/
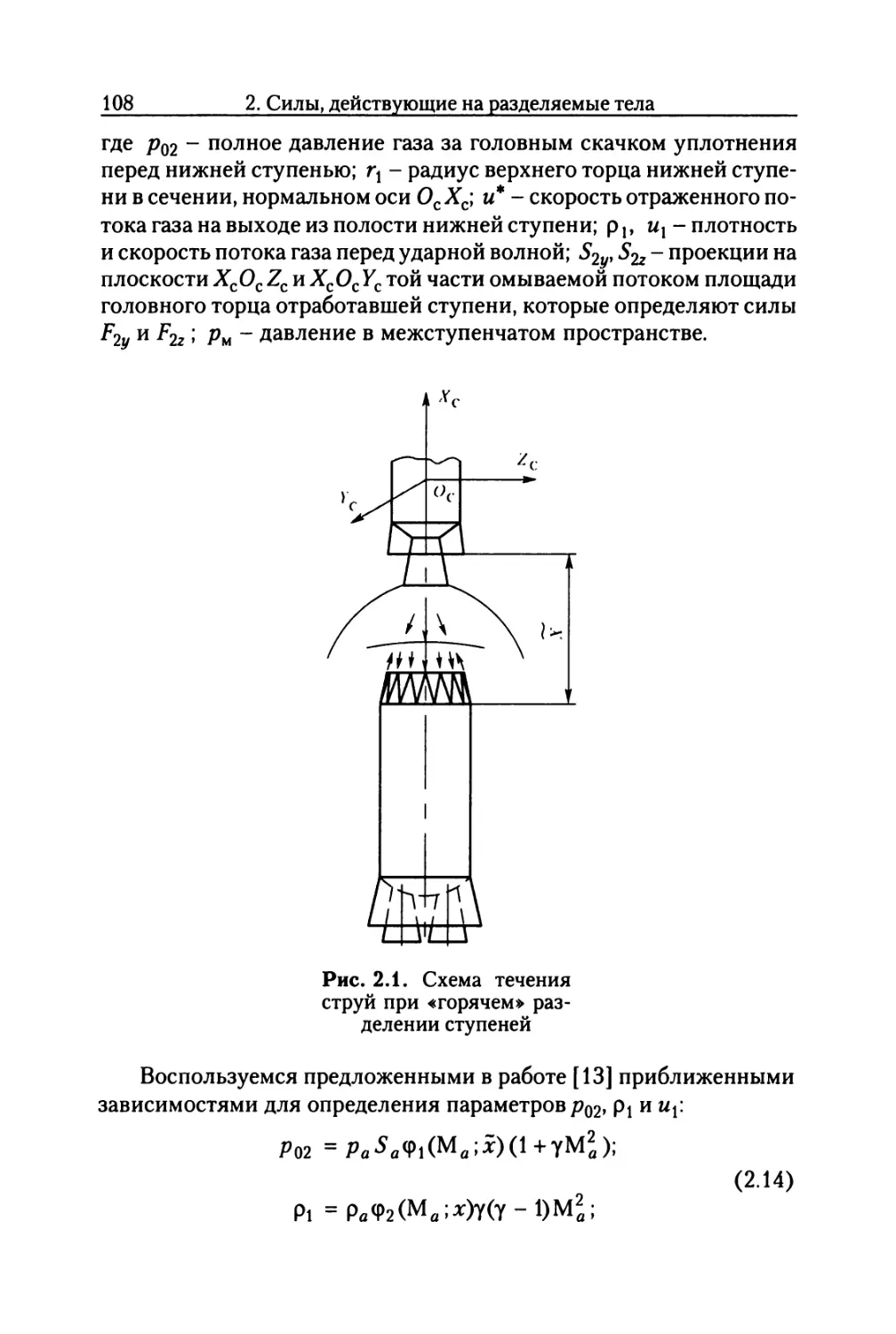
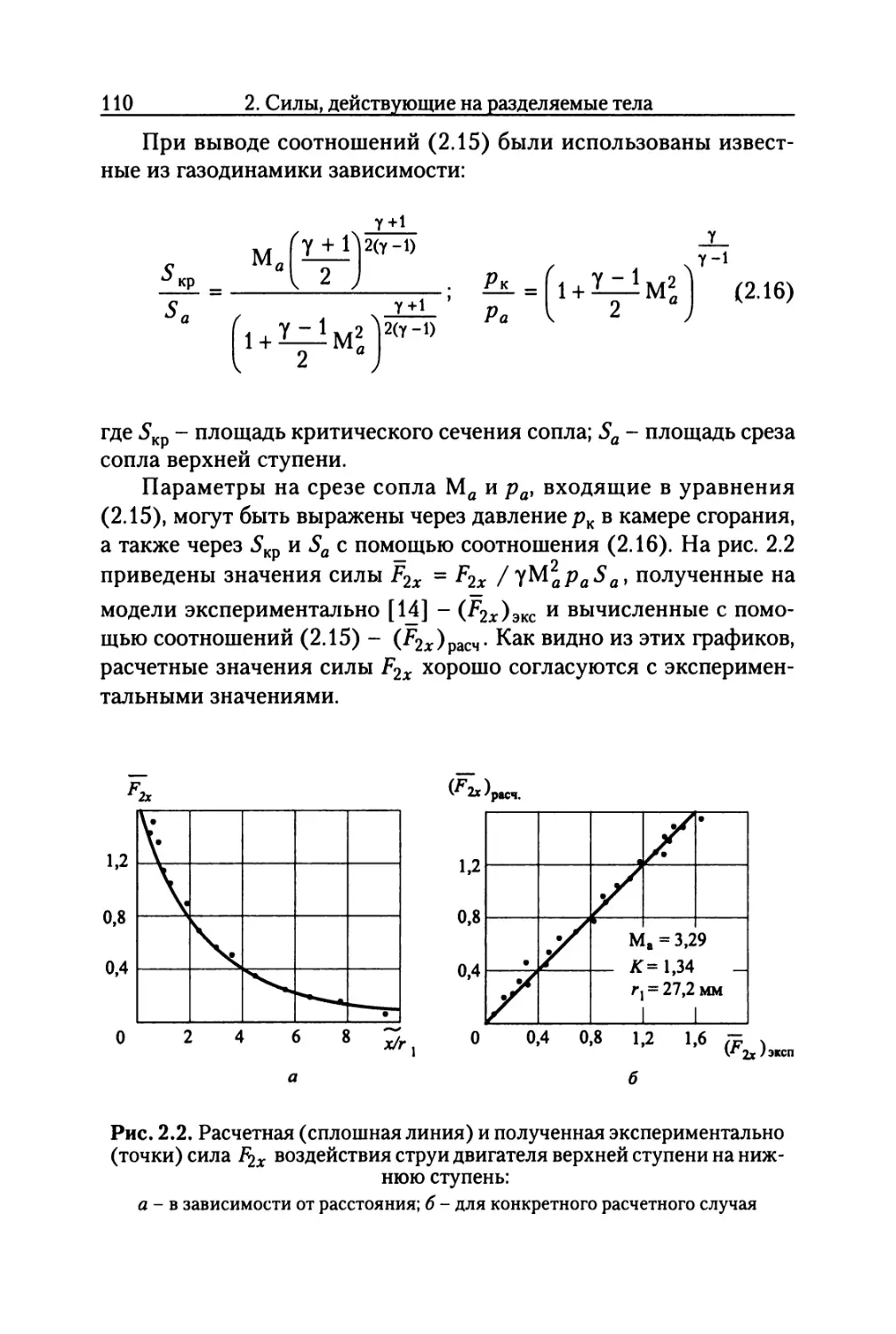



























Text
К.С. Колесников В.В. Кокушкин. С .В. борзых Н.В. Панкова
Расчет и проектирование систем разделения ступеней ракет
Издательство ЛИТУ им. Н.Э. Баумана
К.С. Колесников, В.В. Кокушкин С.В. Борзых, Н.В. Панкова
Расчет и проектирование систем разделения ступеней ракет
Допущено Учебно-методическим объединением вузов по университетскому политехническому образованию в качестве учебного пособия для студентов высших учебных заведений, обучающихся по направлению подготовки дипломированных специалистов «Ракетостроение и космонавтика»
Москва Издательство МГТУ им. Н.Э. Баумана 2006
УДК 629.78.001.24(075.8)
ББК 88.3
Р248
Рецензенты:
д-р техн, наук, проф. А.И. Лиходед, д-р техн, наук, проф. Ф.Н. Шклярчук
Расчет и проектирование систем разделения ступеней ра-
Р248 кет: Учеб, пособие /К.С. Колесников, В.В. Кокушкин, С.В. Борзых, Н.В. Панкова. - М.: Изд-во МГТУ им. Н.Э. Баумана, 2006. - 376 с.: ил.
ISBN 5-7038-2889-9
Рассмотрены проблемы, связанные с расчетом и проектированием систем разделения многоступенчатых ракет и ракетно-космических комплексов. Представлены конструктивные элементы систем разделения, достоинства и недостатки каждого из них, возможные области применения и способы резервирования.
Содержание учебного пособия используется при чтении курса лекций в МГТУ им. Н.Э. Баумана.
Для студентов высших учебных заведений, аспирантов и специалистов в области ракетно-космической техники.
УДК 629.78.001.24(075.8)
ББК 88.3
ISBN 5-7038-2889-9
© МГТУ им. Н.Э. Баумана, 2006
© Оформление. Издательство МГТУ им. Н.Э. Баумана, 2006
Оглавление
Предисловие................................................ 5
Список сокращений.......................................... 7
1. Системы разделения ступеней ракетно-космических комплексов и их элементы.............................................. 9
1.1. Системы разделения................................. 9
1.2. Элементы систем разделения........................ 31
1.3. Пирозамок......................................... 34
1.4. Пироболт.......................................... 40
1.5. Линейные устройства разделения.................... 41
1.6. Пиротолкатель..................................... 67
1.7. Пневмотолкатель................................... 71
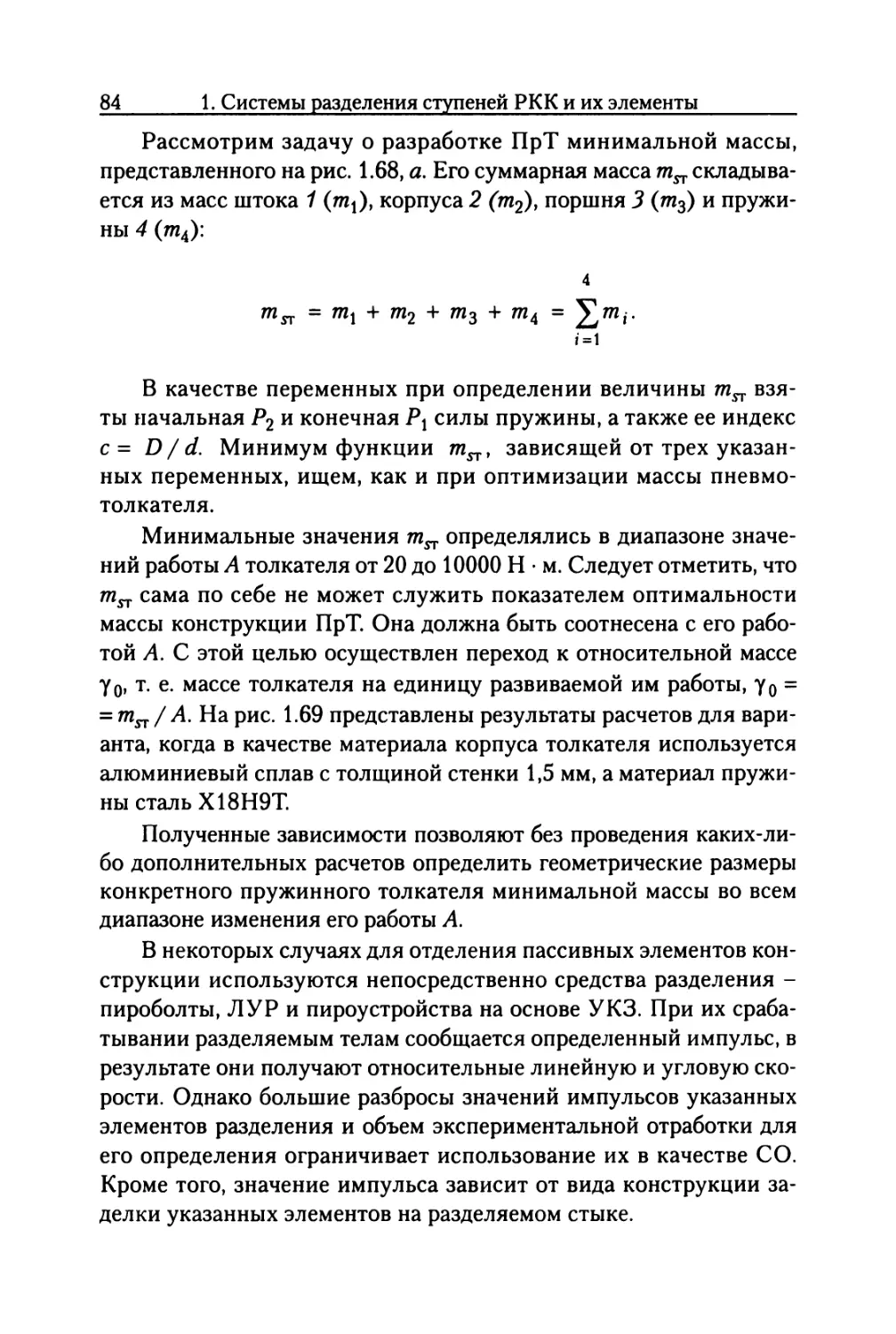
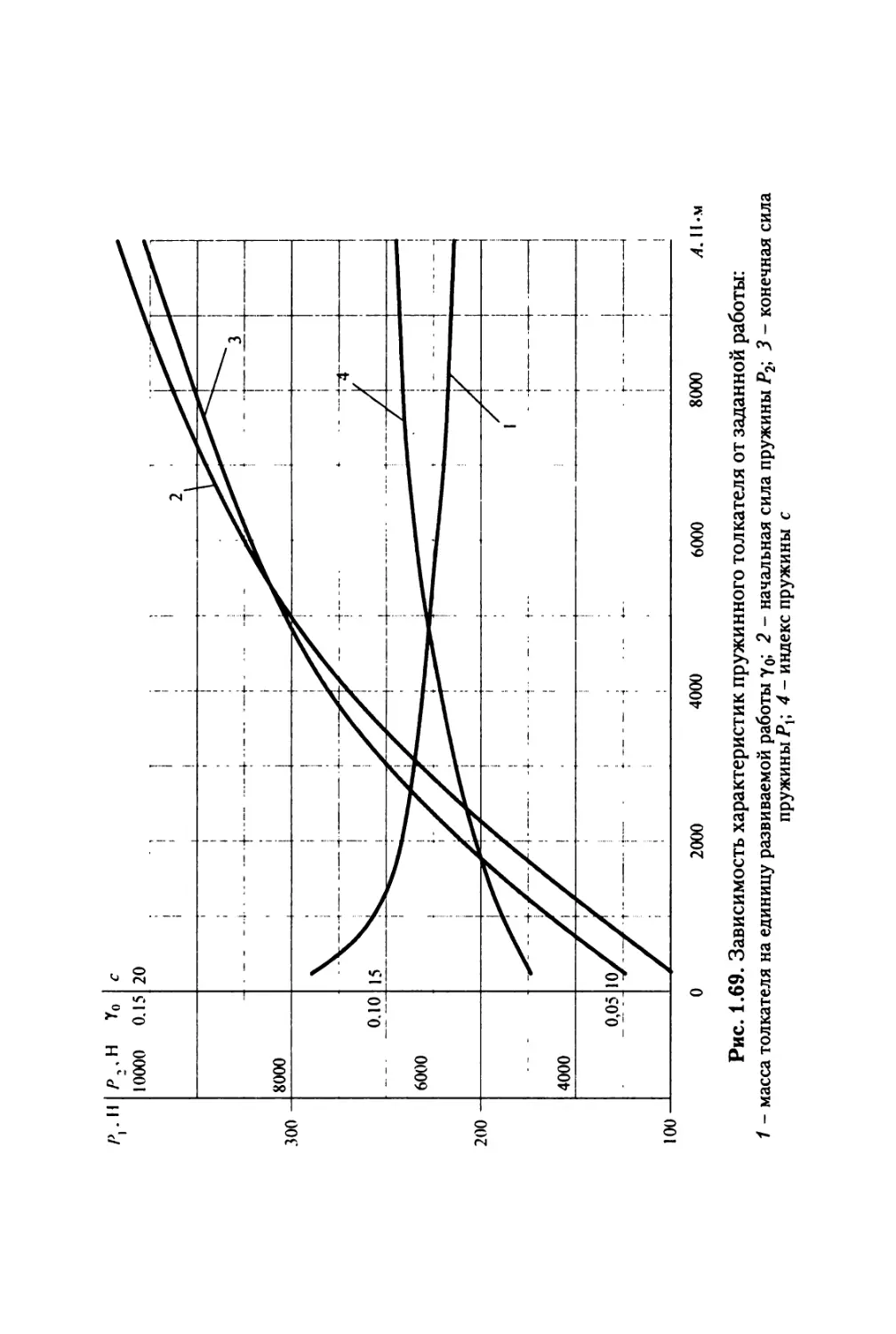
1.8. Пружинный толкатель............................... 81
1.9. Ракетный двигатель твердого топлива............... 86
1.10. Жидкостной ракетный двигатель.................... 87
1.11. Газовое сопло.................................... 87
1.12. Аэродинамические тормозные поверхности........... 89
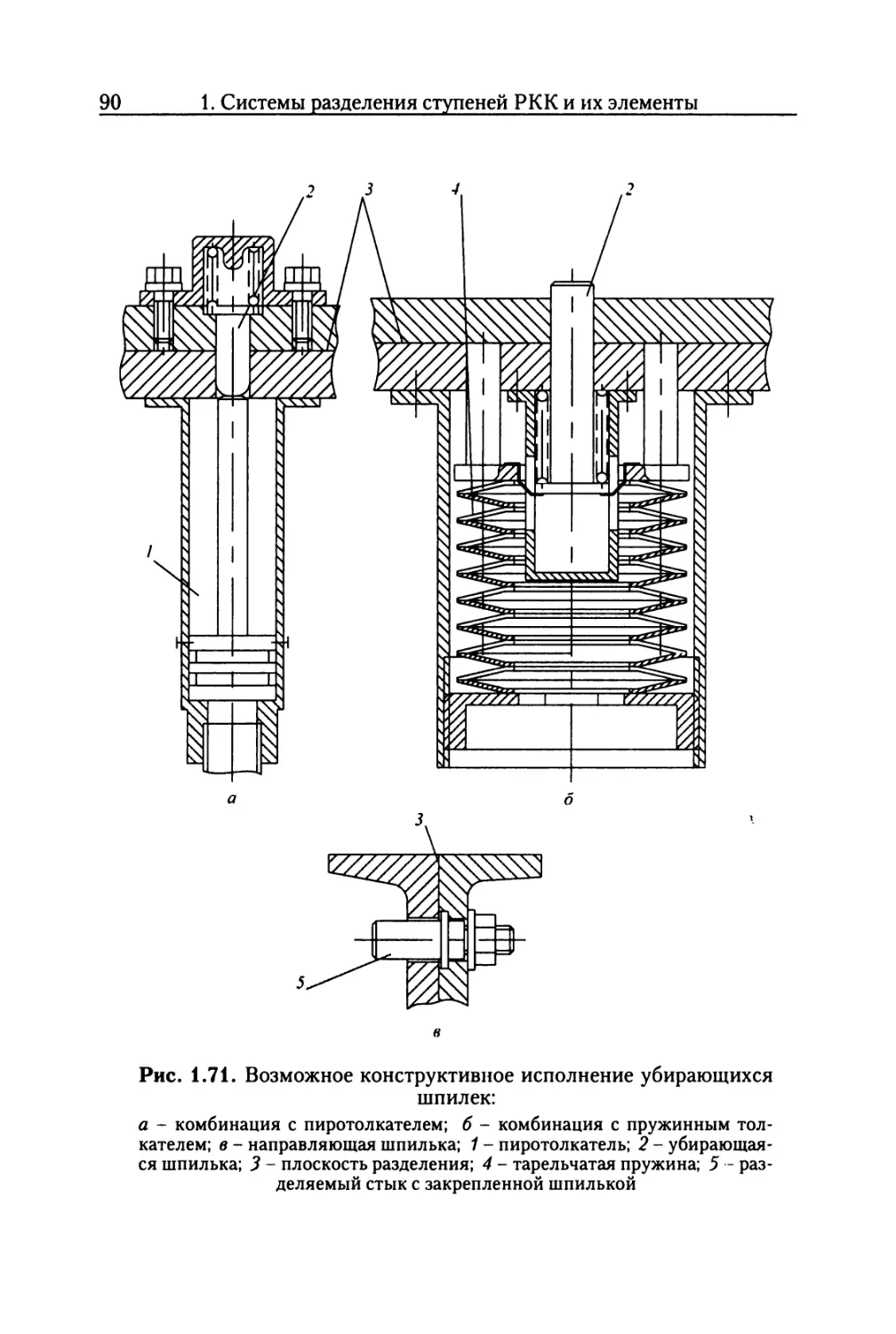
1.13. Сопутствующие элементы........................... 89
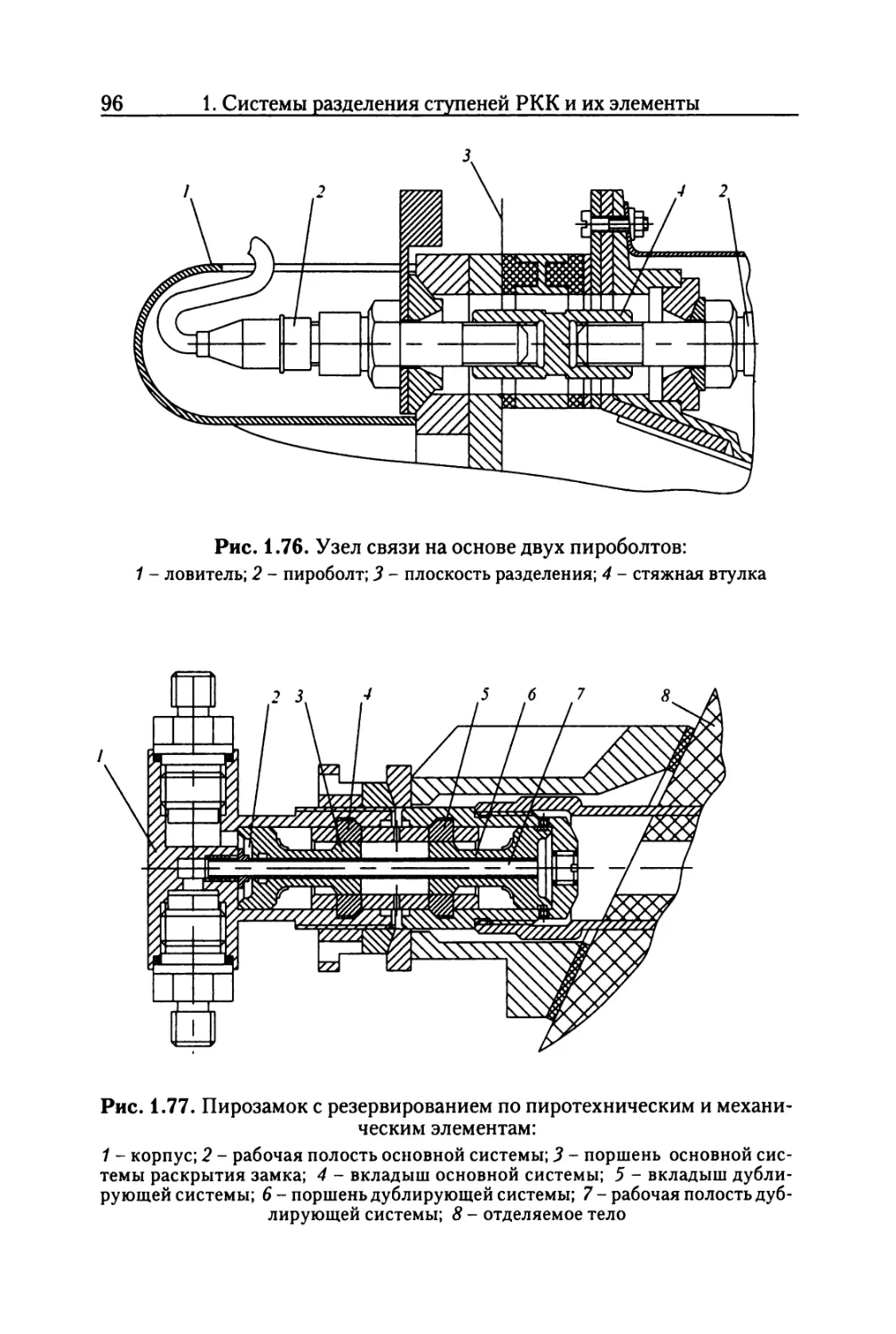
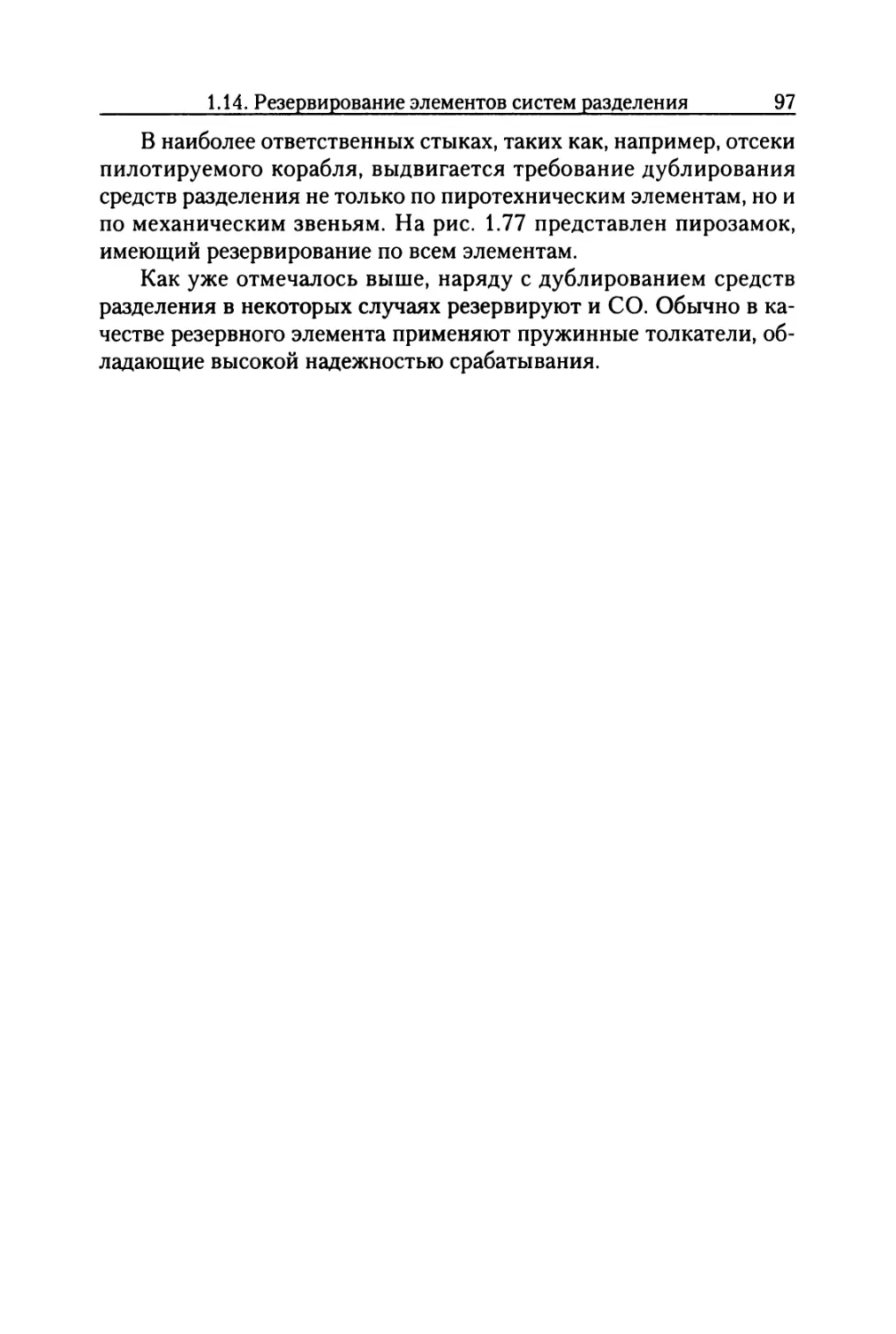
1.14. Резервирование элементов систем разделения....... 95
2. Силы, действующие на разделяемые тела.................. 98
2.1. Сила пружинного толкателя........................ 98
2.2. Сила пиротехнического толкателя................... 99
2.3. Сила пневматического толкателя....................101
2.4. Тяга жидкостного ракетного двигателя..............104
2.5. Тяга ракетного двигателя твердого топлива.........106
2.6. Газодинамические силы.............................106
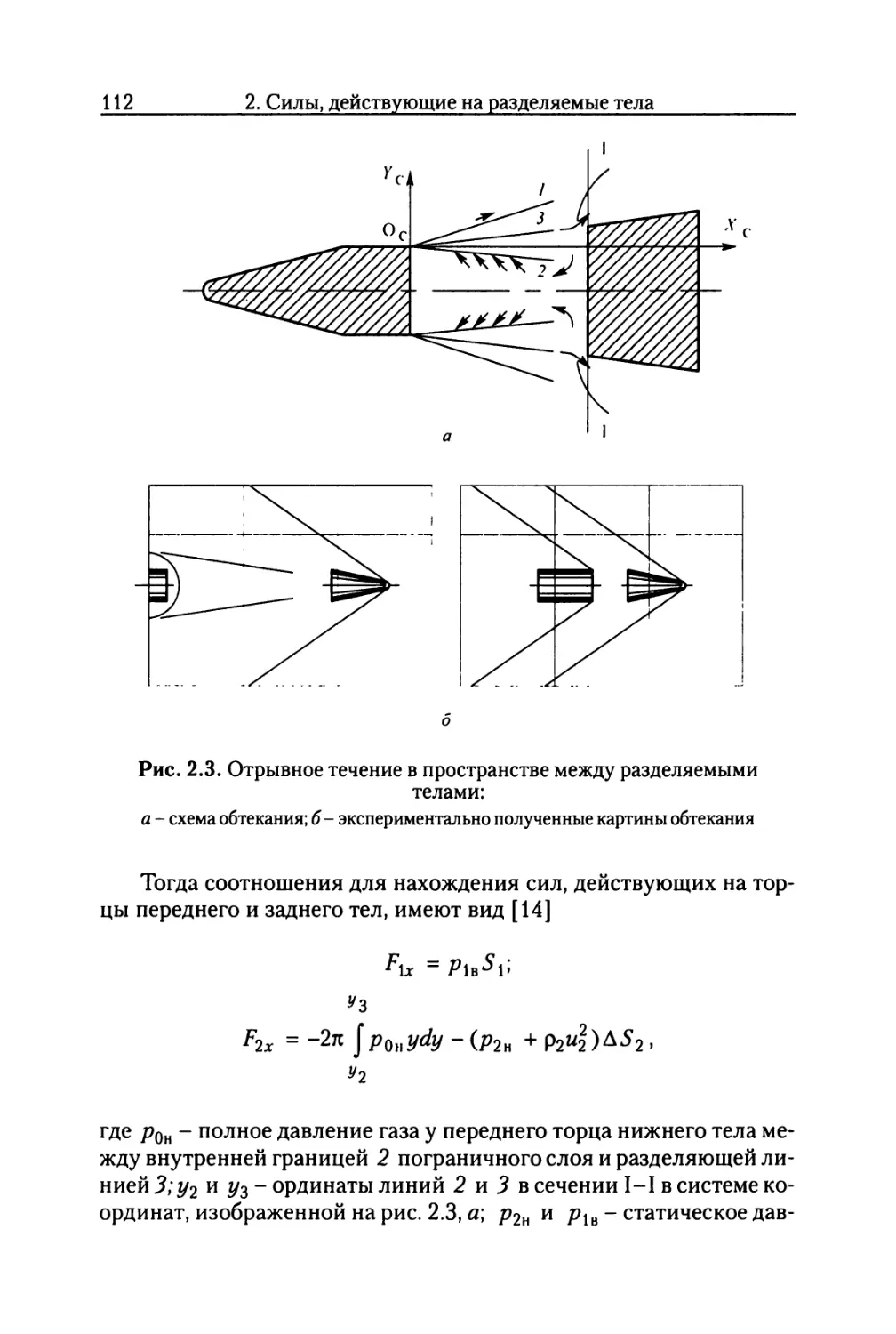
2.7. Аэродинамические силы.............................111
4
Оглавление
3. Разделение ступеней ракет..............................114
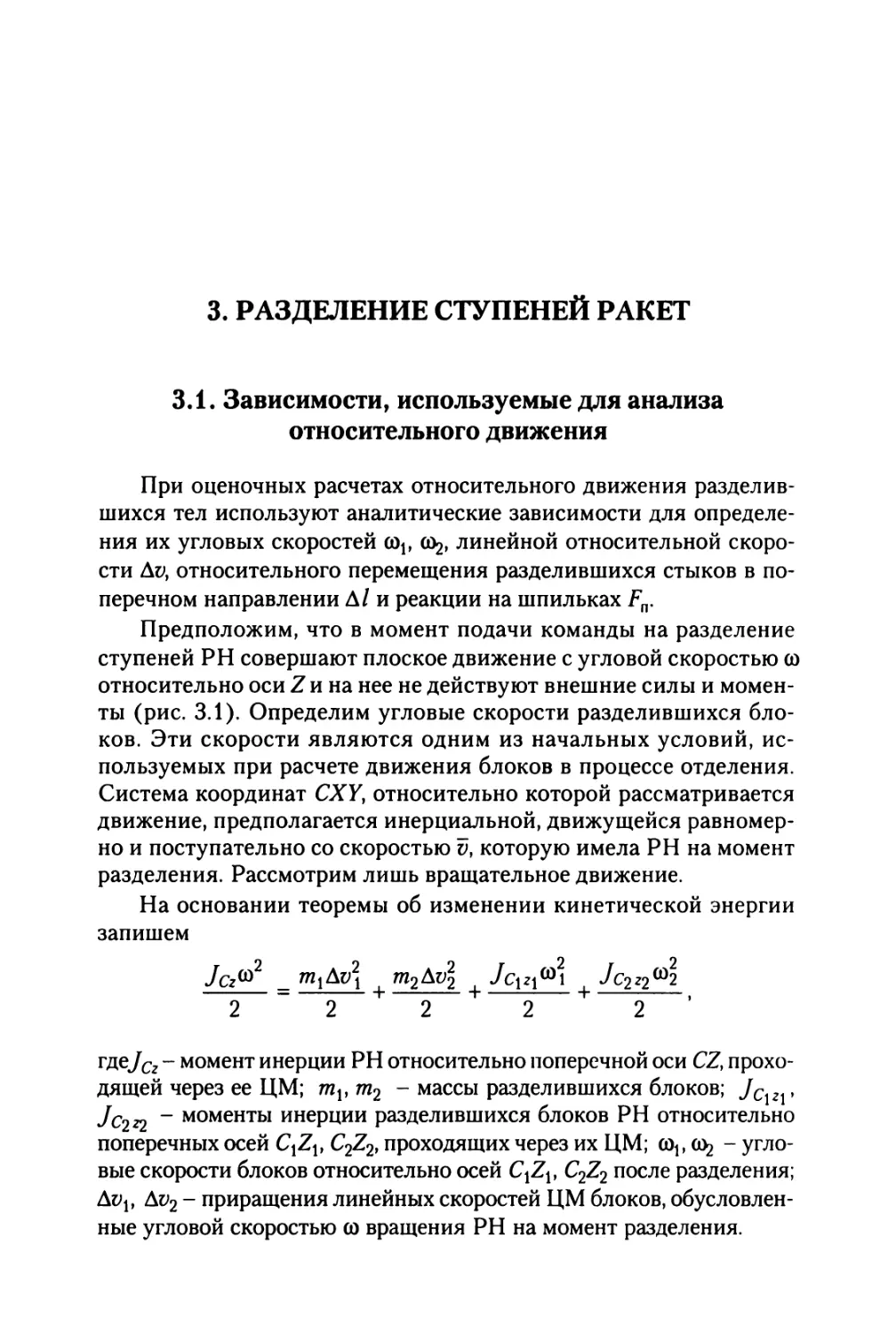
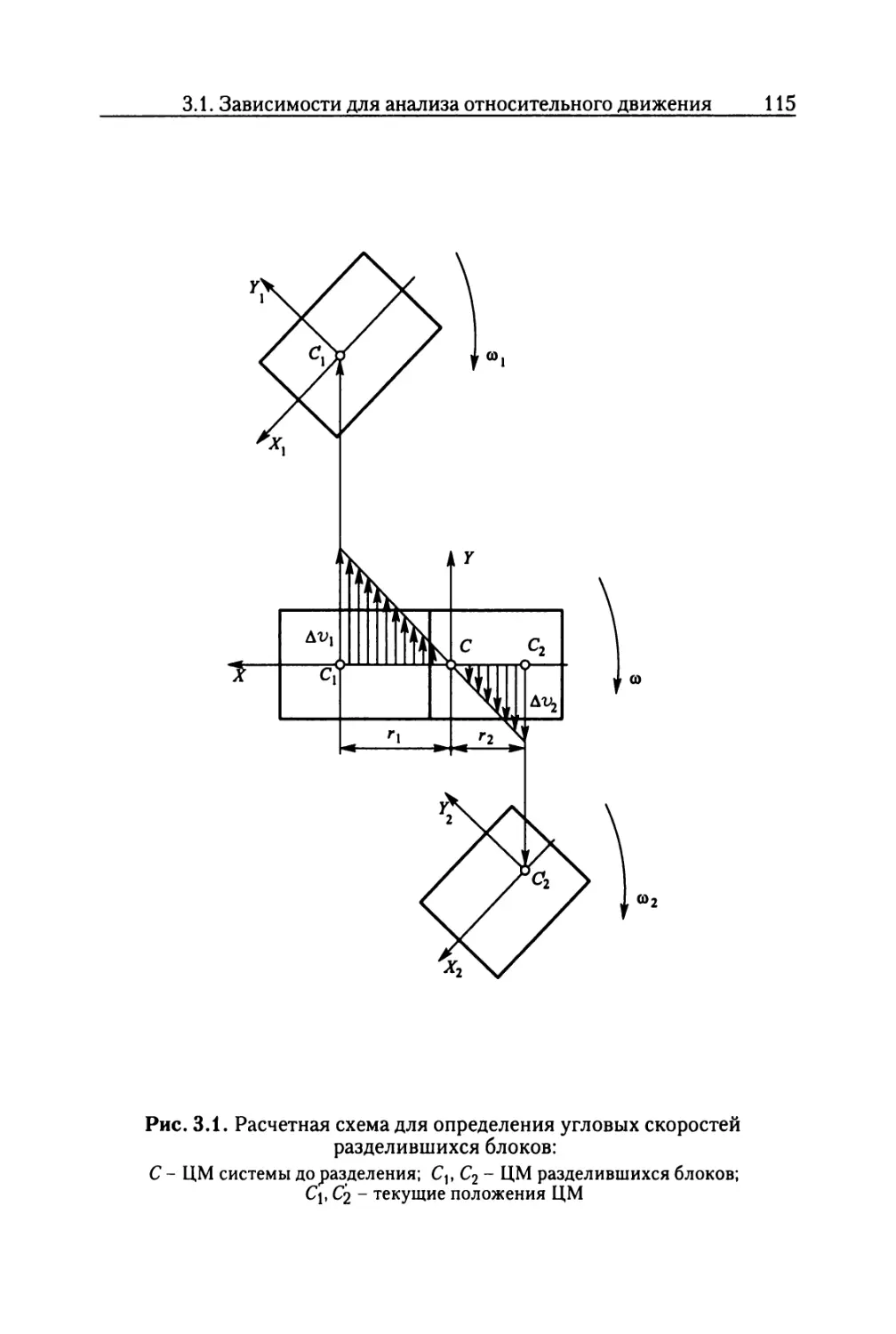
3.1. Зависимости, используемые для анализа относительного движения...............................................114
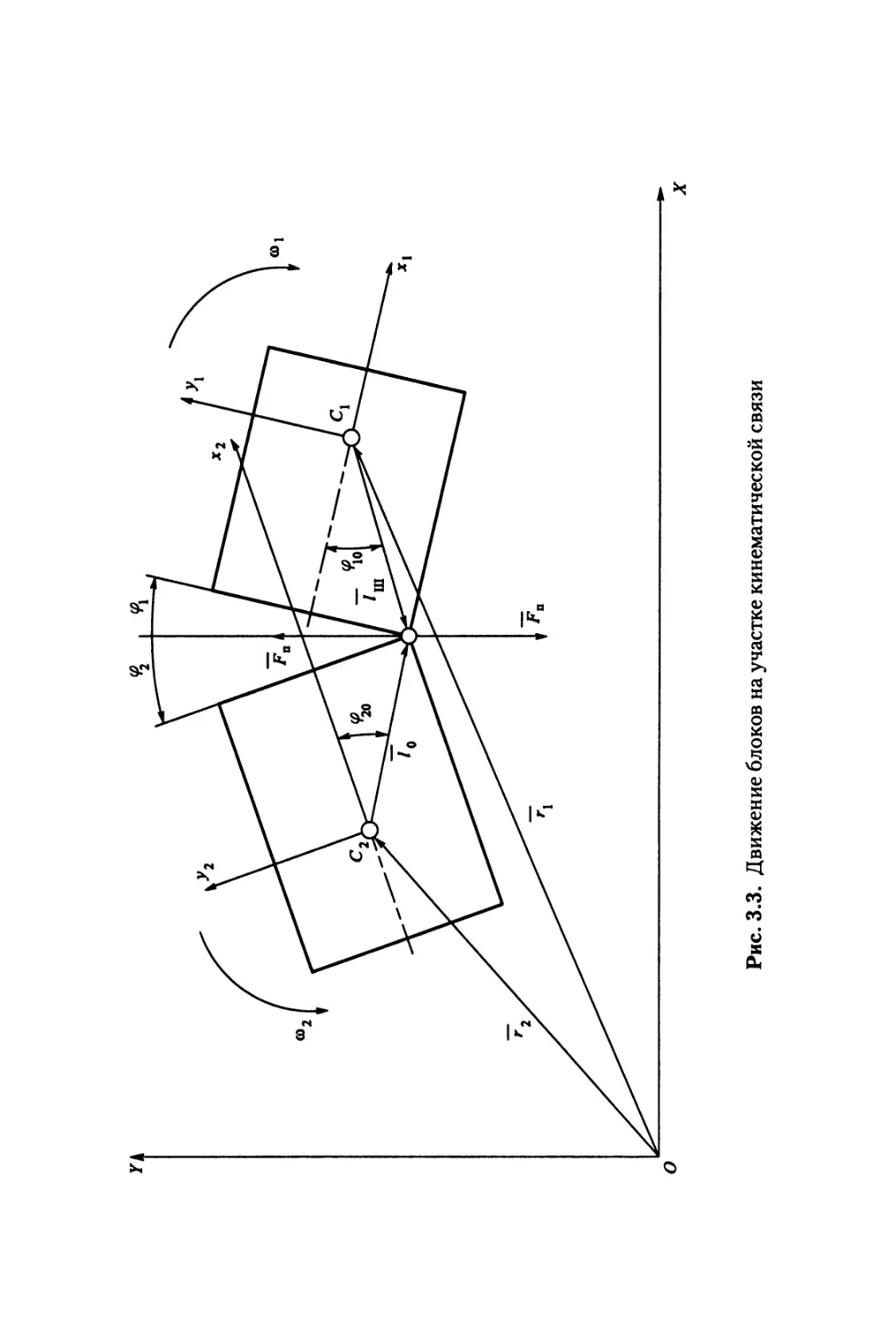
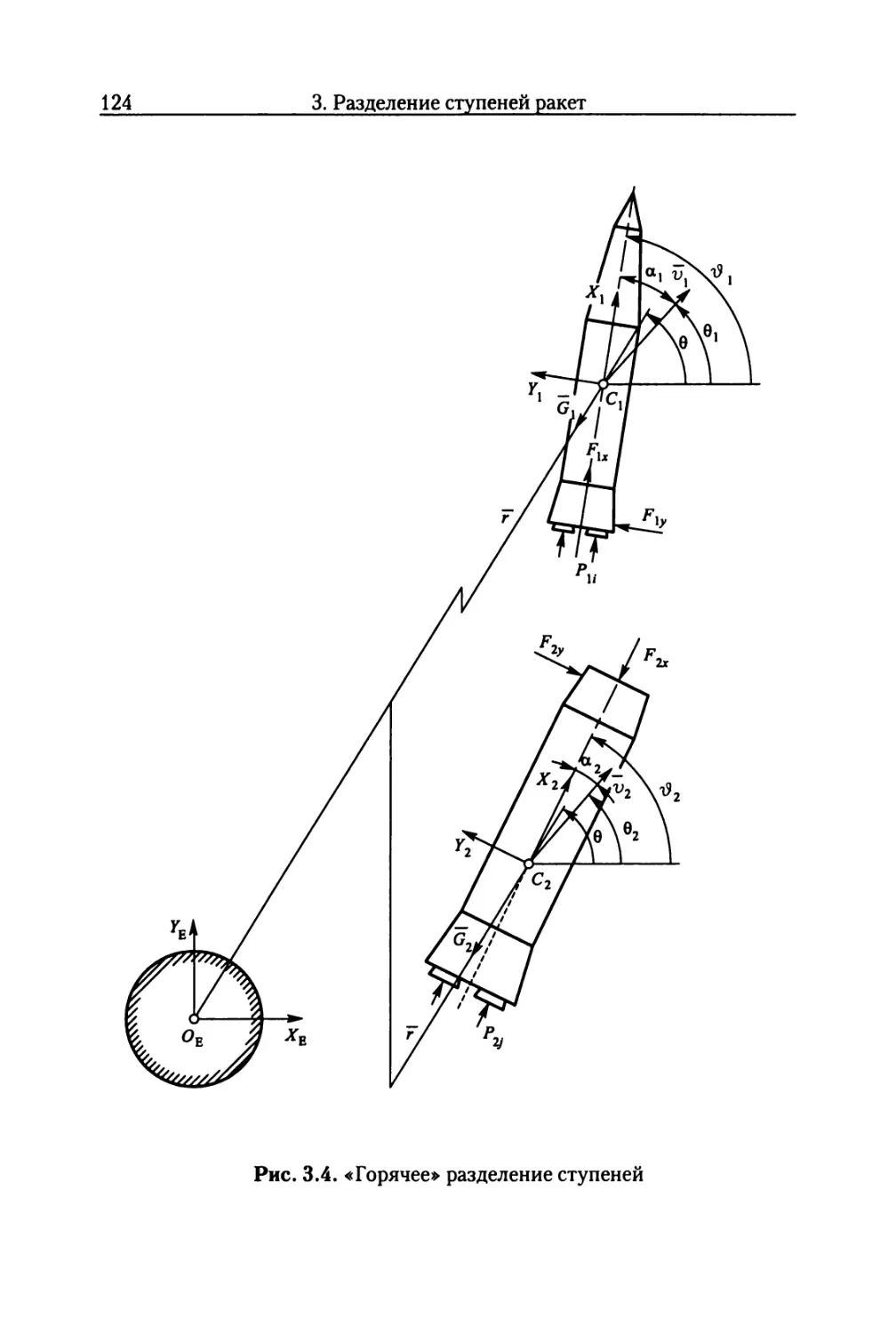
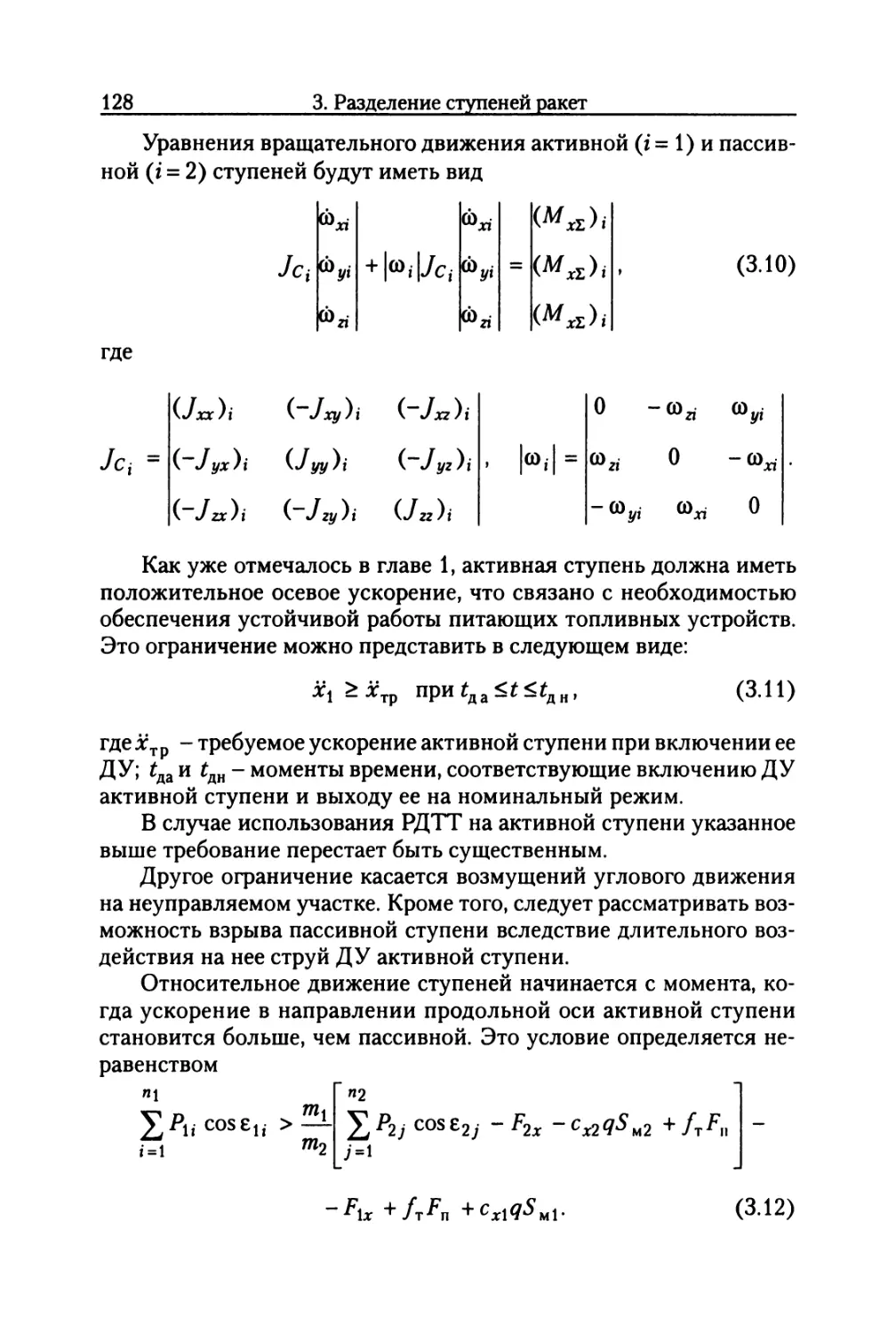
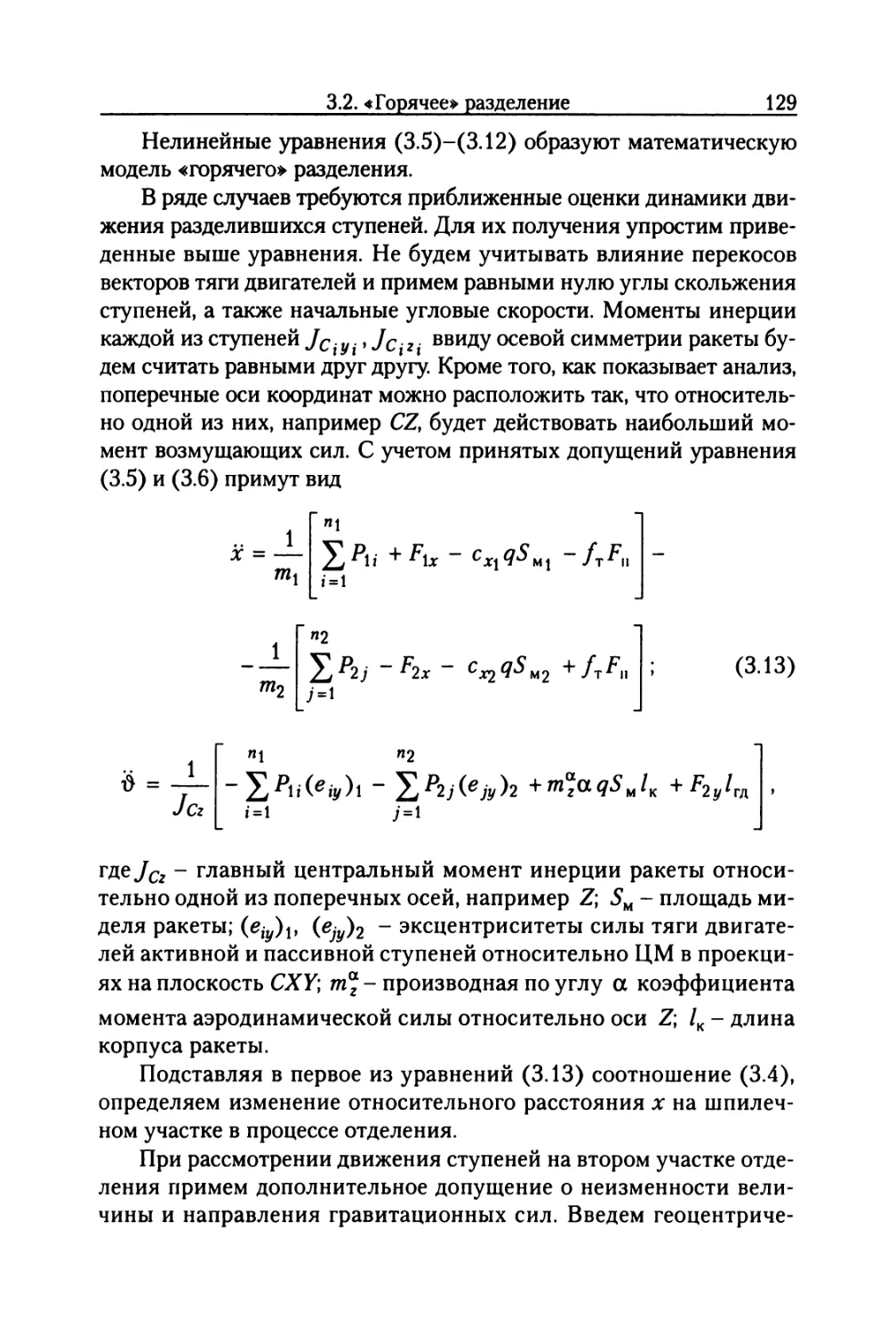
3.2. «Горячее» разделение..............................123
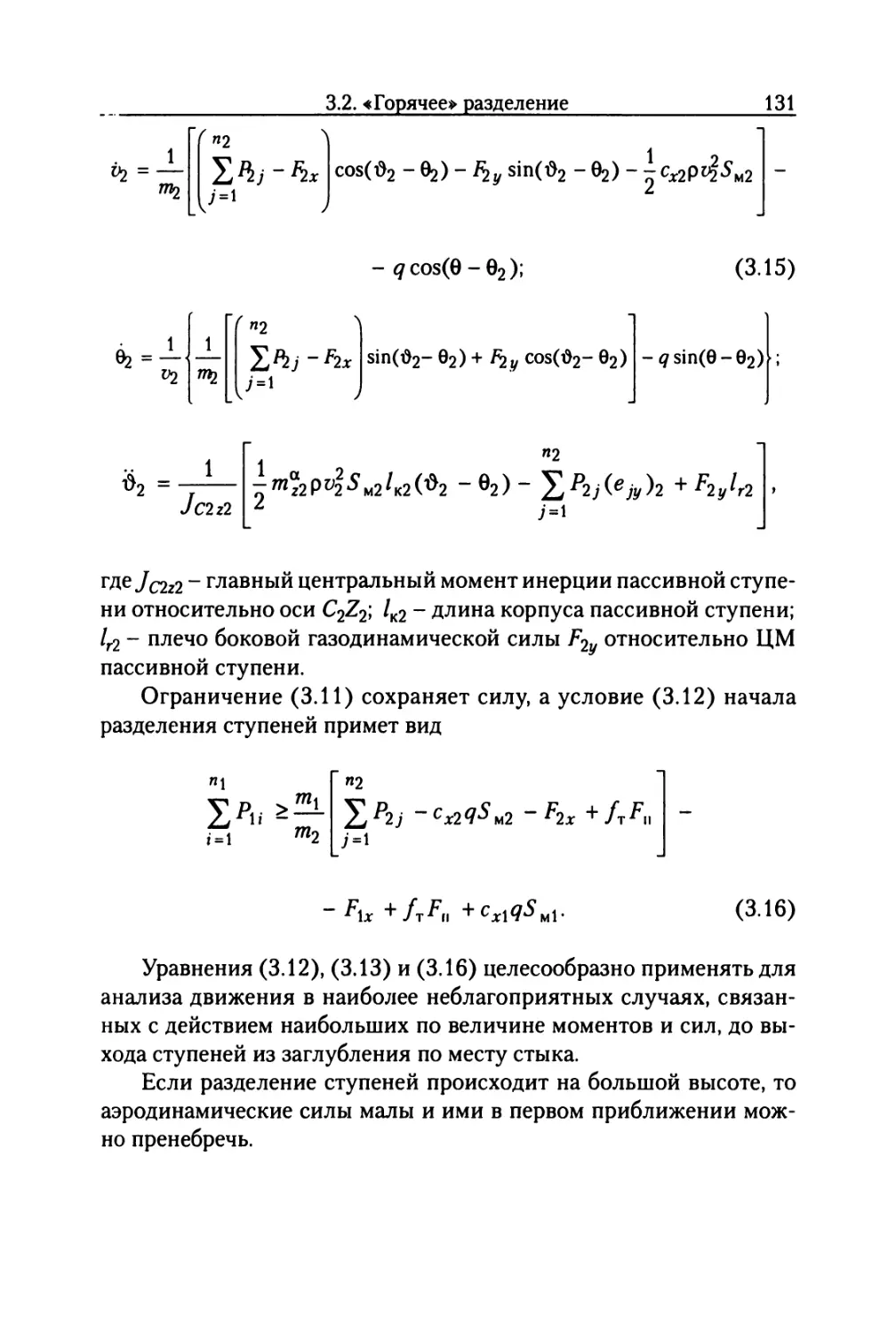
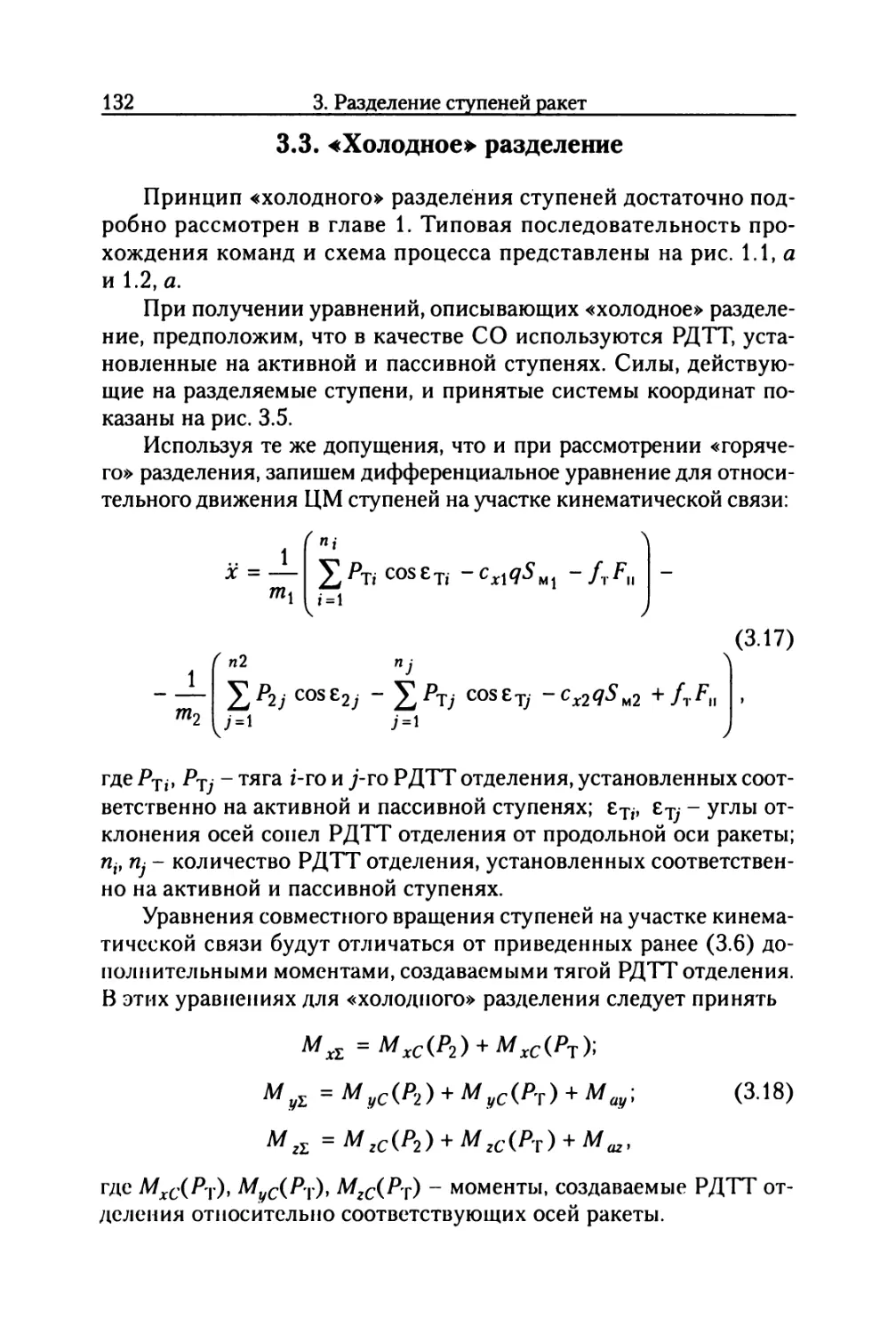
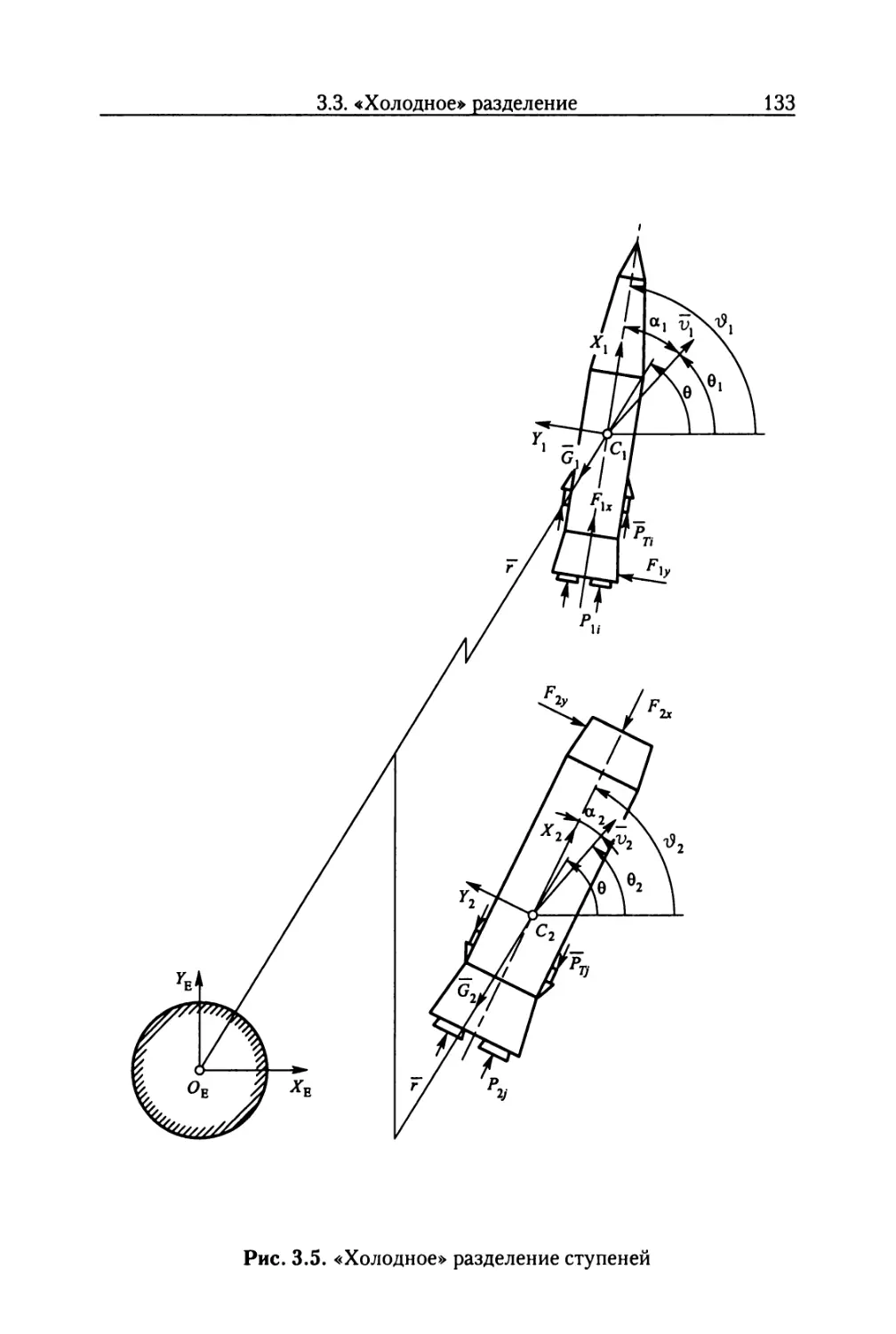
3.3. «Холодное» разделение.............................132
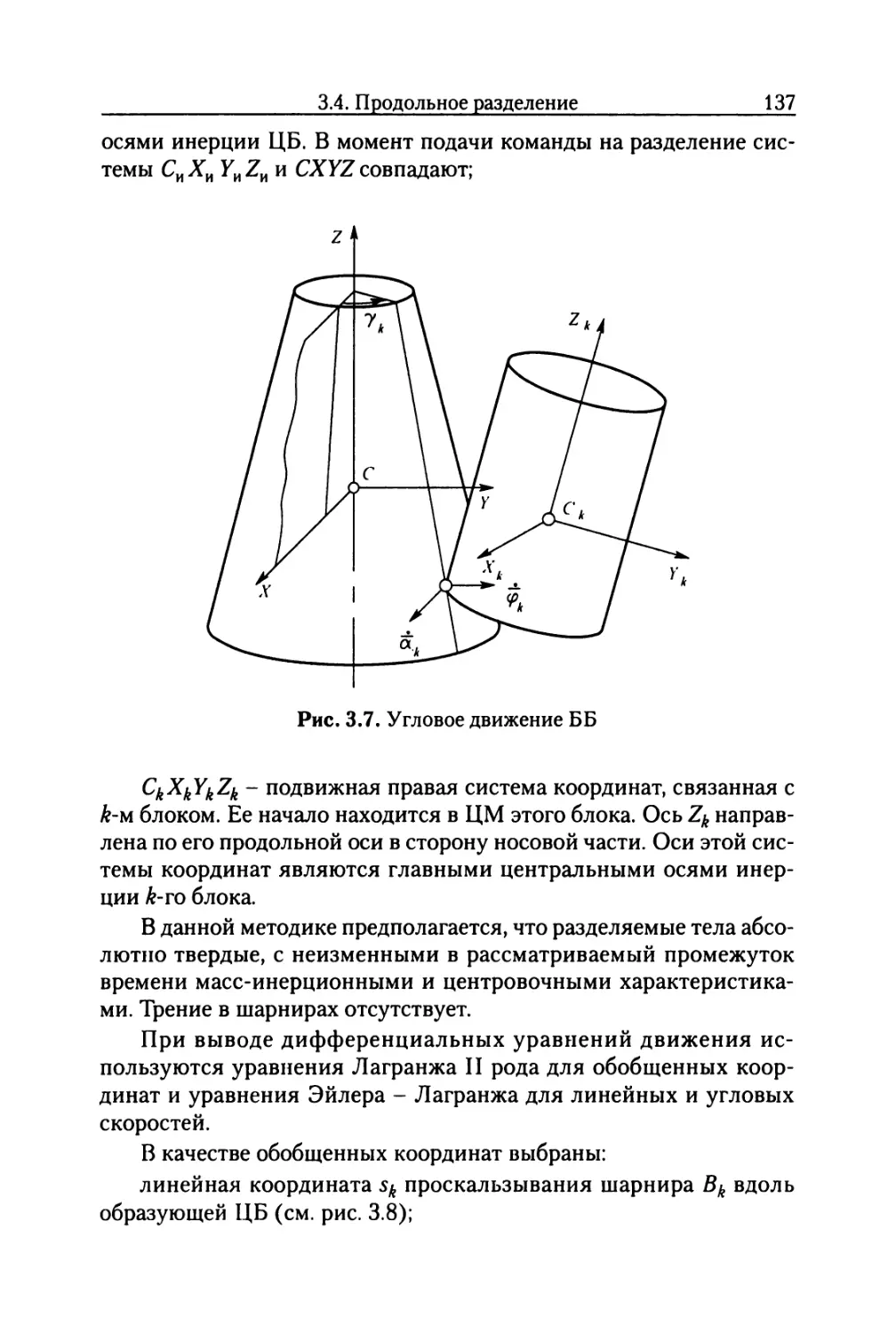
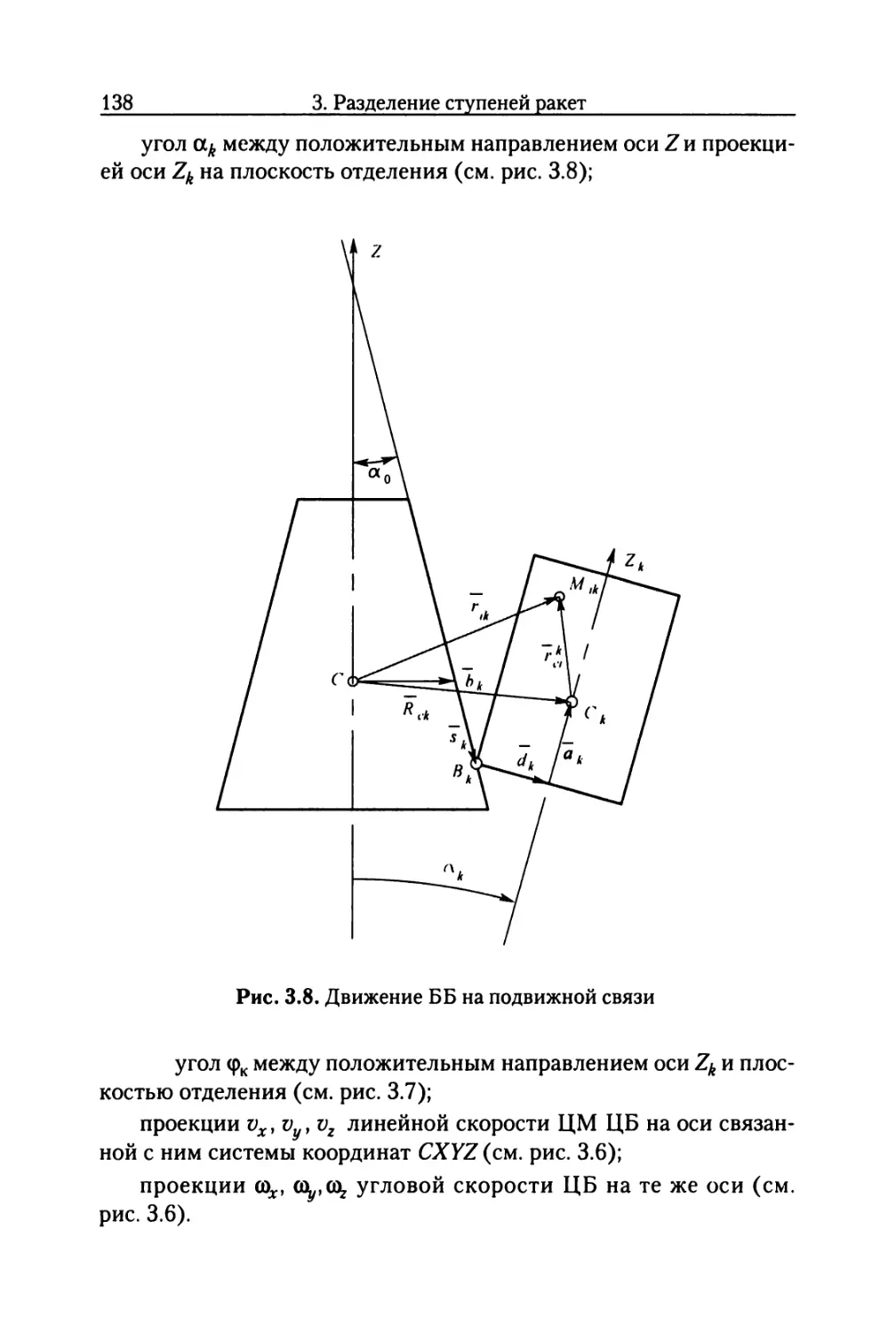
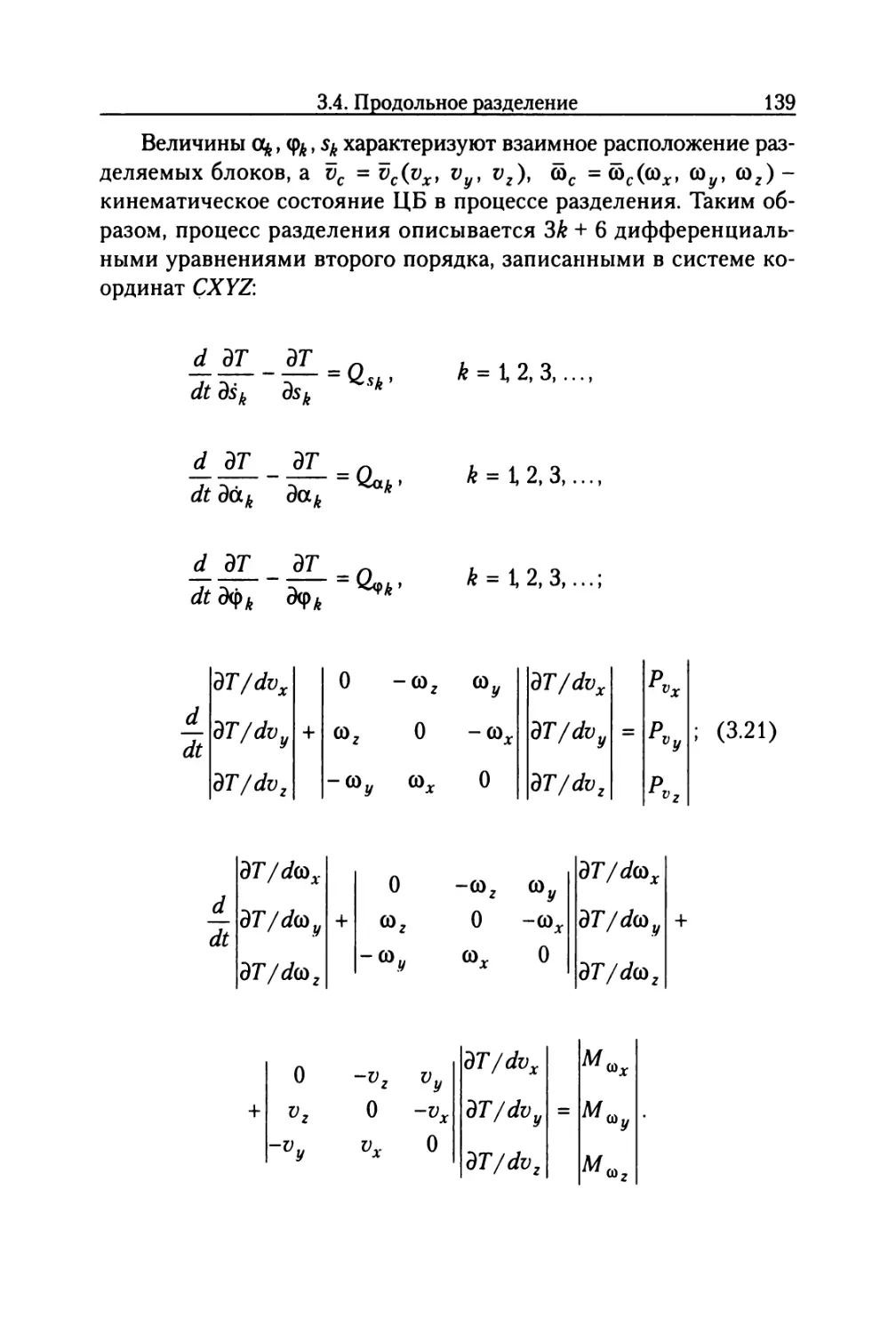
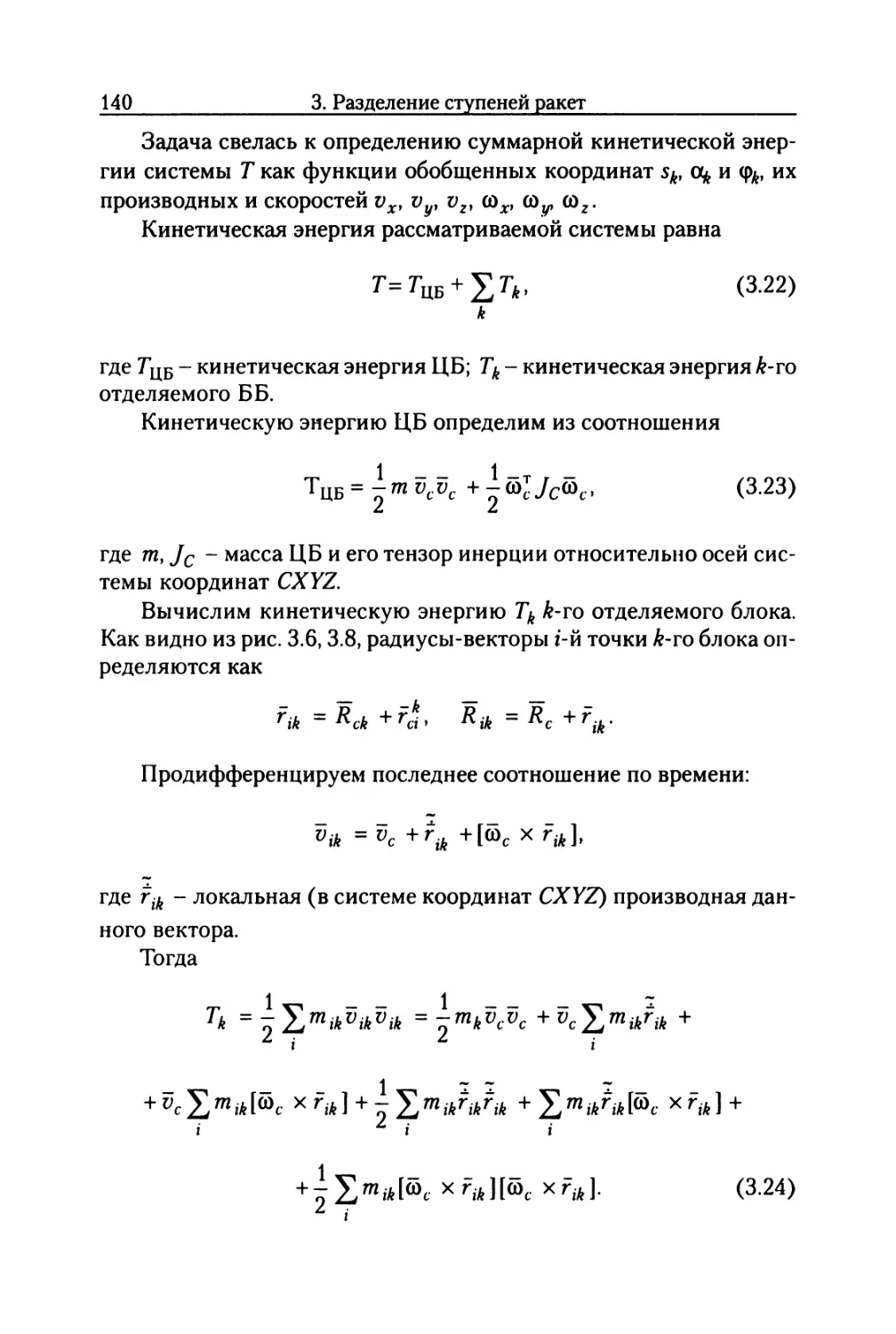
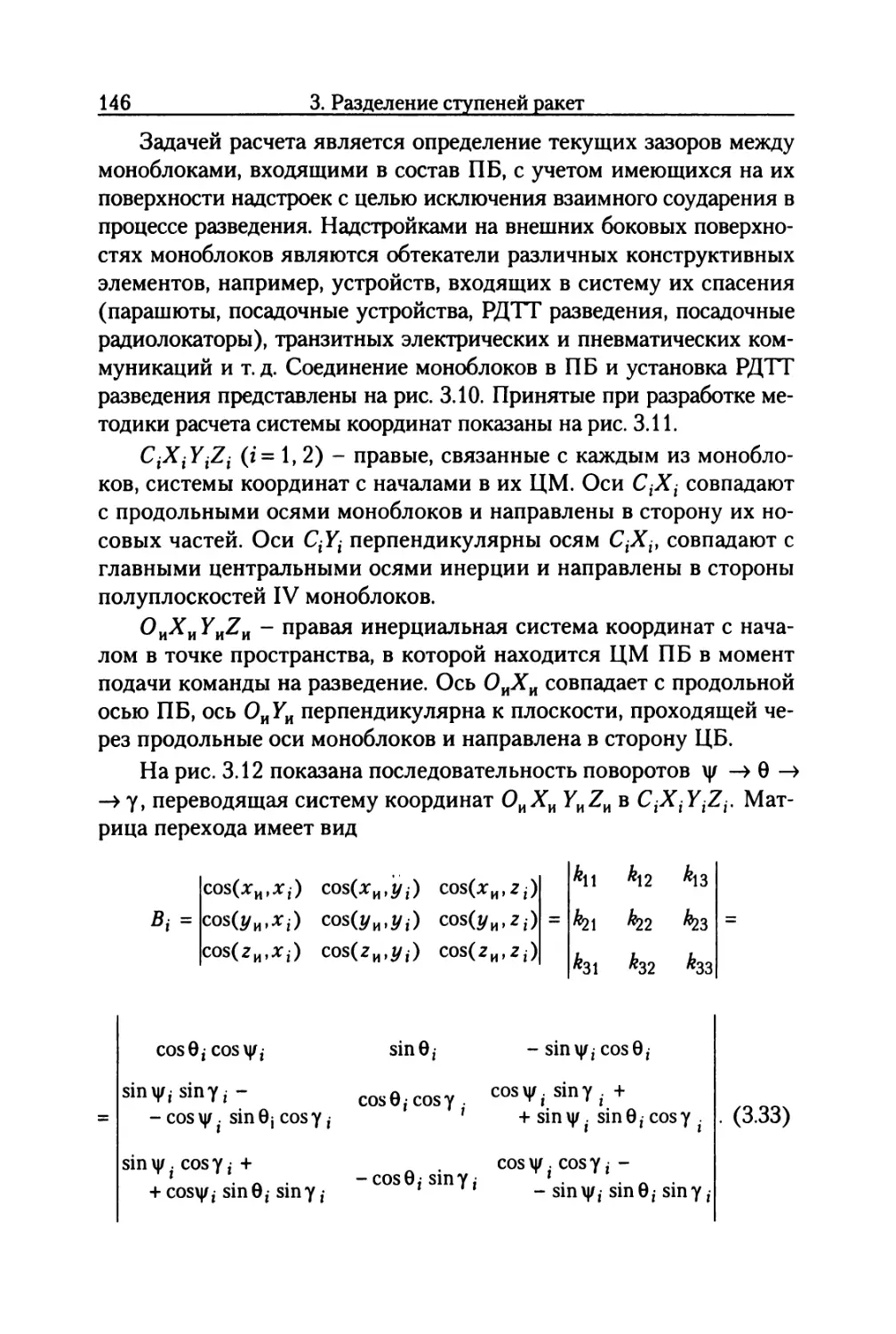
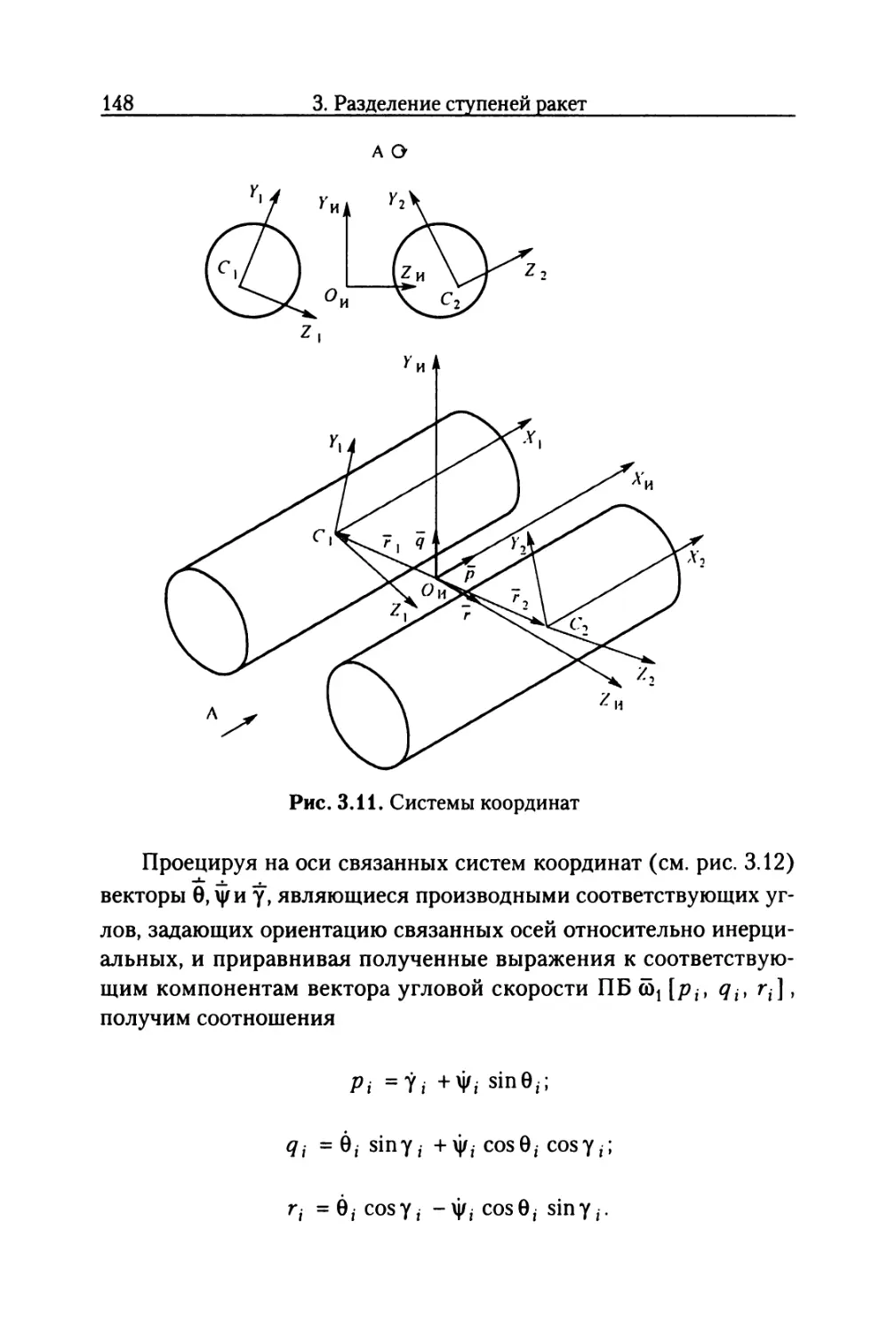
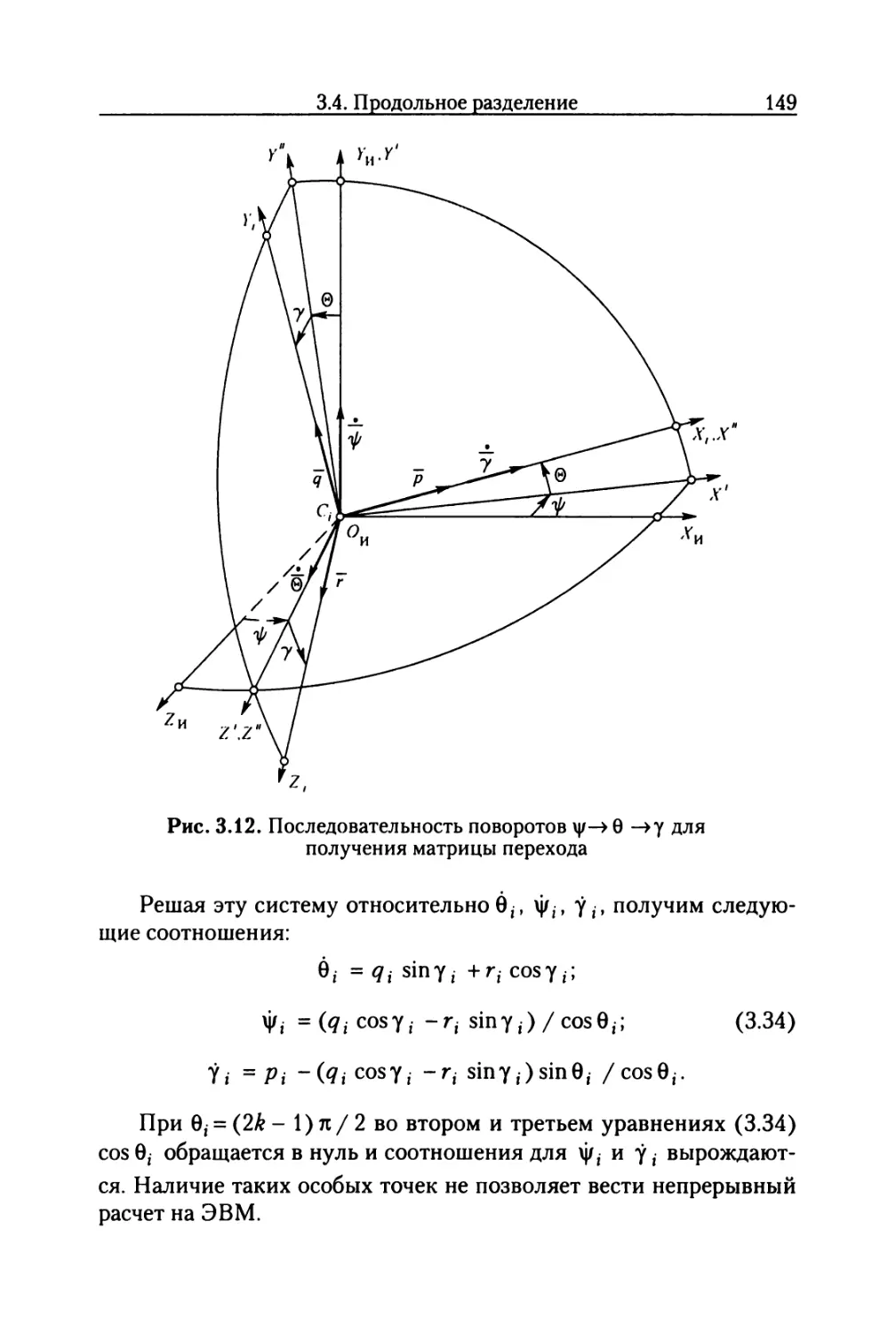
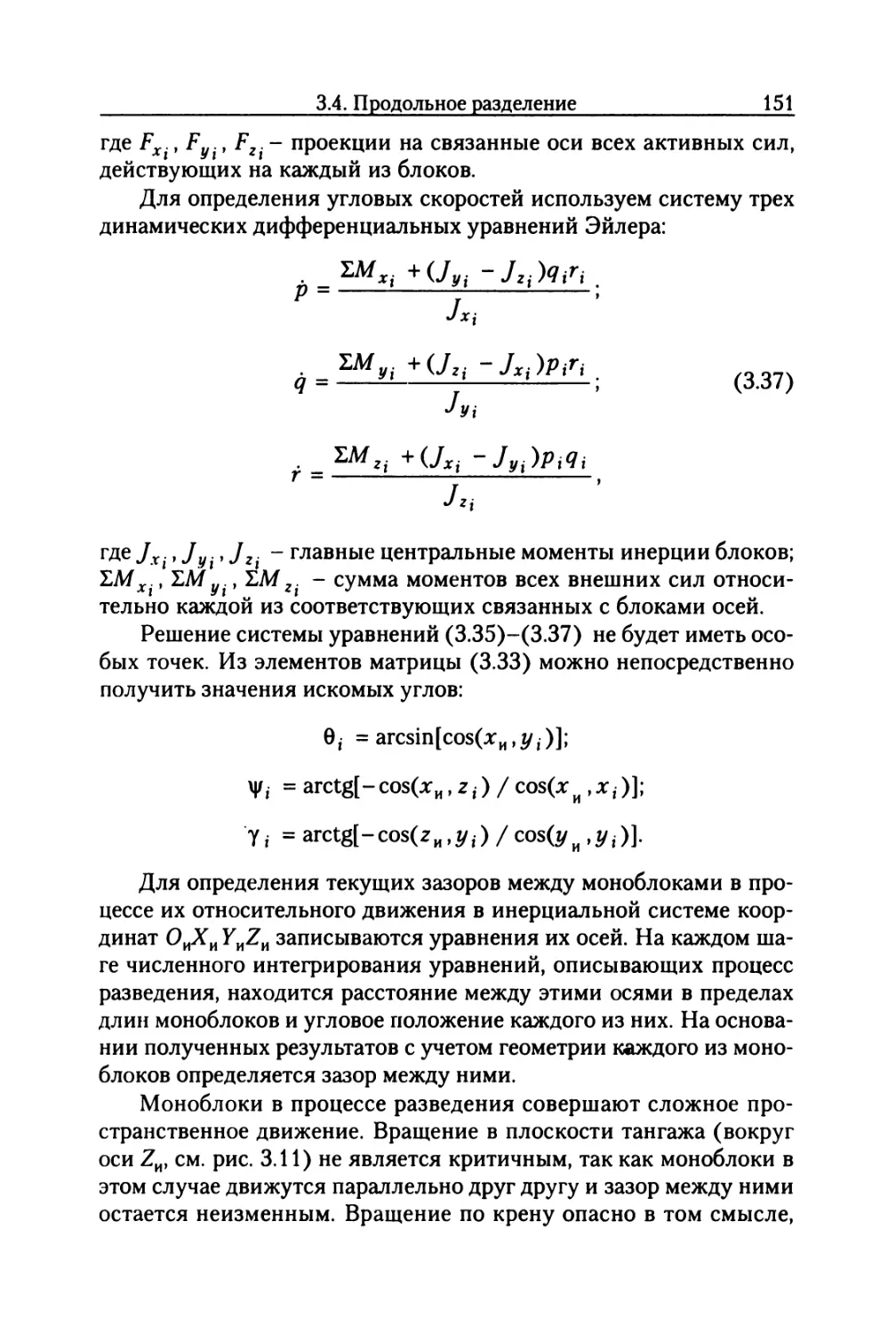
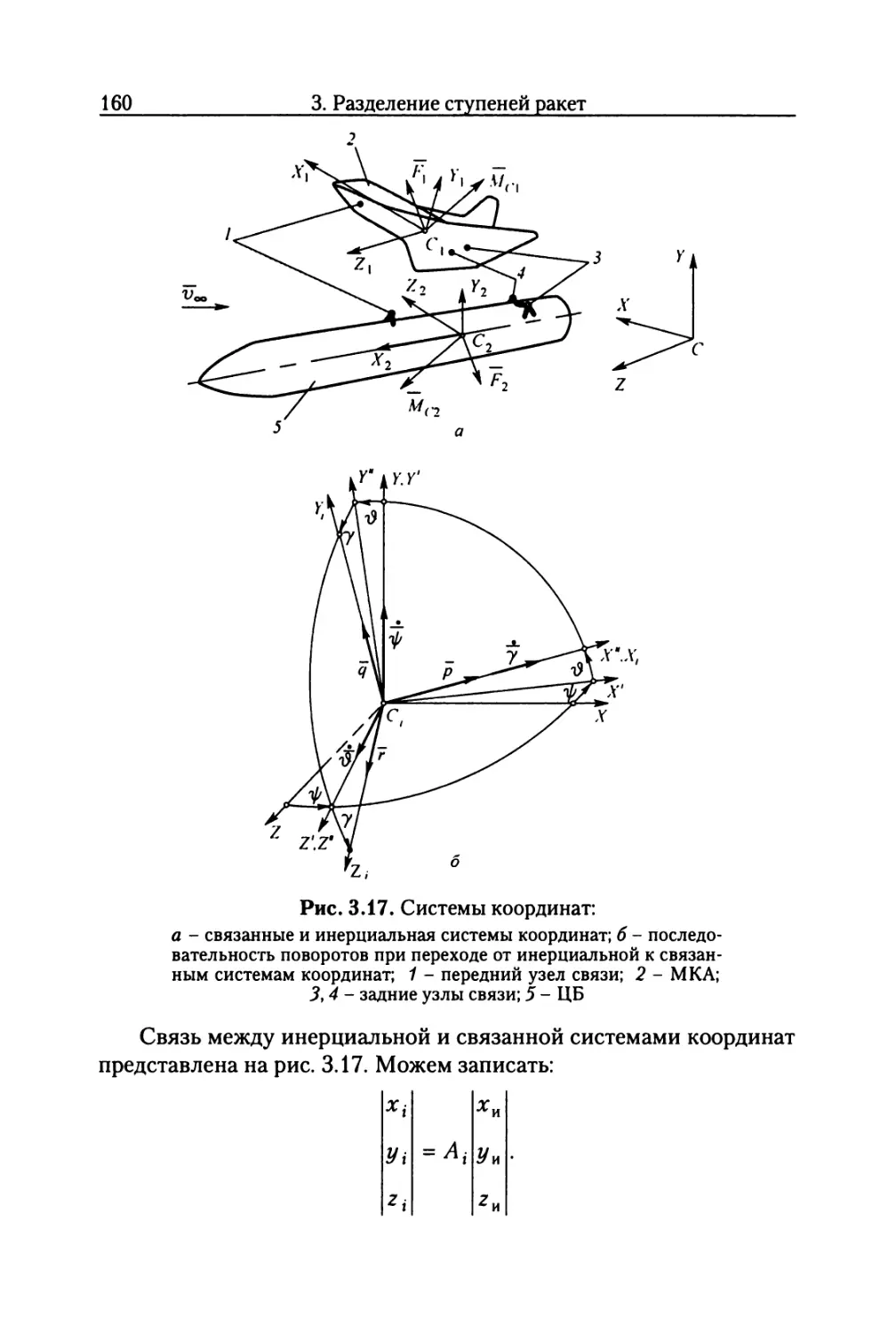
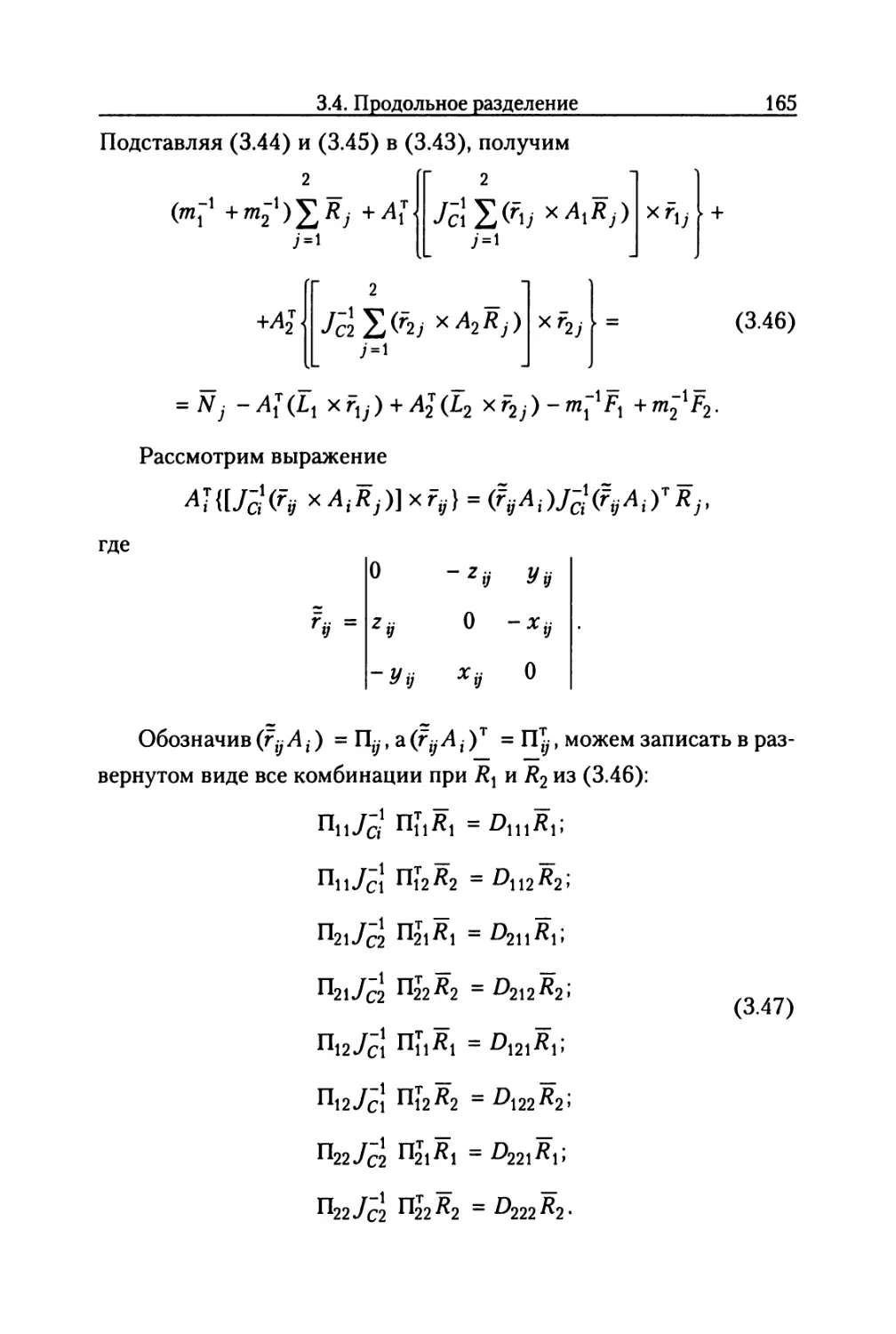
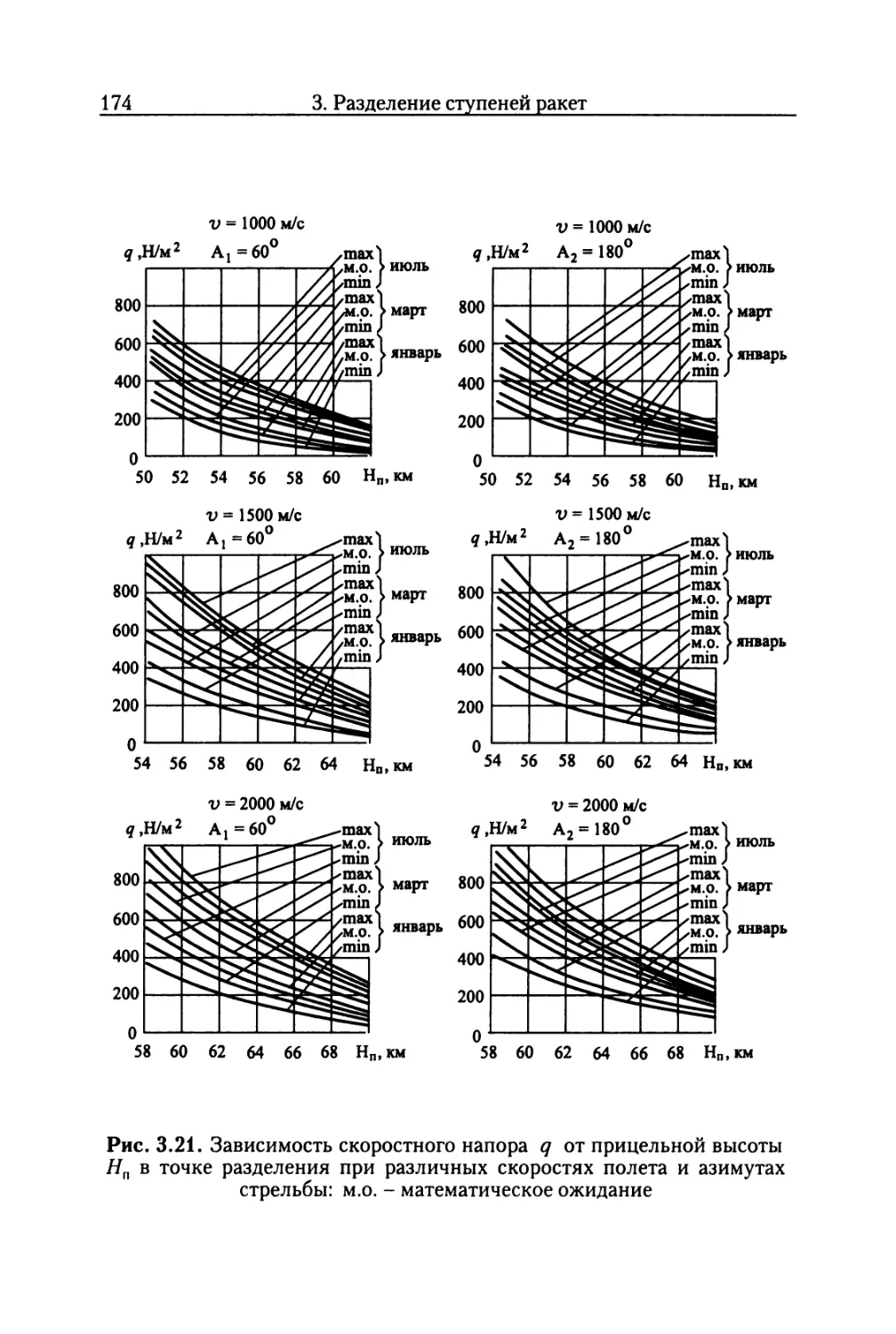
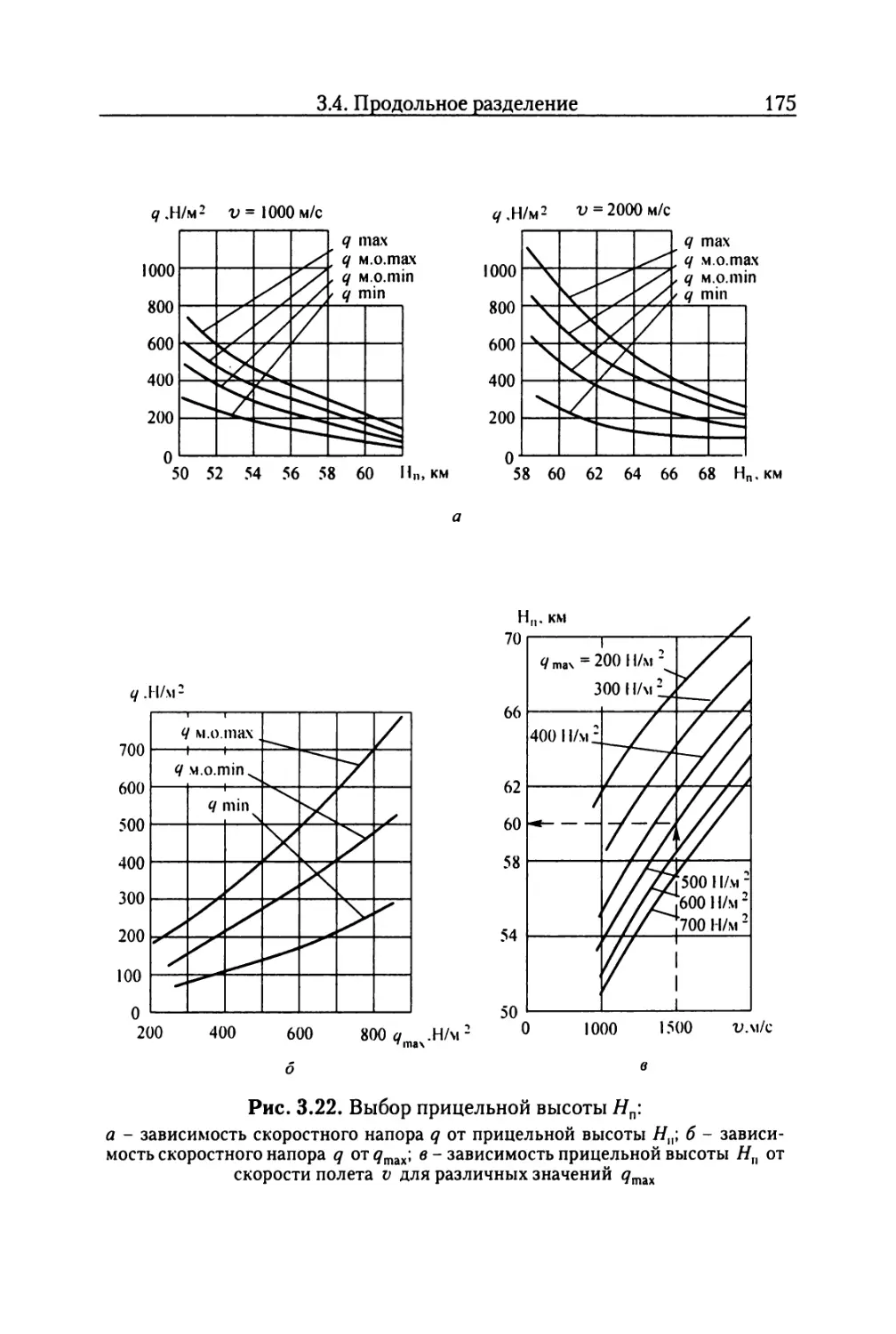
3.4. Продольное разделение............................ 135
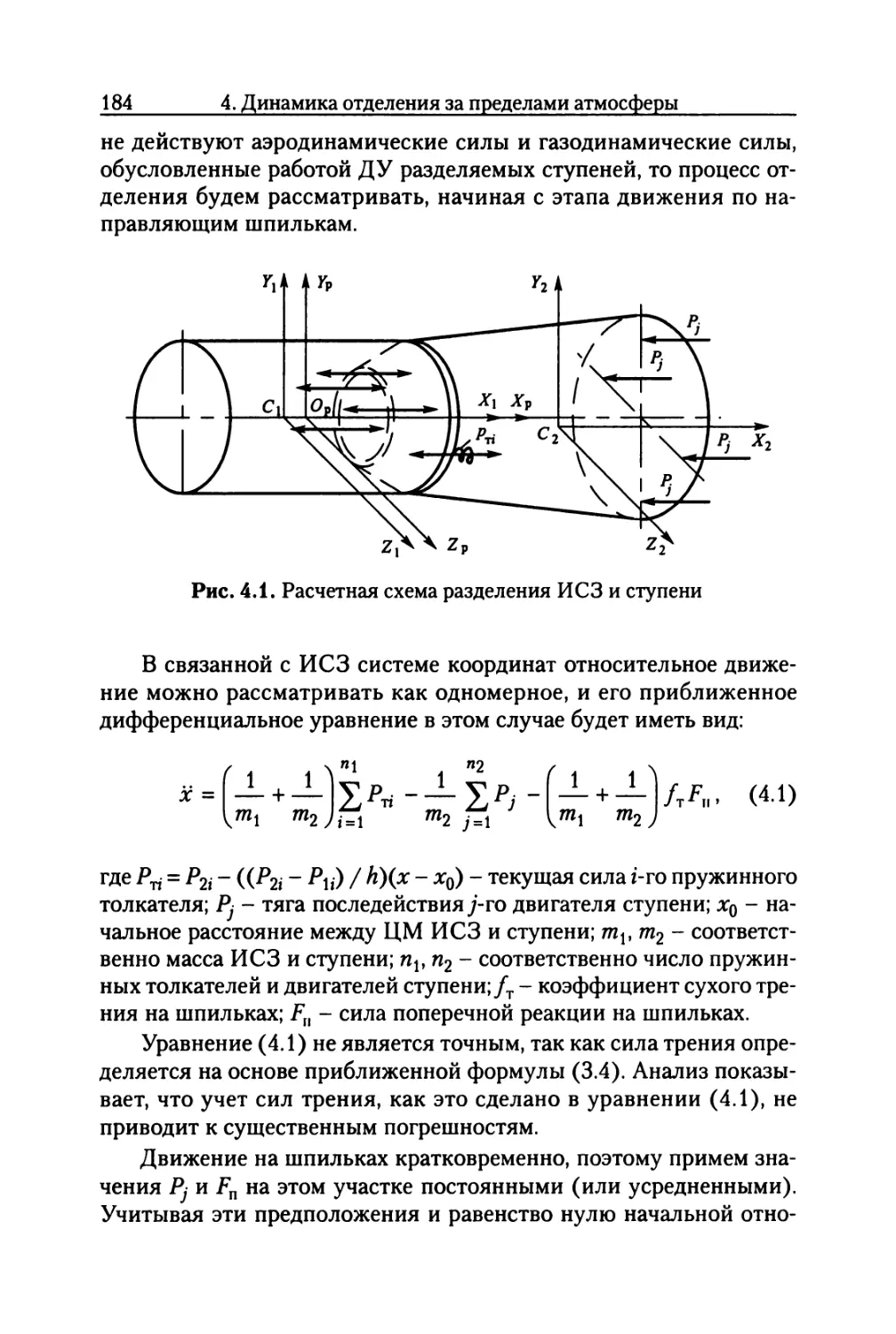
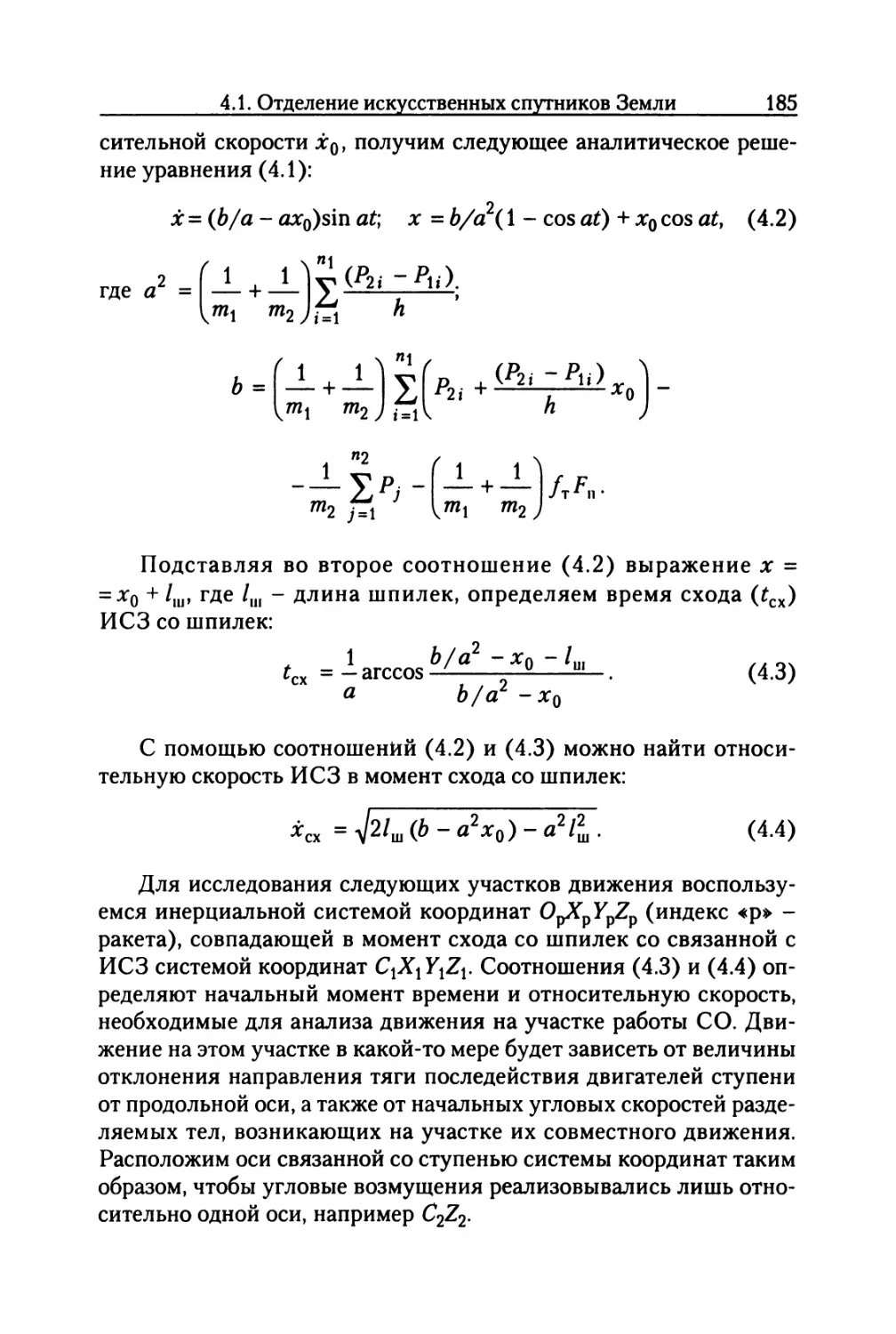
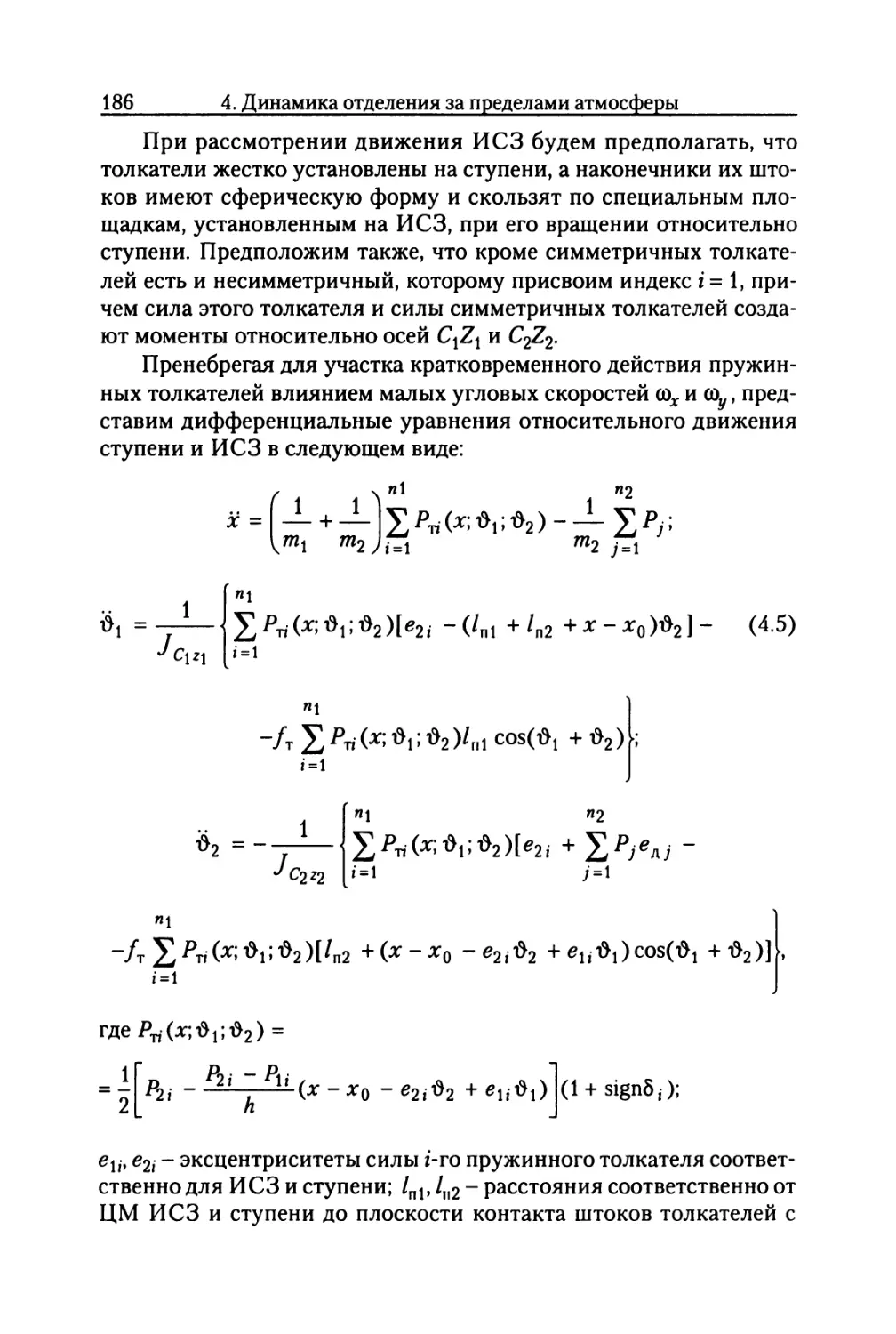
4. Динамика отделения элементов конструкции за пределами атмосферы.................................................183
4.1. Отделение искусственных спутников Земли, космических аппаратов и головных частей ракет........................183
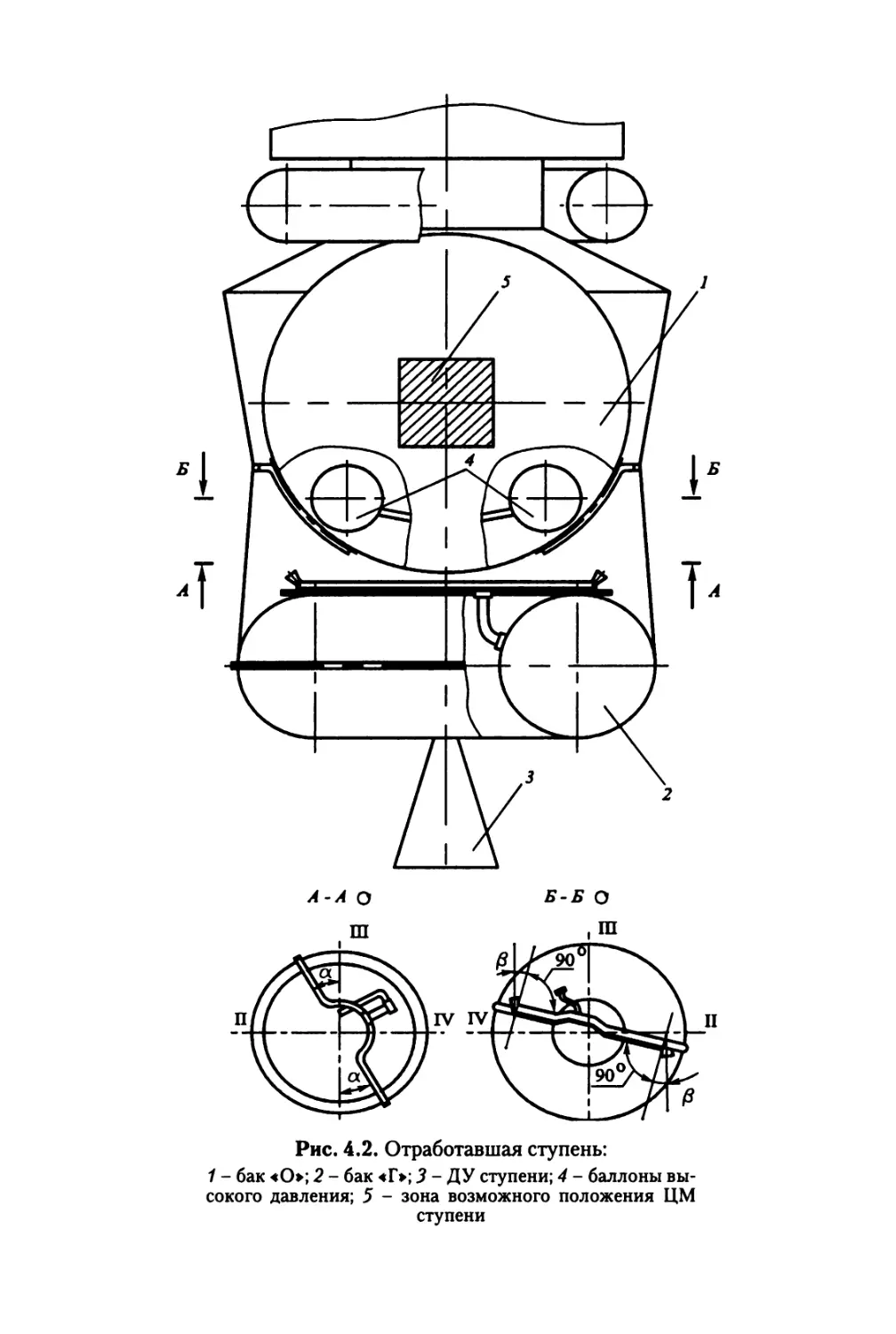
4.2. Стабилизация и увод отделившейся ступени..........199
4.3. Отделение капотирующих устройств..................228
4.4. Раскрытие антенн, кабель-мачт, крышек контейнеров.258
4.5. Система разделения с дополнительными, мгновенно накладываемыми связями .......................................272
5. Влияние упругих свойств конструкции на процесс отделения . . 283
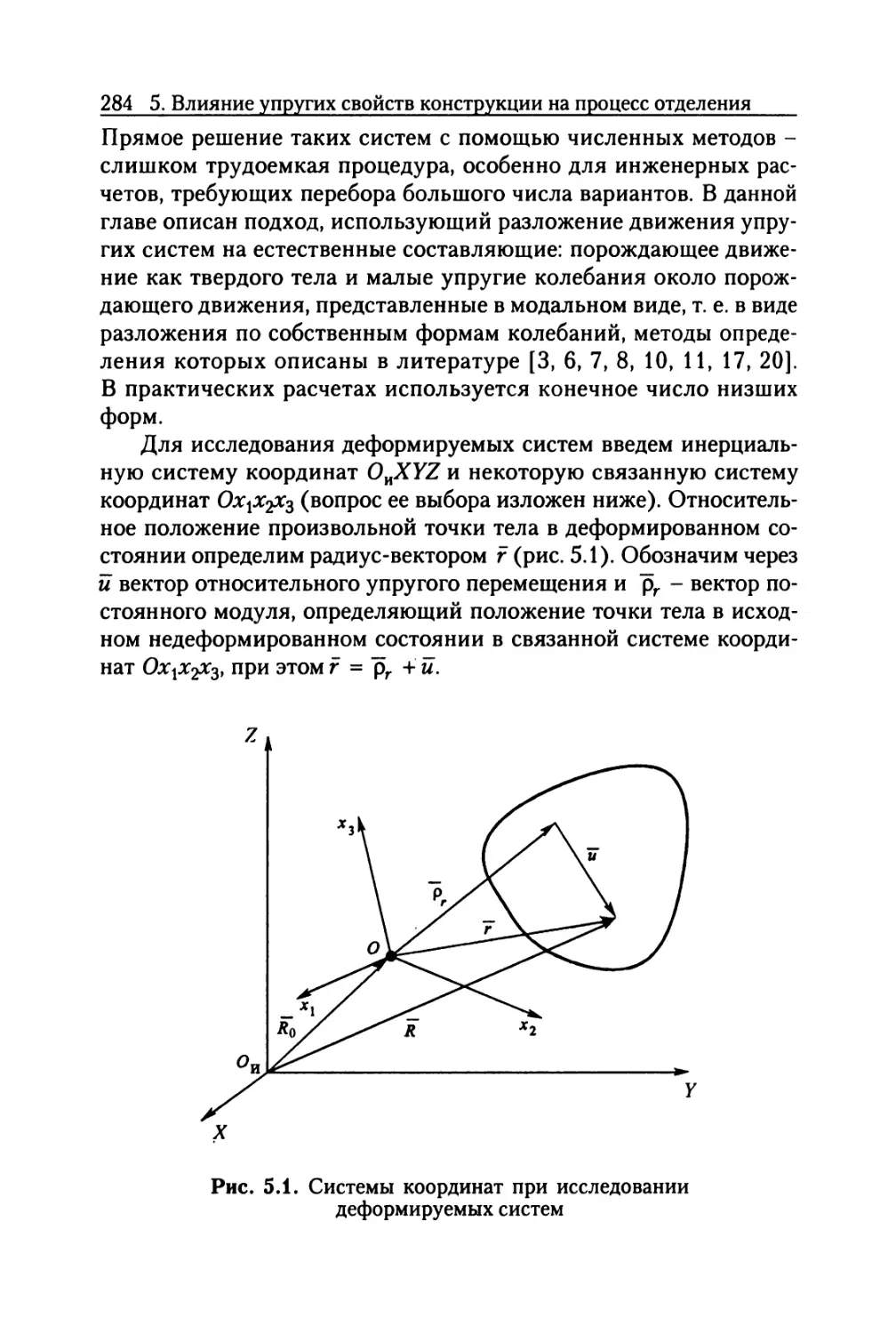
5.1. Элементы общей теории систем деформируемых тел....283
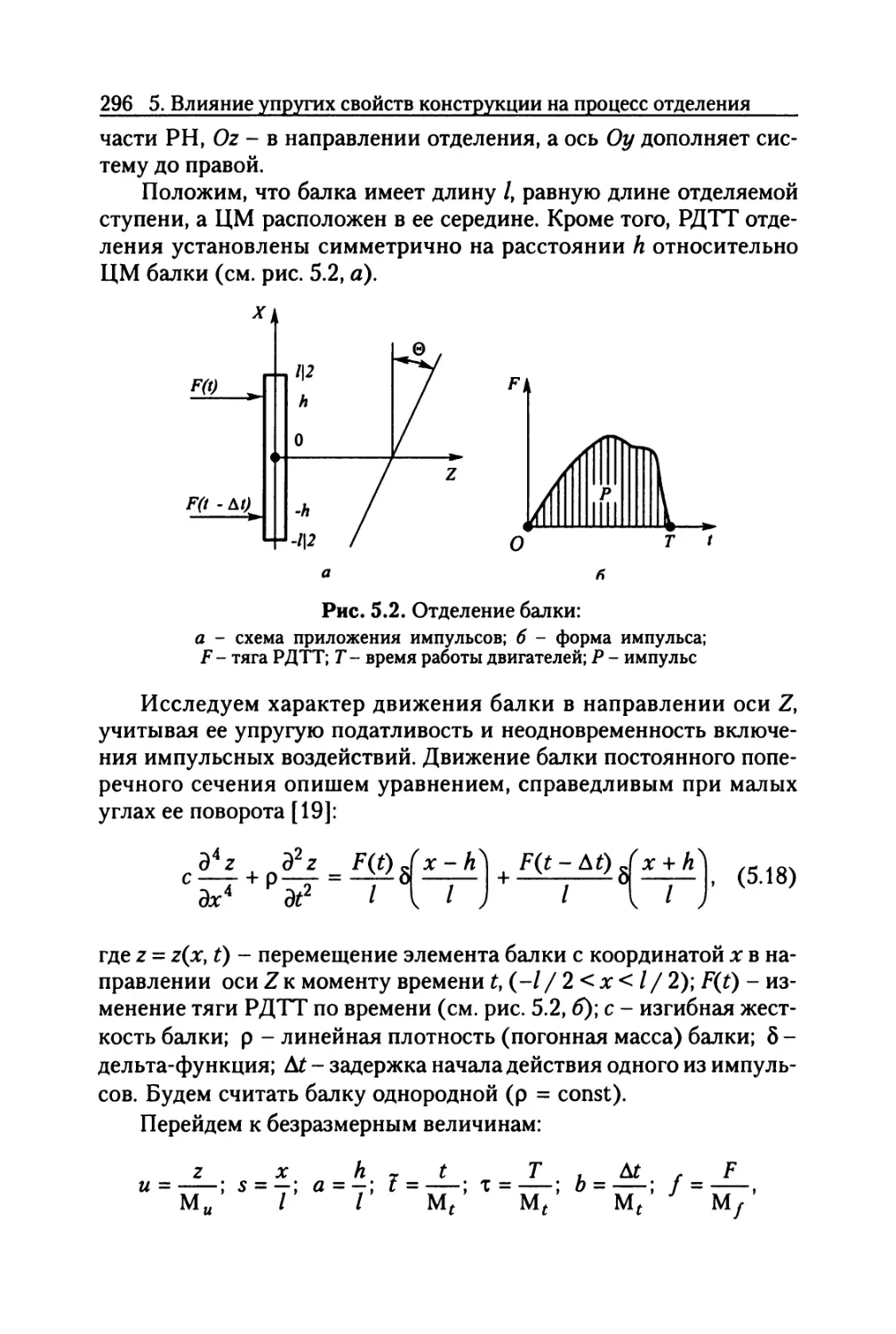
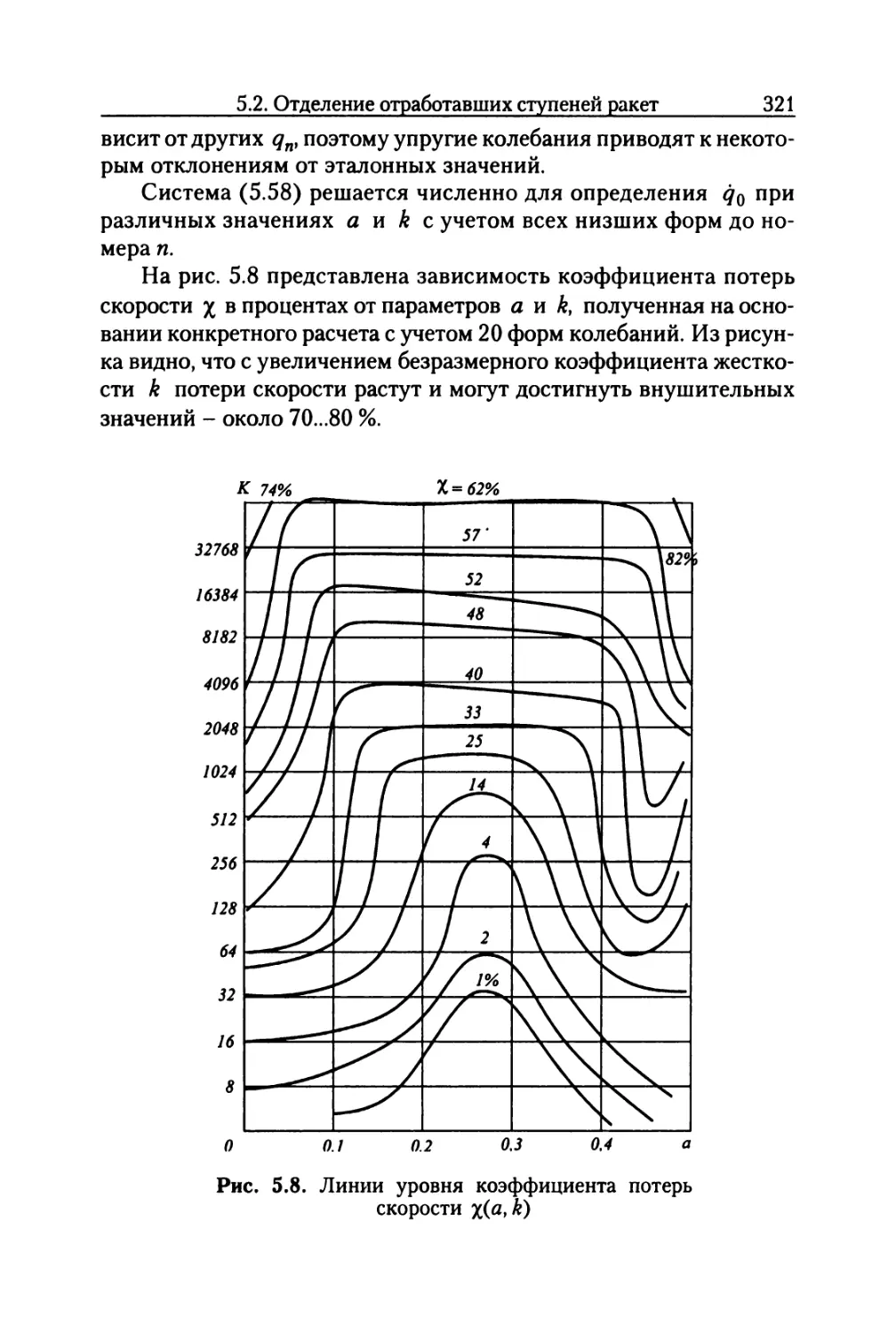
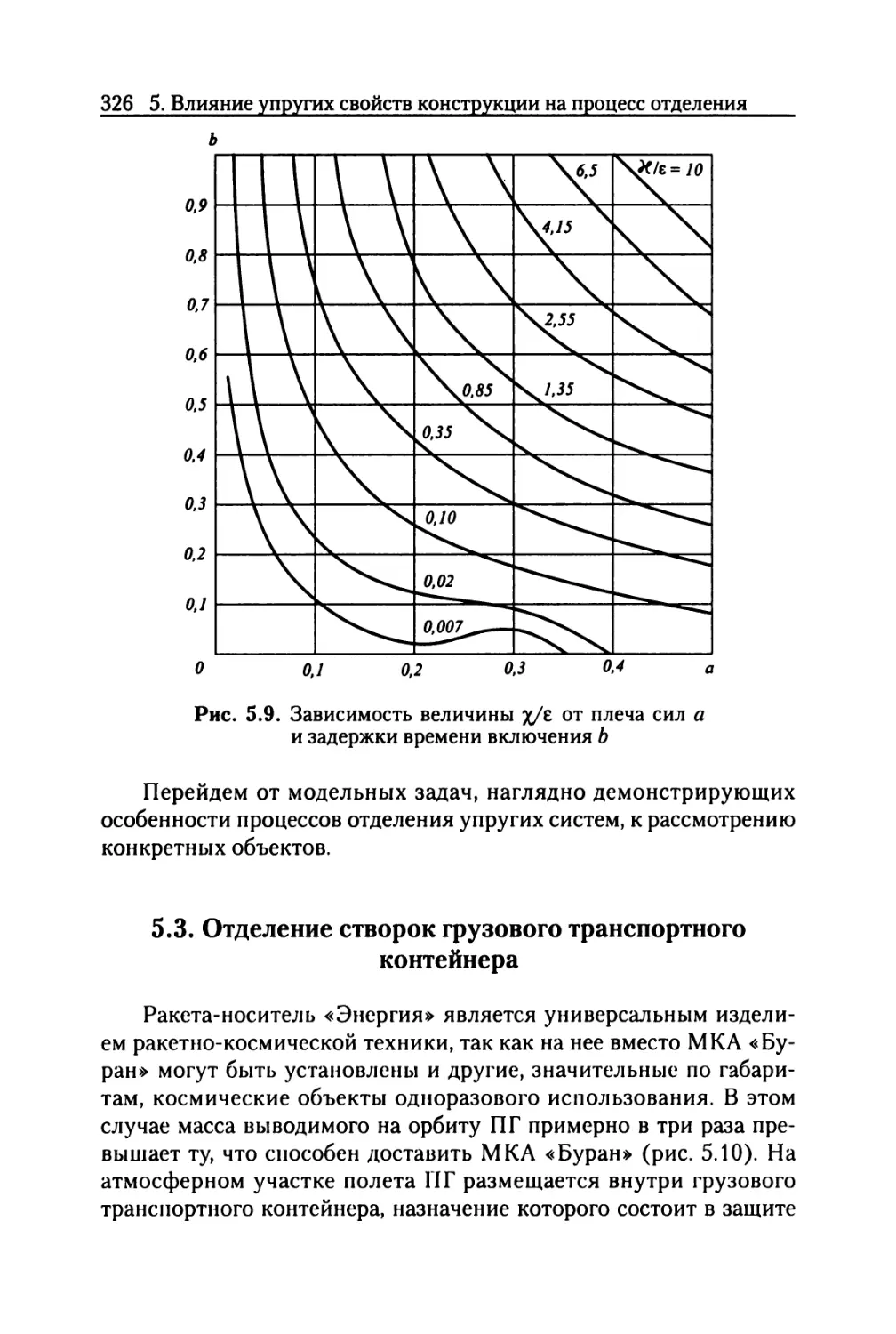
5.2. Отделение отработавших ступеней ракет.............294
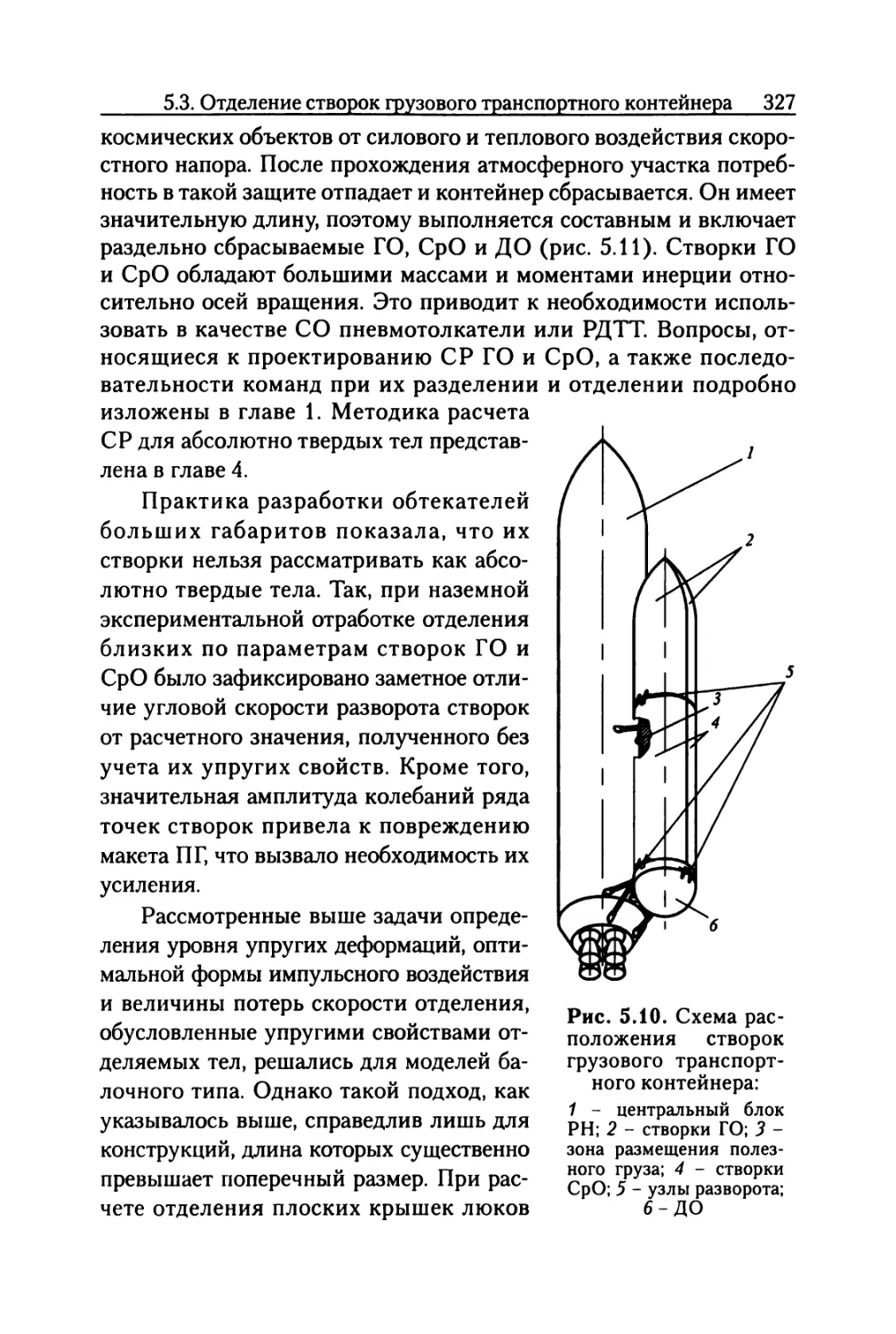
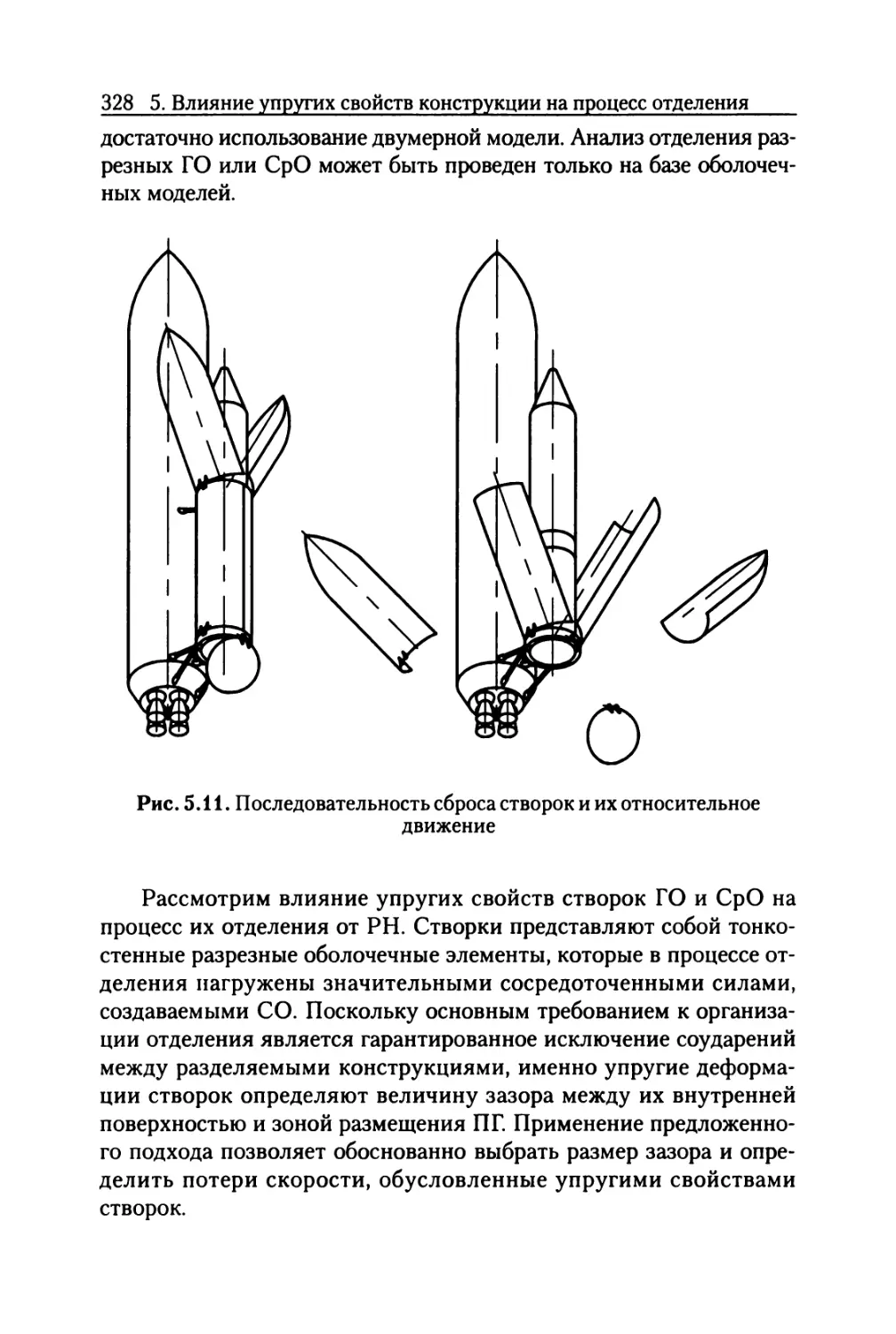
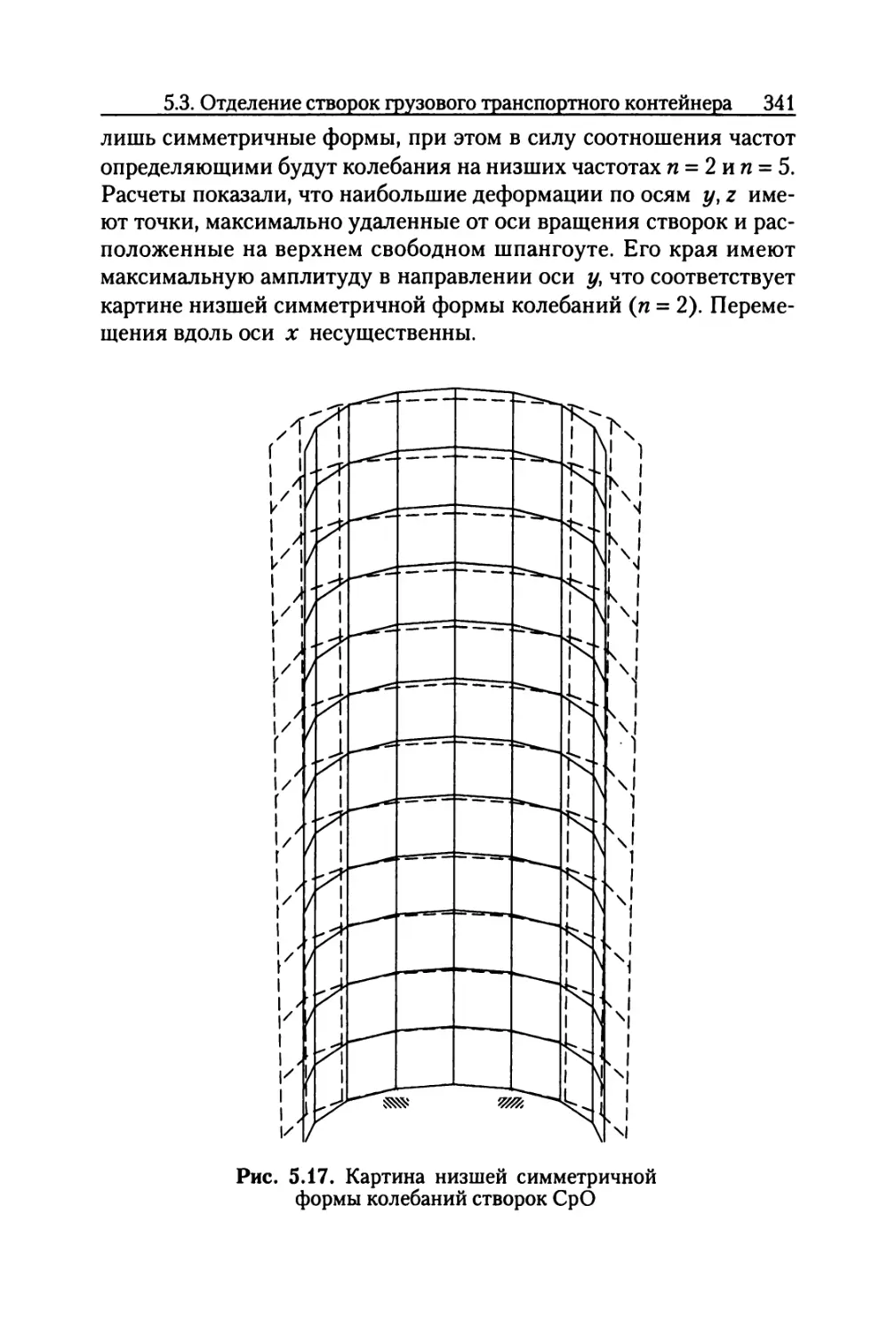
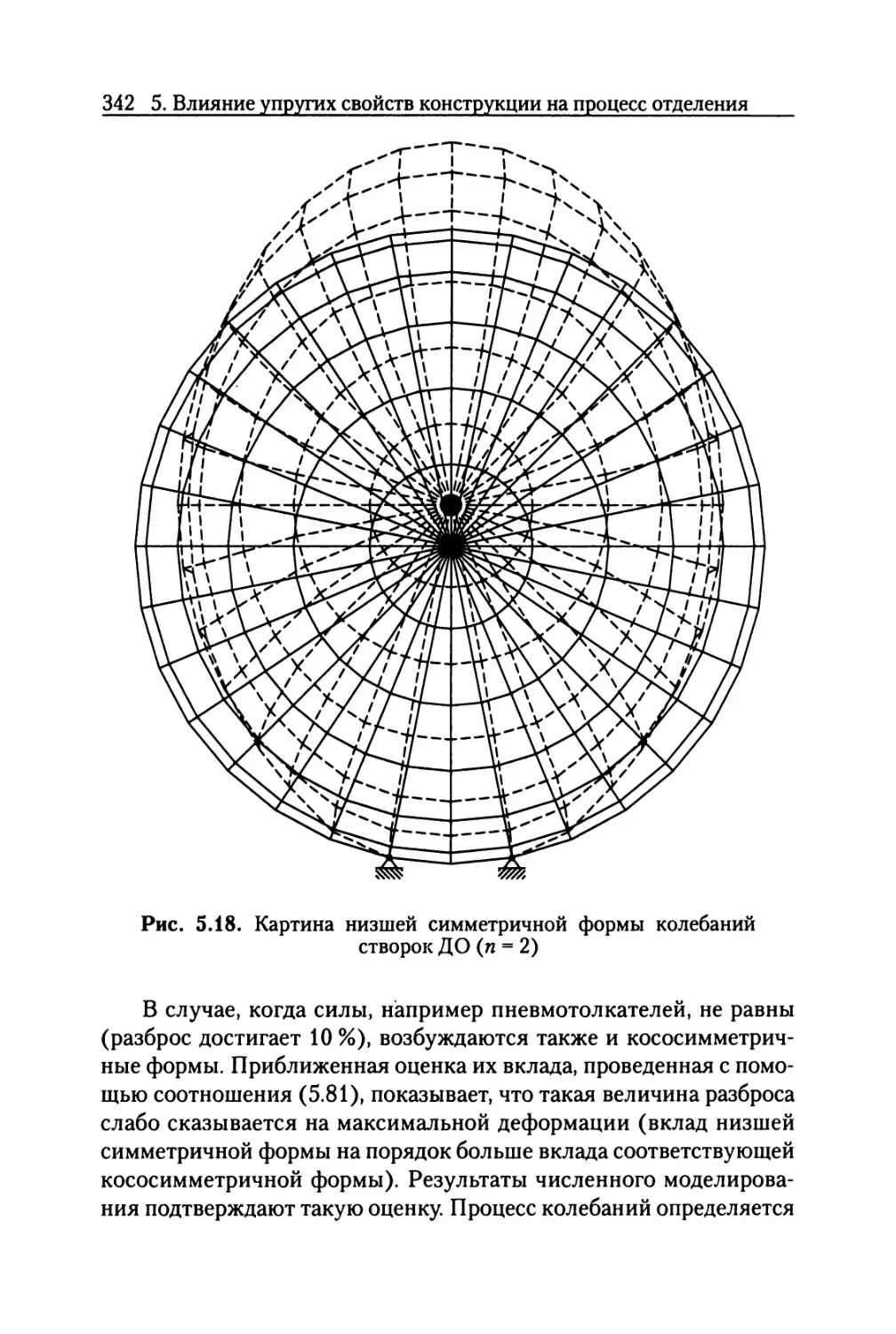
5.3. Отделение створок грузового транспортного контейнера . . . 326
6. Методы экспериментальной отработки систем разделения.
Оценка надежности......................................347
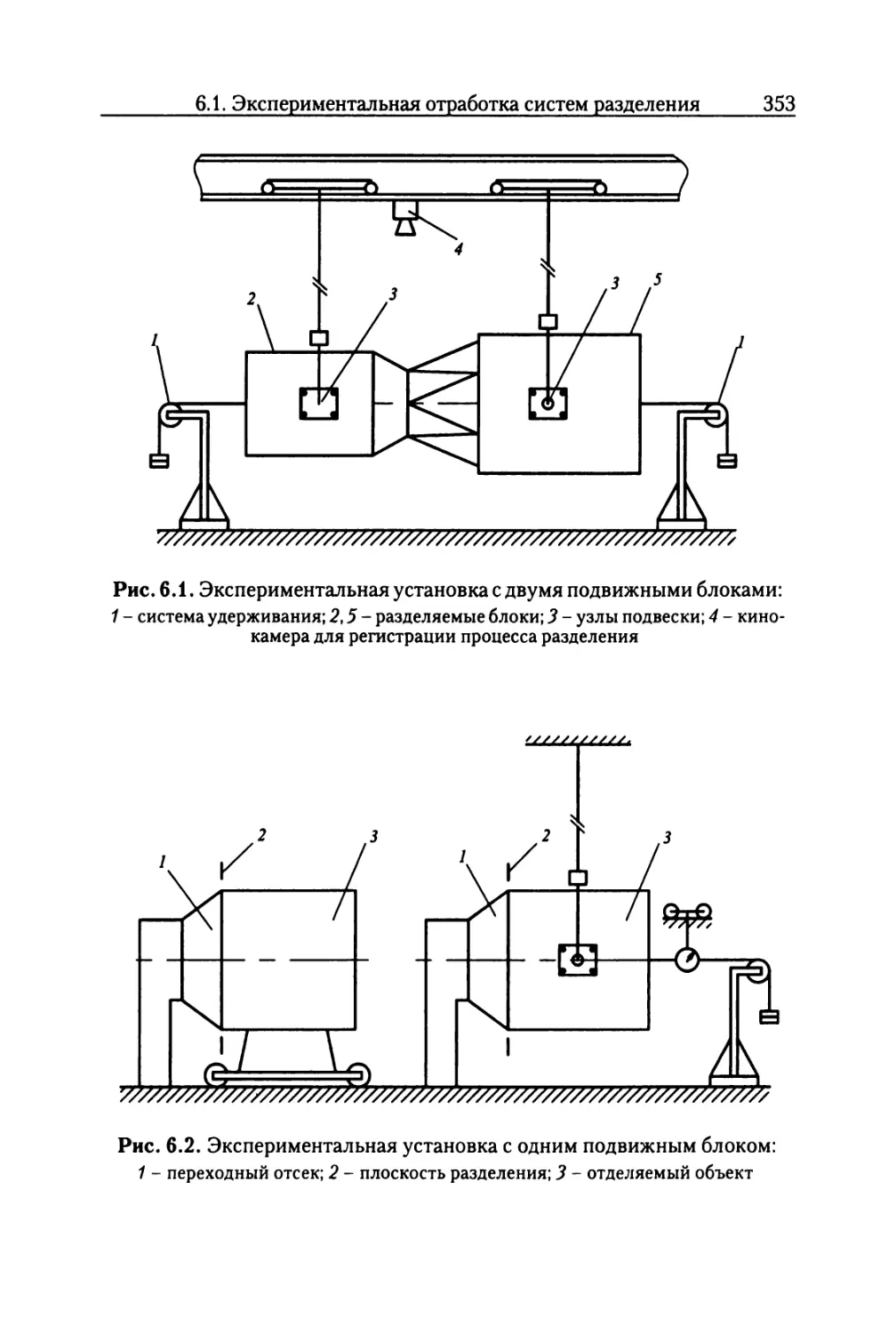
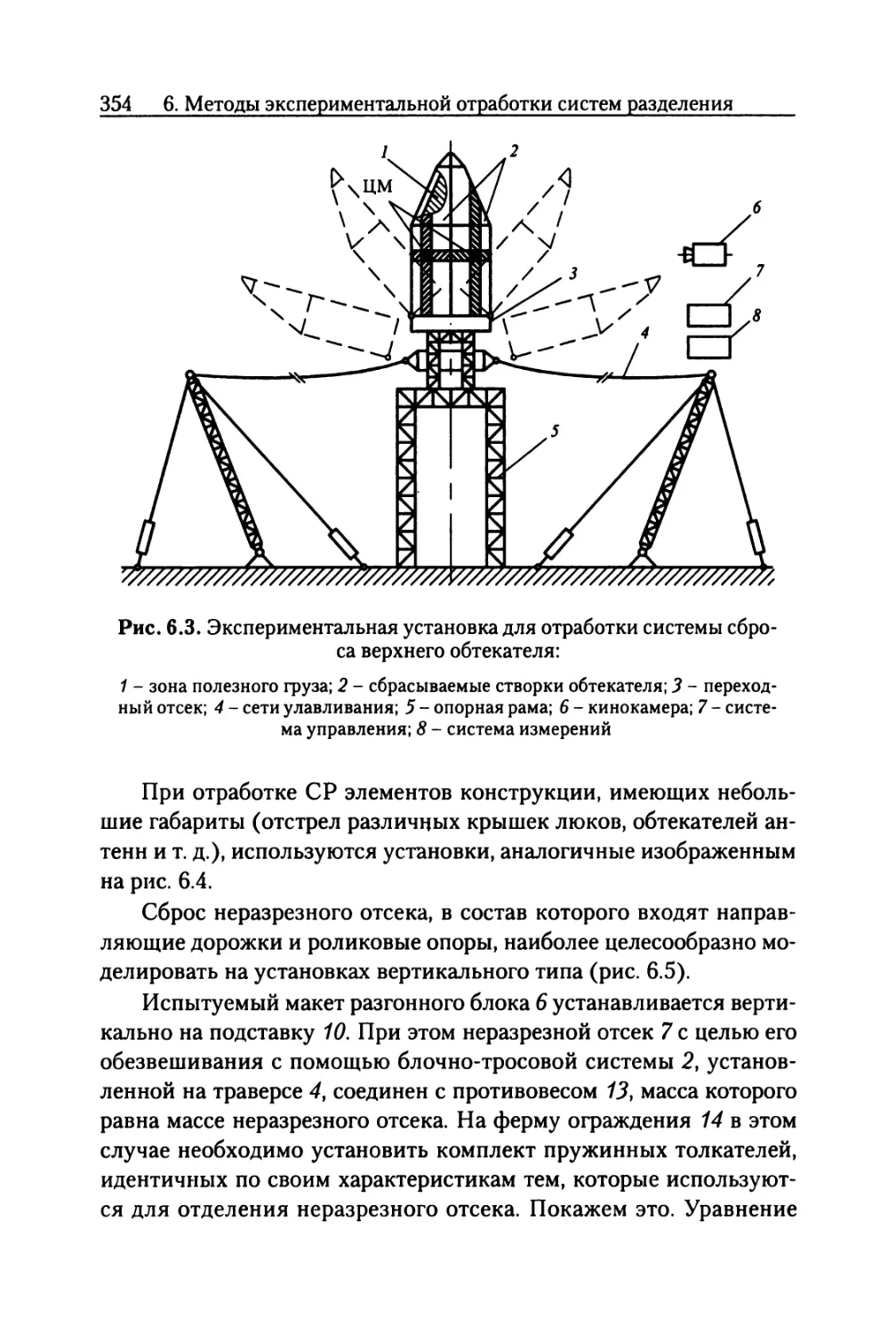
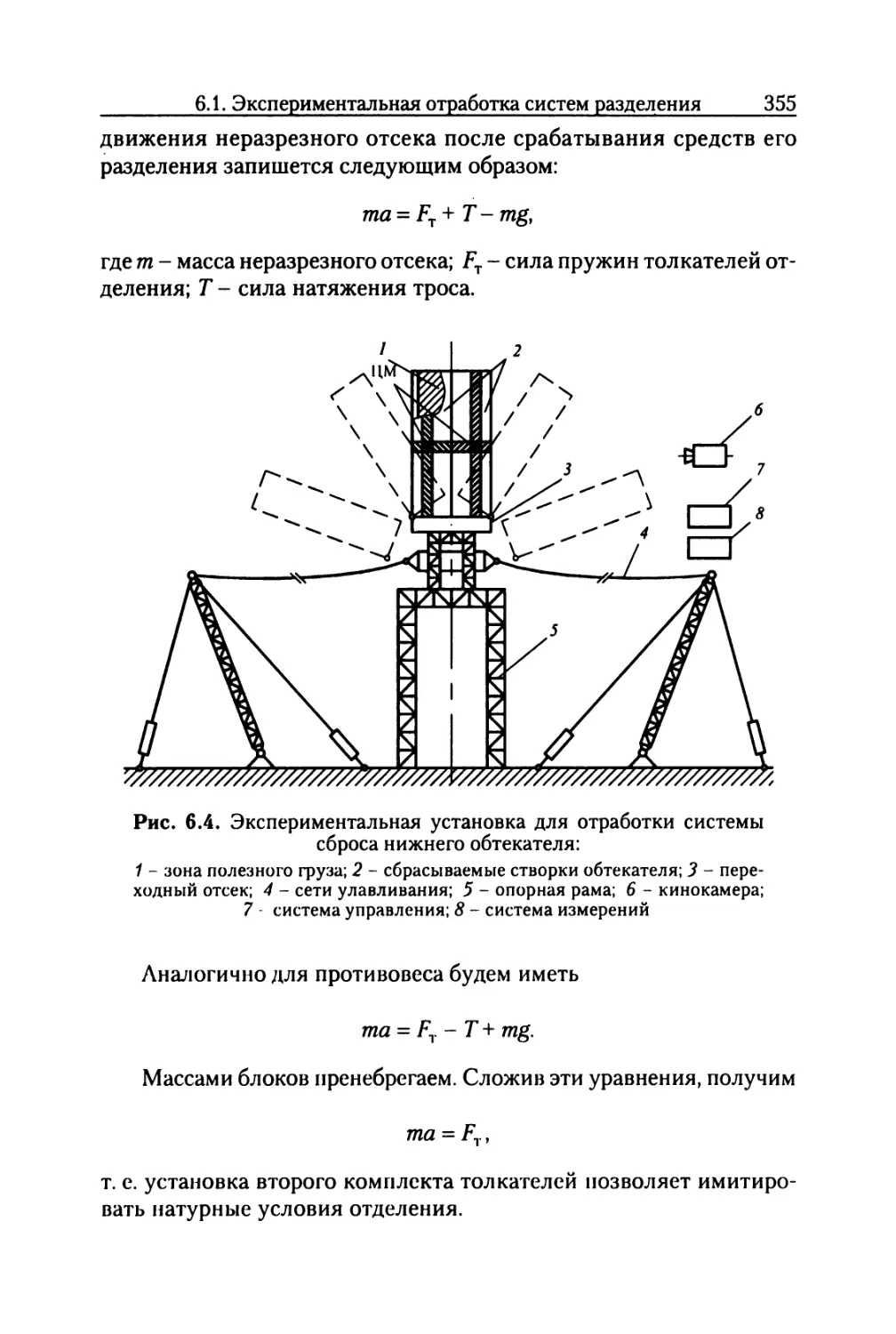
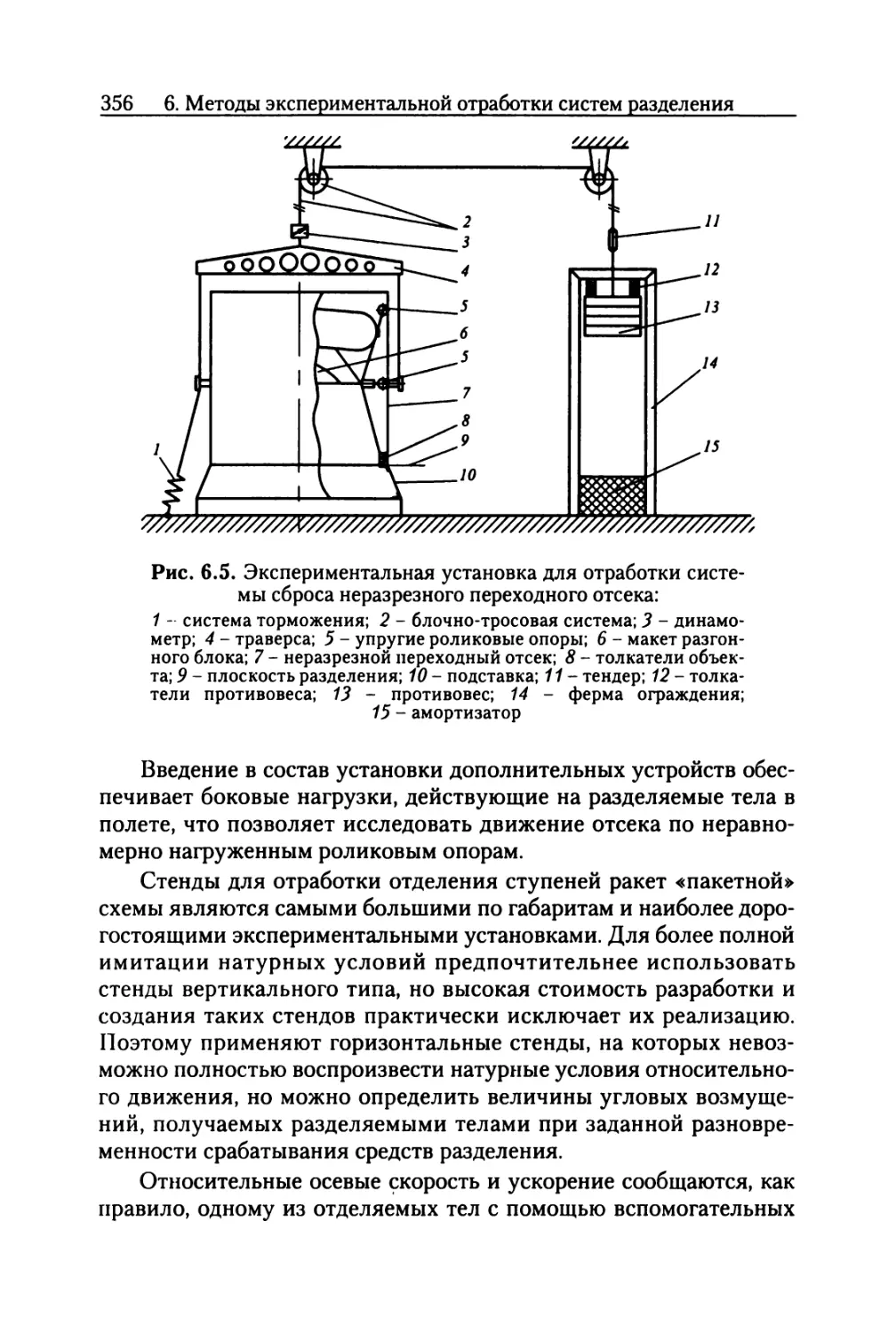
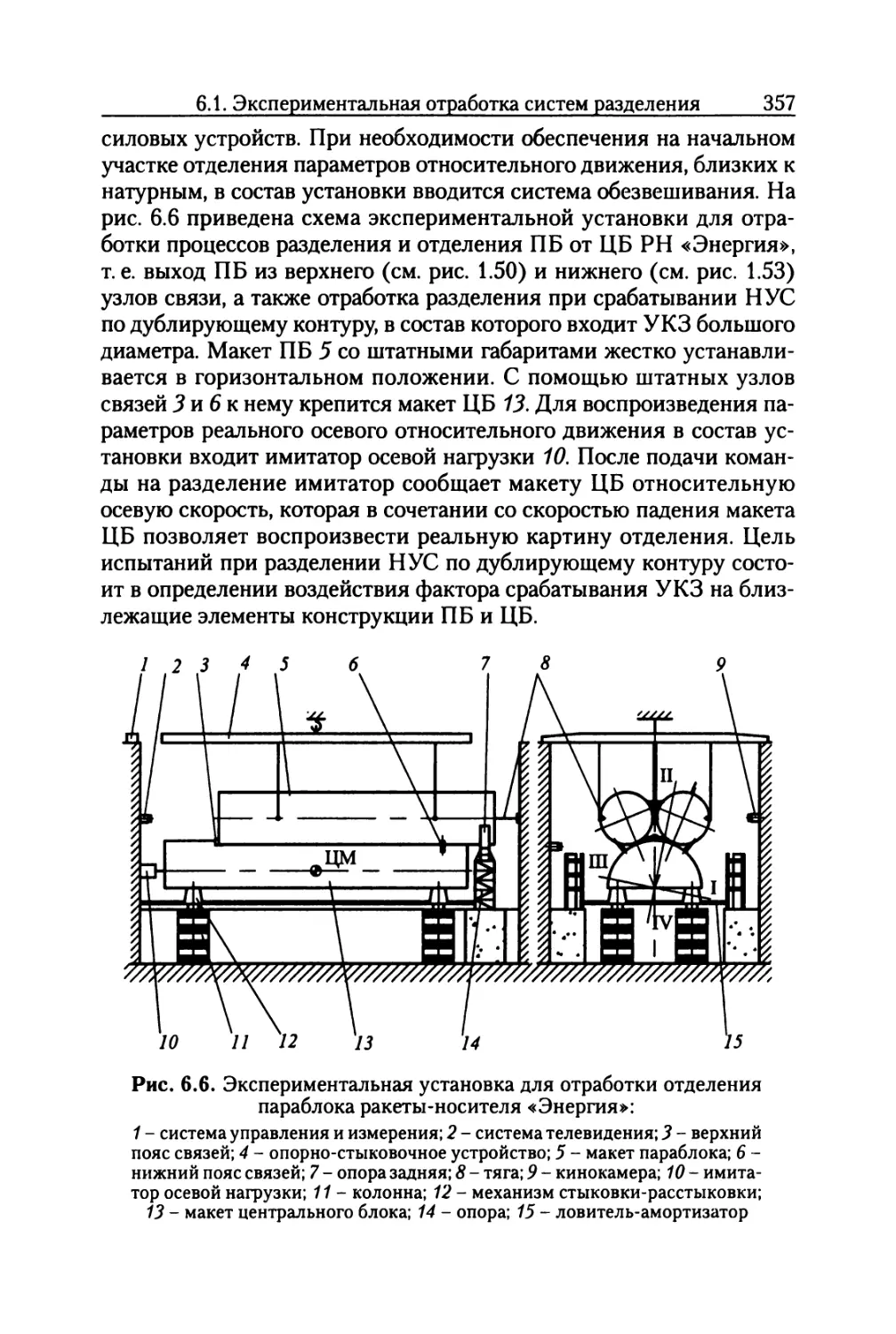
6.1. Экспериментальная отработка систем разделения и их элементов ................................................347
6.2. Приведение экспериментальных результатов к натурным условиям ................................................360
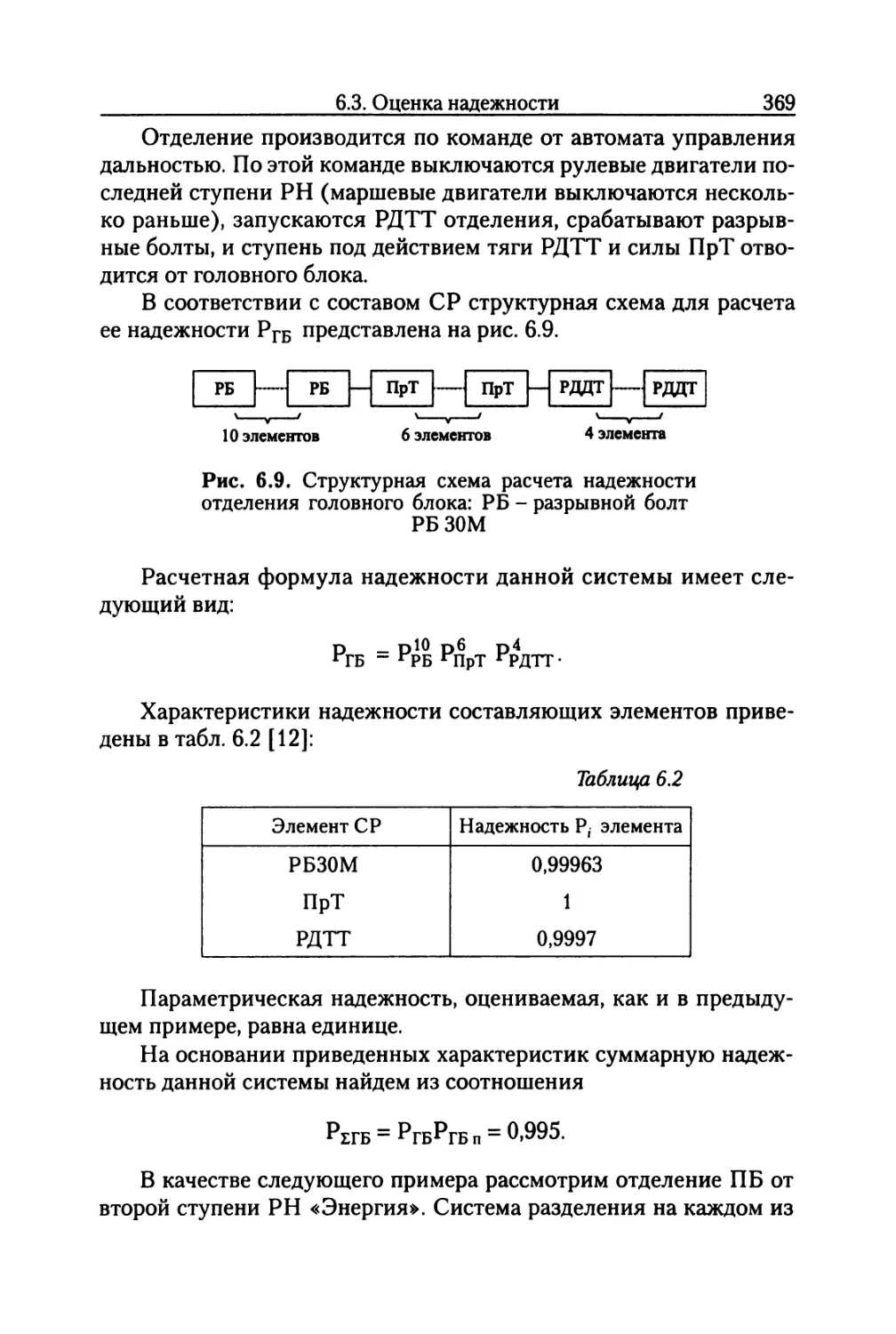
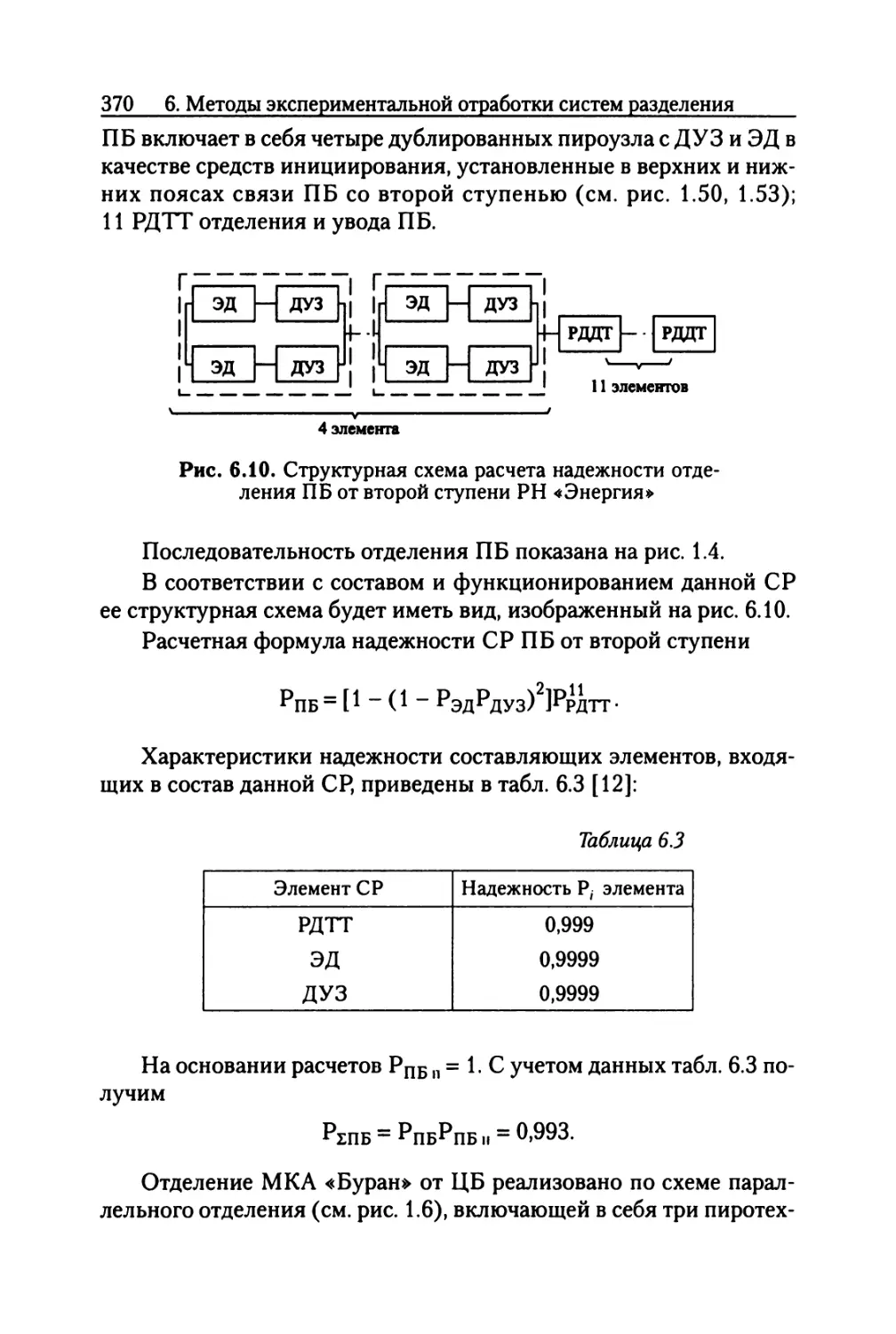
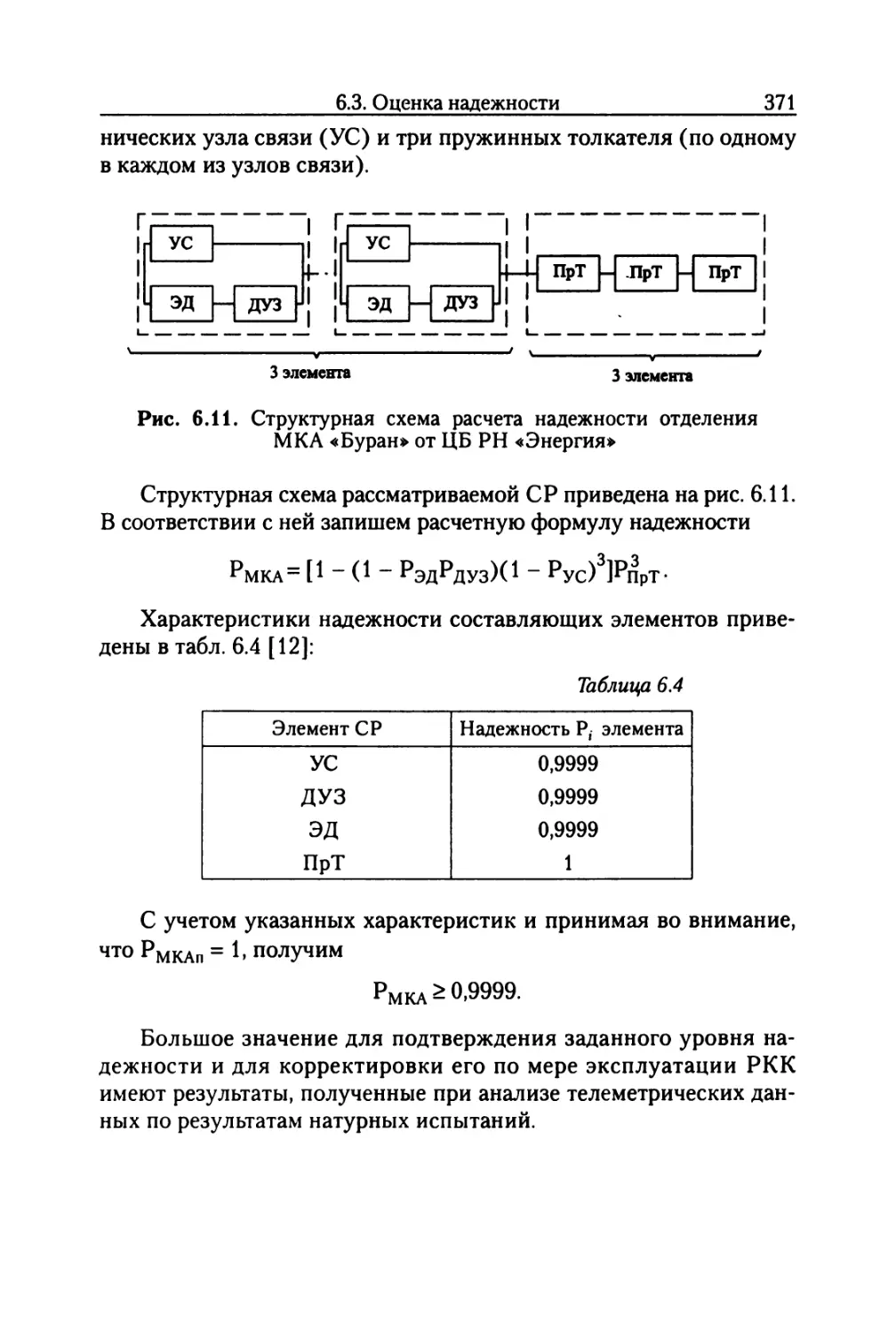
6.3. Оценка надежности.................................366
Список литературы.........................................372
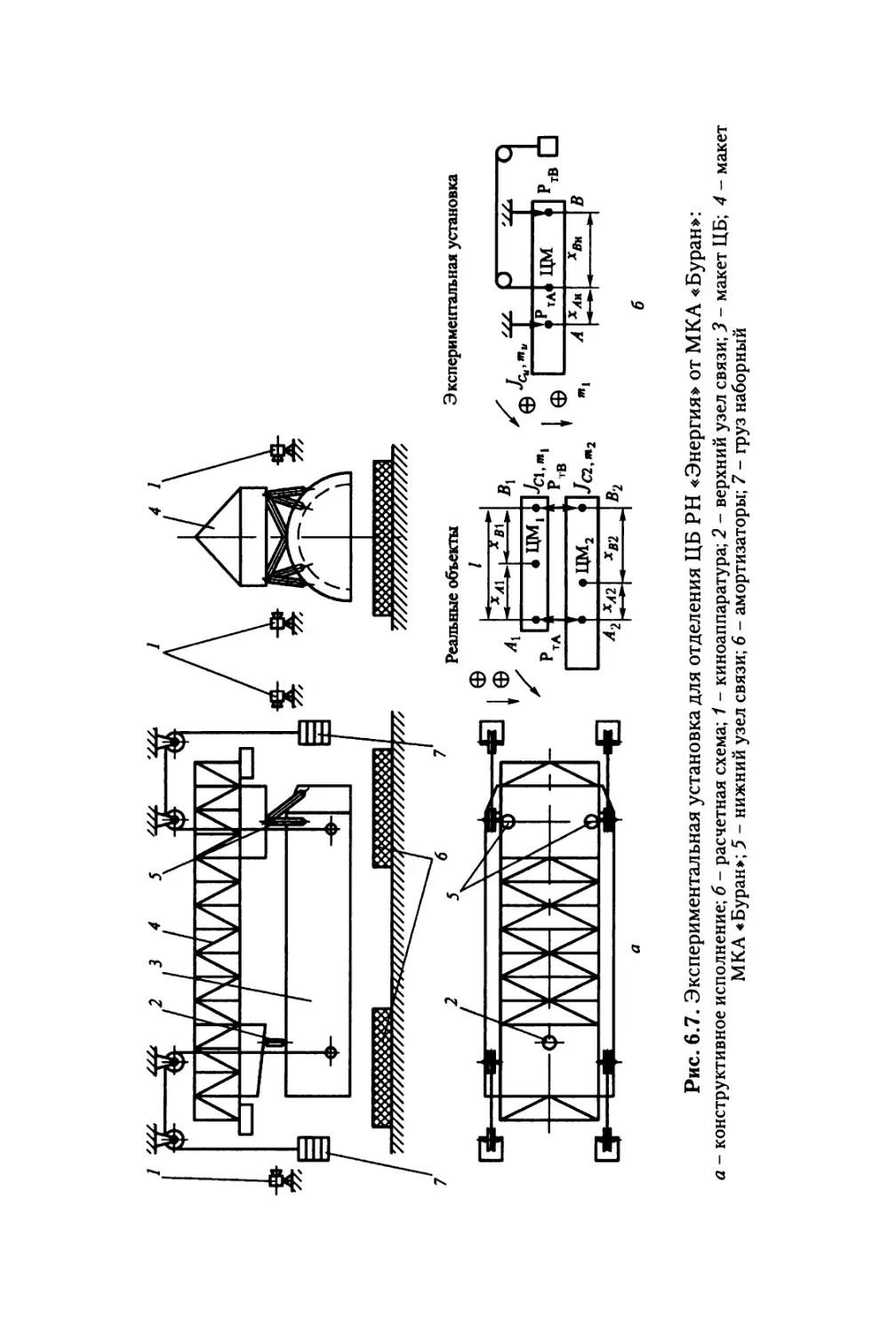
Предисловие
Настоящая книга посвящена рассмотрению комплекса вопросов, стоящих перед разработчиками систем разделения (СР) пассивных элементов конструкции баллистических ракет дальнего действия (БРДД) и ракетно-космических комплексов (РКК).
Развитие ракетной техники в последние десятилетия велось в направлении решения все более усложняющихся задач, связанных как с освоением космического пространства в мирных целях, так и с разработкой новейших образцов оборонной техники. Результатом явилось создание РКК «Восток», «Союз», «Протон», «Энергия», способных обеспечить выполнение обширного объема научно-исследовательских и прикладных работ для многих отраслей промышленности.
