/


































































































































Text
Проектирование трансмиссий автомобилей
СПРАВОЧНИК
Под общей редакцией
засл. деят. науки и техники БССР ||Я
д-ра техн, наук проф. А. И. ГРИШКЕВИЧА
ке
по:
МОСКВА «МАШИНОСТРОЕНИЕ» 1984
ББК 39.53-04
П79
УДК 621.85 001.2 ; 629.113 (0.31)
А. И. Гришкевич, Б. У. Бусел, Г. Ф. Бутусов, В. А. Вавуло, И. В. Каноник, Л. А. Молибошко, О. С. Руктешель, JI. Е. Таубес
Рецензент А. К Фрумкин
Проектирование трансмиссий автомобилей: Справоч-П79 ник/Под общ. ред. А. И. Гришкевича. — М.: Машиностроение, 1984, — 272 с., ил.
В пер,- I р 50 к.
пасаы‘саНЫ схеуь| т₽аис«РСС«й я их агрегатов, методы ям'ора к расчета основных
сведения о материалах, используемых для изготовления деталей трансмиссии. Для инженерно-технических работников, занимающихся проектированием.
конструированием н эксплуатацией автомобилей
3603030000-217 л
И 038(01)-84
ББК 39.33-04 6Т2.1
© Издательство «Машиностроение», 1984 г.
ПРЕДИСЛОВИЕ
«Основными направлениями экономя ческого и социального развития СССР на 1981—1985 годы и на период до 1990 года», принятыми XXVI съездом КПСС, намечено дальнейшее повышение эффективности автомобильного транстюрта, увеличение производства автомобилей, тягачей и специальных машин, повышение их эксплуатационных качеств Задачи повышения производительности автомобильного транспорта становятся особо актуальными в связи с постановлением Пленума ЦК КПСС от 24 мая 1982 г. «Продовольственная программа СССР на период до 1990 года и меры по ее реализации» Требование увеличения производительности автомобильного транспорта обусловливает необходимость совершенствования конструкций и увеличения выпуска легковых и грузовых автомобален, автопоездов различных типов и назначений Эксплуатационные свойства и надежность создаваемого транспортного средства в значительной степени зависят от характеристик трансмиссии.
Современные методы расчетно-теоретических исследований позволяют на начальной стадии проектирования автомобиля и его агрегатов с большой достоверностью расчетным путем обеспечивать заданные функциональные характеристики Такие расчеты требуют проведения большого объема работ с применением вычислительной техники и специальных программ, определяющих нагрузочные режимы работы деталей.
Проектирование трансмиссии автомобиля обычно осуществляется в такой последовательности: в зависимости от назначения автомобиля определяют принципиальную схему трансмиссии, рассматривают основные характеристики. выбирают принципиальные схемы агрегатов, проводят их монстру ирование и выполняют расчеты на прочность основных деталей При этом конструктор анализирует существующие конструкции, оценивает их конструктивные, производственные и эксплуатационные достоинства и недостатки. учитывает преемственность, особенности производства и возможности ши рокой -унификации между существу ющнми и проектируемыми образцами.
В справочнике рассмотрены общие схемы н типы наиболее распространенных автомобильных трансмиссий и приведены сведения по применяемости Их на автомобилях, методики выбора основных характеристик трансмиссий (числа ступеней и передаточных чисел коробки передач, главной передачи, рекомендации по согласованию характеристик двигателя и характеристик гидротрансформатора и др.), методика определения нагрузочного режима их детален, основанная на анализе экспериментально-статистических данных и результатах, полученных методом расчетного определения режимов движения. Приведены методики проектных и поверочных расчетов основных элементов трансмиссий, зубчатых передач, подшипников, валов, шлицевых соединений. Данные по ГОСТ приведены по состоянию на 1 01-84 г.
I
Схемы трансмиссии Расчет основных параметров трансмиссии
I»
В настоящее время на автомобилях применяются трансмиссии следующих видов- механическая, гидромеханическая, электромеханическая, гидро-объемная (гидростатическая).
Наибольшее распространение получили механические и гидромеханические трансмиссии Основными преимуществами механической трансмиссии являются простога конструкции и низкая стоимость, высокие КПД и надежность, недостатками — ступенчатое регулирование крутящего момента >’ сложность компоновки на многоприводмых автомобилях
Применение па автомобилях гидромеханических передач (ГМП) позволяет увеличить еров службы двигателя и трансмиссии, уменьшить число ступеней механического редуктора, уменьшить частоту переключений передач, повысить проходимость автомобиля и улучшить его комфортабельность. ГМП по сравнению с механическими передачами имеет более сложную конструкцию. повышенные массу и стоимость. Замена механической передачи гидромеханической обычно приводит к некоторому ухудшению характеристик разгона автомобиля и увеличению расхода топлива. В трансмиссиях с ГМП момент от двигателя передается на насосное колесо гидротрансформатора непосредственно или при необходимости через согласующий редуктор. В качестве механического преобразователя в ГМП применяются планетарные и вальныс ступенчатые редукторы, позволяющие переключать передачи при сохранении силовой и кинематической связи трансмиссии с двигателем В этом случае фрикционное сцепление в конструкции отсутствует. Если используется ступенчатая коробка пе
редач с переключением передач и разрывом потока мощности, то сцепление сохраняется Механическая часть трансмиссии от ГМП до ведущих колес обычно идентична этой же части механической трансмиссии. Выбор ее схемы в основном определяется теми же соображениями, что и в случае механической трансмиоат.
Электромеханические и гидроибъем-иые трансмиссии являются специальными и применяются на транспортных мащилах в тех случаях, когда по комплексу эксплуатационных и конструктивных свойств трансмиссии первых двух топов не могут быть применены.
1.1. МЕХАНИЧЕСКИЕ
И ГИДРОМЕХАНИЧЕСКИЕ ТРАНСМИССИИ
Конструкция и размещение механических и гидромеханических трансмиссий ззвисят от колесной формулы автомобиля. К механизмам трансмиссии относятся: сцепление и коробка передач (при механической трансмиссии) или гидротрансформатор и коробка передач (при гидромеханической трансмиссии), ведущий мост и карданные передачи; кроме того, многоприводные автомобили имеют раздаточные коробки.
Трансмиссии с задним ведущим мостом (см. табл 1 1) применяются на всех типах автомобилей В трансмиссиях легковых автомобилей обычно используют однодисковое сцепление с диафрагменной центральной пружи ной, имеющее механический или гил-раалический привод, четырех или пятиступенчатую коробку передач пол-ностью еднхроцизированвую, трек-
Механические и гидромеханические трансмиссии
вальцую Дву.хвальные коробки передач применяются в тех случаях, когда лесоосное расположение ведущего и ведомого валов является предпочтительным, а передаточное число первой передачи меньше 4 В случае устаноякн ГМП в качестве механического редуктора преимущественно используется трехсту пен чаты й планетарный редуктор. Гидротрансформатор обычно не имеет механизма блокировки В последнее время с целью повышения топливной экономичности ГМП выполняются по двухпоточной схеме, предусматривается блокировка гидротрансформатора, трехступенчатые редукторы заменяются чстырехступенчатыми
Для улучшения распределения веса по мостам в заднеприводных автомобилях возможен перенос коробки передач назад и объединение се с главней передачей. На рис 1 1 показана конструкция трансмиссии, выполненной по такой схеме при независимой подвеске заднего моста Объединенные в одном картере коробка передач и главная передача крепятся к кузову Соединительный вал находится в трубе, объединяющей картеры сцепления и коробки передач В объединенный картер коробки передач и главной передачи может быть включено и сцапленне (рис. 1.2). Трансмиссии этой схемы характеризуются высокой компактностью конструкции и обеспечивают хорошее распределение веса по мостам. При этом существенно уменьшаются равмеры туннеля в полу кузова при открытом карданном вале или же туннель полностью устраняется. Однако такие трансмиссии являются конструктивно более сложными, чем при обычной схеме, имеют большие стоимость и массу.
Ведущие мосты могут быть двух типов: с неподрессоренной или подрессоренной главной передачей. Мосты первой группы конструктивно проще, надежнее и имеют меньшую стоимость. Мосты второй труппы используются при независимой подвеске ведущих колес. Главные передачи легковых автомобилей — одинарные с гипоидным зацеплением
Трансмиссии грузовых автомобилей с задним ведущим мостом имеют аналогичные агрегаты. С увеличением массы
автомобиля меняются схемы и характеристики агрегатов: увеличивается число ступеней в коробке передач; вместо одинарных главных передач применяют двойные или разнесенные. Автомобили особо малой и малой грузоподъемности имеют четырех-пятисту-пенчатые коробки передач, полностью синхронизированные. Коробки передач, синхронизированные только на высших передачах, применяют редко. В трансмиссиях автомобилей полной массой до 12 т преимущественно используются пятиступенчатые коробки передач с высшей прямой передачей. Трансмиссии автомобилей средней грузоподъемности имеют одинарные главные передачи. Для автомобилей большой грузоподъемности используются одинарные, двойные и разнесенные главные передачи. На автомобилях особо большой грузоподъемности устанавливаются одно- или двухдисковые сцепления с гидравлическим или гидро-пневматическим усилителем. Коробки передач — многоступенчатые с числом передач 8—16. Многоступенчатая коробка передач образуется последовательным соединением основной четырех-, шестиступенчатой коробки передач и дополнительного двух-, трехступенчатого редуктора. Используются разнесенные и двойные главные передачи, блокируемые межколесные дифференциалы. Двухступенчатые главные передачи применяются редко.
Трансмиссии с передним ведущим мостом применяются на легковых автомобилях я микроавтобусах. Схема и конструкция трансмиссии во многом определяются размещением двигателя. Возможно продольное и поперечное расположение двигателя. Различные схемы расположения силового агрегата показаны на рис. 1.3.
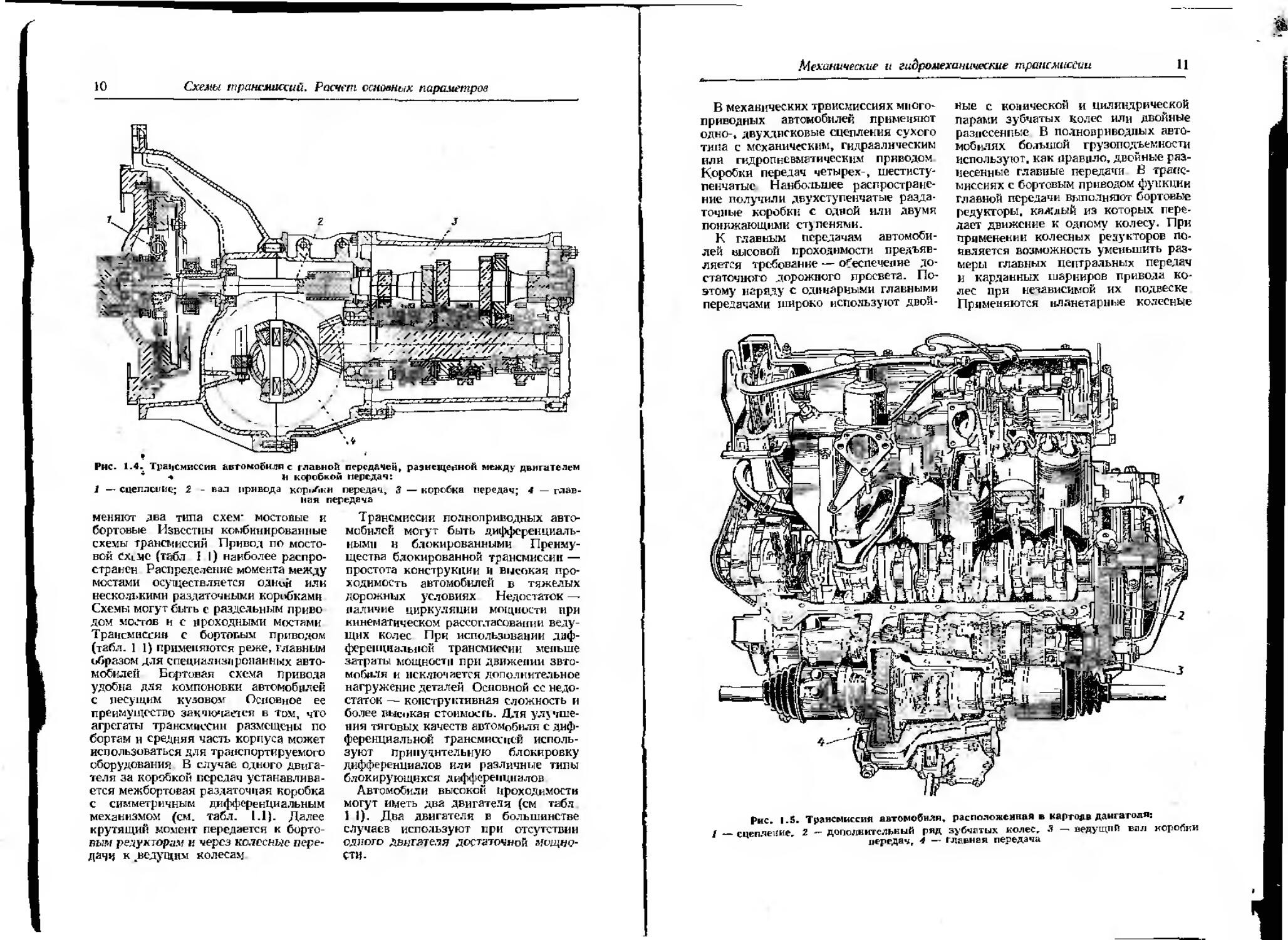
У автомобилей с продольным расположением двигателя наиболее часто применяют схемы с главной передачей, размещенной между двигателем и коробкой передач. При этом сцепление компонуется с двигателем, а его связь с коробкой передач осуществляется дополнительным валом, сцентрированным в маховике (рис. 1 4). Прн распс-ложеиии двигателя над главной передачей связь двигателя с трансмиссией Осуществляется зубчатой передачей
)
Схемы трансмиссий. Расчет основных параметров
(наиболее часто у автомобилей малого класса) или цепной передачей (автомобили среднего и высокого власса)
Трансмиссия с расположением двигателя над главной передачей (рис 1 5) является наиболее компактной и обеспечивает уменьшение переднего свеса Карданные валы привода колес имеют одинаковую длину. Однако при такой схеме усложняется конструкция трансмиссии и из-за высокого расположения двигателя возможно ухудшение аэродинамических характеристик автомобиля. Трансмиссии переднеприводных автомобилей с продольным расположением двигателя проще и имеет меньшую стоимость при использовании двухвальных коробок передач. Поэтому трсхва.тьныс применяются редко Коробки передач полностью синхронизированы На ведомом валу коробки передач устанавливается коническая шестерня глазной передачи. Длина двигателя п схеме с продольным расположением не лимитврустся, поэтому такую схему имеют пренмуще ственно автомобили с двигателем большого объема, Кроме трго, на основе
базового звгимобиля с продольным расположением двигателя могут быть выполнены модификации с приводом на все колеса.
Для автомобилей особо малого к малого классов используется главным образом компововка с поперечным расположением двигателя. При такой компоновке трвисмиссия может иметь два конструктивных исполнения: с размещением в картере двигателя (см. рис. I б) и с размещением в отдельном картере Грис. 1 6). В первом случае достигается большая компактность агрегата двигатель—трансмиссия. При этом конструкция получается сложной, а ремонтные работы затруднены. Более удобно, в том числе и с точки зрения унификации, размещать трансмиссию в отдельном картере. В этом случае момент на ведущий вал коробкп передач передается непосредственно со сцепления, когда ведущий вал расположен соосно с коленчатым валом, или через дополни тельный ряд зубчатых колес. Коробки передач в подзаляющем большинстве двухвальные, полностью синхронизированные. При поперечном
Механические и гидромеханические трансмиссии
коробкой передач к главкой передачей:
ключемяя иередач. 4 — коробка передач, 5 — главная передача
расположении двигателя ьтзвные передачи представляют собой цилиндрическую зубчатую передачу прямозубую, косозубую или шевронную.
Трансмиссии с задним ведущим мостом и задним расположением двигателя по компоновочным схемам близки к трансмиссии переднеприводных автомобилей (см. рис 1 4) Однако про изводство легковых автомобилей с такт! компоновочной схемой в настоящее время сокращается, так как по комплексу тсхиико-эксплуатациопных качеств эти автомобили уступают автомобилям других компоновок
Трансмиссии многопршодных автомобилей можно разделить на две группы: неполноприводных и полноприводных.
Неполноприводные автомобили (6X4, 8X4) имеют, как правило, ведущую тележку, состоящую из двух ведущих мостоз. Мосты тележки могут иметь раздельный привод, или промежуточный мост может быть проходным (см табл. 1 J) Основное преимущество первой схемы — высокая степень унификации ведущих мостов Недостаток — большое количество карданных
сочленений и необходимость установки отдельного агрегата — раздаточной коробки Раздаточная коробка — агрегат более сложный и тяжелый, чем узел деления мощности между мостами в трансмиссиях, выполненных по второй схеме Поэтому конструкция трансмиссии с раздельным приводом имеет большую металлоемкость, требует большего объема работ но техническому обслуживанию Схема с проходным мостом отличается меныпей степенью унификации мостов. По схеме с раздельным приводом выполнены трансмиссии автомобилей семейства КрАЗ моделей 255,257, по схеме с проходным мостом—автомобили семейств МАЗ, КамАЗ, ЗИЛ. У автомобилей 6X4, 8.<4 общего назначения связь между ведущими мостами тележки обычно дифференциальная Автомобили 6X4, 8X4, являющиеся модификацией полноприводных автомобилей, имеют, как правило, блокированную связь между мостами.
Трансмиссия полноприводного автомобиля 4 • 4 схематично показана в табл. 1 1. Трансмиссии этой схемы
Схемы трансмиссий. Расчет основных параметров
Рис. 1.2. Объединенные трансмиссионный агрегат Автомобилей г
I — сцепление; 1 — тяга привода переключения коробки передач; 3 — коробка передач: < — главная передача
отличаются типом привода к мостам (дифференциальный или блокированный) и наличием колесных редукторов. Типичными для легконых автомобилей являются трансмиссии автомобилей УАЗ-469 и ВАЗ 2121 Автомобиль УАЗ 469 имеет блокированный привод к мостам и колесные редукторы с внутренним зацеплением. Передний мост включается только при движении в тяжелых дорожных условиях. В трансмиссии автомобиля ВАЗ-2121 привод мостов дифференциальный и оба моста постоянно включены, колесные редукторы отсутствуют Для автомобилей этого класса применяют четырехступенчатые коробки передач В полноприводных модификациях легковых переднеприводных автомобилей с продольным расположением силового агрегата и двухвальной коробкой передач ис-
пользуется схема трансмиссии без раздаточной коробки (табл 1 1)
В грузовых автомобилях 4X4 малой и средней грузоподъемности применяют трансмиссии с дифференциальным или блокированным приводом мостов. Коробки передач четырех-, шестиступепчатые в сочетании с двухступенчатой раздаточной коробкой с одной или двумя понижающими передачами. Глзвные передачи одинарные. Если общая масса звтомобвля 4.-. 4 превышает 8—9 т, то привод к мостам выполняется дифференциальным с механизмом блокировки Главные пере-. дачи преимущественно двойные или разнесенного типа Широко используются блокируемые межколесные дифференциалы
Для трансмиссий многоосных полно приводных автомобилей обычно при-
Механические и гидромеханические трансмиссии
№МЫ расмитожсния силового агрегата переднеприводных автомобилей с расположением двигатели:
а — продольным: б — поперечным
Схемы трансмиссий. Расчет основных параметров
меняют два типа схем* мостовые и бортовые Известны комбинированные схемы трансмиссий Привод по мостовой схеме (табл I I) наиболее распространен Распределение момента между мостами осуществляется одной или несколькими раздаточными коробками Схемы могут быть е раздельным лриво дом мостов и с проходными мостами Трансмиссия с бортог.ым приводом (табл. 1 1) применяются реже, главным образом для специаяизнропанных автомобилей Бортовая схема привода удобна для компоновки автомобилей с несущим кузовом Основное ее преимущество заключается в том, что агрегаты трансмиссии размещены по бортам и средняя часть корпуса может использоваться для транспортируемого оборудования В случае одного двигателя за коробкой передач устанавливается межбортовая раздаточная коробка с симметричным дифференциальным механизмом (см. табл. 1.1). Далее крутящий момент передается к бортовым редукторам и через колесные передача к .ведущим колесам
Трансмиссии полноприводных автомобилей могут быть дифференциальными и блокированными Преимущества блокированной трансмиссии — простота конструкции И высокая проходимость автомобилей в тяжелых дорожных условиях Недостаток — наличие циркуляции мощности при кинематическом рассогласовании ведущих колес При использовании дифференциальной трансмиссии меньше затраты мощности при движении автомобиля и исключается дополнительное нагружение деталей Основной сс недостаток — конструктивная сложность и более высокая стоимость. Для улучшения тяговых качеств автомобиля с дифференциальной трансмиссией используют принудительную блокировку дифференциалов или различные типы блокирующихся дифференциалов
Автомобили высокой проходимости могут иметь два двигателя (см табл 1 I). Два двигателя в большинстве случаев используют при отсутствии одного двигателя достаточной мощности.
Механические и гидромеханические трансмиссии
В механических трансмиссиях много-приводных автомобилей применяют одно-, двухдисковые сцепления сухого тина с механическим, гидравлическим или гидропневыатическим приводом Коробки передач четырех-, шестиступенчатые Наибольшее распространение получили двухступенчатые раздаточные коробки с одной или двумя понижающими ступенями.
К главным передачам автомобилей высовой проходимости предъявляется требование — обеспечение достаточного дорожного просвета. Поэтому наряду с одинарными главными передачами широко используют двой
ные с конической и цилиндрической парами зубчатых колес или двойные рззпесенпые В полновриводпых автомобилях большой грузоподъемности используют, как правило, двойные разнесенные главные передачи В трансмиссиях с бортовым приводом функции главной передачи выполняют бортовые редукторы, каждый из которых перелает движение к одному колесу. При применении колесных редукторов появляется возможность уменьшить размеры главных центральных передач И карданных шарниров привода колес при независимой их подвеске Применяются планетарные колесные
Рис. 1.5. Трансмиссия автомобиля, расположенная в каргодв дангатоля:
I _сцепление, 2 — дополнительный ряд зубчатых колес, Я — ведущий вал коробк!
передач, 4 — главная передача
12
Схемы трансмиссий. Расчет основных параметров
Механические и гидромеханические трансмиссии
13
8X8 с проходными мостами
6x8 с бортовым приводом и цен тральной раздаточной коробкой
8X8 с бортовым приводом и двумя
двигателями
Примечание. / — двигатель внутреннего сгорания, 2 — сцепление; 3 — корлбка передач: 4 — раздаточная коробка-. 5 — бортовой редуктор. • — узел Деле Ния мощности.
Схемы т/шнишссий Расчет основных параметров
редукторы и редукторы, выполненные в виде цилиндрической пары с наружным или внутренним зацеплением
В трансмиссиях грузовых автомобилей различной грузоподъемности применяются ГМП с числом передач шесть—восемь, а в трансмиссиях мно гоприводных автомобилей высокой проходимости — три—пять передач.
1.2. ЭЛЕКТРОМЕХАНИЧЕСКИЕ ТРАНСМИССИИ
Электромеханическая трансмиссия состоит из электрической и механической передач В таких трансмиссиях электрическая энергия вырабатывается генератором, который приводится во вращение двигателем Трансмиссии выполняются по схеме группового или индивидуального привода ведущих колес В схеме группового привода крутящий момент от одного электродвигателя через механическую передачу передается на несколько колес (рйс. I 7, а). В схеме с индивидуальным приводом крутящий момент на _ каждое колесо передается от отден!.-' ного электродвигателя через механи ческую передачу (рис. I 7, б) Колесо, электродвигатель, редуктор и другие узлы конструктивно объединяются в один агрегат — электромотор-колесо (далее мотор-колесо)
г 7. Схемы элентромсхаии'. трансмиссий привода: группового б — индивидуал!
внутреннего сгорания.
2 — генератор; ______________г-„-.
4 — электромот ор-колесо
Для автомобилей различного назначения преимущественно используют электромеханические трансмиссии с индивидуальным приводом к мотор-колесам. Основными агрегатами электромеханической трансмиссии являются генератор и мотор-колесо Электромеханические трансмиссии применяются на автомобилях-самосвалах грузоподъемностью свыше 70 т, автомобилях и автопоездах высокой проходимости, автобусах особо большой вместимости.
Общим для всех указанных трапе портных средств преимуществом электромеханической трансмиссии перед механической и гидромеханической является бесступенчатое или в крайнем случае двухступенчатое регулирование-крутящего момента
Ряд других преимуществ в различной степени проявляются по типам автомобилей
для самосвалов улучшение компоновки и распределения массы автомобиля но мостам за счет оптимального расположения мотор-колес, возможность реализации одним мотор-колссом большой мощности, меньшая масса трансмиссии для автомобилей мощностью более 700—800 кВт,
для автомобилей и автопоездов высокой проходимости свободный выбор колесной формулы и простота общей компоновки для широкого круга требований, существенное повышение прохо дикости автомобиля или авгопссэда при активизации прицепных звеньев; плавное регулирование силы тяги, упрощение механической части привода;
для автобусов возможность создания сочлененных автобусов особо большой вместимости С высокими тяговыми ч показателями; улучшение планировки и снижение уровня пола пассажирского салона
Электромеханическая трансмиссия имеет следующие недостатки- большую массу агрегатов и трансмиссии в целом, во многих случаях превышающую массу механической и гидромеханической трансмиссий: сравнительно низкий КГ1Д; необходимость применения дорогостоящих материалов, сравнительно высокую стоимость изготовления; относительно большие неподрсс-соренпые массы.
Электромеханические трансмиссии
15
В настоящее время применяются электромеханические трансмиссии постоянного и переменно-постоянного тока
Предпочтительным яалястся пря мое соединение генератора с двигатс лем При необходимости соединение может осуществляться через механическую передачу. В большинстве случаев это приводит к увеличению размеров агрегата двигатель—генератор
Мотор-колесо — исполнительный механизм электромеханической ’ трансмиссии представляет собой отденьпый агрегат, объединяющий следующие оснонные элементы: тяговый электродвигатель; редуктор, ведущее звено которого соединено с валом электродви гателя; колесо, состоящее из ступицы обода и шины, механический тормоз с соответствующим приводом. Кроме этого, конструкция мотор колеса включает подшипниковые узлы, элементы подвески, механизмы переключения передач в двухступенчатых мотор колесах, механизм сцепления в мотор-
колесах лериодического действия. В таб.т 1.2 приведены кинематические схемы редукторов и ряд конструктивных параметров существующих одно- и даухскоростных мотор колес Общие компоновочные решения при конструировании мотор-колес определяются рядом требований1 минимизацией осевого размера мотор колеса; использованием подшипников колес и уплотнений относительно небольших размеров, доступностью коллектора электродвигателя для обслуживания, удобством компоновки механического тормоза, созданием в мотор-колесе воздуховода с минимальным аэродинамическим сопротивлением (при воздушном охлаждении); удобством и надежностью монтажа электроаппаратуры.
На рис ! 8 показана конструкция мотор-ко.теса Электродвигатель является осыо колеса и размещен в ступице; доступ к коллектору свободный, корпус редуктора служит фланцем, при помощи которого мотор колесо крепится к рамс автомобиля
Схемы трансмиссий. Расчет основных параметров
осмсвные параметры мотор колес
Нагрузка иа колесо. кН Мощность электродвигателя, кВт Передаточное число редукторе Схема
28 15 14,1 •J3T
27 38 IS
140 75 59/20
250 75 60/20 лМГ
250 75 20
337 • 230 22
410 230 Т
Дробью даны передаточные числа двухступенчатых редук-
1.3. ГИДРООБЪЕМНЫЕ ТРАНСМИССИИ
Достоинства гидр<Х|бт>смных передач-бесступенчатое плавное изменение в широком диапазоне эксплуатационных режимон скорости и силы тяги; простота компоновки трансмиссии и машины в целом, в том числе транспортного средства с активными прицепными звеньями, возможность длительной и устойчивой работы под нагрузкой при малых скоростях, облегчение условий работы двигателя и агрегатов трансмиссии (в результате снижения перегрузок и вибраций); простота управления; легкость автоматизации, возможность реверсирования движения и торможения без специальных устройств Основ
ные недостатки гндрчобъеывой перс дачи — относительно малый срок службы гитромашин п высокая £тои-
В автомобилях гидрообъемные передачи применяются непосредственно в трансмиссиях для регулирования скорости и силы тяги, в качестве механизма отбора мощности, например для привода ведущих мостов прицепных звеньев.
Гндрообъемиая трансмиссия состоит из гидрообъемных преобразователей" гидронасоса, приводимого двигателем, и гидромоторов. В зависимости от расположения гидроагрегатов, их типа и числа возможны две принципиальные схемы ппрообьемной транемцу-сии
Исходные данные для расчета
17
В первой схеме (рис 1 9, л) насос и гпдромотор объединены в один блок (моноблочная трансмиссия). Гидропередача выполняет функции коробки передач и сцепления Схема обеспечи вает широкий диапазон регулиропания за счет постедовательного или параллельного управления гидронасосом и гидромотором Однако трансмиссии, выполненные по этой схеме, имеют низкий КПД и лишены компоновочных преимуществ.
Во второй схеме (рис 1 9, 6) гидроагрегаты расположены раздельно. Насос соединен с двигателем, гидромоторы через механические передачи — с колесами Гидромоторы устанавливаются как вне колеса, так и встраиваются в колесо (гпдромотор колесо) В последнем случае высокомомситиыс гидро-моторы .могут соединяться с колесом непосредственно Схема удобна для компоновки Применяется для многоприводных машин и автопоездов Регулирование осуществляется обычно путем управления гидронасосом, а необходимый диапазон регулирования достигается за счет отключения привода отдельных мостов. В схеме с раздельным расположением гидроагрега гов может быть использоняно несколько насосов (рис 1.10). Двигатель приводит два насоса, каждый из которых питает гидрометры борта или отдельной группы мостов Схема с бортовым приветом позволяет осуществлять
положением гидриагрСгите»; / -гатрль внутреннего сгорания
управление транспортным средством, изменяя частоту вращения колес одного из бортов. Трансмиссии, выполненные поданной схеме, обладают повышенной надежностью, что обусловлено параллельной работой насосов и магистра-
1.4. ИСХОДНЫЕ ДАННЫЕ ДЛЯ РАСЧЕТА ОСНОВНЫХ
ПАРАМЕТРОВ ТРАНСМИССИИ
При проектировании автомобиля рассчитывают следующие основные параметры трансмиссий: передаточное число главной передачи по; диапазон Дк и передаточные числа основной коробки передач uf; передаточные числа дополнительной коробки передач «р.
Исходные данные для расчета задает техническое задание на проектируемый автомобиль, которое является первичным документом и основа нием для разработки эскизного и технического проектов В нем определяется общее направление работ по конструированию, исследованиям и технологии.
В техническом задании определяется тип автомобиля, дается краткая характеристика области его применения, дорожных условий и режимок эксплуатации с указанием климатических районов по ГОСТ 15150—69* Указываются основные эксплуатационные свойства автомобиля (мощность, скорость и другие показатели, определяющие его динамические качества), показатели массы и размеров, ресурс до капнгазыюго рсышне, гарантийный
Схемы трансмиссий. Расчет основных параметров
пробег, требования к периодичности технического обслуживания, удобству его проведения и трудоемкости, требования к унификации, применяемые тонливосмазочные материалы и другие, необходимые аля проектирования сведения
К показателям размеров, массы и компоновочным параметрам автомобиля, влияющим на характеристики его трансмиссии, относятся, полные массы автомобиля та и прицепа «ппр. общее число мостов, а также число и расположение ведущих мостов, распределение масс по мостам, ширина Во и высота Но, коэффициент обтекае-
При разработке технического задания эти параметры определяют по аналогам с учетом назначения автомобиля, традиций н уровня технической оснащенности завода, качества предполагаемых к использованию материалов
Масал автомоби 1ч и автопоезда в СССР определяются следующей си
стемой состояний масс. Масса неси тря-женного автомобиля ша.н — масса автомобиля без снаряжения, т е без инструмента, запасного колеса, дополнительного оборудования (например, радиоприемника, кондиционера нт п ) и заправки (топлива, жидкого смазочного материала и воды) Массы жадности в амортизаторах, смазочного материала в агрегатах и шарнирах, а также электролита в аккумуляторной батарее входят в массу неспаряженного авто мобиля. ‘
Масса снаряженного автомобиля Щд — масса автомобиля с заправкой и снаряжением, по без водителя и пассажиров
Полная масса та — сумма масс снаряженного автомобили, полезной на-। рузки гпг, водителя и пассажирон
Масса автопоезда та.п — суммарная полная масса тягача и прицепа (полуприцепа).
Полная масса автомобиля определи ется по следующим формулам
Грузового . '. та =- т0 4- шг 4- «я(1 (г — I) 4-
Городского авгиб^са . . , и, = + >iin U + " + П +
Междугородною автобуса . . . rna = nie 4- mn U 4- 2) -г Легкового ................... . . »па — тп 4- т„ (г 4- I) -1- гия
Здесь т„— масса человека (мп — — 75 кг), z — число мест для пассажиров, п — число мест для проезда стоя, те — масса багажа
Число мест для проезда пассажиров в автобусах городского тина стоя определяется исходя из площади, в пределах которой возможно расположение пассажиров стоя В нормальных условиях предполагается размещение на одном звадратном метре свободной плошадп пола до пяти человек, а в часы пик—до восьми Массу багажа водителя и пассажира 1рузовых автомобилей и автобусов городского типа принимают равной 5 кг, автобусов междугородного типа 15 кг и легковых автомобилей 10 кг на одного человека.
Масса снаряженного легкового автомобиля зависит от класса и группы В табл. 1 3 приведены значения масс в зависимости от рабочего объема Кл двигателя, как основного параметра, определяющего принадлежность авто мобиля к определенному классу и группе
Исходные данные дм расчетй
Масса снаряженного автобуса зависит от его номинальной вместимости. На рис 1.11 приведены значения масс, приходящихся на одного пассажира, соответствующие наименьшим и наибольшим удельным массам При этом под номинальной вместимостью понимается число пассажиров, перевозимых автобусом при нормальных условиях движения (не в часы ник)
Если задана грузоподъемность гру зового автомобиля, то его предполагаемую полную массу можно определить по статистическим данным, исходя из коэффициента грузоподъемности ke — = rtrlma.
На рис 1 12 для бортовых самосва
лов и седельных автопоездов приведены огибающие кривые, соответствующие наиболее высоким коэффициентам рассмотренных бортовых автомобилей и седельных звтопоездов.
Распределение массы помостам определяется целесообразностью полного ис1»ользовання грузоподъемности шин, а также необходимостью соблюдения норм максимально допустимой нагрузки на дорогу Ниже приведены максимально допустимые в СССР нагрузки на мосты автомобилей групп А и Б При этом предполагается, что движение автомобилей группы А допускается только по дорогам I и II категорий
Расстояние между местами, м
1.0-1.25 1.20—1.30
группы .4 группы 1>
78,5
49,0
1.40—2,5 2,6 «=* и более
88.3 • 98 1
53.9 58,9
Масса буксируемого прицепа зависит от назначения автопоезда, массы тягача, числа ведущих мостов тягача и ряда других факторов Отношение массы прицепа к массе тягача (коэффициент массы прицепа fe„p) автопоездов, предназначенных для движения по твердым дорогам, составляет 0,5—1,2 При этом большие значения относятся к автомобилям группы Д Для авто поездов с полноприводными тягачами при чвиженпи по грунтовым Дорогам fenp = 0,34-0,6
Сила сопротивления воздуха сказы вает существенное влияние ня тягово скоростные качества автомобилей при высоких скоростях движения Она зависит от площади лобового сечения F (миделево сечение) и формы автомобиля, оцениваемой коэффициентом обтекаемости ftB. При отсутствии технической документации площадь миде-лева сечения может быть определена по выражению
F = аВйН0,
где н Ни — соответственно наибольшие ширина и высота автомобиля, а — коэффициент заполнения площади
(для легковых автомобилей а = 0,784-4-0,8, для грузовых а — 0.754-0.9).
Схемы трансмиссий. Расчет основных параметров
Рис. 1.12. Огибающие кривые максимальных значений коэффициентов грузоподь-
режиме работа и максимальной подаче топлива. Важнейшими параметрами внешней характеристики являются максимальная эффективная мощность (кВт) Nemllx, максимальный крутящий момент (кН-м) Л/еп1ах; крутящий момент при максимальной мощности (кН-м) Мн‘, максимальная частота вращения коленчатого вала (об/мин) nEmix- частота вращения коленчатого ввла при максимальной мощности (об/мин) /1дг, коэффициент приспособляемости по моменту £м> коэффициент приспособляемости по частоте k,„
Для карбюраторных двигателей йм= 1,14-1,35, kw = 1,54-2,5, для дизелей Лм= 1,14-1,15, ka—1,45-5-2,0.
При расчетах часто используют эмпирическую зависимость крутящего момента от частоты вращения коленчатого ^=^[с + ^+с(^)2],
(1.1)
•Болыиис значения а относятся к бо-тяжелым автомобилям. Ниже приведен!/ произведения В0Х Не (мв) современных автомобилей различных типов
Легкоеые автомобили
Особо малого класса ... 1,4- 1.9
Малого класса............. 1.6—2,1
Среднего класса........... 1,9—2,3
Большого класса .... 2,2- 2.6
! разовые лето мобили грузоподъемностью. г
Коэффициента обтекаемости kB (Н-с®/м*) автомобилей различных типов приведены ниже. Гоночные автомобили Легковые автомобили Автобусы ........
Грузовые автомобили
Характеристики двигателя автомобиля при расчетах параметров трансмиссий являются известными. Наиболее полные сведения о параметрах двигателя дает внешняя скоростная характеристика, представляющая зависимость эффективного момента и мощности от частоты вращения коленчатого вала двигателя ч>£ при установившемся
где а, Ь, с — коэффициента, подбираемые по графику внешней скоростной характеристики.
1.13 Скоростная характеристика двигателя ЯМЗ-238
Исходные данные для расчета
21
1.4. Параметры отечественных двигателей
Марка Тип* SSK S к н !* ji ftM Коэффициенты
•
МеМЗ-9665 МеМЗ-968 МеМЗ 968Б ПАЗ-2101 ВАЗ-21011 «Москвич 408» ВАЗ-2103 «Москвич--4123» ВАЗ-2106 УАЗ-451 МИ ЗМЗ-24Д ГАЗ-52-04 ЗМЗ-66 ЗМЗ-Б8 3M3-13 ГАЗ-14 ЗИЛ-130 ЗИЛ-375 КамАЗ ЯМЗ-236 ЯМЗ-238 ЯМЗ-238С ЯМЗ-238Н ЯМЗ-240 ЯМЗ-240Н1 Д12А-525А 0.887 1,197 1.197 1.198 1.295 1,36 1,45 1.48 1,57 2,445 2,445 3.48 4,25 5.53 5.53 6.0 7.0 10.85 11,15 14.84 14,86 14,86 22.3 22,3 38,8 4V 4V 4V 4Р 4Р 4Р 4Р 4Р 4Р 4Р 4Р 6Р 8V 8V BV 8V 8V 8V 6V 8V 8V 8V 12V 12V 12V 20,6 29.4 36.8 50,7 36.8 56,6 65.2 58.8 55,2 69.9 55.2 84.6 143.4 161,8 110,3 132,4 154.6 132,4 176,5 194.9 220,6 264.8 367.7 386,1 4,3 4.3 5Л 5,6 4.75 5.60 5.8 5.4 4.0 4.5 2,8 з,з 4^2 3.2 3,2 Ди 2.6 2J 2.3 2.1 2.1 2,1 2.0 51 74,5 81,5 87,3 94,1 91.2 105.1 111.2 121,6 166.7 186,3 205.9 284.4 411.9 451.1 402 465 елей 637.6 566,7 882.6 882,6 1078,7 1274.8 1765,0 2206 2.75 2.8 3.6 3,4 3.4 3.2 3,5 3,4 3,0 2.35 2,5 1.5 2,25 2.25 2.7 Ц9 1.6 1.5 1.5 1.5 1.5 1.5 1.6 1.2 1.076 1.14 1.02 1,089 1.088 1.23 1,088 1.22 1.16 1,26 1,26 1,094 1.16 1,32 1.23 1,22 1,18 1.12 1,107 1,099 1,091 1.075 1,061 1.055 1,196 1.51 1,54 1.22 1,65 1.65 1.48 1.6 1.7 1.8 1.70 1.8 1,87 1,47 1,95 1.53 1,68 1.68 1.6 L53 L3I 1,63 0.78 0.66 0,61 0.88 0.88 0-23 0,84 0.97 0.91 0.73 0.85 0,97 0.44 0.97 0.41 0,75 0,80 0.51 0,44 0,48 0.77 0,61 0.68 0,48 С 7 0,88 1.49 1,0 0.69 0.69 2.95 0.78 0,98 0,9 1.80 1,46 0.46 2.12 1.38 2.50 1 59 1,3 Ц87 1.73 0,99 1.31 1.07 1.50 1,61 0,66 1.15 0.61 0,57 0.57 2,18 0.62 0.95 0,81 1.53 1.31 0.43 1,56 1.35 1.91 1.34 1.00 0,62 1.31 оде 0.75 0,92 1,31
* Цифро рядвый (Р). обозначено число цилиндров, буквой — V-образный двигатель (V) и
Если известны kw и Аы, то коэффициенты и, Ь, с приближенно могут быть определены из выражений
. _ (2 — — 1 .
^(2-M-l ’
(12)
На графике рис. 1.13 изображена экспериментальная скоростная характеристика двигателя ЯМЗ-238. Точками показаны значения момента, рассчитанные с использованием формул (1 1) И (1 2).
В табл. 1.4 приведены необходимые для тягово-скоростных расчетов параметры двигателей автомобилей.
Параметры внешней характеристики определяют на стецде при комплектации двигателя согласно ГОСТ 16840—78 (без глушителя, вентилятора, радиатора и компрессора). Полученная при испытаниях мощность приводится к нормальным условиям: атмосферному давлению, равному 101 кПа, и температуре воздуха + 15 °C. По стандарту D1N (ФРГ) испытания проводят при отсутствии только радиатора и компрессора, а по стандарту SAE — при отсутствии глушителя, вентилятора, радиатора, компрессора, воздушного фильтра, генератора и водяного насоса. В настоящее время в США азамен стандарта SAE используют новый стандарт, близкий к DIN, ио результаты приводятся к давлению воздуха 59,2 кПа и температуре воздуха +29,4 °C.
Схемы трансмиссий. Расчет основных параметроб
Потерй* мощности, расходуемой иа
привод различных механизмов, в про-
центах от мощности двигателя приве-
дены ниже
Масляный насос
Используя этп данные, можно приближенно сравнивать мощности двпга--телей, определенные по различным стандартам. При этом следует учитывать, что больший процент затрат относится к двигателям мельшей мощности.
Часть мощности двигателя затрачивается иа привод приборов и механизмов, а также неизбежны потери мощности вследствие установки систем впуска и выпуска и несоответствия условий работы двигателя на автомобиле стендовым условиям. Перечисленные потерн учитываются вве ценном в расчет коэффициента fee- Коэффициент fee зависит от типа двигателя и типа автотранспортного средства При приближенных расчетах можно при нимать fec =0,84-0,9, меныние значе
ния относятся к автомобилям с меньшей удельной мощностью.
Если мощность двигателя не задана техническими условиями, то ее находят исходя из заданной максимальной скорости или по удельной мощности, сопоставляя характеристики разрабатываемого автомобиля и существующих аналогов
Мощность двигателя, необходимую для движения с макенмальной скоростью Va шях, находят по выражению
^0,2784\gmavamax
+ 0.0214feBFvlI111o(,
(I 3)
где т}1., — коэффициент дорожного сопротивления при максимальной ско-
Неправильный выбор мощности двигателя приводит к перерасходу топлива Увеличение мощности позво ляет повысить средние скорости дви жеиия, улучшить динамические качества автомобиля, однако при этом возрастают размеры и масса двигателя •и трансмиссии, стоимость автомобиля, • увеличивается расход топяпва и масла
Максимальная скорость движения автомобиля зависит от его типа и назначения. Максимальные скорости легковых автомобилей зависят от клас са и находятся в пределах 100— 220 км/ч.
При оценке тигаво скоростных качеств автомобилей используют понятие удельная мощность Л'уд — отношение номинальной мощности двигателя к полнея) массе автомобиля (автопоезда)
Анализ параметров современных легковых автомобилей показывает, что их максимальные скорости и удельные мощности изменяются в широких пределах Ауд — 20-г 90 кВт/т, Ча гаах — — 1004-220 км/ч (рис 1.14). В то же время наблюдается довольно четкая взаимосвязь между удельной мощностью, максимальной скоростью и классом автомобиля.
малый (не более) средний н большой (не более} , .
40
50
но
220
Расчет параметров механических ступенчатых трансмиссий
23
У грузовых автомобилей оптимальная максимальная скорость выбира ется в некотором диапазоне, определив мом условиями безопасности движения, действующими нормативными документами, скоростными возможностями аналогов и тенденциями развития.
ГОСТ 213115—75* устанавливает нижний предел максимальной скорости 75 км/ч для полностью нагруженных одиночных автомобилей и автопоездов, движущихся по горизон тальиой дороге с твердым покрытием, и 30 км/ч на подъеме крутизной 3 %
Большинство современных грузовых автомобилей имеют »а шах = 804-4-100 км’ч. и в перспективе применительно к большегрузным грузовым автомобилям магистрального типа т'агаах^ЮО ки/ч В настоящее время для грузовых автомобилей рекомендуются t>amax “804-95 км/ч
При выборе удельной мощности необходимо учитывать, что автомобиль, обладающий низкими динамическими качествами, является помехой для других автомобилей При этом чем ниже тягово скоростные кичсства и больше размеры к масса автомобиля, тем больше создает он помех для транспортного потока
Если с точки зрения обеспечения достаточных средних скоростей движе ния и минимальных расходов топлива для большегрузных автопоездов можно признать достаточной Л'Уд ~ 6 кВт/т, то с точки зрения обеспечения равномерного движения транспортных потоков на дорогах предпочтительной является Ауд — 7,5 кВт'т
Шины выбирают по стандартам исходя из расчетной нагрузки па колесо Основным размером, используемым при расчетах тягово-скоростных качеств, является радиус колеса, катящегося без скольжения гко При этом под радиусом качения гк понимается отношение поступательной скорости колеса vK к его угловой скорости <0к-
Радиус качения колеса, катящегося без скольжения, примерно равен радиусу колеса, движущегося в ведомом режиме, т. е. колеса, равномерно катящегося под действием толкающей силы. Последний занимает промежуточное положение межту свобо дным радиусом Гс и статическим гст Значения этих
двух-радиусов приводятся в справочных материалах по сортаментам шин С достаточной для практических целей точностью радиус гко может быть найден по выражению
гК0 = ^шГс.
где — коэффициент деформации, зависит от тина, размера и модели шины (Хщ = 0,954-0,67, меньшие значения относятся к более эластичным шипам).
1.5. ПАРАМЕТРЫ МЕХАНИЧЕСКИХ СТУПЕНЧАТЫХ ТРАНСМИССИЙ
Передаточное число гласной передачи «о выбирают из условия обеспечения максимальной кинематической скорости автомобиля при максимальной частоте вращения коленчатого вала двигателя .и высших передачах в коробке и раздаточной коробке. Передаточное число главной передачи
«j —0.377p>i щдКг^р ш'(,гетахГко).
(1.4)
где ив, ьр.в — передаточные числа высших передач соответственно в коробке передач и раздаточной коробке.
Максимальная кинематическая скорость ок щах может быть равна, больше или меньше расчетной максимальной скорости с’п щах по балансу мощности. Коэффициент высшей передачи
cv va шах Ц. щах
Максимальная кинематическая скорость легковых автомобилей обычно равна максимальной скорости по балансу мощности (Ct)=I). У грузовых автомобилей cv <. I, <?г = I и cv > I. Соотношение определяется назначением автомобиля, динамическими требованиями, а также диапазоном и чис лом передач в коробке передач Увели чение са приводит к повышению динамических качеств автомобиля при ограниченном числе передач в коробке передач При этом в случае движения с большой неравномерностью повышается средняя скорость Излишнее увеличение сп может привести к повышению расхода топлива и снижению
Схемы трансмиссии. Расчет основных параметров
срока службы двигателя Значение с0 < 1 наиболее целесообразно для транспортных средств, совершающих магистральные перевозки при большом диапазоне и числе ступеней в коробке передач. При Сц< I более полно используется мощность двигателя во время работы автомобиля с неполной нагрузкой.
Высшая передача коробки передач заднеприводных автомобилей принимается прямой или повышающей. Повышающая передача наиболее часто применяется на автомобилях средней и большой грузоподъемности, предназначенных для работы с прицелами. По производственным соображениям и с целью унификации коробки передач с повышающей передачей могут применяться и на грузовых автомобилях других типов
Передаточное число высшей передачи коробки передач псредиепривод-
•'.ефйство автомобилей ГАЗ Грузоподъемность базо аоП'модеии. т . . 2—4
Передаточные числа главной передачи . . 6.38
6.33
Передаточные чаем коробки передач определяют исходя из требуемого диапазона (Ди = ui/uB — отношение передаточных чисел крайних передач) и числа ступеней.
Диапазон и число ступеней являются основными характеристиками коробок и определяются типом и назначением автомобилей. Для легковых автомобилей применяют коробки передач с 3—5 ступенями. Наиболее распространенными в настоящее время являются четырехступенчатые коробки передач, хотя наблюдается тенденция увеличения количества моделей с пятиступенчатыми. Трехступенчатые коробки передач применяют только на автомобилях с большой удельной мощностью Трехступенчатые коробки яв
ного автомобиля определяется ее конструкцией н типом привода В этом случае, используя формулу (1.4), целесообразно определить суммарное передаточное число трансмиссии на высшей передаче (ивио) и рааденить пере даточные числа между коробкой передач и главной передачей исходя из конструктивных соображений
Главные передачи легковых автомобилей изготовляют с передаточными числами 3,1—4,9. Обследование ста моделей современных легковых автомобилей показало, что 19 % автомобилей имеют передаточные числа главной передачи 3,1—3,6, 62 % 3,7—4,3 и 16% 4,4—4,9
Передаточные числа главных передач грузовых автомобилей составляют 4,5—9,0. При этом в зависимости от условий эксплуатации на автомобиле могут устанавливаться главные передачи с различными передаточными числами.
«Урал» КамАЗ КрАЗ МАЗ
4,5—7.5 8—10 7.5—12 8—14,5
7,32, 5.S4. 8.173: 6,59;
8.05; 6,53; 8.21 7,23;
8,9 7.22; 7,77
7,339
редач имеют Ди — 2,34-2,6; пятиступенчатые Ди’3,64-4,5 Наиболее распространенные существующие конструкции четырехступенчатых коробок передач имеют Д„ = 3,44-4,00, хотя встречаются коробки передач, у ко торых Ди — 3,14-3,2 и Дк = 4,54-
4.7.
Диапазон и число ступеней коробок передач грузовых автомобилей отли чаются большими пределами Существуют коробки передач с числом ступеней от 6 до 22 при Дк *= 54-25 Число ступеней находится в прямой зависимости от диапазона коробки Это видно из приведенных ниже данных, полученных статистической обработкой результатов, относящихся к различным моделям автомобилей.
8 10 16 20
Расчет параметров механических ступенчатых трансмиссий
25
Основной тенденцией является увеличение числа ступеней и диапазона коробки передач при возрастании массы автомобиля (автопоезда). Увеличение числа ступеней и диапазона большегрузных автомобилей (автопоездов) позволяет более эффективно использовать мощность двигателя при работе автомобиля с различной степенью загрузки п в различных дорожных условиях. Для таких автомобилей в зоне наиболее часто применяемых передач интервал ступеней (отношение передаточных чисел смежных передач) должен быть равен 1,3—1,4. Больший интервал обусловливает увеличение расхода топлива, а также снижение динамических качеств автомобиля. Меньший интервал вызывает затрудне ния у водителя в выборе нужной передачи. У коробок передач с автоматическим переключением число ступеней может быть большим
Передаточное число первой (низшей) передачи Uj, если не установлен диапазон, определяется из необходимости соблюдения трех условий- I) возможности преодоления автомобилем (автопоездом) заданного максимального дорожного солротиалсния; 2) возможности реализации по условиям сцепления колес с дорогой максимального тягового усилия; 3) возможности движения с минимально устойчивой скоростью. Исходя из этого передаточное число первой передачи определяют по трем формулам.
По первому условию «| = = Фпйк?/Пагко/А1еп1ах«радт. гдефтах — максимальное дорожное сопротивление (для одиночных автомобилей фщах> ^0,35, а для автопоездов 4'm»x>
0,18, обычно принимают для легковых автомобилей фшах = 0,354-0,5 и грузовых Фшах = 0,35-5-0,4); Т]г — КПД трансмиссии, -передаточное
число раздаточной коробки.
По второму условию «I = = фе^ы>/А1етзх“радт. где — сцепная масса автомобиля (для полноприводных автомобилей т<р = та; для автомобилей с задними ведущими мостами «= для автомобилей с передним ведущим мостом /нф = — В этих выражениях та и т, — массы, приходящиеся на задние и передние мосты соответственно, а3
и — коэффициенты перераспределения нагрузки, а2 = 0,8-е-0,9 и <х2 = — 1,1-5-1,3); <р — коэффициент сцепления (для сухого шоссе <р= 0,04-0,8).
По третьему условию Н] — == О.377гг£угко/м0нриа mln, где пеу — минимально устойчивая частота вращения коленчатого вала двигателя, об/мин; Va mm — минимально устойчваая скорость движения (для удобства маневрирования принимается va щщ ^44-4-5 км/ч).
Если U|, найденное по первому условию, будет превышать значение, найденное по второму, то целесообразно увеличить сцепную массу автомобиля. При невозможности увеличения сцепной массы принимается uj, найденное по второму условию. При этом автомобиль не сможет преодолеть заданные дорожные сопротивления. Передаточное число, выбранное по первому и второму условию, сопоставляется с определенным по третьему условию. Если первое будет меньшим, чем второе, то окончательно «| принимается по третьему условию.
Передаточные числа промежуточных передач в большинстве случаев рассчитываются по геометрической прогрессии, что обеспечивает возможность работы двигателя при разгоне автомобиля в одинаковом режиме на всех передачах. В общем виде переда» точное число промежуточной передачи
«. ~ п\
где i — номер передачи; п — число передач.
Если в коробке передач имеется прямая передача, то передаточные числа промежуточных передач
« = WIH),
в данном случае п — номер прямой передачи.
Диапазон работы двигателя, возможность и легкость переключения передач, условия работы синхронизаторов зависит от интервала передаточных чисел между смежными ступенями в коробке передач. Интервал между передачами можно оценивать по шагу соседних передач 9*,«+i = иг«/+з. Найденные значения ’ передаточных чисел корректвруют, уменьшая
2Ь
Схемы трансмиссий. Расчет основных параметров
Расчет параметров механических ступенчатых трансмиссий
27
для высших передач за счет увеличения пени При этом шаг между высшими интервалов между низшими При этом передачами оказывается значительно обеспечивается лучшее использование меньшим, нежели между низшими, мощности двигателя при движении Передаточные числа промежуточных автомобиля па наиболее часто у погреб передач гармонического ряда в общем ляемых высших передачах, а также случае улучшаются условия работы спнхро- _ Г i — 1 /д. n j_ i ]- * низаторов Из условия возможности ' 1 —| ' "г J переключения наибольшее значение ft f+i - 1.6-1,7. На низших переда Если передача с ивдексом п является чах встречаются значения шага, близ- прямой, то кие к двум /»— 1 , n — I \—1 При ограниченном числе ступеней «I- «I j ui т п _ ( ) коробки передач можно рекомендовать рассчитать передаточные числа проме Передаточное число ступени заднего жуточных передач по геометрической хода принимается близким к U|. прогрессии и гармоническому ряду Найденные значения передаточных и выбрать средние величины. Переда- чисел уточняются при разработке кон-точиые числа по гармоническому ряду струкцин. определяются из условия обеспечения В табл. 1 5 и 1 6 приведены характе-возрастания скорости автомобиля на ристики некоторых наиболее типичных одну и ту же величину на каждой сту- автомобильных коробок передач 1.3. Основные характеристики коробок передач механических трансмиссий
' Фи]Жа, модель коробки передач Передаточные числа и шаг между соседними ступенями Средние Диапазон
ЗАЗ-968 3.80 2.12 1.41 0,96 4.16 (1,79} (1.50) (1.46) 1.58 3.94
ВАЗ 2101 3.75 2,30 1 49 1.00 3.87 <1 03) <1 54) (1.49) 1.55 3.75
«Москвич-2138» 3.81 2.42 1,45 1.00 4.7! (1.67) (1,67) 11.46) 1.56 3 81
«Москвич-2140» 3 49 2.04 1 33 1,00 3.39 ’ (1,70) (1.54) (1.33) 1,52 3,49
ГАЗ 24 3,50 2.26 1,45 1,00 3,64 (1,55) 11.56} (1.45) 1.52 3.50
T aira-603 3.545 2,266 1,46 0.96 3.43 (1.56) (1.56) (1.51) 1.55 3,80
УАЗ-469 4,! 2 2.64 1,58 1,00 5,22 (1,56) (1.07) (1.58) 1,00 4 12
ГАЗ-53А g 55 3,09 1,71 1.00 7,77 (2.12) (1,81) (1.71) 1.87 6 55
Продолжение табл I 5
Фирма, модель коробки передач Передаточные числа и uiar между соседними ступенями Сред- Дна-
Zshnratlfabrik AKV-10 6.42 3.10 1.08 1.00 — (2.07) (1.85) (1.08) 1.80 Ь 42
ЗИЛ-130 7.44 4.10 2,29 1,47 1.00 7.09 (1.81) (1.79) (1,56) (1 47) 1.65 7,44
Я М3-204 У 6.17 3.40 1 79 1 00 0,78 6.69 (1,82) (I 90) (1,79) (1 28) 1.68 7,91
ЯМЗ-236Н 5,20 2,90 1.51 1,00 0.06 5,48 (1.81) (1,91) (!.52) (1,50) 1.68 7.98
КамАЗ мод 114 7,82 4 03 2.50 1,53 1.00 6,38 (1.94) (1,01) (1,65) (1,53) 1 67 7,82
Clark 205V 7,58 4.38 2.40 1,48 1.00 (1.73) (1,82) (1.62) (1,48) 1.66 7.38
Clark 204VD 6,00 3 50 1.80 1,00 0.80 (1.73) (1,94) (1,80) (1,25) 1.66 7 58
Clark 327V 6,27 3.55 1.89 1,18 1.00 5,11 (1,77) (1,88) (1.60) (1,18) 1,58 6.27
Clark 328V 7,01 3,97 2,11 1,18 1.00 6,71 (1.7?) (1,88) (1,79i 1,63 7.01
Ikatvs 260 6,81 2,90 1,99 1,44 1,00 6,01 (2,00) (1,46) (1,38) (1,44) 1,56 6,81
IFA 8,62 4,66 2.62 1.69 1,00 6,38 (1,69) (1,74) (1,65) (1.69) 1.7 Г 8,62
Scode-760 7,64 4,27 2,60 1,69 1,00 5,95 (!.79) (1,84) (1,63) (1,69) 1,67 ?,64
Taira 138 8.69 4.40 2,66 1.62 1.00 7,53 (1.98) (1,66) (1.04) (1,62) 1,72 8,69
Spyser 4652-A 7.40 4.27 2,47 1,46 1.00 _ (1.73) (1.73) (1.69) (1,46) I J55 7. Ю
Spyser BlSI-T 5 19 2,95 1.72 1.00 0,09 — (1.76) (1,72) (1 72) (1 45) 1,66 7.52
Fuller 5C-65 8.08 4.67 2.62 |,38 1 00 - I (1.73) (1.78) (1.90) (1.38) 1.69 8.08
28
Схемы трансмиссий. Расчет основных параметров
Продолжевне табл 1 5
Фирма, модель коробки передач Передаточные числа и Шаг между соседними ступенями Средние Два-^
Fuller 5С-650 6,37 3,40 1.74 1.00 0.75 — (1,90) (1.95) (1.74) (1.33) 1.71 8.50
David Brown 567'480 7.95 4.70 2.7В 1.56 i,00 — (1.69) (1.69) (1.78) (1.56) 1,68 7.95
David Brown 577/480 6.05 3.34 1.76 1.00 0.77 - (1,81) (1.90) (1.76) (1,30) 1.67 7.86
Zahnradlahrik S5-45 7.92 4.37 2.55 1.49 1.00 7.35 (1,81) (1.71) (1.71) (1,49) 1,68 7.92
Zahnradlabrik S5-45 6,47 3.33 1,70 1.00 0.764 6.00 (1.94) (1.96) (1,70) (1,31) 1.71 8.47
Zahnradfabrik S6-9O 9,01 5.24 3.22 2,20 1.50/1.00 - (1,72) (1,63) (1.46) (1,46/1,50) 8.30 1.55 9,01
Zahnradlabrik S6-90 Примечая пенями. 2. В анаменате VI ступени. Последи 7.03 4,09 2.45 1.50 1.00/0.81 6 48 (1.72) (1.67) '(1.63) (1,50/1.23) я 1. В скобках приведены значения шага между ях дробей приведены значения передаточного чне е из передаточных чисел относится к передаче зад 1.51 соседш 8.8 ми сту- га дая да.
1.6. Основные характеристики коробок передач lecsMX трансмиссий, имеющих дополнительный редуктор
Фирма, модель h; ай “ДР Дополнительный редуктор
КамАЗ мод. 16 7.82 4.03 2,50 1,53 1.00 7,38 6,86 3,28 2,04 1.26 0,816 6.01 9.6 1,00 0,816 Двухступенчатый доинтель
Fuller RT-910 8.05 6,30 4.99 3.95 3,20 8.73 2,61 1.97 1.68 1.24 1.00 2.73 8,05 3,20 1.00 Дпухступеича-тый задний редуктор
Fuller RT-610 9,00 7.02 6,48 4,26 3.43 9.50 2,62 2.05 1.60 1.24 1,00 2.77 9,00 3,43 1,00 Двухступенчатый задний редуктор
Fuller RT-660 7.18 5.01 4.33 3.42 2,67 10.9 2.10 1.64 1,27 1.00 0.78 3,18 9,20 3.42 1,00 То же
Volvo R 61 10.6 7,40 5.20 3,93 9.71 2,70 1,89 1.32 1,00 2.47 10,6 3.93 1.00 »
Расчет параметров механических ступенчатых трансмиссий 29
Пр»дя<окенне табл. 1.6
мХГь i £ 5 “ДР Доповннгель-пый редуктор
Zahnradlabrik S6 IIOGP 13.1 8,67 6,37 4.66 3,43 16.2 3.82 2.53 1.86 1,36 1.00 4.72 13.1 3.43 1.00 Двухступенчатый задний редуктор
Fuller R 1760 9.14 6.85 4.86 3.48 2,62 9.S6 (2.62) 1.96 1,40 1.00 0.75 2.74 12 2 3.48 1,00 То же
ЯМЗ 238А 7,73 5.50 3.94 2.80 11.78 1.S6 1 39 1,00 0.71 2.99- 109 3.94 1,00 •
Fuller RT-915 12,0 9.42 7.45 5.90 4.78 13.03 8.05 6.30 4.99 3.95 3.20 8.73 2,51 1.97 1,56 1,24 1,00 2.73 12,0 4.78 3.20 1.00 Трехступенчатый задний редуктор
Fuller RTO-913 12.5 8,35 6.12 4.56 3.38 13.07 (3.70) 2.47 1.81 1,35 1.00 3.87 13.201 2,14 1.57 1,17 0.87 14,37 3.38 1.00 0,87 То же
Eaton TS-13I2A 11.19 5.84 2.99 1.55 10.17 8.97 4.68 2.40 1.24 8,16 7.22 3,77 1.93 1.00 6,50 11. 9 1.65 1,24 1,00 Трехстуленча-тмй делитель
Spyscr 6012 7.62 4,15 2.26 1.22 7.78 6.25 3.40 1,85 1.00 6.39 6.08 2,76 1,50 0.813 6.18 9.37 1.22 1,00 0.813 То же
15.2 8,18 4.36 2,31 IB.22 8,16 4.39 2.34 1.24 8.17 6,58 3,54 1,89 1,00 6,59 5,29 2.86 1.62 0,80 5,30 19.0 2.31 1.24 1,00 0,80 Четырехсту пен -чатый редуктор
Volvo RS-61 11.22 7,84 5.50 3,93 10.29 9,46 6.61 4.64 3.31 Я,67 2,86 2.00 1,40 1,00 2.41 1.68 1.18 0,84 13,86 1.00 S.93 0,84 3,93 1,00 1.00 0,84 1.00 Передний повышающий делитель и задний понижающий редуктор
Примечания: !. В строке, соответствующей и др = 1, приведены передаточные числа основной коробим Передаточные числа, выключенные в скобим, не исполь-
2. Последние тисиа в ряду чисел Uj соответствуют передачам ааднего хода.
Передаточные числа раздаточных коробок необходимо выбирать для полноприводных автомобилей. В раздаточной коробке предусматривается, как правило, две передачи — высшая и низшая. Высшая является прямой ИДИ имеет передаточное число, близкое
к единице, передаточное число низшей передачи определяют из условий преодоления максимального подъема, полного использования сцепной массы и обеспечения минимальной устойчивой скорости движения Для расчетов используют следующие выражения;
Схемы трансмиссий Расчет основных параметров
1.7. Передаточные числа раадяточных коробок
Модсиь и £& "р
УАЗ-452Д 4X4 1.94, 1,0
ГАЗ 66А 4X4 1.982. 1.0
ЗИЛ-157 6X6 2,08; 1,0
ЗИЛ-131 6X6 2.08. 1.0
«Урал-375» 6X6 2.15; 1.3
«УрСЛ-377» 6X4 2.15. 1,3
МАЗ-7310 8X8 1,88. 1.0
КрАЗ-255Б 6X6 1.31, 1,013
КрАЗ-257Б1 6X4 2.28. 1.23
МАЗ 509А 6X6 1.635. 1.18
КРАЗ-255Л 6X6 2.28. 1 41
НАЗ 2121 4X4 2.135. 1,8
из условия преодоления максимального подъема
Нрн — 4max6w,ari>i>'A^enl8X«oUii]i;
из условия полного использования сцепной массы
Кри *“ Ч'£/п<|/ко Л4еп1ахНоЬр]т. ,
ИЗ; условпя минимальной скорости движения ырн —•
При расчетах принимают 4’шах — = 0,74-0,9, ф = 0.74-0,9. оа1МХ = = 24-3 км/ч.
В табл. 1.7 приведены значения передаточных чисел раздаточных коробок некоторых автомобилей.
1.8. ОЦЕНКА ТЯГОВО-СКОРОСТНЫХ КАЧЕСТВ АВТОМОБИЛЕЙ
С МЕХАНИЧЕСКИМИ ТРАНСМИССИЯМИ
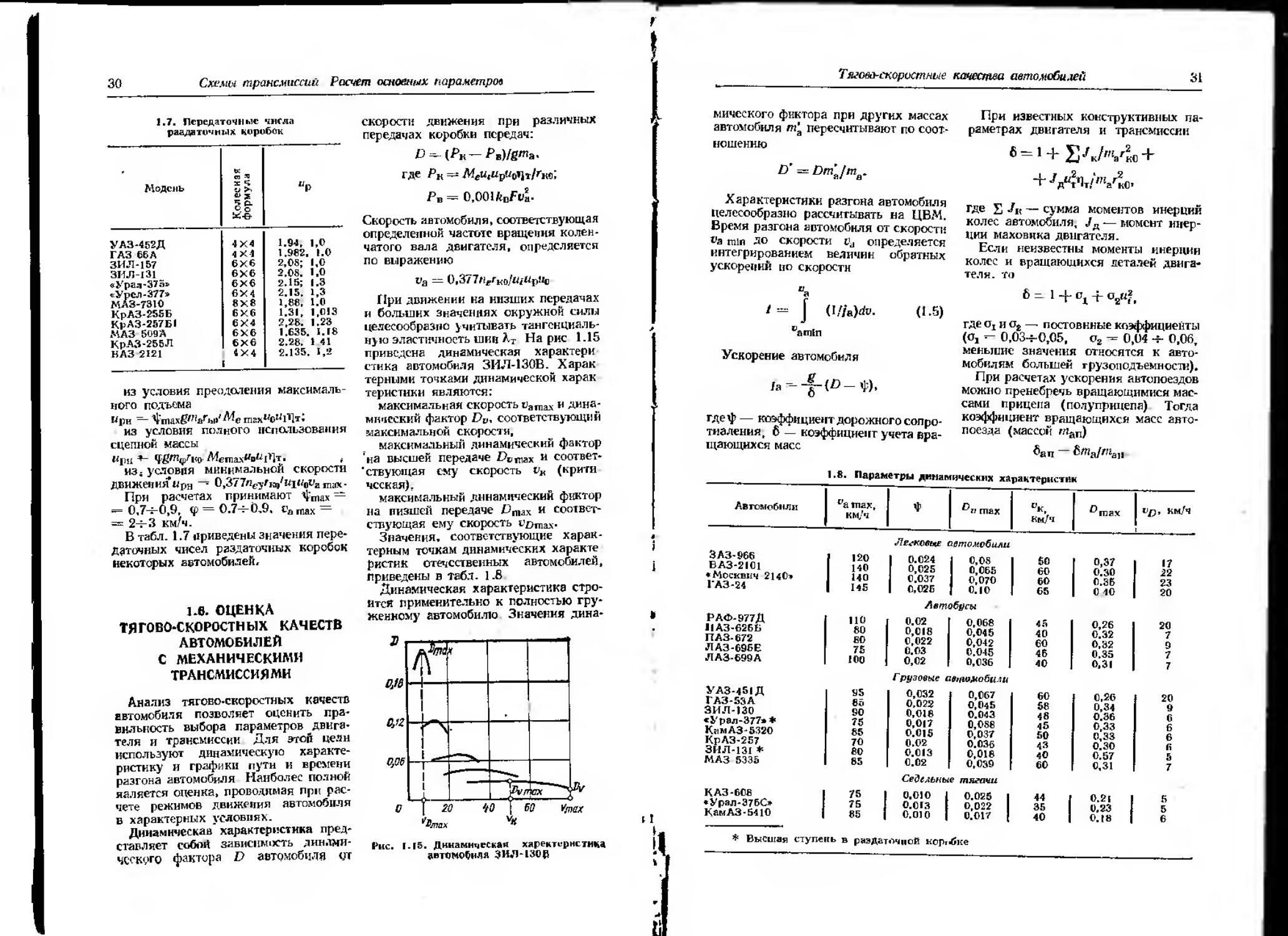
Анализ тягово-скоростных качеств автомобиля позволяет оценить правильность выбора параметров двигателя и трансмиссии Для этой цели используют динамическую характеристику и графики пути и времени разгона автомобиля Наиболее полной яаляется оценка, проводимая при расчете режимов движения автомобиля в характерных условиях.
Динамические характеристика представляет собой зависимость дин.тми-ческрго фактора D автомобиля <л
скорости движения при различных передачах коробки передач:
PB)/g/na.
где Рк =* Мещириоцт/Гм, Р* = O.OOlfenfPa-
Скорость автомобиля, соответствующая определенной частоте вращения коленчатого вала двигателя, определяется по выражению
~ 0,3/7неГко/И7&р1*о
При движении на низших передачах и больших значениях окружной силы целесообразно J читывать тангенциальную эластичность шин Ат На рис 1.15 приведена динамическая характери стика автомобиля ЗИЛ-130В. Харак терными точками динамической харак теристики являются:
максимальная скорость Чашах и динамический фактор Dv, соответствующий максимальной скорости,
максимальный динамический фактор ‘на высшей передаче 7?спих и соответ-"ствукяцая ему скорость ок (крити
чсскгя).
максимальный динамический фиктор на низшей передаче Сгаах и соответствующая ему СКОРОСТЬ VDmax-
Значения, соответствующие характерным точкам динамических характе ристик отечественных автомобилей, приведены в табл. 1.8
Динамическая характеристика строятся применительно к полностью груженному автомобилю Значения дина-
Тягоы-скоростные качества автомобилей
мического фиктора при других массах автомобиля т'а пересчитывают по соотношению
D" = Огпл/та.
Характеристики разгона автомобиля целесообразно рассчитывать на ЦВМ. Время разгона автомобиля от скорости т'а пип до скорости определяется интегрированием величин обратных ускорений но скорости
иа
J (1//а)Л. (1.5)
Darnin
Ускорение автомобиля
/а — Ф).
гдеф— коэффициент дорожного сопротивления, б — коэффициент учета вращающихся масс
При известных конструктивных параметрах двигателя и трансмиссии
в = 1 + £'./"'.4 +
где £ JK — сумма моментов инерций колес автомобиля, 7Д — момент инерции маховика двигателя.
Если неизвестны моменты инерции колес и вращающихся деталей двигателя. то
б _ 1 -f- ot 4- о8«?,
где ot и ог — постовнные коэффициенты (о2 »- 0,03-=-0,05, ог -= 0,04 -5- 0,06, меныиие значения относятся к автомобилям большей грузоподъемности).
При расчетах ускорения автопоездов можно пренебречь вращающимися массами прицепа (полуприцепа) Тогда коэффициент вращающихся масс автопоезда (массой мап)
бап — б/иа/пга11
Автомобили 1.8. Парам "a tnax, км/ч ь. °"" ид, км/ч
Легковые автомобили
ВАЗ-2101
• Москвич 2140» ГАЗ-24
140
140
145
Латобусы
РАФ-977Д 1IA3-626E
ПАЗ-672
Л АЗ-696Е
ЛАЗ-699А
80
60
75
100
УАЗ-451 Д ГАЗ-53А ЗИЛ-130
МАЗ 5335
К АЗ-60В
• Урал-375С» КамАЗ-5410
75
76
Грузовые автомобили
* Высшая ступень в раздаточной коряке
&
Схемы трансмиссий. Расчет основных параметров
1,16. Зависимость для опреде точек переключения передач
Интегрирование выражения (1 5) проводят численным методом. Предпо. лягается, что в небольшом интервале скоростей &Vi = ц — i'/_i движение автомобиля является равноускорен* иым при ускорении, равном полусумме ускорений в начале и конце интервала. Время движения автомобиля Д/<,' при котором его скорость возрастает на величину Aff, определяется по закону равноускоренного движения
£a>i 2Дщ bti = - --------7—г- =
/СР Ji-1 + п
___________26 (Of — Of .i)________ g (Di -f- Di.t — if,i — ifl_i)
1.6. Время разгона
Модель
Суммарное время разгона автомобиля на передаче л от скорости ou min до скорости Оптах находится суммированием времени разгона на интервалах
I = S Л|,-
Скорость движения при переключении на высшую передачу оп соответствует максимальной частоте вращения коленчатого вала двигателя, если ускорение на низшей передаче на всех скоростях движении выше ускорения на высшей передаче (рис. 1 ^сплошные кривые) или соответствует скорости автомобиля, при которой кривые ускорений па низшей и высшей передачах пересекаются (рис. 1.16, штрих-пунктирные кривые).
