/


















































































































































































































































































































































































































Author: Кацман Ф.М. Дорогостайский Д.В.
Tags: техника средств транспорта гидромеханика механика жидкостей и газа водный транспорт судостроение
ISBN: 5-7355-0166-6
Year: 1991




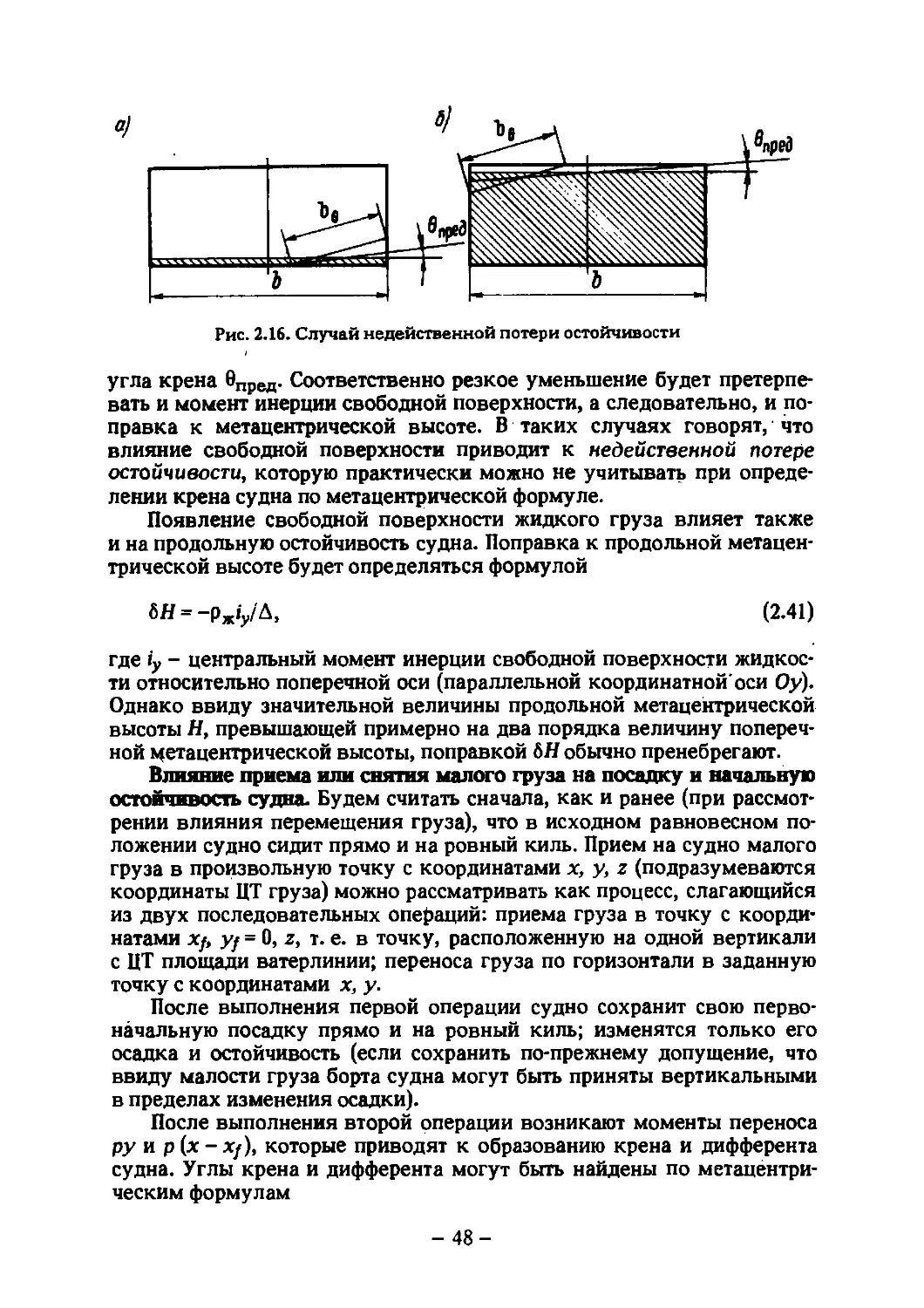
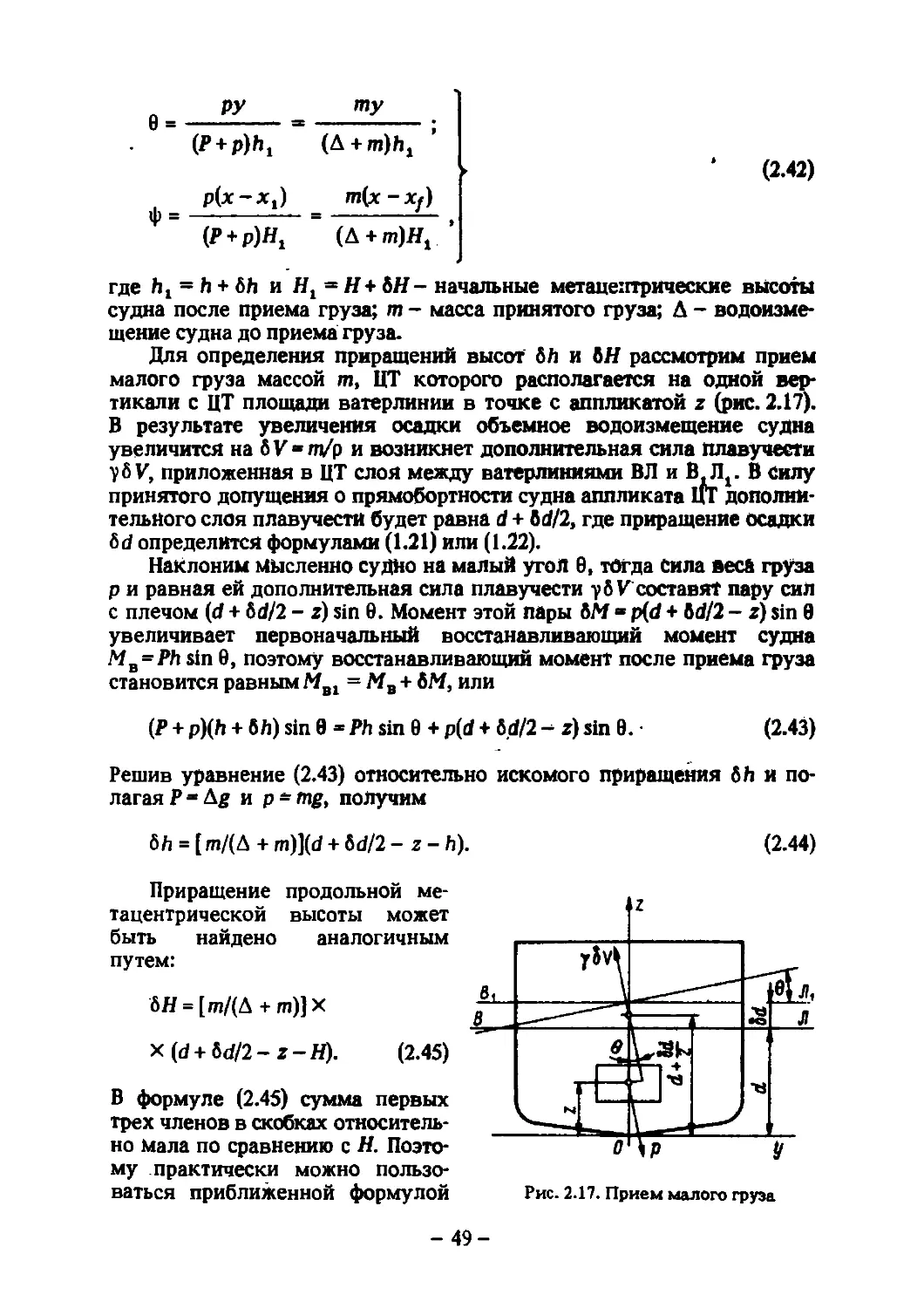
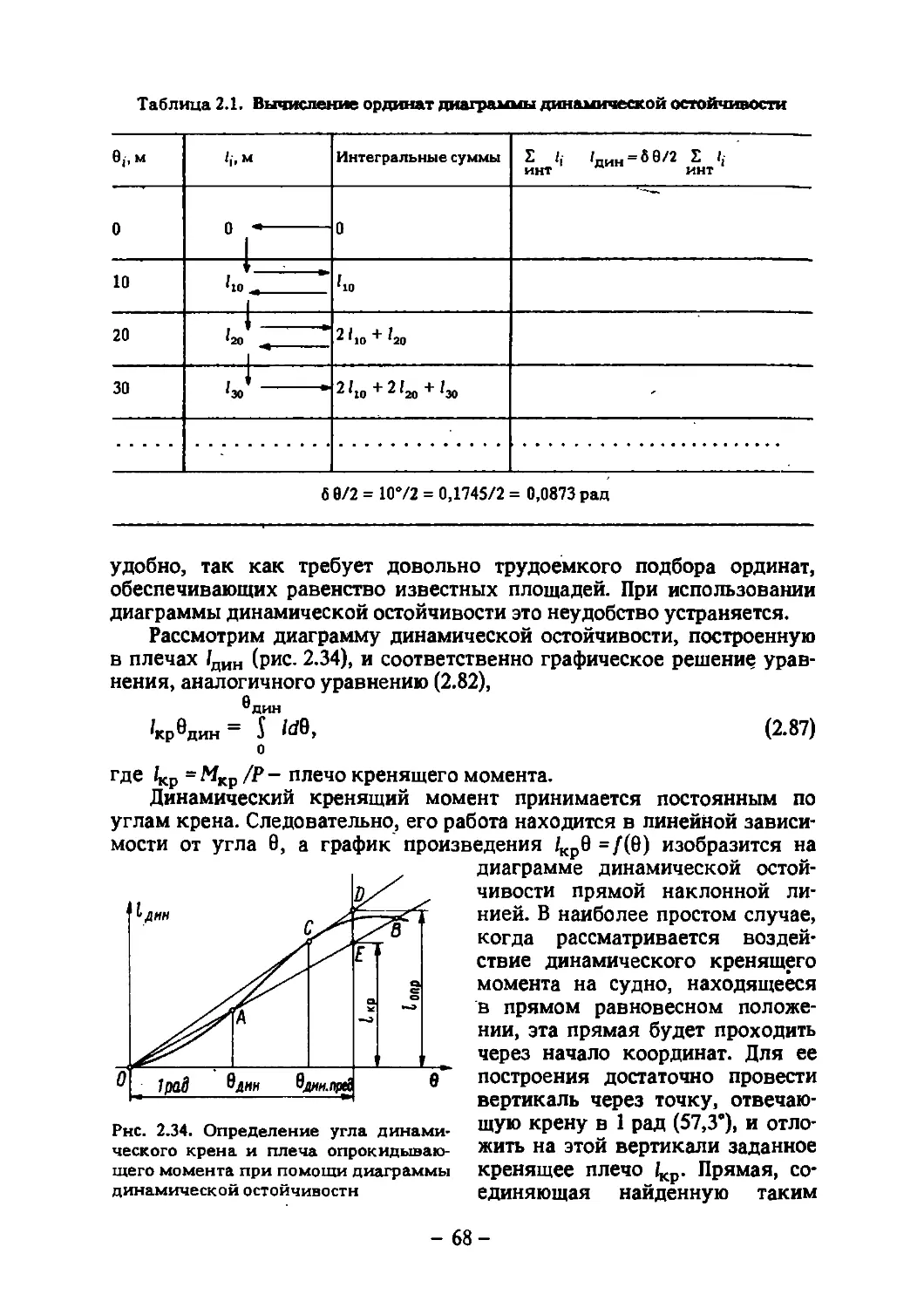
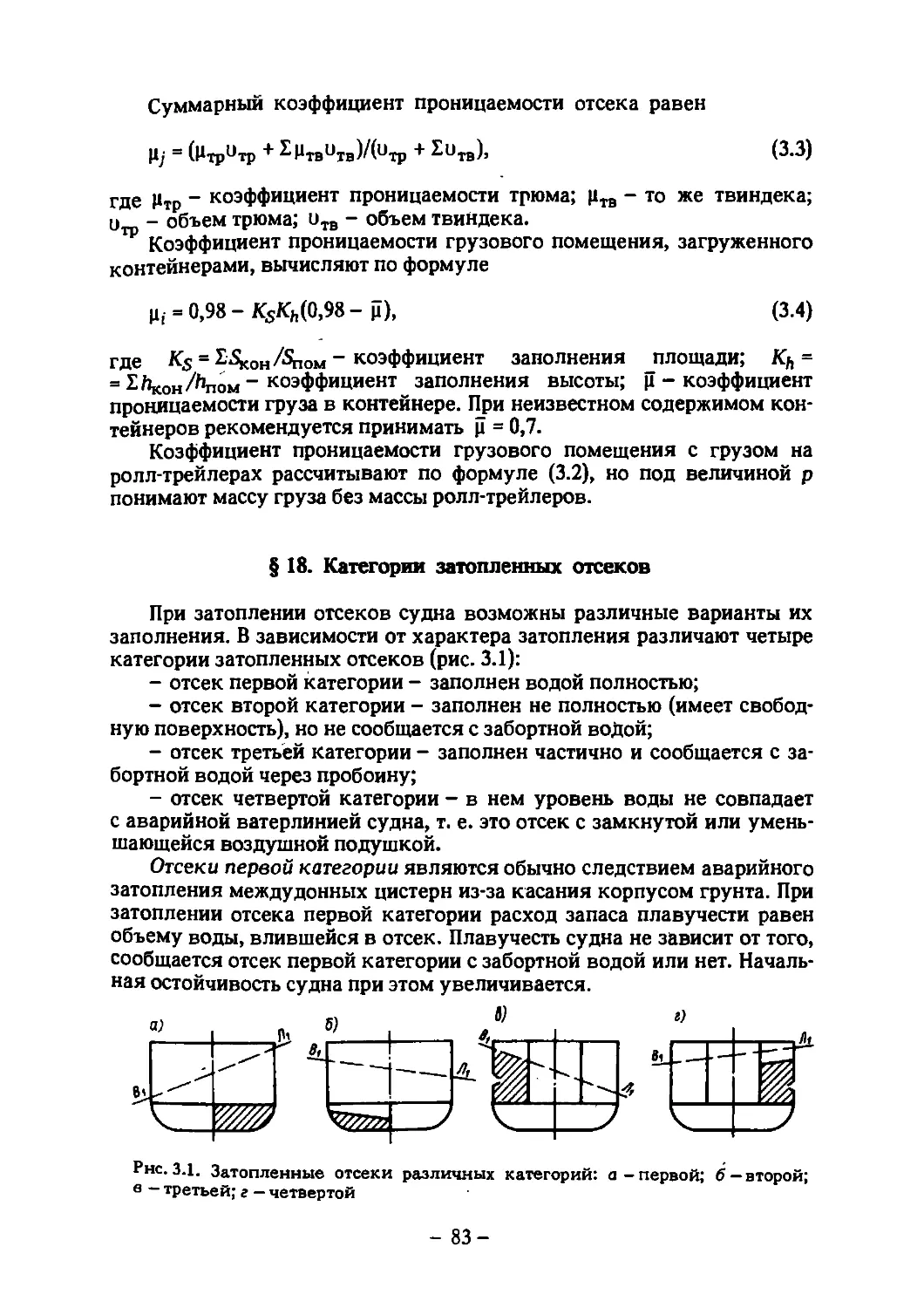
Text
ТЕОРИЯ
УСТРОЙСТВО СУДОВ
Под редакцией доктора технических наук, профессора ф. М. Кацмана
Допущено Государственным комитетом СССР по народному образованию в качестве учебника для студентов вузов, обучающееся по специальности ’’Судовождение”
Ленинград .СУДОСТРОЕНИЕ 1991
ББК 39.42-01
Til
УДК 629.12.001.11:532(075)
Авторы: Ф. М. Кацман, Д. В. Дорогостайский, А. В. Коннов, Б. П. Коваленко
Рецензенты: кафедра теории и устройства судна Новороссийского высшего инженерного морского училища (канд. техн, наук А. В. Самохвалов), докт. техн, наук В. Г. Сизов
Т11 Теория и устройство судов / Ф. М. Кацман, Д. В. Дорогостайский, А. В. Коннов, Б. П. Коваленко: Учебник. - Л.: Судостроение, 1991. - 416 с., ил.
ISBN 5-7355-0166-6
В соответствии с учебной программой курса „Теория и устройство судна” освещены вопросы, изучаемые курсантами высших инженерных морских училищ, получающими специальность „Судовождение”. В краткой описательной форме изложены сведения об устройстве судна, закрепляемые впоследствии учащимися во время плавательной практики. Более подробно излагаются разделы, посвященные теории судна. Отличительной особенностью данной книги является эксплуатационная судоводительская направленность. Особое внимание уделено явлениям, характерным для работы судна в реальных морских условиях, т. е. борьбе за непотопляемость судна, плаванию в условиях стесненных акваторий, плаванию на взволнованном море, в том числе на попутном волнении. В объеме и направленности, необходимых инженерам-судоводителям, излагаются вопросы реверсирования судов, управляемости, качки.
Предназначен для курсантов судоводительских факультетов высших инженерных морских училищ, инженеров-судовбдителей морского флота.
2705140300-024
Т--------------8-01 ББК 39.42-01
048(01)-91
ISBN 5— 7355— 0166- 6 © Ф. М. Кацман, Д. В. Дорогостайский,
А. В. Коннов, Б. П. Коваленко, 1991
ПРЕДИСЛОВИЕ
Курс „Теория и устройство судна” для специальности „Судовождение” состоит из двух неравноценных по объему разделов. В первом семестре первого курса высших инженерных училищ излагается ознакомительный краткий курс „Устройство судна”, предназначенный для введения курсантов в морскую специальность, усвоения ими морской терминологии и изучения основ классификации судов, устройства корпуса судна, его оборудования, судовых устройств и систем. Полученные в этом разделе знания углубляются и расширяются во время плавательных практик на учебных и производственных морских судах.
Раздел „Теория судна” изучается на третьем’курсе. В представленном учебнике материал этого раздела имеет судоводительскую практическую направленность. Основные вопросы, рассматриваемые в разделе „Теория судна”, имеют большое самостоятельное значение для обеспечения безопасности мореплавания. К таким вопросам в первую очередь относятся вопросы плавучести, остойчивости, непотопляемости, мореходности. Все они изложены в прикладной направленности применительно к деятельности будущих инженеров-судоводителей. Все главы данного раздела опираются на основы гидромеханики, без знания которых невозможно усвоение материала этого раздела и курсов, изучаемых на других кафедрах по специальности „Судовождение”, в частности, курса „Управление судна”. Поэтому самые необходимые краткие сведения по гидромеханике судна содержатся в гл. 4.
В соответствии с учебной программой раздел „Теория судна” включает параграфы, в которых рассмотрена прочность судна, не имеющая прямого отношения к теории судна как науки, но тесно связанная с безопасностью мореплавания.
Многолетний опыт преподавания курса „Теория судна” в ГМА, систематическое общение с капитанами судов и со штурманским составом морского флота на судах, в пароходствах, на курсах повышения квалификации капитанов, старших и вторых помощников позволил авторам создать нетрадиционный учебник, отражающий специфику судоводительской специальности. Практическая направленность курса определила включение в него не только классических основ теории судна, но и современных научных и практических достижений науки и теории судна, необходимых для повседневной деятельности судоводителей.
- 3-
Учебник предназначен для курсантов судоводительской специальности морских инженерных училищ Министерства морского флота СССР, слушателей курсов повышения квалификации и штурманского состава морских судов.
Предисловие, введение, гл. 5, 6 и § 70, 71, 75 написаны Ф. М. Кацманом; § 72, 74 - совместно Ф. М. Кацманом и Г. Г. Мартиросовым; § 73 — совместно Ф. М. Кацманом и А. А. Ершовым; гл. 1, 2, 11 - Д. В. Дорого-стайским; гл. 7-9, 15, § 26 - Б. П. Коваленко; гл. 3, 14, 17 и § 91-95-А. В. Конновым. В подготовке учебника принимали участие Г. Т. Миль-Кин, который написал § 22-25, 97, 98; С. Г. Дитятев - гл. 13; Л. Б. Амфи-лохиев - § 8, 58; А. А. Ершов - гл. 12.
ВВЕДЕНИЕ
Морской Флот СССР в годы Советской власти вырос в крупнейший флот мира. Он насчитывает более 6700 судов, имеющих валовую вместимость более 100 per. т, суммарную валовую вместимость около 25 млн. брутто per. т, а дедвейт 28 млн. т. Из этого числа Министерство морского флота (ММФ) СССР владеет более 2800 судами валовой вместимостью более 16 млн. per. т и дедвейтом более 21 млн. т. Морской Флот СССР по тоннажу дедвейта занимает пятое место в мире, обогнав такие крупные судостроительные и морские державы, как США, Великобритания, Норвегия.
Высока доля перевозок советским Морским Флотом в грузообороте мировой торговли, который составляет более 3300 млн. т: Морской Флот СССР обеспечивает транспортировку 240 млн. т. Выполняя огромную работу по перевозке народнохозяйственных грузов, Морской Флот СССР занимает ведущее место по перевозкам экспортных и импортных грузов. Он также в значительном объеме перевозит грузы иностранных фрахтователей. Более чем в 140 стран мира заходят суда ММФ. Морской Флот СССР обеспечивает надежный грузооборот при внешнеторговых связях.
Осуществляя большие по объему и высокие по качеству перевозки, суда ММФ, работая в условиях суровой морской стихии, должны удовлетворять определенным техническим требованиям. Преодолевая влияние различных факторов этой стихии, суда подвергаются воздействию волн, ветра, льда, испытывая динамические удары, качку, вибрацию. При этом возможны повреждения и разрушения конструкций корпуса. Не исключены нарушения целостности корпуса в результате его ударов о подводные препятствия или столкновения судов. Однако во всех случаях суда средства перевозки пассажиров и грузов должны обеспечивать свою безопасность, а следовательно, безопасность команды, пассажиров и грузов. Чтобы плавание судна было безопасным, необходимо выполнять комплекс технических и конструктивных мероприятий, предусмотренных при проектировании и постройке судна, а также объемный комплекс требований эксплуатации. К сожалению, эти условия не всегда соблюдаются.
С 1961 по 1984 г. потери мирового транспортного флота вследствие аварий, вызванных различными причинами, составили более 4400 судов валовой вместимостью 25 116 487 брутто per. т. Только в 1984 г. мировой торговый флот в результате различных причин при работе
-5-
в море потерял 250 судов вместимостью 1 614 100 брутто per. т, что составляет 0,38 % валовой вместимости мирового флота»' Большое количество судов гибнет из-за незнания или пренебрежения экипажами основных положений теории судна. В частности, в том же 1984 г. 40 судов (или 17 %) погибли вследствие воздействия гидрометеорологических факторов, т. е. недоучета судоводителями качки и особенностей движения на попутном волнении, из-за недостаточной осведомленности о мореходности. 22 судна (9 %) погибли в результате потери остойчивости. Из 40 судов, посаженных на мель в 1984 г., и из 20 судов, потерпевших аварию вследствие столкновения в этом же году, значительное количество составляли случаи неудовлетворительного использования средств управления и плохого знания экипажем маневренных характеристик своих судов. Все эти факты показывают, насколько необходимы инженерам-судоводителям твердые знания теории судна. Особо подчеркнули важность этих знаний трегические кораблекрушения советских пассажирских лайнеров „Михаил Лермонтов” и „Адмирал Нахимов”. В этих кораблекрушениях борьба за остойчивость, живучесть, непотопляемости судов играли большую роль.
Независимо от первоначальных причин аварии в конечном счете суда могут погибнуть только от потери плавучести, потери остойчивости, потери прочности. Эти вопросы являются предметом изучения курса „Теория и устройство судна” (ТУС).
Как бы ни была совершенна техника, какие бы самые современные и точные приборы не отражали состояние судна, обстановку и ситуацию, конечный результат, в том числе и безопасность мореплавания, зависит только от экипажа. Высокий уровень знаний, уверенность в них, умение быстро и решительно принимать решения, оценивая обстановку и прогнозируя ее развитие, являются большой гарантией безопасности в море. В первую очередь необходимо четко представлять, к чему приведет данная ситуация и связанные с ней действия. Наиболее часто решения в сложных условиях плавания приходится принимать на судне капитану и его помощникам, т. е. инженерам-судоводителям, входящим в командный состав, обеспечивающий управление судном, от знаний и действий которого зависит эффективность технической и коммерческой эксплуатации, а также безопасность судна, его экипажа, перевозимых пассажиров и груза. Теоретические основы знаний многих вопросов, касающихся этих проблем, содержатся в курсе ТУС, изучаемом курсантами судоводительского факультета, получающими специальность „Судовождение”.
Управляемость судном, физическая сущность совершаемых им маневров, маневренные качества в различных навигационных условиях и другие вопросы, связанные с изменением судном направления движения, в том числе на обратное и движение по криволинейной траектории, излагаются в главе курса ТУС, посвященной управляемости судна.
В значительной степени безопасность мореплавания, сохранение в нештатных условиях судна на плаву зависят от остойчивости, непотопляемости и плавучести. Теоретические основы для решения задач обеспечения безопасности дает учение о статике судна, которое охватывается курсом ТУС.
Коммерческая эксплуатация судна невозможна без обеспечения его скорости при различных загрузке, дифференте, состоянии обшивки корпуса, метеорологических условиях плавания, состоянии двигателей
-6-
и других факторах. Эта проблема является предметом изучения науки о ходкости судна, которая входит в курс ТУС.
Судно в море плавает в штормовых условиях и подвержено качке, ударам волн. Эти факторы могут привести к трагическим явлениям, вплоть до гибели судов и экипажей, если не располагать основополагающими знаниями о свойствах и возможностях судна при плавании на волнении, в шторм, при различных формах качки. Все эти вопросы рассматриваются в главах курса ТУС, посвященных качке судна.
Судно работает в сложных динамических условиях, многочисленны варианты загрузки, воздействия ветра, волнения при различных положениях корпуса относительно волны. Чтобы выполнять свои функции при всех указанных условиях, судно должно быть надежным и должно выдерживать все нагрузки и деформации. Для этого инженеру-судоводителю необходимы знания сил, действующих на судно, и возможностей судна преодолевать эти силы без разрушения. Такие знания можно получить, изучая главу Прочность корпуса судна курса ТУС.
Кроме того, инженер-судоводитель обязан знать классификацию судов, детально разбираться в многообразных типах судов, освоить устройство судна - объекта его будущей деятельности. Принципиальные основы этих знаний также содержатся в курсе ТУС.
Таким образом, курс ТУС - это теоретический фундамент деятельности инженера-судоводителя на судне. Знание всех положений этого курса нужны не только для понимания своих действий на судне, связанных в первую очередь с обеспечением его безопасности, но и для освоения других практических курсов, излагаемых на судоводительском факультете в ВИМУ, в частности „Управление судном”, „Грузо-ведение”. Более того, знание всех положений этого курса для судоводителя обязательно, о чем свидетельствует правило 11/2 и другие правила Международной конвенции о подготовке и дипломировании моряков и несении вахты, принятой в 1978 г. Конвенция строго регламентирует обязательные знания судоводителем следующим вопросов:
- маневрирования и управления судном в любых условиях; реверсирования судна;
- управления судном с учетом влияния течения и ветра;
- маневрирования на мелководье, управления судном с учетом проседания при движении на ограниченной глубине, в условиях бортовой и килевой качек;
- взаимодействия судна с движущимися вблизи судами, с берегом.
Согласно Конвенции судоводитель должен разбираться в устройстве судна, а также хорошо представлять, какие факторы влияют на дифферент и остойчивость и какие мероприятия и действия приведут к безопасному дифференту и остойчивости. Судоводителю также необходимо знание вопросов непотопляемости. В Конвенции прямо сказано, что судоводитель должен проявить „знания влияния повреждений и последующего затопления какого-либо отсека на посадку и остойчивость судов”. Как указывается в Конвенции, судоводитель обязан „показать умение пользоваться таблицами остойчивости, посадки
-7-
и напряжений, диаграммами и счетными устройствами для расчета напряжений, включая знания о погрузке грузов и балластировке для сохранения напряжений корпуса в допустимых пределах”. Кроме того, в соответствии с Конвенцией судоводитель должен в случае необходимости проявить свои знания конструктивных узлов судна и терминологии, а также общие знания рекомендаций международных морских организаций ИМКО по остойчивости судна.
Все эти и другие вопросы, являющиеся основой для будущей деятельности инженера-судоводителя, излагаются в курсе ТУС, и главные из них содержатся в предлагаемом учебнике.
Курс ТУС состоит из двух самостоятельных разделов: „Теория судна” и „Устройство судна”. В ВИМУ в состав курса ТУС также входит прочность судна.
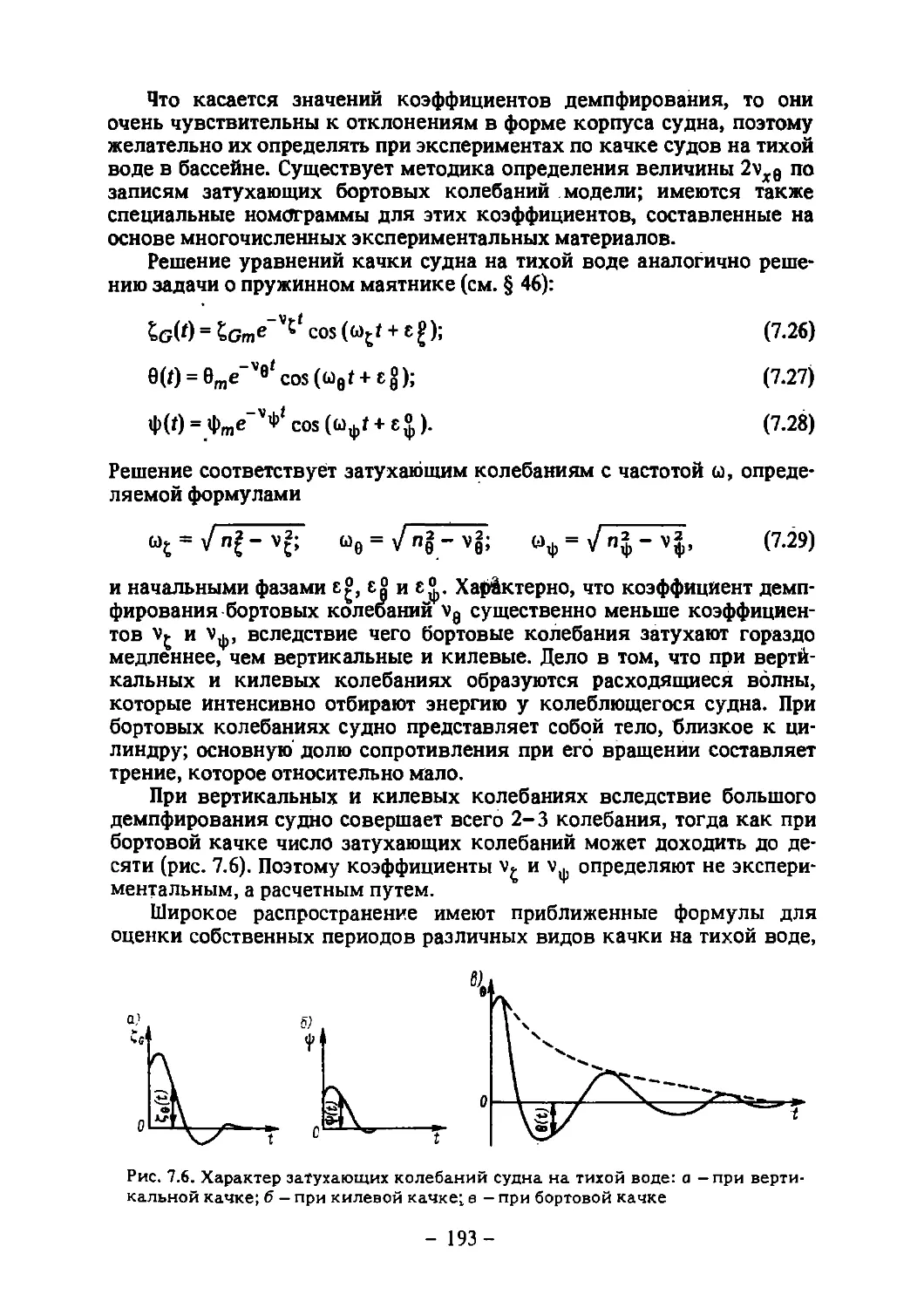
Теория судна - это наука о равновесии и движении судна, изучающая мореходные качества судна, т. е. плавучесть, остойчивость, управляемость, качку, мореходность, ходкость, а также непотопляемость при помощи математического анализа и экспериментальных методов в лабораториях и в натуре. Теория судна включает статику и динамику судна (рис. В.1).
Изучение и развитие теории судна производится путем составления и решения функциональных зависимостей, характеризующих физические явления, обеспечивающие рассматриваемые мореходные качества судна. Сталкиваясь с математическими трудностями в решении поставленных задач, прибегают к экспериментам с моделями судов в специальных лабораториях (опытовых бассейнах, гидродинамических лотках, аэродинамических и кавитационных трубах) или с реальными судами в море.
Аппарат теории судна как науки применительно к теории и практике судовождения позволяет решать многие специальные штурманские и судоводительские задачи, в частности задачи расхождения судов, снятия судов с мели, движения на ограниченной по глубине и ширине акватории.
Истоки теории судна ведут к первым мореплавателям. Первым законом теории судна, сохранившимся до настоящего времени в исходной формулировке, является основной закон плавучести - закон Архимеда. Однако и в древности, и в средневековье он не получил признания как закон судостроения. К периоду древности относится понятие остойчивости - важнейшего свойства судна, которым также занимался Архимед более 2000 лет назад.
Крупный вклад в теорию судна внесли члены Петербургской Академии наук Л. Эйлер и Д. Бернулли. Впервые учение о непотопляемости разработал адмирал С. О. Макаров, имя которого носит ГМА. Неоценимый вклад в теорию судна внес академик А. Н. Крылов, в судовую гидродинамику свою лепту вложили инициатор постройки и первый директор первого в России опытового бассейна Д. И. Менделеев, автор вихревой теории гребного винта, „отец русской авиации” Н. Е. Жуковский. Мировой известностью пользуются труды в области теории судна советских ученых-судостроителей В. Г. Власова, К. К. Федяевского, Г. Е. Павленко, А. М. Басина, В. В. Семенова-Тян-Шанского, В. М. Лаврентьева, С. Н. Благовещенского, Г. А. Фирсова, Я. И. Войткунского, А. Н. Холодилина и др.
-8-
Рис. B.l
Раздел 1. Теория судна
Глава 1
ПЛАВУЧЕСТЬ СУДНА
§ 1. Геометрия корпуса судна
Общее представление о форме корпуса. Корпус судна представляет собой удлиненное тело, которому обычно придается удобообте-каемая форма с целью уменьшения сопротивления воды и воздуха его движению. Для общей характеристики формы корпуса служат:
формы сечений корпуса тремя взаимно перпендикулярными плоскостями;
соотношения главных размерений корпуса;
безразмерные коэффициенты полноты.
. В качестве трех взаимно перпендикулярных секущих плоскостей принимают (рис. 1.1):
вертикальную продольную плоскость, проходящую посередине ширины судна и называемую диаметральной плоскостью (ДП);
вертикальную поперечную плоскость, проходящую посередине расчетной длины судна и называемую плоскостью мидель-щпангоута (обозначается знаком Ф );
горизонтальную плоскость, совпадающую с поверхностью воды и называемую плоскостью грузовой ватерлинии (плоскостью ГВЛ).
При проектировании судов, в частности судов, не предназначенных для перевозки грузов, иногда вместо ГВЛ, отвечающей осадке судна с полным грузом, пользуются некоторой условной ватерлинией - конструктивной ватерлинией (КВЛ).
Рис. 1.1. Сечения корпуса судна и главные размерения
-10-
Диаметральная плоскость делит корпус судна на две симметричные части. Относительно плоскости мидель-шпангоута корпус судна, как правило, несимметричен, что обусловливается общепроектными соображениями и требованиями, связанными с обеспечением мореходных качеств судна. Плоскость ватерлинии делит корпус судна на две несимметричные части: подводную и надводную.
У морских судов верхняя палуба, как правило, имеет седловатость, т. е. палубная линия в ДП является плавной кривой с подъемом от средней части судна в нос и в корму. Седловатость уменьшает зали-ваемость оконечностей и улучшает таким образом мореходность судна. Чтобы обеспечить сток воды за борт, палубе в поперечном направлении придают обычно кривизну, называемую погибыо.
Диаметральная плоскость и плоскость мидель-шпангоута являются главными координатными плоскостями, используемыми при решении задач статики судна. Третьей координатной плоскостью является основная плоскость (ОП), параллельная плоскости ватерлинии и проходящая через линию пересечения верхней кромки горизонтального киля с плоскостью мидель-шпангоута.
Главные размерения судна и их соотношения. Главными размерениями судна являются (см. рис. 1.1):
расчетная длина судна L; различают две расчетные длины, используемые при решении задач статики судна: длину по КВЛ Тквл» И3‘ меряемую вдоль следа КВЛ на ДП между точками пересечения КВЛ с передней кромкой форштевня и очертанием кормы по внутренней поверхности наружной обшивки; длину между перпендикулярами Lp, измеряемую в ДП между перпендикулярами к ОП, проведенными через точки пересечения КВЛ с передней кромкой форштевня (носовым перпендикуляром (НП)] и с осью баллера руля [кормовым перпендикуляром (КП)];
расчетная ширина судна В, измеряемая на уровне плоскости КВЛ в наиболее широком ее месте между внутренними поверхностями наружной обшивки;
высота борта D, измеряемая в плоскости мидель-шпангоута по вертикали у борта от ОП до линии пересечения внутренней поверхности бортовой обшивки с нижней поверхностью палубного настила верхней водонепроницаемой палубы;
осадка судна d, измеряемая в плоскости мидель-шпангоута по вертикали от ОП до уровня ГВЛ.
Разность между высотой борта D и осадкой d определяет высоту надводного борта F.
Все перечисленные главные размерения носят название расчетных, или теоретических, так как они не учитывают толщины наружной обшивки корпуса. Теоретические главные размерения используют в различных расчетах, выполняемых для оценки качеств судна, определяемых его геометрической формой.
Для общей характеристики формы корпуса служат следующие соотношения главных размерений:
отношение L/B, определяющее в значительной степени ходовые качества судна;
- 11 -
отношение В/d, влияющее на остойчивость, качку и ходовые качества;
j отношение L/D, влияющее на прочность судна;
отношение D/d, определяющее остойчивость на больших углах крена и непотопляемость судна.
Безразмерные коэффициенты полноты. Кроме указанных выше отношений главных размерений для характеристики формы подводной части судна используют безразмерные коэффициенты полноты: коэффициент полноты площади КВЛ- Отношение площади ватерлинии S к площади прямоугольника со сторонами L и В:
a=S/(LB); (1.1)
коэффициент полноты площади мидель-шпангоута - отношение площади подводной части мидель-шпангоута о к площади прямоугольника со сторонами В и d:
P = w/(Bd); (1.2)
-коэффициент общей полноты - отношение объема подводной части, или объемного водоизмещения, судна V к объему параллелепипеда со сторонами L, В и d:
Cb = V/(LBd); (1.3)
коэффициент продольной полноты - отношение дбъемного водоизмещения судна V к объему цилиндра, имеющего основанием площадь мидель-шпангоута 6) и высоту L:
ф = V7(wL); (1.4)
коэффициент вертикальной полноты - отношение объемного водоизмещения судна V к объему цилиндра, имеющего основанием площадь КВЛ S и высоту d:
X = V/(Sd). (1.5)
Коэффициенты а, р и Сь считаются основными независимыми коэффициентами, а коэффициенты ф и х - производными от них, связанными соотношениями
Ф=Сь/р; x-Q/a. (1.6)
Координатные оси и параметры посадки судна. Положение судна относительно невозмущенной поверхности воды называют его посадкой. В задачах, связанных с определением посадки судна, обычно используют связанную с судном прямоугольную координатную систему Oxyz, в которой ось Ох направлена в нос по линии пересечения ДП
-12-
с ОП, ось Оу - на правый борт по линии пересечения плоскости мидель-шпангоута с ОП, ось Ох - вверх по линии пересечения ДП с плоскостью мидель-шпангоута (рис. 1.2).
В общем случае посадка судна, а следовательно, и положение его ватерлинии в указанной выше координатной системе определяются тремя параметрами, в качестве которых принимают среднюю осадку d - аппликату точки пересечения плоскости ватерлинии с осью Oz; угол 6 - угол между осью Оу и линией пересечения плоскости ватерлинии с плоскостью мидель-шпангоута (миделевым следом ватерлинии); угол ф - угол между осью Ох и линией пересечения плоскости ватерлинии с ДП (диаметральным следом ватерлинии). Если 0 = 0, то говорят, что судно сидит прямо; если ф = 0, то говорят, что судно сидит на ровный киль. Обычно параметр 0 называют углом крена, а параметр ф - углом дифферента, хотя, строго говоря, угол 0 является углом крена только при ф = 0, а угол ф - углом дифферента только при 0 = 0.
Положительными направлениями -отсчета углов считают: для 6 - направление от оси Оу по часовой стрелке, если смотреть с положительного конца оси Ох, а для ф - направление от оси Ох против часовой стрелки, если смотреть с положительного конца oqh Оу. Таким образом, положительными будут дифферент на нос и крен на правый борт.
Если судно сидит прямо (0 = 0), то его посадка может быть определена двумя параметрами d и ф или значениями осадок носом и кормой (на НП и КП):
L L
dH = d +— tg ф = d + — ф; (1.7)
2 2
L L
dK=d-----tg ф — cf---ф. (1.8)
2 2
Разность осадок носом и кормой d^ -d^ называют дифферентом судна. Угол дифферента и дифферент связаны следующей зависимостью:
dH-dK=L tgi|> (1.9)
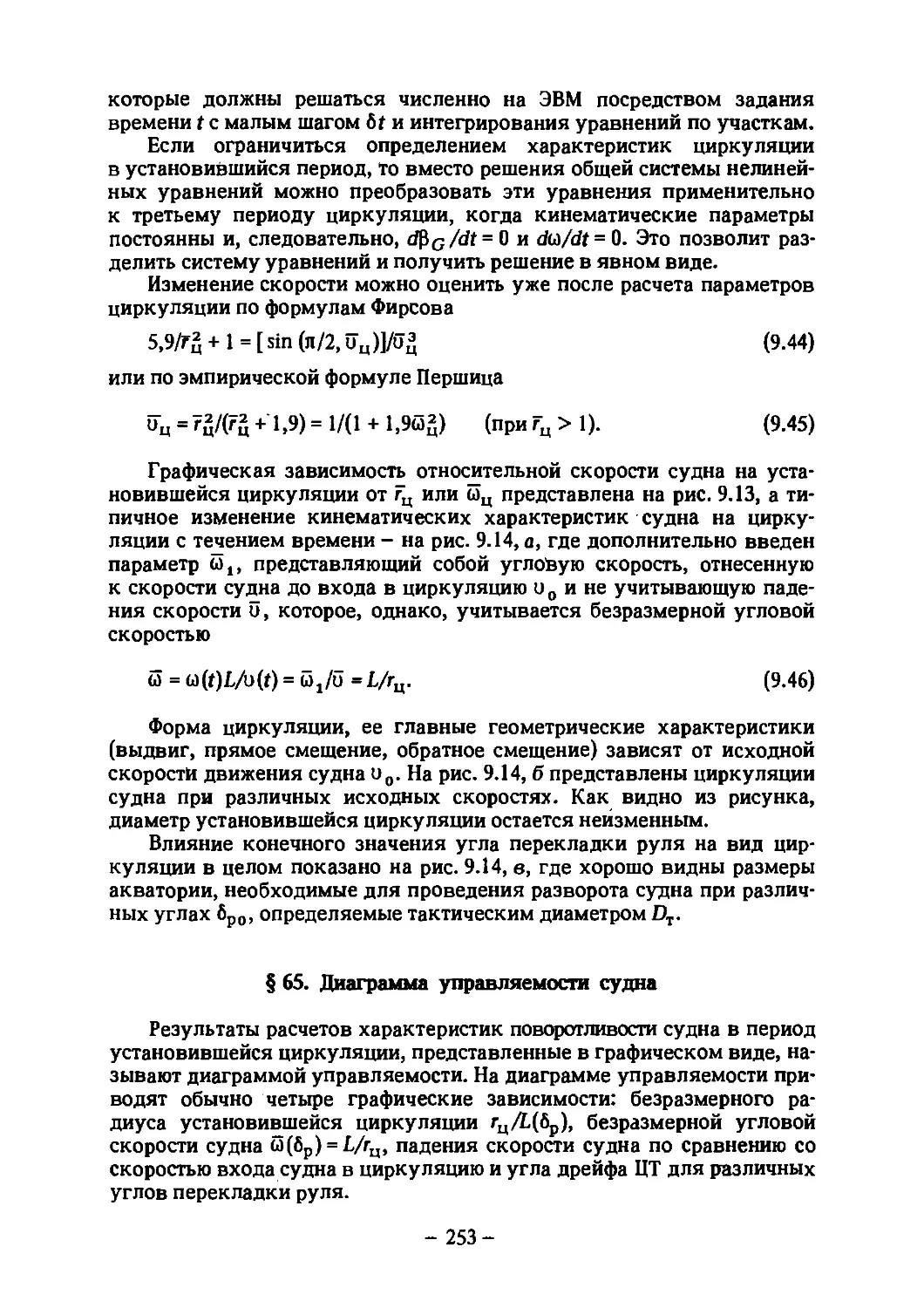
Теоретический чертеж судна. Соотношения главных размерений и коэффициенты полноты не могут дать точного представления о форме корпуса судна: при одних и тех же значениях главных размерений, их соотношений и коэффициентов полноты можно получить множество отличных друг от друга форм корпуса. Точное представление о форме корпуса судна может дать только его теоретический чертеж (рис. 1.3), необходимый для расчетов плавучести, остойчивости, непотопляемости, разработки чертежей общего расположения судна и конструктивных чертежей корпуса.
- 13-
I
-fe. I
Рис. 1.3. Теоретический чертеж судна
На теоретическом чертеже стального судна изображают теоретическую поверхность корпуса без наружной обшивки, толщина которой мала по сравнению с размерами судна, в проекциях на три взаимно перпендикулярные координатные плоскости: ДП, плоскость мидель-шпангоута и ОП. Эти проекции называют соответственно „Боком”, „Корпусом” и „Полуширотой”.
Метод изображения корпуса судна на теоретическом чертеже заключается в вычерчивании совокупности сечений его поверхности рядом плоскостей, параллельных указанным трем плоскостям проекций. Сечения теоретической поверхности судна вертикальными плоскостями, параллельными ДП, называют батоксами; сечения вертикальными плоскостями, параллельными плоскости мидель-шпангоута, -теоретическими шпангоутами; сечения горизонтальными плоскостями, параллельными ОП, - ватерлиниями. Каждое сечение проецируется на одну из плоскостей в своем истинном виде, а на две другие плоскости - в виде прямых линий. Например, каждая ватерлиния изображается в своем истинном виде на „Полушироте” и в виде прямых линий на „Корпусе” и „Боку”.
Поскольку корпус судна симметричен относительно ДП, на „Полушироте” вычерчивают только половины ватерлиний, а на „Корпусе” -половины шпангоутов; при этом половины носовых шпангоутов изображают справа, а кормовых - слева от следа ДП. Нос судна на „Полушироте” и „Боку” в отечественной практике принято располагать справа.
Все три проекции корпуса судна на теоретическом чертеже представляют одну и ту же поверхность, поэтому координаты всех точек пересечения шпангоутов, ватерлиний и батоксов должны быть согласованы на всех проекциях. Все однотипные сечения обычно проводят на равных расстояниях. Число равноотстоящих от ГВЛ ватерлиний зависит от требуемой точности расчетов теоретических элементов судна. Ватерлинии нумеруют по порядку снизу вверх (ОП рассматривают как нулевую ватерлинию). Выше ГВЛ также проводят несколько ватерлиний, чтобы обеспечить необходимое согласование плавности обводов в надводной части судна. Число равноотстоящих теоретических шпангоутов, включая НП и КП, принимают обычно равным 21, т. е. расчетную длину судна делят на 20 равных частей, именуемых теоретическими шпациями.
§ 2. Плавучесть судна
Плавучестью называют способность судна поддерживать вертикальное равновесие в заданном положении относительно поверхности воды в результате действия силы веса судна и выталкивающей силы воды.
Свойство плавучести отличает судно от других инженерных сооружений. Мерой плавучести судна является его водоизмещение Д = pV, где р - плотность забортной воды.
-15-
Рис. 1.4. Силы, действующие на плавающее судно
Условия и уравнения равновесия плавающего судна. На судно, плавающее неподвижно в положении равновесия на спокойной поверхности воды, действуют следующие силы (рис. 1.4):
- сила веса всех его частей, которые приводятся к их равнодействующей - силе веса судна Р = &g, направленной вертикально вниз и приложенной в центре тяжести (ЦТ) судна G (хр уе zg);
- гидростатические силы давления воды, действующие по нормалям к подводной поверхности судна; горизонтальные составляющие этих сил взаимно уравновешивают
ся, а вертикальные составляющие приводятся к их равнодействующей - силе плавучести у V (у - удельный вес забортной воды), направленной вертикально вверх и приложенной в центре величины (ЦВ)-ЦТ подводного объема судна С (хс, ус, zc).
На корпус движущегося судна действуют, кроме того, гидродинамические силы давления воды, имеющие также не только горизонтальные, но и вертикальные составляющие. Однако при решении большинства задач статики судна подъемной силой корпуса, обусловленной гидродинамическими силами давления воды, пренебрегают. Эти силы учитывают только в некоторых специальных задачах статики, например в задачах, связанных с остойчивостью глиссирующих судов.
Основным физическим законом, определяющим плавучесть судна, служит закон Архимеда, согласно которому сила веса судна равна силе плавучести, а масса (водоизмещение судна Д) равна массе вытесненной им воды:
P = yV; A = pV.
(1.10)
Формулы (1.10) являются математическими выражениями первого условия равновесия плавающего судна.
Из теоретической механики известно, что для равенства двух сил необходимо и достаточно, чтобы они были равны по абсолютной величине и направлены противоположно друг другу по прямой, соединяющей точки их приложения. В данном случае обе силы - сила веса и сила плавучести - направлены вертикально; следовательно, вторым условием равновесия плавающего судна является расположение точек приложения этих сил - ЦТ и ЦВ - на одной вертикали, т. е. на одном перпендикуляре к плоскости ватерлинии.
Уравнение плоскости ватерлинии может быть записано в виде
х tg ф + у tg 0-z + </ = 0. (1.11)
-16-
Из аналитической геометрии известно, что прямая, соединяющая точки G и С, будет перпендикулярна плоскости, выраженной уравнением (1.11), в том случае, когда удовлетворяются следующие уравнения:
(xg-xc) + (zg-zc)tg4> = 0; )
(уё ~ Ус) + (% " zc) tg 6 = 0. )
Уравнения (1.12) выражают второе условие равновесия плавающего судна. В совокупности уравнения (1.10) и (1.12) называют системой уравнений равновесия судна.
Если судно сидит прямо и на ровный киль (0 = ф = 0), то уравнения равновесия (1.12) принимают вид
xg=xc; yg = yc- U-13)
Определение массы и координат ЦТ судна. Для использования уравнений равновесия при решении практических задач статики судна необходимо уметь определять массу судна и координаты его ЦТ при любом заданном состоянии его нагрузки. В этом случае масса судна (его водоизмещение Л) складывается из масс порожнего судна, команды, снабжения, судовых запасов и балласта, а также перевозимых грузов и пассажиров с багажом. В целях систематизации учета масс и расчета координат ЦТ судна составляют таблицу нагрузки судна (табл. 1.1), в которую заносят массы всех элементов (статей) нагрузки ш,, координаты (плечи) их ЦТ Xi и zit а также статические моменты т,х, и m,z,- относительно соответствующих координатных плоскостей. При заполнении таблицы используют судовую документацию (чертежи общего
Таблица 1.1. Таблица нагрузки судна
Статьи нагрузки ГПр т Zj, м т • M X}. M Mx = mixi> T • M
1 2 3 4 5 6
Порожнее судно при эксплуатации (с командой, провизией и расходными материалами) гл0 zo mozo *0 ГЛдХо
Судовые запасы (топливо, вода, масло) тз z3 x3
Груз в трюме № 1 глх Z1 mizi * *1
Груз в трюме № 2 Г772 Z2 *2 m2x2
Водяной балласт гпб Z6 т&б *6 m6*6
Поправка на влияние свободных поверхностей жидких грузов - - - -
Суммы Em, Em,x,
- 17-
расположения, таблицы элементов топливных и других цистерн, чертеж размещения грузов и др.).
После суммирования по графам 2, 4 и 6 таблицы нагрузки судна находят
Zm.x. Zm.z.
A = Zm,; х„ =-------; ze =---------. (1.14)
8 Zm, 8 Zm,
Поскольку подводный объем судна симметричен относительно ДП, то определять ординату ЦТ yg нет необходимости, так как она должна быть равна или близка нулю. В противном случае судно получит крен, наличие которого в эксплуатационных условиях недопустимо.
Разность между массой судна с полным грузом и массой порожнего судна носит название дедвейта судна. Таким образом, в дедвейт судна входят массы команды и пассажиров с багажом, провизии, расходных материалов, судовых запасов, полезного груза в трюмах судна и постоянного водяного балласта (если таковой предусматривается). Массы всех грузов й пассажиров с багажом, перевозка которых является назначением судна, составляет полезную, или чистую, грузоподъемность судна.
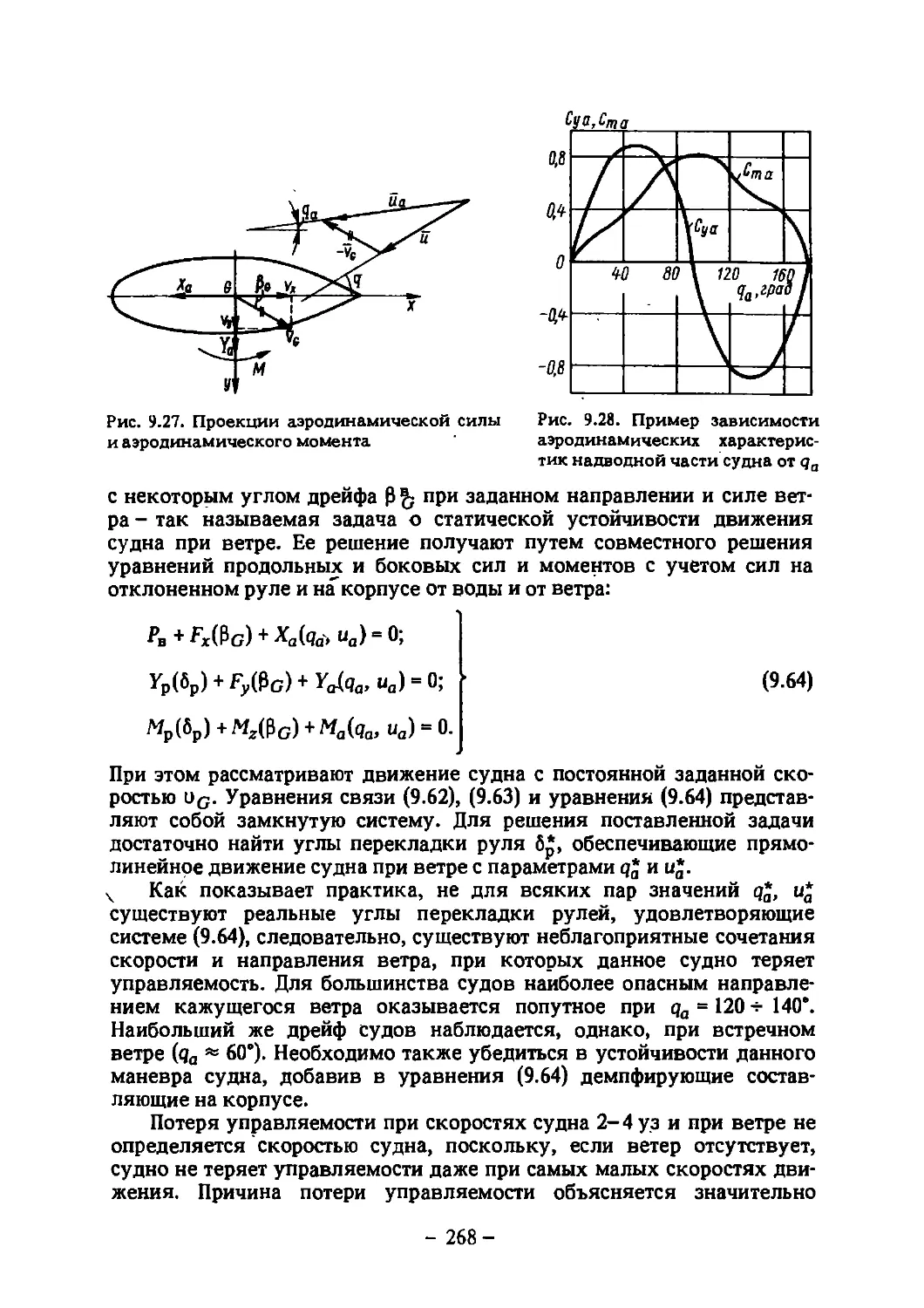
Для определения координат ЦТ однородного генерального или насыпного груза в грузовых помещениях (трюмах и твиндеках) служит чертеж размещения грузов на судне, представляющий собой продольный разрез судна, вычерчиваемый в искаженном (сжатом по длине) масштабе. На каждом грузовом помещении, изображенном на этом чертеже (рис. 1.5), наносят кривую с двумя шкалами - шкалой объемов генерального груза в данном помещении при данном уровне его заполнения и шкалой аппликат его ЦТ. Кроме того, в нижней части чертежа наносят горизонтальную шкалу, позволяющую определить абсциссу ЦТ груза.
Определение теоретических элементов корпуса судна в судовых условиях. В конструкторских бюро при проектировании судна теоретические элементы корпуса судна (в предположении его посадки прямо и на ровный киль) вычисляют в зависимости от осадки судна по стандартной методике с использованием ЭВМ и ординат теоретического чертежа. Результаты таких расчетов позволяют построить ряд кривых, с помощью которых определяют в судовых условиях теоретические элементы, используемые при решении различных практических задач статики судна. К числу таких элементов относятся: водоизмещение Д и объемное водоизмещение V; координаты ЦВ хс и zc; площадь ватерлинии S; абсцисса ЦТ площади ватерлинии xf, коэффициент общей полноты Съ‘, коэффициенты полноты площади ватерлинии а и площади мидель-шпангоута Р; центральные моменты инерции площади ватерлинии 1Х и lyf, аппликаты поперечного и продольного метацентров zm и гм', поперечный и продольный метацентрические радиусы г и R; момент М, дифферентующий на 1 м.
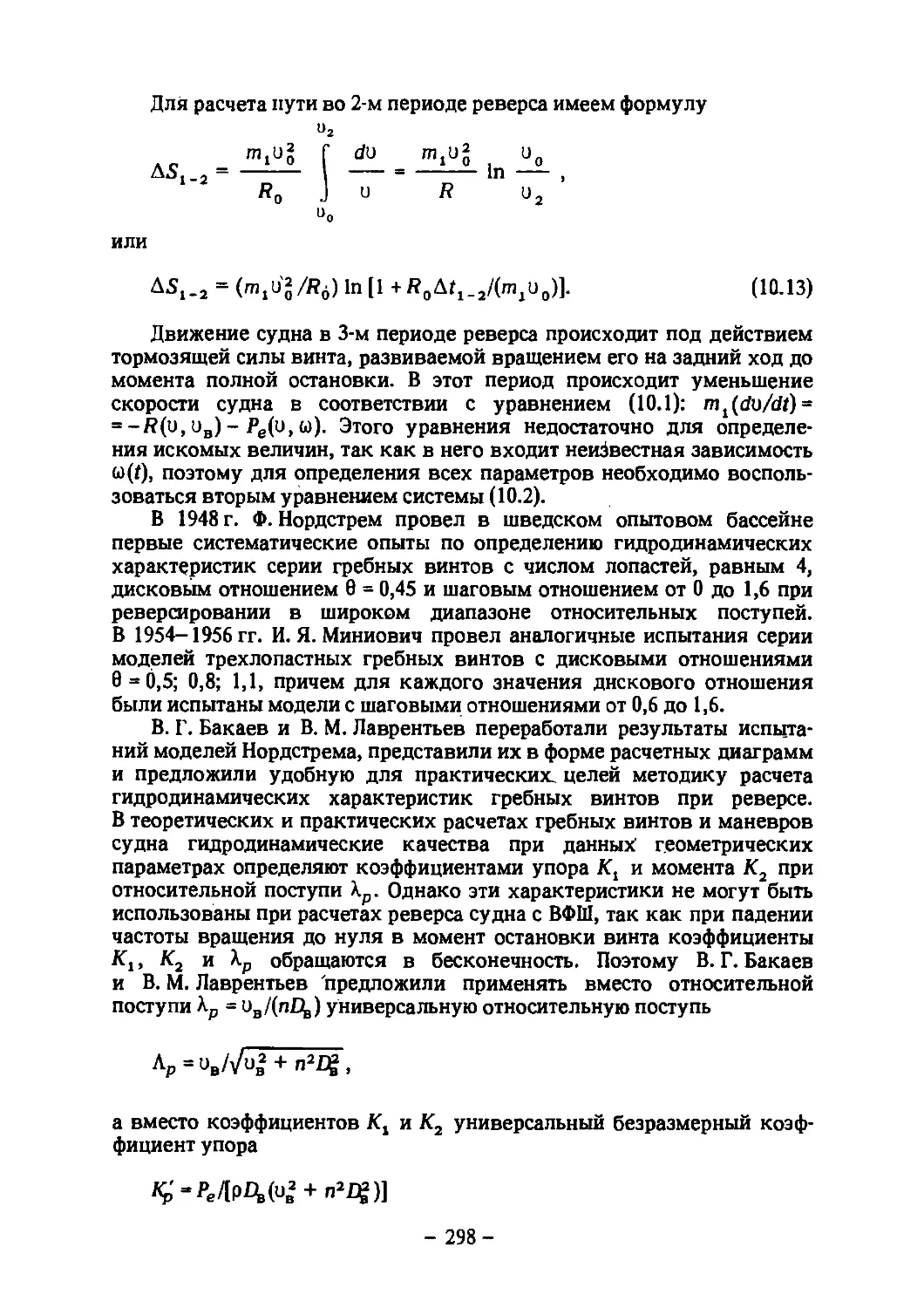
Совокупность кривых, выражающих графически зависимость перечисленных элементов от осадки судна, изображают на одном чертеже,
- 18-
VI,М3 ZiJ*
—ЮГ---------
пи-1U0-too-5U-йоги-
2705 -I 2500 -2900-2200-2000-»ОТ-1600-1900-1200- •
woo-: МО- ;
6U-МО- :
200.:
wo
S,50
ТОиидвя Н1 -9,00
ДЯ
=-♦.50
-9,00 :-з,50
Таят Н *
-100
2,50 г,и
1,50
28 25 30 35 *0
I । । I 1 । I ' 1 1 1 1 1 1
Рис. 1.5. Кривая для определения объема н координат груза в трюме
Рис. 1.6. Кривые элементов теоретического чертежа
который носит название кривые элементов теоретического чертежа (рис. 1.6). На этом чертеже ординаты кривых хс и Xf откладывают от вертикали, представляющей собой след плоскости мидель-шпангоута на ДП, а ординаты прочих кривых - от некоторых условных вертикалей, причем масштаб срдинат указывают на самих кривых или же на шкалах, вычерчиваемых в нижней и верхней частях чертежа.
-19-
Указанный чертеж выдается на судно в составе отчетной документации; он позволяет быстро и без каких-либо вычислений находить значения всех требуемых теоретических элементов корпуса судна для любой осадки.
Кривая водоизмещения и грузовой размер. Кривую, выражающую зависимость объемного водоизмещения судна V от его осадки, называют кривой водоизмещения. Если же ординаты кривой водоизмещения умножить на расчетную плотность забортной воды (обычно принимают р = 1,025 т/м3), то получим кривую Д =/(d), именуемую грузовым размером (рис. 1.7).
Наряду с кривой водоизмещения и грузовым размером на судне пользуются грузовой шкалой (рис. 1.8), также выражающей зависимость Уи Д от осадки судна.
Строевая по ватерлиниям. Кривую, выражающую зависимость площади ватерлинии S от осадки судна d, называют строевой по ватерлиниям (рис. 1.9). Строевая по ватерлиниям обладает следующими свойствами:
- площадь строевой, ограниченная заданной ватерлинией, с учетом масштаба численно равна объемному водоизмещению судна при данной осадке;
- ордината ЦТ А площади строевой с учетом масштаба равна аппликате zc ЦВ судна при данной осадке;
- коэффициент полноты площади строевой равен коэффициенту вертикальной полноты судна х при данной осадке.
Масштаб Бонжана. Как было указано выше, кривую водоизмещения, как и прочие кривые элементов теоретического чертежа, строят для посадки судна на ровный киль, поэтому, если судно имеет значительный дифферент, то использование этой кривой может привести к значительной погрешности вычислений. Для более точного определения объемного водоизмещения, а также абсциссы ЦВ в случае посадки судна прямо, но с дифферентом служит специальная диаграмма, называемая масштабом Бонжана.
Масштаб Бонжана представляет собой совокупность кривых, каждая из которых определяет в некотором масштабе погруженную площадь теоретического шпангоута в зависимости от его углубления, и строится от следа соответствующего шпангоута на ДП (рис. 1.10). Как и теоретический чертеж судна, масштаб Бонжана строится для 21 теоретического шпангоута, т. е. расчетная длина судна (между перпендикулярами) делится на 20 равных частей. На рис. 1.10 для упрощения кривые погруженных площадей показаны только для четных шпангоутов (0-, 2-, 4-го и т. д.). С целью сокращения длины масштаб Бонжана строят в искаженном виде, например в масштабах 1:100 по длине, 1:25 по высоте.
Чтобы использовать масштаб Бонжана, необходимо прежде всего нанести на него ватерлинию судна. Для этого замеряют с плотика или шлюпки осадки судна и d* ы по носовым и кормовым маркам углубления и откладывают эти осадки на соответствующих вертикалях, обычно не совпадающих с НП и КП и отстоящих от последних
-20-
Рис. 1.7. Грузовой размер
Рис. 1.9. Строевая по ватерлиниям
Рис. 1.10. Масштаб Бонжана
- 21 -
соответственно на расстояниях 4, и I*. Полученные точки А и В соединяют прямой линией. Для повышения точности замера осадок при наличии небольшого волнения рекомендуется применять открытую с обоих концов стеклянную трубку длиной около 0,5 м. При небольших колебаниях поверхности воды в районе марок углубления уровень воды в трубке будет оставаться практически неподвижным. Следует иметь в виду также, что марки углубления наносят от нижней кромки горизонтального киля, толщина которого должна быть учтена при нанесении на чертеж точек А и В. Далее снимают с кривых погруженные площаДи шпангоутов ы так, как показано на рис. 1.10 для 8-го шпангоута. После этого определяют объемное водоизмещение и абсциссу ЦВ судна путем табличного вычисления интегралов по правилу трапеций:
+L/2
+ L/2 1 f
У = j todx; хс-— I
-L/2 V J uxdx. (1.15)
-L/2
Рабочая форма вычисления этих интегралов приведена в табл. 1.2.
Как правило, в результате неравномерного распределения грузов по длине корпус судна имеет прогиб или перегиб, максимальная
Таблица 1.2. Рабочая форма вычисления V и хс
№ шпангоутов Площади шпангоутов Произведения i(C0i- <aj)
носовых кормовых ы;
0 Ь>0 “о 0
1
п -1 “п-1 ып-1 (П - 1)(ЫП_I -Ып. 1)
п Ь>п Ь>п п(ып-Wk)
Суммы 2'1
Поправки (ып-ы„)/2 п(ып - ы п)/2
Исправленные суммы 21 е2
*с ~
Примечание. / = L/20 — расстояние между шпангоутами.
-22-
стрелка которого даже на тихой воде может достигать 0,2-0,3 м. В этом случае ватерлиния на масштабе Бонжана будет иметь вид пологой кривой ЛЕВ (см. рис. 1.10, где показан случай перегиба корпуса, когда фактическая осадка на миделе меньше теоретической средней осадки). С достаточной для практических целей точностью можно принять, что максимальной стрелка прогиба (перегиба) будет в плоскости мидель-шпангоута. а поправку к водоизмещению выразить формулой
6V=-(2aa/2)(2- a)LBf,
(1-16)
где / - максимальная стрелка прогиба (перегиба) корпуса. Как видно из рис. 1.10, стрелка прогиба в плоскости мидель-шпангоута определяется следующим выражением:
f = D + tn-F„-m-dcp. (1.17)
Здесь D - теоретическая высота борта судна; ta - толщина палубного стрингера; F„ - назначенная судну высота летнего надводного борта; т - измеренное по борту расстояние от летней ГВЛ до уровня воды в плоскости мидель-шпангоута; d^ - средняя теоретическая осадка (при отсутствии деформации корпуса), равная
1 с/сп
2 F ~ (4t+ 4с)
/н-/к
(c4i. м <4с. м)+ (£4<. м + <4с. м) 4с> (1-18)
где tK - толщина горизонтального киля.
Масштаб Бонжана обычно строят без учета выступающих частей, объем которых (необходимый для уточнения водоизмещения) и продольный статический момент (необходимый для уточнения jq.) должны быть определены особым расчетом.
Строевая по шпангоутам. Кривую, выражающую закон распределения погруженных площадей шпангоутов по длине судна, называют строевой по шпангоутам. С помощью масштаба Бонжана эта кривая, ординаты которой в некотором масштабе численно равны погруженным площадям шпангоутов, может быть построена для любой ватерлинии судна, сидящего как на ровный киль, так и с дифферентом (рис. 1.11).
Строевая по шпангоутам обладает следующими свойствами:
- площадь, ограниченная строевой, численно равна с учетом масштаба объемному водоизмещению судна;
- абсцисса ЦТ площади строевой равна с учетом масштаба абсциссе ЦВ судна;
- коэффициент полноты площади строевой равен коэффициенту ф продольной полноты судна.
Изменение осадки судна от приема или снятия малого груза. В результате приема на судно малого груза массой т в точку с координатами х, у (рис. 1.12) возникнет сила веса груза р = mg и посадка судна
-23-
Рис. 1.11. Строевая по шпангоутам
Рис. 1.12. Изменение осадки судна при приеме малого груза
изменится: увеличится его средняя осадка и в общем случае возникнут крен и дифферент.
Предположим, однако, что судно удерживается от крена и дифферента некоторым условным (воображаемым) внешним моментом и рассмотрим здесь только изменение осадки судна &d. В результате увеличения осадки в воду войдет дополнительный объем б V между ватерлиниями ВЛ и Bi Л, и возникнет дополнительная сила плавучести уб V, приложенная в ЦТ этого объема и равная силе веса груза р. Поскольку предполагается, что масса груза мала по сравнению с массой судна, то можно считать, что борта судна в пределах изменения осадки вертикальны. В этом случае вошедший в воду объем б V можно определить как объем цилиндрического тела, основанием которого служит площадь ватерлинии S, а высотой - искомое приращение осадки &d
&V = S&d. (1.19)
Для определения приращения осадки 6d используем условие равновесия судна после приема груза, выражающееся равенством дополнительных сил веса и плавучести
р = убУ. (1.20)
Подставив выражение (1.20) в уравнение (1.19) и решив последнее относительно 6d, получим
6d = p/(yS) = m/(pS). (1.21)
-24-
Если груз снимается с судна, то его массу т подставляют в формулу (1.21) с отрицательным знаком; следовательно, приращение осадки в этом случае будет также отрицательным, т. е. осадка судна уменьшится на величину &d.
На рис. 1.12 видно, что в общем случае силы р и y&V составляют пару сил, ромеит которой вызовет крен и дифферент свободно плавающего судна. Этот момент будет равен нулю только в том случае,’ если эти силы будут действовать по одной вертикали. При допущении о прямобортности судна в пределах изменения осадки ЦТ объема 6 V будет расположен на одной вертикали с ЦТ площади ватерлинии ВЛ. Следовательно, при приеме или снятии груза судно не получит крена или дифферента, если ЦТ принятого (снятого) груза будет расположен на одной вертикали с ЦТ площади ватерлинии. Положение груза, отвечающее этому условию, показано на рис. 1.12 штриховой линией.
Формула (1.21) является точной для прямобортного судна и приближенной для непрямобортного. В последнем случае она определяет приращение осадки с Достаточной для практических целей точностью, если масса принимаемого или снимаемого груза не превышает 15-20 % массы судна.
В практических расчетах часто используют также величину q -число тонн на 1 см осадки. Если известно q. то приращение осадки выразится формулой
&d = m/q.
(1.22)
Сравнивая формулы (1.21) и (1.22), видим, что величина q пропорциональна площади ватерлинии 5 и связана с ней зависимостью
q = pS/100.
(1.23)
Зная площади ватерлиний при различных осадках и принимая среднюю (расчетную) плотность морской воды р равной 1,025 т/мэ, с помощью этой формулы можно построить кривую q=f(d). Однако при наличии строевой по ватерлинии строить такую кривую нет надобности, так как достаточно снабдить строевую по ватерлиниям дополнительной шкалой для q.
Изменение осадки от приема или снятия большого груза. Если масса принимаемого на судно или снимаемого с судна груза превышает 15-20 % массы самого судна, то формулы (1.21) и (1.22) не обеспечивают необходимой точности расчета. В таких случаях изменение осадки определяют графически, пользуясь грузовым размером A=f<d).
Пусть начальное водоизмещение судна (до приема груза) равно До, а соответствующая ему осадка - d0 (рис. 1.13). Отложим значение массы принятого груза т в масштабе оси абсцисс вправо от точки До и через полученную точку проведем вертикаль. Точку В пересечения этой вертикали с грузовым размером снесем по горизонтали на ось ординат, где по шкале d найдем новую осадку судна, а следовательно, и приращение осадки 6 с/.
-25-
Рис. 1.13. График изменения осадки судна при приеме или снятии большого груза
В случае снятия груза его массу откладывают по оси абсцисс не вправо, а влево от точки, отвечающей первоначальному водоизмещению До.
Изменение осадки при перемене плотности воды. Плотность забортной воды зависит главным образом от ее солености, а также от температуры. В ря
де случаев морские транспортные суда принимают груз в портах с пресной водой, т. е. при р = 1,0 т/м3, и их осадка уменьшается после выхода в открытое море, где плотность воды может составлять 1,015-1,035 т/м3. Наибольшая допустимая осадка судна в морской воде задается Правилами о грузовой марке морских судов, поэтому для максимального использования грузоподъемности судна при его погрузке в пресной воде необходимо оценить уменьшение осадки при переходе из пресной воды в морскую.
Для решения этой задачи в самом общем случае предположим, что судно, имеющее объемное водоизмещение V в воде с плотностью рг переходит в воду с плотностью р2, вследствие чего его объемное водоизмещение получает приращение 6V. Масса судна при этом не изменяется, следовательно,
P1V=p2(V+6V).
(1.24)
Поскольку искомое изменение осадки &d относительно невелико (по сравнению с самой осадкой), то можно принять 6 V=S&d, где S -площадь ватерлинии судна. Таким образом, уравнение (1.24) принимает вид
Pi V = p2(V + S6d). (1.25)
Решив это уравнение относительно &d, получим
6d = (V/5)(P1-p2)/p2. (1.26)
Подставляя в формулу (1.26) среднее (расчетное) значение плотности морской воды pj = 1,025т/мэ и принимая для пресной воды р = = 1,0т/мэ, а также подставляя S = lOOq/p согласно формуле (1.23), получаем
&d = (1/40) A/(100q), (1.27)
или, выражая 6d в сантиметрах,
М = Д/(40<?). (1.28)
-26-
Таким образом, осадка судна увеличивается на величину, определяемую формулой (1.28), при переходе из морской воды в пресную и уменьшается на ту же величину при переходе из пресной воды в морскую.
Запас плавучести и грузовые марки. Запасом плавучести-называют непроницаемый для воды объем корпуса судна, расположенный выше ГВЛ и включающий помещения, ограниченные верхней водонепроницаемой палубой, а также водонепроницаемые надстройки и рубки. Он определяет дополнительную нагрузку, которую может принять судно до того, как оно потеряет способность держаться на воде. Запас плавучести, выраженный в процентах от объемного водоизмещения судна, на транспортных грузовых судах составляет 25-30 %, на танкерах 10-15. на пассажирских судах 80-100 %.
Необходимый запас плавучести судна обеспечивается назначением ему минимальной высоты надводного борта, достаточной для безопасного плавания в определенных районах и в определенное время года. Судам, плавающим под флагом СССР, минимальный надводный борт устанавливается согласно Правилам о грузовой марке морских судов, разработанным Регистром СССР на основе Международной конвенции о грузовой марке. В Правилах изложена методика назначения минимального надводного борта в зависимости от длины судна, коэффициента общей полноты, расчетной длины надстроек, седловатости палубы, погиби бимсов и других параметров. Необходимым условием для возможности использования этой методики является удовлетворение содержащихся в Правилах требований к прочности и остойчивости судна и действий его личного состава в море (закрытий отверстий в корпусе, ограждений и др.).
Назначенную судну высоту надводного борта наносят белой или желтой краской на темном фоне или черной краской на светлом фоне на обоих бортах судна в виде грузовой марки, состоящей из трех частей: отметки палубной линии, знака грузовой марки и грузовых марок, указывающих наибольшие осадки, до которых судно может быть нагружено при различных условиях плавания.
Палубная линия. На каждом борту судна наносят горизонтальную палубную линию длиной 300 мм, середина которой располагается в плоскости мидель-шпангоута. Верхнюю кромку палубной линии проводят по линии пересечения продолженной наружу верхней поверхности палубы надводного борта с наружной поверхностью бортовой обшивки (рис. 1.14). Если на палубе имеется деревянный настил, то верхняя кромка палубной линии должна быть проведена по линии пересечения продолженной наружу верхней поверхности деревянного настила с наружной поверхностью бортовой обшивки.
Знак грузов'ой марки. От верхней кромки палубной линии вертикально вниз откладывают высоту назначенного судну надводного борта и наносят горизонтальную линию длиной 450 мм. Из середины верхней кромки этой линии как из центра описывают круг наружным диаметром 300 мм. Этот круг с пересекающей его горизонтальной линией называют знаком грузовой марки.
-27-
Грузовые марки. Применяют следующие грузовые марки, отмечающие положение ГВЛ судна при его загрузке в различных зонах, районах и в разные сезонные периоды плавания:
- марки для судов с минимальным надводным бортом, а также с минимальным лесным надводным бортом;
- марки для парусных и для пассажирских судов;
- марки для грузовых судов с избыточным надводным бортом.
На рис. 1.14 в качестве примера рассматриваются марки, наносимые на судах с минимальным надводным бортом, совершающих международные рейсы. Эти марки представляют собой горизонтальные линии длиной 230 мм, наносимые перпендикулярно вертикальной линии, проведенной на расстоянии 540 мм в нос от центра кольца грузовой марки.
Летняя грузовая марка, обозначаемая буквой Л, соответствует летнему надводному борту и наносится на одном уровне с горизонтальной линией, проходящей через центр круга. Зимней грузовой маркой, обозначаемой буквой 3, отмечают зимний надводный борт, который получается увеличением летнего надводного борта на 1/48 летней осадки. Зимняя грузовая марка ЗСА соответствует зимнему надводному борту для Северной Атлантики, назначаемому для судов длиной менее 100 м и получаемому увеличением зимнего надводного борта на 50 мм. Требуемое Правилами о грузовой марке морских судов увеличение зимнего надводного борта по сравнению с летним объясняется более суровыми условиями плавания в зимнее время, особенно в Северной Атлантике.
Грузовая марка для пресной воды отмечается буквой П и соответствует надводному борту для пресной воды, который определяется вычитанием из высоты летнего надводного борта изменения осадки судна при переходе из морской воды в пресную. Это изменение осадки (в сантиметрах) выражается формулой (1.28).
Тропическая грузовая марка обозначается буквой Т и соответствует тропическому надводному борту, получаемому уменьшением летнего надводного борта на 1/48 летней осадки. Тропическая грузовая марка для пресной воды ТП соответствует тропическому надводному борту для пресной воды, который получают, уменьшая тропический надводный борт на величину, определяемую формулой (1.28).
Нанесение других перечисленных выше марок для судов, совершающих международные рейсы, а также специальных грузовых марок для судов, не совершающих международных рейсов, рыболовных судов и судов длиной менее 24 м регламентировано упомянутыми выше Правилами о грузовой марке морских судов.
Нанесенные на бортах судна грузовые марки, отвечающие данному сезону, зоне или району, в котором судно может оказаться, не должны быть погружены в воду на протяжении всего плавания судна до прихода в порт назначения. Однако если судно грузится в порту с пресной водой, то соответствующая грузовая марка может быть погружена на величину поправки для пресной воды, указанной в свидетельстве о грузовой марке.
-28-
Рис. 1.14. Грузовые марки
Над горизонтальной линией, проходящей через центр кольца знака грузовой марки, наносят двумя буквами обозначение организации, назначившей судну грузовые марки [в частности, Регистр СССР обозначается буквами Р и С (см. рис. 1.14)].
Марки углубления. Для контроля за осадкой судна при изменении его нагрузки, а также определения его дифферента используют нанесенные на борта судна в носу и в корме цифры, называемые марками углубления (рис. 1.15). Эти цифры обозначают расстояние от нижней кромки горизонтального киля до их нижних кромок в дециметрах. Высота цифр, измеренная по нормали к ОП, равна 1 дм; интервал между цифрами также равен 1 дм (см. рис. 1.15).
Марки углубления наносят на обоих бортах судна в носу и в корме, а также в районе мидель-шпангоута. В зависимости от очертаний форштевня и ахтерштевня носовые и кормовые марки углубления располагают обычно на некоторых расстояниях 1Н и 4с от НП и КП, а средние марки углубления - на расстоянии /м от плоскости мидель-шпангоута (поскольку в плоскости мидель-шпангоута нанесен знак грузовой марки). Кроме того, как было указано выше, на марках углубления нанесена осадка от нижней кромки киля, а не от ОП. Поэтому осадки ы • <4. м < <4< по носовым, кормовым и средним маркам не совпадают соответственно с теоретическими осадками d^ и <4с на НП и КП и со. средней осадкой d. Эти марки могут быть определены графически путем нанесения ватерлинии на схему марок осадки, приведенную в Информации об остойчивости и прочности морского судна, выдаваемую на каждое судно, или вычислены более точно по следующим формулам (рис. 1.16):
= М + 4«Wh. М ~ м)/1^ ~ (4«+ 4с)] ~ 4с >
= <4с. м ~ 4с(*4<. м ~ £4с. м)/[ь ~ (4<+ 4с)1 ~ 4с»
(1-29)
-29-
Рис. 1.16. Расположение марок осадки на корпусе судна
= *^м + м ~ м)/Н (4< + 4c)I t • (1-3Q)
Верхний знак в формуле (1.30) отвечает случаю, когда средние марки осадки смещены в нос судна от плоскости мидель-шпангоута.
Контрольные вопросы
1. Каков геометрический смысл коэффициентов полноты корпуса и его сечений?
2. Сформулируйте условия равновесия плавающего тела (судна).
3. Как на практике определяют положение IIT судна?
4. Как определить осадку судна по кривой элементов теоретического чертежа?
5. Какие задачи решаются с использованием масштаба Бонжана?
6. Одинаково ли будет изменение осадки судна при переходе из соленой воды в пресную в двух случаях: порожнего судна; судна с полным грузом?
7. Каково назначение грузовой марки?
Глава 2
ОСТОЙЧИВОСТЬ СУДНА
§ 3. Начальная остойчивость судна
Определения и общие положения. В механике различают три вида статического равновесия тела. Если тело находится в положении равновесия и при малом отклонении возвращается в свое первоначальное положение, то такое равновесие называют устойчивым. Если
-30-
при малом отклонении тело остается в том положении, в какое его отклонили, то равновесие будет безразличным. Наконец, если при малом отклонении тело будет стремиться еще больше отклониться от своего первоначального положения, то равновесие будет неустойчивым.
В статике судна применительно к равновесию плавающего судна в условиях возможного воздействия на него внешних моментов известное в механике свойство статической устойчивости принято называть статической остойчивостью или просто остойчивостью.
Таким образом остойчивость можно определить как способность судна, отклоненного внешним моментом в вертикальной плоскости от положения равновесия, возвращаться в исходное положение равновесия после устранения момента, вызвавшего отклонение.
Приведенное выше определение показывает, что остойчивость судна тесно связана с его равновесием и служит характеристикой последнего. Судно считается остойчивым, если его равновесие устойчиво, и неостойчивым, если его равновесие неустойчиво или безразлично.
Основы учения об остойчивости судов были разработаны членом Петербургской Академии наук Леонардом Эйлером в работе „Корабельная наука”, опубликованной в 1749 г. Термин „остойчивость” впервые применил ученик Эйлера М. Е. Головин при переводе трудов своего учителя на русский язык (в то время обычно все ученые труды издавались на латинском языке).
Изучая остойчивость судна, различают остойчивость на малых углах наклонения, или начальную остойчивость, и остойчивость на больших углах наклонения. Это вызвано тем, что при оценке начальной остойчивости имеется возможность принять ряд допущений и получить простые приближенные математические зависимости, тогда как задачи, связанные с остойчивостью на больших углах наклонения, могут быть решены только графическим путем.
При анализе остойчивости судна рассматривают его наклонения в двух взаимно перпендикулярных плоскостях - поперечной и продольной. Наклонения в поперечной вертикальной плоскости, характеризуемые углами крена, связаны с поперечной остойчивостью судна, а наклонения в продольной плоскости, определяемые углами дифферента, с продольной остойчивостью судна.
Изучение остойчивости судна производят в условиях его вертикального равновесия, при которых удовлетворяется первое уравнение равновесия (1.10). Таким образом, предполагается, что объемное водоизмещение судна Упри его наклонениях остается неизменным в силу неизменности водоизмещения судна А и плотности забортной воды р. Наклонения, при которых подводный объем судна не изменяется, называют равнообъемными наклонениями, а ватерлинии, отсекающие одинаковые подводные объемы до и после наклонения, называют равнообъемными ватерлиниями.
Изображая на рисунке наклонение судна, мы будем, как правило, наклонять не само судно, а след ватерлинии на плоскости мидель-шпангоута (в обратном направлении). Это удобнее с точки зрения
-31-
графики, но не меняет существа задачи, так как во всех задачах статики судна рассматривают не положение судна в пространстве, а его положение относительно поверхности воды, которую условно принимают наклонной.
Теорема Эйлера. Рассмотрим тело произвольной формы, плавающее с осадкой по ватерлинию ВЛ (рис. 2.1). Предположим, что после его равнообъемного наклонения на бесконечно малый угол tfq> ватерлиния займет положение В, Л,; при этом величина вышедшего из воды клиновидного объема должна быть равна объему вошедшего в воду клина и 2- Для определения этих объемов выделим из них элементарную с вертикальными образующими призму с площадью сечения dS, расположенную на расстоянии у от плоскости xOz. Объем этой призмы будет равен ydtpdS, а равенство объемов и, и и2 может быть записано в виде
dtp $ ydS = dtp S ydS, (2.1)
s, sa
где S, и S2 - части площади ватерлинии, расположенные влево и вправо от оси наклонения Ох. Интегралы, стоящие в правой и левой частях выражения (2.1), представляют собой статические моменты площадей St и S2 относительно оси наклонения Ох. Это равенство возможно только в том случае, когда ось Ох проходит через ЦТ площади ватерлинии ВЛ.
Таким образом, доказана известная теорема Эйлера: ось бесконечно малого равнообъемного наклонения плавающего тела лежит в плоскости ватерлинии и проходит через ЦТ ее площади.
На практике теорема Эйлера считается справедливой не только при бесконечно малых, но и при малых конечных равнообъемных наклонениях. При этом малым углом наклонения, как правило, считается угол, не превышающий 10-12* и не превышающий угла входа в воду верхней палубы у борта 0п (рис. 2.2). Для прямобортного судна теорема Эйлера является точной при любом угле наклонения.
Метацентры и метацентрические радиусы. При равнообъемном наклонении плавающего тела произвольной формы в какой-либо
Рис. 2.1. К формулировке теоремы Эйлера
Рис. 2.2. Угол входа палубы в воду
-32-
вертикальной плоскости в общем случае ЦВ выходит из плоскости наклонения и перемещается в сторону наклонения по некоторой пространственной кривой, которая носит название траектории ЦВ. Проекцию траектории ЦВ на соответствующую ей плоскость наклонения называют кривой ЦВ. При бесконечно малом наклонении тела из равновесного прямого положения на угол dtp (см. рис. 2.1) можно принять допущение, что траектория ЦВ совпадает с плоской кривой, которую в пределах участка CCi можно считать дугой круга с центром в точке л!,. Радиус этого круга г, называют начальным метацентрическим радиусом плавающего тела для данной плоскости его наклонения, а его центр т, - начальным метацентром тела.
Из рис. 2.1 следует, что начальный метацентр может быть определен как точка пересечения линий действия силы плавучести до и после бесконечно малого равнообъемного наклонения плавающего тела из прямого равновесного положения в заданной вертикальной плоскости, а начальный метацентрический радиус - как радиус кривизны кривой ЦВ под указанном выше наклонении плавающего тела (центром кривизны которой является метацентр т,) или как возвышение метацентра над ЦВ.
Каждой ватерлинии, отсекающей заданный объем V, отвечает бесчисленное множество метацентров, расположенных на перпендикуляре, опущенном на ватерлинию из ЦВ, т. е. на линии действия силы плавучести. Чтобы выделить один из них, необходимо задать вертикальную плоскость наклонения (или ось равнообъемного наклонения) плавающего тела.
Пусть ВЛ - начальная ватерлиния плавающего тела произвольной формы, отвечающая его равновесному положению, а В, Л, - бесконечно близкая к ней равцообъемная ватерлиния после наклонения тела на бесконечно малый угол dtp (см. рис. 2.1). Принимая плоскость наклонения совпадающей с плоскостью чертежа, заметим, что согласно теореме Эйлера ось рассматриваемого равнообъемного наклонения будет проходить через ЦТ F (yt) площади ватерлинии ВЛ по нормали к плоскости чертежа. В результате входа в воду клина FHlII и выхода из воды равновеликого ему клина FBlB ЦВ переместится из точки С в точку С, с ординатой dyc. Величина этой ординаты может быть найдена из равенства статического момента Vdyc = Vpdip подводного объема наклоненного тела относительно вертикальной плоскости xOz, проходящей через ЦВ С, суммарному статическому моменту объемов входящего в воду и выходящего из воды клиньев относительно той же плоскости. Для определения последнего выделим элементарную призму с вертикальными Лразующими и площадью основания dS, расположенную на расстоянии у от плоскости xOz. Статический момент этой призмы будет равен (у - уу) ydtpdS, и указанное выше равенство может быть записано
Vp dtp = dtp J (у - yj)ydS = dtp [ J y*dS -yf$ ydS], (2.2)
S 5 S
где интегрирование распространяется на всю площадь ватерлинии S.
-33-
Как известно,
b2rfS = 4; I yds =yjS, (2.3)
s s
где Ix - момент инерции площади ватерлинии относительно оси Ох. Следовательно, выражение (2.2) принимает вид
Vrjdtp = (/х - yfS)d<f = Ifdv, (2.4)
где fy - момент инерции площади ватерлинии относительно оси наклонения. Отсюда получаем выражение для начального метацентрического радиуса
r,=/F/V. (2.5)
Переходя от плавающего тела произвольной формы к судну, заметим, что наклонениям судна около главных центральных осей площади ватерлинии будут отвечать два главных метацентра т и М и два главных метацентрических радиуса г и R, один из которых является наименьшим, а другой - наибольшим (рис. 2.3). В частном случае, когда судно сидит прямо и на ровный киль, главные центральные оси ватерлинии параллельны координатным осям Ох и Оу. Выражения для главных метацентрических радиусов в этом случае принимают вид
r = Ix/V; R=Iyf/V. (2.6)
Метацентрические радиусы г и R отвечают наклонениям судна в поперечной и продольной плоскостях соответственно, поэтому их называют поперечным и продольным метацентрическими радиусами. Отвечающие им метацентры m и М по аналогии называют поперечным и продольным метацентрами.
Метацентрические высоты. Расстояние между начальным метацентром и ЦТ судна носит название начальной метацентрической высоты или просто метацентрической высоты, которая считается положительной, если метацентр расположен выше ЦТ, и отрицательной, если он расположен ниже ЦТ.
Главным плоскостям наклонения соответствуют главные метацентрические высоты, одна из которых будет наибольшей, а другая наименьшей в данном равновесном положении судна. Если в равновесном положении судно сидит прямо и на ровный киль, то главными плоскостями наклонения будут являться ДП и перпендикулярная ей плоскость, параллельная плоскости мидель-шпангоута. Главные метацентрические высоты, отвечающие этим плоскостям наклонения, называют продольной Н и поперечной h метацентрическими высотами.
Как видно из рис. 2.4, на котором показаны аппликаты ЦВ судна С, его ЦТ G и поперечного метацентра т, а также расстояния между этими точками, нанесенные на поперечное сечение судна, для
-34-
Рис. 2.3. К определению метацентрического радиуса
Рис. 2.4. Метацентры и метацентрические радиусы судна
Рис. 2.5. К определению начальной поперечной метацентрической высоты
-35-
поперечной метацентрической высоты справедливы следующие формулы:
h = zc + г - zg; h=zm-zg; h=r-a, (2.7)
где a - возвышение ЦТ судна над ЦВ. По аналогии для продольной метацентрической высоты получим
H = zc + R-zg, H = zM-zg; H = R-a. (2.8)
Метацентрическая высота может служить относительным измерителем остойчивости судна. Действительно, если поперечный метацентр расположен выше ЦТ судна и при этом h > 0. то при малом равнообъемном наклонении судна сила тяжести и сила плавучести создают пару сил, момент которой стремится вернуть судно в первоначальное равновесное положение (рис. 2.5). Значение этого момента пропорционально значению метацентрической высоты. Если точки т и G совпадают (h = 0) ипи метацентр располагается ниже ЦТ (h < 0), то судно неостойчиво. В последнем случае момент пары сил веса и плавучести будет стремиться увеличить крен судна.
Из рис. 2.5 становится ясным физический смысл метацентра, который заключается в том, что эта точка служит пределом, до которого можно поднимать ЦТ, не лишая судно положительной начальной остойчивости (мета по древнегречески означает предел).
Значения поперечных метацентрических высот судов различных типов с полным грузом при нормальной загрузке трюмов лежат, как правило, в следующих пределах:
Пассажирские суда............................. 0,5-1,0
Грузовые суда................................. 0,3—1,4
Лесовозы...................................... 0,1-0,6
Танкеры....................................... 1,0—3,5
Ледоколы...................................... 1,0—4,0
Метацентрические формулы остойчивости. При равнообъемном наклонении судна из положения равновесия сила веса и сила плавучести образуют пару сил, причем в общем случае плоскость действия момента этой пары сил и плоскость наклонения судна могут не совпадать. Объясняется это тем, что при наклонении судна точка приложения силы плавучести - ЦВ - выходит из плоскости наклонения и его траектория'становится пространственной кривой. Составляющую полного момента сил веса и плавучести, действующую в плоскости наклонения, называют восстанавливающим моментом. Вторую составляющую полного момента, действующую в вертикальной плоскости, перпендикулярной к плоскости наклонения, называют деривационным моментом. При малых равнообъемных наклонениях в главных плоскостях ЦВ практически не выходит из плоскости наклонения и восстанавливающий момент представляет собой полный момент возникающей при этом пары сил.
-36-
Рассмотрим равнообъемное наклонение остойчивого судна из прямого равновесного положения в поперечной (главной) плоскости (рис. 2.6). Угол наклонения будем считать конечным, но малым и примем допущение, что участок СС\ траектории ЦВ является дугой круга, лежащей в плоскости наклонения, а линия действия силы плавучести в наклонном положении судна проходит через начальный метацентр т. В силу этих допущений полный момент пары сил,
возникающей при наклонении судна, Рис 2 6 к выводу метацентри. будет равен восстанавливающему ческой формулы поперечной ос-моменту, действующему на плече GK « тойчивости
= I - перпендикуляре, опущенном из ЦТ судна G на линию действия
силы плавучести. Это плечо носит название плеча статической остой-
чивости.
Из прямоугольного треугольника mGK находим
I = h sin 0.
(2.9)
Восстанавливающий момент определяем из выражения
Мв = Ph sin 0, (2.10)
или, учитывая, что угол 0 считается малым углом, и полагая sin 0 з 0; из выражения
MB=PhQ, (2.11)
где угол 0 должен быть выражен в радианах.
Формулы (2.9)-(2.11) носят название метацентрических формул поперечной остойчивости.
Рассматривая наклонение судна в продольной плоскости, нетрудно по аналогии написать метацентрическую формулу продольной остойчивости:
Мв = PH sin ф = РЯф. (2.12)
Пределы применимости метацентрических формул остойчивости ограничиваются малыми углами наклонения судна, при которых еще можно считать справедливыми принятые выше допущения. Практически этими формулами можно пользоваться до углов наклонения порядка 10-12*, но не превышающих углов входа в воду верхней палубы или выхода из воды скулы судна.
Метацентрические формулы используют главным образом для определения углов крена и дифферента судна при воздействии на него
-37-
какого-либо кренящего или дифферентующего момента. При наклонении судна в поперечной плоскости, вызванном приложением кренящего момента Мкр, угол крена будет увеличиваться до тех пор, пока не наступит новое положение равновесия, при котором будет удовлетворено условиеМкр = МВ, т. е. пока восстанавливающий момент не станет равен кренящему. Подставив это равенство в левую часть уравнения (2.11) и решив полученное уравнение относительно 9, найдем
9=Мкр/(РЬ) = МкрА0. (2.13)
По аналогии для угла дифферента будем иметь
Ф-МдифЛИО’Мдиф^о- (2-14)
Произведение k0 = Ph, стоящее в знаменателе формулы (2.13), называют коэффициентом поперечной остойчивости судна, а произведение Ко = PH- коэффициентом продольной остойчивости. Наряду с метацентрическими высотами коэффициенты остойчивости могут служить измерителями остойчивости судна. Однако в отличие от относительных измерителей - метацентрических высот - они являются абсолютными измерителями, зависящими от водоизмещения судна, и поэтому не позволяют произвести наглядную сравнительную оценку начальной остойчивости судов различных размеров.
В практических расчетах часто пользуются вспомогательной величиной М, выражаемой в тоннометрах на один метр дифферента (т-м/м) и известной как момент, дифферентующий на 1 м. При этом определяют не угол дифферента, а непосредственно дифферент судна по формуле
=Мдаф/(9,81М) =МдИф А?, (2.15)
где Мдиф ~ условный дифферентующий момент, выражаемый в т-м и получаемый путем деления дифферентующего момента МДИф (кН-м) на ускорение свободного паденияg = 9,81 м/с2.
Принимая во внимание, что =£ф, и сравнивая выражения (2.14) и (2 Л 5), видим, что коэффициент продольной остойчивости Ко и момент М, дифферентующий на 1 м, связаны зависимостью
М = РН/(9,81£) = АН/£. (2.16)
Учитывая, что продольная метацентрическая высота H = R-a отличается от метацентрического радиуса R на относительно малую величину а, можно принять
M = bR/L. (2.17)
Выражение (2.17)_позволяет заранее построить кривую М =f(d), по которой значение М определяется с достаточной точностью для любой осадки судна.
-38-
Для определения угла Крена при известном кренящем моменте Мкр иногда пользуются вспомогательной величиной т, известной как момент, кренящий на Г. В этом случае угол крена (в градусах) находят по формуле
в=Мкр/т. (2.18)
Сравнивая выражения (2.13) и (2.18), видим, что коэффициент поперечной остойчивости k=Ph и момент, кренящий на Г, связаны зависимостью
m = k/57,3 = Ph/57,3. (2.19)
В отличие от кривой М=/(d), кривая т = f(d) не может быть построена, так как при одной и той же осадке поперечная метацентрическая высота существенно зависит от аппликаты ЦТ судна.
§ 4. Определение начальной остойчивости опытным путем
Как было показано ранее, одна из формул начальной поперечной метацентрической высоты имеет вид
h=zm-zg. (2.20)
Входящая в эту формулу аппликата метацентра zm может быть определена с достаточной точностью в зависимости от осадки судна по соответствующей кривой, имеющейся на судне на чертеже кривых элементов теоретического чертежа. Что касается аппликаты zg ЦТ судна, то достаточно точное определение ее при некотором заданном состоянии нагрузки судна весьма затруднительно. Кроме того, в процессе постройки судна неизбежны нарушения „весовой дисциплины”. Поэтому для определения фактической остойчивости судна, а следовательно, и аппликаты его ЦТ производят специальный опыт кренования. Определение начальной метацентрической высоты основано на использовании метацентрической формулы поперечной остойчивости, представленной в следующей форме:
h=M0/(PM, (2.21)
где Мо - момент, создаваемый перемещением какого-либо груза в поперечном направлении; Ро - вес судна в момент опыта; 0О - малый угол крена, вызванного перемещением груза.
