/












































































Similar




Text
Экз. № 30
РАКЕТА 5В27У
ТЕХНИЧЕСКОЕ ОПИСАНИЕ
КНИГА ВТОРАЯ
Автопилот 5А42
ТО-5В27У-П-ОП
£4 />/
Редакция 2.
»
В книге пронумеровано 144 стр., кроме того, между стр. 30 и 31
помещена вклейка № 1 рис. 11; между стр. 138 и 139 помещены
3 приложения — вклейки № 2, 3 и 4.
СОСТАВ ТЕХНИЧЕСКОГО ОПИСАНИЯ
РАКЕТЫ 5В27У
Техническое описание ракеты 5В27У состоит из пяти
книг.
Книга первая содержит общие сведения о зенитной уп-
равляемой ракете и описание следующих частей ракеты:
планера, маршевого ракетного двигателя па твердом топли-
ве, воздушной системы, электросистемы, стартового двигате-
ля 5С45 и боевой части 5Б18.
Книга вторая содержит описание автопилота 5Л42.
Книга третья содержит описание аппаратуры радиоуп-
равления и радиовизирования 5У44У.
Книга четвертая содержит описание радиовзрывателя
5Е15СБУ’, предохранительно - исполнительного механизма
5В87 и пульта 5Р87.
Ьнига пятая содержит описание турбоэлектрогенератора
5И41.
ОСНОВНЫЕ ОБОЗНАЧЕНИЯ И СОКРАЩЕНИЯ
t —
\п
ДУК(СГ)
ДУС
РМ
гм
ЦРК
Режим «М»
Режим «И»
входная величина.
выходная величина.
постоянная времени; сила тяги двигателя,
коэффициент усиления.
коэффициент затухания колебаний.
символ дифференцирования (оператор).
ошибка.
угловая скорость.
скорость.
угол атаки; угол поворота.
угол крена.
угол гангажа.
угол траектории.
угол отклонения руля.
подъемная сила.
сила лобового сопротивления; объемный
расход воздуха.
давление воздуха; сила,
сила притяжения Земли,
сила.
нормальное ускорение.
масса; отношение скорости полета к ско-
рости звука.
момент.
момент инерции.
кинетический момент гироскопа.
скоростной напор; заряд конденсатора.
напряжение.
потенциал1; основание натуральных лога-
рифмов.
время.
ток.
автопилот.
датчик угла крена.
датчик угловой скорости.
рулевая машина.
гиро мотор.
центральная ра с п редел и тел ы i а я ко р о б ка.
режим масштабного усиления сигналов.
режим интегрирования сигналов
Г Л Л В Л I
ОБЩИЕ СВЕДЕНИЯ
1. НАЗНАЧЕНИЕ АВТОПИЛОТА 5А42
В системе автоматического регулирования, которая пред-
ставляет собой комплекс наведения ракеты па цель, автопи-
лот является одним из основных регуляторов. Он предназна-
чен для автоматического управления полетом ракеты в соот-
ветствии с информацией, поступающей извне (по радиоли-
нии), а также вырабатываемой самим автопилотом с помо-
щью его чувствительных элементов.
Автопилот 5А42 осуществляет:
— стабилизацию ракеты 5В27У при полете па стартовом
участке;
— управление траекторией полета ракеты в соответствии
с сигналами радиокоманды на участке наведения ракеты на
цель;
— стабилизацию ракеты относительно центра масс при
радиоуправляемом полете;
— стабилизацию утла крена ракеты относительно непо-
движной системы координат.
В рабочих диапазонах скоростей и высот полета ракеты
автопилот обеспечивает:
- — достаточную устойчивость ракеты при се движении от-
носительно центра масс;
— необходимую точность стабилизации угла крена ра-
кеты ;
~— высокую
— высокую
полете.
точность выполнения радиокоманды;
маневренность ракеты при радиоуправляемом
2. СИЛЫ, ДЕЙСТВУЮЩИЕ НА РАКЕТУ В ПОЛЕТЕ
вы сКета совершает полет под действием ряда нриложеп-
ж ' К ее К0РпУсу сил, причем сложное движение ракеты мо-
ст • г^ассматРиваться как состоящее из двух движений: по-
1 льного движения центра масс ракеты и вращательного
о
движения ее корпуса относительно центра масс. Так как дей-
ствующие силы в общем случае приложены не в центре масс
ракеты, каждая из них может быть разложена на силу, при-
веденную к центру масс и вызывающую его поступательное
движение, и на момент, приложенный к корпусу и вызываю-
щий вращательное движение ракеты относительно центра
масс.
Движение центра масс ракеты в полете совершается под
действием трех основных приведенных к центру масс сил:
силы тяги двигателя, равнодействующей аэродинамических
сил и силы притяжения Земли.
Если разложить результирующую аэродинамическую
силу R па Q — силу, действующую в направлении, противо-
положном направлению вектора скорости ракеты, и У — си-
лу, перпендикулярную к вектору скорости, то действующие
на ракету силы можно представить в виде системы, как по-
казано на рис. 1,
гдеУ— вектор скорости ракеты;
Т— сила тяги двигателя, направленная вдоль продоль-
ной оси ракеты;
Q— сила лобового сопротивления (составляющая аэро-
динамической силы, направленная противоположно
вектору скорости);
Y— подъемная сила (составляющая аэродинамической
силы, перпендикулярная к вектору скорости);
< i— сила притяжения Земли, направленная по верти-
кали;
О— угол, определяющий направление вектора скорости
ракеты относительно горизонта (угол траектории);
•)— угол тангажа, определяющий положение продольной
осп ракеты относительно горизонта;
а— угол атаки, определяющий положение продольной
оси ракеты относительно направления вектора ско-
рости.
Разложим все действующие силы па составляющие в на-
правлении полета и в направлении, перпендикулярном к по-
лету.
7
Обозначив сумму всех составляющих сил, действующих
в направлении полета, через Ру , а сумму всех составляю-
щих сил, действующих в направлении, перпендикулярном к
полету, через Р^ , получим
Рт ——G sin 0 —Q-j-T cos а;
Pyj =—G cos 0-PY-J-T sin а.
Суммарная сила Ру изменяет величии)7 скорости ракеты,
а суммарная сила Р^ изменяет направление движения ра-
кеты. Следовательно, чтобы управлять направлением движе-
ния ракеты, необходимо управлять силой
При полете ракеты величины углов атаки сравнительно
малы, поэтому можно принять sin а~а. Тогда выражение
для Г \j запишется в виде
Р]\т = —G cos 6-J-Y- Ла.
Известно, что для малых углов атаки подъемную силу раке-
ты можно представить как
где уа—коэффициент пропорциональности между подъемной
силой и углом атаки. Подставив выражение для подъемной
силы в выражение для Р^ , получим
Р1\т = —G cos 0-р(Т+уа)а.
Составляющая силы притяжения Земли G • cos 0 не может
быть использована в качестве управляющей силы.
Управление движением ракеты производится путем изме-
нения суммарной силы (Т+уа)а, состоящей из подъемной
силы и составляющей тяги двигателя.
Поскольку эта суммарная сила оказывается пропорцио-
нальной углу а, очевидно, что для управления полетом ра-
кеты необходимо создать некоторый угол атаки. Для этой
цели на ракете в носовой ее части имеются органы управле-
ния — рули, которые дают возможность управлять враща-
тельным движением ракеты относительно ее центра масс,
т. е. позволяют изменять углы атаки.
3. МОМЕНТЫ, ДЕЙСТВУЮЩИЕ НА РАКЕТУ В ПОЛЕТЕ
Вращательное движение ракеты в полете относительно
ее центра масс совершается под действием управляющих,
возмущающих и стабилизирующих моментов.
8
Управляющие моменты рулей и элеронов
Ракета имеет две пары воздушных рулей и два элерона,
неположенных так. как показано па рис. 2. Две нары рулей,
расположенных в носовой части ракеты, служат для управ-
ления траекторией ее полета: расположенные на задних
Ось К
I
Ось Е
Ось I
Рис. 2. Схема моментов, действующих на ракету
кромках крыльев два элерона служат для стабилизации уг-
Лс1 крена ракеты. При отклонении элерона от нейтрального
1|оло/кения на угол 6 создается угол атаки элерона относи-
льно потока воздуха, обтекающего ракету, и, следователь-
на элероне возникает подъемная сила, приложенная к так
взываемому «центру давления» элерона.
9
Произведения подъемной силы элерона f на расстояния
/п и /д- от центра давления до осей, проходящих через центр
масс ракеты, называются моментами элерона.
Каждый элерон, таким образом, создает два момента:
один момент — относительно оси X (продольная ось раке-
ты), другой — относительно оси, параллельной оси элерона,
проходящей через центр масс ракеты (поперечные оси ра-
кеты I.
Указанные па рис. 2 рули 3 и 4, а также 5 и 6 связаны
попарно валами и поворачиваются совместно. Элероны 1 и 2
связаны между собой так, что если один из них отклоняется
на некоторый угол вверх, то другой — вниз на тот же угол.
(Очевидно, что в этом случае при отклонении элеронов
моменты их подъемных сил на плече /ц взаимно уничтожают-
ся и суммарный момент, равный 2f7 Л, действует только отно-
сительно оси X.
Таким же образом можно показать, что рули 3 и I соз-
дают момент только относительно осн II (называются руля-
ми II капала), а рули 5 и 6 создают момент только относи-
тельно оси I (называются рулями I капала).
Управляющие моменты воздушных рулей М ₽ и элеронов
Щ- пропорциональны углам отклонения соответствующих
рулей элеронов:
где он оэ
углы отклонения рулей и элеронов (максималь-
ные углы ° |11ах = ° !|1ах — 30°; * П1ах = 30°);
I 11 ’ Э ' '
коэффициенты пропорциональности, равные
соответственно
X (X
Л1° =1п° qSI<pb кгм.!гра();
Al°v = m^|SK1) I кгм грае),
где гп° и in’J— коэффициенты эффективности рулей и элеронов;
К)
q — скоростной напор, кг1м'2\
SKP — площадь крыла ракеты, м‘2;
b— средняя аэродинамическая
(САХ), м;
I — размах крыла, м.
хорда
крыла
Коэффициенты
П1Г/ И 111^
зависят от геометрических раз-
меров рулей. их расположения
кеты и от числа М (отношение
вука а при данной плотности
относительно центра
скорости ракеты V к
воздуха: М= ~).
масс pa-
x'корост п
Знаки и направление отклонения рулей
Зпа кп
габл. 1.
отклонения
рулей принято
о и р ед ('Л я г ь со г л а с 11 о
Таблица 1.
Направление поворота
ракеты
Направление отклонения
задней кромки
для для для
руля руля правого
1 канала II канала элерона
Вниз
Вверх
Вниз
Вверх
Вверх
Знак
отклонения
руля
Нос ракеты вверх
Иос ракеты вниз
Поворот ракеты по часовой
стрелке (по полету)
Н- (плюс)
— (минус)
— (минус)
Стабилизирующие моменты ракеты
Стабилизирующими являются моменты, нротиводейст-
иующие действию внешних случайных (или управляющих)
сил, стремящихся развернуть ракету относительно центра
масс. Эти моменты препятствуют такому развороту и стре-
лой я сохранить (стабилизировать) первоначальное поло-
З\еиие ракеты.
Стабилизирующими являются так называемые моменты
мом11ЧеСК0*1 Устойчивости, демпфирующие и инерционные
Ракета считается
°,1а Самопроизволыю
40юром сумма всех
11 Ул ю.
статически устойчивой, если
приходит в положение равновесия, при
действующих на нее моментов равна
бы т Г ^сто,1ч,1в°сти ракеты необходимо и достаточно, что-
нахо°ЧКа 111’ИЛ0/кенпя аэродинамической подъемной силы
Лилась за центром масс ракеты (ближе к хвосту). Тог-
да, если, например, ракета случайно развернется
носом
вверх, то подъемная сила,
создающая
момент относительно
осей I п II, будет стремиться развернуть ракету носом вниз
т. е. в исходное положение. Таким образом, знак стабплизп
рующего момента противоположен знаку момента
воздействия.
внешнего
Выше указывалось, что величина подъемной силы пропор
цпональпа углу атаки ракеты,
статической устойчивости
Поэтому и величина
также
моме
пропорциональна
углу
атаки:
Л1СТ = — к гм,
где 714 а— коэффициент пропорциональности, равный
Л/а — inoc qSI<p|) кгм1рад.
Ракета
(осевая
является телом.
симметричным
относительно
осн
сим метрия).
Поэтому
*
относительно этой оси он
не имеет статической (аэродинамической) устойчивости, т. е
считается, что относительно оси X ракета нейтральна.
Демпфирующие моменты возникают в резуль
тате действия реакции воздуха, обтекающего ракету, при па
личин угловой скорости со разворота ракеты (рис. 2).
Результирующий вектор угловой скорости ракеты со мож
ио разложить на составляющие ио осям I, II и X. Демифи
рующие моменты Ап, Л4п, противодействуют вращении
ракеты, и величины их пропорциональны соответствующим
составляющим угловых скоростей «щ^н, °л-.
Выражения для демпфирующих моментов имеют вид:
М( ~кгм (относительно поперечной оси)*;
л .V .V
кгм
(относительно продольной осп),
где М 10 и Л1^ — коэффициенты пропорциональности соот
ветствепно равные:
Коэффициенты гп(° и иг.
• V
зависят от геометрических ха-
рактеристик ракеты и числа М.
* Ввиду идентичности формул моментов относительно поперечных
осей I и II в обозначениях М, J, (о опущены индексы I и II.
возникают на ракете при
. дВИжения в
। управляющих мо-
как и демпфирую-
iWV17 противодействуют внешнему воздействию, но отлпчают-
щие, пщ'11 ,2____ГТЛХА-П.г ТТГГ»/"\ ГЛ /Л1~Г /Л Г\ Т Т ТГ ТТ П Т7 I ТТ'Т НО ВОЛИ 411“
составляющих уг-
момент време-
Инерционные мом
налпчш. углового ускорь,?'
случае действия на ракетеЛ вРаЧатель„огп
ся от демпфирующих тем чтп"""
1,ам составляющих скороспГя ''Р0П0РЩ1°наль„ы
левого ускорения ракеты в’ вел1|.ч‘1пам
''аждый дапиы/j
Мн
М"
d<o
-r-
dt
d<ov
7ГГ
где J и J.v — моменты инерции ракеты.
Выше было отмечено, что вращательное движение раке-
ты совершается под действием управляющих и стабилизи-
рующих моментов. Поэтому можно составить уравнения мо-
ментов, действующих на ракету в каждый момент времени:
Мр =Л!СТ 4-Л1й
Л1";
+Ж-
или
ЛГа
св
Л1%
Как показано
этом отметим, что
d& dw _ d2£
Ф:="5Г; "dF^ dP
-v dt ’
на рис. 1, '0 = 0 + а (уравнение углов). При
: (о
dt ’ dt dt2
гДе Тх — угол разворота ракеты относительно оси X.
Тогда полные дифференциальные уравнения моментов от-
носительно продольной п поперечных осей запишутся в сле-
дующем виде:
. .o. _ d 0
7И о =гД4 a ! Л4 —r-
dt
M,J'\ =Mm
1 cl I
.V
1 ',л dt2
13
Шарнирные моменты рулей и элеронов
Подъемные силы F, возникающие на рулях и элеронах в
полете (рпс. 2), создают не только управляющие моменты,
по и моменты относительно осей поворота рулей и элеронов.
Величину этих моментов, называемых шарнирными мо-
ментами, зависит от расстояния /р от «центра давления» до
оси поворота и от величины силы f. В течение полета ракеты
положение центра давления и величина силы f меняются в
зависимости от скоростного напора q, числа М, угла поворо-
та руля 6, элерона и угла атаки ракеты а.
Шарнирный момент руля составляется из двух слагае-
мых:
где Ма— коэффициент составляющей шарнирного момента
по углу атаки ракеты.
— коэффициент составляющей шарнирного момента
по углу атаки ракеты.
Шарнирный момент элерона пропорционален углу пово-
рота элеронов:
М ==лАз
ш ш э
где М* — коэффициент шарнирного момента по углу откло
нения элеронов.
Необходимо отметить, что центры давления всех рулей
находятся за осью их вращения (ближе к хвосту ракеты)
Вследствие этого шарнирные моменты в полете стремятся
установить рули в пулевое положение (флюгерный эффект)
Для отклонения руля ракеты в процессе полета на необхо
димый угол рулевая машина автопилота должна преодолев
соответствующий шарнирный момент руля, препятствующш
этому отклонению.
Отличительная особенность ракеты 5В27У состоит в том
что шарнирные моменты рулей, изменяющиеся по режима л
полета ракеты, используются для регулирования управляю
щпх моментов рулей. С этой целью, как показано па рпс. 3
между штоками рулевых машин и соответствующими руля
мп устанавливаются пружинные механизмы.
Управляющий сигнал, вырабатываемый автопилотом
приводит к перемещению штока рулевой машины /. Чёре:
качалку 2 усилие рулевой машины передается на пружин
пый механизм 3, имеющий жесткость С. Пружинный меха
пизм посредством шарнира соединен с осью рулей 4 рыча
гом, плечо которого обозначено через d.
1 машина, за-
зпачсппя шарнирного момеп-
л } (а CJIC_
’ и качалки) пропорционально лишь управляющс-
• «
Момент, который способна развить рулевая
„рпомо больше максимального -......-
ВСА Поэтому перемещение о штока рулевой машины
*1,
сигналу и практически не зависит от действия шарпирно-
довательно
му
го момента.
Рис. 3. Схема работы пружинного механизма
ш
in —
усилие от шарнирного момента руля;
15
Усилие сжатия пружины Fnp пропорционально относитель-
ному перемещению ее концов, т. е. разности 5
значению ее жесткости С. Таким образом. Fnl
гр А/ш
Так как гш —г-
а также
(7 od)C, имеем равенства
ж
7 ОС
Подставив сюда Л41и==Л/ша4-Л4шо и разрешив полученное
выражение относительно 6, получим: I
ш
dC
ЛГ
__и
dC
Отсюда следует, что угол отклонения руля 6 зависит как
от управляющего воздействия рулевой машины о, так и г
коэффициентов и /И6^ которые меняются в зависимости
от числа М, а также от величины скоростного напора q. При
увеличении высоты полета коэффициенты и умень-
шаются вследствие уменьшения величины скоростного напо-
ра q, при этом угол отклонения рулен, как показывает по-
лученное выражение, увеличивается. I
Выражение для угла отклонения элеронов имеет вид
.И"’
ш
“dC
л л-^э
где /Иц/ — коэффициент шарнирного момента элеронов. Угол
атаки ракеты не вызывает дополнительного шарнирного мо-
мента элеронов, так как они жестко связаны друг с другом
и отклоняются в противоположные стороны.
Выше отмечалось, что управляющий момент руля, дей]
m8qSKpb, изменяющейся по
> зависит от величины Л'1о =
/имам полета ракеты.
Смысл применения в ракете 5В27У пружинного механизма
что воздействие на ракету управляющего
омента, увеличивающегося при увеличении скоростного на-
автоматически компенсируется
сжатия
заключается в том,
м
пора
клонения руля всле£ствие
ся приблизительно постоянное соотношение
управления и угловой скоростью разворота
режимах ее полета.
уменьшением угла от-
пружииного механизма
под действием шарнирного момента. При этом обеспечивает-
_ , между сигналом
ракеты па всех
4. СИСТЕМЫ КООРДИНАТ
Для пространственного представления сил. действующих
па ракету, и рассмотрения ее движения в пространстве при-
няты следующие системы координат; земная, условная не-
подвижная, связанная, скоростная и условная подвижная.
Все принятые системы координат прямоугольные.
В з е м н о й • с и с т е м е координат рассматривается
движение центра масс ракеты (рис. I).
Относительно земной системы координат определяется
положение вектора силы притяжения Земли G. В этой же си-
стеме отсчитывается высота полета ракеты 11.
