ попутного потока U7r Максимальный пропульсивный коэффициент исследуемого судна достигается при Г) 7'кьл =s 0,75. Его значение оказывается
Мьшнч примерно на 13 "о по сравнению с пропульсивным коэс|к|>Н11пентом штат-
601
него гребного впита На судне с матой полнотой (см. рис. VIII.8) оптимальны;, по ходкости диаметр Г> Ткнл ~ 0,6 близок к диаметру штатного пинта.
Установка ла (ребным вшном профилированного руля позволяет испаи-ющц (|и>звратиг1.) aHannic it.iivio часть энергии закрученной струи |75] На ii|wx]*"-'l'ip»i>aii ном руле, vcTaiHiicTciiiioM л раиоыющим грибным винтом. так же как и иа n.nipul ляющёй насадке, возникает индуктивная тяга. Значение этой тяги, как и суммар, продольной компоненты силы, зависит от размеров, расположения руля ио отноше-кию к гребному винту и его нагрузки. При размерах и расположении, характерных
Pur. VIII.K. Влияние относи тельного диаметра гребного впита на коэффициент взаим иейсгвин и пропульсивный коэффициент одпомлыюго судна с V-образиыми шпангоутами в кормовой оконечности \U В = 5,5; В'Т - 2,6; строительный ди[<]е-р.мг (Г4 — Гд-) 'Г = 0,526; <р - 0,6; Р = 0.92; xjL = 0,01; a/D - 0.2; bjl) == 0,44. при увеличении диаметра ось пала оставалась на месте]
------и* j НО/П:-------‘ ! ID/T}.
Рис. VIII.9. Влияние относительного зазора .между гребным винтом и рулем на коэффициенты взаимодействия и пропульсивный кг эффиииент одиовального судна с V-образиымн шпангоутами в кормовой оконечно -ти (Z./B = 5,5; BIT 2.6; ф = 0.6; р 0.92; cstfb - 0,15; <«/£> 0,135; bi/D = 0,442; DlT =0 6, h/D
------ W'r = J -------------t ** f tolDy,--------ЧД — I la/m.
для рулей морских транспортных судов, индуктивная тяга на руле па скоростях свободного хода меньше его сопротивления. Только нуи больших нагрузках на i ?ео* ной винт (на швартовном и близких к нему режимах) индуктивная тяга на руле 13‘ вышлет его сопротивление. Следует отмеппь, что индуктивная тяга руля, щмс.п и боковая сила, возникающие па нем в потоке от гребного впита, не постоянны 1,0 времени, а изменяются по некоторому не| подичсскому закону Частота основной i'1!’ моиики колебания указанных величии равна лопастной частоте v = nZ. Исслейка-пню влияния геометрия руля и его расположения за вн itom на пропульсивный фпцнент судна и пульсирующие нагрузки посвящено большое число работ I 88. 103]. х , й.
Систематические материалы по влиянию руля на коэффициенты взаимны ствня и ходкость судна получены В. Л. Еропшиым н В. П. Тальяновой, котор<'1М
были выполнены испытания моделей судов в опытовом бассейне при различном расстоянии между рулем и гребным впитом, а также моделей рулей разной толщины е за гребным винтам в свободной воде. На рис. VIII 9 и VIII 10 приведены результаты этих испытаний в виде кривых изменения коэффициентов взаимодействия в за-
W-
Рис. VIII 10. Влияние относительного зазора между гребным винтом и рулем на коэффициенты взаимодействия и пропульсивный коэффициент одиовального судна с V-образиыми шпангоутами в кормовой оконечности (L/B 6,3; В/Т — 2,5; 6= 0,826; Р о 98; xctL = 0,034, bjD = 0,35; D/T = 0,42; dD = 0,216; db = = 0,22, h<D = 1,58)
О — без руля.
вИсимости от расстояния между гребным винтом и рулем для ряда значений коэффициента нагрузки Kde Как видно пэ этих рисунков, особенно существенно зависит В положения руля коэффициент попутного потока ivy При от юсительно тонком ₽Уле (c'D як 0 135) пропульсивный коэффициент т]П монотонно возрастает при криблнжспнн руля к гребному винту, а при толстом (сРя 0,215) — пропулреив-
иый коэффициент имеет слабо выраженный максимум прн a'D -v 0.35. Таким<Лра-зом,прн относительно тонком руле (<• D s^O. 15) сточки зрении ходкости желательно устанавливать руль ближе к гребному винту. Однако близкое расположение руля за гребным пиитом не может быть рекомендовано по соображениям вибрации ру. । и корпуса (75|
Основываясь ил приведенных результатах и имеющихся данных по взаимодействию гребного впита с рулем, можно констатировать, что прн одновременном удов лстворенин требований ходкости и вибрации a-D должно приниматься равным. < менее 0.2 прн относительно тонком руле (с D ^0,15) С увеличением толщины руля предельное значение зазора a D следует увеличивать. Эмпирическая формула для выбора предельно допустимого зазора для рулей различной толщины следу юны,. n/D>0.2 ' 1,5 ](с/О}-0,15].
Предельная толщина руля, устанавливаемою за гребным впитом, иа отпоснтсль ном радиусе г г R 0,7 в верхней части диска, как показывают данные миде.ц пых испытаний 175], не должна превышать 22 "и диаметра гребного впита, но кран ней мерс при расположении руля иа расстоянии а'1У ~ 0.2. При удалении руля <ц гребного впита предельно допустимая толщина руля может быть увеличена и iipiiiiui.i равной с D < 0,22 + 0,3 I(.i D) — 0.2], но не более 0,25.
Приведенные соотношения могут быть использованы ври определении рацио нальиоП но соображениям ходкости толщины руля и его расположения за винтом а данные рнс VII1.9 и VII1.10 -- для выпойшеиия сравнительных расчетов ходкости при изменении размеров и расположения руля.
§ 32. ПРЕДВАРИ I ЕЛЬНЫЙ ВЫБОР
ОСНОВНЫХ ЭЛЕМЕНТОВ ГРЕБНОГО ВИНГА
Прежде чем перейти к окончательному определению геометрических пара метров гребного винта и расчетам ходкости судна, необходимо принять те его гс метрические элементы, которые определяются главным образом требованиями проч пости и вибрации, а также другими общепроектным и соображениями, г. е. выбрать конструктивный тип гребного винта (со съемными лопастями пли цельиолито! число лопастей, относительный диаметр ступицы и некоторые другие его геомецн веские параметры.
Выбор диаметра гребною винта и частоты вращения. Как показывает ираг тика, правильный выбор на самых ранних стадиях проектирования частоты вращения гребного вала п диаметра гребного винта, согласующихся с размерами корпус II мощностью силовой установки, играет исключительно важную роль в достнже..
высоких ходовых качеств и исключении повышенной вибрации корпуса проск.ч-руемого судна Поскольку на ранних стадиях проектирования известны лишь ориентировочные размеры судна, ожидаемая скорость и мощность установки, выполнение традиционных расчетов затруднительно и не всегда может бы(ь осуществлено в я« обходимые сроки. Поэтому для ouepaniBiioio решения поставленной задачи били разработаны специальные диаграммы (рнс. VIII II—VIII .15) [751 Парис. VII II приведена номограмма для определения рациональной частот вращения л и со, I ветствующего ей диаметра гребного винта судна в завпснмост от скорости обгеьт пня движителя п .-ь ~ v„ (I — \X:j) и мощности установки. Как видно из рисуик рациональная частота вращения гребного вала слабо зависит от скорости ид, и спи* ждется с увеличением мощности, иередзнаемой па впит.
Для более детального выбора основных элементов гребного винта, обеспечив 1 щего переработку заданной мощности без недопустимой кавнтанни лопастей рис. VIII.12—VIII.15 приведены более подробные диаграммы [75] для различных фиксированных скорое icii хода Верхние части диаграмм дают связь между Д'1-1 метром гребного винта и рациональной частотой его вращения для ряда заданных мощностей от 200 кВт и до37 000 кВт. Па лпниих постоянной мощности показаны -и-1 чеиця погребного дискового отношения гребного винта Ar'Av, включая 11 предельное его значение 1,0, выше которого располагается область Л»*1'
метров гребного винта и частот вращения пе обеспечивающих требуемого запл<а против возникновения кавитации винта. В нижних частях приведены кривые удельного упора гребного винта T!Pq прн заданной подводимой мощности и линии постоя них шаговых отношений. По изменению удельного упора Т'Рр с увеличением и11'
604
уменьшением диаметра гребного пинта при заданной мощности может быть оценено
' т
изменение КПД движителя i|n —— v . При определении но этим диаграммам удель-
I I) л
цого упора Т,Р[) необходимо помнить, что приведенные на них значения рассчитаны для винтов с дисковым отношением Л//Ло = 0,6. Величину Т'Ро для других значений ,4р. 4С рассчитываю! но формуле
Т’Рр-Г'Чтна, {' 0-'«IVV М-™!}
₽нс VIII II Диаграмма для предварительного определения оптимальной частоты К вращения и диаметра гребного винта в зависимости от мощности установки.
* — значения п, при которых заданная мощность не может быть исрерабатакн без рялвтоП |||1 кавитации гребного винте.
j Определенная по диаграммам частота вращения гребного винта заданного дна-*етра является предельно большой Это принято с целью снижения трудоемкости *°||Гтрецрования валопровода н двигателя. Уменьшение частоты вращения вала по равнению с диаграммным значением па 10—15% прн заданном диаметре всегда ж*-|ате.»ьно с точки зрения ходкости и в особенности снижения опасности кавитации гРебицх винтов. Для судов с тяжело нагруженным движителем 3,0) увеличе-’’•№ диаметра гребного винта сверх традиционной величины (О'Т < 0,7) и дальней* Вее существенное уменьшение частоты вращения позволит дополнительно 1 605
Рис VI11.12. Диаграмма для предварительного определения основных эле ментов гребного винта и его частоты вращения при = 5 уз.
/ __ область мощностей н диянстргв, при которых наступает рпзпитпя канны ции на
династия (Ag/A^ >)' 2 начало ? ой сгадин кавитации
ъЦ7
Рис. VIII.13. Диаграмма для ментов гребного винта и
предварительного определения основных эле-его частоты вращения при г 1ч ' 10 уз
/. 2— То же. что н<1 рнс. VIH.12
(О/
Рнс VIII 14. Диаграмма для предварительного определения основных элементов гребного винта и его частоты вращения прн оДя 15 уз.
/. 2 — То же, что на рнс. VII 1.12.
608
п, оЪ/мин
Р/Рп.н/кЁт
Рис. VIII 15. Диаграмма для предварительного определения основных элементов гребного винта и его частоты вращения при v = 20 уз
fa 2 — то же, что на рнс. VIII 12.
I 29 п/р Я. И. ВоЛткунекого, т. I 609
увеличит!» пропульсивный коэффициент судна на 10 12 % (151 Дисконос отношение искомого гребного винта при этом может быть рассчитано по формуле
4Л (Л АЬич С’-8 I о-8|Ь5-(«д11аг/«)д1}-
Более подробно о построении описанных диаграмм и их использовании можно узнать нз работы [751.
Сопоставительный анализ указанных диаграмм позволяет сделать вывод, что значение удельного упора Т!Рг> при заданной мощное! и существенно зависит от дна метра гребного винта только при малых' скоростях обтекания движителя (:>Л. < < 10 уз). Гак, например, при увеличении диаметра гребного впита па 50—70% и снижении частот его вращения примерно в 2—2.5 раза удельный упор возрастает при иДя = 10 уз на 20—25 %, при v,ls =15 — па 15—17 %, при - 20 уз на 8—10 % и при v 4 = 25 уз — на 4—5 %. Из приведенного примера следует, что применение гребных винтов увеличенного диаметра с пониженной частотой вращения рационально только иа тихоходных судах с тяжело нагруженным движителем к* Для приближенных вычислении подиаграммам рнс. VI 11.12—VIII. ^рациональной частоты вращения и диаметра гребного винта достаточно иметь данные о коэф фнцненте попутного потока IVy, ожидаемой скорости судна os н мощности силовой установки. Для более точного определения основных элементов гребного винта и скорости дополнительно необходимо знать коэффициент засасывания I и буксировочное сопротивление корпуса судна Rj-. В этом случае по трем ближайшим к ожида мой скорости диаграммам при задаииой^мощпостн можно вычислить
»в = глэ /<1 ~ “^1; - 0 /'о; P‘D, Ае!Ао, n»D,
где 7/Р„ =-. (Г^) ^ 11 - 0,18 ((..1е/Л0) - 0,6]}.
Графической интерполяцией находят значение е5, при котором Те — R?. и опрс. ляют основные элементы гребного вннта.
Полученный диаметр гребного вннта сравнивают с осадкой судна и оценивают возможность его размещения за корпусом. Желательно, чтобы для морских оаио-вальных судов 0.687’д 4' D "С 0,757’л, а для двухзальных 0,627*4 D 0,70 7Д. Это накладывает определенные требования к частоте вращения гребного винта при заданной мощности установки.
Выбор числа лопасгей. Окончательному определению числа лопастей гребного винта должны предшествовать расчеты частот собственных колебаний корпуса, валопровода и силовой установки на основном режиме эксплуатации судна Необходимо отметить, что при работе гребного впита за корпусом из общего спектра возбуж даемых им нестационарных вибрационных нагрузок наибольшего значения в боль шннстве случаев достигают амплитуды гармоник лопастной а1! = nZ и удвоенной лопастной va = 2nZ частот. Окончательно число лопастей проектируемого гребного впита принимают исходя из обеспечения по возможности отсутствия совпади ня частоту, и с собственными частотами первых трех тонов колебаний корпуса, его основных конструкций н валопровода. При этом необходимо помнить, что с увеличением числа лопастей несколько возрастает дисковое отношение гребного винта, обес печивающее заданный запас против возникновения недопустимой кавитации. Приближенно значение дискового отношения ipe6iioro винта при изменении числа лопастей и диаметра может быть определено по диаграмме, изображенной л рнс VIII 16.
Влияние числа лопастей на КПД гребного вннта, выявленное при испытания* систематических серий моделей, показано на рнс. VIII.17, из которого видно, <ГУ с увеличением числа лопастей КПД гребного винта при заданной нагрузке и онШ' мальных диаметрах уменьшается. 11ри переходе от Z = 4 к Z 6 это уменьшение ставляет 1—3%. Для натурных гребных винтов (натурных чисел Re) изменен11 КПД с ростом числа лопастей будет меньше.
Определение диаметра ступицы. Относительный диаметр ступицы dit-'D i ного вннта назначают с учетом конструктивных особенностей гребного пиша к’° съемными лопастями или цельнолитой), размеров гребного вннта и других общспГ11" ектиых требований. Обычно для цельнолитых гребных винтов принимают 0,1" — 610
djj D 0,22, для составных гребных винтов 0,26 0,30. При назначе-
нии окончательного значения диаметра ступицы следует учитывать его воздействие на КПД гребного вннта и пропульсивный коэффициент судна в целом |42, 75]
Для оценки глияиия относительного диаметра ступицы на пропульсивный оэффипиент судна можно воспользоваться данными рис. VIII.18 и гл. X. В общем
южпо отметить, что при установке за гребным винтом профилированного руля снижение пропульсивного коэффициента при увеличении относительного днамс!ра ступицы с djf D = 0 2 до dt[’D 0,32 не превысит 1,5 %,
Wo
l',c/-4o)z=4
0,8
1,1
1,0
D=D„
0.9
1.0
0/пв
Рис. VIII 16. Диаграмма для приближенного обходимого для обеспечения запаса против
определения дискового отношения, возникновения кавитации, равного
запасу для гребного винта диаметром D = Ро с 7, = 4
Рнс. VIII.17. Зависимость КПД гребных винтов от числа лопастей при постоянном значении коэффициента нагрузки К\т — J г' Кт -
--------серии 01-55. В5-65, ВО-75:-----серки 16 ОК, Т7-70. Т8-78.
Sir,%
2
7
0,3
Определение наклона лопастей. Наклон лопастей гребных винтов в корму осу есгвляетея с целые удаления лопастей гребного вннта от корпуса без удлинения Гребного вала. Исследования показывают, что гидродинамические характеристики и КПД гребного винта при наклоне понастеА в пределах 0<Хд< 10’ практически не изменяются 1341 Вместе с тем, при наклоне лопастей увеличивается напряжение в корневом сечении из за возрастания Изгибающих моментов от центробежных сил и скручивающего гидродинамического момента. Наклон лопастей гребного винта в каждом конкретном случае необходимо выбирать с учетом размеров окна ахт< >шгсвпя, возможностей унификации и других общепроектных скбраженнй.
Среднесгатистческое значение наклона лопастей современных греб ЧЫх винтов находится в пределах Ил 5 -=- 10°.
Определение формы контура ло Части Форма контура лопасти характеризуется распределением ее
Ширины вдоль радиуса и расположением цилиндрических сечении относи шльно ^М-'Вой липни лопастн. Распределение ширины вдоль лопастн на периферийных 2°‘ 611
°02
Рнс. VII 1.18. Влияние относительного диаметра ступицы гребного вннта на пропульсивный коэффициент судна.
1 — без руля за винтом; 2 — с телесным рулем.
0,6) наиболее нагруженных сечениях находится при проектировочном расчете в результате удовлетворения условиям прочности н кавитации. На внутренних радиусах Л (/•) принимается конструктивно в зависимости от размеров ступицы и типа гребного винта (ВФШ. ВРШ или впит со съемными лопастями).
Расположение сечений относительно проекции осевой линии лопасти иа пл о скость диска гребного винта характеризуется координатой середины хорд профилей (г). Если (г) иа всех радиусах равна нулю, контур лопасти является симметричным. Чем больше cs (г), тем большую асимметрию (саблевпдиость) приобретает контур лопасти. Обычно осевая линия принимается проходящей через середину корневого сечения |т. е. cs (г — 0|, а (г) задастся вдоль радиуса шт параболическому закону:
где
_________
Csi 180 cos <р (г = 1,0)
отстояние конца лопасти от осевой; 0s — угол, характеризующий саблевидность контура и измеряемый между проекцией осевой линии лопасти и линией, соедини ющей центр с серединой концевого сечения лопасти на нормальной проекции гребного винта.
Ниже приведены рекомендуемые законы изменения с {г) и cs (г) для цельнолитых судовых гребных винтов фиксированного шага с относительным диаметром ступицы dfiiD = 0,2:
? 0,2 0,3 0.4 0,5 0,6 0,7
.... 0.0 0,0001 0,0039 0.0083 0,0157 0,0246
с (г)/с (г)шах • .... 0,710 0,793 0,856 0,933 0,981 1,000
Г 0.8 0,9 0.95 0.975 1,00
csiD .... 0.0350 0,0487 0.0561 0,0600 0,0640
г (r)zc (г)щах — — — —
Испытания моделей гребных винтов с различной саблевпдностью лопастей в опытовых бассейнах и кавитационных трубах в равномерном потоке свндетельству|<>т о слабом влиянии саблевидности на КПД и гидродинамические характеристики впита в целом. При изменении угла саблевидности 0< 0•. < 20° КПД чегырех-лопастиого гребного винта в равномерном потоке практически сохраняется неизменным.
В неравномерном потоке за корпусом судна интенсивность кавитации и вибро-актнвность гребного винта оказываются существенно зависящими от саблеви.т-иостп лопастей. Как показывают исследования 1161, с увеличением саблевидности лопастей снижаются значения периодических нагрузок, действующих на вяло провод и обшивку кормовой оконечности корпуса. Отмечается также снижение объемов каверн, покрывающих лопасти, в условиях работы винта за корпусом при реальных значениях чисел кавитации. Указанные эффекты являются следствием того, что с увеличением саблевидности лопасти постепенно входит в область шШ‘ более подторможенного потока за ахтерштевием и гидродинамические хараь -ристнкп гребного винта за оборот изменяются более плавно, чем в случае сю । тричных лопастей
Надлежащим выбором саблевидности лопасти можно управлять амплитудами и фазами отдельных гармонических составляющих периодических нагрузок ' 1 гребном винте н давления на обшивке корпуса. Следует однако учитывать. лопасти с достаточно большой саб.тевидностыо оказываются менее прочными 11 надежными в эксплуатации, чем лопасти, близкие к симметричным, особенно в Р жимах реверса и заднего хода, когда вытянутый узкий конец саблевидной лопасти
612
оказывается в неблагоприятных условиях прн взаимодействии с плавающими предметами или льдом. Поэтому установка гребных винтов с умеренной саблевндностью (с углом саблевидности, равным или меньшим половины межлопастного угла), особе 1 но винтов регулируемого шага, может быть рекомендована на вновь проектируемых судах с ледовыми усилениями не выше класса Л2. Гребные винты с большой саблевндностью (т. е. с углом саблевидности, значительно большим половины , межлопастного угла) целесообразно использовать только на уже построенных судах, на которых обнаружилась недопустимая вибрация корпуса и все возможные средства ее умсрення уже использованы. При этом следует помнить, что построение лопасти с большой саблевндностью во избежание ее искривления в радиальном Направлении («ложкообразпости») должно производиться с использованием криволинейной образующей винтовой поверхности |75|.
§ 33. ОПРЕДЕЛЕНИЕ РАСЧЕТНОГО РЕЖИМА
И ПРОЕКТИРОВАНИЕ ГРЕБНОГО ВИНТА
ПО ДИАГРАММАМ СЕРИЙНЫХ ИСПЫТАНИЙ
На заключительных стадиях проектирования, когда окончательно определены все геометрические характеристики корпуса судна и параметры енловой установки, выполняют подробные расчеты ходкости н уточняют элементы гребного винта. Важнейшим моментом при этом является выбор среднего шага гребного винта, обес-[ печиваюшего рациональное использование мощности силовой установки в процессе эксплуатации судна.
Разрушение лакокрасочного покрытия, обрастание подводной поверхности корпуса и элементов движителя, увеличение шероховатости лопастей вследствие механических повреждений и коррозионных процессов прн эксплуатации наряду с влиянием .метеоусловий приводят, как известно, к гидродинамическому утяжеле-иню гребного винта. Анализ показывает, что основным, определяющим фактором утяжеления гребных винтов является обрастание корпуса н лопастей водорослями и моллюсками во время длительных стоянок в теплой морской воде. При этом чаще [всего 113 общего количества дополнительных затрат мощности прн заданной скорости 40—50 % обусловлены обрастанием лопастей гребного винта.
Статистические данные |ЗС] показывают, что шероховатость гребных винтов, изготовленных из бронз и нержавеющих сталей современных марок, в большинстве случаев относительно мало изменяется в процессе эксплуатации, если обрастание лопастей отсутствует. Снижение КПД гребного вшпа при этом также является относительно небольшим — до 5 -С %.
11а некоторых судах из-за интенсивной кавитации гребных винтов или электрохимических процессов вследствие плохого электрического контакта с корпусом раблюдаются разрушения лопастей и шероховатость их поверхности существенно [возрастает. Вместе с тем, практика эксплуатации показывает, что возрастание потребляемой гребными винтами мощности при заданной скорости судна, особенно рос л с- его длительной (свыше 15 дней) стоянки в тропических морях, может достигать 30 % и более. Все подобные случаи являются следствием обрастания лопа-теп гребного винта и должны относиться к разряду случаев нерациональной и недопустимой эксплуатации движителя. Такие примеры свидетельствуют о необходимости организации постоянного контроля за состоянием гребных винтов н омываемых струей винта деталей, разработки технических средств для своевременной Очистки лопастей силами экипажа.
Разумеется, компенсация значительною обрастания гребного винта его предварительным «облегчением» по шагу не может быть признана обоснованной. Принимаемое в практике проектирования гребных винтов предварительное «облегчение» по шагу назначается исходя из условий эксплуатации судна, ею типа, района ! •лавания, тина силовой установки и марки глааного двигателя в предположении, то юпастн винта остаются чистыми, необросшими на протяжении всею срока эксплуатации судна.
Для судов с дизельной силовой установкой практикой судостроения рскомеп-|Лоь । следующий подход при проектировании гребного винта фиксированного шага и определении резерва по мощности:
613
при эксплуaiлипы преимуществе iho в южных широтах epeju пЛ шаг вннга следуем выбирать на основном режиме эксплуатации при частоте вращения, увеличен ион на 3—5" i в зависимости от типа судна п двигателя, что эквивалентно запасу по мощности в 10-15%.
при эксплуатации преимущественно в северных широтах—па 2,5-3,0 "о, что эквивалентно 8—10 п,-ному запасу по мощности
Ясно, что помимо отмеченных выше обстоятельств увеличение расчетной частоты вращения лрПС по сравнению с номинальной п будет зависеть также от ряда других эксплуатационных факторов и, главным образом, от конструктивных особенностей его силовой установки. На основе обработки большого ст ат нети чес ко го материала Ф М. Кацманом предложен более дифференцированный подход при определении соотношения, характеризуемою коэффициентом А = Лраг 'п, когда учет особенностей эксплуатации проектируемого судна производится разделением районов преимущественной его эксплуатации на три зоны: тропики, умеренные широты н северные широты
Конструктивный тип судна условно учитывается коэффициентом полноты корпуса 6. Предполагается, что суда с6>0,7 в основном тихоходные, у которых превалирует сопротивление трепня, а суда с 6< 0.7 — быстроходные с большим волновым сопротивлением Учитывается также периодичное г ь доковали» судна (через 12 или 24 мес )
Значения коэффициента k. несколько откорректированные авторами справочника, для дизелей различных типов приведет! в табл VIII.1, а для дизелей разных фирм-изготовителей — в |абл. VIII 2
На судах с турбинными и электрическими установками с регулированием оборотов предусматривать предварительное «ублегчепие-» гребных винтов по шагу не требуется Выбор среднего шага гребного винта с неповоротными лопастями на судах с существенно переменными режимами эксплуатации (ледоколах, буксирах, рыбопромысловых траулерах) производят для некоторого компромиссного режима, определение которого зависит от условий эксплуатации судна и типа силовой установки н осуществляется в каждом конкретном случае индивидуально.
После определения расчетного значения мощности, передаваемой иа гребной винт, и частоты его вращения можно переходить к выполнению расчетов ходкости судна и уточнению геометрических элементов гребного впита по диаграммам гидродинамических характеристик гребных винтов, полученных в результате пспытаии систематических серий моделей Выбор диаграммы для выполнения расчетов производят исходя из значений основных элементов гребного винта, определенных в первом приближении в соответствии с рекомендациями § 32. Выполнение расчетов требует знания бу ксировочного сопротивления корпуса па расчетном режиме экс плуатацнн судна н коэффициентов взаимодействия гребных винтов с корпусом W' . I, Iq. Чаще всего задается также Рз, п и ограничительные характеристики ci о вой установки.
Расчеты ходкости п тяговых характеристик судна по диаграммам серийных испытании моделей гребных винтов удобнее всего выпади ять в табличной форме. В табл. VIII 3—V111 5 приведены рекомендуемые схемы рас ютов ходкости и элементов гребного впита для трех наиболее pacnpocrpai ei пых типов задания Расчеты по схеме, представленной в табл. VII 1.3 производят дтя ряда значений диа.мст[ л D после чего выбирают то значение диаметра, при котором достигается наибадь-шля скорость судна при заданной мощ юстн Вы шеленпя по сьеме, приведи н > н табл. VII 1.4, выио няют для ряда значений и. лежащих в пределах ожидаемой скорости, и принимают значение диаметра обеспечивающее i апбадьшую скорость. После выполнения расчетов по каждой из этих таблиц ci >оят графические зависимости н определяют искомые величины.
>чнтывая трудоемкость выполнения расчетов, в настоящее время все чаше используют вычислительную технику Для удобства автоматизации расчетов диаграммы гидродинамических характеристик практически всех известных серий гре пых винтов аппроксимированы полиномами (см § 11) При выполнении расчетов иа ЭВМ для всех возможных типов задания на проектирование гребного впита рекомендуется задавать ряд значений D. п и vs. Нахождение искомых величин Р pi и nopt производят ио методу перебора вар< антов Шаговое отношение Р L) по известным Кт и J рекомендуется рассчитывать методом последовательных приближений по схеме деления отрезка пополам
614
Та_бл п ца VH1.3. Схема расчета оптимальных диаметров, шага гребных винтов и достижимой скорости одно- и двухзальною судов
Исходи ы е ,ч а и и ы е: Ps. кВт; Z, п, Ле/Л^, r]s; Z.
Искомые величии ы vs; Pi'L).
Величина Значение Примечание
Vs. уз v = 0.515с.,. м/с R. И Kde = vDi /pZpJR Wr = J (Kde) ‘Q = / (Kde) t = / (Kde) цд — v (1 — 1Гт), м/с T- RiZp(\ — fj, II J = v i/(nD) Кт = т/(рл'^4) »)о = /(Л Кт) P/D = / (J. Кт) 1 — t I •I-’lO-i-U/ IQ P= lO^Po/frpisZp). кВт Задают 4 5 значений вбл i зи ожидаемого По данным модельных испытании По принятой диаграмме То же
Таблица VIII.4 Схема расчета оптимальных диаметров, шаювых отношений гребных винтов и достижимой скорости трехвальиых судов
Исходные да и н ы е: P$t. Psz- Psj. кВт; Hi, я», лэ, об/с; Zlt Zz. Z3; (Ле//1с)ь
Искомые величины: D|, Dz, D3, м; (Р<£>)|, (Р‘О)г. (P/D)3-
61С
Продолжение табл. VIII 4
Величина Вал 1 Вал 2 Вал 3 Примечание
J=f(KNQ) 1 P/D = f (KNq) ' Kt =- f (J. P!D) Ke, = рпЧРКг (1 — П D — м 2jTe= tE1+ rEt+ rF3. H QniMaioT с принятой диаграммы выше линии A'.VQopt ” точке, где т]о — О,9От|о Opt •х
Таблица VI 11.5. Схема расчета ходовой характеристики судна при заданных геометрических элементах ВФШ и внешней oi раннчнтельной характеристике енловон установки
Исходные данные: = / (л); £>, м; P/D-, Z; ЛеМ0;
Искомые величины: Ps~ I (os); п = f (vs).
Величина Значсп не Примечав не
v$> }'3 о = 0,515г,. м/с R=f(v3, Гл, TF). Н Kde = I’D I Лр//? W7? = / (Л‘о£) t = f (Kde) <q *= f (Kde) v,\ =o(l — MT/), м/с T = R'(l - I). H Kdt — v fD J = / (Kdt. Pi'D) ’lo = / (Kdt, P'D) 11h = 0 - - «4 Ps- io 3R«;/nwwiJ. кВт zt = COo \/(DJ), об/мин В требуемом диапазоне По принятой диаграмме То же
6)7
В результате описанных выше расчетов определяют скорость судна на расчет iio*t и других режимах его эксплуатации, а также диаметр и средний шаг гребного впита. Кроне того, к этому моменту должны быть окон ьттелыю выбраны число лопастей и угол нх наклона, задана саблевпдиость с\. (г), диаметр ступицы и конструктивный тип вннта (цельнолитой, со съемными лопастями н т. д.) Ориеитн ровочно определяют также и дисковое отношение.
Полученный в результате таких действий гребной винт, геометрия которого соответствует геометрии, принятой при выполнении расчетов серин, обеспечивает переработку заданной мощности я расчетную скорость судна Однако таком греб ной винт не учитывает индивидуальных особенностей пиля скоростей за корпусом проектируемого судна, что может привести к повышенным по сравнению с минимально возможными вибрационным нагрузкам н периодической кавитации на лопастях. Гребной же винт, специально приспособленный к попутному потоку корпуса, позволяет увеличить пропульсивный коэффициент судна па 2—3 %. По этому установка на проектирхемом судне гребного впита с геометрией, полученной в результате выполненных выше расчетов, не рекомендуется и может быть допущена в виде исключения иа судах малосерийной постройки с малой мощностью двигателя. Как правило, эти расчеты являются первым этапом проектирования гребного вннта
Детальная геометрия лопастей гребного винта (профилировка, распределение шага и т. д.) должны быть рассчитаны на ЭВМ с учетом конкретных особенностей поля скоростей за корпусом проектируемого судна по вихревой теории (см § 35).
§ 34 ГЕОМЕТРИЧЕСКИЕ И ГИДРОДИНАМИЧЕСКИЕ
ХАРАКТЕРИСТИКИ ВИНТОВЫХ ПРОФИЛЕЙ
В настоящее время в практике проектирования гребных винтов наиболее широко используются профили типа NACA-66mod, а = 0,8 или профили, построенные на их основе. Рассмотрим их геометрические и гидродинамические характеристику Геометрические характеристики. Ординаты засасывающей »]• и нагнетающей i поверхностей профиля вышеляют по формулам
<(f) = Vc^ + f)*56/7T-^;
Д’ (I) -Vc Й (Villi)
Рис. VIII. 19 Распределение нагрузки вдоль хорды типа NA: А, а = = 0,8 (а) и ПК, п 0 8, b = 0,05 (б).
где безразмерные абсцисса Е и ордината и i] получены делением размерных величин на ft/2 (ft — хорда профиля). Функция распределения стрелки прогиба средней линии Ес (-) приведена в табл VIII G для распределений .нагрузки типа NACA и ПК (рнс. VIII. 19). Функция распределения толщины Fy G) для профиля типа NACA-GGinod, обозначенная как Fr0, также приведена в табл. VIII.6. Ввиду того что у этих профилей толщины около кромок при малых огносшельных толщинах б(б<6,;) оказываются недостаточными с точки зрения мсешой прочих* и рекомендуется использовать профили тина ПК-75, ПК 80 и ПК 82, построенные
618
Таблица VIII.6. Функции распределения толщины и кривизны винтовых профилей
5 । - Ё 2 FC NAC.A, а *= 0,8 ПК. а 0.8; Л = 0.05 'i» N АСА-66 mod
1,000 0.975 0.950 0.900 0.850 0.800 0.600 0.400 0.200 0.101» И - 0.200 - 0.400 0,600 - 0,800 -0,900 - 1,000 0 0.0125 0,0250 0,0500 0.0750 0.1000 0.2000 0,3000 0.4000 0.4500 0.5000 0,6000 (1.7000 0,8000 0,9000 0,9500 1,0000 0 0,0910 0.1590 0,2710 0,3660 0,4480 0,6990 0,8630 0.9610 0.9880 1.0000 0.9790 0.8890 0.7030 0,3590 0.1710 0 0 0,0686 0.1420 0,2820 0,3890 0,1750 0.7250 0,8810 0,9700 0,9920 1,0000 0,9710 0.8770 0.6900 0,3520 0,1680 0 0 0.231 0.306 0.419 0,508 0,584 0,800 0,927 0,990 1.000 0,992 0,931 0,807 0,622 0..375 0,229
на базе профиля NACA-66mod. Профили ИК-75 следует использовать для гребных винтов судов без ледовых усилений, ПК 80— для судов с ледовыми усилениями категории .12, .’13 по Регистру СССР, а ПК-82 — для судов с ледовыми усилениями категории .11 н УЛ [751.
Профили типа ПК-75 имеют следующее распределение толщины вдоль хорды:
Гг(1 6)
t'Tl) (2) при б 0,06; — I < < I ;
FT0(i) пр'1 S<0,06; - 0,6 < £ < 0,8;
Fn(i, 6) при б <0,06; 0,8 < ^ < 0,975;
Frtfi, б) при 6<0,06; —0,9<j< — 0,6.
(VIII. 2)
Функции Fj-l (5, б), РТ2 (=, б) графически представлены на рис. VIII.20.
Функцию распределения толщины для профилей типа ИК-80 и ИК-82 вычисляют по формулам
[ 2 (и0 -|- -|- «.б2 -f- Cjfi’ + «,6*) при 6<6К;
F,. (ё, 6) -
I -FTc№ nP" 6>fiH-
(VIII 3)
Значения козффнцисш в п, и относительной толщины бг приведены в табл. \ I I 7 и VII 1.8.
Диаметр закругления передней кромки профилей рекомендуется принимать равным 0,1с Выходящая кромка профилен начиная с некоторой точки хорды, от-сюящей от кромки па рассюянни s, заостряется по плавной кривой, касательной к контуру профиля. Толщина на кромке составляет 1 мм для профилей ИК-75 и ПК-80 н 2 мм для ПК 82. Расстояние s вычисляют по формуле
0,006 -ф 0,276
0,007 -| 0,256
0,016 -|- 0,21 б
для ИК-75:
для ИК-80;
для ИК-82.
6|9
Площадь сечения профилей типа NACA-G6mod можно найти из выражения
F=gieb, (VIII 4
где gi ~ 0,720; е — максимальная толщина и юфнля.
Моменты сопротивления профиля типа NACA-GGinod относительно точек С nD (рнс. VIII.21) раины
U"c = £c^; (VI11.5)
а относительно точек А и В
%В = ^’
Значения коэффициентов ?С, и £д. в даны в табл. VIII.9 и на рис. VIII.21.
Рнс VIII.20. Изменение функции относительной толщины для входящей (а) и вь ходящей (6) частей различных профилей.
--------ИК-75;-------------ИК-80;--------ПК-82.
Гидродинамические характеристики. В рамках линейной теории невязкой жидкости рассмотренные выше распределения нагрузки соответствуют расчетному режиму безударного входа и дают следующую связь между коэффициентом подъем ной силы Су, относительной кривизной бс и углом атаки а,:
бс= 1(CV; Kj =A,Cr. (VIII ')
Значения коэффициентов и Аг приведены в табл. VIII. 10.
Коэффпциен подъемной силы тонкого профиля в невязкой жидкости равен
C(j°) = 2л (а + 26 .), (VIII.К)
где а — угол атаки. С учетом толщины профиль типа ИК-75 , а = 0,8 имеет в невязкой жидкости коэффициент подъемной силы, равный
Су, = 2пиа (а + 2к2бс), (VII 1.9)
где
ps = I + 0,876; х2 = 1,015. (VIII 10)
В вязкой жидкости указанный профиль развивает подъем ivio ситу, коэффициент koi | ой равен (с уче ом тсищипы) |75]
Су =- 2Л|1 (*х 2Х(\;) (VIII 11)
620
Таблица VIII 7 Значения коэффициентов (ц, функций Ffa Fc и относительной толщины Йк для профилей HK-RQ
С Ю ЭД Q О TJ- со О г: Ч- СЧ 1Л СЧ о О О О С СТ’ OI К Г О N С-J о ОД
—’ СО —« СО — 04 СО СЧ ту Оч — CClD—‘СМСОГ^ОО—’СЧО
•1*
1
ОООООООООООООООООООООООООсОССсО OOOQOOOOQOOOOOOQOQOOOOOinoinOiOCinO OOJ -g- с£ эд о сч ТГ ОД о LO с Ю О ОД п Q1Q ОЮ О CJ IQ N о OI ic N о ООСОО~-• ——> oj oj со со чу "е Со ю сою г^<х?аэаэоо0>слслсло оооооооооооооооооооооооо’ооосоо-^
621
S Таблица VIII.8. Значения коэффициентов а;, относительной толщины 6К и функции fr* для профилей ИК-82
1 - 6 Лк f ГО «о а3 л,
0,0125 0,11 0,1160 0,3055151890 —4,1917201390 33,403918240 — 121,23158270 196,38844330
0.0200 0,11 0,1385 0,3833964345 —5.5739892370 50,708051430 —228,21798110 409 48449500
0.0250 0.11 0,15-10 0.4087453250 —5,3247995920 40,102123230 — 118,07369590 19,619351.4
0,0400 0 12 0,1890 0,4702703268 —5,8597639020 61,308245830 —465,41148700 1 655,52556100
0.0500 0,12 0,2110 0,4901742937 —5,3820721460 50,610253-110 —387,01052400 I 478,85633600
0,0600 0,12 0,2295 0,5243784187 —6,4709968010 75,291913330 610,70581000 2 184,035,37600
0,0750 0,12 0,2550 0,5278500362 —5,2228687190 46,578638930 —325,35631800 1 183,51683500
0,0800 0,12 0,2630 0,5305626587 -5,0707493050 44,804597170 —318.01396610 1 183,14778800
0,1000 0,12 0,2930 0,5297756222 —3,9830028430 28,172871490 —200,24984280 876,77408300
0,1200 0,12 0,3190 0,5258450742 —2,9857584910 11,905613360 —66,74194618 459,00142100'
0.1400 0,12 0,3425 0,5361289986 —3,3116244320 28,134605430 —250,52139680 1 117,65568900
0,1600 0,12 0,3635 0,5320750184 - 2,6979898420 20,703478370 —195,62690970 941,98507700
0.1800 0,12 0,3832 0,5210686773 — 1,6819340260 3,163643433 —39,41321877 417,614'4960
0.2000 0,12 0,4015 0,5150266086 — 1,1327006380 —5,797188817 60,04592096 10,32735517
0,2500 0,12 0,4380 0,5033441722 0,0816792193 —27,136231510 290,01654670 —894,11474800
0,3000 0,12 0,4538 0.5065128449 —0,4625494726 —0,499589147 87.28937520 —318,84788950
0,350 0,09 0,4830 0.4773515195 2,470212525 —90.160008230 I 159,45718400 —5 056,76216000
Продолжение та б л. VII 1.8
1 -5 ®к FT0 о» а. <4 Oj °*
0,400 0,06 0,4960 0,6648123620 — 18,485476390 730,159049000 — 12 254,34174000 73 969,45753000
0,450 0,02 0,5000 0,5000000000 0,0 0,0 0,0 0,0
0.500 0,02 0,4962 0,4962000000 0,0 0,0 0,0 0,0
0,550 0,02 0,4855 0,4855000000 0,0 0,0 0,0 0,0
0,600 0,02 0,4670 0,4670000000 0,0 0,0 0,0 0,0
0,650 0,05 0,4400 0.3449173464 13,198519260 —633,953871000 12 847,12982000 —93 749,31068000
0.700 0.07 0,4038 0,3842703063 4,700291909 -212,945395100 3 554,78839100 —20 225,86036000
0.750 0,08 0.3605 0,4IG3I76930 —0,768551746 —26,447802700 612,96544220 3 391,58927900
0.800 0,09 0,3110 0,4221539839 —3,178722698 36,951412470 -267,91642310 1 084,32586500
0,825 0,09 0.2855 0,4196642601 —3,716520340 42,042127740 —294,76273900 1 138,18480300
0,850 0,09 0.2600 0,3978574601 —2,559586762 — 1,820050480 250.30671310 — 1 116,75823900
0,875 0,09 0,2345 0,4068239766 —4,250144625 42,560285220 316,58730640 467,73 4 300
0,900 0,09 0,1990 0,3856618883 —2,925346890 —16,812288090 596,17473170 —3 371,58329100
0,925 0,11 0,1830 0,3862793968 4,113078595 22,342303200 —58,21150267 429,62972300
0,950 0,11 0,1559 0,3793861975 —4,309452177 19,863029520 - 22,72009151 317,35994320
0,975 0,11 0,1280 0.3778664000 —4,996245910 32,231803710 — 168,11740100 957,52782770
1.000 0,12 0,1000 0,4290800994 —9,159072932 123,876399200 1 068,10021800 4 165,71853000
Здесь ц= щщ; х = XjX2, где р, — коэффициент, характеризующий влияние вязкости на градиент подъемной силы профиля:
Р1= I - ехр (-0,0691 + 12,466 - 0.4271 Ig Re);
(VIII.12)
хЛ — коэффициент, характеризующий влияние вязкости па угол нулевой подъем ной силы профиля:
6(6 — 0,05) (0,1074 Ig Re—0.4378)2'
(VI11.13)
Здесь Re — vob!v — число Рейнольдса для профиля (при расчетах профиля в со-
ставе лопасти i’o = Од).