Во время переключения можно принимать сопротивление движению постоянным. Потеря скорости за время переключения передач
Доп=£ф/П/бП, где — коэффициент учета вращающихся масс при переключении передач (бп — 1,03ч-1,05), tп -* время переключения (7П = 0,8-5-1,5 с в зависимости от способа переключения).
Путь разгона автомобиля находится интегрированием скорости автомобиля
по времени S — I о dt.
Бремя, с
Легковых автомобилей до скорости 100 км/ч (экспериментальные данные)
ЗАЗ-968 ВАЗ-2101 ВАЗ-2102 ВАЗ-21011 ПАЗ-2103 БАЗ-2106 БАЗ-2121 «Мосавнч-2138» «Москвич-2136»
•Москвич-2140»
«Москвич-2137»
20
24
19
М 33 43
ГАЗ-24
ГАЗ-13
ЗИЛ 114
ЗИЛ-117
26
20
Автобусов и грузовых автомобилей до скорости 60 км/ч (расчетные данные)
ПАЗ-672 Л АЗ-695Е Л АЗ-697 Е Л АЗ-509А УАЗ-4 51 ДМ ГАЗ-53 ГАЗ-66 зил-130
38
35
32
36
28
38
ЗИЛ-131
КамАЗ-5320 КамАЗ-5510 «УраЛ-375» «УрСЛ-377» КрАЗ-257 К АЗ-608А
КамАЗ-5410
33
42
50
65
62
55
80
90
Тягово-скоростные качества автомобилей
33
Этот интеграл также определяется численными методами. При равноускоренном движении в интервале скоростей At'f = V/ — Vi_i путь, проходимый автомобилем,
C,Si -* оСрД/ =. 0,5 (»i_t 4- Vi) Ate-
Путь разгона автомобиля от скорости Cumin ДО скорости г'кщах определяют суммированием расстояний AS,-. проходимых автомобилем на интервале
s - £ Д$<-
Путь, пройденный автомобилем за время переключения t„ с передачи с индексом i на передачу с индексом « + 1,
ASn = (Ph max + 0.5Д»„) tn-
В табл. 1.9 приведено время разгона некоторых автомобилей
1.7. ОСОБЕННОСТИ
ТЯ ГОВО-СКОРОСТНЫХ РАСЧЕТОВ ПРИ НАЛИЧИИ
В ТРАНСМИССИИ ГИДРОМЕХАНИЧЕСКОЙ ПЕРЕДАЧИ
При тягово-скоростных расчетах автомобиля с ГМП необходимо помимо передаточных чисел трансмиссии опре делить следующие характеристики ГМП- активный диаметр гидромуфты или гидротрансформатора, кагрузоч ную характеристику системы двигатель—гидромуфта или двигатель— гидротрансформатор, выходную харак теристику системы двигатель—гидромуфта или двигатель—гидротрапсфор матор.
Для он ре холения этих характеристик следует выбрать принципиальную схему и безразмерную характеристику ГМП Безразмерная характеристика определяет зависимость КПД Чт. и. коэффициента момента насосного колеса Лц, коэффициента трансформации К от передаточного отношения гидродинамической передачи ZT-B При этом под передаточным отношением гидродинамической передачи понимают ото тения угловых скоростей турбины и
2 П,р А II Гришкевича
насоса Безразмерная характеристика строится ио результатам испытаний конкретных гидродинамических передач.
Основные соотношения: К= Мт1Ми, (т.п = Ят/пн! Чт.н ~ Nt/Nh = А/Т.н; \ ГДе МТ (М„)’
п-г («и). Мт (Ан) — соответственно крутящий момент (Н-м), частота вращения (сб!мпн), мощность турбинного (насосного) колеса; р — плотность рабочей жидкости (кг/м3) при Г = 90-5-120’’С, Da — активный диаметр (м).
Под активным диаметром Оа пони мается наибольший диаметр рабочей полости. Для комплексных гидротрансформаторов таким размером является наибольший диаметр насосного колеса
В автомобильных ГМП рабочей жидкостью являются минеральные масла (индустриальное, турбинное, трансформаторное и др.), для этих масел при указанной температуре р — 850-5-870 кг;мэ
Основными режимами работы гидродинамических передач являются:
1) -Стоп» (ii.H = 0; - - Лце; К —
= Ао'. Чт.я = 0).
2) холостого хода или синхронного вращения (/,.„ = 1,0; А’ = 0; Чт.н -* = О.
3) равенства моментов (Мн - Мт, К— 1,0; 1т,а= «м; Ан.м,
4) наибольшего коэффициента насоса (Л„ — А,,, щах);
5) максимального КПД (Чт.н — JJt.ii «пах1 *т.и ’т и‘ ” ^ц)
На рис. 1 17 приведены безразмерные характеристики гидромуфты одно- и двухреакторных комплексных гидро трансформаторов Из характеристик видно, что КПД гидромуфты (рис. I 17, о) линейно зависит от ее передаточного отношения, а КПД однореакторного трансформатора имеет максимум при определенном значении передаточного отношения. При коэффициенте трансформации, близком к единице, целесообразно осуществлять пе-?сход на режим гидромуфты (рис
17, б, точка Л) Таким образом, участок АВ яаляется участком работы гидротрансформатора в режиме гидромуфты. В чстырехколесяом трансформаторе (двухреакторном) кривую КПД
34 Схемы трансмиссий. Расчет оснлтых параметров
Г.чгово-скоростные качества автомобилей 35
можно разбить па три участка ОС — оба реактора неподвижны; СА — первый реактор вращается, а второй неподвижен. АВ — о5а реактора враща ются В точке В может происходить включение фрикциона блокировки При полностью сблокированном фрик ционе гидротрансформатор выполняет функцию жзсткого звена В табл., 1 10 прявещпы параметры безразмерных характеристик некоторых отечествен ных гидротрансформаторов
Рабочий диапазон трансформатора определяется минимально допускае мым значением КПД на основных
1.10, Параметры безразмерных характеристик гидротрансформеторов
0,89
0.99
U.B7 0.68 0.9 №92
1,40 I .1
1.52
1.37
1.23
Осуществляется переход не режим гидромуфты
режимах работы автомобиля Обозначают- максимальное значение коэффициента трансформации в рабочем диапазоне Кр, минимально допустимое значение КПД i)p и соответствующее им передаточное отношение /т. „ р
У автомобилей обычно принимают минимально допустимым КПД в рабочем диапазоне 80 % Соответственно обозначают i]so, гй0
Максимальное значение передаточного отношения в рабочем диапазоне /ртах определяется режимом равенства моментов (К ~ 1). Обычно «рпих = — 0,84-^0,85, а передаточное отноше-
пие в рабочей зоне трансформатора составляет 0,4—0,85
Прозрачность — свойство гидромеханической передачи, определяемое возможностью изменения крутящего момента двигателя при изменении сил сопротивления Коэффициент прозрачности П - Ли И 1нг — коэффициенты крутящею момента насосного колеса при двух рассматриваемых значениях передаточных отношений, причем «тли < |'т.и2)-
Если П> 1, передача прозрачная; П = 1 — передача непрозрачная; П < 1 — передача с обратной прозрачностью Например (рис. 1 17,а),тдро-муфта па участке 0—i„ обладает обратной прозрачностью, а на участке /н —1,0 прозрачная
Под коэффициентом прозрачности (если специально не оговаривается) понимается отношение коэффициентов момента насоса на режиме «Стоп» (/т.н _ 0) и на режиме равенства моментов (К = 1)
П = ЪпоР-пм-
В зависимости от числового значения коэффициента прозрачности псе гидротрансформаторы условно разделяют на непрозрачные и прозрачные К непрозрачным и малопрозрачным относят гидротрансформаторы, имеющие П — — 0,7ч-1,5 Г идротр а нсформаторы,
имеющие большие значения коэффициента прозрачности, считаются прозрачными
Наибольшие значения коэффициента трансформации в рабочем диапазоне имеют непрозрачные и малопрозрачные трансформаторы (/(^=1,35-5-1,5).
При известной конструкции трансформатора активный диаметр рассчитывают. используя правила подобия для лопастных машин
м,„’ее>.,-1- <‘-6>
При непосредственном соединении двигателя и ГМП в формулу (1 6) вместо величин Afi; и пн следует подставлять крутящий момент и частоту вращения коленчатого вала двигателя, подсчитанные по внешней характери стике В тех случаях, когда величина Оа известна, выбор характеристик совместной работы осуществляется подбором передаточного числа’согла-
2*
сующей передачи, устанавливаемой между двигателем и ГМП.
В этом случае Мя= MeucnT]rD, где исп, Чсп — передаточное число и КПД согласующей передачи
Согласование характеристик двига теля и ГМП заключается в выборе активного диаметра гидропередачи вли передвточного числа согласующего редуктора, обеспечивающих паи лучшее использование возможностей двига теля и ГМП. Основной задачей согласования является обеспечение при определенной передаче в механической коробве ГМП наибольшего диапазона регулирования при наименьшем расходе топлива Процесс согласования заключается в построении характеристик входа системы двигатель— гидропередача и выборе оптимальной Характеристика входа получается в результате совместного решения уравнений крутящего момента двигателя по внешней характеристике Ме = f (пе) и уравнения крутящего момента на насосном колесе Мц = f (пн). Решение может быть получено аналитически или графически Точки пересечения графиков указанных зависимостей определяют соответствующие одип Другому режимы работы
Для построения характеристики входа необходимо па график внешней характеристики двигателя нанести нагрузочные параболы гидродинамической передачи для ряда значений передаточною числа Игл- Нагрузочные параболы рассчитывают по выражению М, =
На рис I 18 показана характеристика входа или так называемый график
36
Схемы трансмиссий. Расчет основных параметров
совместной работы двигателя с про зрачным трансформатором. Все параболы проходят через начало координат Крутизна этих парабол возрастает при увеличении коэффициента . Положе ния точек пересечения парабол с кривой Ме внешней скоростной характеристики двигателя дают возможность определить крутящий момент двигателя и передаточные отношения гидротрансформатора при работе двигателя па установившемся режиме с определенной частотой и полной подачей топлива. У трансформаторов с прямой прозрачностью рабочая зона слева ограничивается параболой нагружения. соответствующей режиму Стоп», а справа — параболой, соответствующей максимальному передаточному отношению гидротрансформатора У непрозрачных трансформаторов, имеющих постоянной величину 1Т.Н, на графике совместной работы будет только одна парабола.
У некоторых трансформаторов значение при увеличении «т.н от 0 цс 1 • изменяется следующим образом: вна-чадр возрастает от до >-и тоах и затем уменьшается до Л,,м Считают, что твкие гидротрансформаторы обладают смешанной прозрачностью и характеризуются двумя коэффициентами прозрачности для участков с прямой прозрачностью (П, = Хн тазДвм) и с обратвой прозрачностью (/7г = тж). В этом случае на графине совместной работы сектор нагрузочных парабол участка с обратной прозрачностью располагается внутри сектора участка с прямой прозрачностью
При установке между двигателем и ГМП согласующей передачи следует предварительно перестроить внешнюю скоростную характеристику двигателя путем приведения ее к валу насосного колеса, используя при этом зависимости Menp=MeUc„4cnK nenv=nJucL!>
Обычно согласование начинается с выбора основного режима. На выбор основного режима влияют характери стаки трансформатора, характеристики двигателя, тип автомобиля и предполагаемые условия эксплуатации. При этом следует иметь в виду, что общий силовой диапазон регулирования системы двигатель—гидромеханическая передача при определенной ступени
механического редуктора зависит от коэффициента трансформаций К в коэффициента приспособляемости двигателя по моменту Км, а расход топлива от удельного расхода топлива на рассматриваемом режиме и КПД гидротрансформатора.
Дизели обладают малым коэффициентом приспособляемости по моменту. Повтому общий силовой диапазон регулирования системы двигатель—гидромеханическая передача может быть получен в основном за счет повышения коэффициента регулирования трансформатора В этом случае наиболее целесообразно применение непрозрачных пли малопрозрачных гидротрансформаторов, обладающи х более высокими коэффициентами трансформации, чем прозрачные. Для обеспечения полного использования мощности двигателя и снижения расхода топлива на всех эксплуатационных режимах совмещают максимальную мощность двигателя с режимом макси мального КПД гидротрансформатора.
При согласовании следует также обращать внимание на работу трансформатора в режиме «Стоп» и режиме наибольшего коэффициента момента насоса.
Для малопрозрачных трансформаторов с целью максимального использования мощности па режимах трансфор . мации активный диаметр следует подбирать так. чтобы пее= (0.8-М) ,9) пц (п«о — частота вращения ко-тенчатого вела двигателя при полнот) подаче топлива на режиме «Стоп»)
Наибольшая экономичность при использовании таких трансформаторов получается, если = (0,8-i- 1,0) neR {nCR — частота вращения коленчатого вала двигателя при работе с мннвмаль. ным удельным расходом топлива).
Наиболее часто у грузовых автомобилей, самосвалов, городских автобусов согласовывают трансформаторы так, что Лее = (0,5—0,75) л,у- Для повышения экономичности таких автомобилей целесообразно применять блокировку трансформатора.
Высокая приспособляемость карбюраторного двигателя может быть использована для достижения хорошей динамичности автомобиля при применении прозрачного гидротрансформа-
Тялоео-сксроагмые качества автомобилей
тора Прозрачность гидротрансформатора должна быть такой, при которой двигатель во время ipotaHHH с места развивает наибольший крутящий момент, а затем по мере разгона автомо биля переходит на режим максимальной мощности. Удовлетворительная топливная экономичность в этом случае может быть достигнута при согласовании режима наиболее часто используемой мощности с режимом максимального КПД. При этом следует иметь в виду, что при увеличении удельной мощности уменьшается ее наиболее часто используемая величина.
На легковых автомобилях применяют прозрачные трансформаторы с относительно мвлым коэффициентом трансформации на режиме «Стоп» (Ко =~-— 2,04-2,5). Для снижения уровня шума двигателя при трогании с места, а также некоторого уменьшения износа его деталей и улучшения топливной экономичности следует при режиме «Стоп» нагружать двигатель на частоте вращения коленчатого вала меньшей, чем частота, соответствующая макси-мвльиому крутящему моменту, несмотря на то, что это несколько снижает ситу тяги на колесах.
Для снижения уровня шума низкие значения в пределах (0,5—0.75) лд? рекомендуется принимать и для городских автобусов.
При проектировании трансмиссий с гидропередачами, обладающими большой прозрачностью. необходимо обращать внимание на режим с максимальным значением коэффициента насоса ХН1Пах- С «елью предотвращения перегрузки и останова двигателя точка пересечения этой параболы с внешней характеристикой должна лежать правее минимально устойчивой частоты вращения колен чатого вала.
Основной характеристикой кля расчета динамики автомобиля явл кетен характеристика выхода системы дви гатель—гидромеханическая передача, представляющая собой зависимость мощности Nt, крутящего момента Mt на валу турбинного колеса от частоты вращения турбины ит при полной подаче топлива в двигателе.
Исходными данными для расчета являются точки, характеризующие
Рис. 1.19- Характеристики выхода си-
стемы дангатель —
гидротрансформатор
совместную работу двигателя и гидропередачи, и соотношения
МТ = МВК; ит = ЯцГт. и!
Л', - ОДОбЛМг.
Характеристика выхода системы двигатель—гидротрансформатор показана на рис 1.19.
Динамическая характеристика и графики разгона автомобиля строятся с использованием зависимостей, приведенных в разд 1.6 для механических трансмиссий, в которых вместо значений Ме н г.е подставляются соответ* ственно значения Л1Т и лт из выходной характеристики системы двигатель— гидротрансформатор.
Коэффициент учета вращающихся масс 6
! . УцЦм'Пм _
*ЧЛи> сЮн
ГПяГкО Я1аГк0
где JB — момент инерции насоса гидротрансформатора и жестко связанных с ним деталей двигателя и согласующего редуктора: «м- ТЫ — соответственно передаточное число и КПД механической часта трансмиссии;
£Jf — суммарный моче, т инерции колее автомобиля; JT — момент инерции турбины и жестко связанных с ией деталей трансмиссии
Масса рабочей жидкости в трансформаторе невелика, и при расчетах коэффициента б ее не учитывают. Если
40
Схемы трансмиссий. Расчет основных параметров
достигнут.! максимально возможная скорость па низщеГг передаче (двигатель работает с максимальной частотой вращения коленчатого вала);
сопротивление движению автомобиля меньше, чем максимальная сила тяги на включаемой передаче;
за время переключения скорость автомобили не будет ниже минимальной устойчивой скорости на включаемой передаче
В случае, когда переключение передачи с высшей на низшую вызвано увеличением сопротивления движению, переключение в модели произойдет, если одновременно соблюдаются условия-
сила сопротивления движению больше максимальной Силы тяги на высшей
передаче,
скорость движения меньше, чем максимальная скорость на низшей передаче
При снижении скороетв вследствие наличия ограничения t'orp переключение на низшую перелечу произойдет, кргда скорость движения станет близг кой к минимально устойчивой' иа вйешэй передаче При значительном снижении скорости в начале разгона или скорости равномерного движения включают передачу, соответствующую сниженной скорости Эта операция фиксируется как одно переклю-• чеиие
Торможение автомобиля может осуществиться путем торможения двига тедем, тормозами или совместно двига телем и тормозами При этом режим торможения выбирается таким образом. чтобы обеспечить снижение скорости до заданной в пределах зоны видимости Последняя определяется дорожными условиями или специально регламентируется в программе.
Меблирование динамики автоийби ля основано на интегрировании уравнения его движения
у -(р.-р 11
где а — скорость движения автомобиля, м/с, s — координатя пути; Рн — окружная сила на ведущих колесах; Р& — суммарное сопротивление дороги и воздуха.
Окружная сила
В рассматриваемом случае предполагается, что двигатель в каждое мгновение развивает крутящий момент Мд, величина которого определяется положением педали управления подачей топлива а и частотой вращения коленчатого вала двигателя
С этой целью формируется функциональная зависимость крутящего момента Мд =^f (а, й»д), заданная, как правило, в форме таблицы Необходимую тормозную силу ₽т для снижения скорости автомобиля до скорости ограничения i»wp находят по выражению
Вт - Шд (и -— Оогр)/25т, где St — тормозной путь, равный расстоянию видимости или специально оговариваемый в программе.
Движение автомобиля при торможении определяется интегрированием уравнения (1 7), в котором вместо силы ~РК подставляется сила Рт с отрицательным знаком Коэффициент учета вращающихся масс при этом принимается равным единице. В случае торможения автомобиля тормозами и двигателем тормозная евла Р? =
Тормозной момавт двигателя д может быть определен экспериментально при снятии скоростной характеристики двигателя и аппроксимирован по выражению
где Уп — рабочий объем двигателя, л; А н В — постоянные коэффициенты
Для двигателей грузовых автомобилей ЗИЛ и ГАЗ можно принимать Л = 0,15, В — 0,0008, для двигателей ЯМЗ — А =- 0,64, В = 0,(ЮШ2
Рт. д = М-t. дЫкирНо/ляДЬ; Гт.т-Рт-Рт.д.
ПодпрО1 раммы регистрации параметров движения зависят от задачи расчета При анализе тягово-скорое nioix качеств автомобилей определяют значения средних скоростей и их рас-
Расчетные схемы определения динамических нагрузок
41
прс-делепий, а также суммарный расход топлива. Для его определения при наличии экспериментальных данных формируется функциональная зависимость Сг~ [ (Яд, Мд). представленная в табличном виде Значение GT определяется линейной интерполяцией Но двум заданным аргументам лд и Мд.
При сравнительных или приближенных расчетах могут быть исполь-вованы следующие зависимости.
для дизелей
GT =§е,уЛ'дЙцЙ1|/Ю1’а-
= 1.2 + 0.14 И —
— 1.89Иг+ 1,5614s;
для карбюраторных двигателей
*и“ 3,27 — 8,2214 +
+ 9.13И8 - 3.16И’,
+,= 1,25 — 0.99E-I-
+ 0.98Е2 — 0.23Е3,
где ge.v — удельный расход топлива при максимальной мощйостн г/(кВт-ч); Л(д — текущая мощность двигателя; И — отношение текущей мощности двигателя и максимальной И == — Ад/^етах! Е — отношение текущей частоты вращения коленчатого вала двигателя к частоте вращения яря максимальной мощности (Е = — ne.nN).
2
Нагрузочные режимы
Для расчета на прочность и долговечность детелей трансмиссии автомобилей в соответствии с существующими методиками необходимо знать следующие характеристики нагрузочных режимов трансмиссии относительный пробег на каждой из передач, распределение моментов в трансмиссии на каждой из передач, максимальные динамические нагрузки
Применяют два способа определения Характеристик нагрузочных режимов-экспериментально-статистический и расчетный Первый способ основан на анализе результатов экспериментальных исследований нагрузочных режимов автомобилей в различных условиях эксплуатации и нахождении общих, присущих данному классу автомобиля закономерностей. В основу второго способа положены расчеты режимов движения и нагрузок в трансмиссиях в определенных условиях эксплуатации.’Этот способ позволяет более полно
учесть особенности динамической системы конструируемого автомобиля и исроятные условия эксплуатации.
2.1. РАСЧЕТНЫЕ СХЕМЫ
ДЛЯ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ НАГРУЗОК
В ТРАНСМИССИИ
Автомобиль в целом и трансмиссия как составная часть являются сцстема-ми с распределенными параметрами Обычно при схематизации трансмиссии представляются в виде колебательных систем с дискретными параметрами. Основанием для дискретизации является то, что крутильные колебания в трансмиссии имеют выраженный дискретный спектр собственных частот в диапазоне до 200 Гц, поэтому дискретные системы пригодны для расчета колебательных процессов в этом диапазоне.
42
Нагрузочные режимы
В системах, приведенных к дискретному виду, все детали заменяются элементами, каждый из которых характеризуется только одним из параметров: инерционностью или податливостью. Дискретизация системы трансмиссии производится путем выделения элементов, относящихся к сосредоточенным массам, и элементов, обладающих только податливостью. Инерционными элементами (сосредоточенными массами) считают такие, осевой размер которых не превышает 1,5—2 их диаметров. Распределенные массы, если они малы по сравнению со сосредоточенными, учитывают приближенно, относя их к сосредоточенным массам, находящимся на концах участков. В тех случаях, когда осевой размер составляет более двух диаметров, а значение распределенной массы одного порядка с сосредоточенными, она искусственно разделяется на несколько сосредоточенных масс. К сосредоточенным массам относят маховик, диски сцепления, зубчатые крлеса, фланцы, кольца подшипниковг корпуса агрегатов ‘Элементы, обладающие только податливостью, в первую очередь имитируют валы и специальные упругие детали Учет и правильное определение податливости элементов имеют определяющее значение при составлении эквивалентных динамических систем. Зубчатые передачи и опоры имеют сравнительно малую податливость. Тщательный учет податливости таких элементов необходим при расчетах высокочастотных колебаний. Шины, упругие муфты имеют большую массу и высокую податливость, поэтому ИХ заменяют сосредоточенной массой с присоединенной податливостью После дискретизации автомобиль представляют в виде механической колебательной системы, состоящей из множества сосредоточенных масс, соединенных безынерционными упругими звеньями. В системе отражены также все кинематические связи, осуществляемые передачами различных видов. В процессе колебаний инерционные элементы системы обладают только кинетической энергией, податливые элементы — только потенциальной. Моменты инерции определяют аца литическим, графоаналитическим и экспериментальным методами. Лпа-литвческий метод применяют для ле талей, которые условно можно разделить на простые геометрические тела. Моменты инерции простых тел определяют по специальным таблицам Пример такоп» разбиения для зубчатого колеса показан на ркс 2 1, а. Момент инерции J = Jj-f- 4- Графоаналитнческий метод определения моментов инерции применяют в том случае, когда форма детали такова, что деление на простые геометрические тела невозможно. Деталь плотности р разбивают на части концентрическими цилиндрическими поверхностями (рис 2.1, б), описанными вокруг центра вращения на малых расстояниях &Ri один от другого Момеит
tр "Зл 1 инерции одной такой части (на рис. 2.1, б заштрихована) Д/ = М?®Д7?,-рла;/180. Момент инерции тела
С) 5) J = У (аД/^ДД^ряДвО. /==<
Рис. 2 1. Схемы разделение деталей {для определения моментов инерции: а — разделения шестерни ня простые тела вращения для а» а литического определения момента инерция; б —разделение тела сложной формы для графоаналитического определения момента инерции Подотлизости делюмй определяют расчетным^? путем или экспериментально. Формулы для определения полатливости]валов и некоторых деталей приведены в табл. 2 1. При последовательном соединении вэлов их по-
Расчетные схемы определения динамических нагрузок
43
44
Нагрулпм^е режимы
динамическая система трансмиссии автомобиля 1X2: массы с моментом инерции J, — крнвопгспио-шатуиио-го механизм» одного ци. лнндра двигатели; J, — маховика двигатели и ведущих деталей сцепления. Ji — ведомых деталей сце-я; J^ — деталей ко-передач (ведущий ведомый вал с зуб
чатыми колесами и J„, J„— зубчатые колеса, входящие с ними в зацепление), J*— остальных деталей коробки передач, деталей, жестко связанных с выходным флаиц-ы коробки передач, и частя карданной передачи, JE — оставшейся части карданной передачи, ведущих деталей главной передачи, J, — правого (левого) полуосевого зубчатого колеса и деталей, жестко связанных с ним. J, — правого (левого) колесного узла. J, — приведенные к маховым поступательно движущиеся массы автомобиля. У|р — двигателя и коробки передач при повороте в поперечной плоскости. Jjp — заднего ведущего моста при повороте в продольной плоскости (реактивный момент инерции ведущего моста); звенья с податливостями с» — участков коленчатого вала дчпгагсля; с,, — пружин гасителя крутильных колебаний и первичного вала коробки передач; сг1 — валов и соединений коробки передач. ctJ1. еы — нерабочих ответвлений зубчатых передач в коробке передач. с<5— карданной передачи, е^ — дифференциала; е‘,_(«”_) — правой (левой) полуоси. rJS — шин ведущих колее правого (левого) борта. г1р — опор двигателя при повороте в поперечной плоскости; — подвески ведущего моста при повороте моста в продольной плоскости (реактиеная податливость); г1 — сцсплсттс в трансмиссии; с, — сцепление ведущих колее с дорогой
датАивости суммируют, при параллельном — их жесткости.
Податливость шлицевых и шпоночных соединений, рад/(Н-м)
еш = Kmld4hz.
где для соединений с призматической шпонкой /Сш — 6-I0-1’, м’/Н, для соединений с сегментной шпонкой А’щ = 13,8-10"» м’/Н, для шлицевого соединевия = 4,2-Ю'1* м’/Н; d — диаметр соединения, м (для шли цевого соединения d = dcp); I — длина соединения, м, h — активная высота шпонки (шлица), м; г — число шпонок (шлицев).
Податливость карданных шарниров, рад/(Н-м)
е„ = 5- lO-’/d’,
где d—диаметр соединяемых валов, м. Податливость рессорной подвески ведущего моста на скручивание в про дольной плоскости (реактивная податливость), рад/(Н-м)
где с — линейная жесткость подвески, Н/м, L — длина рессоры, м.
Собственная податливость зубьев, накодящихся в зацеплении, приведенная к одному из валов рад/(Н>м),
«а — falbR* cos* а,
где b — рабочая ширина колеса (м), а — угол зацеплелия, R — радиус начальной окружности зубчатого колеса, расположенного на валу, к которому приводится податливость зубчатой передачи (для конических передач R — среднее значение радиуса начальной окружности); м, /(3 — коэффициент (для стальных прямозубых колее Кз = 6-10*11 м’/Н; для стальных косозубых колес fa = 3,6-10"11 м’/Н; для стальных шевронных колес fa =
4,4-10-11 м’/Н).
Для упрощения математического описания элементы эквивалентной механической колебательной системы приводят к одному валу (к одной угловой скорости) или к нескольким. При приведении должны сохраняться равенства кинетических энергий приводимой и приведенной масс, потенциальных энергий деформации приводимого и приведенного упругих звеньев системы и энергии рассеивания на приводимом и приведенном элементах
Расчетные схемы определения динамических нагрузок
системы. Приведенные значения параметров системы
J -= J^tf, С — е&?,
г„с Л> e0 — спбствснвые значения параметра’ элемента; и — передаточное число от вала приведения до вала приводимого элемента
Если в механизме происходит деление мощности на несколько потоков, то передаточное число от приводимого элемента определяют при остановленных других элементах. В табл 2.2 приведены простейшие механические колебательные системы, типичные для трансмиссии автомобиля, и соответствующие им эквивалентные динамические системы
Приведенные крутящие моменты Л1, приложенные к элементам системы, пахощт in соотношения
Л/ — Л4е<«,
где Мв приводимый крутящий момент.
На рис 2 2 показана приведенная к коленчатому валу двигателя эквивалентная динамическая система автомобиля 4X2 (элементы демпфирования условно не показаны).
Операция приведения к одному валу не является обязательной. В конкретной задаче может оказаться удобным приведение системы к нескольким валам, или для детального исследования работы одного из агрегатов его механическую систему рассматриваю с пе-нриведенней
При пракшчсских расчетах эквивалентную динамическую систему автомобиля упрощают, сокращая число элементов Степень упрощения может быть различной п зависит от характера задачи и главным образом от исследу емого частотного диапазона
Упрощение системы проводят в такой последовательности.
1 Исходную динамическую систему разделяют на простейшие двух п одномассовые системы (табл. 2 3 и рис 2.3).
2 Определяют собственную частоту тля Л ой о inoMaci-cEc.fi системы
ч (о- I
Рис. S.3. Последовательность упрощен? эквивалентной динамической системы
для дйухмассовой системы
oj — (Jft + J fc_|)/ J kJ h— ift,
3 Системы, для которых _> >v||m ('lira — верхняя граница исследуемого частотного диапазона) преобразуются в заменяющие, (табл. 2 3)
4. Производится замена простейших систем в соответствии с табл. 2.3 При этом происходит объединение соответствующих звеньев и вычисляются параметры упрощенной системы. Число степеней свободы упрощенной системы уменьшается по сравнению с исходной на число преобразованных систем Дальнейшее упрощение производится в том же порядке (пп.1—4)
Основными характеристиками динамических колебательных систем являются частоты собственных когебаний и формы колебаний
Упрощение динамической системы можно вести до тех пор, пока частоты и формы собственных колебаний упрощенной системы в исследуемом ча статном диапазоне с заданной точностью совпадают с аиэлогичными параметрами исходной системы Для расчета частот н ферм собственных коле баний удобен матричным метод Упро-
46
Нагрузочные режимы
Механическая система Дшглмп тес кая система Параметры динамической системы
П4 J, ZI — J|. j.z — jji?-. С|2 = е, -*- «gU2
•'l =JI' J2~32~ J2\!“~- J3~J3' = e12 = el- e23^e2‘ e24“e3“2
НрИ 3Z V'C J.- ! ")2. .|«=*j F +%(-^-)г+.,..+Ч!
j, = 4 . j2 - 4.fu2. jv=jp/d - «J2: «12 = «I +e2- ep = ep -">2; 1 = Ч’|/ч)2
2-3. Преобразование простейших динамических систем
Заменяемая система Заменяющая система Расчетные формулы
1» Ч Зк Jk = Jk*k !ek Jk+l “ Jk*k-\lek n - 4ft_, ('fc_l.4)2+ чл («Л2; ek=ek-i^ck
Jk ~Jk + Jk-1 '• ek-l ~ ekJk-\-\lJk' <-1 =°-5ч/(вл/<-|)2- 4fe=O.S4/(eft/^)2
Расчетные схемы определения динамических нагрузок
47
щению с анализом частотных характеристик указанным методом подвергаются линейные системы без демпфирования
Уравнения системы записывают в в матричной форме
М (<р}+СМ = {ОЬ (2-1)
где М — матрица инерционных элементов, С — матрица жесткостей; (<р) — координатная матрица
Умножая уравнение (2 [} па матрицу
Ж"1, обратную матрице М, получают
!-№v) = {0}. (2.2)
где J - МАГ1, Н М1С
Множество решений уравнения в матричном виде
i<Pi |ц!ехр (-»«/)
где {[л) — столбец постоянных, to — частота; t — время
Подставив значение {<р| в уравнение (2.2) и разделив обе части на ехр (—гад), получают
(«-o)V)(pj = {o; (2.3)
Для физической колебательной системы (и) -£0 Следовательно, система уравнений (2 3) имеет решение, когда определитель |W —(Л/|=0, т е.
Лп — со» Иц. . .Л1п
Л2| Л21 —<о«.,.лгг1
Лщ ftna.-.Лип — со®
(2-4)
где h — элемент матрицы И.
Опреденнтель (2.4) представляет собой уравнение n-го порядка относительно о>® Решив его, получают п значений квадратов частот собственных колебаний. Собственные векторы матрицы Н определяются на основе решения п — I уравнений системы (2 3), где (jx{ — собственный вектор матрицы И, соответствующий ее собственному значению 1 При этом одна из компонент вектора {р} принимается
равной произвольной константе, например — 1 Программа расчета частот и форм колебаний днпамнческих систем, реализующая этот метод, должна пре, усматривать формирование матриц инерционной и жесткостей без записи уравнений движения Исходными данными являются значение масс инерционных звеньев, жесткостей упругих звеоьев п граф связей между массами, соединенными упругим звеном. Упругое звено может связывать между собой две массы или массу с за лелкой Для систем, содержащих ре активные упругие звенья, днфферен циальные механизмы, дополнительно указываются номера масс, связанных с реактивным упругим звеном и с различными элементами чифферепциэла (водило, солнечное и коронное зубча-тыс колеса), а также значение параметра дифференциала (отношение моментов на солнечном ц коронном зуб чатых колесах).
Расчет частот и форм собственных колебаний трансмиссий по описанному методу может проводиться для выявления опасных форм колебаний, отстройки от частоты резонансных колебаний путем соответствующего подбора конструктивных параметров
На этапе составления динамической колебательной системы каждый инерционный и упругий элемент с1ютвет-ствует определенной детали или группе деталей трансмиссии При упрощении систем сначала при приведении, а затем при уменьшении числа степеней свободы определенность такого собт ветствия теряется Расчетная динамическая система эквивалентна реальной системе трансмиссии только в том, что колебательный процесс в ней в заданном частотном диапазоне модели рует реальный колебательный процесс Однако тот факт, что рят узлов транс миссии характеризуется инерционными и упругими параметрами, превалирующими по своей величине (большие моменты инерции имеют маховик, ко леса, сосредоточенная масса главной передачи; большие податливости — карданный вал. полуоси), дает основание приписывать элементам расчетной динамической системы соответствие определенным деталям, узлам Это удобна для анализа и расчетов.
48
Погрузочные режимы
При расчетах колебаний в трансмиссии в диапазоне до 250 Гц приведенные массы подвижных деталей двигателя можно заменить одной массой с суммарным моментом инерции Jo Если масса автсчюбияя распределена равномерно по ведущим колесам, сцепление их с дорогой одинаково, а трение в дифференциале незначительно, то динамическая система на участке Js—j7 (см. рис. 2 2) яэляется симметричной Ее упрощают объединением параллельных ветвей. Полу-чае-.ся цепная динамическая система, у которой объединенные моменты quep-Ции и жесткости равны сумме соответствующих параметров параллельных ветвей При таком упрощении нс учиты-
ваются противофазные колебания, которые могут возникать в параллельных ветвях В автомобильных коробках передач инерционные массы на нерабочих ответвлениях JS1, J32 можно считать жестко соединенными с рабочими участками При решении вопроса об учете в динамической системе реак тивных звеньев следует принимать во внимание степень взаимосвязи колебаний масс автомобиля и масс транс миссии через реактивный контур и влияние реактивных элементов на частоты и формы собственных колебании системы При многих видах расчетов бывает достаточно учитывать только реактивный контур ведущих мо-
В таил 2.4 представлены расчетные динамические системы трансмиссий, на которые целесообразно ориентироваться при упрощении мпотомассо-вых систем Путем упрощения системы, показанной на рис. 2 2, получена, например, динамическая система трансмиссии автоиоГ.иг.я 4X2.
Параметры динамических систем некоторых автомобилей, приведенные к' коленчатому валу двигателя. Даны в табл f*c’ 11-------- -----------
колебаний табл 2 6
При расчете нагрузочною режима трансмиссий рассматриваются следу -ющие основные колебательные про цессы переходные, возникающие при трогании и переключении передач; низкочастотные колебания в диапазоне до 20 Гц от воздействия неровностей микропрофиля; высокочастотные ко--лебания в диапазоне 20—250 Гц от воздействия двигателя.
Динамические расчетные системы для определения переходных колебательных процессов должны с достаточной точностью воспроизводить первую форму колебаний в трансмиссии с частотой, близкой к соответствующей частоте реальной системы. В расчетную динамическую систему должны быть введены фрикционные элементы, моделирующие работу сцепления в трансмиссии н сцепление ведущих колес с дорогf>ii При отсутствии рьактпьмых штапг в конструкции подвески необ ходимо учитывать реактивный контур ведущих мостов.
> Частоты собственных этих систем даны в
Расчетные схемы определения дикамича.ких нагрузок
Автомобиль дХ .Моменты инерции кг м*
J, Л Л Л J, JP
ГАЗ-53А [V 0.52 0.52 0.52 0.52 0.047 0.666 0 009 0 002 0.002 0.010 0.033 0.121 0.0004 0.0016 0.0053 0,0151 0.018 0.080 0 256 0.742 0.8 S.5 33,7 0.014 0.060 0.195 0.570
ЗИЛ-13(1 1П IV V । 02 02 02 02 02 0,028 0 029 0 030 0.032 0,037 0.003 0.011 0.П35 0.086 0,185 0 001 0.004 0,012 0.028 0,061 0,024 0.080 0,26 0.63 0,14 1.05 3,46 27*0 56.3 0.011 0.037 0.117 0.284 0,615
МАЗ-500А IV .8 .8 ,8 .8 .8 0.093 0,092 0.101 0,402 0.098 0.002 0,018 0.064 0,165 0.394 0,010 0.032 0.115 0.269 0.607 0,1176 0.248 0.915 2.10 4,72 2,78 9,06 0.916 77.0 17,4 0.008 0,025 32.ВО 0.215 0,484
Автомобиль Пере Жесткости с-10~', Н м
С. г«6 СР
ГАЗ-53А »!' IV 4.6 4.6 4.6 4.6 4.0 7.7 10.1 2S.6 0.49 1.91 6,13 18.0 0 из 0.14 С 44 1.30 0.18 0 18 2.64 7.70 0.13 0.57 1.W, 5.43
ЗИЛ 130 III V 8.5 8.5 8.S 8.5 8.5 3,2 0.3 17,5 40,2 80.6 0.52 1.72 5,50 13.3S 28,84 0,04 0.12 0,40 0,96 2.08 0.24 0.78 2.48 6,0 (3.0 0.19 0.64 2.04 4 95 10. Бб
МАЗ 5С0А *v 21.3 21,3 21.3 21,3 21,3 8.9 26.7 56.8 153,0 (30.0 2,67 7.69 28,0 65.0 145.2 0,27 0.88 3.20 7.40 16.8 0.58 1.92 7.0 16.1 36.6 0.41 2.62 9.6 22,4 50.4
На рис 2 4 приведены динамические системы для расчета колебательных процессов в трансмиссии на режимах трогания и переключения передач. Для упрощения расчетов переходных колебательных процессов при переключении передач Динамические системы целесообразно приводить к двум валам ведущему валу коробки передач и карданному. В динамические системы введены элементы, моделирующие работу сцепления — ct, и сцеп ление колес с дорогой — с9 При
расчетах процессов нагружения при переключений передач моделируется работа синхронизаторов в Коробке передач — элемент ct. При расчетах нагрузок на режимах трогания элемент ct исключается.
В расчетах колебаний от воздействия микропрофиля дороги используются динамические системы, с высокой точностью отражающие первые две формы колебаний реальных трансмиссий Особое значение при построении таких динамических систем имеет описание
Нагрузочные режимы
трансмиссий аатемобнлей (рад.'е)
Передача
I lit IV V
8,1 13.9 22.6 33.8
100.0 100,5 100.1 100,1
116,8 117.4 116.0 115.4
723.2 467,3 301.7 205,8
1234,4 1794.4 1189.6 1664,2 1165.0 1399.0 1171.7 1399.3
6,9 10.3 16.4 25,5 31.8
102.8 103,8 103.4 103.4 103,1
144,4 153.1 143.0 140,1 134.2
493.6 408,6 321.4 257,6 209.0
S 68/,3 714.5 762.9 786.0 794,7
1190,5 1039,5 1162.3 1399,3 1680.3
8.5 11,8 19,1 26.5 35.0
98,7 98.7 98.0 97,3 96,4
283,4 274,8 240.2 204.3 159,8
426.0 372,3 326,3 316,0 312.1
563,/ 605.0 666.4 724.8 747.9
2421,4 1487,1 1362,1 1652.5 1386,9
2 9.5 13.9 21.2 30.1
90,4 90,4 90.4 90,5 90.4
105 0 105.0 104.9 104.6 102,4
234 0 233.0 231,2 232,6 211.9
и 450 0 440.0 425.3 398,1 338.2
взаимосвязей колебаний в трансмиссии с линейными и угловыми колебаниями подрессоренной и нсполрессо рснной масс автомобиля (см. разд. 2.7)
Расчет колебаний, возбуждаемых двигателем, проводится с использованием динамических систем, с заданной точностью отражающих пять-шесть форм колебаний трансмиссии Этому требованию отвечают динамические си стены, приведенные в табл 2 7 Эле менты вязкого трения в звеньях си стем условно нс показаны Звено с1г моделирует гаситель крутильных колебаний сцепления Так как колеба-
колеРаний. возбуждаемых двигателем
Расчет максимальных нагрузок в трансмиссии
51
пия. возбуждаемые двигателем, имеют сравнительно высокую частоту, то сцепление колес с дорожной поверхностью ие учитывается Система транс миссии соединена с массой автомобиля звеньями, имитирующими тангенци альную податливость шин ведущих колес.
2.2. РАСЧЕТ МАКСИМАЛЬНЫХ НАГРУЗОК В ТРАНСМИССИИ
Экспериментально установлено, что наибольший момент в трансмиссии автомобиля возникает при трогании автомобиля с быстрым включением сцепления (броском педали) Этот мо мент может значительно превышать момент, соответствующий максимальному моменту двигателя. На рис 2 5 показаны экспериментально полученные моменты в трансмиссий при трогании автомобиля с быстрым вклю чением сцепления па первой и второй передачах Максимальный момент в трансмиссии Afwax для расчетов на прочность определяется по наибольшему из экспериментально полученных значений. Нагруженность трансмиссии в этом случае удобно оценивать коэффициентом динамичности /гя, под которым понимают отношение приведенных максимального момента па упругом звене трансмиссии к моменту, создаваемому па этом звене двигателем при работе на режиме, соответствующем максимальному крутящему менту Агд = AIraaxM4en]ax.
Максимальные динамические нагрузки на полуоси ведущего моста
Рис. 2.5. Осциллограммы момента в трансмиссии при трогании с Сыстрым включением сцепления <?'с = О, I с):
%); 2 - па
В табл 2 8 приведсвы значения максимальных динамических моментов и коэффициенты динамичности для трансмиссий некоторых автомобилей, полученные экспериментально
Величина максимального динамического момента зависит от параметров упругих и инерционных элементов трансмиссии и привода сцепления. Поэтому расчеты максимальных нагрузок в трансмиссии необходимо проводить на основе моделирования движения системы трансмиссии в условиях трогания с резким включением сцепления Для этого используют расчетные динамические системы, показанные на рис 2 4 Движение масс
52
Нагруеочкые режимы
динамической системы описывается системой дифференциальных уравнений, которые решаются на ЭВМ.
При моделировании процесса трогания в исходном состоянии массы* jg— J) (гм. ряс. 2 4, я), Ja—3» (СМ рис 2 4, б) находятся в покое. К массе двигателя прикладывается момент двигателя, и происходит разгон до определенной скорости о, По достижении этой скорости моделируется включение сцепления с.
Момент двигателя задается по внешней скоростной характеристике, содержащей корректорную и регулярную ветви А1Д = А4е(<о)
В момент трогания к массам автомо биля и Js прикладывается момент от сил сопротивления движению
Afj -- бдфГвоМ-
Момент трения в сцеплении Af,. в процессе его включения задается по выражению
Afc ® Mccfc (0 sign (<i>i п«3), где Afrc — статический момент тре-, ния полностью включенного сцепле-. ниЬ. /<-(0 —закон нарастания момен-' та трения в сцеплении по времени при его включений; со,, сд,—угловые ско роста соответственно масс и J»
Закон нарастания момента трения в сцеплепии определяется типом и - параметрами привода и описывается с достаточной точностью экспоненци альиоЙ зависимостью
fc (0=1— охр (—М)>
где k — константа, характеризующая темп включения сцепления (k = = 3/fc); tc — время полного включе ния сцепления.
При отсупггвии в конструкции привода сцепления усилительных пневматических или гидравлических звеньев при броске педали tc = 0,015<--4-0.04 с. Если в приводе сцепления установлен усилитель, то tc при бро ске педали увеличивается Например, для приводи сцепления автомобилей КамАЗ tc = 0,1 с
сы J, понимается нисса с моментом чнер
Расчет максимальною момента в трансмиссии выполняется при трогании автомобили на низших передачах с максимальной частотой вращения коленчатого вала двигателя.
При приближенных расчетах мак симальный динамический момент на ведущем валу коробки передач можно определять по эмпирическим формулам
Alm» - 20cAf, ио при U-, Jg 20,
Л4Пах “= 1 .ЗГ’л1<г при uT 50.
где Ми —
При 20 < ит < 50 величину Afmex находят интерполяцией значений Admax. полученных для ит = 20 и ит— 50, по выражению
AIidrx ~ 2f сЛ1е 1ПЯХ — (2рсЛ1е т«х -
- 1,35МФ) (нт - 20)/30.
Для агрегатов трансмиссии, расположенных за зубчатой парой привода промежуточного вала коробки передач, максимальный динамический момент можно определять по моменту иа ведущем валу с учетом передаточного числа трансмиссии и конструктивных параметров узлов деления мощ
Для ангомобиля с гидромеханической трансмиссией момент на турбинном валу гидротрансформатора
Л1пмх= Л'ЬюА’о.
где AfM — момент на насосном колесе; Ко — коэффициент трансформации при режиме «Стоп».
Максимальный момент на других деталях ваходится по значению момента па турбинном колесе с учетом передаточного числа и КПД трансмиссии на участке от турбинного вала до рассматриваемой детали При этом максимальный момент в трансмиссии не может превышать момент, обеспечиваемый сцеплением при <р = 0.8’
".»»> = ° 8”‘.Л./“Л-
где и' и ~~ соответственно переда печное число и КПД трансмиссии на участке от рассматриваемой детали то ведущих колее.
Экакриментально-статистическш характеристики
2.3. ЭКСПЕРИМЕНТАЛЬНО-
СТАТИСТИЧЕСКИЕ ХАРАКТЕРИСТИКИ НАГРУЗОЧНОГО РЕЖИМА
Нагрузочный режим, определяющий усталостпую прочность трансмиссии автомобиля, зависит от параметров движения автомобиля, его технических характеристик и конструктивных особенностей.
Использование нагрузочных ха ращьристик непосредственно в расче тах затруднительно. Поэтому их при водят к системе детерминированных характеристик, по которым оценивают долговечность деталей. Выбирают та кие режимы нагружения, характсрнзу емые постоянными амплитудой и часто тип, которые обеспечивают в деталях трансмиссий такие же накопления усталостных повреждений, как и реальные случайные нагружения
Накопление усталостных поврежзе. ний в металле характеризуется вели-
чиной В этом выражении z —
число интервалов кривой распределения напряжений в детали; Nf — число циклов нагружения детали за весь пробег напряжением, соответствующим f-му интервалу. Обозначим ₽j = — И CCj — Ni/Np, получим
£’ ор\. = 1=1
где Op — напряжение в детали при расчетном режиме нагружения; А'г — число циклов нагружения при расчетном режиме нагружения; т — показатель степени, зависящий от характера нагружения, Кп — коэффициент приведения режима переменных циклических напряжений к режиму циклического нагружения с расчетной на грузкой (коэффициент пробега),
<и - £
Если кривая распределения представлена аналитической фикцией плотности вероятности, то
°и
Ли’7Г \ cmf(a)do.
или, учитывая пропорциональность зависимости между нагрузкой и напряжением О’,
В этих выражениях <тн, ов, Af„, AfB — соответсгпенно наименьшие и наибольшие напряжения и моменты, действующие на деталь; f (о), f (Л() — соответственно плотности вероятностей напряжений и моментов, действующих па деталь.
Таким образки, применительно к деталям автомобильных трансмиссий обобщенными характеристиками для расчетов иа долговечность являются, расчетные моменты Afp; расчетные частоты вращения валов ир; коэффициенты пробегов Кп или эквивалентные моменты Л!э; коэффициенты относительных пробегов на каждой из передач 5
Эти характеристики определяют отдельно для деталей, работающих на всех передачах (индекс 0 в обозначениях) и для яеталей, работающих на определенных передачах (индекс О.
Наиболее существенное влияние на нагрузочный режим трансмиссии оказывают средние скорости движения; относительны» пробег иа каждой из передач; удельная сила тяги, число ступеней в коробке передач
Средняя скорость автомобиля оаСр зависит главным образом от дорожных условий и удельной мощности двигателя. Если нет других данных, то среднюю скорость автомобиля можпо найти по выражению
®а ср — пих, гДе <Ьпнк— максимальная скорость; Kv — коэффициент, зависящий от условий движения и'удельной мощности автомобиля (Ко ~ 0,5-5-0,75).
54
Нагрузочные режимы
Относительный пробег на передаче gx-представляет собой отношение пути, проходимого автомобилем на »-й передаче, к общему «ути Sj., проходимому автомобилем.
ll = Sl/Ss.
Для средних условий эксплуатации s может быть определен по эмпирическим данным, приведенным в табл 2.9.
Средние скорости движения автолиз-бзия на передачах »jCp могут быть найдены исходя из предположения, что диапазон частот работы двигателя на всех передачах примерно одинаков Тогда справедливо соотношение
Vi гр == ₽п. срИв*И£,
где Пв.ср — скорость автомобиля на высшей передаче,
Vfi. ср — va ср2
«в. и1 — передаточные числа соответственно высшей и f-й передали
4 Подставив значение оя.ср, получим
’,ч.--.члЕ£1''1- <2-5>
Скорости, найденные по выражению (2 5), принимают также в качестве расчетных для нахождения коэффи-
циентов динамичности при расчетах зубчатых колес и подшипников.
Удельная сила тяги представляет собой отношение окружной силы на ведущих колесах к весу автомобиля (автопоезда)
Т,; = ₽.<««
Экспериментально установлено, что распределение удельной силы тяги починяется усеченному по максимальным значениям логарифмически нор мильному закону распределения Плотность вероятности определяется выражением
р И) - (*ехр (- 0,5/2) dt К 2.1 J
о
Параметр i находит по формуле t =-(lglfa- 1етгср)/Яу£,
где Тш — текущее значение удельной силы тяги; У; ср — среднее значение удельной силы тяги на передаче с индексом », Су/ — среднее квадратическое отклонение десятичного логарифма удельной силы тяги на передаче с индексом i
Если рассматривается распределение укг в пределах от уК{ — о- до ущ "= р, то вероятность у тельной силы тяги в этом диапазоне
Р [aT«f < ₽] - Ф (/») - Ф (М;
/« = <₽ -1ёт<ср)отг:
/1-(а-lg Tier) oyi
Значения Ф (/«) п Ф (ft) — определяют по таблицам нормального распределения
Динамические нагрузки, возникающие в деталях трансмиссии, учитываются при расчетах соответствующими коэффициентами. Ппзчому распределения удельных сил тяги ограничиваются величинами расчетных удельных сил тяги.
Расчетные значения удельных сил тяги на передачах уц;р представляют собой отношение максимальной окружной силы, развиваемой на ведущих колесах автомобиля (автопоезда) при установившемся движении, к его весу:
Yxip = nwx/^a-
Если па низших передачах окружная сила на ведущих колесах может быть ограничена по условиям сцепления с дорогой, то для этих передач определяют значения ур как по условиям сцепления, так и по мощности двигателя и в последующих расчетах используют меньшее из значений
По условиям сцепления с дорогой tfqjp = Дяя условий движе-
ния по твердым дорогам принимают ф — 0,7, для автомобилей повышенной проходимости в случае движения вне благоустроенных дорог <р = 0,5-?-0,6.
По моменту двига геля ув,-р = = dicntaxUii}j'rmiOa
Экспериментально статиатыеские характеристики 55
Hazpyaoww режим»
Расчетную удельную силу тяги по
моменту двигателя в случае зования гидромеханической миссии находят по формуле
нсполь-транс
Утр = Л!нЛ'игт),-/гкьОа, (2.6)
где А4Н — момент на насосном колесе трансформатора при максимальной по даче топлива в двигатель и значении коэффициента трансформации, соот-ветстнующем КПД трансформатора 0,7 на низших передачах и 0,85 на выс-
Среднее значение удельной силы тяги иа передачах j ср определяется сопротиилением движению. В общем виде
Ук/ ср — + Vni т- Vjb
где Тф — удельное сопротивление дороги (Т?Ф = 4): Ув« — среднее удель ное сопротивление воздуха (ув,- — ~ ^ui ср'%)• — среднее удель
ное сопротивление разгону Гул ~ = в (Угар — Уф — У».)]-
Срё1нее»удельнос сопротивление виз духа целесообразно учитывать при v-t ср >• 40 км/ч.
Для опреденеыия удельных сопро; тиалений пользуются приведенными ниже данными.
Средние квадратические отклонения десятичного логарифма удельной силы тяги Оу; можно принимать в пределах 0,2—0,25. Большие значения относятся к автомобилям с большой учеяьяой мощностью и к деталям, нагружаемым только при работе на определенной передаче коробки пе редач
Распределение удельных сил тяги для деталей, работающих на всех передачах, также подчинено логарифмически нормальному закону распределения Оно может быть получено суммированием нагрузочных режимов на отдельных передачах. Отяахо прах тика расчетов показывает, что более объективные результаты, особенно для многоступенчатых коробок передач,
получают ио общей кривой распределения удельных сил тяги.
Для нахождения значения общей средней удельной силы тяги у,™ необходимо найти суммарное удельное сопротивление движению vrX-
УкЕ == Ук1 ьр?1 + Ук2ср^2 + • • • +
+ Ук п срам = 2} Ук « ср£ь
Распределение удельных сил тяги подчинено логарифмически нормальному закону, при котором мода распре геледия смещена относительно средней удельном силы тяги, поэтому общая средняя удельная Сила тяги оказывается несколько меньшей, чем суммарное удельное сопротивление движению. Сопоставление экспериментальных и расчетных данных показывает, что справедливо следующее соотношение
?иС-(0,«^0.9)¥хг
Среднее квадратическое отклоните логарифма общей удельной силы тяги может быть принято таким же, как и для распределений па передачах, т с <JVi> =•- 0.20-5-0.25.
Р/кчетный редей ч дечехеиия явля стся условным Он определяется детср минированными значениями момента >Ир, передаваемого рассчитываемой деталью трансмиссии, и частотой ее вращения яр. При этом условно принимают, что автомобиль при заданной передаче в коробке передач движется с предельной для данной передачи удельной силой тяги со скоростью, соответствующей расчетной для данной передачи
Расчетный момент детали может быть найден по выражению
Ч-р = I р^таг кО^т-
(2.7)
где 6 и X — коэффициенты, учитывающие соответственно циркуляцию мощности и долю мощности, передава емую через рассматриваемую деталь-«" и т|" — соптветстаекко перелатяч
Экспериментшьно-статистические характеристики
57
п-.е число я КПД грянем,тссии ла участке от рассчитываемой детали до
Рекомендуется принимать 0 — 1 для автои^илей с одним ведущим мостом млн несколькими, имеющими дифференциальный привод. При блокированном приводе 6~ 1,1 на низших передачах и в — I $, — па высших
Если в приводе от двигатели к рас сматрпавемой детали «имеется узел де ления мощности (межоожой дифференциал), то а берется в соответствии с распределением моментов Этим дифферен циалом. Например, если в раздаточной коробке имеется несимметричный дифференциал, делящий момент между передним и задним мостом в отношении I 2, то для деталей перед него мсстн нужно принимать "k — 1'3, а для деталей заднего моста К — 2/3. В том случае, когда дифференциал отсутствует, коэффициент К прпни мают пропорциональным сцепным массам.
Гидромеханические трансмиссии делят на два участка, даигатель—насосное колесо, турбина—ведущее колесо. Для первого участка расчетным является максимальный момент двигателя Расчетный момент дли второго участка находят по формуле, в которой определяется ио выражению (2.6).
Расчетным моментом для деталей, работающих при всех передачах в ко робке передач, является максимальный момент. ,,;ередаваел|ый через траас-мнссию при установившемся движении Определяется по формуле (2 7), в которую подставляется значение
Ал четная частота ореш^ннл определяется исходя из расчетных ско росте» движения автомобиля При этом Для деталей, работающих на всех пе редачах, о0о — ®icp. а для деталей, работающих на определенных передачах. vip — »j ср (2 5).
Расчетную частоту вращения находят по формуле
так
'Тм——J О <
пип
XdlgyKb
(2-8)
Практически интеграл в формуле (2 8) находят численными методами. В этом случае Кш целесообразно нахи шть по формуле
БСл/й,.
где г — число ин гервалов удельной силы тяги в пределах от ук min До Ук щах, Рп — вероятность уделыюй силы тяги на интервале с номером п
За максимальное значение удельной силы тяги Укспах принимается расчетное значение уир; минимальное значение удельной силы тяги можно ограничивать величиной, отличающейся от значения средней удельной силы тяги на ЗСуе
Практически подсчет целесообразно начинать с наибольших значений удельной силы тяги и прекращать, когда вероятность ал и удельная сила тяги становятся значительно (на 1 — 3 порядка в зависимости от вида расчета и требуемой точности) меньше' соответствующих наибольших зиаче-
Коэффициенты пробе« а зависят от вида натружения Детали. При расчете зубчатых колес на контактную усталость и формулах (2 8) и (2 9) принимают показатель степени m = 3,0, а при расчетах на усталость при изгибе ш — 9,0 При расчетах подшипников принимают шариковых т= 3, релиновых т —- 3,33. По существующим методам подшипники рассчитывают по эквивалентному моменту
,w8i =л#,р” /с,,,-
Коэффициенты пробега определяют по выражению
?> Наибольшее влияние на коэффициенты пробега оказывают отношение
58
Нагружнные режимы
У'кр'Укср и величина сречнего квадратического отклонения o^i Поэтому при приближенных расчетах можно использовать данные графиков рис. 2.6, 2 7 На этих графиках показаны зависимости коэффициентов пробега при расчетах по напряжениям изгиба К nF и контактным КпН в зависимости от отношении удельных сил тяги и средних квадратических отклонений. При использовании графиков для расчета подшипников коэффициент пробега можно принять равным коэффициенту пробега при расчете зубчатых колес на контактную уста-
рис. 2.6. Зависимость коэффициента пробега Кпц От отношений удельных сил
Зависимость
2.4. РАСЧЕТНОЕ ОПРЕДЕЛЕНИЕ НАГРУЗОЧНОГО РЕЖИМА
ТРАНСМИССИИ
Моменты, нагружающие узлы и детали трапсмиссни, представляют собой случайные широкополосные процессы, включающие установившиеся и переходные режимы. Первые характеризуются тем, что изменение их статических параметров происходит за время существенно большее, чем период наиболее низкочастотной составляющей К установившимся режимам можно отнести движение на передачах Переходные режимы на&тюдя-ю1ся при трогании автомобиля и переключении передач, они имеют небольшую протяженность по пути (до 5—8 %), однако их юля в наработке ресурса деталей трансмиссий является существенной Переходные и установившиеся процессы в реализации крутящего момента следуют один за другим и метут быть достаточно четко разграничены. Это позволяет общий нагрузочный режим рассматривать как сумму нагрузочных режимов от установившихся и неустаповившихся процессов Частотный анализ моментов
Расчетное определение нагрузочного режима трансмиссии 59
в трансмиссии автомобиля показывает, что установившийся процесс характеризуют три составляющие ква-чисгатическая, обусловленная сопротивлением движению, динамическая от воздействия мнкронеровнистей порог и динамическая, вызванная неравномерностью работы двпга>сля.
Влияние других составляющих, обусловленных, например, неточностью работы зубчатого зацепления, переходом от однополюсной» к двухполюсному зацеплению, обычно нс распространяется за пределы рассматриваемого узла и может быть учтено при расчетах соответствующими ко-аффициентами Рассматриваемые со ставляющие достаточно четко разделе пы но частотам. К квазистазической со ставляющей следует относить процессы с частотами до 0,3—0,5 Гц. Микропрофиль дороги в зависимости от скорости движения и свойств трансмиссии вызывает колебания с частотами 0,5— 20 Гц, а двигатель — с частотами 20 — 250 Гц Экспериментальные исследования показывают, что перечисленные выше составляющие мо жно считать некоррелированными, по этому нагрузочный режим при уста повившемся движении может быть по лучен их непосредственным суммиро ванием
К процессам, вызывающим неуста ковавшиеся колебания в трансмиссии, относятся режимы трогания и переключения передач При трогании и переключении передач динамический момент в трансмиссии достигает больших амплитуд и изменяется по непериодическому закону Ё общем случае процесс трогания или переклю чения передач можно разделить на пять этапок (см рис 2 8)-/ — выклю ченне предыдущей передачи; // — синхронизация и включение следующей передачи: III — включение сцепления; IV — высокочастотные колебания в процессе включения сцепления; V — колебания в трансмиссии с собственной частотой. Основное значение в формировании динамической нагрузки у трансмиссии имеют III, IV и V этапы
Динамические моменты, действующие в трансмиссии автомобиля на режимах трогания и переключения
сии автомобиля при авреключенин пере
передач, зависят от конструкции ав томобиля (динамической схемы транс миссии, динамических характеристик двигателя), стиля вождения (темпа включения сцепления) и дорожных условий. Темп включения сцепления и дорожные сопротивления являются случайными величинами, и это опреде ляст случайный характер динамического момента в трансмиссии на рас сматриваемых режимах Процесс расчета моментов в трансмиссии на переходных режимах включает следующие операции составление расчетной схс мы, моделирование динамики авига теля, моделирование действий води теля и условий движения В результате расчетов получают статистические характеристики нагружения трансмиссии в рассматриваемых эксплуата ционных условиях при трогании с ме ста и переключении передач как с вы сшей на низшую, так и с низшей на высшую.
Расчет нагрузочного режима трансмиссии выполняется на ЦВМ Пакет программ состоит из объединенных программных блоков и отдельных программ, каждая из которых может использоваться самостоятельно
Схема пакета программ приведена на рис. 2 9 Процесс расчета включает следующие основные этапы определение режима движения, квазнста-тической составляющей и характеристик режима работы трансмиссий; на-гружсиности трансмиссий па режимах трогания с места и переключения передач; характеристик колебательных процессов в трансмиссии от воздеи-стния дорожных неровностей и неравномерности работы двигателя
Затем происходит формирование характеристик нагрузочного режима.
60
Нагрузочные режимы
| блмг РечиеГй" ' }-
Ipepoer’epueinuea релиноб I
/wdevw тинснеша/ j
Усюанобибши-ecu ымцеесы блок» Переходили процессы КвОЗи- coanohsK^iui
1Д|_ №
МОК 4 9орниробание нпруянцка релина
Phc. 2.9. Схема пакета программ no расчету нагрузочного режима трансмиссий автомобилей
2.5. БЛОК ПРОГРАММ «РЕЖИМЫ»
Блок программ «Режимы» состоят ’из программы расчетов режимов дви-чкения и программ счета статической составляющей и режимов работы трансмиссии
Основные положения расчета режимов движения были приведены
в разд. I 8. Программа обеспечивает получение па каждом шаге счета номера передачи I, текущего значения скорости автомобили о и среднего момента в трансмиссии, приведенного к карданному валу М
Текущее значение скорости автомобиля находят интегрированием \ равнений (I 7) Мпчент на карданном налу в зависимости от характера движения при установившемся движении, при торможении двигателем и при разгоне определяется соогветггкелно « - м №ио)'. М = Меи-г^/ио- ’К- Чг — КПД участков трансмиссии соответственно от двигателя до карданного вала и от карданного вала до колес
При торможении только тормозами и при движении с выключенной передачей в коробке передач момент в трансмиссии равен нулю.
Программа расчета статической составляющей обеспечивает получение для каждой г-Й передачи двумерного распределения среднего момента, дей-стнующего в трансмиссии, и скорости движения автомобиля в виде корреляционной таблицы (табл 2.10).
Таблица по вертикали образуется т уровнями, по которым сортируются
2.10. Двумерное распределение
”1 vk «•» 1
"u ₽lft Pin Pjut
"л pik *in PMJ
иш Crril Р-ЧК Pmn ₽i,m
Pol Пик Hvn
Расчет погруженности при трогании с мптпа и переключении передач 61
текущие значения среднего момента, а по горизонтали --- п уровнями, по которым сортируются текущие значения скорости движения. Э.темент таблицы для РЙ передачи — элемент двумерного массива Рц представляет собой вероятность совместного выполнения неравенств
Mj —Ш[2^M<Mj± &Mj2,
Vk — Л v'2 v < щ 4- Av/2,
где ЛЛ4 н Av — ширина интервалов сортировки значении текущего момента Л! и скорости о
Целесообразной является размерность массивов гп = 10, п = 10. На каждом шаге счета соответствующий счетчик увеличивается на единицу. Вероятность определяется по формуле
Программа счета режима движения имеет следующие счетчики:
числа включений каждой передачи отдельно с высшей смежной и с низшей смежной, „
суммарного пройденного пути и пути, пройденного на каждой передаче;
общего времени движения и времени /движения на каждой передаче.
По данным счетчиков вычисляются отпосительное число включений передачи па 1 км пути и относительное ис пользование передач по пути и вре мени.
Массивы результатов решения передаются в программные блоки расчета вагруженности трансмиссии от воздействия микропрофиля дороги, двигателя и расчета нагруженности на режимах трогания и переключения передач.
2.6. БЛОК ПРОГРАММ РАСЧЕТА НАГРУЖЕННОСТИ ТРАНСМИССИИ ПРИ ТРОГАНИИ С МЕСТА И ПЕРЕКЛЮЧЕНИИ
ПЕРЕДАЧ
При составлении модели переключения передач принимают следующие предположения:
переключение на высшую передачу происходит, когда частота вращения коленчатого вала двигателя соответствует максимальной мощности, ив низшую — максимальному моменту;
при выключении передачи одновременно выключается сцепление и уменьшается подача топлива;
в процессе синхронизации движение автомобиля по инерции;
время полного включения сцепления рассматривается как случайная величина
Рекомендуемые динамические системы для моделирования динамических нагрузок в трансмиссии показаны на рис. 2 4- Моменты инерции Jt И Js приводятся к ведущему валу коробки передач, все остальные — к карданному валу.
Моделирование нагрузок при трогании с места и переключении передач рассматривается применительно к автомобилю схемы 6X4. Для других схем авгомобилей последовательность решения остается той же, различие заключается только в динамической системе.
Движение динамической системы осуществляйся под действием внеш-них моментов, момента двигателя Мп и суммарного момента сил сопротивления движению автомобиля Л1£ Выключение предыдущей передачи в соответствии с принятыми допущениями считается мгновенным, и нагрузки о трансмиссии на этом этапе переходного процесса не рассматриваются Процесс синхронизации рассматривается как этап формирования начальных условий (начальных скоростей масс и моментов в звеньях) для этапа включения сцепления.
На этапе синхронизации относительное движение масс динамической Системы отсутствует. Уравнения движения имеют вид
/2йа = Л4снив; (2. 10)
± — Л1г,
где Л1сн — момент синхронизации; ив — передаточное число коробки передач на включаемой передаче:
= JB + Ji + JB + Л + J9 +
4- Л + J»-
62
Нагрузскные режимы
Угловые скорости масс J2 и Ja в мо мент выключения предыдущей передачи ой,, и <а30 являются начальными условиями процесса синхронизации и связаны соотношением <о2(| — «n,1,so (ип — передаточное число коробки передач на предыдущей передаче) Верхние знаки при Мсп (2.10) coin ветствуют переключению с низшей передачи на высшую, нижние — с высшей передачи на низшую В дальнейшем рассматривается только переключение с низшей передачи на высшую. Считая А4гн — const, после интегрирования уравнения-(2.10) в пределах времени синхронизации <сн имеем
Угловые скорости масс системы по окончании процесса синхронизации
iiijc = И4С -• - -. ©вс — Ыас/Нн- ,
Угловая скорость массы J( в момент окончания синхронизации определяется по динамической характеристике двигателя, определяющей скорость снижения частоты вращения коленчатого вала двигателя при вы-ключенном сцеплении и отпущенной педали подачи топлива
Для автомобильных двигателей такие характеристики аппроксимируют экспоненциальной зависимостью
®1С = <ох (со — <ох) ехр (— kt).
где сох и ш — угловые скорости коленчатого вала соответственно на холостом ходу и в момент выключения предыдущей передачи; t — время (t = 0-^сн).
Динамические моменты в звеньях системы в момент окончания синхронизации
~ (^з + t 4" 4“ 4- 4~
4- ^в) ( ;MCH ~
По окончании процесса синхронизации массы J2 и J9 соединяются жест ко, и начинается этап включения сцеп ления
Приложенный к системе момент двигателя MR зависит от положения органа подачи топлива и частоты вра щения коленчатого вала
Мд - f (а, пд),
где а — координата управляющего механизма подачи топлива.
Можно записать
А4Д = / («) Ме (пе).
где Ме (пе) — внешняя скоростная характеристика двигателя; / (а) — закон нарастания крутящего момента
Обозначив время нарастания крутящего момента fe, для рассматриваемой задачи можно принять f («) = t/le при t < te, f (а) = 1 при t^te Зависимость для аппроксимации внешней скоростной характеристики дви-
• гателя приведена в разд 2 1
Момент трения в сцеплении Мс зависит от темпа его включения и может быть описан зависимостью
Мс — Мс.с ] I — exp (—kl)ty(<0i —<М>
где Мс.с — статический момент трения полностью включенного сцепления
Время полного включения tc является случайной величиной, зависящей от многих факторов, и может быть представлено в виде ограниченного справа и слева гауссовского распределения
f (/с' = .Го- Л, еХР I- (/с- м — У 2лО(Фу
— 1с)®/2о«] при tniin tg 1тз\-f (1с) = Р при tc 1щак И /с < 1щ1п,
где /щщ « 1щах — соответственно минимальное и максимальное время полного включения сцепления, fc. м, Ot — математическое ожидакие и среднее квадратическое отклонение времени полного включения сцепления;
Фт = ф |Uc — 1и11п)/се] Ь +Ф 1(1щах - М/о/].
Расчет погруженности при трогании с места и переключении передач 63
Момент сил сопротивления движению МЕ, приведенный к карданному
~ ^г/ко^'ФЧт)-
(2.П)
Все величины сопротивлений, входящие в уравнение (2.11), можно считать детерминированными, за исключением сопротивления подъему, которое при трогании и переключении передач является случайной величиной, зависящей от характеристик макро-профиля дороги
Для описания режимов трогания и переключения передач достаточной характеристикой макропрофиля дороги является распределение уклонов Обычно распределение уклонов макропрофиля имеет ограничения, обус ловленные наличием предельно допустимых уклонов на дорогах Распределение уклонов дороги при расчетах переключений конкретных ступеней преобразуется Это связано с практической нецелесообразностью переключений при определенных дорожных условиях. Например, при крутых подъемах невозможно переключение на высшие передачи Поэтому при расчетах вероятностей переключений на высшие передачи распределения уклонов ограничивают справа. Величина ci раничения «/ зависит от номера включаемой передачи и определяется неравенством
«г — Ф - *BFfi/Ga .
где Рк.в— максимальная скла тяги на включаемой высшей передаче, t’a — скорость движения автомобиля в момент переключения передач
Переключения на низшую передачу на спусках маловероятны Следствием этого является необходимость усечения распределения уклонов макропрофиля слева при расчетах нагру-женности трансмиссии при переключениях с высшей передачи па низшую.
Возможные значения времени включения сцепления в пределах от О До tca п значения дорожных сопротивлений в пределах от фш1п до фтах, характ<*рных тля каждого переклю чения, делятся па разряды Д/Сц п Дф. Разряды характеризуются сред
ним значением величины времени включения сцепления <Сц.к (ft-й разряд) и средним значением дорожного сопротивления фг (/-й разряд)
Определение пагруженности трансмиссий на переходных режимах проводится путем решения системы уравнений для каждой пары значений <сц. < и ф/ Практически реализация на печать не выводится, а непосредственно обрабатывается в ходе решения Обработка заключается в определении ординат момента через промежуток времени &t, равный шагу счета, сортировке ординат по уровням и выделению максимальных значений. Переходный процесс считается законченным, когда размахи колебаний момента составляют не более 20 % ве личины первого размаха Рекомен дуется иметь число уровней п = 25-5--5-50 для сортировки момента
В результате расчетов для каждого переключения отдельно с высшей на низшую и с низшей на высшую пере дачи определяются: распределение ве личин момента, двумерное распределение амплитуд и средних значений, средняя протяженность переходного процесса по пути. Вероятность попа дания момента в с-й уровень шириной
— (Л11Нах — Л^пйпУл, имеющий среднюю величину момента М.т — — ;МШ|П -|- 0,5ДЛ1г (2i — 1), находят по выражению
Р (Mf) - riMlv,
где 4 — длительность переходного процесса; щ — число попаданий момента в t-й уровень
В процессе решения выделяются экстремальные значения амплитуд, которые также сортируются по уровням,
Длик-дьность переходного процесса по пути определяется интегрированием уравнения
S|! = bl^rjfa/Ug.
Общие статистические характеристики момента в трансмиссии получаются суммированием с учетом весовой доли каждой реализации Р (fc. V) во всем множестве
Р (<с, Ф) = f (<с,Ф) Дф-Д<с
Нагрузочные режимы
Результат расчетов в виде распределения момента, двумерного распределения амплитуд и средних значений передаются в блок формирования на грузочного режима
2.7. РАСЧЕТ НАГРУЖЕННОСТИ ТРАНСМИССИИ
ОТ НЕРОВНОСТЕЙ ДОРОЖНОЙ ПОВЕРХНОСТИ
При расчетах нагруженности транс миссий от воздействия неровностей поверхности (микронеровностей) принимаются следующие допущения:
профиль дороги симметричен относительно продольной вертикальной плоскости, проходмаей через ось симметрии автомобиля,
контакт колеса с дорогой является точечным, а влияние длины неровностей на возмущающую силу учитывается Корректировкой микропрофиля, магматическое ожидание скор^ти .движения автомобиля постоянно и равно средней скорости движения.
эквивалентная динамическая система может быть представлена линеаризованной расчетной схемой;
наезд переднего не ведущего моста на неровность не вызывает значительных колебаний в трансмиссии
Расчетная динамическая система применительно к автомобилю 4X2 показана на рис 2 10 В этан схеме направляющее устройство подвески обеспечивает относительное смещение моста и рамы при их вертикальных перемещениях по закону
где 1] — коэффициент, характеризующий кинематическую связь между вертикальными н продольными перемещениями моста и рамы автомобиля (-0,1 ^t]=S0,i).
