/


















































Author: Мирошник И.В. Никифоров В.О.
Tags: инженерное дело техника в целом оптика схемотехника электрические схемы телемеханики
Year: 2000
Similar



Text
И.В. Мирошник, В.О. Никифоров
СИНТЕЗ ЛИНЕЙНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Санкт-Петербургский государственный институт точной механики и оптики (технический университет)
Кафедра автоматики и телемеханики
И.В. Мирошник, В.О. Никифоров
СИНТЕЗ ЛИНЕЙНЫХ СИСТЕМ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Санкт-Петербург
2000
УДК 62-05
И.В. Мирошник, В.О. Никифоров Синтез линейных систем авто матического управления. — C-Пб: СПбГИТМО (ТУ), 2000. — 80 с.
Рецензенты: А.Л. Фрадков, д.т.н., профессор Балтийского государственного технического университета
В.В. Григорьев, д.т.н., профессор Санкт-Петербургского государственного института точной механики и оптики (технического университета)
Учебное пособие содержит необходимые теоретические сведения и методические указания к проведению курсовых работ по теме «Синтез линейных систем управления». Представлены процедуры и основные формулы для расчета регуляторов (алгоритмов управления), задающих блоков и наблюдателей, а также анализа качественных показателей следящих систем непрерывного времени. В приложении приведены дополнительный теоретические материалы, пример расчета системы и результаты моделирования.
Пособие предназначено для выполнения работ по курсам «Теория управления», «Теория автоматического управления», «Основы теории автоматического управления», «Техническая кибернетика» и т.д. Может быть также использовано студентами и аспирантами технических специальностей для самостоятельного изучения современных методов проектирования автоматических систем.
Одобрено на заседании кафедры автоматики и телемеханики Санкт-Петербургского государственного института точной механики и оптики (технического университета) 10 февраля 2000 г. (протокол № 6).
© Санкт-Петербургский государственный институт точной механики и оптики (технический университет), 2000 © И.В.Мирошник, В.О. Никифоров, 2000
ОГЛАВЛЕНИЕ
ВВЕДЕНИЕ 4
Список основных сокращений и обозначений 6
1. ЗАДАНИЕ, ОФОРМЛЕНИЕ И ЗАЩИТА
КУРСОВОЙ РАБОТЫ 8
2. ВАРИАНТЫ КУРСОВОЙ РАБОТЫ 11
3. МЕТОДИЧЕСКИЕ УКАЗАНИЯ К
ВЫПОЛНЕНИЮ КУРСОВОЙ РАБОТЫ 17
3.1. Анализ объекта управления 17
3.2. Синтез алгоритма стабилизации 18
3.3. Исследование возмущенной системы 19
3.4. Исследование следящей системы 25
3.5. Синтез наблюдателей 30
3.6. Исследование синтезированной системы управления 35
ПРИЛОЖЕНИЕ 1. Бланк задания и перечни вариантов 36
Ш. 1. Бланк задания 36
Ш .2. Перечень № 1 рекомендуемых вариантов 3 8
П1.3. Перечень №2 рекомендуемых вариантов 39
ПРИЛОЖЕНИЕ 2. Стандартные переходные функции 40
ПРИЛОЖЕНИЕ 3. Канонические представления 46
ПРИЛОЖЕНИЕ 4. Вывод основных матричных уравнений 49 П4.1. Анализ точности и синтез регуляторов возмущенной системы 49
П4.2. Анализ точности и синтез следящей системы 52
ПРИЛОЖЕНИЕ 5. Синтез редуцированного наблюдателя 56
ПРИЛОЖЕНИЕ 6. Пример расчета системы управления 58
П6.1. Расчет системы 58
П6.2. Синтез расширенного наблюдателя 71
П6.3. Синтез редуцированного наблюдателя 74
СПИСОК ЛИТЕРАТУРЫ 76
J
ВВЕДЕНИЕ
Теория линейных динамических систем и метод пространства состояний являются основными разделами современной теории автоматического управления. Их ведущая роль определяется широкими возможностями алгоритмизации процедур анализа, синтеза и автоматизации проектирования автоматических систем. Теория предлагает целый ряд методов и инструментов для анализа динамических систем и синтеза алгоритмов (регуляторов), обеспечивающих заданное качество процессов стабилизации, слежения и оценивания переменных состояния (наблюдения).
В пособии представлены основные теоретически сведения и методические указания к проведению курсовых работ по теме «Синтез линейных систем управления». В процессе выполнения работы последовательно осуществляется проектирование следящей системы непрерывного времени, что включает синтез всех основных блоков устройства управления - регулятора, задающего блока и наблюдателя, анализ структурных свойств, устойчивости и качества системы, а также моделирование динамических процессов и анализ полученных результатов. В основе расчетов лежат широко распространенный метод модального управления и алгебраические методы анализа точности, построенные на базе матричных уравнений Сильвестра.
В пособии предложены варианты заданий на выполнение курсовой работы, приведены пояснения и все аналитические выражения, необходимые для успешного выполнения задания. Дополнительные сведения из теории линейных систем, вывод некоторых формул, а также пример расчета и моделирования системы даются в приложении.
4
Пособие предназначено для выполнения рабоз по курсам « Теория управления», «Теория автоматического управления», «Основы теории автоматического управления», «Техническая кибернетика» и т.д., а также может быть использовано студентами и аспирантами технических специальностей для самостоятельного освоения современных методов проектирования автоматических систем.
5
СПИСОК ОСНОВНЫХ СОКРАЩЕНИЙ И ОБОЗНАЧЕНИЙ
ОУ - объект управления
ВС — внешняя среда
ЗБ - задающий блок
МОУ - модель объекта управления
МВС - модель внешней среды
х={х,} - вектор состояния
и - входное (управляющее) воздействие
у - выходная (регулируемая) переменная
£ = {£ } - вектор состояния внешней среды
/- возмущающее воздействие
х ={х,*} - вектор состояния задающего блока
g — задающее воздействие
е={е,} - вектор ошибок слежения
£- ошибка слежения по выходу
х = { xt} - оценка вектора состояния
и„ - вектор управления (обратной связи) наблюдателя
у - оценка выходной переменной
х = {х;} - вектор ошибок наблюдения
у - ошибка наблюдения по выходу
£={£} - оценка вектора состояния внешней среды
f — оценка возмущающего воздействия
£ = {£,} - вектор ошибок наблюдения за внешней средой
6
f - ошибка наблюдения по возмущению
<т- перерегулирование
tn - время переходного процесса
ст„ - перерегулирование наблюдателя
tH — время переходного процесса наблюдателя
tp - время работы системы
ху - установившаяся составляющая вектора состояния
уу - установившаяся составляющая выходной переменной
еу - установившаяся ошибка по состоянию
£у - установившаяся ошибка по выходу
Д - абсолютная точность
8 - относительная точность
p = d / dt - оператор дифференцирования (используется также s) а(р) - характеристический полином разомкнутой системы (ОУ) цс(р) - характеристический полином замкнутой системы ак(р) — характеристический полином наблюдателя
А, В, С- матрицы уравнения вход-состояние-выход
Ас - матрица замкнутой системы
Ам- матрица наблюдателя
U- матрица управляемости
Q - матрица наблюдаемости
Кос - матрица обратной связи системы
Кн - матрица обратной связи наблюдателя
□ - знак конца замечания
7
1. ЗАДАНИЕ, ОФОРМЛЕНИЕ И ЗАЩИТА КУРСОВОЙ РАБОТЫ
Целью работы является освоение временных методов исследования линейных систем автоматического управления. В процессе выполнения работы предусматривается проведение синтеза всех основных блоков (алгоритмов) устройства управления - регулятора, задающего блока и наблюдателя; анализ структурных свойств, устойчивости и качества системы; а также моделирование динамических процессов и анализ полученных результатов.
Каждый вариант задания1 включает структурную схему объекта управления и значения его параметров, тип и параметры задающего воздействия, тип и параметры возмущающего воздействия, тип наблюдателя измерений, а также значения качественных показателей синтезируемой системы.
Материалы курсовой работы оформляются в виде пояснительной записки и плакатов, необходимых для защиты работы. Пояснительная записка должна содержать следующие разделы:
1. Анализ объекта управления.
2. Синтез алгоритма стабилизации.
3. Исследование возмущенной системы.
4. Исследование следящей системы.
5. Синтез наблюдателя.
1 Бланк задания на курсовую работу приведен в Приложении 1.
8
б Исследование синтезированной системы управления и заклю
чение.
В текст записки также включаются бланк задания и графические материалы: структурные схемы и временные диаграммы переходных процессов. Вспомогательные материалы (такие, как программы и схемы моделирования) выносятся в приложение. В конце каждого раздела необходимо прокомментировать полученные результаты, а в заключении - сделать выводы по результатам всей работы. Пояснительная записка должна быть оформлена в соответствии с нормативными требованиями, основные сведения о которых можно найти в учебном пособии [10].
Защита курсовой работы проводится в форме краткого доклада, в ходе которого раскрываются основные требования задания, комментируются промежуточные результаты и делается заключение о степени соответствия заданию полученных показателей качества синтезированной системы. На защите используются плакаты, на которые выносятся: полная структурная схема системы управления, основные формулы и результаты расчетов, а также временные диаграммы по разделам 1-6. Плакаты выполняются на листах форматов А1-А4 (по указанию преподавателя).
В ходе работы предусматривается выполнение следующих этапов. ।
1) Анализ объекта управления', построение математической модели объекта в форме вход-состояние-выход, нахождение характеристического полинома и его корней, анализ устойчивости объекта; исследование структурных свойств (управляемости и наблюдаемости); проведение моделирования и построение переходных функций.
9
2) Синтез алгоритма стабилизации', расчет пропорционального регулятора и обратных связей по заданным динамическим показателям качества; проведение моделирования и оценка качества синтезированной системы по полученным временным диаграммам.
3) Исследование возмущенной системы', построение модели внешней среды (возмущения) и определение ошибки системы с пропорциональным регулятором; построение и настройка астатического регулятора и синтез комбинированного регулятора (расчет прямых связей по возмущению); моделирование, оценка качества по полученным временным диаграммам и выбор типа регулятора.
4) Исследование следящей системы: построение задающего блока и (при необходимости) расширенной модели объекта управления; определение ошибки слежения системы с пропорциональным регулятором; синтез комбинированного регулятора и расчет прямых связей по заданию; моделирование и оценка качества по полученным временным диаграммам.
5) Синтез наблюдателя: построение наблюдателя состояния объекта управления и (при необходимости) внешней среды; моделирование и оценка качества процессов наблюдения по полученным временным диаграммам.
6) Исследование синтезированной системы управления: построение полного алгоритма управления; моделирование системы; оценка ее качественных показателей и сравнение с заданием.
Моделирование системы осуществляется на персональных ЭВМ с использованием одного из специализированных пакетов: MATLAB, SIMULINK, TUTSIM и т.д. [3, 5, 7, 8].
ю
2. ВАРИАНТЫ КУРСОВОЙ РАБОТЫ
Вариант задания определяется буквенно-цифровым кодом следующего формата:
PXX.GXX.FXX.MX.QX
вариант показателей качества
тип наблюдателя
вариант возмущающего воздействия вариант задающего воздействия
вариант объекта управления
Здесь символы Р, G, F, М и Q указывают на объект управления, задающее воздействие, возмущающее воздействие, схему наблюдателя и показатели качества, а символы X замещаются цифрами, соответствующими конкретным вариантам задания (см. ниже). Рекомендуемые перечни вариантов задания приведены в Приложении 1.
Объект управления (ОУ) выбирается по первой цифре кода РХХ в соответствии с вариантами, представленными на рис.1, где и - управляющее воздействие, у - выходная переменная,/- возмущающее воздействие. Параметры объекта выбираются по обеим цифрам кода в соответствии с табл. 1.
п
Р1Х
P2X
Рис. 1. Варианты объектов управления
Таблица 1
Значения параметров ОУ
Код Р11 Р12 Р13 Р21 Р22 Р23 Р31 Р32 РЗЗ Р41 Р42
К Q.02 0.05 0.1 0.02 0.05 0.1 0.02 0.05 0.1 0.05 0.1
Т — - - - - - 0.8 1.0 1.2 0.8 1.0
т, - - - - - - - - - 0.2 0.5
Тип задающего воздействия g~g(t) устанавливается по первой цифре кода GXX (параметры g(Z) определяются по табл.2):
G1X - ступенчатое воздействие g=Ag 1 (?);
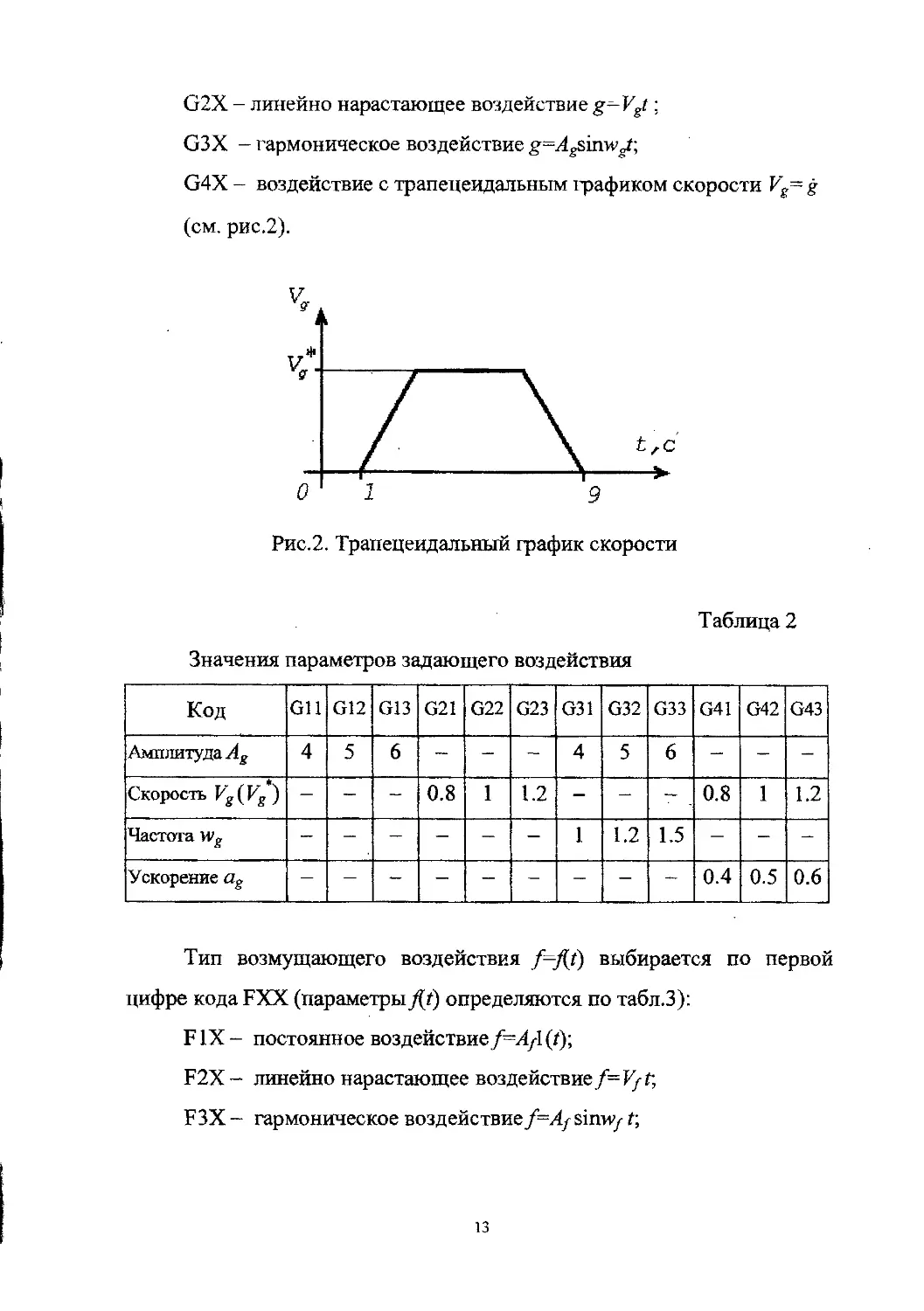
G2X - линейно нарастающее воздействие g-Vgt;
G3X - гармоническое воздействие g=Agsmwgt;
G4X - воздействие с трапецеидальным графиком скорости Vg~ g (см. рис.2).
t,c
Рис.2. Трапецеидальный график скорости
Таблица 2
Значения параметров задающего воздействия
Код Gil G12 G13 G21 G22 G23 G31 G32 G33 G41 G42 G43
Амплитуда Ag 4 5 6 - - - 4 5 6 - - -
Скорость Иу(Тг*) - - - 0.8 1 1.2 - - - 0.8 1 1.2
Частота Wg - - - - - - 1 1.2 1.5 - - -
Ускорение ag - 0.4 0.5 0.6
Тип возмущающего воздействия выбирается по первой цифре кода FXX (параметры fit) определяются по табл.З):
FIX- постоянное воздействиеf-Afi(Г);
F2X - линейно нарастающее воздействие f=Vff,
F3X - гармоническое воздействие f=Af sinwy f;
13
F4X - импульсное воздействие/=M/sign(sinuy t) (рис.З).
Таблица 3
Значения параметров возмущающего воздействия
Код F11 F12 F13 F21 F22 F23 F31 F32 F33 F41 F42
Амплитуда Аг 4 4.5 5 - - - 4 4.5 5 4 5
Скорость Vf - - - 0.4 0.5 0.6 - - - - -
Частота му - - - - - - 1.8 2 1.5 2 2.5
Тип наблюдателя, используемого для восстановления неизмеряе-мых переменных объекта управления и внешней среды, устанавливается по цифре кода MX:
Ml - наблюдатель состояния ОУ (полный наблюдатель)-,
М2 - наблюдатель состояния ОУ и внешней среды (расширенный наблюдатель)-,
М3 - наблюдатель внешней среды (редуцированный наблюдатель).
В вариантах Ml и М2 предполагается, что измеряемой переменной системы является выходная переменная у. Недоступные прямым
14
измерениям переменные (в варианте Ml - переменные соетояния объекта, а в варианте М2 - переменные состояния объекта, вектор состояния внешней среды и возмущающее воздействие f) должны быть оценены с помощью соответствующей схемы наблюдения. В варианте М3 предполагается, что все переменные ОУ доступны измерению, а возмущающее воздействие оценивается с помощью упрощенной (редуцированной) схемы.
Предельно допустимые значения динамических показателей качества синтезируемой системы, к которым относится перерегулирование ст, время переходного процесса t„ и время переходного процесса наблюдателя tH, выбираются по цифре кода QX (табл.4). Для всех вариантов задания требуется получение относительной погрешности системы 8, не превышающей 3% от наибольшей величины задающего воздействия, т.е.
<5 = —^—<0.03, ISmaxI
где gmax =max|g(/)|, t e[0,f^], A - абсолютная погрешность следящей t
системы, рассчитываемая по формуле:
A = max|g(z)-XOI, М0,/>], г
где tp =10 с - общее время работы системы.
В следующем разделе приведены основные теоретические положения и формулы, используемые при выполнении курсовой работы (см. также Приложения 2-5). Пример расчета системы управления дается в Приложении 6.
15
Таблица 4
Значения показателей качества
Код Q1 Q2 Q3 Q4 Q5 Q6
Время переходного процесса t„, с 1.8 1.8 2.0 2.0 2.5 2.5
Перерегулирование ст= <тн, % 1 15 1 15 1 15
Время переход, процесса наблюдателя 1„, с 2 2 2 2 4 4
Относительная погрешность 5 3%
к.