При креновании крен-балласт (чугунные чушки, стальные болванки или мешки с песком) взвешивают и укладывают на верхней палубе у бортов на четыре или на шесть приблизительно равных по массе групп симметрично относительно ЦТ площади ватерлинии (рис. 2.7). При переносе в дальнейшем какой-либо группы крен-балласта с борта
-39-
на борт кренящий момент, входящий в формулу (2.21), находят как произведение веса т балласта в данной группе на плечо переноса I. При упрощенном креновании в эксплуатационных условиях кренящий момент создают обычно подъемом груза на стреле. На многих современных судах предусмотрено специальное устройство для проведения опыта кренования, включающее бортовые цистерны и систему перекачки воды с борта на борт для создания кренящего момента (в этом случае при расчете метацентрической высоты учитывается поправка на влияние свободных поверхностей жидкости в креновых цистернах).
Углы крена определяют с помощью веское, жидкостных кренометров (сообщающихся сосудов, пузырьковых уровней) или специальных приборов - инклинографов.
При использовании веское (рис. 2.8) рекомендуется подвесить на судне три веска (но не менее двух). Места их подвешивания выбирают так, чтобы длина нити составляла не менее 4 м для больших и не менее 1,5 м для малых судов. Груз каждого веска с укрепленной на нем крылаткой погружают в бак со смазочным маслом, чтобы колебания веска быстрее затухали. Для отсчета наклонений нити у каждого веска перпендикулярно ДП устанавливают деревянную рейку (по возможности ближе к нити веска, но так, чтобы она не задевала нити). На рейку наклеивают миллиметровую бумагу для отсчета по ней отклонений веска. Приращение угла крена судна, соответствующее перемещению одной из групп крен-балласта, определяют по формуле
tg 60 = 69 = kA, . (2.22)
где к - отклонение нити веска на уровне верхней кромки рейки; А. - длина веска от точки подвеса до рейки.
Приращение угла крена можно измерять также с помощью сообщающихся сосудов-двух стеклянных трубок диаметром 15-20 мм и длиной 1,0-1,2 м, снабженных шкалами и соединенных резиновой
Рис. 2.7. Схема расположения крен-балласта на судне
Рис. 2.8. Весок и рейка (
1 — точка подвеса; 2 — нить веска; 3 — рейка;
4 — бак с водой или маслом; 5 — груз с крылаткой
-40-
Рис. 2.9. Инклинограф системы Амаева
трубкой. Стеклянные трубки укрепляют вертикально по бортам судна строго в плоскости одного и того же шпангоута и Да одинаковой высоте от палубы (обычно в ходовой рубке). В трубки наливают подкрашенный спирт примерно до половины их высоты.
Инклинограф представляет собой короткопериодный маятник, снабженный пишущим приспособлением для записи углов крена на бумажной ленте, закрепленной на барабане, который вращается часовым механизмом (рис. 2.9). При проведении опыта необходимо иметь не менее двух инклинографов для контроля показаний.
Объемное водоизмещение судна в момент кренования определяют по масштабу Бонжана или по грузовому размеру (при отсутствии существенного дифферента или прогиба судна). При этом осадки носом, кормой и на миделе измеряют по маркам углубления со шлюпки или с плотика. По вычисленному объемному водоизмещению определяют силу веса судна
^ = fcB.4VV, (2.23)
где кв ч - коэффициент, учитывающий выступающие части; у - удельный вес забортной воды, определяемый ареометром; V - объемное водоизмещение без выступающих частей.
В целях повышения точности результатов опыт кренования повторяют несколько раз, после чего начальную метацентрическую высоту рассчитывают по способу наименьших квадратов с учетом вероятной относительной ошибки опыта.
- 41 -
§ 5. Влияние переноса, приема или снятия твердых и жидких грузов на посадку и начальную остойчивость судна
Влияние переноса твердых грузов на посадку и начальную остойчивость судна. Примем сначала допущение, что в исходном равновесном положении судно имеет посадку прямо и на ровный киль. Предположим далее, что в общем случае некоторый твердый груз массой т переносится на судне в произвольном направлении так, что его ЦТ перемещается из точки А (хх, ух, zx) в точку В (х2, у2, z2) так, как показано на рис. 2.10.
Для того, чтобы определить влияние такого переноса груза на посадку и начальную остойчивость судна, воспользуемся следующим методом исследования. Располагая в точке А начало вспомогательной координатной системы Axyz, разложим перемещение АВ на три перемещения в направлениях координатных осей и будем рассматривать сначала влияние вертикальной составляющей, перемещения груза (в направлении оси Az), а затем влияние горизонтально-поперечной и горизонтально-продольной составляющих (в направлениях осей Ау и 4х).
Перемещение груза вдоль оси Oz (рис. 2.11) не создает момента, способного вызвать наклонение судна, и, следовательно, его посадка при таком перемещении не изменится, если начальная остойчивость останется положительной и судно будет по-прежнему находиться в состоянии устойчивого равновесия.
Приращения поперечной и продольной метацентрических высот определяем как суммы приращений их отдельных компонентов согласно формулам (2.7) и (2.8):
6/i = 6zm - t>Zg, 6Н = bzM - 6zg. (2.24)
При неизменной посадке судна 6zm = 6zM = 0, поэтому
Рис. 2.10. Разложение перемещения груза по координатным осям
Рис. 2.11. Вертикальный перенос груза
-42-
Для определения приращения 6zg аппликаты ЦТ судна может быть использована известная теорема теоретической механики: если в системе материальных тел одно из тел получит перемещение в каком-либо направлении, то ЦТ всей системы переместится в том же направлении, причем величины перемещений будут обратно пропорциональны массам тела и всей системы. Применительно к рассматриваемому случаю вертикального перемещения груза указанная теорема приводит к выражению
6zg = (т/Д)(г2 - г^), (2.26)
где Д - водоизмещение судна вместе с переносимым грузом; zt и z -координаты ЦТ груза до и после переноса. Подставляя (2.26) в (2.25), получаем
б/i = 6Н =-(т/Д)(г2-zj. (2.27)
Выражение (2.27) показывает, что перенос груза по вертикали вниз (z2 < zt) приводит к увеличению остойчивости судна, а перенос по вертикали вверх - к ее уменьшению.
При горизонтально-поперечном переносе груза (в направлении оси Оу) из точки j4l(yl) в точку В1(у2) начальная остойчивость не изменится, так как ни аппликата метацентра, ни аппликата ЦТ судна не получат приращений (рис. 2.12). Однако посадка судна изменится-оно получит крен 9. Заметим, что перенос груза на расстояние 41В1 можно представить как снятие груза из точки и прием такого же груза в точку В,. Приложив к судну в этих точках две равные, но противоположно направленные силы p = mg, видим, что перенос груза приводит к образованию пары сил на плече (у2 - у,) cos 9. Момент этой пары сил, являющийся кренящим моментом, равен
Мкр = р(у2 - у J) cos 9. (2.38)
Поскольку угол 9 предполагается малым, можно принять cos 9 1, т. е.
Мкр=р(у2-у1). (2.29)
Приравнивая (в равновесном наклонном положении судна) кренящий момент восстанавливающему Мъ =P(h + 6/1)9, находим
е- , (2.зо)
P(/i + 6/i) Д(/1 + 6/1)
где 6/1 - приращение начальной метацентрической высоты, являющееся следствием рассмотренного ранее влияния вертикальной составляющей перемещения груза.
При горизонтально-продольном переносе груза из точки Bt(xt) в заданную точку В2(х2) (рис. 2.13) начальная остойчивость судна,
-43-
Рис. 2.12. Горизонтально-поперечный перенос груза
Рис. 2.13. Горизонтально-продольный перенос груза
как и в предыдущем случае, не изменится, но возникнет дифферент судна, угол которого по аналогии может быть найден в соответствии с формулой
ф =------------=------------
Р(Н + 6Н) Д(Н + 6Н)
(2-31)
Практически важно знать не угол дифферента, который обычно весьма мал, а изменение осадок носом и кормой и дифферент судна.
Проведем новую ватерлинию равновесия В1Л1 под углом ф к первоначальной ватерлинии ВЛ. При малом угле ф можно считать, что ватерлинии ВЛ и В, Л, как равнообъемные пересекутся по оси, проходящей через их общий ЦТ F (xf). Тогда новые осадки носом и кормой будут равны
dH1 = d + (L/2 -х/)ф; = d- (£/2 + х/)ф. (2.32)
Как было отмечено ранее, все подученные зависимости основаны на допущении, что судно до переноса груза сидело прямо и на ровный киль. Если же в действительности судно имело начальные (малые) углы крена и дифферента, то при определении новых углов крена и дифферента по формулам (2.30) и (2.31) в числители этих формул следует подставить алгебраические суммы моментов, возникающих в результате переноса груза, и моментов РМ0 и РЯф0, отвечающих начальным углам крена и дифферента. Выполнив это, получим
9 = 90 + 69 =
т(у2 - л) Д (ft + 6ft)
h
h + 6h ’
m(x2-xl)
--------- +Ф0 ---- •
Д(Я + 6Я) Н+дН
(2.33)
Формулы (2.33) показывают, что в этом случае даже при отсутствии перемещений груза в направлении осей Ох и Оу его перемещение
-44-
в направлении оси Oz приводит не только к изменению начальной остойчивости судна, но и к появлению дополнительных углов крена и дифферента
/1 6/1 00 /1 + 6/1
60 = 0О -0о = /1 + 6/1
н 6Н
6ф =ф0 >h >h
Н+6Н Н + 6Н
(2.34)
Влияние подвешенного груза на начальную остойчивость судна. Предположим, что находящийся в трюме груз массой т поднимают судовым краном или стрелой (рис. 2.14). В момент отрыва от настила трюма груз становится подвешенным, и в этот же момент начальная метацентрическая высота мгновенно получает некоторое приращение 6/1. Для определения этого приращения мысленно наклоним судно на малый угол в. Тогда шкентель, на котором подвешен груз, примет положение, перпендикулярное плоскости наклонной ватерлинии, а ЦТ груза g переместится в положение gt. Перемещение груза можно представить как приложение к судну двух противоположно направленных вертикальных сил р = mg в точках g и gt. Эти силы создают пару сил на плече I sin 9, где I - длина линии подвеса от нока стрелы О до ЦТ груза g. Момент этой пары 6М = pl sin 6 уменьшает первоначальный восстанавливающий момент судна MB=P/isin9, действовавший до отрыва груза от настдла трюма. Восстанавливающий момент судна с подвешенным грузом равен
МВ1 = Мв - 6M = P(h- pl/P) sin 9. (2.35)
Из формулы (2.35) видно, что в момент отрыва поднимаемого груза от настила, т. е. в тот момент, когда он становится подвешенным грузом, метацентрическая высота изменяется на величину
6/i =-pl/P=-ml/Л.. (2.36)
Из сравнения формул (2.36) и (2.31) следует, что влияние на остойчивость судна подвешенного груза равносильно влиянию подъема груза по вертикали на расстояние I, т. е. мгновенного перемещения его ЦТ в точку подвеса. Таким образом, дальнейший подъем груза на шкентеле после отрыва его от настила уже не сказывается на остойчивости судна.
Влияние свободной поверхности жидкого груза на начальную остойчивость судна. На каждом судне размещается значительное количество жидких грузов (топлива, воды, смазочного масла) в цистернах (танках). Для наливных транспортных судов (танкеров) жидкий груз является основным перевозимым грузом. Если жидкий груз заполняет
-45-
цистерну полностью, т. е. цистерна запрессована, то для задач статики он ничем не отличается от любого твердого груза такой же массы. Однако если жидкий груз заполняет лишь часть цистерны и, следовательно, имеет свободную поверхность, то он получает возможность переливаться при наклонении судна. В результате этого изменяется форма объема жидкости в цистерне и перемещается ЦТ судна, что отражается на его остойчивости.
Предположим, что в одном из отсеков судна, первоначально запрессованном, остался жидкий груз с удельным весом уж, который в прямом положении судна заполняет отсек до уровня вл, имея объем и (рис. 2.15). Если мы наклоним мысленно судно на малый угол 0, то свободная поверхность жидкости в отсеке также наклонится и займет положение Btnt, параллельное наклонной ватерлинии ВхЛ15 а ЦТ жидкости g переместится в новое положение gt. Вследствие малости угла В можно считать, что перемещение ЦТ жидкости происходит по дуге круга радиусом I с центром в точке т0, в которой пересекаются линии действия силы веса жидкого груза до и после наклонения судна. Как и в случае подвешенного твердого груза, переливание жидкого груза можно представить как приложение к судну двух противоположно направленных вертикальных сил р = ужи. Эти силы создают пару сил с плечом / sin 9, момент которой 6М = ужи I sin 9 уменьшает первоначальный восстанавливающий момент Мв = Ph sin 9. Таким образом, с учетом переливания жидкости в отсеке восстанавливающий момент судна равен
Мв j = Ph sin 9 - ужи I sin 9 = P(h - ужи l/P) sin 9. (2.37)
Сравнивая рис. 2.1 и 2.15, видим, что точку т0 можно рассматривать как метацентр жидкости в цистерне. Соответственно отрезок
ности жидкого груза на начальную остойчивость судна
-46-
I = является ее метацентрическим радиусом и поэтому может быть определен формулой, аналогичной формуле (2.5):
l = ix/u, (2.38)
где 1'х - центральный момент инерции свободной поверхности жидкости в цистерне относительно продольной оси (параллельной координатной оси Ох}. Подставив выражение (2.38) в формулу (2.37), получим
MBi = P(h - УЖ1Х/Р) sin 9. (2.39)
Как видно из уравнения (2.39), изменение начальной метацентрической высоты, отражающее переливание жидкости, может быть выражено формулой
f>h = -Уж’х ZP = -Рж«х/Д • (2-40)
Из выражения (2.40) следует, что при расходовании жидкого груза из запрессованных цистерн и появлении свободной поверхности всегда уменьшается остойчивость судна и что уменьшение метацентрической высоты не зависит от количества жидкого груза, поскольку в выражение для поправки 6h не входит его объем и.
Если на судне расходуется с образованием свободных поверхностей несколько жидких грузов в отдельных, не сообщающихся между собой цистернах, то в формулу (2.40) вместо произведения рж1х следует подставить сумму Е рЖ11х1, где п - число отсеков с жидким грузом.
1
При возникновении свободных поверхностей в большом числе цистерн отрицательное приращение 6h может оказаться по абсолютному значению столь велико, что начальная поперечная остойчивость судна станет отрицательной. Поэтому во избежание потери начальной остойчивости недопустимо одновременно расходовать жидкий груз из большого числа запрессованных цистерн (или принимать его одновременно в несколько порожних цистерн). Имеющиеся на судах Инструкции по приему и расходованию жидких грузов устанавливают определенный порядок расходования жидких грузов каждого вида (топлива, воды). Согласно этим инструкциям жидкость разрешается выкачивать из одной цистерны (или из одной пары цистерн правого и левого бортов) до полного их опорожнения, а затем переходить к расходованию из следующей цистерны и т. д. Прием жидких грузов производится в том же порядке, причем в каждую цистерну жидкость принимают до полной ее запрессовки.
Следует иметь в виду, что если в цистерне имеется лишь очень тонкий слой жидкости, объем которой составляет менее 5 % объема цистерны (рис. 2.16, а), или цистерна заполнена почти доверху, т. е. объем жидкости составляет более 95 % объема цистерны (рис. 2.16, б), то ширина свободной поверхности начинает резко уменьшаться после наклонения судна до некоторого весьма малого предельного
-47-
Рис. 2.16. Случай недейственной потери остойчивости
угла крена 0пред. Соответственно резкое уменьшение будет претерпевать и момент инерции свободной поверхности, а следовательно, и поправка к метацентрической высоте. В таких случаях говорят, что влияние свободной поверхности приводит к недейственной потере остойчивости, которую практически можно не учитывать при определении крена судна по метацентрической формуле.
Появление свободной поверхности жидкого груза влияет также и на продольную остойчивость судна. Поправка к продольной метацентрической высоте будет определяться формулой
ЪН = -р„Лу/Ь, (2.41)
где iy - центральный момент инерции свободной поверхности жидкости относительно поперечной оси (параллельной координатной'оси Оу). Однако ввиду значительной величины продольной метацентрической высоты Н, превышающей примерно на два порядка величину поперечной метацентрической высоты, поправкой 6Н обычно пренебрегают.
Влияние приема или снятия малого груза на посадку и начальную остойчивость судна. Будем считать сначала, как и ранее (при рассмотрении влияния перемещения груза), что в исходном равновесном положении судно сидит прямо и на ровный киль. Прием на судно малого груза в произвольную точку с координатами х, у, z (подразумеваются координаты ЦТ груза) можно рассматривать как процесс, слагающийся из двух последовательных операций: приема груза в точку с координатами Xf, yf = 0, z, т. е. в точку, расположенную на одной вертикали с ЦТ площади ватерлинии; переноса груза по горизонтали в заданную точку с координатами х, у.
После выполнения первой операции судно сохранит свою первоначальную посадку прямо и на ровный киль; изменятся только его осадка и остойчивость (если сохранить по-прежнему допущение, что ввиду малости груза борта судна могут быть приняты вертикальными в пределах изменения осадки).
После выполнения второй операции возникают моменты переноса ру и р (х - Xf), которые приводят к образованию крена и дифферента судна. Углы крена и дифферента могут быть найдены по метацентрическим формулам
-48-
0 РУ =
(P + p)ht (A + m)ht
p(x-xt) m(x-xt) ф =----------- --------,
(P + p)H1 (A + m)Ht
(2.42)
где hj = h + 6h и = H+ 6H- начальные метацентрические высоты судна после приема груза; т - масса принятого груза; А - водоизмещение судна до приема груза.
Для определения приращений высот 6Л и 6Н рассмотрим прием малого груза массой т, ЦТ которого располагается на одной вертикали с ЦТ площади ватерлинии в точке с аппликатой z (рис. 2.17). В результате увеличения осадки объемное водоизмещение судна увеличится на б У» m/р и возникнет дополнительная сила плавучести у б V, приложенная в ЦТ слоя между ватерлиниями ВЛ и BJJI1. В силу принятого допущения о прямобортности судна аппликата ITT дополнительного слоя плавучести будет равна d + 6d/2, где приращение осадки 6d определится формулами (1.21) или (1.22).
Наклоним мысленно судно на малый угол 6, тогда Сила веса груза р и равная ей дополнительная сила плавучести уб V составят пару сил с плечом (d + 6d/2 - z) sin 0. Момент этой пары 6М = p(d + 6d/2 - z) sin 0 увеличивает первоначальный восстанавливающий момент судна MB=Ph sin 9, поэтому восстанавливающий момент после приема груза становится равным МВ1 = Мв + 6М, или
(Р + p)(h + 6ft) sin 0 « Ph sin 9 + p(d + 6,d/2 - z) sin 0. • (2.43)
Решив уравнение (2.43) относительно искомого приращения 6h и полагая Р - Ag и р - mg, получим
му практически можно пользоваться приближенной формулой Рис. 2.17. Прием малого груза
-49-
ЪН = -рН/(Р +р) = - тН/(Д + т). (2.46)
В этом случае вторая формула (2.42) после преобразований примет вид
ф =т(х-х,)/ДН. (2.47)
Для приращений коэффициентов остойчивости
6k = (Р + р)(й + 6/i) -Ph; 6К = (Р + р)(Н + 6Н) - PH (2.48)
нетрудно получить выражение
6k = 6K«p(d + 6d/2- z). (2.49)
После определения приращений, а следовательно, и новых значений метацентрических высот можно найти углы крена и дифферента по формулам (2.42) и новые осадки носом и кормой по формулам (2.32), но с учетом изменения средней осадки 6d, определяемого формулами (1.21) или (1.22):
dHi = d + 6d + (L/2 — Xj)ф; dKl = d + 6d- (L/2 + Xf)ty.
(2.50)
Если груз снимается с судна, то его масса т во все полученные формулы должна быть подставлена со знаком минус.
В тех случаях когда судно до приема или снятия груза имело начальные (малые) крен или дифферент, в числители первой формулы (2.42) и формулу (2.47) следует подставить алгебраические суммы моментов, возникающих в результате приема (снятия) груза, и моментов Рй0о и РНф0, отвечающих начальным углам крена и дифферента. Выполнив это и полагая Р = Ag и р = mg, находим
Дй0о + ту (Д + m)(/i + 6/1)
ДНф0 + т(х - xf) т(х - xf) ф ---------------- ф + -----
ДН
(2.51)
ДН
При использовании введенного ранее понятия момента М, диффе-рентующего на 1 м, для дифферента судна после приема или снятия малого груза получаем следующее выражение:
m(x-Xf) М
(2.52)
-50-
§ 6. Нейтральные плоскости
Определим условия, при которых прием или снятие малого груза не вызывает изменения коэффициентов остойчивости и начальных метацентрических высот - измерителей остойчивости.
Последовательно приравняв нулю выражения (2.44), (2.45) и (2.49) и решив полученные уравнения относительно аппликаты ЦТ груза г, найдем, что начальные метацентрические высоты сохраняют свои значения при следующих условиях: поперечная метацентрическая высота при
z = d + 6d/2-h, (2.53)
продольная метацентрическая высота при
z = d + 6d/2 - Я, (2.54)
а коэффициенты остойчивости ккК сохраняют свои значения при
z = d + 6d/2. (2.55)
Полученные выражения представляют собой уравнения так называемых нейтральных плоскостей, параллельных ОП. Если аппликата ЦТ груза удовлетворяет одному из этих уравнений, то его прием или снятие не вызывает изменения соответствующего данной нейтральной плоскости измерителя остойчивости.
Исследуя выражения для приращений измерителей остойчивости, можно также прийти к выводу, что прием груза ниже нейтральной плоскости вызывает увеличение, а прием выше нее - уменьшение значений измерителей остойчивости. В случае снятия груза выводы будут противоположными, т. е. соответствующий измеритель остойчивости будет увеличиваться при снятии груза выше нейтральной плоскости и уменьшаться при снятии груза ниже нее.
Знак приращения осадки 6d зависит от того, принимается данный груз на судно или снимается с него. Следовательно, для каждого измерителя остойчивости имеются две нейтральные плоскости: одна для приема и другая для снятия груза, причем положение каждой плоскости по высоте зависит от массы принимаемого или снимаемого груза.
_ Выражения (2.53)- (2.55) показывают, что у прямобОртного судна нейтральные плоскости, относящиеся к различным измерителям остойчивости, располагаются следующим образом: для коэффициентов остойчивости и начальной поперечной метацентрической высоты несколько выше или ниже ватерлинии судна (практически можно считать, что они совпадают с плоскостью ватерлинии); для начальной продольной метацентрической высоты глубоко под килем судна. Следовательно, прием груза на судно всегда уменьшает, а снятие груза увеличивает начальную продольную метацентрическую высоту (но не
- 51 -
продольную остойчивость как способность сопротивляться дифферен-тующим моментам, определяемую абсолютным измерителем - коэффициентом продольной остойчивости).
§7. Влияние приема или снятия большого груза на посадку и начальную остойчивость судна
В случае приема или снятия большого груза использовать формулы (2.44), (2.45) и (2.49) нельзя, так как они приводят к слишком большим погрешностям. Новые метацентрические высоты h} и можно определять только с помощью изложенного ниже графоаналитического метода, используя кривые аппликат метацентров zm =f(d) и zM =f(d), имеющиеся на судне в составе кривых элементов теоретического чертежа.
Предположим, что до приема груза судно сидело прямо и на ровный киль по ватерлинию ВЛ, имея осадку d (рис. 2.18). Используя графическое решение для случая приема большого груза, находим приращение осадки 6d и проводим новую ватерлинию В1Л1. Далее находим новую аппликату ЦТ судна (после приема груза)
zgl = (&zg + mz)/(A + m). (2.56)
Отложив значение zgl в масштабе ординат кривой zm от оси Od вдоль ватерлинии В1Л1, получим в том же масштабе метацентрическую высоту h± = zml -zgl. Аналогичным способом можно найти новую продольную метацентрическую высоту Hlt если использовать кривую аппликат продольного метацентра zM.
Для определения угла крена может служить первая формула (2.42) при условии, что найденный угол крена остается в пределах малых углов, однако вычисление угла дифферента по второй формуле (2.42) может привести к существенной погрешности, так как эта формула не учитывает продольного смещения ЦВ и ЦТ площади действующей ватерлинии при значительном изменении осадки судна. Поэтому для определения дифферента целесообразно воспользоваться изложенным ниже уточненным способом, предусматривающим использование кривых xj=f(d), хс = f(d) иМ = f(d).
Предположим, что до приема груза судно плавает прямо и на ровный киль с осадкой d по ватерлинию ВЛ (рис. 2.19). В этом случае будет иметь место равенство xg » хс, т. е. ЦТ судна G и ЦВ С будут располагаться на одной вертикали, а сила* веса судна Р и сила плавучести у V будут взаимно уравновешиваться. После приема большого груза массой т и весом р, ЦТ которого расположен в точке с абсциссой х, осадка судна получает приращение 6d, которое для большого груза должно быть найдено графически с использованием грузового размера судна. Абсцисса ЦВ при этом изменится; ее новое значение хс1 должно быть найдено, как показано на рисунке, для новой ватерлинии В1Л1 по кривой хс. Новая сила веса судна Р + р и равная ей сила плавучести
-52-
y(V+6V) создадут пару сил с плечом (хг1 -хс1), условный момент которой (Д+ m)(xgl-хс1) приведет к возникновению дифферента
(4с “ 4с) 1 = (Л + m)(xg! - хс!. (2.57)
Значение М] должно быть снято с кривой М для осадки d + bd, отвечающей массе судна Д + т.
Новая абсцисса ЦТ судна xgl определяется выражением
xgl = (Axg + тх)/(Д + т). (2.58)
После подстановки (2.58) в (2.57) и некоторых преобразований получим (4c~4c)i = [Д(х£-хС1) + т(х-хс1)]/М1. (2.59)
Если до приема груза судно имело начальный (малый) дифферент (4с _4с)о> то к числителю формулы (2.59) следует добавить соответствующий этому дифференту момент (4, - 4с) после чего получим
, М Д(х« -х,.) + т(х-х_,)
(4с ~4c)i = (4с-4с)о~=~ 4 g ~ --------------— •
Ml м.
-53-
Новые осадки судна носом и кормой, как видно из рис. 2.19, могут быть найдены по формулам
> (z.oUj
^^d+ed-a/a+x/^x^-^v )
гдех^ - абсцисса ЦТ площади ватерлинии BjJIj.
Перекачка жидких грузов. Если перекачка жидкого груза производилась из запрессованной цистерны в цистерну такой же емкости, которая, следовательно, заполнялась доверху, то ее влияние на посадку и начальную остойчивость судна равносильно влиянию переноса твердого груза массой, равной массе жидкого груза. При различной емкости цистерн и образовании после перекачки свободных поверхностей необходимо учитывать их влияние на остойчивость.
Прием и снятие (расходование) жидкого груза. Если принимаемый на судно жидкий груз заполнял соответствующие цистерны доверху или если снимаемый с судна жидкий* груз также заполнял цистерны доверху и откачивался до полного их осушения, то его влияние на посадку и остойчивость судна равносильно влиянию приема или снятия твердого груза, рассмотренному ранее. Если же в результате приема или снятия груза появились или исчезли свободные поверхности жидкости, то при определении остойчивости судна должны быть введены дополнительные поправки, учитывающие влияние этих поверхностей (с соответствующими знаками).
§ 8. Остойчивость судна при посадке на мель
Посадки на мель являются одним из наиболее распространенных видов аварий, и их количество составляет около 30 % от количества всех аварий, сопровождающихся гибелью судна. Возможна и преднамеренная посадка судна на грунт для предотвращения еще большей опасности (выброса на рифы, потопления, пожара и т. п.). При этом целесообразно заранее заполнить балластные цистерны и выбросить судно на отлогий берег носом вперед на малом ходу.
При посадке на грунт необходимо помнить о большом влиянии на судно приливно-отливных явлений, когда при отливе возможно опрокидывание судна или его перелом. Для преодоления вредных последствий посадки судна на грунт и для оценки возможности самостоятельного схода с мели судоводителю необходимо уметь проводить расчеты, связанные со снятием судна с мели. К ним относится определение реакции грунта и координат места касания, а также количества груза, которое необходимо переместить или снять с судна для .его всплытия. Особенно сложным бывает определение количества воды, влившейся в судно в результате получения пробоины.
Рассмотрим вначале случай посадки судна на мель без получения пробоины. При касании грунта относительно небольшой поверхностью
-54-
реакцию можно считать приложенной в одной точке (рис. 2.20). Для определения величины вертикальной реакции грунта R нужно знать вышедший из воды объем, который пропорционален изменению средней осадки судна после посадки на мель 6d. Согласно закону Архимеда
R = yf>dS,
(2.61)
где S - площадь ватерлинии при осадке d + 6d/2.
Координаты точки касания с грунтом - точки М - можно найти из метацентрических формул остойчивости:
хм = PH^m/R,
УМ = (Р- R)(h + 6h) 0M/R; zM = 0,
(2.62)
где Фм и 6м - изменение угла дифферента и крена судна при посадке на мель.
Действие реакции грунта равносильно снятию груза весом R в точке М. Согласно формуле (2.44) это приводит к изменению метацентрической высоты на величину 6h = [~R/(P - /?)](d + 6d/2 - h). Для уменьшения опорной реакции R (для облегчения последующего стаскивания) можно воспользоваться приливом или осуществить перемещение груза, вплоть до разгрузки судна. Переносить и снимать груз надо с оконечности, сидящей на мели, на противоположную оконечность. Дифферентовка судна при этом происходит вокруг точки М касания судна с грунтом.
Рассмотрим, как изменится посадка сидящего на мели судна и величина опорной реакции при приеме груза т в точку с абсциссой х. В этом случае уравнение моментов относительно точки. М с учетом малости углов наклонения будет иметь вид
Их - хм) = [АН + pS(xF - хм)2] 6ф, (2.63)
Рис. 2.20. Посадка судна на мель
-55-
откуда ,
6ф- m(x-xM)/l&H+ pS(xF-xM)2], (2.64)
где бф - изменение угла дифферента сидящего на мели судна при приеме груза т; xF - абсцисса ЦТ площади ватерлинии сидящего на мели судна. Второе слагаемое в правой части уравнения (2.63) учитывает, что поворот происходит не вокруг точки с абсциссой xF, а вокруг точки с абсциссой хм.
Изменение опорной реакции от приема груза 6R определится с учетом вошедшего в воду дополнительного объема 6 V = S(xm -хр)6ф:
f>R =* mg - yf>u = mg 1 +
yS(xF-хм)(х-хм) g&H+yS(xF-xM)2
(2.65)
Формулами (2.63) - (2.65) можно пользоваться как при снятии груза (при этом т < 0), так и при перемещении груза, поскольку перемещение эквивалентно снятию груза в первоначальном его положении и установке в конечном.
Формула (2.65) позволяет оценить возможность самостоятельного всплытия судна с мели, при этом необходимо, чтобы R + 6R = 0.
Особую опасность для сидящего на мели судна представляет отлив. При обсушке корпуса судно может потерять остойчивость, завалиться на бок или даже переломиться. Если уровень моря изменится на величину (при приливе 6dM > 0, а при отливе bdM < 0), то осадка судна в районе точки М также изменится на эту величину. Кроме того, изменится и посадка судна. Реакция грунта' уменьшится пропорционально вошедшему в воду объему судна, который равен произведению площади ватерлинии на приращение осадки в районе точки F - ЦТ площади ватерлинии:
f>RM = ~yS [Мм - (xF - х^)бфм ]. (2.66)
Здесь бфм - изменение угла дифферента судна при подъеме уровня воды:
6фм * ySbdM(xjr - xM)/(gbH)-
(2.67)
Изменение коэффициента поперечной остойчивости при подъеме уровня воды можно определить по формуле
6fc0 = 6RM(d + хмфм).
(2.68)
При получении пробоины опорная реакция грунта увеличится на вес влившейся воды. Количество влившейся воды определяется методами, рассмотренными в гл. 3.
-56-
§ 9. Остойчивость на больших углах наклонения
Общие положения. В процессе изложения теории начальной остойчивости судна было отмечено, что определение восстанавливающего момента и плеча остойчивости метацентрическими формулами допустимо только при малых углах наклонения. При увеличении этих углов приходится прибегать к теории остойчивости на больших углах наклонения. Основы дайной теории излагаются в настоящем параграфе, где рассматривается лишь остойчивость на больших углах крена, поскольку большой дифферент у неповрежденного судна практически никогда не возникает.
Условимся, как и ранее, что в исходном равновесном положении судно сидит прямо и на ровный киль, его наклонение происходит в вертикальной поперечной плоскости, а деривационный момент, возникающий в процессе наклонения вследствие несимметрии судна относительно плоскости мидель-шпангоута уравновешивается некоторым воображаемым внешним моментом. Другими словами, будем рассматривать плоскую задачу поперечного наклонения судна, считая, что все характерные точки - ЦВ, ЦТ, метацентр, а также линии действия сил веса и плавучести представлены их проекциями на плоскость наклонения, совпадающую с координатной плоскостью уОг (рис. 2.21).
Рассмотрим равнообъемное наклонение судна на угол 6, не налагая на его значение каких-либо ограничений. При таком наклонении ЦВ судна переместится в точку Cg, а сила веса и сила плавучести у V, действуя перпендикулярно новой ватерлинии BgJlg, составят пару сил. Плечо этой пары gR •/, как и ранее, при рассмотрении малых наклонений назовем плечом статической остойчивости, а момент МВ = Р1- восстанавливающим моментом судна.
При наклонении судна на большой угол теорема Эйлера недействительна и ось наклонения уже не проходит через ПТ площади начальной ватерлинии, отвечающей прямому положению судна. Кроме того, кривая CCg уже не может считаться дугою круга; аналитического выражения она не имеет, и форма ее зависит от обводов судна. В общем случае поперечный метацентр mg выходит из ДП и его положение определяется метацентрическим радиусом.
re^Ixd/V, (2.69)
где /xg - центральный момент инерции площади наклонной ватерлинии BgJIg относительно ее продольной оси.
Если из ЦВ опустить перпендикуляр CN на линию действия силы плавучести судна в его наклонном положении, то нлечо остойчивости можно представить как разность:
/ = О?-СВ = /ф-1в=/ф-а sine. (2.70)
Отрезок /ф называют плечом остойчивости формы, так как при данных водоизмещении судна и угле крена его значение зависит
-57-
только от координат ЦВ, определяемых формой подводного объема. Отрезок /в = a sin 0 называют плечом остойчивости веса, так как при данном угле крена его величина зависит только от возвышения а ЦТ над ЦВ. Соответственно момент Мф = Р/ф называют моментом остойчивости формы, а момент Мв = Pl^ = Ра sin 0 - моментом остойчивости веса.
Иногда в качестве плеча остойчивости формы /ф принимают перпендикуляр ER, опущенный на линию действия силы плавучести из полюса Е, расположенного неподвижно в ДП судна. Тогда плечо остойчивости веса равно =(zg -ze)sin 0, а плечо статической остойчивости
(2.71)
Рассмотренное выще разделение плеча остойчивости на две части имеет целью выделение той его части (плеча веса), которая зависит от данного состояния нагрузки судна и, следовательно, может быть определена только на судне после его погрузки. Оставшаяся же часть (плечо формы) может быть рассчитано заранее в функции водоизмещения и угла крена, а результаты такого расчета могут быть выданы на судно в виде соответствующих графиков.
Диаграмма статической остойчивости. Кривую, выражающую зависимость плеча статической остойчивости I или восстанавливающего момента МВ=Р1 от угла крена 0 называют диаграммой статической остойчивости или диаграммой Рида по имени английского корабельного инженера, впервые предложившего ее для оценки остойчивости судна на больших углах крена. По оси абсцисс диаграммы откладывают значения угла крена: положительные (на правый борт) вправо и отрицательные (на левый борт) влево от начала координат, а по оси ординат - значение плеча остойчивости или восстанавливающего момента (рис. 2.22). Поскольку диаграмму остойчивости строят для некоторого определенного водоизмещения судна, между плечом остойчивости и восстанавливающим моментом существует прямая пропорциональная зависимость и, следовательно, одна и та же кривая может служить одновременно диаграммой моментов и диаграммой
Рис. 2.21. Наклонение судна на большой угол
Рис. 2.22. Диаграмма статической остойчивости
-58-
плеч остойчивости - изменяется только масштаб ее ординат. В таких случаях говорят, что диаграмма остойчивости построена „в плечах” или „в моментах”.
В силу симметрии судна относительно ДП обычно ограничиваются построением только одной половины диаграммы остойчивости для положительных значений угла крена - на правый борт.
Остойчивость на малых углах крена можно рассматривать, очевидно, как частный случай остойчивости на больших углах крена. Следовательно, диаграмма статической остойчивости должна характеризовать некоторым образом также начальную поперечную остойчивость судна. Действительно, дифференцируя по углу крена 0 приближенную (метацентрическую) формулу для плеча статической остойчивости / = h sin 0, получаем
dl
— = hcos0. (2.72)
d0
При 0 = 0 эта производная принимает точное значение:
/ dl \
— = h. (2.73)
\ I0_о
Таким образом, в начальном (прямом) положении судна производная плеча статической остойчивости по углу крена численно равна начальной поперечной метацентрической высоте.
Но, как известно из аналитической геометрии, производная функции геометрически выражает угловой коэффициент касательной в данной точке к графику функции, т. е. тангенс угла между этой касательной и положительным направлением оси абсцисс. Следовательно, для изображения начальной метацентрической высоты на диаграмме плеч статической остойчивости можно воспользоваться следующим построением (рис. 2.23); по оси абсцисс откладывают от начала координат отрезок ОА, равный в масштабе углов крена 1 рад, затем в точке А восстанавливают перпендикуляр к оси абсцисс, который пересекается в точке В с касательной к диаграмме, проведенной в начале координат. Отрезок АВ этого перпендикуляра, измеренный в масштабе плеч остойчивости, будет равен начальной метацентрической высоте. В самом деле, из прямоугольного треугольника ОБА находим
I dl \ h tg а = — = — = h.
\ I е=о 1
(2.74)
Соответственно, если диаграмма остойчивости построена в моментах, то производная восстанавливающего момента по углу крена при 0 = 0 будет численно равна коэффициенту поперечной остойчивости к = Ph.
-59-
Рис. 2.23. Начальная остойчи- Рис. 2.24. Типичные формы диаграммы вость на диаграмме статической статической остойчивости: а — низко-остойчивости бортного судна; б — высокобортного
судна
Рисунок 2.23 наглядно показывает допустимые пределы использования метацентрической формулы (2.10), графиком которой является касательная ОВ. При малых 0 прямая ОВ и кривая ОСЕ, выражающая действительный закон изменения плеча статической остойчивости по углу 6, практически совпадают. Резкое расхождение между ними начинается обычно после входа в воду кромки палубы или выхода из воды скулы судна.
При положительной начальной остойчивости характерными точками диаграммы являются точка О - положение устойчивого равновесия судна - и точки В и В', расположенные симметрично относительно начала координат и определяющие углы заката диаграммы 03, при которых судно находится в положениях неустойчивого равновесия (см.' рис. 2.22). При углах крена, меньших угла заката, судно остойчиво, поскольку восстанавливающий момент стремится вернуть его в положение устойчивого равновесия О. Наибольшую по абсолютному значению ординату диаграммы, определяемую точками А или А', называют максимальным плечом диаграммы (или максимальным восстанавливающим моментом), а отвечающий этой ординате угол крена - углом максимума диаграммы остойчивости. Наибольшая ордината диаграммы соответствует предельному статическому кренящему моменту, приложение которого еще не вызывает опрокидывания судна.
Рис. 2.25. Диаграмма статической остойчивости
-60-
На рис. 2.24 приведены типичные диаграммы статической остойчивости для низкобортного судна с большой начальной остойчивостью и высокобортного судна с малой начальной остойчивостью.
На рис. 2.25 изображена диаграмма статической остойчивости судна, имеющего отрицательную начальную остойчивость (в прямом положении). В этом случае положениям неустойчивого равновесия судна будут отвечать не только точки заката диаграммы В и В', но и начало координат О. Положениям устойчивого равновесия будут соответствовать две точки - С и С. Таким образом, судно с отрицательной начальной остойчивостью не может свободно плавать в прямом положении; оно будет иметь крен 0j на правый борт или равный ему крен 6'1 на левый борт в зависимости от случайных внешних причин (ветра, волнения, перекладки руля и т. п.). Наличие отрицательной начальной остойчивости еще не может служить основанием для заключения, что данное судно вообще неостойчиво и должно опрокинуться. Судно опрокидывается только в том случае, когда его диаграмма остойчивости примет вид, показанный на рис. 2.25 штриховой линией, и будет пересекать ось абсцисс только в одной точке - в начале координат О.
§ 10. Построение диаграммы статической остойчивости и практическое ее использование
Задача о построении диаграммы статической остойчивости с использованием ЭВМ при максимальной автоматизации ввода исходных данных в принципе решена. Однако в настоящее время до осуществления массового (серийного) изготовления бортовых ЭВМ с соответствующими устройствами и снабжения ими судов морского флота для построения диаграмм статической остойчивости могут служить в качестве вспомогательных материалов интерполяционные кривые плеч остойчивости формы, пантокарены и универсальные диаграммы остойчивости, содержащиеся в комплекте судовой документации.
Интерполяционные кривые плеч остойчивости формы и пантокарены. При заданных обводах корпуса плечи формы /ф можно рассматривать как функцию двух переменных - объемного водоизмещения V и угла крена 6:
/ф-/(М). (2.75)
Если в уравнении (2.75) положить 9 = 6, = const, плечо формы становится функцией одного переменного /ф */(¥)• Кривые /ф=/(У) называют интерполяционными кривыми плеч остойчивости формы. Их строят в конструкторских бюро для ряда углов крена от 0 до 90* (с интервалами 10") для водоизмещении, лежащих в пределах, представляющих практический интерес, т. е. от водоизмещения порожнего судна Vnop до водоизмещения судна с полным грузом (рис. 2.26).
С помощью интерполяционных кривых плеч остойчивости формы
-61-
можно построить диаграмму статической остойчивости судна для любого состояния его нагрузки. Для этого на оси абсцисс интерполяционных кривых откладывают точку, соответствующую данному водоизмещению, восставляют в ней перпендикуляр и снимают с кривых значения 1ф для углов крена 10*, 20* и т. д. Дальнейшее вычисление плеч статической остойчивости производят по формуле
I • 1ф - a sin 0 «1ф - (zg - zc) sin 0.
(2.76)
При этом аппликату ЦТ судна zg находят из расчета нагрузки, отвечающей данному водоизмещению, а аппликату ЦВ zc - по соответствующей кривой, имеющейся в документе „Кривые элементов теоретического чертежа”. После определения всех плеч формы строят кривую 1ф и синусоиду a sin 0, разности ординат которых являются плечами статической остойчивости (рис. 2.27).
Если плечи остойчивости формы 1ф отсчитываются от полюса Е (см. рис. 2.21), то соответствующие кривые 1ф = f(V) носят название пантокарен. При помощи пантокарен диаграммы статической остойчивости строят так же, как при помощи кривых плеч остойчивости формы.
Универсальная диаграмма статической остойчивости. Для быстрого построения диаграммы статической остойчивости в судовых условиях наряду с интерполяционными кривыми плеч остойчивости формы и пантокаренами используют универсальную диаграмму остойчивости, которую чертят в конструкторском бюро и включают в состав вспомогательных материалов для самостоятельных расчетов, содержащихся в Информации об остойчивости.
Различными авторами были предложены различные формы универсальной диаграммы, включаемой в Типовую информацию об остойчивости и прочности грузового судна, при использовании которой исходными данными являются фактический дедвейт судна и начальная метацентрическая высота судна при данном состоянии его нагрузки.
Рис. 2.27. Построение диаграммы статической остойчивости с помощью пантокарен
-62-
Теоретические основы универсальной диаграммы статической остойчивости заключаются в следующем: к выражению (2.76) для плеча статической остойчивости прибавляют и одновременно вычитают из него одну и ту же величину hcpsin 0 и, принимая во внимание, что а = г - h, представляют это выражение в следующей форме:
Z
/ = /ф - (г - h) sin 0 + fjq, sin 0 - hcp sin 0 , (2.77)
где hep - некоторое произвольное приблизительно среднее для данного судна значение начальной метацентрической высоты. Если положить
= /ф - г sin0 + hep sin0; (2.78)
t = (h-hcp)sin0, (2.79)
то выражение (2.77) принимает вид
/ = 4+ & (2.80)
При некотором заданном угле крена 0 первое слагаемое - условное плечо формы (j, - зависит только от формы подводного объема данного судна, а следовательно, от его водоизмещения или дедвейта, а второе слагаемое - условное плечо веса t - только от его начальной метацентрической высоты.
При построении универсальной диаграммы вычерчивают два семейства кривых: условных плеч формы 1ф для ряда значений дедвейта судна и условных плеч веса f для ряда значений начальной метацентрической высоты от h = 0 до некоторого ее значения, которое для данного судна является наибольшим (рис. 2.28). Для того чтобы кривые представляли собой не синусоиды, а пучок прямых линий, выходящих из начала координат (что упрощает построение диаграммы), шкалу углов крена принимают синусоидальной, т. е. на оси абсцисс диаграммы наносят деления, расстояния которых от начала координат пропорциональны не углам крена, а синусам этих углов.
Диаграмма статической остойчивости для любого заданного значения дедвейта и любой метацентрической высоты видна непосредственно на универсальной диаграмме. Например, на рис. 2.28 показана жирной линией диаграмма статической остойчивости для -= 4600 т и h = 0,7 м при hq, = 1,0 м. При желании эту диаграмму можно легко перестроить в обычную форму, откладывая плечи остойчивости от горизонтальной оси и пользуясь обычной шкалой углов крена.
Практическое использование диаграммы статической остойчивости. Диаграмму статической остойчивости, построенную для данного состояния нагрузки судна, во-первых, используют для того, чтобы подтвердить выполнение требований Регистра СССР к остойчивости судна на больших углах крена, изложенных ниже. Такое подтверждение может стать необходимым в тех случаях, когда нагрузка судна
-63-
Рис. 2.28. Универсальная диаграмма статической остойчивости
Рис. 2.29. Применение диаграммы статической остойчивости для определения угла крена судна при горизонтально-поперечном переносе груза
не соответствует типовой (предусмотренной Информацией об остойчивости) и его остойчивость вызывает сомнения.
Во-вторых, с помощью диаграммы статической остойчивости может быть определен крен судна тогда, когда метацентрическая формула, пригодная только для малых углов крена, оказывается неприменимой. Для нахождения угла крена на диаграмме статической остойчивости Строят кривую кренящего момента Мкр =7(0) или кренящего плеча АсР = ~Мкр/Р =7(8). Точки пересечения этой кривой с диаграммой остойчивости определят положения устойчивого и неустойчивого равновесий судна. Например, кренящее плечо при горизонтально-поперечном переносе груза на расстояние у, - выражается зависимостью
4q> - Р(Уа “ У1)cos 8/Р- (2.81)
Углу статического крена 0j (положение устойчивого равновесия) будет соответствовать точка Л пересечения косинусоиды (2.81) с диаграммой остойчивости (рис. 2.29). Точка В определит угол 02, отвечающий положению неустойчивого равновесия.
§ 11. Динамическая остойчивость
Общие положения. Динамической остойчивостью называют способность судна выдерживать, не опрокидываясь, динамическое воздействие кренящего момента.
-64-
- Задача о крене судна при воздействии на него кренящего момента была рассмотрена выше в статической постановке, т. е. анализировалось положение судна, при котором наблюдается статическое равновесие между кренящим и восстанавливающим моментами. Предполагалось, что кренящий момент прикладывается к судну постепенно, вызывая пренебрежимо малые ускорения, либо что с момента его приложения истекло достаточно много времени.
Значительный практический интерес представляет рассмотрение той же задачи в динамической постановке, когда нарастание кренящего момента до его наибольшего значения происходит в течение очень короткого времени, не соизмеримого со временем накренения судна, или практически мгновенно. Так действует, например, на судно внезапно налетевший порыв ветра (шквал). В каждый момент времени при этом не будет наблюдаться равенства между кренящим и восстанавливающим моментами, и судно получит, так называемый динамический крен, кратковременный, но значительно больший крена, возникающего при статическом действии такого же кренящего момента.
Рассмотрим процесс наклонения судна под действием внезапно приложенной внешней кренящей пары сил, продолжающей действовать неограниченно долго после приложения. В целях упрощения задачи будем считать, что момент этой пары Мкр не зависит от угла крена (в частности, для ветрового момента это приблизительно соответствует действительности). В этом случае график кренящего момента изобразится на диаграмме остойчивости прямой линией АС, параллельной оси 0 (рис. 2.30). На участке наклонения судна АВ кренящий момент больше восстанавливающего, и судно будет крениться с нарастающей угловой скоростью и убывающим угловым ускорением, которое обратится в нуль в точке В, т. е. при достижении статического угла крена 6СТ . Однако угловая скорость накренения в этом положении судна достигнет максимума, поэтому оно не остановится, а будет продолжать крениться по инерции с убывающей угловой скоростью, которая наконец обратится в нуль в некоторой точке Е при достижении динамического угла крена 6ДИН . Эта точка не является положением равновесия, так как восстанавливающий момент в ней больше кренящего; поэтому судно задержится в ней лишь на одно мгновение, а затем его крен будет убывать и рассмотренный процесс повторится в обратном направлении, т. е. судно начнет совершать колебательные движения, постепенно затухающие под влиянием сопротивления среды. Размахи колебаний судна будут при этом постепенно уменьшаться, и, наконец, оно придет в положение статического равновесия с углом крена 9СТ .
-В процессе колебаний судна происходит непрерывный переход кинетической энергии его накренения в потенциальную, и наоборот. Следовательно, наибольший угол динамического крена может быть определен из условия равенства работ кренящего и восстанавливающего моментов при накренении от 6 = 0 до 0 = 0ДИН (сопротивлением среды, а следовательно, и его работой при этом пренебрегают).
-65-
Известно, что работа пары сил выражается произведением ее момента на угол поворота, а при переменном моменте - площадью под его графиком, построенным в функции угла поворота. В данном случае математическим выражением указанного равенства работ будет служить уравнение ® дин
Мкр0дин= S MBdfi. (2.82)
о
Подынтегральная функция в правой части уравнения (2.82) не может быть выражена аналитически, поэтому это уравнение может быть решено относительно 6диМ только графическим способом - таким подбором положения ординаты DF, при котором площади, выраженные правой и левой частями уравнения, будут равны, т. е.
площадь OAEF = площади OBDF. (2.83)
Обе площади включают общую для них площадь OBEF, следовательно, условие для подбора ординаты DF можно записать в виде равенства площадей, заштрихованных на рис. 2.30:
площадь ОАВ = площади BDE.
(2.84)
Предельный динамический кренящий момент, действие которого судно способно выдержать не опрокидываясь (называемый обычно опрокидывающим моментом), определится равенством заштрихованных площадей ОАВ и BCD (рис. 2.31). Этому моменту соответствует предельный динамический угол крена 9ДИН. пред •
Из сказанного следует, что мерой динамической остойчивости судна служит работа Т восстанавливающего момента при наклонении судна от начального равновесного положения до некоторого заданного угла крена. Эта работа равна
T = SMBde. (2.85)
о
В практике получила также распространение относительная мера динамической остойчивости - отношение работы восстанавливающего момента к силе веса судна, называемое плечом динамической остойчивости
8
'дин = Т/Р = Side. (2.86)
о
Рис. 2.31. Определение опрокидывающего момента
Рис. 2.30. Действие внезапно приложенного кренящего момента
-66-
В теории судна доказывается, что плечо динамической остойчивости имеет размерность длины и определенный геометрический смысл: оно равно приращению возвышения ЦТ над ЦВ судна при его равнообъемном наклонении из прямого положения до заданндго угла крена 6 (рис. 2.32). Действительно, работа восстанавливающего момента равна работе сил веса и плавучести при наклонении судна, которая, в свою очередь, равна произведению одной из этих сил на приращение расстояния между ними.
Диаграмма динамической остойчивости. Кривую, выражающую зависимость работы восстанавливающего момента (или плеча динамической остойчивости) от угла крена, называют диаграммой динамической остойчивости.
Формулы (2.85) и (2.86) показывают, что диаграмма динамической остойчивости является интегральной кривой по отношению к диаграмме статической остойчивости (рис. 2.33) и поэтому обладает следующими свойствами, общими для всех интегральных кривых:
- точки пересечения подынтегральной кривой (диаграммы статической остойчивости) с осью абсцисс отвечают точкам О и D экстремума интегральной кривой (диаграммы динамической остойчивости);
- точка А максимума диаграммы статической остойчивости соответствует точке перегиба С диаграммы динамической остойчивости;
- любая ордината диаграммы динамической остойчивости, отвечающая некоторому углу крена 0, представляет в масштабе соответствующую этому углу крена площадь диаграммы статической остойчивости (заштрихована на рисунке).
Рабочая форма вычисления ординат диаграммы динамической остойчивости приведена в табл. 2.1.
Диаграмму динамической остойчивости целесообразно использовать в судовых условиях для решения двух рассмотренных выше задач: определения динамического угла крена при заданном динамическом кренящем моменте и определения опрокидывающего момента. Приведенное выше решение этих задач при помощи диаграммы статической остойчивости, хотя и наглядно, но методически не вполне
ческого смысла плеча динамической остойчивости
Рис. 2.33. Диаграммы статической и динамической остойчивости
-67-
Таблица 2.1. Вычисление ординат диаграммы динамической остойчивости
В,, м /р м Интегральные суммы £ /, ИНТ 'дин-«0/2 £нт/,
—‘
0 0 0
10 Go 1 Go
20 Go „ 1 . .1 2 ^10 + ^20
30 Go^ ’ 2 Go + 2 Go + /30
6 0/2 = 1О’/2 = 0,1745/2 = 0,0873 рад
удобно, так как требует довольно трудоемкого подбора ординат, обеспечивающих равенство известных площадей. При использовании диаграммы динамической остойчивости это неудобство устраняется.
Рассмотрим диаграмму динамической остойчивости, построенную в плечах /дин (рис. 2.34), и соответственно графическое решение уравнения, аналогичного уравнению (2.82), ® дин
'крвдин = S (2.87)
О
где 1кр = Мкр /Р - плечо кренящего момента.
Динамический кренящий момент принимается постоянным по углам крена. Следовательно, его работа находится в линейной зависимости от угла 0, а график произведения /кр0 = /(0) изобразится на диаграмме динамической остой-
Рнс. 2.34. Определение угла динамического крена и плеча опрокидывающего момента при помощи диаграммы динамической остойчивости
чивости прямой наклонной ли-нией. В наиболее простом случае, когда рассматривается воздействие динамического кренящего момента на судно, находящееся в прямом равновесном положении, эта прямая будет проходить через начало координат. Для ее построения достаточно провести вертикаль через точку, отвечающую крену в 1 рад (57,3°), и отложить на этой вертикали заданное кренящее плечо /кр. Прямая, соединяющая найденную таким
-68-
образом точку Е с началом координат О, представит искомый график произведения /кр9, т. е. график работы кренящего момента, отнесенной к силе веса судна Р. Эта прямая пересечет диаграмму динамической остойчивости в двух точках: А и В. Абсцисса первой из этих точек определяет угол динамического крена 0ДИН> при котором имеет место равенство работ кренящего и восстанавливающего моментов. Вторая точка пересечения практического значения не имеет.
Если построенный таким образом график произведения ^0 вообще не пересекает диаграмму динамической остойчивости, то это означает, что судно опрокидывается. Для того чтобы найти предельный кренящий момент Мопр, который судно еще может выдержать не опрокидываясь, следует провести из начала координат касательную к диаграмме динамической остойчивости до пересечения ее в точке D с вертикалью, соответствующей крену в 1 рад. Отрезок этой вертикали от оси 6 до пересечения ее с касательной определит плечо опрокидывающего момента /опр, а сам момент определится умножением плеча /опр на силу веса судна Р. Точка касания С определит предельный угол динамического крена 0ДИН пред .
Рассмотренное выше решение задачи определения опрокидывающего момента несколько идеализирует физическую картину явления применительно к воздействию на судно кренящего момента от налетевшего шквала ветра. В реальных условиях судно, как правило, воспринимает действие ветра, находясь в открытом море и испытывая бортовую качку. Поэтому Правила Регистра СССР (часть IV „Остойчивость”) предписывают использовать следующую методику опреде
ления опрокидывающего момента с учетом качки.
На диаграмме динамической остойчивости находят вспомогательную точку А (рис. 2.35). Для этого вправо от начала координат откладывают максимальную амплитуду бортовой качки (определяемую по приводимой в Правилах методике) и на кривой динамической остойчивости фиксируют соответствующую точку А', через которую проводят прямую, параллельную оси абсцисс. На этой прямой влево от вспомогательной точки А откладывают отрезок АА', равный двойной амплитуде качки (АА'=20Г). Найденная таким образом точка А, расположенная симметрично точке А', определяет начало динамичес
кого процесса накренения судна под действием динамического кренящего момента. Далее из точки А проводят касательную АС к диаграмме динамической остойчивости и от точки А на прямой, параллельной оси абсцисс, откладывают отрезок АВ, равный 1 рад. В точке В восставляют перпендикуляр ЕЕ до пересечения с касательной АС. Отрезок BE равен плечу опрокидывающего момента /Опр=Мопр/Л если диаграмма динамической остойчивости построена в масштабе плеч, как на
Рис. 2.35. Определение опрокидывающего момента с учетом качки
-69-
рис. 2.35, или равен опрокидывающему моменту Мопр, если диаграмма построена в масштабе работ.
§ 12. Кренящий момент при статическом и динамическом давлении ветра
Давление ветра на судно распределяется неравномерно и зависит от высоты расположения данной части судна над уровнем моря, степени ее обтекаемости и направления ветра по отношению к судну. На практике для упрощения расчетов принято считать, что давление ветра приводится к одной равнодействующей силе, равной произведению некоторого условного давления ветра р на площадь парусности 5^, т. е. на площадь проекции боковой поверхности судна на ДП. При этом условное давление ветра принимают по таблице, приводимой в Правилах Регистра СССР, в зависимости от категории судна (ограниченного или неограниченного плавания) и возвышения центра парусности, т. е. ЦТ площади 5^, над уровнем ватерлинии. Предполагают также, что равнодействующая давления ветра Р приложена в центре парусности.
Статическое давление ветра (рис. 2.36, а) вызовет дрейф судна, т. е. его движение в направлении, перпендикулярном ДП, с некоторой скоростью и. При этом возникнут силы сопротивления воды. Положение по высоте точки приложения их равнодействующей R зависит от формы обводов подводной части корпуса судна. С некоторым приближением можно считать, что сила сопротивления воды R приложена на половине осадки судна. В таком случае при статическом давлении ветра кренящий момент равен
Мкр. ст “ Р,^п(2п d/2},
(2.88)
где р - условное (расчетное) удельное давление ветра; Zn - аппликата центра парусности.
Рис. 2.36. Определение кренящего момента при статическом и динамическом давлении ветра
ЦП — центр парусности
-70-
При динамическом давлении ветра, когда при налетевшем шквале сила давления ветра Р прикладывается к судну практически мгновенно, силы сопротивления воды еще не успевают развиться, так как поступательному перемещению судна препятствуют силы инерции самого судна Р^, равнодействующая которых приложена в ЦТ судна G, и сила инерции присоединенной массы воды, которую судно увлекает за собой.
Как показывают результаты исследований, можно принять, что точка приложения равнодействующей Rm инерционных сил находится на уровне ватерлинии (рис. 2.36, б). Таким образом, кренящий момент от динамически приложенного давления ветра может быть найден по формуле
МКр. дин = ~ d)- (2.89)
Из сравнения формул (2.88) и (2.89) видно, что Мкр. < Мкр ст. Однако динамический кренящий момент более опасен для судна. Статистика аварий судов показывает, что относительно малые суда (рыболовные, спортивные и др.) нередко опрокидываются в результате налетевшего шквала ветра, тогда как постоянно действующий ветер, вызывающий только статический крен, не представляет для них опасности.
§ 13. Требования Регистра СССР к остойчивости морских судов
В СССР требования к остойчивости эксплуатируемых, строящихся, а также капитально ремонтируемых и переоборудуемых судов регламентируются Правилами классификации и прстройки морских судов (часть IV „Остойчивость”) Регистра СССР.
Общие требования к остойчивости включают .требования к так называемому критерию погоды, элементам диаграммы статической остойчивости, начальной метацентрической высоте, а также требования учета обледенения.
Остойчивость судна считается достаточной по критерию логоды К, если соблюдено условие
К = ^опр /^кр. дин 1 >0, (2.90)
где Мопр - опрокидывающий момент, определяемый по изложенной выше методике с учетом качки судна; Мк_ _ин - динамический кренящий момент, определяемый по формуле (2.89).
Максимальное плечо диаграммы статической остойчивости должно быть не менее 0,25 м для судов длиной L 80 м и не менее 0,20 м для судов длиной L > 105 м при угле 9тах = 30°. Для промежуточных значений длин 80 < L < 105 м величина 1^* определяется линейной интерполяцией. Угол заката диаграммы статической остойчивости 03 должен быть не менее 60°.
- 71 -
Начальная метацентрическая высота при всех вариантах загрузки, за исключением варианта „судно порожнем”, должна быть положительной (й = 0).
Судно должно удовлетворять перечисленным выше , требованиям при учете в диаграммах статической остойчивости и начальной метацентрической высоте поправок на влияние свободных поверхностей жидких грузов, определяемых по изложенной в Правилах методике. Некоторое снижение требований к элементам диаграмм статической остойчивости допускается в тех случаях, когда эти диаграммы построены с учетом обледенения, нормы которого также указаны в Правилах. Если при построении диаграммы учтена масса льда согласно этим нормам, то угол заката диаграммы должен быть не менее 55°, а максимальное плечо (только для судов ограниченного района плавания) - не менее 0,2 м при крене не менее 25*.
Особые требования предъявляются к остойчивости пассажирских судов, лесовозов, контейнеровозов и судов, перевозящих насыпные грузы.
Начальная метацентрическая высота пассажирских судов должна быть такой, чтобы:
при скоплении пассажиров на верхней доступной им палубе у одного борта угол крена был не более половины угла заливания1 или угла, при котором палуба надводного борта входит в воду или оголяется скула, смотря по тому, какой угол меньше; во всяком случае этот угол не должен превышать 10°;
при скоплении пассажиров на верхней доступной им палубе у борта угол крена на установившейся циркуляции судна был не более 3/4 угла заливания либо угла, при котором палуба надводного борта входит в воду или скула выходит из воды, смотря по тому, какой угол меньше; во всяком случае этот угол не должен превышать 12*.
Исправленная (на влияние свободных поверхностей жидких грузов) начальная метацентрическая высота лесовозов с лесным грузом, размещенным в трюмах и на палубе, и с полными запасами должна быть не менее 0,1 м.
Остойчивость контейнеровозов, под которыми подразумеваются все суда, несущие контейнерный груз на палубе, должна быть такой, чтобы определенный по диаграмме статической остойчивости статический угол крена на установившейся циркуляции или угол крена при действии бокового ветра был не более половины угла, при котором палуба надводного борта входит в воду; во всяком случае угол крена не должен превышать 15*. Исправленная начальная метацентрическая высота таких судов должна быть не менее 0,2 м.
Требования к остойчивости судов, перевозящих зерно насыпью, изложены в Правилах перевозки зерна Регистра СССР. Исправленная
‘Под углом заливания By подразумевается угол крена, при котором происходит заливание водой внутренних помещений судна через отверстия, считающиеся открытыми, т. е. отверстия, устройства для закрывания которых не удовлетворяют соответствующим требованиям Регистра СССР.
-72-
начальная метацентрическая высота таких судов должна быть не менее 0,3 м. Дополнительные требования к диаграмме статической остойчивости этих судов не предъявляются в следующих случаях:
- если свободная поверхность зерна в любом частично заполненном помещении покрыта зерном в мешках, плотно уложенных на высоту не менее 1/16 ширины свободной поверхности зерна или 1,2 м, в зависимости от того, что больше; вместо зерна в мешках может быть использован другой подходящий несмещаемый груз, уложенный на ту же высоту и оказывающий на поверхность зерна давление не менее 10 кПа (при этом должны быть выполнены содержащиеся в Правилах требования к покрытию поверхности зерна тканью или досками перед укладкой на нее груза;
- если свободная поверхность зерна в частично заполненном помещении укреплена настилом из досок, принайтовленным к бортам полосами или тросами, т. е. если применен так называемый стропинг.
Если же указанные требования не выполняются, то угол 0gs статического крена, вызванного расчетным смещением зерна, не должен превышать 12° для всех судов или угла входа палубы в воду, если он меньше 12°, для судов неограниченного района плавания. При этом угол крена судна определяется путем построения кривой кренящих плеч на диаграмме плеч статической остойчивости (рис. 2.37). Согласно Правилам эта кривая может быть аппроксимирована прямой, проходящей через точку А при угле крена 0 = 0 с ординатой lg0, соответствующей суммарной поперечной составляющей кренящих моментов от расчетного смещения зерна во всех грузовых помещениях. Вторая точка В, через которую проводится прямолинейный график плеч кренящего момента, имеет при угле крена 40° ординату lg40 = 0,8/go.
Диаграмма статической остойчивости может быть построена приближенным способом, исходя из предположения, что ЦТ груза располагается в центре объема каждого грузового помещения, либо уточненным способом, исходя из фактического положения ЦТ зернового груза с учетом подпалубных пустот. В последнем случае при построении диаграммы должна быть учтена вертикальная составляющая расчетного смещения зерна путем добавлением поправки zgs. В Правилах приводится методика расчета подпалубных пустот, а также суммарных поперечной lg0 и вертикальной zgs составляющих плеча кренящего момента от расчетного смещения зерна.
Остаточная площадь lgr диаграммы статической остойчивости между кривыми восстанавливаю-
условного повышения Ц1 судна
0 figs If I
Рис. 2,37. Диаграмма статической остойчивости судна, переводящего зерновые грузы насыпью .
щих и кренящих плеч до угла крена 0max j, соответствующего или максимальной разности между ординатами этих кривых,
-73-
или 40°, или угла заливания Оу (в зависимости от того, какой из них меньше) при всех условиях загрузки судна должна быть не менее 0,075 м- рад.
Дополнительные требования к остойчивости судов, предназначенных для перевозки нез^рновых навалочных грузов, содержатся в Правилах безопасности перевозки незерновых навалочных грузов ММФ СССР. Если установлено, что свободные поверхности данного груза обладают свойством смещения при качке судна на морском волнении, то начальная метацентрическая высота судна, исправленная на влияние свободных поверхностей жидких грузов, а также на влияние смещения поверхности груза в трюмах, должна быть не менее 0,7 м. Кроме того, угол статического крена, вызванного расчетным смещением груза в соответствии с указаниями Правил не должен превышать 12°, а остаточная площадь диаграммы статической остойчивости между кривыми восстанавливающих и кренящих плеч должна быть не менее 0,12 м • рад.
§ 14. Требования к Информации об остойчивости судна для капитана
На каждое судно должна быть выдана согласованная с Регистром СССР Информация об остойчивости судна, содержащая следующие материалы:
- данные об остойчивости судна для типовых вариантов нагрузки, предусмотренных заранее;
- рекомендации в отношении мероприятий, улучшающих остойчивость судна;
- указания, вспомогательные графики, таблицы и другие материалы, служащие для оценки посадки и остойчивости судна при нетиповых, т. е. возможных в эксплуатации, но не предусмотренных заранее, вариантах нагрузки.
Суда Морского Флота СССР, построенные на отечественных заводах до 1979 г., снабжены, как правило, Информациями об остойчивости, составленными применительно к типовой форме, изданной Регистром СССР в 1964 г. В 1979 г. ММФ СССР была издана Типовая информация об остойчивости и прочности морского судна (указания капитанам. судов), на основании которой будут разрабатываться Информации об остойчивости для судов новой постройки. Следует иметь в виду также, что на ряде судов заграничной постройки имеются Информации, составленные соответствующими заводами-строителями и не отвечающие в полной мере принятой у нас типовой форме.
К числу содержащихся в Информации материалов, обеспечивающих возможность самостоятельного выполнения капитаном расчетов посадки и остойчивости судна при нетиповых случаях загрузки относятся:
- данные по танкам и цистернам, используемым для размещения судовых запасов (топлива, масла, пресной воды), а также водяного балласта, необходимые для составления таблицы загрузки судна;
-74-
Рис. 2.38. Схема расположения грузов
- данные по грузовым помещениям в виде номограмм (см. рис. 1.5), нанесенных на схематическом чертеже продольного разреза судна (рис. 2.38); эти данные также необходимы при составлении таблицы загрузки;
- диаграмма контроля остойчивости, на которой нанесены предельные кривые начальной метацентрической высоты по различным нормативным критериям, а также кривые вертикальных моментов дедвейта Mzw относительно ОП (рис. 2.39) в .зависимости от дедвейта судна;
- диаграмма осадок носом и кормой (по маркам осадки или теоретических осадок на НП и КП) в виде кривых постоянных значений
-75-
Рис. 2.40. Диаграмма осадок носом и кормой
осадок носом и кормой, построенных в зависимости от дедвейта судна и статического момента дедвейта относительно плоскости мидель-шпангоута (рис. 2.40).
Информация об остойчивости составляется проектной организацией или заводом-строителем судна по материалам опыта кренования.
Контрольные вопросы
1. Куда на судне необходимо принять малый груз для того, чтобы не изменялись: его начальная остойчивость; его дифферент?
2. Почему при графическом определении начальной метацентрической высоты на диаграмме статической остойчивости по оси углов крена откладывают 1 рад?
3. Каков процесс изменения остойчивости при подъеме груза с палубы: судовыми грузовыми стрелами; береговыми средствами?
4. В какой мере влияет на остойчивость судна площадь свободной поверхности жидкого груза?
5. Одинаково ли изменится остойчивость от появления свободной поверхности жидкости в цистерне на порожнем судне и на судне с полным грузом?
6. Почему диаграмма статической остойчивости имеет максимум?
7. Какой кренящий момент и какой угол крена будет больше: при статическом действии ветра или при динамическом действии ветра (давление ветра одинаково)?
Глава 3
НЕПОТОПЛЯЕМОСТЬ СУДНА
§ 15. Основные понятия и определения
Непотопляемостью судна называют его способность оставаться на плаву после затопления части его внутренних помещений (отсеков), имея посадку и остойчивость, обеспечивающие хотя бы ограниченное использование судна по назначению. Непотопляемость, в отличие от остойчивости неповрежденного судна, нельзя рассматривать как его мореходное качество. Непотопляемость является свойством судна сохранять свои мореходные качества в заданных пределах. Таким образом, судно обладает непотопляемостью, если после затопления части отсеков оно сохраняет плавучесть, остойчивость и посадку в той мере, которая достаточна для выполнения хотя бы части его функций.
Непотопляемость - специфическое качество судна. В отличие от ходкости, управляемости и других свойств судна с непотопляемостью моряки сталкиваются только при аварии, приводящей к поступлению воды внутрь корпуса; В то же время потеря непотопляемости связана с тяжелейшими последствиями - гибелью судна и людей, поэтому ее обеспечение является одной из важнейших задач как судостроителей, так и экипажа.
Непотопляемость является главным элементом живучести судна, поскольку утрата непотопляемости равносильна утрате судна как инженерного сооружения и как эксплуатационной единицы флота. Хотя практические меры по обеспечению непотопляемости насчитывают не одну тысячу лет, теория непотопляемости - сравнительно молодая наука: ей немногим более 100 лет, и приоритет в ней принадлежит оте:чественным ученым.
В практике непотопляемость обеспечивается на всех этапах жизни судна: судостроителями на стадиях проектирования, постройки и ремонта судна; экипажем в процессе эксплуатации неповрежденного судна; экипажем непосредственно в аварийной ситуации. Из такого подразделения следует, что непотопляемость обеспечивается тремя комплексами мероприятий:
- конструктивными мероприятиями, которые проводятся при проектировании, постройке и ремонте судна;
- организационно-техническими мероприятиями, которые являются предупредительными и проводятся во время эксплуатации судна;
- мероприятиями по борьбе за непотопляемость после аварии, направленными на борьбу с поступлением воды, восстановление остойчивости и спрямление поврежденного судна.
Успешная реализация конструктивных мероприятий определяется квалификацией береговых работников. Эффективность мероприятий, проводимых в эксплуатации и после аварии, определяется человеческим
-77-
фактором и прежде всего постоянной готовностью экипажа и технических средств к борьбе за непотопляемость и четкой организацией борьбы за непотопляемость.
Все три комплекса мероприятий содержат соответствующие расчетные методы. На первом этапе выполняют проектные и поверочные расчеты, необходимые для обеспечения судна соответствующей отчетной и информационной документацией. В процессе эксплуатации производят поверочные расчеты непотопляемости для конкретного случая загрузки судна. При аварии судна, приведшей к затоплению отсеков, необходимо, исходя из наличия реальной пробоины, оперативно оценить аварийную посадку и остойчивость, а также время затопления для выбора и исполнения оптимального решения по спасению судна и людей.
§ 16. Принципы обеспечения непотопляемости
Конструктивные мероприятия. Эти мероприятия осуществляют на стадиях проектирования и постройки судна и сводятся прежде всего к назначению таких запасов плавучести и остойчивости, чтобы при затоплении отсеков заданного числа и формы изменение посадки и остойчивости аварийного судна не выходило из допустимых пределов. При этом необходимым условием является подразделение судна на отсеки водонепроницаемыми переборками, палубами и платформами, что является наиболее эффективным средством сохранения запаса плавучести при повреждении корпуса. Действительно, если судно не имеет внутреннего подразделения на отсеки, то при наличии подводной пробоины корпус заполнится водой и судно не сможет использовать запас плавучести. Основным конструктивным принципом подразделения на отсеки является принцип „слабого звена”, т. е. оно должно быть таким, чтобы плавучесть утрачивалась раньше остойчивости. Это объясняется тем, что потеря судном плавучести в результате прогрессирующего затопления - процесс достаточно медленный, длящийся иногда до нескольких часов. Опрокидывание же из-за потери остойчивости происходит в короткий промежуток времени, часто внезапно и, как правило, сопряжено с человеческими жертвами. Поэтому подразделение на отсеки должно быть таким, чтобы судно тонуло не опрокидываясь.
Важным конструктивным мероприятием по обеспечению непотопляемости является создание прочных и водонепроницаемых закрытий (дверей, люков, горловин), установленных по контуру водонепроницаемого отсека, которые должны хорошо работать при крене, дифференте и морском волнении.
Также следует предусматривать водонепроницаемые палубы и платформы, поскольку они предотвращают распространение воды по высоте. Важную роль играют настил второго дна и продольные переборки бортовых танков, которые предотвращают попадение воды в отсеки при повреждениях обшивки днища и борта.
-78-
Водонепроницаемость и прочность должны быть обеспечены не только в подводной, но и в надводной части корпуса, так как последняя определяет запас плавучести, расходуемый при повреждении.
Комплекс конструктивных мероприятий включает сохранение непотопляемости рациональным проектированием судовых устройств и систем, а также снабжением судна надлежащими средствами борьбы за непотопляемость, соответствующей проектной документацией, наставлениями и информациями.
Несмотря на то что конструктивные мероприятия обеспечиваются судостроителями, знание и понимание причин принятия данных конструктивных решений является необходимым для инженера-судоводителя. Анализ аварий и гибели судов показывает, что неправильное понимание конструктивных особенностей судна, Неумение прогнозировать его поведение в аварийной ситуации приводит к принятию при эксплуатации неправильных решений, что нередко является причиной гибели судов и людей. В то же время грамотное использование особен-лостей судна, заложенных при постройке, предотвращает его гибель в положениях, казавшихся безнадежными.
Организационно-технические мероприятия. Организационно-технические мероприятия по обеспечению непотопляемости зависят от экипажа судна и проводятся в процессе эксплуатации с целью предупреждения поступления в отсеки воды, а также сохранения посадки и остойчивости судна, предотвращающих его затопление или опрокидывание. К числу таких мероприятий относятся:
- правильная организация и систематическая подготовка личного состава к борьбе за непотопляемость;
- систематическое наблюдение за состоянием всех корпусных конструкций в целях проверки их износа (коррозии), замена отдельных элементов конструкций при текущем или среднем ремонте в случае превышения установленных норм износа;
- планомерная окраска корпусных конструкций (с удалением, по возможности, слоев старой краски, накопление которой отрицательно сказывается на нагрузке и остойчивости судна);
- устранение перекосов и провисаний водонепроницаемых дверей, люков и иллюминаторов, систематическое их расхаживание и поддержание всех задраивающих устройств в исправном состоянии;
- поддержание в исправном состоянии воздухопроводов системы вентиляции, их запорных устройств и грибков вентиляции;
- контроль забортных отверстий, особенно при доковании судна;
- систематические испытания на герметичность водонепроницаемых отсеков и отдельных конструкций корпуса;
- строгое соблюдение инструкции по приему и расходованию топлива;
- устранение перегрузки судна за счет грузов, особенно жидких (например, трюмной воды), перевозка которых не предусмотрена;
- раскрепление грузов по-походному и предотвращение их перемещения при качке (особенно поперек судна);
-79-
- компенсация потерь остойчивости, вызванных обледенением судна, путем приема жидкого балласта, мероприятия по удалению льда -скалывание его с бортов и палуб, смывание горячей соленой водой;
- балластировка судна в условиях штормовой погоды;
- устранение свободных поверхностей жидких грузов;
- поддержание всех технических средств борьбы за непотопляемость в состоянии, гарантирующем возможность немедленного их использования.
Борьба за непотопляемость после аварии. Под борьбой за непотопляемость понимают севокупность действий личного состава, направленных на поддержание и возможное восстановление плавучести и остойчивости поврежденного судна, а также на приведение его в состояние, обеспечивающее ход, управляемость и использование по назначению. Борьба за непотопляемость после аварии складывается из действий по борьбе с поступлением воды и действий по восстайовле-нию остойчивости и спрямлению поврежденного судна.
Борьба с поступлением воды предшествует всем остальным мероприятиям по борьбе за непотопляемость и лишь в отдельных случаях проводится одновременно с ними. Прекращением поступления воды заканчивается первый этап борьбы за непотопляемость, к концу которого судно должно получить установившиеся элементы посадки и остойчивости. При этом может оказаться, что начальная остойчивость судна весьма мала или даже отрицательна, а посадка характеризуется большим креном и дифферентом и малой величиной минимального надводного борта или даже входом палубы в воду. В таких случаях, чтобы обеспечить безопасность дальнейшего плавания и использовать судно по назначению, необходимо принять меры по восстановлению остойчивости и спрямлению судна, т. е. устранению или уменьшению крена и дифферента.
Если позволяет обстановка, восстановление остойчивости и спрямление следует проводить одновременно с работами по прекращению поступления воды. Однако при этом следует осуществлять лишь те мероприятия, которые не послужат причиной даже кратковременного уменьшения начальной остойчивости судна.
Восстановление остойчивости, как правило, должно предшествовать спрямлению судна. Это особенно важно в случаях, когда после повреждения судно получает отрицательную начальную остойчивость. Мероприятия по восстановлению остойчивости и спрямлению судна необходимо проводить с минимально возможным расходованием запаса плавучести. Им должны предшествовать оценка остойчивости и, в частности, установление опасности появления у судна отрицательной остойчивости и определение посадки судна (крена, дифферента, средней осадки), а также минимальной высоты надводного борта.
Оценка остойчивости после аварии может быть произведена на основании данных о затопленных отсеках. Если имеются основания предполагать, что начальная остойчивость отрицательна или существенно упала (вдвое или больше), необходимо в первую очередь проводить мероприятия по восстановлению остойчивости.
-80-
Наиболее важными из них следует считать те мероприятия, которые предназначены устранять большие свободные поверхности, служащие основной причиной возникновения отрицательной начальной остойчивости. Большие свободные поверхности на высокорасположенных палубах могут появиться вследствие тушения пожаров, повреждения пожарной магистрали, заброса воды при качке через надводные повреждения корпуса. Если не представляется возможным ликвидировать эти поверхности откачиванием воды за борт, то следует спускать воду из вышележащих помещений в нижележащие, по возможности до заполнения последних полностью. Если же свободная поверхность мала или расположена непосредственно под ограничивающей отсек палубой (высокая степень заполнения отсека), то более рациональным представляется заполнение его до палубы забортной водой, которая в этом случае будет играть роль балласта.
Прекращение самопроизвольного перетекания жидких грузов с борта на борт существенно улучшает остойчивость судна и препятствует дальнейшему увеличению крена. Поэтому после повреждения судна должны быть перекрыты клинкеты трубопроводов теплых ящиков, а также топливных и водяных цистерн. При наличии на судне систем перетекания, сообщающих пустые отсеки противоположных бортов и имеющих разобщительные клинкеты, последние, как правило, должны быть всегда открыты.
Жидкие грузы, если они заполняют большое число незапрессован-ных отсеков, необходимо перекачать, сосредоточив их в запрессованных отсеках.
Водяная балластировка уменьшает запас плавучести судна, но служит весьма эффективным средством восстановления его остойчивости. На каждом судне должно быть заранее установлено, какие отсеки могут быть использованы для балластировки, какой эффект они дают для повышения остойчивости и каков порядок их затопления.
Общим принципом при выборе мероприятий по спрямлению поврежденного судна, как и при восстановлении его остойчивости, должно быть стремление к минимальному расходованию запаса плавучести. Поэтому всегда следует отдавать предпочтение тем из них, которые увеличивают запас плавучести, во вторую очередь, проводить мероприятия, которые не изменяют его, и лишь в последнюю очередь прибегать к мероприятиям, связанным с расходованием запаса плавучести.
Перекачивание жидких грузов с борта на борт или из одной оконечности судна в другую создает спрямляющий момент как за счет снятия груза с вошедшего в воду борта (или оконечности), так и за счет приема его на вышедший из воды борт (оконечность). Положительная сторона такого способа заключается и в том, что при этом не расходуется запас плавучести, а отрицательная - в медленности процесса спрямления, обусловленного относительно малой производительностью перекачивающих средств.
При спрямлении судна контрзатоплением отсеков следует стараться получить необходимый спрямляющий момент при минимальном
- 81 -
объеме спрямляющих отсеков. Если спрямление судна по каким-либо соображениям прекращают до полного затопления спрямляющих отсеков, то в дальнейшем должны быть приняты меры по дополнительному затоплению некоторых частично затопленных отсеков и.осушению других с тем, чтобы устранить свободные поверхности. Выбор спрямляющих отсеков надо производить так, чтобы одновременно с устранением крена уменьшался дифферент судна.
Необходимо отметить, что устранение дифферента контрзатоплением отсеков требует большого расходования запаса плавучести, а в некоторых случаях вообще может оказаться нецелесообразным, так как уменьшение дифферента не будет сопровождаться уменьшением осадки в поврежденной оконечности вследствие приема больших количеств забортной воды. Наиболее рациональным мероприятием по уменьшению дифферента является откачка поступившей воды после заделки пробоины, а в отдельных случаях также продольная перекачка топлива.
§ 17. Коэффициенты проницаемости
Расчетная оценка аварийной посадки и остойчивости судна требует знания в качестве одного из исходных данных объема воды и в затопленном отсеке при заданном ее уровне, который отличается от теоретического объема и0 отсека при том же уровне. Это различие объясняется наличием в отсеке непроницаемых для воды предметов и учитывается коэффициентами проницаемости
Ц; = и/и0- (3.1)
В части V Правил Регистра СССР приведены следующие значения коэффициентов проницаемости отдельных судовых помещений:
Помещения, в которых установлены судовые механизмы, технологическое оборудование, помещения электростанций.............. 0,85
Помещения непассажирских судов, занятых грузами или запасами .......................................................... 0,60
Помещения, загруженные порожней колесной техникой, жилые помещения...................................................... 0,95
Пустые н балластные цистерны................................ 0,98
Грузовые помещения судов с горизонтальной грузообработкой .. 0,80
Коэффициенты проницаемости помещений с грузом можно более точно определить расчетным путем. Для грузового помещения, загруженного генеральным грузом, коэффициент проницаемости находят в зависимости от массы груза р, его удельного погрузочного объема х» коэффициента проницаемости груза ц и объема помещения и0 по формуле
1*1 = 0,98 - рх (0,98 - ц)/и0. (3.2)
-82-
Суммарный коэффициент проницаемости отсека равен
Ц; = (йтр^тр ^1*твитвУ(итр + ^итв)> (3-3)
где Цтр ~ коэффициент проницаемости трюма; цте - то же твиндека; □ - объем трюма; ите - объем твиндека.
45 Коэффициент проницаемости грузового помещения, загруженного контейнерами, вычисляют по формуле
ц, = 0,98 -KsKh(0,98-й), (3.4)
где Ks = Е^он/^ом “ коэффициент заполнения площади; Kh = = ЕЬкон/^пом “ коэффициент заполнения высоты; ц - коэффициент проницаемости груза в контейнере. При неизвестном содержимом контейнеров рекомендуется принимать й =
Коэффициент проницаемости грузового помещения с грузом на ролл-трейлерах рассчитывают по формуле (3.2), но под величиной р понимают массу груза без массы ролл-трейлеров.
§ 18. Категории затопленных отсеков
При затоплении отсеков судна возможны различные варианты их заполнения. В зависимости от характера затопления различают четыре категории затопленных отсеков (рис. 3.1):
- отсек первой категории - заполнен водой полностью;
- отсек второй категории - заполнен не полностью (имеет свободную поверхность), но не сообщается с забортной водой;
- отсек третьей категории - заполнен частично и сообщается с забортной водой через пробоину;
- отсек четвертой категории - в нем уровень воды не совпадает с аварийной ватерлинией судна, т. е. это отсек с замкнутой или уменьшающейся воздушной подушкой.
Отсеки первой категории являются обычно следствием аварийного затопления междудонных цистерн из-за касания корпусом грунта. При затоплении отсека первой категории расход запаса плавучести равен объему воды, влившейся в отсек. Плавучесть судна не зависит от того, сообщается отсек первой категории с забортной водой или нет. Начальная остойчивость судна при этом увеличивается.
Рнс. 3.1. Затопленные отсеки различных категорий: о-первой; (5 —второй; в — третьей; г — четвертой
-83-
Аварийное затопление отсеков второй категории может возникнуть при фильтрации воды из соседнего отсека через небольшое повреждение или через заделанную пробоину, когда производительность водоотливных средств близка к интенсивности поступления води в отсек. Водотушение пожара или иной налив воды также приводит к появлению Отсеков второй категории. Изменение плавучести при затоплении отсека второй категории аналогично изменению плавучести при затоплении отсека первой категории. Дополнительное изменение остойчивости определяется отрицательным влиянием свободной поверхности.
Отсек третьей категории, свободно сообщающийся с забортной водой, возникает обычно при навале, посадке на грунт или при аварии забортной арматуры. При затоплении отсека третьей категории количество влившейся воды изменяется в процессе изменения осадки, крена и дифферента поврежденного судна. При этом весь отсек исключается из запаса плавучести, так как вода может беспрепятственно заполнять надводный объем отсека. Изменение начальной остойчивости определяется влиянием геометрии и координат ЦТ потерянной площади ватерлинии. Вместе с тем затопление отсека третьей категории, как правило, не приводит к отрицательной начальной остойчивости, поскольку ее уменьшение из-за потери площади действующей ватерлинии частично компенсируется приемом больших масс воды ниже ватерлинии. Исключение составляют широкие суда (B/d > 3,5).
Аварийное затопление отсека четвертой категории может возникнуть при поступлении воды через низкорасположенное повреждение при герметичности отсека. При затоплении герметичного отсека четвертой категории потеря запаса плавучести определяется количеством влившейся воды, а потеря остойчивости будет промежуточной между потерями остойчивости при затоплении аналогичных отсеков второй и третьей категорий при равных объемах влившейся воды.
Таким образом, при равных объемах влившейся воды наименее опасным будет отсек первой категории, затопление которого соответствует приему твердого груза, а наиболее опасным - отсек третьей категории. В то же время отсеки второй категории представляют значительную опасность, особенно при многоярусном затоплении в пределах одного автономного отсека, когда отрицательное влияние свободной поверхности, кратное числу затопленных палуб, может привести к отрицательной начальной остойчивости. При симметричном относительно ДП затоплении высокорасположенные отсеки второй категории с точки зрения потери остойчивости более опасны, чем отсеки третьей категории с тем же объемом влившейся воды, так как у них при той же свободной поверхности положительное влияние веса влившейся воды будет меньше (рис. 3.2).
Для отсеков второй, третьей и четвертой категорий при рассмотрении отрицательного влияния свободных поверхностей воды необходимо учитывать изменение не только начальной остойчивости судна, но и остойчивости на больших углах крена. Для этой цели вводятся понятия действенной и недейственной потерь остойчивости (см. рис. 3.2).
-84-
Рис. 3.2. Влияние свободной поверхности на остойчивость на больших углах крена: а — действенная потеря остойчивости; б, в — недейственные потери остойчивости
-85-
§ 19. Методы расчета непотопляемости
Под расчетом непотопляемости понимают определение параметров посадки и остойчивости судна после затопления одного или нескольких водонепроницаемых отсеков. Эти расчеты можно выполнять двумя методами: методом приема груза и методом постоянного водоизмещения (исключения).
Метод приема груза предполагает, что судно принимает жидкий груз, масса которого равна массе влившейся воды. При этом соответственно увеличивается водоизмещение судна и изменяются координаты его ЦТ.
Метод постоянного водоизмещения исключает затопленные отсеки из плавучего объема судна, т. е. изменяется конфигурация обводов корпуса. Водоизмещение судна и положение его ЦТ при этом не изменяются.
Поскольку оба метода основаны на достоверных предпосылках, они дают тождественные результаты для реальных величин, которые можно измерить на судне (осадки, крена, дифферента и т. п.). Значения аварийных метацентрических высот и плеч остойчивости будут различными, так как водоизмещения при применении этйх методов разные. Легко показать, что аварийная метацентрическая высота hp, определенная по методу приема груза, будет меньше метацентрической высоты hu, найденной по методу исключения, в силу равенства коэффициентов остойчивости:
Aho = (Д + Pu)hp; hp < h0. (3.5)
В каждом методе расчеты непотопляемости можно разбить на две группы:
1) расчеты параметров посадки и остойчивости после затопления единичного малого отсека или группы малых Отсеков1, не составляющих в сумме большого;
2) расчеты параметров посадки и остойчивости после затопления большого отсека в пределах запаса плавучести судна.
При выполнении расчетов группы 1 следует сделать следующие замечания и допущения:
- все расчетные формулы приближенные;
- судно в пределах изменения посадки прямобортно;
- справедливы метацентрические формулы остойчивости;
- углы крена и дифферента малы (не превышают 12*);
- отсек третьей категории в пределах изменения уровня воды прямостенный, главные центральные оси действующей и всей площади новой ватерлинии параллельны, отсек однороден по проницаемости, в пределах изменения посадки категория отсека сохраняется, абсцисса
’Под малым понимают отсек, при затоплении которого изменение средней осадки не превышает 15 %.
-86-
и ордината ЦТ объема влившейся воды совпадает с координатами ее поверхности;
- до затопления отсека углы крена и дифферента равны нулю или малы; тогда расчетные формулы дадут добавочный крен и дифферент;
- точность расчетов уменьшается с увеличением объема затопленного отсека.
Расчеты непотопляемости, выполняемые при затоплении большого отсека, требуют последовательных приближений. Они также не свободны от допущений, но могут быть доведены до любой степени точности.. Следует отметить, что в этом случае неприменимы метацентрические формулы остойчивости, а углы крена и дифферента не ограничиваются малыми значениями. Большой объем расчетных работ и их сложность обусловливают необходимость применения ЭВМ.
С физической точки зрения метод приема груза целесообразно применять в случаях, когда рассматривается затопление отсеков первой и второй категорий. Для отсеков третьей категории расчет удобнее вести методом постоянного водоизмещения.
§20. Оперативная оценка непотопляемости
Жизненно важной задачей эксплуатации морского транспортного судна является оперативная оценка его аварийной посадки и остойчивости при реальной загрузке (на „отход”) и в конкретной аварийной ситуации. Это объясняется тем, что имеющаяся на судне информация о непотопляемости составлена для типовых случаев загрузки, отличающихся у большинства судов от реальной загрузки.
Следует также иметь в виду, что судно, удовлетворяющее стандарту непотопляемости, при определенных условиях может оказаться потопляемым, и наоборот, что является результатом осреднения требований Правил Регистра СССР к делению на отсеки. Кроме того, эти требования распространяются далеко не на все транспортные суда, так как при минимальном надводном борте (а у большинства накатных судов и при избыточном) их просто невозможно обеспечить. В этом случае капитану аварийного судна необходимо знать, останется ли судно на плаву при принятии надлежащих мер по его спасению или его необходимо покинуть во избежание гибели людей. К сожалению, не имея подобной информации, в экстремальных условиях часто принимают решения умозрительно, что приводит к трагическим последствиям.
Таким образом, очевидно, что в дополнение к построечной информации о непотопляемости судно должно быть снабжено документацией, позволяющей оценить состояние аварийного судна при реальном распределении грузов, запасов и балласта и реальном расположении пробоины. Такая документация также должна содержать рекомендации по борьбе за живучесть и сохранению поврежденного судна. В настоящее время эта актуальная задача решается по следующим направлениям:
-87-
[.Упрощение расчетных методик за счет введения дополнительных допущений и приведения их к виду, привычному для практики грузового помощника.
2. Снабжение судна серией графиков, номограмм, грузовых шкал и диаграмм, выполненных методами проектирования и позволяющих быстро и надежно оценить состояние аварийного судна.
3. Применение бортовых ЭВМ, оперативные возможности которых позволяют выполнить два приближения расчета методом постоянного водоизмещения.
4. Использование береговых штабов с мощными ЭВМ, снабженными пакетом программ, позволяющим выполнить расчет непотопляемости сколь угодно точно.
Первое направление, основанное на упрощении расчетных методик, приводит, как правило, к существенным погрешностям, которые не должны превышать в предварительных расчетах 0,5 % для отклонения средней осадки и 0,2 % для отклонения поперечной метацентрической высоты.
Второе направление определяется нормативными документами ММФ - требованиями к оперативной информации о непотопляемости морских сухогрузных и пассажирских судов. Эти документы содержат нормативы обеспечения аварийной плавучести и остойчивости, порядок расчета и инструкции по использованию номограмм и графиков. Результаты оформляются в виде планшета оперативного контроля непотопляемости.
Третье и особенно четвертое направления наиболее перспективны. Ограничения на их использование накладываются объемом внедрения бортовых ЭВМ на судах ММФ и лимитированным бюджетом машинного времени береговых ЭВМ.
При получении судном пробоины в районе машинного отделения (МО) особо важно оценить ходовое время судна, определяемое временем выхода из строя судовой электростанции, в течение которого можно ликвидировать последствия аварии. Критерием оценки этого времени следует принять время затопления МО до уровня генераторов судна. Оно определяется по формуле
= и/((2пр ~ Qot)> (3.6)
где и - объем воды, при котором происходит затопление МО до уровня судовых генераторов; Qnp - количество воды, поступающее через пробоину; Q0T - производительность водоотливных средств.
Количество воды, поступающее через пробоину, равно
Qnp = xF у/2g(a + t>a/2). (3.7)
/
Здесь х - коэффициент расхода, принимаемый равным 0,7 для пробоины круглого сечения; F - площадь пробоины; а - углубление пробоины; 6а - приращение углубления в результате затопления МО до уровня генераторов.
-88-
Для нахождения коэффициента расхода пробоины некруглого сечения используют понятие эквивалентного диаметра D, определяемого из условия равной пропускной способности отверстий различной формы
FjU^Fin, (3.8)
где F, Fi и П, Пх - площади и периметры пробоин круглого и любого некруглого сечений соответственно:
D=4F1/ni. (3.9)
В результате получают следующую формулу для коэффициента расхода пробоины некруглого сечения:
xt = xF/Ft. (3.10)
В общем случае количество воды, поступающее через пробоину произвольного сечения, равно
Опр = 8,8(F?/n?) у/2g{a + 6а/2). (3.11)
Объем влиршейся воды и определяют с учетом коэффициента проницаемости МО, а производительность судовых водоотливных средств - с учетом ее снижения при параллельной работе насосов.
§ 21. Требования Правил Регистра СССР к делению морских судов на отсеки
Действующие Правила Регистра СССР (часть V „Деление на отсеки”) в качестве характеристики обеспечения непотопляемости определяют вероятность его сохранения на плавУ после получения пробоины. Если судно удовлетворяет требованиям Правил, то в символ класса Регистра СССР вводят знак | 1 |, | 2 | или | 3 |, определяющий количество любых смежных отсеков, при затоплении которых судно остается на плаву.
Правила Регистра СССР распространяются на все пассажирские суда; на грузовые транспортные суда, имеющие в символе класса знаки ледовых усилений УЛА и УЛ (последние суда длиной 90 м и более); на промысловые суда длиной 100 м и более; на ледоколы длиной 50 м и более; на спасательные суда; на буксиры длиной 40 м и более; на атомные суда, а также на некоторые другие суда транспортного и технического флота специальных типов. Для всех прочих морских судов рекомендуется принимать все меры для достижения возможно лучших характеристик деления на отсеки, а обязательность применения Правил определяется заказчиком (судовладельцем).
Ввиду опасности спрямляемости судна, имеющего отрицательную начальную остойчивость, а также с целью обеспечения некоторого
-89-
уровня мореходности поврежденного судна, в Правилах регламентируется (для конечной стадии затопления) минимальное допустимое значение начальной метацентрической высоты непассажирских судов haB= 0,05 м и предъявляются требования к максимальному углу аварийного крена: 15 для пассажирских и 20° для непассажирских судов. После принятия мер по спрямлению крен пассажирского судна не должен превышать 7 при затоплении одного и 12° при затоплении двух и более смежных отсеков, а крен непассажирского судна во всех случаях не должен превышать 12°.
Для пассажирских судов было сочтено необходимым ввести дополнительные требования к аварийной начальной остойчивости исходя из скопления пассажиров на одном борту поврежденного судна и обеспечения его остойчивости на больших углах крена; эти требования выражаются приводимыми в Правилах формулами для haB.
В качестве рекомендации в Правилах регламентируются значения максимального плеча статической остойчивости поврежденного судна, которое должно быть не менее 0,1 м, и протяженности части диаграммы с положительными плечами - не менее 30 при симметричном и 20* при несимметричном затоплении, причем если эти рекомендации выполняются, то для непассажирских судов допускается в конечной стадии затопления положительная метацентрическая высота, меньшая 0,05 м.
Приведенные выше требования к аварийной остойчивости и посадке должны выполняться при затоплении одного любого отсека или двух смежных отсеков (в зависимости от числа пассажиров и команды пассажирского судна и размеров непассажирских судов). При этом принимаемые в расчетах значения условных коэффициентов проницаемости судовых помещений получают дальнейшие уточнения.
Контрольные вопросы
1. Каковы причины изменения остойчивости судна при попадании забортной воды в судовые помещения?
2. Чем отличаются категории затопленных отсеков?
3. Какова последовательность действий для устранения крена судна?
4. В чем отличие требований к остойчивости для поврежденного и неповрежденного судов?
Глава 4
ОСНОВЫ ГИДРОМЕХАНИКИ
Раздел механики, занимающийся движениями жидких и газообразных сред, носит название гидромеханики (греч. hydor - вода + + mechanike - машина). Гидромеханика - это наука, изучающая
-90-
законы равновесия и движения несжимаемых жидкостей и их взаимодействия с ограничивающими их течение твердыми телами.
Многие выводы и положения гидромеханики используют при исследовании и решении ряда задач теории судна. В гидромеханике при изучении практических вопросов динамического взаимодействия твердого тела и окружающей его жидкой среды не принимают во внимание молекулярное движение жидкости и рассматривают ее как сплошную среду, не имеющую межмолекулярных промежутков и пустот. TaKote предположение называют гипотезой непрерывности или сплошности жидкой среды. Принятая модель жидкости дает возможность все кинематические и динамические характеристики движущейся жидкости (скорость, давление и др.) рассматривать как непрерывные функции координат и времени и, следовательно, позволяет использовать математический аппарат, опирающийся на теорию непрерывных функций.
§ 22. Физические характеристики жидкости
Жидкостью называют физическое тело, характеризующееся свойством текучести, обусловленное высокой степенью подвижности частиц жидкости друг относительно друга.
Различают капельные и газообразные жидкости. Капельные жидкости (вода, бензин, спирт, масла и др.) почти несжимаемы и, будучи помещены в сосуд, могут заполнить часть его объема, имея свободную поверхность. Газообразные жидкости сжимаемы и всегда заполняют весь объем замкнутого сосуда, не образуя свободных поверхностей.
При решении некоторых задач гидромеханики воздух (газообразную жидкость) можно рассматривать как несжимаемую жидкость, если скорость его движения относительно невелика (и < 70 м/с). В этом случае законы движения оказываются практически одинаковыми для капельных жидкостей и воздуха.
Движение жидкости складывается из молекулярного движения и движения, вызываемого внешними причинами. В отличие от механики твердого тела, где, как правило, отвлекаются от физических свойств вещества, в гидромеханике обязательно учитывают некоторые физические свойства жидкостей, такие как плотность, весомость, вязкость, температура и др.
Плотностью жидкости называют массу единицы объема жидкости. Если объем жидкости V имеет массу М, то плотность равна
р = M/V. (4.1)
Плотность жидкости зависит от температуры, давления и солености, однако в большинстве случаев влиянием температуры и давления на плотность несжимаемых жидкостей можно пренебречь.
В настоящем курсе рассматривают так называемую однородную жидкость, т. е. такую жидкость, у которой плотность постоянна по
- 91 -
всему объему: р = const. Капельные жидкости практически всегда удовлетворяют этому условию. В теории судна принимают обычно следующие значения плотности: для пресной воды р = 1000 кг/мэ; для воздуха р = 1,226 кг/мэ.
Весомость жидкости характеризуется ее удельным весом (или объемным весом). Удельным весом у называют вес единицы объема жидкости. Следовательно, между весом G данной массы жидкости и занимаемым ею объемом V существует соотношение
У = G/V. (4.2)
Для пресной воды у = 9,81 кН/м3. Удельный вес морской воды изменяется в пределах у = 9,91-10,1 кН/м3 в зависимости от района Мирового океана и времени года. Расчетное значение удельного веса морской воды принято считать равным у = 10,05 кН/м3.