Рис. 4. Земная система координат
17
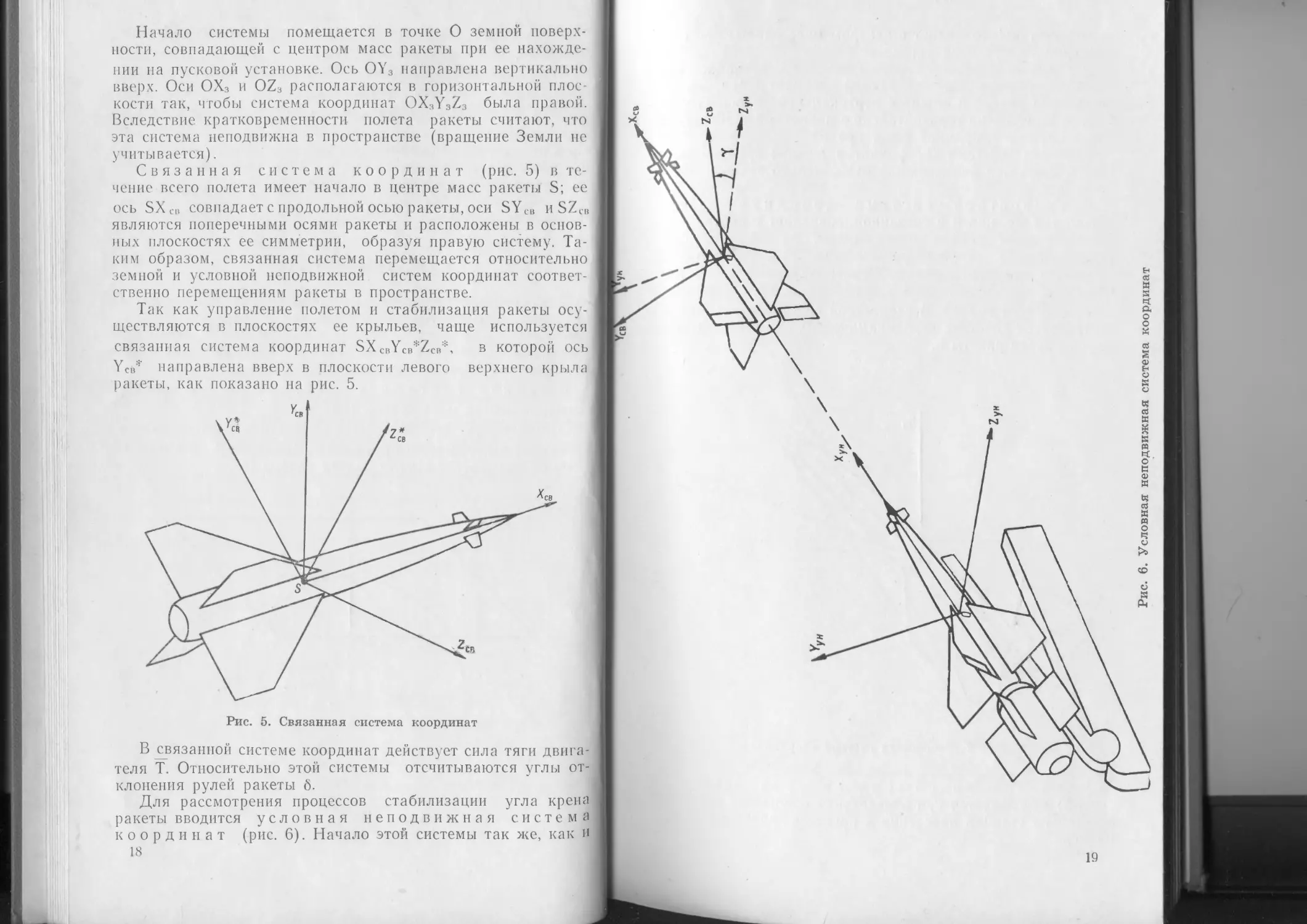
Начало системы помещается в точке О земной поверх-
ности, совпадающей с центром масс ракеты при ее нахожде-
нии на пусковой установке. Ось OY3 направлена вертикально
вверх. Оси ОХз и OZ3 располагаются в горизонтальной плос-
кости так. чтобы система координат OX3Y3Z3 была правой.
Вследствие кратковременности полета ракеты считают, что
эта система неподвижна в пространстве (вращение Земли не
учитывается).
Связанная система координат (рпс. 5) в те-
чение всего полета имеет начало в центре масс ракеты S; ее
ось SXcb совпадает с продольной осью ракеты, оси SYCI{ и SZCB
являются поперечными осями ракеты и расположены в основ-
ных плоскостях ее симметрии, образуя правую систему. Та-
ким образом, связанная система перемещается относительно
земной и условной неподвижной систем координат соответ-
ственно перемещениям ракеты в пространстве.
'1ак как управление полетом и стабилизация ракеты осу-
ществляются в плоскостях ее крыльев, чаще используется
связанная система координат SXcbYCb*Zcb:\ в которой ось
Ycb* направлена вверх в плоскости левого верхнего крыла
ракеты, как показано на рпс. 5.
Рис. 5. Связанная система координат
В связанно![ системе координат действует сила тяги двига-
теля Т. Относительно этой системы отсчитываются углы от-
клонения рулей ракеты 6.
Для рассмотрения процессов стабилизации угла крена
ракеты вводится условная неподвижная система
координат (рис. 6). Начало этой системы так же, как и
18
Рис. 6. Условная неподвижная система координат
19
земной системы, совпадает с центром масс ракеты при ее на-
хождении на пусковой установке.
В отличие от земной системы ось ОА\Н совпадает с на-
правлением продольной оси ракеты в момент пуска, ось ОУу11
направлена вверх и лежит в вертикальной плоскости, ось
OZyil расположена горизонтально в наклонной плоскости так,
чтобы система координат была правой.
Условная система координат в течение времени полета
ракеты считается неподвижной относительно земной системы
координат.
В скоростной системе координат (рис. 7)
начало так же, как и в связанной, совпадает с центром масс
в речение всего времени полета ракеты. Ось SXCK направлена
вдоль вектора скорости ракеты. Ось SYCK расположена в
плоскости симметрии ракеты перпендикулярно к осп SX ск
Ось SZck перпендикулярна к осям SXCK и SYCk так, что си-
стема является правой. В скоростной системе координат рас-
сматривается действие аэродинамических сил н отсчитывают-
ся углы атаки ракеты а.
Рис. 7. Скоростная система координат
У с л о в п а я подвижная система к о о рд и и а г
(рис. 8) используется при определении положения ракеты от-
носительно станции наведения в процессе наведения ракеты
на цель.
Начало координат этой системы неподвижно и совпадае!
с центром вращения антенны станции наведения ракет. Ось
О'Хуп совпадает с направлением
линии визирования), ось O'Y
угломестной антенны сопровождения цели, ось (J'Zyri
ук
л
на цель (с направлением
лежит в плоскости вращения
распо
ложена в плоскости вращения азимутальной антенны сопро
вождения цели. Таким образом, система О'ХуП) у11 Дп перс
мещается соответственно перемещению цели.
В условной подвижной системе координат
отсчиты
ваются
дальность ракеты от станции наведения г, углы рассогласова
ния ракеты относительно линии визирования е и поступатель
иые перемещения ракеты от кинематической траектории ме
тода наведения h.
5. СИСТЕМА УРАВНЕНИИ,
ОПРЕДЕЛЯЮЩИХ
УПРАВЛЯЕМЫЙ
ПОЛЕТ РАКЕТЫ НА ТРАЕКТОРИИ (БЕЗ СТАБИЛИЗАЦИИ)
Движение ракеты относительно центра масс и на траек
тории определяется системой из трех дифференциальны:
уравнений, выведенных выше.
Уравнение моментов: ]
Л/А лла , .«> d^ т d2^
М q—M а-\-М —г— +J—ттг.
dt dt“
Уравнение
сил:
yWV
dO
dt
углов:
Уравнение
О- = 6 -J- а.
Как показывают эти уравнения, независимой перемен-
ной величиной является управляющий момент руля М
Переменные а, О и 0 (так называемые угловые координаты)
определяют положение ракеты и ее вектора скорости в каж-
дый момент времени и связаны между собой системой приве-
денных трех уравнений.
Зависимость между углом отклонения руля и управляю-
щим сигналом радиокоманды называется законом управле
ния и может быть представлена в следующем виде:
3=кАп1„р(л1“, <) R,
где кдп — коэффициент автопилота по сигналу радио
команды; '
ini> (AJ^, Л1щ) — коэффициент пружинного механизма, зави
сящий от и АП;
R — сигнал радиоуправления.
22
ракеты высокой маневренности при радиоуправляемом по-
имеют сильную колебательность движения относительно
Л^Т'тоа масс при отсутствии специальной стабилизации.
це1 Поэтому ракеты с высокой маневренностью требуют осо-
< ..пл качественной специальной ।
осине 1X0
автопилота.
стабилизации с помощью
СТАБИЛИЗАЦИЯ РАКЕТЫ ОТНОСИТЕЛЬНО ЦЕНТРА МАСС
6 ПРИ УПРАВЛЯЕМОМ ПОЛЕТЕ
Колебательный характер полета ракеты приводит к умень-
шению скорости ее иолета, а также затрудняет процесс наве-
дения и ухудшает его точность.
Уменьшение колебательности движения ракеты обеспе-
чивается системой стабилизации с помощью автопилота. Ав-
топилот имеет чувствительные элементы — датчики угловой
скорости, измеряющие угловые скорости ракеты, достигаю-
щие в процессе колебаний больших значений. Рулевые маши-
ны автопилота, получая управляющий сигнал с датчиков
угловой скорости, отклоняют рули ракеты на углы, пропор-
циональные соответствующим угловым скоростям, при этом
моменты рулей воздействуют на ракету в направлении, про-
тивоположном направлению ее угловой скорости. Это воздей-
ствие, препятствующее колебаниям ракеты, называется
моментом искусственного демпфирования.
Степень искусственного демпфирования тем больше, чем
больше коэффициент автопилота, т. е. отношение угла откло-
нения руля к угловой скорости ракеты.
Зависимость между углом отклонения руля и, в данном
случае, угловой скоростью ракеты называется законом ста-
билизации и записывается в операторной форме в виде
S(p) = -k„inp(<, <) Р0 (р).
1 де кД1 коэффициент автопилота по сигналу
ловой скорости.
датчика уг-
7 СТАБИЛИЗАЦИЯ РАКЕТЫ НА СТАРТОВОМ УЧАСТКЕ
ПОЛЕТА
автопилот
рп полете ракеты на стартовом неуправляемом участке
iiDHMnni, ' ” сгабилизирует ее траекторию, т. е. обеспечивает
Такая е,11^СТЬ ее полета с постоянным углом 0.
Встреливап ,а°11лпзацпя необходима для уменьшения ошибки
Так каг1Я ^акет в рабочий сектор станции наведения.
?,?1ГОЛ траектории 0 отсчитывается в земной спсте-
стабил - г —измерен быть не может, то для
1а>ка вырабат аЦПИ используется угол тангажа 0. Угол тан-
ывается в автопилоте путем интегрирования
11а Р-е-
«ь,рабХЦаеИтс;
23
угловой скорости разворота ракеты, измеренной с помощью
датчиков угловой скорости. Закон стабилизации в этом слу-
чае может быть представлен в виде
5(p)=-k„inP(<, <)а(р),
где ки — коэффициент автопилота по сигналу датчика уг-
ловой скорости в режиме интегрирования. |
При пуске ракеты включается схема интегрирования сиг-
налов угловой скорости, при этом нулевое положение рулей
соответствует углу тангажа ракеты, который она имела на
пусковой установке в момент пуска. При отклонении ракеты в
процессе ее последующего полета от направления старта
руль отклоняется пропорционально изменению ее тангажа и
находится в отклоненном состоянии до тех пор, пока продоль-
ная ось ракеты пе вернется в исходное положение. Таким об-
разом, до момента сброса ускорителя обеспечивается стаби-
лизация траектории ракеты.
8. СТАБИЛИЗАЦИЯ УГЛА КРЕНА РАКЕТЫ
Углом крена ракеты считается угол между ее поперечной
осью SZ св и наклонной плоскостью ОХун Z ун условной не-
подвижной системы координат, который образуется в про-
цессе полета ракеты при действии на нее возмущающих
факторов. I
Необходимость стабилизации угла крена ракеты обуслов-
лена особенностью командного метода наведения ракеты на
цель.
Угол крена ракеты относительно условной неподвижной
системы координат измеряется с помощью датчика угла кре-
па — свободного гироскопа, установленного в'автопилоте.
Сигнал датчика угла крена вызывает перемещение штока
рулевой машины, связанной с элеронами ракеты. |
При отсутствии крепа элероны находятся в нулевых по-
ложениях. I
В случае отклонения ракеты по крепу элероны переме-
щаются. при этом их момент разворачивает ракету относи-
тельно осп SX до тех пор, пока угол крена не уменьшится
до допустимой величины.
Для обеспечения стабилизации угла крепа одного сигна-
ла свободного гироскопа недостаточно, так как вследствие
малой величины моментов демпфирования ракеты относи-
тельно оси SX возникают расходящиеся колебания, приводя-
щие к перевороту ракеты и потере управления. I
Для того чтобы обеспечить устойчивый процесс стабили-
зации, используется сигнал датчика угловой скорости, изме-
ряющего скорость разворота ракеты со.г относительно оси SX
24
пению ---------——
1 -нт искусственного демпфирования
М'-' __ттТТП Л TTTITT <"'ГТ' О 1 ТГЛГЭ TITO Cl I ГГ» I I
прОЦОСС с
сигнал суммируется с сигналом свооодпого гироскопа
^10 п наличии угловой скорости ракеты приводит к откло-
11 П - элеронов на дополнительный угол так, что создается
колебаний ракеты и
- стабилизации становится устойчивым.
- Закон стабилизации угла крена ракеты приближенно за-
писывается в виде
где tup
)— коэффициент пружинного механизма элеронов,
зависящий от Л1^э;
коэффициенты автопилота по сигналам дат-
дг
чика угла крепа и датчика угловой скорости.
ГЛАВ А II I
ОБЩЕЕ ОПИСАНИЕ УСТРОЙСТВА АВТОПИЛОТА 5AIJ
1. ПРИНЦИПЫ ПОСТРОЕНИИ АВТОПИЛОТА И СТРУКТУРНЫЕ
СХЕМЫ I
е
Автоматическое управление полетом ракеты осущеспч
вляется в соответствии с информацией, поступающей на aril
топилот извне (по радиолинии), а также вырабатываемой
чувствительными элементами самого автопилота. I
Обработка информации производится на операционный
усилителях постоянного тока. 1
Результирующий сигнал управления с помощью элек|
тропневматического сервопривода преобразуется в перемер
щение рулей ракеты. Управление ракетой и ее стабилиза!
ция в полете осуществляются с помощью двух пар воздуц!
пых рулей, расположенных в носовой части ракеты, и двул
элеронов, установленных на задних кромках ее крыльев
(рис. 2). I
В кинематике межи рулевыми машинами автопилота и
рулями ракеты установлены пружинные механизмы. Этим,
обеспечивается автоматическая (по шарнирному момениу)
коррекция соотношения между результирующим сигналом
управления и перемещением руля при всех рабочих режима!
полета ракеты. I
Рули каждого из каналов у правления находятся в одйо!
плоскости с соответствующими крыльями, причем расположи
ние их относительно плоскости горизонта соответствует схем!
«X» (рис. 2). I
Автопилот 5А42 является трехканальным регулятором: I
а) I канал предназначен для управления движением р<1
кеты и ее стабилизации относительно осп ) св ; I
б) II канал предназначен для управления движением ри]
кеты и ее стабилизации относительно оси ; 1
в) III канал (канал крена) предназначен для стабили.аи
цпп угла крена ракеты относительно условной неподвижно!
системы координат.
I п II каналы выполнены идентично. I
26 I
автоматического регул иро-
управления представлена на
Структурная схема контура
ня по одному из каналов
Ца неуправляемом стартовом участке ав-
- до момента сброса ускорителя осуществляет стаби-
пзацию траектории полета ракеты с целью уменьшения ошп-
станцпн наведения,
па ракету моментов,
ее аэродинамической
топилот /
бок встреливания ее в рабочий сектор
При этом парирование действующих
вызванных сплои ветра и силами
асимметрии, а также возмущением при сходе с пусковой ус-
тановки, обеспечивается путем формирования сигналов ста-
билизации в виде сигнала но угловой скорости и интеграла
от угловой скорости разворота ракеты относительно осей
)\н И /св-
На этом этане полета закон отклонения рулей lull ка-
налов записывается в операторной форме следующим об-
разом:
?(p)=1i>p(^C
_____k„ (Тр + 1) ]
(Т;гр-’+2ТдДлгр + 1)р Jp8(p)
где о(р) —
i J/Vp- i/a\ —
npVNui’ унш/
kpn(p)
pV(p) —
угол отклонения руля;
передаточная функция пру-
жинного механизма, уста-
новленного между рулями
и рулевой машиной, зави-
сящая от суммарного шар-
нирного момента, дейст-
вующего на руль;
передаточная функция ру-
левого привода автопилота;
коэффициент усиления ав-
топилота по сигналу дат-
чика угловой скорости в ре-
жиме интегрирования;
передаточная функция дат-
чика угловой скорости от-
носительно осей У сй и Zcb‘,
передаточная функция ин-
тегратора;
угловая скорость разворо-
та ракеты относительно
центра масс.
27
Радиокоманда Автопилот
28
Передаточную
функцию
k„ (Тр+1)
можно записать в виде
что сигнал стаонлиза-
сигналов: сигнала о г
11з последне! о выражения
ЦПИ формиру
ДУС С
^ПЦПотк?о11е1П1Я Ракеты от линии старта и угловой скоростью
л0,м отклонения. Таким образом, стабилизация траектории
Э1°рта начинается с появлением угловой скорости разворота
1 I I1
----------- ВИДНО,
-- ется в виде суммы дву>
эффициентом к и интеграла от сигнала ДУС с коэф-
kn, т. е. угол отклонения рулей определяется уг-
ракеты.
р а кеты ре-
петирующий сигнал управления составляется в виде раз-
ности сигнала управляющей радиокоманды и сигнала стаби-
лизации, вырабатываемого чувствительным элементом авто-
пилота (датчиком угловой скорости разворота).
Наличие сигнала стабилизации обеспечивает быстрое за-
тухание переходных процессов при выполнении ракетой ра-
обеспечивает быстрое за-
диокоманды наведения.
Закон отклонения рулей I п II каналов на участке наве-
дения ракеты на цель записывается в операторной форме
следующим образом:
«(p)=-i.,P« <)kp„(p) {[tLpH2tXp +1W-
где д(р) — угол отклонения руля;
кДг — коэффициент усиления автопилота но сигналу дат-
чика угловой скорости:
р^(р) — угловая скорость разворота ракеты;
К(р) — сигнал радиокоманды.
Ш канал автопилота на участке наведения выполняет за-
т^п?,.?ЫдеРживания неизменным утла крена ракеты относи-
, связанной
установке в момент пус-
: согласова-
ракеты в полете, с системой коорди-
^сльно условной неподвижной системы координат
кап°л°>кепием ракеты на пусковой jcraHGbixC ъ
пик лем самым обеспечивается пространственное
’’ие системы координат _________
Ha3eMHoi{ станцип паведения
пн 3 РИС‘ Ю представлен
°илизации
яв1яо'Ра°ать'ва,0111ИМ сигнал
“•7СЯ трехстепенный
Рез\еТ"РУеМЫ" ~
- qn. ' т>щии сигнал стабилизации образуется
пеналов датчика
а структурная схема контура ста-
угла крена. Чувствительным элементом автопило-
, пропорциональный углу крена,
гироскоп (датчик угла крена),
в момент пуска ракеты.
Р()стц
в виде
угла крепа и датчика угловой ско-
‘пп°1'11тель1ю оси X. При этом наличие сигнала
29
йчивую стабилщ
[X, действующих
этся следующим
'i!T7+T‘9'(p)]l
дг^дгР'Т 1 ~*И
щения элеронов; I
нт передачи пру-
шханизма, уста-
) в кинематике
щты усиления
по сигналам
гл а крена и дат-
юй скорости; I
1ая функция дат!
вой скорости; I
1 ракеты в услов!
впжноп систем6!
ВКЛЕЙКА № К
S4UWCW
ye ^u/jCf^r
V.
ьа-QiifrOvi--
зак.
Рис. 11. Блок-схема автопилота 5А4 .
StfS
нД
r-|| J
yiiww
МУЯ
МИМИ*
ssss
VHMNWHI
ШГ
—w
\гловоп
ось X.
скорост!
3/183
, вырабатываемый датчиком
Уг0Д,х слагаемых: угла v, на:
Развор„°7, L
- 'кеты относительно вертикальной и горизонта.)^___
пор ' с п Zvh условной неподвижной системы координат,
осей 'У" 1
: угла крена, составляется
накапливаемого ракетой при
(угла пространст-
и3 ДВ\0Те относительно оси X. и угла
развор ена), образующегося за счет одновременного раз-
венного ’относительно вертикальной и горизонтальной
pl к
2 БЛОК-СХЕМА автопилота и назначение
ЕГО ЭЛЕМЕНТОВ
Блок-схема автопилота представляет собой схему соедп-
пия и взаимодействуя основных элементов автопилота,
обеспечивающих его функционирование и требуемые харак-
теристики. Она включает группу чувствительных элементов
(1атчикп угловой скорости и датчик угла крена), группу уси-
лптельно-преобразующих элементов (операционные усилите-
ли), группу исполнительных элементов (струйные реле и ру-
левые машины), а также ряд вспомогательных элементов
(блок питания, трансформатор, узлы подстройки, коммути-
рующие реле, узел ограничения).
Блок-схема автопилота 5А42 представлена на рис. 11.
Здесь основные элементы соединены стрелками, которые
указывают на функциональную связь соответствующих эле-
ментов между собой. Блоки, входящие в комплект автопило-
та, указаны в таблицах 2, 3, 4 и 5.
