/


Author: Светлицкий В.А.
Tags: общее машиностроение технология машиностроения физика механика статистическая механика теория надежности
ISBN: 5-7038-1772-2
Year: 2004




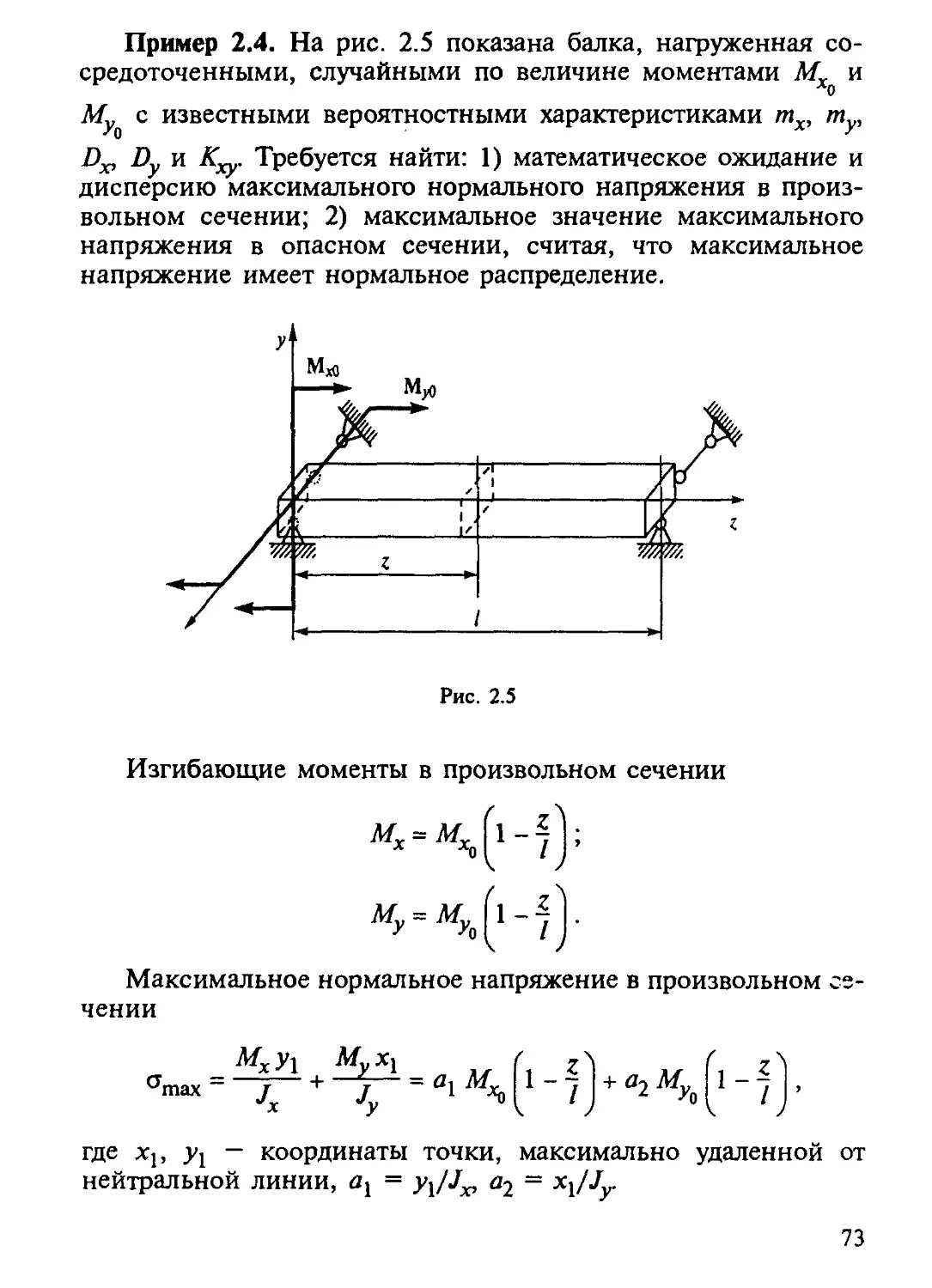
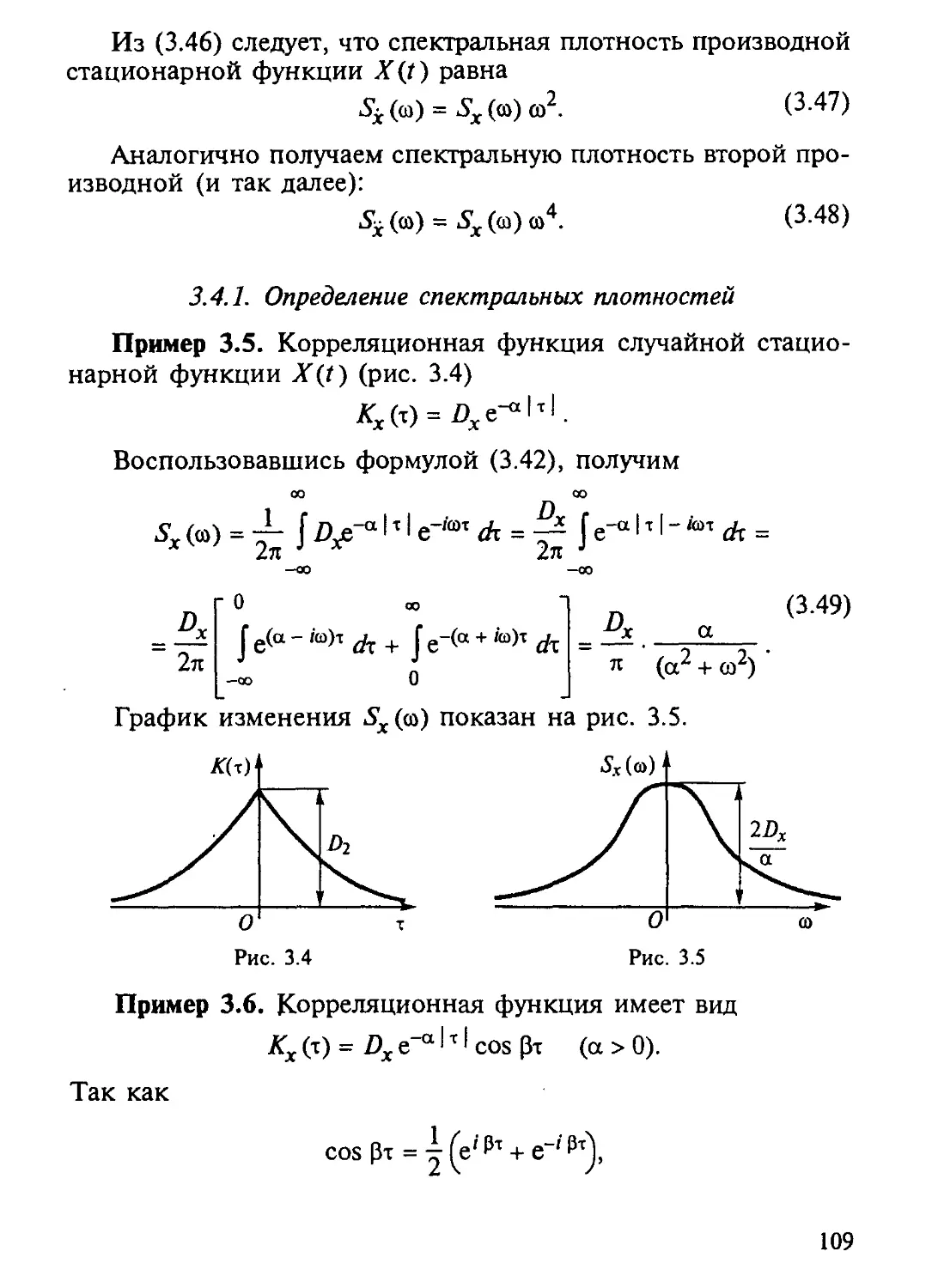
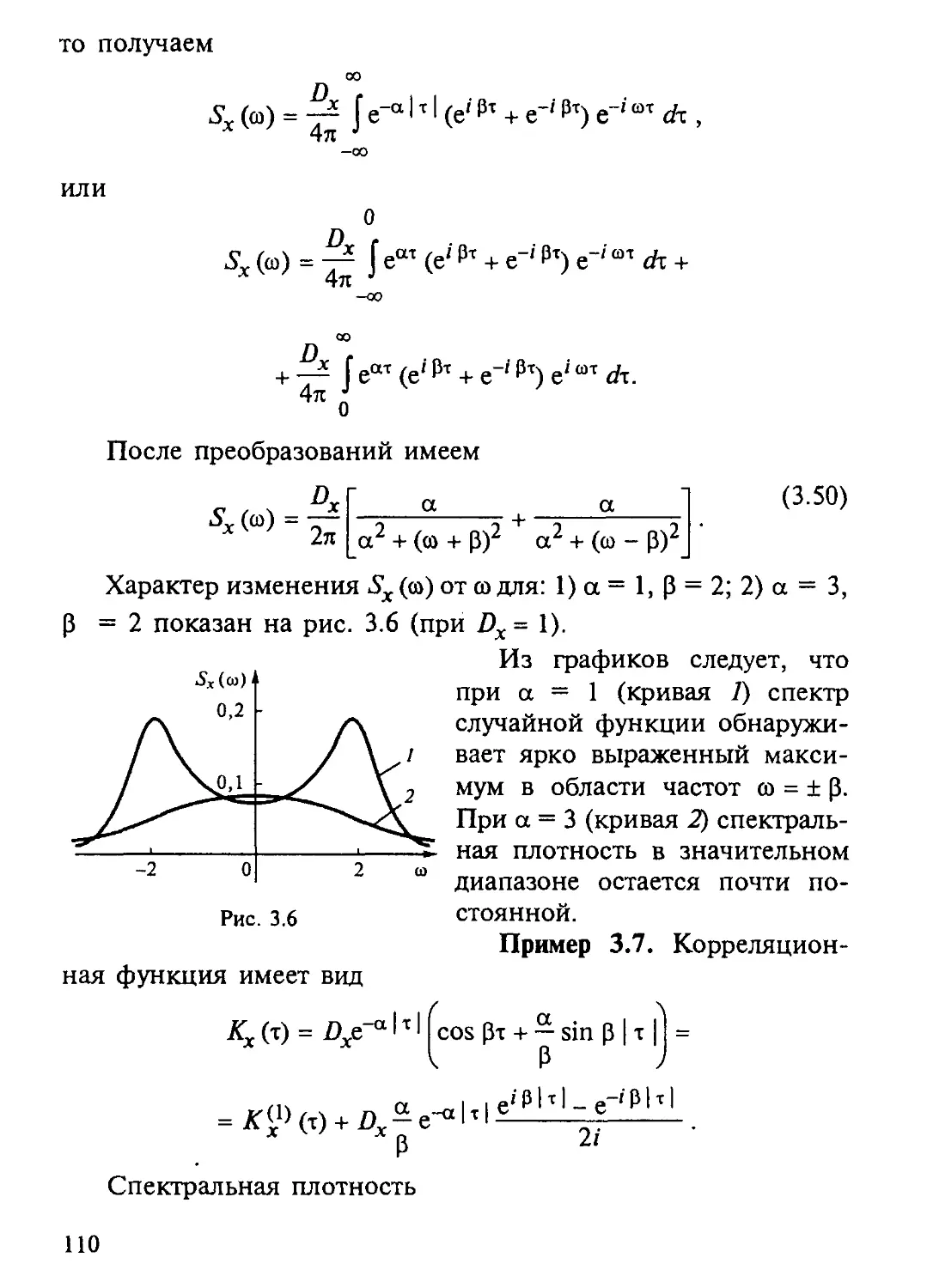
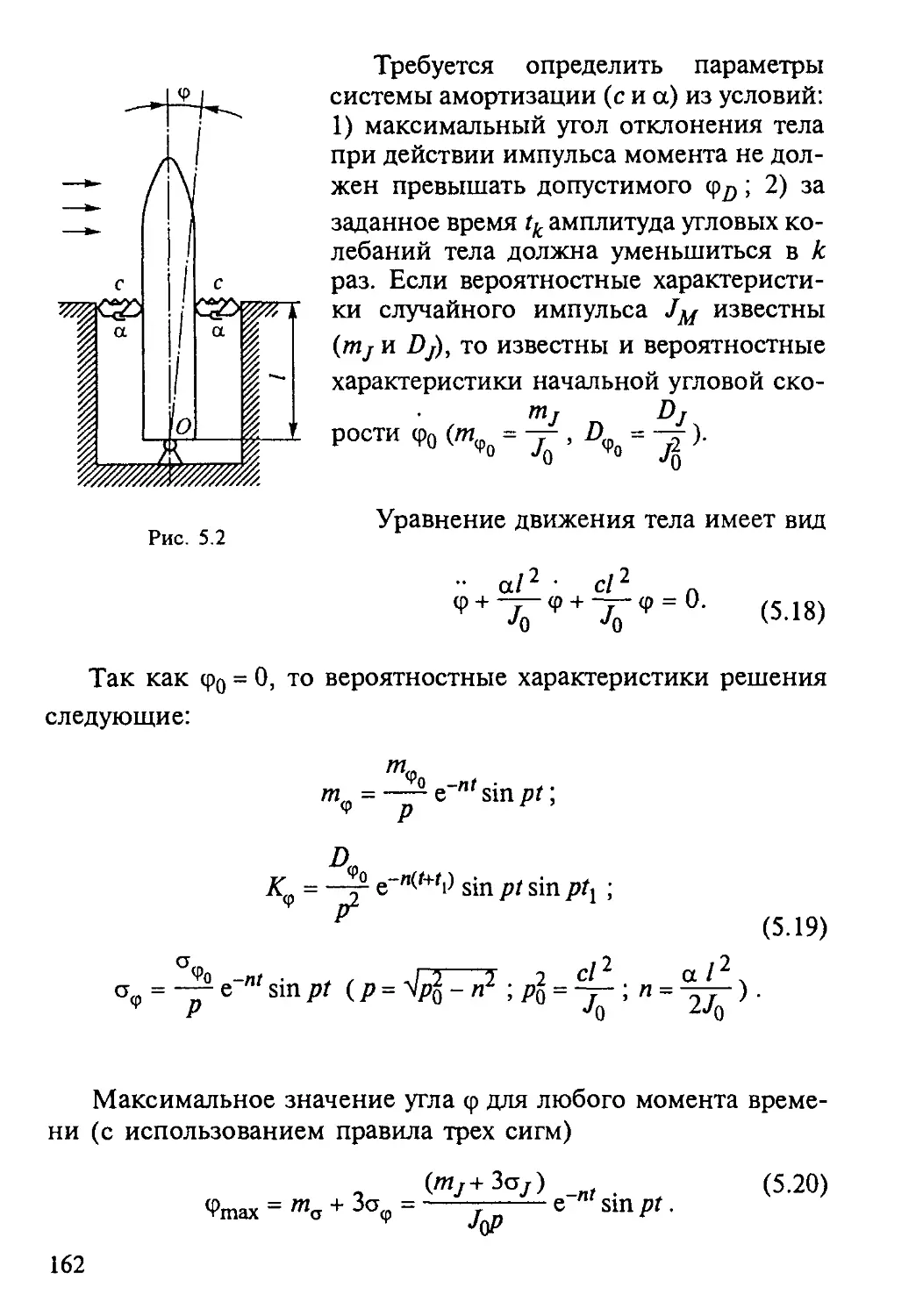
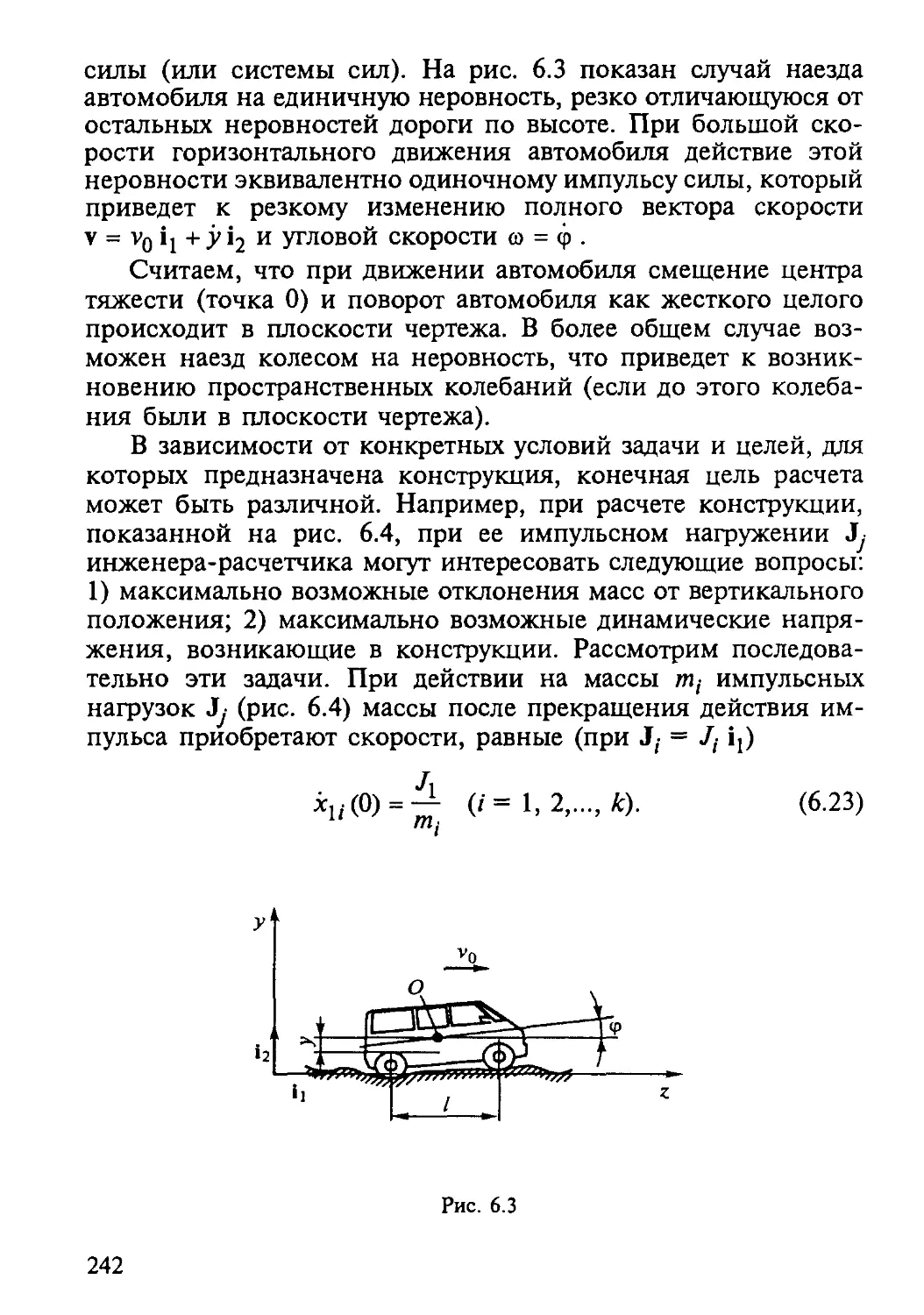
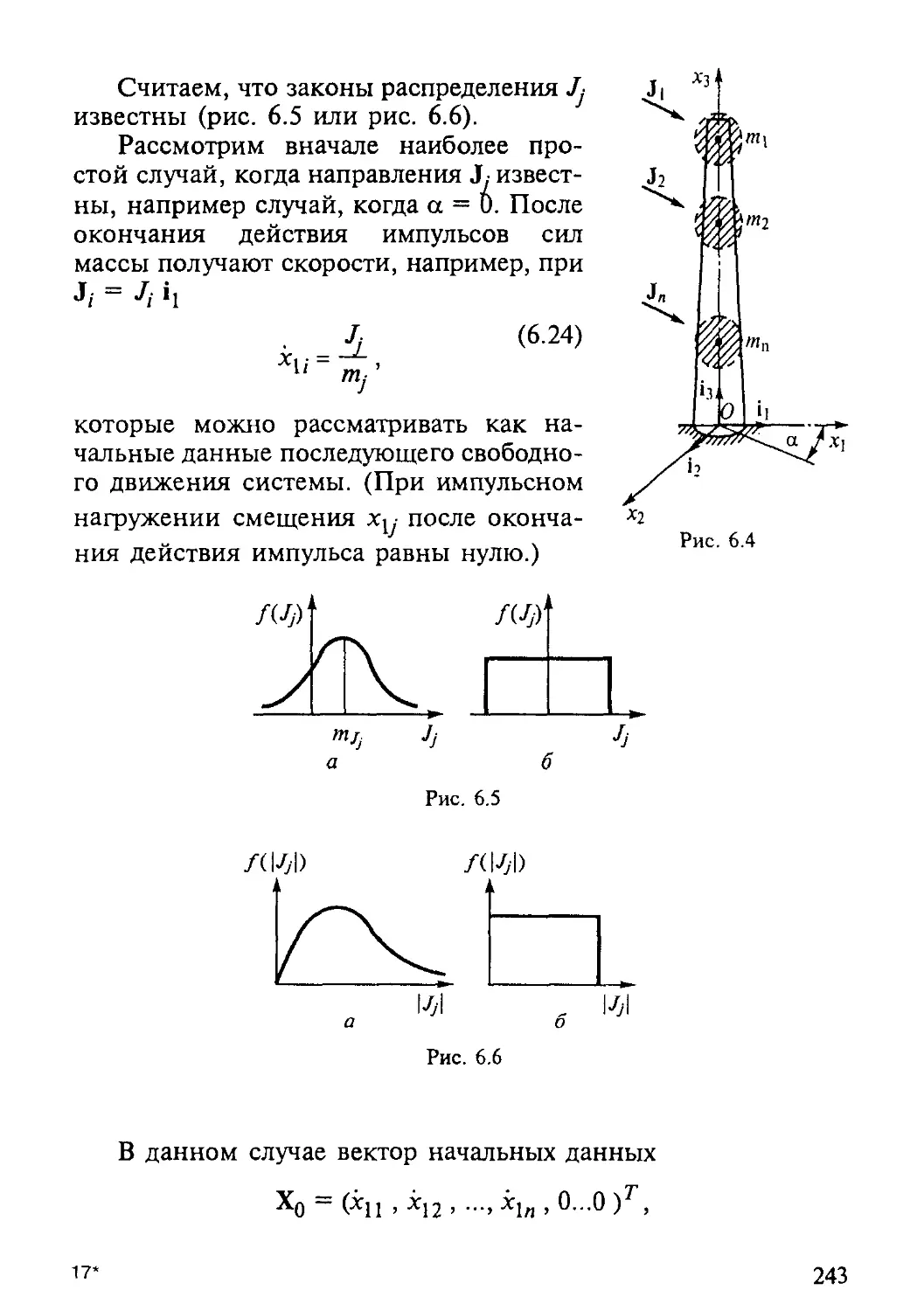
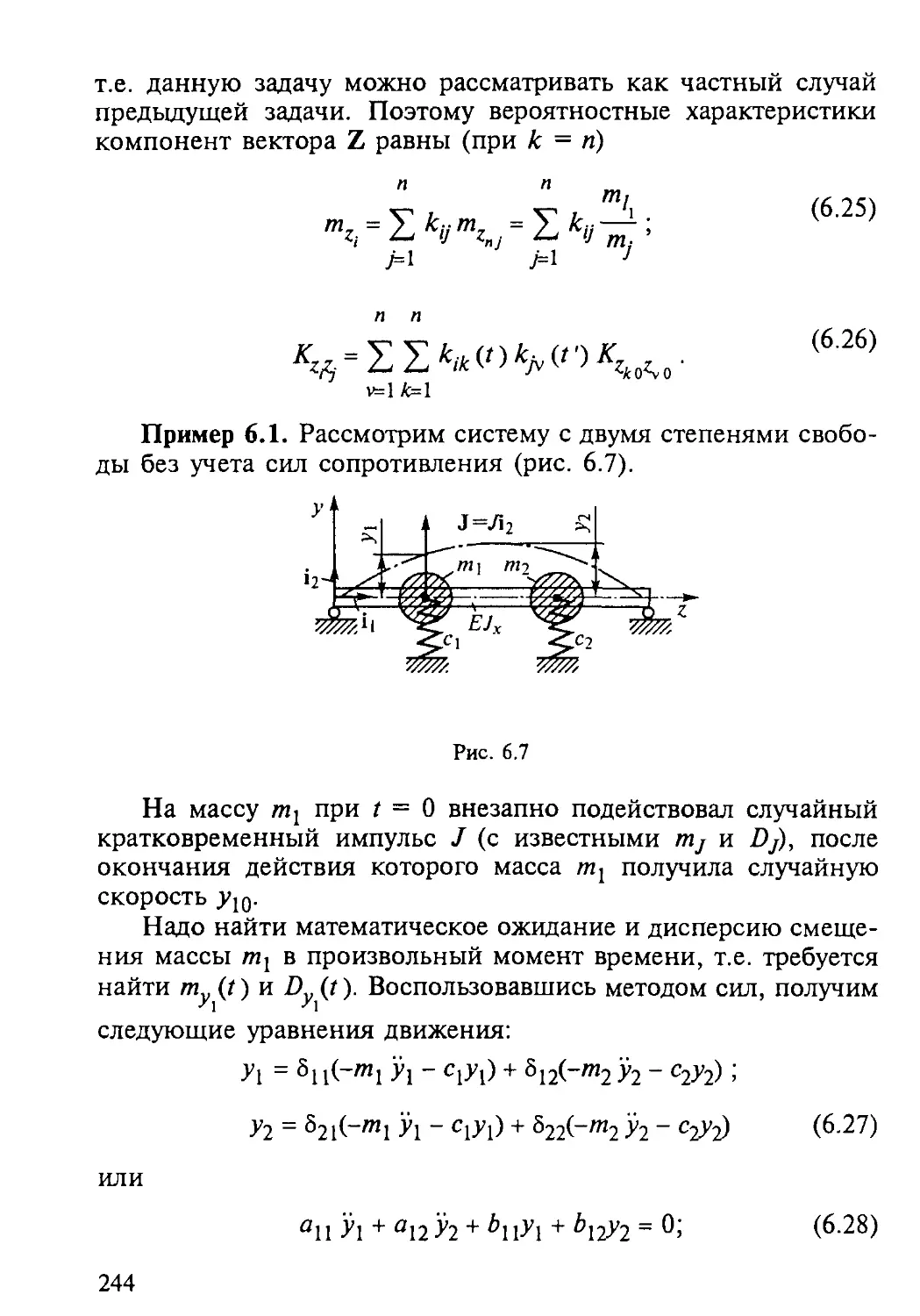
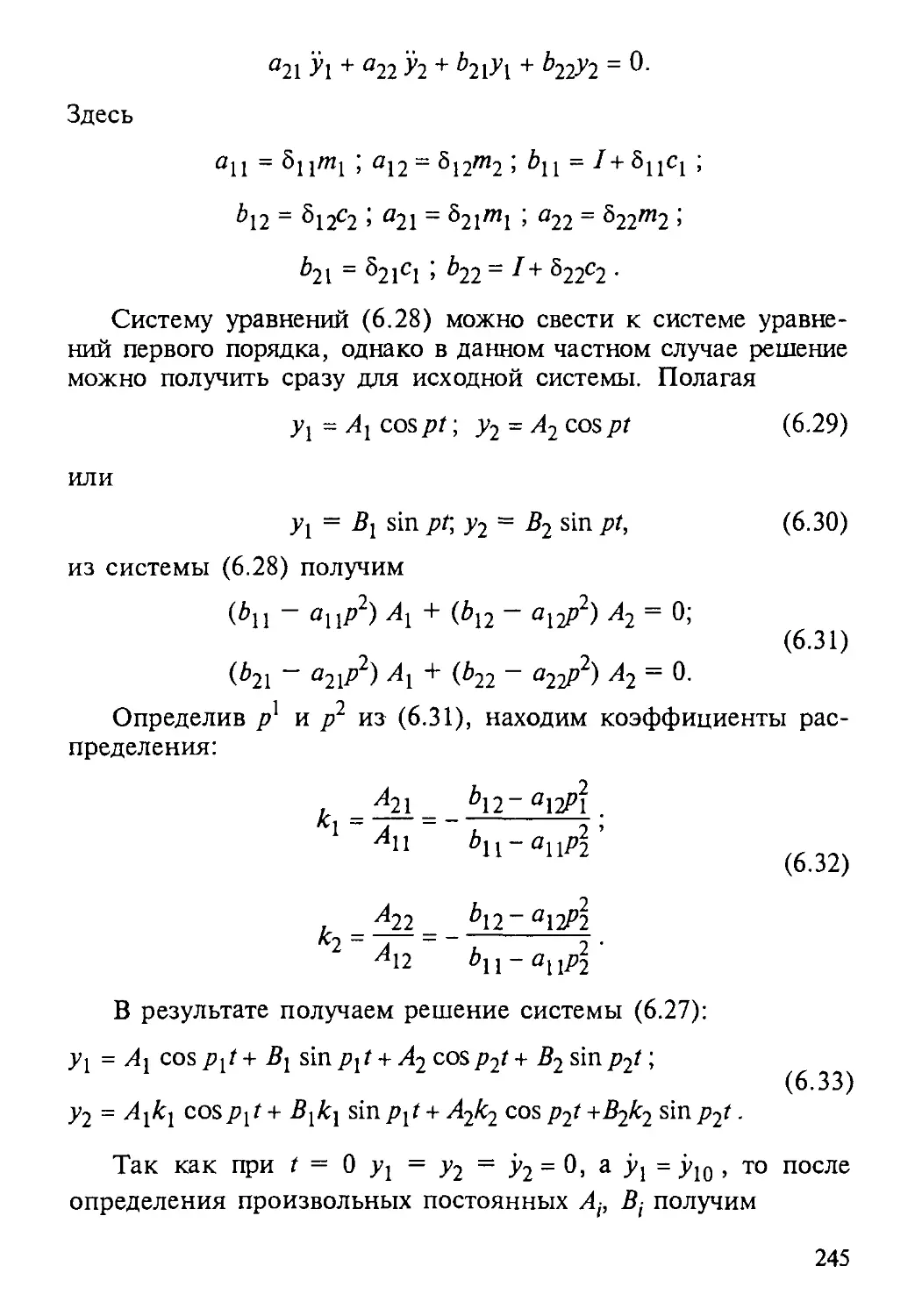
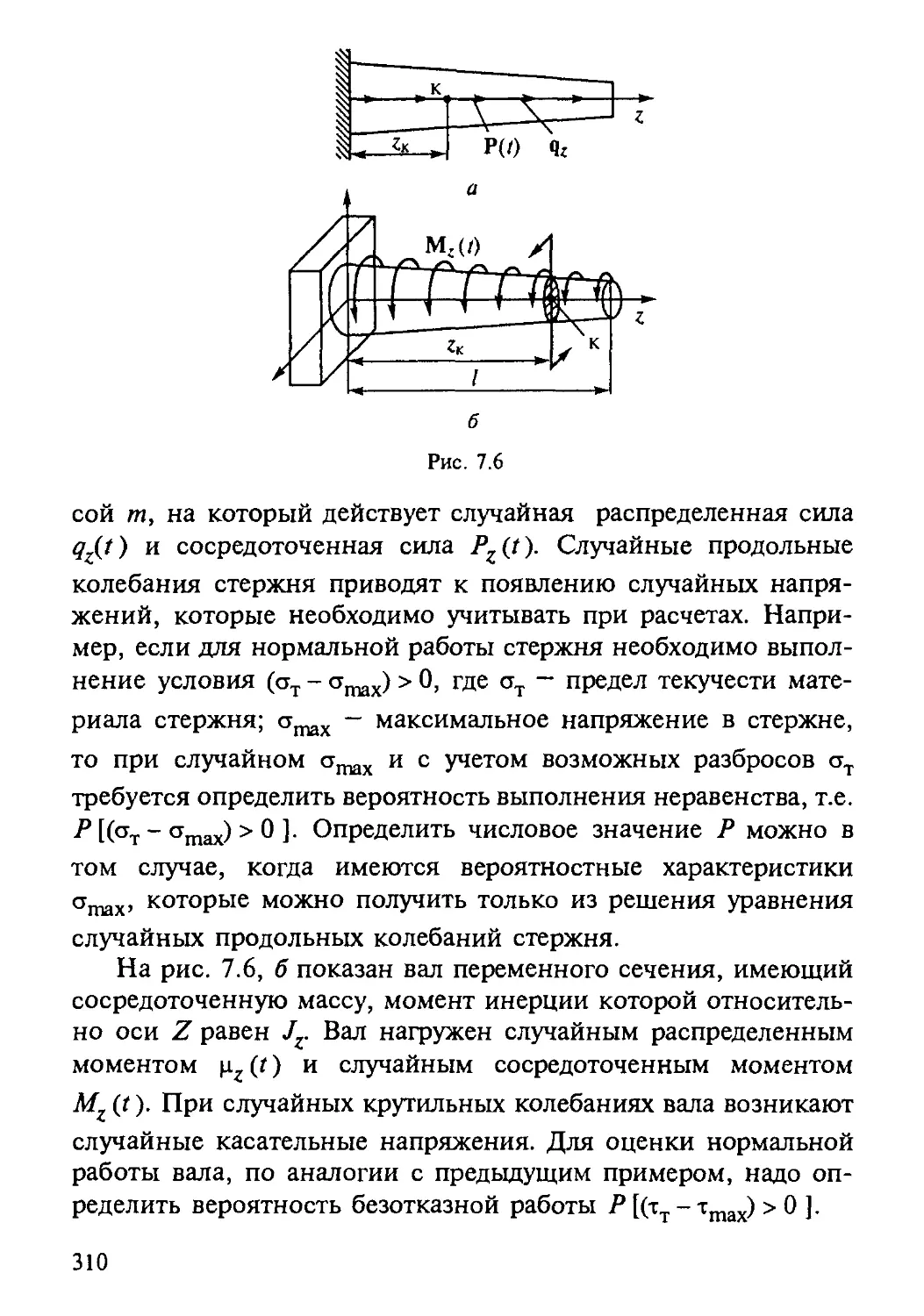
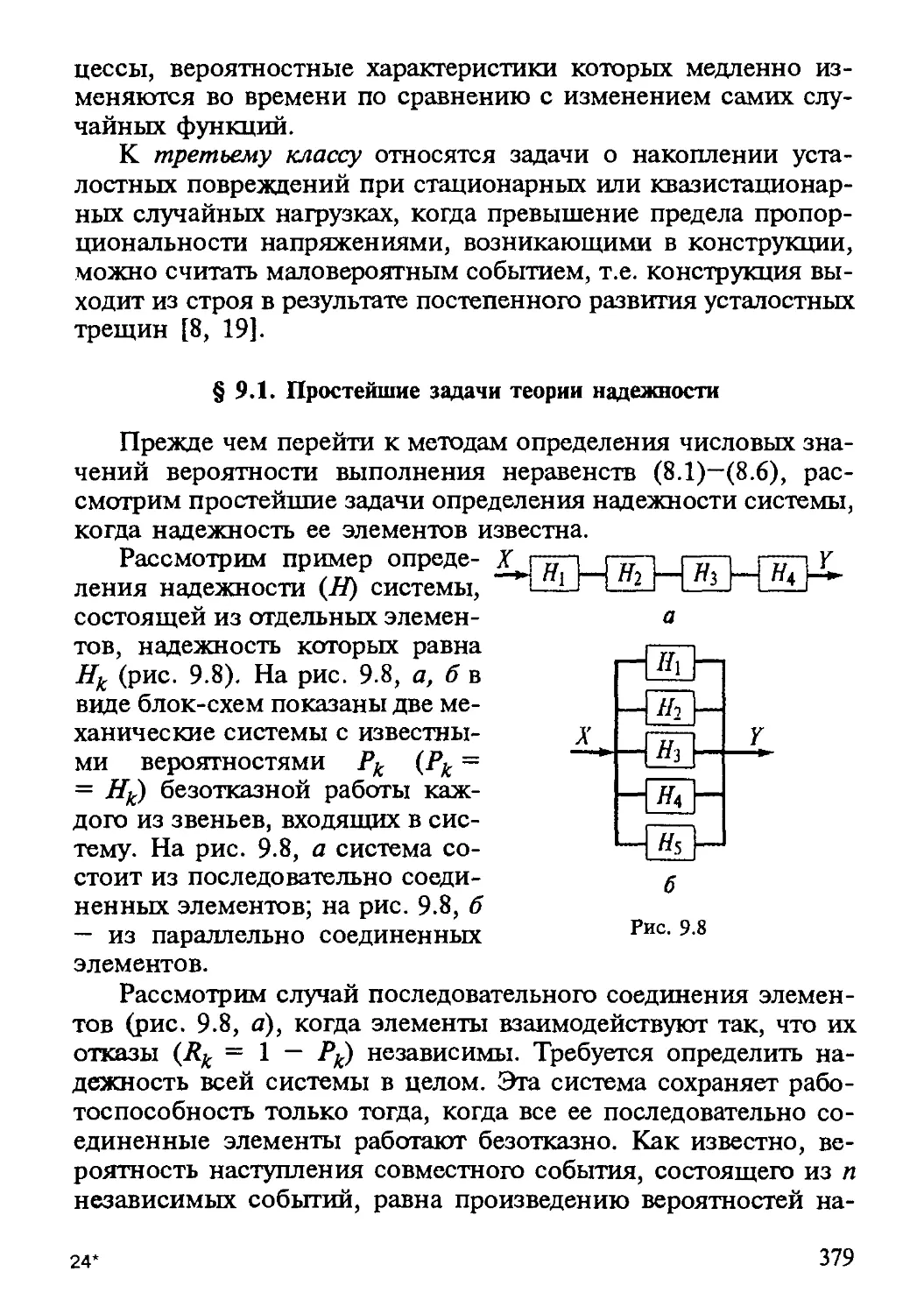