В перемещении в продольном направлении по координате х принимает участие подрессоренная масса автомобиля m и масса переднего моста, а в вертикальном направлении по координате г только масса, приходящаяся на ведущий мост tn2,
т — tflg, — т№ -|- У Jutlrue', т2 — tna/L, где а — расстояние от переднего моста до центра тяжести, L — база автомобиля, — суммарный момент инерции колес переднего моста
Параметры системы: J2 — приведенный момент инерции вращающихся масс двигателя, сцепления, коробки передач, части карданной передачи, — приведенный момент инерции масс части карданной передачи, вра-щающихся деталей ведущего моста, колесных увлов и колес, т2Н — не-подрессоренная масса ведущего моста; си — приведенная жесткость трансмиссии; Одт — приведенная тангенциальная жесткость шин ведущего моста; ср, ftp — приведенная жесткость в коэффициент дсмофирования подвески ведущего моста; гш — радиальная жесткость шин ведущего моста.
Движение масс системы описывается в обобщенных координатах х, г, I. ЧР*. Vis = <Pi - ф2 (Ч>1. Vi - Углы поворота м«юс с моментами Ji и J2)
Уравнения движения системы z = OtPp;
х = ciR — QPp — b2To~
J (2i2)
Ф12 = CkoToV 2 (1//1 +
V l/J4) A41S;
4,l=A4ii//i, ;
R — нормальная реакция
Уравнения связи
Рр = сР (I - z) + ftp (6 — z};
R = 1);
Tc-T +
R " (m2 + ma,) g-.
Расчет нагруженности трансмиссии от неровностей дорожной поверхности 65
Т Сш. Т/Гко (Х/ГК0----<Р12 — <Pl) |-
4" &ш. llrBO (х/ско — 4'12 — Ч>1)>
Л’Ьг — cf2<Pis 4- Ктгфгз.
Коэффициенты уравнений
at = (m4-m2H)/X;
bi = nii (т + еПй^/т2иА:
b2 = т? (t]wt 4“ т2н)/т2цЛ;
b3 = t]m2ffz//nSliА; £>« = i]m {ms +
+ т2и)/т2„Л; А = ч^пт2 +
4- t]2mma 4- тя,т 4- тт2-
Прн заданной спектральной плотности микропрофиля автомобильной дороги Sw спектральная плотность момента в трансмиссии
где Sb — спектральная плотность возмущающего воздействия микропрофиля при скорости движения v автомобиля, IF12 (tv) — комплексная частотная характеристика системы; с]2 — приведенная к колесу жесткость трансмиссии; и" — передаточной число на участке от звена трансмиссии до колеса; v — частота возмущения.
Для системы, описываемой уравнениями (2 12), квадрат модуля комплексной частотной характеристики
|Гц (J'v)|s —
(- ₽2V«+p4V« 0eV2)s +
-4- (- piV7 4- Ряу5 — р5у3)2
“ (И^8 - ХдУ’Ч-^У*—И,Т«4-К9)а4- ‘ + (— V.2V1 + KjV5 + XgT® 4- xev)2
(2.13)
Коэффициенты, входящие в выражение (2.13), Определяются по формулам
0i = RrV0!(J2vy. 02 = [с^ 4-
+ R (at + 6,) Kpfv] rK0/J2;
Рз — rvo!^.2 {Aaf (ai 4* bt) 4-
V- Kui. тЬзсш/ГкО + R)v [(«z 4-
+ *i) ^p4"^iciuj};
3 П/р А- И. Гришкевиче
04 — fui/(^8rI<o) {^. tKp [^з (°! 4“ + b^ — £./'11 + Ь3СШ1T -|- r20f (Ci +
4- bi) Ср 4- rKoWi“i Kp/v I;
0e = {(Kp (сш. т 4- срКш. т) [^a X
X (ai + bi) — fe462[ -ф гкоЯ«1£1 X
X Cp/V} сш/(^2Гкс);
0e — chi. fCp [63 («1 + bi} —
— ЬлЬг] CtuHJ аТко);
Xj-'L X.2 = «2 4-^;
K3= O34- «гУг4-?з:
K1 --= «4 + «з?2 4- «ays 4- y4;
У-s = a4 4- 4- «a7s 4- «П’4 4- Ym
«о = «бТз 4- a4Ts 4- «s?4 4- «2TS;
K7 = asT3 4- a4?4 4- a3ys;
«В = a5?4 4- «4?5; = «sft:
«2 = Кш. i (^2/^4- 1/^г)4-
4-Х»(1/Л4-1/Л);
«3 - Гш. г (*г/г^4- »М«) 4-
4- G 2 (1/J14- Ъ'^г) 4- Кщ. тЛ'12 X
X [(1/А + VA)62//ko4- ЬЧА^а)];
а4 — (Ки^ш. т + *1аКщ. т) [(1/^ 14~
4-1/А)*2/гД04-]/(.М2)];
+ 1/(^1^ г)1 cin. тС12;
Т»-=Кр(а14Л):
уз ~ ci> (ai 4- М 4-
Т* — ^1о1#рСиь
Vb ~ ^iCpCmOi-
Расчеты проводятся на ЭВМ. Программа расчета обеспечивает расчет для каждого значения частоты возмущения v квадрата модуля комплексной частотной характеристики I ^is (*’v) I3. УРовпя спектральной плотности микропрофиля, их произведения (уровня спектральной плотности деформации звена 1—2, ркс. 2.10) и спектральной плотности момента, нагружающего траксмкссию. Для формирования нагрузочного режима необходимо определить е рассматриваемом
66
Нагрузичные режимы
спектральных
диапазоне частот дисперсии колебаний момента и его пергой и второй производных. Эти характеристики рассчитываются но выражениям
Рм- S S„&v;
ffsav-sAv;
^пйп
Dm = £ smv®Av
Дисперсии вычисляются для движения на всех передачах и скоростях, вероятность которых, найденная при расчетах режимов движения, отлична от нуля Результаты расчетов передаются в блок формирования нагрузочного режима При расчетах пагружеп-
ности трансмиссии используются спектральные плотности микропрофнля, определенные для конкретных дорог, или типовые, полученные обобщением результатов измерений характерных видов дорог.
Спектральная плотность микропрофиля автомобильной дороги может быть представлена в виде
S9(M = SoU,7.o)w’, (2.14)
где К — путевая частота, рад /м, А. — 2л//; лй, SB — характерная частота и уровень спектральной плотности при этой частоте, R7 — показатель степени, определяющий интенсивность изменения уровня спектральной плотности по путевой частоте
На рис 2.11’ показана аппроксимация Спектральной плотвости микро-профиля с помощью выражения (2.14), а в табл. 2.11 приведены параметры спектральных плотностей характерных типов дорог.
Спектральная плотность микро-профиля соответствует спектральной плотности возмущения Sm(y) при v — 1 м/с. Для скоростей движения о, отличных от указанной, Sgp(v) = = 1Г JS(7 (Wo) В этом случае спектральная плотность, аппроксимированная выражением (2.14),
Sw = o-'Se Ivy (tAo))-”7 = «v-'SHv/vor^-
При расчетах должна быть учтена сглаживающая способность шин. Спектрвльпая плотность возмущения
автомобильных дорог
Дорога Гл К. 1,’м U S.-105 м’/ред So W, м’/рад St to*, м’/рад w,
Ровное цементибетон-иое шоссе 0.16 0,|6 17 0,34 34 0.3 2.5 2.5
Ровной булыжное шоссе Сю эыбоип 6.2G 11.8 25 0,4 2.5-10 1 2.0 1.0 2.0
Изношенное асфальтобетонное шоссе С Выбоинами 0.26 0,57 25 2.0 8.5 4,4 4.0 3,4
Булыжник — разбитый, в плохом состоя 0.S3 1.8 50 0.1 53 2.4 1.4 3.0
Разбитая грунтовая 0.53 5.3 50 14 0,14 1.6 4.0 2.0
Расчет трансмиссии от нсравномерилти работы двигателя 67
с учетом сглаживающем способноеш шины
(v) - S4V (0(1— cos a v).
где и —• параметр, .характеризующие длину отпечатка шины, а — 1ш.о
1Ш = 2 KOJ/7 (D — O.177),
D — наружный диаметр шипы, И— высота профиля шины,
2.8. РАСЧЕТ НАГРУЖЕННОСТИ ТРАНСМИССИИ
ОТ НЕРАВНОМЕРНОСТИ
РАБОТЫ ДВИГАТЕЛЯ
Расчет проводят применительно к линеаризованной динамической си стеме, к которой приложено полигар ионическое возбуждение Число сте пеней свободы расчетных систем выбирают таким образом, чтобы частотный состав учитываемых составляющих возбуждения полностью входил в полосу собственных частот колебаний системы Рекомендуемые расчетные динамические системы трансмиссий автомобилей приведены в табл. 2.7.
В гасителе крутильных колебаний сцепления (звено 1—3) действует момент трения
Л4тр = Л4Т, я sign (<i>i — <аа), где М-Г'Я— динамический (при движении дисков) момент трения
В первом приближении звено 1—2 Полагается линейным с податливостью, равной податливости ведущего вала. Если полученные в результате решения амплитуды колебаний момента в звене 7—2 ие превосходят величины Л4т.д, то гаситель крутильных колебаний не работает и рассеяние энергии в результате трекия не происходит. Решение, полученное в первом приближении, используется далее для расчета дисперсии момента в трансмиссии При превышении амплитуды колебаний момента на звене 1—2 величины Л(т. д необходимо учитывать рас сеяние энергии в гасителе крутильных колебаний. Для ускорения расчетов на ЦВМ целесообразно силу трения без смазочного материала заменить
3*
силой вязкою сопротивления. Исходя из равенства работы сил трепня за цикл колебаний, эквивалентный ко эффишент вязкого сопротивления определяется по выражению
Ли- 47Ит.дЦЯф12т),
где Фи — амплитуда колебаний в звене 7—2 (ф,2 — Ф1 — фг), v — частота.
Далее осуществляется итерационный процесс определения величины Ли, который прекращается при уело вив |(ф;2 — (Ф|2 и
Ф,2 — предыдущая и последующая амплитуда)
Для расчетов параметров колебаний в трансмиссии, возбуждаемых неравномерностью работы двигателя, достаточной характеристикой воздействия является спектральный состав момента двигателя на последней коренной шейке коленчатого вала Крутящий момент двигателя представляет собой периодическую функцию, которая разложением в ряд Фурье может быть представлена дискретным спектром. Параметры гармонической составляющей зависят от режима работы двигателя.
Для сокращения вычислений гармонический анализ следует выполнять только для одного какого-либо режима, принятого за расчетный, ио раздельно для моментов сил давления газов и Моментов сил инерции возвратио-по-ступатеяьно движущихся масс. Обычно расчетным режимом является режим максимального эффективного момента двигателя. С достаточной точностью можно считать, что амплитуды гармоник от сил давления газов (Лгро Ли») проиорх’.иокальны среднему нидмкаториому давлению pi, а амплитуды сил инерции возвратно-поступательно движущихся масс пропорциональны квадрату частоты вращения nJ коленчатого ввла двигателя. Это дает возможность результаты гармонического анализа момента двигателя на выбранном режиме работы распространить на все другие расчетные режимы работы
Кривая крутящего момента сил давления тазов может быть получена по индикаторной диаграмме работы одного
68
Нагрузочные режимы
Ряс. 2.12. Зависимости крутящего момента по углу поворота <х (СО =* 1ST радус. Л/в = 670 К-му.
цилиндра дви! атсля. Для этого по индикаторной диаграмме определяется зависимость силы давления газов (газовые .сил) на поршень от угла пово- а рота коленчатого вала.
Получепйая зависимость используется для построения графика тангенциальной силы, действующей на кривошип. График представляет зависимость крутящего момента одного цилиндра от газовых сил. Для четырехтактных двигателей график строится в пределах 0—720°, а для двухтактных 0—360°. График крутящего момента двигателя от газовых сил получается суммированием монентов, передающихся на коленчатый вал от каждого цилиндра с учетом их фазового сдвига. Суммирование для двигателей с равномерным чередованием вспышек проводится на интервале 0 — 180т/г, для двигателей с неравномерным чередованием вспышек — на интервале 0 — — ЗбОт/z (т — 4 — для четырехтактных двигателей и т — 2 — для двухтактных двигателей; г — число цилиндров)
Сила инерции от возвратно-поступательно движущихся масс определяется выражением
Pj = — нуры2 (cos a -J- Z. cos 2a). где mj — масса поступательно движущихся частей кривошипно-шатунного механизма; R — радиус кривошипа, <ч — угловая скорость коленча
того вала двигателя; а — угол поворота коленчатого вала, X — отношение радиуса кривошипа к длине ша-
График зависимости крутящего момента двигателя от сил инерции строится в том же порядке, что и график момента газовых сил На рис 2 12 показаны соответствующие расчетные графики применительно к двигателю ЯМЗ-236.
Определение амплитуд гармонических составляющих момента двигателя рекомендуется проводить по следующей методике. Отрезок, соответствующий периоду момента, условно принимается равным 2л, и через промежутки 2л'т измеряются ординаты. Коэффициенты Фурье и средний крутящий момент А4Й определяют но формулам
ям. = 42!'<!и"<:
1
где хь pi — соответственно абсцисса и ордината точки; а — порядок гармоники; АМ1 и Bmi — коэффициенты разложения момента порядка s от газовых и инерционных сил.
Достаточней точность обеспечивается при т > 48. Амплитуда и фаза гармоники s-ro порядка определяются по выражемиим
AMpt — :
tg ®МР» (2.15)
Частота возмущения гармоник
v8 = (ял,ДО) s^s, где — порядок первой гармонией.
Для определения характеристик возмущения, создаваемого двигателем, используют корреляционные таблицы, связывающие скорость движения автомобиля на передачах и средние моменты в трансмиссии, полученные в результате расчетов режимов движения.
Формирование характеристик расчетного нагрузочного режима
69
Характеристики возбуждения от неравномерности работы двигателя представляются в виде двумерного информационного обеспечения, имеющего tn уровней гармоник газовых сил и п уровней — инерционных. Элемент таблицы для f-й передачи ру /, представляет собой вероятность возмущения при среднем моментв в трансмиссии Мц и частоте вращения колончатого вала двигателя, соответствующей скорости Vkl (см Табл. 2 10).
Расчет амплитуд гармонических составляющих для каждого элемента массива осуществляется по приведенным ниже соотношениям.
1. Действие газовых сил
Индикаторный момент двигателя.СО-ответствующий ;-му уровню среднего момента в трансмиссии (Н-м),
-'Имп ~ 0,078pMllt>j,.
Среднее давление, соответствующее механическим потерям в двигателе(Па):
для карбюраторных двигателей Рм.л=5-10« + 1,3-10’шп;
для дизелей ри,п = 8-104 + 1,7 X X 104wn, где wn — средняя скорость поршня, соответствующая скорости автомобиля на 7-ой передаче VkH
wB = O.SI&nVMBj/rHO-
Амплитуда s-fi гармоники при среднем моменте в трансмиссии Мц
Ар/ в — Агр »МВ]1 Мв-р,
где Мяр — индикаторный момент, соответствующий расчетному режиму.
2. Действие инерционных сил
АИ kt — Аи ip
где Anh» — амплитуда гармоники инерционной силы порядка s; к* и «у— частоты вращения коленчатого вала двигателя, соответствующие скорости им и расчетному режиму.
3. Действие суммарных сил
= |/"^г /» + *э "1"
* + 2Аг/вАидв cos (Opg — ада).
Входящие в это выражение углы и «HS определяются по формулам, аналогичным (2 15).
Характеристиками моментов, действующих в звеньях рассчитываемой динамической системы на передаче с индексом f, являются дисперсии колебаний момента, возбуждаемого двигателем при среднем моменте в трансмиссии Мц и скорости движения автомобиля ом-
Дисперсия колебания момента в звене z динамической системы от гармоники порядка s
^s = (0,5AJ7..s)2|irz(fv)|2.
Общая дисперсия в звене z от всех гармоник
DikJ = У, Djks,
t=i
где т — число учитываемых гармоник (рекомендуется т — 6)
Квадрат модуля комвлексной частотной характеристики системы | \VZ |2 рассчитывается по системе дифференциальных уравнений, описывающих движение системы, записанных в операторной форме. Решение проводится на ЦВМ с использованием стандартной программы. Квадрат модуля комплексных частотных характеристик системы на каждой частоте определяется как сумма квадратов действительной и мнимых частей.
2.6. ФОРМИРОВАНИЕ
ХАРАКТЕРИСТИК РАСЧЕТНОГО НАГРУЗОЧНОГО РЕЖИМА
Методики расчета не долговечность деталей трансмиссии при эксперимен-тально-статистическон и расчетЯом нагрузочных режимах одинаковы. В том и другом случае основной характеристикой режима нагружения являются коэффициенты пробега Кп- Последние определяют по характеристикам распределений удельных тяговых сил при экспериментально-статистических нагрузочных режимах или по распределениям крутящих моментов, действующих па рассчитываемую деталь, при расчетных нагрузочных режимах. Основной характеристикой является показатель 7? накопления усталостных
70
Нагрузочные режимы
повреждений, определяемый по формуле
Я--=£Л^рк, (2 16>
где Мк. — момент уровня К, действующий на деталь; р/< — всронтпость момента уровня К.
Программа формирования характеристик нагрузочного режима предусматривает растет накоплений усталостных повреждений отдельно для установившегося режима движения Лу и пеустановившегося Ли. Расчет ведут для каждого звена трансмиссии в соответствии с принятой расчетной схемой При этом определяют коэффициенты пробега отдельно для деталей, работающих па некоторых передачах, и для ’еталей, работающих на всех передачах
Для расчета накопления усталостных повреждений для детали, нагруженной на определенной передаче, используют три корреляционные таблицы режимов движения, нагружепностн трансмиссии от воздействий микропрофнлф и цагружешюсти трансмиссий от неравномерности работы двигателя. Каждая из этих таблиц имеет т уровней момента и л уровней скорости На Пересечении строк и столбцов находятся элементы таблиц, я которых соответственно расположены, вероятности сочетаний моментов Mj и скорости Си, дисперсии колебаний момента на рассматриваемом звене от воздействий дорожных неровностей и неравномерности работы двигателя при этих сочетаниях.
Таким образом, каждый элемент таблицы характаризует процесс нагружения детали при установившемся движении. При этом процесс имеет следующие характеристики-
математическое ожидание Mj; дисперсию Djk — D/ka 4- Djhp; вероятность Pjk
Рассчитываются дисперсии первой к второй производных процессов нагружения , обусловленных воздействием МИКрОПрофиЛЯ (DjliH И Djkn) и двигателя (Djkn< и их суммы bjk — bjhu + Djkn,
Р/Л = г
Для определенного значения Mj из корреляционной таблицы (см, табл 2 10) вычисляется вероятность распределения скорости движения автомобиля
< ji. « ПлПщ
Вычисляются дисперсии процесса нагружения для выбранного значения Mj с учетам весовой доли кажд&й СКОрОСТЦ 1/ц
Л=1
*=-1
B;-S '«И®,-t=l
По величинам Dj, Dj, Dj рассчитываются среднее квадратическое отклонение О] — VDj, эффективная частота vcj Dj'bjt параметр широкополосное™ Р/ =
Расчеты выполняются для всех / «з корреляционной таблицы. В результате определяется распределение момента на звеньях трансмиссии для рассматриваемой передачи (передача с индексом г)
С учетом доли пробега автомобиля на каждой передаче определяется распределение момента в трансмиссии для всего маршрута На основании характеристики суммарного процесса нагружения по формуле (2.16) рассчитывается показатель накопления усталостных повреждений при установившемся движении на рассматриваемой передаче Показатель накопления усталостных повреждений при неустаповив-шнхея режимах /?д определяется не
Основные виды и геометрические характеристики
71
посредственно по распределениям моментов, действующих на деталь на режимах трогания с места и переключения передач
Суммарный показатель накопления устаясетиых повреждений на установившихся и неустановившихся режимах находится по выражению
= Еу/йу/ + Ен1^П1.
где Eyi, ън£ — относительные пробеги при движении на передаче с индексом i соответственно при установившемся и неустановившемся режимах.
Относительные пробеги определяют ся при расчетах режимов движения и нагруженное™ трансмиссий на режимах трогания с места и переключении передач
Еу« — Е« — Ен*,
где — относительный пробег на пе редаче
Коэффициенты пробега
(2'7)
где Afpi — расчетный момент на i-н передаче.
Следует иметь в виду, что коэффициент Кп, найденный по изложенной
методике, учитывает действие внешних динамических нагрузок. Поэтому в формулах расчета напряжений в зубчатых колесах следует принимать коэффициент Kve~
Эквнвалеятаыв момент для расчетов подшипников находится по выраже-
(2.18)
Для деталей, нагруженных на всех пли нескольких передачах, показатель накопления усталостных повреждений определяется для всех передач. I Указатель накопления усталостных повреждений на маршруте
Яое = У &Ris-
Коэффициенты пробега и эквивалентные моменты находятся по выражениям (2.17) и (2 18), в которых вмесю Ли подставляется значение Ros.
Расчетные моменты н расчетные частоты вращения принимаются такими же, как и при экспериментально-статистических нагрузочных режимах.
3
Расчет зубчатых передач
3.1. ОСНОВНЫЕ виды И ГЕОМЕТРИЧЕСКИЕ
ХАРАКТЕРИСТИКИ
ЗУБЧАТЫХ ПЕРЕДАЧ ТРАНСМИССИИ
В трансмиссиях автомобилей применяются главным образом эвольвент-
ные зубчатые передачи (табл 3.1)
Отдельно рассматриваемая зубчатая передача имеет в зацеплении два зуб чатых колеса Меньшее из них назы
вается шестерней, а большее — колесом Ниже в обозначениях величины, относящиеся к шестерне, отмечены индексом ш, а к колесу — индексом к.
Геометрические характеристики зубчатой передачи и составляющих ее зубчатых колес зависят от параметров исходного контура, модуля, вида передачи, коэффициентов смещения у ше стерни и колеса, угла наклона зуба И чисел зубьев. Параметры исходного контура- поясняются на рис. 3.1 Ими являются угол профиля «,
72
Расчет вуОчатых. передач
8.1. Виды эвоиьвентных зубчатых передач, применяемых в трансмиссиях автомобилей
Вид передачи Особенности Применение
Цилиндрическая прямозубая: Наиболее проста в изготовлении
внешнего эацепле- В коробках передач для
создает повышенны!) шуге, цла уменьшении которого применяется модифицированный по высоте зуба исходный контур первой передача и заднего
внутреннего sane- Более славна в изготовлении; В коробках передач с ае-
пленяя создает меньший шум при работе; имеет большую контактную проч сколькими промежуточными валами, в некоторых раздаточных коробках В планетарных коробках передач. в колесных редукторах ведущих мостов; в межосевых дифференциалах
Цилиндрическая ко-соэубая: Сложнее в изготовлении, чем ци-
внешнего зацеп- В Коробках передач и раз-
линдрическая прямозубая; создает осевую силу; имеет большую плавность работы и большую прочность даточных коробках; двойных центральных главных пере
внутреннего эаце- То же В планетарных коробках пе
пленяя Коническая: рсдач легковых автомобилей
пр^мезубвя Наиболее простая на передач с непараллельными осями, в зацеплении создается выталкивающая осевая сила В симметричных межосеаых н межколесных дифференциалах; планетарных коробках передач легкозых автомобилей и колесных редук-торах грузовых автомобилей
С Круголыын зубь- В зацеплении создается осезая сила, которая в зависимости от сочетания утла найлона зуба и направления вращения может быть как выталкивающей, так и затягивающей. Чувствительна к регулировке зацепления При правильной регулирозке имеет хорошую плавность работы и высокую проч- В Главных передачах
Г нпойдная Имеет те же особенности, что и коническая передача с круговыми зубьями. Обладает наиболее высокой плавностью и бесшумностью работы. Вследствие высоких скоростей скольжения профилей требует применения специальных сортов смдасчпых материалов В главных передачах
коэффициент высоты голоски Л*, коэффициент радиального зазора с*. Указанные параметры определяют лишь пропорции элементов зубьев исходного контура и соогеегствующей этому контуру производящей рейки. Абсолютные размеры зубьев производящей рейки характеризуются величиной модуля т. Модуль есть линейная величина, в л
Раз меньшая шага зубьев рейки. Шаг Pt ~ лт показан на рис. 3.1.
Окружность диаметром d = tnz, где г — число зубьев, проведенная из центра, совпадающего с осью зубчатого колеса, в плоскости, перпендикулярной этой оси, является делительной окружностью зубчатого колеса. Ис ходный контур н производящая рейка
Основные виды и геометрические характеристики 73
имеют делительную прямую, делящую шаг между толщиной зуба и шириной впадины поровну. В зависимости от расположения делительной прямой относительно делительной окружности различают, зубчатые колеса без смещения — делительная прямая каса-тсльна окружности, с положительным смещением — делительная прямая смещена от окружности в направлении от оси зубчатого колеса (рис 3 2); с отрицательным смещением — делительная прямая пересекается с окружностью вследствие смещения к осн зубчатого колеса Отношение смещения к модулю называется коэффициентом смещения исходного контура и обозначается х Для зубчатой передачи пользуются коэффициентом суммы смещений *£ = Хц -г *Ш при внешнем зацеплении или хе — х« — х1И — при внутреннем. Передача, в которой хш = *х= 0> че имеет смещения. Если при х1И ф 0 хе = О, то передачу называют равносмещеппой. При > 0 передача является смещенной положительном, а при х%<0 — смещенной отрицательной.
Смещения в зубчатых колесах применяются Для повышения прочности зубьев, в том числе для достижения равнопрочное™ зубьев шестерни и колеса, г также для решения некоторых геометрических вопросов, например, исключения различных видов интерференции профилей зубьев, получения заданного межосевого расстояния и т. п Коэффициенты смещения, применяемые в зубчатых передачах автомобильных трансмиссий, приведе-
Перечисленные выше параметры исходного контура являются исходными независимыми геометрическими характеристиками зубчатой передачи. При рассмотрении цилиндрической прямозубой передачи эти характеристики позволяют после выбора модуля и коэффициентов смещений расчетом определить все прочие ее геометрические характеристики Для цилиндрической косозубой передачи дополнительной исходной характеристикой является угол наклона зуба р. Вследствие наклона зуба линейные тангенциальные размеры и профиль зуба, а следовательно, -его модуль и х гол профиля
Рнс. 3.1. Исходный контур без модификации
в сечении, нормальном к оси зубчатого колеса (торцовом сечении), отличаются от таковых в сечении, нормальном к линии зуба. Модуль и угол профиля в сечении, нормальном к линии зуба, равны модулю т и углу профиля а производящей рейки, но при выполнении геометрических рас-
SI
а — спешнее зацепление (ИPt и ИР2 —
колеса); б — внутреннее зацепление
74
Расчет зубчатых передач
Рис. 3.3. Элементы коничссхкх и гипоидных передач:
а — 'коническая передача с межосепь!м углом £ = 90°, 6 — гипоидная пере-
четов косозубой передачи для ясности могут обозначаться т„ (модуль нормальный) и «п- В торцовом сечении зубчатого колеса модуль называется окружным (иногда торцовым), его обозначают Ш/. Для утла профиля в тор-цовои сечении применяется обозначение а/. При выполнении 1еометриче-ских и прочностных расчетов косозубой передачи коэффициент смещения х рассматривается как отношение- величины смещения к нормальному мо дулю
Дополнительной исходной харак герметикой для конической зубчатой передачи является мсжисевой угол £ (рис 3 3). Диаметр делительной окружности и соответственно модуль конического зубчатого колеса зависят от расстояния рассматриваемого сечения до точки пересечения осей передачи. В прочностных расчетах комической прямозубой передачи используется средний модуль т, т е модуль в сечении, положение которого определяется средним конусным расстоянием Rm При проектировании обычно
выбирают внешний модуль /ле, соответствующий внешнему конусному расстоянию Re. В этом случае для определения среднего модуля используются зависимости
т = in^Rm!Re; Rm~Rc — 0,5^ bu, ~ 0,3Re.
Для частного случая £ = 90°;
Ле-0.5те|/^+^.
В расчетах на прочность конической передачи с круговой линией зубьев используется средний нормальный модуль /нп. Если при проектирований такой передачи выбран внешний окружной модуль т1е, то величина тп определяется из зависимостей т/ -= = niteR,„'Re. тп= т,ст рл, где Рп — средний угол наклона зуба (расчетный)
Конические передачи автомобильных трансмиссий выполняют обычно равносмещенными. Коэффициенты смещения выбирают из условий достижения равного сопротивления усталости зубьев шестерни и колеса и умеренных величин скольжения профилей в крайних точках зацепления. Выполнить оба условия, правильно подобрав коэффициенты смещения — — Л'ш. не всегда можно Поэтому в конических передачах трансмиссии дополнительно к смещениям при необходимости увеличивают толщину зубьев шестерни, соответственно уменьшая толщину зубьев колеса Это достигается соответствующим разводом резцов при нарезании зубьев Отношение линейной величины изменения нормальной толщины зуба к нормальному модулю называется коэффициентом изменения толщины зуба, обозначается лг Для шестерни х1Ш положи тсяьио, для колеса ххк = —хТО1
Дополнительной исходной характеристикой для гипоидной передачи является гипоидное смещение F Гипоидное смещение есть расстояние между осями шестерни и колеса (см рис 3.3). Выбор угла наклона зуба в гипоидной передаче независим только для колеса. После выбора угла рпк и гиповдного смещения Е угол наклона зуба шестерни Рлш определяется геометрическим расчетом, при этом имеет место
Основные виды и геометричл кие Характеристики
неравенство Риш > Рпк Окружной модуль гипоидной шестерни (/п*ш ~ =/nn/cos рРй1) больше, чем у колеса (tniu = mnlcos Рлк) Отношение /п/цх’/й/к — cos Pkk'cos Рпы " Кг называют коэффициентом увеличения диаметра гипоидной шестсрпн. Гипоидная и коническая передачи, имеющие одинаковые диаметры колет и передаточные числа, отличаются диаметрами шестерен — гилончпая шестерня имеет диаметр в Кг раз больший, чем коническая К конструктивным псобенио-ствм гипоидной передачи относится также неравенство углов зацепления рабочих и нерабочих профилей зубьен. Рабочими называются профили, нагружаемые при движении автомобвля вперед, нерабочими — нагружаемые при движении задним ходом
При выполнении прочностных расчетов зубчатых колес трансмиссии
должны быть известны пе только перечисленные выше исходные характеристики, но и некоторые величины, определяемые геометрическим расчетом после выбора исходных характеристик В табл 3 2 дан перечень исходных и рассчитываемых геометрических величин, используемых в расчетах на прочность и усталость зубчатых передач равличпых видов Все исходные характеристики, а также те величины, которые в результате геометрического расчета передачи обязательно указываются на рабочих чертежах зубчатых колес, рассматриваются в таблице как заданные; для определения прочих величин даны <|юрму-лы. В формулах, имеющих два знака, расположенные один под другим, верхний относится к передаче внешнего зацепления, а нпжпий — впутрсн-
зубчатой передачи на усталость и прочность
Наименование и обозначение
Расчетные формулы, указания
Число зубьев zQ1. zK Передаточное число* Коэффициент смещения хш.
По исходным данным
Коэффициент щений Расчетная ширина зубчатого венца Ь/к, мы
венцов ио контакту зубьев
6ц,. ММ
Средняя ширина зубчатых венцов, мм
круглення у корня зуба р^
Модуль т. ым
Угол запеплепня в пере-
Определяется из таблицы инволют по валичине
йср = °-8 (tym + й/к)
По исходным данным
шндрнческой прямозубой передачи' По исходным данным
13
Межосевое расстояние, мм
Начальные диаметры, мы
* Величина и. обозначаемая без
= ——-----------4- ittv а
Xewu,'(U ± I)
индекса, относится к сопряженной паре зубчатых «дачи силового потока.
Расчет вубчатых передач
71
Основные виды и геометричеаше характеристики
Продолжение табл 3,2
№ по пор Наименование и обозначение Расчетные формулы, указания
Дополнительно для конической прямозубой передачи (после п. 8)
33
34
35
36
Средний модуль tn, мм Угол профиля зуба а.
начальный диа-
37
ЗВ
39
По исходным данным
Угол делительного Kouvca finr йк- *
Число зубьев эквивалентной шестерни, колеса
Относительная ширина контакта шестерни
4ил ~ tfUI “ "“uh где d — средний делитег: По исходным данным
«ста = гш/с05 V гок = ^bd “ *B>.wura
Дополнительно для конической передачи с круговыми зубьями (после п. 8)
40
По исходным данным
42
43
Угол профиля в нормальном среднем сечении аа. ” Угол наилома линии зуба в среднем сечении рп. ®
Углы делительного коиу-
Средние начальные диаме-
4G
Коэффициенты изменения
По исходным данным
mnWC0S
Ш^СОЭРд
48
Относительная ширина контакта шестерни
Число зубьев эквивалент ной шестерни, колеса
49
Коэффициент осевого пере
гг>ш = 2ш/6'“ йш СО5’ ₽п): «нк“’к/(с«5 6KC0S’M ерsin ₽„/(лтя)
50
Кчзффиичент ториозого пе-рекрытия
— коэффициент головки
исходного контура в торцовом Сечении, взятый ш носите л ьно окружного модуля:
at = arctg <te «„.'cos ₽я5
78
Расчет зубчатых передач
Продолжение табл. 3.2
Наименование
и сОозначение Расчетные формулы указания
гипоидной передачи (после и. 8) Исходные данные
51 52 Средний нормальный мо дуль тп. мм Угол профиля рабочей стороны зуба в нормальной
53 54 Сумма углов профили обеих сгорел зуба я нормальном сечении %£. в Углы наклона ляпни зуба «
56 57 о среднем сечении Рпк. Pour ° Полусумма углов наклона линии ауба колеса и шестерни, ° Полусумма углов профиля lOeux сторон эуба. ° Углы делительного ков уса 6к (6ш)- * Рср “ °-5 (Рг;к + Риш) “ср ’ 0-5«„s По исходным данным млн при отсутствии данных по формуле бш » 6,45 (СОШ + 6[ш).
5S . Средние начальные днамс- тры^ мм где 66.. 6г — углы конусов вершин и впади;;. указанное нв чертеже шестерни ’ <,шш = ‘’ш “ mnziu/c0’ Рлш- ‘’wk = ‘’к ~ т„гк/соъ Р„к
59 Коэффициент ширины кок См. п. 39
СО таити шестерни Число зубьев экмнваленг ной шестерни, колеса «ош = zib/(cos Ош cos* РПш): гРК = zk/(cos бк cos’ P„It)
51 62 Коэффициент увал имен ня диаметра шестерни Коэффициенты изменения Кг = cos Рпн/cos f<IIIU По исходным данным
толщины зуба xtlu, хгк «7к " “З'ТШ
63 Коэффициент осевого перекрытия в (ЗКь-КВ)(Дек-0.5Ьш) Р -Vtmn
„ bw(fieB —°-siw) *вРср .
”*» •
64 Коэффициент герцового Перекрытия RCK — внешнее коиусноз расстояние, указывается на чертеже колеса Приближенные значения в зависимости от гш следующие:
2Ш 6 7 8 9 10 12 II 16 18 20
0 87 0.95 1.02 1.07 1.11 1.19 1.21 1.23 1.25 1.26
Расчет на усишмсть
79
Рнс. З.Ч. Расчетные значения рабочей ширины ауб-чатпго венца (ЛЬ-,, ЛЬП — свободные участки венца шестпрнк; в состав величины /уш включаются свободные учкетки, но не бозее mf ца сторону)
3.2. РАСЧЕТ НА УСТАЛОСТЬ
При расчете зубчатых передач трансмиссии проверяют контактную усталость активных поверхностей зубьев и усталость зубьев при изгибе В формулах расчета на контактную усталость ветчины пишутся с индексом Н, а расчета иа усталость при изгибе — с индексом /• Ниже при пояснении существа расчета на усталость имеется в виду общий случай, и указанные индексы временно Опущены
При расчете ла усталость сначала определяют расчетное напряжение о и число циклов Д' перемены напряжения за назначенный период работы зубчатого колеса Затем определяют величину cfN, характеризующую усталостное воздействие циклически изменяющегося напряжения па материал детали за назначенный период работы. Здесь т — показатель кривой усталости материала Для оценки сопротивления усталости величину сопоставляют с общим ртсурсом детали поданному виту напряжения ОцщЛ'д, где <7|jln — предел выносливости материала при базовом числе циклов Na. Условием достаточною сопротивления усталости материала в самом общем виде является выражение о” Л' < С ОцтЛ'0, на основе которого при оценке сопротивления усталости определяют допускаемое напряжение в ли срок службы детали в километрах пробега автомобиля. Сопротивление усталости считают достаточным, если расчетное напряжение не превышает допускаемого вли обеспечиваемый срок службы не меньше планируемого.
При проведении расчета на усталость при изгибе зубьев определяют следующие параметры
1 . Характеристики нагрузочного режима зубчатой передачи: расчетный крутящий момент на валу колеса пере дачи Л1,р, окружную силу Гц, расчет ную окружную скорость Vi, относи тельный пробег автомобиля на данной t-й ступени трансмиссии коэффициент приведения реального режима переменных, нагрузок к режиму расчетного момента — мтэффннпеиг про бега КпП Если зубчатая передача нагружается на нескольких ступенях, то эти характеристики определяются для каждой ступени.
2 . Напряжение of,, соответствующее нагрузочному режиму лонной »-й ступени. При работе передачи на нескольких ступенях наибольшая величина Of, принимается в качестве расчетной ар
3 Эквивалентное число циклов Nppt перемены напряжения, приходящейся на 1 км общего пробега автомобиля иа данной ступени Для этого действительное число циклов за 1 км пробега умножается на коэффициент пробега К пр, и относительный пробег на данной ступени s, (Nppi — Npt ' X Кп ГЛ(У-
4 Ресурс по напряжениям изгиба, необходимый для обеспечения 1 км пробега автомобиля.
Если зубчатое колесо нагружается на одной ступени.
на нескольких ступенях.
^1F~ S °Г1А'ьТ1-
Расчет зубчатых передач
5 . Предел выносливости зубьев од нш» для чего исходное табличное значение предела выносливости Q'cifm. соответствующее определенному характеру цикла и технологии обработки, умножается на коэффициенты, учитывающие реальный характер цикла и технологическую обработку.
6 Общий ресурс зубчатого колеса
^F lira = °/П!пЛг<) •
После этого оценивается сопротивление усталости зубьев При оценке по допускаемому напряжению определяются следующие параметры:
общее эквивалентное число циклов расчетного напряжения
Nfe~ Pa:L<Jamp
где Lo — планируемый пробег автомобиля до капитального ремонта агрегата, км,
коэффициент долговечности Kfl =
= у Ып-Кре;
допускаемое напряжение сур ~-= «УНиЛ/Ь
Условие достаточного сопротивления усталости
При оценке по сроку службы определяется пробег автомобиля, обеспечиваемый сопротивлением усталости аубьен по изгибу Lf *-= Rf Ktn'RiF. в этом случае условие достаточного сопротивления усталости Lf >• Lo.
При расчете на контактную усталость активных поверхностей зубьев определяют аналогичные параметры
Перечисленные этапы расчета на усталость целесообразно выполнять в последовательности, предусмотренной табл. 3.3, 3 5, 3 7, 3 12, 3 13.
По твбл. 3.3 определяют данные нагрузочного режима зубчатой передачи Затем по табл 3.5 рассчитывают геометрические коэффициенты напряжений контактных и изгиба. В табл. 3 7 дан порядок определения коэффициентов, учитывающих точность, размеры и условия работы зубчатой передачи По табл 3.12 определяют расчетные напряжения контактные и изгиба По табл 3 13 определяют допускаемые напряжения и проводят оценку сопротивления зубчатых колес кон
тактной усталости и усталости при изгибе зубьев. Табл. 3 4. 3 6, 3.8— 3.11 являются справочными.
Величины, имеющие различные значения на передачах, в таблицах написаны с индексом I. При выполнении расчетов в индексе вместо i пишется иомер передачи 1, 2, 3 и т. д.
Рабочие формулы для определения расчетных и допускаемых напряжений (табл 3.12, 3.13) получены на основе структурных формул, приведенных в ГОСТ21354—75* и рекомендуемом Приложении 1 к нему для расчета цилиндрических зубчатых передач внешнего зацепления:
а) па контактную усталость
G -7 Z Z V Wf1t “+1
wHi ~ КнаКнйКни,
°Н aU
условие достаточного сопротивления усталости он сир,
б) на усталость при изгибе
aF^yFyey^WFtlm’
°FP ypYSKfF,1F HmfSF ’
°F I ini = °F Inn b^Fg^Fd^Fc^FL !
условие достаточного совротиалення
усталости <Jf <2 off-
Объединив формулы для определения расчетного контактного напряжения, получаем
н "Г bufiun и
Подкоренное выражение в рекомендуемом Првложении 1 к ГОСТ 21354—75* обозначено Сц Таким образом, иц = Zm у Сц Т ак как зубчатые колеса трансмиссии имеют неизменное значение коэффициента то расчет на
Расчет на усталость
3.3. Исходные данные нагрузочного режима для расчета зубчатых передач кв усталость
J* по Пор. Наименование и обозначение Расчетные формулы, указания
2 Расчетный крутящий момент на валу колеса зубчатой передачи на данной ступали М/р, П м Расчетная чистота вращения вала колеса рассчитыванмой зубчатой передачи на данной ступени п/р, об/мин Планируемый пробег автомобиля до См разд. 2 3. Для многосателлитнлй передачи М/р определяется на валу, на котором закреплено одно из центральных колес механизма См разд 2.3. Для яланетарных передач расчетная часгота П/д определяется е относительном движения nlo ~ ni — nh' где nft — частота вращения водила на данной ступени Значение Lo указывается в технике-
4 5 Б капительного ремонта агрегата, включающего рассчитываемую зубчатую передачу Lo. км Относительный пробег автомобиля на ском задании См. разд. 2 3 См разд 2.3 а = 1 для зубчатых колес, имеющих одно зацепление, а также для пара-знтвых зубчатых колес и Для сателлитов планетарных передач; а = Пр для зубчатых колес, имеющих Ир зацеплений (например, центральных колес планетарных передач)
Коэффициенты пробега для расчета ил контактную усталость (на усталость при изгибе) Кп/ц Число вхождений в зацепление одного ауба одной и той же стороной за один оборот вала зубчатого колеса вга. ск
трансмиссии. Для планетарных пере-
е 9 той передачи к ведущим колесам автомобиля на данной ступени (для планетарных передач — в относительном движении) Суммарное число оборотов ведущего колеса автомобиля, совершаемое за 1 км пробега Расчетная окружная сила на данной ступени. Н: дач с вращающимся водвлом следует обязательно учитывать табл. 3.4 JVS = 1000/(2»-w) В качестве г((0 может быть принят
томобиля Fti -= "(р l0W где dw относится к зубчатому колесу, для которого указан момент Ai/pj для гипоидных передач Fgi опредё ляется дая шестерни и колеса отдельно Ffi где пр — число сателлнтве; М — vl = lMu,'”/p.'(60 W*1-где dw относится к зубчатому колесу, для которого указана частота вращения n/pi для планетарных передач вяесго п(-р подставляется »>/0
10 для многосаталлетяых передач Расчетная окружная скорость в зуб чатой передаче на данной ступени, м/с
82
Расчет зубчатых передач
3.4. Формулы для определения передаточного числа от рассчитываемой детали л ведущим колесам автомобили для планетарных механизмов трансмиссии
Передаточное число (“шо “пи ико) с учетом стиосительиото вращения звеньев
Использование Типы механизмов табл 8.1
основных звеньев механизма. табл.« 1 А. В С° ‘‘°- 3.0 ° В.с
Рассчитываемое зубчатое колесо
za zb
1 | 1 HI ’ -Р”пъ<ч "«ж гь w *£ -^-"к.мк ~ТГ "ими
и — <Ч”Гановлено b — ведущее Л — ведомое "имя ~ "нмк V"“«
hi х 'll ik Ij t * ~p X -^-Х
о и Ь — остановлено или ведомое Л — ведущее Примечав схемах А. В. С и D эвена механизма и 1 — р х ' “пмв в табл Ь 1-ведущим ко 1 — Р Х аметр р 1 лесам авто «v"“ его знаком, .исло на участ X~£UBHIS 'казанным на е от 11№<ч>ото
3.3. Коэффициенты напряжений
Лв Наименование и обозначение Расчетные формулы, указнини
Коэффициент контактного папря-женин в расчетной точке сопряженных профилей для передачи цнли ндр и ческой прямозубой цилиндрической кнсозубой конической обкатной. £ SO1 конической полуобкатной. £ = 90° конической, 2 + 90“ гипоидной обкатной гипоидной полуобкатной ZH- ‘?иШ°п.|С“О1.'(«ЛП11оих) ZH - 2 <“ ± 1) cos=P/(u sin 2а, 7.fj — 2 У'«* + 1 cos’ Р„'(п sin 2ад) 2Н = lu. cos» ₽n/(V u'- + i sin 2a„) ZU~ Z sm 6ш 1' 2“ cos 2 * + i) СО53Ря/(« sin 2ccrt) ZH = 2 si" «К СШ + 4- К2 etg вк) cos” Рср/(ЛГ« sin 2a,,) zh ~ 2 s'" ®n c,s 6ш x xcos'p^ffK^ sip san)
Расчет па усталость
Продолжение табл 3 5
по пор. Наименование п обозначение Расчетные формулы, указания
2 3 4 б Помниалышс значение коэффнци сига напряжения изгиба зуба для зубчатых колес: передачи внутреннего яацеилс- колеса полуобкатноп конической (ганоидной) передачи Коэффициент, учитывающий алия ние параметров парного зубчатого колеса для передач: ' внутреннего зацепления конических и гипоидных цилиндрических передач внеш него зацепления Коэффициент, учитывающий алия ние угла профиля ka ' . . 15° ►а '.И Коэффициент, учитывающий относительную величину радиуса пере УОш- г0к см- табл 3 6 УОк = 2.25 V ош. >'ок определяются по графику *«ш = *>ж = ' + °-125 (х,< — Хш) *иш = AUK = 1 *«1В ~ ' + 0,125 [(Хфш/хок) -г xS - 1]; ’'ин ~ ‘ + 0.125 [(гфк/гош) + xs - 1] 17° 30' 20° 22*30' 25* 1.07 1.00 0,935 0.88
G 7 6 хпдпой кривой ноофиле зуба t>f . . <> Ар . 1.22 Коэффициент, учитывающий преднамеренное перераспределение толщины зубз для передач конических и гипоидных Расчетное Значение коэффициента напряжения изгиба зуба 0,1 0,2 0,3 0,4 1,12 1,07 1,03 1,00 *-пи = 1.57/(1,57 +х1ш)1 *1К = >.57/(1.57 4- кгк) Агш = Агк = 1 > Fai = ^ОшЧ/иЛх^ршЧш’- vFk — у0К*икйа*рк*гк
крыгне при 'расчете контактного
5 напряжения для передач прямозубых кепрямпзубых Коэффициент, учитывающий перекрытие зубьев при расчете напряжения изгиба для передач прямозубых ze = • Определяется по номограммам ряс 3.0
конических и цилиндрических косоэубых гипоидных Уе. = Ze yful =- ZgCos ₽Cp/cos Рмш| vck = zecos Pcp/Cos P»:k
64
Расчет зубчатых передач
Рис. 8.5. График для определения величины Yt при расчете зубчатых колес внешнего зацепления с исходным контуром по ГОСТ 13755—'81
Рис. 3,6- Номограмма для определения коэффициента Ze (штриховой линиэй со стрелками поиазаи поряден определения коэффициента):
с — при расчете цилиндрических передач; б — при расчете конических и гипоидных передач
3.5, Значения коэффициентов Удд. (уяк)
л ля передачи внутреннего зацепления
рн *и =хк
Я1'К
40 50 60 80 100
= 13
0 2,52 9 ЛИ 2,40 2,35 2.35
(2.72) (2.73) (2.74) (2.73) (2.721
+ 0,3 2,50 2.45 2,40 2.35 2.35
(2,43) (2.52) (2,56) (2.66) (2,70)
+ 0.6 2,46 2.44 2.38 2,35 2,35
(2,23) (2,33) (2.41) (2.54) (2.63)
+ 1.0 2.48 2,44 2.38 2,35 2,35
(2.00) (2.12) (2.23) (2.41) (2,50)
гРШ = 14
0 2,50 2,44 2,38 2.32 2.30
(2,72) (2.73) (2.74) (2.73) (2,72)
+о,3 2.48 2.44 2,38 2.32 2,30
(2.43) (2.52) (2.56) (2.66) (2.70)
+о 6 2,46 2.42 2,36 2,30 2.30
(2.23) (2.33) (2.4 i) (2,54) (2.63)
+ 1.0 2.46 2.42 2.36 2,30 £.30
(2.06) (2.12) (2.23) (2.41) (2.50)
гош
0 2.48 2.40 2.35 2.30 2,20
(2.62) (2.63) (2.64) (2.63) (2.62)
+ 0.3 2,46 2,40 2,35 2.30 2.20
(2.36) (2.43) (2.49) (2.56) (2.60)
+0.6 2.44 2,38 2,32 2.25 2,20
(2.15) (2.24) (2.32) (2.46) (2,53)
+ 1,0 2,44 2,38 2,32 2.25 2.20
(2,00) (2.05) (2.15) (2.32) (2.41)
= 19
0 2.45 2.38 2,32 2.28 2.10
(2.62) (2.63) (2.64) (2.63) (2.62)
-1 0,3 2.43 2.36 2.32 2.26 2.10
(2.36) (2.43) (2.49) (2.58) (2.60)
-1 0.6 2.42 2,35 2.30
(2.15) (2.24) (2.32) (2,46) (2.53)
+ 1 с 2.42 2.35 2,30 2,20 2,10
(2.00) (2.05) (2.15) (2.32) (2.41)
= 25
р 2.30 2,20 2.12 2.02
[2,55) (2.56) 2.55) (2.54)
+ 0 3 2.28 2.20 2.10 2,02
(2.36) (2.42) (2.50) (2.53)
+0.6 2.26 2,18 2,08 2.02
(2.18) (2.26) (2.39) (2.46)
+ 1.0 2.26 2.18 2.06 2.02
(2.00) (2.09J (2.26) (2.34)
гош = 33
о 2,05 2.04 2.00
(2.56) 2.55) (2.54)
+ 0.3 2,08 2.04 2,00
(2.42) 2.50) (2.53)
+0,6 2.06 2.02 2.00
(2.26) (2.39: (2.46)
2,06 2,02 2.00
(2.09) (2,26) (2,34)
пг и м е ч а 11 и . Принято, что зубья
нарезаются долбнкоМ, имеющим
число зубьев
Расчет на усталость
85
3.7. Порядок определения коэффициентов, учитывающих точность, размеры и условия работы зубчатой передачи
по лор. Наименование и обозначение Расчетные формулы. указания
1 2 $ 4 Степей К Fa • 6 7 8 9 10 Коэффициент, учитывающий непостоянство интенсивности нагрузки на наклонных контактных линиях Коэффициент, учитывающий влияние точности иеготоатения на распределение нагрузки Коэффициент, учитывающий вид зуба и точность изготовленяя кри расчете контактных напряжений Коэффициент, учитывающий точность изготовления при расчете иапряже-ний изгиба зуба точности . . . . ... Коэффициент, учитывающий начали ную неравномерность распределения нагрузки вследствие тхфориеинн валов и зубьев Kpg Коэффициенты, учитывающие влияние приработки зубьев в процессе эксплуатации Кцщ- ^Fui Коэффициент, учитывающий начальную неравномерность рвсдределеннв нагрузки между сателлитами (для мно-госатезлитных передач), уп Расчетное значение коэффициентов, учитывающих неравномерность распределения нагрузки но ширине вен- для всех передач (кроме многосателлитных) Для многосателлитных передач Расчетная производственная погрешность в зубчатой передаче Ад, мкм Коэффициент, учитывающий влияние вида передачи на проявление погрешности при формировании динамической нагрузки, Яд кНф " 1 + (®р/3); при «^ > Г ZCj/ф = 1,33; для прямозубых передач Кяф «= 1 Зависит от степени точности передачи по кормам илав№>сги работы ...... 6 7 8 9 0,95 1 Г,05 1.10 Кяа — КнфКну Зависит от степени точности передачи по нормам п-чавиисти работы . . . . 6 7 8 -9 1 1 1,08 1.16 Определяется по графикам рис 3.7 и 3.8 в зависимости от условной группы передачи Определяют по твбл 3.8. исходя из твердости рабочих поверхностей зубьев (WRC) и расчетной окружной скорости; для передач, работающих на весколькнх ступенях, — исходя из окружной скорости на наиболее низкой ступени См табл 3.9 *ЯР = > + («0р — ') Кци>'- КГР = 1 + («СР — 1) A'fui «ЯР = 1 + (Тлк0₽ — l) КНий KF& = 1 + (VnKpp - •} К Fui См табл. 3 10 Для цвлиндрической прямозубой 0.18 Для цилиндрической косозу-бо9 0JD Для конической прямозубой 0,20 Для конической с круговым зубом .... 0.1* Для гшюцдцой , 0.08
86
Расчет зубчатых передач
Продолжение табл з 7
7ft по пор Наименование и обозначение Расчетные формулы, указания
11 Суммарная удельная жесткость сопряженных зубьея МПа Зависит от угла наклона лпнпн зуба н вида передачи
в. Рср° Передачи: 12 16 ?Ь 24 28 32 36 40
кшчиубая цилиндрическая 20 Ю 18 17 ГС 14 13
косоЗубая коническая , . . прямозубые цилиндрическая и коническая ..... 23 22 21 14 20 19 16 (4
12 Внутренняя динамическая пагруака при окружной скорости 1 м/с. Н Fyo — /^дбер И (и + Ч &0/'1
13 Внутренняя Динамическая нагрузка на данной ступени. Н Fi Ы ” Fj0vi
14 15 Предельнее значение динамической нагрузки для данной передачи. Н FiM = McpCE/cOS* P-I0-’
Расчетная внутренняя динамическая нагрузка ня данной ступени F.-,. Н В качестве расчетной принимается меньшая из двух величин: Fy д; или F/«
16 ; 17 Расчетное значение коэффициента" внутренней динамической нагрузке на данной ступени Коэффициент, учитывающий влияние* внешни ч динамических нагрузок на данной ступени. А’,,/ Кд, - I -*• (Fj7 F/0. где рц по и. 9 табл 3 3 См рис 3 9
13 Коэффициенты, учитывающие в.тяя ние динамических нагрузок на усталость зубчатых ког.ес. кНт = К Лд,-Кш-; Kpvi “
19 Коэффициент, учитывающий алняние При применении смазочных материв-
20 свойств смазочного материала Коэффициент, учитывающий влияние евл трения и а ввличину плеча нагиба лов. рекомендуемых для редукторных узлов трансмиссии автомобкаей. принимается Кцр, = I Для ведущего зубчатого колеса внешнего зацепления Крр_ = 1.05; для ведомого Крц = 0.95 Для ведущего и ведомого зубчатых колес внутреннего зацепления ^Ffi = 1
21 Коэффициенты, учитывающие влияние размеров эубаатого колеса и его КхН = 1 лрн йц, «-Г 700 мм; КхИ = 1/(1.07 — 10-Ма>)
при > 700 мм;
Kxf св. табл 3 11
Расчет на усталость
87
т.п
тнрааа'шык значений коэффициента : с твердостью зувьев НВ^ЗЬО
контактную усталость выполняется, с использованием величины Сц во всех промежуточных действиях Ниже величина Сн обозначена Ян (19) и названа параметром контактного напряжения
11риведснные выше формулы распространяются лишь на цилиндрические зубчатые передачи внешнего зацепления Для того чтобы рабочие формулы имели общую структуру itpit расчете зубчатых передач всех видов, применяемых в трансмиссии автомобиля, оказалось необходимым выполнить некоторые их преобразования, не искажающие существа расчета В преобразованном виде эти формулы даны в табл 3 12. 3 13.
Ниже приведены ориентировочные значения коэффициента Kfc, учитывающего влияние двустороннего приложения нагрузки
Для явно выраженного знакопеременного цикла (промежуточные зубча
тые колеса в реверсных однорядных передачах, сателлиты с внешним и внутренним зацеплениями в планетарных пе-
Й8
Расчет зубчатых передач
редачах) или периодического реверсирования при одинаковой продолжительности работы в обоих направлениях Kfc — 1,00.
Для одностороннего отнулевого никла или достаточно близкого кинему (зубчатые колеса низших передач и заднего хода в коробках передач) Кге=^ 1,30.
При периодическом изменении направления нагрузки, когда отношение чисел циклов максимальной нагрузки разных направлений может достигать ^рв/А'ир 0,3-;-0,4 (зубчатые колеса травсмиссии, расположенные за узлом реверсирования, зубчатые колеса раздаточных коробок, ведущих мостов и т.д), Kfc~ 1.20.
Вид механизма Наличие н характер Число разветвлений лр
2 3 4 б 6
Однорядный Отсутствует 1,26 1.30 1.35 1.40
'-8- Водило или два центральных зубчатых к'Меса Годно центральное в простой несоосной передаче) 1.10 1.10 1.15 1.20 1,25
Одно из центральных ауб чзтых колес 1.15 1.20 1.25 1.30
Двухрядный Отсутствует - 1.30 1.35 1,40 1.45
Водило или диа центральных зубчатых колеса Одле из центральных зубчатых колес 1,15 1,20 1.20 1,25 1.25 1,30 1.30 1,35
Расчет на усталость
При периодическом изменении направления нагрузки, когда Л'рв/Л'ир ** «в 0,65-5-0,75 (зубчатые колеса высших передач в коробках передач автомобилей, нсяытывающие реверсирование нагрузки при движении накатом, а также вследствие колебательных процессов), Kfc =1.08,
При периодическом изменении направления нагрузки, когда Л’рв^Л’лр s® 0,45-5-0,60 (зубча тые колеса средних передач в коробках передач автомобилей), Kfc-~ hl4.
3.11. Значение коэффициента Кхр в зависимости от нодуля т ('«„) и диаметра а зубчатого кахеса
Модуль т (шп)
До 300 301—40С 401—500 S01 —ООО 601—70С 701—800
3.12 Расчетные напряжения
Jft ПО пор. Наименование и обозначение Расчетные формулы, указания
1 2 Параметр контактного напряжения на данной ступени» МПа Расчетное контактное напряжение, МПа nHi = zHzt.KHa,KH(iKfioiKH^KxH м Для гипоидной передачи вместо Fy подставляется FfaJ °Н = 275 )ЛПн Для зубчатых передач, работающих под нагрузкой на нескольких ступенях. подставляется наибольшее аиачекиз параметра Пу/ из числа полученных по и. 1
эуба^иа динной ступени, МПа:
шестерни <'/?uli='*jW^n ^Fm^Fa^F^Fv^FjM^xFvi
колеса °Fkl~ i>f£in rFkv^f<-FaKF^KFvlKFnKKxFi<
4 Расчетное напряже ние нагиба зуба те- Ftuti Яля шестерни; F/K( для колеса Принимаются иамбовьшие для шестерни и колеса
стерни в колеса °Fw °FK- МПа из полученных по и. 3
Орщ, Срк (п. 3) определяются только для внэшей передачи трансмиссии.
Расчет зубчатых передач
3.13. Допускаемые напражения я оценка сопротивления усталости
№ по пор Наименование и обозначение Расчетные формулы» указания
3 Класс ГОСТ (R: * Б б’ 7 8 9 10 11 12 Параметр предела контактной вы иослнвости /7/уд |tm. МПа Предел выносливости при симме тричиом изгибе зубьев Орс МПа Коэффициент, учитывающий шероховатость Поверхности активной поверхности зубьев. Zr шероховатости но 789—73» 4 1. МКЧ . . .... (40—26) Коэффициент, учитывающий осо бенности технологии обработки переводной кривой ауба Коэффициент, учитывающий влияние двустороннего првложения нагрузки Параметр предела контактной выносливости при базовом числе циклов, МПа Предельное напряжение изгиба при базовом числе циклов» МПа Ресурсы по контактным напряжениям» необходимые для обеспечения 1 км общего пробега автомоб вля Ресурсы по напряжениям изгиба, необходимые Для обеспечения 1 км общего пробега автонобнля Эквивалентное чисно циклов перемен контактного напряжения Коэффициент долговечности по контактным напряжениям Эквивалентные числа Циклов перемен напряжений изгиба зуба См. табл. 3.15 То же 5 6 7 (20—10) 2.5—1.25 1.25—0.63 0 86 0.91 1.00 Уд =1 — для цементированных, цнанн-рованиых, закаленных ТВЧ по контуру, нормализованных и улучшенных зубчатых колес, имеющих нешлифованную переходную поверхность без грубых следов обработки» ке подвергаемых обработке дробью. Значение, отличное от г д — 1» может приниматься прн наличии достаточно достоверных экспериментальных данных Ориентировочное значение К ре определяется по данным, приведенным на • стр 88-89 nHUm ~ пНа limz(? °Flim =OFC llmr7(KFc R1Hui “ fluiWa S irflft, rIHk ~ aKNs S nlU^iUK0iKnHi RtFtu~awNs S °Fwfiium 0iKuFl RIFk= “kWs 2j °FKfiiUKOiKnFt Показатели mF см. в табл. 3.15 "ЯЕш = Я1Яш£7П ffH‘ ЫЦЕк = тн кШм = V NHolNHEyu' тИ VNHJNHEk Бонн Кщ. <0.9, то принимается Кщ, » = 0,9. Значения Мд® приведены в табл 3.15 NFEui —RIFvxL(/°Fw’ ^FEk ~ RtFxLJaFK
Расчет на усталость
91
№ Расчетные формулы, указания
mF
13 Козффшциенты долговечности по напряжениям изгиба KFLUi V NFaiNFEm'.
KFLk^ VNFs'NFEk Если KpL 0.9- то принимается Kpf_ = —0,9 Значения Npg приведены я табл 3 15
14 Допускаемые контактные напряжения, МПа °HP«i = ~la V nH titnKHl 111= П//Рк = 278 V nH UtaKHi»
15 Допускаемые напряжения изгиба зубьев. МПа aFPm = °F limVtui. °FPk = °F limKMn Если по n, 14 получено Сцр > 0.6cр/ jjm ,y.
Если no n 15 получено Cpp > 0.6aj? цт д[, то принимается Opp — О.бср ijm Значения Цщ M н ^F lien 51 указаны в табл 3 15
16 Условие достаточного соиротивлс- °!t < °НР
17 Условие достаточного сопроткзле ния усталости зубьев при изгибе aF < врр . птН «Г
Сроки службы по контактной вы* иосллности аубьев, км LHm ~ “H Лт^Н0:к1Нш‘ LHk = nH1Umr‘/Ho/tilHK
19 Сроми службы по Выносливости вубьев при изгибе, км LFu “ °F HtnWFo/SlFuis lFk “* °F Hm^Fo/^lFK
Примечание. Еели параметр расчетного контентного напряжения Г1ц < <0.9Прща. то расчеты по пп 9. 10, II, 14. 18 не проводятся; сопротивление контент* ной усталости аубчагой передачи является заведомо Достаточным, Если П[/ > 0.9Пц цга. то ресчеты но указанным пунктам выполняются, однако ступени, на которых Г1ш < < 0,6 Лfj цт, в п 8 не учитываются •— отбраковываются.
Если расчетное напряжения Ср <0.90 jr ц^, то для денного зубчатого колесе ресчеты по пп. 9, 12, 13. 15. 19 ие производятся; сопротивление усталости зубчатого колеса при я&тибе аубыв являете* веведоу.о достаточным Если Ср * C.SCp цт, то расчеты по указанным пунктам выполняются, однако ступени. на которых Ср/ < 0.6Op]jm. ал. 9 не учитываются.
Прн расчете зубчатых ковес. нагружаемых на всех передачах. пп, 8 и 9 выполняются по формулам:
92
Расчем вубчатчх передач
3.3. РАСЧЕТ НА ПРОЧНОСТЬ
Расчет заключается а определении максимальных контактных напряжений на активных поверхностях зубьев и напряжений изгиба зубьев и сопоставлении указанных напряжений с соответствующими предельными. В качестве предельных в этих расчетах принимаются напряжения, при однократном действии которых возможно или значительное повреждение активной поверхности зуба, например, смятие, вдавливание, растрескивание, остаточная деформация зуба или его Поломка
Расчетная нагрузка в зацеплении определяется исходя из величины максимального динамического момента Aijnax- Методы определения величины AfroM, а также соответствующие рекомендации рассмотрены в разд. 2. Последовательность расчета зубчатой передачи на прочность приведена в табл. 3 14 Характеристики выносливости непрочности зубчатых колес из разных материалов даны в табл, 3 15 Все величины, входящие в расчетные формулы напряжений, кроме коэффициента Кд, заимствуются из расчетов на усталость (табл. 3 3.
3.14. Последовательность расчета на прочность
Наименование и обозначение Расчетные формулы, указания
1 Максимальный динамический мо мент на валу зубчатого повеса Мщах- Ч к Определяется экспериментально или аналитически при расчете динамической мо-
мобкоя
S Коэффициент мвпекмвльной дине- К„ = AJm,YMfD, гда Мп — расчетный мо-
нцческой негруэни мент на том же валу и на той же ступени, по которому выполнен расчет на усталость (см. табл. 3.3, о. 1). Вместо величины может быть ведан непосред- ственно коэффициент Кд
1 Параметр контектиого напряже-вия при действии квкевмельиого дияакичасхаго ыомект», МПа ПЯ/ “ КЛ ZHzeKHaK№KxH F( — ив табл. 3,3, п. в
4 Максинвльнов контактное напряжение. МПа ат " т
1 Максвыальлое напряжение изгиба зуба шестерни. Мпв
То же, ауба колеса = кл -b^ Wtofaх
* KFuXKxFk
6 Условие достаточной контентной O/ff < 0,90 н Jjnt jW
прочности активных поверхностей зубьев
Расчет па прочность
93
Продолжение табл, 3.14
№ по пор. Наименование и обозначение Расчетные формулы, указания
7 В 9 Условия достаточной прочности при изгибе зубьев Коэффициент запаса контактной прочности активных поверхностей зубьев Коэффициенты запаса прочности °Лйв < OfiaF lim М. °FjK < O-^F limJH; °U litn M- °F lim M см. в табл. 3.15 n«J = a//limJW/0№ nFj>u ~ °F lim MI°Fjui' nFjv. = °F lim Mi^FjK "Hi * Ml «Fjju > 1,1: np}K l.l
10 зубьев при изгибе Условия достаточной прочности зубьев при опенке по запасам прочности
Сталь Вид тер-мообра ботки Твердость HRC Характеристики выносливости Характеристики прочно-
& 8» 8 I 8 I °Fc Нт- МПа 1 <Р ш 0.9) а * Е 1 лИ0Нт- МПа I 1 (Л «0,9) | -ЯЯП I-Ol^iV | а; Е Ё £ Й Е Ё 2 £ 8 £
12X2H4A Ценен- 66—03 33—41 430 9 19.0 1.2 3 1900 3800
I2XH3A То же 56—63 26—63 380 9 18,5 1.2 3 1851 3800
16ХГНТА 66-63 30-42 410 9 19.0 1 Я 3 1701 3800
18ХГН2ТА 66 — 63 30 — 45 420 9 19.0 1.8 3 1761 3800
1ВХГТ 86-63 28—36 370 9 18,0 3 1601 3800
18X2H48A 68-63 36—46 430 9 21.0 >.9 3 1ев< 3800
2CX2H4A бе—еэ 36-41 460 В 21.0 1.2 э I960 3800
20XH3A 66—63 31—41 400 9 19.0 1.2 3 190С 3800
20ХГНТА 66 — 63 30—42 480 9 19,0 1,2 3 1764 3800
20XHM 68—63 28-36 420 9 20,0 1,2 3 1701 3800
20ХГНР 56—63 26—36 410 9 I6.C 1.2 3 I66C 3800
20ХГР 66-63 28 —ЗЕ 380 9 19.0 1.2 3 15М 3800
26ХГТ 66—63 28—36 400 9 19,0 1.2 3 1700 3800
30ХГТ 66—63 29—42 410 9 19.0 1.2 3 1700 3800
3SX рование 66-63 35—46 410 9 18.0 1.2 3 1750 3800
38XA 1 О f 66—63 35-45 420 9 18.0 1.2 3 1801 3800
40XA > 66—63 35—41 420 9 18.0 1.2 3 1801 3800
40XH Объем закалка 46—65 46 — 65 300 G Н.0 0.60 3 1600 2750
40XH Улучше- 25—50 25—30 240 6 5,0 0.16 3 700 1800
45 Закалка ТВЧ по Контуру 53—58 28—35 280 7 13,0 1 3 1500 3600
55ПП Ю же 56—62 29—за 420 16 0 1 3 1600 3800
94
Расчет зубчатые передач
3.4. АНАЛИЗ РЕЗУЛЬТАТОВ РАСЧЕТА
Для принятия решения о целесообразности сохранения предварительно выбранных размеров и характеристик зубчатой передачи или о необходимости их корректировки результаты расчетов па усталость и прочность следует проанализировать. Наиболее благоприятными результаты расчетов можно признать, сели <ю всем видам напряженного состояния расчетные напряжения не превышают' допускаемых, но достаточно близки к ним, папример (0,74-0,8) Ор^р^Ур. а запасы проч мости находятся в пределах nj — — 1,14-2. При получении недостаточного срока службы следует в первую очередь уточнить характеристики нагрузочного режима и иные исходные данные и повторить расчеты
Наибольшее влияние на результат расчета на усталость оказывает величина расчетного момента важнцм является уточнение его величины для режима работы на низшей' ступени трансмиссии. Например, еелп трансмиссия имеет низкую ступень, предназначенную лишь ддя маневрирования и движения с очень малой скоростью, то для такой ступени в качестве максимального длительно действующего момента на входном валу трансмиссии целесообразно принять не максимальный момент двигателя, а лишь (0,7—0,8) Мв щах с последующей проверкой ограничения по сцеплению ведущих колес. Для автомобилей. на которых используют наиболее низкие ступени трансмиссии преимущественно на бездорожье, проверку момента по сцеплению ведущих колес целесообразно проводить, приняв коэффициент сцепления в пределах <р — 0,54- 0,6 Если выполненное уточнение изменило результат расчета недостаточно, то в общем случае следует принять решение о соответствующей корректировке размеров и иных геометрических характеристик зубчатого колеса В частном случае, к которому относится использование агрегата, стоящего на производстве, при модернизации автомобиля может оказаться целесообразным допустить несколько уменьшенный срок службы
при условии, что запас прочности зубчатых колес достаточен Прямым указанием на необходимость корректировки размеров и характеристик зубчатых колес является получение при их расчете не тоста сочного предела выносливости одновременно по всем видам напряженного состояния.
При получения в результата расчетов очень большого срока службы, например трех-, пятикратного по отношению к планируемому, следует сначала убедиться в достаточной прочности зубьев При излишнем запасе прочности и одновременно чрезмерном расчетном сроке службы принципиально целесообразна корректировка размеров зубчатых колес Однако и в этом случае может оказаться оправданным сохранение выбранных ранее размеров. Основаниями для такого решения могут быть требования унификации; умеренные сроки службы по другим видам напряженного состояния, необходимость иметь достаточную прочность торцоо зубьев (это относится к передвижным зубчатым колесам); необходимость установки зубчатого иолеса па валу, диаметр которого выбран по условиям жесткости конструкции или установки достаточно долговечного подшипника; необходимость разместить на теле зубчатого колеса достаточно надежную зубчатую муфту; требования перспективности конструкции.
В практике проектирования сохранился метод ориентировочной оценки конструкции по номинальным напряжениям, используемый при предварительном выборе рвамеров и параметров деталей. Номинальные напряжения рассчитываются по формулам
Пи ° j1 ZhZ.-.
Данные для расчета определяются в порядке, рассмотренном в табл 3 2 (ba, bf, тп, dw). 3 3 (Ft) и 35 {Zu,
Ze, Yf, ¥е) При анализе результатов такого расчета гопоставляются поминальные напряжения в проектируемых деталях и соответствующих деталях падежпо работающих на автомобилях-аналогах,
4
Расчет подшипников качения
4.1. ОСНОВНЫЕ ТИПЫ И КОНСТРУКТИВНЫЕ
РАЗНОВИДНОСТИ подшипников
Подшипники качения, применяемые в агрегатах и узлах автомобиля. можно разделить на две группы: стандартные, применяемые во всех областях машиностроения, и специальные (нестандартные), предназначенные в основном для подшипниковых узлов автомобилей.
Подшипники первой группы стандартизованы ио типам, сериям н основным размерам. Технические параметры стандартных подшипников (размеры, динамическая и статическая грузо подъемности, предельная частота вращения) дают в каталогах и справочниках по подшипникам^качения.
Подшипники второй группы разрабатывают с учетом конструктивных и эксплуатационных особенностей отдельных агрегатов н механизмов автомобиля. Для этой группы подшипников в каталогах обычно приводятся только габаритные размеры, а значения динамической и статической грузоподъемностей указывают в технических требованиях.
Стандартные подшипники общего назначения. В агрегатах и узлах трансмиссий автомобилей наиболее широкое применение получили следующие типы стандартных подшипников качения, шариковые радиальные одноридные. роликовые радиальные однорядные с короткими цилиндрическими роликами, шариковые радиальпо-упорные однорядные и двухрядные, роликовые радиально-упорные с коническими ро ликами однорядные и двухрядные, шариковые радиальные сферические двухрядные, роликовые радиальные сферические двухрядные, роликовые игольчатые, шариковые упорные.
Для сравнительной оценки технических характеристик перечисленных типов стандартных подшипников в табл. 4.1 приведены ориентировочные значения относительной грузоподъемности, предельной частоты вращения подшипника (аз основу принят радиальный однорядный шарикоподшипник), а также данные по допускаемому у глу перекоса и способности подшипника воспринимать радиальную Fr и осевую Fa нагрузки.
В табл. 4 2 приведены схемы и краткие характеристики отдельных конструктивных разновидностей стандартных подшипников.
Шариковый радиальные однорядные подшипники, применяемые в автомобилестроении. имеют следующие преимущества. простую конструкцию, относительно малую стоимость, высокие значения предельной частоты вращения, способность воспринимать комбинированные нагрузки и фиксировать деталь в осевом направлении. Применение радиальных шариковых подшипников наиболее целесообразно при соотношении FcJFt 0,35 Они могут также применяться в качестве упорных подшипников в тех случаях, когда предельная частота вращения упорного подшипника является недостаточной, Радиальные шариковые подшипники применяются в фиксирующих и плавающих опорах валов коробок передач, раздаточных коробок, ступицах задних колес легковых автомобилей.
Роликовые радиальные однорядные подшипники с короткими цилиндрическими роликами применяют в тяжело-пагружепвых опорах, они предназначены в основном для восприятия радиальных нагрузок.