Зависимости (VIII 10), (VIII. 12) и (VIII.13) получены в результате аппроксимации результатов систематических расчетов профилей типа ИК-75 ио программам, разработанным Н. IO. Завидовским и А. А. Руссц-кпм [29] (для невязкой жидкости) и В. В. Дроб-ленковым и Г. И. Каневским [251 (для вязкой жидкости). Эти формулы справедливы в следующих диапазонах параметров: для функций р, п х, Re > 10s; 0 6 < 0,10; 0 С Ь < 0,03;
Рпс. VIII.21. Значения коэффициентов, определяющих моменты сопротивления сечения, для профиля NACA-66 mod, а = 0,8 и 0 6/,
SJ0.20; 0 ^0,03. При расчетах профилей, обте
каемых вязкой жидкостью, предполагалось, что поверхность гидродинамически гладкая, а степень свободной турбулентности равна 2%.
Анализ результатов расчетов, произведенных с использованием формул (VIII.9)—(VIII. 13), по казывает, что в диапазоне углов атаки, характерных для «рабочих» сечений лопасти иа расчетном или близком к нему режимах работы гребного винта, коэффициент подъемной силы профилей в вязкой жидкости меньше соответствующего значения для тонкого профиля в невязкой жидкости. Это означает, что профиль, средняя линия и угол атаки которого определены по линейной теории (например, по линейной теории несущей поверхности, см. § 33) нз условия обеспечения заданного коэффициента подъемной силы, не обеспечит при работе в вязкой жидкости необходимого значения Су. Для выхода на расчетный режим по подъемной силе угол атаки в вязкой жидкости должен быть равен
a cq + Да,. (VIII. II)
где а. — угол атаки в невязкой жидкости:
Aa« = ai(_jr_,)“26c(’<
(VI11.15)
Для режима безударного входа относительная кривизна f>( , угол атаки «, и расчетный коэффициент подъемной силы Су связаны зависимостями (VIII.7). для этого режима формула (VIII. 15) упрощается и после преобразований принимает вид:
Aaz = C,.o [А2 (-^-1) - 24, (к-----L)] =5,3WCV0/Rc°-K49, (VIII НИ
где Су0 — расчетное значение коэффициента подъемной силы. 624
Таблица VIII 9 Значения коэффициентов g и {• типа NACA-66 mod, а = 0,8
для профилей
Коэффициент Ьс/б
0 0.05 0,10 0,20 0.30 С.аО
0,08334 0,08401 0,08924 0,11240 0,15090 0,26770
0,08334 0,08752 0,09687 0,13250 0,19320 0,40560
6А, В 0.07347 0,07.347 0.07348 0,07348 0,07348 0,07348
Таблица VIII.10. Значения коэффициентов формул (VIII.7) и (VIII 19)
Распределение толщины ('редин я линия Л, л„ ’ £7t fc,
NACA-GGmod NACA, а = 0,8 0,0679 1,54 1,25 0,263
ИК, а = 0,8; Ь= 0,05 0,0733 1.0 1,25 0,263
ИК-75 NACA, а — 0,8 0.0G79 1,54 1,25 0,272
ИК, а = 0,8; Ь = 0,05 0,0733 1,0 1,25 0,272
Аппроксимация результатов систематических расчетов вязкостного соиротн-Врения профилей типа ЙК-75 дает следующую формулу для коэффициента вязко-Гного сопротивления профилен
Сх = Сло (I + 2,36), (VIII. 17)
[где Ср0 — 0,05808/Re0,14"8. Коэффициент обратного качества профиля равен
Сх 0,05808 (Н- 2,36)
~ Су~ CyRc°-iw
(VIII. 18)
ормулп (VIII 17) и (VIII.18) справедливы в диапазоне параметров: 105^Re<i К 3-10’; 0 sg 6 0,10; —0,1 < Су < 0,3.
। На рис. VI 11.22 показан график изменения коэффициента обратного качества в зависимости от Су н Re. Там же приведены данные, соответствующие известной [Логарифмической диаграмме Лаврентьева — Гречина 143].
В Минимальный коэффициент давления на профиле NACA-G6niod, а= 0,8 или ИК-75 со средней линией ИК, а = 0,8, b — 0,05 иа расчетном безударном режиме Нбтекапня может быть вычислен по формуле линейной теории
-P^K'+^ + W-I- (VIII.19)
Л<: Cj и 1\—коэффициенты, значения которых даны в табл. VIII. 10. Диаграммы М" — 6 — рш111 приведены иа рис. VIII 23.
I 625
Минимальный коэффициент давления на профиле при произвольном режиме обтекания иа засасывающей и нагнетающей сторонах профиля находят но формулам [3j:
Рга1„ - (' + «1б I- “А' + "А)' ~ 1 ’>
Р'пнп-С +«1|6)г + ->(Сг-«1зМ2-1- (VIII.20)
Цс » Ю; ---------Rc 10’: подчиним В М Лав-
рептьсна и М. А. Грешна.
За значение РпЦ,, принимают наибольшее из полученных по этим формулам нрефш.тя типа NACA-66inod, а 0,Й коэффициенты равны: и.= 1,25; ца 0,150; и, 1,65; и„ 0,75, и12 0.119о; wI3 13,9. Первое выражен.
соответствует точкам па средней части профиля («площадке» кавитациони 1 диаграммы), а второе — минимуму давлений вблизи передней кромки («ветви» кавитационной диаграммы).
Гидродинамические характеристики профилей типа lSACA-66inod, а при частичной кавитации приведены в § 37.
§ 35. ПРОЕКТИРОВОЧНЫЙ РАСЧЕТ ГРЕБНОГО ВИНТА
ПО ВИХРЕВОЙ ТЕОРИИ
Проектировочный расчет гребного винта по вихревой теории производят по. ле расчетов ходкости судна и определения основных элементов движителя по дпаграм мам. По этой причине при расчете ио вихревом теории считают пзвестш«м11 диаметр 1ребиого вннта, число лопастей, коэффициент унора, относительную посгупь 626
На этапе проектирования гребного впита по вихревой теории ширину и толщину лопастей рекомендуется определять из совместного удовлетворения требованиям прочности и отдаления кавнтанни по В. М. Лаврентьеву, Прн этом должни быть заданы основные элементы гребного винта и режим его работы, характерна и ;ц прочности материала и соответствующие коэффициенты запаса. Совместные условия обеспечения общей статической прочности лопастей и отдаления кавитации ниеют вид ]43]:
^<7tTS ^ПИИ’ сгА. = я.
(VI 11.21)
где Ид = 0,01 1 ' гу А---характеристика прочности;
J ZL/"Oup
Kd—коэффициент прочности [43]: f............... 0,2 0,3 0,4 0,5 0.6 0.7 0,8 0,9 0,95 0.975
A'rf............ 320 274 225 164 HI 65 29,5 10,7 6,3 5,0
/я.—коэффициент запаса, определяемый в соответствии с Правилами Регистра СССР:
Категория ледовых усилений . . Без ледовых ЛЗ Л2 Л1 усилений тл ............. 8,0 9,0 10,0 11,2
°вр — временное сопротивление материала; J» 5 (ЛГ)2 + 2 =
УЛ УЛ
12,5 14
(VII 1.22)
—число кавитации для сечения гребного винта на радиусе У; В—гидродинамическая характеристика, известная из расчета по теории несущей линии или данным § 9; Ка—коэффициент запаса, равный произведению четырех сомножителей: l\,j = = KaLKo^KotKnr- Здесь
Ра + РЯ^о.8 — Ру ( п™' \ 20,05 + 0,2635пг
CL Ри + - Pv \ «Б / 0,05 + 0,26323 ь
(индексы «ПГ» и «Б» соответствуют условиям загрузки судна с полным грузом и в балласте; р„ — атмосферное давление; Лй>в — заглубление сечения лопасти на г -= 0,8 в ее вертикальном положении); /<(,ф’зависит от степени окружной неравном' р-постп попутного потока и определяется по рис. VII 1.24; К& характеризует относительное время эксплуатации судна в режиме, наиболее опасном с точки зрения кавитации (рис. VIII.25); Ксг = 1,10—0,25г.
Коэффициент минимального давления на спинке профиля в расчетном режиме безударного входа вычисляется по фюрмуле (VIII. 19).
Графически система (VIII 21) представлена иа рис. VII 1.26, где линии р — const соответствуют постоянному моменту сопротивления сечения, т. е. постоянным прочностным качествам, а липни pmln = const — постоянному заг.ь'У против возникновения кавитации на спинке профиля. Точка пересечения этих лп-1шй удовлетворяет обоим требованиям, т. е.. решению системы (VIII.21). Слс/г ’7 отмстить, что эта точка соответствует наивысшему гидродинамическому качеству профиля ссчеини. Для профилей типа ХАСА-бб со средней линией NACA, а °-' и НК 75 с ПК, а — 0.8, Л — 0,05 решение системы (VII1.21) может быть иайД' !° с помощью рис. VIII 23
628
В результате решения системы нелинейных уравнении (VIII.21) для ряда расчетных радиусов становятся известными три величины: b.'D, &, Cj, необходимые для построения контура лопасти н проведения дальнейших проектировочных Расчетов.
Следует отметить, что проектирование гребного винта может быть осуществлено к.тк для модельных, так и натурных чисел Re. Расчет для модельных чисел Re ре-
комендуется производить в том случае, если сопротивление судна п коэффициенты взаимодействия определены но традиционной схеме (с использованием корреляционной надбавки
Рнс. V! 11.24. Зависимость коэффициента запаса от степени окружной неравномерности попутного потока.
Рис. VIII.25. Зависимость коэффициента запаса Kvt от относительного времени эксплуатации судна в режиме, наиболее опасном с точки зрения кавитации.
^противление судна рассчитано по аффинной зависн* эффекты коэффициентов взаимодействия, то проек-
на шероховатость). Если же сопротивление судна рассчитано по аффинной зависи-рсти и учтены масштабные эффекты коэффициентов взаимодействия, г* “— прозаике гребного винта необходимо производить на натурные условия.
Результатом расчета по вихревой теории являются распределения шагового отношения и относительной кривизны сечений лопастей. Проектирование гребного
Рис. VII 1.26. Диаграмма Cj—б— Ср min. иллюстрирующая решение системы (VIII.21).
/ — область значений Су и Л. удэвле-i творяющнх условию отсутствия кави-। Tamm нв спинке профиля: // — область значений, обеспечикающих прочность лопасти: II! — область решений I системы (VIII.21); точка Л — решение системы, обеспечивающее наивысшее гидродинамическое качество профиля.
Ига, приспособленного к попутному потоку или имеющего заданное распредели К циркуляции, осуществляется па ЭВМ. Здесь рассматривается проектирование Инта в однородном потоке, подобные расчеты могут производиться «вручную». I Оптимальный гребной винт. Известны Кт, J, Z, 6 (о), Гц, Rc;>, Ь (r}iD, cs(r)!D. Jp первом этапе по теории несущей линии находят гидродинамические характеристики.
629
1. По диаграмма» рис. II IG в зависимости от Z( — J л и Хг/~ Н)3 (\т определяют значение индуктивной поступи X
2. Рассчитывают
Л'г
где tg (г = 0.7) 0,7, а коэффициент обратного качества е определяет, ч
по формуле (VIII. 18).
3. Назначают ряд расчетных радиусов и производят вычисления в табличной форме но обращу тибл. \ 111.11 и \ 111.12. В расчетах используют формулы для определения относительной скорости натекания па элемент
т; /(,+^)‘+т—^)’
п коэ(|>фшше1! га подъемной силы
С\ ...7 -1 . (VIII 23)
»« Л
После заполнения таблицы производят построение графика зависимости d/(; if от г и интегрированием находят коэффициент упора гребного винта К'г. Если расчетное (Л'т) 11 заданное (Л’;) значения отличаются не более чем на I “б, то далее производят расчеты ио и 4 В противном случае уточняют значение индуктивной поступи X)' = А) | 0,3 (Кт Ку) н расчеты по п. 2 и 3 новюряют при г h
Пример расчета натурного винта приведен в табл. VIII.11, результаты которого показаны на рис. VIII.27, а пример расчета модели— в табл. VIII. 12.
4, По графикам рис. 11.8 определяют значения поправок на несущую поверхность К(. Ка, КаТ и вычисляют значения опюсительной кривизны сечений Л(. в предположении, что распределение нагрузки вдоль хорды имеет вид NACA (« = 0,8). Определяют дополнительный угол атаки Ла/, учитывающий снижение подъемной силы за счет вязкости жидкости, по формуле (VIII.16) и находят окончательное значение шагового угла
ч— Р, + Vlt + Kar^D 4 < V111 *4)
где «/.>= 1,54Су. Эти расчеты производят также в табличной форме.
Пример расчета приведен в табл. VI 11.13 для натурного винта н в табл. VII 1.14 для модели. Сопосявление результатов расчетов (рис. \ 111.28) показывает, «го шаговое отношение модели примерно на 0,02 больше соответствующего значения для натурного винта. Эта разница обусловлена в основном различными значениями дополнительного утла атаки Да/.
Гребной винт с произвольным заданным распределением циркуляции. Извест i Л';, J, Z, G* (г), Re , b(r)D, Cgirj'D, b (г). Распределение нормированной циркуляции G" (г) — G(r)G(r =0,6) приведено ниже:
г_........... 0.2 0,407 0,60 0,7657 0,8928 0,9727 1
G* (г) .... 0,549 0,840 1,0 0,930 0.635 0.30
Это распределение характеризуется меньшей но сравнению с оптимальным грсбпь'1 винтом нагрузкой на внешних радиусах лопасти, что благоприятно сказывается па кавитационных характеристиках винта.
Расчеты производятся на ЭВМ в следующей последовательности.
I. Находятся коэффициенты разложения ап нормированной циркуляции О <г в ряд (11.29) из условия прохождения функции G* (г) через заданные точки
2 Определяется в нервом приближении значение циркуляции 6'л в на огг"С,' тельном радиусе г 0,6 но формуле (II 98) По определенному таким образам |С 630
Т б чяаа III I Пример расчета оптимального гребного виита по теории несущей линии (натурный винт) Исходные данные: Л'г = 0,212; КТа = 0,215; J = 0,911; 2=4; Ст. = 0,649; D = 5.7 м; ~гн = 0,2; п = 130 об/мин;
Rep = 4,1 • 10"; к/ = 0,366,
631
2 Таблица VIII. 12. Пример расчета оптимального гребного винта по теории несущей линии (модель)
Исходные данные: Л’г = 0,212; КТо — 0,218; J = 0,911; Z = 4; СТА — 0,649; D — 0,2 м; гн — 0.2; п — 25 об/с; ReL = 5,8-10s; л/ = 0,368.
Величина r При мечание
0,2 0.3 0,4 0.5 0,6 0,7 6,8 0,9 0.95 0,975 1.0
К 1,6200 1,1100 1,0000 0,2400 0,9000 0.8300 0,7400 0,5600 0,4100 0,3000 0 По рнс. П.13
0,1130 0,1320 0,134 0,1290 0,1200 0,1110 0,1020 0.0943 0,0907 0.0889 0,0873 По формуле (11.93)
wxx]vA 0,0GI7 0,1080 0,1460 0,1750 0,1950 0,2120 0,2220 0,2310 0,2340 0,2360 0,2370 По (11.92)
Оа 0,0183 0,0220 0,0268 0,0303 0,0324 0,0322 0,0302 0,0238 0,0177 0,0130 0 По (11.05)
blD 0,2980 0,3300 0.3590 0,3840 0,4050 0,4230 0,4170 0,3710 0,3170 0,2720 0 Задано
vr!°a 1,2100 1,4300 1,6900 1,9600 2,2900 2,6000 2,9200 3,2500 3,4200 3,5000 3,5800 По (VIII.22а)
Cy 0,3190 0,2930 0,2770 0,2520 0,2190 0,1840 0,1560 0,1240 0,1020 0,0858 0,0840 По (П.96)
tg₽, = = У.!1 Г 1,8400 1,2270 1,9200 0,7360 0,6130 0,5260 0,4600 0,4090 0,3870 0,3770 0,3680
г 0,0404 0,0406 0,0398 0,0407 0,0443 0,0493 0,0562 0,0698 0,0854 0,1050 — По (VIII. 18)
1 — е tg 0,9260 0,9500 0,9630 0,9700 0,9730 0,9740 0,9740 0,9710 0,9670 0,9610 —
dKr'dr 0,0510 0,0984 0,1670 0,2440 0,3150 0,3760 0,4070 0,3620 0,2840 0.2130 0
6 0,1230 0,0971 0,0775 0,0598 0.0454 0,0327 0,0225 0,0161 0,0156 0,0176 — Задано
i IU-IO’S 2,0400 2 66.00 3,4200 4,2100 5,2200 6,2000 6,8600 6,7900 6 1100 5,3600 —
Т б л а VIII Пример расчета оптимального гребного винта по теории несущей поверхности (натурный винт) Исходные данные: = 0,187; яЛ, = 1,15; 0«. = 7°; ejD = 0,0454,
Величина Г Примечание
. 0,3 0,4 0.5 1 0.6 0.7 0.8 0.9
₽Л ° 50,66 1,61 42,46 1,30 36,20 1,33 31,38 1.41 27,61 1,56 24,56 1,79 22,15 2,35 Из табл. VIII. 11 По рис. II.8
ха *аТ 2,39 0,370 2,34 0.30 2,17 0,230 2,05 0,163 1,87 0,116 1,63 0,079 1,34 0,056 То же
<5С = 0,0679СуЛ)с 0,0310 0,0237 0,0221 0,0203 0,0192 0 0186 0,0195
° 1,04 0,97 0,82 0,67 0,52 0,38 0,25
а/т — 57,ЗЛ'аГе0/О 0,96 0,78 0,60 0,42 0,30 0,20 0,15
Ла., ° Ф. P/D = nr tg <р 0,071 52,73 1,24 0,060 44,27 1,22 0,050 37,67 1,21 0,040 32.51 1,20 0,031 28,46 1,19 0,025 25,16 1,18 0,020 22,57 1,175 По формуле (VIII. 16) По (VIII.24)
Таблица VIII. 14. Пример расчета оптимального гребного винта по теории несущей поверхности (модель) Исходные да и и ы е: A^Af> = 0,187; л?./ = 1,16; 0? = 7°; е0/О = 0,0454.
Величина ? Примечание
0.3 0.4 0.5 0.6 0.7 0.8 09
₽/; ° ЛС 50,8200 1,6100 42.6100 1,3000 36,3500 1,3300 31,5100 1,4100 27,7400 1,5600 24,700 1,790 22,2400 2,3500 Из табл. VIII 12 По рнс. II.8
2,3900 2,3400 2,1700 2,0500 1,8700 1,630 1,3400 То же
лат 0,3700 0,3000 0,2300 0,1630 0,1160 0,079 0,0560
<5С = 0,0679Cy/Cc 0,0319 0,0245 0,0227 0,0210 0,0195 0.019 0,0198
Каа12’ ° 1.0700 1.0000 0.8400 0,6900 0,5300 0,390 0,2500
Я/Т ~ 5'’’3-^аТгси-£> 0,9600 0,7800 0,6000 0,4200 0,3000 0,200 0,1500
Ла., ° 0,4500 0,3800 0,3100 0,2500 0,1900 0,160 0,1200 По формуле (VIII. 16)
Ф> Р/D = яг tg ф 53,3000 44,7700 38,1000 32,8700 28,7600 25,450 22,7600 По (VI 11.21)
1,2600 1,2500 1,2300 1,2200 1,2100 1,200 1,1900
пределен ню циркуляции G (г) ~= a* (r)G(r- 0.G) рассчитывают по формулам (II.2.1) н (II 24) вызванные скорости в точках несущего вихря. При этом утлы нндукпшной поступи в первом приближении принимаю! из расчета оптимального вннга.
3 На расчетных радиусах вычисляются по формуле. (11.22) значения 1g (у, которые сравнивают с аналогичными значениями предыдущего приближения В слу чае их значительного расхождения расчеты вызванных скоростей повторяют при уточненных значениях угла индуктивной поступи Последовательные уточнения
Рис. VIII.27. Результаты расчета по теории несущей линии оптимального гребного винта (натурного).
Рнс VIII 28 Сопоставление результатов проектировочного расчета оптимальных гребных винтов.
------модель:---------- натурный винт.
величины tg р/ повторяются до тех пор, пока процесс приближений практически не сойдшся.
4. Производятся последовательные уточнения величины Gue пока расчетное значение коэффициента упора /</- не станет достаточно близким к заданному.
Таким образом, в программе расчета должны иметься два основных цикла: по величинам tg и по величине Кт, причем первый цикл находится внутри второй1 После завершения расчетов по теории несущей линии производят расчеты по теории несущей поверхности
Пример расчета приведен в табл. VIII 15.
В некоторых случаях для спроектированного винга производят поверочный расчет прочности Методы таких расчетов даны в § 38.
§ 36. ПОВЕРОЧНЫЙ РАСЧЕТ ГРЕБНОГО ВИНТА
Контрольный (поверочный) расчет гребного винта по вихревой теории можег быть осуществлен по схеме несущей поверхности или несущей линии. В первом случае результатом расчета являются распределение давлений по лопастям и коэф фицисшы упора и момента гребного впита, т. е. распределенные и суммарш гидродинамические характеристики Во втором случае могут быть определены лишь распределения этих характеристик вдоль радиуса лонасгн и коэффициент упора и момента В обоих случаях исходной информацией служат геометрические характеристики впита и данные о режиме его работы.
634
Поверочный расчет гребного винта в неоднородном потоке по схеме несущей поверхности описан в § 18.
Для определения кривых действия гребного впита и получения информации, необходимой для приближенной оценки кавитационных н прочностных характеристик лопастей, производится поверочный расчет гребного винта по схеме несущей линии, основы которого были заложены в работах Л. М. Лепнлкниа, Э. Э. Г моля, Глауэрта, В. Б. Ляписа. Исходным для такого расчета является решение интегродифференцнальиого уравнения теории несущей линии (11.32), записанною с учетом поправок на несущую поверхность и вязкость осесимметричного потока жидкости:
°=^4(*-р тг ~£•) К+26сХЛс1 1 \ R fl J
(VI 11.2.3)
Здесь р их — коэффициенты, учитывающие влияние вязкости на градиент и угол нулевой подъемной силы плоских профилен (см. § 34); f» arctg [о [1 — ф (г)]/Н/ ; Кат, Ка, Кс — поправки на влияние несущей поверхности (трехмерности потока).
Рнс. VIII.29. Кривые действия гребного винта двухвального лцхтеровоза в однородном потоке (Z = 4; Л^А0 - 0,69; Po^iD = 1,06, лопасти гидродинамически гладкие).
--------модель (Re,, = 5 10*);------натурное судно (Rcp“ 6-10’); • -эксперимент в опытовом бассейне («свободная подл»).
Рис. VIII.30. Соотношения между углами Ф, Р и Р/(для г = 0,7), полученные поверочным расчетом гребного винта из серин В4 (Z 4; HfM,, = 0,85; PlD • 0.8), работающего в однородном потоке при различных значениях относительной поступи J.
1 - чр: 2 - Р,: 3 - Р.
Для оптимальных или близких к ним гребных винтов эти поправки рекомендуется принимать по данным § 7.
Уравнение (VIII.25) решают методом последовательных приближений, в процессе которых уточняют значения углов индуктивной поступи. При этом пене зуют представление циркуляции G в виде ряда (II 29), а нормальную к липа> я вызванную скорость вычисляют по (11.32) с помощью квадратурной формулы для сингулярных интегралов [3]. Подстановка ряда (11.29) в формулу (VIII.25) при водит к системе линейных алгебраических уравнений относительно неизвестш'Х коэффициентов этого ряда. Пекле решения системы могут быть найдены распределения циркуляции, коэффициента подъемной силы и других необходимых величин вдоль радиуса лопасти, а также коэффициенты упора н момента гребного вин ' Для определения последних используют формулы (11.81) п (11.82).
На рнс. VI 11.29 приведены результаты расчетов кривых действия гребш го винта двухвального лцхтеровоза, произведенных для случая модельных и натура х испытаний в условиях, когда лопасти являются гидродинамически гладкими 636
Анализ результатов систематических поверочных расчетов по схеме несущей липни показывает, что в широком диапазоне нагрузок значение угла индуктивной поступи (у на произвольно выбранном радиусе близко соответствующему значению шагового угла лопасти <р. Это видно из рис. VII 1.30, где показаны результаты поверочного расчета гребного впита из серии В Нидерландского опытового бассейна.
Приведенные материалы позволяют рекомендовать принимать прн проведении поверочных расчетов в качестве первого приближения для величины fy значение шагового угла.
§ 37. ПОВЕРОЧНЫЙ РАСЧЕТ ГРЕБНЫХ ВИНТОВ НА КАВИТАЦИЮ
Поверочный расчет гребного винта на 2-ю стадию кавитации, при которой начинается влияние кавитации иа КПД движителя, осуществляется с помощью графиков рис. V.6 или формулы (V 6).
Наличие I-й стадии кавитации (пленочных каверн в пределах лопасти) контролируют в два этапа. Па первом этапе производят поверочный расчет гребного винта в неоднородном поле скоростей по вихревой теории несущей поверхности и определяют интенсивность распределенных вихрей па поверхности лопасти в каждый момент времени. Па втором этапе осуществляют переход от профилей сечений лопастей к эквивалентным по распределению скоростей плоским профилям (см. § 21), для которых затем производят расчет частичной кавитации. В дальнейшем может быть выполнен расчет пульсирующих давлений, вызываемых кавернами на лопастях гребных винтов, на обшивке корпуса, и характеристик появляющейся при этом вибрации. Последняя информация может служить критерием допустимости степени ра вития кавитации на винте.
В случае если указанные расчеты не могут быть выполнены.используют изложенную ниже упрошенную методику поверочного расчета. Назначают ряд угловых положений лопасти и ряд расчетных сечений по радиусу винта. Далее определяют коэффициенты подъемной силы выбранных сечений. Для этого вычисляют мгновенную относительную поступь гребного винта для расчетного сечения
J (г, 0)
1 — ф(г, 0) । — WT I
1 — «е (r> °) 1 — ф (<) [
-00 (4
4-'
ПГ
(VIII . 26)
с кривой действия винта в свободной воде снимают значение коэффициента упора Кт (-0 •• рассчитывают коэффициент подъемной силы
(VIII. 27)
определяя В по графикам рис. II. 15 для оптимального гребного винта или с помощью [расчета по схеме несущей линии прн произвольном распределении циркуляции. Затем вычисляют число кавитации проверяемого сечения
Ро + (й0 — г —cos0 J — р„
J- + (М9
(VHI а)
и| относительную кривизну эквивалентного плоского профиля 6с2 (г) = р= fie (г)/Ас (г). Коэффициент Кг (г) снимают с графиков рис. П.8 для оптимального гребного винта или рассчитывают по программе при прои вольном рас-Гиределеинн циркуляции. Потом с помощью диаграмм рис. VIII 31 u VIII.32 определяют длину частичной каверны L на засасывающей (правые «ветви» кавитационных диаграмм) или uai встающей (левые «ветви» кавитационных диаграмм). Эти [диаграммы построены иа основании результатов систематических расчетов частичной кавитации на профилях типа NACA 66inod, а — 0,8, выполненных по программе, разработанной К В. Александровым. Ч|сло кавитации, соответствующее /. = 0, Можно определить по формуле (VIII 20).
637
Рис VIII.31. Кавитационная диаграмма профилен типа NACA-66rnod,
638
639
Рис. VI 11.31. Кавитационная диаграмма профилей типа КАСЛ-66 mod, а = 0,8 при частичной кавитации с относительной длиной каверны L = 0,05.
Рис. VIII.32. Кавитационная диаграмма профилей типа NACA-6G mod, а 0 Ы
640
при частичной кавитации с относительной длиной каверны L- 0,1.
pl П/р Я И ВоАнсунского, т | 641
Рис VI11.32 Кавитационная диаграмма профилей типа NACA-_G6mod, а 1>,Ч; при частичной кавитации с относительной длиной каверны L — 01-
642
В дальнейшем производится сопоставление расчетной длины каверны 1. — I- b с допускаемым значением Z-дои, равным
ТдонЙ«=0,1Л\:/<,Л'г. (VI 11.29)
где Л\|, 0,7144-ода ;[1 - Ч„,эч (7)1 (I -ф^);
2,0 при ///,. 0,2.
1,44 при ///» 0,3; ’ 0,8 пр» Г «0,7;
А'г = А'г 1,0 при 7—0,8;
1,13 при ///,. -=0,4; —
2,0 при г _ 0,9.
1.0 при > 0,5;
Здесь ф1)1ах (г)— максимальное значение коэффициента попутного потока в диске гребного винта па относительном радиусе г; ф — среднее по диску значение коэффициента попутного потока / /х. — относительное время эксплуатации судна в проверяемом режиме
Таблица VIII.16. Пример поверочною расчета i pcCnoi о винта танкера на кавитацию
Исходные данные: 7^=8 м; Ло = 3.8 м; 7s =12 318 кВт; н = = 125 об/мин; Vs = 15,3 уз; W'y 0.51; I -- 0,24; D — 6,5 м; Z = 4; = 0,75;
PiD 0.635; элементы гребного винта на г — 0,8: bit) = 0,398; б= 0,024 8; 6^.— = 0 015 7, Л'. 1,6; 6(2=0,01; ф = 0,39; ё(| = 0.
Величин а II, ’
0 310 .320 2С0
V.v 0 500 0,630 0.680 0 720
с'о 0 0 030 0.100 0.170
J (0) 0.230 0.290 0,320 0,350
Кт 0,190 0 170 0,156 0,147
В 0,058 0,052 0,048 0.045
Су 0,147 0,131 0,120 0,113
0,190 0,193 0,200 0,234
о (L 0) 0,143 0,140 0,140 0,220
В случае если неравенство L /.д0„ выполняется, то степень развита кавитации считается допустимой. В противном случае необходимо внести такие .изменения в геометрические элементы гребного винта (6с. 6. b D и т. д.), которые [обеспечили бы выполнение этого неравенства.
В табл. \ III.16 приведен пример расчета гребного винта танкера водоизмещением 75 000 м3 в условиях балластного плавания. Как видно из таблицы, греб-hioft винт не кавитирует.
§38 Ml ТОДЫ ПОВЕРОЧНОГО РАСЧЕТА ОБЩЕЙ
И МЕСТНОЙ ПРОЧНОСТИ ЛОПАСТЕЙ ДВИЖИТЕЛИ II
Лопасть гребного винта или рабочего колеса водометною движителя представляет собой геликоидальную оболочку переменной толщины и кривизны, жестко закрепленную на ступице и находящуюся под действием внешних сил. В настоящее время существует два подхода к расчету прочности лопастей движителей. В основу
21* 643
первого подхода (метода расчета общей прочности) положено допущение о том, чю лопасть может быть представлена в виде заделанного на конце консольною прямою стержня с переменной площадью поперечных сечений, подверженного косому изгибу от действия внешних сил. При этом подходе удовлетворительные результаты могут быть получены для уаколопастных движителей, имеющих дисковое отношение, значительно меньшее, чем 1,0. Второй подход основывается на методе конечных элементов либо теории тонких пластин или оболочек, пологих относительно некоторой поверхности отсчета, и охватывает все существующие конструкции лопастных движителей. Этот способ расчета позволяет определять напряжение в любой точке лопасти движителя и получил название метода расчета местной прочности. Следует отметить, что первый метод применяют обычно для расчета уаколопастных гребных вшпов с традиционной профилировкой лопастей (сегментным, авиационным профилем и т и), которыми обычно оборудуют транспортные суда. При расчещ широколопастиых гребных винтов, винтов с большой откидкой лопастей, необычной профилировкой лопастей, а также рабочих колес водометных движителей необходимо использование метода расчета местной прочности [9, 56).
В каждом случае расчет прочности включает в себя три задачи: 1) определение внешней нагрузки, распределенной по лопасти; 2) расчет действующих в лопасти напряжений; 3) оценку допускаемых напряжений и запаса прочности и уточнение Геометрических элементов лопастей.
Метод расчета общей прочноеim В основу метода расчета общей прочности положены следующие допущения
лопасть движителя представляет собой заделанный на конце консольный прямой стержень с переменной площадью поперечных сечений, подверженный косому изгибу от действия внешних сил;
сечения, для которых производят расчет, — цилиндрические, спрямленные на плоскости, перпендикулярные образующей лопасти;
одна из главных центральных осей инерции сечения параллельна его хорде. Исходными данными для выполнения расчета общей прочности являются, геометрические характеристики движителя и цилиндрических сечений его лопастей;
режим работы движителя (частота вращения, скорость набегающего потока, значения упора и крутящего момента на этом режиме);
кривые действия движителя (если движитель работает в условиях развитой кавитации, необходимы соответствующие этому числу кавитации кривые действия);
характер набегающего потока (поле скоростей в диске движителя).
1. Определение внешней нагрузки. Равномерный поток. В рассматриваемом случае принимают допущение, что гидродинамическая нагрузка изменяется только в радиальном направлении. Тогда изгибающие моменты от действия осевых п касательных гидродинамических сил в любом сечении лопасти (г//
1) движителей с относительным радиусом ступицы 0,2 гС г(1 0,4 равны
соответственно-
К рп-ГР
А/р = --------Ср>(гП1 гр); (VI11 30)
К,.упЧ)ъ _ _
Д1/= 2~ <VIII3,)
где С1Р, Gf — функции, графики которых представлены на рис. VIII.33; гр—р днус рассматриваемого сечения.
Кроме гидродинамических сил на лопасть движителя действуют центробежные силы инерции
R
Рц = рл-n- J Fr dr, rP
(VI II .32)
644
где F — площадь развернутого на плоскость цилиндрического сечения лопасти. Иля нахождения /•' служит выражение
F^gfb, (VII1.33)
ГДС Pt — 0,70+ 0,72 для сечения типа авиационного профиля, в частности gt — 1=0,72 для профиля ХЛСЛ-66, и Pj = 0,71+0,73 для сегментного профиля.
Если расчет выполняют для сечения, расположенного в районе корня лопасти
Рр = 0,2), для нахождения Ря можно использовать более простую формулу
Рц = 4я®в®бгц,
(VI 11.34)
•де G — масса лопасти; гц — радиальная координата ЦТ лопасти. Приближенно принимают Гц = 0,47/? Масса лопасти может быть вычислена следующим образом:
G РР.3 ( \ I 6 9 4- 2 10* fo 71 _-£*_]
4 10* \ / I + \ D/Dp
(VIII.35)
где р — плотность материала двн-жшеля; Ьо и ев — ширина спрямленного контура и максимальная толщина лопасти на относительном радиусе г = 0,6.
Изгибающий момент от действия центробежных сил равен
Л1ц = ~ рлг/1а tg ХлХ
Я
X j' Fr(r — rL)dr. (VI11.36)
>1
При выполнении расчета для сечения в районе корня лопасти мо-шеиг может быть найден по формуле
Л4,1«О,7Р1(гц1ихд. (V1II.37) Phc.VIII.33. Графики функций GP и Сг.
Проекции полного изгибающего момента для цилиндрического сечения лопасти, развернутого на плоскость, перпендикулярную образующей лопасти (рис VIII.34), могут быть рассчитаны по формулам
.М. = (5fp + Л1ц) cos <р + Л1г sin <р,
л,п = (мр+ Uu)sin1 .Wrcos<p
(VI11 .38)
Кроме изгибающих моментов внешнюю нагрузку лопасти составляют растягн-вл >щие усилия, возникающие от центробежной силы Рц.
Неравномерный поток. При работе лопасти движителя в неравномерном потоке возникают периодические колебания гидродинамических сил, вызывающие усталостные напряжения в лопастях движителя. Для оценки этих напряжений находят Экстремальные значения упора и крутящего момента лопасти (7’1тзк н Л mfn. Qimax min) и амплитудные значения колебания упора и крутящего момента лопасти И один оборот
Та ~ ' 2 1,13,1 • ппг• 9и = ”2" (91 шах — Qi mm).
645
IM и в безразмерном виде
АК7 =' 4" (АГ шах ~ КТ пип) “Г Т т"х ~ А’ """ '*
АЛ'<? - 4" (KQ max - KQ min) =4*^° "1‘'х ~ Kq ,ni"j11 ~ ^2‘
Величины Tt и Qi рассчитывают по формулам
^('-^Лг;
<?х
(VIII.39)
Коэффициенты К] и Доопределяют по кривым действия в
зависимости от поступи
Ja — J
1 — ф-п
I — Фг
Рис. VII 1.34. Схема цилиндрического сечения лопасти.
(ф„ и Фг соответственно коэффициенты осевого и касательного попутного потоков на эквивалентном радиусе г 0,6). Экстремальные значения Гццзх и Qmiac определяют при минимальном, a Timin и Qi min — при максимальном значениях относительной поступи Ja.
’ Для расчета движителя, работающего и скошенном потоке, рекомендуется коэффицпеп г касательного попутного потока увеличить и при пинать равным сч.ф\, где коэффициент Cq, =s 1,5.
2. Расчет действующих напряжены й. Равномерный поток. В этом случае расчет ведут только но статическим на-
грузкам, т. е. определяют ста । ическу ю прочность.
Расчеты напряжений, выполненные для гребных винтов, показывают, что наибольшими напряжениями в сечении лопасти являются сжимающие нормальные напряжения в точке С (см. рис. \ 111.34). Наибольшие растягивающие напряжения обычно возникают в точке D. Поэтому, как правило, ограничиваются определением напряжений в этих точках. Наибольшее напряжение в точке С (или D) от деист
вия внешних гидродинамических сил равно
(VIII. 10)
где IV’g = — момент сопротивления расчетного сечения относительно осн с.
Для точек Д, В и D (см рнс. VIII 34) авиационного профиля коэффициент вЛ,В,г =0,10, для тех же точек сегментного профиля 5.4,«,»=О,Н; для точки С авиационного профиля J-г; = 0.085, сегментного сс; 0,075. Значения коэффициентов с,о Для профиля .\А(’Л-66 даны на рис. VI 11.21 Напряжение в точке
С (илн’£>) от действия центробежных сил составляет
«и "= Рц Г-
(VIII 4!)
Суммарное значение растягивающего и сжимающего напряжения равно о = О’ + о1(, (VIIi 42)
при этом следует учитывать направления напряжении nt н ац.
Пример расчета напряжении приведен в табл. VIII 17
Неравномерный поток. В данном случае производят расчет на статическую и циклическую прочность. Расчет статической прочности выполняют по форму.ым-приведенным выше.
646
Таблица VIII 17. Пример расчета действующих напряжений (для г = 0,3) Исходные длины е: I) — 0,67 м; Z — 3. yp = (J; J = 1,04; о = 215 Н/мм2, поток равномерный.