Для БРДД и особенно РКК,характерно отделение пассивных элементов конструкции, т. е. элементов, исчерпавших свой энергетический ресурс (ступени, разгонные блоки (РБ), двигательные установки систем обеспечения запуска (ДУ СОЗ) и т. д.), или функционирование которых в составе БРДД или РКК закончено (хвостовые отсеки (ХО), переходные отсеки, головные обтекатели (ГО), крышки люков научной аппаратуры и т. д.). Многие аварийные ситуации, связанные, прежде всего, со спасением экипажа, также приводят к необходимости срабатывания различных систем разделения. Здесь и далее под процессом разделения будем понимать непосредственно разделение, т. е. разрыв силовых связей между элементами конструкции РКК или БРДД, и отделение, т. е. относительное движение разделившихся тел. В дальнейшем в случае необходимости каждое из этих понятий будет использоваться дифференцированно. Кроме того, следует отметить, что большинство проблем, связанных с проектированием и расчетом СР РКК, относятся и к БРДД.
Системы разделения отличаются большим разнообразием, так как отделение пассивных элементов конструкции происходит на всех участках полета РКК - на активном участке траектории, при полете по орбите ИСЗ или к другим телам солнечной системы, при посадке на них, при полете по траектории возврата, а также на участке спуска на поверхность Земли. Таким образом, надежное
функционирование СР, которое включает в себя не только безотказность в срабатывании всех элементов, входящих в их состав, но и обоснованный выбор параметров относительного движения разделившихся тел, является важной составной частью успешного выполнения задач, стоящих перед РКК или БРДД. Отказ в срабатывании хотя бы одного из элементов, входящих в состав СР, или неправильный выбор их характеристик ведет, как правило, R аварийным ситуациям, связанным с невыполнением программы полета. Все это диктует их разработчикам необходимость создания элементов СР, обеспечивающих требуемые рабочие характеристики (работу или импульс, время и разновременность срабатывания, прочностные характеристики и т. д.) с одновременным обеспечением заданного уровня надежности при минимальной массе. Кроме того, наземная экспериментальная обработка элементов, входящих в состав СР и системы в целом, должна проводиться в условиях, максимально приближенных к натурным.
В книге рассмотрены особенности построения, принципы действия различных СР и последовательности команд при их срабатывании (циклограммы (ЦГ) разделения и отделения), вопросы, связанные с проектированием и разработкой входящих в их состав средств разделения и отделения, силы, действующие на разделяемые тела, процессы отделения в атмосфере и в космосе, вопросы спасения экипажа космического корабля «Буран» в нештатных ситуациях, орбитальное относительное движение разделившихся объектов, влияние динамики конструкции на процессы отделения.
Эффективное решение дифференциальных уравнений относительного движения разделившихся объектов с учетом действующих на них сил возможно, как правило, только с помощью ЭВМ, поэтому основное внимание в данной работе уделялось физическим картинам рассматриваемых явлений и их математическому описанию.
Название книги несколько уже, чем ее содержание, однако авторы предложили его исходя из желания выделить динамику отделения ступеней, идея которой принадлежит К.Э. Циолковскому
Авторы признательны рецензентам проф., д-рам техн, наук А.И. Лиходеду и Ф.Н. Шклярчуку за ценные конструктивные замечания при подготовке книги к изданию, а также Л.С. Фроловой и В.В. Яськову за неоценимую помощь при техническом оформлении рукописи.
Отзывы, критические замечания и пожелания направлять в Издательство МГТУ им. Н.Э. Баумана по адресу: 105005, Москва, 2-я Бауманская, 5.
Список сокращений
ББ - боковой блок
БО - бытовой отсек
БРДД - баллистическая ракета дальнего действия
ВВ - взрывчатое вещество
ВПС - верхний пояс силовых связей
ВУС - верхний узел связи
ГО - головной обтекатель
гч - головная часть
до - донный обтекатель
дом - двигатели ориентации и маневрирования
ДУ - двигательная установка
ДУ СОЗ - двигательная установка системы обеспечения запуска
дуз - детонирующий удлиненный заряд
дш - детонирующий шнур
ЖРД - жидкостной ракетный двигатель
исз - искусственный спутник Земли
КА - космический аппарат
кви - контрольные выборочные испытания
кди - контрольные доводочные испытания
км - кабель-мачта
ЛОИ - лабораторные отладочные испытания
ЛУР - линейное устройство разделения
МКА - многоразовый космический аппарат
нпс - нижний пояс силовых связей
НУС - нижний узел связи
ПБ - параблок
пг - полезный груз
ПрТ - пружинный толкатель
РБ - разгонный блок
РДР - ракетный двигатель разделения
РДТТ - ракетный двигатель твердого топлива
8 Список сокращений
РКК PH РСУ СА САС СР СО СОЗ СрО СУ СУП УКЗ хо цм ЦБ цг црд чди ЭВМ эд - ракетно-космический комплекс - ракета-носитель - реактивная система управления - спускаемый аппарат - система аварийного спасения - система разделения - средства отделения - система обеспечения запуска - средний обтекатель - система управления - самораскрывающийся механический узел поворота - удлиненный кумулятивный заряд - хвостовой отсек - центр масс - центральный блок - циклограмма - центральный ракетный двигатель - чистовые доводочные испытания - электронная вычислительная машина - электрический детонатор
1. СИСТЕМЫ РАЗДЕЛЕНИЯ СТУПЕНЕЙ РАКЕТНО-КОСМИЧЕСКИХ КОМПЛЕКСОВ
И ИХ ЭЛЕМЕНТЫ
1.1. Системы разделения
Системы разделения и отделения пассивных элементов конструкции, как уже отмечалось в предисловии, отличаются большим разнообразием. В данной главе рассмотрены основные вопросы, связанные с их проектированием, и изложены возможные пути реализации предъявляемых к ним требований.
Участок выведения на орбиту ИСЗ (активный участок траектории) характеризуется тем, что на нем, как правило, производится отделение значительных по габаритам и массам элементов конструкции. Эти процессы обычно осуществляются с помощью мощных по силовому воздействию средств отделения (СО) при значительных перегрузках и скоростных напорах, действующих на разделяемые тела. К таким элементам конструкции относятся отработавшие ступени и различные капотирующие устройства (ГО, крышки люков научной аппаратуры, ХО и т. д.).
На орбитах ИСЗ и на траекториях полета к другим телам солнечной системы наряду с крупногабаритными элементами конструкции (разгонные блоки, переходные отсеки) сбрасываются различные вспомогательные устройства, которые уже выполнили свои функции (блоки датчиков, прицельные устройства и т. д.). Отделение указанных пассивных элементов конструкции осуществляется, как правило, в условиях невесомости за счет незначительных по силовому воздействию СО. На функционирование СР на этом участке накладываются иногда дополнительные требования, такие как, например, увод отделившегося РБ в заданном направлении, фиксация отделяемого элемента в определенном положении на активном или пассивном блоках и т. д. [14].
Рассмотрим основные типы СР, входящих в состав РКК и БРДД. В настоящее время приняты две основные компоновочные схемы ракет-носителей (PH) - с поперечным разделением отработавших ступеней и продольным («пакетная» схема). При отделении ступеней ракет, выполненных по схеме с поперечным делением, обычно реализуют два основных способа [2]: «горячее» разделение, когда двигательная установка (ДУ) верхней (активной) ступени запускается еще до подачи команды на разделение, и «холодное» разделение, или разделение торможением отработавшей ступени после разрыва силовых связей между ступенями. В этом случае ДУ верхней ступени запускается после достижения определенного расстояния между разделившимися ступенями.
Одним из важных требований, предъявляемых к разделению ступеней, является минимальное время процесса. Оно связано со стремлением уменьшить баллистические потери, а также сократить время неуправляемого полета активной ступени. Но для сокращения времени требуется увеличение действующих при отделении сил, что связано с дополнительными массовыми затратами и возмущениями движения разделяемых тел.