Между удельным весом и плотностью жидкости существует соотношение
У = Pg- (4.3)
Вязкостью жидкости называют свойство, в силу которого в ней проявляются силы внутреннего трения, препятствующие сдвигающим усилиям. Вязкость объясняется движением молекул и действием молекулярных сил. В газах вязкость определяется в основном первой причиной, в капельной жидкости - второй.
При малых скоростях движение жидкости вблизи поверхности тела имеет ламинарный (слоистый) характер. Отдельные слои жидкости движутся почти параллельными струйками без переноса конечных малых объемов жидкости из одного слоя в соседние.
При движении слоев жидкости с различными скоростями между ними возникают напряжения внутреннего трения т, значения которых согласно закону Ньютона пропорциональны градиенту скорости ди/дп по нормали п к плоскости скольжения АВ (рис. 4.1):
ди
т = ц ---, (4.4)
дп
где Ц - коэффициент динамической вязкости жидкости.
Для характеристики вязкости жидкости чаще применяют коэффициент кинематической вязкости v, равный отношению коэффициента динамической вязкости к плотности жидкости:
v = |i/p. (4.5)
Динамический и кинематический коэффициенты вязкости жидкостей и газов значительно зависят от температуры. Значения коэффициента кинематической вязкости воды в зависимости от температуры следующие:
t,’C .................. 0 2 4 6 8 10 20 30
v • 106................ 1,79 1,67 1,57 1,47 1,35 1,31 1,00 0,80
-92-
Рис. 4.1. Пояснения' к закону Ньютона
частиц жидкости изме-
При решении ряда теоретических вопросов в целях упрощения изучения явлений, связанных с обтеканием тел жидкостью, в гидродинамике часто пользуются понятием идеальной жидкости. В отличие от реальной абстрактная идеальная жидкость абсолютно несжимаема и обладает абсолютной подвижностью, т. е. лишена вязкости. Коэффициенты ц и v идеальной жидкости равны нулю. Однако все выводы, сделанные для идеальной жидкости, корректируются или дополняются применительно к реальной жидкости.
При обтекании жидкостью твердых тел свойство вязкости проявляется наиболее полно лишь в зоне, непосредственно примыкающей к телу, называемой пограничным слоем.
В пределах пограничного слоя скорости
няются от нуля на поверхности тела до значения скорости внешней среды на границе слоя. Изменение скоростей в этом слое обусловлено интенсивным. проявлением сил вязкости. Поперечный размер пограничного слоя характеризуется его толщиной, которая определяется как расстояние от стенки тела до точки со скоростью, составляющей 99,5 % скорости внешнего потока. Толщина пограничного слоя уменьшается с увеличением скорости и увеличивается от передней части тела к задней.
Несмотря на свою незначительную по сравнению с характерными внешними размерами потока толщину, пограничный слой играет основную роль в процессах динамического взаимодействия потока реальной жидкости с омываемым ею твердым телом.
Пограничный слой не ограничивается областями, расположенными в непосредственной близости к твердым поверхностям. Зоны резкого изменения продольных Скоростей в поперечном к потоку направлении могут образовываться и вдалеке от твердых поверхностей. Таков, например, расположенный вниз по течению за кормой судна гидродинамический „след”, образованный жидкостью, прошедшей сквозь пограничный слой на поверхности тела и сошедшей с этой поверхности. В следе за судном происходит выравнивание тех резких неоднородностей поля скоростей, которые создались в пограничном слое на поверхности судна.
Характерным отличительным признаком пограничного слоя во всех случаях является непременное существование двух граничащих друг с другом областей, различных по природе движений: вихревого движения вязкой жидкости в пограничном слое и безвихревого движения идеальной жидкости во внешней области.
Теория пограничного слоя в настоящее время представляет самостоятельный раздел динамики вязких жидкостей и газов.
Раздел гидромеханики, изучающий законы равновесия жидкости, называют гидростатикой.
-93-
В покоящейся жидкости, как вязкой, так и идеальной, касательные^ напряжения равны нулю и действуют только нормальные напряжения, т. е. законы гидростатики едины как для вязкой, так и для невязкой жидкости. Следует отметить, что понятие нормального напряжения в покоящейся жидкости эквивалентно понятию гидростатического давления р на поверхности S.
Капельная жидкость, как показывает опыт, способна воспринимать произвольные сжимающие усилия. Однако при растяжении она терпит разрыв. Таким образом, в жидкости могут проявляться только сжимающие нормальные усилия - давления. В этом заключается первое свойство давлений в жидкости. Давление в жидкости всегда положительно и в капельной жидкости, которая практически не сопротивляется растягивающим усилиям, не может упасть ниже давления насыщенных газов. В газообразных жидкостях давление может быть уменьшено до любого значения, несмотря на отсутствие сопротивления растяжению. Вторым свойством гидростатических давлений является свойство, в силу которого давление в любой фиксированной точке покоящейся жидкости не зависит от ориентации площадки, воспринимающей давление и проходящей через эту точку.
Рассмотрение условий равновесия жидкости, на которую из мае-' совых сил действует только сила тяжести, позволяет сделать вывод о том, что гидростатические давления в любой точке горизонтальной плоскости, мысленно проведенной в одной и той же жидкости, равны между собой. Такие горизонтальные плоскости называют поверхностями равного давления.
Интегрирование уравнений равновесия жидкости позволяет получить основное уравнение гидростатики, связывающее давление р в произвольной точке, расположенной на определенной глубине Н, с характеристиками жидкости:
Р = Ра + PgH, (4.6)
где ра - атмосферное давление на свободной поверхности жидкости. Ъ гидростатике используют понятие избыточного давления, которое показывает, насколько абсолютное давление больше атмосферного, т. е. Ри = р - ра.
Из. уравнения (4.6) следует, что приложенное к поверхности жидкости внешнее давление передается жидкостью по всем направлениям одинаково. Это явление в физике описывается законом Паскаля. Из основного уравнения гидростатики можно также заключить, что избыточное давление зависит только от высоты столба жидкости и от рода жидкости, т. е. ее плотности, и не зависит от поперечного сечения столба жидкости.
На рис. 4.2 показаны четыре сосуда различной формы, заполненные одной и той же жидкостью и на одинаковую высоту Н. Следовательно, давления на дно этих сосудов будет равны, а если предположить, что и их площади S равны, то будут одинаковыми и суммарные силы давления, так как сила определяется как произведение давления
-94-
s s s s
Рис. 4.2. Сосуды с одинаковым гидростатическим давлением на дно
на площадь, т. е. R = pS. Таким образом, сила давления, как и само давление, не зависит от формы сосуда и веса жидкости в нем. Последнее положение известно как гидростатический парадокс и вместе с законом Паскаля широко используется в практике при проверке прочности и водонепроницаемости цистерн и танков, в работе гидравлических прессов, тормозов, двигателей.
В соответствии с формулой (4.6) избыточное давление, создаваемое столбом жидкости высотой Н, равно
Ри= pgH = уН. (4.7)
В системе единиц СИ давление измеряется в паскалях (Па). Эта единица представляет собой давление, вызываемое силой в 1 Н, равномерно распределенной по поверхности площадью 1 м2. До настоящего времени в технике кроме паскалей широко используют внесистемную единицу, называемую атмосферой: 1 ат = 9,81 • 104 Па, что соответствует давлению столба воды высотой 10 м.
На погруженное тело объемом V со стороны жидкости действуют силы гидростатического давления, результирующая которых всегда направлена вертикально вверх и численно равна весу жидкости в объеме тела. Это положение отражается законом Архимеда. Результирующую сил гидростатического давления именуют силой Архимеда. Она равна
«Apx = PgV=yV. (4.8)
Приложена сила Архимеда в ЦТ объема тела.
В теории судна силу Архимеда называют силой плавучести, а точку приложения силы плавучести - центром величины (ЦВ).
§ 23. Движение жидкостей
Общие сведения. В гидромеханике рассматривают два основных режима течения жидкости - ламинарный и турбулентный. При ламинарном движении связь между движущимися слоями осуществляется силами молекулярного сцепления частиц, в результате которого слой жидкости, перемещающийся с большей скоростью, увлекает за собой соседний слой, движущийся с меньшей скоростью, и, наоборот, частицы первого слоя подтормаживаются частицами второго. Таким образом, ламинарное движение жидкости характеризуется струйным течением, при котором отдельные ее слои движутся с различными
-95-
скоростями в плоскостях, приблизительно параллельных поверхности границы потока. Сдвиг слоев сопровождается образованием касательных напряжений трения, подчиняющихся закону Ньютона.
При турбулентном движении частицы жидкости помимо главного направления перемещаются в поперечном направлении. В результате частицы жидкости движутся по очень сложным, хаотически переплетенным зигзагообразным траекториям. Отдельные частицы могут иметь и возвратные (вихревые) движения то затухающие, то вновь зарождающиеся в разных местах потока. Следовательно, при турбулентном движении перенос количества движения из одного слоя в другой осуществляется главным образом путем перехода отдельных объемов жидкости из слоя в слой.
Рассмотрим виды движений, в которых может участвовать жидкая частица. Как и твердое тело, частица может двигаться поступательно и вращаться вокруг мгновенной оси с определенной угловой скоростью. Кроме того, у жидкой частицы в силу ее легкой деформируемости может быть еще один специфичный вид движения, который именуют деформационным.
В общем случае жидкая частица может участвовать во всех рассмотренных видах движения, и в этом случае движение называют вихревым. В реальной жидкости вихревые движения распространены очень широко: от вихрей в атмосфере до течений в трубах, около твердых стенок и т. п.
Если в потоке жидкости отсутствует вращение жидких частиц, то такое движение называют безвихревым. Несмотря на то, что из-за вязкости течение реальной жидкости практически всегда вихревое, изучение безвихревых движений представляет большой интерес. В ряде случаев вязкость реальных жидкостей проявляется в ограниченных областях, как правило, вблизи твердых стенок или тел, движущихся в жидкости (пограничный слой, гидродинамический след). Остальную часть потока можно рассматривать с позиций безвихревого движения, что значительно облегчает его теоретическое исследование, так как для безвихревого движения справедливо понятие потенциала скорости. В этой связи безвихревые течения называют также потенциальными течениями. При введении понятия потенциала скорости решение задач гидромеханики существенно упрощается, так как вместо определения трех проекций скорости в каждой точке достаточно найти только потенциал скорости, который целиком определяет кинематику безвихревого потока.
Раздел гидромеханики, называемый кинематикой, рассматривает общие свойства движения жидкости без выяснения причин его возникновения, т. е. без учета сил, действующих в жидкости. Следовательно, выводы кинематики справедливы как для реальной, так и для невязкой жидкости.
Различают два вида движения жидкостей: установившееся и не-установившееся. При установившемся движении жидкости все характеристики (скорость, давление, плотность) в любой точке пространства не зависят от времени. Эти характеристики изменяются только
-96-
при переходе от одной точки пространства к другой. Режим установившегося движения весьма распространен в различных видах течения жидкости. К их числу относятся движение жидкости в каналах и реках при неизменном уклоне, обтекание тел и судов с постоянной скоростью и т. п. При рассмотрении в дальнейшем вопросов ходкости судна будет приниматься во внимание только установившееся движение, наиболее важное в практическом отношении.
При исследовании Движения тела в неподвижной жидкости часто используют принцип обращения движения, т. е. тело считают неподвижным, а поток - натекающим на него ср скоростью, равной скорости тела в неподвижной жидкости. Преимущество такого рода замены заключается в том, что если скорость тела не зависит от времени, то в обращенном движении течение в различных точках потока будет установившимся. Для решения практических или научных задач физические процессы перемещения судна в жидкости описывают с помощью необходимого математического аппарата и определенной системы координат. Как правило, пользуются связанной системой координат, т. е. системой, связанной с судном. Вводя принцип обращения движения и неподвижную систему координат, значительно упрощают математическую интерпретацию физических явлений, не меняя их сущности.
Принцип обращения движения широко применяют и в экспериментальной гидромеханике. На нем основано устройство аэродинамических и кавитационных труб, в которых поток воздуха или воды обтекает неподвижные тела.
При движении тел в жидкости с переменной как по значению, так и по направлению, скоростью принцип обращения неприменим, поскольку действующие в прямом и обращенном движениях силы в этом случае неодинаковы.
Используем понятие линии тока, позволяющее получить наглядное представление о движении потока жидкости. Каждая линия тока получается, если в данный момент времени провести кривую, касательную к векторам скоростей Uj, о2, иэ,..., построенных в различных точках потока А2, Аэ,... (рис. 4.3). При неустановившемся движении векторы скорости не будут постоянными и, следовательно, форма линий тока также будет непрерывно изменяться. Отличие линий тока от траекторий частиц жидкости состоит в том, что линии тока указывают направление скоростей в данный момент времени в различных фиксированных точках потока, тогда как траектории отражают путь фиксированной частицы в различные моменты времени. При установившемся движении линии тока
и траектории частиц совпадают. В качестве примера рассмотрим ус-тановившееся обтекание тела (напри- 1 мер, крыла), симметричного относительно плоскости, перпендикулярной чертежу и совпадающей с линиями 00 (рис. 4.4), потоком жидкости, направ- -97- V, Рис. 4.3. Линия тока
Рис. 4.4. Расположение критических точек на теле
1 — носовая критическая точка; 11 - кормовая критическая точка
ленным вдоль плоскости симметрии. Каждой линии тока над крылом соответствует симметричная ей линия тока под крылом (на рис. 4.4 обозначены одинаковыми цифрами). Но есть всегда нулевая линия тока (обозначена цифрой 0), которая приходит в носик тела, затем разветвляется на две линии тока, идущие по поверхности тела, которые в свою очередь в хвостике снова сливаются в. одну. Таким образом, в двух точках на теле пересекаются по три линии тока, чего не может быть, если жидкая частица в этих точках имеет скорость. Значит, в рассматриваемых особых точках, называемых критическими, скорости жидких частиц будут равны нулю.
Выделим в потоке в данный момент времени некоторый замкнутый бесконечно малый контур С (рис. 4.5), ни одна точка которого не является особой. Тогда через каждую точку такого контура можно провести определенную линию тока. Если через все точки контура провести линию тока, то получим поверхность, называемую трубкой тока. Совокупность линий тока, проходящих через все точки площади Ды, ограниченной контуром С, составляет элементарную струйку. Малость площади Ды дает возможность считать скорости и давления в отдельных точках данного сечения постоянными, так как они изменяются в пределах сечения на бесконечно малые величины второго порядка.
Особенностью трубки тока является то, что жидкость не может протекать сквозь ее боковую поверхность, так как скорости касательны к линиям тока. Таким образом, поверхность трубки тока можно рассматривать как непроницаемую стенку. Понятиями трубки тока и элементарной струйки широко пользуются в гидромеханике для изучения движения жидкости.
Уравнение неразрывности. При исследовании движения жидкости предполагается, что она заполняет все занимаемое ею пространство без пустот и разрывов. Следовательно, количество жидкости, вытекшей из некоторого фиксированного в пространстве замкнутого объема за некоторый промежуток времени, например из трубки тока, будет равно количеству поступившей в нее жидкости.
Исходя из указанных представлений и учитывая, что любое движение жидкости должно удовлетворять закону сохранения
-98-
материи (масс), установленному М. В. Ломоносовым, можно составить уравнение неразрывности (сплошности) жидкости
dM dV
-----Р ----, (4.9)
di dt
где dV/dt - скорость изменения объема жидкости.
Для наиболее простого случая установившегося движения несжимаемой жидкости равенство нулю производной dV/dt для какого-либо сечения Ды элементарной струйки означает, что объем Дыи жидкости, протекающей через это сечение в единицу времени, есть величина неизменная, т. е.
Дыи = const. (4.10)
Это и есть уравнение неразрывности несжимаемой жидкости для элементарной струйки. Величину Дыи - секундный объем жидкости, протекающей через данное сечение, - называют объемным расходом жидкости.
Если уравнение неразрывности применительно к движению жидкости представляет собой закон сохранения массы, то выражением закона сохранения энергии в гидромеханике является уравнение Бернулли, связывающее между собой давление, скорость и характеристики жидкости.
Будем считать, что жидкость идеальна и несжимаема, ее движение носит установившийся характер, а из массовых сил действует только вес. Выделим в элементарной струйке объем жидкости, образованный сечениями 1 и 2 (рис. 4.6). В течение малого промежутка времени 6t этот объем переместится в положение Г-2', причем сечение 1 передвинется на расстояние 61х = o^t, а сечение 2- на расстояние 612 = = o26t Из уравнения неразрывности следует, что расход жидкости через любое сечение струйки должен быть одинаков, поэтому объем жидкости 1-Г должен быть равен объему 2-2’. Обозначив этот объем через 6 V, получим
где G)t и(1)2 - площади сечений 1 и 2.
Рис. 4.5. Трубка тока
Рис. 4.6. К выводу уравнения Бернулли
-99-
Изменение кинетической энергии объема жидкости, перешедшего из положения 1-2 в положение Г-2', можно выразить как разность кинетических энергий объемов 1-Г и 2-2', так как в объеме 1 '-2 кинетическая энергия не изменилась:
6(Ми2/2) = рбУ(и2/2 - и2/2). (4.12)
Приращение кинетической энергии-должно быть равно, как известно, работе сил на данном перемещении. На выделенный объем жидкости действуют сцлы тяжести убУ и силы давления р. Работа сил тяжести при перемещении объема жидкости 6 У из положения 1-Г в положение 2-2' равна
убУ^ - z2), (4.13)
где z1nz2- ординаты ЦТ сечений, отсчитываемые от некоторой произвольной плоскости сравнения.
Из сил давления, действующих на рассматриваемый объем жидкости, работу будут производить только те силы, которые приложены к торцам, так как работа сил давления на боковой поверхности струйки равна нулю, поскольку в направлении, перпендикулярном оси струйки, перемещения жидкости не происходит. Работа сил давления, действующих по торцам, равна
Р1Ы1611 -р2ы2612 = 6У(Р1 -р2). (4.14)
Уравнение работы всех сил будет иметь вид
рбУ(о2/2- o?/2) = y6V(z1 -z2) + 6V(P1 -р2). (4.15)
После деления выражения (4.15) на убУ и перегруппировки получим известное уравнение Бернулли
zi + Pi/У + »?/(2g) = z2 + р2/у + u2/(2g), (4.16)
или
z + р/у + о 2 /(2g) = const. (4.17)
Это уравнение показывает, что сумма высоты положения сечения z, пьезометрического запора p/у и скоростного напора и2/(2g) является постоянной величиной для всех сечений данной элементарной струйки.
В гидромеханике используют также другую форму уравнения Бернулли:
yz + p + pu2/2 = const. (4.18)
Первый член этого уравнения выражает удельную (отнесенную к единице веса) потенциальную энергию сил тяжести (энергию положения),
- 100-
второй - удельную потенциальную энергию давления и третий -удельную кинетическую энергию. Таким образом, удельная механическая энергия на всем пути движения жидкости в элементарной струйке остается постоянной, но при переходе к другой струйке ее значение может измениться.
При рассмотрении реальной жидкости в уравнении Бернулли вводят поправки на преодоление сил сопротивления, но физическая сущность уравнения и выражаемого им закона сохранения энергии и взаимозависимости скорости jyrroKa и давления в нем остается неизменной.
Коэффициент давления и его свойства. Рассмотрим обтекание симметричного профиля (нагтример, ватерлинии судна, крыла или лопасти гребного винта) потоком безграничной жидкости, имеющим скорость и0 (рис. 4.7). Остановимся на двух точках одной и той же линии тока, идущей из бесконечности по оси симметрии и разветвляющейся в носовой критической точке. Первая точка А находится далеко перед телом в невозмущенном потоке, где скорость равна и0, давление р0; а вторая точка В-в произвольном месте на теле, где скорость и, давление р. Так как обе Точки располагаются на одной линии тока, можно связать между собой скорости и давления в этих точках с помощью уравнения Бернулли (4.18):
pUo/2 + po + -pzo = pu2/2 + p + yz. (4.19)
Здесь z = z0. Представив левую и правую части уравнения (4.19) в безразмерном виде й разделив его на ро J/2, получим
(p-Po)/(P^/2) = l-o2/og. (4.20)
Левую часть выражения (4.20) называют коэффициентом давления и обозначают р. Величина р - р0, находящаяся в числителе, характеризует избыточное давление (по сравнению с давлением в набегающем невозмущенном потоке). Величину ро^/2, стоящую в знаменателе, называют скоростным напором. Таким образом,
Р = (р-Ро)/(ро?/2), (4.21)
или
р = 1-(о/оо)2. (4.22)
Использование р для характеристики давления удобно потому, что его значение, во-первых, не зависит от рода жидкости и, во-вторых, не зависит от скорости набегающего потока, являясь лишь функцией формы тела, которая определяет, соотношение о/ио. Полученные выводы относятся, строго говоря, к невязкой жидкости, однако они остаются практически верными и для движения хорошо обтекаемых тел в реальной вязкой жидкости.
- 101 -
Пользуясь выражением (4.22), определим характер распределения коэффициента давления по телу (рис. 4.8), когда ось р = 0 совпадает с осью тела. Вдали от тела (точка А) скорость жидкости равна скорости набегающего невозмущенного потока и0 и в соответствии с (4.22) рд=0. В носовой (критической) точке скорость равна нулю, а Рдх 1. В точке D pD = 1, а'в точке Е рд = 0. Рассмотрим теперь миделевое сечение тела С - С. Так как тело занимает часть сечения потока, скорость его в районе средней части тела больше, чем скорость набегающего потока. Наибольшее возрастание скорости наблюдается в районе сечения С-С, где поток максимально стеснен. Значит, ос < оо, но тогда Рс< 0, поскольку > 1. На рис. 4.8 показан характер эпюры распределения коэффициента давления р. Очевидно, что в области, где р < 0, давление р < р0. На теле всегда имеются точки (М и /V), в которых р = 0, т. е. р = р0 и о = оо.
Распределение коэффициента давления в вязкой жидкости для хорошо обтекаемых тел не совпадает с полученной теоретической кривой в кормовой части тела и имеет характер, показанный штриховой линией. Уменьшение давления в корме связано с изменением картины обтекания тела вязкой жидкостью по сравнению с картиной обтекания идеальной жидкостью.
Кавитация. Из уравнения Бернулли следует, что с увеличением скорости должно падать давление. При достаточно больших скоростях потока давление в точках, где коэффициент давления имеет минимальное значение, может упасть до давления насыщенных паров pd, при котором жидкость начнет кипеть. Это явление вскипания жидкости без ее нагрева называют в гидромеханике кавитацией. .
Появлению кавитации способствуют растворенные в воде воздух й газы, которые выделяются при понижении давления. Пары жидкости и выделившиеся из нее воздух и газы образуют полости, именуемые кавитационными кавернами.
Существует три вида кавитации: пузырчатая, пленочная и вихревая.
При пузырчатой кавитации каверны в виде отдельных пузырьков располагаются по телу разрозненными группами. По мере развития процесса отдельные пузырьки сливаются и образуют пленочную кавитацию, при которой каверны существуют в виде тонких длинных полос. В ядрах вихрей возникает вихревая кавитация.
Рис. 4.7. К определению коэффи- Рис. 4.8. Эпюра коэффициента даипемия циента давления
- 102-
Кавитационные процессы определяются числом кавитации
X’(p0-Pd)/(p»?/2). (4.23)
Условием возникновения кавитации в определенной точке тела является равенство числа кавитации х коэффициенту местного разрежения £, который представляет собой коэффициент давления с обратным знаком, т. е.
5 = -р = (Ро-Р)/(Р»3/2). (4-24)
Из-за различного рода случайных причин кавитационная каверна и, в первую очередь, ее задняя кромка неустойчивы и пульсируют. Если при замыкании каверны на теле часть каверны в результате пульсаций попадает в область, где р > pj, то пар в этом месте конденсируется, что происходит практически мгновенно и сопровождается звуковым импульсом и гидравлическими ударами. Этот процесс называется захлопыванием (замыканием) пузырьков каверны. При замыкании каждого пузырька внутри него в течение миллисекунд и даже микросекунд возникают высокие давления. Вследствие малой площади сечения пузырьков и высоких давлений импульсного характера в материале тела возникают напряжения, во много раз превосходящие его предел текучести. Происходит выкол материала, появляются трещины, интенсифицируется процесс коррозии. Такое разрушение материала называют кавитационной эрозией.
Из сказанного следует, что кавитация на телах (крыльях, лопастях гребных винтов) нежелательна. Для отдаления момента начала кавитации следует по возможности увеличивать заглубление тела, поднимая тем самым давление на поверхности тела, либо уменьшать пики разрежения £. Для уменьшения £ следует придавать телу более обтекаемую форму, увеличивая его длину по сравнению с шириной (толщиной).
§ 24. Основы теории подобия
Несмотря на большие успехи, достигнутые современной гидромеханикой в области теоретического изучения взаимодействия плавающих тел с жидкостью, определять гидродинамические характеристики аналитическим путем пока еще не удается ввиду трудностей математического и гидродинамического характеров. Поэтому практические методы количественной оценки гидродинамических реакций жидкости на движущееся в ней тело основываются на результатах модельных исследований, проводимых в специальных аэрогидродинамичес-ких лабораториях - опытовых бассейнах, аэродинамических и гидродинамических трубах, гидролотках и гидроканалах.
Для постановки эксперимента на моделях, обеспечивающего количественное прогнозирование ходовых качеств судна, потребовалось
- 103-
установить системы безразмерных параметров, определяющих изучаемые явления и служащих критериями подобия физических процессов в модельных и натурных условиях.
Обоснование условий, при которых должны проводиться модельные испытания, и вывод расчетной схемы пересчета результатов модельных испытаний на натурные условия могут быть получены из теории подобия, основы которой приведены ниже. Для соблюдения механического подобия явлений, происходящих в натурном объекте и его модели, требуется одновременное выполнение подобия трех видов - геометрического, кинематического и динамического.
Потоки жидкости, обтекающие две подобные системы, например судно и его модель, состоят из бесконечного числа точек. Сравнивая попарно точки, занимающие одинаковые относительные положения в той и другой системе, будем называть их сходственными точками, а расстояния между сходственными точками в каждой системе - сходственными размерами. К числу сходственных размеров относятся, в частности, главные размерения судна и модели длина, ширина, осадка и др.
Потоки жидкости, обтекающие натурное судно и его модель, считаются геометрически подобными, если в них все сходственные линейные размеры находятся в одном и том же соотношении, например,
(4.25)
Здесь I - модуль, или масштаб, геометрического подобия. При соблюдении геометрического подобия отношение сходственных плопщдей натуры и модели равно квадрату масштаба подобия, а сходственных объемов - его третьей степени:
«н/«м = /2; VH/VM = P. (4.26)
Потоки жидкости, обтекающие натурное судно и его модель, будут кинематически подобными, если при геометрическом подобии систем их сходственные точки описывают геометрически подобные отрезки траекторий в течение сходственных промежутков времени fH и tM, находящихся в постоянном соотношении
rH/tM = t (4.27)
Здесь t - масштаб времени.
В кинематически подобных системах отношение скоростей сходственных точек ин и им в сходственные моменты времени постоянно и равно отношению масштабов размеров и времени
ин/»м=^. (4.28)
Кинематически подобные потоки будут динамически подобными, если отношение масс геометрически подобных сходственных объемов одинаково в обеих системах:
/Мм = т. (4.29)
- 104-
Если считать в общем случае, что плотности рн и рм жидкостей, омывающих натурное судно и его модель, находятся в отношении г, то, полагая Мн = рн Ун и = pMY<, в двух динамически подобных системах получаем
т-РнУн/Рм^м = ^3-
(4.30)
Теперь можно найти соотношение сил RH и RM, действующих на сходственные массы Мн и Мм. Полагая согласно закону Ньютона
do„ Л)м
Ян=Мн—— и «м"Мм-— , dtH dtM
находим
RH // ml гР
---= ----/(Мм-----=------=-----.
RM dtH \ ^м/ t2 t2
(4.31)
Формула (4.31) определяет соотношение любых сил, действующих в потоке жидкости, в том числе сопротивлений воды движению судна и его модели, подъемных сил на крыле и его модели, нормальных сил на руле и его модели и т. п.
Полагая г» рн/рм, Р = Йн/Йм и Р/Р = о„/Ом» выражение (4.31) записывают обычно в виде
2Ян/(РнОнЯн) = 2Ям/(Рмимйм) = С, (4.32)
где С - безразмерный коэффициент соответствующей гидродинамической силы, имеющей определенное обозначение. Это выражение позволяет написать общую формулу для любой гидродинамической силы, действующей на тело со стороны жидкости:
R = C(po2/2)Q. (4.33)
Так, например, полное сопротивление воды движению судна можно рассчитать по следующей формуле:
R = Upu2/2)Q, (4.34)
где t, - коэфициент полного сопротивления; й - смоченная поверхность корпуса судна.
Подъемная сила крыла определяется формулой
У = Су(ро2/2)5, (4.35)
где Су - коэффициент подъемной силы крыла; S - площадь крыла
- 105-
в плане. Для расчета профильного сопротивления крыла используем формулу следующего вида-.
X = Cx(po2/2)S, (4.36)
где С - коэффициент профильного сопротивления крыла. Аналогичным образом можно рассчитывать любые гидродинамические силы, используя соответствующие безразмерные коэффициенты и выбирая наиболее характерные участки поверхности тела.
Выясним конкретные требования, выполнение которых обеспечивает равенство (4.32). Для этого рассмотрим два частных случая: в потоке преобладают явления, вызванные вязкостью жидкости; в потоке преобладают явления, определенные весомостью жидкости.
В первом случае для получения соотношения сил, наблюдаемых в натурных и модельных условиях, воспользуемся выражением для касательных напряжений, действующих в потоке жидкости [см. формулу (4.13)]:
до т = vp --- .
дп
(4.37)
Отношение сил вязкостной природы, действующих в потоках, обтекающих тело и его модель, получает в этом случае выражение
1?н Эон
— = VhPh —— /?м дп
(4.38)
Приравнивая правые части выражений (4.31) и (4.38), получаем
r/V/2 = (vH/vM)(r/7t). (4.39)
Это равенство может быть записано в следующей форме:
= uL/v = Re. (4.40)
Выражение Re = oL/v называют числом Рейнольдса. Оно является одним из важнейших критериев механического подобия и характеризует отношение инерционных сил, действующих в динамически подобных системах, к силам вязкостной природы.
Выражение (4.40) позволяет также сформулировать закон подобия Рейнольдса: в двух динамически подобных системах, в которых действуют только силы вязкостной природы, числа Рейнольдса должны быть равны между собой.
Во втором случае, когда в динамически подобных системах преобладают силы весомости, следует принять RH=MHgH и Ям=Мм£м. Тогда
Ян /Ям = MHgH/(MMgu) = (gH /gM)rl3.
(4.41)
- 106-
Приравнивая правые части выражений (4.31) и (4.41), получаем
r/Vta = ШР.
(4.42)
Это равенство можно записать в форме
Ц»? У&Лн ° »М/У = Fr. - (4-43)
Выражение Fr = о/У gL носит название числа Фпуда и также является критерием механического подобия, характеризующим отношение инерционных сил, действующих в динамически подобных системах, к силам тяжести.
Выражение (4.43) позволяет сформулировать закон подобия Фру^ да-, в двух динамически подобных системах, в которых действуют только силы тяжести, числа Фруда должны быть равны между собой.
Число Фруда является не только критерием подобия, но и мерой скорости судна - его относительной скоростью. В частности, число Фруда (в различных его модификациях) характеризует все переходные режимы движения судна, а также плавания на мелководье. Так, режим плавания судна на мелководье, определяемый в основном волнообразованием, также характеризуется модифицированным критерием Фруда ~
¥гн = о/у/1н, (4.44)
где Н - глубина фарватера.
Разделение степени быстроходности судов при различных режимах движения (плавание, глиссирование, движение на крыльях) осуществляется с помощью числа Фруда, в котором в качестве линейной характеристики служит кубический корень из объемного водоизмещения
Frv = o/Vg V~V. (4.45)
При движении судна кроме гидростатической силы плавучести возникает также вертикальная гидродинамическая сила поддержания кг (которой в статике судна пренебрегают), поэтому в общем случае Уравнение вертикального равновесия движущегося судна будет иметь вид ' “ ’ _____-
P = yV + Rz. (j4.46)
В связи с этим могут иметь место три следующих режима движения надводного судна по поверхности воды, характеризуемые приблизительными значениями числа Fry-;
Плавание (Fry < 1). Сила /?2 при этом пренебрежимо мала, и уравнение вертикального равновесия судна имеет вид
P = yV.
(4.47)
- 107-
Переходный режим (l<Fry<3). Гидродинамическая сила Rz постепенно возрастает, и пренебрегать ею уже нельзя. Уравнение вертикального равновесия имеет наиболее общий вид (4.46).
Глиссирование (Frv> 3). Гидростатическая сила плавучести у V практически исчезает, и уравнение вертикального равновесия приобретает следующий вид:
Р-Лг. (4.48)
Переход на подводные крылья происходит при Fry561 2,2 -е- 2,7.
§ 25. Основы теории крыла
В Морском Флоте СССР широко используют различные крыльевые конструкции, имеющие специальную форму, обеспечивающую при обтекании их потоком подъемную силу, во много раз превосходящую силу лобового сопротивления. На судах крылья применяют в качестве рулей, лопастей гребных винтов и крыльчатых движителей, лопаток насосов и турбин, лопастей вентиляторов и др. Само судно можно также рассматривать как крыло.
Для объяснения механизма возникновения подъемной силы рассмотрим крыло (рис. 4.9), ориентированное относительно поточной системы координат, в которой ось х совпадает с направлением скорости потока и, ось у перпендикулярна к ней и направлена вверх, а ось z направлена вдоль крыла. Протяженность крыла в направлении оси z называют размахом крыла (удлинением) I. Если рассечь крыло плоскостью уОх, то в ее пересечении с крылом получится профиль крыла. В зависимости от требований к гидродинамическим характеристикам применяют сегментные, авиационные, клиновидные и другие профили.
Форма профиля крыла характеризуется следующими геометрическими параметрами (рис. 4.10):
— относительной толщиной профиля, т. е. отношением его максимальной толщины к хорде (в процентах)
f = (fmax/b)’100%,
где хорда профиля b = ОА - радиус окружности, проведенной из его задней кромки О через крайнюю точку носика А;
- относительной кривизной профиля (в процентах)
X = (//*>)• 100%,
где / - максимальная ордината линии средней кривизны:
- средней геометрической хордой - отношением площади проекции крыла в плане S к его размаху:
bcp=S/l-, (4.49)
- 108-
Рис. 4.9. Схема возникновения гидродинамической реакции на крыле: а — распределение давлений по профилю крыла; б — схема гидродинамических сил на крыле >
- относительным удлинением X, под которым понимают отношение размаха крыла к средней хорде:
X = //bcp=P/S. (4.50)
Различают крылья малого удлинения (X < 2), конечного удлинения (2 < X < 6) и бесконечного удлинения (X > 6).
Для гидродинамики судна особый интерес представляют крылья малых и конечных удлинений. Так, корпус судна при движении с углом дрейфа имеет X ? 0,03 0,2, при этом под размахом следует понимать удвоенную осадку, а под хордой - его длину по действующей ватерлинии. Судовые рули имеют удлинение X = 1 -е- 2, а лопасти гребных винтов - Х'= 1 3.
Угол между направлением скорости набегающего потока и хордой крыла называют углом атаки. При движении крыла в жидкости со скоростью и под некоторым углом атаки а на верхней части профиля, называемой спинкой, будет наблюдаться сужение потока и, следовательно, увеличение скорости, а на нижней части - уменьшение скорости потока (см. рис. 4.9, а).
В соответствии с законом Бернулли на спинке профиля будет наблюдаться разрежение (-Др), на брюшке - повышение давления (+Др). Разность давлений обусловливает результирующую сил давлений Ra. Вязкость потока определяет наличие на профиле силы трения
Рис. 4.10. Геометрия профиля крыла
1 — задняя кромка; 2 — спинка; 3 — линия средней кривизны; 4 — носик; 5 — брюшко
- 109-
Rf. Результирующую этих сил R (см. рис. 4.9, б) называют гидродинамической силой. Проекцию этой силы на ось х именуют силой лобового или профильного сопротивления X, проекция силы R на ось у-подъемной силой Y. При изучении сил, возникающих на руле как на крыле, используют систему координат, связанную с крылом. В этом случае проекция R на ось п определяет нормальную силу N=Rn, а проекция R на ось t - тангенциальную силу Т = Rf. Соотношения между этими составляющими гидродинамической силы следующие:
R = УХ’ + У2 = y/Tz + N3; Y= N cos a - T sin a;
X - Wsin a + Tcos a; N = X cos a - У sin a;
T= Y cos a -Xsin я.
4
Гидродинамический момент на баллере руля равен
Мб = N(xa-x6),
(4.51)
(4.52)
где хд - абсцисса центра давления на профиле (точки приложения нормальной силы); хб - расстояние от начала координат до оси баллера.
Рассмотренные силы пропорциональны плотности жидкости р, площади крыла S и квадрату скорости и2 и определяются следующими формулами гидромеханики:
ро2 ро2 ро2
У = С„----S;X = Cx-----S;N = Cn----S;
У 2 2 2
(4.53)
ри2 ро2
T-Ct —— S;M6=Cm—--Sb, 2 2
где Су, Сх - безразмерные коэффициенты подъемной силы и лобового сопротивления; Сп, Ct- безразмерные коэффициенты нормальной и касательной сил; Ст - безразмерный коэффициент момента. Коэффициенты Су, Сх, Сп, Ct, Ст называют гидродинамическими характеристиками крыла. Они зависят в основном от формы профилей, а для крыла заданных размеров и формы профиля - от угла атаки.
Качество профиля характеризуется отношением
К = Су/Сх. (4.54)
В теории крыла используют понятие обратного качества профиля
е=Сх/Су. (4.55)
Гидродинамические характеристики различных профилей определяют с помощью продувок в аэродинамических трубах. По данным
- ПО-
Рис. 4.11. Зависимости коэффициентов подъемной силы С„ лобового сопротивления Сх и момента на баллере Ст от угла атаки
продувок крыльев для определенных значений удлинений и относительных толщин строят графики зависимостей безразмерных коэффициентов от угла атаки. На рис. 4.11 в качестве примера приведены характерные зависимости гидродинамических коэффициентов от угла атаки. Как видно из рисунка, кривая Су(а) имеет максимум при некотором угле атаки акр, который называют критическим. Для крыльев конечного
удлинения акр = 32 + 35*. При закрити-ческих углах атаки наблюдается быстрое уменьшение Су и значительный рост Сх, т. е. наблюдается режим резкого снижения качества крыла. Это объясняется отрывом вязкого потока от спинки профиля, в результате которого нарушается плавность обтекания верхней стороны крыла и образуются вихревые дорожки за крылом. В связи с этим по Правилам Регистра СССР на судах устанавливают ограничитель угла поворота пера руля на 32°.
Из рис. 4.11 также видно, что при угле атаки а = 0 коэффициент подъемной силы не равен нулю. Только для симметричных профилей при а = 0 Су = 0. Во всех других случаях Су = 0 лишь при каком-то отрицательном угле атаки, т. е. при обтекании профиля по направлению, не совпадающему с направлением хорды. Прямую, проходящую в этом направлении через заднюю острую кромку профиля, называют направлением нулевой подъемной силы (ННПС), а угол ан - углом нулевой подъемной силы. Фактический гидродинамический угол атаки профиля равен а = ан + ак, где ак - кромочный угол атаки, т. е. угол между хордой профиля и вектором скорости.
Многочисленные экспериментальные исследования показывают, что коэффициент подъемной силы до критического угла атаки возрастает по линейному закону, т. е. коэффициент подъемной силы
можно определить как
Су = С“а,
(4.56)
где
dCy
С«-------
у da
В процессе эксплуатации судовых крыльевых устройств изменяется состояние поверхности наиболее ответственных механизмов и устройств, таких как лопасти гребного винта и руля. Изменение
- 111 -
толщины и характера распределения пограничного слоя вследствие увеличения шероховатости поверхности профиля вызывает уменьшение подъемной силы и увеличение профильного сопротивления.
Из-за различного отклонения линий тока на спинке и брюшке профиля уменьшается эффективная кривизна средней линии профиля по сравнению с геометрической: тем больше, чем толще пограничный слой. В результате этого уменьшается угол нулевой подъемной силы ан и снижается качество крыла.
§26. Морское волнение
Эксплуатация морского транспорта происходит большую часть времени в условиях взволнованного моря. Примерно 70% времени эксплуатации судна неограниченного района плавания приходится на штормовые условия. В задачах теории судна морское волнение выступает в качестве причины образования возмущающих сил и моментов при качке судна как внешнее возмущение в задачах управляемости, как причина дополнительного сопротивления судна при ходе на волнении и т. д. Поэтому необходимо уметь математически описывать морское волнение и определять силы, вызываемые им на корпусе судна.
Морское волнение проявляется в различных формах в зависимости от причин, порождающих его, а также от формы акватории и удаленности от очага возникновения. Из форм морского волнения, имеющих наибольшее значение для проблем морского транспорта, выделяют следующие: ветровое волнение, волнение типа „мертвая зыбь”, смешанное, перекрестное, разрушающееся волнение, волны на границе слоев воды различной плотности.
Ветровое волнение представляет собой движение тяжелой жидкости (морской воды), вызываемое неравномерным распределением скоростей ветрового потока над поверхностью моря, причем форма и размеры ветровых волн постепенно изменяются, что, в свою очередь, усиливает их взаимодействие с ветровыми потоками. По мере выхода из зоны зарождения шторма ветровые волны, представляющие собой сугубо несимметричные трехмерные холмы, под действием сил вязкости в жидкости выстраиваются в цепь цилиндрических гребней, движущихся в одном направлении и называемых мертвой зыбью.
Волнение, образующееся после прихода волн мертвой зыби в новый штормовой район и представляющее собой сочетание ветровых волн с мертвой зыбью, именуют смешанным. При этом интенсивность каждой волновой системы и направление их распространения могут не совпадать.
Перекрестное волнение является результатом наложения двух одинаковых по типу волновых систем, пришедших из разных направлений.
При подходе волн к мелководным участкам моря их характеристики изменяются, и на участках определенной глубины волны
- 112-
становятся неустойчивыми и разрушаются. Волнение этого типа называют разрушающимся, и оно представляет большую опасность, особенно для малых судов.
В сложных волновых задачах теории судна иногда используют упрощенные, идеализированные формы морского волнения, которые тем не менее позволяют количественно оценивать основную часть производимого волнами эффекта. Такими упрощенными моделями волнения являются так называемые плоские стоячие волны и плоские прогрессивные регулярные волны малой амплитуды.
Плоские стоячие волны существуют в природе и представляют собой колебания свободной поверхности воды в замкнутых акваториях, например в прямоугольных бассейнах или цистернах. В стоячих волнах движение воды совершается по прямолинейным траекториям (вверх - вниз), а число волн строго связано с размерами бассейна, так как эти волны представляют картину собственных колебаний, характерных для данного бассейна.
Плоские прогрессивные волны представляют собой другой вид движения жидкости, при котором частицы движутся в вертикальной плоскости по траекториям, близким к круговым.
В жидкости большой глубины траектории частиц практически представляют собой окружности, причем их радиусы резко уменьшаются с увеличением отстояния рассматриваемой частицы от поверхности воды (рис. 4.12). Для жидкости конечной глубины траектории частиц из окружностей превращаются в эллипсы (рис. 4.13), а соотношение полуосей эллипсов уменьшается с глубиной. Частица жидкости на дне акватории совершает возвратно-поступательное движение в плоскости дна.
Если высота волн мала по сравнению с их длиной, то переноса масс воды вместе с волной в направлении ее движения не происходит. Так, легкий поплавок, помещенний на пологие морские волны, практически остается на месте, совершая лишь круговое движение вместе с частицами воды в волне. Для более крутых волн это явление не имеет
Рис. 4.12. Движение частиц жидкости в волне на глубокой воде
Рис. 4.13. Движение частиц жидкости в волне при ограниченной глубине
- ИЗ-
места, и плавающие на их поверхности тела осуществляют так называемый волновой дрейф в направлении распространения волн.
Таким образом, видимое движение волн на поверхности воды представляет собой лишь внешнюю подвижную геометрическую картину. Основные явления при волнении скрыты под водной поверхностью. Давление жидкости внутри волны в каждой точке определяется уравнением Бернулли, в котором выделены три характерные составляющие: гидростатическое давление у£, гидродинамическое давление ри2/2 и внешнее давление р0, совпадающее на свободной поверхности воды с атмосферным давлением воздуха: '
р0 + у£ + Ри 2/2 = const. (4.57)
Здесь I, - отстояние рассматриваемой точки от поверхности воды в спокойном состоянии.
Плоские прогрессивные регулярные волны хорошо описываются с помощью тригонометрических функций синуса или косинуса в виде
£в(£, 0 = 'в cos № + «)> (4-58)
где гв - амплитуда прогрессивных волн - наибольшее отстояние по вертикали свободной поверхности воды от равновесного положения; о - частота волнения - количество волн, проходящих через неподвижную точку за время 2л; к - волновое число или частота формы волны, связанная с длиной волны А., под которой понимают расстояние между соседними вершинами или подошвами волны (рис. 4.14):
it = 2л/А.. (4.59)
Частоту формы волны можно еще трактовать как число волн длиной А., укладывающихся на отрезке длиной 2л. Функция £в(£, t) представляет собой ординаты волновой поверхности; она характеризует возвышение свободной поверхности в точках с абсциссой £ в момент времени t.
Кроме этих основных понятий используют и другие: высоту прогрессивной регулярной волны hB = 2гв, угол волнового склона ав (см. рис. 4.14), скорость распространения волны с, период волны тв, крутизну волны 2гв/А..
Угол волнового склона меняется по длине волны от нуля на вершине и подошве до наибольшего значения а0, называемого наибольшим углом волнового склона. Угол «в можно вычислить
Рис. 4.14. Параметры плоских прогрессивных регулярных волн
- 114-
для волн относительно малой амплитуды путем дифференцирования выражения (4.5):
Э£в гв
ав % tg а = ---= -2л — sin (kt, + of)» (4.60)
dt, X
Из выражения (4.60) видно, что угол а0 пропорционален крутизне волны rjk:
а0 ~ кгв = 2пгв/к. (4.61)
Приведенное приближенное описание волнения допустимо для относительно пологих волн с крутизной гв/Х < 1/25.
Период волны тв - это промежуток времени прохождения через неподвижную точку двух последовательных гребней волн. Период связан с частотой волнения:
тв = 2л/о. (4.62)
Скорость распространения прогрессивных волн с представляет собой скорость перемещения профиля волны в направлении оси О£:
с = к/хв. (4.63)
Для акватории с глубиной Нв скорость волны с равна
с2 = (о/к)2 = (g/k) th кНв. (4.64)
При больших глубинах можно считать th кН= 1, тогда можно получить связь между частотой волны а и частотой формы к:
k = o2/g, (4.65)
С учетом выражения (4.65) можно получить удобные приближенные формулы связи параметров волнения для глубокой воды:
тв = 2л/£ = 2л/ Jgk = J2nk/g * 0,8 /к; (4.66)
с = к/тв = V^nX) я= 1,25 /Т. (4.67)
Полное давление в точках под волновой поверхностью на глубине I, может быть вычислено с использованием интеграла Бернулли (4.17):
р(£) = Ро + - yrBe-*£ cos (kt, + ot). (4.68)
Из формулы (4.65) видно, что орбитальное движение частиц уменьшает
- 115-
гидростатическое давление на величину гидродинамической составляющей давления
6р - -yrBe cos (k£ + or),
(4-69)
которая уменьшается с глубиной по экспоненциальному закону е ~к^ = = е-2п£/х Следовательно, уже на глубине, превышающей длину волны (£ > X), гидродинамическое воздействие волны на плавающие объекты резко уменьшается.
Понятие регулярности для прогрессивной волны относится ко всем геометрическим и кинематическим ее характеристикам. Оно означает, что все параметры волны (амплитуда, длина, частота и т. д.) не меняются как с течением времени, так и от волны к волне.
Волны мертвой зыби внешне во многом напоминают плоские прогрессивные волны, но отличаются от них отсутствием регулярности. Это значит, что каждая волна мертвой зыби имеет свои отличные от других волн амплитуду, длину и частоту. Для таких нерегулярных волн уже неприменимо понятие амплитуды; дЛя них используют понятие высоты волны hB, представляющей собой расстояние по вертикали между соседними вершиной и подошвой (рис. 4.15). Описание нерегулярных волн производят совершенно другими методами, основанными на статистике наблюдений за характеристиками волн, такими как ординаты свободной поверхности £в, высоты волн t^, частоты о, длины Хит. п., которые носят случайный характер. В судостроительной литературе часто употребляют понятие двумерного нерегулярного волнения, под которым подразумевают цилиндрические волны типа мертвая зыбь t нерегулярными характеристиками. Другой тип волнения, называемый трехмерным нерегулярным волнением, представляет собой обычные ветровые волны, наблюдаемые в районе действия шторма.
Ветровые волны внешне представляют собой пространственные образования специфической волновой формы, движущиеся в определенном направлении и характеризующиеся высотой, длиной, частотой или периодом и скоростью распространения. Каждая отдельная ветровая волна имеет свои индивидуальные параметры, практически не
встречающиеся у других окружающих волн. Данные параметры представляют собой случайные числа. Даже направление распространения каждой конкретной волны чем-то отличается от остальных, хотя в целом для волнения в данном районе моря можно определить некоторое среднее направление.
Такое разнообразие характеристик ветровых волн не позволяет вводить строгие зависимости между их пара-
Рис. 4.15. Образец записи нере- метрами, определяемые гидродинами-гулярного ветрового волнения кой волнового движения, как было
- 116-
сделано для плоских регулярных волн. Однако для множества волн в шторме могут быть получены статистические закономерности, основанные на результатах длительных наблюдений за ветровым волнением в разных частях Мирового океана. Данная информация собирается международными гидрометеорологическими службами уже многие годы и постоянно пополняется и расширяется. Сейчас уже обобщены экспериментальные данные о статистических характеристиках волнения для различных районов океанов и морей, сгруппированные по сезонам и месяцам. Данные собираются автоматическими станциями, передающими информацию в специальные центры. На каждой станции производится непрерывная запись ординат волн с помощью датчиков гидродинамического давления, расположенных на небольшой глубине. Характерный вид записи ветрового волнения показан иа рис. 4.15.
В каждом шторме можно выделить три характерных периода. В начальный и конечный периоды развития шторма средние характеристики волнения изменяются с течением времени; такое волнение называют развивающимся и затухающим. Однако существует промежуток времени, в котором эти характеристики можно считать примерно постоянными; соответствующее ему волнение называют вполне развитым волнением. Большинство исследований мореходности судов выполнено применительно к волнению этого типа.
Для количественного описания нерегулярного волнения используют средние значения параметров волн, например среднюю высоту hB, средний период тв, среднюю длину волны Л и т. д. Эти величины определяют путем деления суммы наблюдаемых значений каждой характеристики у последовательной группы волн на их число. Так, средняя высота волн равна
_ 1 Ьв ~ п
Кроме того, широко распространены характеристики волн заданной обеспеченности. Общая формула для определения высоты волн обеспеченностью р% имеет вид
hp% = 2py[D^, (4.71)
где 2р - коэффициент, зависящий от р %; DjB - дисперсия волновых ординат, которая определяется как средний квадрат ординат ветровых волн за некоторый промежуток времени:
п
DtB=- У U,- (л > 200). (4.72)
п i=l
Используемые в отечественной практике высоты волн 3 %-ной обеспеченности определяют следующим образом: если /13 % = 4 м, это
п
2 hi' <4-7°)
i = l
- 117-
значит, что из 100 последовательно наблюдаемых волн три волны будут иметь высоту, большую или равную 4 м. Для характеристик 3 %-ной обеспеченности величина коэффициента 2р равна 5,3.
Для средних характеристик обеспеченность составляет 46,5 %, при этом 2р = 2,5. Между средними характеристиками и характеристиками 3 %-ной обеспеченности существует связь:
h3 %/hB = 5,3/d^?(2,5/d^) = 2,11. (4.73)
В зарубежной практике широко распространена так называемая значительная высота волн hl/3, определяемая как средняя от одной трети наиболее высоких (из серии наблюдаемых) волн. Ей соответствует обеспеченность 13,5 % и коэффициент 2р = 4,0. С учетом этого связь между всеми тремя характеристиками имеет вид:
h3% = 1,33\/3 = 2,llhB. (4.74)
В судовых условиях определение характеристик нерегулярного волнения связано с определенными трудностями. Как правило, на судах отсутствует специальная аппаратура для этих целей и высоты волн приходится оценивать визуально. Погрешности визуальных оценок связаны с психологическими факторами искажения реальных размеров волн при наблюдениях с больших или малых судов. В отечественной практике рекомендуется на глаз оценивать высоту 5-6 наиболее крупных волн в группе и определять их среднюю высоту Лвиз. В результате статистической обработки подобных наблюдений получена приближенная формула для перевода значений Ьвиэ в h3
^з% = ^ь^виз- И-75)
Значения коэффициента kh выбирают в зависимости от /1ВИЭ:
^виз • • • 0,5 1,0 2,0 3,0 4,0 5,0 6,0 7,0 8,0 9,0 10,0
kh.... 1,60 1,45 1,32 1,28 1,25 1,23 1,20 1,18 1,16 1,14 1,12
Наряду с высотой нерегулярных волн, отражающей интенсивность шторма, важную роль играют частотные параметры волнения: частоты, периоды и длины. На основании наблюдений за морским волнением удалось получить эмпирическую зависимость между средним периодом волн в шторме и высотой волн h3 %:
х = fcT Vh3%, (4.76)
где коэффициент кх для развитого ветрового волнения можно принимать равным 3,1-3,3. Эта зависимость показана на рис. 4.16 в виде зоны изменения среднего периода для развивающегося и затухающего волнения.
- 118-
Рис. 4.16. Зависимость среднего периода ветрового волнения от высоты волн 3 %-ной обеспеченности
1 — развитое волнение; 2 — развивающееся волнение; 3 — затухающее волнение; 4 — область значении периодов волн, встречающихся редко
На основании статистики наблюдений получены также приближенные зависимости между средней высотой и длиной ветровых нерегулярных волн. Например,
hB = 0,17X3M.
(4-77)
Эта зависимость никоим образом, конечно, не отражает взаимосвязи между длиной и высотой конкретной ветровой волны.
Одной из первых попыток подразделения ветровых штормов по их интенсивности было введение в 1954 г. шкалы волнения, предложенной Главным управлением гидрометеорологической службы СССР, -шкалы ГУГМС (табл. 4.1), в которой все возможные варианты ветрового волнения градуируются в баллах. Одновременно дается словесная характеристика волнения и диапазон изменения высоты волн 3 %-ной обеспеченности.
В зарубежной практике оценку степени волнения связывают с силой ветра, определяемой по известной шкале Бофорта.
Естественно, что для точного установления балльности волнения необходимо уметь определять величину %, которая является более строгой характеристикой интенсивности волнения, чем балльность. Однако в задачах мореходности судов требуется знание более полной
Таблица 4.1. Шкала балльности волнения (шкала ГУГМС)
Баллы волнения Высота волны h3 %>м Словесная характеристика волнения Высота значительных волнЬ1/э, м
0 0 Отсутствует 0
I 0-0,25 Слабое 0-0,20
II 0,25-0,75 Умеренное 0,20-0,55
III 0,75-1,25 Значительное 0,55-0,95
IV 1,25-2,0 Значительное 0,95-1,50
V 2,0-3,5 Сильное 1,50-2,65
VI 3,5-6,0 Сильное 2,65-4,50
VII 6,0-8,5 Очень сильное 4,50-6,40
VIII 8,5-11,0 Очень сильное 6,40-8,30
IX 11,0 и более Исключительное >8,30
- 119-
информации о конкретном шторме, чем обезличенная балльность по шкале волнения. Такую важную информацию дают спектральные методы описания ветрового волнения. В этих методах основное место занимают спектры морских волн - распределения высот волн (или других, связанных с высотой волн характеристик) по частотам. При этом вводится понятие спектральной плотности ординат SjB(o), которая представляет собой удельную энергию волн, приходящуюся на малый диапазон частот (или длин волн).
Типичные спектры ветрового волнения показаны на рис. 4.17. Понятно, что площадь под кривой спектральной плотности равна полной энергии волн в практическом диапазоне частот и эта энергия увеличивается с ростом балльности волнения.
Хотя для расчетов интересен спектр полностью развитого морского волнения, полезную информацию представляет изменение энергии спектра во времени от его зарождения и до полного развития (рис. 4.18). Спектр волнения показывает также, каких больше волн в данном шторме; их длины легко могут быть найдены по частотам в соответствии с формулой (4.66). Характерно, что график спектра ветрового волнения начинается не из нуля, а с некоторой частоты; это объясняется тем, что в ветровом шторме отсутствуют очень длинные волны, например волны сейсмической природы.
Рис. 4.17. Эмпирические спектры ветрового волнения с различной балльностью
Рис. 4.18. Изменение вида спектра ветрового волнения при скорости ветра 30 уз
1 - 5 — развивающееся волнение; 6 - 9 — затухающее волнение
- 120-
В настоящее время собрана достаточно полная информация о спектрах волнения по многим районам Мирового океана. Наличие спектров волн позволяет определять с помощью выводов спектральной теории волновых процессов многие интересующие нас характеристики волнения и использовать их в расчетах мореходных качеств и прочности морских судов. Так, для развитого морского волнения можно вычислить среднюю высоту волн, а значит, и h3 %, и hl/3:
hB = 2,5[Ts5B((J)da]i« . (4.78)
о
Интеграл в (4.78) графически выражает площадь под кривой спектра St,(o) в определенном масштабе. Выражение (4.78) справедливо для цилиндрических нерегулярных волн типа „мертвая зыбь”. Для случая трехмерного ветрового волнения необходимо произвести суммирование (интегрирование) интенсивности волн по всем направлениям от -л до л:
hB=2,5[T J 5{в(о, <p)d<pda]1/2. (4.79)
о —л
Здесь считается, что спектральная плотность SjB(a, ф) изменяется по направлениям согласно закону косинуса:
S5b = (2/n)StB(a)cos2 Ф, (4.80)
а под величиной ф понимается угол между направлением распространения волн и ветра; этот угол заключен между -л/2 и л/2, т. е. волны, бегущие навстречу ветру, отсутствуют.
При решении задач о бортовой качке судов важную роль играет спектр углов волнового склона Sa(a), который может быть легко вычислен через спектральную плотность ординат волнения $£в(о):
Sa»(57,3)2(oVga)S?B(a). (4.81)
При проведении различных расчетов поведения судна на волнении было бы удобно, если бы спектральную плотность можно было представлять в аналитическом виде, а не в виде экспериментального графика, а также связывать ее с балльностью волнения. Существует много выражений, аппроксимирующих реальные спектры морских волн; некоторые из них рекомендованы международными морскими конференциями для выполнения конкретных расчетов.
Наиболее общая форма записи имеет вид
^в=А1о-'"ехр(-В1а-"), (4.82)
где А„ т и п - коэффициенты, зависящие от условий волнообразования. Так, 12-я Международная конференция опытовых бассейнов рекомендует для расчетов качки и прочности судов спектр вида
- 121 -
g2 I 3,11-io4 \
SrB = 8,1 • IO"3-- o’5 exp-------------o~4 ,
b k4 \ k*h2 /
K-p \ Kp”l/3 /
(4.83)
где kp - коэффициент степени развитости волнения (kp = 1 соответствует развитому волнению, kp < 1 - развивающемуся, кр > 1 - мертвой зыби). Чтобы спектральная плотность (4.82) лучше соответствовала экспериментальному спектру морских волн, целесообразно с учетом значений hl/3 и длины волны А.т подобрать величину кр, соответствующую максимуму этого спектра:
кр = /м(ОГГ).
(4.84)
Понятно, что для различной балльности волнения (для конкретной h1/3) формула (4.83) дает различные спектры.
Сочетание статистических и спектральных характеристик волнения представляет собой необходимую информацию для исследования мореходных качеств.
Контрольные вопросы
1. Какими свойствами обладает идеальная и реальная жидкости?
2. В чем отличие кавитации от закипания жидкости?
3. Каков смысл критериев Фруда и Рейнольдса? ,
4. Как направлена подъемная сила на крыле?
5. Как вы понимаете обеспеченность морского ветрового волнения?
Глава 5
СОПРОТИВЛЕНИЕ ВОДЫ ДВИЖЕНИЮ СУДНА
§ 27. Сопротивление движению судна. Буксировочная мощность
Составляющие сопротивления. Судно, двигаясь на границе двух сред, испытывает их сопротивление своему движению: подводная часть - сопротивление воды, надводная часть - сопротивление воздуха.
На каждую элементарную площадку подводной (смоченной) поверхности судна dQ (рис. 5.1) действует элементарная гидродинамическая сила, которая является следствием реакции выведенной из равновесия частицы воды. Эта элементарная гидродинамическая сила может быть разделена на элементарные касательные т и нормальные р составляющие. Проинтегрировав по всей смоченной поверхности судна Q проекции на ось х элементарных касательных
- 122-
V
—/ Рис. 5.1. Элементарные силы, действующие ------------ --^Р\ , на подводную поверхность корпуса двнжуще-Ttfff \pdQ гося судна
сил TdQ; получим выражение для сопротивления трения
Rf = $T cos (т, x)dfi. (5.1)
—— й
Проинтегрировав по всей смоченной поверхности судна Q проекции элементарных сил гидродинамического давления на ось х, получим выражение для сопротивления давления
Rp- $ р cos (р, х) dfi. (5.2)
Расчет сопротивления воды с помощью зависимостей (5.1) и (5.2) очень сложен.
Сила сопротивления воды движению судна включает в себя силы различной природы, подчиняющиеся различным законам подобия и зависящие от различных свойств жидкости. Сила трения обусловлена касательными силами, которые зависят от свойств вязкости, т. е. от чис-лаРейнольдса._£йлы давления состоят из двух составляющих. Одну из них - силу вязкостной природы, зависящую от числа Рейнольдса, называют сопротивлением формы R$. Другую составляющую силы давления, зависящую от сил гравитации, т. е. от числа Фруда, называют волновым сопротивлением Rw.
/Таким образом, полное сопротивление воды движению судна можно записать в виде суммы трех основных составляющих:
R = Rf + R& + Rw. (5.3)
Надводная часть судна движется в воздухе и испытывает вязкостную составляющую полного сопротивления воздуха Явозд- В подводной
Таблица 5.1. Составляющие сопротивления среды движению судна
Составляющие полного сопротивления Доля составляющей от полного сопротивления, %
Тихоходные суда, танкеры, балкеры с Fr = 0,15-0,18 Быстроходные суда, контейнеровозы, пассажирские суда cFr> 0,27
Сопротивление трения Сопротивление давления вяз- 70 70
костной природы (формы) 24 8
Волновое сопротивление 5 20
Воздушное сопротивление 1 2
Итого 100 100
- 123-
части корпуса имеются выступающие части (скуловые кили, рудерпост, кронштейны, шахты лага, эхолота), которые создают /дополнительное сопротивление выступающих частей RB. ч. В реальных условиях эксплуатации судно преодолевает сопротивление RM ветра, волнения, течения, т. е. явлений метеорологического характера, и сопро-. тивление льда R„.
Таким образом, в более развернутой форме полное сопротивление может быть представлено в виде следующей суммы его отдельных составляющих (табл. 5.1):
R = Rf + R<b + Rw + ^возд + Кл ^в. ч* (5.4)
Буксировочная мощность судна. Мощность, необходимую для преодоления силы сопротивления Ттри буксировке с заданной скоростью, называют буксировочной мощностью EPS (Effective Pferde Starke), которая равна (в кВт)
EPS = Ru. _ (5.5)
§ 28. Сопротивление трения
Пограничный слой. Поток вязкой жидкости, обтекающей судно или какое-либо другое тело, принято условно разделять на три области (рис. 5.2):
область I (пограничный слой)-непосредственно прилегающая к телу зона, в которой свойства вязкости жидкости проявляются наиболее интенсивно;
область II— область потенциального потока, в которой силы вязкости утрачивают свое значение и жидкость можно рассматривать как идеальную; '
область III - область гидродинамического следа, в которой частицы еще подтормаживаются телом, но скорости их стремятся выравняться за счет взаимодействия с внешним потоком.
В пограничном слое происходит интенсивное изменение скорости потока от нуля (при обращенном движении) на поверхности тела до скорости внешней среды на границе слоя. Поперечный размер пограничного слоя характеризуется его толщиной 6, определяемой как расстояние от стенки тела до точки, в которой скорость составляет 99,5 % скорости потока.
Режим движения жидкости в пограничном слое характеризуется местным числом Рейнольдса
Rex = ux/v, (5.6)
где х - отстояние данного сечения от носовой оконечности тела. В зависимости от Rex поток в пограничном слое может быть ламинарным или турбулентным.
-124-
Рис. 5.2. Схема разделения потока вокруг судна на три зоны
I — пограничный слой; II — потенциальный поток; III - гидродинамический след (спутная струя)
Движение жидкости внутри пограничного слоя может быть исследовано теоретически, причем это исследование позволяет произвести расчеты параметров пограничного слоя и определить в конечном счете результирующую проекций напряжений сил трения на направление движения, т. е. силу трения Rj, и результирующую проекций сил давления вязкостной природы на направление движения, т. е. сопротивление формы Яф, сумма которых составляет вязкостное сопротивление.
Сопротивление трения можно рассчитать двумя путями. Первый путь, использующий закономерности трехмерного пограничного слоя, в практических расчетах не применяют. Второй путь заключается в определении безразмерного коэффициента трения £/, входящего в частную формулу сопротивления
R; = ^pu2/2)ft.
(5.7)
В 1871 г. Уильям Фруд, проводя натурные буксировочные испытания судна „Грейхаунд”, пришел к мысли о возможности определения сопротивления трения судна путем буксировки тонких длинных досок, у которых практически могли быть исключены силы давлений и оставлены только силы трения. В результате таких испытаний У. Фруд установил, что сопротивление трения зависит от скорости буксировки пластин (досок), площади их смоченной поверхности и состояния последней, определяемого коэффициентом /:
Rf0=№n. (5.8)
Его сын Реджинальд Фруд расширил и обобщил эксперименты отца и получил формулу
Rf0=fQul’62s. (5.9)
Эта формула, когда-то повсеместно принятая, в настоящее время иногда встречается в судовой документации, разработанной в Англии.
На основе опытов Фрудом было введено понятие об эквивалентной технически гладкой пластине, буксировка которой позволяет определить значение сопротивления трения данного судна (если такая буксировка была бы возможной). Под эквивалентной пластиной понимается плоская тонкая технически гладкая пластина, имеющая длину, равную длине судна по действующей ватерлинии, смоченную поверхность, одинаковую со смоченной поверхностью судна, и движущаяся со скоростью судна. При этом режимы обтекания в пограничном слое судна и пластины должны быть идентичны.
- 125-
Чтобы произвести расчет элементов пограничного слоя, т. е. определить закон изменения 6 вдоль поверхности, необходимо знать закон распределения скоростей поперек пограничного слоя и зависимость от них касательного напряжения т на стенке. Распределение скоростей обычно задается на основе эксперимента или приближенно в форме степенной или тригонометрической функции.
Пограничный слой вблизи корпуса судна имеет сложный турбулентный характер. Для анализа характеристик вязкостного потока упрощают задачу, рассматривая обтекание тел упрощенных обводов и пластин. В турбулентном пограничном слое распределение касательных напряжений в поперечном направлении подчиняется различным законам: вблизи стенки оно определяется влиянием вязкости, а на удалении от нее - турбулентным обменом. Поэтому при решении задач о законах течения в турбулентном пограничном слое принимают допущение о возможности подразделения пограничного слоя по толщине на две области: тонкую пристеночную область ламинарного подслоя; внешнюю область, в которой выравнивание скорости в поперечном направлении предполагается не зависящим от вязкости жидкости и обусловлено турбулентным перемешиванием.
Значения и характер изменений составляющих сопротивления вязкостной природы, т. е. Rf и R$, зависят от явлений, происходящих в пограничном слое судна.
Причиной возникновения сопротивления трения, как уже указывалось, является вязкость жидкости. Сцепление отдельных частиц жидкости между собой и с наружной обшивкой судна приводит к тому, что по всей подводной поверхности судна возникают силы, касательные к элементам этой поверхности и противодействующие движению судна. На величину сопротивления трения в первую очередь влияют размеры поверхности корпуса, скорость и характер его обтекания.
На рис. 5.3 приведены примерные эпюры скоростей в пограничном слое. При ламинарном обтекании коэффициент полноты эпюры 0,67, при турбулентном - 0,90. Сопротивление трения в турбулентном потоке в 50-100 раз превышает сопротивление трения в ламинарном потоке, подчиненном закону Ньютона.
Буксировки пластин для определения сопротивления трения в каждом конкретном случае удалось избежать благодаря проведенным экспериментальным и теоретическим исследованиям движения жидкости
Рис. 5.3. Эпюры скоростей в пограничном слое
1 — ламинарный режим обтекания; 2 — турбулентный режим обтекания; 3 — ламинарный подслой
- 126-
в пограничном слое. На основе исследований, проведенных Гебер-сом, Т. Карманом, Л. Прандтлем, О. Рейнольдсом, К. Шенхерром и др., была установлена общая закономерность изменения коэффициента трения технически гладкой эквивалентной пластины в зависимости от числа Рейнольдса (при турбулентном обтекании):
5/о »/(lgRe)". (5.Ю)
Дальнейшие исследования позволили уточнить и конкретизировать эту зависимость. Так, наиболее употребительной в отечественной практике является формула Прандтля-Шлихтинга
5/0 = 0,455/(lg Re)2-58. (5.11)
Находит также применение формула, рекомендованная VIII Конференцией опытовых бассейнов в Мадриде в 1958 г.,
tf0 = 0,075/(lg Re - 2)2. (5.12)
Формулы (5.10)- (5.12) часто называют экстраполяторами трения. Коэффициенты турбулентного трения технически гладких пластин обычно приводятся в литературе в функции числа Рейнольдса в табличной или графической форме.
Замена судна эквивалентной пластиной не учитывает влияния кривизны судовой поверхности на сопротивление трения, вызванного изменениями толщины пограничного слоя реального судна и характера потока в нем вследствие перераспределения давления вдоль корпуса. Это влияние, сравнительно небольшое, обычно учитывается при расчете других составляющих сопротивления в зависимости от удлинения судна L/B.
Более важным является существенное отличие степени шероховатости корпуса даже вновь построенного судна от состояния поверхности технически гладкой пластины. Учет шероховатости смоченной поверхности корпуса судна производится путем введения надбавки £п, условно именуемой надбавкой на шероховатость, к коэффициенту сопротивления трения эквивалентной пластины, после чего формула для сопротивления трения судна принимает вид
R/=(5/o + 5n)(PU2/2)n. (5.13)
Рекомендуемые значения корреляционного коэффициента £п ' Ю3 для судов некоторых типов следующие:
Быстроходные и среднескоростные грузовые и транспорт-
ные суда, а также пассажирские суда................ 0,25—0,30
Среднетоннажные танкеры и балккэриеры (L < 220 м;
0,75 < Сь < 0,80).................................... 0,2-0,1
Крупнотоннажные танкеры (L > 220 м, Сь > 0,8)..... —0,3—0,0
- 127-
Лишенное физического смысла отрицательное значение £п для крупнотоннажных танкеров длиной более 220 м объясняется тем, что эта надбавка не только учитывает действительное влияние шероховатости свежеокрашенной поверхности иа сопротивление, но также выполняет роль корреляционного коэффициента, обеспечивающего согласование с натурой результатов модельных экспериментов с учетом всех погрешностей физического и методологического характера (нестрогость гипотезы Фруда, рыскание на курсе, брызгообразование и др.). Следует, однако, отметить, что реальная шероховатость обшивки корпуса судна даже в условиях, проведения сдаточных испытаний, как правило, больше шероховатости, учитываемой надбавкой £п, и оказывает существенное отрицательное влияние на эксплуатационные качества судна.
Шероховатость обшивки судна разделяют на технологическую и эксплуатационную.
Под технологической шероховатостью понимают состояние обшивки корпуса после окраски перед сдаточными ходовыми испытаниями для данного судна или после очередного докования для судна в эксплуатации.
Экспериментально установлено, что после окончательной покраски шероховатость корпуса, т. е. среднеарифметическая высота микронеровностей профиля на базовой длине 50 мм, должна составлять не более 120-140 мкм. Каждые Юмкм технологической шероховатости свыше 140 мкм увеличивают потребную мощность для достижения заданной скорости на 0,8-1 %; каждые 30 мкм шероховатости свыше 140 мкм снижают скорость судна до 1 %.
В процессе эксплуатации корпус судна подвергается коррозии, что приводит к вспучиванию краски и увеличению шероховатости корпуса. Помимо этого корпус судна обрастает животными организмами-зоопланктоном и водорослями. Все эти явления увеличивают эксплуатационную шероховатость обшивки корпуса и соответственно ведут к существенному снижению скорости судна, увеличению потребной мощности, повышению расхода топлива. В качестве мер борьбы с эксплуатационной шероховатостью используют специальные долгосрочные лакокрасочные покрытия, в том числе самополирующиеся. Суда, которые плавают-в тропической зоне и интенсивно обрастают, подвергаются дополнительно подводной междоковой очистке без вывода их из эксплуатации.
Изложенное свидетельствует о том, что сопротивление трения, в частности шероховатость обшивки корпуса, характеризующая величину сопротивления трения, весьма существенно влияет на эксплуатационные качества судна, определяя его технические и коммерческие показатели.
§ 29. Сопротивление формы
Сопротивление формы составляет некоторую долю вязкостного сопротивления и представляет собой часть результирующей
- 128-
гидродинамического давления, возникающую в результате его перераспределения вдоль корпуса, вызванного влиянием вязкости жидкости на поток, обтекающий тело. Для судов с традиционными обводами роль этой составляющей в общем балансе сопротивления сравнительно невелика. Однако она существенно повышается для крупных судов с полными обводами, а для тел или судов с весьма малым удлинением сопротивление формы может составлять основную часть полного сопротивления. К таким судам и телам относятся баржи, понтоны, шары, цилиндры и др.
Причины возникновения и физическая сущность сопротивления формы могут быть объяснены следующим образом. При обтекании судна потоком жидкости давление в ней падает от носа до миделя и нарастает от миделя в корму. В области отрицательного градиента давления, т. е. от носа до миделя, частицы жидкости движутся с положительным ускорением, величина которого пропорциональна градиенту давления. В области мидель-шпангоута скорость частиц достигает максимального значения, и в потоке устанавливается минимальное давление. Далее, от миделя в корму движение происходит против возрастающего давления, т. е. с отрицательным ускорением (рис. 5.4).
Если бы жидкость была идеальной, то запаса кинетической энергии частиц хватило бы для преодоления противодавления на пути от миделя в корму и каждая частица достигла бы ахтерштевня. В условиях же вязкой жидкости при движении частиц внутри пограничного слоя затрачивается дополнительная энергия на преодоление касательных сил вязкостного трения. У частиц, движущихся внутри пограничного слоя вблизи поверхности судна, скорости малы и соответственно мал запас кинетической энергии. Этот запас энергии может оказаться недостаточным для преодоления положительного градиента давления при движении частиц от миделя в корму, и в результате некоторые частицы под действием возрастающего давления Могут начать двигаться в обратном направлении, т. е. против набегающего потока. Такой обратный поток оттесняет пограничный слой от поверхности тела (см. рис. 5.4). Точку А, в которой начинается это оттеснение, называют точкой отрыва пограничного слоя. Отрыв пограничного слоя с образованием вихрей искажает картину обтекания судна в его кормовой части по сравнению с той, которая наблюдалась бы при обтекании идеальной (невязкой) жидкостью. Давление в кормовой части судна уменьшается и, следовательно, появляется результирующая нормального давления, направленная в сторону, противоположную движению судна. Эта результирующая и является сопротивлением формы судна. Поскольку величина сопротивления формы зависит от интенсивности
Рис. 5.4. Изменение давления в пограничном слое
- 129-
вихреобразования, то его часто называют вихревым сопротивлением.
Величина сопротивления формы в значительной мере зависит от степени обтекаемости тела, а также от характера обтекания: при ламинарном режиме течения в пограничном слое его отрыв наступает раньше, чем при турбулентном режиме. Это объясняется меньшей скоростью, а следовательно, и меньшей кинетической энергией частиц жидкости вблизи поверхности тела.
У хорошо обтекаемых тел и судов с большим удлинением и заостренной кормовой оконечностью запас кинетической энергии частиц жидкости может оказаться достаточным для одновременного преодоления как сил трения, так и возрастающего давления на пути от миделя к корме, и отрыва пограничного слоя может не произойти. В этом случае пограничный слой в кормовой оконечности плавно сходит с поверхности тела, превращаясь в спутную струю, но при этом линии тока все же отклоняются от поверхности тела, причем это отклонение с . ростом толщины пограничного слоя увеличивается по мере приближения к корме. Изменение картины линий тока по сравнению с картиной, которая наблюдается при обтекании тела идеальной жидкостью, приводит к изменению местных скоростей обтекания, а следовательно, и давлений. Вследствие перераспределения давлений их результирующая вдоль потока становится отличной от нуля, представляя собой сопротивление формы хорошо обтекаемого тела.
§30. Волновое сопротивление
При рассмотрении в § 27 составляющих сопротивления воды движению судна было установлено, что волновое сопротивление - это часть проекции на ДП результирующей гидродинамических давлений, возцикающих в результате образования судовых волн. Для уяснения сущности волнового сопротивления и связанных с ним явлений целесообразно прежде всего рассмотреть природу образования судовых волн, тем более, что волновое сопротивление занимает особое место в ряду других составляющих по своему влиянию на проектирование судов, их эксплуатацию и перспективу развития.
Рассмотрим обтекание внешним потоком неподвижного корпуса судна вдоль некоторой горизонтальной плоскости х-х, расположенной достаточно глубоко под поверхностью воды (рис. 5.5). При встрече с носовой частью судна частицы жидкости притормаживаются и их скорости уменьшаются. В районе мидель-шпангоута поток жидкости стеснен корпусом судна и скорость частиц в элементарных струйках вблизи корпуса превышает скорость свободного натекающего потока. Далее скорость частиц жидкости уменьшается, и, если пренебречь потерями на трение, частицы жидкости снова приобретают скорость свободного потока.
Давление в потоке по контуру обтекаемого сечения корпуса изменяется в соответствии с законом Бернулли, и эпюра приращений давлений Др по сравнению с давлением р в свободном потоке в плоскости
- 130-
х-х имеет вид, показанный на рисунке. Если плоскость расположена достаточно глубоко, то можно считать, что перепады давления Др относительно малы по сравнению с гидростатическим давлением в потоке, и поэтому обтекание корпуса на этом уровне будет плоскопараллельным, т. е. вертикальные перемещения частиц жидкости отсутствуют.
Иная картина обтекания наблюдается вблизи поверхности воды, на которую сверху действует только относительно небольшое постоянное атмосферное давление. Здесь линии тока искривляются в вертикальном направлении в соответствии с перепадами давления Др: в области повышенного давления уровень воды поднимается, а в области пониженного - опускается. Однако изменение уровня свободной поверхности воды не точно соответствует распределению давлений вдоль корпуса, так как корпус судна непрерывно встречается с новыми массами воды, вертикальные перемещения которых имеют динамический характер, т. е. происходят с некоторым ускорением и на большую величину, чем требуется для уравновешивания перепадов давления. Вместе с тем на частицы жидкости также действуют силы тяжести, обусловленные весомостью жидкости, и, таким образом, возникают их колебательные движения - судовые волны.
Судовые волны состоят из двух групп - носовой и кормовой (рис. 5.6). Носовая группа зарождается несколько позади форштевня, а кормовая - несколько впереди ахтерштевня. Каждая из этих групп разделяется в свою очередь на две системы волн - расходящихся (с короткими гребнями) и поперечных. Гребни расходящихся волн носовой и кормовой групп располагаются по обоим бортам судна в эшелонном порядке, и если соединить их середины, то получаются практически прямые линии, направленные под углом а = 18-20° к ДП судна. Каждый гребень расходящихся волн составляет с .ДП угол ₽ =2а. Поперечные волны располагаются между расходящимися волнами по нормалям к ДП судна. Первая поперечная волна носовой группы зарождается несколько позади форштевня бугром (гребнем),
Рис. 5.5. Эпюра давления при обтекании ватерлинии и образование судовых волн
Рис. 5.6. Схема носовой и кормовой групп расходящихся и поперечных волн
131 -
а первая поперечная волна кормовой группы - несколько впереди ахтерштевня впадиной (подошвой), захватывающей кормовую оконечность. Длина гребня каждой последующей поперечной волны больше, чем предыдущей, а высоты волн соответственно уменьшаются. Носовая группа волн обладает большей интенсивностью, чем кормовая, и более ярко выражена. При относительной скорости сулна Fr < 0,15 практически наблюдаются только расходящиеся волны. С увеличением скорости интенсивность поперечных волн возрастает, а расходящиеся волны становятся малозаметными.
Длина поперечной волны (расстояние между соседними гребнями) зависит от скорости судна и для синусоидального профиля опреде-ляется~формулой
A. = (2n/g)u2 « 0,17u2, (5.14)
где us - скорость судна, уз. Соответственно длина поперечной волны в долях длины судна будет равна
X/L = 2n(Fr)2. (5.15)
Изменение скорости движения^удна на неограниченной глубине фарватера незначительно сказывается на структуре расходящихся волн, и взаимодействие носовой и кормовой групп этих волн практик чески можно не принимать во внимание. Олнако с ростом скорости длина поперечных волн увеличивается и происходит их интерференция (сложение). При некоторой скорости судна может получиться совпадение фаз, когда гребни носовых волн накладываются на гребни ^кормовых волн, в результате чего за кормой судна образуются волны 'увеличенной высоты (неблагоприятная интерференция). При другой скорости, при обратных Фазах, гребни носовых волн уменьшаются (благоприятная интерференция) и интенсивность волнообразования ослабляется. ‘ L
Энергия волн пропорциональна квадрату их амплитуды, поэтому при возрастании высоты поперечных волн происходит резкое увеличение уносимой волнами энергии.
По мере увеличения скорости случаи совпадения и несовпадения фаз будут чередоваться, что отражается на характере кривой коэффициента волнового сопротивления
U = ^w/[(pu2/2)Q]=/(Fr), (5.16)
примерный вид которой приведен на рис. 5.7. Бугры и впадины на кривой t,w являются следствием благоприятной и неблагоприятной интерференций.
Характер интерференции зависит от числа Фруда, а следовательно, от скорости и длины судна. Точнее, он определяется соотношением между длиной поперечных волн, зависящей от скорости судна, и волнообразующей длиной судна, под которой понимается расстояние
- 132-
нительная составляющая горизонтальных сил давления, которая и называется волновым сопротивлением. С энергетической точки зрения волновое сопротивление объясняется тем, что на создание и поддержание системы волн необходима затрата определенной энергии.
Резкое увеличение волнового сопротивления с ростом относительной скорости является весьма неблагоприятным фактором, сдерживающим рост скоростей судов. Действительно, характерная для всех видов транспорта тенденция роста скоростей перевозок в наименьшей степени наблюдается на морском транспорте. Увеличение скорости современных контейнеровозов до 27-30 уз даже при максимально возможном уменьшении волнового сопротивления за счет оптимизации форм обводов и корпуса и выбора соответствующих главных размерений сопровождается увеличением мощностей энергетических установок до 100 тыс. л. с. и более, что окупается только при новых формах перевозки грузов. В связи с этим решение проблемы снижения волнового сопротивления является важной задачей в судостроении.
Снижение волнового сопротивления в настоящее время осуществляется практически на основе двух принципов: его избежания и по^ гашения. Принцип избежания предусматривает отдаление корпуса судна от поверхности воды путем погружения его под воду или подъема его над поверхностью воды. В первом случае степень уменьшения волнового сопротивления зависит от глубины погружения. Принцип погашения предусматривает обеспечение благоприятной интерференции носовой и кормовой групп поперечных волн.
Реализацией принципа избежания является создание подводных транспортных судов, судов на подводных крыльях (СПК), судов на воздушной подушке (СВП), экранопланов. У СПК, СВП, экранопланов корпус на ходу не пересекает поверхности воды, что обеспечивает скачок в скорости до 80 уз при традиционных мощностях энергетических установок за счет уменьшения волнового и частично вязкостного сопротивлений.
Реализацией принципа погашения является увеличение волнообразующей длины. Одним из средств этого служит применение kpeiF серскои кормы и бульбовыхобразований носа. Положительный эффект формы носовых образований с каплеобразным утолщением был
- 133-
впервые установлен экспериментально У. Фрудом еще в 70-х гг. прошлого столетия. Наиболее выгодным применение бульбообразных обводов оказалось при числах Фруда, составляющих 0,28- 0,30.
Теоретически уменьшение волнового сопротивления объясняется возникновением положительной интерференции. При рациональном выборе относительного поперечного сечения бульба и его удлинения можно получить благоприятную интерференцию.
Основным крупным недостатком пассажирских судов с бульбообразными носовыми обводами являлась несколько более стремительная килевая качка на волнении, что при отсутствии успокоителей качки ограничивало строительство таких судов.
В 1961 г. профессор Инуи провел в Токийском бассейне исследования, проверенные в дальнейшем на каботажном пассажирском судне „Куренаи Мару”, на котором была установлена наделка в форме развитого бульба. При Fr = 0,33 была достигнута проектная скорость на мощности, на 13 % меньшей, чем затрачиваемая до установки наделки. При наличии общей тенденции к увеличению скоростей транспортных судов этот эксперимент положил начало массовому строительству судов с бульбообразными носовыми образованиями. В настоящее время строится большое число таких судов, особенно танкеров и контейнеровозов.
Однако следует иметь в виду, что при балластном пробеге эффект от применения бульба обычно снижается и даже может быть отрицательным. Этот эффект уменьшается также при пониженных эксплуатационных скоростях. Поэтому в каждом отдельном случае решение о применении указанной формы обводов должно быть подтверждено модельным экспериментом.
§ 31. Сопротивление движению судна на мелководье и ограниченном фарватере
Морские транспортные суда часто длительное время движутся на акватории, ограниченной по глубине и ширине. Наиболее крупные морские порты находятся в устьях рек, поэтому подход к причалу осуществляется по каналам. При этом изменяется характер обтекания корпуса и возникают физические явления, знание которых особо важно для судоводителя.
Характеристиками движения судна на мелководье являются относительная глубина фарватера H/d и относительная скорость движения Fr = и/ V gH, где Н - глубина фарватера; d - осадка.
изменение глубины фарватера в стооону уменьшения влияет на всё составляющие полного сопротивления воды движения судов. В основном увеличивается волновое сопротивление, частично возрастает вязкостное. В результате влияния относительно близкого грунта (дна фарватера) возрастают скорости обтекания вдоль внешней границы пограничного слоя судна, а также перепады давления вдоль поверх-ности судная соответственно увеличиваются вязкостные составляющие
- 134-
сопротивления. При H/d > 4 изменение незначительно, однако при Тдо/^ПУ^Т^Гвязкостное сопротивление может увеличиться на 10—15 % по сравнению с его значением на глубокой воде.
^значительно более существенные изменения претерпевает картина волнообразования на мелководье, которая, как показывают наблюдет ния и теоретические исследования, определяется значением относи^ тельной скорости FrH = u/V gH. При скорости судна и < (0,35- 0,40)7 gH характер волнообразования на мелководье практически не отличается" от наблюдаемого в условиях неограниченной глубины (рис. 5.8). По мере дальнейшего увеличения скорости судна при данном отношении H/d длина поперечных волн, образуемых судном, а также угол раство-ра фронта расходящихся волн постепенно увеличиваются. Это приводит
Рис. 5.8. Характер волнообразования и сопротивление судна при его движении на мелководье
- 135-
к увеличению площади поверхности воды, покрытой волнами, и соответственно к увеличению волнового сопротивления. Наибольшего значения полное сопротивление движению судна достигает при так называемой критической скорости о ир = у/gH. когда носовая и кормовая системы судовых волн вырождаются в пне поперечные (одиночные) волны, пнижушиеся вместе с супном. При мяпыу значениях H/d эти волны, особенно носовая, имеют значительные амплитуды и на их образование затрачивается много энергии..
Одновременно с образованием одиночных (спутных) волн по мере приближения к критической скорости возникает дифферент судна на корму и возрастает его средняя осадка, что при малых H/d создает угрозу удара судна о дно водоема или даже временного „присоса’’ его к грунту. Примерный характер изменения дифферента и осадки судна иллюстрируют кривые, приведенные в нижней части рис. 5.8.
В закритической области одиночные носовая и кормовая волны разбиваются на веерообразные пучки расходящихся волн, обращенных выпуклостью наружу. При этом площадь сектора, охваченного волнами, убывает с ростом скорости, сопротивление воды уменьшается и примерно при и = 1,2 у/ gH становится равным сопротивлению на глубокой воде. При дальнейшем увеличении скорости сопротивление на мелководье оказывается меньше, чем на глубокой воде, что объясняется главным образом исчезновением поперечных волн, игравших основную роль в образовании волнового сопротивления. Движение судна вдоль мелководного канала сопровождается явлениями, аналогичными тем процессам, которые наблюдаются при движении на мелководье неограниченной ширины, однако при стеснении фарватера стенками канала эти явления выражаются более резко и имеют дополнительные особенности. При движении судна в канале наблюдается не одна критическая скорость, а некоторая область критических скоростей от о, до о?. которая сужается с увеличением ширины канала, и в пределе обе критические скорости совпадают с критической скр_-ростью на мелководье = / gH.jlpn относительно малых скоростях (и<и . ) в районе расположения~судна и на некотором расстоянии перед ним возникает течение воды в сторону, противоположную движению судна (встречный поток). Вследствие этого увеличивается скорости обтекания корпуса судна и вязкостные составляющие сопротивления воды, а также происходят дополнительные-потери энергии на трение встречного потока о ложе канала. Кроме jroro, уровень свободной поверхности жидкости около судна понижается и судно дифферентуется на корму. Это явление наиболее интенсйвно~при □ = и J и малых отношениях H/d, когда возникает опасность касания днищем ложа канала.
~ Достижению первой критической скорости и х сопутствует появление одиночных волн перед судном и за его кормой, движущихся с его скоростью и оказывающих вредное влияние на ложе канала и его берега. Сопротивление движению при этом резко возрастает. Поэтому скорость движения судов в каналах обычно ограничивают значением □ * (0,56— QD) V~gH '—————
- 136-
Увеличение скорости до второй критической и2 приводит к повышению уровня жидкости около судна и дальнейшему развитию спутных волн, но менее интенсивному повышению сопротивления, кото
рое достигает максимума несколько раньше, чем на мелководье при неограниченной ширине фарватера.
В закритической области (при и > и2) уровень воды около судна постепенно снижается до уровня невозмущенной свободной поверхности, дифферент судна постепенно уменьшается, а поперечные волны разбиваются на пучки расходящихся волн. Соответственно снижается и сопротивление движению судна до значения, существенно меньшего сопротивления на мелководном фарватере неограниченной ширины.
Значения критических скоростей о, ии,, а также скорости □„соответствующей минимальному сопротивлению движению, зависят от отношений Гдег/^к и H/d, формы сечения канала и обводов судна (Far 'площадь мидель-шпангоута; FK - площадь живого сечения канала)?
Если судно движется вблизи одной из стенок канала, сопротивление воды возрастает и появляется поперечная сипя, притягивающая судно к ближайшей стенке при и < 7 gH или отталкивающая его при и > У ?Н. ~
Из рис. 5.8 видно, что сопротивление воды движению судна в стесненных условиях Rh значительно превышает сопротивление на глубокой воде Roo, „горб” кривой сопротивления на мелководье существенно возвышается над кривой сопротивления на неограниченной глубине. Точка А, при которой начинает вторично возрастать сопротивление на стесненной акватории, соответствует второй критической
скорости.
Представленное краткое описание физических явлений, возникающих при движении судов на стесненной по глубине и ширине аква
тории, является схематизированным, но при этом достаточно строго объясняет физическую сущность явлений.
Стесненность фарватера влияет не только на значение сопротивле-
ния, но и на посадку судна, на его маневренные качества, поэтому важно выделить долю каждой со-
ставляющей сопротивления движению на мелководье, чтобы иметь возможность учесть их влияние на судовождение. Анализ исследований позволил построить график, характеризующий границы влияния мелко-водья на вязкостное и волновое сопротивления (рис. 5.91. Кпивяя 1 ограничивает область влияния мелководья на вязкостную составляющую сопротивления. Как видно из рис. 5.9, влияние мел-1<оводья начинает сказывать-ся при d/H > 0,33. Кривая 2
din
0,7
0,6
0,5
0,4
0,3
0,7.
0,1
О 0,2 0,4 Ц6 0,8 1,0 1,2 1,4 /,6 1,8 2,0 FrH
Рис. 5.9. Влияние мелководья на волновую и вязкостную составляющие сопротивления воды движению судна
- 137-
иллюстрирует влияние мелководья на волновую составляющую сопротивления. _
• При дифферентовании судна на корму дополнительно возрастает сопротивление формы. Положение точки отрыва пограничного слоя на судне при его движении с дифферентом вблизи дна становится нестабильным. Она может перемещаться вдоль кормовой оконечности судна в зависимости от множества факторов: неровности дна, небольшого волнения и т. п. Поэтому составляющая сопротивления формы может меняться в широких, но небольших по абсолютному значению пределах. Помимо этого при движении судна в канале может проявляться еще одна составляющая сопротивления, отсутствующая при движении даже на мелководье. Связана она с тем, что судно, двигаясь в канале ограниченного сечения, действует как поршень, толкая воду перед собой. Происходит образование уклона поверхности воДы, который вызван преодолением дополнительного сопротивления трения. Судно вынуждено двигаться против этого уклона, что приводит к возникновению так называемого сопротивления от уклона R?. Эта часть сопротивления может быть определена по формуле
«y = Atg?, (5.18)
где У - угол отклонения поверхности воды от горизонтали.
Следует помнить, что при движении на стесненном фарватере превалирует дополнительное волновое сопротивление, увеличение составляющих трения, формы и сопротивления уклона носит вторичный характер.
При движении судов в узкостях и каналах ограниченная ширина акватории влияет в основном на волновое сопротивление. Это является следствием отражения расходящихся волн от стенки канала и попадания отраженной волны на корпус судна или на волновую систему, образуемую судном, что вызывает сложное волновое перераспределение, влияющее на значение волнового сопротивления. Характерными параметрами, влияющими на волновое сопротивление в узкостяхГ являются b/В и Fjgc/FK (b- ширина канала: Ftb- - площадь мидель-шпангрута судна; Fy- площадь живого сечения кяналаТ. При движении в каналах и узкостях возникают явления, аналогичные движению на мелководье.
Особенность этого движения, которую важно учитывать при расхождении или обгоне судов на близком расстоянии, состоит в появлении в районе расположения судна, а также на некотором расстоянии перед ним дополнительного течения воды. При сравнительно невыср; ких скоростях Движения судна, не превосходящих-»,, скорость вызванного течения Au направлена в сторону, противоположную движению судна, и увеличивает среднюю скорость обтекания корпуса. При высоких скоростях движения, больших и2, возникает дополнительное течение со скоростью Ди, направленной в сторону движения судна, увеличивается скорость попутного потока. В результате изменяется вязкостное сопротивление и перераспределяется волнообразование
- 138-
вокруг судна. При и <о, значительно понижается, а при о >о, повышается средний уровень воды в районе судна, что изменяет посадку судна. При и < 0, судно часто ударяется о грунт, возрастают перепады пявлений. что приводит к росту амплитуды волн по сравнению с движением на мелкой воде при неограниченной ширине акватории.
" Если судно движется ближе к одной из стенок узкости~либо канала или расходится с другим судном в достаточной близости, то его обтекание и картина волнообразования перестают быть симметричными. Это приводит к повышению сопротивления в докритической и при-критической областях и вызывает возникновение поперечной силы при докритической скорости, притягивающей судно к ближайшей стенке или к расходящемуся судна. В закритической области происходит отталкивание судна. Капитан К. Дж. Пламер в работе „Маневрирование судов в узкостях” пишет: „В очень узком канале не следует спешить уступать дорогу встречному судну (чтобы не приблизиться к стенке канала), необходимо сделать это своевременно (там, где канал расширится) и не забыть, по меньшей мере, сбавить ход... На узком фарватере расхождение с встречным судном может закончиться рысканием и касанием противоположного берега (или сталкиванием). Эффект присасывания оказывает влияние и на встречное судно. Присасывание является следствием скорости судна или, что одно и то же, воздействием потока воды, обтекающего судно”. Цитаты из труда опытного английского капитана подтверждают важность учета при управлении судном описываемых особенностей движения судна.
§ 32. Изменение посадки судна при движении на мелководье
Причины изменения посадки судна при движении на ограниченной глубине рассмотрены в § 31. Изменяется как средняя осадка, так и дифферент судна, что может приводить к касанию грунта кормовой оконечностью. Судоводителю необходимо иметь четкое представление об изменении посадки судна и вовремя ограничивать скорость движения судна, не допуская превышения 80 % первой критической скорости.
Зная размеры судна, глубину фарватера Н и осадку dq,, можно определить величину изменения средней осадки Adq, и первую критическую скорость, при которой начинает резко возрастать сопротивление:
Д dcp = (k2 - l)[u2/(2g)] (5.19)
ок1 = У 2/(3k- * (5.20)
Здесь к - коэффициент, учитывающий влияние относительного удлинения судна:
L/B.......... 4 5 6 7 8 9 12
к............ 1,32 1,27 1,23 1,19 1,17 1,15 1,10
- 139-
Формулы (5.19) и (5.20) действительны для определения Ad^, и ик1 при Н > l,4d и дают достаточную для практики точность. Для меньших относительных глубин рекомендуется формула
Adcp = (fc2-D[u2/(2g)L (5.21)
которая позволяет вычислить наибольшую просадку при движении с критическими скоростями (un < ик1). При этом следует учитывать, что просадка кормы превышает fid^, на 15-20 %. При увеличении ско; рости свыше 0,8ик1 осадка кормы возрастает очень резко.
На рис. 5.10 показан характер изменения осадки судна носом и кормой в широком диапазоне скоростей движения. Как видно из рисунка, по мере приближения к критической скорости и = у gH происходит интенсивное всплытие носа и погружение кормы. По рис. 5.10 можно судить об изменении угла дифферента и средней осадки судна. При малых докритических скоростях судно изначально дифферентуется на нос, а при достижении скорости, соответствующей Ргд= 1, имеет максимальный дифферент на корму. Переход от погружения судна к всплытию совпадает с этой скоростью.
Прохождение судном мелководных участков особенно важно для крупнотоннажных морских судов в связи с возможным изменением посадки. С увеличением размеров судов протяженность мелководных морских путей значительно увеличивается. Движение круп-ных судов, особенно танкеров и балкеров, происходит с докритичес-кими скоростями, поэтому на мелководье крупные суда с бульбовыми образованиями получают дифферент на нос.
Для крупнотоннажных судов с полными обводами корпуса (Сь > 0,8) были проведены исследования по изучению влияния различных факторов на изменение посадки. Оценивалось влияние загрузки судна, начального дифферента, ускорения и торможения, наличия буксирных концов и т. п. Результаты испытаний, выполненных в Англии, показаны на рис. 5.11. Из рисунков видно, что судно дифферентуется на нос. Однако из этого не следует делать вывод, что выгоден начальный дифферент на корму, так как в этом случае возникает опасность повреждения движителя и руля.
На рис. 5.12 представлена номограмма изменения осадки носом. Аналогичные номограммы имеются для осадки кормой и средней осадки.
Величины просадки оконечностей могут достигать нескольких метров, и этот факт необходимо учитывать судоводителю при движении судна на мелководье. Поэтому плавание судов на мелководье должно быть связано с навигационным запасом глубины. Этому вопросу оказывается сейчас большое внимание.
Минимально допустимый клиренс воды под килем Кн предлагается определять в виде суммы навигационных запасов:
Кн > z0 + Zi + z2 + z3, (5.22)
где z0 - запас глубины на крен судна от ветра; zt - навигационный
- 140-
Дифферент нанос Погружение
Рис. 5.10. Влияние мелководья на посадку судна
— нос;----— корма
42
°0,06 Ц07 0,08 0,09 0,10 0,11 0,12 Fr
Рис. 5.11. Влияние ускорения и замедления движения на посадку крупнотоннажного танкера
1 — изменение осадки носом; 2 — изменение осадки кормой;- — при ус-
корении; — — — — при замедлении
- 141 -
Средний период волны, с
7 8 9 10 11 12 13 14 15
Рис. 5.12. Изменение осадки судна носом на нерегулярном волнении в условиях мелководья
запас глубины, зависящий от вида грунта; z2 - волновой запас глубины; z3 - скоростной запас глубины, учитывающий изменение осадки судна в зависимости от его скорости. Волновой запас глубины, регламентируемый НШС-82, приведен в табл. 5.2 для КУВ = 90°.
Скоростной запас глубины, регламентируемый НШС-82, следующий:
Скорость судна, уз....'...... 4 6 7 8 10 12
z3, м...................... 0,2 0,3 0,6 0,8 0,9 1,3
Скоростной запас глубины z3 для крупнотоннажных судов с бульбом определяют по просадке носом, а для остальных судов - по просадке кормой. Связь между этими просадками можно определить по формуле Ремиша
6dH = 90CgB26dK/£2. (5.23)
Таблица 5.2. Волновой запас глубины
Длина судна, м Высота волн 3 %-ной обеспеченности, м
1 2 3 4
100 0,2 0,6 1,1 1,7
150 0,1 0,4 0,8 1,3
200 0,1 0,3 0,7 1,1
250 0,0 0,3 0,6 1,0
- 142-
Значение клиренса Кн вычисляют с учетом изменения уровня воды ДНн и обледенения судна:
Кн = (Нн± ЬНн)~ (d-bd + t). (5.24)
Здесь Нц - навигационная глубина; d- осадка при р = 1,025 т/мэ; е - поправка на обледенение (вводится для Кц = Н для районов плавания, расположенных севернее 66'39' и равна 0,1).