Величина Значение Примечание
Ь, м г, м P/D , I4D с <р — arctg—— , с Л.Г cos <р sin 0 6Г [гц, Г) ;Ир= Kj-fm^Gp^Z), Н м Мг = KQfmWGy'&Z), Нм «ц ?ч Л1 = (Л1д> -}- Л1ц) cos <р 4- А1д sin <р, Нм Г, м3 V'l(C), м2 «' j (О), м3 лц = Рц/F, Н/м№ о6 (С. D) = (С. D)], Н/мм2 ° (Q = о. (С) г оц. 11/мм2 *V°niax 0.365 0,033 5 1,4 0,482 5 0,87 6 0,42 1 1,169 J 1 089 750 0 50 000 1 180 0,0088 0.000 031 ) 0,000 045 J 5,7 38 43,7 4,9 Задается чертежом гребного винта По рнс. VII 1.33 По формуле (VIII.36) По (VIII 34) По (VI 11.33) По (VIII .40)
[Таблица VIII 18 Механические х рактеристикн материалов, применяемых для изготовления гребных винтов
Материал Предел прочности °вр- "««’ 11рсде^ текучести (Tg; Н/мм11 Предел усталости о_,, П, мм*
Сталь: [ углеродистая 25Л 438 224 78—39
нержавеющая 1X1 III Д 585 438 175—88
Марганцево-железистые лат> нн: ЛМнЖ 55-3-1 438 195 107—83
ЛАМиЖ 67-5-2-2 605 242 147—130
бронзы. । алюмнннево никелевая Бр \АП9 4 4 605 215 175
марганцсво алюминиевые: Нева 60 605 272 175—165
Нева-70 685 292 175- 165
647
Для расчета циклической прочности определяют амплитудные значения ко.н банпя упора н крутящего момента ДА'у и Д/Cq по выражениям
АЛ'Г (Л'Гшах г г.ип) (1 ~ 1т)";
~ (Крптах ~ ^цшах)( ^т)".
вычисляют ДЛ1р — ^Krl'nsDi(jp-, AAIq «- &Kq(>ii~D:‘G]-, &Мр cos <р 4* Д'Му sin <р
при этом
_ gn:ax — °пГ.п . „ gm»x "I" °inln
°а " ------2----- 1 а,п 2 ’
Стедует заметить, что при расчете иа статическую прочность максимальное напряжение в неравномерном потоке принимают равным п|1П1Х = ат°ч- Напряжение о вычисляют по формуле (VI 11.12).
3. Оценка допускаемых напряжений и запаса прочно с т и. Полученные в результате расчета максимальные напряжения не должны п рсвос ходить доп у скаем ы х.
Можно считать, чю прочность лопастей движителя по статическим нагрузкам обеспечена, если коэффициент запаса по временному сопротивлению материала находится в диапазоне o1ID/oinax = 8—10, а по пределу текучести ns = os/omav = 3-4
Для обеспечения циклической прочности нужно, чтобы
|/ °'пах gmaxniiiin , (V111. I >)
ИЛИ
"в4’0*0'"’ (Viii»
где о J—предел усталости материала (табл. VIII. 18). п_ коэффициент запас з циклической прочности, принимаемый обычно равным 3,5 1,0.
Кроме того, необходимо соблюдение условия статической прочности, записываемого для случая циклической нагрузки:
—5s gmax = °тп '1 О„. (\ II 1.41)
« s
Если любое из этих условий не выполняется, следует изменить геометричсск ie элементы лопастей движителя: толщину сечений, форму контура лопасти и г. Д. (см. конец настоящего параграфа).
Л1етоды расчета местной прочности. Расчет местной прочности лопастей может быть основан на методе конечных элементов или на представлении лопасти движ теля в виде оболочки переменной толщины и кривизны и позволяет учесть ширину лопасти и изменение вдоль этой ширины внешней нагрузки [56).
Лопасти движителей по своим геометрическим характеристикам довод i .и ’ разнообразны, но нх срединная поверхность почти всегда мало отличается от пр» мою геликоида. В связи е этим в настоящее время разработан метод определений напряжений в лопастях, основанный на соотношениях теории тонких оболочек, пологих относительно геликоидальной поверхности отсчета и имеется программа расчета действующих напряжений иа ЭВМ Практическая реализация этой п >" граммы, однако, трудоемка и требует больших затрат машинного времени
* Фирсов 13. А и др. Расчет местной прочности лопастей ipc-Iiiiux пиитов с homo” ’’ ЭВМ. — В сб.: Тезисы 26-х крыловских чтений. Л.. Судостроение, 1977, с. 62—61
648
IB практике отечественного судостроения зачастую применяется более простой метод, разработанный на базе представления лопасти движителя в виде изотропной тонкой пластины переменных толщины и кривизны и произвольной формы в плане, консольно закрепленной на ступице. Контур пластины образован контуром развернутой поверхности лопасти. Предполагают, что лопасть загружена поверхностной гидродинамической нагрузкой, нормальной к срединной плоскости' пластины, и нагрузкой инерционной природы. Следует отметить, что этот метод применим для класса шнрокодопастиых движителей с мало изменяющимся вдоль радиуса лопасти шаговым угла»! (не более чем на 30°) н относительно небольшим углом саблевидностн лопастей (О.я <2 30°).
Допущения теории малого прогиба сводят в данном случае задачу к нахождению прогиба срединной плоскости, который полностью определяет напряженное и деформированное состояние последней.
Исходными данными для выполнения расчета местной прочности являются: геометрические элементы лопастей движителя (развернутая поверхность лопасти, толщины и кривизны этой поверхности в любой ее точке);
режим работы движителя (скорость набегающего потока, частота вращения движителя, упор и момент);
поле скоростей в области расположения лопастей движителя.
Вид неравномерности потока для водоизмещающих судов определяется главным (образом обводами корпуса, размещением движителя в Дп или по борту, а также Iгребным валом и его опорными конструкциями, для судов с динамическими принципами поддержания — наклоном вала н обтеканием его кронштейнов, либо полем скоростей, формирующимся при обтекании угловых колонок. Неравномерность ноля перед рабочими колесами водометных движителей зависит от формы водовода и наличия спрямляющих аппаратов.
Для движителей быстроходных судов обычно существует дна основных режима работы: преодоление горба сопротивления (например, выход судии на крылья) и движение с максимальной скоростью. Расчет местной прочности. как правило, выполняется'для режима полного хода (режима длительной эксплуатации). Для движителей водоизмещающих судов расчетным режимом является скорость полного хода.
Расчет гидродинамических нагрузок на лопастях движителей, имеющих доста-|точно большое дисковое отношение, должен выполняться па основе теории несущей ’ поверхности. Для пекавитирующих движителей в настоящее время разработаны программы расчета на ЭВМ перепада давлений на лопасти при работе движителя в равномерном и неравномерном потоке (см § 21, 36)
Для кавитирующих движителей строгие методы расчета гидродинамических нагрузок отсутствуют. В связи с этим в расчетах прочности распределение нагрузок для кавитирующих движителей определяют приближенно Наиболее достоверные । результаты могут быть получены на базе метода, изложенного в § 21 При расчете 1см.' па базе этого метода давление в области каверн принимают равным р?, постольку метод не учитывает влияние толицши каверн Определенные таким обрати силы несколько завышены.
Действующие нлнря/кеиия в консольной пластине, заменяющей лопасть, при Заданной нагрузке определяют в результате решения с помощью ЭВМ краевой (адачп с использованием принципа возможных перемещений. По этому методу билн’выполнепы систематические расчеты напряжений, возникающих в лопастях Пшжнтелей быстроходных судов, работающих в условиях характерных для этих рдов неравномерных потоков, обусловленных угловой колонкой и наклоном вала. Ва рис. VIII 35 представлено распределение относительного напряжения вдоль ррды лопасти для случаев равномерного потока и потока, скошенного на 16°.
В рассмотренных случаях неравномерного потока наблюдается увеличение (по сравнению с равномерным) напряжений в лопастях в районе от середины лопари к входящим кромкам (рис. VIII 36). Как видно из рнс. VIII.3G, в сечении лопа-н на относительном радиусе г = 0,9 на расстоянии от входящей кромки, равном римерно 0,25ft, напряжение в неравномерном потоке возрастает в 10 15 рлз.
При прсиедепнн систематических расчетов было установлено влияние основных геометрических характеристик движители на действующие напряжения. Общее млпчение толщины лопасти приводит к снижению действующих напряжений, юпорциоиалытому примерно квадрату этого увеличения. Местное утолщение
649
лопастей, снижая максимальное напряжение, действующее в сечении может вы звать в некоторых других точках сечения рост напряжений (рис. V 111.37). Измс некие контура лопасти, например саблевидноеть ее, сильно влияет на прочности) । • харак 1 ернстики лопасти, приводя в некоторых случаях к значительному нзмеиенщ.,
Рис. VIII.35. Влияние неравномерности на распределение напряжении но хорде для различных радиусов лопасти: а — равномерный поток; б — скошенный поток.
напряжения в лопастях. Приблизительная оценка влияния откидки может бып. выполнена по графикам, представленным на рис. VI 11.38, построенным для наиболее характерных неравномерностей потока, имеющих место для гребных винтов СПК Как следует из рисунка, откидка лопасти в случае неравномерного потока
напряжения в лопастях. Приблизительная
приводит к снижению действующих па пряжений при углах откидки 0 О.ч Зп углы откидки 0s > 30“ невыгодны сточки
Рис VIII.36. Влияние неравномерности потока на
скошенны Л поток:
по хорде лопасти.
распределение напряжении
поток за угловой колонкой.
Рис. VIII 37.
1 ИСХОДНЫЙ
Влияние местного изменения толщины профиля на распределение напряжений.
профиль; 2 утолщенный профиль; <т, и а. нлпря^еиия в исходном и утилщеинпч профиле соответственно.
зрения прочности лопастей. В равномерном потоке откидка лопастей во всех с. • чаях увеличивает значения максимальных действующих напряжении
Для обеспечения прочности лопасти движителя, работающего в равномсри* 4 потоке, нужно, чтобы в каждом сечспнн выполнялось условие
">• “ а4-М1Иах » 3,0 4,(1, (VI11.43)
650
где л, — коэффициент запаса прочности; о, — Предел текучести материала; 0^* — максимальное значение напряжения, действующего е сечении.
При работе движителя в неравномерном п«>1 икс необходимо, кроме написанною выше, соблюдение соотношения
п~ =----------- П-‘ -----: А 3,5 4-4,0, (VIII 46)
| / (Ттах (Z) l,rr.ex (X) ’Viin (X)
I 2~
где °п1 \(Х) 11 п1пГп (Z) — максимальное и минимальное значения напряжений в некоторой точке сечения лопасти при прохождении этой точкой окружности от / — О до х = 2л.
Следует отметить, что при расчетах местной прочности коэффициенты запаса прочности лх и п- являются приближенными и будут уточняться по мере накопления опыта эксплуатации быстроходных судов.
Рис. VIII.38. Влияние саблевидиости на распределение напряжений: а—неравномерный; б — равномерный поток.
/ — cKouieii н i.i fi поток; 2 — поток за у гл они Л колонкой.
Согласно изложенному выше, расчету прочности винта должен предшествовать выбор расчетного Mei ода. При этим следует руководствоваться следующими рекомендациями.
Л Метод расчета общей прочности применяют в случае узколопастных (/!/; До 1) гребных винтов с обычной формой профиля (авиационного, сегментного и т п) Если ns 3 или л~ <7 3,5. следует произвести корректировку геометрических элементов лопасти. При этом можно либо увеличить максимальные толщины лопастей, либо изменить контур лопасти (см. рис VI 11.38). Следует учесть, что в последнем случае возможно некоторое уменьшение КПД движителя при заднем ходе судна.
Б. Методы замены лопасти консольной пластиной используют для расчета прочности лопастей шпроколопастпых гребных винтов и рабочих колес водометных движителей, если изменение шагового угла вдоль радиуса движителя не превышает 30 , а угол саблевидное™ лопасти не более 30“. С помощью этого метода расчет действующих напряжений выполняется обычно на ЭВМ. Однако во многих случаях определение напряжений может быть приближенно произведено по графикам рис VIII.35 п \ 111.36 (табл. VIII.19). При этом производят следующие Перации.
выбирают графики для соответствующего поля скоростей;
выполняют расчет общей прочности для корневого сечения Лопасти;
с помов|ыо рис. VIII 35 производят приближенный расчет напряжений в се-йспиях на нескольких радиусах.
Далее в каждом сечении определяют коэффициенты запаса прочное!и: в случае [)авномер1юго потока по формуле (VI 11.45), в случае неравномерного потока по [VIII.43), (VIII 43а) и (VIII 44) В первом случае запас прочности должен составлять 3,0—4,0; во втором соответственно 3.5—4,0 и 3,0 4,0. При невыполнении этих условий следует производить корректировку либо толщин сечений лопастей, рибо кош ура лопасти, как это рекомендовалось для случая расчета общей прочное ги.
651
Таблица VIII.19. Пример приближенною определения распределения напряжении в лопасти
Исходные данные: поток неравномерный (скошенный); cr ); в f
-43,7 Н/мм3 (но табл. VIII. 17); сг11гр „^ = 2,5-43,7 = 109,5 Н?мы2’(<Л1 рнс. VII 1.36); ссчсние— середина лопасти.
Величина Г
0.3 (1 4 0.5 0,6 0.7 0.8 С ’1
(аЧ-0,з)рав (см- Р,,С- VII 1.35) 1.0 0,835 0,72 0,62 0,47 0,37 0,25
(а/°^0,з)|1ср <см- Р||С- VIII 35) 1,0 0,96 0,91 0,86 0,79 0,68 0,55
Cpani н мм8 43,7 35,0 31,5 27,1 20,55 15,2 10,95
Опер» 11 ММ8 109,5 105 99,7 94.0 86,3 74.5 60,2
В. Метод конечных элементов и метод замены лопасти оболочкой, полог., относительно геликоидальной поверхности, охватывает весь класс лопастных дин жителей и рекомендуется только для случаев лопастей сложной геометрии.
§ 39. ОСОБЕННОСТИ РАСЧЕТА СООСНЫХ ГРЕБНЫХ ВИНТОВ
Движительиын комплекс, состоящий из двух винтов, имеющих общую ось вр щення и расположенных на небольшом расстоянии друг от друга, носит на ванн соосных гребных винтов. Гребные винты комплекса могут иметь одинаковое и пр тивоположпое направление вращения.
Соосные гребные вниты противоположных направлений вращения позволяй уменьшить потерн на закручивание потока, что Дает возможность повысить КП I комплекса. Кроме того, у этих винтов могут быть устранены иекомпененровани реактивные моменты и гироскопические моменты при криволинейном движем г Причинами, препятствующими их широкому распространению, являются сложит конструкции редуктора, обеспечивающего противоположное вращение, и уп нения линии вала.
Винты одинаковых направлений вращения — винты тандем — имеют бо, :е низкий КПД, чем соосные винты противоположных направлений вращения и одиночные винты Основанием для их применения является возможность снижения т: метра ио сравнению с одиночным винтом, а также некоторое увеличение зат на кавитацию за счет реализации большего дискового отношения. Строгий теоре т ческий расчет соосных винтов весьма сложен. При приближенном расчете иеоб димо учесть их взаимное влияние путем расчета поля вызванных скорошей, со . •• ваемого одним винтом комплекса в плоскости диска второго В далы еншем t -лученное таким образом поле скоростей рассматривают как поле натекаюшл о потока.
При расчете этого поля принимают, что передний гребной винт вызывает в дн заднего впита аксиальные и тангенциальные скорости. С учетом того что средни., тангенциальные скорости перед винтом равны нулю, полагают, что задний ви вызывает в диске переднего только аксиальные скорости. Вызванные аксиаль скорости увеличивают скороеib протекания через диски гребных винтов, а таш цнальные вызванные скорости уменьшают закручивание потока в диске кормов винта (рис. VIII.39). Хотя у реального гребного винта вызванные скорости ляются функцией утла поворота, в расчете рассматривают осреднеиные по окр\ ' ности значения этих скоростей. Значение скорости и'х в диске соседнего винта м жет быть принято по данным табл, 11.2, скорость к'е можно определить из со. г ношения а'0 2Г/(2лг). Дальнейший расчет каждого впита ведут носледоваи
ными приближениями, используя для всех приближений методы расчета нзош ванных винтов. В первом приближении прн вычислении вызванных скоростей ’ ; соседнего винта взаимное влияние винтов ие учитывают, во втором нриближс 1 вводят уточнения в эти скорости.
652
Очевидно, что для достижения наивысшего КПД комплекса необходимо свести к минимуму потерн на закручивание струн. Для винта с бесконечным числом лопастей они могут быть в принципе сведены к нулю, для реалы ого вшиа, тангенциальные скорости которого переменны по окружности, этого достигнуть невозможно.
Как уже отмечалось выше, изменение
Рис. VIII.39. Треугольники скоростей для^соосных винтов: а — переднего; б — заднего винта.
Рнс VIII.40 Диаграмма для проектирования соосных винтов.
Согласно выводам теории слабоиагружеииых соосных винтов с бесконечным числом лопастей, разработанной И. II. Поляковым, для оптимального соосного комплекса характерен одинаковый диаметр переднего и заднего винтов и равномер-
Рис. VIII 41. Зависимости PJD (я) и PjD (б) от Pi,,/D.
диаметр заднего винта принимают на 5—10 % меньше диаметра переднего, чтобы исключить onaciiocib кавитационной эрозии, обусловленной пересечением лопастями заднего винта вихревых шнуров, сходящих с концов лопастей переднего. Относительное уменьшение заднего винта возрастает по мере росте нагрузки комплекса.
Для приближенных оценок характеристик соосных винтов могут быть использованы графики, полученные Линдгреном на основании испытании серии соосных
653
Гребных вннгов (рис \ 111.40, \ III 41). Расчет Следует нести по коэффициенту
0,5233», 4. ра.
А'ЛУ V’
В зависимости от этого коэффициента по графику рис \ II 1.40 определяют вели чипы J, ilnPlu 1) (переднего винта). Шаговые отношения переднего <Р„ D) и заднего впита (Р, D) находят по графикам рис. VIII.41 в зависимости от гидродштамич ского шагового отношения Pln/D.
При расчете гребных винтов тандем применяемые методы аналогичны методам, которые используют при расчете соосных винтов противоположного вращения Однако в этом случае использование для расчета заднего пинта допущения о равно мерном распределении вызванных скоростей по окружности приводя г к зкачитедг иым погрезнностям. Поэтому в значения гидродинамических характеристик по осред-нечиым скоростям следует ввести поправки. Для этой цели можно использовать графики, предложенные .4. А. Мавлюдовым [561.
Глава /\
АВТОМАТИЗИРОВАННОЕ ПРОЕКТИРОВАНИЕ ГРЕБНЫХ ВИНТОВ
§ 40. ОБЩАЯ ХАРАКТЕРИСТИКА СИСТЕМЫ
АВТОМАТИЗИРОВАННОГО ПРОЕКТИРОВАНИЯ ГРЕБНЫХ ВИНТОВ
В настоящее время частные методы определения с помощью ЭВМ элементов и гидродинамических характеристик гребных винтов принято объединять в системы автоматизированного проектирования (С.АПР ГВ). Под проектированием гребного винта понимается вся совокупность работ, в результате которых определяется гео метрня лопастей гребного винта, подлежащего изготовлению и установке на судно Характеристика основных этапов проектирования гребного винта приведена в табл. IX.I
Как правило, все этапы проектных работ по гребным винтам.предшествующие их детальному проектированию, выполняют в проектно-конструкторских бюро (ПКБ). Техническое задание (ТЗ) па проектирование гребного винта готовит проектант судна с использованием в ряде случаев результатов модельных испытаний корпуса.
Детальное проектирование осуществляется в большинстве случаев в научно-исследовательских организациях (НПО), располагающих экспериментальной блзот Эго обстоятельство связано с необходимостью проведения модельных испытаний гребного винта.
Иногда оказывается, что все требования ТЗ можно удовлетворить, выбрав греб ной винт по диаграммам серийных испытаний. В этом случае проектирование гребного винта по вихревой теории и проведение испытаний его модели не выполняю и НКБ может обойтись при проектировании гребного винта собственными силами.
Игитовые материалы, разработанные в процессе проектирования гребного винта, анализируют проектанты судна с точки зрения удовлетворения всем выставленным в ТЗ требованиям На основе этих материалов в ПКБ подготавливают рабочую документацию. На базе рабочей документации в технологическом бю предприятия, изготовляющего впит, выпускают документацию по технологической подготовке производства.
В зависимости от круга н специфики решаемых в той пли иной оргаипзанн» задач формируются соответствующие варианты САПР ГВ. Наиболее полные и сложные системы разрабатывают и применяют в НПО В задачи этих систем входит обеспечение иэготовлепия и испытаний моделей гребных винтов. В САПР ГВ III!<’ включают программы, обеспечивлютцие не только текущее, ио н исследовательское
654
Таблица IX. I Эганы проектирования гребных винтов
Л» 11.11 Этап просктпро-квния судна Этен проектирования гребных винтов Основные роботы по проектированию гребиыч впито»
1 Поисковая проработка Выбор типа ДЫ1Ж1 цельного комплекса Вариантные расчеты ходкости движнтельных комплексов иа основе обобщенных данных
2 Техническое предложение Выбор энергетической установки и составление проекта технического задания (ТЗ) на проектирование гребного винта Расчеты ходкости гребного винта иа основе обобщенных данных и информации по прототипу
3 Эскизный проект Составление ТЗ иа проектирование гребного винта Расчеты ходкости гребного впита па основе данных испытаний модели корпуса 1
4 Технический проект 1 При наличии блнэк Детальное проектирование гребного впита Г>ГО ПРОТОТИП» IIB ЭТОМ ЭТП111- Выбор основных элемент ив гребного винта; проектирование впита по вихревой теории; испытания модели гребного впита; расчеты прочности, параметров ви-броактпвностп и кавитационных характеристик гребного винта; выпуск теоретического чертежа foiyi быть использованы Дан-
II ыс по буксировочным испита к и ям модели корпуса прототипа; в ряде случаен бук
сироночные испытания проводят на этяпе технического проекта.
или перспективное проектирование. В ПКИ используют усеченные варианты САПР 1В учитывающие специфику специализации ПКБ.
Проектирование гребного винта является важным этапом разработки проекта судна в целом, поэтому САПР ГВ можно рассматривать в качестве подсистемы САПР судов, которая может формировать ТЗ на проектирование гребного винта, анализировать н использовать результаты проектировании гребного винта
Проектирование гребного винта является частью процесса технической подготовки производства гребного винта. С этой точки зрения С \ПР ГВ представляет собой подсистему автоматизированной системы гехнпческой подготовки проишод-сюа гребных пингов (АС1Г1П ГВ), обеспечивающей помимо проектирования автоматизированное выполнение консгру к юрских и технологических работ.
Исходная информация для САПР ГВ Техническое задание на проектирование Гребного винта должно содержать;
требования к проектируемому гребному винту;
зависимость полного сопротивления воды движению судна от скорости;
зависимости коэффициентов взаимодействия гребного винта с корпусом судна III1/, i и iq от коэффициента нагрузки гребного винта по тяге К or:',
координаты, определяющие положение гребного винта, а также углы наклона гребного вала в вертикальной и горизонтальной плоскостях фен и <(.зн;
теоретический чертеж кормовой оконечности судна;
описание поля скоростей потока в месте расположения гребною винта 0„), Рг0 (с, 0„). ё|)(1 (г, 0^) в виде таблиц при пяти или более значениях радиуса в лиана зоне о, г гtI до г 1 и при 36 и ш более значениях угловой координаты 0о £ € [0, 2л J;
655
ограничительную и топливную характеристики двигателя в виде таблиц при 10 или более значениях частоты вращения гребного винта, включая и наибольшую;
марку материала, из которого будут изготовлять гребной винт, механические Характеристики этого материала (пределы прочности, текучести и усталости при симметричном цикле нагружения), а также его плотность.
В зависимости от требований, предъявляемых к проектируемому гребному винту, могут оказаться необходимыми и другие исходные данные. Например, для определения характеристик вибрации кормовой оконечности, вызываемой гребным винтом, в ТЗ следует включать данные по жесткостям и массам элементов конструкции судна.
Результирующая информация САПР ГВ В итоге проектирования гребного винта с помощью САПР ГВ получают информацию по геометрии спроектированного гребного винта и данные поверочных расчетов и модельных испытаний гребного винта.
Информация, записанная в стандартном виде па машинный постель и позволяющая с помощью специальных программ определять любые геометрические характеристики (включая координаты в произвольных точках) поверхностей гребного винта, называется математическим представлением соответствующих поверхностей. Можно считать, что проектирование гребного винта — это процесс формирования математического представления его наружных поверхностей. Методы и программы математического представления поверхности лопастей гребных винтов регламентируются стандартами.
Таблица IX.2. Основные параметры гребного винта
Номер записи Помер элемента записи Формат параметра Параметр • Примечание
идентификатор пояснение
I 1 16/11 .VI Номер гребного винта (конструкторский)
2 I 8Л1 № Дата создания файла Например, 01 01.84
3 I 8Л1 N3 Дата занесения в файл конструкторской информации Например, 01 06.84
4 1 6 NVAR 11омер гребного впита (проектный) Например, 99999
5 I 3 ICL Класс гребного винта по ГОСТ 8054—81
6 1 3 N Число лопастеЛ
7 1 77 1 D Диаметр гребнпго вин та, мм
8 I 77.1 DO Диаметр условном ступицы, мм Поверхность лопасти определена при г > 0,5/)0
9 I F7 1 DLI Минимальный диаметр фактической ступицы, мм
10 1 П 1 ALII Длина ступицы, мм
II 1 F7 1 С SI I Отстояние середины ступицы от начала ко ординат глобальной системы координат, мм 1
12 1 F7 1 HF IL Наибольший сопряга гощпй. радиус Кривизн! I галтельиого перехода, мкг
656
Удобно представить информацию по геометрии гребного винта в виде файла, состоящего из 14 массивов. Первый массив содержи! основные параметры гребного винга (габт 1X2). а остальные определяют^ геометрические элементы гребного винта: FTM, Fcv, b, cs, хл, ё. fM. Р, 1'ц, F*. /7. причем Fru (7,
Ir) = Гт O'. ?); Гем (r, gc) = Fc (г, I);
t . I -|- 3. z z
1 + ?г.м
1 — 1 - -
—j при £>?„,;
np"
1 "I 4C.U
I — I - -- При
1 4'v
где Етл! и Ec.M — безразмерные абсциссы максимумов толщины и средней линии цилиндрических сечений лопасти; F^ = rH (x‘H)/min fH — нормированная зависимость радиуса ступицы от переменной хл, принимающей на кормовом срезе сту-
пицы значение —1, а на носовом — значение 4-1; Г* (5) = р* Q)/max р(. — нор-
мированная
зависимость радиуса
галтельного
перехода
засасывающей (нагнета-
/•п
ющей) поверхности лопасти к поверхности ступицы от безразмерной абсциссы точки сопряжения галтельного перехода с поверхностью лопасти. Из 13 перечисленных геометрических параметров гребного винта лишь Fj-m и Fcm могут являться функциями двух переменных: г 11 Остальные параметры являются функциями лишь одной переменной. Универсальным способом аппроксимации функций одной или двух переменных являются параметрические кубические или бикуби-
Таблица IX.3 Одномерный геометрический элемент
11оыер звписк Номер элемента записи Формат париметра Параметр Примечание
идентмфн кятор пояснение
1 I /3 JEL Номер геометрического элемента JEL = - 1. 2,’.... 10, 21. 31. 32
2 1 /3 JM ( IEL) Тип аппроксимации
3 1 /3 М Количество узловых точек
4 1, 51 йГ. 12.5 Х(/). 1 = 1 41 Абсциссы узловых точек
5 1, 51 6/; 12.5 У(П, 1 = 1. 51 Ординаты узловых точек
6 1 £12.5 DYI Значение первой производной элемента по параметру на левой границе области определения
7 1 £12.5 DY2 То же на правой границе области определения
657
Таблица IX.4. Двумерный iсо*егрическиг элемент
Номер заппси Номер элемента записи Формат пяраме тра 1Lip а метр Ирм меч.'ш иг
идентификатор пояснение
1 1 /3 JEL Номер геометрического элемента JEL 1 пли 2
2 1 /3 JM (JEL) Тип аппроксимации
3 1 /3 31 Количество узлов на линиях* — const
4 1 /3 /. Количество узлов на линиях г const
5 1, ,41 б/? 12.5 Л (/), 1 = 1, .44 Значения г в узловых точках
G 1, L 6Д12.5 У (/). 1 1, I Значения £ в узловых точках
7 1, ML 6JS12.5 ZU), 1 = 1, ML Аппликаты узловых точек ML M'L
8 1. L 6/? 12.5 Ш (2), 2=1,/. Первые производные но параметру при г = = гн и Ё € 1-1 । 1
9 1. L 6ZTI2.5 DI (2|. J L Первые производные по параметру при г = 1 и £ С 1 1.П
10 1. М GJT12.5 DI (Л. / = 1, М Первые производные по параметру при g = 1 " Гя- '1
11 1. М Г>£|2.5 Е>2(1). 1 - 1, М Первые производные по параметру при £ = 1 " f С- 1ГП- Ч
Таблица IX.5. Стаидаршые номера |сомстрнческих элементов гребного вннга
Оа и дартиыП номер Обозначен не Пояснение Слан дартиый номер Обозначение Пояснение
1 2 3 4 5 6 7 1 г S - Ц, " ~ 1:тм (Л ?г~0)- 1. /’z.u € 10. । 1 Fcm (г, £г = 0)= 1; Гем < । 8 t) 10 21 31 32 р ?r;.w Fh п гг Fit - Fir (хп); к,, € l-l, Hl Fh > 1 f Г — F[ (г) । Fr Fr C-) 1
658
Таблица IX.6. 1ипы аппроксимации кривых и поверхностей, применяемые в САПР ГВ
Указатель типа вппрок-см.ации Тип аппроксимации Параметризацня
1 3 5 7 101 103 105 107 109 117 125 127 129 131 Кубнческнн сплайн переменной х £ € 1—1. Ik производная аппроксимируемой функции ограничена Кубический сплайн одной переменной х £ [—1, 1]; при х = —I производная аппроксимируемой функции неограннчсна Кубический сплайн переменной х Q £ 1 — 1, 1 Г. при х 1 производная аппроксимируемой функш н неогра-инчепа Кубический сплайн переменной х £ С 1 — 1, 1]: при х - dsl производная аппроксимируемой функции неограничен» Бикубический сплайн переменных х f f |—1. 1 |, у £ |1, 1 |; частные производные аппроксимируемой функции /• ограничены Т i 1 1 о же; при х -<• — 1 > о т , 1 ‘‘F 1 1 о же; прн х -» 11 —— — о ч- , .1 1 1 о же; при х — 1 и х - 1 —— -» оо Бикубичсск! н сплайн п< ремеш ых х £ € 1 — 1. 1 1. У € 1 1,1; при у -к . I 0F 1 -> —1 -г СЮ 1 W 1 Т 1 1 <)Г 1 То же; при у —► II -► оо Т 1 1 1 1 Гоже; при у ->—1н^->1 -►оо т- 1 di' 1 То же; прн -j— -► сю н "Г"*’ ’1^1’00 -Г , , НА I То же; при у >_hl -у- 1► ю и , 1 dA 1 "Г" * " 1 |'аГ[ ” 50 .. . , 1 0F 1 1 о же; при х» ± 1 -> оо и 1 OF I при у -» ±1 | —| - оо и •= X и — arccos [(1 — х>.'2] и arccos |(-1 — х> 2 | п — arccos (—х) и = х; v = у и — arccos |il —х)/2]; v — у и — arccos [(—1 — x)/2J; v — у и = arccos (—х); v = у и = х; v — arccos |(1 — у)!2 ] и = х; v = arccos [(—1 — i/)/2 ] н = х; о = arccos (—у) и aicco: |(1 — х)'2|; v — arccos (—у) и — arccos |( 1 — x)/2J, v — arccos (—у}
659
ческне сплайны соответственно Для восстановления таких сплайнов необходимо знать вид параметра, вид и значения граничных условий, координаты узлов н значения аппроксимировавши функции в этих узлах. Эи информация, полное!ыо определяющая к'омечрпчсскне элементы гребною впита, располагается в сооптет-ствующнх массивах так, как, например, в табл. IX.3 н IX.4. Каждому геометрическому элемешу присваивают стандартный номер в соответствии с табл. IX.5.
Значительно улучшает качество аппроксимации функций с неограниченной производной введение специальной замены переменных (параметризация кривых или поверхностен). При этом вмесго исходных таблично заданных функций вида У = fi (*) или г — f2 (А У) аппроксимируют функции у = ft (и) или z = /2 (к, о), где и = и (л). V— V (у) — стандартные функции, вид которых определяется в табл. IX.3 и IX.4 указателем типа аппроксимации. Возможные варианты параметризации приведены в табл. IX.6
§41. ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ САПР IB
Программное обеспечение полного варианта САПР ГВ состоит из трех ком плексов программ, методологически и структурно увязанных между собой. 1) ком илекса программ проектных и поверочных расчетов гребных винтов; 2) комплекса программ технической подготовки производства моделей гребных винтов; 3) ком
Рис. IX.I. Структурная схема процесса автоматизирование11’0
С60
плекса программ обработки результатов испытаний моделей гребных винтов в кавитационных трубах.
Одна из возможных структурных схем процесса автоматизированного проектирования гребных Bin тон с помощью САПР ГВ иредщавлена на рис. IX.I. Цифрами на этом рисунке обозначены следующие элементы схемы:
I. Техническое задание на проектирование (расчет) гребного винта.
ТЗ может предусматривать выполнение всей процедуры проектирования или выполнение отдельных расчетов по программам, входящим в САПР ГВ.
2. Назначение расчетного режима.
Для судов с дизельной силовой установкой при применении гребного винта фиксированного шага выполняют его предварительное «облегчение». С этой целью расчетную частоту вращения гребного винта увеличивают по отношению к номинальной частоте вращения дизеля. Назначение расчетного режима осуществляется «вручную».
<3. Определение основных элементов гребного винта и расчет ходкости на основном (расчетном) режиме.
Программа обеспечивает выбор гребного винта но заданной диаграмме серийных испытаний моделей гребных винтов при всех встречающихся на практике вариантах задания исходных данных.
4 Библиотека диаграмм серийных нсньианпй гребных винтов.
Библиотека формируется в виде набора файлов внешней памяти, содержащих аппроксимации регрессионными полиномами диаграмм испытаний серий моделей гребных винтов для судов различного назначения.
4.1. Регрессионный анализ кривых действия и запись их в библиотеку.
5. Кривая сопротивления. Данные по взаимодействию гребного винта с корпусом, включая поле скоростей в диске гребного винта.
5.1. Ввод систематических данных по коэффициентам взаимодействия.
|Я
гребных винтов с помощью САПР ГВ.
66!
Аппроксимации систематических данных по коэффициентам взаимодействия используют при расчетах иа ранних стадиях проектирования.
5.2. Ввод и анализ поля скоростей в диске гребного впита.
Программа обеспечивает ввод поля скоростей, его гармонический анализ и запись в библиотеку полей.
6. Расчет ходкости на режиме, наиболее опасном с точки зрения кавитации лопастей гребного винта.
Расчет производится с целью уточнения дискового отношения.
7. Выбор параметров откидки и саблевидное™ лопастей.
8. Оптимизация гребного винта на основе, расчета но теории несущей линия
В программе могут быть предусмотрен)* следующие возможности:
расчет распределения циркуляции с разгрузкой конца лопасти при заданном допустимом снижении KI|Д относительно оптимального винта:
расчет вызванных скоростей по заданному закону распределения циркуляции вдоль радиуса;
расчет исходных данных для программ, определяющих кривизну и шаг сечений ио теории несущей поверхности, включая расчет ширины и толщины лопасти из условий обеспечения прочности и требований по канитапноипым характеристикам лопастей.
9. Определение кривизны и шага сечений лопасти по теории несущей поверх
иости. На этом этане используется программа, основанная па допущении о малости
«/Р dr
(см. § 7, 35). При больших значениях этих производных сле
дует уточнить распределения шата и кривизны с помощью программы, учитывающей в граничном условии радиальные составляющие нормалей к несущей и срединной IIUBepXHOCIHXI.
10. Формирование ма1смагическо1'о представления поверхности лопастей гребных винтов (МПП ГВ).
Формирование Ml III ГВ осуществляется программой, входящей как и ком
плекс программ проектировочных расчетом. так и в комплекс программ автомат зпровапной подготовки производства моделей гребных винтив.
// Запись МПП ГВ в базу данных.
Запись (считывание) МПП ГВ в базу данных осуществляется специальным модулем по помору варианта (проекта)
12. Расчет интегральных геометрических характеристик лопастей и их сечений Вычисляются, в частности, значения дискового отношения, объема лопастей, площадей и моментов инерции сечений.
73. |Л£Л-(Л£,Д)111ип1
Если полученное расчетом дисковое отношение значительно отличается от дискового отношения диаграмм)*, по которой производился выбор основных элементов гребного впита, то расчет начиная с блока 3 повторяется. При этом, однако, не пользуется диаграмма с более близким к требуемому значением /1£/Л0.
14. Поверочный расчет гребного книга по теории несущей поверхности.
Программа предусматривает возможность выполнения расчета кривых действия п интенсивности присоединенной циркуляции гребного виши, работающего в однородном потоке, а также расчета интенсивности присоединенной циркуляции, сил и моментов, действующих на лопасть гребного винта, сил и моментов, действующих на гребной впит в целом и передающихся на гребной вал при работе впита в неоднородном паче скоростей.
15. Запись результатов поверочного расчета по теории несущей поверхности в базу данных.
16 Вывод результатов поверочного расчета по теории несущей поверхности на печать.
17. Построение плоских профилей, эквивалентных сечениям лопасти гребного винта (см. § 21).
18. Запись в базу данных геометрии эквивалентных профилей.
19. Расчет давлений на лопастям гребного шипа.
Для расчета давлений численным способом оиределяекя Ю-информпое отображение ШКЧШ1ОС1И каждого эквивалентного профиля па внешность крута.
20. Вывод иа печать результатов расчетов давлений.
21. Расчет кавитационных диаграмм сечений лопастей гребною вшил.
22. Вывод на печать параметров кавитационных диаграмм сечений лопастей гребного винта.
23. Расчет интенсивности кавитационного шума гребного винта.
24. Вывод па печать результатов расчета кавитационного шума.
25. Расчет зон лопастей гребного шипа, охваченных кавитацией.
26. Вывод па печать параметров каверн.
27. Удовлетворяют ли требованиям Т'З расчетные кавитационные характеристики лопастей гребного впита?
28. Принятие решения о способах улучшения кавитационных характеристик гребного винта.
Решение может касаться например, изменения профилировки лопастей или заключаться в специальных конструктивных .мерах. Решение принимает проектант гребного винта.
29. Расчет сил па гребном винте, работающем в неоднородном потоке давлений, индуцированных впитом в воде, и сил, возникающих при работе винта иа корпусе.
30. Данные, ио геометрии корпуса судна и его конструкции.
31 Вывод иа печать результатов расчетов.
32. Расчет вибрации корпуса, обусловленной работой гребного винта.
33. Удовлетворяют ли нормам параметры впбраиип корпуса судна?
34. Принятие решения о путях уменьшения вызванной гребным винтом вибрации корпуса судна
Решение принимают совместно проектант гребного вннга и проектант судна. Оно может касаться изменения параметров гребного винта (например, числа лопастей), параметров корпуса (например, увеличения жесткости), а также взаимного расположения винта н корпуса.
35. Расчет статической н циклической прочности лопастей гребного винта.
36. Печать результатов расчета.
37. Удовлетворяют ли нормам запасы прочности?
38. Изменение коэффициента, определяющего запас прочности лопастей.
Если спроектированный гребной винт не удовлетворяет нормам прочности, то приходится уве нчнвать момент сопротивления корневых сечений его лопастей. В тех случаях когда необходимое увеличение толщины или ширины лопасти превышает 10%. гребной вниг проектируют заново, увеличивая в исходных данных к программе блока 8 коэффициент, определяющий запас прочности.
39 Принятие решения о необходимости изготовления модели гребного винта.
Решение принимает проектант гребного впита.
40. Нужна ли модель гребного впита?
41. Автоматизированная подготовка ирипаводетва модели гребного винта.
Аптоматпанроваипая подготовка производства моделей гребных винтов состоит из следующих основных этапов:
1) проверки геометрии спроектированного гребною впита путем вычерчивания базовых геометрических элементов и проекции поверхностей лопастей;
2) сглаживании и коррекции геометрических элементов. Решение о необходимости сглаживания или коррекции принимает проектант гребного впита;
3) построения формовочных чертежей для изготовления отливки, чертежей общего вида модели, цилиндрических сечений лопастей;
4) подготовки исходных данных для системы автоматического программирования (САП);
5) подготовки управляющей программы для обработки модели гребного шипа па станке с ЧПУ.
42 Вывод па автомат чертежей модели гребного пиита.