Датчики угловой скорости 688 предназначены для изме-
рения трех составляющих угловой скорости ракеты относи-
тельно осей ХСв, YeB, Zcb и выработки сигналов в виде на-
пряжений, соответствующих значениям этих составляющих.
Датчик угла крена 702М-Б предназначен для измерения угла
крена ракеты в условной неподвижной системе координат и
Vrj?' 0ТКН сигиала в впДе напряжения, соответствующего
Операционный :
1 Утрирования
радиокоманды (на участке
Звания сигналов стабилизации: сигнала датчика уг-
R Р и интеграла от сигнала угловой скорости (на
р участке).
ат] - сигнал управления или стабилизации I и
’ ВЬ1Рабатываемый усилителем напряжения, посту-
,_____________________.ь мощности 710М рулевого
щ автопилота.
g (крена) результирующий сигнал стабилиза-
ции vr ’ ммиРованием сигналов датчика утла крена
ловой г
СТартовом
II ка^аУЛЬТИРУЮ1чий
чает ва * ----------
пРнвол\ Рационный усилнтел
усилитель напряжения 709 предназначен
сигнала датчика угловой скорости и сиг-
наведения), а также для
сигнала датчика уг-
щщ па/ vclUdJ1
11 nr ^азУется ।
* W 1 1 I г, - л ______ жж * VAX AAAIXUl XVAUA Л».
кЮ1цп?лр^0В011 ск°ростн непосредственно на входе уснлн-
31
Операционный усилитель мощности 710М, струйное рел
679Б и ролевая машина 685Б(В) образуют Замкнутый koi
тур следящей системы (сервопривод). Сервопривод предназ
качен для перемещения (отклонения) рулен ракеты в cool
ветствип с результирующим сигналом управления. I
Рулевая машина является исполнительным элементе]
сервопривода, перемещающим рули ракеты с помощью эне^
гни сжатого воздуха, направляемого в рулевую машин
струпным реле. Рулевая машина включает в себя потенций
метр обратной связи, вырабатывающий напряжение, соотве'1
ствующее положению рулевой машины. I
Струйное реле управляет энергией сжатого воздуха, пс
даваемого в рулевую мащийу для ее перемещения в cooi
ветствип с сигналом ошибки, вырабатываемым усилителе
мощности. ;
Операционный усилитель мощности предназначен д;
сравнения результирующего сигнала управления с сигнал )
местной обратной связи по ходу штока рулевой машины
для выработки сигнала ошибки, достаточного
для приведения в действие струйного реле.
Блок питания 3003 обеспечивает питание
по мощност
накальных
аиодно-сеточных цепей усилителей напряжения и усилителе
мощности, а также питание схемы ограничения радиокоманд
Трансформатор 668 обеспечивает питанием цепи гиром(
торов датчиков угловой скорости. Узлы подстройки 695
предназначены для регулировки коэффициентов (передато]
ных чисел) автопилота по сигналам датчиков угловой сю
рости и датчика угла крена, а также для подстройки ну.ч
вых сигналов усилителен напряжения и усилителей мои
ности.
Узел ограничения
3002-сбН
предназначен для ограничу
ния напряжения радиоуправления, подаваемого на опера
циоииый усилитель напряжения 709.
3. БЛОКИ, ВХОДЯЩИЕ В КОМПЛЕКТ АВТОПИЛОТА
В комплект
ные в табл. 2.
автопилота
5А42 входят блоки,
перечислен
Таблица 2
Наименование блока
Шифр блока
Количество
в ко.мплеК
те автопилота
Блок управления
Рулевой блок
Рулевой блок
3002
686А
686Б
32
В блок управления
ные в табл. 3.
3002 входят блоки и узлы, неречислен-
Таблица 3
Наименований блока
Шифр блока
Количество в
одном блоке
Датчик угла крена
Датчик угловой скорости
датчик угловой скорости
Опепаиионный усилитель напряжения
Операционный усилитель мощности
Блок питания
Трансформатор
Реле
Узел подстройки
Узел ограничения
В рулевые блоки 686А и 686Б
чые соответственно в табл. 4 и 5.
Наименование блока
702М-Б
688Б-1
688 Г-1
709
7 ЮМ
3003
668
695Б
3002-сб11
1
9
1
2
1
1
)
9
1
входят блоки, перечпслен-
Таблица 4
Шифр блока
Количество
в одном блоке
Рулевая машина
Струйное реле
685Б
679Б
Таблица 5
Наименование блока
Шифр блока
Количество
в одном блоке
Рулевая машина
Струйное реле
685В
679Б
Конструкции
рассматриваются
Описания.
блоков, перечисленных в табл. 2, 3, 4 и 5,
в соответствующих разделах настоящего
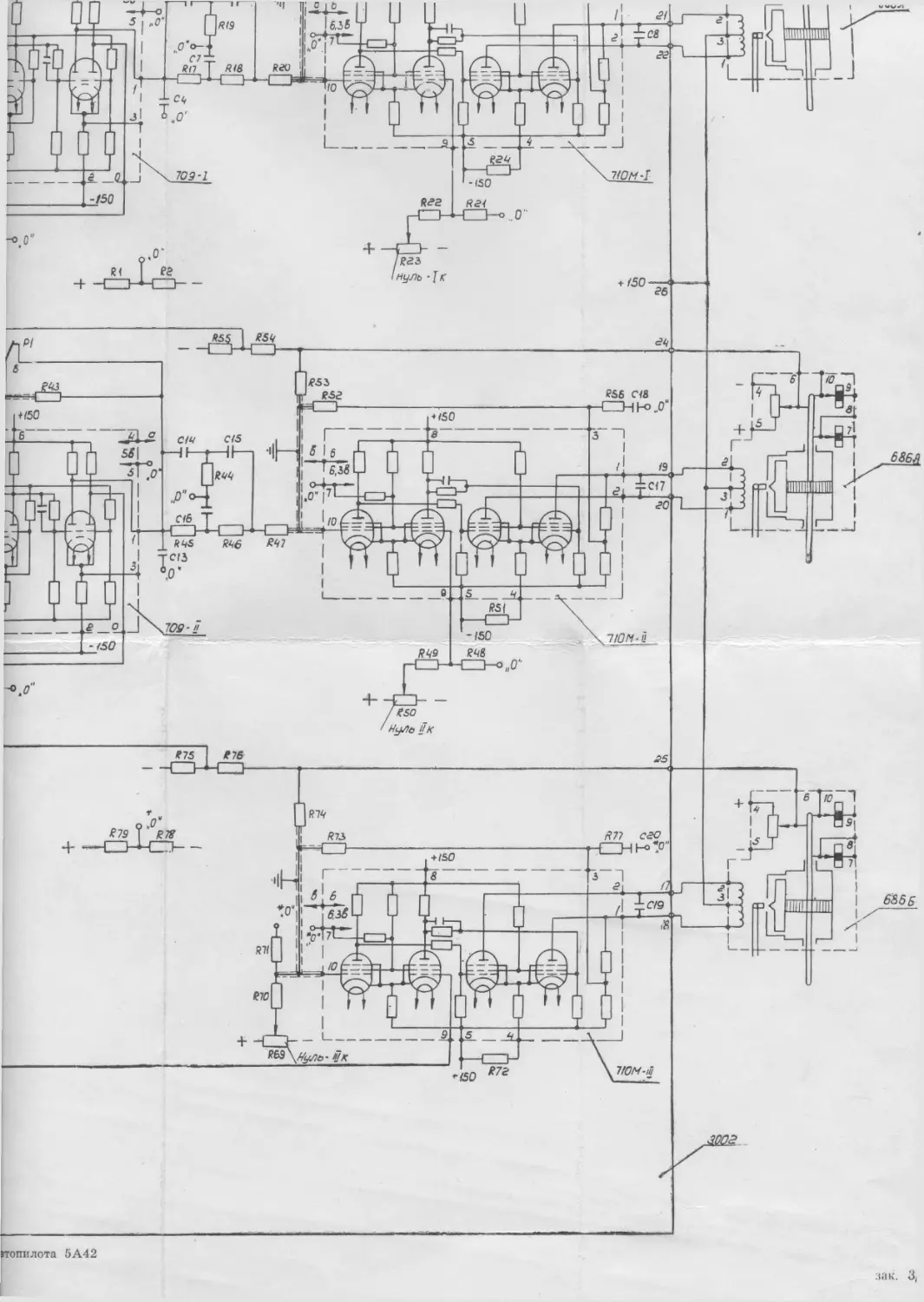
4. ПРИНЦИПИАЛЬНАЯ СХЕМА АВТОПИЛОТА
Принципиальная
схема автопилота иред-
ставп ч 7 сЯЬНая электрическая
хна в приложении 1 к настоящему Описанию.
j-хема автопил
Основные цепи
Цепь
— Цепи
Цепь
—150 в;
f * * V А Ч
ia автопилота включает несколько основных ценен.
л принципиальной схемы:
питания потребителей напряжением 26 в;
итания накалов ламп;
питания потребителей напряжением +150 в и
33
— цепь питания гиромоторов;
— цепь разарретирования ДУК;
— цепь включения реле Р1 и Р2;
— цепь сигналов датчиков угловой скорости I и II кап
лов;
— цепь сигналов радиоуправления;
— цепь сигналов датчика угла крена и датчика углов<
скорости канала крена; '
— цепь контроля и телеметрии.
Цепь питания потребителей и а ир я ж еи и е м 26
Потребителями напряжения 26 в (рис. 12)* являютс
опорные делители, состоящие из сопротивлений Rl, R2;
R78, R79, па которых образуются опорные напряжения («и
ли автопилота»); потенциометры рулевых машин, датчик!
угловой скорости и датчика угла крена; переменные сопр
тпвлеиия R13 и R39 центровки усилителей напряжения; и
ременные сопротивления R23, R50 и R69 регулировки пул»
усилителей мощности.
Цепь питания
накалов
ламп
Блок питания 3003 трансформирует первичное иапряж
ине 115 в, 1000 гц в напряжение 6,3 в для питания накале
ламп усилителей мощности и в напряжение 5 в для питаю
накалов ламп операционных усилителей напряжет
(рис. 13). I
Цепь питания
потребителей
+ 150 в и —150 в
напряжение!
Блок питания 3003 преобразует первичное иапряж
пне 115 в, 1000 гц в постоянные выпрямленные напряжен!
+ 150 в п —150 в (относительно нуля автопилота) для пит
ния соответственно анодных и катодных цепей всех усилит
лей автопилота (рис. 14). ।
Цепь питания г и р о м о т о р о в
Питание гиромоторов (рис. 15) осуществляется от первп
ного трехфазного источника ракеты с напряжением 36
1000 гц. Гиромотор датчика угла крепа питается иепосрсдс
венно от первичного источника. Для питания гиромоторс
всех датчиков угловой скорости в автопилоте предусмотри
трехфазный трансформатор 668, имеющий вторичное липе
иое напряжение 85 в.
* Ввиду идентичности схем I и II каналов автопилота на рис. 12, 1
14, J7, 18, 19 и 21, поясняющих работу отдельных цепей автопилот
приведены лишь элементы схемы I канала; схемы I и II каналов из
бражены в приложении № 1.
34
Вход Iканала
35
^1
Рис. 14. Цепь питания потребителей напряжением +150 в и —150 в
*
hjOOO> 99f
38
Цепь разарретирования ДУК
гт in команде «Пуск» напряжение +26 в с турбоэлектроге-
опа 5И41 поступает на пусковую обмотку электромаг-
неР31 д1аТчика угла крена, который приводит в движение мс-
11ПтачеСкую систему разарретирования гироскопа (рис. 16).
г?111 этом с помощью контактной группы в цепь включается
дополпптсльпая < '
такты блокировки пуска.
ваппп гироскопа.
обмотка удерживания и замыкаются коп-
сигнал нзирующпе о разарретнро-
26в * Пуск
Рис. 16. Цепь разарретирования ДУК
Контакты подключения
• дополнительной обмотки
в цепь электромагнита
Контакты
блокировки
пуска
Механизм
арретирования
(условно)
Це п ь включения реле Р1 и Р2
проверке автопилота па обмотки реле Р1 и Р2 по-
пал ряжение + 26 в, переключающее усилители I и II
интегрального режима (режим «И») в масштабный
44 • при проверке автопилота—от наземного псточ-
> при радиоуправляемом полете — от турбо-
жт?7°^а лРакеты после сброса ускорителя (рис. 17).
А'т° "лл конденсаторы С1 и С2 с резистора-
ЛО° ^шунтированы контактами реле Р1 с целью
их заряда, а резисторы радиоуправления
сгУпает
Напала ич
^ежим «М»);
э-|ектГ1"Та,1Ия’
'е'троге-
мн R841’’ \име «М*»
с»ятпя R85 -
R30 „ реального
» _ 4 Г V) Гт ГЛ ТТ * */*+vu ? Ч М V/OIi V 1 AJJ L ' С 4 IJ W у
* пРавлепИи '4 г'Ю11аются контактами реле Р2 к блоку радио-
39
Рис. 17. Цепь включения реле Р1
40
Цепь сигналов датчиков угловой
скорости 1 п II каналов
скорости
-----1 угловой
снимаемое с потенциометров датчиков
р’рости, близко к пулевому напряжению
При отсутствии
reline, 1......
разворота ракеты Ma-
x'гл о вой
' автопилота.
cbt£ieiiii сигналов датчиков угловой скорости I и II каналов
рнтпчны. При наличии угловой скорости по I каналу перс-
метению щетки ДУС (рис. 19) > --
Снимаемое с потенциометра) напряжение,
яет через резистор R7 на делитель регулировки кру-
тизны сигнала, состоящий из резистора R10 и переменного
сопротивления R9.
Сигнал, снимаемый с делителя, поступает через резистор
соответствует определенное
которое посту-
pH на I вход усилителя напряжения. В режиме мас-
штабного усиления в цепь обратной связи усилителя вклю-
чается резистор R16, в режиме интегрирования — резистор
R84 и конденсатор Cl. С выхода усилителя напряжения
сигнал проходит через фильтр и поступает па усилитель
мощности.
Цепь
радиоуправления
с п г и а л о в
Сигнал радиокоманды (рис. 18) поступает па автопилот
с блока радиоуправления в виде разности напряжений, под-
водимых через резисторы R30 R14 и R40, R41 к 1 и II вхо-
дам усилителя напряжения.
На стартовом участке полета резисторы автопилота R14
и R41 соединяются с напряжением +13 в в бортовой схеме
ракеты с помощью соответствующих реле, и напряжение ра-
диокоманды на автопилот не проходит. Резисторы R30 и R40
являющимся нулем авто-
соединяются с напряжением +13 в,
пилота «О», с помощью реле Р2.
у I ’ — * 1 Ч/ J Л 1 |У V* и и ч.
. реле Р2 с момента сброса
ч а? щ' *°д ит 11 с Р е к л ю ч е 11 и е
ИОГО у V11J1UI1H >1 С иимищпги реле 1*1 ^Г1С1 р
реле Р1 и Р2 обозначены до срабатывания).
Ф, R17
П*1ЬТП ---
ЖИТ ДЛЯ
т°те (КтаНД'Ь1‘ Фчльтр
Фильтп _____________
ускорителя.
усилителей
^Ь1Х°Д^ блока радиоуправления подключается к автопило-
В этот момент
автопилота в режим
усиления с помощью реле Р1 (па рис. 1коп-
^°сле усилителя напряжения
через двойной
Т-образный фильтр,
R18, R19 и
1 служит для сглаживания
сигнал радиокоманды про-
состоящий из
конденсаторов С5, С6, С7.
пульсаций напряжения ра-
j настроен на частоту 80 гц. На этой час-
ч ЬтР уменьшает амплитуду пульсаций радиокоманды
Jn 20 раз. Далее управляющий сигнал через ре-
етп ПОстУ11ает на вход операционного усилителя
11 в виде разности токов его выходного каскада по-
to
PI
Рис. 18. Цепь сигналов радиоуправления
Рис. 19. Цепь сигналов датчиков угловой скорости
дается в обмотки струйного реле рулевого
щеиие штока рулевой машины происходит
при котором напряжение
обратной связи и поступающее
блока. Переме-
до положения,
се потенциометра
резистор R26 на
управляющий сиг-
снимаемое с
через
вход усилителя мощности, компенсирует
пал. Таким образом, обеспечивается пропорциональность не
ремещепия штока рулевой машины
Уровень напряжений при нулевой команде cootbctctbyci
переменная состав]
Макси маль-
сигиалх радиокоманды
+ 13 в, т. е. нулю автопилота; при этом
ляющая имеет амплитуду 1 в иа частоте 80 лр
на я команда образуется при разности напряжений 6.7 в. Це
пи сигналов радиоуправления в I и II каналах
идентичны. Входными сопротивлениями I канала автопилота
являются
зисторов R14 и R15 (по II входу). I
Диоды Д9—Д12, сопротивление R86 и резистор R97, яв-
ляющиеся элементами узла ограничения, обеспечивают огра-
ничение максимального напряжения радиокоманды, посту-
пающего на резисторы R14 и R30 до уровня, соответствую-
щего 33,5 градуса отклонения руля (описание узла ограниче-
ния изложено в разделе 5 главы VI).
Для регулировки нуля усилителя напряжения предусмот-
рены потенциометр R13 и резистор R12, подключаемые
к I входу усилителя напряжения 709. j
Регулировка нуля усилителя мощности производится I
помощью сопротивления R23 и делителей R21 и R22, нодклю
чаемых ко II входу усилителя мощности 7ЮМ.
V
автопилота
и
R30 (по I входу) п делитель.
состоящий из ре
и
I
крена
R61 и суммируется
и R68. Напряжение суммарного сигнала под
входу усилителя мощности. К I входу нодклю
состоящая из сопротивления
корректирую
через резистор R96 поступает иа де
с сигналом ДУК иа ре
С потенциометра датчика угла креиа (рис. 20) напряже
нпе поступает через резистор R64 па делитель крутиз
ны, состоящий из сопротивления R66 и резистора R67. Сигнал
ДУС канала
лители R59 и
зисторах R60
водится ко II
чается цепь регулировки нуля,
R69 и резистора R70, а также резистор R71
щий коэффициент усиления усилителя. Наличие цепи обрат
ной связи (R74) обусловливает соответствие перемещения
штока рулевой машины суммарному сигналу ДУК и ДУС.
44
Вход Шк-
$
15
Цепи контроля
Работоспособность схемы автопилота, установленного d
ракете, определяется по прохождению контрольных сигналов
задаваемых с контролыю-поверочной аппаратуры (рис. 21)
Контрольные сигналы по I и II каналам поступают соответ-
ственно на переменные сопротивления R9 и R35. I
III канал проверяется по двум входам: контрольный сиг-
нал ДУК поступает на переменное сопротивление R66, а кон-
трольный сигнал ДУС — на переменное сопротивление R59.
При нормальном функционировании канала отклонение
руля должно соответствовать поданному контрольному сигна-
лу. Отклонение руля измеряется дистанционно. I
Контрольно-поверочная аппаратура содержит: I
а) задающую схему, которая вырабатывает кон-
трольные сигналы, подаваемые па проверяемый автопилот;
б) регистрирующую схему, получающую с авто-
пилота информацию об отработке им контрольных сигналов.
Дистанционный контроль отклонения рулей ракеты осу-
ществляется по напряжению, снимаемому с потенциометров
обратной связи соответствующих рулевых машин автопилота.
5. РАБОТА АВТОПИЛОТА НА РАЗЛИЧНЫХ ЭТАПАХ
ПОЛЕТА
Подготовка автопилота к пуску ракеты I
При подготовке ракеты к пуску’ па центральную распре-
делительную коробку7 ЦР1\ через бортовой разъем ракеты m
наземных источников питания подается постоянное напряже-
ние 26 в, переменное однофазное напряжение 115 в, 1000 гЦ
и трехфазное напряжение 36 в, 1000 гц. Н
Указанные напряжения поступают из коробки ЦР1\ **
блок управления, а также в рулевые блоки автопилота 11
обеспечивают подготовку автопилота к пуску. За 30 сек <’
момента включения электропитания автопилот подготавлП'
вается к работе. В течение этого времени роторы гироскопов
приобретают рабочую скорость вращения, а лампы усилите
лей прогреваются и выходят па рабочие режимы.
46 I
47
Пуск ракеты
При подаче команды «Пуск» производится подрыв пиро,
заряда воздушно-арматурного блока ракеты, и сжатый B03J
дух из бортового баллона подается на редуктор, который ре1
дуцнрует давление до 18 ати. Далее воздух поступает н|
турбоэлектрогенератор 5И41. Когда турбоэлектрогенератор
выйдет па режим, происходит автоматическое переключение
бортовой аппаратуры с наземных источников питания на пи-
тайне от бортового источника (турбоэлектрогенератора).
момент перехода на бортовой источник питания напряжение
+26 в с турбоэлектрогенератора 5П41 подается па арретир
датчика угла крена автопилота. I
При разарретировании ДУК замыкаются контакты, кото-
рые включены последовательно в цепь блокировки пуска.
Если цепь блокировки пуска замкнута, то происходит подрыл
пиропатронов ускорителя.