3. МЕТОДИЧЕСКИЕ УКАЗАНИЯ К ВЫПОЛНЕНИЮ КУРСОВОЙ РАБОТЫ
3.1. Анализ объекта управления
По структурной схеме объекта (см. рис.1) находится математическая модель вход-выход
a(p)y(t) = b(p)u(t) +
и модель вход-еостояние-выход:
и к У
x=Ax + Bu+Df, (1) —> ОУ г1 >
у - Сх, (2)
где х={х,} - «-мерный вектор состояния, и - управляющее воздействие, у - выходная переменная, f - возмущающее воздействие. Характеристический полином объекта определяются выражением
а(р) = det[p/ - А] = рп + axpn~x +.. .+а„_хр + ап,
а его корни р, находятся в результате решения характеристического уравнения а(р)=УУ
Для анализа свойств управляемости и наблюдаемости модели (1), (2) находятся матрицы управляемости U и наблюдаемости Q:
П = [В|ЛВ|...|Л"“1В], Q =
и рассчитываются значения определителей det 17 и det<2- Если detCM) и det£M), то система является полностью управляемой и наблюдаемой.
По окончании расчетов проводится моделирование ОУ при и=1 и
/=0 и находятся переходные функции V~x2(t). /
17
3.2. Синтез алгоритма стабилизации
Стабилизацией называется режим работы системы управления, при котором поддерживается заданное значение выходной переменной или заданное состояние ОУ. На данном этапе решается задача стабилизации нулевого состояния (х=0) и нулевого значения выходной переменной (у=0) для невозмущенного объекта, т.е. в предположении, что
/=0.
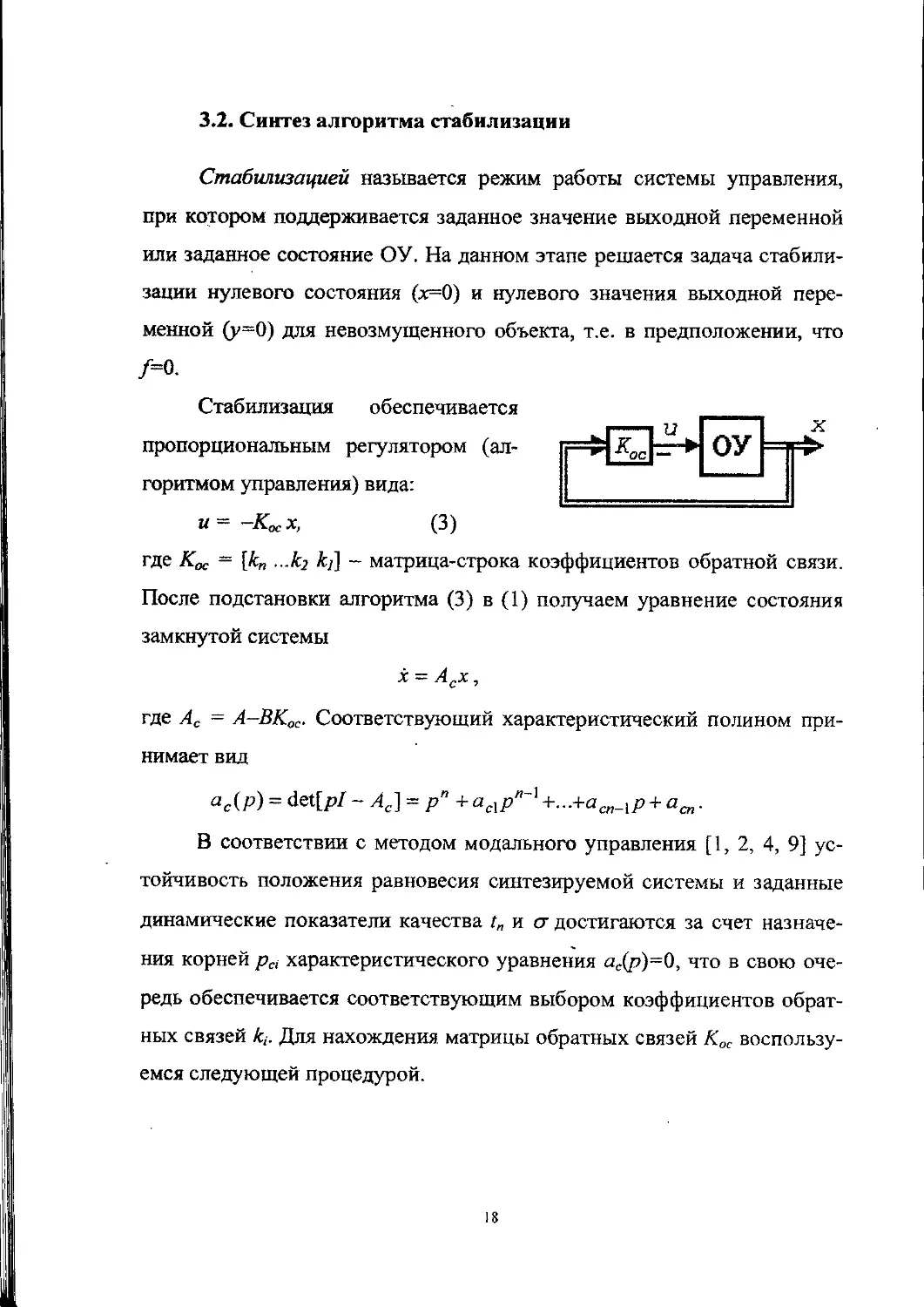
Стабилизация обеспечивается
пропорциональным регулятором (алгоритмом управления) вида:
ОУ
и = -Кж х, (3)
где Км = \k„ ...k2 £/] - матрица-строка коэффициентов обратной связи. После подстановки алгоритма (3) в (1) получаем уравнение состояния замкнутой системы
х = Асх,
где Ас = А—ВКос. Соответствующий характеристический полином принимает вид
ас(р) = det[p/ - Ас] = рп + аЛрп~} +...+ас„_хр + асп.
В соответствии с методом модального управления [1, 2, 4, 9] устойчивость положения равновесия синтезируемой системы и заданные динамические показатели качества /„ист достигаются за счет назначения корней р^ характеристического уравнения ас(р)=0, что в свою очередь обеспечивается соответствующим выбором коэффициентов обратных связей к,. Для нахождения матрицы обратных связей Кп,_ воспользуемся следующей процедурой.
18
1. По заданным качественным показателям t„ и <т с использованием метода стандартных переходных функций (см. Приложение 2) находятся корни характеристического уравнения замкнутой системы рС1 и коэффициенты желаемого характеристического уравнения а с1.
2. Коэффициенты матрицы обратной связи К*ос = [&*... соответствующей канонической (управляемой) форме объекта (1), (2) (см. Приложение 3), рассчитываются как
ki=aei-a,- (4)
3. Для обратного перехода (от канонической формы к исходному представлению системы) используется преобразование
КОС^К*ОСР, (5)
где Р - матрица преобразования (подобия), рассчитываемая как P=lfU~\
alf - матрица управляемости канонической модели ОУ.
4. Находится матрица замкнутой системы АС=А~ВКЖ.
По окончании расчетов выполняется моделирование замкнутой системы (I)-(3) при начальных условиях Х0)=1 и К(0)=0. По полученным временным диаграммам у=Х](Г) и F=x2(t) определяются качественные показатели синтезированной системы а и tn и делается заключение о том, насколько полученные результаты соответствуют требованиям задания.
3.3. Исследование возмущенной системы
На данном этапе анализируется поведение системы в условиях действия возмущающего воздействия 7(0*0. Рассчитывается точность
19
системы с полученным ранее пропорциональным регулятором, рассматривается астатический регулятор, обеспечивающий уменьшение установившейся ошибки, и комбинированный регулятор, гарантирующий получение абсолютной точности возмущенной системы. Анализ включает построение модели внешней среды (ВС), т.е. динамической системы, выходом которой является возмущающее воздействие /(/).
Синтез модели внешней среды. По заданному возмущающему воздействию fit) конструируется модель внешней среды, т.е. определяются структура и параметры системы:
£=г£ £(О) = £о, (6) ВС
/ = (7) j
где £={£/} ~ «/-мерный вектор состояния внешней среды. Переменные состояния £, можно ввести как
6 = /(О, & = /(0 и т.д. (8)
Тогда уравнение (7) получается из условия /=£|, а уравнение состояния (6) находится дифференцированием выражений (8) по времени (подробнее - см. [4] и [7, работа №3]). Начальные значения переменных выбираются как £,0 = /('-1)(0).
Для проверки модели внешней среды нужно составить структурную схему, осуществить моделирование и получить графики и Ш-
Анализ точности системы с пропорциональным и астатическим регуляторами. Для оценки точностных показателей возмущенной системы необходимо определить установившуюся составляющую выходной переменной y^t) (см. [1, 2, 4, 9] и Приложение 4).
20
Уравнение состояния системы с пропорциональным регулятором получается подстановкой алгоритма (3) в (1) и имеет вид
х = Асх + Df . (9)
Выбор матрицы обратной связи Кж, осуществленный в п.3.2, обеспечивает заданные динамические показатели возмущенной системы (9). Для оценки ее точности и нахождения ошибки y/f) необходимо рассмотреть установившийся режим работы модели (9), (2). В этом режиме вектор состояния х определяется как (см. Приложение 4)
ху = Mof^
где Mof — прямоугольная матрица размера ихиу, являющаяся решением матричного уравнения типа Сильвестра:
M0fr-AcM0j =DH. (10)
Таким образом, для оценки точности возмущенной системы с пропорциональным регулятором необходимо выполнить следующие действия.
1. Решить уравнение (10) и найти матрицу Mof.1
2. Рассчитать установившуюся ошибку: ^(0 = сада (н)
где переменные & определяются уравнениями (8).
3. Определить абсолютную погрешность в установившемся режиме:
D) <12’
где tp =10 с - время работы системы, и относительную погрешность:
Ау =тах|^(/)|, 1е[0/р],
1 О способах решения матричных уравнений см. [5, §3.3], а также [3, §1.8].
21
I о max I
Замечание J. Для постоянных и медленно меняющихся возмущений fit) можно воспользоваться приближенной формулой
yy(t) = -CA;lDf(t). □
Для подтверждения правильности расчетов необходимо осуществить моделирование возмущенной системы, получить графики y(t), fit), найти экспериментальные значения абсолютной Л у и относительной 8'f погрешности.
Для повышения точностных показателей возмущенной системы может быть использован астатический (пропорционально-интегральный^ пегулятоп пиля
коэффициенты, определенные аналитическими методами (см. [1,2, 8]) или экспериментальным путем. Выбор такого регулятора обычно позволяет уменьшить установившуюся составляющую уу(1), а для случая постоянных или медленно изменяющихся возмущений - обеспечить получение абсолютной точности.
Для экспериментального определения коэффициентов астатического регулятора (13) требуется провести моделирование системы (1)-(2), (13), (14) с разными значениями коэффициентов в диапазоне кР е[1,2], £/>0. По результатам экспериментов выбираются значения кР
22
и кь для которых достигается наименьшая ошибка системы Д 'f без существенного ухудшения ее динамических характеристик (на этом этапе исследований допускается 20%-е превышение указанных в задании показателей tn и ст).
Замечание 2. Описанный способ построения астатического регулятора в общем случае не гарантирует получения заданной точности <5, < б, а время установления процессов в возмущенной системе может
значительно превысить заданное значение t„. □
В работе необходимо привести найденные значения коэффициентов регулятора кР, ki и результаты моделирования (графики у(1) и ДО) автономной и возмущенной системы с астатическим регулятором. По временным диаграммам автономной системы (/(?)= О, y(0)~L К(0)=0)
определяются динамические показатели качества t'n, ст', а по графикам для возмущенной системы (у(0)=И(0)=0) находится абсолютная погрешность А у и рассчитывается относительная погрешность
£' = Ay/lgmaxl
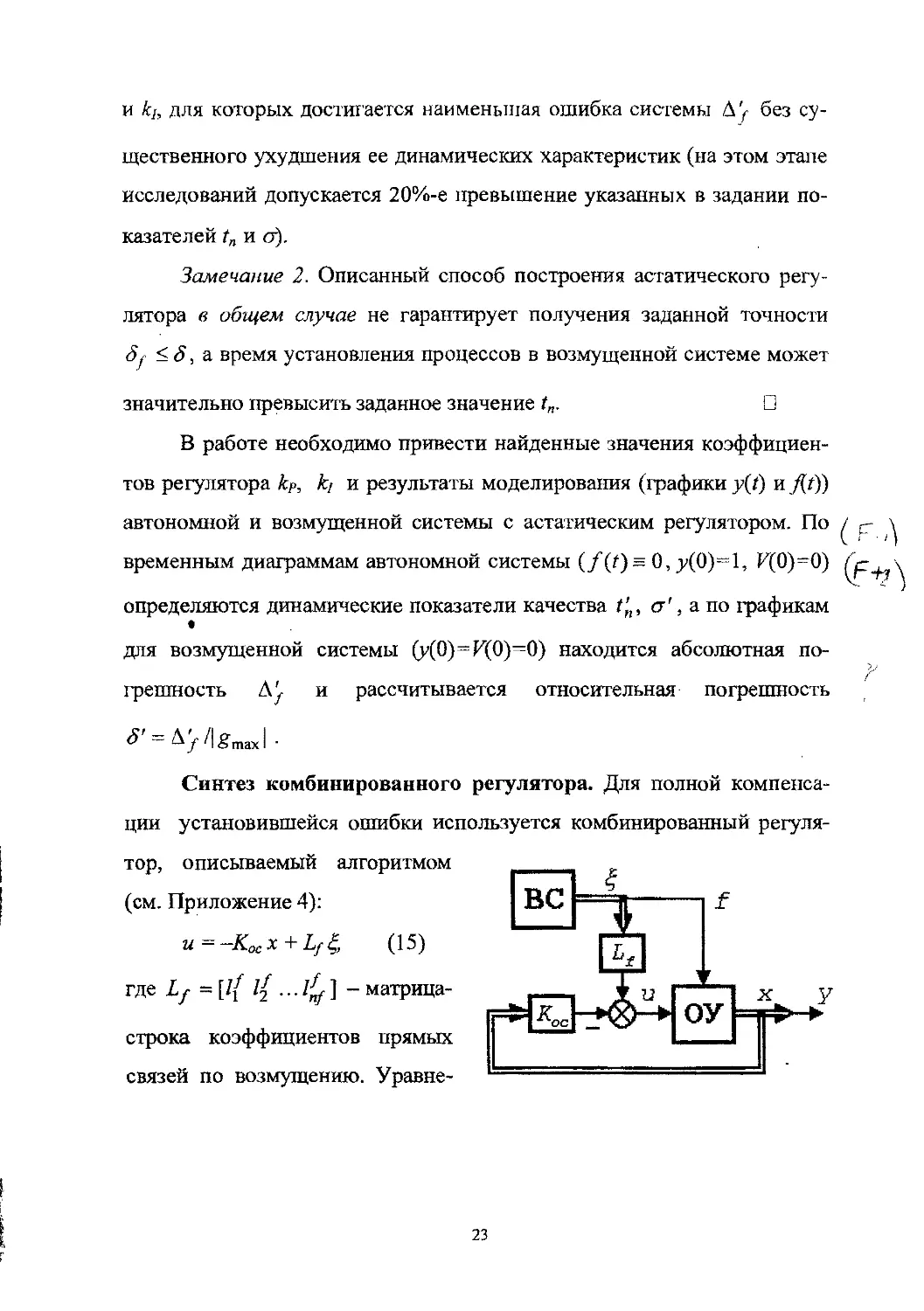
Синтез комбинированного регулятора. Для полной компенсации установившейся ошибки используется комбинированный регуля-
тор, описываемый алгоритмом (см. Приложение 4):
u=-Kocx + Lf£, (15) где Lf = [l{ - матрица-
строка коэффициентов прямых связей по возмущению. Уравне
23
(М
ние состояния замкнутой системы получается подстановкой (15) в (1) и имеет вид:
х = Асх + (BLf + DH)^.
Состояние системы в установившемся режиме определяется выражением
Ху — а ошибка слежения -
(16)
Матрица размера ихиу-и матрица-строка прямых связей L,- рассчитываются как решения системы матричных уравнений:
Mfr-AcMf = BLf+DH, (17)
CMf = G. (18)
Тогда из уравнения (16) получим уу-0 и, следовательно, обеспечивается абсолютная точность возмущенной системы по выходной переменной.
Замечание 3. В общем случае использование алгоритма (15) обеспечивает получение нулевого значения уу, а не переменных вектора состояния Ху. Тем не менее во многих частных случаях Л^=0 и, следовательно, ху=0. Тогда уравнение (17) принимает вид
BLf+DH = 0. (19)
Таким образом, для нахождения матрицы прямых связей L/ нужно решить систему уравнений (17), (18).
По окончании расчетов необходимо дополнить структурную схему системы управления, осуществить моделирование, получить временные диаграммы Х0-Л0 и оценить точность стабилизации.
24
В заключение раздела проводится сравнительный анализ систем с пропорциональным, астатическим и комбинированным регуляторами. По результатам синтеза осуществляется окончательный выбор регулятора, обеспечивающего заданные показатели качества возмущенной системы (выбор должен быть согласован с преподавателем).
3.4. Исследование следящей системы
Слежением называется режим работы системы управления, при котором поддерживается заданный закон изменения выходной переменной у = g(t) или состояния ОУ х = х*(/). Задача слежения сводится к стабилизации нулевого значения ошибки слежения
Е =g~y
или соответствующего вектора ошибок по состоянию е (см. ниже).
Задача синтеза следящей системы решается без учета влияния внешней среды, т.е. в предположении, что /0=0. При этом уравнение объекта управления (1) можно переписать в виде
х= Ах + Ви. (20)
Тем не менее, в системах с астатическим регулятором (13), обеспечивающим уменьшение погрешности системы в условиях действия возмущения f, требуется учесть динамику регулятора, что вызывает необходимость использования при расчетах следящей системы расширенной модели объекта (см. ниже). Раздел включает также построение задающего блока (ЗБ), т.е. встроенной динамической системы, выходом которой является задающее воздействие g(r).
25
Синтез задающего блока. По заданному задающему воздействию g(t) необходимо синтезировать задающий блок, т.е. определить структуру и параметры динамической модели вида:
х*=Л*х‘, x*(0) = Xq, (21) ---- д
g = C'x\ (22) ЗБ 'г1 *
где х* = |х*>— «^-мерный вектор состояния за
дающего блока. Переменные состояния х* можно ввести как
*Г = g, X2=g, и Т.Д.
Тогда (22) получается из выражения g = х,, а уравнение (21) - в резуль
тате дифференцирования х* по времени. Начальные значения перемен
ных х* выбираются как 4 =g('“1)(0).
Для проверки задающего блока нужно составить его структурную схему, осуществить моделирование и получить графики g(t) и Vg(t).
Построение расширенной модели объекта.1 Расширенная мо
дель представлена моделью ОУ (20) и дополнительным блоком, учиты
вающим влияние астатического регулятора (13)-(14)
u = kpv + kjv, (23) где v - входное воздействие расширенной модели. Для построения такой модели опре
деляется дополнительная пе
ременная вектора состояния х„+1, удовлетворяющая уравнению
х„+) = k,v.
(24)
Данный этап выполняется для систем с астатическим регулятором.
26
Тогда с учетом (23) уравнение объекта (20) принимает вид х = Ах + Bxn+l + kpBv. (25)
Уравнения (24)-(25) и (2) описывают искомую расширенную модель, которая может быть записана в компактной форме:
х = Ах + Bv, (26)
У = СХ, (27)
где х =
(и 41)-мерный вектор состояния расширенной модели,
АВ1 Г кРВ
0 0 J к,
С =[С 0].
Полученная модель используется в последующих расчетах следящей системы.
Замечание 4. Далее в настоящем параграфе используются обозначения, соответствующие исходной модели ОУ (20), (2) (без учета астатического регулятора). При работе с расширенной моделью (26), (27) переменные х, и и матрицы А, В, С заменяются на переменные х , v и матрицы А , В, С , соответственно (см. также Замечание 5). О
Модель ошибок и анализ точности. Введем в рассмотрение п-мерный вектор ошибок слежения (см. [1,2,4] и Приложение 4)
е — Mgx “X.