Перечень чертежей дан при описании блока 41
43 Вывод управляющей программы для стайка.
44. Изготовление отливки модели гребного винта
45 Изготовление модели гребного винта с помощью фрезерного станка с ЧПУ.
46. Управление экспериментом и обработка результатов испытаний мщии гребного впита в кавитационной трубе.
В номенклатуру стандартных испытаний модели гребного шипа входит определение кривых действия Массивы экспериментальных значений коэффициентов
ЬбЗ
упора и момента обрабатываются с помощью программы регрессионного анализа; коэффициенты полученных зависимостей записываются в библиотеку диаграмм (см. блок 4.1).
47. Испытания модели гребного вин га в кавитационной трубе.
48. Печать результатов экспресс-обработки экспериментальных дачных.
49. Анализ результатов испытаний модели гребного винта.
Анализ выполняет проектант гребного впита. В результате рассмотрения полученных прн испытаниях модели гребного винта данных принимают решение о необходимости изменения геометрии лопастей.
50. Нужна ли коррекция математического представления поверхности лопастей?
51. Коррекция математического представления поверхности лопастей.
Коррекция выполняется путем замены аппроксимаций соответствующих геометрических элементов.
52. Окончательный расчет ходкости, уточнение диаметра гребного винта, расчет паспортной диаграммы
53. Формирование технического отчета по результатам проектирования гребного впита.
54. Вывод машинного носителя с окончательным М11П спроектированного гребного винта.
Этот машинный носитель используют затем для построения теоретических чертежей гребного впита (блок 55). Он является основой для автоматизированной подготовки рабочей и технологической документации по гребному винту.
55. Построение теоретических чертежей натурного гребного винта и печать таблиц геометрических параметров гребного впита.
Каждая из программ, входящих в систему, может использоваться независимо от системы в качестве самостоятельной программы.
Глава X
ГРЕБНЫЕ ВИНТЫ РЕГУЛИРУЕМОГО ШАГА
§ 42. ОГОГ.ГНПОСТИ ПРИМЕНЕНИЯ И ПРОЕКТИРОВАНИЯ
ВИНТОВ РГГУЛИРУ1 \\0I0 шлг\
Конструктивная особенность гребного ввита регулируемого шага (ВРШ), заключающаяся в возможности поворота его лопастей в широком диапазоне угловых положений, придает этому движителю существенные эксплуатационные преимущества по сравнению с обычным гребним винтом.
Одним из основных достоинств ВРШ является то, что независимо от скорости и сопротивления движению судна всегда возможно передать иа гребной винт полную мощность главного двигателя за счет соответствующего изменения шага лопастей. В результате для судов, оборудованных ПРИ):
существенно увеличиваются тяговые характеристики на промежуточных и малых скоростях, что особенно важно для рыболовных траулеров, буксиров, ледоколов, судов на подводных крыльях (для последних указанное качество ВРШ позволяет обеспечить эффективное прохождение «горба сопротивления» прн разгоне судна);
всегда может быть обеспечено соответствие между потребляемой гребным пип том мощностью и располагаемой мощностью двигателя в реальных условиях эксплуа танин судна, а именно при обрастании и увеличении шероховатости корпуса и лопастей гребного винта, н условиях волнения и ветра, прн изменении водоиз.м> щения’судна, прн ii.iauauini судна на мелководье, а также прн уменьшении м<ип носи! на валу вследствие эксплуатационного износа двигателя или потребления мощности навешенными на главный двигатель дополнительными потребителями энергии (вспо.могаге.ты1ыми механизмами).
664
Важным эксплуатационным преимущсстом ВРШ является возможность обеспечения работы движителя на оптимальных по экономичности режимах в широком диапазоне скоростей судна. При применении ВРШ та или иная скорость хода может быть получена при различных значениях частоты вращения гребного вала, чего не может обеспечить обычный гребной винт; при этом для заданной скорости за счет определенною сочетания шага и частоты вращения всегда может быть ныбрап режим работы, соответствующий наиболее высокому значению произведения КПД движителя иа КПД двигателя.
ВРШ позволяет получить любое значение скорости — от скорости полного переднего до скорости полною заднего хода — без изменения направления н частоты вращения гребных валов. Это свойство ВРШ приводит к существенному улучшению эксплуатационных и маневренных качеств судна, в частности;
на судах с дизельными установками, обладающими сравнительно высокими минимально устойчивыми оборотами двигателя, возможно получение любых малых скоростей хода, вплоть до нулевой скорости (прн этом режим нулевой скорости обеспечивается без остановки двигателя); в результате повышается мобильность управления судном н эффективность маневрирования на малых скоростях;
значительно улучшаются реверсивные характеристики судна, так как в процессе реверсирования на BI’III может быть подана гораздо большая мощность, чем на обычный гребной винт: па судах с газо- и паротурбинными установками — за счет использования мощности главного двигателя (а нс специальных относительно маломощных устройств заднею хода), па судах с дизельными установками — за счет более высокой частоты вращения гребных валов; в результате при применении ВРШ существенно сокращается выбег судна прн экстренном торможении, что имеет большое значение с точки зрения обеспечения безопасности плавания судна.
Важными достоинствами ВРШ как составной части двнгателыю-движитояьного комплекса судна являются.
упрощение энергетической установки и повышение показателей се экономичности в связи с исключением из состава aiicprciичсской установки специальных реверсивных устройств (турбин заднего хода, реверс редукторов);
повышение моторесурса энергетической установки благодаря отсутствию частых остановок и реверсирования главных двигателей на режимах маневрирования и швартовных операций;
возможность отбора мощности на специальные я вспомогательные нужды непосредственно от главного двигателя, что исключает необходимость использования иа судне дополнительных источников энергии;
возможность достижения высокого уровня автоматизации энергетической установки и мобильности ее управления.
Эксплуатационными преимуществами ВРШ являются4
уход от критических по вибрации корпуса судна значений частоты вращения гребного впита, способствующий улучшению условий обитаемости иа судне и повышению долговечное in работы различного судового оборудования;
более широкие возможности самостоятельного (без буксиров) осуществления швартовных операций и маневрирования в портах н узкостях, которое снижает эксплуатационные расходы, чго особенно важно для крупнотоннажных судов.
Вместе с тем, ВРШ свойственны и некоторые недостатки. По сравнению с обычными гребными винтами ВРШ имеет дополнительные гидродинамические noiepii. Эти потери обусловлены увеличенным диаметром ступицы, в которой размещается механизм поворота лопастей (</н ВРШ составляет 28— 30 % D, а ино|да и более), а также увеличенной относительной толщиной лопастей в районе корневых сечений. Для’широколопастпых ВРШ не удастся, как правило, оптимизировать с точки зрения плавности обтекания участки притыкания лопастей к ступице. В связи с этим максимально достижимый КПД у ВРШ будет ниже, чем у гребных винтов фиксированного шага (ВФШ). На рис. Х.1 сравниваются КПД ВРШ и ВФШ при различных гидродинамических нагрузках. Хотя на отдельных режимах соотношение между КПД сравниваемых серий винтов может быть как в пользу одного, так и другого типа винта, считают, что максимальные значения КПД у ВРШ на 3—5% (в зависимости от гидродинамической нагрузки) ниже, чем у ВФШ.
Вследствие того что лопастн ВРШ должны иметь возможность поворачиваться в сторону отрицательных шаговых углов без взаимного задевания, дисковое отношение этих гребных винтов ограничено. Как правило, максимальное значение 665
дискового отношения ВРШ не превосходит 0.75—О.Ы). Эта конструктивная особенность создает определенные трудности проектирования ВРШ для относительно быстроходных судов в свяли с необходимостью обеспечения запасов по второй стадии кавитации (т. е. кавитации, сопровождающейся снижением эффективности пиита), которые при проект крова и пн ВФШ обычно достигаются увеличением дискового отношения до значений 1.(1—1,(. Для преодоления этих трудностей дпамец BP1J1 приходится принимать несколько большим, чем у ВФШ (чтобы уменьшить гидродинамическую нагрузку движителя). что сопровождается необходимостью уменьшения номинальной частоты вращения проектируемого ВРШ. Таким образом.
Рис. X.I. Сравнение КПД гребных пингов фиксированного и регулируемого шага. ------ БФ1П серии В1-55;-------ВГИ1 серии AU-CP4-55: т)о “ >1< вФТП/ВПИТ
К недостаткам ВРШ относят также их больший вес по сравнению с ВФШ, а также некоторое увеличение затрат па постройку судна. Считают, однако, что увеличен ная стоимость ВРШ окупается в течение I—2 лет эксплуатации судна.
Проектирование ВРШ имеет свои специфические особенности.
Выбор проектною режима. В связи с тем что каждый ВРШ гидродинамически эквивалентен бесчисленному множеству винтов фиксированного шага, при его про-ектирон.тнии необходимо решать, какой режим работы винта наиболее целесообразно принять в качестве проектного, т. е. для какого режима следует произвести выбор распределения шагового отношения но радиусу.
Выбор проектного режима ВРШ зависит от назначения и условий эксплуатации судна, для которого проектируется данный движитель. Различают три основных группы судов, применительно к которым следует учитывать особенности проектн роваиия ВРШ с точки зрения выбора проектного режима.
I. Транспортные суда, у которых гидродинамическая нагрузка движителя на длительных эксплуатационных режимах изменяется незначительно. На диаграмме A"j—J этому условию соответствует сравнительно узкая область изменения значений ком|и|>нциента Кщ (заштрихованная область /, рис. Х.2). При проектирова пин ВРШ для этих судов в качестве проектного режима принимают режим, соответствующий усяивию получения наилучнтнх пропульсивных качеств иа основном ходовом режиме плавания судна (точка Л). Тем не менее, при решении вопроса о выборе типа движителя и соответствующего проектного режима для транспортных судов, совершающих длительные рейсы при существенно различных водоизмещения* (с полным грузом и в балласте), целесообразно оценить значения коэффициента Кит для каждого из указанных режимов
Данную труппу, как правило, составляют пассажирские, сухогрузные суда, контейнеровозы, танкеры.
Сбб
2. Сула, имеющие два пли более двух режимов длшельиой эксплуатации, каждый из которых хараюери зушея сунюснюпным различием |Т1лрод||1Н1мичсской нагрузки движители (например, области / и // па днатрамме Кт— J) В эту группу входят рыболовные траулеры, суда с комбниировлнными силовыми установками, морские буксиры, спасательные суда. Выбор проемною режима для судов этой группы пади производить исходя из анализа экономических показателей эксплуатации судна в течение определенною периода.
•3. Суда, для которых требования тбеспечеиня высоких .маневренных качеств
определяется именно этими требованиями. Эту группу составляют паромы, рейдовые буксиры, кабельные и другие суда. Характеристики заднего хода для указанных судов имеют важное значение. Поэтому при выборе элементов винта принимают заниженное значение конструктивного шагового отношения, что способствует повышению характеристик BPJII на заднем ходу.
Ограничение длины корневых сечеиин лопасти. Контур лопасти ВРШ и соот-вегстненно длины хорд спрямленных цилиндрических сечеиин лопасти на отдельных радиусах надо выбирать такими, чтобы обеспечить разворот лопастей в сторону отрицательных шаговых углов без взаимного задевания Это трсбоиаипе приобретает особую важность при проектировании ВРШ для относительно быстроходных судов, дисковые отношения которых близки к предельным (Л г!А0 > 0,7). Предельные значения длин хорд спрямленных цилиндрических сечений допаши t>ilp определяют при решении уравнения
5,11 ф) + sin2 0 = cos2О-тд2 у-—Лб^ , (X I)
f. 90 Сир , „ .
где О----—-----S-cos'p; АО угловой зазор между сечениями па радиусе г при
взаимном развороте лопастей.
GG7
Распределение по радиусу предельных значений длин хорд спрямленных цилиндрических сечений для 4- и 5-линастных ВРШ с конструктивным шаговым отношением PHiD т I 2, определенное решением приведенного уравнения, показано па рис. Х.З. На этом же рисунке показано распределение хорд спрямленных сечений лопасти, найденных из условия обеспечения равного запаса по кавитации для всех сечений при безударном входе. Видно, что для ВРШ, дисковые отношения которых близки к предельным, невозможно удовлетворить требование обеспечения одинакового запаса по отношению к возникновению профильной кавитации по всей длине лопасти.
Вследствие ограниченности длины хорд в районе корневых сечений лопасть ВРШ по сравнению с лопастью ВФШ при одинаковых значениях дискового отношения (при <4л/Ло> 0.65) оказывается относительно загруженной в районе корня лопасти (что усугубляется также конструктивными условиями сопряжения лопасти
Рис. Х.З, Распределение по радиусу длины цилиндрических сечений лопасти ВРШ: а — Z = 4; б — Z = 5.
предельная длина цилиндрических сеченнП лопасти;--------------длина цилинд-
рических сечений, соответствующая равсисюу запаса по началу кавитации при безударном входе.
с фланцем) и более широкой в районе наиболее нагруженных периферийных сечений. Эга особенность ВРШ, хотя и может приводить к некоторому снижению его КПД по сравнению с ВФШ, с точки зрения повышения кавитационных качеств винта (по второй стадии кавитации) является положительным свойством, так как в районе наиболее нагруженной части лопасти длины хорд сечений лопасти ВРШ соответствуют сечениям лопастей ВФШ с несколько большим дисковым отношением. Вследствие этого можно считать, что по кавитационным качествам, характеризующим начало второй стадии кавитации, ВРШ лишь несущественно уступают ВФШ (при равных значениях дискового отношения).
Искажение формы цилиндрических сечений и изменение закона распределения шаговою отношения по радиусу при повороте лопасти ВРШ. Различают конструктивное P^D н установочное P'D шаговые отношения ВРШ. При конструктивном шаговом отношении распределение шага отдельных цилиндрических сечений л< -пасти по радиусу и их профилировка соответствуют режиму работы ВРШ, для которого производится его проектирование. Установочное шаговое отношение ВРШ шаговое отношение при установке сю лопастей на любой шаговый угол, отличны/1 оз конструктивного. При повороте лопастей ВРШ относительно их положения при конструктивном шаговом отношении изменяется закон распределения шага отдельных цилиндрических сечений по радиусу и происходит искажение их формы, что сказывается на гидродинамических и кавитационных характеристиках винта.
В процессе проектирования и гидродинамических расчетов ВРШ возникает необходимость определения геометрических параметров лопасти при различных установочных шаговых отношениях или при повороте лопасти на определенный угол относительно ее положения при конструктивном шаговом отношении 668
1
Вследствие малости относительной толщины п кривизны цилиндрических сечений можно считать, что характер искажения их фирмы при повороте лопасти па определенный у юл будет таким же, как искажение формы правильной винтовой поверхности при ее повороте па тот же угол. Учитывая это, для решения задач, связанных с уставов кинем связи между геометрическими параметрами цилппдрпвеских сечений лопасти ВРШ и углами поворота лопасти, можно использовать построенные А. С. Лодкиным диаграммы искажения винтовых линий на опредс-чсыпых радиусах при повороте лопасти ВРШ (рпс. Х.4). Диаграммы ноС1росны для относительных радиусов г = 0,4; 0,65; 0,8 и 0.96. Относительная длина blD располо-I женной перед осью поворота (или за ней) части цилиндрического сечения отложена на диаграммах по дугам концентрических окружностей с центром в начале координат, С помощью этих диаграмм могут быть определены ординаты Z — X/R искаженных винтовых линий, соответствующие повороту лопасти на угол у. На диаграммах нанесены также линии постоянных значений дополнительного угла нулевой подъемной силы цилиндрического сечения лопасти па соответствующем радиусе, обусловленного искажением винтовой линии при повороте лопасти. Представленные на диаграммах значения а1|Ы1 определяют угол нулевой подъемной силы S-образной [дужки при коэффициенте компенсации цилиндрического сечения k — 0.51.
Для цилиндрического сечения с произвольным k, повернутого относительно положения при конструктивном шаговом отношении на угол у, угол нулевой подъемной силы определяют по формуле
а= а0+Аа,1С||1 (Х.2)
где «у—угол нулевой подъемной силы цилиндрического сечения в положении лопасти ВРШ, соответствующем конструктивному шаговому отношению;
при k < 0,5;
4(1 - k)3
А =
7— 12/г
Ак
аиск — угол, значение
снимают
при к>0,5;
с диаграмм рис. Х.4.
Необходимо иметь в виду, что диаграммы, изображенные на рис. Х.4, построены для винтовой поверхности с конструктивным шаговым отношением PK/D = — 0,8. При определен пн параметров искаженных винтовых линий с иным конструктивным шаговым 01 ношением необходимо повернуть координатные осн на у юл
ф = arctg-^4- -arctg^£-. (Х.З)
пг лг
Пспользу я ординаты кривых искаженной винтовой линии и суммируя их с ордн-Игатами исходного профиля, можно построить результирующую форму профиля лопасти ВРШ при повороте ее на некоторый угол.
В табл. X I представлена схема расчета распределения установочного шагового отношения, соответствующего повороту лопасти ВРШ на угол у относительно исходного положения, определяемого распределением Pt(/D. При выполнении рас-, чета нет необходимости осуществлять поворот координатных осей на диаграммах |рнс. X 4, так как этот поворот учитывается расчетным путем. В табл. X I все величины, отмеченные одним штрихом, относятся к входящей части лопасти (части лопасти перед осью поворота), а отмеченные двумя штрихами — к выходящей части.
Учет влияния стунипы. При расчете ВФШ, относительный диаметр ступицы [которых составляет 0,18—0,20 диаметра винта, силы иа ступице, как правило, li e учитывают. При поверочном расчете ВРШ, для которых характерен от нос и тел ь-|нын диаметр ступицы, равный 0,28—0,32, необходимо учесть силы, возникающие [на ступице за счет разрежения на «обтекателе винта. Это может быть сделано [на основе данных, полученных В. М. Котловиной (721.
’ К^М’Фчч.ш’Нтом компенсации цилиндрического сечения лопасти называют отношение Длины части хорды, расположенной перед осью поворота, к полной длине хорды сечения.
669
С70
1 -44I-----------------------------------------------L
Мшых относительных радиусах при повороте лопасти ВРШ.
671
672
22
II/P Я. П НоАткунского» т. I
673
Таблица XI Расчет установочного шагового отношения ВРШ при повороте лопасти иа угол у
Исходные д Линне: у; biD
Дополнительный коэффициент упора, обусловленный силой на обтекателе сту ппцы, определяют по формуле
Л’с ~ <К^гц21р (PilD) tc (ста).
(Х.4)
где fp и fc—нормированные функции, которые могут быть определены с помощью графика, приведенного на рис. Х.5, где fp построена в зависимости от поступи нулевого упора Pi'D, a ft: — от параметра Стд = Стд/(1 + Ста)
Коэффициент упора винта равен
^ = A-ro-^, (Х5)
где Кто коэффициент упора, найденный в результате поверочного расчета и характеризующий упор, создаваемый лопастями.
Учет нагрузок, действующих на конструктивные элемен!ы ВРШ На лопасти ВРШ действуют тс же силы гидродинамической и инерционной природы, чт н иа лопасти ВФШ Однако при проектировании ВРШ необходимо более детально' изучение этих сил и обусловленных ими моментов, поскольку они воспринимаются не только материалом лопасти, но и подшипниками комлевой заделки лопасти а также механизмом ее поворота. Как правило, определяющая роль прн расчет. ВРШ принадлежит силам и моментам гидродинамической природы; лишь для весьма высокооборотиых ВРШ инерционные нагрузки соизмеримы с гидролинами ческнмн. Методы расчета инерционных нагрузок детально изложены в работе |б].
Гидродинамические нагрузки, действующие на лопасть, складываются из силы спора, тангенциальной силы, изгибающего момента относительно плоскости заделки лопасти н гидродинамического момента относительно оси поворота лопасти Xoih все эти нагрузки переменны во времени - за счет перекладки лопаскй при маневра
674
рованпи, а также за счет неравномерности пат я скоростей — их принято определять в квазнстаппонарной постановке Упор и тангенциальная сила могут бьпь непосредственно определены на основании экспериментальных кривых действия, причем максимальные нх значения возникают в процессе реверса судна (см. гл. X III). Тангенциальную силу рассчитывают по значению момента исходя из предположения, что она приложена на половине длины лопасти. Изгибающий момент относительно плоскости заделки определяется соотношением
(Х.6)
где F — рашюдеАсюующня сил, действующих па лопасти; rti — радиус прило-
жения равнодействующей. Прн вычислении что упор приложен на радиусе
тогда
V" Т'г7г + Q2 ГК р
Расчет но эшм приближенным формулам дает несколько завышенные значения изгибающих .моментов.
Скручивающий момент, действующий на лопасть, находят из выражения
R
Мскр = J Cmi dr< ( Х •«)
ГН
где Cmi — коэффициент момента элемента лопасти; — скорость потока на элементе лопасти Безразмерной характеристикой гидродинамического скручивающего момента является коэффициент С',,,, представляемый в виде
„ Мснр
Знак скручивающего момента считают положительным, если момент действует в направлении увеличения шага лопасти, и отрицательным — при действии момента в обратном направлении.
В применяемом в настоящее время приближенном методе расчета принимают, что
Cmi = I®/ (2Л — 0,5) — О,5ао — (х 9)
где £ определяют по графику рис. X 6 в зависимости от шагового угла <р и отношения 6/г элемента лопасти, а Ат — по графику рис. Х.7 в зависимости от коэффициента компенсации k элемента лопасти. Значения а„(.к и утла атаки находят в результате расчета искаженной геометрии лопасти и поверочного расчета винта соответственно. Значения углов а/. Oq и «иск должны включать определенные в процессе расчета поправки иа конечность ширины лопасги.
Таким образом, если выпапнеи поверочный расчет ВРШ, вычисление скручивающих моментов на лопастях нс составляет труда, причем результаты расчета удовлетворительно согласуются с данными эксперимента.
Одиако поверочный расчет может быть выполнен по методам, изложенным в гл. VIII, лишь для установившихся режимов работы винта. В то же время наибольшие значения нагрузок, в частности и по скручивающему моменту, наблюдаются при маневрировании судна и в процессе реверса Для этих режимов поверочный расчет связан со значительными трудностями и обладает существенно
22* 675
меньшей точностью (см гл XIII), что осложняет расчет скручивающих моментов. Поэтому в процессе практического проектирования в настоящее время ncncwi.iyioi данные*по гидродинамическим скручивающим моментам, полученные в результате модельных испытаний ВРШ в опытовом бассейне или в кавитационной трубе Модельные испытания проводят в широком диапазоне относительных поступей и шаговых отношений, охватывающем возможные изменения этих параметров в процессе различных маневренных режимов судна (реверс с полного переднего хода на «Пол нын назад», реверс с полного заднего хода на «Полный вперед», режимы «Стоп «Швартовный вперед», ^Швартовный назад») Практика проектирования ВРШ показывает, что наиболее часто режимы работы, при которых действуют максимальные нагрузки па механизм изменения шага со стороны ВРШ, соответствуют швартовому режиму работы ВРШ (J — 0). Это могут быть режимы «Стоп», «Швартои-ный вперед» иди «Швартовный назад». Значения шагового отношения и частоты вращения ВРШ, соответствующей допустимым режимам работы главного дни-
Рис. Х.7. График для определения коэффициента Ат.
гателя, на этих режимах известны в процессе проектирования ВРШ. С использованием данных модельных испытаний могут быть определены также коэффициенты скручивающих моментов, а следовательно, и абсолютные значения действующих моментов. Режим работы, на котором гидродинамический скручивающий момент оказывается наибольшим, принимают в качестве расчетного при проектировании конструктивных элементов привода поворота лопастей ВРШ
Практически важным является вопрос о снижении гидродинамических скручивающих моментов на проектируемом ВРШ. так как снижение действующих па конструкцию нагрузок означает возможное уменьшение ее габаритов, металлоемкости, мощности приводных двигателей Выполненные исследования показывают [72] что в принципе можно обеспечить существенное снижение скручивающих моментов па наиболее нагруженных (с точки зрения этих моментов) режимах работы ВРШ, однако это снижение будет сопровождаться ухудшением пропульсивных и кавита циоиных качеств винта. Возможности же снижения скручивающих моментов без ухудшения указанных качеств весьма ограничены
В практике для снижения скручивающих моментов следует:
уменьшать конструктивное шаговое отношение ВРШ (эта рекомендация согласуется с изложенной выше рекомендацией об улучшении характеристик ВРШ на заднем ходу для судов, к которым предъявляются повышенные требования в части обеспечения высоких маневренных качеств);
увеличивать число лопастей ВРШ (перевод на увеличенное число лопастей приводит, однако, к усложнению конструкции ступицы и к трудностям размещения механизмов поворота лопастей в ступице без увеличения ее относительного диаметра);
рационально осуществлять выбор коэффициента компенсации.
676
Исследования показывают, что за счет изменения коэффициента компенсации можно добиться заметного снижения скручивающих моментов (иа 10—15 %), однако уменьшение скручивающих моментов иа одних режимах сопровождается их ростом на других режимах Поэтому оптимальные значения коэффициентов компенсации должны выбираться в каждом конкретном случае путем сравнительных расчетов скручивающих моментов Расчет скручивающих моментов можно выпол пять по методике, изложенной в [72]
§ 43. ДИАГРЧММЫ ДЛЯ ПРОЕКТИРОВАНИЯ И ГИДРОДИНАМИЧЕСКИХ РАСЧЕТОВ ВРШ. СХЕМЫ РАСЧЕТОВ
Ниже изложен метод проектирования ВРШ с использованием диаграмм серийных модельных испытаний.
В судостроительной практике известны 4-лонастные ВРШ серии AU-СР, разработанные в Японии. В этой серии варьируются дисковое отношение (.4еМ(1 = = 0,40; 0,55; 0,70) и конструктивное шаговое отношение (Рц D 0,6; 0,8; 1,0).
С. Н Иванов переработал исходные диаграммы гидродинамических характеристик ВРШ серин AU-СР, представив их в форме, употребляемой в отечественной судостроительной практике, а именно в виде корпусных (Ку — J—Л) и машинных (Kq—J- i|) диаграмм Часть этих диаграмм приведена па рис. Х.8 -X.I6, где представлены сводные (т. е. построенные по конструктивному шаговому отношению) корпусные и машинные диаграммы для ВРШ серий AU-CP4 40, AU-CP4 35. AU-CP4-70 с Z=4 и Д£/Ао-0.40; 0,55; 0,70, а также корпусные диаграммы для ВРШ серии AU СР4 55
677
Рис. X .9. Сводная диаграмма Kq—J—т1в ВРШ серии AU 4 4
Рис Х.10. Сводная дна грамма’ KT—J—т]0 ВРШ серии AU-CP4-55.
Рис. Х.12. Сводная диаграмма Кт—J—Ло ВРШ серии AU-CP4-70.
Рис. Х.15. Диаграмма Кт~J— Ло ВРШ серин AU-CP4-55 с PK/D= 0,8.
c Pr.D = 0,6; 0,8; 1,0 для различных углов поворота лопастей относительно положения, соответствующего конструктивному шаговому отношению. Геометрические характеристики контура лопасти, распределение шага и максимальной толщины лопасти по радиусу, а также ординаты профиля цилиндрических сечений лопасти ВРШ серин AU-СР приведены в табл. Х.2 и Х.З. Относительный диаметр ступицы ВРШ[серии AU-СР составляет 0,30.
Рассмотрим два наиболее употребительных типа задания иа проектирование ВРШ с использованием диаграмм серийных модельных испытаний. В обоих случаях в качестве исходных данных по корпусу судна должны быть заданы:
зависимости буксировочного сопротивления R корпуса со всеми выступающими частями и тягн L на гаке (если L =# 0) от скорости судна v ;
данные по гидродинамическому взаимодействию гребных винтов с корпусом коэффициент попутного потока IV'Y и коэффициент засасывания t (в общем случае
Рис. X 17. Универсальная характеристика двигателя
I верхняя ограничительная характеристики; 1 — нижняя ограничительная характеристика.
Рис. Х.18. График для определения достижимой скорости хода и геометрических параметров ВРШ.
зависимости указанных коэффициентов от коэффициента нагрузки движителя по тяге), включая коэффициент iq влияния неравномерности попутного потока на крутящий момент гребного винта,
максимально допустимый из условий размещения диаметр гребного винта Р„ВУ. число гребных винтов ZP.
Более распространенным в практике проектирования является тип задания, предусматривающий определение элементов гребноговннга применительно к данной силовой установке, т. е дополнительно должны быть известны-
универсальная характеристика главного двигателя (рис. Х.17), в том числе номинальная мощность Рз11Очи соответствующая ей частота вращения гребного вяла Н](ом»
отпоептельпые потери мощности в валопроводе (КПД валопровода) »]Е.
Расчет элементов ВРШ п скорости полного хода судна при данном типе задания производят в форме табл. Х.4, задаваясь 3- 4 значениями скорости в районе ожидаемой скорости полного хода. Результаты расчета представляют в виде графика (рис X 18), где строят зависимости располагаемой тяги движителей Тг.конструк тнвного шагового отношения PK!D it диаметра ВРШ от скорости хода. Там же на носят буксировочное сопротивление R. (в том числе с учетом тягн I. на гаке, если проектирование ВРШ производится на режим хода с возом). Достижимую скорость полного хода определяют по точке пересечения кривой располагаемой тягн с кривой 686
Таблица X 2 Геометрические характеристики контура лопасти, Распределение шага и максимальной толщины лопасти по радиусу ВРШ серии AU-CP
Ж, 00*1 О О lOi-OO О О ОО Примечания. 1. Максимальная ширина лопасти h на г 0.66 равна: 0,2650 прн Ag Ао = 0.4; 0,3610 1<ри Лg /10 0,55; 0,4'70 при .4 р .4 , 0.7, Г рк 1 2. Для винтов с Ag ,40 = 0.4 к 0.55 распределение конструктивного шага по радиусу постоянно 1—— (г) = const 1. 3. Условная максимальная толщина лопасти при г = 0 Со = 0,050
tf.' © rt с •Q СП ООО о О 1Q — О Г’О О UJ о С ОООО о
0,90 о о ЭС QQ ЭО Г- СГ> СО во Г*- о СЧ 1П i^O о ООО о о о о
0,80 т ю ‘О сч сч еч сч сч о О <Х СП о — о СП ТГ 1С Ь СТ, О Т о о о о" о о о
ОГО 0,990 0,483 ) 0,483 У 0,471 J 0 600 0,800 1,000 0,017 1 0,402
0.66 | О о СО СО ОО ООО О "Ч о СОИ.) ООО — Q 1П со ТГ О ОС О О =О — ООО 00—0 о
0,50 0.60 | ос СП гг-гО ос ос эо — X оу —• — О Оу О 05 СЧ ОУ 1П iQ ХГ ID N СП 0 О ООО с сГ о" о о*
1.0 Ю ОО ОС 00 — — — о ш М* €4 OCX Г* Г' Г* С1 СЧ ооО |П Ш тГ СП г--оо СО ООО 000 оооо о
О сч -ф сч со о с~> г» х> о О — о С4 О О м- 041О — Т- — £2 со!" ТГ тг СО ini'-О О СО ООО* 000 оооо о
0,30 ст г-^сч — Х>О OOOtn о Ш СП Ш О О 04 2 О ю СО со СЧ ТГ О X О СО ООО 000 оооо о
Характеристика Отношение ширины лопасти к максимальной ширине лопасти прн ЛлМа, равном 0 40 0,55 0,70 Коэффициент?компенсации k при Ле1Ав равном 0.40 0,55 0,70 Распределение шагового отношения при Ае/Ль = 0,70 и Ph!D, равном 0 6 0 8 1.0 Отношение максимальной толщины профиля к диаметру винта при Ас = 0,40, 0,о5. 0,70 Отношение отстояния максимальной толщины профиля от входящей кромки к полной ширине при Л£/<4и = = 0,40; 0,55; 0,70
687
Таблица X 4. Определение элементов ВРШ и скорости полною хода судна при заданной mobihucih энергетической установки и частоте вращении требного вала
II с х о д и ы е да н н ы е: /'х1ЮМ, кВт; п|10М, об/с; U"t; /, (q; i|H; Zp
буксировочного сопротивления. По этой скорости находят диаметр и конструктив ное шаювос отношение ВРШ, тягу движителей После проведения расчета следует убедиться, чю полученный диаметр BPIII не превосходит максимально допустимого.
Более правильным с точки зрения достижения нанлучшпх пропульсивных качеств проектируемого ВРШ является тип задания, в котором у проектанта есть возможность при заданном максимально допустимом диаметре винта обеспечить оптимальную частоту вращения вала. Расчет элементов ВРШ, частоты вращения и скорости полного хода в этом случае производят в форме табл X 5 задаваясь 3—4 значениями скорости в районе ожидаемой скорости полного хода. Результаты расчета представляют в виде, аналогичном показанному на рис X.I8, только вместо зависимости D f (»s) на график наносят зависимость п — f (и„). н номинальную частоту вращения нала определяют при скороси) полного хода судна.
Ciporo говоря, если зависимость коэффициентов взаимодействия от нагрузки двнжшеля является существенной, следует проверить, насколько принятые в расчет
Таблица X 5. Определение элементов ВРШ частоты вращения вала и скорости полного хода судна при заданной мощности энергетической установки н максимально допустимом диаметре вин1а
Исходные данные: P$ltow, кВт; Dmax, м; №7; I; iq; г]и; У.р.
Величина l’sl °s2 l’i3 Примечание
т'д = 0.515 (1 — IP'/) uR, м/с l'r"> ”DI Ws Р,</£> = f (Kdq) J f (Kdq) ’to= f (Kdq) и = Va'(JD), об/с ЛиР.чП» K11 ‘Ql'.l По кривой Л,,pt То же То же
значения ll-'r и / отличаются or значений, соответствующих фактической нагрузке движителя. При сущее теином отличии уточненных значений коэффициентов U /- и I or принятых ранее расчет следует повторить, основываясь уже на уточненных значениях этих коэффициентов.
С целью улучшения реверсивных характеристик судна определенное в результате расчета конструктивное шаговое отношение ВРШ целесообразно уменьшить иа 7—Ю "<> и нрння1ь его равным одному из значений, имеющихся средн конструктивных шаговых отношений для винтов располагаемой серии.
Поверочный расчет ВРШ на кавитацию. Проверка отсутствия у нроектируе мото ВРШ на расчетном режиме второй стадии кавитации может быть произведена с использован нем графика, приведенного на рис X.I9 График построен на основании модел .них испытаний ВРШ геометрические элементы которых сравнительно близки к элементам ВРШ серии AU-СР. Минимальное значение дискового отноше-
ния, обеспечивающее отсутствие ухудшения гидродинамических характеристик
Рис. Х.19 Граф ।к для определения величины |o„J3 AtJ Ао]
винта вследствие кавитации на расчетном ре жиме, находят но формуле
где Д' — коэффициент, принимаемый равным 1 2 для двухзальных судов и 1,3— 1,5 для одновальных судов (в зависимости от степс ни неравномерности попутного потока в месте расположения винта): о0 и J — число кавитации и относительная поступь пинта иа । асчсн ом режиме соответственно Вели чипу <roJx — определяют по графику
рис. Х.19 при значении коэффициента Кт. равном коэффициенту упора впита иа расчетном режиме Дисковое отношение у проектируемого I3PII1 должно быть не меньше определенного ио указанной формуле. В протиппом случае необходимо либо использовать серию ВРШ с большим дисковым отношением, либо уменьшить нагрузку на ВРШ за счет увеличения его диаметра при одновременном снижении
частоты вращения.
Поперечный расчет статической и циклической прочности лопастей. Оценк статической и циклической прочности лоиасгей ВРШ выполняют по методике, приме I я смой для обычных гребных винтов (ем § 38). Для ВРШ в качестве расчетного принимают цилиндрическое сечение лопасти иа радиусе г ~ 0,35. Перед выполнением поверочного расчета прочноеm необходимо найти наибольшую нагрузку па лопасть в диапазоне возможных режимов эксплуатации ВРШ и шаговый угол расчетного сечения. С этой целью предварительно рассчитывают тяговую характеристику судна прн использовании полной мощности главного двигателя (см ниже) Принимая во внимание число гребных винтов, число лопастей и коэффициент засасывания, находят упор одной лопасти и шаговый угол расчетного сечения. Минн мяльное значение условного коэффициента запаса прочности рекомендуется прини мать, руков<*сгвуясь данными, полученными Л. И Вишневским на основании статистического анализа общей прочности лоиасгей целого ряда находящихся в эксплуатации ВРШ (табл X 6). Содержащийся в табл X 6 коэффициент .V следует принимать равным 0,95—1,00 для винтов, изготовленных из бронзы, и равным 1,75 для винтов из стали 1Х14ПДЛ.
Окончательная толщина расчетного сечения лопасти ВРШ должна удовлетворять Правилам Регистра СССР или Речного Регистра РСФСР.
Особенности расчета ходовых и тяговых характеристик судов, оборудованных ВРШ Расчет тяговой характеристики Расчет выполняют исходя из условия, что во всем диапазоне скоростей судна двигатель работает на номинальном режиме, г с. при Ps Р.ч ном и п п|(,П1 Рекомендуемая схеме расчета представлена в табл Х.7. Рлсчст производят с использованием диаграммы ВРШ, соответствующей выбранному конструктивному (или по возможности близ
690
Таблица Х.6. Условные коэффициенты запаса прочности
Диаметр винта» м Материал ns
Одновинтовые суда Двух-винтовые судя Одновинтовые суда Двухвинтовые суда
<2,5 Бронза, латунь 2.9.V 2,8Л‘ 2,8 2.6
(’.таль нержавеющая 3.0.V 2.9А- 3,0 2,8
сл Бронза, латунь 3.1 \ 3.0.V 3,2 3,0
Сталь нержавеющая 3.2.V 3,1 Д' 3,4 3,2
>4 Бронза, латунь З..ЗА- 3.2.V 3,6 3,4
Сталь нержавеющая 3 -1 А' 3,3 \ 3,8 3,6
кому к нем}) шаговому отношению, на котором нанесены также гидродинамические характеристик» ВРШ для различных установочных шаговых отношений (см , например, рис. X.I4-X.16).
Результаты расчета представляют в виде зависимости максимальной тяги Те max судна и шагового отношения ВРШ от скорости судна (рис. Х.20) Полученный
Рис. Х.20. Тяговая характеристика ВРШ.
Рис X 21. Определен не экономичных режимов работы ВРШ
график позволяет определить значения скорости судна и потребного шага ВРШ при различных значениях сопротивления движению (для режимов буксировки; при изменениях сопротивления, обусловленных различной нагрузкой судна, обрастанием корпуса, нл ни и нем ветра, полпенни моря или иными причинами). Дли решения
691
Таблица X 7 Расчет тяговой характеристики ВРШ
Исходные данные- Р$, кВт; л, об/с; D, м; И7/-; t; iq; т]„; Zp.
Beдичина Р1?7) P.O P,D При мечам ие
103Рд’>1„ ° 2лрл3£Лд j = f (kq, p:d) •lo = f <Kq- P'M ид = JnD, м/с T . _ Zp(l —0 PsThPlp kH По диаграмме ВРШ
Таблица Х.8. Определение потребляемом мощности и расхода топлива для различных режимов работы ВРШ
Исходные данные: t's, уз; R, Н; L, Н; D, м; IVY; /; i'q\ i)„; Zp.
Величина P,'D P, D p,/« Примечание
ид — 0,515 (1 — U'/) t’s> м/с Т - Р -г Р л Zp(l-0’ Кот = vaD trf> Т J = f (Kdt< P'D) Чо = I (Kdt> Pili} n — va!(JD), об/с Ps= кВт P-t — f (л. Ps), кг/с По диаграмме Кт~ •/—•Io По характеристике двигателя
692
С93
этих задач достаточно нанести на график кривую соответствующего сопротивления судна с учетом сопротивления воза.
Расчет наиболее экономичных режимов хода. Цель расчета — определение соотношений частоты вращения н шагового отношения ВРШ, обеспечивающих прн заданной скорости судна наивысший КПД движителя пли минимальный расход топлива. Для установления этих соотношений задают ряд значений скорости судна и для каждой скорости производят расчет, в ходе которого для нескольких заданных значений шаговых отношений ВРШ вычисляют потреб ляемую мощнос!ь двигателя. Рекомендуемая схема расчета представлена в табл. Х.8. 3ia схема может быть использована как для расчета свободного хода судна, так и для хода судна с возом. По универсальной характеристике двигателя для каждой пары зпачелий чаеплы вращения ВРШ и потребляемой мощности в пре делах рабочей зоны двигателя может быть определен также расход топлива В, (последняя строка табл. Х.8). Результаты расчета представляют в форме, покжтапхой
Рис. Х.23. Поправка к скручивающему моменту, обусловленная влиянием коэффициента компенсации лопасти: с — J — 0; б — J — 0,5; в— J = 0,8.
на рис. Х.21. Пунктиром иа этом рисунке показана линия, соответствующая наиболее экономичному по расходу топлива режиму работы ВРШ и определяющая необходимые для обеспечения этого режима значения его частоты вращения и шагового отношения
Полученные указанным способом данные по выбору наиболее экономичных режимов работы ЁРШ используют при проектировании систем совместного управления двигателем и движителем судна.