При отделении ракеты от пусковой установки отключает-
ся бортовой разъем, при этом снимается напряжение +26 в
с реле Р1 п Р2 автопилота и операционные усилители напря-
жения переключаются в режим интегрирования.
Работа автопилота на участке полета с ускорителем
При полете ракеты с ускорителем сигналы датчиков уг-
ловой скорости в I и II каналах поступают на усилители на-
пряжения. включенные в режим интегрирования. Таким об-
разом, на выходе операционного усилителя вырабатывается
напряжение, пропорциональное угловой скорости и углу от-
клонения ракеты от стабилизируемого направления. Это на!
пряжение подается на вход усилителя мощности и вызывав
перемещение штока рулевой машины, при этом угол откло-
нения рулей пропорционален угловой скорости и углу откло!
нения ракеты от липни старта.
Па стартовом участке полета аппаратура радиоуправле-
ния от схемы автопилота отключена. Я
Па этапе полета с ускорителем канал крепа по обеспечЛ
вает полную стабилизацию угла крена ракеты, так‘как эф]
фективности элеронов недостаточно для парирования боль*
пшх действующих па ракету моментов, однако он умепьшас1
угловую скорость ракеты относительно осп Хсв к момеп1'!
сброса ускорителя, что облегчает последующий процесс сгМ
билизацпи крена. 1
48 I
работа автопилота с момента сброса ускорителя
до момента начала радиоуправления
При отделении ускорителя производится переключение
•пма работы усилителен напряжения (с интегрирования
масштабное усиление). Одновременно к входу автоппло-
,,а пОдключается аппаратура радиоуправления, однако радио-
таманда не выдается до момента захвата ракеты станцией
иедеиия. При этом полет ракеты стабилизируется по I и
If каналам с помощью сигналов датчиков угловой скорости
автопилота.
На этом же этапе за время не более 1 сек с момента от-
деления ускорителя происходит стабилизация угла крепа ра-
кеты относительно условной неподвижной системы коор-
динат.
Таким образом осуществляется подготовка к началу на-
ведения ракеты па цель.
Работа автопилота в процессе наведения ракеты на цель
С момента захвата ракеты станцией наведения аппарату-
ра радиоуправления начинает выдавать на автопилот коман-
ды наведения ракеты на цель. При этом автопилот осущест-
вляет перемещение рулей I и II каналов ракеты в соответ-
ствии с сигналами радиокоманды.
Вместе с тем производится стабилизация ракеты относи-
тельно поперечных осей по сигналам датчиков угловой ско-
рости.
Канал крена автопилота на этапе наведения ракеты на
цель стабилизирует ракету по крепу.
49
Г Л А В Л III
ЧУВСТВИТЕЛЬНЫЕ ЭЛЕМЕНТЫ АВТОПИЛОТА
1. ОСНОВНЫЕ СВЕДЕНИЯ ИЗ ТЕОРИИ ГИРОСКОПОВ
о
1 и роско пом называется вращающееся с оольшо!
угловой скоростью вокруг оси симметрии тело вращения (р
тор), одна из точек которого неподвижна.
Для обеспечения свободы вращения ротора гироскопа во
круг неподвижной точки может быть применен, например, км
данный подвес. Карданный подвес состоит из двух рамок 2 и
(рис. 22). Ротор / гироскопа с большой угловой скоростью
Рис. 22. Карданный подвес:
1—ротор; 2, 3—рамки; 4—основание
50
ается вокруг осп OZ относительно внутренней рамки
может поворачиваться ----------------------------
вешней рамки 3.
В ся вокруг осп OY относительно
ваТЬмеТрпп ротора называют осью
с11 о лгкю ги dock о и а.
вокру г оси ОХ относи гелыю
Последняя имеет возможность поворачп-
основания 4. Ось OZ
и г у р ы пли г л а в-
скопа. Ось ОХ перпендикулярна к
OY и OZ; все три осн OZ, ОХ и О^ пересекаются в од-
°1ой точке, которая и является неподвижной точкой ротора.
Карданный подвес обеспечивает ротору гироскопа свобо-
. вращения относительно трех осей, поэтому гироскоп, уста-
fJoBпенный в карданном подвесе, называют гироскопом с
под-
пересечения
то такой гироскоп па-
называют
Если центр масс
гироскопа совпадает с точкой
дар ио рамке гироскопа, импульса
бы доста-
вивших частей
осей карданного подвеса (точкой О)
зывается а с т а т и ч е с к и м.
При сообщении ротору астатического гироскопа быстрого
вращения можно наблюдать ряд специфических явлении, ко-
торые получили название гироскопических. Ось ротора при
повороте основания карданного подвеса сохраняет свое поло-
жение в пространстве,
силы которого при певращающемся роторе было
точно, чтобы привести рамку во вращение, теперь не произ-
водит почти никакого видимого эффекта. Характер движения
гироскопа под действием приложенного момента по сравне-
нию с движением иевращающегося тела изменяется: момент,
приложенный к внешней рамке гироскопа, вызывает его вра-
щение вокруг осп внутренней рамки и, наоборот, момент,
приложенный к внутренней рамке, вызывает вращение гиро-
скопа вокруг осп внешней рамки.
Причина возникновения рассмотренных выше гироскопи-
что при попытках пзме-
возникает мо-
оскоп и ч е с к и м м о-
еских эффектов заключается в том,
НИТ|
плоскость вращения ротора гироскопа
называемый гироскоп
мснт сил инерции,
Al О п -г _
“'’-топический момент всегда направлен так, что стре-
совместить по кратчайшему пути вектор угловой ско-
собствеппого вращения гироскопа с вектором угло-
переносного вращения. Это правило спра-
Для любого направления угловой скорости Q собст-
врагцения гироскопа и направления переносного вра-
(й<- Вектор .Иг- перпендикулярен к плоскости, содержа-
Мптся г
РОстц Q
Вот СКоР°сти со,
ЩГОГО
Величина гироскопического момента в случае, когда век-
тор toе перпендикулярен к оси 07, определяется выражением
/И). =Jz , I
где Jz — полярный момент инерции ротора (момент инерции
относительно оси OZ). Величину J*Q = H называют кине-
тическим моментом гироскопа. Размерность кинети-
ческого момента Н — гсм сек- -~— = гсм сек, а размерность гм*
„ 1 I
роскопического момента Мг =гсм сек.'~—=гсм, I
1 (
Рис. 23. Гироскопический момент, пропорциональный проекции (OeSlH|
В более общем случае, когда ось ротора составляет с век
тором переносной угловой скорости угол ср, гироскопиче
ский момент вызывается только составляющей «>г-sin ср, нер
пеидикулярной к вектору кинетического момента 1
Л/г = Н<о<? sin
Важно отметить, что гироскопический момент действует от
иосителыю оси ОХ, перпендикулярной к осп OY, вокруг ко
торой происходит переносное вращение. I
Рассмотрим движение трехстепенного гироскопа под лей
ствпем внешнего момента M = PZ, приложенного относнтель
по оси внутренней рамки гироскопа ОХ (рис. 24).
мгновение момент Р/ вызывает ускоренное вращение внутреп
ней рамки вокруг оси ОХ с угловой скоростью <ол-. С появле
нием угловой скорости <»v возникает гироскопический момеи
Мгу, направленный в сторону положительной оси OY. Это1
52
.«('ПТ вызывает движение внешней рамки гироскопа вокруг
ь ------” скоростью (оу •• --------- ------------
= //«у, направленного
” ’. Угловая скорость <оу
х пор, пока гироскопический момент М
движение гироскопа отпо-
только вра-
прецессия гп-
OY с угловой
°юго момента М
вешнему моменту Л4 = Р/
^цеоппш момент Р/. В результате
и появление гироскопиче-
противоположпо
возрастает
не уравновесит
,сцие гироскопа вокруг осп внешней рамки
роскопа.
Рис. 24. Прецессия трехстепенного гироскопа
Условие равенства моментов М и 7Wrv позволяет онре-
^елнть угловую скорость (Оу прецессионного вращения:
М Р/
= <опр.
1еДнее равенство выражает закон прецессии гироскопа.
,'Ип0\аг,^авление прецессии таково, что при своем
ки КОп стремится совместить по кратчайшему
Пос.-
19 V
движении
пути вектор
(рИс 1ч,еского момента Н с вектором внешнего момента /И
53
Более подробный анализ показывает, что прецессионное
движение может сопровождаться очень малыми по амплиту-
де колебаниями, совершаемыми относительно осей подвеса
гироскопа с большой частотой. Эти колебания, называемые
нутационными, возникают в момент приложения внеш-
него момента и быстро затухают под воздействием вредных
сопротивлений (в основном сухого трения в осях карданного
подвеса).
Из выражения для угловой скорости прецессии гироскопа
следует, что при отсутствии момента внешних сил отсутст-
вует и прецессионное движение гироскопа. Положение гиро-
неизменным в пространстве.
скопа в этом
случае остается
Рис. 25. Направление прецессии
Поэтому корпус свободного
гироскопа можно произ-
вольно наклонять в любых
направлениях, с любыми
скоростями и ускорениями.
При всех эволюциях глав-
ная ось гироскопа сохра-
няет свое первоначальное
положение неизменным в
пространстве. Указанное
свойство свободного гиро-
скопа широко используется
в приборах, предназначен-
ных для измерения углов
поворота подвижных объек-
тов относительно заранее
установленного направле-
ния. Датчики углов. в кото-
рых применяются свободные гироскопы, являются одними из
основных элементов автопилотов.
Если ограничить свободу вращения гироскопа относитель-
но одной из осей (связав, например, внешнюю рамку кар-
данного подвеса жестко с корпусом), то мы получим гиро-
скоп с двумя степенями свободы. Такой двухстепенный гиро-
скоп теряет способность выдерживать стабильным направле-
ние своей оси в пространстве (так как теперь ее можно при-
нудительно поворачивать вместе с корпусом), по зато при-
обретает новое качество — способность реагировать на угло-
вую скорость относительно оси недостающей степени сво-
боды.
Рассмотрим характер движения двухстепенного гироско-
па при вращении его основания с угловой скоростью
(рис. 26). В результате того, что ротор гироскопа поворачи-
вается одновременно около двух осей (вокруг главной осп
54
гироскопа 07 с угловой скоростью Q и вокруг оси OY вместе
с основанием с угловой скоростью ), возникает гироско-
пический момент. Этот момент приложен к ротору гироско-
па, направлен вдоль осн ОХ и равен
Mr.v = Но>в sin ( «>в Н).
(Знак Л при аргументе синуса обозначает, что берется угол
между векторами и И). Гироскопический момент вызы-
вает вращение ротора вместе с рамкой относительно осп X
с угловой скоростью (о.г. Вращение (прецессия гироскопа)
будет происходить до тех пор, пока вектор кинетического
момента гироскопа 1Т не совместится с осью вынужденного
вращения. При этом Л1Гл-— О» так как оба вращения (соб-
ственное и вынужденное) совпадают. Таким образом, при
вращении основания двухстепенного гироскопа вокруг оси,
перпендикулярной к осн ротора и рамки (рис. 26), роюр
двухстепенного гироскопа опрокидывается. Эта ось назы-
вается измерительной осью (или осью ч у в с т-
Рис. 26. Гироскоп с двумя степенями свободы
55
внтельности) двухстепенного гироскопа. Ось OX, bq,
круг которой прецессирует гироскоп, носит название осц
п р е ц е с с и и двухстепенного гироскопа. I
Необходимо отметить, что вращение ротора с угловой
скоростью (о с также вызывает появление гпроскопическо-
го момента Л1гу = На>г. Момент Мгу-стремится развернуть ро.
тор гироскопа в сторону, противоположную вращению осно-
вания, и уравновешивается реакциями в подшипниках под.
веса рамки гироскопа. I
Двухстепенный гироскоп не реагирует на вращение осно-
вания вокруг осн ОХ, так как при таком вращении положе-
ние осп ротора не изменяется. 1
Если поворот рамки двухстепенного гироскопа относи-
тельно основания ограничить пружиной, то по углу отклоне-
ния рамки можно судить об угловой скорости вращения ос-
нования вокруг измерительной осн. В данном случае прецес-
сия гироскопа происходит до тех пор. пока действующий ги-
роскопический момент не уравновешивается противодейст-
вующим моментом пружины. Поэтому при условии линейнос-
ти характеристики пружины и достаточно малых углах от-
клонения рамки 01' начального положения установившийся
угол поворота рамки будет пропорционален угловой скорос-
ти основания. Чувствительность двухстепенного гироскопа я
угловой скорости относительно соответствующей осп исполь-
зуется в датчике угловой скорости, являющемся одним из
основных элементов автопилота. I
2. ДАТЧИК УГЛА КРЕНА (БЛОК 702М-Б)
Назначение и принцип действия
Датчик угла крепа предназначен для измерения угла кре-
на ракеты относительно условной неподвижной системы ко|
ординат и выработки сигнала в виде напряжения, соответ-
ствующего значению угла крепа. I
Датчик утла крепа представляет собой свободный асп1’
тич(скип гироскоп. Действие прибора основано па свойств^
свободного гироскопа сохранять неизменным положение ос|
вращения ротора в пространстве. Ось собственного вращенЧ
ротора гироскопа в арретированном положении находится и
вертикальной плоскости, проходящей через продольную °с11
ракеты, п перпендикулярна к этой осп. Ось внешней рамЯ
гироскопа совпадает с продольной осью ракеты.
Ориентация рамок датчика угла крена относительно Ч
ловной неподвижной системы координат (раздел 4 глН
56 I
до старта ракеты показана на рис. 27 (оси О/уи. OZ ие
внутренней рамки гироскопа перпендикулярны к плос-
чертсжа).
УН1
Рис. 27. Ориентация рамок ДУК относительно условной
неподвижной системы координат до старта
При полете ракеты в плоскости Хун2у11 разворот по курсу
В этой плоскости ие вызывает появления угла крена и не
оказывает влияния иа свободный гироскоп. При повороте
ракеты относительно оси Хсв между внешней рамкой гиро-
скопа и корпусом ракеты образуется угол, равный углу
крена *(.
Когда полет ракеты происходит не в плоскости Xy„Z
рогора гироскопа образует некоторый
осью Ycn ракеты (рис. 28). L
^рса возникает креп ракеты относительно
э 1>Кп°и системы координат. Свободный ________
(н креп. Чтобы убедиться в этом, разложим вектор угловой
• орости разворота ракеты по курсу wy па составляющие по
Си Ротора — и по оси Хун— co.v.
сон вызывает лишь изменение относитель-
спо УГЛовой скорости вращения ротора
п°Рачц Ц<Я КЙеп Ракеты относительно плоскости /упХун,
!!°п°Рот
СВ
ракеты (рис. 28)
локной системы координат
ось
угол с поперечной
В этом случае при изменении
। условной непод-
гироскоп чувствует
Опрости •
°Си Ротора
11гч./~'°Ставляюща
а составляющая co.v,
по-
ает корпус прибора относительно внешней рамки. При
е корпуса датчика угла крена относительно внешней
с° Щетки потенциометра, закрепленного на внешней
Н11мается сигнал, пропорциональный углу крена.
?
ун
Рис. 28. Появление угла пространственного крена
Конструкция и электрическая схема датчика угла крена
Основными узлами датчика
л. внешняя рамка, механизм
5
гла крепа являются гиро
арретира и потенциометр!
веский датчик. Конструкция прибора показана на рис. 29. 30
31, 32. В гироузле применен гиромотор 1 (рис. 30), представ
ляющнй собой асинхронный трехфазный электродвигатель
Ротор 2 гиромотора выполнен в виде полого цилиндра, виут
ри которого расположен статор 3 с обмоткой, закрепленной
Рис. 29. Общий вид датчика угла крена
58
Рис. 30. Конструкция гпромотора:
/ гиромотор; 2—ротор; 3—статор с обмоткой;
4—фланцы
па осп. К ротору крепятся винтами два фланца 4, на цапфы
которых посажены подшипники. Концы статорной обмотки
выведены через отверстие в осн.
Питание гпромотора осуществляется переменным напря-
жением 36 в, 1000 гц, которое подводится через кольцевой
коллектор 22 на осп внешней рамки (рис. 31) и центральные
точечные контакты 20 на осп внутренней рамки. Кожух гиро-
мот ора одновременно является внутренней рамкой гироско-
па. Внутренняя рамка смонтирована во внешней рамке 7.
Максимальный угол поворота внутренней рамки от упора до
упора составляет ±70°.
Внешняя рамка установлена па подшипниках 5 в корпусе
!' прибора. Внешняя рамка имеет возможность вращаться
вокруг своей осн.
Для балансировки гироскопа на корпусе гпроузла и па
ппешней рамке закреплены балансировочные впиты и гру-
зики 23 и 24 (рис. 32).
Для обеспечения исходного взаимного расположе-
1И|я рамок гироскопа до момента старта ракеты в
Ситчике угла крепа предусмотрен механизм арретнро-
Вапня. Механизм арретирования (рис. 31) представляет
Н)бой электромагнит плунжерного типа, подвижный сердеч-
1И|к которого связан системой рычагов с внутренней и внеш-
'1ен рамками гироскопа. При подаче напряжения на обмотку
Электромагнита /5 плунжер 13, втягиваясь, преодолевает
"Нипводействпе пружины 14 и поднимает рычаг 17. Рычаг
z выходит из прорези кулачка 1<>. освобождая внешнюю
59
Рис. 31. Кинематическая схема датчика угла крена:
5—подшипник; 6—потенциометр; 7—внешняя рамка; 8—кулачок;
9—рычаг; 10—кулачок; 11—толкатель; 12—подшипник; 13—плун-
жер; 14—пружина; 15—обмотка электромагнита; 16—контактная
группа; 17—рычаг; 18—контакт; 19—корпус; 20—точечные контак-
ты; 21—токосъемник; 22—кольцевой коллектор
Рис. 32. Конструкция датчика угла крена:
23, 24—балансировочные винты и грузики; 25—шестиклеммная
колодка
60
рамку. Одновременно с этим рычаг 17 заставляет поворачи-
ваться рычаг 9, который освобождает толкатель 11. Толкатель
}1 выходит из прорези кулачка 8, освобождая тем самым
внутреннюю рамку.
При обесточивании электромагнита гироскоп арретирует-
ся. Пружина 14, разжимаясь, опускает рычаг 17, который
своим концом начинает давить на кулачок 10 внешней рам-
ки. Момент, приложенный к осп внешней рамки, вызывает
прецессию гироскопа относительно оси внутренней рамки.
Внутренняя рамка будет прецессировать до тех пор, пока
кулачок 8 не коснется толкателя И. Гироскоп теряет одну
степень свободы, и внешняя рамка начнет поворачиваться во-
круг своей оси до тех пор, пока конец рычага 17 не попадет
в прорезь кулачка 10. С этого момента рычаг 17 начинает да-
вить на толкатель 11, который, нажимая на кулачок 8. за-
ставляет поворачиваться внутреннюю рамку до тех пор, пока
конец толкателя не попадет в прорезь кулачка.
Катушка электромагнита арретира выполнена из двух об-
моток, соединенных последовательно (рпс. 33). Сопротивле-
ния обмоток равны 99 и 6 ом. В арретированном положении
гироскопа обмотка с сопротивлением 99 ом закорочена кон-
Рис. 33. Электрическая схема датчика угла крена
тактом 18 (рис. 31), что обеспечивает форсированный режим
при включении электромагнита (через обмотку с сопротив-
лением 6 ом проходит ток более 4 а). При срабатывании ар-
ретира контактная группа 18 размыкается и замыкается кон-
тактная группа 16, выдающая сигнал «Разарретировано».
Потенциометрический датчик представляет собой коль-
Йевой потенциометр 6, закрепленный па внешней рамке.
Токосъемник 21 закреплен па корпусе прибора. Потенцио-
метр обеспечивает возможность съема сигнала при поворотах
Пнещней рамки гироскопа на любой угол. Рабочий угол по-
Тенциометра ±20°, угол намотки участка, противолежащего
Рабочему, ±7°, остальная часть витков потенциометра зако-
61
рочена. При повороте корпуса прибора от 0 до ±20° напри,
жение, снимаемое со щетки потенциометра, изменяется от о
до ±13 в. При дальнейшем повороте корпуса гироскопа сиг.
нал остается постоянным, так как при этом щетка скользит
по закороченной части потенциометра. Па участке потенцио-
метра, противолежащем рабочему, также происходит пзмо-
пение сигнала. Зависимость величины сигнала от угла пово-
рота внешней рамки показана ни рис. 34. 1
। Ц/, в I
Рис. 34. Зависимость величины сигнала от угла поворота внешней
рамки I
Для соединения датчика угла крена со схемой автопп.ю-
та предусмотрены две шестиклеммные колодки 25 (рис. 32).
установленные на корпусе прибора. Кожух датчика окрашен
черной масляной краской, па нем нанесены стрелки, указы-
вающие направление полета ракеты и кинетического момента
гироскопа. 1
3. ДАТЧИКИ УГЛОВОЙ СКОРОСТИ (БЛОКИ 688Б1 и 688Г1)
Назначение и принцип действия
Датчики угловой скорости предназначены для измерения
трех составляющих угловой скорости ракеты относительно
осей связанной системы координат и выработки сигналов I
виде напряжений, соответствующих значениям этих состав'
ЛЯЮ1ЦИХ. И
Датчик угловой скорости представляет собой двухстспеН'1
пый гироскоп с ограничением свободы вращения рамки прУИ
При наличии угловой скорости ракеты относительно осЯ
датчика, называемой измерительной осью, возникает гпр0'
скопическпй момент, при этом рамка прибора поворачивав1!