Матрица Mg размера ихиг, а также некоторая матрица-строка Lg = [If If.. ], находятся как решения системы уравнений:
MgA*-AMg = BLg, (28)
СМг=С'. (29)
При этом модель (уравнение состояния) ошибки слежения, принимает
вид:
27
ё= Ае+ BLgx* - Ви,
а уравнение выхода -
£= Се.
(30)
(31)
Задача слежения сводится к стабилизации нулевого выхода £ или нулевого состояния е модели (30), (31).
Структура полученной модели ошибок аналогична модели ОУ (1), (2), где роль возмущения играет переменная LgX. Поэтому для анализа точности и синтеза регуляторов используются процедуры, рассмотренные в п.3.3.
Замечание 5. При работе с расширенной моделью объекта следует
Г е "I ввести (и+/)-мерный вектор ошибок ё - , где е - «-мерный век-
_ел+1_
тор, использующийся далее при построении регуляторов (32) и (36). □
После подстановки (32) в уравнение (30) получаем модель ошибки слежения замкнутой системы:
ё = Are+BL„x . ° S
(33)
Выбор матрицы обратной связи Км, осуществленный в п.3.2, обеспечивает заданные динамические показатели модели (33). Для нахождения установившейся ошибки £у и оценки точности слежения необходимо по схеме, рассмотренной в п.3.3, проанализировать устано
28
вившийся режим модели (33), (31). Вектор установившихся ошибок определяется выражением:
еу = Mogx*, где - прямоугольная матрица nxng, являющаяся решением матричного уравнения тина Сильвестра (см. Приложение 4):
MogA — AoMog — BLg . (34)
Таким образом, для анализа системы с пропорциональным регулятором и оценки ее точности необходимо выполнить следующее.
1. Решить уравнения (28 ), (29) и найти матрицы Mg и Lg.
2. Решить уравнение (34) и найти матрицу Mog.
3. Рассчитать установившуюся ошибку по формуле:
£у = CMogx, (35)
где переменные х* (Г) были определены при синтезе задающего блока.
4. Определить абсолютную погрешность в установившемся режиме:
= пих|^(Г)|, t е[0,Гр],
где =10 с, и рассчитать относительную погрешность
15 maxi
Для проверки расчетов следует осуществить моделирование системы с регулятором (32), получить временные диаграммы у(0> g(0> 40 и найти экспериментальные значения погрешностей Ag и S'g.
Синтез комбинированного регулятора. Компенсация установившейся ошибки слежения и достижение абсолютной точности невоз
29
мущенной системы обеспечивается комбинированным регулятором, описываемым алгоритмом (см. Приложение 4)
и - Кх е + LgX(36)
где Lg = [Zf Zf... Zfg ] - найденная ранее матрица прямых связей. После
подстановки (36) в (33) находим модель ошибки слежения замкнутой
системы:
ё = Лсе. (37)
Полученная модель автономна и асимптотически устой
чива, что гарантирует получение нулевых ошибок еу =0, % =0 и, следовательно, абсолютной точности слежения (Ag= ^=0).
По окончании синтеза регулятора необходимо дополнить структурную схему системы, осуществить моделирование, получить временные диаграммы Х0> ^(0» gOX PgOX Х0, оценить точность системы и провести сравнительный анализ результатов моделирования следящей системы с пропорциональным и комбинированным регуляторами.
3.5. Синтез наблюдателей
Для текущей оценки неизмеряемых переменных, требующихся для построения регулятора, и фильтрации возможных помех измерения используются блоки (алгоритмы) наблюдения, или наблюдатели [1,4,9].
По заданной схеме измерения выбирается тип наблюдателя, необходимого для оценки неизвестных переменных объекта управления или внешней среды: наблюдатель состояния ОУ, расширенный наблюдатель
30
ОУ и внешней среды или редуцированный наблюдатель состояния внешней среды. Во всех случаях рассматривается режим слежения для возмущенной системы и используются полученные ранее алгоритмы управления. Причем с целью упрощения исследований предполагается,
что в системе используются истинные значения переменных состояния
ОУ и внешней среды, т.е. закон управления имеет вид и = К,хе +Lj^ + LgX*,
или, при использовании астатического регулятора,
и = kpv+ kj Jv(f)cfr, о
где v = Касе + Lgx*.
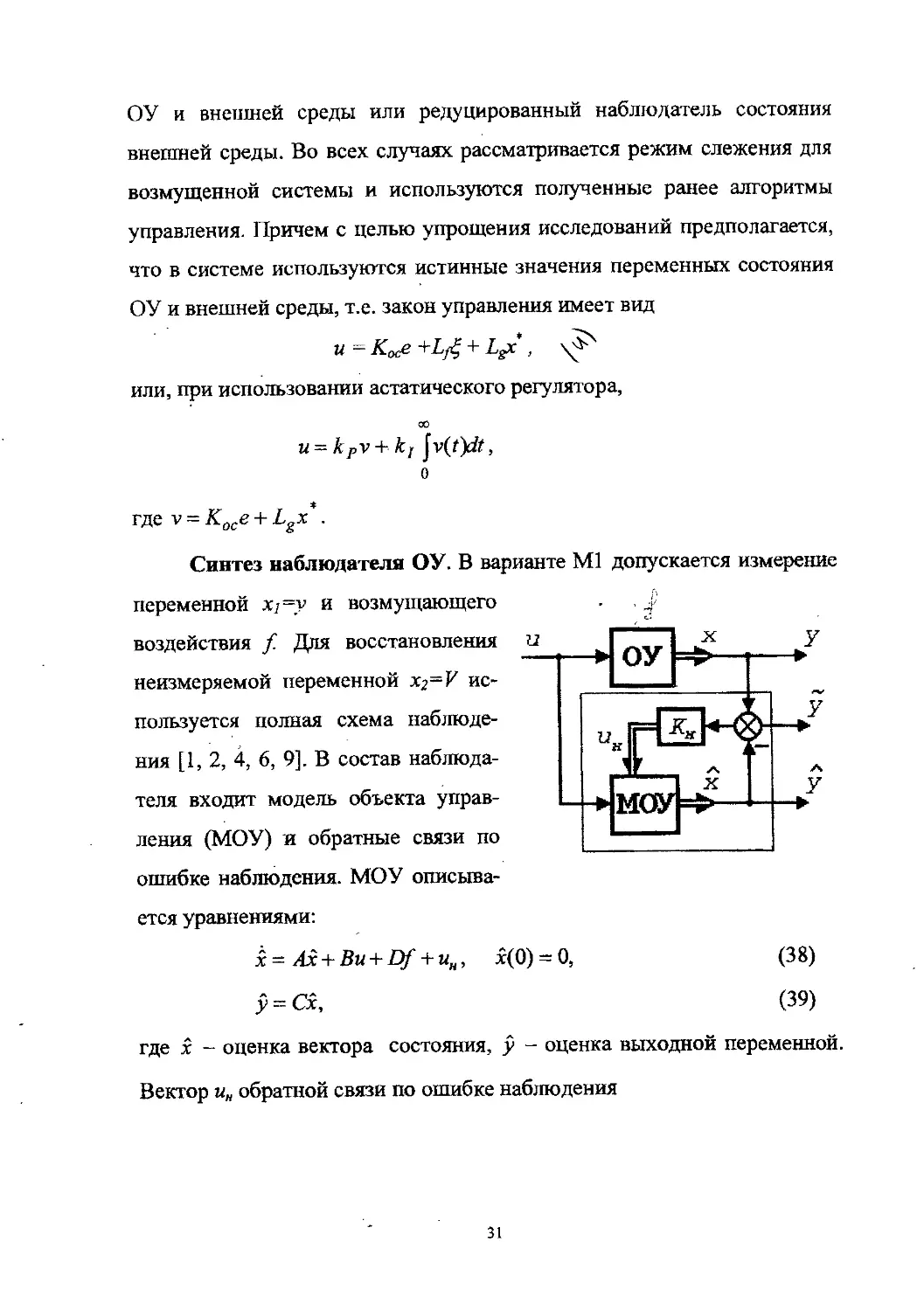
Синтез наблюдателя ОУ. В варианте Ml допускается измерение
переменной х;=у и возмущающего воздействия f. Для восстановления неизмеряемой переменной x2=V используется полная схема наблюдения [1, 2, 4, 6, 9]. В состав наблюдателя входит модель объекта управления (МОУ) и обратные связи по ошибке наблюдения. МОУ описыва
ется уравнениями:
х~ Ax + Bu + Df + ин, х(0) - 0, (38)
У = Сх, (39)
где х - оценка вектора состояния, у - оценка выходной переменной. Вектор ин обратной связи по ошибке наблюдения
31
У = У~У
определяется по формуле
«и=*нЬ (40)
где Кн = [к“ ... k“ к"\т - матрица-столбец коэффициентов обратной связи.
Введем в рассмотрение вектор ошибок наблюдения
х = х-х.
Модель ошибок получается вычитанием (38) из (1) и после подстановки (40) принимает вид:
х = Аих, х(0) = х0 = х0, (41)
у = Сх, (42)
где Ан = А-КНС. Соответствующий характеристический полином наблюдателя описывается выражением
a«(Jp) = det[JpZ- Аи] = рп + аи1рп~' + ан2р+...+анп.
Устойчивость положений равновесия х=0, у = 0 модели (41), (42) и заданные динамические показатели качества наблюдателя и <тк достигаются за счет назначения соответствующих корней рн характеристического уравнения о„(р)=0, что в свою очередь обеспечивается соответствующим выбором обратных связей. Для нахождения матрицы обратной связи наблюдателя Кн используется следующая процедура, аналогичная рассмотренной в п.3.2.
1. По заданным качественным показателям и <т„ с использованием метода стандартных переходных функций (см. Приложение 2) находятся корни характеристического уравнения замкнутого наблюдателя рш и коэффициенты желаемого характеристического уравнения аН1.
32
2. Коэффициенты матрицы обратной связи К'н = [&"*... k%*k"*~\T, соответствующей канонической (наблюдаемой) форме представления модели ошибки (42) (см. Приложение 3), рассчитываются как
*,"* =aHi -at.
3. Для обратного перехода от канонической формы к модели (42) используется преобразование
Ки =Р^К*,
где
Q’ - матрица наблюдаемости канонической модели (см. Приложение 3).
Синтез расширенного наблюдателя. В варианте М2 для оценки
неизвестных переменных xy--V и т.д., а также возмущения f используется схема расширенного наблюдения. Для ее построения необходимо сформи
ровать расширенную модель, содержащую объект управления и модель внешней среды (ВС), т.е. модель вида:
*р =^рхр+Ври, (43)
У = СРХР
(44)
где хр
АР
(и+и/)-мерный вектор состояния расширенной модели,
А
О
DH
Г
СР={С 0].
зз
Матрица наблюдаемости такой модели имеет вид: Qp =
Наблюдатель для модели (43), (44) (расширенный наблюдатель) строится в соответствии с методикой, рассмотренной для варианта Ml с учетом соответствующих замен х на хр, А на Ар, С на Ср, В на Вр и Q на а-
у Редуцированный наблюдатель возмущения. В варианте М3 допускается измерение всех переменных состояния Х\=у, xy=V и т.д., а требуется оценить возмущение f В этих условиях применение расширенной схемы наблюдения становится нецелесообразным, и поэтому используется наблюдатель пониженной размерности, или редуцированный наблюдатель (см. Приложение 5).
По окончании расчетов выполняется моделирование системы с наблюдателем при начальных условиях Х0)=0.1, 7(0)=0. Получаются временные диаграммы у =Xy(t) и x^OQ - для варианта Mb у = xx(t), х2(г)и /(0 = й(0 - для варианта М2, /(/) = ^(7)-для варианта М3. По графикам оцениваются динамические показатели качества процесса наблюдения сг„, tH и точность наблюдателя, делается заключение о степени соответствия полученных результатов заданию.
34
3.6. Исследование синтезированной системы управления
На последнем этапе исследований формируется оценка ошибок слежения
ё=Млх*-х, (45)
где оценка вектора состояния х объекта управления для варианта Ml генерируется наблюдателем (38)-(40), для М2 - расширенным наблюдателем, а для М3 выбирается х = х. Полный алгоритм управления следящей системы принимает вид:
и = К0Сё + Lf^ + Lsx*, (46)
или, при использовании астатического регулятора (13), (14) -
и = kPv + kj (47)
о
где
v = -£oCe + £gx*. (48)
Оценка вектора состояния внешней среды £ и возмущения f для варианта М2 генерируется расширенным наблюдателем, для М3 - редуцированным наблюдателем, а для Ml выбирается £ = £ и f = f •
Осуществляется моделирование синтезированной системы при начальном условии у(0)=0.1. Получаются временные диаграммы у(<), и при необходимости V(t) и Vg(f), а также e(f) и y(t), оцениваются динамические и точностные показатели качества системы управления и делается заключение о степени соответствия полученных результатов требованиям технического задания.
35
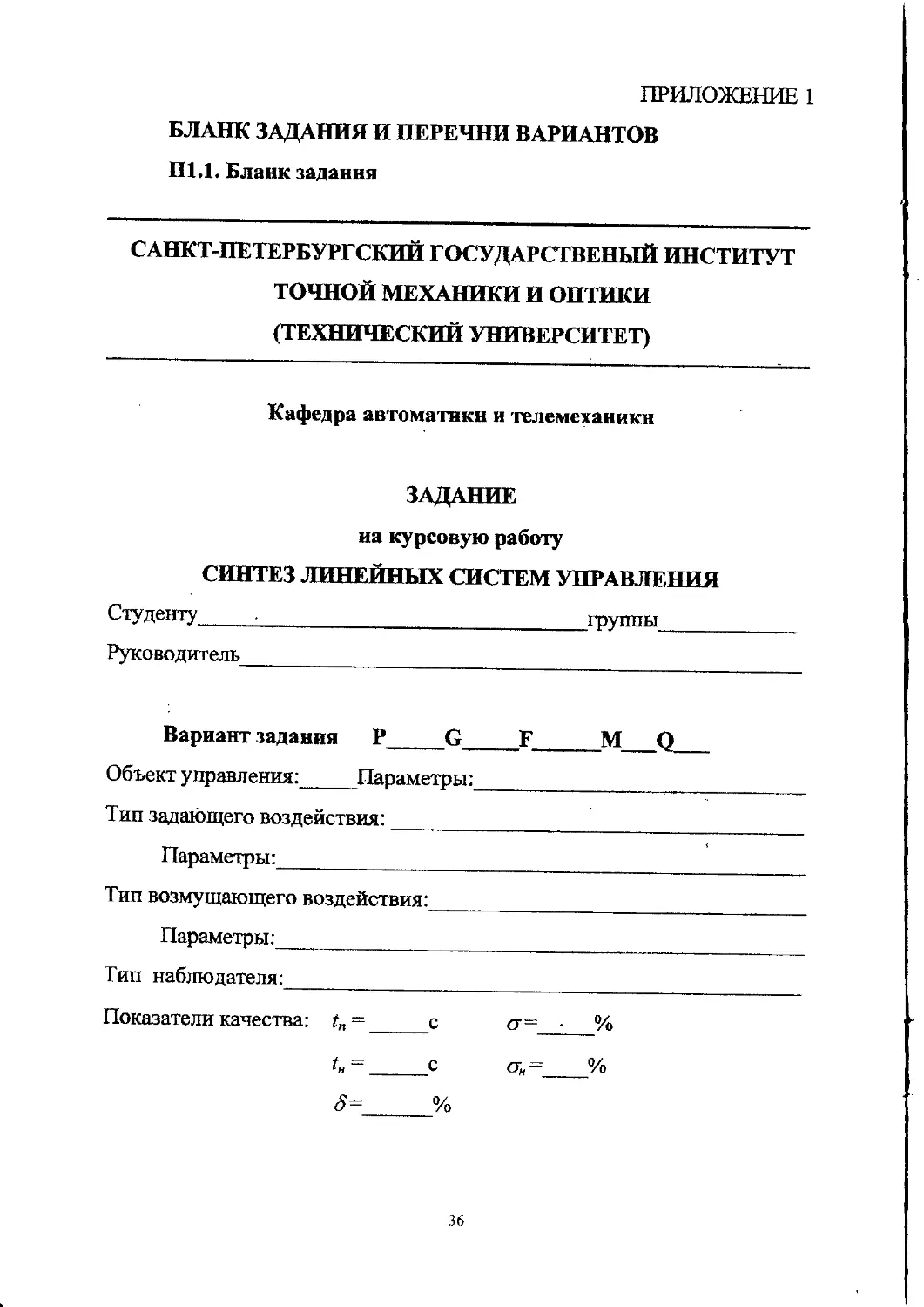
ПРИЛОЖЕНИЕ 1
БЛАНК ЗАДАНИЯ И ПЕРЕЧНИ ВАРИАНТОВ
П1.1. Бланк задания
САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕНЫЙ ИНСТИТУТ ТОЧНОЙ МЕХАНИКИ И ОПТИКИ (ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ)
Кафедра автоматики и телемеханики
ЗАДАНИЕ па курсовую работу СИНТЕЗ ЛИНЕЙНЫХ СИСТЕМ УПРАВЛЕНИЯ
Студенту группы
Руководитель___________________________________________
Вариант задания Р G F М Q
Объект управления:Параметры:
Тип задающего воздействия:_____________________________
Параметры:_________________________________________
Тип возмущающего воздействия:__________________________
Параметры: ________________________________________
Тип наблюдателя:_______________________________________
Показатели качества: tn =с о-= %
С =с стн =__________%
8=%
36
Содержание пояснительной записки:
Оглавление.
1) Анализ объекта управления.
2) Синтез алгоритма стабилизации.
3) Исследование возмущенной системы.
4) Исследование следящей системы.
5) Синтез наблюдателя.
б) Исследование синтезированной системы управления и заключение.
Приложения.
Список литературы.
Перечень графического материала:
1) Полная структурная схема системы.
2) Переходные процессы автономной системы.
3) Переходные процессы возмущенной системы.
4) Переходные процессы следящей системы.
5) Переходные процессы наблюдателя.
6) Переходные процессы полной системы управления.
Литература
1. Андреев Ю.Н. Управление линейными конечномерными объектами. - М.: Наука, 1979.
2. Андриевский Б.Р., Фрадков А.Л. Избранные главы теории автоматического управления. - СПб: Наука, 1999.
3- . Квакернаак X., Сиван Р. Линейные оптимальные системы управления. -М.: Мир, 1977.
4. Лямин А.В., Михайлов С.В., Никифоров В.О. и др. Исследование моделей объектов управления и среды функционирования. - СПб: СПбГИТМО, 2000.
б. Мирошник И.В., Болтунов Г.И. Моделирование систем управления. Учебное пособие. - Л.: МИПК, 1991.
6. Мирошник И.В., Никифоров В.О. Синтез линейных систем автоматического управления. Учебное пособие. - СПб: СПбГИТМО, 2000.
Дата выдачи задания _______________________________
Подпись руководителя: _________________
Подпись студента:__________________________________
37
П1.2. Перечень № 1 рекомендуемых вариантов
N варианта Р G F M Q Сложность
1 Р21 G1X FIX М2 Q5 3
2 Р31 G1X FIX М2 Q6 3
3 Р22 G1X F2X Ml Qi 3
4 Р32 G1X F2X М2 Q5 3
5 Р23 G2X FIX Ml Q2 3
6 РЗЗ G2X FIX Ml Q3 3
7 Р21 G1X F4X Ml Ql 4
8 Р31 G1X F4X Ml Q2 4
9 Р32 G1X F3X Ml Q3 4
10 Р31 G2X FIX М2 Q5 4
11 Р21 G2X F3X Ml Q4 4
12 Р22 G2X F3X М2 Q6 4
13 Р32 G2X F3X Ml Ql 4
14 Р22 G2X F4X Ml Q2 4
15 Р31. G2X F4X Ml Q4 4
16 Р23 G3X FIX Ml Q3 4
17 РЗЗ G3X FIX М2 Q5 4
18 Р31 G3X F2X Ml Ql 4
19 Р21 G3X F4X Ml Q2 4
20 Р21 G4X FIX Ml Q3 4
21 Р32 G4X FIX М2 Q4 5
22 РЗЗ G3X F2X М2 Q6 5
23 Р23 G3X F4X М2 Q5 5
24 Р23 G4X F2X М2 Ql 5
25 Р32 G4X F2X М2 Q5 5
26 Р22 G4X F3X М2 Q6 5
27 Р32 G4X F3X Ml Q6 5
28 РЗЗ G4X F3X М2 Q5 5
Примечание. Вместо символа "X" может использоваться любой номер варианта из таблиц 2 и 3.