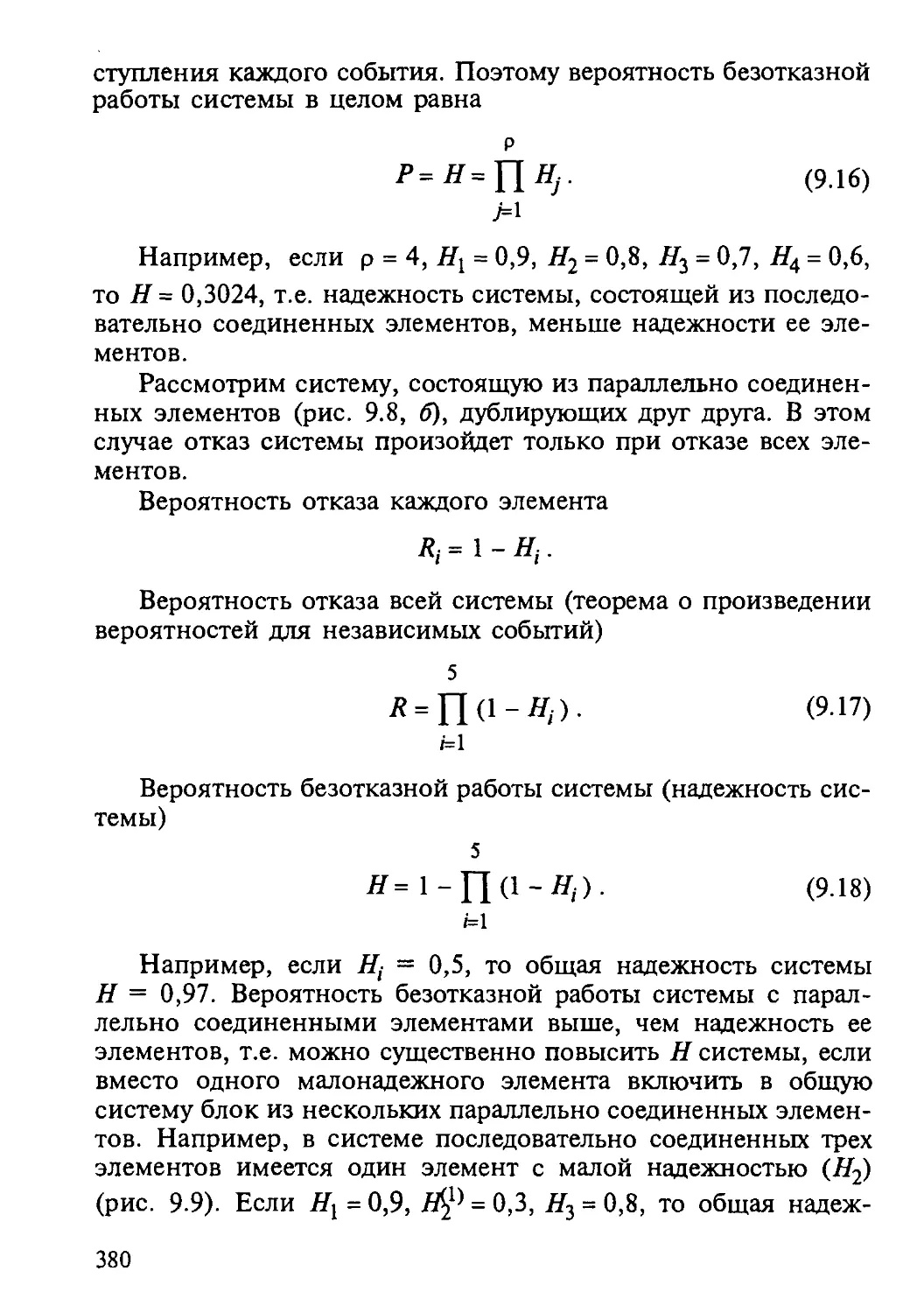
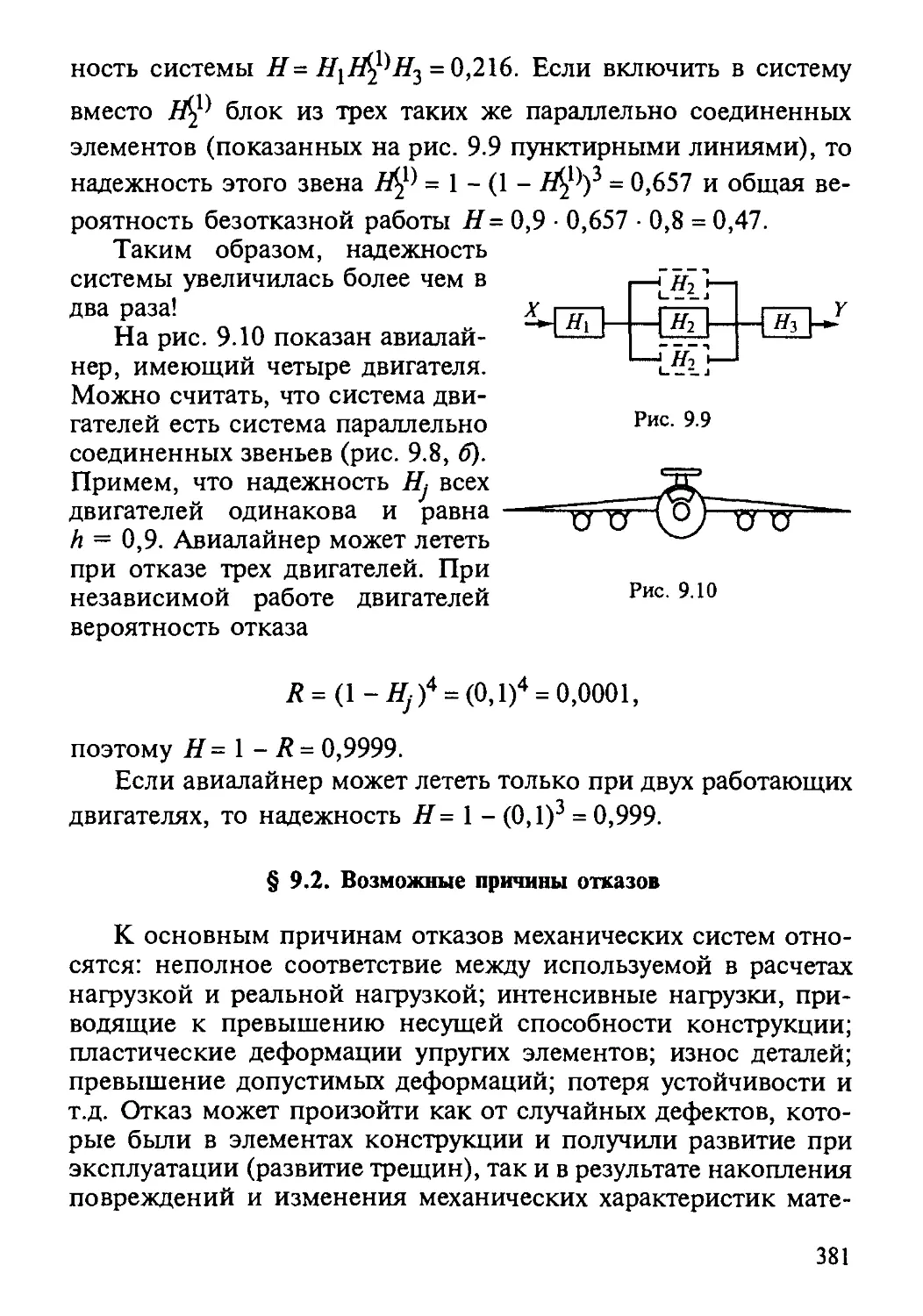
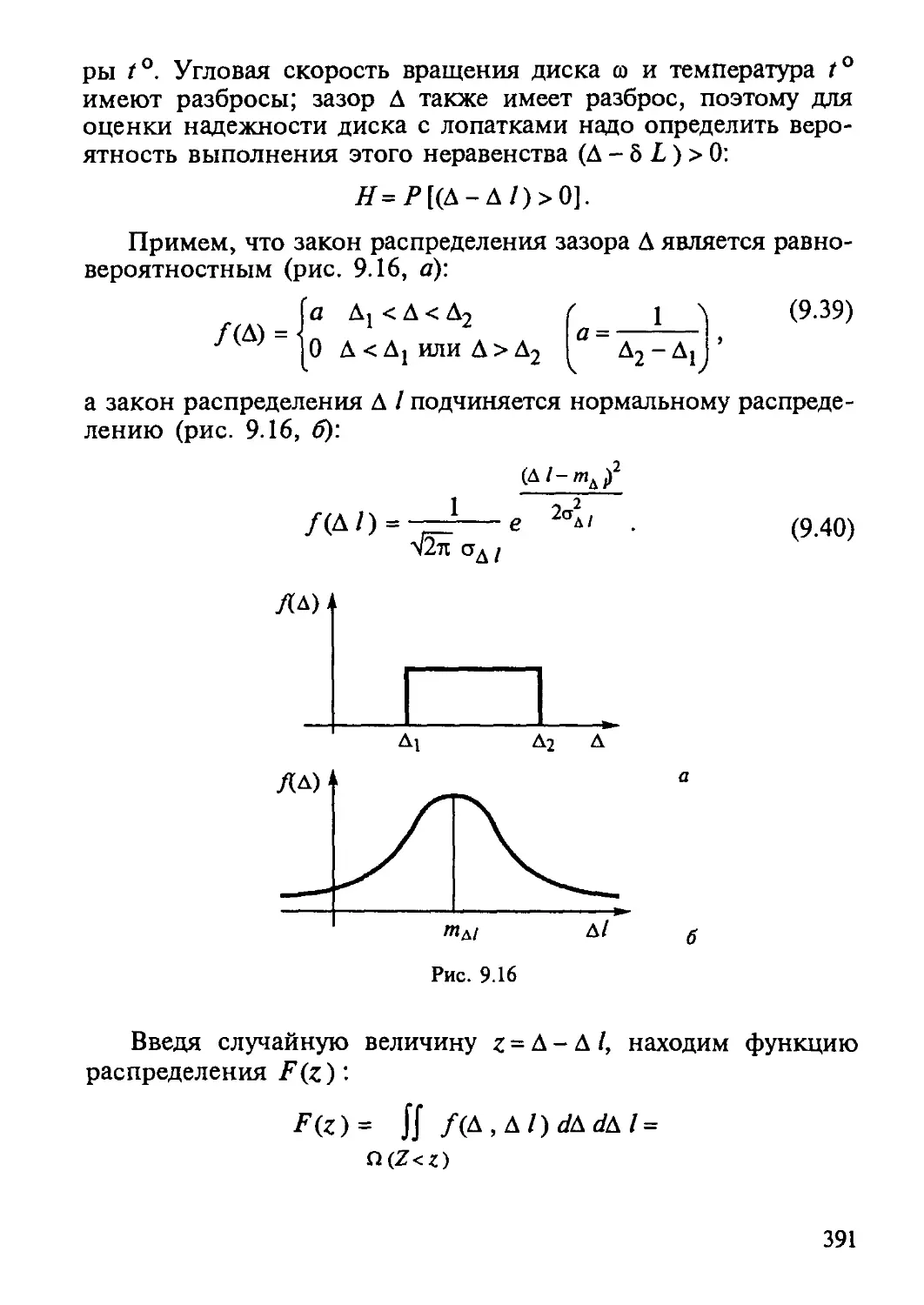
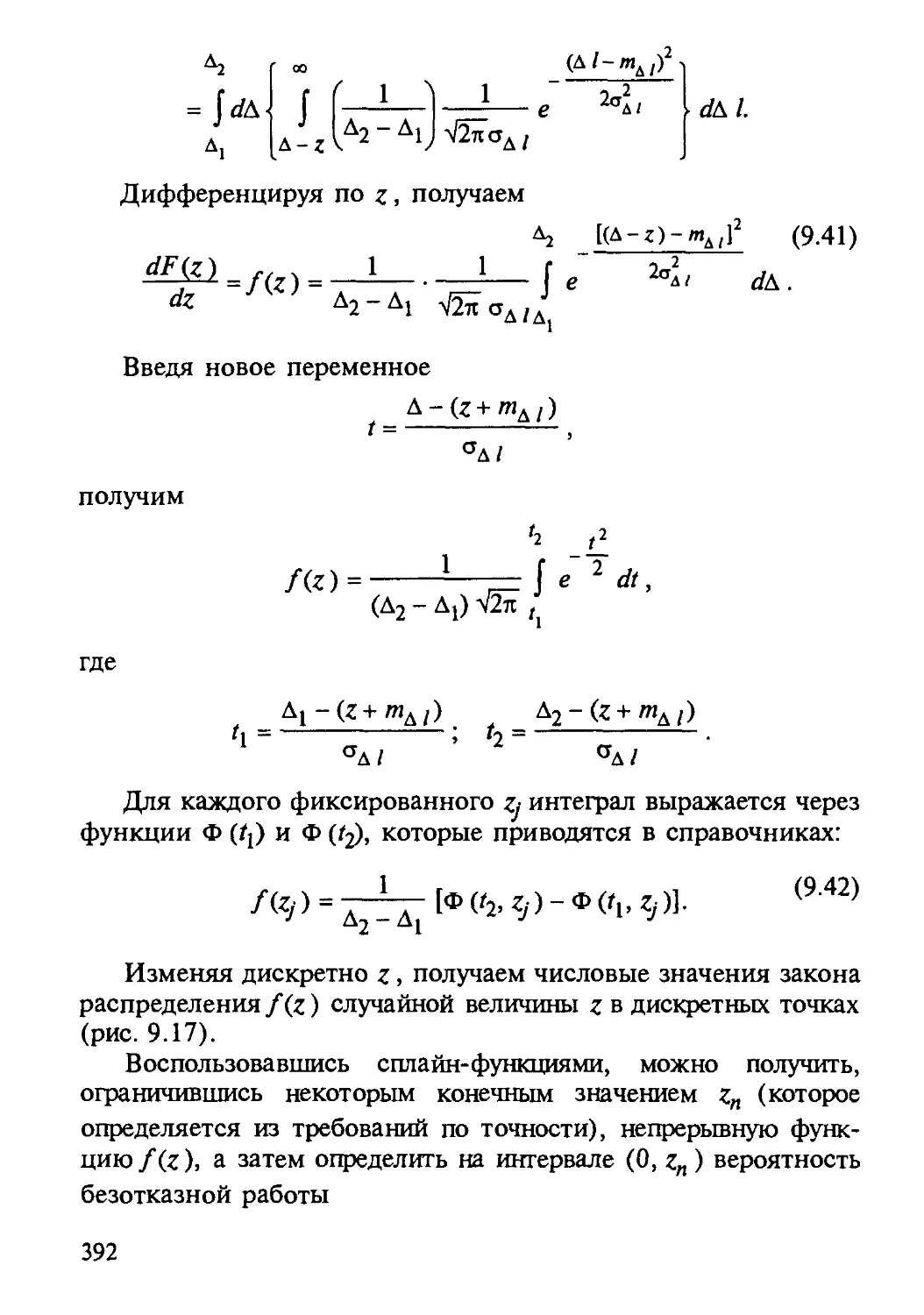
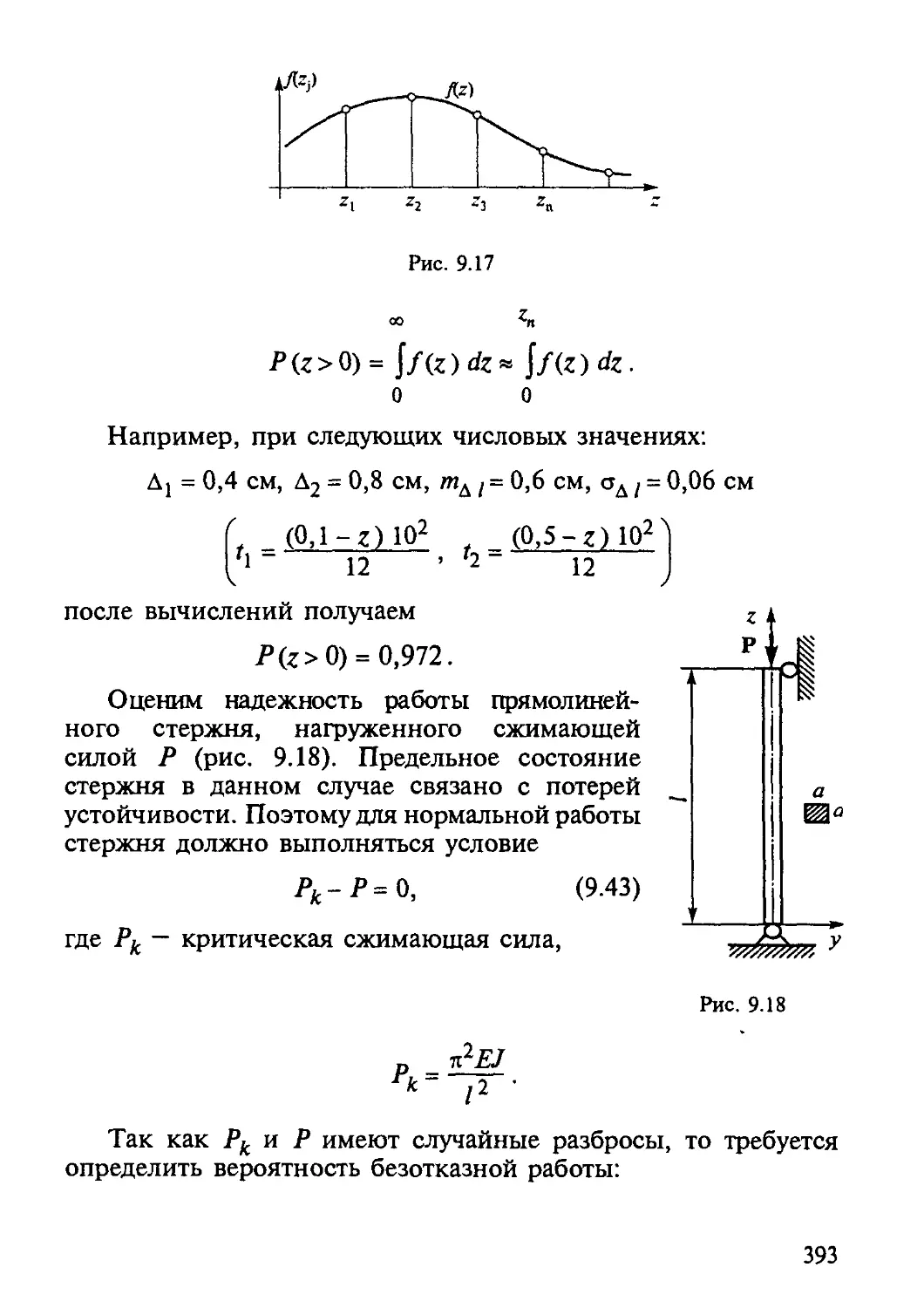
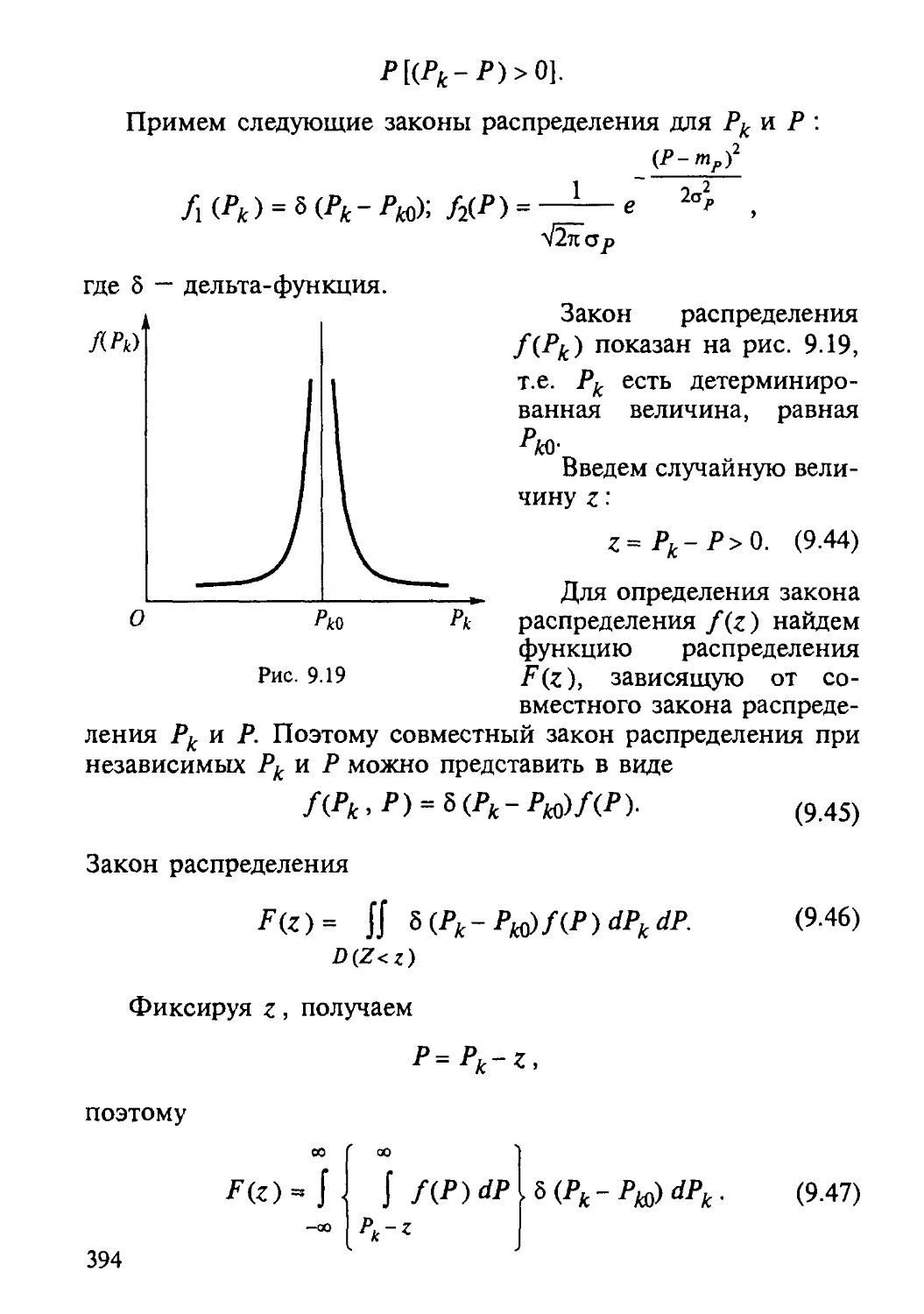
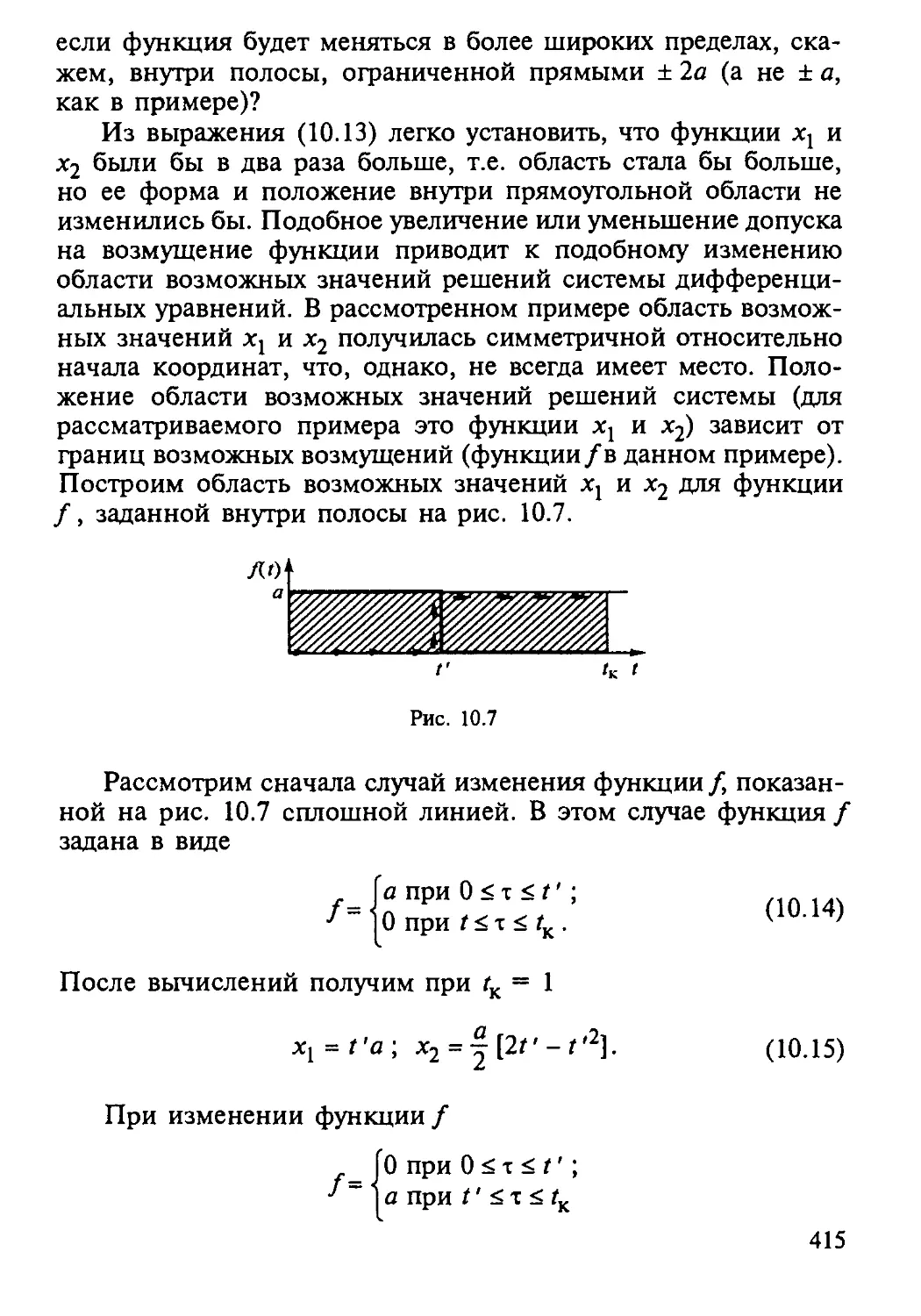
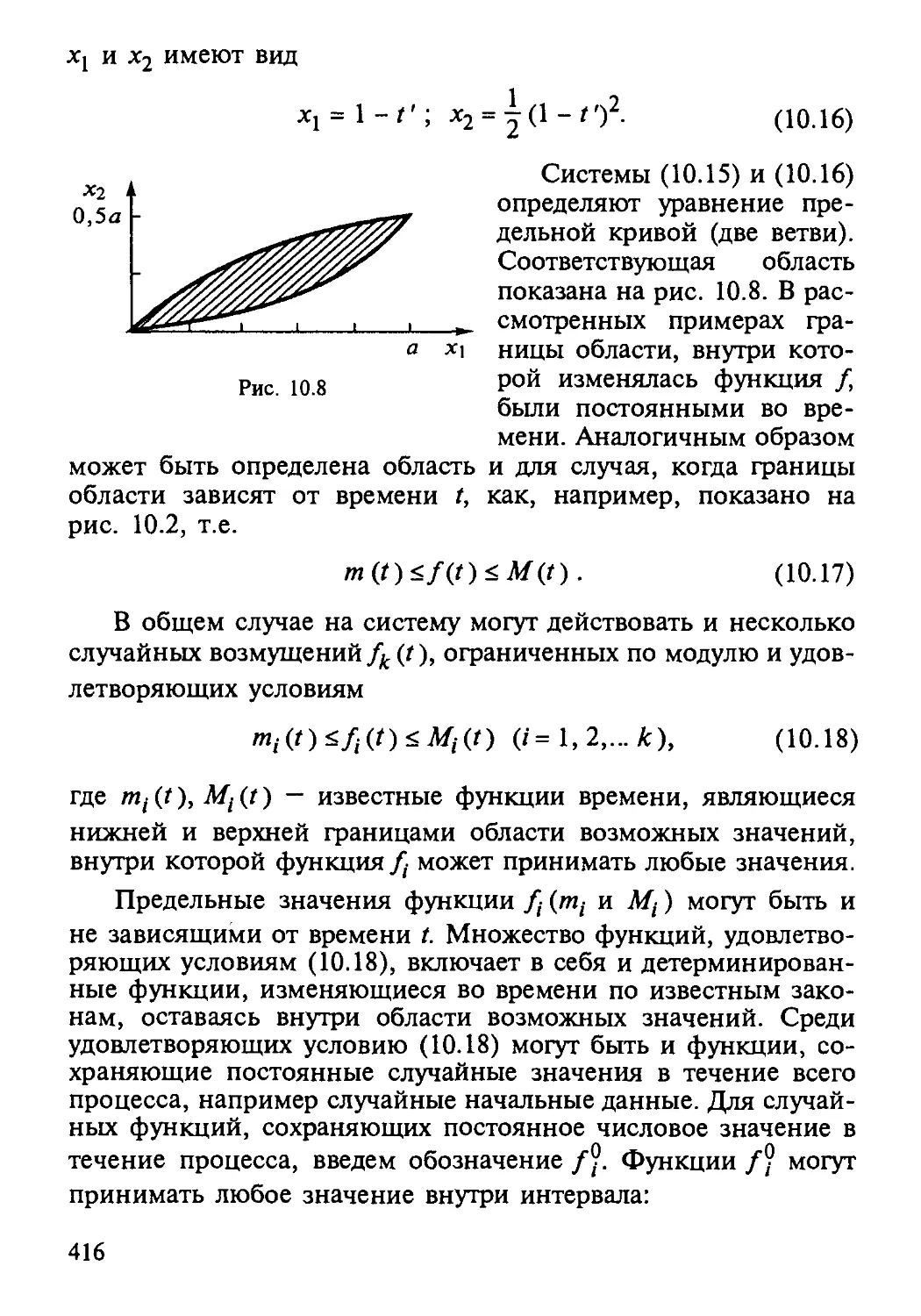
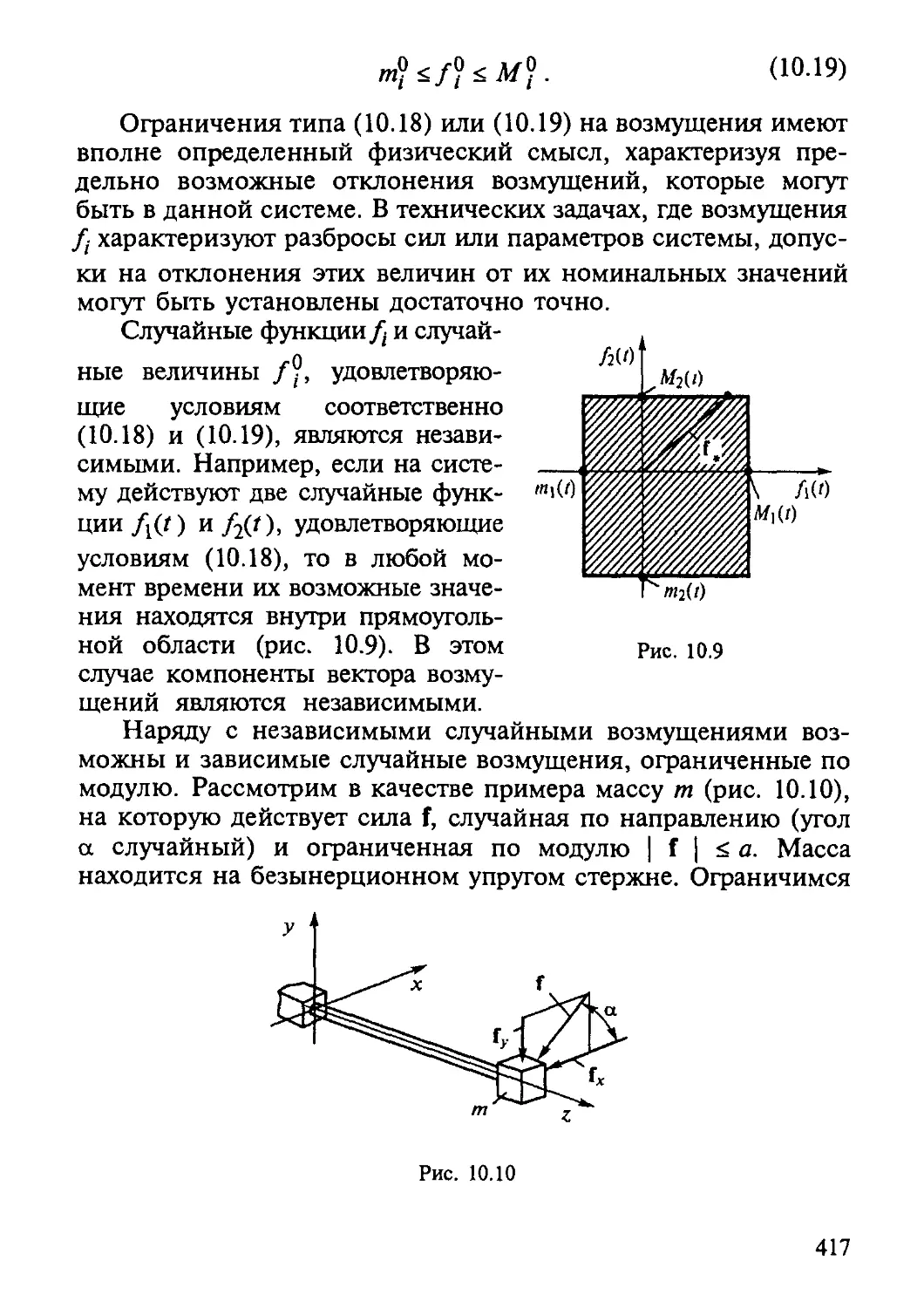
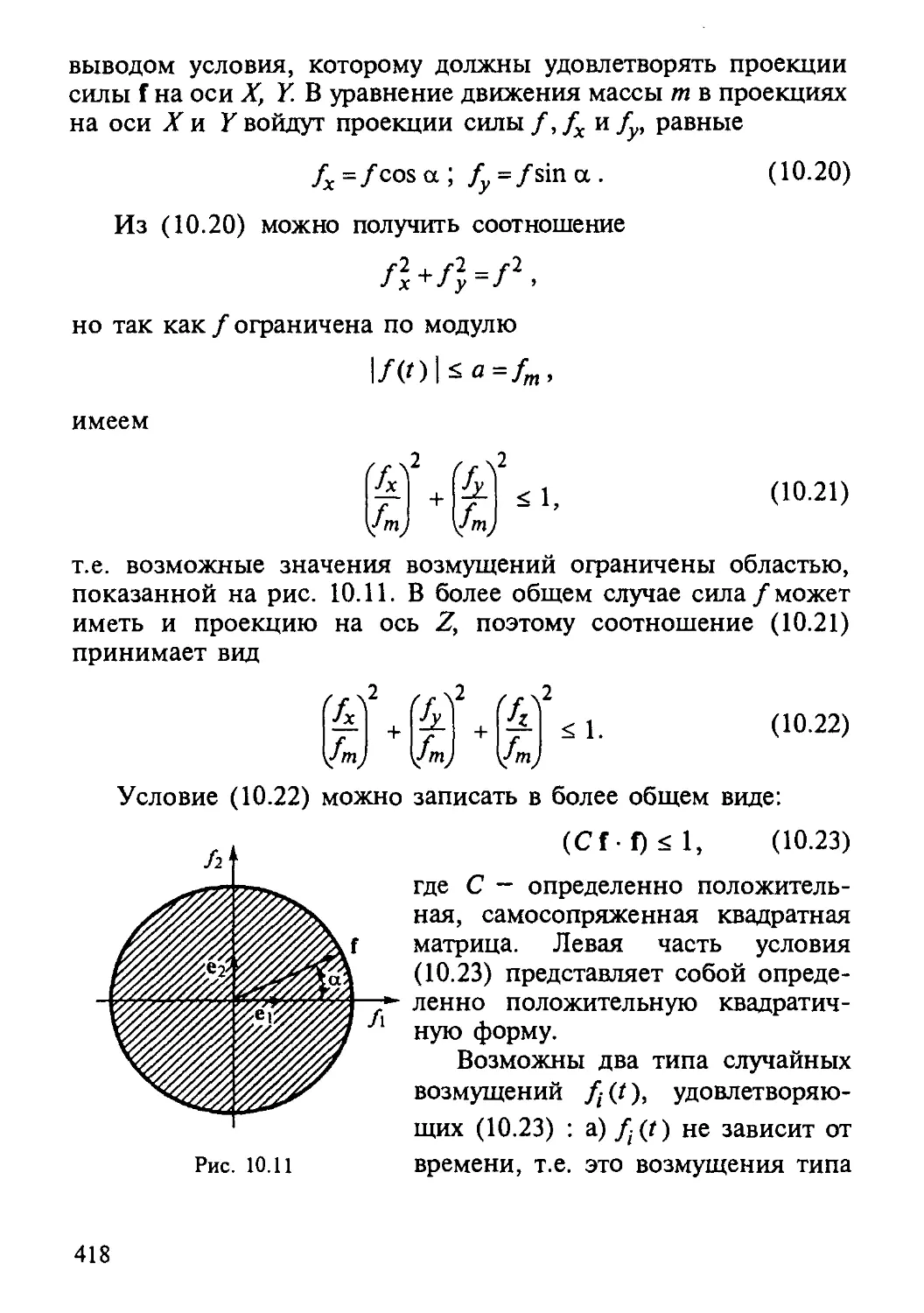
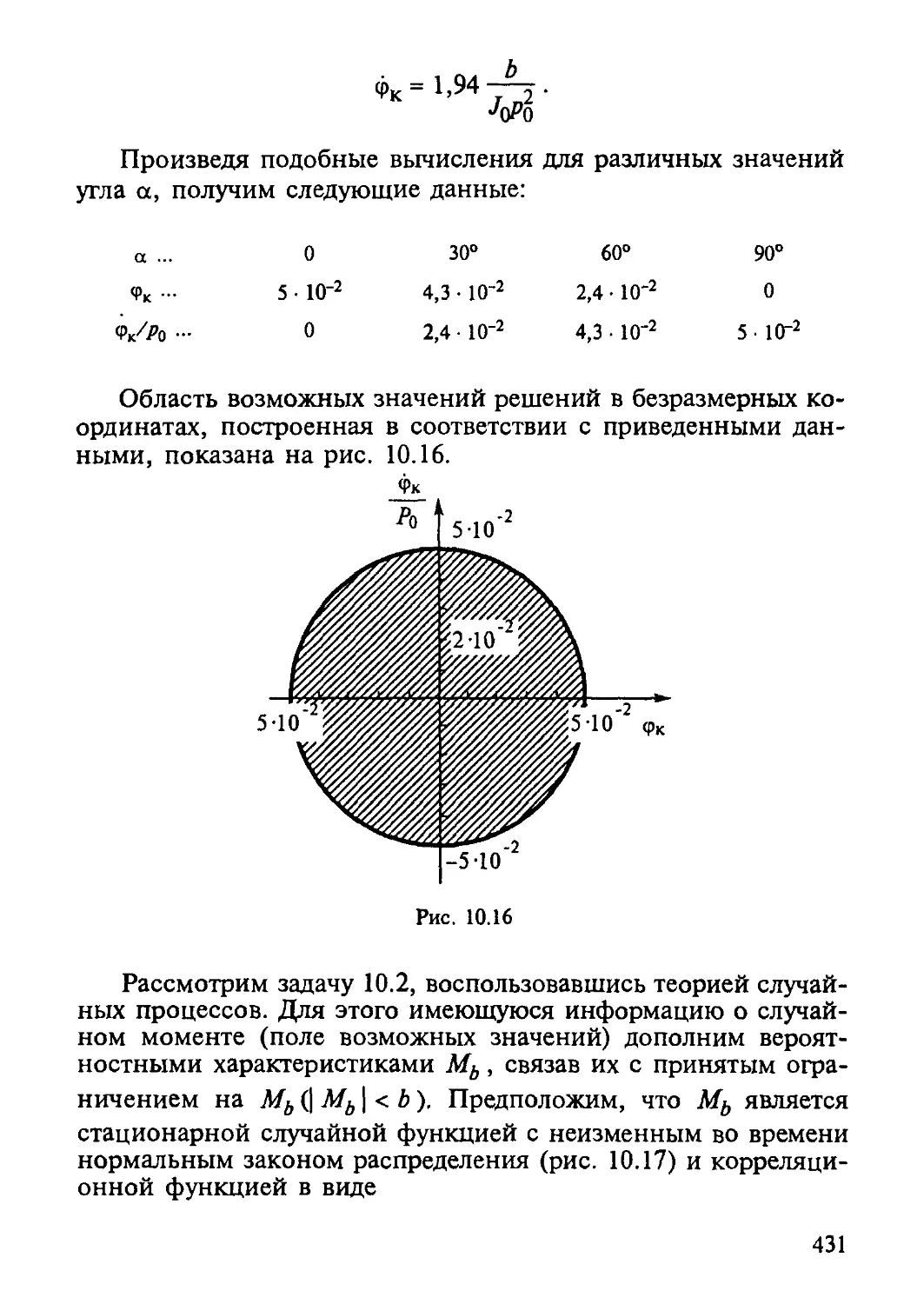
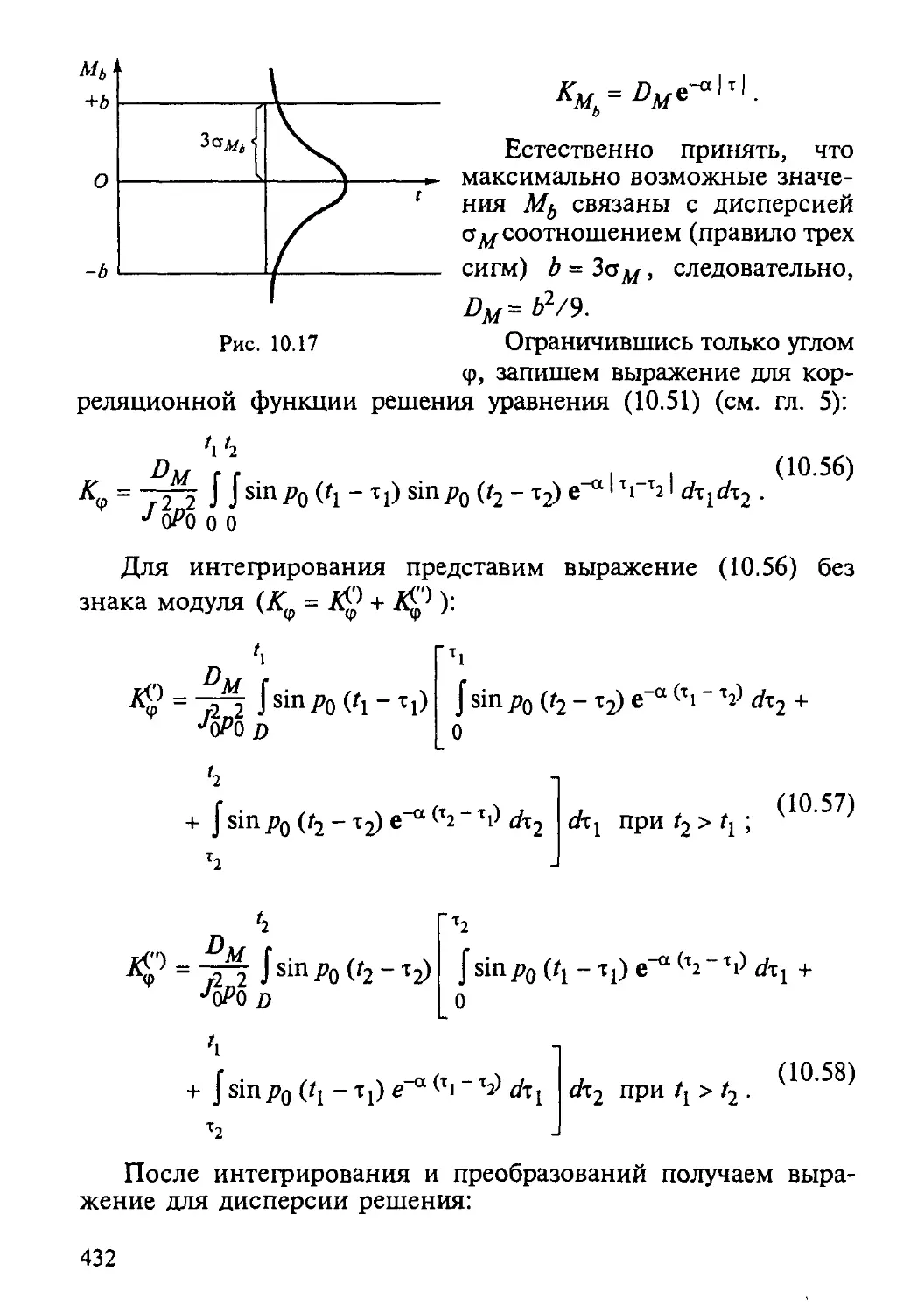
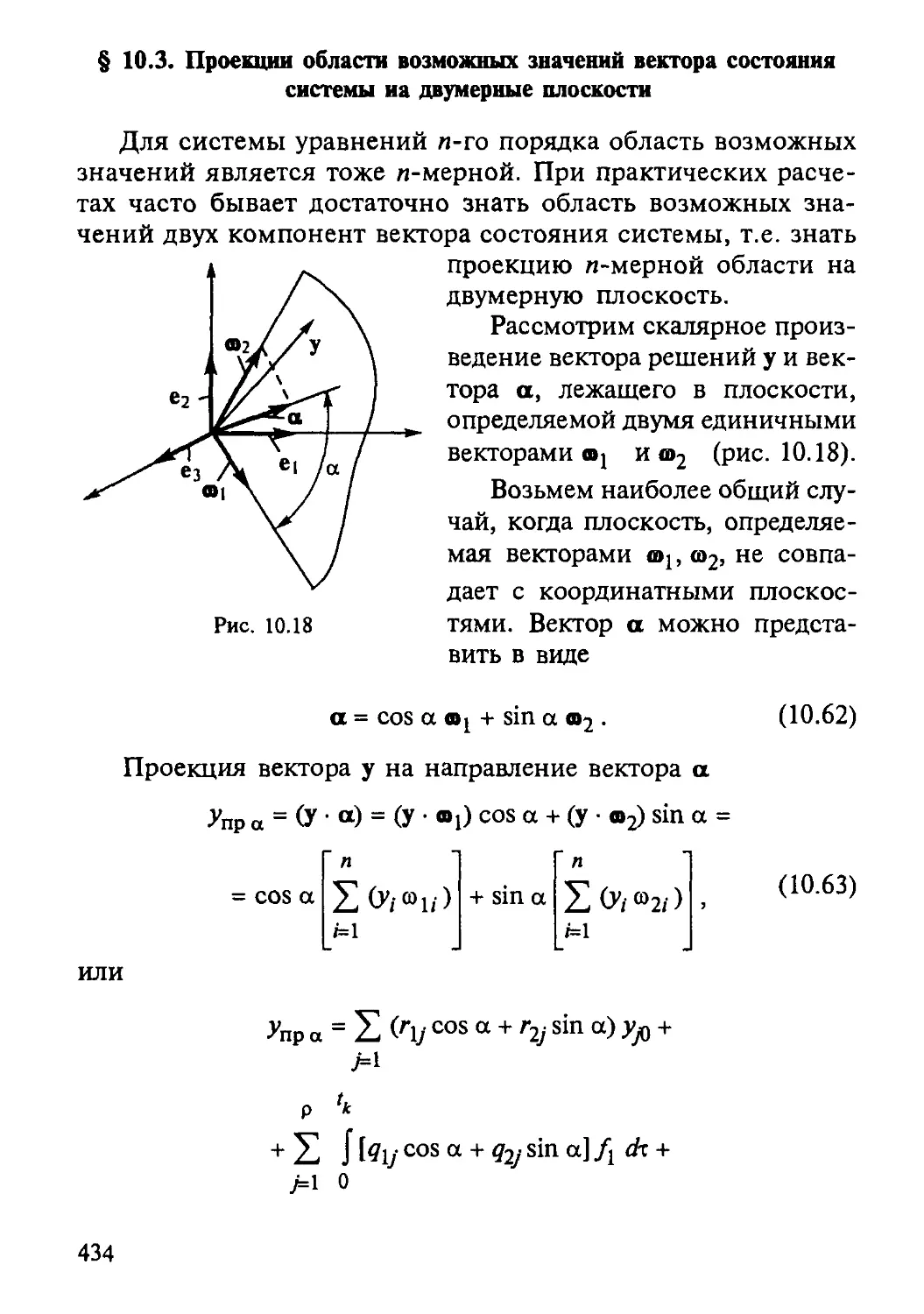
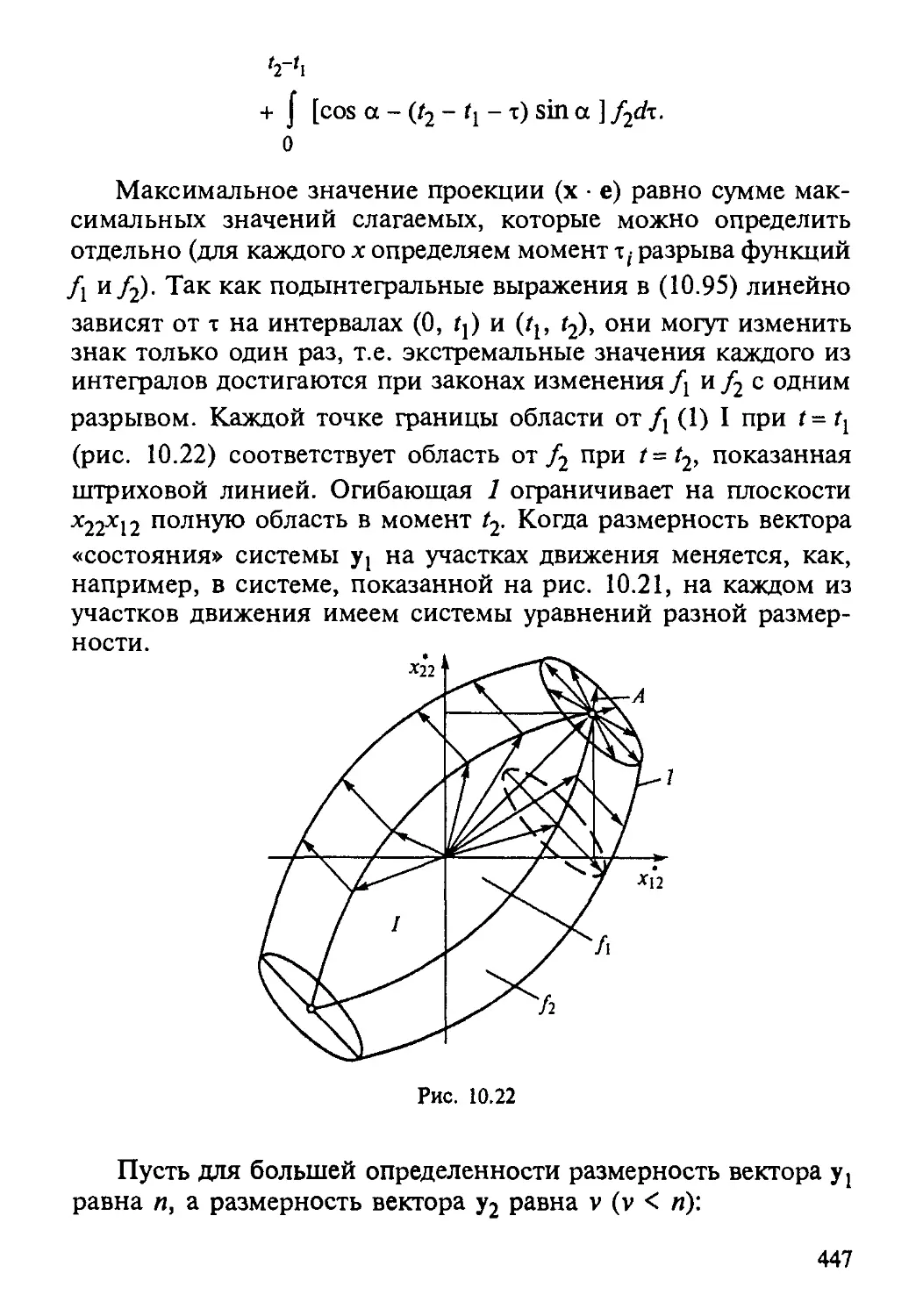