ся на угол, при котором гироскопический момент компенсв
руется моментом пружины. Угол поворота рамки нропориЧ
палеи величине угловой скорости ракеты. Три датчика }
оВОй скорости
расположены в блоке управления так, что их
оси направлены соответственно по осям раке-
Zcn. как показано на рис. 35.
Рис. 35. Расположение датчиков
угловой скорости в ракете
Движение
приближенно
где. J v _
рамки датчика угловой скорости может быть
записано в следующем виде:
. d2a da , di)
Jv dt- k dt Ca-H dt ’
момент инерции подвижных частей относитель-
но оси прецессии гироскопа, гем сек2:
к удельный демпфирующий момент, гем/рад сек;
жесткость пружин, гем:рад:
— угол поворота рамки гироскопа, рад;
Ч кинетический момент гироскопа, гем сек:
Как показывает уравнение, по окончании переходного про.
цесса
угол поворота рамки пропорционален
измеряемой угловой скорости:
С dt
Угол отклонения рамки с помощью потенциометрического
датчика с коэффициентом к(|преобразуется в напряжение
постоянного тока 1
nJir=kua в.
Конструкция и электрическая схема
датчика угловой скорости
Три датчика угловой скорости, применяемые в автопилоте
5А42, имеют одинаковую конструкцию, которая показана на
рис. 36, 37 и 38. Рамка 2 (рис. 37) с гиромотором 1 уставов-
Рис. 36. Общий вид датчика угловой скорости
лена на подшипниках 3 в корпусе 4. Рамка имеет ограничь1'
ный угол поворота, который! регулируется упорными винтаМ!
12 (рис. 38). Гиромотор представляет собой асинхроннь*!
трехфазный электродвигатель, питание которого осуП1еС1
вляется переменным напряжением 85 в, 1000 гц. Ротор 14 Г1
ромотора (рис. 39) выполнен в виде полого цилиндра, в11У'г1|
которого расположен статор 15 с обмоткой, закрепленный
оси. К ротору крепятся винтами два фланца 16, на цапфы к J
торых посажены подшипники 17. Концы статорной обм° I
64 I
1ГгСдены через отверстие в оси. К основанию // (рис. 37),
крепленному на корпусе, привинчен потенциометр 10. 1\ то-
3<. ?ке основанию на плоских пружинах 8 подвешен сухарь 6
5 • щеткодержателем 7 и щетками 9. Отклонения рамки через
Доводок 5 передаются на щеткодержатель. Пружины создают
момент, который препятствует
(588Б1 и 688Г1 имеют пружины
обеспечивает различные пределы
повороту рамки. Датчики
различной
измерения
жесткости, что
угловой ско-
рости.
Рис. 37. Кинематическая схема датчика угловой скорости:
6'-сухпМ0Т°Р’ —рамка; 3—подшипник; 4—корпус; 5—поводок;
‘Рь; 7—Щеткодержатель; 8—пружины; 9—щетка; 10—потен-
циометр; 11—основание
°1енцпоМеТр намотай
Н’^ины 8
1 егУлировка
проводом из золотого сплава,
изготовлены из бериллиевой бронзы.
_ «нуля» датчика осуществляется путем исре-
Потенциометра относительно щеток. Регулировка
ВаН1ь/1а ИЗМеРення производится за счет перемещения ос-
я // относительно шарика поводка 5.
65
13—шестиклеммная
12—упорный винт;
колодка
1—гиромотор; 2—рамка;
Рпс. 39. Конструкция гиромотора:
1—гпромотор в сборе; 14—ротор; 15—статор; 16—фланец; z
шипник
66
Цля соединения датчика угловой скорости со схемой ав-
пи 1ота предусмотрена шестиклеммная колодка 13 (рис. 38).
Р-гановленная на корпусе. Электрическая схема датчика ио-
•^азапа на рис. 40.
М Л5 R6
Рис. 40. Электрическая схема датчика угловой скорости
67
УСИЛ ИТЕЛ ЬНО-ПРЕОБРАЗУЮЩИ Е ЭЛЕМЕНТЫ
АВТОПИЛОТА
1. ОСНОВНЫЕ СВЕДЕНИЯ ИЗ ТЕОРИИ ОПЕРАЦИОННЫХ
УСИЛИТЕЛЕН
интегрирование, суммирование, вычитание и т. п.
или
разнообразным требова-
предъявляемым к операционным элементам, элементы
Эти эле-
преобр3’
----- г----------г __ _______ _ -----------------, t
а определяется величиной и стабильность’
Система автоматического регулирования является устрой-
ством, обеспечивающим воспроизведение требуемой функцио-
нальной зависимости между регулируемой и управляющей
величинами. 1
Для реализации этой зависимости схема регулятора дол-
жна включать элементы, позволяющие производить опреде-
ленные динамические преобразования рабочих сигналов, т. е.
выполнять с сигналами определенные операции: дифференци-
рование
Такие элементы схемы называются операционным и
решающими элементами.
Наиболее полно удовлетворяют
ниям
замкнутого типа с отрицательной обратной связью,
менты, называемые операционными у сил и
строятся иа принципах, положенных в основу замкнутых сис-
тем автоматического регулирования. При определенных усло-
виях оказывается, что точность работы таких элементов !К
зависит от изменения параметров основного канала
зующего сигнал, ;
параметров цепи обратной связи и входной цепи. __
Рассмотрим схему простейшей линейной системы автоМ‘*
тического регулирования, состоящей из трех звеньев (рис. 4 I
Пусть передаточные функции этих звеньев имеют вид
F I
1 — х(р) ’
F.,(p) = -44-; I
у(р)
ку(р)= .
у *1(р)—z(p)
68
Передаточная функция замкнутой системы получается исклю-
чением координат Х1(р) и z(p) из этой системы уравнений:
У(р)_ ky(p)F1 (р)
х(р) 1-hky (р)К(р) ’
Отсюда следует, что при достаточно большом значении
ky (р) 1 выражение, связывающее входную и выходную
величины, может быть с достаточной для практики точностью
представлено в виде
уСр) _ F](p)
и?1/13 11ВЦ1ем случае — усилителя)
пи обДПОИ 1!елпчппами определяется
F / \ мыоис,1мос1
MoST°"ePa«"OH
7??Oro,,г
Кость" обрат|10"
В°ДИ:
Со,Фотив
В°ДИ
между выходной
параметрами це-
эким образом, при достаточно большом коэффициенте уси-
«и«И/ 0С110ВП0Г0 звена системы автоматического регулирова-
связь
только
В связи и входной цепи.
ч зависимости от вида передаточных
шый элемент, построенный на этом принципе,
выполнять различные математические преобразования
сигнала. Например, в схеме, приведенной на рис. 42.
связи усилителей с k v 1 установлены ем-
имеющая передаточную функцию (изображение про-
Х10сти) F2(p)
-”Пепие с передаточной функцией (изображение про-
°сти) Fj(р) __ Следовательно, передаточная
:Иий .
его элемента
i(p)
= Ср, и на входе — омическое
. Следовательно,
69
Ш . b'i(P) = i
q(p) F2(p) KCp ’ I
t. e. такой элемент является интегратором. I
В случае емкости на входе и омического сопротивления J
обратной связи имеем 1
^(Р) _ ?i(P) _ Ср __ !
*i(p) ” >>(Р) ” 1 ” <Р’
R I
т. е. этот элемент дифференцирует входной сигнал вь I
Отметим, что для уменьшения ошибки преобразования
так же, как и в схемах разомкнутого типа, входное сопротив-
ление усилителя должно быть величиной достаточно большой
по сравнению с сопротивлениями входной цепи и цепи обрат-
ной связи. Только в этом случае можно считать, что по цепи
входа и по цепи обратной связи протекает один и тот же ток.
вызванный приложенной величиной входного напряжения
ei(p).
Рис. 42. Интегрирующий операционный усилитель (интегратор)
При этом для схемы, приведенной на рис. 43,
i (р) = а т а к ж е i (р) = - ; ^2- -р-
17 *i(p) 17 z2(p)
или
Р)(р)—go(p) __ е0(р)—е2(р)
*1(р) z2(p)
мр)=*.(р) (-w+O-^cpi-^r-
70
где Zi (р) и z2(p) — изображения комплексных сопротнвле-
jjiii цени входа н обратной связи — величины, обратные пе-
редаточным функциям F] (р) и F2(p).
Рис. 43. Общая схема операционного усилителя
Так как в нашем случае коэффициент усиления усилителя
достаточно велик
то величина погрешнос-
ти от первого слагаемого
ег(р)=—ех(р) Из этого вытекают два следствия:
F В операционных усилителях величина е0 напряжения
ч _ г ____ _j с выходным напряже-
нием, поэтому потенциал входной точки а усилителя близок
к нулевому.
2- При выполнении операции
НОетг г
мь преобразуемого входного напряжения
'Знак «—» перед вторым слагаемым ei(p) ( — 7-<)
CTqo - -Р/
необходимым условием осуществления отрицательной
°Рэтиой связи.
сК|ц^аЧа сУммиРованпя сигналов с заданным дннамиче-
соотношением межд\ ними также выполняется па one-
![Ь ином усилителе. В схеме, приведенной на рис. 44, вход-
ЧЛ(Ч.аС‘Ппчпнь1 ei 11 е2 подводятся через соответствующие ком-
сопротпвлення Zj(p) и z2(p) к точке а усилителя,
установлено в цепи обратной связи.
ошибки мала (е0С^) по сравнению
честь
'‘°Нпп~,г “X---
Явление z(p) у
мала и
усилитель изменяет поляр-
на обратную
что явля-
Z(p)
Рис. 44. Схема суммирования на операционном усилителе
Ток i по закону Кирхгофа составляется из суммы
i = h + Io-
Thk как
Ир)=
g0(p)—g(p)
z(p)
gi(p)—^о(р)
Z1(P)
i2(p) =
g2(p)-gp(p)
Z-2(P)
то с учетом e0(p) О после подстановки имеем I
*<р)=Ч-ВН(р)+4&^р)]-
При использовании любого преобразующего элемента в
реальной схеме немаловажное значение имеют величины его
входного и выходного сопротивлений.
Для того, чтобы элемент не шунтировал предшествуют116
ему цепи схемы, вырабатывающие входной сигнал, необходим
мо стремиться к возможно большему значению его входного
сопротивления. С другой стороны, чем меньше выходное col
противление преобразующего элемента, тем меньше влияю16
па величину его выходного сигнала сопротивления последу10
гцих цепей схемы, т. е. нагрузки.
В операционных усилителях с отрицательной обратив
связью входное сопротивление практически равно сопро1,,э
.пению zBX (р) па его входе. Я
Л ОПЕРАЦИОННЫЙ УСИЛИТЕЛЬ НАПРЯЖЕНИЯ (БЛОК 709)
Назначение усилителя напряжения
Операционный усилитель напряжения (блок 709), исполь-
зуемый в автопилоте 5А42, предназначен для преобразования
сигналов управления и стабилизации 1 и II каналов автопи-
лота в результирующий управляющий сигнал, подаваемый на
ВХОД следящей системы рулевого привода. Сигнал управле-
ния вырабатывается аппаратурой радиоуправления ракеты
в виде разности напряжений ирк относительно пуля автопи-
лота.
Сигнал стабилизации, вырабатываемый датчиком угловой
скорости автопилота в виде напряжения идг относительно
нуля автопилота, поступает на делитель регулировки крутиз-
ны, имеющий коэффициент деления 0,65, и затем на опера-
ционный усилитель.
Результирующий сигнал управления иВых на разных эта-
пах полета ракеты формируется в следующем виде:
на стартовом участке (режим интегрирования):
( . _ 30,3(Тр+1) , .
Пвых(р) — “ Цдг(р),
Г
на участке наведения (режим масштабного усиления):
и вых— 1,64 Цдг 2,25 црк.
Иных при нулевых значениях входных сигналов имеет на-
чальный уровень нуля автопилота.
Блок 709 обеспечивает усиление сигнала ошибки с коэф-
фициентом ку =3000-4—15000 и в соответствии со значениями
комплексных сопротивлений в цепи его обратной связи и во
ВХоДной цепи осуществляет заданные преобразования сиг-
налов.
Принципиальная схема усилителя напряжения
В
лок 709 представляет собой трехкаскадный электронный
1тель, выполненный на двойных триодах. Все каскады
•ис. 45) выполнены по дифференциальной схеме,
- два входа и два выхода.
подаче сигнала только иа одну сетку лампы другая
; "Л1|'геля (р
е-имеют ди
°лжпа быть соединена с нулем.
I уу *
йьгГь * Псп°льзуется один выход, усилителя, другой должен
К с°еДинен с нулем.
73
Проследим работу дифференциального каскада (рис. 46).
При подаче на сетку первой половины лампы положи-
тельного напряжения ток через нее увеличится, так как, чем
больше положительное напряжение на сетке, тем больше
анодный ток.
Рис. 46. Схема первого каскада усилителя напряжения
Увеличение анодного тока вызовет большее падение на-
пряжения на анодном сопротивлении R2 и уменьшение на-
пряжения в точке б. Значит, увеличение напряжения на сетке
вызывает уменьшение напряжения на аноде.
Так как обе половины лампы связаны между собой через
^атодное сопротивление R4, то увеличение анодного тока че-
1з первую половину лампы приведет к повышению напря-
2,1111 яо в точке а, а при неизменном напряжении на сетке
половины лампы — к увеличению отрицательного
ЧепрНачит’ когДа ток через первую половину лампы растет,
вторую он уменьшается.
Ко в Уменьшение вызывает увеличение напряжения в точ-
<<+>>) > поск°льку меньший ток создает и меньшее па-
С напряжения па резисторе R3.
11°Тснп ' )Вательпо’ между анодами лампы возникает разность
которая и составляет полезный сигнал. Такой
75
каскад называют также балансным, так как на его работу не
влияет изменение напряжения питания и температуры окру-
жающей среды.
При изменении питающего напряжения токи в обеих по-
ловинах лампы изменяются одинаково и разница между ни-
ми остается постоянной (в случае, если сами лампы одина-
ковы по своим параметрам). Для уменьшения зависимости
выходного напряжения от изменения напряжения питания
производится подбор ламп по величине разности анодных
токов.
Лампы с наименьшей разностью анодных токов устанав-
ливаются в первый каскад, так как от его работы зависит ра-
бота всего усилителя. I
Изменение температуры окружающей среды ведет к из-
менению величин сопротивлений анодных нагрузок. 1
Для того, чтобы исключить влияние температуры на раз-
ность анодных токов, сопротивление R2 и резистор R3 под-
бираются с одинаковыми температурными коэффициентами.
Второй каскад усилителя выполнен также по дифферен-
циальной схеме (рис. 47). Он должен иметь большой коэффи-
циент усиления. Для увеличения коэффициента усиления во
втором каскаде применена положительная обратная связь:
аноды лампы через резистор R8 и сопротивление R9 соеди-
нены с сетками. 1
I каскада
к сеткап
лапп
Ш каскада
Рис. 47. Схема второго каскада усилителя напряжения
При этом напряжение с выхода лампы (анода) с тем же
знаком добавляется к напряжению на входе (сетке); за счет
эТОго происходит дополнительное усиление.
Для стабилизации работы каскада применена емкостная
отрицательная обратная связь (конденсатор С1).
На низких частотах сопротивление конденсатора велико,
п он на усиление не влияет. На высоких частотах его сопро-
тивление уменьшается, и напряжение с анода понадает на
сетку в противоположной полярности, уменьшая коэффициент
усиления каскада.
Для передачи сигнала со второго каскада на третий и
обеспечения необходимого напряжения на сетках лампы
третьего каскада служат межкаскадные делители напряже-
ния на резисторах R1 1—R12 и R13—R14.
Третий каскад выполнен по той же схеме, что и первые
два (рис. 48). К нему предъявляется требование достаточно
большой мощности для получения большого выходного на-
пряжения при малых сопротивлениях нагрузки. Так, у усили-
теля 709 па сопротивлении нагрузки Rn выходное напряже-
I
ние превышает 20 в.
В усилителе с глубокой
* *
отрицательной обратной связью
из-за наличия фазовых искажений сигнала может возникнуть
высокочастотная генерация (контур усилителя при замыка-
нии обратной связи становится неустойчивым).
Для срыва генерации в усилитель введены конденсаторы
С2 и СЗ.
Конденсатор С2 включен па входе третьего каскада уси-
лителя.
На высоких частотах он создает опережение по (разе, ком-
1|(нсируя отставание по фазе, возникающее в остальных зве-
'Ьях усилителя.
конденсатор СЗ включен на выходе усилителя параллель-
но 1[Чгп
ч 1 РУзке. Он уменьшает коэффициент усиления усилпте-
11а высоких частотах.
цепей усилп-
±10% и на-
» 11Нтания анодно-сеточных и накальных
Не°бходимо постоянное напряжение +150 в
Я*ение накала 5 в ±10%’.
С анооаб
RIZ
Рис. 18. Схема третьего каскада усилителя напряжения
Напряжение накала ламп снижено против нормального
(G.3 в), что вызвано необходимостью получения малых се-
точных токов п большей стабильности. С целью повышения
стабильности применяется также тренировка используемых в
усилителе ламп.
Конструкция усилителя напряжения I
Блок 709 (рис. 49) состоит из алюминиевого штампов^11
кого каркаса / с приклепанными к нему лирами 2 и пресс0
ванной из прссспорошка печатной платы 6 с распаянными Ч
пей элементами (лампами, резисторами, конденсатор4
мн и переходной колодкой для включения блока в схему)- 1
Печатная плата 6 с элементами крепится к каркас) 11
тырьмя винтами 4, два из которых одновременно кре,,Ч
крышку 3 для защиты выводных проводников ламп. I
78 I
Рис. 49. Конструкция усилителя напряжения:
1—каркас; 2—лиры; 3—крышка; 4—винты; 5—теплоизоляционный
экран; 6—печатная плата
Между печатной платой п каркасом помещен теплоизоля-
ционный экран 5.
С целью улучшения электроизоляционных свойств печат-
ная плата с распаянными на ней элементами покрывается
влагозащитным лаком.
з. ОПЕРАЦИОННЫЙ УСИЛИТЕЛЬ МОЩНОСТИ (БЛОК 7ЮМ)
Назначение усилителя мощности
Операционный усилитель мощности (блок 7ЮМ) предка-
V; 11 И1 каналов с сигналом обратной связи по положению
и *!'.1’°11 Машипь1 и выработки сигнала ошибки, достаточного
। в действие струйного реле.
ост*1 ВХод Усилителя сигналы подаются в виде напряжений
. сяниого тока с операционного усилителя напряжения в I
||q «МИПИД II 17 17! 1 IV
,1О1Иности дЛЯ приведения
Ч'. |р1Налах 11 суммарного сигнала с ДУС и ДУК в 111 кала-
7?РЬ|е"вю
7Юм
Рузкой усилителя служат обмотки струйного реле
лючаются в анодную цепь второго
обеспечивает
ко-
када. Блок
состоянии с
Uh ’-“vm <\у nt; МСПСС MUV 11 13 LUU1DC1C1D1HI CU ОПОЧС"
11 во 1 лекснь1Х сопротивлении в цепи его обратной свя-
1а п.. Вх°Диой цепи осуществляет заданное усиление
Ощибки. "
усиление в разомкнутом
не менее 500 и в соответствии со значе-
сиг-
79
Принципиальная схема усилителя мощности
Блок 7ЮМ представляет собой электронный двухкаскад
ный усилитель. Оба каскада выполнены по днфференцналь
ной схеме, т. е. имеют два входа и два выхода (рис. 50). 1
Питание анодно-сеточных цепей производится от источнц
ка постоянного тока напряжением ±150 в ±10%. 1
Рис. 50. Схема усилителя мощности 7 ЮМ
Напряжение па экранные сетки первого каскада подает-
ся от источника ±150 в через делитель напряжения па ре-
зисторах R2 и R5, а па экранные сетки второго каскада —
через гасящий резистор Rll. 1
При подаче сигнала на сетку только одной лампы сетка
другой должна быть соединена с нулем.
Первый каскад усилителя выполнен на пентодах (рис. 51)-
Проследим его работу. 1
При подаче положительного напряжения па сетку перво»
лампы ток через нее увеличится, так как, чем больше поло-
жительное напряжение па сетке, тем больше анодный ток.
Увеличение анодного тока вызывает большее падение Hsj
пряжения па сопротивлении R1 и уменьшение напряжения
точке б.
Значит, увеличение напряжения на сетке (« + ») вызыв<|е
уменьшение напряжения на аноде («—»). 1
Так как обе лампы связаны между собой через кн10'11^,
сопротивление R4, то увеличение анодного тока через
вую лампу приведет к повышению напряжения в точке и. J
при неизменном напряжении па сетке второй лампы - J
чпт отрицательное смещение на ней, т. е. уменьшит анод
ток.