Допускаемая' осевая нагрузка Радон (Н), которую могут воспринимать роликовые подшипники некоторых типов (см. табл. 4 2) без снижения
4,1. Основные тарантеристякм стандартным подшипников качения
Тип подшипника
0000 JDOO 2000 зооо 4000 6000. 7DOO 8000
Характеристика 1^^
Относительная динамическая грузоподъемность 1 0,6-0,8 1,2-1,6 1,5-2 2-2.2 1,1-1,2 1,6-1.9 1,4—1,7
Относ втель-ная предельная частота вращения 1 1 1 0,5—0.65 0.3-0,4 1 0.5—0,65 0,25—0,5
Допускаемый угол перекоса 15- з« V з« 2' 10' 2' 15'
Воспринимаемая нагрузка:
основная Радиальная Радиальная и осевая Осевая
дополнительная Осевая, Осевая, 20 См, табл. 4.2 Осевая, 25 - 70—200 40—150 -
Внутренний диаметр подшипника, мм 1—350 5-200 15-320 4 0—500 13-280 16-240 15-320 10-500
Примечали!, Осевая нагрузка указана в % от неиспользованной радиальной.
$
-
S
S
Расчет подшипников качения
Продолжение гибл 4.2
Подшипник ГОСТ Характеристика
12000 42000 92000 0200С 8328-75* 8328-75» 8328-75* 8328—75* Воспринимает радиальные и небольшие кратко-временные осевые иазруакн одного направления-предназначен для установки на опорах плавающих валов То же Воспринимает радиальные и небольшие осевые нагрузки а двух направлениях; применяется в вмчестав фиксирующей опоры вала Имеет увеличенное число роликов, что повышает
29200 02000 36000 46000 66000 5377-79 5377-79 Шарим 831-75 831-75 831-75 его грузоподъемность, ио снижает быстроходность (повышенное трение между роликами); применяется на плавающих опорах валов, в узлах с ограниченными радиальными размерами Воспринимает только радиальные нагрузки; применяется иа плавающих опорах валон в узлах ые радиально-упорные Угол коятакта а = 12°; применяется при 0,ЗБ< С < 0,65 а = 26*; FJFf = 0,65-5-0.68 а — 36”; FJFf > 0.68
i
Основные типы и конструктивные разновидности
99
Продолжение табл.
Подшипник ГОС! Характеристика
8995-.'5
«52-75
ОднорядныЛ, а = 36°; имеет разъемное внутрен-
нее кольно и контакт о четырех точках, воспри-
нимает осевые пагрузки в обоих направлениях
Двухрядный, а = 26°. воспринимает осевые нагрузки в обоих направлениях
Двухрядпый| а — 26е; воелринпиает осевые на» грузни в обоих иапраалеиняи
Рмшгвтмт раддвиако'упорн»
М3»-78 а “ 10* IT*i врямдяпея вря “ в|88*®,<4
7260—61 а 25ч-30’; примвмется при > 0,62
6364 — 78
о. = 94- 17е; воспринимает осевую нагрузку в обоих направлениях, применяется в фиксирующих
100
Расчет подшипников качения
долговечности, определяется по следующим формулам,
.для подшипников серий диаметров 100,’200, 300 и 400
Ра доп =
= [1,75 — 0.12uzin]ax7fu [D — ф],
для подшипников серий диаметров 500 и 600
Радон =
=КаС0 [1,16 — 0,08nmax/Gi (D — ф],
где Со — статическая грузоподъемность подшипника, Н; d, D — соответственно внутренний и наружный диаметры подшипника, мм; Пщах — максимальная частота вращения подшипника, об/мин; Кд, Ки — коэффициенты
Ниже приведены значения коэффициента Ка в зависимости от характера осевой нагрузки (температурного режима).
Постоянная (высокая температура) О
Переменная (умеренная темпера-
тура) ................. ..... 0.06
Коэффициент Кв определяется по серий диаметра подшипнике.
Серки диаметров . . 100. SCO. 200. 400 non апп
Роликовые подшипники с короткими цилиндрическими роликами применяются в основном в подшипниковых узлах коробок передач, раздаточных коробок, редукторов ведущих мостов.
шариковые радиально-упорные подшипники однорядные и двухрядные применяются в тех случаях, когда на опору действует комбинированная нагрузка. Наиболее употребляемые в автомобилестроении конструктивные разновидности радиально-упорных шариковых подшипников приведены в табл 4 2.
Однорядные радиально-упорные шариковые подшипники воспринимают осевую нагрузку только одного направления и устанавливаются попарно с соответствующей регулировкой Выбор конструктивной разновидности од
норядного шарикового радиально-упорного подшипника определяется соотношением между осевой в радиальной нагрузками
Роликовые радиально-упорные подшипники, применяемые в автомобилях, приведены в табл. 4 2. Подшипники предназначены для восприятия комбинированной нагрузки Однорядные подшипники воспринимают осевую нагрузку одного направления, а двухрядные — в обоих направлениях.
Роликовые радиально-упорные подшипники условно подразделяются на три группы- с малым углом контакта (а= 10ч-16°), с увеличенным углом контакта (а = 20-5-22°) и с большим углом контакта (а = 25ч-30°)
Однорядные подшипники применяются для установки вала с регулируемыми разнесенными опорами Двухрядные подшипники, а также однорядные спаренные подшипники, установленные симмстричпо, могут применяться в качестве фиксирующей опоры вадя.
- Роликовые радиально-упорные подшипники применяются в тяжелонвгру-женных опорах коробок передач, раздаточных коробок, редукторов ведущих мостов и в узлах ходовой части автомобиля.
Другие типы стандартных подшипников, укаванные в табл. 4.1, в агрегатах и узлах автомобиля используются сравнительно редко. Применение радиальных даухрядиых сферических шарике- и роликоподшипников имеет место в тяжелонагруженных опорах раздаточных коробок многопринодных автомобилей. Радиальные роликоподшипники с длинными цилиндрическими роликами н игольчатые, а также шариковые упорные подшипники в агрегатах и уалах автомобилей используются в основном в нестандартном исполнении.
Специальные подшипнкии. Подшипники качения, относящиеся к группе специальных, выпускаются с учетом конструктивных и эксплуатационных особенностей агрегатов и узлов автомобиля. Все специальные подшипники являются нестандартными,*в табл 4 3 приведены основные конструктивные разновидности специальных подшипников.
Основные типы и конструктивные разновидности 101
4.3. Подшипники качения специальные (нестандартные)
Подшипник
Роликовые радиальные без колец
S4Q00
нагрузки при невысокое частоте вращения Приме* вястся в опорах с ограниченными в радиальном направлении размерами (блок промежуточных зуб-
литы колесных планетарных передач и др )
Имеет стальной штампованный сепаратор, обладает повышенной быстроходностью по сравизнню с типин 64000
Имеет два ряда роликов и сепаратор, меняв чувствителен к перевесу, обладает повышенными грузоподъ*
При ширине подшипника до 30 мм выпускается однорадими. свыше 30 мн — двухрядным. Сепаратор изготввливвется из стели, из легких сплавов и из рввличных видов пластмасс. Применяется в подшипниковых углах неробок передач и раздаточных ко»
Раликоем радиальные иеольчотые Ось анртреннмо кольца (карданные)
Икее? ролики оо сферическими торцами, из имеет уплотнения
Имеет уплотнение, ролики могут иметь конические
или цвлнндрнческие торцы
Имеет резиновое уплотнение повышенной герметичности. пе требует замены смазочного матариала при
эксплуатации
102
Расчет подшипников качения
Плдшнтшк
Характеристика
Шариковые упорные однорядные в защитном кожухе
Воспринимает только осевую нагрузку, не требуется
Применяется в муфтах выключения сцепления
Воспринимает только
Кроме перечисленных выше основных типов и конструктивных разновидностей подшипников, в агрегатах и узлах автомобилей в качестве опор качения могут применяться также комплекты свободных цилиндрических и игольчатых роликов.
, 4.2, ОСОБЕННОСТИ
' конструкций
ПОДШЙПНИКОВЫХ УЗЛОВ
Подшипники качения имеют в основном два назначения; восприятие действующих на опору радиальных я осевых нагрузок; фиксация вале (корпуса) в ссеаом направлении. В эа-вйсимости от конструкции агрегата, условий монтажа, требований к же-сткости опор и точности вращения деталей при решении этих задач могут быть использованы следующие основные варианты устройства подшипниковых узлов.
«фиксирующая опора — плавающая опора» (рис. 4.1). Придвинем варианте устройства опор вал (корпус) доджей быть зафиксирован в осевом направлении только в одной, фиксирующей (установочной) опоре На второй, плавающей опоре должна быть предусмотрена возможность изменения длины вала, что обеспечивается выбором соответствующей посадки одного из колеи или самим подшипником.
Рассматриваемый принцип устройства опор имеет следующие преимущества: расстояния между посадочными местами для подшипников «а валу
и в корпусе не должны выдерживаться с особой точностью; возникновение осевого преднатяга или защемление тел качения вследствие тепловых удлинений вала исключается, значительно упрощается монтаж подшипников. D многоопорных валах должна быть только одна фиксирующая опора, остальные — плавающие.
' В качестве фиксирующей опоры могут применяться радиальные одноряд» йые шарикоподшипники (рис. 4.1, о), радиальные роликоподшипники Типа В2000 (рас. 4.1,6), двухрядные или сдвоенные (яри симметричной установке) радиально-упорные шариковые (рис, 4.1, в) И роликовые (рис. 4,1, в) подшипники, шарикоподшипники с четырехточечным контактом крист-{|укти№ой разноаидаостн 176СОО рис, 4.1, в). При ограниченных монтажных размерах подшипникового узла и больших радиальных и осевых нагрузках на опору в качестве фиксирующей опоры может быть использована комбинация роликового радиального однорядного подшипника Типа 2000 или 32000 и шарикового радиального однорядного подшипника (рис. 4.1, е). В этом случае монтаж подшипников производится таким образом, чтобы роликоподшипник воспринимал только радиальную, а шарикоподшипник — только осевую нагрузку.
Необходимое выравнивание линейных погрешностей на плавающей опо ре лучше всего осуществляется эа счет установки на опоре радиальных роликовых подшипников типа 2000 (рис. 4 I, а, д} или 32 000 (рис. 4.1, б,
Особенности конструкций подшипниковых узлов
103
г, в), у которых ролики могут перемещаться вдоль дорожки безбортового кольца В качестве плавающих опор также могут использоваться радиальные игольчатые подшипники, роликовые подшипники с длинными цилиндрическими роликами без колец, а также комплекты свободных роликов. При использовании радиальных шариковых подшипников создание плавающей опоры может быть осуществлено за счет применения подвижной писадки либо внутреннего кольца на вал, либо наружного кольца в корпус (рис 4 1, о)
«Регулируемые опоры» (рис 4.2). При рассматриваемом варианте устройства опор вал (корпус) монтируется в двух разнесенных однорядных радиально упорных шариковых или роликовых подшипниках, каждый из которых способен воспринимать осевое усилие только одного направления. Преимущество данного варианта устройства опор состоит в том, что требуемый вид начальной регулировки подшипников (осевой зазор, нулевой зазор, осевой предварительный натяг) может быть получен непосредственно прп монтаже подшипников в агрегате.
При регулируемых опорах возможны две схемы установки подшипников: схема «X» (рис. 4.2, в) и схема «О» (рис. 4 2, б—г). Выбор схемы зависит от характера приложения нагрузки, конструкции агрегата, условий работы, удобства монтажа, регулировки и обслуживания в эксплуатации. Схема «О» является предпочтительной в тех случаях, когда необходимо получить большую опорную базу подшипников (расстояние между точками 1—Г).
При расчете осевого зазора или предварительного натяга подшипников следует обращать внимание на возможность тепловых деформации вала, корпуса и самих подшипников Перепад температур вала и корпуса приводит к тому, что при одинаковом материале вал в осевом и радиальном направлениях расширяется больше, чем кор пус Это необходимо учитывать при выборе схем установки подшипников.
В случае установки подшипников по схеме «X» вследствие теплового расширения вала начальный осевой зазор всегда будет уменьшаться, а прп уста-
новке подшипников по схеме «О» следует различать три возможных случая В первом*(рис 4 2, б) линии конусов наружных колец подшипников сходятся в одной точке на оси вала; радиальное тепловое расширение подшипников компенсируется осевым теп левым удлинением вала, и отрегули рованный при монтаже зазор в подшипниках практически не изменяется.
Во втором (рис. 4.2, в) линии конусов наружных колец подшипников пересекаются. Радиальное тепловое расширение подшипников в этом случае оказывает на зазор большее влияние, чем осевое удлинение вала, и начальный зазор в подшипниках в результате нагрева агрегата будет уменьшаться.
В третьем случае (рис 4 2, е) линии конусов наружных колец подшипников не пересекаются, при этом радиальное расширение подшипников влияет на
104
Расчет подшипников качения
4.2. Схемы установки подшипников
зазор в подшипниках в меньшей степени, чем осевое удлинение вала, и начальный зазор в подшипниках увеличивается. В данном случае подшипники могут регулироваться с нулевым зазором и даже с небольшим осевым преднатягом.
При решении вопроса о том, какое из двух колец подшипника, внутреннее или наружиое,будст регулируемым, следует исходить из условий сборки подшипникового узла и конструктва-ных особенностей агрегата Как правило, при установке подшипников по схеме «0» регулировка осуществляется внутренним кольцом подшипника, а при установке по схеме «X» — наружным кольцом.
«Плавающий вал* (рис. 4 3). В этом варианте опоры имеют принципиально одинаковые устройства с регулируемыми опорами. Однако если в «регулируемых опорах» для компенсации тепловых рксширепий деталей необходим начальный осевой зазор или небольшой предпатяг, то для опор плавающего вала всегда предусматривается гарантированный осевой зазор, веиичнна которого в зависимости от размеров подшипников и длины вала находится в пределах от 0,5 до 1,0 мм. Осевой зазор должен задаваться конструктивно подбором соЫветству-
ющих допусков на линейные размеры деталей. Допуски должны быть назначены с таким расчетом, чтобы исключалось защемление подшипников при самых неблагоприятных условиях. Однако и чрезмерный осевой зазор нежелателен во избежание появления значительных ударных нагрузок при каждом изменении направления осевых нагрузок.
Для опор плавающего вала приме няются радиальные роликовые под шинники типа 42000 (рис. 4 3, а), а также радиальные однорядные шариковые подшипники при условии подвижной посадки одного из колец каждого подшипника (рис. 4 3, б). - Радиально-упорные подшипники для опор плавающего вала не применяются.
В коробках передач автомобилей подшипниковые уалы первичного и вторичного валов выполняются, как правило, по принципу «фиксирующая опора — плавающая опора». В^ качестве фиксирующих опор чаще всего ‘используются радиальные однорядные шарикоподшипники конструктивных разновидностей 0000 и 56000, а^тахже 70000 или 170000 — с канавкой для ввода шариков. Последние два типа подшипников имеют увеличенное число шариков, обладают более высокой грузоподъемностью и применяются для автомобилей большой грузоподъемности.
На плавающей опоре ведущего вала коробки передач (центрирующая опора в маховике двигателя) используются радиальные однорядные шариковые подшипники типов 0000, 60000 и 18UOOO. В качестве плавающей опоры вторичного вала коробок передач легковых автомобилей в грузовых авто-
g)
Методы расчетов
105
мобилей малой и средней грузоподъ емкости применяются игольчатые подшипники типа 464000 или комплекты свободных роликов, а грузовых автомобилей большой грузоподъемности— радиальные роликовые подшипники типов 502000 и 64000 или комплекты свободных роликов
Подшипниковые узлы промежуточ него вала коробок передач легковых и грузовых автомобилей малой гру зоподъемности выполняются, как пра вило, по принципу «плавающего вала». Промежуточный вал таких автомобилей выполняется обычно в виде блока зубчатых колес, вращающегося на неподвижной оси В качестве опор качения используются радиальные игольчатые подшипники типа 464000 или комплекты свободных игольчатых роликов. В коробках передач грузовых автомобилей средней и большой грузоподъемности промежуточный вал устанавливается в ‘.фиксирующей опоре — плавающей опоре» или в регулируемых опорах с использованием роликовых радиально упорных подшипников
В раздаточных коробках подшипниковые узлы выполняются по тем же принципам, что и в коробках передач В связи с высокой иагруженностыо подшипниковых узлов раздаточных коробок в них широко применяются радиально-упорные роликовые подшипники, особенно в автомобилях большой грузопотъемплсти
В главных передачах ведущих мостов автомобилей применяются главным образом роликовые радиальноупорные подшипники, устанавливаемые в регулируемых опорах В грузовых автомобилях коническая шестерня для увеличения жесткости устанавливается между опарами, при этсм па перечней опоре устанавливаются спаренные роликовые радиально-упорные подшипники одинакового или разных типоразмеров, а на задней (дополнительной) опоре — роликовые радиальные подшипники типа 102000. Коническое колесо обычно монтируется вместе с корпусом дифференциала и устанавливается в опорах регулируемого типа с. использованием роликовых радиалыю-улопиых подшипников типов 7200 и 7500 Шариковые рачиаль-
но-упорные подшипники ввиду их малой жесткости для опор дифференциала применяются сравнительно редко, иногда в легковых автомобилях.
4.3. МЕТОДЫ
РАСЧЕТОВ подшипников
Подшипники качения могут работать при следующих режимах нагружения и относительного вращения колеи* вращаются пол нагрузкой; не вращаются под нагрузкой; совершают под нагрузкой качателыюв движение, В агрегатах и узлах трансмиссии автомобилей подшипники в большинстве случаев работают в режиме вращения под нагрузкой. Опоры, в которых подшипники пол нагрузкой пе вращаются, а при вращении работают без нагрузки, применяются в коробках передач и раздаточных коробках (передняя опора ведущего вала коробки передач в маховике двигателя, опоры сврбодно сидящих на валу зубчатых колес постоянного зацепления) К подшипникам, совершающим под нагрузкой качательное движение, относятся игольчатые подшипники карданных шарниров (карданные подшипники)
Основным показателем работоспособности вращающихся под нагрузкой подшипников качения является долговечность Современные методы расчета долговечности подшипников основаны на теории усталостного разрушения рабочих поверхностей тел качения и колец подшипника Технической характеристикой подшипника, определяющей его долговечность, является динамическая грузоподъемность С. Под динамической грузоподъемностью понимается нагрузка (радиальная — для радиальных я радиально-упорных подшипников и осевая — для упорных подшипников), которую группа идентичных подшипников может выдержать в течение расчетного срока службы, равного 1 млн оборотов внутреннего кольца. Под расчетным сроком службы понимается число оборотов, которой должно отработать не мепее 90 °о подшипников из данной группы в одинаковых условиях без появления признаков усталости металла.
106
Расчет подшипников качения
При расчете долговечности подтип» ника учитываются характер и направление внешней нагрузки, скоростной и температурный режимы подшипника, смазочный материал и условия смазывания подшипника, конструктивные особенности подшипникового узла и условия монтажа подшипника
Для подшипников, невращающихся под нагрузкой или вращающихся с ча стотой менее I обочин, показателем работоспособности является остаточная деформация тел качения и колец подшипника. Технической характеристикой, определяющей работоспособность таких подшипников, является статическая грузоподъемность Св. Под статической грузоподъемностью подшипника понимается нагрузка (радиальная — для радиальных и радиально упорных подшипников и осевая — для упорных подшипников), воздействие которой на невращающяйся подшипник вызывает общую остаточную деформацию тела качения п колец в наиболее нагруженной зоне контакта, равную 10-4 диаметра тела качения Расчет невращающихся подшипников проводится по максимальной динамической нагрузке, действующей на подшипниковую опору
Оценка работоспособности карданных подшипников, работающих при качательном движении, проводится или по динамической грузоподъемности С (расчет долговечности), или по статической грузоподъемности Сс (расчет при статическом нагружении) Расчет карданных подшипников, имеющий специфические особенности, обусловленные необходимостью учета влияния качатсльного движения па работоспособность подшипника, приведен в разд. 10 Ниже приведен расчет долговечности вращающихся под нагрузкой подшипников и расчет ис-вращающихся пол нагрузкой подшипников, работающих в условиях статического нагружения
4.4. НАГРУЗКИ, ДЕЙСТВУЮЩИЕ НА подшипники
В редукторных узлах трансмиссии автомобилей нагрузки на подшипники обусловливаются усилиями в за
цеплении зубчатых колес. Подшипники осей сателлитов планетарных передач дополнительно нагружаются цейтробежными силами от массы сателлитов. Расчет нагрузок на подшипники выполняется в такой последовательности;
а) рассчитываются усилия в зацеплении зубчатых колес;
б) составляется расчетная схема действующих на вал нагрузок и находятся опорные реакции;
в) определяются радиальные и осевые нагрузки действующие на подшипники.
При расчете долговечности нагрузки иа подшипники определяются по эквивалентному крутящему моменту Мд Для подшипников, работающих в условиях статического нагружения, расчет нагрузок проводится по максимальному динамическому моменту М/шах Рекомендации по определению М9 и /Кустах приведены в разд. 2.
Усилия в зацевлении зубчатых колес. Окружное Ff, радиальное F/? и осе-,вое Fx усилия в зацеплении цилиндри-'ческих, конических и гипоидных зубчатых колес рассчитываются по формулам, приведенным в табл 4 4В формулах для определения Fp и FK ги поидных н конических зубчатых колес с непрямыми зубьями верхние или нижние знаки принимаются в зависимости от направления наклона зубь ев и направления вращения зубчатого колеса (напрапленис вращения по ча совой стрелке считается правым, а про тив часовой стрелки — левым) Для ведущего зубчатого колеса верхние знаки следует принимать в том случае, когда направление вращения (если смотреть с вершины делительного конуса) совпадает с направлением на клопа зубьев, а для ведомого, если указанные направления не совпадают, в противном случае следует принимать ннжние знаки.
Направление лейставя радиального Fp и осевого Fx усилий в зацеплении гипоидных п конических зубчатых колес с непрямыми зубьями определяется в зависимости от знака плюс или минус При положительном значении Fp направлено по радиусу к оси вращения зубчатого колеса, a Fx — от вершины к основанию
Определение нагрузок
167
4 4. Выражения для расчета усилий
зацеплении зубчатых колес
Зубчатые колеса с зубьями
лие прямыми | непрямыми
Цилиндрических
2.M;-rfw 1 гм/йц,
f, >е («ш -1- р) Ft *S <aten + ₽>/cos ₽
0 1 Fftgfl Конических
2AWm | 2M/dm
F. tg (а + р) cos б <*e <«n + p) cos 6 T sin pn sin 6} F(/cos Pr
F, tg (а + р) sin б । | <IK («„ + P) sin 6 ± sin P„ cos 6) Ff/cos Pn Гипоидных
для колеса 2M2Mms: для шестерни F/2 cus f'„t/eos Рп2
(tg (“и + rteos 6 х s,n ₽n si" 6> Fi'cos P«
<tg («„ + P) «in 6 ± sin Pn cos 6) Fj/cos P„
Используемые обозначения см в разд. 3, угол трения р —
делительного конуса параллельно оси вращения, прн отрицательных значениях FfiwFx направлены в стороны, противоположные указанным.
Опорные реакции. Радиальные и осевые реакции на опорах вала определяются на основании расчетной схемы действующих на вал нагрузок с использованием известных методов механики и сопротивления материалов Если действующие на вал нагрузки расположены не в одной плоскости, то их проецируют на две взаимно перпеядикуляриые плоск-эста, находят в каждой плоскости составляющие опорных реакций, а затем геометрически складывают и получают в результате суммарные реикции_на опорах
При составлении” расчетной схемы действующих на вал нагрузок радиальная реакция в опоре с радиальным подшипником лрикаадывается в плоскости симметрии подшипника В опоре с радиально-упорным однорядным подшипником радиальная реакция 7? прикладывается в точке пересечения осн вращения подшипника с нормалью, проведенной к середине контактной
площадки Гела качения с наружным кольцом (рис 4 4) Расстояние 1д (опорная база) от точки приложения радиальной реакции до широкого торца наружного кольца подшипника рассчитывается по формуле
Ir = 0.5 (В -L 0.5 (d -| D) tg а].
Для стандартных радиально-упорных однорядных шариковых и роли-
108
Расчет подшипников качения
новых подшипников значения приведены в табл. 4 5 и 4.6.
При установке в опоре сдвоенных радиально-упорных роликовых под
тип подшипминка
шипников одинакового типоразмера, смонтированных по схеме «ЛЬ (рис. 4.5, опора I), радиальная реакция Rj в опоре 1 прикладывается нс в плоскости симметрии подшипников, а смещается от нее на расстояние ох в сторону, противоположную направлению действующей на вал осевой силы Рд Расстояние ot (мм) определяется по формуле
<4= Kia,
где а — расстояние между точками пересечения оси вращения подшипников с нормалями, проведенными к серединам контактных площадок тел качения с наружными кольцами подшил пиков, мм. Ki — коэффициент, определяемый по графику рис. 4 6 в зависимости о< параметра v = =~- yen tg к) (R1 yen — условная радиальная реакция в опоре /, вычисленная в предположении, что она действует в плоскости симметрии подшипников и приложена в точке О на расстоянии /с от опоры // (см. рис 4 5)
По найденному значению at определяется расстояние I между точками приложения радиальных реакций fa и fai, исходя из которого их вычисляют.
Нагрузки, действующие на подшипники. Радиальная нагрузка на подшипник Fr равна по величине резуль тирующей радиальной реакции в под шипниковой опоре Осевая нагрузка Fa, действующая на подампник, определяется в зависимости от конструкции подшипниковых опор и типа установленных на них подшипников
Графив для определенна возф-Kj при регуояроахе подтип -
/левым эазором-ютягоы: 2 — с преднвтягом
Оправление нагрузок
169
При установке вала в «фиксирующей опоре — плавающей опоре» действующая па вал осевая нагрузка Рд воспринимается полшмпцикы| фиксирующей опоры. Осевая нагрузка на подшипник фиксирующей опоры Fa — ~ РА~ где £/t — алгебраическая сумма осевых усилий в зацеплении одновременно работающих на валу зубчатых колес.
При установке вала в радиально-упорных однорядных подшипниках (в «регулируемых опорах») осевая нагрузка на подшипники Определяется исходя из действующей на вал осевой нагрузки РА= £fx и осевых составляющих Si и Sji, возникающих в опорах I и Ист радиалъчых нагрузок 'г1 и FTii (рис 4 7). Осеиая составляющая S от радиальной нагрузки на радиально-упорный подшипник FT определяется по формулам.
РиС- 4.7. Схемы действия нагрузок при
рядных шариковых или роликовых подшипниках:
а — схема «О»: б — схема «X»
для роликовых
1.245Frtga,
для шариковых
Значения коэффициента е приведены ниже.
18. 19. 20 24, 25, 26
0.57 0.68
30 35. 36 40
0.80 0,95 Г. 14
Угол ковтвк-
Примечание. Для « - 12° 1ВС = (>g (Fr/Co) — 1,1441/4.729; для a =*= 15° lg е = Cig (FT/C0) - 1,7661/7,363.
Формулы для определения осевых нагрузок на радиально-упорные одно-
Расчет подшипники» каченич
рядные подшипники при их парной установке на валу приведены ниже.
При Sj>Sn. РЛ>0 или Si <Sjj; РА * SII “ SI Fol = Si: F«II = Sl+
При Sj < Sn. Рд < Sn — Sj FflI= - S1I — PA' FaII bII
4.5. РАСЧЕТ ДОЛГОВЕЧНОСТИ ПОДШИПНИКОВ
Долговечность подшипников агрегатов трансмиссии автомобилей выражается в километрах, т е. в той же
единице измерения, в какой исчис ляется срок службы автомобилей Расчет долговечности подшипников проводят в такой последовательности.
I . Определяют параметры нагрузочного режима рассчитываемого агрегата трансмиссии эквивалентный крутящий момент на ведущем валу .Мэ,, расчетную частоту вращения ведущего вала Пр; (об: мин) и относительные пробеги автомобиля на передачах Здесь н далее индекс / обозначает порядковый номер передачи в коробке передач (/—1,2, , k, где k — число передач) Рекомендации по определению параметров нагрузочного режима приведены в разд 2
2 Определяют динамическую груво подъемность подшипника С (для стандартных подшипников — по каталогам и справочникам, для нестандартных — по формулам, приведенным в табл 4 7)
DT > 25,4 мм
упорный однорядный
fc (i cos ct)°-7^^3,647O’,‘4
короткими ци.чнндриче-
сними роликами и радиально-упорный упорный однорядный одинарный и двой-
с длинными цилиндрическими ками бет колец
{ г2/Зо1Л fc//33,647D^4
t .7/9 AHrfMZl
Vtff r dt
24^l‘D4teff
геометрии деталей подшипника.
— коэффициент.
z — число тел качения; От — диаметр тела качения (средней диаметр дня конического ролика н наибольший для бочкообразного), мм, 1гц — эффективная длина линии кон-
Расчет долговечности
111
9. Числовые значения коэффициента f для роликовых радиальных с хораткими цилиндрическими роликами и
рядный
78,'26
радиальных роликовых
45,82
40,98
40,43
65.03
67.79
53.44
58,42
74.95
73,85
56*46 55,86
54,13
53.01
51.76
50.40
48,94
/3.85
76.06
77.16
радиальных сферических шариковых и роликовых
|рохсдящ,ей через центры
1’адиаль ный одно-
радиаль-но*упор-
46,69 49.08
51.10
52,82
54,29 55.54
57.49 58,80
59.59 59.95
59.92 59.59
58.99 58.16
57.13 55,95
54.63 53.20 51,66 50.05
44,23 46.49
48,41 50.04
51.43 52,62
54.46 55,71
56.46 56,79
18.63
19.89 21,09 22,25 23,38 25,57 27.67 29,70 31,65
33.61
35,24 36.82
38.21
39.38
40.29
40.91
4 Определяют эквивалентную динамическую нагрузку подшипников по формулам:
шариковых радиальных и радиально-упорных и роликовых радиально-упорных
Для подшипникового узла, состоящего из двух одинаковых подшипников, динамическую грузоподъемность рассчитывают по формулам- шариковых С — 1,62Ct. роликовых С = 1,72Clt где Ct —динамическая грузоподъемность одного подшипника
3 Составляют расчетную схему вала и находят радиальную />£ в осевую Fa, нагрузки, действующие на подшипник (см разд. 4 4).
упорных шариковых и роликовых
где V — коэффициент вращения (V =* = 1 и V~ 1,2 при внутреннем кольце, соответственно вращающемся и неподвижном по отношению к нагрузке); Xi, Yi— коэффициенты соответственно радиальной н осевой нагрузки.
99.20
58.52
70,99
73.27
165.34
181.87
192.90
198.41
209.43
36.72
45,21
51.06
55.66
59.51
62.86
55,8'1
90.20
92,82
95.28
97.59
99 79
101.87
112
Расчет подшипников качения
Ниже приведены значения коэффициента У для шариковых радиальных
/г«№г,с‘
4.11. Коэффициенты У для шариковых радиальмо-увориых
0.029
0.057
0.290
0.430 0.576
0.015 0.02Я г.,ш >
0.120 0.170 0.29О
0.440
I 0.76 I 0.78 | 1.24 | 0.80 а = 35. 36°
| 0.66 | 0.66 | 1.07 | 0.9S а = 40°
1 0.57 | 0.55 I 0.93 | 1.14
П р к м е ч a и н е Значения коэффициента X при РцДУГ,) >е следующие.
«, ° К? 15 1«. 19. 20
Однорядный 0,45 0,44 0 43
подшипник
ДпухрндныП 0.74 0.72 0,70
ПОДШИПНИК
а. ° 24.25.26 30 35, 36 40
ОднорадныП 0.41 0.39 0.37 0.3S
подшипник
ДвухрЯдиыД 0.67 0.63 0,60 0,57 ПОДШИПНИК
При FpXVF.Xe и любых значениях
<х X -= I.
Для однорядных ПОД1И1111НИКОВ прн FJVFT^e принимается Х= I и У = 0
1.4 2.8 5.1.
2.3 1.99 1.71
0.19 0.22 0.26
подшипников при Fal(VFr}> е, а для других типов — в табл. 4.II—4 12
Этим значениям У соответствует X = 0,56. При Fa'(VFr)-^e У — О,
5. Определяют коэффициент внутренних динамических нагрузок
X»u=l+(0.7,n> £ </,Л. > .
где п — число зубчатых колес, одновременно работающих на валу; Г/д£ — динамическая нагрузка в зацеплении зубчатых колес (см табл 3.7, п. 13); Fti — окружное усилие в зацеплении зубчатых колес (см табл. 4 4)
6 Находят коэффициент внешних динамических нагрузок КЯ2. который учитывает влияние колебательных процессов в трансмиссии на до.и ©вечность подшипника Для подшиппи ков, расположенных рядом с фланцем крепления карданного вала, следует принимать Лда = 1,2; для подшипников дифференциала Кд2 = 1,3-5-1,5; для прочих подшипников агрегатов трансмиссии при отсутствии экспериментальных данных рекомендуется принимать /Сдг=-= I.
7. Определяют коэффициент ра-дяалмюго зазора К3. учитывающий влияние монтажного зазора в подшипнике на его долговечность Этот коэффициент определяют только для ра днальных и радиально-упорных роли новых подшипников при числе тел качения г > 10 и наличии монтажного зазора При этом из двух установленных на валу радиально-упорных роликовых подшипников К3 определяют только для того подшипника, который не воспринимает внешнюю осевую нагрузку. В остальных случаях следует принимать К3 = I
Значение Ка, определяют по графику (рис 4.8) в зависимости от параметра
9,- - Frf/4,547A)'ll^f9 С09 а,
где Fr; — радиальная нагрузка, Н; fefi — фактическая длина линии контакта ролика с кольцом мм, Дг —
Расчет долговечности
113
4.12. Коэффициент ы X и Y для роликовых радиальных сферических радиально-упорных подшипников
Подшипник FJiVFJ^ l.S rg а FJWF,) > 1,5 tg а
Ро 1иковы1 радвольиых сферических и радиально упорных Однорядный I г (01 I 0.40 (0,40/tg а) Двухрядный 1 1 (0,45,'1g а) | 0,67 (0.67/tg а) Шариковых сферических Однорядный I 1 (0) 1 0,40 (0.40/lg а) Двухрядный 1 I (0,42/lg а) 1 0,65 (0.65/Ig а) Примечание Без скобок приведены значения коэффициента X. в скоб
монтажный радиальный зазор в подшипнике, мм.
Для полнокомплектных радиальных ппушипнмков с короткими цилиндрическими роликами значения Лг приведены в табл. 4 13, для остальных типов радиальных роликовых подшипников значение Дг определяют по рабочим чертежам деталей подшипникового узла Для радиально-упорных роликовых подшипников Лг — 2оп '/ л si» а. где S£i — монтажный осевой
,'.1Г ,<111.11. < >|
Значения Дг ио
— соответственно иаимснь-। наибольшее значения номинальною
Bl г,-. |
.1. ’I! I И
40-60
ВО—100 100—120 120-140 140—160 160—180 180—200 200—225 225—250
зазор в подшипниках, величину которого определяют по рабочим чертежам подшипникового узла.
Величина /Са; ограничивается предельным значением, вычисляемым по формуле Капр *- 0,22z0,7. Если найденное по график}' (рис. 4 8) значение Каг > Лзпр- то следует принимать Kai — Лицр-
8. Находят коэффициент температуры Кт в зависимости от рабочей температуры подшипника Т.
150 175 200 225 250
1.10 1.15 1.25 1.35 1.40
9. Определяют коэффициент материала Дм- Для полнокомплектных ПОДШИПНИКОВ Км = 1- Для ПОДШИПНИКОВ без одного или обоих колец значение Кы определяют по графику рис. 4 9 в зависимости от поверхностной твердости деталей подшипникового
Рис. 4.8. График для определения воаф-фициепта ряднальиого зазора Ка роликовых подшипников;
1 — радиальных: 2 радиально упорных
114
Расчет подшипников качения
Рис. 4.9. График для определения коэф, фмциеитов материала Км. Км„
10 Рассчитывают приведенную на» гр}зку по формуле
Pnp i = Pj^n uK^zKsiKtKm
Под приведенной нагрузкой понимают постоянную нагрузку (радиальную— для радиальных и радиально-упорных подшипников и осевую — для упорных подшипников), при приложении которой к подшипнику обеспечивается такой же расчетный срок службы подшипника, как и при дей-, ствит^льпых условиях его работы в подшипниковом уале,
11 Определяют число оборотов подшипника за I км пробега автомобиля, n,i — 1000ппл i 2лгв,
где Uant—передаточное число от подшипника до ведущих колес автомобиля; ги — радиус качения ведущих колес автомобиля, м.
Значение и„.К£ определяют по кинематической схеме трансмиссии автомобиля Для подшипника, у которого при работе вращаются оба кольца (например. подшипник передней опоры вторичного вала коробки передач, расположенной в горновой выточке первичного вала), при определении и и. к i следует исходить из относи-
Редналььых и редналыю-уиорных
Шариковых
тельной частоты вращения колец подшипника Поти — пви ± «и, где пвд и «|Г — частота вращения соответственно внутреннего и наружного кольца подшипника; знак плюс принимается при вращении колец в разные стороны, знак минус — в одну сторону.
12. Рассчитывают долговечность подшипника на t й передаче по формуле (км)
£„==10б(С..Р„р|)",п1Ь где т — показатель степени (для шариковых подшипников т = 3, для роликовых подшипников т = 3,33), 13. Определяют суммарную долговечность подшипника с учетом работы автомобиля на всех передачах
Л Ei/M-1.
Долговечность подшипника лбеспе-чиваетси, если выполняется условие LK £в, где LB — нормативный пробег автомобиля до капитального ремонта.
.4.6. РАСЧЕТ ИЕВРАЩАЮЩИХСЯ ПОД НАГРУЗКОЙ
ПОДШИПНИКОВ
Опенку работоспособности певраща-ющихся под нагрузкой подшипников, работающих в условиях статического на|руженпя, проводят в такой последовательности.
1 Определяются необходимые для расчета исходные данные- максимальный динамический момент Л1/1Пах на валу, на котором установлены рассчитываемые подшипники, и статистическая грузоподъемность подшипника Cq (для стандартных подшипников опрс делается по каталогам и справочникам, для нестандартных — но зависимостям. приведенным ниже). Н.
12,26/гЛ2 cos а
Сферических . .
З.ЗЗйД2 cos а
Укорных
49sD2
Роликовых
Радиальных и радиально-упорных
Упорных ...................
2i,S7izltffDT ct эв.те}1о7
Расчёт невращающихся под нагрузкой подшипников
2 Рассчитываются радиальные Fro и осевые FeQ нагрузки, действующие иа подшипники (см. разд. 4 4).
3 Находится эквивалентная статическая нагрузка Ре, представляющая собой постоянную иагрузку (радиальную — для радиальных и радиальноупорных подшипников и осевую — для упорных), приложение которой к подшипнику вызывает в наиболее нагруженной зоне контакта тел качения с кольцами такую же общую остаточную де<|ч?рмацию, как и при действительных условиях нагружения. Значение Рв рассчитывается по следующим формулам для подшипников:
радиальных шариковых, радиальных сферических и радиально упорных
при пониженных Ко ~ 0,5-е-0,8); Км — коэффициент материала (для
полнокомплектных подшипников
К но — 1: для подшипников без одного или обоих колец значение Кмв определяется по графику рис 4 9 в зависимости от поверхностной твердости деталей, выполняющих роль беговых дорожек).
Работоспособность неаращающегося под нагрузкой подшипника обеспечивается, если выполняется условие
принимается большее из двух полученных значений Ро, роликовых радиальных
P# — F го;
Шариковые радиальные
| 0,6 | 0 50 | 0,6 J 0,50
упорных шариковых и роликовых
Р -= F«o-
Здесь — коэффициенты соответственно радиальной и осевой нагрузки (табл 4 14)
4. Определяется приведенная статическая нагрузка Роир:
где Ко — коэффициент надежности при статическом нагружении, учитывающий предъявляемые к подшипниковому узлу требования в отношении плавности хода и легкости вращения (при высоких требованиях Ко ~ 1.2-5--е-1,5, при нормальных Ко = 0,8-е-1,2,
0.5 | O.22/tga| 1.0
I 0,44/tea
Шариковые
радиально-упорные
вых однорядных редиалыю укорных подшипников, установленных узкими или
широкими
сматривается как одни двут днально-упорный подшипник
5
Расчет валов
и шлицевых соединений
5.1. ВИДЫ РАСЧЕТОВ ВАЛОВ АГРЕГАТОВ ТРАНСМИССИИ
При оценке работоспособности валов агрегатов трансмиссии автомобилей применяют три вида расчета- на статическую прочность, на жесткость и на сопротивление усталости При практических расчетах валов конкретных агрегатов трансмиссии обычно используют не все три вида расчетов, а только те из них, которые определяют работоспособность валов и агрегвта в целом.» Выбор определяющих видов расчета. зависит от конструктивных особенностей вала и агрегата и характера нагружения.
Расчет на статическую прочность проводят по максимальному динамическому моменту Afymax и выполняют для всех валов агрегатов трансмиссии. В результате расчета определяют максимальные напряжения в опасных сечениях вала и устанавливают запасы прочности.
Расчет на жесткость выполняют для валов коробок передач, а также других редукторных узлов трансмиссии, имеющих длинные валы. Значительная деформация этих валов нарушает правильность зацепления зубчатых колес и контакт тел качения с кольцами подшипников, что может привести к повышенной вибрации и шуму при работе агрегата и увеличению износа зубьев и подшипников Расчет валов на жесткость проводят по расчетному крутящему моменту Л4р.
Растет на сопротивление усталое ш выполняют в основном для полуосей ведущего моста автомобиля. Валы кор^Лок передач, раздаточных коробок и главных передач, диаметры которых выбирают из условия обеспечения не
обходимой жесткости или по размерам подшипников, имеют повышенные за пасы статической прочности, что. как правило, исключает необходимость проведения расчета на сопротивление усталости При этом виде расчета валов используют длительно действующие нагрузки с учетом числа и характера циклов нагружения.
5.2. ОПРЕДЕЛЕНИЕ ДЕЙСТВУЮЩИХ НА ВАЛ НАГРУЗОК
Валы агрегатов трансмиссии автомобилей нагружаются крутящим моментом М„. окружными Flt радиальными F/j и осевыми Fx усилиями, действующими в зацеплениях зубчатых колес, и реакциями опор R. На полуоси (разгруженные) действует только крутящий момент.
Расчет действующих на вал нагрузок проводят в такой последовательности.
1. Устанавливают необходимые для расчета исходные данные:
расчетный Afp и максимальный динамический Л1угаах крутящие моменты на ведущем валу агрегата траисмис-
передаточное число Uj„ от ведущего вала агрегата трансмиссии до рассчитываемого вала (ио кинематической схеме агрегата):
параметры зубчатых колес, взаимодействующих с рассчитываемым валом* начальный диаметр dw, угол профиля зуба ссц,, угол наклона f и направление зуба (по рабочим чертежам зубчатых колес),
лилейные и угловые размеры, необходимые для составления расчетной схемы вала (табл 5 I)- расстояние I
Определение действующих на вал нагрузок
117
6.1. Расчетные схемы и формулы для определения радиальных реакций на онорах типовых валов агрегатов трансмиссии автомобилей
Расчетная схема аала Формулы для определения радиальных реакций на опорах аала
9 * рм g * 7*^ Ir —1 1£-—-"и Rl/K = (f'A‘l + FxrW}l''-R,n-Fi (‘-W «z„ = P^j,t
Йг„ Лрл=IF« ('1 - ’)~fj*+pv (>» - W* Rsn = (Щ - FJa> + W,,: R«i = [pz ('a - 0 - Fi (ll - W-
Л» k ft? - ₽«» Ry:i = [F/h (* — fi) ~~ Fxi’wi + I1*s) + + Fx2roe) ,: Rpn = F/}sr2 - Fx»ra’t)/t: «гп-НлО-М-^М'-Ч)/* Кгп = (~Fll,l+ Fti,z)il
II ^0* •л г г nF*i '~г >ег Чы \L# I
V -С л FfI Jf 4t & R0n=\FRl(l~4)-F,«rwt+Fto (l~4 cos V + + Fii С ~ 4 si" V + ^/a.2 «os q>] I: Rpn (F«A + Fxirwi +• ffe'a cos 4> + + Pt2tz s'n V - “«<₽),': «гл = Г ft (' - 4 “««('- 4 CO£ » + 4- FJ?a - 4 s«n v 4- Frfun sin *₽I/,:
«гп = + Fi2li cos * ~ - sin «• 4- FjrZee sin *P)/£
Расчет еамв и шлицем? соеНинёниЯ
между опорами вала, расстояния от точек приложения нагрузок до опор; угол <р между плоскостями, проходящими через ось вала и точки приложения усилий в зубчатых зацеплениях (но рабочим чертежам агрегата).
2 Определяют крутящий момент на рассчитываемом валу.
При расчете на жесткость и сопротивленце усталости
AIr. р = ^IB-Aip.
При расчете на статическую прочность
Афишах — UisM/mw
3 Рассчитывают усилия в зацеплении зубчатых колес окружное Ft, радиальное Ед и осевое Fx (см. габл 4 4).
4. Составляют расчетную схему вала.
5 Определяют радиальные реакции на опорах вала в двух взаимно перпендикулярных плоскостях в плоскости осей валов (осей вращения сопряженных зубчатых колее) и в перпендикулярной к ней плоскости
6. Определяют действующую па вал осевуйо нагрузку Рд
При составлении расчетной схемы вала усилия в зацеплении зубчатых колес и реакции опор считают сосре-дегточеннымн, а усилия в зацеп тении зубчатых колес приложенными в полюсе зацепления посередине зубчатого венца Реакцию опоры при установке в ней радиального подшипника прикладывают в точке пересечения оси вала с плоскостью симметрии подшипника, а при установке радиально-упорного подшипника — в точке пересечения оси вала с нормалью, проведенной к середине контактной площадки тела качения с наружным кольцом (см рис. 4.4). При пространственном расположении точки приложения усилий в зацеплении зубчатых колес от носительно выбранных координатных плоскостей находят проекции этих усилий на координатные плоскости и по их значениям рассчвтывают реакции на опорах вала
Реакции па опорах вала определяют по расчетной схеме известными методами механики п сопротивления материалов. Для типовых валов агрегатов трансмиссии расчетные схемы и фор
мулы для определения опорных реак ций приведены в табл. 5.1.
Следует отметить, что крутящий момент может действовать не по всей длине вала. Участок вала, восприни мающий крутящий момент, определяется местом и конструкцией соединения зубчатых колес с валом. Осевые усилия в зубчатых зацеплениях могут восприниматься вли частью вала, пли вовсе не восприниматься валом, что также зависит от конструктивного исполнения соединения зубчатых колес с валом.
5.3. РАСЧЕТ ВАЛОВ
НА СТАТИЧЕСКУЮ ПРОЧНОСТЬ
Валы агрегатов трансмиссии автомобиля работают при следующих видах напряжений- только кручения (разгруженные полуоси); только из гиба (промежуточный вал некоторых конструкций коробок передач); изгиба и кручения вли изгиба, сжатия (растяжения) и кручения (валы коробок передач, раздаточных коробок и главных передач). Формулы и порядок расчета валов на статическую прочность по указанным видам напряженного состояния приведены в табл 5 2 Расчетные формулы даны для наиболее общего случая напряженного состояния вала, работающего при совместных изгибе, сжатии (растяжении) и кручении. При пользовании табл. 5 2 для расчета вала, работающего только на кручение, в ней следует опускать те пункты, которые откосятся к расчету нормальных напряжений о, а при расчете вала, работающего только на изгиб, — пункты, относящиеся к расчету касательных напряжении т и нормальных напряжений при сжатии (растяжении).
Исходными данными для расчета вала на статическую прочность являются следующие параметры
максимальный крутящий момент на ведущем валу агрегата трансмиссий Alntax. Н-мм (см. разд. 2), передаточное число от ведущего вала агрегата трансмиссии до рассчитываемого вала и,в;
размеры опасного сечения вала (наружный d„ и внутренний <fwl диа-
Расчет валов на статическую прочность
6.2. Порядок расчета вала на статическую прочность
М по пор
Наименование и обозначение
Расчетные формулы, указания
Действующие на вал нагрузки
.Максимальный крутящий момент, вое принимаемый валом, Н мм
Усилия, действующие в зацеплении
Л!ктпах " и1вм/так
См табл. 4-4 при этой М = At,
окружное Ff радиальное F/^
Радиальные реакция на левой к пра
вой опорах вала, Н:
в плоскости осей валов Рул* *>уп в плоскости, перпендикулярной к плоскости осей валов, Ч^д-
Осевая сила, действующая иа рал. Н
Расчет напряжений в опасных сечениях вала
Изгибающий мопент в опасном сечении вала, Н мм: в плоскости осей валов.
в плоскости, перпендикулярной к плоскости осей валов, Л(„2 суммарный М„
Геометрические характеристики опасного сечения вала
момент сопротивления при изгибе W„. мм’
пользуясь известными правилами механики я сопротивления материалов, для типовых валов агрегатов транс миссии см табл. 5 1
Определяют по эпюре изгибающих но ментов
Подсчитывают по формулам. Приведенным в табл. 5 4. иля по справочным данным
момент сопротивления при кручении 1Р'К, мм*
площедь S, мм’
Напряжение иэгнба. МПа
Напряжение кручения, МПа
Коэффициенты, учитывающие влияние абсолютных размеров сечения
на предел текучести Кет
на предел прочности Кев
Коэффициент запаса прочности по пределу текучести-
по напряжениям изгиба
по напряжениям кручения
Коэффициент запаса прочности ио пределу прочности:
но напряжениям изгиба
по напряжениям кручения
Общий коэффициент запаса прочности
См. ркс 5 I
'ктпах/^г
'етат
по пределу текучести
по пределу прочности
Условия достаточной прочности вала
а/Г "йв+псв
120
Расчет валов и шлицевые соединения
3.3. Механические характеристики стандартных образцов на материалов, нримениеных для валов автомобилей, МПа
Сталь Тиер Дисть ПН, нс менее °в «г ’в ь 6_ । i_ ] °*-'
45 40Х 40ХН 40ХН2МА 12ХНЗА 12Х2Н4А 18ХГТ зохгт 240 270 270 390 260 300 330 320 600 900 920 1400 950 1100 1150 1150 550 750 750 1150 700 850 950 950 450 680 700 1000 650 800 900 900 300 450 450 800 490 590 665 665 350 410 420 650 420 500 520 520 210 240 250 330 2IO 250 280 310 0.08 0.08 0.07 0.07 0.07 О.07 0.10 0,10
гермиобра-
из которой вырезаны стандартные
Поперечное » сечение вала Момент сопротивления Площадь сечения S
В7И <
Я<1®/32 лДц/16 Я^/4
я(4“4н)/(32^н) «(<,н-‘,нн)/(|6‘*н) я(4-4в)/4
лйц/за—bh(^d„ — — hfl(Wdu) 3Bl®/l6—Wl(2tfe— -"№*«) Я<7к.'4 — 6Л/2
я0^/?2—bh (2tfH— «JS/|6—6ft(2rf„— м^в/4 — bh
Расчет валов на апатическую прочность
121
Продолжение табл. 5.<
d— делительный (средний) диаметр эпольвентных шлпкеп
d./de.......................О 0.0S 0,10 0.15 0,20 0.25 0.30 0.35 0.400
......................1,0 0.S25 0,350 0.775 0.700 0,625 0.550 0.475 0.400
. . . 1.0 0,564 0.926 0.884 0,840 0,791 0.740 0,686 0,630
1.0 0.936 0,873 0.800 0.746 0,682 0.618 0.565 0.490
Примечание, г — число шлицев.
метры); размеры шлицов, шпоночных пазов и других элементов опасного сечения;
материал и термообработка вала;
механические характеристики материала вала, МПа (пределы текучести от и прочности <7В при изгибе, пределы текучести тт и прочности тв при кручении — табл. 5 3), а также геометрические параметры, соединен иых с валом зубчатых колес.
Оценку статической прочности вала проводят по пределу текучести ае или прочности ов. При отношении Ог/Оц^О,? запас прочности определяют по пределу текучести, а при CtlaB > 0.7 — по пределу проч нести.
122
Расчет еа.юв и шлицевые соединения
5.4. РАСЧЕТ ВАЛОВ НА ЖЕСТКОСТЬ
При расчете на жесткость определяют прогибы и углы поворота сечений вала. Для агрегатов трансмиссии рассчитывают прогибы валов в точках пересечения их cceii с плоскостями, проходящими через середины зубчатых венцов сопряженных зубчатых коли.-, а углы поворота — для сечений, расположенных в указанных плоскостях н на опорах валов. Прогибы и углы поворота определяют в плоскости осей валов и в перпендикуляр-ион к ней плоскости.
Наибольшее влияние на работу зубчатой передачи оказывают прогибы валов в плоскости их осей и углы поворота сечений в перпендикулярной плоскости Прогибы валов приводят к изменению ыежосевого расстояния, дополнительному скольжению активных поверхностей зубьев и увеличению их Износа. Углы поворота в плоскости, перпендикулярной плоскости осей валов,’ вызывают перекашивание одного зубчатогд колеса по отношению к другому, что обусловливает неравномерное распределение нагрузки по длине зуба.
На работоспособность подшипников качения, особенно роликовых, существенное влияние оказывают углы поворота сечений на опорах вала. Перекос вала в подшипниковых опорах вызывает искажение контакта тел качения с кольцами, что приводит к увеличению неравномерности распределения нагрузки между телами качения И в зоне контакта, повышению износа и шума.
Расчет на жесткость ввла постоянного сечения. Прогибы и углы пово-
рота вала постоянного сечения, на ходящегося под действием сосредоточенных сил Р и моментов М (рис. 5 2), определяют на основании обобщенных уравнений упругой линии и углов поворота сечений вала.
Уравнение упругой линии
EJy = EJyt, + EJ&ex Ь
-I- М (х - о)«.'2 + Р (х - b)\6. (5 1)
Уравнение углов поворота
EJO — EJf)0 -j- М (х - о) +
+ Р (х - 6)2< 2. (5 2)
где Е — модуль упругости материала вала при растяжении (сжатии), х— текущая координата сечения вала, в котором определяют прогиб у и угол поворога 0; EJy,, EJQa — по стояннме, определяемые из условий закрепления вала в опорах (при креплении вала в подшипниковых опорах принимают EJya = 0, EJQa =£ 0, в за-‘щемленной опоре EJya = EJi)n — 0);
J — осевой момент инерции сечения вала; а, b — координаты сечений, в ко торых приложены сосредоточенные нагрузки соответственно AI и Р.
В уравнениях (5 1) и (5 2) нагрузки М и Р принимаются положительными, если они имеют направления, указанные па рис. 5.2 (при направлении оси у вверх М действует по часовой стрелке, а направление Р совпадает с направлением оси у), а при противоположных направлениях — отрицательными. Если какие нибудь нагрузки (М или Р) повторяются несколько раз, то и соответствующие члены в уравнениях (5.1) и (5 2) составляются столько же раз.
Расчет вала постоянного сечения на жесткость с использованием уравнений (5.1) н (5.2) проводят в следующем порядке.
I. Устанавливают необходимые для расчета исходные данные: расчетный крутящий момент на ведущем валу агрегата трансмиссии А1р (см. разд. 2); наружный д„ и внутренний de„ диаметры поперечного сечения вала, модуль упругости материала вала Е (для стали Е— 21-Ю4 МПа), остальные параметры см. разд 5 2.
Расчет валов на жесткость
123
2. Составляют расчетную схему вала и находят действующие на вал нагрузки в плоскости осей валов и в плоскости, перпендикулярной к плоскости осей валов (см разд 5 2) Силы выражают в И, =а моменты — в Н-мм.
3. Определяют осевой момент инерции сечения вала (мм4)
J -=я«-<)/64
4 Рассчитывают прогибы у и углы поворота сечений в плоскости осей валов хОу (рис 5 3. б) Для этого составляют уравнения упругой линии вала-
в пределах первого участка (OcS <xs=/J
EJy - EJyo -I- EJB^x 4- (5.3)
в пределах второго участка (4^
EJy=EJyt + EJQvtX +
4-
+ M1(x-Z1)«/2; (5.4)
в пределах третьего участка (4=S «х«0
EJ у EJ у» 4- EJ &уо» +
+ Ягах'/6~Гл(*-/1)’/6 +
+ Mi (х- у»/2 - ГЛ (ж-Ц)»/6--Л4(*-4)«/2. (56)
Составляют уравнения углов поворота сечений вала:
в пределе* мрвого учестка (Ос
*<4)
EJfSy EJBy^ 4- Лрл**/2> (5.6)
в пределах второго участка (4«Е *s£4)
EJ6e = EJbyi + Я„„х»/2 —
-F«l(x-/l)»/2 + M1(x~4); (5.7)
в пределах третьего участка (4< xs£0
EJQy = fJO^o 4- 1?|/дХ®/2 —
- (x - 4)*, 2 4- Mt (x - /,) -
- Fri (x - 4)«/2 - Мг (x - 4). (5 8)
В уравнениях (5 3)—(5 8) ya и 0;/n обозначают соответственно прогиб и угол поворота сечения вала ня левой опоре (х — О).
Рис. в.8, Расчетная схема вала постоям* кого сечения!
а — в пройревствекиой систем» коордиа кат куц в — в плоскости осей валов хоу\ — в плоскости X0Z, перпендикулярной плоскости ос«й вале»
Определяют угол поворота сечения вела на левой опоре (ж» 0) 9»л =» 0(/с=* [—4- fib (г ~ 4И8-*
- 3Aft (1 — 4)* + Fm(/-i»)’ +
4- 3Mi (I — I»)’V6EJIi (5.9) в плоскости симметрии зубчатого венца колеса / (х = /[)
<6-10)
в плоскости симметрии зубчатого венца колеса 2 (х — 4)
FR| (12 — 4)2 +
4- 2Л4 (4 - 4)J/2EJ-. (5.11)
на правой опоре (х = I)
еиа = О^л 4- [РвпР - fRi (I - 4)* 4-4-2Ai1(/-/1)-FflJ(/-Wa-
-2Me(Z-4)[/2fJ. (5-12)
124
Расчет валов и шлицевые соединения
Выражение (5.9) получено из уравнения (5 5) исходя из условия равенства нулю прогибов вала на левой и правой опорах (у0 — ул = 0 и при к — I у = уп = 0) Выражения (5.10), (5.11) и (5.12) получены из уравнений соответственно (5.6), (5.7) и (5.8).
Определяют прогибы вала в мм;
в плоскости симметрии зубчатого венца колеса / (к ~= /,)
J'l-'Wi (5 13)
в плоскости симметрии зубчатого венца колеса 2 (х~
V2 = 6|/л^2 1~ [^л*2 ~ F 1?1 ^2 — 11)3 +
+ ЗМJ (12 -1,)2] /GEJ. (5.14)
Выражения (5.13) и (514) получены из уравнений соответственно (5.3) и (5 4)
5. Определяют прогибы z и углы поворота бг в плоскости хОг, перпендикулярной к плоскости осей валов (рис. 5.3, е). Для этого составляют уравнения упругой линии вала:
в пределах первого участка (0я£ < * < й
Eiiж EJzB + £7e«x+£tn*s/6i (5.18)
в пределах второго участке (^<
EJz sb EJzB 4- £J6zoX 4-
+ К«лх’;б - Fti (x - (5.16)
в пределах третьего участка (/4< < * »S О
EJz ж EJio + EJQzoX 4.
+ йглх’/'б — Ffi (х — Zi)*/6 4-
+ F«(*-W6. (5.17)
Составляют уравнения углов поворота сечений вала:
в пределах первого участка (0
EJGz = EJQzo + Rzn#№ (5.18) в пределах второго участка (/. *^4)
-f«(*-/i)s/2: (5.19)
в пределах третьего участка (/8^
л ^7)
EJGz « EJGze 4- 1?глХ®/2 -
- F/i (*- W+f« (*—У®/2. (5.20)
В уравнениях (5.15)—(5.20) гв и 6М обозначают соответственно прогиб и угол поворота сечения вала на левой опоре (х = О)
Определяют угол поворота сечения вала_2.на_левой опоре (х = 0): егл - ег0 =- +fa (I - i,)a -
-Fnd-WGEJl; (5.21) в плоскости симметрии зубчатого венца колеса I (х = Z,)
е21 = е„ + Rz„fy2E3; (5.22) в плоскости симметрии зубчатого венца колеса 2 (х — /а)
е?2 “ ®2Л +
+ [КгЛ-F,i (>2 - (5.23)
на правой опоре (х = 1}
61П = 61Я + [ЯглР - Fa (I - Zi)« +
+ Fn(l~lWEJ. (5.24)
Выражение (5.21) получено из уравнения (5,17) при^ значении ж=- I и ta =** tn ж о, а выражения (8.22), (5.23) и (8 24) — из уравнений соответственно (5.10), <5.19) и (5.20).
Определяют прогибы вела: в плоскости симметрии зубчатого венца колеса 1 (* °= /0
(6.25)
в плоскости симметрии зубчатого венца колесе 2 (х °= 4)
Ч — +
+(*.л‘1-(S.26)
Выражения (5.25) и (5.26) получены соответственно из уравнений (5.15) и (5.16).
6. Определяют суммарный прогиб Л2 и суммарный угол поворота 6Е сечений вала:
Лх = Ку* 4- г®;
= J
Расчет валов на жесткость
125
В плоскостях хОу и кОу прогибы и углы поворота сечений вала могут иметь как положительные, так и отрицательные значения. Знаки плюс или минус при значениях прогибов и углов поворота указывают на направление линейных и угловых перемещений сечений вала относительно выбранных осей координат. При положительном значении прогиба сечение вала смещено в направлении координатной оси [Оу или Ог) (рис 5 3), а при отрицательном значении — в противоположном направлении. Если угол поворота имеет положительное значение, го сечение вала повернуто против часовой стрелки, а если отрицательное — по часовой.
Для вала, нагруженного только од ной сосредоточениЬй нагрузкой (силой Р или моментым Му, прогибы и углы поворота можно определять по формулам, приведенным в табл. 5 5. В ней представлены четыре схемы нагружения вала схемы (две первые) при приложении нагрузки между опорами и схемы при консольном нагружении вала. Для каждой схемы приведены формулы относительных значений углов Поворота 0 и прогибов В для различных сеченнй вала (на них указаны индексы при величинах 6 и Й, а также формулы для определения абсолютных значений углов поворота 6 и прогибов у.
Табл. S.S можно пользоваться также для определения прогибов и углов поворота прн действии на вал нескольких нагрузок. В этом случае по формулам табл, б б сначала определяют прогибы и углы поворота в заданном сечении при действии на вал каждой нагрузки в отдельности, а затем проводят их алгебраическое суммирование
о-Se,:
где у, 6 — соответственно прогиб п угол поворота сечения при совместном действии иа вал всех нагрузок; у,, 0, — соответственно прогиб и угол поворота сечения при действии на вал f-й нагрузки; k — число действующих на вал нагрузок.
Расчет вала на жесткость по формулам табл 5 5 рекомендуется выполнять
Рнс. 8.4. Последовательность преобразования ступенчатого сала в вкамвалонтный Вал постоянного сечения!
а и * — вал соответственно ступенчатый и вквнвелентяый; С в в — иагрувии, действующи* иа чисти peipeiaHHbx валов, ссотагтстаеннс ступенчатого и »к>и-ве.теитного
при ручном счете, а по обобщенным уравнениям (Б.1) и (6.2) — на ЭЦВМ.
Расчет на жесткость ступенчатого вала. Для определения прогибов и углов поворота сечений ступенчатого вала его преобразуют в зквивелент-ный вал постоянного сечения. Преобразование ступенчатого вала основам на следующем принципе: если вал постоянного сечения с моменгсм инерции заменить валом с моментом инерции Jo = kJi и изменить при этом все нагрузки и реакции в k -раз, то угловые и линейные перемещения всех сеченнй вала не изменятся.
Последовательность преобразования ступенчатого вала в эквивалентный вал постоянного сечения показана па рис 5 4 Для заданного вала с моментами инерции J], Js, Js и внешними нагрузками Pt, Р9, Ра и М (рнс. 5.4, а)
126
Расчет валов и шлицевые соединения
Расчет еалов па усталость при кручении
V27
находят реакции на левой /?л и правой Кп опорах и строят эпюры поперечных сил Q и изгибающих моментов М„. В переходных сечениях вала / и 2 находят поперечные силы Qi и Q2 и изгибающие моменты MKi и УЙиг-«Разрезают» ступенчатый вал по переходным сечениям / и 2 на отдельные части и прикладывают соответствующие им поперечные силы н изгибающие моменты (рис. 5.4, б). Преобразуют каждую часть вала с моментами инерции J|, Js в вал с моментом инерции Jo (обычно Jo принимают равным моменту инерции сечения одной из частей вала). Для этого находят коэффициенты приведения k, = Л/Л, Аа = Jo^a, умножают все силы н моменты, приложенные к каждой части ступенчатого вала, на со ответствующий этой части коэффициент приведения k и одновременно принимают, что момент инерции каждой части вала равен Jo (рве. 5 4, в). Определяют результирующую поперечную силу AQ и результирующий изгибающий момент АЛ1ц в местах разреза* соответствуют перемещениям тех же сечений ступенчатого вала. Расчетные значения перемещений вала в местах посадки зубчатых колес не должны превышать следующих величии: прогиб вала в плоскости осей валов 0,1 мм, а в перпендикулярной к ней плоскости 0,15 мм; угол поворота в каждой плоскости 0,002 рад. Суммарный угол поворота на опоре при установке в ней роликового или игольчатого подшипника не должен превышать 0,0005 рад, а при установке шарикового радиального или радиально-упорного подшипника 0,002 рад. При установке в опоре самоустанавли-вающегося подшипника (сферического) угол поворота сечения вала на опоре пе лимитируется. 5.5. РАСЧЕТ ВАЛОВ НА УСТАЛОСТЬ ПРИ КРУЧЕНИИ Валы трансмиссии автомобилей на сопротивление усталости при кручении
AQi = Qi(Aa—AJ; рассчитывают в такой последовательности (табл. 5.6).
A AU “ AU (Аа — А>); овределяют параметры нагрузочного режима, необходимые для расчета;
AQa =* Qi (ka — As); устанавливают размеры опасных се-
ДЛ1И2 = Л1и2 (Аз — А«). чений вала и механические характеристики стандартных образцов из ма-
еСбединив» отдельные части вала друг с другом и приложив в местах соединения результирующую поперечную силу AQ и результирующий из гибающий момент Д.Ии, получают эквивалентный вал постоянного сечения с моментом инерции Jo (рис. 5 4, г) Необходимо отметить, что на эквивалентный вал действуют не только заданные внешние нагрузки, измененные в А раз, но и дополнительные внешние силы AQ и моменты ДА1Н от внутренних силовых факторов, приложенные в местах сопряжения частей Для определения прогибов и углов поворота сечений эквивалентного вала применяют те же методы, что и для вала постоянного сечения. Найденные в результате расчета линейные и угловые перемещения сечений эквивалентного вала по величине и направлению териала вала; рассчитывают напряжение кручения в опасных сечениях вала и величину накопления усталостного повреждения за 1 км пробега автомобиля, находят предел выносливости вала при реальном цикле напряжения и ресурс вала по сопротивлению усталости при кручении; определяют расчетный срок службы Исходными данными для расчета вала на сопротивление усталости при кручении являются следующие параметры: дорожные условия, в которых должна проходить эксплуатация автомобиля (« = 1, 2, .., А — порядковый номер вида), относительные пробеги автомобиля в рассматриваемых видах дорожных условий а,; расчетный крутящий момент на валу Мр{, Н-м (см. разд. 2);
128
Расчет валов и шлицевые соединения
5.6. Порядок расчета вала на сопротивление усталости при кручении
№ по пор
Наименованне и обозначение
Расчетные формулы н указания
Расчет накопления усталостного повреждения вала aa I км пробега автомобиля
Момент сопротивления опасного се чем ня вала при кручении мм’ Номинальное напряжение кручения. МПа Число циклов перемены напряжения кручения за 1 км пробега автомобиля. Показатель степени, характеризующий зависимость между напряжением кручении вала и числом циклов т Расчетная величина накопления усталостного повреждения вала за 1 им пробега автомобиля, (МПа)т/им Ресурс вала по сопротивлении Общий коэффициент, учитывающий влияние концентрации напряжении, абсолютных размеров сечения, состояния поверхности и упрочняющей обработки вала на предел выносливости при кручсиии s Предел "выносливости стандартного образца нз материала вала при круче нин с симметричным циклом при вероятности неразрушения р = 0.95 (для нормального закона распределения) Коэффициент, характеризующий качество материена Предел выносливости вала при кручении с реальным симметричным цин лом при р =— 0.95 Базовое число циклов перемены напряжений при кручении вала Ресурс вала по сопротивлению уста лости при кручении. (МПа)”1 Расчетный сро Расчетный срок службы вала для отдельных ведов дорожных условий, км Расчетный срок службы вала при эксплуатации автомобиля в смешав иых дорожных условиях, км Условие достаточной выносливости См. табл 5 4 ^=«„10*/^ Рекомендуется принимать т = 4 Я1Т» = ^Няпв( усталости при кручении ТД «₽Ат Д' си. табл. 5 8 Кет си. рис. 5.5 КПТ см. табл. 5.9 см. табл. 5.10 т = t j (1 •— ~ Ki/"1» ггД‘ = 2т_. (кхд + к<рт) “ (ктд — кч>т) г« Рекомендуется принимать = 6-10’ «т lim i = Trww0i службы вала Li ~ прА Нш 1/Я1Т1 = 11 £ «</*£ > Lo
Расчет валов на усталость при кручении
129
коэффициент приведения реального режима нагружения к расчетному Кпвм число циклов напряжения кручения за один оборот ведущего колеса автомобиля nBt, коэффициент асимметрии цикла п; коэффициент учета неста-ционарности режима нагружения Opj (значения Кпв, па- г, Ср приведены в табл. 5.7),
радиус качения ведущего колеса автомобиля Гн, м: нормативный пробег автомобиля до капитального ремонта £0, км, размеры опасного сечения вала (наружный /Зц и внутренний dBtl диаметры вала), размеры шлицев, шпоноч -ных пазов и других элементов сечения,
материал и шероховатое |Ь поверх ности, упрочняющая обработка вала, механические характеристики стандартных образцов из материала вала предел прочности при растяжении Ов, предел текучести при кручении тт, среднее значение предела выносливости при кручении т_1а коэффициент вариации предела выносливости при кручении t’t_I (см табл 5 3)
Параметры нагрузочного режима для расчета вала на сопротивление усталости определяют на основании экспериментальных данных раздельно для каждого вида дорожных условий, в которых будет эксплуатироваться автомобиль, или расчетным путем При-
веденные в табл 5 7 значения параметров нагрузочного режима для типовых дорожных условий носят ориентировочный характер, и их следует использовать только в том случае, если отсумтвуют экспериментальные или расчетные данные.
Расчет вала на сопротивление усталости на всех этапах проводят для каждого вида дорожных условий в отдельности, а затем на основе гипотезы накопления усталостных повреждений находят суммарный срок службы вала при эксплуатации автомобиля в смешанных дорожных условиях
5 п/р А. И. Гришкевича
Расчет валов и шлицевые соединения
•5.6 Значения эффективного коэффициента концентрации напряжений при кручении Кх
Вал riel ов, МПа
400 600 800 ЮОО 1200
С галтельныа'и переходами 0.01 1.90 2.00 3/ d =• £ 2,10 2.20 2.30
0.03 1,03 1.66 1.70 1.75 1.80
0.05 1.50 1,53 1.56 1.59 1.62
0.1 1,20 1,28 1.31 1.34 1,37
0.2 1.10 1.12 1.14 1.17 1.20
o.ot 1.80 Did *= 1, 1.87 1 1,94 2.02 2.10
0.03 1,55 1.58 1.62 1.66 1.70
0.05 1.45 1.47 1,49 1.52 1.55
од 1.20 1.23 1.27 1,31 1,35
0.2 1.10 1.12 1,14 1.17 1.20
0,01 1.65 £• 1.71 <? = J, 1.77 1.85 1.95
0.03 1.52 1.57 1,61 1.06 1.71
0.05 1.42 1.44 1.47 1.51 1.54
0.1 1.20 1.22 1.24 1.27 1 30
t 0,2 1.05 1.07 1 09 1.12 1.15
Со шлицами 2,10 Прямобочными 2.36 | 2,55 2.70 2.80
1,40 Эеолъаектнеши 'Ти 1.58 1.60
5.9. Значения коэффициента KJIT, учитывающего влияние состояния поверхности на предел выносливости при кручении
Видн шЛиц&ых соединения
6.10. Значения коэффициента Kp.f, учитывающего влияние упрочвяючей обработки вала на предел
5.6- ВИДЫ ШЛИЦЕВЫХ СОЕДИНЕНИЙ
Шлицевые зубчатые соединения различаются по передаваемой нагрузке, степени подвижности сопрягаемых деталей, форме зуба и другим геометрическим параметрам.
По виду действующих силовых факторов шлицевые соединения трансмиссия автомобилей подразделяют на четыре группы:
группа М — соединения, передающие только крутящий момент (рис 5.6);
группа ЗМ — зубчатые муфты, соединяющие вал со свободно установленным па нем зубчатым колесом (рис 5 7);
группа МР — соединения, передающие крутящий момент и поперечную силу (рис 5 8);
группа РР — соединение промежуточного зубчатого колеса с валом (рис. 5.9)
По степени подвижности сопрягаемых деталей принято различать следующие группы зубчатых соединений" шАшасные — соединения, имеющие значительные осевые перемещения элементов под нагрузкой (например, скользящее шлицевое соединение карданной передачи);
неподвижные — соединения, у которых сопрягаемые детали стянуты в осе-
Рее, Совдипенмж, передающи* только крутищий камеи* (группа М)
Рис, в,7. Зувчатвв муФ-та (группа ЭМ)
Рис. 5.8. Соединение, передающее крутк-щий момент я окружное усилие (группа МР)
чатого »да« с валом (группа РР)
132
Расчет калов и шлицевые соединения
Рнс. 5.10. Прамобочные центрированные шанцевые соединении:
о ~ о» наружному диаметру D, б — по внутреннему диаметру <1, в — по боковым повсрхнсстнм Ь
вом направлении соседними деталями, создающими осевой натяг (например, соединение фланца вторичного вала с валом);
условно-неподвижные — соединения, у которых относительные осевые пере* метения сопряженных элементов под нагрузкой не предусмотрены кинематикой, но возникают при работе за счет перекосов, деформаций и зазоров в соединении (скользящее зубчатое колесо — шлицевой вал, полуосевое Зубчатое колесо дифференциала — полуось, венцы зубчатых муфт и др)
По форме профиля зубьев (шлицев) различают следующие типы шлицевых соединений прямобочные, эвольвент-иые и треугольные (рис. 5 10—5.12).
Прямобочные шлицевые соединения. Основные размеры прямобочных шлицевых соединений установлены ГОСТ 1139—80, который предусма тривает три серин соединений легкую, среднюю и тяжелую, различающиеся между собой размерами и числом шлицев (табл. 5 11 и рис 5 10),
Соединения легкой серии имеют наименьшую высоту шлицев, их при меняют для неподвижных или слабо-нагруженных узлов. Средняя серия
рекомендуется для среднсиагружсн-ных неподвижных или условно-неподвижных соединений. Тяжелая серия предназначена для подвижных соеди пений, имеющих перемещения сопряженных деталей под нагрузкой, и для всех остальных соединений, работающих в наиболее тяжелых условиях, передающих максимальный крутящий момент
Профиль зубьев прямобочного шлп-целлг» соединения «Лично выполняется так, чтобы толщина зубьев в поперечном сечении вала приблизнтель но равнялась ширине впадин по дуге окружности D или d Соединения выполняются с четным числом шлицев z (6, 8, 10, 16, 20) и с центрированием по наружному Р, внутреннему d диаметрам или по боковым поверхио стнм b (см рис 5 10)
При выборе способа центрирования сопряженных деталей основными критериями служат режим нагрузки, конструкция детали, эксплуатационные .требования, особенности технологического процесса изготовления деталей и используемое при этом оборудование
В конструкциях, требующих точного центрирования по кинематическим или динамическим условиям, применяется центрирование по наружному или внутреннему диаметру Если отверстие термически не обрабатывают или обрабатывают до невысокой твердости, то из технологических соображений следует применять центрирование по наружному диаметру Тогда центрирующие поверхности допускают точную и высокопроизводительную обработку вала — круглым шлифованием, а отверстия — протягиванием
Входящие углы впадин отверстия и вала выполняют по радиусу г = — (0.1-т-0,15) й, где h — высота шлицев При любом способе центрирования на углах зубьев делают фаски под углом 45° с катетом f. несколько большим г.