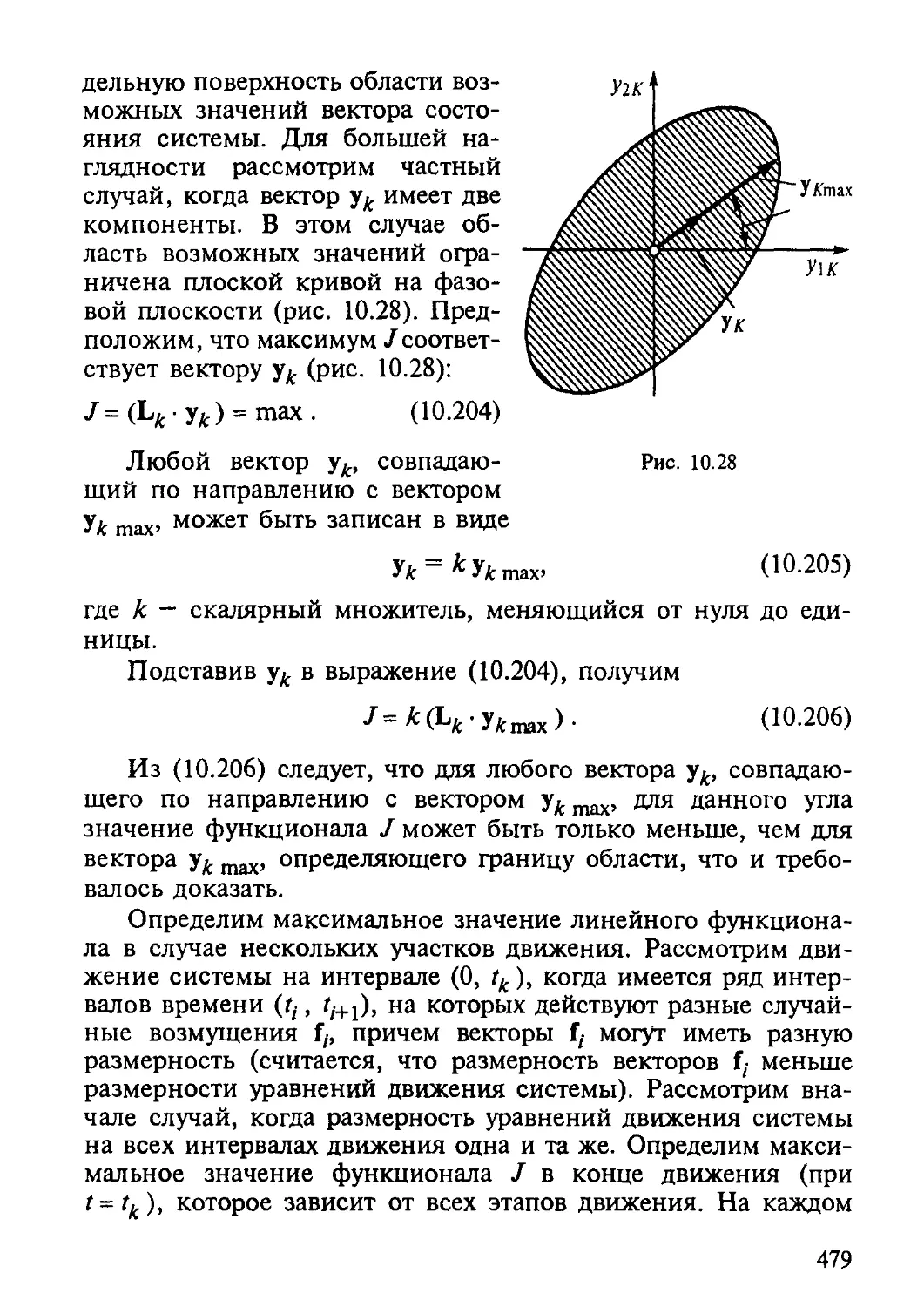
Text
В. А. Светлицкий
Статистическая
механика
и теория
надежности
Издание второе, стереотипное
Рекомендовано учебно-методическим
объединением вузов
по университетскому политехническому образованию
в качестве учебника для студентов,
обучающихся по специальностям
«Динамика и прочность машин», «Ракетостроение»,
«Космические летательные аппараты
и разгонные блоки»
Москва
Издательство МГТУ имени Н.Э. Баумана
2004
УДК 621.01 : 624.07@75.8)
ББК 22.317
С24
Рецензенты:
член-корр. РАН Н.А. Махутов,
д-р техн. наук, проф. В.А. Постное
Светлицкий В.А.