80
При этом падение напряжения на резисторе R.3 умень-
шится, а потенциал точки в возрастет (« + »).
Следовательно, между анодами ламп возникнет разность
потенциалов, являющаяся полезным сигналом.
э /50в
R4
-150 в
Рис. 51. Схема первого каскада усилителя мощности
то-
тем и ер ату ры
влияние изменения
токов, сопротивление R1 и резистор
R3
Для уменьшения зависимости выходного напряжения от
изменения напряжения питания так же, как и в блоке 709,
производится подбор ламп по величине разности анодных
Ков и крутизне.
Чтобы исключить
1азность анодных ........- ,-----г
Чро 11Ра10ТСЯ по величине температурного коэффициента со-
ИЯ.
Min Целью получения большого коэффициенте! усиления и
таЛ1Мальпой потребляемой мощности лампы каскада рабо-
в режиме малых токов.
Зои. ^обеспечивается большой величиной анодных narpv-
H<R R3-
Дает^о^ХоДимый режим работы ламп первого каскада соз-
й Uen.! п°Дбором резисторов R4 в цепи катода и R2, R5
,1И ОДранпой сетки.
81
Для передачи сигнала с первого каскада па второй и соз-
даппя па сетках ламп второго каскада необходимого папря-
жения служат межкаскадные делители напряжения па pQ.
зисторах R6—R7 и R8—R9. |
Второй каскад усилителя (рис. 52) выполнен также по
балансной схеме на пентодах. Нагрузка усилителя дифферен-
циальная, каждое из сопротивлений нагрузки является анод-
ным сопротивлением выходного каскада. fl
Достоинство этих ламп заключается в большой допусти-
мой мощности рассеивания на аноде и большом допустимом
токе катода. 1
Необходимый режим работы ламп создается подбором
резистора R10 в цени катода так, чтобы рабочая точка
находилась на линейном участке статической характеристи-
ки, а нулевые токи были при этом равны 9±1.5 ма. I
Для уменьшения нагрева усилителя часть сопротивления
катода RK (рпс. 52) устанавливается за пределами блока.
8 + /50в
СЗ
4
С анодов DO
ламп , Ко
I каскада —
• __________
С1
R6
R12
R13
R7
02
-150 в
Рис. 52. Схема второго каскада усилителя мощности
Напряжение обратной связи снимается с анода лампы
чСрсз делитель напряжения па резисторах R12 и R13.
;1К как при выбранном режиме работы ламп второго каска-
;1 напряжение на аноде очень большое. Стабильность дсли-
ге.1Я обеспечивается подбором резисторов ио температур-
ному коэффициенту.
]1з-за наличия фазовых искажений в усилителе может
возникнуть высокочастотная генерация.
Для коррекции частотной характеристики в усилитель
введен конденсатор СЗ, а также вне схемы усилителя уста-
навливаются конденсаторы С1 и С2.
Конденсатор СЗ включен на входе второго каскада. На
высоких частотах ои создает опережение ио фазе, компенси-
руя отставание ио фазе других звеньев усилителя.
Конденсатор С1 включается между анодами ламп второго
каскада. На высоких частотах он снижает коэффициент уси-
ления. Конденсатор С2 корректирует частотную характерис-
тику усилителя при работе на индуктивную нагрузку.
Конструкция усилителя мощности
Влок 710М (рис. 53) состоит из алюминиевого штампо-
(-°ваиной из порошка печатной платы с
лемептами (лампами, резисторами.
данного каркаса 1 с приклепанными к нему лирами 2 и прес-
распаяиными на ней
конденсаторами и
1111)еХ(Иной колодкой).
“Ре.Меппм ' ' ’ ...
10 крепят крышку
винтами 4, два из которых одио-
защищающую выводные провод-
и каркасом помещен теилоизоля-
экран 6.
||;В|
электроизоляционных свойств
лаком.
83
Рис. 53. Конструкция усилителя мощности:
каркас; 2—лиры; 3—печатная плата; 4—винты; 5—крышка;
6—теплоизоляционный экран; 7—колодка
84
РУЛЕВОЙ ПРИВОД АВТОПИЛОТА
Рулевой привод автопилота предназначен для перемеще-
ния рулей и элеронов ракеты в соответствии с результирую-
щими сигналами управления и стабилизации, вырабатывае-
мыми в схеме автопилота.
1. ОСНОВНЫЕ СВЕДЕНИЯ ИЗ ТЕОРИИ СЕРВОПРИВОДА
Сервопривод является необходимым устройством систем
автоматического регулирования, в которых регулирующая
величина представляет собой механическое перемещение
(реже — скорость). Выходное перемещение в таких систе-
мах должно с возможной точностью соответствовать (быть
пропорциональным) сигналу управления, который вырабаты-
вается в схеме регулятора.
Для механического перемещения необходимо использо-
вание источника механической энергии, поэтому работа сер-
вопривода связана с управлением энергией этого источника,
Сервопривод состоит из следующих основных элементов
•рис. 54): двигателя, датчика обратной связи, элемента
сравнения, усилителя сигнала ошибки.
Элемент
сравнения
Усилитель
Х2
Датчик обратной
связи
Рис. 54. Структурная схема сервопривода
Двигатель осуществляет перемещение исполнитель,
ного органа регулятора. |
При работе системы возникает необходимость изменения
направления перемещения исполнительного органа, поэтому
в двигателе должна быть заложена возможность реверса. :
По роду энергии, используемой для перемещения испол-
нительного органа, двигатели классифицируются па электри-
ческие, пневматические и гидравлические. 1
Управление двигателем наиболее часто осуществляется
с помощью электрических сигналов управления. Поэтом
сервоприводы принято называть соответственно электриче-
скими, электроппевматическими и электрогпдравлпческими.
Основными характеристиками двигателя, определяющи-
ми динамику его работы, являются:
— механическая — зависимость скорости V двигате-
ля от нагрузки F на нем при постоянном сигнале управ-
ления I;
— скоростная — зависимость скорости от управляю-
щего сигнала при постоянной нагрузке. Я
иповые характеристики двигателя представлены на
рис. 55 и 56. I
Рассмотрим в качестве примера работу электропневма-
тпческого двигателя, изображенного на рис. 57. Я
Здесь источником энергии является сжатый воздух, под-
водимый к струйной трубке 1 и распределяемый при ее пово-
роте между полостями двухходового пневмоцилпндра 2.
Струйная трубка поворачивается электромагнитом 3, иа ко-
торый поступает сигнал управления в виде тока I. Под Ad'i-
ствием перепада, давлений в полостях цилиндра поршень 2
со штоком перемещается со скоростью V. Я
При отсутствии нагрузки на штоке величина установив-
шейся скорости перемещения штока зависит только от вели-
чины сигнала управления. Если к штоку приложена нагрУ31
ка сопротивления (силаР). то пропорциональность меЖД)
скоростью п входным сигналом сохраняется, однако скоро1'1*
пая характеристика смещается по осп ординат, как показан0
пунктиром на рис. 56. Таким образом, скоростные хараК1!
ристики для различных нагрузок (F0<Fi<F2) имеют вид СЧ
мен ст в а прямых. Я
При разных сигналах управления (11<12<Тз) механиу-
скпе характеристики двигателя, как показано па рис. 55, 13 1
же представляются в виде семейства прямых. Я
86 Л
Рис. 55. Механическая характеристика двигателя
Рис. 56. Скоростная характеристика двигателя
Воздух
Характер движения поршня зависит не только от величц.
иы силы нагрузки, по и от инерционности самого поршня, а
Рис. 57. Работа электропневматического двигателя:
1—струйная трубка; 2—пневмоцилиндр; 3—электромагнит;
4—поршень
Если представить зависимость движущей силы Р (пере-
пада давлений в полостях цилиндра) от управляющего сиг-
нала I выражением
где кт — коэффициент пропорциональности, то зависимость
между управляющим сигналом и скоростью без учета сжи-
маемости воздуха получится из выражения равенства сил
-^-m+kM\=P=kTI, I
где m — приведенная к штоку масса движущихся детален.
км — коэффициент механической характеристики ДвИ
гателя.
Отсюда можно получить передаточную функцию ДвИ j
теля как звена системы автоматического регулирования:
кт
У(р) км
Кр) Л р+1
км
88
Так как перемещение штока л*2—^Vcit, то запишем в опе-
0
раторноп
форме
V(p) = A-.(p) р.
Следовательно, передаточная функция двигателя но пере-
мещешпо представится в виде
к г
ха(р) _____км____
(£p+i)p’
т с двигатель представляет собой интегрирующее звено с
’ ' кт
коэффициентом усиления—и с инерционным членом, имею-
щим постоянную времени
in
км
Датчик обратной связи предназначен для изме-
рения величины перемещения исполнительного органа дви-
гателя и выработки сигнала обратной связи, пропорциональ-
ного этому перемещению. В качестве датчика обратной свя-
зи, например, может быть использован потенциометр, вклю-
ченный так, как показано на рпс. 58. Движок потенциометра
жестко связан с исполнительным органом; таким образом,
напряжение обратной связи иОс, снимаемое между движ-
ком и точкой а схемы, пропорционально перемещению
двигателя, т. е.
Нос — Кос-^
где кос— коэффициент датчика обратной связи.
Рис. 58. Схема датчика обратной связи
89
Отметим, что характер и величина сигнала, вырабатывав
мого датчиком обратной связи, должны быть такими же, ка1
у управляющего сигнала, подаваемого на сервопривод, tITQ
оказывается необходимым при их сравнении. у
Элемент сравнения осуществляет сравнение yJ
равляющего сигнала uv и сигнала обратной связи ii()c и жЯ
рабатывает сигнал ошибки иОш, равный их алгебраической
разности (рис. 59). Выражение, описывающее работу эле-
мента сравнения, представляется в виде
U ош — Uy Нос*
Элемент
В практических схемах сравнение этих двух сигналов осу-
ществляется на входе преобразующего элемента, например,
усилителя, подобного описанному в главе IV, позволяюще-
го производить вычитание двух входных величин или их сум-
мирование (в этом случае для получения алгебраической
разности знак сигнала обратной связи, поступающего ва
усилитель, изменяется на обратный). Я
Усилитель
сигнала
ошибки обеспечивает пре
образование сигнала ошибки в сигнал необходимого вида *
мощности, предназначенный для приведения в действие два
гателя. «
В рассмотренном нами выше случае (рис. 57) двигатель
приводится в действие путем подачи в электромагнит упраВ'
ляющего тока I. Таким образом, задачей усилителя сигнал^
ошибки является обеспечение пропорциональной зависимо0- *
где к у — коэффициент усилителя.
К усилителю предъявляются требования
паразитного запаздывания сигнала.
90
минимально1
2. НАЗНАЧЕНИЕ И ВЗАИМОДЕЙСТВИЕ ЭЛЕМЕНТОВ
РУЛЕВОГО ПРИВОДА АВТОПИЛОТА
рулевой привод каждого пз трех каналов автопилота
-д42 включает в себя (рис. 60): рулевую машину с датчиком
обратной связи (блоки 685Б и 685В); струпное реле (блок
57913) и усилитель мощности (блок 710М).
рулевая машина осуществляет перемещение ис-
полнительного органа — рулевой ракеты — с помощью энер-
гии сжатого воздуха, направляемого в псе струйным реле.
Датчик обратной связи вырабатывает сигнал
обратной связи в виде напряжения, пропорционального пе-
ремещению штока рулевой машины.
Струйное реле, направляет в рулевую машину энер-
чпо сжатого воздуха в соответствии с величиной и полярно-
стью усиленного электрического сигнала ошибки, поступаю-
щего с усилителя мощности.
Усилитель мощности вырабатывает сигнал ошиб-
4,1 путем сравнения поступающих па его вход сигналов уп-
равления и обратной связи и преобразует (усиливает) па-
’Ряжение сигнала ошибки в ток достаточной мощности для
^Введения в действие струйного реле.
единого агре-
п автопилоте 5Л42 рулевая машина, датчик обратной
Внзп и струйное реле скомпонованы в виде
Та рулевого блока 686 (рис. 61).
аъ, С11лптель мощности входит в состав блока
1опплота 3002 и описан в главе IV.
91
Рис. 61. Рулевой блок 686
Струйное реле (блок 679Б)
Принцип действия
Струйное реле является пневматическим усилителем мощ-
ности, преобразующим электрический сигнал, поступающий
с усилителя, в пропорциональный этому сигналу перепад
давлений воздуха в полостях рулевой машины. 1
Сжатый воздух из пневмосистсмы ракеты подводится под
давлением 18 ати к входному штуцеру 1 (рис. 62). Далее
воздух поступает через ниппельное подвижное соединение 2
в сопло 3 и при истечении из сопла попадает в два приемных
отверстия 4, каждое пз которых сообщается с соответствую-
щей полостью рулевой машины.
Сопло жестко соединено с ротором электромагнитного по-
воротного устройства и имеет возможность поворота на угол
±3,5° от нейтрального положения. Нейтральным считается
такое положение сопла, когда оно расположено симметрично
относительно приемных отверстий. При этом устанавливает-
ся равенство статических давлений ₽! и Р2 в полостях руле-
вой машины, образуемых при истечении воздуха пз сопла-
92
2
Рис. 62. Конструктивная схема струйного реле:
1—входной штуцер; 2—ниппельное соединение; 3—сопло; 4—прием-
ные отверстия; 5—рассекатель приемника
В случае отклонения сопла от нейтрального положения ра-
венство давлений в полостях рулевой машины нарушается.
Перераспределение давлений воздуха в полостях приводит к
перемещению поршня рулевой машины. Скорость движения
поршня рулевой машины зависит от расхода воздуха пз по-
лости опорожнения. В струйном реле 679Б в большинстве
случаев имеет место сверхкритическое истечение, при котором
объемный расход воздуха определяется величиной проходно-
го сечения приемного канала, открывающегося па истече-
ние, т. е.
Qv =kif3 см? [сек,
где f2 — проходное сечение, см2.
Объем воздуха, вытесняемый в секунду поршнем при его
Движении, равен
Qv = vS см?; сек,
где у — скорость движения поршня, см/сек;
S — площадь поршня, см2.
93
Приравнивая выражения для объемного расхода, полу-
чим
Учитывая, что f2 = k2a (а—угол поворота сопла струйного ре.
ле), окончательно получим
а=ка
— коэффицнен г геометрических параметров кон-
струкции, т. е. при работе струйного реле совместно с ру-
левой машиной имеет место пропорциональная зависимость
скорости перемещения поршня от угла поворота сопла. Я
Сопловой аппарат струйного реле 679Б выполнен так, что
при среднем положении сопла его проходное сечение пол-
ностью перекрыто рассекателем приемника 5 (рис. 62), а от-
верстия приемнике! полностью перекрыты стенкой сопла.
Такая конструкция соплового аппарата приближает его к
распределителям золотникового типа, обеспечивая малый
расход воздуха в нейтральном положении сопла и большую
крутизну характеристики струйного реле по давлению. 1
В струйном реле для управления поворотом сопла приме-
нено электромагнитное поляризованное поворотное устрой-
ство. Поворотное устройство (рис. 63) состоит из двух 11-об-
разных магпитопроводов 1, постоянных магнитов 2 прямо-
угольной формы, ротора 4, с которым жестко связано сопло,
и управляющих обмоток 3. Управляющие обмотки намотаны
так, что их магнитные поля направлены навстречу друг
Другу. I
Рис. 63. Электромагнитное поляризованное поворотное устройств I
Л тоТ^*’
-магнитопровод; 2-—постоянные магниты; 3—управляющие оом
4—ротор
94
Постоянные магниты создают основной ноток подмагни-
цпвання Фо, который замыкается по магнитопроводам, прохо-
дя через рабочие зазоры и концевые части ротора. Если ро-
,rOi) находится в среднем положении и токи в управляющих
обмотках равны между собой (результирующий магнитный
поток управляющих обмоток Фу равен нулю), напряжен-
ность магнитного поля в зазорах иод северным и южным по-
носами магнитов одинакова и равна
где Фо — магнитный поток постоянного магнита, сек-,
So — площадь поперечного сечения зазора между по-
люсным наконечником и ротором при среднем
расположении ротора (симметрично относи-
тельно нейтральной линии магнита), см2’,
Ро— магнитная проницаемость воздуха, ом сек!см.
Вследствие равенства напряженностей поля в обоих зазо-
рах электромагнитные силы, действующие па ротор, взаим-
но компенсируются. Предположим, что иод действием внеш-
него момента ротор отклонился от среднего положения ио
часовой стрелке. Величина магнитного потока Фо в обоих за-
зорах при этом ие изменится, но изменятся площади сечения
зазоров: под северным полюсом площадь зазора увеличится,
а под южным уменьшится. Следовательно, напряженность
поля под северным полюсом уменьшится, а под южным уве-
личится:
стРуйного реле при равных токах в управляющих
*стойчиво сохраняет среднее положение, т.
битного потока постоянных магнитов
действию центрирующей пружины,
^пощего
hn=-^-<hs = —
PoSn PoSS
В результате равенство электромагнитных сил, действующих
”а ротор, нарушится и возникнет момент, стремящийся по-
аериуть ротор в направлении поля с большей напряженпо-
^ью, т. е. против часовой стрелки. Таким образом, ротор
обмотках
е. действие маг-
на ротор аналогично
Величина восстанавли-
момента «магнитной пружины» пропорциональна в
которых пределах углу отклонения ротора от нейтрального
битного потока постоянных
11оложеиия.
ще^Рп поступлении па вход усилителя мощности управляю-
Чит° С1П11ала ток в одной из управляющих обмоток увелп-
т°ки -
УпРав
_ х : оомоток
а в другой уменьшится. Так как теперь магнитные по-
’ Управляющих обмоток не компенсируются, то появится
^'Тяющий магнитный поток Ф
• и далее разветвляется на два потока
который проходит по ро-
за мыкающиеся
95
через рабочие зазоры и магнитопроводы. Направление \ц.
равляющего магнитного потока зависит от знака разности
токов А 1 = 1]—Ь, т. е. от знака управляющего сигнала па
входе усилителя мощности. ]
Если управляющий магнитный поток Фу имеет направле-
ние, указанное на рис. 63, в рабочем зазоре иод северным
нижним полюсом магнитные поля подмагничивания и управ-
ления складываются, а под южным вычитаются. Это приво-
дит к неравенству напряженностей поля в рабочих зазорах:
и появлению вращающего момента, стремящегося уравнять
напряженность поля в обоих зазорах. Ротор отклонится так,
что площадь сечения Sn увеличится, a уменьшится, т. е. он
отклонится против часовой стрелки. В отклоненном положении
11^ = 11 , и на ротор не действует вращающий момент. Таким
образом, положение ротора струйного реле зависит от величи-
ны разности токов в управляющих обмотках реле. При опре-
деленном подборе конфигурации полюсов магнитов и формы
ротора угол поворота ротора относительно нейтрального по-
ложения пропорционален величине разности токов в управ-
ляющих обмотках. Направление поворота ротора соответст-
вует знаку управляющей разности токов. ]
Управляющая характеристика струйного реле, т. е. зави-
симость угла поворота ротора от разности токов А1 в об-
мотках, приведена иа рис. 64. Характеристика имеет вид
петли гистерезиса. Наличие петли гистерезиса объясняется
тем, что при уменьшении разности токов в управляющих об
мотках до нуля ротор полностью не размагничивается,
96
Рис. 64. Управляющая характеристика поворотного устройства
Примерный вид зависимости перепада давлении, созда-
ваемого струйным реле в полостях рулевой машины, от раз-
ности токов в управляющих обмотках показан иа рис. 65.
Передаточная функция струйного реле приближенно мо-
жет быть выражена следующим образом:
1 ГпА а(р) _ кер______________
'MP,~AJ(p) (Т1Р-1-1)(Т2рН2ТХр [ 1) ’
где кср — коэффициент усиления струйного реле по уг-
лу поворота ротора, град/ма;
jL_— постоянная времени управляющих обмоток,
1 К сек;
---постоянная времени подвижной системы, сек;
;2 —относительный коэффициент затухания по-
движной системы;
I. — индуктивность управляющих обмоток;
— омическое сопротивление обмоток;
J — момент инерции ротора с соплом;
С — жесткость «магнитной пружины».
97
Up
Рис. 65. Пневматическая характеристика струйного реле
Конструкция и электрическая
с т р у нп о г о реле
с х е м а
Конструкция струнного реле показана на рис. 66 и 67, где
представлены его общин вид и отдельные детали.
Сопло 1 струйного реле запрессовано в пермаллоевып
ротор 2. Один конец осп ротора с подшипником входит в
гнездо па корпусе 10, другой — в гнездо на крышке магнито-
провода 4. Магнитопровод 4 с установленными в нем посто-
янными магнитами 3 крепится к корпусу четырьмя болтами-
Материал магнитопровода — пермаллой. МагнитопровоД
имеет два отверстия: одно — для входа рассекателя 5 прпеМ'
пика, другое — для входа втулки с ниппелем 6. К корпус
с одной стороны с помощью четырех винтов крепится прием-
ник с запрессованным в нем рассекателем. С другой стор0.