Оценка гидродинамических скручивающих моментов относительно оси поворота лопасти ВРШ. Расчет гидродинамических скручивающих моментов ВРШ может быть произведен с использованием теоретического метода, разработанного А. А. Русец-ким [721. Применение этого метода целесообразно для проведения различных сравнительных расчетов, например для выбора рациональных значений коэффн циенгов компенсации.
Приближенная оценка скручивающих моментов может быть выполнена также с помощью предложенной Л И. Вишневским методики, основанной на анализе систематических экспериментальных данных Согласно этой методике коэффициент гидродинамического скручивающего момента, действующего на лопасть ВРШ. вычисляют по формуле
(А Д \ 2
-4^) . (Х.П)
694
где С'т - - коэффициент, определяющий значения скручивающих моментов для базового ВРШ с числом лопастей Z— 4. дисковым отношением Лр/Л0—0,75 и коэффиинен юм компенсации лопасти k - 0,5
~ mh. ( X. 12)
Коэффициенты С„,о и SCmit определяют по графикам, приведенным иа рнс. Х.22 н Х.23 для заданных значений относительной поступи J (J >0), конструктивного н установочного шаговых отношений ВРШ (PtfD и Р D) иа радиусе г = 0,G5 и коэффициента компенсации лопасти
Г лапа XI
КРЫЛЬЧАТЫЕ ДВИЖИТЕЛИ
§ 44 ПРИНЦИП ДЕЙСТВИЯ И КОНСТРУКЦИЯ
КРЫЛЬЧАТОГО ДВИЖИТЕЛЯ
Крыльчатый движитель (КД) состоит из вращающегося вокру! вертикальной оси ротора, устанавливаемого заподлицо с днищем судна. По окружности ротора на равном расстоянии друг от друга располагаются лопасти, перпендикулярные к нижней поверхности движителя. Лопасти, представляющие собой профилирован ные крылья с удлинением порядка 4—5, вращаются вместе с ротором и одновременно совершают колебания вокруг собственных осей. Прн этом лопасти в каждой! точке окружности имеют положение, обеспечивающее создание необходимой гидродинамической силы.
При работе движителя каждая лопасть совершает относительно воды два движения: вращательное вместе с ротором и поступательное совместно с судном, в результате чего лопасть обтекается циклоидальным потоком. Прн работе движителя с нулевым упором все лопает должны устанавливаться под углами атаки, равными нулю, т. е. по касательным к направлению избегающего циклоидального потока. Поскольку все внутренние нормали к циклоиде пересекаются в одной точке, движение лопасти должно быть таким, чтобы хорды лопастей в любой точке траектории были перпендикулярны к прямой, соединяющей рассматриваемую точку с узловой точкой .V циклоиды, лежащей иа диаметре, перпендикулярном поступательному движению (рис. XI П Для создания движителем упора каждая лопасть должна отклониться на угол атаки от положения, соответствующего нулевой нагрузке. При этом колебания лопасти в каждом се положении на окружности должны быть такими, чтобы возникающая сила имела составляющую, направленную в сторону движения судна.
Па рис. XI. I показаны треугольники скоростей и схема сил, действующих па лопасти крыльчатого движителя Изменение значений и направлений этих сил достигается перемещением точки Л', называемой центром управления На рис. XI.2 даны некоторые характерные для движения судов с КД положения центра управления .V. Как видно из рисунка, КД выполняет функции не только движителя, но и органа управления, что позволяет отказаться от обычного рулевого устройства
В настоящее время имеется несколько кинематических схем крыльчатых движителей Наиболее известна классическая кинематика, обеспечивающая точное соблюдение условия перпендикулярности хорды к прямой, проходящей через центр управления. Наряду с классической кинематикой известны и другие законы перекладки лопастей, в частности в отечественном судостроении применяют так называемую шарнирную кинематику, обеспечивающую более высокую эффективность КД, а также кинематику типа А1.
Режим работы движителя определяется положением центра управления. Основной геометрической характеристкой КД является максимальный относительный Ьксцснтриситет, равный отношению наибольшего возможного расстояния центра управления ог осн движителя к его радиусу: ?.о ОМ/R При максимальном эксцентриситете движитель создает наибольший vnop, причем этим значениям упора соответствуют и более высокие значения КПД движителя Эксцентриситет движителя
595
Таблица XI.1. Габаритные и присоединительные размеры нормализованных крыльчатых движителей
Тип Типоразмер, (11 ндскс) движителя Диаметр . Длина лопасти L. мм в ысота, ММ Дли на 1, мм Большой диаметр конуса пала г/, мм Номинальный тяиор по чертежу ме ж д> лопастью и днищем Число лопастей Масса, КГ
по осп лопастей D, мм днища ротора Z), мм фуида-мен тл плиты мм и Н, не болен* при 3—5 лопастях при 6—7 лопастях
мм
ДКК-800 800 1040 1140 520 125 210 575 560 70 70 900
ДКК-ЮОО 1000 1280 1390 650 150 260 700 700 90 90 3 5 1 500
ДКК-1200 1200 1500 1610 780 180 300 820 820 110 90 2 400
Л ДКК-1400 1400 1750 1870 910 220 350 950 960 120 100 3 000
ДКК-1600 1600 2000 2120 1040 250 400 1060 1020 140 120 • 5 300
Д К К-1800 1800 2250 2390 1170 280 450 1170 1220 160 130 7 100
ДКК-2000 2000 2500 2660 1300 310 500 1310 1350 180 150 900
г- 5
ДКК 2300 2300 2840 3030 1500 450 580 1490 2000 200 170 6 16 000
ДКК-2600 2600 3190 3410 1690 500 650 1670 2250 240 240 21 000
Б ДКК-3000 3000 3670 3900 1950 550 750 1900 2600 280 280 28 000
ДКК 3500 3300 4280 4560 2280 620 870 2230 3000 320 320 6 41 000
ДКК-ЮОО 4 4860 5200 2600 700 1000 2500 3400 360 360 58 000
определяет значение угла атаки лопасти и в этом смысле играет ту же роль, что я шаг гребного винта, благодаря возможности изменения эксцентриситета КД по своим свойствам аналогичен ВРШ, и его применение наиболее целесообразно на
судах, нагрузка движителей которых изменяется в широких пределах (буксирах, траулерах и др.).
Крыльчатые движители по своей кон струкцнн подразделяются иа три группы: движители с горизонтальными приводными валами и приводом от автономного движителя; движители с вертикальными приводными валами; движители со встроенными двигателями. Наиболее распространены движители с горизонтальными приводными валами. КД с вертикальными валами, как правило, имеют малую мощность и применяются во вспомогательных установках.
Крыльчатые движители производит ряд зарубежных фирм. В нашей стране выпускают КД нормализованного ряда, габаритные и присоединительные размеры которых даны в табл. XI.I ина рис. XI.3. Движители изготавливают с различным числом лопастей, которое колеблется от 3 до 8, наиболее распространены 5- и 6-лопастные КД.
Крыльчатые движители могут исиоль
зоваться не только в качестве движителя, по н в”ка!естве рабочего органа средства активного управления. В этом случае движитель располагается в поперечном канале в корпусе судна. Поскольку для движителя, размещенного в канале, тяга всегда совпадает с направлением осн канала, v этих движителей осуществляется регулирование лишь ее значения и направ-
ления.
§ 45. ГИДРОДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ КРЫЛЬЧАТЫХ ДВИЖИТЕЛЕЙ
Осн впымп гидродинамическими характеристиками крыльчатого движителя являются его упор 7' и гидродинамический момент Q иа оси ротора. К безразмерным характеристикам КД относятся гидродинамический коэффициент упора
(XI I)
и гидродинамический коэффициент момента
(Х1.2)
Здесь Гр — DL (L — длина лопасти); и= ziDn— окружная скорость лопастей. Коэффициент полезного действия КД определяется формулой
(XI.3)
где J »л/и
Для оценки эффективности движителей при режиме их работы, близком к швартовному, когда их КПД стрем ггся к нулю, исиоль уют коэффициент ка
С98
Рцс XI,4. Диаграммы кривых действия КД: а — Кт = f (J); б—Кц =
699
П(, /л-г + кг| Kq + J>
’ ~ 2KQ • (xl 4>
На швартовном режиме s — Ку/(2 ИДр)
Безразмерные гидродинамические характеристики КД обычно представляют в виде диаграмм кривых действия, аналогичных диаграммам ВРШ. В качестве переменного параметра из этих диаграммах используют относительный эксцентриситет движителя. Диаграммы кривых действия для 6-лопастиого движителя с шарнирной кинематикой приведены на рнс XI.4.
Для проектирования механизма КД и расчета прочности его элементов важное значение имеет гидродинамический момент Л1г относительно осн поворота лопасти. Значение этого момента характеризуется безразмерным коэффициентом
Рис. XL5. Зависимость КПД движителя
1 — кинематика типа Л1, 2 —
от максимального эксцентриситета, шарнирная кинематика.
Рис. XI 6. Зависимость КПД и качества от дискового отношения.
I — С j-д = 06 2 — С Т'Д — оо; 3 —- С у-д 2,0.
При выборе элементов движителя необходимо наряду с КПД учитывать и крутя щие моменты, действующие на его лопасти.
Гидродинамические характеристики крыльчатого движителя могут быть определены путем модельного эксперимента или на основе расчета по вихревой теории. Практические расчеты чаще всего ведут с использованием данных модельных испытаний Выполненные к настоящему времени систематические исследования крыльчатых движителей позволили выявить влияние основных геометрических и кинематических характеристик движителя на его гидродинамические характеристики и получить материал для выбора в процессе проектирования основных элементов КД
Эксцентриситет Известно, что с увеличением шагового отношения гребного винта до 1,5—1,7 максимальный КПД растет, а при больших шагах уменьшается. Аналогичная зависимость имеется и для КД. Однако для большинства" движителей, наибольший относительный эксцентриситет которых Хо< I, КПД ие достигает максимального значения По данным Ван-Маиена, КПД имеет максимум при Хо — = 1,75. Зависимость максимального КПД КД от эксцентриситета, полученная на основании данных модельных испытаний движителей с различными законами управления, приведена на рис. XI.5.
Дисковое отношение Дисковое отношение КД определяется соотношением
т = bcpLZ/(LD) = bcpZ/D. (XI 6)
Результаты модельных испытаний показали, что характер влияния дискового отношения на эффективность движителя зависит от коэффициент нагрузки Зависимость 700
шс ачччшмю umuiiiriii н ум1Т1~а~г.тстся. а1 велПЧепие дискового oi ношения сопровождается т.1кже увеличением коэффициента скручивающего момента Сг„, иа лопастях КД. Зависимость нагрузки КД, соответствующей началу его развитой Кавитации, от произведения от, где о — чнедо кавитации, приведена на рис XI.7. С помощью этой зависимости можно определить минимально допустимое значение дискового отношения движителя
Форма контура лопасти. Контур лопасти оказывает сравнительно слабое влияние иа эффективность КД. Наибольшего значения КПД достигает КД с эллиптическим или близким к нему кошером лопасти Из технологических соображений чаще применяют трапециевидный или прямоугольный контур.
Рис XI.7. График для определения дискового отношения КД.
Рис. XI.8. Зависимость максимального Стг от коэффициента компенсации.
Число лопастей. КПД движителя слабо зависит от числа лопастей. Увеличение числа лопастей от 3 до 6 при неизменном дисковом отношении ведет к росту КПД на 12%.
Форма профиля сечеиия лопасти. Оптимальное значение радиуса кривизны средней линии профиля лопасти уменьшается с увеличением нагрузки. Согласно рекомендациям О. В. Рождественского, радиус кривизны средней линии может быть определен по формуле
з
А’о = 0,4
(I +> + ??) 2D I + 0.5Х
(Х1.7)
где
0,515(1 + J. 1+Сгл)Д (XI.8)
Коэффициент качества на швартовах практически не зависит от кривизны профиля.
В качестве исходного профиля, симметричного относительно искривленной средней лнннн, принимают обычно профиль КАСЛ 03020. Ординаты этого профиля с толщиной 20 %_следующие:
4-100, %.............. О 1,25 2,5 2 5 7.5 10 15 20 25
-тр-ЮО, %............. 0 3,157 4,358 5.925 7,000 7,805 8,909 9,503 9,902
-^-•100, %............ 30 40 50 70 80 90 95 100
-5-100, % ........10,003 9,072 7,606 6,107 4,372 2,413 1,344 0,210
701
кривимы iKJijiK.1 uii|>tgi<a^Mi<.)T но цязрму.чц
{XI.'))
где ni — безразмерная абсцисса максимальной толщины профиля; Ь — текущая ширина лопасти.
Положение оси вращения. В диапазоне, изменения положения оси поворота характеризуемом коэффициентом компенсации (отношением отстояния осн от передней кромки к хорде профиля), меньшим 0,5. его значение практически не влияет на КПД движителя и должно определяться из условия снижения скручивающих моментов 41,.. На рис. X 1.8 приведена зависимость максимального Стг от положе пня осп вращения лопасти Как видно из этой зависимости, для тяжело нагр женных движителей целесообразно принимать коэффициент компенсации к рав иым 0,35—0,40, для менее нагруженных движителей целесообразно выбирать меньшие значения k
§ 46. ВИХРГВАЯ ТЕОРИЯ И ГИДРОДИНАМИЧЕСКИЙ
РАСЧЕТ КРЫЛЬЧАТОГО ДВИЖИТЕЛЯ
Работа крыльчатого движителя сопровождается непрерывным измененшш значения и направления скорости потока, набегающего па каждую из его лопастей, и’.соответствующим изменением возникающей па лопасти циркуляции, которое сопровождается образованием пелены вихрен, параллельных размаху лопасти и располагающихся по циклоидальным кривым в потоке за движителем. Поскольку лопасти представляют собой крылья конечного размаха с переменной циркуляцией, за ними формируется также пелена продольных вихрей, интенсивность которой переменна во времени Ввиду большой сложности описанной вихревой системы КД строгое решение задачи определения гидродинамических характеристик движителя затруднено.
Практический расчет ведут на основе упрощенной вихревой системы исходя н.з следующих допущений: лопасти крыльчатого движители бесконечно длинные и тонкие; хорда лопасти мала по сравнению с наименьшим радиусом кривизны орбиты лопасти. В итоге решается плоская задача о поле скоростей движителя с бесконечно узкими лопастями. Указанные допущения относятся только к расчету поля скоростей КД. При вычислении действующих на лопасти гидродинамических сил вводят поправки па конечность размаха и хорды лопасти. Расчетная вихревая схема КД представлена на рис. Х1.9. Она состоит из Z вихрей с переменной во времени циркуляцией Г (0) и Z циклоидальных цепочек вихрей интенсивностью-.
Вес лопасти крыльчатого движителя расположены на одинаковом расстоянии и совершают за одни оборот идентичные колебания. Поэтому расчет сводится к рассмотрению задачи о крыле, обтекаемом со скоростью, складывающейся из скорости набегающего потока и скоростей, вызванных как вихревой системой самого крыла, так и системами Z — I остальных крыльев.
Основное интегродиффереициальное уравнение строится на основе уравнения связи-
оС., ь
г= лГвйч1па-Г’ <х,,0>
где скорость vR включает наряду со скоростями ш/? и е4 скорости, вызванные всей системой присоединенных вихрей, кроме рассматриваемого, н всей системой свобод ных вихрен. Скорость vR может быть выражена через составляющие скорости:
’ VR = ~\F ~ + 2или'« cos 0 — 2 (со/? — ttG) vA sin 0. (XIII)
702
п|пе1-]1<1д||'|)ференциалы1ое уровнен не (XI.1U) приводи кя к вид
Г = sin flu — J cos (О — Цо) — ta0 sin flu - w/<«os
r f^cv b \ - ten -
где Г = Г I —----— mR I; K'o = —£• ; «•« = ~~ .
\ da 2 I u>R R n\R
(XI 12)
Решение уравнения (XI. 12) ведут метолом последовательных приближений. В nepi м приближении при известной кинематике движителя определяют Г (1*1 и - в пред
положении, что wn п tt'p во всех точках окружности равны нулю. При решении уравнения возникают дополнительные затруднения, связанные с исключением особенности в точке схода пелены с /г-н лопасти, а также с иахожде
Рис. XI.К). Треугольник скоростей КД.
Рис. XI 9 Вихревая схема КД
пнем в последующих приближениях, когда величина Г (О) аналитически не задана. Первое из них устраняется допущением о сходе пелены с задней кромки лопасти и вычислением вызванной скорости па оси пращения. Для преодоления второй трудности разработан приближенный прием определения функции Г (0) любого приближения без непосредственного вычисления **£ [24 J. Как пра-
во
вило, расчет сходится после 3— 1 пр 1б.тпжепнй. Определение поля скоростей крыльчатого движителя позволяет перейти к расчету его гидродинамических характеристик
Полагая, что подъемная сила перпендикулярна мгновенной скорости набегающего потока, а сопротивление характеризуется коэффициентом обратного качества, можно получить следующие выражения для мгновенных значений коэффициентов гидродинамических характеристик движителя:
, г
АГ = "2^“ CVfc'kftc0S (°k ~ Рол + ак) 11 + F *6 (°* Рщг+ад)], (XI. 13)
Z
*4? ='Й- «л)!1 +*'C|U(puft-ак)| (XI.14)
Здесь /-л — индуктивная поступь ft-fi лопасти; alt - местный угол атаки. В связи с вышеуказанными допущениями в значение угла a/t должны быть введены по-
703
правки, учитывающие конечность ширины н размаха лопасти. Проведенные оценки показали, ито существенна лишь поправка на коне шесть ширины, которая определяется соотношением а1{р — CJi.'b, где Са 80 + 30 (I — 3d); h b — величина, зависящая от радиуса кривизны циклоиды рр
±i__ l/ fJkY_____L
b Ъ } \ Ь / 4 ‘
Радиус кривизны р( можно рассчитать по формуле 3
(J- 2J sin 0 + I) 2 ./ sin 0 — I
Испитый угол атаки равен
(XI.15)
(XI 16)
(XI. 17)
Детально метод расчета гидродинамических характеристик КД изложен в |24).
Расчету гидродинамических характеристик крыльчатого движителя должен предшествовать выбор числа и размещения движителей. Как правило, судно оборудуют двумя крыльчатыми движителями, что позволяет обеспечивать его вы сокие маневренные качества. Рекомендуется устанавливать движители противоположного вращения, чтобы исключить влияние реактивного момента. Случаи ycia-новкн одиночных движителей редки и относятся только к малым судам.
Движители располагают попарно в носу или в корме. Первый вариант харак терен для буксиров, второй для относительно быстроходных судов. На паромах и плавучих кранах практикуется диагональное расположение движителей оди i в носу и один в корме. Подобное размещение особенно благоприятно для обеспечения высоких маневренных качеств судил.
Наиболее высокие пропульсивные качества, как правило, обеспечиваются прн кормовом расположении движителей. Некоторое исключение составляют весьма полные тихоходные суда, у которых целесообразно расположение одного движителя в носу. О. В. Рождественский обобщил требования к форме обводов и установке КД па судах. В частности, прн кормовом расположении он рекомендует применение транцевой кормы с заглублением гранца порядка 0.2/9 Перед движителем н за ним должны иметься площадки, длина их должна составлять не менее D перед движителем и 2D за ним Наклон батоксов перед движителем должен быть не более 5°, а в районе транца минимально возможным. Ширину транца при кор моном расположении движителей следует принимать не менее 4D, а расстояние между нх осями — не менее (1,5—2,0)0.
Коэффициенты взаимодействия КД с корпусом находят прн самоходных испытаниях. Существуют некоторые трудности с определением характеристик движителя <в свободной воде» и измерением упора движителя Для предварительных расчетов рекомендуются следующие коэффициенты взаимодействия, ф 0,05-5- 0,1, t = 0,1 : 0,15 — для судов с острыми обводами и транцевой кормой, ф 0,20-5-0,30 t — 0,10’ 0,20 для судов с полными обводами типа буксиров, плавкранов и паромов.
Рассмотрим выбор элементов двнжнте тя для случая, когда задана скорость судна и его сопротивление при этой скорос1н, равное эффективной тяге движителя.
На первом этапе в соответствии с приведенными выше рекомендациями определяют коэффициенты взаимодействия и вычисляют скорость набегающего на двп житель потока н потребный упор движителя
н4=1>(1 -ф); Т = -j—(XI.181
Площадь гидравлическою сечения КД l'f> — I.D можно считать заданной, так как диаметр движителя выбирают, как правило, из условий раэмещс! ня, а длину лопастей I. находят из условия проч1 ости, принимая L (Об 0,65) D. При вы
704
боре диаметра и числа топастен движителя обычно исходят из типовых КД, вьч у скас-мых серийно промышленностью Дальнейший расчет недут в следующей ио следовагельностн
I Определяют упшималык допустимое из условий кзнппанпи значение дисковою отношения Для этой цели вычисляют коэффицпе! т нагрузки движителя ио у нору
и число кавитации, соответствующее
полному ходу судна.
10 200 + ~y/i
где Л — погружение диска движителя Пи графику рис XI.7 определяют произведение о0т и рассчитывают т. При известном дисковом отношении т и числе ло-
м . Т/J
пастей Z можно найти среднюю ширину лопастей из соотношения оГ[ —.
Форму лопасти принимают иолуэллиптической иди прямоугольной со скругленными углами. Поперечные сечения лопастей обычно выполняют в виде профилей NACA 03020 с искривленной средней линией и относительной толщиной 10 15 %
2. Залают ряд значений чисел оборотов и вычисляют серию значений коэффициентов Кг = 7/"«Г ^vu~ На диаграмму кривых действия движителя износят кривую Кт = / (;>) в функции J v j 'и и определяют значения и и эксцентриситета Ао, соответствующие наибольшему Kil l, движителя.
3. Вычисляют гидродинамическую мощность, потребляемую движителем на этом режиме, Ps- Кц -L- /~t, (nnD)a.
4. Находят полную мощность, потребную для вращения движителя, Р = F= Ks/ihPlrp, где i]M механический КПД движителя, лежащий в диапазоне 0.Й2— 0,80; 1|1(1 КПД. учитывающий потери иа трение ротора о воду, обычно прими мается равным 0,97.
5. В заключение выбирают коэффициент компенсации лопасти, для чею используют график рнс XI 8.
Если проектируемое судно имеет несколько основных режимов плавания (например, «Свободный ход* и «Ход С тралом»), то для расчетов ходкости используют диаграмму' кривых действия для данного движителя, на которой нанесены кривые гидродинамических коэффициентов для разных относи ельны.х эксцентриситетов Схема таких расчетов аналогична расчетам ВРШ, изложенным в гт X
Характеристики КД при маневрировании, как правило, определяют экспериментальным путем, поскольку теоретический расчет может быть проведен лишь для части режимов Ис Испания ведут в квазпетацпопарноп постановке для ряда установившихся режимов, соответствующих различному положению центра управления.
В процессе маневрпрова! ня возможны режимы когда наблюдаются перегрузки отдельных юпастей пли движителя в целом Для исключения этого либо ограни чнвают частоту оборотов ротора, либо уменьшают эксцентриситет. Последнее pea.ru зуют путем блокировки сервомоторов, обеспечивающих положения верхнего конца рычага управления в 1утри некоторой области, ограничиваемой так называемой диаграммой ходз.
23 П р Я И. Войткуиекого, т I
705
Глава Л'//
ПРОЕКТИРОВАНИЕ ДВИЖИТЕЛЬНОГО КОМПЛЕКСА ГРЕБНОЙ ВИНГ НАПРАВЛЯЮЩАЯ НАСАДКА
§ 47. ОБЩАЯ ХАРАКТЕРИСТИКА КОМПЛЕКСА ГРЕБНОЙ ВИН! — НАПРАВЛЯЮЩАЯ НАСАДКА
Направляющие насадки на гребные винты являются эффективным средством повышения пропульсивных качеств судов с тяжело нагруженными движителями. За последние 20 лет в СССР все буксирные суда н промысловые траулеры оборудуют । аправляющпми насадками. Значительное распространение направляющие насадки различной конструкции получили на транспортных судах и крупнотоннажных танкерах. В отдельных случаях направляющие насадки па гребные винты устанавливают для защиты лопастей от повреждений при плавании иа мелководье, во льдах
и других специфических условиях. Для улучшения маневренных качеств судов применяю! поворотные насадки.
По конструктивным особенностям и назначению направляющие насадки разделяют на обычные осесимметричные и несимметричные. Обычная осесимметричная насадка образуется вращением крылового профиля заданной формы вокруг осп гребного винта Несимметричная насадка характерна тем, что профили каждого ее меридионального сечения имеют различные форму, размеры и угол с осью гребного винта
Геометрическую ф рму направляющих насадок принято характеризовать следующими основными параметрами (рис. Х1Г.1) длиной насадки /д; диаметром Од и радиусом Rd насадки в месте расположения гребного винта; относительным удлинением Id Id'Dd насадки, диаметром Одд входного сечения насадки, диаметром £>дд выходного сечения насадки, коэффициентом раствора а. = D дд/О^; коэффициентом расширения Р — отстоянием IDE диска гребного винта
(плоскости, проходящей через середину концевых сечений лопастей) от входной кромки насадки дпииой 1цс цилиндрической вставки; радиусом рдд закругления входящей кромки насадки; радну ом ргд закругления выходящей кромки; зазором Л/? между концом лопасти гребного винта н поверхностью насадки, отпоен телыюп максималы ой толщиной профиля насадки 6д.
706
При нагрузках на движитель, характерных для современных морских судов, насадки при f > 1 ускоряют поток в диске гребного винта и создают дополнительный упор, а при Р< 1 замедляют поток и испытывают сопротивление. Воздействие направляющей насадки на скорость потока в диске гребного шшта (обра-батьшаемую винтом массу) является определяющим фактором в ее влиянии на КПД эюго двнжителыюго комплекса. Действие насадки на концевые потерн гребного впита и потери па закручивание потока проявляется менее существенно.
Значение и направление дополнительной скорости вызываемой насадкой в диске 1рсбпого винта, зависят от ее геометрической формы Это дает возможность произвести общую теоретическую оценку влияния формы насадки, которую можно характеризовать средней скоростью протекания жидкости через диск винта vsli.
Рис XII 2. Зависимость от коэффициента нагрузки Ст КПД идеального дви жителя и комплекса винт—насадка.
1 современная пропулъгипная насадив (р > 1). 2 — идеальны П движитель; 7 — реально используемая насадка с поджатием потока (р < 1).
па гидродинамические характеристики комплекса. Для идеального двнжптоаьного комплекса, т. е комплекса, у которого отсутствует закручивание струн п вязкостные потери, а вызванная скорость равномерно распределена по диску и сечен ню струи, па основе общих законов механики можно записать выражения для упора комплекса Тп P^oVxoo ₽ЛА« (у.-1 + “«)' упора впита 7\. = р.Ац X
со \ K'r«i
т-’д “I-5—j wxno и затраченной мощности PDi -- Тт,ил + ‘
Из этих соотношений, введя коэффициент нагрузки по полному упору комплекса , v2a
Суп - Тп>(>А0—g—• можно получить формулы для коэффициента полезного действия комплекса
4 Стт! Va
+ 4
(XII.I)
23*
707
о
708
отношения упора насадки к упору гребного пиита л 7 or
п отношения площади Ля стртп далеко ноге винта
। +-JrL —
4 и.Л
за комплексом к площади ,40 диска грсб-и . ;v .
На рнс XI 1.2 XII.4 приведены результаты расчетов 0,-, ^оо/^о Л-тя ряда значений коэффициента нагрузки Стп по ценному упору комплекса. На этих рисунках заштрихована область изменения скорости протекания ця/(.'п.4 реально используе-
Рис. XII 5. Ориентировочная зависимость увеличения КПД Лт)о движителя и пропульсивного коэффициента судна Л1)с при установке насадки от коэффициента нагрузки Стт-
I — однова.тьныс суда. Лч£>: 2 дп> хн.ыьные суда, ------------- — с Поворотными насадком» — — — с неподвижными насадками.
мымн насадками Как видно из рисунков, используемые в настоящее время насадки приводят к изменению скорости и,(| в достаточно узком диапазоне по сравнению со скоростью протекания через диск гребного впита без насадки (пунктирная линия 2). Увеличение КПД идеального двпжптсльного комплекса с иаилуч-шей пропульсивной насадкой (линия I па рис. XI 1.2) в рассматриваемом случае только за счет снижения осевых потерь в диапазоне нагрузок, характерных для транспортных судов (Суу 2-1-5), составляет околоб—10 "и но сравнению с идеальным движителем (плА = с'д + —j При этом упор насадки достигает 25—40 % от упора гребного винта. Площадь струи за комплексом в том же диапазоне нагрузок немногим более площади диска винта ~ 1.08). Дальнейшее увеличение
скорости vslt в область, расположенную выше липни 1 па рнс XII.2, посредством совершенствования направляющей насадки или применения иных устройств позволило бы значшельно унеличнп. КПД комплекса. В результагс проведенного анализа можно констатировать, что для достижения наибольшего КПД комплекса и упора насадки необходимо при ее конструировании оремиться к максимальному увеличению скорости протекания i\h через диск гребного винта. Однако, как показывает опыт, достичь этого только за счет увеличения коэффициента расширения насадки р невозможно из-за отрыва потока от внутренней выходной стенки насадки
Увеличение КПД движителя с установкой направляющей насадки оказывается тем больше, чем выше его нагрузка (коэффициент Стт) На рнс X 11.5 приведены кривые для ориентировочной оценки возрастания КПД н пропульсивного коэффициента судов при установке насадки.
70*»
§ 48. ВЫБОР ФОРМЫ ПРОФИЛЯ НАПРАВЛЯЮЩЕЙ НАСАДКИ
И ПРОЕКТИРОВАНИЕ ДВИЖИТЕЛЬНОГО КОМПЛЕКСА
Сложная картина формирования н отрыва трехмерного пограничною слоя па поверхности насадки не позволяет в настоящее время теоретически решить задачу выбора оптимальной геометрической формы ее профиля. Известные попытки переноса условий оптимума по форме плоского профиля для направляющих насадок оказались безуспешными.
Наиболее надежно эта задача может быть решена экспериментально на основе систематических испытаний серии моделей направляющих насадок различной формы в опытовых бассейнах. Получающееся при этом различие в Re от 10* на моделях до 10я на натуре н обусловленное им влияние масштабных факторов на отрыв потока от стенок насадки действует и безопасную сторону, т. е. определенные по дан-
Рис. X 11.6. Влияние, относительного удлинения насадки иа ее эффективность в зависимости от коэффициента нагрузки Kdt-
I — а — 1.4; 2 - а = 1,3; р - 1,125; АЯ/Л = 0,011; 3 — а •= 1.2; 4 а = 1.45.
Рис. XII.7. Влияние расширения насадки на ее эффективность.
— ,d!dd = °-6: SR/R = ------‘d!dd 0J6: дя/л = о.ою.
ным модельных испытаний предельные значения раствора и расширения насадки в натурных условиях гарантированно обеспечат отсутствие отрыва потока.
На рис. XII.6—XII.8 приведены полученные при систематических испытаниях моделей комплекса зависимости относительного упора от основных геометрических элементов Iq'Dd- ° • Р для заданного коэффициента нагрузки по упору комплекса К/>г ~ Л\/Г Кт[. Все испытанные модели имели острую заднюю кромку (Prn'hi ~ 0.0015) и максимальную относительную толщину = 0,12 .0,14 Ит рисунков видно, что удлинение насадки существенно влияет па ее эффектив иость только иа швартовном и близких к нему режимах, а оптимальное значение Id/Dd изменяется в зависимости от нагрузки в пределах от 0,5 до 0.7. Еще менее значительное влияние оказывает коэффициент раствора насадки а, оптимальное значение которого в зависимости от нагрузки, по к; анней мере для направляющих насадок с 0,6, находится в пределах 1,25—1,35. Наиболее существенное
влияние во всем диапазоне нагрузок оказывает коэффициент расширения насадки р оптимальное значение которого при удлинении tplDp 0,6 лежит в пределах 1,10—1 18 в зависимости от нагрузки.
710
Многочисленные данные модельных испыюннй направляющих насадок разлнФ-йои формы и удлинения свидетельствуют о том. что их безотрывное обтекание при работе на переднем ходу обеспечивается при угле расширения выходной части насадки у sC 9°. Вместе с тем, в ряде случаев возникает необходимость проектирования насадок, обеспечивающих повышенные тяговые характеристики не только на переднем, но и на заднем ходу. Очевптно, что эфх[>ективно действующая направляющая насадка как на переднем, так и па заднем ходу, должна иметь симметричный отпо-ентидыю диска гребного винта профиль. Коэффициенты раствора а и расширения 0 этой насадки будут одинакоными. Однако спроектированная таким сбразом насадка на переднем ходу будет уступать насадке, специально разработанной для работы па этом режиме.
В реальных условиях (за исключением некоторых случаев) комплекс гребной винт—направляющая насадка на заднем ходу должен развивать только определенную часть упора переднего хода или желательно улучшение его гндродннамнче-
на ее эффективность (ч>= Об)
Рис. X1I.8. Влияние раствора насадки
Рис. XII 9. Влияние коэффициента расширения насадки на ее эффективность при работе па переднем и заднем ходах (/£>=0,6; а = 1,3; /д = 0,003)
ских характеристик иа заднем ходу ценою незначительного (2—4 "о по КПД) снижения эффективности при работе на переднем ходу. Учитывая пологую зависимость относительного упора насадки 0 Td>T от коэффициентов а и 0, а также благоприятное слияние утолщения выходной кромки насадки на ее эффективность при работе па заднем ходу, такая задача может быть успешно решена На рис X11 9 и XII. 10 показаны зависимости отношения упоров насадки на переднем и заднем ходах il,_ * flп. к (при одинаковом упоре впнтз) в зависимости от коэффициента расширения i асадки 0 н толщины выходной ее кромки Толщина выходной кромки испытанных насадок 2(1|го увеличивалась за счет смещения наружной ciciikh профиля при сохранении формы внутренней поверхности и угла у. Данные, приведенные па рис XII.9, получены при острой выходной кромке насадки. Как видно из рисунков, с увеличением 0 ее эффективность при работе на заднем ходу увеличивается. При 0 1,18 упор насадки с раствором а 1,3 на заднем ходу составляет при-
мерно G0 % упора на переднем ходу. Снижение же упора такой насадки на переднем ходу благодаря патогон зависимости ее гидродинамических характеристик от 0 не превышает 3—4 ?6 Поэтому в тех случаях когда к характеристикам комплекса па заднем ходу предъявляют повышенные требования, для насадок с удлинением IdIDd= 0.6 0,7 коэффициент расширения следует увеличивать до 1,17— 1,19 при а= 1,3, в диск гребного винта располагать па удалении от передней кромки, равном 40—45 % длины насадки.
711
Из рис. XII Ю видно, что с увеличением толщины выходной кромки (радиуса закругления) упор насадки на «днем ходу монотонно увеличивается практически по линейному законе, а се упор на переднем ходу снижается балл- резко, особенно при 2(7d Id > 2.6 "о- У не.нчение толщины выходной кромки от 0 до 2 ”ч приводит к возрастанию упора насадки иа заднем ходу па 15 20"». На переднем ходу упор при этом снижается на 3—5 %.
На основании накопленных данных разработаны и рекомендованы стандартные профили для двех насадок с удлинением IpDo 0,6 и 0,8. В табл .XII.I u XII
Рис. XII.10 Влияние относительной толщины выходной кромки иасадкн ртр = 2<>7-г/1/т «а ее эффективность при работе на переднем н заднем ходах (1д = 0,6; а= 1,1;Р = 1,12): а — отношение упоров иаевдкп на переднем н заднем ходу;
б — влияние рго на упор иа переднем ходу.
приведены ординаты этих профилей. Для упрощения технологии изготовления пред латаемых насадок наружная, выходная внутренняя стенки профиля и цилиндрическая вставка в диске гребного винта состоят из прямолинейных поверхностей Поверхность двоякой кривизны образует только входная внутренняя часть насадки. В отдельных случаях, когда снижение КПД комплекса примерно иа 2 % может быть признано допустимым и необходимы технологические упрощения конструкции. внутренняя входная часть контура профиля насадок может быть образована двумя отрезками прямых. При этом излом контура располагается на 1Х- (0,12.
0.14) /р от входной кромки, и радиус скругления шва в точках излома отрезков должен быть не менее 0,1/д. Образование всего входного участка контура иасадкн одним отрезком не рекомендуется, так как это приводит к снижению эффективности иасадкн примерно па 8%.
Таблица XII I Ординаты профиля направляющем насадки с (г, Dr> 0,6
‘.!'d DX'DD Примечен не 'у h> °Xl<r,D Примечание
0 000 0,025 0,050 0,07э 0,100 1.148 1,104 1,081 1,060 1,050 0.150 0.200 0 290 0,480 1.000 1.029 1.014 1.000 1,000 1,060 1 Цилиндрическая ! вставка Прямая линия
0.05/jT). = О.зв/д. Руд О.ОТбЫр, I0. тэ/д; носовая кромка
цилиндрической вставки располагается па ” 0.29.
712
Pile XII II Диаграмма для предварительною определения осповшх элементов и частоты вращения гребного винта в направляющей насадке при v |s -- 5 уз.
/ облт-ц, Monnin tv ft и ди.тме i pi in при которых n.iciyiuvi рлэвитая кавитация }|Л лшхнтяк
713
тцйИнгии
Тт/Р^Н/кВт
Рис ХИ.|2. Диаграмма для предварительного определения основных элементов и частоты вращения гребного винта в направляющей насадке при w.|, ~ 10 уз.
I — область МЭЩ11 ocivft И Д11.1М«ТроП. при которых наступает Г«ЧНШЯИ КЛВИТ.пШЯ nt лопастях.
714
Рис. XII.13 Диаграмма для предварительного элементов и частоты вращения гребного пинта в прн t’/s = 15 уз.
определения основных направляющей насадке
1 — об.тшть мощностей н диаметров, при которых наступает развитей кавитация на лопастях.
7|5
Таблица XI 1.2. Ординаты профиля направляющем насадки с /д/Рд -0,8
'о 11рнмечаним Ц 'г> Примем л н ия
0,000 1,178 0.150 1,023
0.025 1,118 0.200 1,009
0,050 1.090 0,300 1,000 Цилиндрическая
0.075 1,068 вставка
0,100 1.049 0.500 I.IXKI 1 000 1,086 j Прямая линия
Руд = 0.С625<о: /дд = 0.375/п: рдд - U.UHIp: /дд (I. Уд. носовая кромка цилиндрической петанки располагается иа /v Qj 0,3,
В указанных выше стандартных и лрушх насадках испытаны обширные серин моделей гребных винтов фиксированного шага и BP1II [4, 841, результаты которых могут быть использованы при выполнении практических расчетов ходкости судов п проектировании их днижительиых комплексон
Для предварительной оперативной оценки эффективности применения направляющей насадки иа прост ируемом судне и определения основных элементов гребного вита па рис XII 11 XII.13 даны специально разработанные диаграммы для гребных винтов фиксированного шага в приведенной выше направляющей насадке е огнисителы1ым удлинением 1[уР>ц 6.6 Уяельный упор комплекса Т? Рп. определяемый но нижней части диаграммы, рассчитан для гребных винтов с дисковым отношением ,4д/А0 = 0,6 Подробное описание таких диаграмм приведено в § 32
Правила выбора числа лонасюй, диаметра ступицы и других конструктивных элементов гребного впита в насадке сохраняются такими же, как и для открытого гребного винта (см. § 32) Следует лишь помнить, что применение трехлопастиых гребных винтов в поворотных направляющих насадках или неподвижных, но уста навливающнхея несоосно с гребным винтом (е пересечением осей), недопустимо по соображениям вибрации. Как показываю! исследования [5|, только при Z 3 па насадке возникает значительная нестационарная нагрузка, действующая перпендикулярно осп насадки
Выполнение проектировочного расчета гребных винтов в насадках по диаграммам испытании серий моделей комплекса производят в том же порядке и по тем же схемам, что п открытых гребных винтов (см. § 33). Выбранная но диаграммам серийных испытаний геометрия гребного винта комплекса, так же как и открытого гребного винта, па дальнейших стадиях должна уточняться главным образом с целью снижения опасности кавитации лопастей и вибрационных нагрузок, пере даваемых на корпус судна. Окончательная геометрия лопастей гребного винга (профилировка, распределение шага и т. д) должна быть рассчитана па ЭВМ с учетом конкретных особенностей поля скоростей за корпусом проектируемого судна по вихревой теории (см. § 35) Профилировку лопастей гребных винтов в насад ках рекомендуется производить с использованием тех же стандартных профилей, что и для открытых 1ребных винтов (см. § 34).