С24 Статистическая механика и теория надежности. — 2-е
изд., стереотип. М.: Изд-во МГТУ им. Н.Э. Баумана, 2004.
- 504 с: ил.
ISBN 5-7038-1772-2
Изложены основные разделы статистической механики, основы тео-
теории надежности и их использование в практике проектирования прибо-
приборов, машин и конструкций в различных отраслях промышленности.
Описана теория случайных колебаний механических систем с конечным
числом степеней свободы и систем с распределенными параметрами.
Приведены методы численного решения прикладных задач статистичес-
статистической динамики; рассмотрены теория и численные методы определения
надежности элементов конструкций, а также нетрадиционные задачи,
при решении которых нельзя воспользоваться методами статистической
динамики.
Содержание учебника соответствует курсу лекций, который автор
читает в МГТУ им. Н.Э. Баумана.
Для студентов технических университетов. Может быть полезен ас-
аспирантам и инженерам-механикам, работающим в различных отраслях
машиностроения.
ББК 621.01:624.07@75.8)
УДК 22.317
© В.А. Светлицкий, 2002
ISBN 5-7038-1772-2 © Издательство МГТУ им. Н.Э. Баумана, 2002
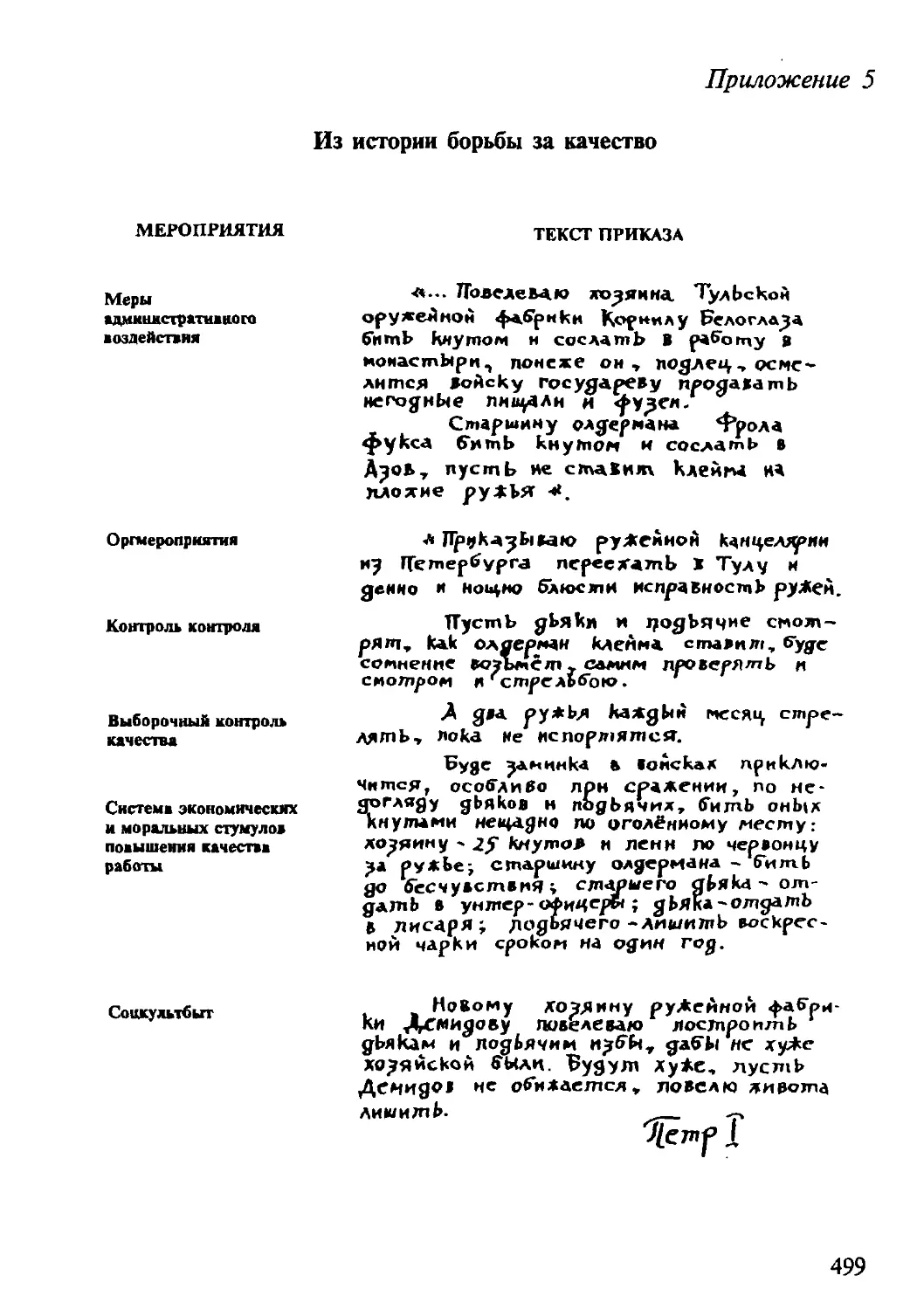
Предисловие
Развитие новой техники потребовало более глубокого по-
понимания физических особенностей работы проектируемых
конструкций в реальных условиях, что необходимо как для
увеличения точности расчетов, так и для повышения их на-
надежности.
Было установлено, что классические детерминированные
возмущения не являются основными, а методы классической
механики, основанные на понятии детерминизма, не являются
достаточными для понимания и объяснения физических эф-
эффектов, возникающих при работе приборов, находящихся на
движущихся объектах, при вибрации двигателей летательных
аппаратов, движении транспортного средства, действии ветро-
ветровых и сейсмических нагрузок. Возникла необходимость созда-
создания новой физической модели при исследовании этих дина-
динамических процессов и, в частности, нового математического
аппарата, позволяющего учесть внешние возмущения, которые
не являются детерминированными. Таким математическим ап-
аппаратом стала теория случайных процессов, которая была до-
достаточно хорошо разработана применительно к задачам радио-
радиотехники и автоматического регулирования, где эффект от слу-
случайных возмущений оказался соизмеримым с эффектом от
детерминированных возмущений и игнорирование случайных
возмущений приводило бы к неверным результатам. Поэтому
теория случайных процессов была привлечена к решению
конкретных задач, относящихся к радиотехнике и автомати-
автоматическому регулированию, много раньше, чем в других облас-
областях техники, в частности, раньше, чем для исследования
механических систем, где случайными возмущениями, как
правило, пренебрегали.
Во многих прикладных задачах такое пренебрежение слу-
случайными возмущениями, особенно когда они действительно
являются малыми, вполне допустимо и решение задачи не
требует привлечения статистической механики. Если же слу-
случайные возмущения соизмеримы (по вероятностным характе-
характеристикам) с известными силами и, особенно, когда на систему
действуют только случайные возмущения, классические методы
расчета становятся неприемлемыми и для получения числен-
численных результатов надо использовать вероятностные методы.
Поэтому внедрение в практику проектирования статистических
методов расчета является необходимым условием для создания
надежных конструкций.
Повышение надежности новой техники, рассчитанной на
эксплуатацию в экстремальных условиях, при высоких требо-
требованиях к точности и надежности функционирования и одно-
одновременном уменьшении материалоемкости невозможно без ис-
использования в практике проектирования методов статистичес-
статистической механики.
Первые четыре главы настоящего учебника посвящены из-
изложению основных положений теории вероятности и случай-
случайных процессов. Рассматриваются случайные величины и слу-
случайные функции и их вероятностные характеристики; функции
распределения плотности вероятности, математические ожида-
ожидания и дисперсии. Приводятся различные виды законов распре-
распределения, встречающихся в практических задачах. Рассмотрены
нестационарные и стационарные случайные процессы, имею-
имеющие большое прикладное значение при анализе колебаний
механических систем. Приведены основные результаты спект-
спектральной теории стационарных случайных функций и исполь-
использования спектрального представления стационарных случай-
случайных функций при анализе установившихся колебаний. Изло-
Изложена теория марковских процессов.
В главах 5—8 рассматриваются случайные колебания систем
с конечным числом степеней свободы и систем с распределен-
распределенными параметрами. Изложение теории случайных колебаний
проводится аналогично изложению классической теории коле-
колебаний, что позволяет наиболее наглядно установить, чем эти
разделы механики (детерминированные колебания и случайные
колебания) родственны и чем они отличаются друг от друга.
Методы анализа случайных колебаний, изложенные в книге,
дают возможность: исследовать динамические процессы, воз-
возникающие в механических системах, определить вероятност-
вероятностные характеристики обобщенных координат системы и их про-
производных для систем с конечным числом степеней свободы,
получить вероятностные характеристики напряженно-дефор-
напряженно-деформированного состояния для систем с распределенными пара-
параметрами.
Девятая глава посвящена основам теории надежности. Из-
Изложены методы численного определения вероятности безотказ-
безотказной работы механических систем при однократном или малом
числе нагружений и ограниченном времени процесса.
Использование методов статистической механики в расчет-
расчетной практике возможно только, когда имеется статистическая
информация о случайных возмущениях, получить которую в
необходимом для проведения расчетов объеме не всегда воз-
возможно. При изложении теоретических основ статистической
механики принимается, что необходимая информация о слу-
случайных возмущениях известна. Однако практически это не
всегда возможно, так как требует очень большого объема экс-
экспериментальных исследований.
Получение вероятностных характеристик возмущений пред-
представляет собой проблему несоизмеримо более сложную, чем
последующее решение уравнений состояния системы. Поэтому
в учебник включена глава, в которой изложены теория и чис-
численные методы исследования задач динамики механических
систем, когда имеющаяся информация о случайных возмуще-
возмущениях недостаточна для проведения расчетов с использованием
статистической механики.
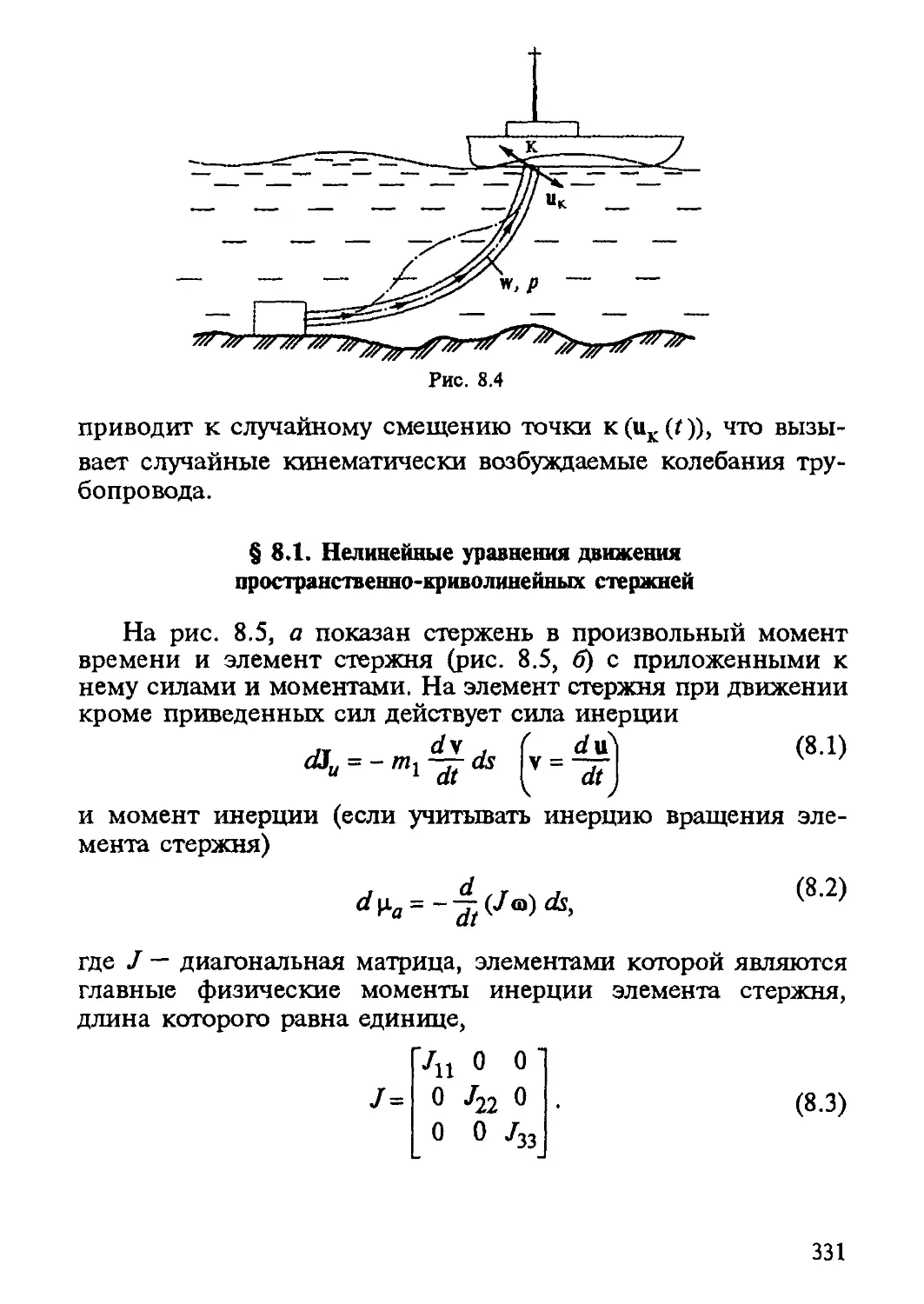
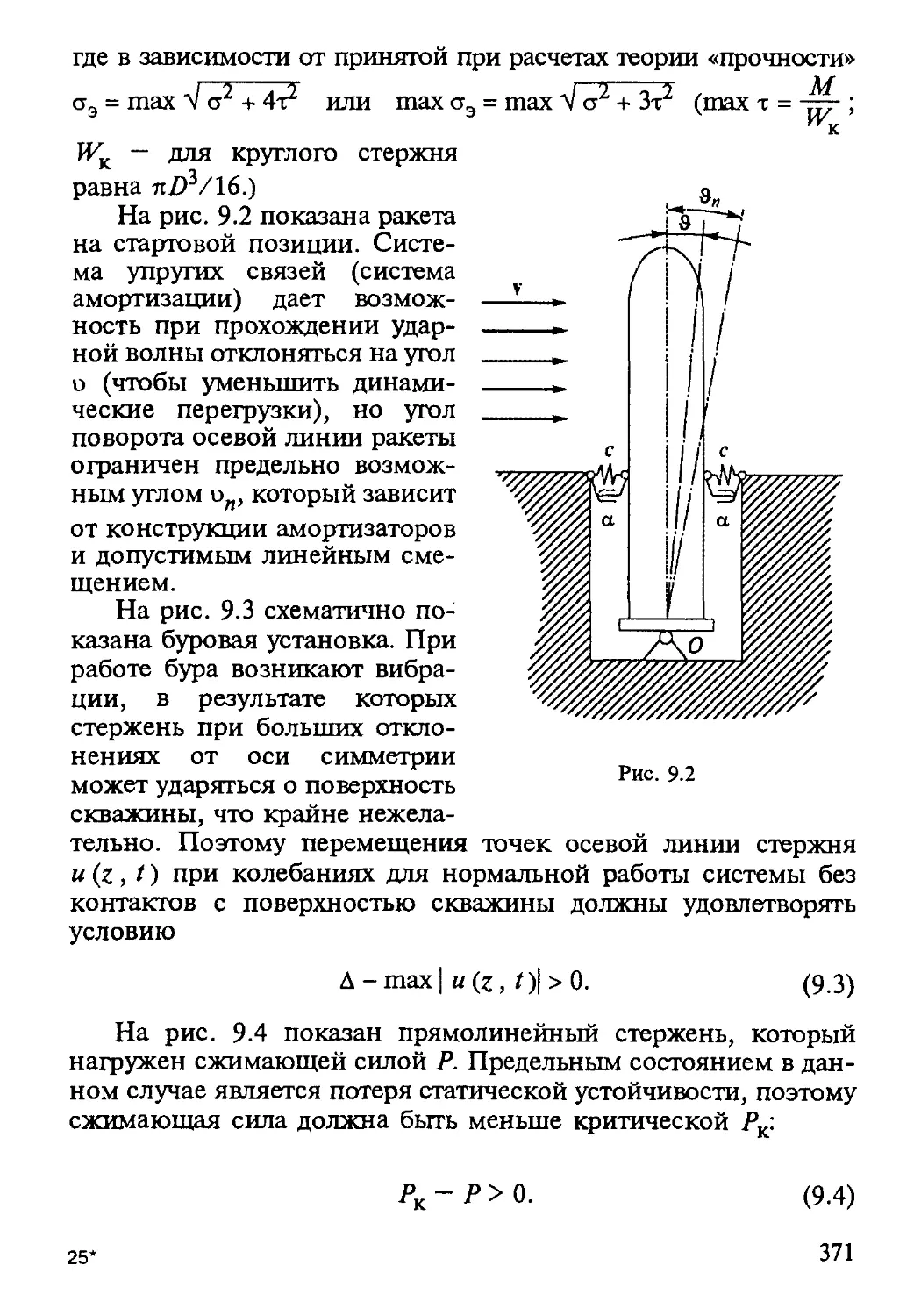
Введение
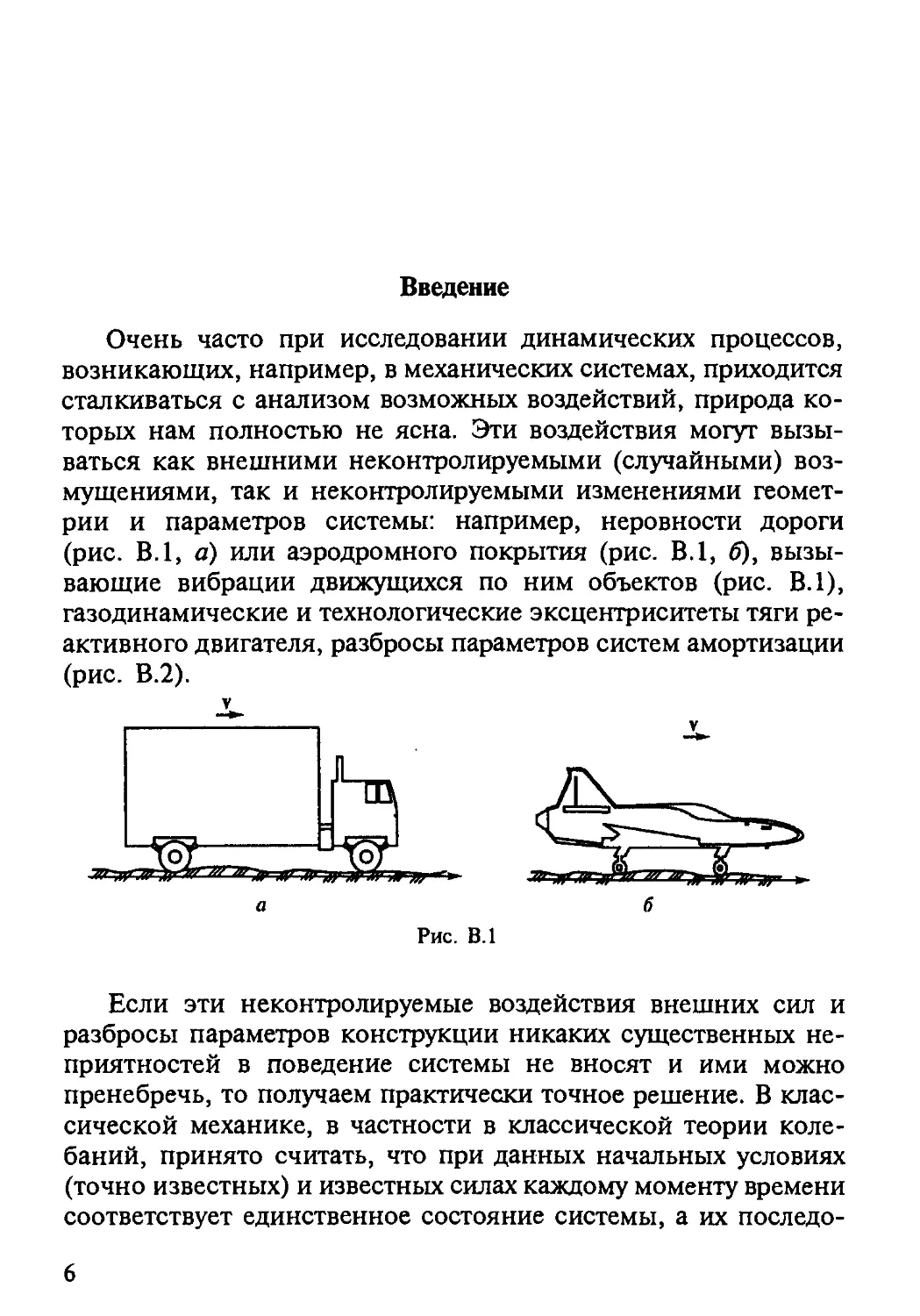
Очень часто при исследовании динамических процессов,
возникающих, например, в механических системах, приходится
сталкиваться с анализом возможных воздействий, природа ко-
которых нам полностью не ясна. Эти воздействия могут вызы-
вызываться как внешними неконтролируемыми (случайными) воз-
возмущениями, так и неконтролируемыми изменениями геомет-
геометрии и параметров системы: например, неровности дороги
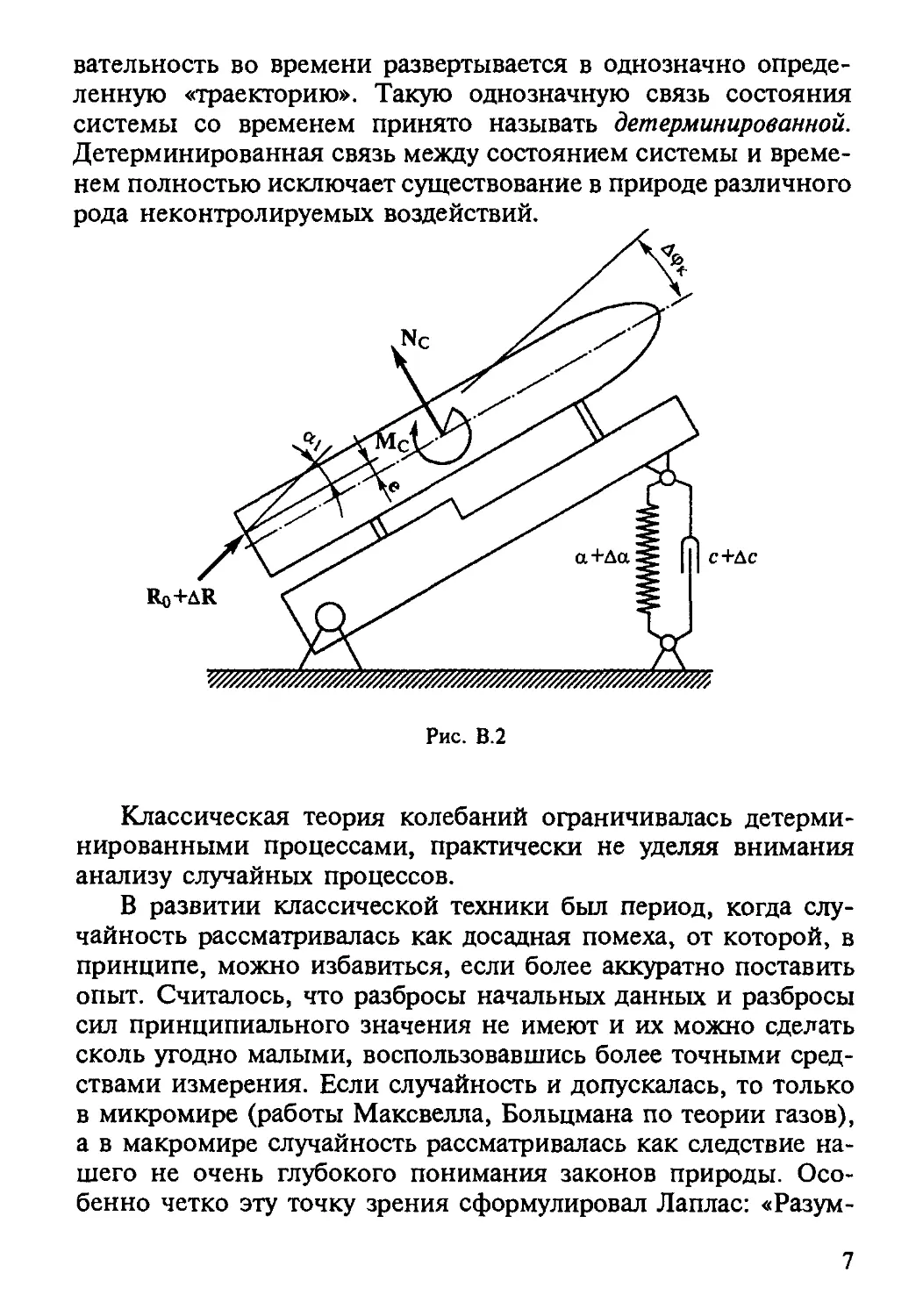
(рис. В.1, а) или аэродромного покрытия (рис. В.1, б), вызы-
вызывающие вибрации движущихся по ним объектов (рис. В.1),
газодинамические и технологические эксцентриситеты тяги ре-
реактивного двигателя, разбросы параметров систем амортизации
(рис. В.2).