§ 33. Дополнительные составляющие сопротивления
Сопротивление воздуха. Судно движется на границе раздела двух сред и испытывает не только сопротивление воды, но и сопротивление воздуха. Вследствие обтекания воздухом надводной части корпуса, включая надстройку, мачты и т. п., на этой поверхности судна возникают силы давления и касательные напряжения. Результирующей этих сил является аэродинамическая сила Ra. Если принять направление потока воздуха, имеющего скорость ивоэд, произвольным и составляющим с ДП угол то аэродинамическая сила Ra по отношению к ДП будет направлена под некоторым углом ₽t >а, (рис. 5.13, а).
Проекция вектора Ra на направление движения судна представляет силу сопротивления воздуха движению судна Явозд вязкостной природы. При попутном ветре сила йвозд совпадает с направлением движения судна (рис. 5.13, б). Другая поперечная составляющая Rap результирующей силы Ra, которая является проекцией этой силы в направлении, перпендикулярном скорости движения судна и, способствует возникновению силы дрейфа.
Направление и абсолютное значение вектора ивозд зависят от скорости движения судна й и скорости ветра иветр. При отсутствии ветра ивозд = а йвозд = ^а- При наличии ветра относительная скорость воздуха овозд определяется как геометрическая сумма скоростей о
Рис. 5.13. Схема сил на подводной части корпуса судна: а — при встречном ветре; б - при попутном ветре
- 143-
и °ветр с учетом угла между скоростью потока воздуха и ДП судна, который можно найти из выражения
sin otj — (uBeTp/uB03g) sin otj. (5.25)
Таким образом,
«возя = V °2 + °ветр + 2°иветр cos а2; (5.26)
^возд = — cos Рд. (5.27)
Вектор относительной скорости овОЗД относится к кажущемуся ветру. На сдаточных ходовых испытаниях ивозд измеряется чашечным анемометром на высоте, исключающей экранирующее влияние конструкций корпуса на результаты измерений.
Воздушное сопротивление при отсутствии ветра не превышает 3 % от полного сопротивления.
В практических расчетах воздушное сопротивление находят, используя результаты продувок моделей надводных частей корпусов судов, по формуле
^возя = ^(Рвозя/2)(0 ± ^ветр)2^х’ (5.28)
где С - безразмерный коэффициент сопротивления воздуха, определяемый с помощью испытаний моделей (при а = 0 для сухогрузных судов, танкеров, балкеров С = 0,7 + 1,2); рвозд - плотность воздуха; °ветр “ проекция скорости ветра на направление движения судна; Fx -площадь проекции надводной части судов на плоскость мидель-шпангоута.
При расчетах сопротивления среды движению судна воздушное сопротивление учитывают с помощью коэффицента воздушного сопротивления, который суммируется с другими коэффициентами сопротивления. Этот коэффициент равен
£возя = С(РВОзд/Р)(1 ± UBO3«/»)(Fx/«)- (5-29)
Поскольку для транспортных судов Fx/Q = 0,04- 0,08,
^возя = (0.03 4- 0,09)(1 ± ивозд/и)2 • 10'э. (5.30)
Коэффициент воздушного сопротивления определяют по данным испытаний моделей надводной части судов в аэродинамических трубах.
Учет воздушного сопротивления наиболее часто требуется производить при обработке результатов натурных, в том числе приемосдаточных, испытаний судов, которые, как правило, проводятся при незначительном ветре.
Сопротивление выступающих частей. Сопротивление выступающих частей, которое добавляется к сопротивлению так называемого
- 144-
(5.31)
голого корпуса, создают вертикальные и скуловые кили, выкружки и кронштейны гребных валов, рули, рудерпост, шахты лага и эхолота и т. п. Эти части корпуса погружены достаточно глубоко и служат источником дополнительного сопротивления вязкостной природы. Выступающие части, расположенные вдоль линии потока, обтекающего корпус, и увеличивающие смоченную поверхность (например, скуловые кили), создают дополнительное сопротивление трения, а остальные выступающие части - сопротивление формы.
Коэффициент сопротивления выступающих частей 5а может быть определен экспериментально путем сопоставления результатов испытаний модели голого корпуса и корпуса с выступающими частями по формуле
2КМ в ч 2ЛМ „ po=(Q + QB,4) po=Q
где 7?м. в. ч - сопротивление модели с выступающими частями; г к -сопротивление модели голого корпуса; QB ч _ смоченная поверхность выступающих частей.
Рекомендуется в расчетах ходкости принимать следующие значения коэффициента сопротивления выступающих частей: для одновинтовых судов = (0,05-0,15) • 10*э в зависимости от длины судна; для двухвинтовых судов 5а = (0,45-0,60) • 10-э в зависимости от количества рулей и коэффициента общей полноты судна.
Влияние гидрометеорологических факторов на сопротивление. В реальных условиях эксплуатации сопротивление судна возрастает из-за влияния ветра, волнения, течения. При этом потеря скорости является следствием совокупности следующих причин:
- увеличения воздушного сопротивления;
- появления дополнительного сопротивления, обусловленного килевой и вертикальной качкой;
- потери энергии на отражение (дифракцию) волн от корпуса судна;
- увеличения сопротивления вследствие движения судна с углом дрейфа, вызванного влиянием ветра и волнения;
- увеличения сопротивления за счет рыскания судна;
- увеличения ветрового течения;
- изменения характеристик корпуса, двигателя и движителя.
Рассматривая влияние волнения на сопротивление, можно отметить то, что максимум дополнительного сопротивления от морского волнения наблюдается в области резонанса килевой и вертикальной качки, причем килевая качка оказывает на сопротивление большее влияние, чем вертикальная, а также то, что из всех параметров судна наибольшее влияние на дополнительное сопротивление от морского волнения имеет его длина. Чем меньше судно, тем при меньшем волнении дополнительное сопротивление приобретает ощутимое значение. Максимальное влияние волнения наблюдается при отношений X/L = 0,8 - 1,2.
- 145-
Учет влияния ветра и волнения на сопротивление движению судна и его скорость затруднен вследствие сложности механизма этих явлений. К настоящему времени многими учеными (А. И. Вознесенским, Г. А. Фирсовым, В. Б. Липисом, Хавелоком, Герритсма и Бенкельманом и др.) выполнены теоретические и экспериментальные исследования по разработке методов расчета дополнительного сопротивления на волнении.
Так, В. Б. Липис предлагает среднее сопротивление судна в эксплуатации, т. е. при ветре и волнении, рассматривать как сумму:
й(о,/1з%. Q) = «o(o) + ^ветр (У, Лз %, q) + ^?волн(^ Л3 %, q). (5.32)
Здесь q - курсовой угол волн - угол между генеральным направлением распространения волн и курсом судна; Ro - сопротивление на тихой воде; RBOm ~ сопротивление на волнении, рассчитываемое по данным результатов испытаний моделей на регулярном волнении в опытовых бассейнах или по материалам обработки подобных систематических испытаний. Для этого сопротивления при произвольном курсовом угле В. Б. Липис предложил следующую формулу:
^волн = ^волн(^> h3 %), (5.33)
где Кд - функция влияния курсового угла волн (рис. 5.14); К^олн “ Д°* полнительное сопротивление судна на встречном волнении, которое может быть рассчитано по выражению
Рис. 5.14. График изменения коэффициента иа: а-Ип = 0,8; б-
- 146-
Здесь Ст - коэффициент, зависящий от главных размерений судна, периода килевой качки и скорости судна:
Ст = 113pg(L/100)3[(T«/10) Vg/d]3(10B6/L)3'2 х
X (10d/L)[l - 1,05(1 - Fr/0,29)2]; (5.35)
Р = 0,7-1,5 -характеристика степени развитости волнения; 0=0,7-для слабо развивающегося волнения; 0 = 1,5- для зыби; - параметр, характеризующий влияние скорости судна:
Kg = (0,17/Fr) {[1 + 10 • 2л/(т goJ]1'2 - 1 } + 0,19. (5.36)
В выражении (5.36) Тф - период килевой качки (см. § 49); <i)L = 2ng/L -частота волны при А. = L.
Дополнительное сопротивление .от действия ветра находят по формуле
Кветр = 0,25CoCq(100Fx /L)(L/100)3(Fr2 + Fr2 + 2FrB cos q), (5.37)
где Co - коэффициент сопротивления при встречном ветре (q = 0); Cq - коэффициент влияния курсового угла ветра и волн; FrB = = 0,7(10^3 % /L)1П - число Фруда при абсолютной средней скорости ветра. Коэффициенты Со и Cq определяют при аэродинамических продувках моделей. Для судна с грузом Со можно подсчитать по формуле Ишервуда
Со = 2 + 0,5Fy /В2 - 10Fy /L2 - 1,6С/(1ОВ). (5.38)
Здесь Fy - площадь продольной проекции надводной части корпуса судна. Приближенно Сч может быть найден из табл. 5.3.
Скорость судна в штормовых условиях снижается не только вследствие увеличения сопротивления из-за воздействия
Таблица 5.3. Значения коэффициента Cq
Тип судна 4, град.
0 45 90 135 180
Универсальное сухогрузное судно 1,00 1,15 0 -0,95 -0,90
Судно для навалочных грузов 1,00 1,10 0 -0,75 -0,90
Ролкер с контейнерами на палубе -1,00 0,60 0,30 -0,70 -1,00
Танкер 1,00 0,80 0 -0,65 -0,70
- 147-
метеорологических условий. Во избежание неблагоприятной качки, ударов волн о борт судна (слеминга), заливания носовой оконечности и палуб, потери остойчивости, особенно на попутном волнении, и других причин капитан вынужден преднамеренно снижать скорость судна (см. гл. 8).
§ 34. Особенности сопротивления воды движению судна с необычными формами и соотношениями главных размерений
Среди современных судов можно выделить суда двух характерных разновидностей, существенно отличающиеся от судов традиционных типов по форме и соотношениями главных размерений корпуса. К первой из них относятся особо крупные сравнительно тихоходные суда с полными обводами корпуса: супертанкеры, специализированные суда для перевозки навалочных грузов (балккэриеры) и т. п. Для этих судов характерны высокие значения коэффициента общей полноты (Cj, = 0,82 -5- 0,85) и невысокое значение числа Фруда (Fr = 0,15 * 0,17). Вторую разновидность составляют быстроходные суда с острыми обводами, приспособленные для выполнения ускоренных погрузочно-разгрузочных работ и предназначенные для перевозки большегрузных контейнеров,трейлеров, пакетов и т. п.
Особенности полных обводов корпуса обусловливают новую постам новку вопросов при изучении сопротивления движению. Опыт проек-тирования морских транспортных судов до недавнего времени в значительной мере основывался на результатах экспериментальных и теоретических исследований волнового сопротивления, поскольку вязкостное сопротивление предполагалось слабо изменяющимся в зависимости от формы корпуса. Экспериментальные исследования сопротивления судов с полными обводами позволили установить ряд Новых явлении. В частности, полученный в отдельных случаях выигрыш в снижении сопротивления при применении бульбовых или некоторых иных носовых обводов оказывается настолько большим, что не может быть объяснен снижением только волнового сопротивления, доля которого невелика, а должен связываться и с изменением вязкостного сопротивления.
При движении судов с полными обводами (Сь_= 0,75) появляется носовая подпорная волна, которая отличается от гравитационных поперечных волн у судов с обычными формами обводов и представляет собой местную деформацию свободной поверхности. Разрушаясь. носовая подпорная волна образует за собой вихревой след, на создание и поддержание которого требуется затрата энергии. Последнее обусловливает дополнительное увеличение сопротивления судна за 'йет' новой составляющей, получившей название сопротивление разрушенной волны (англ, wave breaking resistance). Величина этой составляющей может достигать 10-15 % полного сопротивления. _
Анализ распределения давления в носовой оконечности и сопротивлений, измеренных на моделях с различными параметрами носового
- 148-
заострения, позволил установить для полных судов с Сь > 0,82 прямую зависимость изменения сопротивления от угла входа ГВЛ в воду. Так, для танкеров при исходном корпусе с U-образными шпангоутами и углом входа ГВЛ ан/2 = 35* в случае уменьшения угла входа до ан/2 = 25* за счет удлинения носа на 1,3% длины судна достигается уменьшение мощности на 9 %.
Таким образом, достаточно действенным средством снижения сопротивления судов с коэффициентом полноты до Q, - 0,8 является сужение обводов в районе ГВЛ, которое можно осуществить в заданных размерениях путем заглубления части объемов корпуса с одновременным переносом их вперед за носовой перпендикуляр и образованием бульба таранного типа. Такие обводы, способствуя понижению носовой подпорной волны за счет уменьшения величины давления в районе форштевня, при правильном выборе формы бульба обеспечивают также снижение вязкостного сопротивления.
Однако заострение ватерлиний не является универсальным средством. При дальнейшем увеличении коэффициента полноты и уменьшения отношения L/В до величин, характерных для современных танкеров, эффективность заострения ГВЛ в сочетании с носовыми бульбами уменьшается. Это объясняется тем, что при большой полноте и соответственно малой длине носового заострения уменьшение углов входа ватерлинии приводит к резкому возрастанию кривизны носового плеча ватерлиний в районе их перехода в цилиндрическую вставку. В результате высота гребня подпорной волны в этом районе также возрастает и, несмотря на уменьшение носовой вопны у форштевня, интеграл давлений по носовой оконечности увеличивается. Помимо этого, вследствие сильного отклонения линий тока в носу, наблюдается интенсивное вихреобразование. Оба этих фактора влекут за собой рост сопротивления судна.
Отрыв пограничного слоя в корме до последнего времени рассматривался как единственный возможный источник вихреобразова-ния при обтекании корпуса. Такое представление существенно изменилось благодаря интенсивным исследованиям влияния формы обводов, в первую очередь носовых шпангоутов, на сопротивление крупнотоннажных судов. Эти исследования показали, что у моделей полных судов в месте перехода линий тока с борта на днище образуется пара свободных вихрей либо из-за чрезмерного отклонения местной скорости потока от направления движения судна, либо вследствие местного отрыва при обтекании скулы с малым радиусом закругления. Модельные испытания свидетельствуют о том, что такая форма образования вихрей оказывает существенное влияние на вязкостное сопротивление.
Для уменьшения потерь энергии на создание подпорной волны у судов с Сь > 0,82 прибегают к притуплению обводов носовой оконечности путем применения цилиндрических и таранно-конических форм носа. Такие обводы при больших давлениях в районе форштевня и уменьшенной протяженности по длине корпуса области их действия приводят к существенному снижению остаточного сопротивления.
- 149-
Рис. 5.15. Зависимость коэффициента сопротивления формы от коэффициента общей полноты
и числа Рейнольдса. В области
При этом, естественно, имеет место сопротивление разрушенной волны. Однако выдвинутые впереди форштевня цилиндрические или таранноконические бульбы уменьшают интенсивность фронта подпорной волны и тем самым снижают затраты энергии на образование вихревого следа.
Представление о характере влияния полноты обводов на вязкостное сопротивление дает рис. 5.15. На графике можно выделить три характерные области значений коэффициента Q,. В области 1 при умеренных значениях коэффициента (Q, < 0,8), обеспечивающих условия безотрывною обтекания, справедливы изложенные ранее зависимости вязкостного сопротивления от геометрии корпуса 11, при 0,8 < Сь < 0,88, проявляется
влияние разрушения подпорной волны, скуловых вихрей и отрыва пограничного слоя. Значения £ф при этом изменяются в широких пределах в зависимости от геометрии корпуса и режимов его обтекания. В области Ill кормовые обводы настолько полные, что положение
точки отрыва практически не изменяется.
Конструктивные особенности специализированных быстроходных судов (контейнеровозов, лихтеровозов и др.) обусловливают необходимость применения транцевых кормовых образований. На транцах крепятся конструкции, необходимые для выполнения специфических для этих судов операций (приема и выгрузки барж, лихтеров, колесной техники и т. п.), что вынуждает опускать транцы к воде. Острые сочленения транца и бортов при обтекании потоком кормы судна приводят к интенсивному вихреобразованию и соответственно к увеличению вязкостной составляющей сопротивления. Это обстоятельство вынуждает проектантов судов этих типов обращать особое внимание на размеры и формы транцевых кормовых образований, а также на их положение относительно воды.
§ 35. Экспериментальные методы определения сопротивления
Испытания в опытовых бассейнах. Основным методом определения сопротивления воды является испытание модели судна в опытовом бассейне, где производится также обработка форм обводов корпуса в целях получения минимального сопротивления, а следовательно, максимальной скорости судна при заданной мощности энергетической установки.
- 150-
Опытовый бассейн представляет собой заполненный водой канал, оборудованный устройствами для буксировки моделей и измерительной аппаратурой. Различают два вида опытовых бассейнов: динамометрического типа (с буксировочной тележкой) и гравитационного типа (с падающим грузом).
Опытовые бассейны динамометрического типа (рис. 5.16) иногда называют бассейнами типа Фруда, так как их прототипом явился бассейн, построенный У. Фрудом в 1872 г. Такие бассейны имеют сравнительно большие размеры: длину 100-1000 м, ширину 6-16 м и глубину 3-8м. Максимальная скорость тележки, буксирующей модель, составляет обычно от 6 до 15 м/с. Модель прикрепляется к тележке, движущейся по рельсам вдоль стенок бассейна, через динамометр, замеряющий ее сопротивление.
Еще задолго до исследований Фруда (приблизительно в 1775 г.) во Франции был построен первый бассейн гравитационного типа. В бассейнах этого типа модель приводится в движение весом свободно падающего груза при помощи бесконечного троса, охватывающего два блока, расположенных по концам канала (рис. 5.17). Сопротивление модели определяется массой груза, а скорость движения замеряется на специальном барабане, связанном с буксировочным тросом. Гравитационные бассейны имеют следующие размеры: длину 10-50 м, ширину 1,5-6,0 м, глубину 1,0-3,5 м. В настоящее время бассейны гравитационного типа встречаются очень редко.
Модели судов обычно изготовляют из дерева или парафина, в том числе и на деревянной основе, обрабатывая их поверхность на
Рис. 5.16. Поперечный разрез опытового бассейна динамометрического типа
1 — буксировочная тележка; 2 — модель судна
Рис. 5.17. Продольный разрез опытового бассейна гравитационного типа
1 — падающи^у груз; 2 — ведущий трос; 3 — ролик устройства для записи скорости модели; 4 — ведущие блоки; 5 — буксирный трос; 6 — груз для натяжения буксирного троса
- 151 -
специальных копировально-фрезерных станках и обеспечивая полное соответствие обводов модели теоретическому чертежу судна. Масштаб модели выбирают в зависимости от размерений натурного судна, размеров бассейна и скорости буксировки с таким расчетом, чтобы дно и стенки бассейна оказывали пренебрежимо малое влияние на результаты испытаний.
Гипотеза Фруда. При обтекании судна и модели потоком реальной жидкости, обладающей свойствами весомости и вязкости, полное динамическое подобие может быть обеспечено только при одновременном соблюдении законов подобия Фруда и Рейнольдса, т. е. при одновременном удовлетворении равенств (4.40) и (4.43). Определяя из этих равенств отношение скоростей им/ин, приравнивая найденные выражения и полагая gM =gH, получаем
чм/чн = ' (5.39)
т. е. коэффициент вязкости жидкости, в которой должна испытываться модель, при точном соблюдении условий динамометрического подобия должен быть в I3'2 раза меньше коэффициента вязкости чн забортной воды, что неосуществимо. С другой стороны, при равенстве коэффициентов вязкости необходимо принять размеры и скорость модели соответственно равными размерам и скорости судна, т. е. модельные испытания теряют свой смысл, становясь обычными натурными испытаниями. Если же выполнить только закон подобия Рейнольдса, то скорость модели пришлось бы принять даже большей, чем скорость судна, пропорционально масштабу модели I = LH /Ьы.
Встретившись с таким затруднением, У. Фруд в 1869 г. выдвинул гипотезу, которая явилась чрезвычайно ценным вкладом в экспериментальную гидродинамику судна. Существо ее заключалось в предположении, что полное сопротивление можно рассматривать как сумму двух независимых составляющих, одна из которых обусловлена только свойством вязкости, а другая - свойством весомости жидкости, т. е.
R-ZjReJ+^Fr). (5.40)
Фруд принял допущение, что первая составляющая в правой части выражения является сопротивлением трения Rf, которое можно считать равным сопротивлению пластины, имеющей длину, смоченную поверхность и скорость, равными соответственно длине, смоченной поверхности и скорости судна (или, по современной терминологии, эквивалентной пластины), и вычислять по формуле вида (5.11). Модельные испытания, согласно гипотезе Фруда, были необходимы только для определения сопротивления Rr=R - Rf, названного позднее остаточным сопротивлением, и пересчёта его на натуру по предложенному им закону подобия для явлений, обусловленных свойством весомости жидкости.
Из рассмотрения составляющих полного сопротивления очевидны нестрогости гипотезы Фруда н вытекающие из нее погрешности
- 152-
пересчета результатов испытаний моделей на натуру. В первую очередь такой нестрогостью является допущение о зависимости остаточного сопротивления только от числа Фруда, т. е. от свойства весомости жидкости, поскольку в остаточное сопротивление входит также и сопротивление формы, определяемое свойством вязкости жидкости. До последнего времени это допущение приводило лишь к незначительной погрешности при определении полного сопротивления, так как доля сопротивления формы в полном сопротивлении была относительно невелика. Однако для современных крупных судов с большой полнотой обводов корпуса эта погрешность уже ощутима.
В целом схема Фруда оказалась весьма плодотворной и до настоящего времени она продолжает оставаться физической и методологической основой анализа данных модельных испытаний.
Порядок испытаний модели и пересчета их результатов на натуру.
Испытания моделей и пересчет их результатов на натурное судно производят, как правило, в следующей последовательности.
1. Испытывают модель-голого корпуса (без выступающих частей). Замеряют скорость модели им и ее полное сопротивление Ru.
2. Определяют коэффициент полного сопротивления модели
£м = ^M/(pUM/2)QM.
3. Подсчитывают число Рейнольдса для модели и натурного судна (Ие)м = 1)м^м/^м> (1^е)н =
4. Находят коэффициенты трения эквивалентной пластины для модели и натурного судна
(&/о)м=ЛКе)м;(?/о)н=ЛПе)н.
5. Определяют коэффициент остаточного сопротивления модели (£г)м = £м “ (^/о)м-
При равенстве чисел Фруда этот коэффициент равен коэффициенту остаточного сопротивления судна:
(£г)м = (£г)н-
6. Вычисляют коэффициент полного сопротивления судна
£н = (£/о)н + (£г)н + £п + %>а'
7. Определяют полное (буксировочное) сопротивление судна
Рин
*Н = £н (^ + ^В. ч)н’
2
- 153-
Скорость судна ин> соответствующую скорости модели им, находят из соотношения, вытекающего из равенства чисел Фруда:
□н = V /LM = им Г1 М V Н ' м м •
Систематические испытания серий моделей. Для суждения о влиянии отдельных параметров на изменение сопротивления и накопления материалов, позволяющих определять сопротивление судов без проведения испытаний каждой модели в опытовом бассейне, проводят так называемые систематические испытания серий моделей. В этом случае испытывается группа моделей, отличающихся друг от друга планомерно изменяющимся элементом формы или главных размерений, в то время как остальные параметры остаются неизменными. Систематические испытания серий моделей дают исходный материал для эмпирических методов расчета буксировочного сопротивления или буксировочной мощности. Эмпирические методы расчета сопротивления используют только в начальной стадии проектирования судов, при эксплуатации последних и во всех случаях, когда необходимо решать задачи, связанные с ходкостью судна, но при этом нет возможности провести модельные испытания. Степень точности эмпирических методов зависит от соответствия форм обводов рассматриваемого судна исходным формам обводов, заложенных в данную систематическую серию.
Сопротивление судов с относительно малыми значениями отношения L/В и коэффициента полноты Cf> буксиров, промысловых судов, ледоколов (на чистой воде), как правило, определяют по графикам удельного остаточного сопротивления
Rr/D=f (Ft). (5.41)
Так, для буксиров имеются подобные графики Кена, ОИИМФа, для промысловых судов - графики Аллана и др.
Наименее точным, но весьма простым способом предварительной оценки буксировочной мощности судна является способ адмиралтейских коэффициентов, согласно которому буксировочную мощность судна определяют по формуле:
EPS = иэЛ2,3/С, (5.42)
где □ - скорость судна; Д - водоизмещение судна; С - адмиралтейский коэффициент, принимаемый (при условии равенства чисел Фруда) по данным судна-прототипа, имеющего близкие соотношения главных размерений.
Контрольные вопросы
1. Каковы физические особенности составляющих полного сопротивления судна?
- 154-
2. Как влияет мелководье на систему корабельных волн; на сопротивление воды?
3. В чем состоит гипотеза Фруда?
Глава 6
СУДОВЫЕ ДВИЖИТЕЛИ
§ 36. Классификация движителей
Для приведения судна в движение с заданной скоростью к нему необходимо приложить усилие, равное по величине и противоположное по направлению силе сопротивления среды (воды и воздуха). Такая постоянно действующая на судно сила может быть создана при помощи различных продолжительно работающих источников энергии: мускулов человека, ветра и разного рода двигателей. Для преобразования энергии двигателей в энергию поступательного движения судна служат специальные механизмы, называемые движителями. Чем выше эффективность судового движителя, тем совершеннее происходит процесс преобразования затрачиваемой энергии, тем больше скорость судна, тем меньше расход топлива при той же мощности энергетической установки.
Движители разделяют на лопастные и водометные. Применяют лопастные движители четырех типов: гребное весло, гребное колесо, гребной винт, крыльчатый движитель.
Гребное весло - наиболее примитивный тип движителя. Гребное колесо является полупогруженным движителем, у которого рабочим органом служат лопасти (плицы). Находясь часть своего пути в воде, плицы сообщают ей ускорения, воспринимая реактивную силу упора.
Гребной винт представляет собой конструкцию в виде ступицы с размещенными на ней лопастями, которые расположены радиально на равных угловых расстояниях друг от друга. Гребные винты изготовляют цельнолитыми или со съемными лопастями. Различают также винты фиксированного шага (ВФШ) (рис. 6.1, а) и регулируемого шага (ВРШ) (рис. 6.1, б), а также соосные гребные винты (рис. 6.2).
Гребные винты располагаются обычно в корме и только у некоторых специальных типов судов (ледоколов и паромов челночного типа) - в носу. Простота конструкции и передачи крутящего момента на движитель, малое влияние волнения на его гидродинамическую эффективность и ряд других преимуществ гребных винтов явились причинами наибольшего распространения их среди движителей морских судов.
- 155-
- 156-
Рис. 6.4. Схема сил при движении судна с крыльчатым движителем: а — передний ход; б —поворот налево; в — поворот направо; г — движение лагом при двух крыльчатых движителях
N — центр управления; О — центр движителя
- 157-
Крыльчатый движитель представляет собой диск, установленный заподлицо с плоской частью подзора кормы (рис. 6.3). В воде находятся только рабочие детали движителя - крылообразные вертикальные лопасти, число которых составляет 4- 8. Если к хордам профилей крыльев провести нормали, то они все пересекутся в единой точке N, расположенной эксцентрично относительно центра диска и называемой центром управления. При вращении диска лопасти устанавливаются в определенное положение относительно потока, совершая по отношению к диску колебательные движения вокруг вертикальной оси. Закон этого колебательного движения выбирается таким, чтобы каждая лопасть за время полного оборота диска создавала силу, направленную всегда в сторону движения судна. Оси всех лопастей совершают движение по циклоиде, и каждая лопасть обтекается циклоидальным (криволинейным) потоком. Это достигается перемещением центра управления лопастями N вдоль диаметра движителя. Меняя положение точки N, можно создавать силы различной величины.
Перемещением центра управления в стороны от основного диаметра при неизменном направлении вращения можно получить любые направления силы упора движителя. Таким образом, без реверсирования движителя можно изменить направление движения судна на обратное, а также объединить в одном устройстве функции движителя и рулевого органа. Изменение положения центра управления N относительно центра диска О обычно осуществляется дистанционно с мостика.
На рис. 6.4 приведены схемы сил, развиваемых на крыльчатом движителе при изменении эксцентриситета и обеспечивающих движение судна прямо и повороты налево и направо (рис. 6.4, а-в).
При установке на судно двух крыльчатых движителей оно получает возможность двигаться лагом (рис. 6.4, г). Благодаря этому свойству крыльчатые движители устанавливают на портовых буксирах, паромах, плавучих кранах и других судах, для которых характерны высокие маневренные качества. Крыльчатые движители часто используют в качестве подруливающих устройств.
Водометным движителем называют размещенный внутри корпуса комплекс, состоящий из водопроточных труб (или каналов) и насосов, которые засасывают воду из приемного отверстия в днище судна и выбрасывают ее через отливной водопровод. Реакция струи, отбрасываемой движителем с повышенной скоростью, является силой, движущей судно. Водометные движители широко используют в речных условиях, особенно на мелководье. В морских условиях их применяют в качестве движителей подруливающих устройств.
§37. Геометрия гребного винта
Основными элементами гребного винта являются ступица, представляющая собой тело вращения, и укрепленные на ней лопасти (рис. 6.5). Расстояние R от оси винта до конца лопасти (точки, наиболее
- 158-
Рис. 6.5. Конструктивные элементы гребного винта (а); формы контуров лопастей гребных винтов (б)
1 — лопвсть; 2 — засасывающая поверхность; 3 — ступица; 4 — нагнетательная поверх* ность; 5 — входящая кромка; 6 — выходящая кромка; 7 — край лопасти; 8 — корень лопас* ти; 1 — симметричный, 11 — саблевидный, 111 — ледокольный, IV — усеченные контуры лопастей
удаленной от оси) - радиус винта, его удвоенное значение равно диаметру винта DB = 2R. Боковую кромку лопасти, обращенную в сторону вращения гребного винта при переднем ходе судна, называют входящей, противоположную ей кромку - выходящей. Поверхность лопасти, обращенная в корму судна и воспринимающая реакцию отбрасываемой воды при переднем ходе судна, именуют нагнетательной, противоположную ей (обращенную к корпусу судна) - засасывающей поверхностью. Форма лопасти характеризуется ее контуром, который образуется пересечением нагнетающей и засасывающей поверхностей. Число лопастей винта z = 2-8 в зависимости от типа судна. \
В основе геометрии лопастей гребного винта лежит винтовая поверхность. Рассмотрим, как она образуется.
Возьмем горизонтальный отрезок прямой линии = г и будем вращать его равномерно вокруг вертикальной оси 00, одновременно перемещая его вверх с постоянной скоростью (рис. 6.6). В результате такого сложного движения отрезок BBt опишет в пространстве винтовую поверхность. Если теперь вокруг оси 00 построить цилиндрическую поверхность радиусом г, то точка Bt опишет на этой поверхности винтовую линию. Отрезок BBt называют образующей винтовой поверхности, а путь, проходимый любой точкой образующей BBt в аксиальном направлении за один полный оборот вокруг оси 00, -геометрическим шагом винтовой линии Нв. Если BBt не доходит до оси 00, то при'одновременном поступательном движении она образует винтовую поверхность в виде винтовой ленты (рис. 6.7). Винтовая лента ограничена двумя цилиндрическими поверхностями, из которых внутреннюю можно рассматривать как стержень, несущий на себе винтовую, ленту.
Разрежем цилиндрическую поверхность с прочерченной на ней винтовой линией EiB1D1 по вертикальной образующей E1D1 и развернем ее на плоскость. Полученная развертка будет иметь вид
- 159-
Рис. 6.6. Развертка винтовой поверх- Рис. 6.7. Образование винтовой ленты ности
прямоугольника ACDE, длина основания которого равна длине окружности 2л г, а высота - шагу винтовой линии flg (см. рис. 6.6). Если вращение и подъем образующей ВВг происходит с равномерной скоростью, то винтовая линия при этом превратится в гипотенузу AD прямоугольного треугольника ADE, называемого шаговым треугольником. Угол Ф при основании треугольника именуют шаговым углом. Этот угол определяют из соотношения
tg Ф =Яв/(2лг).
<6.1)
Отношение шага винтовой поверхности, положенной в основу образо
вания лопасти, к диаметру винта называют шаговым отношением Hb/Db-
При равномерных поступательном и вращательном движениях любой точки образующей получается винтовая линия постоянного шага, у которой шаговый угол сохраняет постоянное значение. При равно
мерных вращательном и поступательном движениях образующей любой формы с произвольным углом наклона ее к оси цилиндра получается винтовая поверхность постоянного шага.
Правильную винтовую поверхность имеет только нагнетательная сторона лопасти. Поскольку лопасть гребного винта воспринимает гидродинамические силы, равные десяткам килоньютонов, она должна обладать достаточной прочностью, т. е.
Рис. 6.8. Профили сечений гребного винта: а — сегментный; б — авиационный; е - клиновидный
- 160-
быть телесной. Поэтому засасывающей стороне придают неправильную винтовую поверхность исходя из необходимости обеспечить прочность лопасти и придать удобообтекаемую форму лопастным сечениям.
Рассекая телесную лопасть соосным с винтом цилиндром радиусом г и развертывая контур полученного сечения на плоскость, получаем профиль сечения лопасти на данном радиусе. В зависимости от типа и условий работы винта применяют сегментные, авиационные и клиновидные профили (рис. 6.8). У сегментных профилей наибольшая толщина приходится на середину хорды профиля, у авиационных она смещена к передней кромке в район трети хо^ды профиля. Сегментные и авиационные профили могут быть плосковыпуклыми, двояковыпуклыми и выпукло-вогнутыми. В зависимости от направления вращения образующей лопастей гребные винты могут быть правыми и левыми.
Отношение площади лопастей гребного винта к площади диска, ометаемого гребным винтом, называют дисковым отношением
eB=Fp/F. (6.2)
Здесь Fp - площадь лопастей гребного винта; F = nD£/4 - площадь диска круга, ометаемого гребным винтом.
Основными геометрическими характеристиками гребных виитов морских судов являются диаметр гребного винта DB, дисковое отношение 0В, шаговое отношение Нв /DB, относительный диаметр ступицы Do/Pb.
§ 38. Кинематические характеристики гребного винта
Представим себе, что гребной винт или лопастной, элемент винта вращается не в воде, а в твердой среде. Тогда за один оборот он пройдет в аксиальном направлении путь, равный геометрическому шагу. В воде расстояние, проходимое винтом за один полный оборот, будет меньше шага (рис. 6.9). Путь, проходимый гребным винтом в воде в осевом направлении за время, соответствующее одному обороту, называют поступью гребного винта hp = ир /п. В теории гребных винтов в качестве важнейшей кинематической характеристики используют относительную поступь kp = up/(DBn). Скорость движения гребного винта в твердой среде в осевом направлении была бы Нвп, скорость этого же движения в воде будет меньше. Разность Нвп-ир именуют скольжением гребного винта St. Важным кинематическим параметром гребного винта является относительное скольжение
S = (Нвп - ор)/(Нвп) = 1 - ир/(Нвп). (6.3)
Величина ир - это скорость движения гребного винта в жидкости в аксиальном направлении, не равная скорости судна относительно воды.
- 161 -
Рис. 6.9. Треугольники пути, пройденного гребным винтом за один оборот (о), и его скоростей (б) ,
Оба кинематических параметра связаны между собой. Как следует из выражения (6.3),
S = 1 - ир/(Нвп) = 1 - opZ^/[n(HB Д^)] = 1 - Хр/(НВ /^). (6.4)
§ 39. Основы лопастной теории и гидродинамические характеристики гребного винта
Для того чтобы гребной винт мог приводить в движение судно, необходимо передать ему от главного двигателя через гребной вал, вращающийся с частотой п, некоторый крутящий момент М. При проходе через диск винта массы воды воспринимают воздействие момента М и, следовательно, получают приращение момента количества движения относительно оси винта, поэтому поток жидкости за винтом закручивается в сторону его вращения, т. е. в нем кроме вызванных осевых скоростей на бесконечности за винтом и ыа/2 в диске винта (в соответствии с теоремой Фруда - Финстервальдера) возникают также окружные вызванные скорости ы( на бесконечности.
Из теории гребного винта известна связь между осевыми и окружными вызванными скоростями
Wt(wr - “t/2) = ыа(ир + ыд/2), (6.5)
где ь)г = 2пгл - окружная скорость, обусловленная вращением гребного винта. В соответствии с формулой (6.5) вызванная идеальным гребным винтом окружная скорость в плоскости его диска равна половине вызванной скорости за винтом и направлена в сторону, противоположную окружной скорости потока.
Рассмотрим многоугольник скоростей потока, натекающего на кольцевой элемент лопасти винта толщиной dr, образованный
- 162-
сечениями винта двумя соосными с ним цилиндрами радиусами г и г + dr (рис. 6.10). Очевидно, что этот элемент можно рассматривать как элемент крыла, расположенный в потоке жидкости под некоторым углом атаки а,. Двумя взаимно перпендикулярными сторонами этого многоугольника являются окружная скорость ыг = 2пгп, обусловленная вращением гребного винта, и осевая скорость ир, вызванная поступательным движением элемента лопасти в жидкости в направлении движения судна.
Угол ₽ = arctg (uD/(0r) называют углом поступи. Поскольку углы АОВ и CDB равны, то угол f, определится формулой
tg Pi = ut/(Ja = (up + ь)а/2)/(ыг - (0t/2). (6.6)
Этот угол именуют углом индуктивной поступи. Он характеризует режим работы рассматриваемого элемента гребного винта с учетом индуктивных потерь, являющихся следствием появления вызванных скоростей Ь)о и (0f.
Направление вектора результирующей скорости и, и хорды элемента лопасти определяют три угла (см. рис. 6.10): угол атаки элемента лопасти а,, кромочный угол ак, угол нулевой подъемной силы а0.
В соответствии с теорией крыла на рассматриваемом элементе лопасти возникнут сила профильного сопротивления dX, направленная
Рис. 6.10. Многоугольник скоростей и сил для сечения лопасти гребного винта
- 163-
вдоль вектора скорости и„ и перпендикулярная к ней подъемная сила dY. Проецируя эти силы на ось Ох, совпадающую с направлением окружной скорости элемента лопасти, и перпендикулярную к ней ось Оу, совпадающую с направлением поступательной скорости винта, получаем соответственно элементарные упор и касательную силу:
dP = dPy - dPx = dY, cos p, - dX sin p, = dY cos ₽, (1 - e tg p,); (6-7)
dT = dTy + dTx = dY sin p, + dX cos p, = dY sin p, (1 + e ctg pj, (6.8)
где £ - обратное качество элемента лопасти.
Произведение элементарной касательной силы dT на радиус г цилиндрической поверхности, отсекающей рассматриваемый элемент лопасти, определит момент сопротивления его вращения
dMp = rdT = dYsin p, (1 + e ctg p,)r. (6.9)
Соответственно мощность, затрачиваемая на работу элемента лопасти, равна
dNp = MdMp = dYsin p, (1 + e ctg PJwr. (6.10)
Подставляя в формулы (6.7) и (6.8) выражение для подъемной силы крыла dY - Cy(pu2/2)dF, заменяя в нем площадь dF площадью элемента лопасти и интегрируя полученные выражения с учетом числа лопастей в пределах от радиуса ступицы гст до внешнего радиуса винта R, получаем выражения для полных упора Р и момента сопротивления Мр гребного винта
R
f PU?
P = Z 1 Cybcos Pi; (1 - Е tg PJdr; (6-11)
Гстя
г Pul2
Mp = ? j ----Cyb sin р; (1 + e ctg Pi) rdr. (6.12)
rCT
Ддя преодоления момента Mp к гребному винту должен быть приложен равный по величине и обратный по направлению крутящий момент, развиваемый главным двигателем. Равенство этих моментов обусловливает вращение гребного винта с постоянной частотой.
При вращении гребного винта на его лопастях, как на крыльях, наряду с момёнтом возникает сила упора, приложенная вдоль оси вала к упорному подшипнику, жестко связанному с корпусом судна. Эта сила, уравновешивая силу сопротивления среды, придает судну поступательное движение.
Упор Р и момент Мр являются гидродинамическими характеристиками гребного винта, выраженными в размерной форме. Однако
- 164-
в теории и практике проектирования и эксплуатации гребных винтов, как правило, используют безразмерные гидродинамические характеристики, для определения которых интегральные выражения (6.11) и (6.12) представляют в безразмерной форме, приводя к ней все члены подынтегральных выражений:
1
Г z b / и,- \2 / г \
P=pD£n2 \ ~ Су— ------------- cos₽, (l- etgp,)d— ; (6.13)
J. 4 У DB \ DBn I \ R I
r„/R
i
/ Г 2 b 1 I); \2 / Г \ / Г\
Mp = pD%n?. I — Cv— --------- 'sin ₽j(l + e ctg ₽ ) — \d — . (6.14)
J 8 DB \DBn] \R I \R/
rCT/J?
Интеграл в формуле (6.13) обозначают через Кх и называют коэффициентом упора гребного винта, а интеграл в формуле (6.14) обозначают черезК2 и именуют коэффициентом момента винта. С учетом этих обозначений формулы (6.13) и (6.14) примут вид
P = K1PD^n2;
Mp=K2pD*n2.
(6.13а)
(6.14а)
Здесь
1
f z b I и,। \2 / г \
К1= \ —Су— ---------------1 cos ₽! (1 - е tg ₽;)d — ; (6.15)
J 4 DB \ DBn I \ R I -
r„/R
i
f z b I \2 I r\ / r\
K2 = I —Cy — |------------1 sinpJl+ectgPi))—1 dl—I. (6.16)
J 8 \Z^ fl I \ RI \ RI
r„/R
Мощность, необходимая для вращения гребного винта, равна
Np = Мры = 2nK2pn3DB . (6.17)
КПД гребного винта, вращающегося в свободной воде, равен отношению полезной мощности, отдаваемой винтом, к мощности, затраченной на его вращение:
pUp _ K1pri2DBup Op kp
Пп s “ “ “ • (о.Io)
Mpb) K2pn2£§2nn K2 2nn£)^ K2 2n
- 165-
Рис. 6.11. Кривые действия гребного
винта в свободной воде
Рнс. 6.12. Специальные режимы работы гребного винта: а — швартовный; б -винт — движитель; в - нулевого упора; г - нулевой подъемной силы; д - в зоне Параля; е — гидротурбины
- 166-
Кривые зависимостей безразмерных гидродинамических характеристик Пр, К2 от относительной поступи называют кривыми действия гребного винта в свободной воде (рис. 6.11). Для геометрически подобных гребных винтов и их моделей при соответствующих состояниях поверхностей лопастей и ступиц кривые действия в свободной воде тождественны.
§ 40. Специальные режимы работы гребных винтов
Различные режимы работы гребных винтов можно проследить по многоугольнику скоростей (см. рис. 6.10) и кривым действия винта (см. рис. 6.11). Если гребной винт работает в швартовном режиме, т. е. скорость судна и относительная поступь Хр равны нулю, то угол атаки элементов лопастей будет максимальным, что приведет для данного конкретного винта к наибольшим значениям коэффициентов упора и момента при Пр = 0 (рис. 6.12). Швартовный режим соответствует случаям посадки судна на мель, остановке при движении во льдах и т. п.
Представим себе судно с работающим гребным винтом, буксируемое другим судном, причем скорость буксировки больше, чем была бы скорость буксируемого судна, если бы оно двигалось своим ходом. Предположим далее, что скорость буксировки увеличивается постепенно, т. е. при постоянных п и Ов увеличивается относительная поступь Хр, а следовательно, и скорость ир. С их возрастанием увеличиваются углы индуктивной поступи элементов лопастей на всех радиусах и уменьшаются их углы атаки. Но из теории крыла известно, что уменьшение угла атаки приводит к уменьшению коэффицента подъемной силы Су, к снижению коэффициентов упора К. и момента К2.
При некотором значении ир проекции сил dX и dY (см. рис. 6.12) на ось Оу окажутся равными по абсолютной величине и упор гребного винта примет нулевое значение = 0). Относительную поступь Хр, соответствующую такому режиму движения, называют поступью нулевого упора. КПД винта при этом обращается в нуль. Абсолютную поступь hp, отвечающую относительной поступи нулевого упора Лр|, именуют шагом нулевого упора или гидродинамическим шагом винта НВ1 В пределах относительной поступи от Хр = 0 до Хр = Хр1, т. е. от = 0 до ир = Hg 1 /п> гребной винт является движителем, развивая положительный упор и имея отличающийся от нуля КПД при вращении с частотой п и затрате мощности на преодоление положительного момента Мр (см. рис. 6.12, б).
Дальнейшее увеличение Хр приводит к режиму, при котором а, = 0, т. е. направление результирующей скорости потока и, совпадает с направлением нулевой подъемной силы. Соответствующую этому режиму относительную поступь А.р0 называют поступью нулевой подъемной силы, которой отвечает шаг нулевой подъемной силы > Нв. В этом режиме момент Мр остается положительным, но упор приобретает
- 167-
отрицательное значение и притормаживает судно. При дальнейшем увеличении Ар наступает режим, при котором угол атаки а, принимает небольшое отрицательное значение, подъемная сила dY также становится отрицательной, а проекции на ось Ох сил dX и dY оказываются равными по абсолютной величине и момент Мр обращается в нуль. Относительную поступь А.р = Хр2, соответствующую этому режиму, называют поступью нулевого момента, а абсолютную поступь hP2 - шагом нулевого момента НВ2>НВ1>НВ. Работая в режиме нулевого момента, гребной вийт свободно вращается, но создает отрицательный упор и притормаживает судно. Таким образом, в пределах относительной поступи от А.р до Хр = Хр2 гребной винт уже не является движителем, он как бы „парализован” или находится в так называемой зоне Параля (см. рис. 6.11, 6.12, д).
Дальнейшее увеличение относительной поступи за предел Хр2 и увеличение (по абсолютной величине) отрицательного угла атаки приводит к тому, что не только упор Р, но и момент Мр оказываются отрицательными, т. е. гребной винт из движителя превращается в гидротурбину (см. рис. 6.12, е).
§ 41. Диаграммы для расчета гребных винтов
Диаграммы для расчета гребных винтов позволяют решать многие эксплуатационные задачи, в том числе задачи, необходимые судоводителю. В частности, с помощью этих диаграмм определяют достижимую скорость судна, упор гребного винта, строят паспортные диаграммы.
Диаграммы для расчета гребных винтов являются результатом систематических испытаний моделей гребных винтов в опытовых бассейнах или специальных лабораториях - в кавитационных трубах. Эти испытания позволяют установить взаимосвязь всех геометрических характеристик (Нв ZDB; 0; z; D0/DB и др.) и их влияние на эффективность работы гребных винтов.
Испытания моделей гребных винтов заключаются в измерении упора Р и момента Мр гребного винта при различных частотах вращения п и различной скорости поступательного движения ир. Результаты испытаний обрабатываются в виде кривых действия гребного винта (см. рис. 6.11). Серии моделей винтов обычно варьируются по Нв 0; z при сохранении контура лопастей, формы лопастных сечений, их относительной толщины и относительного диаметра ступицы. Кривые действия гребного винта позволяют решать проектные и эксплуатационные задачи, причем обычно достаточно располагать кривыми КЛ = f(kp) и Пр =/(А.р) либо К2 = /(Хр) и лр =/(А.р) в зависимости от того, какая задача решается.
В мировой практике для этих целей широко используют диаграммы, построенные на основе кривых действия гребных винтов. Оригинальная форма таких диаграмм, получившая признание в нашей стране, предложена Э. Э. Папмелем. Существо ее заключается в том,
- 168 -
Таблица 6.1. Расчетные коэффициенты диаграммы Папмеля
Задано Расчетные коэффициенты Искомые величины
Up, Ов> р К j урр/Р= Кр /Kt - коэффициент упора - диаметра П, Пр. HB/DB
Up, п, Р - (ир/ рп) -J q/P~ — коэффициент упора - частоты вращения DB, Пр г
Up, K'd = DBup = V pUp/Np = 7 75Л^(2лКа) - коэффи-циент мощности - диаметра П, Пр. HB/DB
Up, П, Np к; = (Up/ Л) V PUp/Np = V 75Х=)/(2лК2 - коэффициент мощности - частоты вращения *>в- Пн, HB/DB
что на кривых действия серийных винтов соединяются точки с одинаковым значением КПД на линиях Кх = f(kp) и К2 = /(Хр). В результате получаются две диаграммы - одна для решения задач, когда выбирается двигатель, другая - обратная, когда его характеристики известны и для них с помощью диаграммы рассчитываются элементы винта и скорость судна. По обеим диаграммам легко определить оптимальные диаметр винта или частоту его вращения, скорость судна или упор винта, его шаговое отношение, потребляемую мощность двигателя и т. д. Если диаметр или частота вращения не известны, то такую задачу можно решить методом последовательных приближёний. Для облегчения решений задач с помощью диаграмм Папмелем был предложен ряд расчетных коэффициентов, позволяющих в зависимости от условия задания решать прикладные задачи по ходкости
Рис. 6.13. Схема построения диаграммы Папмеля (а) и ее общий вид (б)
- 169-
судна. Упомянутые условия и расчетные коэффициенты, с помощью которых они решаются, сведены в табл. 6.1.
На рис. 6.13 представлены схема построения диаграммы и ее общий вид. Схема построена в координатах К1~кр, очевидно, что вторая половина диаграммы - в координатах К2-кр- будет аналогичной.
§ 42. Взаимодействие гребных винтов с корпусом судна
Возмущения в районе расположения гребного винта, вызываемые корпусом, могут существенно изменить условия обтекания его элементов, однако гребной винт также изменяет окружающий его поток, а следовательно, и условия обтекания корпуса. Следовательно, гидродинамические характеристики одного и того же гребного винта, работающего в свободной воде и за корпусом судна, будут различными, а сопротивление воды движению судна в присутствии работающего гребного винта будет отличаться от его буксировочного сопротивления.
Строгое изучение гидродинамического взаимодействия между гребным винтом и корпусом является весьма сложной теоретической задачей, поэтому обычно используют изложенный ниже искусственный прием: гребной винт условно рассматривают как изолированный, но работающий в потоке, измененном корпусом, а корпус судна рассматривают соответственно как буксируемый в потоке, измененном работой гребного винта.
Попутный поток. При движении судно увлекает за собой близлежащие частицы воды, формируя так называемый попутный поток, направленный в сторону движения судна (рис. 6.14). Попутный поток, создаваемый корпусом судна и работающим за ним гребным винтом, называют эффективным попутным потоком. Его экспериментальное и тем более теоретическое определения сопряжены с большими трудностями. Поэтому обычно оценивают номинальный попутный поток, возникающий в месте расположения гребного винта у судна, буксируемого без винта. Номинальный попутный поток несколько отличается от эффективного, но в инженерных расчетах этим отличием, как правило, пренебрегают.
Попутный поток за корпусом судна неравномерен по величине и направлению, его скорости изменяются по радиусу и по окружности. Например, интенсивность попутного потока достигает максимума за ахтерштевнем, кронштейном гребного вала или кромкой руля, а минимума - по линиям, расположенным примерно по нормали к ахтер-штевню.
Рис. 6.14. Попутный поток за корпусом судна
- 170-
При определении характеристик гребного винта в целом практически принято учитывать только осевой попутный поток, в результате возникновения которого скорость воды в месте расположения диска винта (при обращенном движении) будет меньше скорости невозмущенного потока далеко перед судном, т. е. скорость гребного винта относительно набегающего на него потока будет меньше скорости судна.
Средняя скорость попутного потока и в диске винта равна разности между скоростью судна и и осевой скоростью потока ир в диске винта:
и = и-ир. (6.19)
Отношение средней скорости попутного потока к скорости судна
ф = и/и = (и - ир)/и (6.20)
называют коэффициентом попутного потока.
Из формулы (6.20) нетрудно получить следующее выражение для скорости потока в диске винта:
tjp = u(l —ф). (6.21)
Неравномерность попутного потока в месте расположения гребного винта объясняется главным образом неоднородностью его структуры, т. е. тем, что он состоит из нескольких относительно независимых составляющих, каждая из которых обладает своим характерным распределением скоростей. *
Одной из таких составляющих является потенциальный попутный поток, обусловленный полем скоростей вокруг изолированного корпуса, движущегося в идеальной жидкости при отсутствии трения и волнообразования. В этом случае судно при своем движении вытесняет частицы воды, которые в носу движутся вперед и в стороны, а в корме - вперед и внутрь, заполняя пустоту, непрерывно образующуюся за кормой.
Вторая составляющая попутного потока за кормой судна имеет вязкостную природу и обусловлена силами трения. Поэтому она называется попутным потоком трения.
Величина потенциального попутного потока зависит также от волнообразования в корме судна. Поэтому третьей относительно небольшой по величине составляющей попутного потока, которую следует рассматривать как поправку к потенциальной составляющей, является' волновой попутный поток, причем если позади диска гребного винта располагается вершина кормовой поперечной волны, то эта надбавка положительна, если же в районе диска располагается подошва волны, то она отрицательна.
Таким образом, коэффициент номинального осевого попутного потока можно представить в виде суммы:
- 171 -
Ф = ФР + Ф/+АФР> (6.22)
где фр - коэффициент потенциального^попутного потока; ф/ - коэффициент попутного потока трения; Дфр - поправка к коэффициенту потенциального попутного потока, обусловленная волнообразованием. Коэффициент попутного потока меняется с изменением осадки судна и увеличивается с ростом шероховатости корпуса.
Для определения коэффициента попутного потока были получены эмпирические зависимости путем обработки результатов испытаний моделей различных судов в опытовых бассейнах. В частности, для одновинтовых транспортных судов может быть использована следующая формула Шенхерра:
ф =0,10 + 4,5
ХФВ/Ь (7- 6х)(2,8- 1,8<р)
DB
--(-IM
(6.23)
1
2
Е
d
где X - коэффициент вертикальной. полноты судна; Е - высота оси гребного вала над основной линией; - коэффициент, равный 0,3 для судов с обычной кормой и 0,5-0,6 для судов с подрезанным, дейдвудом; - угол наклона образующей лопасти.
Для двухвинтовых судов с выкружками гребных валов и вращением винтов наружу
3/2
ф =2б5(1 - Q,) + 2cos2-------0,02.
(6.34)
Здесь Сь - коэффициент общей полноты судна; /2 - угол наклона выкружек к горизонту.
Для двухвинтовых судов с кронштейнами гребных валов
Ф = 2Cg(l - СЬ) + 0,04. (6.25)
Коэффициент попутного потока одновинтового судна можно найти также с помощью диаграмм Харвальда по формуле
ф = ф0 + Дф, + Дф2, (6.26)
где Фо - коэффициент попутного потока, определяемый_по диаграмме в зависимости от Сь и отношения L/В (рис. 6.15, а), Дф, - поправка, учитывающая влияние формы кормовых образований судна (рис. 6.15, б); Дф2 - поправка, учитывающая влияние отношения диаметра винта к длине судна (рис. 6.15, в).
Коэффициент попутного потока двухвинтового судна может быть найден по рис. 6.15, г без введения поправок Дф1 и Дф2.
Неравномерность попутного потока оказывает влияние на схему расчета геометрических и гидродинамических характеристик гребного
- 172-
Рис. 6.15. Диаграммы Харвальда для определения коэффициента попутного потока морских судов
1 — суда с U-образными шпангоутами; П — суда с V-образными шпангоутами
Рис. 6.16. Формирование силы засасывания на корпусе судна
А — эпюра давления при отсутствии гребного винта; В — изменение давления вследствие работы винта; С — зона давления при работающем гребном винте
- 173-
винта и весьма существенно влияет на эксплуатационные свойства гребного винта и судна в целом.
Засасывание. Как правило, гребные винты располагаются в кормовой оконечности судна (исключением являются некоторые морские паромы и ледоколы). Работая за корпусом судна, гребной винт подсасывает воду и увеличивает скорость обтекания кормовой оконечности судна. При этом в соответствии с законом Бернулли понижается давление во всей зоне, охваченной подсасывающим действием винта, что увеличивает сопротивление формы (рис. 6.16). Кроме того, повышение скорости обтекания кормовой оконечности приводит к возрастанию сопротивления трения. Заштрихованная на рис. 6.16 область, соответствует уменьшению давления в корме от работы гребного винта.
В результате этих явлений появляется дополнительная сила ДР, действующая на корпус и увеличивающая сопротивление воды движению судна. Эту силу принято называть силой засасывания. Таким образом, часть упора гребного винта, именуемая обычно полезной тягой Ре, затрачивается на преодоление сопротивления R, а остальная часть упора идет на преодоление силы засасывания, т. е.
Р-Ре + ДР. (6.27)
Отношение силы засасывания к упору гребного винта
/ = ДР/Р = (Р-Ре)/Р (6.28)
называют коэффициентом' засасывания. Из формулы (6.28) нетрудно получить следующее выражение для полезной тяги гребного винта:
Ре=Р(1-0- (6-29)
Коэффициент полезной тяги, определяемый выражением
Ке=Ре/(рп2^), ' (6.30)
связан с коэффициентом упора KL зависимостью
K^-KJl-r). (6.31)
При проектировании новых судов значения коэффициента засасывания определяют экспериментальным путем. Приближенно они могут быть найдены по линейной зависимости от коэффициента попутного потока в соответствии с эмпирической формулой
Г = Кф. (6.32)
Причем для одновальных судов с рулями, снабженными пропульсивными насадками или контрпропеллерами, К = 0,5- 0,7; с обычными обтекаемыми рулями К = 0,7-0,9; с пластинчатыми рулями К = 0,9-1,05.
- 174-
Для двухвинтовых судов могут быть рекомендованы следующие формулы: с выкружками гребных валов
1 = 0,25ф +0,14;
(6.33)
с кронштейнами гребных валов
t = 0,70ф + 0,06.
(6.34)
Пропульсивный коэффициент. Совершенство гидродинамического комплекса движитель - корпус судна принято характеризовать так называемым пропульсивным коэффициентом и, который определяется отношением буксировочной мощности судна EPS = Ru = Peu к мощности Np -Мры, затрачиваемой на вращение гребного винта:
4*EPS/Np=Pe»/(Mpu).
(6.35)
Здесь ы - угловая скорость вращения винта. Подставляя в формулу (6.35) уже известные выражения Ре = Р(1 ~ 0 и о = ир/(1 - ф) и учитывая коэффициентом г = i, /i2 влияние неравномерности потока в диске винта, получаем
П =Рор(1 - 0»/[Мрь)(1 - Ф)] = ПрПк,
(6.36)
где Лк = (1 ~ 0’7(1 - ф) - коэффициент влияния корпуса.
§ 43. Кавитация гребных винтов
Кавитацией называют явление парообразования и выделения воздуха и газов, обусловленное понижением давления в жидкости до давления насыщенных паров. Появлению кавитации способствуют растворенные в воде воздух и газы, которые выделяются при уменьшении давления. Пары жидкости и выделившиеся из нее воздух и газы образуют полости, называемые кавитационными кавернами.
Природу развития кавитации можно проследить на примере профиля крыла, обтекаемого под углом атаки а потоком со скоростью и0 и давлением р0 на бесконечности (рис. 6.17). На засасывающей стороне крыла возникает разрежение, а на нагнетательной - повышенное давление. Для линии тока,
- 175-
проходящей через точку В на засасывающей поверхности, уравнение Бернулли запишется так:
Ро + Р»о/2 = Pi + Ри?/2. (6.37)
где р, и и , - давление и скорость в рассматриваемой точке В. Уравнение (6.37) может быть преобразовано к виду
(Ро " Pi)/(Puq/2) = и?/ио - 1- (6.38)
Величину
&-(Рв-Рж)/(р»г/2) (6.39)
называют коэффициентом разрежения.
Кавитационные характеристики крыла оценивают числом кавитации
и = (Р - Pd)/(pu о/2),
(6.40)
где Pd - давление насыщенных паров при данной температуре. Условием возникновения кавитации в определенной точке является равенство числа кавитации и коэффициенту разрежения £.
На рис. 6.18 представлена эпюра коэффициентов разрежения на поверхности профиля крыла. Пусть в точке А на засасывающей поверхности £ =и, т. е. возникает кавитация. Поскольку коэффициент £ не может быть больше и, то в области В-В' появится кавитационная каверна. С ростом скорости каверна будет увеличиваться. До опреде
ленного предела увеличения размеров каверны площадь эпюры не
меняется, а только перераспределяется - срезается верхушка эпюры
и увеличивается разрежение в хвостовой части профиля. Так как
Рис. 6.18. Эпюра давления на профиле лопасти
площадь эпюры характеризует подъемную силу, то, как следует из рис. 6; 18, до какого-то момента развития кавитации коэффициент подъемной силы Су не меняется. При увеличении скорости потока, когда каверна охватывает всю засасывающую поверхность, коэффициент Су уменьшается, т. е. снижаются гидродинамические характеристики крыла. Коэффициент профильного сопротивления от числа кавитации зависит в меньшей степени.
Представим себе, что на засасывающей стороне лопастей гребного винта имеет место разрежение, определяемое углом атаки и скоростью потока, натекающего на элемент лопасти. При условии £ = и не входящей
кромке засасывающей стороны возникает кавитация. С увеличением скорости потока
- 176-
Рис. 6.19. Снижение упора гребного винта и скорости судна при второй стадии кави- ’ /
тации /
кавитационная каверна начинает рас- у?
пространяться от края лопастей к сере- У-
дине и от входящих кромок к выходя- '
щим. Кавитационные каверны, охваты- л' /'
вающие часть засасывающей поверхнос-ти, при переходе лопасти из области по- / /
вышенного разрежения в область более / р / высокого давления трансформируются. _____________
Происходит конденсация паров и так q п
называемое захлопывание (замыкание) пузырьков каверны. При замыкании каждого пузырька внутри него возникают в течение миллисекунд и даже микросекунд высокие давления. Вследствие малой площади пузырьков и высоких давлений импульсного характера в материале винта возникают напряжения, во много раз превосходящие его предел текучести. Происходит выкол материала, появляются трещины, интенсифицируется процесс коррозии. Такое разрушение материала гребного винта называют кавитационной эрозией.
Наблюдают две стадии кавитации. Для первой стадии, когда кавитационная каверна распространяется лишь на части засасывающей поверхности и коэффициенты подъемной силы Су и профильного сопротивления Сх не меняются, наиболее серьезным для практики обстоятельством является кавитационная эрозия. При второй стадии кавитации, когда каверны охватывают всю засасывающую поверхность, уменьшается коэффициент подъемной силы, а следовательно, и коэффициенты упора и момента гребного винта, причем снижается КПД винта. Падение момента влечет за собой повышение частоты вращения, что уменьшает поступь и еще больше снижает КПД винта. Иллюстрация снижения скорости судна и упора гребного винта, кавитирующего во второй стадии, приведена на рис. 6.19.
Гребные винты транспортных судов могут работать в условиях первой стадии кавитации или вблизи нее. Кавитационная эрозия, как правило, наблюдается на периферийной части засасывающей стороны, где лопастные сечения толще, т. е. больше разрежение.
При проектировании гребного винта стремятся избежать явления кавитации, для чего прежде всего уменьшают пик разрежения на засасывающей поверхности, не снижая упора гребного винта. При заданном диаметре винта это достигается рациональным подбором дискового отношения, исключающим кавитацию. Увеличение дискового отношения 0 снижает удельное давление на лопасть, уменьшает относительную толщину профиля и, следовательно, разрежение на его засасывающей стороне, а также угол атаки а,.п.
- 177-
§44. Особенности управления судов с ВФШ и ВРЙ
Современные суда оборудуют как ВФШ, так и ВРШ.
ВФШ установлены на большинстве морских транспортных судов. Лопасти ВФШ монолитны со ступицей. Шаговое отношение ВФШ постоянно для каждого радиуса лопастных сечений. Это отношение выбирают применительно к наиболее характерному режиму движения судна. Для транспортных и пассажирских судов таким режимом является развитие судном со свежеокрашенным корпусом и с проектной осадкой наибольшей скорости при полной мощности главных двигателей и номинальной скорости вращения гребного винта в определенной метеорологической обстановке. При проектировании ВФШ шаговое отношение несколько уменьшают, чтобы в эксплуатации гребной винт не перегружал главный двигатель.
Для указанных условий, принятых в качестве исходных при проектировании, принимают шаговое отношение гребного ВФШ, обеспечивающее равенство моментов:
МеЦв=Мр. (6.41)
Здесь Пв ~ КПД валопровода; Ме - эффективный крутящий момент двигателя; Мр - момент сопротивления гребного винта.
Если эксплуатационные условия не отвечают проектным, то нарушается равенство моментов (6.41) и нарушается соответствие ВФШ главному двигателю. Такие ситуации возникают при ухудшении состояния обшивки корпуса судна вследствие коррозии и обрастания, изменении шероховатости лопастей гребного винта, ветре и волнении, увеличении осадки, плавании на мелководье и др. Все эти явления вызывают увеличение момента сопротивления гребного винта, падение частоты вращения, повышение давления и температуры, характеризующих работу двигателя. При росте момента Мр двигателю тяжело работать в тепловом отношении, поэтому ВФШ, перегружающий двигатель, называют гидродинамически тяжелым.
В процессе эксплуатации судна с меньшей, чем проектная, осадкой при попутном волнении и при незначительной качке момент сопротивления гребного винта может снизиться, а частота вращения гребного винта - повыситься. В этом случае регулятор на двигателе уменьшит подачу топлива для достижения номинальной частоты вращения двигателя. Снизятся температуры и давления в двигателе, ему будет в тепловом отношении работать легче. Режим такой работы двигателя обеспечивает гидродинамически легкий гребной винт.
Из изложенного следует, что при ВФШ только в одном-единствен-ном режиме эксплуатации судна, соответствующем проектному, двигатель будет обеспечивать номинальные или заданные значения мощности, частоты вращения, расхода топлива.
Учитывая, что большинство судов оборудовано дистанционным автоматическим управлением двигателя с мостика (ДАУ), судоводитель должен принимать во внимание эти обстоятельства, так как при
- 178-
„тяжелом” гребном винте в деталях двигателя возникают повышенные тепловые напряжения, которые приводят к большому износу и даже выходу из строя важных деталей цилиндропоршневой группы двигателей. ДАУ позволяет судоводителю с мостика изменять режимы работы двигателя для обеспечения различных скоростей судна и изменения направления движения судна.
При ВФШ изменение направления хода судна (вперед, назад) обеспечивается реверсированием двигателя и соответственно изменением направления вращения ВФШ. Экономические режимы движения судна могут быть реализованы в этом случае только путем снижения частоты вращения двигателя, но при этом гребной винт, выбранный из условия обеспечения полного хода судна, становится неоптимальным.
ВРШ (рис. 6.20) представляет собой конструкцию, в которой лопасти могут дистанционно, с мостика, устанавливаться на различные шаги, обеспечивающие движение судна от полного переднего хода до остановки и движение полным задним ходом без изменения частоты вращения главного двигателя и без его реверсирования.
ВРШ состоят из следующих основных конструктивных элементов: съемных лопастей, ступицы, валопровода, механизма изменения шага (МИШ), силовой части системы управления, дистанционной части системы управления с мостика. В ступице расположен механизм
Рис. 6.20. Конструктивная схема ВРШ
1 — лопасть; 2 — валопровод; 3 —механизм изменения шага; 4 — пульт управления на мостике; 5 — система управления с мостика
- 179-
поворота и изменения шага. В комплект ВРШ входит гребной вал с системой трубопроводов.
ВРШ обладают следующими преимуществами по сравнению с ВФШ:
- обеспечивают полную мощность двигателя при широком диапазоне изменения скоростей, что важно при движении судна во льдах, в сложных метеорологических условиях, при различных осадках и различных водоизмещениях, при буксировке других судов и т. п.;
- обеспечивают любое значение скорости от наибольшего переднего до наибольшего заднего хода, без реверсирования двигателя и изменения направления и частоты вращения гребного винта;
- реализуют экономический ход судна по заданной оптимальной программе перекладки лопастей, что предусмотрено специальной блокировкой систем управления ВРШ и двигателя, обеспечивающей наилучшую комбинацию шага и частоты вращения.
Помимо перечисленных ВРШ позволяют получить и другие менее принципиальные, но важные преимущества по сравнению с ВФШ, облегчающие управление судном с мостика. К ним относятся:
- существенное сокращение времени и расстояния, проходимого судном при экстренной остановке и реверсе;
- обеспечение только дистанционного управления с мостика;
- применение повышенного уровня автоматизации управления системой судно- двигатель- ВРШ;
- повышение маневренных качеств судна, в частности облегчение швартовок, исключение рывков при буксировке и т. п.;
- облегчение пуска двигателей, который осуществляется при положении лопастей ВРШ в нулевом шаге; при этом уменьшается число пусков и увеличивается моторесурс двигателя;
- возможность судна, оборудованного ВРШ, продолжительное время стоять на месте в ожидании лоцмана, для ориентации в обстановке, не останавливая вращения гребных винтов и прогревая двигатели; это обеспечивается установкой шага лопастей в нулевое положение.
К недостаткам ВРШ относятся следующие:
- КПД ВРШ на расчетном режиме за счет повышения диаметра ступицы ниже КПД ВФШ на 1-2 %;
- масса ВРШ существенно превышает массу ВФШ;
- сложность конструкции и дороговизна.
Следует отметить, что повышенная стоимость ВРШ окупается в первые один-два года эксплуатации судна за счет основных преимуществ ВРШ.
Остановимся на некоторых специфических свойствах ВРШ, знание которых поможет усвоить особенности реверсирования и управляемости судов, оборудованных этими движителями.
В результате поворота лопастей ВРШ относительно их проектного положения и соответственно проектного шага изменяются формы профилей лопастных сечений на данном радиусе, а шаг лопасти меняется неравномерно по радиусу. Перераспределение шага и искажение профилей лопастей объясняется тем, что при установочном проектном
- 180-
шаге профили лопастей образовывались сечением лопасти цилиндром, соосным с винтом, а образующиеся винтовые поверхности при изготовлении лопасти вращались относительно оси ступицы.
В то же время лопасти ВРШ для изменения шага разворачиваются относительно оси фланца, а не оси ступицы, ориентировочно которой формировалась правильная винтовая поверхность при изготовлении лопастей. Поэтому для ВРШ различают установочное шаговое отношение после разворота лопастей и конструктивное шаговое отношение, предусмотренное при его проектировании и изготовлении. Установочное шаговое отношение фиксируется обычно на r/R = 0,6Л, так как при повороте лопасти на некоторый угол шаговое отношение на различных лопастных сечениях вдоль лопасти изменяется неравномерно. При некоторых углах поворота корневые сечения будут иметь положительные шаговые отношения, а периферийные и средние - отрицательные. Эти особенности ВРШ необходимо учитывать при проектировании и управлении судном.
При решении многих судоводительских задач используют так называемую паспортную диаграмму судна (рис. 6.21).
В верхней части паспортной диаграммы наносят кривые 1 зависимости полезной тяги гребного винта при постоянной частоте вращения и кривую 2 буксировочного сопротивления чистого корпуса. Кроме того, здесь же могут наноситься кривые 3 полного сопротивления судна с учетом обрастания и старения корпуса, при движении в усло-вих ветра и волнения, при перемене осадки или с учетом сопротивления какого-либо буксируемого объекта.
В нижней части диаграммы строят кривые 4 мощности, потребляемой гребным винтом при постоянных значениях частоты его вращения, кривая 5 потребной мощности двигателя и ограничительная характеристика двигателя 6, называемая кривой располагаемой мощности.
Кривая 5 получается простым графическим построением - переносом из верхней части диаграммы точек пересечения кривых 1 с одной из кривых 3, соответствующей данным условиям, в нижнюю часть диаграммы на одну из кривых 4 в соответствии с частотой вращения винта (при постоянной скорости судна).
Кривая 6 с достаточной для судоводительских задач точностью
- 181 -
может быть построена из условия постоянства вращающего момента двигателя при различных оборотах, т. е. из пропорции вида
Npfai, л1)/л1 = Np(u2, п2)/л2. (6.42)
Если точки кривой располагаемой мощности графически перенести в верхнюю часть паспортной диаграммы на соответствующие кривые полезной тяги, то получится кривая 7, называемая кривой предельной располагаемой тяги, которая используется при решении задач о буксировке судном каких-либо объектов. Вычитая из ординат этой кривой ординаты кривой сопротивления судна в соответствующих условиях плавания, можно получить кривую 8 располагаемой тяги на гаке буксира:
Рб=Ре1-Я. (6.43)
Паспортная диаграмма позволяет, в частности, решать задачи о средней потере скорости судна в тех или иных условиях плавания. Для этого необходимо сравнить две точки в верхней части паспортной диаграммы на кривой 8 при пересечении ее с кривой 2 и с кривой, соответствующей определенным эксплуатационным условиям, например с одной из кривых 3. Абсциссы этих точек дадут значения интересующих нас скоростей судна в этих условиях.
Контрольные вопросы
1. В чем отличие шага гребного винта от поступи?
2. Какова физическая природа силы засасывания?
3. Из чего складывается упор гребного винта?
4. Как пользоваться паспортной диаграммой судна?
5. Почему происходит „утяжеление” гребного винта?
Глава 7
КАЧКА И МОРЕХОДНОСТЬ СУДНА НА ВОЛНЕНИИ
§45. Основные сведения о качке судна
Плавание судна в условиях тихой воды составляет лишь часть времени его эксплуатации в море. Основная доля времени эксплуатации (около 70 %) приходится на плавание в штормовых условиях, которые судно может выдержать, только обладая многими мореходными качествами. Обеспечение этих качеств зависит от правильного проектирования судна и от правильной эксплуатации его судовым
- 182-
экипажем. Невыполнение определенных правил и недостаточное знание свойств и возможностей судна может привести к гибели экипажа и судна, к потере грузов.
Среди мореходных качеств, проявляемых в условиях штормового плавания, важное место занимает подверженность судна различным видам качки. Качка судна - это комплекс различных видов колебательного движения судна, которые оно может совершать на морском волнении и на тихой воде. Интенсивность этих колебаний зависит не только от интенсивности волнения, но и от свойств самого судна, способа его загрузки, характера избранного способа управления судном в море.
Колебательное движение судна является -причиной многих, как правило, отрицательных явлений, сопровождающих качку, которые могут иметь нежелательные и опасные последствия. Среди этих явлений особое значение имеют следующие:
- образование ускорений и перегрузок, различных в разных районах судна, которые в свою очередь являются причиной морской болезни, смещения недостаточно закрепленных или сыпучих грузов, дополнительных напряжений в конструктивных элементах корпуса и надстроек;
- изменение характеристик остойчивости по сравнению с тихой водой и образование опасных ситуаций вплоть до опрокидывания судна;
- заливание палуб, опасное для перевозимых грузов и прочности судна;
- ухудшение ходкости судна вследствие увеличения сопротивления и изменения условий работы гребного винта и двигателя;
- ухудшение в некоторых случаях управляемости вплоть до ее полной утраты с опасными последствиями.
Следует отметить, что качка судов представляет собой сложный динамический процесс, чувствительный к небольшим изменениям состояния судна и режима его движения. Пренебрежение сущностью этого явления недопустимо. Безопасная эксплуатация судна требует глубокого изучения вопросов, связанных с поведением его на волнении.
С позиций теории судна качка представляет собой периодическое движение судна как твердого тела с известными характеристиками, окруженного жидкостью, участвующей в движении судна и порождающей качку. Судно рассматривают как свободное инерционное тело с шестью степенями свободы, движение которого разделяют на отдельные составляющие, связанные с каждой из этих степеней свободы. Поскольку колебательное движение судно может совершать не только на волнении, но и на тихой воде, в изучении качки выделяют два необходимых этапа: качка судна на тихой воде и качка на волнении.
Под мореходностью судна на волнении понимают всю совокупность явлений, наблюдаемых при движении судна в условиях взволнованного моря, среди которых качка является основным и выступает в качестве фактора, определяющего многие другие явления, сопутствующие ей.
- 183-
Некоторые из этих явлений имеют важное самостоятельное значение. В качестве таковых выступает, например, динамическая остойчивость судна на волнении, особенно на попутном. Ходкость судна на волнении представляет сложную комплексную проблему, в которую входят изучение дополнительного сопротивления корпуса в условиях волнения и качки, характера работы гребного винта в волновом потоке жидкости и при качке, а также исследование взаимодействия корпуса, движителя и энергетической установки как единой динамической системы. Слеминг - это сильные вертикальные удары носовой оконечности при движении судна на встречном волнении, обусловленные случайными совпадениями фазы колебаний носа судна и подходящей волны и приводящие к резкому повышению гидродинамических давлений на днище судна. Слеминг - комплексная проблема мореходности и прочности судна.
Цель изучения качки судна и сопутствующих явлений состоит в разработке средств и методов прогнозирования характеристик качки, ускорений и усилий, действующих на судно и перевозимые грузы, уже на стадии проектирования судна, а также в разработке рекомендаций судоводителю по правильной и безопасной эксплуатации судна в условиях штормового плавания.
§ 46. Виды и параметры качки судна. Системы координат
Качка может наблюдаться как в условиях поступательного движения судна с постоянной скоростью, так и при отсутствии хода. С точки зрения теоретической механики качка судна является предметом изучения динамики свободного твердого тела, окруженного жидкостью и находящегося под воздействием морского волнения (или без него). Прежде чем заниматься динамикой колебательного движения судна, необходимо задаться параметрами, характеризующими положение судна как свободного твердого тела в произвольный момент времени относительно его среднего положения. С этой целью введем несколько систем координат (рис. 7.1). Одна из них Gxyz с началом в ЦТ судна G - подвижная, связанная с судном система, служащая для описания геометрии корпуса судна и распределения масс внутри него. Вторая система координат - также подвижная система, но лежащая в плоскости поверхности воды в ее невозмущенном состоянии. Ее вводят для отсчета отклонений судна от положения равновесия. Третья система - неподвижная в пространстве,
также лежащая на поверхности воды система, служащая для описания направления движения судна и направления распространения волнения.
Положение судна в каждый момент времени (отклоненное от положения равновесия) описывается шестью независимыми параметрами в соответствии с шестью степенями свободы. Отклонения ЦТ судна -точки G - характеризуются координатами £g(0> 4g(0 и £g(0 в системе
- 184-
Повороты судна относительно трех осей дают еще три угла: угол крена 0, угол дифферента ф и угол рыскания хр- Известная система углов Эйлера для задач качки является неудобной, поэтому А. Н. Крыловым и С. Н. Благовещенским предложена более удобная корабельная система углов (см. рис. 7.1). Все три угла в общем случае качки судна также являются функциями времени: 0(0. Ф(0 и хР(0- Направление распространения волн определяется курсовым углом х между вектором скорости распространения волн с и направлением, обратным направлению движения.
В процессе качки судна все шесть указанных величин могут меняться со временем. Соответствующее движение судна, при котором происходит изменение только одного из параметров, носит определенное название (табл. 7.1).
Как будет показано ниже, при движении судна в соответствии с 3, 4 и 5-й степенями свободы возникает качка, причем не только на волнении, но и на тихой воде, а для 1, 2 и 6-й степеней свободы колебательное движение возможно только на волнении, так как на тихой воде отсутствуют силы и моменты, стремящиеся вернуть отклоненное
Таблица 7.1. Виды движений судна при качке
Координата Название вида качки Степени свободы
5g(0 nG(0 Sg(0 8(0 ФСО х р(0 Продольно-горизонтальная Поперечно-горизонтальная Вертикальная Бортовая Килевая Рыскание 1-я 2-я 3-я 4-я 5-я 6-я
SG(0 ФСО Продольная 3-я, 5-я
nG(0 ?g(0 8(0 Поперечная 2-я, 3-я, 4-я
- 185-
Рис. J.2. К определению скорости точки А при продольной качке судна
судно в исходное положение. Понятия „продольная качка” и „поперечная качка” характеризуют сложное движение сразу вдоль нескольких степеней свободы, причем в первом случае ЦТ судна движется в вертикальной продольной плоскости при одновременной килевой качке [ф(0], а во втором случае ЦТ совершает орбитальное движение в поперечной плоскости с одновременным изменением двух координат HgW и £с(0 и бортовой качкой 0(f)-
При том или ином виде качки изменяются не только перечис-
ленные координаты и углы, но появляются переменные во времени . . линейные и угловые скорости
и ускорения, например £g(0, SgW> 6(0» ф(0> Ф(0 и т. д. Эти скорости и ускорения называют кинематическими параметрами отдельных видов качки судна. Кроме того, движение произвольной точки судна характеризуется линейной скоростью и ускорением. В образовании этих скоростей и ускорений участвуют те или иные линейные и угловые кинематические параметры. Например, для точки А в носовой оконечности судна линейную скорость ид при продольной качке определяют через tc> Ф и абсциссу точки (рис. 7.2).
Линейные и угловые скорости и ускорения в ЦТ судна отыскивают дифференцированием по времени координат и углов как функций времени. Таким образом, одной из главных задач теории качки является нахождение функций, описывающих процессы качки. Эти функции получают в результате решения уравнений качки судна, рассматриваемых в § 49.
§47. Судно как колебательная система
Для изучения характера поведения судна и определяющих факторов при качке удобно рассматривать судно как своеобразную систему. При формировании этой системы выделяют только те факторы и свойства, которые оказывают влияние на качку судна. В состав такой системы включают само судно, рассматриваемое как свободное твердое тело; окружающую его жидкость, находящуюся с судном в гидродинамическом взаимодействии, и факторы, способные регулировать параметры качки.
Система находится под воздействием морского волнения. Это могут быть регулярные прогрессивные волны высотой fig с частотой о, идущие под курсовым углом х> либо нерегулярная мертвая зыбь или
- 186-
нерегулярное ветровое волнение. Волнение представляет так называемый процесс на входе системы. На выходе рассматриваемой системы имеются колебательные процессы шести видов, т. е. качка судна по каждой из степеней свободы. Характер колебаний зависит от типа волнения - регулярного или нерегулярного.
Процесс на входе достаточно описать двумя параметрами: параметром интенсивности волнения hB и частотным параметром - частотой регулярных волн о или средней частотой нерегулярных волн. При этом курсовой угол х рассматривается как вспомогательный заранее заданный параметр.
Процессы на выходе системы - качка различных видов - характеризуются тремя параметрами: интенсивностью качки данного вида в виде амплитуды изменения координаты £, л....Хр> фазой колеба-
ний и частотой колебаний. Частота колебаний судна по каждой степени свободы является важной характеристикой динамики процесса качки.
У судна без хода частота качки обычно совпадает с частотой волнения, у движущегося судна частота качки зависит от скорости судна и значения курсового угла X- Процесс качки судна описывается так называемой математической моделью судна при качке - системой уравнений динамики судна, находящегося под действием возмущающих сил и моментов от волн. Решение этой системы уравнений представляют шесть процессов колебаний на выходе системы (рис. 7.3).
На характер качки судна оказывают влияние форма корпуса, распределение масс, величина водоизмещения, начальные метацентрические высоты, скорость судна и изменения курсового угла волн, наличие и настройка успокоителей качки. Одна часть этих факторов (форма корпуса, водоизмещение, тип успокоителя качки) может варьироваться при проектировании судна, а другая (метацентрические высоты, скорость судна, изменение курсового угла волн, надстройка успокоителя качки) может изменяться в процессе эксплуатации. Грамотное и направленное изменение судоводителем указанных
Рис. 7.3. Представление судна при качке в виде системы
- 187-
факторов может существенно улучшить характеристики процессов качки на выходе системы, а в ряде случаев - обеспечить безопасность судна при плавании в шторм.
Оценку качества функционирования или настройки рассматриваемой системы, зависящих от рационального проектирования судна и правильной его эксплуатации, производят по величинам амплитуд соответствующих видов качки, амплитудным значениям ускорений и перегрузок в различных точках на судне, а также по ряду других специальных критериев.
Довольно полную картину о качке дают так называемые амплитудно-частотные характеристики (АЧХ) отдельных видов качки, под которыми понимают зависимость амплитуды какого-либо вида качки от частоты волнения, например ?Gmax(°) или ®тах(°)- Очевидно, что эти зависимости, кроме всех прочих факторов, будут различными при изменении интенсивности волнения. Иногда АЧХ представляют в безразмерном виде, относя амплитуду качки к полувысоте волн, делая тем самым данную АЧХ универсальной для волнения любой интенсивности.
Таким образом, для исследования качки судна необходимо составить математическую модель поведения судна на волнении, которая позволит связать воедино характеристики качки судна, параметры волнения и управляющие факторы.
§ 48. Качка судна без хода на тихой воде
Прежде чем строить уравнения качки судна на морском волнении, целесообразно рассмотреть виды качки судна на тихой воде. Несмотря на то, что качка на тихой воде (качка от порыва ветра, качка при работе судовыми грузовыми средствами) встречается на практике довольно редко, роль теории этой качки чрезвычайно важна. Исследуя качку судна на тихой воде (т. е. качку при отсутствии периодических возмущающих сил и моментов), удается определить важные колебательные свойства судна - так называемые характеристики собственных (или свободных) колебаний судна, необходимые при исследовании качки на волнении, собственные периоды и частоты качки всех трех видов, а также коэффициенты сопротивления корпуса судна.
Для оценки этих характеристик составим уравнения качки судна на тихой воде. Такие уравнения могут быть получены из общих уравнений динамики свободного твердого тела и добавлением соответствующих реакций жидкости. Рассмотрим качку трех основных в данном случае степеней свободы - 3, 4 и 5-й, т. е. вертикальную, бортовую и килевую качки.
При составлении уравнений качки используем принцип Д’Аламбера, согласно которому сумма всех действующих на тело внешних сил и моментов, включая силы инерции, равна нулю. В проекциях на интересующие нас оси координат уравнения имеют следующий вид: 3-я степень свободы:
- 188-
- AtG + K*onp + R^ + Я*идр = 0; (7.1)
4-я степень свободы:
-40 +W?onp +М’пплв + М?идр = 0; (7.2)
5-я степень свободы:
+ М?опр +Л/>лав +М?идр = 0, (7.3)
где A£g> 40 и М ~ проекции фиктивных сил инерции при ускоренном движении и вращении судна без учета окружающей жидкости на оси z, х и у, Я*опр, М?опр и ^сопр - проекции силы и момента силы сопротивления на оси z, х и у, Кплав» М*лав и М£лав - проекции изменения силы плавучести и момента плавучести на оси г, х и у, /?^идр, М^идр и - проекции гидродинамической реакции и момента (инерционной природы) на оси г, хи у. Рассмотрим природу всех сил и моментов, входящих в уравнения (7.1)-(7.3).
Изменение силы плавучести R„niiB в уравнении вертикальной качки (7.1) вызвано изменением величины погруженного объема при малом отклонении судна по вертикали на величину £G(f) (рис. 7.4, а):
KnnaB = -yWGa). (7.4)
При повороте судна относительно осей х и у на малые углы крена 0(0 и дифферента ф(0 (рис. 7.4, б, в) появляются восстанавливающие моменты
M^aB = -VVhoO=-Pho0; (7.5)
Мйлав=-^Ноф--РНоф. ч (7.6)
Сила и моменты сопротивления образуются при Движении корпуса судна за счет трения воды о корпус, вихреобразования и генерирования расходящихся волн на поверхности тихой воды. Будем считать, что эти реакции .пропорциональны линейной и угловым скоростям колебаний судна £g(0> 8(0 и Ф(0 в первой степени:
Ксопр = -1*Ло(0; (7.7)
м?опр = -1мё(0; (7.8)
M?onp=-W(0. (7.9)
Здесь цг, цХ0 и Цуф - соответствующие коэффициенты сопротивления, зависящие, очевидно, от формы корпуса в подводной части, от частоты колебаний судна, осадки и т. д. (рис. 7.5).
Гидродинамическая сила #гидр и моменты инерционной природы ^гидр> ^гидр обусловлены инерционностью окружающей судно воды
- 189-
ствующие на судно при качке на тихой воде: а — сила плавучести ^плав» -продольный восстанавливающий момент М^лав; е— поперечный восстанавливающий мо-
тивления, действующие на судно: а -при вертикальной качке; б — при бортовой качке; е — при килевой качке
мент Мплав
при неустановившемся движении в ней колеблющегося судна. Их при
нято считать пропорциональными соответствующим ускорениям судна:
RzrKBP = -^G(tY, (7-10)
(7.11)
м?идр=-М(')- (7-12)
Обычные инерционные сила и момент в выражениях (7.1)- (7.3) пропорциональны тем же ускорениям судна и зависят от массы судна А и его моментов инерции масс /х и 1у.
Подставляя теперь силы и моменты всех категорий в уравнения (7.1)-(7.3), получаем уравнения качки судна без хода на тихой воде: 3-я степень свободы:
(А + Xz)tG + nz^G + ~ 0; (7.13)
4-я степень свободы:
(7х + \сб)6 + 11хв0 +Pho9 = 0; (7.14)
5-я степень свободы:
(7У + *-Уф)Ф + ЦУф4> + PHoty = 0. (7.15)
- 190-
Первые слагаемые инерционной природы показывают, что коэффициенты Xz, Хх0 и имеют размерность, совпадающую с размерностью стоящих с ними в скобках массы А или моментов инерции масс судна 1Х и 1у. Это послужило поводом назвать эти коэффициенты так: Xz - присоединенной массой жидкости при вертикальных колебаниях; Хх0 и Хуф - присоединенными моментами инерции масс жидкости относительно осей Gx и Gy соответственно. Однако не следует думать, что Xz - это та часть окружающей судно жидкости, которая участвует в колебаниях. При колебаниях судна движением охватываются гораздо большие массы воды, но из записи инерционной силы в виде (7.10) формально следует, что коэффициент Xz имеет размерность массы. Тем не менее из выражений (7.13)- (7.15) видно, что окружающая судно жидкость увеличивает его инерционные характеристики, которые вычисляются по приведенным формулам. В теории управляемости, где рассматривают движение с ускорением в горизонтальной плоскости, также появляются присоединенные массы и присоединенные моменты инерции, но они количественно отличаются от аналогичных величин в качке, поскольку характер движения жидкости и вид волнообразования в этих случаях будут различными.
Указанные характеристики качки судов зависят от частоты о колебаний судна, параметров формы корпуса B/d, L/В, Сь и т. п.
Представим уравнения качки в безразмерном виде, разделив каждое уравнение на коэффициент при ускорении: 3-я степень свободы:
U + [Нг/(Д + X2)Rg + [у5вл/(Д + MRg = 0; (7.16)
4-я степень свободы:
0 + [|1хв/(/х + Хх0)] 0 + [Ph0/(Ix + Ххв)16 = 0; (7.17)
5-я степень свободы:
ф + [Иуф/(/у + Хуф)]ф + [РНО/(1У + Хуф)]ф= 0; (7.18)
x + 2vx + n2x = 0. (7.19)
Как легко убедиться, все приведенные уравнения качки судна на тихой воде в математическом смысле идентичны уравнению (7.19), следовательно, сравнивая их коэффициенты между собой, можно сделать вывод, что частота собственных колебаний п судна (без учета сопротивления) на тихой воде и коэффициенты демпфирования 2v равны: для вертикальной качки
"£= / ——
V Д + х2 для бортовой качки
пе =
Pho
11_й
2v0 = ; (7.21)
‘х +
- 191 -
для килевой качки
/ №О . НуФ
Пф — / , 2а?ф — . (7.22)
V 1у + "-уф 1у + "-у ф
Из полученных выражений следует, что частоты и коэффициенты демпфирования зависят от многих физических параметров различной природы.
Рассмотрим для примера собственные частоты и п0. Собственная частота определяется полнотой и площадью ватерлинии судна, массой (водоизмещением) судна, зависящей от количества груза, и присоединенной массой жидкости, определяемой формой и объемом подводной части судна. Собственная частота бортовых колебаний п0 зависит от начальной остойчивости судна в данном рейсе (hQ), т. е. от способа размещения груза по высоте судна, от момента инерции масс судна 1Х, который определяется, в частности, способом распределения груза по ширине корпуса и.величиной Лх0, -зависящей опять-таки от формы подводной части корпуса и величины погруженного объема, а значит, от количества перевозимого груза.
Как видно, на собственные частоты качки судна оказывают влияние конструктивные параметры судна, способ загрузки и общее количество взятого в рейс груза. Если к тому же учесть, что значение начальной метацентрической высоты h0 зависит от наличия на судне свободных поверхностей жидких грузов, то следует добавить, что эти частоты могут меняться в рейсе по мере расходования запасов.
Для вычисления конкретных значений собственных частот и коэффициентов демпфирования нужно уметь определять входящие в формулы (7.20)-(7.22) величины 5ВЛ, A, X2, Но, h0, 1Х, Хх6, 1у, Хуф, ц2, йхбИйуф-
Площадь ватерлинии 5ВЛ для данной осадки судна снимается с кривых элементов теоретического чертежа, величины hQ и Но получают из расчета остойчивости судна в данном рейсе.
Для определения 1Х и 1у можно использовать приближенные формулы
7Х~ А[В2а2/(11,4Сь) + О2/12]; (7.23)
1Х * (А/12)(В2 + 4zfc); (7.24)
1у «= 0,07(a/g)PL2, (7.25)
где а - коэффициент полноты конструктивной ватерлинии; D - высота борта; гс - возвышение ЦТ судна над ОП.
Присоединенная масса и моменты инерции жидкости находят с помощью имеющейся информации, содержащейся в литературе_ по качке, где_эти величины представляют в безразмерном виде: Xz = = M(PV); ^хб = ^хб//х * (0,314/Сь)(А.х8/Хэл). Здесь Хх0/А.эл - отношение, полученное для разных судов в результате эксперимента с моделями.
- 192-
Что касается значений коэффициентов демпфирования, то они очень чувствительны к отклонениям в форме корпуса судна, поэтому желательно их определять при экспериментах по качке судов на тихой воде в бассейне. Существует методика определения величины 2ух0 по записям затухающих бортовых колебаний модели; имеются также специальные номограммы для этих коэффициентов, составленные на основе многочисленных экспериментальных материалов.
Решение уравнений качки судна на тихой воде аналогично реше
нию задачи о пружинном маятнике (см. § 46):
£g(0 = %Gme cos(oct + e g); (7.26)
0a) = 0rne-v0'cos((Oef + e80); (7-27)
l|)(t) = i|)rne’Vc0S(Ull)t + ep. (7.28)
Решение соответствует затухающим колебаниям с частотой ы, определяемой формулами
= а/ “е = а/ n0 - ve; °ф = V "ф- '’ф. (7.29)
и начальными фазами е£, е2 и е^. Характерно, что коэффициент демпфирования бортовых колебаний Уд существенно меньше коэффициентов а>£ и Уф, вследствие чего бортовые колебания затухают гораздо медленнее, чем вертикальные и килевые. Дело в том, что при вертй-кальных и килевых колебаниях образуются расходящиеся волны, которые интенсивно отбирают энергию у колеблющегося судна. При бортовых колебаниях судно представляет собой тело, близкое к цилиндру; основную долю сопротивления при его вращении составляет трение, которое относительно мало.
При вертикальных и килевых колебаниях вследствие большого демпфирования судно совершает всего 2-3 колебания, тогда как при бортовой качке число затухающих колебаний может доходить до десяти (рис. 7.6). Поэтому коэффициенты у^ и Уф определяют не экспериментальным, а расчетным путем.
Широкое распространение имеют приближенные формулы для оценки собственных периодов различных видов качки на тихой воде,
Рис. 7.6. Характер затухающих колебаний судна на тихой воде: а - при вертикальной качке; б - при килевой качке; в — при бортовой качке
- 193-
которые получаются в результате применения приближенных зависимостей для моментов инерции и присоединенных масс и подстановки их в выражения (7.20)- (7.22):
(7.30)
(7.31)
(7.32)
При выводе последней формулы используют представление момента инерции через радиус инерции гх:
4 + Хх0=рУг2 = рУ(сВ/2)2, где с - эмпирический коэффициент, изменяющийся для большинства судов в пределах 0,71-0,85.
Анализ формул (7.30)-(7.32) приводит к выводу о близости собственных периодов вертикальной и килевой качки. Кроме того, малочисленность параметров судна, входящих в них, свидетельствует о приближенности этих формул. При возможности следует пользоваться более точными формулами (7.20)- (7.22). Вся необходимая информация для их использования содержится в справочной литературе.
Формулу (7.32), входящую в состав так называемых капитанских формул, применяют не только для оценки периода т0 по рассчитанной начальной метацентрической высоте h0, но и для экспериментальной проверки расчета остойчивости путем раскачивания судна и замера среднего периода собственных бортовых колебаний на тихой воде и последующего контроля h0: h0 = (сВ/т0)2.
На каждом судне необходимо периодически производить определение конкретного значения коэффициента с путем сопоставления известного значения h0 и замеренного периода т0. Нежелательно округлять его значение до 0,8, как это еще часто делают на практике. Также будет неверным использование в формуле (7.32) среднего значения периода качки судна на нерегулярном волнении, поскольку последний не совпадает с периодом собственных колебаний судна на тихой воде. Точность определения т0 должна быть порядка 0,1 с.
§ 49. Основы линейной теории качки судна на регулярном волнении
На судно, плавающее на волнении, кроме рассмотренных в § 48 сил и моментов действуют так называемые возмущающие силы и моменты от морских волн. Эти силы имеют сложную гидромеханическую природу;
- 194-
они являются явными периодическими функциями времени, амплитуды которых зависят как от характеристик судна, так и от параметров волн.
Полагаем, что судно неподвижно закреплено в его нейтральном положении, а его поперечные размеры малы по сравнению с длиной волны. Кроме того, считаем, что волны - прогрессивные регулярные с относительно небольшой амплитудой и малой крутизной hB/X, что курсовой угол равен х = 90’ и что судно не имеет хода.
Вертикальная проекция возмущающей силы, появившейся в результате действия волны, складывается из трех составляющих: гидростатической, обусловленной увеличением погруженного объема при прохождении волны; демпфирующей, вызванной обтеканием корпуса жидкостью со скоростью пРи действии сил трения и вихреобразо-вания; инерционной. Однако при проведении приближенных расчетов качки можно пользоваться упрощенными выражениями для возмущающей силы и момента, учитывающими только гидростатическую составляющую. Учет криволинейности волновой поверхности в пределах судна и влияния орбитального движения частиц воды в волне производят с помощью редукционных коэффициентов и£, и§, и0, (рис. 7.7):
Rl03M = yrB^zdsBn cos of; (7.33)
Л/возм = «оиви®Р\ cos of. (7.34)
Включая эти силы и моменты в соответствующие уравнения качки судна на тихой воде (7.13) и (7.14), получаем уравнения качки судна на регулярном волнении
(А + X2)tG + PzU + V-%n^G = 7гв^и§-%л cos (7.35)
(4 + *xe)G' + Px80 + phod =®оиви&д/,о cos of. (7.36)
Решение этих линейных однородных уравнений находят в виде суммы решения соответствующего однородного уравнения качки судна на тихой воде и частного решения неоднородного уравнения в форме его правой части:
£g(0 = SGme"V^ cos (o^t + e“) + £Co cos (of + e2); (7.37)
0(f) = 0me V0< cos (ыеt + eg) + 0O cos (of + e8). (7.38)
Первые слагаемые в правой части формул (7.37) и (7.38) со временем обращаются в нуль из-за того, что они изменяются по экспоненте, и вынужденные колебания происходят по закону, описываемому вторым слагаемым, где £Go и ®о ~ амплитуды вертикальной и бортовой качек, а е2 и е8 - фазы колебаний по отношению к волне.
Используя понятие АЧХ, получаем выражения для АЧХ вертикальной
- 195-
и бортовой качек судна без хода в положении лагом к регулярному волнению
V (ng - о2)2 + 4vgo2
V(ng - о2)2 + 4vgo2
(7.39)
(7.40)
Большее распространение получили АЧХ, представленные в безразмерном виде (рис. 7.8):
t,G0 /гв =/(°/^); ео/«о = /(°/пв )• С7-4*)
Из рис. 7.8 видно, что резонанс наблюдается при совпадении частот волнения и собственных колебаний (о = п& и о = п0). При о -» 0 АЧХ стремятся к единице (см. рис. 7.8), т. е. при очень малых частотах волнения судно следит за волной. Его динамические свойства, в первую очередь инерция, проявляются при конечных частотах о, особенно в зоне резонанса. Характерно, что АЧХ вертикальной качки не имеет ярко выраженного резонансного пика, что объясняется большими значениями по сравнению со значениями v0.
Уменьшать амплитуды качки судна на частотах, близких к резонансным, можно путем увеличения демпфирующих сил за счет установки, например, скуловых килей, повышающих вихревые составляющие силы и момента сопротивления (Я£опр и М£опр).
Важной особенностью АЧХ бортовой качки является ее поведение при попытке повлиять на характеристики судна изменением остойчивости (h0). Оказывается, что увеличение остойчивости приведет к увеличению частоты собственных колебаний судна [см. формулу (7.21)]. При этом эффект качки все же ухудшится, так как возрастут все ускорения, которые пропорциональны не только амплитудам качки, но и квадрату частоты колебаний:
0~0ong. (7.42)
Также изменятся ускорения при вертикальной качке:
tGo - Sgo^- (7-«)
Полученные выше уравнения (7.35) и (7.36) качки судна, расположенного лагом к волне, не содержат уравнений поперечных колебаний судна. Известно, что судно участвует в круговом орбитальном движении волны и движется с тремя степенями свободы, т. е. испытывает поперечную качку. Три уравнения поперечной качки выглядят сложнее полученных нами уравнений и составляют систему, в которой
- 196-
Рис. 7.7. Редукционные коэффициенты возмущающего момента при бортовой качке: а — по относительной ширине судна х gj б — по относительной осадке
каждое уравнение содержит слагаемые, зависящие от всех переменных t)g и 6. Методика решения уравнений поперечной качки приведена в справочниках и входит в отраслевой стандарт.
Второй важный случай качки - продольная качка судна с ходом на встречном регулярном волнении, уравнения которой также составляют систему уравнений вертикальной и килевой качек. Каждое из этих уравнений содержит в левой части слагаемые, определяемые Z,q, ф, to, Ф> и зависит от скорости судна Од.
Рис. 7.8. Амплитудно-частотные характеристики в безразмерном виде: а — вертикальной качки; б — бортовой качки
5?8Ь/«о
- 197-
В общем случае качки судна результат решения должен зависеть от курсового угла судна х- При курсовых углах, отличных от 0 и 90*, система уравнений будет содержать уравнения поперечного движения и рыскания.
Решение сложных задач теории качки возможно при использовании быстродействующих современных ЭВМ, и прибегают к нему только в исследовательских целях. В практических целях ограничиваются расчетами характеристик поперечной и продольной качек судна (при X = 90* и х = О’).
Таким образом, целью исследования качки судна на волнении является определение амплитудных значений перемещений ЦТ и других точек судна, скоростей и ускорений в этих точках, а также собственных частот колебаний судна, определяющих зону резонанса. В ряде случаев желательно знать всю АЧХ качки, необходимую при расчете поведения судна на нерегулярном волнении.