Нецентрирующие диаметры dj выполняют по классу Ль, d — по классу Хд. По внутренней поверхности остается зазор А, определяемый разностью полей допусков по этим классам.
Если поверхность отверстия имеет высокую твердость (HRC 40 и более) ту следует применять центрирование
Виды шлицевых соединений
133
6.11. Основные расверы прпмоЗочных шлицевых соединений, (ГОСТ 1189-80*»
Номимальнмй размер axdxD Ъ нс менее не менее не более
Легкая серия
6X23X26 6 22.1 3.54 0.3+ 0-2 0.2
6X26X30 6 24.6 3,85 ОЛ+0.2 0.2
6X28X32 7 26.7 4.03 0.3 +0-2 02
8X32X36 t> ЗОЛ 2.71 . ОЛ+О.2 0.3
8X32X40 7 34,6 3.46 0.4 +0,2 0.3
8X42X46 8 40.4 5,03 0.4+С.2 0,3
8X46X50 9 44,6 6.7S ОЛ+0.2 0.3
8X62X58 10 49.7 4.89 0.5+0-3 0.5
8X56X62 10 53.6 6.38 о.б+о.з 0.5
8X62X68 12 69,8 7.31 0.5+0.3 0.5
10X72X78 12 69,6 5.45 0,б+°>3 0,5
(0X82X88 J2 79,3 8.62 о.б+0.3 О.5
10X92X98 89,4 10.08 О.б+°-3 О.б
10Х 102Х 108 16 99,9 11.49 0.5+0-3 0.3
10X112X120 18 108,8 10,72 0.5+0.3 О.Б
Средняя серия
6X11X14 6.9 — о,з+°>8 0.2
6X13X16 3.3 12.0 — 0.з+°‘а
6X16X20 14.34 — 0,э+°‘а 0,2
6X16X32 13.7 О,зт°'а 0.2
6X31X26 0 19.8 1,65 0,з+°-а 0.2
6X23X26 g 21,3 1.34 с,з+о.а 0,2
6 X 30 X 33 8 23,4 1.63 ОлтО.Я 0.3
6X28X34 7 28,8 1.70 Ол+0,2 0,3
8X32x38 6 29.4 — 0,4”+®,а 0,3
8X36X42 33. б 1.02 ол+°-а 0,3
8X42X48 6 39.5 2.57 0.4+°«а 0.5
8X46X54 9 42.7 0.5-+0-3 0,5
8X52X60 10 48.7 2,44 0.5+0.3 0,5
8X56x63 10 52.2 2.5 0 5+»,з 0,5
8X62X72 12 57.8 24 0.5-+0-3 0,5
10X72X82 12 67.4 — О.з+О-2 О.5
10X82X92 12 77.1 3 0 O.g+0.3 0.5
10X92x102 14 87.3 4,5 0.5-+0-3 0 5
I0X 109X112 16 97.7 6.3 o.s+o-3 0.5
10Х 112X125 18 106.3 4,4 0.5+°-3 0.5
134
расчет валов и шлицевые соединения
Продолжение табл. 5.11-
Номинал ьаь>П размер гХЛХО Ь не пенсе не менее не болов
sss8s«asssgssas§;| хххххххххххххххх 5,5 хххххххххххххххххх аг' о" о 2.5 3 3 4 4 5 5 6 5 S 6 7 6 8 9 Тяжелая « 14.1 IS.6 18.5 20.3 23.0 24.4 28.0 31.3 36.9 40.9 47.0 50.6 56.1 65,9 75 6 85.§ 98.7 104 - 0,3-1 0.2 С.З+0-2 О.Э+0-2 0.3+0-2 0.4 +«-2 С.4+0-2 0.4+0-2 0.4-* °-2 0.4+0-2 о.б+о-з О.в+О.З 0,б+°-3 о.б+0-3 0.5-* °-3 о.б+0.3 о.б+0-3 о.б+о-з о.б+о.з 0.2 0.2 0.2 0.2 0.3 0.3 0.3 0 3 0.3 0.5 0.5 0.5 0.5 0,5 0,5 0.5 0.5 0.5
Примечание. Обозначение величин см. рис. 8.10. по- внутреннему диаметру, обрабаты- обычно применяют соединения с вы» вая центрирующие поверхности ва.та сокимн аубьями. Бововые грани зубьев «втулки шлифованием. Центрирование вала шлифуют, у основания зубьев по внутреннему диаметру позволяет предусматривают канавки. Втулку, обеспечить наиболее высокую точность, как правило, выполняют из мате-Неоднтрирующие диаметры Dt аыпол- риала твердостью не более HRC 40, ияют по классу X», D — по классу х<- так как протягивание является окон» По наружной поверхности соединения чательноП операцией обработки от-образуется зазор Д, определяемый перстня. разностью полей допусков по этим Диаметры Dt выполняют по классу классам. Недостатком центрирования у,. D и d — по классу di — по по внутреннему диаметру является классу Л5 На наружной и внутренней уменьшение опорных площадок по поверхностях соединения образуются центрирующему диаметру и более вы- зазоры Д, величина которых опреде-сокая трудоемкость изготовления. ляется разностью полей допусков по Центрирование по боковым граням этим классам. зубьев применяют в тек случаях, Эвольвентные шлицевые соединения когда точность центрирования втулки (рис 5. И) Соединения с звольвеиг-не имеет существенною значения и ним профилем зубьев обладают еле-13 то же время необходимо обеспечить дующими преимуществами по сравне-достаточную прочность соединения нию с нрямобочнымн в эксплуатации (карданное соедине- Имеют повышенную нагрузочную цне). При этом способе центрирования способность благодаря постоянному
Виды шлицевых соединений
135
утолщению зубьев по мере приближения к основанию, уменьшению концентрации напряжений п вероятности возникновения трещин у основания зубьев при термообработке вследствие возможности обеспечения закруглений во впадинах вала.
Втулки с эвольвептиым профилем обладают способностью самоустанав-ливаться на валу под нагрузкой, что улучшает равномерность распределения нагрузки между зубьями и создает лучшее прилегание боковых поверхностей зубьев втулки и вала. Благодаря этому прочность на смятие и износ эвольвентных соединений (при прочих равных условиях) выше, чем у пряыобочных щлицевых соединений.
Для нарезания эвольвентных зубьев методом обкатывания с помощью червячных фрез с высокой точностью может быть применено стандартное 3)борежущее оборудование, позволяющее нарезать одной фрезой валы с различным числом зубьев данного модуля и шага.
Эвольвситные шлицевые соединения рекомендуется применять для передачи значительных крутящих моментов. Особенно желательно использование эвольвентного соединения, когда требуется высокое сопротивление усталости валов, несущих большие нагрузки.
Для эвольвентного соединения принято число зубьев от II до 50, угол профиля исходного контура рейки 30*, форма впадин может быть плоской или закругленной
Эвольвситные соединения центрируются обычно по боковым поверхностям зубьев (рис. 5 11, а) и по наружному диаметру (рис 5 11, б). Центрирование по наружному диаметру применяется в тех случаях, когда необходима повышенная точность вращения деталей, посаженных иа вал.
Основные размеры эвольвентных шлицевых соединений установлены ГОСТ 6033—80* (табл. 5.12).
Треугольные шлицевые соединения (рис. 5 12) применяют главным образом для неподвижного соединения детален, передающих относительно малые крутящие моменты, а также для соединения вала с тонкостенными втул ками. Они имеют наиболее мелкие
зубья (модуль 0.2—1.5 мм. число зубьев 15—70)
Угол профиля характеризуется углом впадин вала. Наиболее часто применяют углы впадин 60, 72, 90®. Центрирование осуществляется только по боковым поверхностям зубьев Поверхностная твердость втулки не должна превышать HRC 40.
Треугольные зубья с галтелями большого радиуса у основания обладают несколько большей прочностью на изгиб, чем эвольвептпые. Треугольные шлицевые соединения в автомобилях в основном применяются в рулевых управлениях и торсионных подвесках.
Посадки шлицевых соединений по поверхностям центрирования (наружный, внутренний диаметры, боковые поверхности зубьев) назначают но системе отверстия из числа стандартных посадок для гладких цилиндрических поверхностей
Для подвижных и неподвижных посадок предусматривается зазор по сопрягаемым поверхностям Величина зазора между посадочными поверхностями при высоких требованиях к точности центрирования должна быть
136
Расчет ваме и шлицевые соединения
5.12. Основные размеры эвольвентиых шлицевых соединений (ГОСТ 6033—80*)
m = 1 MM ш = 1.5 мм Ш- m- 2,5 мм m- 3.5 мм 5 MM
11° III * X г x * * - * * *
12 13. 15 17 20 22 25 28 30 32 35 38 40 42 46 SO 55 60 65 70 76 so 8 j SO 95 1 100 no 120 180 140 150 160 170 180 ISO 200 220 240 260 280 300 320 340 360 380 400 =222288853388 1 1 1 1 1 1 1 1 1 IJggmS 1 1 1 1 1 1 1 1 1 1 1 1 I 1 I 1 1 1 0 0 0 0 0.5 0.5 0 0.5 0.5 0.5 0 0.5 0.5 1^25 1.25 1,25 1.25 1.25 1.25 12 14 16 18 18 20 22 24 N 26 28 32 36 38 24 26 28 30 34 36 38 42 44 48 50 0 24 —0.25 — 0.25 —0,25 0.75 0,25 0,25 0.25 —0.25 0.75 0.75 0.25 —0,25 0.75 1.25 0.25 -0,75 0,75 —1.25 0.25 1.75 —0.25 1.25 -0,75 0.75 12 14 14 16 18 18 20 22 24 26 28 32 34 36 38 16 18 8 20 22 24 26 28 30 32 34 36 38 42 46 50 0 0.5 0 0 —0 5 0 0.5 -0.5 0 0.5 2.5 0 2.5 2.5 2.5 2.5 2,5 2.5 2.5 2,5 2.5 2.5 2.5 2.5 2.5 2,5 12 14 14 16 16 18 20 22 24 26 28 30 32 14 16 IS 18 20 22 24 24 26 28 30 34 36 38 42 1.25 0.25 1.25 0.25 l.25 1.25 1.25 1.25 1.25 1.25 1.25 1.25 «5 2^5 0.5 -l.S 3.5 1.5 -0,5 -2.5 2,5 0,5 -l.S 1.5 -2.5 0.5 3.5 -0.5 14 16 18 18 20 22 24 14 14 16 16 18 18 20 22 24 26 26 30 32 34 36 38 1.25 0.25 -0.75 1.75 0.75 —0.25 -1.25 0 5 0 0 5 5 5 5 11 : 1 И 155=31 1 1 1 1 1 1 1 1 11 I I 1 | 1 1 | | I 2.5 0.5 2,5 0
наименьшей. По иенентрирующнм диа-метрам всегда предусматривается сравнительно больший зазор, величина которого должна быть достаточной для обеспечения сопряжения только по посадочным поверхностям.
Рекомендуемые посадки и допуски для прямобочных соединений приведены в приложении к ГОСТ 1139—80*. для эвольвентных соединений ГОСТ 6033—80*.
5.7. РАСЧЕТ ШЛИЦЕВЫХ СОЕДИНЕНИЙ
Для оценки прочности и износостой-коств шлицевого соединения выполняют два вила раечвтов рабочих поверхностей: на смятие и на износ.
Расчет на смятие выполняют из условия передачи соединением максимального динамического крутящего момента Al/max
Расчет шлицевых соединений
137
При расчете на износ используют распределение длительно действующих нагрузок, которое может быть задано в табличном виде, графически или ста твстическимн характер нети ками. В рассматриваемой методике распределение длительнодействующих нагрузок задается статистическими характеристиками для каждой нагружающей данное соединение передачи в отдель ности
Основным видом расчета неподвижных соединений является расчет иа смятие. Однако, учитывая возможность ослабления и даже исчезновения осевого натяга неподвижного соединения в процессе работы, целесообразно для него выполнять также и расчет на износ. Такой расчет имеет условный характер по сравнению с аналогичным расчетом подвижных и условно-неподвижных соединений Для неподвижных соединений группы И расчет на износ нс обязателен.
При расчете соединений на износ учитывают их состояние после некоторого периода приработки. При расчете соединений на смятие учиты-
вают твердость рабочих поверхно стей зубьев (при отсутствии упрочнения и при улучшении учитывается состояние после приработки; при закалке и цементации — до приработки).
В расчетах соединений групп МР и РР с центрированием пп наружному или внутреннему диаметру принято допущение, что центрирующей поверхностью воспринимается лишь небольшая часть поперечной силы, а основная ее часть воспринимается боковыми поверхностями зубьев соединения
Расчет рабочих поверхностей на смятие. Этот расчет проводят по максимальному динамическому моменту в следующем порядке
1. Определяют среднее давление смятия Осм. Ср
2. Определяют максимальное давление смятия Оси. max
3. Находят коэффициент запаса прочности п.
Формулы и порядок расчета шлицевых соединенно на смятие приведены в табл. 5 13 и 5 14.
S 13. Порядок расчета шлицевого соединения на снятие
Наименование и •Лозпзчсние
Расчетные формулы, указания
Максимальный динамический момент иа валу рассчитываемого соединения М уп,ах,
Исходные данные
См. разд 2
Наружный диаметр вала D, мм
Внутренний диаметр втулки (ступикы) Л,
Высота фаски на шлицах вала мм
Высота фаски на шлицах втулки (ступицы) fc, мм
Число зубьев на валу соединения z
Рабочая длина ссдвнения 1, мм
То же
См. табл. 5 11 и 3 12
Общая контактиая длина для двух сопряженных шлицевых деталей
Диаметр основной окружности зубчатого колеса, мм
Делительный ди а мето зубчатого колеса
Угол профаля в торцовом ссчспин Юр ® Угол между направлениями сил PPVp,
Для конического зубчатого колеса параметр определяется в среднем сечения
Усилия в зубчатом зацеплении, Н. окружное Ру
Определяется по схеме сил, действующих на промежуточное зубчатое колесо (см рис 5 9)
Определяются аналогично соответствую -щчм нагрузкам в разд 4.
Предел текучести материала зубьев меньшей твердости <гт, МПа
См табл 5 15
138
Расчет валов и шлицевые соединения
Поодсижение табл 5 13
Наименование и обозначение Расчетные формулы, указания
Расчет даел Средний диаметр шлицевого Сиедииення. Рабочая высота шлицев, мы Удельный суммарный статический момент площади рабочих поверхностей соединения относительного вала, мм* Среднее давление смятия, МПа Максимальное даалеике смятии, МПа Коэффициент запаса прочности ний смятия <?ср — ®<5 <D + 4) h = O.S(D-d)-ft,^lc Sp « O.5rfCpftz °см ср "* л,/тпах >O*/SpJ °смтах “ °смср^э^пр^»т К3. Кир. KD см табл. 5.14 п — Otlacurnl,x Достаточная прочность соединения обеспечивается. если пь 1,254-1.4 (меньшее значение для кеэака.ченаых соединений. большее — для закаленных)
$.14. Поправочные коэффициенты для расчета соединений на смятие
Наименование ilf Рисунок Расчетная формула Указания
Коэффициент неравномерности распре деления иагрузхи между зубьями Коэффициент продольной (по длине соединения) концентрации нагруени Коэффициент концентрации нагрузки от закручувания м зм МР рр и зм МР рр м. зм МР рр М. МР М. МР 6 6' Б 7 а 8 5 9 5.6 5.7 5.8 5 9 5 6, 5 7. 5 8 59 5 6. 5 в 5.6. 5 8 + а » | + a. us. § „— R •>е«.%__+й + £ ।++?5*<S,L'J+ » в. к” 5С Эк о + * К К X * + Для конических зубчатых колес tfB опре-деляетсх в средеей сечении Для схемы нагружения по рис 5 13, о (зубчатый венец рас положен со стороны закручиваем ого участка вала) Для схемы негр уже пня по рис 5 13. б (зубчатый венец расположен со стороны незенручекного участка вала) O'D <0.5 Во всех случаях f/D а.' 0.5 Соединения способ кы быстро прирабатываться (рабочие поверхности соеди нения не имеют уп рочнеиня) I/O а. 0.5 Соединения медленно при р аб а ты в а ют с я (рабочие поверхности закалены или це меятирозаны)
Расчет шлицевых соединений
Вид термообработки
40ХН
поверхности
18ХНЗА
гох I2XH3A
I2X21UA 20Х2Н4А 28ХГ11Г ЗОХГТ 18ХГ1
Цементация
300 240 2S0 280 330 380 400 330
140
Расчет валов и шлицевые соединения
Расчет шлицевых соединений
Наименование ,* обозначение Расчетные формулы и указания
Расчет долговечности силицевоео соединения по износу
Средний диаметр ылицевого с,*дпненяя. «?ср = 0.5 (О rf) SF = 0.5<1Срйг
п лог цеди рабочих поверхностей соединения относительно вала, мы2
Рабочая высота шлицев, мм h = 0.S (D - <!) - l„ — lc
Номнненьнов давление смятия на :-й передаче, нагружающее данное соединение. МПа aKi «= (M./Spt)- ID”
Расчетное давление смятия, нагружа янэ i = oirt«s^np
ющее данные еатедцнегош на «-Й передаче Кэ и Кпр см табл 5 17, 5 14
Число циклов перемены длалеяпя на бо Для соединений групп М. ЗМ н МР
новой поверхности шлица соединения за (рис. 5.6, 5 8) следует принимать аг — 1-
один ofttipOT вала Для сгедпненнП группы РР (рис. 5.9) й; = 2
Число оборотов ведущего консса. совершаемое за 1 км пробега ng ~ 1ООО/(2лгк0)
Число циклов перемены давления ла боковой поверхности шлица соединения на *-й передаче, приходящееся на 1 нм про A'li = oi"S,(B_i<)P’i
бега Ресурс износостойкости соединения п ус- Ли1 = S^Hsi^li^mU
ловких единиц:!х. обеспечивающий 1 км Суммируются только данные тех режимов
пробега Ьвтомобкля ,(пе£едач). па которых онз > [о )й1|
- ^пй см табл 5 17
Допускаемое условное давление при ба Ренонендххные значения [а 1, в записи-
зовом числе ЦИКЛОВ и постоянном ре- мости от термообработки н твердости ра-
жиме работы. МПа бочих поверхностей соединения привенсны в примечании
Предельное давление смятия по условию "и11т*= toV<KcK6c),
износостойкости при базовом числе циклов и постоянном режиме работы он jsm Кс « Кос сы- тэбл- 5 17
МПа
ОбЮ><й ресурс износостойкости в услов йых единицах RH j|n) лн lim -= °и 11тл0
Ожидаемый прибег автомсбаля до достижения сгсдинением предельного состояния по износу £и, км ^и "" ^иНп1/^и1
Условие Достаточной изпосостойкостч шлицевого соединения £„ > £.
по допускаемому давлению на износ
Суммарное эквивалентное число циклов
перемены расчетного наибольшего давле- с(1 — наибольшее значение из чиела
Долускаемов давление смятия по расчету
соединения ва износ, МПа см. табл 5 17
Условие, достаточной износостойкости шлицевого соединения "из нб 1 г 1из
Примечание Рекомендуемые значения допускаемых наибольших давлений
при числе циклов V,, — 10’ с ностозкным режимом работы
термообработка . ... — X лучшеняе Закалка 1 [ементацня и закалка или азоти-
НЦС1НВ) . 20 4218) роваяие 28 (’70) 40 45 52 60
loly, МПа . . .... 95 ПО 135 170 185 205
При работе с частым реверсированием рекомендуется снижать значения [у] на 20 — 25 %.
Расчет шлицевых соединений
141
Рис. б.IS. Схема нагружения шлицевого соединения нал - шестерня
Рис. 5.14. График для Определения коэффициентов приведения КШ1 в зависимости от
I — Дорожные самосвалы, повышениой проходимости: вые автомобили, автобусы, выс автомобили
автомобили 2 — ГРУЗ»-3 — легко
5.17 Коэффициенты, используемые при расчете износа
Наименование Расчетная формула Указания
Коэффициент приведен ня ражнма реальных давлений на рабочих поверхностях соединения к режиму давления прн расчетном крутящем конеиге М- на дай ной передаче Коэффициент, учитывающий условия смазки соединения Коэффициент, учитывающий условия осевого закрепления ступицы на валу и ее перемещения под нагрузкой Коэффициент числа циклов Коэффициент, учитывающий влияние неравномерности нагружения зубьев и сколь ження рабочих Поверхностей при вращении вала «пн.- Кс = 0.7 Кс = 1 «С = >.4 «С = » «оС.= ‘ «о.С =« 1.25 «о-С = 3 ««= К Л'ЕХ/Л'о «;-= । -1+(з^-о„!) <=--1 + (st® - ол) «э — 3 cos (0.5ур) 9агЦг — 2) См. рис. 5.14. При использовании графика предварительно схсдует определить удельные силы Тяги на тех передачах, на которых нагружается ржхмзтрпвлеыое соединение При наличии обильной смаз к« без загрязнения При средней смазке и для пелоднижоых соединений При бедной смазке с загрязнениями Без смазки (соединение ведущего вала коробки передач со ступицей ведомого диска сменлеи ня) При жестком закреплении При закреплении, допускающем небольшие осевые перемещения (соединение ЗМ рис. 5.7) При осевых перемещениях под нагрузкой Для соединений группы М (рис 5 6) Для соединений группы ЗМ (рис. 5.7} Для соединений группы МР (рис 5 8} Для соединений группы РР (рис. 5 9)
142
Сцепления механических трансмиссий
Расчет рабочих поверхностей на износ. При этом виде расчета определяют или срок службы соединения в километрах пробега автомобиля LB, или допускаемое давление смятия ио износу [<т]иэ.
При оценке по сроку службы определяют пробег автомобиля La = = КнИт-Чщ, обеспечиваемый изно состойкостью соединения. При оценке по допускаемому давлению [о ]га сначала определяют суммарное эквивалентное число циклов перемены расчетного давления Ne? и коэффициент числа циклов Лц, а затем находят допускаемое давлепие смятия по износу [<т],(3 = ои пт'Дц.
Износостойкость соединения обеспечивается, если £и ’3» LB — при оценке ИО сроку службы ИЛ1Юиаи<5^ |о]ца — при оценке по допускаемому давлению.
Исходными данными для расчета шлицевого соединения на износ являются следующие параметры- планируемый пробег автомобиля до за-
мены узла, включающего рассчитываемое соединение, LB (км) и расчетный радиус ведущих колес автомобиля, расчетный крутящий момент соединения иа t-й передаче М; (Н-м); относительный пробег автомобиля на t-й передаче Уг; наружный диаметр вала D (мм), внутренний диаметр втулки d (мм); высоты фасок на зубьях ваза /в м на зубьях втулки fr, (мм), число зубьев на валу z; рабочая длина соединения /ц передаточное число от вала рассматриваемого соединения до ведущих колес автомобиля на данной передаче нв.ц;; наибольшее давление, допускаемое из условий длительной работы соединения без износа Кроме этого, задается условное базовое число циклов нагружения NB = —• 10s и показатель степени износа от давления т (можно принимать т — = 3).
Формулы и порядок расчета шлицевых соединений приведены в табл 5 16 и 5.17.
Сцепления
механических трансмиссий
ел. конструкции
Сцепление — это механизм трансмиссии, передающие! крутящий момент двигателя и позволяющий кратковременно отсоединить двигатель от трансмиссии и вновь их плавно соединить.
Конструкция сцепления должна обеспечивать ряд специфических тре Сований: полное (чистое) включение и выключение, плавность включения, минимальный момент инерции ведомой части сцепления; уравновешенность осевых усилий во включенном и выключенном сцеплении, нормальный
тепловой режим работы; постоянство момента трения сцепления; гашение высокочастотных колебаний, вызываемых работой двигателя; легкость и удобство управления
Для нормального трогания автомобиля с места и переключения передач сцепление должно обеспечивать необходимую плавность включения, которая достигается применением упругих элементов в механизме н приводе сцепления, а при наличии усилителя — соответствующим выбором его характеристик Для снижения динамических нагрузок в трансмиссии при
Конструкции
143
кожух. 6 — поданип-ник выключения. 1
нажимные ир/жциы
Рис. 6 1 Типовые конструкции сцеиле-
о и б — соответственно одно и двухдисковое с периферийными пружииами; s и г — однодисковов соответственно с центральной конической и тарельчатой яру-жинвми; I и 2 — диски соответственно ведомый и нажимной, 3 — отжимные рыча-
144
Сцеп, гения механических трансмиссий
трогании с места и переключении передач стремятся обеспечить минимальный момент инерции ведомой части сцепления, постоянно связанной с первичным валом коробки передач. Выход из строя сцепления в большой степени обусловлен его тепловой напряженностью Для отвода и рассеивания теплоты применяют массивные ведущие диски, вентиляционные отверстий, оребрение поверхностей а выполняют другие конструктивные ме роприятия
Угловая скорость коленчатого вала двигателя даже в установи вшсуся ре жиме его работы не остается постоянной, а изменяется в течение одного цикла В результате возникают вы сокочастотные колебания со стороны двигателя, которые могут приводить к шуму и вибрациям в трансмиссии Для их гашения в вс.ъ>чых дисках устанавливают гасители, характеристики которых выбирают исходя из динамического расчета трансмиссии как колебательной системы
На автомобилях в большинстве случаев Применяют сухие дисковые по- > стоянпр замкнутые сцепления с пру жинным На5кимным устройством и га ентелем крутильных колебаний, расположенным в ведомом лиске. Эти сцепления подразделяются по ряду признаков
По способу действия — па неавто магические и автоматические В на стоящее время обычно применяют не автоматические сцепления. Автоматические сцепления установлены на некоторых моделях легковых ентомоби-леЙ (ЗАЗ-968Р, Citroen, Volkswagen и др ). При этом автоматическим может быть или само сцепление (центробежное) исходя из принципа его работы, или система управления, обеснечи-ивющая работу неавтоматического сцепления (обычно фрикционного или электромагнитного) по требуемому алгоритму без вмешательства водителя.
По числу дисков — на одно- и двух-дцековые Однодискстиге сцепления используют па легковых и грузовых автомобилях малой и средней грузоподъемности Двух тисковые сцепления устанавливают на аптсмобнлях средней и большой грузоподъемности
По раеположению нажимных пру-
жин — на периферийные и центральные По периферии устанавливают ряд цилиндрических пружин, а центрально — одну коническую, цилиндрическую или тарельчатую Последние получили распространение в сцеплениях легковых автдаобйлей, осталь-
ные типы применяют в сцеплениях грузовых автомобилей и автобусов.
По типи привода — на механические и гидравлические, которые В свою очередь могут иметь следящий гидравлический, пневматический или вакуумный усилитель.
Типовые конструкции сцеплений показаны на рис 6 I.
6.2. ВЫБОР ОСНОВНЫХ ПАРАМЕТРОВ
Основными параметрами являются: наружный D и внутренний d диаметры фрикционных накладок ведомых дисков; коэффициент запаса сцепления Р, нажимное усилие пружин Рн; рвс-четныЙ коэффициент трения ji. число гч н жесткость сп нажимных пружин; давление </ па фрикционные накладки, число ведомых тисков гд
Указанные параметры должны соответствовать требованиям ГОСТ 122.18—76* на основные параметры сухих фрикционных сцеплений и ГОСТ 1786—80 на асбестовые фрикционные накладки Эти стандарты полностью соответствуют рекомендациям СЭВ PC 368—65, PC 369—65 и PC 5278—75. В ГОСТ 12238—76 указаны наружные диаметры ведомых тисков сцеплений, частоты вращения и крутящие моменты двигателей, в I ОСТ 1786—80—типы, основные параметры, размеры, технические требования, методы испытаний асбестовых фрикцноппых накладок
Предельные отклонения размеров накладок составляют, ио наружному диаметру —I мм, по внутреннему диаметру +1 мм, по толщине б — ±0,1 мм. Неплоскостность для наружного диаметра при равномерно приложенном номинальном давлении 10 кПа должна составлять не более 0.3 мм при D 200 мм и 0.6 мм при D > 200 мм
В табл. 6 1—6 3 в кач>СТве енравоч него материала приведены некоторые
Выбор основных параяетров
сведения но фрикционным накладкам и сцеплениям автомобилей, соответствующие указанным выше стандартам. В табл 6 4 помещены данные по основным параметрам и размерам сцеплений отечественных автомобилей, а также по сцеплениям ЯМЗ для двигателей мощностью 130—160 кВт
Коэффициент запаса сцепления f — это отношение статического момента трения Мс к максимальному моменту двигателя
Р ~ Ml Листах-
Значение р выбирают с учетом неизбежного изменения (уменьшения) коэффициента трення р накладок в процессе эксплуатации, усадки нажимных пружин, наличия регулировки нажимного усилия, числа ведомых дисков. Уменьшение Р составляет вследствие усадки пружин 8—10%. вследствие износа накладок 15%, суммарное уменьшение Р равно 23—25 % Ниже приведены средине значения р для автомобилей:
Легковых . . . 1.2—1.75
RPV30BMX ............1,5—2,2
oBuuieiiiiofi и высокой проходимости .................1,8-3,0
Нажимное усилие
Ри- (6 1)
ГтЦ2/ r„pZf
где tm — средний радиус трения, гт = = (О’ - <P);(D2 — d2)'» ~ (D - <f)/4, zf — число поверхностей трепня (z> — — 2 для однодискового и zy — 4 для двухдискового сцепления).
Значения параметров, входящих в формулу (6 I), должны быть согласованы с данными табл 6 I и 6 2
Коэффициент трения р зависит си-ряда факторов параметров фрикционных материалов, состояния и относительной скорости скояыкеиия поверхностей трения, давления, температуры и составляет 0,22—0,30
Давление на фрикционные накладки
Ч=-Ри S„ * «М* (D2 - <Р)]. (6 2)
6Л. Основные параметры сцеплений (ГОСТ 12238—Тв*>
Размеры накладок, мм Момент двигателя. Н-м. не более Частота вра-
D а fi щення. об/мии. не более
180 100. 120. 125 2.5; 3.0; 3,6; 88 8000
2(1(1 120, 130. НО 4.0, 4.5 142 8000
215 140. 150, 100 186 8000
24(1 100, 180 235 7000
250 155. 180 201 5000
280 165. ISO. 200 255 4500
300 165, 175, 200 3.5: 4.0. 4.5. 353 4500
325 (85. 200. 220, 6,0
325 230 372 4500
Я10 (6S. IOS. 210 402 (465) * 4000
350 195. 200. 210 441 (800) 4000
350 240. 290 5.0; 6.0
380 200. 220. 230 490 (930) 3500
400 220. 240, 280 685 (1080) 3000
420 220, 240. 280 4 0, 4.5. 5.0, 1080 (1420) 3000
6.0
* В скобках приведены данные Для даухдискового сцепления
вл. Основные параметры сцеплений отечественны* автомобилей
Параметры § * * И Я и £ 3 ямз
14 236 К 238
Максимальный крутящий момент двигателя, Н,м 74,5 111.8 87,3 105,9 121.0 186.3 -'8-4,4 402,1 637.4 666.9 882.6
Число ведомых дисков Фрикционные накладки, мм* 1 1 1 । 1 । 2 2 2 s
наружный диаметр 190 204 200 200 200 223 300 342 350 400 400
внутренний диаметр 130 140 142 142 130 150 164 186 200 220 -220
толщина 3,5 3.3 3.3 3,3 3.3 3 5 4.0 4.0 4.5 4.0 4,0
Площадь трения фрикционной на кладки без учета отверстий под заклепки, ем* 159 156 156 181 221 496 617 643 876 876
Разница в толщине ведомого диска в выключенном к включенном сцеплении. км 0,45 0 8-1,0 0 6—0.8 0,7-0,95 1.0 Нет Нет Нет
Средний радиус трения, мы 81 S8 86 SG 84 95 119 13(1 141 159 159
Нажимные пружины. 6 1 1 t | 9X2 12 15 14X2 12X2
усилие в выключенном сцеплении, кН 4 07 — - 5,50 5,50 8.39 12 00 13,30 11,84 13,78
усилие во включенном сцеплении, кН 3.72 - - 5,14 7,54 10,90 11.18 11.06 12,90
радиус установки, мм Параметры намниной пружины' 80 194 * 195* 187.5* 187,5» 89 108 126 125 188 И 128 168 и 128
жесткость, И/км 40.2 Персмсииая 5,7 и 10,1 28,5 38.1 21,2 14,4 14.4
диаметр проеолоки, мм 4.0 2.29 ** 2,2 ** 2,2** 2.32 ** 3.0 Л п 4.5 5.5 4 5 4,5 31.5
средний диаметр, мы 55 28.6 и 21,3 24,8 23,5 38.6 31,5
Сцепления механических трансмиссий__________ Выбор ОС110внЬ1Х параметров
Продолжение табл 6 4
Параметры i м ямз
14 co к 238
днийа в свободном состоянии, и - - 84 и 70 02-65 63 102 88 88
длина в рабочем состоянии, мм 28.5 — — — — .19 45 58 56 56
усилие в рабочем состоянии. Н 623 3340 *** 3494 *** 3089 *** 3620 *** н .114 628 6Я2 931 461 461
число рабочих витков 4.0 - - 8.5 7,5 9 9
Давление на фрикционные накладки, МПа 0.235 0,510 0,224 0,198 0 200 0,2.33 0,151 0.165 0.167 0,140 0.115
Расчетный коэффициент трения 0.3 0,3 0.3 0.3 0.3 0,3 0,3 0.3 0,22 0,25 0.25
Коэффициент запаса сцепления 2,08 1,57 2,06 1,44 1,55 1.81 2,0 2.35 2,14
Допустимая частота вращения, об/инн 4-100 5800 7000 '7000 7000 4500 3200 3200 2600 2100 2100
Максимальный диаметр кожуха сцепления, мм 245 270 203 263 St>3 279 352 400 410 464 460
Число отжимных рычагов Передаточные числа' 5 18 **+» 18 **<•* 18 *«** (8 а 4 4 4 4
рычагов 4,6 3,5 3 5 2.43 2 43 3.79 1 68 •> '13 4.85 4 ^5^4
вклки 1.69 1.8 2,5 2,15 2.45 1,44 1.68 2.12 1.67 1.86 1.86
Ход муфты выключения, мм:
холостой 2—3 4,5— 5,5 2 2 2 2 5 4 3 — 4 3,6 3,6
рабочий 10 8 8-9 8-9 ’0 11,7 16 1 S 15
Масса сцепления (без маховика, картера и механизма привода), кг 4.1 0,1 4,38 п 02 5,55 14.0 20,0 20.5 63.8 64 2
* Диаметр приложения нагрузки диафрагменной пружины ** Толщина диафрагменной пружины.
*** Рабочее усилие ни нажимном диске.
**** Число лепестков диафрагменной пружины,
150
Сцепления механических трашяиссий
и второй передачах для различных дорожных сопротивлений
Летом об |<ль т|» “ 0,02 ф = 0.16
K'| “1 W'H °II If’l "I
ЗАЗ 958М 15,5 51.3 52.3 173.2 26.6 88.1
ВАЗ-2101 16,8 53.8 46.4 148.7 28.8 92.3
«Москвич 2140» 23,5 73.7 71.8 225,1 40.6 127.3
ГАЗ-24 27.0 61,1 66.4 150,2 39.8 90.0
22.0 22.2 113,3 114,2 36.5 36.8
34,9 35.8 174.6 176.0 95,3 96,1
33.2 26.0 104.2 81.5 51.6 40.4
ЗИЛ 130-76 55,5 43,4 200.8 157.1 238.3 186.5
44.5 18,2 67.9 27.8 82.9 34.0
КамАЗ 53212
82. S 33.8 127.5 52,3 582,0 238 5
КамАЗ-5410 43.9 18.0 67.1 27.5 97.1 39,8
КамАЗ 5511 31.4 12 9 47.7 19.6 51.6 21.1
36.3 10.7 125,8 37.1 65 2 19.2
МАЗ-500A 8926 69.2 20.4 252,3 74.4 447.9 132.0
13.7 4.04 51.2 5.1 17.3 5.1
МАЗ 5)352-886 i 26.3 7.75 101.2 29,8 44.3 13 1
МАЗ-5336 8578 26.3 7.26 52,4 14.5 35.2 9 '
62.0 125.9 34.8 151.7 41,9
MA3-5431-TM3 803 45.0 13.3 91,0 26,8 92,4 27,2
МАЗ 64221-9346 47.7 13.2 97,0 26.8 88.4
21.3 10,6 38.7 19.3 27.4 13.6
Scania LB 111 (20000.'38000> 41.0 20 7 76,5 38.1 73.9 36.8
13.6 4.32 24.6 8.7 16.5 5.85
Scania 1 ВТ 11 IBB (24000/38000) 26.4 9.4 48.3 17.1 40.3 14,3
13.4 4.75 24.3 8.6 16 0 5.7
Scania LT I46S 42 (24000,36000) 20.4 37.1 13.2 26,8 9.5
39. S 26.0 139.2 91.8 80.9 5'1.3
Bedford TM 1500 (15000/19125) 51.4" 33.9 184.7 121.8 154.0 101.5
21,7 7,9 37.4 13.7 28.1 10.3
Bedford TM 1700 (Ц680/28125) 54.8 20.1 95.7 35,0 128.6 46.8
43.9 16,1 74.9 27.4 66.9 24.5
Bedford TM 1900 (22000/40000) 83,1 "зол 143.8 52.6 239.1 87.5
Bedford TM 2000 (27500) 144.2 95,1 571,5 376.7 — —
26.7 45.6 16.7 41,9 15.3
Bedford TM 3000 (24000/30000) 33.8 12.4 58.0 21,2 62,7 23.0
64.4 32.0 127.6 63.5 103,5 51.5
OM 220 35 (24000'44000) 123,7 61.5 124,3 444.9 221.3
Примечаиия: 1. В числителе приведены значения параметров для автомобиля без прицепа, в знаменателе — Для автопоезда.
2 В графе «Автомобиль» в скоб"0'
нностран-
Расчет деталей
151
Допустимое повышение температуры за одно включение принимают равным 10 °C для автомобилей без прицепа и 20 °C для автопоезда.
6.4. РАСЧЕТ ДЕТАЛЕЙ
В сцеплениях применяются цилиндрические. конические и тарельчатые нажимные пружины Их характеристики приведены на рис. 6 2. Цилиндрические пружины имеют линейную характеристику во всем рабочем диапазоне. Коническая пружина до посадки витков также имеет линейную характеристику, затем по мере выключения витков из работы жесткость пружины увеличивается. Это является ее недостатком, так как приводит к увеличению усилия при выключении сцепления к значительному снижению нажимного усилия при износе фрикционных накладок. Наиболее благоприятной характеристикой обладает тарельчатая пружина, усилие которой в рабочем диапазоне изменяется незначительно при выключении сцепления и износе фрикционных накладок
Расчет пружин заключается в определении их размеров (/п. D и d) обеспечивающих требуемое нажимное усилие и прочность.
Нажимное усилие одной витой пружины
Р п = (Л1.+- £>о);*п>
где Ро — суммарное усилие оттяжных и отжимных пружин сцепления, Ро — s= (0,05 — 0,08) Рв. zlt - число нажимных пружин.
Формулы для рвечета цилиндрических и конических винтовых пружин приведены в •—_забл. 6 6. Выбранные цилиндрические пружины должын удовлетворять требованиям ГОСТ 16118—70
Максимальное напряжение кручения Тщах возникает при полном выключении сцепления. При этом Рптп = Рп-!-+ Сп1н-
Жесткость пружины ев но возможности принимают минимальной, чтобы износ накладок меньше сказывался на изменении момента трения сцепления. Ее можно определить из условия
Рис. 6 2. Характеристики нажимных «ру-
обеспечения минимального коэффициента запаса сцепления рш1„
Гц = Ра (I — Рт1п'Р)‘7ц,
где /и — величина износа накладок (/и = 0.56 — для приклепываемых и /„ — 1,06—для прикаецваемых накладок)
Значения с„ приведены н табл 6 4.
При разработке конструкции места установки нажимных пружин следует учитывать действие па них центробежных сил.
Для предохранения пружин от нагрева устанавливают теплоизолирующие шайбы (рис 6 3).
Сцепления с тарельчатыми пружинами благодаря своим достоинствам получили широкое распространение, особенно на легковых автомобилях.
Рис. 6 3- Варианты установив нажимных пружин:
/ — ведущий югцая шайба;
4 — кожух сцепления
152
Сцепления механических трансмиссий
Пара Конических сечения
круглого сечения м круглого прямоугольного
жение 80. г О. ,,
* “ л<1» т—
H8X18, 6<1‘ , r iGb*
1 a 6D3i 1 1 “ 2 (О, 4-0,) X 1 a 6»»»i (O,-i-D±)x'
усилие X (of -J- os) i Х(ОГГО1)
Жест- Gd* GO* i6b‘
8О»« C" 2(0,-J-Dj} X cn 6”*< (D, 4-Ог)Х
x(ol + ol)i x(Ot-l-Dl)
*D/<i . . 3456780 10
1г . . 1.58 1-.40 1.31 1.25 I.2I I.I6 I.I6 1.14
«* d/Ь . 1,0 1.5 2.0 2.5 3.0 4 0
V . . 0.208 0.231 0,246 0.258 0.267 0.282
*** 6...... 5.57 2,67 1.713 1,256 0.995 0.698
Использование тарельчатых пружин упрощает * конструкцию сцепления, уменьшает его размеры, число деталей, обеспечивает плавное включение, равномерное давление на нажимной диск, малое изменение нажимного усилия при износе накладок.
Тарельчатая пружина имеет форму усеченного конуса и состоит иЗ сплош кого кольца с меридионально расположенными лепестками Возможны два варианта установки тарельчатой пружины (рис 6 4) В первом случае пружина действует на нажимной диск
той пружины
наружным краем сплошного кольца, во втором — внутренним. Первый ва-
риант получил наибольшее распространение. Во втором варианте упрощается
конструкция установки пружины.
уменьшается усилие выключения и напряжения в пружине, но усложняется механизм выключения сцепле-
Схсма для расчета пружины приведена на рис 6 5 Сила, действующая па нажимной диск, обозначена буквой Рк, я сила, прикладываемая к пружине при выключении сцепления, — Рвыкл- Значения этих сил отличаются одно от другого передаточным числом пружины
Рвыкл = Ра (De — £>t), tDc — Dt);
2 лЕ f>ti In(Jifei)
11 3 p! (I-ад1 x
x [6“ + ("-'
/fl = Da/Dg. Ifz = Dc-'De,
Расчет деталей
153
где /, — перемещение пружины в месте приложения силы Рн, обусловленное поворотом сплошного кольца, Е bs «2-105 МПа, р„«0,26
Перемещение конца лепестков пружины при выключении сцепления состоит из перемещения 12, вызванного изменением угла наклона сплошного кольца пружины, и деформации изгиба /2 лепестков разрезной части, /2 = Г2 + 12 Из рис. 6 5 /2 = /| (Рс —
- Рг)/(Ре - Dc)
Расчеты показывают, что величиной деформации лепестков /2 можно пренебречь Тогда /2 =» 12.
При проектировании рекомендуют принимать DJba— 1,2ч-1,5, h!o =
100, число лепестков равным 8—20 Отношение h/б определяет нелинейность пружины. При h/б |,6 имеется большая область с постоянной осевой силой, при h':b > 2,8 возможно «выворачивание» пружины
При рвечете на прочность определяют напряжение в наиболее натруженном месте пружины — в середине <х:новаю1я В лепестка при выключенном сцеплении и деформации пружины при /1 — h
п____ 2РВыклРд
&(Dl + Ded +
, 0,5£ 0.5 (Р — Рд) + б«
где D — (De — D^J-’ln (Ре<Рд); а = = 2h/(De~Du).
Полученное значение напряжения сравнивается с пределом текучести материала при растяжении 0т
Ведущие диски передают крутящий момент от двигателя к ведомым дискам. Направляющими устройствами для перемещения дисков в осевом направлении служдт выступы, шипы, зубья (рис 6 6, а, б) или пальцы (рис. 6 6, в, г); кроме того, могут применяться шпоночные соединения, а также равпорасположенные по окружности тангенциальные упругие пружины.
Радиальные размеры дисков выбирают исходя из размеров фрикционных накладок и маховика, их толщину предварительно принимают равной
4,5—6 % наружного диаметра накладки и затем уточняют по результатам теплового расчета сцепления
Ведущий диск рассчитывают на смятие элементов, соединяющих его с маховиком,
•7см “= тзх/^«л1гвг«5ц).
где гв — число ведущих дисков; г« — число контактирующих элементов;
— площадь контакта одного элемента; гит — средний радиус расположения контакта, Atj щах — максимальный динамический момент; k — коэффициент, учитывающий число и расположение ведущих дисков (k = 0,5
Сцепления механических трансмиссий
е)
Рис. 6.7. Элементы конструкции ведомых
для однодискового сцепления, k = = 0,6 и 0,25 соответственно для про-' межуточного и нажимного (наружного) двсков двухдискового сцепления).
Для существующих конструкций осм= 10-е-15 МПа.
Тангенциальные пружины рассчитывают на срез tep м смятие осм заклепок, а также па растяжение Ор и изгиб ои пластин
тср = 4^/rn8x/(r1S(Az3nd2);
М»«0^15-5-20 МПа; (6 5)
Псм — hMf тах/(гв<пгв^з^звп)'
Оси шах ^20 -е- 30 МПа; (6 6)
Op - ЙИ, tnax/[rKmz"zH®n (^ii —
— da)]; Op „их 400 4- 500 МПа, Оц = Е8и/в//д;
Он max 850 4- 900 МПа,
где <f3 и г3 — соответственно диаметр и число заклепок; 1>п, /д, 6П и гп — соответственно расчетные ширина, длина, толицта и число иластнн.
Ведомый диск состоит из металлического диска, к которому кренятся,
обычпо заклепками, шлицевая ступица и фрикционные накладки Для обеспечения лучшего контакта поверхностей трения, предохранения их от коробления при нагреве и плавного включения стремятся увеличись осевую податливость ведомых дисков. С этой целью их выполняют разрезными Выполнение прорезей Т-образными (рис. 6.7, а) уменьшает ширину перемычек между секторами, которые в свою очередь могут последовательно отгибаться в разные стороны (рис. 6.7, б). Между диском и фрикционными накладками часто устанавливают пластинчатые пружины, позволяющие добиться требуемой и более равномерной податливости. Фрикционные накладки крепятся к диску или к диску и пластинчатым пружинам, приклепанным к диску независимо одна от другой, головки заклепок размещаются в отверстиях противоположных накладок с зазором (рис 6.7, б, в) При сжатии ведомый диск (или пластинчатые пружины) распрямляются. При выключении сцепления они снова прогибаются
Расчет ведомого диска ведут по напряжениям смятия о, м и среза тСр заилепок по формулам (6.6) и {6 5) и шлицев по формулам, приведенным
Ьтасимные рычаги предназначены для включения и выключения сцепления lix конструкция должна обеспечивать минимальное трение в шарнирах при высоких передвточном числе и жесткости. Обычно равномерно по окружности устанавливаются три— пять рычагов. Наибольшее распространение получил вариант установки отжимных рычагов на игольчатых подшипниках 3 (рис 6 8). Одна опора, обычно на нажимном диске 1, выполняется жесткой, а конструкция второй опоры позволяет компенсировать изменение расстояния между опорами (—1 мм) при повороте рычага 2, что достигается при помощи гайки 4 с подвижной сферической опорой. Зазор между рычагами 2 и упорным кольцом б (или подшипником) рсгу лируегся гайками 4. Для удержания рычага в выключенном положении устанавливают оттяжные пружи-
Растет Оеталгй
155
Отжимные рычаги рассчитывают по напряжениям изгиба. Для произвольного сечения
Си = (f я max*n)/(apcii^ и) >
где РНП1ах—сила сжатия пружин в выключенном сцеплении; к — расстояние до опвсного сечения, обычно х = с, а и с — плечи рычага; гр — число рычагов; — момент сопротивления опасного сечения. Напряжения изгиба Оц не должны превышать для сталей 140—160 МПа, для ьовких чугунов 60—80 МПа
Подшипники вык гючения позволяют значительно снизить трение при вы ключенни. Иногда используют подшипники скольжения, представляю щие собой пропитанные специальными маслами угольно-графитовые втулки, не требующие пополнения смазочного материала в течение всего срока службы Гораздо чаще используют подшипники качения с защитным кожухом, смазочный материал к ним подается по гибкому шлангу, соеди ненному с масленкой, которая устанавливается на корпусе сцепления. В последнее время широко используют герметичные подшипники, заполненные смазочным материалом, обеспечивающим их работоспособность в течение всего срока службы автомобиля. Некоторые виды применяемых на отечественных автомобилях подшипников приведены в табл. 6.7. Размеры выбираемого подшипника определяются конструктивно й в Первую очередь аевисят от диаметра первичного вала коробки передач.
Гасители крутильных колебание, предназначенные для снижения или полного устранения высокочастотных колебания, возникающих в трансмиссии от действия периодических возмущений, вне зависимости от конструкции работают по принципу рассеивания энергии Они состоят из упругого элемента (пружины, торсионы, резина), обеспечивающего относительное перемещение ведущей и ведомой частей диска, и дисскпатнвпого эле-
Наиболыиее распространение в автомобилях получили гасители трения без смазочного материала с исполь эоаанисм пружин а качестве упругих
элементов. Примеры конструкций га* Сигелей приведены на рис. 6.9. Пру* живы 3 устанавливаются ка диаметре 80—120 нм в окнах длиной 26—27 мм ступицы 6 ведомого диска и в дисках Z, 2 и 4 с предварительным натягом, Размеры пружин: d = 3+4 мм, D “ "= 14+19 мм, число витков 3—4, еаэор между витками 3—4 мм. Рас< сеивапие энергии происходит на поверхностях трения, образовенных дисками /, 4 н Б, 9. Сжатие поверхностей трения осуществляется заклепками или болтами 7. В последнем случае для придания стабильности усилию сжатия устанавливают тарельчатые 8 или цилиндрические пружины. С этой же целью часто диски гасителя выполняют пружинными.
Основными параметрами, характеризующими гаситель сцепления, являются. момент трения Л7Т; момент предварительной затяжки пружин Л1П; жесткость пружин од угол замыкания гасителя <рг В существующих конструкциях число пружин равно 6—10;
Расчет деталей
157
Л1П—(0,08-т-0,|5) Л/е щах, Фг~-= 2° 30* 4-3° 40’; Mt — (O.O64-0,17) .* Л1етах, Для пружин принимают отношение среднего диаметра к диаметру проволоки равным 4,5—5,5.
Гаситель трения без смазочного материала имеет линейную характеристику в пределах угла замыкания. Получили распространение также гасители с нелинейной характеристикой, различного конструктивного исполнения, позволяющие более эффективно устранять крутильные колебания В одних конструкциях используют пружины разной длипы, устанавливаемые в окнах одинакового размера (Borg and Beck), которые включаются в работу последовательно В других конструкциях последовательное включение в работу пружин обеспечивается выбором соответствующих размеров окон в дисках и ступице. В таких гасителях пружины о твой жесткости чередуются с пружинами другой жесткости при увеличенном, обычно до 10, общем числе пружин
Напряжение в пружине подсчитывают по данным таб.1 6 6, ттах ^6504-850 МПа.
На указанные значения ориентируются при предварительном выборе параметров гасителя- Эти параметры корректируют, рассчитывая амплитудно-частотные характеристики трансмиссии, составной частью которой является гаситель. При этом учитываются упругие, инерционные и диссипативные свойства трансмиссии хак многомассовой динамической системы, циклический характер изменения крутящего момента двигателя, обусловленный дейстиием инерционных и газовых сил
Резонансные колебания являются высокочастотными и соответствуют третьей-четвертой собственным частотам трансмиссии. Динамические системы автомобилей с различными колесными формулами (см. табл 2 4) являются исходными при составлении расчетной схемы, по которой проводится подбор параметров гасителя. Для автомобиля 4X2 целесообразно принимать шестпмассовую динамическую систему (рис 6 10. о) Далее вспользовапы обозначения, принятые В разд 2.
Варианты конструкций гасите-
Если в качестве обобщенных координат приняты моменты в упругих ввеньях Л1^Е = ((fi — <р2) е12, Л123 — — (Фг — Фв) = (<р3 — —
— Фр);еа4р; Мц — (ф< — <Pb)fe4ei Л*р ~ == фр/вр. то уравнения движения системы принимают вид
Сцепления механических трансмиссий
16.7)
Момент Мр (ф1, qij представляет собой периодическую функцию крутящего момента двигателя от инерционных и газовых: сил. Упругое звено ех> включает в себя гаситель и янлвется нелинейным (ряс. 6,11),
(Ф» ~ «Р«)/Гв (при Мг + Мт + + Ма Mt 4- MD)i
(«Pi —4>|)/(еят«г) -г +(Мт»еп Ац MnBgnAtu)x X ев*е'; (при + Л,В < < Ми < Л1г + Л$, + Л1п).
бора параметров гасителя крутрлпиых КО' деблиий сцепления
йу/ев
(см. рис. 6.10).
Здесь Д1Г — момент замыкания пружин гасителя.
Уравнения движения (6.7) при подборе параметров гасителя целесооб-равно решать на АВМ без линеаризации системы. Для удобства изменения
Рис. 6.12. Зависимость Л(„
от момента
трения AfT сцеплении груаового вотомп-бИЛя 4X2:
1 — мп => о. з — Д1п =» 200 11м; S — Л(ц = 400 Н-м
Расчет привода
159
оптимизации нелинейные элементы упругого звена а12 воспроизводягея на блоках нелинейности. Характеристика звена е12 получается в результате суммирования ее составляющих. Функция Л1Я (<рь <Р|) может быть получена различными способами, например, с помощью блоков нелинейности или в результате суммирования ее гармонических составляющих.
В результате рвечетов амплитудно-частотных характеристик устанавливается зависимость между амплитудами моментов в трансмиссии и значениями параметров гасителя. Расчеты показывают, что наибольшее влияние на амплитуды оказывает момент трения гасителя, причем существует некого рое его значение, при котором ампли туда резонансных колебаний минимальны (рис 6 12).
6.5. РАСЧЕТ ПРИВОДА
Удобство и легкость управления оцениваются ^следующими параметрами привода.
1) рэ&яой Й7ныкл. которую необходимо совершить водителю для полного выключения сцепления (для легковых автомобилей В'пыкл 23 Дж, для грузовых В'выкл < 30 Дж);
2) максимальным усилием на пе-двлн сцепления Рпед (для грузовых автомобилей по ГОСТ 21398—75* Рдоп=5 150 Н при наличии усилителя и 250 11 без усилителя сцепления);
3) полным ходом педали сцепления /пвд (Для легковых автомобилей /пед — 1404-160 мм, для грузовых п автобусов /пед^ 190 Мм)
Применяются приводы двух видов, механические и гидравлические. Механические приводы имели широкое распространение на легковых автомобилях, сейчас используются на ряде грузовых ентомобилей. Гидравлические приводы устанавливают на грузовых автомобилях, автобусах и на всех легковых автомобилях.
Для снижения усилия на педали в привод может встраиваться пневматический или вакуумный усилитель. Пневматические усилители используются на большегрузных автомоби
лях (МАЗ, КаМАЗ, Bedford), вакуумные усктогели устанавливаются обычно в системе управления автоматическим сцеплением автомобилей малого класса.
Конструктивное исполнение педали сцепления и способ ее крепления определяются компоновочными соображениями. Для сцеплений с гидравлическим приводом характерно верхнее крепление педали на переднем щитке автомобиля (автомобили заводов ВАЗ, ГАЗ. КамАЗ). При этом улучшается доступ к приводу, повышается герметичность кабины. При использовании механического привода педаль обычно имеет нижнее крепление (КрАЗ, ЗИЛ). Верхнее крепление педали на автомобиле МАЗ (рис. 6.13) обусловлено конструкцией кабины (опрокидывающаяся). Ось поворота кабины проходит вблиан точки О, поэтому при опрокидывании рычаги и тяги, находящиеся правее этой точки, остаются практически неподвижными. Конструкция следящего механизма 2, встроенного в привод, приведена на рис. 6.13.
На рис. 6 14 приведена схема гидравлического привода сцепления с пневматическим усилителем и его конструктивное исполнение (КамАЗ). Следящий механизм регулирует давление воздуха в цилиндре усилителя в зависимости от давления жидкости в гидроприводе, т. е. от усилия на педали сцепления.
При расчете привода определяются кинематические и силовые зависимости.
Исходными данными для расчета привода являются допустимое усилие на педали, ее полный ход и перемещение нажимного двска.
Общее передаточное число привода от педали до нажимного диска
Исходя из передвточиых чисел составляющих элементов привода: педали, части привода, расположенной между педалью и вилкой сцепления («н “ 1,44-2,2) и отжимных рычагов сцепления (игц3,84-5,5)
“ =- Ццедмчривйсц
Расчет привода
160 Сцепления механических трансмиссий
Для гидравлического привода «пр = /гл/^исп = 5исп/®гл = = О2.„М.
где 4ч: п (гл). 5исп<гл). 4,ясп<гл>—соот’ ветственио перемещение, площадь и диаметр исполнительного (главного) цилиндра.
Диаметры поршней цилиндров при нимаются обычно равными, т. е. кпр = — 1,0 (табл. 6 8). Полный ход поршня главного цилиндра на 20—25 % больше хода поршня исполнительного цилиндра, что необходимо для обеспечения перекрытия отверстия, соединяющего цилнцдр с расширительным бачком (и для подачи чвсти жидкости к цилиндру следящей системы)
Величина максимального усилия на педали
/*пед = /’»/(«’]) + Ая/(«отЧот).
где ч — КПД привода (•) ~ 0,85); «от и Чот — соответственно передаточное число и КПД частя привода от оттяжной пружины с усилием Рот до педали.
30—12
— свободные
МАЗ-5335
ВАЗ-2101 ГАЗ-53 Л
Рнс. в. 14. Гидравлический привод сцепления с пневматическим усилиталем: в — схема; б — общий вид. / — следящий механизм; 2 — цнлицдр, 3 — tue-
Еслн Риед > /’доп, то необходима установка усилителя, причем
/’ус = (риед — /’доп) «усТ]уг>
где «уС и ч]уС — соответственно пере даточное число и КПД части привода от педали до места установки цилиндра усилителя.
Диаметр цилиндра усилителя
DyC = РусЦяри,),
где Ру, — давление воздуха в ресивере (для пневмосистем р.„ = 0.65ч-ч-0,75 МПа).
6 П/р А, И, Гришкевича
Динамические свойства сцепления и его привода, определяющие закон нарастания момента трения сцепления при его включении, оценивают по следующим показателям.
темпу включения сцепления, определяемому временем Zt нарастания до максимальной величины осевого усилия /*с пих сжатая фрикционных накладок.
коэффициенту динамичности kt = - /’с тах'Ри.
характеру нарастания осевого усилия Рс в процессе включения.
Для расчета этих показателей используют эквивалентную дпнамиче-
162
Сцепления механических трансмиссий
ния присоединена оттяжная пружина, имеющая усилие РОТ.
Уравнения движения для адиабатного процесса имеют вид
скую систему, в которой детали сцепления и привода заменены эквивалентными массами и упругими звеньями. На рис 6.15 показана такая сишема для сцепления с пневмоусилителом
Сцепление моделируется массами т, и ms, соответствующими массам ведущего и ведомого дисков, а податли весть ведомого диска — упругими звеньями е13 и с2 На массу nij действуем сила Р„ = Лр'си, создаваемая нажимными пружинами Величина А соответствует зазорам между маховиком н ведомым диском, ведущим и ведомым дисками в полностью выключенном сцеплении Эквивалентная модель привода включает массу рычагов и тяг т3 п приведенную массу педали сцепления 1 * * * * тЛ,- а податливость привода моделируют упругие звенья е13 и е84. Модель включает следящий механизм, встроенный в упругое звено eS4, и цилиндр усилителя, поршень которого связан с массой /пэ. К печали сцепле-
Рис. 6.(6. Осциллограмма процесса резкого включения сцепления грузового автомобиля с пневмоуенлителем;
I — изменение усилия РуС. развива,
емого цилиндром усилителя. 2 и 3 —
изменение осевого усилия Рс сжатия
фрикционных накладок соответственно
при работающем и отключенном усили-
:< Fesgn х2;
[ 0 при хх — х2^Д; Pis = | (*i — *2 — A)/e(2 при
' [ хх — х2> А;
р J О при А;
2 1 (Ха —Д)/еа при х2>Д:
10 при хх—х8^0;
(*1 - х3)/ею при
х, х3>0;
| 0 при |х3- х4|^€о;
Р34 =| [Хз — Х« — ₽0Sgn(X3 — X4)J/ej4
при |хэ —xt|>ee;
Fye — (Р — Ра) «ус;
Р = Pw -Ь РХз1х„ —
Ft -- (Р|2 4- Россит.
0,М^р!(гв]/"Т) при е>0, 1,89;
0,156х/£ X
х /(р°’6« — /Р-^/Т /ее
Кинематические схемы Построение ряда передаточных чисел
163
при е>0, 6 < 1,69;
0,04>^е/>ц/(ео К?') правее, О >1.89;
(1,156x,1с X
х П(р/а₽)1Л®~ ”
‘ ‘' — (р/ри>)1'т11/7'/'б<|
при е<0, ©< 1,89;
« = х9—*4, е е0,
где е0 — полный ход штока клапана, р — давление воздуха в цилиндре усилителя; ра — атмосферное давление; хи — полный объем пневмоеистемы, стнесеинкй к площади Syc цилиндра усилителя, Т — начальная термодинамическая температура воздуха в цилиндре усилителя; р и ji, — коэффициенты трения соответственно для фрикционных поверхностей и для стали по стали; Гщп — средний радиус шли цев ведомого диска; у. — коэффициент расхода, определяемый характеристиками усилителя; f — площадь выпускного отверстия следящего механизма
Секундный расход воздуха Gw при опорожнении (е > 0) и наполнении (8 < 0) цилиндра определяют по формулам газовой динамики с учетом воз-
нежности надкритического (в >-1,69) и подкритического (6 < 1,89) режимов истечения, определяемых отношением 8 давлений воздуха на входе и выходе следящего механизма
Расчеты показывают, что время нарастания усилия Рс до максимального определяется временем истечения воздуха из цилиндра и составляет 1с ~ = 0,14-0,6 с, а коэффициент динамичности kj близок к единице. При отсутствии усилителя 1с ~ 0,03 с, kj ^1,5 В качестве примера на рис 6 16 показана записанная с АВМ осциллограмма решения уравнений движения. Кривая I изменения усилия пневмоусилителя имеет характерный пере гиб, который соответствует равенству усилий цилиндра и пружин сцепления Анвлнз показывает, что избыточное усилие Рус уменьшается при практически неподвижных массах до
Послс этого нажимной диск и педаль
сцепления перемещаются при практически неизменном Рус, пока не будет устранен зазор А. Отсюда следует, что максимальное значение Рус не должно превышать Рв. Из расчетных и экспериментальных данных следует, что при времени опорожнения цилиндра 0,4—0,5 с динамические нагрузки в трансмиссии снижаются примерно в 1,5 раза.
Коробки передач механических трансмиссий
7.1. КИНЕМАТИЧЕСКИЕ СХЕМЫ.
ПОСТРОЕНИЕ РЯДА
ПЕРЕДАТОЧНЫХ ЧИСЕЛ
Коробка передач является агрегатом трансмиссии, преобразующим крутящий момент и частоту вращения по величине и направлению. В механи-
6*
ческой трансмиссии это преобразо-
вание осуществляется, илк правило, с помощью зубчатых колес и является ступенчатым
Различают два основных вида ступенчатых коробок передач- с неподвижными осями валов; планетарные. Первые кратко называют вольными.
164
Коробки передач механических трансмиссии
Рис. 7.1. Схемы чстырех-
сооспых ко-автомобнлгй.
а — ГАЗ-БЗ. УАЗ-451, б — ГАЗ-24 «Волга»; в — ВАЗ 2401 «Жигули», г — Ford «4-410»; 0 — Turner «Т 4.200»
Бальные коробки широко применяют как в механических трансмиссиях, так и в гидромеханических Планетарные используют в оснокпом в гидромеханических трансмиссиях В дальнейшем будем рассматривать ступенчатые сальные коробки передач механических трансмиссий
Коробки, передач классифицируют по следующим признакам: числу ступеней (передач прямого хода), взаимному расположению ведущего и ведомою валов, числу элементов управ
ления, которые должны быть включены для получения определенной передачи; числу ветвей в передаваемом силовом потоке.
На автомобилях с механической трансмиссией применяют коробки с числом передач 3—16 (очень редко больше 16) По взаимному расположению ведущего и ведомого валов коробки передач разделяют на соосные и несоосные. Число элементов управления, включаемых на одной передаче, на единицу меньше числа степеней сво-
тЦийчт
Тт -L ₽ис. 7 3. Схемы пяти- и шестистулеячатых
=—1 —-1 1 г4 f Т соосных коробок передач с постоянным за-
-L-1- _ Т цепленнем всех шестерен:
|I I а — КамАЗ, тип 14; б — Zahnradfab-
-------------— ilk <АК-5»: е — IFA «W 50L»; а — Zahmad-fabrik «АК 6-80»
боды коробки перадач. Наиболее распространены коробки с двумя степенями свободы, б которых для получения определенной передачи включается одна зубчатая муфта или передвижное зубчатое колесо. На автопоездах устанавливают коробки передач с тремя, иногда четырьмя степенями свободы. Такие коробки имеют, как правило, число передач восемь и более. Поэтому их называют многоступенчатыми Подавляющее большинство коробок передач механических трансмиссий вы- полнены с неразветвленным силовым потоком, так что через каждое зубчатое зацепление включенной передачи проходит весь силовой поток. Известны, однако, коробки с разветвленным потоком, включающим две или три ветви Коробки передач с двумя степенями свободы имеют обычно не более шести передач. В механических трансмиссиях их выполняют или по трехввль-ной соосной схеме (рис 7 1—7 3), или двухвальной песоосной (рис. 7.4).
zs 7— j>T F 't . -о ¥ . 1 б h тт 4- П-W 1 РпВД & gl Рис. 7л. Схемы четырехступенчатых несоосных коробок передач затомобилей: а — Citroen «GS», Skoda «1000 МВ»: б — Autounion Audi, в —- Hillman Imperial г — ЗАЗ-968 «3 апорожец»
166
Коробки передач механических трансмиссий
Рис. 7.5. Схемы коробок передач с разветвленным силовым котовом:
« — Fuller «RГ-815» с двумя промежуточными валами (показана основная часть без дополнительного редуктора); б — MBck «TRL-107» с тремя промежуточными валами
В трехвальной коробке одна из передач образуется в результате непосредственного соединения соосных ведущего (первичного) и ведомого (вторичного) вадов, эта передача является прямой. При движении на прямой передаче зубчатые колеса и подшипники коробки разгружены, вследствие чего снижаются износ, потери мощности и шум. На других передачах переднего хода в трехвальной коробке силовой поток проходит через два зубчатых зацепления. Это позволяет получить достаточно большое передаточное чисто (и, = 74-9), что часто требуется для первой передачи На автомобилях с механической трансмиссией преобладают соосные трех-вальные коробки передач Несоосные даухвальные применяют в тех случаях. когда соосное расположение ведущего и ведомого валов обуслов ливает усложнение трансмиссии, и при этом заданное передаточное число первой передачи невелико («2 < 4)
В современных конструкциях коро бок передач большинство зубчатых колее находятся в постоянном зацеп Ленин Для включения передач исполь
зуют зубчатые муфты и синхронизаторы. Зубчатые колеса первой передачи п заднего хода часто не имеют постоянного зацепления. В этих случаях одно из зубчатых колес пары выполняют передвижным п используют его для включения передачи
Схемы трехвальиых соосных коробок передач с двумя степенями свободы, распространенные в настоящее время, имеют принципиальные различия только в схеме включения первой передачи и передачи заднего хода. Можно выделить следующие варианты схем: все зубчатые колеса находятся в постоянном зацеплении (рис. 7.1, г, д и рис. 7 3), не имеют постоянного зацепления только зубчатые колеса заднего хода (рис 7 I, б, о и 7.2, г—*); не имеют постоянного зацепления зубчатые колеса первой передачи в заднего хода (рис. 7.1, в и 72, а—в). Отличительной особенностью последних схем является отсутствие отдельного зубчатого колеса заднего хода на ведомом валу Для включения заднего хода используется то же передвижное зубчатое колесо, которое образует первую передачу.
Схемы с постоянным зацеплением всех зубчатых колес применяют для коробок передач с относительно большой продолжительностью работы на первой передаче и заднем ходу. Преимуществами таких схем являются отсутствие изнашивания торцов зубчатых венцов и сокращение хода вилок переключения передач, недостатком— необходимость свободной установки на ведомом валу отдельного зубчатого колеса большого размера дая передачи заднего хода. В результате установки такого колеса увеличивается не только общее число зубчатых колес, но и суммарный момент инерции согласованно вращающихся деталей коробки, в результате чего повышаются нагрузки на синхронизаторы.
Схемы соосных коробок передач с разветвленным силовым потоком показаны па рис 7 5. В таких коробках больше зубчатых колес. Однако они имеют меньшие размеры, а следовательно, меньшие моменты инерции и окружные скорости. Применение подобных схем позволяет повысить срок службы коробок передач при боль-
Кинематические схемы. Построение ряда передаточных vucet 167
них значениях передаваемой мощности
Несоосные двухвальные коробки не редач (схемы на рис. 7 4) устанавлн вают в основном на легковые и спор тивные автомобили, у которых дни гатель размещен радом с ведущим мостом. Ведомый вал таких коробок выполняют вместе с шестерней главной передачи: конической или гиповд нон — при продольном расположении двигателя, цилиндрической — при поперечном На рис 7 4, а—-г показаны типичные схемы передачи зад него хода, а также варианты расположения передач переднего хода и синхронизаторов. Синхронизатор первой-второй передач обычно устанавливают на ведомом валу, так как его размещение на ведущем валу затруднено вследствие малого диаметра шестерни первой передачи Синхрониза тор высших передач иногда устанавливают на ведущем валу, чтобы умень шить приведенный момент инерции
Применяя для коробок передач с двумя степенями свободы соосную трехвальную схему, можно получить диапазон передаточных чисел, близкий к ©н.п ** 9- Высшей передачей при этом может быть прямая {ив— 1) или ускоряющая (нв 0,64-0,8) Большинство трехвальных коробок передач в качестве высшей, наиболее часто используемой, имеют прямую передачу. При этом преобладающая часть общего пробега автомобиля характеризуется минимальными потерями мощности и взносами в коробке передач. Получили распространение также и коробки с высшей ускоряющей передачей. Появление коробок с ускоряющей передачей было вызвано стремлением уменьшить частоту вращения вала двигателя при движении авто мобиля без груза. Такие коробки предназначались для автомобилей с технологически неизбежными холостыми пробегами. В последующем рост удельных мощностей позволил использовать ускоряющую передачу как при холостых пробегах, так и в случае пробегов с грузом. Вследствие передачи мощности через два зубчатых зацепления на ускоряющей передаче, при преимущественном ее использовании, повышаются требования к на
дежности конструкции и увеличиваются потери мощности. Поэтому в настоящее время наблюдается тенденция уменьшения числа коробок с ускоряющей передачей. Ускоряющую передачу используют для расширения диапазона коробки передач без увеличения передаточного числа первой передачи или сохранения диапазона при уменьшении этого числа. В последнем случае преследуется цель сохранения уровня нагрузок на элементы коробки передач и карданной передачи при увеличении крутящего момента двигателя. Специализированные заводы почти для каждого типоразмера внпу скаемых коробок имеют модификация с высшей прямой и ускоряющей пере дачами При этом для последней модификации указывается несколько больший входной крутящий момент
Схемы коробок передач с двумя степенями свободы не накладывают каких-либо ограничений на закономерности построения ряда передаточных чисел. При выборе числа передач и передаточных чисел руководствуюп-я основным требованием, предъявляемым к коробке передач: обеспечить заданные тягово-скоростные качества и вы сокую топливную экономичность автомобиля
Многоступенчатые коробки передач с тремя степенями свободы образуют на базе основной четырех-, пяти или шестиступенчатой коробки, имею щей соосную трсхвальную схему, путем присоединения к последней дополнительного редуктора (рис 7.6) Обычно этот редуктор имеет две ступени (прямую и редукторную) и обеспечивает получение удвоенного числа передач. Применение трехстуиснчатого допол нителыюго рсдукгрра позволяет- утроить число передач по отношению к числу передач базовой коробки Для получения определенной передачи в коробке с тремя степенями свободы необходимо включить два элемента управления: один в базовой коробке и один в дополнительном редукторе.
Многоступенчатые коробки передач с четырьмя степенями свободы обра зуют присоединением к базовой коробке двух дополнительных редукторов — переднего и заднего.
KopoDt.-u передач механических трансмиссий
коре&ж^яерсдач с дополнительными редукторами
редуктором
Ряд передаточных чисел многоступенчатой коробки б пределах ее общего диапазона не может быть произвольным, так как закономерность ряда, принятая для базовой коробки, неизбежно повторяется на каждой ступени дополнительного редуктора. Построение общего ряда прп этом опре-
яграммы, иллюстрирующие ряда передаточных чисел
стегюнями свободы
деляется закономерностью ряда передаточных чисел базовой коробки и соотношением между диапазонами базовой коробки и дополнительного редуктора Применяемые варианты построения ряда передаточных чисел многоступенчатых коробок с тремя степенями свободы поясняются лучевыми диаграммами (рис 7.7) На гори ' зоцталях А отмечены передаточные • числа базовой коробки (точки 1, 2,
3, .), а на горизонталях Б — многоступенчатой (точки 7, Н, Ilf,...). Лучи, соединяющие точку О С горизонталью Д. обозначают передачи базовой коробки. Вертикальный луч соответствует прямой передаче, лучи, расположенные елраза, — понижающей, а слева — ускоряющей. Лучи, соединяющие горизонтали, обозначают ступени дополнительного редуктора: вертикальные — прямую ступень, направленные вниз вправо — пони жающую, а вниз влево — повышающую. Отрезки, заключенные между соседними точками по горизонтали, пропорциональны логарифму отношения (<?) соответствующих передаточных чисел, например, 1g lg q4_5, lg Отрезок между крайними точками на горизонтали А пропорционален логарифму диапазона базовой коробки lg Об. к, а на горизонтали Б— многоступенчатой коробки 1g Он. и- Из построений следует 1g Од. р = 1g Ои.п— — 1g Об. к 11ли ^д. Р = ^’в. п®с.в (глв Од. р — диапазон дополнительного редуктора).