38
П1.3. Перечень № 2 рекомендуемых вариантов
N варианта Р G F м Q Сложность
1 Р2Х G1X — Ml QX 3
2 РЗХ G1X — Ml QX 3
3 Р2Х G2X — Ml QX 4
4 РЗХ G2X — Ml QX 4
5 Р2Х G3X — Ml QX 4
6 РЗХ G3X — Ml QX 4
7 Р2Х G4X — Ml QX 5
8 РЗХ G4X — Ml QX 5
Примечание. Здесь в рекомендуемых вариантах задания возмущение отсутствует, а вместо символа "X" может использоваться любой номер варианта из таблиц 1, 2 и 4.
39
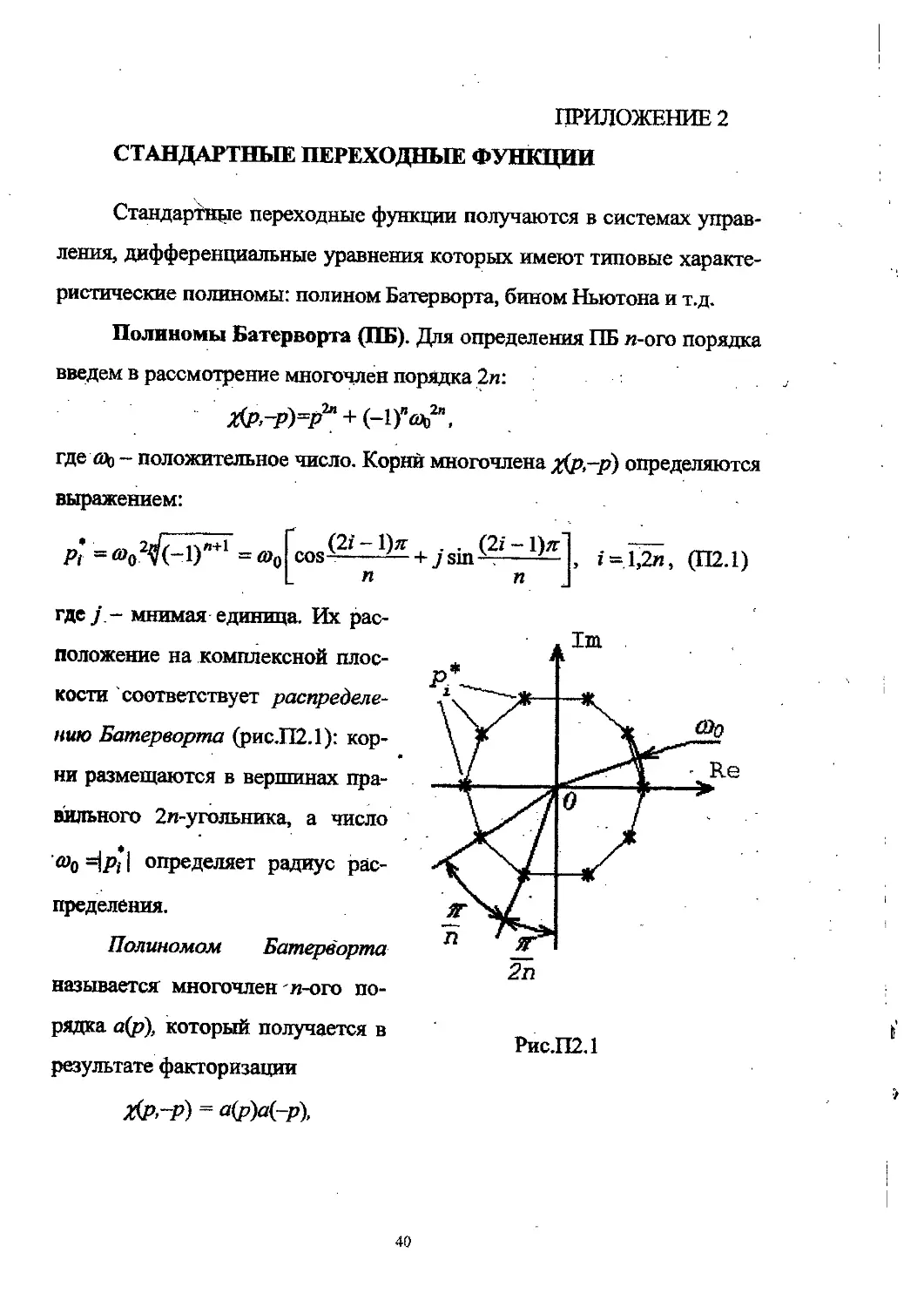
ПРИЛОЖЕНИЕ 2
СТАНДАРТНЫЕ ПЕРЕХОДНЫЕ ФУНКЦИИ
Стандартнее переходные функции получаются в системах управления, дифференциальные уравнения которых имеют типовые характеристические полиномы: полином Батерворта, бином Ньютона и т.д.
Полиномы Батерворта (ПБ). Для определения ПБ и-ого порядка введем в рассмотрение многочлен порядка 2п:
2(р,-Р)=Р2и + (-1)в^2в, где o)q - положительное число. Корни многочлена %(р,-р) определяются
выражением:
* 2л/Т~гГй+Г Г (2х -1)л . . (2z - l)zr pf = ®02v(-l) =®o 0081--------~ + jsm—--------—
n n
i = l,2n, (П2.1)
где j - мнимая единица. Их расположение на комплексной плоскости соответствует распределению Батерворта (рис.П2.1): корни размещаются в вершинах правильного 2п-угольника, а число со0 На I определяет радиус распределения.
Полиномом Батерворта называется многочлен n-ого порядка а(р), который получается в результате факторизации
Рис.П2.1
Ха~А) = а(р)а(-р).
40
; t
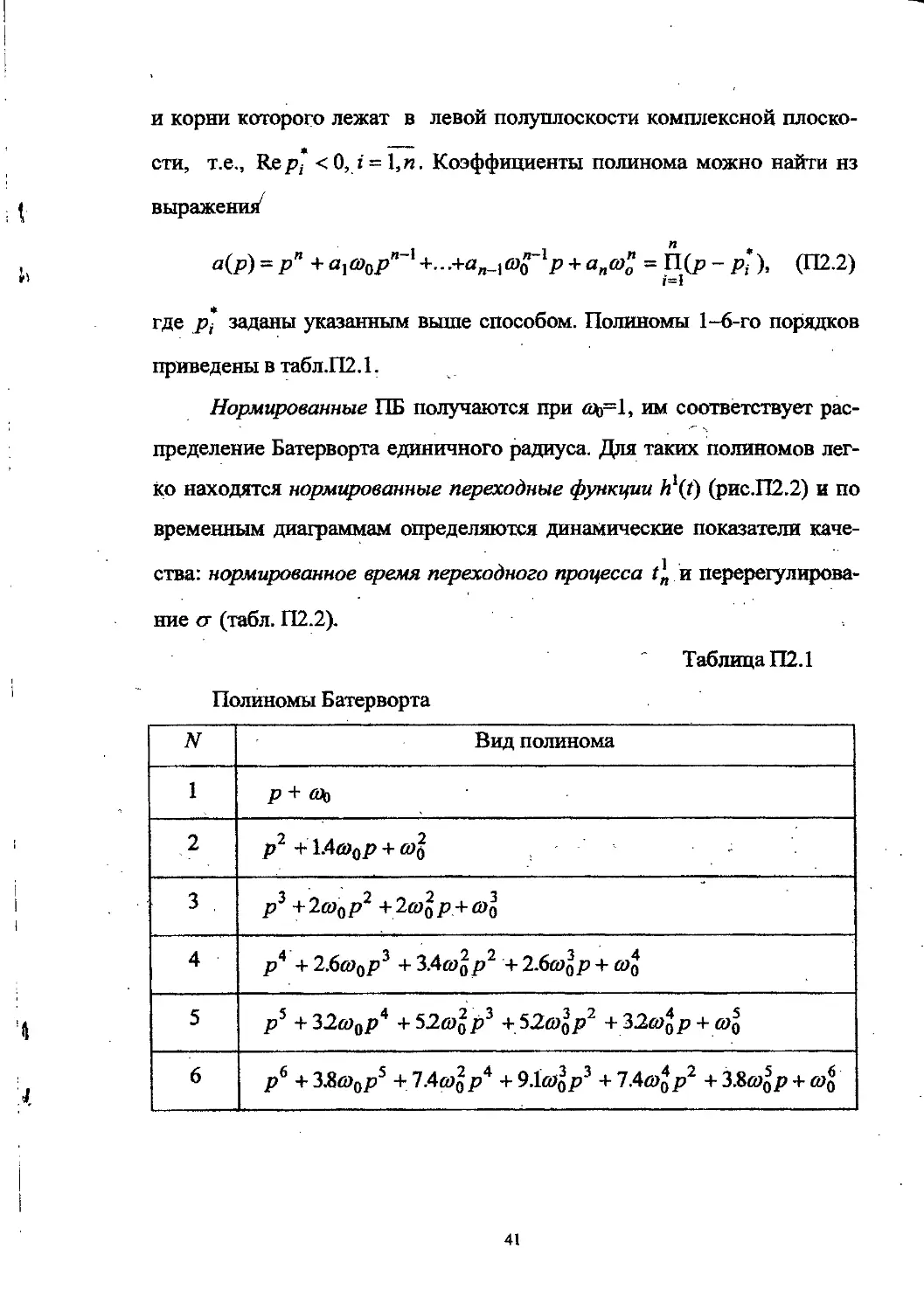
и корни которого лежат в левой полуплоскости комплексной плоскости, т.е., Re pt <0, i = l, п. Коэффициенты полинома можно найти нз выражений
Хр) = р" + Р + а„о)” = П(р-р’), (П2.2)
где Pi заданы указанным выше способом. Полиномы 1-6-го порядков приведены в табл.П2Л.
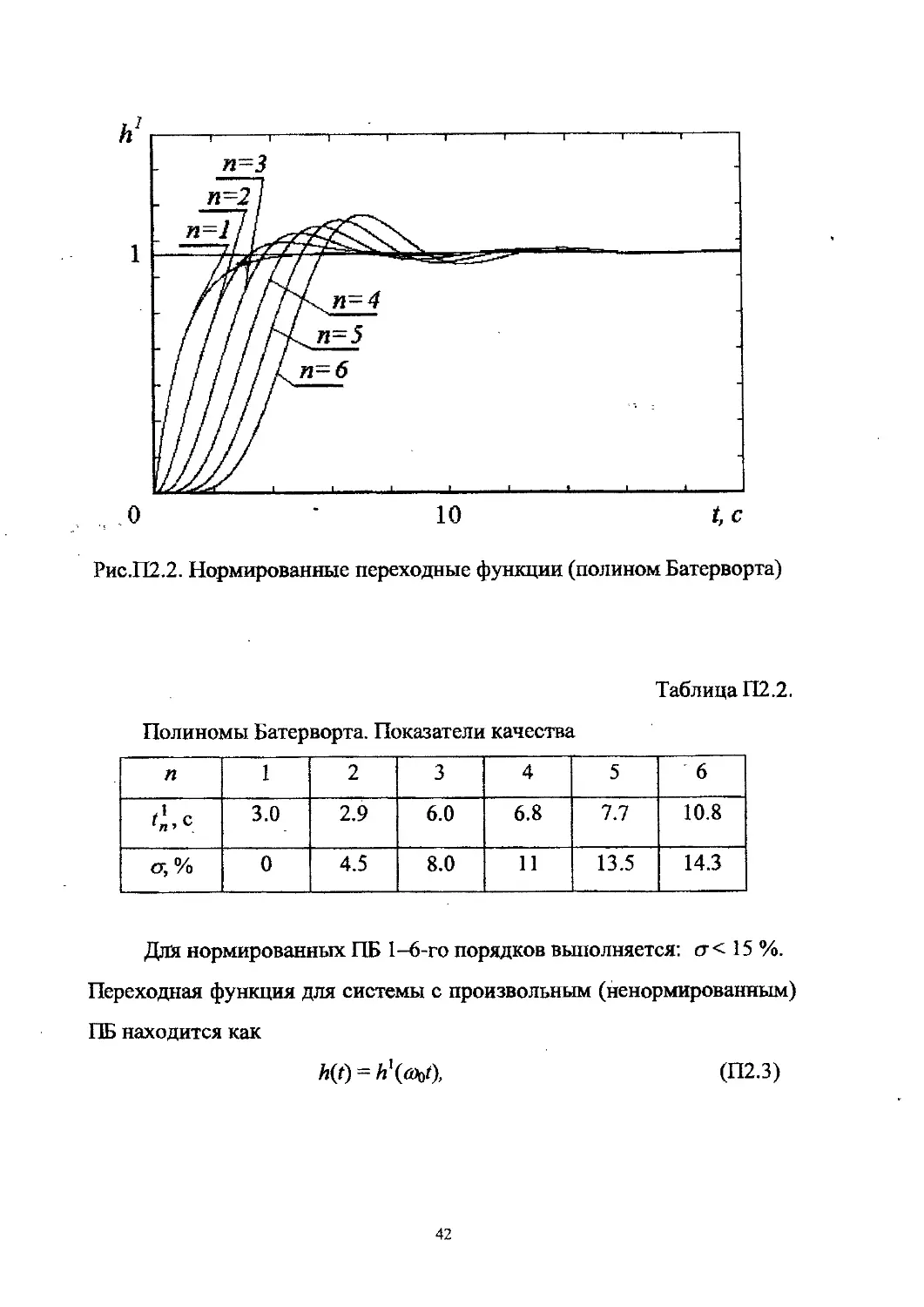
Нормированные ПБ получаются при оь=1, им соответствует распределение Батерворта единичного радиуса. Для таких полиномов легко находятся нормированные переходные функции /^(t) (рис.П2.2) и по временным диаграммам определяются динамические показатели качества: нормированное время переходного процесса t]nn перерегулирование а (табл. П2.2).
Таблица П2.1
Полиномы Батерворта
N Вид полинома
1 р+ 0)0
2 р2 +1.4®0р + ;
3 . р3 + 2®0р2 +2®ор + б>о
4 р4 + 2.6®0р3 + 3.4®о р2 + 2.6®ор +
5 р5 + 32со0р4 + 52й>ор3 +52(0% р2 + 32а)4р + o)q
6 р6 + 3.8й)ор5 + 7.4®о р4 + 9.1®о р3 + 7.4д>о р2 + 3.8®gp +
41
Таблица П2.2.
Полиномы Батерворта. Показатели качества
п 1 2 3 4 5 6
3.0 2.9 6.0 6.8 7.7 10.8
а, % 0 4.5 8.0 11 13.5 14.3
Для нормированных ПБ 1-6-го порядков выполняется: сг< 15 %. Переходная функция для системы с произвольным (ненормированным) ПБ находится как
Й(Г) = Л’СлъО, (П2.3)
42
т.е. для случая >1 получается сжатием hl(t) вдоль оси t. При этом перерегулирование ст остается прежним, а время переходного процесса определяется по формуле:
tn = fп ! &о (П2.4)
Биномиальные разложения. Полином задается формулой (биномом) Ньютона (БН):
а(р) = рп+а^()рпЛ+...+ап_Аа^р+апа)^ = (р + ®0)", (П2.5)
где <ао - положительное число, at - биномиальные коэффициенты. Полиномы 1-6-го порядков, построенные на базе бинома Ньютона, приведены в табл.П2.3.
Полиномы имеют кратные вещественные отрицательные корни Pi = -<Oq, что обеспечивает получение в системе монотонных переходных процессов, т.е. ст= 0 %.
Таблица П2.3.
Биномиальные разложения
N Вид полинома
1 р+ СОо
2 р2 +2а>0р + (о1
3 р3 + 3<и0р2 +3®ор + <Уо
4 р4 + 4а>ар3 +6<OqP2 +4®qP + ®q
5 р5 + 5<э0р4 +1Ой>ор3 +10®^р2 +
6 р6 +6а)0р5 +15®оР4 +20<WqP3 + 15<DqP2 +6а)^р + (о^
43
Нормированные полиномы получаются при 0% =1 и имеют корни р* = -1. Переходные функции h'(t) систем 1-6-го порядка приведены на рис.П2.3. По временным диаграммам определяется нормированное время переходного процесса f * (табл.П2.4).
Рис.П2.3. Нормированные переходные функции (биномиальное распределение)
Таблица П2.4.
Биномиальные разложения. Показатели качества
N 1 2 3 4 5 6
3.0 4.8 6.3 7.8 9.2 10.5
СТ, % 0 0 0 0 0 0
44
Переходная функция h(t) системы с произвольным БН находится по формуле (П2.3), а время переходного процесса t„ определяется выражением (П2.4).
Построение характеристических полиномов. Для нахождения коэффициентов полинома Батерворта или биномиального разложения по заданному времени переходного процесса t„ используется следующая процедура:
а) по нормированным переходным функциям или таблицам определяется значение f ;
б) по формуле
(П2.6) находится минимально допустимый радиус распределения корней;
в) коэффициенты искомого полинома определяются по формулам (П2.2) или (П2.5), где коэффициенты at находятся по соответствующим таблицам.