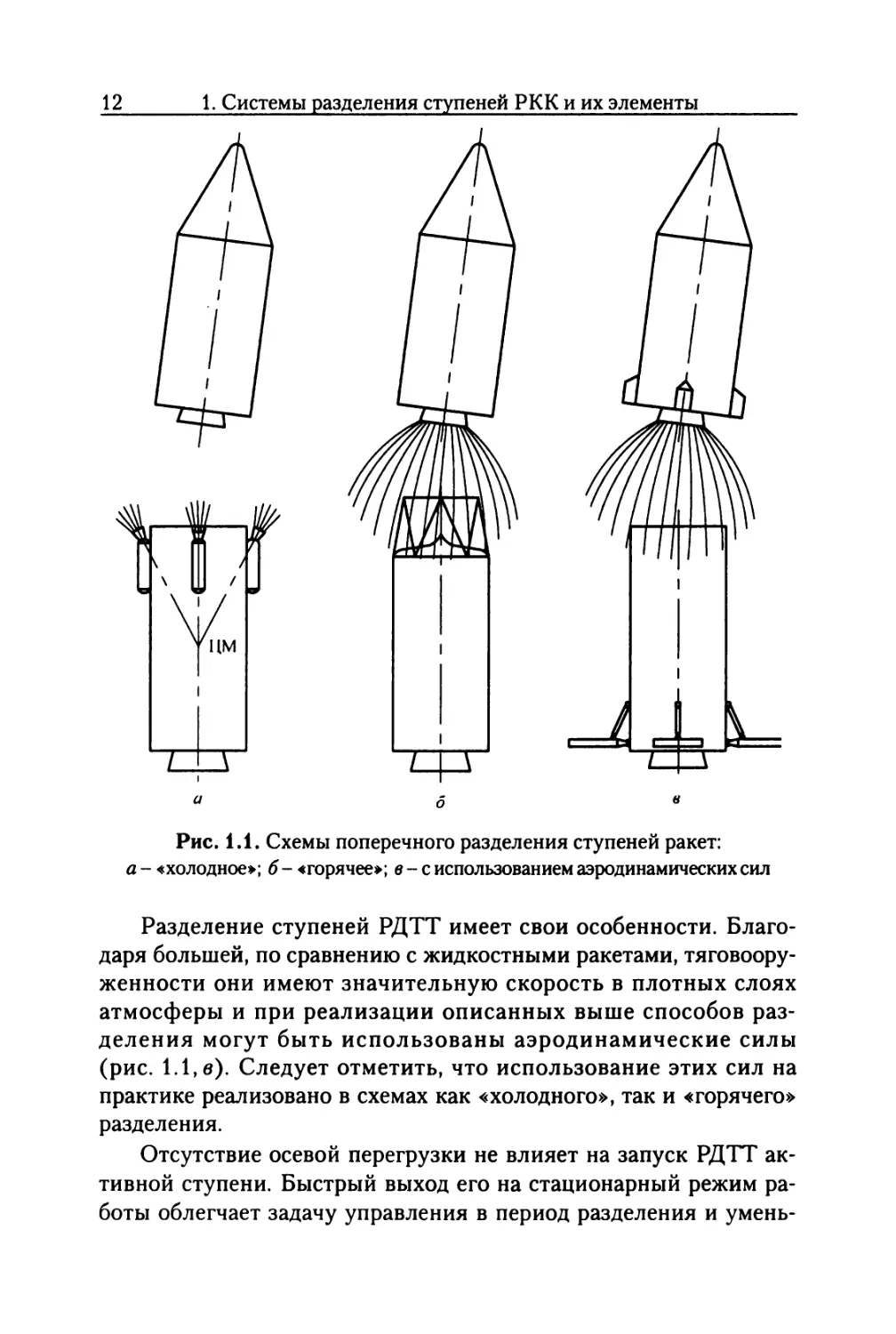
При «холодном» разделении (рис. 1.1, а) для сообщения ступеням относительной скорости обычно применяются ракетные двигатели твердого топлива (РДТТ), расположенные в верхней или нижней частях отделяемой ступени. Установка в верхней части позволяет направить вектор их тяги практически в центр масс (ЦМ) отработавшей ступени, что приводит к значительному уменьшению возмущений движения при разделении. Однако такая установка имеет и существенный недостаток - воздействие струй РДТТ на активную ступень.
Нижняя установка РДТТ позволяет практически исключить последний недостаток, но приводит к заметному увеличению возмущений за счет значительно большего эксцентриситета тяги РДТТ. В некоторых случаях прибегают к комбинированной установке РДТТ, т. е. как на отработавшей, так и на активной ступенях, что приводит к ускорению и упрощению запуска ее ДУ, но требует дополнительных массовых затрат.
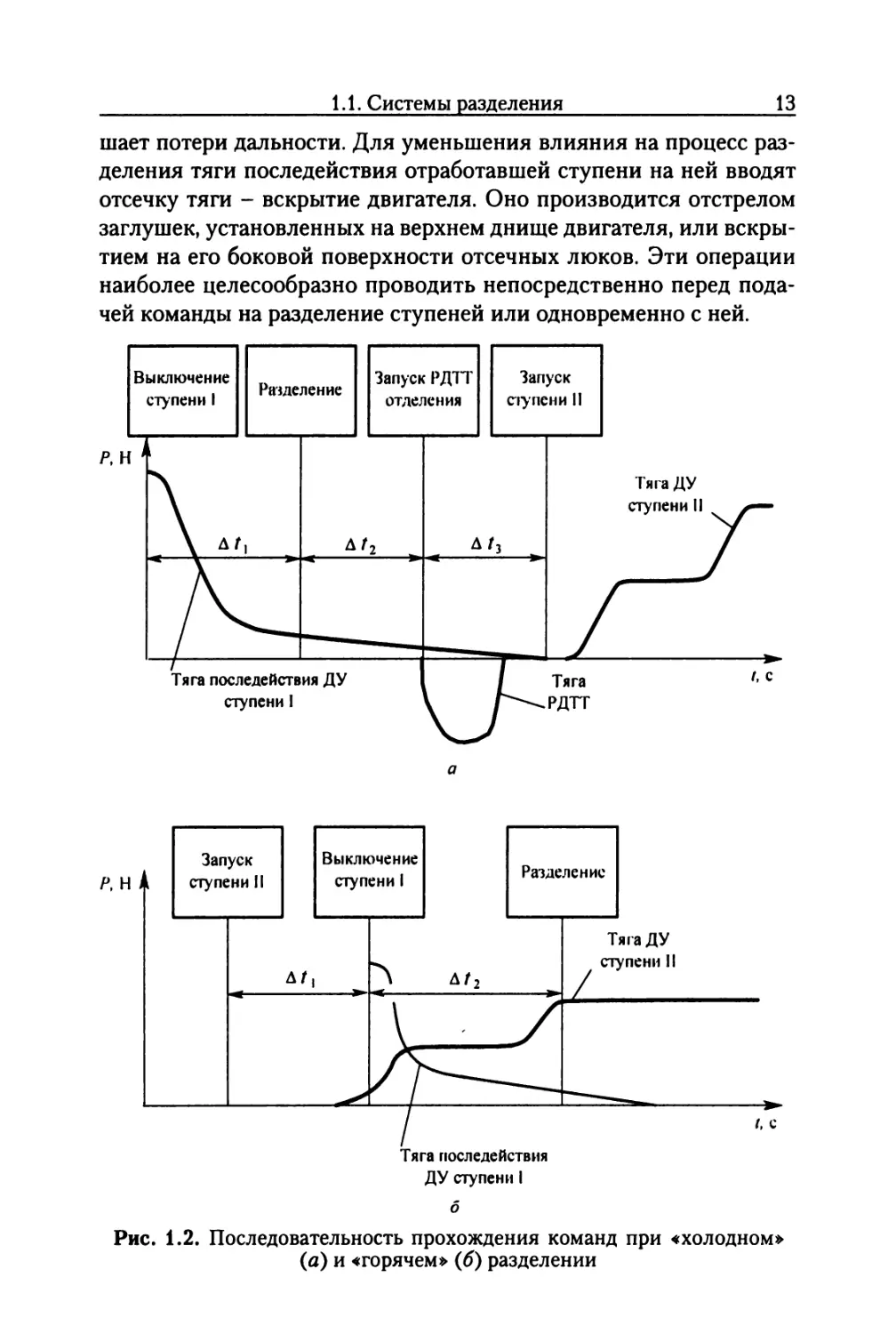
Циклограмма «холодного» разделения ступеней представлена на рис. 1.2, а (Щ - временная задержка). Основным требованием при ее формировании является отвод отработавшей ступени на безопасное расстояние до полного выхода на режим ДУ активной
ступени. Тяга РДТТ, установленных на активной ступени, выбирается в основном из условия создания небольшой перегрузки с целью обеспечения запуска ее ДУ.
Основные достоинства «холодной» схемы разделения заключаются в том, что процесс происходит под действием незначительных по величине сил, плавно, без заметных возмущений линейной и угловой скоростей активной ступени.
К недостаткам можно отнести весьма сложную последовательность операций, сравнительно большие потери скорости, трудности с запуском ДУ активной ступени из-за отсутствия осевой перегрузки после разделения.
При «горячем» разделении (рис. 1.1, б) встает вопрос защиты отделяемой и активной ступеней от теплового и силового воздействия струй ДУ активной ступени во время ее запуска. На активной ступени должно предусматриваться создание достаточно прочной и теплостойкой донной защиты ХО, на которую действуют отраженные горячие газы и избыточное давление в межблочном отсеке. Последний проектируется таким образом, чтобы обеспечить свободный выход из него газов до начала разделения ступеней. Он выполняется обычно в виде фермы или отсека со специальными газоотводными люками.
Тепловая и силоцая защита отделяемой ступени, входящая в межблочный отсек, устанавливается на верхнем днище ее бака.
Типовая ЦГ «горячего» разделения представлена на рис. 1.2, б. Опережающий запуск ДУ активной ступени позволяет создать осевую перегрузку, необходимую для гарантированного прижатия жидких компонентов топлива к нижним днищам баков с целью нормального поступления их в ДУ активной ступени.
Преимуществом «горячего» разделения является быстрота процесса, простая последовательность команд, обеспечивающая надежный запуск активной ступени.
К недостаткам следует отнести значительные возмущения углового движения и дополнительный расход топлива активной ступени, а также увеличение материальных затрат, связанное с необходимостью проектирования и экспериментальной отработки тепловой защиты ступеней.
Таким образом, обе компоновочные схемы PH имеют свои преимущества и недостатки, и выбор любой из них для вновь разрабатываемой ракеты требует серьезного технического обоснования.
Рис. 1.1. Схемы поперечного разделения ступеней ракет: а - «холодное»; б- «горячее»; в - с использованием аэродинамических сил
Разделение ступеней РДТТ имеет свои особенности. Благодаря большей, по сравнению с жидкостными ракетами, тяговоору-женности они имеют значительную скорость в плотных слоях атмосферы и при реализации описанных выше способов разделения могут быть использованы аэродинамические силы (рис. 1.1, в). Следует отметить, что использование этих сил на практике реализовано в схемах как «холодного», так и «горячего» разделения.
Отсутствие осевой перегрузки не влияет на запуск РДТТ активной ступени. Быстрый выход его на стационарный режим работы облегчает задачу управления в период разделения и умень
шает потери дальности. Для уменьшения влияния на процесс разделения тяги последействия отработавшей ступени на ней вводят отсечку тяги - вскрытие двигателя. Оно производится отстрелом заглушек, установленных на верхнем днище двигателя, или вскрытием на его боковой поверхности отсечных люков. Эти операции наиболее целесообразно проводить непосредственно перед подачей команды на разделение ступеней или одновременно с ней.
ДУ ступени I
Рис. 1.2. Последовательность прохождения команд при «холодном» (а) и «горячем» (б) разделении
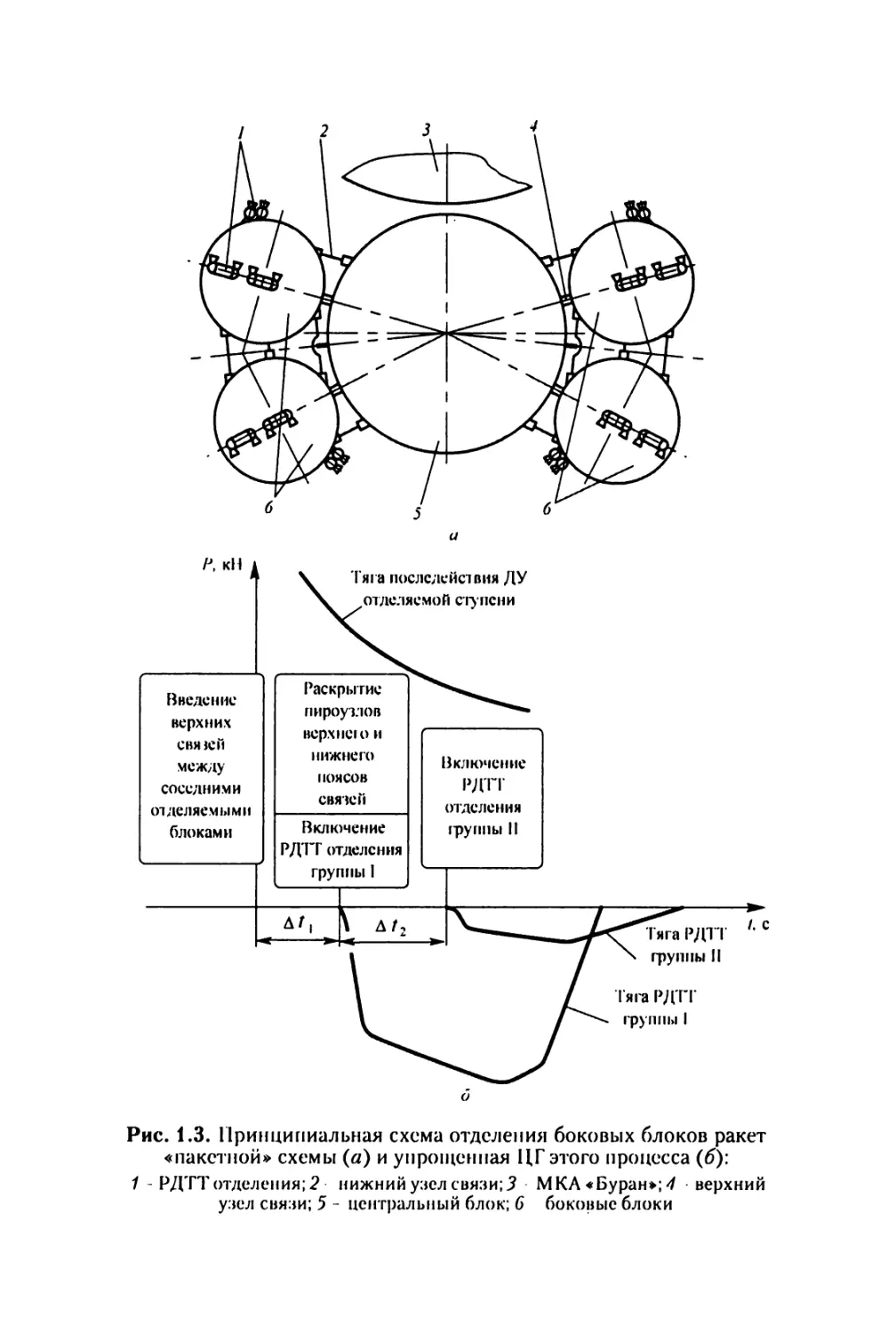
В ракетах «пакетной» схемы, поперечное сечение одной из которых представлено на рис. 1.3, а, отделение боковых блоков (ББ) после выработки в них компонентов топлива может осуществляться одним из трех способов:
- разрыв нижних силовых связей, вращение относительно верхних узлов связи, раскрытие их и отвод ступеней от центрального блока (ЦБ). По этой схеме реализовано отделение ступеней PH типа «Восток»;
- разрыв верхних силовых связей, вращение относительно нижних узлов (с возможным проскальзыванием отделяемых ступеней вдоль поверхности активной ступени) с последующим раскрытием их или соскальзыванием отделяемой ступени с поверхности ЦБ. По этой схеме выполнена дублирующая система отделения ступеней PH «Энергия» и отделение многоразового космического аппарата (МКА) «Буран» от ЦБ при выполнении им маневра для возврата на стартовую позицию;
- одновременное раскрытие верхних и нижних узлов связи и отвод отработавших ступеней от ЦБ (основная схема отделения ББ PH «Энергия»).
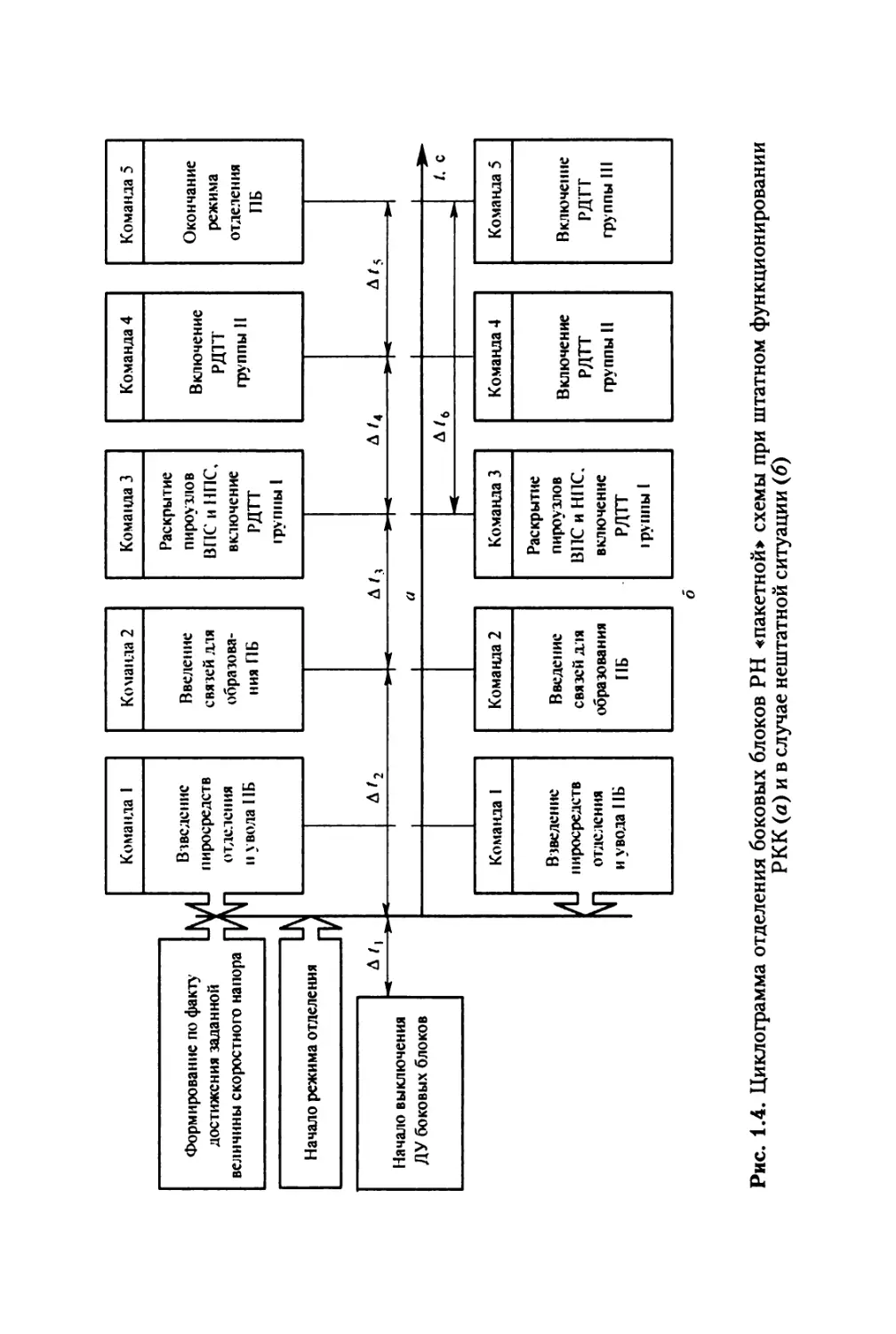
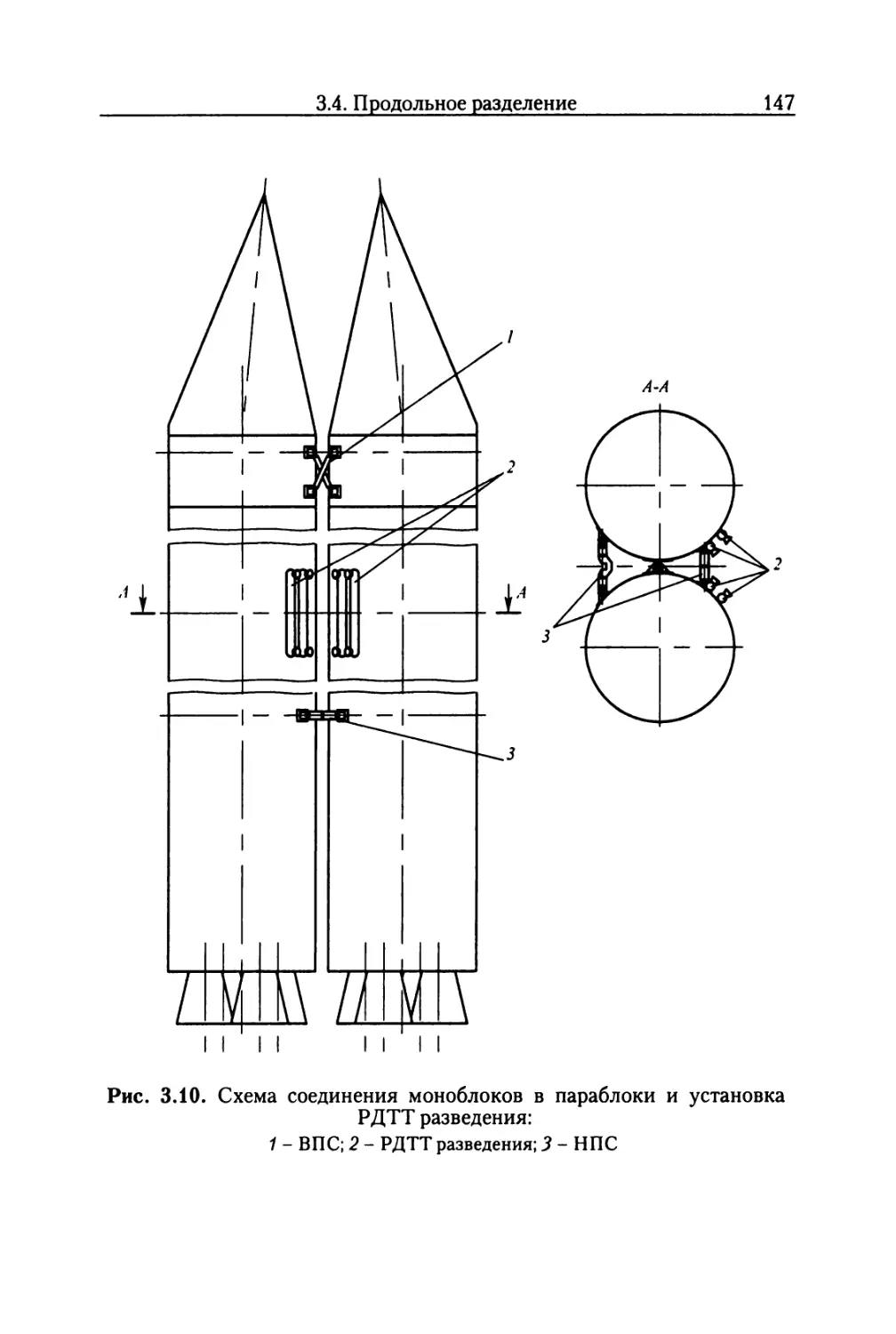
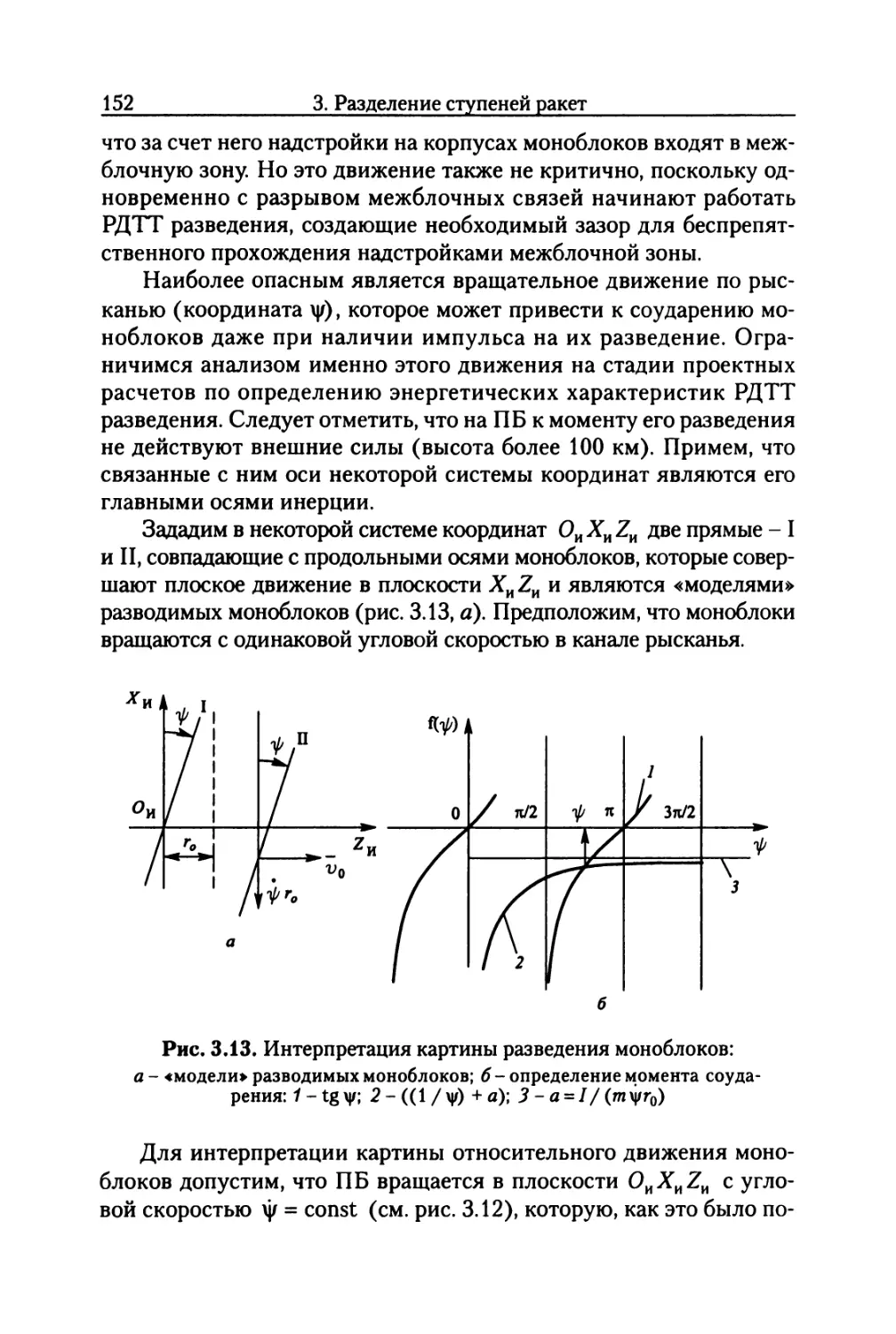
На рис. 1.3, б представлена упрощенная ЦГ штатного отделения ББ PH «Энергия». В процессе предстартовой подготовки и в полете блоки должны иметь возможность перемещаться друг относительно друга. Отделение же этих блоков проводится попарно по факту достижения PH определенного скоростного напора, т. е. команде на отделение должна предшествовать операция соединения (запирания) рядом расположенных ББ в единое целое - параблок (ПБ). Полная ЦГ штатного и нештатного отделения ПБ показана на рис. 1.4.
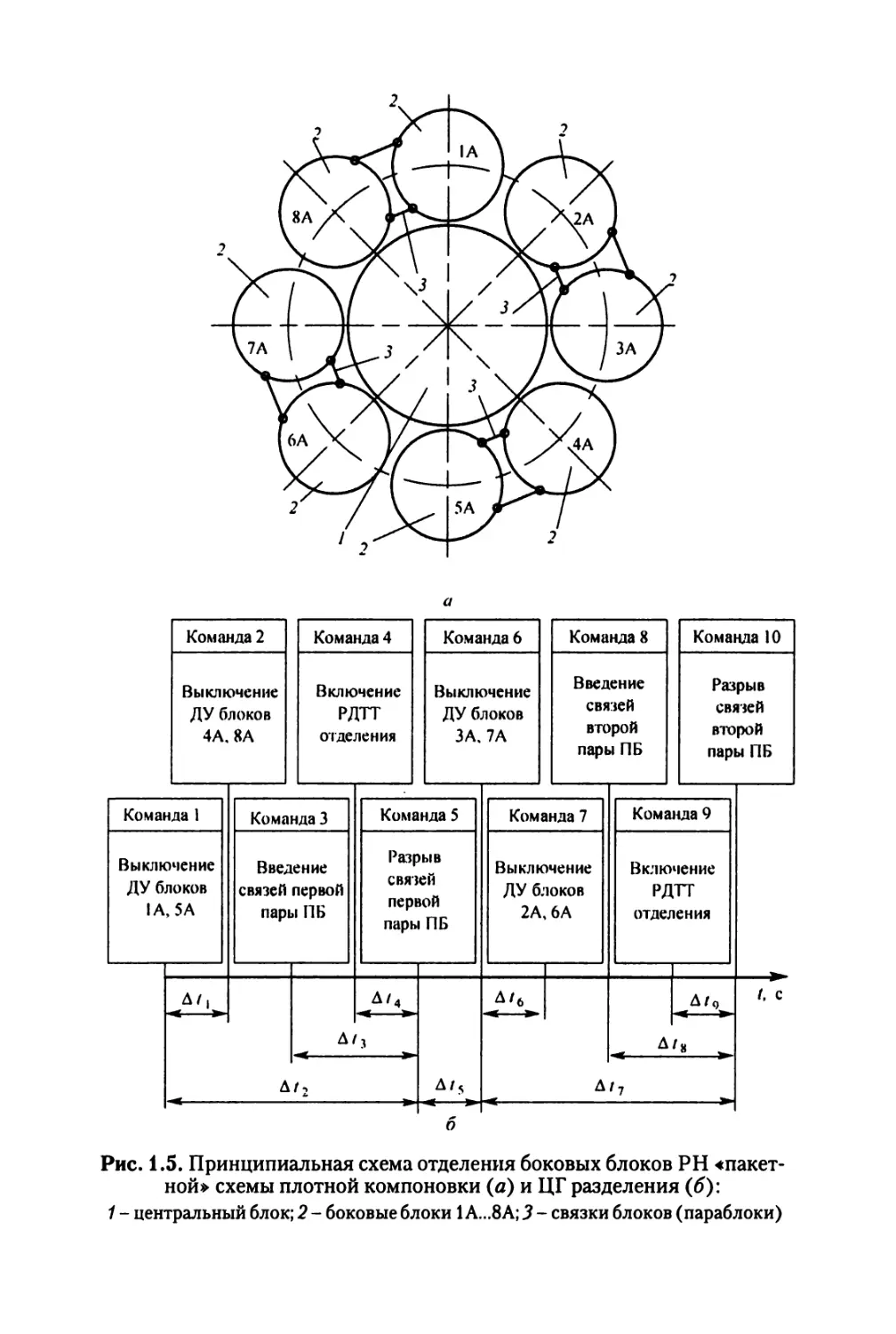
На рис. 1.5, а представлено поперечное сечение PH «пакетной» схемы с плотной компоновкой ББ. Отделение их также предполагается параблоками с помощью РДТТ. В процессе полета возможны нештатные ситуации, связанные с отказом ДУ одного из ББ. С целью компенсации несоосности вектора тяги в этом случае необходимо выключить ДУ диаметрально противоположного блока. Незначительная величина зазоров между ПБ приводит к необходимости построения ЦГ отделения, отличной от принятой на PH «Энергия» (рис. 1.5, б). Отличие состоит в том, что система управления (СУ) в процессе полета анализирует состояние ББ и подает сначала команду на отделение двух диаметрально противоположных штатно отработавших ПБ. Имея минимальную, по сравнению с другими ПБ, массу и симметричное расположение РДТТ относительно их ЦМ, они без соударений пройдут начальный участок отделения.
1
2
3
4
о
Рис. 1.3. Принципиальная схема отделения боковых блоков ракет «пакетной» схемы (а) и упрощенная ЦГ этого процесса (б):
1 - РДТТотделения; 2 нижний узел связи;? МКА «Буран»; 4 верхний узел связи; 5 - центральный блок; 6 боковые блоки
Рис. 1.4. Циклограмма отделения боковых блоков PH «пакетной» схемы при штатном функционировании РКК (а) и в случае нештатной ситуации (6)
2.
a
о
Рис. 1.5. Принципиальная схема отделения боковых блоков PH «пакетной» схемы плотной компоновки (а) и ЦГ разделения (б):
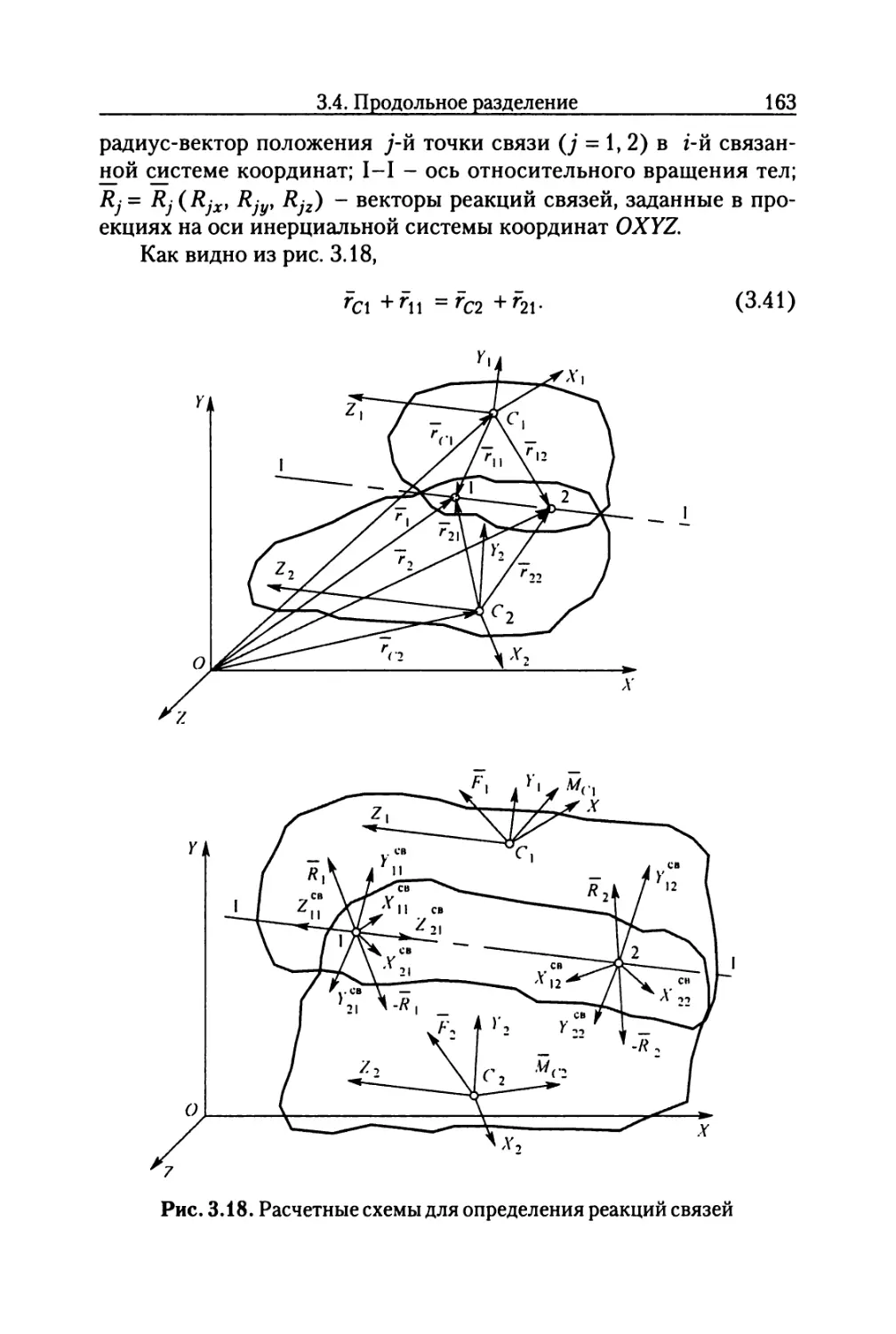
1 - центральный блок; 2 - боковые блоки 1 А...8А; 3 - связки блоков (параблоки)
В случае штатной работы всех Б Б СУ выдает команду на отделение двух попарно фиксированных ПБ.
Одновременное отделение всех ПБ в этом случае может привести к их соударению в процессе относительного движения. Кроме того, резкое изменение осевой перегрузки отрицательно скажется на работе ДУ ЦБ.
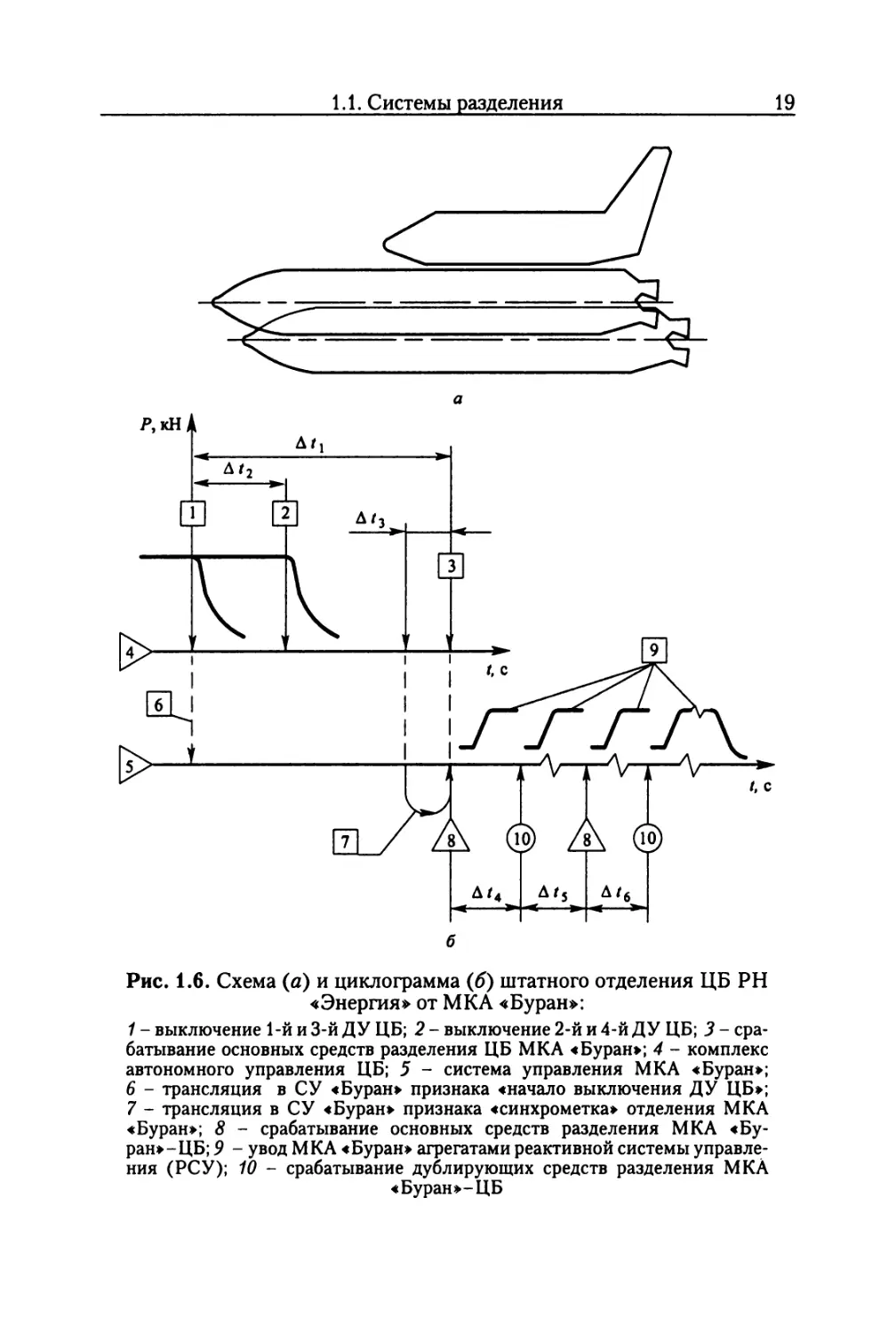
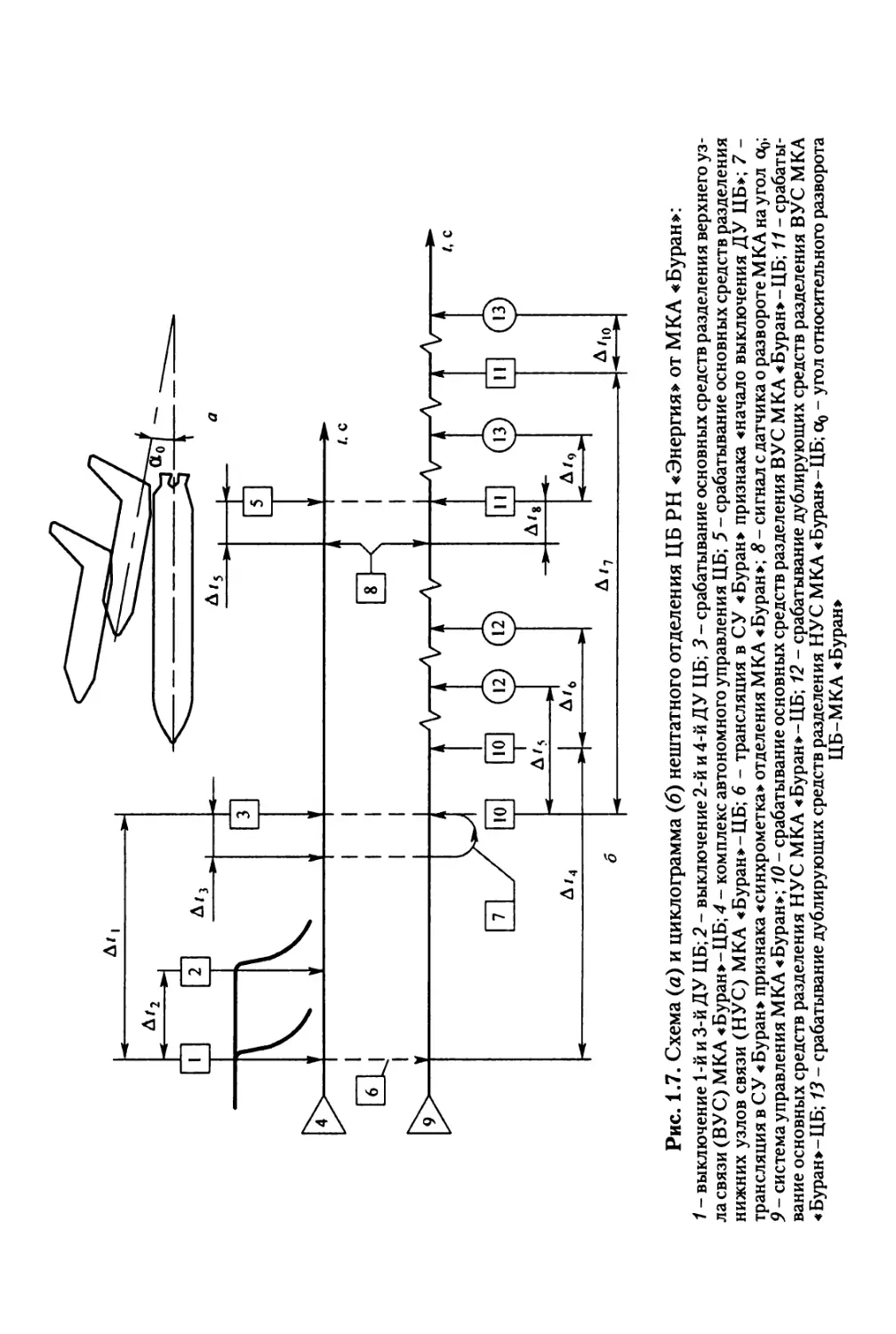
По комбинированной схеме выполнено отделение ЦБ PH «Энергия» от МКА «Буран». На рис 1.6 показаны процесс отделения и его ЦГ при штатном полете, а на рис. 1.7 - в случае нештатной ситуации, приводящей к необходимости выполнения маневра возврата и посадки на аэродром в районе старта.
Проектирование СР ступеней проводится при выполнении следующих требований:
- при срабатывании узлов связи и отделения разброс элементов конструкции или осколков не допускается, а виброударные перегрузки не превышают заданный уровень;
- время разрыва узлов связи и особенно их разновременность минимальные (последняя величина обычно не превышает 0,01 с);
- высокая надежность всех узлов и агрегатов, входящих в состав системы;
- минимальное плечо относительно ЦМ разделяемых ступеней суммарного вектора силы расстыковки транзитных электрических, гидравлических и пневматических разъемов, проходящих через разделяемый стык;
- все электроразъемы в момент расстыковки обесточены;
- разъемы всех типов, не участвующие в процессе разделения, по возможности предварительно расстыкованы индивидуальными средствами;
- электрокоммуникации обеспечивают гарантированный запуск элементов, входящих в состав системы;
- средства разделения и отделения имеют пиротехническое и электрическое дублирование;
- точность установки РДТТ отделения составляет не более ± Г;
- средства разделения и отделения оказывают минимальные возмущения на активную ступень;
- газодинамическое воздействие РДТТ отделения на окружающие элементы конструкции не превышает допустимой величины, которая не требует установки дополнительной тепловой и силовой защиты;
- простота и доступность обслуживания элементов СР на технической и, при необходимости, стартовой позиции;
- максимальная унификация и стандартизация.
Рис. 1.6. Схема (а) и циклограмма (б) штатного отделения ЦБ PH «Энергия» от МКА «Буран»:
1 - выключение 1-й и 3-й ДУ ЦБ; 2 - выключение 2-й и 4-й ДУ ЦБ; 3 - срабатывание основных средств разделения ЦБ МКА «Буран»; 4 - комплекс автономного управления ЦБ; 5 - система управления МКА «Буран»; 6 - трансляция в СУ «Буран» признака «начало выключения ДУ ЦБ»; 7 - трансляция в СУ «Буран» признака «синхрометка» отделения МКА «Буран»; 8 - срабатывание основных средств разделения МКА «Буран»-ЦБ; 9 - увод МКА «Буран» агрегатами реактивной системы управления (РСУ); 10 - срабатывание дублирующих средств разделения МКА «Буран»-ЦБ
Рис. 1.7. Схема (а) и циклограмма (6) нештатного отделения ЦБ PH «Энергия» от МКА «Буран»:
1 - выключение 1-й и 3-й ДУ ЦБ; 2 - выключение 2-й и 4-й ДУ ЦБ; 3 - срабатывание основных средств разделения верхнего узла связи (ВУС) МКА «Буран»-ЦБ; 4 - комплекс автономного управления ЦБ; 5 - срабатывание основных средств разделения нижних узлов связи (НУС) МКА «Буран»-ЦБ; 6 - трансляция в СУ «Буран» признака «начало выключения ДУ ЦБ»; 7 -трансляция в СУ «Буран» признака «синхрометка» отделения МКА «Буран»; 8 - сигнал с датчика о развороте МКА на угол ц}; 9 - система управления МКА «Буран»; 10 - срабатывание основных средств разделения ВУС МКА «Буран»-ЦБ; 11 - срабатывание основных средств разделения НУС МКА «Буран»-ЦБ; 12 - срабатывание дублирующих средств разделения ВУС МКА «Буран»-ЦБ; 13 - срабатывание дублирующих средств разделения НУС МКА «Буран»-ЦБ; - угол относительного разворота ЦБ-МКА «Буран»
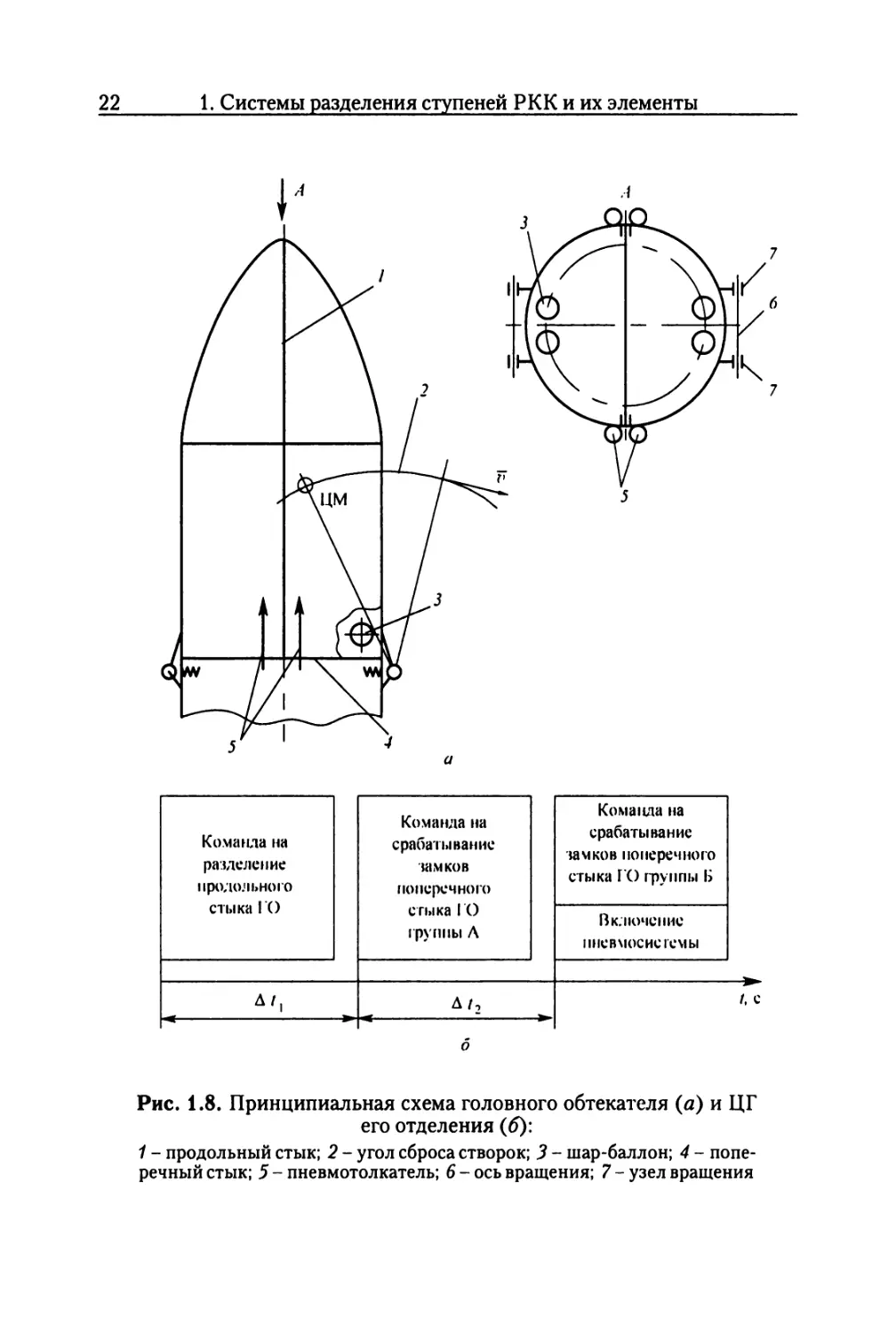
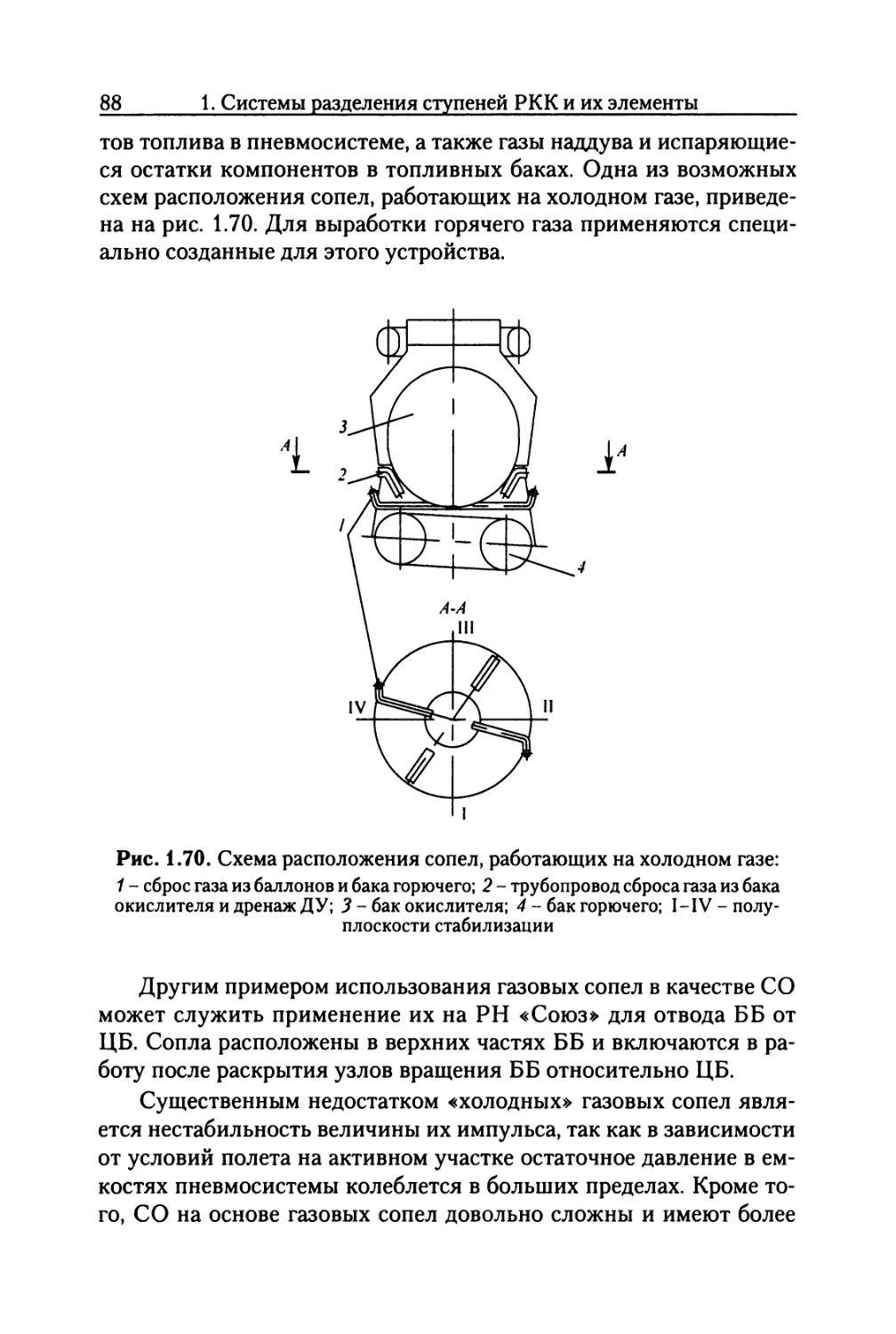
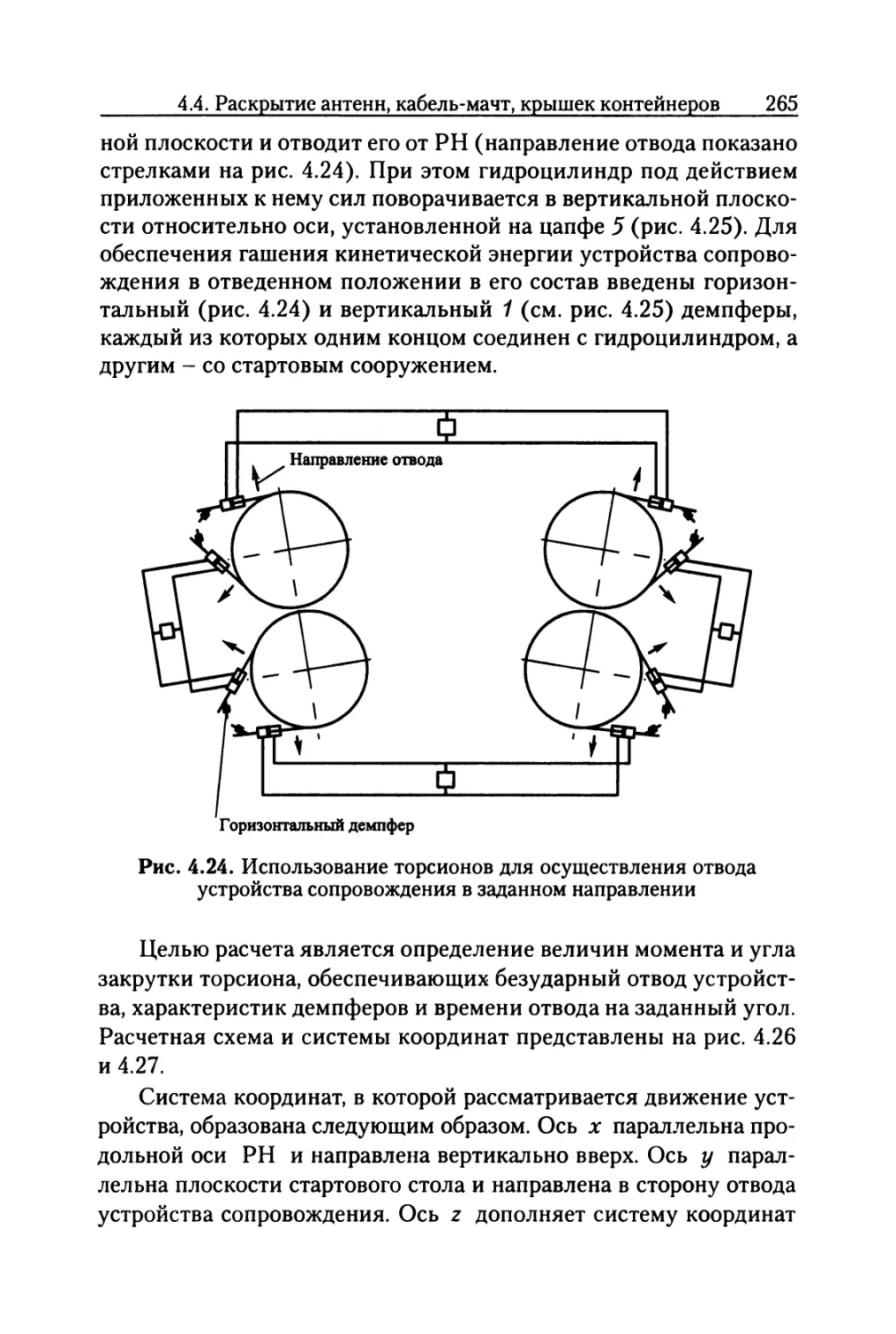
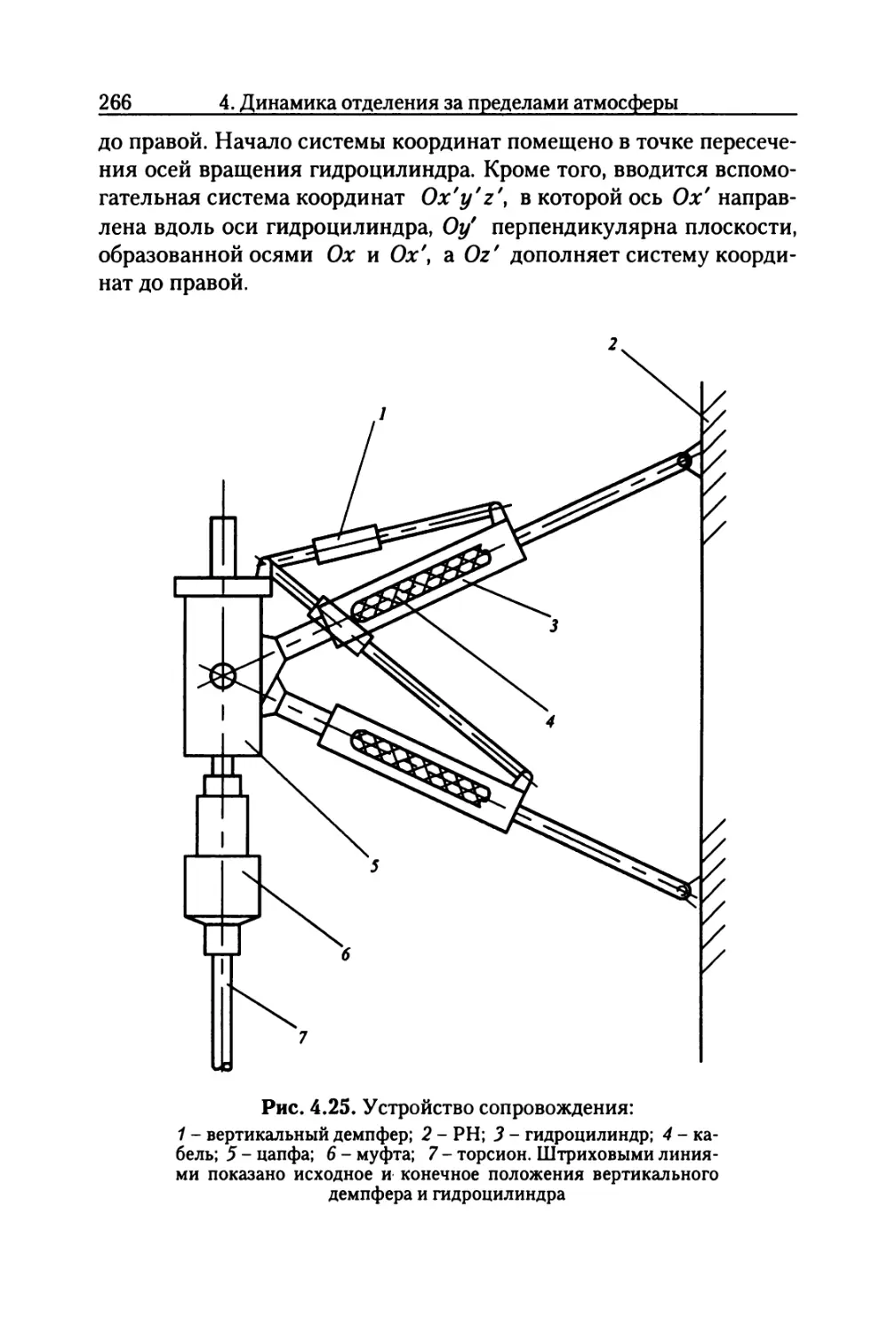
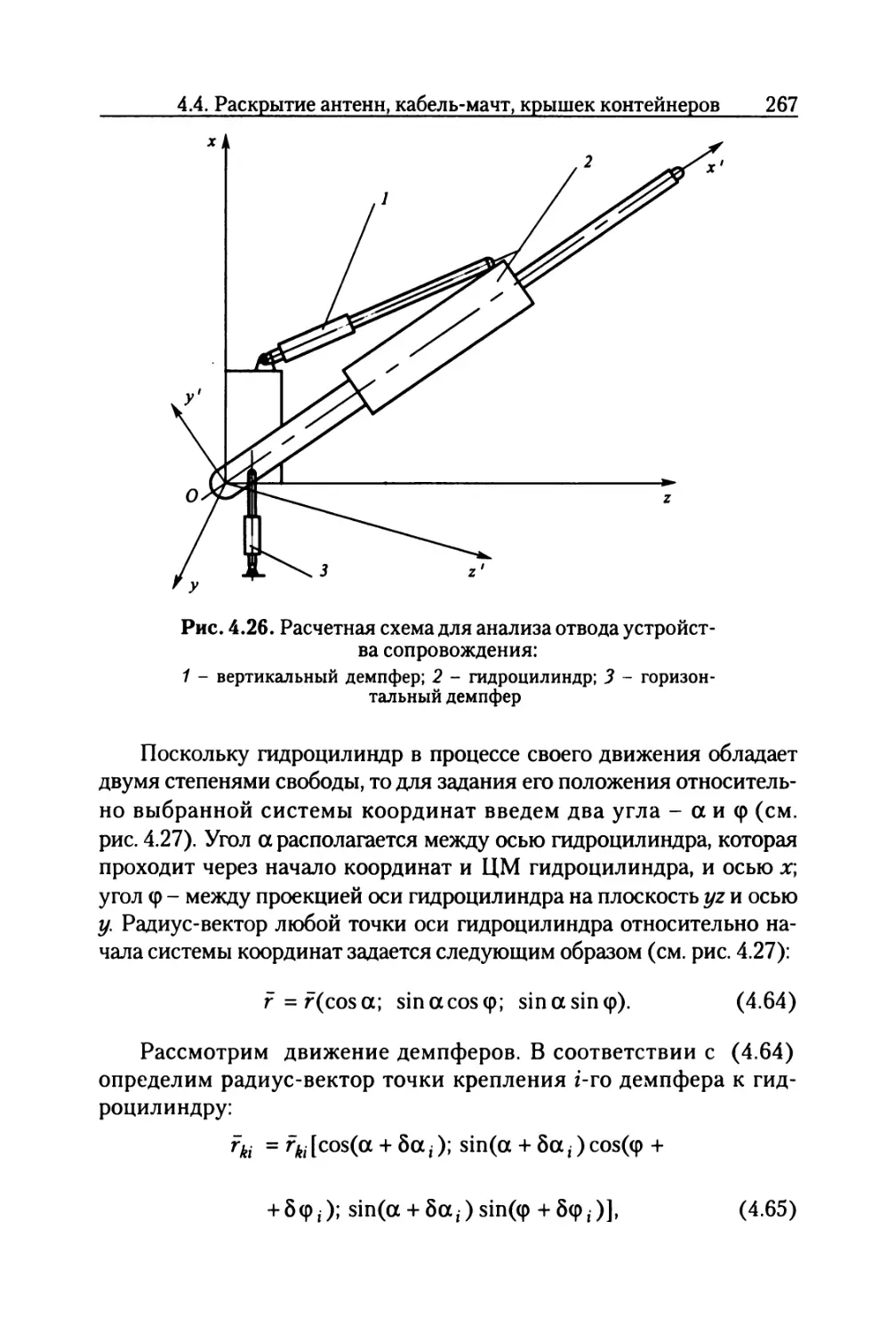
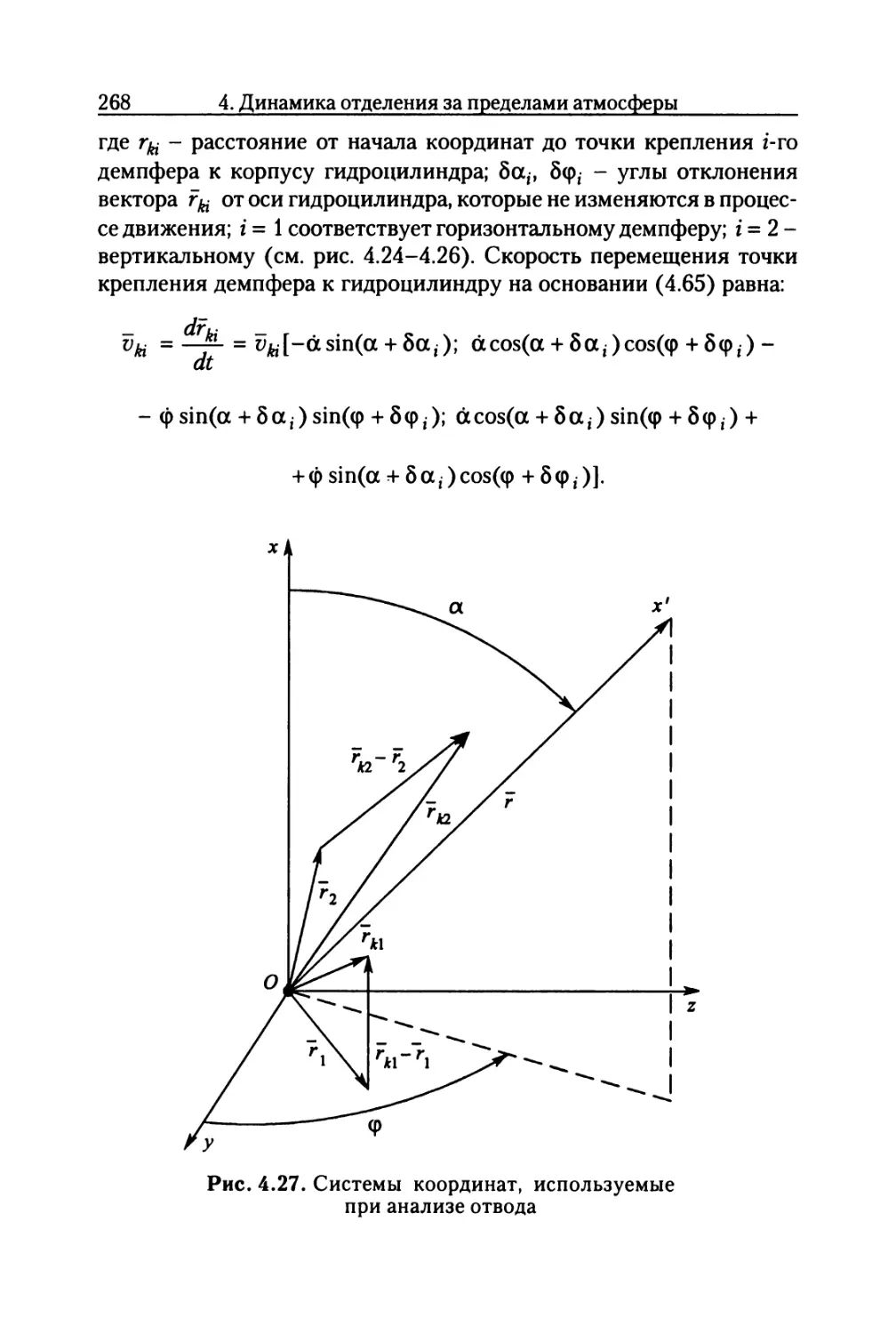
Для защиты космических аппаратов (КА) от воздействия набегающего потока широко используются капотирующие устройства в виде ГО, которые сбрасываются после прохождения PH плотных слоев атмосферы [14, 15]. Процесс сброса происходит следующим образом: после подачи команды на отделение производится разрыв силовых связей сначала по продольному стыку створок, а затем по поперечному между створками и PH. Обтекатель разделяется таким образом на две или более створки, которые под действием сил от СО начинают вращаться относительно осей, расположенных около нижнего стыковочного шпангоута (рис. 1.8). По достижении определенного угла, называемого углом сброса, створки отделяются и, обладая относительной скоростью, отходят от PH. Угол сброса выбирается обычно из условия получения максимального значения проекции скорости отделения створки v на направление, перпендикулярное к продольной оси PH и лежащее в плоскости ее вращения.
В узле вращения перпендикулярно продольной оси PH обычно устанавливаются один или несколько короткоходовых, но с большой начальной силой, пружинных толкателей. Их назначение - сообщение дополнительной скорости точкам ГО, расположенным вблизи узла вращения, для исключения их соударения с PH в процессе относительного движения.
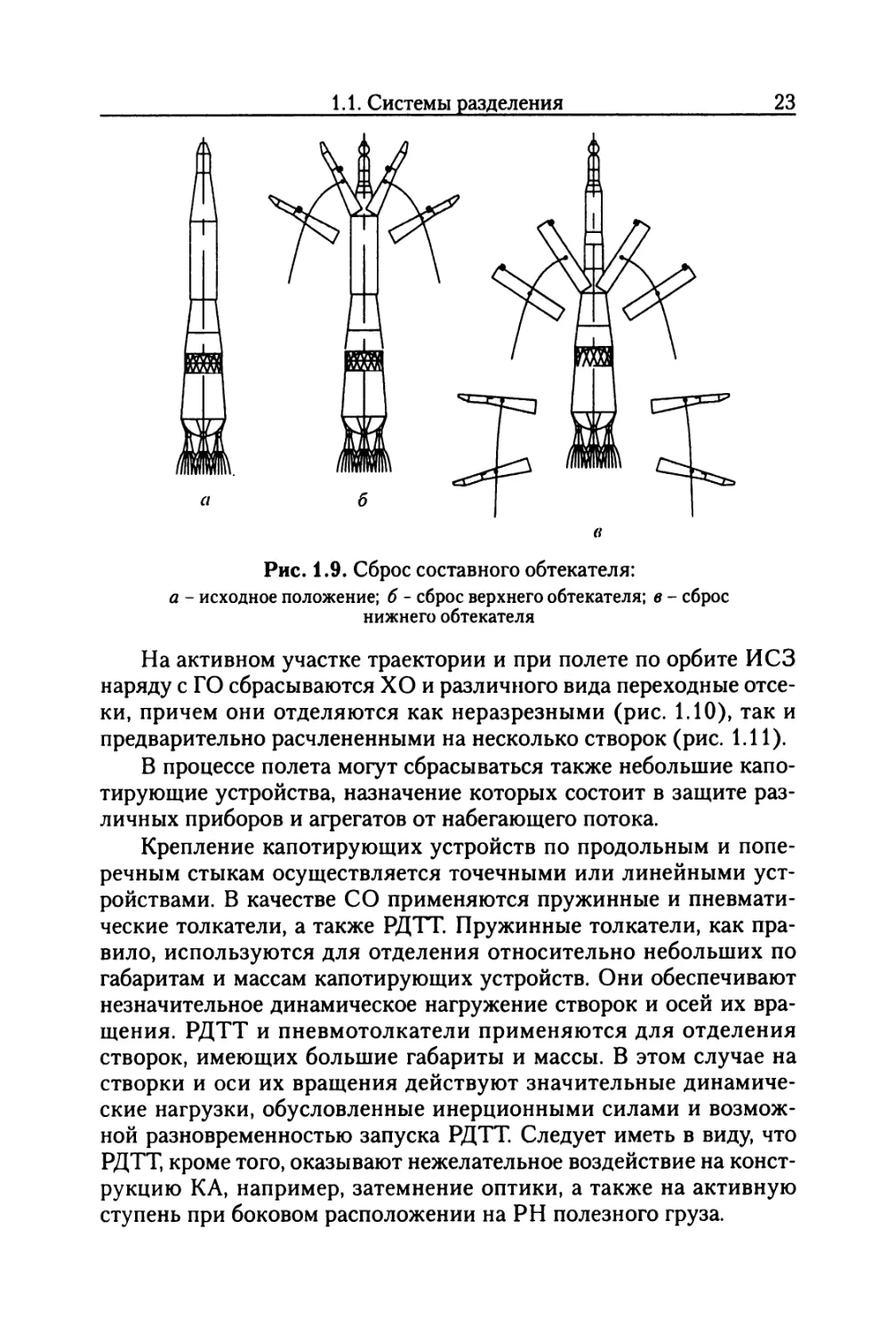
В тех случаях, когда длина ГО составляет несколько десятков метров, его необходимо расчленить на два или более самостоятельных отсека, отделение которых осуществляется последовательно (рис. 1.9).
Расчлененная конструкция ГО является весьма нежесткой, поэтому воздействие на нее средств отделения приводит к возбуждению упругих колебаний. Опыт показал, что наиболее интенсивно колеблются нижние кромки створок, причем максимальная амплитуда наблюдается в направлении зоны полезного груза (ПГ), что вынуждает сокращать ее размеры. Необходимо рационально выбирать силовые характеристики СО, позволяющие безударно отделить створки обтекателя и максимально уменьшить амплитуду колебаний нижних кромок. Процесс оптимизации указанных силовых характеристик представляет значительную сложность и является предметом самостоятельного исследования. Некоторые аспекты этой задачи рассмотрены в главе 5.
Команда на разделение продольного стыка ГО
Команда на срабатывание замков поперечного стыка I О группы А
Команда на срабатывание замков поперечного стыка ГО группы !>
Включение
ПНСВМОСИС ГСМЫ
А/.
Рис. 1.8. Принципиальная схема головного обтекателя (а) и ЦГ его отделения (б):
1 - продольный стык; 2 - угол сброса створок; 5 - шар-баллон; 4 - поперечный стык; 5 - пневмотолкатель; 6 - ось вращения; 7 - узел вращения
Рис. 1.9. Сброс составного обтекателя: а - исходное положение; б - сброс верхнего обтекателя; в - сброс нижнего обтекателя
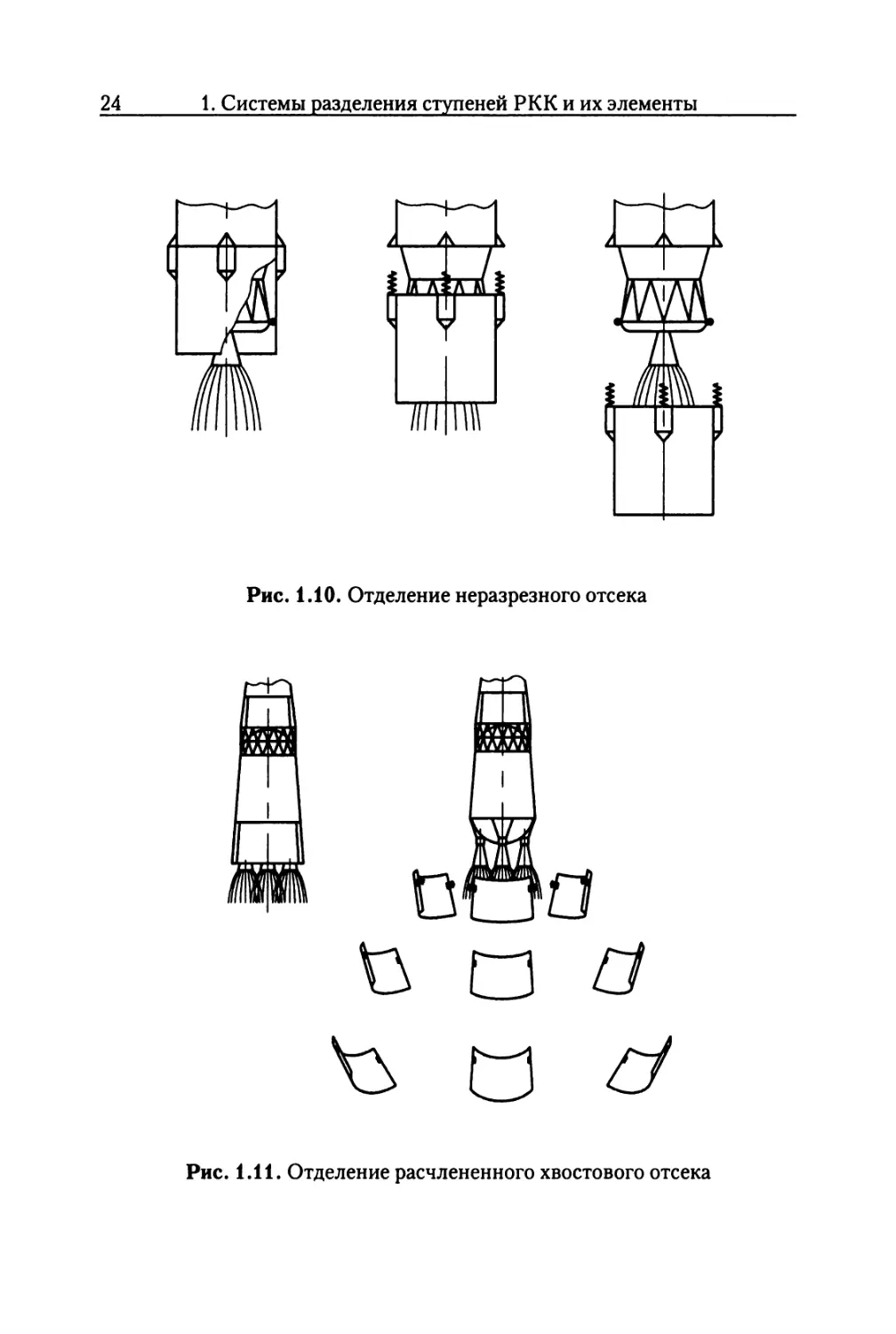
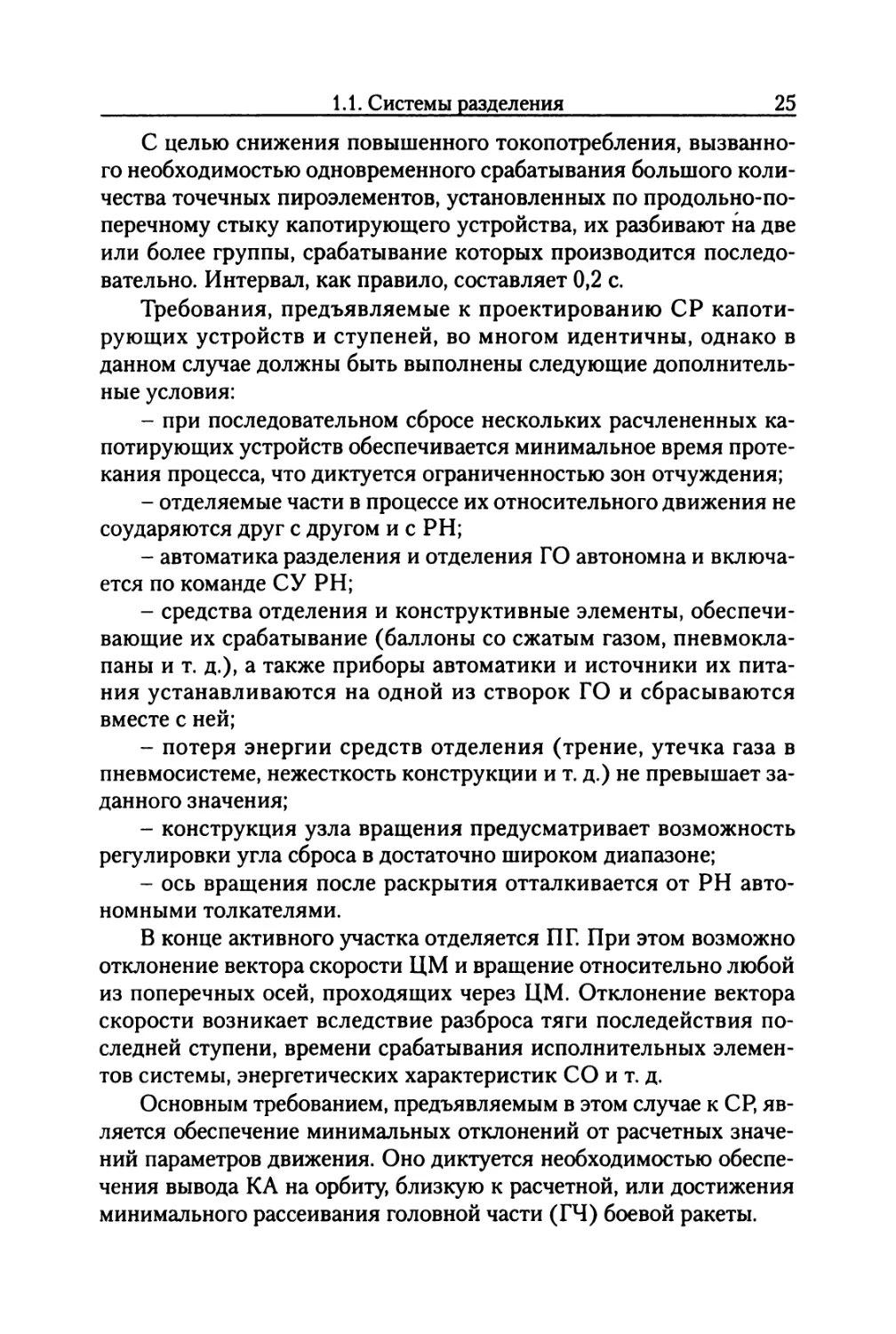
На активном участке траектории и при полете по орбите ИСЗ наряду с ГО сбрасываются ХО и различного вида переходные отсеки, причем они отделяются как неразрезными (рис. 1.10), так и предварительно расчлененными на несколько створок (рис. 1.11).
В процессе полета могут сбрасываться также небольшие капотирующие устройства, назначение которых состоит в защите различных приборов и агрегатов от набегающего потока.
Крепление капотирующих устройств по продольным и поперечным стыкам осуществляется точечными или линейными устройствами. В качестве СО применяются пружинные и пневматические толкатели, а также РДТТ. Пружинные толкатели, как правило, используются для отделения относительно небольших по габаритам и массам капотирующих устройств. Они обеспечивают незначительное динамическое нагружение створок и осей их вращения. РДТТ и пневмотолкатели применяются для отделения створок, имеющих большие габариты и массы. В этом случае на створки и оси их вращения действуют значительные динамические нагрузки, обусловленные инерционными силами и возможной разновременностью запуска РДТТ. Следует иметь в виду, что РДТТ, кроме того, оказывают нежелательное воздействие на конструкцию КА, например, затемнение оптики, а также на активную ступень при боковом расположении на PH полезного груза.
Рис. 1.10. Отделение неразрезного отсека
Рис. 1.11. Отделение расчлененного хвостового отсека
С целью снижения повышенного токопотребления, вызванного необходимостью одновременного срабатывания большого количества точечных пироэлементов, установленных по продольно-поперечному стыку капотирующего устройства, их разбивают на две или более группы, срабатывание которых производится последовательно. Интервал, как правило, составляет 0,2 с.
Требования, предъявляемые к проектированию СР капотирующих устройств и ступеней, во многом идентичны, однако в данном случае должны быть выполнены следующие дополнительные условия:
- при последовательном сбросе нескольких расчлененных капотирующих устройств обеспечивается минимальное время протекания процесса, что диктуется ограниченностью зон отчуждения;
- отделяемые части в процессе их относительного движения не соударяются друг с другом и с PH;
- автоматика разделения и отделения ГО автономна и включается по команде СУ PH;
- средства отделения и конструктивные элементы, обеспечивающие их срабатывание (баллоны со сжатым газом, пневмоклапаны и т. д.), а также приборы автоматики и источники их питания устанавливаются на одной из створок ГО и сбрасываются вместе с ней;
- потеря энергии средств отделения (трение, утечка газа в пневмосистеме, нежесткость конструкции и т. д.) не превышает заданного значения;
- конструкция узла вращения предусматривает возможность регулировки угла сброса в достаточно широком диапазоне;
- ось вращения после раскрытия отталкивается от PH автономными толкателями.
В конце активного участка отделяется ПГ. При этом возможно отклонение вектора скорости ЦМ и вращение относительно любой из поперечных осей, проходящих через ЦМ. Отклонение вектора скорости возникает вследствие разброса тяги последействия последней ступени, времени срабатывания исполнительных элементов системы, энергетических характеристик СО и т. д.
Основным требованием, предъявляемым в этом случае к СР, является обеспечение минимальных отклонений от расчетных значений параметров движения. Оно диктуется необходимостью обеспечения вывода КА на орбиту, близкую к расчетной, или достижения минимального рассеивания головной части (ГЧ) боевой ракеты.
Причинами, приводящими к появлению вращения ПГ, могут быть поперечные колебания корпуса ракеты во время его отделения, наличие эксцентриситета тяги последействия, эксцентриситета действующих сил средств отделения, разновременность срабатывания средств разделения и т. д.
Один из возможных способов уменьшения указанных возмущений состоит в переводе ДУ ракеты непосредственно перед ее выключением в положение, при котором линия действия тяги проходит через ЦМ системы «последняя ступень + ПГ». В противном случае значительный по величине импульс тяги последействия приведет к появлению угловых возмущений.
Временная задержка Д t между выключением ДУ и разделением выбирается из условия спада тяги последействия с тем, чтобы уменьшить потери работы СО на ее парирование.
Работа средств отделения выбирается из соотношения
^эф —
где Лдф - эффективная работа СО, т. е. часть работы, сообщающая разделяемым телам относительную скорость; Ар - располагаемая работа СО, которая определяется при наземной экспериментальной отработке и представляет собой работу этих СО за вычетом потерь на трение на шпильках, расстыковку транзитных коммуникаций и т. д.; Ап - потери работы, которые затрачиваются на парирование импульса тяги последействия, аэродинамических сил и т. д.
Очевидно, что с ростом интервала Д t уменьшается импульс последействия и, как следствие, , но возрастают угловые возмущения, сообщаемые ПГ. Несоударение последней ступени PH с ПГ обеспечивается надлежащим выбором А^, однако с целью уменьшения интервала Д t или в случае реализации нерасчетного импульса последействия должны быть предусмотрены более действенные способы, позволяющие избежать столкновения. Примером может служить разворот последней ступени PH после ее отделения относительно одной из поперечных осей с помощью специально предусмотренных для этой цели средств.
В зависимости от характера действующих сил СО ПГ можно разделить на расталкивающие, тормозящие и комбинированные [12]. В первом случае отделение осуществляется расталкиванием ПГ и последней ступени PH по направлению их продольных или поперечных осей. Этот способ реализуется при продольной компо
новке ПГ в составе РКК. Во втором - торможением последней ступени с помощью, например, РДТТ. В третьем расталкивание и торможение сочетается, например, с разворотом последней ступени относительно одной из поперечных осей.
Указанные СР функционируют в нормальных условиях полета. Существуют кроме того аварийные ситуации, приводящие к необходимости отделения определенных элементов конструкции и срабатыванию дополнительных специально введенных для этого СР Особенно важным является срабатывание СР, связанных со спасением экипажа.
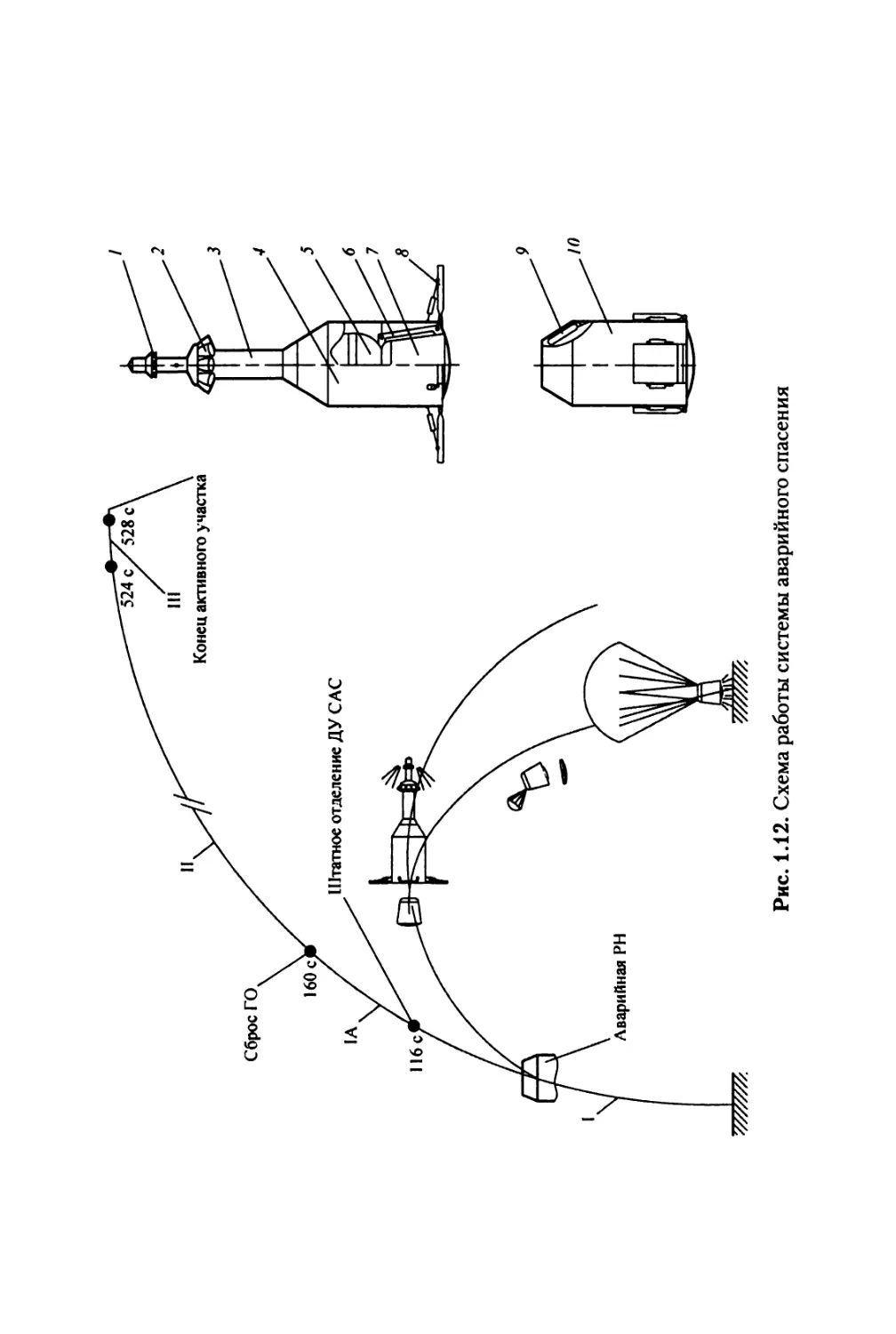
Рассмотрим этот случай применительно к PH «Союз». Вся траектория выведения КА на орбиту разбита на четыре участка работы системы аварийного спасения (САС) (рис. 1.12). На атмосферном участке полета (участок I САС) для обеспечения спасения экипажа служит специально предусмотренная для этой цели ДУ САС 3, выполненная на основе РДТТ и установленная в носовой части ракеты. Она состоит из центрального ракетного двигателя (ЦРД) 2 и ракетного двигателя разделения (РДР) 1.
Спасение экипажа на участке I САС происходит в такой последовательности. После появления сигнала «Авария» разрываются электрические коммуникации между бытовым отсеком (ВО) 5 и приборно-агрегатным отсеком, а спускаемый аппарат (СА) 7 фиксируется в опорных ложементах 6. Через временной интервал Д£, отсчитываемый от предыдущей команды, выключается ДУ PH, отделяется спасаемая часть 4, включается ЦРД и раскрываются решетчатые стабилизаторы 8. В верхней части траектории полета отделившейся части подается команда на разрыв силовых связей между СА и ВО и запуск РДР. Под действием его тяги СА выходит из-под обтекателя и в дальнейшем осуществляет автономный полет.
Участок IA САС (см. рис. 1.12) начинается после отделения ДУ САС. При появлении сигнала «Авария», как и в предыдущем случае, производится разрыв электрических коммуникаций между бытовым и приборно-агрегатным отсеками и фиксация СА в опорных ложементах. Через временной интервал At выключается ДУ PH и подается команда на отделение спасаемой части 10, а также на запуск РДТТ 9 ее отвода от PH. Затем с временной задержкой, величина которой зависит от времени аварии при полете по траектории выведения, подается команда на разделение СА и ВО, после чего СА совершает автономный полет.
Рис. 1.12. Схема работы системы аварийного спасения
После сброса ГО начинается участок II САС. В случае появления сигнала «Авария» на этом участке производится выключение ДУ PH и через временной интервал Д£ подается команда на отделение БО, который под действием давления его наддува и работы СО уходит от PH. Далее по фиксированной временной метке отделяется СА.
Участок III САС начинается с того момента, когда ДУ КА в случае аварии PH способна вывести весь корабль, отделенный от PH, на орбиту, и завершается в конце активного участка траектории PH.