Многоступенчатые коробки С делителем (рис. 7.6, о). Делителем пазы-
Кинематические схемы. Построение ряда передаточных чисел 169
вают дополнительный редуктор, диапазон которого выбран из условия Од, р » в <где «б-в огношаше передаточных чисел двух соседних высших передач базовой коробки) Соблюдение указанного условия обеспечивает получение плотного геометрического ряда передаточных чисел (g m 1,2-5-1,3) в области высших передач многоступенчатой коробки. При этом передаточные числа базовой коробки чередуются в общем раду с передаточными Числами, получаемыми на редукторной ступени делителя (рис 7 7, а, б). Делитель незначительно расширяет общий диапазон. .Прп его установке базовую коробку выполняют с достаточно широким собственным диапазоном, и она имеет обычно ряд, отличный от геометрического, с несколько уп.тегненпымк высшими передачами Широкий диапазок базовой коробки позволяет использовать ее на некоторых автомобилях без денителя и тем самым обеспечить высокую степень унификации
Делитель, устанавливаемый впереди, имеет наиболее простую конструкцию и минимальное число зубчатых колее (два) КПД коробки с передним делителем не отличается от КПД базовой коробки, так как сохраняется число зубчатых зацеплений, передающих силовой поток. Недостатком коробки с делителем является больший крутящий момент на ведомом валу базовой коробки, чго обусловливает применение для нес относительно большого межиеевоги расстояния.
Многоступенчатые коробки с задним дополнительным двухступенчатым редуктором. Задний двухступенчатый редуктор выполняют вольным с двумя парами зубчатых колес (см рис. 7 6, б) или планетарным (см рис. 76, а). Его редукторная ступень является понижающей При заднем расположении редуктора расширяется общий диапазон без увеличения нагрузок в базовой коробке Диапазон редуктора, как правило, ограничивают <©л.р«4), так как с его увеличением усложняется переключение ступеней редуктора Возможность иметь большой диапазон редуктора используют как для расширения общего диапазона
многоступенчатой коробки, так и для одновременного сокращения диапазова базовой коробки Последнее приводит к уменьшению степени унификации базовой коробки, так как такой диапазон не позволяет использовать ее отденыю без дополнительного редуктора. Однако при этом уменьшается крутящий момент на ведомом валу базовой коробки, и она может быть выполнена более компактной с меньшим межосевым расстоянием. Кроме того, сокращение диапазона базовой коробки и связанное с этим значительное уплотнение ее ряда передаточных чисел уменьшают разность угловых скоростей и приведенный момент инерции в синхронизируемой системе при переключениях. Тем самым существенно снижаются нагрузки на синхронизаторы и появляется возможность синхронизировать все передачи. Вместе с тем при работе на низшей ступени заднего редуктора КПД многоступенчатой коробки передач сни-
На рис. 7 7, в, г показано построение ряда передаточных чисел восьмиступенчатых коробок, в которых базовая коробка имеет уплотненный геометрический ряд со знаменателем до. к*®
1,354-1,40 Диапазоп редуктора перекрывает диапазон базовой коробки и выбирается из условия Од.р » к (где п — число передач базовой коробки). Ряд многоступенчатой коробки в этом случае получается геометрическим во всем диапазоне со знаменателем <7к,п = Чб.к (коробки передач ЯМЗ-238А, Volvo «R61») Так же строится ряд и десятиступсичатой коробки передач. Плотность ряда при этом может быть повышена до g -« -у 1,25-5-1,35 (коробка передач Fuller «RT-9I0»)
На рис. 7 7, д показано построение ряда девятиступенчатой коробки передач. Ее пятиступенчатая базовая коробка имеет уплотненный геометрический ряд со знаменателем дс в сокращенном диапазоне, образованном второй—пятой передачами Диапазон заднего редуктора перекрывает сокращенный диапазон базовой коробки и равен £>лр = flj,1-1 = q* Блокировкой в механизме переключений исклю
170
Коробки передач механических трансмиссий
чается возможное гъ включения первой передачи базовой коробки, когда в редукторе включена высшая (прямая) ступень. В результате коробка имеет давять передач вместо десяти потен-циалыкз возможных. В диапазоне передач II— IX имеется геометрический ряд со знаменателем g = ас. Между передачами 1—2 шаг увеличен, т. е. 91-2 °" 91-11 > 9с- В результате этого общий диапазон коробки может быть достаточно большим (Ои.п= 12—13). Описанный вариант построения ряда многоступенчатой коробки с двухступенчатым редуктором и нечетным числом передач позволяет уменьшить необходимый диапазон редуктора и нагрузки на его синхронизаторы при достаточно большом общем диапазоне коробки. Так как первая передача базовой коробки исключается из числа включаемых па высшей ступени редуктора, то она может быть выполнена без синхронизатора.
На рис. 7 7, е показано построение ряда десятиступенчатой двухдиапазонной Аоробки передач На высшем' диапазоне ^передачи 1В—5В), являющемся собственным диапазоном базовой коробки, обеспечивается работа автомобиля в легких и средних условиях. На низшем диапазоне (передачи 1Н—SH}, получаемом при включении понижающей ступени диапазонного редуктора, обеспечивается работа автомобиля в средних и тяжелых условиях Диапазон редуктора при этом перекрывает не весь диапазон базовой коробки, а лишь его некоторую часть Многоступенчатая коробка передач с двумя самостоятельными диапазонами нс имеет высокой плотности ряда передаточных чисел в области высших передач. В общем ее ряду часто имеются почти повторяющиеся передаточные числа
На рис 7 7, ас показан вариант построения ряда передаточных чисел многоступенчатой коробки передач с задним трехступенчатым редуктором.
7.2. КОНСТРУКТИВНЫЕ СХЕМЫ
Редукторная часть большинства коробок передач механических трансмиссий имеет твповую компоновку. Это относится в основном к соосным трех
вальным коробкам. Признаки типовой компоновки следующие цельный литой картер; двухопорные валы; передняя опора ведущего вала расположена в расточке маховика или коленчатого вала; ведущий вал выполнен заодно с консольно расположенной шестерней привода промежуточного вала; передний подшипник ведомого вала установлен в расточке консольной части ведущего вала, зубчатые колеса жестко крепятся на промежуточном валу, в некоторых случаях вал выполняют заодно с частью зубчатых колее или вместе со всеми в виде блока; зубчатые муфты и синхронизаторы установлены на ведомом вюлу; зубчатые колеса высших передач расположены ближе к передней недостаточно жесткой опоре ведомого вала, а низших— ближе к задней.
Соосность ведущего и ведомого валов трсхвальной коробки обеспечивается соосностью таких элементов, как отеерстия под подшипники в кар-т.ерс, опорные шейки ведомого вала, шейки ведущего вала и гнездо в нем под передний подшипник ведомого вала. Коробка передач крепится к картеру сцепления, образуя вместе со сцеплением и двигателем силовой агрегат В зависимости от принятой схемы подвески силового агрегата коробка передач может иметь поддерживающую упругую опору или не иметь ее. Относительно картера сцепления коробка передач центрируется с помощью выступающей части наружного кольца заднего подшипника "ведущего вала пли концентрично обработанного пояска на фланце крышки этого подшипника.
Конструктивно обеспечивается, как правило, следующая схема сборки коробки. Промежуточный вал в сборе, а затем и ведомый, без опорных подшипников вводят через достаточно широкое окно, выполненное в картере сверху (реже сбоку или снизу) После этого монтируют подшипники. Ведущий вал в сборе устанавливают через отверстие в картере под подшипник, для чего зубчатый венец вала выпол няют меньшего размера, чем отверстие.
Требуемая общая жесткость конструкции обеспечивается главным об
Конструктивные схемы
171
разом жесткостью картера и валов. По условию жесткости длина двухопорных валов ограничивается. Поэтому между опорами размещают нс более шести пар зубчатых колес.
Применяют также некоторые варианты компоновки трехва.тьпых коробок передач. Коробки передач легковых автомобилем часто выполняют с удлинителем и с трехопорным ведомым валом (см. рис 7.L, б, в). Основное назначение удлинителя — сокращение длины карданной передачи. В конструкции некоторых коробок одна из передач вынесена за заднюю стенку картера. Так, в коробке, схема которой показана на рис 7 1, в, вынесена передача заднего хода, что позволило выполнить более компактной ц жесткой основную часть коробки В коробках, схемы которых показаны на рис 72, г и д вынесена ускоряющая передача. Это позволяет унифицировать модификации коробок не редач, например, шестиступенчатую с пятиступенчатой В коробках, схемы которых показаны на рис. 7 2, в и д, число вилок переключения может быть сокращено на одну'. В первом случае дополнительная вилка установлена для сокращения длины коробки, во вто ром — для уменьшения приведенного момента инерции согласованно вра щающихся деталей коробки и уменьшения нагрузок на синхронизаторы. В коробке, схема которой дана па рис 7.3, в, применены многоопорные валы и картер с разъемом в плоскости валон. Обеспечивая высокую жесткость, такое решение усложняет кон струкцию В этой коробке для уменьшения приведенного момента инерции и пагрузок синхронизатор второй-третьей передач размещен на промежуточном валу.
На рис 7 8, а показана конструкция пятиступенчатой коробки пере дач автомобилей семейства КамАЗ. Коробка имеет типовую компоновку редукторной части Все зубчатые колеса находятся в постоянном зацеп лении Синхронизаторы установлены для пятой четвертой и третьей-второй передач. Зубчатые колеса первой передачи и заднего хода прямозубые, остальные — косоэубые Подача масла в продольный канал ведомого вала 3
производится маслопагиетающим кольцом 2, установленным на везущем валу 7. Для установки коребки отбора мощности у картера коробки передач справа и слева имеются люки, закрытые крышками Привод коробки отбора мощности осуществляется от прямозубой шестерни заднего хода с модулем 4,25 мм.
Пятиступенчатая коробка передач автомобклей семейства КамАЗ используется также в качестве базовой для десятиступеичатой модели и имеет с последней высокую степень унификации. За исключением ведущего вала 1 в десятиступенчатой модели используются все детали базовой пятиступенчатой коробки С целью унификации передний конец промежуточного вала 4 последней имеет шлицы, обеспечивающие соединение с промежуточным валом делителя Делитель установлен впереди базовой коробки (рис 7.8, б). В случае его установки вал 1 .базовой коробки заменяется валом 5 Переключение делителя производят с помощью синхронизатора При соединении вала 7 с валом 5 получают прямую ступень делителя, а вала 7 с шестерней 6 — ускоряющую. Картер 8 делителя выполнен отдельно от картера базовой коробки, но объединен с картером сцепления.
На рис 7.9 показана конструкция восьмиступенчатой коробки передач. Задний редуктор двухступенчатый, имеет прямую и пониженную ступени Главными особенностями конструкции коробки являются следующие" общий картер 1 для четырсхсту. пенчатой базовой части и заднего редуктора; оригинальное размещение зубчатых колес заднего хода. От зубчатого колеса 2 первой передачи ведомого вала базовой части коробки приводится во вращение зубчатое колесо 8 вала 7 заднего хода, который проходит в отсек заднего редукшра и с помощью свободно установленной шестерни 6 соединяется с колесом 4 первой пары редуктора Включение заднего хода производится муфтой 5. При таком размещении зубчатых колес заднего хода сокращается длина коробки. Промежуточные валы 9 и 3 выполнены заодно с зубчатыми колесами низших ступеней соответственно
Коробки передач механических трансмиссий
базовой части и заднего редуктора. Остальные зуОатые колеса промежуточных валов зафиксированы на их шейках с помощью мелкошлицевых соединений. Шлицевые участки на шейках вала занимают не более */в длины шейки, что облегчает сборку.
На рис. 7,10 показана конструкция девятнегупенчатой коробки передач. Коробка выполнена на базе пятиступенчатой и имеет задний двухступенчатый планетарный редуктор. Шестерни первой передачи и заднего хода выполнены заодно с промежуточным
Конструктивные схемы
173
174
Коробки передач механических трансмиссий
'\
Конструктивные схемы
валом 11. Остальные зубчатые колеса промежуточного вала выполнены попарно в виде блоков 12, 13 и напрессованы на вал Картер планетарного редуктора состоит из двух половин 9 и 10. Для смазывания подшипников зубчатых колес ведомого вала 8 и элементов планетарного редуктора установлен насос 14. Отбор мощности может производиться с торца заднего конца удлиненного промежуточного вала //, для чего последний выведен через картер редуктора и имеет на выходе поддерживающий шариковый подшипник
На рис. 7.11 показана конструкция дссятиступенчатой коробки передач Коробка имеет пятиступенчатую базовую коробку и вальный двухступенчатый редуктор Все зубчатые колеса прямозубые с постоянным зацеплением. Синхронизаторы установлены только в редукторе Базовая коробка имеет ряд передаточных чисел с высокой плотностью (q — 1,27). при которой возможно переключение передач
без синхронизаторов. Зубчатые муфты базовой коробки имеют небольшой диаметр и выполнены со скосами на зубцах, что облегчает включение пс редач Главной особенностью этой коробки передач является разделение силового потока на две ветви как в базовой коробке, так и в редукторе. Два промежуточных вала 3 установлены на подшипниках. Выравнивание нагрузок в параллельных ветвях обеспечивается применением в базовой коробке самоустанавлияающегося ведомого вала 4 Концы этого вала поддерживаются небольшими круглыми торсионами 9 и 10, а соединение редуктора с шестерней 5 выполнено с помощью самоустанавливающейся зубчатой муфты 8. Условие сборки обеспечивается применением на ведомых валах 4 и 6 базовой коробки и редуктора, а также на ведущем валу 1 зубчатых колес с Четным числом зубьев Для базовой коробки н редуктора применен общий картер 2 со съемной задней стенкой 7 Шестер
Корабли передач механических трансмиссий
ни If выполнена отдельно и установ-лева на ведущем валу 1 с помощью шлицевого соединения, обеспечиваю
щего некоторую степень самоуста повки.
7.3. ОСНОВНЫЕ РАЗМЕРЫ
Межосевое расстояние. Для соосных трехвальпых коробок передач с двумя степенями свобода и перазветвленюлы силовым потоком межосевое расстояние aw (в мм) может быть определено по величине крутящего момента на ведомом валу:
са1«=вйЛ|/‘Л1вых. (7.1)
где ka — 8,9-=-9,3 для коробок передач легковых автомобилей, ha — 8,6-4-9,6
Mamax, Ни. . НО 26Q
*'«>• мм • 8®
для грузовых автомобилей (большие значения относятся к коробкам с ускоряющей передачей, а также коробкам автомобилей с дизелем), — ~ Л^етах^т
Значения а^, и k0 для выполненных конструкций приведены в табл 7.1. Мсж/кевое расстояние многоступенчатой коробки определяется как меж осевое расстояние входящей в ее состав базовой коробки. В формулу (7.1) при этом следует подставить максимальное значение крутящего момента па ведомом валу базовой коробки, а коэффициент выбрать в пределах 9,5-4-11
Для коробок передач грузовых автомобилей ниже приведен рекомендуемый рациональный ряд межосевых расстояний
340—420 700 — 050 000—450
Межоеевые расстояния коробок передач легковых автомобилей нахо дятся в пределах 65—80 мм
Осевой размер коробки передач. Осевой размер"/ по картеру определяется шириной b пенней зубчатых колес, шириной В подшипников и осевыми
размерами // зубчатых муфт и синхронизаторов В табл 7.1 приведены значения /, /», В, Н. определенные ио базовому размеру коробки, которым является межосевое расстояние аа.
Рабочая ширина венцов зубчатых колес b tv (0,19-4-0,23) aw Большие
Мидель коробки
ГАЗ-53 ЗИЛ-130 ЯМЗ-236Н
zr «5S-110GP»**
ЗАЗ-968
ВАЗ-2101
ЯМЗ 238А »♦ Volvo «R61*
Мк mas >ia ведущем валу.
74/280
106/386 112/ЗВО 186/632 285/1800 402/2900 882/4500 637/4830
1100/2100 1250/3280 1200/2530 II60/3I6C
3.24(3.51*
Примечание
Основные размеры
177
значения относятся к более нагруженным зубчатым колесам Для выходной пары зубчатых колес заднего валыюго редуктора многоступенчатой коробки Ъ я> (0,34-0,4) aw
Подшипники, устанавливаемые в коробках передач механических трансмиссий, имеют ширину В яг (0,254-4-0,28) Са, для легковых автомобилей и В» (0,20 ч- 0,25) aw для грузовых
Осевые размеры зубчатых муфт и синхронизаторов зависят от конструктивных особенностей Двусторонняя зубчатая муфта с синхронизаторами обычно имеет Н о; (0,684-0.78) aw у легковых автомобилей и Н п 10.404-4-0.55) aw — у грузовых
Ниже приведены осевые размерь! I картеров коробок передач грузовых автомобилей.
Четырехступенчатой
(2.2 -2,7)
(2,7-3.0) о№
(3.2 -3.5) а^,
Для четырехступеичатой коробки легкового автомобиля I « (3,0ч- 3,4) aw
Диаметры валов. Размеры валов коробок передач выбирают исходя из условий обеспечения достаточной жесткости. Для трехвальных соосных коробок диаметр ведомого и промежуточного валов в средней их части (валы ступенчатые) d яг 0,45йц|; соотношение' между наибольшим диаметром d вала и расстоянием / между его опорами dll % 0,16ч-0 18 для промежуточного вала и 0.18—0,21 для ведомого
Диаметр ведущего вала в шлицевой части
d - kg'y Меmax.
где d — в мм: кд — эмпирический коэффициент, кд = 4ч-4,6; Л1£|Лах — максимальный крутящий момент дви-татедя, Н-м
Размеры и типы подшипников.
В трехвальных коробках применяют,
Модель коробки передач Задняя опора ведущего Опора промежуточного вала Опора ВеДочанп вала
передняя задняя передняя задняя
ЗАЗ-968 II1PI 25X62X17 РР1 30XC2XJ7 ШР1 25Х62Х 17 РК2 30X72X47 1IIP1 25X62X17
ВАЗ 2101 ШР1 30x75X19 ШРУ2 20X50x20 6 РР1 25 X 55X18 РС 19.ЭХ 25.ЗХ X 19.8 ШР1 30X72X19
—Мое кв ич - IIlPI РО РО РО ШР1
2141Ы 30X62X16 2.5X20-23 2,5X20—23 4.5X13—13 30x72X19
ГАЗ-21 ШР1 30 X 75X19 РО 3.5x30—21 РО 3.5X30—21 РО 5 5X15 8—14 I1IPI 30X75X19
ГАЗ-53 IUP1 45X85X19 PPI 35X72X17 П1Р1 35X80x21 Р0 7X17—14 ШР! 35X80X21
ЗИЛ-(30 ШР1 60X110X22 РРН 42X72X19 ШР1 40X90X23 РС 29.96X X43.S6X33 ШР1 50X110X27
ЯМЗ 236 Н ШР1 70X150X35 РР1 PPI 40X90X33 РК1 ШР1 45 X (20X29 PKI РРН 40X77,5x23 РРН I1IP1 55X140X33 РР1
ZF «5S-110GP» 85X150X28 LUPI 50.8X1WX35 ШР1 50.8X100X35 РРН 30X60X26 РРН 69.8 X 150X35 ШР1
Volvo «R61» 65X160X37 55х 120X29 52X80X22 46X80X31 65X160X37
однорядный; 111РУ2 —
ШР1 — шариковый
двухрядный;
РРУ2 — роликовый
178 Коробки передач механических трансмиссий
как правило, однорядные радиальные шарико и роликоподшипники легкой и средней серии Ниже приведены основные размеры таких подшипников, выраженные в долях межоссвого расстояния aw. размеры . . , <f 1) В Заднего вала. ведущего ... 0,15 <1 SO 0,22 ведомого . . . 0.40 0,90 0,22 промеж уточного 0,30 0.72 0 20 Псредпего. промежуточного нала 0.30 0.61 0.20 Передняя шейка ведомого вала имеет диаметр 0,23аш. Болес сложные и имеющие большую стоимость подшипники используют для одной из опор в двухвальных коробках передач легковых и спортивных автомобилей В коробках, схемы которых показаны на рис 7 4, одна из опор имеет двухрядный радиально-упорный подшипник. Наиболее часто такую конструкцию применяют для ведомых валок, имеющих на одном из концов коническую шестерпю главной передачи Диалогичные подшипники иногда устанавливают для одной из опор промежуточного вала трехввльпых коробок В* коробке передач, представленной на рис. 7.10, для ведущего 2 и ведомого S валов применены цилиндрические роликоподшипники, спсхмб-ные воспринимать значительные осевые силы Для промежуточного Бела 1! в'этой же коробке использованы конические роликоподшипники. Типы 11 основные размеры подшипников, уста иавливаемых в коробках передач механических трансмиссий, приведены в табл 7 2. первой передачи в коробках передач грузовых автомобилей большей грузоподъемности при малом числе зубьев шестерни (г = 12). а также для выходной нары заднего сального редуктора многоступенчатых коробок. Размерный ряд применяемых моту лей и исходный контур для зубчатых колес трансмиссии должны удовлетво рять требованиям ОСТ 37.001 222—80 и ОСТ 37 001 223—80. Угол наклона р линии зуба. Большинство зубчатых колес в коробках передач автомобилей выполняют косозубыми для уменьшения шума при работе и повышения прочности. Угол наклона линии зуба косозубых колес имеет следующие значения (в °) Коробки легковых автомобилей трехвальнме ... . 22—34 даухвальные . 20—25 Коробки грузовых автомобилей 18—26 При выборе угла наклона учитывают: необходимость обеспечения достаточного осевого перекрытия; ограничение осевой силы, действующей на под-< шинники валов, необходимость выдержать заданное межосевое расстояние; условие уравновешивания осевых сил на промежуточном валу (для трехвальных коробок) Для относительно узких зубчатых колес коробок передач достаточным является осевое перекрытие, при котором коэффициент Ер =- 1 Угол нак лона Р, удовлетворяющий условию Ер — 1, определяют из равенства Р — arc sin (ятп'Ь) (7.2) Практически для уменьшения осевой силы часто применяют зубчатые
7.4. ПАРАМЕТРЫ ЗУБЧАТЫХ КОЛЕС колеса с несколько меньшими углами наклона линии зуба В’зтих случаях необходимо проверять величину гео-
Нормальный модуль тл. Ниже приведены значения тп (в мм) коробок передач механических трансмиссий различных автомобилей. Легковое автомобиль класса: особо малого и малого . . 2,21—2,75 Среднего 2.75—3.0 Грузовые автомобили грузе-иодьемн остью МЭЛОЛ И среднеП . 3.5—4,25 большой 4.25 — 5.0 Зубчатые колеса с модулем, равным 5 или иногда 6 мм, применяют для метрического показателя плавности ke, равного отношению минимальной суммарной длины контактных линий в зацеплении к номинальной. Чт<х5ы в рс зультате уменьшения угла р по отношению к значению, удовлетворяющему равенству (7 2),* снижение плавности работы не ствло значительным, следует иметь ke 0,94. Проверку значения производим, используя ГОСТ 16532—70 «Передачи зубчатые цилиндрические эвольвентныс внешнего зацепления. Расчет геометрии» (приложение 5).
Параметры вубчшпых колес
179
Во всех случаях значение угла Р должно быть уточнено на основе за виеимостей между межосевым расстов-нием и принятыми параметрами зубчатых колес Перед уточнением угла решается вопрос о применении смещений.
Коэффициент смещения х исходного контура. Главное назначение смещения — повышение прочности зубьев. Передача, в которой число зубьев шестерни гщ 23 и передаточное число и Js 1,5, может выполняться без смещения (хш — хк = 0) При гш < 23 и и 2 передачу выполняют обычно разносмсщенной (хш > 0, Л< ~= — *ш) или смещенной (хш > хк, xs > 0)
В первом случае прочность зубьев шестерни и колеса приблизительно одинакова в результате некоторого повышения прочности зубьев шестерни н допустимого снижения прочности зубьев колеса. Во втором случае можно повысить прочность зубьев шестерни, практически не снижая (иногда повы сив) прочность зубьев колеса При гш < 23 и и < 2 передачу, как правило, выполняют смещенной Выбирая коэффициенты смещения, руководствуются специальной справочной литературой и приложениями 2, 3 ГОСТ 16532—70 На выбор смещений могут влиять геометрические условия Например, если при заданном модуле и одинаковых углах р требуется выполнить соседние пары зубчатых колес с различным суммарным числом зубьев гЕ, то это достигается введением смещений
Суммарное число зубьев г2 кинематической лары. После выбора межосевого расстояния aw и модуля тп выбирают сначала предварительное значение угла Рпр, например, удовлетворяющее равенству (7.2) или несколько меньшее Затем определяют суммарное число зубьев г2 пр -= =- 2аш cos ₽пр/«гп Величину гг пр округляют до целого значения zz и находят уточненное значение угла найлона
Р = arccosfO.Sm^Zj,/^).
(7 3)
Если при подборе чисел зубьев меняют z2, сохранив х£ = О. то угол р
также изменится в соответствии с равенстве»! (7 3).
Смещенная положительная передача имеет хх>0. Если предварительно выбраны значения аш, т , г£ и при этом желательно получить коэффициент х£, близкий к некоторому предварительно выбранному значению, следует задаться вспомогательной величиной у, несколько менылей желательной величины и определить необходимое значение угла Р и уточненное значение х£*
« — uw — утп.
Р - arceos(0,5znozE/c);
«1 - arctg (tg а/cos Р); (7.4)
atw — атетоз (и cos
(7 5)
= г1 (inv aiw~ i»vaf)/(2 tg a),
(7 6)
где a — угол профиля исходного контура.
Если смещения в передаче применяют для компенсации уменьшения z£t что иногда делается при подборе чисел зубьев, или уменьшения угла р с целью уменьшения осевой склы, то необходимое значение х£ определяют, используя зависимости (7 4)—(7.6). Предварительно находят межосевое расстояние условной несмещенной передачи- о — 0,5/nnz2/cos р (где z£ и Р — скорректированные величины).
Осевые силы на косозубых колесах промежуточного вала трехвальной коробки передач уравновешены при условии tgpn/dn’ — tgPi/dj (где Р„ и d,f — соответственно угол наклона липни зубьев и делительный диаметр ведомого зубчатого колеса привода промежуточного ваза, р, и di — то же ведущего зубчатого колеса включенной передачи). Практически допускается небольшая избыточная сила, действующая в одном папразлении на всех передачах. Осевая сила не уравновешена на первой передаче и задкам ходу, если зубчатые колеса этих передач прямозубые.
Коробки передач механических трансмиссий
Параметры зубчатых колес 181
Продолжение табл 7.3
Передаче гвщ мм Р *вщ | *вм
ямз-гзбн
Привода промежуточного вяла Первая Вторая Заднего хода Привода промежуточного вала Первая Вторая Четвертая Заднего хода Дополнительного редуктора 28 18 22 33 47 16 21 25 21 28 36 19 28 38 62 47 37 23 26 62 46 61 46 38 30 27 4S 42 35 32 32 32 32 28 28 К® 31,5 38 33,5 3| 30 32 30 30 4.5 4.25 4.25 4.25 4,25 4,25 4.25 мАЗ, т 4.25 5 4.5 4.5 4.5 1.25 5 4.5 26° 22' 20' 0 26° 24® "о 0 п 15 18“ 0 17’ 19’31* 21’ 0 0 19’ 0 Ю.4 +0.653 +0,408 0 л-0,4 т 0,1 +0,695 +0.7 +0.766 +0,363 -f 0.212 -f-0,572 -1-0,628 —0.423 0 - 0,4 ' 0 +0.328 + 0,7 +0.14 —0.4 —0,366 —0,172 —0,216 +0.212 0 0 —0.1 -! 0,242
Для несмещенной или равносме-щенной прямозубой передачи суммарное число зубьев определяет из равенства zS(1p= 2аш/тп При = О значение 2Гпр может быть целым числом только в том случае, если межосевое расстояние кратно модулю. В противном случае z£ вр округляют до целого менылего числа г£( и передача при заданных значениях aw и т может быть выполнена только смещеннг|й с х£>0 Необходимое значение при этом рассчитывают в следующем порядке:
a s^0,5mzj.;
«щ, = arccos (я cos «/««;);
*s — г» (lnv aw ~ ,nv е)Л2 а)-
Для увеличения х£ с целью повышения прочности зубьев можно дополнительно уменьшить z£ на один-два зуба
Для прямозубых передач заднего хода может быть определено межосевое расстояние при выбранных значениях zz, т, хю, хи(х£)-
inv aw = (xs2 tg a/zs) -I- inv a;
aw C06 a/cos aw.
Зпачения параметров зубчатых колес коробок передач механических трансмиссий приведены в табл 7 3.
Число зубьев зубчатых колес. Для определения чисел зубг.еп ведущего (гВщ) и ведомого (гьм) зубчатых колес пары используют систему двух уравнений
где tip — передаточное число от ведущего зубчатого колеса к ведомому.
Определение z£ рассмотрено выше. Для решения системы (7.7) необходимо определить также величину ар. Для передач переднего хода двухвальных коробок (см рис. 7 4) up — = И/ (где щ — передаточное число коробки) Для передач переднего хода трехвальной коробки с двумя степенями свободы (см. рис 7.3, в) Uf = = unupi (где uu — передаточное число пары привода промежуточного вала; Upt — то же пары данной i-Й передачи). Величину иП целесообразно определять исходя из заданного передаточного числа «1 первой передачи. При этом учитывают следующие ограничения шестерня первой передачи должна иметь размеры, позволяющие выполнить промежуточный вал до-
Коробки передач механических трансмиссий
статочио жестким, число зубьев этой шестерни по условию качества зацепления не должно быть менее 12; шестерня ведущего вала должна иметь размеры, позволяющие выполнить гнездо под передний подшипник ведомого вала, для обеспечения сборки желательно, чтобы внешний диаметр этой шестерни не превышал размер отверстия в картере под подшипник ведущего вала, для уменьшения нагрузок большая часть общего пере даточного числа первой передачи должна приходиться на пару первой передачи.
Распределение передаточного числа Mt оказывается рациональным, если число зубьев ZiFJIl шестерни первой передачи будет находиться в следую щих пределах: г1вщ = 17-5-15 для коробок передач легковых автомобилей («4 — 3,5-т-3,8) и г2Е1ц — 16-5-12 для коробок передач грузовых автомобилей («j — 6-5-8) Меньшие значения ZiDiy относятся к коробкам передач с большими значениями Wj и большим модулем зубчатых колес пер, в<5й передачи. '
Передаточные числа отдельных пар первой передачи «р1- (zls—г1вщ)/*1вщ; пары привода промежуточного вала «п — Ui/ujn; других пар передачи переднего хода upj = и/пп Аналогично определяют передаточные числа отдельных нар зубчатых колес базовой коробки многоступенчатых коробок пе редач с тремя степенями свободы. Исходными при этом являются передаточные числа базовой коробки.
Для дополнительного редуктора многоступенчатой коробки передач передаточные числа отдельных пар зубчатых колес определяют исходя из схемы редуктора и его диапазона Од.р. Для переднего делителя, имеющего прямую и одну редукторную (новы шающую или понижающую) ступени (см рис. 7 6, о), передаточное число ид = гД- вм/гд.щц— «р.и«п(где «р.н“ — £>д. р для понижающего делителя; кР.н = 1»Д-Р - для повышающего).
Для заднего дополнительного ре дуктора, имеющею прямую и понижающую ступени (см рис. 7 6, 6). передаточные числа отдельных пар зубчатых колес следующие: «р.н —
^zxi гт.вщ^'гт.вщ>
и «с — передаточные числа соответственно тихоходной и быстроходной пар редуктора, z£ и гт.вш —с<мт" bcictbchho суммарное число зубьев и число зубьев шестерни тихоходной пары редуктора Величины г£т и гт.вщ предварительно выбирают.
Зубчатые колеса заднего планетарного редуктора (рис 7 6, в). Ведущим звеном в редукторе является солнечная шестерня (zd), ведомым— водило (h), а тормозным — эпициклическое зубчатое колесо (Z(,) Высшая ступень (прямая) получается при блокировке механизма путем соединения эпициклического колеса с водилом, низшая — остановкой колеса Передаточное число низшей ступени вр.и — — 1 + (zfr'Zu). Число сателлитов п», — 3-5- 5, чаще применяют tip — 5. Межосевое расстояние заднего планетарного редуктора sv (0,5-5--4-0,55) «а,б (где ацг, — межосевое расстояние базовой коробки).
Предпочтение отдается прямозубым передачам Модуль зубчатых колес в выполненных конструкциях находится в пределах 2,75—3,5. Число зубьев гь и ги и число сателлитов подбирают так, чтобы удовлетворялись условия сборки, соосности и размещения. Если заданное передаточное число и условие сборки обеспечиваются при ta + Zg — гь — Zg (где Zg — число зубьев свтеллита), то коэффициенты смещений зубчатых колес редуктора должны удовлетворите равенству xsag " x2bgl т е ха xg ““ xb xg-Если передаточное число и условие сборки обеспечиваются при ги -|- zg ф -^гъ — Zg, то для соблюдения условия соосности, заключающегося в равенстве межосевых расстояний сателлита во внешнем зацеплении Ooug и внутреннем c^z.g, необходимо применить компенсирующие смещения. Значения и xxtg при этом рассчитывают:
°cg ~ 0.5/п (Св -}- гв);
Ubt = 0,5т (Zb — Zg); awag - arccos (aog cos a/c^p); auAg = arccos (e£,gcos a/«u,p).
Элементы управления
183
*1* Н*
— inv а)/(2 tg а);
¥Sfcfi=e - ^(’1*°^-
— inv а)/(21g а).
Чтобы избежать неблагоприятных значений х, разница между величинами (гя ~r xg) и (гь — xg) должна быть небольшой В выполненных конструкциях эта разница не превышает трех.
7.5. ЭЛЕМЕНТЫ УПРАВЛЕНИЯ
Для коробок передач с двумя степенями свободы наибольшее распространение получило управление с механическим приводом переключения передач При достаточно близком расположении коробки передач и рабочего места водителя рычаг и механизм переключения размещают в крышке коробки Привод в этом случае — непосредственный. В коробках передач легковых автомобилей рычаг переключения иногда устанавливают на картере удлинителя или в специально выполненном кронштейне крышки коробки передач для наиболее удобного размещения рычага у рабочего места водителя При удаленном расположении силового агрегата, в том числе при компоновке кабины над двигателем, применяют дистанционное управление Дистанционное управление с механическим приводом иногда заменяют полуавтоматическим или автоматическим
^Перемещение зубчатых муфт или передвижного зубчатого колеса при переключениях передач производятся с помощью вилок Последние имеют или поступательное перемещение, ийи качательное. Наиболее распространен привет с поступательным перемещением вилок (см рис. 7 8, а н 7.9) Привод с качательным движением вилок применяют, например, для коробки передач, показанной на рис 710. Вилки 3, S, 7 установлены на игольчатых подшипниках на осях /5, закрепленных в боковых стенках картера /. Привод к вилкам 5 и 7 осуществляется продольными штангами 4 и 6.
Механизм переключения передач, кроме его основных элементов, включает устройства для фиксации ней-
трального положения и включенной передачи (фиксаторы) и предотвращения одновременного перемещения двух вилок (замок), а также предохранитель, затрудняющий перевод рычага переключения в положение, при котором может быть включен задний ход (иногда и первая передача).
Удобство управления при механическом приводе обеспечивается рациональным расположением рычага переключения и ограничениями расчетного усилия, прикладываемого к рукоятке рычага, хода рычага, числа его положений (числа штоков).
Для многоступенчатых коробок передач с тремя степенями свободы применяют комбинированную систему управления. Базовая коробка имеет управление с механическим приводом, а дополнительный редуктор, как правило, — преселекторное, в котором используется пневматический или электропневматический привод. На ряс. 7 12 показана принципиальная
184
Kopo&ji передач механических трансмиссий
схема управления делителем многоступенчатой коробки передач В этой схеме используется пневматический привод Выбор ступени делителя про изводится водителем с помощью переключателя /, устаноалеиного на рычаге переключения передач базовой коробки Чтобы после установки переключателя / в положение включения требуемой ступени делителя произошло выключение предшествующей ступени и включение требуемой, необходимо вык лючить сцепление При этом упор б, перемещаясь вместе со штоком привода сцепления, воздействует на клапан 5 включения ступеней делителя
Зубчатые муфты. В коробках передач зубчатые муфты выполняют с прямыми зубьями, имеющими наиболее технологичный ЭВОЛЬВСНТНЫЙ профиль. Для муфт корыбйк передач легковых автомобилей модуль т = 2,04-2,5 мм; грузовых автомобилей т — 2,54-5,0 мм.
Величину делительного диаметра d зубчатого венца муфты и параметры зубьев выбирают. Необходимая длина зуба I (в мм) предварительно может быть определена:
7 « 2Мм/(&й<тсм).
где Л4М — момент, передаваемый муфтой на режиме максимального момента
Статистические уровни
номинального напряжения смятия в зубчатых муфтах коробок передач механических трансмиссий
Кор.«Ткй передач Передача °см" МПа
Легксвого Высшая 10—20
автомобиля Низшая Промежуточная 20—45 15—35
Г рутового Высшая 20 40
автомобиля Низшая Промежуточная 40-100 30—60
Многогтуиел-чвтая (задние дополнительные редукторы) Низшая 1 30— 200
С ряэпет- Низшая базовой 60—
пленным коробки 140
силовым Низшая 1 допел- 120—
ПОТОКОМ нительного редуктора 300
’ Супеиь
двигателя, Н-м, г — числи зубьев, Л — активная высота зуба, мм; всм — номинальное напряженке смятия, МПа
Значения <тсм для выполненных конструкций зубчатых муфт приведены в табл, 7 4 Большие значения <тгм относится к зубчатым муфтам с меньшим временем работы под нагрузкой Зубчатые муфты коробок передач с раз-веталенным силовым потоком передают только крутящий момент, и в их соединении отсутствует поперечная сила Поэтому для них принимают повышенные значения осм.
Для уменьшения хода вилок переключения и осевого размера коробки передач 'стремятся уменьшить длину зубьев за счет увеличения диаметра. Параметры зубчатых муфт некоторых коробок передач приведены в табл 7 5 (где Dud — наружный и внутренний диаметры соответственно охватываемой и охватывающей деталей; I — рабочая длина зуба; г — число зубьев муфты).
Кроме достаточной прочности и компактности зубчатые муфты должны Обеспечить невозможность самовыключения год нагрузкой Самовыключение может явиться следствием ряда дефектов неполного (не на всю длину Зубьев) включения муфты вследствие погрешностей в исходных положениях соединяемых элементов; неисправности или чрезмерного износа фикса торов положений вилок; неравномер кого изнашивания зубьев муфты по длине Отсутствие погрешностей в нс ходном положении элементов обеспечивается при проектировании разработкой допусковой схемы.
На рис. 7 13 показаны основные виды муфт и варианты выполнения их зубьев. Для уменьшения вероятности самовыключения зубья муфт выполняют или с небольшой конусностью по длине (рис. 7.13, в), или с выступом по длине (рис. 7 13, г). Зубья с конусностью имеют у торца большую толщину Осевая сила, возникающая пол действием нагрузки, препятствует выходу их из зацепления Под нагрузкой в сопряженных зубьях создается замок, препятствующий самовыключению В конструкции, показанной на рис 7 13, б, зубчатые венцы двусторонней муфта выполнены
186
Коробки передач пептических трансмиссий
трехрядными с более тонкими зубьями в среднем ряду Утоиьшение зуба составляет (0,12—0,15) т Вследствие этого под нагрузкой во включенной муфте создастся замок, препятствующий самовыключению.
Синхронизаторы. В ступенчатых коробках передач устанавливают главным образом инерционные синхронизаторы с конусными поверхностями трения. Незначительное применение имеют инерционные дисковые синхронизаторы. Конструкции инерционных синхронизаторов разнообразны Однако любая из них в качестве обязательных имеег элементы трения и блокировки. Вспомогательными являются элементы упругой связи между деталями. В устройстве, показанном на рис 7 14, а, элементами трення являются конусное кольцо 2 я конус
иый выступ на зубчатом колесе 3 В качестве алемевгов блокировки используются конический поясок в отверстиях диска передвижной муфты I и пальцы 4, входящие в эти отверстия Пальцы жестко связаны с кольцом 2 С помощью подпружиненных шариков 5 и пальцев 6 упруго связаны муфта 1 и кольцо 2 В устройстве, показанном ва рис. 7 14, б, элементы трения вы полиены на передвижной муфте 1 и блокирующем кольце 2 В качестве элементов блокировки используются внутренние зубцы блокирующего кольца 2 и торцовые участки зубьев полумуфты, нарезанной на зубчатом колесе 3. С помощью пружины 4 упруго связаны зубчатое колесо 3 и блокирующее кольцо 2.
Элементы упругой связи способствуют установке деталей системы в нейтральное положение и одновременно не препятствуют блокировке системы, разблокировке и включению передачи.
Рнс. 7.14. Конструктивные схемы инерционных синхронизаторов:
а — с блокирующими пвньцвмн;
Элементы управления
Э<}>фекгив11о«ть синхронизатора оценивается временем /с синхронизации при условии, что соблюдены ограничения по усилию на рычаге переключения и давлению на поверхностях трения. При предварительном выборе основных размеров синхронизатора время /с для коробок передач легковых автомобилей принимают в пределах 0,15—0,3 г—для высшей передачи и 0,5—0,8 с — для низшей, для коробок передач грузовых автомоби лей- 0,3—0.8 с — для высшей пере дачи и 1—1,5 сдля низшей. Для ступеней заднего редуктора много ступенчатой коробки принимают fc — = 1+2 с
Необходимый момент трения синхро низатора
= (7.8)
где .Иц в Н-м, /в — суммарный приведенный момент инерции для той части системы, угловая скорость которой изменяется под действием момента Afjt, кг-ы*; и — передаточное число от вала, к которому приводится момент инерции, к включаемому зуб чатому колесу; Aci>na4 — начальная разность угловых скоростей вала и установленного на нем включаемого зубчатого колеса, рад/с.
При определении величин и и Дынач целесообразно руководствоваться данными табл. 7 6 и 7 7 В табл 7.7 <oN и <i>v — угловые скорости соответственно при максимальных мощности двигателя и крутящем моменте
Расчетный средний радиус поверхности трения синхронизатора (рис.7 14)
гм — Мц sin y/(pQ),
где у — половина угла конуса; р — коэффициент трепня; Q — осевая сила на передвижной муфте, Н
Для пары ствль—бронза принимают у = 6-Ь 7°, р ~ 0,06.
Осевая сила
Q = РрИр.мЧ,
где Рр — нормативное усилие на рукоятке рычага переключения, Н, для легковых автомобилей и автобусов
Рр = 60 Н, для грузовых Рр =-- 100 Н; ир.м — передаточное число от рукоятки рычага к муфте (отношение хода ру кояткн к ходу муфты), 1] — КПД привода переключения
Расчетное значение Гц корректируют для достижения соответствия размерам зубчатых муфт и колес.
Необходимая ширина кольца по образующей конуса
бр. — МрЮлирягр},
где — в м; рм — условное допустимое давление, отнесенное ко всей поверхности трения, в предположении отсутствия на ней канавок, для пары сталь — бронза pN = (I -ь 1,5) МПа-Основные размеры некоторых синхронизаторов даны в табл 7.8 Иногда все синхронизаторы коробки передач выполняют с одинаковыми размерами. В этих случаях, чтобы не было чрезмерной недогрузки синхронизаторов высших передач, допускают несколько повышенную нагруженность синхронизатора более низкой передачи.
Равенство (7.8) является приближенным и используется для прсдва рительного выбора размеров синхро низатора Последующий проверочный расчет выполняют с учетом умсныпе ння скорости автомобиля за время синхронизации Влиянием соцротвв Ленин масляной ванны я сил трения в подшипниках и зубчатых зацеплениях пренебрегают. Для сухих сцеплений пренебрегают также моментом ведения лиска. При проверочном расчете определяют время синхровизации и удельную работу трения за одно включение.
Время синхронизации
(7.S)
где /с — в с; Ми — момент трения синхронизатора, рассчитинпый при реально принятом радиусе Гц, Н-м; вс — угловое замедление вала, на котором расположен синхронизатор, рад/с8.
Знак минус в выражении (7 9) относится к переключению на соседнюю высшую передачу, плюс — на соседнюю низшую.
188
Коробки передач механических трансмиссий
7.6. Формулы для определении Jj. и и Д<оиач
Переключаемый объект Условия переключения 7 2 (Ван. к которому приводится момент) нач
Трехвальная коробка ягре-Дач. базовая коробка многоступенчатой коробки передач с задним дополнительным редуктором (см рис. 7.6. б. в). Последовательное при включенной ступени редуктора ~ Jc + + ^пр“п* "* + S ^iut2 +J6 з“п? б. з (Ведущий) “»lv -“й±>1
Базовая коробка многоступенчатой коробки передач с передним делителем (см рис. 7 6. е). Прямая ступень в делителе JZ = Jc + Jti + ^лр“1Г + + 2 Jiu'ii + Ai. з“п! б 3.+ + S3?n. д (Ведущий) “к±1 I “к
То же. Редукторная новы •f2=^c+^ + JrIP«^Z + - ! 1
тающая или понижающая ступень в делителе + 2 Jiupi + J6. з“д* б. з + (Ведущий делителя) Д| “рк “рк±| 1
Передний делитель многоступенчатой коробки передач (см. рис. 7 6. а). С пря мой ступени на редукторную при включенной передаче в базолой коробке JS=<rc 4- £1 1
То же. С редукторной ступени на прямую JX=Jc -«I- £1 1
Задний валькый дополнительный редуктор (см. рис. 7 6, б). С понижающей ступени на прямую при включенной передаче в ба новой коробке JS = Ja + J6. p" c“ + + JTup?H (Ведомый базовой короб- ь>д 1, “б. в| “Р.п 1 1
То же С прямой ступени на л снижающую = Ja + ^6-p“ c + JT1‘p? и -“М,-и6. и 1 “р.н 1 “р.н
Задний планетарный редуктор (см. рис. 7.6. а). С по пикающей ступени на прямую при включенной передаче в базовой коробке JX = Jb + Ja (26,,2e)® + + VeCWa (Эпициклическое зубчатое колесо планетарного редукторе) ®д/“б.в“р.н 1
То же. С понижающей ступени на прямую Jb+Jn(2J>/2n)® + + V«W <W“6.H 1
Базовая коробка многоступенчатой коробки передач с задним дополнительным редуктором (см рис. 7.6, б. 6). С высшей передача на пившую после включения прямой ступени в редукторе •*2 = Л: + Лт + Лтр“п + + 2 + ^6. з“тъ б. з (Ведущий базовой короб- “«£7 р.н! “б.н
Элементы управления
189
Продолжение табл 7 б
Переключаемый объект Условия переключения (Вал, к которому приводится момент) д“кач
Базовая коробка ыпогосту псичатой коробки передач с задним дополиителыты редуктором (см. рис 7.6,6. е). С низшей на высшую передачу после включения поив жающей ступени в редукторе J £ — Jc + + Jnpun "1" + 2j Ji“i S + J6 з“п~. 6 a „1——-M A1 “б. В “б. 11 1 "б. в
— ведомого диска (дисков! сцепления;
Моменты инерции*
иля блока заднего хода с постоянным зацеплением; 7Д — шестерни лары делителя; а — ведомого вана базовой коробки в сборе с ведущим колесом заднего редуктора; Jg.p—
— слптпетстлелно включаемой и вы*
коробкН передач с передним делителем на редукгс
«'«.в и "б.в
— от шестерни данителя к ве-
7.7. Ориентировочные значения расчетной угловой скорости (рад/с)
Направление переключения передач Карбюраторные двигатели автомобиля Дизель грузового автомобвля
легкового грузового
С низшей на вме- С высшей на низ- (0.6—0,7) <йя (0,4—0,6) ti>N (0,7-О.В) Од,, не менее (0,э—0,6) ®w, не менее Ыд( (0,75—0.85) ььу (0,9-1,0) ам
Момент трения Л1и — sin у и угловое замедление ес = = 84’йс.к/(®Гк’]с.|0 (где нс. к н 1)с.н—
соответственно передаточное число и КПД на участке трансмиссии от элемента синхронизатора, соединенного
190
Коробки передач механических трансмиссий
.8. Основные размеры и показатели напряженности инерционных синхронизаторов коробок передач механических трансмиссий
Модель коробки передач Передача, 'и мм ts 'С мм 'с- с “и- Дж,'см’
Первая 37 29 4.97 0.98 U.S
ВАЗ-2101 Вторая 37 у 29 42 4.97 0,64 10.0
Третья 37 7 29 42 4,97 0.57 9.8'.'
Четвертая 37 7 29 42 4.97 0,31 6.57
Первая 23 10 29.5 40 2.8 1.13 8.9
«МоскВнч-2140» Вторая 23 10 29.5 40 2,8 0,92 8.61
Третья 23 10 40 2.8 0.38 6,13
Четвертак 23 10 29.5 40 2.8 0,22 3.14
Первая 30.5 9.5 37 35 4.61 0,94 7.9
ГАЗ-24 Вторая 30.5 9.5 37 35 7,61 0,83 8.15
Т ретья 27,5 9.5 33 35 3.81 0,50 6.30
Четвертая 27,5 9.5 33 35 3,81 0,28 4.87
ГАЗ 63 Третья 31 10 39 35 5.08 1,70 21.1
Четвертая 31 10 39 3S 5,08 0.92 18,6
ЗИЛ-130 Вторая 45 8 11 57 30 12,2 2,26 17,34
Третья 15,8 57 30 12.2 0.88 8.42
Четвертая 40 11 49 30 9,27 0.57 5.65
Пятая 40 п 49 30 9.27 0.34 4.28
ЯМ34-236Н Вторая 75 16 80 26 47,2 1.59 19.42
Третья 75 16 80 26 47.2 0,57 9.03
Четвертая 59 16 65 26 29,2 0.61 11,65
Пятая 59 16 65 29.2 0.26 4.82
КамАЗ, тип 1Б Вторая 92 IT 82 30 75,7 1 18 19.48
Третья 92 1 *. 82 30 67.0 1.02 11.17
Четвертая 65 15 75 30 33.4 0.84
Пятая 57 15 75 30 25.7 0.61 9.70
СТтуплик
низшая 63 17 70 30 35.6 0.77 13 73
высшая 63 17 70 30 35,6 0.31 9.05
Вторая 65 11 78 35 24.6 2.05 35.9
ZF«5S-1IOGP. Третья 65 78 35 24.6 1,00 21.7
Четвертая 65 78 35 24.6 0.72 14.9
Пятая 65 11 78 35 24.6 0.60 14.4
1 гуг.я>гь>-
низшая 82.5 13,5 94 35 48,5 ? а 39,4
Высшая 82,5 13,5 94 35 48.5 1.1 25.4
Volvo «R61> Первая 70 13 65 40 33.5 1.39 6,05
Вторая 70 13 65 40 83.5 1,30 It’.8-
Т рать я 64,5 60 40 24.1 1,02 It
Четвертая 64,5 11 60 40 24,1 0.53 7,8
Ступа кь.
низшая 83.5 27.6 72 36 100 0.64 8.9
высшая 76 17 72 36 50.4 0,33 14.1
* Значения М определены исходя из среднего давления pv = 1,4 МПа и коэффициента трения и = 0.06.
Типы гидромеханических передач
191
с массой автомобиля, к ведущим ко лесам автомобиля, ф — коэффициент сопротивления движению).
Работа трения (в Дж) = —• 0,5Л1ц/с (Ашнач ± ecfc) Знак плюс относится к переключению на соседнюю высшую передачу, минус — на соседнюю низшую Удельная работа трения (в Дж<сма) ьум — (2.1^5),)
(где Гц и Ьц — в см)
Значения /с и w^, полученные при проверочном расчете для ряда выполненных конструкций, приведены в табл. 7 8 Они определены исходя из следующих условий для синхронизатора высшей передачи ф — 0,02, для остальных синхронизаторов ф = = 0,05, значения а>ц относятся ко всей поверхности трения.
Поверхн«тсп| блокирующих элементов выполняют под углом ₽ (рис. 7 14), удовлетворяющим условию
tg F «S (РГц 'ГВ Sin т>) + мс, (7.10) где гб — средний радиус, на котором расположены блокирующие поверхности. pg яг и « 0,06
Удовлетворяя условию (7.10), угол р. однако, должен быть больше угла, при котором становится невозможной разблокировка передвижной муфты. Практически целесообразно принимать р лишь на 2—У меньше макси» мвльного значения, удовлетворяющего условию (7 10). Значения угла р для некоторых конструкций указаны в табл. 7 8
В соответствии с ОСТ 37 001.007—70 синхронизаторы коробок передач грузовых автомобилей средней и большой грузоподъемности в условиях стендовых испытаний должны обеспечивать время переключения 1пер =£ I с при усилии на рукоятке рычага переключения ₽р 150 Н. В процессе испытаний ведомый вал неподвижен, переключение вверх производится при максимальной частоте вращения вала двигателя, а вниз — при частоте, равной 1/3 максимальной. Момент, создаваемый на ведущем валу при выключенном сцеплепии, в этим случае не должен превышать 1,5 Нм.
8
Гидромеханические передачи
8.1. ТИПЫ ГИДРОМЕХАНИЧЕСКИХ ПЕРЕДАЧ
Гидромеханические передачи (ГМП) состоят из гидромуфты вли гидротрансформатора, многоступенчатого механического редуктора и системы управления. Дополнительным элементом ГМП может быть тормоз-замедлитель.
Наибольшее распространение Получили ГМП, построенные по полнопо-точной схеме вся мощность двигателя поступает на насосное колесо гидро трансформатора, а турбинное колесо связано с ведущим валом механиче
ского редуктора. Ограниченное применение имеют дифференциальные ГМП, в которых на некоторых режимах мощность передается параллельно через гидравлический и механический элементы Некоторые европейские фирмы выпускают передачи, в которых низший диапазон обеспечивается в результате принудительного вращения в обратном направлении реактора гидротрансформатора.
Для эффективной работы ГМП необходимо, чтобы ее КПД в основной рабочей зоне составлял не менее 80 %. Стремясь расширить зону высоких
192
Гидромеханические передачи
КПД, нередко допускают снижение максимального коэффициента трансформации до 1,8—2,8 и для обеспечения необходимого силового диапазона увеличивают число передач в механическом редукторе до четырех на легковых автомобилях и городских автобусах и до пяти—восьми на грузовых автомобилях и междугородных автобусах.
Для работы в составе полнопоточней ГМП наибольшее распространение получили одноступенчатые гидротрансформаторы с центростремительным турбинным колесом, центробежным насосным колесом и осевым реактором, установленным на муфте свободного хода, — комплексные гидротрансформаторы (см. разд. 1)
На легковых автомобилях получили распространенис гидротр ансформаторы со штампованными лопатками насосного и турбинного колес и литым колесом реактора, имеющие, как правило, небольшой коэффициент транс формации в стоповом режимс_(1,8—2,5) Я значительную прямую прозрачность 12—2,5). На грузовых ^автомобилях. авг<>бусах, карьерных самосвалах, а также автомобилях большой грузоподъемности и повышенной проходимости применяют комплексные гидротрансформаторы с прямой прозрачностью (1,6—1,8), с литыми лопастными колесами, часто с двумя реакторами, отключаемыми поочередно механизмами свободного хода.
Однако в связи с наметившейся тенденцией снижения максимального коэффициента трансформации многие изготовители гидропередач отказались от применения четырехколесных гидротрансформаторов. Отчасти это решение объясняется внедрением новой технологии производства лопастных колес, позволяющей существенно повысить качество обработки поверхностей колес.
В двухпоточных передачах типа SRM применяют более сложные гидротрансформаторы. имеющие два центростремительных турбинных колеса с расположенным между ними реак тором
Для устранения кавитации и обес печения циркуляции рабочей жидко сги в связи с необходимостью отвода
теплоты на входе iндротрансформа-тора поддерживается давление подпитки, для чего на выходе устанавливают жиклер или редукционный клапан, 01 рани<1Ивающий снижение давления в полости гидротрансформатора. Давление подпитки поддерживают па уровне 200—400 кПа для гидротрансформаторов трансмиссий легковых автомобилей и 400—800 кПа для гидротрансформаторов грузовых автомобилей большой грузоподъемности. В ГМП легковых автомобилей с двигателями мощностью свыше НО кВт, автобусов и грузовых автомобилей для охлаждения рабочей жидкости применяют масляные радиаторы или. водомасля-ные теплообменники На автомобилях с двигателями меныпей мощности потери теплоты в гидропередаче сравнительно невелики. В этом случае охлаждение рабочей жидкости гидротрансформатора обеспечивается установкой на поверхности насосного колеса лопаток для обдувки
На подъемно-транспортных машинах, работающих в режиме разгон— торможение (вильчатые, фронтальные погрузчики), применяют гидротрансформаторы с высокими преобразую-1цими свойствами и сравнительно высоким КПД в зоне малых передаточных отношений, нскомплексныс и неблокируемые
8.2. МЕХАНИЧЕСКИЕ РЕДУКТОРЫ
Основные соотношения планетарных механизмов. Планетарным механизмом называется механизм, состоящий из зубчатых колес, в котором геометрическая ось хотя бы одного колеса подвижна. Зубчатое колесо с подвижной геометрической осью называется сателлитом (g — см. эскизы к табл. 8.1). Са|е.ъчит может имен» один или иесколько зубчатых венцов (g, f) либо состоять из находящихся в зацеплении зубчатых колес Звено, в котором установлены оси сателлитов, называется еодилом (Л) Зубчатое колесо, геометрическая ось которого совпадает с основной осью механизма, называется центральным (k, а также а, Ь). Основным звеном планетарного механизма называется
Механические редукторы
193
звено, воспринимающее в нагруженной передаче внешний момент и являющееся центральным
Планетарные механизмы обозначают в соответствии с обозначениями их основных звеньев. Планетарные механизмы, в которых основными звеньями являются два центральных колеса и водило, обозначаются 2k—h.
Планетарный редуктор может состоять из ОЧНОГО планетарного механизма или нескольких, соединенных друг с другом. Планетарный механизм, у которого вращаются все три основных звена, называется дифференциальной передачей или диффорен циалом. Классификация трехзвеиных планетарных механизмов типа 2k—h приведена в табл 81. Наибольшее
распространение в планетарных редукторах автомобильных ГМП имеют трехзвенные механизмы типа А п D. Значительно реже используют механизмы типа В, С, Е.
Кинематические и силовые характе-риствки трехзвенного планетарного механизма определяются его кинематическим параметром Р, ранным передаточному числу от звена о к звену b при остановленном водиле Л
р - *& = К ~ %)/К - ыа) =
= («в ~ —лй), (8.1}
где <о и я — соответственно угловая скорость и частота вращения элемента авеяа. Здесь и далее верхний индекс относится к остановленному звену»
>.1. Классификация трехзвенных планетарных механизмов
Тип Схема Сателлиты Зацепления Значение параметра Р
Л ifitu Однопекцоные Разноименные гЬ_
В Двухвеицовые (блочные) • г1> Гв
с ДкухвеииС'йие Одноименные — два внешних или дли внутренних
D Окковснвовые пар- Разноименное цен тральных колес + £
То же Одноименное Нен тральных колес '-Г
Е л JQa • Конические аубчя тыс колеса гь
П/р А- И. Гришкевича
194
Гидромеханияеские передачи
Выражения для определения параметра Р (с учетом знака) указаны в табл. 8.1. Уравнение (8 1) известно как формула Виллиса и может быть непосредственно использовано чин расчетов при анализе и синтезе планетарных редукторов. Однако удобнее использовать его в преобразованном ваде
4a-Pnb^H-P)nh. (8 2)
Написанное в таком виде уравнение часто называют основным уравнением кинематики трехзвенного механизма. В ряде случаев используют параметр
= —Р. При этом основное уравнение кинематики принимает вид
п«-г = + /<)«/.- (8 3)
Параметры зубчатых колес, составляющих планетарные механизмы, должны удовлетворять нескольким условиям
Условие соседства. В планетарных цехаю1змах для обеспечения зазора между сателлитами сумма радйуспв окружностей выступов соседних сателлитов должна быть меньше расстояния между их осями
Условие сборки. При установке в планетарном механизме нескольких сателлитов числа зубьев центральных колес должны быть связаны с числом сателлитов Лр и их расположением на водиле Сателлиты обычно равномерно распределяют но окружности Для механизма типа А условие сборки состоит в том, что сумма чисел зубьев центральных колес а и b должна быть кратна числу сателлитов
Условие соосности. Оси центральных колес планетарных механизмов должны совпадать с основной. В этом случае в механизме с цилиндрическими передачами зацепления центральных колес с сателлитами имеют одинаковое меж осевое расстояние Исключение составляют механизмы, в которых сателлит состоит из двух зубчатых колес, находящихся в зацеплении
Числа зубьев колес зацепления быстроходных планетарных механизмов не должны иметь общих множителей Не рекомендуется, чтобы числа зубьев центральных колес были кратными числу сателлитов.
Планетарный редуктор состоит из комплекта трехзвенных планетарных механизмов и элементов управления — блокировочных тормозов и вращаю 1ЦИХСЯ блокировочных фрикционов. Число степенен свободы планетарного редуктора на единицу больше числа элементов управления, которые необходимо заблокировать одновременно для включения передачи.
В планетарных редукторах с двумя степенями саободы необходим только один вращающийся фрикцион для получения прямой передачи, остальные фрикционы являются ториозными.
Основные показатели, учитываемые при выборе схемы планетарного редуктора. Исходными данными при выборе схемы являются число передач переднего и заднего хода и значения передаточных чисел. Выбрать конкретную схему можно или путем синтеза возможных схем, или в результате анализа известных выполненных схем Задачей синтеза яаляется отбор из множества возможных схем нескольких, имеющих наиболее благоприятные оценочные показатели
Оценку схем планетарных редукторов производят по следующим показателям:
окружной скорости скольжения по периферии дисков разомкнутых фрикционов. Следует стремиться к тому, чтобы эта скорость была не более 30—35 м/с на режиме длительной работы и не более 60—65 м с кратковременно;
угловой скорости скольжения дисков разомкнутых фрикционов малого диаметра Не рекомендуется, чтобы эта скорость превышала удвоенную угле вую скорость ведущего вала редук-
абсолютным значениям кинематического параметра Р трехзвенных ме ханизмов Не рекомендуется иметь | Р | < 1,4 и | Р | > 4, желательно, чтобы значение параметра находилось в пре юлах 1,7 < | Р | < 3,
числу одновременно выключенных фрикннолов чем их меньше, тем меньше дисковые потери на трение;
числу одновременно переключаемых фрикционов при переходе с одной передачи на другую: чем их меньше, тем проще система управления;
Механические редукторы
195
отсутствию элементов, надежность которых трудно обеспечить (сателлитов слишком малого диаметра, сложных уплотнений и т, п);
относительной простоте, в том числе количеству планетарных механизмов и фрикционов, технологической преемственности;
возможности варьировать передаточные числа без существенных конструктивных изменений;
перспективности с точки зрения возможности разработки на базе данной схемы различных модификаций;
степени унификации;
компактности конструкции;
простоте изготовления и обслуживания.
Кинематический анализ планетарных редукторов. При кинематическом анализе решают следующие задачи
1. Определяют передаточные числа при заданной кинематической схеме, известных числах зубьсн платегарных механизмов или их кинематических параметрах Р, порядке включения фрикционов. Может быть решена и обратная задача — определены необходимые значения параметра Р и числа зубьев при заданных передаточных числах. Для этого используют основное уравнение кинематики (8.2), которое записывают для каждого из нагруженных планетарных радов, обращая особое внимапие на знак параметра Р.
2. Определяют относительные частоты вращения йф дисков разомкнутых фрикционов на всех передачах как разность алгебраических значений частот вращения разноименных дисков:
Лф = яЕЩ— лвм, (8.4) где пРщ и пвы — частоты вращения соответственно ведущего и везомого дисков
3 Определяют относительные частота вращения сателлитов как нагруженных, так и свободно вращающихся по частоте вращения любого центрального колеса, находящегося в зацеплении с данным сателлитом;
я« = ««(aa/zg) = iib (?j/2e);
па = Па~ nft; nb=nb — nf,.
Силовой анализ планетарных редукторов. При силовом анализе планетарных редукторов используют следующие зависимости (предполагают, что силами трения можно пренебречь):
Мп + Мь + Mh = G; Мь = — PMa.
Mh = (1 - ₽) Ма. (8 5)
На основании силового анализа решают следующие задачи
1. Определяют моменты, передаваемые тормозными фрикционами Рекомендуется сначала определять действующие моменты в долях момента па ведущем валу редуктора, а затем переходить к абсолютным единицам.
2. Находят моменты, нагружающие блокировочный фрикцион. Значение момента может быть получено в результате решения системы уравнений, отражающих
а) условие равновесия сателлита, относительному вращению которого препятствует блокировочный фрикцион;
б) зависимости между моментами на звеньях сблокированного планетарного механизма;
в) равенство моментов на ведущем и ведомом валах сблокированного механизма;
г) равенство суммарного момента двух включенных фрикционов, расположенных на ведущем валу редуктора, моменту на этом валу.
Выбор необходимых уравнений определяется расположением фрикциона в схеме редуктора.
Существует универсальная зависимость, позволяющая решать задачу на основании следующих соображений. Блокировкой обеспечивается передача от ведущего вала редуктора мощности А'кщ — ЮвщМящ Эта мощность может быть представлена как произведение момента Мф.б, нагружающего блокировочный фрикцион, и относительной угловой скорости дисков Ыф,б разомкнутого блокировочного фрикцяопа при мысленно остановленном ведомом вале редуктора (сови — 0) Тогда
ЛГф. б = Л4вщ<йвщ/шф. б =
= АГщцЯдщ/йфд;
>96
Гидромеханические передачи
Величину Пф.б определяют по формуле (6 4) при мысленно остановленном ведомом вале (нвм = 0) с использованием уравнения кинематики (8.2) для планетарного механизма.
3. Рассчитывают номинвльное значение окружной силы, действующей в зацеплении:
Fo = /ИиДО.бяи^Пр);
Fb = Мь/(.0,5тгъПр),
где Мо, Мъ — моменты, действующие соответственно на валах звена а кли Ь; пр — число сателлитов, находящихся в зацеплении с центральным звеном; т — модуль зацепления.
4. Определяют номинальное значение силы Fb, действующей на подшипник сателлита. Для планетарного механизма типа А (см табл. 8.1)
Fh = 2Fe = 2rfc.
Для механизма типа D силы овреде-ляюг с учетом взаимного расположения зубчатых колес и сил (окружных* и радиальных), действующих в зацепления)? (рис 8,1). В быстроходных редукторах дополнительно следует учесть центробежные силы, действующие на сателлиты
5 Определяют КПД редуктора (без учета дисковых потерь В разомкнутых фрикционах) как отношение крутящих моментов на ведущем и ведомом валах, рассчитанных с учетом потерь на трение в редукторе МВМ1] = МвщКТ) и без учета ЛТВМ = Л4ВЩ«. Тогда
Ч — Л1цм ц/Л1цм:
чЬ, = (>->4,чл)/(|-4)-
При определении потерь в зубчатых зацеплениях механизма можно приближенно принять г] = 0,98 для внешнего закепдеиия и «] = 0,99 для внутреннего.
Дифференциальные гидромеханические передачи. В дифференциальных ГМП мощность на всех или некоторых режимах передается параллельно через механический и гидравлический элементы. В случае если через гидравлический элемент передается не вся мощность двигателя, КПД передачи ваше, чем КПД полнопоточной ГМП.
Дифференциальная ГМП имеет выходную характеристику, существенно отличающуюся от характеристики входящего в ее состав гидротрансформа-
В общем случае дифференциальная ГМП имеет ведущий вал, еввзанный с двигателем, ведомый вал, связанный с потребителем энергии, вал насосного колеса гидротрансформатора и вал турбинного колеса гидротрансформатора Механический элемент дифференциальной ГМП при всех включенных органах управления имеет две степени свободы.
Уравнения, определяющие чистоты вращения разных валов механического элемента.
Иц = ^тяд "г п, ит евпя 4- с*пи.
где е1, е,, е3 и е4 — передаточные отношения между валами сесяветпвенио
двигателя в насосного колеса при остановленном ведомом вале (л„ = 0), потребителя энергии и насосного колеса
Механические редукторы
197
при остановленном вале двигателя (Пд = С), двигателя и турбинного колеса при остановленном ведомом вале («и — 0), потребителя энергии и турбинного колеса при остановленном вале двигателя (лд — 0).
Если обозначить = еЛец ё3 — = то передаточное
отношение гидравлического элемента
<н. т (®8 + п)/(1 + п) =
= ПТ/ПЮ, а передаточное отношение дифференциальной ГМП
>д. п — (₽з — <н. t)/(Wh. т — ««) — пп/ид-
Если пренебречь КПД механического элемента редуктора, то моменты на основных валах
Мд = — ₽1Л1и — еаМт>
Мп=- еаМ„- е^Мт.
В этих выражениях моменты взяты с учетом знака. Момент двигателя считается положительным, если совпадают налравлекня вращения его вала и действия развиваемого им момента.
Если принять, что коэффициент трансформации равен отношению момента на ведомом валу к моменту на ведущем валу, взятому с противоположным знании, то коэффициент трансформации Л ГМП и коэффициент трансформации Кгг гидротрансформатора, являющегося ее гидравлическим элементом, будут связаны следующими зависимостями:
К = (ё4КЕт — ез),г(1 — ёзКгт);
Кгт — (К + ЩЦёзК + ЭД-
Насосное колесо гидравлического Элемента нагружает вал моментом Мн = —Хнл 2, а турбяннов колесо нагружает вал моментом Мт = —-Лтп®. Тогда коэффициент трансформации гидравлического элемента КГт —
МТ!МК — —Моменты на ведущем и ведомой залах дифференциальной ГМП
Мц = ^дпд: Ми = КаЯд«
где
?.д = е®ли (I ~~ гт) (1 + ЭДд.вБ лп = е,лй (8S — ei/(rT) (1 -ф ё31д. и)
= -Ю*-
Приведенные зависимости позволяют по безразмерной характеристике гидравлического элемента и параметрам ei, е2, е3, et построить характеристику дифференциальной ГМП как зависимость коэффициента XJ( и коэффициента трансформации К от передаточного ОТНОШСНИЯ Гд.г|.
Расчет фрикционных муфт и тормозов механических редукторов. Наибольшее распространение в ГМП имеют многодисковые фрикционные муфты и тормоза. Конструкции многодисковых муфт могут иметь различные варианты, так как изменением числа поверхностен трения можно менять момент трения. Дисковые муфты и тормоза не требуют регулировки зазоров между трущимися поверхностями, одинаково хорошо работают при разном направлении вращения ведущих поверхностей относительно ведомых, не нагружают валы и их опоры радиальными усилиями.
В ГМП легковых автомобилей получили распространение также ленточные тормоза. Они отличаются сравнительной простотой конструкции и небольшими осевыми размерами.
В многодисковых фрикционных тормозах и муфтах один комплект дисков, как правило, изготовляют из высоко-углеродистой пружинной стали (например, стали 65Г), а сопряженный элемент — из такой же стали, облицованной фрикционным материалом.
В ГМП наиболее часто применяют фрикционные накладки на основе медного порошка, а также бумажные композиции, графитизированные бумажные композиции, графитизированные пластические материалы.
Бумажные композиции, состоящие из волокон целлюлозы, асбеста на основе фенольных смол, имеют пористую структуру, высокую податливость, что способствует повышению плавности включения ГМП. Добавление в эту композицию чешуйчатого
198
Гидромеханические передачи
Рнс, 8.2. Зависимости коэффициента трения от скорости скольжения для различных фрикционных материалов:
1 — бумажной композиции; 2 — графитизированной бумажной композиции;
материала; 4 —- порошкового «а медноя основе
графита повышает тепловроводпоегь материала и его энерг<1емкость.
Графитопластические материалы формуют из графитового порошка на основе фенолформальдегидной или эпоксидной смолы Этот пористый материал обладает большей знергоеы-цостью, чем бумажная композиция. Наибольшей энергоемкостью обладают порошковые материалы. Зависимость коэффициента трения от скорости скольжения Для разных фрикционных материалов показана на рис. 8 2.
Основными расчетными показателями диеновых фрикционных муфт и тормозов являются передаваемый момент и работа буксовакия Осевое усилие Р сжимает пакет дисков (рис в 3), и момент трения, возникающий между ними, обеспечивает связь ведущих деталей с ведомыми. Для смешанных пар трения, в которых один элемент изготовлен из стали, а другой из неметаллического материала, считают, что давление в любой точке поверхности постоянно, а для металлических иар трения иринимают до— — const (где q — давление, v — скорость скольжения дисков).
Момент трения муфты
Mj — S kjy.PRc,
где fej — коэффициент, учитывающий ослабление осевого усилия в результате осевых сил трения: р — коэффи-
циент трения, Rc — средний радиус; z — число пар трения
Для смешанных Yiap трения рекомендуется средний радиус определять по формуле
Яс = (2/3) (Я® - Rty(Ru — Яв), лля металлических пар трепня
Rc — 0,5 (/?н -j- Rp),
где R„ и Яв — радиусы поверхности трения соответственно наружный и внутренний.
Коэффициент
(1 + л>(1~(ЛД)°-5Ч
j ~ (1 + Ц«1Яс;Яв)(1 - АВ}гг где [ij — коэффициент трения между рабочими поверхностями шлицевых соединений дисков, = 0,15-4-0,20; Л = (1 - РР1Яс/Яв)/(1 + РУ1Кс/Дв); В — (1 — PpiRc/Ra)iO 'л PPiBcfRtt)', z2 — четный номер пары трения.
При увеличении числа дисков, а также разницы между их наружным и внутренним радиусами давление иа последних дисках существенно уменьшается Поэтому нецелесообразно применять муфты с числом пар трения больше 10—15 Отношение о. RtjRlt для дисков из порошковых материалов принимают в пределах сс== 0,68-4-0,82, а для упругих дисков я = 0,55-^0,62.
Для ориентировочного выбора толщины б стальных дисков, работающих в паре с дисками из порошковых материалов, можно рекомендовать эмпирическую формулу 6 0,8 -}-+ 0,005 D, где D — наружный диаметр диска, мм.
199
Механические редукторы
Для улучшения условий трения и охлаждения на поверхности дисков из порошковых материалов выполняют каналы, которые уменьшают рабочую поверхность дисков на 20—50 %. Это необходимо учитывать при расчете давления Для пары трепня сталь — порошковый материал MK-S Допустимое давление составляет 4 МПа.
При расчете ленточных тормозов принимают следующие допущения: тормозной барабан является абсолютно жестким, поперечное сечение тормозной ленты абсолютно жесткое и не искажайся при деформировании; на всем протяжении лепты обеспечивается ее плотный контакт с барабаном; не учитывается масса ленты и смещение силы тревия относительно линии приложения сил натяжения ленты
Если один конец ленты закреплен, а другой патянут с силой So. то натяжение Si] ленты на закрепленном конце определяют по формуле Эйлера
S^So^®,
где а — угол охвата барабана лентой.
Тормозной момент при указанном на рис 8 4 направлении вращения
МТ = So (еца - 1)/?,
где R — радиус барабана.
При заданном усилии натяжения ленты So тормозной момент зависит от способа крепления ее концов. При неподвижном креплении второго конца ленты тормозной момент зависит от направления вращения барабана (тормоз с самоуси-теиием) При вращении в направлении, противоположном указанному (см рис 8 4), тормозной мо-
Л4Т = So (е^“- 1) R/eua.