45
ПРИЛОЖЕНИЕ 3
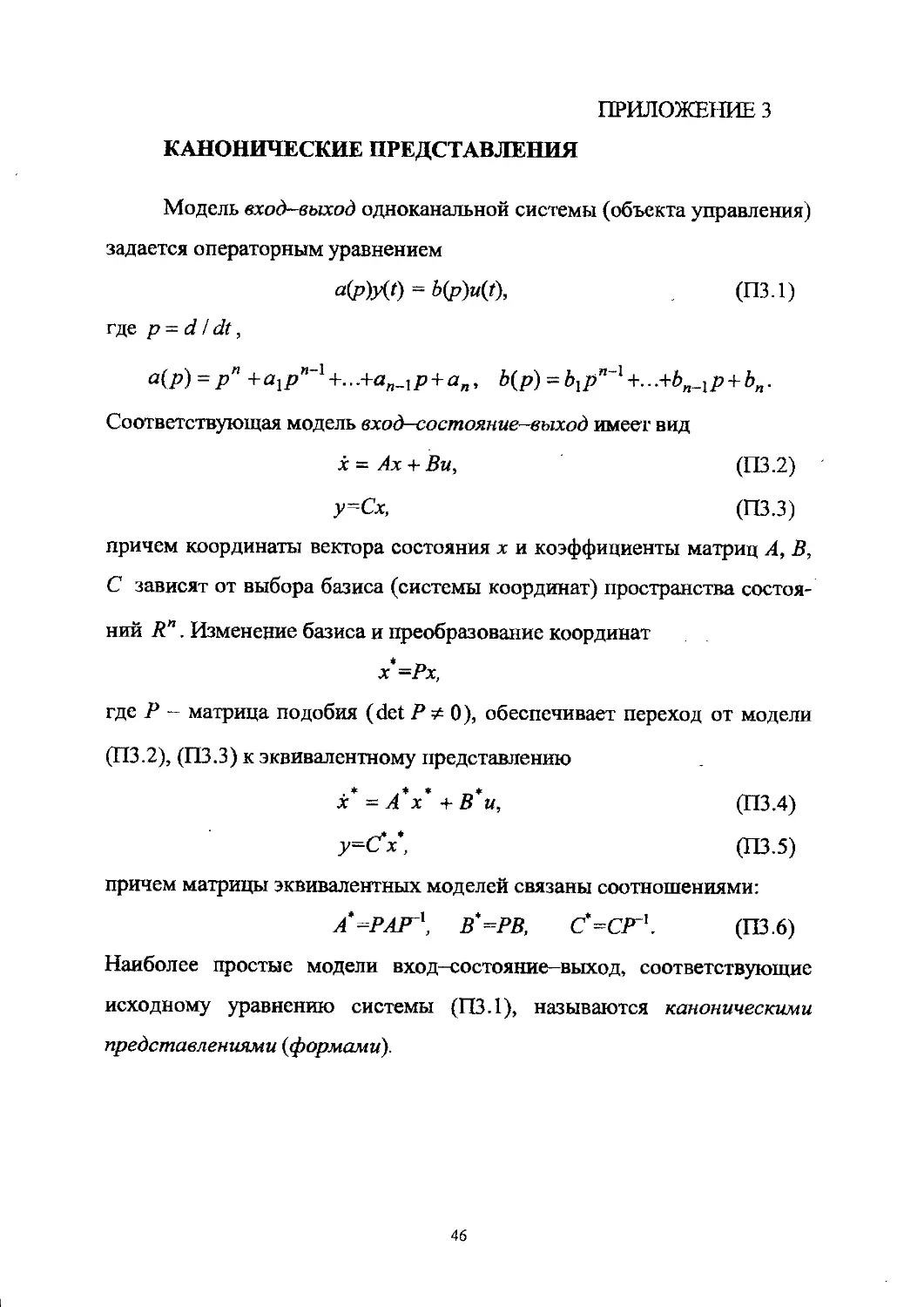
КАНОНИЧЕСКИЕ ПРЕДСТАВЛЕНИЯ
Модель вход-выход одноканальной системы (объекта управления) задается операторным уравнением
«(рМО = b(p)u(f), (ПЗ-1)
где р - d / dt,
а(Р) = рп +ахрп~х+.. .+ап_1р + а„, Ь(р) = Ь^рпЛ +.. .+Ьп_}р + Ь„. Соответствующая модель вход-состояние-выход имеет вид
х = Ах + Ви, (П3.2)
у=Сх, (ПЗ.З)
причем координаты вектора состояния х и коэффициенты матриц А, В, С зависят от выбора базиса (системы координат) пространства состояний R". Изменение базиса и преобразование координат
х*=Рх, где Р - матрица подобия (det Р * 0), обеспечивает переход от модели (П3.2), (ПЗ.З) к эквивалентному представлению
х* = А* х*+В*и, (П3.4)
(П3.5) причем матрицы эквивалентных моделей связаны соотношениями:
А*=РАРЛ, В*=РВ, C‘=CPri. (П3.6) Наиболее простые модели вход-состояние-выход, соответствующие исходному уравнению системы (П3.1), называются каноническими представлениями (формами).
46
Рис.ПЗ.1. Структурная схема канонической управляемой формы
Каноническая управляемая форма. Модель полностью управляемой системы может быть приведена к виду (П3.4), (П3.5), где (см,-рис.ПЗ.1):
C*=[bnbn.}... Md,
ат=[-а„ -a^-t... -а2 -nd, 0=[0 0...0 0]т,
I— единичная матрица размера (и-1)х(и-1).
Матрица преобразования находится как
P=lfU~\ (П3.7)
где U к if — матрицы управляемости исходной и канонической моде-ли соответственно. Для случая л=3 имеет место:
'о 0 1
и* = 0 1
1 ~а\ -а2 +а^
47
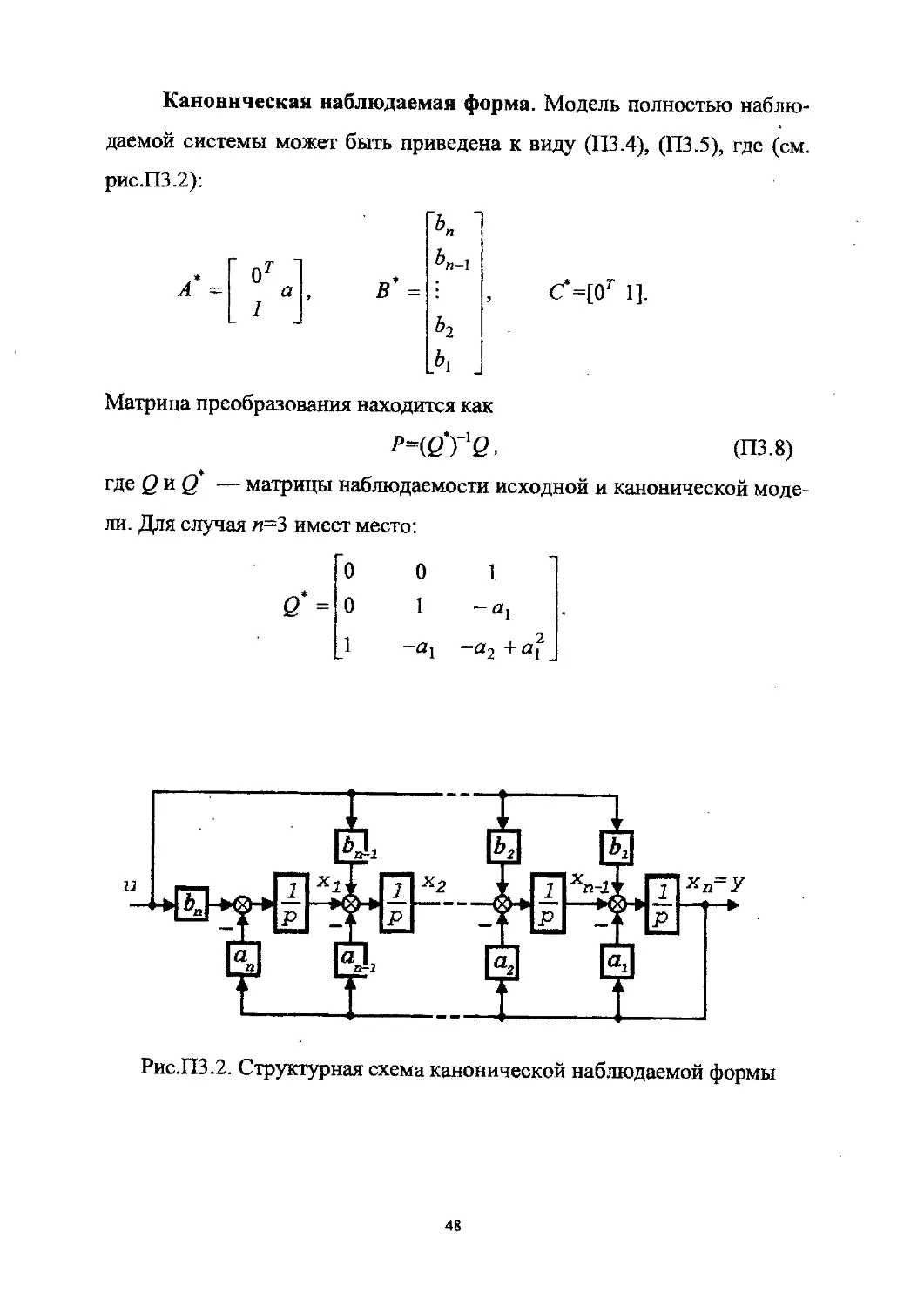
Каноническая наблюдаемая форма. Модель полностью наблюдаемой системы может быть приведена к виду (П3.4), (П3.5), где (см. рис.ПЗ.2):
С*=[0г 1].
Матрица преобразования находится как р=(е’)-'е, (пз.8)
где Q и Q* — матрицы наблюдаемости исходной и канонической модели. Для случая л=3 имеет место:
О
Q* =
О 1
1 -«1
. 2
а\ а1 + а1
Рис.ПЗ.2. Структурная схема канонической наблюдаемой формы
48
ПРИЛОЖЕНИЕ 4
ВЫВОД ОСНОВНЫХ МАТРИЧНЫХ УРАВНЕНИЙ
П4.1. Анализ точности и синтез регуляторов возмущенной системы
Рассматривается задача стабилизации объекта управления x=Ax + Bu + Df, (П4.1)
у = Сх, (П4.2)
где dimx = п, в условиях возмущающего влияния модели внешней среды:
£(О) = £о (ПАЗ)
(П4.4) где dim£ = «y.
Анализ точности системы с пропорциональным регулятором. Пропорциональный регулятор описывается выражением
и=-Кжх, (П4.5)
где Кос ~ матрица-строка коэффициентов обратной связи. После подстановки (П4.5) система (П4.1) принимает вид
х = Асх + Df, (П4.6)
где Ас = А-ВКос. Предполагается, матрица обратной связи выбрана так, что Ас - асимптотически устойчива.
Установившаяся составляющая выходной переменной (ошибка) yy(t) определяется выражением
Уу=Сху, (П4.7)
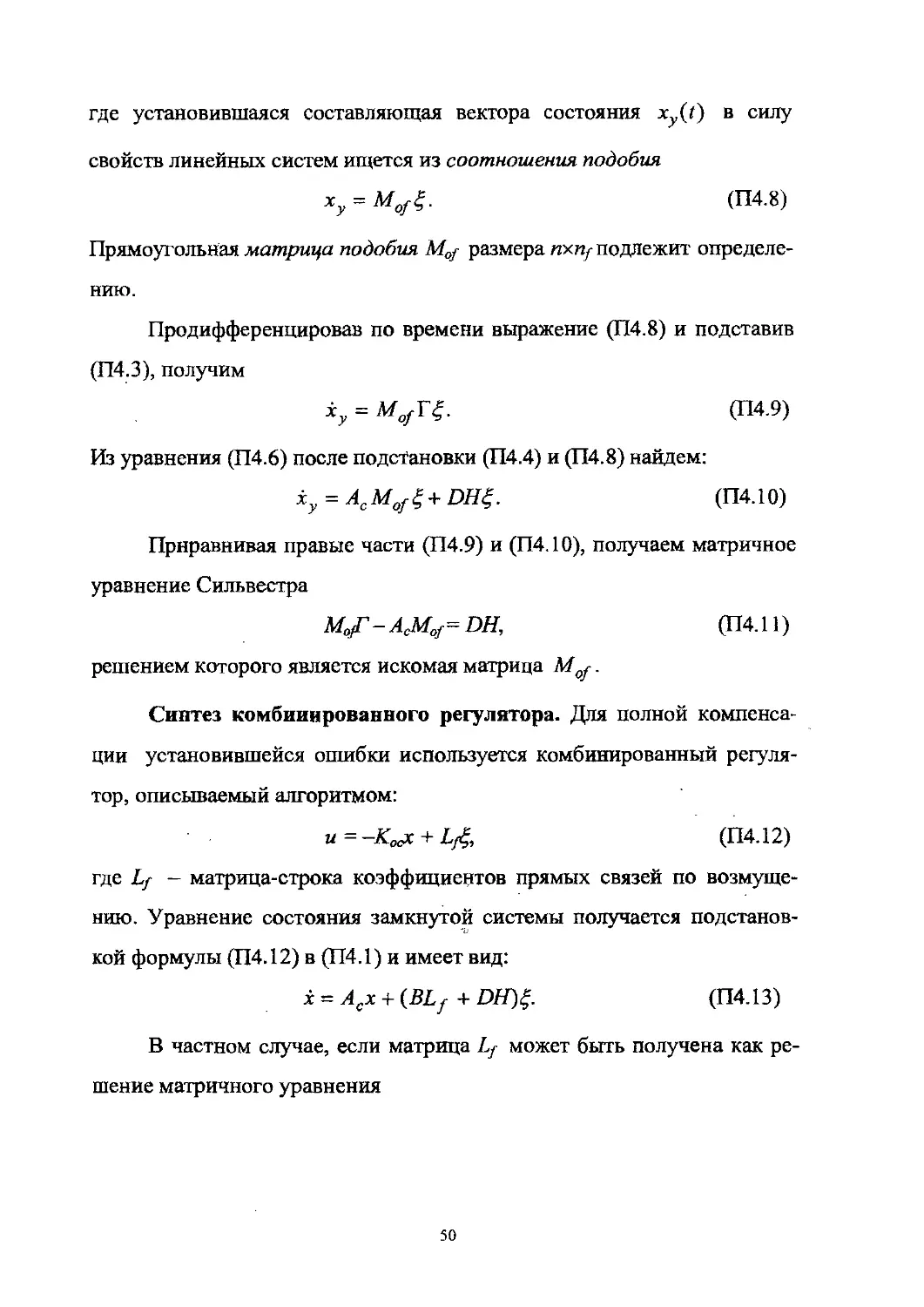
49
где установившаяся составляющая вектора состояния xy(l) в силу свойств линейных систем ищется из соотношения подобия
ху = Mof%. (П4.8)
Прямоугольная матрица подобия MOf размера яхту подлежит определению.
Продифференцировав по времени выражение (П4.8) и подставив (П4.3), получим
ху = (П4.9)
Из уравнения (П4.6) после подстановки (П4.4) и (П4.8) найдем:
xy = AcMof^+DH^. (П4.10)
Приравнивая правые части (П4.9) и (П4.10), получаем матричное уравнение Сильвестра
MojT-AcMof^DH, (П4.11)
решением которого является искомая матрица Мо?.
Синтез комбинированного регулятора. Для полной компенсации установившейся ошибки используется комбинированный регулятор, описываемый алгоритмом:
u=—Kocx + L£, (П4.12)
где L/ - матрица-строка коэффициентов прямых связей по возмущению. Уравнение состояния замкнутой системы получается подстановкой формулы (П4.12) в (П4.1) и имеет вид:
х = Асх + (BLf + DH)£. (П4.13)
В частном случае, если матрица Lf может быть получена как решение матричного уравнения
50
BLf+DH=Q,
то в условиях асимптотической устойчивости матрицы Ас из уравнения (П4.13) находим: ху =0, что и обеспечивает получение нулевой установившейся ошибки уу = 0.
В общем случае установившееся состояние системы (П4.13) определяется выражением
ху = М£ (П4.14)
и, следовательно, установившаяся ошибка системы будет
Уу=СМ£ (П4.15)
где Mf - прямоугольная матрица размера ихиу. Для получения абсолютной точности необходимо обеспечить у =0, что, вообще говоря, не требует получения нулевого вектора Матрица Mf и искомая матрица прямых связей находятся следующим образом.
Из уравнения (П4.15) при уу = 0 подушим
(П4.16) Продифференцировав по времени выражение (П4.14) и подставив 014.3), получим
xy = MfY^. (П4.17)
Из уравнения (П4.13) после подстановки (П4.14) найдем
ху = А с Mf % + (BLf + . (П4.18)
Приравнивая правые части (П4.17) и (П4.18), получаем матричное уравнение Сильвестра
MfY - Ас Mf = BLf + DH. (П4.19)
51
Таким образом, матрица Mf, использующаяся для расчета вектора xy(t), и матрица Lf прямых связей комбинированного регулятора (П4.12) рассчитываются как решения системы матричных уравнений (П4.16) и (Г14.19).
П4.2. Анализ точности и синтез следящей системы
Рассматривается задача слежения объекта управления:
х = Ах + Ви + Df, (П4.20)
у = Сх, (П4.21)
где dimx = п, за внешней динамической системой (задающим блоком):
х* = А*х*, х*(0) = Хд, (П4.22)
g = C*x*, (П4.23)
где dimx* = ng. Ошибка слежения (по выходу) определяется как
£=8~У
и основная задача управления ставится как задача стабилизации нулевого значения ошибки е - 0.
Модель ошибок слежения. Задача слежения может быть переформулирована в терминах пространства состояний. Для этого вводится в рассмотрение и-мерный вектор ошибок слежения
е = Mgx - х, (П4.24)
где Mg - подлежащая определению матрица подобия размера лхи8. Если Mg удовлетворяет условию
C*MS=C, (П4.25)
то имеет место
52
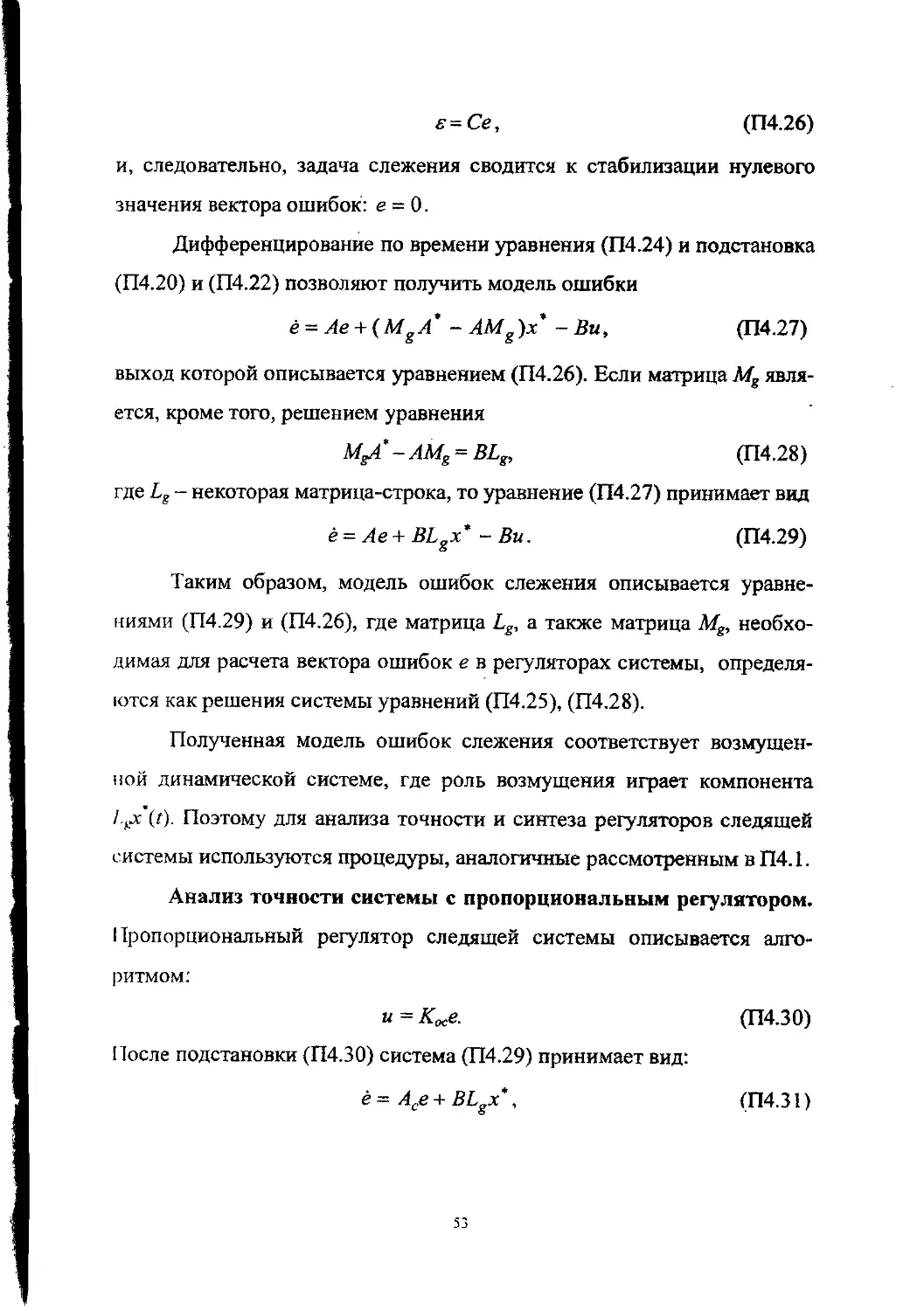
£=Се, (П4.26)
и, следовательно, задача слежения сводится к стабилизации нулевого значения вектора ошибок: г = 0.