Приведенное описание последовательности операций при спасении экипажа в случае аварии PH на активном участке траектории не претендует на абсолютную полноту и не охватывает весь перечень срабатываемых в этом случае СР
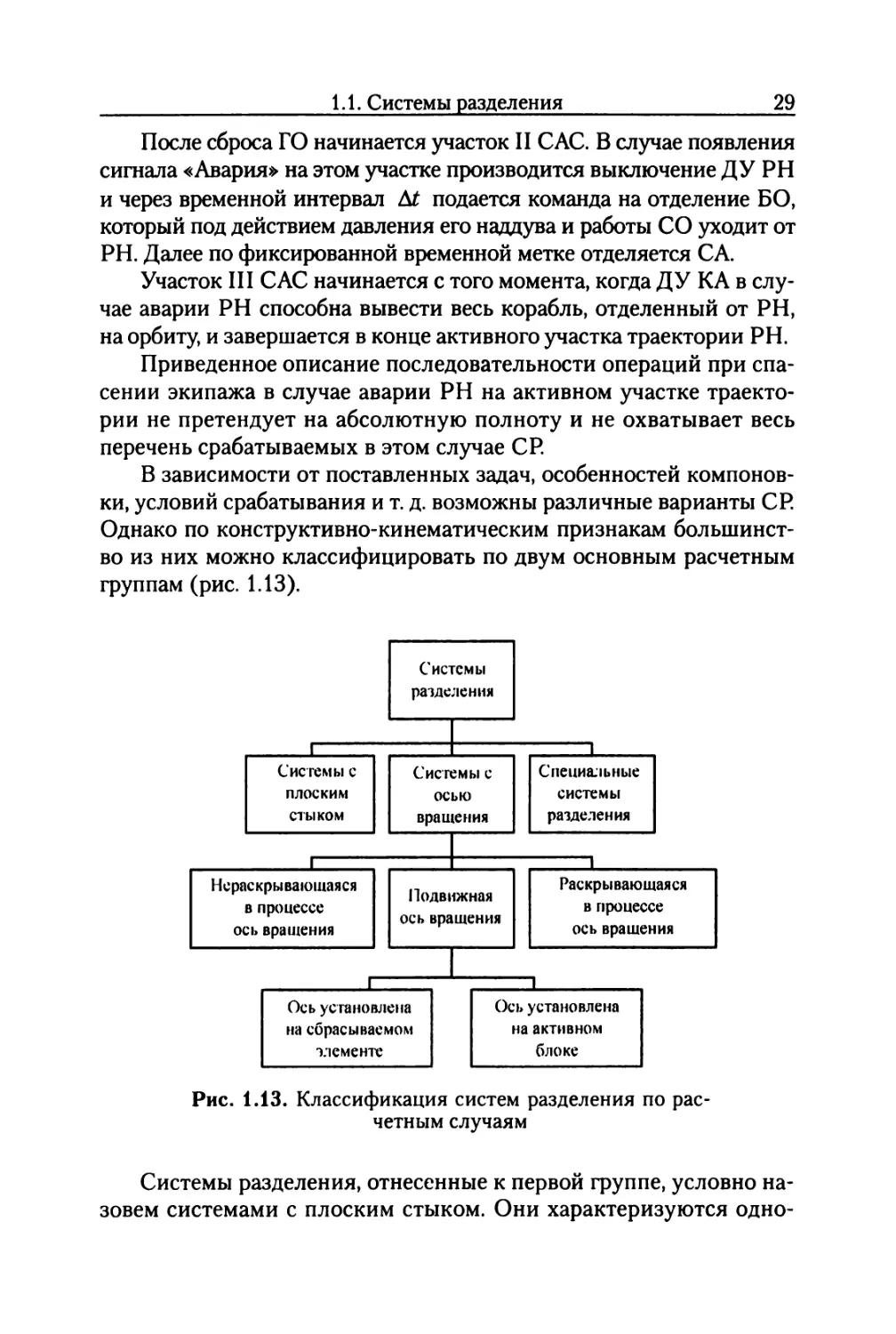
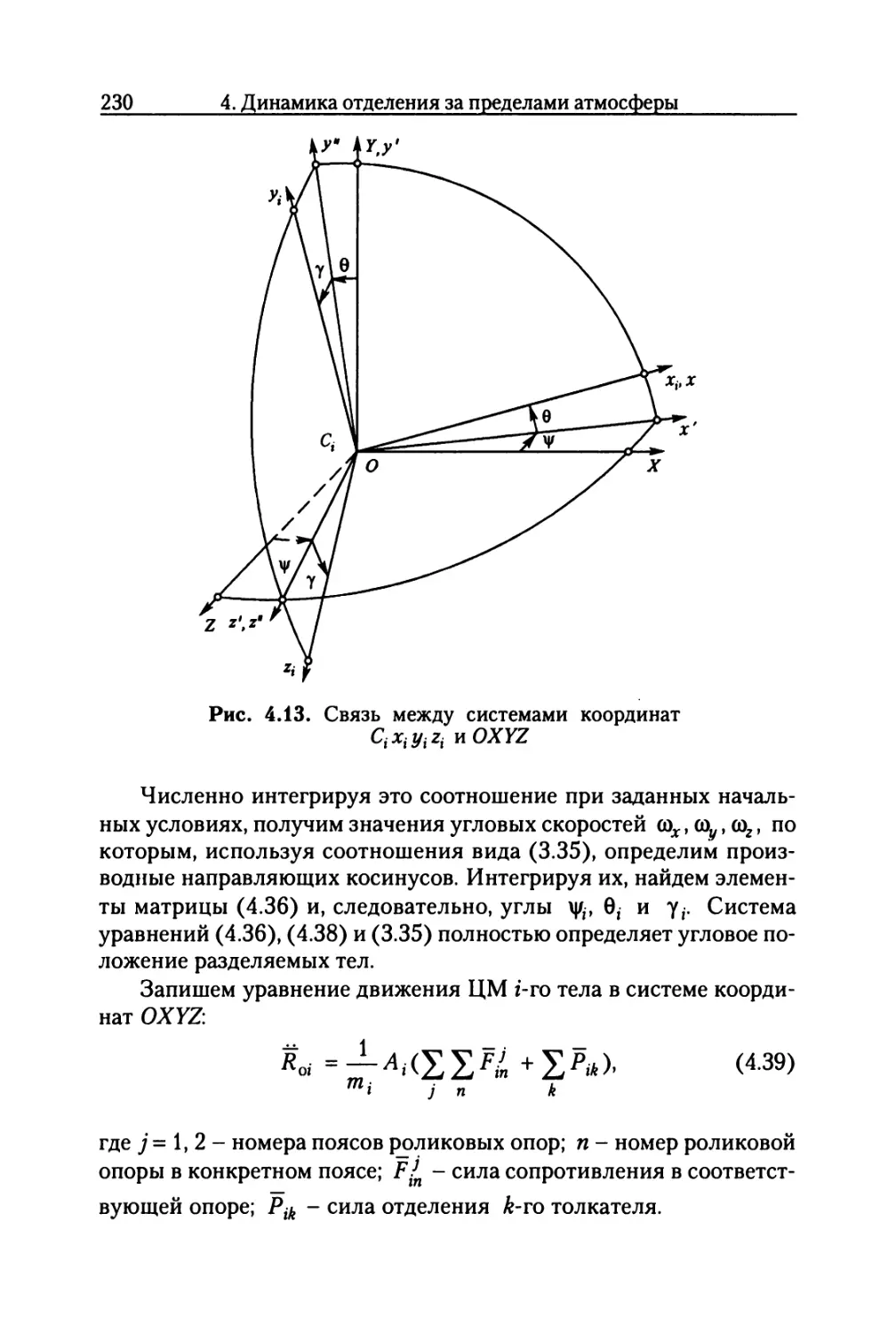
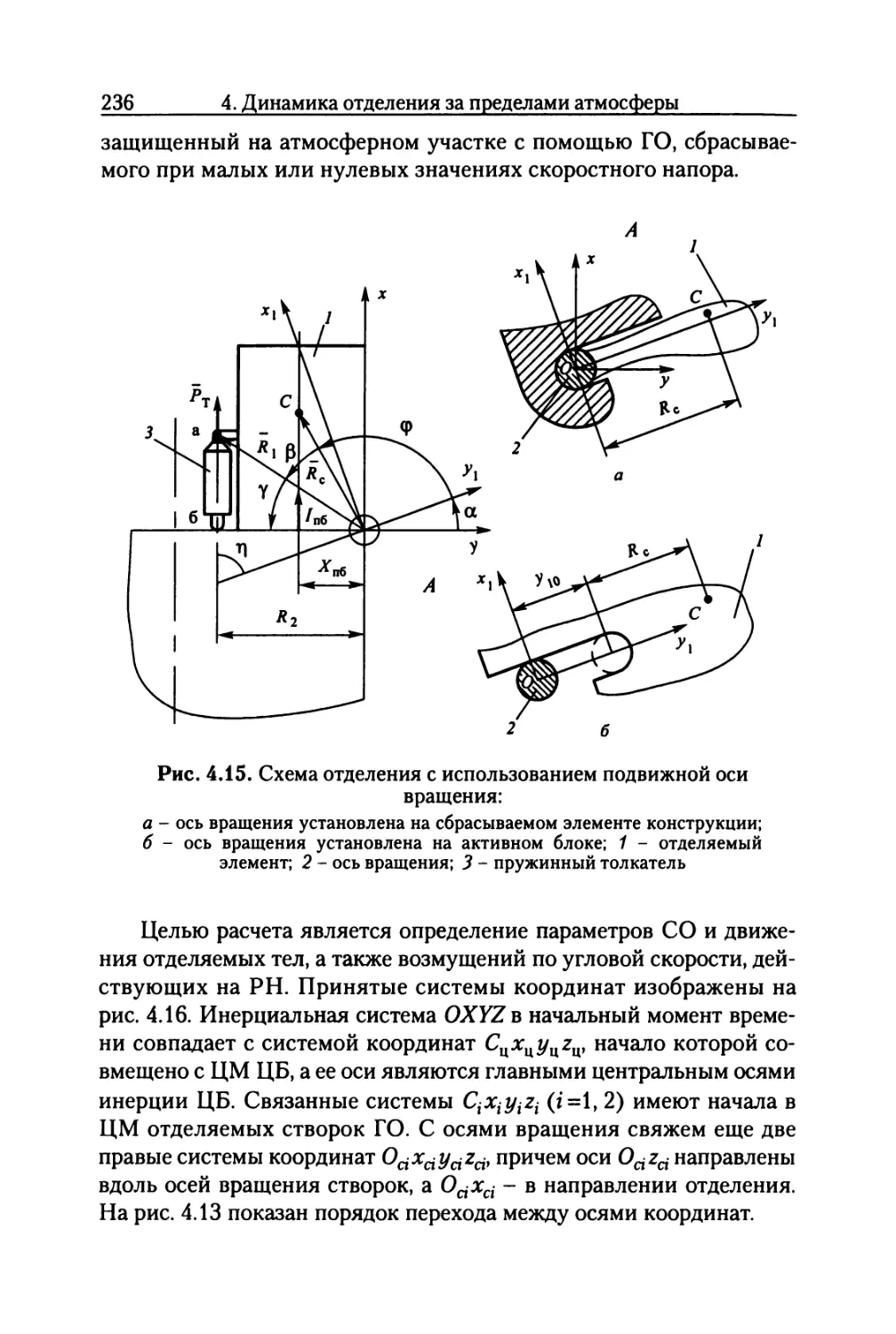
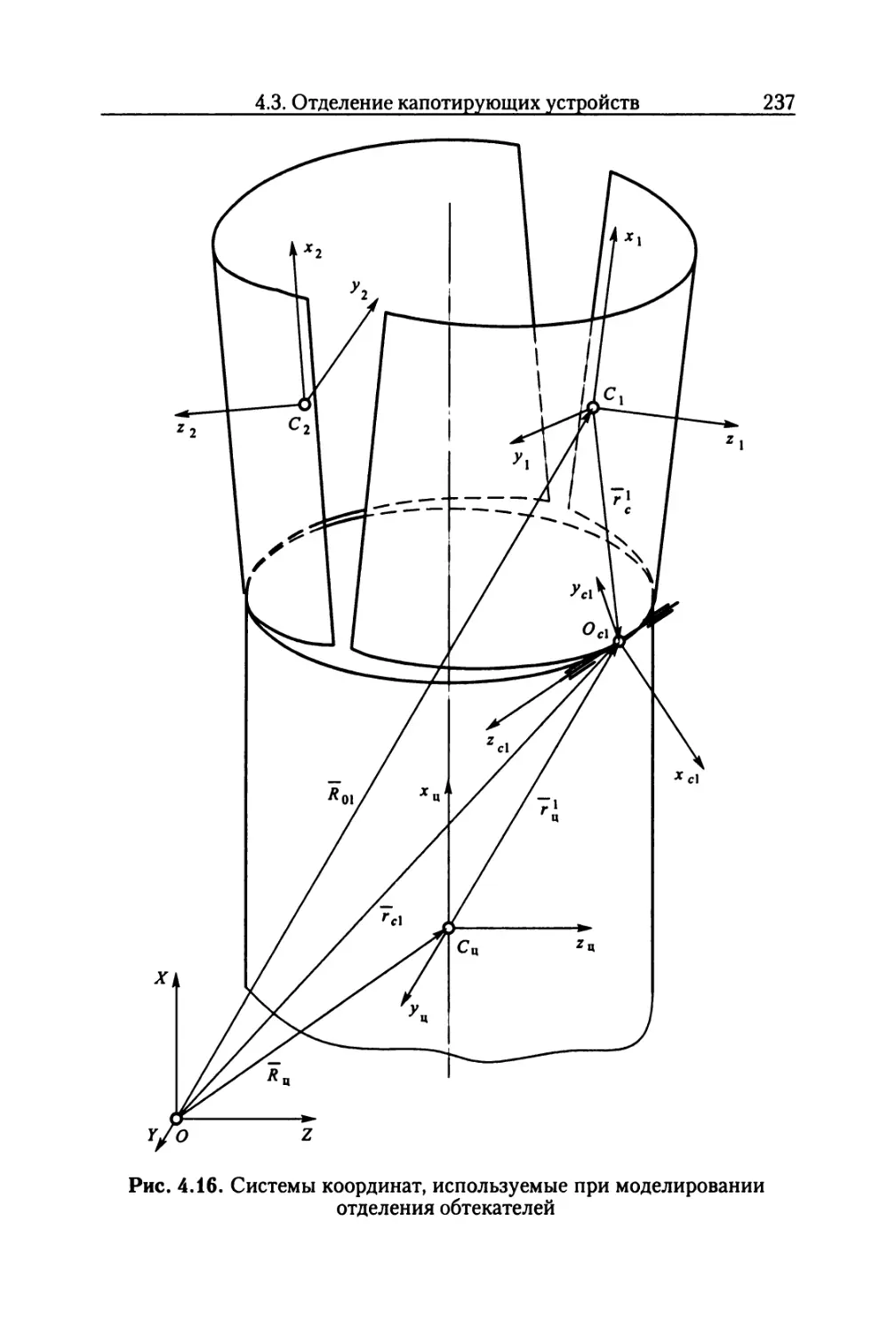
В зависимости от поставленных задач, особенностей компоновки, условий срабатывания и т. д. возможны различные варианты СР. Однако по конструктивно-кинематическим признакам большинство из них можно классифицировать по двум основным расчетным группам (рис. 1.13).
Рис. 1.13. Классификация систем разделения по расчетным случаям
Системы разделения, отнесенные к первой группе, условно назовем системами с плоским стыком. Они характеризуются одно
временным разрывом средств связи разделяемых элементов конструкции с последующим одновременным или опережающим включением в работу СО. Эта группа достаточно обширна и объединяет СР отработавших ступеней, ПГ, головных блоков, ГЧ, отсеков КА, крышек люков парашютных контейнеров и т. д. Для всех отделяемых элементов конструкции, входящих в данную группу, расчет кинематических параметров их относительного движения может быть проведен по единой методике.
Процесс отделения пассивного элемента конструкции, крепление которого к активному блоку выполнено по схеме плоского стыка, можно разбить в общем случае на следующие участки:
- одновременное или несколькими группами срабатывание средств разделения;
- относительное движение под действием сил СО при наличии кинематической связи (шпилечный участок);
- относительное движение под действием сил СО;
- свободное относительное движение.
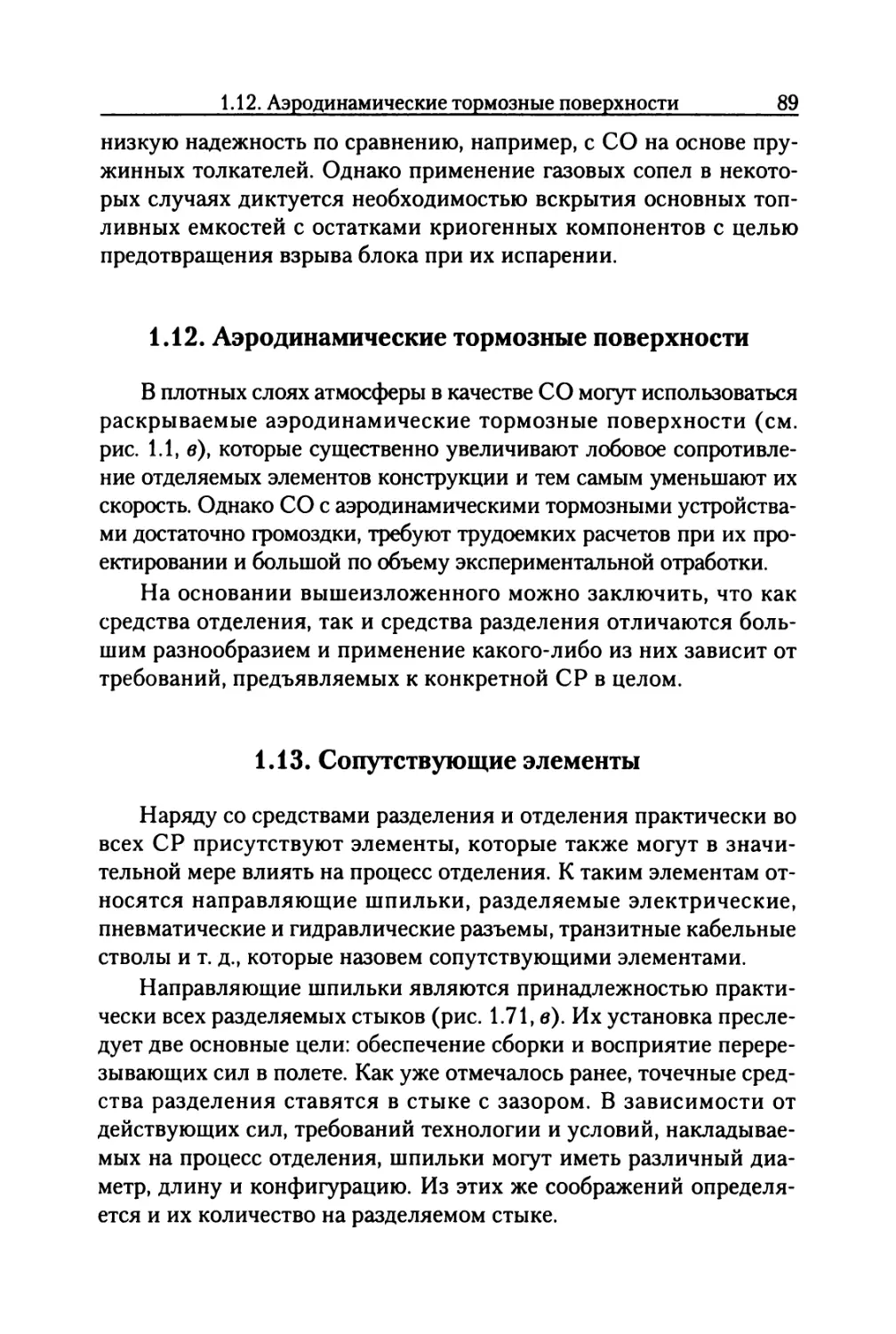
О назначении направляющих штырей или шпилек более подробно будет сказано в § 1.13. В этом случае имеет место относительное движение двух тел, имеющих связь в виде шарнира с тремя степенями свободы (продольное перемещение и повороты относительно ортогональных поперечных осей). Не во всех СР этого типа указанные участки имеют четко выраженные границы.
Так, например, при отделении отработавшей ступени по «горячей» схеме отсутствует участок свободного относительного движения. В случае применения в составе СР убирающихся шпилек (см. § 1.13) или линейных устройств разделения (см. § 1.5) будет отсутствовать шпилечный участок.
Во вторую группу можно объединить СР, имеющие дополнительную связь в виде оси вращения (см. рис. 1.13). С дополнительной осью вращения выполняются системы сброса ГО, происходит раскрытие солнечных батарей, кабель-мачт (КМ), антенн и т. д. По этой же схеме, как правило, производится отделение (штатное или аварийное) ступеней PH «пакетной» схемы. Процесс отделения указанных элементов можно разбить на следующие участки:
- срабатывание средств разделения;
- движение на оси вращения под действием СО;
- свободное относительное движение.
При сбросе, например ГО, его створки после раскрытия продольно-поперечного стыка поворачиваются на заданный угол, а затем, после раскрытия осей вращения, совершают свободное относительное движение. При открытии антенн или КМ участок свободного относительного движения отсутствует. После отвода указанных элементов на заданный угол происходит их фиксация в этом положении. Существуют, кроме того, СР, в которых совмещено вращательное движение отделяемого элемента относительно оси с поступательным движением ее вдоль паза.
Следует отметить, что некоторые СР (назовем их специальными) не могут быть отнесены ни к одной из описанных выше групп, и при проектировании каждой из них приходится создавать новую методику расчета. Примером такой системы может служить отделение переходного отсека скатыванием его по упругому ограждению в виде подпружиненных роликовых опор (см. рис. 1.10).
Указанная выше классификация СР позволяет существенно уменьшить количество методик, используемых для их расчета.
1.2. Элементы систем разделения
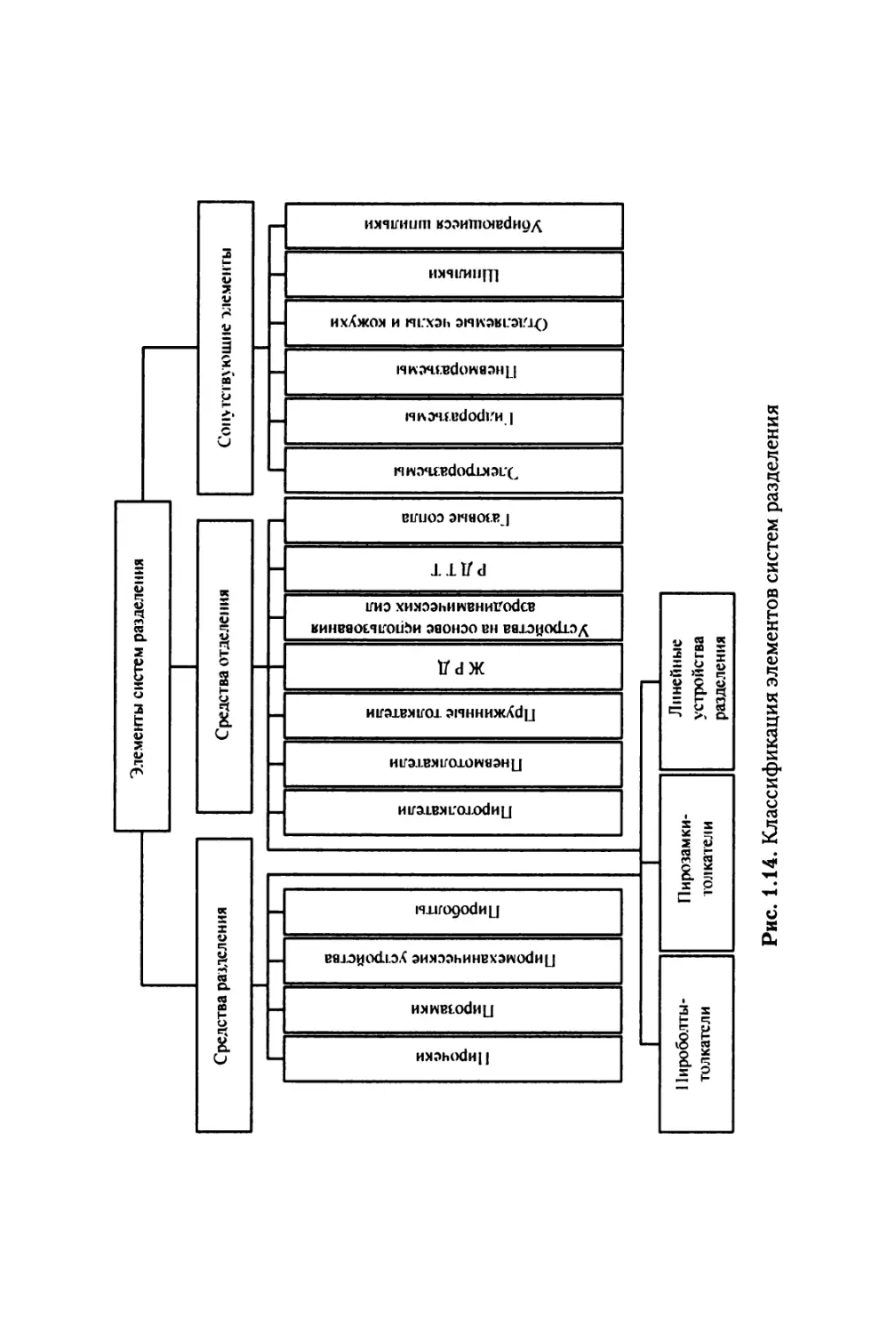
Многочисленность СР и масштабность стоящих перед ними задач привели к необходимости создания разнообразных исполнительных элементов, каждый из которых в составе конкретной СР выполняет определенные функции. В зависимости от конструктивных особенностей и назначения этих элементов разделим их на три группы (рис. 1.14):
- средства крепления и разделения;
- средства отделения;
- сопутствующие элементы.
Для срабатывания средств разделения и большинства СО необходима подача электрической команды, которая, принимая во внимание требования к быстродействию, минимальному разбросу по времени и т. д., реализуется, как правило, через пироустройство. Основные преимущества пироустройств: малые габариты и масса, высокая надежность, низкий расход энергии инициирующего импульса тока, простота электрической схемы, способность вырабатывать большое количество энергии за более короткое время по сравнению с любым из механических устройств, достаточно точное регулирование интенсивности действия, а также возможность обеспечения заданного периода задержки на срабатывание.
Рис. 1.14. Классификация элементов систем разделения
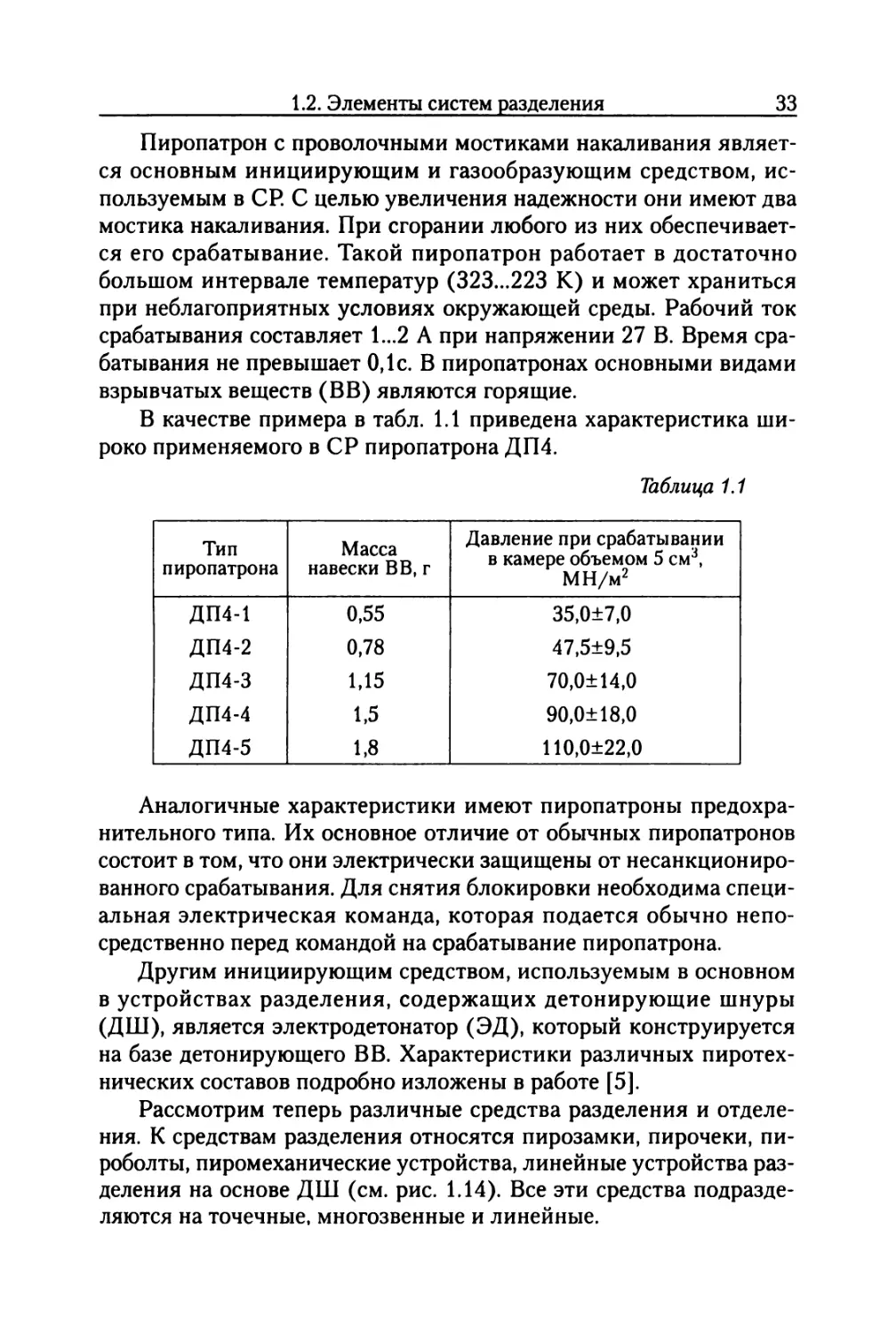
Пиропатрон с проволочными мостиками накаливания является основным инициирующим и газообразующим средством, используемым в СР. С целью увеличения надежности они имеют два мостика накаливания. При сгорании любого из них обеспечивается его срабатывание. Такой пиропатрон работает в достаточно большом интервале температур (323...223 К) и может храниться при неблагоприятных условиях окружающей среды. Рабочий ток срабатывания составляет 1...2 А при напряжении 27 В. Время срабатывания не превышает 0,1с. В пиропатронах основными видами взрывчатых веществ (ВВ) являются горящие.
В качестве примера в табл. 1.1 приведена характеристика широко применяемого в СР пиропатрона ДП4.
Таблица 1.1
Тип пиропатрона Масса навески В В, г Давление при срабатывании в камере объемом 5 см3, МН/м2
ДП4-1 0,55 35,0±7,0
ДП4-2 0,78 47,5±9,5
ДП4-3 1,15 70,0±14,0
ДП4-4 1,5 90,0±18,0
ДП4-5 1,8 110,0±22,0
Аналогичные характеристики имеют пиропатроны предохранительного типа. Их основное отличие от обычных пиропатронов состоит в том, что они электрически защищены от несанкционированного срабатывания. Для снятия блокировки необходима специальная электрическая команда, которая подается обычно непосредственно перед командой на срабатывание пиропатрона.
Другим инициирующим средством, используемым в основном в устройствах разделения, содержащих детонирующие шнуры (ДШ), является электродетонатор (ЭД), который конструируется на базе детонирующего ВВ. Характеристики различных пиротехнических составов подробно изложены в работе [5].
Рассмотрим теперь различные средства разделения и отделения. К средствам разделения относятся пирозамки, пирочеки, пироболты, пиромеханические устройства, линейные устройства разделения на основе ДШ (см. рис. 1.14). Все эти средства подразделяются на точечные, многозвенные и линейные.
Другой характерной группой элементов СР являются устройства, сообщающие разделившимся телам относительную скорость, которые назовем средствами отделения. В их состав входят пиротолкатели, пневматические и пружинные толкатели, импульсные средства отделения, РДТТ, жидкостные ракетные двигатели (ЖРД), газовые сопла, аэродинамические устройства.
Существуют, кроме того, такие элементы, которые являются одновременно средствами разделения и отделения. К ним относятся, например, пирозамки-толкатели и пироболты-толкатели.
К средствам разделения и отделения предъявляются следующие основные требования:
- минимальная масса и габариты;
- работоспособность в заданном температурном диапазоне;
- максимальная надежность;
- минимальное потребление электрической энергии при срабатывании;
- нечувствительность к динамическому нагружению и воздействию окружающей среды;
- минимальное динамическое воздействие на окружающие элементы конструкции;
- отсутствие вылетающих частей и осколков;
- простота конструкции и ее технологичность;
- взаимозаменяемость;
- минимальная стоимость;
- простота и безопасность в эксплуатации;
- обеспечение заданных эксплуатационных характеристик.
1.3. Пирозамок
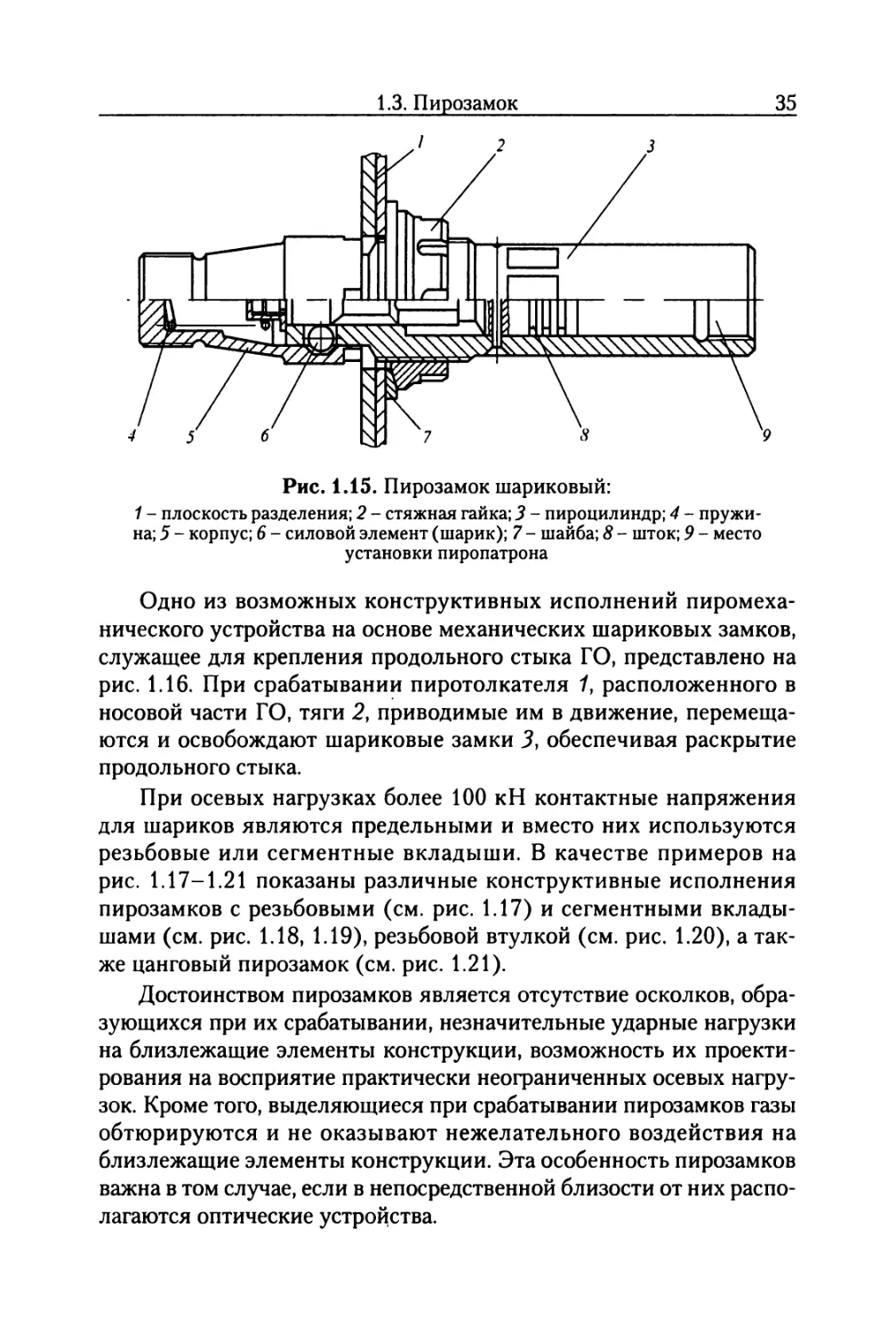
Пирозамки являются одним из наиболее распространенных точечных средств разделения. Существует целый ряд их разновидностей в зависимости от значения воспринимаемой нагрузки, наличия дублирования по пиротехническим и механическим средствам, конструктивных особенностей и т. д. Так, например, при малых осевых нагрузках (порядка нескольких десятков килоньютонов), приходящихся на узел связи, применяются шариковые пирозамки (рис. 1.15). Примером использования таких замков является крепление с их помощью ГЧ БРДД.
Рис. 1.15. Пирозамок шариковый:
1 - плоскость разделения; 2 - стяжная гайка; 3 - пироцилиндр; 4 - пружина; 5 - корпус; 6 - силовой элемент (шарик); 7 - шайба; 8 - шток; 9 - место установки пиропатрона
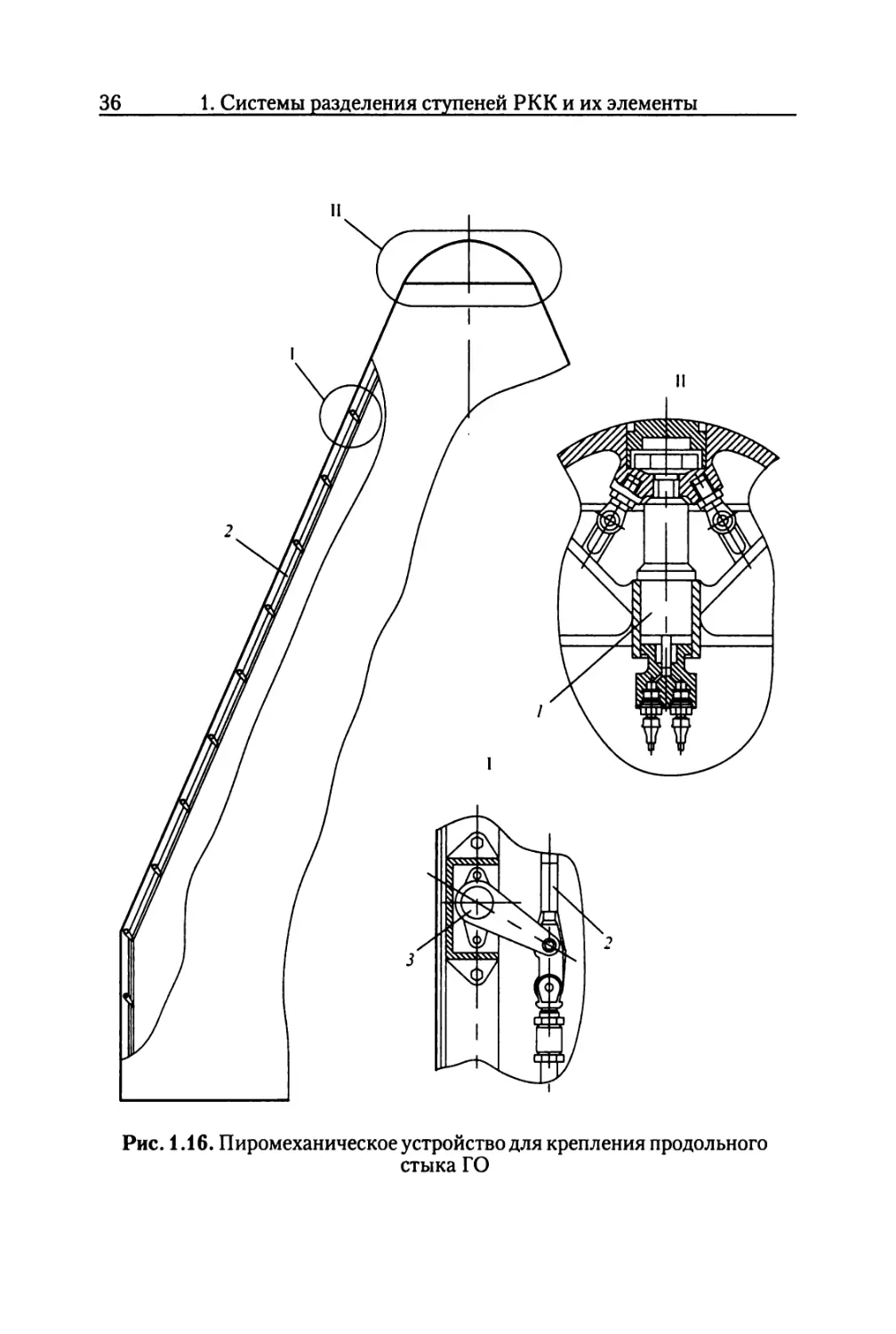
Одно из возможных конструктивных исполнений пиромеханического устройства на основе механических шариковых замков, служащее для крепления продольного стыка ГО, представлено на рис. 1.16. При срабатывании пиротолкателя 1, расположенного в носовой части ГО, тяги 2, приводимые им в движение, перемещаются и освобождают шариковые замки 3, обеспечивая раскрытие продольного стыка.
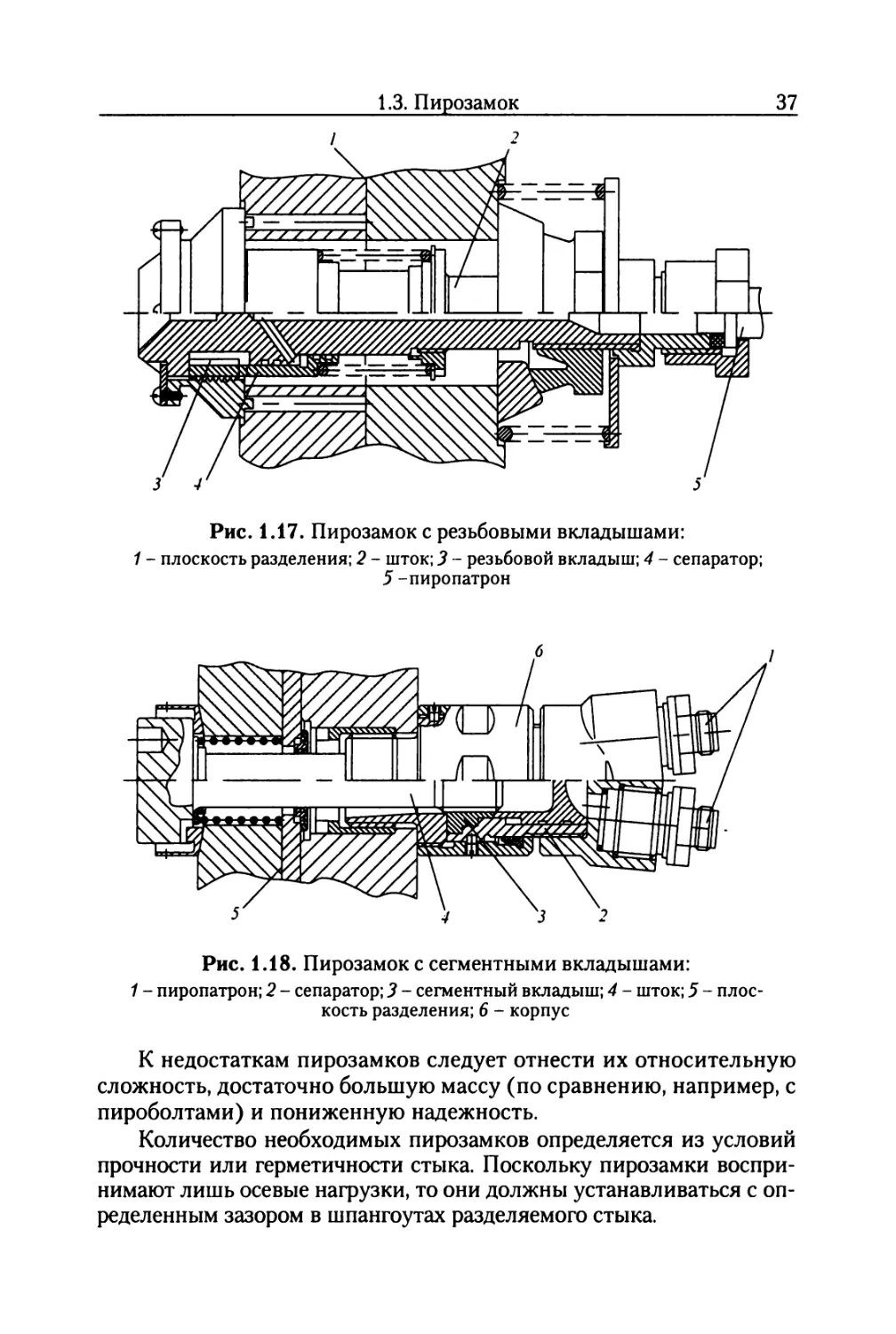
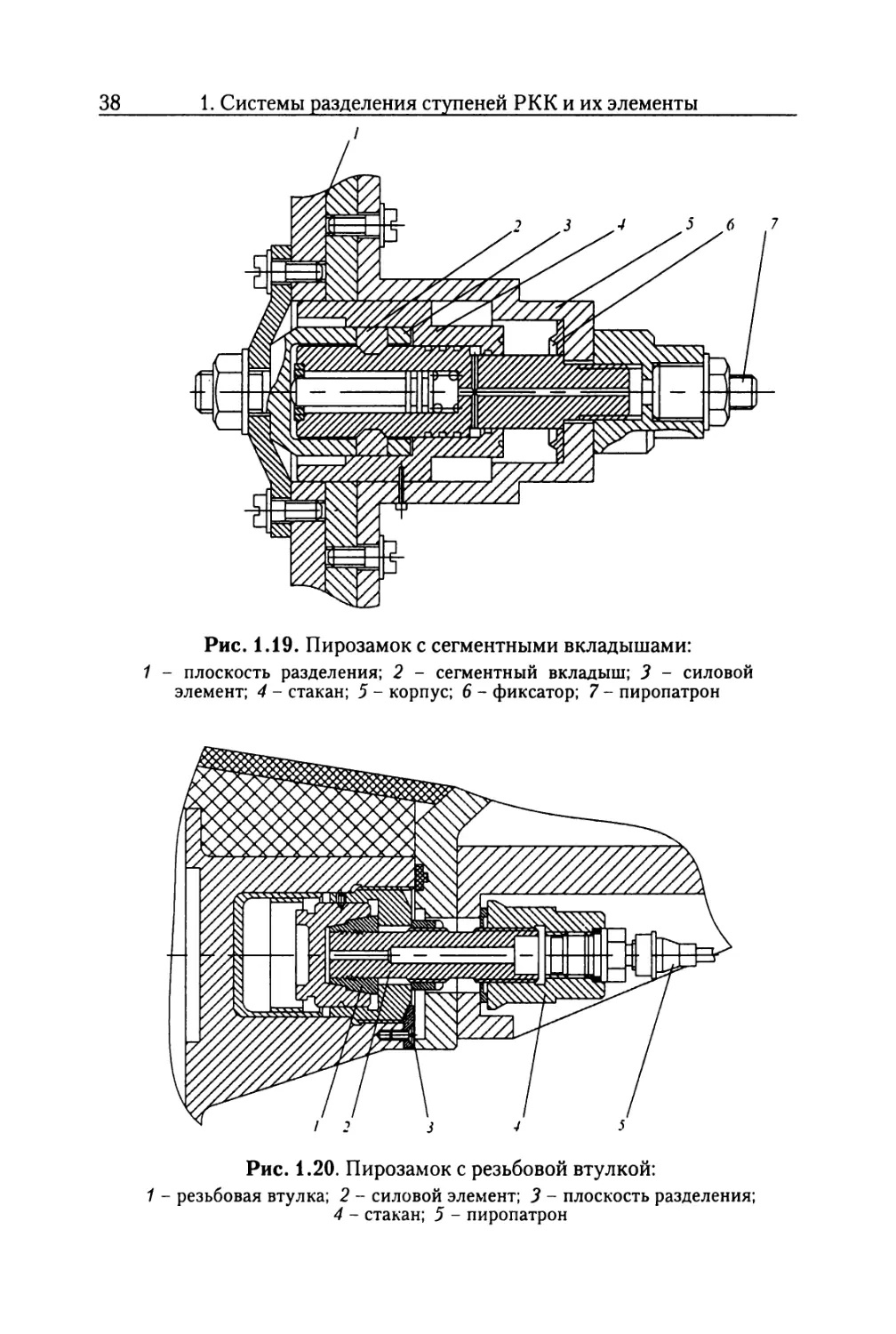
При осевых нагрузках более 100 кН контактные напряжения для шариков являются предельными и вместо них используются резьбовые или сегментные вкладыши. В качестве примеров на рис. 1.17-1.21 показаны различные конструктивные исполнения пирозамков с резьбовыми (см. рис. 1.17) и сегментными вкладышами (см. рис. 1.18, 1.19), резьбовой втулкой (см. рис. 1.20), а также цанговый пирозамок (см. рис. 1.21).
Достоинством пирозамков является отсутствие осколков, образующихся при их срабатывании, незначительные ударные нагрузки на близлежащие элементы конструкции, возможность их проектирования на восприятие практически неограниченных осевых нагрузок. Кроме того, выделяющиеся при срабатывании пирозамков газы обтюрируются и не оказывают нежелательного воздействия на близлежащие элементы конструкции. Эта особенность пирозамков важна в том случае, если в непосредственной близости от них располагаются оптические устройства.
Рис. 1.16. Пиромеханическое устройство для крепления продольного стыка ГО
Рис. 1.17. Пирозамок с резьбовыми вкладышами:
1 - плоскость разделения; 2 - шток; 3 - резьбовой вкладыш; 4 - сепаратор; 5 -пиропатрон
Рис. 1.18. Пирозамок с сегментными вкладышами:
1 - пиропатрон; 2 - сепаратор; 3 - сегментный вкладыш; 4 - шток; 5 - плоскость разделения; 6 - корпус
К недостаткам пирозамков следует отнести их относительную сложность, достаточно большую массу (по сравнению, например, с пироболтами) и пониженную надежность.
Количество необходимых пирозамков определяется из условий прочности или герметичности стыка. Поскольку пирозамки воспринимают лишь осевые нагрузки, то они должны устанавливаться с определенным зазором в шпангоутах разделяемого стыка.
/
Рис. 1.19. Пирозамок с сегментными вкладышами:
1 - плоскость разделения; 2 - сегментный вкладыш; 3 - силовой элемент; 4 - стакан; 5 - корпус; 6 - фиксатор; 7 - пиропатрон
Рис. 1.20. Пирозамок с резьбовой втулкой:
1 - резьбовая втулка; 2 - силовой элемент; 3 - плоскость разделения;
4 - стакан; 5 - пиропатрон
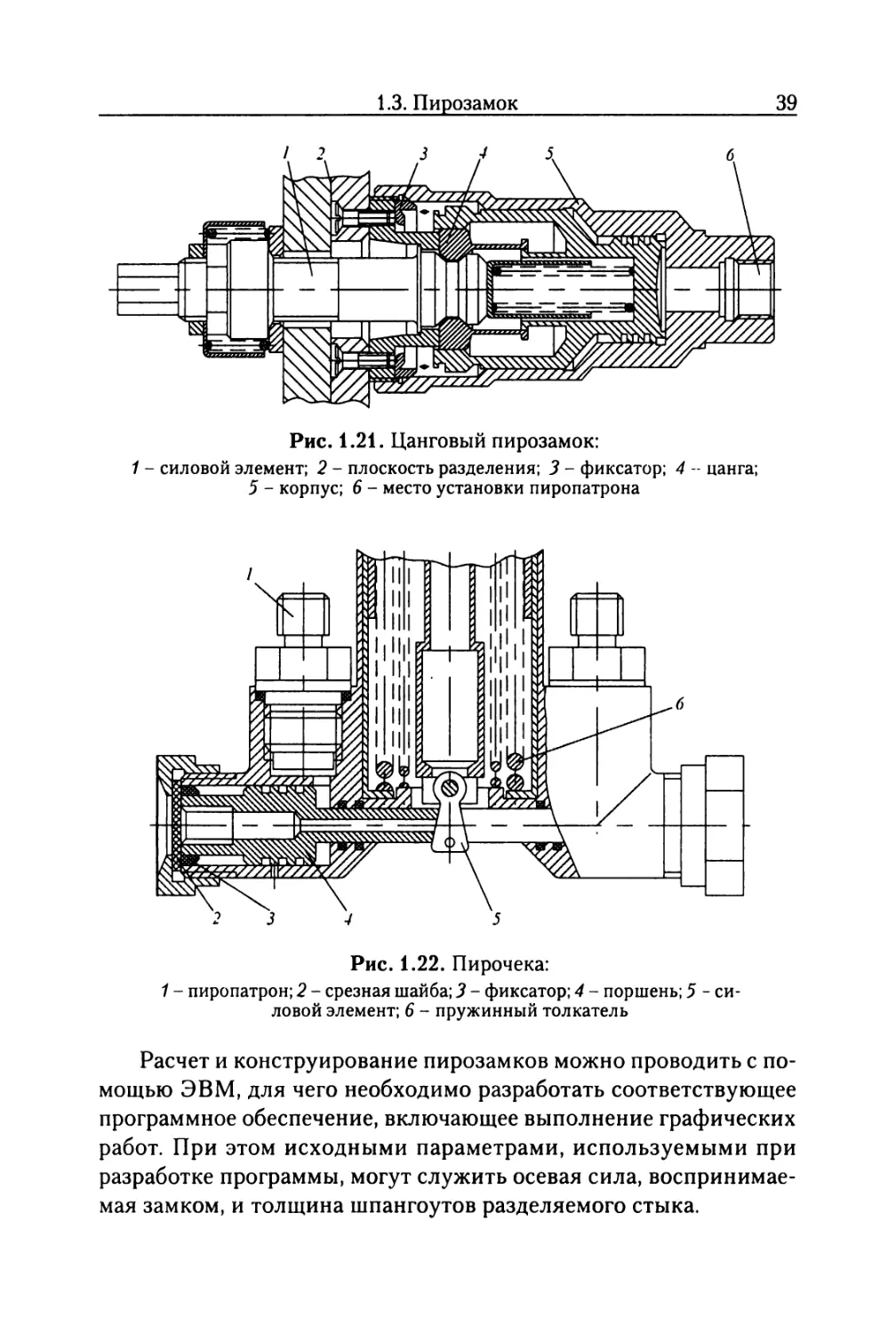
Рис. 1.21. Цанговый пирозамок:
1 - силовой элемент; 2 - плоскость разделения; 3 - фиксатор; 4 - цанга; 5 - корпус; 6 - место установки пиропатрона
Рис. 1.22. Пирочека:
1 - пиропатрон; 2 - срезная шайба; 3 - фиксатор; 4 - поршень; 5 - силовой элемент; 6 - пружинный толкатель
Расчет и конструирование пирозамков можно проводить с помощью ЭВМ, для чего необходимо разработать соответствующее программное обеспечение, включающее выполнение графических работ. При этом исходными параметрами, используемыми при разработке программы, могут служить осевая сила, воспринимаемая замком, и толщина шпангоутов разделяемого стыка.
Для крепления сравнительно небольших элементов конструкции, а также для фиксации СО служат пирочеки (рис. 1.22). Несмотря на относительно более простое устройство по сравнению с пирозамком, пирочека имеет существенный недостаток, а именно наличие в ее конструкции основного силового элемента, работающего на срез, что приводит к увеличению массы. Кроме того, пирочеки плохо компонуются на изделии.
1.4. Пироболт
Широко распространенным устройством для разделения является пироболт. Он применяется для крепления ступеней, ГЧ, стартовых ускорителей, ХО и т. д. Принцип работы пироболта прост. При подрыве заряда разрушается корпус пироболта, раскрывая соединяемый им стык. На рис. 1.23 показан пироболт и установка его на изделии. Существует целый ряд модификаций пироболтов в зависимости от воспринимаемой ими осевой силы и от ряда других признаков. Известно, что закаленные стали при разрушении образуют более ровный срез, чем незакаленные. Чем более хрупкой является сталь, тем легче она разрушается под действием динамических нагрузок. Хорошо зарекомендовавшей себя маркой стали, используемой для изготовления корпусов пироболтов, является ОХНЗМ.
Масса пироболта в зависимости от воспринимаемой им осевой силы Р, измеряемой в килоньютонах, может быть определена на основании эмпирической зависимости тх^ = (0,8625Р + 80) г. Аналогично может быть записано соотношение для определения массы заряда пироболта т11Н = (0,0065Р) г. Коэффициенты, входящие в эти соотношения, имеют соответствующие размерности.
К достоинствам пироболтов следует отнести простоту их конструкции, отсутствие подвижных элементов, небольшие габариты и массу, быстроту и незначительную разновременность срабатывания. Так, разновременность срабатывания группы из четырех пироболтов не превышает 0,003 с. Ток срабатывания пироболтов составляет 0,8...1,2 А, что меньше, чем у пиропатронов. Все это привело к их широкому использованию в составе РКК.
Несмотря на указанные достоинства, пироболты обладают двумя основными недостатками, которые приводят к ограничению, а в некоторых случаях и к невозможности их применения.
Плоскость разделения
Рис. 1.23. Пироболт
Первым из них является образование осколков, которые могут повредить близлежащие элементы конструкции. Вторым - возникновение ударных нагрузок, отрицательно сказывающихся на работе приборов, а также на элементах гидро- и пневмоавтоматики. Если первый недостаток легко устраняется введением специальной защиты, улавливающей осколки, то борьба со вторым крайне затруднительна. Это является одной из основных причин, как правило, исключающей применение пироболтов, воспринимающих большие (1000 кН и более) нагрузки.
1.5. Линейные устройства разделения
Все описанные выше средства разделения предназначены для соединения расчлененных стыков. Применение линейных пироустройств разделения на основе ДШ или удлиненных кумулятивных
зарядов (УКЗ) позволяет выполнить отделяемые отсеки без специального промежуточного стыка. Указанный вид устройств разделения имеет такие преимущества, как небольшие габариты и масса, малое время срабатывания, потребление незначительного количества электроэнергии, высокая надежность, сравнительно невысокая стоимость. Благодаря достаточно широким возможностям и простоте технических решений по защите линейных устройств от внешних воздействий их несанкционированное срабатывание практически исключено.
Большой практический вклад в разработку линейных устройств разделения сделан Институтом электросварки им. Е.О. Патона.
Рассмотрим более подробно вопросы, связанные с использованием УКЗ [24]. Эти устройства применяются для отсечки тяги РДТТ, разделения ступеней, узлов и агрегатов КА, выброса и отсечки парашютных систем, вскрытия люков, перерезания трубопроводов и бортовой кабельной сети и т. д.
Стандартные УКЗ диаметром DyK3 имеют характеристики, представленные в табл. 1.2.
Таблица 1.2
Диаметр УКЗ, мм Масса ВВ на погонный метр УКЗ, г/пог.м Глубина пробивания преграды из СтЗ, мм Глубина пробивания преграды из АМгб, мм
3 5,6 3,5 5,5
4 10,4 4 7
5 12,5 5,5 9
6 22 7 И
7 32 8 13
8 40 8,5 15
9 56 9 16
10 60 И 18
13 89 14 24
14,5 132 16 26
16 176 18 28
19 212 21 34
22 300 23 40
Рис. 1.24. Удлиненный кумулятивный заряд с линзой:
1 - оболочка; 2 - линза; 3 - ВВ; 4 - облицовка
Под глубиной пробивания преграды здесь понимается толщина перерезаемого образца. В образовании кумулятивной струи принимает участие не весь объем ВВ, которым заполнен стандартный УКЗ, а только его некоторая, так называемая активная часть заряда 3, имеющая диаметр (рис. 1.24). Важнейшим условием применения УКЗ является снижение влияния продуктов взрыва ВВ на элементы конструкции РКК. Одним из возможных путей является уменьшение количества ВВ на погонный метр УКЗ без снижения его пробивной способности. Экспериментально установлено, что в первом приближении активную и неактивную части
заряда можно разделить кривой, равноудаленной от оболочки и облицовки УКЗ. Неактивную часть заряда можно заменить линзой 2 из меди. В табл. 1.3 даны сравнительные значения массы ВВ в граммах на погонный метр в стандартных УКЗ и в УКЗ с медной линзой (глубины пробивания одинаковые).
Таблица 13
Диаметр УКЗ, мм Стандартный УКЗ УКЗ с линзой
7,0 32 21
10,0 60 33
13,0 89 53
14,5 132 86
19,0 212 155
22,0 300 220
На рис. 1.25 представлена экспериментальная зависимость глубины 1р пробивания преграды по оси симметрии УКЗ от толщины Двв слоя ВВ между кумулятивной выемкой и металлической оболочкой заряда, на рис. 1.26 - зависимость глубины пробивания от толщины 8^в облицовки кумулятивной выемки (см. рис. 1.24). Из этих рисунков следует, что оптимальными характеристиками обладают УКЗ со следующими параметрами: lp/d3 = 1,0... 1,1; Двв/^з > °>25; °>065 < «кв /^з < 0,085.
Рис. 1.25. Экспериментальная зависимость глубины пробивания преграды от толщины слоя В В
Рис. 1.26. Зависимость глубины пробивания преграды от толщины облицовки кумулятивной выемки
На рис. 1.27 представлена зависимость глубины пробивания преграды от массы р навески ВВ в УКЗ на погонный метр и приведены сечения двух наиболее предпочтительных типов УКЗ нестандартных профилей (УКЗ-УН). Основным критерием эффективности их действия является глубина пробивания преграды. На рис. 1.28 показаны результаты экспериментов по определению глубины пробивания преграды из СтЗ в зависимости от диаметра rfKB кумулятивной выемки, из которых видно, что оптимальное значение rfKB/Z? = 0,5. Зная оптимальный диаметр кумулятивной выемки для данного типа УКЗ-УН, можно определить оптимальную толщину кумулятивной облицовки при ширине b = const. На рис. 1.29 приведены результаты экспериментов, из которых следует, что величина 6^B/rfKB = 0,16...0,17. На рис. 1.30 дана опытная зависимость глубины 1р перерезания преграды от толщины Двв слоя ВВ для УКЗ-УН трех типов, причем предполагалось, что все прочие параметры УКЗ-УН оптимальные. В соответствии с полученными результатами Двв / rfKB = 0,4...0,44.
Сравнительный анализ УКЗ-УН с цилиндрической кумулятивной выемкой (см. рис. 1.27) и стандартного УКЗ показал, что первый из них эффективнее на 12...20 %.
Другой возможной конфигурацией кумулятивной выемки является клиновая (см. рис. 1.27). Важным параметром, существенно влияющим на глубину пробивания преграды, является угол а при вершине кумулятивной выемки. На рис. 1.31 приведена зависимость глубины пробивания преграды из СтЗ от значения этого угла, из которой следует, что оптимальный угол составляет около 70°.
Рис. 1.27. Зависимость глубины пробивания преграды от массы навески ВВ для УКЗ нестандартных профилей (УКЗ-УН) с цилиндрической (/) и клиновой (2) выемкой
Рис. 1.28. Экспериментальная зависимость глубины пробивания преграды от диаметра кумулятивной выемки: Х-УКЗ-УН12; Д-УКЗ-УН16
d кв
Рис. 1.29. Определение оптимальной толщины кумулятивной облицовки:
Х-УКЗ-УН12, dKh = 6,0 мм, 5^= 1,0 мм; О - УКЗ-УН14.5, б/кв = 7,25 мм, 5кв=1,2мм; Д - УКЗ-УН16, б/кв = 8,0 мм, 5КВ = 1,3 мм
Рис. 1.30. Зависимость глубины пробивания преграды от толщины слоя ВВ:
х - УКЗ-УН12; О - УКЗ-УН14.5; А - УКЗ-УН16
1р
Рис. 1.31. Зависимость глубины пробивания преграды от угла при вершине кумулятивной выемки: х - УКЗ-УН12; О - УКЗ-УН14.5; А - УКЗ-УН16
Результаты экспериментов показали, что эффективная толщина облицовки кумулятивной выемки на 15...20 % больше, чем у стандартного УКЗ. На рис. 1.32 представлена опытная зависимость (при а= 70° и оптимальном значении 5кВ) глубины пробивания преграды из СтЗ от Двв, в соответствии с которой Двв / b = = 0,22...0,23.
1 р
ь
Рис. 1.32. Зависимость глубины пробивания преграды от толщины слоя ВВ:
X - УКЗ-УН12; Д - УКЗ-УН14.5; О - УКЗ-УН16
Эффективная глубина пробивания преграды УКЗ-УН с оптимальными характеристиками в зависимости от массы В В на погонный метр для различных материалов преграды представлена на рис. 1.33.
На рис. 1.34 приведены экспериментальные характеристики эффективности УКЗ-УН с клиновой и цилиндрической кумулятивными выемками по сравнению со стандартным УКЗ при пробивании преграды из СтЗ для различных значений массы навесок ВВ на погонный метр. Из них видно, что УКЗ-УН с клиновой кумулятивной выемкой эффективнее стандартного на 25...30 %. Оптимальное фокусное расстояние (расстояние от УКЗ до преграды) для такого типа УКЗ составляет/= (0,7... 1,2)6.
Рис. 1.33. Зависимость глубины пробивания преграды от массы ВВ на погонный метр для различных материалов преграды:
1 - СтЗ; 2 - титановый сплав; 3 - высокопрочная сталь типа А К
Как уже отмечалось, существенным недостатком УКЗ всех типов является образование и разлет во всех направлениях осколков, образующихся при их срабатывании. На рис. 1.35 представлено устройство для защиты от продуктов детонации и разлетающихся элементов корпуса УКЗ. Размеры такого устройства даны в табл. 1.4.
Таблица 1.4
Ширина b УКЗ-УН, мм Навеска ВВ, г/пог.м Материал кожуха В, мм Л, мм А, мм /, мм
6 18 ЛМгб 50 36 26 6
6 18 СтЗ 30 25 14 6
6 18 СтАК 24 20 10 6
10 44 СтЗ 45 41 22 10
10 44 СтАК 36 36 17 10
12 80 СтЗ 75 58 36 12
12 80 СтАК 55 47 25 12
Примечание. В - ширина, /г - высота, А - толщина устройства.
Рис. 1.34. Зависимость глубины пробивания преграды из СтЗ от массы ВВ на погонный метр:
х - стандартный УКЗ; А - У КЗ-УН 16 с цилиндрической кумулятивной выемкой; О - У КЗ-УН с клиновой кумулятивной выемкой
Рис. 1.35. Устройство для защиты от продуктов детонации
Для дублирования пироустройства на основе УКЗ по заряду возможна параллельная установка двух УКЗ под углом (рис. 1.36) таким образом, чтобы кумулятивные струи пересекались в одной точке поперечного сечения УКЗ. При этом, как показали эксперименты, образуется кольцо из перерезаемого материала, что во многих случаях недопустимо.
Рис. 1.36. Дублированное по заряду пироустройство на основе УКЗ:
1 - перерезаемая преграда; 2 - амортизирующая оболочка; 3 - УКЗ; 4 - корпус
При испытаниях УКЗ, у которых струи сходятся на преграде, а также на некотором расстоянии выше нее, она вообще не перерезается. Если струи сходятся на обратной стороне преграды, то при срабатывании устройства образуется кольцо, имеющее в сечении треугольную форму. При установке двух УКЗ под углом а друг к другу толщина перерезаемой преграды увеличивается на 10...15 %. Дублирование по заряду пироустройств на основе УКЗ целесообразно осуществлять зеркальной установкой двух УКЗ относительно преграды.
УКЗ поставляется в виде элементов определенной длины. Естественно, что в процессе их сборки в единый пироузел возникает необходимость их стыковки по торцам. С целью определения передачи детонации между секциями УКЗ были проведены экспериментальные исследования по определению влияния несоосности торцов УКЗ по вертикали 8В, горизонтали 8Г и зазора 8Т между торцами (см. рис. 1.37) на характер перерезания. Они показали,
что при 5В = 5Г = 0 и 8Т = £>укз в месте зазора перерезание отсутствует. Чтобы избежать этого, указанный зазор не должен превышать 1 мм, а смещение 5В <0,1£)укз и 8Г <0,08DyK3.
Рис. 1.37. Возможные несоосности торцов УКЗ по вертикали и горизонтали и зазоры между торцами
Необходимо, чтобы расстояние между ЭД и УКЗ (см. рис. 1.37) удовлетворяло условию 8г<0,1£)укз. Допустимый зазор по вертикали лежит в диапазоне 8В = 0,1...0,15 мм. В противном случае глубина бронепробивания уменьшается на 10...30 %.
Для передачи детонации от одной секции УКЗ к другой расстояние 8 между ними должно подчиняться соотношению 8 <2DyK3 для УКЗ с линзами и 8<3£)укз для УКЗ с клиновыми кумулятивными
выемками. В случае срабатывания второго заряда при инициировании первого перерезание преграды практически отсутствует. Установка металлической пластины толщиной 3...5 мм между зарядами УКЗ исключает детонацию второго при срабатывании первого.
Основным недостатком пироустройств разделения на основе УКЗ является разлет при их детонации фрагментов оболочки и осколков, образующихся при перерезании преграды, а также оседание копоти на близлежащих элементах конструкции. Кроме того, они содержат большое количество В В на погонный метр, что приводит при их срабатывании к значительным ударным нагрузкам.
Для уменьшения или даже полного устранения этих недостатков были разработаны линейные устройства разделения (ЛУР) на основе ДШ. Возможные конструктивные исполнения ЛУР изображены на рис. 1.38 и 1.39. Представленные пироустройства обладают следующими достоинствами: отсутствие загрязнения и осколков, разновременности в срабатывании, а также меньшие по сравнению с УКЗ ударные нагрузки.
Следует, однако, отметить, что ЛУР в сравнении с УКЗ имеют большую стоимость, кроме того, их труднее устанавливать и обслуживать. Устройство ЛУР и схема подключения к нему ЭД представлены на рис. 1.40. Внешняя оболочка ЛУР обычно изготавливается из стали Х18Н9(10)Т. Цилиндрическая часть оболочки при срабатывании ДШ практически не раздувается, поэтому ее делают сплющенной. Заряд помещается в медную или эластичную оболочку и устанавливается в наполнитель из вакуумной резины. Заряд в металлической оболочке способен работать в диапазоне температур 73...423 К и обладает высокой механической прочностью. Плотность заряда составляет (1,6...1,62) • 103кг/м3. Наполнитель существенно снижает вибронагрузки. Параметры используемых зарядов приведены в табл. 1.5.
Таблица 1.5
Наружный диаметр заряда, мм Толщина стенки заряда, мм Навеска ВВ, г/пог. м Масса погонного метра, г
1,60 0,280 1,12 11,3
1,60 0,300 1,19 12,6
1,77 0,330 1,56 15,9
1,85 0,350 1,63 16,8
2,00 0,376 2,03 21,1
2,21 0,419 2,30 24,7
Окончание табл. 1.5
Наружный диаметр заряда, мм Толщина стенки заряда, мм Навеска ВВ, г/пог. м Масса погонного метра, г
2,50 0,474 3,01 32,3
2,70 0,507 3,57 37,7
3,00 0,509 4,51 46,8
Рис. 1.38. Линейные устройства разделения на основе детонирующего шнура со сплющенной оболочкой с одним (а) и двумя (6) зарядами:
I - до разделения; II - после разделения; 1 - детонирующий шнур; 2 - линейное устройство разделения
б
Рис. 1.39. Линейные устройства разделения на основе детонирующего шнура с одним (а) и двумя (б) зарядами:
I - до разделения; II - после разделения; 1 - линейное устройство разделения; 2 - детонирующий шнур
При взрыве заряда ДШ (см. рис. 1.38) в инертном наполнителе образуется газовая полость. Газообразные продукты, воздействуя на наполнитель, деформируют без нарушения целостности металлическую оболочку либо в упругой, либо в упругопластической областях. Расширяясь, оболочка производит разрушение связей элементов PH или КА. Оптимальными, как это показали экспериментальные данные, являются ЛУР, уплющение которых (отношение ширины к высоте) d /Ь = 2,8 (см. рис. 1.40).
Рис. 1.40. Линейное устройство разделения:
1 - электродетонатор; 2 - стакан; 3 - промежуточный заряд; 4 - оболочка ЛУР; 5 - наполнитель; 6 - детонирующий шнур
На рис. 1.41 показано изменение при взрыве заряда ДШ размера b /2 оболочки ЛУР, которое назовем эффективностью 5пур, в зависимости от массы В В на погонный метр для различных значений упл гашения оболочки d/b. Увеличение межцентрового расстояния а между зарядами в ЛУР приводит к образованию двух самостоятельных газовых камер и его эффективность падает. С увеличением массы заряда деформация оболочки будет определяться в основном избыточ
ным давлением газов, образующихся при взрыве. В этом случае эффективность ЛУР практически не зависит от межцентрового расстояния между зарядами. Влияние межцентрового расстояния между зарядами на эффективность ЛУР представлено на рис. 1.42. На рис. 1.43 показано влияние количества зарядов и их диаметра б/3 на эффективность ЛУР при уплющении d/Ь- 2,8, а на рис. 1.44 влияние массы навески ВВ р в заряде на эффективность действия ЛУР Представленные выше результаты экспериментов позволяют установить оптимальные соотношения и параметры отдельных элементов ЛУР Концентратор напряжения выгоднее всего помещать в середине разламываемой оболочки. Детонация от одного заряда к другому через наполнитель не передается.
Рис. 1.41. Зависимость эффективности ЛУР от массы ВВ на погонный метр: о - d/b = 2,79; b-d/b = 2,06
Рис. 1.42. Влияние межцентрового расстояния между зарядами на эффективность ЛУР:
о - диаметр заряда 1,55 мм; д - диаметр заряда 3,1 мм
Рис. 1.43. Влияние диаметра зарядов на эффективность ЛУР:
О - один заряд; Д - два заряда; 1 - зона прорыва оболочки ЛУР
Рис. 1.44. Эффективность ЛУР в зависи-мостит от массы навески ВВ на погонный метр:
О- один заряд; Д - два заряда; 1 - зона прорыва оболочки ЛУР
На рис. 1.45 показана зона гарантированного разделения для сборки, работающей на срез до разламывания накладок, а на рис. 1.46 для сборки, работающей на разламывание накладок по концентратору.
Для передачи детонации от одного ЛУР к другому применяются заряды с насыпным гексогеном в цилиндрических медных оболочках, а также отрезки шнуров, имеющих больший диаметр, чем диаметр основного заряда. При установке зарядов встык детонация передастся не всегда, а при установке внахлест вообще не передается. Для гарантированной детонации необходимо устанавливать вставку с промежуточным зарядом. Одно из возможных кон
структивных исполнений стыковочной муфты неразъемного типа представлено на рис. 1.47. На рис. 1.48 показан узел для инициирования ЛУР, а на рис. 1.49 - виды концевых заделок ЛУР.
Рис. 1.45. Зона гарантированного разделения для сборки, работающей на срез до разламывания накладок:
О - экспериментальные значения; 1 - один заряд; 2 - два заряда; 3 - зона прорыва оболочки ЛУР; 4 - область гарантированного разделения сборки без прорывов оболочки ЛУР
Рис. 1.46. Зона гарантированного разделения для сборки, работающей на разламывание накладок по концентратору:
О - экспериментальные значения; 1 - один заряд; 2 - два заряда; 3 - зона прорыва оболочки ЛУР; 4 - область гарантированного разделения сборки без прорывов оболочки ЛУР
Рис. 1.47. Стыковочная муфта неразъемного типа:
1 - фланцы модулей ЛУР; 2 - уплотнительный паз в муфте; 3 - прокладка;
4 - гайка поджимная; 5 - модуль ЛУР; 6 - основной заряд; 7 - насыпной заряд
Рис. 1.48. Узел для инициирования ЛУР:
1 - промежуточные заряды; 2 - муфта; 3 - прокладка резиновая;
4 - электродетонатор; 5 - корпус детонатора; 6 - паз уплотнительный; 7 - гайка поджимная; 8 - оболочка модуля; 9 - наполнитель модуля; 10 - заряд; 11 - заглушка; 12 - прокладка уплотнительная
Общим недостатком пироустройств на основе линейных зарядов является наличие в их составе элементов с легковоспламеняющимися и детонационно-способными веществами. Кроме того, это устройства одноразового действия, что исключает их проверку на функционирование. В связи с этим необходимо проводить большое количество испытаний в условиях, максимально приближенных к натурным.
Рис. 1.49. Виды концевых заделок ЛУР:
а - концевая заглушка, обжатая взрывом; б - заглушка, установленная по легкопрессовой посадке; в - клеевая заглушка; г - механическая заглушка; д - комбинированная заглушка на клею; 1 - оболочка ЛУР; 2 - наполнитель; 3 - заряд; 4 - заглушка; 5 - фланец, приваренный к оболочке ЛУР
Каждое из рассмотренных средств разделения обладает специфическими конструктивными особенностями, определенными достоинствами и недостатками; применение того или иного из них в реальных конструкциях требует предварительной проработки и технического обоснования.
В качестве примера приведем конструктивное исполнение пиромеханического верхнего узла разделения центрального и бокового блоков PH «Энергия». На рис. 1.50, а он показан в исходном состоянии, а на рис. 1.50, б - после срабатывания.
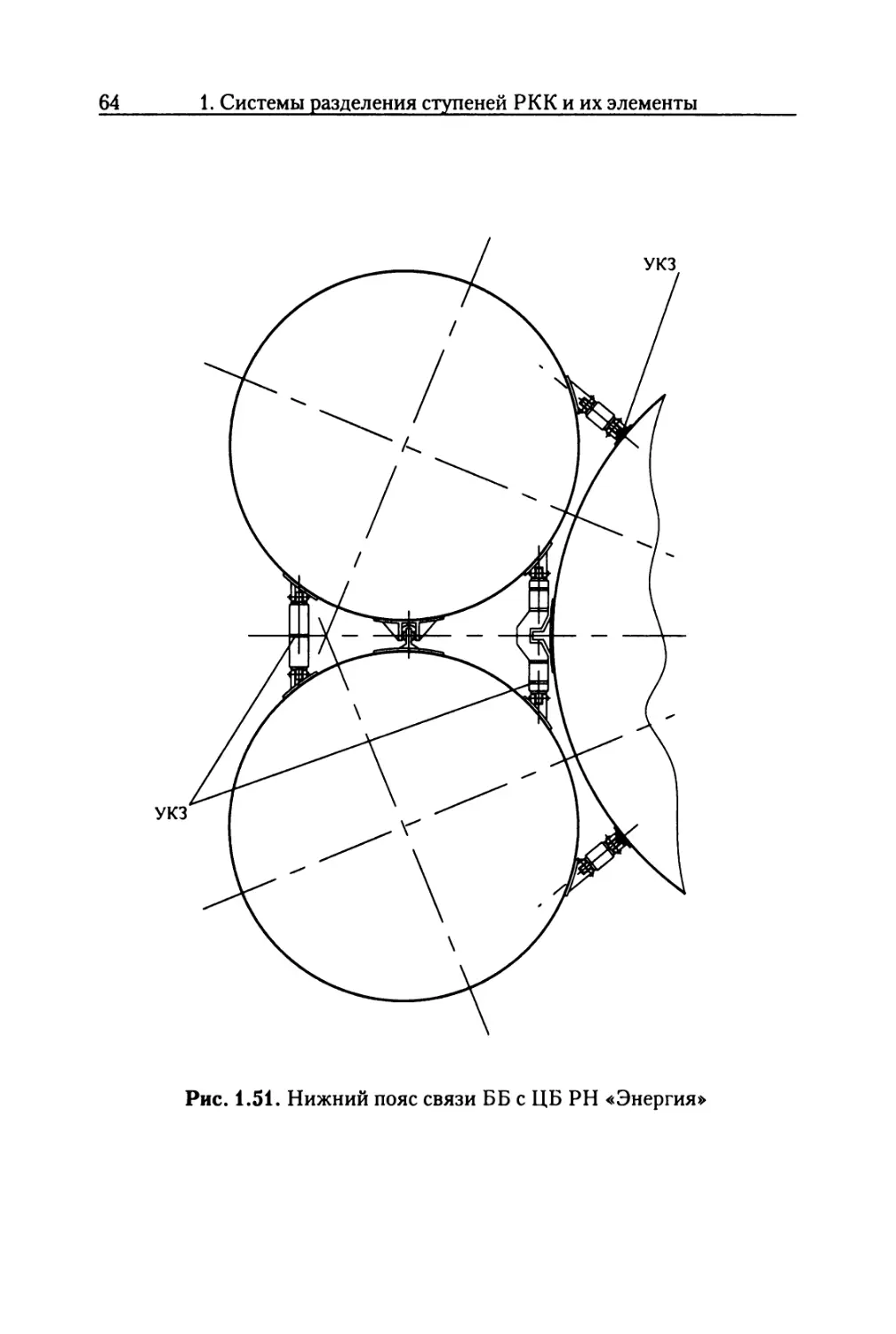
На рис. 1.51 изображен нижний пояс силовой связи ББ с ЦБ PH «Энергия».
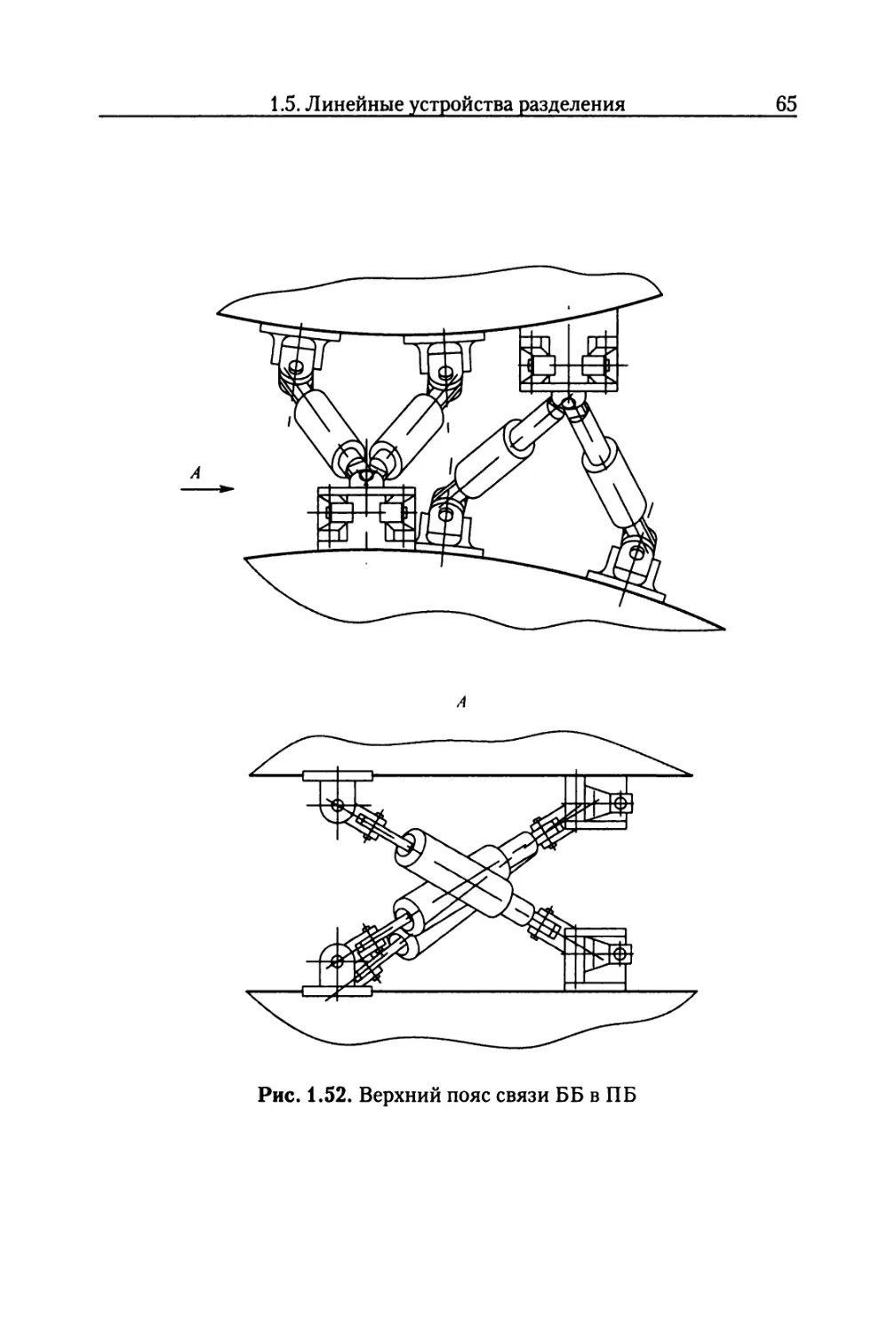
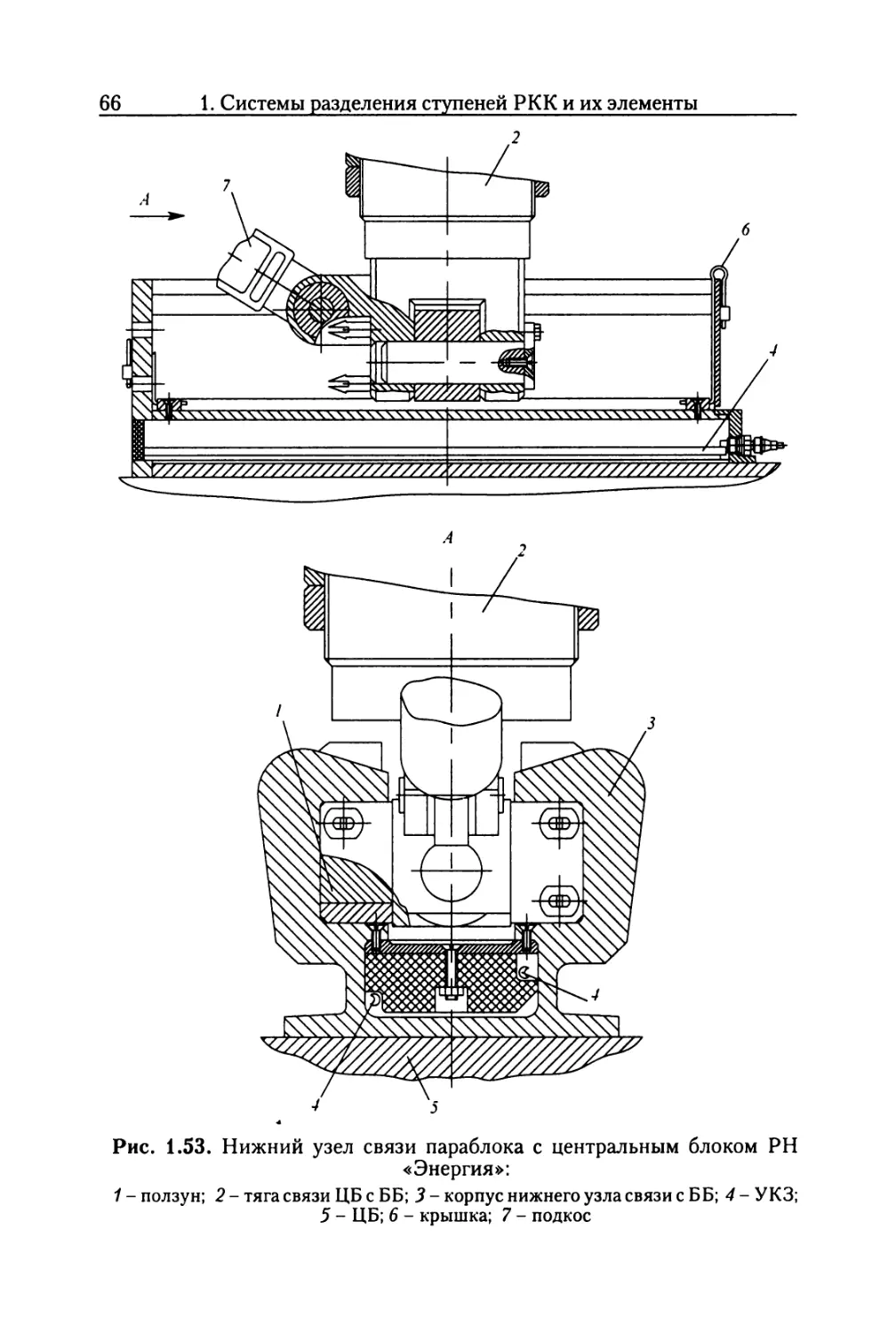
На рис. 1.52 представлен верхний пояс связи ББ в ПБ. Как видно из рис. 1.53, в случае несрабатывания основного контура разделения нижнего узла связи ПБ с ЦБ, который построен на основе УКЗ, разделение осуществляется чисто механическим путем.
ДШ
а
Рис. 1.50. Пиромеханический верхний узел разделения ББ и ЦБ PH «Энергия» в исходном положении (а) и после срабатывания (б)
Рис. 1.51. Нижний пояс связи ББ с ЦБ PH «Энергия»
Рис. 1.52. Верхний пояс связи ББ в ПБ
Рис. 1.53. Нижний узел связи параблока с центральным блоком PH «Энергия»:
1 - ползун; 2 - тяга связи ЦБ с ББ; 3 - корпус нижнего узла связи с Б Б; 4 - УКЗ; 5 - ЦБ; 6 - крышка; 7 - подкос
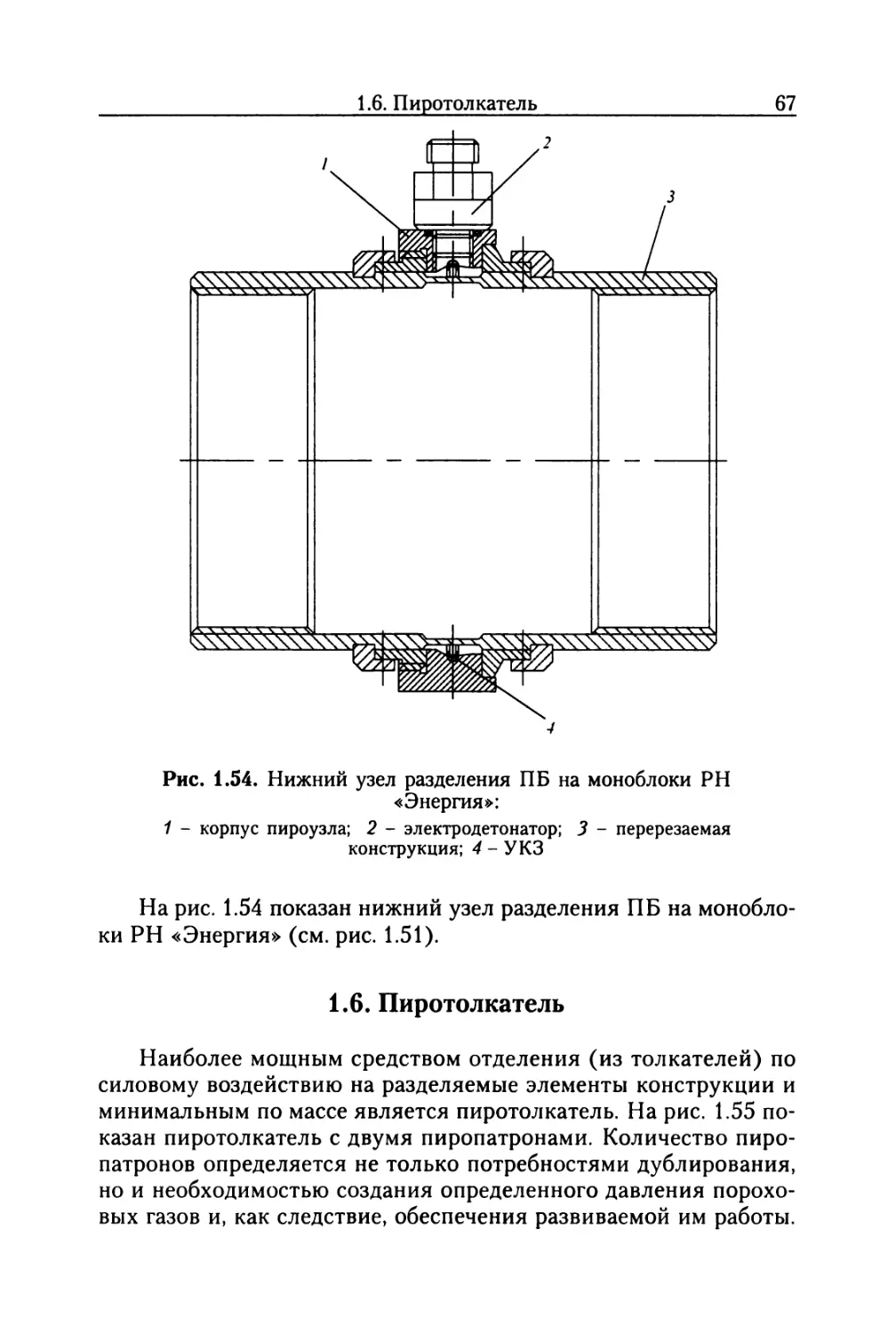
Рис. 1.54. Нижний узел разделения ПБ на моноблоки PH «Энергия»:
1 - корпус пироузла; 2 - электродетонатор; 3 - перерезаемая конструкция; 4 - УКЗ
На рис. 1.54 показан нижний узел разделения ПБ на моноблоки PH «Энергия» (см. рис. 1.51).
1.6. Пиротолкатель
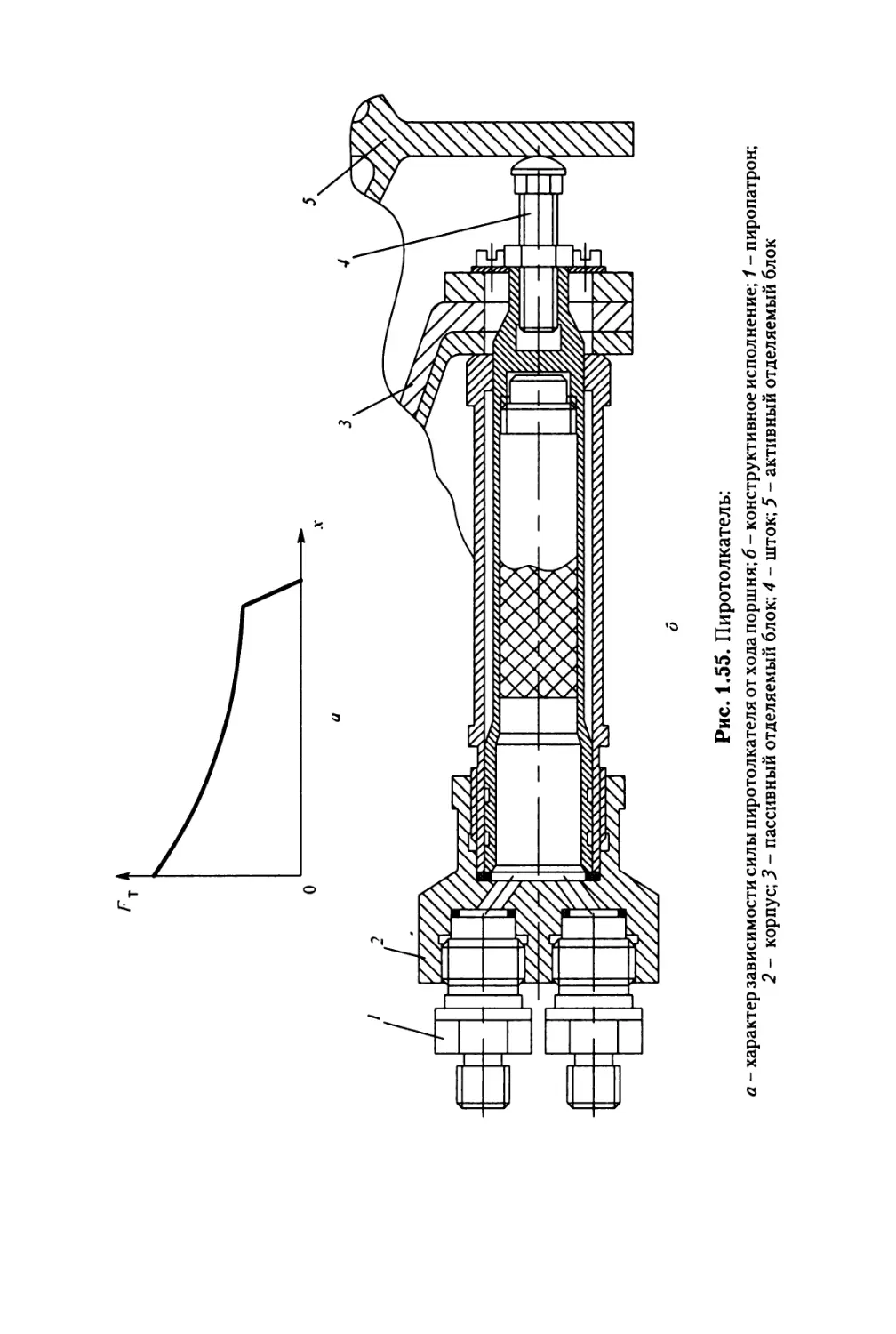
Наиболее мощным средством отделения (из толкателей) по силовому воздействию на разделяемые элементы конструкции и минимальным по массе является пиротолкатель. На рис. 1.55 показан пиротолкатель с двумя пиропатронами. Количество пиропатронов определяется не только потребностями дублирования, но и необходимостью создания определенного давления пороховых газов и, как следствие, обеспечения развиваемой им работы.
Рис. 1.55. Пиротолкатель:
а - характер зависимости силы пиротолкателя от хода поршня; 6 - конструктивное исполнение; 1 - пиропатрон;
2 - корпус; 3 - пассивный отделяемый блок; 4 - шток; 5 - активный отделяемый блок
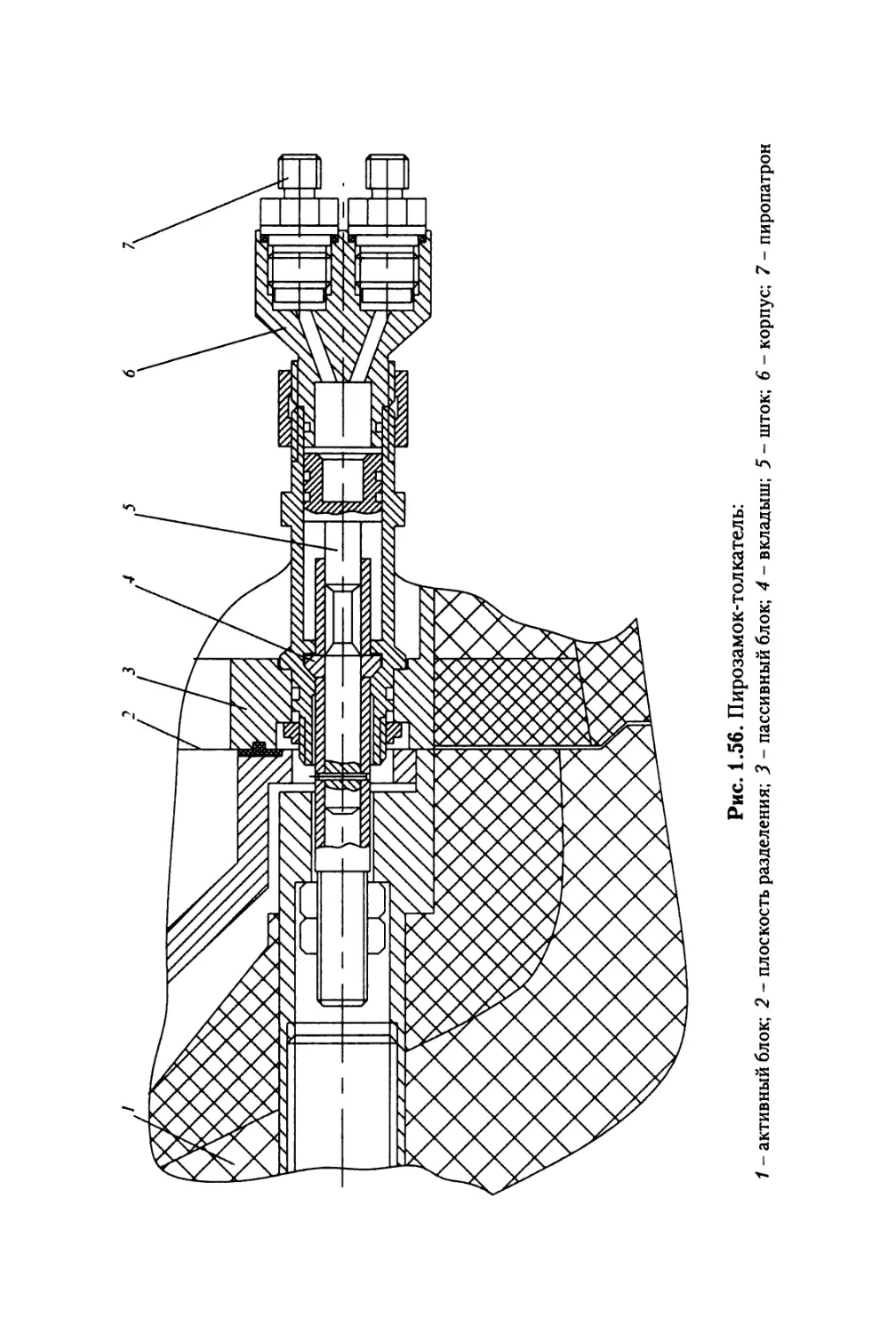
Рис. 1.56. Пирозамок-толкатель:
1 - активный блок; 2 - плоскость разделения; 3 - пассивный блок; 4 - вкладыш; 5 - шток; 6 - корпус; 7 - пиропатрон
Пиротолкатели используются в случаях, когда нужно разместить мощное СО в небольшой объем, или при ограничениях по массам, заложенных на проектируемые СО.
Наряду с указанными преимуществами пиротолкатели обладают и недостатками, которые в некоторых случаях ограничивают их применение. Это значительные ударные нагрузки и большой (до 40 %) разброс развиваемой силы относительно номинального значения. Такой разброс обусловливается нестабильностью характеристик пиропатронов (основная составляющая), широким температурным диапазоном окружающей среды, технологическими причинами, связанными с изготовлением корпусов и поршней пиротолкателей. Значительное отклонение сил от их номинальных величин приводит к большим (в сравнении, например, с пружинными толкателями) возмущениям разделяемых объектов по угловой скорости, для парирования которой требуется дополнительный расход рабочего тела управляющих органов и увеличение их эффективности. Кроме того, сила, развиваемая пиротолкателем, резко уменьшается по ходу поршня.