Схема закрепления концов ленты, показанная на рис. 8 5, а, обеспечивает одинаковое самоусиление при вращении барабана в любом направлении («плавающий» тормоз).
В этом случае
So = W/d, .'И, = Р1Р{еиа~ l}fd.
Омбениостыо схемы, показанной на рис. 8 5, б, является отсутствие само-усиления независимо от направления вращения.
При dt — <4 — d
,WT = (PlR;d) (eua— l)/(eya -E I).
Перемещение подвижного конца лепты при включенном тормозе h — ~ 2пва, Где б — зазор между лентой и барабаном в начале затяжки. Ширину ленты выбирают, используя формулу
b = (eu<z — 1)].
Степень неуравновешенности тормоза, определяемая как отношение радиального усилия на ось барабана к тангенциальному тормозному усилию, для рассмотренных типов тормозов равна единице.
Максимальный момент трепня фрикционной муфты или тормоза должен
ленточных
самоусиление»;
усиления
Гидромеханические передачи
Рис. 8.6. Звеисимости допустимой удель-
2 — графи-
с законом включения от нуля до максимального значения за время буксования т.
В первом приближении можно считать закон изменения W линейным или экспоненциальным.
Мощность буксования Л =а = Л!ф (<|Ц — w2) характеризует интенсивность выделения теплоты на трущихся поверхностях, удельная работа буксования U-уд = W7(zS) (где z — число пар трения; S — площадь поверхности трения диска) — степень из нашивав ия фрикционных поверхностей, средняя удельная мощность бук сования Луд = 1У/(гЗт) — среднюю интенсиаяость тепловыделения на трущихся поверхностях.
На рис. 8.6 показаны зависимости Допустимой удельной мощноств буксования or удельной работы буксования для различных фрикционных материалов.
мепт, т. е,
Мф = ₽Мк.
где? А41: — подводимый крутящий МО мент; — коэффициент запаса сцепления.
Для фрикционных муфт и тормозов, расположенных за турбиной гидротрансформатора, обычно принимают р= 1,14-1,3. Для муфты блокировки .гидротрансформатора р —• 1,4-5-1,8
Поскольку коэффициент трения покоя, как правило, превышает коэффициент трения скольжения, то после включения муфты запас ее момента трения обычно превышает требуемое значение.
При трогании автомобиля с места, а также при переключевии передач во фрикционных муфтах и тормозах механическая энергия преобразуется в тепловую. Количество преобразованной энергии за период одного включения принято называть работой буксования
U7 — | ЛТф (ш,— <e2)«tt.
где <01 и ь>2 — угловые скорости соответственно ведущего и ведомого элементов муфты; Л4ф — момент трения муфты, меняющийся в соответствии
8.3. КОНСТРУКЦИИ ГИДРОМЕХАНИЧЕСКИХ ПЕРЕДАЧ ГРУЗОВЫХ АВТОМОБИЛЕЙ
В связи с применением ГМП на автомобилях различного назначения расширяется круг требонаний к ним. Поскольку одна модвль не может удовлетворять всем требованиям, целесообразно создание семейств ГМП определевного интервала мощностей.
При создании семейства ГМП обычно используют модульный принцип конструирования. Это позволяет снизить
стоимость трансмиссии в результате организации массового производства унифицированных узлов, применяемых в различных моделях передач. При этом обеспечиваются высокая надежность и ремонтопригодность изделий При разработке семейства планетарных редукторов необходимо иметь несколько кинематических схем. Одна из схем должна быть базовой и удовлетворять условию максимальной унн фикацин.
Остальные кинематвческие схемы семейства должны получатьсн путем добавления к базовой схеме одноряд
ных трехзвенных планетарных механизмов. В качестве дополнительно ис-
Конструкции гидромеханических передач
201
пол^уемых одноридных трехзвенных механизмов желательно применять механизмы базовой кинематической
Кинематические схемы всех модификаций должны обеспечивать заданные число ступеней и передаточные числа.
Ниже приводится описание некоторых наиболее характерных семейств ГМП грузовых автомобилей, принципы построения которых могут быть использованы при проектировании трансмиссий
Семейство ГМП Минского автомо-бильнрго завода (табл. 8 2), имеющих
базовую модель с числом ступеней 3 -f- 1 с раздачей мощности назад, состоит из следующих моделей: а) с числом ступеней 4 -J- 2_и двусторонней дифференциальной раздачей мощности; б) с числом ступеней 4 —2 однопоточная, в) с числом ступеней 4 -' 1 двухпоточная. Эти„ГМП предназначены для установки на автомобили большой грузоподъемности и высокой проходимости с двигателями мощностью 350—500 кВт. Порядок включения элементов управления и передаточные числа передач проведены в табл. 8.2.
8.2. Кинематические схемы ГМП Минского автомобильного завода
202
Гидромеханические передачи
<9 г)
Рис. 6.7. Кинематические схемы ГМП фирмы Detroit Diesel Allison:
оном передаточных чисел
Семейство ГМП фирмы Detroit Diesel АШяил состоит из трех автоматических ГМП серий АТ, МТ, НТ (табл, 8.3).
фирмы Detroit Diesel Allison
Модель Передаточ ные числа передач переднего S Р U «
AT 540 3.45. 1,41 2,25, 1.0 125 631
МТ 643 3,58. 1.39 2.09. 1.0 231 780
МТ 653DR 8,04; 2,09, 3.58; 1.39: 245 920
МТ 6S4CR 4.17; 1.66, 2.21; 1,27; 285 920
НТ 740D 3,69: 1,40 2,07: 1.0 350 950
НТ 750CRD 3,19: 1,69: 1,55; 1,24; 1,0 (3,69: 2,00; 1.60; 1,26; I.Q) 420 1041
НТ 750DRD 7,49: 2.07; з,19; 1 40; 0 420 1041
V730 1,61; 1,23; 0.875 420 1179
П р и и 1 U Я ' Н е. В скобках ука-
замы передаточные чис ла второго варианта
передачи.
ГМП серии АТ предназначены длг работы с карбюраторными двигателям» и дизелями мощносгыо 175 кВт (грузовые автомобили) и 120 кВт (автобусы). Эти ГМП устанавливают на фургонах и грузовых автомобилях для доставки товаров внутри города, мусоровозах, малых городских автобусах Они состоят из гидротрансформатора и четырехступенчатого механического редуктора.
ГМП серии МТ рассчитаны на совместную работу с двигателями мощностью 185—2W| кВт ии грузовых автомобилях или 150—175 кВт на автобусах Их устанавливают на самосвалы, мусоровозы, пожарные автомобили,, магистральные грузовые автомобили, городские и междугородные автобусы. ГМП этой серии имеют блокируемый гидротрансформатор н механический редуктор с четырьмя или пятью передачами переднего хода и одной — заднего хода.
ГМП серии НТ спроектированы для работы с дизелями мощностью 320 кВт или газовыми турбинами до 300 кВт. Эти Г.МП имеют также четырех- и Пятиступенчатые модификации. Используют передачи на магистральных грузовых автомобилях, пожарных автомобилях и междугородных автобу
Кроме этих серий в семейство входит специальная ГМП V 730, лспользуе-мая на автобусах, имеющая три пере-
Конструкции гидромеханических передач
дачи переднего хода и повышающую коническую передачу на входе в гидротрансформатор Она рассчитана на работу с двигателями мощностью до 195 кВт. В конструкции этих передач широко использован модульный принцип. Отдельные конструктивные блоки: гидротрансформатор, блоки фрикционов, блок гидравлического управления, корпусные детали, планетарные механизмы являются составными элементами многих модификаций.
Два передних планетарных механизма (рис. 8.7, в) используются во всех модификациях лтяполучеиия трех высших передач (V 730) Дополнительную низшую передачу получают путем добавления еще одпото планетар-
модификацвя этой двум направлениям:
ного механизма с тормозом, связанным с коронным —..................
(рис. 8.7, б).
Дальнейшая схемы шла по .. _ была создана пятиступенчатая передача с узким диапазоном передаточных чисел для тягачей (рис. 8.7, в), а за тем пятиступенчатая передача расширенного диапазона для применения на самосвалах, бетоновозах и т д. (рис. 8 7, а).
Семейство ГМП фирмы Mercedes-Benz предназначено для грузовых ав томобнлей и автобусов полной массой 14—38 т, оснащенных двигателями мощностью 123—235 кВт и имеющих удельную мощность 4,4—15 кВт/т. Семейство включает ГМП с тремя, четырьмя, шестью и семью ступенями для движения вперед.
Эти ГМП компонуют из стандартного набора блоков (рис 8.8)- гидротрансформатор.? в сборе с фрикционом блокировки, гилрозамедлителя, переднего редуктора, заднего редуктора, трехступенчатого редуктора. Каждый блок имеет свой корпус. Четырех -н шестиступевчатые передачи имеют одинаковые кинематические схемы (табл, в 4) и состоят из трех планетарных механизмов, четырех многодисковых тормозов и двух многодисковых муфт. В семиступенчатой передаче — четыре планетарных механизма Все типы гидропередач могут быть изготовлены и без тормоза замедлителя.
Семейство гидромеханических пере дач ZF ИР 500 имеет модификации
зубчатым колесом
Рлс. З.Я. ЗЛорхяьиыГ! принцип компоновки ГМП для грузовых автшисбилсй_семейства _ Mercedes-Benz:
дрозамедлятелем; в — четырахст} пеяча-тая ГМП, г — гидротрансформатор. 2 —
,чатый редуктор; е — задний кор-
с четырех-, пяти- и шестнстуленчатым редуктором (рис. 8 9). Редукторы имеют следующие диапазоны: четырехступенчатый 2,81—1,0, пятиступенчатый 3,48—0,83 или 5.78—1,0, шестиступенчатый 5,78—0,83.
Расчетные параметры па ведущем валу следующие: мощность 220 кВт, момент 950 Н-м На рис. 8 10 приведен разрез ГМП ZF 6НР 500
В последнее десятилетие получают распространение полиаето.матичакие (диапазонные} ГМП, состоящие из гидротрансформатора с системой блокировки, сухого сцепления и многоступенчатой синхронизированной коробки передач (передачи типа ГСК). Такне передачи имеют следующие преимущества" невысокую по сравнению с автоматическими планетарными передачами стоимость; позволяют использовать коробку с большим числом передач (шесть, восемь и более); применимы
Гидромханичесь.ие передачи
Рис. 8.9. Кинематические схемы ГМП семейства ZF HP 500:
а — четырехступенчатой; 6 — шестисту-п е>| чатой
для любых условий эксплуатации.
Особенно целесообразно использовать
ботающих как в условиях бездорожья, так и на дорогах с различным покрытием. Основными недостатками являются относительно большая масса и разрыв потока мощности при переключении.
ГСК ZF Transmatic состоят из комплексного гидротрансформатора, имеющего максимальный коэффициент трансформации 2 или 2,5, однодискового сухого сцепления и вальной коробки передач. Механический редуктор имеет четыре, шесть или восемь передач. Возможна установка гидрозамедлителя Диапазон шестиступенчатой механической коробки передач 6,4 Гидропередача рассчитана на совместную работу с двигателями мощностью 175—270 кВт.
Составными элементами ГСК Fiat Hydrotrans яиляются двухступенчатый гидротрансформатор с системами
такие передачи на автомобилях, ра-
Рис. 8.10. Шестйступеичахая ГМП ZF 6НР 500:
Конструкции гидромеханических передач
8.4. Кинематические схемы гмп для грузовых автомобилей фирмы Mercedes- Вепг
блокировки и автоматического управ .тения, однодисковое сухое сцепление, механическая синхронизированная коробка передач, имеющая восемь передач для движения вперед и две для дви-
жения назад.
Максимальный коэффициент трансформации = 3 ГСК имеет четыре рабочих режима:
1) трансформации крутящего момента при заторможенном реакторе, выключенной муфте блокировки;
2) механической передачи крутящего момента — муфта реактора разомкнута, муфта блокировки замкнута, момент передается непосредственно от двигателя на вал турбины через муфту блокировки;
3) гидродинамического торможения — реактор остановлен, муфта блокировки замкнута;
4) нейтрального положения — муфта сцепления выключена, турбина гидротрансформатора и ведущий вал коробки передач не связаны между собой. Этот режим используется при переключении передач.
Блокировка трансформатора осуществляется при достижении турбиной 5h “о максимальной частоты вращения при условии, что педаль подачи топлива не нажата до упора (рис. 8.11). Сигнал на разблокировку*
Рис. 8.11. Выходная характеристика ГСК Fiat Hydrotrans:
иический и гидромеханический;
зона разблокировки от нажатая до
206
Гидре механические передачи
поступает при уменьшении скорости турбины до 40 “о максимальной или при нажатии либо педали подачи топлива (до упора), либо педали сцепления. На рис 8.11 показаны зависимости относительных момента на вал^ турбинного колеса Мт = М-Г/М„оч {где Мцом — номинальный момент двигателя) и частоты вращения вала насосного колеса пи = «л/^ном (где Пцом — номинальная частота вращения коленчатого вала двигателя) от •относительной частоты вращения вала турбинного колеса Лт= n-t!numt
Режим торможения включается водителем. Его интенсивность зависит от включенной передачи. Диапазоны передаточных чисел механической коробки передач, переключаемые делителем на входе, приведены ниже.
Передачи .....................
Диапазон высший .......................
матора, имеющих одинаковый активный диаметр 370 мм, но различные углы паклопа лопаток насосного колеса, отличаются характером^кривой коэффициента момента.
Механический редуктор (рис 8 12) имеет ведущий вал, два промежуия-ных вала, на которых установлены сдвоенные фрикционные муфты, и ведомый вал С зубчатыми колесами ведущего вала постоянно находятся в зацеплении соответствующие колеса первого и второго промежуточных валов Ниже приведены передаточные числа редуктора.
Гидродинамический замедлитель, состоящий из статора, ротора и крышки, является отдельным элементом, что позволяет выпускать модификации передачи как с замедлителем, так и без него
Вторая
4.67
3.37
Третья Четвер- Заднего тая хода
2.46 1,38 7.45
1.78 I 5,38
I Передача ...... ..............। - Пераая -'/Вторая
Передатоугое число 2.43 1.44
С.08
Заднее! хода 1.97
8.4. КОНСТРУКЦИИ ГИДРОМЕХАНИЧЕСКИХ ПЕРЕДАЧ АВТОБУСОВ
'В настоящее время распространены две принципиальные схемы автобус-пых ГМП-
комплексный блокируемый гидротрансформатор в сочетании с переключаемыми фрикционами, ва.тьным или планетарным редуктором с двумя-пятью ступенями (ЛАЗ-НЛМИ, Mercedes-Benz W3D080, Ргаца 2М-70);
многоступенчатый гидротрансформатор, с одно- или двухступенчатым редуктором, выполненным но однопоточной или дифференциальной схеме {Fiat, SRM. Renk Doromat 874. Voith D851)
Автоматическая двух- и трехсту яенчатач ГМП ЛАЗ НАМИ является примером ГМП первой схемы. Характерная, особенность грехступенчатой-вальпой ГМП — фрикционы с периферийными клапанами, переключаемыми пневматическим исполнительным механизмом. Два гмдротрансфор-
Автматическая ГМП фирмы SRM является примером передач с внутренним разделением потока мощности двигателя и гидротрансформатора. ГМП SRM DS состоит цз двухступенчатого гидротрансформатора, планетарного механизма, солнечное зубчатое колесо которого связано с реактором гидротрансформатора, а коренное — с ведомым валом передачи; двух тормозов Т1 И Т2 блокировочного фрикциона Ф (рис 8.13).
Передача обеспечивает четыре рабочих режима Первый режим (вклю-
Рис. 8.12. Килематичсскаи схема трех-ступенчатой ГМП ЛАЗ-НАМИ
Конструкции гидромеханических передач
207
•чеп тормоз 72) — мощность двигателя « крутящий момент передаются двумя потоками: первым поток через двухступенчатую турбину непосредственно на ведомый вал, второй — через вращающийся реактор н зубчатую передачу. Оба потока суммируются на ведомом валу Суммарный крутящий момент
М2 — МТ + Afp«T] —
= мди(К + (К-1)«1п1.
-где М? — крутящий момент, передаваемый турбиной на ведомый вал; 7ИТ — М дКЛ; МГ — крутящий мо-менг реактора, Мр—Л!ДВ(К—1): и и 1] — передаточное число и КПД зубчатой передачи; К — коэффициент трансформации гидротрансформатора.
Силовое передаточное число на этом режиме
Кгн = Mt/Мам - К Ь (К - 1)«П. кинематическое
ыгм = Лдв/Яа *= — П + (• —*гт)и)Лгт.
где «а и ПдВ — частоты вращения ведомого вала и двигателя; «гт — передаточное отношение гидротрансформа тора.
КПД передачи на первом режиме
Чгм = Кгм/Цгм — 'гт [К т
+ (К-1)Щ]|/[1 +0-«)«!
Максимальное значение силового передаточного числа при максимальном коэффициенте трансформации /(—4,2, передаточном числеtзубчатого ряда « = 1,8 и 1] = 0,97 составляет 9,6.
Мощность, передаваемая реактором, Л'р = Л7лпц iK— 1)/гтП [1 —'Г1Я-
При скорости движения автомобиля ©.ЗбОплх система автоматизации переводит передачу го второй режим работы; реактор останавливается тормозом Т1, планетарный механизм вращается вхолостую Переход на третий режим работы осущесталиется при скорости движения автомобиля 0,78-ипвх’ трансформатор блокируется рикционом Ф, а тормоз Т1 освобож-ается — получается механическая 'рямая передача.
Рис. 8.13. Кинематическая схема ГМП SRM DS
Четвертый режим работы передачи является тормозным При одновременном включении фрикциона блокировки и тормоза Т2 реактор вращается в направлении, противоположном вращению насосного и турбинного колес. Гидротрансформатор работает в режиме замедлителя
На рис 8 14 показали зависимости относительного момента Л(г на валу турбинного колеса, относительной частоты вращения па вала насосного колеса и КПД Ч ГМП в зависимости от относительной частоты вращения ит вала турбинного колеса.
КПД этой передачи в диапазоне скоростей 20—100 % Стах выше 80 %. Мощность, передаваемая реактором, не превышает 38 % мощности двигателя при гГм — 0,19.
Выходная характеристика ГМП SRM DS
Конструкции гидромеханических передач
209
210
Гидромеханические передачи
Конструкции гидромеханических тредт
Рис- 8.15. Кинематическая схема дифференциальной ГМП Volth Dlwa D 831
Двухпоточная I МП Voith Dtwa D851 имеет входной дифференциал, в котором мощность разделяется на два потока (рис. 8 15) На первой передаче включены фрикцион Ф/ и тормоз Т2. Водило первого планетарного механизма связано с ведомым валом, а солнечная шестерня — с насосным колесом гидротрансформатора. Насосное и турбинное колеса гидротрансформатора имеют противоположное вращение
Это схема дифференциальной передачи с разветвлением на ведомом валу, в которой
ej = —Ki; ег = 1 Кг;
ез = °, • + К»,
где К] и Ка — параметры переднего н заднего планетарных механизмов.
После разгона блокируется тормоз Т1 и освобождается тормоз Т2. Мощность передается только через механический редуктор. Включение фрикциона Ф2 и освобождение остальных зленевтез управления обеспечкввюг прямую механическую передачу.
8.3. конструкции
ГИДРОМЕХАНИЧЕСКИХ ПЕРЕДАЧ ЛЕГКОВЫХ
АВТОМОБИЛЕЙ
В настоящее время на легковых автомобилях, оснащенных двигателями рабочим объемом 1,2 Л и выше, приме
няют трех- и чегырехегупенчатые передачи. Большинство ГМП — полно-поточные, с простым комплексным гидротрансформатором, имеющим коэффициент трансформации в стоповом режиме 1,8—2,3, и механическим редуктором, в большинстве случаев планетарным. Кинематические схемы ГМП легковых автомобилей приведешь в табл. 8 5.
Схему I имеют ГМП, предназначенные для легковых автомобилей с рабочим объемом двигатели 1.2—2,0 л. Первая передача этой ГМП — гидромеханическая полнопоточная, вторая— дифференциальная двухколонная и третья — прямая механическая. Имеется также четырехступенчатая модификация этой ГМП (схема 2)
В трехступенчатых ГМП, как правило, используют редукторы типа Ravigneaux (схемы 3 и 4) и Simpson (схемы 5 и 6)
Редуктор Ravigneaux сделан на базе планетарного механизма типа D с парными сателлитами. Как планетарный, этот механизм используется только на второй передаче, при этом его водило свободно
Редуктор Stmpson имеет два одинаковых планетарных механизма типа А. Его солнечные шестерни закреплены на общем пустотелом валу, а иногда их выполняют в виде сплошной длинной шестерни. Нагрузки на зубчатые колеса при прочих равных условиях в этом редукторе ниже, чем в редукторе Ravigneaux
Особенностью схемы 7 является применение трехвениового сателлита, что позволило отказаться ст использования коронкой шестерни, имеющей высокую стоимость.
Четырехступенчатый планетарный редуктор, показанный на схеме 8, состоит из трех планетарных механизмов, трех тормозов, двух фрикционов и имеет три степени свободы.
9
Раздаточные коробки
9.1. КИНЕМАТИЧЕСКИЕ СХЕМЫ
Раздаточная коробка является меха пизмом трансмиссии, распределяющим крутящий момент между ведущими мостами автомобиля. Устанавливают раздаточную коробку за коробкой передач, отдельно или в одном блоке с ней. Во многих случаях раздаточную коробку одновременно используют в качестве двухступенчатой дополнительной коробки передач
Классифицируют раздаточные коробки по следующим признакам- характеру деления силового потока; числу ступеней передаточного числа; количеству ведомых валов; взаимному , расположению ведомых валов; периодичности включения привода переднего моста.
По характеру деления силового потока различают раздаточные коробки с дифференциальным, блокированным и смешанным приводом ведомых вадов. Смешанный привод можно применять при наличии трех ведомых валов.
Число ступеней в раздаточной коробке — одна или две. Двухступенчатые коробки используют для расширения диапазона передаточных чисел трансмиссии. Необходимость в этом возникает в тех случаях, когда диапазон передаточных чисел устанавливаемой коробки передач недостаточен для полноприводного автомобиля.
Ведомых валов в раздаточной коробке, как правило, два. Три ведомых вала имеют раздаточные коробки автомобилей с колесной формулой 6x6 с раздельным приводом мостов тележки. В раздаточных коробках с двумя ведомыми валами последние имеют или соосное расположение, или несоосное. При песлоспом расположении один из ведомых валов может устанавливаться еоосно ведущему валу. Это поз
воляет осуществить прямую передачу мощности с ведущего вала на соосный ведомый
По периодичности включения привода вспомогательного ведущего моста, которым обычно яаляется передний мост, различают раздаточные коробки с постоянно включенным н с периодически включаемым передним мо-
К типовым можно отнести три основные группы схем раздаточных коробок Коробки первой группы (рис 9 I) имеют следующие особенности- два соосных ведомых вала с дифферен циальным приводом и постоянно включённый передний мост. Для раздаточных коробок второй группы (рис 9.2) характерны два несоосвых ведомых вала с блокированным приводом, один из которых соосен ведущему валу, и периодически включаемый передний мост. Коробки третьей группы (рис, 9.3) имеют два соосных ведомых вала с блокированным приводом и периодически включаемый передний мост. Раздаточные коробки первой группы — двухступенчатые и одноступенчатые, второй и третьей групп — обычно двухступенчатые.
Главной особенностью раздаточных коробок первой группы является отсутствие в приводе ведущих мостов циркуляции мощности. Эго позволяет иметь постоянно включенный привод всех ведущих мостов и, следовательно, обеспечить более равномерную их загрузку. Для улучшения проходимости автомобиля в сложных дорожных условиях б раздаточных Коробках первой группы устанавли вают муфту принудительной блокировки межосевого дифференциала. Дифференциальный привод необходим для автомобилей, предназначенных для постоянной работы в качестве полноприводных.
Кинематические схемы
213
Основным преимуществом раздаточных коробок второй группы является наличие прямой передачи с ведущего вала на соосный с ним ведомый При движении па прямой передаче в раздаточной коробке автомобиль работает как неполноприводной с отключенным передним мостом. При этом нагрузки на подшипники и зубчатые колеса раздаточной коробки отсутствуют Для работы автомобиля в качестве полноприводного в раздаточной коробке второй группы включается привод переднего моста. Движение с включенным передним мостом при малом сопротивлении движению сопровождается циркуляцией мощности. В контур циркуляции входят зубчатые колеса раздаточной коробки, соединяющие ее ведомые валы, карданные и главные передачи, полуоси и шины. Раздаточные коробки, имеющие схемы второй группы, рекомендуются для автомобилей, работающих в полноприводном режиме лишь периодически, если при этом на высшей ступени в раздаточной коробке допускается передаточное число, равное единице.
Раздаточные коробки третьей группы отличаются от коробок второй группы отсутствием прямой передачи, поэтому их зубчатые колеса и подшипники нагружены на всех режимах работы. Вследствие соосного расположения ведомых валов зубчатые колеса раздаточной коробки третьей группы не входят в ковтур циркуляции мощности.
В каждой группе типовых схем имеется несколько вариантов, отличающихся общим числом валов, способом переключения ступеней, расположением элементов переключения. Многие схемы характеризуются наличием промежуточного вала. В коробках, выполненных по этим схемам, большее количество зубчатых колёс и подшипников, но они имеют более широкие компоновочные возможности. Наличие промежуточного вала позволяет распределить передаточное число низшей ступени между двумя парами зубчатых колес и тем самым уменьшить диаметр ведомого колеса Кроме того, при соосном расположении ведомых валов в коробках с промежуточным валом меньше реактивный момент, дейстиующий на детали крепления раз-
в.1. Схемы раздаточных короБох с дифференциальным приводом:
с и в — автомобилей соответственно «Урал-375Д» И КамАЗ-4310; «—ZF4PW. а — ZF «VG-800-4VI»; д — ZF «VG-275»
даточной коробки. В этом случае реактивный момент равен разности моментов на ведомом и ведущем валах. При соосных ведомых валах и отсутствии промежуточного вала реактивный момент равен сумме моментов на ведомом и ведущем ралах.
Переключение ступеней и включение вспомогательного моста осуществляют, как правило, при помощи зубчатых муфт. Расположение муфт переключения ступеней оказывает влияние на передаваемый ими момент и на условия смазывания подшипников свободно установленных зубчатых колес. Муфты, установленные на ведущем налу, передают обычно меньший крутя-
Раздаточные норобгм
Рис. 9.2. Схемы раздаточных коробов с блЬкирбсанным приводом и иесооснымк .ведомыми валами автомобилей:
в — 'гАЗ^б. УАЗ 452, б — ЗИЛ-131;
в — Austin Gipsy
щий момент, но при этом подшипники зубчатых колес ведущего вала, как наиболее удаленного от масляной ванны, имеют неблагоприятные условия смазывания. Передвижные зубчатые колеса в качестве элементов включения применяются редко. К раздаточным коробкам, в которых используются такве колеса, относятся двухступенчатые раздаточные коробки сблокированным приводом, устанавливаемые на автомобилях ГАЗ-66 и УАЗ-452. В этих коробках (см. рис. 9.2, а) одновременно включаются низшая ступень и привод переднего моста Возможность валючсния низшей ступени при выкаюченном приводе переднего моста исключена.
Особенностью схем, показанных на рис 9.4, а 1г б, является наличие трех ведомых валов Коробки, выполненные по первой схеме, имеют дифференциаль иый привод к промежуточному и зад нему мостам и блокироиапный — к переднему, вторая — блокированный привод ко всем трем мостам Отличие Схем, представленных на рис 9 4, в
( Рис. 9.3. Схемы раздаточных коробов с блокированным приводом и соосными
ведомыми валами автомобилей:
УАЗ-450; б — Talra-Ш. в — Та!-
и а, — разделение потока мощности, проходящего через зубчатые зацепления. Первая из схем имеет дифференциальный привод; поток мощности на ведущем валу делится между двумя одинаковыми зубчатыми передачами, а суммируется на корпусе дифференциала. При такой схеме для равномерной загрузки параллельных ре
и полная идентичность выполнения последних. Вторая схема (рис. 9.4, г) имеет два одинаковых двухступенчатых редуктора, расположенных ав межосевым дифференциалом. Вследствие усложнения конструкции обеспечивается равномерная загрузка параллельных редукторои
Особенностью схемы, показанной на рис 9 4, д, является наличие трех ведомых валов — вала блокированного привода заднего моста и двух валов дифференциального привода бортовых передач передних колес Принятое расположение муфт переключений обеспечивает на высшей ступени прямую передачу всем мощности на
Кинематические схемы
задний мост Схема, представленная на рис. 9.4, е, характеризуется наличием муфты свободного хода в приводе переднего моста и дополнительной губчатой передачи (ДП), осуществляющей кинематическое рассогласование в приводе
На рис 9.5 показана схема двухступенчатой раздаточной коробки с планегарным редуктором Планетарный трехзвеииый механизм исполь зуется в качестве редуктора па высшей ступени, при этом вся мощность передается на задний мост На низшей ступени включены оба моста, и указанный планетарный механизм используется в качестве несимметричного межосевого дифференциала, который при необходимости может быть блокирован.
Во многих раздаточных коробках грузовых полноприводных автомобилей предусматривают установку механизма отбора мощности. Отбор мощности, как правило, производится с ведущего вала В зависимости от принятой схемы при работе механизма отбора мощности зубчатые колеса раздаточной коробки могут или вращаться без нагрузки (см. рис. 9.1, б, 9,3, б, а), вли быть неподвижными (см. рис 9 1, а, г" 9.3, в). В первом случае смазывание элементов раздаточной коробки и механизма отбора мощности может быть обеспечено достаточно длительное время в результате разбрыз
гивания масла; во втором — смазы-
вание элементов механизма отбора мощ-
ности, а также подшипников ведущего
вала и установленных на нем зубчатых
колес возможно лишь кратковременно
маслом, попавшим вследствие разбрызгивания при движении автомобиля. Если необходима более длительная работа механизма отбора мощности, го устанавливается масляный
насос с приводом от ведущего вала или вала механизма отбора.
При выборе схемы раздаточной коробки учитывают также направление вращения карданных валов и условия их размещения. Так, например, при размещении карданного вала привода переднего моста иногда целесообразна установка дополнительной зубчатой
передачи между соответствующим ве-
домым
валом раздаточной коробки
валом привода переднего
моста
Рис. 9.4. Схемы комбиннровниных раздаточных коробок автомобилей:
а — КрАЗ-2б5Б1. б — ЗИЛ-157КД; в -MagltiiS Deulz; г ~.Т-70; д — Berliet, е —
Такую передачу имеют раздаточные коробки автомобилей МАЗ-509А и КрАЗ-255Б1 (см рис 9 4, в). Установка дополнительной передачи позволяет унифицировать раздаточные ко робки различных модификаций авто-
Рнс. 9.6. Схема раздаточной коробки с плане тарным редуктором онто мобиля Magi-Гич KI3/D22
Раздаточные коробки
мобилей, отличающихся расположением карданного вала привода переднего моста.
9.2. КОНСТРУКТИВНЫЕ СХЕМЫ
На рис 9 6 показана конструкция двухступенчатой раздаточной коробки трехосного полноприводного автомо биля КамЛЗ-4310. Раздаточная коробка имеет несимметричный межосевой цилиндрический дифференциал и постоянно включенный привод переднего моста. На ведущем валу / закреплено колесо 2, входящее в зацепление с колесом 5, установленным неподвижно на промежуточном валу 8 Шестерни низшей ступени 7 и высшей 14 свободно установлены соответственно на про-
межуточном валу 8 и пустотелом валу 15 корпуса дифференциала Включение низшей ступени производится перемещением муфты 6, а высшей — муфты 16. Ведомый вал 10 привода мостов тележки соединен с эпициклическим колесом 11 дифференциала Вал 13 привода переднего моста соединен с центральной шестерней 12 дифференциала. Отношение моментов на валах 10 и 13 равно отношению чисел зубьев эпициклического колеса 11 (гь) и центральной шестерни 12 (z<J и выбрано равным двум, что приближенно соответствует распределению массы автомобиля между тележкой и передним мостом Для блокировки дифференциала установлена муфта 17. Блокировка происходит при сосдине-
Рнс. 9.6. Раздаточнни коробка с несимметричным межосевым цилиндрическим дифференциалом автомобиля КамАЗ-4310
Конструктивные схемы
217
нии этой муфтой валов /3 и 15 Предусмотрены отбор Мощности от шестерни 3, а также от заднего конца ведущего вала 1 Картер раздаточной коробки имеет разъем в плоскости, перпендикулярной осям валов На его основной части 4 справа и слева выполнены приливы—площадки для крепления раздаточной коробки к раме
На рис 9 7 представлена конструкция двухступенчатой раздаточной коробки полноприводного легкового автомобиля ВАЗ-2121 «Ннва« Раздаточная коробка имеет симметричный межосевой конический дифференциал и постоянно включенный привод переднего моста На ведущем валу 1 свободно установлены шестерни высшей ступени 2 и низшей 4. Включение ступеней производится с помогцыо двусторонней муфты 3. Промежуточный вал 5 выполнен совместно с двумя зубчатыми колесами в виде блока На корпусе дифференциала закреплено колесо 8 Ведомые валы 6 и 9 соединены с помощью шлицев с коническими ко лесами 7 днфферепциалч Для блоки ротки дифференциала установлена муфта 10 Картер раздаточной коробки имеет разъем в плоскости, перпендикулярной осям валов. Раздаточную коробку устанавливают отденьно от коробки передач и с помощью двух кронштейнов подвешивают к лонжеронам кузова.
Картер с разъемом в раздаточных коробках применяется в тех случаях, когда это необходимо по условиям технологии сборки. Разъем обычно выполняют в плоскости, перпендикуляр ной осям валов В коробках без промежуточного вала разъем иногда делают в плоскости валов. В этом случае максимально упрощается сборка. В раздаточной коробке автомобиля КрАЗ 255Б1 (см. рис. 9 4. с) двухступенчатый редуктор и симметричный межосевой дифференциал выполнены в отдельных картерах, собираемых в общий блок. При такой конструкции упрощается сборка, однако увеличивается число обрабатываемых поверхностей и винтовых соединений.
В двухступенчатых раздаточных коробках с постоянный зацеплением зубчатых колес два колеса устанавливают на валу свободно, применяя подшип-
IIH кн качения иди скольжения В некоторых конструкияях (рис 9 7) установку производят непосредственно на шейку вала, которая в этом случае имеет канавки, способствующие смазыванию поверхностей трения. Для зубчатых колес, неподвижных относительно вала, используют шлицевые и шпоночные соединения Иногда такие колеса выполняют совместно с валом, как что сделано в конструкции, показанной на рис 9.7, или в виде пустотелого блока. Блок устанавливают па ось. неподвижно закрепленную в картере Ось одновременно является элементом, повышающим жесткость картера.
В раздаточных коробках с дифференциальным приводом используют цилиндрические и конические межосевые дифференциалы. Несимметричные дифференциалы в основном цилиндрические, а симметричные — конические. Сателлиты конических дифференциалов выполняют с отверстием и устанавливают па осях В цилиндрических дифференциалах сателлиты имеют шипы, которые устанавливаются в отверстия корпуса (воднлп) Корпус дифференциала, как правило, состоит из двух частей, соединяемых винтами.
218
Раздаточные коробки
Приводное колесо крепится к корпусу винтами или заклепками. В некоторых конструкциях (см. рис. 9.6) приводное колесо 9 является средней частью корпуса дифференциала.
Если за раздаточной коробкой отсутствуют узлы с переменным передаточным числом, то на одном из ее валов, имеющих постоянное передаточное число к ведущим колесам, размещается привод спидометра.
Коробки передач, устанавливаемые на полноприводных и нелолнопрнвод-ных автомобилях, обычно унифицированы Поэтому раздаточные коробки чаще выполняют как отдельный механизм При их установке на раме используются опоры с упругими элементами.
9.3. ОСНОВНЫЕ ДЕТАЛИ И УЗЛЫ
Картер. Размеры картера в поперечной плоскости определяются мсжосе вЬ1М расстоянием и заданными переда, точными числами, а его конфигурация в поперечном направлении — относительным ресположением осей. Послед-
Рис. 9.8. Зависимость между
1 — УАЗ-450, 2 — УАЗ-452; 3 — ГАЗ 63;
4 — ГАЗ-66: S — ЗИЛ-157КД. 6 — ЗИЛ 131. 7 — Taira-138; в — «Урал-375Д>;
9 — МАЗ 502: Ю — МАЗ-509А: И — КрАЗ-25761. 12 - КрАЗ-25561
Нее выбирают с учетом необходимого просвета под картером и возможности размещения карданных валов На рис. 9 8 и 9 9 представлены зависимости между межосевым расстоянием aw и максимальным крутящим моментом. Межосевое расстояние относится к наиболее нагруженной паре зубчатых колес раздаточной коробки, а крутящий момент — к ведомому колесу этой нары Определение момента производят по ДВИ1 ателю и по сцеплению ведущих колес При определении момента по двигателю принимают, что в коробке передач включена первая передача, а в раздаточной коробке — низшая ciy-иень Наблмпаемый значительный разброс значений мсжосевых расстояний при близких значениях крутящего момента объясняется различиями в планируемой длительности работы на низшей ступени и в условиях еаболы полноприводного автомобиля, (екоторое влияние оказывают условия размещения карданных вадов и принятая схема раздаточной коробки. В раздаточных коробках с дифференциальным приводом, например, учитываются условия размещения меж.-осевого дифференциала.
(книвные demnu и ЦЭ.1Ы
21У
Зубчатые колеса. В раздаточных коробках применяют преимущественно косозубые передачи. При использовании прямозубых передач принимают меры для уменьшения шумности их работы. Например, в раздаточной коробке автомобиля Г АЗ-65 для улучшения плавности работы прямозубые колеса выполнены с увеличенной высотой зубьев. С этой же целью не применяют зубчатые колеса с четным чме лом зубьев Исходный контур и мо дули зубчатых колес вновь ироск тируемых конструкций должны удовлетворять требованиям ОСТ.
На рис. 9 10 дана зависимость между окружным модулем и максимальным крутящим моментом на ведущем валу раздаточной коробки. Значения модулей в раздаточных коробках в среднем на 15—25 % выше, чем в коробках передач тех же автомобвлей Суммарное число зубьев Zj. в каждой паре и угол наклона зуба f находятся в тех же пределах, которые характерны для коробок передач механических трансмиссий. Коэффициент рабочей ширины венца зубчатых колес (фо ~ ~ Ь/сда) принимают в пределах фа в =-0,18-^0,22— для автомобилей малой грузоподъемности и фо = 0,22-т--=-0,38 — для остальных. Направление линии зуба выбирают из условия наиболее рационального нагружения подшипниковых углов Данные по некоторым параметрам зубчатых колес раздаточных коробок приведены в табл. 9 I.
Валы. На рис. 9 II представлены зависимости между диаметрами ведущего и ведомого валов в зоне опоры и максимальным передаваемым моментом. Максимальный крутящий момент для ведомых валов раздаточных коробок с дифференциальным приводом определен исходя из максимвльного момента двигателя, а коробок с блокированным приводом — с учетом сцеп ления ведущих колес при ф = 0,7. Вал должен иметь достаточную жесткость.
При выборе его дваметра учитывают условия унификации подшипников и приводных фланцев Размеры и геометрические соотношения валов приведены в табл 9.2.
Подшипники. В раздаточных коробках используют в основном шариковые радиальные подшипники, так как они более просты и имеют меньшую стоимость некоторых конструкциях
9.!. Основные параметры и размеры зубчатых колее раздаточных коробок
Автомобиль Наименование пары зубчатых колес гш «К «п,’ 0 Направление лнинн зуба «Э £ О S II
УАЗ-452 ГАЗ-66 ЗИЛ 131 МАЗ- 609А «Урал-375Д> Низшая ступень Привод ведомого вала Низшая ступень Привод ведомого вала Низшая ступень Привод ведомого вала Низшая ступень Высшая ступень Привод корпуса дифференциала Привод переднего моста Низшая ступень Высшая ступень 24 27 34 17 31 23 25 25 S2 3'8 38 28 34 29 33 29 39 24 25 20 33 3,5 4,65 4.55 4,25 4,25 5 5 Б 5 5 0 0 0 0 23° 33' 40" 23’ 33' 40" 20’ 03' 20’ 03' 20’ 03' 20’ 03' 19’ 28' 47" 19’ 28' 47" Левое Правое Правое Левое Правое Левое Правое Левое Правое Левое Правое Правое Левое Правое Левое 106.7S 106.75 112,5 112,5 178.51 178.51 165 165 180 98 130,27 143,2 143,2 ~ 18 25 37 23 28 36 39 39 42 42 48 42 48 44 38 42 50 48 52 60 0,17 0.17 0.25 0,25 0.22 0,235 0.23 0,25 0.24 0,32 0.335 0 30 Раздаточные коробки
Продолжение табл 9.1
Автомобиль Наименование пары зубчатых колес ?»i '«П- Направление линии зуба Ящ. мм' в 9- II
«Урал-375 Д> Привод корпуса дифференциала 33 43 5 19’ 28' 47" Прайсе 202.5 48 50 0.25 9.4
КрАЗ-257Б1 Низшая ступень 5 27’ 08' 24" Левое Правое 160.75 62 60 0.36 10.7
Высшая ступень 25 34 5 27’ 08‘ 24" Правое Левое 165,75 66 036 10,7
Привод ведомого вала 24 35 5 27’ 08' 24" Правое Левое 165,75 50 0,27 8.0
КрАЗ-255Б1 Низшая ступень 23 5 27’ 08' 24" 165,75 62 0.35 10.3
36 Правое 58
Высшая ступень 28 31 5 27’ 08' 24" Правое Левое 165,75 60 58 0.35 10,3
Привод мостов тележки 5 27’ 08' 24" Правое 165 75 50 0,27 8.0
35 Левое 45
Привод переднего моста 21 4 26’ 10' Левое 118 1 0.355 9,4
Правое
Tatra 138 S1 Низшая ступень 20 35 Я 14’ - 170 58 59 0.34 9,4
Высшая ступень 24 31 6 14’ - 170 65 70 0.38 10.5
Привод ведомого вала 6 14’ - 170 70 70 0.38 11,3
детали и узлы
222
Раздаточные коробки
Основные детали и узлы
223
с косозубыми передачами на опоре вала, имеющей меньшую радиальную нагрузку, устанавливают радиальный шариковый подшипник, а па другой опоре — радиальный роликовый Первый воспринимает комбинированную нагрузку, а второй — только радиальную. Если осевая нагрузка такова, что установка шарикового подшипника, способного ее воспринимать, затруднена или экономически нецелесообразна, то устанавливают конические подшипники и обеспечивают возможность их регулировки Сложные подшипниковые узлы, имеющие большую стоимость, в раздаточных коробках применяют только при особо тяжелых условиях работы и ограниченных размерах В табл. 9 3 приведены основные размеры и типы подшипников раздаточных коробок
Межосевой дифференциал. Межосевые дифференциалы выполняют в виде зубчатого трехзвенного механизма с одиночными сателлитами. Крутящий момент распределяется между центральными зубчатыми колесами механизма, каждое из которых соединено с соответствующим ведомым валом. Соотношение между моментами на центральных колесах дифференциала (или на ведомых валах) равно соотношению чисел зубьев центральных колес z/>!za (см. рис. 9 6) или диаметров. Влияние внутренних сил трения па распределение моментов незначительно, и им можно пренебречь Дифференциал, имеющий zh — га, называют симметричным При гь г,, дифференциал является несимметричным. Необходимое значение отношения zt>!za определяют из условия наилучшего использования сцепной массы автомобиля. Исходя из этого условия, отношение моментов на ведомых валах должно равняться отношению сцепных масс, приходящихся на соответствующие ведущие мосты. Практически указанное равенство соблюдается приближенно. Межосевой дифференциал раздаточной коробки должен быть достаточно компактным, чтобы на его корпусе можно было разместить приводное зубчатое колесо Ниже приведены основные параметры межосе вых дифференциалов, установленных в раздаточных коробках
224
Раздаточные коробки
Автомобиль . Кинематический па- КрАЗ-257Б1 МАЗ-509А «Урал-375Д» Кам 43-4310 В АЗ 2121 «Пива»
раыетр .... aw мм 1 2 03.75 2 56.54 2 56.54
Внешнее конусное расстояние мм 73.15 37.5
Максимальный суммарный момент "на ведомых валах М. Н.м 10 000 5700 6000 690( 820
Модуль гн. мм — 4.25 3.75 3.71
Внешний модуль тс, мм Рабочая ширина венца l>w, мм 5.5 25 40 40 45 3.5 15
Число зубьев эпициклического колеса zj, . . 22 40 40 40 IS
солнечной шестерик «д 22 20 20 20 18
сателлита Zg , . II 10 10 10 12
Число сателлитов ”р Диаметр осн шипа сателлита <f. мм Диаметр отверстия под подшилинк са теллита D, мм 4 30 30 4 25 35 4 24 28 24 28 16 16
0.3. Подшипники, применяемые в раздаточных коробках различных автомобилей
Бал •* Подшипник Тип Серия ПИЙ D!°W
d'mm
Основные детали и узлы
225
Продолжение табл. 9 3
Вал Подшипник Тип Серия и»?» Diaw
Ведущий Передний ЗИЛ-131 Шариковый радиальный Тяжалая 130 0.67
Задний Роликовый радиальный — 80 0.45
Привода заднего Передний однорядный Средняя 120 0.67
моста Задний Шариковый радиальный 100
Привода перед Передний однорядный » 100 0.3G
него моста Задний Роликовый радиальный ИО 0,62
Ведущий Передний однорядный «Урал-375Д* Роликовый конический Средняя 130 0.91
Промежуточным и задний Передний однорядный по 0.56
Корпуса диффе- Передний Шариковый радиальный Легкая 160 0.79
ренинала Задний однорядный » 180 0.69
Привода заднего Задний » Средняя 120 0.60
моста Привода перед Передний » 120 0.60
него моста Ведущий Перадний МАЗ 509А Роликовый конический Средняя 1S0 0.73
Промежуточе ый и задний Передний однорядный » 120 0.66
Корпуса диффе Передний Шариковый радиальный Легкая 180 1.0
реыциала Привода заднего и задний Задний однорядный Средняя 120 0.66
моста Промежуточной Передний » Легкая 125 0.96
шестерни и при вода переднего Ведущий и задний Перадний КрАЗ-255 БI Шариковый радиальный Т яжелая 150 0,91
Задний однорядный Роликовый радиальный Средняя ПО 0.67
Прометку Т очный Передний Шариковый радиальный Тяжелая 140 0.85
Средний однорядный Роликовый радиальный - 180 1,09
Задний Средняя 110 0.67
Привода проке Передний » ПО 0.67
«уточного и звд Задний Шариковый радиальный Тяжалая 140 0.85
него мостов Привода перед- Передний однорядный Средняя 120 0.83
него моста Промежуточной и задний Роликовый конический 80 0.68
шестерня Ведущий Передний однорядный Tatra-138 S1 Шариковый радиальный 190 1.11
Зедний однорядный Роликовый радиально 82 0.48
Промежуточного Передний упорный двухрядный Роликовый конический — 140 0.82
блока Привода заднего и задний Передний однорядный — 160 0.94
моста Задний — 170 1.0
Раздаточные коробки
9.4. ЭЛЕМЕНТЫ УПРАВЛЕНИЯ
Для управления раздаточной коробкой используют зубчатые муфта и реже передвижные зубчатые колеса. Перемещение зубчатых муфт и передвижных колес производится с помощью вилок, устанавливаемых на штоках. Переключение ступеней предусматривается, как правило, при остановленном автомобиле, и синхронизаторы для облегчения включения муфт, за редким исключением, не применяются Привод к штокам вилок выполняют механическим, пневматическим или электропневматичоским. Его выбор производят с учетом расстояния от рабочего места водителя до раздаточной коробки типа кабины, требований с точки зрения комфортабельности, наличия в автомобиле постоянно действующего источника сжатого воздуха Конструктивная схема одного из вариантов механического привода показана па рис 9 12 Штпки вилок имеют фиксаторы положений, аналогичные применяемым в коробках передач.
Рис. 9.13. Схема управления раздаточной неробкой автомобиля ЗИЛ-131 с электро-пневматнческим валюченнен нередкого
вал привода переднею «оста, Н — шток
включения 1гривода переднего моста. 12 — муфта включения привода переднего мо-
В раздаточных коробках с блокиро ванным приводом и периодически включаемым передним мостом привод пере ключенин должен обеспечивать обязательное включение переднего моста при включении низшей ступени. По сзедиее достигается различными способами- блокировкой в приводе переключений соо10етствующих штоков; выбором соответствующей схемы (см. рис 9 2, а); применением автомат» ческой системы, использующей в ка честве сигнала перемещение штока вилки включения низшей ступени. На рис 9 13 показана схема управле ния раздаточной коробкой автомо биля ЗИЛ-131. Привод штоков 3 и 4 вилок переключения ступеней является механическим, а штока 11 вилки включения переднего моста — элентро-пневматическим. При включении низ шей ступени перемещением штока 3 одновременно замыкается цепь питания обмотки злектронневматвческого ^лапана 14, клапан открывается, и
Элемиты управления
сжатый воздух поступает в пневматическую диафрагменную камеру 13. воздействующую на шток // вилки включения прикола переднего моста Включение последнего происходит под действием сжатого воздуха, а выключение — под действием возвратной пружины пиевмокамеры. Для того чтобы передний мост можно было включать также и на высшей ступени, в кабине установлен соответствующий элек-тровключатсль, замыкающий при необходимости цель питания электро-пневматического клапана 14.
Схема пневматического привода в управлении раздаточной коробкой автомобиля МАЗ-509А показана на рис 9 14. Для переключения ступеней используется пневматический цилиндр 4, обеспечивающий три фиксиро ванных положения муфты 7 включе пня ступеней — нейтральное, высшей ступени и низшей Включение блокировки межосевого дифференциала про изводится с помощью пневматического цилиндра 10. При подаче в цилиндр сжатого воздуха дифференциал блокируется. Разблокировка дифференциала происходит под действием пружины штока цилиндра Управление цилиндрами 4 и 10 осуществляется с помощью многопозцциоиного крана.
На некоторых автомобилях устанавливают раздаточные коробки с автоматическим вкаючением переднего моста при помощи роликовой муфты свободного хода (см рис 9 4, е) Кон струкция такой муфты показана на рис. 9 15. Ведомая обойма 1 муфты закреплена па валу привода переднего моста. Муфта двухрядная: ряд с ведущей обоймой 3 обеспечивает блокировку муфты на переднем ходу, ряд с обоймой 2 — па заднем ходу С помощью передвижной зубчатой муфты 4 колесо 5 дополнительной передачи соединяется с обоймой 3 (или 2) При одинаковой частоте вращения передних и задних колес автомобиля колесо 5 дополнительной передачи, а с ней и ведущая обойма 3 (или 2) вращаются медленнее, чем вал привода переднего моста с ведомой обоймой /, поэтому муфта разблокирована и перед пий мост отключен Кинематическое рассогласование обеспечивается соответствующим выбором передаточного
рамцпала раздаточной коробки МАЗ-5СВА:
8 — муфта включения блокировки дифференциала; 9 — рычаг. 10 — цилиндр включения блокировки дифференциала.
> переключения раздаточной кс
ены: I — высшая ступень (диф-1иал блокирован). fl — высшая ib (дифференциал разблокирован), низшая ступень (дифференциал
. V — низшая ступен ференцкал блокирован)
числа дополнительной передачи. Рассогласование 1100 (nt — п6)/л6 i % принимают в пределах 3—5 %. Блокировка муфты свободного хода и включение привода переднего моста происходят автоматически когда частота вращения ведущих колес заднего моста вследствие их проскальзывания па 3—5 % превысит частоту вращения передних колес. Включение может происходить как на высшей ступени, так и на низшей Поэтому в слу-чае разблокированной муфты на низшей ступени задний мост может оказываться пол действием значительного
228
Карданные передачи
крутящего момента, что следует учитывать при проектировании трансмиссии.
Кинематическое рассогласование роликовой муфты иногда обеспечивают в результате соответствующего увеличения передаточного числа главной передачи переднего моста. В Этом случае дополнительная передача не 1ре буется, и зубчатая муфта 4 может быть соединена непосредственно с валом привода заднего моста
Система автоматического включения привода переднего моста, основанная па использовании роликовой муфты свободного хода, не получила широкого распространения вследствие функциональных недостатков такого привода и небольшой долговечности муфты.
Карданные передачи
10.1. кинематические
И КОНСТРУКТИВНЫЕ СХЕМЫ
Карданная передача автомобиля — это механизм трансмиссии, состоящий из одного или нескольких карданных валов и карданных шарниров, предназначенный иля передачи крутящего момента между агрегатами, оси валов которых не совпадают или могтт изменять свое относительное положение (рис 10 I)
Основными элементами карданной передачи якляются шарниры, которые подразделяют по кинематическим свойствам на карданные шарниры неравных и равных угловых скоростей, а по наличию фиксированных осей качания — на полные и полу-кардаппые шарниры.
Полным карданным шарниром называют шарнир, имеющий фиксированные оси качания, полукарданным шарниром — шарнир, не имеющий фиксированных осей качания. Упругие
полукарданные шарниры допускают утлоные отклонения осей валов до 5°, а жесткие — до 2° н некоторое их продольное перемещение.
В трансмиссиях современных автомобилей преобладают полные карданные шарниры, осевая компенсация в которых обеспечивается установкой на шлицах карданного вала скользящей вилки.
На рис. 10 2, а показана схема карданной передачи, получившей распространение па двухосных автомобилях с одним задним ведущим местом. Мощность от коробки передач 1 передается к заднему ведущему мосту 5 через два карданных вала 2 и 4 и три шарнира. Последний вал имеет промежуточную опору 3.
Двухосные полноприводные автомобили имеют три двухшарнпрные карданные передачи (рис 10 2. б) В этом случае между карданными передачами устанавливают раздаточную коробку б. На рис. 10 2, в показана схема трансмиссии автомобиля с ипдивидуаль-
Кинематические и конструктивные схемы
Рве. 10.1. Кардавмые передачи с шарнирами, имеющими крестовину: - двухшарнирная привода ведущего
веской, в — с шарниром, инеюир'м крестовину. и с упругим полукардакным шарниром, я — с жесткими полукард,ih ними шарнирами; 1 и 2 — полные карданные шарниры соответственно нерав
соответственно упругий и жесткий полу карданные шарниры неравных угловых Скоростей
ным приводом мостов Карданная передача заднего моста 5 имеет два карданных вала 4 и 7, четыре шарнира и промежуточную опору 3. Карданные валы 2. 9 и 10 обеспечивают привод соответственно к раздаточной коробке 6, промежуточному 8 и переднему 11 мо-
В современных полноприводных ав томобилях применяют схему с промежуточным проходным МОСТОМ (рис |0 2, г). В этом случае карданный вал 4 обеспечивает привод дополнительного редуктора 12, от которого мощность раздается непосредственно к промежуточному 8, а через карданный вал 7 к заднему мо-
Рис. Ю.2. Схемы карданных передач
Для привода ведущего управляемого колеса используют конструкцию (рис. 10 2. б), в которой имеется несколько шарниров 13 с промежуточной опорой 3 и шлицевым соединением 14
Наибольшее распространенве в карданных передачах получила промежуточная опора (рис. 10 3, о) с одним радиальным шарикоподшипником /. внутренняя обойма которого установлена на карданном валу 2, а внешняя — в резиновой втулке 3. Втулка с помощью кронштейна 4 крепится к раме (несущему кузову) автомобиля.
Промежуточную опору с двумя подшипниками (рис 10 3, б) устанавливают при значительных отвосительных перемещениях агрегатов трансмиссии, соединенных карданным валом, или при невозможности соединить агрегаты одним валом (например, для привода заднего моста трехосного автомобиля). Вопрос о необходимости промежуточной опоры в карданной передаче решается при определении допустимой длины карданного вала.
250
Карданные передачи
10.3. Промежуточные опоры:
10.2. ОСНОВНЫЕ ПАРАМЕТРЫ
Пол данной LK карданного вала понимают расстояние между центрами шипов крестовин карданных шарниров, установленных на концах данного вала. Допустимую длину LKmax карманного вала определяют исходя из критической частоты вращения последнего Под критической частотой вращения 1|Онимаюг частоту, при которой происходит потеря устойчивости прямолинейной формы еси вращающегося вала Критическая частота вращения карданного вала (иб'мнн)
п«р- 1.185- 107ГО® тНг/к. ОМ где D и d — соответственно наружный и внутренний диаметры карданного вала, см.
В соответствии с ОСТ 37 001.053—74 «Ввлы карданные. Технические требования к установке. Нормы дисбаланса» долуствмой является длина, при которой максимальная частота вращения карданного вала, соответствующая максимальной скорости движения автомобиля, не превышает 70 % расчетной критической частоты вращения вала. Исходя из этого. допустимую длину
вала рассчитывают в следующем порядке.
1) Определяют максимальную частоту вращения карданного вала
«к пмх = 2,650а шахПв-к/Гко. (10-2)
где uB_i; — передаточное число от карданного вала к гедущим колесам; ®а шах — максимальная скорость двн жен и я автомобиля, км/ч
2) Находят расчетный крутящий мо мент на карданном валу на низшей не редаче в коробке передач
М — М^, (10 3)
где А-fj — крутящий момент на ведущем валу коробки передач, Н-м, для механических трансмиссий Afj = — /Метах — максимальный крутящий момент двигателя, для гидромеханических трансмиссий Д4, — максимальный крутящий момент на валу турбины гидротрансформатора при коэффициенте трансформации, соответствующем КПД трансформатора, равном 0.7; >«| — передаточное число коробки передач на низшей передаче.
3) Выбирают размеры наружного и внутреннего диаметров карданного вала. Для этого используют данные табл 10 1, в которой приведены размеры сечений труб по ГОСТ 5005—82 Н значения крутящих моментов, соответствующие статистическим уроаням напряжений круче ния в карданных валах грузовых (тк*= 1004-120 МПа) и легковых (г« ‘ 254-55 МПа) автомобилей, или данные табл. 10 2, в которой указаны основные размеры элементов карданных передач
4) Определяют допустимую длину карданного вала (в см)
I ншах "= 0.83 • 10’ 4- аа/Икшах-
(10.4)
Значения D и d в формулу (10 4) подстааляют сантиметрах.
Углы установки карданных валов влияют на напряженность работы кар-* дайной передачи, а следовательно, и на срок ее службы Углы установки валов, соединяемых шарниром неравных угловых скоростей, не должны
Основные параметры
231
Резне ры сечения 10.1. Момент Размеры < Поляр- инерции сечения см* ечений труб карданных аале груэочиан способность Мя (И м> при т тпах» tM
it-hfex «о х Г. X н"юУ1Гг 100—120 25-55 МПа nP« ”k max-
3000 4000 5000
*6 *6 «5 55 55 63 66 71 71 71 71 71 71 82 82 82 82 94 94 100.5 104 104 104 2.5 2.5 2.0 2.5 3.5 3.5 2.0 1.6 2^0 2.1 2.2 2.5 3.0 2.5 3.0 8,5 4.0 3.5 4.0 6.0 4.0 4.5 5.0 8.44 8.81 9.87 12.47 17.82 23.16 14.12 12.97 14.63 16.30 17.15 17.99 20.54 24,84 27.26 32.08 38.67 44.51 50.51 58.08 101.50 70.76 80.03 89.40 21 10 22,46 29.13 37 40 55.23 81.06 49.43 48 И 54.57 61,14 64.48 67.83 78.05 95.6.3 118.6 144.9 172.1 200.3 255.1 296.2 371.0 396.3 452.2 599.6 844 - 1 000 881—1 050 977—1 180 1 247—1 500 1 782—2 140 2 316—2 780 1 412 — 1 700 1 297—1 560 1 463 — 1 750 1 630— 1 950 1 715—2 060 1 799—2 180 2 054—2 460 2 484—2 980 2 726—3 280 3 293—3 950 3 867—4 640 4 451—5 340 5 0SI —6 050 5 £08—6 950 10 150—12 200 7 076-8 500 8 003—9 600 8 940—10 700 .? ---------1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 И II 1 1 1 | 134 137 149 150 151 161 162 168 168 168 169 169 169 170 18! 182 182 183 195 195 202 205 206 206 116 119 129 130 131 139 140 145 146 146 146 147 147 157 158 158 159 169 169 175 178 178 178 11 4 106 Its 116 125 126 130 130 130 131 131 131 J 32 140 142 151 157 159 159 160
быть меньше 1° из-за опасности бри-неллирования и при номинальной нагрузке в статическом состоянии автомобиля не должны быть более 3° — для легковых автомобилей, 4е — для грузовых автомобилей н автобусов, 8° — для автомобилей высокой про хомчссти. Указанные ограничении приняты для обеспечения высоких значений КПД карданной передачи, большего срока службы шарниров и уменьшения степени неравномерности вращения карданного вала.
Синхронное вращение ведущего и ведомого валов карданной передачи достигается при следующих условиях.
в двухшарнирной карданной передаче (рис. 10 4, а, б) углы Ти и у»а между карданным валом 2 и соединяемыми им валами 1 и 3 должны быть равными, а вилки шарниров на концах карданного вала при сборке необходимо устанавливать в одной плоскости;
в трехшарнирной кар тайной передаче с промежуточной оперой (рис. |С 4, в) синхронное вращгице
ведущего 1 и ведомого 4 валов в зависимости от расположения вилок на концах карданных валов 2 и 3 обеспечивается при соблюдении условий, указанных в табл |0 3 Так как во время движения автомобиля углы у»з и Уз» в трехшарнириоЙ передаче могут меняться при постоянной угле уц,
232
Карданные передачи
10.2. Основные резмеры элементов карданных передач
АвгоМЪбнль
Соединяемые агрегаты
ВАЗ-210! «Жигули*
«Москвич -2140*
ГАЗ 24
УАЗ-451М
УАЗ-452
ГАЗ-53А
ГАЗ-66-0!
ЗИЛ 130
«Урал-375 Н»
КамА'З- 5320
МАЗ 5335» КрАЗ-255Е1
БалАЗ-540А
БалАЗ-548А
324 324 386 540
680 680 550
1842 1842
1842 1656 1262 2060 2560 2643 3972 2186 1930 4930 2465 3740 3064 3064 2348 1350 6750 1800 8520
Примечание КП — коробка передач; ПО -- промежуточная опора: РК — раздаточная коробка. ПрМ — промежуточный мост; ЗМ — задний мост; ПМ — перед иий мост; Д — двигатель. СР — согласующий редуктор
го полной синхронизации вращения валов / и 4 достичь нельзя Однако синхронизация тем ближе к полной, чем меньше угол у|2, поэтому рекомен-
дуется угол Viz выбирать в пределах 1—2°,
в чстырехшарнирной карданной передаче с промежуточной опорой
Взаимное расположение вилок
Под углом 90"
В одной ппоскосчк
В одной плоскости Под утком 90"
Основные параметры
233
231
Карданные передачи
10.5. Основные’'размеры карданного шарнира
(рис 10 4, г, д) синхронное вращение не только конечных валов / и 5, но также и вала 3 промежуточной опоры возможно при соблюдении указанных выше условий для каждой из двух двухшарнирпых передач, составляющих четырехшарнирную, в отдельности.
Если углы установки карданного вала указаны в двух взаимно перпендикулярных плоскостях, то у = -JA^p + tU'
Основные размеры крестовин (рис. 10.5, п) и вилок (рис. 10.5, б) карданного шарнира стандартизованы и должны выбираться из числа указанных в отраслевом стандарте ОСТ 37 001.068—76 «Шарниры карданные неравных угловых скоростей. Основные размеры и технические требования» (табл. 10 4).
В качестве определяющего размера карданного шарнира можно принять размер Н между торцами крестовин (рис. 10.5, а). Значение Н должно быть равно или больше меньшей из величин
1.57 УМ или 1,57 >^850си'коф/ио.
Параметры крестовин карданных шарниров
Параметры CWB (ФРГ) psc * (ПНР! МАЗ СССР) OWB (ФРГ) FSC (ПНР) HS (Великобритания)
Передаваемый момент М, кН ы . о 4.3 5.2 5.2 S.6 6.6
Высота го шипам 11, мм 117.8 126.0 127.0 127.0 123.0 140.0 146.8
Диаметр шипа мм 27,83 35.28 29.46 33,65 30.55 35.25 33.56
Контактное напряжение по линии касания иглы с шипом ои. 2876.8 2418.6 2868.1 2876,8 3075.1 2733.4 3008.7
МПа 42.86 42.07 41,04 50.39 52.00 48.19 56,35
Нагрузка на подшипник Р. кН Грузоподъемность подшипника:
38.20 20.65
статическая Св. кН 58.0 36.84 40,21 21.39 55,10 26.79 50.75 28,20 58.0 30.84 55.24 30.41
л
0. G О о X с g е
Параметры га Г9 Сй
& 8 &
S О £ в. £ о
Передаваемый момент Д1. кН ы 6.8 7.5 9.45 9.5 10,5 12.5 12.5
Высота го шипам Н. мм 147.0 143,8 159.5 165,0 165.0 175.0 196.0
Диаметр шипа rfm. мм 33.65 32.44 42,70 45.00 40.019 46.80 37.90
Контактное напряжение по линии касания иглы с шипом <тт[ 2757.7 3075.7 2829,7 2710.0 3015.7 2613.5 2810.8
МПа 56.10 62.50 69.23 67.28 89.64 75.2!
Hai-рузка на подшипник Р, кН Грузоподъемность подшипника 74,63
статическая G>. кН дв мимическая С, кН 59.69 32.27 83.65 29.26 89.05 35,30 72. S0 35.79 65.25 33.35 68.67 90.84 49 55
Расчет деталей
235
где Л! — м'омент, определяемый по формуле (ЮЗ); 6Сц — вес, приходящийся на мост, к которому подводится момент через рассчитываемую карданную передачу, при полной нагрузке автомобиля, кН, —коэффициент сцепления шнн с дорогой, <р — 0,85; и0 — передаточное число главной передачи Определенный таким образом размер Н соответствует карданным шарнирам автомобилей с карбюраторными двигателями Если же крутящий момент передается от дизеля, то необходимо величину М умножить на коэффициент, равный 1,2. Зная размер Й, по табл. 10 4 выбирают соответствующий типоразмер карданного шарнира Предварительный выбор типоразмера шарнира можно также производить, ориентируясь на уже имеющиеся конструкции (см табл 10 2) Основные параметры крестовин некоторых карданных шарниров приведены в табл 10.5 Предварительный выбор вида шлицевого соединения вилки карданного шарнира с валом п его параметров производят, ориентируясь на данные существующих конструкций Выбранные параметры должны соответствовать ГОСТ 6033—80, ГОСТ 1139—80 или отраслевой нормали автомобилестроения ОН 025 333—69. После выбора размеров деталей карданной передачи выполняют проверочные рас* четы. честве расчетного момента карданной передачи принимают Л11<в, 2 Условно сосредоточенную нормальную силу, действующую в середине шипа, Рш — 10W/ ilK cos у), (10 5) где М — в Н-м; /и—расстояние между серединами игольчатых роликов противоположно расположенных карданных подшипников, мм (рис 10.5. о), Т — угол установки кзрданього вала, 3 Напряжение изгиба шипа в сечении А—А (рис. 10.5, п) где h — плечо силы мм (опреде- ляется исходя из того, что сила приложена в середине игольчатого ролика карданного подшипника); й"о — момент сопротивления сечения ниша, мм3, для шипа без отверстия для смазывания W'(I = 0,W?u’ для ШиПа с 0ТВ<,Р* стием а’о Для смазывания Оценку напряженного состояния шипа при изгибе производят, сопоставляя значения ои со средним стати* стичесним уровнем напряжений из* гиба в выполненных конструкциях (<т„ — 200-4-300 МПа). 4. Напряжение среза шипа в сече* нни А—.4 (рис. 10.б, о)
10.8. РАСЧЕТ ДЕТАЛЕЙ Ъ “ ИЛИ
При расчете креставины карданною шарнира определяют следующие параметры I. Расчетный крутящий момент Л! на карданном валу. При расчете карданных передач автомобилей с колесной формулой 4X2, а также карданных передач, расположенных между коробкой передач и раздаточной коробкой или проходным мостом тележки, в качестве расчетного принимают меньший из двух моментов на карданном валу: определенного по двигателю Л4и.д и по сцеплению ведущих колес При расчете карданных передач многоприводных автомобилей, расположенных за раздаточной коробкой, в ка- т,-«>./[« (4.-<©1- Напряжения среза шипа в выполнен* ных конструкциях находятся в пределах хв =* 60-4-100 МПа. В вилке шарнира возникают папря* жен ля изгиба и кручения. Под действием силы Рш, приложенной на плече л, напряжение изтба Сц =- РшО/в’е Напряжение кручения в опасном сечении Б—Б (рис 10 5, б), возникающее под действием силы Рщ, приложенной на плече с. т1( - РщС
236
Карданные передачи
ой силы от полного автомобиля
Моменты сопротивления зависят от формы опасного сечения Б—Б. Во многих случаях оно может быть заменено прямоугольником с размерами Ь к I (ркс. 10 5, б) В этом случае
Го = 1Л«/6 и W^klb*.
Для отношений 1/Ь, равных 1; 1,5, 1,75, 2, 2,5, 3, 4; 10, значения коэффициента k соответственно рзвны 0,208, 0,231; 0,239, 0,246; 0,258; 0,267; 0,282, 0,312.
Напряжения в выполненных конструкциях находятся в следующих пределах: Си ~ 50-J-80 МПа; тк = = 80-4-160 МПа.
При расчете игольчатых подшип-ников карданного шарнира определяют следующие параметры.
1. Эквивалентный крутящий момент на карданном валу
Мн. а = Рк. (Ю.6)
где Рн. э— эквивалентное тяговое усилие на колесах автомобиля, мощность к которым подводится через рассматриваемый вал, Н.
Эквивалентное тяговое усилие
Рн. а i= Рк,
где <7ф — вес, приходящийся на колеса автомобиля, к которым мощность передается через рассматриваемый карданный вал; СфХ — вес, приходящийся на все ведущие колеса автомобиля;
Рк.9 х — суммарное эквивалентное тяговое усилие па всех ведущих колесах автомобиля, определяемое в зависимости от полного веса автомобиля (автопоезда) СЛ (рис. 10 6)
Приведенные на рис. 10.6 зависимости 2, 3, Б. 7 относятся к грузовым автомобилям (4x2) и автобусам, эксплуатируемым в следующих условиях; по асфальтированным дорогам равнинной местности (кривая 7); по асфаль-тироианным дорогам пересеченной местности, а также по дорогам с булыжным, щебеночпо-гравпйным покрытвем и улучшенным грунтовым (кривая 5|; в городских условиях (кривая 31; по грунтовым дорогам неудовлетворительного состояния (кривая 2) Кривая 4 относится к грузовым автомобилям (автопоездам) в случае их работы на дорогах различного вида при следующем распределении последних: 20 % — асфальтированные равнинной местности; 20 — те же пере-
сеченной местности, 25 % — булыжные, щебеночные, гравийные, улучшен-' нце грунтовые; 25 % — естественные грунтовые; 10 % — городские. Кривая 6 — для магистральных грузовых автомобилей (автопоездов) общим весом свыше 160 кН при работе только на асфальтированных дорогах; кри вая I — дая автомобилей повышенной проходимости. Для легковых автомобилей с колесной формулой 4x2 рекомендуется пользоваться кривой 4, а для автомобилей-самосвалов — крилей S.
2. Радиальную нагрузку на подшипник (в Н)
Р,э=и 1О’Л4и.з/0кСО»у), (10 7)
3. Фактор качательнсго движения в подшипнике
где а — центральный угол между игольчатыми роликами, а = 360,'z; z — количество игольчатых роликов в подшипнике (см табл 10 4).
Если « > 1 и является дробным числом, то его значение округляют до меньшего целого числа. Если 0,9 < < п < 1, то принимают л = 1.
4 Поправочный коэффициент Ка. При л = 0,2 -4- 0,9 Ка 0,83 (и +
Расчет деталей
237
+ 1); при п 1 Ка рассчитывают по формуле
Ка= 1 + У cos3,7j«, /=-1
где j =Л, 2, 3...т.
При «<0,2 производят проверку подшипника только по статической грузоподъемности.
5 Коэффициент Кц, учитывающий влияние качателыюго движения на срок службы подшипника, Kk»0.1z/K«.
6 Усталостный износ подшипника (в условных единицах), накопленный за ( км пробе! а автомобиля. /?,п =- 103«в_« («гаКтКб)3-33'^^).
где Кт — температурный коэффициент, при рабочей температуре до 100 СС К, = 1, при 125 °C Кт = 1,05, при 150 'С КТ ~ 1,10; Кв— коэффициент безопасности. Ле = 1,1 -г- 1,2
7 Расчетный срок службы игольчатого подшипника шарнира (в километрах пробега автомобиля)
5п=105/<кС3-33/«1И,
где С — динамическая грузоподъемность подшипника, Н.
При отсутствии данных С можно определить по формуле
С = Аг^ 3dp!p. вф, где dp и 1р. эф — соответственно диаметр и эффективная длина (длина Контакта) игольчатого ролика, мм; А — постоянный коэффициент, А = 40 для игольчатых роликоподшипников без сепаратора и А = 60 для подшипников с сепаратором.
Срок службы карданного подшипника не должен быть меньше половины планируемого срока службы автомобиля до капитального ремонта.
Игольчатый подшипник проверяют по статической грузоподъемности. Для этого определяют максимальную динамическую нагрузку на подшипник
Pri— PrJkl/M*.*
где Л4«. э и Рщ определяют по формулам соответственно (10 6) и (10 7); Л1к}— максимальный динамический момент на карданном валу.
Рис. 10.7. Схема х расчету хритичеа частоты вращения карданного вала
Для автомобилей с механической трансмиссией легковых (4X2) Af1U' = — 1,5Л1^тяхРа>, грузовых (4 .- 2) при Са 150 кН Л1»й = I ,ЗЛ1е tnaxPui (где „«jri* Р — коэффициент запаса колеса), зовых(4 • 2и6 X 4)прибя> 150кН и полноприводных Afiy — 1,6ЛТкф Для автомобилей с гидромеханической трансмиссией, имеющих колесную формулу 4X2, Мц} = Л4гКп1ах«1 (где Д1Н — максимальный крутящий момент на насосном колесе гидротрансформатора; Кщах — максимальный коэффициент трансформации).
Должно соблюдаться следующее условие- Рг{< Со, Для некоторых подшипников значения Со указаны в табл 10 4. При оценке статической грузоподъемности используют значения Со стоящие в числителе. При отсутствии данных Сп можно определить по формуле
Со = 22zdp/p. аф.
При расчете трубы карданного вала определяют следующие параметры,
1. Критическую частоту вращения карданного вала по формуле (10,1). Для карданного вала, имеющего трубчатую часть и стержень (рис. 10,7), «пр следует рассчитывать по формуле (10.1), подстааляя вместо L» приведенную длину вала
Z-np = L-тр /тр,
где £тр — длина трубчатой части вала, м; 1тр — дайна трубы, заменяющей стержень, м,
(тр =- W i
238
Карданные передачи
Ест, ^ст — соответственно условная длина и диаметр стержня, м.
2. Напряжения кручения трубы под действием расчетного момента М и максимального динамического момента МК]
TB = A1/W'T и т,у = Л4к;/Л<т.