Рис. В.1
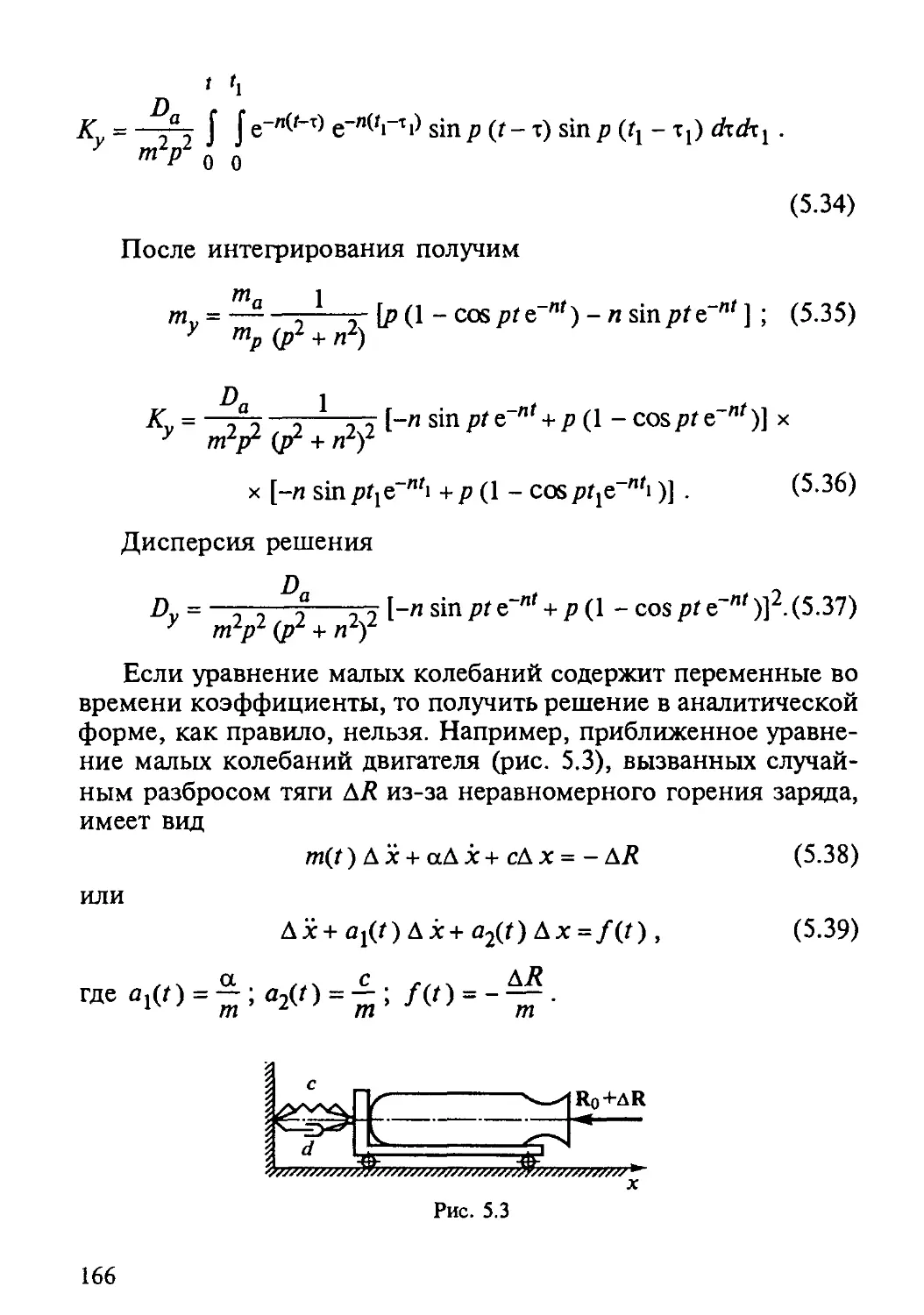
Если эти неконтролируемые воздействия внешних сил и
разбросы параметров конструкции никаких существенных не-
неприятностей в поведение системы не вносят и ими можно
пренебречь, то получаем практически точное решение. В клас-
классической механике, в частности в классической теории коле-
колебаний, принято считать, что при данных начальных условиях
(точно известных) и известных силах каждому моменту времени
соответствует единственное состояние системы, а их последо-
вательность во времени развертывается в однозначно опреде-
определенную «траекторию». Такую однозначную связь состояния
системы со временем принято называть детерминированной.
Детерминированная связь между состоянием системы и време-
временем полностью исключает существование в природе различного
рода неконтролируемых воздействий.
Рис. В.2
Классическая теория колебаний ограничивалась детерми-
детерминированными процессами, практически не уделяя внимания
анализу случайных процессов.
В развитии классической техники был период, когда слу-
случайность рассматривалась как досадная помеха, от которой, в
принципе, можно избавиться, если более аккуратно поставить
опыт. Считалось, что разбросы начальных данных и разбросы
сил принципиального значения не имеют и их можно сделать
сколь угодно малыми, воспользовавшись более точными сред-
средствами измерения. Если случайность и допускалась, то только
в микромире (работы Максвелла, Больцмана по теории газов),
а в макромире случайность рассматривалась как следствие на-
нашего не очень глубокого понимания законов природы. Осо-
Особенно четко эту точку зрения сформулировал Лаплас: «Разум-
ное существо, которое в каждый данный момент знало бы все
движущие силы природы и имело бы полную картину состоя-
состояния, в котором природа находится, могло бы — если бы только
его ум был в состоянии достаточно проанализировать эти дан-
данные — выразить одним уравнением как движение самых боль-
больших тел мира, так и движение мельчайших атомов. Ничего не
осталось бы для него неизвестным, и оно могло бы обозреть
одним взглядом как прошлое, так и будущее». {Лаплас. Анали-
Аналитическая теория вероятностей.)
Правда, при реализации этого утверждения возникают не-
некоторые трудности, связанные с получением информации о
положении тел системы и их скоростей в данный момент
времени. Например, движение молекул газа можно описать
дифференциальными уравнениями, но для их решения необ-
необходимы начальные условия в данный момент времени, т.е. мы
должны мгновенно получить информацию о положении моле-
молекул в пространстве, что возможно только при бесконечной
скорости передачи информации, но никакие сигналы не могут
быть переданы со скоростью, большей скорости света. Поэтому
трудность, связанная с получением информации о положении
молекул, имеет принципиальное значение. Второе допущение,
которое молчаливо использовалось, заключается в том, что в
принципе возможны абсолютно точные измерения (можно по-
получить абсолютно точные значения координат молекул и их
первых производных). Это допущение противоречит принципу
неопределенности Гейзенберга.
Таким образом, получить точную информацию о начальном
состоянии молекул газа принципиально нельзя, а тем самым
нельзя предсказать и поведение молекул газа во времени. Стро-
Строго однозначная зависимость между следствием и причиной
требует непрерывного копирования окружающего мира, т.е.
совершенно исключает появление нового, качественно отлич-
отличного явления. Если бы это было так, то была бы невозможна
эволюция окружающего нас мира с непрерывной сменой и
качественным изменением форм жизни. Все это говорит о том,
что случайность является не следствием нашего невежества, а
объективно существующей реальностью.
Как доказательство реальности случайности может рассмат-
рассматриваться принцип наименьшего принуждения Гаусса, вывод
которого использует методы, разработанные для анализа веро-
вероятностных задач. Принцип наименьшего принуждения Гаусса
формулируется следующим образом [11, 43]: истинное движение
системы, находящейся под действием сил и подчиненной неосво-
бождающим связям без трения, отличается от движений, совер-
совершающихся при тех же начальных условиях, тем свойством, что
для истинного движения мера отклонения от свободного движе-
движения, т.е. принуждение, есть минимум. Принуждением в данный
момент Гаусс называет меру отклонения системы, движущейся
под действием внешних активных сил (с учетом голономных
и неголономных связей, наложенных на систему), от свобод-
свободного движения, которое она имела бы, начиная с рассматри-
рассматриваемого момента, под действием тех же внешних сил, если бы
с этого момента были устранены наложенные на нее связи.
Рис. В.З
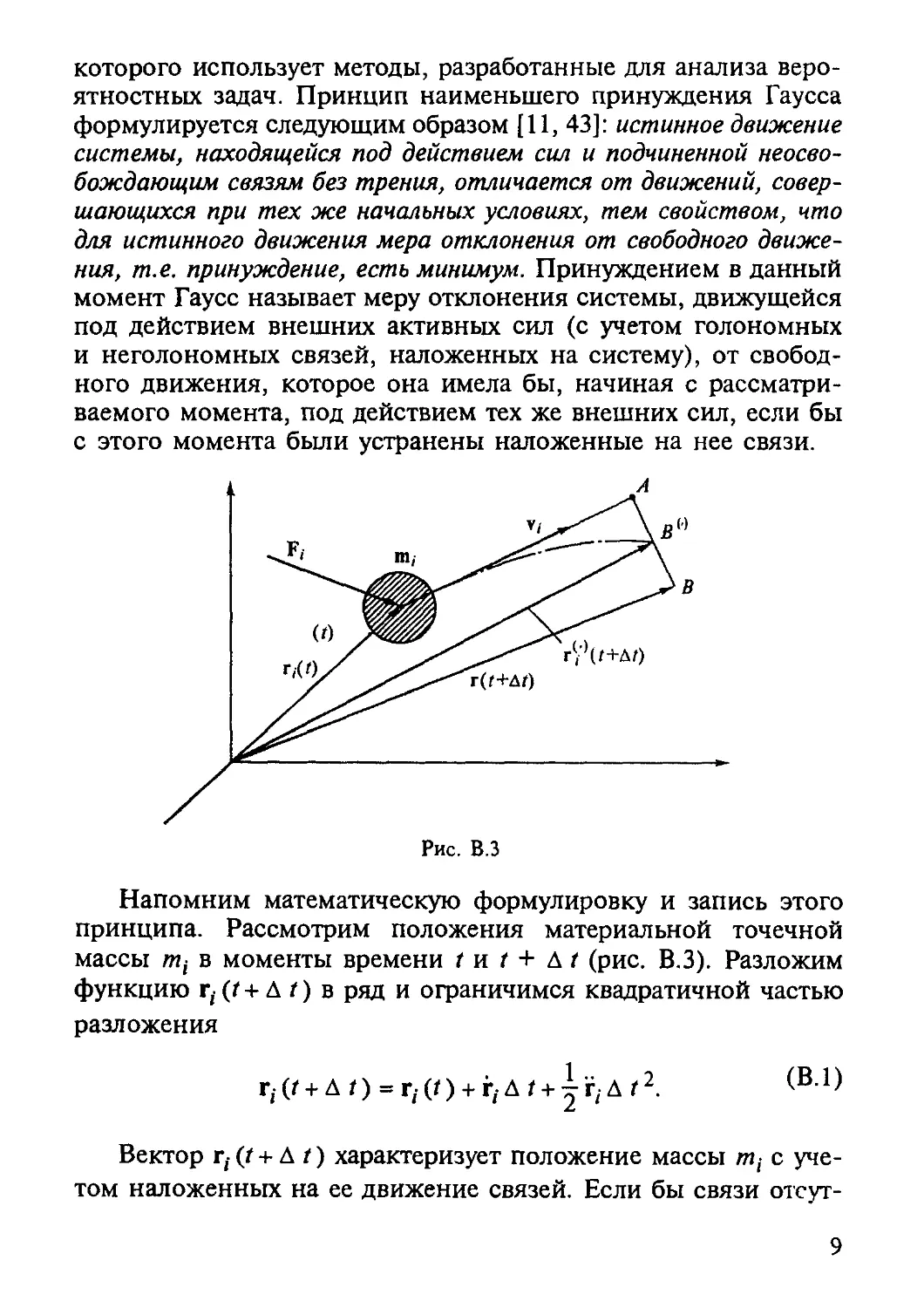
Напомним математическую формулировку и запись этого
принципа. Рассмотрим положения материальной точечной
массы mt в моменты времени t и t + At (рис. В.З). Разложим
функцию Tj(t + At) в ряд и ограничимся квадратичной частью
разложения
rt(t+ А О = г,(О + г,Д t + ^At2.
(B.I)
Вектор Tj(t+ A t) характеризует положение массы т{ с уче-
учетом наложенных на ее движение связей. Если бы связи отсут-
ствовали, то положение точки в момент t + Д t определялось бы
вектором iO(t + At), который с точностью до величин третьего
порядка малости можно представить в виде
или (так как if>(/) = г,- (/), tf(t) = г,- (J))
iP(/ + AO = r/(O + r,Ar + ^ifpAf2. (в.2)
При отсутствии связей уравнение движения точки имеет вид
m/rp = F,., (B.3)
поэтому имеем
1 F-
iP(/ + AO = r,(O + r,A' + 5TTA'2- (В-4)
Расстояние между положениями точки в момент t + A t при
действии связей и без связей равно
BOB = Ar/ = r^+A0-ifW04fc-^W2- (B)
Вектор В^В определяет отклонение материальной точки
при ее действительном движении от положения, в котором она
оказалась бы при свободном движении. За меру отклонения
точки от свободного движения Гаусс принимает пропорцио-
пропорциональную квадрату отклонения | Д г,-12 величину г,-, которую на-
называют принуждением:
Для всех точек системы имеем
7-iym r Ii2 <в-7)
z-2Lmi ri-m. .
10
или в скалярной форме записи,
«=1 [j=l V V J (=1
где
3 f F\2
Принцип Гаусса состоит в том, что в любой момент времени
для истинного движения системы сравнительно с кинемати-
кинематически возможным движением принуждение имеет наименьшее
значение:
я
z = Xy^0 = min- (B.9)
ы
Идея меры отклонения системы от свободного движения в
форме суммы величин, пропорциональных квадратам отклоне-
отклонений материальных точек системы, тесно связана с работами
Гаусса по теории ошибок, в частности с методом наименьших
квадратов, позволяющим определить неизвестную величину с
наименьшей средней квадратичной ошибкой. Метод наимень-
наименьших квадратов, относящийся к анализу случайных явлений,
приводит к соотношениям, аналогичным соотношению (В.9).
В теории наименьших квадратов основная задача формули-
формулируется следующим образом: имеются неизвестные функции yi
и их известные значения ую, тогда ошибки измерения равны
Если ум имеют разные дисперсии 5,-, то вводятся множители
Pj, зависящие от о). В предположении, что ошибки 5,- подчи-
подчиняются нормальному закону, доказывается следующая теорема.
Для того чтобы неизвестные yt приняли наиболее вероятные
значения, необходимо, чтобы
11
приняло минимальное значение, а при
и к = п это выражение превращается в (В.9).
Возвращаясь к принципу Гаусса, с учетом изложенного
результата из теории ошибок можно его сформулировать в
терминах теории вероятностей, а именно: истинное движение
системы отличается от кинематически возможного тем, что
имеет наибольшую вероятность. Связь между методом наимень-
наименьших квадратов и принципом наименьшего принуждения Гаусса
представляет собой нечто большее, чем просто аналогия, т.е.
отличие истинного движения тела от возможного носит веро-
вероятностный характер. Принцип Гаусса имеет существенное пре-
преимущество перед принципом Даламбера: он дает возможность
получить уравнения движения системы при любых неголоном-
ных связях, т.е. принцип Гаусса является наиболее общим
принципом механики и этот принцип допускает вероятностную
трактовку ! В современной физике пришлось ясно осознать тот
факт, что случайность нельзя полностью исключить и ее надо
учитывать как составную часть любой теории.
Однако эта точка зрения разделялась не всеми исследова-
исследователями. Многие физики и механики считали, что учет случай-
случайности является временным отступлением от классических тео-
теорий, что по мере накопления знаний роль случая будет сведена
к нулю. Познавая в будущем более глубокий уровень физичес-
физических процессов, можно будет объяснить явления, ныне для нас
случайные, как проявление полностью детерминированных
процессов, которые в настоящее время скрыты от нашего взора.
Сторонники противоположной точки зрения на случай-
случайность считают, что только вероятностные методы анализа про-
процессов могут дать правильный ответ. По мнению сторонников
вероятностной трактовки законов природы, классическая ме-
механика является частным случаем статистической механики,
так как абсолютно точное знание начальных условий и сил
fi 2 ' ' '
принципиально невозможно не только в микромире, но и в
макромире.
По мнению ряда ученых, детерминизм есть математическая
условность, позволяющая упрощать исследование многих
сложных процессов, в которых можно ограничиться изучением
одних лишь средних значений.
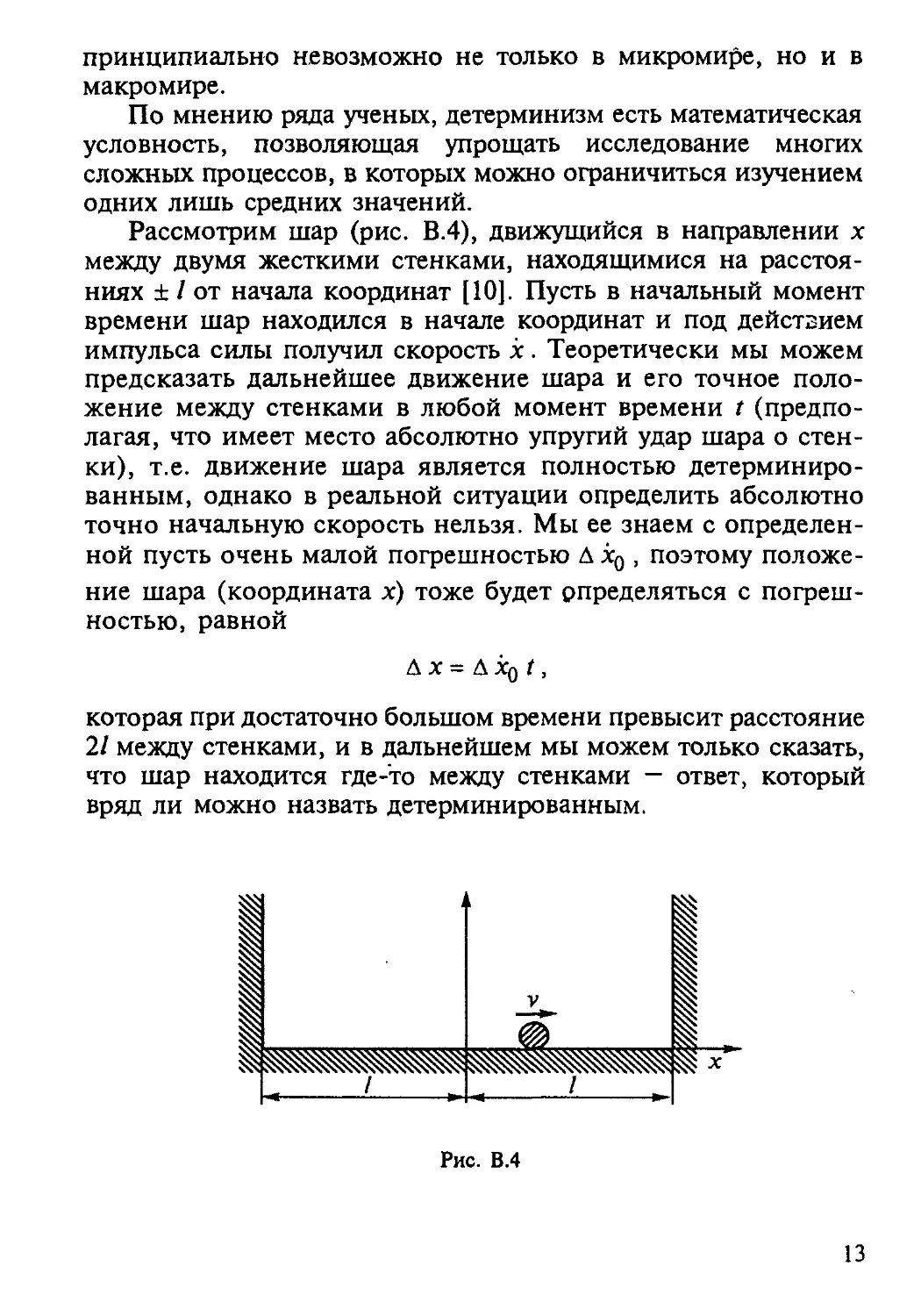
Рассмотрим шар (рис. В.4), движущийся в направлении х
между двумя жесткими стенками, находящимися на расстоя-
расстояниях ± / от начала координат [10]. Пусть в начальный момент
времени шар находился в начале координат и под действием
импульса силы получил скорость х. Теоретически мы можем
предсказать дальнейшее движение шара и его точное поло-
положение между стенками в любой момент времени / (предпо-
(предполагая, что имеет место абсолютно упругий удар шара о стен-
стенки), т.е. движение шара является полностью детерминиро-
детерминированным, однако в реальной ситуации определить абсолютно
точно начальную скорость нельзя. Мы ее знаем с определен-
определенной пусть очень малой погрешностью Д х0 , поэтому положе-
положение шара (координата х) тоже будет определяться с погреш-
погрешностью, равной
А х = А х0 t,
которая при достаточно большом времени превысит расстояние
2/ между стенками, и в дальнейшем мы можем только сказать,
что шар находится где-то между стенками — ответ, который
вряд ли можно назвать детерминированным.
Рис. В.4
Рассмотренные точки зрения диаметрально противополож-
противоположны и имеют чисто философское значение. С прикладной точки
зрения, ни один из физических процессов нельзя считать стро-
строго детерминированным, так же как нельзя считать и полностью
случайным. К какой категории отнести данный конкретный
процесс, целиком зависит от точности имеющихся исходных
данных и от того, каковы конечные результаты и с какой
точностью необходимо их получить.
Имеется много прикладных задач, которые могут быть опи-
описаны точными математическими соотношениями, т.е. практи-
практически их можно считать детерминированными, как, например,
движение спутника по орбите. Но не менее обширен класс
физических процессов, которые носят явно недетерминирован-
недетерминированный характер. К таким физическим процессам принадлежат,
например, колебания транспортного средства при движении по
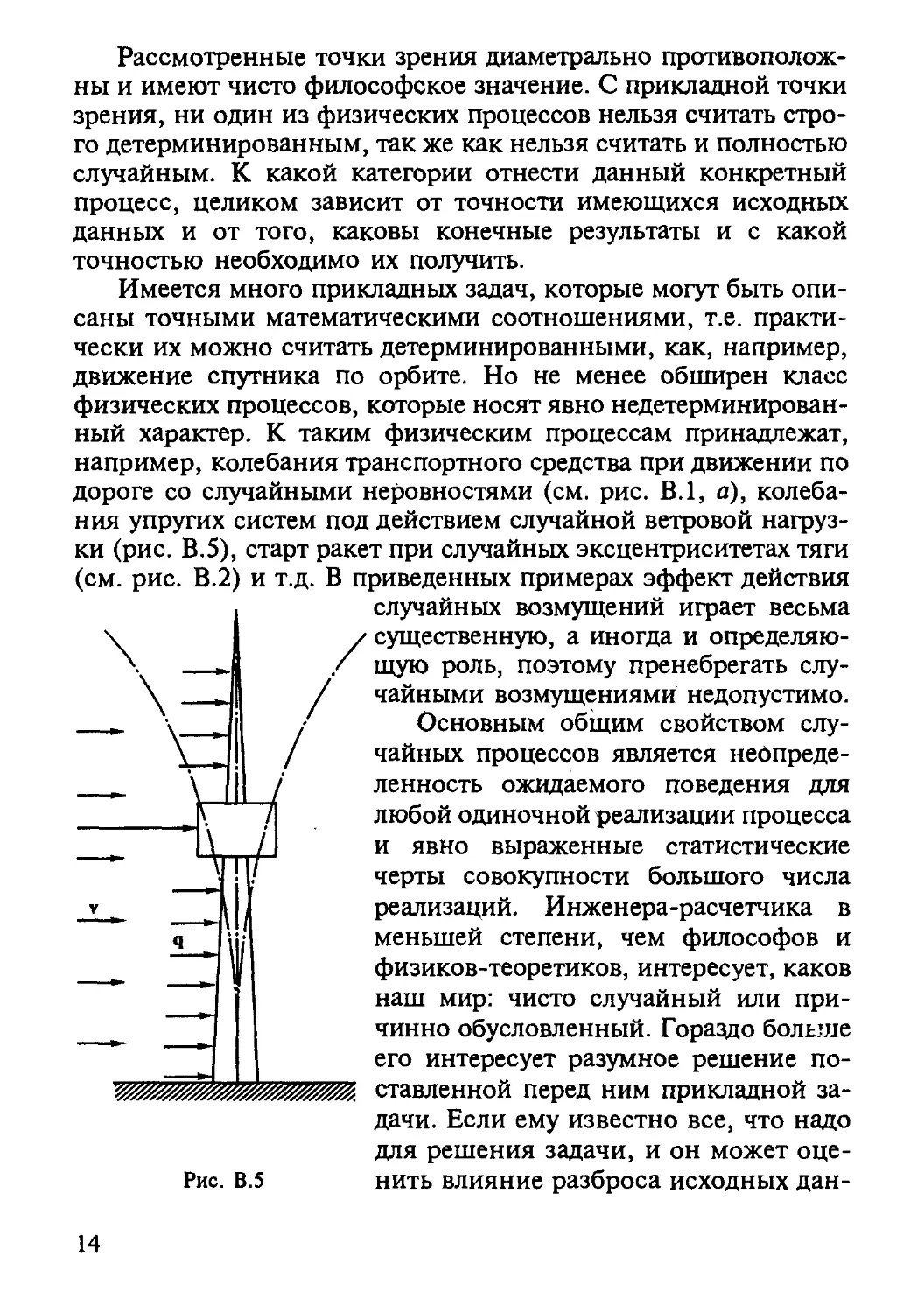
дороге со случайными неровностями (см. рис. В.1, а), колеба-
колебания упругих систем под действием случайной ветровой нагруз-
нагрузки (рис. В.5), старт ракет при случайных эксцентриситетах тяги
(см. рис. В.2) и т.д. В приведенных примерах эффект действия
случайных возмущений играет весьма
• существенную, а иногда и определяю-
определяющую роль, поэтому пренебрегать слу-
случайными возмущениями недопустимо.
Основным общим свойством слу-
случайных процессов является небпреде-
ленность ожидаемого поведения для
любой одиночной реализации процесса
и явно выраженные статистические
черты совокупности большого числа
реализаций. Инженера-расчетчика в
меньшей степени, чем философов и
физиков-теоретиков, интересует, каков
наш мир: чисто случайный или при-
причинно обусловленный. Гораздо больше
его интересует разумное решение по-
поставленной перед ним прикладной за-
задачи. Если ему известно все, что надо
для решения задачи, и он может оце-
Рис. в.5 нить влияние разброса исходных дан-
ных на конечный результат и установить, что этим влиянием
можно пренебречь, то он использует методы классической
механики. Если же неопределенность исходных данных или
неопределенность в задании действующих на систему сил ве-
велика, то ему приходится обращаться к методам, позволяющим
ликвидировать эту неопределенность, — в частности, к методам
теории вероятностей и статистической механики. То, что когда-
нибудь в будущем эта неопределенность будет устранена, для
инженера-расчетчика в данный момент является слабым уте-
утешением.
Одно из предубеждений против распространения вероят-
вероятностных методов анализа механических систем связано с
невозможностью однозначного количественного предсказа-
предсказания поведения системы, как это можно сделать, основываясь
на законах и методах классической механики. Многие иссле-
исследователи придерживаются убеждения, что единственный вид
предсказания, которое имеет право называться научным, —
это точное количественное предсказание будущих событий.
Можно услышать претензии на неполноту статистических
методов в том смысле, что они не позволяют делать опреде-
определенные выводы и предсказания относительно индивидуаль-
индивидуальных событий. Однако, когда требуется предсказать результа-
результаты, характеризующие поведение большого числа отдельных
случайных событий, статистические методы дают более со-
содержательную информацию, и предсказание, основанное на
этих методах, столь же определенно, как и предсказание
поведения отдельного тела, основанное на методах класси-
классической механики.
Для применения методов теории вероятностей необходи-
необходимым условием является возможность многократного осущест-
осуществления случайного события в практически однородных усло-
условиях. Основная трудность при применении вероятностных ме-
методов в расчетной практике заключается в том, что вероятност-
вероятностные характеристики случайных функций можно получить,
только имея большое число реализаций случайного процесса,
что может быть сопряжено с большими техническими труд-
трудностями в проведении экспериментов или с большими
экономическими затратами. Так, например, для получения ве-
вероятностных характеристик случайных неровностей дороги или
аэродромного покрытия (см. рис. В.1) надо иметь набор запи-
записей микропрофилей различных участков дороги (грунтовой,
булыжник и т.д.), при том, что получение этих записей очень
трудоемко. Но процесс накопления статистической информа-
информации о случайных возмущениях продолжается, и поэтому роль
вероятностных методов расчета непрерывно растет.
В настоящее время одним из основных методов анализа
случайных процессов служит корреляционная теория. Кор-
Корреляционная теория позволяет при известных вероятностных
характеристиках входа получить аналогичные вероятностные
характеристики выхода. Следует еще раз подчеркнуть, что
эти характеристики имеют смысл как характеристики мно-
множества процессов, а не отдельного процесса. Если, например,
по дороге со случайными неровностями движется 1000 оди-
одинаковых автомобилей с одной и той же скоростью, то можно
предсказать, в среднем, как данная дорога (вход) действует
на автомобиль: например, определить математические ожи-
ожидания и дисперсии напряжений (выход) в сечениях рамы
автомобиля. Если же по ограниченному отрезку дороги дви-
движется один автомобиль, то получить вероятностные характе-
характеристики выхода (без дополнительных предположений) нель-
нельзя. Еще более убедительным примером является одиночный
старт ракеты (см. рис. В.2).
При движении по направляющей на ракету действуют слу-
случайные силы, вызванные эксцентриситетами тяги (вход), поэ-
поэтому в момент схода с направляющей она получает случайные
разбросы (выход) угла Д (рк и угловой скорости Д фк . Используя
корреляционную теорию, можно формально определить мате-
математические ожидания (точнее средние значения) разбросов
(Д Фк и Д фк) и их дисперсии, но достоверность этих резуль-
результатов очень мала.