§49 ОСОБЕННОСТИ КАВИ1АЦИИ ДВИЖИТЕЛЬНОГО
КОМПЛЕКСА ГРЕБНОЙ ВИНТ — НАПРАВЛЯЮЩАЯ НАСАДКА
Направляющая насадка с Р > I, увеличивая скорость протекания поды через гребной винт, разгружает сечения винта, и это должно приводить к отдалению начала его кавитации. Однако увеличение скорости иротежаиия связано также с понижением давления вблизи гребного винта, что приближает начало его кавитации. Исследования показывают, что второе обсюятельегво превалирует над первым и гребной впит комплекса, спроектированного ча ту же мощность, что и открытый винг, при одинаковой площади лопастей начинает кавитировать раньше. И только
716
на швартовном и близких к нему режимах наблюдается обращая картина, и значение необходимого для обеспечения одинакового запаса против возникновения кавитанпп дискового отношения гребного винта в насадке примерно па 5 •*« меньше, чем для открытого впита. При этом развиваемый комплексом у пир, как известно, на 20—25 "и 6o.ti.uic, чем у открытого гребного впита. Для заданного упора преимущество комплекса винт насадка с точки зрения кавитации на больших нагрузках существенно возрастает.
Результаты обработки данных испытаний моделей шипов в кавитационных трубах. при которых одновременно с измерением гидродинамических характеристик производили визуальные наблюдения за появлением и развитием кавитации лопастей, показали, что наступление се второй о алии. сои «а да тощее с началом снижения гидродинамических характеристик (кривых действий), чаше всего пронсхо-
Р>1с. XII 14. Влияние кавитации иа характеристики винта в насадке (Л* D -= 1,45; А,-,М0 ~ 0,576; Z = 4).
дит при развитой профильной (пузырчатой) кавтпации па лопастях Однако снижение упора насадки может наступать и при наличии развитой кавитации в концевых вихрях, сходящих с лопастей. При испытаниях моделей ВРШ было замечено также, что момент возникновения того пли иного вида кампании, при котором начинается резкое снижение гидродинамических характеристик, в значительной степени зависит как от установочного шагового отношения, так и от направления поворота лопастей от их конструктивного шага. Было выявлено т*кже, что наиболее резкое снижение кривых действий ВРШ наблюдается при возникновении кромочной кавитации с нагнетающей стороны лопастей и менее резкое — при вихревой катнттацин
На рис XII 14 приведены кривые действия ВРШ в насадке, полученные при испытаниях в кавитационной трубе, для различных чисел кавитниин. Из рисунка видно, что при а„ — 2,3 кривые действия гребного винта не изменились и сохранились такими же, как н при атмосферном давлении, а коэффициент упора насадки начиная с поступи J — 0,76 снизился вследствие интенсивной каитпацвн в концевом вихре. Следует отметить, что с увеличением зазора между концом лопасти н стенкой насадки начало снижения коэффициента упора насадки смещается в область больших uai рузок (меньших поступей). Это свидетельствует о целесообразности увеличения зазора с целью повышения КПД комплекса в тех случаях, когда его гребной винт работает в режиме с развитой кавитацией концевых вихрей.
Для винтов в насадке наблюдается более сильная зависимость критического числа кавитации от шагового отношения, чем у открытых гребных винтов Это особенно проявляется у двнжнтелытого комплекса с ВРШ. когда на эту зависимость накладываются также искажения в распределении шага вдоль радиуса при повороте лопасти. Ila рис, ХИ. 15 показаны результаты .многочисленных кавн-
717
Тационпых испытаний (по началу второй стадии) моделей движитедьных комплексов ВРШ в насадке с а — 1,23-г 1,32; 1ц = 0,58-^0,62; р = 1,12ч-1,14; D = 200: 4-250 мм, Z 3-Ч-4; ДдМ,, ® 0,45-0,74; Р„'П = 0,9т 1,3; PJD - 0.8ч-1,5, обработанные в форме зависимости
noS? А Ч('тт- Стд)
при различных Р,Ч). Здесь же приведена аналогичная зависимость для открытых моделей ВРШ, полученная в результате испытаний в кавитационных трубах.
При выборе дискового отношения ВРШ, работающего в насадке, может быть использована эмппрп кская зависимость, применение которой целесообразно в начальной стадии проектирования для сравиН1е«1Ы1о малых нагрузок (Сгт 2.5):
Рис. XII.15. Систематические данные по кавитационным характеристикам ВРШ в свободной воде и в насадке, полученные в результате обработки данных испытаний в кавитационных трубах.
/ гпобпднлм подл 2 Ж’111 в насадке.
Кавитация в кошевых вихрях гребного винта оказывает неблагоприятное воздействие на внутреннюю ебшнвку насадки. Как показывают наблюдения, если зазор ДА1 мал, кавитирующий вихрь, коснувшись шенкн насадки, полностью пли частично замыкается на пей, вытягивается па обшивке в направлении потока и дробится на отдельные пузыри. При А/? > 0,01 I обычно не происходит полного дробления кавитирующих вихрей; сот рикасаясь со стенкой вихри деформируются и отходят от стенки с ослабленной интенсивностью Начало касания и дробления па насадке кавитирующих вихрей легко обнаруживается в натурных условиях, поскольку это сопровождается характерным для замыкания каверн звонким металлическим звуком Дробление каверн в кошеных вихрях вызывает значтт пые ударные давления на внутренней обшивке насадки. В местах дробления кавитирующих концевых вихрен не исключено появление эрозионного разрушения обшивки насадки Развитие эрозии наиболее вероятно прн больших шаговых отношениях винта D > 1.2) н нагрузках движнтельиого комплекса (Стт> 3). Причем если зазор между копнами лопастей и стенкой насадки не одинаков ио окружности, то процесс развития эрозии ускоряется. Эю происходит вследствие изменения за оборот впита интенсивности н характера замыкания вблизи стенки Кавитирующих 718
вихрей. Обнаружено, что в местах, где зазор минимален (Л/? ^0,01/?) н эрозия более интенсивна, процесс разрушения может ускоряться за счет коррозии. Глубипи эрозпонно коррозионных разрушений обшивки насадки, изготовленной из обычной конструкционной стали, в районе концов лопастей, как показали систематические осмотры па первых судах серин «Пятидесятилетие комсомола*, может составить до 5 мм в год, а ширни- разрушенной зоны — примерно 20 *•> диаметра насадки. Для уменьшения или ликвидации эрозионных разрушений обшнвки насадкн необходимо уменьшать шаг винта на койне лопасти, увеличивать зазор между концами лопастей и стенкой до Л/? 0,015/?, а также скруглять торцевые кромки лопастей.
Для снижения шпеиснвпости коррозионно-эрозионных разрушений направляй них насадок необходимо нх внутреннюю обшивку изготовляю из коррозионно-стойких материалов (например, аустенитных хромоникелевых сталей). Изготовление внутренней обшнвки из таких .материалов по всей длине насадкн обеспечивает существенно лучшие условия защиты от контактной коррозии в месте стыковашя разнородных материалов.
Глава XIII
РЕВЕРСИРОВАНИЕ СУДОВ ПРИ ПОМОЩИ ГРЕБНЫХ ВИНТОВ
§ 50. РАСЧЕТ ХАРАКТЕРИСТИК ВИНГА
ПРИ РЕВЕРСИРОВАНИИ
Гребной нт г является не только движителем, обеспечивающим поступательное движение судна, но и средством реализации важного эксплуатационного маневра — реверса. Методы расчета гидродинамических характеристик гребных винтов обычно разрабатывали для режимов пх работы, близких к режиму пол ною переднего хода. Лишь сравнительно небольшое число исследовании касалось определения характеристик при так называемых «нерасчетных режимах» и, в частноои, режимах, возннкаощнх при маневрировании судна Это было связано как с небольшим объемом инженерных задач, прн которых необходимы эти характеристики, так и со значительными трудностями расчета гребных винтов прн подобных режимах, обусловленными неприемлемостью методов линеаризации решений. основанных на предположении о малости влияния вызванных скоростей ил форму вихревой системы.
В течение длительного времени и инженерш й практике использовали только давние, полученные в результате экспериментального исследования гидродинамических характеристик винта при реверсировании. Необходимость теоретического исследования гпдродинах-пческих хзрактеристк вннга при маневрировании возникла применительно к задаче определения нагрузок, действующих ня лопасти ВРШ. В последние годы появился ряд проблем, связанных с расчетами прочности и уточнением характеристик маневрирования, для решения которых потребовалась разработка теоретических методов определения .характеристик ВФШ при произвольном значении относительной поступи.
Реверс судна нр 1С1авляет собой сложный нестационарный процесс, сопровождающийся изменением как скорости поступательного движения судна, так п ча стоты вращения его |ребных винтов. Однако прн реальных скоростях изменения этих параметров роль нестационарных добавок, как показано в [47, 72], невелика н может не учитываться. Поэтому в практических расчетах режим работы гребного впита в каждый момент времени рассматривается как установившийся.
Реверсы ВФШ и ВРШ существенно отличаются друг от друга. Прн реверсе ВФШ происходит изменение на противоположное направления поступательного движения гребного винта и направления его вращения. При реверсе ВРШ меняется лишь направление поступательного Движения шипа, частота же его вращения изменяется незначительно. Это обстоятельс гво обусловливает ра.ъянчпыс формы пред-С1анлення характеристик этих винтов при реверсе. Обычная форма гндродннамн-
7|9
ческпх характеристик гребного винта, применяемая для режимов установившегося движения переднего и заднего хода н виде зависимостей коэффициентов Кт — Tl(i>irL)'} н Kq Q (|>/i2Ds) от поступи J, приемлема лишь для части режимов, поскольку при п—>-0 эти коэффициенты стремятся к бесконечности. Поэтому дополнительно вводят коэффициенты
Т Q
К /' ~ -----> г> ' »< ° Г ч ’
po-jfy-
(XIII I)
графики изменения которых строят в зависимости от J" I ./ Совокупность гра фпков Kr I (J). Kq I (J) н К), /(•/''>, Л'„| /(.и позволяет описать .ха-
рактеристики гребного шина на всех режимах реверса.
Рис. XIII.I. Кривые К pg = f (J р) винта с P’D = I при реверсе. Рнс X111.2. Кривые К,„„ = / Up) винта с Р/D = I при реверсе.
В Г. Бакаевым п В. М Лаврентьевым предложены универсальные коэффициенты вида
К Т
*’* рО <, . м *» >
рЛ (Од 4- /г!Р)
/"ф »
рП'^-:, п *л-)
сохраняющие конечные значения при любых скоростях н частотах вращения. Коэффициенты КрП и К„,о связаны с коэффициентами Кт и Kq простыми соотношениями.
Кг К,\-1 А'о К"'"з- (XIII 31
'-Jp '“•'J
Педтхтатком этих коэффициентов является введение в формулу для величин п н v в квадрате, чю не позволяет в полной мере учитывать знаки этих величин н создает в некоторых случаях определенные неудобства при их' использовании.
Характеристики гребиою вннга при реверсе в виде упиверсалытых коэффнни ентов д.тнп на рнс. XIII.1 и XIII 2
Наиболее паяные испытания гребных винтов при реверсе были проведены I lop литром ом и II Я Мииновнчсм Результаты таких испытании для серии трсх.юпасгнытт винтов с .4лМ(1 О Н приведены на рнс. XIII.3—XIII.6.
720
Рис. XIII 3 Кривые Кт = /(J) серии винтов с Ае/А9 Рнс. XIII 4. Кривые Kq = / (J) серии винтов с Л/г Ло -
»0,8 при реверсе. • .. _ — ^.8 при реверсе.
721
Рис XI1I.5. Кривые = ,г(7°)’серии винтов с Ае!А0~ Рис. XIII.6. Кривые Кт = f (JD) серин винтов с Яе/.4о = 0,8 при реверсе. = 0,8 при реверсе.
722
Поскольку при реверсе ВРШ частота вращения гребного винта изменяется в сравнительно узких пределах, результаты испытаний таких винтов могут быть предога плены в форме обычных коэффициентов Кт и Kq-
Процесс реверса судна, оборудованного ВФШ. принято разделять на следующие периоды: первый — от подачи команды О реверсировании до момента отключения двигателей; второй — от момента отключения двигателей до остановки гребных винтов, третий — от момента остановки гребных винтов до остановки судна; четвертый — от момента остановки судна до развития судком установившейся скорости противоположного направления. Анализ действия ВФШ в процессе реверса па ссниве рассмотрения треугольников скоростей элемента лопает показы вает, что гребной винт после изменения направления его вращения создает направленные навстречу набегающему потоку аксиальные вызванные скорости, значения которых соизмеримы со скоростью судна. В процессе торможения судна под дей-
Рис. XIII.7. Треугольник скоростей (я) и схема течения вблизи винта, работающего в режиме обратной струи (б)
стонем отрицательного упора винтов наступает момент, когда вызванные скорости, направленные навстречу набегающему потоку, превосходят абсолютные значения его скорости, в результате чего формируется струя, направленная навстречу потоку, и наступает так называемый режим обратной струи. Iрсуюльпик скоростей и схема течения при этом режиме, возникшем в третьем периоде реверса, показаны на рис. XIII.7.
Если для расчета гидродинамических характеристик гребного впита иа большинстве режимов реверса могут быть использованы с той или иной степенью прн Снижения обычные соотношения вихревой теории, то для режима обратной струи должна быть построена вихревая схема, позволяющая моделировать эту форму течения. Имеется ряд работ, посвященных разработке теории и метода расчета гидродинамических характеристик винта на этом режиме [4]. Приближенная вихревая теория и практические методы расчета гидродинамических характеристик винта при произвольном режиме работы ВФШ и ВРШ разработаны А. А. Русецким н Т. Ю. Пршцемихиной н детально изложены в работах [71, 72]. В частности, эти методы положены в основу схемы расчета крутящих моментов на лопастях ВРШ (см гл. X).
Более строгий метод определения характеристик винта в процессе реверса может быть построен на основе последовательного расчета формы вихревой систе-стемы, развивающейся в процессе реверса. Подобный подход используется в [51].
§51. РАСЧЕТ МАНЕВРЕННЫХ КАЧЕСТВ СУДНА ПРИ РЕВЕРСИРОВАНИИ
Движение судна в процессе реверса характеризуется системой уравнений вида
,л-^- Td-R. {XIII 4)
al
2л/-J- <?Т|. г <?. (XIн.5)
723
tue т масса судна с учетом присоединенной массы воды; Тр — тяга гребного винга; I — момент инерции вращающихся масс валопровод , <?К|, — крутящий мо-менг двнгаюля; Qip — момент iрепня н опорах валопровода; Q — момент, необходимый для вращении вала Данная система определяет движение одиовального судна. В случае нескольких гребных валов в правой части первого уравнения записывается величина -Те— сумма тяг всех гребных вннгов. Если характер изменения момента двигателя при реверсе для отдельных валов судна различен, вращение каждою вала описывается отдельным уравнением
При практическом решении уравнений значения сопротивления п характеристики винтов п двигателя принимают такими же, как при установившемся движении с теми же скоростью н частотой вращения. Влияние псстацнонарностн учитывается лишь введением присоединенной массы волы, и расчет массы судна ведут по формуле
т-(1 + У|||', (XIII 6)
где kn 0,05-5-0,15— коэффициент присоединенной массы. Значения упора н момента гребных винтов определяют на основании кривых действия винта при реверсе ft функции от поступи, которую вычисляют обычно по формуле
либо в функции от J I ./ Для определения тяги винта используют зависимость Те - Т (1 - /).
Однако взаимодействие гребных винтов с корпусом судна в режимах реверса значительно сложнее и недостаточно изучено. Применяя гипотезу квазнстацнонар-пости, предполагают, что коэффициенты взаимодействия при реверсе равны коэффициентам взаимодействия па установившихся режимах движения. При этом допускают, что коэффициент попутного потока онреде. яется лишь направлением движения судна и не завис»! от режима работы винга. Таким образом, при движении судна вперед ф принимаю! таким же, как при ус1аиовпвшемся переднем ходе, а при движении назад — как при установившемся заднем ходе. Коэффициент васасыва пня при положительном упоре впита полагают равным коэффициенту засасывания на переднем .ходу, при отрицательном упоре засасывание принимаю! равным нулю. Момент инерции вращающихся масс валопровода вычисляют как сумму моментов инерции отдельных вращающихся масс. Момент инерции гребного винта может быть вычислен по приближенной формуле
Р3 7 . I г \
- 0,3Zd11BX — [8D -±- - 2,4&111ах ) , (X III.«)
где bm>- максимальная nnipiii а лопает».
Систему уравнений (XIII I) и (XIII.5) решают методом численного интегрп ровання, который детально изложен в |1| Результаты вычисления параметров движения судна иллюстрируются графиком рнс. VIII 8.
Если пренебречь моментом инерции вращающихся масс и принять, что сопротивление судна пропорционально квадрату скорости, а гребные винты в первый период реверса создают дополнительное сопротивление Л/?, равное их сопротивлению при свободном вращении, а во втором развивают постоянный отрицательный упор, то уравнение (XII 1.4) можно упростить п решить задачу в конечном виде. Паду ценные в результат решения системы формулы для расчета длины » времени вы бега судна имеют вид:
(XIII 9)
724
т Т,
tn
к
arctg
_________t>0 /с_______
Г ^г(| 4 С :Vi)
(Xi II 10)
+
Здесь L,( длина корпусе судна; С u С! — коэфф>Н111’-’1|1ы, определяемые из соотношений С R aj;
\R Л'7 (P.'D)pn-(l - Ч~)~ .
,= 05 ' (Р D)-
I'o начальная скорость судна; Kr(l’,D)— коэффициент упора при поступи нулевого момента; т, — время развития двигателем полного реверсивного момента. Согласно рекомендациям И. Я Мнииовнча, упор вш га Т можно найти по приближенной формуле
Т 2л<21:|. Р. (XIII.II)
Рнс. XIII.Я. Параметра движения и работы двигателя судна при реверсе ВРШ в относительных величинах.
! - скорость движения; 2 выбег; 7 число оборотов 1 ребиого винта; -/ - упор гребного винта: 5 момент гребного винтя.
Рнс XIII.9. Характер изменения параметров системы судно—двигатель—ВРШ при реверсе.
Исходя из аналогичных допущений получают формулы для времени н длины свободного выбега судна, т. е пути, проходимого по инерции без реверсирования винтов 11уть и время, пройденные судном до того момента, когда его скорость станет равной О,О5т'о, будут равны:
~ 3 0 г г
О С/1
19.0
m
(С j- I ।) г'п
(XIII 12)
10 ~
Реверс судна, оборудованного ВРШ, принято подразделять на следующие периоды.
I Поворот лопастей гребного винта (лонастп поворачиваю!си из положения, соответствующего первоначальной скорости переднего или заднего хода, в положение, соответствующее движению судна в обратном направлении).
2. Торможение судна (скорость судна под действием отрицательного упоре, развиваемого винтом, уменьшается до нуля).
3. Развитие скорости судна (скорость в обратном направлении возрастает до установившегося значения)
Процесс реверса судна с ВРШ описывается уравнениями, аналогичными уравнениям (XIII.4) и (ХГП.5). При решении этих уравнений используют те же упрощающие допущения, касающиеся коэффициентов взанм действия винта с корпусом, а также учета влияния песгацконарностн Решение системы производят методом чи-
725
еденного интегрирования причем интервал интегрирования зависит от времени перекладки лопастей и размеров судна. Для судов водоизмещением более 500 т достаточной точности обычно удается достичь при интервале интегрирования 0.5— 1,0 с в первом периоде реверса и 1-3 с в последующих.
Типичная картина изменен ня параметров системы судно—двигатель- ВРШ в процессе реверса приведена па рис XIII9.
В настоящее время расчет ведется с помощью ЭВМ, что позволяет решать нра ктнчсски важную задачу об оптнмалыюхГзаконе^ перекладки. обеспечивающем мн нимальпый выбег судна пзаданпые’значсиия нагрузок^иа лопасти ВРШ.
Применительно к судам с ВРШ также разработаны приближенные форму iu для оценки характеристик реверса В частности, такие соотношения предложены Л Л. Арефьевым |1] и Г. Г Мартиросовым [53 J.
При выводе формул Арефьев принимал, чго тяга винтов равна пулю в первом периоде н постоянна во втором периоде реверса. Исходя из этих допущений и полагая квадратичную зависимость сопротивления от скорости хода (R == ст2), можно решить уравнения реверса. Полный выбег судна характеризуется формулой
m
1п ф In c’i
{XIII 13)
Здесь ц, — скорость судна в копие перекладки лопастей, равная
t'o
1 + ~~ v'oTll
где т„— время перекладки лопастей Тягу Тр = Т принимают по диаграммам кривых действия из условия использования полной мощности двигателя при и = ь0 и номинальном числе оборотов гребного вала. Для определения Т можно также использовать формулу
Т = 2я<?кр//>3,
(XIII.14)
где P.j шаг заднего хода винта. Однако в этом случае точность расчета заметно снижается.
Глава XIV
РАБОТА ГРЕБНОГО ВИНТА В УСЛОВИЯХ КАЧКИ
§ 52. ВЛИЯНИЕ УСЛОВИЙ ДВИЖЕНИЯ СУДНА НА ВОЛНЕНИИ НА РАБОТУ ГРЕБНОГО ВИНТА
При движении судна иа волнении гидродинамические характеристики гребного винта могут существенно измениться в силу следующих основных причин: увеличения средней нагрузки винта вследствие роста сопротивления движению п снижения скорости судна, а также изменения коэффициентов взаимодействия с корпусом;
изменения гармонического состава (спектра) поля скоростей набегающего потока под влиянием колебании винта п корпуса судна при качке, а также волнового движения воды;
периодического приближения впита к поверхности воды и оголения лопастей в процессе качки.
В результате повышения среднем нагрузки винта снижается его КПД, а качка судна вызывает периодические изменения во времени средних за оборот гидродинамических характеристик (рис XIV. I). Перераспределение мгновенной нагрузки io лопастям приводит к появлению дополнительных поперечных средних за 72ft
«борот периодическич сил и моментов, амплитуды которых могут быт одного пори дка со средними упором и вращающим моментом. Меняются гармонический состав н уровень нестационарных сил и давлений, передаваемых винтом на корпус судна и валопровод, а также интенсивность кавитационного шума. Колебании впита вб.1и<и поверхности воды с оголением лопастей'сопровождаются атмосферной кавитацией, аэрацией потока и брызгообразовапием. При этом существенно снижаются срсд| не упор н крутящий момент и возрастают размахи их колебаний за период качки (рнс. XIV.2). Это явление, носит название разгона винта
Рис. XIV.1. Колебания средних за оборот wiopa 7» (/)и поперечной силы Ft (t) прн гармонических колебаниях погружения Л (/) винта с P,D = 1,2; Z 4; AsJA0= = 0.55 в свободной воде [47]. а — на глубоком погружении (fim 5,0); б—иа малом погружении (й/п 0,44) с оголением лопастей [заштрихованные зоны h (/)].
При движении судна па нерегулярном волнении i пдролпнамическпе. характеристики впита становятся случайными процессами н частотном диапазоне колебаний относительного погружения впита. На режимах разгона винт действует как нелинейная динамическая система и основные колебания гидродинамических сил приобретают .характер случайного импульсного процесса (рис. X IV.3). Спектральный анализ результатов натурных и модельных испытаний свидетельствует о характерном росте интенсивности колебаний^ упора н момента в обтастп малых частот (рис. XIV.4).
Условия работы винта определяют следующие характеристики.
I. Коэффициенты нагрузки, вычисляемые по средним значениям (обозначаемым знаком «~») сопротивления, скорости и коэффициентов взаимодействия при дви женин судна па волнении (с индексом 1F):
по тяге
I R 4- Кдл -I- /<<«' |
по упору
^Г>1 (Г (* " ^/1 )
(XIV.1)
[(! - 7и )Z,, R т <^АА /?Л1Г
(XIV .2)
727
2 Колебания погружения оси вмнга h (/) согласно процессу вертикальных перемещений Zu при качке относительно волновой поверхности воды;
h-h+7.v (/ Л'„, Кр, 7р) (XIV 3)
Среднее погружение осп винта Л складывается на начального погружения h„, ординаты кормовой ходовой волны ZB. изменения оеадки кормой на ходу STK и ординаты собственном волновой системы вита 6ЛО [4]
Л — ft® h 2В Ь ХТК р 6/i0
(XIV 41
Рис. XIV.2, ^Средние значения Кта< A'qw и размахи ЛА’лг, &Kqw для винта при качке: а — Кт Л'- K?\v в условиях вертикальных колебаний изолированного винта с Z = 4; .4д/Л® = 0,55; P:D = 1 при Frn = п p'D - 5 и различных значениях hm [47] х — й„, = 0.80; J------h,„ — 0,56; О — = 0,32; Д — Л,„ 0.08;
------Кт без качк1£ при 6® = 0 44 Ггп = 5. ; б — относиюльные размахи AK/-U Ктл и ^Kq^t’Kot, определенны при испытаниях модели контейнеровоза (L — 175 м, 6 — 0,57; /г® 1,8; hm 1,27) на в треч| ом регулярном волнении
с относительной длиной волны 'K^l-L [95]
Здесь
6/t0 — —2,57? [ I +- — Л'оти ) - 1 X
XMAi) ’ ’схг( gh0''A^\J(XIV.5)
где 7| — функция Вссселя. Для одновитовых судов с обычной формой обводов
h„ л Tti— 1.14Л?, гплВГг^. (Х1\ .Ь)
Процесс вертикальных относительных перемещений винта определяется через кинематические характеристики качки:
где Mr. св дшна н ордината набегающих волн, ся, ф, О неремещенне при вертикальной качке н углы килевой и бортовой качек
Справочные данные о характеристиках качки приведены в т. 2.
728
3. Поле мгновенных скоростей и потока, набегающего на пинт за корпусом судна (н системе координат С):
_ «и» Л',
7(0. г. О,,, = t.|r Re V V С (Г,.)С-Н- (XIV 8)
™0 Л.
где р* | о>к | £2 — относительная кажущаяся частота качки. Систематический материал по коэффициентам Cmxw в настоящее время отсутствует. Разработап-
Рнс. XIV 3. Колебания крутящего момента Qw (/), частоты вращения и (I), погружения винта h (t), индикатора подачи топлива s (() и угол килевой качки ф (/) при движении судна на встречном нерегулярном 8 балльном волнении |Л0 = 1,9; L— = 138 м; Fr — 0,10; (fini)j 3= 0,53].
ные методы расчета позволяю! определить С,я.уц- только для потенциального обтекания 113, 74] Расчет дает результаты, лишь качественно согласующиеся с экспериментом, поскольку влияние вязкого следа на изменение скоростей в ди
ске винта при качке оказывается весьма существенным |32]. Как н при движении на тихой воде, источником практической информации о номинальном набегающем потоке остается модельный эксперимент: измерения поля скоростей за корпусом модели при движении с вынужденными коле баннямн на тихой воде (рис XIV .1) [32]. Коэффициеш “оо»гд-1 1 Фч </«)>
знание которого достаточно для расчетов ходкости судна на волнении, может
Рнс XIV 4 Безразмерные спектры погружения S(1 Sh w'ffA п упора Sf~~ — Sy. Т винта по модельным испытаниям пекачающегося впита в условиях набегающего нерегулярного волнения и различного погружения [Уб].
I S- П|>|< ('„,)! 3 —0.31: / 5-у. при
('m)l 3 = 0.73; 3 - 5-J. прИ(Лш)| з 0.91
быть определен также на обычных мореходных испытаниях саыох<Ш1ЫХ моделей. В зоне усиленной килевой качки распределение фи (г0) отличается повышенными значениями па внутренних радиусах (см. рис XIV.5). При этом, однако, осред-ненное по диску значение меняется мало. Аналогичный вывод относительно коэффициентов попутного потока К'п» 11 засасывания /„• получен из анализа само
729
ходных испытанiiii моделей на волнении при условии, что учитывается изменение кривых действия изолированного вннга вследствие- качки па малом ногружелпн |17]. В расчетах ходкое tn судил па волнении применяют поэтому средние значения W'ro 11 Ф W услозлн тихой воды при коэффициентах нагрузки, вычисленных no (XIV. I).
В ка честве первого приближения для расчета потя скоростей согласно (XIV 8) используется предположение о «проницаемости’ корпуса: изменение скорости потока Аоц- определяется как сумма ш чеАных скоростей перемещений нрп качке ин и частиц вачиового потока для гичек диска вннга
Ри- X1V.5. Коэффициенты ряда (XIV 8) прн вынужденных килевых колебаниях модели судна с L 4,88 м; О = 0,70; 0 = 0,20 м; й„= 0,85; а — средние знач пин C.JOU'Y н сооп-г при качке (/) и иа тихой воде (2); б коэффициенты C,,I|vt (т = I, 2, 3, 4; ^ = I).
Деду = ии (г0, 60, wK7) + цв (г0, Р„, <н|;/) =
- Reel [Cu ie/,>O' Cff/2e‘°» Иг/’1'4’’1] (XIV.9)
Коэффициенты Cn,v в (XIV 9) выражаются через амплитудные и фазовые частотные характеристики |47, 1081.
Учет влияния условий (XIV.3! (XIV 8) и (XIV 9) па гидродинамические характерно! икн винта проводят исходя нз реакции на единичные гармонические колебания (индекс Л относится к амплитудам)
Н Л 7’vsiii/>*00 fi hiR'. |XI\ lf)>
>- = ?+ ?.A cos p*0o;
X = й/ад.
(XIX . 11)
Зависимость коэффициентов гидродинамических сил от р*, h, йд, ). онре-дцдистся методами теоретического расчета и модельного эксперимента.
730
§ 53 ТЕОРЕТИЧЕСКИЕ И ЭКСПЕРИМЕНТАЛЬНЫЕ МЕТОДЫ РАСЧЕТА ДЕЙСТВИЯ ГРГ1.НОГО ВИНТА ПРИ КАЧКЕ
Расчетные теоретические методы для колеблющегося винта разработаны при общем предположении о глубоком погружении (минимальное погружение осн = в —Лд>2). Эю ограничивает возможность определения существенных для расчетов ходкости изменений упора и крутящего момента винта, которые происходят в условиях малого погружения и определяются экспериментально. Теория служит основным средством нахождения средних за оборот поперечных сил и моментов и всех составляющих мгновенной нестационарной нагрузки.
Гипотеза стационарности Метол эквивалентной поступи. По гипотезе стационарности предполагается, чн> гидродинамика винта при нестационарном обтекании лопастей такая же, как и при стационарной его работе в каждый момент времени с кинематическими параметрами, соответствующими мгновенному полю скоростей внешнего потока. Определяемые таким путем гидродинамические характеристики винта называются квазистационариымп. Могут быть применены любые методы расчета винта в однородном стационарном потоке, если вместо поступи Х,ц- — Х( ввести эквивалентную мгновенную поступь элемента лопасти
W = 'W. ОД
где Оу = Оо + ху. При качке согласно (XIV. II)
О cos₽ 0с)
sin Оу cosp'
(XIV. 12)
Наиболее простые расчетные формулы при использовании эквивалентного радиуса на гихой воде (с индексом «О») в виде
получены И. Я- Мнпновичем [4, 55] лопасти Ro н кривых действия винта
А то Кто
— А’оо । >
(XIV.I3)
сил и моментов опре-
где Х(। и Х(2 — поступи пулевого упора и нулевого момента соответственно. Коэффициенты основных дополнительных средних за оборот доляют по формулам
\KTw = К то
AA'qw - Kqo
|- Хдд- cosp+00 + лп
-,2
4/?п ' л" v ' 4/<;
'А У , М , , Л/1У
4- -7— Хдд- cos p‘0u | . 4/^ ЛН
cos 2р*0о
_ - cos 2р*0о
,.cnsp ос;
А/yr = Кто
т(2 мпр’Ое
(XIV. 14)
Согласно выражениям (XIV 14) вертикальные колебания впита приводят к среднему по времени увеличению Кт Кд и их колебаниям с удвоенной частотой качки (причем эти изменения имеют второй порядок малости по Х^у и для винта за корпусом практически не проявляются), а также дают поперечную нагрузку первого порядка. Колебания горизонтальной скорости внешнего потока приводят главным образом к колебаниям Кт н Kq с частотой качки и амплитудами первого порядка по Xq.v Эксперимент подтверждает эти результаты (см. рис. XIV.1), однако для поперечной нагрузки — лишь качественно, поскольку Гу и Му обусловлены окружной неоднородностью потока, влияние которой существенно связано с иестаниопарностью обтекания лопастей за оборот винта. Уточненные способы расчета действия винта при качке методом эквивалентной поступи приведены в
731
Полная гидродинамическая нагрузка при нестационарном движении впита мож<1 быть определена как сумма трех составляющих: квалнсташюиарнон. шири i онной н Iагрузкн, обусловленной влиянием нестационарного вихревого следа. Инерционная нагрузка имеет потенциальную природу н определяется расчетом в пред 1оложенн1 бесциркуляционного обтекания лопастей. Инерционные силы и моменты выражаю ся через присоединенные массы лопасти н винта в целом |47|.
Влияние >естаннонарного вихревого следа приближенно учитывается исходя из гнпо езы плоских сечений но теории нестационарно о движения профиля крыла [9, 85]. Поск льку, однако, это влияние существенно зависит от малого удлинения лопастей и сложной ф< рмы их вихревого следа, наиболее эффективно применение вихревой теории нестационарного движения винта.
Методы вихревой теории. Применительно к колеблющемуся винту общие положения поверочного расчета ви «та по вих >евой теории (см. § 3(>i допол 1яются следующими.
— нестацпонарность обтека шя каждой лопасти связана с периодическими колебаниями скорости потока как за оборот, так и за период качки;
— вихревая пелена за винтом деформируется согласно периодическому скосу набегающего потока под углом •/, (/) к оси винта.
Разработаны три основных метода
Теория малых колебав и и в и н i л t и и а НЕ/К дает воз можность получить функцию влияния нестационарное!!! L как поправку к квази стационарной индуктивной скорости и’о
u- tanReel|/.(5)e1’p,°"]- (XIV. 16)
Здесь
1.(8) xj/ofrSIX, (X)+!-2-|/._, (5)-/,(5>]|; 5 р* l.t.
где X',, /0, It, L । — модифицированные функции Ьссселя и Струве.
Дополнительный анализ потока движителя со струей, отклоненной на угол у_, приводит к функции в ни) ня деформации следа*
Ду- (-1- cos (»„— -у-sin (Q cosp‘(»„
(XIV. I7>
Функции /, /х вводятся в квазнстационарный расчет неоптнмального умеренно нагруженного винта (по схеме несущей линии) [47 ].
Расчет по линейной теории нестационарной несущей поверхности для винта при качке имеет следующие особенности [10]. Поскольку в уравнение (IV.57) для определения вихревой интенсивностн у£ ' лопасти входят скорости внешнего потока, вычисляемые по (XIV 8). то у*/’, te<;l и и определяют ! аналогичном виде, например:
*.> I» < <*+/₽*) | 6п+
= Reel V VJ у<М е (XIV 18)
Задаю отклонение вихревого следа сшласно (XIV. 15)
2
8yw х j.u cos р* 0в
Л1
(XIV 19)
732
Соответствующу о добавочную индуктивную скоросп Ли1, определяют по «методу
А»с(/. д. С,) 4л [ |^- Г{£(Р. % тГ )^ (/?< ’) 1
ГН ^1
-Гц'’(Р- °о- П (J',, <'Т(/Р. (XIV.20)
где ft, (pi ко рдциата начала деформи пш ne..ei ы (па 3.4 шири) ы лопасти от входящей кромки), л, ч —нормали к поверхности лопастн и впх юного следа.
расстояния между точками (Xj, r( т)5 на д-й лопасти и (х, р, т) па вихревой пелене с уче м (индекс с •) i боа учета ее деформации соответственно. При этом
/гс'’ = ((Я( ’) ~Г \"w I — 2 (S<os (°о + 0| I - Р cos (0о — т + 11 2.
(XIV .21)
Расчет Гц {. ведут последовательными приближениями (в первом приближении I’w'c = ГцС’). Гидродинамические силы и моменты определяют через у/7> и по форме ле Н Е. /Куковског в виде двойных рядов.
Результаты расчета Ру в сравнении с экспериментом приведены на рис. XIV.6.
Метод дает согласующиеся с эко ернментом розу- ьтаты для слабых н умеренных нагрузок (Су< 3). причем в последнем случае в формуле (XIV. 19) Л( заменяется на А/о.
Теория нелинейной и е сiа ц и о и а р i о й i е с у щ е й п о в е р х н о с т п харакюрна тем, чго при определении интенсивности вихрей формы вихревого следа, индуктивных скоро: ей п гидродинамических давлений впит не предполагается слабо!. гружен! ыы. Практический расчет для винта при качке выпешпяют чйслепно по методу дискретных вихрей [И, 51 |, Непрерывной распределение у* 1 по опорной поверхности лопастн. геометрия которой задана в общем виде (см $ 3), заменяют дискретным в виде сетки прямолинейных вихревых отрезков, каждый из которых имей пос ж ную по длите напряже) пость (рис.XIV 7). Нелене за лопастью образует сежа пт вихревых трезков, сошедших в след за время от /=0 до расчетного монета / I. При этом радиус вектор г 1 1 д 1Я у ловых точек определяют 11 условия, что вихревые элементы следа располагаются по траекториям движения жидких частиц с переносной скоростью п/-:
г’<> ? ') ( w (/ 1.2, .) (XIV.22)
Скачок давления на юпастях |/5|</) находят непосредственно через шпорал Ла> ранжа
|р] ’ (XIV.23)
В расчет |р]< * входит насру ка, связанная как с окружным, 1ак и с радиальным об еканием лопасти.
Р ультаты расчета для условий (XIV II) приведены на рис XIV 7 XIV.9. На рнс XIV.7 (оказано поле скорости и положение свободного концевою вихря в момент, кота вит i ри качке проходит среднее положение. Хлрактеию отклонение потока за в) ним. На | и XIV.8 приведено распределение перепада давлений по радиусу । а каждой из четырех лопастей винта для разных моментов времени
Метод дает согласующиеся с экспериментом результаты для больших нагрузок (см рис XIV 9)
733
Экспериментальные методы. Для получения экспериментальных данных, непосредственно используемых в практических расчетах действия винта при качке, принодят следующие модельные испытания в опытовом бассейне (31. 32, 47, 78, 94 -96, 109]
вынужденные колебания модели впита в свтйодиой воде на большом погружении с целью проверки и корректировки расчетных теоретических методов вынужденные вертикальные колебания модели винта в свободной воде па ма лом погружении с целью определения влияния атмосферной кавитации;
вынужденные колебания модели судна с измерением номинального поля .мгновенных скоростей за корпусом в диске винта и нестационарных гидродинамических сил;
Рис. XIV.6. Коэффициент амплитуды вертикальной силы гребного винта при р* = = 0,1 при различных Л. ду и ha по расчету н эксперименту: / —Лду = 0,47; It,, = = 1,5; II — Ллг = 0,18; ha = 0,57.
I — расчет по BtixpCBvn теории без учета скоса потока [10 ]. 2 — расчет по внхревоП теории с учетом скоса потока [10[; 3 — расчет ни формулам (XIV I I) при К» — 0.6: О — экспериментальные данные 117 I.
Рис X1 V.7. Вид расчетного вихревого потока винта с Z = 4; Л pj'A0 — 0,55; P,'D — = 1,2 но методу дискретных вихрей.
испытания самоходной свободной модели судна либо в жесткой запряжке на регулярном волнении для определения средних значений teyw, /,у и г|/лг н учета влияния экранирующего эффекта реакции корпуса па атмосферную кавитацию;
испытания моделей винтов на упругом валу методом свободных колебаний для определения присоединенных масс;
Проводят н другие виды испытаний в условиях регулярной и нерегулярной качек, в основном исследовательского характера [109].
Гидродинамические силы и моменты намеряют с помощью динамометрической аппаратуры. Дополнительно к общим условиям моделирования {см. § 10) учитывают условия подобия no Xi, р* телу атмосферной кавитации впита y.h и числу Фру да по погружению Frh. В предположении, что при атмосферной кавитации лопастей давление в воздушных кавернах равно атмосферному, имеем
= gh (n lfD)"2 2Ft2; Frft = пГ) (йЛГ1/2. (Х1\ .24)
Подобие по критериям Эйлера и Фруда соблюдается, таким образом, совместно Для учета эффектов капиллярности воды обеспечивается за критически А режим по числу Вебера
We anlpn2^] *>310 6
734
Исиышння проводят при различных значениях ft0, fij. р*, J. хл. причем особое внимание уделяют беспеченню стабильности поддержания постоянных значении частот £? и м эй время каждого режима. Регистрируют процессы измерения средних зи оборот упора, момента и поперечных cil.l [69 J.
Наиболее существенные резулыаты испытаний ohiochich к условиям малого погружения (Лп1 < I) Па средних кривых действия винта имеются три характерные зоны (см рис. XIV.2):
/ — оголение лопастей при качке слабо влияет на А'дг и Kqw, а поперечная нагрузка остается такой же. как в условиях большого погружения; прекоса воздуха не происходит либо наблюдается частичная аэрация потока; при оголении лопастей наблюдается струнное обтекание впита бет брызг;
II — периодический захват винтом воздуха вызывает развитую атмосферную кавитацию лопастей и полную аэрацию потока, в условиях которых Krw и Kqw резко снижаются от максимальных до минимальных .значений; уменьшается и ам-
Piic. XIV.8. Резулыаты расчета перепада давлений по лопастям ('—I 2, 3, 4) в различные моменты за период качки при = 0,2; Хду ~ 0 47; р* — 0,1.