Дифференцирование по времени уравнения (П4.24) и подстановка (П4.20) и (П4.22) позволяют получить модель ошибки
e = Ae + (MgA* - AMg)x* -Ви, (П4.27)
выход которой описывается уравнением (П4.26). Если матрица Mg является, кроме того, решением уравнения
MgA* - AMg = BLg, (П4.28)
где Lg - некоторая матрица-строка, то уравнение (П4.27) принимает вид ё = Ае + BLgx* - Ви. (П4.29)
Таким образом, модель ошибок слежения описывается уравнениями (П4.29) и (П4.26), где матрица Lg, а также матрица Mg, необходимая для расчета вектора ошибок е в регуляторах системы, определяются как решения системы уравнений (П4.25), (П4.28).
Полученная модель ошибок слежения соответствует возмущенной динамической системе, где роль возмущения играет компонента l.gx’it). Поэтому для анализа точности и синтеза регуляторов следящей системы используются процедуры, аналогичные рассмотренным в П4.1.
Анализ точности системы с пропорциональным регулятором. Пропорциональный регулятор следящей системы описывается алгоритмом:
и = Кхе. (П4.30)
После подстановки (П4.30) система (П4.29) принимает вид:
ё = Асе + BLgx*, (П4.31)
53
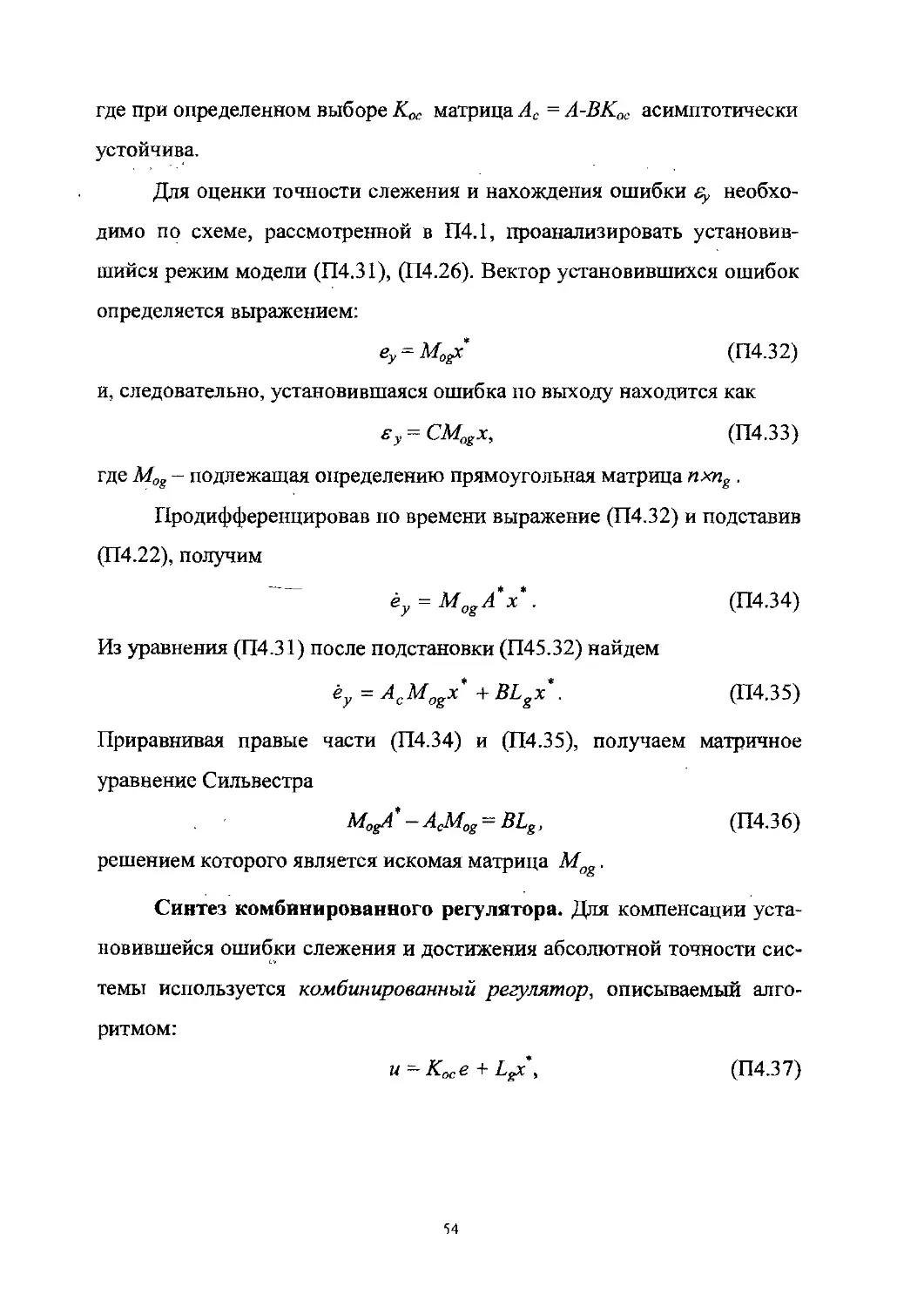
где при определенном выборе Кос матрица Ас = А-ВКОС асимптотически устойчива.
Для оценки точности слежения и нахождения ошибки Еу необходимо по схеме, рассмотренной в П4.1, проанализировать установившийся режим модели (П4.31), (П4.26). Вектор установившихся ошибок определяется выражением:
еу = (П4.32)
и, следовательно, установившаяся ошибка по выходу находится как
еу = CMogx, (П4.33)
где Mog - подлежащая определению прямоугольная матрица nxng .
Продифференцировав по времени выражение (П4.32) и подставив (П4.22), получим
ёу = MogA*x*. (П4.34)
Из уравнения (П4.31) после подстановки (П45.32) найдем
ёу = AcMogx* + BLgx*. (П4.35)
Приравнивая правые части (П4.34) и (П4.35), получаем матричное уравнение Сильвестра
MogA' -AcMog~ BLg, (П4.36)
решением которого является искомая матрица Mog.
Синтез комбинированного регулятора. Для компенсации установившейся ошибки слежения и достижения абсолютной точности системы используется комбинированный регулятор, описываемый алгоритмом:
и - Кпее + LgX*, (П4.37)
54
где вектор ошибок е рассчитывается по формуле (П4.24), а матрицы Lg и Mg определяются как решения системы (П4.25), (П4.28). После подстановки (П4.37) в (П4.29) получаем модель состояния ошибки слежения замкнутой системы:
ё = Асе, (П4.38)
структура которой (в условиях асимптотической устойчивости Ас) подтверждает получение нулевого значения вектора еу и, следовательно, установившейся ошибки Еу = 0.
ПРИЛОЖЕНИЕ 5
СИНТЕЗ РЕДУЦИРОВАННОГО НАБЛЮДАТЕЛЯ
По измеряемым переменным состояния ОУ хр=у, х2 =V,... требуется оценить возмущение f с помощью схемы наблюдения пониженной размерности (редуцированного наблюдателя).
Первоначально полагаем, что переменная f доступна измерению. Наблюдатель внешней среды строится как полный наблюдатель для модели (6)-(7) и содержит модель внешней среды (МВС):
1 = Г^ + ин> £(0) = 0, / = Я£
и обратные связи по ошибке наблюдения
где £, - оценка вектора состояния внешней среды, f - оценка возмущения. Вектор обратных связей ин рассчитывается по формуле:
(П5.1)
где Кн - матрица-столбец коэффициентов обратных связей.
Введем в рассмотрение вектор ошибок наблюдения
1 = ^-1-
Модель ошибок наблюдения получается вычитанием (П5.1) из (6) и (П5.2) из (7). После подстановки (П5.3) получаем:
t = (П5.4)
f = Hl, (П5.5)
56
где Г„ = Г - КнН. Выбор матрицы обратной связи Кн производится
в соответствии с методикой, изложенной для варианта Ml. Отметим нереализуемость построенного наблюдателя ввиду использования
неизмеряемого возмущения f
Для нахождения реализуемой схемы наблюдения модель
(П5.1)-(П5.3) преобразуется таким образом, чтобы на ее вход вместо функции f поступали измеряемые переменные состояния. С этой це-
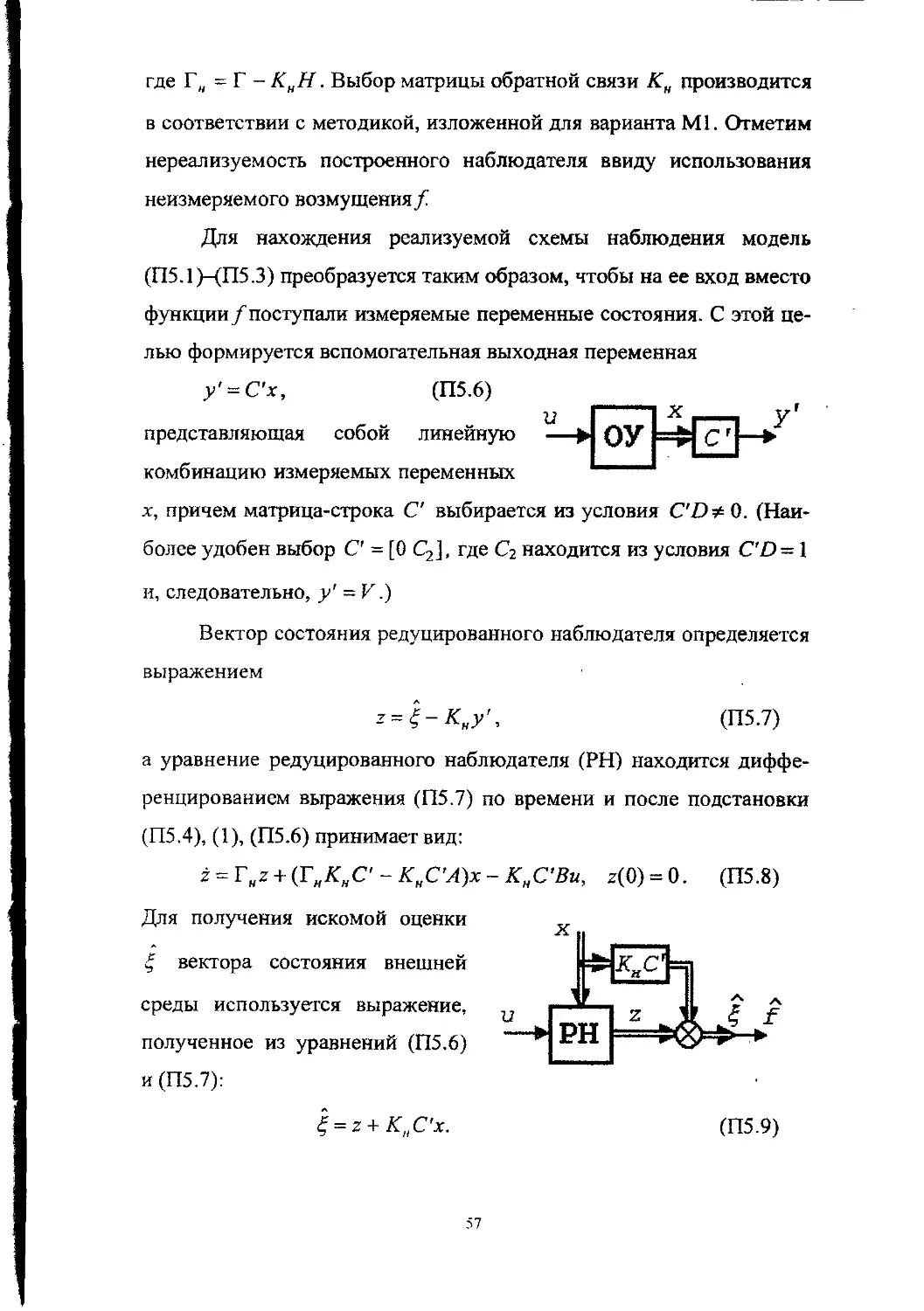
лью формируется вспомогательная выходная переменная
у' = Сх, (П5.6)
представляющая собой линейную комбинацию измеряемых переменных
х, причем матрица-строка С' выбирается из условия CD* 0. (Наиболее удобен выбор С = [О С2], где С2 находится из условия CD-1
и, следовательно, у = V.)
Вектор состояния редуцированного наблюдателя определяется выражением
х = 1-Кну', (П5.7)
а уравнение редуцированного наблюдателя (PH) находится дифференцированием выражения (П5.7) по времени и после подстановки
(П5.4), (1), (П5.6) принимает вид:
z = Г„2 + (ГИКИС' - К С'А)х Для получения искомой оценки £ вектора состояния внешней среды используется выражение, полученное из уравнений (П5.6) и (П5.7):
£ = z + KHC'x.
К„С'Ви, z(0) = 0. (П5.8)
57
ПРИЛОЖЕНИЕ 6
ПРИМЕР РАСЧЕТА СИСТЕМЫ УПРАВЛЕНИЯ1
П6.1. Расчет системы
Пусть задан вариант курсовой работы P30.F30.G40.M1.Q0, который означает следующее:
- объект управления: РЗХ с параметрами К =1 и Т =1;
- задающее воздействие: трапецеидальный график скорости с параметрами Vg =4 и ag =2;
- возмущающее воздействие: гармоническое f=-Ajsvnwft с параметрами Af=l 0 и иу =3;
- тип наблюдателя: полный2;
- показатели качества: сг< 15%, tn =0.3 с, tH =0.6 с, 6 = 0.1%;
- время работы системы: tp =9 с.
1. Анализ ОУ. По-заданной структурной схеме находится модель вход-выход:
(р2 + Р)У ~u—f.
Модель имеет второй порядок (т.е. и=2) и характеристический полином а(р)=р2+р. (П6.1)
Коэффициенты полинома =1 и а2 =d, а его корни: рх = 0, р2 = -1.
1 Материалы приложения имеют иллюстративный характер и поэтому ни по форме, ии по полноте изложения не могут служить образцом для оформления пояснительной записки курсовой работы.
2 Варианты М2 н М3 рассматриваются в П6.2 и П6.3.
58
Введем в рассмотрение вектор состояния ОУ x=[xi xi]r = [у составим систему уравнений состояния
|*1=*2, 1*2 =-*2 +«~/
и запишем уравнение выхода у = Х|. Полученные уравнения приводятся к векторно-матричной форме (1), (2), где:
Г° 11 Г гт
А= , В= , D = , С=10.
0-1 1 -1 1 J
Находятся матрицы управляемости и наблюдаемости:
и рассчитываются значения det t/ - -1, det0 = 1, подтверждающие полную управляемость и полную наблюдаемость ОУ. Результаты моделирования переходных процессов при w=l(f) и/=0 приведены нарис.Пб.1.
Рис.Пб.1. Переходные процессы в разомкнутой системе
59
2. Синтез алгоритма стабилизации. Стабилизация обеспечивается пропорциональным регулятором (3), где Кж ~\k2 АД, т.е.
и = - к2ху - к\х2 .
(П6.2)
Для нахождения значений kj используется следующая процедура. По заданному перерегулированию о<15% и с учетом порядка ОУ и=2 выбирается желаемая переходная характеристика, соответствующая полиному Батерворта 2-го порядка:
ас(р) = р2 +1.4®0p + ®q.
(П6.3)
По таблице П2.2 определяется значение tA = 2.9 с и по заданному значению t„ = 0.3 с находится радиус распределения корней щ>«10. После подстановки в (П6.3) находятся коэффициенты полинома сц=14 и а2=100 и его корни: Р\,2~ -1 ±Л-
Коэффициенты обратной связи управляемой канонической модели ОУ определяются по формуле (4): А1* = 13 и к2 = 100, т.е. К*ос =[100 13]. После этого по формуле (5) определяются коэффициенты обратной связи искомой модели
0 1
^=[^2^1] = [Ю0 13]
0 111
1-110
= [100 13]
и находится матрица замкнутой системы
t Го 11 Го!. . Г о 11
Ас = - [100 13] =
L0 J L~100 ~14.
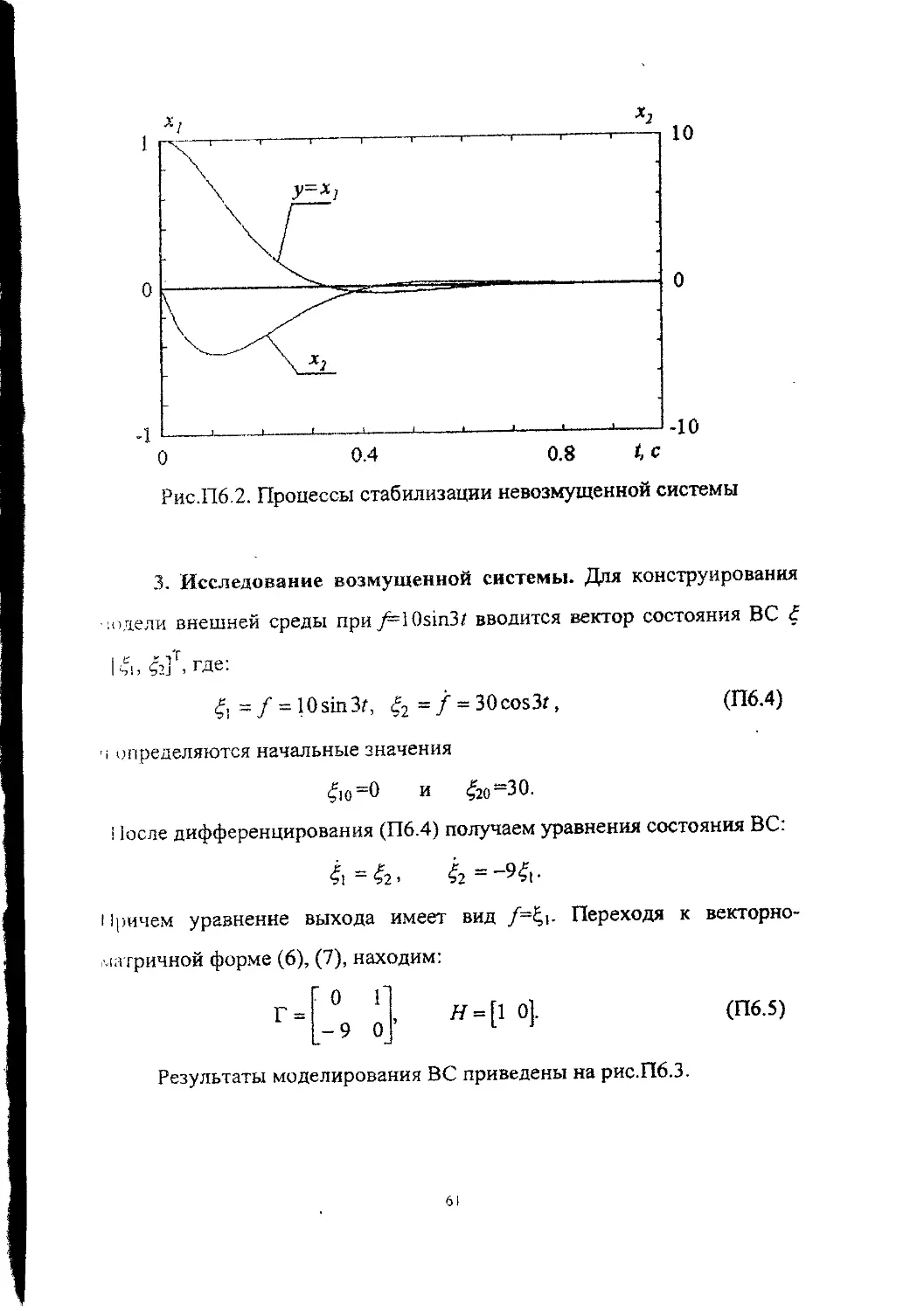
Результаты моделирования замкнутой системы приведены на рис.Пб.2. По временной диаграмме y=y(t) находятся значения времени переходного процесса — 0.3 с, и перерегулирования - «4%.
60
Рис.Пб.2. Процессы стабилизации невозмущенной системы
3. Исследование возмущенной системы. Для конструирования ;одели внешней среды при /=10sm3z вводится вектор состояния ВС с 1^, £]Т,где:
£i = / = 10sin3r, 5,i ~f = 30cos3t, (П6.4)
i определяются начальные значения
£ю=0 и &о=30.