§ 50. Влияние скорости судна и курсового угла на его качку
В предыдущих разделах рассматривалась качка судна без хода, когда коэффициенты уравнений качки не зависели от скорости судна, а качка происходила с частотой, равной истинной частоте регулярного волнения.
В общем случае движения судна со скоростью uG под курсовым углом х к системе регулярных волн частота встречи судна с волнами, называемая кажущейся частотой волнения, зависит не только от истинной частоты о, но и от параметров движения судна uG и х-
Будем считать, что курсовой угол х = 0° соответствует чисто встречному волнению, а X = 180’ - попутному (см. рис. 7.1).
Скорость распространения волн ск в подвижной системе координат О£л£> движущейся вместе с судном, может быть выражена через скорость волн с в неподвижной системе координат, скорость судна uG и курсовой угол х:
Цс = с + Uq cos х • (7.44)
Промежутки времени между прохождением мимо наблюдателя, находящегося на судне, последовательных гребней волн - кажущиеся периоды волн - определяются формулой
тк=—-------------------------------------------------------, (7.45)
с* с + uG cos х 1 + (uG /с) cos X 1 + (uG /с) cos x
где т - истинный период волнения.
- 198-
Из выражения (7.45) можно получить связь между истинной о и кажущейся частотой регулярного волнения ок:
2л I uG \
ок =----= 1+-------cosx о. (7.46)
тк \ с /
Из формул (7.45) и (7.46) видно, что, изменяя скорость uG и курсовой угол X, можно влиять на значения периода и частоты возмущающих сил и моментов при качке судна на волнении в пределах
При uG cos х = -с кажущийся период тк обращается в бесконечность, т. е. при всех сочетаниях uG и х, при которых выполняется это равенство, гребни волн будут неподвижны относительно движущегося судна. Если при этом х - 180*, то судно будет находиться на вершине или подошве волны (при uG = c). Кажущийся период при попутных курсовых углах (х > 90’) может стать отрицательным, если | uG cos X | > > с, при этом гребни волн отстают от судна.
Из уравнений (7.35) и (7.36) качки судна на регулярном волнении видно, что возмущающие силы и моменты в их правых частях определяются кажущейся частотой волнения ок (7.46). Однако воздействие курсового угла этим не ограничивается; на косых курсовых углах изменяется конфигурация волны по отношению к корпусу судна, что отражается на амплитуде возмущающих сил и моментов. Поэтому входящие в выражения редукционные коэффициенты оказываются функциями курсового угла: (х), x®(x), и§(х) и и§(х). Это объясняется, в частности, тем, что протяженность волны поперек судна является функцией курсового угла х- XB=X/sinx- Угол волнового склона ав при косых курсовых углах меняется вдоль судна не только по величине, но может иметь разные знаки в разных частях длины корпуса.
Курсовой угол и скорость судна влияют также на положение резонансных зон соответствующих видов качки. Если при отсутствии хода судна резонанс бортовой качки происходит при частотах волн о » пе, то при движении судна возможно несколько сочетаний значений скорости uG и курсового угла х, при которых это условие будет сохраняться:
ок = Пе, т. е. [1 + (uG/с) cos X ]о = Пе. (7.48)
Но учитывая, что с = Ло/(2л) и о = yjlng/K, получаем окончательно
А. / / 2л£ \
uG cos х =------ пе - /--------- . (7.49)
2л \ V к I
- 199-
Выражение (7-49) можно использовать как уравнение для определения опасных сочетаний и с и х с точки зрения попадания судна в условия резонанса на волнах длиной X.
§ 51. Штормовые диаграммы судна
Для оперативного решения многих практических задач качки существуют специальные диаграммы, называемые штормовыми. Существует несколько вариантов штормовых диаграмм, разработанных различными авторами. Наиболее широкое распространение в отечественной практике получили диаграммы Ю. В. Ремеза для глубокой воды и для ограниченной глубины.
Штормовая диаграмма для глубокой воды представлена на рис. 7.9. Данная диаграмма позволяет определять опасные с точки зрения резонанса сочетания значений us и х не только для регулярного, но и для нерегулярного волнения.
Для регулярных волн исходными величинами задачи являются длина волны X*, откладываемая на вертикальной оси, и значения кажущегося периода волн т£, замеренного с движущегося судна с помощью секундомера как среднее значение из 10-12 последовательных волн. Величину тД наносят в верхней части диаграммы в криволинейной сетке значений постоянных величин кажущихся периодов. При движении судна с курсовым углом х > 90° точка с координатами X*, Тк попадет в левую часть диаграммы, а при х > 90* - в правую.
Точки пересечения линий тк = т* и X = Х£ переносят в нижнюю часть штормовой диаграммы, где вертикальная линия представляет собой геометрическое место точек с координатами uG, х в полярной системе координат. Конкретную скорость судна uG откладывают вдоль радиуса полукруга, а лучи, проведенные из центра, соответствуют постоянному значению курсового угла X- Частному случаю движения судна соответствует в нижней части рабочая точка с координатами uG = ug и X = Х*- Резонансные значения скоростей судна и курсовых углов находятся на другой вертикальной линии, которая проходит через точку в верхней части диаграммы с координатами X и тк = те = = 2л/п0 (для случая резонанса по бортовой качке).
Близость рабочей точки с координатами uG, х* к вертикальной линии резонанса по бортовой качке свидетельствует о возможности попадания судна на волне длиной X в зону резонанса. Считается, что зона резонанса имеет протяженность по периодам тк, определяемую неравенством
О,7т0 « тк « 1,3т0. (7.50)
Проводя вертикальные линии через точки с координатами X*, О,7т0 и X*, l,3i0, можно построить в нижней части диаграммы опасную резонансную зону (на рис. 7.9 заштрихована). Для выхода из опасной зоны необходимо так изменить координаты рабочей точки uG, х, чтобы она не попадала в заштрихованную область.
- 200 -
8 Ъх 11,0 г
10,0
9,0
8,0-
7,0
6,0
6,0
11,0 1Ц0
S.0 8,0 7,0
6Л 5Д-4,0 3.0 20
Л0-
3,0
2,0
1,0
Wk
?1 20 1Я 18 17 16 15 1<f 13 12 11 10 9 8 7 6 5 4 ИК,с
is'27 2б 25 2р 23 i2 zf 20'19 '№ П18' 15 74 fl 12' 11 '10 9 ff 7'6 '? 4 V.C w'if’ зб $4 jo '2p ft %•' 2p ip 'y' if '» i2 io e'i,3x,c
A.
xvirifup g зпданюод
Резонансная зона при определении по:^%Ф
-висите волны!hs
-интенсивности волнения „ Й валлах'СН баллов) —
-периоду 8олниПк- 11с) оплорезонансная зона ~
0,7z-i-1,3t
2j6vsC0S?,4'j
0
Рис. 7.9. Штормовая диаграмма Ю. В. Ремеза для неограниченной глубины жидкости
- 201 -
волнение
Рис. 7.10. Штормовая диаграмма для произвольной ограниченной глубины жидкости
Х=70м; Tfc = 16c; Н = 10м
- 202-
Точно так же решается задача по определению резонансных зон по вертикальной и килевой качке, только вместо величины т0 необходимо в описанную процедуру ввести величины Tg и Тф. При этом получатся еще две резонансные зоны по вертикальной и килевой качке, которые могут частично накладываться друг на друга.
Следует отметить, что диаграмма Ю. В. Ремеза не дает количественной оценки амплитуд качки судна, которую можно получить только расчетом соответствующих АЧХ точки. Диаграмма Ю. В. Ремеза позволяет ориентироваться только в отношении частот качки и близости к частоте резонанса, поэтому она не зависит от индивидуальных особенностей судна и едина для всех судов.
Для оценки- частотных резонансных зон при движении судна в жидкости с произвольной ограниченной глубиной служит диаграмма, приведенная на рис. 7.10. В отличие от диаграммы, изображенной на рис. 7.9, здесь в верхней части кроме линий постоянных значений кажущегося периода волнения (тк = const) имеются кривые постоянных скоростей распространения волн при различных глубинах (Н = = const). В остальном обе диаграммы практически не отличаются.
Если считать, что частота собственных колебаний судна при ограниченной глубине жидкости остается неизменной (с некоторым приближением), то влияние глубины акватории отражается только на изменении (уменьшении) скорости распространения волн на мелководье, а значит и на величинах кажущегося периода волн.
Резонансные сочетания скорости uG и курсового угла х также находятся на вертикальных прямых, однако при ограниченной глубине таких вертикалей получается две: их проводят, откладывая влево и вправо на горизонтали Л. = Л.* от линии Н = Н* отрезок а, равный расстоянию от правого края диаграммы до соответствующей линии постоянного кажущегося периода тк = т0. Девая вертикаль соответствует движению судна на попутном волнении со скоростью, большей скорости волны, что встречается довольно редко. Ширина резонансной зоны определяется повторным построением для значений тк = О,7т0 итк = 1,3т0.
Кроме указанных диаграмм существуют штормовые диаграммы, позволяющие определять безопасный режим движения судна из условия не только умеренности качки, но и разгона винта при качке или ударов днища на волнении (слеминга). К сожалению, эти диаграммы строго индивидуальны для каждого судна и их построение требует проведения сложных расчетов на ЭВМ мореходности судна.
§ 52. Особенности нелинейной качки судна на регулярном волнении
В § 49 при составлении уравнений качки судна на волнении выражения для некоторых категорий сил были получены в линейном виде. Так, момент сил сопротивления при бортовой качке был записан в прямой пропорциональной зависимости от первой степени угловой
- 203-
скорости бортовой качки 0, а восстанавливающий момент Ph08 и главная часть возмущающего момента - от угла крена и угла волнового склона aB(f). Эти допущения применимы к случаю малых колебаний судна на относительно пологих волнах.
Если углы крена при качке превышают границы применимости метацентрической формулы начальной остойчивости, то вместо выражения М* лав = PhJd необходимо использовать графическую зависимость вида = Р/(0) (диаграмму статической остойчивости).
Нельзя при этом принимать зависимость момента сопротивления от скорости колебаний в линейном виде М*опр = цх00. Как показывают эксперименты с моделями судов, этот закон носит сугубо нелинейный характер:
MJonp=”e|e|8. (7.51)
где - коэффициент сопротивления при нелинейной зависимости сопротивления от скорости 0. Даже эти два вида нелинейности (по восстанавливающему моменту и по моменту сопротивления) превращают уравнение бортовой качки в нелинейное дифференциальное уравнение, решение которого осуществить гораздо труднее, чем уравнения (7.36).
Влияние отмеченных нелинейных эффектов качественно видоизменяет АЧХ бортовой качки (рис. 7.11). Резонансный пик отклоняется либо в сторону малых частот (более длинных волн), если остойчивость судна достаточна, либо в сторону высоких частот - при малой начальной остойчивости или при S-образной диаграмме статической остойчивости. Если провести так называемую „скелетную” линию АЧХ, то она, отклоняясь от вертикали в ту или иную сторону, представит собой график зависимости частоты собственных нелинейных колебаний от амплитуды качки судна шв(0о). Как и в случае линейной теории качки, амплитуда бортовой качки растет с уменьшением демпфирования колебаний.
При плавном нарастании частоты волнения возможны резкие переходы от качки с малой амплитудой к качке с большой амплитудой.
Рис. 7.11. Диаграммы статической остойчивости и соответствующие им АЧХ нелинейной бортовой качки; а — нормальная остойчивость; б — малая начальная остойчивость
- 204-
Например, при увеличении частоты и приближении к точке Ь (см. рис. 7.11, а) режим качки скачком переходит в новый режим, соответствующий точке d, далее амплитуда плавно уменьшается с ростом частоты. При плавном уменьшении частоты возмущений точка на АЧХ перемещается по верхней ее ветви до точки с, а затем скачком переходит в точку а. Зона АЧХ между точками b и с на практике никогда не реализуется.
Отмеченные особенности нелинейной качки судна наблюдаются при плавании судна на волнении с различными частотами: войдя в режим устойчивых колебаний с довольно большой амплитудой, судно внезапно успокаивается и качается с малыми амплитудами. Это соответствует на АЧХ нелинейной качки переходу из точки с в точку а при неожиданном подходе волны с меньшей частотой (более длинной волны, чем предыдущие).
Итак, при качке судна с большими амплитудами происходит изменение частоты собственных колебаний, а также наблюдается неустойчивость отдельных видов качки, проявляющаяся в скачкообразном изменении амплитуд при плавном изменении частот (или длин) волн.
§ 53. Качка судна на нерегулярном волнении
Как упоминалось в § 26, наиболее распространенный вид морского волнения - ветровое нерегулярное волнение, характеризуемое статистическими параметрами и определенным спектральным составом, зависящим от силы шторма и времени его существования (развитости волнения). Особенность качки судна на нерегулярном волнении заключается в том, что каждая подходящая к судну новая волна имеет
свои индивидуальные характеристики.
Характер нерегулярной бортовой качки показан на рис. 7.12. Ее параметрами являются амплитуды колебаний 0о„ текущие значения угла крена 0,(0, размахи 0р, полупериоды колебаний Тд,/2.
Учитывая случайный характер этих величин, при оценке качки судна на нерегулярном волнении используют статистические характеристики качки: перемещения, определенные с некоторой степенью
обеспеченности, средние значения этих перемещений и периодов и т. п. Наибольшее распространение получили величины 3 %-ной обеспеченности ?G3%, Лоз%> Оз %, Фз % и так называемые значительные величины (с обеспеченностью 14 %) £g 1/з> Лв 1/з> 0 1/3’ Ф1/3-
Кроме того, процесс нерегулярных колебаний судна по той или иной степени свободы характеризуется спектром колебаний -
Рис. 7.12. Запись угла крена при нерегулярной бортовой качке
- 205-
распределением перемещений по частотам в реальном диапазоне их изменения. Если математическая модель судна как колебательной системы описывается линейными уравнениями качки (линейной системой), то спектральные характеристики процессов на ее выходе могут быть определены на основании теоремы Хинчина:
5вых(а)=|Ф(«)|Чх(о)- (7-52)
Здесь &ых(°) ~ спектр перемещений соответствующего вида колебаний; |ф(о)|- модуль передаточной функции системы (АЧХ); SBX(o) — спектр волнения.
Для бортовой и килевой качек спектральная плотность угловых перемещений определяется выражением
S(o)=j*(o)|2Sa(o) = (o4/g2) | Ф(о) | 2S5b(o), (7.53)
где Sa(o) - спектр углов волнового склона.
Как следует из выражений (7.52) и (7.53), характер конкретного спектра качки определяется взаимным расположением АЧХ и спектра волнения на оси частот. Смещение АЧХ относительно максимума спектра волнения может привести к появлению у спектра процесса качки двух локальных максимумов, так называемых „двугорбых спектров” (рис. 7.13). Такое смещение определяется изменением частоты собственных колебаний п по отношению к частоте максимума спектра волнения SgB(o).
При движении судна под произвольным курсовым углом к волне АЧХ соответствующего вида качки зависит от скорости судна и угла х, при этом соответствующий спектр качки называют псевдоспектром. Входящие в состав АЧХ редукционные коэффициенты х, зависящие от соотношений ВД, dA, следует считать функциями курсового угла х и истинной частоты волнения, поскольку
BA=Bo2/(2ng); d/к = do2/(2ng), (7.54)
а при расчете соответствующих АЧХ вместо истинной частоты волн о в формулы типа (7.40) надо подставлять значения кажущейся частоты
ок, вычисляемые по формуле (7.46).
Наличие спектров качки судна позволяет определить статистические характеристики качки, например перемещения судна 3 %-ной обеспеченности, используя связь этих величин с дисперсией процесса качки так же, как это делалось в § 26:
Рис. 7.13. Влияние взаимного расположения АЧХ 0о/ао и спектра волнения на вид спектра углов крена при нерегулярной бортовой качке
1 — спектр волнения SgB; 2 — АЧХ бортовой качки 00 /а0; 3 — спектр углов крена 5g
- 206 -
?G3% “ 2,64 = 2,64 (J Sg(j(o)do),/2 =
или
?G , ----(oK)
rB
2 к 1/2
S?B(o)cfo
(7.55)
03 % = 2,64 7Б7 = 2,64 (j Sg(o)do) *« =
(7.56)
Средние величины параметров качки и значительные величины определяют по формулам, аналогичным выражению (4.52):
03% = 1,330^=2,110^; . Sg3% = 1.33?g1/3=2,HIGcp- (7-57)
Стандартом качки называют корень квадратный из дисперсии перемещений соответствующего вида качки с коэффициентом, равным единице. Так, стандарт боковой качки равен Од = У5д.
Спектры скоростей и ускорений ЦТ судна и соответствующие угловые величины определяются по несложным формулам. Например, для спектров угловой скорости и ускорения бортовой качки
Sg(o) = оДЗо(о); Sg(o)do; (7.58)
О
Dg^Tsg(o)do. (7.59)
о
Соответствующие значения угловой скорости и углового ускорения 3 %-ной обеспеченности равны
03 % = 2,64 у^; 03 о/о = 2,64 у^. (7.60)
Как следует из формул, чем больше дисперсия исследуемого параметра, тем больше его статистическая характеристика, следовательно, интенсивность соответствующего вида качки на нерегулярном волнении будет определяться взаимным расположением резонансного пика АЧХ и максимума спектра волнения, поскольку сдвиг резонансного пика АЧХ в сторону меньших значений спектральной плотности %в(о) будет приводить к меньшим значениям произведения (7.52), а следовательно, и к уменьшению дисперсии в формулах (7.55) или (7.56) (рис. 7.14).
Применительно к бортовой качке судна (без хода лагом к волне) можно сказать, что уменьшение начальной метацентрической высоты h0 приведет к снижению частоты собственных колебаний, а значит,
- 207-
Рис. 7.14. Влияние частоты собственных колебаний судна на площадь спектра Sg (на дисперсию) при нерегулярной бортовой качке: а — при ng = 0m; б — при ”0 < °т> « - при ng > om
1 —спектр волнения SgB; 2 —АЧХ бортовой качки 60/и0; 3 — спектр углов крена Sg
к перемещению резонансного пика влево, в область низких частот, где ординаты спектра волнения близки к нулю. В результате уменьшится величина диспер.сии углов крена Dg и все статистические характеристики качки 9з%, 83 % и 93 %.
Учитывая специфику формы АЧХ и спектра волнения, можно наглядно объяснить тот факт, что углы крена судна на нерегулярном волнении в среднем будут меньше, чем углы крена на регулярном при частоте резонанса. Нерегулярное волнение вследствие его хаотичности не дает возможности установиться определенному процессу колебаний, который может наблюдаться на мертвой зыби, если частота волн близка к частоте резонанса п.
В случае необходимости можно учесть трехмерный характер морского ветрового волнения при вычислении 3 %, 03 % и др. Для этого необходимо использовать зависимость спектра волнения от направления распространения волн (4.65) и осуществить дополнительное интегрирование в формулах (7.55) и (7.56) по этому параметру в пределах от - л до +л. Например,
2 Г
О0= ~ я J о
[ 0о , — (0к, Ug, X) “о
2
SEb(o)cos2 XdXda.
(7-61)
Статистические характеристики качки судов на нерегулярном волнении обладают определенным преимуществом - у них отсутствует зависимость от частоты волнения, свойственная АЧХ. Эти характеристики при данном Варианте загрузки судна определяются скоростью uG и курсовым углом судна X- Поэтому удобно представлять их графически в виде круговых диаграмм, откладывая по радиусу интересующую статистическую характеристику (при uG = const) на разных курсовых углах. Эти круговые диаграммы хорошо дополняют информацию, получаемую с помощью штормовых диаграмм Ю. В. Ремеза, в части количественной оценки соответствующего вида качки.
- 208-
Рис. 7.15. Круговые диаграммы амплитуд бортовой 83 % и килевой Фз % качки на нерегулярном волнении при двух скоростях судна
Пример круговых диаграмм для вертикальной, килевой и продольной качки представлен на рис. 7.15.
Недостатком круговых диаграмм является то, что они соответствуют конкретному случаю загрузки судна, определяемому величинами d, h0, D$, D^, Ix, Iy, и зависят от балльности волне
ния, поэтому для полноты информации необходимо иметь большой набор этих диаграмм.
Приближенная оценка резонансных зон качки судна на нерегулярном волнении может осуществляться по диаграмме Ю. В. Ремеза с по-
мощью специальных шкал, расположенных слева и справа от нее. Слева располагаются две шкалы А и В (см. рис. 7.9 и 7,10) для входа в диаграмму по высоте волн /13 % или hl/3: откладывая найденную визуально высоту волн по обеим шкалам и проводя горизонтальные линии до пересечения с линией тк = т0, получаем две вертикальные прямые, ограничивающие в нижней части диаграммы зону чистого резонанса по бортовой качке на нерегулярном волнении. Результаты использования шкал А и В для килевой и вертикальной качек дают малопригодные на практике результаты. Если известна балльность волнения, можно получить еще более приближенную оценку качки, проводя через расположенные в правой части диаграммы концы отрезка с номером, соответствующим балльности ролнения, горизонтальные линии до пересечения с кривой т = т0. Дальнейшее построение аналогично построению с помощью шкал А и В.
Контрольные вопросы
1. Каков практический смысл изучения качки судна на тихой воде?
2. Почему при горизонтальных движениях судна и рыскании отсутствуют собственные колебания судна на тихой воде?
3. Каков смысл АЧХ качки судна?
4. Как влияет начальная остойчивость на бортовую качку судна на тихой воде, на регулярном волнении?
5. Как влияют на качку скорость судна и курсовой угол волнения?
6. Как пользоваться штормовой диаграммой?
Глава 8
СПЕЦИАЛЬНЫЕ ВОПРОСЫ МОРЕХОДНОСТИ СУДНА НА ВОЛНЕНИИ
Наряду с решением классических задач теории качки судов во второй половине XX в. интенсивно проводятся исследования практически важных вопросов поведения судна на волнении, при которых многие мореходные качества судна,-такие как остойчивость, прочность, управляемость, ходкость, оказываются тесно взаимосвязанными. К числу этих проблем относятся остойчивость судов на попутном волнении, явления слеминга и випинга, заливаемости и рыскания судов на волнении, ходкость судна на волнении и т. п. Ниже будут рассмотрены основные физические явления, лежащие в основе перечисленных проблем мореходности.
§ 54. Изменение остойчивости судна при движении на попутном волнении
Из опыта эксплуатации морских судов и теоретических исследований в настоящее время известно, что при движении судов на волнении с попутными курсовыми углами (х = ± 135 + 180°) остойчивость судна уменьшается. Это изменение остойчивости, состоящее в уменьшении как начальной остойчивости, так и всех параметров диаграммы статической остойчивости, происходит при полном отсутствии контроля со стороны судоводителя.
Остойчивость судна изменяется вследствие изменения формы подводного объема, а следовательно, всех его характеристик: аппликаты ЦВ zc, метацентрического радиуса, формы ватерлинии, ее моментов инерции, плеч остойчивости формы и др. Причем эти характеристики периодически меняются во времени с малыми частотами, если скорости движения судна и волн отличны друг от друга или становятся постоянными при движении судна со скоростью волн. Фактическая криволинейная ватерлиния судна на волнении является результатом наложения двух волновых систем - морского волнения и собственных корабельных волн - и оказывается зависящей от числа Фруда Fr = = ush[gL
Пример диаграмм статической остойчивости при движении на тихой воде и на попутном волнении представлен на рис. 8.1.
Бортовая качка судна на курсовых углах, отличных от попутных, оказывается довольно интенсивной, и динамические углы крена могут достигать больших значений. Наибольшую опасность это явление представляет для коротких судов. Как свидетельствует статистика ИМО, около 50 % судов длиной до 60 м опрокинулось именно на попутном волнении. Однако, как показывает опыт, аварийность судов
- 210-
Рис. 8.1. Диаграммы статической остойчивости на попутном волнении (судно на вершине волны)
1 — на тихой воде; 2 — на волнении с X = 135*; 3 — на волнении с X ® 150*; 4 — на волнении с X - 180*
больших размеров на попутном волнении также высока, так как возникающая бортовая качка часто приводит к смещению сыпучих или плохо закрепленных грузов. Наличие постоянного угла крена у судна со смещенным грузом делает качку еще более интенсивной, и гибель такого судна, как правило, предрешена.
' Движение судна на попутном волнении сопровождается ухудшением управляемости, захватом судна волной и самопроизвольным разворотом в опасное положение лагом
к волне (явление брочинга). Теоретические и экспериментальные ис-
следования явлений, возникающих при движении судна на попутном волнении, связаны с большими трудностями, чем и объясняется от
сутствие простых методик, позволяющих оценить указанное уменьшение остойчивости в судовых условиях. Однако это обстоятельство не снимает ответственности с судоводителя, который должен понимать основы указанных явлений и знать причины известных аварий.
В настоящее время изменение остойчивости судна можно оценивать на двух уровнях: статическом при статической постановке судна на попутную регулярную волну и динамическом с учетом многообразия гидромеханических явлений обтекания корпуса волной. Однако
в последнем случае исследования часто не удается довести, до практически приемлемых результатов вследствие недостаточности информации по гидродинамическим характеристикам корпуса.
При статической постановке судна на волну с длиной, близкой к длине судна, следует ожидать снижения остойчивости, когда в районе миделя располагается вершина волны, и ее повышения, когда там будет подошва. Аппликата ЦВ судна zc всегда увеличивается независимо от того, что располагается в районе миделя - вершина или подошва. Изменение же метацентрического радиуса определяется взаимным расположением волны и судна и конкретными обводами корпуса в районе ватерлинии. Изменение начальной метацентрической высоты может быть получено как алгебраическая сумма:
6h = 6zc + бг.
(8.1)
Если бы борта судна были вертикальны по всей его длине, то можно было бы считать, что /вл = const и бг = 0. Для реальных судов имеется значительное изменение обводов по высоте в нобу и в корме, поэтому на вершине волны /вл будет уменьшаться, причем бг < 0 и |бг|> 6zc. Этим объясняется уменьшение метацентрической высоты при попадании судна на вершину волны (б/i < 0).
- 211-
Установлено, что наибольшая потеря остойчивости может происходить, если длина попутной волны будет удовлетворять соотношению
= COSX, (8.2)
где кх ~ коэффициент, зависящий от формы обводов (к) = 0,5 0,8).
Опасные с точки зрения движения на попутном волнении числа Фруда могут быть получены из соотношения
1 / Г~ А. I кГ~
Fron = - j---1 /—----------- -0,4 -----г (8.3)
| cos Х| V 2п L V |cos х|
Из формулы (8.3) следует, что опасные значения числа Фруда меняются в пределах 0,28- 0,40, т. е. указанное явление характерно в основном для сравнительно небольших или скоростных судов. Следует отметить, что с ростом углов крена метацентрический радиус и плечи остойчивости формы уменьшаются, а соотношение (8.2) уже не выполняется и его необходимо корректировать.
В связи с аварийностью судов на попутном волнении ММФ в 1988 г. были разработаны рекомендации по выбору безопасных скоростей и курсовых углов при штормовом плавании судна на попутном волнении, которые дополняют известную Типовую информацию об остойчивости и прочности грузового судна. Указанные рекомендации позволили отменить соответствующие рекомендации 1984 г. по аналогичному режиму движения судов.
Основную часть действующих рекомендаций удалось представить в виде диаграммы безопасных скоростей и курсовых углов при штормовом плавании судна на попутном волнении, предложенной А. И. Богдановым.
Пример такой диаграммы для судна „Поронайск” (h3 % = 6 м, волнение 6 баллов) приведен на рис. 8.2.
Диаграммы Богданова, соответствующие определенной балльности волнения, рассчитывают в конструкторском бюро индивидуально для каждого судна. На диаграмме отмечены три опасные для судна зоны пониженной остойчивости и усиленной бортовой качки. Эти зоны представлены в системе координат us, h. Каждая из трех зон зависит, кроме того, от курсового угла движения судна в диапазоне 180 ± 45’. Оставшиеся незаштрихованные области позволяют выбрать сочетания параметров os и h, которые соответствуют безопасным режимам движения судна на попутном волнении и безопасным вариантам загрузки с учетом расходования запасов в рейсе.
Построение зоны пониженной остойчивости на диаграмме основываются на допущении, что время, в течение которого у судна будет опасная начальная остойчивость, не должно превышать четверти периода собственных колебаний судна на тихой воде т9:
кттк < те/4. (8.4)
- 212-
Рис. 8.2. Диаграмма безопасных скоростей движения судна на попутном волнении
^3 % = 2,9 м; d = 6,5 м
Здесь fcT - коэффициент, отражающий долю периода т0, в течение которого остойчивость судна становится недопустимой.
Использование диаграммы Богданова применительно к судам, для которых она не рассчитана, не допускается, поскольку безопасные зоны на диаграмме существенно зависят от формы обводов судна.
Введение описанных диаграмм в практику мореплавания помогает судоводителям в деле снижения аварийности на попутном волнении.
Движение судна на косых попутных курсовых углах, как правило, сопровождается усиленной бортовой качкой, однако -механизм ее несколько иной, чем при качке лагом к волне.
При неравенстве скоростей движения судна и волн восстанавливающий момент является функцией времени, как и. возмущающий момент в правой части уравнения качки. Периодическое изменение восстанавливающего момента вследствие изменения плеч статической остойчивости при прохождении волны вдоль судна приводит к раскачиванию судна с большими амплитудами угла крена:
(Ix + Х9)0 + ц00 + P(h0 + t>h cos 0KZ)0 (8.5)
При некоторых неблагоприятных сочетаниях параметров возможен своеобразный резонанс: колебания судна усиливаются и могут привести к опрокидыванию в одном из следующих размахов (рис. 8.3).
Для определения опасных режимов движения судна на попутном волнении может быть использована штормовая диаграмма Ю. В. Ремеза (рис. 8.4). Опасными с точки зрения ухудшения остойчивости
- 213-
Рис. 8.3. Запись углов крена, иллюстрирующая характер опрокидывания судна на попутном волнении
X=L
Рис. 8.4. Определение зоны пониженной остойчивости на попутном волнении на штормовой диаграмме (X - 44 м)
на попутном волнении считаются режимы, при которых кажущийся период волны удовлетворяет соотношению
т*=2т0/1,3 (£=£),
(8.6)
где т0 = 2n/G)g - период собственных бортовых колебаний судна на тихой воде. На штормовой диаграмме проводят горизонтальную линию, соответствующую условию X. = L, до ее пересечения со штриховой кривой тк = оо и из точки пересечения опускают в нижнюю часть диаграммы вертикальную линию до курсового угла X ~ 138*. Сочетание скорости судна и* и курсового угла х* Дпя точек этой вертикали соответствует случаям пониженной остойчивости, когда волна оказывается неподвижной относительно судна. Зона пониженной остойчивости, соответствующая условию (8.6), может быть получена повторным построением при использовании значений кажущегося периода тк = т0/1,3 и тк = т0/О,7.
§ 55. Ударные нагрузки
Движение судна на значительном волнении при встречных курсовых углах может сопровождаться соударениями судна и волны, приводящими к повышенным местным нагрузкам на корпус в носовой оконечности и к вибрации. В ряде случаев были зарегистрированы повреждения судовых конструкций, приводящих к существенным затратам на ремонт судов. Среди указанных явлений выделяются слеминг и бортовой слеминг (слепинг).
- 214-
Продольная качка (особенно килевая) на встречном волнении при резонансных частотах приводит к значительным скоростям и ускорениям носовой оконечности. Если при этом фаза скорости вертикальных перемещений носа судна по отношению к фазе вертикальной составляющей скорости волны в этом месте такова, что относительные вертикальные скорости судна и волны оказываются максимальными, то на плоских днищевых участках может происходить гидравлический удар, при котором гидродинамические давления превышают допустимые для днищевых перекрытий нагрузки. Замечено, что такие удары обычно сочетаются с предварительным оголением участка днища судна в носу. Нарастание давления на плоских участках днища носит импульсный характер. Возникающие при этом высокочастотные напряжения называют випинговыми напряжениями.
Интенсивность днищевого слеминга зависит от формы обводов корпуса в носовой части, от осадки судна носом, продольного радиуса инерции массы судна, скорости судна и интенсивности волнения. С уменьшением осадой судна вероятность возникновения слеминга, как правило, возрастает. Ударные нагрузки локализуются на плоских участках днища в районе 0,15-0,25 длины судна от носа, причем опасные деформации могут распространяться до 0,4 длины судна. Измеренные в натуральных условиях пики давления достигают 1,6 МПа, хотя несущая способность днищевых перекрытий обычно в 1,5-2 раза ниже.
Повреждения днищевых перекрытий от слеминга носят довольно массовый характер. Так, по сообщению Английского Ллойда, в 1967 г. получили повреждения от слеминга 114 судов, а затраты на ремонт только 32 судов составили 250 тыс. фунтов стерлингов.
На рис. 8.5 приведена зависимость вероятности возникновения слеминга от интенсивности волнения на судне типа „Маринер” (А = = 10 500 т). Как видно из рисунка, на волнении 7 баллов (сильном) судно испытывает удары на каждых 10-12 волнах даже при отсутствии хода, а при скорости 15 уз удары могут происходить на каждой второй волне.
Вероятность слеминга уменьшается при увеличении курсового угла. При курсовом угле 35° вероятность слеминга уменьшается на 30 % по сравнению с движением судна навстречу волнению.
На рис. 8.6 проиллюстрировано влияние осадки судна и курсового угла на вероятность появления днищевого слеминга.
На рис. 8.7 показано распределение давлений от слеминга по днищу судна при различных осадках. Из рисунка видно, что при уменьшении осадки не только увеличиваются максимальные значения ударных нагрузок, но и расширяется в корму зона, охваченная слемингом.
Скорость судна также оказывает влияние не только на значения давлений при слеминге, но и на протяженность района развития слеминга по длине судна (рис. 8.8).
- 215-
Рис. 8.5. Вероятность возникновения слеминга на встречном волнении при различной скорости судна типа „Маринер”
Рис. 8.6. Влияние курсового угла и осадки судна на вероятность возникновения слеминга на судне „Маринер” (os=10y3, волнение 7 баллов)
1 — судно в балласте; 2 — промежу-
Рис. 8.7. Протяженность эоны, охваченной слемингом, по длине судна при различных осадках
1 - d/L = 0,033; 2 - d/L - 0,042; 3-d/L-- 0,060; 4 -d/L = 0,081
Рис. 8.8. Расположение эон повышенного слеминга при различных скоростях по длине судна типа „Маринер” на нерегулярном волнении в 7 баллов
- 216-
Ударные гидродинамические давления на днище судна при сле-минге пропорциональны квадрату вертикальной скорости соударения судна и волны:
Рсл = (8.7)
где к - так называемый коэффициент формы днищевых носовых сечений судна. Установлено, что значение коэффициента к не зависит от интенсивности волнения и от скорости судна, а определяется только формой носовых шпангоутов [к * (0,5 - 2,0) • 10* Н • с2/м*].
Слеминг начинает проявляться, когда относительная скорость соударения не превышает некоторого „порогового” значения
(ог)п = 0,093у£Е. (8.8)
Вероятность появления слеминга обусловлена одновременным появлением двух статистически независимых случайных событий: оголения днища в носовой оконечности и превышения пороговой скорости (8.8):
Руд = ехр [- 3,51(<гё з % + ий/Й з %)]. (8.9)
где з % и £н з % _ относительные перемещения и скорости носовой оконечности 3 %-ной обеспеченности, определяемые при расчете продольной качки судна на встречном волнении. Частоту ударов судна в час можно оценить с помощью выражения
Псд = (1 800/л)(£н з %/^н'З %)Руд. (8.10)
Безопасные в отношении слеминга режимы плавания судна на волнении удобно представлять в виде специальных диаграмм (рис. 8.9). На диаграмме ограничивают область допустимых скоростей, безопасных в отношении слеминга, при различных интенсивностях волнения (на рисунке незаштрихована). Вид ограничительной линии показывает, что при увеличении балльности волнения скорость судна необходимо снижать до определенного значения. Диаграмма, приведенная на рис. 8.9, соответствует условиям, При которых за 20 ч плавания максимальным давлением с обеспеченностью 1 % будет давление, равное 0,7 МПа, а число ударов в час не будет больше шести. Недостатком диаграммы является то, что она относится к конкретному судну и соответствует одной осадке судна.
Уменьшения вероятности возникновения слеминга можно добиться также увеличением осадки судна носом [см. формулу (8.9)]. Следует отметить, что слеминг проявляется в довольно широком диапазоне курсовых углов, поэтому изменение курсового угла не дает желаемого эффекта в части снижения опасности слеминга.
Статистические данные о подверженности слемингу судов с различными длиной и полнотой обводов приведены на рис. 8.10. Как видно
- 217-
НитенаЛюспл ботиит, tai
Рис. 8.9. Опасная и безопасная в отношении слеминга зоны судна типа „Маринер” в балласте
ной и полнотой корпуса
из рисунка, опасные нагрузки от слеминга увеличиваются с уменьшением полноты обводов судна и с увеличением его длины в пределах 50-150 м. Суда длиной более 200 м редко имеют повреждения днища, что объясняется их относительно большой осадкой в балласте и боль-
шой толщиной обшивки днища.
Наряду со слемингом при продольной качке судна наблюдается явление слепинга (англ, slapping - шлепание) - удары волн в бортовые ветви шпангоутов в носовой оконечности при малых курсовых углах и большой скорости судна. Явление слепинга также связано с предварительным выходом из воды носовой оконечности и обусловлено развалом борта судна выше ватерлинии. Максимальные значения давлений при слепинге могут достигать 0,6-0,8 МПа; при этом наблюдаются повреждения бортовых перекрытий судна. В качестве меры борьбы со слепингом рекомендуется изменение курсового угла и снижение скорости судна.
В зарубежной практике имеет распространение оценка поведения судна в отношении слеминга, основанная на опыте эксплуатации судна. Так, в США считается, что
< Напряжение, Па
о.оч - я Растяжение
Т 1Максштиый
1 Макашапный
пиирнжение
L Сжатие прогиба
-О&е
Рис. 8.11. Изменение суммарных напряжений изгиба корпуса со време-
допустимое число ударов судна в балласте за время, равное 100 периодам килевой качки судна,
нем при слеминге
не должно превышать шести.
- 218-
При погружении носовой оконечности судна в волну гидродинамические давления вызывают упругие изгибные колебания корпуса. Происходящее одновременно с этим изменение изгибающего момента, действующего на корпус судна, называют ударным изгибающим моментом, в отличие от волнового изгибающего момента (без учета качки). Ударные изгибающие моменты для судна в балласте значительно больше, чем для судна с полным грузом, когда слеминг отсутствует. Эти ударные напряжения могут играть заметную роль в образовании напряженного состояния корпуса на волнении.
Результат наложения ударных напряжений на волновые напряжения и напряжения на тихой воде показан на рис. 8.11.
Динамический характер воздействия изгибающего момента на волнении учитывается в процессе проектирования судна на основе применения Норм прочности судов.
§ 56. Заливаемость судна на волнении
Движение судна на волнении сопровождается еще двумя отрицательными явлениями: забрызгиванием надстроек и заливанием палуб.
Забрызгивание - это попадание брызговых потоков воды на ходовую рубку и другие надстройки и палубные грузы. Опасность забрызгивания состоит в ухудшении условий видимости и управления судном в шторм, а также в усилении обледенения судна в зимних условиях и связанном с этим ухудшением остойчивости, характеристик качки и ходкости судна на волнении (за счет увеличения моментов инерции массы обледеневшего судна).
Заливаемость судна - это поступление сплошных масс воды на палубу в процессе качки на волнении. При превышении определенных пределов заливаемости может создаться опасность для людей й перевозимого груза и измениться остойчивость судна. Наиболее опасная форма заливаемости - зарываемость в волну на встречных курсовых углах. Она характерна для быстроходных судов с полным грузом.
Заливаемость судна на встречных курсовых углах определяется изменением уровня поверхности воды по борту судна с учетом перемещений самого судна при продольной (а также бортовой) качке. Изменение уровня воды относительно судна определяется величиной
Zb(x, 0 = ?G(t, и, X, he) + хфи и, X, М -
- U(f, Ок, X, hB). (8.11)
По существу величина Zg(x, t) представляет собой профиль волны, записанный в связанной с судном колеблющейся системе координат. Условие заливания палубы в точке судна, расположенной на расстоянии х от ЦТ, может быть представлено неравенством вида
^0(х) > Он(х), (8.12)
- 219-
Рис. 8.12. Кривые эаливаемости судна на встречном волнении
1 — заливание палубы; 2 — оголение дни* ща; 3 — профиль корабельной волны на борту судна
где £в0(х) - амплитудное значение изменения уровня в месте с координатой х, равное
2во(х) = Zb(x, 0/cos (oKt + ев);
(8.13)
£>н(х) - эффективная высота надводного борта судна в этом месте, определенная на ходу судна с учетом системы корабельных волн на тихой воде.
Величины £в0(х) являются ординатами так называемых кривых эаливаемости, т. е. уровня воды по борту судна в течение времени, превышающего периоды волны и качки судна. Форма кривых заливае-мости (рис. 8.12) зависит от скорости судна, курсового угла, формы подводной и надводной частей корпуса судна, интенсивности и характера волнения. Расчет кривых эаливаемости требует предварительного расчета амплитуд вертикальной и килевой качек и фаз качки на
встречном волнении.
Для уменьшения эаливаемости еще на стадии проектирования увеличивают надводный борт судна и делают развал бортов в носовой части судна. Однако развал бортов вызывает увеличение собственной
частоты килевой качки судна Ыф, а при движении судна на встречном волнении (с кажущимися частотами ок > Ыф) такое изменение значения Ыф будет приводить к приближению резонансной зоны к реальным частотам встречи судна с волнами, т. е. к усилению качки. Поэтому развал бортов в носу быстроходных судов не будет уменьшать зали-ваемость. Для тихоходных судов это мероприятие, однако, дает положительный эффект, так как у них обычно
^ф > Ок*
В условиях эксплуатации судна воздействовать на уровень заливаемости приходится путем снижения скорости судна или уменьшения осадки носом. Однако нужно помнить, что уменьшение осадки носом может привести к опасности возникновения слеминга. Изменение же курсового угла судна не приводит к ощутимому
Рис. 8.13. Зависимость относительного уровня воды на нерегуляриом волнении от курсового угла в трех точках судна
1 — на НП; 2 — на КП; 3 — на миделе
- 220-
результату в отношении заливаемости, поскольку превышение допустимого уровня заливания палубы может сохраняться за счет усиления бортовой качки при увеличении курсового угла х-
На рис. 8.13 показано влияние курсого угла на характеристики заливаемости судна при нерегулярном волнении в трех точках по длине судна.
§ 57. Ухудшение ходкости судна и условий работы гребного винта и двигателя на волнении
Качка судна на волнении тесно связана с функционированием всего пропульсивного комплекса судна, состоящего из корпуса, гребного винта и судовой энергетической установки (СЭУ). Процесс колебаний судна на волнении оказывает отрицательное влияние как на работу каждого элемента этого комплекса, так и на их взаимодействие. Совокупность свойств судна в отношении способности его двигаться в условиях волнения объединена понятием ходкости судна на волнении.
Изменения, вносимые качкой и волнением в характер функционирования пропульсивного комплекса, состоят в следующем:
- увеличивается сопротивление воды движению судна при тех же скоростях за счет воздействия морского волнения и колебательного движения судна при качке;
- снижается эффективность работы гребного винта, режим его работы отличается от расчетного, происходит периодическое оголение винта при прохождении волны и за счет качки судна;
- увеличивается в среднем и приобретает периодический характер нагрузка на главном двигателе; при оголении гребного винта двигатель осуществляет заброс оборотов;
- при возникновении слеминга, слепинга, заливаемости палуб и оголении гребного винта судоводитель осуществляет дополнительное вынужденное снижение скорости судна.
Таким образом, естественно и намеренно снижается скорость судна.
В целом задача о ходкости судна на волнении представляет сложную комплексную научно-техническую проблему, решение которой в настоящее время находится в завершающей стадии.
Что касается определения естественной потери скорости судна на волнении, то для решения этой частной задачи ходкости необходимо произвести анализ системы уравнений ходкости судна, состоящей из уравнения сил в проекции на продольную ось Gx и уравнения моментов на гребном валу:
(Д + /dt) = Pe(uG, n, he, x, t) - R(»g> Ь» X, 0; (8.14)
2nIK(dn/dt) =MOT(n, qT) -MB(uG, n, hB, tG, Ф, 0» (8-15)
где n - частота вращения гребного вала; R - полное сопротивление судна на волнении с учетом качки; 1К- момент инерции масс двигателя,
- 221 -
вала и гребного винта; Мда - момент на фланце двигателя; qT - положение ручки подачи топлива; Мв - момент сопротивления вращению гребного винта.
К системе уравнений (8.14) и (8.15) необходимо добавить уравнение ограничительных характеристик двигателя, которые определяют зону допустимых значений мощности двигателя и частоты его вращения, а при движении судна косыми курсами к волне еще и уравнение рыскАния. Понятно, что определение функциональных зависимостей величин, входящих в систему, от параметров волнения и качки судна связано с предварительным решением задачи о качке судна.
В результате численного решения системы всех уравнений с учетом указанных ограничений находят значения скорости судна ugU Ьв, Х, Чт) и частоты вращения двигателя n(t, tig, gj, соответствующие заданным параметрам волнения hg и X и параметру топливопода-чи qT. На практике представляют интерес средние за большой промежуток времени значения скорости ид и частоты п. Для этого систему упрощают, полагая производные due /dt и dn/dt равными нулю.
Решение задач ходкости судна на волнении может быть осуществлено исключительно с помощью современных быстродействующих ЭВМ.
Для судов отдельных типов были проведены расчеты ходкости, а их результаты представлены в виде так называемых диаграмм штормового плавания Липиса и Кондрикова. Однако применять их можно лишь для судов тех типов, для которых они составлены.
Таким образом, поведение судна на морском волнении является сложной научно-технической проблемой, представляющей интерес как с точки зрения проектирования судна, так и с точки зрения правильного управления судном в штормовых условиях. Успешное внедрение результатов научных исследований поведения судна на морском волнении в практику судовождения зависит от быстроты завершения этих исследований и освоения их результатов судоводителями.
§ 58. Наклонения судна, перевозящего сыпучие грузы
Сыпучие грузы относятся к сухим навалочным грузам. Их способность к смещению при накренениях судна является причиной многих аварий на море. Статистика свидетельствует, что около 30 % случаев гибели судов связаны со смещением навалочных грузов. Более 50 % всех опрокинувшихся судов перевозили сыпучие грузы. Поэтому судоводителю необходимо неукоснительно соблюдать правила перевозки этих грузов и знать физику происходящих явлений. В частности, надо хорошо представлять себе, как влияют сыпучие грузы на остойчивость и посадку судна.
Степень подвижности сыпучих грузов характеризуется углом естественного откоса - так называемым углом пересыпания ап, равным для угля 8", для зерна 15, глинозема 30, медного концентрата 35’ и т. д. При ап > 35’ груз считается не опасным с точки зрения его смещения при перевозках.
- 222-
Рассмотрим упрощенную схему поседения судна с пересыпающимся грузом.
Пусть внешний момент накреняет судно на угол 6. При накренении судна на угол 0 < ап груз не пересыпается и не создает дополнительного кренящего момента (рис. 8.14, а). При бблыпих накренениях часть груза пересыпается таким образом, что его поверхность остается под углом ап к горизонту (рис. 8.14, б). Угол поворота поверхности груза относительно первоначального горизонтального положения Рп = = 0 - ап. Возникающий при этом кренящий момент Мкр пропорционален удельному весу груза уг, объему переместившегося груза Vr, выделенному на рис. 8.14, б штриховкой, и плечу 1^р, на который сдвинулся груз. Так как Vr = (l/2)(bi?/4) I? tg pn - ширина поверхности сыпучего груза; /г - длина трюма с сыпучим грузом),
^кр ~ * ^г'хг 18 (8 “ ®п) * ~ «п)> ’ (8-18)
где ix г = Irbj?/12 - момент инерции площади поверхности груза.
Из формулы (8.16) видно, что уменьшение ширины поверхности груза Ьг снижает кренящий момент в кубической зависимости. Поэтому продольная сепарация груза, установка шифтингбордсов резко уменьшают Мкр. Выражение (8.16) дает линейную зависимость Мкр от угла крена. На самом деле на значение Мкр влияют размеры подпалубных пустот, где может пересыпаться груз, и поэтому зависимость Мкр = = /(0) является более сложной.
При выпрямлении судна обратного пересыпания груза не происходит до тех пор, пока его поверхность не повернется на угол, больший -ап, т. е. на участке 0 - 2ап обратного пересыпания груза нет и Мкр = = const. При дальнейшем накренении на другой борт груз начинает пересыпаться в обратную сторону. В течение одного полного колебания кривая Мкр(0) опишет как бы петлю гистерезиса с размахом 20 и толщиной 2ап (рис. 8.15).
Если после накренении на угол 0О внешний кренящий момент исчезает, то за счет пересыпавшегося груза и его момента Мкр судно будет плавать с некоторым углом статического крена 0j (рис. 8.16). Попытка устранить этот крен за счет перекачки балласта или топлива может привести к опрокидыванию судна на противоположный борт.
Для объяснения этого процесса обратимся к диаграмме статической остойчивости судна с сыпучим грузом, изображенной в верхней части рис. 8.16, в нижней части которого показана зависимость суммарного момента =МВ -Мкр от угла крена. После накренении судна на угол 0О и пересыпания груза (точка А) внешний момент пропадает и судно плавает с углом статического крена 0, (точка С). При спрямлении судна кривая меняется по линии CBD, причем в примере, показанном на рис. 8.16, она имеет минимум в точке В. Для спрямления судна до угла 02, которому соответствует точка В, необходимо приложить спрямляющий момент М2. Поскольку на участке BDE М? меньше М2, судно начинает опрокидываться на противоположный борт. Таким образом, спрямление судна, имеющего в диаграмме
- 223-
минимум при положительных углах крена (точку В), до нулевого угла крена недопустимо. Наличие такого минимума определяется условием более крутого подъема функции Мкр =/(0) по сравнению с Мв =/(0) в начале координат, а также углом статического крена судна 0р превосходящим величину 2ап.
Поскольку крутизна наклона кривой характеризуется величиной производной функции по его аргументу, то наличие опасного минимума (точка В) можно определить из условия
или, учитывая выражение (8.16),
Т’г1хг/1’ = Рг>хг/Л- (8-18)
Рассмотрим поведение судна с сыпучим грузом при бортовой качке. Пусть судно под действием волн испытывает симметричную качку с амплитудой 0* (рис. 8.17, а). Допустим, что смещение груза происходит при накренении на правый борт (0* > ап). Величина Мкр определится из графика Мкр=/(0*). На тихой воде после снятия внешнего момента возник бы статический крен с углом 0Х. На волнении судно продолжает качаться около нового положения равновесия. Следующее максимальное накренение судна под действием волн произойдет на угол 02 = 0t + 0*. Величина 02 определится из равенства площадей треугольников САВ и О1А1В1. Из-за нелинейности диаграммы статической остойчивости второе наклонение будет несколько большим. Это приведет к дальнейшему смещению груза, и если Мкр линейно возрастает с углом крена, то на каком-то накренении судно опрокинется. Для случая, изображенного на рис. 8.17, а, это произойдет на третьем накренении. Уменьшение Мкр за счет установки диаметральной переборки увеличивает количество наклонений судна до опрокидывания и позволяет судоводителю, заметившему нарастающий крен, изменить курс и спасти судно.
В действительности величина Мкр после того, как груз начинает соприкасаться с палубой, стабилизируется (рис. 8.17, б), а при малых подпалубных пространствах и несколько уменьшается при дальнейших накренениях. В этом случае положение судна на волнении также может стабилизироваться. Оно будет плавать при угле статического крена 0t и совершать относительно него качку с амплитудами 0д и 0* (на левый и правый борт), определяемыми равенством площадей O1C1D и О1А1В1 (см. рис. 8.17, б). Безопасность судна с точки зрения возможности опрокидывания будет зависеть от площади диаграммы статической остойчивости выше линии О^!. Если 0t < ₽п, то при качке судна возможно обратное пересыпание груза и уменьшение угла крена 0Г. При 0t > Рп происходит увеличение размахов при качке; судно увеличивает крен в сторону смещения груза и может
- 224-
Рис. 8.14. Накренение судна с сыпучим грузом: а-6<ап, Мкр=0; б-0>ап
Рис. 8.15. Кренящий момент от пересыпания груза
Рис. 8.16. Диаграмма ста* тической остойчивости судна с сыпучим грузом
Рис. 8.17. Диаграмма статической остойчивости при бортовой качке судна с сыпучим грузом: а — кренящий момент возрастает с увеличением угла крена; б — кренящий момент ограничен
- 225 -
Рис. 8.18. Требования Регистра СССР к диаграмме статической остойчивости судна с сыпучим грузом
в конечном итоге опрокинуться. Условие 0t > ₽п эквивалентно неравенству (8.17).
Для безопасного плавания судов, перевозящих сыпучие грузы, Регистр СССР регламентирует величину 01, ограничивая ее значением 0j = 12*. Кроме того, нормируется площадь диаграммы от угла 0t до 0 =40*, или угла заливания, если он меньше. На рис. 8.18 эта площадь As заштрихована,-Для незерновых грузов As> 0,12 рад • м; для зерна As 5® 0,075 м -рад. Величина Мкр, необходимая для вычисления площади определяется по методике Регистра СССР [3]. Начальная метацентрическая высота h0 должна быть больше 0,7 м при перевозке незерновых грузов и больше 0,3 м при перевозке зерна.
§ 59. Экспериментальные исследования качки судна
Изучение качки судов только на основе анализа уравнений качки не может полностью удовлетворить запросы практики мореплавания. Как показывают наблюдения за качкой судов, расчетные значения амплитуд зачастую отличаются от реальных значений. Часто это обстоятельство объясняется недостаточной информацией о коэффициентах демпфирования качки, особенно для судов новых типов с необычной формой корпуса. Поэтому в настоящее время экспериментальные исследования некоторых аспектов поведения судна на волнении все еще имеют большое значение.
Экспериментальные методы изучения качки могут выполняться на моделях судов в специальных мореходных бассейнах, а также в натурных условиях на реальных морских судах.
Мореходные бассейны представляют собой специальные гидродинамические лаборатории, оснащенные сложной техникой, основу которых составляет относительно мелководный прямоугольный бассейн для проведения экспериментов с моделями. Современные бассейны имеют различные размеры, как правило, порядка 80 х 80 х 5 м. Бассейны оборудуют волнопродукторами - устройствами для создания в бассейне прогрессивных волн того или иного направления.
Волнопродукторы могут быть пластинчатыми, плунжерными или пневматическими. Волны генерируются в результате либо вертикальных колебаний клиновидного водоизмещающего тела у одной из стенок бассейна, либо колебаний разрезных вертикальных щитков,
- 226-
либо создания периодического давления воздуха под колпаками у стенки бассейна. Диапазон максимальных длин волн колеблется от 4 до 20 м.
Современные экспериментальные средства позволяют моделировать качку судов не только на регулярном, но и на нерегулярном волнении. Для этого управление работой волнопродуктора осуществляется микропроцессором, вырабатывающим случайные сигналы с целью воссоздания в бассейне волнения заданного спектрального состава.
Размеры модели не должны быть очень малыми, поскольку при этом на результаты эксперимента могут оказывать влияние силы поверхностного натяжения. Масштаб моделей колеблется в пределах 1/20-1/50.
В мореходных бассейнах могут проводиться самые разнообразные экспериментальные исследования мореходности судна: качки на тихой воде (на глубокой воде и на мелководье), всех видов качки моделей па волнении с ходом и без хода; исследования сопутствующих явлений - заливаемости, забрызгивания; определение кинематических характеристик в любой точке судна, динамической остойчивости судна на волнении с учетом качки; Изучение причин опрокидывания моделей на волнении и т. д.
Экспериментальные исследования качки судна на моделях основываются на результатах теории качки.
При качке моделей судов необходимо обеспечить геометрическое, кинематическое и динамическое подобия модели и натуры. Динамическое подобие соблюдается при равенстве чисел Фруда и Струхаля для модели и натурного судна:
= ин/7^; (8.19)
ShM = nMLM/uM = ShH » ПнЛн/ин. (8.20)
Для измерения и обработки параметров качки моделей используют различную аппаратуру. Так, замеры углов крена и дифферента при бортовой и килевой качках осуществляют авиационными гировертикалями с двумя степенями свободы. Применяют также датчики ускорений, спектральные анализаторы, специальные вычислительные комплексы для непрерывной обработки результатов эксперимента.
Проведение натурных испытаний судна на мореходность - довольно сложная научная проблема. Особенности натурных испытаний состоят в необходимости одновременной записи параметров волнения на судах либо на автоматических радиобуях, в ограниченности возможностей определения ряда параметров, например перемещений, скоростей, вследствие отсутствия на судне неподвижной системы отсчета по сравнению с испытаниями в бассейне.
На судне, обеспечивающем испытания, устанавливают аппаратуру: гировертикали, датчики ускорений, самописцы, анализаторы колебаний. Иногда выполняют киносъемку испытываемого судна
- 227-
с судна сопровождения с целью фиксации характера качки, заливаемое™, забрызгивания надстроек.
Мореходность оценивают при двух-трех значениях скорости судна и нескольких курсовых углах. Обычно маршрут движения судна составляют таким образом, чтобы последовательно охватить несколько галсов: 0, 45, 90, 135 и 180°. Для расчета статистических характеристик судна достаточно зарегистрировать 100-150 колебаний на одном курсовом угле.
Перед проведением испытаний необходимо производить градуировку аппаратуры - волнографов и гировертикалей - на специальных тарировочных стендах. Важное значение имеет тщательный инструктаж, организация испытаний, наличие программы и обеспечение согласованности действий экипажа и испытательной партии.
§ 60. Основные принципы умерения качки судна
В связи с отрицательными явлениями, вызываемыми качкой судна на волнении, появилось большое число изобретений и теоретических разработок, связанных с успокоителями качки судов. Если обратиться к бортовой качке, то можно выделить два предельных случая - качка при очень малой остойчивости, когда ДП судна стремится оставаться вертикальной, и качка при очень большой остойчивости, когда ДП все время занимает положение, параллельное вектору ускорения силы тяжести с учётом орбитального движения частиц в волне (динамической вертикали).
Принципы умерения качки с использованием успокоителей основаны на том, что система судно-успокоитель представляет собой новую динамическую систему, колебательные свойства которой Отличаются от таковых для парциальных систем. Задача проектанта состоит в том, чтобы подобрать такие характеристики успокоителя, которые улучшили бы динамические свойства результирующей системы.
Любой успокоитель бортовой качки образует так называемый стабилизирующий момент Мст, изменяющий сумму всех моментов, действующих на судно при качке без него. Уравнение бортовой качки стабилизированного судна имеет вид
(4 + *хо)0 + Цхбё + Ph08 =MB(t) - М„. (8.21)
Стабилизирующий момент можно представить в общем виде как совокупность различных способов стабилизации судна
Мст = а0 + ьё + сё, (8.22)
где а, Ь, с - коэффициенты стабилизации. Если стабилизация осуществляется относительно динамической вертикали, то вместо угла крена 0 нужно вводить величину 0 - а0 sin ot.
Перенося стабилизирующий момент в левую часть уравнения (8.21), получаем
(4 + в + с) 0 + (цх в + Ь) ё + (Ph0 + а) 0 = МВ(Г). (8.23)
- 228-
Отсюда видно, что стабилизация судна по 6 равносильна изменению остойчивости судна, стабилизация по 0 - изменению демпфирования качки, а стабилизация по 0 - изменению момента инерции.
Существующие успокоители качки используют различные принци-пы стабилизации, например а ¥= О, Ь + 0, с = 0 или b + 0, с + 0, а = 0 и т. д.
Для оценки эффективности стабилизации судна используют понятие кратности умерения качки, представляющее собой отношение амплитуды качки судна без успокоителя к амплитуде качки стабилизированного судна (по частотам резонанса):
fccr = 9m/(9m)cT = 1 + bn0/(2vePho). (8.24)
Выражение (8.24) получено для случая стабилизации по демпфирующему моменту (Ь ¥= 0, а = с = 0), который является наиболее эффективным способом стабилизации (рис. 8.19). Возможно построение успокоителей качки из условия стабилизации качки на нерегулярном волнении; тогда под кратностью понимают отношение средних амплитуд (или амплитуд 3 %-ной обеспеченности):
^ст = 0т/(0т)ст- (8.25)
Существуют различные успокоители качки: скуловые кили, пассивные цистерны, бортовые управляемые рули (активные) и т. д. Для успокоения килевой качки могут использоваться носовые пассивные и активные крылья.
Скуловые кили представляют пассивный тип успокоителя, работающий по принципу образования стабилизирующего момента, пропорционального угловой скорости 0. Конструктивно скуловые кили выполняются в виде узких перфорированных полос металла, привариваемых вдоль судна к его скуле с каждого борта. Суммарная площадь килей составляет от 3 до 6 % площади конструктивной ватерлинии судна. Кили увеличивают момент сил инерции волновой природы и момент сил сопротивления вихревой и волновой природы. По-видимому, они оказывают влияние на дифракционную составляющую возмущающего момента.
Эффективность килей возрастает с ростом их ширины. В режиме резонанса с помощью скуловых килей можно добиться 1,5-2-кратного умерения качки, а на нерегулярном волнении они уменьшают амплитуды бортовой качки на 20-25%. Два скуловых киля суммарной площадью 4К приводят к увеличению коэффициента демпфирования бортовой качки:
?хвК = йхв[1 + ЮАк/(1В)], (8-26)
где цх0 = *е/“е-
Полагая Лк * 0,06LB, Цхек/Цхе “ 1,6 и частоту резонанса о = ш0, преобразуем формулу (7.40) так:
0о/ао * и®и^/(2цхек). (8.27)
- 229-
60,град
Рис. 8.20. Изменение АЧХ судна при использовании пассивных успокоительных цистерн
1 — цистерна отключена; 2 — цистерна работает
Рис. 8.19. АЧХ бортовой качки
1 — нестабилиэированного судна; 2 — судна, стабилизированного по 0: 3 — судна, стабилизированного по 0;
4 — судна, стабилизированного по В
Отсюда следует, что при = 0.06LB кратность умерения бортовой качки скуловыми килями на частоте резонанса составит 1,6.
Пассивные бортовые цистерны - это сообщающиеся или несооб-щающиеся с забортной водой бортовые цистерны, соединенные между собой каналом. В цистерне типа „Флюм” канал имеет высоту, равную высоте самой цистерны.
Масса жидкости в цистерне составляет 2,0- 2,5 % водоизмещения судна. Период колебаний жидкости в цистернах типа „Флюм” равен периоду собственных колебаний судна, а отставание по фазе от колебаний судна - углу п/2. Такие цистерны работают в противофазе с волной, поскольку при частоте резонанса разность фаз колебаний судна и волны составляет п/2.
При изменении осадки судна в эксплуатации изменяются его характеристики, что требует в каждом конкретном случае подстройки цистерны изменением количества жидкости в ней. Пассивные цистерны вследствие наличия свободной поверхности жидкости изменяют остойчивость судна, а следовательно, и период собственных колебаний судна на тихой воде, смещают зону резонанса в область йизких частот. Кратность умерения качки цистерной типа „Флюм” может составлять 2-3.
Характер изменения АЧХ бортовой качки судна вследствие применения пассивной цистерны показан на рис. 8.20.
- 230-
Контрольные вопросы
1. Почему происходит изменение начальной остойчивости судна при движении на попутном волнении?
2. Какова физическая природа и причины возникновения слеминга?
3. Как влияет начальная остойчивость на ускорения при бортовой качке судна?
4. Каковы условия заливания судна?
5. Каков механизм остойчивости судна с сыпучим грузом?
6. Каковы принципы умерения качки судов?
Глава 9
УПРАВЛЯЕМОСТЬ СУДНА
61. Кинематические параметры КривОЛИНеЙНОГО движения гудия
В большинстве задач управляемости рассматривается криволинейное движение судна в плоскости ватерлинии. Если не принимать во
внимание случаи движения судна на волнении с изменением углов крена и дифферента вследствие качки и динамического воздействия ветра или поворота судна, то в остальных случаях можно предпо-
ложить, что движение судна плоское.
Для описания такого движения вводят две системы координат: неподвижную О£т], связанную с земной поверхностью, и подвижную Gxy, жестко связанную с судном (рис. 9.1). Начало подвижной системы
полагается в ЦТ судна, который считается лежащим в плоскости миде-
ля, т. е. посередине длины судна. Корпус судна считается симметричным относительно ДП. Используют так называемые левые системы координат, у которых поворот оси Gx к Gy (и к Од) осуществляется по часовой стрелке. Ось Gy перпендикулярна ДП судна и совпадает с главной осью инерции, ось Gz вертикальна, перпендикулярна плоскости действующей ватерлинии и совпадает с главной вертикальной осью инерции.
При решении задач управляемости определяют несколько кинематических параметров. Угол ф между осью Gx и осью О£ называют углом курса, угол ₽g между вектором скорости ЦТ судна
Рис. 9.1. Кинематические параметры плоского движения судна
-231-
и осью Gx - углом дрейфа, угол ф5 между вектором скорости ЦТ судна и осью ОЕ, - углом поворота траектории или углом скорости, а угол 6 , отсчитываемый от ДП до плоскости симметрии руля, - углом перекладки руля. Положительные направления углов показаны на рис. 9.1.
В задачах управляемости, где исследуется разворот судна при малых значениях его скорости в качестве параметров целесообразно использовать проекции скорости на оси систем координат Gxy. их, и и угловую скорость вращения ы, а в задачах, где скорость судна не может'считаться малой, - модуль скорости uG> угловую скорость ш и угол дрейфа Pg- Кроме того, вводят и другие параметры: ф, ф5> время t, радиус кривизны траектории ЦТ г.
Не все кинематические параметры являются независимыми. Как видно из рис. 9.1, соотношение между углом курса ф, углом дрейфа PG и углом скорости ф; имеет вид
Ф’₽о + Ф5. (9.1)
Если продифференцировать выражение (9.1) по времени, то получим соотношение между скоростью изменения угла курса (скоростью поворота ДП), скоростью изменения угла дрейфа и угловой скоростью вращения судна:
t/ф dflG uG ----= (J =-------+------ .
dt dt r
(9.2)
Кроме того, существует известная связь между модулем скорости и G, угловой скоростью (1)ц и радиусом кривизны г:
Ь)ц = u/r.
(9.3)
Обе системы основных кинематических параметров связаны между собой соотношениями, вытекающими из рис. 9.1:
O| = uGcosPG; un = -uGsinwG.
(9.4)
Положение судна в любой момент времени t определяется координатами его ЦТ £g и nG и углом курса ф, которые можно вычислить по формулам
{ их(0Л + £о;
*0
nG(0 = { uy(f)df + n0;
*0
(9.5)
ф = i ь)ц(ол+ф0.
*0
При этом должны быть известны начальные условия при t = t0:
ux('o) = ихо;
£g(Q = £0;
nG('o) = n0;
«(t0) = w0;
<₽(f0) = <₽0-
(9.6)
- 232 -
Под траекторией судна понимают траекторию движения ЦТ судна. Кроме того, представляет интерес траектория абсолютного движения других точек судна, например его оконечностей. Траектории произвольных точек судна могут быть построены по координатам этих точек для последовательных значений времени.
§ 62. Судно как управляемая система
В процессе эксплуатации судна возникает большое число различных ситуаций, в каждой из которых должны применяться те или иные способы управления судном. Для систематизации всего многообразия задач управления, а также для формирования правильного подхода при инженерном решении этих задач в последние годы в теории управляемости осуществляется внедрение научных понятий, выработанных в других отраслях техники. В частности, оказалось плодотворным использование методов теории автоматического регулирования, теории управления подвижными объектами и др. В связи с этим в настоящее время в теории управляемости судно рассматривают как управляемую систему (УС), представляющую собой сочетание трех основных элементов: судна как объекта управления, средства управления и управляющего устройства.
Под объектом управления (ОУ) понимают само судно, несущее в себе все остальные элементы системы и состоящее из корпуса и гребных винтов или других средств движения (движителей).
Средства управления (СУ) - это устройства, которые создают силы и моменты для управления движением судна. В качестве средств управления могут выступать рули различных конструкций, поворотные насадки, сами гребные винты, а также дополнительные средства улучшения управляемости, называемые средствами активного управления (САУ).
Третьим важным составным элементом системы является управляющее устройство (УУ), в котором вырабатывается сигнал, задающий команду для изменения его силового воздействия на корпус судна. УУ может представлять собой систему автоматического управления, какой является авторулевой, либо иметь в своем составе ЭВМ. Роль УУ выполняет также человек с его опытом управления судном, умением прогнозировать обстановку и принимать решения. При участии в управлении нескольких человек (рулевого, вахтенного, механиков, лоцманов и др.) все они в совокупности представляют определенное УУ.
Как видно, судно представляет собой УС переменного состава, причем ее состав определяется не только перечнем участвующих устройств или людей, но и меняется от одной задачи управления к другой, если происходит смена целей управления, например при управлении курсом судна или при торможении для подхода к причалу, изменении его посадки и водоизмещения и т. д.
- 233-
Рис. 9.2. Судно как управляемая система
Используемое в дальнейшем понятие управления нужно понимать как организацию того или иного процесса, которая обеспечивает достижение определенных целей.
Условное графическое изображение рассматриваемой УС, взаимодействие элементов системы и внешние факторы,' влияющие на ее функционирование, показаны на рис. 9.2.
Задача управления судном
характеризуется целью управления, которая обычно состоит либо в направленном изменении каких-либо величин, характеризующих движение судна, либо в поддержании их постоянными. Эти величины называют управляемыми координатами. В качестве управляемых координат выступают кинематические параметры (или величины, являющиеся их комбинациями), описанные в § 64. Управляемые координаты характеризуют так называемый выход системы, изображенный на рис. 9.2 стрелкой 3. Силовое воздействие, вырабатываемое СУ, показано стрелкой 2, а управляющий сигнал - стрелкой 1.
Управляемая система считается замкнутой, если существует обратная связь 6, которая позволяет УУ корректировать сигнал в соответствии с целью управления. При отключении обратной связи система считается разомкнутой и ОУ проявляет иные свойства. Разомкнутая система совершает так называемый переходный процесс, при котором СУ внезапно обеспечивает входной координате некоторое постоянное заданное значение. При этом движенце системы определяется свойствами ОУ. Если же менять входную координату по заданному закону, то такое управление без обратной связи будет программным.
Входящие в состав системы элементы оказывают взаимное воздействие друг на друга. Так, руль как СУ испытывает воздействие скорости судна, угла дрейфа, угловой скорости, которые изменяют силы и момент от руля и делают реакцию руля на сигнал со стороны УУ неоднозначной (связь 5 на рис. 9.2). Также поток воды в корме судна, формируемый корпусом в районе расположения руля, изменяет условия его работы (связь 4).
Свойства УС могут меняться при воздействии внешних условий на составляющие систему элементы. Так, мелководье, близость стенки
канала, наличие ветра и волнения изменяют силы на корпусе судна, влияют на работу движителя и его взаимодействие с корпусом судна, что в конечном итоге отражается на характеристиках управляемости (стрелка 9). Так же и УУ находится под воздействием различных факторов: навигационной обстановки, наличия узкостей, экономических факторов и т. п. (стрелки 8 и 10). Вообще говоря, УУ должно в том или ином виде учитывать и постоянные изменения в УС,
- 234-
например изменение осадки судна, наличие дифферента и т. д. (связь 7).
Следует отметить, что внешние воздействия (ветер, волнение, течение) изменяют лишь характеристики управляемости, воздействуя на ОУ и СУ. Однако если движение судна вызвано только внешними факторами, то такое движение не характеризует управляемость.
Под послушливостью системы понимают способность судна противодействовать внешним факторам при обеспечении управляемости на заданном уровне их воздействия. При отсутствии внешних воздействий их роль может выполнять неустойчивость судна на курсе.
Кроме прочих параметров, характеризующих управляемость судна, играет роль чувствительность - способность судна возможно быстрее реагировать на действие СУ, например на перекладку руля.
Для исследования функционирования судна как УС применяют различные методы моделирования: физическое, математическое, использование аналоговых устройств.
Физическое моделирование предполагает использование самоходных управляемых моделей, испытываемых в условиях бассейнов или полигонов. При математическом моделировании составляют алгоритм, систему уравнений, называемую математической моделью, которая позволяет получать вычислительным путем зависимости кинематических параметров движения судна от управляющих сигналов, задаваемых в виде определенных функций - законов управления. Подобное моделирование осуществляется в настоящее время с использованием современных быстродействующих ЭВМ. Моделирование на аналоговых устройствах состоит в подборе таких электронных схем и систем, внутренняя структура и соответствие электрических сигналов которых повторяют принцип функционирования данной УС. Такое моделирование производится на специальных аналоговых вычислительных машинах и комплексах.
Варьирование законов управления, начальных условий или характеристик судна позволяет в короткое время просматривать многие варианты и способы управления судами, решать аварийные задачи, воспроизведение которых на натурных судах затруднительно или по объективным причинам невозможно.
§ 63. Силы, действующие на корпус судна на глубокой воде
Рассмотрим силы и моменты, действующие на корпус судна при произвольном его движении в плоскости ватерлинии. Предположим, что судно совершает неустановившееся движение с ускорением и неравномерным вращением. ЦТ судна описывает криволинейную траекторию, кривизна которой меняется от точки к точке. Действующие на корпус силы и моменты можно классифицировать в зависимости от причины, их порождающей, следующим образом:
- силы на корпусе от судовых движителей;
- 235-
- гидродинамические реакции на корпусе вследствие его движения в жидкости;
- силы на корпусе, обусловленные инерцией судна и окружающей жидкости;
- силы на корпусе со стороны СУ.
Для определения большинства из этих сил необходимо знание кинематики движения не только ЦТ, но и корпуса в целом, в частности в местах расположения судовых движителей и СУ. Важное значение имеет знание характеристик потока жидкости вблизи корпуса, движителей и СУ.
Рассмотрим общий случай движения судна по криволинейной траектории, кривизна которой меняете# от точки к точке. В каждый момент времени судно поворачивается относительно центра вращения (см. рис. 9.1), положение которого определяется кривизной траектории в этот момент времени:
/ dl
l/r(t) = l/—. (9.7)
/ dif
Здесь r(f) - мгновенное значение радиуса кривизны дуги траектории ЦТ; dl - дифференциал дуги траектории ЦТ судна.
Угловая скорость вращения судна вокруг собственной оси Gz в общем случае складывается из угловой скорости вращения при движении по траектории (вращения относительно оси, проходящей через центр поворота - точку О) и скорости изменения угла дрейфа Pg (9.2).
При установившемся движении по кругу (период установившейся циркуляции) угол дрейфа остается постоянным и угловая скорость вычисляется по формуле (9.3).
При вращении судна на месте без хода угловая скорость определяется как скорость изменения угла курса ф во времени:
. dif
u ur=o =----• (9-8)
dt.
Точку, относительно которой судно поворачивается в его относительном движении, называют полюсом поворота. При движении судна по круговой траектории полюс поворота Р лежит в ДП в носовой части судна (рис. 9.3). Полюс поворота характеризуется тем, что полный вектор абсолютной скорости в этой точке направлен строго вдоль ДП, а следовательно, в точке Р поперечная составляющая скорости равна нулю. Его положение определяется как точка пересечения сил Gx с радиусом О±Р, перпендикулярным ДП судна. Как легко убедиться, положение полюса поворота на оси меняется в зависимости от кривизны траектории 1/г и угла дрейфа Рс и может находиться как в пределах судна, так и впереди него.
- 236 -
Для изучения обтекания корпуса судна, гребных винтов и СУ важно знать, под каким-углом направлен вектор скорости потока жидкости в каждой точке длины судна. Это направление определяется так называемым местным углом дрейфа Р(х), определяемым через соотношение поперечной и продольной составляющих скорости потока в рассматриваемой точке М (хм, 0) (см. рис. 9.3). Как видно из рис. 9.3, в произвольной точке на ДП М (хм, 0) имеет место соотношение
tg Р (хм) = (хР - xM)/(r cos PG). (9.9)
Для достаточно пологих траекторий можно принимать
tg Р(х) * Р(х); Р(хм) = pG - g)xm/ug. (9.10)
Следовательно, местный угол дрейфа по длине судна меняется по линейному закону, возрастая от носа в корму, а в полюсе поворота обращается в нуль, меняя знак. Учитывая то, что угол дрейфа Р(х) определяет соотношение поперечной и продольной проекций скорости в данной точке:
tgP(*M) = Uy(xM)/Ux(xM), (9.11)
а также то, что продольная проекция их(хм) одинакова для всех точек судна, закон распределения (9.10) одновременно показывает, как изменяется поперечная составляющая скорости потока иу вдоль судна. Эпюра поперечной скорости оу представлена на рис. 9.4.
Кроме того, важно иметь в виду, что при криволинейном движении судна его кормовые точки движутся по траекториям с ббльшими радиусами кривизны, а соответственно, и с ббльшими линейными скоростями, чем ЦТ судна:
им = UG cos pG/cos Р(х).
(9.12)
Если говорить о скоростях потока жидкости в этих точках, то необходимо принимать во внимание, что вследствие обтекания корпуса и вследствие его спрямляющего воздействия на поток вблизи
Рис. 9.3. Изменение угла дрейфа ₽ по длине судна
Рис. 9.4. Эпюра распределения поперечной скорости Uy при криволинейном движении судна
- 237-
корпуса реальные скорости потока и углы его натекания на винты и органы управления будут несколько иными, а реальная картина может быть получена только из соответствующих экспериментов.
Как показывают натурные испытания судов, положение полюса поворота Р по длине судна находится в пределах хР (0,35- 0,60)L, а углы дрейфа можно оценить по приближенной формуле р «в 0,4L/r.
Приступим к описанию сил, действующих на судно при криволинейном неустановившемся движении.
Силы на гребных винтах. В задачах управляемости, в отличие от задач ходкости судна, рассматривают условия работы гребного винта, существенно более сложные. Во-первых, изменяется режим работы гребного винта даже при движении на прямом курсе в процессе торможения судна, во-вторых, изменяются условия натекания потока на винт при движении судна с углом дрейфа и одновременным его вращением. При этом в дополнение к уже известным упору и моменту сопротивления гребного винта появляются боковые силы, а упор и момент изменяют свои значения, соответствующие равномерному движению судна прямым курсом.
При движении судна на циркуляции вследствие увеличения сопротивления корпуса судна, движущегося с углом дрейфа Рд, увеличивается нагрузка на двигателе и снижается частота вращения винта. Приближенно изменение частоты вращения на циркуляции определяется формулами:
п/п0 = 1/[ 1 + (Ь/r)2]; п/п0 = 0,5(1 - и/о0), (9.13)
полученными на основе систематизации натурных испытаний. Падение скорости на циркуляции можно оценить с помощью выражения:
и/о0 = 1/[1 + 2,7(L/r)2]. (9.14)
В случае движения судна с углом дрейфа и угловой скоростью набегающий на гребной винт поток отклоняется от ДП на величину угла дрейфа в корме Рк(х = хв), где хв - абсцисса гребного винта. Вследствие косого обтекания на гребном винте гидродинамическая реакция отклоняется от его оси в направлении поперечной составляющей потока, т. е. на гребном винте образуются две составляющие -продольная (упор) и поперечная.
Образование поперечной составляющей можно трактовать как возникновение силы сопротивления вращающегося гребного винта, обтекаемого поперечным потоком со скоростью иу(х = хв), хотя причина ее в действительности гораздо более сложна. Боковая сила непосредственно влияет на управляемость судна, образуя момент, препятствующий развороту. Она образуется по двум причинам: из-за косого натекания воды на винт и из-за неравномерного распределения скоростей потока воды по высоте винта:
РУ=РУ1 + РУ2. (9.15)
- 238-
V*
Рис. 9.5. Образование боковой силы на гребном винте при наличии поперечного потока
оси вращения винта вызывает
Первая составляющая образуется вследствие того, что для двух лопастей, находящихся в вертикальном положении, скорость обтекания верхней лопасти равна алгебраической сумме скорости 1>у и скорости, вызванной ее вращением, а нижней лопасти -их разности (рис. 9.5). В результате возникает нескомпенсирован-ная боковая сила сопротивления обеих лопастей, направленная всегда в направлении поперечной скорости потока и не зависящая от направления вращения гребного винта. Положение линии действия этой силы относительно
одновременно увеличение момента сопротивления его вращению.
У двухвинтового судна силы, возникающие на каждом винте, суммируются, так как они не зависят от направления вращения винта.
Вторая составляющая в (9.15) вызвана тем, что лопасть, попадая в верхнее положение, в котором скорости попутного потока оказываются больше, чем в нижнем положении, вследствие неоднородности попутного потока по высоте винта (что приводит к меньшим значениям угла поступи), испытывает большее сопротивление. В результате возникает нескомпенсированная боковая сила Ру2, которая при винте правого вращения будет стремиться развернуть судно вправо, так как направлена на левый борт. Для винта левого вращения эффект будет обратный. Для двухвинтового судна эти силы компенсируют друг друга, если его винты вращаются в разные стороны. При прямолинейном движении судна действие силы РУ2 компенсируется перекладкой руля на один борт на 1- 2*.
Итак, наличие угла дрейфа в корме вызывает поперечную силу на винтах, момент которой на прямом курсе стремится уменьшить угол дрейфа, а на заднем ходу способствует развороту судна. При движении судна задним ходом появляется еще одна поперечная составляющая вследствие работы винта на задний ход и несимметричного набрасывания струи на корму судна с каждого борта. Величина этой силы может составлять до 40 % упора винта. Ее направление совпадает с направлением вращения винта при реверсе.
Гидродинамические реакции на корпусе при движении судна на тихой и глубокой воде. При движении судна в плоскости ватерлинии на тихой воде подводная часть корпуса обтекается водой довольно сложным образом. Если рассматривать произвольное плоское движение судна с углом дрейфа и угловой скоростью вращения, то обтекание корпуса имеет пространственный характер и сопровождается перетеканием воды под днищем с одного борта на другой, а также сложной системой вихреобразования. В результате взаимодействия корпуса
- 239-
с жидкостью на нем образуется поле гидродинамических давлений, равнодействующая которых не лежит ни в одной из главных плоскостей; точка ее приложения меняет свое положение nd длине судна в зависимости от кинематических параметров движения судна, а ее величина и момент относительно начала координат не могут быть определены простым расчетом. Тем не менее в настоящее время разработаны методы расчетно-экспериментального определения гидродинамической реакции воды, позволяющие проводить расчеты управляемости водоизмещающих судов.
В основе этих методов лежит поэтапное определение реакции и ее момента отдельно для каждого вида плоского движения судна. Произвольное плоское движение судна разбивают на поступательное с углом дрейфа в ЦТ Pg и чисто вращательное с угловой скоростью ы; в каждом случае определяют своим способом составляющие силы и момента в проекции на оси координат, а затем суммируют соответствующие проекции:
Fx ~ Fti(Pg) + Fy ~ Fy 1 (Рg) +
Mz = Mz1(Pg) + Mz2(w)-
(9.16)
Первые составляющие в правых частях уравнений (9.16), зависящие от угла дрейфа Pg> называют позиционными, поскольку их вели
чина в основном определяется положением судна относительно скорости потока (углом дрейфа). Вторые составляющие были названы демпфирующими, так как они выполняют роль сил сопротивления при вращении корпуса судна вокруг вертикальной оси.
При определении позиционных составляющих подводную часть
корпуса судна рассматривают как вертикальное крыло предельно малого удлинения, движущееся поступательно (и равномерно) с углом дрейфа ₽g> который выполняет роль угла атаки в теории крыла. Для того чтобы картина обтекания крыла соответствовала обтеканию
Рис. 9.6. К определению позиционных составляющих ' гидродинамической
реакции
реального корпуса, движущегося в плоскости ватерлинии, необходимо дополнить реальный подводный корпус таким же, но симметричным относительно плоскости ватерлинии (рис. 9.6). Понятно, что полученные реакции на дублированном корпусе необходимо будет разделить пополам по окончании расчетов.
Как показывает опыт, позиционная составляющая на корпусе приложена в носовой части суд
на, и можно считать практически, что она лежит в плоскости ватер
линии, т. е. ее вертикальная
- 240-
составляющая равна нулю в диапазоне скоростей, соответствующих скоростям транспортных судов. Однако положение точки приложения ее заранее неизвестно и, кроме того, оно зависит от угла дрейфа. Поэтому вместо позиционной силы определяют ее проекции FX1 и Fyi, считая,.что она перенесена в начало координат, компенсируя этот перенос величиной позиционного момента М21.
Использование теории крыла предельно малого удлинения связано с существенными математическими трудностями, поэтому, если имеется возможность определить позиционную составляющую и ее момент экспериментально, то это делают путем обтекания дублированной модели потоком жидкости - буксировкой ее в бассейне с углом дрейфа под водой на глубине, при которой свободная поверхность не влияет на результаты эксперимента, либо продувкой этой модели в аэродинамической трубе. В обоих случаях с помощью динамометра замеряют составляющие FX1, Fyi и М21 в связанной с моделью системе координат.
Результаты исследования позиционных сил представляют в виде безразмерных коэффициентов позиционных сил и момента:
2Fri(PG) 2Fyi(M
Cxi(₽g)‘ pu2Ld ’ pu2Ld
(9.17)
pu2L2d
В формулах (9.17) в числитель входит величина сил и момента по осям координат, замеренных динамометром в эксперименте и приходящихся на половину дублированной модели, а в знаменателе - плотность и скорость воды или воздуха (в зависимости от вида эксперимента) и характерные размеры модели - осадка и длина между перпендикулярами.
Демпфирующие составляющие, входящие в формулы (9.16), могут быть определены из условий обтекания такого же дублированного корпуса при вращении его вокруг вертикальной оси, проходящей через полюс поворота судна. Нужно помнить, что для каждого угла дрейфа и соответственно каждого радиуса кривизны траектории движения судна положение полюса поворота будет меняться по длине судна.
При вращении судна вокруг вертикальной оси, лежащей в ДП, обтекание корпуса будет происходить в плоскостях, перпендикулярных продольной оси Gx (рис. 9.7). Поскольку в поперечном направлении корпус «судна представляет собой довольно плохо обтекаемое тело, движение жидкости в поперечных плоскостях имеет отрывной характер с образованием застойной зоны за корпусом и интенсивным вихреобразованием: с линии киля судна сходит вихревая пелена
- 241 -
вдоль всей длины судна.
Скорость обтекания каждого поперечного сечения определяется его положением по длине судна (см. рис. 9.4). Сила сопротивления, приходящаяся на единицу длины судна в произвольном поперечном сечении, равна
Fy2/6x =
= (l/2)Cp(x)pd(x)o2(x). (9.18)
Для фактического определения демпфирующей силы и мо
мента проводят испытания модели судна в круглом так называемом циркуляционном бассейне, где осуществляют буксировку ее с углом дрейфа Pg на различных радиусах г.
Силы со стороны СУ. Учитывая, что маневрирование включает достаточно широкий спектр возможных движений судна, СУ должно обеспечивать большинство из них, для чего необходимо создавать и иметь возможность регулировать продольные, поперечные силы и разворачивающий момент.
Существующие СУ, в частности судовые рули, выполняют эту задачу в достаточно ограниченном объеме. При снижении судном скорости эффективность рулей существенно уменьшается. Известен ряд других недостатков рулей. Так, руль, размещенный в струе гребного винта, создает боковую силу на прямом курсе, хотя этого не требуется и т. д. Для расширения возможностей судна в плане маневрирования созданы САУ (см. § 95).
Исходя из задач управляемости судна, необходимо уметь вычислять силы и момент от СУ в каждом случае, а также представлять особенности их работы в различных условиях эксплуатации судна.
В общем случае силы и момент от СУ можно представить в виде их проекций на оси связанной с судном системы координат:
Мсу - (Cx)cyP02Scy/2; (У)су - (Cy)cyPU2SCy/2; (Mz)cy =(Ст)суР025суЬ/2.
(9.19)
Здесь (Сх)су, (Су)су и (Ст )су - безразмерные коэффициенты сил и момента, зависящие от геометрии, конструктивных особенностей, условий работы и размещения данного СУ; Scy - характерная площадь СУ. Зная в каждом конкретном случае функциональные зависимости для этих коэффициентов от определяющих параметров, полученные экспериментально или расчетом, мы можем вычислять размерные величины Wcy> (^Осу, (Мг)су и вводить их в уравнения движения судна в качестве управляющего воздействия.
- 242-
Среди множества параметров, определяющих значения коэффициентов сил и момента, существуют несколько таких, которые используют для направленного их изменения при управлении судном. Например, для судового руля - угол его перекладки, для подруливающего устройства типа „винт в трубе” - частота его вращения и шаг винта, для руля в струе гребного винта - угол его перекладки и частота вращения винта и т. д. Эти параметры являются как бы „аргументами”, а результат, т. е. значения сил и момента, - функциями этих аргументов. Учитывая взаимную обусловленность руля и гребного винта, принято говорить о движительно-рулевом комплексе судна, который в задачах управляемости целесообразно рассматривать как единое целое.
Рассмотрим отдельные СУ судном с точки зрения образования на них усилий.
Руль является в настоящее время наиболее распространенным СУ, которое в сочетании с гребным винтом может обеспечивать судну удовлетворительную управляемость. Конструктивные особенности и классификация судовых рулей приведены в гл. 16. Образование рулем сил и моментов принято рассматривать в два этапа: при работе изолированного руля вне корпуса судна и в реальных условиях его установки на судне в том или ином конструктивном варианте по отношению к корпусу и гребным винтам.
Для изолированного руля применима схема образования гидродинамических сил, характерная для руля малого удлинения, движущегося в жидкости вблизи ее свободной поверхности. На таком крыле-руле возникают гидродинамическая сила и момент относительно баллера. Этот момент имеет значение при проектировании рулевой машины. С точки зрения управляемости имеет значение другой момент - тот, который создает гидродинамическая сила относительно ЦТ судна, но он уже зависит от конкретного варианта установки руля за корпусом судна.
Как следует из теории крыла, его сопротивление, подъемная сила и момент могут быть представлены в поточной системе координат:
*п ~ ОтР^п^р/^; Уп - СупРОп^р/2;
Mb = Qpu^fe/2,
(9.20)
где Ст, Сун и С6 - гидродинамические коэффициенты руля, определяемые его геометрией и углом атаки:
On GtnQp» е> ар)’ ^уп ~ £уп0р> е> «Р);
Q = (Ip, е, Iq, otp);
(9.21)
ип “ скорость потока; Sp - площадь боковой проекции руля.
Графические зависимости этих коэффициентов от угла атаки рассмотрены в § 25, посвященном основам теории крыла.
- 243 -
В качестве определяющих геометрических параметров руля выступают: относительное удлинение 1р, относительная толщина сечения е, ордината расположения баллера 1$ и другие возможные параметры его формы.
С точки зрения управляемости судна представляют интерес проекции гидродинамической силы не на поточную, а на связанную с судном систему координат. Поэтому усилия на корпусе судна со стороны руля (рис. 9.8) выражают через проекции Хп и Уп и угол перекладки руля бр следующим образом:
Хр = Хп cos (бр - ар) + Уп sin (бр - ар);
Ур = Уп cos (бр - ар) - Хп sin (бр - ар);
Мр ~ УрХр.
(9.22)
(9.23)
(9.24)
Величина угла атаки руля ар определяется, в свою очередь, направлением относительно руля вектора скорости потока воды ир в районе расположения руля, который зависит от многих условий: от угла дрейфа в корме судна, от спрямляющего действия корпуса на поток, сходящий с судна в корме, от расположения гребного винта по отношению к рулю и др.
_ В связи с малым удлинением большинства судовых рулей (1,0 < < 1р< 2,5) зависимость коэффициента подъемной силы рулей от угла атаки носит нелинейный характер, отражаемый формулой Манделя:
. . I dcyn \
Суп(ар) “ 1 ~~ I ар + - ар> \ daP I
(9.25)
где производная от коэффициента подъемной силы по углу атаки вычисляется при Кр = 0, a CD представляет собой коэффициент сопротивления руля при поперечном отрывном обтекании (ар = 90°). Существующие рекомендации по определению данной производной и коэффициента Ср следующие:
dCyn 2 л
dap 2 +
CD«= 1,5-5- 2,0.
(9.26)
При больших значениях угла атаки плавное обтекание руля нару-
шается и происходит срыв потока, сопровождающийся резким умень-
шением подъемной силы (см. рис. 4.11).
Рабочий диапазон углов атаки профилированных рулей может быть оценен по формуле
| Ир |< 30/vV
(9.27)
Рис. 9.8. Сила и момент, возникающие на руле
- 244-
Для приближенного расчета коэффициента сопротивления может быть использована формула
Qm(ap) ~ Осо Оуп(«р)/(0»9п/р), (9.28)
где Схо - значение коэффициента профильного сопротивления при нулевом угле атаки (например, для профилей типа NACA 0015 Схо= 0,0065).
Приведенные приближенные формулы для гидродинамических характеристик изолированных рулей, конечно, не исключают более точных данных, получаемых в результате экспериментального их определения путем буксировки моделей рулей в бассейне или гидро-лотке. Многие данные по гидродинамическим характеристикам рулей опубликованы в специальных атласах судовых рулей.
Расположение руля за рудерпостом изменяет его характеристики в ту или иную сторону. Что касается коэффициента поперечной силы, то обычно он уменьшается:
Cyp = fcpCyn (fcp<l), (9.29)
однако результирующая поперечная сила на комплексе рудерпост -руль может и возрасти по сравнению с поперечной силой изолированного руля, что повышает эффективность рулевого устройства. Это происходит за счет увеличения эффективной площади комплекса 5К, куда включают площадь рудерпоста:
Yp = fcpCynpo2SK/2. (9.30)
К сожалению, существующие данные о редукционных коэффициентах кр получены только применительно к случаю движения судна без угла дрейфа. Экспериментально полученные данные хороша аппроксимируются формулой
У полуподвесных рулей наличие кронштейна также изменяет характеристики самого руля.
Изменение характеристик судового руля происходит вследствие влияния свободной поверхности жидкости, корпуса судна и гребных винтов.
Влияние близости свободной поверхности воды зависит от скорости обтекания руля, его заглубления и удлинения. При малых относительных скоростях обтекания, характеризуемых числом Фруда по хорде руля Fq,, влияние свободной поверхности аналогично влиянию твердой стенки, которая увеличивает эффективное удлинение руля примерно в два раза. При числах Фруда
Frb = upM?b>0,5-0,7 (9.32)
- 245 -
подъемная сила руля уменьшается за счет прорыва воздуха к рулю (аэрации руля). Наиболее эффективный способ борьбы с аэрацией рулей - заглубление или размещение под кормой судна.
Влияние корпуса судна проявляется в основном через скорости потока в районе руля и через воздействие на углы атаки руля при движении судна по криволинейной траектории.
Наличие в кормовой части корпуса судна попутного потока, характеризуемое уменьшением скоростей жидкости в районе руля по сравнению со скоростью движения судна, а также неравномерностью этого потока по высоте руля, приводит к уменьшению боковой силы руля и соответственно к уменьшению эффективности рулевого устройства. Скорость жидкости, натекающей на руль, выражается через скорость судна и коэффициент попутного потока к:
□р = 0,514(1 т w)os. (9.33)
Для рулей за рудерпостом коэффициент попутного потока увеличивается примерно на 30 % по сравнению с этим коэффициентом для гребного винта. При движении судна по криволинейной траектории или даже при наличии угла дрейфа симметрия потока в корме судна нарушается. Для руля это выражается в изменении его угла атаки ар.
Как видно из рис. 9.8, угол дрейфа судна в кормовой части приводит к косому обтеканию руля даже при 6р = 0. Правда, наличие корпуса судна в некоторой степени спрямляет этот поток, тем не менее это явление проявляется в нарушении зависимости боковой силы на руле от угла его перекладки, характерной на прямом курсе.
Угол атаки руля при наличии угла дрейфа в корме принимается равным
“р = 6р - ик₽р, (9.34)
где ик - коэффициент, учитывающий спрямляющее действие корпуса. Геометрический угол атаки вычисляют по формуле
иг = бр - ₽Р. (9.35)
Следовательно, условия работы руля на циркуляции изменяются по сравнению с прямым курсом.
Угол дрейфа Рр будет различным при разных радиусах циркуляции г и углах дрейфа судна Ро:
|xp/L|cos₽g
Рр = Pg + arctg-j--------— . (9.36)
1 +|xp/r|sin Pg
Влияние скоса потока в месте расположения руля проявляется в изменении коэффициента и подъемной силы на руле при данном угле его перекладки 6р:
- 246-
1 1 dcvn
“ Суп(Кр)ри25р - (бр — ИкРр) X
2 2 аар
Ср
х pu’Sp + — (бр - xKpp)2po2Sp, (9.37)
2/р
а следовательно, и боковой силы У (б_) и момента ftL в формулах (9.23) и (9.24).
Такое изменение управляющего воздействия для судов с боковым расположением рулей проявляется даже на прямом курсе вследствие того, что попутный поток одного борта по отношению к рулю уже не обладает симметрией и приводит к появлению постоянного угла скоса, аналогичного углу дрейфа ₽р (рис. 9.9). Для судов с несколькими бортовыми рулями условия их работы на криволинейной траектории оказываются различными из-за местных углов дрейфа flp(y). Как видно из формулы (9.37), при некоторых углах ₽р(Рр * бр/хк) возможно резкое снижение боковой силы руля.
С другой стороны, при больших углах дрейфа судна в корме выход на критические углы атаки руля произойдет при углах перекладки руля, меньших углов, вычисленных по формуле (9.34). Таким образом, более раннее отрывное обтекание руля не позволит получить нужные значения управляющих воздействий. Это произойдет, очевидно, тогда, когда для выхода из циркуляции руль будет переложен на противоположный борт. При этом угол бр в формуле (9.37) станет отрицательный и обе величины в скобках будут иметь одинаковые знаки.
Влияние угла дрейфа проявляется не только в изменении фактических углов атаки руля, но и в изменении коэффициента попутного потока в районе расположения руля:
wp(Pp) = wpo(l-Pp), (9.38)
что также отражается на величине боковой силы:
Гр~и£ = [1- wpo(l - Рр)]2и2. (9.39)
Перечисленные особенности работы руля относятся к случаю, когда руль не находится в зоне струи гребного винта. При размещении руля за гребным винтом его работа сопровождается дополнительными явлениями. Во-первых, скорость обтекания части руля, омываемой струей гребного винта, возрастает на величину осевой составляющей вызванной скорости в струе иа. Вследствие этого существенно возрастает гидродинамическая нагрузка на этой части площади руля. Если в - площадь руля, попадающая в зону струи, а иа - вызванная аксиальная составляющая скорости, то общая боковая сила на руле равна (рис. 9.10)
Yn = ^(ap)Pup(Sp " «р. в)/2 + Суп(«р)Р<UP + ^)2Sp/2. (9.40)
- 247-
Рис. 9.9. Влияние скоса потока рИс. 9.10. Работа руля в струе гребного на угол атаки бортового руля винта
Подъемную силу руля вычисляют с использованием формулы (9.37). Кроме того, подъемную силу руля переводят в связанную с судном систему координат по формуле (9.23). Скорость потока в месте расположения руля ир (без учета струи винта) в свою очередь зависит от параметров движения судна □$, Pg, L/r и коэффициента попутного потока к.
До сих пор учитывалась только осевая составляющая вызванной скорости в струе винта, однако две другие составляющие - радиальная и тангенциальная - также участвуют в образовании скоса потока в месте расположения руля. Так, встречаются случаи, когда при нулевом угле перекладки руля на нем образуется поперечная сила, под действием которой судно описывает циркуляцию большого радиуса или отклоняется от прямого курса. Направление боковой силы при этом определяется направлением вращения гребного винта. Известно, что эта сила невелика и для ее компенсации перекладывают руль на 2-3°. Величина этой силы зависит от расположения руля по высоте по отношению к струе винта: если руль пересекает верхнюю и нижнюю половины струи, то эффекты от указанных скосов компенсируют друг друга и результирующая боковая сила близка к нулю.
Силы на корпусе, обусловленные инерцией судна и окружающей жидкости. Движение судна по криволинейной траектории в общем случае сопровождается возникновением ускорений различной природы. Так, при неустановившемся движении, когда скорость судна переменна во времени, наблюдается линейное ускорение ЦТ судна, направленное вдоль вектора скорости этой точки. При движении судна с постоянной по значению скоростью, но по криволинейной траектории, когда вектор скорости ЦТ судна меняется только по направлению, существует центростремительное ускорение, направленное к центру кривизны траектории в данный момент времени.
В соответствии с законами механики ускоренное движение тела некоторой массы приводит к образованию так называемых фиктивных сил, или сил инерции. Для криволинейного движения тела характерно образование центробежной силы. Также и при вращательном движении: при наличии углового ускорения у тела возникают моменты инерционной природы.
- 248 -
Применительно к морскому судну, которое представляет собой систему твердое тело- окружающая жидкость, данные силы инерционной природы состоят из двух частей, одна из которых - уже упомянутые силы инерции, другая - дополнительные силы инерции, вызванные участием жидкости в движении судна и приложенные к судну как результирующие гидродинамических давлений на корпусе в подводной части, порожденных ускоренным движением самого судна, и пропорциональные ускорению судна.
§ 64. Уравнения движения судна в горизонтальной плоскости
Как было сказано в § 63, одним из наиболее распространенных способов исследования управляемости является математическое моделирование на базе решения системы уравнений движения судна. Форма уравнений движения зависит от. вида исследуемых маневров, а также от условий плавания судна. Основой для составления подобных уравнений являются уравнения нестационарного движения судна на тихой воде в горизонтальной плоскости без учета воздействия ветра, волнения, ограничений потока жидкости и т. д.
Если первоначально не учитывать связь между управляемыми кинематическими параметрами и управляющим сигналом, то система будет считаться разомкнутой (см. § 62). С помощью уравнений для разомкнутой системы можно исследовать так называемые переходные процессы, например движение судна с внезапно переложенным рулем. Добавляя к этим уравнениям закон управления, т. е. закон изменения управляющего параметра, например угла перекладки руля, во времени, можно исследовать задачи программного управления движением судна без обратной связи. Наконец, подключая уравнения, описывающие обратную связь, можно исследовать управляемость судна как замкнутой системы в сочетании с используемой на нем системой автоматического управления движением.