I - ₽*Оо - о. II — р*о, л б
Рис. XIV 9 Сопоставление результатов эксперимента н расчета по методу дискрет пых вихрей для коэффициента амплитуды вертикальной силы винта с P D- 12;
/®г = 0,1; р* = 0,05-г- 0,1; Z ~ 1; ЛЕ/Д0 = 0,35.
/ — экспериы<-»тплы|ые данные: 2 — расчет с учетом скос* вихревиП пелены; 3 расчет без учета скоса ввхревоП пелены.
плитуда поперечной силы, но возрастают значительно амплитуды колебаний Kpw и Kqw",
111 — зона насыщения струи воздухом; возможен некоторый рост A'nr u Kqvr в районе швартовного режима.
Наступление режима II характеризуется соответствующим значением коэффициента нагрузки K'DTV/ = 1/2 (см- Рис- XIV 2). Срывы К7к. и KqV
происходят практически при одной и той же нагрузке, так что К*пг^ служит основной мерой активности воздействия атмосферной кавитации винта на его средние гидродинамические характеристики. Общая тенденция зависимое)и K'D{V (и уровня максимального снижения ДКУш н AA'yw) от режима работы винта при качке достаточно определенно связана с числом атмосферной кавитации но минимальному погружению
х,„ (л ГЙГ2 = 2Fr^ - (XIV.25)
т
Из геометрических параметров винта наибольшее влияние на A'/, и оказывает P D. На рис XIV.J0 приведены зависимости KpTw от х,„ при различных значениях P/D [47 J
735
Отметим, что вил средних кривых действия винта при качке на малом погружении такой же. как у частично погруженного впита па тихой воде (см. рис. XIV.2, псиктирн.ти линия). В последнем случае, однако, отклонение Кт 11 от значений на глубоком пот ру женин более существенно особенно в зоне I вследствие постоянства прососа воздуха, снижения активной площади диска и больших потерь на волнообразование. Поэтому к оценке изменения Лщ- и Kqw ис-
ходя из результатов для частично погруженных винтов следует относиться с осторожностью [65 961.
Техника и результаты измерений скоростей номинального потока в диске винта при вынужденных колебаниях модели судна иа режимах качки описаны в [32] (см. § 52).
Испытания свободных самоходных моделей на вол нении проводят по стандартной методике. Особенности обработки результатов таких испытаний для определения IVy, / и Tj/j описаны в [30. 47, 65].
§54. ПРАКТИЧЕСКИЙ МЕТОД РАСЧЕТА ДЕЙСТВИЯ
ГРЕБНОГО ВИНТА ПРИ КАЧКЕ
Метод предназначен для определения средних за оборот впита значений Л'тд*-, Kqw и которые необходимы при проведении расчетов ходкости судна па волнении. Он основан на представлении гидродинамических сил и моментов в функции от кинематических параметров движения винта при качке.
Основные этапы расчете следующие
1. Считают, что в условиях регулярного волнения определенной интенсивности и направления (высота 2£д, дл! иа Kw и угол встречи волн заданы) судно движется с постоянными средними значениями скорости t>w ji частоты вращения винта «п- Характеристики качки судна и, следовательно, йд и в (XIV 10)
736
и {XIV il) известии. Полагают, что амплитуда?,., определена в центре диска винта н выполняются условия
~ ~ б„,(|—~
JK' Л?-Х ~ ---й—т:-• Ар >,2—О (XIV.26)
if17
Режим работы винта по средней нагрузке характеризуется коэффициентом
Kdiw = Кета (-hi) (XIV.27)
Рис XIV. 11. Графики для определения С^(а) и С£ (б)
Формулы для расчета Krw, Kqw и Гун следующие:
— ЛЛ'гц-----[Су-Лд + |l[]P Лдд-jsill Ч? COSOK^ "t
+ *-/ (<4У + ,2Az) cos 2ЧЛ
XqU'z = A'qo — A^qit — [ H’ y P14₽ '.4X ] sil' “i? +
+ С<?ХЛЛЛ cwi + C</' (>Ch + ’ az) cos2oK/;
Л ir = c'&aY cos + l‘-22P*>-.4 у Sin <oKr (XIV.28)
Входящие в эти формулы коэффициенты К^о и К™ находят по кривым действия вннга на тихой воде (при 7 7ц-) для условий глубокого погружения (см.
гл III) Для определения коэффициентов С используют расчетные п экспериментальные методы (см. § 53). Экспериментальные данные получены на систематических модельных испытаниях гребных винтов серин В4, проведенных в 1965 г. в опытовом бассейне ЛКИ [47]. Средние изменения коэффициентов упора ЛКущ н вращающего момента &Kqw вводят в расчет только на режимах атмосферной кавитации и вычисляют упрощенно но данным эксперимента (прн К1)ТК, < Л ;?Г1Г):
<?олто; ДЛи1Г ^Лоо» (XIV 29)
24 П р Я Н неЛткунского, т. 1
737
где
Ча
при
при
(XIV 2»а)
Коэффициенты Ср Cq, определяемые с помощью (рафика рис. XIV II, идут в расчет непосредственно при режиме // (см. рнс. XIV.2), а при режиме I учитц вается нелинейность по амплитуде h ।
при К1}Тц, «С К п7 u ;
при KDr« > *оГ1г,
(XIV.30)
где. йи = h* (7Г. /’//)> 2>0.
Рнс. XIV.13 График для определения . при '% 2 п ----- »Р« л,„ < 2.П
Значения й4 находят по графику рис, XIV. 12. Для определения Cj^. служит гра фпк, приведенный на рис XIV. 13. Остальные коэффициенты, входящие в (XIV 28) рассчп ынают по следующим формулам.
^70^(1 > = ^00^(2 J
с/ 0 7Х„; С^ о,7л,э: (XIV.3I)
Р„ = -(2.5 -0,8-£-)f
И - -(0.22 А _ 0,05)/;
Ин (о.8 0.26-^-^-^-, (Х1\ 32)
где
738
При использовании одного из выражений (XIV.28) для определения Kqw в уравнении движения системы впит—пал—двигатель для расче>а колебания частоты вращения винта добавляется слагаемое:
(О Ь f*.|4—’ (XIV 33)
где
Vi = \п/л; Сц KqJ.J//2;
("13 - м‘тг) (тУ'
2. Изменение гидродинамических сил и моментов винта в условиях нерегулярной качки описывают вероятностными закономерностями 47]. Применяют обще принятый в теории корабля приближенный подход: поток и винт рассматривают как единую механическую систему, обладающую передаточными свойствами по отношению к входным [й (/), I'(Л1 и выходным I/•'(/). .4-1 (/) и др. | случайным процессам. Основным входным процессом считают нерегу 1Ярные колебания погружения гребного винта h (/) |см формулы (X1V.3)—(XIV 7 | которые представляют собой стационарный нормальный случайный процесс Его характеристики- среднее значение 8, дисперсия ojj, средняя частота <оЛ, средняя частота огибающей со , спектр Sj, (со) и его средняя частота ет1. Эти характеристики определяют при расчете нерегулярной качки либо экспериментально. Показаге. ем ширины спектра (со) служит относительная частота минимального погружения
Все перечисленные характеристики колебаний погружения винта, а также би и пц считаются заданными в зависимости от условий плавания высоты воли 3 %-nofl обеспеченности h „ степени развитости волнения qH и курсового угла встречи воли
Коэффициент средней нагрузки винта Апу-ц- определяется по формулам (XIV 2), (XIV.27) и при заданных условиях плавания имеет постоянное значение. Все зависящие от Л (() характеристики винта рассматривают как случайные процессы
Расчетная схема действия пинта предстаплена на рис. XIV. 14. Исходный процесс hit) имеет огибающую hln (/), которую, согласно формуле (XIV 25), линейно отслеживают флуктуации щраметра и,„ (/). В со тветствии с зависимостью, изображенной на рис. XIV 10 этим флуктуациям отвечают случайные колебания ^Di\v^ Зона нагрузок, при которых впит hiiichciibiio подсасывает воздух, пульсирует, сужаясь и расширяясь вместе с ее границей П°ка траектория
процесса K'DTW (/) не досыпает постоянного уровня KDfw, Реж,1М впита не «захватывается» зоной развитой атмосферной кавитации. Согласно (X IV 29) и (XIV.30) колебания Кт (О и Kqw (!) представляют собой «непрерывные» случайные процессы ЛАд, q IАй (<)1 на частотах процесса Дй (() В отдельные случайные моменты времени зона критической нагрузки захватывает режим работы винта и происходят резкие срывы импульсы средних значений ДА'}- ц [йт (/)] на частотах процесса йт (г) Колебания «непрерывных» и импульсы «средних» сил имеют спектры на различных частотных диапазонах и рассматриваются поэтому как одновременно протекающие независимые случайные процессы В соответствии с этой схемой
^TW, QW (О ~ ^Г0, Q0 I *^7. Q (01— ^7. y[^m(0]. (XIV .34)
Дисперсия колебаний al — н их спектры S-дксперснй и спектров составляющих:
— равны соответственно
су мме
Т. Q
S (р‘) =S". -(/)+$* _(₽•)•
Г, (J ' Т. Q ' Т, Q
(XIV.35)
24*
739
При расчете «непрерывных* колебаний с учетом выражения (XIV.30) используют статистическую линеаризацию и преобразование спектра | ток , в результате
(XIV 36)
Где оЛ — С? q находят по графикам рис. XIV. И и интеграл вероятности erf (х) х [I - exp (-О.бЗх*)]1'2. (XIV 37)
Рис. XIV.I4. Расчетная схема разгона винта при качке.
Импульсный процесс разгона винта! характеризует случайная функция
1 (Г) = 1 (KDTW — KDTVr) —
I при K-dtW (0 >^DT'v\
0 при (t) < KDrw.
единичная
(XIV.38)
В соответствии с выражением (XIV.38) стандарты колебаний
q- ?с (хт)|/з Кто, <?о» (XIV.39)
где д0 определяется по (XIV.29) при «значительном» значении (*т)|/3. равном
(хт)1/3 g(A-2ah)(nV0)’2-
(XIV.40)
740
Приближенное выражение для непрерывных частей спектров St. — следующее:
/ .) (**Г. <?)* 4 (<»*)* Г _ I _
T-Qp I 4-/П1 + т, [ (р*)-+ 4 (ю,)4
2п1| _______Зль________1
+ (р*)2 + 16 («.)• 4 (Р)2 4 36 (w4 р I ‘
(XIV 41)
Здесь
р* — р*/'шд; — “д/й;
"'1 = (’ ~Т7“) : «24=(>—+-ЙГ^в)2’
причем
Kdtw~ kdtw
х“ “ <™h
(XIV.42)
где (к)» х 1^^) >
— тй-(4-“55)и тг>№
Для коэффициента вертикальной силы согласно (XIV'.28) входным процессом
d/i _ с
служит —— Формулы для расчета стандарта и спектра следующие:
ару. р °h“A | (CFy)2 + t‘W ]'/2=
(XIV.43)
Для рассмотренных процессов нерегулярных колебании Kqw (/). Krw (О 11 р yw (О значения средних амплитуд равны 1,25оу , «значительных» ампли-
туд 2 0 ay q п амплитуды с обеспеченностью 3 % 2,64 оу_ q
Общей характеристикой режима работы винта при нерегулярной качке служит вероятность атмосферной кавитации
5»к=ехр-------(XIV.44)
Вероятность имеет смысл среднего суммарного относительного времени действия винта в условиях разгона, причем
J?K = vi„. (XIV.45)
где V— среднее число импульсов в единицу времени; ти — средняя длительность импульсов, равная
Дополнительными характеристиками служат: вероятность оголения лопастей
О — ехР 2 о, ) ] I'
(XIV.47)
741
среднее число оголений лопастей за время fB
Л’ы = со.(, ^ог! (X1V.4S)
среднее относительное время пребывания лопастей над водой
1 — sign (Л — 1) erf
(XIV 49)
В определенных условиях плавания J7’or> так как не каждый выход лопастей из воды сопровождается интенсивным подсосом воздуха и падением эффективности винта Вследствие разгона винта при качке расчетные спектры упора и крутящего момента имеют две характерные области: в районе частоты Ыд и вблизи нулевой частоты Это вполне согласуется с экспериментальными результа|амп (69] (см рис. XIV.4).
§ 55. РАСЧЕТ ХОДОВЫХ ХАРАКТЕРИСТИК СУДНА НА ВОЛНЕНИИ
В качестве показателей ходкости судна иа волнении принимают: ё0 — наибольшую достижимую среднюю скорость судна при естественном изменении режима движения; о — предельно допустимую среднюю скорость судна при намеренном изменении режима движения; Ре — используемую мощность силовой установки; о, — срсдиеэксплуатационную скорость судна на волнении; Kdtw — коэффи-
С реднеэксплуатаци
Рис. XIV 15. Схема общего расчета хо
742
циеит нагрузки, учитывающий среднее дополнительное сопротивление судна в условиях ветра и волнения моря; Л>)о среднее снижение пропульсивного коэффициента судна; n0 н (Р D)u — средние значения частоты вращения винта и шагового отношения ВРШ, соответствующие скорости бг; п и Р. D — средине значения частоты вращения винта и шагового отношения ВРШ, соответствующие скорости б; Доп1 н ЛПщ — наибольшие забросы колебаний скорости судна и частоты вращения двигателя соответственно; Л'„г и Л’п — средние числа случаев оголения винта и срабатывания затщпы двигателя по частоте вращения за время 100 периодов качки.
Способы учета влияния ветра и морского волнения на характеристики ходкости судна предложены во многих работах [22, 30, 41, 47—50, 94, 109 и др.[. Все параметры, кроме срсдисэксплуатационнон скорости, определяют применительно к движению судна в стационарных условиях ветра и нерегулярного морского волнения различных степеней развитости, интенсивности к направления. Характеристики ветра и волнения моря задают по шкале Главного управления гидрометеослужбы СССР. Используют также типовые расчетные спектры нерегулярного волнения: спектр Л. И Вознесенского и Ю. А. Нецвсгаева и спектр, рекомендуемый 12-й МКОБ в форме, содержащей коэффициент qB развитости волнения (см. §21 первого раздела). В последнем случае средний период fR и высота волн 3 %-ной обеспеченности связаны соотношением
*1 = <10пУ1) Vs%- (XIV.50)
Основными параметрами расчетных условий погоды для конкретного шторма служат , qK и курсовой угол ветра ц волн 0В. Посадка судна характеризуется осадками — средней Т, носом Тр и кормой Тд — при заданном водоизмещении.
Схема общего расчета ходовых характеристик судна на волнении приведена на рис. XIV 15 Основные положения методики расчета следующие [50]. Вели-
довых характеристик судна на волнении
743
чина среднего сопротивления движению судна на волнении А’м- складывается из сопротивления RB на тихой воде и дополнительного сопротивления А/?ц- как суммы среднего сопротивления вследовие воздействия волнения моря и качки судна Raw (см. § 19 21 второго раздела) и ветрового coiipolивлеиня Raa (см § И второго раздела). Соответствующие значения А'отч' определяют согласно формуле (X 1V.2) при lFrn-— U7r0 и
Наибольшая средняя скорость судна на волнении ё0 и соответствующие значения частоты вращения й(1 находят путем решения системы уравнений статики пропульсивного комплекса;
ч IP (1 - м ) - h- (7с); (X1 V.5I)
*Qlt PnO^ - ,|> :г,1п/^Р(ЛвК
«o=^rtnp
(XIV.52)
где Pg1', n|lp— предельно допускаемые значения мощности силовой установки и частоты вращения винта соответственно. Для определения Krw и Kqw используют выражения (XIV.28) и (XIV.33) применительно к условиям регулярного волнения и выражения (XIV.34) — нерегулярного волнения. Следовательно, определяя статические ходовые характер нети к и судна для условий нерегулярного волнения, достаточно в уравнениях (XIV 51) и (XIV.52) использовать значения ЛрС, /. «г, Iq па тихой воде при J = ./ц Изменения действия впита при нерегулярном волнении учитывают только при расчете динамических ходовых характеристик нерегулярных колебании скорости судна и частоты вращения винта, а также дополнительных изменений их средних значений. При этом имеются в виду как пульсации упора и момента, вызванные колебаниями скоростей и ускорений набегающего потока (на частотах качки), так и разгон винта В специальных случаях (например для СПК) система уравнений (XIV.51) и (XIV.52) дополняется уравие-пепиеч для определения изменения посадки судна, содержащим Fyw-
Решение уравнении (XIV.51) и (XIV.52) производят численными методами. Для судов с ВФШ первоначально задают ряд значений пв. Затем при Kqw = = Kqq решают уравнение (XIV.52) относительно 7^-, рассчитывают значения
и решают уравнение (XIV.51) относительно р0 Для судов с ВРШ расчет проводят при постоянном значении п0 = л,1р Задают ряд значений й0, при известных Jw по уравнению (XIV.52) вычисляют значения (PD)B, затем рассчитывают значения К'1^ и но уравнению (XIV.51) находят п0.
Дополнительно в каждом из расчетов определяют изменение пропульсивного коэффициента
~ I 'г 1 -t
Л,’« “ 2л ( q I - U7
[Kv' К"
лто 7 лто 7
„W J4rU л-н
(XIV.53)
где /(£ A, Ju/D находят по значениям е() n„, (/’ L>) а К"о, — по номинальным значениям t>,|. (Р Р)ц. Для судов с ВФШ (P- D)o (PiD\„. Колебания скорости А:> (?) и частоты вращения Vt (?) определяют при решении следующих уравнений динамики пропульсивного комплекса (в относительных приращениях)
rcjLS£L = (>-'u )-' ATw- А«;
(XIV 54)
(X1V.55)
744
В этих рсда ча
уравнениях Тг и Гд — постоянные времени судна и системы винт—пе-
двнгатель, равные
_ £’«£>< . т 2л/хй0
' с ~ ~’ л я ’ gRw V.to
(XIX 56)
где D,. — сила тяжести судна; 1Х — момент инерции вращающихся масс системы винт —передача—двигатель.
Для крупных морских судов переходные процессы, происходящие и системе винт—передача—двигатель, не имеют обратного влияния иа изменение скорости судна вследствие того, что Тг, на 1—2 порядка больше 7’д. Поэтому уравнения (XIV.54) и (XIV.55) можно рассматривать раздельно. Нет необходимости и в сов местном решен пи (XIV.54) и (XIV.55) с уравнениями дополнительных движений судна на волнах (качки, рыскания). Характеристики качки и относительных перемещений корпуса на волнении рассчитывают предварительно в зависимости от S
как от параметра.
Определяя расчетным путем характеристики ходкости судна на волнении, не прибегают к полному анализу действия системы регулирования. Предполагают, что она работает устойчиво и не имеет резонанса, автоколебаний или других режимов с динамическим усилением в рабочем диапазоне параметров ходкости. Учитывают только два общих свойства регуляторов частотьнвращения: статизы и запаздывание регулирующего воздействия. При этом относительное изменение момента двигателя связано с Ап упрощенным соотношением:
AQn-------Дч 1 (/ тэ), (XIV.57)
где — коэффициент неравномерности регулятора; т, — общее время запаздыва пня но регуляторному воздействию.
Колебания упора ATtr н крутящего момента Л(?ц- пинга при качке определяют через значения н Kqw по формулам (XIV.28) и (XIV.34). Колебания сопротивления \R иа регулярном волнении описываются периодической функцией с частотой ык и амплитудой Ядц-д, линейно зависящей от амплитуды волны [ем. формулу (V.9) второго раздела).
В результате решения уравнений (XIV.54) и (XIV.55) наибольшие размахи колебаний скорости Ао,„ и частоты вращения Ллп1 определяется в виде
- Ai’mi | Ацц)»; Аяш Длпц 4- Ar,m2< (XIV.58)
где \пч11, Ллт, — наибольшие размахи колебаний скорости н частоты вращения на режимах «непрерывных» колебании гидродинамических сил и моментов и Дет2, Anm2 — то же па режимах разгона винта, рассчитываемые по формулам
Avm> = ₽. ~ Г | |2---] /S; (XIv.59)
«и Л I | + (_(|,ктс)-
[,-„р(-
Ал™, = ЛиАп (l I (—у) 1«Т + 2.Г + (XIV.GJ)
Ап „,» = Zi0 р у 11 СХР ( Ро'Хв)]- (XIV.62)
СД "Г 2
где Я.41Г.4 (то) — сопротивление, определяемое но выражению (V 9) второго раздела. у0, /.в, —величины, вычисляемые по формулам (XIV 29а), (XIV 42) и
(XIV 44); Sj (ш) спектр волнения;
_^JL; р,=^£д±Х; CX1V.63)
Тс cj* 1 Т д
1 fh
*'« = CQ -ГгГ Л<?0
________JW__________
1,4 ----0,9Л + 1,8йд
(XIV 64)
745
Сд— коэффициент саморегулирования двигателя (Сд = 0 для дизеля, Ся — 1 для паровой трубимы).
Разгон двигателя носит характер резких забросов частоты вращения во время резких сбросов момента винта, причем вследствие относительно малой инерции двигателя эти забросы кратковременны и частота вращения п (/) успевает восстановить первоначальное значение Пд до действия очередного импульса. Использование формулы (XIV.57) дает возможность приближенно учесть влияние всережимного регулирования Средства для более полного анализа указаны в (8, 77].
Согласно схеме общего расчета (см. рис. XIV. 15) иа следующем этапе определяют допускаемую скорость судна. Основные положения расчёта допускаемой скорости судна в опасных условиях штормового плавания подробно изложены в [47— 50. 109].
Предельно допускаемую среднюю частоту вращения типа по условиям его разгона прн качке рассчитывают по формуле
Я = па\ I + (l -е‘₽в/Х«) [1п (1,14 104щ,Х1,А-)Г'21 \ (XIV.65) I Сд -t- z )
где п3 — уровень настройки системы защиты двигателя по частоте вращения. При п^>пи допускаемые значения частоты вращения и скорости судна равны соответственно fl0 и б0, если же л < Ло, то допускаемой яв ляется «, а соответствующее ей значение скорости судна определяют по формуле (X1V.51). С учетом дополнительной потерн скорости судна при разгоне винта выражение для и имеет вид
(XIV. 66)
Рис XIV. 16 Результаты расчета снижения пропульсивного коэффициента т)д> прн движении судна на нерегулярном волнении.
Допускаемая скорость судна в условиях встречного волнения при интенсивном струйио-брызювом залп ваши! палубы определяют по методике, изложенной в (49 ]. Для судов с палубным грузом (контейнеровозов и др ) используют методику оценки опасных условий воздействия давления потока воды па палубный груз, разработанную Д. В Кондриков’ым [41 I
В качестве среднеэксплуатанионных характеристик ходкости судов на волнении рассматривают сопротивление движению судна 7?э, скорость v3 и снижение пропульсивного коэффициента At]Dj- Эти характеристики определяют как средние за заданный срок эксплуатации (за время рейса, за сезон или за год) с учетом долговременной статистики штормов различной силы, направления и степени развитости. Алгоритм расчета всех этих показателей одинаков Например, средиеэксплу-атационную скорость находят по формуле
я Чв niax (^з%)швх
= j'Фв j | £’ 1/:3%- ^в- Рв) (Л3%)(^'3%) (₽в ,ft3%)rfA3%.
° 7 в min °
(XIV.67)
где v — средняя скорость судна для заданных условий отдельных стационарных ветро-волновых режимов [см. формулу (XIV.66)]; S' (Лд^) вероятность встречи судном стационарного шторма определенной интенсивности; S — условная
746
вероятность встречи судном штормов с различной степенью развитости волнения;
— условная вероятность встречи судном таких штормов на направлениях, определяемых углом 0П. Принято, что подчиняется логарифмически
нормальному закону с параметрами, указанными в [41].
Расчет средних характеристик для определенного рейса н заданной загрузки судна производят по результатам расчетов для различных районов океана, на пример:
т
va = V Vjl! JL, (XIV.68I
1=4
где т число климатических районов, проходимых судном в рейсе; вэ, — сред-пеэксплуатационная скорость для каждого района; s, — расстояние, проходимое судном в рейсе в каждом районе; х— общая длина нуги в репсе.
Среднегодовые характеристики рассчитывают через среднерейсовые значения, определяемые для вариантов загрузки судов с грузом и в балласте, например:
ч>
с. = *б«э. б + (I — М vo. г- 1 XIV.69)
где fe(j — коэффициент балластных переходов.
Таблица XIV. 1 Расчетные значения потери скорости на волнении для судна с 6 0,6. V = 21 400 м8
р , ° ’ в' Ограничение h-io/ , м л /0
3 б 7 9 11
Вариант 1, Дт>э = 1 уз
180 Л 0.4 2.4 7.8 13,0 16.0
135 А+Б 0.2 2,0 5,4 9.2 12,4
90 Л — 0.6 1,4 4.8 8,8
45 В — 1.4 3,6 5.6 7.6
0 В — 1.6 4,2 6,6 8,1
Вариант 2, Лсэ •= 2 уз
180 Б-|-Г 0,8 3,0 6.9 12,6 15,9
135 Б+Г 0,8 3,0 5,4 8,9 124
90 Л 0.5 1.8 3,2 4 8 7.0
45 В 0,6 1.4 2.8 2.2 5,6
0 Б-!-В 0.6 1.6 3,3 4,9 2.6
П р п м е ч а н и е. Вид ограничений скорости: А — по условиям заливания;
Ь — по разгону влита н двигателя, В — по бортовой качке; Г — п> слемннгу.
Для примера на рнс. XIV. 16 и в табл. XIV 1 приведены некоторые результаты расчетов для судов типа «Скульптор Коненков» Из рисунка видно, что интенсивноегь и направление волнения существенно влияет на пропульсивный коэффициент, потеря которого на встречном волнении более 6 баллов превышает 8 %. Данные о потере скорости судна приведены в табл. XIV. 1 для двух вариантов расчета судно с полным грузом с контейнерами на верхней палубе (вариант 1); судно в балласте (вариант 2) В таблице отмечены причины дополнительного снижения скорости
747
Г лава XV
НАТУРНЫЕ ПРОПУЛЬСИВНЫЕ ИСПЫТАНИЯ СУДОВ
j 56. СКОРОСТНЫЕ ИСПЫТАНИЯ
Каждое построенное или капитально отремонтированное судно проходит натурные скоростные испытания. В результате этих испытании получают сведения > максимально достижимой скорости судна, проверяют и уточняют в случае необходимости методику расчета ходовых качеств, основанную т а экспериментальных I теоретических исследованиях, выявляют надобность корректировки геометрии ребиых вннтои.
При испытаниях транспортных судов особое значение придается достижению Мной из главных характеристик построенного судна — проектной скорости, при-пмасмой за основу при расчетах дальности плавания, экс.плуатаннонно-экономп-(ескнх расчетах, связанных с перевозкой грузов, пассажиров и производством |ромысловых работ.
Для траулеров, буксиров, ледоколов проводят при различной частоте враще-1ия гребных винтов тяговые динамометрические испытания с измерением тяги на аке судна с возом. Скоростные испытания по полной программе, как правило, прокутят для головных судов серий, серийные же суда испытывают по сокращенным :рограммам.
В результате проведения скоростных испытаний получают зависимость скорости ода от частоты вращения гребных винтов и потребляемой мощности главных дви-ателей, значения максимально достижимой и спецификационных скоростей хода, ависимости упора гребных винтов от частоты вращения винтовые характери-тики двигателя.
Перед испытаниями корпус и выступающие части судна приводят в специфнка-ионное состояние. Судно вводят в док и производят очистку и окраску его подвод ого корпуса. При необходимости устраняют повреждения выступающих частей. Особые требования предъявляются к соблюдению проектных размеров и состоянию оиастей движителей. Категорически не допускается судно к испытаниям, если на ромка.х лопастей имеются задиры, вмятины. Шаг и диаметр гребных винтов долиты соответствовать паспортным данным. Поверхности лопастей, ступицы должны ыть очищены от обрастания. Качество поверхности подводной части судна сле-ует проверять по профилограммам, снятым в нескольких местах (у транспортных удов профилограммы снимают на 20 участках по каждому борту и 10 участках о днищу). После выхода судна из дока уже на плаву проверяют центровку вало-ровода, производят отладку работы механической установки.
Перед испытаниями определяют фактическую нагрузку судна (по замеренным .'адкам в соответствии с масштабом Бонжаиа и по сводке переменных грузов — шлива, воды и т д.) Знание фактической нагрузки необходимо, нискольку расчег-ые скорости оценивают при определенном водоизмещении.
Скорость судна на ходовых испытаниях может быть измерена либо относительно >ды (с помощью лага, вертушки, трубки Пито), либо отиоситшьно суши (на мерной шии «ли путем использования радионавигационных систем ближнего и дальнего чтствия) Широкое распространение на скоростных испытаниях получил метод тмеренпя скорости ио времени пробега между створами мерной линии (МЛ), пред-авляющен собой защищенный от господствующих ветров прибрежный участок моря достаточной глубиной и без сильных течений (должно отсутствовать течение под •лом более 20° к направлению пробегов) Береговые створные знаки, ограничивайте измерительный участок, представляют собой решетчатые шиты, окрашенные черно-белый цвет. Схема мерной линии приведена иа рис. XV 1
Для исключения влияния дна на скорость глубина моря на МЛ должна быть менее наибольшего значения, определенного по одному из двух соотношений
//>ЗИЙГ; //>2.75-^-, (XVI)
и Т—наибольшая осадка; В ширина судна; v наибольшая возможная орость судна.
В табл XV' I приведены минимальные значения глубины воды при которой отсутствует влияние мелководья Длина и оборудование МЛ должны обеспечивать точность измерения скорости, а ее расположение — возможность разгона до выхода на мерный участок при пробеге в прямом и обратном направлениях В соответствии с действующими нормами для морских транспортных судов точное1Ь измерения и отсчетов при проведении испытаний должна быть: при определении скорости ±0,5%, времени прохождения мерного участка 0,2 с, числа оборотов в минуту (частоты вращения) ±0,2 %. момента иа гребном валу в пределах ±3 % от момента
при номинальной мощности, расхода топлива ±0,5 %, скорости относительного ветра ±2 %, направления ветра ±5 %, осадки ±2 см, температуры забортной воды и воздуха в машинном отделении ±1 °C, времени начала н окончания пробега I мин
Длине разгонного участка как фактору, от которого зависит устойчивый режим движения иа мерной линии, должно уделяться особое внимание (особенно для крупных тихоходных судов). Минимальная длина зависит от инерции судна, типа силовой установки, потери скорости на повороте при заходе на очередной галс и от соотношения мощности и водоизмещения судна. Рекомендуется использовать регламенты по длине разгонного участка для порожнего грузового быстроходного судна при любой мощности, нревыша! щей половину номинальной,—25 длин судна, для танкеров дедвейтом 65—100 тыс т при осадке с полным трузом при любой мощности, превышающей половину номинальной, — 40 длин судна. Дону-Таблица XV. I. Минимальные глубины воды на фарватере, м при которых отсутствует влияние мелководья
('«коростъ Осадка, м
судна, уз 2 3 4 5 6 1 8 9 10
15 40 50 65 75 90 105
20 — — 45 55 70 80 95 115 125
25 40 50 65 75 90 100 115 135 150
30 45 60 75 90 100 120 135 155 175
35 55 70 85 100 120 140 160 185 210
40 05 80 95 115 130 155 180 205
45 70 85 105 125 145 175 — — —
50 75 95 115 135 160 — — —
719
стнмые значения ветровой нагрузки при испытаниях для судов водоизмещением не более 1 тыс. т — 2 балла по Бофорту, водоизмещением 1—20 тыс т — 3 балла, свыше 20 тыс г — 4 балла.
На рис. XV.2 приведена диаграмма допустимого волнения (волновой нагрузки) при проведении испытаний судов длиной 50— 230 м.
Для обеспечения правильности измерения скорости требуется, чтобы курс судна не отклонялся от заданного Количество перекладок руля при прохождении мерного участка должно быть гг> возможности минимальным, а перекладка нс должна превышать Зэ от нулевого положения аксиометра Измерение времени про хождения судном мерного участка осуществляется с помощью секундомеров не менее чем тремя наблюла юлями. Чля большей достоверности результатов замеров желательно фиксацию времени производить с двух различных мест па судне.
Рис XV.2. График для определения допустимых значении волновой нагрузки
Измерение частоты вращения В первом приближении режим работы двигателей иа ходовых испытаниях задают штатными э.тектрогахометрами (репитеры уста навлнвают на мостике и в машинном отделении). Однако для уменьшения возмож пых погрешностей в показаниях штатных тахометров и выполнения в последующем более достоверного анализа частоту вращения гребных винтов контролируют механическим тахоскопом— прнСюром, в котором совмещены счетчик частоты вращения н секундомер, включающиеся и выключающиеся одновременно В тех слу чаях когда невозможно подключить тахоскоп к торцу вала, применяют импульсные счетчики оборотов (контактного, индуктивного пли фотоэлектрического тина)
Схема установки на судне фотоэлектрического счетчика частоты вращения гребного вала изображена на рис XV 3 Смонтированный в трубке фотоэлекгри ческий датчик 2 реагирует на периодические световые импульсы, обусловленные вращением гребного вала, на поверхности которого наклеена черно-белая полоска / Импульсы преобразуются в усилителе 3 и подаются на специальный счетчик 4. функционирующий синхронно с секундомером. Точность измерения фогоэ. ектрп-ческого счетчика частоты ±1 импульс
В счетчике контактного типа получение импульсов доспи ается периодическим замыканием и размыканием электрической цепи специальным контактором, скользящим по проводнику. наложенному на гребной вал. Стабильность работы двигателя в течение всего пробега на галсе может быть определена на основе записи числа оборотов с отметкой времени па лепте шлейфного осциллографа
750
Определение мощности на гребном валу Мощность иа гребном валу может быть рассчитана по формуле Рд = 2л(?л-10 3 Здесь Q— крутящий момент,, определи е.мый но углу закручивания вала <р, измеряемому с помощью торсиометров
Q JpG<r'l (XV.2)
где — момент инерции вала; G — модуль сдвига, определяемый калибровкой вала на стенде или ультразвуковым .методом; /—длина морг ого у метка вала. Поскольку J (I, I — величины постоянные для данного гребного вала, то Q ~ <р. Погрешность оценки мощности при использовании торсио.мс1ров составляет 2 3 %.
В тех случаях когда установка торсиометров по тем или иным причинам невозможна, прибегают к косвенным методам. Для дизельных установок наиболее достоверным косвенным методом является измерение расхода топлива которое производят с помощью специальных мерных бачков (обычно трехсекциоиных). устана-ливаемых в машинном отделении. Расход тот л ива определяют по времени оно-
Рцс XV 3. Схема установки на судне фотоэлектрического счетчика частоты вращения гребного вала.
/ — черло-белая полоска; 2 — Датчик. 3 усилитель; 4 ечнчцк
рожнения топливного бачка заданной емкости. Часовой расход топлива на каж дом режиме работы двигателя находят нз выражения
Вт==3.6^р-, (\\’.з)
где у объем мерного бачка (секции) р,— плотность топлива, I — замеренное время опорожнения бачка (секции) С известной нз стендовых испытаний универсальной характеристики снимают мощность двитагеля в зависимости от измерен кого flT и частоты вращения п. Погрешность оценки мощности по расходе топлива 4-5 °.,
Приближенно мощность приводного дизеля может быть определена ю гем пературе выхлопных газов.
Для Седов с паротурбинными установками оценку мощности турбозубчатого агрегата можно произвести по расходу и параметрам пара. Расчет ведут но формуле
Р.ч- 32.5Я,(?М, (XV
Здесь Нг— адиабатический перепад. Q секундный расход пара, измеряемый с помощью дроссельных шайб. эффективный КПД турбозубчатого агрегата
Па судах с электродвижением мощность определяют по параметрам тока под водимого к двигателю, рассчитывая ее следующим образом
1,36 10 3/С'||„, (XV.5)
где I — силл тока якоря электродвнгагечя. U — напряжение в якорной обмотке; Чо — КПД гребного электродвигателя
751
______________„—...—— коюрые н<1 время проведения псчпя таний либо размещают в упорном подшипнике, либо па гребном валу (в виде уп-pyroii вставки в липин валопровода) Возможно также измерение упора посредством магиитоупругнх преобразователей, не имеющих непосредственного контакта с гребным валом.
Достоинством упоромеров в упорном подшипнике (например, упоромеров Мччтчеля) является возможность установки всех элементов прибора на неподвижном основании и то, что при этом не изменяется конструкция гребною вала
Более высокими метрологическими характеристиками обладают упоромеры, выполненные в виде вставки в линию вала с виброчастот нымчч преобразователями. Сила, воспринимаемая упоромером, представляет собой сумму сил;
F = Т — Рвл sin а 4- Pr (XV.6)
Здесь Т — упор винта; Р||Л — вес гребного винта и части валопровода в корму от упоромера; а — угол наклона вала, Рг — гидростатическая сила, направленная по оси вала и равная Рг = тлгРйд 4, где d — диаметр вала; Ля — глубина погружения дейдвудного подшипника
Основные режимы работы двигателей на испытаниях и определение скорости судна. Как было указано, скоростные испытания проводят путем осуществления сгруппированных по определенным режимам работы главных двигателей (ГД) последовательных пробегов судна на мерной линии. На режимных пробегах требуется соблюдение условии стабильности теплового режима работы ГД Обязательными режимами работы ГД для головных транспортных судов, оборудованных ДВС, являются следующие п = я„см, 1,03лНом. 0,9)пи„м, 0.80/т11ОМ, 0,63/чПом; оборудованными паровыми ГТЗЛ: пиом, 0.97лиом, 0,88л11Оч. 0,78л1|ом. Обязатель пые режимы для серийных судов с ДВС. 1,03л,|ОМ, 0,91лц<>м, O,W)rt,„,M;
с паровыми ГТЗЛ п|(ом, 0,97ицом, 0,88лнпч (п|||1М — номинальная частота вра щен ни гребного вала). Для катеров согласно ГОСТ 21792—76 обязательными режимами ГД являются: 0,6.Члном, 0,80л,,ом. 0,91л,и l,03n[lo,t.
1 (сред выходом па галс должен быть достигнут установившийся режим движения судна и работы механической установки. С целью исключения влияния течения на результаты испытаний осуществляют троекратные пробеги на мерной линии; два галса в одном направлении и один — в противоположном. Средняя скорость судна оср и средняя частота вращения гребного вала и,.р на режиме определяют как
_ щ 2oj + o3 . Н1 + 2па ! «з ,vV7.
vcp---------4------ лср -------------д------, (АЛ .7)
де V; и tti (i= 1, 2, 3) — замеренные иа каждом галсе скорость н частота вра-цения.
Для быстроходных судов и катеров (CJIK, глиссеров с мощными двигателями) ложно проводить и двукратные пробеги, поскольку их скорость значительно ире-чышает скорость течения Тогда о, р 0,5 (V, + Щ). При переходе на обратный галс (оворот судна должен осущесчвляться при углах перекладки руля, не превышающих 5°, с тем, чтобы избежать существенного изменения режима работы ГД. Разв ра иваться рекомендуется в направлении от берега, в противном случае при заклинке уля судно может оказаться в опасной близости от берега. При этом судно описи ает не полуциркуляцию, а кривую, называемую коордонатом (см. рнс. XIV 1), тобы галсы противоположного направления проходили па линиях, расположенных риб.чизнтельно иа одинаковом расстоянии от берега Весь цикл скоростных испы-апин следует проводить при практически неизменных погодных условиях Если се испытания нельзя провести в течение одного дня то при их продолжении иа ругой день следует повторить последние режимы, чтобы выявить возможное нлня-не изменившихся погодных условий В течение всего периода проведения иеччы-нччч'ч необходимо тщательно контролировать водоизмещение судна
В рсзулы-ате проведения скорей гных испытаний мот быть не только оценены ходовые качества построенного судна, но II уточнена методика расчета ходкости. Для выполнении полного анализа необходимо, чт>>бы в натурных условиях, были получены те же данные, что и при проведении модельных испытаний. Однако известно что сопротивление судна практически никогда нс измеряют, а упор определяют в редких случаях. Отсутствуют также при выполнении анализа и характеристики взаимодействия движителя с корпусом натурного судна При измерении в натурных условиях лншь части необходимых величин могут иметь место следующие случаи анализа.
Рис. XV.4. Кривые — f (п) и Рд f (л).
результаты модельных испытания;
натурные данные
1 Измерены скорость судна о,. частота вращения л, мощность Рр или момент Q. По результата*! модельных испытаний получены значения коэффициентов взаимодействия /, iq и кривые действия гребного винта в свободной воде, поэтомх поданным натурных испытании могут быть вычислены коэффициент момента пинта Kq Q (t »гГ):'<д) и его относительная поступь J — 0,515с\ (I U'7) (nD). Точки, соответствующие рассчитанным таким путем значениям Kq, нанося! на кривые действия винта Если при этом натурные точки не совпадают с кривыми действия, то вносят поправки в значения IV и iq и добиваются согласования крн вых. Далее, пользуясь теми же кривыми действия, рассчитывают сопротивление судна по формуле Ру (I I) Krfm-D* которое сопоставляют с сопротивлением, рассчитанным на основе модельных испытаний. При расхождения результатов вносят поправки либо в сопротивление, либо в коэффициент засасывания
2. На испытаниях судна измерены us и п Пользуясь кривыми действия и коэффициентами взаимодействия, можно определить относительную поступь натурного впита J 0,515с., (1 — IVy) (пР). а также рассчитать потребляемую винтом мощность и его упор PD = 2лря*£>5 10‘3; Т Kr^n-D*.