! 1осле дифференцирования (П6.4) получаем уравнения состояния ВС:
41=^2- £=-*£
11ричем уравнение выхода имеет вид /=^ь Переходя к векторно
матричной форме (6), (7), находим:
О Г
-9 0 ’
М1 4
Г =
(П6.5)
Результаты моделирования ВС приведены на рис.Пб.З.
61
РисЛб.З. Процессы в модели внешней среды
Для оценки точности возмущенной системы с пропорциональным регулятором (П6.2) необходимо решить матричное уравнение (10) относительно неизвестной матрицы MOf. Получаем
тп тп _ -0.00906 0.00139
m2i т22 L“ 001250 -0.00906-
По формуле (11) с учетом выражений (П6.4) находим установившуюся
составляющую ошибки
А-Ч1 °]
-0.00906 0.00139
- 0.01250 - 0.00906
10 sin Зг
ЗОсоэЗ/
- -0.1 sin(3r + 0.43)
и определяем точность системы управления А/=0.1, 6f = 0.1 / 20 = 0.5% (см. рис.Пб.4). Так как 8? > 8, то для повышения точности системы используется комбинированный регулятор.
62
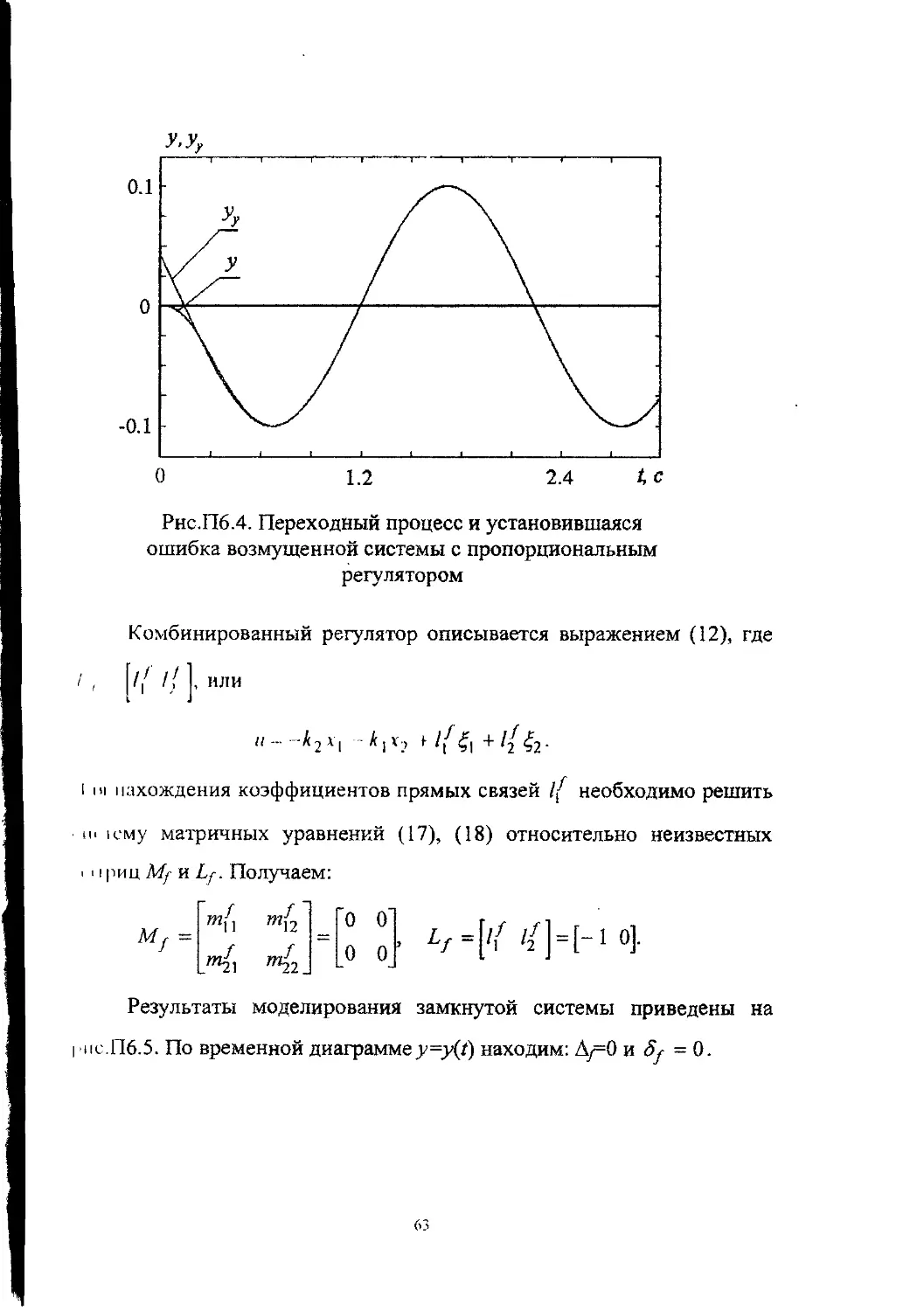
Рнс.Пб.4. Переходный процесс и установившаяся ошибка возмущенной системы с пропорциональным регулятором
Комбинированный регулятор описывается выражением (12), где [/' // ], ИЛИ
II - — А 2 х J - к J V-, (• // £ + if £2 .
in нахождения коэффициентов прямых связей if необходимо решить
> юму матричных уравнений (17), (18) относительно неизвестных
11 риц MfaLf. Получаем:
Х1
т{2 ~0 О
mf2 .0 О
Lf=[‘l = 0].
Результаты
моделирования замкнутой системы приведены на
с.Пб.5. По временной диаграмме у =y(t) находим: Д/=0 и = 0.
63
Рис.П6,5. Процессы в возмущенной системе с комбинированным регулятором
4. Исследование следящей системы. Для построения задающего
блока, вырабатывающего задающее воздействие с трапецеидальным графиком скорости, необходимо отдельно проанализировать гладкие
участки графика g(/). Для упрощения анализа положим, что Го=О, й рассмотрим три участка движения (рис.Пб.б): ОА (0 <t <Г| ), АВ (Л <t < t2 ) и ВС (f2 <t <h ).
На участке равномерного движения АВ вы
Рис.П6.6. Трапецеидальный график скорости
64
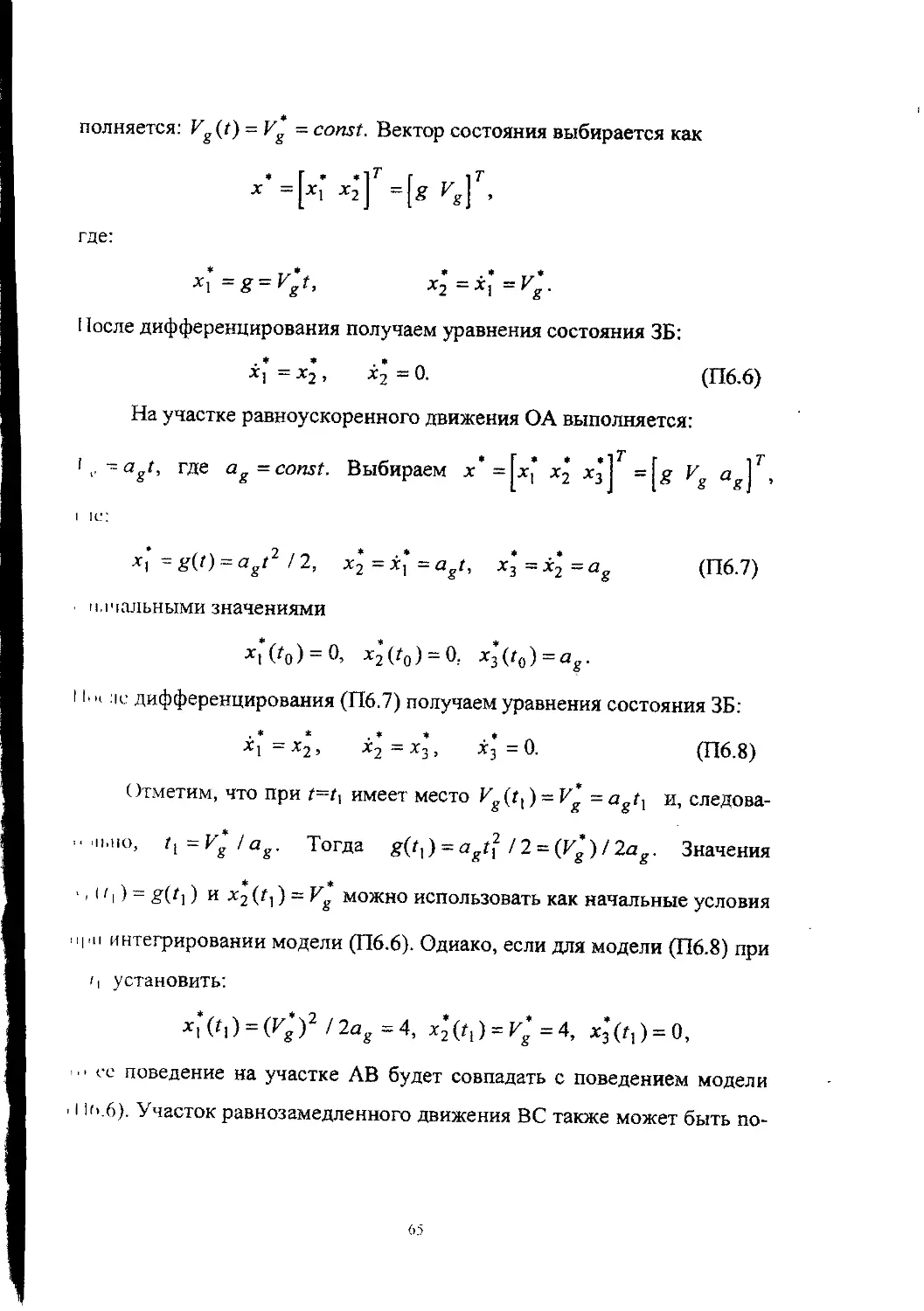
полняется: Kg(r) = V* = const. Вектор состояния выбирается как
х* = [х* x2j = [g где:
*Г=£ = ^> Х2=Х*=У*.
11осле дифференцирования получаем уравнения состояния ЗБ:
х* = х2 , х2 = 0. (П6.6)
На участке равноускоренного движения ОА выполняется:
_ . г » . . 1Г г т Г
I, ~agt, где ag= const. Выбираем х = х, х2 х3 = g Vg agl , । ie:
x,’ =g(l) = agt2 П-, X2=x*=agt, x*3=x*2=ag (П6.7)
и, пальными значениями
X|‘(7o) = 0’ ^2(Zo) = °- x3*(ro) = ag-
I h ii :ic дифференцирования (П6.7) получаем уравнения состояния ЗБ: х*=х2, х2=х3, х3’=0. (П6.8)
Отметим, что при t=t\ имеет место Kg(tt) = V* = agt} и, следова- "ыю, г,=К*/<з Тогда g(r.) = aI,f12/2 = (К*)/2а„. Значения , U।) = g(t\) и х2 (Г,) = V* можно использовать как начальные условия при интегрировании модели (П6.6). Одиако, если для модели (П6.8) при Р установить:
xi*(fi) = (^g)2 !2ag =4, X2(tx) = Vg =4, Хз(/1) = 0, • •• ее поведение на участке АВ будет совпадать с поведением модели ' I О б). Участок равнозамедленного движения ВС также может быть по
65
лучен с помощью модели (П6.8) и соответствующего выбора начальных условий в момент t2. Аналогично получается задающее воздействие, соответствующее начальному положению системы g=0 при t е [0, f| -1) и конечному положению g=20 при t > t3 =8.
Таким образом, все участки заданного кусочно-гладкого задающего воздействия получаются с помощью модели ЗБ (П6.8). После перехода от уравнений (П6.8) и g = Х|*.к векторно-матричной форме (21),
(22) находим:
1 О’
О 1
О О
С*=[1 0 0].
Замечание. При моделировании системы управления ввиду сложности переключения начальных условий в традиционных пакетах моделирования динамических систем удобно воспользоваться схемной реализацией ЗБ, рассмотренной в [7, работа№3], которая предусматривает использование модели (П6.8), дополненной импульсным входным воздействием
to), t,), G). ге[/2, Г3], 'е['з> tpJ.
Результаты моделирования ЗБ приведены на рис.П6.7.
66
Пропорциональный регулятор следящей системы описывается I синением (32), или
и = к2ех + /Г|в2, (П6.9)
причем переменные е, определяются выражением е = Mgx* -х, где
m«2 mf3 = ° z z z L™21 ™23J
и hi:
et = mIslxI + mf2x2 + mX3x3 -xt, e2 = m2Xxx +m%-)x2 +m23x3 ~x2.
'(.ня нахождения коэффициентов матрицы Mg необходимо решить сис-н му матричных уравнений (28), (29) относительно неизвестных матриц Л/j, и Lg - \lx l2 Zfj. Находим:
67
т°8
т2\ т22 т23
10 0
8 [О 1 о] 8 1
и, следовательно, ei=xi“xi, е2=х2-х2.
Для оценки точности следящей системы с пропорциональным регулятором (П6.9) необходимо решить матричное уравнение (34) относительно неизвестной матрицы Mog. Получаем:
0 0.01 0.0086
0 0 0.01
По формуле (35) находим установившуюся составляющую ошибки:
Еу = 0.01х2 + 0.0086х3,
где для участка АВ: х2 = <3g(r-/0), х3 =ag; для участка ВС: х2 =4, х3 = 0 и т.д. Наибольшее значение ошибки получается при t=t{=3: ^,=0.0572 и, следовательно, Лг=0.0572.
Результаты моделирования следящей системы с пропорциональным регулятором приведены на рис.П6.8. По временной диаграмме E=e(t) находятся наибольшие значения установившихся ошибок для участков АВ, ВС и CD и абсолютная погрешность Ag =0.057.
Комбинированный регулятор следящей системы определяется выражением (36), или
и = к2е{ + k^e2 +18 х2 + /J х3, (П6.10)
где коэффициенты прямой связи I8 и I8 получены выше.
Рис.Пб.8. 11роцессы в следящей системе с пропорциональным регулятором (ошибка слежения)
Результаты моделирования следящей системы с комбинированном регулятором приведены на рис.П6.9, из которого видно, что Д8= 0.
Рис.П6.9. Процессы в следящей системе с комбинированным регулятором (ошибка слежения)
69
4. Синтез наблюдателя. Для восстановления неизмеряемой переменной х2=Р используется полная схема наблюдения. Модель объекта управления (МОУ) описывается уравнениями (38), (39), где:
и
и"
«2
или, в скалярной форме:
(П6.12) А =-А +«-/ + «2-
Обратные связи наблюдателя определяются выражением (40) и, следовательно,
< = к^у, ин2 = к”у, где у = х, - X].
Для нахождения коэффициентов обратной связи к" используется следующая процедура. По заданным значениям ст <15% и tH =0.6 с находится характеристический полином:
аи(р)=р2+7р + 25, (П6.11)
определяются его коэффициенты aMi=7 и ан2=25 и корнир\2= -3,5+/3,5.
Рассчитываются коэффициенты обратной связи наблюдаемой канонической формы: к“* =6 и к2 =25, то есть Л'* =[25 б]Г. Определяются коэффициенты обратной связи исходной модели:
'251-Г6
6 J |_19 ’
Результаты моделирования работы синтезированного наблюдателя при X] (0) = -1 и х2 (0) = 0 приведены на рис.Пб. 10.
А
Kt
1
1 -1
’1 о1 Го о 1
А
70
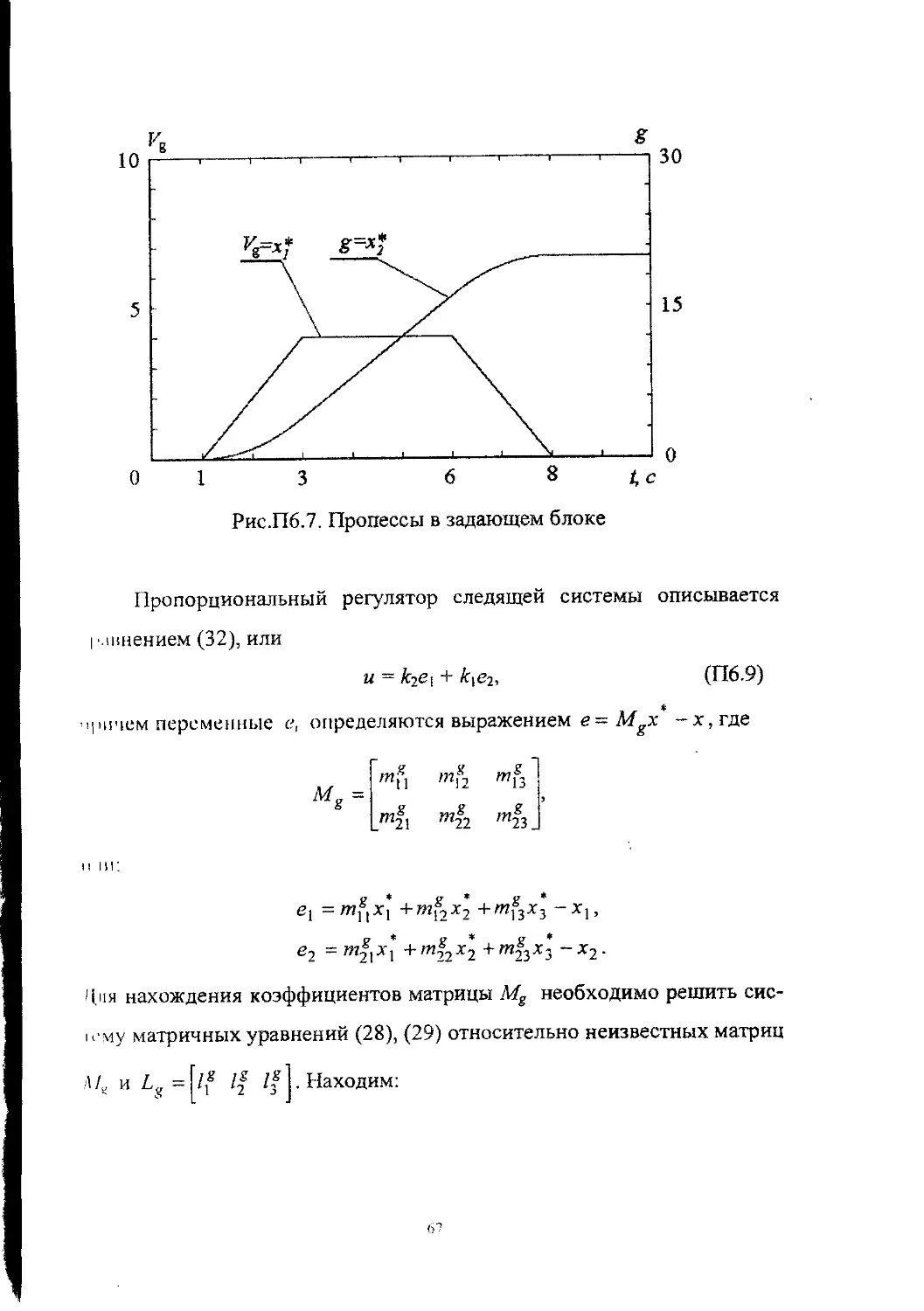
Рис.Пб.10. Процессы в полном наблюдателе (ошибки наблюдения)
5. Исследование синтезированной системы управления. Полный алгоритм управления (45) в рассматриваемом случае описывается выражением
и = k2et + к\ё2 + l{ + lfx2 + lfx2,
। де <?| = xf - X], ё2 = х2 - х2, = /, сигналы х* вырабатываются ЗБ,
а оценки х, и х2 ~ наблюдателем (П6.12). Результаты моделирования полной системы при Х|(0)= -1, х2 (0)=0, х, (0) = 0, х2 (0) = 0 приведены на рис.Пб.И.