В примере со стартом ракеты имеет место более сложная
задача учета неопределенности изменения случайных эксцент-
эксцентриситетов тяги во времени, так как неизвестно, какой из воз-
можных случайных законов изменения эксцентриситетов тяги
будет реализован при данном единичном старте. Если бы за-
запускалась 1000 ракет, то мы могли бы использовать вероят-
вероятностные характеристики входа (эксцентриситетов тяги) и по-
получить вероятностные характеристики выхода (Д фк и А фк )
для всей серии пусков. При одиночном запуске этого сделать
нельзя, но можно утверждать, что с увеличением числа запус-
запусков получающиеся значения Л фк и А фк все ближе, в среднем,
приближаются к своим теоретическим значениям. Обычно при
исследовании случайных процессов в механических системах,
в частности нестационарных процессов, подразумевается (одно
из допущений, позволяющих использовать математический ап-
аппарат теории случайных процессов), что условие массовости
процесса выполняется. Для стационарных случайных процес-
процессов принятие гипотезы об эргодичности процесса позволяет
вместо множества реализаций рассматривать одну реализацию
и получить информацию, достаточную в рамках корреляцион-
корреляционной теории для предсказания поведения системы. Для многих
прикладных задач такой подход к изучению случайных процес-
процессов оказывается вполне достаточным, поэтому корреляционная
теория и получила столь широкое распространение.
Имея алгоритм определения вероятности безотказной ра-
работы, можно, изменяя конструктивные параметры системы,
повысить эту вероятность, т.е. спроектировать более надежное
изделие. Но не всегда вероятностные оценки качества бывают
приемлемыми. Часто требуется, чтобы выполнялись гаранти-
гарантированные критерии качества процесса. Например, при запуске
одной ракеты необходимо, чтобы она гарантированно попала
в заданную область. Вероятностная оценка того, что она по-
попадет в заданную область, например, с вероятностью, равной
0,9, не позволяет быть уверенным в том, что она действительно
попадет в заданную область.
Оценка случайного процесса или результатов испытаний
методами теории вероятностей не носит абсолютный характер
и в зависимости от требований к конечным результатам может
быть истолкована по-разному. О возможных различных взгля-
3 Зак. 292 17
дах на один и тот же конечный результат говорится в поэме
М.Д. Кендалла [4]. (Она приведена в приложении 4.)
Инженер-расчетчик должен самостоятельно выбирать ме-
методы расчета в зависимости от имеющейся информации о
случайных возмущениях.
Глава 1. КРАТКИЕ СВЕДЕНИЯ ИЗ ТЕОРИИ
ВЕРОЯТНОСТЕЙ
Во многих областях техники приходится встречаться с осо-
особыми явлениями, которые принято называть случайными. Рас-
Рассмотрим, например, процесс изготовления однотипных дета-
деталей. Можно установить, что размеры деталей будут колебаться
около некоторого установленного значения. Эти отклонения
носят случайный характер, поэтому измерения обработанных
деталей не дают возможности представить размеры следующей
детали, однако для больших партий деталей отклонения раз-
размеров начинают подчиняться определенным закономерностям,
которые изучаются специальной математической дисципли-
дисциплиной — теорией вероятностей. Теория вероятностей отражает
закономерности, присущие случайным событиям (явлениям)
массового характера. Имеется много монографий по теории
вероятностей, в которых подробно изложены основные поня-
понятия и методы теории вероятностей и теории случайных функ-
функций, например [12, 13, 17]. Поэтому в данной главе приведены
лишь те положения и результаты, относящиеся к теории веро-
вероятностей, которые используются в последующих главах книги.
§ 1.1. Основные понятия теории вероятностей
Одно из основных достоинств теории вероятностей, которое
позволяет ее эффективно использовать, например, в практике
проектирования механических конструкций, заключается в
том, что она дает возможность количественно оценить такие
эмоциональные понятия, как «вероятно», «мало вероятно»,
«большая вероятность» и т.д. Как известно, чтобы спроекти-
спроектировать машину, прибор, летательный аппарат и т.д., надо по-
получить численные значения параметров конструкции и крите-
критериев ее качества (работоспособности), к которым относятся и
вероятностные критерии качества. Для сравнения конструкций
по вероятностным критериям надо знать численные значения
вероятностей (например, вероятности безотказной работы).
Теория вероятностей и основанные на ней разделы статисти-
статистической механики механических систем позволяют это сделать.
Явления, которые могут реализоваться или нет, называют
случайными событиями. Например, порыв ветра, действующий
на телебашню (см. рис. В.5), является случайным событием.
Событие, которое обязательно произойдет, называют достовер-
достоверным. Событие, которое не может осуществиться, называют невоз-
невозможным. Для того чтобы установить, произойдет или не произой-
произойдет некоторое случайное событие, необходимо провести экспе-
эксперимент или, как принято говорить, провести испытания.
Исследования показывают, что события, случайные при
единичном испытании, при большом числе испытаний (при
неизменных условиях опыта) начинают подчиняться некото-
некоторым неслучайным закономерностям, которые получили назва-
название вероятностных. Число появлений событий при испытаниях
характеризуется частотой события W. Частотой события W
называют отношение числа испытаний п, при которых событие
произошло, к числу всех проведенных испытаний N.
При этом подразумевается, что исходы событий в серии
опытов взаимно независимы (случайные события называют
независимыми, если появление или отсутствие одного из них
никак не сказывается на появлении другого).
Частота событий в какой-то степени может рассматриваться
как внутренняя характеристика явления, однако она есть слу-
случайная величина, зависящая от конкретной серии испытаний.
При очень большом числе испытаний частота W почти пере-
перестает изменяться, приближаясь к некоторой величине Р, кото-
которую называют вероятностью.
Следует отметить, что характер приближения частоты к
вероятности при увеличении числа опытов несколько отлича-
отличается от стремления к пределу, как это понимается в высшей
математике. В высшей математике, когда говорится о стремле-
стремлении переменной хп с ростом п к постоянному пределу а, то
это означает, что разность | хп — а \ становится меньше любого
положительного числа е для всех значений п, начиная с неко-
некоторого достаточно большого числа. Относительно частоты со-
бытия и его вероятности такого утверждения сделать нельзя,
так как вполне возможно, что при большом числе опытов
частота события будет значительно отклоняться от его вероят-
вероятности. Но такое значительное отклонение является тем менее
вероятным, чем больше число опытов. В теории вероятностей
существует понятие «сходимость по вероятности», т.е. случай-
случайная величина хп с ростом п сходится по вероятности к величине
а, когда вероятность неравенства | хп - а | < е при увеличении п
неограниченно приближается к единице. Это утверждение со-
составляет содержание теоремы Бернулли: «При неограниченном
увеличении числа однородных независимых опытов можно ут-
утверждать, что частота события будет сколь угодно мало отли-
отличаться от его вероятности».
Поэтому, если событие А повторяется большое число (N)
раз и при этом в п случаях событие обладает признаком В, а
исходы событий в этой последовательности взаимно независи-
независимы, то вероятность появления признака
Р(В)= lim ¦?.
Зная вероятность события, можно, не проводя никаких
опытов, предсказать, с какой частотой будет появляться это
событие при большом числе опытов. Можно также сказать, что
вероятность события представляет собой меру возможности
появления события при одном опыте.
Статистическое определение вероятности позволяет устано-
установить:
1) вероятность достоверного события (равную единице);
2) вероятность невозможного события (равную нулю);
3) вероятность произвольного случайного события А (рав-
(равную положительному числу, не превосходящему единицу, т.е.
Q<P(A)Zl).
Если имеются два события А и В, причем вероятность
события А не зависит от того, произошло событие В или нет,
то такие два события называют независимыми. Событие А на-
называют зависимым от события В, если вероятность события А
меняется в зависимости от того, произошло событие В или нет.
Вероятность события А, вычисленную при условии, что имело
21
место событие В, называют условной вероятностью события А
и обозначают Р (А \В).
1.2.1. Основные теоремы теории вероятностей
1. Теорема сложения вероятностей. Вероятность суммы двух
несовместных событий равна сумме вероятностей этих собы-
событий, т.е.
Р(А + В) = Р(А) + Р(В). A.1)
2. Теорема умножения вероятностей. Вероятность произве-
произведения (совмещения) двух событий А и В равна произведению
вероятности А на условную вероятность события 5, т.е.
Р(АВ) = Р(А)Р(В\А). A.2)
Вероятность произведения двух событий можно выразить и
через условную вероятность события А. В этом случае
Р(А\В) = Р(В)Р(А\В).
Вероятность совместного осуществления двух независимых
событий равна произведению вероятностей этих событий, т.е.
Р(АВ) = Р(А)Р(В). A.3)
3. Формула полной вероятности. Следствием теорем сложе-
сложения вероятностей и умножения вероятностей является так на-
называемая формула полной вероятности. Пусть требуется опре-
определить вероятность события Л, которое может произойти вместе
с одним из событий В: (J' = 1, 2,..., л), образующих полную груп-
группу несовместных событий, которые называют гипотезами. Не-
Несколько событий в данном опыте образуют группу событий,
если в результате опыта непременно должно реализоваться хотя
бы одно из них. Так как гипотезы Bj образуют полную группу,
то событие А может появиться только в комбинациях с какой-
либо из этих гипотез, т.е.
А = ВХА + Ву4 +...+ В„А.
Поскольку гипотезы 2?, несовместимы, то и комбинации ВА
также несовместимы, поэтому, применяя к ним теорему сло-
сложения, получаем
п
Р(А) = ^Р{В]А).
Воспользовавшись теоремой умножения, для каждого из
слагаемых в правой части полученного соотношения оконча-
окончательно имеем
л
P(A) = Y,P(Bj)P(A\Bj). A-4)
>1
Выражение A.4) называют формулой полной вероятности.
4. Формула Байеса (теорема гипотез). Следствием теоремы
умножения и формулы полной вероятности является форму-
формула Байеса. Пусть имеется полная группа несовместных гипо-
гипотез Д(У= 1, 2, ..., п). Вероятности этих гипотез до опыта
известны и равны Р{Вр. В результате проведенного опыта
имело место событие А. Возникает вопрос, как следует
изменить вероятности гипотез в связи с появлением
этого события?
Воспользуемся формулой условной вероятности Р Щ \Л) для
каждой гипотезы и теоремой умножения:
Р (АЦ) = Р(А) Р (Bj \А) = Р (Вр Р (А \В).
Из полученного соотношения следует, что
Согласно формуле для полной вероятности A.14), оконча-
окончательно получаем
ГЩ\*= /^'«Ч» . 0.5,
^Р{ВрР{А\Вр
23
§ 1.2. Функция распределения и плотность вероятности
случайной величины
Функция распределения. Одним из основных понятий тео-
теории вероятностей является понятие о случайной величине.
Случайной называют величину, которая в результате опыта
может принять то или иное значение, заранее неизвестное. Эта
величина может быть как дискретной, так и непрерывной. Она
будет полностью определена с вероятностной точки зрения,
если будет известно, с какой вероятностью возможно появле-
появление каждого из принимаемых случайной величиной значений.
Такое соответствие называют законом распределения дискретной
случайной величины. Закон распределения дискретной случай-
случайной величины X, которая в результате опыта примет одно из
xj(j = 1, 2,..., п) возможных значений, можно представить в
виде табл. 1.1.
Таблица 1.1
Ряд распределения
^1 ^2 Ъ — ^я
Л 1 р2 1 Рг 1 - | Л,
Зная ряд распределения случайной дискретной величины,
можно получить функцию, характеризующую это распределение:
х, < х
Неравенство Xj < х под знаком суммы указывает, что сум-
суммирование распространяется на все значения х,-, которые мень-
меньше х. Функцию F(x) называют функцией распределения случайной
величины х. Когда переменная х проходит через возможное
значение X, функция F(x) меняется скачкообразно, причем
величина скачка равна вероятности Pj появления значения Ху
Несовместные события х.- образуют полную группу, поэтому
л
F(x) = ^Pj=h
т.е. функция распределения больше единицы быть не может.
24
Для непрерывной случайной величины под вероятностью
события понимают вероятность события X < х, где х — неко-
некоторая текущая переменная. В этом случае вероятность
Р(Х<х) есть некоторая функция от х, которую по аналогии с
дискретной случайной величиной называют функцией распре-
распределения:
F{x) = P{X<x). A.7)
Функцию F(x) иногда называют интегральной функцией рас-
распределения или интегральным законом распределения. Функция
распределения является самой универсальной характеристикой
случайных величин как дискретных, так и непрерывных.
Функция распределения должна удовлетворять условию
0<F(x)<l. A.8)
Из определения функции F(x), данного в A.7), следует, что
ни при каких сколь угодно больших х функция F(x) не может
быть больше единицы (так как F(x) есть вероятность, а веро-
вероятность не может быть больше единицы):
F(<x>) = lim F(x) = 1.
Так как вероятность Р(Х<х) не может быть меньше нуля,
то из A.7) следует, что
F(-oo) = lim F(x) = 0.
X —> -чх>
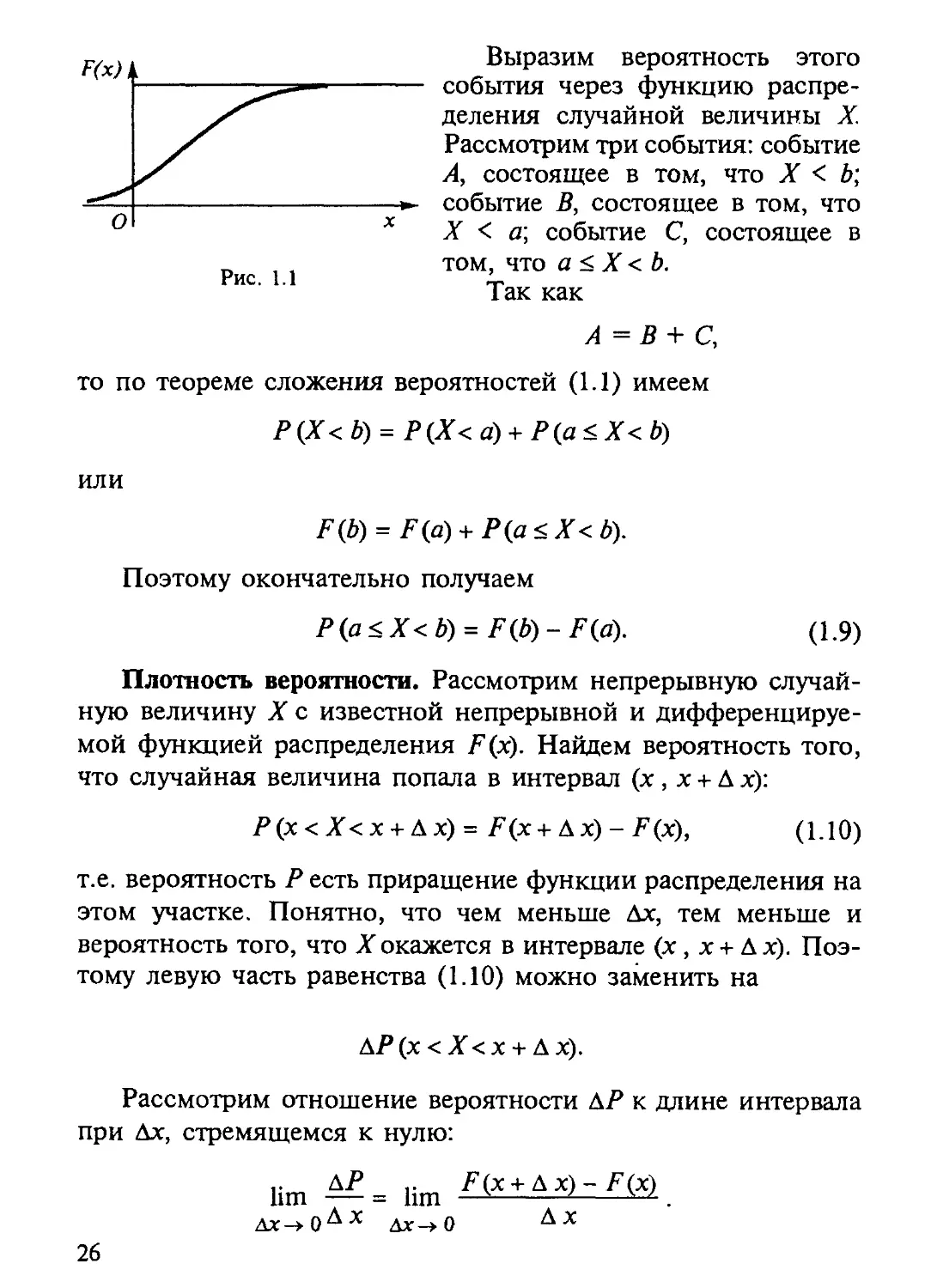
Примерный вид функции распределения для непрерывной
случайной величины показан на рис. 1.1. При решении при-
прикладных вероятностных задач часто бывает необходимым оп-
определять вероятности того, что случайная величина X примет
значение, заключенное в некотором ограниченном интервале,
например, в интервале (а, Ь). Условимся для определенности
левый конец а интервала (а, Ь) включать в интервал, а правый
конец b не включать. Тогда попадание случайной величины X
на интервал {а, Ь) равносильно выполнению неравенства
а<Х<Ь.
Выразим вероятность этого
события через функцию распре-
распределения случайной величины X.
Рассмотрим три события: событие
А, состоящее в том, что X < Ь\
событие В, состоящее в том, что
X < а; событие С, состоящее в
_, , , том, что а<Х<Ь.
РИС. 1.1 гг
Так как
А = В + С,
то по теореме сложения вероятностей A.1) имеем
Р(Х< Ь) = Р(Х<а) + Р(а<Х< Ь)
или
F(b) = F(a) + P(a<X<b).
Поэтому окончательно получаем
P(a<X<b) = F(b)-F(a). A.9)
Плотность вероятности. Рассмотрим непрерывную случай-
случайную величину X с известной непрерывной и дифференцируе-
дифференцируемой функцией распределения F(x). Найдем вероятность того,
что случайная величина попала в интервал (х, х + Ах):
Р(х<Х<х + Ах) = F(x + Ax)-F(x), A.10)
т.е. вероятность Р есть приращение функции распределения на
этом участке. Понятно, что чем меньше Ах, тем меньше и
вероятность того, что Xокажется в интервале (х, х + Ах). Поэ-
Поэтому левую часть равенства A.10) можно заменить на
АР(х<Х<х + Ах).
Рассмотрим отношение вероятности АР к длине интервала
при Ах, стремящемся к нулю:
Ит ДР= Um F(X + Ax)-F{x)
Дх->0Ах Дх->0 Лх
26
Ограничиваясь линейной частью разложения F(x + Ax) в
ряд, получим
?-/"» 011)
Введем обозначения
F'(x)=f(x), A.12)
поэтому
dP=f(x)dx.
Функция fix) называется плотностью распределения непре-
непрерывной случайной величины X. Из A.12) следует
х
F(x) = \f(x)dx. A.13)
—00
Устремив верхний предел к бесконечности, получим
F(co)=l/(x)ax=h
-оо
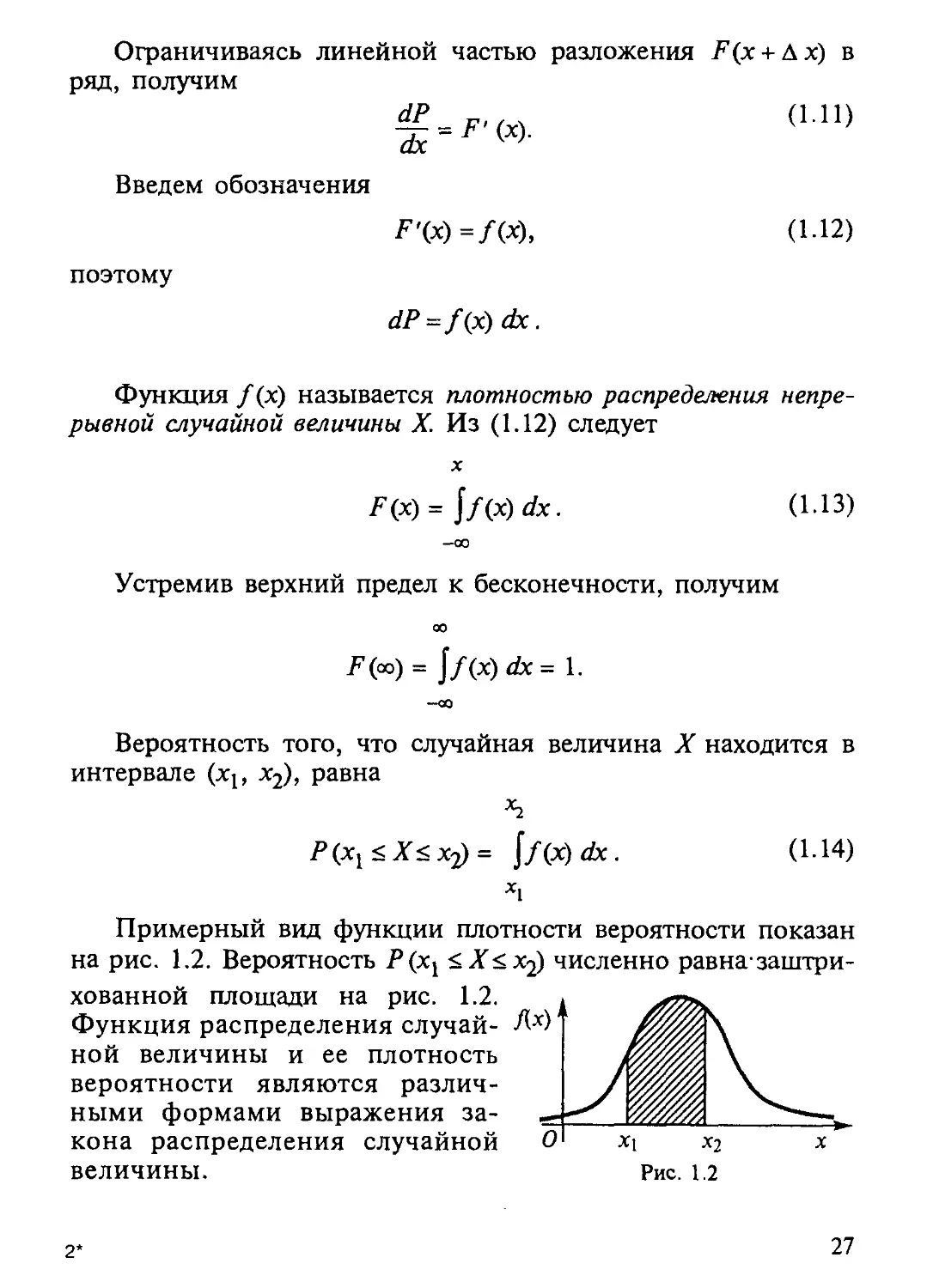
Вероятность того, что случайная величина X находится в
интервале (jcj, x2), равна
P(xlzXzx7)= \f(x)dx. A.14)
xi
Примерный вид функции плотности вероятности показан
на рис. 1.2. Вероятность Р(х{ < Х<х$ численно равна-заштри-
равна-заштрихованной площади на рис. 1.2.
Функция распределения случай-
случайной величины и ее плотность
вероятности являются различ-
различными формами выражения за-
закона распределения случайной
величины.
27
§ 1.3. Числовые характеристики случайных величин
и их основные свойства
Полной характеристикой случайной переменной величины
(или системы случайных величин) является закон распределе-
распределения, заданный функцией F(x) или плотностью распределения
/(х). На практике, однако, такая исчерпывающая характерис-
характеристика не всегда может быть получена вследствие ограниченности
экспериментальных результатов или из-за сложности их про-
проведения либо из-за большой их стоимости. В этих случаях
вместо законов распределения используют приближенное опи-
описание случайной величины, полученное с помощью минималь-
минимального числа неслучайных характеристик, отражающих наиболее
существенные особенности распределений. Часто бывает до-
достаточно указать только отдельные числовые параметры, ха-
характеризующие существенные свойства распределения случай-
случайной величины, например, среднее значение, относительно ко-
которого группируются возможные значения случайной величи-
величины или число, характеризующее степень разброса случайной
величины от ее среднего значения. Такие неслучайные харак-
характеристики, которые в сжатой форме позволяют выразить наи-
наиболее существенные особенности распределения, называются
числовыми характеристиками случайной величины. Например,
для одной случайной величины X такими числовыми (неслу-
(неслучайными) характеристиками являются ее математическое ожи-
ожидание и дисперсия.
Математическое ожидание. Простейшей числовой характе-
характеристикой дискретной случайной величины X в данной серии
опытов является ее среднее арифметическое значение
N
MlX] = mx=JyYxi> A.15)
1=1
где т^ — среднее значение случайной величины; N — число
испытаний; х,- — значения случайной величины, которые она
принимала при этих испытаниях; М — операция осреднения.
В технической литературе используются еще два обозначе-
обозначения для операции осреднения <>, Е. В дальнейшем для опе-
операции осреднения принято обозначение М [14].
28
Если некоторые значения Xj, принимаемые случайной ве-
величиной X, повторяются rtj раз, то все значения Xj можно
разбить на R групп и выражение A.15) представить в виде
R п к (к \
М И [М )
где №у — частота (статистическая вероятность Р.) появления х-.
Поэтому для дискретной случайной величины ее среднее
значение равно
к
m^^xfi.
М
Для непрерывной случайной величины X математическое
ожидание равно
00 ОО
М[х] =тх= \xdP= \xf(x) dx . О-17)
-00 —00
Дисперсия. Для характеристики разброса значений дискрет-
дискретной случайной величины в данной серии опытов можно взять
среднее значение какой-нибудь положительной меры отклоне-
отклонения случайной величины от ее среднего значения, например,
квадрат разности между значениями случайной величины и ее
средним значением:
к к
М[!2] = ях' = Х^(*,--О2 = Е% (х, = х,-О> A18)
ы ы
о
где Xj = Xj - т^ называется центрированной случайной величиной.
Величина Dx' называется статистической дисперсией слу-
случайной величины X. При практических расчетах удобнее исполь-
использовать величину
оу = л/Д7, A.19)
29
которая называется статистическим средним квадратическим
отклонением.
Для непрерывной случайной величины дисперсия и среднее
квадратическое отклонение равны
00
DX=M[°X2} = \(x-mj2f(x)dx; (UQ)
Вероятность отклонения случайной величины от ее сред-
среднего значения на некоторую величину можно оценить, вос-
воспользовавшись формулой П.Чебышева:
Р(\Х-тх\>а)<~. A.21)
or
1.3.1. Основные свойства математического ожидания и дисперсии
1. Математическое ожидание детерминированной величины
равно этой величине:
00 00
М[с] = jcf(x) dx = c J/(x) dx = с .
-00 —00
2. Математическое ожидание случайной величины, умно-
умноженной на детерминированный множитель,
00
М[сХ] = Jcxf(x) ax = cmx. (L22>
—00
3. Дисперсия детерминированной величины С равна нулю:
СО 00
М [°Х2] = J(х - яд2/(х) dx = J(с - с) f(x) dx=O.
—00 —ОО
4. Дисперсия случайной величины, умноженной на детер-
детерминированный множитель,
30
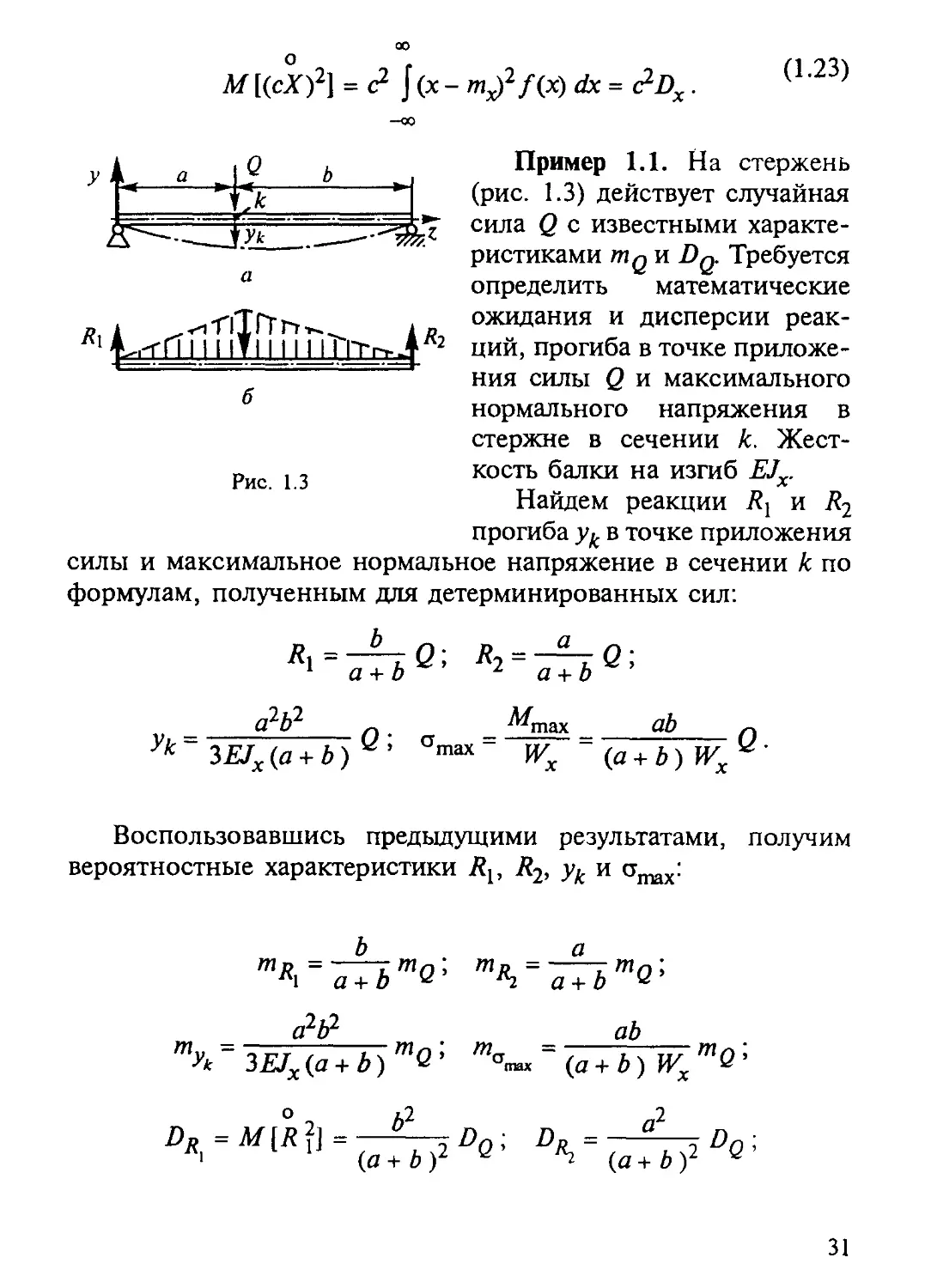
Рис. 1.3
00
М КсХJ] = с2 J (jc - mj2fix) dx = (?DX. (l 23)
—00
Пример 1.1. На стержень
(рис. 1.3) действует случайная
сила Q с известными характе-
характеристиками thq и Dq. Требуется
определить математические
ожидания и дисперсии реак-
реакций, прогиба в точке приложе-
приложения силы Q и максимального
нормального напряжения в
стержне в сечении к. Жест-
Жесткость балки на изгиб EJX.