753
Рассмотренный в случаях I и 2 анализ носит несколько условный характер, поскольку многие величины беру гея из результатов модельных испытаний.
По результата»! скоростных испытаний могут быть откорректированы геометрические элементы гребного винта Для этого необходимо прежде всего сравнить кривые зависимости скорости судна от час юты вращения впита и кривые зависимости мощности, потребляемой винтом, от скорости, построенные по результатам модельных и натурных испытаний При таком сравнении могут иметь место следующие случаи.
Л. Точки, нанесенные на график i’s = j (п) и построенные по натурным данным лежат выше расчетных (рнс. XV.4, о), кривые зависимости мощности от скорости но данным натурных и модельных испытании совпадают, по на расчетной частоте вращении винт потребляет мощность, большую номинальной, и обеспечивает судну большую скорость В эгом случае винт является гидродинамически тяжелым и шаг винта должен быть уменьшен.
Б. Точки, нанесенные на график г1, j (л) и построенные по натурным дан иым лежа! ниже расчетных (рис. W.4. б); кривые зависимости мощности от ски ростн по данным натурных н модельных испытаний совпадают, но на расчетной частоте вращения винт потребляет мощность, меньшую поминальной, н не обеспечивает проектную скорость судна, т е винт является гидродинамически легким. В этом случае шаг впита должен быть увеличен.
В Точки, нанесенные на график о, f (л) и построенные по натурным данным, лежат ниже расчетных (рнс. Х\ 4, а); мощность, потребная для достижения заданной скорости, превышает расчетную. Это означает, что либо завышено сопротивление движению судна по сравнению с расчетным, либо в натурных условиях пропульсивный коэффициент не равен расчетному, либо > то и другое одновременно. I ели невозможно устранить такое расхождение, ю соответствие работы винта работе двигателя может быть достигнуто корректировкой элементов винта с тем, чтобы избежать перегрузки двигателя.
Г. Точки, нанесенные на график с'в = f (л) и построенные но натурным дан иым, совпадают с расчетными (рис. XV.4, г); мощность. при которой обеспечивается заданная скорость судна, больше номинальной. В данном случае требуется корректировка параметров винга.
§ 58. ОСОБЕННОСТИ СКОРОСТНЫХ ИСПЫТАНИЙ СУДОВ ОБОРУДОВАННЫХ ВРШ
Как известно, гребными винтами регулируемого шага оборудуют суда, для которых характерны несколько различающихся по нагрузке винта режимов. Ходовые испытания судов с ВРШ проводят не только на свободном ходу, но и на режимах с возом Поэтому объем испытаний v таких судов значительно больше, чем у судов с ВФШ. Испытания проводят при трех—пяти шаговых отношениях ВРШ Р/D и нс менее чем при пяти значениях частоты вращения при каждом шаговом отношении винта Испытания начинают с тарировки выносного указателя шага лопастей (ВМ11) При работающем двигателе пли двигателях (при двухвальнон установке) путем медленного разворота лоиасгей в сторону увеличения или уменьшения ша>а лопастей находят положение BVIU, при котором судно не движется (отсутствует струя от движителя). Это положение фиксируется иа картушке репитера шага и считается положением нулевого упора. Далее выбирают шаг, соответствующий полной мощности двигателя при номинальной частоте вращения Для этого при «ном — const устанавливают заведомо заниженный шаг лопастей и путем постепенного ею увеличения добиваются полной загрузки двигателя. (Для ряда транспортных судов, буксиров и т. п значение шага, соответствующее полной мощности, близко к конструктивному Рц D.) Затем устанавливают макси мальный шаг лопастей (P.'D)max, допускаемый конструкцией механизма изменения шага и ограничиваемый механическим носовым упором. На этом шаге выход двигателя па верхнюю ограничительную характеристику достигается путем постепенного увеличения частоты вращения пинта. Испытания проводят при PiD
(Р P)nia\. Рц & " при Р D < Р,( D (при 1—2 шаговых отношениях). Замеренные в процессе скоростных испытаний па свободном ходу значения представляют в форме графиков г\ /(л) и Рд> f (п) (рис XV 5) Кроме этих графиков
754
Рис. XV.5. Кривые vt ~ f (л) и Pd f ('*) при P^D = const, построенные no результатам натурных испытании (винтовые характеристики)
П
Рис. XV Зависимость расхода топлива G от частоты вращения п гребного винта при различных скоростях судна.
(иногда их называют винтовыми характеристиками), строят зависимости расхода топлива на милю пройденного пути в функции от частоты вращения (рис, XV.6). Имея такие графики, можно выбрать режимы работы механической установки, обеспечивающие минимальный расход топлива па милю при заданной скорости Для этого, используя данные винтовых характеристик, наносят кривые постоянной скорости на график рис. XV.6. Линия, проведенная через минимумы кривых постоянной скорости н будет характеризовать искомый оптимальный режим Для судов, оборудованных дизельными установками, наиболее экономичными ио расходу топлива режимами, как правило, являются режимы, когда заданная скорость судна достигается при меньших оборотах, а следовательно при больших значениях шаговых отношений
§ 59. ТЯГОВЫЕ ДИНАМОЧГТРИЧГС.КИГ ИСПЫТАНИЯ
Различают два вида |яювых испытаний, проводимых для судов буксирного типа’ швартовные и ходовые с возом. При испытаниях на швартовах определяют полезную тягу в зависимости от частоты вращения винта н от шагового отношения, если судно оборудовано ВРШ Результаты испытаний представляют в форме графиков зависимости полезной тяги на гаке и мощное!и на валу от частоты вращения гребного вала При проведении швартовных динамометрических испыта ний судно должно быть удалено от пирса так, чтобы гребной впит отстоял от стенки на расстоянии, равном не менее 75D; глубина фарватера при этом должна быть равной (5—6) D Испытания с возом проводят с целью определения тяги на гаке. В процессе таких испытаний производят те же измерения, что и па свободном ходу. Дополнительно лишь фиксируют сопротивление воза по показаниям динамометра, закрепленного иа испытываемом судне. Для построения кривой тяги на гаке достаточно провести испытания с двумя возами, сопротивление которых подобрано так, чтобы скорости судна с возами при использовании полной мощности составляли бы приблизительно 0,3 и 0,Ь от скорости латного свободного хода. Тогда, имея данные по испытаниям на свободном ходу, на швартовах (две точки) и результаты испытаний с двумя возами (еще две точки), можно ио четырем точкам построить кривую тяги. При проведении тяговых испытаний с возом следует следить за длиной буксирного троса; ина должна быть нс менее 200 м с тем. чтобы исключить влияние работы гребных винтов на сопротивление воза Программа таких испытаний практически такая же, как и для испытаний на свободном хату. Сжимают четыре-пять винтовых характеристик при различных шаговых отношениях ВРШ. строят кривые vs [ (и), Ps I (я) и расхода топлива на милю пути Bs = f (л) а также кривую тяги иа гаке /. / (а,. Р D). Эти данные могут быть
положены в основу выбора наиболее экономичных режимов движения с определен ным возом при vs = const.
УКАЗАТЕЛЬ ЛИТЕРАТУРЫ
1 Арефьев А А Определение элементов реверса судна с винтами регулируемого шага (ВРШ). — Судостроение. 1958, Хе 6. с 12 17
2. Ачкин&дзе А. UI. Обобщение теоремы Бетц на случай заданного распределения нагрузки по части лопасти Труды ЛКИ Ходкость и мореходные качества судов, 1932, с 23—30.
3 Бавин В, ф ЗавадовскмЙ Н. К) Левк и вс к им К) Л. и др. Гребные винты. Современные мек>ды ратчетв. Л., Судостроение. 1983
4. Басин А. №.. Мнниовнч И. Я. Теории расчет ребных винтов. Л., Судпром-гнз, 1963.
5 Бискуп Б. А Сергеева Е. И. Периодические силы возникающие на направляющей насадке от Гидродинамического действия i реб1 «ин пинт» В сб : Вопросы судостроения 1972, аып. 1. с 40- 45.
6. Бакшт Ю. В. и др. Гребные винты регулируемого шага. Л , Судпромгмз. 196).
7 Бородай И. К , Нсцветаев Ю. А. Мореходность судов. Л., Судостроение, 1982.
8. Бур.танов В. Н , Голощгкнн А. С., Линне В Ь. и др. I с ледов айне динамики про пульс и иною комплекса судна на нерегулярном волнении Судостроение 1978, № I, С. 28 — 31
9. Бискуп Б А , ТердгцкиЙ Б Никитин М. В и др. Прочность гребных винтов Л., Судостроение, 1973.
756
• о Бавин В. Ф И др Применение численных методов теории потенциале двойного слоя к расчету гребного винта при качке судна. — В сб.: Доклады семинара по гидродн । нике судна. Т. I. Варна. 1S84. с. 78.1—78.6.
И Белоцерковский С м и др. К построению нестационарной нелинейной теории п ДУШНОГО винта. — Пап. АН СССР. Механика жидкостей и газов. 1879, Л> 6, с. IC7—113.
12. Ветчинвип В П . Поляхоа II. Н. Теория и.расчет воздушного гребного винта. М Оборонена. ГзЮ. •
13. Воробьев Ю. Л движителя при качке 4 7—.51.
Крылов О. Н. судна. Труды
Пульсирующие составляющие скорости в дн не ЦНШ1МФ. jI-, Транспорт, 1983. вып 283. с.
14. Войткунскнй Я. И. и др. Спр.шочник по теории корабля. Л.. Судостроение, 1973.
15 Воеводская t. И., Титов Н А Исследование гидродинамической эффективности гребных ринтов увеличенного диаметра с пониженной частотой вращения применительно к одновинтовым морским судам В сб.: Вопросы судостроения. 1978. вып, 19, с. 9—16.
16. Воеводская Е. Н., Турбал В. К. Влияние (мсиоложння и основных гяометрическ х элементов гребного винта на возбуждаемые нм вибрационные нагрузки — В сб.' Вопросы судостроения. 1982, вып 32, с. 21 — 32.
17. Гах<у П. Д. Краевые задачи М , Наука. 1977.
18 Гире И В. и др. Испытание мореходных качеств судов. Л.. Судостроение, 1977.
19 Горшкоа А С.., Русецкнв А. А. Кавитационные трубы. Л., Судостроение. 1972.
20 Горни А. Л., Пустошный А Ф. Влияние формы носовых обводов на течение в пограничном слое морских транспортных судов. — В сб : Гидродинамика транспортных судов, ЦНИИ нм акад. А. И. Крылова. 1981. с. 54 — 68.
21 Град штейн II. С., Рыжик Н. М. Таблицы интегралов, сумм, рядов и произведений М , Наука. 1971
22. I ре чин М. А. О совместной работе впита н двигателя в условиях волнения в килевой качни судна. — Труды ИПННМФ, Л.. Транспорт. 1961. вып 35. с. 74—78.
23. Гречин ЛА. Л Расчет характеристик разгона и торможения судна — Труды ЦНИИМФ, Л., Транспорт, 1978. вып. 15, с. 97—109.
24 Грузинов В И. и др Крыльчатые движители. Л., Судостроение. 1973
25. Дробленков В. В.. Каневский Г. И. Подъемная сила и вязкостное сопротивление плоских профилей в вязкой несжимаемой жидкости. — В сб Вопросы судостроения. |980, вып. 23, с. 26—32
26. Дробленков В. В., Каневский Г. И., Ка рул и на ЛА. Я. и др. Подъемная сила и вязкостное сопротивление винтовых профилей в вязкой жидкости и масштабный эффект гндро-дн мимических характеристик гребных винтов — Веб.: Вопросы судостроения, 1982, вып §2, с. 93—102.
27. Жуковский II. Е. Вихревая теория гребного винта. — Избр, соч., т. 2, М. - Л., ГНТТЛ. 1948
28. Завидовский Н. Ю., Титов И. А, Гидродинамические характеристики четырех -лопастных гребных винтом для скоростных транспортных судов — В сб.: Вопросы судостроения, 1974. вып. 5 с. 3—14.
29. Завадовскмй Н. Ю., РусецкнЙ А. А. Метод расчета давлений на лоплстях гребных винтов. — Труды ИТО Судпрома, Л.. Судостроение 197. яып 253, с. 65—77
30. Илы.*н В. ЛА. Методика оценки характеристик ходкости судна на реальном морском волнении. -- В сб.. Вопросы судостроения» 1982. вып. 32. с. 33—44
31. Ильин В. Л1. Экспериментальное нсслгдовпние влияния волнения моря и качки на гидродинамические характеристики гребных винтов — В сб/ Вопросы судостроения, 1972, вып 1, с. 79—85.
32. Ильин В М. и др. С истематические экспериментальные исследования поля скоростей в диске движителя при качке судна — В сб.- Вопросы судостроения, 1983, вып 37, с. 53—59.
33. Каневским Г. И., Круглова С. II. Влияние сближения дисков гребных винтов на пропульсивные характеристики двухняльных судов. — Труды ЦНИИ нм. акад А. II. Крылова. 197 л. вып 285, с 123—128.
34. Кацман Ф М., Кудреватый Г. М. Конструирование вннторулевых комплексов морских судов. Л., Судостроение, 1974.
35 Кацман Ф ЛЕ, Пустошный А. Ф Метод расчет влияния шероховатости гребных винтов на винтовые характеристики дянгвтсля — В кн : Научно технический сборник. Регистр (X СР. Л. Транспорт. 1981. вып II. с. 39—51.
36. Кацман Ф. ЛА. и др- Пропульсивные качества морских судов. Л., Судостроение. 1972.
37. Копеецкий В. В Теория идеального движителя. Конспект лекций. ЛК1 . i960.
38. Кспесцкий В. В Гидродинамика винта в трубе круговою сечения. Л., Судпром гнз. 1956
39. Клюкин М. И. и др. Справочник по судовом акустике. Л., Судостроение, 1978.
И». Корнейчук А А Квадратурные формулы для сингулярных интегралов — В сб : Ч меленные методы решения дифферсн и мольных и интегральных уравнений н квадратурные формулы. М . Наука, 1964. т. 4. А*» 4. С. 64—74.
41. Кондрнков Д. В. Обобщенная форма представления волновых режимов в нолях оценки средне-рейсовой скорости судна. — Труды ЦНШ1МФ Л., Транспорт. 1973. вып 165, с 12—16-
42. Котлов и ч в. М. О силах, действующих на обтекатели ступиц гребных винтов. — 1 руды ЦНИИ им. акад. Л. И Крылова. 1968, выв 234. с 15—29.
43. Лаврентьев R. ЛА. Судовые движители. М.—Л., Морской транспорт, 19-19
44 Лаврентьев В М. Гидродинамика широколопастных гребных винтов. Труды НТО Судпрома, 1963 вып 45. с |А7 219.
45. Лебедев И Н. Специальные функции н их приложения. М —Л., Физматгнз, 1963.
46. Лепилкин А. ЛА. К вихревой тййрин изолированного винта. Труды ЦАГ11. 19-10, вып. 529. с 29 13.
47. Липис В. Б. Гидроди и эмика гребного винта при качке судна Л., Судостроение. 1975.
757
48. Л ни кс В Б, Расчет параметров автоматической системы защиты двигателя при движении судна на волнении. — Судостроение, >977, Л* |0, с 40—43.
49. Лнпиг В Б., Ремел Ю В, Безопасные режимы штормового плавания судов. М., Транспорт, >982.
50 Лнпис В. Б., Крылов О. If. Общий прогноз кодовых характеристик судна на вил кеннн — Труды 11НШ1МФ. Л.. Транспорт, 1983, вып. 295, с. 119— <31.
51. Лкпнс В. Б., Петрин А. А. Гидродинамика Гребного винта на переменных режимах.— В сб.: Доижады семинара по i ндродннамине судна, т. I. Варна. 1983, с. 1—7.
52. Лнфенко II. Л. и др. Метод определения вффечтивн го поля скоростей в месте расположения движителя. —Труды НТО Судпр >ма, Л.. Судостроение. I9H0. вып. 313. с. 34-40.
53. Мартиросов Г. Г.Расчет реверспсудна с BPI1I — Судостроение. 1962, №6, с. 14—18.
54. Мин. ояич II. Я и др Гидродинамические источники звука. Л , Судостроение, I97f
55. >1иниовн<1 И Я Влияние качки корабля на гидродинамические характеристики гребных винтов. — Судостроение. 1949, № 5. с. 7 - 9
56. Ма вл годов М. А.. Нугецкий А. А., Садовников Ю. М. и др. Движители быстроходных судов. Л , Судостроение, 1982.
57. Майкапар Г. Н. К теории тонкого крылв. Приложения вихревой теории винта. Труды ЦАГ11, 1917, аып 613.
•8. Мншкевич В. Г. MjmniHUtffl обработка результатов испытаний систематических серий моделей гребных винтов в «свободной воде» В сб.: Средства и методы натурных исследований переходных качеств судов. Материалы по обмену опытом. НТО Судпрома, Л , Судостроение, >979, вып 296. С. 61 68
59. Мншкевич В. Г. О построении квадратурных формул для сингулврны.х интегралов, встречающихся в аз рог ид роди кам икс*. Веб: Вопросы судостроения. 198U. вып 23, с 98—108.
611. Мншксвнч В Г., Титов И А Об учете закручивания струи при расчете гидродинамических характеристик грибных винтов, работяющих в раннимерном и неравномерном пото ках — В сб. Вопросы судостроения. 1977. вып. 15, с. 73 — 78
61. Мншкевич В. Г. 11гли>к*Лиая вихревая теория гребною вииТ.л в однородном потоке идеальной жидкости. — В сб.: Вопросы судостроения, 1978, вып. 19. с. 70- 82.
62. Морогов В. II Кавитационный шум кяк последовательность акустических импульсов, возни кающих в случайные моменты времени. Акустический журнал, 1968, т 14, .V 3. с. 435- 1411.
63 Матвеев Г. А Орлов О. П., Пустошный Л Ф пар Эффективный попутный поток. Состояние, вопроса к направление исследований. — В сб : Гидродинамика транспортных судов, ЦНИИ им. акяд. А II. Крылова. 1981, с 3—26.
64. Некрасов А. И. Теория крыла в нестационарном потоке. — Себр. соч., т. 2. М.. Изд-во АН СССР, 1982.
65. О । клок О. П., Пустошный А. Ф. Приближенный метод определения масштабного аффекта номинального попутного потока иа однонлльцых судах Труды ЦНИИ нм. акад. А Н Крылова. 1975, вып. ?85. с. 83—98.
66. Папмель Э. Э. Практический расчет гребного винта Л., HJIBK. 19JG.
67. Иерннк А Л. Проблемы Кавитации Л.. Судостроение. 1966.
68. Пехтусов ,\|. В , 1 урбал В. К Гидродинамические характеристики многолопастных гребных винтов. — В сб.; Вопросы судостроения. >972. вып. 1, с. 13—24.
69. Проблемы прикладной гидромеханики судив/Под ред II А Титова. Л., Судостроение, 1975.
70. Пустошный А Ф Титов И. А Некоторые особенности взаимодействия гребного винта с корпусом судна. — В сб. • Г и др одни а ми кв транспортных судов, ЦНИИ нм. акад А. II. Крылова. 198U, с. 9—13.
71. Русецкий А А., Прнщемнхнна Т Ю. Расчет гидродинамических характеристик гребных винтов в процессе маневрировании — В сб. I идродпнамика транспортных судил. ЦНИИ нм акад. А Н. Крылова, 198). с 45 52
72. Русецкий А. А. Гидродинамика нинтов регулируемого шага. -И , Судостроение, 1968.
73 Русецкий А А. Движители судов с динамическими принципами поддержания .1 , Судостроение. >979.
74. Смородин А. И , Шпаков В. С. Теоретическое исследование характеристик потен-цилльиого поток г вблизи корпуса судна при качке - D сб Доклады семипара по гидродинамике судив, т. I, разд. 6. Варна. 1983, с. 1—19
75. Турбал В. К и др. Проектирование формы обводов и движителей морских транспортных судов. .И , Судостроение, 1983.
76. Урик Р. Д- Основы гидроакустики.Пер с англ. Л.. Судостроение, 1978.
77. Устройство для моделирования колебаний момента сопротивления гребного винта. А. с № 588546 (СССР) Опубл, в Б Н . 1978. .V- 2.
78. Фоменко Ю. И., Малова В. Ф. Гидромеханические характеристики комплекса впит направляющая насадка при качке вблизи поверхности воды. — Труды ЦННИМФ, Л., Транспорт, 1971. вып. 153. с. 31 — 46.
79. Чумак В. М. Систематические данные пэ акенмалыкой стстэпляющей попутн го потока за корпусом одн вальных транспортных судзв. —В сб Войр. сы судостроения. 1980, вып 26. с 81 89
80. Brnijn A.. Wolde Т. Mee.'mrenient and prediction of ships noise as generated by cavi-latlng propeller — Symposium on «High powered propulsion of large ships». Wagenlngcri (Ne therlands). 1974.
81. Cavitation Commillec report. — Proceedings of the 12th 1TTC. Roma. >969.
82 <a\italloii session — Proceedings of the I6ih 1TTC 1 cningrad. 1981
83 PynrG. A study of the scale effect on wake, propeller i.iviialloii and vthralory pressure »( Inti! nf two linker models — ‘ISN’VME, 1974 vol 8*
758
84. Dyne <j. An experimental verification of a design method for chicled propeller Swedish Slalr Shipbuilding Experimental Tank I’ubl. 1968. N 63.
85. lallisen О. И., Minsaas K. J., Liapls N., Skjordal S. O. Pred'rclion of resisUnce and propulsion of a ship In a seaway Proceedings of lhe 13th ON К symposium. Tofcvo, I9«p p. 505—529.
86. Hoekstra M- Prediction of full scale w akc characteristics based on model wake survey Ini Shipbuilding Progress. June 1975. vol. 22, N 250. px 204 — 219
87. Hough G. R.. Ordway D. E. The generalized actuator disk. — Developments in theoretical and Applied Mechanics. Perga iron Press. |9C5. vol. II. p 317 — 336.
88 Holden К. O-. Fagcrjord О . brostad R. Early design stage approach to reducing surface forces due (O propeller cavitation. — FSNAME. 1980, vol 88.
89. Hylarldes S., van Gent W. Hydrodynamics reactions to propeller Vibrations. - Sinn and Wcrf. 1979, N 19. p. 383-393 1
90 Huang T. T.. Peterson F, B. Influence of viscous effects on model full Scale cavita lion scaling. — Journal oi ship Research. 1976, vol. 20. К 4, p- 215—223.
91 La mm e rcri W. P. A., Manon J. D., Ocsterveld ,M. W. C. The Wagcwiiigen В screw series. — TSNAMB. 1969. ml. 77, r. 269-318
92. Malveyev G. A.. Orlov l). I*. Velocity field prediction problem: main adjectives._
Conference on seagoing qualities of ships and marine structures. \'зпде. September 1983. p. 1—12.
A3. Morgan Wm. B., Siloxlc V., Denny S. B. Propeller Lifting-surface correction — TSNAMU. 1968. vol. 76. p. 309—317
94. Murday D. C. On predicting power increase in irregular weaves from model expenioetits In regular waves. — Proceedings of lhe 13th I’I IT.. Berlin Hamgurg. vol. 2, 1972.
95. Nakamura S. Added resistance and propulsixe performance of ships in waves - The Socletv oi Naval Architects of Japan. Int. Seminar on waves resistance, Feb. 3—5. Tokyo. 1976 p. 199—217.
96. Nalto S., Nakamura S. Open water characteristics and load fluctuation of propeller at racing condition in u aves. — The Society of Naval Architects of Japan, 1979. N 172. p. ">l 63.
97. Report of Performance Commit lee. — Proceedings of the !5^” 1TTC. Hjgtte» 1978.
98. Recomendations oi the I4**1 ITTC. - Proceedings of the 1TTC. Canada. 1974-
99. Raes tad A. E. Estimation of Marine Propellers Induced effect on lhe hull wake Hold. Scale clfects on lhe hull wake Field. — Del Norske Veritas report, N 72—3—4.
I00. D. Ross. Mechanics of underwater noise. — Pergamon Press. N. Y .. 1976.
MH Sasajlina H- and Tanaka J. On the Estimation of wake of ships. — Proceedings of the It1*1 ITTC. Tokyo. 1966.
102. Sparcnberg V. A. Application of lilting surlace theory to ship screw. Int. Shipbuilding Progress, i960, vol. 7, N 67, p. 99—106
IU3. Siihrbler K. An experimental investigation on the propulsive effect of л ruder in lhe propeller slinstream. -• Int. Shipbuilding Progress, vol. 21. N 234, 1974
10*1. Tsakonas S-« Jacobs W. R., ЛИ M- R. Exact linear lifting-surface theory for a Marine propeller In a Nonunti«»rm How field — Journal of ship Research, vol. 17, N 4. 1973
105. Tsakonus S., Breslin J. P.. Jacuhs W. R. Blade Pressure Distribution for a moderately loaded propeller. Journal of ship Resrarsh. vol. 27. N I. 1983.
106. Titov I. A-, Poostnshnlj A. F., Orlov О. I*. Prediction of the velocity field in way of ship propeller. — Proceedings of ihe 12th Symposium on Naval Hydrodynamics. Washington, D. C.. 1979
107. Titox 1- A., Otlesnov Yu. P. Some aspects of propeller hull interaction Swedish. — Soviet Propoller Symposium. Moscow. 1973.
1U8. Yuasa H Calculation of Hie fluctuations of propeller lo.nl Induced by ship motions in oblique waves (part 11. — ISNA, Japan. 1974. vol. 136, p 69 — 82
169 Vosscrs G. Fundamentals of behaviour ships in waves. — Journal of Ship Research. 1961— 1962. vol. 65 -95.
ОГЛАВЛЕНИЕ
Or научных редакторов ..................... ............. 5
РАЗДЕЛ НЕРНЫЙ
ГИДРОМЕХАНИКА
Основные обозначении...............•........................ 7
л а в з I. Общие сведения tin гидромеханике . . .......... 9
I. Основные свойства и физические характеристики жидкостей . .......... 9
2. Кинематические характеристики потоков жидкости ... .................... К
лава П Гидромеханика невязкой жидкости ................................
3 Уравнения движения невязкой жидкости н их ннтегр.иы.................
4 Потенциальные течения.................................................. 21
5. Методы расчета потенциальных течений и обтекании тел.................. 31
6. Методы расчета гидродинамических реакций.............................. 16
7. Вычисление инерционных гидродинамических реакций и кинетической энергии жидкости ............................................................... 50
8. Знтчения присоединенных масс тел различной формы ............... . 53
9. Влияние на присоединенные массы свободной шшерхности жидкости......... 62
л а в в III- Обтекание тел вязкой жидкостью .............. . ..........
10. Теория Напряжений я уравнения движения вязкой жидкости .............. 70
II. Турбулентные течения жидкости ........................................ 73
12. Динамическое подобно потоков жидкости и общие формулы Для гидродинамических сил ............................................................ 77
13. Пограничный слой и его свойства............................ . . 81
14. Ламинарный пограничный слой ........................................ 86
15. Турбулентный пограничный слон ................................. ... 88
16. Обтекание шероховатых поверхшхтей.................................... 96
17. Трехмерный пограничный слой .......................................... Ю0
18. Турбулентные струи и гидродинамический след за телом................ 102
лвв a 1V. Волны и гидродинамические силы волновой природы .... 107
19. Характеристики плоских регулярных волн ........................ 107
20 Статистические характеристики ветровых волн н снедения о волнении в некоторых районах моря ................................................. .... 112
21. С.псктрвльный метод исследования н структура морского ветрового волнения 120
22. Поствновка задачи о волновом сопротивлении и ее функции Грина .... 130
23. Волнообразование и гидродинамические силы волновой природы при поступательном движеинн тел и судов ........................................ 139
лава V. Теория крыла ................................................... Н4
>4 Геометрические и в пдроаэродннамичгскнг характеристики крыльев ... 144
!5. Расчет гндроаэродянамнческпх характеристик профиля крыла ............ <49
!6 Линейная теория крыла конечного размаха . . .................. 153
>7. Нелинейная теория крыли конечного размаха .............................. I .’>9
»8 Обтекание плоских решеток профилей ........................... ..... 162
!9 Теория нестационарной] движения крыла .................... 16а
)
Глава VI. Кавитация . . ... 178
$ 30 Природа кавитации и ее виды........................................ . 17в
% 31 Расчет развитого кавитаципнао о обтекания тел........................... 183
§ 32 Искусственная кавитации............................................... 189
Глава VII Установки для экспериментальных нс следований в области гидродинамики судна ................................. 190
§ 33 Общие сведения ...................................................... 190
$ 34 Опытовые бассейны ............................................... .... ИН
$ 35. Конструкция и оборудование опытовых бассейном ................... ... 19В
$ 30 1 кдродинамнческие лотки................................................ 1!Ш
§ 37. Капмтацнонные трубы................................................. 2011
§ 38. Конструкция и оборудование навигационных труб ........................ 21)2
§ 39. Капитяцяонпыс бассейны ......................... .... ... 204
§ 40. Опытовые бассейны для мореходных испытаний судом ... ........... 2(15
Указатель литературы ...................................... 210
РАЗДЕЛ ВТОРОЙ
СОПРОТИВЛЕНИЕ ДВИЖЕНИЮ СУДОВ. 214
Основные обозначения......................................... 214
Глава |. Общие сведения с сопротивлении движении) судов...................... 215
§ I. Сопротивление движению судна и его составляющие........................ 215
$ 2. Общие формулы для сопротивления и буксировочной мощности................ 219
§ 3. Расчет площади смоченной поверхности судна ............... 221
Глава И Вязкостное сопротивление судил .................................... 222
§ 4. Характерные особенности течения в пограничном слое судна ............ . 222
§ 6. Сопротивление трения при плоском и осесимметричном обтеквннн тел .... 227
§ 6. Вязкостное сопротивление крыловых профилей н тел вращения............ 233
§ 7. Вязкостное сопротивление плохообтекаемых тел ........................ 234
§ 8 Вязкостное сопротивление судна.................................... . 241
$ 9. Влияние шероховатости обшивки На сопротивление ..................... 246
$ 10. Сопротивление вырезов..................................... . ... 235
§ II. Сопротивление воздуха движению судил . . ........................ 259
§ 12. Пуги снижения вязкостного сопротивления суд»в.......................... 2G4
Глава III. Влияние волнообразования и ускорения на сопротнвтенне движению судна ..................................................................... 271
$ 13. Характерные особенности волмообрэшвання и волнового сопротивления судив 271
§ 14. Применение теории волнового сопротивления.............................. 274
§ 15. Пути снижения волнового сопротивления ........................... . 283
§ 16 Сопротивление при движении с ускорением ............................... 286
Г л в в в JV. Сопротивление при движении судна на ограниченном фарватере 289
§ 17. Сопротивление судна tu мелководье и в канале ......................... 289
§ 18 Влияние ограниченности глубины мерных линий на coiipoiявление н скорость судов при натурных нспыта ниях ............................................ 294
Глава V. Сопротивление при движении судна на волнении ....................... 296
£ 19 Влияние морского волнения на сопротивление и скорость судна............. 296
§ 20. Методы определения дополнительного сопротивлении судна на волнении . . . .31)2
§ 21. Приближенный учет влнииия морскою волнения па сопротивление днншению
судил.................................................................. 309
761
Глава VI Исследование сопротивления воды движению суда» путем мены* танин моделей........................................... ... ....... 315
§ 22. Расчетно-экспериментальный метод определении сопротинлення воды движению судна по результатам буксировочных испытаний ............................. 315
§ 23. Методы пересчета сопротивления модели на натурное судно и примеры их использовании .............................................................. 324
§ 24. Методы экспериментальною определения составляющих сопротивления ... 331
Глава VII- <иособы приближенного ртечета сопротивления движению судна 34!
§25. Классификация приближенных способов расчета сонритилтения............... 341
§ 26. Способы приближенного определения остаточного сопротивления судна на основании серийных испытаний моделей . . . . -.............- . .......... . 313
§ 27. Способы определения остаточного сопротивления путем пересчета с прототипа ...................................................................... 381
§ 28. Сопротивление многокорпусных судов н приближенные способы его расчета 384
Г л л в a Vlll. Форма корпуса морских судов и сс влияние на сопротивление . . . 391
§ 29. Влияние иа сопротивление основных соотношений и коэффициентов полноты корпуса ..................................................................... 391
§ 30 Формы обводов корпуса и их выбор........................................ 401
§ 3! Сопротивление и форма выступающих частей ........................... 406
§ 32. Аналитические методы оптимизвцнн формы обводов...................... 408
Глава IX. Сопротивление судов внутреннего и смешенного плавания ... 410
§ 33. Формы обводов судов внутреннего н смешанного плавания, особенности их сопротивления и методы его определения ........................................ 410
§ 34. Практический учет влияния мелководья на сопротивление судов внутреннего и смешанною плавания ...... , , ............................................... 415
§ 35. Сопротивление составов ................................................ 418
Указатель литературы....................................... 42!
РАЗДЕЛ ГРЕТИЯ
СУДОВЫЕ ДВИЖИТЕЛИ .......... 425
Основные обозначения и системы координат, используемые при описании судовых движителей................................ 425
1 л а в в I. Общие сведения о движителях ... ....................... 4:10
§ I Принцип действии и классификация движителей. ............. 430
§ 2. Идеальный движитель.................................ч.................. 434
§ 3- Геометрия н конструкция граною вннта .................................. 436
§ 4. Основы гидродинамики i ребиого винта .................................. 442
Главе It. Вихревая теория гребного винта, работающего в однородном потоке ................................................................ - 446
§ 5. Вихревая теория гребного винта ...................................... 446
§ 6. Вихревая теория несущей линии . . ........................ . . 450
§ 7 Теория стационарной несущей поверхности ............ 459
§ 8 Силы и моменты на i ребном винте ............. . . . ............. . 466
§ 9. Грибной винт с наименьшими индуктивными потерями ........... 4 71
Глава III. Экспериментальное определение кривых действия гребных винтов 475
§ ID Методика динамических испытаний моделей гребных винтов ............. 175
§11. Результаты серийных испытаний моделей гребных винтов . . . . 4 77
§ 12. Масштабный эффект гидродинамических характеристик гребных винтов . . . 510
7G2
Глава IV. Взаимодействие гребною винта с корпусом судна . _ . . 5И
§ 13. Основные понятии .................................................... 514
$ И. Экспериментальное определение коэффициентов взаимодействия гребного винта с корпусом судна................5..................................... 518
§ 15. Влияние работы гребного винта на величину и распределение попутного потока
§ 16. Масштабный эффект поля скоростей ....................................... 527
5 17. Оптимальный движительный комплекс корпус — движитель ........ 531
§ !в Вихревая теория гребного винта, работающего в неоднородном по окружности потоке...........................................................'........... 534
Глава V Кааитацня гребных винтов ............. .... 538
§ 19 Формы кавитвцни и ее влияние на акенлуатвциониые хара «герметики гребных 'винтов................. .... ..................... .... 538
§ 20- Методы прогнозирования кавитации гребных винтов ........ 541
§21. Расчетная оценка момента возникновения кавитации и лип лопастей, охваченных кавитацией ............................................. ........... . 543
5 22 Кавнтациоинвя эрозия движителей и мены борьбы с ней . ........... 555
Глава V1. Периодические силы и давления, передаваемые винтом на гребной вал и корпус судна . ....................................................... 563
§ 23. Гребной винт как источник возникновения периодических сил, передаваемых вл гребной вал н корпус судна ........................................ • 563
§ 24. Методы определения и способы снижения периодических сил и моментов, передаваемых гребным винтом на валопровод ...................................... 564
§ 25 Периодические давления иа корпусе судна, обусловленные гидродинамическим действием гребного винта <................................. 574
Главе VII Гребной винт как источник шумности.......................... ..... 583
§ 26- Основные физические причины, вызывающие шум гребного винта.............. 583
§ 27. Звук вращения гребного винта ......................................... 586
,§ 28. Кввнтацнонный шум гребного винта ...................................... 589
§ 29. «Пение» гребного винта ............................................... 594
§ 30 Мероприятия, снижающие шум гребного пинта ............................. 595
Г л а я a V11I. Практический расчет гребного винта.................... ..... 596
§ 31. Рекомендации по расположению гребных винтов . . ............... 596
§ 32. Предварительный выбор основных элементов гребного винта ... . . . 604
§ 33. Определение расчетного режима и проектирован не гребного винта по диаграммам серийных испытаний ......................................................... 613
§ 34. Геометрические и гидродинамические характеристики винтовых профилей 618
§ 35. Проектировочный расчет гребного винта по вихревой теории ............... 626
§ 36. Поверочный расчет гребного винта ..................................... 634
$ 37. Поверочный расчет гребных винтов на кавитацию........................ 637
§ 38. Методы поверочного расчета общей и местной прочности лопастей движителей 513
§ 39. Особенности расчета соосных гребных винтов ............................. 652
Глава [X. Автоматизированное проектирование гребных винтов .... 654
§ 40 Общая характеристика системы автоматизированного проектирования гребных винтов .................................................................. 654
§ 41. Пршраммное обеспечение САПР ГВ........................................ 660
Глава X Гребные винты регулируемо! и шагв . . . . ... - - . 6Б1
§ 42. Особенности применения и проектирования винтов регулируемого шага . . 664
§ 43 Диаграммы для проектирования н гидродинамических расчетов ВРШ. Схемы расчетов.................... . ............. . ........................ 677
Главе XL Крыльчатые движители ..... ....... .... 695
§ 44- Принцип действия и конструкция крыльчатого движителя ................... 6У>
§ 45 Гидродинамические характеристики крыльчатых движителей ................. 698
§46- Вихревая теория и I ндродннамичсский расчет крыльчатого движителя . . . 702
763
Глава Х11. Проектирование двнжитсльного комплекса iрсбпоЙ винт направляющая насадка ............................................................... 706
§47 Общая характеристика комплекса гребной пинт — направляющая насадка 706
§ 48 Выбор формы прцфиля направляющей насадки и проектирование движитель-кого комплекса................................................................. 710
§ 49 Особенности кавитации движитель него комплекса гребной винт — направляющая насадив............................................................. . . 71b
Глав Х|Ц. Реверсирование судов при помощи гребных винтов....................... 719
§ 50. Рвсчет характеристик винта при реверсировании ....................... 719
§ 51 Расчет маневренных качеств судна при реверси роваии и.................... 723
Глава XIV. Работа гребною винта в условиях качки ...................... 726
§ 52. Влияние условий движения судна на волнении на работу гребного винта . . , 726
5 53 Теоретические и экспериментальные методы расчета действия гребного вннта прн качке ............................................................... 731
§ 54 Практический метод расчета действия гребного вннта при качке............. 736
§ 55. Расчет ходовых характеристик судна на волнении ........................ 742
Г л в в в XV. Натурные пропульсивные испытания судов...................... 748
§ 56 Скоростные испытан ня .................................................. 748
§ 57. Анвлиз результатов испытаний ............................................ 753
§ 58- Особенности скоростных испытаний судов, 1<>орудованных ВРШ............... 754
§ 59. Тяговые динамометрические испытания................................ , 756
Уквзвтсль литературы........................................... 756
СПРАВОЧНИК ПО ТЕОРИИ КОРАБЛЯ В ТРЕХ ТОМАХ Под редакцией Я. И Войткунского
ТОМ ПЕРВЫЙ ГИДРОМЕХАНИКА.
СОПРОТИВЛЕНИЕ ДВИЖЕНИЮ СУДОВ. СУДОВЫЕ ДВИЖИТЕЛИ
Звв. редакцией И Г Ррсецкий
Редакторы: Н И Долинина, А И. Кускова. Н П Саяпина Корректоры: С Н Маковская. И. М. Меримская. В. Ю. Самохина Художественный редактор О. П. Андреев Технический редактор А. И. Казаков Переплет художника Б. Н. Осснчакова ИБ Ni 814
Сдано в наб >р 16 10.84 Подписано в печать 25.07.85. М-23764. Формат бОХЭО'/ы
Бумага книжно-журнальная имп. Гарнитура литературная, Печать высокая. Усл. печ. я. 48. Уои. кр. ОТТ. 48, Уч.-взд. л. 61.9. Тираж 11000 экз. Изд. № 3960-84 Заказ № 255. Цена 3 р 60 к.
Издательство «Судостроение., 191065, Ленинград, ул. Гоголя, 8.
Ленни-радская типография .“А 6 ордена Трудового Красного Знамени
Ленин радского объединения «Техническая книга, им Евгении Соколовой Союэполиграфпрома при Государственном комитете СССР но делам издательств, полиграфии в книжной торговли.
193144. г. Ленинград, ул. Моисеенко, 10.