ны корпуса на четырех винтах закреплен приемный штуцер '
98
Рис. 66. Общий вид струйного реле
Рис. 67. Конструкция струйного реле:
сопло; 2—ротор; 3—постоянные магниты; 4—магнитопровод;
'^"рассекатель; 6—ниппель; 7—приемный штуцер; 8—управляю-
щие катушки; 9—восьмиклеммная колодка; 10—корпус; 11—отверс-
тие выхода отработанного воздуха
99
с ниппелем 6. На приемнике установлена восьмиклеммная
колодка 9, па которой распаиваются выводные провода у1ь
равляющих катушек 8, которые располагаются внутри маг-
нитопровода. Ротор струйного реле размещается во внутрец.
нем окне катушек. Угол поворота ротора ограничивается
упорами, которые ввинчиваются в магнитопровод. Зазор меж.
ду соплом и приемником регулируется с помощью прокла-
док. Отработанный воздух вытекает из струйного реле через
отверстия 11 в магнптопроводс и через щели между прием-
ным штуцером п магнитопроводом. Струйное реле с помощью
четырех винтов крепится к рулевой машине. Электрическая
схема струйного реле показана иа рис. 68. 1
г
2
3
£
5_
6
7
8
И
Рис. 68. Электрическая схема струйного реле
Рулевая машина (блоки 685Б и 685В)
П р и и ц и и
действия
Давление струп воздуха, поступающего из выходных от-
верстий струйного реле, подается в приемные отверстия /
рулевой машины (рис. 69), соединенные с изолированными
полостями 2 цилиндра. В полостях рулевой машины в cooi-
2
Рис. 69. Конструктивная схема рулевой машины: 4 110р
1—приемные отверстия; 2—изолированные полости цилиндра; a I
шень; 4—потенциометр И
рстствип с угловым положением сопла струйного реле обра-
зуются давления Pj и Р2. Поршень 3 рулевой машины пере-
мещается под действием разности давлений (A P = Pj—Р2) в
по юстях цилиндра пропорционально углу отклонения сопла
оТ нейтрального положения. С линейного потенциометра об-
ратной связи 4 снимается сигнал, пропорциональный вели-
чине перемещения поршня рулевой машины от среднего (пу-
дового) положения. Этот сигнал поступает па вход усилите-
ля мощности н компенсирует сигнал управления. При этом
сопло струйного реле займет среднее положение относитель-
но приемных отверстий, давления в полостях рулевой маши-
ны станут равными и поршень рулевой машины остановится
в смещенном положении.
К о и с т р у к ц и я п э л е к т р и ч е с к а я
рулевой машины
е х е м а
Конструкция рулевой машины показана па рис. 70 и 71.
Внутри дюралюминиевого цилиндра корпуса 5 свободно пе-
ремещается поршень 13 с двусторонним стальным шлифо-
ванным штоком 15. Поршень крепится на штоке гайкой. Кор-
пус с одной стороны имеет стенку с отверстием для прохода
штока, другая сторона корпуса закрывается крышкой 14,
также имеющей отверстие для штока. Крышка прижимается
к корпусу накидной гайкой 2. Уплотнение мест выхода штока
из цилиндра и крышки, а также между полостями цилиндра
создается манжетами 3 и 4 специальной формы из морозо-
стойкой резины. На корпусе имеются приливы 12 с прием-
ными отверстиями для воздх ха. Приливы предназначены для
крепления к блоку струйного реле. В хвостовой части корпу-
са рулевой машины смонтированы концевые выключатели 11
11 потенциометры 6. Концевые выключатели используются
прп проверках автопилота и представляют собой бронзовые
контактные стержни, заармированные в прессматернал по
краям, с посеребренной контактной поверхностью. К контакт-
ному стержню концевого выключателя подводится элсктро-
кктанне. Потенциометры представляют собой керамические
Сгержнн с намоткой из константановой проволоки. Контакт-
нее пружины потенциометров п концевых выключателей ус-
ыновлены па токосъемнике 7 из прессматерпала, закреплеи-
t °м на конце штока, выходящем из цилиндра в хвостовую
! асть корпуса. Потенциометры н концевые выключатели за-
( КЩепы цилиндрическим кожухом 8. Хвостовая часть кор-
ц, а закапчивается вилкой 10 для крепления рулевой маши-
Л в ракете. На наружном конце штока, выходящем из ци-
L пДра, закреплена вилка 1 для соединения рулевой машины
1 ^еханпзмом рулей. Рулевая машина имеет выводной жгут 9.
L . 101
Рис. 70. Конструкция рулевой машины (разрез):
6—потенциометры; 7—токосъемник; 11—концевые выключатели
13—поршень
Рис. 71. Конструкция рулевой машины:
1 —вилка, 2 накидная гайка; 3, 4—манжеты; 5—корпус; 6—потен-
циометры; 7—токосъемник; 8~кожух; 9—выводной жгут; 70—вил-
ка ; И—концевые выключатели; 12—приливы; 13—поршень;
14—крышка; 15—шток
102
Отличие рулевой машины 685В от рулевой машины 685В
состоит в том, что па ее штоке вместо вилки закрепляется
сайка (рпс. 70) для соединения с пружинным механизмом
элеронов.
Электрическая схема рулевой машины приведена на
рис. 72.
б к
3 б
С ж
Рис. 72. Электрическая схема рулевой машины
103
Г Л А В Л VI
ВСПОМОГАТЕЛЬНЫЕ ЭЛЕМЕНТЫ ЭЛЕКТРИЧЕСКОЙ
СХЕМЫ АВТОПИЛОТА
1. БЛОК ПИТАНИЯ (БЛОК 3003)
Назначение и принцип действия
Блок питания предназначен для обеспечения питанием
анодносеточных и накальных цепей операционных усилителей
напряжения и усилителей мощности, а также для обеспече-
ния напряжением подпорки диодов ограничения радиокоман-
ды. Схема блока питания состоит из двух частей: трансфор-
матора, обеспечивающего необходимые вторичные перемен-
ные напряжения, и выпрямителя с фильтром, преобразующе-
го переменный ток в постоянный с напряжением +150 в и
—150 в. Электрическая схема блока представлена па рис. 73.
Рис. 73. Электрическая схема блока питания
104
На клеммы 1 и 2 колодки А подается однофазное напря-
жение 115 в, 1000 гц для питания первичной обмотки транс-
форматора.
Со вторичных обмоток трансформатора снимаются сле-
дующие напряжения:
с III и IV — 8,5 в мощностью 0,1 ва с каждой обмотки;
с V — 2x119 в относительно среднего вывода с общей
мощностью 15 ва;
с VI — 5 в мощностью 10 ва;
с VII — 6,3 в мощностью 20 ва.
II обмотка экранная и расположена между первичной и
вторичной обмотками. Конец этой обмотки выводится на
клемм)’ колодки А для соединения с корпусом автопилота.
Напряжение с V обмотки подается па выпрями гель, собран-
ный на диодах.
Примерная вольт-амперная характеристика кремниевого
диода представлена на рис. 74. Как показано па рисунке,
диод является нелинейным элементом. Нелинейность харак-
теристики — основное качество, обеспечивающее возмож-
ность выпрямления переменного тока. При положительных
значениях мгновенной величины переменного напряжения
сопротивление диода очень мало, поэтому прямой ток, прохо-
t
Рис. 74. Вольт-амперная характеристика диода
105
Дящий через него, достаточно велик. При отрицательных зНа.
чеииях переменного напряжения сопротивление во много раз
больше и обратный ток ничтожно мал. Таким образом, если
пренебречь величиной обратного тока, то можно сказать, что
диод проводит через себя ток только в одном направлении
т. е. выпрямляет переменный ток. Т|
Выпрямитель собран па четырех диодах по мостовой схе-
ме, которая обеспечивает двухполупериодное выпрямление.
Достоинством двухполупериодной схемы является боль-
шая величина среднего выпрямленного тока и меньшая его
пульсация по сравнению с одпополупериодиой схемой.
Схема двухполупериодного выпрямителя представлена на
рис. 75.
/?н
Рис. 75. Схема двухполупериодного выпрямителя
Сплошными стрелками показано направление тока в пер-
вый полупсриод, когда на клемме А имеется положительное
значение переменной величины напряжения, а пунктирными
стрелками — направление тока при отрицательном значении
напряжения.
Таким образом, через сопротивление нагрузки R(( проте-
кает ток одной полярности. Выпрямленное напряжение
фильтруется фильтром, образованным сопротивлениями на-
грузки источника и конденсаторами С1 и С2, и подается на
клеммы А4 и А6.
Средняя точка V обмотки выводится на клемму А5 и в
схеме автопилота соединяется с «нулем автопилота»' Таким
образом, выпрямленное напряжение, снимаемое с блока пи-
тания относительно «нуля автопилота», равно +150 и —150 0-
106
С обмотки III напряжение подается на клеммы Б5 и Б6
0 идет к схеме ограничения I канала автопилота.
С обмотки IV напряжение подается на клеммы БЗ и Б4
Л идет к схеме ограничения II капала автопилота.
С обмотки VI напряжение подается на клеммы А7 и А8.
0 схеме автопилота к ним подключаются нити накала ламп
операционных усилителей напряжения (блоков 709).
С обмотки VII напряжение подается на клеммы Б1 и Б2
0 идет к нитям накала ламп усилителей мощности (блоков
71 ОМ).
Конструкция блока питания
Блок питания состоит из следующих элементов:
— корпуса;
— тороидального трансформатора;
— платы с закрепленными на пей диодами, конденсатора-
ми и колодочками;
— четырех стоек для крепления платы.
Общий вид и детали блока питания представлены на
рис. 76 и 77.
Рис. 76. Общий вид блока
питания:
4 и 8—стойки
Корпус 1 блока питания
отливается из алюминиевого
сплава. С наружной стороны
корпуса установлены четыре
стойки 8 для крепления пла-
ты 2. Тороидальный транс-
форматор 7 устанавливается
в расточку основания корпу-
са 1 и заливается компаун-
дом.
На плате 2 устанавлива-
ются кремниевые диоды 5,
два конденсатора 6 и четыре
стойкп 4 для крепления двух
десятиклеммных колодок 3;
на эти колодки выведен весь
электромонтаж для соедине-
ния блока питания с внешней
схемой. На корпусе 1 имеется
фланец 9 с тремя отверстия-
ми для крепления в блоке управления автопилота.
Тороидальный сердечник трансформатора выполнен пу-
тем навивки из ленты. Материал ленты — электротехниче-
ская сталь. Для уменьшения потерь на вихревые токи сердеч-
ник подвергается специальной обработке п отжигу. Тороид
с намоткой покрыт лентой пз лакоткаин.
107
Рис. 77. Конструкция блока питания: I
I — корпус; 2—плата; 3—десятиклеммные колодки; /—стойки:
5—диоды; 6—конденсаторы; 7—тороидальный трансформатор:
9—фланец
2. ТРАНСФОРМАТОР (БЛОК 668)
Назначение трансформатора
I
Трансформатор предназначен для повышения напряжения
бортового источника питания ракеты до величины, необходи-
мой для питания гиромоторов датчиков угловой скорости ав-
топилота. Трансформатор преобразует трехфазпое перемен-
ное напряжение 36 в 1000 гц в трехфазпое напряжение 85 в
с той же частотой. В
Электрическая схема трансформатора
Электрическая схема трансформатора представлена на
рис. 78. На клеммы 4, 5 и 6 колодочки А подается напряже-
ние 36 в, 1000 гц для питания первичных обмоток трансфер
, к____________________________________________________-
матора, причем на клемму 6 подается фаза А, на клемму
фаза В и клемму 4—фаза С. J
Повышенное до 85 в напряжение со вторичных обмот°
подается на клеммы 1, 2 и 3 колодочки Б (на клемму / —'
за А, клемму 2—фаза В, клемму 3—фаза С). I
1оь J
Рис. 78. Электрическая схема трансформатора
Клеммы 1, 2 и 3 колодочки Л, а также клеммы •/, 5 и 6
колодочки Б соединены между собой. Три однофазных транс-
форматора. первичные и вторичные обмотки которых соеди-
нены в звезду, образуют трехфазный трансформатор.
Конструкция трансформатора
Трансформатор состоит из следующих элементов:
— корпуса;
- — трех тороидальных однофазных трансформаторов;
— четырех резиновых прокладок;
— шайбы для крепления тороидальных трансформаторов;
двух шестпклеммных колодок.
Общий вид и детали блока трансформатора иредставле-
111,1 рис. 79 и 80.
Корпус 1 трансформатора выполнен из дюралюминиевого
корпусе сделана расточка для установки торои-
<lJ11‘iibix трансформаторов 2. Крепятся трансформаторы к
109
Рис. 79. Общий вид трансформатора
корпусу винтом 3, который
прижимает шайбу 7. Между
тороидальными сердечника,
ми, а также между корпу.
сом и шайбой установлены
резиновые прокладки 5. v
корпусу винтами крепятся
две шестиклеммные колод,
кп 6, на которые выведены
копны обмоток. Для креп-
ления трансформатора в
блоке управления автопило-
та на его корпусе имеется
фланец с тремя отверстиями.
Сердечники тороидальных
однофазных трансформато-
ров выполнены путем на-
вивки из ленты. Материал
ленты — электротехниче-
ская сталь.
Для уменьшения потерь па вихревые токи сердечники
подвергаются специальной обработке и отжигу. fl
Рис. 80. Конструкция трансформатора: Ш
-корпус; 2—тороидальные трансформаторы; 3—винт; 4—-п14
5—резиновые прокладки; 6—шестиклеммные колодки
ПО
3. РЕГУЛИРОВОЧНЫЕ СОПРОТИВЛЕНИЯ (УЗЛЫ 695Б)
В схеме автопилота применены проволочные переменные
сопротивления типа СППР для регулировки передаточных
чисел автопилота от датчиков угловой скорости и датчика
угла крена, для установки нулевых выходных напряжений
операционных усилителей напряжения («центровка»), для
установки рулевых приводов в нулевые положения («нули
рулей») и для регулировки напряжения подпорки ограниче-
ния («ограничение»). В цепи регулировки передаточных чи-
сел и напряжения подпорки ограничения узлы 695Б вклю-
чены по реостатной схеме, а в цепи регулировки нулевых по-
ложений рулевого привода и «центровки» усилителей напря-
жения — по потенциометрической схеме.
В узел 695Б входят (рис. 81): корпус, траверса с осью, то-
косъемник, каркас с намоткой, основание и контрящая гайка.
1’ис. 81. Общий вид и конструкция регулировочного сопротивления:
*'—корпус; 2—траверса; 3—токосъемник; 4—каркас; 5—основание;
в—контрящая гайка
Корпус изготовлен из алюминиевого сплава методом хо-
лодного давления. Корпус / имеет анодное покрытие, вну-
тРенняя поверхность его покрыта клеем. Па корпусе имеется
с°сок с резьбой, имеющий продольные пропилы и оканчи-
вающийся конусом. Па сосок навинчивается контрящая гай-
6 с внутренней конической поверхностью, обеспечиваю-
щая цанговый зажим оси потенциометра в соске. Для огра-
ничения угла поворота осп с траверсой па внутреннем торце
К()рпуса имеется выступ. Траверса 2 изготовлена из прессма-
Л?Нала- траверсе для фиксации пружины имеются Т-об-
1 паз и два выступа, которые также* служат для огра-
и выступ в виде сек-
предназначенный для ограничения утла поворота. Ось
Разный паз и два выступа,
1'01р^Н11я осевого перемещения траверсы
111
потенциометра армируется в траверсу. Токосъемник 3 штам.
пуется из листовой бронзы и в целях повышения надежности
работы покрыт серебром. Контактирующие поверхности токо-
съемника полируются. Каркас 4 представляет собой тороид
изготовленный из нрессматсриала. Намотка выполнена эм/
лированным проводом с высоким удельным сопротивлением
Рабочая дорожка зачищена от изоляции. Основание 5 ц3'
готовлено из нрессматсриала. В основание заармпрованы вы-
воды и центральный контакт. Каркас с намоткой приклеен к
основанию. J
Концы намотки подпаиваются к выводам основания с по-
мощью медных луженых проводников. j
4. ЭЛЕКТРОМАГНИТНЫЕ РЕЛЕ
В схеме автопилота применены электромагнитные реле
постоянного тока. Общий вид и детали реле представлены па
рис. 82 и 83. Реле предназначены для коммутирования це-
пей обратных связей операционных усилителей напряжения
п отключения входов РК в режим «И» и состоят пз следую*
щих основных частей: двух сердечников 1 электромагнита с
обмотками, ярма 2. якоря 3. контактной группы 4, возврат'
ной пластинчатой пружины 5, корпуса 6, крышки 7 и фторо
пластовой изоляции 8.
Принцип действия реле основан па притяжении сталыЮ
го якоря к сердечнику электромагнита, ио обмоткам кото-
рого протекает электрический ток. При отсутствии тока якор1’
оттягивается от сердечника возвратной пружиной и контак1'
ными пластинами.
112
Рис. 83. Конструкция реле:
1—сердечники электромагнита; 2—ярмо; 3—якорь; 1—контактная
группа; 5—пластинчатая пружина; 6—корпус; 7—крышка; 8—фторо-
пластовая изоляция
При наличии тока создаваемый им магнитный поток за-
мыкается (через сердечник, ярмо, якорь и воздушный зазор
между якорем и сердечником), и якорь притягивается к сер-
дечнику. Контактная группа состоит из подвижных плоских
пружин с серебряными контактами и неподвижных контак-
тов, являющихся одновременно выводами реле.
5. УЗЕЛ ОГРАНИЧЕНИЯ (3002 СбП)
Назначение и принцип действия
Узел ограничения предназначен для ограничения макси-
мального напряжения радиоуправления, поступающего па
нход операционного усилителя напряжения.
Схема узла ограничения состоит из трансформатора с
выпрямителем, преобразующих переменный ток 1 15 в, 1000 гц
п постоянный ток, и делителя постоянного напряжения, со-
стоящего пз сопротивлений и мостика из диодов.
113
Электрическая схема узла ограничения представлена н’а
рис. 84.
Па диоды Д1—Д4 подается с блока питания 3003 пере-
менное напряжение 8,5 в. Выпрямленное напряжение фильт-
руется фильтром, образованным сопротивлением нагрузки ц
конденсатором С26, и поступает на делитель, состоящий из
резисторов R90, R97, R86 и R89. Резистор R97 и сопротивле-
ние R86 включены в диагональ моста из диодов Д9—Д12. Па
другую диагональ моста подается напряжение радиоуправ-
ления. I
ЯЗО
Рис. 84. Электрическая схема узла ограничения
Сопротивление R86 служит для регулировки уровня на*
пряжения «подпорки» между точками А и Б, до которого ог-
раничивается сигнал радиоуправления. 1
При подаче в автопилот сигнала радиоуправления (« ' у
на резистор R88, «—» на резистор R87) напряжением’
меньшим напряжения «подпорки», диоды ДЮ и ДП буД)
«закрыты», и весь сигнал радиоуправления пойдет _
вход операционного усилителя напряжения. При подаче
автопилот напряжения радиоуправления, большего по ее
чине напряжения «подпорки», диоды ДЮ и Д11 «открываю
ся». При этом в цепь сигнала радиоуправления включи?
дополнительно цепочка R88—ДЮ—R97—R86—ДИ Ч
Ото создаст на резисторах R88 и R87 падение напряже-
ния, равное разности напряжений сигнала радиоуправления
и напряжения «подпорки». На входе операционного усилите-
ля установится напряжение, равное напряжению «подпорки».
При указанной полярности сигнала радиоуправления дио-
ды Д9 и Д12 будут «закрыты». При перемене полярности сиг-
нала радиоуправления будут «открываться» диоды ДО и Д12,
а диоды ДЮ и Д11 будут «закрыты».
Конструкция
В узел ограничения входят:
— печатная плата;
— регулировочные сопротивления.
Трансформатор для питания выпрямителей узла выпол-
нен в блоке питания 3003, где имеются две вторичные об-
мотки.
Рис. 85. Плата с элементами:
1 —печатная плата; 2—конденсаторы; 3—диоды; 4—сопротивления;
5—диоды; 6—восьмиклеммные колодки
Плата 1 (рис. 85) выполнена из гетинакса. Печатные ли-
нии расположены с одной стороны. В печатных линиях сде-
ланы отверстия и зенковки для пайки резисторов и дио-
дов, для установки конденсаторов и колодок. Па плате уста-
новлены два конденсатора 2, восемь диодов 3, десять ре-
зисторов 4, восемь диодов 5 и две восьмиклеммные колод-
Ий 6'. Регулировочные сопротивления (узлы 695Б) 2 (рпс. 94)
взнесены в блок регулировки.
Г Л АВА VII
КОНСТРУКЦИЯ АВТОПИЛОТА 5А42
Автопилот (рис. 86) состоит из блока управления
3002) и трех рулевых блоков (блоков 686А — в I и
лах и блока 686Б — в капало крепа).