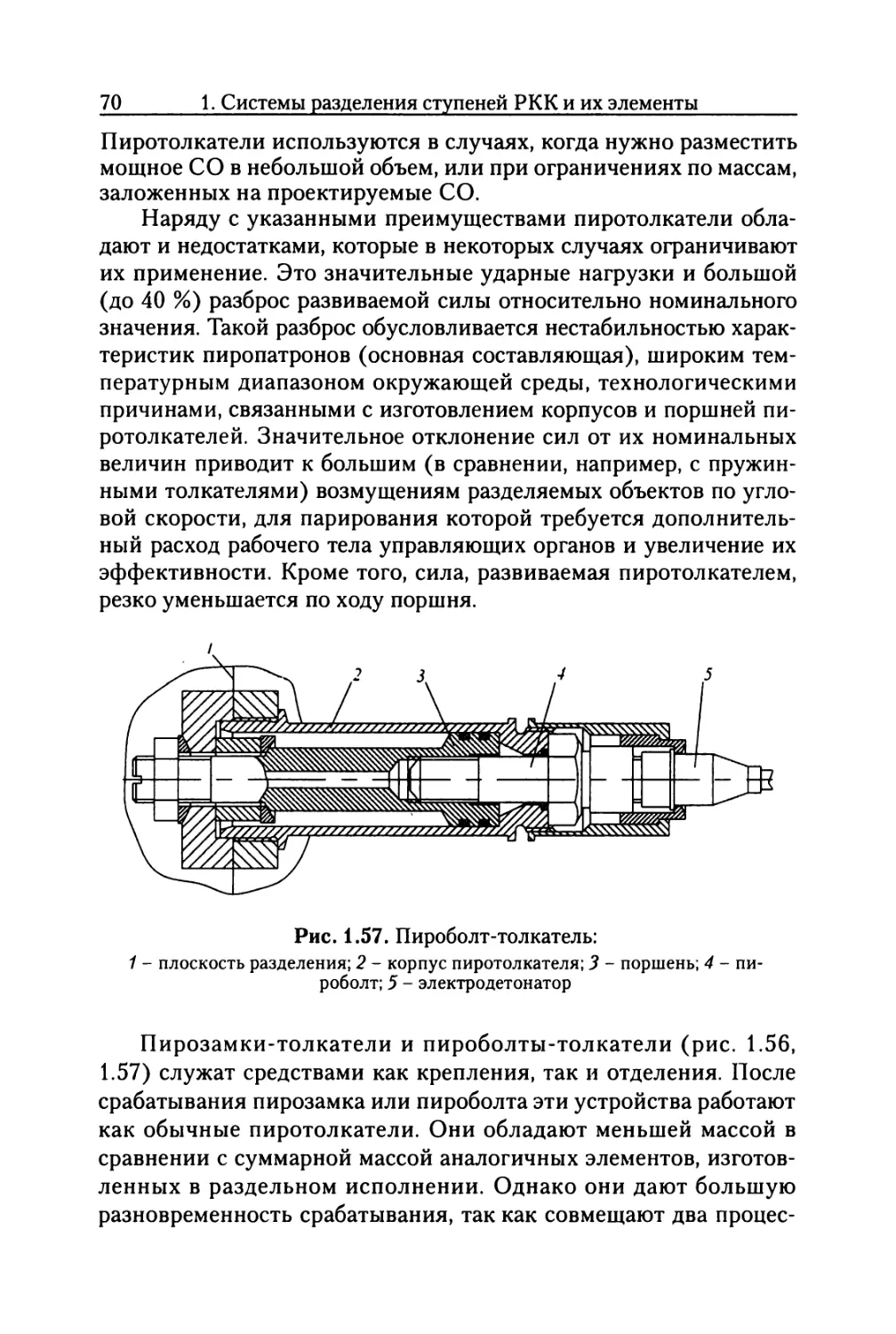
Рис. 1.57. Пироболт-толкатель:
1 - плоскость разделения; 2 - корпус пиротолкателя; 3 - поршень; 4 - пироболт; 5 - электродетонатор
Пирозамки-толкатели и пироболты-толкатели (рис. 1.56, 1.57) служат средствами как крепления, так и отделения. После срабатывания пирозамка или пироболта эти устройства работают как обычные пиротолкатели. Они обладают меньшей массой в сравнении с суммарной массой аналогичных элементов, изготовленных в раздельном исполнении. Однако они дают большую разновременность срабатывания, так как совмещают два процес
са, что может привести к значительным возмущениям разделяемых тел по угловой скорости. Кроме того, такие устройства достаточно сложны, менее надежны и требуют тщательной экспериментальной отработки.
1.7. Пневмотолкатель
Другим элементом, служащим для отделения, является пневмотолкатель. При его срабатывании по сравнению с пиротолкателем наблюдаются меньшие ударные нагрузки, а отклонения развиваемой им силы от номинального значения и градиент ее изменения по ходу поршня толкателя не столь велики. Однако пневмотолкатели сложнее и тяжелее пиротолкателей и имеют в сравнении с ними меньшую надежность.
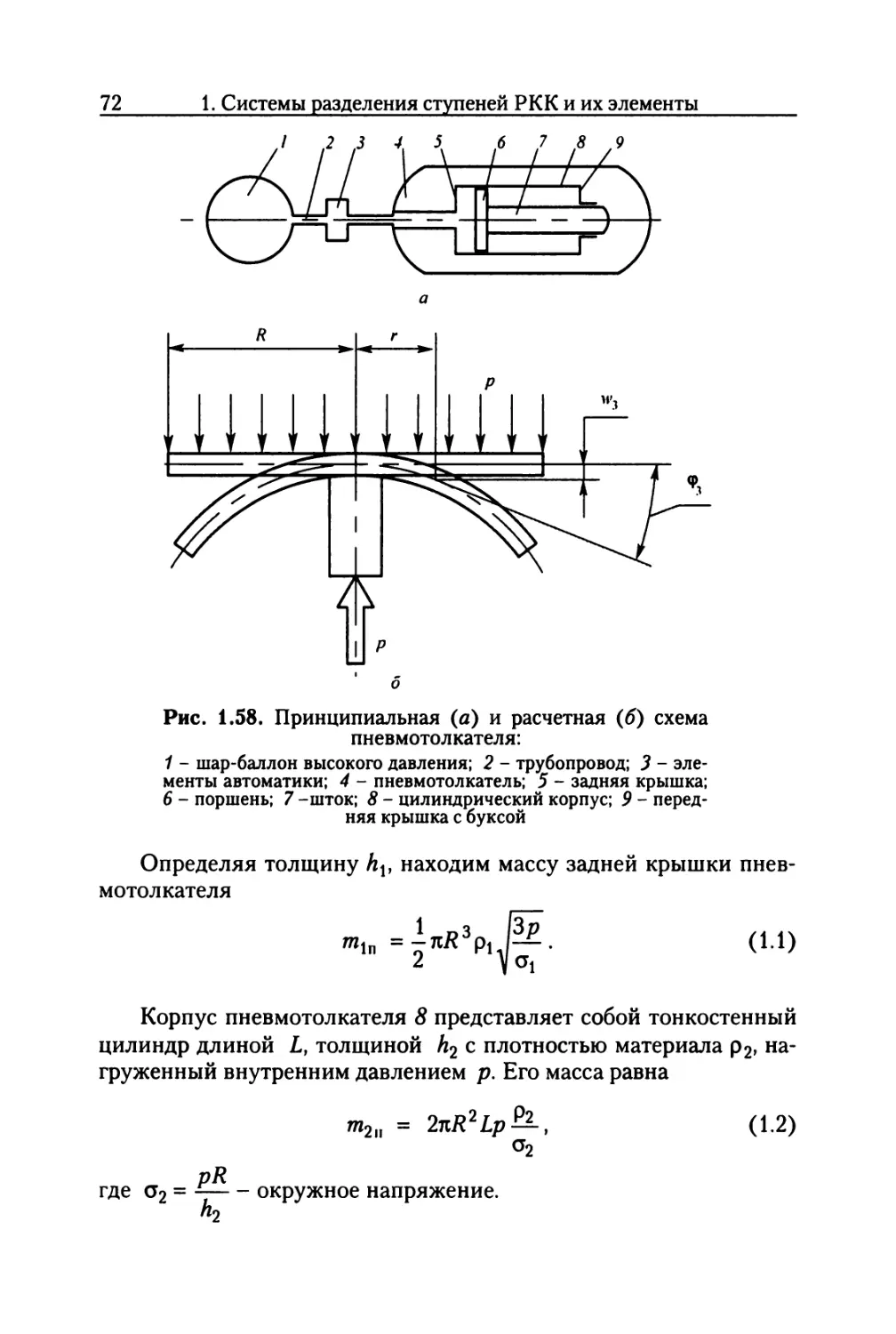
При разработке конструкции пневмотолкателя такие его параметры, как рабочий ход поршня, давление в рабочей полости и другие, могут варьироваться. Соответственно меняется и масса всей пневмосистемы, в состав которой наряду с пневмотолкателем входят баллоны высокого давления, трубопроводы и элементы автоматики. Важным является вопрос о проектировании системы минимальной массы. Ниже дана методика определения геометрических характеристик пневмосистемы, представленной на рис. 1.58, а, которая при заданной работе позволяет уменьшить ее массу.
При разработке методики расчета предполагалось, что расширение газа в системе является адиабатическим, при этом давление газа в баллоне /ив пневмотолкателе в каждый момент времени одинаково. Масса и объем газа в трубопроводах в силу их малости не учитывались.
Заднюю крышку 5 пневмотолкателя представим как круглую пластину толщиной радиусом R с плотностью материала pt, нагруженную давлением р газа и защемленную по контуру. Максимальное радиальное напряжение получается на ее контуре, где оно равно [21]
Рис. 1.58. Принципиальная (а) и расчетная (б) схема пневмотолкателя:
1 - шар-баллон высокого давления; 2 - трубопровод; 3 - элементы автоматики; 4 - пневмотолкатель; 5 - задняя крышка; 6 - поршень; 7 -шток; 8 - цилиндрический корпус; 9 - передняя крышка с буксой
Определяя толщину hv находим массу задней крышки пневмотолкателя
=|пй3Р1 Д. (1.1)
2 у Qi
Корпус пневмотолкателя 8 представляет собой тонкостенный цилиндр длиной L, толщиной й2 с плотностью материала р2, нагруженный внутренним давлением р. Его масса равна
m2ll = 2nR2Lp —, о2
(1.2)
pR
где о2 = ----окружное напряжение.
а2
Увеличение радиуса 5Л цилиндрического корпуса пневмотолкателя как тонкой безмоментной оболочки после подачи давления
р равно [17]
5, к E2h2 I, 2 )
(1.3)
где Е2, v2 - соответственно модуль упругости второго рода и коэффициент Пуассона для материала цилиндра.
Поршень 6 представляет собой свободную по контуру круглую пластину радиуса R с плотностью материала р3, нагруженную сосредоточенной силой, приложенной в центре и равной по величине суммарной силе давления газа на поршень, т. е. Р = = пЯ2р (рис. 1.58, б).
В соответствии с [19, 21] прогиб w3 такой пластинки и наклон
Фз -------- ее изогнутой поверхности можно наити по формулам:
dr
64D3 + & (Inr - 1) - -С,г2 - С2 1пг + С3; 8D3 4 1 3
Фз = - _Р± _Я51(2|„, - 1) Uc.r + й-, 16£)3 8£>3 2 г
где г - текущий радиус поршня; D3 - жесткость пластины.
Произвольные постоянные Cit С2 и С3 определим из следующих условий:
- угол фз в центре пластины (г= 0) равен 0;
- прогиб w3 в центре пластины равен 0;
- изгибающий момент на краю пластины
M=dJ^^-+v3— =0,
I dr r )r=R
где v3 - коэффициент Пуассона для поршня.
В соответствии с первыми двумя условиями С2 = С3 = 0. На основании последнего условия получим
С1 = +
8D3 1 + v3
Окончательно определим величину qty
рг
Фз = —~
2 L г>2 1 г г>2 7 4- Vo г 4- 47? In-/?--
1R 1 4" Vg
Необходимым условием допустимости прогиба являются, с одной стороны, величины максимальных напряжений, возникающих в поршне, а с другой - сохранение зазора между поршнем и цилиндрическим корпусом пневмотолкателя. Второе условие является более жестким, поэтому из него следует исходить при нахождении толщины поршня. Определим радиальное смещение угловых точек поршня по направлению к цилиндрическому корпусу. Как легко видеть, на краю пластины наклон ее изогнутой поверхности
3pR3
8D3(l + v3)
Поскольку угол фз мал, искомое смещение точек поршня
5. =^зФ1 = А3 3pR3 , 2 316D3(l+v3)
(1.4)
где h3 - толщина поршня.
Сохранение зазора выражается следующим образом:
kbi = bR, (1.5)
где 8Д определяется по (1.3), а коэффициент k > 1. При проектировании подобных конструкций принимается, что k > 10. Подставляя в формулу (1.5) выражение для 5,, найденное из (1.4), и учитывая, п E3h3
ЧТО £>3 = ---, получим
12(1 -v23)
h3
3 kE2 2
ч I1/2 (1 - Уз) (l-03v2).
где Е3 - модуль упругости второго рода для материала поршня.
Запишем соотношение для определения массы поршня
^зп = рЯ2/г3р3.
(1.6)
В реальных конструкциях шток 7 имеет практически ту же самую длину £, что и корпус пневмоцилиндра. Он работает на сжатие. Анализ показывает, что его устойчивость будет основным расчетным случаем. При этом один конец штока жестко заделан, а другой свободно опирается на отделяемую ступень и имеет возможность бокового смещения в процессе расхождения ступеней. Критическая сила в этом случае определяется из соотношения [19]
£кр = лЛ2р = (4л2£4Л)/£2,
где J4 = лг4 / 4 - момент инерции поперечного сечения штока относительно его диаметра; г4 - радиус штока; £4 - модуль упругости второго рода для материала штока.
Находим массу штока
(1.7)
где р4 - плотность материала штока.
Напряжение, возникающее в баллоне высокого давления q5-pR^ / где Т?Б - радиус баллона; h5 - толщина его оболочки. Определим массу баллона
тъ = 4л7?| Л5р5 = 2лр5р / о5, (1.8)
где р5 - плотность материала корпуса баллона.
Кроме массы оболочки следует учесть массу газа тиб1|, которым заправлен баллон. Из уравнения состояния pV0 / Т= m^Rv/ ц получим
^6u=PVoH/‘Rr7'>
(1.9)
где Vq - объем баллона; ц - молекулярный вес газа; Rr - универсальная газовая постоянная; Т - температура газа в баллоне.
Общая масса пневмосистемы пг5|| выражается суммой масс ее элементов (1.1), (1.2), (1.6)-(1.9):
™sn
= л7?3р1
'3/1/Л2
<4ст1 J
+ 2itR2 Lp^2?2 + яЯ3р3^р ст2
З/г/з^гО ~ уз) 2 4о2£з(1-0^)
+
(110) 1
+ 2Л£2р4^]2 + 2л р57?|/5р / о 5 + pVop / RrT, l£4 J
где /j./5 - коэффициенты запаса прочности соответственно для
каждого из элементов, входящих в состав пневмосистемы. При этом принимается, что /3 = k.
Приведем это соотношение к более удобному виду:
= aiR3Jp + a2R2pL + a3RL2y[p + аАр, (111)
где коэффициентами аь...га4 обозначены постоянные величины, входящие в соотношение (1.10).
Работу, развиваемую толкателем, определим из уравнения
А _ рУо 1 [ уР Y-l l^o + лЯ2£,
где у - показатель адиабаты.
Таким образом, задача сводится к нахождению параметров р, L и /?, определяющих минимум функции (1.11) при постоянной работе А.
Для решения этой задачи используем метод множителей Лагранжа при условии
(1.12)
Как известно, условный экстремум функции определяется из следующих соотношений:
ЭФ = ЭФ = ЭФ =0
др дк dR
где Л, - множитель Лагранжа.
Проводя дифференцирование этого соотношения, получим систему алгебраических уравнений для определения искомых параметров p,L,R.
= £1^. + а27?2£ + + х2о_
др 2^ 2 2^ 4 Y-1
1-
Уо +nR2L
V"1'
= 0,
= a2^2P + Za^RLfp + kp
у nR2 = 0,
Vo
4V0 +nR2L
— = dp + 2a2RpL + a3 JpL2 + X.J------ 2kRL = 0.
dR +nR2L)
Из второго и третьего уравнений следует, что
L = (1.13)
У°з
Введем обозначение Vt = nR2L. Перепишем последнюю систему уравнений с учетом (1.13):
( У А V 0 =0,
lVo+vJ
р =
Vo+VtJ
X = —1-(У{4ра{а3 +pv}a2 +па4р). пА
Исключая из этой системы X и р, получим уравнение для Vt, которое решается численно. Используя соотношения для L и определим окончательно р, £, R яля различных сочетаний А и Vo.
Значения параметров р, Ln R, минимизирующие массу пневмосистемы, зависят от величин, входящих в соотношение (1.10). Масса теплоизоляции не учитывалась, поскольку в реальных условиях пневмотолкатели и подводящие к ним трубопроводы не изолируются ввиду быстродействия системы.
Рис. 1.59. Зависимость давления от заданной работы, рабочее тело - азот
В качестве примера ниже рассмотрена пневмосистема с входящими в нее элементами, изготовленными из стали со следующими характеристиками: pf = 7,8 г/см3; = 2 • 105 Н/см2; = 2 Ю7 Н/см2; V, = 0,3. Рабочим телом в ней служит азот или гелий. Рис. 1.59-1.62 соответствуют азоту, а рис. 1.63-1.66 - гелию. Из рис. 1.59, 1.63 следует, что работа А практически линейно зависит от р. Этим обусловлена малая зависимость линейных размеров пневмотолкателя от А для постоянных значений Vo (см. рис. 1.60, 1.61, 1.64, 1.65). Кроме того, при уменьшении Vo линейные размеры пневмотолкателя при постоянном значении А уменьшаются и, несмотря на резкое увеличение давления р, в этом случае (см. рис. 1.59, 1.63) несколько уменьшается масса всей пневмосистемы (см. рис. 1.62, 1.66).
Рис. 1.60. Зависимость длины корпуса пневмотолкателя от заданной работы, рабочее тело - азот
R, м
К0=40л
20 л
Юл
5 л
2л
1 л
0 50 100 Л,кН-м
Рис. 1.61. Зависимость радиуса крышки пневмотолкателя от заданной работы, рабочее тело - азот
Рис. 1.62. Зависимость массы пневмосистемы от заданной работы, рабочее тело - азот
Рис. 1.63. Зависимость давления от заданной работы, рабочее тело -гелий
Рис. 1.64. Зависимость длины корпуса пневмотолкателя от заданной работы, рабочее тело - гелий
Рис. 1.66. Зависимость массы пневмосистемы от заданной работы, рабочее тело - гелий
При сравнении результатов для азота и гелия видно, что оптимальные линейные размеры пневмосистемы при фиксированной работе для гелия немного меньше, чем для азота, а давление - больше. Таким образом, масса пневмосистемы с гелием несколько больше, чем масса пневмосистемы с азотом, но это отличие незначительное. Это свидетельствует о том, что применение гелия в качестве рабочего тела в пневмотолкателях не дает практического выигрыша в массе по сравнению с азотом, а стоимость его получения на несколько порядков выше.
1.8. Пружинный толкатель
Самыми распространенными устройствами для сообщения разделяемым телам относительной скорости являются пружинные толкатели (ПрТ). При конструировании ПрТ могут использоваться пружины сжатия, растяжения или кручения. Наиболее предпочтительным является использование пружин сжатия, так как они обладают практически стопроцентной надежностью. Это объясняется тем, что в случае разрушения пружины она просаживается на виток и не теряет своей работоспособности. При этом лишь несколько уменьшается развиваемая толкателем работа. В случае же разрушения пружин растяжения или кручения они полностью теряют свою работоспособность. Возможные конструктивные исполнения ПрТ с пружиной сжатия показаны на рис. 1.67, 1.68, а.
Рис. 1.67. Пружинный толкатель:
1 - шток; 2 - обойма внутренней пружины; 3 - корпус; 4 - технологическая заглушка
Рис. 1.68. Расчетная схема пружинного толкателя для оптимизации его массы (а), анализа процесса отделения пассивного элемента (6) и определения силы пружины от хода поршня (в):
1 - шток; 2 - корпус; 3 - поршень; 4 - пружина; D - средний диаметр пружины; d - диаметр прутка; С - центр масс отделяемого элемента; I - ход пружины до полного ее разжатия
В тех случаях, когда для отделения требуются значительные силы на небольшом (обычно не более 100 мм) ходе, вместо винтовых в толкателях используют тарельчатые пружины (см. далее рис. 1.71, б).
В процессе срабатывания ПрТ происходит «мягкое» безударное нагружение конструкции разделяемых элементов. Требования к точности их изготовления и чистоте поверхности сопрягаемых подвижных деталей значительно ниже, чем для пиротехнических и пневматических толкателей. Кроме того, они имеют небольшой (не более 10 %) разброс номинального значения работы, причем и он может быть значительно уменьшен за счет селективного подбора пружин.
Большим достоинством ПрТ является то, что их характеристики можно проверять и воспроизводить при предполетной отработке. ПрТ относительно дешевы в производстве, просты в конструировании, не требуют практически никаких инструкций при работе с ними. Их установка на разделяемом стыке должна производиться таким образом, чтобы после срабатывания ПрТ оставались на пассивной части PH или КА.
Простейшее и самое дешевое СО пружинного типа имеет одну мощную пружину, размещенную на продольной оси КА. Сложность и стоимость СО, включающего несколько ПрТ, незначительно выше, чем монопружинного средства отделения. В этом случае в целях уменьшения возмущений углового движения активной части их следует располагать диаметрально противоположно на разделяемом стыке по окружности с одинаковым радиусом. При этом существует два способа корректировки их силовых характеристик. Первый состоит в селективном подборе пружин, а второй - в регулировке их начального усилия.
Основным недостатком ПрТ является его большая масса на единицу развиваемой работы по сравнению, например, с пиротолкателем.
При работе толкателя пружина может разжиматься полностью или иметь ограничение в конце хода до силы Исходными величинами для расчета ПрТ являются работа А, начальная сила пружины Р2 и ход толкателя h. По конструктивному исполнению ПрТ во многом идентичен рассмотренному выше пневмотолкателю.
Рассмотрим задачу о разработке ПрТ минимальной массы, представленного на рис. 1.68, а. Его суммарная масса складывается из масс штока 1 (т^, корпуса 2 (т2), поршня 3 (т3) и пружины 4 (т*):
4
= тх + т2 + т3 + т4 = i=i
В качестве переменных при определении величины взяты начальная Р2 и конечная Р} силы пружины, а также ее индекс с= D / d. Минимум функции зависящей от трех указанных переменных, ищем, как и при оптимизации массы пневмотолкателя.
Минимальные значения определялись в диапазоне значений работы А толкателя от 20 до 10000 Н • м. Следует отметить, что сама по себе не может служить показателем оптимальности массы конструкции ПрТ. Она должна быть соотнесена с его работой А. С этой целью осуществлен переход к относительной массе у0, т. е. массе толкателя на единицу развиваемой им работы, у0 = = / А. На рис. 1.69 представлены результаты расчетов для вари-
анта, когда в качестве материала корпуса толкателя используется алюминиевый сплав с толщиной стенки 1,5 мм, а материал пружины сталь Х18Н9Т.
Полученные зависимости позволяют без проведения каких-либо дополнительных расчетов определить геометрические размеры конкретного пружинного толкателя минимальной массы во всем диапазоне изменения его работы А.
В некоторых случаях для отделения пассивных элементов конструкции используются непосредственно средства разделения -пироболты, ЛУР и пироустройства на основе УКЗ. При их срабатывании разделяемым телам сообщается определенный импульс, в результате они получают относительные линейную и угловую скорости. Однако большие разбросы значений импульсов указанных элементов разделения и объем экспериментальной отработки для его определения ограничивает использование их в качестве СО. Кроме того, значение импульса зависит от вида конструкции заделки указанных элементов на разделяемом стыке.
Рис. 1.69. Зависимость характеристик пружинного толкателя от заданной работы:
1 - масса толкателя на единицу развиваемой работы 2 - начальная сила пружины Р2; 3 - конечная сила пружины Pi; 4 - индекс пружины с
1.9. Ракетный двигатель твердого топлива
Для отделения значительных по массам и габаритам элементов конструкции (ступеней, капотирующих устройств и т. д.) применяются РДТТ. Особые требования, предъявляемые к их работе в составе СР, - достаточно большой необходимый импульс с незначительным (не более нескольких процентов) отклонением от номинального значения - привели к созданию специальных РДТТ, служащих исключительно для целей отделения пассивных элементов конструкции. Экспериментально отработан целый ряд двигателей с различными значениями развиваемых импульсов. Время их действия, как правило, находится в интервале 0,5... 1,5 с.
Достоинством РДТТ в качестве СО является возможность получения большого импульса за незначительный промежуток времени при сравнительно небольшой их массе.
Несмотря на очевидные преимущества, РДТТ имеют и ряд существенных недостатков. Как и всем пиротехническим устройствам, им присущ некоторый разброс по времени выхода на режим и реализации импульса. Обусловливается он неодновременностью в срабатывании элементов автоматики и пиропатронов-воспламенителей, а также свойствами заряда (в основном его температурой). Такой разброс в некоторых случаях приводит к значительным возмущениям углового движения разделяемых тел, а также дополнительным нагрузкам (как правило, определяющим) на оси вращения капотирующих устройств. Для частичного устранения этого недостатка РДТТ на старте, как правило, термостатируются, для чего приходится создавать специальную, очень громоздкую систему их обогрева или охлаждения.
Другим недостатком РДТТ является то, что вылетающие из их сопел струи раскаленных газов, содержащие твердые частицы, вызывают повреждение и нагрев окружающих элементов конструкции и приводят к дополнительным возмущениям по угловой скорости. Особенно неблагоприятное воздействие РДТТ могут оказать на центральный или отделяемые ББ при параллельном расположении ступеней. В этом случае в районе торможения газовых струй возникает избыточное давление, превышающее несущие способности элементов конструкции, на которые струи оказывают силовое и тепловое воздействие. При использовании РДТТ следует также учитывать возможность оседания на поверхностях оптических устройств содержащихся в газовой струе двигателя твердых частиц, что приводит к ухудшению их работоспособности или выходу из строя.
Еще одним недостатком РДТТ является наличие в их составе сопловой заглушки, которая выбивается избыточным давлением пороховых газов при выходе двигателей на режим. Разгоняясь в поле его струи, заглушка приобретает большую кинетическую энергию и может разрушить или повредить близлежащие элементы конструкции. Для борьбы с этим недостатком разработаны способы выбивания заглушек с малыми скоростями до запуска РДТТ. Кроме того, созданы заглушки, распадающиеся после их выбивания на мелкие, близкие к пылеобразным, частицы.
1.10. Жидкостной ракетный двигатель
В случае применения ЖРД для целей отделения относительная скорость активному блоку может сообщаться за счет работы основной, рулевой или специально созданной для этой цели ДУ. Отделение с помощью ЖРД имеет целый ряд преимуществ, основными из которых являются: возможность работы на основных компонентах топлива, быстрое достижение достаточно большой относительной скорости и улучшение управляемости активного блока на участке отделения, так как ЖРД, как правило, совмещают функции СО и исполнительных органов СУ. «Горячее» разделение ступеней (см. рис. 1.1, б) является наиболее характерным примером использования ЖРД в качестве СО. Тем не менее использование ЖРД как специально созданного СО требует увеличения массы системы, дорогостоящей экспериментальной отработки и надежной тепловой защиты пассивного элемента от воздействия газовых струй.
1.11. Газовое сопло
Для отделения космических разгонных блоков с одновременной их стабилизацией вращением и уводом от КА часто используются газовые сопла. Необходимость направленного увода вызывается тем, что после срабатывания СР на разгонный блок продолжает действовать остаточная тяга его ДУ и блок может догнать ПГ и повредить его.
Газовые сопла работают как на холодном, так и на горячем газе. Источником холодного газа обычно являются остатки компонен
тов топлива в пневмосистеме, а также газы наддува и испаряющиеся остатки компонентов в топливных баках. Одна из возможных схем расположения сопел, работающих на холодном газе, приведена на рис. 1.70. Для выработки горячего газа применяются специально созданные для этого устройства.
Рис. 1.70. Схема расположения сопел, работающих на холодном газе: 1 - сброс газа из баллонов и бака горючего; 2 - трубопровод сброса газа из бака окислителя и дренаж ДУ; 3 - бак окислителя; 4 - бак горючего; I—IV - полуплоскости стабилизации
Другим примером использования газовых сопел в качестве СО может служить применение их на PH «Союз» для отвода ББ от ЦБ. Сопла расположены в верхних частях ББ и включаются в работу после раскрытия узлов вращения Б Б относительно ЦБ.
Существенным недостатком «холодных» газовых сопел является нестабильность величины их импульса, так как в зависимости от условий полета на активном участке остаточное давление в емкостях пневмосистемы колеблется в больших пределах. Кроме того, СО на основе газовых сопел довольно сложны и имеют более
низкую надежность по сравнению, например, с СО на основе пружинных толкателей. Однако применение газовых сопел в некоторых случаях диктуется необходимостью вскрытия основных топливных емкостей с остатками криогенных компонентов с целью предотвращения взрыва блока при их испарении.
1.12. Аэродинамические тормозные поверхности
В плотных слоях атмосферы в качестве СО могут использоваться раскрываемые аэродинамические тормозные поверхности (см. рис. 1.1, в), которые существенно увеличивают лобовое сопротивление отделяемых элементов конструкции и тем самым уменьшают их скорость. Однако СО с аэродинамическими тормозными устройствами достаточно громоздки, требуют трудоемких расчетов при их проектировании и большой по объему экспериментальной отработки.
На основании вышеизложенного можно заключить, что как средства отделения, так и средства разделения отличаются большим разнообразием и применение какого-либо из них зависит от требований, предъявляемых к конкретной СР в целом.
1.13. Сопутствующие элементы
Наряду со средствами разделения и отделения практически во всех СР присутствуют элементы, которые также могут в значительной мере влиять на процесс отделения. К таким элементам относятся направляющие шпильки, разделяемые электрические, пневматические и гидравлические разъемы, транзитные кабельные стволы и т. д., которые назовем сопутствующими элементами.
Направляющие шпильки являются принадлежностью практически всех разделяемых стыков (рис. 1.71, в). Их установка преследует две основные цели: обеспечение сборки и восприятие перерезывающих сил в полете. Как уже отмечалось ранее, точечные средства разделения ставятся в стыке с зазором. В зависимости от действующих сил, требований технологии и условий, накладываемых на процесс отделения, шпильки могут иметь различный диаметр, длину и конфигурацию. Из этих же соображений определяется и их количество на разделяемом стыке.
Рис. 1.71. Возможное конструктивное исполнение убирающихся шпилек:
а - комбинация с пиротолкателем; б - комбинация с пружинным толкателем; в - направляющая шпилька; 1 - пиротолкатель; 2 - убирающаяся шпилька; 3 - плоскость разделения; 4 - тарельчатая пружина; 5 - разделяемый стык с закрепленной шпилькой
В некоторых случаях направляющие шпильки отрицательно влияют на процесс отделения, являясь источником больших возмущений отделяемых тел по угловым скоростям. Разработан ряд устройств, в которых в едином узле совмещены, наряду с убирающимися шпильками, средства разделения или отделения, а также использована их комбинация. Конструктивное исполнение некоторых из этих элементов СР приведено на рис. 1.71, а, б. Суть таких устройств состоит в том, что СО, входящие в их состав, начинают действовать после того, как сработают средства разделения стыка и будут убраны направляющие шпильки. Реализация некоторых СР крайне затруднительна без предварительного освобождения стыков от направляющих шпилек.
Для осуществления транзитной связи между разделяемыми стыками на них располагаются различные разъемные соединения. На рис. 1.72 показана разрывная электроплата, а на рис. 1.73 - разрывная гидропневмоплата. В процессе отделения пассивного элемента конструкции они разделяются под действием сил, развиваемых СО, или заранее при помощи собственной системы расстыковки.
Рис. 1.72. Разрывная электроплата:
1 - плоскость разделения; 2 - пружинный толкатель; 3 - механический цанговый замок; 4 - трос; 5 - разрывные электроразъемы
Рис. 1.73. Разрывная гидропневмоплата:
1 - замок; 2 - пружина отделения; 3 - гидроразъем; 4 - пневморазъем; 5 - плоскость разделения
Разрыв плат осуществляется следующим образом. Разделяемые тела под действием СО получают относительную скорость. К плате (см. рис. 1.72) крепится трос 4, после выборки слабины которого он ее расстыковывает. Следует отметить, что совершенно идентичная по конструктивному исполнению плата будет иметь существенно разные (отличающиеся в несколько раз) усилия расстыковки в зависимости от слабины троса и угла расстыковки.
Для уменьшения возмущения отделяемых объектов по угловым скоростям разъемы должны иметь одинаковые силы и ход расстыковки, при этом их необходимо устанавливать диаметрально противоположно друг другу.
Если электрическая или пневматическая связь между блоками осуществляется без разъемов на разделяемом стыке, то для разрезания транзитных кабелей или трубопроводов используются пиротехнические ножи (пирорезаки), одно из возможных конструктивных исполнений которых показано на рис. 1.74.
Рис. 1.74. Пиротехнический нож
Пирорезак для кабелей состоит из цилиндрического стального корпуса 2, поршня с ножом 5, изготовленного из закаленной стали, и наковальни 1 из мягкой стали. Поршень с ножом удерживается в исходном положении с помощью штифта 4 до тех пор, пока давление, создаваемое пиропатронами 3 за поршнем, не превысит уро
вень, необходимый для его срезания. После этого поршень разрезает кабель 6 и ударяет по наковальне, которая гасит его энергию. Используются также пирорезаки с линейным зарядом ВВ, которые могут применяться для перерезания не только кабелей, но и трубопроводов (рис. 1.75).
Рис. 1.75. Пирорезак с линейным зарядом ВВ:
1 - электродетонатор; 2 - трубопровод; 3 - кабели;
4 - УКЗ; 5 - корпус
Операции, связанные с разрывом или расстыковкой разъемов всех типов, являются вспомогательными по отношению к основной задаче разделения и отделения, но они необходимы, поскольку несрабатывание любого из сопутствующих элементов может оказать негативное влияние на процесс отделения.
1.14. Резервирование элементов систем разделения
Сложность и высокая стоимость создаваемых РКК приводит к необходимости повышения надежности каждого из элементов, входящих в их состав. С этой точки зрения важно резервирование средств разделения, так как в случае отказа любого из них пассивный элемент конструкции, как правило, невозможно отделить. Отказ же части из рассмотренных выше СО позволяет обеспечить при разумно выбранных их характеристиках безударное отделение пассивного элемента.
В реальных конструкциях осуществляются способы дублирования по заряду, средствам инициирования, электрическим цепям и механическим элементам.
Дублирование по заряду - наиболее распространенный способ резервирования пиросредств, используемых в ракетно-космической технике. Он состоит в том, что, например, в состав пирозамка вводится два пиропатрона и в случае отказа одного из них другой обеспечивает надежное срабатывание этого средства разделения. Элементы разделения с таким способом дублирования изображены на рис.1.18 и 1.22.
Все выпускаемые и вновь разрабатываемые отечественной промышленностью пиротехнические устройства имеют дублирование по средствам инициирования. В пироболтах и пиропатронах оно реализуется в установке двух мостиков накаливания. При сгорании любого из них происходит воспламенение указанных пиросредств. В пироустройствах на основе УКЗ и ЛУР осуществляется дублирование по средствам инициирования и по заряду (см. рис. 1.36, 1.38, 1.39).
Другим способом дублирования является установка нескольких элементов разделения в одном узле связи таким образом, чтобы при срабатывании любого из них узел раскрывался. Примером конструктивного решения подобного рода может служить узел связи на основе двух пироболтов (рис. 1.76). Это устройство основано на использовании однотипных средств разделения.
Дублирование можно осуществлять, применяя и разнородные элементы, например пирозамок или пироболт в сочетании с УКЗ. Назначение последнего - перерезать силовой элемент основного средства разделения в случае его несрабатывания.
Рис. 1.76. Узел связи на основе двух пироболтов:
1 - ловитель; 2 - пироболт; 3 - плоскость разделения; 4 - стяжная втулка
Рис. 1.77. Пирозамок с резервированием по пиротехническим и механическим элементам:
1 - корпус; 2 - рабочая полость основной системы; 3 - поршень основной системы раскрытия замка; 4 - вкладыш основной системы; 5 - вкладыш дублирующей системы; 6 - поршень дублирующей системы; 7 - рабочая полость дублирующей системы; 8 - отделяемое тело
В наиболее ответственных стыках, таких как, например, отсеки пилотируемого корабля, выдвигается требование дублирования средств разделения не только по пиротехническим элементам, но и по механическим звеньям. На рис. 1.77 представлен пирозамок, имеющий резервирование по всем элементам.
Как уже отмечалось выше, наряду с дублированием средств разделения в некоторых случаях резервируют и СО. Обычно в качестве резервного элемента применяют пружинные толкатели, обладающие высокой надежностью срабатывания.
2. СИЛЫ, ДЕЙСТВУЮЩИЕ НА РАЗДЕЛЯЕМЫЕ ТЕЛА
2.1. Сила пружинного толкателя
Экспериментально установлено [14, 24], что вектор силы цилиндрической винтовой пружины, как правило, не совпадает с ее осью и в процессе разжатия пружины меняет свое направление. Причина этого заключается в том, что невозможно изготовить идеально однородную пружинную сталь и получить совершенно идентичные по своим характеристикам витки пружины.
Нежелательное действие боковой составляющей силы пружины и момент относительно ее оси можно уменьшить путем установки нескольких толкателей, подобранных и откалиброванных в достаточно узком диапазоне характеристик.
Сила пружинного толкателя определяется из соотношения (см. рис. 1.68)
Р = Р2-(Р2-Р1)х/Л,
гдех - текущее перемещение пружины; h - ход пружины толкателя.
Если в толкателе реализуется полное разжатие пружины, то в последнем соотношении следует установить Pj = 0. Вопрос об оптимальном значении силы Р1( с точки зрения минимума массы толкателя, рассмотрен в главе 1.
Аналогичная зависимость имеет место и для момента пружины кручения
М = М2-(М2-М^/<рк,
где <р, фк - соответственно текущий и конечный углы поворота пружины; М2, М\ - начальный и конечный моменты пружины.
Полная работа пружины сжатия без учета потерь на трение равна h
Ас = fP(x)dx = (Pt + P2)/i/2.
О
Для пружины кручения
<Рк
4р= /Л/(ф)«/ф = (Л/, + М2) фк /2 .
О
Потери работы на трение зависят от конструкции ПрТ и определяются обычно экспериментально. Согласно [14], эта величина не превышает 10 % от полной работы.
2.2. Сила пиротехнического толкателя
При определении силы, развиваемой пиротехническим толкателем, приняты следующие допущения:
- сгорание рабочего заряда происходит мгновенно;
- отсутствует прорыв газов через зазоры и потеря их энергии на деформацию конструкции;
- процесс является адиабатическим.
Правомерность принятия первого допущения объясняется двумя причинами. Во-первых, рабочее тело пиропатрона инициируется с внешней стороны, и во внутреннюю полость пиротолкателя газы прорываются уже после воспламенения всего заряда. Во-вторых, время сгорания заряда пиропатрона существенно меньше времени срабатывания пиротолкателя.
В соответствии с принятыми допущениями максимальное давление в камере пиротолкателя можно определить из соотношения [22]:
п =m3[f3~(y-^C3(T„ -То)] Р max »
vo - а3т3
где т3 - масса заряда; /3 = RrTr- сила заряда; у - показатель адиабаты; Э = 4,189 кДж/ккал - механический эквивалент тепла; С3 - удельная теплоемкость заряда; Тп - температура поверхно
(2.1)
сти заряда, при которой происходит его газификация; Го - начальная температура заряда; Vo - начальный объем камеры пиротолкателя; а3 - коволюм газов заряда; Rr - газовая постоянная; Тг - температура газов, образующихся при сгорании заряда.
Введем понятие приведенной длины /п камеры пиротолкателя:
/ _ “ азтз
п ” 5
° п
здесь 5П - площадь поршня.
Теперь соотношение (2.1) представим в виде
л _ тз[/з ~ (Y ” 1)ЭС3(ТП - Tq) _
/'max “
Для адиабатического закона справедливо следующее равенство:
Рк(^г ~ азУ = РтахО^Ог ” азУ ’
при этом рк - давление газов в камере; Vr = VOr+ Snx/m3 - удельный объем газов пирозаряда во время хода х поршня; VOr =V0/m3-начальный удельный объем газов пирозаряда.
Используя последние соотношения, запишем
Pk Pmax[/n+xJ
(2.3)
На рис. 1.55 представлена типовая зависимость силы FT пиротолкателя от хода поршня. Используя формулу (2.3), получим выражение для определения работы пиротолкателя
In
Ат = jpKSndx = ^^ о
(1-Y) [(/„ +1)*
/я______-I
-1
(2.4)
где /„ - полный ход поршня.
Как видно из соотношения (2.2), давление газов в камере пиротолкателя зависит от начальной температуры пирозаряда. В реальных условиях она может находиться в диапазоне 223...323 К, что приводит к существенным колебаниям величины ртах, входящей в формулу (2.4), а следовательно, и Ат.
2.3. Сила пневматического толкателя
При расчете силы пневмотолкателя принимаем основные допущения, аналогичные использованным при выводе уравнений, описывающих рабочие процессы пиротолкателей, исключая те из них, которые связаны с горением пирозаряда. Принципиальная схема пневмотолкателя изображена на рис. 1.58. Сила, развиваемая пневмотолкателем,
FT = 5п(р2-р3), (2.5)
где 5П - площадь поршня пневмотолкателя; р2 Рз ~ давления перед поршнем и за поршнем.
Будем считать, что полость пневмотолкателя перед поршнем заполняется газом до начала его движения, т. е. команда на включение в работу пневмосистемы подается до начала разрыва силовых связей между разделяемыми телами. Полость перед поршнем в процессе работы толкателя подпитывается газом через отверстие площадью а стравливание воздуха в окружающую среду из полости, расположенной за поршнем, осуществляется через отверстия суммарной площадью 53. Предположим также, что баллоны высокого давления, содержащие запас рабочего газа, имеют пневматическую связь (закольцованы), т. е. их можно рассматривать как один приведенный баллон, содержащий весь запас рабочего газа. Кроме того, если в состав пневмосистемы входят несколько толкателей, будем считать их эквивалентными одному, имеющему линейные размеры, аналогичные штатному толкателю, а площадь поршня 5П - равную суммарной площади поршней всех толкателей.
Предположим, что в полости пневмоцилиндра, расположенной за поршнем, находится воздух, т. е. подтеканием рабочего газа через поршень можно пренебречь.
Уравнения состояния газа в приведенном баллоне и пневмотолкателе для текущего момента времени будут иметь вид
= mxRxTx,1 Р2У2 Рз^з = тз^з^з» (2.6)
где 7?3 - соответственно постоянные газа и воздуха; тх 2 3; Р1,2,3’ Л,2,з» ^1,2,з “ масса, давление, температура и объем газов (индекс 1 относится к баллону, 2 - к полости перед поршнем, 3 - за поршнем).
Полагая, что начальная температура в обеих полостях одинакова и равна Tq, запишем соотношения для состояния газа:
V; r2=T’of—гз =^0^—V (2.7)
kPlO J \P20 J \Рзо)
где p10, p20, Рзо ~ начальные давления в баллоне, в полостях перед поршнем и за ним.
В соответствии с предположением о предварительном заполнении пневмотолкателя газом р2о = Рю-
Равенства для объемов и масс газа:
vi = V10 = const; V2 = V20 + 5nx; V3 = V30 - 5nx;
777 j = TTZjQ — ^2 = ^20 + 7772x’ ^3 = ^30 — ^Зх» (2.8)
где V10 V20 V30 ” начальные объемы баллона, полостей перед поршнем и за ним; т2х - масса газа, поступающего в полость перед поршнем при его ходе х, равная массе газа, истекающего из баллона, т. е. т\х~ т2х»т3х ~ масса воздуха, стравливаемого из полости за поршнем за тот же ход.
С учетом уравнений (2.6), (2.7) и (2.8) представим pv р2 и р3 в виде
^10
^20 +
V20 4- 5„х
kxV
Л)^1Р10
(2.9)
_ 777 30 т3х Т р п У
РЗ " Т7-------Г”"/()/<зР30
кзо “ V
\ 7
Запишем соотношения для определения величин mix и т3х: ^Зх = ^3 РЗ^ст»
где р j - плотность газа в баллоне; р3 - плотность воздуха в полости за поршнем; v„, v„ - скорости газа подпитки и стравливания соответственно.
Для определения скорости подпитки v„ и стравливания ост воспользуемся уравнением Бернулли:
1 2 1 2
2 Р1°п = Р\ - Р2< 2 Рз°ст = Рз~ РокР'
где рокр - давление окружающей среды. Из последних соотношений имеем
Г9п ( n Y|1/2
2Р1 | Р2
_ Pl I Р1 Л
2Рз J _ Рокр
Рз V Рз
Плотности pt и рз вычислим из формул:
/и10 - 7И1х 7П30 - т3х
Pi------т,------ Рз - V,----з—•
Vio V30 - S„x
Используя полученные соотношения, запишем выражения для и т3х:
р
™\х = 5, 2ptpt 1--£-
I Pi
п1/2 г г
; т3х = 53 2р3р3 1 -
р
г окр
Рз
\11/2
. (2.1
0)
Уравнение движения штока толкателя при отделении некоторой приведенной массы ттгпр:
m„vx = Fx -£FCI, (2.11)
где Гс/ - сумма сил сопротивления движению.
Таким образом, сила FT толкателя (2.5) находится из совместного решения уравнений (2.9)—(2.11).
Проанализировав процесс отделения, определяем параметры пневмотолкателя. При отделении за пределами атмосферы в по
лости за поршнем будет отсутствовать давление воздуха и система уравнений существенно упростится.
2.4. Тяга жидкостного ракетного двигателя
При разделении ступеней производится выключение ЖРД отработавшей ступени и включение маршевых двигателей активной ступени. Остаточная тяга, или тяга последействия, отработавшей ступени оказывает существенное влияние на процесс отделения. При этом необходимо знать закон выхода на режим ДУ активной ступени.
Для определения тяги ЖРД на установившемся режиме работы обычно используют соотношение [1]
Р = —u + Sa(pa -рн), g
где Gc - секундный весовой расход компонентов топлива; g - ускорение свободного падения; и - скорость истечения газов из сопла; Sa - площадь среза сопла; ра - давление газов на срезе сопла; рн- атмосферное давление на высоте Н.
Для определения давления рк в камере сгорания на участке выхода ЖРД на режим полной тяги можно воспользоваться формулой [12, 14]:
где ^км
- ткм
Рк =Ркм(1-е-^км),
(2.12)
RrTK с
VK с
- давление в камере сгорания на режиме
полной тяги; Rr - газовая постоянная; Тк - температура газов в камере; Ук - объем камеры сгорания; т км “ постоянная времени камеры сгорания, приближенно равная времени пребывания продуктов сгорания в камере; t - текущее время.
Тяга ЖРД в данном случае может быть найдена из выражения [14]
? ~ ^т^крРк’
где 5кр - площадь критического сечения сопла; Кт - коэффициент тяги.
Давление рк определяется из соотношения (2.12), а Кт из следующей формулы:
На достаточно больших высотах в этом соотношении можно положить ря = 0.
Типовые изменения указанных тяг приведены на рис. 1.2.
Рассмотрим спад тяги ЖРД. По команде на его выключение закрываются клапаны на магистралях подачи горючего и окислителя. При этом в полостях за клапанами остается некоторое количество компонентов топлива. Одним из них, как правило, горючим, заполнена «рубашка» двигателя. Разделение ступеней происходит на достаточно больших высотах, где атмосферное давление мало или полностью отсутствует. Это обеспечивает практически полное истечение в атмосферу продуктов сгорания и испарившихся остатков компонентов топлива.
Команда на разделение ступеней должна подаваться с некоторой задержкой по отношению к команде на выключение ДУ отработавшей ступени. Такая последовательность прохождения команд связана с необходимостью достижения достаточно низкого уровня тяги последействия (как правило, <3% от уровня номинальной тяги). В этом случае основной составляющей, формирующей тягу последействия, являются газообразные продукты испарившихся остатков компонентов, содержащихся в «рубашке» двигателя. Процесс их испарения происходит относительно стационарно. При этом реализуются незначительные, но продолжительные но времени действия силы. Их импульс с достаточной степенью точности может быть определен из соотношения
1 = Jp„e_t/TKM6* = ткмр„, о
при этом - начальная тяга последействия (в момент подачи команды на разделение ступеней). Величина указанного импульса
является определяющей при выборе энергетических характеристик СО разгонных блоков КА, так как импульс СО должен превышать суммарный импульс тяги последействия.
2.5. Тяга ракетного двигателя твердого топлива
Как и в предыдущем случае, рассмотрим влияние на процесс разделения переходных режимов, связанных с запуском РДТТ активной ступени и выключением пассивной. Время работы РДТТ существенно зависит от температуры заряда и может меняться в достаточно широком диапазоне. Основным критерием для определения времени разделения служит факт выгорания заряда. При падении осевой перегрузки до заданного уровня включается последующий РДТТ и с некоторой задержкой At рвутся связи между ступенями. Обнуление тяги отработавшей ступени и выход на режим активной ступени происходит за 0,1...0,2 с. Величина задержки Д£, как правило, выбирается такой, чтобы расчет процесса отделения ступеней твердотопливной ракеты можно было проводить, принимая тягу пассивной ступени нулевой, а тягу активной ступени - постоянной и равной тяге установившегося режима работы двигателя.
Последняя ступень выключается при достижении ракетой заданной скорости полета. При этом заряд ее РДТТ, для компенсации накопленных ошибок на предшествующих ступенях, выработан еще не полностью. Чтобы обнулить тягу последней ступени, разработаны различные способы ее отсечки [25]. Переходный процесс, связанный с отсечкой тяги, требует тщательной экспериментальной отработки для получения заданных характеристик изменения тяги последействия. Как и на первых ступенях, команда на отделение подается при достижении ракетой заданной осевой перегрузки.
2.6. Газодинамические силы
При отделении ступеней и некоторых других элементов конструкции на них действуют газодинамические силы от струй маршевых двигателей и двигателей отделения. Во многих случаях расчет этих сил затруднителен и их определение ведется с помощью экспериментов в аэродинамических трубах [18, 23].
Рассмотрим силовое воздействие струй двигателя в межступенчатом пространстве при «горячем» разделении ступеней. Струи газа, истекающие из сопла двигателя активной ступени, действуют на отработавшую ступень и, отражаясь от нее, взаимодействуют с активной ступенью. Как показали исследования, сложную струю, состоящую из струй нескольких двигателей, с достаточной точностью для оценки давления можно заменить одной эквивалентной струей с тем же массовым расходом, что и у многосопловой двигательной установки.
При составлении математической модели примем следующие основные допущения:
- продукты сгорания, истекающие из сопел, представляют собой идеальный газ;
- количество тепла, поступающее к стенкам межступенчатого пространства, составляет неизменную долю тепловой энергии газообразных продуктов сгорания, истекающих в этот объем;
- рассматриваются близкие положения ступеней и малые углы отклонения продольной оси нижней ступени относительно продольной оси верхней ступени.
На рис. 2.1 показана схема течения струй при взаимодействии их с нижней ступенью. Истекающая из сопла струя, быстро расширяясь, проходит через головной скачок уплотнения перед нижней ступенью и попадает в полость перед ее торцом. Затем течение меняет свое направление и выходит из полости со скоростью, близкой к звуковой.
При определении воздействия струй на нижнюю ступень будем использовать систему координат О^У^, связанную с верхней ступенью. Предполагаем, что течение за прямой ударной волной перед нижней ступенью параллельно оси ОСХС.
Для определения сил ^2z воздействия струй на ниж-
нюю ступень пренебрегаем взаимодействием между основным и возвратным течениями за ударной волной. Тогда
П П
F2x = 2л J p02n/r + J pxuxrdr\
о о
(2.13)
F2jz=2n| pMdS; F2z = \pMdS,
<52 j,) (52г)
где р02 - полное давление газа за головным скачком уплотнения перед нижней ступенью; т\ - радиус верхнего торца нижней ступени в сечении, нормальном оси ОСХС; и* - скорость отраженного потока газа на выходе из полости нижней ступени; р j, их - плотность и скорость потока газа перед ударной волной; S2y, - проекции на плоскостиXCOCZC иXCOCYC той части омываемой потоком площади головного торца отработавшей ступени, которые определяют силы F2y и F2z ; рм - давление в межступенчатом пространстве.
Рис. 2.1. Схема течения струй при «горячем» разделении ступеней
Воспользуемся предложенными в работе [13] приближенными зависимостями для определения параметров р02, pj и щ:
Р02 = Ра-$аф1(Ма;х)(1+уМ2);
(2.14)
Pi = РаФ2(Ма;*)У(Т-1)Ма;
где
щ = иа 1 +
(у - 1)М2
Ф1(Ма;х)
[у(у-1)М2а +2] 2тсг2
Z _ v(Y-1)M«+4
X
<Vx2 +r2 z
<p2(Ma;x)
1 I Г 1 'a
2 I x
у(г-1)м£
7
Здесь pa, pa, ua и Mfl - соответственно давление, плотность, скорость и число Маха струи на срезе сопла двигателя; Sa и га - площадь и радиус выходного сечения сопла; х - относительное расстояние между ступенями.
Как известно из газодинамики,
и =
у у +1
Подставляя выражения (2.14) в (2.13) и учитывая последнее равенство, получим
f2x =YM2paSa
(. 1 М Y(Y - 1)М2 ( 2 У7
1 +--у U-/1 (*)] + ——-----V2--------; *
I YM2J [у(у-1)М2 -2]Iy + 1J
— + —5" 1 +--------г
2 М2 (у - 1)М2
1/2
[1-/1W;
(2.15)
^2 у = ^2 2 = Pm*^2z»
где а = 1у(у - 1)М2 +1; b = ^у(у - 1)М2 - 1.
X + г 2 2
При выводе соотношений (2.15) были использованы известные из газодинамики зависимости:
кр
Sa
Y+1
I 2 )
Y
^- = р + Ц^М2а1 (2.16)
Ра \ 2 )
где 5кр - площадь критического сечения сопла; Sa - площадь среза сопла верхней ступени.
Параметры на срезе сопла Mfl и ра, входящие в уравнения (2.15), могут быть выражены через давление рк в камере сгорания, а также через 5кр и Sa с помощью соотношения (2.16). На рис. 2.2 приведены значения силы F2x = F2x / yM2apaSа, полученные на модели экспериментально [14] - (Т*2х)экс и вычисленные с помощью соотношений (2.15) - (^2х)расч- Как видно из этих графиков, расчетные значения силы F2x хорошо согласуются с экспериментальными значениями.
Рис. 2.2. Расчетная (сплошная линия) и полученная экспериментально (точки) сила Р^х воздействия струи двигателя верхней ступени на нижнюю ступень:
а - в зависимости от расстояния; б - для конкретного расчетного случая
Силу, действующую на нижний торец верхней ступени, найдем по формуле
Р\х =Рм(^1 ~nSa),
где - площадь нижнего торца верхней ступени; п - число двигателей верхней ступени; рм - давление в пространстве между ступенями, которое изменяется по мере выхода на режим ДУ верхней ступени и зависит от расстояния между ступенями. Для оценки можно воспользоваться зависимостями, приведенными в [14]. На практике указанная величина определяется в процессе длительных и дорогостоящих экспериментальных исследований.
2.7. Аэродинамические силы
На процессы разделения ступеней на активном участке траектории и отделение элементов конструкции КА при их спуске на поверхность Земли существенное влияние оказывают аэродинамические силы. Известно, что их определение во всем диапазоне скоростей РКК при полете в плотных слоях атмосферы чрезвычайно затруднительно. Эта задача требует выполнения сложных теоретических расчетов и проведения большого количества продувок в аэродинамических трубах.
Ограничимся рассмотрением «холодного» разделения ступеней. В этом случае на элементы конструкции межблочного пространства действует отрывное течение, схема которого показана на рис. 2.3, а. На этом рисунке линии 1 и 2 соответствуют внешней и внутренней границам пограничного слоя. Линия 3 является разграничительной, причем воздух из области 1-3 с внешним потоком, а из области 2-3 перетекает в межблочное пространство [13, 16]. По достижении некоторого расстояния х между разделяемыми ступенями, которое зависит от числа М^внешнего потока, они начинают обдуваться как изолированные тела.
Определение аэродинамических сил будем проводить при следующих основных допущениях:
- газ считается идеальным;
- температура торможения неизменна во всей области потока;
- статическое давление стационарно;
- тела симметричны и расположены соосно.
Рис. 2.3. Отрывное течение в пространстве между разделяемыми телами:
а - схема обтекания; б- экспериментально полученные картины обтекания
Тогда соотношения для нахождения сил, действующих на торцы переднего и заднего тел, имеют вид [14]
Е\х ~ Р1в^1»
Уз
F2x = ~2п JPanydy ~ (Р2н + Р2М2>Д52 -
у2
где рОн - полное давление газа у переднего торца нижнего тела между внутренней границей 2 пограничного слоя и разделяющей линией 3;у2 и г/з - ординаты линий 2 и 3 в сечении I-I в системе координат, изображенной на рис. 2.3, а; р2н и Pi в ” статическое дав
ление в области отрыва соответственно у переднего торца нижнего тела и заднего торца верхнего тела; р2, и2 - плотность и скорость в области отрыва у переднего торца заднего тела; Д 52 " проекция на плоскость, нормальную к оси Ос Хс части площади переднего торца заднего тела, расположенной в отрывной области, ограниченной внутренними линиями 2; - проекция на плоскость, нормальную к оси ОСХС, части площади заднего торца переднего тела, расположенной в той же области.
На рис. 2.3, б изображены экспериментально полученные картины обтекания двух разделяющихся тел [13].
Аэродинамическая сила лобового сопротивления, действующая на переднюю поверхность верхнего тела, определяется из выражения
где сх - коэффициент лобового сопротивления; 5 м - площадь миделя; р, v - плотность и скорость набегающего потока воздуха.
3. РАЗДЕЛЕНИЕ СТУПЕНЕЙ РАКЕТ
3.1. Зависимости, используемые для анализа относительного движения
При оценочных расчетах относительного движения разделившихся тел используют аналитические зависимости для определения их угловых скоростей cob СО2, линейной относительной скорости Да, относительного перемещения разделившихся стыков в поперечном направлении Д / и реакции на шпильках Fn.
Предположим, что в момент подачи команды на разделение ступеней РН совершают плоское движение с угловой скоростью со относительно оси Z и на нее не действуют внешние силы и моменты (рис. 3.1). Определим угловые скорости разделившихся блоков. Эти скорости являются одним из начальных условий, используемых при расчете движения блоков в процессе отделения. Система координат CXY, относительно которой рассматривается движение, предполагается инерциальной, движущейся равномерно и поступательно со скоростью у, которую имела РН на момент разделения. Рассмотрим лишь вращательное движение.
На основании теоремы об изменении кинетической энергии запишем
Jcz^2 = ТПх&у\ т2&У2 Jc\z\®\ Jc2z2®2
2 ” 2 + 2 2 + 2 ’
гдеJCz - момент инерции РН относительно поперечной оси CZ, проходящей через ее ЦМ; mv т2 - массы разделившихся блоков; JcXz\> Jc2z2 ~ моменты инерции разделившихся блоков РН относительно поперечных осей CxZb C2Z2, проходящих через их ЦМ; со1( со^ - угловые скорости блоков относительно осей QZp C2Z2 после разделения; Даь Да2 - приращения линейных скоростей ЦМ блоков, обусловленные угловой скоростью со вращения РН на момент разделения.
Рис. 3.1. Расчетная схема для определения угловых скоростей разделившихся блоков:
С - ЦМ системы до разделения; C]t С2 - ЦМ разделившихся блоков; Cj, С2 - текущие положения ЦМ
Как видно из рис. 3.1,
Д^ = COTj, Д^2 = СОГ2 »
где и г2 - расстояния от ЦМ PH до ЦМ соответствующих блоков в момент подачи команды на разделение.
В соответствии с теоремой Штейнера
Jcz = Jc\z\ + Jc2Z2 + + m2r2 •
Подставим данное выражение в левую часть уравнения для кинетической энергии, a Дг^ и Да2 - в его правую часть. После преобразования получим
Ucxzi ^Jc2Z2^2 = + Jc2Z2®2- (31)
Воспользуемся теоремой об изменении кинетического момента:
Jcz® = JciZ^\ +Jc2z2<*2 + "4^1 + m2r2bv2.
Преобразовав это соотношение, будем иметь
+ JC2Z2 ) ® = Jc\z\^\ Jc2Z2^2' (3-2)
Выразив со из (3.2) и подставив его значение в (3.1), получим
©! = С02 = со.
Рассмотрим две точки Ах и Л2 (рис. 3.2), каждая из которых принадлежит одному из блоков. До разделения они совпадают. Для оценки взаимного перемещения этих точек в поперечном направлении в процессе относительного движения разделившихся блоков может быть использовано следующее равенство:
Д/ = (&rxt - /?t[sin(a + со0 - sin a] 4- cor2£ - /?2[sin P - sin(P - co0], где Rb R2 - расстояние от ЦМ разделяющихся тел до точки, находящейся на разделяемом стыке; t - текущее время, которое с учетом того, что /?! sin a = R2 sin P; Rx cos a = rt; R2 cos P = r2 примет вид
Д/ = (rj 4- r2 )(atf - sin (00.
Рис. 3.2. Относительное перемещение разделившихся блоков в поперечном направлении
Это соотношение справедливо при небольшом (до 0,2 м) расхождении блоков.
В процессе проектирования СО возникает необходимость в оценке относительной линейной скорости &и разделившихся объектов. Рассмотрим, например, отделение отработавшей ступени массой т2 от активной части PH массой тх с помощью толкателей одного из типов, рассмотренных в главе 1. Пусть суммарная эффективная (за вычетом потерь) работа толкателей равна Лт, а равнодействующая их сил проходит через ЦМ разделившихся объектов.
Предположим, что инерциальная система координат движется равномерно и прямолинейно со скоростью v, которой обладала PH на момент подачи команды на разделение. После срабатывания толкателей активная часть PH получит дополнительную скорость Дг^, а отработавшая ступень Av2, направленную в противоположную сторону.
В соответствии с теоремами об изменении кинетической энергии и количества движения
2 2
т< Да< m2Av2 л А ал
% -• + - -= АТ; m1Av1 -m2Av2 = 0.
При этом относительная скорость равна Av = Д^ + Av2. Выражая из последних двух соотношений Avx и Д^2 через Av и подставляя их в первое уравнение, получим
Дг)= 2^T(mt +ттг2) у тхт2
(3.3)
В случае отделения, например, ступени массой т с помощью
РДТТ суммарным импульсом I = | где Ердтт - текущая тя-0
га РДТТ, - конечное время его работы, скорость отделения Av можно определить, воспользовавшись теоремой об изменении количества движения: Q = mAv. Учитывая, что количество движения Q численно равно Z, получим, что Av = 1/т.
Следует отметить, что значение I указывается в техническом паспорте на РДТТ. Его отклонение от номинального значения, как правило, не превышает 3 %. В реальных условиях относительная скорость Av будет меньше за счет потерь, обусловленных наличием тяги последействия ДУ отделяемой ступени, трением на шпильках, необходимостью расстыковки разъемов, установленных на разделяемом стыке, и т. д.
При использовании РДТТ для отделения створок ГО их угловая скорость со может быть определена на основании теоремы об изменении кинетического момента:
_ г
П г^рдтт»
где Kq - кинетический момент створки относительно оси вращения; г - плечо тяги РДТТ относительно оси вращения.
Интегрируя, получим
Ко = г | FVKndt = Ir.
О
Принимая во внимание, что X0=J0co, где Jo - момент инерции створки относительно оси вращения, окончательно получим (H=Ir/Jo.
Полученная величина со является максимальной и ее уменьшение возможно за счет потерь, которые определяются для каждого конкретного случая.
Движение ступеней ракет в процессе отделения целесообразно разделить на три участка:
- участок кинематической связи (шпилечный участок);
- участок работы СО;
- участок свободного относительного движения.
При относительном движении разделяемых ступеней на первом участке шпильки воспринимают перерезывающую силу Fn. Значение этой силы используется при расчете шпилек на прочность и возмущений углового движения разделяемых ступеней. Для ее определения примем следующие допущения:
- размеры шпилек пренебрежимо малы в сравнении с разделяемыми ступенями;
- из всех шпилек работает только одна, играющая роль шарнира;
- движение ступеней происходит в плоскости XY (рис. 3.3);
- углы поворота <Pi и ф2 относительно координатных осей
и C2z2, совпадающих с главными центральными осями инерции ступеней, пренебрежимо малы;
- угловые скорости ступеней достаточно малы.
Составим для ступеней кинематическое уравнение связи. Запишем положение шпильки и соосного с ней отверстия в инерциальной системе координат OXY.
гш =п +/ш; г0 =г2 +/0>
где rj, г2 - радиус-векторы, определяющие положение ЦМ разделяющихся ступеней; /ш , /0 - радиус-векторы, определяющие положение шпильки и отверстия в связанных системах координат Ci Xi г/1 Z] и С2 х2 у2 z2 соответственно.
Приравняв векторы гш и г0, дважды продифференцируем полученное равенство. В силу принятых допущений получим
И +Е1 х/ш = Г2 + Е2 х/0’
где Ер е2 - угловые ускорения ступеней.
Проекция этого уравнения на ось OY запишется следующим образом:
У\ -аш£1 = У2 +«0^2-
где аш = 1Ш cos (р10; а0 = /0 cos <р20.
В рассматриваемой упрощенной постановке задачи линейные ускорения ух и у2 ЦМ ступеней и их угловые ускорения определяются из следующих уравнений движения:
j/1 =—(5Л1+*п); У2 =— -F„y,
тх т2
El =Т^[ЕЛ/г1(Л1)-Л1«ш1; е2 = —— [^M22{Fi2)-F„aQ],
J C\z\ J C2z2
где ^Fyi, У, F^ - проекции на координатную ось OY внешних сил, действующих соответственно на первую и вторую ступени;
У, М 22 (f\2 ) - моменты внешних сил относительно осей CXZ\ и C2z2; пг2, Jc^» JC2Z2 “ массы и моменты инерции ступеней относительно главных центральных осей и C2z2 соответственно; Fn - поперечная сила на шпильке.
Решая уравнения движения совместно с уравнением связи, найдем силу, действующую на шпильку:
F„ ---------2---------------(3.4)
JL + 1 + аш + а0 ^2 J C\z\ Jc2?2
Участок кинематической связи имеет место не только при поперечном разделении ступеней, но также и при отделении других крупногабаритных элементов конструкции. В некоторых случаях
наличие направляющих шпилек является основной причиной изменений углового движения разделяемых тел.
Причиной возникновения случайных возмущающих моментов является возможное несовпадение ЦМ разделяемых блоков с линией действия результирующей силы СО. Разброс положения ЦМ зависит от технологии изготовления, условий компоновки PH, перемещения компонентов топлива внутри емкостей и т. д. Отклонение же результирующей силы от номинального направления зависит от точности установки СО и, в большей части, от допусков на развиваемые ими силы.
При определении моментов, возникающих от действия случайных силовых факторов, можно использовать максимальную оценку, которая обычно проводится при ограниченном количестве возмущающих сил. В случае же большого их числа на практике для нахождения результирующего момента этих сил используют среднеквадратическую зависимость. Следует отметить, что при определении возмущающего момента относительно какой-либо оси необходимо учитывать два случайных фактора — максимальное отклонение развиваемой силы от ее номинального значения и расположение максимальных и минимальных возмущающих сил относительно рассматриваемой оси. Тогда результирующий момент относительно соответствующей оси может быть определен из соотношения
рй рй
М = РНом (1 + 5* X у Г? - Рном (1 - 5’ X У г?
НОМ V /Д1 I ним \ /Д1 J '
У i = l |i=l
где Рном - номинальная сила, например, пиротолкателя; 5* - среднеквадратическое отклонение возмущающей силы от ее номинального значения; пь п2 - количество возмущающих сил, создающих соответственно положительный и отрицательный моменты относительно рассматриваемой оси; rit Tj - плечи i-й и j-й возмущающих сил.
Среднеквадратическое значение 5* определяется так:
п
где п = пх 4- п2 и bk - максимальное значение разброса Л-го возмущающего фактора.
Если принять, что все 5^ равны между собой и равны 5, то по-я* 5 следнее соотношение примет вид о = —=.
3.2. «Горячее» разделение
Проектирование разделения и отделения ступеней включает выбор средств разделения, отделения и их характеристик, а также формирование ЦГ их срабатывания.
В случае «горячего» разделения ступеней их расхождение происходит за счет тяги ДУ активной ступени при спадающей тяге двигателей отработавшей ступени (см. рис. 1.1,6, 1.2,6). Схема действующих на разделяемые ступени сил и принятые системы координат приведены на рис. 3.4.
Обычно управление ракетой осуществляется поворотом камер основной или рулевой ДУ, которые к моменту разделения, как правило, приводятся в нулевое положение. Таким образом, переходный процесс, связанный с отделением, является неуправляемым. Аналогично в нулевом положении находятся обычно и двигатели активной ступени, которые начинают работать как исполнительные органы СУ по истечении некоторого времени после подачи команды на разделение. На основании сказанного можем пренебречь угловым движением ракеты на шпилечном участке.
Для анализа относительного движения ступеней введем инерциальную систему координат CXYZ, совпадающую в момент срабатывания узлов связи с одной из связанных со ступенями систем координат.
При составлении уравнений движения ЦМ ступеней будем учитывать следующие силы:
- тягу Ри одного двигателя активной ступени, определяемую в соответствии с рекомендациями, изложенными в § 2.4 и 2.5;
- тягу последействия одного двигателя пассивной ступени Р2; (см. § 2.4 и 2.5);
- газодинамические силы Flx, FXy , действующие на активную ступень, и газодинамические силы fyy» действующие на пассивную ступень;
- силы аэродинамического сопротивления;
Рис. 3.4. «Горячее» разделение ступеней
- силу трения на шпильках /TFn, где /т - коэффициент трения скольжения;
- гравитационные силы и G2.
Проектируя действующие силы на оси инерциальной системы координат CXYZ, получим уравнения движения ЦМ активной и пассивной ступеней. Вычитая из уравнений движения ЦМ активной ступени уравнения движения ЦМ пассивной ступени, получим уравнения относительного движения ЦМ ступеней. Например, в направлении оси СХ будем иметь
X i cos Eli + Р\х ^xl 4$ м 1 /т Р\\
т\ i=l
”2
COSC2; +/тЛ| >
т2 i=l
(3.5)
где 5м1, 5м2 - площади миделей активной и пассивной ступеней; ен, е2; - углы наклона векторов тяги двигателей активной и пассивной ступеней; щ, п2 - число двигателей активной и пассивной ступеней; сх1, сх2 - коэффициенты лобового сопротивления активной и пассивной ступеней; <7 = рг>2/2 - скоростной напор набегающего потока воздуха; р и v - плотность и скорость набегающего потока воздуха.
Рассмотрим вращательное движение ступеней.
На разделяемые ступени будут действовать следующие моменты сил относительно координатных осей, проходящих через их ЦМ:
1) моменты, создаваемые тягой двигателей активной ступени ^xi(^i), Мг1(Р.) и тягой двигателей пассивной ступени
МАР2\Му2(Р2\Мг2(Р2);
2) аэродинамические моменты Мау, М&;
3) моменты от газодинамических сил F2y, F2r
На шпилечном участке ступени вращаются как единое целое. Запишем уравнения совместного вращательного движения ступеней относительно осей системы координат CXYZ'.
где Jc - тензор инерции всей ракеты относительно ее центральных осей;
0 -сог ©у
н= сог 0 - и. 0
=мхм) + мхС(Р2у,
М= мyC<J\) + ^ус(^г) + ау ” ^2г^гд»
где /ГЛ - расстояние от линии действия проекций равнодействующей газодинамических сил F2y, F2z до плоскости CYZ.
После окончания шпилечного участка полет активной ступени управляем, ее угловое движение определяется программой полета, начальными возмущениями и работой СУ. Углы атаки и скольжения активной ступени будут малыми. Пассивная же ступень совершает неуправляемый полет и уже нельзя сделать предположение о малости указанных углов.
В этом случае с использованием тех же исходных положений, что и ранее, можно записать следующие дифференциальные уравнения движения ЦМ активной и пассивной ступеней в проекциях на оси инерциальной системы координат CXYZ:
*1 (Рц)х Plx сх! М 1 C0S ё\х
У1 = АВ1 (^)у 0 — cxi S м 1 sin cq 4- Siy ; (3.7)
тх
2'1 (^)г 0 0 glz
*2 (^2z)x ~ р2х - cx2q2Sм2 cosa2 g2x
У2 = — в2 Ш2 (^2z)y р2у С“2^2^м2«2 COSa2 4- , (3.8)
*2 (РИ)г р2г Сг2 ^2^м2р2 g2z
где Bv В2 - матрицы перехода между связанными CxXxYxZx, C2X2Y2Z2 и инерциальной CXYZ системами координат; (Р^Е)Ж =
”к Пк Пк
= £(Л«)х. <<Ркт)у = KPki)y> (рк^2 = %Р*)г - проекции
1=1 1=1 1=1
тяги двигателей активной (&= 1) и пассивной (k = 2) ступеней на соответствующие оси связанных систем координат; - про-
изводные коэффициентов подъемной и боковой сил соответственно по углу атаки 02 и углу скольжения р2; gfa, gfy, gkz ~ проекции вектора ускорения силы тяжести на оси инерциальной системы координат CXYZ.
Моменты сил относительно главных центральных осей, действующих на активную и пассивную ступени, определяются соотношениями
(Мх1)1 = Мж1(Р1)-Мж1(Ру1|р);
=Myi(P,)-M,1(Pyiip) + (Me!Z)1;
(M2Z)i = Мг1(Р1)-Мг1(Рупр) + (Л/вг)1;
(3.9) (Л/д1)2 = Мж2(Р2);
(MyZ)2 = Му2(Р2)+(Мау)2-(F2!lra2)-,
(М2Ъ)2=М22(Р2) + (Маг)2 ~(F2ylrA2),
где /гд2 - расстояние от линии действия проекций равнодействующей газодинамических сил F2y, F2z до плоскости C2Y2Z2; Л/х1(Рупр), Л/у1(Рупр), ^zi(^ynp) ~ управляющие моменты, действующие на активную ступень, относительно осей связанной с ней системы координат.
Уравнения вращательного движения активной (i = 1) и пассивной (г = 2) ступеней будут иметь вид
где
(Jxx)i (-Jxy)i (-Jxz)i 0 -coa
Jci - (~Jyx)i (J yy)i (-Jyz)i • Ы = (0д 0 -to*
(-Jxx)i (Jzz)i ~ ®yi 0
Как уже отмечалось в главе 1, активная ступень должна иметь положительное осевое ускорение, что связано с необходимостью обеспечения устойчивой работы питающих топливных устройств. Это ограничение можно представить в следующем виде:
*1 > Хтр при taа <t <taн, (3.11)
где хтр - требуемое ускорение активной ступени при включении ее ДУ; £даи £дн - моменты времени, соответствующие включению ДУ активной ступени и выходу ее на номинальный режим.
В случае использования РДТТ на активной ступени указанное выше требование перестает быть существенным.
Другое ограничение касается возмущений углового движения на неуправляемом участке. Кроме того, следует рассматривать возможность взрыва пассивной ступени вследствие длительного воздействия на нее струй ДУ активной ступени.
Относительное движение ступеней начинается с момента, когда ускорение в направлении продольной оси активной ступени становится больше, чем пассивной. Это условие определяется неравенством
П1 Г И2
£Ри cose1( > ^- £Р2> cose2> - F2x -cx2qSM2 + fTFn -
i=l m2
^lx m1-
(3.12)
Нелинейные уравнения (3.5)-(3.12) образуют математическую модель «горячего» разделения.
В ряде случаев требуются приближенные оценки динамики движения разделившихся ступеней. Для их получения упростим приведенные выше уравнения. Не будем учитывать влияние перекосов векторов тяги двигателей и примем равными нулю углы скольжения ступеней, а также начальные угловые скорости. Моменты инерции каждой из ступеней Jc^y^ Jcizi ввиду осевой симметрии ракеты будем считать равными друг другу. Кроме того, как показывает анализ, поперечные оси координат можно расположить так, что относительно одной из них, например CZ, будет действовать наибольший момент возмущающих сил. С учетом принятых допущений уравнения (3.5) и (3.6) примут вид
1
X = --
т\
«1
Л: + F\x ~ i = l
1
«2
” ^2х " СХ2^м2 ;=1
(3.13)
”1 ”2
= “7 ~ iy)l ~ ^2 / (g )г + 7И2(Х^5М/К + ^2г/^гд »
JCz i=i ;=1
где JCz - главный центральный момент инерции ракеты относительно одной из поперечных осей, например Z; 5М - площадь миделя ракеты; (eiy)b (ejy)2 ~ эксцентриситеты силы тяги двигателей активной и пассивной ступеней относительно ЦМ в проекциях на плоскость CXY\ - производная по углу а коэффициента момента аэродинамической силы относительно оси Z; /к - длина корпуса ракеты.
Подставляя в первое из уравнений (3.13) соотношение (3.4), определяем изменение относительного расстояния х на шпилечном участке в процессе отделения.
При рассмотрении движения ступеней на втором участке отделения примем дополнительное допущение о неизменности величины и направления гравитационных сил. Введем геоцентриче
скую систему координат ОЕХЕУЕ. Ось ОЕХЕ направим параллельно линии местного горизонта в сторону полета ракеты, ось ОЕУЕ совпадает с местной вертикалью (в точке старта) (см. рис. 3.4). Тогда гравитационное ускорение в проекциях на оси ОЕХЕ и ОЕУЕ можно представить в виде
£1хг = ё2хг = -gcos0; £1Уг =g2yr = -gsine,
где cos0 = гХг/г, sin0 = гут/г, г- геоцентрический радиус, проведенный в ЦМ ракеты; гХг, гуг - проекции вектора г на соответствующие оси системы координат ОЕХЕУЕ.
С учетом принятых выше допущений запишем уравнения движения для активной ступени:
Xj = vt cos 0,; у\ = Uj sin 0,; 0j = Oj -о^;
"I 1
EPli +flx cos(°l - 01 ) - 7 cxj
- gcos(0-0j);
n\ 4
2 i=l i = l
где Jc\z\ - главный центральный момент инерции активной ступени относительно оси QZp /К1 - длина корпуса активной ступени; Pfl - тяга z-ro управляющего двигателя (общее количество которых предполагается равным четырем); If - плечо тяги z-ro управляющего двигателя относительно оси CXZX.
Аналогичные уравнения для пассивной ступени имеют вид
х2 = v2 cos02; у2 = v2 sin02; 02 = $2 “0с2;
п2
l'=1
cos(02 - Ог) - Fiy sin(O2 - 62) ~ I Cx2P^5m2
- q cos(0 - 02 );
(3.15)
1
n2 1
sin(O2-e2)+ Fiy cos(02-e2) -<?sin(0-e2)
1 ”2
~ P^2 *-*'m2^k2 (^2 -®2)- 5L^2>(e>y)2 + ^2j^r2
2 >=1
где Jcizi ~ главный центральный момент инерции пассивной ступени относительно оси C2Z2; /к2 - длина корпуса пассивной ступени; /г2 - плечо боковой газодинамической силы F2y относительно ЦМ пассивной ступени.
Ограничение (3.11) сохраняет силу, а условие (3.12) начала разделения ступеней примет вид
«1 Г «2
ЕР1- >^~ YPU “^2^м2 -Р2ж +/ТР„
1=1 т2 ;=1
(3.16)
Уравнения (3.12), (3.13) и (3.16) целесообразно применять для анализа движения в наиболее неблагоприятных случаях, связанных с действием наибольших по величине моментов и сил, до выхода ступеней из заглубления по месту стыка.
Если разделение ступеней происходит на большой высоте, то аэродинамические силы малы и ими в первом приближении можно пренебречь.
3.3. «Холодное» разделение
Принцип «холодного» разделения ступеней достаточно подробно рассмотрен в главе 1. Типовая последовательность прохождения команд и схема процесса представлены на рис. 1.1, а и 1.2, а.
При получении уравнений, описывающих «холодное» разделение, предположим, что в качестве СО используются РДТТ, установленные на активной и пассивной ступенях. Силы, действующие на разделяемые ступени, и принятые системы координат показаны на рис. 3.5.
Используя те же допущения, что и при рассмотрении «горячего» разделения, запишем дифференциальное уравнение для относительного движения ЦМ ступеней на участке кинематической связи:
X = — £ Р-п cos eTi - cxiqS - fTF„ m\ .ti
4 /
r n2 n j
^P2j cose2> - ^Ptj coset>
l>=1 )=i
(3.17)
— Cx2 qS M2 + fr F„ ,
где PTl, PT; - тяга z-го и у-го РДТТ отделения, установленных соответственно на активной и пассивной ступенях; £Т:, £Т; - углы отклонения осей сопел РДТТ отделения от продольной оси ракеты; nit rij - количество РДТТ отделения, установленных соответственно на активной и пассивной ступенях.
Уравнения совместного вращения ступеней на участке кинематической связи будут отличаться от приведенных ранее (3.6) дополнительными моментами, создаваемыми тягой РДТТ отделения. В этих уравнениях для «холодного» разделения следует принять
мхъ =МхС(Р2) + МхС(РтУ,
му£ =МуМ) + МуС(Рг) + Мау-, (3.18)
мгЪ = м гС(Р2) +м гС(Рт) +мш,
где Л/хС(Рт), Л/уС(Рт), Л/гС(Рт) - моменты, создаваемые РДТТ отделения относительно соответствующих осей ракеты.
Рис. 3.5. «Холодное» разделение ступеней
После окончания шпилечного участка уравнения движения совпадут с ранее полученными (3.7), (3.8), (3.10) с той лишь разницей, что в правых частях этих уравнений проекции газодинамических сил и моментов должны быть заменены на соответствующие проекции сил и моментов тяги РДТТ отделения.
Газодинамические силы при «холодном» разделении в отличие от «горячего» начинают действовать при удалении ступеней на значительное расстояние друг от друга и практически не оказывают влияния на процесс.
Ограничение (3.11) остается справедливым и в рассматриваемом случае, а условие начала относительного движения принимает вид
"i Г п2
£PTicos€Tl £P2>cos£2; -
м т2
"j
~YPTj coseT, - cx2qSM2 + fTF„
;=1
+ frpn + сх1<7^мГ (3-19)
Соотношения (3.7), (3.8), (3.10) с новыми правыми частями и уравнения (3.17), (3.18), (3.19) образуют математическую модель «холодного» разделения ступеней.
Для приближенной оценки динамики относительного движения при «холодном» разделении можно принять такие же, как и для «горячего» разделения, упрощающие предположения, получив при этом несложные уравнения. Допуская, кроме того, что РДТТ отделения установлены идеально симметрично, сведем выражения (3.5) и (3.6) с измененными правыми частями для участка кинематической связи к следующим:
1 Г”*
х =--- X PTi “ Cxl^Ml - frpn -
1
т2
coseTj
(3.20)
пi п j п2
й = — + ЕРтДгтЛ + ЕР2><^>2-m^SMlk
JCz i=l 7=1 ;=1
Реакция Fn на шпильках определяется с помощью соотношения (3.4). Дифференциальные уравнения, описывающие движение ступеней после окончания шпилечного участка, отличаются от (3.14) и (3.15) тем, что в их правых частях необходимо учесть силы и моменты от действия РДТТ отделения. Уравнения (3.20) справедливы для оценочных расчетов.
3.4. Продольное разделение
Отделение боковых блоков от центральной ступени
Рассмотрим общий случай, когда имеется активный ЦБ и «k» отработавших ББ, соединенных с ним верхним и нижним поясами связей.
Разделение происходит следующим образом. Сначала рвутся ВПС, при этом ЦБ сохраняет связь с ББ посредством k подвижных нижних двухстепенных цилиндрических шарниров В^. Далее начинается разворот ББ под действием СО относительно этих шарниров (рис. 3.6-3.8) с одновременным проскальзыванием вдоль образующей ЦБ. Это движение обусловлено перегрузкой, создаваемой силой тяги ДУ ЦБ. Кроме того, ББ под действием внешних сил и сил инерции могут выходить из плоскости отделения, вращаясь относительно шарниров В^.
Такая последовательность разделения связей не является обязательной. Методика расчета продольного разделения ступеней остается справедливой и для случая, когда первыми рвутся НПС и вращение ступеней происходит вокруг ВПС, как на PH «Восток».
При штатном полете массы отделяемых ББ приблизительно одинаковы (так как топливо вырабатывается во всех баках). Однако массы ББ могут существенно различаться, например, вследствие отказа ДУ одного из Б Б. на старте или в любой точке траектории полета. Тогда масса блока, полностью или частично заполненного топливом, к моменту начала отделения значительно превысит массы остальных блоков. Вследствие этого процесс отделения будет протекать асимметрично и ЦБ получит значительные возмущения по линейным и угловым скоростям. Причиной возмущений может также служить отделение несимметрично расположенных блоков или их последовательное отделение.
При разработке методики использованы следующие системы координат (см. рис. 3.6, 3.7, 3.9):
Си Хи Уи ZM - правая инерциальная система координат с началом в точке пространства, в которой располагается ЦМ ЦБ в момент подачи команды на разделение. Центр этой системы координат движется с постоянной линейной скоростью, которой обладала ракета в момент подачи команды на разделение;
CXYZ - правая, связанная с ЦБ система координат с началом в его ЦМ. Ось CZ направлена вдоль его продольной оси в направлении полета. Оси этой системы являются главными центральными
осями инерции ЦБ. В момент подачи команды на разделение системы Си Хи Уи ZH и CXYZ совпадают;
CkXkYkZk - подвижная правая система координат, связанная с А-м блоком. Ее начало находится в ЦМ этого блока. Ось Zk направлена по его продольной оси в сторону носовой части. Оси этой системы координат являются главными центральными осями инерции k-го блока.
В данной методике предполагается, что разделяемые тела абсолютно твердые, с неизменными в рассматриваемый промежуток времени масс-инерционными и центровочными характеристиками. Трение в шарнирах отсутствует.
При выводе дифференциальных уравнений движения используются уравнения Лагранжа II рода для обобщенных координат и уравнения Эйлера - Лагранжа для линейных и угловых скоростей.
В качестве обобщенных координат выбраны:
линейная координата sk проскальзывания шарнира Bk вдоль образующей ЦБ (см. рис. 3.8);
угол ak между положительным направлением оси Z и проекцией оси Zk на плоскость отделения (см. рис. 3.8);
Рис. 3.8. Движение ББ на подвижной связи
угол фк между положительным направлением оси Zk и плоскостью отделения (см. рис. 3.7);
проекции vx, vy, vz линейной скорости ЦМ ЦБ на оси связанной с ним системы координат CXYZ (см. рис. 3.6);
проекции сох, (Oyittoz угловой скорости ЦБ на те же оси (см. рис. 3.6).
Величины а*, , S/g характеризуют взаимное расположение разделяемых блоков, a vc = vc(vx, vy, vz), <oc = wc(cox, coy, to2) -кинематическое состояние ЦБ в процессе разделения. Таким образом, процесс разделения описывается 3k + 6 дифференциальными уравнениями второго порядка, записанными в системе координат CXYZ:
эт dt dsk _iL = c k = 1, 2, 3,.
d дТ k = 1, 2, 3,
dt dak
d ЪТ k = 1, 2, 3,
dt ЭфЛ
dT/dvx 0 -co
d dt ^T/dvy + 0
dT/dvz -CO, 4
°>у
"“х
О
3T/dvx ЗТ/dVy 3T/dvz
(3.21)
-®z 0 ^y -(0x dT/dox dT/ddiy +
cov 0
X 3T/do3z
+ 0 ~vz vz 0 -vx -Vy vx 0 dT /dvx 3T/dVy 3T/dvz = M<ox M«y
Задача свелась к определению суммарной кинетической энергии системы Т как функции обобщенных координат sk, и ф^, их производных и скоростей vx, vyt vz, сох, со^, со2.
Кинетическая энергия рассматриваемой системы равна
+ (3.22)
k
где ГЦБ - кинетическая энергия ЦБ; Tk - кинетическая энергия £-го отделяемого Б Б.
Кинетическую энергию ЦБ определим из соотношения
ТцБ = 1 m vcvc +1 ф Jcwc, (3.23)
где m, Jc - масса ЦБ и его тензор инерции относительно осей системы координат CXYZ.
Вычислим кинетическую энергию Tk k-ro отделяемого блока. Как видно из рис. 3.6,3.8, радиусы-векторы i-й точки £-го блока определяются как
?ik ~ ^ck + Г ci ’ Rik ~
Продифференцируем последнее соотношение по времени:
Vik = vc + tik +[йс X rik]f
где rik - локальная (в системе координат CXYZ) производная данного вектора.
Тогда
Tk =^mikvikvik = ^mkvcvc +Vc^mikfik +
+ mikx rik] +1 mikWik + '£mik?ikx rik] + i i i
+ ^£mik[“с X rik][coc. x rik]. (3.24)
Рассмотрим отдельные слагаемые этого выражения:
= RckYmik
С учетом свойства ЦМ Б Б
^mik=mk; ^тпй^=0; ^mikrik =mkRck.
Следовательно,
= mkvcRck-
х X(KC* +^)] =
i i
= Vc^mikttoc x R^ + v^m^ xr^) =
= ®c £ m ik(Rck X M + <*\ (£ m ikfci ) x = i i
= Rck 771 ik><&c x «С ) = ”4 Rck [rJt. X wc ].
(3.25)
Раскроем скобки и приведем подобные члены в последнем слагаемом (3.24):
± L т * [®с х r.k ][cot х f.J = 1 (0cT fck<oc. (3.26)
Это соотношение можно получить следующим образом:
xFiJ[®c XFJ =|S 777« <»y to2
x ik У ik z ik
= | ^mikl(ziktoy - yikto2)2 + (x,*<oz - zikG)x)2 +
+ (Vik^x - х^у)2] = 1 ^mik[(y2.k + z2k)(»2 + (x2k + z2ik)a2y +
+ (** + ^>2 - 2xikVik^y -IXikZiktoxtoz -2г/(*г|А(0у(0г] =
= 2^xkxk<iix + ^ykvk^y + ^k2^2 -ZJxkyk^xtoy ~
“ 2Ух^2^С0хС02 — 2 J ykz zk®y®z) ~ 2 Jck^cr
где Jck - тензор инерции £-гоББ относительно системы координат CXYZ.
С учетом выполненных преобразований выражение (3.24) запишется в следующем виде:
Tk =^k^c +mkvcRck +mkRck[vc хйс] +
+ + ®c^mik[rik *rik]+^Jckac. (3.27)
Инерционные характеристики k-го отделяемого ББ задаются относительно связанной с ним системы координат CkXk YkZk, поэтому, обозначив его тензор инерции относительно этих осей через Jck, свяжем между собой этот тензор и тензор, входящий в соотношение (3.26), используя теорему об изменении центра приведения [11]:
Jck = AkJckAxk +mk(R2kE - RckRxk), (3.28)
где E - единичная матрица.
Данное соотношение записано с учетом того, что k-й отделяемый ББ участвует относительно ЦБ в двух движениях - вращательном и поступательном. Первый член этого выражения учитывает поворот системы координат CkXk YkZk относительно CXYZ (матрица поворота ЛД а второй - поступательное перемещение £-го отделяемого блока относительно ЦБ. На рис. 3.9 показана по-
следовательность поворотов с* —>а* <pk, где е* + у* = л/2, а угол уk устанавливает угловое положение шарнира Bk k-vo блока на поверхности ЦБ. Матрица имеет вид
4 =
созф* siny* +
+ sinq>£ sin a* cosy*
- cos ф* cos у * +
+ 8Шф* sina* siny^
sin q>^ cos а*
cos a* cosy*
-sM*siny* + +со5ф* sin a* cosy*
cos a* siny*
sinq>£ cosy* +
+со8ф* sin a* siny*
- sin a*
cosq>£ cos a*
В (3.27) входят векторы Rckl rik и их производные, которые также выражаются через обобщенные координаты (см. рис. 3.8):
Rck =bk (3.29)
откуда Rck = sk + А*[(б* х dk) 4- (б* х а*)], где б* - вектор относительной (по отношению к системе координат CXYZ) угловой скорости £-го блока.
При дифференцировании (3.29) учтено, что все векторы (за исключением sk), входящие в правую часть этого равенства, имеют постоянные модули, а вектор bki кроме того, и постоянное направление в системе координат CXYZ.
При формировании матрицы Ak положительными принимались повороты против часовой стрелки. В этом случае вектор ф* в системе координат C*X*K*Z* имеет проекции (0; —<р^; 0), а вектор ak в системе координат CkX' Y' Z' - (-a*; 0; 0). На рис. 3.9 показаны последовательности поворотов при формировании матрицы A J (обратный переход).
Определим проекции векторов а* и ф* в системе координат CXYZ.
^kcXYZ = ^k^kCkxkYkZk ’
или ф* = ф*[-ф* cosa* cosy*; - ф* cosoc* siny*; ф* sin a *].
Аналогично получим
ak siny*; a* cosy*; 0].
Рис. 3.9. Последовательность поворотов -> а* -> срЛ для получения матрицы перехода
Тогда
®*=а*+Ф*- (3.30)
Проекции этого вектора на оси системы координат CXYZ равны: [-ccAsinyA-tp^cosa^cosy^; a*cosy*-<p*cosa* sinyA; (p^sinaj.
Подставив выражение rik = Rck +[<o^ xrj] в (3.27) с учетом (3.28), получим значения следующих слагаемых:
®c^mik\rik =^cYmik(^ck *Rck) =
i i
= mkac(Rck xRck) + mTcJckO)k;
2 ~ ^^K^ck^ck '^'^^cJck^k' (3.31)
Рассмотрим последний член выражения (3.27). Подставив в него значение Jck из (3.28), получим
^cfck^c =^c{AkJckA\ +mk(R2ckE -RckR^k)](0c. (3.32)
Таким образом, значения ТцБ и Tk полностью определяются выражениями (3.23), (3.25)-(3.32), с помощью которых вычисляются их отдельные составляющие. Полную кинетическую энергию системы можно найти из соотношения (3.22). Подставив (3.22) в (3.21), получим систему нелинейных дифференциальных уравнений:
Ф1(аА, Фа, sk, vx..ak, ф*. sk, vx, ...) = О,
Ф2(а*> Фа, s'k> vx.&k> Фа, vx, ...) = 0,
Фза+6<«а. Фа. s'k' vx.“а- Фа, vx> •••) = 0.
Получение этих уравнений представляет собой трудоемкий вычислительный процесс. Если ББ расположены симметрично относительно ЦБ, процедура существенно упрощается. Обобщенные силы находятся традиционным способом и зависят в общем случае от аэрогазодинамических сил, действующих на разделяемые тела, тяги последействия ДУ ББ, тяги ЦБ, действия РДТТ отделения и т. д.
Данная система решается с помощью ЭВМ. При этом входящие в нее уравнения предварительно разрешаются относительно входящих в их состав вторых производных обобщенных координат и первых производных обобщенных скоростей.
Для определения реакций в шарнирах Bk можно воспользоваться принципом Д’Аламбера.
Разведение параблока на моноблоки
Как отмечалось в главе 1, разгонные блоки первой ступени PH «Энергия» отделяются попарно соединенными в виде так называемых параблоков. Необходимость разведения ПБ на моноблоки возникла впервые в связи с поставленной задачей их повторного использования.
Расчет разведения проводится для определения энергетических характеристик РДТТ. Кроме того, находятся кинематические параметры каждого из блоков, которые необходимы для расчета рассеивания места посадки и выбора параметров исполнительных органов СУ.
Задачей расчета является определение текущих зазоров между моноблоками, входящими в состав ПБ, с учетом имеющихся на их поверхности надстроек с целью исключения взаимного соударения в процессе разведения. Надстройками на внешних боковых поверхностях моноблоков являются обтекатели различных конструктивных элементов, например, устройств, входящих в систему их спасения (парашюты, посадочные устройства, РДТТ разведения, посадочные радиолокаторы), транзитных электрических и пневматических коммуникаций и т. д. Соединение моноблоков в ПБ и установка РДТТ разведения представлены на рис. 3.10. Принятые при разработке методики расчета системы координат показаны на рис. 3.11.
(/=1,2) - правые, связанные с каждым из моноблоков, системы координат с началами в их ЦМ. Оси совпадают с продольными осями моноблоков и направлены в сторону их носовых частей. Оси перпендикулярны осям CjXit совпадают с главными центральными осями инерции и направлены в стороны полуплоскостей IV моноблоков.
0иХиУи7и - правая инерциальная система координат с началом в точке пространства, в которой находится ЦМ ПБ в момент подачи команды на разведение. Ось ОИХИ совпадает с продольной осью ПБ, ось ОИУИ перпендикулярна к плоскости, проходящей через продольные оси моноблоков и направлена в сторону ЦБ.
На рис. 3.12 показана последовательность поворотов у -> 0 -> у, переводящая систему координат ОИХИ УИ7И в С^У^. Матрица перехода имеет вид
cos(xM,x:)
Bi = cos(yM,xf)
cos(zM,x:)
cos(xH,yf) cos(xH,zf) cos(t/H,t/f) cos(yM,zf) cos(zM,^/f) COS(Zn,Z:)
^11
^21
^31
^12 ^13
^22 ^23
^32 ^33
cos 0j cos Vi sinOf
sinViSinYi- cosOiCOsy .
- cos Vi sin0j cosy i 1
- sin Vi cos0i
cos v i sin у . +
+ sin Vi sin0: cosy .
. (3.33)
sinv cosy.- + cosv.cosYi-
1 . A -cos0iSinYi 1 . . Q
+ cosvi sin 0i sin у 1 11 - sin Vi sin 0 ; sin у:
Рис. 3.10. Схема соединения моноблоков в параблоки и установка РДТТ разведения:
1 - В ПС; 2 - РДТТ разведения; 3 - НПС
Проецируя на оси связанных систем координат (см. рис. 3.12) векторы 0, уи у, являющиеся производными соответствующих углов, задающих ориентацию связанных осей относительно инерциальных, и приравнивая полученные выражения к соответствующим компонентам вектора угловой скорости ПБ cot [р:, qit rj , получим соотношения
Pi = ii +V> sine,;
q, = 9, siny, + y, cosO, cosy,;
r, = 0, cosy; -v, cosOj siny,.
Рис. 3.12. Последовательность поворотов у-> 0 ->у для получения матрицы перехода
Решая эту систему относительно 0f, » уг, получим следую-
щие соотношения:
0f = qi siny i + rf cosy
Vi =(?iC0SYi ~ri siny / cos0f; (3.34)
Yi = Pi "(4icos7i -r, sinyf)sin0f/cos0f.
При 0, = (2k - 1) n / 2 во втором и третьем уравнениях (3.34) cos 0,- обращается в нуль и соотношения для \|/ 2 и у i вырождаются. Наличие таких особых точек не позволяет вести непрерывный расчет на ЭВМ.
Составим систему уравнений, которая не содержала бы особых точек. Продифференцируем выражения для направляющих косинусов, входящих в матрицу (3.33). В полученные соотношения вместо 0, у и у подставим их выражения из (3.34). После преобразований система дифференциальных уравнений будет иметь вид
*11 =4cos(xM>x,) = гЛ1 -<7,*3i:
at
* 12 = 4cOS(XH,l/,) = rik22 - qik32, at
* 13 =4cos(xH,z,) = гЛз -<7Лз;
at
* 21 = 4C0S(yM>xi) = Pik3\ at
* 22 = C0S<J/и >У,) = Pi *32 “ ri*121 (3-35)
at
* 23 = 4cos(t/„, z,) = p,k33 -r,*13; at
* 31 =4C0S(zH.^.) = 9i*ii -Pi*2i;
at
* 32 =4cOS(ZM,l/,) = qikx2 -р&2; at
* 33 =4COS(ZH.*>) = <7i*13 -Pi*23-
at
Дифференциальные уравнения движения ЦМ каждого из блоков в инерциальной системе координат запишутся так:
У и ^•И
(3.36)
где Fx., Fy., F2. - проекции на связанные оси всех активных сил, действующих на каждый из блоков.
Для определения угловых скоростей используем систему трех динамических дифференциальных уравнений Эйлера:
L\L +(JU- ~Jz-)*Jiri • _ '•'•ft t t
. = +Uzj . (3 37)
У i
__ zj + UXi ~ J у iQ i
Jzi
где Jx , Jy., Jz - главные центральные моменты инерции блоков; ЕЛ/Х., ЕЛ/ у , ЕЛ/2. - сумма моментов всех внешних сил относительно каждой из соответствующих связанных с блоками осей.