Решение линейных уравнений позволяет приближенно определить кинематические параметры движения судна - угол дрейфа Pg и угловую скорость и - при условии, что задан закон перекладки руля во времени 6p(Z), который обычно принимают в виде, изображенном на рис. 9.11.
Общий смысл решения дифференциальных уравнений управляемости состоит в нахождении законов изменения кинематических параметров во времени
₽g = M0; <о = ы(0; ug = ugW (9.41)
при заданном законе перекладки руля бр = бр(1) и известных начальных условиях (9.6).
Важным видом маневра судна является циркуляция - траектория судна, движущегося первоначально прямым курсом с непереложен-ным рулем, у которого в некоторый момент времени руль перекладывается по закону, изображенному на рис. 9.11.
- 249 -
Рис. 9.11. Закон перекладки руля при циркуляции судна
Рис. 9.12. Движение судна на циркуляции
Вид циркуляции судна при отсутствии ветра, волнения и течения показан на рис. 9.12.
У циркуляции выделяют три периода: маневренный, эволюционный и период установившейся циркуляции.
Маневренный период циркуляции длится от момента начала перекладки руля до ее окончания в момент времени f0 (см. рис. 9.12). При перекладке руля на пере руля вследствие изменения угла атаки появляется поперечная сила, увеличивающаяся по мере увеличения угла перекладки. Под действием этой силы судно начинает дрейфовать в сторону, противоположную перекладке руля, со скоростью дрейфа которая обусловливает возникновение угла дрейфа в ЦТ судна
(см. рис. 9.12). Обтекание корпуса судна с углом дрейфа сопровождается образованием позиционной составляющей гидродинамической силы ^yi(Pc) и момента.Afz,(PG). Одновременно с этим под действием момента от руля и M2i(Pg) начинается вращательное движение судна с положительным угловым ускорением и судно отклоняется носом в сторону поворота. Угол дрейфа с течением времени увеличивается.
Эволюционный период циркуляции начинается с момента t0 окончания перекладки руля на величину бро и заканчивается, когда все кинематические параметры принимают постоянные значения. Вследствие начавшегося в предыдущий период вращения судна с угловой скоростью ы(1) развиваются демпфирующие составляющие гидродинамической силы и момента, а также центробежная сила на корпусе. Результирующая поперечная сила на корпусе теперь направлена на тот же борт, на который переложен руль, вследствие чего дрейф судна меняет свое направление и судно смещается в другую сторону, одновременно вращаясь.
- 250-
Период установившейся циркуляции начинается после стабилизации кинематических параметров и продолжается до тех пор, пока не будут предприняты меры по выводу судна из циркуляции путем обратной перекладки руля. Участок траектории, соответствующий этому периоду, представляет собой окружность, по которой судно движется носом внутрь этой окружности с постоянным углом дрейфа Рц, угловой скоростью Ыц и линейной скоростью иц < и0. В период установившейся циркуляции имеет место равновесие соответствующих проекций сил и момента, действующих на корпус судна со стороны жидкости, руля, винта и сил инерции.
Циркуляция как траектория в целом характеризуется несколькими геометрическими и кинематическими параметрами. Обратное смещение - это расстояние наибольшего дрейфа судна lt в сторону от линии первоначального курса в маневренный период. Прямое смещение - это расстояние 12 от линии первоначального курса до точки траектории, где судно изменило курс на 90’. Выдвиг~ расстояние / в направлении первоначального курса до точки поворота судна на 90 . Диаметр установившейся циркуляции - диаметр окружности, соответствующей траектории установившегося движения судна: Лц = 2Гц. Тактический диаметр циркуляции DT - расстояние между линиеи первоначального курса и линией курса судна, измененного на 180*. Период обращения судна на установившейся циркуляции - время изменения курса судна на 360* в период установившейся циркуляции, равное тц = 2лгц/иц = 2л/ыц.
Угол дрейфа Рц, угловая скорость ыц и линейная скорость иц в период установившейся циркуляции играют роль кинематических параметров циркуляции.
Кроме того, используют безразмерные параметры циркуляции /1 = //Лц; /2 = //Лц; l3 = l^D^; Лц = ЛЦД; иц = иц/и0. Для безразмерных параметров установившейся циркуляции существуют приближенные оценки, характеризующие порядок их значений, которые не рекомендуется использовать для оценки управляемости конкретного судна и подменять ими расчетные значения:
11 = 0,6 -е- 1,3; 12 = 0,25 + 0,50; /э = 0 + 0,1;
Лц = 1,5-7,0.
(9.43)
При движении судна на циркуляции траектории его оконечностей существенно отличаются от траектории ЦТ, особенно для судов большой длины. Это обстоятельство необходимо учитывать перед разворотом судна в ограниченной акватории:
DH, к = Лц + L sin PG, (9.42)
где Л/ к - диаметр траектории носа или кормы в период установившейся циркуляции.
При проведении расчетов параметров циркуляции судна по протяжении всех ее периодов используют нелинейные уравнения,
- 251-
Рнс. 9.13. Относительная скорость на установившейся циркуляции
Рис. 9.14. Изменение элементов движения судна на циркуляции: а - изменение кинематических параметров во времени; б - траектория ЦТ судна при различных режимах работы судовой энергетической установки; в — траектории при различных конечных углах перекладки РУЛЯ б0
- 252-
которые должны решаться численно на ЭВМ посредством задания времени t с малым шагом 6i и интегрирования уравнений по участкам.
Если ограничиться определением характеристик циркуляции в установившийся период, то вместо решения общей системы нелинейных уравнений можно преобразовать эти уравнения применительно к третьему периоду циркуляции, когда кинематические параметры постоянны и, следовательно, d$G/dt = 0 и d(o/di = 0. Это позволит разделить систему уравнений и получить решение в явном виде.
Изменение скорости можно оценить уже после расчета параметров циркуляции по формулам Фирсова
5,9/г£ + 1 = [ sin (л/2, иц)]/и£ (9.44)
или по эмпирической формуле Першица
uu = rg/(rj+ 1,9) =1/(1+ 1,9(32) (при гц >1). (9.45)
Графическая зависимость относительной скорости судна на установившейся циркуляции от гц или ыц представлена на рис. 9.13, а типичное изменение кинематических характеристик судна на циркуляции с течением времени - на рис. 9.14, а, где дополнительно введен параметр (51( представляющий собой углоЬую скорость, отнесенную к скорости судна до входа в циркуляцию и 0 и не учитывающую падения скорости и, которое, однако, учитывается безразмерной угловой скоростью
о = ы(г)Г/о(0 = Wj/u = L/Гц. (9.46)
Форма циркуляции, ее главные геометрические характеристики (выдвиг, прямое смещение, обратное смещение) зависят от исходной скорости движения судна и 0. На рис. 9.14, б представлены циркуляции судна при различных исходных скоростях. Как видно из рисунка, диаметр установившейся циркуляции остается неизменным.
Влияние конечного значения угла перекладки руля на вид циркуляции в целом показано на рис. 9.14, в, где хорошо видны размеры акватории, необходимые для проведения разворота судна при различных углах 6р0, определяемые тактическим диаметром DT.
§ 65. Диаграмма управляемости судна
Результаты расчетов характеристик поворотливости судна в период установившейся циркуляции, представленные в графическом виде, называют диаграммой управляемости. На диаграмме управляемости приводят обычно четыре графические зависимости: безразмерного радиуса установившейся циркуляции ru/L(6p), безразмерной угловой скорости судна <3(6р) = Г/гц, падения скорости судна по сравнению со скоростью входа судна в циркуляцию и угла дрейфа ЦТ для различных углов перекладки руля.
- 253-
Диаграмма управляемости представляет собой статическую характеристику управляемой системы - зависимость ее выхода от значений управляющего параметра без учета переходных процессов в маневренный и эволюционный периоды: ыц=/1(6р), йц=/2(бр), Рц=/3(бр) [в отличие от временной характеристики, представляющей изменение управляемой координаты во времени ы(0, u(t)> PgW]-Диаграмма управляемости строится применительно к условиям тихой воды и отсутствия ветра и течения.
На рис. 9.15 приведена типичная диаграмма управляемости. Точки на кривых диаграммы, лежащие на пересечениях с вертикальной осью, соответствуют установившемуся периоду конкретной циркуляции, совершаемой данным судном при перекладке руля на угол бр.
Критерием поворотливости судна является максимально достижимая относительная кривизна ы(6р „щ) при наибольшем угле перекладки руля 6ртах> определяемом ограничениями в рулевой машине. Диаграмма управляемости теоретически обладает симметрией относительно начала координат, но на практике эта симметрия нарушается вследствие наличия боковой силы на гребных винтах из-за неравномерности попутного потока.
Вид диаграммы существенно зависит от того, является ли судно теоретически устойчивым на курсе или нет. Диаграмма управляемости, изображенная на рис. 9.15, соответствует устойчивому на курсе судну. Для судна, неустойчивого на-курсе (см. § 71), диаграмма управляемости представлена на рис. 9.16. Для такого судна характерно явление, называемое гидродинамическим люфтом, состоящее в том, что при малых углах перекладки руля (бр < 6р у) неустойчивое на курсе судно может начать совершать циркуляцию противоположного направления (при бр > 0, и < 0).
Предельное значение угла перекладки руля, при котором наблюдается обратная управляемость, называют предельным углом обратной управляемости &р = 6р. у. Для судна с обратной управляемостью критерием управляемости является также величина ы0 и 6р = 0, т. е. минимально возможная устойчивая угловая скорость поворота судна. Кроме того, G)o характеризует самопроизвольную циркуляцию, в которую входят неустойчивые суда с непереложенными рулями. При переходе через точку 6р = 6р_ у смена знака угловой скорости происходит скачком.
Участок диаграммы управляемости неустойчивого судна в районе проявления гидродинамического люфта показан на рис. 9.17.
При изменении загрузки судна характеристики его поворотливости изменяются. Так, при изменении осадки судна от балластной до осадки судна с полным грузом поворотливость судна ухудшается (рис. 9.18). При уменьшении осадки до 7 м у судна появляется неустойчивость, выражающаяся изменением диаграммы вблизи нуля.
Дифферент судна существенно влияет на характеристики его управляемости. Увеличение дифферента на корму приводит к ухудшению поворотливости и увеличению устойчивости судна на курсе и, наоборот, появление дифферента на нос повышает рыскливость судна
- 254-
Рис. 9.15. Диаграмма управляемости судна на тихой глубокой воде
Рис. 9.16. Диаграмма управляемости судна, неустойчивого на курсе
Рис. 9.17. Характер проявления гидродинамического люфта у неустойчивого судна
Рис. 9.18. Диаграмма управляемости танкера типа „Казбек” при различных осадках
- 255-
и уменьшает его радиусы циркуляции. Это происходит вследствие изменения формы диаметрали судна в подводной части и изменения положения по длине точки приложения гидродинамической силы на корпусе и ее момента относительно ЦТ судна.
Если говорить о влиянии конструктивных параметров судна на поворотливость, то первостепенное значение имеет соотношение площади руля и площади диаметрали судна. Оказывает влияние и форма очертаний оконечностей судна: поворотливость увеличивается с увеличением подрезов в корме и ухудшается при подрезах форштевня.
Пример танкера „Казбек” показывает, что увеличение площади руля в два раза приводит к улучшению поворотливости только на 15 %, при малых же углах перекладки руля она практически не изменяется.
Наличие подрезов в корме сильно влияет на поворотливость: уже при незначительных подрезах дейдвуда судно может терять устойчивость, при этом быстро растут предельные углы 6р у. Наличие бульбовых наделок в носовой части судна приводит к улучшению поворотливости, но количественно не на много (на 2-5 %). Увеличение коэффициента общей полноты судна при прочих равных условиях приводит к улучшению поворотливости и к большей рыскливости. Что касается углов дрейфа судна на циркуляции, то, как показывают расчеты, при данном радиусе циркуляции величины углов дрейфа практически не зависят от конструкции и параметров движительно-рулевого комплекса и определяются исключительно формой корпуса судна и отстоянием его от ЦТ судна.
§ 66. Крен судна на циркуляции
Еще один важный параметр криволинейного движения судна-угол крена судна на циркуляции в различные ее периоды. Вообще говоря, проблема уменьшения угла крена на циркуляции имеет большее отношение к остойчивости судна, но по традиции ее решают в рамках теории управляемости судна.
При движении судна по прямой с нулевым углом дрейфа крен отсутствует вследствие симметрии сил и моментов, действующих на судно. Вследствие перекладки руля, появления угла дрейфа и угловой скорости на корпусе образуются пары сил, составляющие кренящий момент относительно продольной оси. В сочетании с восстанавливающим моментом судно накреняется в ту или иную сторону до определенного угла. Этот угол крена может быть достаточно большим при малой начальной остойчивости судна и при большой его скорости и кривизне траектории. Его величина учитывается при нормировании остойчивости судов некоторых типов, например пассажирских.
Величина угла крена на циркуляции в разные ее периоды будет различной. Также будут различаться и силы, участвующие в образовании кренящего момента. Из всех сил, играющих роль в управляемости судна, при образовании кренящего момента важны следующие.
- 256-
1. Силы на корпусе от руля и их кренящий момент. Боковая сила на руле Ур приложена на половине высоты руля и создает момент относительно оси Gx, проходящей через ЦТ судна (рис. 9.19),
1
Мхр = -Ур(бр)гр = — cp(6p)pu2SpZp.
(9.47)
Знак кренящего момента принимается положительным, если он наклоняет судно наружу от циркуляции.
2. Гидродинамическая сила на корпусе. Эта сила, приложенная в точке с аппликатой zr в подводной части, образует момент
1
Мхг = Уг(Рс)гг = ~ cr(₽c)pu^Ldzr. (9.48)
3. Силы инерции масс судна и присоединенной массы жидкости.
Эти силы, приложенные в различных точках (в ЦТ и ЦВ судна), равны
УИ = (Д +A-22)u^cosPG/ru; (9.49)
Ми - cos Pg Ац)^. (9.50)
Восстанавливающий момент при статическом крене судна определяют по метацентрической формуле остойчивости
MB=Ph09. (9.51)
Приравнивая сумму моментов (с учетом знаков) нулю, получаем выражение для угла крена
1
9 = -----(Уг(Рбкг - Кр(бр)2р - Y„zc]. (9.52)
Ph0
Для маневренного периода моментом сил инерции и силы на корпусе можно пренебречь, поэтому
0=-——— Ур(брК. (9-53)
Ph0
Величины zc, Zp и zr измеряются в системе координат Gxyz. Обычно zp < 0, поэтому в маневренный период судно кренится в сторону перекладки руля.
При переходе судна из маневренного в эволюционный период сила инерции вследствие изменения кривизны траектории меняет свой знак;
- 257-
одновременно возрастает момент Мг. В результате крен судна имеет динамический характер и его наибольшее значение достигается в эволюционный период. Натурные испытания судов показывают, что динамический крен судна может превышать крен судна в период установившейся циркуляции в 1,3- 2,5 раза.
Обычно судно после переваливания на другой борт совершает несколько боковых колебаний, и постепенно угол крена приближается к углу крена на установившейся циркуляции.
Характер изменения угла крена судна на циркуляции представлен на рис. 9.20.
В конечный период циркуляции судно имеет постоянный угол крена Оу, значение которого определяется значениями гидродинамической силы и инерционной силы, а мо\ нт от силы на руле относительно мал и им пренебрегают:
Au^cosPgzc
Оу =------------« --------. (9.54)
Однако известно, что скорость UG и радиус гц зависят от кривизны траектории, поэтому 0у = 0у(б).
Максимально возможный угол крена на установившейся циркуляции при наибольшем угле перекладки руля можно определить по приближенной формуле Фирсова
(9тах)уст а 1,4[ug/(bh0)](d/2 + zG), (9.55)
где Zq - возвышение ЦТ судна над ОП. Максимальные угловые скорости, при которых происходит этот крен, равны б®^ = 0,5 -е- 0,6. Но нужно помнить, что наибольшего значения угол крена достигает в эволюционный период, когда он превышает значение, определяемое по формуле (9.55) в 1,3-2,5 раза. Этот период является наиболее опасным во всем процессе разворота.
§ 67. Устойчивость движения судна на курсе
Наряду с поворотливостью важным качеством морского судна является способность двигаться по прямой. В реальных условиях
- 258-
плавания на судно действуют различные возмущения (удары волн, порывы ветра, гидродинамическое воздействие проходящих мимо судов и неподвижных препятствий), которые стремятся вывести судно из прямолинейного равномерного движения. Но даже на тихой воде при отсутствии внешних возмущений некоторые суда имеют тенденцию уходить от прямого курса вследствие особенностей формы корпуса и распределения гидродинамической нагрузки в подводной части. Иными словами, существуют устойчивые и неустойчивые суда.
Исследованием условий возможности движения судна прямым курсом занимается раздел управляемости - устойчивость движения судна на курсе. Устойчивость судна - это его способность сохранять после воздействия возмущений некоторые кинематические параметры движения. Существуют некоторые разновидности устойчивости, например устойчивость движения на прямом курсе и устойчивость движения на циркуляции, автоматическая или собственная устойчивость и эксплуатационная устойчивость, динамическая и статическая устойчивость.
Собственной устойчивостью судна называют его способность двигаться по. прямолинейной траектории с неотклоненными органами управления. Эксплуатационная устойчивость характеризуется способностью сохранять в среднем некоторое направление движения с использованием СУ и при воздействии внешних возмущений в виде ограниченного волнения.
Устойчивость движения судна рассматривается применительно к конкретным кинематическим параметрам: углу курса ф, углу дрейфа Pg. угловой скорости ы и линейной скорости l>g- Характерно, что по отношению к одним параметрам устойчивость имеет место всегда, а по отношению к скорости судна <J с устойчивость существует всегда, поскольку при постоянном режиме работы двигателя временное уменьшение скорости сразу же прекращается после устранения внешнего возмущения в виде дополнительного сопротивления. По отношению к параметрам Pg, ы и (р собственная устойчивость разных судов может быть различной.
Если значение рассматриваемого параметра после внешнего воздействия на судно, которое приводит к временному изменению именно этого параметра, возвращается к его исходному значению, то такой вид устойчивости Называют асимптотической устойчивостью. Этим видом устойчивости обладает судно по отношению к скорости l>g- Если же с течением времени некоторый параметр не возвращается к исходному значению, а принимает новое постоянное значение, то данный вид устойчивости называют неасимптотической. Так, по отношению к углу курса Ф возможны случаи неасимптотической устойчивости судов, поскольку на тихой воде не возникает сил и моментов, возвращающих судно на исходный курс при неотклоненном руле. Наконец, некоторые параметры могут продолжать изменяться с течением времени после снятия внешнего возмущения, тогда движение называют неустойчивым.
- 259-
У некоторых судов при .отклонении от курса и при выходе на новый курс возмущение угла дрейфа убывает до нуля, значит, в отношении Pg они являются асимптотически устойчивыми при неасимптотической устойчивости по углу курса (р. У других судов возможен вход в самопроизвольную циркуляцию; при этом угол курса постоянно увеличивается (неустойчивость по отношению к (р), а угол дрейфа и угловая скорость ы принимают новое постоянное значение, следовательно, по отношению к PG и ip движение будет неасимптотически устойчивым. Такая неопределенность понятия устойчивости судна привела к тому, что стали считать судно устойчивым на курсе, если возмущения угла дрейфа со временем исчезают (хотя старый курс и не восстанавливается), и неустойчивым, если судно с непереложенным рулем входит в циркуляцию (угол дрейфа принимает постоянное значение).
На рис. 9.21 показаны виды возмущенного движения судна при различных видах устойчивости.
Исследование устойчивости движения проводят теоретически путем исследования коэффициентов линеаризованных уравнений движения судна в горизонтальной плоскости и определения соотношения между этими коэффициентами, приводящего к тому или иному виду устойчивости. Эти соотношения принято называть критериями устойчивости. Математические выражения, получаемые при исследованиях устойчивости, довольно громоздки. Они приведены в специальных справочниках и учебниках по управляемости судов.
Следует отметить, что собственной устойчивостью обладают лишь немногие морские суда, большинство же судов являются неустойчивыми на курсе, и для сохранения прямолинейности их движения требуются постоянные перекладки руля. В этом случае говорят об эксплуатационной устойчивости.
Если при рассмотрении собственной устойчивости считают, что все параметры, кроме одного, не изменяются, то полученные в результате критерии называют критериями статической устойчивости. Кроме того, существуют критерии динамической устойчивости, при этом исследование проводится с использованием всей системы уравнений движения судна. Критерии статической устойчивости получаются более простыми, но более жесткими.
Статически устойчивая система будет, как правило, и динамически устойчивой, а статически неустойчивая система в ряде случаев может быть динамически устойчивой.
Условием статической устойчивости является взаимное расположение центра гидродинамических давлений на корпусе и ЦТ судна. При кормовом расположении центра давления по отношению к ЦТ будет иметь место статическая устойчивость по углу дрейфа и угловой скорости судна.
Обычно у судов гидродинамическая сила на корпусе приложена в носовой части судна, таким образом, эти суда статической устойчивостью не обладают, но могут обладать динамической устойчивостью.
- 260-
Что касается устойчивости судна при движении на циркуляции, то практически все суда являются асимптотически устойчивыми по отношению к углу дрейфа на циркуляции, т. е. при попытке изменить характеристики установившейся циркуляции Pg и ыц судно стремится сохранить первоначальную циркуляцию. Однако при воздействии боковых возмущений от ветра и течения устойчивость траектории не сохраняется и циркуляция смещается в направлении их воздействия (рис. 9.22).
Эксплуатационная устойчивость судна характеризует способность судна двигаться избранным курсом на небольшом волнении с использованием рулевого органа. Управление может осуществляться человеком или с помощью авторулевого. При отклонении судна от курса начинает увеличиваться угол курса ф, появляется угловая скорость о и судно приобретает инерцию вращения. Рулевой стремится парировать дальнейший рост угла ф перекладкой руля, которую он прекращает в соответствии с его опытом и интуицией и возвращает руль в ДП. В это время судно возвращается на прежний курс, но вследствие инерции проскакивает нужное направление. Этот процесс называют рысканием.
Таким образом, точность удержания судна на курсе зависит от многих факторов, определяемых свойствами судна, рулевого, длительностью вахты, утомляемостью и т. п. Поэтому эксплуатационную устойчивость оценивают статистическими показателями, такими как средняя частота перекладки руля йр, средняя амплитуда угла перекладки б£Р, средняя.амплитуда угла рыскания х£Р. Считается, что судно обладает удовлетворительной эксплуатационной устойчивостью на курсе при йр = 4- 6 Vmhh, брР = 3-5°, = 2-3° (волнение моря до 2 баллов).
Рис. 9.21. Траектории судна при различных видах устойчивости по углу курса Ф
1 — невозмущенное движение судна; 2 — асимптотическая устойчивость по углу курса ф; 3 — неасимптотическая устойчивость по углу курса ф; 4 — неустойчивое движение по углу курса ф
Рис. 9.22. Искажение траектории судна под воздействием ветра (циркуляции при ветре)
1 — при отсутствии ветра; 2 — при ветре
- 261 -
Исследования управляемости судов позволяют связать собственную устойчивость судна с эксплуатационной и с характеристиками поворотливости судна. В качестве основной характеристики эксплуатационной устойчивости принимают число перекладок руля в минуту Яр. Исследования А. Д. Гофмана дают возможность написать следующую приближенную зависимость этой характеристики от безразмерной угловой скорости движения судна с непереложенным рулем: пр = = 6,0й)о + 0,5. Параметр ы0 используют также в качестве критерия устойчивости судна на курсе при нормировании управляемости судов внутреннего плавания (й0 0,2).
Рыскание судна на волнении приводит к ухудшению средних ходовых качеств судна, к снижению средней путевой скорости судна, к повышению расхода топлива судовой установкой. Как показывают расчеты, у динамически неустойчивого судна даже с использованием авторулевого в результате рыскания увеличение среднего сопротивления судна на тихой воде равно половине добавки сопротивления^которое имеет это судно на установившейся циркуляции с кривизной ы * 1,8ы 0 (при постоянной мощности главного двигателя).
На современных судах с дизельной СЭУ постоянство частоты вращения гребного винта обеспечивается регулированием подачи топлива. Вследствие рыскания судна происходит увеличение расхода топлива примерно в 1 + 7 gj q раз, что может составить величину от 2 до 28 % (0,05 < ы0 < 0,20). Учитывая это обстоятельство, становится экономически обоснованной целесообразность установки и тщательной настройки авторулевых на морских судах.
Авторулевой представляет собой регулятор, предназначенный для поддержания заданного курса и изменения курса судна по заданной программе. В соответствии с этим авторулевой может работать в режиме стабилизации, обеспечивая прямолинейное движение судна с наименьшими углами рыскания (или минимумом расхода топлива) либо в режиме управления.
Закономерности регулирования параметров движения изучаются специальной наукой - кибернетикой (kebernetike - искусство управления). Управление движением может производиться либо с использованием данных о действующих на судно внешних возмущениях, либо по изменениям регулируемого параметра по сравнению с заданным его значением. Однако возмущения, действующие на судно, трудно поддаются измерению, поэтому на практике реализуется второй путь: измерение и использование информации об отклонениях кинематических параметров движения судна от их значений на прямом курсе.
В структурной схеме управляемой системы (см. рис. 9.2) авторулевой выполняет роль УУ, которое перерабатывает информацию, подаваемую с помощью обратной связи 6, об угле курса и его изменениях. В авторулевом формируется управляющий сигнал, поступающий на рулевую машину. Зависимость сигнала с oj основных кинематических параметров движения судна Ф, бф, ф, ф и др. называют законом регулирования.
- 262-
dt, dt
im
Рис. 9.23. Скорость перекладки руля в эави- х
симости от величины управляющего сигнала
Наиболее распространенный вид закона регулирования учитывает сразу несколько параметров. Например,
d<f t
е = -а, бф - а2 ------ а2 j бфЛ.
dt о
(9.56)
Величины ах, а2 и а3 называют передаточными числами авторулевого. Отрицательные знаки в выражении (9.56) свидетельствуют о необходимости обеспечения устойчивого движения, возвращения судна на исходный курс.
Выбор значений коэффициентов а1} а2 и а3 зависит от сложности (уровня) устройства авторулевого. Они могут устанавливаться заранее по каким-либо рекомендациям или изменяться самой системой управления при перемене внешних условий плавания или состояния загрузки судна. Такие системы называют адаптивными или самонастраивающимися. Если значения at и а2 выбирают из условия обеспечения минимума отклонений судна от курса или расхода топлива, то такой закон регулирования называют оптимальным.
Следует помнить, что реальные рулевые машины при отработке сигнала в виде (9.56) обладают некоторыми особенностями. В частности, угловая скорость перекладки руля бывает различной при отклонении от нулевого положения и при возвращении в него. Кроме того, рулевая машина имеет некоторую зону нечувствительности при малых значениях сигнала £, что приводит к запаздыванию (рис. 9.23). Как правило, зона нечувствительности по углу перекладки не превышает Г, зона пропорциональности £j - е2 составляет 4-5°, поэтому скорость перекладки руля достигает наибольшего значения только по достижении угла перекладки руля 5- 6°.
§ 68. Особенности управляемости судна на заднем ходу
Управляемость судов, движущихся задним ходом, обладает существенными особенностями. Можно констатировать, что большинство морских и речных судов трудно управляются на заднем ходу или не управляются вообще. Для некоторых судов наблюдается даже обратная управляемость, при которой судно поворачивает в противоположную сторону. Суда с поворотными насадками управляются на заднем ходу несколько лучше, чем суда с рулями. Устойчивость на курсе
- 263 -
судов с рулями также хуже: их трудно удерживать на прямом курсе, особенно при слабом ветре.
Такое поведение судов объясняется многими причинами. Во-первых, движение судна задним ходом происходит при противоположном направлении вращения гребных винтов, при котором руль уже не обтекается струей гребного винта, что приводит к резкому уменьшению силы на руле. Струя гребного винта, попадая на корпус, образует в кормовой части судна поперечную силу, направленную влево при работе винта правого вращения на задний ход. Это явление известно как набрасывание воды в раковину.
Во-вторых, при движении кормой вперед с переложенным на правый борт рулем судно совершает дрейф в сторону перекладки руля, при этом образующийся угол дрейфа в корме уменьшает реальный угол атаки руля и дополнительно снижает его эффективность. Кроме того, критические углы атаки рулей на заднем ходу, при которых происходит срыв потока и резко уменьшается боковая сила, существенно меньше, чем на прямом ходу, и составляют величины порядка 20*. Следовательно, диапазон рабочих углов атаки рулей на заднем ходу сокращается.
В-третьих, при движении судна задним ходом. с углом дрейфа гидродинамическая сила на корпусе приложена кормовее ЦТ судне и образует момент, имеющий знак, противоположный знаку момента' от руля. Таким образом, разворот судна определяется соотношением моментов Мр и Мр (рис. 9.24). Ясно, что разворачивающий момент Мр - Мр на заднем ходу будет меньше, чем на переднем ходу, в связи с вышеперечисленными особенностями работы руля.
Сказанное относится к начальным стадиям маневрирования судна. Неудовлетворительная управляемость наблюдается и при движении задним ходом на циркуляции. Перекладкой руля на противоположный борт не удается одержать судно и вывести его из установившейся циркуляции. Для одержания судна приходится маневрировать движителями. Увеличение площади рулей не дает заметного эффекта, поскольку одновременно происходит увеличение боковой корпусной силы.
Уменьшения момента Мр можно добиться путем перемещения точки приложения силы Fy в нос в процессе проектирования судна „подрезанием” кормы, увеличением площади диаметрали в носу бульбовыми наделками. Увеличение дифферента на нос, казалось бы, может привести к желаемым результатам, однако эффекта не дает, поскольку ухудшаются условия работы руля и винта при уменьшении осадки кормой.
При входе судна в циркуляцию заднего хода угол дрейфа меняет свой знак (рис. 9.25) и обе силы способствуют развороту судна. Но при такой картине действия сил вывести судно из циркуляции оказывается трудно. Необходимо перекладывать руль на противоположный борт на угол, бдльший предельного угла обратной управляемости.
Диаграмма управляемости судна на заднем ходу (рис. 9.26) также существенно отличается от соответствующей диаграммы переднего
- 264 -
Рис. 9.24. Схема сил и моментов при движении судна на заднем ходу
хода. Кроме обратного направления кривой угловой скорости ы(бр) отличия состоят в значительно больших критических углах перекладки руля бр₽ * 10\ очень больших значениях угловой скорости без перекладки руля ы0(бр = 0).
У Некоторых судов критический угол перекладки руля оказывается настолько большим, что он превышает наибольший допустимый угол перекладки, который на заднем ходу составляет заведомо меньшую величину (порядка 20’). Управляемость судна на заднем ходу характеризуется диаграммой, изображённой на рис. 9.26, и называется обратной. Если судно на заднем ходу подчиняется рулю, т. е. поворачивает в сторону перекладки руля при бр < брр, но не выходит из обратной циркуляции при оперировании рулем, то такую форму управляемости называют частичной. Управляемость судов, способных к тому же выходить из циркуляции заднего хода, называют полной.
В управляемости неустойчивых на курсе на заднем ходу судов выделяют несколько категорий. Так, суда, обладающие полной прямой управляемостью, могут быть выведены из установившейся циркуляции перекладкой руля на противоположный вращению судна борт, а суда с полной обратной управляемостью - перекладкой на внутренний по отношению к циркуляции борт.
Суда с полной прямой управляемостью и суда, неустойчивые на курсе, могут'обладать частичной управляемостью на заднем ходу,
Рис. 9.25. Схема сил и моментов на циркуляции заднего хода
Рис. 9.26. Диаграмма управляв' мости судна на заднем ходу
1 — устойчивое на заднем ходу судно; 2 — неустойчивое на заднем ходу судно
- 265 -
однако для совершения ими нужного поворота руль надо перекладывать на угол, больший критического; если этого не сделать, то судно повернет в противоположную сторону. Суда с полной обратной управляемостью совершают поворот в сторону, обратную перекладке руля.
Частично управляемые суда при движении с прямого курса (заднего хода) обладают прямой управляемостью, однако не могут выходить из циркуляции на заднем ходу. Неуправляемые суда не выходят из циркуляции и не поворачивают в нужную сторону на заднем ходу. Что касается судов, устойчивых на курсе на заднем ходу, то они имеют полную прямую управляемость при наличии частичной управляемости.
§ 69. Управляемость судов с учетом внешних факторов
Рассмотренные вопросы управляемости касались случая движения судна в условиях тихой воды при отсутствии так называемых внешних факторов, под которыми понимают ветровое и волновое воздействия, ограниченные глубины фарватера, наличие стеснения акватории в виде стенок причалов или канала, различных неподвижных и подвижных препятствий (других судов и морских подвижных объектов), а также течения. Все эти факторы изменяют в той или иной степени характеристики управляемости судна на тихой глубокой воде и ставят ряд специальных задач, расширяя само понятие управляемости путем добавления новых видов маневров кроме рассмотренных движения прямым курсом и циркуляции.
Учет ветра и течения приводит к введению новых сил и моментов в дополнение к уже рассмотренным, причем особенность состоит в том, что результат исследования и даже характер управляемости судна теперь еще зависит от направления и интенсивности воздействия этих внешних факторов. Ниже рассмотрены основные виды внешних факторов и их влияние на управляемость морских судов.
Управляемость судна при ветре. Плавание судна в условиях ветра составляет большую часть времени его эксплуатации в течение года. В связи с возникновением аэродинамических сил и моментов, воздействующих на подводную часть судна при ветре, этот фактор определяет многие мореходные качества судна, в том числе его управляемость. Ветер изменяет параметры движения судна на прямом курсе и в циркуляции. Судно должно обладать более широким спектром маневров (в широком смысле слова). Например, необходимо или обеспечивать возможность прямолинейного движения с постоянным углом дрейфа, или сохранять заданное положение диаметрали без хода, или осуществлять разворот судна при разных направлениях и скоростях ветровых потоков и т. д.
Во всех этих задачах следует в первую очередь уметь определять аэродинамические силы и момент при различных курсовых углах судна относительно ветра и различных скоростях ветра (рис. 9.27). При этом ветер рассматривается как постоянно дующий в одном заданном направлении без учета его порывистости.
- 266-
В задачах управляемости судна без хода при ветре используют так называемый истинный ветер, характеристики которого заданы в неподвижной в пространстве системе координат. В задачах о движении судна удобнее оперировать понятием кажущегося ветра, определяя его параметры в связанной с судном системе координат.
Аэродинамическую силу и ее момент относительно оси Gz в общем виде записывают через проекции на оси системы Gxyz'.
Xa=Cxa(qa)pau2aSHX/2- (9.57)
Уа = Суа(ча)рапа25нУ/2; (9.58)
Ma = Cma(qa)pau2SH//2, (9.59)
где Сха, Суа и Ста - коэффициенты аэродинамических сил и моментов, зависящие от курсового угла кажущегося ветра, формы и расположения надстроек и прочих элементов архитектуры надводной части судна, включая его надводный борт; ра - плотность воздуха; иа - скорость ветра в системе, связанной с судном (кажущегося ветра); 5^ и - проекции надводной части судна на плоскость миделя и на ДП.
Аэродинамические коэффициенты надводной части корпуса не поддаются теоретическому определению. Их находят путем продувок моделей надводной части судов в аэродинамических трубах в диапазоне углов qa = 0 -5- 180’. На сегодняшний день уже имеется большая информация об этих коэффициентах для судов различных типов, позволяющая использовать приближенные формулы, полученные путем математической обработки результатов многих экспериментов. Так, для речных судов применяют следующие формулы:
Суа = 1,05 sin qa-, (9.60)
Cma - Cya(0,2S + - qa/360). (9.61)
Для получения надежных результатов лучше использовать более сложные, включающие большее число конструктивных параметров судна закономерности, опубликованные в справочной литературе.
Один из вариантов зависимостей этих коэффициентов от угла представлен на рис. 9.28. Для различных судов вид графиков может существенно отличаться. Аэродинамические коэффициенты зависят также от изменения средней осадки и дифферента судна.
Из треугольника скоростей ветра и судна можно получить связь между скоростями и направлением истинного и кажущегося ветра:
и2 = и2 + uG - 2иаос cos (qa + ₽G); (9.62)
<? = Qa + Pg + arccos [(u2 + u2 - u£)/(2uua)]. (9.63)
Одной из важных задач управляемости судов при ветре является определение возможности судна двигаться в данном направлении
- 267-
Рис. 9.27. Проекции аэродинамической силы и аэродинамического момента
аэродинамических характеристик надводной части судна от да
с некоторым углом дрейфа Р при заданном направлении и силе ветра - так называемая задача о статической устойчивости движения судна при ветре. Ее решение получают путем совместного решения уравнений продольных и боковых сил и моментов с учетом сил на отклоненном руле и на корпусе от воды и от ветра:
Рв+Гх(М + Ха(0а>ив) = 0;
ур(^) + гу(0С) + Шр па) = 0;
Mp(6p)+M2(₽G) + Wa(<?a,Ua) = 0-
(9.64)
При этом рассматривают движение судна с постоянной заданной скоростью uG. Уравнения связи (9.62), (9.63) и уравнения (9.64) представляют собой замкнутую систему. Для решения поставленной задачи достаточно найти углы перекладки руля б*, обеспечивающие прямолинейное движение судна при ветре с параметрами q£ и и„.
ч Как показывает практика, не для всяких пар значений q„, и* существуют реальные углы перекладки рулей, удовлетворяющие системе (9.64), следовательно, существуют неблагоприятные сочетания скорости и направления ветра, при которых данное судно теряет управляемость. Для большинства судов наиболее опасным направлением кажущегося ветра оказывается попутное при qa = 120 -s- 140’. Наибольший же дрейф судов наблюдается, однако, при встречном ветре (qa * 60’). Необходимо также убедиться в устойчивости данного маневра судна, добавив в уравнения (9.64) демпфирующие составляющие на корпусе.
Потеря управляемости при скоростях судна 2-4 уз и при ветре не определяется скоростью судна, поскольку, если ветер отсутствует, судно не теряет управляемости даже при самых малых скоростях движения. Причина потери управляемости объясняется значительно
- 268-
большими аэродинамическими моментами по сравнению с гидродинамическим моментом и моментом от руля. При наличии ветра с и > > 2,5 м/с (такой ветер встречается очень часто) движение судна со скоростью 2-4 уз может сопровождаться потерей управляемости.
Результаты расчетов удобно представлять в виде графической зависимости опасной скорости ветра (при qa = 130*) от скорости судна (рис. 9.29) и необходимого угла перекладки руля при различных скоростях и направлениях ветра (рис. 9.30). При увеличении осадки судна меняется соотношение между площадями парусности и подводной части диаметрали Ld, что обычно способствует улучшению управляемости при ветре.
Архитектура надводной части судна определяет знак аэродинамического момента Ma(qa) и склонность судна при неотклоненном руле разворачиваться в сторону ветра (приводиться к ветру) или от ветра (уваливаться от ветра). Как показывает опыт, маневр удержания на прямом курсе судна, уваливающегося от ветра, надо производить перекладкой руля на наветренный борт, а судна, приводящегося к ветру, наоборот, - перекладкой руля на подветренный борт.
С точки зрения эксплуатационной устойчивости наличие ветра, дующего с кормы, приводит к увеличению рыскливости судов. При совершении судном циркуляции при ветре необходимо учитывать его снос в направлении ветра (см. рис. 9.22).
Управляемость судна на волнении. Особенности управляемости морских судов на волнении на сегодняшний день исследованы еще недостаточно. Наибольшее число работ посвящено вопросам курсовой устойчивости и рысканию судна на волнении. Вопросы поворотливости в условиях волнения исследованы мало.
Движение судна прямым курсом на волнении сопровождается продольной качкой, при которой периодически изменяется площадь погруженной части диаметрали в корме, которая, как известно, во многом определяет характеристики курсовой устойчивости судна. Вопрос об изменении эффективности руля на волнении вследствие качки судна с учетом переменности режимов работы гребного винта и его воздействия на руль также изучен недостаточно.
Если говорить о характеристиках поворотливости судна на волнении, то, как свидетельствуют данные натурных испытаний судов, влияние волнения оказывается невелико и находится в пределах точности методов расчета управляемости на тихой воде. Однако этого нельзя сказать о форме траектории судна на волнении. Совершая циркуляцию на волнении, в каждый момент времени судно оказывается под различными курсовыми углами к волне и их взаимодействие постоянно меняется. Вследствие этого форма циркуляции существенно искажается, причем ее конкретный вид зависит от начальных условий движения судна по отношению к волнам.
На рис. 9.31 приведены результаты расчета циркуляции судна длиной 118 м, идущего с начальным курсовым углом 60* на волнении с волнами такой же длины, при перекладке руля на 35*. При различных значениях исходного курсового угла траектории могут быть самыми разнообразными.
- 269 -
Волнение так же, как и ветер, является причиной рыскания судов. В количественном отношении рыскание характеризуется амплитудой угла рыскания и угловой скоростью разворота судна или периодом рыскания.
Рыскание может быть симметричным или асимметричным. Асимметрия рыскания определяется либо разными углами рыскания на правый и левый борт, либо разным временем лежания судна на правом и левом рысках. Асимметричное рыскание приводит к отклонению в среднем от намеченного курса (рис. 9.32). Особенно велико рыскание бывает на попутных курсовых углах к волне (х * 135’). При увеличении скорости судна на попутном волнении углы рыскания увеличиваются, а при скорости, близкой к скорости бега волн, наблюдается потеря устойчивости движения судна. На встречном волнении амплитуда рыскания достигает наибольших значений при курсовом угле судна к волне, близком к 60*, причем она возрастает при снижении скорости судна и увеличении длины волн.
Наименьшее рыскание наблюдается при движении судна лагом к волне. Рыскание на волнении, как и в прочих случаях, определяется также оперированием рулем, а следовательно, опытностью рулевого или настройкой авторулевого.
Захват судна попутной волной и юление брочинга. При движении на попутном волнении сравнительно коротких и быстроходных судов возможны опасные ситуации захвата судна волной с последующей потерей управляемости. В большинстве случаев такая ситуация оканчивается либо опасным разворотом судна в положение лагом к волне, либо переворачиванием и гибелью судна. Весь комплекс явлений, связанных с движением и переворачиванием судна на попутном волнении, носит название брочинга. Рассмотрим здесь только явления, связанные с захватом судна волной и потерей управляемости.
Эксперименты показывают, что скорость судна, опасная с точки зрения захвата его попутной волной, определяется соотношением
и5>1,35\/Г (9.65)
При этом длина попутной волны составляет одну-две длины корпуса судна. При совместном движении судна с волной практически прекращается обтекание руля водой и резко падает его эффективность.
Судно, находясь на вершине волны, приобретает дифферент на нос, вследствие чего теряет устойчивость на курсе и, не имея возможности управляться рулем, разворачивается в положение лагом к волне.
На рис. 9.33 показано изменение курса, угла дрейфа и угловой скорости судна со временем в процессе самопроизвольного поворота на попутном волнении (длина волны Хв = 0,831). Угол крена нарастает очень быстро, практически в считанные секунды, и судно переворачивается (рис. 9.34). Единственным средством предотвращения брочинга считается уменьшение скорости судна на попутном волнении. Благоприятно сказывается также удифферентовка судна на корму, повышающая устойчивость на курсе.
- 270 -
Рис. 9.29. Соотношение опасной скорости ветра и скорости судна при потере управляемости
Рис. 9.30. Необходимые углы перекладки руля при ветре
Ча - 130-
Рис. 9.31. Циркуляция судна
1 — на тихой воде; 2 — на волнении;
X-60-
Рис. 9.32. Путь судна при асимметричном рыскании
I — компасный курс; 2 — фактический курс; 3 — путь судна при рыскании
271 -
ческих параметров при развороте судна на попутном волнении L = 60,4 м; В = 10 м; d - 3,5 м; Оо = = 15,5 уз
на при развороте на попутном волнении (h0 = 0,5 м)
Явления, связанные с качкой и остойчивостью судов при захвате волной, описаны в § 55.
Управляемость судов при обгоне и расхождении. В практике судовождения часто встречаются случаи, когда два судна вынуждены двигаться некоторое время на достаточно:, близком расстоянии друг от друга. Если такая ситуация возникает в открытом море при отсутствии препятствий, то целесообразно ее избегать, однако при движении в подходных каналах или при передаче грузов на ходу такие режимы движения оказываются неизбежными. Известно много случаев столкновения судов при обгоне друг друга на небольшом расстоянии, которые произошли вследствие внезапного образования сил присасывания и моментов зарыскивания на одном или обоих судах и из-за невозможности или неумения экипажа использовать рулевое устройство для совершения необходимого маневра. Если подобная ситуация возникает в узком канале, то внезапный разворот судна (при медленной перекладке руля) приводит к посадке его на мель и к перегораживанию канала.
Взаимодействие судов на малых дистанциях обусловлено взаимным влиянием гидродинамического поля движущегося судна на обтекание и распределение давлений по корпусу другого с образованием поперечной силы и момента зарыскивания. Эти моменты являются дополнением к гидродинамическим силам и моменту на корпусе судна при его одиночном движении, следовательно, на каждое судно действуют суммарные корпусные силы и момент, зависящие от кинематических параметров движения и от взаимного расположения судов относительно друг друга (рис. 9.35):
rK = Fy(Pg, й) + yB3(PG, ht, b); (9.66)
- 272-
MK=MzftG,
(9.67)
Сила взаимодействия У^ и момент взаимодействия Маз на мелководье или в канале дополнительно определяются глубиной акватории Н и расстоянием до бровки канала 1К.
Для определения реакций взаимодействия, по-видимому, достаточно ограничиться случаями движения судов параллельными курсами с углами дрейфа, полагая, что обгон совершается довольно длительное время, вследствие чего положение судов по отношению друг к другу можно считать квазистатическим (т. е. без динамики обгона).
Как показывают экспериментальные и теоретические исследования взаимодействия судов, на бортах судов, обращенных друг к другу, наблюдается местное уменьшение давлений, поэтому поперечная сила Увз стремится уменьшить дистанцию между судами при обгоне (эффект „присасывания”), а момент зарыскивания Мвз стремится развернуть обгоняющее судно носом в сторону другого судна и создать опасную ситуацию. Наибольшие значения поперечной силы возникают при b = 0, т. е. при чисто траверзном расположении судов, а момент эа-рыскивания максимален, когда мидель одного из судов находится примерно на траверзе кормы другого.
Влияние угла дрейфа на поперечную силу Уаз невелико, однако это влияние на момент зарыскивания очень существенно (рис. 9.36), особенно для судна, идущего впереди своего партнера. Значения скоростей обоих судов влияют на значения указанных реакций
Рис. 9.35. Схема действия сил и взаимное расположение судов при обгоне
Рис. 9.36. Влияние угла дрейфа и взаимного расположения судов на коэффициенты силы присасывания (а) и момента зарыскивания (б) h, = 1,25 м
- 273-
(как обычно по квадратичной зависимости), однако нужно учитывать, что при развороте судна на большой скорости и на малой относительной дистанции потребное время для перекладки руля может оказаться недостаточным, чтобы успеть парировать момент Мвэ и избежать столкновения.
При встречном движении судов в начальный момент их встречи сила и момент действуют таким образом, что носовые оконечности стремятся отойти друг от друга, а при прохождении миделя они резко меняют знак и становятся опасными. В конечной фазе расхождения смена их знаков происходит вторично.
Наличие мелководья существенно влияет на силы взаимодействия в сторону их увеличения. Коэффициент, учитывающий влияние мелководья, можно определить по эмпирической формуле
кн = Гвз(№вз(“) = МвЭ(Н)/Мв-3(оо) =
= 1 + 10 ехр { -0,78612///^ + d2)]5'3}, (9.68)
где dt и d2 - осадка первого и второго судов соответственно. Волновые картины каждого из судов при различных скоростях оказывают довольно сложное по характеру влияние на силу присасывания и момент зарыскивания.
При встречном расхождении судов и попадании их в зону гидродинамического взаимодействия процесс управления судном с помощью руля для парирования момента зарыскивания довольно сложен.
На рис. 9.37 показан характер перекладок руля для разных глубин H/d в различные моменты взаимного расположения судов, характеризуемого относительной координатой х=х/Ъ - расстоянием между форштевнями судов (при h± = 1,5):
х = 1 - 2b/(2L). (9.69)
Результат такого манипулирования отражается на кинематических параметрах и о, которые существенно уменьшаются и за все время т = tu 0 /L прохождения судов друг относительно друга остаются в разумных пределах (рис. 9.38).
Управляемость судов на мелководье и в канале. С увеличением размеров судов и их осадки все большая акватория Мирового океана становится для судоходства относительно мелководной.
В связи с ограничением фарватера меняются многие характеристики движения судна. Увеличивается сопротивление воды движению судов - ухудшаются маневренные элементы, вплоть до потери управляемости, изменяется посадка судна относительно поверхности воды и т. д. Поэтому при плавании на мелководье и особенно в каналах судоводитель должен проявлять исключительное внимание, хорошо разбираться в физических процессах, происходящих с судном.
Влияние мелководья на маневренные элементы возникает при глубине H/d < 4. На мелководье изменяется характер обтекания корпуса
- 274-
Ър.град
Рис. 9.37. Необходимые углы перекладки руля при встречном расхождении судов
Рис. 9.38. Результат манипулирования рулем при расхождении судов
1 — без работы рулем; 2 — при работе рулем
Рис. 9.39. Влияние глубины на коэффициенты присоединенных масс
Су Сщ
Рис. 9.40. Влияние глубины фарватера на поперечную гидродинамическую силу и момент на корпусе
~су’>-----~ст
- 275-
судна, увеличиваются все составляющие гидродинамического сопротивления. На мелководье присоединенные массы судна значительно больше, чем на глубокой воде (рис. 9.39), и судно становится как бы более инерционным. На характеристики работы винторулевого комплекса ограничение фарватера оказывает значительно меньшее влияние и обычно не учитывается. В результате при торможении судна его выбег на мелководье в 1,1-1,5 раза больше, чем на глубокой воде. Кроме того, в процессе торможения судно перестает слушаться руля и разворачивается почти перпендикулярно исходному движению.
Движение на установившейся циркуляции происходит по окружности вокруг центра циркуляции. На судне возникают не зависящие от глубины инерционные центробежные силы, которые должны компенсироваться поперечной силой на корпусе за счет поворота судна йа определенный угол дрейфа. Эта поперечная сила на мелководье существенно возрастает при неизменном угле дрейфа Pg (рис. 9.40).
Для сохранения равновесия сил на циркуляции нужно, чтобы угол дрейфа уменьшался, что и происходит на мелководье. Это приводит, в свою очередь, к увеличению диаметра циркуляции и к меньшему падению скорости при совершении циркуляции на мелководье.
Влияние мелководья на диаграмму управляемости иллюстрирует рис. 9.41. Исследования показали, что это влияние носит стабильный характер для судов различных типов. Хотя диаметр циркуляции зависит от множества параметров (нагрузки винта, посадки судна, ветра, волнения и т. п.), графиком, приведенным на рис. 9.41, можно пользоваться для оценки маневренных характеристик в первом приближении.
Влияние мелководья сказывается на элементах не только установившейся циркуляции, но и неустановившегося ее периода, а следовательно, и на устойчивости движения судна на курсе.
Устойчивость на курсе оценивается начальным участком диаграммы управляемости при углах перекладки руля |7>р | < 16рр |. Как видно из диаграммы управляемости (см. рис. 9.41), при прямом положении руля (6р = 0‘) угловая скорость о на мелководье меньше, чем на глубокой воде и, следовательно, путь более прямой. Это дало основание исследователям утверждать, что устойчивость судна мелководье возрастает, рыскливости
в действительности на мелководье, объясняли неравномерностью поверхности дна и связанными с этим возмущающими силами. Однако степень неустойчивости на прямом курсе оценивается величиной производной йРо/йбр при нулевом угле перекладки руля. На диаграмме управляемости кривые, соответствующие различным
Рис. 9.41. Диаграмма управляемости при ограниченной глубине жидкости
на Увеличение судна, происходящее
- 276-
глубинам в диапазоне |бр |< 6£Р, пересекаются. Причем в начале координат производная отрицательна (для неустойчивых на курсе судов) и ее абсолютное значение растет с уменьшением глубины. Поэтому на мелководье ухудшается не только поворотливость судна, но и устойчивость на курсе.
При движении в каналах кроме мелководья на значения действующих сил и моментов оказывает дополнительное влияние наличие боковой стенки. Движение около станки приводит к увеличению скоростей протекания воды между стенкой и судном из-за стеснения потока. При этом давление воды вследствие закона Бернулли падает и на стороне судна, обращенной к стенке, развивается поперечная сила подсасывания Увз. Из-за работы винта она сдвинута в корму и создает момент Мвз, стремящийся развернуть нос судна в сторону от стенки (возникает так называемый эффект свободной воды). Влияние боковой стенки становится заметным, когда расстояние от судна до нее становится меньше, чем четыре ширины судна. Аналогичные явления, но менее ощутимые, происходят при движении судна вдоль наклонного дна. Влияние наклона дна становится ощутимым даже при малых уклонах к горизонту (5- 6°).
При расхождении судов в канале между ними из-за сжатия потока возрастают скорости протекания воды. Вследствие закона Бернулли (см. § 23) падает давление воды и между судами возникают силы притягивания. Кроме того, из-за уменьшения давления уровень воды между судами понижается, суда накреняются друг к другу и сила притягивания увеличивается.
На рис. 9.42 показаны последовательные положения судов при расхождении в канале. При подходе судов друг к другу их носовые оконечности стремятся оттолкнуться. Когда суда расходятся бортами, носовые части судов отклоняются к центру канала. При расхождении
Рис. 9.42. Расхождение судов в канале
H/d = 1,3; Ft = 0,12; В = B/L - l,5;F = F/(p V2LT);M = M/(pV2LT)
- 277-
кормовыми оконечностями они притягиваются друг к другу, и это положение наиболее опасно с точки зрения возможности столкновения.
Контрольные вопросы
1. Какие кинематические параметры используют при решении задач управляемости судов?
2. Перечислите принципы функционирования судна как УС.
3. Назовите силы и моменты, действующие на корпус при управлении судном, и дайте их краткую характеристику.
4. Каковы параметры и периоды циркуляции судна?
5. Объясните смысл диаграммы управляемости судна, неустойчивого иа курсе.
6. Каковы причины крена судна на циркуляции?
7. Какими параметрами оценивается эксплуатационная устойчивость судна на курсе?
8. В чем причина ухудшения управляемости судна на заднем ходу; при ветре; на мелководье; на попутном волнении?
Глава 10
РЕВЕРС СУДНА С ВФШ И ВРШ
§ 70. Основные определения
Реверсивными, или инерционно-тормозными, качествами судна называют его свойства останавливаться и изменять направление движения на обратное под воздействием движителей при их отключении или развороте лопастей, а также при воздействии других судовых средств. Эти средства зависят от характеристик корпуса, в первую очередь от размеров судна, типа движителя, типа СЭУ, скорости судна перед началом реверса, а также типа и метода осуществления маневра.
Для облегчения изложения материала данной главы и понимания учащимися процессов, характеризующих реверс судна, в дальнейшем будем рассматривать только реверс судов с дизельными СЭУ. Реверс судов с другими СЭУ (турбозубчатыми агрегатами, электрогребной установкой) имеет особенности, несущественно влияющие на действия судоводителя.
Реверс судна характеризуется следующими параметрами:
- выбегом судна - расстоянием, пройденным судном с момента поступления команды об остановке главных двигателей до момента полной остановки судна;
- 278-
- временем выбега - временем, отсчитываемым от подачи команды о реверсе до момента полной остановки;
- боковым смещением.
Торможение может быть осуществлено с помощью движителя, создающего отрицательный упор при изменении частоты вращения, либо при изменении геометрических характеристик винта путем разворота лопастей. Подобное торможение называют активным. Если торможение осуществляется таким образом, что сила упора винта равна нулю, а снижение скорости происходит только вследствие воздействия силы сопротивления воды, то торможение называют пассивным.
Существуют различные методы торможения судна: с помощью реверсирования движителей, с помощью перекладки лопастей ВРШ, с помощью отключения движителя от двигателя, торможение с помощью перекладок руля, а также с помощью якорей, отданных до грунта или на одну-две смычки. В практике судовождения применяют различные методы торможения или их комбинации, однако наиболее часто используют либо чисто активное, либо чисто пассивное торможение, поэтому в дальнейшем другие виды торможения рассматривать не будем.
В случае активного торможения выбег судна и время реверса в первую очередь зависят от времени перехода от мощности переднего хода к полной мощности заднего хода, которую можно оценить в долях от мощности переднего хода.
В общем случае дифференциальные уравнения системы судно-двигатель-гребной винт при реверсе выглядят следующим образом:
do
--------= -Л(и, ив) ± Ре(и, ы), (10.1) dt
а уравнения системы гребной винт- двигатель - так: dto
I----=Мд(м) - Мр(ы, и) - М^, (10.2)
dt
где mt = m(l + A.u) = (A/g)(l + A.lt) - коэффициент присоединенной массы; Д - весовое водоизмещение); R - сопротивление воды; и = dS/dt - скорость судна; ив - скорость ветра, тормозящего судно; Ре - движущая (тормозящая) сила гребного винта, имеющая знак „+” при совпадении ее направления с направлением движения судна на передний ход; ы - угловая скорость вращения винта; I - момент инерции системы гребной винт-вал-двигатель, равный сумме приведенных к оси вала моментов инерции вращающихся масс и присоединенного момента инерции гребного винта; Ма - крутящий момент, развиваемый главным двигателем при постоянной подаче топлива; Мр - момент сопротивления гребного винта; - приведенный момент от сил трения, принимаемый в первом приближении постоянным.
Увеличение размеров судна при прочих равных условиях неизбежно
- 279-
приводит к росту выбега и увеличению времени выбега. Это объясняется двумя факторами: увеличением силы инерции судна, которая зависит от его массы [см. формулу (10.1)], преодолеваемой для обеспечения реверса; уменьшением удельной мощности СЭУ, используемой для торможения судна. Если в качестве удельной мощности принять о =1Уе/(Ди3), то для обеспечения равной скорости у судов с большим водоизмещением понадобится меньшее значение о и, следовательно, меньшая мощность будет использована на торможение судна.
§ 71. Работа ВФШ при реверсе
. На установившемся переднем ходу судна на ВФШ создается момент сопротивления Мр, преодолеваемый крутящим моментом двигателя. При этом создается сила упора гребного винта Р, направленная в сторону движения судна. В процессе реверса под действием реверсивного момента главного двигателя уменьшается частота вращения гребного винта. Однако в начальный период поступательная скорость судна практически не меняется. ВФШ переходит на режим свободного вращения под действием струи, натекающей на него со скоростью поступательного движения судна. В этот период его гидродинамический момент становится положительным (см. § 44) и гребной винт вращается как гидродинамическая турбина (режим авторотации или турбинный режим). В определенный период постепенно увеличивается реверсивный момент двигателя, наступает равновесие между моментом, развиваемым гребным винтом как турбиной, и моментом сопротивления на гребном валу. Скорость вращения гребного винта становится равной нулю. Гребной винт начинает активно тормозить движение судна. Скорость его поступательного движения вперед падает, и под действием отрицательного крутящего момента двигателя гребной винт увеличивает частоту вращения в обратном направлении. Судно останавливается, а затем под действием отрицательных сил упора начинает двигаться задним ходом.
Описанный процесс реверса судна, оборудованного ВФШ, принято разделять на следующие четыре периода:
1-й период: холостой ход - от начала команды „Задний ход” о реверсе до начала выполнения главным двигателем этой команды. Время реверса зависит от наличия ДАУ и его конструкции. Уравнение 1то периода имеет вид m^du/dt) --R + Ре-0.
2-й период: инерционный выбег судна - от начала процесса реверса двигателем до начала вращения гребного винта в обратном направлении.
3-й период: активное торможение судна - от начала вращения ВФШ в обратном направлении до остановки судна.
4-й период: задний ход - от остановки судна до развития полной скорости заднего хода.
- 280-
Пассивное торможение с точки зрения физических процессов, происходящих при нем, также имеет свои периоды и свои закономерности движения судна в каждом из них:
1-й период: холостой ход - от начала команды „Стоп” до начала выполнения главным двигателем этой команды.
2-й период: инерционный выбег - с момента началаладения оборотов винта до достижения оборотов свободного вращения или авторотации.
3-й период: торможение судна недостаточно быстро вращающимся винтом. Этот период длится до момента, когда вращающий момент становится меньше момента сопротивления вращению валовой линии.
4-й период. Торможение судна застопоренным винтом - от остановки винта до остановки судна.
Понятно, что четыре. периода пассивного торможения соответствуют двум периодам активного. Однако при активном торможении падение частоты вращения винта происходит при помощи активного воздействия на двигатель, создаваемого пуском контрвоздуха.
При активном торможении в 1-м периоде двигатель и ВФШ работают на передний ход. Время реализации этого периода зависит от исполнительного механизма ДАУ, а если ДАУ нет, то от опыта механиков. При наличии ДАУ продолжительность 1-го периода составляет 2-4 с, без ДАУ - 15-60 с, в зависимости от тренированности механиков. На величину выбега при 1-м периоде влияют размеры судна и его скорость перед выполнением маневра.
Второй период начинается с момента прекращения подачи топлива в ДВС. Для быстрой остановки и запуска ДВС в обратном направлении подается контрвоздух. Чем раньше он будет подан для запуска двигателя в обратном направлении, тем меньше будет свободный выбег и время выбега судна по инерции. Однако время подачи контрвоздуха определяется исключительно конструкцией ДВС и не зависит от квалификации механиков. Преждевременная подача контрвоздуха без учета скорости судна и конструктивных особенностей двигателя может привести к противоположному эффекту, когда двигатель -не только не будет остановлен, но даже может увеличить частоту вращения переднего хода. В этом случае будет полностью ликвидирован тормозящий эффект, двигатель окажется переохлажденным и запуск его в обратном направлении будет затруднен. Судоводитель должен обязательно знать реверсивную частоту вращения двигателя и, следовательно, скорость судна, при которой может быть начат реверс или остановка двигателя подачей контрвоздуха.
Так, в Инструкции по эксплуатации современных двигателей L-MC/MCE фирм „МАИ” и „Бурмейстер и Вайн” указано: «когда дается команда „Стоп”, а скорость судна велика, прекращается подача топлива, но необходимо подождать снижения частоты вращения до 20 % номинальной пном2>. Для понимания важности для судоводителей затронутого вопроса процитируем раздел „Реверс судна с поста управления” из Инструкции по эксплуатации нового отечественного судового двигателя 9ДКРН-4, установленного на серийных
- 281 -
контейнеровозах типа „Капитан Гаврилов” (водоизмещение с грузом 24 350 мэ, скорость 20,68 уз, эффективная мощность главного двигателя 9ДКРН-4 19 900 з. л. с.). После получения команды „Стоп” подождать, пока частота вращения двигателя не снизится до „реверсивного уровня” (40 об/мин). По окончании реверса перевести рукоятку в положение „Пуск” и держать ее, пока частота вращения достигнет пусковой в новом направлении».
По существу, безопасная скорость судна во внештатных условиях определяется реверсивной частотой вращения двигателя, при которой могут быть обеспечены экстремальный реверс по условию пуска контрвоздуха.
§ 72. Работа ВРШ при реверсе
Наибольший вклад в решение сложных задач теории реверса судна с ВРШ, доведенное до конкретных рекомендаций судоводителю и проектанту, внесли отечественные ученые А. А. Русецкий и Г. Г. Мартиросов. Реверс и остановка судна, оборудованного ВРШ, осуществляется судоводителем с мостика путем разворота лопастей без изменения направления вращения гребного винта. Время перекладки лопастей с полного переднего хода на полный задний ход составляет 10-30 с.
Рассмотрим периоды реверса судна с ВРШ.
1-й период: начало торможения - от начала команды, т. е. от момента поворота лопастей из положения, соответствующего полному переднему ходу судна, до промежуточного положения, соответствующего началу развития отрицательного упора. Продолжительность периода до 6 с.
2-й период: активное торможение - от момента возникновения на лопастях отрицательного упора до остановки судна.
3-й период: движение в обратном направлении - судно от полной остановки движется в обратном направлении до достижения полной скорости заднего хода.
Развитие перечисленных этапов реверса судна с ВРШ наглядно иллюстрирует рис. 10.1. Положение лопасти винта, изображенное на рис. 10.1,а, соответствует полному переднему ходу. При подаче команды „Полный назад”, лопасти перекладывают в позицию, соответствующую этому маневру. Через 2-3 с упор ВРШ падает до нуля (рис. 10.1, б), а через 5 с переложенные лопасти ВРШ начинают обеспечивать режим заднего хода (рис. 10.1, в), тормозя судно и используя при этом на торможение мощность главного двигателя. В течение последующих 3 с продолжается режим торможения (рис. 10.1, г). Через 10-15 с перекладываемые лопасти займут положение, соответствующее команде „Стоп” (рис. 10.1, д). Если бы была дана команда „Стоп”, то ВРШ, используя мощность двигателя на торможении судна, обеспечило бы остановку судна. Оно дрейфовало бы при работающем двигателе и при нулевом положении лопастей ВРШ. В этом случае в любой
- 282-
Рис. 10.1. Схема работы лопасти ВРШ при реверсе: а — перед началом маневра; б — через 2—3 с; в — через 4-6 с (начало торможения); г — через 8 с (режим торможения); д — через 10—15 с (режим торможения); е — через 20—30 с (конец перекладки лопастей, режим торможения, судно продолжает двигаться вперед)
ПХ — передний ход; ЗХ — задний ход; а — угол атаки сечения; V — угол установки лопасти ВРШ
- 283-
момент в кратчайший срок может быть выполнена любая команда о движении судна. Но поскольку была команда „Полный назад”, лопасти в этом случае устанавливаются на 10’ заднего хода (рис. 10.1, е), ВРШ работает в режиме заднего хода и при значительно меньшем выбеге, чем при команде „Стоп”, судно останавливается. Далее оно без дополнительной перекладки лопастей начнет двигаться задним ходом.
Судоводитель должен знать о широких тормозных и реверсивных возможностях ВРШ. Например, при перекладке лопастей с полного переднего хода в положение, обеспечивающее меньшую скорость, ВРШ до установившейся скорости судна, соответствующей положению лопастей, будет активно тормозить судно.
Гидродинамические режимы работы ВРШ при реверсе можно представить следующим образом. В начале 1-го периода, в первые секунды перекладки лопастей, относительная поступь Л.р = const, поскольку частота вращения гребного вала и скорость судна при ВРШ - величины практически постоянные, так как время перекладки лопастей по сравнению с временем реверса судна мало. При начальной перекладке лопастей из положения „Полный вперед” уменьшение шагового отношения и изменения его знака приводят вначале к уменьшению значения, а затем и знака коэффициента упора. Изменение знака коэффициента упора на отрицательный происходит, как правило, при некотором положительном шасрвом отношении, а максимальный шаговый упор соответствует наибольшему отрицательному шаговому отношению. Коэффициент момента К2 по мере поворота лопастей уменьшается и может стать отрицательным, т. е. ВРШ начнет работать в турбинном режиме. При дальнейшем повороте лопастей К2 вновь становится положительным, достигая в конце перекладки значений, часто превосходящих К2 при полном переднем ходе судна. Избежать турбинного режима можно, уменьшив скорость перекладки лопастей. Во 2-м и 3-м периодах шаговое отношение изменяется незначительно, но вследствие активного торможения изменяется скорость судна и относительная поступь. Большой отрицательный упор, развиваемый в конце первого периода, уменьшается и достигает в 3-м периоде установившегося значения упора заднего хода.
Фиксируя изложенные положения, А. А. Русецкий отмечает, что при реверсировании профили сечения лопастей ВРШ искажаются, так как ось их поворота не совпадает с осью геометрии лопасти, струя за ВРШ расширяется и происходит перераспределение вызванных аксиальных скоростей при различных режимах реверса. На рис. 10.2, а приведено распределение вызванных скоростей в начальный период реверса. На рис. 10.2, б аксиальная вызванная скорость потока у ВРШ, работающего в режиме турбины, направлена в сторону, противоположную скорости набегающего потока, и достигает максимальной величины за диском винта. Скорость потока в струе винта оказывается меньше скорости потока на бесконечности. Как видно из рис. 10.2, в, при дальнейшем увеличении отрицательного упора наступает режим, когда жидкость перестает протекать через диск винта, а затем начинает формироваться поток, протекающий через винт в направлении,
- 284-
Рис. 10.2. Распределение скорости за ВРШ при реверсе: а — перед началом маневра; б — в начальном этапе перекладки лопастей; в — в заключительном этапе перекладки лопастей
противоположном набегающему потоку. Отмеченные особенности существенны для управляемости судов, оборудованных ВРШ, и, следовательно, чрезвычайно важны для судоводителя.
Не рассматривая расчеты реверса судов с ВФШ и с ВРШ, так как их осуществление не входит в обязанности судоводителя, обратим внимание на основные различия в реверсировании этими движителями.
При команде „Стоп” судно с ВФШ продолжительное время движется в режиме свободного инерционного выбега, который зависит от водоизмещения судна и начальной скорости его движения. Для судна, оборудованного ВРШ, реализация команды „0” или „Стоп” является маневром активного торможения с использованием мощности главного двигателя. Маневр „Стоп” для судна с ВРШ соответствует маневру „Задний ход” для судна с ВФШ. Перекладка лопастей ВРШ для развития меньшей скорости с полного переднего хода приведет к режиму работы ВРШ на заднем ходу при использовании мощности двигателя для подтормаживания судна до значения скорости, соответствующей заданному углу перекладки. Таким образом, у судна с ВРШ при реверсе исключен период свободного инерционного выбега. Мощность главного двигателя используют уже через 1-2 с после команды „Полный назад” или „Стоп”.
Следует учитывать, что на большинстве судов с ВРШ полную мощность и наибольшую частоту вращения для заднего хода, обеспечивающих наиболее благоприятный реверс, т. е. минимальные выбег и время выбега, достигают при перекладке лопастей на шаг, меньший шага
- 285-
Таблица 10.1. Время выполнения различных команд при реверсе для двух систем управления
Управление
Команды
раздельное
совместное
„Передний полный” — „Стоп” „Стоп” — „Задний полный”
26 с
30 с
„Стоп” — „Передний полный” „Передний средний” - „Стоп”
„Стоп” — „Задний полный”
„Задний средний” — „Стоп”
2 мин 35 с
5 мин 50 с 21с
2 мин
29 с
2 мин 39 с 5 мин 16 с
30 с
2 мин 39 с
25 с
полного заднего хода. Это обусловлено тем, что перекладка на шаг полного заднего хода может привести к перегрузке двигателя, снижению его частоты вращения и, следовательно, к падению мощности заднего хода.
В целях использования наиболее экономичных режимов на подавляющем большинстве судов, оборудованных ВРШ, предусматривается совместное управление ВРШ и главного двигателя по специально заданной программе. Судоводитель единой ручкой управления с мостика изменяет шаг ВРШ и частоту вращения главного двигателя, обеспечивая наиболее экономичный расход топлива при данной скорости судна. Поэтому совместным управлением судоводитель пользуется в своей обычной практике, раздельным, когда необходимо экстренное быстрое реагирование судна на команды судоводителя по увеличению или уменьшению скорости.
Разница во времени выполнения режимов при раздельном и совместном управлениях ВРШ видна из табл. 10.1, в которой приведены результаты испытаний и данные опыта эксплуатации танкера-продук-товоза типа „И. Броз Тито”.
§ 73. Силы и моменты, определяющие траекторию судна при реверсе
Как уже указывалось в предыдущих параграфах, траектория движения судна при реверсе формируется под влиянием целого комплекса специфических сил и моментов. Эти силы и моменты, являясь лишь частью всех сил и моментов, оказывающих воздействие на судно, накладываются на обычные силы и моменты, действующие на подводную и надводную части судна и его движительно-рулевой комплекс в общем случае. Силы, приложенные к судну при нормальном движении без реверса, схема их представления, особенности образования рассмотрены в гл. 9. Некоторые явления, сопровождающие реверсирование, в плане потери управляемости и возникновения дополнительной
- 286-
поперечной нагрузки на корпус судна, описаны в § 72.
Таким образом, можно сделать вывод о том, что под действием различных сил, а также в условиях потери эффективности руля траектория движения судна будет иметь сложный криволинейный характер. В настоящее время судоводитель, чтобы производить маневры в узкостях
и при швартовке, должен знать
особенности движения судна при Рис. 10.3. Схема приложения сил и мо-реверсировании. Это является од- ментов к судну при реверсе ним из важнейших факторов безопасного маневрирования. Учитывая целый ряд принципиальных различий в осуществлении реверса и ха
рактере образования дополнительных сил и моментов на корпусе судов с ВРШ и ВФШ, определим подходы, исходя из которых может быть найдена полная траектория движения судна при различных ме-
тодах осуществления маневра.
Очевидно, что при полном описании такого сложного нестационарного движения, каким является реверс, необходимо исходить из общих уравнений движения. На рис. 10.3 приведена схема стационар
ных сил, приложенных к судну.
Общая математическая модель движения будет иметь следующий вид:
du d₽
-(m + A.u) -----cos p + (m + Xn) -----sin p - mow sin p -
- dt dt
du dp
-(m + X22) -------sin p + (m + Л.22) и -------cos p - mow cos p -
dt dt
(10.3)
dw
-X26 ----+ Уг + Ya ± Уик ± У01 ± KU2 ± Kp = 0;
dt
da I du dp \
-(4 + *6e) ----+ *26 -----sin ₽ +----и cos p + Mr +
dt \ dt dt I
+ Ma + YaxG + MUK + MUI + MU2 ± Mp = 0, где XUK - сила взаимодействия между винтом и корпусом судна, которая при обычной работе винта на передний ход является силой
- 287-
засасывания, а при работе его на режиме обратной струи определяет продольную составляющую нагрузки на корпусе, обусловленную влиянием разрушающегося потока винта и неравномерностью обтекания им корпуса вдоль ватерлинии; Кик - поперечная нагрузка, причины возникновения которой будут проанализированы далее; УЦ1 и Уи2 - силы, обусловленные влиянием косого обтекания гребного винта в условиях криволинейного движения и неравномерностью попутного потока по диску винта; Мик, Mup Ми2 - соответствующие этим силам моменты. Остальные члены уравнений (10.3) рассмотрены в гл. 9.
Для решения системы (10.3) ее следует дополнить уравнениями системы двигатель-движитель, что имеет особое значение для судов с ВФШ, у которых реверс осуществляется изменением направления вращения гребного винта. Кроме того, необходимо иметь полученное опытным или теоретическим путем выражение для сил Кик, УЦ1, KU2 и для соответствующих им моментов, а также знать примерную количественную оценку влияния каждой из них на режимах реверса. Это позволит упростить выражения (10.3), избавившись от несущественных величин.
Рассмотрим поперечные силы и моменты на винтах при косом натекании на них потока, впервые исследованные Г. Глауэртом. При наличии поперечной составляющей скорости натекания и sin р* происходит переменное по диску винта изменение тангенциальной скорости обтекания лопасти на величину о sin р* cos у (р* - угол дрейфа с учетом влияния корпуса;' у - угол поворота лопастей, отсчитываемый от вертикального положения). Углы атаки сечений также изменятся на переменную величину. Ниже и выше оси гребного винта эти изменения имеют противоположные знаки. В результате подъемная сила и силы профильного сопротивления сечений лопастей, находящихся в верхней и нижней половинах гребного винта, будут отличаться от их средних по окружности значений. Суммарное действие этих сил состоит в следующем: сумма горизонтальных составляющих в диске винта не равна нулю и образует поперечную силу Уи1, направленную в ту же сторону, что и поперечная составляющая скорости натекания о sin Р*; точка приложения упора гребного винта смещается в половину диска, в которой движение лопастей происходит навстречу поперечной составляющей скорости натекания, в результате чего образуется дополнительный момент Му. Следует учитывать, что указанные явления зависят от того, в каком направлении вращается винт и движется судно, что особенно важно для судов с ВФШ, у которых на разных этапах торможения винт вращается в противоположные стороны.
Г. А. Фирсов и И. Я. Миниович предлагают следующую формулу для определения поперечной силы гребного винта:
/ 1 dK2 \
= 2,14рп££ К2----кр—- I о sin Р*. (10.4)
\ 2 dkp I
- 288 -
Если аппроксимировать кривую К2 = f(kp) линейной зависимостью К2 = К,о(1 - А.р/Л.2О) (К20 - значение коэффициента момента на швар-, товах; Л20 - значение относительной поступи, соответствующее шагу нулевого момента), то
Г01 = 2,14pnD’Kao[l - Ар/(2А20)]и sin ₽*. (10.5)
При реверсе ВРШ применение такой аппроксимации дает значительную погрешность, поэтому в данном случае следует использовать исходную зависимость (10.4).
Причина образования поперечной силы, образующейся из-за неравномерности распределения попутного потока по диску винта, обусловлена формой кормовых обводов корпуса и утлом конструктивного наклона гребного вала. Г. В. Соболев приводит такое выражение для определения этой системы:
dK2
YU2 = -фрп2££ —2- Лр, (10.6)
dAp
где ф - коэффициент попутного потока. При применении линейной аппроксимации К2 = выражение (10.6) преобразуется следующим образом: KU2 =-фрп2£^К^0Лр/А20. Так же, как и в предыдущем случае, при реверсе ВРШ лучше использовать выражение (10.6).
Рассмотрим причины образования и характер действия поперечной нагрузки, возникающей из-за воздействия обратной струи гребного винта. Анализ действия ВФШ при реверсе показывает, что после изменения направления вращения гребного винта появляются вызванные аксиальные скорости, направленные навстречу набегающему потоку и аналогичные тем, которые возникают в ситуации с ВРШ, подробно рассмотренной в § 72, хотя и имеющие другую причину. На определенном этапе значение этцх скоростей становится больше скорости набегающего потока и формируется режим обратной струи. При реверсе судна с ВФШ этот момент наступает значительно позже, чем при реверсе судна с ВРШ. Н. И. Анисимова показала, что после наступления режима обратной струи закрученный ВФШ поток, вступив в контакт с корпусом судна, разрушается. Если упрощенно разделить этот поток на два: правый и левый, первый из которых ввиду закрученности движется в направлении поверхности, а второй - под судно, то из-за значительной разницы в полноте кормовых обводов корпуса выше и ниже оси винта поток, поднимающийся к свободной поверхности, отклоняется корпусом в значительно большей степени, чем поток, идущий к ОП, что приводит к различным реактивным воздействиям каждого из этих потоков и, как следствие, появлению поперечной нагрузки. Очевидно, что возникновение этой нагрузки при торможении судна является свойством, в значительной степени определяющим отличие режима реверса от любого другого режима движения судна.
- 289-
Если воспользоваться условной схемой обтекания, показанной на рис. 10.4, где принято, что поток от винта на каждом борту имеет конечную ширину и постоянные по сечению скорости ы(, направленные под одинаковыми углами уп и ул к горизонту, то можно определить каждую составляющую. Сила результирующей гидродинамической реакции имеет две составляющие на правом и левом бортах. Очевидно, что горизонтальная составляющая этой реакции на правом борту может быть определена так:
Уп = (-pnDg/2)(i)f[cos уп + cos vn + (ua/b)f) sin ап]. (10.7)
Здесь vn - угол, под которым происходит отслаивание струи от обвода шпангоута на правом борту; ап - угол, который составляет аксиальная вызванная винтом скорость G)a с контуром ватерлинии (угол заострения ватерлинии, который может быть получен с теоретического чертежа).
Выражение для поперечной силы на левом борту будет отличаться знаком и тем, что угол vn близок к прямому и угол ал мал, поскольку эти величины относятся к уровню ватерлинии, расположенной ниже оси гребного винта. Приняв vn = п/2, ал = 0, получим выражение для суммарной силы реакции
Кик = Уп + ул = (-Рп£§/2)G)f[cos vn + (ua/uf) sin 0^)]. (10.8)
Анализ этой силы, проведенный Н. И. Анисимовой, показывает, что она имеет значительную величину, достигая 40 % швартовного упора гребного винта, работающего на задний ход, и зависит от направления вращения гребного винта, так как этим определяется направление завихренности потока, размеров, геометрии ВФШ, формы кормовой оконечности и взаимного расположения винта и корпуса. Среднее значение безразмерного плеча поперечной силы, возникающей при реверсе для судов с традиционной формой обводов, составляет примерно I = - 0,35 и, следовательно, в первую очередь вызывает отклонение кормы судна от заданной траектории движения. Принципиальным является то, что для судов, оборудованных ВРШ и ВФШ одного направления вращения, направления действия поперечной силы на корпусе противоположны, что объясняется различной природой возникновения отрицательного упора (у ВФШ - изменением направления вращения, у ВРШ - изменением геометрии винта с сохранением прежнего направления вращения).
Судоводитель должен помнить следующее правило: судно, оборудованное ВФШ правого вращения, на режиме реверса будет отклоняться вправо, судно, оборудованное ВРШ правого вращения, будет изменять курс влево. Для судов с винтами левого вращения изменения курса противоположны описанному выше.
На рис. 10.5 показано формирование поперечной силы для судов с ВФШ и ВРШ правого вращения.
Таким образом, к поперечной силе и моменту на винтах при косом обтекании, а также к поперечной силе, образующейся из-за
- 290-
Рис. 10.4. Образование поперечных сил на корпусе от наброса струи ВФШ при реверсе
Рис. 10.5. Формирование поперечных сил у судов: а - с ВФШ; б - с ВРШ
неравномерности распределения попутного потока по диску винта, рассмотренных в § 44, добавляется поперечная нагрузка на корпусе, обусловленная влиянием обратной струи гребного винта. Влияние обратной струи, помимо образования поперечной нагрузки на корпусе, приводит к резкому снижению эффективности руля на режиме реверса. Это явление будет рассмотрено несколько подробнее в § 74.
Очевидно, что поперечная нагрузка от воздействия обратной струи гребного винта является функцией его поступи Лр, поэтому необходимо знать характер ее распределения в зависимости от кр для судов с ВРШ и ВФШ, который в первую очередь определяется тем, что режим обратной струи и появление дополнительной нагрузки на корпусе происходят для судов с ВФШ и ВРШ при поступях различных знаков.
Согласно экспериментальным данным, полученным Н. И. Анисимовой для судов с ВФШ, зависимость поперечной нагрузки на корпусе от поступи винта имеет вид, представленный на рис. 10.6.
При реверсе ВРШ вызванная аксиальная скорость, которая является основной причиной образования поперечной нагрузки на корпусе судна, определяется искажением профиля сечения попасти и рядом других причин, которые при перекладке лопастей ВРШ имеют более сложный, чем при реверсе ВФШ, характер. На рис. 10.7 приведена зависимость поперечной нагрузки на корпусе от поступи винта наиболее распространенных ВРШ, полученная при специальных испытаниях и расчетах на ЭВМ, проведенных А. А. Ершовым. Некоторое снижение абсолютного значения поперечной нагрузки на корпусе, образованной обратной струей ВРШ, объясняется сильным искажением профиля сечения лопасти при перекладках на угол 30’ и более,
- 291 -
Рис. 10.6. Поперечная нагрузка от воздействия обратной струи ВФШ при реверсе
А. = u/(n3xD)
Рис. 10.7 Поперечная нагрузка от воздействия обратной струи ВРШ при реверсе
соответствующих полному заднему ходу судна. В результате часть сечений, расположенных ближе к ступице, работает под положительным углом атаки, т. е. не образует обратной струи. При интегрировании суммарной нагрузки на корпусе судна это явление сказывается весьма существенно, поэтому наблюдается определенный спад поперечной нагрузки по сравнению со сходным режимом у ВФШ.
Важное значение имеет вопрос о количественных соотношениях между описанными силами для выделения из них существенных и несущественных сил. Расчеты показывают, что при реверсе судна с переднего хода на скорости 1 м/с при полной перекладке лопастей ВРШ, т. е. в ситуации, близкой к швартовной, максимальные значения У01 и У02 составляют 43 и 4% от Уик соответственно. Таким образом, можно сделать вывод о том, что наибольшее значение из дополнительных поперечных нагрузок на винторулевой комплекс имеет сила от наброса винтовой струи на корпус судна, причина возникновения которой описана в § 72. Сила Уо t играет существенную роль только при практических расчетах завершающих стадий маневрирования, когда искажение траектории по сравнению с первоначальным прямолинейным движением достигает значительной величины, приводящей к увеличению угла Р*. Силой же от неравномерности попутного потока по диску винта можно пренебречь.
Особенного внимания заслуживает сила Хик, которая на режимах работы винта на передний ход обусловливается засасыванием, а при переходе на режим обратной струи определяет продольную составляющую от воздействия струи гребного винта на корпус судна. Очевидно, что ее влияние, проявляющееся через уменьшение тяги винта заднего хода так же, как и в предыдущем случае, целиком зависит от значений вызванных аксиальных скоростей, образованных различными сечениями лопастей, а также от формы кормовых обводов корпуса судна на уровне расположения винта и от дальнейшего движения винтовой струи. Как уже указывалось, наиболее сложные явления, связанные с искажением профиля сечений лопасти при
- 292-
перекладках на задний ход, наблюдаются у ВРШ, поэтому значение и характер распределения этой -нагрузки нуждаются в особом рассмотрении именно для данных винтов. По специально созданной программе была рассчитана на ЭВМ продольная составляющая нагрузки на корпусе, вызванная обратной струей ВРШ (рис. 10.8).
Как показывают расчеты, значение продольной составляющей нагрузки от обратной струи гребного винта может достигать 50 % от упора Р гребного винта на задний ход, т. е. может существенно снижать его эффективность. Это должно быть учтено в процессе определения полной траектории движения судна при реверсе.
Результаты расчетов, произведенных по уравнениям (10.3) с учетом динамики двигательно-движительного комплекса и изменения сил на руле, а также появления дополнительных продольных и поперечных нагрузок для равновеликих судов одного исходного направления вращения винта, представлены на рис. 10.9. Отличия этих судов заключаются в том, что одно из них имеет ВРШ, а другое ВФШ. Как видно из рисунка, использование ВРШ приводит не только к существенному уменьшению выбега судна, но и к значительно большему искажению траектории движения судна. Кроме того, отклонение от курса противоположно тому, которое имеет судно с ВФШ. Эти особенности должны быть известны судоводителю при маневрировании на ограниченных акваториях.
Однако в обычных условиях для приближенных оценок реверсивных способностей иногда используют упрощенные методы, рассмотренные в § 75.
Рис. 10.8. Продольная нагрузка от воздействия обратной струи ВРШ при реверсе
Рис. 10.9. Траектория судна при реверсе: а -с ВФШ; 6-сВРШ
- 293-
§ 74. Особенности управляемости судов с ВФШ и ВРШ при реверсе
Особенности управляемости судов с ВФШ и ВРШ на режимах реверса обусловливаются в первую очередь нестационарностью работы пропульсивного комплекса и движения судна в этот период, а также тем, что к силам на корпусе, винте и руле судна, имеющим одинаковую физическую природу как при установившемся движении, так и на переменных режимах, добавляются силы и нагрузки, вызванные явлениями, характерными только для режимов реверса. Эти силы были рассмотрены в § 73. В настоящем параграфе определяются возможности, которые имеются для осуществления движения по заданной траектории и которые связаны прежде всего с силами на руле судне.
Эффективность руля, обеспечивающего управление судном, зависит от скорости потока, набегающего на руль, т. е. от скорости потока, вызванного поступательной скоростью судна, и от скорости струи за гребным винтом, уменьшенной или увеличенной за счет скорости попутного потока.
Управляемость судов с ВФШ при реверсе. С уменьшением частоты вращения ВФШ /И скорости движения судна снижается эффективность руля. При маневре „Стоп” наступает момент потери управляемости, обусловленный равенством скоростей потока, набегающего на винт в результате движения судна, и скорости потока, создаваемого винтом при работе на задний ход. Часть руля, попадающая в поток гребного винта, в этом случае не обтекается потоком, и эффективность руля как средства управления практически теряется. Как следует из § 71, продолжительность изменения частоты вращения двигателя сравнительно большая. Скорость судна при этом уменьшается на значительную величину. Тогда судно с гребным винтом, работающим в режиме авторотации, совершает свободный инерционный выбег- без использования мощности главного двигателя на торможение, а проходимый судном путь составляет до 80 % его общего выбега при реверсе.
В течение всего этого периода, т. е. при выбеге, составляющем до 80 % суммарного выбега, поток, набегающий на руль, не обеспечивает в полной мере эффективности руля. Составляющая скорости суммарного потока, обусловленная потоком от винта, равна нулю. В начале этого периода скорость потока, набегающего на гребной винт, превышает скорость потока от гребного винта, и сила на руле оказывается достаточной для компенсации поперечной нагрузки, возникающей на корпусе, а также других сил, действующих в этот момент для удержания судна на курсе. В оставшуюся часть периода, завершающую реверс и составляющую 20- 30 % выбега, судно с ВФШ оказывается неуправляемым, а траектория движения судна определяется соотношением сил на корпусе в данный момент времени, из которых наибольшее влияние оказывает поперечная нагрузка, возникающая из-за воздействия обратной струи, натекающей на корпус. Управляемость судна на заднем ходу рассмотрена в § 68.
- 294 -
Момент падения эффективности руля и появления поперечной силы на корпусе зависит не только от времени запуска двигателя на задний ход, т. е. от свойств двигателя и ДАУ, но и от скорости судна перед маневром, мощности двигателя на заднем ходу, особенностей гребного винта и руля.
При большой начальной скорости судна и малой мощности двигателя на задний ход скорость набегающего на руль потока снизится, но будет больше скорости потока от винта в режиме заднего хода, поэтому выбег судна при реверсе будет несколько больше, но эффективность руля сохранится на продолжительное время и большую длину выбега судна. Поперечная сила на корпусе при этом будет значительно снижена, что обеспечит лучшее удержание судна на курсе.
Управляемость судов с ВРШ при реверсе. Реверсивные качества судов с ВРШ существенно отличаются от реверсивных качеств судов, оборудованных ВФШ. У судов с ВРШ, как правило, момент потери эффективности руля и появления поперечной силы на корпусе, требующей дополнительной компенсации, наступает значительно раньше, чем у судов с ВФШ, - тогда, когда судно имеет большую скорость. Кроме того, поперечная нагрузка на корпусах этих судов существенно различается по значениям, так как ее возникновение обусловливает различная мощность.
Судно с ВРШ в первый период реверса, т. е. через 4- 6 с после поступления команды, начинает работать в режиме заднего хода, используя до 100 % мощности двигателя на торможение. Поэтому момент потери управляемости у судна с ВРШ наступает уже в 1-й период реверса, т. е. раньше, чем у судна с ВФШ.
Г. Г. Мартиросов представил наглядную схему работы винторулевого комплекса судна с ВРШ (рис. 10.10). До реверса часть руля обтекается потоком, скорость которого равна скорости потока, натекающего на винт, плюс вызванная скорость гребного винта (рис. 10.10, а). Через 2- 3 с после начала перекладки лопасти ВРШ поворачиваются на 3- 5’. Винт работает в режиме нулевого упора (см. § 44). Скорость потока, набегающего на руль, уменьшается и становится равной скорости потока, натекающего на винт (рис. 10.10, б). Через 4-6 с после начала перекладки лопастей, когда они повернулись на 5° и более, наступает режим торможения судна. Скорость потока, набегающего на руль, меньше скорости потока, набегающего на винт, на величину скорости, направленной навстречу набегающему потоку вызванной аксиальной скорости (рис. 10.10, в). Управляемость судна уменьшается. При дальнейшем торможении судна скорость потока, набегающего на руль, становится равной нулю вследствие того, что вызванная скорость за гребным винтом становится равной скорости набегающего на винт потока (рис. 10.10, г). Судно теряет управляемость. Затем при продолжении активного торможения аксиальная скорость, вызванная гребным винтом, начинает превышать скорость потока, натекающего на винт (рис. 10.10, д). Руль обтекается потоком, направленным навстречу движению судна. Судно неуправляемо. Траектория движения определяется в основном поперечной силой на корпусе. При остановке
- 295 -
Рис. 10.10. Работа комплекса ВРШ—руль при реверсе
' А — скорость потока, набегающего на винт; Б — скорость потока, натекающего на руль
судна скорость набегающего на гребной винт потока равна нулю (рис. 10.10, е). Руль обтекается потоком, создаваемым гребным винтом, работающим в режиме заднего хода.
Как было указано выше (см. § 72), поток за ВРШ в режиме реверса расширяется. Вследствие этого, даже если высота руля больше диаметра гребного винта, поток, создаваемый гребным винтом, полностью может изолировать руль от потока, набегающего на судно и гребной винт, как бы парализуя руль.
Ранее было установлено, что перекладка лопастей ВРШ с установившегося переднего хода на „Стоп” является также маневром реверса. Работу ВРШ в этом случае иллюстрирует рис. 10.10, д. Разница заключается в том, что в момент остановки судна (см. рис. 10.10, е) скорость потока, набегающего на руль, будет практически равна нулю, и судно будет терять управляемость. При этом потеря управляемости будет происходить раньше, чем при маневре „Полный вперед” - „Стоп” для судна с ВФШ.
Положение лопастей, соответствующее минимальной скорости переднего хода, при которой судно будет удерживаться рулем на курсе, зависит от посадки судна, метеорологических условий, системы управления ВРШ.
При волнении моря и ветре увеличивается значение минимального шага руля, необходимого для удержания судна на курсе. В режимах,
когда судно теряет управляемость или неуправляемо, оно может отклониться от курса в любую сторону, определяемую соотношением сил на корпусе в данный момент. Применительно к командам по перекладке лопастей ВРШ, при которых судно будет плохо управляться, судоводителю необходимо до производства перекладок лопастей переложить руль в сторону, противоположную поперечной силе, которая возникнет в дальнейшем. В этом случае судно отклонится
- 296-
в заданную сторону, а затем вернется к первоначальной траектории. Испытания и практика эксплуатации теплохода „Большевик Камо” полностью подтвердили изложенное.
§ 75. Упрощенное определение параметров реверса судов с ВФШ и ВРШ
Упрощенное определение параметров реверса судов необходимо для оценки возможности осуществления безопасного маневрирования, особенно при плавании в узкостях и вблизи акватории портов, где знание тормозных характеристик может помочь судоводителю избежать непосредственной опасности навала или столкновения.
Рассмотрим определение элементов реверса судна с ВФШ при активном его торможении.
В 1-й период реверса поступательная скорость движения судна не меняется. Пройденное за этот период расстояние можно определить как Д50_1 = и0Д/0_г Как показано В. Г. Бакаевым и В. М. Лаврентьевым, условно можно принять, что после подачи команды „Задний ход” сравнительно быстро установится равновесие между вращающим моментом двигателя и моментом винта, работающего на задний ход. Считаем, что с момента сбрасывания нагрузки двигателя до указанного момента проходит малое время. Тогда можно очень приближенно принять, что в течение этого периода упор винта равен нулю и движение судна происходит лишь под воздействием тормозящей силы сопротивления:
du
— =- Я(и,ив). (10.9)
Принимая, что на этом участке изменения скорости судна R = R0u2 (Ro - сопротивление движению при скорости и 0 установившегося движения в начальный мрмент времени fj, получим в результате интегрирования уравнения (10.9)
т, Г du
t = -'--и* I ---. (10.10)
«о J О2
ио
После интегрирования выражения (10.10) имеем
Д^.2 = (ш1//?0)и’(1/и2 - 1/и0), (10.11)
где Д<1-2 и и2 - время и скорость в конце рассматриваемого периода. Если известно время Д tr _ 2, то
и2 = и 0/[1 + Ko^.j/^uJ], (10.12)
- 297 -
Для расчета пути во 2-м периоде реверса имеем формулу
m,u2 Г du пци* и0
AS. , = ----- 1 ----=------- In --- ,
Яо J и R о2
%
или
AS,., = (m,u'J/R6) In [1 + /?0ДГ1_а/(тЛи0)]. (10.13)
Движение судна в 3-м периоде реверса происходит под действием тормозящей силы винта, развиваемой вращением его на задний ход до момента полной остановки. В этот период происходит уменьшение скорости судна в соответствии с уравнением (10.1): т,(Л»/й)“ =-Я(и, ив) - Ре(и, (о). Этого уравнения недостаточно для определения искомых величин, так как в него входит неизвестная зависимость (0(f), поэтому для определения всех параметров необходимо воспользоваться вторым уравнением системы (10.2).
В 1948 г. Ф. Нордстрем провел в шведском опытовом бассейне первые систематические опыты по определению гидродинамических характеристик серии гребных винтов с числом лопастей, равным 4, дисковым отношением 6 = 0,45 и шаговым отношением от 0 до 1,6 при реверсировании в широком диапазоне относительных поступей. В 1954-1956 гг. И. Я. Миниович провел аналогичные испытания серии моделей трехлопастных гребных винтов с дисковыми отношениями 0 = 0,5; 0,8; 1,1, причем для каждого значения дискового отношения были испытаны модели с шаговыми отношениями от 0,6 до 1,6.
В. Г. Бакаев и В. М. Лаврентьев переработали результаты испытаний моделей Нордстрема, представили их в форме расчетных диаграмм и предложили удобную для практических, целей методику расчета гидродинамических характеристик гребных винтов при реверсе. В теоретических и практических расчетах гребных винтов и маневров судна гидродинамические качества при данных: геометрических параметрах определяют коэффициентами упора К{ и момента К2 при относительной поступи Хр. Однако эти характеристики не могут быть использованы при расчетах реверса судна с ВФШ, так как при падении частоты вращения до нуля в момент остановки винта коэффициенты К,, К2 и Х.р обращаются в бесконечность. Поэтому В. Г. Бакаев и В. М. Лаврентьев предложили применять вместо относительной поступи = uB/(nDg) универсальную относительную поступь
Ар = ив/^и* + п2£§ ,
а вместо коэффициентов К, и К2 универсальный безразмерный коэффициент упора
=Ре/[рад + п2£§)]
- 298 -
и универсальный безразмерный коэффициент момента
K; = M/[pDB(u2 + n2D2)].
Эти характеристики связаны с характеристиками, обычно употребляемыми при расчете, следующим образом:
Лр = Хр/УГТТ2; К, = Кр/(1 - Л2);
К2 = Кт/(1+Л2).
Если известна характеристика двигателя, т. е. зависимость вращающего момента на гребном валу Мд от частоты его вращения при заданных условиях режима работы двигателя и характеристики винта Мр(Хр), Ре(Ар)> то из уравнения (10.1) можро исключить зависимость от частоты вращения. Тогда правая часть уравнения будет рассматриваться только как функция скорости судна:
/(□) = -7?(uJ-Pe(u). (10.14)
При этом тормозящая сила винта равна
Ре = (1 - 0(1 - Ф)2^рОв2и2/Х2. _ (10.15)
Здесь t - коэффициент засасывания; ф - коэффициент попутного потока; Кр - коэффициент упора с учетом коэффициента влияния корпуса.
При известных функциях Ре(и) и 7?(и) можно произвести интегрирование времени торможения: о Г du
^2-3 = ^ — (10.16)
J Ли)
и пути торможения в этот период времени: о
Ju du
—— - (10.17)
/(и)
и2
- В случае пассивного торможения выражения (10.11), (10.13), (10.16), (10.17) пригодны для описания процесса до момента остановки винта. С момента остановки винта торможение происходит под действием силы суммарного сопротивления корпуса с застопоренным винтом. Для этого периода уравнение движения имеет вид
/(и) = -7?(и) - Кр'(1 - г)р£§(1 - ф)2и2, (10.18)
где AjtJ - универсальный коэффициент упора при <о = 0. Скорость, при которой прекращается вращение винта, получают из уравнения
= ^,p£g(l - ф)2и2; (10.19)
u = vH'/[(l - Ф)2рад. (10.20)
Здесь Мр - момент сопротивления вращению валовой линии; IQ -универсальный коэффициент момента при ы = 0.
- 299-
- Полное время выбега равно
'“'o-i +'1-2 + '2-з> (Ю-21)
а полный выбег
S’S0-i + S1-2 + S2-3- (10.22)
Вопрос об определении параметров реверса судов с ВРШ имеет целый ряд особенностей, о которых уже указывалось выше, однако принцип раздельного определения времени и дистанции в каждом периоде сохраняет свою силу.
Следует обратить внимание на то, что в выражения для расчета введен коэффициент засасывания, учитывающий уменьшение тяги винта на заднем ходу. Это уменьшение тяги обусловлено влиянием обратной струи гребного на корпус судна, физика которого представлена на рис. 10.8. Данное явление особенно заметно у судов с ВРШ, на которых обратная струя возникает в самом начале реверса.
Иногда при решении практических судоводительских задач для определения параметров реверса используют элементы методов идентификации уравнений движения судна по данным натурных испытаний. В этих случаях измеряется время снижения скорости на заданную величину или другие параметры, позволяющие приблизительно оценить характеристики реверса судна при изменении загрузки, посадки, обрастания и~т. п. без проведени'я полномасштабных натурных испытаний. Однако удовлетворительная точность может быть получена лишь при четком знании каждого периода торможения судна и применении зависимостей, которые полностью характеризуют физические процессы, происходящие в этом периоде, а также использовании соответствующего математического аппарата. Реальные перспективы в этом направлении могут быть открыты только при установке на судах вычислительной техники.
Контрольные вопросы
1. Каков механизм торможения судна?
2. Какие выделяют периоды и способы реверса судна с ВФШ; судна с ВРШ?
3. Какими периодами характеризуются гидродинамические режимы работы ВРШ при реверсе?
4. Перечислите силы и моменты, определяющие траекторию судна при реверсе.
5. В чем специфика управляемости при реверсе судов ВФШ; судов с ВРШ?
Глава 11
ПРОЧНОСТЬ КОРПУСА СУДНА
§ 76. Внешние силы и напряжения в корпусе судна
Определения и общие положения.Прочностъю корпуса судна называют его способность противостоять внешним усилиям, возникающим в процессе эксплуатации судна, без нарушения целости как всего корпуса, так и отдельных его конструктивных элементов. Прочности корпуса должна соответствовать необходимая жесткость, т. е. способность сопротивляться внешним усилиям без значительных изменений формы конструкций. В большинстве случаев при удовлетворении требований к прочности жесткость оказывается достаточной.