(блока
II капа-
Рис. 86. Общий вид автопилота 5А42
1. БЛОК УПРАВЛЕНИЯ (БЛОК 3002)
В блоке 3002 скомпонованы все чувствительные
автопилота, а также все усилителыю-преобразующие и
могательные элементы его электрической схемы. Я
Общин вид блока (со снятыми колпаками) предст
па рис. 87 и 88. Л
116
элеме"1'1’1
• 11Л *
Рис. 87. Общий вид
блока 3002 со снятым верхним колпаком
Конструктивной основой блока 3002
нус (рис. 89) и литая плата (рис. 90).
являются литой кор.
Плата изготовлена
Рис. 89. Литой корпус:
1—приливы; 2—крышка
Рис. 90. Литая плата:
1-ДУС I канала; 2—ДУС II канала; 3—ДУС канала крена;
5—блок питания; 6—трансформатор
118
из алюминиевого сплава и анодирована. К плате крепятся
три датчика угловой скорости (1 канала /, II канала 2, ка-
пала крена с?), датчик угла крена 4, блок питания 5. транс-
форматор 6, шасси с установленными на нем элементами и
печатная плата узла ограничения.
В плате имеется расточка, в которую устанавливается
датчик угла крена. Для крепления датчиков угловой ско-
рости, датчика угла крепа, блока питания, трансформатора
в плате имеются отверстия с резьбой. Кроме того, в плате
имеются отверстия для проводников, подходящих к гермо-
вводу. для вывода монтажных проводов и десять отверстии
по периферии для крепления платы к корпусу. Три отверстия
из тесятп являются центрирующими. Шасси (рис. 91) выпол-
Рис. 91. Шасси:
*—усилитель напряжения; 2—усилитель мощности; 3—реле; 4—ка-
тушка делителя напряжения; 5—катушка катодной нагрузки; 6—пе-
чатная плата; 7—конденсаторы; 8—конденсаторы
пено из алюминиевого сплава, имеет анодное покрытие и
Г|редназначено для крепления усилителей напряжения 1 уси-
лителей мощности 2, реле <7. четырех катушек делителя на-
пряженпя 4. трех катушек катодных нагрузок 5, двух конден-
саторов 7, двух конденсаторов 8 и печатной платы 6 с раз-
мещенными на ней резисторами и конденсаторами. Для пре-
дохранения деталей и узлов от коррозии, а также для за-
щиты чувствительных элементов от пыли и влаги и обеспсче-
1,Пя постоянного давления внутри блока плата с закреплен-
ными на пен блоками заключена в герметичный контейнер.
Заполняемый азотом.
119
Герметичный контейнер (рис. 92) состоит из обода / с де.
талями и двух колпаков 2, которые припаиваются к ободу.
К стальному ободу припаиваются два гермоввода 3, две
трубки 8. десять стоек 7 и защитная лепта 5. I
Рис. 92. Герметичный контейнер:
1—обод; 2—колпаки; 3—гермоввод; 4—стойки; 5—защитная лента;
6—винты; 7—пробки; 8—трубки I
Сорокапятиштырьковые гермовводы припаиваются к
ободу. Гермоввод (рис. 93) обеспечивает герметич-
ность в местах вывода проводов из блока 3002. Трубки и
стойки припаяны к ободу. Трубки предназначены для
проверки герметичности контейнера и наполнения его
Рис. 93. Гермоввод
120
азотом. Стойки предназначены для крепления платы к обо-
ду и всего контейнера к корпусу. С одной стороны на стой-
ках имеется наружная резьба для крепления платы, а с дру-
гой стороны в торце — внутренняя резьба для крепления
контейнера к корпусу. Таким образом достигается вполне
определенное и неизменное положение платы с укрепленными
на ней чувствительными элементами по отношению к
корпусу блока 3002. Во избежание попадания припоя внутрь
блока при запайке колпаков к ободу приваривается элек-
тророликовой (электроточечнон) сваркой защитная лента 5.
Колпаки отштампованы из стали.
Перед запайкой между ободом и колпаками проклады-
ваются асбестовый шнур и латунная проволока, предназна-
ченные для облегчения распайки блока в случае необходи-
мости. Прочность пайки гермовводов и колпаков проверяет-
ся путем подачи воздуха под давлением внутрь контейнера.
Герметичный контейнер крепится к корпусу при помощи де-
сяти винтов 6, которые контрятся резьбовыми пробками 7.
Корпус (рис. 89) выполнен из алюминиевого сплава литьем
в землю, имеет анодное покрытие и окрашен серой эмалью.
На корпусе имеются приливы 1 с отверстиями для креп-
ления его в ракете. В корпусе имеется отсек, который пред-
назначен для размещения блоков регулировочных сопротив-
лений, а также для предохранения от поломки гермовводов
п трубок. Отсек закрыт крышкой 2.
Блоки регулировочных сопротивлений устанавливаются в
двух расточках отсека, а через третью расточку выводятся
проводники от гермовводов к штепсельному разъему блока.
Блок регулировочных сопротивлений (рис. 94) состоит из
корпуса со втулками 1, прикрепленных к нему сопротивле-
ний типа 695Б 2. пластины 3 и уплотнительного кольца 4.
Рис. 94. Блок регулировочных сопротивлений:
'"Корпус со втулками; 2—сопротивления 695Б; 3—пластина; 4—уп-
лотнительное кольцо
121
Корпус выполнен из дюралюминия и имеет анодное по-
крытие.
Сопротивления 695Б кренятся к корпусу ганками. Для то-
го, чтобы предотвратить выпадение контровочных гаек сопро-
тивлений, к корпусу привинчена пластина. Па пластине на-
несено краской обозначение регулировочных сопротивлений.
Уплотнительное кольцо обеспечивает плотное соединение кор-
пуса регулировочных сопротивлений с корпусом блока 3002.
Блоки регулировочных сопротивлений снаружи закрыты тех-
нологическими крышками, которые снимаются при установке
блока управления в ракету. Для соединения блока 3002 с
рулевыми блоками автопилота, аппаратурой радиоуправле-
ния, источниками питания и схемой борта ракеты блок имеет
сорокапятиштырьковый штепсельный разъем.
Печатная плата (рпс. 95) изготовлена из фольгированно-
го гетинакса толщиной 3 мм. Б печатных линиях сделаны
отверстия и зенковки для пайки резисторов и конден-
саторов, а также для колодок. Колодки предназначены для
электрического соединения печатной платы со схемой блока
3002.
Рис. 95. Печатная плата
Каждый делитель напряжения состоит из двух катушек,
соединенных последовательно.
Каждая катушка состоит пз каркаса, изготовленного пз
алюминия, и обмотки. Катушки катодных сопротивлений
усилителей мощности изготовлены также из алюминия. На
кожухе блока 3002 белой краской нанесена стрелка, указы-
вающая направление полета, т. с. положительное направ-
ление оси X ракеты. Стрелка дает возможность правильно
ориентировать блок при проверках и монтаже.
2. РУЛЕВЫЕ БЛОКИ (БЛОКИ 686А И 686Б)
Рулевые блоки являются исполнительными органами ав-
топилота, перемещающими рули ракеты в соответствии с
электрическими сигналами управления и стабилизации, ко-
торые формируются в блоке 3002 и подаются на обмотки
струйного реле.
Блоки 686А и 686Б ио своим техническим характеристи-
кам ничем не отличаются друг от друга. Различие заклю-
чается только в конструкции хвостовика штока. Хвостовик
рулевого блока 686А выполнен в виде вилки, а хвостовик
блока 686Б оканчивается гайкой.
Рулевой блок (рис. 96 и 97) состоит из рулевой машины
(блока 685) и струйного реле (блока 679Б).
Рис. 96. Общий вид рулевого блока
Струйное реле 1 кренится к корпусу рулевой машины 2
четырьмя винтами 3. Между корпусом рулевой машины и
струйным реле установлены резиновые уплотнительные коль-
ца ~4. Рулевой блок имеет выводной жгут, который оканчи-
вается малогабаритным десятиштырьковым штепсельным
разъемом 5. Концы управляющих обмоток струйного реле
припаиваются к переходным колодкам рулевой машины, ус-
тановленным под кожухом.
123
Рис. 97. Конструкция рулевого блока:
струйное реле; 2—рулевая машина; 3-винты; 4-уплотнительные
кольца; 5—штепсельный разъем
3. МОНТАЖ БЛОКОВ АВТОПИЛОТА В РАКЕТЕ
Блок управления (блок 3002)
том отсеке ракеты на четырех
приклепанных к kodhvcv
полках
устанавливается в четвер-
шппльках, закроил
продольных
блока управления не-
монтажа и демонтажа
Рис. 98. Монтаж блока 3002 в ракете
124
обходимо спять крышке люка № 5 ракеты. Разъем блока
управления стыкуется с ответной частью центральной рас-
пределительной коробки ракеты (ЦРК). Рулевые блоки I и
II каналов (блоки 686А) размещены во втором отсеке ра-
кеты. Кинематическая схема соединения рулевых блоков с
рулями показана па рис. 99.
Рис. 99. Кинематическая схема соединения рулевых блоков
с рулями
Рулевой блок капала крена (блок 686Б) расположен в
хвостовой части четвертого отсека. На рис. 100 приведена
кинематическая схема соединения рулевого блока канала
крена с элеронами.
В соответствии с электрической схемой автопилота в
табл. 6 и 7 приведены перечень контактов в разъемах авто-
пилота и их назначение.
125
Рулевой блок 6866
Рис. 100. Кинематическая схема соединения рулевого блока
с элеронами
126
Таблица б.
Разъем блока управления 3002
Помер
контакта
II а з н а ч с н п е к о п т а к i з
Постоянное напряжение —26 в
2 Постоянное напряжение +26 в
3 1 5 Фаза А Фаза В переменное напряжение 36 в, 1000 гц Фаза С 1
6 7 Переменное напряжение 115 в. 1000 гц
8 + 26 в на разарретирование датчика угла крена
9 10 Сигнал «Разарретировано» с датчика угла крена
13 Контроль III канала по цепи ДУК при «безлюковой» проверке («Вход Шк-1»)
14 • Контроль II канала при «безлюковой» проверке («Вход Пк»)
15 Контроль I канала при «безлюковой» проверке («Вход 1к»)
16 + 26 в на Р1 и Р2, которые переключают усилители на- пряжения в режим масштаба
17 и 18 Сигнал с усилителя мощности в канале крена на управ- ляющие обмотки струйного реле
19 и 20 Сигнал с усилителя мощности II канала на управляю- щие обмотки струйного реле
21 и 22 Сигнал с усилителя мощности I канала на управляю- щие обмотки струйного реле
23 Сигнал с потенциометра обратной связи рулевой маши- ны I канала на вход усилителя мощности I канала
24 Сигнал с потенциометра обратной связи рулевой маши- ны II канала на вход усилителя мощности II канала
127
Номер
контакта
Сигнал с потенциометра обратной связи рулевой мапщ.
ны III канала на вход усилителя мощности III канала
-26
-1-150 в на управляющие обмотки струйных реле, I. ц
и III каналов
{-13 в — «нуль автопилота»
Резервная цепь
29
Резервная цепь
Резервная цепь
Резервная цепь
3-1 Команда радиоуправления по II каналу на первый и
35 второй входы усилителя напряжения II канала
36 Команда радиоуправления по I каналу на первый и
37 второй входы усилителя напряжения I канала
38 Резервная цепь %
39 Резервная цепь
40 Резервная цепь
41 Резервная цеп ь о» •
Контроль III канала по цепи ДУС при «безлюковой«
проверке («Вход Шк-2»)
128
Таблица 7.
Разъемы рулевых блоков 686А и 686Б (разъемы идентичны)
Номер
контакта
10
11 а з н а ч с н и е к о н т а к г а
Управляющая обмотка струйного реле
Средняя точка управляющей обмотки струйного реле
( + 150 в)
Питание потенциометра обратной связи рулевой маши-
ны постоянным напряжением 26 в
Сигнал с потенциометра обратной связи рулевой машины
Ламель нулевого положения штока рулевой машины
Токосъемник нулевого положения штока
9
Ламель крайнего положения штока рулевой машины
Токосъемник крайнего положения штока
Для электрической стыковки блоков автопилота с элек-
тросхемой ракеты используются штепсельные разъемы. Типы
разъемов, применяемых в автопилоте, и места установки их
на ракете указаны в табл. 8.
Таблица 8.
Тип разъема
Место установки
разъема
Подход к разъему
2РМ39Б45Ш2П1
2РМ22КПН10Ш1Ш
2РМ22КПН10Ш1П1
2РМ22КПН10Ш1П1
Коробка ЦРК
Левый борт второго
отсека
Правый борт второго
отсека
Нижний люк четвертого
отсека
Люк № 5
При снятии второго
отсека
Люк .N? 5
Регулировка параметров установленного в ракету авто-
пилота в эксплуатации производится регулировочными по-
тенциометрами, размещенными в двух сборках, расположен-
ных в верхней части блока управления. Для доступа к ука-
занным органам регулировки в корпусе ракеты имеются
соответственно два люка. В табл. 9 указаны органы регу-
лировки автопилота, их назначение и обозначение. Располо-
жение регулировочных потенциометров приведено па
рис. 101.
Таблица 9.
№ люка
в корпу-
се раке-
ты
Обозначение
потенциометра
II а з н а ч е н и е
Люк № 16.;
Люк № 1
ДП
Д
С Г
11уль I
Нуль II
Нуль III
Центровка I
Центровка II
Регулировка передаточного числа по
сигналу датчика угловой скорости
I канала
Регулировка передаточного числа по
сигналу датчика угловой скорости
II канала
Регулировка передаточного числа по
сигналу датчика угловой скорости
III канала
Регулировка передаточного числа по
сигналу датчика угла крена
Подстройка нулевого положения руля
I канала
Подстройка нулевого положения руля
II канала
Подстройка нулевого положения руля
III канала
Подстройка пуля
ния I канала
Подстройка нуля
ния II канала
усилителя цапряжс-.
усилителя напряже-
Ограничение 1
Ограничение II
Подстройка уровня ограничения сигна
ла радиоуправления I канала
Подстройка уровня ограничения сигна
ла радиоуправления II канала
130
ЛЮК Н?16
ЛЮХН24
Рис. 101. Расположение регулировочных потенциометров в ракете
4. ВЗАИМОЗАМЕНЯЕМОСТЬ БЛОКОВ АВТОПИЛОТА
В комплекте автопилота 5А42 обеспечивается взаимоза-
меняемость блоков 3002, 686А, 68615. После замены блока
комплект автопилота должен быть проверен и отрегулиро-
ван в соответствии с действующей инструкцией по эксплуа-
тации ИН-5В27У-П-ОП.
5. ТАРА ДЛЯ УПАКОВКИ БЛОКОВ АВТОПИЛОТА
Хранение и транспортировка блоков управления 3002 и
Рулевых блоков 686А и 686Б автопилота 5А42 производят-
ся в соответствующих упаковочных тарах.
Тара (рис. 102) для упаковки блока 3002 представляет
собой деревянный ящик. Ящик имеет откидывающуюся
Крышку, которая закрывается двумя замками. Движение
Крышки при откидывании ограничивается двумя ременными
ограничителями.
131
132
Для переноски па боковых стенках укреплены две ручки.
С внутренней стороны у дна ящика в углах шурупами при-
винчены четыре деревянные бобышки, на которые опираются
два бруска. К брускам привинчена рама с амортизаторами.
Рис. 102-2. Чертеж тары для упаковки блока 3002. Вид А-А
Рама сварена из стальных уголков. Для крепления блока
3002 к раме приварены четыре бобышки с резьбовыми от-
верстиями, в которые ввинчиваются четыре винта. Габариты
ящика 428x415x455 мм. Вес тары с блоком 3002 не более
30 кг.
133
Рис. 102-3. Чертеж тары для упаковки блока 3002. Вид Б-Б
Тара для упаковки блока 686 представлена на рис. 103.
Для упаковки блока 686 применяется коробка из гофриро-
ванного картона.
Блок 686 укладывается в мешок из пленки. Из мешка от-
качивается воздух, чтобы не конденсировалась влага, и ме'
шок склеивается горячим способом. Затем блок, упакован-
ный в мешок, помещается в коробку. Зазоры между блоком
и стенками коробки заполняются прокладками из гофрир0-
ванного картона. Коробка закрывается крышкой и заклеи-
вается бумажной лентой. 1
Габариты коробки 270x100x140 мм. Вес коробки с бло
ком 686 не более 1,5 кг.
131
ое-$г
lllllllll III II
Рис. 103. Чертеж тары для упаковки блока 686
lUh
Рис. 104. Чертеж тары для упаковки блоков 3002 и 686
Для хранения и транспортировки блоков управления 3002
н рулевых блоков 686Л и 686Б автопилота 5А42 в составе
ЗИП используется металлическая герметичная тара
(рис. 104).
Тара представляет собой металлический каркас, закры-
вающийся крышкой. Внутренняя часть металлического
ящика разделена перегородкой па две части: в одной
укрепляется блок управления 3002. а в другой — рулевые
блоки 686А и 680Б. Для переноски па боковых стенках ук-
реплены две ручки. С внутренней стороны у боковых стенок
ящика в углах прикреплены 4 металлических угольника, к
которым привинчена рама с амортизаторами. Крепление
блока 3002 к раме и упаковка блоков 686 описаны ранее.
Габариты ящика <570x410x430 мм. -Вес тары с блоками
3002 и 686 не более 28 кг.
137
9
ПРИЛОЖЕНИЕ
ВКЛЕЙКА №
1
R57
Назначение цепи и ток л И клемн
38
Я&8
ДЮ
*эо
Д1
Радио коме*
'<68 /ОООгц
♦2 6£ переклик усилит
1 и Пк из интег села /реж и/ 16
саг
м
рэг
дз
365 /ОСОгц &
Д5
| 366 /000гц С.
ДР
КоктроЛо ДУ С о фк ^du беллнлк
" 266 1 8а 2
,. - “ 266 1.8а /
31
контроль 7 к при безлюк проб 6л од I к 15 -
Радиокоманда 7к / Рк7кя~1 37
Радиокоманда Iк
<000гц
Радиокоманда / л
пуль Cf6/r)OnU^O/7) О'
сг/
R93
б/
3003
ДИ
R9&
*97
£S9
ди
026
0F-
ДЬ
ДЗ
Д'?
сгг
OF-
Д<5
/?Э5
R9P
Д/6
6'86 Б
втопилота 5А42
за к. 3(
Принципиальная электрическая схема автопилота 5А42
дю
RS9
Радиокоманда 1к
Д!
756 /аюгц о,7а
/00 С г.
Радио коноида а
36 Ё /ООО г И С.
проб 6л од / К
Радиокоманда 1к
М
Д6
Д5
ДР
651 6.36
6/
Радиокоманда » к
а£/тю/->и~локт-мУ
366 /ОСОгч &, /,
ТонтооОо ~ДУС а ТРк Paj ~&ёл7Оок:
пробОбкод-
R90
R97
РЮ
ДИ
-/50
сег
со/
о
R30
R93
R91
3003
С26
56
.0
OF
Д/З
Д/5
R95
R98 R9R
Д/Ч /огй.Цк
Д/6
\Д4
6/
_________________________30QiQ^
нобка jhwij /// канала^
Жё положение
'обка рулей II канала
doe положение
пробка интеграла
no II каналу
нь ограничение по Рканат1
*ь ограничения по п каналу
ингпргР^АЕ
налу
Р15:1
ритный чертеж блока управления 3002
зак. 3/1
R8
Размеры даны для установки
блока управления относи-
тельно осей объекта
Ось рулей
II канала
Ось рулей.
I канала
Ф6,5ь
к Ьо
н
26й
УстаноЬка рулей I канала
б нулевое положение
Установка рулей /// кань
1 Нулевое положение
Установка рулей II кан.
6 нулевое положение
Передаточное число
по углу крена
а интеграла
по I каналу
Габаритный чертеж блока
Передаточное число I канала
по у гл о бой скорости
точное число Ш канала
полой скорости
ФЗУ
Передаточное чрслоукана-
ла по углооой скорости
ентробка интеграла.
по II каналу
Уровень ограничения пр [_
Уровень ограничения по п
ВКЛЕЙКА Л? 4.
Блок рулевой 68 6 Р
21,8
Ф1С5
w-гс
Иолпачок_ сняли при_ устанойн
’кё "блока h Изделие
7О_5___________
16,15
18
230-0,3
' Той
~хо2
215*0,3
Билка штепсельная
Блок рулейой 6365
ШР не показан
ф-
налогабаритная 2РР122КПНП1ШП1
lililliW
Ф6Д
ШР не показан
169
ян_ сдела
Габаритный чертеж блоков 686А
и 686Б
Розетка________
ПтНбТабаПйтная
2РН22БПН1ОГ1П1
штепсельная
зак. 3/183
21,8
ФПС 5
ход
Иолла чок снять при цстаноб-
~ке ~6лока 1 ~изделие~ '
Блок рулевой 686fl
__________7/7,5_________
16,15
Ф
/г
230-0,3
~ход
ход
Билка штепсельная
налоеабаритная 2РС122КПН1
' ход
в
Ф6Д
Ф6Й
ЮР не показан
169
Розетка штепсельная
ян сфера
Габаритный чертеж блоков 686А|и 686Б
liaTFzaTapum н а я
2РР122БПН1ОГ1П1
у/?