Решение системы уравнений (3.35)-(3.37) не будет иметь особых точек. Из элементов матрицы (3.33) можно непосредственно получить значения искомых углов:
= arcsin[cos(xM, у,)];
у, = arctg[-cos(xM, z f) / cos(xи,x,)];
у f = arctg[- cos(zи, у f) / cos(y и , у J,)].
Для определения текущих зазоров между моноблоками в процессе их относительного движения в инерциальной системе координат ОИХИ УИ7И записываются уравнения их осей. На каждом шаге численного интегрирования уравнений, описывающих процесс разведения, находится расстояние между этими осями в пределах длин моноблоков и угловое положение каждого из них. На основании полученных результатов с учетом геометрии каждого из моноблоков определяется зазор между ними.
Моноблоки в процессе разведения совершают сложное пространственное движение. Вращение в плоскости тангажа (вокруг оси ZM, см. рис. 3.11) не является критичным, так как моноблоки в этом случае движутся параллельно друг другу и зазор между ними остается неизменным. Вращение по крену опасно в том смысле,
что за счет него надстройки на корпусах моноблоков входят в межблочную зону. Но это движение также не критично, поскольку одновременно с разрывом межблочных связей начинают работать РДТТ разведения, создающие необходимый зазор для беспрепятственного прохождения надстройками межблочной зоны.
Наиболее опасным является вращательное движение по рысканью (координата у), которое может привести к соударению моноблоков даже при наличии импульса на их разведение. Ограничимся анализом именно этого движения на стадии проектных расчетов по определению энергетических характеристик РДТТ разведения. Следует отметить, что на ПБ к моменту его разведения не действуют внешние силы (высота более 100 км). Примем, что связанные с ним оси некоторой системы координат являются его главными осями инерции.
Зададим в некоторой системе координат 0иХи7и две прямые - I и II, совпадающие с продольными осями моноблоков, которые совершают плоское движение в плоскости XilZil и являются «моделями» разводимых моноблоков (рис. 3.13, а). Предположим, что моноблоки вращаются с одинаковой угловой скоростью в канале рысканья.
Рис. 3.13. Интерпретация картины разведения моноблоков: а - «модели» разводимых моноблоков; б-определение момента соударения: 1-tgy; 2-((1 /у) + а); 3 - а = 1 / (туго)
Для интерпретации картины относительного движения моноблоков допустим, что ПБ вращается в плоскости 0иХи7и с угловой скоростью \j/ = const (см. рис. 3.12), которую, как это было по
казано в § 3.1, сохраняют и моноблоки. Положим также, что к моноблоку II приложен суммарный импульс J на разведение, в результате действия которого ему будет сообщена линейная относительная скорость v0, направленная вдоль оси O„Z„. Кроме того, моноблок II после разрыва силовых связей между моноблоками получит направленную вдоль оси О„ Х„ относительную скорость vi = Vro> гДе го ” начальное расстояние между ЦМ моноблоков.
Уравнения прямых в системе координат O„X„Z„ запишутся следующим образом:
для I x = zctgy;
для II х + ytr0 = (z - г0 - »ot)ctgy.
Используя соотношение для определения расстояния между двумя параллельными прямыми и приравнивая его нулю (соударение), получим
tgy =
г0 + vot ^rot
Принимая во внимание, что yt = у и тио0 = /, где т - масса моноблока; г>0 - относительная скорость моноблоков в плоскости O„X„Z„ после срабатывания РДТТ разведения, а I - импульс РДТТ разведения, окончательно будем иметь
'Ь т - .
V ^гот
Решив графически это уравнение (рис. 3.13, б) и определив угол \|/, можно найти момент времени, при котором произойдет соударение.
Заданные прямые бесконечны, а моноблоки имеют конечную длину А, поэтому необходимая проверка проводится на основании соотношения
ОРо)2 + Со +IV/ тУ)2 > h2.
Если это соотношение выполняется, то соударение не произойдет.
Интерес представляет исследование возможности разведения ПБ на моноблоки без использования для этой цели специальных РДТТ.
К моменту разведения область возможных значений р, q, г (см. рис. 3.12) определяется геометрическим местом точек пересечения двух эллипсоидов:
ЛР2 +JyQ2 +J2r2 = 2T;
Jx2p2+Jy2q2+J2r2 = K20,
где Т - кинетическая энергия ПБ на момент разведения; KQ - кинетический момент относительно его ЦМ. Анализ летной телеметрической информации позволяет определить диапазон Т и Ко. Поскольку эллипсоиды будут соосными, их пересечение на плоскости qr имеет форму кольца.
Рис. 3.14. Зоны возможного соударения моноблоков
На рис. 3.14 представлены зоны возможного соударения. Кривые для различных значений р получены численным интегрированием уравнений углового движения моноблоков. Часть кольца,
ограничивающая параметры q, г, попадающая во внутреннюю область кривой, полученной для заданного значения р, является зоной соударения. На рисунке приведены результаты расчетов для отрицательных значений р. Для положительных значений р кривые будут иметь зеркальное отображение относительно оси q. Как видно из рис. 3.14, существуют области сочетания значений р, q, г, при которых не происходит соударение в процессе разведения. Установка на моноблоках специальной аппаратуры, определяющей значения угловых скоростей, позволяет выбрать момент для подачи команды на разведение моноблоков.
Отделение орбитального корабля
Система отделения орбитального корабля была детально разработана при создании многоразового космического аппарата «Буран». МКА крепится к ЦБ с помощью трех узлов (см. рис. 1.6, 1.7), в состав которых входят средства отделения. В носовой части установлен один узел, а в кормовой - два узла, образующие ось вращения. Рассматриваемый процесс в штатной ситуации осуществляется по схеме параллельного отделения, который описан ранее.
Отделение МКА и спасение экипажа в случае возникновения аварийной ситуации, требующей прекращения выполнения штатной программы, вызывает большие затруднения, так как МКА нельзя посадить на неподготовленную площадку и он должен совершить сложный маневр, чтобы выйти в район специального аэродрома.
При авариях отделение МКА происходит на атмосферном участке, где на разделяемые объекты действует значительный скоростной напор, и процесс отделения становится проблематичным.
Рассмотрим аварийное отделение МКА на активном участке траектории. Такая ситуация возникает при отказе ДУ одного из ББ или одного из двигателей ЦБ. В этом случае энергетических ресурсов РН недостаточно для вывода МКА на орбиту ИСЗ, и он возвращается на аэродром, расположенный в районе старта. При этом система ЦБ совместно с МКА прекращает движение по штатной траектории выведения, переходит на траекторию возврата, где совершает переворот в плоскости движения, гасит приобретенную скорость и разгоняется в направлении старта. Схема
маневра возврата и изменение угла тангажа в ходе его выполнения представлены на рис. 3.15. На этом рисунке выделены характерные участки и точки:
О - точка старта и место расположения аэродрома посадки;
А - точка возможной аварии на участке выведения;
ВС - участок разворота системы МКА - ЦБ;
СЕ - участок гашения приобретенной скорости;
EF - участок разгона в направлении старта;
FR - участок формирования заданных кинематических параметров движения МКА - ЦБ;
RD - траектория свободного падения ЦБ;
R - область кинематических параметров, сочетание которых обеспечивает достижение МКА посадочной полосы, разделение его и ЦБ, выключение ДУ ЦБ.
тУ.ГРВД
О 100 200 300 400 500 г, с
Рис. 3.15. Маневр возврата орбитального корабля:
а - схема маневра; б - зависимость угла тангажа О от времени в ходе маневра
При маневре возврата условия процесса отделения определяются возможностями автономного движения МКА. Непосредственно после отделения на него должен действовать значительный скоростной напор q, имеющий ограничение по нижнему пределу. Это ограничение вызвано необходимостью иметь достаточную подъемную аэродинамическую силу, иначе МКА перейдет в пикирование. Иными словами, МКА после отделения должен выйти на некоторый балансировочный угол атаки абал, в противном случае не будут выполняться условия, обеспечивающие сохранность его конструкции (рис. 3.16, а).
предельные (/для системы МКА-ЦБ йййййййййййй предельные <?для автономного МКА
б
Рис. 3.16. Ограничения по скоростному напору, обеспечивающие:
а - сохранность конструкции МКА; б - управляемость
Процесс разделения и выход МКА на требуемый угол определяется отрезком времени порядка 15 с, в течение которого скоростной напор изменяется незначительно. Следовательно, необходимо организовать движение связки МКА - ЦБ так, чтобы в области R она имела скоростной напор q > gmin (<7mjn = 200 Н/м2),
который обусловлен требованиями по автономному начальному движению МКА. Поскольку при управлении движением системы существуют погрешности (навигационные, инструментальные, методические и т. д.), траектория маневра возврата должна быть построена так, чтобы при скорости v прицельная высота Ни обеспечивала условие:
<7min -1/2[р(НГ| ±ДЯ1|)±Др(Н|1)П(&±Да± ±W(Hn)±bW(H„)]2 <<7max.
где ДЯП - ошибка в определении прицельной высоты; р(Я„ ± ±&НП) - плотность атмосферы на высоте Ян; Др(Яп) - отклонение плотности атмосферы на высоте Яп; &и - ошибка в определении скорости движения МКА - ЦБ; W(Hn) - скорость ветра на высоте Яп; Д1У(ЯП) - отклонение скорости ветра на высоте Яп.
В то же время, существуют допустимые пределы максимального скоростного напора, так как ограничены возможности, во-первых, по управлению МКА - ЦБ на участке FR, а во-вторых, - по управлению МКА на отрицательных углах атаки (рис. 3.16, б). Из рисунка видно, что предельное значение скоростного напора, при котором возможно разделение, составляет </тах <2000 Н/м . Следует отметить, что ЦБ представляет собой аэродинамически неустойчивый объект.
Итак, чтобы обеспечить попадание МКА на посадочную полосу в районе старта, необходимо создать соответствующие начальные условия для его автономного движения, а для этого, выполняя ограничения по управлению, привести МКА в зону R (см. рис. 3.15) и отделить от ЦБ. В процессе отделения и при последующем относительном движении МКА и ЦБ их взаимное соударение недопустимо. При этом необходимо учитывать следующие факторы:
- большая длина разделяемых тел, затрудняющая процесс отделения. Вращательное движение относительно поперечных осей при условии малых начальных зазоров может привести к их столкновению носовыми или хвостовыми частями;
- импульс силы, сообщаемый разделяемым телам средствами отделения, установленными в узлах связи, имеет эксцентриситет относительно их ЦМ, что приводит к возмущениям вращательного движения относительно поперечных осей;
- продолжительная тяга последействия, создающая систематический момент по тангажу;
- скоростной напор, значения которого лежат в указанных выше диапазонах;
- аэродинамические силы и моменты, зависящие от взаимного положения разделяемых тел, так как сказывается их интерференция;
- начальное положение системы МКА - ЦБ относительно набегающего потока и ее угловая скорость;
- случайные ветровые воздействия, оказывающие влияние преимущественно в боковом канале управления;
- аэродинамическое управление или управление с помощью ЖРД ориентацией МКА. В ряде случаев невозможно одновременно удовлетворить требованиям обеспечения безударного отделения и максимально быстрого выхода МКА на а^,;
- ограничения по энергетическим характеристикам исполнительных органов СУ.
При разработке методики расчета приняты в основном те же допущения, что и при расчете разделения ступеней. Оси связанных с разделяемыми телами систем координат (рис. 3.17) являются главными центральными осями инерции. Индекс i= 1 относится к МКА, a i = 2 - к ЦБ. Оси параллельны продольным осям разделяемых тел и ориентированы в стороны носовых частей, оси CjYj направлены вверх параллельно вертикальной плоскости симметрии тел. При этом OXYZ - правая инерциальная система координат, ось ОХ которой лежит в плоскости тангажа и параллельна местному горизонту, ось OYсовпадает с местной вертикалью.
Поступательное движение каждого из тел относительно инерциальной системы координат и вращательное относительно связанных систем координат (см. рис. 3.17) может быть выражено следующими уравнениями:
dQ, _ F.
~dT~Fi'
= -й, xKCi, (3.38)
at
где Qj- вектор количества движения z-ro тела; - главный вектор всех внешних сил, действующих на z-e тело; KCi =Ja®i~ вектор кинетического момента z-ro тела относительно его ЦМ; cd f - вектор абсолютной угловой скорости z-ro тела; MCi - главный момент всех внешних сил, действующих на z-e тело, относительно его ЦМ; JCi -главный центральный тензор инерции z-ro тела.
Рис. 3.17. Системы координат:
а - связанные и инерциальная системы координат; 6 - последовательность поворотов при переходе от инерциальной к связанным системам координат; 1 - передний узел связи; 2 - МКА;
3,4 - задние узлы связи; 5 - ЦБ
Связь между инерциальной и связанной системами координат представлена на рис. 3.17. Можем записать:
*i
Уг
*i
и
Выражая yit О, черезpit qit rt, как и ранее, получим особенности, для устранения которых выразим элементы матрицы Aj с помощью параметров Родрига - Гамильтона [11] р,-, щ, vz:
ахх = cos(xH, х:) = cos Ocosу = р2 + Л2 - ц2 -V2;
а12 =cos(xll,yi) = sintf = 2(р;у, + Х(ц,);
а13 = cos(xH, z,;) = - sin у cos б = 2(-p, p, + X ,v,•);
a21 = cos(z/H, xf) = sin veiny-cosy sin tfcosy = 2(-р(У| + X,-pf-);
a22 = cos(z/H, z/,) = p2 + p2 -v? -X2;
a23 = cos(z/H, г,) = cosysiny + sinysindcosy = 2(p(X( + у,р,);
a31 = cos(zH, х{) = sinycosy + cos у sin d sin у = 2(pIpl +у,Х,);
a32 =cos(zH, z/j) =-cos Osin у = 2(-р,Х; +v,Pj);
a33 =cos(zH,z() = cosycosy - sinysinOsiny = p2 +v2 -X2 -p2.
Параметры Родрига - Гамильтона связаны с системой углов Эйлера при последовательности их поворота у-»О -*у соотношениями
Vi ^i Yi • Vi • ^i • Yi p, = cos — cos —- cos — - sin — sin —- sin —;
2 2 2 2 2 2
. . у।. Oj Yj , уj 0, . y,
X. = sin — sin—- cos— + cos — cos—Lsin —;
' 2 2 2 2 2 2
• Vi ^i Yi Vi • ^i • Yi
p, = sin — cos —- cos — + cos — sin —- sin —;
' 2 2 2 2 2 2
Vi . Oi у, . у. О, . у।
' 2 2 2 2 2 2
а углы Эйлера выражаются через параметры Родрига - Гамильтона следующим образом:
sin fl,- = 2(p,v, + Х.ц, );
2(р,Х, -У,ц,) .
• 2 2 2 л2 ’
Pi -vl -А2
(3.39)
2(р,ц, -XjV,)
W = ~2~~^2-----2---2-
Pi +Х2 _ц2 _у2
Аналогично получим
Pi =2(р,Х, -А,(р; +у,ц, - p.v,.);
4i = 2(р,Й, - Ц,р, +X,v, -v,X( );
г, =2(p,v, -v(.p, +цД, -МД
Pi = "|(Mi +?iPi +^,); (3.40)
=|(PiPi -9iV, +r,Pi);
Й» =|(P,v, +9,Pi -гД,);
V, =|(-PiPi + <?Ai +r(Pi)-
Удобство использования параметров Родрига - Гамильтона состоит в том, что уравнения (3.38)-(3.40) не имеют особенностей и могут решаться с помощью ЭВМ при произвольном изменении кинематических параметров разделяемых тел. Кроме того, указанный метод решения позволяет отказаться от соотношений вида (3.35) и, таким образом, уменьшить количество интегрируемых дифференциальных уравнений.
Разделение тел происходит с разновременным разрывом связей, поэтому в правые части уравнений движения (3.38) должны входить соответствующие реакции связей. В данном случае связь может быть в виде оси вращения или сферического шарнира.
Расчетная схема для определения реакций связей приведена на рис. 3.18, где приняты следующие обозначения: гп - радиус-вектор ЦМ i-го тела в инерциальной системе координат (г = 1, 2); г у -
радиус-вектор положения j-й точки связи (j = 1,2) в i-й связанной системе координат; I-I - ось относительного вращения тел; Rj= Rj(RjX, Rjy, RjZ) - векторы реакций связей, заданные в проекциях на оси инерциальной системы координат OXYZ.
Как видно из рис. 3.18,
ГС1 +ги “ ГС2 +г21-
(3.41)
Рис. 3.18. Расчетные схемы для определения реакций связей
Дважды дифференцируя соотношение (3.41) и учитывая, что векторы гп и г21 имеют постоянный модуль, получим
аС\ + е1 х Г11 + х (Ю1 х rll) = аС2 + е2 х r21 + (02 X (со2 X Г2Х),
(3.42)
-----------j J Q\ . где = -(i = 1, 2) - угловое ускорение i-ro тела.
dt
Аналогичное соотношение можем записать и для связи 2. На основании (3.41) и (3.42) для ;-й связи в проекциях на оси инерциальной системы координат OXYZ будем иметь
аС\ ~ аС2 + Лт(ё1 х г1?) - Л2Т (ё2 х r2?) = Nj, где
Nj = Л2[©2 х(й2 хг2;)] - уЦЧ©! x^ хг1;)], (3.43)
2
аа +(-1)'+1£Я7]- (3.44)
>=1
Уравнение вращательного движения примет вид
2
+®i х Ja®i =Ма + xi-iy^AiRj],
>=i
откуда
г 2
?1 ‘Га +£,.
2=1
(3.45)
где
£; - (Л/а ©; XJq.©,).
3.4. Продольное разделение Подставляя (3.44) и (3.45) в (3.43), получим
2
2
(mj-1 + m~x) Rj. + Af J"} (i\j x AtRj) x rt Д +
У-1
2
;=1
+Л2Т
2)
(3.46)
> = 1
Рассмотрим выражение
ЛГ{[X Л,яр] xr*} = ^A^J^A^Rj,
где
О
=
Z У
-у*
Zij
О
ху
у а
~ ХУ О
Обозначив (Гу Л ,•) = Пу, а (г^ Л, )т = Щ, можем записать в развернутом виде все комбинации при R\ и R2 из (3.46):
iwa1 п11*1 =^111^; П11 Jc\ П12^2 = ^112^2' ^21Jc2 ^21^1 = £*211 Яр IklJc2 ^22^2 = ^212^2' П12/с1 = Di2\R\',
ni2^2 =^122^2!
П22/С2 П21^1 = ^221^1 J ^22 Jc2 П22^2 = ^222^2-
(3.47)
С учетом (3.47), подставленных в (3.46), получим два векторных уравнения:
Хц/?1 4- ^12^2 - К21^1 + ^22^2 = ^1! ^2- (3.48)
в которых 2
i = l 2 + Циь
^12 = ^miX + ^112 i = l 2 + #212;
^21 = Х772/ + ^121 i=l 2 + #221!
^22 = Х772/1 + ^122 i = l + D222;
Кх =NX -AX(LX xrxl)-m^Fx + Л2Т(£2 хr21) + m?F2;
Х2 = N2 -Ax(Lx xr12) -m^Fx + A2(L2 xr22) + m2*F2.
Поскольку Kn, K12 и т. д. есть квадратные матрицы вида
/<21
Pll Р12 Pl3
P2i Р22 Р23 -
Р31 Р32 РЗЗ
Р14
Р24
Р34
Р\5 Р16
Р25 Р26 ;
Р35 Р36
Р41 Р42 Р43
Р51 Р52 Р53 ;
Рб1 Рб2 РбЗ
Кх2 -
Р44
Р54
Рм
Р45
Р55
Рб5
Рлб
Р56
Рбб
Ки
К12 ~
то систему (3.48) можно привести к следующей:
(3.49)
Ось вращения формируется цилиндрическим и сферическим шарнирами, поэтому суммарное число компонентов реакций связей будет равно пяти. Если принять, что ось I-I параллельна осям OjZi (i =1, 2), то система уравнений (3.49) примет вид
У\
*1 = Р-1 ^1Z
*2
У2 К2у
откуда получим величины реакций в проекциях на оси инерциальной системы координат. Легко показать, что если между разделяющимися телами сохраняется связь в виде сферического шарнира (j =1), то нахождение реакции сведется к уравнению = Кь по-
лученному из системы (3.48).
Окончательно уравнения движения двух тел с учетом реакций связей будут выглядеть так:
= +(-1)'+1(Я1+Я2);
at
^1 = мс, + MCii(R^) + MCi2(Rf2n)-<b, xKLi. at
Как показали исследования, на процесс разделения наибольшее влияние оказывает начальное значение угла атаки а0 связки МКА-ЦБ и ее угловая скорость Кроме того, он зависит и от величины скоростного напора q. Область возможных комбинаций а0 и связки МКА-ЦБ ограничена из условий ее управляемости перед разделением. Их значения на этот момент (они определяются на основе расчета траекторий движения и анализа возможностей СУ связки в целом) составляют I а0|<15°, I |<5°/с. Необходимо найти такие комбинации этих параметров на момент выключения ДУ ЦБ, принятом за начало процесса разделения, при которых исключалось бы соударение разделившихся тел при их относительном движении.
Типовые результаты расчетов по определению зоны безударного отделения представлены на рис. 3.19, где знак «X» означает соударение хвостовыми частями, а «Н» - носовыми. Незаштрихо-ванная область - комбинация а0 и со^, при реализации которой в момент выключения ДУ ЦБ разделение происходит безударно, По - прицельная точка, прямоугольные границы области вокруг нее обусловлены разбросами Да0 и Асо^. Только в том случае, когда прицельная зона полностью попадает в незаштрихованную область, можно говорить о гарантированном безударном отделении.
Определение q на высотах Н = 50...70 км, на которых происходит разделение, затруднительно, поэтому прицельная область должна быть инвариантна относительно q, что упрощает алгоритм управления.
Все сказанное касается зоны безударного отделения в плоской постановке задачи, т. е. при начальных углах скольжения Ро и крена у0, равных 0, а также при со^ = соу0 = 0. Следует отметить, что силы и моменты, действующие на разделяемые тела, максимальны в вертикальной плоскости, являющейся плоскостью разделения.
Качественный анализ при ненулевых значениях указанных выше параметров показывает следующее:
при (0*0 * 0 не происходит уменьшения зоны безударного отделения, так как СУ МКА после разрыва связей работает в режиме стабилизации в канале крена, а ЦБ - тело цилиндрической формы;
при (0^0 * 0 движение после разрыва связей развивается в плоскости, перпендикулярной к вертикальной и, следовательно, не увеличивает возможность соударения;
при после разрыва связей относительного угла крена не существует;
при Ро * 0 (например, при Ро > 0) хвостовая часть ЦБ смещается в сторону положительного направления оси CXZX. Возникающий при этом аэродинамический момент крена, действующий на МКА, положителен, так как стремится поднять его правое крыло, способствуя увеличению зазора. Аналогичная картина наблюдается и при Ро < 0.
Рис. 3.19. Зоны безударного отделения МКА в зависимости от скоростного напора:
а - q = 100 Н/м2; б - q = 400 Н/м2; в - q = 700 Н/м2; г - q = 1000 Н/м2
Для расчетов процессов разделения и отделения с учетом аэродинамического воздействия на разделяемые тела, а также оценки управляемости системы МКА - ЦБ перед разделением и возможности автономного спуска МКА проводится статистическая обработка параметров атмосферы на заданных высотах для различных времен года. При нахождении возможного диапазона скоростных напоров учитываются отклонения термодинамических параметров атмосферы, скорость ветра на заданных высотах, скорости и высоты полета системы МКА - ЦБ. Целью таких расчетов является определение зависимости прицельной высоты Н„ от прицельной скорости полета v„ МКА - ЦБ, т. е. Н„ =f(v„) при условии непревы-шения максимального отклонения величины скоростного напора.
Основная задача расчетов состоит в нахождении диапазонов скоростного напора по известной формуле q = poi/2 .
Для определения прицельной высоты Н„ в момент прихода системы МКА - ЦБ в точку разделения необходимо получить математическое ожидание <?мо величины скоростного напора и его среднеквадратичное отклонение <5q в зависимости от высоты Нц, т. е. qM0=fx(Hn), oq=f2(Hn) в условиях разброса параметров атмосферы и ошибок по прицельной высоте выведения системы МКА - ЦБ. Для этого проводится обработка групп реализаций для каждого значения прицельной высоты Н„ по формулам математической статистики [12]:
п hi
(3.50) п
п
£(<7. -<7мо)2
1=1_____________
п - 1
При формировании реализаций q полагается что Я„ соответствует математическому ожиданию реальных высот выведения. Закон их распределения принимается нормальным. В соответствии с этим законом, используя датчик случайных чисел, выбираются реализации высот выведения связки МКА - ЦБ:
Я, = Яп + О,.<Ьнп,
где ДЯП - ошибка выведения по высоте, соответствующая отклонению 3q одн - среднеквадратичное отклонение по высоте; а,- -случайное число из датчика случайных чисел.
При определении распределения плотности атмосферы и ее разбросов предполагается, что известны систематические и случайные отклонения термодинамических параметров атмосферы для данного района, времени и высоты полета. Тогда
Pi
Др , %
~ Рст — Рст + i ч Рст Рст ?
где рст - значение плотности стандартной атмосферы на высоте Др/рст - систематическое относительное отклонение плотности атмосферы на высоте Нц для данного района и времени полета; Одр/рст - среднеквадратическое относительное отклонение плотности атмосферы на высоте Ни для данного района и времени полета; bj - случайное число.
Скорость связки МКА - ЦБ находится из соотношения
v = ^(v sin А + )2 4- (5 cos А + )2,
где v - вектор навигационной скорости полета МКА - ЦБ; А - азимут направления полета; wx, wy - широтная и меридианальная проекции скорости ветра, которые определяются как
^х = ™сх +ci&wx'’
^у ~~ су +
где wcx> wcy - математические ожидания скоростей ветра в широтных и меридианальных направлениях; awx, Gwy - среднеквадратические отклонения скоростей ветра в соответствующих направлениях; с,, di - случайные числа.
Для определения необходимого количества реализаций и, а также приемлемых затрат машинного времени построена зависимость среднеквадратического отклонения скоростного напора aq от количества реализаций п (рис. 3.20, а). На рис. 3.20, б показана гистограмма распределения случайных значений скоростного напора при значениях v= 1000 м/с, 13,3 м/с и параметрах атмосфе-
ры на высоте Н„ = 50 км, н = 333,3 м. По соотношениям (3.50) определено математическое ожидание скоростного напора q = 499 Н/м2 и его среднеквадратическое отклонение <5q = 66,4 Н/м2. Для этих значений построен нормальный закон распределения
г/ ч 1
/(?) = г— ехр
(<? - ?и„ Ч
и совмещен с гистограммой статистического распределения. Очевидно удовлетворительное соответствие статистического и теоретического распределений, что позволяет принять статистическое распределение q соответствующим нормальному закону.
На рис. 3.21 представлены зависимости q от прицельной высоты Нп в точке разделения при скоростях полета 1000; 1500 и 2000 м/с и азимутах стрельбы 60 и 180°. Некоторое их несовпадение объясняется наличием систематической составляющей скорости ветра для каждого из азимутов.
Если обобщить распределение скоростного напора для всей географической зоны разделения при маневре возврата для любого времени года, т. е. выбрать максимальное и минимальное значения математического ожидания (<7м.отах и <7м.отт)> предельные отклонения q, соответствующие ±3о(<7тах и то получим результаты, изображенные на рис. 3.22, а. Можно построить зависимость минимального 6?min, максимального и минимального значений математического ожидания (<7м.отах» ?м.о min)’ (Рис- 322, б). На рис. 3.22, в представлены значения прицельной высоты Нп от скорости полета для различных уровней б?тах = const. Этот график является основанием для выбора алгоритма управления, не зависящего от времени года. Действительно, прогнозируя скорость полета в точке разделения, можно выбрать прицельную высоту такой, при которой максимальное значение скоростного напора не превышает q = ^max. Итак, если прогнозируемая скорость составляет, например, v = 1500 м/с и предельное значение скоростного напора не превышает gmax = = 500 Н/м2, то из рис. 3.22, в получим, что Яп = 60,2 км, при этом из рис. 3.22, б видно, что диапазон математического ожидания скоростного напора в зависимости от времени года составит qM 0 = = 260...400 Н/м2, а минимальное его значение <7min > 140 Н/м2.
Рис. 3.20. Определение скоростного напора:
а - зависимость среднеквадратического отклонения aq скоростного напора от количества реализаций п; б- гистограмма распределения случайных значений скоростного напора
v = 2000 м/с
V = 2000 м/с
58 60 62 64 66 68 Нп, км
Рис. 3.21. Зависимость скоростного напора q от прицельной высоты Нп в точке разделения при различных скоростях полета и азимутах стрельбы: м.о. - математическое ожидание
а
.Н/м 2
Рис. 3.22. Выбор прицельной высоты Нп:
а - зависимость скоростного напора q от прицельной высоты Ни; б - зависимость скоростного напора q от <утах; в - зависимость прицельной высоты Ни от скорости полета v для различных значений <?тах
При исследовании процесса разделения проведем анализ различных схем с целью выбора такой, которая обеспечивала бы безударность процесса в более широком диапазоне изменения начальных параметров, влияющих на характер процесса. При этом рассмотрим следующие схемы:
- одновременный разрыв всех связей и отделение ЦБ при работающих его маршевых двигателях;
- одновременный разрыв всех связей и отделение ЦБ после выключения его ДУ;
- разновременный разрыв связей и отделение ЦБ после выключения его ДУ.
При анализе последней схемы следует варьировать временем задержки разрыва связей и воздействием управляющих органов МКА и ЦБ на участке кинематической связи. Кроме того, необходимо рассмотреть влияние на процесс разделения различных дополнительных средств отделения, установленных на ЦБ.
При отделении ЦБ с помощью его маршевой ДУ исключается перекос вектора тяги относительно его ЦМ. В противном случае неизбежно столкновение с МКА. Кроме того, должно выполняться условие по приведению системы МКА - ЦБ в область допустимых кинематических параметров (v, Нп, а0, со2О). При этом необходимо учесть возможные отказы ДУ ЦБ. Расчеты показали, что большие угловые отклонения системы в конце выполнения маневра возврата существенно затрудняют реализацию требуемых кинематических параметров в области разделения R и при этом не выполнятся условия по q и а. Существенным недостатком такой схемы является возможность газодинамического воздействия ДУ ЦБ на МКА. Время выхода ЦБ из зоны взаимного перекрытия составляет - 4 с и при этом ЦБ приобретает относительную скорость -10 м/с. При начальной угловой скорости связки со20 ± 5 0/с это приведет к неизбежному столкновению. Кроме того, ЦБ перемещается в переднюю сферу МКА, что недопустимо с точки зрения безопасности его автономного полета. Таким образом, данная схема неприемлема.
При рассмотрении процесса отделения с выключенной ДУ ЦБ учитывается влияние на процесс тяги последействия. Ее наличие после разрыва связей усугубляет неустойчивое движение ЦБ, что неизбежно приведет к соударению хвостовых частей МКА и ЦБ. Другими словами, необходимо выбрать такой момент для разрыва связей, при котором влияние тяги последействия незначительно.
В то же время, нельзя затягивать процесс (при неуправляемой системе МКА - ЦБ), чтобы избежать достижения больших углов и угловых скоростей. Это может привести к воздействию на разделяемые тела аэродинамических сил и моментов, не позволяющих осуществить безударное отделение. Сказанное выше в основном относится к схеме с одновременным разрывом всех связей между МКА и ЦБ.
В схеме с разновременным разрывом связей предполагается, что передняя связь разрывается одновременно с выключением ДУ ЦБ. В процессе дальнейшего движения происходит разворот МКА и ЦБ относительно оси вращения, образованной шарнирами задних связей, и в наиболее подходящий момент времени подается команда на их разрыв (см. рис. 1.7). Такая последовательность очевидна, так как после разрыва передней связи разделяемые объекты, разворачиваясь, приобретают относительную скорость в поперечном направлении, что приводит к улучшению процесса отделения.
Проведем сравнение схем с одновременным и разновременным разрывом связей в сопоставимых условиях. Критерием сопоставимости являются размеры безударной зоны в зависимости от начальных параметров а() и со2() при одинаковых значениях q. В обоих случаях работают две пары двигателей ориентации, которые расположены в хвостовой и носовой частях МКА. Их тяга направлена на отвод МКА от ЦБ. Кроме того, они создают некоторый кобрирующий момент.
Время подачи команды на разрыв задних связей варьировалось дискретными величинами, отсчитываемыми от команды на выключение ДУ ЦБ, причем с целью изучения влияния относительного разворота на процесс разделения не накладывались ограничения на время задержки. Как уже указывалось ранее, диапазоны изменения значений начальных кинематических параметров лежат в пределах а() = ±15°, со2() = ±5 °/с. Результаты расчетов представлены в виде зон безударного отделения (см. рис. 3.19).
Анализ полученных результатов показывает, что с ростом аэродинамического воздействия зоны безударного отделения уменьшаются. При малых величинах задержки размеры зон уменьшаются, причем наблюдается смещение границ соударений в область положительных значений а() и со2(). Это обусловлено влиянием еще достаточно большой тяги последействия. При больших значе
ниях задержки также происходит некоторое уменьшение зоны безударного отделения вследствие неустойчивости движения системы МКА - ЦБ. Как показали расчеты, зоны безударного отделения для схемы с разновременным разрывом связей шире, чем для схемы с одновременным разрывом связей, причем наиболее широкие зоны наблюдаются при некоторой оптимальной задержке на срабатывание задних узлов связей, равной Д£опт. Наглядное представление о характере относительного движения дают «кинограммы». На рис. 3.23 приведена одна из них для случая с описанным выше разновременным разрывом связей.
Следует иметь в виду, что время задержки на разрыв задних связей ограничено, так как при превышении определенного его значения МКА и ЦБ соударяются хвостовыми частями.
Расчеты показывают, что время задержки зависит от скоростного напора. При разновременном разрыве связей наиболее целесообразно принять указанную ниже последовательность операций:
- одновременно с выключением ДУ ЦБ разрывается передняя связь МКА с ЦБ;
- МКА и ЦБ разворачиваются относительно друг друга на заданный угол;
- по достижении этого угла разрываются задние связи;
- разделившиеся МКА и ЦБ совершают свободное относительное движение (см. рис. 1.7).
Дальнейшее исследование выбранной схемы отделения проводится с целью изучения влияния работы двигателей реактивной системы управления МКА, а также дополнительных СО ЦБ на характер относительного движения.
Исследования показали, что работа ракетных двигателей системы управления МКА является наиболее предпочтительной в режиме «обкатки». При таком режиме в момент разрыва передней связи и до разрыва задних работают четыре из указанных двигателей, расположенных в носовой части. После разрыва задних связей через определенный промежуток времени они выключаются и включаются двигатели в хвостовой части МКА, как бы приподнимая хвостовую часть и заставляя МКА «обкатываться» вокруг вращающегося в том же направлении ЦБ. Через некоторый промежуток времени производится выключение двигателей, расположенных в хвостовой части, и повторное включение носовых двигателей для обеспечения выхода МКА на балансировочный угол a6ajl, т. е. на тот угол атаки, с которым он должен прийти в зону R (см. рис. 3.15).
? = 400Н/м2
г=12с г=1Ос г = 8с г = 6с
г = 8с / = 7с
г = 6 с
г = 5 с
/ = 4 с
г = Ос
г=12с г= 10с г = 8с г = 6с / = 4с г = Ос
ZV -ао w zo = "2 °/с
г=6с г=5с
/=4с г=Ос
г=10с г = 8с
Г=12с г=10с /=8с Г = 6с
/ = 4с г = Ос
Рис. 3.23. Характер относительного движения МКА и ЦБ для случая с разновременным разрывом связей
Существенное влияние на процесс отделения оказывают двигатели ориентации и маневрирования (ДОМ), установленные в хвостовой части МКА. Особенность их состоит в том, что они включаются на участке работы ДУ ЦБ и работают в постоянном режиме в течение нескольких десятков секунд, создавая силу тяги вдоль продольной оси МКА. Наличие работающих при отделении ДОМ заметно увеличивает зону безударных комбинаций а0 и сого. Это увеличение зоны объясняется тем, что МКА обладает, после разрыва задних связей, значительным ускорением в направлении продольной оси, приводящим к движению МКА в область расположения ЦМ ЦБ, т. е. в область малых поперечных перемещений вращающегося ЦБ.
Кроме влияния на процесс отделения штатных энергетических установок, можно рассмотреть влияние дополнительных средств - РДТТ, установленных на ЦБ, и газовых сопел, использующих газы наддува топливных емкостей ЦБ. Назначение этих средств - создать дополнительную тягу, приложенную в плоскости продольной симметрии связки МКА - ЦБ и направленную на отвод ЦБ от МКА. Включение их в работу проводится одновременно с командой на разрыв задних связей. Расчеты показали, что использование дополнительных СО существенно увеличивает зоны безударного отделения во всем диапазоне реализуемых скоростных напоров.
Статистический анализ, как это следует из приведенных выше материалов, проводился для следующих вариантов отделения:
1) с работающими ракетными двигателями СУ МКА;
2) с работающими ДОМ и ракетными двигателями СУ МКА;
3) с использованием РДТТ, установленных в хвостовой части ЦБ;
4) с использованием газов наддува топливных емкостей ЦБ;
5) с использованием комбинации тяги газов наддува и РДТТ.
Для каждого варианта по результатам расчетов получены зависимости изменения вероятности безударного отделения от величины q при оптимальных сочетаниях а0, со^ (рис. 3.24). На рисунке для определения величин скоростных напоров даны три оси абсцисс с номинальными значениями q и его отклонениями, соответствующими ±3с. По рисунку можно определить диапазон значений q для каждого из рассмотренных выше вариантов, при кото
рых параметрическая вероятность безударного отделения равна единице. В табл. 3.1 приведены значения номинальных и максимальных (± 3d) скоростных напоров и соответствующие скорректированные (из-за невозможности учета влияния всех разбросов) значения начальных кинематических параметров для указанных выше схем отделения.
330 460 700 900 1150 <7niin. Н/м2 (-3(7)
770 1540 2300 3100 3850 Н/м 2 (+3(7)
Рис. 3.24. Зависимость вероятности Р безударного отделения от скоростного напора q при оптимальных сочетаниях а0 и со2О: 1-5 - варианты отделения
Таким образом, для разделения, например по схеме 2, необходимо выполнить такую последовательность операций:
привести систему МКА - ЦБ в точку разделения с горизонтальной скоростью v= 1000; 1500; 2000 м/с соответственно на высотах Нп = 50; 57,2; 62 км (см. рис. 3.22, в), что обеспечит максимальный скоростной напор q = 710 Н/м2;
выдержать в точке разделения прицельные значения кинематических параметров ап = -6°, Рп = уп = 0; со^ = соуп = 0°/с; согп = = 1%;
провести отделение с использованием двигателей РСУ и ДОМ, при котором одновременно с выключением ДУ ЦБ раскрывается передняя связь, МКА и ЦБ разворачиваются относительно друг друга на шарнирах задних связей на заданный угол, по достижении которого раскрываются задние связи.
Таблица 3.1
Схема отделения 1 2 3 4 5
<7ном • Н/м 200 450 1300 1500 1800
?тах > Н/М 310 710 2000 2300 2850
а0,град -6 -6 -5 -4 2
Чо>7с -0,6 1 0,5 -1 0
При выполнении данных требований с учетом возможных разбросов значений параметров, влияющих на процесс, удовлетворяются все указанные выше ограничения, и отделение происходит безударно с параметрической надежностью, равной единице.
На основании полученных результатов могут быть сформулированы последовательности операций при формировании процессов отделения по остальным схемам.
4. ДИНАМИКА ОТДЕЛЕНИЯ ЭЛЕМЕНТОВ КОНСТРУКЦИИ ЗА ПРЕДЕЛАМИ АТМОСФЕРЫ
4.1. Отделение искусственных спутников Земли, космических аппаратов и головных частей ракет
При отделении указанных объектов основными критериями, определяющими построение СР и последовательность срабатывания ее элементов, являются минимизация возмущений полезного груза по линейной и угловой скоростям, а также исключение взаимного соударения отработавшей ступени или разгонного космического блока и ПГ в процессе их относительного движения после разделения.
Поскольку процессы отделения ИСЗ или ГЧ сходны, то далее для краткости будем говорить об отделении ИСЗ, подразумевая, что все сказанное в основном относится и к ГЧ, если, конечно, нет специальных оговорок.
Полагаем, что по истечении некоторого времени запаздывания Д£, отсчитываемого от момента выключения ДУ ступени, начинается отделение ИСЗ. Этот процесс можно разбить на следующие этапы:
- совместный полет с момента выключения ДУ последней ступени до подачи команды на разделение;
- движение по шпилькам;
- движение после схода со шпилек до окончания работы СО;
- свободный полет разделившихся объектов.
Расчетная схема процесса представлена на рис. 4.1. Полагаем, что отделение осуществляется с помощью пружинных толкателей. Обычно толкатель жестко крепится на отработавшей ступени. В первом приближении относительная скорость определяется соотношением (3.3).
Поскольку уравнения совместного движения отличаются от ранее рассмотренных в главе 3 только тем, что на разделяемые тела
не действуют аэродинамические силы и газодинамические силы, обусловленные работой ДУ разделяемых ступеней, то процесс отделения будем рассматривать, начиная с этапа движения по направляющим шпилькам.
В связанной с ИСЗ системе координат относительное движение можно рассматривать как одномерное, и его приближенное дифференциальное уравнение в этом случае будет иметь вид:
/ х п\ П2 ✓ X
* = J_ + J- - — — + — АЛ-. (4.1)
т2 Ji = l т2 j=i т2 J
где = P2i - ((P2i - P\i) / h)(x - x0) - текущая сила i-го пружинного толкателя; Pj - тяга последействия у-го двигателя ступени; х0 - начальное расстояние между ЦМ ИСЗ и ступени; т^т2- соответственно масса ИСЗ и ступени; пь п2 - соответственно число пружинных толкателей и двигателей ступени; /т - коэффициент сухого трения на шпильках; - сила поперечной реакции на шпильках.
Уравнение (4.1) не является точным, так как сила трения определяется на основе приближенной формулы (3.4). Анализ показывает, что учет сил трения, как это сделано в уравнении (4.1), не приводит к существенным погрешностям.
Движение на шпильках кратковременно, поэтому примем значения Pj и Fn на этом участке постоянными (или усредненными). Учитывая эти предположения и равенство нулю начальной отно
сительной скорости х0, получим следующее аналитическое решение уравнения (4.1):
п
х = (b/a - ox0)sin at; х = b/а (1 - cos at) + х0 cos at, (4.2)
2 | 1
где a = I —
}^<P2i-Pu\
m2 Ji^l
h
b
\ ni -+-R mi m2 j
~Pu)r ---------x0
h
1 "2 m2 jl
_1_
Л1
1
m2
Подставляя во второе соотношение (4.2) выражение х = = х0 + /ш, где /ш - длина шпилек, определяем время схода (tcx) ИСЗ со шпилек:
^сх
1 b/а2 -х0 - 1Ш = — arccos —----—-------
а b/а2 - х0
(4-3)
С помощью соотношений (4.2) и (4.3) можно найти относительную скорость ИСЗ в момент схода со шпилек:
хсх = ^1ш(Ь-а2Хц)-а212ш . (4.4)
Для исследования следующих участков движения воспользуемся инерциальной системой координат 0рХрУр2р (индекс «р» -ракета), совпадающей в момент схода со шпилек со связанной с ИСЗ системой координат Соотношения (4.3) и (4.4) оп-
ределяют начальный момент времени и относительную скорость, необходимые для анализа движения на участке работы СО. Движение на этом участке в какой-то мере будет зависеть от величины отклонения направления тяги последействия двигателей ступени от продольной оси, а также от начальных угловых скоростей разделяемых тел, возникающих на участке их совместного движения. Расположим оси связанной со ступенью системы координат таким образом, чтобы угловые возмущения реализовывались лишь относительно одной оси, например C2Z2.
При рассмотрении движения ИСЗ будем предполагать, что толкатели жестко установлены на ступени, а наконечники их штоков имеют сферическую форму и скользят по специальным площадкам, установленным на ИСЗ, при его вращении относительно ступени. Предположим также, что кроме симметричных толкателей есть и несимметричный, которому присвоим индекс i = 1, причем сила этого толкателя и силы симметричных толкателей создают моменты относительно осей CXZX и C2Z2.
Пренебрегая для участка кратковременного действия пружинных толкателей влиянием малых угловых скоростей сох и соу, представим дифференциальные уравнения относительного движения ступени и ИСЗ в следующем виде:
/ \ ”1 п2
т2 fa
<>! — (All + /П2 + X - Х0 )*2 ] - (4.5)
J C\z\ i = 1
”1
-A X Pri (Х< *>1; $2 Xil COS^J + 1^2 )
1=1
«1 «2
= --р— + Ypje*j -
C2Z2 1=1
”1
+ (х~хо ~e2i^2 + elf»,)cosC^j +^2)] i=i
гдеР„(х;д1;д2) =
e2i “ эксцентриситеты силы i-ro пружинного толкателя соответственно для ИСЗ и ступени; /п1, /112 - расстояния соответственно от ЦМ ИСЗ и ступени до плоскости контакта штоков толкателей с
опорными площадками; ед; - эксцентриситет тяги j-ro двигателя ступени, signS, =
+1 при 5, > О,
5, = h -(х-х0 -e2,d2 +eii^i)-
-1 при 8: < О,
Уравнения (4.5) могут быть проинтегрированы только численно. Однако, если в них пренебречь малыми величинами и е2,О2, а также положить постоянной (или усредненной) тягу последействия каждого из J-х двигателей ступени (но не равными друг другу) и cos(,d1 + д2) =1, то получим следующее решение:
1 1
х = (х0 + /ш ) cos at + — хсх sin at + — bx (1 - cos at)\ a a2
. ( , b<\ .
x = xcx cos at - a x0 + —у sin a^>
I a2 J
fc . \ t2 b c
— + 60 t + a3---|- (cos at - 1) —у sin at;
t a J 2a2 a2
b c
= a3t + — sin at —-(cos at - 1) + d0; a a
O2 = f— + — + 60lf + faj + — + —1 (1 - cos at) -
2 ( a 4a °J 2 2 J 2 a2
- sin at - —sin 2at + ——(1 - cos 2at\, a2 8a2 8a2
• ( bo Co I ao bo ,
02 = + — + — t + — sin at —- (cos at - 1) +
( 2 2 J. a a
С о . bo — Co . л л
+ — sin at + —------- sin 2at + ,
2a 4a °
где б0 - угловая скорость, приобретенная ИСЗ и ступенью к моменту схода со шпилек соответственно относительно осей CjZj и C2Z2;
61
( 1 р — р A i”2
1^, iTil h ) m2
~ -,(ьх А ~(ЬХ
= С1 + «1 4- - *о + <71 4- - *0
\а J \а
if а2
х2
= 91 —; 91 q2
62 -91 хо + ha
z ( . ЬЛ __ ( . Ь< УЬ,
а2 ~ ^11 ^0 + Ап й” + *0 Ап ~~2 ^0
I а) V а )\а
с2
b3 =;i^ + 291f4~xoW а ) а
х •*сх .
а
j (Ь\ , ~ ( , Ьх\ хсх
а3 = с2 + d2 4--х0 ; 64 = d2 х0 +/„, -4- ; c4=d2-^-; \а2 ) I а1) а
( п1 п2 п\
С1 =-у^— Ё^2«в2, + i^Pjenj ;
^C2Z2 |j=l ;=1 i=l
ix
( ni ni A
у Pli ~ P\i p f Pli ~ P\i [
\ /
Анализ показывает, что силы трения, возникающие в местах контакта наконечников штоков толкателей с опорными площадками, не оказывают существенного влияния на движение ИСЗ и ступени, поэтому при оценках в первом приближении ими можно пренебречь.
После окончания работы пружинных толкателей начинается свободный полет ИСЗ и отработавшей ступени. При этом на отработавшую ступень продолжает действовать тяга последействия ее
ДУ. Вследствие случайного характера этой силы и начальных угловых возмущений возможно множество различных траекторий ее движения. Параметры СР должны выбираться такими, чтобы не только отделение объектов, но и их дальнейшее движение происходило без соударений.
В силу длительности рассматриваемого процесса движения здесь в общем случае уже нельзя пренебречь ни одной из составляющих угловой скорости и поэтому дифференциальные уравнения движения ЦМ отработавшей ступени запишем в следующем виде:
*2 _(Pz)x2 Sxp
У2 =—в2 т2 (Pz)y2 +
*2 (Pl)*2 ёгр
(4.6)
где В2 - матрица перехода между связанной С2Х2^2^2 и инерциальной ОрХр ypZp системами координат, по виду аналогичная (3.33); gXp, gyp, g2p- проекции гравитационного ускорения на оси инерциальной системы координат ОрХр KpZp. Величины (РЕ )Х2, (РЕ ) (Pz)z2 могут быть найдены из соотношений:
«2
= COSe>’
;=i
”2
<Р£>г/2 = ZP> sine> cos^:
;=i
”2
(Pz)z2 = ZPJ Sin£> Sin^:
>=1
где e; - угол между истинным направлением тяги последействия у-го двигателя ступени и осью C2X2I ^>j ~ угол, определяющий поло-иг
жение проекции Pj sine; в плоскости Y2Z2.
Аналогично записываются дифференциальные уравнения движения ЦМ ИСЗ:
*1
У1
*1
Sxp
ёгР
(4-7)
Вычитая из (4.6) уравнения (4.7) и пренебрегая малой разностью гравитационного ускорения, получим дифференциальные уравнения относительного движения ИСЗ и ступени:
х -<^)ч
у <ЫК
ТП2
*
(4.8)
Дифференциальные уравнения вращательного движения ступени имеют вид
Jc2 К | + |“с2 ,Л2 |®С21 = йС2 <Р,), (4.9)
где JC2 - тензор инерции ступени; |ш£21 = [<^>Х2; ; ®Z2 ]•
Проекции момента тяги последействия на оси Х2, Y2, Z2 определим из соотношений:
«2
Mx2(pj)= ^Pj sinE; sin^7 -e2j cos^);
;=i
«2
Mr2(P;)= ^Pj^zj C0S^ -exj sine; sin£7);
J=1
«2
MZ2(Pj) = ^Pj(exj sinE; cos^; ~eyj COSCy),
где ex., ey., ег. - расстояния от линии действия силы Р}до соответствующих координатных осей.
Дифференциальные уравнения вращательного движения ИСЗ аналогичны (4.9) с той лишь разницей, что в их правых частях вместо проекций момента тяги последействия стоят проекции моментов сил управляющих двигателей МХ{ (Ру ), MYi (Ру ), Мz\ (^у )• Они работают, как правило, в дискретном режиме, и длительность воздействия на ИСЗ каждой из составляющих зависит от величины возмущений по углу и угловой скорости в каждом из каналов управления.
Уравнения движения ступени и ИСЗ после окончания работы пружинных толкателей упрощаются, если можно принять следующие предположения:
- угловые скорости сох и соу ИСЗ и ступени к моменту окончания работы пружинных толкателей малы и ими можно пренебречь;
- силы и моменты, обусловленные перекосами тяги последействия, несущественны;
- оси связанных с ИСЗ и ступенью систем координат являются главными и центральными;
- силы тяги последействия и пружинных толкателей создают моменты лишь относительно оси CXZX ИСЗ и оси C2Z2 последней ступени.
При этих предположениях уравнения относительного (4.8) и вращательного движения ИСЗ и последней ступени можно заменить следующими:
«2 «2
х = -— У Pj costf2; У =------------У Pj Sin 1>2;
(4.Ю)
1 Л1 1 n2
" ”“7 ^?iyeiy sin8j I $2 ~
J C\z\ **C2Z2 J = 1
где Piy - тяга i-го управляющего двигателя; eiy,* 8: - плечо установки и угол наклона i-ro управляющего двигателя.
Ограниченность случайных отклонений масс, моментов инерции, линейных размеров, а также действующих сил от их номинальных значений приводит к тому, что ЦМ ИСЗ и ступени будут описывать «трубки» траекторий, концы которых в любой момент времени образуют в трехмерном пространстве некоторые соот-
ветствующие ограниченные замкнутые множества Qn(^) и Qci^ki) (зона полезного груза и зона ступени соответственно). Каждой граничной точке этих множеств, которые назовем предельными, соответствуют однозначно определенные угловые положения самих объектов. Предельные множества Qn(tki) и Qci^ki) совместно с граничными угловыми положениями соответственно ИСЗ и ступени с учетом их геометрических размеров определяют некоторые предельные множества Qn(^-)n Qc(£&).
Независимо от законов распределения вероятностей отклонений положений ЦМ и угловых положений обоих разделяемых объектов соответственно в предельных областях Qn (^) и Qc(^)» вероятность столкновения этих объектов будет равной 0, если указанные предельные множества не пересекаются, т. е. выполняется соотношение ) n Qc(^) = 0 при любом времени tki.
Рассмотрим в качестве примера разделение ИСЗ и ступени, имеющей однокамерный двигатель. Интегрируя уравнения (4.10) для номинальных условий, при которых случайные отклонения возмущения равны 0, получим на участке действия тяги последействия функцию, определяющую расстояние между «центрами»
Дг(^-) = 7[х + хн«ь +(^о)н]2 +£2. (4.11)
tki( _ tki( _
где х = - [ [cos ^2н tdtdt; у = - f [sin О2н tdtdt.
0 0^2 0 0 77X2
Здесь хн и д2н “ соответственно относительная линейная и угловая скорости ступени, приобретенные при номинальных условиях в момент окончания работы пружинных толкателей; (х0)н - начальное номинальное расстояние между ЦМ ИСЗ и ступени; т2, Р - соответственно номинальные масса ступени и тяга последействия ее ДУ.
Вычитая из уравнений (4.6), соответствующих случаю ненулевых начальных возмущений, те же уравнения для номинальных условий, учитывая принятые выше упрощающие предположения и пренебрегая малой разностью гравитационных ускорений, действующих на ступень и ИСЗ, получим применительно к участку дей
ствия тяги последействия выражение для размера области, занимаемой множеством в проекции его на плоскость OpXpYp:
Rc^ki) = + д°2^- + Дх0)2 + Ду2,
№
^2-1 cos(02h + )tdtdt -т2 ) т2
где
О (А _ ПАР f f Р
=- cos(d2H + Д^г)tdtdt + J Г — cos i)2h tdtdt, оот2 0 0т2
(4.12) tki‘ Л -
Ду = - f f 1 - JL sin(d2H + &b2)tdtdt -001 m2 )m2
- f f sin(^2H + &b2)tdtdt + f I* sin O21l tdtdt, 0 0 m2 0 0 m2
здесь Д Xq - отклонение от номинального значения расстояния между ЦМ ИСЗ и ступени в момент подачи команды на разделение; До2 - отклонение от номинального значения относительной скорости, приобретенной ступенью в момент окончания работы пружинных толкателей; ДО2 - отклонение угловой скорости ступени за счет разброса сил пружинных толкателей, положения ее ЦМ и величины момента инерции; Дти2 - отклонение массы ступени от ее номинального значения; ДР - отклонение тяги последействия от ее номинального значения.
Отклонение относительной скорости Дг2 можно найти, пользуясь уравнениями (4.5) и учитывая равенства
Щ + v2 = х-, m2npv2 =тм, (4.13)
где и о2 - относительные скорости, приобретенные соответственно ИСЗ и ступенью (необходимо учитывать их знаки); т2пр -приведенная масса ступени:
™2пр =
т2 "1
1-2Р/^(Р2, +Р1(.)
1=1
Если в выбранной системе координат C2X2Y2Z2 действуют моменты Л/Г2 и МZ2, то можно, поворачивая эту систему координат, выбрать новую, связанную со ступенью, систему координат, для которой результирующая угловая скорость совпадает с новым направлением оси C2Z2. Аналогично можно поступить и со связанной с ИСЗ системой координат C^YjZp При этом получаются соотношения, аналогичные (4.12) для размеров области, занимаемой множеством Qc(tki) в сечениях, не совпадающих с плоскостью OpXpYp.
Если отделение ИСЗ от ступени происходит после завершения резкого спада тяги последействия, то, принимая средние значения тяги последействия (номинальные) Р и массы т2 неизменными, можно упростить выражения для функций х и у, входящих в соотношение (4.11):
* = -=-?j-(l-costf2Hrw); У = -^— ~ 51П^2н^ .
т2й2н щ2^2н I ^2н )
Полагая также неизменными отклонения массы Дт2 и тяги последействия ДР, упростим выражения для функций Дх и Ду, входящих в соотношение (4.12):
. - ДР + (1-Дш2/т2)Рг. .1 * г, чх т
Д х =---—------- 7 27 [ 1 - cos(02„ + Дб2 )ГЙ ] +
т2(^2н +Д^2>
р
+ ^—(1-cos02h^);
щ2^2н
д- = ДР + (1-Дт2 /т2)Р ™2(й2н +Д^2)2
sin(fl2„ +Д02Хй ^2н + Д^2
, р L sinWfa? ^2^2н I *' ^2н ,
Обычно масса объекта и его момент инерции - взаимокорре-лированные случайные величины, т. е. для некоторого конструктивного исполнения объекта отрицательному отклонению массы Дти2 соответствует меньший момент инерции. Из полученных выше соотношений следует, что решающее значение имеет тот радиус
[Лс(г*,)]тах области, занимаемой множеством Qc(^)> которому соответствуют максимальные по модулю отклонения Д^2, &т2 и ДР, причем Д02 должно быть противоположно по знаку угловой скорости i32h , Д?и2 - отрицательное, а ДР - положительное.
Соотношение (4.12) определяет размеры области, внутри которой будет находиться ЦМ ступени в любой момент ее относительного движения. Ступень представляет собой геометрическое тело, с учетом размеров которого указанная выше область расширится. Принимая для простоты ступень в виде цилиндра с диаметром dc и расстоянием /с от ЦМ до среза сопла, получим приближенное соотношение для аппроксимирующего радиуса предельного множества
*Л) = Л(^)]2тах + /с2 + ~d2c - 2[Pc(^)]maxJ/c2 +l<2COS(pc, V 4 V 4
где
|Ду| d
Фс =arctgZA~^A ; 7; ч+<^2н +arctg^r-
(Дх + До2гй + Дх0) 21 с
Принимая также ИСЗ в виде цилиндра с диаметром d„ и расстоянием /п от ЦМ до торца по месту стыка со ступенью и учитывая случайное отклонение скорости Дг^ отделения ИСЗ, получаем оценку радиуса предельного множества Q„ (t^):
= + "7 •
V 4
Величину Дг?! найдем с помощью соотношений (4.5) и (4.13).
Полученные выше соотношения для радиусов 7?с(£й) и являются оценками в первом приближении и позволяют достаточно быстро найти приемлемые значения относительной линейной и угловой скоростей. Для обеспечения безударного свободного полета ИСЗ и ступени необходимо выбрать такие значения скоростей х„ и 1)2н> для которых в любой момент времени удовлетворяется неравенство ) "* (.^ki) < )•
Интегрируя уравнения (4.6), (4.7) и (4.9) при выбранных значениях х„ и i32h, можно в момент прекращения действия тяги последействия определить компоненты скорости, а также координаты ИСЗ и ступени в инерциальной системе координат OnXnYnZn.
В ряде случаев, особенно на первых этапах проектирования, представляют интерес оценки значений относительных линейной и угловой скоростей, приобретаемых разделяемыми объектами в результате действия пружинных толкателей.
Интегрируя второе равенство (4.13), находим
ги2прДг2 = ги1Дг1-
Поскольку h = Ax’] + Дг2, то, пользуясь полученными выше соотношениями, можем записать
ДГ1= Л/(1 +m1/m2np); Дг2 = Л/(1 + т2пр/тх).
Кинетическую энергию, сообщаемую ИСЗ и ступени пружинными толкателями, можно найти следующим образом:
1 2 V1 ^*21 + Ai Л ГА
= g h Art -ГтрArt;
1 2 v Ai + Ai a _
^2^2 = X n ^2 "ApA*2,
2 i=l 2
где FTp - приведенная сила сопротивления, обусловленная, например, трением и другими возможными потерями работы (Лтр). Из представленных выше соотношений следует, что
«1 ”1
E<Ai + Pxi)h-2A^ £(P2i + Pxi)h-2A^
vx = —------------------; v2 = —----------------------.
^(l + mi/mjiiip) m2np(i + m2np/mx)
Подставляя полученные выражения в соотношение х2 = = (ух + &2 )2, ПОЛуЧИМ
।--------
Viti у тхт2пр
Отклонения скоростей Avx и До2 ИСЗ и ступени равны:
Дг>2 = о2-о2н,
где а1н, v2li - номинальные значения соответствующих скоростей.
Угловые скорости ИСЗ и ступени можно оценить по формулам
1
•^2*2
й2
”1 «2
+ +2Х^/®2/
i=l j-1
А к
— + ^0-X
Отделение ступени от ИСЗ может производиться с помощью РДТТ Тогда при движении на шпильках вместо (4.1) будем иметь следующее уравнение:
f "3 "2
* = У. ^тлЛ C0S^Tflt ~ У/ т2 ^*=1 ;=1
1 О --+--- m, т2)
I! ’
где РТД* и етл* - соответственно тяга £-го РДТТ и угол между вектором его тяги и осью ступени; п3 - количество РДТТ.
Дифференциальные уравнения движения ИСЗ и ступени после схода их со шпилек при тех же упрощающих предположениях, что и в случае пружинных толкателей, будут выглядеть так:
' «з п2
У/ P-Tflk cos ""
^ = 1 7=1
* «3 ”2
^2 “ , У/ I\iik (gT/iA COS^tM + ^/^2; »
*'С2?2 ^ = 1 7 = 1
где етл* - эксцентриситет проекции тяги РТлк cos етл^; 4 ~ расстояние от плоскости OpypZp до сечения, в котором приложена тяга ЛдЛ •
Для «усреднения» тяги последействия ступени в процессе отделения ей может быть преднамеренно сообщена некоторая угловая скорость вращения относительно одной из поперечных осей за счет установки, например, РДТТ, имеющего большее время работы по сравнению с другими двигателями.
Для оценки в первом приближении относительной скорости, сообщаемой РДТТ разделившимся телам, можно использовать соотношения
f «3 П2 у
* = ~~ СО8етдЛ ~ ’
т2 1^-1 У=1 J
if”3
% У. ^тлЛ COS£Ta£
т2 k = \
п2
^ТД^ ’
7
где tTJ[k - время работы £-го РДТТ.
Как уже отмечалось в главе 1, импульс РДТТ указывается в техническом паспорте на его применение. Тягу последействия ДУ ступени в течение времени работы РДТТ можно принять постоянной или аппроксимировать ее изменение одной из элементарных функций. Суммарный импульс РДТТ отделения /тд и тяги последействия /пс соответственно равны
«з ^пс п2
/пс = J ^Pjdt, о *=! о ;=1
где £11С - время спада тяги последействия.
В этом случае соотношение для х принимает наиболее простой для оценочных расчетов вид:
х (/тд coseTA — /пс).
77^
Последнее равенство написано из условия, что все РДТТ установлены симметрично с одинаковым углом етд (обычно это угол наклона сопла РДТТ к его продольной оси).
При использовании для отделения ступени сопел, работающих на газах наддува ее топливных баков, относительное движение ИСЗ и ступени по направляющим шпилькам можно описать следующим дифференциальным уравнением:
1
л4
^ст cos Б ст т2
«2
^77Zt т2)
где Рсш, гст - тяга гтг-го сопла и угол между его осью и продольной осью ступени; и4 - количество сопел.
При определении Рст, давление в баках можно считать постоянным в течение рассматриваемого промежутка времени, так как расход газов наддува компенсируется испарением остатков компонентов топлива.
4.2. Стабилизация и увод отделившейся ступени
В большинстве случаев к системам разделения предъявляется единственное требование - обеспечение безударного отвода пассивного элемента конструкции. На дальнейшее его движение не накладывается, как правило, никаких ограничений. Но иногда при отделении отработавших ступеней и РБ на орбитах Земли выставляется требование о необходимости их стабилизации и направленного увода. Это обусловлено, во-первых, необходимостью обеспечения нормальной работы систем радиосвязи космического объекта и, во-вторых, наличием в топливных емкостях ступени или блока остатков низкокипящих компонентов, которые следует стравить, чтобы предотвратить их разрушение за счет избыточного давления, образующегося вследствие испарения компонентов топлива. Кроме того, последнее требование диктуется иногда условием незасорения орбит. Стравливание газов из баллонов высокого давления и остатков компонентов топлива отработавшей ступени должно быть упорядоченным. В противном случае их воздействие на космический объект может привести к потере его стабилизированного движения.
В случае стабилизации отработавшей ступени (рис. 4.2, 4.3) вращением, например относительно продольной оси, весь процесс увода разбивается на три этапа. После выключения ДУ ступени необходим достаточно большой интервал времени Д^ до подачи команды на ее отделение, требуемый для уменьшения тяги последействия и испарения остатка компонентов топлива из охлаждаемой части двигателя. Это обусловлено тем, что импульс тяги последействия отработавшей ступени за время до начала процесса ее увода должен быть меньше импульса сил СО. Иначе ступень начнет двигаться в сторону космического объекта. Через интервал времени Д£2, отсчитываемый от команды на разделение, произво
дится закрутка отработавшей ступени, например, за счет использования остатков газа в баллонах высокого давления и одновременное сообщение ей дополнительной скорости на увод от космического объекта.
По истечении некоторого промежутка времени Д£3, также отсчитываемого от команды на разделение, включаются сопла, работающие на газах наддува топливных баков (см. рис. 4.3, 4.4). Указанная последовательность диктуется тем, что к моменту вскрытия баков отработавшая ступень должна отойти от космического объекта на достаточно большое расстояние - такое, чтобы полностью исключить или свести к допустимому минимуму попадание кристаллов или капель компонентов, вылетающих из сопел вместе с газом, на такие элементы конструкции объекта, как солнечные батареи, оптические приборы, аппаратуру и т. д. Этим же во многом объясняется и выбор оси, относительно которой осуществляется закрутка.
Другим фактором, определяющим выбор оси, относительно которой осуществляется закрутка, является то, что вся гидроарматура устанавливается на днищах баков. В процессе закрутки относительно продольной оси жидкость под действием центробежной силы приливает к периферии баков и тем самым исключается или резко уменьшается количество кристаллов и капель, вылетающих из сопел.
Вращение отработавшей ступени может осуществляться не только за счет газовых сопел, но и, например, с помощью специально установленных РДТТ.
Наличие в баках остатков компонентов оказывает существенное влияние на процесс стабилизации и увода отработавшей ступени. В случае небольших располагаемых импульсов на увод и больших возмущений по угловой скорости относительно любой из поперечных осей может возникнуть неустойчивое движение и, как следствие, потеря направленного увода. Вследствие этого в каждом конкретном случае минимальная угловая скорость стабилизирующей закрутки (Dmin должна выбираться из условия устойчивости движения ступени, а максимальная сотах - из условия прочности элементов конструкции ступени, т. е.
CDmin < CDmax.
Рис. 4.2. Отработавшая ступень:
1 - бак «О>; 2 - бак «Г>; 3 - ДУ ступени; 4 - баллоны высокого давления; 5 - зона возможного положения ЦМ ступени
Команда на выключение ДУ
Команда на Команда на
отделение вскрытие
ступени баллонов
Команда на вскрытие баков”О”и”Г'
Д,1 Д/2
At'
Рис. 4.3. Циклограмма стабилизации и увода ступени
Рис. 4.4. Зависимость относительного расстояния и скорости увода отработавшей ступени от времени: ---------- ~ max» ^Yleinaxi-------“ Л=>2 min» ^lemin
Другим важным параметром является скорость увода отделившейся ступени, которая выбирается, в основном, из условия исключения возможности ее соударения с космическим объектом в процессе относительного движения. Соударение может быть обусловлено тягой последействия ступени, импульс которой может достичь большого значения.
Как уже отмечалось, выбор направления отделения и скорости увода диктуются необходимостью обеспечения такого положения разделившихся тел, которое не влияло бы при их взаимном относительном орбитальном движении, например, на радиосвязь с Землей.
Будем считать, что разгонная ступень доставляет космический объект на круговую орбиту и отделяется от него. Разгонной ступени при этом сообщается некоторая относительная скорость поступательного и вращательного движений, и она удаляется от космического объекта в условиях действия на нее тяги газовых сопел и тяги последействия ее ДУ. На космический объект после его отделения действует лишь сила гравитации.
Выберем некоторую геоцентрическую систему координат EXYZ, неподвижно ориентированную в пространстве. С ЦМ космического объекта О свяжем систему правых орбитальных осей Oxyz, в которой ось Ох направлена вдоль геоцентрического радиуса-вектора точки О, ось Оу - по касательной к траектории в сторону движения, а ось Oz - по бинормали. Считаем, что точка О после разделения объекта и ступени движется по круговой орбите радиуса 7?0 с постоянной угловой скоростью со. С ЦМ отработавшей ступени свяжем систему ее главных центральных осей Cx'y'z' (рис. 4.5, а).
Движение ЦМ ступени С относительно системы координат EXYZ под действием притяжения Земли и тяги , которая обусловлена работой сопел увода ступени и тягой последействия ее ДУ, определяется уравнением
т^т = росг -miiRR-3, (4.14)
dt2
где R - геоцентрический радиус-вектор точки С; т - масса ступе-ни; ц = 398603 км3/с2 - гравитационная постоянная Земли.
Рис. 4.5. Схемы для анализа орбитального движения отработавшей ступени:
а - системы координат; б - взаимное расположение систем координат EXYZ и Охуг\ в - изменение угла о; г - углы Эйлера; д - ориентация вектора относительной скорости ступени г>0 в плоскости Оху
205
В выражении (4.14), как это видно из рис. 4.5, а, имеем
d2R d2RQ __ drc _ d2rc
dt2 dt2 dt2
= (О х (со х 7?0); гс - радиус-вектор точки С, со = (&k - уг-
d2R0 где—72 dt2 ловая скорость орбитального движения точки О; k - орт оси Oz.
Определим со на основании закона всемирного тяготения, co-
ll ^ооб
гласно которому а„ = В то же время, а„ = , где оов6
Rl Rq
= (oR0. Приравнивая выражения для ап, получаем
(0= (p/?o"3)1/2.
С учетом этого, выражение (4.14) примет вид:
т-
+ 2юх —+(ох[(ох(/?0 + гс)] + dt2 at
+ р(Яо + rc)|/?o +rc| 3
(4.15)
= p
1 OCT •
Принимая во внимание, что перемещение rc ступени относительно космического объекта на несколько порядков меньше геоцентрического радиуса Яо, линеаризируем (4.15) по гс (индекс с в дальнейшем опускаем). Для этого рассмотрим члены, входящие в это уравнение:
i' jk
2сох—= 20 0 (о =[-2<o^|i + | 2(0—|/ + (0)i,
^t dx dy dz \ dt) dt) dt dt dt
где i, j, k - соответственно орты осей x, у, z.
Аналогично имеем
5 х [со х (Ro + г)] = [—(о2 (Яо + х)] i + (—о2 у)]2 + (Q)k.
В общем случае разложение некоторой функции /(х, г/, z) в ряд Тейлора в окрестности точки (0; 0; 0) имеет вид
f(x,y,z) = /(0;0;0) + ^х + ^-у z + ...
дХ г=0 ду r=0 OZ г=0
Используем это соотношение для разложения функции | Rq + г | . Отбросим члены более высокого порядка малости:
1*0 +г|"3 = К*о +х)2 + у2 + z2]~3/2 = R’3 -3R’4x+...
Учитывая, что ц = (o2Rq, получим
M|R0 +r|”3(R0 +r) = (o2R03(R0-3 -3xR-4)(R0 +r) =
= co21 1 - 3 —J [(Ro + x)i + yj + = w2[(R0 - 2x)i + yj + zkj.
I Ro)
Подставляя полученные результаты в (4.15), получим уравнения движения ЦМ ступени относительно подвижных орбитальных осей Oxyz\
d2x п dy „ 2 г
—- - 2со— -Зсо х =
dt2 dt
где x,y,z- компоненты вектора г в системе координат Oxyz\ fx,fy, fz - компоненты вектора ускорения Р()СТ/ т.
Предположим, что при £=0 ступени, находящейся в точке г = 0, при ее отделении от космического объекта сообщается относительная поступательная скорость и кинетический момент Lo, произвольно ориентированный в пространстве. Рассмотрим влияние вектора £0 на характер относительного движения разделив
шихся тел. Будем считать, что Ржт является единственной силой, действующей на ступень. Положим, что она направлена вдоль оси Cz' , являющейся геометрической осью симметрии ступени, проходящей через ее ЦМ. Такое предположение позволяет считать, что L = Lq = const.
Вращательное движение ступени влияет на ориентацию вектора Рост и тем самым на ее поступательное движение. В относительном движении ступени по отношению к космическому объекту нежелательным, как это уже отмечалось выше, является попадание ее в полупространство х < 0. Глубину погружения ступени в область х < 0 будем характеризовать наибольшим за все время движения углом:
(—х)
Qm = max 0; 0 = arctg , .
Необходимо определить такие траектории относительного движения ступени, которые отвечают наименьшим значениям Qm.
Для дальнейшего исследования удобно выбрать неподвижные оси системы координат EXYZ так, чтобы ось EZ была направлена параллельно вектору £0, а ось ЕХ была перпендикулярна оси Oz. Поскольку ось ЕХ лежит в плоскости орбиты, взаимное расположение систем координат EXYZ и Oxyz описывается только двумя углами - аир (рис. 4.5, б). В дальнейшем для более наглядной интерпретации орбитального движения введем замену а= - о.
Орбитальная система координат равномерно вращается вокруг оси Oz, поэтому значение угла а линейно увеличивается со временем, т. е. о= а0 + mt (рис. 4.5, в).
Связь между системами координат Oxyz и EXYZ записывается следующим образом:
X X
cos о - sin а 0
Y = sinocosp cosacosp sin р У (4-17)
Z - sin а sin р -cos о sin р cos р X
В силу неизменности направления вектора £0 в инерциальном пространстве EXYZ, угол р (см. рис. 4.5, б) остается постоянным в течение всего времени движения, р = р0 = const. Связь между систе-
мами координат EXYZ и Cx'y'z' определяется углами Эйлера прецессии (10, нутации (0) и собственного вращения (ф) (рис. 4.5, г) и характеризуется соотношением
х'
У* z‘
cos ycoscp - sin vpcosOsin <p - cosvgsincp- sin ycosOcoscp sin ysin 0
sin vpcoscp + cos vgcos Osin <p cos ycos 0 cos <p - sin ysin <p - cos vpsin 0
sin 0 sin <p sin OcosO cosO
X
Y
Z
(4.18)
Обозначим через p, q, г проекции угловой скорости вращения ступени на связанные с ней оси, а через Л, В, С - ее моменты инерции относительно связанных с ней осей. Моменты инерции ступени после отделения от нее космического объекта изменяются во времени, т.е. Л =Л(£), B = B(t) и С = C(t). Это может быть вызвано двумя причинами.
Во-первых, как уже отмечалось выше, ступени в соответствии с циклограммой отделения и увода (см. рис. 4.3) сообщается систематическая угловая скорость относительно продольной оси. Поскольку положение ЦМ ступени может изменяться в значительном диапазоне (см. рис. 4.2), ей будут сообщены также угловые скорости прецессии и нутации. Следствием этого явится движение остатков компонентов топлива внутри баков, которое имеет колебательный характер, что и служит одной из причин изменения моментов инерции ступени во времени.
Следует отметить, что в разгонных ступенях часто предусмотрены внутрибаковые перегородки. Жидкость, попадая в пространство между перегородками, отбрасывается центробежной силой к периферии баков и после успокоения удерживается в этом положении. Моменты инерции ступени в дальнейшем сохраняются практически неизменными.
Во-вторых, причиной изменения моментов инерции ступени является стравливание давления из баллонов высокого давления, а также газов наддува и испаряющихся остатков компонентов из топливных баков (см. рис. 4.2). Физически этот процесс выглядит так. После вскрытия баков (см. рис. 4.3) и падения давления в каждом из них до определенного уровня возникает подтвержденный на практике процесс «шампанизации», при котором жидкость мгновенно превращается в пену, полностью заполняющую объемы баков. При этом резко увеличивается поверхность испарения, и
вследствие этого происходит кристаллизация жидкости. В дальнейшем ее испарение идет с поверхности кристаллов до полного опорожнения баков.
Следует сделать замечание, являющееся существенным при дальнейшем изложении. Уменьшение моментов инерции ступени относительно связанных с ней осей за счет испарения остатков жидкого наполнения в реальных условиях не превышает 10 % от их первоначальных (при t = 0) значений.
Принимая во внимание симметрию ступени относительно продольной оси (Л = В), запишем динамические уравнения Эйлера:
±(Ap)+(C-A)qr =0; at
(Aq) + (Л - С)рг = 0; (4.19)
dt
4^=°-dt
Из третьего уравнения имеем
Cr= CqTq = const. (420)
В то же время, проекция вектора £0 на ось Сг' равна Lo cos 0 (см. рис. 4.5, г). Следовательно, для выполнения (4.20) 0 должен оставаться постоянным во все время движения:
0 = 0О = const. (4-21)
В уравнении (4.19)
Л2(р2 + <72) = Л§(р§+<720).
Учитывая (4.21), можем записать
^о(Ро +<7о) = £о sin2
Р2 +92 =f^sin2 0о-
I at /
Из этих соотношений легко получить зависимость, определяющую изменение угла прецессии у:
t
A^ = Lo> или * = Vo + Jтт;• (4-22)
at Jo Л(0
При постоянном моменте инерции А получаем регулярную прецессию. При переменном А получаем квазирегулярную прецессию, в которой угол 0 остается постоянным, но скорость прецессии меняется. Учитывая, что (см. рис. 4.5, г) г = — + — cos 0О, полу-dt dt чим закон изменения угла собственного вращения:
' — - -L1*.
С(0 4(r)J (4.23)
Lq COS0Q, ИЛИ ф = <Ро + Lq COS0Q|
При заданной зависимости изменения моментов инерции ступени от времени соотношения (4.20), (4.22), (4.23) полностью описывают ее движение вокруг ЦМ. _
Движение ЦМ ступени определяется вектором Ржт, который изменяется во времени. В силу сделанных предположений
^ост — ^остСО^г''
(4-24)
Компоненты орта /г- в осях системы координат Oxyz получим, используя соотношения (4.17) и (4.18):
(1г')х = cos ст sin 0 sin у - cos р sin о sin 0 cos у- sinpsinocosO;
= -sinasin0siny-cospcososin0cosy-sinpcosacosO; (4.25)
(G')z = cospeos© - sin psinOcosy.
Углы p и 0, как это было показано выше, являются постоянными, а углы о и у меняются со временем. Соотношения (4.24) и (4.25) позволяют определить компоненты fx,fy и /2 реактивного ускорения Рост/т, входящие в уравнение движения ЦМ (4.16), как функции времени. Масса ступени т = m(t) также может изменяться по времени в соответствии с определенным законом.
Решение системы (4.16) при заданном как функция времени реактивном ускорении с начальным условием v = v0 при £=0 имеет вид [4]
х = ^2- sin со t + 2 ^2. (1 - cos со t) + со со
+ 2jsin(t — Т|) d T|J/y(^)^ + J sin со (£-1;)^; о о о °
(4-26) с п
у = -3twOu - 2 (1 - cos cot) + 4^- sin со г + [ [ / (Е)г/£</т| -
* со со *
оо
tn t 5 п
- 2 J J A© sin(T] - §) di) - 4 J di J sinflj - nHn / fy G)
0 0 0 0 0
t
z = sin cot + f sin(£ - ,
(O J (0
где vOx, vOy, vOi - компоненты вектора относительной скорости отделения ступени vQ в системе Oxyz.
Для практического исследования свойств движения ступени после ее отделения упростим полученные соотношения. Предположим, что кинетический момент, сообщенный ступени, достаточно велик, т. е.
Lo »А(О , или — » со.
dt
Ввиду малой угловой скорости со орбитального движения космического объекта данное соотношение в большинстве реальных случаев выполняется. Преобразуем систему (4.16), для чего введем безразмерное время 5 = — t, здесь Ло - момент инерции при t=0.
Ло
Кроме того, введем новые переменные vx = —, = —,vz = —.
со у со со
„ dx dx ds dx •
Принимая во внимание, что — = —-------, получаем — = evx, где
dt ds dt ds
A0co . .
£ = —— «1. Аналогично можем записать
d2x _ d ~¥"dt
(dx\ ds dvx ds co2 dvx --- --- = (0-—-- =------—. ^dt) ds ds dt e ds
Подставим эти результаты в (4.16):
dx « dy ♦
— =£px; ds ds
-j- = ыг\ ds
^=e[2p; +3x + u(/z)x];
(4-27)
-^ = e[-20;+«(/,oyJ; ds *
dv- /> \ i
— =е[-г +и(12>)г], ds
где и = Рост / mco2, а компоненты вектора 1г- определены соотноше-
z, ne\ rz do do ds ,
нием (4.25). Кроме того, — =----, но о = о0 + a)t, следователь-
dt ds dt
do do d\u dw ds 1T
dt ds dt ds dt ' '
— = —, откуда — = = 1. Здесь зависимость A(t) заменена
dt A ds A(o)
на зависимость А(о), поскольку, как было указано выше, о линейно зависит от t.
Дополним теперь (4.27) уравнениями для нахождения углов:
^ = 0; 4е = °! 4Z=£; ^ = -^’1. (4.28)
ds ds ds ds A(g)
Соотношения (4.27) и (4.28) представляют собой систему обыкновенных дифференциальных уравнений в стандартной фор
ме с малым параметром е и быстро изменяющимся углом цл Это наиболее простой вид систем, допускающих осреднение [9].
Не будем приводить детальное проведение процедуры осреднения по быстрым и медленным переменным. Теория этого метода изложена в целом ряде работ, а практическое применение к исследованию орбитального движения представлено, например, в [4].
При осреднении по у точность по остальным параметрам будет соответствовать ~с на достаточно большом интервале времени -1 / е [4]. Этого вполне достаточно для исследования процесса движения.
t t
Принимая во внимание, что J sin у б/у = 0 и Jcosydy = О, ° _ °
при осреднении по у компоненты вектора 12> (4.25) примут более простой вид:
(4\= -sin р sin qcos 6;
(lz)y = -sin р cos qcos 6;
(4)г = cos p cos 6.
Осредним систему уравнений (4.16). При этом воспользуемся условиями (4.28) и приведенными выше соотношениями для определения компонентов орта 12>. Введем следующие безразмерные переменные:
т = со i, (х, у, z) = (х, у, г)--- и /(т) = coseo. (4 29)
0osinpo 77Z(0CODO
С учетом изложенного, система (4.16) запишется так:
4т - 2 - Зх = -/(т) sin(o0 + *);
t/т2 dx
+ 2 = —/(т) cos(o0 + т); (4.30)
t/т2 dx
+ z = /(T)ctgp0.
ат
Угол о0 определяет ориентацию космического объекта относительно системы координат EXYZ в момент подачи команды на разделение. При этом отделение КА от РБ производится в направлении оси Сг' с начальной относительной скоростью р0. При этом й0 параллельна £0.
Примем начальную относительную скорость о0 за характерную скорость при введении безразмерных переменных в (4.29). Тогда начальные условия движения для уравнений (4.30) можно записать в следующем виде:
5(0) = у(0) = ?(0) = 0;
dx(Q) dy(0) dz(0) ,
7 - -sinq0; -^^ = -coso0; —7^ = ctgp0.
ax ax ax
Решение задачи (4.30) будет аналогично (4.26) [4]: х = -sino0 sint -2coso0(I-cost) -
t n
- 2 J sin(t - t|)</t| J cos(o0 + d^ -0 0
T
- J /(0 sin(o0 + 0 sin(T - ;
0
у =3tcoso0 +2sino0(l-cosT)-4cosQ0 sinx -
т H
-J f /(£) cos(o0 + dr\ +
0 0
+ 2 J J sin(o0 + ^) sin(T) - 0 d^ di\ + о 0
т n
+ 4 J d$ J sin(E, - n) dr\ J f(g) cos(o0 + ;
0 0 0
(4.31)
z = ctgpo
•t
sinz + j/(^) sin(z -^)d^ о
Движения в плоскости Оху и в направлении оси Oz разделяются. При осевой закрутке ступени в плоскости орбиты 60 = 0, р0 = = л / 2. Реально из-за возмущений при разделении 0О и р0 отличаются от указанных выше на небольшие значения.
Переход от безразмерных соотношений (4.31) к размерным осуществляется с помощью масштабов времени Mt, координат Л/г, тяги Л/Рост:
A/t=l/co; A/r=i>0sinp0/(o; Л/Рост = m(0)o0co / cos0o,
где m(0) - масса ступени при t = 0.
Рассмотрим частный случай экспоненциально спадающей тяги, т. е. когда изменяется согласно следующему закону:
Л0 = 7оае-ат, (4.32)
где а - положительная безразмерная величина, характеризующая скорость спада тяги; /0 - общий безразмерный импульс, сообщаемый силой (4.32) за время 0 < t <
Преобразуем систему (4.31), подставив в нее уравнение спада тяги Р(ХП. (4.32). Представим полученное выражение только для z, так как оно имеет наиболее простой вид:
z = ctgp0 sinx + /оа| е-0^ sin(t . о
Последний член этого равенства приводится к табличному интегралу:
t о
Jsin(x - fydt, = -еТ™ |sin(x -£)б/(т - Е,) = о т
|0
------- [a sin(t - - cos(t - ЭД • =
1 + а2 k
е-0" 1
-----7 +------7 [(а sin т - cos т)] .
1 + аг 1 + а
Используя этот результат, запишем
Z = ctgpo SWT 1-------У—-
I 1 + а
/оа 10а
—^-t-cost-----^-г-е
1 + а2 1 + а2
После аналогичных преобразований для х и у зависимости (4.31) выглядят так:
х = -sino0 sin? - 2cosa0(l - cost) + /0
Ll + a:
2а , . ч
y(smo0 -acoso0) +
. f 6 + 2a2 a
+cost cosa0-------— sina0-------
. 4 + a2 4 + a2
f a 6 + a2'
+ sinx coso0----- - sino0------
. 4 + a2 4 + a2
—ат z \ v —gt z \ a(7 + a )
-e cos(o0 + t)-----------------— -e4** sin(a0 + *)-----
(l + a2)(4 + a2) (l + a2)(4 + a2)
6
у = Зтсозао + 2 sina0(l - cost) - 4cosa0 sinx +
, т Г За z 4
+10 ------(acosa0 — sidqq)t —
Ll + a2
„ . f 6 + 2a2 a
-2 shit cosa0------— smon---------
I 4 + a2 4 + a2
+
„ ( a 6 + a
+ 2 cos x cos <y0----- - sin o0------
I 4 + a2 4 + a2
, a(5 - a2)
+ cosa0
(1 + a2)2
2a2 (4 +а2) -ат , ча(а4+5a2+22) + sino0----r---7 - e^x cos(o0 + t)——5-5-г2
(1 + a2)2 (1+ a2)2(4+ a2)
sin(o0 +t)
12-6a2
(1 + a2)2 (4 +a2)
(4.33)
. /0« г = ctgpo sinx 1------—-
( 1 + а
+
70а -at
—- cos х------—— е
1 + a2 1 + а2
Движение, описываемое этими уравнениями, состоит из гармонических колебаний с периодом обращения по орбите Дх = 2л, равномерного дрейфа по у, зависящего от х, и переходного процесса -е~“т.
Рассмотрим сначала частный случай, когда импульс 70, сообщаемый ступени тягой Р^ за время 0 < х <«», значительно меньше начального, получаемого ступенью при ее отделении в момент х = 0. В этом случае величиной Ржт можно пренебречь, положив в соотношениях (4.31) /=0. Тогда будем иметь квазисвободное относительное орбитальное движение ступени, определяемое соотношениями
х = -sino0 sinx -2coso0(l-cosx);
у = 3xcoso0 + 2 sino0(l - cost) - 4cosa0 sinx;
z = ctgp0 sinx.
Заметим, что колебания в направлении оси Ог могут только уменьшить угол
(— х) 0m = max arctg , ,
определяющий наибольшее погружение ступени в область х < 0. Поэтому рассмотрим движение только в плоскости орбиты космического объекта (р0 = ± л /2).
Для плоского движения о0 равен углу между отрицательным направлением оси Оу и вектором начальной скорости v0 (рис. 4.5, д'). Угол сто = О соответствует отделению ступени «назад», т. е. в направлении, противоположном орбитальному движению космического объекта; о0 = л / 2 - отделению ступени «вниз», т. е. в радиальном направлении к Земле; о0 = л - отделению ступени «вперед», т. е. в направлении движения космического объекта; а0 = Зп / 2 - отделению ступени «вверх», т. е. в радиальном направлении от Земли.
Рис. 4.6. Зависимость угла 0п от направления начального импульса: а0 - начальный угол
Зависимость угла 0Ш от о0 представлена на рис. 4.6. Из него видно, что угол Qm имеет наибольшее значение, равное л / 2 при О < о0 < л / 2 и Зл / 2 < а0 < 2л, а наименьшее 0т = 0 - при о0 = л.
Траектории относительного движения при различных о0 показаны на рис. 4.7-4.9. При 0 < а0 < л / 2 и Зл / 2 < о0 < 2п ступень непосредственно после отделения пройдет между космическим объектом и Землей (см. рис.4.7, а, 4.8, а). В этот момент 6т = п / 2. В дальнейшем ступень будет постоянно дрейфовать в положительном направлении оси Оу. При о0 = л / 2, о0 = л / 2 + Д (Д = 9‘), о0 = Зл / 2 и о0 = Зл / 2 + Д движение ступени закончится примерно через один виток по орбите ее столкновением с космическим объектом (см. рис. 4.7, б, в, 4.8, б, в). При л/2 + Д<с0<п наибольший угол 0т возможен на начальном участке относительного движения (см. рис.4.9, а). При л < о0 < Зл / 2 наибольший угол 0т достигается примерно через один виток по орбите (см. рис. 4.9, б). При о0 = л траектория относительного движения целиком лежит в области х > 0 (рис. 4.9, в), поэтому 0т = 0. При л/2+Д < о0 < < Зл / 2 + Д ступень будет постоянно дрейфовать в отрицательном направлении оси Оу (см. рис. 4.9).
Таким образом, для максимального уменьшения угла 0т ступень должна отделяться строго «вперед», т. е. в направлении орбитального движения.
Рис. 4.7. Траектории относительного движения ступени при а0, равном:
а-45°; 6-90°; в-99°
Рис. 4.8. Траектории относительного движения ступени при а0, равном:
а-315°; 6-270°; в-279°
Рис. 4.9. Траектории относительного движения ступени при о0, равном:
а- 135°; 6-225°; в- 180°
Принимая различные значения угла 0т, получим также различные углы секторов благоприятного направления отделения (см. рис. 4.6):
0Ш = 0 при о0 = 180°;
ет <5° при 175° <о0 <255°;
0ГО < 10° при 170° <о0 <260°;
0т < 15° при 165° <а0 < 263° и т. д.
Рассмотрим теперь более подробно движение отделившейся ступени при действии на нее остаточной тяги, спадающей по экс
поненциальному закону (4.32). Из соотношений (4.33) видно, что действие тяги влияет на характер дрейфа в направлении оси Оу (члены порядка т в выражении для х). Когда сила тяги достаточно спадет при (е“т« 1), движение, описываемое уравнениями (4.33), будет складываться из гармонических колебаний с периодом Дт = 2л и равномерного дрейфа вдоль оси Оу.
Дрейф определяется членами, содержащими т в выражении для у (4.33). Рассмотрим их
у* = Зт cos ©о + (a cos ст о -sina0) .
1 + а2
Как было уже показано выше, ступень при свободном относительном движении, в зависимости от величины <т0, может совершать дрейф как в положительном, так и в отрицательном направлениях оси Оу. Величину углао0, при котором происходит изменение направления дрейфа, определим из условия у = 0, т. е.
cos a0 + ——— (a cos o0 - sin a0 ) = 0, откуда
1 + a2
a0 = arctg a +
(4.34)
При 0 < a0 < a0 и л + a0 < a0 < 2л дрейф будет происходить в положительном направлении оси у, а при а0 < а0 < л + а0 - в отрицательном.
Направление дрейфа в зависимости от начального значения о0 представлено на рис. 4.10, а. Как видно из соотношения (4.34), случай очень быстро спадающей тяги a 1 и случай малого импульса /0 <к 1 при a ~ 1 близки к случаю свободного движения, так как л / 2 - а0 «с 1. То же самое можно видеть из соотношений (4.33). При а ~1 и /0 1 имеем свободное движение с точностью до О(/о). Так происходит потому, что сила тяги в этом случае представляет собой лишь малое возмущение.
При а«1 и e'aT«: 1 имеем с точностью до малых величин свободное движение с безразмерной начальной скоростью (1 + /0).
Действительно, преобразуя при указанных выше предположениях первое из соотношений (4.33) и отбрасывая члены более высокого порядка малости, получим
X = -sino0 sinx - 2cosa0(l - cost) + Z0(-2cosa0 + 2cosxcosa0 -
-sinxsina0) = (l + Z0)[-sina0 sinx -2coso0(l-cosx)].
Проведя аналогичные упрощения выражений для у и z, запишем систему (4.33) в следующем виде:
х = (1 + Zo)[- sinCq sinx - 2cosg0(1 - cost) + O(Zo/a);
у = (1 + /0)[3xcoso0 + 2sino0(l - cost) - 4cosa0 sinx] + O(Zq / a);
z = (1 + Z0)ctgp0 sinx + °(zo / «)•
В рассматриваемом случае почти весь импульс тяги сообщается ступени за короткое время т - l /a« 1, что практически равносильно мгновенному приращению безразмерной скорости от 1 до (1 + Zo). В плоскости орбиты траектории движения в этом случае близки к траекториям, изображенным на рис. 4.7-4.Э.
При а<1 и Zo >1 движение, описываемое уравнениями (4.33), в период действия тяги может существенно отличаться от свободного движения. Если, например, тяга спадает очень медленно (a« 1), а ее величина не мала (Zoa> 1), то движение, соответствующее уравнениям (4.33) на интервале времени х <1 / a, будет носить иной характер.
Рассмотрим первое из уравнений этой системы при условии выполнения указанных выше предположений. Отбросим в нем члены, содержащие а в степени выше первой. Кроме того, учтем, что e-aT = 1 - ах +0(х2 ). В этом случае
X = -sina0 sinx - 2cosQq(1 - cosx) +
2a , . .
-----r-(sina0 - acosoo) + cosx
.1 + a2
6 + 2a2 a
------- coso0--------5-sina0 +
4 + a 4 + a J
(a 6 + a2 .
+ Sin X -- COS Oq--- sin Oo
(4 +a2 4+a2
-------------— е~” cos(o0 + т)-(1 + а2)(4 + а2)
(7 + а2)а с (1 + а2 )(4 + а2)
sin(o0 + т) =
Г з =-sino0 sinx - 2cosq0(1 - cost) +/0 2asina0 + -costcoso0 -
а а . 3 . 3/4 4 z 4
COSTSinQg + —SinTSinQo SinTSinGg (1 - (XT)cOS(Qo + t) — 4-------------------------------------------4 2-2
(1 - ocT)sin(a0 +t) =-sina0 sinx - 2cosq0(1 - cost) + 4
Г 3 3'
+Z0oc 2sino0(l - cost) --coso0 sinx +-tcos(o0 +t) .
Вместе с аналогичными преобразованиями соотношений для у и z будем иметь
х = -sino0 sinT - 2coso0(l - cost) + /0a[2sino0(l - cost) -
3 3
--COSOQ SinT + -TCOS(O0 + t)] +O(Zo«2);
(4.35)
у = 3tcoso0 + 2sinoo(l - cost) - 4cosa0 sinx +
+/0a{5cosoo(l - cost) + 6sino0 sinx - 3r[sina0 + sin(o0 +t)]} + + O(Zoa2);
2 = ctg p0[sinx - /oa(l - cost)] + О(/оа2).
Траектории, описываемые этими уравнениями, в плоскости орбиты р0 = л / 2 при всех о0 имеют вид раскручивающейся спирали (рис. 4.10, б). Поэтому Qm = л / 2 при всех о0. Таким образом, отделение при почти постоянной и немалой тяге является неблагоприятным с точки зрения уменьшения угла 0ш.
Экстремальные свойства движения (4.33) рассмотрены для различных 4 и а. Полученные зависимости 0т(<Уо) для движения в плоскости орбиты аналогичны представленным на рис. 4.7-4.Э.
б
Рис. 4.10. Анализ движения отделившейся ступени при действии на нее остаточной тяги:
а - зависимость направления дрейфа от начального значения о(); б - траектории движения ступени в плоскости орбиты р0 = л/2 при медленном спаде тяги а «1
Кривые при /0 —> оосоответствуют предельному случаю, когда начальная скорость отделения = 0. Как видно из этих рисунков, независимо от параметров /0 и а при 0 < а0 < л / 2 и Зл / 2 < < а0 < 2л угол 0Ш = л / 2. Таким образом, отделение в направлении полупространства у < 0 всегда является неблагоприятным с точки зрения уменьшения угла 0т.
При а > 1 независимо от значения /0 наиболее благоприятным в смысле уменьшения угла 0Ш оказывается направление отделения а0 = л. Значение 0т при этом в ноль не обращается и сохраняет некоторое конечное малое значение. Можно получить оценку для 0т(л) при а > 0 и любом /0:
0т(л) < (9 + а) / (12ла2(3 + а2)).
Не приводя полный вывод представленной оценки, укажем порядок ее получения. Для этого в соотношениях (4.33) положим а0 = л. Максимальному погружению ступени в область отрицательных значений параметров х, у будет соответствовать минимум функции х = х(т), у = £(т), заданной параметрически. Условие указанного экстремума записывается следующим образом:
dx dx . dy ~ d2x п
— = — / — = 0 и —- > 0.
dy dx dx dy2
Следует отметить, что наибольшее погружение ступени в область низких орбит происходит при т, лежащем в интервале 2л < т < 2л + л / 4, в котором sin т и cos т больше нуля.
Траектории движения при а>1 подобны траекториям свободного движения (см. рис. 4.7-4.9). При а<1 и /0<1 / а благоприятным направлением отделения остается а0= л. При а —> О и Iq —> °° благоприятного направления отделения вообще не существует, так как происходит перестройка от движения свободного типа (см. рис. 4.7-4.9) к движению спирального типа (см. рис. 4.10, б).
Таким образом, отделение отработавшей ступени в направлении, близком к орбитальному движению, является наиболее благоприятным в смысле ограниченности максимального угла «погружения» в область более низких орбит, чем орбита космического объекта (0т «1 рад). Это имеет место в том случае, когда основная часть импульса тяги сообщается ступени не более, чем за первые полвитка при движении по орбите или когда импульс тяги, сообщенный ступени за первые полвитка движения по орбите, мал по сравнению с ее импульсом отделения. Иначе, если тяга за полвитка спадает медленно и ее импульс, сообщенный ступени за первые полвитка, не мал по сравнению с ее импульсом отделения, отделение всегда будет неблагоприятным в смысле 0m ~ 1 рад.
Рассмотрим конкретный случай изменения тяги по времени:
/(т) = /0 expf—------о,62т -2,11
0 U +6,77т )
где свободная постоянная под знаком ехр подобрана так, что при со
/0=1. J/(T)rfT = l.