Найдем реакции Ry и R2
прогиба ук в точке приложения
силы и максимальное нормальное напряжение в сечении к по
формулам, полученным для детерминированных сил:
a2b2 n Мтшх ab n
Ук 3EJx(a + b)V' amax- Wx~{a + b)Wx^-
Воспользовавшись предыдущими результатами, получим
вероятностные характеристики Rx, R2, yk и а,^
Ъ а
a2b2 ab
myk-3EJx(a + b)mQ' m°™ = (a + b)WxmQ'
31
п Г *# f n • n ^ д
Чь = [з?Гх (а + ft )J 2> "-^(e + ftJ^ fi'
Оценим вероятность того, что разность (сттах -т ) при-
тах
мет значение, превышающее предел текучести материала балки.
Воспользовавшись неравенством Чебышева A.21), получим
a2b2 Do
IV шах amax^ TJ {а + ЬJ ^2 „2,
§ 1.4. Законы распределения плотности вероятности
Законы теории вероятностей представляют собой матема-
математическое выражение реальных закономерностей, проявляю-
проявляющихся в массовых случайных явлениях. К таким математичес-
математическим законам, в первую очередь, относятся законы распределе-
распределения случайных величин (и более общие законы распределения
случайных функций). Как правило, законы распределения слу-
случайных величин устанавливаются на основании эксперимен-
экспериментальных исследований, но иногда могут быть получены и тео-
теоретически. Пример теоретического определения закона распре-
распределения приведен в конце данного параграфа.
1. Закон распределения плотности вероятности, когда слу-
случайная величина X принимает с вероятностью Р — 1 одно
единственное значение х = а. В этом случае
Дх) = 5(х-а), A.24)
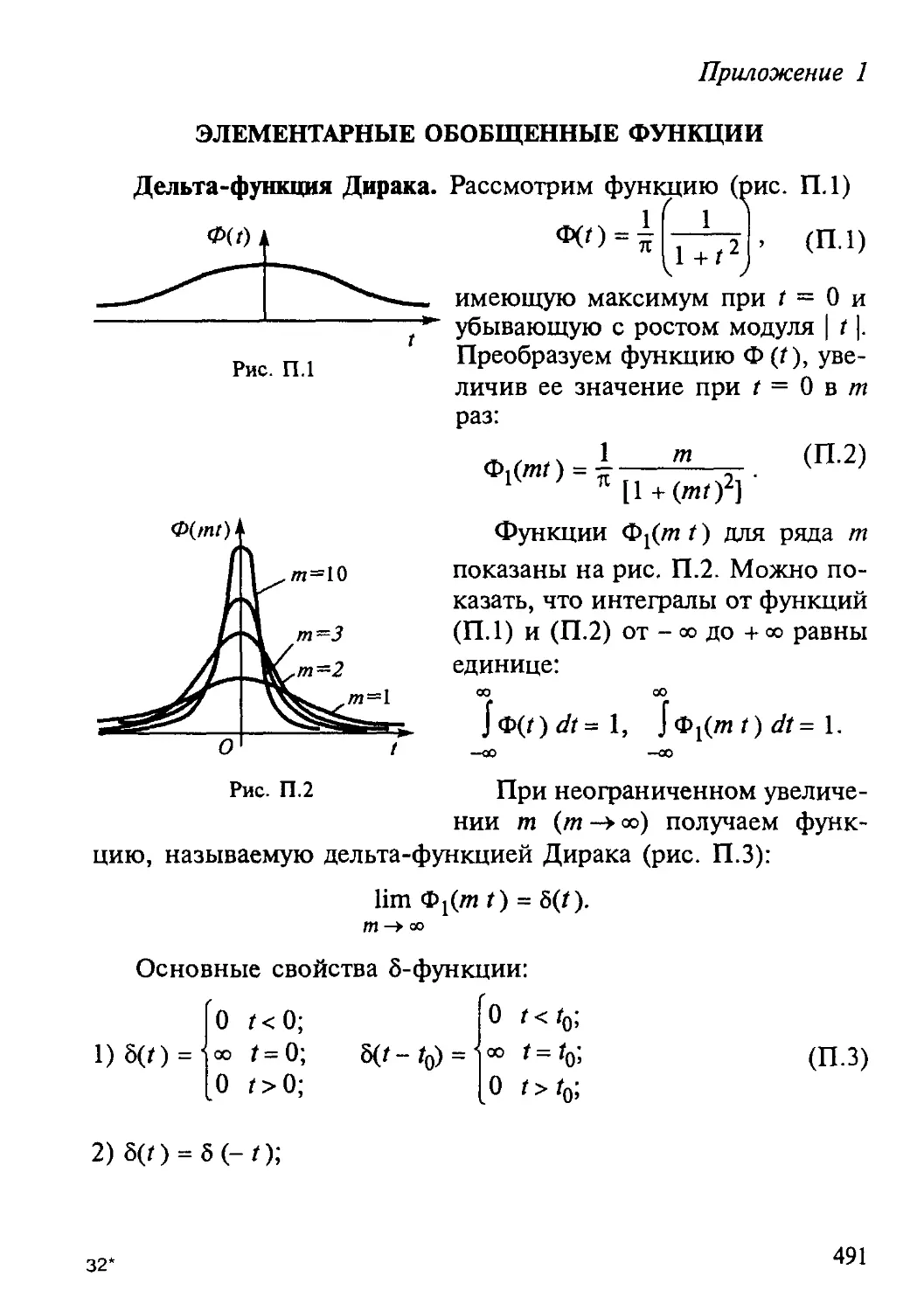
где 5 (х- а) — дельта-функция.
Основные свойства дельта-функции даны в приложении 1.
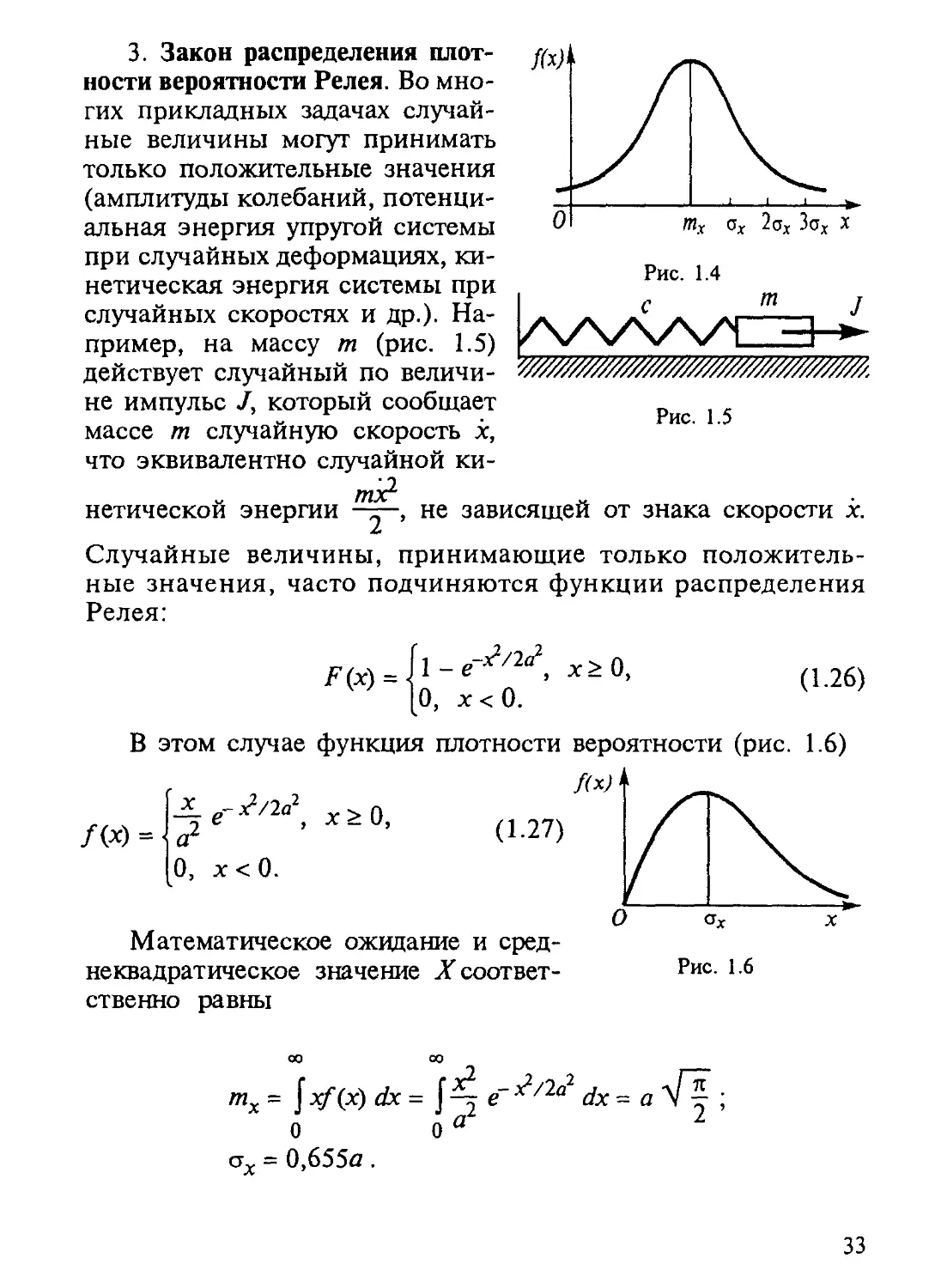
2. Нормальный закон распределения плотности вероятности
(закон Гаусса) (рис. 1.4), который является одним из наиболее
распространенных и часто применяемых на практике, харак-
характеризуется плотностью вероятности
f(x) = l—-e 2°l . A.25)
стхлГ2тс
32
3. Закон распределения плот-
плотности вероятности Релея. Во мно-
многих прикладных задачах случай-
случайные величины могут принимать
только положительные значения
(амплитуды колебаний, потенци-
потенциальная энергия упругой системы
при случайных деформациях, ки-
кинетическая энергия системы при
случайных скоростях и др.)- На-
Например, на массу т (рис. 1.5)
действует случайный по величи-
величине импульс /, который сообщает
массе т случайную скорость к,
что эквивалентно случайной ки-
кинетической энергии —г—, не зависящей от знака скорости х.
Случайные величины, принимающие только положитель-
положительные значения, часто подчиняются функции распределения
Релея:
Fix) = \\-^,x>^ A26)
[О, х < 0.
В этом случае функция плотности вероятности (рис. 1.6)
\2LcrJ-na2 г>п
/(*) = \а2 ' ' A-27)
[О, х<0.
Математическое ожидание и сред-
неквадратическое значение ЛГсоответ- Рис- 1-6
ственно равны
00 00 ^__
тх = jxf(x) dx = /4 е'^2 dx^a^R;
0 0°
ах = 0,655а.
33
Рис. 1.5
Распределение Релея является однопараметрическим, так
как тх и ах зависят от одного параметра а.
Если в результате обработки экспериментальных данных
получился закон распределения, который можно принять за
закон распределения Релея, то параметр а равен максимально-
максимальному значению плотности вероятности (см. рис. 1.6). Производ-
Производная/(х) A.27) равна
dc а2{ а2)
поэтому максимальное значение /(х) достигается при х - а.
4. Закон распределения Пуассона. Дискретную случайную
величину X (безразмерную) называют распределенной по закону
Пуассона, если ее возможные значения равны 0, 1, 2,..., п, а
вероятность того, что X = п, выражается зависимостью
Р{Х=п) = ^е-а,
где а > 0.
Математическое ожидание и дисперсия случайной величи-
величины X, распределенной по закону Пуассона, равны: тх = а и
Dx=a.
Это свойство распределения используют при проверке прав-
правдоподобия гипотезы о том, что случайная величина А'распре-
А'распределена по закону Пуассона. Если статистические характерис-
характеристики тх1^ и ?)?) близки, то это может служить подтверждением
справедливости предположения, что случайная величина А1 рас-
распределена по закону Пуассона.
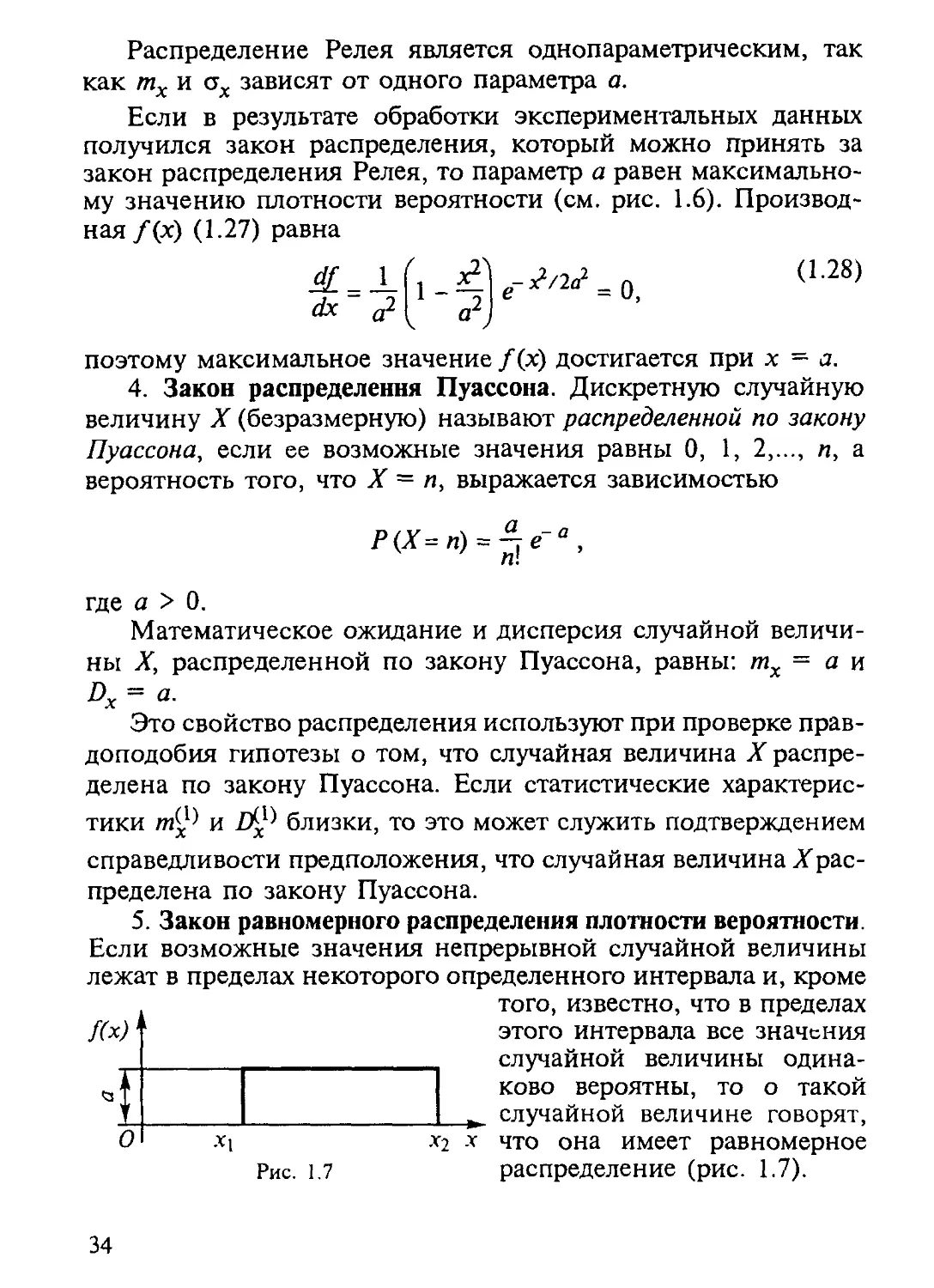
5. Закон равномерного распределения плотности вероятности.
Если возможные значения непрерывной случайной величины
лежат в пределах некоторого определенного интервала и, кроме
того, известно, что в пределах
этого интервала все значения
случайной величины одина-
одинаково вероятны, то о такой
случайной величине говорят,
что она имеет равномерное
Рис. 1.7 распределение (рис. 1.7).
34
В этом случае
Г а, хх<х<х2 Г _ i \ A.29)
|0, х < хх или х > х2 Г х2-х1\'
где а — плотность распределения; (jcj, x2) — интервал возмож-
возможных значений случайной величины.
Математическое ожидание и дисперсия случайной величи-
величины X, распределенной равномерно на интервале (х1г х2), соот-
соответственно равны
*l+*2. n (*1~*2>2
тх = —2— ' х = 12— "
6. Закон распределения плотности вероятности модуля слу-
случайной величины, распределенной по нормальному закону. Слу-
Случайная величина Y равна модулю случайной величины X, т.е.
Y = \Х\. Случайная величина Л'имеет нормальное распределение.
Закон распределения плотности вероятности Y имеет вид
/u»-/<M>—±-.' * *.' 2°'> , (U0)
¦№oxL J
где тх и ах — параметры нормального закона распределения
случайной величины X. Математическое ожидание и дисперсия
случайной величины равны
Г (тх\ (тх\
^=2гхФога+СТхФИ:
ау = о1 + т2х-т2у,
где
Ы лГ2?о
35
Графики изменения /(у) в зависимости от тх приведены
на рис. 1.8.
В частном случае, когда тх = О,
/(й._2_,-4 ал»
^12пах
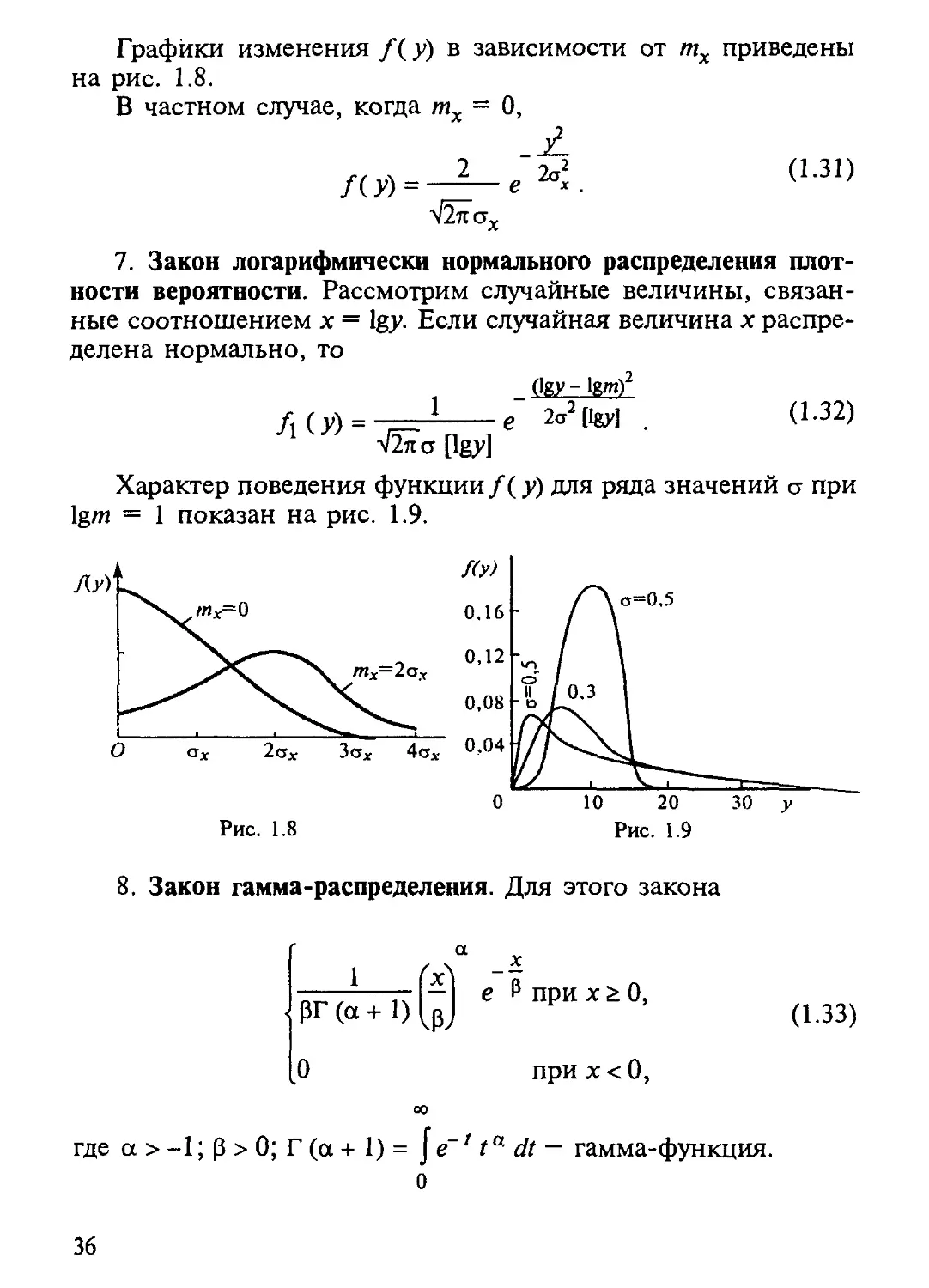
7. Закон логарифмически нормального распределения плот-
плотности вероятности. Рассмотрим случайные величины, связан-
связанные соотношением х = Igy. Если случайная величина х распре-
распределена нормально, то
_ (lgy - tewJ
/, (у) = 1 е 2о2 [lgy] . A-32)
1 Ша[\ёу]
Характер поведения функции/(у) для ряда значений а при
lg/я = 1 показан на рис. 1.9.
Рис. 1.8 Рис. 1.9
8. Закон гамма-распределения. Для этого закона
а _х
о * 1Ч [ -] е Р при х > О,
.pr(a+l)[pj v A.33)
О при х < О,
00
где а > -1; р > 0; Г (а + 1) = J е~' tа dt - гамма-функция.
О
36
Параметры гамма-распре-
гамма-распределения
fmS] csl
в-М:э"^
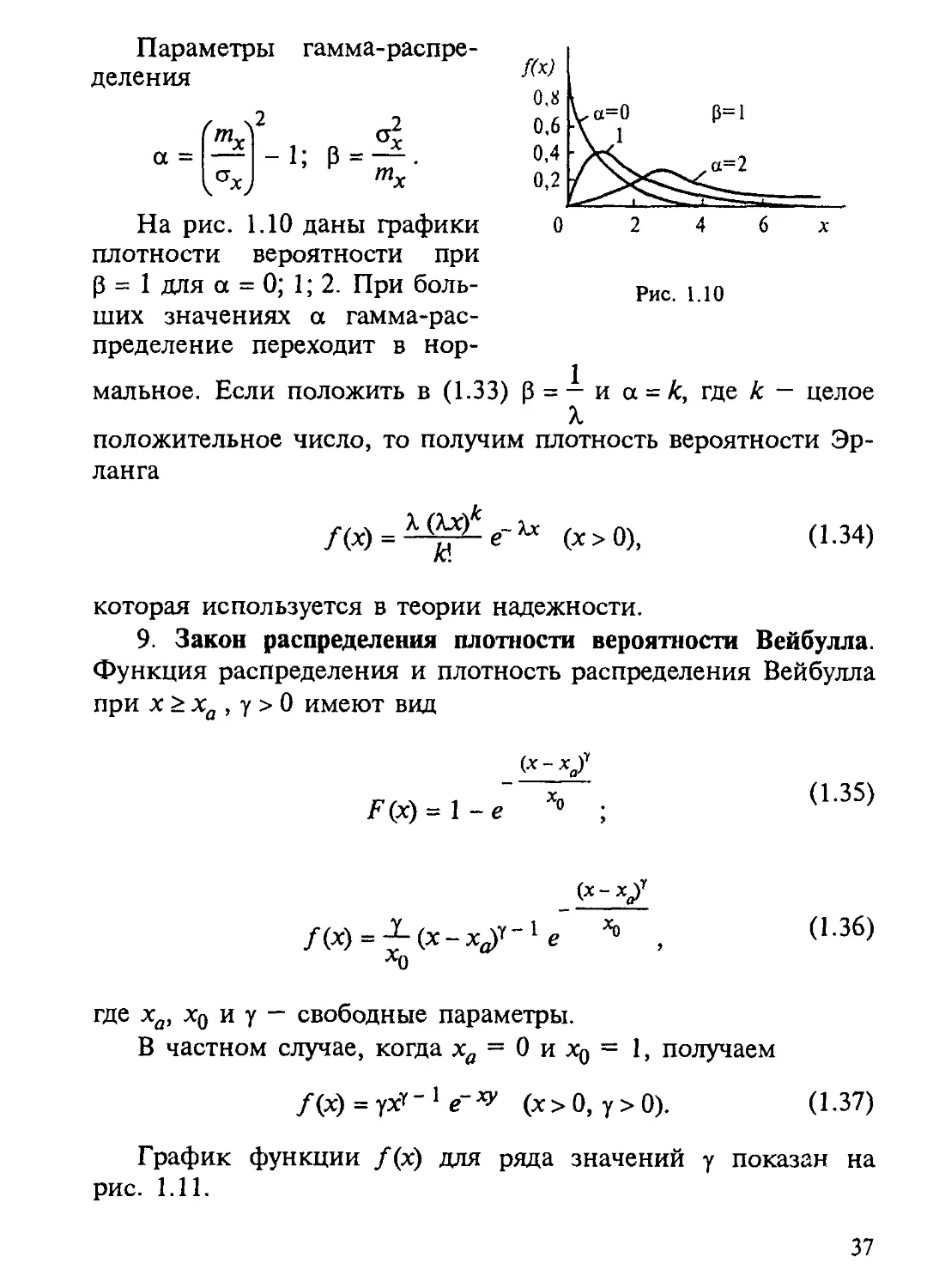
На рис. 1.10 даны графики
плотности вероятности при
р = 1 для а = 0; 1; 2. При боль- Рис 1Л0
ших значениях а гамма-рас-
гамма-распределение переходит в нор-
нормальное. Если положить в A.33) р = — и а = к, где к — целое
А.
положительное число, то получим плотность вероятности Эр-
ланга
f(x) = ^^e-^ (x>0), A.34)
которая используется в теории надежности.
9. Закон распределения плотности вероятности Вейбулла.
Функция распределения и плотность распределения Вейбулла
при х > ха , у > 0 имеют вид
FW-l-e' Х° ; A35)
/(x) = f (х-Ха)У-1е Х° , A36)
где ха, х0 и у — свободные параметры.
В частном случае, когда ха = 0 и jc0 = 1, получаем
f(x) = yx(-1 е-*У (х>0, у>0). A.37)
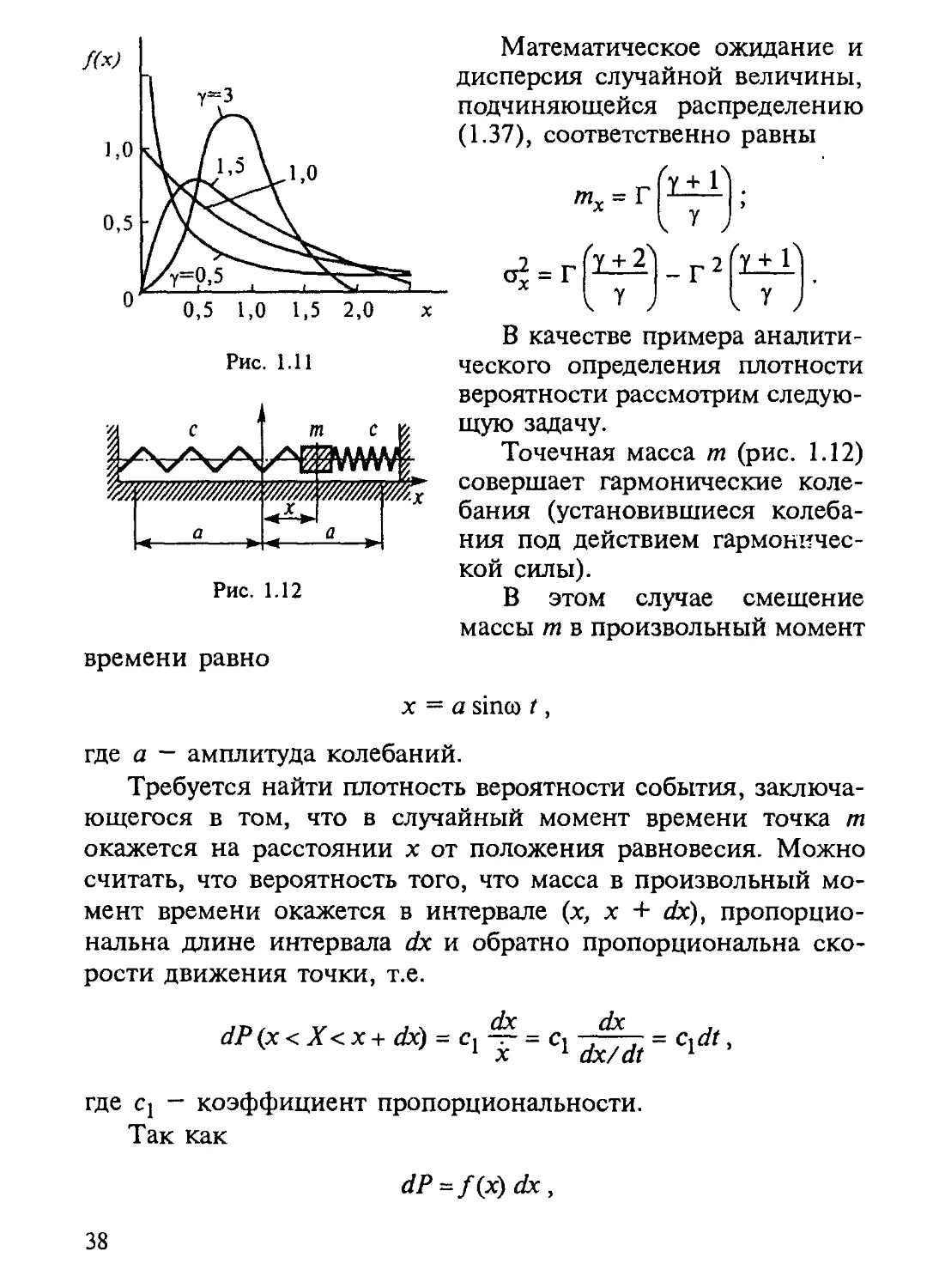
График функции f(x) для ряда значений у показан на
рис. 1.11.