Моменты сопротивления стандартных труб указаны в табл. 10 1. Для нестандартной трубы U7t рассчитыва ют по формуле W-f = л (Ё>4— d4)/(l6D)
Напряжения кручения не должны превышать 300 МПа.
3. Угол закручивания трубы кар данного вала под действием расчет ного момента М
== 160A4/..IP/(JTGn).
где JT — полярный момент инерции сечен ля, м4. для стандартных труб значения приведены в табл 10 I. при расчете нестандартной трубы JT рассчитывают по формуле JT=’ = Я (D4 -* d*),!32; С — модуль упругости при кручении, для стали G — = 8,5-10* МПа.
Условие жесткости вала при кручении- 0к 3 9° на I м длины вала.
При расчете шлицевого соеди-иейия скользящей вилки определяют номинальное напряжение смятия Осм боковых поверхностей шлицев. Условие ПРОЧНОСТИ При СМЯТИИ Оси “ м 15 4* 35 МПа.
10.4. ШАРНИРЫ
РАВНЫХ УГЛОВЫХ СКОРОСТЕЙ
Карданные шарниры равных угловых скоростей применяют для привода управляемых ведущих колес, где они обеспечивают равномерное вращение колес при углах у между валами до 40°,
Сдвоенные карданные шарниры (рис. 10.8) представляют собой карданную передачу с двумя шарнирами неравных угловых скоростей, у которой отсутствуй г карданный вал, вилки соединены и расположены в одной плоскости к углы наклона равны, т. е Т1 -= у2 Для обеспечения последнего служит центрирующее устройство. Оно состоит из сферической обоймы 6, вставленной в уширение вала /. сферического сухаря 7. установленного на конце вала 4, и резинового защитного чехла 5. Валы 1 и 4 имеют проушины Втулки 2 соединяют валы с составными крестовинами 3 Крестовины установлены в корпусе шарнира 8.
Недостатками сдвоенного шарнира являются конструктивная сложность и неполная синхронность работы Кроме того, эти шарниры не могут передавать больших крутящих моментов вследствие ограничения по давланию на иголки.
Кулачковый шарнир (рис. 10 9, а) имеет две вилки 2 и 6. насаживаемые на вады / и 7 или откованные с ними
Рис. Ю.8. Сдвоенный карданный шарнир
Шарниры равных угловых скоростей
239
(0.10. Шариковый шарнир с дели-
как одно целое, два лолуцилиндри ческих кулачка 3 и 5, охватываемых вилками, диск 4, входящий в цилиндрические пазы кулачков. Такой шарнир действует аналогично сдвоенному, в котором первый шарнир создает неравномерность вращения,ga второй устраняет эту неравномерность, в результате чего приводной вал вращается равномерно На рис. 10 0, б показана другая конструкция кулачкового карданного шарнира. В вилках / и 6 этого шарнира установлены два кулачка 2 и 4, которые соединены между собой с помощью шипа 3, входящего в паз 5.
Кулачковые шарниры отличаются простотой конструк»”И и способностью передавать крутящий момент до 30 кН-м в результате наличия передающих поверхностей большой площади. Однако КПД этих шарниров ниже, чем КПД сдвоенных шарниров. Поэтому их устанавливают в карте рах или снабжают специальными за щитными кожухами и смазывают.
Шариковые шарниры обеспечивают равенство угловых скоростей соединяемых валов в результате того, что их рабочие шарики всегда расположены в бнссекторной плоскости.
Валы I и 3 шарикового шарнира с делительными канавками (рис 10 10) имеют вилки, в которых имеются по четыре канзвки I и II. В собранном виде вилки расположены во взаимно перпендикулярных плоскостях, а между инми установлены шарики 2. Для
а — продольный разрез; б — детали
центрирования вилок в одной из иих на штифте 5 размещен центрирующий шарик 4 с лыской, которая нужна для обеспечения установки рабочих шариков 2 при сборке. Применяют также шириковые шарниры, у которых шарик 4 устанавливают без штифта 5. Средние липин канавок (рис. Ю 10, а) представляют собой окружности равного радиуса с центрами О, и 02, которые находятся на одинаковом расстоянии от центра О карданного шарнира. В результате при любом угле между валами рабочие шарики удерживаются в плоскости. проходящей через точки пересечения средних линий канавок и делящей пополам угол между осями валов
В зависимости от размеров шарниры этого типа рассчитаны на передачу крутящего момента 1,34 — 7,6 кН-м. Шариконые шарниры собирают с предварительным натягом, величина которого зависит от размера шарнира. Сборка шарнира — селективная.
Разновидностью рассмотренного шарнира является шариковый шарнир с прямолинейными канавками, который допускает угловые и осевые перемещения соединяемых валов.
На рис. 10 11 показана конструкция шарикового шарнира, который состоит из внутренней обоймы 1, сепаратора 2. шести шариков 3 и чашки 4. Центры кривизны канавок Ot и Ог расположены па одинаковом
240
Карданные передачи
Расстоянии от центра О шарнира. Поэтому угловые перемещения валов вызывают подъем или опускание ка» нзвок, что изменяет положение шариков В этой конструкции шарики удерживаются в биссекторной плоскости сепаратором 2.
Разновидностью последнего шарнира является шарнир, поперечное сечецие канавок которого не окружность, как в первом случае, а эллипс. Конфигурация эллипса такова, что линия действия сил в точках контакта шариков с канавками составляет 45° с направлением действия окружной силы (рис. 10 12), Центры пятен контакта шариков шарнира с поверхностью канавок расположены при этом на определенном расстоянии от наружных кромок канзвок чашки и обоймы, что предохраняет последние от смятия и позволяет выдерживать длительные динамические нагрузки. Шарниры этого типа могут передавать крутящий момент до 50 кН-м.
Расчет сдвоенных карданных шарниров с крестовинами аналогичен расчету карданных передач с шарнирами неравных угловых скоростей.
В кулачковых шарнирах напряжения смятия на контактирующих поверхностях относительно невысокие вследствие значительной площади последних Вилки рассчитывают ‘так же, как « в шарнирах неравных угловых скоростей.
Основные размеры и передаваемые расчетные крутящие моменты для шарниров равных угловых скоростей, применяемых на отечественных полноприводных автомобилях, приведены в отраслевой нормали ОН 025 315—68 «Шарниры постоянной угловой скорости. Типы и основные размеры». В соответствии с и. 4 данной нормали основные параметры шарниров равных угловых скоростей должны соответствовать показателям. указанным в табл. 10.6.
Ю.в. Тиноразперный ряд шарниров равных угловых скоростей
Тип шарнира
Параметр шариковый кулачковый (дисковый)
Расчетный крутящий момент, кН и 1.37 2.20 4.50 7 75 8.20 30.70
Диаметр шарике (лиска), нм 25.32 (25.50) 29.50 40,0 42.86 98.0 108,0
Максимельний диаметр вращения шарнира, мм S8 109 142 156 122 140
Расстояние между наружными торцами, мм 96 109 134 144 1ЬЬ 192
Наружный Диаметр пала, мм 32 0 35.0 44.5 50.0 56.0 62,0
Нагрузка на передний мост кН, нс 10.0 15.0 27,5 35.0 40,0 55.0
11
Главные передачи и привод к ведущим колесам
11.1. КИНЕМАТИЧЕСКИЕ СХЕМЫ ГЛАВНЫХ ПЕРЕДАЧ
Главная передача — механизм трансмиссии автомобиля, преобразующий крутящий момент и расположенный перед ведущими колесами автомо биля (ГОСТ 18667—73*).
Главные передачи по числу, виду и расположению зубчатых колес подразделяют на одинарные, двойные, конические, гипоидные, цилиндрические, червячные, центральные двойные. разнесенные двойные, двухступенчатые
Кинематическая схема главной передачи определяет конструкцию ведущего моста автомобиля, и поэтому выбор схемы является одним из важных этапов проектирования главных передач
Одинарная главная передача (рис 11 1) компактна, имеет минимальные размеры и массу, невысокую стон мость, проста в производстве и эксплуа тации Применение ее ограничено ве личиной передаточного числа (и0 sg7) и несущей способностью зубчатого зацепления’ при передаче боль того крутящего момента необходимо увеличивать модуль зуба, а следовательно, и размеры зубчатых колес, что приводит к уменьшению дорожного просвета
Одинарную коническую главную пе редачу (рис. Ill, а) применяют на легковых автомобилях и грузовых малой грузоподъемности Более широкое распространение получила гипоидная главная передача (рис II 1,6), обладающая родом преимуществ по сравнению с конической повышенной несущей способностью по контактным напряжениям, большей плавностью работы и бесшумностью Иногда применение гипоидной передачи обусловлено наличием гипоидного смещения Е как фактора, расишряю-
9 П/р Л 11. Гришкевичи
щего компоновочные возможности В отечественном автомобилестроении эти передачи устанавливают на автомоби лях семейства ВАЗ, «.Москвич», «Вол га». ГАЗ-53А и др
Одинарную цилиндрическую главную передачу используют на легковых автомобилях при поперечном ряс положении двигателя
Некоторые зарубежные фирмы (например. Foden, Albion и Tatra) при меняют одинарную червячную главную передачу (рис. П.|, в) В этом случае можно получить главную не редачу с передаточным числом и0 > 7. Однако более низкий по сравнению с конической в гипоидной передачами КПД червячной передачи, меньшая игру .«очная способность при тех же размерах и несколько большая стоимость производства ограничивают область применения таких передач.
Центральная двойная главная передача обладает большей нагрузочной способностью по сравнению с одинарной при тех же размерах колес и позволяет получить большое передаточные числа (//„ 12) без уменьшения дорожного просвета под кар терем главной передачи.
Центральные двойные глзвные передачи выполняют по следующим схе мам. а) первая ступень коническая
Рис. 11.1. Схемы одинарных главных мере-
242
Главные передачи и привод к ведущим почесан
о) f) в)
Гхсмы центральных двойных главных^нередач
(гипоидная), вторая — цилиндрическая (рис. 11 2, п); б) первая сту-пеиь коническая (гипоидная, червячная), вторая — планетарная, в) пер вая ступень планетарная, вторая — — коническая (гипоидная) (рис 11.2, б),’г) первая ступень цилиндрически,1 вторая — коническая (гипоидная) (рис •
В отечественном автомобилестроении наибольшее распространение получили передачи по схеме, представленной на рис II 2, а. Эти передачи могут .быть «плоскими*.. все валы расположены в горизонтальной плоскости (автомобиль ЗИЛ-130) (рис 11 2,а), «пистолетного» типа, валы расколе жены в двух неперпендик}яярных плоскйс1Ях (автомобиль КрАЗ-257Б1) (рис. /I 2, д); Г-образными- валы расположены в двух взаимно перпен дикулярных плоскостях — горизон дальней и вертикальной (автомобили «Урал 375Н», ЗИЛ 131, КамАЗ-5320, рис 112, е) Последний тип главной передачи позволяет получить наиболее компактный промежуточный проходной мест тележки трехосного автомобиля
При «плоской» главной передаче сокращаема расстояние меж.1у фланцами крепления карданного вала, что при небольшой базе автомобиля может привести к большим углам па клопа этого вала
В случае Г-образной главной пе редачи пара «этических зубчатых колес размещена над балкой моста,
вследствие чего необходимо увеличение высоты пола кузова и соответственно погрузочной высоты платформы. '
С точки зрения нагруженное™ опор промежуточного вала’ преимущество имеет «плоская» схема» где радиальные усилия, действующие на промежуточный вал со стороны конического колеса и цилиндрической шестерни, направлены а противо/ю-ложныс стороны и лежат в одной плоскости. Эго обусловливает уменьшение результирующей этих усилий.
Условия смазывания опор вала, шестерни и промежуточного вала хуже в схемах «пистолетного» типа и Г образной. В этих передачах необходимо предусм атривать принуднтель ну ю
подачу масла с помощью насоса либо устанавливать специальные ловушки, масляные каналы со стоком масла к опорным подшипникам указанных валов ^Зубчатые колеса главной передачи, выполненной по схеме, изображенной на рис 112, а, могут передавать большой крутящий момент. Передаточное число конической пары обычно находится в пределах 1,5—2,7 Следовательно, основная редукция момента происходит в цилиндрической паре
Центральные двойные главные пе редачи, выполненные по схемам, представленным на рис 112, б, обеспечивают лучшие условия компоновки автомобиля по сравнению с передачами, имеющими пару зубчатых колее внешнего зацепления (рис 112, а и е) К недостаткам этого типа передач относится повышенная трудоемкость их изготовления, а также несколько большие потери на перемешивание масла в центральном ре-
Рис 11.3. Схемы разнесенных двойных главных передач
Кинематические схемы гласных передам
243
дукторе. Применение такой передачи в" тележке трехосного автомобиля вызывает необходимость установки обходных передач.
Двойная главная передача, выполненная по схеме, изображенной на рис 112, в, обладает существенными преимуществами в отношении обеспечения требуемой жесткости конструкции и простоты осуществления привета заднего моста тележки Недостатком схемы является несколько меньшая компактность конструкции, так как при одинаковой ширине венца и одинаковом диаметре колес нагрузочная способность цилиндрической передачи несколько ниже, чем конической или гипоидной.
Разнесенная двойная главная передача состоит из центрального редуктора с одинарной конической или гипоидной передачей и межколеспым дифференциалом Д/, за которым расположены два колесных редуктора Р (рис 11 3, в) На рис. 11 3, б представлена схема разнесенной двойной главной передачи проходного моста (Д2 — межосевой дифференциал)
Разнесенные двойные главные передачи сложнее по конструкции, чем центральные, имеют большее число зубчатых колес и подшипников Несмотря на это, оии получили широкое распространение на автомобилях средней и большой грузоподъемности вследствие рада преимуществ, основными из которых являются возможность уменьшения размеров межколесного дифференциала и диаметра полуосей вследствие малой степени редукции момента, подводимого к меж колесному дифференциалу, получения компактной центральной части ведущего моста н достаточно большого дорожного просвета под центральной частью балки ведущего моста, осуществления вариации передаточного числа без изменения конструкции центрального редуктора и центральной части балки ведущего моста
В практике конструирования при вада ведущих колес редукторы раз несенной двойной главной передачи разделяют на бортовые, расположенные перед ведущими колесами или непосредственно за межколесным дифференциалом, и колесные, располо-
з)
Схемы редакторов дущих колес
женные в ступице ведущего колеса или его тормозного барабана Применяют следующие виды редукторов с цилиндрической передачей внешнего зацепления (рис. 114, а, а), с кони ческой передачей внешнего зацепления (рис. 114, в), с цилиндрической передачей внутреннего зацецления(рис. 11 4, д, г); с цилиндрический плане тарной передачей с заторможенными эпициклическим (рис 114, б, ж) или солнечным (рис. 11 4, з) колесами, с конической планетарной передачей (рис 114, и).
Разнесенные главные передачи, имеющие бортовой редуктор с цилиндрической передачей внешнего зацепления. обеспечивают существенное повышение нагрузочной способности по сравнению с центральными двойными передачами По сложности ковструкции они занимают промежуточ ное место между центральными двойными передачами и передачами с колесными планетарными редукторами Одним из их недостатков является сложность получения относительно большого передаточного числа
Этого недостатка лишены редукторы с цилиндрической передачей внутреннего зацепления, которые обладают большей компактностью К недостат
244 Главные передачи и привод к ведущим колесам
них передач
кам таких редукторов следует отнести некоторую сложность равмеще-ния тормозов и установки с (улицы колеса
Разнесенные главные передачи с многосателлитными планетарными и непланстарными цилиндрическими пе редачами (МАЗ-500А, БенЛЗ-54ОА, Raba-018. Skoda МТ-24 и др.) вследствие повышенной нагрузочной способности и компактности конструкции получили наиболее широкое применение. Некоторая сложность конструкции ограничивает их применение в постах с допустимой нагрузкой на ось "менее 60 кН
Редукторы с многосателлитными пе планетарными передачами (с затор меженным водилом) обеспечивают пе редаточные числа в пределах 2—5 Преимуществом таких конструкций является несколько меньшая относительная скорость вращения подшипников сателлитов. Редукторы с заторможенным эпициклическим колесом благодаря возможности получения больших передаточных чисел (ик. р — 3 -е- 6) имеют широкое распространение в ведущих мостах автомо бклей. В редукторах с заторможенным солнечным колесом передаточные числа находятся в пределах
1,21,5, что ограничивает при менение таких редукторов.
Цилиндрические планетарные колес ные редукторы обычно имеют три сателлита Находят применение конструкции с четырьмя и пятью сатслли таин. Однако увеличение числа са теллитов обусловливает повышение стоимости конструкции, а также применение дополнительных ковструк-тивных мероприятий по выравниванию нагрузки между ними.
Разневенные двойные главные передачи с планетарной конической передачей отличаются особой компактностью Однако сложность получения передаточных чисел более трех ограничивает использование этой конструкции
Некоторые зарубежные фирмы устанавливают на отдельных моделях автомобилей разнесенные главные передачи, представляющие собой сочетание двойного (коническая м пялввд-рическля лары) центрального редуктора и колесного, планетарного или цилиндрического.
Двухступенчатая главная передача позволяет подобрать передаточное число трансмиссии, наиболее соответствующее условиям эксплуатации автомобиля Низшую ступень такой передачи используют при движении автомобвля в тяжелых дорожных условиях (например, в горной местности) для преодоления повышенного сопротивления движению, а также для более редкого применения промежуточных передач ' в коробке При использовании высшей • ступени с меньшим передаточным числом в хороших дорожных условиях или при неполной загрузке автомобиля улучшается топливная эково-мичность, увеличивается средняя скорость движения и уменьшается нагру-женностъ трансмиссии автомобили
Двухступенчатая главная передача пожег бьпь образована в результате установки дополнительной пары цилиндрических зубчатых колес (рис 115, с) или введения блокируемого планетарного механизма между дифференциалом и коническим колесом (рпс II 5, б). Первую схему применяют при создании двухступенчатой главной передачи на базе центральной двойной На промежуточном валу и корпусе дифференциала расположены две пары цилиндрических зубчатых колес. Шестерни на промежуточном валу устанавливают на подшипниках скольжения и соединяют с валами через зубчатую муфту. Вторую схему используют для одинарных и двойных главных передач.
К недостаткам двухступенчатых главных передач следует отнести пекото-рую сложность конструкции и невозможность осуществления переклю-
Конструкции главных передач и их основные параметры 245
чення ступеней при движении автомобиля. Эти недостатки, наряду с широким распространением многоступенчаты* коробок передач, обусловили ограниченное применение двухступенчаты* главных передач.
11.2. КОНСТРУКЦИИ ГЛАВНЫХ ПЕРЕДАЧ И ИХ ОСНОВНЫЕ ПАРАМЕТРЫ
Наибольшее распространение в главных передачах получили ко нические и гипоидные передачи с зубчатыми колесами, имеющими криво линейные зубья, т е. с круговой, эвольвентвой и циклоидальной линией зубьев Абсолютное большинство зубчатых колес конических и гпповдных передач, устававливаемых в авгемо-билях (около 95 %), имеют круговую линию зубьев Учитывая, что ни эвольвентная, ни циклоидальная линии зубьев пе обеспечивают существенных преимуществ в отношении нагрузочной способности передач и технологии их изготовления, при проектировании новых конструкций главных передач следует ограничиваться применением зубчатых колес с круговой линией зубьев
Для соприкосновения зубьев конических зубчатых колес по всей длине необходимо, чтобы их образующие сходились к вершине ковуса и чтобы радиусы кривизны сопряженных поверхностей зубьев были одинаковыми. Однако в эксплуатации, особенно при больших нагруз ках, вследствие деформирования валов, подшипников и картера зубчатые колеса смещаются, что вызы вает концентрацию напряжений на широком конце зуба Для устранения этого радиус кривизны выпуклой стороны зуба делают меньшим, чем радиус кривизны вогнутой стороны. В этом случае линейный контакт зубьев происходит не по всей длине зуба, а только на некотором участке по обе стороны от контактной точки, и действительная длила контактной линии увеличивается с ростом нагрузки. Чен больше жесткость опор, тем меньше должна быть разность радиусов кривизны сопряженных
поверхностей зубьев ц тем более равномерно распределяется нагрузка на зубья колес.
Направление винтовой линии зуба конических зубчатых колес выбирают из условия, чтобы при эксплуатации осевое усилие шестерни было направлено от вершины конуса и отжимало шестерню от колеса, не давая ему защемляться. При вращении конической шестерни. по часовой стрелке (движение автомобиля вперед) зто условие выполняется в случае левого направления винтовой линии зуба При движении автомобиля назад направление осевого усилия изменится, но величина его будет меньше.
В гипоидных передачах направление винтовой линии зуба зубчатых колес определяется направлением смещения оси шестерни При смещении оси вниз направление винтовой линии зубьев шестерни должно быть левое, чтобы осевое усилие шестерни было направлено от вершины конуса При смещении оси вверх направление винтовой линии зуба по тем же соображениям должно быть правое Смещение Е (см. рис 111,6) в гипоидных передачах легковых автомобилей нс должно превышать 0,2 «/ея (где — внешний делительный диаметр шестерни), а в грузовых автомобилях 0,125
В двойных главных передачах для разгрузки подшипников промежуточного вала от осевых усилий направление винтовой линии зуба цилиндрической шестерни выбирают так, чтобы осевое усилие от этой шестерни было направлено противоположно осевому усилию от конического колеса.
В центральных двойных главных передачах наибольшее распространение получили косозубые цилиндрические зубчатые колеса. К недостаткам косозубой цилиндрической передачи следует отнести возникновение суммарных осевых нагрузок па подшипники промежуточного вала при дви женин автомобиля назад, а также наличие осевого усилия на валу цилиндрического колеса. Этот недостаток отсутствует в шевронной цилиндрической передаче,* которая, однако, вследствие повышенной слож-
246
Гланине передачи и привод к ведущим колесам
поста изготовления не получила широкого применения в главных передачах
В центральных двойных главных передачах передаточное число цилиндрической пары нц = (0,45 -S- 0,75) иЛ, причем большие значения числового коэффициента выбирают при меньших значениях (ыЛ = 5 -5- 9)
В разпесенпых двойных главных передачах передаточные числа колесного редуктора ик.р и главной передачи ил связаны зависимостью «к-г = (0,3 -=- 0,6) ил.
Планетарные передачи двойных главных передач выполняют прямозубыми. Соотношение между диаметрами ступиц колеса ©ст и эпициклической шестерни <3-вэ ~ (1.2 -5-~ 1,5)^.9 Большие значения числового Коэффициента выбирают в случае неподвижной эпициклической шестерни
Примеры характерных конструкций главных передач изображены на рис 116—119 Геометрические параметры конических и гипоидных зубчатых колес главных передач при ведены в табл. 11 I, а цилипдричес кнх зубчатых колес — в табл, 11 2 в
Картер главной передачи изготовляют клк одно целое с балкой ведущего моста (автомобиль ГАЗ-24 «Волга) или отдельно от балки с разъемными гнездами под подшипники корпуса дифференциала (автомобили ГАЗ-53А, ЗИЛ-130) Наибольшее распространение имеет п|1следняя конструкция, облегчающая монтажно-демонтажные и регулировочные работы Для обличения сборки часто горловину картера, в которой размещены ведущий вал и его подшипники, делают разъемной. В картере, выполненном
А-А &
Рис. 11.6. Одинарная гипоидная главная передача автомобиля ВАЗ-2101 «Жигули»
Конструкции главных передач и их основные параметры
247
отдельно, предусматривают фланец для крепления главной передачи к балке моста. Правильность уста повки картера относительно балки обеспечивается центрирующими штиф
Основное требование, предъявляемое к картеру главной передачи. — жесткость конструкции. Она определяет точность зацепления зубчатых колес главных передач. Для увели чения жесткости на картере главной передачи делают наружные и внутренние ребра (рис 11.6). Повышение жесткости опор колеса достигается вследствие расположения гнезд этих опор непосредственно в корпусе картера.
В современных конструкциях вал конической шестерни устанавливают, как правило, по двум типовым схемам: с креплением вала да подшипниках 1 и 2 консольно (рис. 11.6 и 11 7) и иа подшипниках 6 и 7 по обе стороны шестерни (рис. 11 8).
Схема с креплением вала на подшипниках, расположенных по обе стороны шестерни, лучше с точки зрения жесткости, чем первая Однако она конструктивно сложнее и используется в основном в одинарных главных передачах
Схему с консольным креплением вала на двух подшипниках применяют в основном в двойных главных нередачах.
и права) к ведуиц.
111. Геометрические параметры конических и гипоидных зубчатых колес главных передач
Параметр ГАЗ-53А
Число аубьев хо-
Торцовый модуль. мм
Конусное расстояние. мм
Длина зуба по образующей ко-
нуса. мм
Угол профили
Угол наклона винтовой линки
Коэффициент: высоты головки ауба
б
41
8.3
172.686
47,04
43.00
!!• 30'
46* 18‘
"34’ 03' бб"
смещения ис-ходяого контура
тангенциальной коррекция
Гипоидное смещение. мм
ЗИЛ-130 ЗИЛ-131 ЭИЛ-133ГЯ £ КамАЗ-6920 КамАЗ 5410 2 2 $ МАЗ 5335
14 11 6 11 15 15 12 12
25 19 41 24 25 28 28 32
9.0 9.0 10.38 9.5 8,775 8,5 10.5 11,0
125 8 98.79 216.36 125,4 131,695 135,0 136.216 187.97
33,0 67.7 42,0 37,0 38,0 5'6.2 52
40.0 33.0 62.0 42,0 37,0 37.0 55 0 50
30* 20’ 22’ 30' 30’ 20* 20’ 17» 30' 20’
35* 41’ 44' 45” 04' 37’ 39' 42* 37’ 00' 2 Г 35’ 46' 36° 50'
33’ 49'
0.86 0,848 0.95 0.75 0,85 0,85 0.75 0.85
0.354 0.480 0 1-179 0.350 0,329 8.342 0.315 0,425
—0.354 -0.4 80 -0.6291 -0.350 -0,329 — 0,342 —о.з!» —0.425
0.045 0,251 0.006 0,010 0.940 0,1 [3
-0.045 —0 025! —0.096 -0,010 —0.015 -0 113 —0,113
36 -
В числителе указано значение параметра шестерни, в знаменателе — колеса.
250
Г.юеные передачи и привод к ведущим колесам
11.2. Геометрические параметры цилиндрических зубчатых колес
центральных славных передач
5 ст - <=
t— <л •о •о
Параметр ге 1-
ц; р, X
Ра я; ST М
Число зубьев 14 12 12 12 14 13 14
Чб" 49 50 4В" “49" 60
Модуль, мм 6.0 5.5 6.0 6.0 6.0 6,5 6.25
Межцентровое расстоя 190.467 180.45 197.02 196.746 196.745 2 М.87 231,25
ние, мм
Длина зуба, мм 70,0 70,0 76.0 76.0 76.0 75.0 96.0
75.0 65,0 70.0 70.0 70.0 70.0 76.0
Угол поклона линии винтового зубе 16° 07'05" 16° 14'53" 20“ 19“ 19° 18’ —
Угол зацепления исходного контура Коэффициент 20° 20“ 20“ 20’ 20“ 20“ 25“
высоты голонки зуба 0.8 0.8 0,8 0.85 0,65 0.85 1.0
радиального зазора 0,30 0,25 0.30 0.20 0.20 0.20 0,20
0.500 0.218 O.30I 0.255 0,250 0,231 0.440
контура 0.049 —0.218 —0.093 —0,250 —0.250 —0 231 —0 330
Примечай нс. И числителе указало качение параметра шестерни, в знаме-
нателе — колеса.
11.3, Геометрические параметры цилиндрических зубчатых колес
’’ колесных редукторов
Leyland (Великобритания) Raba (ВНР)
и | с * и | С *
26 19 64 18 15 48
3,331 21“ 31' 20“
1.0 0,8
0,33 0.25
0,156 0,090 0,336 0.4823 0,4878 1.4578
86.61 63.29 213,184 81.0 67.5 216,0
3,58 3.36 3,478 4.02 4.33 4.73
7.49 8,325
75,5 78,0
72,5 66.0 5 80,0 60 58 3 70
Примечание К - коронное эпициклическое аубчатое колесо; С — сателлит. Ц — центральное (солнечное) зубчатое колесо.
Конструкции главных передач : и ах основные параметры 251
Основные мероприятия, направленные на повышение жесткости узла шестерни, следующие увеличение расстояния между спорами 4 и 5, расположенными с одной стороны шестерни, и уменьшение длины консоли (рис 119), уменьшение расстояния Между опорами 6 и 7, расположенными по <6е стороны шестерни (рис 118) Валы главной передачи рассчитывают на прочность и жесткость Жесткость должна обеспечивать постоянство условий зацепления зубчатых колес при передаче больших нагрузок. Допустимые прогибы и перемещения (в мм) валов главной передачи под нагрузкой в трех направлениях указаны па схеме рис. 11 10. Тип и расположение подшипников во многом определяют жесткость главной передачи Угловое смещение оси шестерни зависит в основном от типа подшипника 2, установленного у основания конической шестерни (рис И 6), диаметра внутреннего кольца подшипника, расстояния между опорами 4 и 5 (рис. К.9) и длины консоли. Тип подшипника 1 хвостовика шестерни (рис 11 6) влияет на жесткость конструкции незначительно. При установке роликоподшипника (конического или цилиндрического) у основавия шестерпи жесткость конструкции значительно больше, чем при установке шарикоподшипника При использовании конических роликоподшипников для уменьшения длины консоли и увеличения расстояния между опорами подшипники следует располагать так, чтобы вершины их конусов были обращены внутрь вала, навстречу один другому (рис 11.6 и 119) При размещении подшипников по обе стороны конической шестерни (рис. 11 8) наибольшую жесткость получают при уставовке цилиндрического рояикопо кшимникв без внутреннего кольца От типа подшипников, расстояния между ними и от распределения нагрузки по подшипникам зависит также жесткость колеса главной передачи. Для повышения жесткости расстояние между подшипниками 4 и 5 (рис 11 6 и 118) должно быть по возможности небольшим, для чего ко- Рис 11 10. Допустимые прогибы и перемещения вала шестерен главной передачи нические роликоподшипники располагают так, чтобы вершины их конусов были обращены наружу по отношению к корпусу дифференциала Чтобы воспрепятствовать смещению колеса под действием осевой нагрузки, целесообразно устанавливать подшипники с предварительным натягом. Подшипники 4 и 5 колеса 3 (рис 11 7) устанавливают па корпусе дифференциала, поэтому они имеют большие размеры для обеспечения необходимой жесткости. Для разгрузки конических подшипников главной передачи от осевых сил и повышения ее жесткости при сборке производят предварительный натяг подшипников, который контролируют измерением момента, необходимого для проворачивания вала. Предварительный натяг подшипников конических зубчатых колес главной передачи составляет 0,03—0,05 мм. Момепт, необходимый для проворачивания вала, 1—3 Н-м В качестве опор конического колеса могут применяться сферические роликоподшипники Грузоподъем- ность и жесткость этих подшипников меньше, чем конических роликоподшипников, однако опи являются самоустапавливающимися, а следовательно, менее чувствительны к перекосам, что имеет большое значение при значительных размерах подшипников колеса главной передачи. Шарикоподшипники, для которых не требуется регулировка, используют в настоящее время только в главных передачах малолитражных легковых автомобилей. Цилиндрическое колесо двойной главной пе-
252 Главные передачи и привод к ведущим колесам
редачи устанавливают на шарикоподшипниках только при прямозубых или шевронных цилиндрических зубчатых колесах Регулировка, зубчатых колес ц под-шиггчиксе главной передачи требуется также перестановкой необходимого числа прокладок 3 (рис. 11.9) с одной стороны на другую, не изменяя общего числа прокладок, чтобы не нарушить регулировку подшипников.
в некоторых случаях, когда необходимый натяг подшипников качения и правильное взаимное расположение зубчатых колес не обеспечиваются допусками на линейные размеры сопряженных деталей. Подшипники вала шестерни главной передачи обычно регулируют при помощи регулировочных прокладок / (рис 11.8 и 11 0) Для регулировки подшипников колеса главной передачи применяют регулировочные гайки 3 (рис. 11.8), упирающиеся п наружные кольца подшипников, или регулировочные прокладки 3 (рис 11 9) В некоторых легковых автомобилях подшипники колеса ве регу лоруют. После подшипников регулируют зацепление конических зубчатых колес* главной передачи, для чего, устанавливают их правильное относи адыгое положение при необходи мом боковом зазоре между зубьями Регулировку бокового зазора между зубьями проверяют при помощи индикатора. Боковой зазор в широкой част зубьев должен быть в предачах 0,10—0,35 мм (для новых зубчатых колес). Регулировку правильного относительного положения зубчатых колес проверяют с помощью краски. При этом шестерню перемещают при по мощи регулировочных прокладок 2, расположенных между картером главной передачи и фланцем стакана (см рис. 11 8 и 11.9) Если подшипники шестерни главной передачи установлены непосредственно в картере, перемещение вала шестерни осуществляют изменением толщины кольца 3 (см. рис. 11 6) Для регулировки зазора в конических колесах отвертывают на определенный угол гайку 3 (рис 118). упирающуюся в одной стороны в наружное кольцо подшипника колеса, и завертывают ив такой же угол гайку с противоположной стороны. Регулировку можно осуществлять 11.3. ДИФФЕРЕНЦИАЛЫ Дифференциал — механизм трансмиссии автомобиля, распределяющий подводимый к нему крутящий момент между выходными валами и позволяющий им вращаться с неодинаковыми скоростями (ГОСТ 18667—73*). Дифференциалы устанавливают в узлах деления мощности, когдв требуется, чтобы на участке трансмиссии за этим узлом отсутствовала циркуляция мощности, в частности — между ведущими колесами (межко.чсспые дифференциалы) и между мостами (межосевые дифференциалы; В зависимости от характера распределения крутящего момента дифференциалы делят на симметричные, несимметричные и блокируемые (с принудительной блокировкой или самублоки рующиеся) По ковструкции передач различают дифференциалы шестеренчатые, хилачкоеые. чернччные и с иеханиэ-мом (еободного хода Межосевые дифференциалы могут быть симметричные и несимметричные Межколесный дифференциал всегда симметричный (числа зубьев полуосевых зубчатых колес равны между собой) и в случае небольшого внутреннего трения распределяет крутящий момент поровну между полуосими. Кинематические схемы шестеренчатых дифференциалов представлены на рис. 11.11. Шестеренчатый дифференциал представляет собой планетарный механизм (рис. 11.1! и 11 12). который сое гонт из ведущего эвена / (водила), полуосевых зубчатых колес 2 и 4 и сателлитов 3 Из условия равенства моментов, приложенных к дифференциалу, можно записать Mi = Л12 -4- Если дифференциал симметричный (рис. (1 11 а), т. е. чиста зубьев
Дифференциалы
253
полуоссвых зубчатых колес z2 и г„ равны, то моменты на полуосях
Мг = —О.5Л41 (1 f Mtp'Mi} -
- — О,5ЛМ1 + Я<9;
Af3 - — 0,5М! (1 — Mrp/AQ -
----<0,5Ма(1 -KC),
где Kg — коэффициент блокировки дифференциала, Ко = Al-ep/Alf, Л1тр — момент трения в дифференциале
В обычных шестеренчатых днффе-вешшалах момент фения Л/т» мая по сравнению с подводимым моментом Л-t, и почти не влияет на распределение крутящего момента. В этом случае для симметричного дифференциала
Мя — Мя == 0.5Л/,.
для несимметричною дифференциала М* гг (4f, - AIip)/fc -f- z3) -=z г2Л1,(1 -Ke)/(Zs!+ 2S).
Ms - гг (Mt + MTP)/(z2 4- z3) -
= Z3xM1 (1 + КбУ(гг4- *э).
где Л1а, z2 и Л13. гг — крутящий момент и число зубьев соответственно на обгоняющем и отстающем полу-осевых зубчатых колесах
В некоторых случаях используют коэффициент блокировки К$—
S)
Рис. 11.11. Схемы дифференциалов; а — симметричного. б — иес»мметр»ч-
Тогда
Зубчатые колеса шестеренчатых дифференциалов рассчитывают на прочность при приложении максимального динамического момента к корпусу (водилу) дифференциала. Методика расчета зубчатых колес на прочность изложена в разд 3. Зубья зубчатых колес дифференци алов на Циклическую усталость не рассчитывают
При выборе основных размеров зубчатых колес конических дпф^рен-циалов могут быть- использованы данные табл 11 4
Шип крестовины рассчитывают на смятие и срез Напряжение смятия
Автомобиль Число зубьев •И § Йо! hod расстояние. чрофкоя севца. литов
свтел- шесте-
ЗАЗ 968 10 20 3.5 39.13 20° 30‘ 2
«Москвич-2140» 10 14 4,13 35,53 22“ 30' 12.6 2
ВАЗ-2101 «Жигули» 10 16 4.0 37.77 22“ 30' 12 2
ГАЗ-24 «Волга» 10 16 5.0 47,2 23“ 30' Q
УАЗ-469 10 16 4,75 44,9 22“ 30' 35
ГАЗ-53А 11 22 5,75 62.62 22“ 30' 2! 4
ЗИЛ-130 1 1 22 6.35 78.09 22* 30' 27 д
«Урал-375Н» 22 6,35 78,09 20* 37 4
КамАЗ-5320 22 6.35 78,09 22° 30' 27 л
МАЗ-5335 20 5,6 82,77 20“ 22,«
КрАЗ-267 В1 22 8.0 98,39 20“ 30.2 4
БелАЗ 54ОА 11 22 8.0 08.30 20“ 30.2 J
БелАЗ 548Л 11 22 0.0 ИО 6Н 20“ 4
254
Главные передачи и привод к ведущим колесам
Рис. 11.12. Блокируемый конический диф-
ференциал:
I — часика дифференциала;
не должно превышать 100 МПа, а среза 120* Ml 1а
Диаметр шипа крестовины
«•'ш -М, (/(ирПрГср, с/’и. д).
где Кир — коэффициент неравномерности распределения нагрузки между сателлитами; пр — число сателлитов; гср.г — расстояние от центра крестовины до середины сателлита (полуосевой шестерни); Рс.д — допустимое давление между шипами и сателлитами, Рс.Д=80 МПа для легковых автомобилей, Рс.д = — 100 МПа для грузовых автомоби лей
Давление между торцом сателлита и корпусом Дифференциала
с - 4М1 <g « s«n 61/[KH₽V<P- с Z
где <fj|,T—наружный диаметр опорной поверхности торца сателлита, a — угол зацепления; 6j — угол делительного конуса сателлита
Значение Pt. с нс должно превышать 200 МПа.
Коэффициент блокировки шесте
ренчатых дифференциалов Кб ^0,15. С течки зрения повышения проходимости таких значений Кб не всегда достаточно. Наиболее простым способом подпой блокировки является блокировка с помощью зубчатой или штифтовой муфты 5 (рис 11.12). Управление блокирующей муфтой может быть механическое, пневматическое, гидравлическое или электрическое. Постоянное движение с включенной муфтой может привести к поломке полуосей при повороте автомобиля или при наезде на неровность дороги Поэтому для увеличения силы тяги на буксующем ведущем колесе применяют самлблокирующиеся дифференциалы с повышенным трением Эти дифференциалы (рис И 13) отличаются от обычных конических тем, что в них крестовина заменена двумя
А~А
Рис. 11.13. Дифференциалы повышенного трения:
Дифференциалы
осями 1 и 6, соединенными между собой и с водилом 5 дифференциала через V-образные кулаки, а также тем, что на торцах позуосевых зубчатых колес 8 этих дифференциалов устанавливают фрикционные конусные чашки 2 (рис 11.13, о) или Диски 7 8 (рис 11 13, б)
Момент трения с учетом нормального давления, возникающего в зубчатом зацеплении, и давления со стороны V-образных кулаков (скосов) на осях сателлитов 4 для дифференциала с конусными чашками
Л1Т,Д/.i.JL'ei ('-у’»8' +
Р Гер. с \ SUIT
+ rcp.,i™6.)
X .
\ sin у/
где гк.ч, гт.ч и гер.т — средние радиусы соответственно конусной и торцовой поверхностей чашек и опорных поверхностей торцов сателлитов; у — половина угла при вершине конуса чашки, Р — угол скоса на осях сателлитов, и — коэффициент трения; A't — плечо окружной силы на скосах корпуса дифференциала.
В этом случае коэффициент блокировки
Кб =
Кулачковый дифференциал с повышенным трением и радиально расположенными кулачками показан на рис 11 14. Момент от колеса главной передачи подводится к сепаратору /, в пазах которого расположены плунжеры 2 Наружные торцы плунжеров соприкасаются с внутренней поверхностью обоймы 3, связанной шлицевым соединением с правой полуосью. Внутренние торцы плунжеров соприкасаются со звездочкой 4, насаженной на шлицах на левую полуось Внутренняя поверхность обоймы 3 и наружная поверхность звездочки 4 имеют кулачки, очерченные по определенному профилю. При ПОВОрОПз автомобиля плунжеры перемещаются в радиальном направлении в сепараторе 1 и, скользя по кулачкам обоймы 3 и звездочки 4, обеспечивают разную частоту вращения полуосей
Рис. 11.14. Кулачковый дифференциал с радиальным расположением кулачков
Главные передачи и привод к ведущим колесам
Рис. 11.1$. Силы, действующие на п кер кулачкового дифференциала;
а — схема. б — треугольник сил;
На плунжер действуют со стороны обоймы <? сила Л\ (рис 11.15). со стороны звездочки 4 — сила Л'а и со стороны сепаратора 1 (водила) — сила R.
Силы Л] и Л2 связаны следующей зависимостью
Л'а — »V,cqs (fij — 2q>)/cos (02 4- 2ц)
Момент на обойме, если она соединена с забегающим колесом,
Ma - A’tsiii (р2 4 ф) ra.
AloMeirr на звездочке, если она со динена с отстающим колесом
Ma = Aasin (02 + <р) г2.
Коэффициент блокировки
cos (₽J — 2(f) sin (0S 4- <р) ra — _ — cos (02 4- 2<p) sin (Pi — <p) <,
cos (Pl — 2ф) sin (P2 4- ф) rt 4- ’ 4- cos (0g 4- 2q>) sin (0j — ф)
Как правило. K& — 0,4 ~ 0,5. Плунжеры, кулачки обоймы и звездочки рассчитывают на смятие для случая прямолинейного движения ! автомобиля
oLrt= 0,418 Vr(A'n2>E,«) (ljvi± 1/pj),
где I — длина контакта плунжера и кулачка вдоль образующей кулачка.
Pi и Рв — радиусы кривизны контактирующих поверхностей плунжера и кулачка, для которых определена величина А'||а); Е — модуль упругости первого рода» Е -- 200 ГПа
В выражении для определения осм знак плюс соответствует контакту выпуклых поверхностей соприкасаю щихся^ деталей, а знак минус — выпуклой поверхности с вогнутой Напряжения осм не должны превышать 2500 МПа
К дифференциалам с повышенным трением относится также червччщлй дифференциал (рис. II 16). В этом дифференциале па ковцах полуосей на шлицах расположены полуосевые и червячные зубчатые колеса 1 и 5, находящиеся в зацеплении с чер вяками 2 я 4. Червяки 2 и 4 сцеплены с сателлитами 3 При определенной разности моментов па шестернях начинают вращаться относительно кор нуса дифференциала (водила) сателлиты 3 п червяки 2 н 4, если моменты равны, то весь механизм вращается как одно целое
Коэффициент блокировки червяч-нсГго дифференциала определяется КПД всех последовательно включенных червячных пар. У дифференци аза, представленного на рис II 16, момент от одной полуосевой шестерни на другую передается через четыре червячные пары В этом случае коэффициент блокировки
Кв —(1 — 4i*]24s44)/(* 4- (ЬЧаЧзШЬ
Рис. 11.16. Червячный дифференциал
Привод к ведущим колесам
где Hi, i)g, i|S. i}4 —КПД при передаче мощности соответственно от червячной шестерни 1 к червяку 2, от червяка 2 к сателлиту 3. от сателлита 3 к червяку 4, от червяка 4 к червячной шестерне 5.
Коэффициенты блокировки вячных дифференциалов достигают 0,7—0,8 Применение таких дифференциалов ограничено вследствие сложности их конструкции и высоких требований к точности изготовления. Некоторое применение находят дпф ферепцианы, представляющие собой кулачковые или роликовые муфты свободного хода.
11.4. ПРИВОД
К ВЕДУЩИМ КОЛЕСАМ
Крутящий момент от межколесного дифференциала к каждому из ведущих колес может передаваться с помощью: 1) вала и шарниров, размещенных в приводе ведущих управляемых колес, 2) редуктора привода ведущих колес; 3) вала, соединяющего непосредственно ведущее колесо с дифференциалом.
В зависимости от схемы подшипникового хзяа дал ведущего колеса (полуось) может быть или нагружен изгибающим моментом от сил взаимодействия колес с дорогой, или разгружен от таких моментов
На рис. II 17 приведены схемы подшипниковых узлов ведущего колеса Первая схема (рис. 11 17, а) используется в грузовых автомобилях. Благодаря тому, что подшипники несколько разнесены, изгибаю щие моменты от сил взаимодействия колес с дорогой воспринимаются картером, не нагружая полуось. Вторая схема (рис 11 17, б) отличается от первой тем, что вместо двух подшипников имеется только один. В этом случае изгибающие моменты от сил взаимодействия колеса с дорогой воспринимаются совместно полуосью и картером ведущего моста Эта схема применяется редко.
В третьей схеме (рис 11 17, в) полуось у виеиРЛЮ юнца имеет шейку, на которую установлен подшипник, расположенный во внутренней расточке картера ведущего моста.
а — разгруженной; б — разгруженной три четверти. в — полуразгружеш
На внешнем конце полуоси крепится ступица ко-ieca Если она отсутствует, то полуось выполняют с фланцем, к которому крепят тормозной барабан и диск колеса Изгибающие моменты от сил взаимодействия колеса с дорогой воспринимаются полуосью Моменты от вертикальной R? и продольной Rx сил незначительны, так как плечо а выполняют возможно меньшим, момент ог поперечной силы Ry может достичь большой величины.
По такой схеме (рис И 17, являющейся наиболее простой, полияют подшипниковый узел леса в легковых автомобилях
Расчет полуосей производят на статическую прочность и усталость. При расчете на прочность разгруженной полуоси определяют напряжение кручения т и деформацию при кручении 6:
"Стах = Rx^koJV'x = AJjnlax/lFT,
бщах = 180Л(утах1/(ЯО/т;), где Rx — продольная сила; Aljmax— максимальный динамический момент па полуоси; W'T — момент сопротивления сечения полуоси; — полярный момент инерции сечения* С — модуль упругости при кручении, для стали G — 85 ГПа. I — длина полуоси.
ВЫ-ко-
258
Главные передачи и привад к ведущим колесам
Рис. 11.18. Схема для расчета на г: ность палуразгружеиной пвлуоси
Ориентировочно можно принимать -Wmax— 1.5 Mff Полученные значения не должны превышать указан пых значений. тц(ак — 500 -5- 700 МПа, 6ПИХ— 6 -4- 15° на I м длины полуоси
При расчете на прочность полу-ражриженной полуоси (рис. II 18) рассматривают следующие три характерных режима на! ружепия.
1. Интенсивное торможение или разгон. Возможны три случая: а) вертикальная сила Rz имеет паиёольшее значение /?гтах. При отсутствии данных ,для определения /?г1пах можшр принимать щах— 1.2 Яг ст (где Яг ст* — статическая нагрузка на колесо), б) продольная сила Rx имеет предельное значение Rx max = Rz max s X <Pmax (Me <pmax = 0.8); в) поперечная сила Ry отсутствует.
Для этого режима определяют эквивалентное напряжение
o' -- V’o2 4т2,
где от = а у /£гавх }- 7?|гаа./1Га
и т -- Кхщах CBo'Wt.
2. Занос автомобиля на повороте. Возможны следующие случаи а) вертикальная сила Rz имеет значение, соответствующее повороту автомобиля или ааносу ведущего моста При этом к центру тяжести массы, относя
щейся к ведущему мосту, приложена сила Pv — Gs<pmax (рис. 11 18) Силу Rx определяют отдельно для наруж ного и внутреннего колес.
Rz„ - Gt 10,5 -i- haVmax Sj:
/?гв — Ог — Лги.
где G2 — вес, приходящийся на ведущий мост автомобиля; q»max = I.
б) поперечная сила Ry имеет предельное значение Ryn — Rtffmax Ч Rye -• Лгв<Ршах. в) продольная сила Rx отсутствует.
Для этого режима напряжения изгиба определяют отдельно для полуосей наружного и внутреннего
°п = \.Rучгко — ^zHe)/IFо и
°в = (Rytfvo + A’ze0). If'o
3. Переезд через препятствие. Возможны следующие случаи: а) при ударе колеса о дорожное препятствие возникает вертикальная сила
₽гд — ЛгстКд,
где Кд — ксырфициеит динамичности, Л'д — 1,75 — для легковых автомобилей, Кп = 2 — для грузовых автомобилей и Кд - 2,5 — для автомобилей высокой проходимости;
б) продольная Rx и жнюречлая Rlt силы отсутствуют
Для этого режима определяют на нряжепие изгиба
Rmax — о-
В выполненных конструкциях полу-разгруженных полуосей напряжения находятся в пределах о' = 600 -=--4-750 МПа
Расчет полуосей на усталость выполняют в соответствии С методикой, приведенной в разд. 5 5. Ниже приведены значения минимального диаметра tfniin полуосей некоторых отечественных автомобилей.
БелАЗ 5404 58
Г 43-S3 А
42
КрАЗ-257 БI
58
ГАЗ-24
ЗИЛ 130 48
«Москвич -
2140»
24
♦ У рал -375 Н» МАЗ-500А 48 42
ВАЗ-2101
ПРИЛОЖЕНИЕ
1. Обозначение материалов
Условные обозначения и номера ГОСТ для металлов и сплавов приведены
При маркнровке углеродистых. качественных н легированных сталей, латуней. бронз, алюминиевых и цинковых сплавов используют буквеино цифровые обо значения, в которых буквы указывают легирующие добавки (табл прил 2), а следующие за «ими цифры - содержание в % этих добавок. Отсутствие цифры означает, что в марке содержится до 1.5 % этого легирующего элемента. Это не отвоентся к легирующим добавкам, оказывающим сильное слияние на свойства сталей (Mo. Ti. V, 13) Их содержание в стели обычно отранячниаетсм 6,6 °. Мо а О - % V, TI, а В содержится в ты сячных долях процента. Дее первые цифры в обозначениях конструкционных ле тированных сталей указывают содержание углерода в сотых долях процента
В зависимости от химического состава и свой,-гв конструкционные легированные стали делят на качественные, высококачественные н особовыеококачсствсл ные. В конце обозначения марок сталей последних Двух типов добавляются соот иетственно буквы А и Ш. В этих сталях ограничивается допустимое содержание фоафирз (сответственно 0.035. 0.025 и 0.025 %) серы (0,035 0.025 и 0,015 %), меди (0.3. 0.3 н 0.25 %). никаля и хрома (0,3. 0,3 и 0,3 %). Например, высококачественная сталь 15ХГН5ТА содер жят в среднем 0,15 % углерода (0,13—
0,03—0,09
1Л—1,8 % никеля’.
Буква Л в конце марки стали означает, что ока предназначена для отливок. Цифры в обозначениях серого чугуна означают округленный десятикратный предел прочности Cg (МПа) при растяжении. Дли высокопрочных и ковких чугунов — округленное десятикратной еременнов сопротивление разрыву о^ (МПа) и относительное удлиненье б (%) после разрыва. При обозначениях цветных силанов «.на чала указывают легирующие элементы, а затем их процентное содержание На пример. БрОЦС4-4-4 означает оловянную бровзу с содержанием олова, цлнка и свинца приблизительно по 4 % (соответ ственно 3—5, 3—5 3.3—4 5 °,) |>сталб-иов — медь
2. Общая характеристика материалов
Материалы, применяемые в автомобилестроении. должны в первую очередь обеспечивать статическую и динамическую прочность деталей, а также их долговечность при длительно действующих нагрузках Важное значение имеет стоимость детали, определяемая сто-
нмостью материала, способом получения заготовки, видом механической и термической обработки.
В зависимости от формы н назначения детали в качестве заготовок используют поковкн, штамповки, отлиаян, Наиболее дешевыми но и наименее прочными являются отливки из серого чугуна с пластинчатым графитом. Механические свойства чу|уна в значительной степени определяются формой содер жлщегося в нем углерода (2.2—3.8 %). Наилучшую прочность п пластичность имеют ковкие чугуны с округлыми (глобулярными) включениями графита. Близки к ним высокопрочные чу гукы, модифицированные матяяйИ- Ченее прочны чугуны, получаемые с помощью других модификаторов, Наихудшими качествами обладают серые чугуны с пластинчатым графитом. Механические свойства чугуна могут быть повышены добавкой легирующих элементов и термической обработкой
Поковки » штамповки имеют более равномерную и мелкозернистую структуру с ориентированным расположением волокон металла, что приводит к 6**лее высоким механическим свойствам. Однако прокат используемый для получения поковок и штамповок. примерно в 3 раза дороже черного литья
На свойства углеродистой стали в первую очередь влияет количество содержащегося в ней углерода. Для деталей трансмиссии применяют "ж........... я
среднеуглеродистые высококачественные -------, .
до 0 5% углерода. При изготовлении пружин используют высоиоуглеродястые (до 0,7 % С) стали. Повышение содержания углерода увеличивает механическую прочность стали н ее твердость после закалки При этом одновременно снижаются относительное удлввевке 6. ударная вязкость сн и свариваемость.
В наибольшей степени требованиям прочности и долговечности отвечают легированные стали, имеющие после химике-терм и ческой обработки с последующей закалкой н нкзк«ггемператур-нмя отпуском высокую прочность, твердость и износостойкость поверхности. При соответствующем подборе легирующих элементов достигается ряд других качеств (упругость, коррозионная стой кость и др )
Дс*бтвка к стали никеля уваличивает ее проквливаемость и обеспечивает высо кие Оу- н a.f. & в сочетании с хромом — высокое с^- Действие марганца подобно никелю Его содержание огреннчнвается обычно 2 %, так как увеличение приводит к снижению Иц. Кремний повышает Од к Оу- при сохранении б, облегчает термообработку. Хром увеличивает Од.
обычно мало- и качественные и стали, содержащие
Материал
Приложение
Условные обозначения металлов и сплавав
ГОСТ
углеродистая обыкновенного качества качествен на я кокстру кцион - 380—71* 1050—74* * Ст, БСт. ВСт
легированная низколегированная иружннно рессорная 4543—71 * 19282—73 14059 -79 Сталь
серый 1412—79* СЧ
высокопрочный 7239—77 вч
ковкий 1215—79 Цветные сплавы* КЧ
На основе AI 2685—75* <4784 —74*) АЛ. АК (АК. Д, АМс и Др.)
На основе Mg 2вБ8—79 <14957—76) МЛ (МА)
Латуки 1020—77Е (15527 —70*) ЛС, ЛК. ЛМцС н Др. (Л. ЛА, ЛВОС и Др )
Бронзы оловянные 6)4—73, 613— 79 (5017 —74*1 ю же
Бронзы безо ловя ян ые 493—79 (18175—78*) Г.р
Элемент Сталь Сплав Элемент Сталь Сплав
Алюминий Ю д Молибден М
Бериллий Мышьяк —
Бор Р plflKAnB, н Н
Ванадий Ф Вам О К 111 п — О
Вольфрам В В Свинец —
Железо Ж Серебро Ср
Кремний к TllTI'H J Ти
Магний 1L! Мс X ром А X. Хр
Марганец Мц 1 Тящ' — Ц
Медь д М Фосфор П ф
Нажимной диск
Нажимные пружины
МЛБ, АК12М2, АЛ4. АЛ9В
СЧ 21, СЧ 24, «Ч 26 65Г. 6ОС2А
АЛ4. СЧ 18, СЧ 21
СЧ 16. СЧ 21. СЧ за. ОЧ 24 вег. 60ХФА
Общая характеристика материалы
Продолжение
Детали Легковых Грузовых
Картер
Крышка картера
Ведущий вал
Промежуточный вал
него хода
Каретка сикхровиэатора Конусков кольцо синхронизатора
Коробка передач
МЛ5. AKI2M2. СЧ 18 AKI2M2, СЧ 18 40Х, 19ХГН. 20ХГНМ 45. ЗОХ. 35Х. 19ХГП. 20ХГНМ ЗОХ, 35Х. 19ХГН. 20ХГНМ 45. 40Х. 19ХГН СЧ 18. СЧ 21. СЧ 24 СЧ 15. СЧ 18 40Х. 2БХГМ, 15ХГН2ТА 25ХГМ, 15ХГН2ТА 35Х. 40Х, 15ХГН2ТА. 2БХГМ. 25ХГТ 45. 25X1*4, 15ХГН2ТА
ЗОХ, 38Х, 19ХГН 40Х, 15ХГ112ТА, 25ХГТ
ЛМаСКА 58—2—2—1 - 1, ЛМцАЖН ЛМаСКА 58—2—2—1 — I
08. 10. 20
20 X
40
35. 30 X
35
15. 20, 35
20Х. 55ПП. 15ХГН2ТА.
18ХГТ, 20ХГНТР.
20ХГТР. 1БХГН2ТА 35. 40
40. 45. 35Х
35. 40. 45
Картер главной передачи Коническла зубчатые колеса главной передачи Полуоси Зубчатые колеса диффсрск пиала Крестовина Дифференциала Чашки дифференциала Зубчатые, колеса колесного редуктора Задний мост МЛБ, специальный ковкий чугун (ВАЗ) 20ХГНР. 19ХГН. 2ОХН2М 30. 35, 70. 35Х2ГСМА 14ХГН 20ХГНР. 20ХН2М ЗОХ. 40Х. 14ХГН КЧ35-Ю, специальный ков аяй чугун (ВАЗ) КЧ 35-10. ВЧ 50-2. 40Л 55ПП. 20Х112М, ЗОХ ГТ. 20ХГНМ, I2X2H4A. 20ХНЗА 40Г, 45PFI. 47 ГТ, 35ХГСА. 20ХГНТР 18ХГТ. 20ХНЗА. 2БХГТ. 25ХГМ, 20 XI 12.4 20Х. 18ХГТ. 20ХНЗА. I2XH3A КЧ 35-10. Мстб, 40. 35Л, 40Л 20ХНЗА, 18ХГТ
4 Механические свойства некоторых чугунов
Марка Cg, МПа Твердость НИ
Рестяжение \ Изгиб
СЧ 15 147 314 163—229
СЧ 18 176 356 170—-229
СЧ 20 190 392 170—221
СЧ 25 245 451 180—2Б0
КЧ 35-10 333 (10) 100- 163
КЧ 37-12 362 (12) ПО—163
ВЧ 50-2 Прцмечапа 490 В скобках привел (2) ецы значения 6. % 160—280
262
Приложение
мпа
1276 -1471
Распространенные виды термическом обработки черных материалов
2UX 30 X 35Х 40Х 40Г 18X11 25ХГТ ЗОХГТ 25ХГМ 36ХМ 12ХНЗА 20 X ИЗ Л 20Х2Н4А 35ХГСА 15ХГН2ТА 20ХГНР 20ХН2Л1
981—1078
1275 1079
834
686
735
1079
1275
735 1079
1275 1С18 932
1275
гермообработки
Серый МоднфиииронанкыП Высокопрочный Легированный серый Конкий 1 Смягчающий отжиг <г & 600 °C) 2. Нормализация Закалка ТВЧ Отпуск, закалка объемная или ТВЧ Много часовой (23—43 ч) двухступенчатый отжиг (Л 3 — 9204- 970 °C, /, = 7204-760 °C)
10, 15, 20, 25 Цементация (цианирование), закалка, иизкотемперагур-
30. 35 ный отпуск 1. Закалка, низкотемпературный отпуск {HRC 30—40);
40. 45 цементация, заквнка, 0 I Закалка, низкотемпературный отпуск (7/RC 40—50):
I5X. 20Х ЗОХ, 35Х. 40Х 2 Закалка ТВЧ (HRC 53—60) Цементация, закалка, низкотемпературный отпуск
2 Закалка ТВЧ
40Г
18ХГТ. 25ХГТ. ЗОХГТ 25ХГМ 12ХНЗА, 20ХНЗА. 1 Цементация, низкотемпературный отпуск; 2 Циаип рование, нитроцементация, закалка, низкотемпературный отпуск Цементация, закалка (одинарная или двойная), низко-
20Х2Н4А температурный отпуск
20ХН2М. 15ХГН2ТА Цвнвитацня. закалка, низкотемпературный отпуск
Общря характеристика материалов
твердость, коррозионною стойкость Вана дий повышает вязкость стали. Алюминий используется для получения азотируемых сталей особо высокой твердости
Свойства латуней (медно-цинковые сплавы) определяются их химическим со ставом. Повышение содержания улучшает пластичность, тепло- и троирооодвость. коррозионную кость. Повышение содержания улучшает обрабатываемость резанием, прирабатываемость. увеличивает износостойкость. снижает себестоимость. Свинец улучшает антифрикционные свойства. а олоно, марганец, кремний, железо повышают механическую прочность и коррозионную стойкость
Из бронз (сплавы меди с оловом, алюминием, марганцем н др.) широло распространены оловянные бронзы. Они обладают достаточной прочностью. коррозионной стойкостью, хорошей тепло
цинка
проводностью, высокими антифрикционными свойствами, хорошими упругими свойствами. Повышение содержания олова увеличивает прочность и твердость при уменьшении пластичности и ударной ваэкост». Цинк и никель улучшают механические свойства, свинец н фосфор — антифрикционные свойства (одв.ако фск.фор снижает механические свойства). Кремнистые 11 бериллиевые бронзы обладают высокой упругостью, прочностью, выносливостью, химической СТОЙКОСТЬЮ.
В табл. 3 приложения приведены сведения но материалам основных деталей трансмиссий автомобилей. Характеристики сталей, используемых для изго тоалеиня зубчатых колес, и их термообработка даны о табл. .1.15 а наиболее распространенные виды термообработки — в табл 6 приложения.
СПИСОК ЛИТЕРАТУРЫ
1 Валы и оси. Конструирование и расчет/С. В Серенсен. М. Б Гро-ман, Р. М. Шнейдерович, В П Ко-гасв М.: Машиностроение, 1970. 320 с
2 Гаспаряиц Г. А. Главная передача автомобиля М МАМИ, 1973. 70 с.
3 . Гируцкий О. И. Автоматические коробки передач современных лег косых автомобилей Обзорная информация. М : НИИНавтопром, 1981. 48 с
4 . Грузовые автомобили/М С- Высоцкий, Ю Ю Беленький, Л. X. Ги-лелес и др. М Машиностроение, 1979 384 с.
5 Динамика системы дорога —* шипа4— автомобиль — водитель/Под ред А А Хачатурова М.; Машиностроение, 1976 535 с
6 . Кинематика и долговечное гь подшипников качения машин и при-боров/И С Цитович, Ю В Скорынин, И - В Каноник, Н. Т. Минченя Минск Наука к техника, 1977. 176 с.
7 . Кожевников С И , Перфильев п. Д. Карданные передачи. Киев. Техника, 1978 263 с.
8 Красненькое В. И., Егоркин В. В. Синхронизаторы в ступенчатых трансмиссиях М Машино строение, 1976. 196 с.
9 Маси но ГЛ. А-, Алексеев В. И., Мотовилин Г- В. Автомобильные ма териалы. М.: Транспорт, 1979. 288 с.
10 Осепчугов В. В. Автобусы. — М: Машиностроение. 1971 232 с.
11 Платонов В- Ф. Полноприводные автомобили М Машиностроение. 1981 279 с.
12 . Применение ЭВМ при ковстру-ироавцни и расчете автомобиля/Под ред А. И. Гришкевича Минск. Вы шэйшая школа. 1978. 264 с.
13 . Прочность н долговечность автомобиля/Б В Голвд. Е П. Обо ленский, Ю Г Стефанович, О Ф. Трофимов М' Машиностроение, 1974. 328 с.
14 Родионов В. Ф., Фиттер-ман Б. М. Проектирование легковых автомобилей. М. Машиностроение. 1980. 479 с.
15 . Смирнов Г. А. Теория движения колесных машин. М.- Машиностроение, 1981 272 с
16 Снришевский А. И. Подшипники качения. М Машиностроение, 1968. 632 с.
17 . Стесун С. П., Яковенко Е. А. Гидродинамические передачи. М: Машиностроение, 1973. 352 с.
18 Фаворин М. В. Моменты инерции тел. М : Машиностроение, 1970 312 с.
19 . Цитович И. С., Каноник И. В., Вавуло В. А. Трансмиссии автомобилей Минск. Наука и техника, 1979. 256 с.
20 Яковлев А. И. Конструкция и расчет электромотор колес. М.: Машиностроение, 1981. 191 с.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Автомобиль динамическая характеристика 30 удельная мощность 22 удельная сила тяги 54 характеристика разгона 31
Вал
определение нагрузок И6 расчет 116, 118, 122, 127'
Возмущения, создаваемые двигателем 68
Гидромеханическая передача --- автобусов 206 --- грузовых автомобилей 200 ---дифференциальная 196 — —легковых автомобилей 211 типы 191
Г идротрансформатор активный диаметр 33 безразмерная характеристика 33 согласоавнне с двигателем 35 характеристика входа 35 характеристика выхода 37
Главная передача кинематические схемы 241 конструкции 246 основные параметры 245 регулировка 252 схемы 242
Дщ мерное распределение «момент-скорость» 60
Дифференциал классификация 252 коэффициент блокировки 253 — кулачковый 255
— > муфта блокировки 216
— червячный 256
— шестеренчатый 252
Зубчатая передача
геометрические параметры 75
коэффициенты напряжений 82
параметры исходного контура 71
расчет на прочность 9*2
расчетные напряжения 89
элементы зацепления 73, 74
Карданная передача
схемы 228, 229
элементы 229
критическая частота вращении 230
— —, промежуточная опора 229
расчет 235
углы установки 231
----, шарниры равных угловых ско-
ростей 238
Коробка передач
основные виды 163
----, зубчатые муфты 184
межосевое расстояние 176
основные авды Ий
----, синхронизаторы 186
-----с двумя степенями свободы 165
----с задним двухступенчатым редуктором 169
---- с делителем 168
----с разветвленным силовым потоком 166
----с тремя степенями свободы 167
число зубьев 179
число ступеней 24
Межосевой дифференциал 223
Муфты фрикционные многодисковые
197
Нагрузочный режим
коэффициент пробега 53, 57, 71
максимальные нагрузки 51
относи 1ельпый пробег на передаче 54
2М>
Предметный указатель
расчетные характеристики 58 средняя скорость движения на передаче 54
эквивалентный момент 57. 71 экспериментально-статистические характеристики 53
Параметры трансмиссии диапазон 17, 24 -----основные 17
собственная частота колебаний 45
Передаточные числа -----главных передач 23 -----коробок передач 24, 168 -----раздаточных коробок 29 Планетарный механизм
кинематический анализ 195 основные соотношения 192 силовой анализ 195
Подшипники качения определение нагрузок Ю7 расчет 110, 114 типы неконструктивные разновидности 95
Полуоси
расчет 258
схемы 257
Радиус качения колеса 23
Раздаточная коробка
схемы 212, 216
управление 226
Режим движения 39
Спектральная плотность мнкропро-филя автомобильных дорог 66 Сцепление
конструкция 142
выбор параметров 144
расчет деталей 151
расчет показателей нагруженное™ 149
расчет привода 159
Трансмиссия
виды и типы 4, 5, 7, 14, 16
динамические системы 44
схемы 12
Шлицевые соединения
’ виды 131
расчет 136
ОГЛАВЛЕНИЕ
Предисловие ........
I. СХЕМЫ ТРАНСМИССИИ.
РАСЧЕТ ОСНОВНЫХ
ПАРАМЕТРОВ
ТРАНСМИССИИ.
1 1 Механические и гидромеханические трансмиссии. .
1 2 Электромеханические трансмиссии ..............
I 3 Гидрообъемные трансмиссии ...................
1 4. Исходные данные для расчета основных параметров трансмиссии .... . . .
1 5. Параметры механических ступенчатых трансмиссий. .
1 6 Опенка тягово-скоростиых качеств автомобилей с механическими трансмиссиями. .
1.7 Особенности тягчво скоростных расчетов при наличии в трансмиссии гидромеханической передачи.........
1 8. Расчет режима движения автомобиля ... ...
2 . НАГРУЗОЧНЫЕ РЕЖИМЫ
2 1. Расчетные схемы для определения динамических нагрузок в трансмиссии.........
2.2 Расчет максимальных нагрузок в трансмиссии......
2 3. Экспериментально-статистические характеристики нагрузочного режима....
2 4 Расчетное определение нагрузочного режима трансмиссии ...................
2.5. Блок программ «Режимы» 2 6. Блок программ расчета иагружеиности трансмиссии при трогании с места и пере-ил юченни передач.........
2 7 Расчет нагруженности трансмиссии от неровностей дорожной поверхности....
3 2.8 Расчет нагруженное™ трансмиссии от неравномерности работы двигатели......... 67
2.9 Формирование характеристик расчетного нагрузоч-иого режима.................. 69
4 3. РАСЧЕТ ЗУБЧАТЫХ ПЕРЕДАЧ 71
14 3 1 Основные виды н геоме трические характеристики зуб-
16 чатых передач трансмиссии 71
3 2 Расчет на усталость... 79
3 3 Расчет на прочность. . . 92
17 3 4 Анализ результатов расчета 94
"'! 4. РАСЧЕТ подшипников КАЧЕНИЯ..................... 95
30 . , г.
4 I основные типы и конструктивные разновидности подшипников.................. 95
„ 4.2. Особенности конструкций подшипниковых узлов. . . 102
«о 4 3. Методы расчетов подшипников ..................... 105
41 4 4 Нагрузки. действующие на подшипники.............. 106
4 5 Расчет долговечное™ подшипников ................... 110
41 4 6 Расчет невращающихся
под нагрузкой подшипников. . 114
5. РАСЧЕТ ВАЛОВ
53 И ШЛИЦЕВЫХ СОЕДИНЕНИЙ. . . 116
58 5.1. Вады расчетов валов агре-
60 гатов трансмиссий.................. 116
5.2 . Определение действующих на вал нагрузок................ 116
5.3 Расчет валов на статиче-
61 скую прочность..................... 118
5.4 Расчет валов на жесткость 122
5.5 . Расчет валов на усталость
64 при кручении .... . . 127
268
Оглавление
5-6 Виды шлицевых соединений ......................... 131
5.7. Расчет шлицевых соединений ................ 136
6. СЦЕПЛЕНИЯ МЕХАНИЧЕ-
СКИХ ТРАНСМИССИЙ. . . 142
6.1. Конструкции............ 142
6.2. Выбор основных параметров ........................ 144
6 3 Расчет показателей иа-гружевности ... 149
6.4 Расчет деталей 151
6.5. Расчет привода. 159
7. КОРОБКИ ПЕРЕДАЧ МЕХАНИЧЕСКИХ ТРАНСМИССИЙ 163
7 1. Кинематические схемы. Построение ряда передаточных чисел.................... 163
7.2 Конструктивные схемы 170
7.8. Основные размеры. . . 176
7.4. Параметры зубчатых колес 178
7 5. Элементы управления. . 183»
8. ГИДРОМЕХАНИЧЕСКИЕ ПЕРЕДАЧИ................ 191
8.1. Типы гидромеханических передач ..................... 191
8.2. Механические редукторы 192
8 3 Конструкции гидромеха-
нических передач грузовых автомобилей ................. 200
8.4. Конструкции гидромеханических передач автобусов 206
8.5. Конструкции гидроме-
ханических передач легкавых автомобилей................... 211
9. РАЗДАТОЧНЫЕ КОРОБКИ 212
9 1. Кинематические схемы. . 212
9.2 Конструктивные схемы 216 9 3 Основные детали и уалы 218
9.4 Элементы управления. 226
fO. КАРДАННЫЕ ПЕРЕДАЧИ 228
101 Кинематические и конструктивные схемы........ 228
10 2 Основные параметры 230
10 3. Расчет деталей..... 235
10 4, Шарниры равных угловых скоростей .................... 238
I | . ГЛАВНЫЕ ПЕРЕДАЧИ И ПРИВОД к ВЕДУЩИМ КОЛЕСАМ . 241
111 Кинематические схемы главных передач............... 241
М.2. Конструкции главных передач н их основные параметры 245 11.3. Дифференциалы .... 252
11.4. Привод к ведущим колесим .......................... 257
ПРИЛОЖЕНИЕ ................... 259
1. Обозначение материалов 259 2 Общая характеристика материалов ..................... 259
Список литературы 264
Предметвый указатель . 265
Аркадий Иванович Гришкевич, Борис Устинович Бусел, Геннадий Филиппович Бутусов и др.
ПРОЕКТИРОВАНИЕ ТРАНСМИССИЙ АВТОМОБИЛЕЙ
Редакторы: Е. В. Радовская, И. Ю. Скачкова Художественный редактор С. С. Водчиц Переплет художника Г. Г. Кожанова Технический редактор Л. П. Гордеева Корректоры И. Г. Богомолова н А. М. Усачева
ИБ № 3516
Сдано в набор 18 08 83.
Подписано в печать 17.04 84. Т-08361
Формат 60х901/1В
Бумага типографская № 2.
Гарнитура литературная.
Печать высокая. Усл.’ печ. л 17,0 Усл кр.-отт. 17,0.
Уч.-изд. л. 21,55. Тираж 14000 экз.
Заказ 223. Цена 1 р. 50 к
Ордена Трудового Красного Знамени издательство «Машиностроение», 107076, Москва, Стромынский пер., 4.
Ленинградская типография № 6 ордена Трудового Красного Знамени Ленинградского объединения >v> «Техническая книга» им. Евгении Соколовой Союзполиграфпрома при Государственном комитете СССР по делам издательств, полиграфии и книжной торговли.
193144, г. Ленинград, ул. Моисеенко, 10.
ИЗДАТЕЛЬСТВО «МАШИНОСТРОЕНИЕ»
НОВАЯ ЛИТЕРАТУРА по автомобилестроению Выпуск 1984 года
Автомобили ВАЗ; Ремонт после аварий* Справочник. А. А. Звягин, Р. Д. К и с л ю к, А. Б Егоров и др.; Под общ. ред. А. А. 3 в я г и н а. 26 л., ил. В пер.: 1 р. 60 к.
Аэродинамика автомобиля: Сб. статей Пер. с англ. 28 л., ил. В пер.: 2 р. 30 к.
Б а р у в В. Н., ПергаментЛ Р., Тихомиров Е. Д. Устройство автомобилей КамАЗ: 11лакаты в 3-х сериях.
Серия 1. Общая компоновка автомобилей. Комплект на 15 листах. 4 р. 50 к.
Серия 2. Трансмиссия автомобилей. Комплект на 19 листах. 5 р. 70 к.
Серия 3. Управление и электрооборудование автомобилей Комплект на 17 листах. 5 р. 10 к.
Безопасность конструкции автомоб ил я/Ю. М. Н е м-ц о в, М. А. Андронов, Ф. Е. Межев и ч и др. 14 л., ил 85 к.
Лукин П. П., Гаспарянц Г. А., Родионе в В. Ф. Конструирование и расчет автомобиля: Учебник для вузов по специальности «Автомобили и тракторы». 20 л., ил. В пер.: 95 к.
Ду кипе кий В. С., Котиков IO. Г., Зайцев Е. И. Долговечность деталей шасси автомобиля. 17 л., ил. В дер.: 1 р. 20 к.