о
Нетрудно видеть, что за полвитка (т = л) тяга резко падает. Из этого следует, что движение отработавшей ступени подобно свободному (рис. 4.7-4.Э), и наиболее благоприятное направление отделения в смысле уменьшения угла 0т должно совпадать с орбитальным движением космического объекта. Этот вывод подтверждается результатами численного анализа экстремальных свойств движения (4.31) в плоскости орбиты при указанном выше законе
изменения тяги. Полученные зависимости наибольшего угла «погружения» вт от направления отделения а0 аналогичны представленным на рис. 4.6 и могут незначительно изменяться для различных /0. При о0 = п аля любого Iq имеем Qm < 15°. Если задаться определенными диапазонами 9т, благоприятным для отделения окажется целый сектор, например:
0т <5° при 175’ < о0 <230°;
ет < ю- при 170’ <о0 <241’;
< 15’ при 165’ <о0 < 245’ и т. д.
Траектории движения ступени относительно космического объекта аналогичны изображенным на рис. 4.6-4.Э. Они подобны траекториям свободного движения. Следовательно, отделение ступени в направлении, близком к направлению орбитального движения космического объекта, является благоприятным в смысле достаточной малости угла «погружения» ступени в область более низких орбит, чем орбита космического объекта.
Полученные выше результаты носят в основном качественный характер. Практическое решение вопроса относительного орбитального движения применительно, например, к орбитальной станции «Мир» не вызывало технических трудностей. Конфигурация станции и условия ее полета позволяют отделять от нее пилотируемые и грузовые космические корабли в направлении по касательной к траектории (или близких к нему), которое, как это показано выше, является наиболее предпочтительным для исключения соударения при относительном движении разделившихся тел.
Разработка международной космической станции «Альфа» (рис. 4.11) привела к необходимости исследовать вопрос относительного орбитального движения при произвольном (по направлению) отделении космических кораблей как в штатных, так и в аварийных условиях полета станции. Одна из рассматриваемых аварийных ситуаций связана с пробоем станции метеоритом или техногенным осколком, приводящим к выходу из строя СУ станции. В этом случае она может потерять пространственную ориентацию и за счет истечения из пробитого отсека газовой среды или компонентов топлива приобрести значительную угловую скорость с произвольной ориентацией ее вектора в пространстве.
В такой ситуации экипаж должен по возможности быстрее покинуть станцию. При определении траектории движения корабля-спасателя в правые части полученных ранее уравнений (4.16) вместо Рос,, вводятся проекции сил увода, которые могут работать в дискретном режиме. Логика их работы должна быть построена таким образом, чтобы обеспечить безударный выход корабля-спасателя за пределы станции.
4.3. Отделение капотирующих устройств
Неразрезной отсек
Особенность отделения таких отсеков состоит в том, что они имеют значительное взаимное перекрытие с разгонным блоком (см. рис. 1.10). В процессе относительного движения после разделения в течение определенного промежутка времени отсек сохраняет связь с разгонным блоком через подпружиненные роликовые опоры. При разработке методики расчета отделения использовались следующие системы координат (рис. 4.12):
Рис. 4.12. Расчетная схема отделения переходного отсека:
1 - дорожка; 2 - подпружиненный ролик
OXYZ - правая инерциальная система координат с началом в той точке пространства, в которой находился ЦМ разгонного блока (без отделяемого отсека) в момент подачи команды на разделение;
- связанные с отделяемыми телами системы координат с началами в их ЦМ (i = 1 - разгонный блок, i = 2 - отделяемый неразрезной отсек);
^kixkiykizki ~ правые конструкционные системы координат с началом на продольных осях отделяемых тел в точках их пересечения с конструкционными плоскостями (плоскости, относительно которых задаются геометрические размеры тел и координаты элементов их конструкции).
Подпружиненные роликовые опоры размещены на разгонном блоке. На внутренней поверхности отделяемого отсека проложены дорожки, по которым катятся ролики. Ширина дорожек выбирается с учетом возможного поперечного смещения роликов в процессе относительного движения отделяемых тел. Предположим, что в качестве СО используются пружинные толкатели, установленные на отсеке равномерно по окружности в районе его стыка с активной частью блока.
Для определения угловых положений отделяемых тел относительно системы координат OXYZ будем использовать углы рысканья у,, тангажа 0, и крена уг (рис. 4.13). Матрица перехода от системы координат к OXYZзаписывается следующим об-
разом:
Л siny. siny. - siny. cosy. +
cosViCosOj -cosy, sine, cosy, 4-cosy, sin0, siny.
sin0,
- siny,- cos0,
cos0, cosy i
cosy, siny, + + sinsin0, cosy ,•
-cos0, siny ,•
-siny, sin0, siny ,-
(4.36)
Движение i-го тела относительно его ЦМ описывается динамическими уравнениями Эйлера:
Ji^i +<>, X
(4-37)
где J, - тензор инерции i-ro тела относительно его центральных осей. Из этого соотношения получим, что
е, = J^Loi xJi®]).
(4.38)
Рис. 4.13. Связь между системами координат C.x. z/jZ, и OXYZ
Численно интегрируя это соотношение при заданных начальных условиях, получим значения угловых скоростей сох, соу, сог, по которым, используя соотношения вида (3.35), определим производные направляющих косинусов. Интегрируя их, найдем элементы матрицы (4.36) и, следовательно, углы Ч|/,, 0, и уг. Система уравнений (4.36), (4.38) и (3.35) полностью определяет угловое положение разделяемых тел.
Запишем уравнение движения ЦМ г-го тела в системе координат OXYZ:
ROi =— + ^Pik), (4.39)
mi j n k
где j- 1, 2 - номера поясов роликовых опор; п - номер роликовой опоры в конкретном поясе; F? - сила сопротивления в соответствующей опоре; Pik - сила отделения k-vo толкателя.
Установим некоторые дополнительные зависимости. Положение ЦМ отсека в системе координат С^у^ задается следующим образом (см. рис. 4.12):
= ^(«02" *01)-
Определим радиус-вектор произвольной точки В, принадлежащей отсеку в системе координат С^у^. Радиус-вектор этой точки в инерциальной системе координат OXYZ
г ин _ д -(2) , р
ГВ - Л2ГВ +К02-
Радиус-вектор точки В в С^у^ равен:
W - ад = аца2г^ + «02 - ад =
(4.40)
= Л1тА2(г&> + Л,т(«02 - «01) = A2lfV> + f£>,
где Д21 = ” матрица перехода между системами координат
^2 *2 3/2 *2 и ^1 *13/1*1-
Радиус-вектор точки, принадлежащей блоку, в системе координат C2x2y2z2 выражается аналогично:
rj > = Л12г^^ + rff), = Д2 (7?01 - /?ог)» (4-41)
где Л12 = А2 Aj - матрица перехода между системами координат Ci*13/1*1 и C2x2y2z2.
Относительная скорость ЦМ отсека в системе координат ^i*i3/i*i определяется из соотношения
г?21 = v™ - и*0 х г$ = А](у2 - х г$,
при этом щ, v2 получаются интегрированием уравнения (4.39).
Приращение относительной скорости, обусловленное вращением связки до разрыва связей, может быть определено по методике, изложенной в § 3.1.
Предположим, что штоки толкателей отделения не проскальзывают по ответной плоскости блока. Координаты некоторой точки Т (см. рис. 4.12), лежащей на стыковом шпангоуте отсека, через
которую проходит ось #-го толкателя, в системе координат записываются так:
гГ2 = Гг2(хст^ *т cos<pr; RT sin <рг),
где х<$ - координата х плоскости стыка в системе C2x2y2z2; Rt~ радиус окружности, на которой расположены толкатели; <рг - угол, определяющий положение k-ro толкателя по окружности.
Определим ход толкателя. Как видно из рис. 4.12,
= /?01 +Г-Г1 - Rq2 ~Тт2- (442)
Поскольку пружинные толкатели установлены на отсеке жестко и их оси параллельны его продольной оси, вектор Дг <2>, характеризующий ход #-го толкателя, направим так же. Воспользуемся соотношениями (4.40), (4.41) и запишем выражение (4.42) в системе координат- C2x2y2z2\
Дг^2^ = А2 (7?01 -/?02) + ^12^71 ” ^Г2-
Очевидно, что точки 7\ и Г2 (см. рис. 4.12) до разделения совпадали. Силу £-го пружинного толкателя, действующую на отсек, в зависимости от его хода найдем по соотношениям, приведенным в §2.1. Силу пружинного толкателя, действующую на блок, определим из уравнения
Аналогично найдем моменты сил этих пружинных толкателей MlTk, действующие на разделяемые тела:
Y^iTk = (4.43)
k k
где riTk - радиус-вектор точки контакта штока #-го пружинного толкателя отделения со шпангоутом блока (i = 1, 2).
Роликовые опоры по отношению к дорожкам устанавливаются с некоторым зазором. Вследствие различных возмущений, действующих на разделяемые тела в процессе их относительного движения, ролики могут контактировать с дорожками. Расчетная схема
этого процесса приведена на рис. 4.14. Точка К принадлежит блоку, на котором жестко установлены роликовые опоры, а точка С определяет точку контакта ролика опоры с дорожкой. Определим текущее расстояние \КС\:
^2 =^2T(/?01 "^02 +А^1)’
Вектор г^, определенный в системе координат Cxxxyxzx, имеет постоянный модуль.
Рис. 4.14. Схема для определения сил в роликовых опорах
Введем единичный вектор ё(а, Ь, с) направляющих косинусов прямой КС, заданный в системе координат Тогда уравне-
ние этой прямой запишется в следующем виде:
х-х0 = У-Уо = Z-Zp а Ь с
Плоскость дорожки описывается уравнением
-хт) + В(у -ут) +C(z - гт) = О,
где А, В, С — проекции на плоскость дорожки единичного вектора нормали, проведенного из точки К; RD2 (xD2, Ут* zdi) ~ вектор некоторой точки D2, принадлежащей дорожке, который задан в системе координат C2x2y2z2.
В векторном виде это соотношение примет вид
rn + D = 0, где D = -nRm,
an- единичный вектор, перпендикулярный плоскости дорожки.
Определим длину перпендикуляра, опущенного из точки К на плоскость дорожки:
d = \ nfk2 + ^l-
Поскольку векторы ё и п единичные и неортогональные, то ёп = cos <р, откуда
|Ж| JgfK+ р| cos <р еп
Определим силу Fj пружины, входящую в выражение (4.39).
Ход опоры равен:
й = |СК|/а0-|СХ|, но \СК|= h0 + 8о,
где Ло - высота пружины в недеформированном исходном состоянии; 6о - начальный зазор между роликами и дорожкой. Тогда
50<А<Я+50,
где Н - высота пружины, сжатой до соприкосновения ее витков.
Силу n-й пружины роликовой опоры в j-м поясе и ее момент относительно ЦМ i-ro тела запишем следующим образом:
^2п = ; л/i = х );
м2 = гс2 х (-nF„7), но rc2 = rk2 + ё I СК |.
Величину LQi в (4.37) найдем как геометрическую сумму моментов (4.43) и моментов сил, определенных на основании последних соотношений.
Полученные уравнения описывают процесс отделения неразрезного отсека от разгонного блока при наличии между ними связи в виде j поясов подпружиненных роликовых опор. Если установку опор и дорожек на разделяемых телах поменять местами, то при незначительных доработках представленные соотношения сохраняют силу.
Обтекатель
Рассмотрим системы отделения обтекателей, которые широко распространены в ракетно-космической технике. По расчетным случаям их можно разделить на две основные группы (см. рис. 1.13). К первой отнесем те, в которых сбрасываемый пассивный элемент конструкции сначала поворачивается вокруг оси вращения на заданный угол, а затем ось принудительно раскрывается и пассивный элемент начинает свободное относительное движение. Такие системы используются в основном при сбросе ГО больших размеров.
Ко второй группе относятся системы, в которых ось вращения после срабатывания средств разделения имеет свободу поступательного движения в заданном направлении (рис. 4.15). Пассивный элемент конструкции в этом случае будет совершать сложное движение - поворот относительно оси 2 с движением ее вдоль паза. Ось вращения может быть закреплена на отделяемом элементе или активном блоке. Такие системы применяются при сбросе небольших головных и бортовых обтекателей, а также приборов, штанг и т. д.
Рассмотрим процесс сброса ГО первоначально в пространственной постановке. Необходимость такого подхода вызвана появлением PH типа «Энергия». Ввиду ее универсальности на ней вместо МКА «Буран» может устанавливаться ПГ другого назначения,
защищенный на атмосферном участке с помощью ГО, сбрасываемого при малых или нулевых значениях скоростного напора.
Рис. 4.15. Схема отделения с использованием подвижной оси вращения:
а - ось вращения установлена на сбрасываемом элементе конструкции; б - ось вращения установлена на активном блоке; 1 - отделяемый элемент; 2 - ось вращения; 3 - пружинный толкатель
Целью расчета является определение параметров СО и движения отделяемых тел, а также возмущений по угловой скорости, действующих на РН. Принятые системы координат изображены на рис. 4.16. Инерциальная система OXYZ в начальный момент времени совпадает с системой координат Сцхц2/цгц, начало которой совмещено с ЦМ ЦБ, а ее оси являются главными центральным осями инерции ЦБ. Связанные системы С^у^ (:=1, 2) имеют начала в ЦМ отделяемых створок ГО. С осями вращения свяжем еще две правые системы координат причем оси Odzri направлены
вдоль осей вращения створок, а Остхп - в направлении отделения. На рис. 4.13 показан порядок перехода между осями координат.
Рис. 4.16. Системы координат, используемые при моделировании отделения обтекателей
Движение ЦБ после подачи команды на разделение в инерциальной системе координат будет выражаться следующими дифференциальными уравнениями:
тиЯи = V + R;
k
(4.44)
Лц^- + йц Xjcx =ул7оц(^:)) + л/оц(Ю.
где JCll - тензор инерции ЦБ относительно связанных с ним осей; R - суммарный вектор сил реакций связей, действующих на ЦБ; тц - масса ЦБ; У - сумма внешних сил, действующих на ЦБ.
k “
Запишем дифференциальные уравнения движения створок ГО:
^i^Oi У + Ri> т
(4-45)
xJci^l=YMCi(Fim}) + rciXRi + Мip, т
где Ri - суммарный вектор сил реакций связей, действующий на i-ю створку; - масса i-й створки; \ - суммарный вектор внеш-
т
них сил, действующих на i-ю створку; JCi - тензор инерции i-й створки ГО относительно связанных с ней осей; А/1р - реактивный момент, возникающий на оси вращения i-й створки и подлежащий определению; гс' - расстояние от оси вращения до ЦМ i-й створки; со - угловая скорость вращения i-й створки.
Введем уравнения, показывающие, что точки связи принадлежат одновременно ЦБ и одной из створок ГО. Как видно из рис. 4.16,
га = Кц +^ц> или Ъ = ROi +гс-
Дважды продифференцировав эти соотношения, получим равенство ускорений точек связи:
— ЛОц _ _ •
Яц +—— хг,; +соц х(соц хг‘) = at
= ROi + х fj + х (5( х г/ ). (4.46)
at
Подставив в это выражение соотношения (4.44), (4.45), получим шесть дополнительных скалярных равенств. Добавим, кроме того, очевидные соотношения
R = -Z Ri; МОц(Я) = -X Mip + X (-R)], (4.47) i i i
которые также дают шесть скалярных уравнений для каждой створки. Относительно оси Odzci связь допускает угловое движение. Тогда от шести неизвестных Mip (i = 1, 2) можно перейти к четырем:
где Adi - матрица перехода от системы координат Ocixciycizci к системе координат С^у^.
Для получения последних четырех скалярных соотношений воспользуемся тем, что проекции векторов углового ускорения ЦБ и i-й створки ГО на оси Ocixci и Ociyci равны, так как вращение возможно лишь относительно осей Ocizci. Следовательно, в выражениях
Юцх
“ну И Ala “ij, , (4.48)
где Лц п- - матрица перехода от системы координат, связанной с ЦБ, к системе, связанной ЦМ с i-й створкой, первые две проекции векторов равны и могут быть определены из соотношений (4.44) и
(4.45). Таким образом, (4.44)-(4.48) дают замкнутую систему уравнений.
На практике широко распространена симметричная компоновка PH с установкой ГО в носовых частях (PH «Восток», «Протон» и др.). Как правило, в системах отделения створок ГО этих PH в качестве СО используются пружинные толкатели. Они устанавливаются на боковой поверхности обтекателя параллельно его продольной оси. Расчетная схема отделения створки ГО приведена на рис. 4.17, а. В точке О располагается ось вращения створки, в точках и О2 -опоры пружинного толкателя соответственно на активной части PH и сбрасываемой створке, С, С' - исходное и текущее положение ЦМ створки. При работе пружинного толкателя точка связана с PH, а точка О2 будет перемещаться по окружности радиуса г2. Ее промежуточное положение на траектории обозначим через О2. Расстояние между точками Ot и О2 найдем из соотношения
I = ОХО2 = 7ri2 + r2 ” 2rtr2 cos[(<pt + ф2) + ф]> (4.49)
где ф - текущий угол поворота створки.
Величина текущего хода толкателя
Лт = /-/0, (4.50)
где /0 = О^О2- начальная длина толкателя.
Определим плечо силы толкателя относительно оси О. Для этого составим уравнение прямой Ot О2 в системе координат Оху, связанной с PH. Координаты х, у точек Ot и О2 соответственно
(-г^шфр -^созф!) и [ г25т(ф + Ф2); -г2соз(ф + фг)].
Уравнение искомой прямой запишем в виде
Лх + Вг/+С=0, (4.51)
где А = ^cos ф|— r2cos (ф + Фг); В = -rx sin ф) - r2 sin (ф + Ф2); С = =-r1r2sin[(<p,+<р2) + <р].
Плечо силы толкателя равно длине перпендикуляра, опущенного из точки О на эту прямую,
С
Рт у1а2 + В2
Рис. 4.17. Отделение створки ГО (плоский случай): а - расчетная схема отделения створки ГО; б - зависимость угловой скорости и угла разворота створок обтекателя от времени
Подставляя в это соотношение А, В, С и используя выражение (4.49), получаем
Рт =уП^2 sin[((p! + (р2)+ <р].
В рассматриваемой схеме на каждой створке установлено 2п (п = 1, 2...) одинаковых диаметрально расположенных толкателей. Поскольку они работают одновременно, будем считать их за один приведенный, расположенный в плоскости симметрии створки. Учитывая (4.50), можем определить текущую силу приведенного толкателя:
п
Момент силы, развиваемый приведенным толкателем относительно оси вращения, найдем из соотношения
М т = Ррт
Рг-Рх h
Г1Г2 sin[(<pt + <р2)+ ф].
1 р -7 Р*
(^ _ ^о)
PH летит с ускорением и с работающей СУ, поэтому на створку кроме силы от толкателей действуют еще осевая (Gnx) и поперечная (Gny) силы инерции. Причиной появления поперечной силы инерции является работа исполнительных органов СУ, приводящая к угловому движению PH. Обычно траектория полета строится таким образом, чтобы в течение промежутка времени, необходимого для отделения створок, движение PH происходило с нулевыми углом атаки и угловой скоростью. Худшим с точки зрения отделения является такое направление поперечной силы инерции, при котором она создает момент относительно оси вращения, противоположный моменту от пружинных толкателей. Осевая сила инерции оказывает на процесс движения створки двоякое воздействие. До тех пор пока прямая ОС' (см. рис. 4.17, а) лежит слева от оси х, осевая сила инерции препятствует вращению створки обтекателя. Как только эта прямая окажется справа от оси х, осевая сила инерции будет способствовать вращению. Момент силы инерции переносного движения относительно оси вращения можно представить в виде
Мм, = -Gr3[nx cos (Фз + Ф) ±ny sin (ф3 +ф)|, где G - вес створки; пх, пу - осевая и поперечная перегрузки.
Дифференциальное уравнение вращения створки будет иметь вид
Joz§ = Мт + ^ин ’
где JOz - момент инерции створки относительно оси вращения.
По достижении заданного угла поворота створки (угла сброса) срабатывает механический замок и ось выталкивается из паза специальными толкателями, установленными нормально поверхности PH.
Величина угла сброса выбирается на основании следующих соображений. Во-первых, до момента его достижения должно произойти полное срабатывание пружинных толкателей или других СО, так как в противном случае не будет обеспечено упорядоченное движение створок. Во-вторых, створке должна сообщаться возможно большая поперечная составляющая относительной скорости с тем, чтобы исключить соударение ее с PH.
После срабатывания пружин выталкивания оси вращения створка будет совершать свободное плоское движение с постоянной угловой скоростью (рис. 4.18).
Поступательное движение створки относительно PH определяется соотношениями:
x = vxQ -gnxt; y = vyQ ±gnyt,
где vxq, vyQ - проекции на соответствующие координатные оси скорости ЦМ створки в момент отделения ее от PH. В выражении для у знак второго слагаемого определяется направлением поперечной силы инерции Gny.
Результаты расчетов отделения конкретных створок (см. рис. 4.17) позволяют представить качественную картину этого процесса. На начальном участке вращения створка под действием момента сил пружинных толкателей приобретает значительную угловую скорость ф. Когда положительный момент от толкателей становится равным отрицательному моменту от сил инерции Gnx и Gny, угловая скорость створки достигает максимального значения, а затем под действием отрицательного момента сил инерции начинает уменьшаться. При переходе ЦМ створки С вправо от оси Ох момент от осевой силы инерции меняет знак на положительный. По достижении угла а = arctg пу / пх ыежщ осью Ох и отрезком ОС', который отсчитывается в направлении вращения, сум
марный момент сил инерции становится положительным. В этом положении створки ее угловая скорость ф достигает минимума, а затем снова начинает увеличиваться вплоть до достижения створкой угла сброса.
Рис. 4.18. Картина относительного движения створок обтекателя
При срабатывании пружинных толкателей, установленных в узлах разворота, угловая скорость створки несколько уменьшается, а затем сохраняет постоянное значение, так как створка теряет связь с РН.
Как видно из рис. 4.17, б, угол поворота створки <р увеличивается неравномерно, причем максимальному и минимальному значениям ф соответствуют точки перегиба кривой изменения <р.
Рассмотрим теперь процесс сброса пассивного элемента (не обязательно обтекателя) 7, имеющего подвижную ось вращения 2, установленную на отделяемом элементе конструкции. Предположим, что отделение производится в невесомости, а пассивный элемент крепится к КА пироболтами. В качестве средств отделения используется пружинный толкатель 3 (см. рис. 4.15).
Весь процесс сброса пассивного элемента конструкции можно разбить на три участка. Первый - вращение его вокруг оси под действием момента силы Рт пружинного толкателя, второй - вращение и одновременное поступательное движение вдоль паза и третий - свободное относительное движение. При анализе движения пассивного элемента необходимо учитывать начальную угловую скорость, которую он получит при срабатывании пироболтов.
Предположим, что паз, по которому движется ось, составляет некоторый угол а с плоскостью разделения. Системы координат, принятые для анализа процесса отделения, представлены на рис. 4.15. Ось Ох параллельна продольной оси КА.
Система имеет две степени свободы. В качестве обобщенных координат при составлении уравнений Лагранжа II рода примем угол поворота ф пассивного элемента конструкции вокруг оси вращения и у10 - поступательное перемещение оси вращения вдоль паза. Координаты ЦМ (точка Q пассивного элемента конструкции в системе координат Ох^у^:
хс = |яс | sin <р; ус = г/10 + |/?с | cos <р.
Продифференцируем эти соотношения по времени и запишем выражение для кинетической энергии:
т = Г^(хс + Ус)+±М2>
где JCz - момент инерции отделяемого элемента относительно оси Cz.
Уравнения Лагранжа после необходимых преобразований будут иметь вид
ту 10 - т|Яс|(ф sin ср + ф2 cos <р) = Qyi0; (4.53)
J0z<p-m|/?c|j/io sincp = (£,,
где JOz - момент инерции отделяемого элемента относительно оси вращения.
Определим обобщенные силы Qyi0 и (2ф. Запишем координаты концов пружинного толкателя (а - подвижного и б - неподвижного) в системе координат Ох^у^
*ia = |«! | sin (Pt, yia = I cos <p J + у 10;
Xj6 «l^lsin^ +y), y16 =|«1|cos((p1 +y); cpt = <p + p.
Аналогично (4.51) запишем коэффициенты при переменных и свободный член в уравнении прямой, проходящей через точки а и б:
л=з/1б~У1а; в=*1б-*1а; с=У1а^1б-х1аУ1б-
Подставляя полученные значения А, Ви Св (4.52), определим плечо рт силы толкателя относительно оси вращения. Величина его хода на основании (4.49) и (4.50) равна:
htt = J(x16 -х1а)2 + (у 1б -г/1а)2 -/0.
Для определения влияния трения на процесс движения найдем силу FH, нормальную поверхности паза:
FH = РТ sinТ) + т|Лс|ф2 sincp,
А где sin Т| = -=====. 7л2 + в2
Теперь можем записать соотношения для определения обобщенных сил:
Qyio ~~ cost) — fTFH, Оф — —Ртрт + f^F^r, где г - радиус оси вращения; /т - коэффициент сухого трения.
Подставляя полученные соотношения в выражение (4.53) и разрешая их относительно вторых производных, получим окончательную запись дифференциальных уравнений движения пассивного элемента конструкции. Их численное интегрирование следует вести при таких начальных условиях (t = 0):
Л InfL sin ос
г/10 = 0; (р = <р0; t/ю =—-----: Ф = .
™ Лг
где /пб - импульс, возникающий при срабатывании пироболтов; т - масса отделяемого элемента; г/пб - расстояние от оси вращения О до оси пироболта, смонтированного параллельно оси Ох.
Если ось вращения установлена на КА, а охватывающий ее паз - на пассивном элементе (см. рис. 4.15, б), то момент инерции последнего относительно оси вращения JOz будет зависеть от текущей координаты у10, т. е.
Joz = Jcz + ™(|КС| + !/io)2>
что приводит к соответствующим изменениям соотношений (4.53). На рис. 4.19 представлены кинематические параметры движения оси вдоль паза, установленного на КА. Расчеты проводились при различных углах наклона фуСТ отделяемого элемента к линии местного горизонта и действии на отделяемый элемент кроме указанных выше сил еще и силы тяжести.
Под действием импульса сработавшего пироболта ось 2 отделяемого элемента 1 (см. рис. 4.15) начинает поступательное движение вдоль паза, а затем останавливается. Отделяемый элемент 1 в это время под действием силы пружинного толкателя 3 совершает вращательное движение и как только сумма всех действующих на него сил в проекции на направление паза становится положительной, ось снова приходит в движение. Следует также отметить (см. рис. 4.19), что угол фуст не оказывает заметного влияния на кинематические параметры отделяемого элемента.
Ую’ Ую» ^о’ м м/см/с2
Рис. 4.19. Поступательное движение оси вращения вдоль паза
Крышка люка
Рассмотрим отделение в условиях невесомости небольших по размерам и массам элементов конструкции (крышек люков, кожухов, бортовых обтекателей и т. д.) без установки на них оси вращения. В таких системах обычно в качестве СО используют пружинные толкатели.
Сначала исследуем общий случай отделения пассивного элемента двумя пружинными толкателями, имеющими различные силовые характеристики и установленными на различных расстояниях от ЦМ пассивного элемента. В подобных системах масса активного блока или КА несоизмеримо больше массы пассивного элемента и поэтому отделение можно считать происходящим как бы от неподвижной стенки. Для определенности положим, что за счет начальных возмущений, обусловленных срабатыванием элементов крепления, отделяемый элемент будет вращаться против хода часовой стрелки. Расчетная схема и типовая характеристика пружинного толкателя представлены на рис. 1.68.
При рассмотрении процесса отделения крышки в общем случае можно выделить два участка движения: 1) совместной работы толкателей; 2) когда один из толкателей полностью выбрал свой ход и работает лишь второй толкатель.
Обозначим начальные силы первого и второго толкателей соответственно через P2i (i = 1, 2), а конечные через Ри.
Используя приведенные на рисунке обозначения, запишем выражения для определения текущих сил толкателей:
р _ р (< ХС+Г1ф\ р _р С Хс-Г2ф)
к Ч ) \ 12 )
Дифференциальные уравнения поступательного движения ЦМ и вращательного движения вокруг ЦМ пассивного элемента конструкции:
тхс = Рт1 + Рт2; /Сгф = Рт1г( - Рт2г2, (4.54)
гдеJCz - момент инерции отделяемого элемента относительно оси, проходящей через его ЦМ и перпендикулярной к плоскости отделения.
Подставляя в эти уравнения соотношения для Рт1 и Рт2, получим
хс = ахс +Ь<р + с; ф = аххс + fet(p + (4.55)
где
1 (Р21 Р22 l 1 (^22r2 1 /П п ч
=----Г- + -Г' ; ь =--; c = -(p2i+р22);
l2 ) I2 ) тп
1 Г ^21Г1 _ ^22гг\ J Cz I h h J
С = (Р21П + Р22Г2>-
J Cz
Решение системы уравнений (4.55) будет иметь вид
хс = ё~Ь' (CteX1£ + Cxel2t) + ^-^(С3еХз£ + С4еХ4£) + A.f2 а ах гх + г2
(4.56)
<p = C1eXlf + С2еК2‘ + С3еХз£ + С4?4£) +
П + г2
при этом
f = |[а + bx + V(a-^i)2 +4ai&];
g = |[а + 61 - 7(а - 6i)2 + 4aj6];
Xj - корни характеристического уравнения системы; Q - произвольные постоянные.
Для определения Ci (i= 1...4) используем начальные условия G = 0):
хс =0; (р = 0; хс = vQ; ф = со0-
Начальные линейную и угловую C0q скорости отделяемому элементу сообщают импульсные средства разделения (УКЗ, пироболты, детонирующие шнуры и т. д.). Если же крепление осуществляется при помощи пирозамков или пирочек, то при
tx = 0 х0 = 0, а со0, вообще говоря, не равна нулю. Начальная угловая скорость может быть следствием неодновременности (в пределах допустимого разброса) срабатывания пирозамков. Воспользовавшись начальными условиями, определим произвольные постоянные:
Ct -------—r-lJIijeiHi -(/ -^1>Ц2л/Й];
G = ~jg[-Д- <о0(/-М + »о«1 -(/-МИгд/ЙЬ
СЗ = 2(g
1 2(g-/)4/i
Ц/Йа1^1 "wo(g-fei) + yoai -(g-*i)H2>
_ Ar2 + hr\ . r( +r2
p2 =
A ~ h.
И + r2
Непосредственной подстановкой коэффициентов a, at, b, bi из (4.55) в соотношения для g и / из (4.56) получим, что g,f<§. Используя этот результат, а также значения произвольных постоянных С, (i = 1...4), можем записать решение уравнений движения тела на первом участке:
g~bt «i7ig|(g-/)
{[<Оо(/~М-»о<Мз1п.уДГ1 + -Jjgll fliPi -
- (/ - Ь} )p2 ]cos Jjg| b- {[<00(g - bx) -
«iV|/|(g-/)
t>oai Isin 7Й + Ж +
1 ( sin л/L/l h
ф = -(gy)Umo(g-fei)-poai] -
(g -b\)|i2]cosд/j/jtx +lf>o(/-M-t>o«i]
- [«1И1 -(/-М^соз-Д^ + Цг-
Рассмотрим второй участок. Первый толкатель закончил работу и продолжает работать только второй. Уравнения движения на этом участке будут иметь вид
хс = xcd + фр + п; ф = xcdx + <ppj 4-Пр (4.57)
где d = -Р22 / Р = р22г2 / т12> п = Р22/ т; dx = P22r2/JCz 12,
Р\=?22 r2 / Jcz hi п\~ ~Р22r2/Jcz •
Учитывая, что dx/d=рх/р - пх/ п = -тг2/JCz = у, представим (4.57) так:
хс = xcd +<рр + п; ф = y{xcd + фр + п).
Решение такой системы может быть записано как
хс = С'хе'^^ +C2e~^^h + C'3pt2 + С\р------
d + ру
Ф = C'{ye^^h + Ciye~^^t2 - C'.dP» -C'.d- yn . d + py
Начальными условиями на втором участке являются параметры движения в конце первого участка, т. е. при t2 = 0 хс = ххк\ Ф = Фи; хс =xlk; <i> = cou.
Используя их, определим произвольные постоянные:
q =
1
2(rf + py)
x\kd +ФиР+« +
x\kd+®\kP yld + ру
С2 ------------
2(J + py)
, Xud+GttbP
Xikd + Ф1*Р + п - —--— •
jd + РУ
_ <pu с3 ~------------, С4 ---------------
d + ру d + ру
Уравнения движения на втором участке примут вид:
хс = - ту— х^+<йхкр sin^d + py\t2 + (xikd + фир +
а + РУ[ ^d + py| У1 1
+ zz)cosa/|J + py|?2 +(<0i* -YXi*)pt2 +(Ф1* ~Ухц)р+п ;
(4.58)
Ф = - — Y ***/ + sinJrf + py|«2 + Y(*i* d + Фир +
<* + PY ^d + py| 1
+ n)cos+ ру|^ -((ou -YXi*)<*2 " (<Pi* ~yxxk)d~yn .
На основании полученного общего решения могут быть записаны зависимости для анализа следующих частных случаев.
1. Толкатели имеют одинаковые ходы h, но разные плечи сил гх и г2 и различные начальные силы (P2i * Р2г)-
Такой случай возникает, когда из условий компоновки приходится использовать различные по габаритам толкатели и выдерживать требование отделения пассивного элемента с минимальными возмущениями по угловой скорости, т. е. момент импульса, развиваемый каждым из толкателей, должен быть одинаков.
2. Толкатели имеют одинаковые плечи сил, но разные ходы и силы.
3. Толкатели имеют одинаковые ходы и силы, но разные плечи сил.
Эти случаи встречаются, когда отделяемому пассивному элементу надо сообщить заданную угловую скорость в определенном направлении. Во втором случае в коэффициентах, входящих в уравнения, следует принять rt = г2, а в третьем - /] = /2 = /; Р2] = ?22-
4. Толкатели имеют одинаковые ходы и плечи сил, но различные силы (за счет допусков на изготовление). В реальных конструкциях этот случай является основным, поэтому рассмотрим его более подробно.
Предположим, что первый толкатель имеет положительный допуск на развиваемую силу, а второй - точно такой же допуск, но отрицательный, т. е.
Р21 = Р2 + АР 2; Р22 = ^2 ~~ ^Р 2*
Л1 - ^12 = ^1 -ДРр
Используя диаграмму толкателя (рис. 1.68), будем иметь
+ ДР] = (Р2 + ДР2)(1 - h /I);
Pi-APi = (P2-AP2)(l-h/l).
Запишем выражения для коэффициентов системы (4.55):
a = -2P2/ml; b = -2r&P2/ml; с = 2Р2/т;
а\ =—2r&Р 2 /JCzl', ^1 = -2г2 Р2/Jczl', C| = 2г ДР2/Jcz-
Уравнения движения пассивного элемента на первом участке в общем случае:
хс =^А(Схек'1 +С2еХгС)-^^(С3еХзС +С4е^‘) + 1;
«1 О]
(4.59) ф = Ciex't +С2еХ1‘ + С3еХз‘ +С4ех*‘.
Предположим, что крепление пассивного элемента осуществляется с помощью пирозамка или пирочеки, т. е. при t = 0 хс = 0; хс = 0; (р = 0; ф = 0. Тогда значения произвольных постоянных будут следующими:
Q = С2 = -aj/ 2{g-f)\ С^ = C^ = a^l/ 2(g-f).
Подставляя их в общее решение (4.59), получим
хс = —1— [0! - g) cos -(&!-/) cos д/j/jt] + I; g J
Ф =
(cos §f\t - cos J\g\t). g J
Выражения для корней характеристического уравнения однородной системы, соответствующей системе (4.55), в данном случае таковы:
^1,2 -
\Jcz т)
/
Как и раньше, = g, a S2 = /. Оценим значения g и /. Для этого в выражениях для и 52 сравним члены, входящие в подкоренное выражение:
(Г7Jcz -1 / тп)2 V 4r7 тJCz (ЬР2 / Р2)2. (4.60)
Положим, отделяемый элемент конструкции - люк, имеющий прямоугольную форму. Тогда JCz = ^-(г2 +82)> где 5- толщина тг2
обшивки люка. Так как 5 < г, то JCz = Кроме того, как отме-
чалось в главе 1, ЛР2 / Рг - 0Л- Подставляя эти результаты в (4.60), получим, что 121 > 48 • 0,01, т. е. вторым членом в подкоренном выражении можно пренебречь.
Аналогичная оценка может быть проведена и для пассивных элементов другой конфигурации, причем характер неравенства останется тем же. Используя полученный результат, запишем значения корней характеристического уравнения:
g = -2r2P2/JCzl=bi-, f=-2P2/ml=a.
Тогда на первом участке хс = /(1 - cos (4.61)
ф = —!— Ьх - а
(cos - cos
В конце первого участка, т. е. при t = будем иметь ф = ф1Л, xi=h - гф1*. Подставив эти соотношения в уравнения (4.61), можем определить время Г1Л:
А"ГФ1* = /О" cos ^и);
Фи =
ах1 bi ~ а
Умножим второе равенство на г и сложим с первым:
1 - h/l = fl - ^H-lcosM* + cos ( Ьх - aj N' ' О] - a Vl 1
Отсюда методом последовательных приближений может быть найдено txk.
На втором участке соотношения (4.58) после соответствующих упрощений записываются в виде
с = —-~~k- — sin J\d + pylf2 -
(d + pY)^\d + py|
_л^а±2^со5/p—ji2 +
J Cz + ™
+ Y*u + РФ1* + Ay+^u(l+K) + Jczl . (d + py)^\d + py| d + py JCz + mr2
Ф =
Y(^U + ) sjn /lj + pyb2
(J + py)^\d + py\
cos J|J + ру|г2 -
кг + тг2
d4i\k ~Фи t hy-<f>ik(l + yr) mrl
d + py 2 d + py jCz + mr2’
где d = -kP2 / ml; p = kP2r / ml; kP2 = P2- ЛР2; у = -mr /JCv
5. Отделение производится с помощью одного пружинного толкателя, установленного со смещением относительно ЦМ пассивного элемента. Плечо может изменяться вследствие разброса положения ЦМ и допуска на установку пружинного толкателя. При анализе движения в этом случае уже нет необходимости вводить в рассмотрение два участка. Тогда решения уравнений движения имеют вид
v Г Ла+Ьг/\С J.C Л-71а+^1£ h/,r А X Jc*1
Хс =С|в* +С2в 4" CgOt 4- Сс? +-------— ,
кг + тг
J\a+by\t _J\a+by\t mrl
<p=Ctye*' 1 +С2уе ’ -C3at-C4a +-------------------—.
Jcz + mr2
Пусть при t = 0 хс = 0; (р = 0; х = v0; ф = со0, следовательно,
хс = —— ?9..+.Юо£ sjn /|а + Zryk - I cos J\a + by\t + r(voy - co0 )t + I
1 Ф = TT
Yfoo + сорт)
—у I cos ^|a + Z>y|t - (t>0Y - co 0 )t + .
Время срабатывания толкателя определим из условия х + г ср = А, используя которое можем записать:
/ - А = / cos ^|а + Ау|^
р0 +й>ог 71а + *т|
sin ^|а + Ау|^ •
Отсюда, как и ранее, методом последовательных приближений найдем tk.
6. Вектор силы толкателя проходит через ЦМ отделяемого элемента. Тогда
хс = 1(1-cos at) + (v0 / a) sin at,
где v0 - начальная скорость элемента и а = Р2/ ml.
Если и0 = 0, то время срабатывания толкателя определяется аналитически. В этом случае из последнего уравнения можем записать: h /1= 1 - cosatk, откуда tk = arccos (1 -h /1) /а. Если h = I, to tk = n / 2a и tk = — arctg — при p0 * 0.
a v0
Таким образом, для рассмотренных частных случаев получены аналитические зависимости, позволяющие провести анализ движения отделяемого элемента при заданных (или определенных предварительно) начальных условиях.
4.4. Раскрытие антенн, кабель-мачт, крышек контейнеров
Раскрытие антенн, кабель-мачт, откидных штанг с установленными на них приборами, крышек контейнеров производится их вращением вокруг нераскрываемых осей (цилиндрических шарниров), укрепленных, например, на КА. После поворота на заданный угол осуществляется фиксация раскрытой части конструкции.
Основная особенность динамической системы заключается в том, что масса и момент инерции КА значительно больше массы и момента инерции раскрываемой антенны или штанги. Это позволяет упростить расчет, так как движение КА в процессе раскрытия можно считать не зависящим от относительного вращения антенны или штанги.
Дифференциальное уравнение относительного вращения антенны вокруг цилиндрического шарнира О (рис. 4.20) можно представить в виде
JOya. = My(F) + Му(Ф), (4.62)
где JOy - момент инерции антенны относительно оси вращения Оу; Му (F) - момент относительно оси вращения всех активных
4.4. Раскрытие антенн, кабель-мачт, крышек контейнеров 259 сил и сил трения; Му (Ф) - момент относительно оси вращения сил инерции антенны от переносного движения вместе с КА.
Рис. 4.20. Схема вращения антенны вокруг цилиндрического шарнира:
1 - космический аппарат; 2 - раскрываемая антенна
Будем считать, что КА совершает движение в плоскости xczct перпендикулярной оси шарнира, с ускорением ЦМ ас и постоянной угловой скоростью соу. Направление вектора ускорения ас в пространстве за время раскрытия антенны примем неизменным.
Каждый элементарный участок длины антенны при относительном вращении подвержен действию элементарной силы инерции </Фа, обусловленной ускорением ас, и элементарной нормальной силы инерции б/Фн, зависящей от вращения КА с угловой скоростью соу с ускорением
ап = |СК|со2 =г(02у,
тогда d<ba = m(x)acdx и <1Ф„ = m(x)r(a2ydx, где т(х) - масса единицы длины антенны.
Плечи элементарных сил инерции относительно оси вращения Оу определяем из рис. 4.20:
da = х sin(P + a); dn = /0 sin д = /од/1 - cos2 т|,
где х - расстояние от точки О до рассматриваемого элементарного участка антенны.
Выразим угол Т| через координату х и угол а. Из треугольника ОКС будем иметь:
Iq- Г COS Т|+ X COS («о +tt).
Отсюда
cos т| = - [/0 - х cos(a0 + a)] г
и расстояние от ЦМ С до элементарного участка К
г = + х2 -2/0xcos(a0 +a).
Вычислим момент сил инерции относительно оси вращения в зависимости от угла поворота антенны:
/
Му(Ф) = Му(Фа) + Му(фн) = ас\т(х)х sin(a + р)<& + о
/
+ /Осо2у j г т(х)^1 - cos2 т| dx, о
где / - длина антенны.
Рассмотрим выражение r^l- cos2 Т|. На основании полученных ранее результатов будем иметь
гд/1 - cos2 т| = г 1- А[/о -xcos(a0 + a)]2 =
V г2
= /2 -[/0 -xcos(a0 +a)]2 = х sin(a0 + a).
Окончательно получим
/ /
Му(Ф) = ас j т(х)х sin(a + $)dx + /Осо2 j т(х)х sin(a0 + a)dx. о о
Угол Р выразим через его начальное значение Ро и угловую скорость соу, считая ее постоянной:
Р = Ро + ayt.
При заданных Ро, Cfy и ас момент сил инерции будет зависеть от угла а.
Раскрытие рассматриваемых элементов конструкции производится, как правило, приложением импульса силы, создающего момент относительно оси вращения и вызывающего начальную угловую скорость со0 их вращения. В этом случае в уравнении (4.62) выражение My(F) будет содержать моменты сил трения на оси вращения и сил сопротивления.
Определим суммарное давление Nсил инерции антенны на ось вращения:
N = Jn2x+N2,
I I
здесь Ns = J[(</Фа )х + (</Фн )ж]; N2 = J[(</Фв ) 2 + (</Фн) 2 ];
о о
(е/Фа )х = -aam(x)dx = -ас cos fyn(x)dx;
(d<ba)2 = -ас sin fyn(x)dx;
)x = cos(a0 + i\)m(x)dx-,
(</Фн)г = -ra>y sin(a0 + T\)m(x)dx.
Момент сил сухого трения на оси вращения
A^(frp) =-^Aro.
где /т - коэффициент сухого трения; г0 _ радиус оси вращения антенны. _ _
Моменты сил инерции Му(Ф) и силы трения My(FTp) зависят от параметров движения КА а>у, ас, Р и угла а раскрытия антенны. Поэтому уравнение (4.62) можно представить в виде
/Оуа = Ф(шу;ас;р;а;0. (4.63)
В общем случае оно решается численными методами с начальными условиями при t = 0; a = 0.
В момент фиксации вращающейся антенны в крайнем отведенном положении возникают динамические нагрузки, которые можно определить, приравняв кинетическую энергию вращения антен
ны к потенциальной энергии торможения фиксирующего устройства Г!,, и изгиба антенны Пиз:
Joy )] = Пт + ПИЗ,
где a(tk ) - угловая скорость в конечный момент вращения антенны, определяемая из решения дифференциального уравнения (4.63).
Дифференциальное уравнение относительного вращения антенны (4.63) справедливо и в случае, если вектор ас не лежит в плоскости, перпендикулярной к оси вращения антенны, а вращение КА совершается одновременно вокруг всех трех координатных осей. Тогда для вычисления момента сил инерции М у(Ф) необходимо взять проекцию ускорения на плоскость xczc, а при вычислении давления на ось вращения учитывать силы инерции антенны, обусловленные поступательным и пространственным вращательным движениями КА.
Рассмотрим порядок расчетов при разработке системы отвода кабель-мачты с установленной на ней гермоплатой, через которую осуществляется электрическая и пневматическая связь между отсеками КА.
В нештатной ситуации перед разделением отсеков корабля кабель-мачту с гермоплатой необходимо за крайне ограниченный промежуток времени отвести на заданный угол и зафиксировать в этом положении. В районе оси вращения кабель-мачты проходят кабели и трубопроводы, создающие момент сопротивления (Мс) ее вращению.
Первоначально проводится серия расчетов для определения работы Ат толкателей отвода при различных значениях Мс. Результаты одного из таких расчетов с фиксированным Мс приведены на рис. 4.21. На их основании определяется зона отвода (рис. 4.22) при заданном циклограммой разделения времени, необходимом для осуществления этой операции. Используя экспериментальные значения Ат и Мс, находят фактическое время отвода (рис. 4.23).
В качестве еще одного примера системы с нераскрываемой осью вращения рассмотрим отвод входящего в стартовое сооружение устройства сопровождения РН «Буран». Назначение устройства состоит в уменьшении до допустимых пределов бокового смещения РН на начальном участке движения с целью предотвращения соударения сопел двигателей ББ с элементами конструкции стартового стола. Данная проблема становится особенно актуальной при отказе ДУ одного из ББ.
Рис. 4.21. Определение работы толкателей отвода Ат при фиксированном значении момента сопротивления Мс
Рис. 4.22. Определение зоны отвода
Мс, Нм
600
500
400
зоо
200
100
Диапазон значений момента сопротивления кабелей (эксперимент)
Зона неотвода КМ с гермоплатой
0,3
0,2
Диапазон разброса времени отвода КМ с гермоплатой (эксперимент)
Рис. 4.23. Определение фактического времени отвода
'=/(4) А = 308 Н м
7///////^
0,1
0
Основным элементом рассматриваемого устройства является гидроцилиндр 3 (рис. 4.25), который и воспринимает боковое движение PH, причем гидроцилиндры двух соседних ББ имеют гидравлическую связь по схеме, изображенной на рис. 4.24. Гидроцилиндр одним концом крепится к установленной на стартовом столе цапфе 5 с помощью шарнира, допускающего вращение в вертикальной плоскости, а другим концом — к ХО ББ. В состав устройства входит также муфта 6, соединенная с цапфой 5 и с тор-сионом 7, который закручивается на заданный угол и стопорится в этом положении. Торсион обеспечивает поворот устройства сопровождения в горизонтальной плоскости. По гидроцилиндру проложен кабель 4, создающий при его повороте относительно шарнира момент сопротивления Мс.
Отвод устройства сопровождения осуществляется в такой последовательности. После подъема PH на заданную высоту, гарантирующую выход сопел ДУ ББ из заглублений в стартовый стол, СУ подает команду на разрыв силовой связи гидроцилиндра с ХО ББ. Одновременно с этим производится расстопорение торсиона, который поворачивает все устройство в горизонталь
ной плоскости и отводит его от РН (направление отвода показано стрелками на рис. 4.24). При этом гидроцилиндр под действием приложенных к нему сил поворачивается в вертикальной плоскости относительно оси, установленной на цапфе 5 (рис. 4.25). Для обеспечения гашения кинетической энергии устройства сопровождения в отведенном положении в его состав введены горизонтальный (рис. 4.24) и вертикальный 1 (см. рис. 4.25) демпферы, каждый из которых одним концом соединен с гидроцилиндром, а другим - со стартовым сооружением.
Рис. 4.24. Использование торсионов для осуществления отвода устройства сопровождения в заданном направлении
Целью расчета является определение величин момента и угла закрутки торсиона, обеспечивающих безударный отвод устройства, характеристик демпферов и времени отвода на заданный угол. Расчетная схема и системы координат представлены на рис. 4.26 и 4.27.
Система координат, в которой рассматривается движение устройства, образована следующим образом. Ось х параллельна продольной оси РН и направлена вертикально вверх. Ось у параллельна плоскости стартового стола и направлена в сторону отвода устройства сопровождения. Ось z дополняет систему координат
до правой. Начало системы координат помещено в точке пересечения осей вращения гидроцилиндра. Кроме того, вводится вспомогательная система координат Ox'y'z\ в которой ось Ох' направлена вдоль оси гидроцилиндра, Оу' перпендикулярна плоскости, образованной осями Ох и Ох\ a Oz' дополняет систему координат до правой.
Рис. 4.25. Устройство сопровождения:
1 - вертикальный демпфер; 2 - PH; 3 - гидроцилиндр; 4 - кабель; 5 - цапфа; 6 - муфта; 7 - торсион. Штриховыми линиями показано исходное и конечное положения вертикального демпфера и гидроцилиндра
Рис. 4.26. Расчетная схема для анализа отвода устройства сопровождения:
1 - вертикальный демпфер; 2 - гидроцилиндр; 3 - горизонтальный демпфер
Поскольку гидроцилиндр в процессе своего движения обладает двумя степенями свободы, то для задания его положения относительно выбранной системы координат введем два угла - а и ф (см. рис. 4.27). Угол а располагается между осью гидроцилиндра, которая проходит через начало координат и ЦМ гидроцилиндра, и осью х; угол ф - между проекцией оси гидроцилиндра на плоскость yz и осью у. Радиус-вектор любой точки оси гидроцилиндра относительно начала системы координат задается следующим образом (см. рис. 4.27):
г =r(cosa; sinacos9; sinasin9). (4.64)
Рассмотрим движение демпферов. В соответствии с (4.64) определим радиус-вектор точки крепления i-ro демпфера к гидроцилиндру:
= fki [cos(a + 5a:); sin(a + 5a t) соз(ф +
+ 5фг); sin(a + 5a J sin(9 + 5q>f)],
(4.65)
где - расстояние от начала координат до точки крепления i-ro демпфера к корпусу гидроцилиндра; За,-, 8фг - углы отклонения вектора от оси гидроцилиндра, которые не изменяются в процессе движения; i = 1 соответствует горизонтальному демпферу; i = 2 -вертикальному (см. рис. 4.24-4.26). Скорость перемещения точки крепления демпфера к гидроцилиндру на основании (4.65) равна:
dr
= ^[-dsin(oc + 8aJ; acos(a + 3aI)cos((p 4-Зф,)-dt
- <psin(a + 8а1)51п(ф 8фf); acos(a + 8af) зт(ф + 8фг) +
+ Ф sin(a + 8аг)со5(ф + 8ф f)].
Рис. 4.27. Системы координат, используемые при анализе отвода
Угловая скорость вращения демпфера относительно точки его крепления к стартовому сооружению определяется из соотношения
й. _ (fki -rj)^Vki
(|^-Л|)2
Скорость конца демпфера может быть представлена в виде суммы:
=^ki
где - составляющая скорости, перпендикулярная оси демпфера; - составляющая скорости, направленная вдоль оси демпфера, или скорость движения штока демпфера,
=^ие^хеь где
Будем считать, что демпфер является осесимметричным телом, состоящим из двух частей: подвижной, которая крепится к гидроцилиндру, и неподвижной, крепящейся к стартовому сооружению. Началом демпфера выберем точку его крепления к стартовому сооружению, а концом - точку крепления к гидроцилиндру Тогда его момент инерции относительно точки крепления к стартовому сооружению равен:
Ji = Joi + Ju
где JOi - момент инерции неподвижной части относительно точки крепления к стартовому устройству; Ju - собственный момент инерции подвижной части; ти - масса подвижной части демпфера; du - расстояние от конца демпфера до ЦМ подвижной части.
Расстояние от начала демпфера до его ЦМ определяется как
L _ ^oidoi -r,|-</u)
тио, +mti
где mOi - масса неподвижной части демпфера; dOi - расстояние от начала демпфера до ЦМ его неподвижной части.
На демпфер действуют следующие силы: Р, - реакция в точке крепления к гидроцилиндру; Рп - газодинамическая сила; Р, - сила веса демпфера. Кроме этих сил следует учесть еще и силу Кориолиса:
FK, = -2mu(v£ х Sj).
Момент от этой силы относительно точки крепления демпфера к стартовому сооружению равен:
MKi =2mll[^(rAl - г, х “с
Аналогично момент силы веса относительно той же точки запишется следующим образом:
МА- =-(m0, + mli)(gxr0)),
где г0, = £,ё,.
Запишем ускорения концов демпфера, предварительно сделав замечание, что
-гф=4-<hi). at at
поскольку вектор fi имеет постоянные модуль и направление относительно начала системы координат Oxyz. Тогда
) =------------------!-----------1 >
dt2 ти
при этом Fs - сила сопротивления демпфера.
Аналогично найдем угловое ускорение:
— Pi ~ ^~i) х ^j] (д gg)
dt ' Ji
где Мп - момент газодинамической силы относительно вращения демпфера.
Полное ускорение конца демпфера
+(“i X(“i Х ^i)-
at
Рассмотрим теперь движение гидроцилиндра. Для него функция Лагранжа запишется следующим образом:
2 • 2
L = Joz'it)у + [Joy'(t) sin2 а + Joz(t) cos2 «I у ~
-moglo(t)cos а + ^mi[iOi(t)]2, (4.67)
где Jox' 'J Оу' >Joz' - моменты инерции гидроцилиндра соответственно относительно осей Ох', Оу'и Oz'; mQ - масса гидроцилиндра; тх - масса втягиваемой части гидроцилиндра; /о(0 - расстояние от пересечения осей вращения гидроцилиндра до его ЦМ; /01 - расстояние от осей вращения гидроцилиндра до подвижного штока.
Следует отметить, что моменты инерции гидроцилиндра JOx,, Joy'» Jо/ являются переменными величинами вследствие подвижности его штока. Зависимости для их определения аналогичны тем, что были получены выше для демпферов.
В соответствии с (4.66) и (4.67) получаем уравнение движения гидроцилиндра при его отводе:
d ?
Joz'& + -r(Joz')a-(Joy' sinacosa - mog/o sina = Ma;
dt y
Joy' sin2 a + JOx- cos2 а)ф +
d , T k 2 d , t ч 2
(Jo/)sin a + —(JOx-)cos a dt dt
Ф +
+ 2(JOy. - JOx.) аф sin 2a = , (4.68)
где Ma, Мф - суммы проекций векторных моментов всех сил соответственно на горизонтальную и вертикальную оси вращения устройства сопровождения.
Необходимо отметить, что в Ма и Мф входят составляющие реакций 7?г в точках крепления демпферов к гидроцилиндру.
Схема нахождения реакций 7?г следующая. Поскольку точка крепления, например горизонтального демпфера к гидроцилиндру, является их общей точкой, то ускорения гидроцилиндра и демпфера в этой точке равны. С помощью соотношений (4.64) записываются координаты этой точки для гидроцилиндра и демпфера. Результаты дважды дифференцируются и приравни
ваются. В полученные соотношения подставляются а и (р из (4.68). Аналогичная операция проделывается и для вертикального демпфера. В итоге получаем систему из шести линейных уравнений^где неизвестными будут шесть компонентов реакций векторов /?! и /?2-
Энергию, которую необходимо погасить вертикальному (Е^) и горизонтальному (Е^ ) демпферам при наличии пиротехнических СО, определим из следующих соотношений:
, (Pml sina0)2 , (P„l)2
р' _ p i ________v Ф_____°7________. p' _ p .
~ ' n 9 ’ 'L'a ~ ' n t ’
2(Jox' cos a0 + JOy' sin a0) ^Joz'
где £ф, Ea - механическая энергия, воспринимаемая соответственно горизонтальным и вертикальным демпферами без учета энергии пиротехнических СО верхней точки гидроцилиндра от ХО PH; Рф - составляющая импульса пиротехнических СО, лежащая в горизонтальной плоскости и перпендикулярная оси гидроцилиндра; Ра- составляющая импульса СО, лежащая в вертикальной плоскости и перпендикулярная оси гидроцилиндра; а0 - угол отклонения оси гидроцилиндра от вертикали в момент разрыва связей.
Представленные зависимости полностью описывают процесс отвода устройства сопровождения PH.
4.5. Система разделения с мгновенно накладываемыми связями
Рассмотрим СР с плоским стыком, на отделяемый элемент которой через некоторый промежуток времени после срабатывания СО накладываются мгновенные связи. Схема установки отделяемого элемента представлена на рис. 4.28. Процесс отделения от КА происходит следующим образом. После срабатывания пироболтов 6 отделяемый элемент 1 за счет их импульса получает начальные линейную и угловую скорости. Дальнейшее движение происходит под действием пружинных толкателей 2 и 4, которые жестко закреплены на отделяемом элементе. Для сообщения ему определенного направления движения с целью предотвращения
4.5. Система разделения с мгновенно накладываемыми связями 273 соударения его с КА на последнем установлены упоры 7. Отделяемый элемент в процессе своего движения может контактировать как со всеми упорами одновременно, так и с каждым из них в отдельности. В методике расчета предполагается, что КА обладает значительно большей массой в сравнении с массой отделяемого элемента.
Для анализа процесса отделения вводятся две системы координат - связанная CxxyxZ\ с началом в ЦМ отделяемого элемента и инерциальная Oxyz (рис. 4.29, б) с началом, лежащим на плоскости разделения 3 (см. рис. 4.28), причем в момент подачи команды на разделение оси Ох и Схх совпадают, а оси Оу и Суь Oz и Cz} параллельны и соответственно одинаково направлены. В исходном положении оси связанной системы координат ориентированы следующим образом: Охх параллельна продольной оси КА и проходит через ЦМ отделяемого элемента, Оу^ лежит в плоскости симметрии отделяемого элемента и направлена в сторону его движения, Ozi дополняет систему до правой. Матрица перехода от инерциальной системы координат к связанной записывается следующим образом:
cos рcos у
-cos р sin у
sin Р
cos a sin у + sin a sin р cos у cos а cos у - sin а sin Р sin у
-sin а cos Р
sin а sin у - cos а sin р cos у sin а cos у + cos а sin р sin у cos а cos р
(4.69)
При движении отделяемого элемента 1 можно выделить два участка. Первый из них начинается после срабатывания пироболтов 6 (см. рис. 4.28). Отделяемый элемент под действием сил двух пружинных толкателей 2 и четырех пружинных толкателей 4 перемещается в направлении оси Ох. Одновременно с этим толкатели 2 сообщают ему движение в направлении оси Оу. Такие случайные факторы, как разность в импульсах срабатывания пироболтов 6, разброс в характеристиках толкателей 2 и 4 и т. п., могут привести к движению отделяемого элемента и в направлении оси Oz. В процессе отделения штоки толкателей 4 будут перемещаться по плоскости х = 0, а штоки толкателей 2 - по плоскости у = -а, обозначенной на рис. 4.29, а. При этом в точках контакта будет возникать сухое трение.
А-А
Рис. 4.28. Схема установки отделяемого элемента на КА:
1 - отделяемый элемент; 2 - пружинный толкатель отделения; 3 - плоскость разделения; 4 - пружинный толкатель подъема; 5 - электрический разъем; 6 - пироболт; 7 - упоры
Рис. 4.29. Расчетная схема (а) и системы координат (б), принятые при анализе отделения элемента с дополнительными, мгновенно накладываемыми связями:
3 - плоскость разделения; 4 - пружинный толкатель подъема
Второй участок начинается с момента контакта отделяемого элемента 1 с одним из упоров 7. Толкатели 4 к этому времени заканчивают работу. Уравнения движения на обоих участках идентичны и поэтому в дальнейшем ограничимся подробным рассмотрением лишь первого участка. Для описания движения отделяемого элемента на нем вводятся характерные точки, координаты которых задаются в общем виде (xb, zb) (i = 1...8) (см. рис. 4.29). Точки 1-4 являются точками пересечения осей толкателей 4 с плоскостью 3 установки отделяемого элемента на КА. Точки пересечения продольных осей толкателей отделения 2 (см. рис. 4.28) с плоскостью x^zx обозначим через 5 и 7, а с плоскостью у = -а через 6 и 8. С помощью матрицы перехода (4.69) координаты указанных точек записываются в инерциальной системе координат Oxyz.
Определим силы каждого из четырех пружинных толкателей 4 (см. рис. 4.29). Для этого запишем уравнение плоскости, проходящей через первые характерные точки:
X у Z I *1 ух zx I
х2 у2 z2 I *з Уз *з I
или Ах + By + Cz + D = 0.
Уравнение прямой, перпендикулярной этой плоскости и проходящей через i-ю (i = 1...4) точку,
х-х, _у-ух _ z-zx А В С
Точки пересечения этой прямой (уперt, zliep,-,) с плоскостью х = 0:
_ Упер! ~Vi _ znepi — ~А В С ’
В с
откуда ynepi =~-Xj +ух; zliep, = --х, +zh
/I
Тогда расстояние от i-й точки пересечения до i-й точки равно:
/ о\2 / ,__________
, 2 (xiB I xiC] xi Hi ni 7T
di=Jxi + —— + —*— = —ЧА + В +C.
‘ t A J V A J A
Сила i-ro (i = 1...4) пружинного толкателя P( (см. рис. 4.28, 4.29, поз. 4):
Р_ = Р2,
Р, при di < hit О при > hit
(4.70)
где Р% - начальная сила i-ro толкателя; А, - ход i-ro толкателя.
Силу толкателя 2, продольная ось которого проходит через точки 5 и 6, обозначим Р5, а через точки 7 и 8 - Р6. Для определения текущих значений этих сил запишем уравнения прямых, проходящих через точки 5 и 6, 7 и 8:
Х-*6 = У ~ Уб = z~z6 . Х~Х8 = У ~Ув = z~z8 х5~хб У5 ~Уб г5~гб’ х7~х8 У7~У8 z7 ~ z8
(4-71)
Точки пересечения этих прямых с плоскостью у = -а:
v _ (-а-у6)(^5 ~хб) . v _ (-a-y6)(*5 " ^б) . , .
х5-б--------------------+ х6> 25-6----------------+ 26>
Уб ~Уб Уб ~Уб
Y _(-а-у8)(*7 ~х8) .v . , _ (-а-у8)(27 - z8) . ,
х7-8--------------------+ х8> z7-8----------------+ z8-
У7 ~У8 У7 ~У8
Расстояния от точек пересечения прямых (4.71) с плоскостью у = -а до точек 5 и 7 соответственно равны:
^5 = 7(хб -х5-б)2 +0/б +а)2 +(^6 _ 25-б)21
^6 = 7(Х8 -x7-e)2 +(1/8 +а)2 +(z8 “ z7-e)2 •
Определим силы пружинных толкателей:
Р = р (1 -^5.1 = Р5 при d5 < h5, 5 25l h5j 0 при d5 > h5;
(4.72)
p6 =р26(1-4Й
I h6j
P6 при d6 <h6,
О при > A6,
где P25, - начальная сила и ход толкателя 2, продольная ось ко-
торого проходит через точки 5 и 6; Р26» ^6 _ начальная сила и ход толкателя 2, продольная ось которого проходит через точки 7 и 8.
Схема для определения сил сухого трения приведена на рис. 4.30. Положение i-й точки (i= 1...4, 6, 8) в некоторый момент времени обозначим через i, а через бесконечно малый промежуток времени через f . Используя матрицу перехода (4.69), запишем соотношения для определения нормальных сил в этих точках:
pH = Pj cos pcosy (i = 1...4).
Кроме того, определим нормальные силы в точках 6 и 8:
P^e = Р5 6 sin T|(cos a sin у 4- sin a sin р cos у) +
+ Р5 6 cos r|(cos а cos у - sin а sin Р sin у).
Рис. 4.30. Схема для определения сил трения
Силы трения в точках контакта толкателей с плоскостями х = О и у = -а в инерциальной системе координат Oxyz могут быть записаны в следующем виде:
fTpi [°; АР* cos(n - е 1); АР? sin(" - е i)] для i = 1... 4;
(4.73)
FTpi [/т Р? sin(n - Е i); 0; /т Р? cos(n - Е i)] для i = 6, 8.
Запишем уравнения поступательного движения ЦМ отделяемого элемента до встречи его с преградой:
тх =
4
Хр> + (р5 + рб) sinq 1=1
cos Pcosy - (Р5 + P6)COST|COS Psiny -
-Рр + /tP6N sin<n “ Еб) + frP» sin(n - e8);
’ 4
my = ^Pf + (P5 +P6)sinr| (cos a siny + sinasin Pcosy) +
4
+ (P5 + Pg) cos T| (cos a cos у - sinasin Psiny) + /T ^P^ cos(n - ef); i=l
(4.74)
’ 4
= J}Pf +(P5 +P6)sinr| (sinasiny -cosasinPcosy)+
mz
4
+ (P5 + p6 )cosT|(sinacosy + cos a sin Psiny) + fT ^P^ sin(n -£,) +
+fTP^ cos(n - e6) + fTpH cos(n - e8),
где Pp - сила расстыковки электроразъемов 5 (см. рис. 4.28).
Рассмотрим вращательное движение отделяемого элемента. При разделении ему могут быть сообщены начальные угловые скорости относительно осей Сух и Czx за счет разности импульса при срабатывании пироболтов 6 и разброса сил расстыковки электрических разъемов 5 (см. рис. 4.28). Обе эти величины определяются
экспериментально. Последующее вращательное движение будет происходить под действием сил трения и пружинных толкателей 2 и 4 (см. рис. 4.28). Воспользуемся динамическими уравнениями Эйлера:
</соХ1
•Л?*! "*"(Усг| ~Jcy\)^y\^z\ =MXt>
d(t)u.
Jcy'-^ + Ucxx -Jcz^x^z, =Myi> (4.75)
Jcz\ & + (JCy\ ~ Jcxx^tox^yi = M гр
где MXi, Myi,Mx - проекции главного момента внешних сил на соответствующие координатные оси.
Кроме того, как это видно из рис. 4.29, имеют место следующие кинематические соотношения:
а а . cocosy-w siny
wx. = a cos р cos у + р sm у; а = —5-------—------;
1 cos Р
wу = -acos Рsiny + pcosy; р = а>Х1 siny + co^cosу; (4.76)
сог1 = d sin Р + у; у = - tgP (а>Х1 cos у - <oyi sin у) .
При определении моментов сил каждого из пружинных толкателей 2 и 4 (см. рис. 4.28) (МТ1) относительно координатных осей Xj, ух и Zj воспользуемся известными зависимостями:
Мтх\ ~ ~ 2цРтуц ’
М = 7 F - т F ту] li Tjq i 1 i * тг] ।г »
A/tz] “ X1 ii ~ Уli^Tjqj>
где yu, - координаты точек приложения силы г-го пружинного толкателя в связанной с телом системе координат Cx^y^z^ FTXii, F^., F^. - проекции силы i-ro пружинного толкателя на соответствующие координатные оси.
Сила каждого из пружинных толкателей определяется соотношениями (4.70) и (4.72). Поскольку она является скользящим век
тором, то удобно предположить, что сила каждого из толкателей 4 приложена в точке, лежащей на плоскости Су fa, а толкателей 2 - в точках 5 и 7 (см. рис. 4.29), лежащих на плоскости Cxfa. Толкатели жестко установлены на отделяемом элементе. Проекции их сил на оси связанной системы координат запишутся следующим образом: (Р,; 0; 0) (i= 1...4) и (Pf sin r|; P,-cosr|; 0) (: = 6, 8). На основании сказанного можем записать момент силы толкателя, расположенного, например, в первой характерной точке:
Л/Т1 = мТ1(0; PjZtp Рхуц), где i/n, zlt - координаты точки пересечения продольной оси толкателя с плоскостью Су fa.
Следует заметить, что кроме систем уравнений (4.74)-(4.76), которые описывают поступательное и вращательное движения тела до встречи его с преградой, необходимо еще ввести условия для определения углов с, (см. рис. 4.30). Эта задача упрощается тем, что, задавая начальные условия интегрирования уравнений (4.74)-(4.76), мы получаем вполне определенную картину поступательного и вращательного движений относительно всех координатных осей. Таким образом, в каждый момент времени известны координаты и направления движения точек контакта штоков толкателей 4 с плоскостью х = 0 и толкателей 2 с плоскостью у = -а, следовательно, известно направление силы трения. Это позволяет по приведенным выше зависимостям определить проекции момента каждой из сил трения на связанные с отделяемым телом координатные оси. Остается неясным вопрос о направлении силы трения в начальный момент движения. Эту неопределенность можно обойти так же, как это делается в баллистике при определении аэродинамических сил, т. е. предположить, что на нулевом шаге сила трения равна нулю. На первом шаге мы уже будем знать движение тела и, следовательно, сможем определить направление силы трения. На втором шаге значение силы трения берем с первого шага и т. д.
х - xik
Углы Е, задаются как углы между прямой ------------:---=
Xi,k+1 %itk
У-y^k z~zi,k . ,
=--------1:----------------, где г - номер точки, k - номер шага,
У itk+\ ~~ У i,k zitk+l ~~ z i,k
и осью Оу (для i = 1...4), а также аналогичной прямой и осью Oz (для i = 6 и 8).
Рассмотренная СР является одной из нетипичных. Естественно, что существует ряд других систем, не укладывающихся в рамки предложенных в книге методик расчета. К таким системам следует отнести систему отделения ступеней в нештатных ситуациях, связанных с отказом в полете их ДУ. В этом случае существенное влияние на процесс отделения будут оказывать значительные остатки жидкого наполнения в топливных баках отделяемой ступени.
5. ВЛИЯНИЕ УПРУГИХ СВОЙСТВ КОНСТРУКЦИИ НА ПРОЦЕСС ОТДЕЛЕНИЯ
5.1. Элементы общей теории систем деформируемых тел
Основные динамические величины
Развитие ракетно-космической техники сопряжено со структурным усложнением РКК, ростом их габаритов с одновременной минимизацией массы «сухой» конструкции. В связи с этим при моделировании механических процессов, связанных с функционированием РКК, все более актуальным становится учет упругих свойств конструкций.
Особенно важен учет упругих свойств в процессах отделения, которые происходят под действием значительных сосредоточенных сил, создаваемых специальными СО, установленными в нескольких точках конструкции (см. главы 1, 2). Под действием этих сил в разделяемых телах могут возникнуть колебания, на возбуждение которых расходуется часть работы СО. В результате этого требуемая относительная скорость отделения, рассчитанная без учета упругих свойств, в реальном процессе будет несколько меньшей. Поэтому актуальной является не только прогнозируемая оценка уровня колебаний и величины потерь скорости отделения, но и задача снижения их негативного влияния за счет рационального выбора мест установки СО и их рабочих характеристик.
В самой общей постановке изучение отделения и направленного перемещения упругих конструкций является сложной задачей, так как такие движения описываются громоздкими «гибридными» системами, включающими как уравнения в частных производных, так и обыкновенные дифференциальные уравнения.
Прямое решение таких систем с помощью численных методов -слишком трудоемкая процедура, особенно для инженерных расчетов, требующих перебора большого числа вариантов. В данной главе описан подход, использующий разложение движения упругих систем на естественные составляющие: порождающее движение как твердого тела и малые упругие колебания около порождающего движения, представленные в модальном виде, т. е. в виде разложения по собственным формам колебаний, методы определения которых описаны в литературе [3, 6, 7, 8, 10, И, 17, 20]. В практических расчетах используется конечное число низших форм.
Для исследования деформируемых систем введем инерциальную систему координат OKXYZ и некоторую связанную систему координат Ох^2Х3 (вопрос ее выбора изложен ниже). Относительное положение произвольной точки тела в деформированном состоянии определим радиус-вектором г (рис. 5.1). Обозначим через и вектор относительного упругого перемещения и рг - вектор постоянного модуля, определяющий положение точки тела в исходном недеформированном состоянии в связанной системе координат Оххх?х3, при этом г = рг + й.
Рис. 5.1. Системы координат при исследовании деформируемых систем
Для любой точки радиус-вектор, скорость и ускорение в инерциальной системе координат имеют вид:
R = Яо + рг + й(хх-,х2; х3; 0;
(51)
- - - - du
v = Vq + оэ х г + ——; dt
_ dvQ _ _ d(f) - - r- n- du d2u z-
a = —- + co x + — x r + co x [co x r] + 2co x — + —-- ,(5.2)
dt dt dt dt2
dr du „ ,
где — = —; * - знак локальной (в подвижном системе координат
dt dt
О1х1х2х3) производной; со - угловая скорость подвижной системы координат. _
Вектор количества движения Q деформируемой системы:
Q = J vdm = mvQ + со х £ + (5.3)
т
Статический момент L массы всего деформированного тела относительно полюса О:
£ = |(рг + u)dm = тгс, (5.4)
т
где гс - радиус-вектор центра масс деформированного тела массой т. Отсюда
Вектор момента количества движения К:
К = xv dm = L xv0 + J(i> + К*, (5.5)
т
где К* = (г х — dm - кинетический момент относительного дви-J dt т
жения; J - тензор инерции «затвердевшей» системы.
В выражении (5.5):
(5-6)
при этом
E(rr) - ггт = £(рг рг) + 2£(йрг) + Е(йй) -
~ ( Рг Рг ) - (й Рг ) - ( ргйт ) - (ййт );
£ - единичная матрица; ( ) - знак скалярного произведения.
С учетом (5.1)-(5.4) получим выражение для кинетической энергии Т системы
Г = - fvodm = -mvQ + w[£ х р0] + -5(Jc5) + v0 — + К*й) + Г*, 2J 2 2 at
m
(5.7)
1 г du du ,
где T* = - j — — am - кинетическая энергия относительного m
движения. Далее знак локальной производной опустим. Заметим, что
упругих деформаций uk: Е^=-(^
Q=gradP0T, K=gradwT.
Потенциальная энергия деформации упругого тела
V»
где V0 - объем тела; - компоненты тензора напряжений, отнесенные к деформируемому пространству; - компоненты тензора конечных деформаций, выраженные через компоненты вектора kl +^lk +^ji^jk
(j; k; 1 = 1, 2, 3), причем связаны с упругими деформациями по закону Гука: ajk = Ajklmz I; m =1,2,3), Ajklm - тензор упругих постоянных, который в случае изотропного тела выражается
у 1
5.1. Элементы общей теории систем деформируемых тел 287 через две независимые постоянные Ляме, определяемые в свою очередь через модуль Юнга и коэффициент Пуассона.
Уравнения движения упругих сложных систем
Не будем останавливаться на анализе и сравнении известных подходов к описанию движения упругих систем [8,11]. Воспользуемся вариационным принципом Остроградского - Гамильтона. В соответствии с этим принципом рассматриваются вариации ряда величин на возможных перемещениях системы. Переход между двумя возможными положениями механической системы, разделенными малым временем 8£, можно осуществить, совершая произвольные малые поступательные 87?0 и угловые 8а перемещения системы как целого, а также произвольные малые упругие 8й перемещения. По принципу Остроградского - Гамильтона сумма вариаций действия Гамильтона с учетом неголономности связи и элементарной работы всех сил на соответствующих виртуальных перемещениях равна нулю. Из этого получаются следующие уравнения движения системы и граничные условия [И]:
+ ш х О = У F.+ У F^; dt i j
(5.8)
+ ZJ0 xQ = +
du _ _ 7 1 x
— + (oxz> = 4- — V0 - в объеме упругого тела;
dt Ро
ио0 = fs - на поверхности упругого тела,
где ~ главный вектор и главный момент внешних
сил (сил тяжести, аэродинамических и т. д.);
i i
главный вектор и главный момент сил, создаваемых СО; fm - плотность массовых сил; р0 - плотность упругого тела в единице объема; V = i -ь 4- j 4- —k - набла-оператор, отнесенный к
Э.%4 Эх2 Эх3
288 5. Влияние упругих свойств конструкции на процесс отделения деформируемому пространству; 0- тензор напряжений с компонентами Цу, отнесенный к деформируемому пространству; п0 - единичный вектор внешней нормали к поверхности деформируемого тела; fs - действующие поверхностные силы.
Первое из уравнений (5.8) совпадает с уравнением, получаемым на основании теоремы об изменении количества движения. Второе представляет собой модификацию теоремы об изменении кинетического момента в случае подвижного^пространства При относительном движении член vQ xQ исчезает лишь в том случае, когда начало О подвижной системы координат находится постоянно в ЦМ механической системы. Однако связывать начало системы координат О с центром масс деформируемой системы не всегда удобно.
Выбор связанной системы координат
Как отмечалось выше, при выводе уравнений (5.8) использовались в качестве рабочих гипотез предположения о применимости закона Гука. Кроме того, принималось, что тела при деформации сохраняют неизменными свои линейные размеры и площади поверхности. Система (5.8) является «гибридной», состоящей как из обыкновенных дифференциальных уравнений, так и из уравнений в частных производных. Это соответствует физической сути задачи разделения тел: на переносное движение механической системы в целом (поступательное и вращательное) накладываются относительные упругие перемещения отдельных элементов, представляющих сплошную среду. В переносном движении каждое тело обладает шестью степенями свободы, в относительном - бесконечным числом.
Исходя из конструктивных особенностей разделяемых тел и опыта технической реализации процессов разделения, можно сделать предположение о малости упругих деформаций по сравнению с характерными линейными размерами конструкций. Таким образом, задача об упругих деформациях решается в линейной постановке.
При анализе линейных упругих систем в современных исследованиях чаще всего применяют метод разложения по собственным формам упругих колебаний (модальный анализ). Пренебрегая квадратами и произведениями величин упругих перемещений
- о - du din
w, угловых скоростей со и их производных —, —, из третьего dt dt
уравнения (5.8) после линеаризации получаем
д2и [7 Ло _ _ ч dvQ - _
РО ТТ " V0 = РО \fm - — Хрг-СОХ(СОХрг)-—^--(ОХГо df dt dt
(5.9)
при этом второй член в левой части уравнения имеет следующие компоненты по координатным осям (в системе координат ОХ1*2*з):
Граничные условия примут вид
2 jklm
(5.10)
Волновое уравнение (5.9) вместе с граничными условиями образуют краевую задачу, описывающую колебания, совершаемые упругой системой. Постановка задачи завершается заданием начальных условий на перемещения и скорости всех частиц системы. Таким образом, краевая задача (5.9)-(5.10) может быть записана следующим образом:
А + Сй = F, dt2
(5.И)
где А и С-инерционный и упругий линейные операторы;/7-сумма «внешних» сил, куда входят как собственно внешние силы, например, от СО, так и силы инерции переносного движения из (5.9).
Обратимся к задаче о свободных колебаниях упругой системы в отсутствие внешних сил. Пусть й = u0(xt, х2» хз» 0- Решение уравнения
А д2и Л
А —— + Cw0 = 0
Эг
(5.12)
290 5. Влияние упругих свойств конструкции на процесс отделения ищем в виде
U0(Xi, х2, х3, t) = и(хр х2, х3)ф(0.
Тогда при подстановке м0 в (5.12) получим
Ф + й)2ф = 0; (С - а>2п A) U = 0. (5.13)
При решении задачи (5.13) получаем бесконечный набор собственных частот сол и собственных форм Un(xx, х2> хз) колебаний упругого тела.
Любое решение, удовлетворяющее (5.13), является решением (5.12). Модальный подход заключается в том, что решение неоднородного уравнения (5.11) ищется в виде разложения в ряд по собственным функциям однородной задачи:
й(хх, х2, х3, 0 = У, Un(xit х2, x3)qn (t). (5.14)
n=0
Для свободных от связей тел первые шесть форм в разложении (5.14) соответствуют движению твердого тела (три перемещения вдоль координатных осей и три поворота относительно этих осей). Этим формам соответствуют нулевые значения частот соп = 0. Поэтому (5.14) представим в виде
u(xi, х2, х3, 0 = X х2- x3)qn (t).
k=i n=l
Формы, соответствующие разным частотам, попарно ортогональны:
_ _ / _ _ _ _ (At/„, а ®) » (At/;, U„ ) = (At/„, ит ) = 0;
( Ct/;, ип) = (Ct7„, t/;) = (Ct7„, Um) = 0.
При этом предполагается, что при отсутствии деформации начало связанной системы координат находится в ЦМ системы.
В качестве связанной системы координат выберем теперь такую, чтобы относительно нее все первые шесть обобщенных координат были тождественно равны нулю. В этом случае относитель-
______5.1. Элементы общей теории систем деформируемых тел 291 ные перемещения частиц имеют отличную от нуля энергию деформации, а оси связанной системы координат отслеживают формы, соответствующие движению механической системы как твердого тела. Если на отделяемое тело наложена связь, то нулевых частот будет меньше на столько, сколько степеней свободы запрещается данной связью, и связанная система координат должна быть выбрана в соответствии с формами движения твердого тела.
Модальный анализ как метод дискретизации
Как уже отмечалось, система (5.8) является «гибридной». Исследование такой системы практически невозможно из-за сложности математического аппарата и громоздкости вычислений. Гораздо удобнее иметь дело с обыкновенными дифференциальными уравнениями. Поэтому при изучении деформируемых систем в целях упрощения применяют различные методы дискретизации и аппроксимации. Модальный анализ является наиболее строгим из них, если известны решения краевой задачи теории упругости. Однако эти решения известны лишь для наиболее простых систем, для более сложных мы можем располагать лишь обычно приближенными значениями совокупности функций Uw да и то достаточно небольшим их количеством (и - невелико). Этот вопрос будет рассматриваться позже. Обращаясь к формулам (5.1)-(5.7) с учетом выражения (5.14), получим
г = Рг + *2. x3)qn (ty,
n=l
f оо А
Ljrdm = J pr + dm = L0 + ^LOnq„,
m m n=l
далее знак суммы опустим.
J ~~ J0 + (УOn + J()n )?n + Jmn Чп 4m »
Q = mvQ + ш x L + LOn ; at
K=Lxv0 +J(ii + KOn^ + Kmn^qm-, at at
1 —2 T = -m»o
+ (O(L X»0) + ^(Oj(O + O0L0„
dt
+ &KOn — — qm +-am„
On dt mn dt 4m 2 mn dt dt
W = jUndm; Jo = J(p2£- prprT )dm-, J^n = pr)£--Un^]dm-, JOn = /[(рД,)£ -PrU^dm; Jmn = \[(UmUn)E--UmU*]dm; KOn= J(pr xUn)dm; Kmn= j(Um xUn)dm-, amn = m m
= j(UmU„)dm. m
Тогда, учитывая, что
a =^-+axv0 +^x(pr + U„qn) + ax[ax(pr + U„qn)] + at at
+ 2mxUn ^- + Un ^tL; n dt " dt2
V = VQ + fflx(pr + Unqn) + Un at
умножая третье из уравнений (5.8) слева на Um и интегрируя по всему объему, запишем систему (5.8) в следующем виде:
(dvn _ _ A dm ,-г -г . г dqn т 1Г+охг'о +ТГх<£о +£0п^) + 2<охА0я ^Д- +
I at at at
+Lon +<bxmx(L0 + LOnqn) = ХЛ <515)
Л i j
[Jo +(Jon +Jon)dn at at
+ 2Jmnm^-qn +KQn^- + Kmn^-qn +ЙХ dt dt2 dt2
5.1. Элементы общей теории систем деформируемых тел 293
+ С/on + ./оп)?п + Jтп Яп Чт ] ® +
+ (Го + L»nqn) +(0 х = % М(Л) + % М(Р^У,
d2qn т (dv0 _ _ 77 (йв
атп ~^Г+Стп<1п +LOn ® х *0 + КOn ~J7 +
dt2 I dt J dt
+ Km„q„ -<b/п„ш - Jm„q„(i> + 2K„„ = q
тпЧп wJ()n Jmninw mn w »
где Qm = \Umfmdrn-, cm„ = je(Um)VUnTdV°.
m y0
Поскольку функции Un являются собственными функциями краевой задачи и удовлетворяют условиям ортогональности, то:
атп = стп = ° Припяти; LOn = 0; КОп = 0; спп = <a2„q„\ Кпп = 0.
При этом первые уравнения (5.15) принимают вид
m(j^ + “ Х °° = S + L ^Pj>
1Л + (Лп + JoTn)9n]^+Von®^-+®X[Jo +(Лп + at at
+ Лп )Яп = Е ШЛ ) + % М<Лр)) + О,;
ап
d2 — d
—Гг+^2пЯп \ -^}оп^-^}тпЯт^ + 2Кт„(й-^- = О.„ + О2, dt1 I dt
где Ob О2 - члены порядка выше первого, ап = апп.
Полученные уравнения являются общими. Это так называемый случай быстрого вращения механической системы (сохранены квадратичные члены с угловыми скоростями и угловыми ускорениями).
В реальных условиях, например при отделении ПБ или ГО, упрощающим условием является малость угловых скоростей вращений их как твердых тел в сравнении с частотой собственных коле-
баний. В этом случае система приведенных выше уравнений упрощается:
k at Ji ;
(5.16)
Система уравнений поступательного и вращательного движения условно твердого тела и колебательные движения, на первый взгляд, не связаны. Однако связь существует за счет членов, зависящих от координат, т. е. аэродинамических и гравитационных сил и сил, развиваемых СО. И только в их отсутствии система распадается, что может быть еще одним упрощающим условием. В случае, когда деформации элементов нельзя считать малыми, следует обращаться к системе уравнений (5.15).
5.2. Отделение отработавших ступеней ракет
Исследование явления отдачи
Процессы отделения элементов конструкции РКК отличаются большим разнообразием разделяемых конструкций, схем разделения и внешних условий. Эти факторы определяют расчетную модель и направление анализа исследуемого процесса. Конкретные виды связей между объектами и последовательность операций при разделении описаны в главах 1, 3, 4. Отметим здесь лишь те особенности конструкции, которые существенны для упругой постановки задач отделения.
Под носителем будем понимать любой объект (ракету-носитель, орбитальный корабль, космическую платформу, орбитальную стацию), от которого отделяется какой-либо элемент конструкции. Такими элементами могут быть выработавшие топливо ускорители, створки обтекателей ПГ, отстреливаемые крышки люков, антенны орбитальных телескопов, панели солнечных бата
рей, отделяемые перед укладкой спутника в отсек многоразового КА перед возвращением на Землю, и т. п. Хотя конструкция носителя обладает определенной нежесткостью, ее упругие свойства, как правило, значительно менее выражены, чем упругие свойства отделяемого тела. Поэтому представляется обоснованным для многих задач разделения пренебречь упругими свойствами PH и считать его абсолютно жестким телом. Будем считать также, что масса и инерционные характеристики PH неизменны в процессе отделения. В случае «горячего» разделения при работающем двигателе активной ступени PH масса ее за время отделения t? умень-шится на величину jm(t)dt, где m(t) - секундный массовый расход о
топлива. Но поскольку время разделения мало, изменение массы ступени несущественно и для реальных процессов составляет менее 1 %. Предполагается, что связи между разделяемыми телами являются идеальными, т. е. силы трения в узлах связи не учитываются.
Сделаем также предположение о характере движения тел. Организованное движение отделения тел системы как целого характеризуется значительными линейными и угловыми перемещениями. Упругие деформации отделяемого объекта, как уже отмечалось, малы по сравнению с характерными линейными размерами.
Обратимся к задаче отделения в самой простой постановке, когда отделяемая ступень, подверженная импульсным воздействиям СО, моделируется балкой. Такая модель справедлива для объектов значительной степени удлинения (т. е. отношение длины ступени £ к ее диаметру d равно примерно 10 и выше), например ПБ PH «Энергия» (см. рис. 1.3). При всей простоте данной модели с ее помощью удается выявить и исследовать основные динамические эффекты процесса отделения.
В соответствии с ЦГ разделения (см. рис. 1.3) ступень, имитируемая балкой (рис. 5.2, а), освобождается от связей и подвергается импульсным воздействиям, моделирующим срабатывание РДТТ отделения (рис. 5.2, б). Срединная линия балки параллельна продольной оси PH. РДТТ действуют в одном направлении перпендикулярно срединной линии. Движение балки будем рассматривать относительно инерциальной системы координат Oxyz (см. рис. 5.2, а), начало которой расположено в ЦМ отделяемой ступени. Ось Ох направлена вдоль срединной линии в сторону носовой
296 5. Влияние упругих свойств конструкции на процесс отделения части PH, Oz - в направлении отделения, а ось Оу дополняет систему до правой.
Положим, что балка имеет длину /, равную длине отделяемой ступени, а ЦМ расположен в ее середине. Кроме того, РДТТ отделения установлены симметрично на расстоянии h относительно ЦМ балки (см. рис. 5.2, а).
Рис. 5.2. Отделение балки:
а - схема приложения импульсов; б - форма импульса; F- тяга РДТТ; Т- время работы двигателей; Р - импульс
Исследуем характер движения балки в направлении оси Z, учитывая ее упругую податливость и неодновременность включения импульсных воздействий. Движение балки постоянного поперечного сечения опишем уравнением, справедливым при малых углах ее поворота [19]:
4z d2z _ F(t) Jх - F(t - Д0 Уx +
~ + Рдё~~Г\ 1 \
(5.18)
где z - z(x, t) - перемещение элемента балки с координатой х в направлении оси Z к моменту времени t, (-1 /2<х<1/2); F(t) - изменение тяги РДТТ по времени (см. рис. 5.2, б); с - изгибная жесткость балки; р - линейная плотность (погонная масса) балки; 5 -дельта-функция; At - задержка начала действия одного из импульсов. Будем считать балку однородной (р = const).
Перейдем к безразмерным величинам:
z х h т t Т , Ы , F
и =---; s = —; а = —; с=—; т = —; о = —; / =---,
Mu I I Mf Mt Mf Му
т
где Ми = Ply[cp; Mf = l2y[p/c; Mf= 2Р / Mf; Р = J Т- вре-О
мя работы двигателей.
Уравнение (5.18) примет вид
ы”"+ и = /(?)8(s - а) + f(t - b)8(s + а), (5.19)
где штрихом обозначено дифференцирование по s, а точкой-по t. Знак * в дальнейшем опущен.
Суммарный импульс от двух силовых воздействий равен:
т
/ > 0.
О
(5.20)
Решение уравнения (5.19) для свободной балки находится в пределах
0<Г; | s | < 1/2, (5.21)
при начальных условиях
wlr=o — 0» ^1г=о — 0 (5.22)
и граничных условиях
u"\s=±l/2 ” 0»
u"'ls=±l/2 ” 0.
(5.23)
Представим решение (5.19), (5.21), (5.22) в виде разложения в ряд по собственным функциям задачи о собственных колебаниях свободной однородной упругой балки [19]:
и=0
Собственные функции U„(s) удовлетворяют уравнению и""-^пи„ =0
298 5. Влияние упругих свойств конструкции на процесс отделения и граничным условиям (5.23). Неотрицательные собственные числа определяются из соотношения
cosX„ch= 1, Хо = 0; = пп + — + (-1)"+1е„;
Л Л ' v ' Л 2 ' Л J
О < е„ « 1(п - 1, 2,...); = 4,73, Х2 = 7,85,...
Нормированные собственные функции U0l я 1, U02 = 2s л/З, cos(Xns) + ch(Xns) 3 5
_ cos(X„/2) ch(X„/2)’ ....
sin(M) + sh(Xns) „ = 2 4 6 sin(X„ /2) sh(X„ /2)..............
Неизвестные qn(t) удовлетворяют уравнению qn +kinqn = A„ и начальным условиям (5.22), где А„ = f(t)Un(a) + f(t - b)Un(-a) -коэффициенты разложения правой части (5.19) по собственным функциям. Получим
<701 = Ф(О + Ф(* - Н Яо2 = 2$>/3[(р(Г) - <р(Г - &)],
Яп =[Vn(0 + (-l)"+1V„G-Wn(a),
О, t < о,
О, t < о,
ф(0 =
Wn(t) = Ц f(r\)dr\dt„ t > 0;
.0 0
t
-|-f/(^)sinl2n(r-^)^,t>0.
. л 0
Окончательное решение (5.19), (5.22), (5.23) примет вид
и = [<р(0 + ф(£ - 6)] + 12as[(p(i) - ф(£ - 6)] +
+ £ Un (a) Un (s)[V„ (0 + (-1)”+1 (t - 6)]. (5.24)
п =1
Из условия (5.20) имеем | % | <1/ Х2Я, кроме того |f/J <2, следовательно, ряд (5.24) сходится абсолютно и равномерно в области (5.21). Часть решения (мф), которая содержит функцию ф, описывает дви-
____________5.2. Отделение отработавших ступеней ракет____299 жение балки как твердого тела, остальная часть решения (му) -вклад упругой деформации балки в ее общее перемещение, причем
|uv|< £8/А2, =0,76. (5.25)
п =1
В то же время, при t > t + b величина мф = 2ф(т) + 2t - 2т - b + + 12asb неограниченно возрастает, т. е. в результате действия симметричных относительно ЦМ импульсов балке сообщается движение, складывающееся из равномерного поступательного движения в положительном направлении оси Z со скоростью мф = 2 и свободных колебаний около направления, составляющего с осью X угол 0 = arctg(12a6A/M /1) > 0 (см. рис. 5.2, а).
Условием корректной применимости уравнения (5.18), а следовательно, и решения (5.24) будет 0 «1 и Ми<^1, или для исходных параметров
\2h\tP / р/3 « 1 и Р / у/ср «с 1.
При t = т + 2b + 0,38 балка будет заведомо целиком находиться в области z > 0. Однако в некоторые моменты времени отдельные участки балки могут «погружаться» в область z < 0. Это и есть явление отдачи. В конкретных конструкциях отдача не должна превышать заданной величины. Определим из (5.24) наибольшее «погружение» точек балки в область z < 0:
ит = min min w(s, 0 < 0.
т Q<t |s|<l/2
На основании предыдущих рассуждений убеждаемся, что минимум ит = um(sm,tm) существует и достигается в некоторый момент времени 0 <tm < 0 в некоторой точке балки sm.
Если учитывать только движение балки как твердого тела, то
min u^s.t) = uv(-l/2,t) и
И 7 (5.26)
- min[u<. (-1 / 2, t)] = min[(l - 6a)(p(i) + (1 + 6а)ф(£ - />)]• 0<£ °-r
В этом приближении величина наибольшей отдачи является монотонной функцией параметров а и b (рис. 5.3), так как
дыф (-1 / 2, t) / да < 0, ди^ (-1 / 2, t) / db < 0. Чем больше плечо а и задержка Ь, тем больше отдача. Заметим, что при небольшом плече (а <1/ 6) отдачи не возникает (uffl = 0) ни при какой форме импульса /, длительности импульса т и задержке включения Ь. В «твердом» приближении отдачи нет и при одновременном включении импульсов Ь = 0. Используя свойство ф(£ - Ь) > ф(£) - Ь, можно получить оценку отдачи при а > 1/6, b > 0. Имеем > > -Ь (6а - 1). С учетом возможного вклада упругих перемещений (5.25) общая оценка наибольшей отдачи балки при произвольной форме и длительности импульса будет следующей:
-0,76, а < 1/6,
-0,76 - fe(6a - 1), а >1/6.
Уточним некоторые особенности упругой деформации балки. Согласно (5.24), глубина возбуждения колебаний на частоте со„ = Х2„ характеризуется величиной (а)[ф„ (0 + (-1)л+1 (t - Z>)]|. Колебания возбуждаются слабо, если импульсное воздействие приложено вблизи узла соответствующей формы (Un(a) = 0):
(0,276) = 0;
ГО "I и2
1,0,368J
( 0,091А
и5 0,273 = 0...
1^0,440J
Так, например, при а = 0,275 относительно слабо возбуждаются 1-я и 5-я формы. При а = 0,5 достигают наибольшего возбуждения все формы колебаний, так как £/„(0,5) = 2, п = 1, 2,... Влияние величины проявляется по-разному в случаях относительно резкого (т 2л / X2 « 0,28) и плавного (т » 2л / X2) силовых воздействий. При резком воздействии форма практически не важна, поскольку низшие формы возбуждаются как при ударе /(0 = 6(0/2.
Тогда
Ф(0 =
0, t < 0,
t Фл(0 =
t >0;
.2
0, t < 0,
| sin(X2„ 0 / Л2„, t > 0.
Наибольшая отдача в «твердом» движении достигается в мо-
мент = b и равна:
0, а < 1 / 6;
-|(6а-1),а>1/6.
Для конкретных технических задач отделения задержка не превосходит длительности импульса 6<т, поэтому при резком воздействии можно считать b = 0. В этом случае
U = t +1 (а) {/„ (S)(2 /12„ ) sin(k2„ Г).
2 п =1,3,5...
Величину наибольшей отдачи ит практически определяют только низшие формы (и = 1, 3). Если импульсные воздействия приложены между двумя узлами первой формы (а <0,28), то наибольшая отдача достигается на конце балки (sm = 0,5) в течение четверти периода колебаний на первой собственной частоте (tm < <0,07). Если импульсные воздействия приложены ближе к концам балки (а > 0,28), то наибольшая отдача достигается в центре балки (sm = 0) в течение того же времени. Наиболее существенными с точки зрения отдачи являются варианты приложения импульсов в центре балки (а = 0) и на концах (а = 0,5). Отдача в обоих случаях одинакова: ит ® -0,1, tm » 0,04. Величина отдачи снижается на порядок, если импульсные воздействия сосредоточены в узлах первой формы (а = 0,276): ит « -0,011; sm = 0,5; tm~ 0,008.
Определим характерные величины на примере постоянной силы воздействия:
302 5. Влияние упругих свойств констрз гкции на процесс отделения
0, t < 0, т < t, /=L ф=- 0 < t < х; .2 0, t < 0, t2 / 4т, 0 < t < х , 1 т — (t — —), Т < Г. .2 2
фл
О, t < о,
l-cos(A,2n0. о < t <т> 2(Х4пт)
cos Х2П (t - т) - cos(X2„ t)
Будем считать для простоты b > х/ 2, тогда
и
(ф) _ т ~
О, а < 1 / 6,
-Ь2 (36а2 - 1) / 8т, а > 1 / 6;
/(Ф) _
О, а < 1 / 6, b (1 + 6а) /2, а > 1/6.
В зависимости от времени задержки b приложения второго импульса возбуждение n-й формы упругих колебаний может быть либо погашено cos(X2n6) < (-1)" / 2, либо усилено cos(X„6) > >(-1)" /2.
При b < t < х, согласно (5.24),
и = —[£2 +а-6)2] + — s(2t-b) +
4т т
+ £ ^п-(а)4пД 1 - cos(X2„ Г) + (-1)"+1 (1 - cos X2„ (t - 6)) |. (5.27)
Л=1 2т X4
В отсутствие задержки (Ь = 0) характер зависимости величины наибольшей отдачи ит от плеча а такой же, как и при резком воздействии. Диапазон изменения ит составляет: (т um) « -0,0076, tm «0,094 при а = 0 или при а = 0,5; (т ит) » -0,00026, tm~ 0,017 при а = 0,276.