Изучая прочность плавающего судна, его корпус рассматривают как пустотелую тонкостенную составную балку переменного по длине сечения, находящуюся под воздействие^ сложной системы сил, в число которых входят силы веса и инерции, гидростатические силы давления воды, гидродинамические силы, возникающие при движении судна, и т. п. Все эти силы в совокупности вызывают деформацию корпуса, которую в практических расчетах принято разделять на деформацию общего изгиба в продольной и поперечной плоскостях и местные деформации составных элементов корпуса. Соответственно рассматривают общую продольную прочность, поперечную прочность и местную прочность корпуса судна.
При характерных для морских судов соотношениях между высотой борта и шириной корпуса обеспечение общей продольной прочности в обычных условиях плавания на взволнованной поверхности моря приводит также и к обеспечению общей поперечной прочности, которую проверяют только в особых случаях (например, при постановке в док).
Кроме усилий, возникающих при общем изгибе корпуса, отдельные его конструкции воспринимают различные местные нагрузки. Например, набор и настил палубы воспринимают вес расположенных на палубе грузов, днище и борта - давление забортной воды и т. д. Проверка прочности этих конструкций под действием таких местных нагрузок является задачей расчета местной прочности.
Внешние силы, вызывающие общий изгиб корпуса. При проверке общей продольной прочности корпус судна рассматривают в условиях воздействия на него только вертикальной нагрузки - сил веса и вертикальных составляющих гидростатических и гидродинамических сил давления воды. Горизонтальные составляющие внешней нагрузки (упор движителей и силы сопротивления воды) не учитывают, так как общие напряжения в связях корпуса от таких сил пренебрежимо малы.
Явление общего изгиба корпуса судна, плавающего на взволнованной поверхности воды, схематизируется. Изгибающие моменты,
- 301-
возникающие в различных поперечных сечениях корпуса, разделяют на три составляющие: на изгибающие моменты, возникающие при плавании судна на тихой воде; на дополнительные изгибающие моменты, возникающие при плавании на волнении в результате перераспределения сил плавучести по длине судна и на дополнительные динамические изгибающие моменты, действию которых судно периодически подвергается при ходе на волнении вследствие ударов днищем о воду. Соответственно разделяют и перерезывающие силы в поперечных сечениях корпуса.
Силы веса и вертикальные составляющие гидростатических сил давления воды (силы плавучести), действующие на судно, плавающее в положении статического равновесия на тихой воде, уравновешены в целом, т. е. их равнодействующие равны по абсолютному значению, противоположно направлены и приложены в точках, лежащих на одной вертикали. Однако по длине судна силы веса и плавучести распре-
делены по различным законам, что приводит к возникновению перерезывающих сил и изгибающих моментов, а следовательно, и к общему продольному изгибу корпуса.
Распределение сил веса по длине судна определяется ступенчатой кривой сил веса (рис. 11.1, а), а распределение сил плавучести -ступенчатой кривой сил плавучести (рис. 11.1,6), равновеликой по площади строевой по шпангоутам судна. Вычитая ординаты ступенчатой кривой сил плавучести из ординат ступенчатой кривой сил веса, получают ступенчатую кривую нагрузки q (рис. 11.1, в). Согласно общей теории изгиба балок первая интегральная кривая от кривой нагрузки будет представлять собой кривую перерезывающих сил Q (рис. 11.1, г), а вторая интегральная кривая - кривую изгибающих моментов М (рис. 11.1,6). Все операции по построению указанных выше кривых в совокупности носят название постановки судна на тихую воду.
Ординаты кривой сил веса представляют в некотором выбранном масштабе силы веса, действующие на единицу длины судна.
Рис. 11.1. Эпюры сил веса (а), сил плавучести (б), нагрузки (в), перерезывающих сил (г) и изгибающих моментов (д)
- 302-
Для построения этой кривой длину судна разбивают на двадцать равных по длине участков - теоретических шпаций. Для упрощения расчетов принимают допущение, что в пределах каждой шпации вес распределяется равномерно, вследствие чего кривая получает ступенчатый вид. Исходным документом для построения кривой сил веса служит подробная таблица нагрузки судна, а также чертеж продольного разреза судна, при помощи которого отдельные статьи нагрузки распределяют по теоретическим шпациям. Предложено несколько способов (приемов) построения отдельных составных частей кривой сил веса, в частности кривой сил веса корпуса. Подробное рассмотрение этих способов, представляющее интерес лишь для инженеров-кораблестроителей, выполняющих расчеты общей прочности, выходит за пределы данного курса. Укажем только, что необходимыми условиями правильности построения кривой служат равенство ее площади (с учетом принятых масштабов) водоизмещению судна и совпадение абсцисс ЦТ площади кривой и ЦТ судна.
Кривая сил плавучести представляет собой строевую по шпангоутам, ординаты которой умножены на удельный вес забортной воды и отложены в масштабе, принятом ранее при построении кривой веса. Для упрощения расчетов полученную таким образом главную кривую сил плавучести заменяют равновеликой ей по площади ступенчатой кривой (см. рис. 11.1, б). Отметим, что площади и абсциссы ЦТ ступенчатых кривых сил веса и сил плавучести должны соответственно совпадать в связи с равновесным положением судна.
Построение кривой нагрузки q не требует пояснений. Отметим только, что если кривая нагрузки построена правильно, то части ее площади, расположенные выше и ниже оси сравнения, будут равны между собой.
Ординаты кривых перерезывающих сил и изгибающих моментов в произвольном сечении с абсциссой х определятся интегралами
Qx = 5 Qx^x; Мх = j Qxdx = J J qx<ix2, (11.1)
О ООО
которые вычисляют табличным способом как интегралы с переменным верхним пределом.
Кривые перерезывающих сил и изгибающих моментов как интегральные по отношению к кривой нагрузки обладают следующими свойствами: кривая нагрузки пересекает ось сравнения в точках, отвечающих экстремальным значениям перерезывающей силы; кривая перерезывающих сил пересекает ось сравнения в точках, отвечающих экстремальным значениям изгибающего момента: экстремальные значения кривой перерезывающих сил отвечают точкам перегиба кривой изгибающих моментов.
При плавании судна по взволнованной поверхности моря происходит непрерывное перераспределение сил плавучести по длине судна вследствие изменения профиля волновой ватерлинии в процессе поступательного перемещения (хода) и качки судна. В результате такого перераспределения возникает дополнительная внешняя
- 303-
нагрузка на корпус судна, которая приводит к возникновению дополнительных перерезывающих сил и изгибающих моментов.
В результате килевой и вертикальной качки судна возникают также дополнительные ускорения, а следовательно, изменяются и силы веса. Кроме того, в условиях такой качки при ходе против встречной волны происходит периодическое оголение носовой оконечности судна; при входе ее в воду на днище действуют значительные гидродинамические силы, вызывающие соответствующий динамический изгиб корпуса судна.
В классической теории общего продольного изгиба корпуса судна на волнении обычно принимают допущение, что с точки зрения общей продольной прочности наиболее неблагоприятными являются такие положения судна, когда его мидель-шпангоут располагается либо на вершине, либо на подошве волны, гребень которой перпендикулярен ДП судна, а длина равна длине судна (рис. 11.2). Если средняя часть судна находится на вершине волны (рис. 11.2, о), то силы плавучести на этом участке возрастают, а к оконечностям убывают. В этом случае корпус судна изгибается, получая перегиб. Наоборот, когда средняя часть судна находится на подошве волны (рис. 11.2, б), силы плавучести посредине уменьшаются, а к оконечностям возрастают и судно получает прогиб.
В тех случаях, когда гребень волны не перпендикулярен ДП судна, его корпус кроме общего продольного изгиба подвергается скручиванию. Однако скручивание, как правило, не является лимитирующим фактором для морских транспортных судов за исключением судов некоторых конструктивных типов, например судов открытого типа (с широкими люками). Для таких судов существует специальная расчетная методика.
Дополнительные перерезывающие силы и изгибающие моменты, возникающие на волнении в результате перераспределения сил плавучести по длине судна, могут быть определены путем расчета, известного под названием статической постановки судна на вершину и подошву волны. В этом расчете кривые сил веса и сил плавучести
- 304-
на тихой воде не используют, а строят только кривую дополнительной нагрузки, интегрированием которой по длине судна получают искомые кривые дополнительных (волновых) перерезывающих сил и изгибающих моментов. Однако, вследствие значительной трудоемкости такого расчета, часто пользуются соответствующими приближенными формулами. Приближенная методика существует также для определения динамической составляющей волновой нагрузки.
Нормальные и касательные напряжения в продольных связях корпуса. С достаточной для практических целей точностью можно принять, что деформация общего изгиба корпуса судна как тонкостенной пустотелой составной балки следует гипотезе плоских сечений и подчиняется общепринятой теории изгиба балок. Согласно этой теории нормальные напряжения в поперечных сечениях по высоте балки изменяются по линейному закону, а по ширине балки остаются неизменными для каждого отстояния от нейтральной оси сечения (проходящей через его ЦТ). Таким образом, нормальные о и касательные т напряжения в продольных связях корпуса могут быть определены по известным формулам 1
o=Mzj/I; X“QSl(Ib), (11.2)
где М - изгибающий момент, действующий в рассматриваемом поперечном сечении; z,- - отстояние ЦТ поперечного сечения данной продольной связи от нейтральной оси; I- момент инерции площади поперечного сечения продольных связей корпуса относительно нейтральной оси; Q - перерезывающая сила в поперечном сечении; S - статический момент относительно нейтральной оси части площади поперечного сечения продольных связей, расположенной выше или ниже горизонтального сечения, в котором определяются касательные напряжения; b - суммарная толщина продольных связей корпуса, пересекаемых горизонтальным сечением, на уровне которого определяются касательные напряжения.
Поскольку момент Инерции I всегда положителен, знак напряжения в l-й связи определяется знаками изгибающего момента М и аппликаты z,. При перегибе корпуса изгибающий момент, вычисленный по изложенной выше методике, получается положительным. Следовательно, в этом случае напряжения в продольных связях корпуса, расположенных выше нейтральной оси, также будут положительными (растягивающими), а в связях, расположенных ниже нейтральной оси, - отрицательными (сжимающими). При прогибе корпуса напряжения соответственно меняют знаки.
При разработке Норм общей прочности и требований Регистра СССР к общей прочности морских судов была использована более простая приближенная формула для касательных напряжений, основанная на схематизации поперечного сечения корпуса в виде пустотелой балки с верхним и нижним поясками площадью и ы2 и тонкими стенками (бортами) (рис. 11.3), площадь которых не учитывается в расчете момента инерции I и статического момента S, поскольку ее влияние
- 305 -
Рис. 11.3. Схематизация поперечного сечения корпуса судна
на указанные величины можно считать пренебрежимо малым. В этом случае момент инерции и статический момент (для сечения по нейтральной оси, где касатель-
ные напряжения достигают максимума) будут описываться фор-
мулами
G)j + (о2
Подстановка формул (11.3) во
°1+ °2 J , второе выражение (3.2)
(Н.З)
дает
* = Q/(bh) = Q/Q, (11.4)
где й - площадь сечения вертикальных стенок балки, т. е. площадь сечения продольных связей бортов судна (от верхней палубы до ОП).
Расчет эквивалентного бруса. Расчет элементов поперечного сечения продольных связей корпуса (их суммарной площади и момента инерции) носит название расчета эквивалентного бруса.
Расчет эквивалентного бруса выполняют в табличной форме (табл. 11.1), причем ввиду симметрии судна относительно ДП расчет производят для одной половины поперечного сечения (рис. 11.4). Ось сравнения, относительно которой вычисляют статические моменты и переносные моменты инерции связей, проводят обычно посередине высоты расчетного сечения. Собственные моменты инерции связей, как правило, невелики; поэтому в таблицу заносят лишь те значения собственных моментов инерции связей, которые существенно превышают погрешность определения их переносных моментов инерции.
После заполнения таблицы подсчитывают суммы А, В и С. Отстояние z0 нейтральной оси от оси сравнения и момент инерции I всего сечения относительно его нейтральной оси определяют по формулам
z0 = B/A; (11.5)
8000~ I=2(C-Az£) = 2(C-B2/A). (11.6)
Рис. 11.4. Пример поперечного сечения продольных связей корпуса
При действии сжимающих напряжений некоторые гибкие
- 306-
Таблица 11.1. Пример расчета эквивалентного бруса
№ связи Связь Размеры связи, мм Площадь сечения связи ы.см2 Отстояние от оси сравне-ненияз, м Статический момент G)z, см2 * м Переносный момент инер-ЦИИШХ2, СМ^С2 Собственный момент инерции!, см^м2
1 Вертикальный киль 0,5 х 1200 х 16 96 -3,40 -326 1110 12
2 Днищевые стрингеры 2 х 1200 х 10 240 -4,00 -960 3840 29
3 Крайний междудонный лист 1100x12 132 -3,20 -422 1352 13
4 Горизонтальный киль 0,5 х 2000 х 20 200 -4,00 -800 3200 -
5 Обшивка днища 5500 х10 550 -4,00 -2200 8800 -
6 Скуловой лист 2300 х12 276 -3,60 -994 3577 34
7 Настил внутреннего дна 6900 х 6 414 -2,80 -1159 3246 -
8 Обшивка борта 4800 х10 480 -0,10 -48 6 922
9 Ширстрек 2000 х 20 400 3,30 1320 4356 133
10 Палубный стрингер 2000 х 20 400 4,05 1620 6561 -
И Настил палубы 2000 х 8 160 4,20 672 2822 -
12 Карлингс 500 х 12 60 4,00 240 960 -
13 Полка карлингса 150 х 16 24 3,70 89 329 -
Суммы А = 3432 В = -2968 С=41302
связи - пластины, входящие в состав перекрытий корпуса, теряют обычно устойчивость и не могут нести всю приходящуюся на них нагрузку. В этом случае выполняют расчет эквивалентного бруса во втором приближении, редуцируя при этом площади сечения таких связей, т. е. вводя их в расчет с редукционным коэффициентом
Ф=0э/0сж<1> z (Н.7)
где оэ — эйлерово напряжение пластины; осж - абсолютное значение действующего сжимающего напряжения от общего изгиба.
Нормы общей прочности Регистра СССР предусматриваю! проверку общей продольной прочности по предельному состоянию, т. е. при действии так называемого предельного момента. Этот момент определяется исходя из предельного момента сопротивления проверяемого сечения корпуса, вычисленного с учетом редуцирования гибких связей, при напряжениях, соответствующих пределу текучести в наиболее удаленной от нейтральной оси верхней жесткой продольной связи эквивалентного бруса.
При прочих равных условиях нормальные и касательные напряжения в продольных связях корпуса обратно пропорциональны моменту инерции площади их поперечного сечения. Но момент инерции представляет собой сумму произведений площадей сечения продольных связей на квадраты их расстояний от нейтральной оси. Следовательно, самая важная роль в обеспечении общей продольной прочности принадлежит связям, наиболее удаленным от нейтральной оси - верхней палубе и днищу с их продольным набором. При общем изгибе судна в этих связях будут возникать наибольшие нормальные напряжения.
§ 77. Контроль общей продольной прочности судна в эксплуатации
При типовых случаях нагрузки транспортных судов длиной L > 80 м, приводимых в Информации об остойчивости и прочности судна для капитана, общую прочность его корпуса можно считать обеспеченной. Поэтому необходимость проверки общей прочности упомянутых транспортных судов в эксплуатации может возникнуть при загрузке трюмов, отличной от типовых случаев, с большой неравномерностью распределения груза по длине судна (например, при загрузке концевых трюмов и отсутствии груза в средних или, наоборот, при загрузке средних трюмов и отсутствии груза в концевых трюмах), а также для выяснения возможности выполнения грузовых операций в порту или на рейде в требуемой последовательности.
Напряженное состояние корпуса судна определяется изгибающим моментом и перерезывающей силой, действующими на судно в различных его поперечных сечениях. Для сухогрузных судов, перевозящих генеральные, лесные и легкие сыпучие грузы, обычно ограничиваются проверкой общей прочности по изгибающему моменту, действующему
- 308-
в миделевом сечении судна. Для танкеров, а также для судов, предназначенных для перевозки тяжелых навалочных грузов (например, рудовозов), как правило, необходима (в зависимости от возможных случаев нагрузки и по согласованию с Инспекцией Регистра) проверка общей прочности по изгибающим моментам и перерезывающим силам, действующим в нескольких поперечных сечениях корпуса.
Полные изгибающий момент и перерезывающая сила при данном состоянии нагрузки судна складываются из изгибающего момента и перерезывающей силы на тихой воде и дополнительных изгибающего момента и перерезывающей силы от морского волнения, которые практически одинаковы при различных осадках судна. Поэтому без большой погрешности допустимо оценивать и проверять напряженное состояние корпуса судна по значению изгибающего момента Мт. в и перерезывающей силы QT. в на тихой воде. Такое допущение предусмотрено в Правилах Регистра СССР.
Типовая информация об остойчивости и прочности грузового морского судна содержит специальные диаграммы контроля прочности, по которым общая прочность судна может быть проверена для любого состояния его нагрузки и в любых условиях его эксплуатации (в рейсе, на рейде, в порту). Каждую такую диаграмму (рис. 11.5) строят в конструкторском бюро на основе формул, приводимых в Правилах Регистра СССР. Поскольку значения моментов сопротивления и площади поперечного сечения продольных связей для каждого конкретного судна известны, эти формулы дают возможность вычислить максимальные допустимые значения Мт, в и QT. в .
При наличии диаграммы контроля общей продольной прочности судна по изгибающему моменту или перерезывающей силе, построенной по уравнениям (11.22)—(11.23), проверку прочности в данном поперечном сечении осуществляют в следующем порядке.
1. Определяют дифферент судна «4, - .
2. В табличной форме рассчитывают дедвейт судна Ди и сумму +МХ положительных моментов части дедвейта, расположенной в нос от данного поперечного сечения (табл. 11.2).
3. На диаграмме контроля общей продольной прочности (см. рис. 11.5) откладывают значение дедвейта Дw (на рисунке Д» = = 7000 т). От полученной точки переходят по наклонной прямой к горизонтали, отвечающей найденному ранее дифференту судна (в данном примере dH-dK = -2Mj. Через найденную точку проводят вертикаль, на которой откладывают сумму моментов +МХ и ставят точку А.
Прочность корпуса считается достаточной, если точка А находится в безопасной зоне, т. е. для плавания в рейсе, когда она лежит между линиями Опасно-перегиб в рейсе и Опасно-прогиб в рейсе. Если точка А лежит за этими линиями, но между линиями Опасно-
- 309 -
Рис. 11.5. Диаграмма контроля обшей продольной прочности
Таблица 11.2. Расчет изгибающего момента от грузов, входящих в дедвейт
Дифферент м Р,т + МХ, кН • м
Судовые запасы Перевозимый груз Балласт Суммы Расчетная Допустимая от (в рейсе) до
- 310-
перегиб на рейде и Опасно-прогиб на рейде, то прочность достаточна только для погрузки-разгрузки на рейде и т. д.
Допустимые значения суммы +МХ определяют по точкам пересечения вертикали для заданного дедвейта и дифферента с соответствующими границами и заносят в табл. 11.2.
Контрольные вопросы
1. Каковы особенности нагрузки на корпус судна на тихой воде и на волнении?
2. Каков характер распределения по высоте судна нормальных и касательных напряжений на миделе?
3. Какова процедура контроля общей продольной прочности судна при его загрузке в конкретном рейсе?
’ Глава 12
ХОДОВЫЕ И МАНЕВРЕННЫЕ ИСПЫТАНИЯ СУДОВ
§ 78. Ходовые испытания
Эксплуатация вновь построенного судна начинается с проведения приемосдаточных испытаний. Таким испытаниям подвергается также каждое судно, на котором проводился большой ремонт. Главная задача приемосдаточных испытаний - оценить качество постройки или ремонта и определить возможность приемки судна в состав действующего флота. Объем проверок и испытаний определяется программой приемосдаточных испытаний, которая составляется проектантом судна и до их начала должна быть согласована со всеми заинтересованными организациями.
В процессе проведения приемосдаточных испытаний головного судна производят:
оценку качества проекта нового судна и разработку конкретных рекомендаций по внесению корректив в проект, которые необходимо учесть при постройке серийных судов;
оценку соответствия судна проекту, выявление причин отступления или неправильных технических решений;
определение возможности выполнения на судне требований различных правил, регламентирующих постройку и безопасную длительную эксплуатацию судна нового проекта;
разработку рекомендаций по улучшению эксплуатационных качеств судов серийной постройки, по упрощению и удешевлению судов;
- 311 -
оценку удобства эксплуатации и обслуживания механизмов, устройств, оборудования и разработку рекомендаций с целью улучшения расположения механизмов и оборудования на судне, если это будет найдено необходимым.
Приемосдаточные испытания включают следующие этапы:
швартовные испытания, проводимые по окончании постройки судна у стенки завода-строителя с целью оценки качества заводских работ и определения готовности судна к выходу в море для проведения ходовых испытаний;
ходовые испытания, осуществляемые в море для проверки основных спецификационных характеристик и определения возможности принятия вновь построенного судна в состав действующего флота;
контрольное вскрытие, осмотр и ревизию механизмов, проводимые по окончании ходовых испытаний с целью оценки качества установки, сборки и регулировки судовых механизмов и оборудования;
контрольные испытания, выполняемые после ревизии механизмов и устранения недостатков, выявленных во время предыдущих испытаний, и завершения всех строительных работ на судне для определения возможности приемки судна от завода-строителя.
Испытания и приемку судна осуществляет приемная комиссия, которая назначается для головного судна ММФ - получателем судна; для серийного судна - пароходством или управлением, в состав которого оно поступает. В состав комиссии обязательно входит капитан, старший механик, электромеханик и начальник судовой радиостанции.
Члены экипажа судна также участвуют в приемосдаточных испытаниях: контролируют выполнение программы испытания (соответствие режимов работы заданным, правильность снятия замеров и отсчетов), записывают показания штатных и специальных приборов, наблюдают за работой механизмов, устройств и оборудования, принимают участие в составлении приемосдаточной документации.
Начало швартовных и ходовых испытаний согласуется с местной инспекцией Регистра СССР, группой наблюдения заказчика, приемной комиссией и устанавливается приказом директора завода-строителя судна.
Швартовные испытания какого-либо механизма могут быть начаты только после того, как для этого механизма оформлены документы приемки построечного периода, а ходовые испытания - после того, как группой наблюдения и инспектором Регистра СССР будет подписан протокол об окончании швартовных испытаний данного механизма.
Ходовые качества судна определяют при испытаниях, во время которых необходимо установить соотношение между такими основными характеристиками, как мощность главного двигателя и скорость судна. Испытания проводят на специальных полигонах с соблюдением по возможности некоторых предельных условий (иногда называемых стандартными), гарантирующих желаемый уровень качества получаемых результатов.
Ходовые качества судна, оцениваемые в стандартных условиях, являются тем нижним пределом, когда могут быть произведены:
- 312-
X 5Г
Мерный
Разеонный участок к участок ^Разгонный участок
Рис. 12.1. Схема маневрирования судном при испытаниях на мерной линии
непосредственное сопоставление характеристик ходкости по результатам натурных испытаний и модельного эксперимента; общая проверка проектных предпосылок; сопоставление полученных результатов с результатами испытаний однотипных судов. С этой точки зрения ходовые испытания имеют большое эксплуатационное и научно-техническое значение, так как накопленные данные являются основным показателем, который следует учитывать как при проектировании новых судов, так и при использовании вновь построенных судов в практической деятельности.
Основным методом определения ходовых качеств судна являются его испытания на мерной линии, при которых маневрирование судном осуществляется по схеме, показанной на рис. 12.1. Такие испытания проводят на участках морских переходов, оборудованных мерными милями с подходящими навигационными и погодными условиями. В случае отсутствия таких участков испытания могут проводиться при наличии на судне абсолютного лага, обеспечивающего незначительную погрешность измерения скорости, на глубине, соответствующей рабочей для данного лага. Основными измеряемыми. параметрами являются скорость судна, мощность, момент на валу, частота вращения гребного винта и-расход топлива. Порядок выполнения испытаний определяется конкретными условиями их проведения.
§79 . Определение маневренных характеристик
Маневренные характеристики судна зависят от управляемости судна (см. § 44) и его реверсивных двойств (см. § 77). Приблизительность методов расчетного определения параметров реверса и других маневренных характеристик, а также ряд принципиальных упрощений, которые используют при этом, не позволяют судоводителю полностью полагаться на расчетные и на так называемые расчетно-экспериментальные методы, которые существуют в настоящее время.
При испытаниях, проводимых для оценки управляемости судов и их инерционно-тормозных свойств, производят определение действительных значений параметров их управляемости и реверса.
- 313-
В процессе испытаний получают исходные данные по составлению Информации об управляемости судна, а также таблицы маневренных элементов судна, вывешиваемой в штурманской рубке.
Регистр СССР, капитан и экипаж судна должны быть уверены, что судно удовлетворяет соответствующим ему критериям управляемости. Поэтому на каждом головном судне серии и на всех судах индивидуальной постройки должны проводиться полномасштабные испытания. Кроме того, испытания должны выполняться на каждом судне после ремонта, модернизации или замены движительно-рулевого комплекса.
Испытания необходимо проводить в условиях глубокой воды при волнении интенсивностью не выше 1 балла и ветре силой не более 2 баллов при отсутствии крена и дифферента. Загрузка должна соответствовать осадке по соответствующую грузовую марку с возможным отклонением не более 10 %. Во время проведения маневров для замера параметров управляемости обязательно поддерживать одинаковую частоту вращения движителей или один и тот же угол перекладки лопастей ВРШ.
Испытания по определению маневренных характеристик должны охватывать выявление всех принятых критериев управляемости и параметров реверса, о которых говорилось выше, поэтому эти испытания включают маневры, перечисленные ниже.
Исследование установившейся циркуляции при различных углах перекладки руля до перекладки „на борт”. В процессе этого эксперимента фиксируют углы перекладки и замеряют соответствующие им диаметры установившейся циркуляции. Способы измерения должны гарантировать точность определения диаметра не менее ± 5,0 %. На основании испытаний строят диаграмму управляемости судна, т. е. зависимость-to =DC/L =/(б). Для построения участка диаграммы при малых углах перекладки (| 61 < 5’) выполняют маневр „Спираль”.
Маневр „Спираль”. Необходимость проведения этого маневра обусловлена неустойчивым на курсе движением большинства судов при малых углах перекладки руля. Параметры циркуляции при простой перекладке руля на малые утлы довольно нестабильны. При выполнении „Спирали” судно вводится в установившуюся циркуляцию при угле перекладки 6 = 6 -5- 8° на один борт и измеряется угловая скорость вращения судна вокруг вертикальной оси Q. После этого угол перекладки уменьшается на 1-2’ и производится замер угловой скорости после стабилизации ее величины. Процесс повторяется до прямого положения руля и продолжается далее до углов перекладки 6- 8° противоположного борта. Затем маневр повторяется в обратном направлении. По замеренным величинам угловой скорости Q(6) можно построить график ы(б) в диапазоне ± 5*. При этом величину ы(б) вычисляют по формуле
о = 0,01745QL/(uou), (12.1)
где и - относительная скорость судна на циркуляции. Значение и в первом приближении берут равным единице. Далее методом
- 314-
последовательных приближений определяют to, используя, зависимость падения скорости на циркуляции и формулу (12.1). Вычисления производят для всех циркуляций на левый и правый борта, а затем осредняют при одинаковых д.
Выход из установившейся циркуляции после отключения главных двигателей. Этот маневр производят с целью определения управляемости судна при движении по инерции. Для его выполнения судно при движении с постоянной скоростью вводят в циркуляцию при угле перекладки руля 6 = 20°. Затем двигатель останавливают или лопасти ВРШ перекладывают в положение Н = 0, а руль с максимально возможной скоростью перекладывают в противоположную сторону. Управляемость считается достаточной, если при указанных действиях судно выходит из циркуляции.
Движение задним ходом. При данном маневре проверяется управляемость судна на заднем ходу. Испытания проводят на заднем ходу в установившемся режиме. Судно движется прямым курсом в течение 5-6 мин. Удержание судна на прямом курсе производят только с помощью руля и подруливающего устройства. Судно считается управляемым в режиме движения на задний ход, если оно способно удерживаться на прямом курсе. Кроме движения на прямом курсе проверяется возможность выхода из установившейся циркуляции заднего хода с помощью одного руля.
Маневр „Зигзаг”. Этот маневр выполняют с целью определения характеристик управляемости по сдерживанию судна: угла зарыскивания <р0 и времени сдерживания t0. Маневр „Зигзаг” может осуществляться в трех модификациях: 10710°; 20720°; 30730*. Для выполнения „Зигзага” 10710’ руль перекладывают на угол 6 = 10°. Судно входит в циркуляцию. В процессе испытаний ведется наблюдение за курсом судна. При отклонении на 10° руль с максимальной скоростью перекладывают на б = 10* противоположного борта. Судно в первый момент после перекладки руля по инерции^ продолжает уклоняться в сторону первоначальной перекладки. Во время испытаний измеряют предельное отклонение судна в сторону первоначального направления, т. е. угол зарыскивания <р0, и время этого отклонения t0 - время зарыскивания. После перехода судна через линию первоначального курса и дальнейшего отклонения руля на величину 10° руль снова перекладывают на противоположный борт на угол 10° и процесс повторяется. В ходе испытаний маневр „Зигзаг” 10710° выполняют 2-3 раза. Аналогичным способом производят маневры „Зигзаг” 20720’ и 30730°. Все маневры „Зигзаг” осуществляют при постоянной частоте вращения или постоянном угле перекладки лопастей ВРШ.
Выход из установившейся циркуляции. Данный маневр выполняют для определения характеристики экстренного сдерживания судна-угла зарыскивания и времени сдерживания. Судно вводят в установившуюся циркуляцию с максимально возможным углом перекладки руля. После стабилизации движения судна руль перекладывают на противоположный борт в положение „На борт”. Замеряют, как и при маневре „Зигзаг”, угол зарыскивания и время сдерживания.
- 315-
Торможение судна. Испытания проводят для определения характеристик активного торможения и движения по инерции с различных начальных режимов движения судна. Во время испытаний измеряют выбег судна, время выбега, фиксируют траекторию, а также время и промежуточную дистанцию между обсервациями для того или иного маневра.
В соответствии с рекомендациями ИМО и на основании руководящих документов ММФ Информация для капитана о маневренных элементах судна должна включать в себя информацию об инерционнореверсивных качествах судна при торможении на полный задний ход и стоп с различных начальных установившихся режимов для двух случаев груза и балласта с обязательным указанием общего выбега и общего времени выбега, а также их текущих значений. В этой информации обязательно должна быть указана точка, где скорость движения судна уже не обеспечивает его управляемость, а также предполагаемое направление смещения судна после этого. Кроме того, в таблице маневренных элементов должна содержаться информация о поворотливости судна, состоящая из графического представления двух циркуляций судна: при перекладке руля на 15° и 30* каждого борта для случая груза и балласта, а также текущие значения скорости судна и времени достижения определенного курса. Отдельно должна быть представлена информация по проведению маневра „Человек за бортом”, а также информация о ходовых качествах судна в виде зависимости скорости установившегося движения судна от частоты вращения винта или угла перекладки (шага) ВРШ.
Таблицу маневренных элементов заполняют по данным приемосдаточных и полномасштабных эксплуатационных испытаний, однако при эксплуатации изменение состояния судна, а также внешних воздействий на него может резко повлиять на маневренные качества судна и сделать их отличными от тех, на основании которых заполнялась таблица маневренных элементов. Это вынуждает капитана судна и экипаж проводить испытания судна непосредственно в условиях эксплуатации, чтобы незнание маневренных возможностей судна в определенный момент не повлекло за собой нарушение условий безопасности мореплавания. Такие же требования диктуют основные руководящие документы ММФ. Так, пункт (08) Обязанностей вахтенного помощника капитана на ходовой вахте Устава службы на судах ММФ предписывает ему твердо знать маневренные возможности своего судна, пункт 4.4.2 НСШ-82 обязывает капитана „накапливать и обобщать сведения об изменениях маневренных элементов судна при различных условиях плавания для последующего использования”.
Таким образом, экипажу судна следует использовать любую возможность для определения маневренных элементов непосредственно в условиях рейса, однако при этом необходимо помнить, что точность выбранного метода должна обеспечивать получение конечных результатов с погрешностью не более 10%, в противном случае использовать их в практической деятельности будет нельзя.
- 316-
Контрольные вопросы
1. Каковы задачи проведения приемо-сдаточных испытаний судна?
2. Назовите этапы приемо-сдаточных испытаний.
3. Каковы особенности различных маневров при испытаниях судов на управляемость?
Раздел II. Устройство судна
Глава 13 КЛАССИФИКАЦИЯ, ОСНОВНЫЕ ХАРАКТЕРИСТИКИ И ТИПЫ МОРСКИХ СУДОВ
§ 80. Классификация морских судов
Морские суда классифицируют по ряду основных признаков: по назначению, району плавания, типу энергетической установки, типу и количеству двигателей, архитектурно-конструктивному типу и ряду других.
Рис. 13.1. Классификация
- 318-
По назначению суда разделяют на транспортные (грузовые, грузопассажирские и пассажирские), промысловые, вспомогательные и др. (рис. 13.1).
По району плавания все суда морского флота в соответствии с Правилами Регистра СССР подразделяют на суда неограниченного района плавания и суда, имеющие ограничения по району и условиям плавания, которые устанавливает Регистр СССР в зависимости от типа, размеров и конструкции корпуса судна.
По типу энергетической установки различают: теплоходы, оборудованные ДВС; турбоходы, оборудованные паротурбинной или газотурбинной энергетической установкой; электроходы, оборудованные гребной электрической дизельной или турбинной установкой; атомоходы, оборудованные атомными парогенераторами (рис. 13.2).
морских судов по назначению
- 319-
Рис. 13.2. Атомный ледокол „Арктика”
По типу движителей суда подразделяют на винтовые (движитель -гребной винт), со специальными движителями (крыльчатыми, ротор* ными, водометными), весельные и парусные. Винтовые суда различают также по числу гребных валов: одновальные (большинство грузовых и промысловых судов), двухвальные (пассажирские и крупные специализированные суда), трехвальные (ледоколы, океанские пассажирские лайнеры).
В зависимости от архитектурно-конструктивного типа (внешней формы и конструкции) суда разделяют:
- по количеству корпусов: однокорпусные, двухкорпусные (катамараны), трехкорпусные (тримараны);
- по количеству и конструкции непрерывных палуб: одно-, двух-, трехпалубные;
- по количеству и типу надстроек: одно-, двух- (с баком и ютом) и трехостровные, (со средней надстройкой);
- по форме поперечного сечения корпуса: с прямостенными бортами и с наклонными бортами;
- по форме носовой оконечности (форштевня): с прямым, наклонным, ледокольным, бульбообразным и другими форштевнями;
- по форме кормовой оконечности: с крейсерской и транцевой кормой;
- по форме днища: плоскодонные и килеватые;
- по форме продольного сечения корпуса; суда с цилиндрической вставкой - средней частью корпуса судна, у которой форма поперечного сечения неизменна по длине, и суда без цилиндрической вставки.
- 320-
По роду движения различают водоизмещающие суда и суда с гидродинамическими принципами поддержания.
§ 81. Технико-эксплуатационные характеристики морских судов
К основным технико-эксплуатационным характеристикам морских судов относятся линейные, весовые и объемные характеристики, скорость судна, автономность и дальность плавания и др.
Линейные характеристики. К линейным характеристикам в первую очередь относится габаритные размерения судна. Они определяют возможность постановки судна у причала ограниченной длины, прохода судна в док с определенной длиной шлюза ц шириной ворот, входа в порт или прохода по каналу с ограниченной глубиной фарватера, прохода судна под мостами на некоторых каналах и т. д. Такими габаритными размерениями являются: длина наибольшая - расстояние по горизонтали между крайними наружными точками форштевня и кормы судна; ширина наибольшая Яде - расстояние между вертикалями, проведенными касательно к наружной поверхности судна в самой широкой его части; высота максимальная Нтяг - расстояние по вертикали от наружной кромки киля до самой высокой точки судна (вычитая из этой величины осадку, получают высоту судна над водой); высота борта D - расстояние по вертикали от наружной кромки киля до верхней палубы надводного борта; осадка судна d -расстояние, измеренное в плоскости мидель-шпангоута от наружной кромки киля до плоскости грузовой ватерлинии (ГВЛ).
Кроме указанных габаритных размерений в расчетах используют теоретические значения длины, ширины и осадки, определенные в соответствующих разделах теории судна.
Весовые характеристики. Весовое водоизмещение судна равно весу вытесненной воды. В дальнейшем, чтобы исключить двоякое толкование, под водоизмещением судна мы будем понимать его полную массу & в тоннах.
При характеристике водоизмещения морских судов выделяют следующие типичные случаи нагрузки:
» - водоизмещение порожнего судна, слагаемое из массы построен-
ного судна с оборудованием, механизмами и устройствами, но без масс груза, запасов топлива, масел и воды в цистернах, судовых запасов, экипажа, пассажиров и их вещей;
- водоизмещение судна с полным грузом и 100 % запасов - водоизмещение судна, загруженного ро максимально допустимую осадку, т. е. по грузовую марку, с полными запасами, экипажем и пассажирами;
- водоизмещение судна'с полным грузом и 10 % запасов - водоизмещение, условно соответствующее массе при возвращении судна из рейса.
Грузоподъемность судна определяется массой груза, на перевозку которого рассчитано судно. Различают чистую грузоподъемность судна
- 321-
и дедвейт. Чистая грузоподъемность судна - это масса груза в трюмах или танках, пассажиров с багажом и необходимых для них запасов воды и продовольствия, которые могут быть приняты на судно при имеющихся судовых запасах и экипаже. Под дедвейтом понимают массу перевозимого груза, экипажа с багажом, запасов топлива, воды и прочих расходных материалов. Дедвейт равен разности водоизме-щений судна с полным грузом и порожнего судна. Дедвейт - более полная характеристика грузоподъемности судна, так как значение чистой грузоподъемности может существенно отклоняться от проектной в зависимости от массы принятых на судно запасов.
Объемные характеристики. Регистровая вместимость, или регистровый тоннаж, является условным показателем объема помещений судна, защищенных от воздействия моря. Единицей измерения регистровой вместимости служит так называемая регистровая тонна, равная 100 куб. фут, или 2,83 мэ.
Регистровая вместимость как объемный показатель имеет весьма широкое применение и служит для сравнения судов, для статистического учета тоннажа в сопоставимых величинах, наиболее полно отражающих размер судов, для установления величины всевозможных сборов, связанных с заходами судов в порты, проходом каналов и т. д.
Обмер советских судов и все связанные с этим расчеты производятся Регистром СССР.
Различают два вида регистровой вместимости: валовая, или брут-то-регистровая, и чистая, или нетто-регистровая.
Валовая регистровая вместимость характеризует размеры судна и представляет собой выраженный в регистровых тоннах и определяемый обмером объем всех судовых помещений под верхней палубой и в надстройках за вычетом объемов, установленных правилами обмера судов.
Чистая регистровая вместимость условно характеризует в регистровых тоннах объем помещений, служащий для перевозки грузов и пассажиров, т. е. используемый для исчисления портовых налогов и сборов. Она получается в результате исключения из валовой регистровой вместимости объема определенных регламентируемых помещений.
На основании обмера Регистром СССР судну выдается документ, именуемый мерительным свидетельством. Эти свидетельства пользуются взаимным признанием во всех странах, подписавших Международную конвенцию о взаимном признании мерительных свидетельств.
При направлении советских судов через Суэцкий и Панамский каналы, где применяются особые правила обмера судов, Регистр СССР производит обмер судов по этим правилам, и выдает судам специальные мерительные свидетельства на бланках особой формы. Эти свидетельства пользуются соответствующим признанием и избавляют наши суда за границей от задержек и расходов, связанных с переобмером.
Грузовместимостью судна называют выраженное в единицах объема количество груза, которое могут вместить грузовые помещения судна. Грузовместимость выражается в кубических метрах. Различают два вида грузовместимости - в зерне и кипах.
- 322-
Грузовместимость в кипах всегда меньше грузовместимости в зерне на 5-10 %, причем это расхождение у различных судов неодинаково и зависит от того, насколько грузовые помещения удобны для укладки штучных грузов.
Особым образом определяется грузовместимость судов при перевозке ряда крупных унифицированных грузов - контейнеров, лихтеров, трейлеров, автомашин, железнодорожных вагонов. В этом случае грузовместимость измеряется, как правило, в количестве единиц соответствующего груза, принимаемых на судно, с учетом размещения груза на верхней палубе. Например, контейнеровместимость выражается в количестве стандартных 20-футовых (шестиметровых) контейнеров.
Чтобы оценить, возможности полного использования грузоподъемности судна для перевозки различных грузов, используют понятия «удельной грузовместимости судна и удельного погрузочного объема груза.
Удельной грузовместимостью судна называют отношение грузовместимости судна к массе груза, для перевозки которого оно проектировалось.
Удельным погрузочным объемом груза называют отношение объема, занимаемого определенным грузом в судовом грузовом помещении, к массе этого груза. Значение удельного погрузочного объема в значительной степени зависит от плотности груза, его упаковки и особенностей укладки в трюмах, размеров пустот между отдельными грузовыми местами и элементов набора корпуса.
В практике международных перевозок грузы с удельным погрузочным объемом ц < 1,1 принято называть весовыми, или дедвейтны-ми, а с ц > 1,1 - объемными.
Скорость судна. Скорость - одна из важнейших эксплуатационнотехнических характеристик судна, определяющих его провозную способность и скорость доставки грузов. Скорость морских судов измеряют в узлах (1 узел равен 1 морской миле в час; 1 морская миля равна длине одной дуговой минуты меридиана, что составляет 1852 м).
На практике пользуются различными понятиями скорости морских судов. Проектная скорость - скорость, на которую выбираются главные размерения и форма корпуса. Сдаточная скорость судна, фиксируемая в договорной спецификации, - скорость, которую должно развивать вновь построенное судно на сдаточных испытаниях.
После приемки судов в эксплуатацию устанавливается техническая, или паспортная, скорость которая называется также нормальной рабочей скоростью и приводится в паспортных данных о судне. Это скорость, которую судно в нормальном техническом состоянии должно развивать при достаточно длительных переходах на спокойной воде (при силе ветра не выше 3 баллов по шкале Бофорта) и при нормальном режиме работы энергетической установки.
Судам, уже находящимся в эксплуатации, назначается так называемая заданная техническая скорость. Она устанавливается ежегодно для каждого судна службой судового хозяйства пароходства с учетом технического состояния судна (механизмов, корпуса, винта).
- 323 -
Предусматриваются различные значения заданной технической скорости судна с грузом и в балласте.
Экономическая скорость - это такая скорость судна, при которой расход топлива на единицу пройденного расстояния получается минимальным. Обычно она значительно ниже технической (60 % от оот) и используется лишь в тех случаях, когда судно имеет в запасе время, например когда оно при следовании полным ходом может прибыть в порт назначения в нерабочие дни и вынуждено будет платить за эти дни портовые сборы.
Скорости современных транспортных судов в зависимости от их назначения составляют 14-18 уз, а океанских пассажирских лайнеров и крупных контейнеровозов - 22-32 уз.
Автономность плавания. Это еще одна важная эксплуатационная характеристика судна. Под автономностью плавания понимают длительность пребывания судна в море без пополнения запасов топлива, провизии и пресной воды. Для морских транспортных судов автономность плавания составляет 30-60 сут, а для крупных ледоколов, гидрографических, научно-исследовательских судов -6-12 мес.
Дальность плавания. С характеристикой автономности плавания связана дальность плавания - расстояние, которое может пройти судно с заданной скоростью без пополнения запасов топлива, смазочного масла и котельно-питательной воды. Дальность плавания современных крупных морских судов составляет 15-30 тыс. миль.
Кроме перечисленных имеется большое число иных техникоэксплуатационных характеристик судна, учитывающих его назначение, конструктивные особенности, тип двигателя и т. п. Некоторые из них будут рассмотрены в других параграфах учебника.
§ 82. Типы транспортных судов
Все транспортные морские суда в зависимости от назначения подразделяют на грузовые, пассажирские и грузопассажирские.
Грузовые суда. Эти суда служат для перевозки различных грузов и по назначению подразделяются на три группы: сухогрузные, наливные и комбинированные.
Группа сухогрузных судов наиболее многочисленна (около 80 % от общего количества грузовых судов) и разнообразна по типам судов. К ней относятся универсальные сухогрузные суда, суда для навалочных грузов и различные специализированные суда: контейнеровозы, лихтеровозы, суда с горизонтальной грузообработкой, рефрижераторы, лесовозы и т. п.
Универсальные сухогрузные суда (рис. 13.3) предназначены для перевозки генерального груза, под которым понимают груз в упаковке (ящиках, бочках, тюках, кипах или в отдельных местах), автомашины, прокат, металлоконструкции и т. п. Грузоподъемность универсальных сухогрузных судов в зависимости от их типа составляет обычно 4-8 тыс. т, достигая иногда 14-18тыс. т. Скорость этих судов 14-18 уз.
- 324-
Рис. 13.3. Универсальное сухогрузное судно
Суда для навалочных грузов (балкеры, балккериеры) предназначены для перевозки навалом (без тары) руды и рудных концентратов, угля, зерна, химических удобрений, цемента, сахара-сырца и т. п. Различают суда узкоспециализированные - рудовозы, цементовозы, углевозы и универсальные, перевозящие любые навалочные грузы.
Суда для навалочных грузов (рис. 13.4) - наиболее крупнотоннажные среди сухогрузных судов. Их дедвейт составляет в среднем 35-50 тыс. т и может достигать 200 тыс. т. Скорость балкеров обычно не превышает 14-16 уз. По конструктивному типу это одновинтовые суда, часто с кормовыми и носовыми бульбами. МО и жилая надстройка обычно расположены в корме. Грузовые трюмы формируются в нижней и верхней частях наклонными продольными переборками, обеспечивающими самораспределение (самоштивку) груза в продольном и поперечном направлениях. Цистерны, образуемые этими переборками и бортами, используют для приема водяного балласта. Для уменьшения крена при возможном смещении груза трюмы на некоторых судах разделяют продольными переборками. Второе дно выполняется с утолщенным настилом и специальными подкреплениями, позволяющими проводить грузовые операции грейфером.
Контейнеровозы (рис. 13.5) - специализированные сухогрузные суда, предназначенные для перевозки грузов в контейнерах - стандартных емкостях многоразового использования, масса которых с грузом составляет 10-40 т. По грузоподъемности и вместимости контейнеровозы подразделяют на три основные группы: контейнеровозы вместимостью до 300 единиц; суда, рассчитанные на 1000-1500 контейнеров; суда, перевозящие свыше 2000 контейнеров. Скорость контейнеровозов в зависимости от водоизмещения - 14-30 уз, дальность плавания - до 30 тыс. миль. Мощность энергетической установки составляет 1,5-60 тыс. кВт.
- 325-
Рис. 13.4. Общий вид судна для навалочных грузов
I bj
I
Рис. 13.5. Общий вид контейнеровоза
Для быстрого и надежного крепления контейнеров предусматривается ячеистая конструкция трюмов в виде системы вертикальных стоек из углового профиля, устанавливаемых с учетом размеров контейнеров. Примерно 30 % контейнеров от общего количества перевозятся на крышках грузовых люков в несколько (до 5) ярусов, где они фиксируются с помощью палубных креплений. Поэтому остойчивость судна и прочность верхней палубы рассчитываются из условий перевозки на люках двух, трех, иногда пяти ярусов груженых контейнеров. Для обеспечения надлежащей остойчивости судна в конце рейса (после расходования запасов топлива) принимается^ балласт в бортовые танки. В целях обеспечения сохранной перевозки контейнеров на судах предусматриваются пассивные успокоители качки (цистерны с перетоком), а также танки для автоматического регулирования крена при грузовых работах.
Лихтеровозы (рис. 13.6) - специализированные сухогрузные суда принципиально нового типа, перевозящие грузы в баржах - лихтерах. Особенностью эксплуатации лихтеровозов, появившихся в конце 60-х гг, является существенное сокращение стояночного времени грузовых операций, возможность доставки различных грузов лихтерами в мелководные и плохо оборудованные порты, в том числе в речные порты. В зависимости от способа грузообработки различают три основных типа лихтеровозов.
Наиболее распространены лихтеровозы типа ЛЭШ (LASH - lighter aboard the ship), строящиеся с 1969 г. и представляющие собой крупные суда, которые способны перевозить 40-90 лихтеров грузоподъемностью до 370 т со скоростью 18-22 уз. По конструктивному типу лихтеровозы типа ЛЭШ, как правило, двухвинтовые, однопалубные с избыточным надводным бортом. Лихтеровозы типа ЛЭШ, предназначенные для работы в ледовых условиях, имеют носовую оконечность и форштевень ледокольного типа. Жилая надстройка располагается в носу судна, а МО либо размещается в корме, либо несколько смещается от нее к миделю. Лихтеры, подводимые к кормовым консолям буксиром, перегружаются козловым краном грузоподъемностью 500 т в грузовые трюмы ячеистого типа. Кроме лихтеров в трюмах и на палубе можно перевозить контейнеры.
Другим типом лихтеровозов являются суда типа Си-би (от англ. Sea Беа), которые отличаются большими размерами и грузоподъемностью перевозимых барж-лихтеров. По конструктивному типу это многопалубные суда без поперечных переборок в пределах грузовых помещений. Они вмещают 26 или 38 барж водоизмещением до 1300 т. Доставка барж-лихтеров из воды и перемещение их по судну производится специальными подъемниками и передвижными тележками. Лихтеровозы типа Си-би так же, как и суда типа ЛЭШ, вместо барж могут перевозить контейнеры.
Третьим типом лихтеровозов- являются суда докового типа. На время грузовых операций трюм-док заполняется водой и в него через носовые или кормовые ворота вводятся лихтеры с помощью буксиров. Затем после центровки лихтеров над местами установки воду откачивают.
- 328-
Рис. 13.6. Общий вид лихтеровоза
Суда с горизонтальной грузообработкой, или, как их часто называют, суда типа ро-ро (от англ, rolle on-roUe off), служат для перевозки колесной техники и штучных грузов, погрузка и выгрузка которых производятся накаткой. Суда этого типа появились в начале 60-х гг. и благодаря существенному сокращению времени грузообработки .получили широкое распространение как линейные суда. Суда с горизонтальной грузообработкой разделяются на узкоспециализированные (автомобилевозы, трейлеровозы, контейнеровозы) и универсальные. В зависимости от количества и вида перевозимого груза данные суда условно делятся на три основные группы: дедвейтом до 1 тыс. т, от 2,5 до 5 тыс. т и свыше 8 тыс. т. Скорость судов в зависимости от водоизмещения изменяется в широких пределах - от 13 до 25 уз. По конструктивному типу суда с горизонтальной грузообработкой являются одновинтовыми многопалубными преимущественно с кормовым расположением МО и жилой надстройки. Поперечные переборки на верхних грузовых палубах, как правило, отсутствуют, а в трюмах имеются вырезы в поперечных переборках, необходимые для перемещения грузов и снабженные водонепроницаемыми закрытиями. Грузовые люки на многих судах отсутствуют. Автомобили, трейлеры и другая колесная и гусеничная техника загружаются обычно своим ходом, а контейнеры, поддоны, пакеты и прочие грузы - при помощи автопогрузчиков через кормовые или носовые забортные аппарели или лацпорты, имеющие ширину проезжей части до 10 м. Внутри судна грузы перемещаются по пандусам, аппарелям с помощью лифтов, надпалубных кранов и транспортеров.
Одной из разновидностей универсальных судов с горизонтальной грузообработкой являются суда для перевозки понтонов с крупногабаритными и тяжеловесными грузами массой свыше 50 т (рис. 13.7). Иногда суда этого типа называют рофлоу. Для принятия понтона с грузом такое судно протапливается; понтон ввозится через грузовые ворота, после чего они закрываются и судно всплывает. Кроме того, груз можно закатывать через эти же ворота с причала на специальных тележках или грузить обычным способом с помощью мощных судовых кормовых кранов.
Рефрижераторные суда предназначены для перевозки скоропортящихся грузов. В зависимости от температурных режимов в грузовых помещениях различают несколько групп рефрижераторных судов: низкотемпературные, перевозящие замороженный груз; высокотемпературные, перевозящие охлажденный груз; универсальные - для перевозки любого груза; фруктовозы, в том числе банановозы, приспособленные для перевозки плодов и имеющие систему для усиленной вентиляции грузовых помещений. Водоизмещение высокотемпературных судов и фруктовозов обычно не превышает 10 тыс. т, универсальных и низкотемпературных судов 10-20 тыс. т. Скорость рефрижераторных судов обычно несколько выше, чем у универсальных сухогрузных судов, и составляет 18-22 уз.
Лесовозы - специализированные сухогрузные суда, предназначенные для перевозки лесных грузов, в том числе круглого леса
- 330-
Рис. 13.7. Судно типа рофлоу
и пиломатериалов россыпью, в пакетах и блок-пакетах. В случае необходимости лесовозы могут быть использованы для перевозки массовых грузов, таких как зерно и уголь, генеральные грузы, контейнеры. В последнее время в целях ускорения грузовых операций лес перевозят в пакетах, что обусловило появление лесовозов-пакетовозов. Разновидностью лесовозов являются щеповозы - суда для перевозки древесной щепы. Дедвейт современных лесовозов составляет, как правило, 1,5-20 тыс. т, щеповозов - 15-20 тыс. т. Скорость судов -13-16 уз. Главным отличием лесовозов от других грузовых судов состоит в том, что около 1/3 груза перевозится на верхней открытой палубе (караван). Это предопределяет необходимость обеспечения повышенной прочности верхней палубы, освобождение ее от загромождающих конструкций и оснащение этих судов специальными устройствами для крепления каравана. Лесовозы обычно даже с полным грузом должны принимать водяной балласт (примерно 8-10% грузоподъемности), что необходимо для обеспечения остойчивости, поэтому на них имеются балластные танки большой емкости.
Группа наливных судов включает танкеры для перевозки сырой нефти и нефтепродуктов: мазута, бензина, дизельного топлива и т. п. (рис. 13.8), газовозы для перевозки сжиженных газов и химовозы для перевозки химикалиев (кислоты, расправленной серы).
Грузоподъемность танкеров колеблется в очень широких пределах: 1,5-500 тыс. т. Скорость малых танкеров - 12-14, больших - 14-18, супертанкеров - 14,5-16 уз. По конструктивному типу танкеры пред--ставляют собой одновинтовые однопалубные суда с носовыми бульбами и минимальным надводным бортом, с МО и надстройкой, расположенными, как правило, в корме судна.
- 331 -
Рис. 13.8. Общин вид нефтеналивного судна
Основные конструктивные особенности наливных судов определяются спецификой жидких грузов. Как известно, при качке наличие на судне свободных поверхностей жидкости уменьшает его остойчивость и вызывает динамические удары груза о борта и переборки судна. Воздействие этих вредных для судна факторов тем сильнее,, чем больше площадь свободных поверхностей жидкого груза. Для уменьшения свободных поверхностей жидкости в грузовых помещениях танкеров устанавливают непрерывные продольные и поперечные переборки, которые делят эти помещения на отдельные отсеки (танки).
На современных танкерах обычно предусматривают две продольные переборки. При ширине судна 35-50 м и более в ряде случаев устанавливают третью переборку, которая может быть проницаемой. Лишь на малых судах допускается одна переборка. Получаемая за счет большого числа продольных и поперечных связей повышенная прочность корпуса, а также специальные меры по обеспечению безопасности экипажа (переходные мостики и тоннели) позволяют увеличивать допустимую осадку и грузоподъемность танкеров. По действующим международным правилам минимальный надводный борт, устанавливаемый для танкеров, меньше, чем для сухогрузных судов с той же длиной. В целях предотвращения загрязнения моря нефтепродуктами при повреждении корпуса современные танкеры оборудуют двойным дном и двойными бортами в районе танковой части, что делает их экологически чистыми.
Прием груза в танкеры производится по закрытым трубопроводам, выгрузка - судовыми грузовыми насосами.
Газовозы - наливные суда для перевозки сжиженных газов. По типу перевозимых газов различают газовозы для сжиженных нефтяных газов, аммиака и других газов с температурой сжижения до 218 К, газовозы-этиленовозы для сжиженного этана, этилена и других газов с температурой сжижения до 169 К и газовозы для сжиженного природного газа - метана с температурой сжижения до 110 К. Водоизмещение газовозов в зависимости от вида и способа сжижения газов составляет 15-30 тыс. т. Скорость этих судов составляет обычно 16-20 уз. По конструктивному типу газовозы представляют собой суда с кормовым расположением МО и надстройки, двойным дном, двойными бортами и цистернами изолированного балласта.
Сжиженный газ перевозится во вкладных или встроенных грузовых танках-цистернах - цилиндрических, сферических или прямоугольных, которые размещаются в трюмах и на палубе на специальных фундаментах. Вместимость грузовых танков 2-10 тыс. м3. Грузовые операции производятся судовыми грузовыми насосами.
Для обеспечения безопасности газовозы оборудуют комплексом приборов для измерения температуры груза и корпуса судна, давления, уровня заполнения танков, газоанализаторами, системами вентиляции и различными противопожарными системами.
Химовозы - наливные суда для перевозки жидких и расплавленных химических веществ, опасных для людей и окружающей среды. Водоизмещение этих судов составляет 2-12 тыс. т, скорость - до 16 уз.
- 333-
Коррозионно-агрессивные, опасно реагирующие с водой и особо токсичные вещества перевозятся во вкладных танках, изготовляемых обычно из инертных относительно груза материалов. По конструктивному типу, средствам защиты, способу грузообработки химовозы имеют много общего с газовозами.
Третья группа грузовых судов - комбинированные суда, т. е. суда, приспособленные для перевозки грузов нескольких определенных видов, в том числе жидких с резко отличающимися транспортными характеристиками: физическим состоянием, плотностью, технологией перегрузки. Различают несколько типов комбинированных судов: нефтерудовозы типа ОО (от англ, oil/ore carrier); универсальные нефтесухогрузные суда типа OB (pil/bulk carrier) для одновременной перевозки нефти и легких навалочных грузов; суда типа 0В0 {pil/bulk. ore carrier) для перевозки разнообразных сухих навалочных грузов, в том числе руды и нефтепродуктов в одних и тех же грузовых помещениях; суда типа PROBO (Product/oil/bulk/ore carrier), способные принимать в отдельные трюмы-танки различные нефтепродукты и насыпные грузы, включая руду; суда типа BORO (bulk/oil го ship) для перевозки навалочного груза, нефти и генерального груза, загружаемого в специальные твиндеки накатом. Дедвейт современных комбинированных судов 25-170 тыс. т, наиболее крупных 200-280 тыс. т, скорость 15-16 уз.
По конструктивному типу комбинированные суда имеют много общего с танкерами и балкерами. Это однопалубные суда с кормовым расположением МО и надстройки. Как правило, суда этого типа имеют бак и ют, однако наиболее крупные комбинированные суда - гладкопалубные. Грузовая часть судна разделена обычно двумя продольными переборками, которые образуют центральный танк - трюм и бортовые танки для нефтепродуктов. Ширина грузовых люков невелика -обычно 25- 50 % ширины судна. Погрузка на эти суда сухих грузов выполняется береговыми средствами, жидкого груза - судовыми грузовыми насосами.
Пассажирские суда. Класс пассажирских судов (рис. 13.9) включает суда, предназначенные для перевозки пассажиров. По назначению пассажирские суда подразделяют на лайнеры - суда для обслуживания регулярных линий, круизные суда, предназначенные для отдыха и туристических путешествий, суда для массовых перевозок и суда местного сообщения.
Лайнеры - наиболее крупные пассажирские суда. Их водоизмещение составляет 20-50 тыс. т, скорость 22-30 уз. Пассажировместимость 500-1500 чел. Круизные суда обычно имеют несколько меньшие размеры. Их водоизмещение составляет 5-12 тыс. т, скорость 16-20 уз, пассажировместимость 200-500 чел.
Особенностью пассажирских судов является наличие нескольких палуб и платформ в корпусе, развитой надстройки и открытых участков палуб, значительное остекление наружных стенок прогулочных палуб и общественных помещений.
При проектировании пассажирских судов особое внимание уделяют
- 334-
Рис. 13.9. Пассажирское судно
Рис. 13.10. Железнодорожный паром
- 335-
обеспечению безопасности мореплавания: непотопляемости, умере-нию качки, снабжению противопожарными и спасательными средствами.
На современных судах пассажиры располагаются в одно-, двух-, четырехместных каютах с удобствами. Для отдыха предусмотрены музыкальные салоны, комнаты отдыха, спортзалы, плавательные бассейны и т. п.
Для обеспечения безопасности энергетическая установка пассажирских судов, как правило, двухвальная. В качестве главных двигателей обычно используют дизели.
Для перевозок пассажиров на местных линиях служат небольшие пассажирские суда вместимостью до 200 чел. и пассажирские катера. В последние годы широкое-распространение получили скоростные морские суда на подводных крыльях, имеющие скорость 35-45 уз и рассчитанные на перевозку до 200 чел.
Грузопассажирские суда. Такие суда занимают промежуточное положение между грузовыми и пассажирскими судами. Обычно к этому классу относят либо грузовые суда, имеющие помещения для размещения 12 и более пассажиров, либо пасссажирские суда, имеющие трюмы для перевозки коммерческих грузов. В данный класс включают также суда, предназначенные для перевозки транспортных средств и людей между береговыми пунктами, - паромы (рис. 13.10).
По назначению различают железнодорожно- и автомобильно-пассажирские паромы и универсальные паромы. Паромы могут быть небольшими с ограниченной автономностью плавания (для местных линий) и с большой автономностью плавания (трансокеанские).
Водоизмещение небольших паромов для местных линий составляет в среднем 1-3 тыс. т. Такие паромы могут перевозить 30-50 железнодорожных вагонов или 50-100 автомашин и до 500 пассажиров. Водоизмещение трансокеанских паромов составляет 10-20 тыс. т. Они могут перевозить 200-400 автомобилей и до 1500 пассажиров. Скорость паромов 18-22 уз.
По конструктивному типу и внешнему виду паромы имеют много общего с пассажирскими судами и с судами с горизонтальной грузо-обработкой. Для вкатывания железнодорожных вагонов и автомобилей на паром используют грузовые ворота в оконечностях судна и бортовые лацпорты. Палуба, на которую принимают технику, обычно является палубой переборок и располагается на расстоянии 1,8-2,4 м от ватерлинии, что связано с высотой причалов. Автомобили размещают на нескольких так называемых гаражных палубах, железнодорожные вагоны - на одной Палубе переборок - вагонной палубе, реже - на двух- трехвагонных палубах, на которые вагоны доставляют лифтами. Пассажиры располагаются на верхних палубах в каютах или на сидячих местах.
Энергетическая установка паромов, как правило, дизельная двухвальная. Для повышения маневренности при швартовных операциях паромы оснащаются носовыми подруливающими устройствами. Некоторые железнодорожные паромы имеют и кормовые подруливающие устройства.
- 336-
Контрольные вопросы
1. Каковы принципы классификации судов?
2. Перечислите основные типы транспортных судов.
3. Назовите особенности транспортных судов различных типов.
Глава 14
ОБЩЕЕ РАСПОЛОЖЕНИЕ СУДНА
§ 83. Архитектурно-конструктивные типы судов
Под архитектурой судна будем понимать общую компоновку и характерные особенности его главных составных частей - надстроек, рубок, трюмных и междупалубных помещений, - а также формы судовых обводов. Конструкцией судна назовем сочетание конструктивных элементов, образующих корпус судна, обеспечивающих ему кроме плавучести необходимую прочность. Между архитектурой и конструкцией современных судов существует тесная взаимосвязь, поэтому появился термин „архитектурно-конструктивный тип судна”.
Архитектурно-конструктивный тип судна характеризуется его внешним видом и конструктивными особенностями. Он зависит от формы основного корпуса, расположения и количества надстроек и рубок, числа палуб и платформ, расположения МО, кожуха дымовой трубы, переборок и рангоута, высоты надводного борта и т. п.
Основной корпус - водонепроницаемое сооружение^ состоящее из бортов и днища и закрытое палубой. Форма основного корпуса характеризуется формой и обводами носовой и кормовой оконечностей, линией погиби верхней палубы, формой мидель-шпангоута.
Формы носовой оконечности весьма разнообразны. Для обычных сухогрузных судов характерен прямой форштевень с углом наклона 25-30’ от вертикали. Наклонная форма форштевня необходима для увеличения площади палубы с целью размещения палубных механизмов, улучшения всхожести на волну, уменьшения заливаемости и обеспечения безопасности. При столкновении судов наклонный форштевень вызывает повреждения в основном в надводной части как у Протараненного судна, так и у таранившего. У судов ледового плавания наклон форштевня в подводной части (под углом 40-50’ к горизонту) улучшает условия плавания в битом льду, а почти вертикальный форштевень в надводной части позволяет следовать вплотную за ледоколом. Наклон форштевня в подводной части у ледоколов составляет 25-30’ к горизонту. Форштевни пассажирских лайнеров в подводной части имеют бульбообразную форму, а в надводной клиперскую. В ряде случаев бульбообразная форма уменьшает волнообразование,
- 337-
за счет чего скорость судна увеличивается на 1-5%. Бульбообразный нос применяют также на танках и сухогрузных судах с умеренными скоростями. На супертанкерах и на крупнотоннажных балкерах получила распространение носовая оконечность цилиндрической формы или бульбообразной формы таранно-конического типа.
Кормовая оконечность может быть крейсерской или транцевой. В последнее время на транспортных судах получила распространение крейсерско-транцевая корма, позволяющая упростить технологию постройки судов, уменьшить вибрацию корпуса за счет укорочения кормового свеса. Форма кормовой оконечности существенно зависит от числа винтов.
Продольную погибь палубы называют седловатостью. Она определяется по правилам о грузовой марке и может быть стандартной (квадратная парабола, носовая ордината которой в два раза больше кормовой) или отличаться от нее в большую или меньшую сторону. Суда с избыточным надводным бортом (например, контейнеровозы или ро-ро) могут вообще не иметь седловатости. Поперечную погибь палубы называют погибью бимсов, стандартная наибольшая ордината которой равна 0,02 ширины судна.
Высота надводного борта определяется по Правилам о грузовой марке. Если высота надводного борта судна соответствует величине, допустимой Правилами о грузовой марке, то такое судно называют судном с минимальным надводным бортом, если же она больше, то его называют судном с избыточным надводным бортом. К судам с минимальным надводным бортом относятся рудовозы, лесовозы, нефтеру-довозы, танкеры. Такие судна, как хлопковозы, контейнеровозы, имеют избыточный надводный борт.
Борта у судов на миделе бывают вертикальными, наклонными (с завалом и развалом) или округленными.
Надстройка - непроницаемая палубная конструкция, ширина которой равна ширине судна. Надстройка может не доходить до бортов на величину не более 0,04 ширины судна. Рубка - палубная конструкция, не доходящая до бортов на величину 0,04 ширины судна и более. Надстройки и рубки служат для размещения различных судовых помещений. Длинные надстройки и рубки могут принимать участие в обеспечении общей продольной прочности, снижая при этом напряжения в палубе до 30 %. На современных судах надстройки, кроме надстройки бака, и рубки, как правило, многоярусные.
В процессе эксплуатации судна на надстройки действуют силы тяжести различных устройств и вышележащих ярусов, удары волн при заливании палубы, усилия от общего продольного изгиба корпуса. Надстройки и рубки обычно изготовляют из стали. В последнее время на многих судах получили распространение надстройки и рубки из легких сплавов, что уменьшает массу корпуса и понижает ЦТ судна, улучшая при этом остойчивость.
По количеству и расположению надстроек и рубок различают следующие архитектурные типы судов: гладкопалубные, у которых
- 338-
Рис. 14.1. Архитектурно-конструктивные типы судов в зависимости от числа и расположения надстроек: а — гладкопалубное без надстроек; б — трехостровное; в — двухостровное; г — двухостровное с удлиненным баком; д — двухостровное с удлиненным ютом; е — одноостровное с баком; ж — одноостровное с ютом; з — со сплошной надстройкой; и — квартердечное
имеются только рубки (рис. 14.1, а); трехостровные (рис. 14.1, б), имеющие три надстройки: носовую (бак), среднюю и кормовую (ют); двухостровные, имеющие две надстройки: одноярусный бак и многоярусную надстройку юта (рис. 14.1, в), если средняя надстройка сливается с ютом или баком, то судно соответственно имеет удлиненный бак (рис. 14.1, г) или ют (рис. 14.1, б); одноостровные, имеющие одну надстройку - бак (рис. 14.1, е) или ют (рис. 14.1, ж), со сплошной надстройкой по всей длине судна (рис. 14.1, з); квартердечные с местным подъемом верхней палубы на 0,8-1,2 м в кормовой части (рис. 14.1, и).
На архитектуру судна существенно влияет расположение МО по длине. Современные транспортные суда имеют кормовое, промежуточное (смещенное в корму) и, реже, среднее расположение МО.
Развитие типов транспортных судов зависит в первую очередь от эксплуатационных требований, которые предъявляются к судну. Современное морское транспортное судно должно быть таким, чтобы:
удовлетворялись все условия безопасного плавания в районе, для которого оно предназначено;
при максимальном использовании назначенной судну грузоподъемности его грузовместимость была достаточной; экономические показатели (производительность труда экипажа и портовых рабочих, себестоимость перевозок, объем капиталовложений в строительство судов и портов и т. п.) судна были оптимальными;
прием, хранение во время рейса и выгрузка в портах груза осуществлялись по оптимальной технологии;
была возможность сокращения времени пребывания в рейсе за счет увеличения скорости;
- 339-
условия для работы и отдыха находящихся на судне людей были наилучшими.
Развитие архитектурных типов морских транспортных судов направлено на удовлетворение в максимальной степени указанных выше эксплуатационных требований.
§ 84. Классификация судовых помещений
Основной корпус, надстройки и рубки разделяются на отдельные.по-мещения. Помещения в основном корпусе, образованные бортами, основными переборками, палубами и платформами, называют отсеками.
В основном корпусе размещаются следующие отсеки: форпик и ахтерпик - крайние носовой и кормовой отсеки; междудонное пространство, ограниченное настилом второго дна и днищевой обшивкой; трюм -пространство между вторым дном и нижней палубой; твиндек - межпалубное пространство; диптанки - цистерны, расположенные выше второго дна; коффердамы - сухие непроницаемые отсеки, отделяющие топливные цистерны от соседних помещений; отсеки главных и вспомогательных механизмов; туннель гребного вала - помещение для размещения и обслуживания гребного вала на судах со средним или промежуточным расположением машинного отделения. Трюмам и твиндекам присваиваются порядковые номера от носа к корме.
Надстройки располагаются на верхней палубе основного корпуса, рубки - на верхней палубе или на палубах надстроек.
Для определения положения помещения на судне приняты следующие названия палуб и междупалубных помещений (рис. 14.2). В основном корпусе (сверху вниз): верхняя палуба, вторая палуба, третья палуба (на многопалубных судах последнюю палубу называют нижней), второе дно. В надстройке и рубках (снизу вверх); палуба I яруса надстройки (бака, юта, средней надстройки), палуба II яруса рубки, палуба Ш яруса рубки и т. д. К этим терминам могут прибавляться названия палуб с зависимости от их назначения: прогулочная, шлюпочная, нижний (ходовой) мостик, верхний (навигационный) мостик.
Положение помещения по длине обозначается номерами шпангоутов, а по ширине -наименованием борта (правый и левый борт -ПрБ и ЛБ). Всем помещениям на судне присваиваются порядковые номера (по правому борту - нечетные, по левому - четные).
В зависимости от назначения все судовые помещения разделяют на специальные,
7/1________
'40 V ярус
3
8 Ш ярус
7 • Пярус
£
6
I ярус
и
Рис. 14.2. Наименование палуб и междупалубных помещений
1 — второе дно; 2 — вторая платформа; 3 — первая платфор-ма; 4 — третья (нижняя) палуба; 5 — вторая палуба; 6 — верхняя палуба; 7 — палуба надстройки I яруса (палуба бака, юта и т. д.); 8 — палуба рубки II яруса (прогулочная палуба);
3 — палуба рубки Ш яруса (шлюпочная палуба); 10 — палуба рубки IV яруса (нижний, ходовой мостик); 11 — палуба рубки V яруса (верхний, навигационный мостик)
5 • Твиндек
4 Твиндек
j Тбиндек
Tf”°” 2гЗХ
7 / данное
/ГспМ
5
- 340-
служебные, хозяйственные, медицинские, помещения экипажа и пассажиров, общественные и бытовые.
Специальные помещения определяются назначением судна. Это грузовые трюмы на грузовых судах; лаборатории - на научно-исследовательских судах и т. д.
Служебные помещения - это помещения, в которых экипаж несет вахту и производит различные работы. В свою очередь служебные помещения разделяют на помещения управления судном-машиннокотельное отделение (МКО), рулевая рубка, радиорубка, радиолокационная, аккумуляторная, румпельное отделение; административные помещения - судовая канцелярия, бухгалтерия, кинобудка; судовые мастерские - плотницкая, механическая, электро- и радиомастерские. Во всех служебных помещениях устанавливают лишь то оборудование, которое необходимо для выполнения экипажем определенных служебных функций. Установка постороннего оборудования в служебных помещениях категорически запрещена.
Хозяйственные помещения подразделяют на продовольственнопищевые - камбуз, хлебопекарня, кондитерская, буфетная, раздаточная, сервировочная, продовольственные кладовые; санитарно-хозяйственные - посудомоечная, прачечная, сушильная белья, сушильная спецодежды, гладильная, кладовые чистого и грязного белья; помещения обслуживания пассажиров - почта, сберкасса, фотолаборатория, справочное бюро, парикмахерская, различные киоски и ателье; кладовые судового снабжения - шкиперская, фонарная, малярная, машинная кладовая. В хозяйственных помещениях устанавливают необходимое бытовое оборудование, например полки, шкафы, вешалки, подножные решетки, холодильники, различные подставки и т. п.
В медицинских помещениях оказывается первая помощь заболевшим членам экипажа и пассажирам. На крупных судах оборудование этих помещений позволяет при необходимости проводить длительное лечение и даже сложные операции. К медицинским помещениям относятся амбулатория, изолятор, стационар, аптека, различные специализированные кабинеты (рентгеновский, зубоврачебный и т. п.), а также те бытовые помещения (ванные, умывальные, туалеты), которые входят в блок медицинских помещений. На морских пассажирских судах помещения экипажа и помещения пассажиров устраивают отдельно друг от друга. Однако вследствие однородности функций, выполняемых этими помещениями, их можно рассматривать без разделения. Жилые помещения - это одно-, двух- и четырехместные каюты, предназначенные для проживания в них людей. На крупных судах каюты экипажа, как правило, одноместные. Каюты старшего комсостава могут состоять из нескольких помещений (кабинета, спальни, санузла и т. п.). На судах имеются запасные каюты для практикантов или лиц, временно находящихся на судне по своим служебным обязанностям. Жилые помещения не располагают ниже грузовой ватерлинии (ГВЛ). Площадь пола и кубатура жилых помещений регламентируются Правилами Регистра. Жилые помещения оборудуют одноярусными или двухъярусными койками, мягкими или полумягкими диванами, столами, стульями, креслами, платяными шкафами с несколькими отделениями. Кроме того, в каютах устанавливают вешалки,
- 341 -
настенные бра, различные полки, зеркала и т. д. Каюты радиофицируют; в некоторых устанавливают телефоны.
Общественные помещения - это помещения, предназначенные для отдыха или проведения различных общесудовых мероприятий. К ним относятся: кают-компании, салоны, столовые команды, курительные, буфеты, рестораны, кинозалы, библиотеки, плавательные бассейны и т. п. Общественные помещения оборудуются в соответствии с их назначением.
Бытовые помещения предназначены для обеспечения личной гигиены и для санитарно-бытового обслуживания экипажа и пассажиров. К ним относятся умывальные, душевые, ванные, туалеты, бани, прачечные и т. д.
§ 85. Расположение помещений на судах
Отсеки, надстройки и рубки разделяются палубами, платформами и выгородками на отдельные помещения. Количество, назначение и расположение помещений зависят от типа и назначения судна.
В § 82 отмечалось, что на архитектуру и конструкцию судна существенно влияет расположение машинного отделения (МО), служащего для размещения всех необходимых механизмов и агрегатов. Место расположения МО по длине судна зависит от многих причин.
При расположении МО в средней части судна упрощается удиф-ферентовка судна, уменьшается величина изгибающего момента на вершине волны для судна без груза и на подошве волны для судна с грузом. К отрицательным факторам можно отнести использование наилучшего по расположению и форме объема корпуса, не предназначенного для размещения груза, снижение грузоподъемности судна из-за большой длины валопровода и наличия его туннеля, уменьшение полезного объема кормовых трюмов и ухудшение их формы из-за проходящего в них туннеля, затруднение центрования валопровода большой длины и нарушение нормальных условий его работы при продолжительном изгибе судна.
При расположении МО в кормовой части лучшие объемы предо? ставляются под груз, улучшаются условия размещения и эксплуатации грузового устройства на сухогрузных судах, укорачивается валопровод и отпадает необходимость в устройстве туннеля, однако ухудшаются условия удифферентовки судна без груза, так как в носовые отсеки приходится принимать балласт. Прием балласта в носовые отсеки улучшает мореходные качества судна, но увеличивает изгибающий момент на вершине волны.
На современных сухогрузных судах часто наблюдается промежуточное расположение МО, при котором за МО размещается один грузовой трюм, реже два. Такое расположение дает возможность частично избавиться от недостатков расположения МО в средней и кормовой частях судна.
В носовой части корпуса между форштевнем и таранной переборкой
- 342-
располагается форпик. В этом отсеке устанавливают цепной ящик, предназначенный для хранения якорной цепи по-походному. Если в форпике установлена платформа, то под ней устраивают балластную цистерну, в которую принимается забортная вода для удифферентовки судна. В пространстве, образованном платформной и палубой, оборудуют шкиперскую кладовую. За форпиковой переборкой расположены грузовые трюмы. На многопалубных судах междупалубные пространства - твиндеки - также используют для перевозки груза.
В междудонном пространстве оборудуют цистерны для хранения жидких судовых запасов и приема балласта. Отсеки двойного дна, предназначенные для хранения разнородных жидкостей, например воды и топлива, отделены друг от друга коффердамом - пустым отсеком длиной обычно в одну шпацию.
Если МО находится в середине судна, то перед ним и за ним располагают грузовые трюмы. Через кормовые трюмы проходит туннель гребного вала и валопровод к гребному винту. В кормовой части основного корпуса поперечной водонепроницаемой переборкой выгораживается ахтерпик. В ахтерпике так же, как и в форпике, может быть установлена платформа, под которой устраивают цистерну для балласта, а на платформе размещают румпельное отделение, в котором имеется оборудование, приводящее в действие перо руля.
На верхней палубе располагают надстройки и рубки, а также некоторые судовые устройства. В надстройке бака оборудуют различные мастерские и кладовые судового снабжения. В средней надстройке и надстройке юта располагают служебные, жилые, бытовые и другие помещения, необходимые для управления судном и обеспечения нормальной жизни и детельности экипажа.
Расположение и назначение некоторых помещений на танкере (рис. 14.3) несколько отличаются от расположения и назначения помещений на сухогрузном судне (рис. 14.4). Корпус танкера разделен поперечными и продольными переборками на большое количество грузовых танков. МО на танкерах располагают в корме. Судовые жидкие запасы хранятся в двойном дне в районе МО и в цистернах форпика и ахтерпика.
Для погрузки и выгрузки жидкого груза танкер оборудуют грузовыми насосами, которые располагают в насосном (помповом) отделении. Может быть одно насосное отделение - перед МО, но может быть и два насосных отделения, расположенных в носовой и кормовой частях судна.
Грузовые танки отделены от других помещений вертикальными коффердамами длиной 600-900 мм, что повышает противопожарную защиту судна. Если на судне имеется средняя надстройка, установленная над грузовыми танками, то под ней устраивают горизонтальный коффердам высотой от 0,6 до 2,0 м в зависимости от разряда перевозимого груза. Образовавшееся пространство используют для хранения шлангов. Горизонтальный коффердам во избежание скопления газов нефтепродуктов не имеет закрытий и постоянно проветривается естественным движением воздуха.
- 343 -
Рис. 14.3. Общее расположение помещений на танкере
1 — форпик; 2 — носовое насосное отделение; 3 — диптанк^яжелого топлива; 4 — цистерна изолированного балласта; 5 — грузовой танк; 6 — цистерна сбора нефтеостатков; 7 — грузовое насосное отделение; 8 — МО; 9 — ахтерпик; 10 — помещение аварийного дизель-генера-тора; 11 — банно-прачечный блок; 12 — медблок; 13 — станция пенотушения; 14 — провизионный блок; 15 — помещение кондиционеров и вентиляторов; 16 — помещение мусоросжигающей печи; 17 — помещение инертных газов; 18 — открытый бассейн; 19 — сварочная мастерская; 20 — спорткаюта; 21 — столовая и салон экипажа; 22 — курительный салон; 23 — пост управления грузовыми операциями; 24 — блок-каюта; 25 — кают-компания и салон; 26 — камбузный блок; 27 — станция объемного химического пенотушения; 28 — двухместные каюты; 29 — одноместные каюты; 30 — блок навигационных помещений; 31 — рупеъья рубка; 32 — отстойные танки; 33 — цистерны тяжелого топлива
- 344-
Рис. 14.4. Общее расположение помещений на сухогрузном судне: а — боковой вид; б — палуба юта; в — шлюпочная палуба; г — нижний мостик; д — средний мостик; е — верхняя палуба; ж — трюм
1 — ахтерпик; 2 — МО; 3 — грузовые трюмы; 4 — форпик; 5 — междудонное пространство; 6 — помещения гидрокомплексов грузовых стрел; 7 — грузовые стрелы; 8 — камбузный блок; 9 — салон и кают-компания; 10 — салон и столовая команды; 11 — медицинский блок; 12 — судовая канцелярия; 13 — помещение кондиционеров; 14 — помещение аварийного дизель-генератора; 15 — бассейн; 16 — блок-каюта капитана; 17 — блок-каюта старшего механика; 18 — радиорубка; 19 — совмещенная рулевая штурманская рубка; 20 — провизионные камеры; 21 — помещение для перевозки ценных грузов; 22 — сухие отсеки; 23 — цистерна мытьевой воды; 24 — балластные цистерны; 25 — цистерна дизельного топлива; 26 — диптанк для перевозки растительных масел
- 345 -
На танкерах устраиваются специальные помещения для курения, так как курить на танкере можно только в строго определенных местах. Для обеспечения безопасного передвиженияя экипажа по верхним открытым палубам в штормовую погоду на танкерах между надстройками делают переходные мостики.
Контрольные вопросы
1. Что понимают под архитектурой и конструкцией судна?
2. Чем отличается надстройка от рубки?
3. Перечислите основные архитектурно-конструктивные типы судов.
4. Перечислите эксплуатационные требования, от которых зависит развитие типов транспортных судов.
5. Перечислите номенклатуру судовых помещений и их назначение.
б. Как нумеруются судовые помещения?
7. Каковы преимущества и недостатки различных вариантов расположения МО?
Глава 15
КОНСТРУКЦИЯ КОРПУСА СУДНА
§ 86. Основные конструктивные элементы
Большинство транспортных судов в конструктивном отношении представляют собой сочетание собственно корпуса судна и надстроек, размещаемых на нем.
Корпус современного стального судна - это тонкостенная водонепроницаемая оболочка симметричной относительно ДП формы, подкрепленная изнутри балками и рамами и разделенная палубами и продольными и поперечными переборками (рис. 15.1). Внешняя непроницаемая поверхность корпуса образуется наружной обшивкой. Наружная обшивка в сочетании с подкрепляющим ее набором подразделяется на отдельные перекрытия: палубы, днище и борта. Главная, или верхняя, палуба замыкает корпус судна в единую водонепроницаемую конструкцию. Кроме того, на некоторых судах возможна установка одной или нескольких промежуточных палуб, а также второго дна. Горизонтальные перекрытия - палубы, платформы, второе дно - принято называть настилами.
Балки, подкрепляющие обшивку и настилы, подразделяют на продольные и поперечные в зависимости от их ориентации к судну. Легкие продольные балки называют ребрами жесткости. Днищевые и бортовые продольные балки носят название стрингеров. Центральный стрингер, проходящий вдоль всего судна в ДП, именуют вертикальным килем. Продольные мощные связи палуб называют карлингсами.
Балки набора образуют так называемую систему перекрестных
- 346-
Рис. 15.1. Конструкция корпуса наливного судна
связей. В зависимости от того, какие балки преобладают в данной системе набора, различают продольные и поперечные системы набора перекрытий. Выбор системы набора связан с характером работы конструкции при воздействии на нее внешних нагрузок. Кроме продольной и поперечной системы набора получила распространение смешанная система набора, при которой обычно палубу и днище выполняют по продольной системе, а борта - по поперечной. Это вызвано особенностями работы корпуса судна при общем продольном изгибе.
Для уменьшения пролетов палубных перекрытий в судовых конструкциях используют вертикальные стойки - пиллерсы. Конструкции, ограждающие люковые вырезы в палубах, называют комингсами.
Оконечности судна в ДП представляют собой довольно сложные в конструктивном отношении образования - форштевень и ахтерштевень.
Продольные и поперечные переборки с целью обеспечения надлежащей прочности и жесткости подкрепляют набором. Легкие вертикальные балки носят название стоек, более мощные вертикальные балки (рамные конструкции) называют контрфорсами. Горизонтальные поперечные связи на переборках именуются шельфами.
При конструировании корпуса судна проектанты стремятся соединять между собой элементы корпуса таким образом, чтобы добиться не только необходимой прочности, но и достаточной жесткости.
В поперечных плоскостях конструктивные элементы, лежащие в плоскостях шпангоутов, объединяют в шпангоутные рамы. Жесткость шпангоутных рам обеспечивается в результате связывания элементов рамы в углах с помощью книц - накладок треугольной, трапецеидальной или фигурной конфигурации. Наличие таких жестких узлов обеспечивает совместную работу всех балок рамы. Подпалубные элементы шпангоутной рамы называют бимсами, днищевые - флорами и бортовые - шпангоутами. Кницы устанавливают в местах соединения шпангоутов с бимсом, а иногда и шпангоутов с флором. Шпангоутные рамы устанавливают параллельно друг другу вдоль судна на расстоянии шпации. Шпация (или практическая шпация) в отличие от теоретической шпации теоретического чертежа выбирается и? условий прочности судна. Ее величина зависит от размеров судна и определяется в соответствии с требованиями Правил Регистра СССР.
§ 87. Наружная обшивка
Наружная обшивка корпуса выполняется из отдельных листов и состоит из обшивки бортов, верхней палубы и днища, т. е. входит в состав основных перекрытий. Наряду с обеспечением водонепроницаемости корпуса наружная обшивка участвует в общей и местной прочности судового корпуса совместно с подкрепляющими ее балками. Соответственно различным нагрузкам, внешним по отношению к корпусу, наружняя обшивка выполняется из листов различной толщины. На выбор ее толщины влияют также опасность повышенного износа и местной коррозии листов.
- 348 -
Рис. 15.2. Растяжка наружной обшивки
Наружная обшивка, а также настилы палуб и платформ формируют из ряда поясьев, состоящих из листов, сваренных между собой встык короткими сторонами. Длинные стороны листов обычно ориентируют вдоль судна. Поясья наружной обшивки носят специальные названия. Пояс переменной ватерлинии, выполняемый обычно из листов повышенной толщины, называют ледовым поясом; верхний бортовой пояс, примыкающий к верхней палубе, носит название ширстрека (его толщина также увеличена по соображениям общей прочности). Листы верхней палубы, примыкающие к борту (к ширстреку) именуют палубным стрингером. В районе скулы судна располагается скуловой пояс. В ДП по днищу судна проходит горизонтальный киль; его приваривают перпендикулярно вертикальному килю судна.
Для листов наружной обшивки стараются использовать листы стандартных размеров. В отечественном судостроении широко используют листы 1,6 х 6,0 м. В последние годы наметилась тенденция к применению листов с размерами 4,5 х 16,0 м, что отвечает опыту зарубежного судостроения. С увеличением размеров листов уменьшаются затраты на постройку корпуса. Так, при постройке танкера „Крым” использование крупногабаритных листов размерами 3,2 х 14,0 м позволило снизить трудоемкость постройки судна на 12 %.
Для оконечностей судна, где поверхность имеет сложную геометрическую форму двоякой кривизны, приходится производить раскрой листов. С целью повышения точности раскроя используют деревянные блок-модели в масштабе 1 : 25 или 1:50. Окончательные размеры листов переносят на плазовый теоретический чертеж с согласованием трех проекций и выполняют чертежи развертки.
В эксплуатации судна и при его ремонте часто необходимо знать расположение листов обшивки относительно судового набора. Для этой цепи служит специальный чертеж - растяжка наружной обшивки (рис. 15.2).
В оконечностях судна ширина некоторых поясьев уменьшается. При чрезмерном сужении отдельные поясья обрывают; такое место в обшивке называют потеряем.
§ 88. Конструкция днищевых перекрытий
Днищевое перекрытие корпуса судна является важным элементом его конструкции, который наряду с верхней палубой во многом
- 349-
Рис. 15.3. Конструкция днищевого перекрытия сухогрузного суднгьнабранного по продольной системе набора.
1 — бортовая обшивка; 2 — шпангоут; 3 — приподнятый крайний лист настила внутреннего дна; 4 — стойка поперечной переборки; 5 — поперечная переборка; 6 — сплошной флор с вертикальными стойками на каждой паре ребер; 7 — бракета; 8 — вертикальный киль; 9 — продольное ребро жесткости; 10 — днищевой стрингер.
Рис. 15.4. Стрингерная система набора днищевого перекрытия со сплошными флорами.
1 — вертикальный киль; 2 — сплошной флор; 3 — вырез облегчения (лаз); 4 — ребро жесткости флора (стойка); 5 — днищевой стрингер.
- 350 -
определяет общую продольную прочность корпуса при его изгибе. Кроме того, отдельные участки днищевого перекрытия, например участки в носовой оконечности судна, испытывают повышенные местные нагрузки ударного характера на волнении, в частности при сле-минге, и должны быть надлежащим образом подкреплены.
Для участия в общем продольном изгибе днищевое перекрытие должно прочно соединяться с бортами. В то же время днище воспринимает поперечные нагрузки со стороны бортов.
Днищевые перекрытия на сухогрузных судах длиной более 80 м, на газовозах, крупных танкерах имеют внутренний настил, называемый двойным дном. Ври продольном изгибе корпуса судна днище испытывает продольные растягивающие и сжимающие усилия. Конструкция днища должна обеспечивать как прочность при растяжении, так и устойчивость перекрытия при сжимающих усилиях. Наиболее распространена по этой причине продольная система набора днищевых перекрытий, особенно в средней части судна (рис. 15.3). Хотя для судов длиной до 120 м при расположении МО в средней части судна поперечная система набора днища предпочтительнее из соображений простоты и экономичности, даже для судов с длиной несколько выше 100 м используют продольную систему подбора, несмотря на повышенные затраты на изготовление конструкций. На судах с двойным дном при продольной системе набора иногда вместо продольных ребер жесткости устанавливают днищевые стрингеры, при этом систему набора называют стрингерной (рис. 15.4). Данная система, набора позволяет избавиться от многочисленных вырезов в поперечных балках (флорах) для прохода продольных ребер. Однако для обеспечения местной прочности приходится устанавливать дополнительные стрингеры в плоскостях, совпадающих с вертикальными стойками поперечных переборок. Аналогично поступают и на палубных перекрытиях. Таким образом образуются замкнутые продольные рамы с кницами по всем четырем углам.
Конструкция днища в МО во многом зависит от мощности устанавливаемого на суднё главного двигателя. С увеличением размеров судов осложняется центровка валопровода из-за деформаций днищевых перекрытий. Для обеспечения надлежащей жесткости конструкции увеличивают размеры вертикального киля, днищевых стрингеров и флоров.
Днищевое перекрытие воспринимает при качке местные инерционные нагрузки от двигателя через фундаментную раму (рис. 15.5).
Лри продольной системе набора сплошные флоры в МО устанавливают через один шпангоут, а под фундаментом - на каждом шпангоуте. Фундамент выполняют из двух продольных вертикальных стенок с поясками. Конструкция фундамента должна обеспечить доступ для осмотра второго дна.
Правила Регистра СССР требуют установки в носовой части судна подкреплений на длине, не меньшей четверти длины судна, вследствие повышенной опасности возникновения в этом районе слеминга на волнении. При этом регламентируются размеры связей и расстояния
- 351 -
Рис. 15.5. Установка фундамента под главный двигатель в МО при поперечной системе набора корпуса.
1 — ширстрек; 2 — кница; 3 — настил палубы; 4 — ребро жесткости палубы; 5 — карлингс; 6 — карлингс-комингс; 7 — комингс-бимс; 8 — шахта МО; 9 — рамный бимс; 10 — пиллерс; 11 — рамный шпангоут; 12 — обыкновенный шпангоут; 13 — бортовой стрингер; 14 — настил второго дна; 15 — днищевые трингера; 16 — вертикальный киль; 17 — флор; 18 -днищевая обшивка; 19 — подкрепления фундамента; 20 — платформа; 21 — поперечная переборка; 22 — крайний между донный лист; 23 — днищевой стрингер; 24 — фундаментный поясок
Рис. 15.6. Флоры: а — водонепроницаемый; б — сплошной. 1 — вертикальный киль; 2 — стрингер.
- 352 -
Рис. 15.7. Бракетные (открытые) флоры: а — с бракетами; б — со стойкой у стрингера вместо бракеты; в — с промежуточными стойками
между ребрами жесткости и флорами. На сухогрузных судах с двойным дном в носовой оконечности устанавливают полустрингеры (при поперечной системе набора), которые простираются не на всю высоту двойного дна.
Водонепроницаемые флоры (рис. 15.6, а) устанавливают в двойном дне с целью образования цистерн. Листы этих флоров подкрепляют вертикальными ребрами жесткости. На судах, перевозящих насыпной груз или тяжеловесы, все флоры в трюмах делают сплошными (рис. 15.6, б).
При поперечной системе набора возможна установка открытых флоров - бракетных или облегченных. Бракетные флоры представляют собой конструкцию из двух поперечных балок (днищевой и балки второго дна), которые соединяются между собой бракетами и распорками между ними (рис. 15.7). Облегченные флоры - это обычные флоры из более тонкого листового материала и с большими вырезами.
- 353-
У бортов судна на втором дне устраивают сточные колодцы для сбора воды и конденсата, представляющие собой выгородки в виде ящика, закрытого сверху сеткой (рис. 15.8). Ранее распространенные льяла, образованные наклонными участками настила двойного дна у борта, подвергались повышенной коррозии.
Суда-нефтерудовозы могут иметь высоту двойного дна до 6 м, поэтому требуется принимать меры для обеспечения прочности и устойчивости высоких флоров и стрингеров с учетом ударных нагрузок при загрузке руды грейферами и от переливающейся жидкости. Второе дно у бортов судна делают наклонным для облегчения выгрузки сыпучих грузов.
§ 89. Конструкция палубных и бортовых перекрытий
Палубы судна должны удовлетворять нескольким условиям соответственно выполняемым ими функциям. В их число входят эксплуатационные, прочностные и гидромеханические функции: размещение грузов и устройств, обеспечение непотопляемости, общей и местной прочности.
Палубы, вместе с продольными связями обеспечивают прочность при продольном изгибе корпуса, а также местную прочность при перевозке палубных грузов, при поступлении воды во время шторма. Кроме того, палубы являются опорными конструкциями для бортовых перекрытий, продольных и поперечных переборок. Как и днищевые перекрытия, палубные перекрытия могут выполняться по поперечной или продольной системе набора (рис. 15.9).
При поперечной системе настил палуб опирается на бимсы и полубимсы, которые соединяются со шпангоутами с помощью книц. При продольной системе набора перекрытий верхней палубы ее настил подкрепляется продольными ребрами, опирающимися на мощные рамные бимсы. Расстояние между этими бимсами такое же, как и между рамными флорами.
В продольном направлении палубное перекрытие подкрепляется карлингсами. Они уменьшают пролеты рамных бимсов, что соответственно уменьшает их размеры. На нефтеналивных судах продольную мощную балку, лежащую в ДП, называют отбойным листом. Его размеры учитывают усилия, возникающие от ударов груза при качке на волнении. Размещение на палубе грузовых люков определяет положение карлингсов: их устанавливают в плоскостях, совпадающих с бортовыми стенками комингсов люков.
Продольную систему набора верхних палуб используют в случаях, когда трудно обеспечить устойчивость палубного перекрытия от сжимающих усилий. Для нижних палуб поперечная система набора оказывается предпочтительной, так как она в меньшей степени загромождает междупалубные и трюмные помещения. На судах с горизонтальной грузообработкой верхнюю, а также промежуточные палубы в средней части выполняют по продольной системе. На некоторых судах продольная
- 354-
4
5
1
/2
6
7
9
-10 11
15
13
14
Рис. 15.9. Конструкция кормовой оконечности при продольной системе набора, 1 — стенка шахты МО; 2 — стойка шахты; 3 — поперечная переборка; 4 — настил палубы юта; 5 — подпалубное ребро жесткости; б — палубный стрингер; 7 — ширстрек; в — главная палуба; 9 — рамный шпангоут; 10 — платформа МО; 11 — ребро жесткости борта; 12 — обшивка борта; 13 — настил второго дна; 14 — днищевой стрингер; 15 — флор.
система набора в средней части к оконечностям постепенно переходит в поперечную. Палубные перекрытия с продольной системой набора могут быть беспиллерсными, с карлингсами и пиллерсами в ДП, а также с дополнительными пиллерсами.
Бортовые перекрытия соединяют палубные и днищевые перекрытия и обеспечивают их участие в общем продольном изгибе. Борта судна, воспринимающие перерезывающие силы, проектируются с учетом местной прочности от различных видов нагрузок: волнения, гидростатических сил, реакций масс льда.
Бортовая обшивка подкрепляется системой вертикальных и продольных балок. Основными несущими балками являются шпангоуты.
При поперечной системе набора (см. рис. 15.5) борта подкрепляются продольными балками - стрингерами. В оконечностях и в МО наличие стрингеров обязательно. Стрингеры устанавливают в сочетании срамными шпангоутами или без них. При прохождении стрингера через палубную переборку их соединение оформляется кницами.
- 355-
При поперечной системе набора борта шпангоуты устанавливают на каждой шпации (основные шпангоуты). В районе грузовых помещений шпангоуты состоят из двух ветвей - трюмных и твиндечных шпангоутов. Трюмные шпангоуты имеют большее сечение, поскольку гидростатическая нагрузка в нижней части корпуса существенно больше, чем в верхней. Правила Регистра СССР предусматривают наличие в районе МО рамных шпангоутов усиленного профиля и бортовых стрингеров.
В зависимости от ледового класса судна для увеличения прочности бортового перекрытия устанавливают промежуточные шпангоуты, размещаемые между основными, а также бортовые стрингеры на расстоянии не менее 1,4 м друг от друга. На танкерах с двумя продольными переборками для увеличения жесткости конструкции между бортом и ближайшей продольной переборкой размещают горизонтальные распорки. Распорки располагают в плоскости рамных шпангоутов при любой системе набора бортовых перекрытий.
Для уменьшения последствий аварий судов при столкновениях, особенно судов, перевозящих опасные в экологическом отношении грузы (танкеров, газовозов, атомоходов), необходимо осуществлять конструктивную защиту бортов.
С этой целью на танкерах делают двойные борта, конструкция которых учитывает принципы такой защиты. Кроме того, одним из элементов конструктивной защиты на танкерах являются горизонтальные платформы в междубортном пространстве, выполняемые по продольной системе набора у наружного борта и по клетчатой у продольной переборки. Данные платформы служат амортизаторами при поперечных ударах в борт судна в момент столкновения судов. Ширина образующихся бортовых отсеков должна составлять 20 % от ширины среднего грузового помещения.
Анализ работы бортовых перекрытий при поперечных ударах показывает, что большая доля энергии удара поглощается бортовым перекрытием в результате его деформации. В этом отношении наиболее рациональной оказывается система набора с рамными шпангоутами.
Тенденция, направленная на увеличение раскрытия палуб, потребовала принятие дополнительных конструктивных мер, повышающих способность корпуса противостоять его скручиванию. Для этой цели на судах устраиваются подпалубные коридоры, объединяемые с поперечными подпалубными цистернами. У судов с полным раскрытием палубы (для перевозки навалочных грузов) в верхней части бортов устраивают подпалубные цистерны, которые используют для приема балластной воды в порожних рейсах и для преднамеренного снижения остойчивости, направленного на улучшение характеристик бортовой качки.
У рефрижераторных судов, имеющих изоляционное покрытие бортовых перекрытий, в процессе перегрузки в условиях взволнованного моря на ошвартованное судно это покрытие часто повреждается. Для его предохранения на таких судах выполняют двойные борта.
Крупнотоннажные суда типа ОБО также имеют двойные бортовые перекрытия. Это позволяет сделать их внутренние поверхности гладкими, что способствует облегчению разгрузочных работ с сыпучими грузами.
- 356-
§ 90. Конструкция оконечностей
Оконечности судна представляют собой сложные конструктивные образования, функции которых довольно разнообразны. В оконечностях размещают различные цистерны и помещения, устанавливают оборудование и судовые устройства. Геометрическая форма оконечностей, как правило, очень сложная, диктуется условиями ходкости, мореходности, особенностями движителей и рулевого устройства. В конструктивном отношении оконечности судна должны обеспечивать постепенный переход от штевней к средней части корпуса, а также осуществлять крепление продольных балок судового набора (рис. 15.10).
Носовая оконечность судов заканчивается форштевнем, к которому крепится обшивка и вертикальный киль. Внутри форпика устанавливают несколько платформ, служащих опорами для форштевня. Между платформами устанавливают горизонтальные фигурные пластины, называемые брештуками, к которым крепятся бортовые стрингеры.
Носовая оконечность ограничивается поперечной таранной переборкой. Внутри носовой оконечности размещается цепной ящик, выполняющий роль опоры для якорных механизмов, устанавливаемых на палубе бака.
Конструкция форштевня во многом определяется назначением судна. Форштевни бывают литыми, коваными, сварными или комбинированными (литосварными). Сварные форштевни выполняют из гнутых листов, подкрепляя их горизонтальными бракетами (брештуками), согласованными с набором носовой оконечности. В плоскости бортовых стрингеров в качестве распорок устанавливают холостые бимсы, лишенные листового настила. Платформы и холостые бимсы в ДП опираются на продольную отбойную переборку, которая увеличивает прочность носовой оконечности.