П6.1. Синтез расширенного наблюдателя
Для одновременного восстановления переменных х2=И и f (схема измерений М2) используется расширенный наблюдатель. Для его по
71
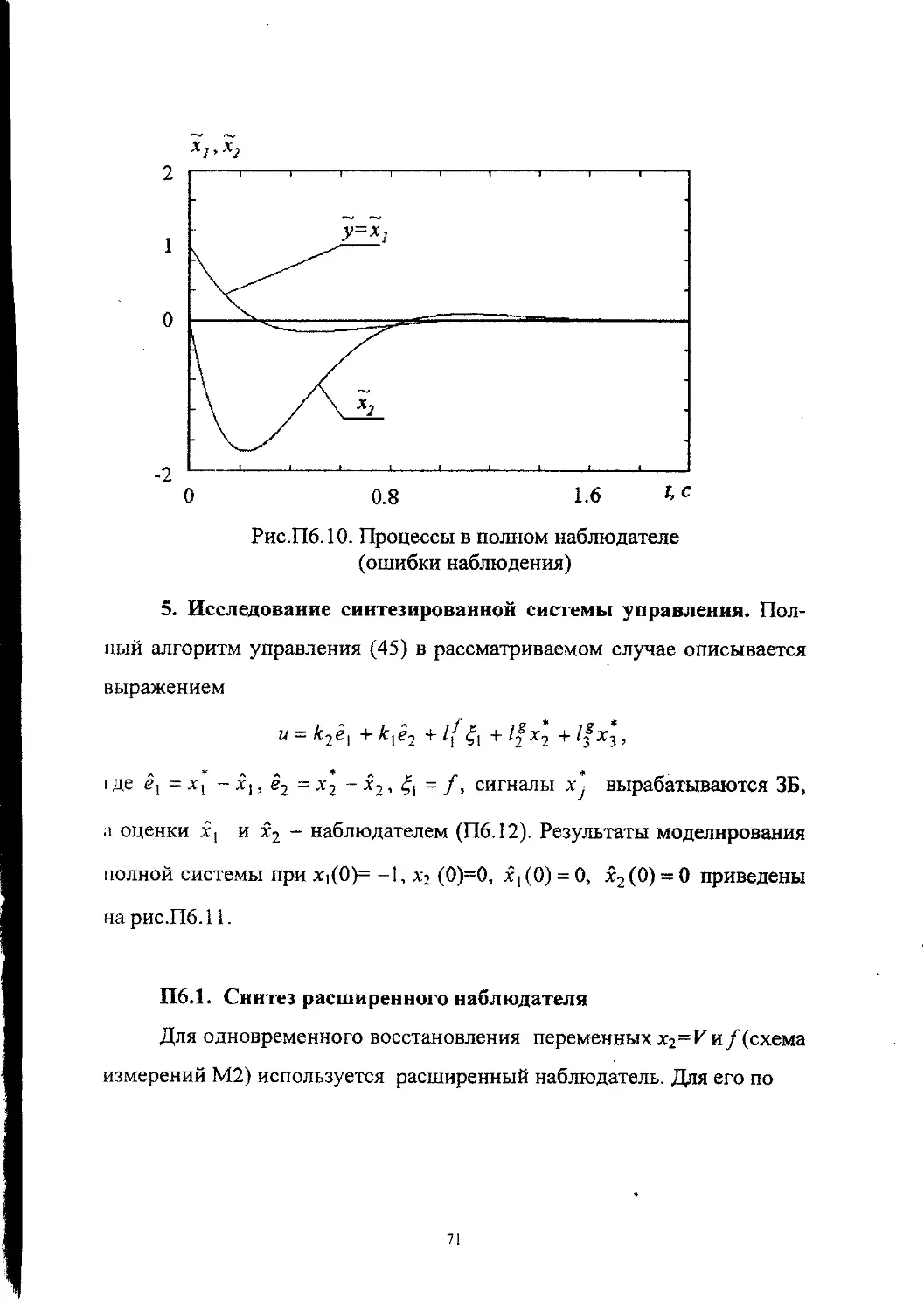
Рис.Пб. 11. Процессы в следящей системе
строения необходимо сначала синтезировать модель внешней среды, которая в рассматриваемом случае описывается уравнениями (6), (7) с матрицами (П6.5). Тогда расширенная модель, содержащая модель ОУ и модель ВС, будет описываться уравнениями (43) и (44), где:
При этом характеристический полином расширенной системы имеет вид:
ар{р) = Р(Р + 1)(Р2 + 9) = / + р3 + 9р2 + 9р
и, таким образом, а2“9, а3=9. а4=0.
72
Окончательно расширенный наблюдатель описывается уравнениями (38), (39) с учетом подстановок А~АР, В=Вр, С=Ср, D=0 и х = хр. В скалярной форме уравнения наблюдателя имеют вид:
Х| = х2 + и", х2 = -х2 + £1 + и + и2,
£=-9$+и4и.
Обратные связи определяются выражениями: и^Цу, и“2~к”3у, и3=к£у, и^к,“у, |де у =Х] -X].
Для нахождения коэффициентов обратной связи к” используется процедура, подробно описанная выше (см. п.П6.1). По заданным значениям о<15% и 7, =0.6 с выбирается желаемая переходная характеристика, соответствующая полиному Батерворта 4-го порядка, рассчитывается радиус распределения корней 11.5, определяются коэффициенты желаемого характеристического полинома: ot=30, аз=450, а3=3954, /,17490, и коэффициенты обратной связи в каноническом наблюдаемом базисе = 17490, к3 = 3945, к2* =441, к" =29. Осуществляя переход к исходному базису, окончательно получаем: к % =29, " = 412, к" = 3685, к" = 13524.
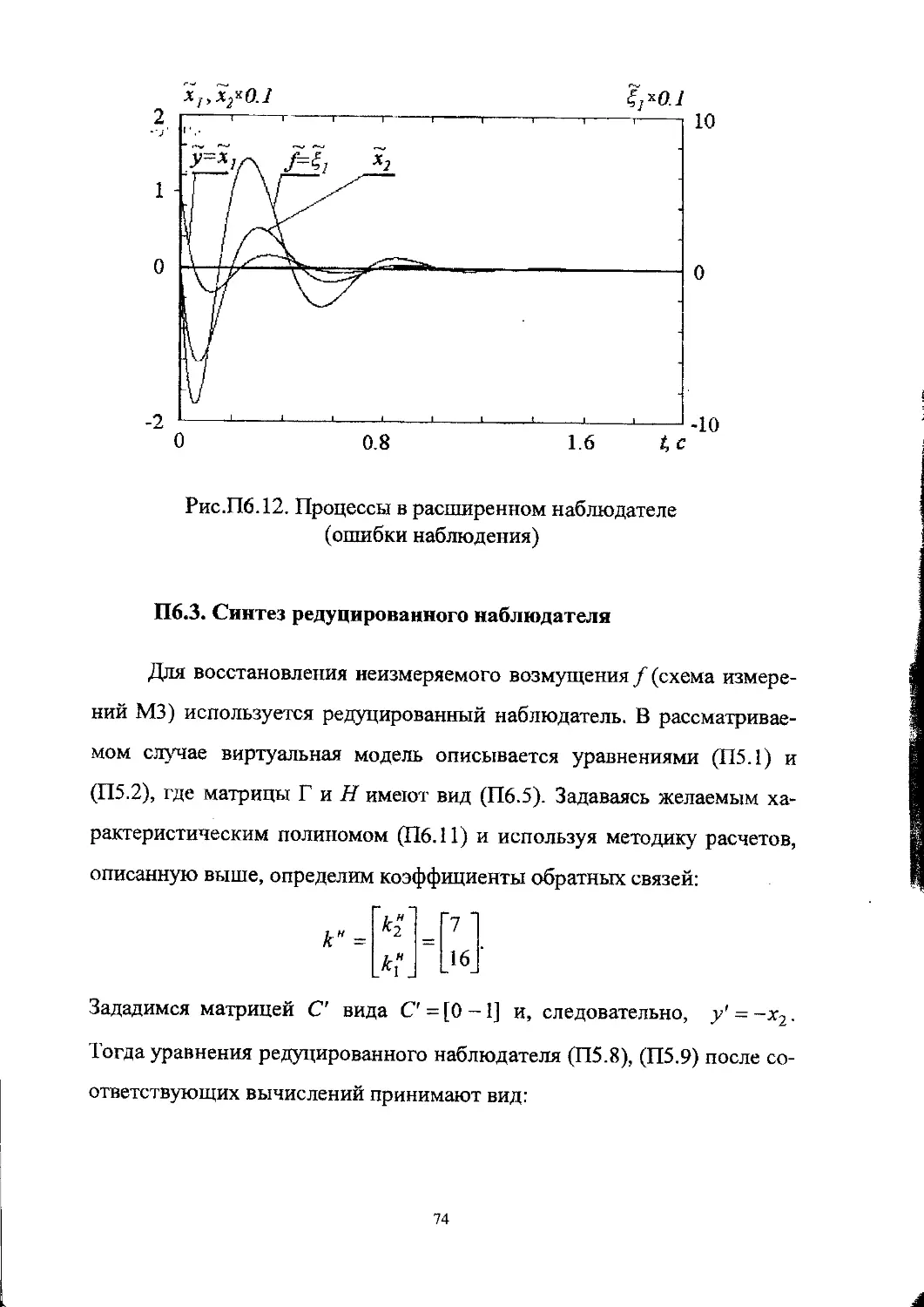
Результаты моделирования расширенного наблюдателя при q (0) = -1, х2 (0) = 0, (0) = 0 и |2(0) = 0 приведены на рис.Пб. 12.
73
Рис.П6.12. Процессы в расширенном наблюдателе (ошибки наблюдения)
П6.3. Синтез редуцированного наблюдателя
Для восстановления неизмеряемого возмущения f (схема измерений М3) используется редуцированный наблюдатель. В рассматриваемом случае виртуальная модель описывается уравнениями (П5.1) и (П5.2), где матрицы Г и Н имеют вид (П6.5). Задаваясь желаемым характеристическим полиномом (П6.11) и используя методику расчетов, описанную выше, определим коэффициенты обратных связей:
'7 '
16 '
Зададимся матрицей С вида С = [0 -1] и, следовательно, у' = -х2. Тогда уравнения редуцированного наблюдателя (П5.8), (П5.9) после соответствующих вычислений принимают вид:
74
Zj = -7zj + z2 + 26x2 + 7m, • z2 = -25z] + 159x2 + 16м, f = l\ =-Z| +7x2.
Результаты моделирования редуцированного наблюдателя при Z](0) = 1h z2(0) = 0 приведены на рис.Пб. 13.
Рис.Пб.13. Процессы оценивания возмущения (редуцированный наблюдатель)
СПИСОК ЛИТЕРАТУРЫ
1. Андреев Ю.Н. Управление линейными конечномерными объектами. - М.: Наука, 1979.
2. Андриевский Б.Р., Фрадков А.Л. Избранные главы теории автоматического управления. - СПб: Наука, 1999.
3. Болтунов Г.И., Никифоров В.О., Чежин М.С. Программные средства анализа и синтеза систем управления. - СПб: СПбГИТМО, 2000.
4. Григорьев В.В., Дроздов В.Н., Шлепков С.В. Автоматизированное проектирование систем управления. Учебное пособие - Л.: ЛИТ-МО, 1982.
5. Дроздов В.Н., Никифоров В.О., Бендюговский А.Е., Кайдошко Э.А. Математические основы теории систем. - М.: Издательство МГАП «Мир книги», 1993.
6. Квакернаак X., Сиван. Р. Линейные оптимальные системы управления. - М.: Мир, 1977.
7. Лямин А.В., Михайлов С.В., Никифоров В.О. и др. Исследование моделей объектов управления и среды функционирования. - СПб: СПбГИТМО, 2000.
8. Мирошник И.В., Болтунов Г.И. Моделирование систем управления. Учебное пособие. - Л.: МИПК при ЛИТМО, 1991.
9. Синтез дискретных регуляторов при помощи ЭВМ / В.В. Григорьев, В.Н. Дроздов, В.В. Лаврентьев, А.В. Ушаков. - Л.: Машиностроение, 1983.
10. Тихонов Ю.Л. Разработка пояснительной записки в курсовом и дипломном проектировании. - Л.: ЛИТМО, 1988.
76
1900-2000
Кафедра автоматики и телемеханики образована в 1945 году. Ее основание связано с именем первого заведующего и первого декана факультета Электроприборостроения Марка Львовича Цуккермана. Профессор М.Л. Цуккерман в 1910 году окончил Санкт-Петербургский политехнический институт им. Петра Великого, в двадцатые годы организовал в Ленинграде отраслевую лабораторию электроизмерений (ОЛИЗ) и был известен в стране как крупный специалист в области систем телеизмерений.
Осенью 1945 года кафедра провела первый набор студентов по специальности «автоматика и телемеханика». Первый выпуск молодых инженеров состоялся в 1948 году и составил 17 человек. По времени это событие совпало с выходом в свет известной книги Норберта Винера "Кибернетика, или управление и связь в животном и машине", в которой дается обоснование кибернетического подхода, выдвигающего на передний план информационное содержание природных, социальных и технических процессов и рассматривающего проблемы автоматического управления с точки зрения преобразования, передачи и использования информации.
Проф. М.Л. Цуккерман руководил кафедрой с 1945 по 1959 год. К своей работе кафедра приступила, имея преподавательский состав, включавший проф. Д.И. Зорина, доцентов Е.А. Танского и Р.И. Юргенсона и заведующего лабораторией А.А. Мезерина. В пятидесятые годы в преподавательский состав кафедры вошли проф. А.А. Кампе-Немм, доценты Г.А. Тацитов и Б.А. Арефьев, старшие преподаватели В.А. Борисов. В.Г. Новиков и В.В. Соколов, а также выпускники ЛИТМО Н.М. Яковлев, Л.Т. Никифорова, Н.М. Перевозчиков, Ю.Б. Ганту и А.М. Шпаков.
В 1955 году при кафедре образована научно-исследовательская лаборатории (НИЛ). В этот период основные направления научно-исследовательских работ пред
ставляли задачи автоматизации измерения и регистрации параметров кораблей во время их мореходных испытаний, а также стабилизации скорости и фазирования двигателей. Под научным руководством проф. М.Л. Цуккермана была налажена подготовка научных кадров высшей квалификации через систему аспирантуры.
С 1959 года по 1970 кафедру возглавлял ученик М.Л. Цуккермана, выпускник кафедры автоматики и телемеханики ЛЭТИ им. В.И.Ульянова (Ленина) 1936 года, доцент Ефимий Аполлонович Танский. За время его руководства профессорско-преподавательский состав пополнился ст. преп. Л.Л. Бориной, доцентами А.И. Новоселовым и И.П. Пальтовым, пришедшими из других высших учебных заведений и промышленности, а также выпускниками кафедры, успешно закончившими обучение в аспирантуре - В.Н. Дроздовым, А.В. Ушаковым, В.А. Власенко и И.П. Богоявленской. В этот период защитили диссертации иа соискание ученой степени доктора технических наук доценты Б.А. Арефьев и Р.И. Юргеисон.
В научно-исследовательской работе на кафедре произошел заметный поворот к проблемам автоматизации оптико-механического приборостроения, что привело к длительному научно-техническому сотрудничеству кафедры с ЛОМО им. В.И. Ленина, в рамках которого для нужд оборонной техники была разработана целая гамма прецизионных фотоэлектрических следящих систем. Совместно с НИИЭТУ кафедра приняла участие в разработке автоматической фототелеграфной аппаратуры, реализованной в виде комплекса "Газета-2".
С 1970 по 1990 год кафедрой руководил известный специалист в области автоматизированного электропривода и фотоэлектрических следящих систем профессор Юрий Алексеевич Сабинин. В эти годы заметно изменилась структура дисциплин и курсов, читаемых студентам кафедры. Коллектив преподавателей пополнился новыми выпускниками аспирантуры: Ю.Л. Тихоновым, В.В. Лаврентьевым, В.В. Григорьевым, В.В. Хабаловым, Л.С. Громовой, В.И. Бойковым, С.В. Быстровым, А.Б. Бушуевым, А.Н. Коровьяковым, И.В. Мирошником, Ю.П. Котельниковым, Г.И. Болтуновым и И.П. Салмыгиным.'Из промышленности и других подразделений института пришли иа кафедру доценты И.Ю. Рогинский, П.В. Николаев, И.П. Болтунов. Приобрела устойчивый характер система подготовки кадров высшей квалифи
78
кации. Защитили диссертации на соискание ученой степени доктора Технических наук И.II Нальтов. В.В. Григорьев и В.Н. Дроздов. Более 40 человек успешно завершили обучение в аспирантуре.
Прикладные разработки кафедры были связаны с задачами адаптивной оптики для оптических телескопов и технологических лазеров, адаптивной радиооптики и управления полноповоротными радиотелескопами, автоматизации обработки снимков в пузырьковых камерах, гребного электропривода и робототехнических систем, автоматического управления процессом мягкой посадки летательных аппаратов. Новый облик теории управления 1970 годов, внедрение метода пространства состояний и вычислительной техники, повышение математического уровня исследований нашли отражение в научных разработках кафедры, многочисленных трудах и монографиях. В эти годы интенсивно разрабатываются проблемы теории многомерных динамических систем, качественная теория устойчивости, методы согласованного и многорежимного управления, положено начало теоретическим работам в области робототехники. Научное руководство перечисленными работами осуществляли Ю.А. Сабинин, А.В. Ушаков, В.Н. Дроздов. И.В. Мирошник и В.В. Григорьев. В 1980 году на кафедре создан собственный машинный класс.
С 1990 года кафедрой руководит ее воспитанник профессор Валерий Владимирович Григорьев. В эти годы на кафедру помимо традиционной подготовки инженеров-электриков по специальности «2101 -управление и информатика в технических системах» была возложена подготовка бакалавров по направлению «5502 -управление и автоматизация», для чего были разработаны новые учебные планы. Профессорско-преподавательский состав пополнился профессором Е.Ф. Очиным, а также выпускниками аспирантуры ИТМО В.В. Черноусовым, А.П. Баевым, В.О. Никифоровым, М.С. Чежиным. А.В. Лямииым, А.А. Бобцовым и др. Продолжала эффективно работать система подготовки кадров высшей квалификации, диссертации на соискание ученой степени доктора технических наук защитили И.В. Мирошник. P.O. Оморов . А.В. Ушаков и А.И. Скалон
Научно-исследовательская работа ведется по целевым правительственным и министерским программам, грантам РФФИ и Администрации Санкт-Петербурга.
Ухудшение финансирования Высшей школы практически не сказалось на качестве и интенсивности ведущихся на кафедре теоретических разработок. Завершилось формирование научной школы кафедры и ее основных направлений, возглавляемых профессорами В.В. Григорьевым, И.В. Мирошником и А.В. Ушаковым. С 1994 года существенно расширилось участие кафедры в международных научных мероприятиях.
В учебной работе кафедры произошел качественный скачок, обусловленный полной модернизацией компьютерного класса (1994 год), который находится в постоянном структурном и функциональном развитии. 14 апреля 1994 года образована научная Лаборатория Кибернетики и Систем управления (руководитель И.В. Ми-рошиик). Целью ее создания явилась концентрация научного потенциала кафедры в области нелинейных и адаптивным систем, роботов и микропроцессорной техники, а также активизация подготовки научных кадров и внедрение результатов в учебный процесс.
За прошедшие 55 лет кафедра Автоматики и Телемеханики подготовила более 3600 дипломированных инженеров. Около 100 молодых ученых закончили аспирантуру и защитили кандидатские диссертации, 13 человек защитили диссертации на соискание ученой степени доктора технических наук, существенно обновилось содержание учебного процесса и лабораторная база. Сейчас кафедра выпускает ежегодно около 40 специалистов в области управления и прикладной информатики. Выпускники кафедры работают в ведущих научных центрах и учебных заведениях России, Европы, Азии и Америки, в иромышленных и коммерческих фирмах, лабораториях и кафедрах нашего института.
На 55-м году своего существования кафедра автоматики и телемеханики представляет собой работоспособный коллектив, полный новых идей и творческих планов.
80