Видно, что при плавном воздействии (т » 0,3) отдача существенно меньше, чем при резком. Чем больше длительность импульса т или чем меньше сила импульсного воздействия 1/т, тем меньше отдача.
Согласно (5.26), (5.27), вклад упругой деформации балки |т иф| < оо
< \ 16 / X4 = 0,037 существен лишь в области b2(36a2 - 1 )/4 < П=1
< 0,037 параметров аиЬ, отмеченной на рис. 5.3 штриховкой. В этой области величина отдачи примерно одинакова |тмш| -0,01, за исключением окрестности точки а = 0,276, 6 = 0, где она на порядок меньше.
личины отдачи от места а приложения импульсов и задержки включения b
Тем самым установлено условное разбиение плоскости параметров плеча а и задержки b на три области. В области I (области малой отдачи) импульсы приложены вблизи узлов первой формы собственных колебаний (а~ 0,276) и задержка мала (6= 0), движение балки здесь наиболее сбалансированное. В области средней
304 5. Влияние упругих свойств конструкции на процесс отделения отдачи II либо 0< а <1/6, либо задержка не превышает полупериода колебаний на первой собственной частоте (0 < Х2/> < л).
Рис. 5.4. Максимальная отдача ит и упругие компоненты отдачи
В области большой отдачи III преобладает движение балки как твердого тела. В области 62(36а2 - 1) / 4> 0,037 можно считать um = и(^. На рис. 5.4 представлен общий вид зависимостей ит(а, Ь) (сплошная линия) и (пунктирная линия).
Форма импульсного воздействия при разделении
Рассмотрим задачу о нахождении оптимальной формы импульса отделения. Как было показано в предыдущем разделе, наибольшая отдача ит зависит от плеча а, задержки Ь, формы импульса f и его длительности т. По отношению к / величина ит явля-
ется нелинейным функционалом. Нужно найти такую функцию ит(а, Ь, т), чтобы для любой кусочно-непрерывной функции /(0, отличной от нуля только на интервале 0 < t < т и дающей положи-т
тельный импульс Р(т) = j f(t)dt > 0, выполнялось условие: о
ит (а, Ь, т, /) / 2Р(т) < ит {а, Ь,х,)< 0,
причем нужно указать такую последовательность функций
Л(0. •••. /п(0.чт0 lim = ит(а> ь> *)• Определен-
2Р„(т)
ная таким образом величина ит (a, Ь, т) будет представлять собой наименьшую возможную при данных а, 6,т отдачу, приходящуюся на единицу количества движения, сообщаемого обоими импульсами балке.
Следует отметить, что при относительно малой длительности импульс любой формы воспринимается балкой как удар f(t) = = 8(0 и
«т («> Ь, Т)т <а- Ь’ °> 5>
Из примеров, рассмотренных в предыдущем разделе, видно, что
ит(а, Ь,х)х_^ —> 0.
Следовательно, только при достаточно большой длительности импульса выбор его формы может существенно снизить отдачу.
Исследуем процесс разгона балки под действием импульсов вида
/(0 =
0, t < 0, t > х,
jch(yi) / 2sh(yx), 0 < t < x,
(5.28)
где у- интенсивность разгона (некоторая постоянная).
При такой форме импульсного воздействия закон движения балки в период действия обоих импульсов b < t < х (считаем b < т) на основании (5.24) будет следующим:
306 5. Влияние упругих свойств конструкции на процесс отделения и = щ + и2 +и3', eyt
2у sh(y£)
u2 =-----------U(s, a, -b, y);
2y sh(y£)
U(s, a,b, y) = |(l + e^6) + 6as(l-e'76) + (5.29)
+ A V ( iVc-7^]'
Э 1 , 14 .,-2 1 v ' h
z n=l I +
1
«3 =----:-----
у sh(yt)
1 ^С7я(а)уя(5)(со5х2^ _ (1)„ cosx2j(r _ fe)) n=l 1 + X„y
Закон движения балки в интервале 0 <t <b описывается (5.29) при отбрасывании членов, содержащих время задержки Ь. В движении (5.29) выделены три составляющие: вклад их процесса разгона (экспоненциально увеличивается со временем), вклад и2 переходного процесса (уменьшается), м3 - остаточные колебания ограниченной амплитуды. В период 0 < t < т справедливы оценки:
1, 25 + 2у2 1 + 4у2£Гп4
----------——; I и31 < — у sh(yx) у sh(yx)
оо
где ^Х”4 <0,01. Следовательно, при достаточной длительности И =1
импульсов (еух » 1) первый компонент становится определяющим: у |м2,з1 Y В выражении для щ множитель еух за-
дает скорость разгона, а множитель U(sf a,b,y)- форму изгиба балки при разгоне, зависящую от плеча а, времени задержки b и интенсивности разгона у.
Рис. 5.5. Влияние интенсивности разгона на форму изгиба балки: а - неподвижная точка на конце балки (1 - у = 2, 3; 2 - у = 6,8; 3 - у = 11,3), b = 0,04; б - неподвижная точка в интервале -0,5 < $ <0 (4 - у = 20,2; 5 - у = 33,8; 6 - у = 45), b = 0,04; в - форма с тремя неподвижными точками (7 - у = 67,8; £-у = 124;9-у = 169), 6 = 0; стрелками на графиках показано направление движения
Рассмотрим свойства формы изгиба U. При малой интенсивности разгона (у —>0) из (5.29) получаем, что форма изгиба близка к прямолинейной Как видно из рис. 5.5, с ростом интенсив-
ности разгона у форма изгиба все более искривляется и при достижении некоторой величины у = у*(а,Ъ) появляются неподвижные точки U = 0, а при у >уф на отдельных участках балки U< 0. В последнем случае отдача этих участков балки назад не устраняется даже при неограниченном растягивании импульса:
2
lim ит < - min U(st a, b, у) < 0, т->« т у |s|<l/2 v "
так как она заключена в основной, доминирующей компоненте щ процесса отведения балки (5.29), если у <уж, то их > 0, и отдача связана только с неосновными компонентами и2 и м3. Из оценок |м2|, |из1 и определения наибольшей отдачи следует:
-(2,25 + 0,066у2) /ysh(yx) < ит <0 и lim ит =0, Т ->ОО
причем характер стремления к нулю - экспоненциальный с пока-зателем (-у). Наиболее интенсивное уменьшение составляющих отдачи «2 и «з с ростом длительности импульса т происходит при у = у». Следовательно, при заданных параметрах плеча а и задержки b в семействе импульсов (5.28) наименьшая отдача ит
308 5. Влияние упругих свойств конструкции на процесс отделения при достаточно большой длительности импульса (т -> °°) достигается при критическом значении интенсивности разгона У = У*(а, 6), когда форма изгиба U неотрицательна и имеет неподвижные точки U = 0. При у < у ♦ отдачи практически нет, но время отделения увеличивается, а при у >у+ режим слишком интенсивен и порождает отдачу.
Исследуем свойства функции у (а, Ь). Исходя из достижимости равенства U(s, а, Ь,у*)>0 при |s| <0,5, в соотношении (5.29) получаем
, 1 1 т + 1
b = — In-----;
у* т 1
(5.30)
-1205- ^(/п(5)1/п(о)(1 + Х4л;2Г1
О п=2, 4,...
т = шах 2 ---------------------------------------------
|$|<0, 5
i+ ^i/n(5)t/n(o)(i + x4„Y;2)-1
п=1, 3,...
Величина т не определяется для значений (а, у Д при которых знаменатель максимизирующей дроби не будет строго положительным для всех |s| <0,5. Формула (5.30) позволяет строить на плоскости параметров (а, Ь) линии уровня функции у*(а, Ь). Результаты расчетов, учитывающих вклад первых десяти форм представлен на рис. 5.6, б. Над каждой линией указано значение Д = у Д]2. Каждой из точек семейства кривых, изображенных на этом рисунке, соответствует определенный характер движения балки. Абсолютный максимум у ф принадлежит точке А (а « 0,297; b = 0; Д ~ 5,52). Окрестность точки А является областью относительно малой отдачи. Это совпадает с выводом предыдущего пункта: отдача относительно мала, если импульсные воздействия сосредоточены вблизи узлов первой формы Ц(5) собственных колебаний свободной балки и время задержки включения одного из импульсов существенно меньше периода колебаний на первой собственной частоте X2.
Соответствующая точке А форма изгиба имеет три неподвижные точки, в которых [/=0, она представляется наиболее сбалансированной с точки зрения интенсивности разгона и места приложения им-
____________5.2. Отделение отработавших ступеней ракет____309 пульсов (рис. 5.5, в). Кривая АВ (штриховая линия на рис. 5.6, б) делит полосу параметров 0 <а < 0,5, b > 0 на две области. Для области, лежащей ниже кривой АВ, форма U имеет неподвижную точку в интервале -0,5 < 5 < 0. Движению балки, представленному на рис. 5.5, б, соответствует точка Е (см. рис. 5.6, б). Для небольшого отрезка кривой АВ, непосредственно прилегающего к точке А, форма U имеет две неподвижные точки: одну в интервале -0,5 < 5 < 0, другую - на конце s = -0,5. Для области, лежащей слева и выше кривой АВ, неподвижной точкой формы является конец балки 5 = -0,5. Например, характеру движения балки, изображенному на рис. 5.5, а, соответствует точка С на рис. 5.6, б. В этом случае формула (5.30) упрощается, так как максимум т достигается при 5 = -0,5. Из (5.30) следует, что у* —>0 при т 6а, т. е. в области малых Д (см. рис. 5.6, а) преобладает движение балки как твердого тела.
б
Рис. 5.6. Основные формы движения в областях малой (I), средней (II) и большой (III) отдачи:
а - композиция основных форм движения; б - линии уровня функции интенсивности разгона Ь)
Относительный вклад членов, описывающих упругий изгиб балки в формуле (5.30), при малых Д составляет примерно Д2. Можно условно считать, что кривая BD на рис. 5.6, б, для которой вклад упругого изгиба сравним со вкладом от движения балки как твердого тела, отделяет область относительно большой отдачи (выше BD), где низка критическая интенсивность разгона и преобладает движение балки как твердого тела. Это деление согласуется с выводами предыдущего пункта. На рис. 5.6, а наглядно показана композиция основных форм движения в областях малой I, средней II и большой III отдачи. Знак + означает сложение форм, а знак — результирующее движение.
Для формы изгиба U можно сформулировать краевую задачу, подобную тем, которые возникают при определении форм вынужденных колебаний. Для этого в (5.19) положим /(0 = е1 \ у > 0 и будем искать частное решение этого уравнения в виде и =U(s, а, Ь,у)еу Получим
U""+ у 2U= 8(s - а) + е^5($ + а), (5.31)
при этом следует добавить граничные условия для свободной балки из (5.30):
^"ls = ±o,5 = O; tf"ls = ±o,5 = O- (5.32)
Решение краевой задачи (5.31), (5.32) можно получить не только в виде бесконечного ряда (5.29), но и в довольно громоздком конечном виде.
Рассмотрим более подробно описанный выше процесс экспоненциального разгона свободной балки при наличии неподвижных точек.
Для области относительно малой отдачи I остановимся на простом случае, когда импульсы сосредоточены в узлах первой формы U\(s) собственных колебаний балки (а« 0,276) и реализуются одновременно (Ь = 0). На плоскости параметров (а, Ь) соответствующая точка близка к точке А на рис. 5.6, б. В силу того, что 6 = 0, четные формы U2t д, собственных колебаний не будут возбуждены. В силу выбора а, форма t/j(s) не будет возбуждена, а форма U5(s) возбудится очень слабо, так как точки приложения импульсов практически лежат в ее узлах ($= 0,273). Поэтому с большой точностью можно считать, что упругий изгиб балки определяется
_____________5.2. Отделение отработавших ступеней ракет___311 только формой (/3(5). С учетом этих предположений получим приближенно из (5.24)
u(s, t) = 2 cp(t) + 2(/3(0,276)1/з(5) фз(0. (5.33)
Уравнение (5.33) позволяет выразить величины силы f(t) и t
количества движения P(t) = J /(£) через закон движения произ-о
вольной точки 5 балки. Дифференцируя (5.33) по t с использованием приведенных ранее соотношений для ип(п = 3), <p(t), у(0. будем иметь
<5-з4>
= (5'35)
где р= (/3(0,276)6/3(5), a = Xj(-l - р)-0-5.
При мнимом значении а гиперболический косинус в (5.34), (5.35) переходит в тригонометрический. Для концов балки 5 = = ± 0,5 будет Р » -2,66; а = 93,9. Имея в виду, что по определению ит < и (± 0,5; t) для всех t, получим из (5.35) оценку:
Ц(±О,5;0-----Ра_ sh( у (5,3б)
v' 2(1+ Р) 2(1+ Р) т v v 7
Для множества траекторий конца балки при ы(±0,5; t) > 0 (это соответствует общему движению балки в положительном направлении после окончания действия импульсов) с учетом того, что ит < 0 и Р < 0, получим из (5.36) оценку наибольшей отдачи, приходящейся на единицу сообщенного балке количества движения:
Um <------1 + Р < 0.
2Р(т) Pash(at)
(5.37)
Равенство (5.37) в пределе достижимо.
Согласно вышеизложенному нужно указать последовательность /1(0» /г(0» которая в пределе удовлетворяла бы равенству из (5.37).
Для этого рассмотрим, например, семейство траекторий конца балки, имеющих за время п/п (п = 1, 2,3,...) переходного процесса единичное смещение:
u(±0,5; t) =
- (cos nt - 1), 0 < t < —, 2 п
(5.38)
4 И s' i
-1, — < t < т.
п
По формулам (5.34), (5.35) определим соответствующие
значения силы и количества движения:
~П + Ba П / 1 х хЧ Л X 71
--------cosn£ +-------— -------— (спа£ - cosn£), 0 < t < —, 4(1 + р) 4(1 +р)(п2 +а2) п
---------------— cha£ + chaf £ - —1 4(1 + P)(n2 + а2) L 1
(5.39)
РПЮ =
ра2п2 Г к Г л А к ------—-------— ch а т — + sh ат
4(1 + P)(n2 + a2) L V
Отдача на единицу сообщенного балке количества движения составляет
«т _________-2(1 + P)(n2 + а2)
(О pan2 sh а(т - —^ + sh ат
lim ц”» =----Ц-Ё_.
п 2Рп (т) Ра sh ат
(5.40)
Отдача тем ближе к предельному значению (5.37), чем быстрее осуществляется переход к экспоненциальному разгону балки при неподвижных концах. В пределе для /„(£) прип—£>0, согласно (5.39), с точностью до нормирующего множителя получаются
функции из семейства (5.28), причем интенсивность разгона а, принятая в данной постановке (соответствует Д» 4,2) с малой (~1 %) поправкой на вклад отброшенных в (5.33) старших гармоник, совпадает с полученной ранее критической интенсивностью у„(0,276; 0). Тригонометрические добавки в формуле (5.39) и гиперболический косинус со сдвигом на п/п позволяют избавиться от остаточных колебаний, что способствует уменьшению отдачи.
В области средней отдачи II рассмотрим прямую а = 0 (см. рис. 5.6, б). Когда оба импульса приложены в середине балки, они сливаются как бы в один суммарный импульс. Поэтому можно рассмотреть только Ь = 0. Считая, что упругий изгиб балки определяется в основном первой формой собственных колебаний, получим приближенно из (5.33)
u(s; 0 = 2ф(0 4-2[/1(О)[/1($)ф1(0.
(5.41)
Формула (5.41) подобна (5.33) и позволяет использовать соотношения (5.31)—(5.40), положив Р = t/1(O)t/1(± 0,5) = -2,44, а= = А^(-1 - Р)“°’5 » 18,7. Полученное значение интенсивности разгона соответствует Д = 0,83, что хорошо согласуется с уточненным значением Д ® 0,882 (см. рис. 5.6, б). Аналогично и с теми же значениями Р и а проводится исследование в случае а = 0,5, 6=0 (точка F на рис. 5.6, б), которое также приводит к выводу о преимуществах экспоненциального разгона балки при наличии неподвижных точек.
В области относительно большой отдачи III (выше линии BD на рис. 5.6, б) пренебрежем изгибом балки. Будем иметь приближенно из (5.24)
u(s, 0 = Р (0 ч- P(t - b) ч- 12as[P(t) - P(t - b)]. (5.42)
Делая замену р = g(t)eyt, у = (1 / 6)1п[(6а 4-1) / (6а - 1)], а > > 1/6 и предполагая функцию g(0 гладкой, получим
w(-0,5; 0 = (1 - 6a)e^[g(0 - g(t - 6))] = 6(1 - 6a)eT'g(0,
откуда находим g(t) и затем
(5.43)
Имея в виду, что по определению ит £ ы(-0,5; t) для всех t, получим из (5.43) оценку величины наибольшей отдачи, приходящейся на единицу сообщенного балке количества движения:
| (6а - 1)6^ <0. (5.44)
Равенство в (5.44) достижимо. Положим х = nb. Зададим импульсное воздействие в виде серии ударов, приходящихся на моменты времени t = 0, b, 2Ь,..., nb, таких, что P(t) = е"7* при nb < t < < (п + 1)6, п = 0, 1,2, 3... Подставляя Р(0 в (5.42), получим «(-0,5; t) = 0 при b < t< nb, т. е. разгон происходит при неподвижном конце 5= -0,5. Нетрудно определить, что в этом примере
-Hs!- = -lb(6a-i)e^nb.
P(nb) 2
При > 1, х » b указанная серия ударов может быть достаточно хорошо описана экспонентой P(t) = e7t, 0<£<т. Полученное здесь значение интенсивности разгона согласуется со значением у, определенным из (5.30) при Д «1.
Проведенное выше исследование некоторых случаев направленного перемещения свободной балки практически показывает, что экспоненциальный ее разгон при наличии неподвижных точек является при достаточной длительности импульсов наилучшим с точки зрения уменьшения отдачи разгоном, который следует дополнять кратковременным переходным процессом для подавления остаточных колебаний. Суть процесса экспоненциального разгона проста: чем дальше отходит балка в заданном направлении, тем больше становится сила импульсного воздействия.
Оценки типа (5.37), (5.44) позволяют понять в каждой конкретной ситуации, на какой уровень отдачи можно рассчитывать в лучшем случае и какой должна быть минимальная длительность импульсного воздействия, чтобы уровень отдачи удовлетворял требованиям конструктивных допусков.
Определение потери скорости поступательного движения при отделении
Прежде всего следует рассмотреть вопрос о распределении энергии. Как известно, потенциальная энергия П деформации и кинетическая энергия Т движения связаны с прогибом балки следующим образом:
1/2 1/2
П = - ju"2ds; Т = -1/2 -1/2
Полная энергия имеет вид
Е = |{[(Ф(0 + Ф(* " ЭД2 + 12а2 [ф(0 - <p(t - 6)]2 +
+ %U2(a)[(yn(t) + (-1)”+Ч(t - 6)]2 + Х4„[Vn(0 + (-l)"+,Vn(f - б)]2}. n=l
Из выражений (5.3) и (5.4) следует, что количество движения балки по отношению к связанным с ней осям равно нулю.
В отличие от количества движения энергия, передаваемая балке импульсами /, зависит от ее податливости. Чем больше упругая податливость балки, тем большую работу совершает сила f на относительном упругом перемещении точек приложения импульсов и тем больше будет энергия упругих колебаний Е^. При этом доля энергии £ф, передаваемая обоими импульсами «твердой» составляющей, остается неизменной при t > Т + Ь, так как ыф= 1, ^=1/2.
После окончания работы РДТТ отделения балка должна приобрести заданную скорость поступательного движения в направлении удаления от РН. Однако некоторая часть энергии, сообщаемая балке двигателями отделения, может перейти в энергию упругих колебаний, и скорость ее поступательного перемещения по окончании действия двигателей отделения окажется существенно меньше заданной. Рассмотрим механизм выявления потерь величины поступательной скорости в направлении отделения.
Выделим два существенно различных случая силового воздействия, встречающихся на практике в задачах отделения, когда действующая сила зависит:
- от перемещения (тем самым задана энергия, накопленная в средствах разделения) - пружинные толкатели;
- от времени (тем самым задан импульс, сообщаемый балке) -РДТТ, газовые сопла.
Рассмотрим сначала задачу об отделении абсолютно жесткой балки.
Аналогично предыдущим исследованиям представим отделяемое тело однородной балкой. Движение абсолютно жесткой балки будем считать идеальным, или эталонным, для задачи об отделении упругой балки. Потери скорости под влиянием упругости будем вычислять относительно скорости абсолютно жесткой балки, полученной после окончания работы СО при тех же параметрах разделения.
Обратимся к случаю заданной энергии отделения. Свяжем с PH систему координат Oxyz, в которой ось Ох направлена параллельно оси балки в ее исходном положении, a Oz совпадает с направлением относительного перемещения балки в процессе отделения (рис. 5.7). Предположим, что в начальный момент балка массой т неподвижна и опирается на две сжатые пружины 1 и 2, расположенные симметрично относительно ЦМ балки О и имеющие одинаковые жесткости с. Пусть в начальный момент балка находилась на линии z — 0, а при перемещении балки z = h пружины полностью распрямились.
Уравнение движения балки в направлении оси z имеет вид
ср z 2c(h - z), z < h, m-- = ’
dt [0, z > h.
Потенциальная энергия сжатых пружин переходит в кинетическую энергию поступательного движения балки:
v2 nch2 /гхеч
т — = 2---- (5.45)
2 2
и определяется жесткостью пружин с и ходом А.
При этом количество движения, сообщаемое балке распрямившимися пружинами,
mv = h^2cm
зависит от параметров пружин с и h, а также от массы балки т. Чем больше масса балки, тем большее количество движения сообщат ей одни и те же пружины.
В качестве эталонной скорости для дальнейших исследований выберем в соответствии с (5.45) скорость
оэт = h^2c / т.
Иная ситуация возникает при отделении под действием сил, заданных не как функции перемещения, а как функция времени. Предположим, что задан импульс отделения. Аналогично предыдущему рассмотрим движение абсолютно твердой бал
Рис. 5.7. Отделение пружинными толкателями
ки в плоскости Охг под действием двух одинаковых сил = F2 = F(0, приложенных симметрично относительно ЦМ балки,
перпендикулярно ее средней линии (см.
рис. 5.2, а). Тогда движение балки в направлении оси Oz определя
ется уравнением
m^-=2F(t). dt2
При этом сообщенное балке количество движения
т mv = 2Р; Р = | F(t)dt. о
(5.46)
В качестве эталонной скорости при расчетах ее потерь для упругой балки возьмем величину, определяемую из соотношения (5.46),
&эт=2Р/т.
(5-47)
Упругие деформации могут повлиять на передачу балке энергии и импульса и отразиться на характере ее движения. Эта взаимосвязь обусловливает перераспределение энергии в процессе
318 5. Влияние упругих свойств конструкции на процесс отделения движения. Рассмотрим эти явления для указанных выше случаев силового воздействия.
Как уже было показано, при импульсном воздействии все количество движения целиком передается балке и сосредоточивается только в «твердой» компоненте движения (без учета упругих колебаний). Энергия же упругих колебаний увеличивается с ростом упругой податливости. Суммарное количество движения в упругих перемещениях равно нулю при условии, что не учитывается поворот векторов сил за счет упругих колебаний.
Рассмотрим задачу отделения упругой балки под действием сил, зависящих от перемещений. Обратимся вновь к однородной упругой балке, первоначально неподвижной и опирающейся на две сжатые пружины 1 и 2 (см. рис. 5.7), которые расположены симметрично относительно ЦМ балки, имеют одинаковые жесткости с и ход h.
Силы воздействия пружин на отделяемую балку, как и прежде,
Л2 =
с(Л -г^г), ги < h, О, Z^2 - к
(5.48)
где Zj 2 - перемещение балки в точках контакта с пружинами. Начальные условия примем нулевыми:
= 0. (5.49)
t=o
I л 3z
Граничные условия для свободных «нижнего» и «верхнего» концов балки
(5.50)
В безразмерных переменных уравнения движения упругой балки имеют вид
u""+u = /t5(s - а) + /28(s + а); (5.51)
/1.2 “
*(1-ы12), ui 2 < 1, 0, и12 > 1;
(5.52)
«к=о = °; “к=о = о;
(5.53)
u1s=±l/2 - О,
(5.54)
где k - безразмерный коэффициент жесткости пружин, учитывающий жесткость балки, k = cl?/ЕJ\ EJ - изгибная жесткость балки. Для твердой балки скорость отделения после полного распрямления пружин в безразмерном виде равна йэт = ^2k. Именно относительно этой величины будем вычислять коэффициент относительной потери скорости за счет упругой податливости:
_ мэт -Up Л»
(5.55)
где «о - скорость ЦМ балки, определяемая интегрированием вдоль ее длины:
1/2 «о=| iids. -1/2
(5.56)
Решение уравнений (5.48)-(5.51) ищем в виде разложения по формам собственных колебаний свободной балки. В силу симметрии задачи в разложении будут участвовать только симметричные формы колебаний:
ц /5) _ cos(Xns) t ch(X„s) cos(X„ / 2) ch(X„ / 2) ’
n = 1, 3, 5.................
(5.57)
где X, = 4,73; X3 = 11,00;
n
= nn + — 2
+ £„, 0 < £„
« 1.
W - 1;
; К
Форма Uo отвечает поступательному перемещению балки, а формы U„ при п > 1 определяют упругие колебания.
Подставим u(s, т) = У qn (x)Un ($) в уравнения (5.51)-(5.54),
п =0,1,3.5,...
при этом правую часть уравнения (5.51) тоже разложим в ряд по формам собственных колебаний. Тогда после интегрирования
по длине балки с нулевыми начальными условиями <?п|т=о = 0;
<7п|т=о =0 получим
Яп + ^Яп = fiUn(-a) + f2Un (а), п = i, 3,5,...
Причем в выражения для Д2 в соответствии с (5.52) входят перемещения балки в точках контакта с пружинами:
“U = %4nVn(±a)-
п =0
Поскольку пружины расположены симметрично, = /2; Un(-a) = [/„(a), Uj = и2. Решение (5.56), (5.57) получаем численно, ограничиваясь некоторым числом низших форм колебаний.
После полного распрямления пружин потенциальная энергия их сжатия перейдет в энергию поступательного и колебательного движения балки. На основании (5.56) баланс энергии можно записать в виде
(5.58)
В этом выражении первый член представляет собой энергию поступательного движения балки, а величина qQ характеризует скорость движения ЦМ. Под знаком суммы (Е) члены представляют собой энергию упругих колебаний балки. Чем больше эта энергия, тем больше потери скорости поступательного движения, т. е. разность между реальной скоростью центра масс qQ и эталонной скоростью.
Доля энергии упругих колебаний и, следовательно, коэффициент потери скорости поступательного движения х определяются двумя параметрами: координатой а точек контакта с пружинами и безразмерной жесткостью пружин k. В силу (5.55) и последнего соотношения коэффициент потери скорости можно представить так:
здесь скорость поступательного движения qQ определяется после полного распрямления пружин. Причем из (5.58) видно, что qQ за-
____________5.2. Отделение отработавших ступеней ракет___321 висит от других qn, поэтому упругие колебания приводят к некоторым отклонениям от эталонных значений.
Система (5.58) решается численно для определения при различных значениях а и k с учетом всех низших форм до номера п.
На рис. 5.8 представлена зависимость коэффициента потерь скорости х в процентах от параметров а и k, полученная на основании конкретного расчета с учетом 20 форм колебаний. Из рисунка видно, что с увеличением безразмерного коэффициента жесткости k потери скорости растут и могут достигнуть внушительных значений - около 70...80 %.
Рис. 5.8. Линии уровня коэффициента потерь скорости %(a,k)
Введем вспомогательную безразмерную величину То= 2п / 42k, равную периоду колебаний упругой балки как твердого тела, закрепленной на двух пружинах жесткости с, и сравним ее с периодами собственных колебаний упругой балки, Тп = 2л / ,n = 1, 2,...
Если период колебаний балки как твердого тела на пружинах существенно превосходит период ее собственных упругих колебаний по первой форме, т. е. То > 7\ (соответственно k 250), то потери скорости оказываются незначительными и составляют несколько процентов. В процессе отделения упругий изгиб балки остается достаточно малым и слабо влияет на общий характер движения. Особенно мал коэффициент потери скорости в случае установки пружин вблизи узлов первой формы (а » 0,276).
Если период «твердых» колебаний сравним с периодом упругих колебаний по первой форме (То ~ 7\; £ « 250), потери скорости становятся значительными - около 50 %. Первая форма колебаний в процессе отделения испытывает сильное возбуждение и поглощает большую часть энергии, передаваемой от пружин к балке. Если пружины расположены вблизи узлов первой формы, поглощение энергии первой формой снижается. Следующая форма колебаний (третья) возбуждается при этом незначительно, так как период колебаний Т3 То. В результате потери скорости снижаются до нескольких процентов.
Если период «твердых» колебаний балки меньше периода упругих колебаний по третьей форме (То <Т3; k > 800), потери скорости превосходят 50 %. Установка пружин вблизи узлов первой формы колебаний уже не дает снижения потерь скорости, так как в процессе движения сильно возбуждаются не только первая форма, но и целый ряд последующих форм. Все эти формы колебаний активно поглощают энергию, передаваемую от пружин к балке.
Таким образом, для обеспечения малых потерь скорости в процессе увода жесткость пружин отделения должна быть согласована с жесткостью балки. Например, чтобы потери скорости не превосходили 3 %, период «твердых» колебаний балки должен быть больше:
- периода упругих колебаний по первой форме, если пружины расположены вблизи узлов первой формы;
- трех периодов упругих колебаний по первой форме, если пружины расположены ближе к середине или концам балки.
Рассмотрим другой тип задач, в которых отделение балки производится двумя силами, зависящими от времени, т. е. задан их импульс:
= F(t) cos0t; F2 = F(t - At) cos02.
Углы 0j и 02 характеризуют угол поворота нормали к поверхности балки в точках приложения сил за счет ее изгиба:
tg0i,2=^ (5.59)
дх х=*12
Ввиду малости упругого изгиба,
COS 0J 2
= 1-lf—f
2 2
где 2 ~ координаты точек приложения сил.
Введя, как прежде, безразмерные величины, получим для сил /1,2 =/(T)[l-e(u')2s=±a + ...], (5.60)
где £ - малый параметр, с _ 1 Р2 2£/рб’
(5.61)
Р - суммарный импульс СО, действующий на балку; рб - масса балки на единицу ее длины.
Если оба импульса отделения прикладываются к твердой балке одновременно, то ее безразмерная скорость поступательного движения в соответствии с (5.47)
йэт = 2. (5.62)
В разложении по формам собственных колебаний свободной балки кроме симметричных форм (5.57) будут участвовать и кососимметричные формы:
U02(s) = 2j3s;
U sin(X"s) ! sh(X„s) nV 7 sin(X„/2) sh(X„/2)’
n = 2, 4,6,....
X2 = 7,85; X4 = 14,14;...;
Xn = nn + ^--en; 0<En«cl.
Здесь форма 1/02 отвечает вращению балки вокруг ЦМ. Отдельные соотношения системы уравнений движения связаны между собой через выражения для сил импульсного воздействия Д2 (5.60), в которые входят производные от перемещений в точках приложения сил. В общем случае при произвольном значении е следует ограничиться некоторым разумным числом низших форм колебаний и решать численно усеченную систему конечного числа обыкновенных дифференциальных уравнений. Однако в реальных ситуациях коэффициент с весьма мал. В этом случае решение может быть построено методом малого параметра в виде разложения в ряд по с.
В нулевом приближении по с система (5.59), (5.60) распадается на отдельные независимые уравнения для каждого и, и ее решение находится в квадратурах (5.24). Тогда после окончания действия импульсов скорость поступательного движения балки (5.59) равна эталонной скорости (5.62) и коэффициент потери скорости равен нулю.
Решение первого приближения по с ищем в виде
где верхний индекс 0 относится к нулевому приближению, а индекс 1 - к искомой добавке первого приближения.
Поступательное движение ЦМ балки определяется только членом п = 0, коэффициент потери скорости (5.55) можно представить так:
Х = 1-^о/2 = -е^1)/2.
Уравнение для определения поправки первого приближения обобщенной координаты д0, отвечающей поступательному движению балки, имеет вид
iff = - fa - 6)(u')2 =а, (5.63)
где значения производных и' определяются вдоль порождающего решения (5.24). В правой части (5.63) стоит известная функция времени, что позволяет найти в квадратурах поправку и коэффициент потери скорости:
х+Ь
X = £ ± J[/(*) (u')2s = -a + /(*-b) (u')2s = a №
2 0
Механизм потери скорости в данном случае отличается от механизма потери скорости, рассмотренного для отделения, происходящего под действием упругих сил. Когда силы импульсного воздействия заданы как функции времени и действуют перпендикулярно упругой линии балки, потери скорости движения ЦМ в заданном направлении обусловливаются уменьшением проекции сил (/i,2cos ®1,г) на Данное направление за счет упругого изгиба балки. Чем больше жесткость балки ЕJ, тем меньше параметр £ (5.61) и, соответственно, меньше коэффициент потери скорости.
Для получения представления о характерных значениях х были рассмотрены движения балки под импульсным воздействием ступенчатого вида:
Л0 =
—— , 0 < т < т*, 2т*
(5.64)
О, т < 0, т > т*,
где т» - время приложения импульса отделения.
При построении порождающего решения (5.39) учитывались первые десять ненулевых форм. Зависимость величины х / £ от параметров плеча приложения сил а и задержки времени включения b представлена в виде линий уровня на рис. 5.9 для безразмерного значения длительности импульса т = 0,3.
Как видно из этого рисунка, х / £ растет с увеличением задержки во времени включения одного из импульсов и расстояния от точек приложения импульсов до середины балки. Когда импульсы приложены в середине балки (а = 0), потери скорости отделения отсутствуют (х = 0), так как в этом случае во время отделения упругая линия балки остается перпендикулярной направлению Oz. Когда импульсы реализуются с разбросом во времени и приложены не в середине балки, она вращается как твердое тело вокруг ЦМ. Это приводит к постоянному отклонению направления действия силы от заданного направления движения Oz и, следовательно, к потерям скорости.
Рис. 5.9. Зависимость величины х/е от плеча сил а и задержки времени включения Ь
Перейдем от модельных задач, наглядно демонстрирующих особенности процессов отделения упругих систем, к рассмотрению конкретных объектов.
5.3. Отделение створок грузового транспортного контейнера
Ракета-носитель «Энергия» является универсальным изделием ракетно-космической техники, так как на нее вместо МКА «Буран» могут быть установлены и другие, значительные по габаритам, космические объекты одноразового использования. В этом случае масса выводимого на орбиту ПГ примерно в три раза превышает ту, что способен доставить МКА «Буран» (рис. 5.10). На атмосферном участке полета IIГ размещается внутри грузового транспортного контейнера, назначение которого состоит в защите
космических объектов от силового и теплового воздействия скоростного напора. После прохождения атмосферного участка потребность в такой защите отпадает и контейнер сбрасывается. Он имеет
значительную длину, поэтому выполняется составным и включает раздельно сбрасываемые ГО, СрО и ДО (рис. 5.11). Створки ГО и СрО обладают большими массами и моментами инерции относительно осей вращения. Это приводит к необходимости исполь-
зовать в качестве СО пневмотолкатели или РДТТ. Вопросы, от-
носящиеся к проектированию СР ГО и СрО, а также последо
вательности команд при их разделении изложены в главе 1. Методика расчета СР для абсолютно твердых тел представлена в главе 4.
Практика разработки обтекателей больших габаритов показала, что их створки нельзя рассматривать как абсолютно твердые тела. Так, при наземной экспериментальной отработке отделения близких по параметрам створок ГО и СрО было зафиксировано заметное отличие угловой скорости разворота створок от расчетного значения, полученного без учета их упругих свойств. Кроме того, значительная амплитуда колебаний ряда точек створок привела к повреждению макета ПГ, что вызвало необходимость их усиления.
Рассмотренные выше задачи определения уровня упругих деформаций, оптимальной формы импульсного воздействия
и отделении подробно
Рис. 5.10. Схема расположения створок грузового транспортного контейнера: 1 - центральный блок PH; 2 - створки ГО; 3 -зона размещения полезного груза; 4 - створки СрО; 5 - узлы разворота;
6-ДО
и величины потерь скорости отделения, обусловленные упругими свойствами отделяемых тел, решались для моделей балочного типа. Однако такой подход, как указывалось выше, справедлив лишь для конструкций, длина которых существенно превышает поперечный размер. При расчете отделения плоских крышек люков
328 5. Влияние упругих свойств конструкции на процесс отделения достаточно использование двумерной модели. Анализ отделения разрезных ГО или СрО может быть проведен только на базе оболочечных моделей.
Рис. 5.11. Последовательность сброса створок и их относительное движение
Рассмотрим влияние упругих свойств створок ГО и СрО на процесс их отделения от РН. Створки представляют собой тонкостенные разрезные оболочечные элементы, которые в процессе отделения нагружены значительными сосредоточенными силами, создаваемыми СО. Поскольку основным требованием к организации отделения является гарантированное исключение соударений между разделяемыми конструкциями, именно упругие деформации створок определяют величину зазора между их внутренней поверхностью и зоной размещения ПГ. Применение предложенного подхода позволяет обоснованно выбрать размер зазора и определить потери скорости, обусловленные упругими свойствами створок.
_____5.3. Отделение створок грузового транспортного контейнера 329 Особенности представления сил и моментов СО, действующих на упругие тела
Движение створок грузового транспортного контейнера в процессе отделения описывается уравнениями (5.16), (5.17). В правые части этих уравнений входят главные векторы сил и моментов СО. Эти силы классифицированы в главах 1,2, однако их выражения получены при рассмотрении движения абсолютно твердых тел, которыми моделировались разделяемые объекты. Учтем упругие свойства створок при определении значений сил и моментов средств отделения.
Рассмотрим отделение одной из створок как нежесткого элемента конструкции. Для анализа этого процесса введем следующие системы координат (рис. 5.12):
ОХУХ - инерциальная система координат с началом в ЦМ PH в момент подачи команды на разделение. Ось ОХ параллельна продольной оси PH и направлена в сторону ее носовой части, ОУ направлена в сторону третьей (III) полуплоскости PH, ось OZ дополняет систему до правой;
Cxyz - связанная с PH система координат, совпадающая в начальный момент с OXyZ\
CkxkVkzk “ связанная с отделяемой створкой система координат с началом в ЦМ створки. Ось Qx^ в момент подачи команды на разделение параллельна оси ОХ, ось Qz^ лежит в плоскости вращения створки и направлена в сторону увеличения угла ее поворота, Ckyk дополняет систему до правой.
РДТТ крепятся непосредственно к оболочке створок с внешней стороны (рис. 5.13, б). Их положение в системе координат Ckxkykzk в исходном (недеформированном) состоянии характеризуется вектором r^(i = 1> 2,...). Индекс i сответствует номеру РДТТ, установленному на k-й створке. Направление вектора тяги РДТТ Fiw(t) характеризуется углами 0^, 0^, 0^, образуемыми им с координатными осями xk, yk, zk. Точка крепления РДТТ в процессе отделения получает упругое смещение относительно положения условно твердой створки, при этом вектор силы развернется дополнительно на углы Д0*, Д0^, Д0^. Можно записать (см. рис. 5.12):
pj =r‘,J+“J- <563>
Рис. 5.12. Системы координат для расчета отделения створки
Поскольку углы дрх,, ДР , ДР* малы, запишем проекции си-IK IR 1К
лы Г1ДВ(0 на оси связанной системы координат Скхку^к\
FiW = |г>дв (0|lcos Р i (i - Др i / 2) - др{ sin р/], j = X, у, z . (5.66)
Для получения главногб вектора сил двигателей, установленных на k-й створке, необходимо просуммировать векторы, проекции которых определяются выражениями (5.66), по числу двигателей:
Ливн = УЛ^инЛди. (5.67)
______5.3. Отделение створок грузового транспортного контейнера 331 где - матрица перехода от системы координат Ckxkykzk к инерциальной системе координат OXYZ.
Главный момент сил двигателей относительно ЦМ створки в уравнении ее вращательного движения запишется с учетом (5.65) и разложения (5.14) следующим образом:
La
г.Д lk
nk _
+
n-\
X ^1ДВ »
(5.68)
где щ - число учитываемых в расчетах собственных частот Л-й створки; ~ вектор собственных форм колебаний на n-й частоте в точке крепления i-ro двигателя.
Силы FTl, развиваемые толкателями, зависят от рабочего хода, который может быть вычислен как разница между текущим значением длины 1^ i-ro толкателя и ее начальным значением /ю:
*, = |(,| -Щ
Толкатель одним концом крепится на створке обтекателя, а другим свободно опирается на кронштейн, установленный на PH. Следовательно, вектор /,, проведенный из точки опоры толкателя в точку его крепления, изменяется как по величине, так и по направлению. Определим этот вектор (см. рис. 5.12):
h = + pj - Р™ = - *0 - Р™ (5-69)
где Rch, Ro - радиус-векторы в инерциальной системе координат OXYZ начал связанных систем координат C^x^y^z^ и Cxyz соответственно; г J - радиус-вектор точки крепления i-ro толкателя к k-й створке в недеформированном ее состоянии; йJ - упругое смещение точки крепления толкателя в процессе отделения; р™ - радиус-вектор точки установки толкателя на PH.
Используя это соотношение, можем записать
|^i| ^ck ^о) +
Пк _ + п=\
А и ->ИН Pj£ ’
где Лн_*ин - матрица перехода от системы координат Схугк OXYZ.
Проекции сил на оси инерциальной системы координат запишутся следующим образом:
• i-iP
^2 = kJ тг-7 > j = х, у, z.
1 1 /,•
(5.70)
Главный вектор этих сил по аналогии с (5.67)
i
а главный момент сил толкателей относительно ЦМ створки будет иметь вид
nk
(5.72)
П=1
Поскольку створки сбрасываются одновременно, действие толкателей на PH записывается так:
k i
(5.73)
Соотношение для главного момента сил толкателей относительно ЦМ PH имеет вид
=SSIP,™ k i
(5.74)
Аналитические оценки уровня возбуждения колебаний
Выражения сил толкателей и РДТТ отделения, полученные выше, входят в правые части уравнений движения условно твердых тел (5.16) и уравнений упругих колебаний для каждого возбуждаемого тона (5.17). Для последних представляется целесообразным получить приближенные оценочные решения, позволяющие понять качественный характер процесса и установить количественные зависимости, пригодные, например, для экспресс-оценок.
Уравнения упругих колебаний по каждому тону связаны между собой выражениями (5.66)-(5.74) через упругие смещения uik точек их приложения и разворот векторов сил на углы ДР^. Предположим, что упругие смещения существенно меньше перемещений этих точек, обусловленных движением отделяемых створок как целого, и поворот векторов сил, вызванный упругостью створок, также незначителен. Тогда отдельные уравнения по каждому тону колебаний будут независимыми, и в этом случае они решаются аналитически:
qn (0 = ЯпО cos t + s^n t + со„ п
t
+ —+FiUni + ^]sin<o„(t-T)rfT, (5.75) о i
где ЯпО> ЯпО -начальные условия, а формы ортонормированы.
Зависимость тяги РДТТ от времени близка к постоянной (см. главу 2). То же самое можно сказать и об изменении силы толкателей, особенно в начальной, наиболее опасной фазе процесса отделения. Тогда в (5.75) проекции сил могут быть вынесены из-под знака интеграла.
С точки зрения уменьшения возмущений при разделении и снижения нагрузок на узлы связи предпочтительнее симметричные схемы процесса, когда плоскость отделения совпадает с плоскостью симметрии отделяемой конструкции, при этом СО установлены попарно симметрично. Отделение створок контейнера выполнено именно по такой схеме. Для нее F* = F2X; Fy = -F2y; Fz = F2z (рис. 5.13).
В наборе собственных форм колебаний створок присутствуют как симметричные, так и кососимметричные формы. Для данной схемы =~Un2> Un\ =^п2 для симметричных
форм U%i=Uy2> = “^п2 ддя кососиммет-
ричных.
Как отмечалось выше, РДТТ могут иметь задержку включения по времени друг относительно друга. Возможен также разброс сил, развиваемых отдельными толкателями.
Рис. 5.13. Схема установки средств отделения ГО и СрО: а - пневмотолкатели; б - твердотопливные двигатели
Из (5.75) видно, что кососимметричные формы возбуждаются только при наличии задержки Д£ включения одного из РДТТ (или разнице сил толкателей), иначе возбуждение охватывает только симметричные формы. Тогда при At= 0 для симметричных форм из (5.75) получим
2[Кж1/*1 + F*U* + FfU* ] z ------П1----1---n\----1--nil
“n
о, г < о,
Yn(0 =
1 - cos(£>nt, 0 < t <Т,
COS (0n (t - T) - COS (0„ t,
t < T,
(5.76)
где T - время работы РДТТ. Характер колебательного процесса произвольной точки обтекателя иллюстрируется рис. 5.14, а. В период работы РДТТ колебания происходят около смещенного положения:
(5.77)
а после окончания их работы сохраняются остаточные колебания около нулевого значения qn = 0. В частности, когда время работы РДТТ равно целому числу периодов колебаний на данной частоте Т = 2ла / <пп (а - произвольное положительное число), остаточных колебаний нет (рис. 5.14, 6).
Упругая деформация в произвольной точке створки
(5.78)
где U*it U„i - компоненты вектора собственных форм в этой точке, а суммирование ведется только по симметричным формам.
Рис. 5.14. Характер колебательного процесса:
а - задержка включения отсутствует (Д£ = 0); б - время работы двигателя кратно периоду свободных колебаний; в - время задержки отличается от кратного на полпериода; г - вклад кососимметричных форм колебаний;
д - время задержки кратно периоду колебаний
Поскольку вклад в упругую деформацию высших форм быстро падает с ростом номера формы, в реальных расчетах учитывается ограниченное их число. Максимальное значение упругой деформации, как видно из рис. 5.14, а, получается удвоением (5.77).
Рассмотрим влияние задержки включения одного из двигателей на характер процесса. Предположим, что задержка включения Д£ заметно меньше времени работы двигателя: tТ, что имеет место в действительности. Тогда для симметричных форм в течение работы двигателя Д£ < £ < Г, интегрируя (5.75), получим
Qn (0 =
2[FixUxni+Fyu^+FlzU^][ ( ( м
---------- ——------—— 1 - COS (0„ — cos со „ t-
I 2 J I 2
2 сот, п
(5.79)
для кососимметричных форм
Яп (f) ~
2[FxxUxnX
2 (07, и
. AC (5.80)
I 2 J I 2 J
Выражение (5.79), так же как и (5.76), описывает колебания около смещенного положения, определяемого соотношением (5.77). Однако в отличие от (5.76) амплитуда этих колебаний зависит от времени задержки At Амплитуда максимальна и равна амплитуде колебаний (5.76), когда время задержки кратно периоду колебаний на данной частоте А£ = 2 ла / со„. Если время задержки отличается от кратного на полпериода Af = (2 ла + л) / со„, колебания около среднего положения отсутствуют. Эта ситуация иллюстрируется рис. 5.14, в. Сохраняет силу и оценка (5.77) средних значений упругих деформаций, вызванных возбуждением симметричных форм колебаний, а также оценка их максимальных значений, как удвоенного значения (5.77).
Оценим вклад кососимметричных форм в упругую деформацию створок. Как видно из (5.80), колебания на кососимметричных формах происходят около невозмущенного значения qn = 0 (рис. 5.14, г). При этом амплитуда колебаний зависит от времени задержки At Амплитуда равна нулю, когда время задержки кратно периоду колебаний на данной частоте А£ = 2ла / со^ (рис. 5.14, д). Амплитуда достигает максимума, когда время задержки отличается от кратного на полпериода колебаний на данной частоте Д£ = (2ла + л) / со„. Суммарный вклад кососимметричных форм оценивается рядом
nk
± X2 + FXUni + F*un№n sin(CO„ l^ml • (581> n=l 2
IM.
где суммирование ведется только по кососимметричным формам. При условии малости задержки включения одного из РДТТ по х Af _
сравнению с периодом колебании на низших частотах со„ — «1
. ( А^ М ~ х
можно положить sinl со„ — I = (йп —. Таким образом, в указанных
пределах возбуждение кососимметричных форм колебаний происходит тем сильнее, чем значительнее время задержки Д£, при нулевой задержке A t = 0 кососимметричные формы вообще не возбуж
даются.
Введение упрощающих предположений позволило рассмотреть отдельные уравнения колебаний как независимые и получить аналитические оценки (5.75)—(5.81). В общем случае уравнения колебаний по каждому тону связаны между собой и с уравнениями движения условно твердых тел посредством выражений сил, входящих в правые части (5.66)-(5.74). Поэтому система уравнений (5.16), (5.17), описывающая разделение упругих тел, решается численно, с помощью ЭВМ.
Анализ схем отделения по уровню возбуждения колебаний и потерям скорости
Методы численного интегрирования системы обыкновенных дифференциальных уравнений известны. Однако их программная реализация может служить лишь исходным пунктом для разработки специализированной программы, пригодной для инженерного анализа процессов отделения. Такого рода программа должна отвечать ряду требований: учитывать специфику процесса (например, конкретный характер сил, создаваемых средствами отделения), охватывать широкий круг возможных реализаций схем разделения, обладать необходимой информативностью, быть экономичной в смысле затрат процессорного времени. В то же время она должна быть достаточно гибкой (учитывать возможное изменение характера связей между телами в определенный момент процесса), а также предоставлять пользователю дополнительные возможности учета различных особенностей процесса.
Программа, удовлетворяющая этим требованиям (рис. 5.15), включает блок, который осуществляет интегрирование системы дифференциальных уравнений второго порядка произвольной размерности, и пакет внешних по отношению к этому блоку процедур, отражающих особенности процесса разделения и определяющих возможности программы (на рисунке выделен пунктиром).
Рассмотрим результаты численного моделирования, выполненного с помощью этой программы, динамики упругих створок контейнера, имеющих гипотетические характеристики, для различных схем разделения.
Поскольку в разложение (5.14) входят формы и частоты собственных колебаний, они предварительно определялись с помощью специализированного конечноэлементного комплекса.
Рис. 5.15. Блок-схема
программы для анализа
процессов отделения
В качестве примера на рис. 5.16 и 5.17 представлены картины низшей симметричной (п = 2) формы колебаний соответственно створок ГО и СрО. Из рис. 5.16 видно, что наибольшую амплитуду имеют нижние точки обтекателя, расположенные на его цилиндрической поверхности в районе плоскости, делящей ГО на створки. Можно предположить, что именно эти области створок ГО будут наиболее активно откликаться на внешнее воздействие и иметь наибольшие деформации в направлении зоны размещения ПГ.
Рис. 5.16. Картина низшей симметричной формы колебаний створок ГО
Аналогичные точки СрО, как это видно из рис. 5.17, расположены в верхней его части. Форма деформации ДО (п = 2) представлена на рис. 5.18.
Рассмотрим динамику створок СрО, упругие свойства которых выражены в наибольшей степени. В соответствии с представленной выше качественной оценкой характера процесса при отсутствии разброса в силовых характеристиках СО возбуждаются
_____5.3. Отделение створок грузового транспортного контейнера 341 лишь симметричные формы, при этом в силу соотношения частот определяющими будут колебания на низших частотах п = 2 и п = 5. Расчеты показали, что наибольшие деформации по осям у, z имеют точки, максимально удаленные от оси вращения створок и расположенные на верхнем свободном шпангоуте. Его края имеют максимальную амплитуду в направлении оси у, что соответствует картине низшей симметричной формы колебаний (п = 2). Перемещения вдоль оси х несущественны.
Рис. 5.17. Картина низшей симметричной формы колебаний створок СрО
Рис. 5.18. Картина низшей симметричной формы колебаний створок ДО (п = 2)
В случае, когда силы, например пневмотолкателей, не равны (разброс достигает 10 %), возбуждаются также и кососимметричные формы. Приближенная оценка их вклада, проведенная с помощью соотношения (5.81), показывает, что такая величина разброса слабо сказывается на максимальной деформации (вклад низшей симметричной формы на порядок больше вклада соответствующей кососимметричной формы). Результаты численного моделирования подтверждают такую оценку. Процесс колебаний определяется
______5.3. Отделение створок грузового транспортного контейнера 343 возбуждением низшей частоты, и лишь на движение отдельных частей створки незначительно влияют низшие кососимметричные формы.
Общий характер колебаний близок к картине, иллюстрирующей приближенные аналитические оценки (5.76)-(5.81). Однако в период действия толкателей амплитуда колебаний существенно отличается от аналитических оценок, что объясняется взаимосвязью уравнений движения условно твердых тел и упругих колебаний.
Рассмотрим движение створки как целого. Работа толкателей переходит как в кинетическую энергию движения отделения, так и в энергию упругих колебаний, возбуждаемых в конструкции створок, что вызывает потери скорости отделения по сравнению с абсолютно жесткими моделями. Коэффициент потерь угловой скорости х оп-ределяется в момент окончания работы СО из соотношения
где со, сотв - угловая скорость деформируемой и абсолютно твердой створки соответственно.
Расчеты показали, что х не превышает нескольких процентов. Это объясняется особенностью схемы расположения толкателей -вдоль продольной оси. На потери скорости влияют колебания именно в этом направлении, а они на порядок меньше поперечных колебаний в точках крепления штоков толкателей к створке обтекателя.
Анализ полного движения створки (разворот створки как целого и упругие относительные колебания) в радиальном направлении, т. е. глубины погружения в направлении ПГ, показывает следующее. Края верхнего шпангоута СрО даже при малых углах разворота створки получают значительные линейные перемещения вследствие удаленности от оси разворота. Однако в начальной, наиболее опасной фазе отделения, когда угол поворота створки мал и скорость отделения еще незначительна, в основном упругие деформации, максимальные в этих точках, задают характер результирующего движения. Поэтому необходимый размер зазора, определяемый максимальной глубиной погружения точек створки в
344 5. Влияние упругих свойств конструкции на процесс отделения направлении размещения ПГ, выбирается из анализа движения именно этих точек.
Коэффициент потери скорости для створок ГО меньше, чем СрО для данной схемы разделения, так как упругие свойства створки ГО менее выражены, чем у створок СрО.
Анализ полного движения в радиальном направлении показывает, что величина радиального зазора между внутренней поверхностью створок ГО и зоной размещения ПГ определяется движением краев нижней части створки.
Рассмотрим теперь другую схему отделения створок ГО и СрО от PH, при которой используются РДТТ (см. рис. 5.13, б), создающие силы, зависящие от времени.
При отделении створок СрО линии действия тяги РДТТ расположены в плоскости, перпендикулярной продольной оси створок. В случае одновременного запуска двигателей (задержка отсутствует) практически во всех точках прослеживается наложение колебаний на двух низших формах п = 2 и п = 5.
Наиболее интенсивно колеблются точки краев верхнего шпангоута створок СрО в направлении оси С^у^ при этом амплитуда колебаний меньше (примерно вдвое) по сравнению со схемой отделения посредством толкателей.
Задержка включения одного из двигателей (Д£ = 0,05 с) приводит к возбуждению кососимметричных форм и существенно сказывается на характере колебаний: максимальная амплитуда возрастает в 1,5 раза.
Таким образом, для случая симметричного нагружения уровень возбуждения колебаний для схемы с пневмотолкателями примерно вдвое больше, чем для схемы с двигателями. Но если для первой схемы разница сил (в пределах реальных допусков) практически не влияет на характер процесса, то для второй задержка включения одного из двигателей значительно увеличивает амплитуду колебаний и делает ее близкой к первой схеме.
В случае использования РДТТ коэффициент потерь скорости х обусловлен изменением вследствие упругих колебаний угла, определяющего линии действия сил двигателей. Особенностью данной схемы является ббльшая (~ в 3 раза), чем для схемы с толкателями, величина потерь скорости отделения.
Поскольку рост относительной угловой скорости створки как целого происходит медленнее, чем для схемы с пневмотолкателя-
5.3. Отделение створок грузового транспортного контейнера 345 ми, влияние упругого компонента движения прослеживается дольше. Наиболее опасными (в смысле возможного соударения) являются края верхнего шпангоута створки.
При отделении створок ГО оба двигателя установлены в одной точке (рис. 5.13, б), лежащей в плоскости симметрии створки. Прослеживается наложение колебаний на двух низших формах п = 2 и п = 4, причем форма п = 2 возбуждается слабо.
В отличие от створок СрО при отделении ГО появление задержки не нарушает симметрии процесса, и возбуждения кососимметричных форм не происходит. В этом случае уровень колебаний значительно меньше, чем при отделении с помощью пневмотолкателей. Достоинством данной схемы является также нечувствительность к возможной задержке включения двигателей.
Коэффициент потерь скорости в момент окончания работы РДТТ (t ~ 1с) намного больше, чем для схемы с толкателями. Это объясняется тем, что дополнительный разворот линии действия тяги РДТТ в плоскости симметрии вследствие упругих деформаций уменьшает плечо сил относительно оси вращения.
Влияние упругой составляющей мало из-за небольших амплитуд колебаний, и данная схема отделения практически безопасна с точки зрения возможных соударений с ПГ.
Уровень колебаний ДО, по крайней мере, на порядок ниже, чем створок ГО и СрО, что объясняется существенно большей жесткостью его конструкции, а также тем, что значения сил короткоходовых пружинных толкателей, используемых в качестве СО, на порядок меньше сил пневмотолкателей и двигателей, установленных на створках ГО и СрО.
На величину потерь скорости отделения ДО большое влияние оказывают упругие деформации точек упора штоков толкателей в направлении продольной оси. Сами по себе они невелики, но сравнимы с малым ходом толкателей, вследствие чего коэффициент потерь скорости достигает 5 % в момент прекращения работы толкателей.
В данном анализе не затронут вопрос выбора места установки СО. Безусловно, как это было показано в § 5.2, задача снижения уровня колебаний и потерь скорости отделения за счет рационального выбора мест установки СО актуальна. Поскольку в величину потерь скорости основной вклад вносит низшая симметричная форма, представляется обоснованным размещать СО в области узлов
этой формы. Однако возможность такого рода оптимизации зависит от конкретных задач. В данном случае она практически исключена. Действительно, уменьшение плеча установки пневмотолкателей ведет к увеличению времени разворота створок, отчуждаемой зоны их падения и баллистических потерь PH. Сдвиг мест установки двигателей ближе к краям створок - к недопустимому воздействию рабочего тела на ПГ при раскрытии створок. Но в ряде других случаев такая задача оптимизации может быть поставлена.
6. МЕТОДЫ ЭКСПЕРИМЕНТАЛЬНОЙ ОТРАБОТКИ СИСТЕМ РАЗДЕЛЕНИЯ. ОЦЕНКА НАДЕЖНОСТИ
6.1. Экспериментальная отработка систем разделения и их элементов
Системы разделения и их составляющие проходят тщательную и всестороннюю экспериментальную отработку ввиду повышенных требований, предъявляемых к надежности функционирования.
При отработке конкретной СР первоначально испытываются и доводятся до заданных характеристик входящие в ее состав средства разделения и отделения, а также сопутствующие элементы, причем наиболее тщательно отрабатываются те из них, которые содержат пиротехнические устройства. Элементы СР как устройства одноразового действия испытываются на основе статистических методов. По результатам серии испытаний и каждого испытания в отдельности можно получить исчерпывающую информацию о работоспособности конкретного элемента. Испытания элементов СР на срабатывание проводятся после совокупного или последовательного нагружения их внешними воздействиями, имитирующими натурные условия.
В целях получения необходимого объема информации разрабатывается техническая документация, содержащая следующие материалы:
1) программу с перечислением всех испытаний, которым подвергается данный элемент конструкции;
2) описание каждого последовательного испытания с указанием выходных данных;
3) подробное описание оборудования и стендовых установок, которые предполагается использовать во время испытаний;
4) детальное описание порядка монтажа оборудования, указанного в п. 3, необходимых его тарировок и проверок перед испытаниями;
5) подробное описание методики испытаний;
6) описание методов обработки экспериментальных данных;
7) отчет по результатам испытаний, в котором указаны условия проведения каждого из испытаний и собрана вся информация, полученная в ходе их проведения.
Этот перечень носит общий характер и может изменяться в зависимости от вида испытаний и отрабатываемого элемента.
Процесс экспериментальной отработки элементов, входящих в состав СР, а также испытания систем в целом проводятся в определенной последовательности и подразделяются на ряд этапов. Основными из них являются:
лабораторные отладочные испытания (ЛОИ);
контрольные доводочные испытания (КДИ);
контрольные выборочные испытания (КВИ);
чистовые доводочные испытания (ЧДИ);
промежуточные испытания отдельных крупных подсистем, входящих в состав отрабатываемой СР;
комплексная экспериментальная отработка.
Лабораторные отладочные и контрольные доводочные испытания являются первым этапом экспериментальной отработки отдельных элементов системы (пирозамков, пиротолкателей, пирочек, пироустройств на основе УКЗ и т. д.). На этом этапе определяются:
соответствие разработанной конструкции эксплуатационным требованиям;
конструктивные недостатки;
механические характеристики;
виброударные нагрузки и т. д.
Лабораторные отладочные испытания проводятся в условиях окружающей среды. Основное их назначение - выявление конструктивных недоработок. В процессе этих испытаний осуществляется подбор пиротехнических средств (если они входят в состав испытуемого конструктивного элемента) для получения заданных механических характеристик.
Контрольные доводочные испытания, как правило, включают в себя испытания на транспортировку, ударную стойкость, вибронагружения, воздействие повышенной и пониженной температуры, влажности, а также определение влияния длительного пребывания в вакууме на работоспособность испытуемого элемента конструкции.
При испытаниях на транспортировку, ударную стойкость и вибропрочность отрабатываемый элемент СР подвергается полному циклу динамического нагружения. Имитация транспортировки предусматривает нагружение, например пирозамка, циклическими нагрузками, имеющими место при перевозке его всеми видами транспорта от завода-изготовителя до стартовой позиции. При этом проверяется целостность конструкции, ее усталостная прочность, а также изменение моментов затяжки резьбовых соединений.
При испытаниях на вибропрочность имитируют полетные виброрежимы (частоты, амплитуды) и в результате получают те же данные об испытуемом элементе, что и при отработке на транспортировку. На этом этапе КДИ проверяется возможность самопроизвольного раскрытия испытуемого элемента, например гермоплаты, при срабатывании установленного в непосредственной близости от нее пироэлемента.
Испытания на ударную стойкость имитируют процессы кратковременного, но с большой перегрузкой нагружения отдельных элементов конструкции. Источниками таких нагрузок в полете служат, в основном, пиротехнические устройства. Они также имеют место при включении и выключении маршевых и вспомогательных ДУ, при отделении ступеней и т. д.
Следует отметить, что режимы виброиспытаний и испытаний на ударную стойкость могут изменяться не только для различных изделий (ракет), но и для отдельных элементов, входящих в состав одного и того же изделия. Это объясняется спецификой условий работы как изделия в целом, так и отдельных его элементов. Определяющим фактором является место установки испытуемого элемента на РН.
Температурные испытания имитируют реальные условия, имеющие место на стартовой позиции и при полете изделия, а также при его транспортировке и хранении. Для этого отрабатываемый элемент конструкции выдерживается в заданной температурной среде, а затем с минимальной временной задержкой после извлечения из нее поизводится его срабатывание. Диапазон температур, при которых обычно проводятся подобные испытания, лежит в пределах 223...323 К.
Часто такой вид испытаний совмещают с испытаниями на влажность. В этом случае создается не только температурная среда, но и максимально возможная при данной температуре влажность. Подобные испытания особенно важны для элементов СР,
входящих в состав боевых ракет, длительное время пребывающих на стартовом устройстве или хранящихся в полевых условиях.
При испытаниях на прочность элементов крепления, например пирозамков, проводится нагружение нескольких образцов статической силой до разрушения и таким образом определяется их несущая способность.
Важным условием, которое проверяется при испытаниях элементов конструкции, содержащих пиротехнические устройства, является подтверждение надежности их срабатывания с одним пиропатроном или пироболтом (при наличии дублирования по пиротехническим элементам).
Практически все элементы конструкции, устанавливаемые на разделяемых стыках космических кораблей, проходят испытания на длительное пребывание в условиях глубокого (до 1,33 • 10”6 Н/м2) вакуума. Их цель - определение воздействия вакуума на механические характеристики и работоспособность испытуемого элемента.
Другим важным этапом КДИ является определение механических характеристик отрабатываемых элементов конструкции. К ним относятся работа пиротолкателя, сила расстыковки разъемов всех типов, диапазон времени срабатывания пирозамков и т. д. Естественно, что при КДИ не всегда удается создать натурные условия, при которых происходит срабатывание испытуемого элемента. В этом случае проводится пересчет экспериментальных механических характеристик на натурные условия.
Основными механическими величинами, определяемыми при отработке разрывных плат, являются сила и ход их расстыковки. Расстыковка плат проводится в диапазоне углов, соответствующих взаимному положению разделяемых объектов при их относительном движении. Как показали эксперименты, сила расстыковки платы растет с увеличением угла. В реальных условиях раскрытие плат происходит под действием динамических сил. В задачи экспериментальной отработки входит имитация и этих условий, так как при динамической расстыковке сила на порядок и более превосходит силу статической расстыковки платы.
При испытаниях пирозамков наряду с такими механическими величинами, как сила раскрытия, предельная прочность и др., важным параметром является время раскрытия, т. е. время от момента подачи команды на срабатывание до полного раскрытия пирозамка. Как отмечалось в главе 1, большая разновременность срабаты
вания пирозамков в процессе разделения приводит к возмущению углового движения разделяемых объектов, что во многих случаях отрицательно сказывается на характере их последующего относительного движения.
Основная механическая величина, определяемая в процессе отработки пиротолкателей - развиваемая ими работа, которая замеряется на установках маятникового или рельсового типа, а затем пересчитывается на натурные условия.
КДИ - наиболее важный начальный этап отработки элементов, входящих в состав СР.
Следующий этап отработки - ЧДИ. Эти испытания обычно совмещаются с КВ И и проводятся с целью подтверждения соответствия параметров элемента заданным требованиям. В технических условиях на ЧДИ указываются требования, которым должен соответствовать отрабатываемый элемент, количество элементов, последовательность проведения испытаний и метод выборки элементов из партии для проведения испытаний.
По завершении указанных этапов составляется заключение о работоспособности данного элемента конструкции и определяется возможность его использования в составе РКК или комплексной экспериментальной установки.
Следующим этапом экспериментальной отработки являются испытания отдельных крупных подсистем, входящих в состав отрабатываемой СР. Для систем, отличающихся достаточной простотой, эти испытания являются завершающими. По их результатам дается заключение о пригодности данной сборки к установке на изделие или о допуске ее к использованию в составе комплексной экспериментальной установки.
Комплексные испытания являются наиболее сложными и дорогостоящими в экспериментальной отработке СР. При их проведении подтверждаются полученные расчетным путем основные кинематические параметры системы, такие как линейная относительная скорость и угловые скорости разделяемых тел. В процессе испытаний окончательно устанавливается принятая на стадии проектных разработок последовательность прохождения команд на срабатывание элементов СР, а также измеряются виброперегрузки, возникающие при срабатывании пиротехнических и механических элементов системы и их влияние на близлежащие элементы конструкции. По результатам испытаний составляется заключение о пригодности и возможности установки данной СР на
натурное изделие. Кроме того, при необходимости даются рекомендации о доработке смежных систем и элементов конструкции.
При комплектовании экспериментальной установки для комплексных испытаний необходимо, чтобы узлы и агрегаты, входящие в ее состав, прошли полный цикл предварительной отработки. Все технологические элементы (опорные рамы, переходные отсеки и т. п.) должны быть достаточно жесткими, чтобы их податливость под действием нагрузок не сказывалась на процессе разделения. Испытания следует проводить при максимальной имитации натурных условий.
Экспериментальные установки для испытания систем с плоским стыком могут быть выполнены в двух вариантах: оба разделяемых блока подвижны (рис. 6.1) или один блок подвижен, а другой неподвижен (рис. 6.2). Подвижные блоки могут устанавливаться на рельсовой дорожке или подвешиваться на тросах. Трос должен быть первоначально вытянут силой несколько большей, чем подвешиваемый на нем груз. Его навивка, как правило, делается комбинированной (так называемый безмоментный трос), длина выбирается максимально возможной, чтобы свести к минимуму маятниковый эффект и вращение свободно подвешенного на нем груза.
Крепление тросов подвески при пространственном нагружении тел в процессе их разделения должно осуществляться через трехстепенной карданный узел, дающий свободу вращения относительно любой из трех ортогональных осей.
Для экспериментальной отработки системы сброса ГО используются стационарные установки, изображенные на рис. 6.3 и 6.4. Эти установки унифицированы и позволяют проводить отработку как моно-, так и составных обтекателей (см. рис. 1.8 и 1.9). Эксперименты с составными обтекателями проводятся так же, как и в натурных условиях - сначала отрабатывается верхний (см. рис. 6.3), а затем расположенный под ним нижний обтекатель (см. рис. 6.4). При этом обтекатели устанавливаются вертикально на специальной раме достаточно высоко от земли. После срабатывания элементов крепления, СО и раскрытия осей вращения створки 2 совершают свободное движение и падают на сеть улавливания 4, назначение которой состоит в предотвращении повреждения створок и обеспечении многократного их использование в процессе испытаний. Фиксация кинематических параметров движения створок проводится обычно с помощью системы кинорегистрации 6.
Рис. 6.1. Экспериментальная установка с двумя подвижными блоками: 1 - система удерживания; 2,5- разделяемые блоки; 3 - узлы подвески; 4 - кинокамера для регистрации процесса разделения
Рис. 6.2. Экспериментальная установка с одним подвижным блоком: 1 - переходный отсек; 2 - плоскость разделения; 3 - отделяемый объект
Рис. 6.3. Экспериментальная установка для отработки системы сброса верхнего обтекателя:
1 - зона полезного груза; 2 - сбрасываемые створки обтекателя; 3 - переходный отсек; 4 - сети улавливания; 5 - опорная рама; 6 - кинокамера; 7 - система управления; 8 - система измерений
При отработке СР элементов конструкции, имеющих небольшие габариты (отстрел различных крышек люков, обтекателей антенн и т. д.), используются установки, аналогичные изображенным на рис. 6.4.
Сброс неразрезного отсека, в состав которого входят направляющие дорожки и роликовые опоры, наиболее целесообразно моделировать на установках вертикального типа (рис. 6.5).
Испытуемый макет разгонного блока 6 устанавливается вертикально на подставку 10. При этом неразрезной отсек 7 с целью его обезвешивания с помощью блочно-тросовой системы 2, установленной на траверсе 4, соединен с противовесом 13, масса которого равна массе неразрезного отсека. На ферму ограждения 14 в этом случае необходимо установить комплект пружинных толкателей, идентичных по своим характеристикам тем, которые используются для отделения неразрезного отсека. Покажем это. Уравнение
________6.1. Экспериментальная отработка систем разделения_355 движения неразрезного отсека после срабатывания средств его разделения запишется следующим образом:
та = FT + Т-mg,
где т - масса неразрезного отсека; FT - сила пружин толкателей отделения; Т - сила натяжения троса.
Рис. 6.4. Экспериментальная установка для отработки системы сброса нижнего обтекателя:
1 - зона полезного груза; 2 - сбрасываемые створки обтекателя; 3 - переходный отсек; 4 - сети улавливания; 5 - опорная рама; 6 - кинокамера; 7 система управления; 8 - система измерений
Аналогично для противовеса будем иметь
та = FT - Т + mg.
Массами блоков пренебрегаем. Сложив эти уравнения, получим
та = FT,
т. е. установка второго комплекта толкателей позволяет имитировать натурные условия отделения.
Рис. 6.5. Экспериментальная установка для отработки системы сброса неразрезного переходного отсека:
1 - система торможения; 2 - блочно-тросовая система; 3 - динамометр; 4 - траверса; 5 - упругие роликовые опоры; 6 - макет разгонного блока; 7 - неразрезной переходный отсек; 8 - толкатели объекта; 9 - плоскость разделения; 10 - подставка; 11 - тендер; 12 - толкатели противовеса; 13 - противовес; 14 - ферма ограждения;
15 - амортизатор
Введение в состав установки дополнительных устройств обеспечивает боковые нагрузки, действующие на разделяемые тела в полете, что позволяет исследовать движение отсека по неравномерно нагруженным роликовым опорам.
Стенды для отработки отделения ступеней ракет «пакетной» схемы являются самыми большими по габаритам и наиболее дорогостоящими экспериментальными установками. Для более полной имитации натурных условий предпочтительнее использовать стенды вертикального типа, но высокая стоимость разработки и создания таких стендов практически исключает их реализацию. Поэтому применяют горизонтальные стенды, на которых невозможно полностью воспроизвести натурные условия относительного движения, но можно определить величины угловых возмущений, получаемых разделяемыми телами при заданной разновременности срабатывания средств разделения.
Относительные осевые скорость и ускорение сообщаются, как правило, одному из отделяемых тел с помощью вспомогательных
силовых устройств. При необходимости обеспечения на начальном участке отделения параметров относительного движения, близких к натурным, в состав установки вводится система обезвешивания. На рис. 6.6 приведена схема экспериментальной установки для отработки процессов разделения и отделения ПБ от ЦБ PH «Энергия», т. е. выход ПБ из верхнего (см. рис. 1.50) и нижнего (см. рис. 1.53) узлов связи, а также отработка разделения при срабатывании НУС по дублирующему контуру, в состав которого входит УКЗ большого диаметра. Макет ПБ 5 со штатными габаритами жестко устанавливается в горизонтальном положении. С помощью штатных узлов связей 3 и 6 к нему крепится макет ЦБ 13. Для воспроизведения параметров реального осевого относительного движения в состав установки входит имитатор осевой нагрузки 10. После подачи команды на разделение имитатор сообщает макету ЦБ относительную осевую скорость, которая в сочетании со скоростью падения макета ЦБ позволяет воспроизвести реальную картину отделения. Цель испытаний при разделении НУС по дублирующему контуру состоит в определении воздействия фактора срабатывания УКЗ на близлежащие элементы конструкции ПБ и ЦБ.
Рис. 6.6. Экспериментальная установка для отработки отделения параблока ракеты-носителя «Энергия»:
1 - система управления и измерения; 2 - система телевидения; 3 - верхний пояс связей; 4 - опорно-стыковочное устройство; 5 - макет параблока; 6 -нижний пояс связей; 7 - опора задняя; 8 - тяга; 9 - кинокамера; 10 - имитатор осевой нагрузки; 11 - колонна; 12 - механизм стыковки-расстыковки;
13 - макет центрального блока; 14 - опора; 15 - ловитель-амортизатор
Рис. 6.7. Экспериментальная установка для отделения ЦБ PH «Энергия» от МКА «Буран»:
а - конструктивное исполнение; б - расчетная схема; 1 - киноаппаратура; 2 - верхний узел связи; 3 - макет ЦБ; 4 - макет МКА «Буран»; 5 - нижний узел связи; 6 - амортизаторы; 7 - груз наборный
На рис. 6.7, а показана экспериментальная установка для отработки процессов разделения и отделения отработавшего ЦБ от МКА «Буран». Макет МКА «Буран» 4 жестко устанавливается в горизонтальное положение. К нему с помощью штатных верхнего 2 и нижнего 5 узлов связи, в состав которых входят СО, крепится макет ЦБ 3. Этот макет через систему блоков обезвешивается таким образом, чтобы в процессе испытаний получить в точках А и В линейные ускорения (см. рис. 6.7), соответствующие реальным условиям отделения. При этом суммарная масса макета 3 и противовесов 7 равна приведенной массе реальных объектов. Кроме того, момент инерции макета ЦБ выбирается таким образом, чтобы получить параметры относительного углового движения этого макета, соответствующие реальным. После срабатывания узлов разделения датчиковая аппаратура и средства кинорегистрации 1 фиксируют параметры относительного движения макета ЦБ.
В ходе комплексных испытаний имитируется также последовательность прохождения команд на срабатывание всех элементов, входящих в состав испытуемой СР, предусматривается возможность проверки разделения по основным и дублирующим средствам. Поскольку испытания проходят, как правило, в закрытом помещении, включение в работу таких СО, как РДТТ, исключено.
Комплексные испытания являются завершающей стадией экспериментальной отработки СР, и по их результатам дается заключение об их допуске к использованию в составе штатного изделия.
6.2. Приведение экспериментальных результатов к натурным условиям
Экспериментальная отработка СР как в целом, так и отдельных ее элементов позволяет получить целый ряд механических и кинематических величин, которые в большинстве случаев отличаются от аналогичных величин, возникающих в реальных условиях. Это несоответствие объясняется трудностью, а зачастую и невозможностью полного воспроизведения их в процессе экспериментальной отработки. Рассмотрим лишь простейшие вопросы, связанные с анализом экспериментальных данных и приведением их к натурным условиям.
Предположим, что для отделения незначительного по массе и габаритам элемента конструкции используется пиротолкатель. От
деляемый элемент установлен на рельсовой тележке. Имитировать подвижность второго тела нет необходимости, так как его масса на несколько порядков больше отделяемой. Пусть при экспериментальной отработке отделяемая масса - тэ, скорость ее ЦМ после полного срабатывания пиротолкателя - аэ. Работа пиротолкателя расходуется на сообщение скорости отделяемой массе и деформацию конструкции. Натурная конструкция и конструкция экспериментальной установки должны быть равными по жесткости (такое требование к экспериментальной установке, как правило, записывается в техническое задание на ее разработку), поэтому пиротолкатель сообщает одну и ту же кинетическую энергию в эксперименте и в натурных условиях:
2 2
тэуэ
где т}[ - масса, отделяемая в натурных условиях; ин - скорость ее ЦМ.
Таким образом,
(6.1)
Работу любого толкателя Лт можно определить на установках маятникового типа путем замера отклонения маятника. Из равенства кинетической энергии отделяемой массы математического маятника в момент срабатывания толкателя и ее потенциальной энергии в максимально отклоненном положении маятника найдем
1 2
2тэ^э
= m3gh = m3g/(l - coscp) = АТ,
где h - высота подъема маятника; / - длина маятника; ср - максимальный угол его отклонения.
Замерив, например, с помощью средств кинорегистрации, угол ф и зная тэ, можно определить АТ и иэ, а следовательно, воспользовавшись соотношением (6.1), и ин.
При комплексных испытаниях определяются потери работы Ац на преодоление сил сопротивления (трение на шпильках, при расстыковке разъемов и т. д.). Эффективная работа Лэф средств отделения будет меньше полной работы А:
ЛЭф = Л-Лп. (6.2)
При проведении испытаний по определению , как правило, нет необходимости полностью имитировать натурные условия, а достаточно воспроизвести силы сопротивления на участке работы СО и, таким образом, определить Лп. Эффективную работу СО можно найти через кинетическую энергию отделяемого от неподвижной опоры тела в момент полного срабатывания СО, измерив при этом линейную и угловую скорости отделения:
1 2 1 2
^эф =2Шэ^э + ^Усэ®э»
где (Og, JC3 - угловая скорость и главный центральный момент инерции тела, отделяемого на экспериментальной установке.
Эффективный импульс средств отделения определяют путем отстрела тела, сообщив ему прямолинейное поступательное движение,
4ф =
В случае отстрела тела, имеющего ось вращения,
т 1 г
*эф J3®3>
Г
где г - плечо относительно оси вращения, на котором приложен импульс.
При комплексных испытаниях на экспериментальных установках рельсового типа (см. рис. 6.2) с двумя подвижными массами 1 и 2 средствами измерений определяются скорости подвижных тел после срабатывания СО. По этим скоростям находится
л _ 1 «и । 1 m -,2
^эф ” 2 + 2 ^2э^2э-
Для пересчета угловых скоростей используют равенство кинетических моментов экспериментальной и натурной систем при одинаковых импульсах СО и идентичности экспериментального и штатного стыков. Тогда
Л
II
Приведенные соотношения позволяют лишь приближенно оценить полученные результаты. В некоторых случаях приведение экспериментальных данных на натурные условия вызывает большие трудности и требует разработки специальных методик. При отделении, например, тела с подвижной осью вращения в земных и инопланетных условиях приходится исследовать оба случая. Существенным здесь является различие в ускорениях свободного падения. Как показывают расчеты, тело, отделяемое в условиях лунного тяготения, в земных условиях иногда не отделяется вовсе. Еще большие трудности встречаются при обработке экспериментальных данных, получаемых на установках, имитирующих пространственную картину движения. С аналогичными трудностями приходится сталкиваться при отработке систем, в которых разделяемые тела содержат остатки жидкого наполнения, так как поведение их в условиях невесомости и в поле тяготения различно. Это замечание особенно существенно в тех случаях, когда в баках имеются внутренние перегородки. Жидкость постоянно изменяет центровку разделяемых тел и их инерционные характеристики, что может сказаться на характере относительного движения. Невозможность отработки таких систем в наземных условиях приводит к необходимости проведения расчетов при крайнем отклонении центровочных и инерционных характеристик в предположении, что количество остатков жидкого наполнения известно.
На рис. 6.7 изображена экспериментальная установка для отработки процесса отделения ЦБ от МКА. При ее разработке необходимо в первую очередь расчетным путем определить приведенную массу имитатора ЦБ 3 совместно с противовесами и его главный центральный момент инерции относительно оси, перпендикулярной к плоскости разделения имитатора. Они должны быть выбраны таким образом, чтобы кинематические параметры относительного движения имитатора соответствовали аналогичным параметрам штатного ЦБ.
На рис. 6.7, б схематично показано расположение толкателей отделения относительно ЦМ реальных разделяемых объектов, а также применительно к экспериментальной установке. При этом трос, связанный с противовесом, изображен условно закрепленным в ЦМ имитатора. Кроме того, суммарная масса противовесов 7 выбирается из условия обезвешивания имитатора. В дальнейшем приняты следующие обозначения (см. рис. 6.7, б): aA2i -
_________6.2. Приведение результатов к натурным условиям_363 ускорение точки Л2 относительно точки At; аВ21 _ ускорение точки В2 относительно точки Bp at, а2 - ускорения ЦМ соответственно тел 1 и 2 в натурных условиях; аА„, ав„ - ускорения точек А и В имитатора; Ер е2 - угловые ускорения тел 1 и 2 в натурных условиях; Ртд(Тв) - силы, развиваемые штатными пружинными толкателями в точках А и В соответственно; Jc\(C2) ~ главные центральные моменты инерции соответственно тел 1 и 2 относительно осей, перпендикулярных к плоскости отделения; тпх и т2 - масса тел 1 и 2 соответственно; xAi, xBi - расстояния от ЦМ 1-го тела до точек At и Вр хЛ2> ХВ2 ~ расстояния от ЦМ 2-го тела до точек Л2 и В2; ХА„, XBlt -расстояния от ЦМ имитатора до точек Л и В.
Получим соотношения для определения аА21 и aB2i:
аА2\ = аА2 ~ аА1 = (а2 +е2хЛ2)~(а1 + е1хЛ1) =
Л-Л*Л2 ~ РтВхВ2 JC2
РтА РтВ
РтАхА1 + РтВхВ1 Jci
1 И ---+-----
Wj т2 J
(2 2 А
41 . ХА2 р — + “7— г тл “
Введем обозначения
2 2
г _ ХА1 . ХА2 . ллл —;— + —г—-
хА1хВ1 хА2хю . _ тхт2
к вл-----г--+ —-Т----> т пр-----;---
JC\ JC2 т\ +т2
тогда
«Л21 = Ртл+РтВ + КдлЛл - КВАРгВ.
Аналогично получим
«В21 = Рта+РтВ - КАВРТА + КВВРТВ, ^пр
“л. = о. + V* = +Р,Д + Р,Л*Л" х„, =
^пр J Си
_ ^тА + Р-гВ , ^Аи р ХАиХВи р , -----------+ “Т гтЛ Z ггВ’
^пр УСи УСи
/7-/7 р г — + ^тВ ХАиХВи р хВи р
аВи - аи ” ^и*Ви------------------гтЛ + “Т--ГтВ»
^пр У Си JC и
2 2
где КАВ = КВА, Квв = ти||р - приведенная масса ими-
Jci Jc2
татора и противовесов, равная приведенной массе разделяемых тел; 7Си - главный центральный момент инерции имитатора относительно оси, перпендикулярной к плоскости разделения; яи, еи-ускорение ЦМ и угловое ускорение имитатора соответственно.
Условие равенства относительных ускорений отделения на экспериментальной установке и в реальных условиях запишется так:
аА21 - аАи> аВ21 = аВи> (6.3)
у2 y х
'г о К Р JZ р — ^Ли р Ли Ви р .
Т. е. АА *тЛ ВА *тВ г ‘‘тЛ j *тВ»
УСи У Си
(6.4)
у2 Y Y
IT D 1 IT D _ ^Ви D Ли Ви D
“лЛВГтЛ +лВВгтВ -”7—гтВ----------т--ГтЛ-
У Си У Си
Для того чтобы выполнялось условие (6.3), необходимо равенство в (6.4) коэффициентов при силах толкателей. Получим систему уравнений
у2 y х
IS _ хАи . if _ if _ Ли^Ви . if _ хВи
л ЛЛ - “Г » л АВ “ л ВА-------7---» л ВВ “ “7 •
УСи УСи У Си
Учитывая, что xAi + xBi = х^ + хю = I и хВц = l-xAtt, используя полученные ранее соотношения для Км, КАВ и Квв, будем иметь
41 + ХА2 _ хАи . ХА1ХВ1 + ХА2ХВ2 _ ХАн^ ~ ХЛи ) .
Jci Jc2 Jch Jd Jc2 Jch
(6.5)
41 ! XB2 _ (( — хЛи )2
Jc\ Jc2 Jcm
Решая систему уравнений (6.5), получим
т _ Jc\Jc2
JC* Jci+Ja
Аналогичные выкладки, как правило, приходится проводить для каждой конкретной установки в зависимости от решаемых на ней задач и условий проведения экспериментов.
6.3. Оценка надежности
Надежность является одним из основных показателей совершенства технических систем, подсистем и входящих в них элементов, приобретающим все большее значение по мере возрастания их сложности. Этот показатель особенно важен при создании пилотируемых КА и других дорогостоящих изделий ракетно-космической техники.
При определении надежности сложных технических изделий обычно вводится понятие элемента и системы. Под элементом понимается часть системы, надежность которой изучается независимо от надежности других элементов системы. Изделие ракетно-космической техники рассматривается как система, состоящая из множества элементов. Их взаимодействие в системе может быть представлено схемой, отражающей связи между надежностью отдельных элементов. Такие схемы носят название структурных схем надежности. Элементы, входящие в их состав, в зависимости от влияния на надежность системы могут быть соединены последова
тельно, параллельно или составлять различные комбинации из последовательно и параллельно соединенных элементов. Надежность срабатывания элемента или системы в целом при условии обеспечения заданных технических характеристик назовем функциональной надежностью.
Надежность функционирования последовательно соединенных элементов определяется соотношением
k
₽1=ПР1'
i=l
где Р, - надежность i-ro элемента из их общего числа k, входящих в состав системы.
Для однотипных элементов, соединенных последовательно, это соотношение принимает вид
рг=р*.
Надежность функционирования параллельно соединенных элементов вычисляется по формуле
k
pL =1-П<1-р<)-i=l
Для однотипных элементов, соединенных параллельно, р£ =1-(1-р<)*.
Расчетные характеристики надежности можно уточнить по результатам экспериментальной отработки по следующим формулам [12]:
(! - Pj.)2+mGpz I р£(1-РЕ)
1-Р£+ПОР1 1 Х^РХ(1-Pz)+nGPl
где оР1 - среднеквадратическое отклонение, полученное расчетным путем; п - количество испытаний; т - число отказов при п испытаниях.
Если расчетные значения отсутствуют, то величины Pz и аРх определяются выражениями:
Если в процессе испытаний отказы отсутствуют (т = 0), расчет РЕ и oPz ведут, используя соотношения:
=1-77-1
1 п + 1
Орг =------J-----
£ п + 2 Vn +3
+ 0,25.
Эти зависимости используются для уточнения значений характеристик надежности как единичных элементов, так и СР в целом с учетом экспериментальной отработки и летных испытаний.
Помимо функциональной надежности рассматривается также параметрическая надежность, под которой будем понимать надежность безаварийного (по одному или нескольким параметрам) протекания процессов при известных (выбранных) параметрах элементов и заданных в определенном диапазоне случайных значениях внешних возмущений. Применительно к СР рассматривается параметрическая надежность безаварийного (безударного, с непре-вышением предельной нагрузки или предельных отклонений и т. д.) протекания процесса относительного движения разделяемых частей.
Суммарная надежность СР - это произведение функциональной и параметрической составляющих.
Рассмотрим несколько примеров расчета надежности конкретных СР. В состав каждой из систем отделения двух идентичных блоков ДУ системы обеспечения запуска (СОЗ) маршевой двигательной установки разгонного ракетного блока входят разрывной болт РБ 8X55, пружинный толкатель (ПрТ), самораскрывающий-ся механический узел поворота (СУП).
ДУ СОЗ отделяется в такой последовательности:
через временной интервал, равный Д^, после последней команды на запуск маршевой двигательной установки производится выключение ДУ СОЗ;
через промежуток времени, равный Д£2, от той же команды срабатывают РБ 8X55, после чего под действием пружинных толкателей и сил инерции, обусловленных работающей маршевой двига-
тельной установкой, ДУ СОЗ разворачиваются относительно осей самораскрывающихся узлов поворота. По достижении ими заданно-
РБ — ПрТ — СУП го угла происходит расфиксация осей, и далее ДУ СОЗ начинают свободное относительное движение. В соответствии с со-
РБ — ПрТ — СУП ставом средств разделения и отделения со-ставляется структурная схема, представ-
Рис. 6.8. Структурная схема расчета надежности отделения двигательной установки системы обеспечения запуска: РБ - разрывной болт РБ 8X55 ленная на рис. 6.8. Расчетная формула для определения надежности имеет вид Рду соз = (Ррв)2 (Рпрт)2 (Рсуп)2-где Ppg - надежность срабатывания разрывного болта; РПрТ - надежность сраба-
тывания пружинного толкателя; РСУП “ надежность срабатывания самораскрывающегося механизма узла поворота.
Характеристики надежности единичных составляющих, входящих в состав данной системы, приведены в табл. 6.1 [12].
Таблица 6.1
Элемент СР Надежность Р, элемента
РБ 8X55 0,99988
ПрТ 1
СУП 1
Параметрическая надежность Рду соз п в этом случае равна единице, так как процесс протекает безударно при всех возможных отклонениях от номинальных значений параметров, влияющих на процесс (масса ДУ СОЗ, ее момент инерции относительно оси вращения, разброс характеристик ПрТ и т. д.).
Таким образом, суммарная надежность СР двух ДУ СОЗ равна
Рх ду соз = Рду соз Рду соз п = 0,99976.
В качестве второго примера рассмотрим СР головного блока от последней ступени РН. В ее состав входят десять разрывных болтов РБ ЗОМ, четыре РДТТ отделения, шесть ПрТ
Отделение производится по команде от автомата управления дальностью. По этой команде выключаются рулевые двигатели последней ступени PH (маршевые двигатели выключаются несколько раньше), запускаются РДТТ отделения, срабатывают разрывные болты, и ступень под действием тяги РДТТ и силы ПрТ отводится от головного блока.
В соответствии с составом СР структурная схема для расчета ее надежности РГБ представлена на рис. 6.9.
РБ — ПрТ
' У *
10 элементов
ПрТ — рддт — рддт
—у—z
6 элементов
4 элемента
Рис. 6.9. Структурная схема расчета надежности отделения головного блока: РБ - разрывной болт РБ ЗОМ
Расчетная формула надежности данной системы имеет следующий вид:
р _ рЮ рб р4
НГБ - НРБ КПрТ ГРДТТ-
Характеристики надежности составляющих элементов приведены в табл. 6.2 [12]:
Таблица 6.2
Элемент СР Надежность Р, элемента
РБ30М ПрТ РДТТ 0,99963 1 0,9997
Параметрическая надежность, оцениваемая, как и в предыдущем примере, равна единице.
На основании приведенных характеристик суммарную надежность данной системы найдем из соотношения
Регб = ргбРгб п = 0,995.
В качестве следующего примера рассмотрим отделение ПБ от второй ступени PH «Энергия». Система разделения на каждом из
ПБ включает в себя четыре дублированных пироузла с ДУЗ и ЭД в качестве средств инициирования, установленные в верхних и нижних поясах связи ПБ со второй ступенью (см. рис. 1.50, 1.53); 11 РДТТ отделения и увода ПБ.
V
4 элемента
Рис. 6.10. Структурная схема расчета надежности отделения ПБ от второй ступени PH «Энергия»
Последовательность отделения ПБ показана на рис. 1.4.
В соответствии с составом и функционированием данной СР ее структурная схема будет иметь вид, изображенный на рис. 6.10.
Расчетная формула надежности СР ПБ от второй ступени
Рпб = [1 ” (1 “ РэдРдуз)2]Ррдтт-
Характеристики надежности составляющих элементов, входящих в состав данной СР, приведены в табл. 6.3 [12]:
Таблица 6.3
Элемент СР Надежность Р, элемента
РДТТ 0,999
эд 0,9999
ДУЗ 0,9999
На основании расчетов РПБ п = 1. С учетом данных табл. 6.3 получим
Репб = РпбРпб и - 0,993.
Отделение МКА «Буран» от ЦБ реализовано по схеме параллельного отделения (см. рис. 1.6), включающей в себя три пиротех
нических узла связи (УС) и три пружинных толкателя (по одному в каждом из узлов связи).
Рис. 6.11. Структурная схема расчета надежности отделения МКА «Буран» от ЦБ РН «Энергия»
Структурная схема рассматриваемой СР приведена на рис. 6.11. В соответствии с ней запишем расчетную формулу надежности
Pmka = [1 _ (1 - РэдРдуз)(1 ~ Рус)3]РпрТ-
Характеристики надежности составляющих элементов приведены в табл. 6.4 [12]:
Таблица 6.4
Элемент СР Надежность Р, элемента
УС 0,9999
ДУЗ 0,9999
эд 0,9999
ПрТ 1
С учетом указанных характеристик и принимая во внимание, чт<> РМКАп = 1. ПОЛУЧИМ
РМКА> 0,9999.
Большое значение для подтверждения заданного уровня надежности и для корректировки его по мере эксплуатации РКК имеют результаты, полученные при анализе телеметрических данных по результатам натурных испытаний.
Список литературы
1. Абгарян КА., Калязин ЭЛ., Мишин В.П. Динамика ракет. М.: Машиностроение, 1989. 378 с.
2. Александров В А., Владцмиров В.В., Дмитриев РД. Ракеты-носители. М.: Воениздат, 1981. 315 с.
3. Аминов В.Р. Об определении динамических характеристик упругого космического аппарата по результатам частотных испытаний // Космические исследования, 1992. Т. 30. № 11. С. 25-37.
4. Белецкий В.В. Движение спутника относительно центра масс в гравитационном поле. М.: Изд-во МГУ, 1975. 345 с.
5. Брауэр М. Пиротехнические устройства для космических аппаратов // Вопросы ракетной техники, 1969. № 9. С. 47-61.
6. Виттенбург Й. Динамика систем твердых тел. М.: Мир, 1980, 292 с.
7. Вьюжанин ВА., Титов БА., Тугаров В.Б. Определение собственных частот и декрементов колебаний упругого космического аппарата по результатам летных испытаний // Современные вопросы механики космического полета: Труды 26 чтений, посвященных разработке научного наследия и развитию идей К.Э. Циолковского, Калуга, 17-20 сентября 1992 г. С. 24-29.
8. Галлагер Р. Метод конечных элементов. М.: Мир, 1984. 428 с.
9. Волосов В.М., Моргунов Б.И. Методы осреднения в теории нелинейных колебательных систем. М.: МГУ, 1971. 507 с.
10. Гонткевич В.С. Собственные колебания пластин и оболочек. Справочное пособие. Киев: Наукова думка, 1964. 287 с.
И. Докучаев Л.В. Нелинейная динамика летательных аппаратов с деформируемыми элементами. М.: Машиностроение, 1987. 231 с.
12. Инженерный справочник по космической технике / Под ред. А.В. Солодова. М.: Воениздат, 1977. 430 с.
13. Карпов ЮА., Семенкевич Ю.П., Черкез АЛ. К расчету отрывного течения между двумя телами // Известия АН СССР. Механика жидкости и газа, 1968. № 3. С. 88-94.
Список литературы 373
14. Колесников КС., Козлов В.И., Кокушкин В.В. Динамика разделения ступеней летательных аппаратов. М.: Машиностроение, 1977. 223 с.
15. Конструкция управляемых баллистических ракет / Под ред. А.М. Сенюкова, Н.И. Морозова. М.: Воениздат, 1969. 444 с.
16. Краснов Н.Ф. Аэродинамика. М.: Высш, шк., 1971. 632 с.
17. Лизин В.Т., Пяткин В А. Проектирование тонкостенных конструкций. Машиностроение, 1985. 364 с.
18. Муллен Э., Бендер В., Бритт С. Газодинамические аспекты процесса разделения ступеней // Вопросы ракетной техники, 1969, № 11. С. 15-23.
19. Прочность, устойчивость, колебания. Справочник под ред. А.И. Биргера, Я.Г. Пановко. М.: Машиностроение, 1968. Т. 1. 831 с.
20. Статика и динамика тонкостенных оболочечных конструкций / Под ред. А.В. Кармишина. М.: Машиностроение, 1975. 376 с.
21. Тимошенко С.П., Войновский-Кригер С. Пластины и оболочки. М.: Физматгиз, 1963. 636 с.
22. Шишков АА. Рабочие процессы в ракетных двигателях твердого топлива. М.: Машиностроение, 1989. 239 с.
23. MoyerSA, Talbot M.D. Wind-tunnel techniques for unmanned vehicle separation investigation //Journal of aircraft and rockets, 1994, v. 31, № 3, p. 585-590.
24. Palmer G.D., Mitchell D.H. Analisis and simulation of a high accuracy spacecraft separation system //Journal of Spacecraft and Rockets, 1966, v. 3, № 4, p. 458-463.
25. Sehgal R. Payload separation and thrust termination in a solidpropellant rockets motor// Aerospace Engineering, 1962, v. 21, № 5, p. 6-11.
Учебное издание
Константин Сергеевич Колесников Вячеслав Вячеславович Кокушкин Сергей Васильевич Борзых Наталья Васильевна Панкова
РАСЧЕТ И ПРОЕКТИРОВАНИЕ СИСТЕМ РАЗДЕЛЕНИЯ СТУПЕНЕЙ РАКЕТ
Редактор ЛА. Осипова Художник Н.Г. Столярова Корректор Л.И. Малютина Компьютерная трафика В.В. Яськова Компьютерная верстка ИА. Марковой
Оригинал-макет подготовлен в Издательстве МГТУ им. Н.Э. Баумана
Санитарно-эпидемиологическое заключение № 77.99.02.953.Д.008880.09.06 от 29.09.2006 г.
Подписано в печать 10.11.2006. Формат 60 х 90/16.
Бумага офсетная. Печать офсетная. Гарнитура Petersburg. Печ. л. 23,5. Уч.-изд. л. 23,0. Тираж 1000 экз.
Заказ № 4835
Издательство МГТУ им. Н.Э. Баумана. 105005, Москва, 2-я Бауманская, 5.
Отпечатано с оригинал-макета в ГУП ППП «Типография «Наука».
121099, Москва, Шубинский пер., 6.
Для заметок
Для заметок