На судах с бульбовыми наделками конструкция носовой оконечности существенно осложняется. Бульб выполняется в виде вытянутого или полусферического тела, обшивка которого подкрепляется внутри шпангоутами и вертикальными и горизонтальными диафрагмами. В определенных случаях бульб выполняется в виде отдельной конструкции, привариваемой к носовой оконечности (рис. 15.11).
Конструкция кормовой оконечности судов во многом зависит от количества гребных валов и рулей, а также от архитектурного типа кормы.
У одновинтовых судов в районе расположения дейдвуда устанавливают поперечные переборки с уменьшенной шпацией, выполняющие роль диафрагм. Аналогично подкрепляется обшивка в районе подзора кормы и в месте расположения руля (рис. 15.12).
На двухвинтовых судах гребные валы проходят через специальные подкрепления - мортиры. В месте выхода валов из корпуса судна имеются выкружки. Внутри каждой выкружки размещен дейдвудный подшипник (рис. 15.13).
Ахтерштевень одновальных судов - мощная литая или сварная
- 357-
1
fs-
10
л
7
8
Рис. 15.10. Конструкция носовой оконечности.
1 — козырек; 2 — выгородка в баке; 3 — палуба бака; 4 — обшивка борта; 5 — шпангоут; 6 — цепной ящик; 7,9 — платформы; 8 — переборка форпика (таранная); 10 — стрингер в ДП; 11 — поперечная переборка; 12 — сплошной флор; 13 — отбойная переборка; 14 — форштевень; 15 — главная палуба; 16 — брештук.
- 358 -
Рис. 15.11. Бульб, выполненный отдельной конструкцией.
1 — форштевень; 2 — платформа; 3 — продольная переборка бульба; 4 — обшивка бульба; 5 — стрингер бульба; 6 — вертикальная диафрагма; 7 — распорки; 8 — шпангоут бульба; 9 — разделительная переборка цепного яшика; 10 — переборка форпика; 11 — главная палуба; 12 — бимс; 13 — шпангоут; 14 — карлингс»
- 359 -
Рис. 15.12. Транцевая корма одновинтового судна.
Рис. 15.13. Литой кронштейн-ахтерштевень для двухвинтового судна.
- 361 -
конструкция (рис. 15.14). Его роль в обеспечении местной прочности кормы чрезвычайно высока, однако конструктивное крепление и увязка ахтерштевня с судовым набором и другими элементами кормовой оконечности вызывает много трудностей (рис. 15.15).
Передняя часть ахтерштевня, называемая старнпостом, крепится к продольным балкам судового набора. В старнпосте делается утолщение для прохождения гребного вала - яблоко старнпоста. Кормовую часть ахтерштевня, служащую для крепления петель судового руля, называют рудерпостом. Нижняя часть (подошва) ахтерштевня ограждает гребной винт, располагаемый в отверстии, именуемом окном ахтерштевня. Верхнюю часть ахтерштевня, являющуюся продолжением старнпоста, называют аркой.
На судах, имеющих полубалансирный руль, рудерпост выполняют в виде самостоятельного кронштейна, не связанного непосредственно со старнпостом.
§ 91. Конструкция переборок
Переборки на судах имеют самое различное назначение: обеспечение непотопляемости, разделение грузовых помещений, защита грузовых помещений на наливных судах и т. д. Водонепроницаемые пере-
Рис. 15.16. Шпангоут супертанкера с тремя продольными переборками
- 362 -
о
1 — полотнище поперечной переборки; 2 — обыкновенная стойка; 3 — шлейф; 4 — полотнище продольной переборки; 5 — доковая стойка; 6 — обыкновенная стойка продольной переборки; 7 — ширстрек; 8 — шпангоут; 9 — бортовой стрингер; 10 — скуловая кница;
И — флор; 12 — обшивка Днища; 13 — ребро жесткости днища; 14 — горизонтальный киль; 15 — вертикальный киль
борки должны выдерживать гидростатический напор воды и инерционные нагрузки от жидких и сыпучих грузов. Являясь конструктивными элементами корпуса судна, переборки воспринимают нагрузки от палубы и днища, выполняют функции опор, повышают жесткость корпуса судна. Переборки воспринимают значительные Поперечные и продольные усилия, поэтому их конструкция во многом определяется характером и величиной этих нагрузок.
По расположению на судне переборки делят на поперечные и продольные. Поперечные переборки выделяют в корпусе водонепроницаемые отсеки, поэтому, будучи герметичными, они простираются по высоте от днища до верхней палубы; их называют главными переборками. Первую от борта продольную переборку устанавливают на танкерах большого водоизмещения для разделения танков с целью уменьшения размеров свободных поверхностей жидких грузов, уменьшения размеров загрязнения моря нефтепродуктами в случае аварии, а также для отделения бортов от грузовых помещений на нефтерудовозах, - 363-
Рис. 15.18. Различные виды гофрированных переборок: а — из швеле-ров; б — со стойками переменной высоты; в — волнистая; г — из швеллеров и листов; д — из обрезных профилей; в — из трапециевидных профилей; ж — из угловых профилей
где образующиеся пространства используют в качестве тоннелей (рис. 15.16).
' По конструкции переборки бывают плоскими и гофрированными. Плоские переборки (рис. 15.17) изготовляют из стальных листов -полотнищ, подкрепленных набором из вертикальных стоек и горизонтальных шельфов. Вертикальные стойки обеспечивают устойчивость переборок при действии сжимающих усилий. Шельфы выполняют роль распорок между бортовыми перекрытиями. Набор переборок согласовывают с продольными балками палуб, днища и бортов и объединяют в конструктивные узлы с помощью книц.
Гофрированные переборки (рис. 15.18) обладают повышенной устойчивостью в направлении гофров, однако их изготовление для судов большого водоизмещения связано со значительными затратами. Расположение гофров на поперечных переборках - вертикальное, а на продольных - горизонтальное. Гофрированные переборки позволяют получать существенный выигрыш в массе корпуса, который на судах водоизмещением 20 тыс. т может доходить до 25 %.
Контрольные вопросы
1. Перечислите основные названия конструктивных элементов судового набора и наружной обшивки.
- 364-
2. Каков состав элементов перекрытий, выполненных по продольной и поперечной системам набора корпуса?
3. Перечислите конструктивные особенности оконечностей судна.
Глава 16
СУДОВЫЕ УСТРОЙСТВА
Судовые устройства - это комплексы конструкций и механизмов, выполняющих различные функции по обеспечению нормальной эксплуатации судна и безопасности его экипажа и пассажиров. Общим признаком для классификации судовых устройств является их принадлежность к внешнему оборудованию судна. Ниже рассматриваются только основные общесудовые устройства, наиболее применяемые на всех судах морского флота.
§ 92. Швартовное устройство
Швартовное устройство предназначено для закрепления судна у причала или рядом с другими судами или плавсредствами. С помощью швартовного устройства осуществляются также небольшие перемещения судна вдоль причала при швартовках. На швартовное устройство действуют силы течения и ветра, усилия, связанные с изменением положения судна при погрузочно-разгрузочных операциях и при изменении уровня воды, а также с рывками от качки при швартовке судов друг к другу в море.
Элементы швартовного устройства - швартовы, кнехты, киповые планки, клюзы, вьюшки, швартовные механизмы, кранцы - в большинстве случаев стандартизированы. Снабжение судов ими производится по Правилам Регистра СССР в зависимости от размеров судов, однако их номенклатура остается практически неизменной независимо от типа, назначения и размеров судна. Элементы швартовного устройства располагаются на верхних палубах, преимущественно в оконечностях судна.
Швартовы — это стальные, растительные или синтетические канаты (тросы), обеспечивающие связь судна с причалом или плавучим сооружением. Они должны быть легкими, гибкими, прочными, эластичными и износоустойчивыми. Все швартовы имеют на забортном конце петлю - огон, который при швартовке накидывают на мощную тумбу - береговой пал. При стоянке у причала заводят несколько швартовов (рис. 16.1), которые в зависимости от направления и места крепления называют соответственно насовой продольный, кормовой продольный, прижимной и ширинг. Количество швартовов зависит от условий стоянки.
Кнехты (рис. 16.2, а, б) - это металлические тумбы, на которых крепится судовой конец швартова. Они бывают стальные или чугунные.
- 365-
Рис. 16.1. Схема швартовки судна лагом
1 — дополнительный кормовой продольный швартов: 2 — кормсвой продольный швартов; 3 — кормовой прижимной швартов; 4 — носовой шпринг; 5 — кормовой шпринг; 6 — носовой прижимной швартов; 7, 8 — носовые продольные швартовы; 9 — киповые планки (роульсы); 10 — кнехты; 11 — швартовые клюзы
Рнс. 16.2. Элементы швартовного устройства: а — двойной прямой кнехт; б — двойной крестовый кнехт; в — киповая планка с двумя роульсами; г — киповая планка с тремя роульсами; д — швартовный литой клюз; е — клюз с поворотной обоймой; ж — швартовная вьюшка; з — автоматическая швартовная лебедка; и — бросательный конец; к — кранец.
- 366 -
Кнехты имеют шляпки и приливы, препятствующие соскальзыванию троса вверх при потравливании. Швартов навивается на кнехт четырьмя-пятью восьмерками. Кнехты устанавливают по бортам судна на фундаменты и крепят к ним болтами или сваркой. В месте установки фундамента палуба имеет подкрепление.
Киповые планки (рис. 16.2, в, г) и клюзы (рис. 16.2, д, е) служат для направления швартовов на кнехты, ограничения боковых перемещений швартовов и предохранения швартовов от перетирания. Их устанавливают у борта вдоль судна на некотором расстоянии в нос или в корму от кнехта для того, чтобы усиление натяжения швартова действовало примерно вдоль кнехта, так как при этом кнехт может выдержать большие усилия.
Киповые планки устанавливают в районе пропуска швартовов через леерное ограждение, а также в носовой и кормовой частях судна. Киповые планки подразделяют на открытые и закрытые. К открытым относятся прямая киповая планка, киповые планки с роульсами (от одного до трех). Применяют также упрощенные киповые планки, состоящие из нескольких отдельно стоящих роульсов. Открытые киповые планки позволяют принимать трос снизу или горизонтально. Этого недостатка лишены закрытые киповые планки, у которых наметка или горизонтальный роульс закрывает проем. В этом случае швартовы могут подниматься вверх при движении судна в шлюзах со значительным перепадом высот, при швартовке к судну с более высоким надводным бортом и в других аналогичных ситуациях.
Клюзы используют для пропуска швартовов через фальшборт. Простейшим в конструктивном отношении является литой бортовой клюз, а также панамские клюзы. Общим недостатком их является износ тросов иэ-за трения швартовов в клюзе. Этот недостаток почти полностью устранен в универсальном клюзе, однако и в этой конструкции не исключено заклинивание троса между горизонтальными и вертикальными роликами. Применяют также автоматические клюзы, у которых вращающаяся на подшипниках обойма несет два или три шкива, предназначенных для проводки швартовов. Обойма закрепляется в корпусе, который в свою очередь крепится к фальшборту или отдельному фундаменту на палубе. Следует отметить конструктивную сложность автоматических клюзов и необходимость тщательного ухода за ними.
Вьюшки (рис. 16.2, ж) представляют собой специальные укрепленные на фундаменте барабаны с высокими бортиками, предназначенные для хранения швартовных тросов. Они делаются либо бесприводными, либо с ручным приводом. Так как вьюшки используют в основном для хранения стальных тросов, изгибные напряжения в тросе определяют отношение диаметра барабана к диаметру троса (12-20). Стравливание швартова с вьюшки производится с притормаживанием барабана ножным ленточным тормозом.
Растительные и синтетические тросы хранятся в больших бухтах на деревянных банкетках. Тросы закрываются парусиновыми чехлами.
- 367-
После закрепления швартовного троса на берегу судно подтягивается к причалу при помощи швартовных механизмов. Обычно эту роль на носу выполняет брашпиль, а на корме - шпиль. В средней части судна используются турачки грузовых лебедок.
На больших судах устанавливают специальные швартовные механизмы - швартовные шпили и лебедки. Автоматические швартовные лебедки (рис. 16.2, з), применяемые в основном на танкерах и балкерах, регулируют натяжение троса при изменении осадки судна, при рывках и т. п., стравливая и выбирая швартовы. Такие лебедки улучшают условия стоянки судна и увеличивают срок службы швартовных канатов. Так как швартовы постоянно находятся на барабане лебедки, не требуются вьюшки и кнехты.
Для амортизации ударов корпуса о причал или о борт другого судна во время швартовки применяют мягкие переносные кранцы (рис. 16.2, к), представляющие собой парусиновые мешки с наполнителем, оплетенные снаружи пеньковым канатом. Применяют также надувные (пневматические) кранцы.
Для подачи швартовов с судна на причал используют бросательный конец (рис. 16.2, и). Это пеньковый трос малого диаметра, на конце которого закреплен оплетенный мешочек с песком. К другому концу выброски привязывают огон швартова. При швартовке в трудных погодных условиях применяют линеметательные аппараты.
§ 93. Буксирное устройство
Буксирным устройством называют комплекс средств, позволяющих судну буксировать другой плавучий объект или самому быть взятым на буксир. Оно предназначено для приема, крепления и быстрой отдачи буксирного троса. Буксирные устройства подразделяют на общесудовые устройства, необходимые каждому судну, и устройства судов специального назначения - буксиров, буксиров-спасателей, ледоколов, ледокольно-транспортных судов. Устройства, предназначенные для буксировки самого судна, располагаются в носовой части, а устройства для производства буксировочных работ - в корме.
На рис. 16.3 показано общее расположение элементов буксирного устройства на морском буксире.
Буксирный трос предназначен для связи буксировщика с буксируемым объектом. Он может быть растительным, стальным или синтетическим. Стальные тросы применяют в основном на буксировщиках, имеющих буксирную лебедку. Синтетические канаты более легки и упруги, они в два раза легче стальных и в три-четыре раза легче пеньковых тросов при одинаковой прочности, а на волнении лучше гасят рывки. Диаметр буксирного троса зависит от мощности буксировщика. Обычно каждый буксировщик снабжается двумя буксирными тросами: одним для буксирной лебедки, другим для буксирного гака.
Буксирные лебедки служат для буксировки в море на длинном и коротком буксире, для регулирования длины и для хранения
- 368-
5
Рис. 16.3. Расположение буксирного устройства иа морском буксире. 1 — буксирный клюз; 2 — буксирная арка; 3 — буксирная лебедка; 4 — буксирный гак; 5 — ограничитель буксирного троса; 6 — швартовный кнехт; 7 — вьюшка с тросом; 8 — битенг; 9 — буксирная дуга; 10 — швартовный шпиль
буксирного троса по-походному. Автоматические лебедки, кроме того, регулируют натяжение буксирного троса при буксировке на волнении.
Буксирный гак предназначен для крепления и быстрой отдачи буксирного троса. По высоте его стремятся располагать как можно ближе к палубе, чтобы уменьшить величину кренящего момента от косого натяжения буксирного троса. Гаки снабжают приспособДением, позволяющим отдать буксирный трос за борт при опасном крене буксировщика. Имеются гаки с автоматической отдачей. Конструктивно гаки выполняются открытьями (рис. 16.4, а), закрытыми (рис. 16.4, б), с механическими (рис. 16.4, в) или гидравлическими затворами (рис. 16.4, г). Гаки снабжаются амортизаторами, необходимыми для гашения ударных волн в буксирном тросе. Горизонтальное рабочее положение гака обеспечивается поддержкой его снизу стальной подставкой - погоном буксирного гака.
Буксирная дуга - это мощная балка, служащая для крепления буксирного гака и обеспечения его перемещения с борта на борт за линией натяжения буксирного троса. Она крепится к прочным корпусным конструкциям, которые в этом месте должны быть подкреплены.
Буксирная арка предназначена для защиты людей, которые могут оказаться на палубе во время буксировки. Она также предотвращает провисание буксирного троса при его ослаблении и защищает от повреждения палубное оборудование, буксирная арка устанавливается в корму от буксирного гака; ее высота должна быть небольшой, чтобы исключить излом линии натянутого буксирного троса, идущего
- 369 -
6)
a-}
Рис. 16.4. Гаки различных типов: а — открытый; б — закрытый; в — с механическим затвором; г — с гидравлическим затвором.
Рис. 16.5. Буксирные клюзы: а - глухой; б — с наметкой; в — с роульсами.
1 — глухой клюз; 2 — фальшборт; 3 — стойка фальшборта; 4 — утопленный клюз; 5 — наметка; 6 — вертикальный роульс; 7 — горизонтальный роульс.
- 370-
с гака или лебедки. По бортам буксирные арки опираются на фальшборт, а при большой ширине судна в пролете арок они могут подкрепляться стойками.
Буксирный клюз (рис. 16.5) служит для ограничения бокового перемещения буксирного троса. Он устанавливается в корме и используется, как правило, при буксировке на длинном буксире. Сверху буксирный клюз закрывают наметкой. Для предохранения буксирного троса от перетирания буксирные клюзы снабжают горизонтальными и вертикальными роульсами.
Битенги - это мощные стальные тумбы, связанные с набором корпуса. Битенг устанавливают в корму от буксирной лебедки и используют для крепления буксирного троса при работе по стаскиванию судна с мели рывками. Битенги ограничивают также боковое перемещение натянутого буксирного троса.
§ 94. Якорное устройство
Якорное устройство предназначено для обеспечения стоянки судна на внешнем или внутреннем рейде. Оно также может использоваться при швартовке к причалу и при погашении инерции в целях предотвращения столкновения. Кроме того, якорное устройство служит для снятия судна с мели своими силами путем завозки станового или вспомогательного якоря на глубину. Прикрепленный к якорю трос выбирают с помощью лебедки.
Якорное устройство обычно размещается в носовой части судна. Однако на ледоколах, буксирах и некоторых других судах специального назначения оно может быть и на корме.
Эффективность якорного устройства определяется держащей силой якоря, зависящей от его конструкции и массы, а также от общей длины вытравленной за борт части якорной цепи и ее массы.
К основным элементам якорного устройства (рис. 16.6) относятся якоря, якорные цепи, якорные клюзы и цепные трубы, цепные ящики, якорные механизмы для отдачи и подъема якорей и стопоры.
Якоря должны быстро отдаваться и удобно крепиться по-поход-ному, обладать большой держащей силой при малой массе, быстро забирать грунт и легко отделяться от грунта. По назначению якоря делят на становые и вспомогательные, к которым относятся размещаемый в корме стоп-анкер, служащий для постановки судна лагом к ветру, и верп - легкий якорь, который можно завозить в сторону от судна на шлюпке. Количество и масса становых якорей для каждого судна выбирается по Правилам Регистра СССР. Масса стоп-анкера равна одной трети массы станового якоря, а масса верпа - половине массы стоп-анкера.
В соответствии с Правилами Регистра СССР на советских судах применяют якоря двух конструктивных тппов - адмиралтейский якорь и якорь Холла (рис. 16.7).
- 371 -
Рис. 16.6. Носовое якорное устройство:
I — брашпиль; 2 — стопор; 3 — якорная цепь'; 4 — палубный клюз; 5 — якорь; 6 — бортовой клюз; 7 — клюзовая труба; 8 — цепная труба; 9 — цепной
Рис. 16.7. Якоря различных типов: а - адмиралтейский, б -якорь Холла.
1 — шток; 2 — скоба; 3 — веретено; 4 — лапа; 5 — голова.
- 372-
Адмиралтейский якорь представляет собой штоковый якорь с неподвижными лапами. Он прост по конструкции и имеет довольно.боль-шую держащую силу - 6-8 масс якоря. Однако наличие штока затрудняет уборку якоря в клюз, поэтому армиралтейские якоря в настоящее время на транспортных судах в качестве становых не используют.
Самым распространенным на судах морского флота является бес-штоковый якорь с поворотными лапами системы Холла. Этот якорь
прост в изготовлении, надежен и удобен в эксплуатации, но имеет низкий коэффициент держащей силы (3-4). Масса якоря Холла от 100 кг до 15 т. Эти якоря применяют как в качестве становых, так и в качестве вспомогательных.
Якорная цепь (рис. 16.8, а) осуществляет гибкую связь между якорем и судном. Она должна амортизировать рывки на волнении, быть прочной и износоустойчивой. Конструктивно звенья цепи выполняют с распорками и без распорок. Основной характеристикой якорной цепи является калибр, т. е. диаметр прутка звена цепи. Все размеры звеньев цепи стандартизированы. Цепь состоит из смычек длиной 25-27 м с нечетным числом звеньев. Различают якорную смычку, коренную смычку,
Рис. 16.8. Якорная цепь: о - элементы якорной цепи; б — жвака-галс
1 — якорь; 2 — концевое звено; 3 — вертлюг; 4 — общее звено; 5 — соединительное звено; 6 — глаголь-гак; 7 — концевая
скоба; 8 — усиленное звено
- 373-
которая крепится к устройству для быстрой отдачи цепи, и промежуточные. Смычки соединяются разъемными звеньями, скручивание цепи предотвращают включением в нее вертлюгов.
Якорная цепь крепится скобой жвака-галса к обуху, связанному с жесткими корпусными конструкциями. Жвака-галсовая смычка короткая (2-3 звена) и имеет глаголь-гак, необходимый для быстрой отдачи якорной цепи за борт (рис. 16.8, б).
Якорные клюзы предназначены для направления движения якорной цепи при отдаче или выбирании якоря. Они состоят из якорной трубы, палубного и бортового клюзов. Якорную трубу выполняют сварной из двух половин, причем нижняя половина трубы толще верхней из-за большего износа. Якорные клюзы часто делают с нишами в бортах судна, в которые входят лапы якоря. В этом случае якоря не выступают за обводы корпуса.
Рис. 16.9. Схема якорно-швартовного брашпиля
I — электродвигатель; 2 — привод кулачковой муфты; 3 — привод тормоза звездочки; 4 — турачки; 5 — подшипники грузового вала;
6 — цепные звездочки; 7 — фундаментная рама; 8 — редуктор
- 374-
Цепные трубы служат для направления якорной цепи от палубы до цепного ящика. Верхний конец трубы подводится к станине якорного механизма, а нижний снабжен раструбом и несколько не доводится до верха цепного ящика.
Цепной ящик служит для хранения якорной цепи на судне. Цепь каждого станового якоря укладывается в свое отделение цепного ящика. Каждое отделение имеет квадратную или круглую форму в плане. Изнутри цепной ящик обшивают деревом, а внизу него укладывают деревянную решетку. Размеры цепного ящика должны обеспечивать самоукладку цепи при выборе якоря. Высота должна быть такой, чтобы полностью уложенная цепь не доходила до верха ящика на 1-1,5 м.
Якорные механизмы служат для вытравливания и выбирания якорной цепи с якорем и для подтягивания судна к якорю, лежащему на грунте. В качестве якорных механизмов применяют шпили и брашпили.
Брашпиль (рнс. 16.9) имеет горизонтальный вал с насаженными двумя цепными звездочками. По концам вала имеются турачки -швартовные барабаны, необходимые для выбирания швартовных концов. Брашпиль устанавливают на палубе бака на фундаменте.
Шпиль в отличие от брашпиля имеет вертикальный вал, на котором располагается одна цепная звездочка и швартовный барабан. Механизм шпиля располагается под палубой.
Стопорение якорей по-походному осуществляется при помощи якорных стопоров. Применяют винтовой стопор, который заклинивает якорную цепь между двумя колодками, стопор с закладным палом, который стопорит якорную цепь, а также цепной стопор, состоящий из отрезка цепи малого калибра с талрепом н глаголь-гаком.
§ 95. Рулевое устройство и средства активного управления
Рулевое устройство предназначено для удержания судна на курсе или изменения направления его движения. Рулевое устройство является одним нз важнейших устройств, так как обеспечивает судну управляемость. Как правило, основные элементы рулевого устройства располагаются в корме, но некоторые суда имеют и носовое рулевое устройство.
При движении судна рулевое устройство постоянно находится в действии, и выход его из строя может привести к аварии и даже к гибели судна. Поэтому к конструкции рулевого устройства предъявляются очень высокие требования.
Основными частями рулевого устройства являются руль, рулевой привод, рулевая машина и привод управления рулевой машиной (рис. 16.10).
Работа отдельных элементов устройства строго согласована. Как только рулевой начинает вращать штурвал, с помощью телемотора включается рулевая машина, и движение от нее передается через
- 375-
Рис. 16.11. Рули различных типов: а — небалансирный (обычный); б — балансирный; в — полубалансирный; г — подвесной
1 — перо руля; 2 — противоледовый выступ (ледовый зуб); 3 — баллер;
4 — рудерпис; 5 — кронштейн
Рис. 16.10. Схема рулевого устройства морского транспортного судна
I — перо руля; 2 — фланцевое соединение руля и баллера; 3 — опоры баллера;
4 — голова баллера; 5 — сектор; в — рулевая машина; 7 — штурвал pyworo управления; в — рулевая передача; 9 — баллер; 10 — гельмпортовая труба; 11 — петля рулевого пера; 12 — штырь; 13 — петля рудерпоста; 14 — рудерпост; 15 — пятка ахтерштевня
рулевой привод на руль. Перекладка (поворот) руля продолжается до тех пор, пока вращается штурвал. При остановке штурвала телемотор выключает рулевую машину и руль останавливается или автоматически возвращается в среднее положение. Для контроля за положением руля служит специальный прибор - аксиометр, установленный перед штурвалом и связанный электрической системой с баллером.
Руль служит для непосредственного поворота судна. Он состоит из вертикальной пластины, называемой пером руля, и поворотного вала - баллера. Судовые рули классифицируют по расположению пера руля относительно оси вращения, по способу крепления пера руля к баллеру и корпусу судна и по форме профиля поперечного сечения.
По первому признаку различают небалансирные (обычные), полубалансирные и балансирные рули. Небалансирным называют руль, ось вращения которого близка к передней (носовой) кромке пера (рис. 16.11, а), у балансирных рулей ось вращения проходит на достаточном удалении от носовой кромки пера (рис. 16.11, б). Часть пера руля, расположенная впереди оси баллера, называют балансирной. Если балансирная часть имеется не по всей высоте руля, то такой пуль
- 376-
принято называть полубалансирным (рис. 16.11, в). В связи с перераспределением площади пера руля относительно оси вращения отстояние центра давления от оси вращения у балансирных рулей меньше, чем у небалансирных, и, следовательно, момент на баллере будет меньше, что ведет к уменьшению мощности рулевой машины. Однако крепление таких рулей к корпусу судна сложнее и менее надежно.
Балансирные и полубалансирные рули характеризуются коэффициентом компенсации, т. е. отношением площади балансирной части ко всей площади пера руля. Для балансирных рулей этот коэффициент принимают равным 0,15-0,25, а для полубалансирных - 0,15.
По форме профиля рули бывают плоскими и обтекаемыми (профильными). Плоские рули в основном применяют на несамоходных судах.
Профильный руль представляет собой набор горизонтальных ребер (пластин) и вертикальных диафрагм, сваренных друг с другом и образующих каркас, который с обеих сторон покрыт приваренными к нему стальными листами. При этом горизонтальные ребра крепятся к основе пера руля - рудерпису - массивному вертикальному стержню. Рудер-пис отливают (или отковывают) вместе с петлями для навешивания пера руля на рудерпост. Иногда рудерпис делают сварным. Профилированные рули имеют перед пластинчатыми ряд преимуществ: более высокое значение нормальной силы давления на руль; меньший момент, необходимый для поворота руля. Кроме того, обтекаемый руль, расположенный за гребным винтом, позволяет улучшить пропульсивные качества судна. Эти рули нашли наибольшее применение.
Баллер представляет собой вал для передачи вращающего момента на руль. Баллер жестко соединен с пером и проходит через гельмпор-товую трубу в румпельное отделение, где расположена рулевая машина. В судостроительной практике применяют два типа соединения пера руля с баллером: фланцевое и конусное.
Баллер руля входит в кормовой подзор корпуса через гельмпорто-вую трубу, обеспечивающую непроницаемость корпуса, и имеет не менее двух опор (подшипников) по высоте. Нижняя опора располагается над гельмпортовой трубой и, как правило, имеет сальниковое уплотнение, препятствующее попаданию воды в корпус судна; верхняя опора размещается непосредственно у места закрепления сектора или румпеля. Обычно верхняя опора (опорно-упорный подшипник) воспринимает массу баллера и пера руля, для чего на баллере делают кольцевой выступ. Перекладка руля в любом рулевом устройстве осуществляется с помощью румпеля - рычага, жестко закрепленного на верхнем конце баллера.
Рулевой привод связывает баллер руля с рулевой машиной и состоит из румпеля и соответствующей передачи к нему от рулевой машины. В качестве основных на судах получили распространение секторные рулевые приводы со штуртросовой или зубчатой передачей и гидравлические.
Наибольшее применение имеет гидравлический плунжерный
- 377 -
4
Рис. 16.12. Гидравлический плунжерный привод
1 — баллер; 2 — румпель; 3 — скалка; 4 — гидравлический пресс; 5 — электродвигатель; 6 — рулевой насос; 7 — предохранительный клапан
привод (рис. 16.12), в котором на баллер насажен румпель, связанный шарнирно с плунжером. Последний может перемещаться в двух неподвижных гидравлических прессах. Прессы заполнены минеральным маслом и соединены трубками с рулевым насосом, приводимым в движение электродвигателем.
В соответствии с Правилами Регистра СССР суда должны иметь главный и вспомогательный рулевые приводы. Если главный и вспомогательный рулевые приводы находятся в помещении, полностью или частично расположенном ниже ГВЛ, то предусматривается аварийный рулевой привод, расположенный выше палубы переборок.
Конструкция рулевого устройства допускает перекладку руля на 35* на оба борта. Согласно требованиям Регистра СССР скорость вращения пера руля должна быть такой, чтобы на перекладку с 35* одного борта до 30* другого затрачивалось не более 28 с при максимальной скорости переднего хода. Положение пера руля контролируется специальными указателями. У вспомогательного привода мощность должна быть достаточна для перекладки руля с 15* одного борта на 15° другого за время, не превышающее 60 с при скорости судна, равной половине максимальной, но не менее 7 уз.
Для обеспечения работы рулевых приводов применяют электрические и гидравлические рулевые машины. Рулевую машину обычно размещают в специальном румпельном отделении, а на малых судах и катерах - в посту управления судном. Для обеспечения бесперебойной работы рулевого устройства пост управления рулевой машиной дублируют, располагая запасной пост в румпельном отделении или рядом с ним.
Привод управления рулевой машиной состоит из телемоторной передачи, связующей пусковое устройство рулевой машины со штурвалом, расположенным в рулевой рубке. На крупных судах дополнительный штурвал устанавливается также на верхнем мостике. Кроме того, на всех судах предусматривается возможность управления рулевой машиной непосредственно из румпельного отделения (на случай выхода из строя телемотора).
- 378-
Существенным недостатком обычных рулей является их слабое действие на малых и задних ходах. Для обеспечения лучших маневренных качеств на многих судах применяют специальные средства, не зависящие вообще или мало зависящие от основного рулевого устройства, объединенные общим названием средства активного управления (САУ). К их числу относятся активные рули, поворотные направляющие насадки, подруливающие устройства, поворотные колонки и др.
Рнс. 16.13. Средства активного управления: и - активный руль; б — поворотная направляющая насадка; в — подруливающее устройство туннельного типа; г — выдвижная колонка с гребным винтом
1 — перо руля; 2 — винт подруливающего устройства; 3 — гидравлический двигатель; 4 — баллер; 5 — трубопровод; 6 — гребной винт; 7 — поворотная насадка
- 379-
Активные рули (рис. 16.13, а) устанавливают на крупных транспортных судах. Руль имеет обычную обтекаемую форму и оборудован небольшим гребным винтом. Винт размещается в специальной насад* ке и получает вращение от электромотора, вмонтированного в каплевидную наделку на пере руля; питание к мотору подводится через полый баллер. Упор, создаваемый рулевым винтом, значительно увеличивает разворачивающее действие руля, причем, что особенно ценно, наибольшее влияние рулевой винт оказывает при малой скорости судна или при полном ее отсутствии. Действие активного руля возрастает также с увеличением угла перекладки. Поэтому на малых ходах угол перекладки руля допускается до 90° на борт, а на полном ходу во избежание поломки руля ограничивается обычными пределами (35°).
Активные рули облегчают маневрирование судов при движении в узкостях, позволяют производить швартовку без помощи портовых буксиров. Кроме того, они повышают безопасность плавания: рулевой винт при необходимости может быть использован как движитель судна, обеспечивая скорость до 4- 5 уз.
Поворотные насадки (рис. 16.13, б) применяют на буксирных судах вместо обычных рулей. Насадка представляет собой массивное кольцо, закрепленное на баллере по типу балансирного руля. При ее повороте струя воды, отбрасываемая гребным винтом, изменяет свое направление, чем и обеспечивается поворот судна. Помимо улучшения управляемости, насадка также увеличивает упор, создаваемый винтом, что очень важно для буксира.
Кроме поворотных, на буксирах часто применяют и неподвижные направляющие насадки. В этом случае насадка служит только для увеличения упора гребного винта, а управляемость судна обеспечивается обычным рулем, установленным позади насадки.
Подруливающие устройства (рис. 16.13, в) применяют в дополнение к основным рулям. Их устанавливают в носовой части судна или в носовой и кормовой одновременно. Подруливающее устройство состоит из сквозного туннеля, проходящего от одного борта к другому, и винта, размещенного внутри туннеля. Винт приводится во вращение электромотором через редуктор. Работа устройства заключается в создании бокового упора за счет силы реакции выбрасываемой из туннеля воды. Направление упора изменяют реверсированием винта.
Подруливающие устройства обеспечивают высокую маневренность судна на малом и заднем ходах, позволяют судну перемещаться лагом, разворачиваться на месте. Они применяются на паромах, земснарядах, крупных пассажирских и грузовых судах, часто вместе с активным рулем.
На судах небольших размерений, таких так портовые буксиры, в последние годы стали применять поворотные колонки (рис. 16.13, г). Они служат одновременно средством движения и средством управления. Отечественная промышленность выпускает колонки четырех типоразмеров мощностью от 30 до 500 кВт. Для передачи крутящего момента на винт приходится дважды менять направление оси гребного
- 380-
вала под углом 90’. При большой мощности гребного двигателя конические зубчатые зацепления, используемые для смены направления линии вала, становятся чересчур громоздкими.
§ 96. Спасательное устройство
Спасательное устройство представляет собой комплекс спасательных средств и устройств для их хранения и спуска на воду.
Несмотря на то что времени с момента аварии до гибели судна в большинстве случаев достаточно для проведения спасательной операции, время проведения этой операции является основным показателем эффективности спасательных средств.
Причина аварии и гибели судна может быть различной: столкновение, пожар, потеря остойчивости и др. Поэтому спасательные средства, задачей которых является эвакуация людей с гибнущего судна, должны защищать их от неблагоприятных внешних воздействий и обеспечивать всем необходимым для поддержания нормальной жизнедеятельности. Спасательные средства могут также использоваться при оказании помощи людям с других судов, терпящих бедствие.
Количество спасательных средств, их размещение на судне, а также основные технические требования, предъявляемые к ним, определяются Международной конвенцией по охране человеческой жизни на море и Правилами по конвенционному оборудованию судов Регистра СССР в зависимости от типа судна и района плавания.
Общие требования для всех спасательных средств независимо от их типа и назначения касаются особенностей их хранения, использования и удобства обнаружения. Так, все спасательные средства должны сохранять свои качества после длительного хранения при температуре наружного воздуха - 30 - + 65 °C и обеспечивать возможность эксплуатации в условиях морского волнения при температуре воды - 10 - + 30 ’С.
Материал, из которого изготовляют спасательные средства, должен быть устойчивым против гниения и коррозии, должен выдерживать воздействие воды и нефти. Большинство спасательных средств в походном положении находятся на открытых палубах, поэтому необходимо, чтобы они сохраняли свои качества после длительного воздействия солнечной радиации.
Для удобства обнаружения спасательных средств существует требование об их окраске в яркие цвета, обычно в оранжевый как наиболее заметный на морской поверхности. Шлюпки и плоты должны иметь достаточный запас сигнальных средств для обнаружения их в ночное время.
На судах применяют спасательные средства коллективного и индивидуального пользования. К средствам коллективного пользования относят шлюпки, спасательные плоты, плавучие приборы, а к средствам индивидуального пользования - спасательные круги, жилеты, нагрудники, костюмы-комбинизоны.
- 381 -
Рис. 16.14. Спасательные шлюпки: а — открытая гребная (деревянная, металлическая или пластмассовая); б — закрытая моторная; в — закрытая танкерная моторная; г — разрез закрытой моторной шлюпки
I — сдвижные крышки; 2 — сходный люк;3 — спасательный леер; 4 — световой лжж; 5 — рулевая рубка; 6 — вентиляционная головка; 7 — бросательный конец; 8 — подъемное устройство; 9 — рундук; 10 — двигатель
Основным спасательным средством на морских судах является шлюпочное устройство, включающее: шлюпки и катера, которые по назначению могут быть спасательными, разъездными, рабочими, специальными и т. п.; шлюпбалки, стрелки, краны, кран-балки для спуска и подъема спасательных шлюпок; приспособления для хранения шлюпок, катеров и плотов по-походному (ростр-блоки, найтовы, чехлы).
Максимальная вместимость спасательных шлюпок (рис. 16.14) 150 чел., а максимальная их масса с людьми и снабжением 20,3 т.
На пассажирских судах неограниченного района плавания количество мест в спасательных шлюпках каждого борта принимается равным половине общего количества находящихся на судне людей; на грузовых и нефтеналивных судах .неограниченного района плавания -общему количеству мест на судне.
Спасательные шлюпки делают вельботного типа - с одинаково заостренным носом и кормой и полными обводами корпуса. Такие шлюпки обладают хорошей мореходностью и наибольшей вместимостью. Рабочие шлюпки имеют более легкую конструкцию с транцевой кормой.
- 382-
Спасательные шлюпки обязательно имеют внутренний запас плавучести, который обеспечивается установкой в их корпусе воздушных водонепроницаемых ящиков. Объем ящиков подбирается такой, чтобы шлюпка с полным снаряжением и с людьми оставалась на плаву даже при заполнении ее водой до верхней кромки планширя при высоте надводного борта не менее 2 см.
Снаружи шлюпки под планширем закрепляют обносной леер с поплавками, а на уровне скулы - кили-поручни, за которые могут держаться спасающиеся при прямом и перевернутом положении шлюпки. В двух местах под днищем предусматриваются подкильные концы с узлами - мусингами. Они идут от киля до каждого борта и служат для облегчения возврата опрокинувшейся шлюпки в нормальное положение. Для закрепления шлюпталей при спуске и подъеме шлюпки в носу и корме имеются подъемные гаки. Люди в шлюпке размещаются на боковых банках, установленных в один-два яруса, и нескольких поперечных банках.
Шлюпки относятся к разряду активных спасательных средств, поэтому они должны иметь собственные средства движения, обеспечивающие минимальную скорость 6 уз при буксировке полностью загруженного 25-местного плота. В настоящее время в качестве средств движения используют ручные приводы и ДВС.
Шлюпки размещают на верхней, шлюпочной, палубе судна в районе средней или кормовой надстройки. Их располагают, как правило, симметрично по обоим бортам, однорядно и в один ярус. Если на судне имеется только одна шлюпка, ее помещают в ДП и предусматривают возможность спуска ее с обеих бортов.
Каждая шлюпка хранится на двух-трех кильблоках - поперечных подставках, изготовленных по форме обводов шлюпки. Кильблоки устанавливают или на палубе, или на кронштейнах шлюпбалок. Чтобы не приподнимать шлюпки при вываливании их за борт, наружная часть кильблоков делается откидной.
Шлюпки крепятся по-походному с помощью специальных оттяжек - найтовов. Нижйей частью найтовы прочно соединены с палубой, а верхней - храпом - закладываются за планширь шлюпки и надежно обтягиваются талрепами. Для быстрой отдачи найтовы снабжены гла-голь-гаком.
Нормы снабжения спасательных шлюпок устанавливаются Правилами Регистра СССР. В снабжение входят прежде всего весла, уключины, руль с румпелем, мачта с парусом, компас, а на некоторых шлюпках - специальный пенал со штурманским снабжением. Винтовые шлюпки снабжаются принадлежностями для возможного мелкого ремонта привода.
Для подачи сигналов бедствия шлюпки имеют парашютные ракеты, фальшфейеры, дымовые шашки, электрический батарейный фонарь для сигнализации, а также сигнализирующее устройство с дальностью слышимости не меиее 0,5 мили. Некоторые шлюпки снабжают радиостанцией. Моторные шлюпки со скоростью 6 уз и более оборудуют прожектором.
- 383-
В каждой шлюпке предусматривается запас пресной воды и сухой провизии (галеты, шоколад, сгущенное молоко и т. п.) в водонепроницаемой упаковке, а также аптечка первой помощи. Запас воды составляет 3 л на каждого человека, а пищевой рацион - не менее 5000 кал на человека.
В снабжение шлюпки входят также опорные крюки, топоры, нож, фалини, плавучий якорь с дректовом, пиронафтовый фонарь, специальные спички, ручной насос, ведра и другие предметы, необходимые в автономном плавании.
Все спасательные шлюпки имеют стандартную окраску и маркировку. На обоих бортах шлюпки в носовой части указываются ее порядковый номер, размеры и вместимость, а также порт приписки и название судна. Шлюпки нумеруются от носа к корме; шлюпкам правого борта присваивают нечетные номера, шлюпкам левого борта -четные.
Для спуска шлюпок на воду и подъема их на борт служат шлюпбалки, оборудованные шлюпочными лебедками или тормозными вьюшками. Главное требование, предъявляемое к конструкции шлюпбалок, - обеспечение быстрого и безопасного вываливания и спуска шлюпок на воду с полным снаряжением и людьми при условии отсутствия механической энергии, любом состоянии моря и креие судна до 15* на любой борт.
Существует три типа шлюпбалок: поворотные, заваливающиеся и гравитационные.
Поворотные шлюпбалки наиболее простые; они представляют собой две одинаковые изогнутые балки, расположенные между бортом и шлюпкой. Так как расстояние между шлюпбалками несколько меньше длины шлюпки, вываливание ее за борт производится в два приема: сначала выводят один конец шлюпки, а затем разворачивают шлюпбалки так, чтобы мог быть выведен второй конец. Разворачивают шлюпбалки вручную с помощью закрепленных на них тросовых оттяжек - бакштагов.
Недостатком поворотных шлюпбалок является значительная затрата времени и сил на вываливание шлюпки. Поэтому в настоящее время их применяют только для легких рабочих шлюпок. Большинство шлюпок, а спасательные все без исключения, оборудуются шлюпбалками заваливающегося или гравитационного типа.
Заваливающиеся шлюпбалки бывают разных конструкций, но все они характерны тем, что при вываливании за борт должны поворачиваться вокруг горизонтальной оси. В положении по-походному шлюпбалки завалены внутрь судна, и для их поворота используют специальный привод, обычно винтовой. Спуск шлюпок после вываливания производится вручную - с использованием тормозных вьюшек или с помощью шлюпочных лебедок, на барабан которых наматывается ходовой лопарь шлюпталей. Все заваливающиеся шлюпбалки - парные.
Заваливающиеся шлюпбалки обеспечивают достаточно быстрый спуск шлюпки, но требуют при вываливании значительного усилия, особенно в начальный период, когда балки должны несколько
- 384-
приподнимать шлюпку. Поэтому на судах Правилами Регистра СССР разрешается применять шлюпбалки только гравитационного типа.
Гравитационные шлюпбалки отличаются от заваливающихся тем, что вываливание их за борт производится полностью за счет сил веса шлюпки и самой балки. В результате шлюпку любых размеров может спустить на воду один человек, затрачивая при этом не более 2 мин, тогда как при заваливающихся шлюпбалках время вываливания и спуска шлюпки составляет 3-4 мин. Различают скатывающиеся и шарнирные гравитационные шлюпбалки.
Для спуска шлюпки освобождай^ ее крепления, стопоры обеих шлюпбалок и тормоз лебедки. Обе шлюпбалки начинают вываливаться за борт, скатываясь по направляющим. Когда они полностью вывалятся и остановятся, упираясь в ограничители, рога выходят из проушин подвесок, и при дальнейшем потравливании лопарей происходит спуск шлюпки на воду. Таким образом, вываливание и спуск совмещаются в одну операцию, выполняемую общим приводом.
На больших судах при крене на противоположный борт вылета шлюпбалки может оказаться недостаточно для обеспечения необходимого зазора между шлюпкой и бортом. В этих случаях шлюпки для безопасного спуска снабжаются специальными салазками, которыми они скользят по борту.
Недостатком скатывающихся шлюпбалок является возможность обмерзания направляющих станины, что может потребовать предварительной околки льда перед спуском шлюпки.
В этом отношении более надежна шарнирная шлюпбалка. Она состоит из двух половин - верхней и нижней, которые при отдаче стопоров только поворачиваются вокруг оси, не смещаясь по станине. В остальном принцип работы ее тот же, что и у скатывающихся. Шарнирная шлюпбалка проще по конструкции, однако для получения того же вылета она должна иметь значительно большую высоту.
Спасательные плоты бывают жесткими и надувными. Жесткие плоты изготовляют из легких сплавов и пластмасс в виде замкнутой трубы - пантона. Внутренняя полость понтона разделена на ряд водонепроницаемых отсеков, которые заполнены воздухом или пенопластом. Внутри контура плота делается двойное непроницаемое днище, также разделенное на отсеки, в которых может храниться запас провизии, питьевой воды и другое установленное снабжение. Использование плота предусматривается любой стороной. Для этого внутри него с каждой стороны имеются скамьи для сидения, дуги для натягивания защитного тента, герметические крышки к двойному дну. Внутри и снаружи плота предусматривается обносный леер. Плот может перемещаться с помощью гребков или паруса.
Широко распространены на судах надувные плоты (рис. 16.15). Они также состоят из отдельных камер, что позволяет плоту удерживаться на воде при повреждении некоторых из них. Камеры заполняются сжатым газом (смесью углекислого газа с азотом) из специального баллона, причем заполнение может производиться как на палубе, так и автоматически на плаву.
- 385-
Рис. 16.15. Спасательный надувной плот: а — общий вид; б —каркас плота
1 — входной трал; 2 — плавучий якорь; 3 — надувное днище; 4 — шторка входа; 5 — сиг* нальный огонь; 6 — двойной тент; 7 — водосборник; 8 — газовый баллон в чехле; 9 — пусковой линь; 10 — водобалластный карман; 11 — леер; 12 — надувное сиденье; 13 — надувная дуга; 14 — камера плавучести; 1'5 — буксирное приспособление; 16 — банка
В походном положении плот хранится на палубе судна в специальном контейнере. Штерт от устройства, открывающего баллон с газом, закрепляется на судне. При сбрасывании плота за борт или при его всплытии после гибели судна штерт, натягиваясь, открывает баллон, в результате чего плот через 0,5-2 мин может уже плавать в надутом состоянии. Для лучшего обнаружения плота в море в дневное время ему придают ярко-оранжевую окраску. В ночное время на плоту загорается лампочка, питание которой происходит от водяной батарейки. Вместимость надувных плотов от 6 до 20 чел. Посадка людей производится в основном из воды. На больших судах для предотвращения попадания людей в воду стали применять различные скаты или рукава. Однако спасательные операции при этом оказались довольно сложными. Поэтому были созданы спускаемые спасательные плоты. Они надуваются на палубе, выносятся стрелой за борт, заполняются людьми и спускаются на воду.
Кроме вышеперечисленных спасательных средств коллективного и индивидуального пользования на судах имеются так называемые плавучие приборы, к которым относятся легкие плоты, не имеющие днища или имеющие решетчатый поддон, и спасательные скамьи, установленные на верхних палубах для отдыха людей и снабженные воздушными ящиками. Плавучие приборы сбрасывают в воду вручную или они всплывают самостоятельно после гибели судна.
§ 97. Мачтовое и грузовое устройства
Мачтовое устройство современных транспортных судов с механическим двигателем предназначено для несения средств сигнализации и связи и для поддержания грузовых стрел. Однако в последнем случае мачты все чаще заменяют более низкими грузовыми
- 386-
колоннами или полумачтами, которые могут быть одновременно использованы в качестве вентиляторов.
На современных грузовых судах находят все более широкое применение безвантовые мачты, которые бывают одиночными (рис. 16.16, а), двуногими и треногими. Наибольшее распространение получили двуногие мачты: Л-образные (рис. 16.16, б), П-образные (рис. 16.16, в) и V-образные (рис. 16.16, г). С помощью двуногих мачт удобнее
Рис. 16.16. Грузовые мачты различных типов: а — одиночная; б — двуногая Л-образная; в — двуногая П-образная; г — двуногая V-образная 1 — вторая палуба или второе дно; 2 — верхняя палуба; 3 — мачта; 4 — траверса; 5 — салинг; 6 — клотик; 7 — обух топенанта; 8 — ванты; 9 — башмак шпора; 10 — пяртнерс; П — степс; 12 — шпор мачты; 13 — стеньга; 14 — поворотная головка; 15 — консольный салинг; 16 — фундамент тяжеловесной стрелы
- 387-
располагать грузовые стрелы и легче обеспечивать необходимый вылет их за борт. Двуногие рамы объединяют наверху жесткой салинговой площадкой, к которой крепят стеньгу и топенанты стрел. V-образная мачта на каждой полумачте имеет консольные салинги.
Грузовое устройство судна - это комплекс оборудования, механизмов и конструкций, обеспечивающих погрузку и разгрузку судна, а также перемещение грузов внутри него.
При работе судна на линии между хорошо оборудованными портами собственные грузовые устройства обычно не используются. Однако собственное грузовое устройство позволяет производить грузовые операции как самостоятельно, например при стоянке в необорудованном порту или на рейде, так и совместно с береговыми средствами в целях ускорения грузовых работ.
Многообразие перевозимых морем грузов и расширяющаяся специализация морских судов обусловливают необходимость постоянного совершенствования и поиска новых видов грузовых устройств.
В состав грузовых устройств на универсальных сухогрузных судах входят грузовые стрелы или краны, закрытия грузовых люков и средства внутритрюмной механизации. На судах с горизонтальной грузообработкой грузовыми устройствами являются аппарели, пандусы, погрузочные лифты и подъемники; на лихтеровозах типа ЛЭШ - катучие козловые краны. На судах, перевозящих сыпучие (навалочные) грузы, роль грузовых устройств выполняют транспортеры и перегружатели различных типов. На наливных судах грузообра-ботка ведется с помощью грузовых насосов и трубопроводов. На пассажирских судах к числу грузовых устройств могут быть отнесены всевозможные лифты, а также устройства для погрузки на судно автомашин, багажа и провизии.
Классификация судовых грузовых устройств представлена на рис. 16.17.
Грузовое устройство со стрелами отличается высоким расположением точек крепления оснастки, удерживающей стрелу в рабочем положении. Для этой цели используют мачты и надстройки. Устройство размещают вблизи грузовых люков, в нос или в корму от них, на отдельных площадках, которые находятся на специальных грузовых рубках (тамбучинах) и на рострах надстроек. Тамбучины высотой 2,5-3 м располагают между грузовыми люками, что обеспечивает ряд эксплуатационных удобств: улучшается обзор для лебедчика, лебедки не мешают размещению палубного груза, снятые крышки люкового закрытия находятся под рострами рубки или надстройки, доступ в закрытые трюмы возможен через двери и трапы в рубках.
В зависимости от грузоподъемности различают легкие стрелы (гру-заподъемностью до 10 т) и стрелы-тяжеловесы (грузоподъемностью 10-300 т). В зависимости от обеспеченности механизмами (лебедками) для выполнения рабочих движений различают обычные и механизированные стрелы.
Легкая грузовая стрела (рис. 16.18) состоит из длинного металлического стержня трубчатой или ажурной конструкции, один конец
- 388-
Грузовые устройства
Рис. 16.17. Классификация судовых грузовых устройств
которого - шпор - шарнирно связан с мачтой, грузовой колонной или самостоятельным фундаментом вблизи мачты, а второй конец - нок -поддерживается снастью, называемой топенантом. Благодаря шарниру стрела может поворачиваться в горизонтальной и вертикальной плоскостях. Последнее достигается изменением длины топенанта, который выбирают или вытравливают либо с помощью турачки грузовой лебедки, либо специальной топенантной лебедкой. При отсутствии специальных лебедок топенант в нужном положении стопорят с
- 389-
Рис. 16.18. Легкая грузовая стрела
1 — башмак шпора; 2 — вертлюг шпора; 3 — мачта; 4 — обух топенанта; 5 — блок топенанта; 6 — топенант; 7 — обух нока; 8 — грузовой блок; 9 — противовес; 10 — вертлюг;
11 — гак; 12 — тали оттяжки; 13 — оттяжка; 14 — грузовой шкентель; 15 — стрела; 16 — направляющий блок; 17 — грузовая лебедка; 18 — палубный обух топенанта; 19 — цепной стопор; 20 — лопарь топенанта; 21 — тре- Рис. 16.19. Спаренная работа двух гру-угольное звено зовых стрел
помощью цепного стопора с треугольным звеном, который накидывают на рым или обух палубы.
Перемещение груза осуществляют с помощью стального троса -шкентеля, который наматывают .на барабан грузовой лебедки. Длина грузовой стрелы, а также длина шкентеля должна обеспечивать подъем и опускание груза из любой точки грузбвого трюма, а также с расстояния не менее 2 м от борта судна на пирсе (минимальный вылет стрелы). Вылет тяжеловесных стрел должен составлять не менее 4 м.
Легкие грузовые стрелы с оснасткой для одиночной работы имеют ограниченное применение в качестве вспомогательного грузового устройства. Причиной этого являются необходимость осуществлять поворот стрелы оттяжками вручную и большая продолжительность одного цикла работы стрелы, достигающая 4-5 мин. Поэтому на практике предпочитают спаренную работу двух стрел (способ „на телефон”) (рис. 16.19). Грузовые шкентели двух стрел объединяют на общем трехзвеннике, к которому крепится и гак. Нок одной из стрел (люковой) устанавливается над люком, а другой (бортовой) выносится за борт. Стрелы раскрепляются неподвижно с помощью топенантов, оттяжек и топрика (топрик-талей). В этом случае перемещение груза происходит вследствие согласованного изменения длины шкентелей. Несмотря на некоторое снижение грузоподъемности при спаренной
- 390-
5
Рис. 16.20. Оснастка Фарелла для спаренной работы стрел
1 — оттяжка бортовой стрелы; 2 — бортовая стрела; 3 — топенаит-тали; 4 — топрик; 5 — люковая стрела; 6 — оттяжка люковой стрелы; 7 — стойки оттяжек; 8 — топенант-, ные лебедки
Рис. 16.21. Оснастка Мо-Слевинг
1 — колонка; 2 — мантыль оттяжки; 3 — ходо вой конец топенанта; 4 — топенантный блок; 5 — салинг; 6 — коренной конец топенанта; 7 — грузовой шкентель; 8 — верхний блок оттяжки; 9 — нижний блок оттяжки; 10 — двухбарабаиная топенантная лебедка;
11 — грузовая лебедка
работе грузовых стрел, общая производительность возрастает в 3-4 раза, так как рабочий цикл длится около 35-40 с. Однако и при спаренной работе сохраняется присущий одиночным схемам недостаток-ограниченная возможность распределения груза. Этого недостатка лишены патентованные грузовые стрелы системы Фарелла, Велле и Мо-Слевинг.
Оснастку Фарелла (рис. 16.20) также применяют для спаренной работы стрел. В этой усовершенствованной оснастке оттяжки закрепляются на специальных стойках у борта так, что. точки их крепления оказываются на одной линии со шпорами стрел. Топенанты обеих стрел оснащаются талями, а ходовые концы подаются на топенантные лебедки, что позволяет менять вылет стрел без их полной переоснастки.
Еще большими возможностями обладают механизированные стрелы с оснасткой Мо-Слевинг (рис. 16.21), Велле и Халлена. Главной особенностью механизированных стрел является сдвоенный топенант со значительным разносом топенантных блоков.
Оснастка Халлена обеспечивается Т-образными или V-образными мачтами, позволяющими получить большое удаление неподвижных блоков талей топенанта от оси судна. Каждый топенант обслуживается отдельной лебедкой. При вращении барабанов лебедок в одну сторону
- 391 -
стрела изменяет вылет, при работе барабанов в разные стороны - пово
рачивается.
В отличие от легких тяжеловесные стрелы опираются своим шпором не на мачту, а на специальный фундамент, установленный около нее. У тяжеловесных стрел грузоподъемностью более 20 т применяют врезной шкив в районе нока, через который проводят ходовой конец грузового шкентеля, направленного через канифас-блок у салинга мачты к барабану грузовой лебедки. Работают тяжеловесы либо поодиночке, но с переменным вылетом, либо вместе с патентованными конструкциями с двойным топенантом. Тяжеловесную стрелу при одиночной работе обслуживают четыре лебедки (грузовая, топенантная и две для оттяжек), причем для этого нередко используют те же грузовые лебедки, что и для легких стрел. Поэтому грузовой шкентель и топенант тяжеловесов работают через многошкивные тали (пяти-, шестикратные), называемые гинями.
Тяжеловесная грузовая стрела обычно работает на оба борта, обслуживая при этом только тот трюм, над которым она установлена. Если возникает необходимость в обслуживании соседнего трюма, то стрелу переставляют. Чтобы исключить эту трудоемкую и длительную операцию, применяют систему с перекидным тяжеловесом (систему Штюлькен, оснастку типа двойной маятник, отечественную оснастку с меняющимися блоками), состоящую из двух вертикальных или слегка наклоненных к ДП массивных грузовых колонн, каждая из которых оканчивается вверху вращающейся головкой с блоками для топенанта. Тяжеловесную стрелу устанавливают между этими колоннами и с
помощью топенантов перекидывают на любой из смежных трюмов, между которыми находится грузовое устройство (рис. 16.22).
После окончания грузовых операций перед выходом в море все стрелы надежно закрепляют по-походному. Легкие стрелы чаще всего опускают до горизонтального положения, и их ноки закрепляют на специальных подставках на палубе. Если судно перевозит палубный груз, то стрелы крепят вертикально к мачте, где для этого предусматривается специальный бугель с хомутом. Тяжеловесные стрелы всегда крепят вертикально, так как их используют не при всех грузовых операциях. Бегучий такелаж хорошо обтягивают вдоль стрелы или же убирают совсем. На лебедки надевают специальные чехлы.
Грузовые краны получили на современных судах очень большое распространение. Краны компактнее стрел,
Рис. 16.22. Механизированная тяжеловесная стрела системы Штюлькен
- 392-
Рис. 16.23. Судовые грузовые краны различных типов
удобнее в эксплуатации, во многих случаях обеспечивают значительно большую производительность при выполнении грузовых операций. За последние годы появились принципиально новые конструкции палубных кранов, а у кранов традиционной конструкции заметно возросла грузоподъемность, в качестве приводов стали использовать новые механизмы (электрогидравлические).
Судовые грузовые краны в отличие от стрел связаны с корпусом судна только своими опорными конструкциями (рис. 16.23). Шкивы для запасовки тросов бегучего такелажа размещаются на стреле и на корпусе крана. По способу закрепления на судне различают стационарные и перемещающиеся краны. По принципу работы - полноповоротные, портальные с выносными консолями, портальные с грузозахватным элементом в пределах портала.
Судовой стационарный кран состоит из колонны со стрелой, обычно ажурной конструкции, поворотной площадки с подъемно-поворотным механизмом и постом управления и баллера, являющегося основой крана для закрепления его на корпусе судна (баллер иногда
- 393-
проходит; сквозь верхнюю палубу до нижележащей). Для регулирования длины такелажа, т. е. для изменения вылета стрелы, используют специальную лебедку. Другая лебедка предназначена для обслуживания грузового шкентеля. Поворот площадки крана с колонной и стрелой вокруг вертикальной оси осуществляется механизмом поворота, который состоит из неподвижного зубчатого венца и находящейся с ним в зацеплении зубчатой шестерни, вращаемой от двигателя.
В зависимости от типа приводных двигателей различают электрические, гидравлические и электрогидравлические краны. Последние, благодаря исключительной маневренности, получили наибольшее распространение.
В последнее время все большее применение находят спаренные краны, устанавливаемые на одной поворотной платформе. Каждый из кранов также может поворачиваться вокруг вертикальной оси. Каждый кран может работать как отдельно, так и совместно, при этом грузоподъемность при спаренной работе почти вдвое превышает грузоподъемность одного крана.
Проблема увеличения вылета стрелы крана успешно решается установкой кранов не в ДП судна, а вдоль борта. У этого способа есть еще одно преимущество - существенно увеличивается площадь палубы для размещения дополнительного груза.
Постоянное совершенствование конструкций судовых кранов привело к отказу от канатного топенанта. Вылет стрелы изменяется с помощью гидроцилиндров, что значительно упрощает конструкцию механизма изменения высоты за счет исключения топенантной лебедки и бегучего такелажа, а также снижает высоту кабины. Кроме того, грузовая лебедка выносится на основание стрелы, и, благодаря отсутствию вырезов для тросов, кабина крана становится полностью герметичной. Примером такой конструкции является кран типа LAP5 фирмы „Вяртсила” (рис. 16.24). Эта же фирма предлагает краны по схеме ломающейся стрелы (рис. 16.25). Такая конструкция расширяет эксплуатационные возможности крана, позволяет устанавливать его в ограниченном пространстве.
В качестве грузового устройства на контейнеровозах нередко применяют стационарные краны грузоподъемностью не менее 30 т. Как правило, они снабжены универсальными контейнерами спредерами с автозахватами, приспособленными для работы как с 20-футовыми, так и с 40-футовыми контейнерами. Однако более рациональным представляется установка на контейнеровозы перемещающихся по рельсам портальных кранов, поскольку они могут быть легко удалены из района ведения грузовых операций при наличии высокопроизводительных терминальных перегружателей.
Перемещающиеся по рельсам поворотные краны (рис. 16.26) обеспечивают погрузку в несколько трюмов судна, их установка на судне не требует больших затрат, однако при их использовании интенсивность грузовых операций на судне несколько ниже, чем при применении стационарных поворотных кранов. Чаще всего краны перемещаются вдоль судна, иногда совмещаются продольное и поперечное
- 394-
Рис. 16.24. Кран типа LAP5 а “ минимальный вылет; b — максимальный вылет
Рис. 16.25. Кран с ломающейся стрелой
Рис. 16.26. Перемещающиеся поворотные краны: а - с закрепляемой тележкой; б — с подвижной тележкой; в — портальный обыкновенный; г — портальный с поперечной тележкой
- 395-
перемещения. В конструкции с закрепляемой тележкой кран прочно соединен с нею. На период выполнения грузовых операций тележку закрепляют на рельсах рельсовыми захватами. При установлении рельсов закрытого типа кран на тележке может перемещаться по ним вдоль судна с грузом на гаке.
Портальные катучие краны с консолями являются универсальными грузовыми устройствами средне- и крупнотоннажных судов, способными перегружать сыпучие, пакетированные и контейнерные грузы. Примером подобной конструкции крана может служить устройство Алгоккин (рис. 16.27). Иногда предусматривается складная конструкция такого крана; при установке по-походному верхнее строение крана (крановая балка) опускается. На контейнеровозах на уровне верхних балок портальных кранов, например кранов фирмы АСЕА,пре-дусмотрены выдвижные или поворотные консоли. Грузоподъемность кранов, предназначенных для перегрузки 20- и 40-футовых контейнеров, составляет соответственно 20 и 30 т. Подвеска, применяемая для перегрузки генерального груза, имеет грузоподъемность Ют.
На рис. 16.28 представлена конструкция судового катучего козлового крана с поворотными консолями. Наличие консолей позволяет осуществлять погрузку-разгрузку контейнеров с необорудованного причала на борт судна без применения дополнительного оборудования. По пролетному строению козлового крана перемещается грузовая тележка с телескопическим грузозахватным приспособлением. Перемещение грузовых тележек по консолям крана за пределы пролетного строения позволяет принимать грузы, находящиеся на расстоянии до 9 м от борта судна. Грузоподъемность крана - до 40 т, пролет -30,66 м.
Наибольшую грузоподъемность (500 т) имеют перемещающиеся козловые краны, установленные на лихтеровозах типа ЛЭШ (рис. 16.29) и обеспечивающие подъем-опускание лихтера и его перенос вдоль судна. На лихтеровозах с кормовым подъемником весь процесс погрузки осуществляется поочередным действием двух устройств. Подъем и опускание лихтера производит подъемник, а их перемещение вдоль судна - транспортная тележка.
Суда-баржевозы докового типа грузового устройства не имеют, поскольку кормовые или носовые ворота лишь обеспечивают возможность доставки груза в грузовые помещения судна.
Появление транспортных судов с горизонтальной грузообработкой связано с развитием единых транспортных систем, важным элементом которых являются трейлеры и различные виды колесной техники. Грузовые устройства судов с горизонтальной грузообработкой включают внешнюю кормовую аппарель, кормовой порт, носовые, скуловые, бортовые и внутренние аппарели, пандусы, подъемники, закрытия (над аппарелями, пандусами).
Кормовые аппарели являются самыми сложными и дорогими грузовыми устройствами. И все же, несмотря на это, для транспортировки грузов между берегом и судном наиболее часто используют кормовые аппарели трех типов: прямые, угловые и поворотные (рис. 16.30).
- 396-
Рис. 16.27. Катучий кран типа Алгок-кин с выдвижной консолью
1 — грузовая тележка с лебедкой; 2 — выносной транспортер; 3 — грейфер
Рис. 16.28. Судовой катучий козловой кран, установленный на судне у стенки в рабочем состоянии (а); вид сверху на судно с козловыми кранами в рабочем (1) и в походном (2) положениях (б)
Рис. 16.29. Козловой кран грузоподъемностью 500 т для лихтеровоэов типа ЛЭШ
- 397-
Рис. 16.30. Внешние грузовые устройства, применяемые на судах с горизонтальной грузообработкой; а, б — прямые кормовые аппарели; в — две прямые кормовые аппарели; г — угловые кормовые аппарели; д — кормовая и угловая аппарели; в — поворотная кормовая аппарель; ж — две кормовые полупово-ротные аппарели
- 398-
Рис. 16.32. Носовая аппарель судна с горизонтальной грузообработкой типа „Иван Дербенев'*’
- 399-
В отдельных случаях применяют носовые поворотные устройства. Целый ряд судов оборудован несколькими типами аппарелей, например, двумя кормовыми прямыми, двумя кормовыми полуповоротны-ми, кормовыми прямой и угловой и другими в зависимости от особенностей эксплуатации.
Грузоподъемность угловых и поворотных аппарелей (70-80 т) у большинства судов соответствует массе 12,2-метрового ролл-трейлера с тягачом или вилочного погрузчика с 20-футовым контейнером. Прямые кормовые аппарели рассчитаны на двухпоточное движение или прием штабеля контейнеров и имеют грузоподъемность 250 т и более. Распределение грузов внутри судна осуществляется с помощью внутренних аппарелей, пандусов и лифтов грузоподъемностью 50-70 т, шириной соответственно 3,5-3 и 4,5- 4 м при длине 16-18,5 м.
Каждое из устройств имеет и достоинства, и недостатки. Внутренние аппарели и пандусы обеспечивают для большинства видов груза большую интенсивность грузообработки, но установка их на судне связана со снижением грузовместимости. Применение лифтов влечет за собой снижение интенсивности грузообработки, но потери грузовместимости не столь значительны. На крупнотоннажных судах предпочтение отдается аппарелям и пандусам, поскольку уменьшение вместимости по сравнению с общей грузовместимостью менее значительно, а большая интенсивность грузообработки существенно сокращает время грузовых операций в портах. На среднетоннажных судах, как правило, применяют компромиссное решение: на верхнюю палубу груз поступает по аппарели, а в нижние грузовые помещения подается лифтами. В последнее время отмечается тенденция увеличения доли судов, оборудованных только лифтами, количество которых для сохранения интенсивности грузообработки доходит до трех.
В настоящее время существует несколько типов носовых аппарелей (рис. 16.31, 16.32), но такого широкого применения, как кормовые, они не нашли из-за их довольно сложной конструкции и высокой строительной стоимости.
Бортовые аппарели устанавливают на судах для осуществления операций с грузами на поддонах. Используют бортовые аппарели редко, так как небольшое расстояние между корпусом судна и причалом не позволяет при значительной разности колебаний уровней производить грузовые операции. Поэтому практикуется передача груза через бортовые лацпорты с помощью вилочного погрузчика, перемещающего груз на площадку, размещенную на судне непосредственно за бортовым лацпортом и регулируемую по высоте, чтобы всегда быть на уровне причала. При одной и той же длине и расчетной нагрузке стоимость пандуса значительно ниже стоимости подвижной аппарели, служащей в положении по-походному закрытием. Однако закрытие над пандусом существенно повышает стоимость судна. Преимуществом подвижной аппарели перед пандусом является также высвобождение ею части полезного объема судна под грузы.
Грузовой подъемник простейшего типа - тросового - имеет максимальную грузоподъемность 50 т, высоту подъема 5-6 м, скорость
- 400-
подъема 5-6 м/мин, размеры платформы 16 х 3,5 м. Подъемник поднимает груз за четыре угла с помощью гидравлической лебедки. Может обслуживать несколько палуб. Цепные подъемники (одноярусные и двухъярусные) с принципом действия тросового подъемника нашли применение при доставке грузов с главной палубы на вышележащие палубы.
Подъемники рычажного типа обычно используют для доставки
Рис. 16.33. Подъемник рычажного типа
грузов на настил второго дна. Типовой рычажный подъемник имеет платформу размерами 13 х 3 м и предназначен для подъема груза на высоту 4-5 м со скоростью 5 м/мин (рис. 16.33).
По сравнению с подвижной аппарелью и пандусом подъемники имеют более высокую стоимость, но позволяют оптимальным образом
использовать грузовое пространство судна.
В качестве грузовых устройств на судах для перевозки навалочных грузов в основном используют стационарные и продольно-пере-мещающиеся поворотные краны. Грузоподъемность кранов судов, построенных в 80-е гг., составляет не менее 15 т. Грузовые устройства устанавливают, как правилр, на судах первых двух дедвейтных групп (10-20 тыс. т, 25-40 тыс. т). Крупнотоннажные суда (55-75 тыс. т и более 80 тыс. т) грузовыми устройствами обычно не оборудуют.
Особую группу представляют саморазгружающиеся суда для перевозки навалочных грузов, которые можно разделить на две группы: для перевозки пылевидных грузов (цемента, окиси алюминия) и кусковых грузов (угля, руды и т. п.). На судах первой группы устанавливают мощные пневматические устройства, которые по трубопроводам выкачивают груз на берег и наоборот. Суда второй группы оборудуют различными грузовыми устройствами: транспортерами, шнеками и т. п., но большее распространение получила транспортерная система выполнения грузовых операций.
§ 98. Закрытия грузовых помещений и приспособления для крепления груза
Закрытия судовых грузовых помещений имеют большое значение как для обеспечения сохранности груза и повышения эффективности морских судов, так и для безопасности мореплавания. Люковые закрытия должны отвечать следующим требованиям:
- обеспечивать непроницаемость грузовых помещений, надежно перекрывать грузовые проемы;
- иметь достаточную прочность для размещения грузов на самом закрытии;
- 401 -
Рис. 16.34. Съемные люковые закрытия
Рис. 16.35. Четырехсекционное шарнирно-откидное закрытие
- 402-
- сохранять работоспособность при углах крена судна до 8* и дифферента до 3* независимо от седловатости палубы, а также при температурах окружающего воздуха от - 30 до + 50 ’С;
- не затруднять грузообработку судна в положении „Открыто”;
- иметь минимальные затраты труда на их обслуживание;
- отвечать общеинженерным требованиям, т. е. иметь минимальную массу, высокую ремонтопригодность, технологичность и т. д.
Люковые закрытия располагают на верхней и промежуточных палубах. По кинематическому признаку различают съемные, шарнирно-откидные, откатываемые, сдвигаемые и наматываемые закрытия. Некоторые из закрытий могут сочетать в себе несколько кинематических признаков.
Съемные люковые закрытия целиком или посекционно отделяют от комингса люка и переносят на соседний люк посредством грузовых средств (рис. 16.34). Иногда крышки перемещают с помощью тележки и укладывают в штабель возле поперечного комингса люка. Секции съемных люковых закрытий в вертикальном положении занимают у поперечного комингса меньше места. Съемные люковые закрытия имеют наиболее простую конструкцию. Однако при размещении секций на соседних люках следует учитывать очередность грузообра-ботки трюмов.
Шарнирно-откидные закрытия люка являются наиболее распространенными на морских судах. Они различаются количеством секций, направлением их откидывания (вдоль или поперек судна) и кинематикой привода. При открытых грузовых люках вертикально расположенные секции крышек занимают мало места на палубе, что и определило широкое применение шарнирно-откидных закрытий на судах с близкорасположенными люками (рис. 16.35).
Откатываемые закрытия имеют секции, которые при открывании люка перемещаются на катках вдоль одного из комингсов. Если ширина грузового люка не превышает половины ширины судна, то секции откатываемого закрытия можно смещать к бортам. Каждая из секций имеет две пары катков и свой привод (рис. 16.36, а). У откатываемых многосекционных закрытий типа Мак-Грегори секции у комингса устанавливаются вертикально. Секции соединяются между собой цепями (рис. 16.36, б) или металлическими тягами (рис. 16.36, в).
Наматываемые закрытия имеют секции, которые шарнирно соединены между собой и при открывании люка наматываются на ось, барабан или на одну из секций. Многосекционное наматываемое закрытие показано на рис. 16.37. Длина его секций последовательно возрастает, что позволяет укладывать закрытие в несколько слоев.
Закрытия с большим количеством шарнирных соединений между секциями требуют повышенного внимания и не очень надежны в работе.
На контейнеровозах, имеющих большое раскрытие трюмов и соответственно люки больших размеров, применяют люковые закрытия понтонного типа. Эти люковые крышки выполнены в виде одной секции с размерами грузового люка. Понтонную крышку люка поднимают
- 403-
Рис. 16.36. Откатываемые люковые закрытия: а — с раздельным откатом вдоль судна; б — механизированные системы Мак-Грегори; в — механизированные с жесткими тягами
Рис. 16.37. Наматываемое люковое закрытие
- 404-
грузовым краном и укладывают на свободное место на палубе или пирсе.
Водонепроницаемость люковых закрытий обеспечивается уплотнениями и задрайками.
К уплотнениям предъявляется большоё количество требований. Так, нагрузки, возникающие при движении судна на волнении, не должны вызывать смещений уплотнительной прокладки относительно уплотнительного бурта. Деформации уплотнения не должны вызывать преждевременного износа прокладки или ее разрушения. Остаточные деформации должны быть минимальными и не вызывать нарушений проницаемости при многократном открывании и закрывании люков. Материал уплотнительной прокладки не должен терять упругих качеств при температурах от - 30 до + 70 °C, ее рабочие поверхности должны быть износо-, свето-, озоностойкими и не должны бояться воздействия нефтепродуктов.
Задрайки предназначены для обжатия уплотнительных прокладок закрытий, а также для крепления крышек к комингсам грузовых люков. Задрайки по конструкции бывают винтовыми, закладными, эксцентриковыми и клиновыми.
Для предохранения уплотнительных прокладок от разрушения при откатывании или откидывании люковых закрытий служат специальные устройства разобщения и задраивания.
В целях обеспечения безопасности и сохранности груза, принятого в трюмы и на палубы, необходимо принимать меры по-походному креплению груза. Все детали, снасти и приспособления, используемые для этой цели, можно разделить на две группы. В первую входят детали, постоянно закрепленные на корпусных конструкциях, такие как стационарные и откидные обухи, вварные гнезда для крепления гака найтова. Во вторую группу входят съемные приспособления, связывающие отдельные грузовые единицы друг с другом или с корпусом судна. Основой съемных деталей для крепления грузов являются найтовы или оттяжки разного рода, включающие элементы, с помощью которых найтов крепится к упаковке груза и к корпусным конструкциям (для этого концы найтовов оформляют в виде коушей). Необходимое натяжение найтова достигается с помощью винтового талрепа.
Если в качестве груза используют контейнер, то все его углы оформляют таким образом, чтобы обеспечивалось их соединение между собой и крепление к палубе с помощью стандартных фитингов, струбцин и контейнерных стопоров. Кроме этого, контейнеры в общем штабеле раскрепляют найтовами.
Закрепление колесной техники производят тросовыми и цепными найтовами со специальным натяжным устройством. Деревянные стопорные подушки, устанавливаемые с двух сторон колеса, исключают прокатывание техники по палубе.
Для крепления перевозимых на открытых палубах лесных грузов применяют металлические или деревянные стензели (вертикальные стойки), которые устанавливают у фальшборта по всей длине участка
- 405-
палубы, предназначенного для размещения палубного лесного груза.
Контрольные вопросы
1. Какие составные элементы входят в якорное и рулевое устройства?
2. Из каких элементов состоит оснастка легкой и тяжелой грузовых стрел?
3. Перечислите типы люковых закрытий.
Глава 17 СУДОВЫЕ СИСТЕМЫ
Каждое морское судно имеет развитую сеть трубопроводов, необходимых для перекачки воды, топлива, воздуха и других жидкостей и газов. Эти трубопроводы с относящейся к ним арматурой, механизмами и приборами, называют судовыми системами.
Судовые системы обеспечивают самые разнообразные судовые нужды и по своему назначению подразделяются на несколько групп:
- трюмные системы, противопожарные системы, санитарные системы, системы отопления, рефрижераторные системы, системы вентиляции и кондиционирования воздуха;
- специальные системы танкеров;
- вспомогательные системы разного назначения: воздушные, измерительные и температурные трубы различных цистерн и отсеков, системы дистанционного контроля за уровнем жидкости и осадкой судна, трубопроводы для продувания забортной арматуры и т. п.
Кроме перечисленных, на каждом судне имеются системы, обеспечивающие нормальную работу судовых двигателей и механизмов. Эта группа систем входит в состав энергетического оборудования судна и рассматривается в курсе судовых энергетических установок.
§ 99. Трюмные системы
Транспортные суда имеют обычно только две трюмные системы: осушительную и балластную. Некоторые специальные типы судов, например буксиры-спасатели, ледоколы, суда ледового класса, кроме осушительной и балластной систем оборудуют и другими системами этой группы. К ним относятся водоотливная, спасательная, креновая, дифферентная системы.
Осушительная система служит для удаления за борт трюмной воды, т. е. воды, которая постепенно накапливается в трюмных помещениях судна - в МО, грузовых трюмах и др. Причины скопления такой воды могут быть разными: отпотевание металлических частей корпуса, возможные протечки в трубопроводах и наружной обшивке, продувание механизмов, мытье настилов и т. п. Трюмная вода собирается в льялах, проходящих вдоль обоих бортов от форпиковой
- 406-
до ахтерпиковой переборки, и в сборных колодцах - специальных углублениях в двойном дне. Из помещений, расположенных выше уровня двойного дна, вода поступает в льяла и колодцы по спускным трубам.
В льялах и спускных колодцах установлены приемные патрубки осушительной системы. Поскольку суда обычно имеют дифферент на корму, приемники размещают у кормовой переборки отсека. В каждом трюме устанавливают не менее двух приемников - по одному с каждого борта.
Контроль за уровнем воды в льялах производят каждую вахту. Уровень замеряют футштоком через измерительные трубки или с помощью дистанционных приборов. Наиболее удобной в эксплуатации является централизованная система замера уровня, совмещенная с предупредительной сигнализацией. Перспективной является автоматическая система откачки воды из льял.
Балластная система служит для приема, перемещения по судну и удаления за борт жидкого балласта. Балласт (забортная вода) принимается на судно для увеличения осадки при порожнем рейсе с целью улучшения работы гребных винтов, для выравнивания крена или дифферента, изменения остойчивости судна. Вес принимаемого балласта доходит до 20 % водоизмещения судна, а иногда и более.
В качестве балластных емкостей используют отсеки двойного дна, форпик, ахтерпик, бортовые и подпалубные цистерны, диптанки.
Для приема балласта в систему служит специальный забортный клапан - кингстон, устанавливаемый на днище или скуле судна в МО. Своим приемным фланцем кингстон крепится непосредственно к наружной обшивке судна или к особому кингстонному ящику, сообщенному с забортным пространством.
Для предохранения системы от засорения приемные отверстия кингстонов закрывают решетками. Для очистки решеток от водорослей, льда и т. п. к кингстонам подводят по специальному трубопроводу пар и сжатый воздух. При каждой постановке судна в док кингстоны обязательно осматривают и, если необходимо, ремонтируют.
Водоотливная система предназначена для откачки больших масс воды из затопленных отсеков после заделки пробоины.
Спасательная система в отличие от водоотливной специально приспособлена для откачки аварийной воды из отсеков других судов. Кроме мощных насосов система оборудована гибкими шлангами, которые перекидываются с палубы в затопленный отсек поврежденного судна.
Креновую систему применяют на ледокольных судах. Она служит для преднамеренного накренении и раскачивания судна с целью освобождения от сжатия льдами или облегчения схода с мели, а также для выравнивания крена, возникшего вследствие затопления бортовых отсеков, неравномерного расходования топлива или других причин. Наиболее широко креновую систему используют для искусственного раскачивания ледокола, чтобы облегчить его продвижение в тяжелых льдах.
- 407-
Дифферентах система служит для преднамеренного создания или устранения дифферента судна путем заполнения или осушения специальных носовых либо кормовых емкостей. Перемещение балласта осуществляется мощными насосами или продувкой цистерн сжатым воздухом. Дифферентную систему, как и креновую, применяют в основном для облегчения движения ледокола во льдах. Например, если ледокол не может преодолеть тяжелые льды за счет собственного веса, прибегают к искусственному утяжелению носовой оконечности судна. Для этого перекачкой балласта сначала создают дифферент на корму, чтобы носовая оконечность судна легко взошла на кромку льда, а затем этот балласт перекачивают из кормы в нос, чем и обеспечивается продавливание ледяного покрова.
§ 100. Противопожарные системы
Причинами пожаров на судах являются чаще всего неосторожное обращение с огнем, замыкания в электропроводке, выбрасывание искр из дымовой трубы, самовозгорание некоторых грузов, например хлопка, угля. Пожар на судне является страшным бедствием, приводящим к гибели людей и всего судна.
Для активной борьбы с возникшим пожаром на судах предусматривают разнообразные противопожарные системы, которые можно подразделить на следующие группы: системы пожарной сигнализации, оповещающие экипаж о возникновении пожара в каком-либо месте судна; системы пожаротушения, являющиеся основным средством борьбы с огнем. Ввиду различных свойств горючих материалов суда оборудуют несколькими противопожарными системами. По роду используемого вещества различают системы водотушения, паротуше-ния, газотушения, жидкостного тушения и пенотушения.
Успех тушения пожара зависит прежде всего от быстроты обнаружения его очага. Для этого на судах применяют автоматические системы пожарной сигнализации, извещающие о появлении признаков пожара в том или ином месте судна. Такими системами оборудуют помещения, в которых отсутствует постоянное наблюдение со стороны экипажа: грузовые трюмы, различные кладовые, пассажирские каюты и др.
Различают два основных типа этих систем: электрические и дымовые. Наибольшее распространение получили электрические системы сигнализации, при которых внутри контролируемых помещений, обычно на подволоке, устанавливают специальные приборы-извещатели, реагирующие на повышение температуры, появление дыма или пламени. Извещатели связаны электрической цепью с мостиком или специальным пожарным постом, где находится сигнальный щит. На щите нанесен боковой вид судна и имеются сигнальные лампочки, указывающие на определенное помещение. При возникновении пожара в каком-либо помещении извещатель замыкает или, наоборот, размыкает электрическую цепь, в результате чего на щите загорается сигнальная
- 408-
лампочка, указывающая место пожара, и одновременно включается звуковой сигнал.
На пассажирских и крупных грузовых судах в дополнение к автоматическим системам пожарной сигнализации предусматривают ручные извещатели, которые подают сигнал на пожарный пост от нажима кнопки.
Действие систем водотушения основано на охлаждении горящих веществ потоком воды. Такими системами оборудуют все морские суда для борьбы с пожарами в жилых и служебных помещениях, на открытых палубах и платформах.
В зависимости от способа подачи воды на очаг пожара различают системы, прдающие воду мощной сплошной струей от ручных или лафетных стволов (водопожарные системы), и системы, подающие воду в виде капель различного размера от специальных распылителей (спринклерные системы, системы водораспыления, водопожарные системы с особыми стволами).
Достоинства систем водотушения следующие: простота устройств, неограниченное количество гасящего вещества - воды, безвредность для людей. Недостатками этих систем является то, что вода может испортить груз и оборудование. Кроме того, водой нельзя тушить работающие электроустановки иэ-за опасности замыкания, а также ряд грузов, например карбид кальция, из-за опасности химических реакций, сопровождающихся выделением теплоты и взрывчатых газов, тушение горящих жидкостей водой затруднительно.
На судах системы водотушения, кроме прямого назначения, используют для снабжения водой пенных установок, орошения палубы, скатывания и мытья палубы, мойки якорной цепи при подъеме якоря и для других нужд.
Действие систем паротушения заключается в том, что горящее помещение заполняют паром, который частично вытесняет воздух и создает атмосферу, не поддерживающую горение. Паротушение применимо только в закрытых нежилых помещениях. Системами паротушения оборудуют грузовые трюмы, топливные цистерны, кладовые с легковоспламеняющимися веществами, котельные отделения, дымоходы для тушения загоревшейся сажи, а также грузовые танки, коффердамы и насосные отделения на танкерах.
Пар в систему поступает от котлов по отдельной магистрали, снабженной редукционным клапаном (детандером) для понижения давления. Магистраль подведена к распределительной клапанной коробке (станции паротушения), от которой в каждое помещение отходит самостоятельный трубопровод.
Система паротушения проста по устройству, пригодна для тушения большинства горючих веществ, включая жидкие. Недостатки паротушения следующие: необходимость тщательной герметизации помещения, что не всегда бывает возможным; пар вызывает порчу груза и оборудования; при тушении некоторых веществ, например селитры, карбида кальция, угля, применение пара опасно из-за возможности образования взрывчатых газов. Поэтому наряду с паротушением на
- 409-
судах находят широкое применение более эффективные, хотя и более сложные, системы химического тушения - системы газотушения и пенотушения.
Действие систем газового и жидкостного тушения, как и систем паротушения, основано на создании вокруг очага пожара атмосферы, не поддерживающей горение. Эти системы также применяют только в закрытых нежилых помещениях. На современных судах для целей пожаротушения используют углекислый газ (углекислоту), дымовые газы и специальные легкоиспаряющиеся жидкости. Соответственно различают системы углекислотного, дымового и жидкостного тушения.
Системой углекислотного тушения оборудуют грузовые трюмы, МО, помещения аварийных генераторов и насосов, кладовые Для хранения легковоспламеняющихся материалов, а также глушители двигателей и дымоходы котлов. При работе системы жидкая углекислота подается по трубопроводу в горящее помещение, где, попадая в атмосферные условия, полностью испаряется, увеличиваясь в объеме. При заполнении отсека углекислым газом на 30% содержание кислорода в атмосфере снижается (ниже 15 % против обычных 21 %) и горение прекращается.
Запас жидкой углекислоты хранят на судне в стальных баллонах под высоким давлением. Стандартный баллон емкостью 40 л при нормальных условиях содержит 30 кг углекислоты. Баллоны размещают на одной-двух станциях углекислотного тушения. При наличии на судне двух станций подвод углекислоты в каждый охраняемый отсек предусматривают от обеих станций.
Углекислотное тушение отличается быстротой и эффективностью действия, не портит груз, пригодно для борьбы с любым пожаром, в том числе для тушения электрооборудования, находящегося под током. Недостатки системы состоят в необходимости большого числа баллонов и очень высоком давлении в них (например, при 40 °C -130 атм), вследствие чего система имеет большой вес, в высокой стоимости, а также в опасности утечки газа, которую невозможно восполнить во время рейса.
В системе дымотушения (системе инертных газов) для тушения пожара используют газы, вырабатываемые в специальном газогенераторе за счет полного сгорания обычного дизельного топлива. Полученные негорючие газы, называемые условно инертными, состоят из азота и углекислоты. Они охлаждаются до 30-40 °C забортной водой, очищаются от следов сажи и направляются по системе трубопроводов к охраняемым помещениям.
В системе жидкостного тушения огнегасительным веществом служит особая жидкость, которая при выпуске в горящее помещение легко испаряется, превращаясь в тяжелый негорючий газ. Существует несколько составов огнегасительных жидкостей. Запас огнегасительной жидкости хранится в баллонах под небольшим давлением, что практически исключает опасность утечки. Жидкостная система пригодна для тушения пожаров любых горючих веществ, а также электроустановок, находящихся под током, причем гасящее действие жидкости
- 410-
даже выше, чем углекислоты. На новых судах система находит все большее применение, ею оборудуют МО, кладовые с легковоспламеняющимися веществами и т. п.
Действие систем пенотушения основано на том, что горящие поверхности изолируют от кислорода воздуха слоем специальной пены. Пеной можно тушить пожар как в помещении, так и на открытом воздухе. Обладая малым удельным весом (0,05-0,15 кг/мэ), пена легко удерживается на поверхности любой горючей жидкости, поэтому является эффективным средством для тушения нефтепродуктов. Системой пенотушения оборудуют прежде всего грузовые отсеки на танкерах, а также топливные и масляные цистерны, МО.
На судах применяют пену двух видов: химическую и воздушно-механическую. Химическая пена получается при химической реакции щелочи и кислоты, к которым добавляются вещества, придающие пене клейкость. Воздушно-механическая пена образуется путем механического смешивания пенообразующей жидкости, воды и воздуха. Соответственно различают системы химического и воздушно-механического пенотушения.
101. Окраска и маркировка судовых систем
Трубопроводы и арматуру судовых систем окрашивают под цвет помещений, в которых они расположены. Для того чтобы их можно было различать, на них наносят отличительные знаки в виде колец различного цвета. Ширина отличительных колец 25 или 50 мм, предупреждающих - 50 мм. Их цвет не должен совпадать с цветом окраски трубопровода. При совпадении цветов отличительные знаки наносят на вспомогательные кольца белого цвета.
Отличительные и предупреждающие знаки наносят на трубопроводы у палуб и платформ, переборок, механизмов, аппаратов, цистерн, клапанов, клинкетов, кранов, коробок и т. п., а также в местах переплетения труб. На прямолинейных участках трубопроводов отличительные знаки располагают на расстоянии не более 6 м друг от друга.
Ниже приведены примеры цветов отличительных и предупреждающих знаков для различных проводимых сред.
Цвет отличительного знака
Проводимая среда
Зеленый Серебристо-серый Коричневый
Жедтый (охра)
Сиреневый Голубой Черный
Вода
Пар
Минеральные, растительные, животные масла, горячие жидкости Газы в газообразном и сжиженном состоянии (кроме воздуха) Кислоты и щелочи Воздух Загрязненные и другие жидкости
-411-
Цвет предупреждающего знака Проводимая среда или назначе-
ние трубопровода
Красный Противопожарный
/ Желтый с черными диагональными Токсичная и т. п.
полосами '
Синий Питьевая вода, пищевые продукты
Контрольные вопросы
1. Перечислите основные типы судовых систем.
2. Назовите виды противопожарных систем.
3. Приведите примеры отличительных и предупреждающих знаков, наносимых на трубопроводах.
СПИСОК ЛИТЕРАТУРЫ
1. Барабанов Н В. Конструкция корпуса морских судов. Л.: Судостроение, 1981.552 с.
2. Бронников А. В. Морские транспортные суда. Л.: Судостроение, 1984.352 с.
3. Кацман Ф. М., Дорогостайский Д. В. Теория судна и движители. Л.: Судостроение, 1979.279 с.
4. Липис В. Б., Ремез Ю. В. Безопасные режимы штормового плавания судов. М.: Транспорт, 1982.118 с.
5. Мастушкин ГО. М. Управляемость промысловых судов. М.: Легкая и пищевая промышленность, 1981. 238 с.
6. Нечаев Ю. И. Остойчивость судов на попутном волнении. Л.: Судостроение, 1978.272 с.
7. Першиц Р. Я. Управляемость и управление судном. Л.: Судостроение, 1983.272 с.
8. Правила классификации и постройки малых судов. Л.: Транспорт, 1985. 928 с.
9. Справочник по теории корабля: В 3 т./Под ред. Я. И. Войткунского. Л.: Судостроение, 1985.
10. Судовые устройства/Под ред. О. И. Александрова. Л.: Судостроение, 1982.320 с.
11. Типовая информация об остойчивости и прочности грузового судна. М.: ЦРИА „Морфлот”, 1979. 92 с.
12. Требования к оперативной информации о непотопляемости морских сухогрузных судов. М.: В/О „Мортехинформреклама”, 1986.44 с.
13. Управление судами и составами/Соларев Н. Ф. и др. М.: Транспорт, 1983. 296 с.
- 412-
ОГЛАВЛЕНИЕ
Предисловие........................................................ 3
Введение.......................................................... 5
РАЗДЕЛ!. ТЕОРИЯ СУДНА............................................. 10
Глава 1. Плавучесть судна.......................................... 10
§ 1. Геометрия корпуса судна................................... Ю
$ 2. Плавучесть судна...................................... 13
Контрольные вопросы........................................... 30
Глава 2. Остойчивость судна........................................ 30
$ 3. Начальная остойчивость судна............................. 30
§ 4. Определение начальной остойчивости опытным путем......... 39
§ 5. Влияние переноса, приема или снятия твердых и жидких грузов иа посадку и начальную остойчивость судна.................... 42
$ 6. Нейтральные плоскости.................................. 51
§ 7. Влияние приема или снятия большого груза на посадку и начальную остойчивость судна................................. 52
$ 8. Остойчивость судна при посадке на мель................. 54
§ 9. Остойчивость на больших углах наклонения............... 57
§ 10. Построение диаграммы статической остойчивости и практическое ее использование.............................. 61
§ 11. Динамическая остойчивость........................... 64
§ 12. Кренящий момент при статическом и динамическом давлении ветра............................................. 70
$ 13. Требования Регистра СССР к остойчивости морских судов. 71
§14. Требования к Информации об остойчивости судна для капитана..................................................... 74
Контрольные вопросы......................................... 76
Глава 3. Непотопляемость судна.................................... 77
$ 15. Основные понятия и определения......................... 77
§16. Принципы обеспечения непотопляемости................... 78
$ 17. Коэффициенты проницаемости............................. 82
§ 18. Категории затопленных отсеков.......................... 83
$ 19. Методы расчета непотопляемости......................... 86
S 20. Оперативная оценка непотопляемости..................... 87
§ 21. Требования Правил Регистра СССР к делению морских судов иа отсеки.................................................... 89
Контрольные вопросы ......................................... 90
Глава 4. Основы гидромеханики..................................... 90
$ 22. Физические характеристики жидкости..................... 91
$ 23. Движение жидкостей................................... 95
$ 24. Основы теории подобия.................................. ЮЗ
-413-
J 25. Основы теории крыла...................................... 10В
$ 26. Морское волнение......................................
Контрольные вопросы............................................ 122
Глава 5. Сопротивление воды движению судна.......................... I22
$ 27. Сопротивление движению судна. Буксировочная мощность ... 222
$ 28. Сопротивление трения.................................... 224
$ 29. Сопротивление формы..................................... I2®
$ 30. Волновое сопротивление.................................. 130
$ 31. Сопротивление движению судна иа мелководье и ограниченном фарватере....................................... 134
$ 32. Изменение посадки судна при движении иа мелководье... 139
$ 33. Дополнительные составляющие сопротивления............... 143
§ 34. Особенности сопротивления воды движению судна с необычными формами и соотношениями главных размерений....... 148
§ 35. Экспериментальные методы определения сопротивления... 130
Контрольные вопросы............................................ 154
Глава 6. Судовые движители........................................ 155
$ 36. Классификация движителей................................ 155
$ 37. Геометрия гребного винта................................ 158
§ 38. Кинематические характеристики гребного винта............ 161
$ 39. Основы лопастной теории и гидродинамические характеристики гребного винта................................. 162
$ 40. Специальные режимы работы гребных винтов............... 167
S 41. Диаграммы для расчета гребных винтов.................... 168
$ 42. Взаимодействие гребных винтов с корпусом судна.......... 170
§ 43. Кавитация гребных винтов................................ 175
_ § 44. Особенности управления судна с ВФШ и ВРШ.................. 178
Контрольные вопросы............................................ 182
Глава 7. Качка и мореходность судна на волнении..................... 182
$ 45. Основные сведения о качке судна......................... 182
$ 46. Виды и параметры качки судна. Системы координат......... 184
$ 47. Судно как колебательная система......................... 188
$ 48. Качка судна без хода на тихой воде...................... 188
$ 49. Основы линейной теории качки судна на регулярном волнении....................................................... 194
$ 50. Влияние скорости судна и курсового угла на его качку. 198
$ 51. Штормовые диаграммы судна............................... 200
§ 52. Особенности нелинейной качки судна на регулярном волнении....................................................... 203
$ 53. Качка судна на нерегулярном волнении................... 205
К онтрольные вопросы.......................................... 309
Глава 8. Специальные вопросы мореходности судна на волнении ...... 2Ю
$ 54. Изменение остойчивости судна при движении на попутном волнении...................................................... 2Ю
$ 55. Ударные нагрузки....................................... 214
$ 56. Заливаемость судна на волнении......................... 219
$ 57. Ухудшение ходкости судна и условий работы гребного винта и двигателя на волнении....................................... 221
$ 58. Наклонения судна, перевозящего сыпучие грузы........... 222
$ 59. Экспериментальные исследования качки судна............. 226
$ 60. Основные принципы умерения качки судна.................. 228
Контрольные вопросы........................................... 231
-414-
Глава 9. Управляемость судна.................................... 231
S 51. Кинематические параметры криволинейного движения судна . 231
42. Судно как управляемая система........................ 233
j 63k Силы, действующие иа корпус судна на глубокой воде... 235
§ 64. Уравнения движения судна в горизонтальной плоскости. 249
5 65. Диаграмма управляемости судна....................... 253
$ 66. Креи судна на циркуляции............................ 256
$ 67. Устойчивость движения судна иа курсе................ 258
$ 68. Особенности управляемости судна иа заднем ходу....... 263
S 69. Управляемость судов с учетом внешних факторов........ 266
Контрольные вопросы........................г............... 278
Глава 10. Реверс судна с ВФШ и ВРШ.............................. 278
$ 70. Основные определения................................ 278
$ 71. Работа ВФШ при реверсе.............................. 280
$ 72. Работа ВРШ при реверсе.............................. 282
§ 73. Силы и моменты, определяющие траекторию судна при реверсе 286
$ 74. Особенности управляемости судов с ВФШ и ВРШ при реверсе... 294
$ 75. Упрощенное определение параметров реверса судов с ВФШ иВРШ....................................................... 297
К онтрольные вопросы..................................... 200
Глава И. Прочность корпуса судна ............................... 301
$ 76. Внешние силы и напряжения в корпусе судна. ......... 301
§ 77 Контроль общей продольной прочности судна в эксплуатации.. 308
Контрольные вопросы........................................ 311
Глава 12,'кодовые и маневренные испытания судов................... 311
$88. Ходовые испытания.................................... 311
$ 79. Определение маневренных характеристик................. 313
Контрольные вопросы......................................... 317
РАЗДЕЛП. УСТРОЙСТВО СУДНА...................................... 318
Глава 13. Классификация, основнвк характеристики й типы морааа судов................................................... 318
$ 80. Классификация морских судов......................... 318
§ 81. Технико-эксплуатационные характеристики морских судов.... 321
$ 82. Типы транспортных судов............................. 324
Контрольные вопросы....................................... 337
ГлаА 14. Общее расположение судна.............................. 337
$ 83. Архитектурно-конструктивные типы судов.............. 337
$ 84. Классификация судовых помещений..................... 340
$ 85. Расположение помещений иа судах..’.................. 342
Контрольные вопросы................................... 346
Глава 15. Конструкция корпуса судна............................ 346
$ 86. Основные конструктивные элементы.................... 346
$ 87. Наружная обшивка.................................... 348
$ 88. Конструкция днищевых перекрытий..................... 349
$ 89. Конструкция палубных и бортовых перекрытий.......... 354
$ 90. Конструкция оконечностей............................ 357
$ 91. Конструкция переборок............................... 362
Контрольные вопросы....................................... 364
-415-
Глава 16. Судовые устройства.......................................
§ 92. Швартовное устройство..................................
§ 93. Буксирное устройство...................................
§ 94. Якорное устройство.....................................
$ 95. Рулевое устройство и средства активного управления.....
$ 96. Спасательное устройство................................
$ 97. Мачтовое и грузовое устройства.........................
§ 98. Закрытия грузовых помещений и приспособления для крепления груза..............................................
Контрольные вопросы..........................................
Глава 17. Судовые системы....................................
$ 99. Трюмные системы .................................
$ 100. Противопожарные системы ........................
§ 101. Окраска и маркировка судовых систем.............
Контрольные вопросы....................................
365
365 368
371 375 381
386
401 406
406
406
408
411
412
412
Список литературы...............................................
412
УЧЕБНОЕ ИЗДАНИЕ
Кацман Феликс Максович, Дорогостайский Дмитрий Витальевич, Коннов Алексей Васильевич, Коваленко Борис Павлович
ТЕОРИЯ И УСТРОЙСТВО СУДОВ
Учебник для вузов
Зав. редакцией П. К. Зубарев. Редактор Н. И. Долинина. Художник С. В. Алексеев Художественный редактор А. Н. Миронов. Технический редактор И. Ю. Максимович. Корректор С. Н. Макоеская
ЦБ № 1314
Подписано в печать 14.06.91. Формат 60 х 90/16. Бумага офсетная № 2. Печать офсетная. Усл. печ. л. 26,0. Усл. кр.-отт. 25,48. Уч.-иэд. л. 27,01. Изд. № 4367 -88. Тираж 8000 экз.
Заказ 626. Цена2 р. 50 к.
Набрано в издательстве Судостроение” на наборно-печатающем автомате оператором В. В. Михайловой
Издательство Судостроение”, 191065, Ленинград, ул. Гоголя, 8.
Отпечатано в Тульской типографии при Государственном комитете СССР по печати г. Тула, пр. Ленина, 109.