Математическое ожидание и
дисперсия случайной величины,
подчиняющейся распределению
A.37), соответственно равны
В качестве примера аналити-
аналитического определения плотности
вероятности рассмотрим следую-
следующую задачу.
Точечная масса т (рис. 1.12)
совершает гармонические коле-
колебания (установившиеся колеба-
колебания под действием гармоничес-
гармонической силы).
В этом случае смещение
массы т в произвольный момент
времени равно
х — a sinco /,
где а — амплитуда колебаний.
Требуется найти плотность вероятности события, заключа-
заключающегося в том, что в случайный момент времени точка т
окажется на расстоянии х от положения равновесия. Можно
считать, что вероятность того, что масса в произвольный мо-
момент времени окажется в интервале {х, х + dx), пропорцио-
пропорциональна длине интервала dx и обратно пропорциональна ско-
скорости движения точки, т.е.
,„, v , . dx dx ,
?/Р(х<Л'<х+Лс) = с1у = с1^^ = с1А,
где с1 — коэффициент пропорциональности.
Так как
dP=f(x)dx,
38
Рис. 1.11
Рис. 1.12
то после преобразований получим
Из этого выражения для f(x) исключим время t, восполь-
воспользовавшись законом движения массы т:
—г = а со cos a t= а® У I - sin2 со / =
at
= аса V 1 - (х/аJ = со Va2 -x2 .
Получим
/(х) = Cl •
Найдем значение сх из условия нормирования
J/(x)<fc=f/(x)dr=l.
—<ю —а
После вычислений получим q = со/л. Окончательное выра-
выражение для плотности вероятности имеет вид
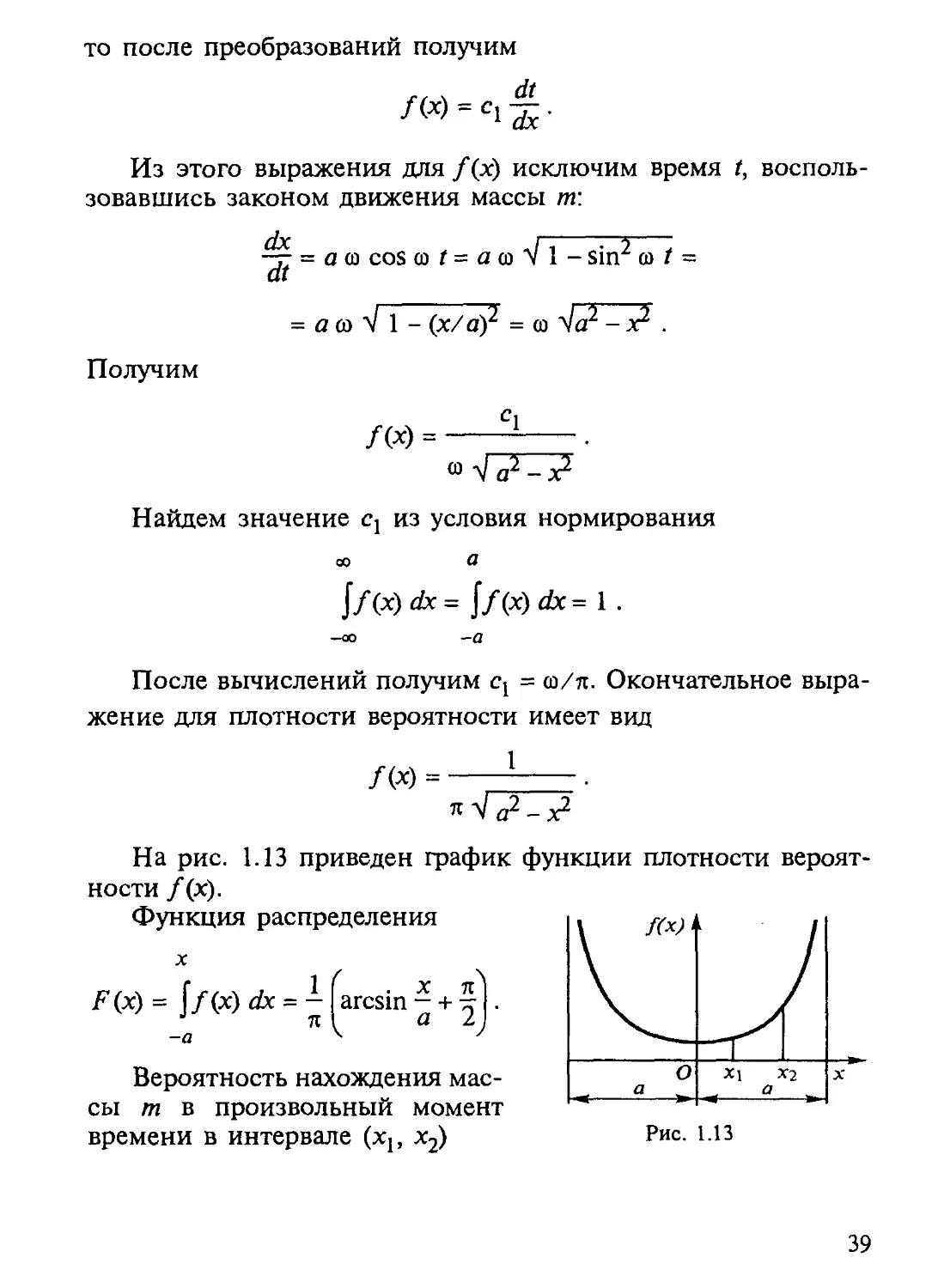
fix) = 1 .
На рис. 1.13 приведен график функции плотности вероят-
вероятности /(х).
Функция распределения
X
Fix) = f/(x) ахЛ farcsin ^ + |j.
-а ^ '
Вероятность нахождения мас-
массы /и в произвольный момент
времени в интервале (*j, x2)
Рис. 1.13
*2
Г 1 ( Х1 Х\Л
Р(хх<Х< х2) = J/(x) dx = - arcsin — - arcsin — .
я V a a)
§ 1.5. Определение вероятности попадания нормально
распределенной случайной величины на заданный участок
Вероятность попадания случайной величины на участок
(х^ х2) определяем из соотношения A.9).
Функция распределения
X (*-"»х>2
F(x)=\mdx = ^=\e~ 2°2 dx. (L38)
а у 2п
- 00 -Q0
х- тх
Введя обозначение = t, получим интеграл вероятнос-
а
тей
1 Н <-
F(t) = —i— \e 2 dt=O(t).
Тогда
1 Ч '-
P(xl<X<x2) = \e 2 dt=O(t2)-O(tl),
где
x% - mr х*)- mr
h=~—-; t2 = -—-¦
a a
Числовые значения Ф (t2) и Ф (^ ) приводятся в справоч-
справочниках.
Найдем вероятность попадания случайной величины X на
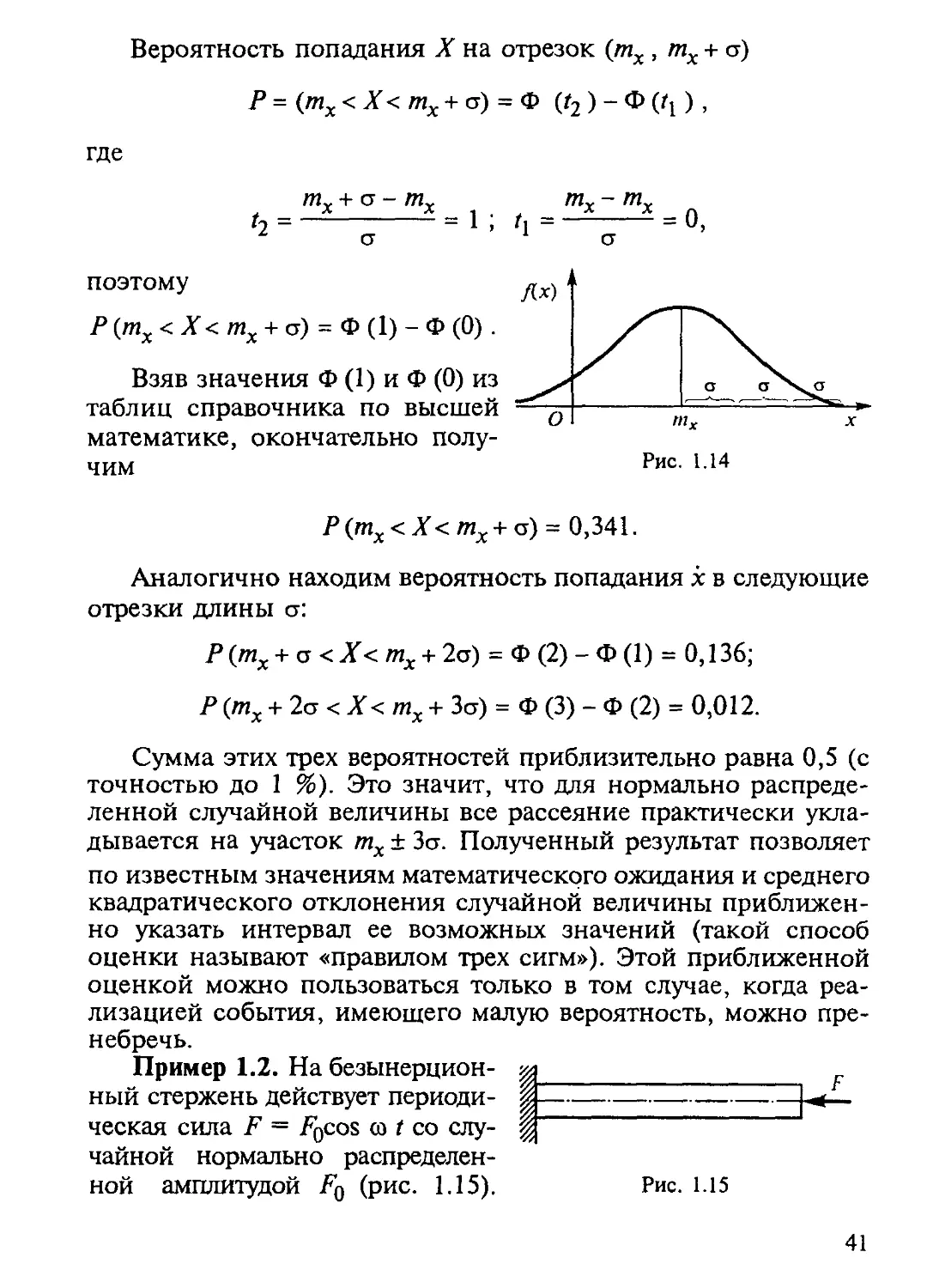
отрезки длиной а (рис. 1.14).
40
Вероятность попадания X на отрезок (тх , тх+ а)
Р = (тх < Х< тх + а) = Ф Ц2)-Ф (Ц ),
где
поэтому
Р(тх < Х< тх + а) = Ф A) - Ф @) .
Взяв значения Ф A) и Ф @) из
таблиц справочника по высшей
математике, окончательно полу-
получим
Р(тх <Х<тх+а) = 0,341.
Аналогично находим вероятность попадания к в следующие
отрезки длины ст:
Р (тх + а < Х< тх + 2а) = Ф B) - Ф A) = 0,136;
Р {тх + 2а<Х<тх+ За) = Ф C) - Ф B) = 0,012.
Сумма этих трех вероятностей приблизительно равна 0,5 (с
точностью до 1 %). Это значит, что для нормально распреде-
распределенной случайной величины все рассеяние практически укла-
укладывается на участок тх ± За. Полученный результат позволяет
по известным значениям математического ожидания и среднего
квадратического отклонения случайной величины приближен-
приближенно указать интервал ее возможных значений (такой способ
оценки называют «правилом трех сигм»). Этой приближенной
оценкой можно пользоваться только в том случае, когда реа-
реализацией события, имеющего малую вероятность, можно пре-
пренебречь.
Пример 1.2. На безынерцион-
безынерционный стержень действует периоди-
периодическая сила F = F0cos со t со слу-
случайной нормально распределен-
распределенной амплитудой FQ (рис. 1.15). Рис. 1.15
41
ttiY + а — niy. tnY — wv
L a l a
Рис. 1.14
Ее вероятностные характеристики mF = 6,5 Н , aF = 2,4 Н.
Требуется определить вероятность того, что сила, действующая
на стержень, находится в интервале 100...120 Н.
Определяем значения ?2 и h-
t 120-65 ЮО-65 5
2 ~ 24 ~ ' г ~ 24 ~
Вероятность появления амплитуды силы, находящейся в
интервале 100...120 Н,
Р A00 < Fo < 120 ) = Ф (tj ) - Ф {t\) = 0,0614.
§ 1.6. Системы случайных величин и их числовые характеристики
Рассмотрим наиболее простой случай — систему двух слу-
случайных величин X, Y.
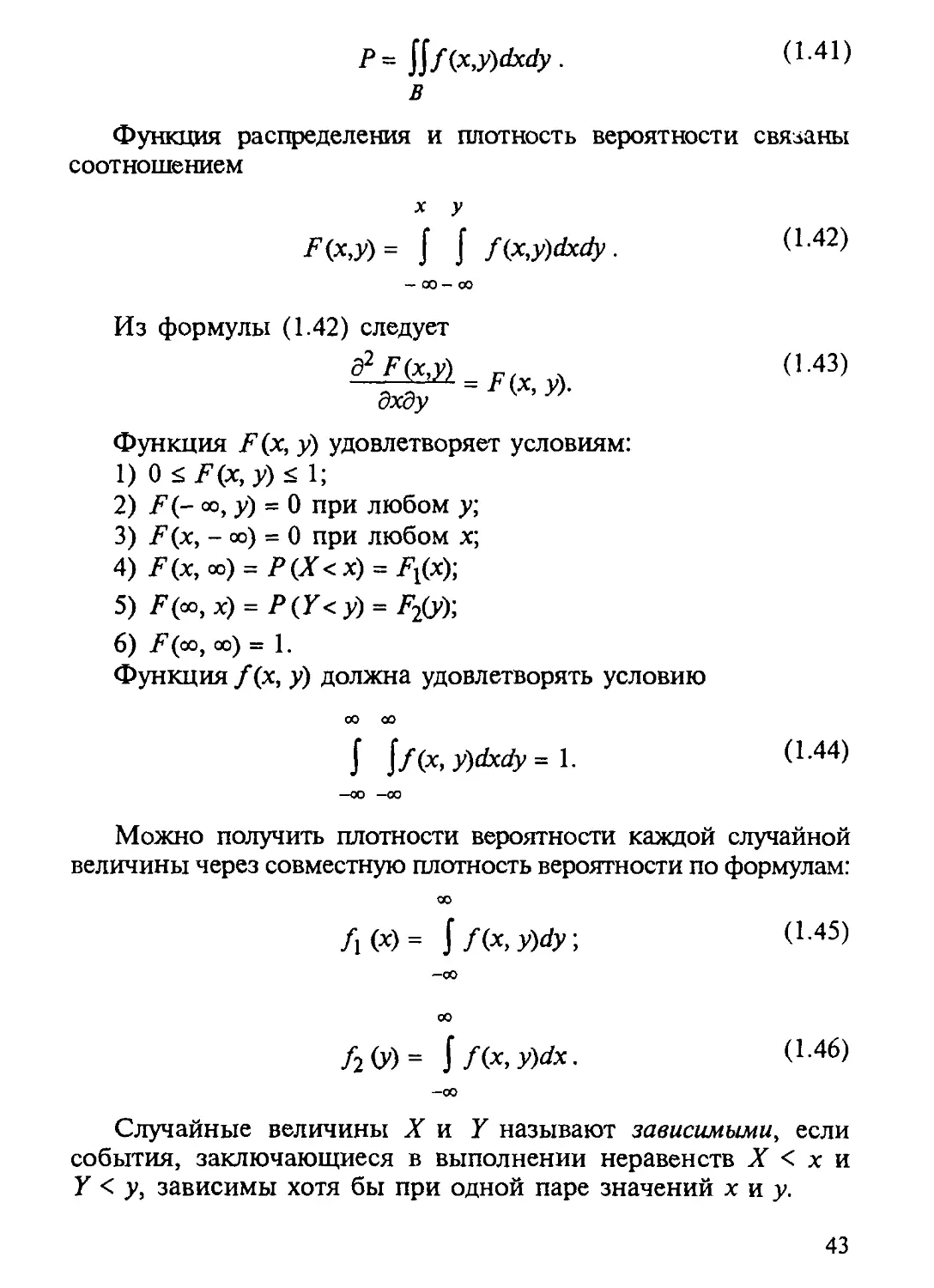
Совместной функцией распределе-
распределения двух случайных величин X и Y
называют вероятность совместного
выполнения двух неравенств X < х
и Y< у, т.е.
F(?c,y) = P(X<x, У<у).A-39)
Геометрически соотношение
A.39) представляет собой вероят-
вероятность попадания случайной точки в
заштрихованную область (рис. 1.16).
Двухмерную плотность вероятности
можно ввести по аналогии с одномерной, а именно:
/О.^-ШП^^»^^^-^. (МО)
ду->0
Из соотношения A.40) следует, что f(x, у) dxdy есть веро-
вероятность того, что точка попала в бесконечно малый прямо-
прямоугольник (рис. 1.16). Вероятность того, что точка попала в
некоторую конечную область В плоскости, равна
42
Рис. 1.16
P-jjf(x,y)dxdy. A-41)
В
Функция распределения и плотность вероятности связаны
соотношением
х у
F(x,y)= J $ Ax,y)dxdy. (L42)
— 00-00
Из формулы A.42) следует
д2 F(x,y) _. . A.43)
Функция F(x, у) удовлетворяет условиям:
lHzF(x,y)<l;
2) F(- оо, у) = 0 при любом у;
3) F(x, - да) = 0 при любом х;
4) F(x,oo) = P(X<x) = Fl(x);
5) F(cD,x) = P(Y<y) = F&y,
6) F(«>, оо) = 1.
Функция f(x, у) должна удовлетворять условию
00 00
J \f{x,y)dxdy=l. (L44)
-00 -00
Можно получить плотности вероятности каждой случайной
величины через совместную плотность вероятности по формулам:
00
А(х)= jf(x,y)dy; A-45)
—00
00
/г(У)" \fix,y)dx. A-46)
—00
Случайные величины X и Y называют зависимыми, если
события, заключающиеся в выполнении неравенств X < х и
Y < у, зависимы хотя бы при одной паре значений х и у.
43
Условные законы распределения. Условным законом распре-
распределения одной из величин {X, Y), входящих в систему, называют
ее закон распределения, вычисленный при условии, что другая
случайная величина приняла определенное значение, т.е.
F(x,y) = Fl(x)F2(y\X<x)
или
F(x,y) = F2(y)Fl(x\Y<y). A.47)
Дифференцируя сначала по х, а затем по у, получаем (тео-
(теорема умножения законов распределения [12])
д1 F(x, у) .. . -.,,,,,. A-48)
или
Э2 ^(х, у) .. . , . . . . ¦ . A.49)
—О^у' = f(x, у) =/2 (у)/г (х | у).
Соотношения A.48) и A.49) называют теоремой умножения
законов распределения. Из A.48) и A.49) находим условные
законы распределения через безусловные:
или
/Ых)=_л*^; /(х|у)=_л^1_.
f fix, y)dy \ f(x, y)dx
—00 —ОО
Для условных плотностей выполняются условия:
00
f(x\y)*O; jf(x\y)dx=l
и
44
00
/O|x)>0; jf(y\x)dy=\.
—00
Случайные величины X и Y считают независимыми, если
события, заключающиеся в выполнении неравенств X < х,
Y < у, независимы при любых значениях хну. Для независи-
независимых случайных величин X, У совместная функция распределе-
распределения (на основании правила умножения вероятностей незави-
независимых событий)
F(x,y) = P(X<x)P(Y<y) A.50)
или
F(x,y) = Fl(x)F2(y). A.51)
Дифференцируя соотношение A.51) сначала по х, а затем
по у, получаем
д2 F(x v) &F\ 8F2
4Sf = аГ -^ =/<* *> =/1 «Л (Л • A-52)
Числовые характеристики системы двух случайных величин.
Для установления «связи» между двумя случайными величина-
величинами Л' и У вводится неслучайная числовая характеристика —
корреляционный момент К^, который для дискретных случай-
случайных величин равен
« л
Кху = Z Z (*/ - wx) (У/ - ту) Pij '
где Р^- — вероятность того, что система (X, Y) примет значение
(х,-, yj). Для непрерывных случайных величин корреляционный
(взаимно корреляционный) момент равен
00 00
Kxy=M[XY] = l J (x-mj(y-my)f(x,y)dxdy,
—00 —00
где f{x, у) — совместный закон распределения плотности веро-
вероятности системы случайных величин (X, Y).
45
В качестве примера совместного закона распределения двух
случайных величин приведем нормальный закон распределения
г, ч 1 Г 1 \(х-тхJ
f(x,y) = — exp J-——— j
2п ах ау VI -Гц { А1 ~ гху) е$
Ir^jx-m^jy-my) | (у-т/ \ A-53)
Для двух случайных непрерывных величин имеем следую-
следующие вероятностные характеристики:
оо оо
тх = J J */(*> y)dxdy ,
-о. -« A.54)
00 00
ту = J J j/(x, у)Лс(у;
—00 -ОО
00 00
Z)x= J J (x-mj2f(x,y)dxdy,
-00 -00 A.55)
QO 00
Dy= J J {y-m/ffr,?)dxdy\
—oo —oo
00 00
^ = f J (* - «x> (У - mp/Cx, y)rf«(V ¦ A-56)
—00 —OO
Для независимых случайных величин /(х, у) =/j (x)^ (у),
поэтому из формулы A.56) получаем
00 СО
*ху = \f\ (х) (х~ тх>^ \fl (У) (У- my)dy = (тх- тх)(ту ~ ту) = °-
—00 —00
Следовательно, если корреляционный момент двух случай-
случайных величин отличен от нуля, то это указывает на наличие
зависимости между ними. Случайные величины, для которых
корреляционный момент равен нулю, называют некоррелиро-
некоррелированными. Из формулы A.56) следует, что корреляционный мо-
46
мент характеризует не только зависимость величин, но и их
рассеяние. Если, например, одна из величин X или Y мало
отклоняется от своего математического ожидания, то корреля-
корреляционный момент будет мал, какой бы зависимостью эти вели-
величины ни были связаны, поэтому для устранения этого недо-
недостатка вводится безразмерная характеристика — коэффициент
корреляции (или нормированные корреляционные моменты):
Кху A.57)
Гху = °х«у '
где ах, <зу — средние квадратические отклонения случайных
величин X и Y. Коэффициент корреляции может быть как
больше нуля, так и меньше нуля. Коэффициент /•„, изменяется
в пределах
-\<Гху<\. A.58)
Докажем справедливость соотношения A.58). Рассмотрим
случайную величину z '¦
Z = oyX±vxY,
где ах, Gy — среднеквадратичные значения случайных центри-
центрированных величин X и Y. Дисперсия случайной величины Z
равна
Dz=M[Z2]=a2yDx + o2xDy±2axayKxy.
Дисперсия больше нуля, поэтому
o2yDx + o2xDy±2oxoyKxy>0,
или (так как Dx = а2 , Dy = a2)
ауох±Кху>0.
Из последнего соотношения следует
Кху й ах ау
или
47
r^l < 1. A.59)
Найдем, например, г„, для линейно связанных случайных
центрированных величин Yw X:
Y = aX.
Дисперсия D равна a2Dx. Взаимно корреляционный момент
К^ = M[XY] = аМ[Х2] = aDx,
поэтому
aDx
гху = —=1-
*У асхсх
Справедливо и обратное: если коэффициент корреляции г^
близок к единице, то связь случайных величин X и Y мало
отличается от линейной. Коэффициент корреляции г^, A.57),
устанавливающий степень взаимосвязи между двумя случайными
функциями, не имеет строгого функционального характера. Кор-
Корреляционная зависимость, в отличие от функциональной, ис-
используется, когда одна из величин зависит не только от второй
величины, но и от ряда случайных факторов, учесть которые при
установлении связи между величинами невозможно.
Зависимость между случайными величинами X и Y прояв-
проявляется в том, что условная вероятность появления, например,
Y- при реализации события хк отличается от безусловной веро-
вероятности, т.е. влияние одной случайной величины на другую
характеризуется условным распределением одной из них при
фиксированном значении другой. Практическое использование
коэффициента корреляции при количественной оценке степе-
степени взаимосвязанности (зависимости) двух случайных величин,
как правило, справедливо, когда закон распределения нормаль-
нормальный. В этом случае из равенства AL, = 0 следует независимость
случайных величин. Для оценки меры зависимости двух про-
произвольных случайных величин использовать К^ нельзя, так как
даже при функциональной связи двух величин (однозначной
зависимости) корреляционный момент может быть равен нулю,
т.е. понятия некоррелированности и независимости не экви-
эквивалентны.
48
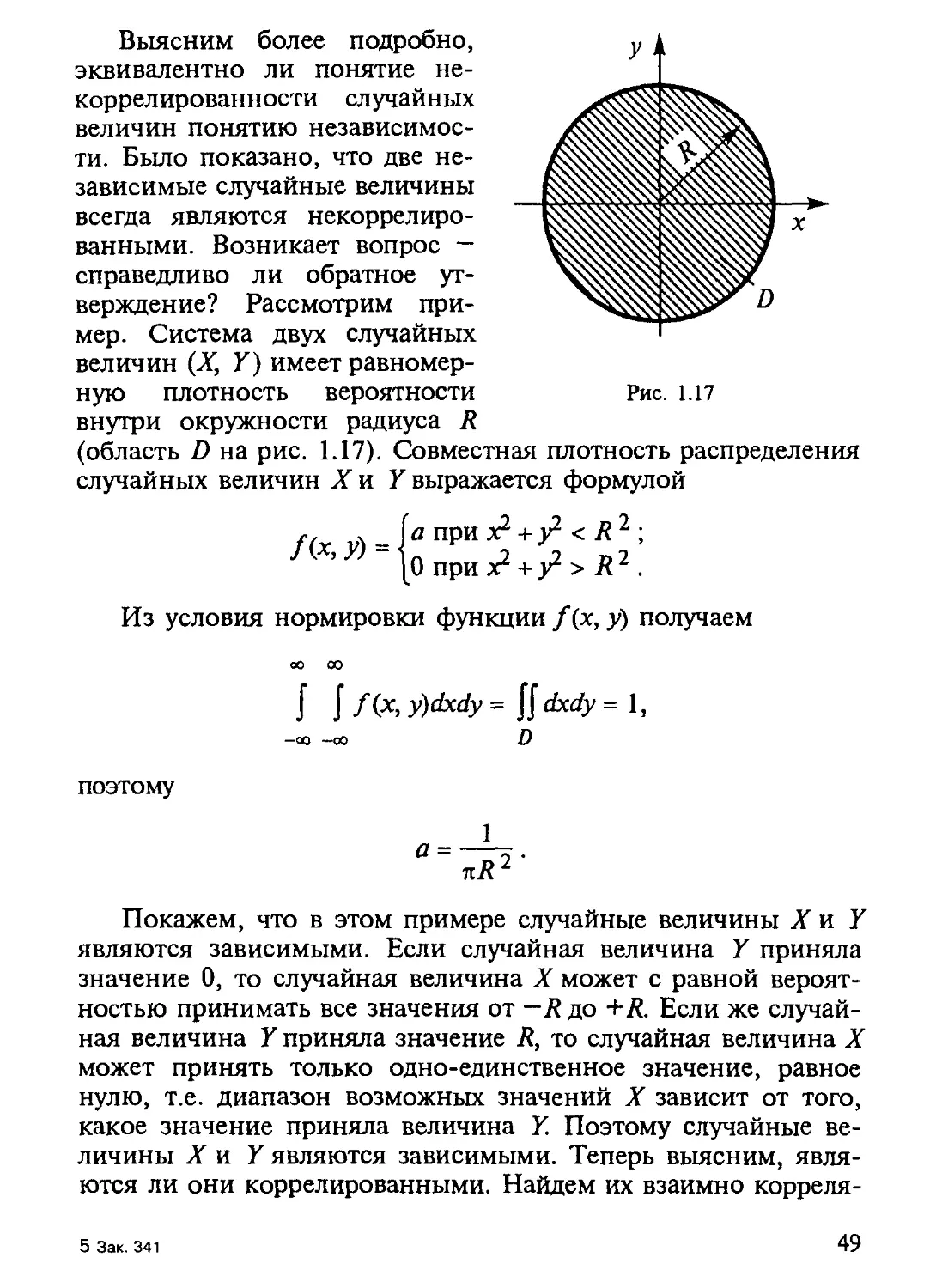
Выясним более подробно,
эквивалентно ли понятие не-
некоррелированности случайных
величин понятию независимос-
независимости. Было показано, что две не-
независимые случайные величины
всегда являются некоррелиро-
некоррелированными. Возникает вопрос —
справедливо ли обратное ут-
утверждение? Рассмотрим при-
пример. Система двух случайных
величин (X, Y) имеет равномер-
равномерную плотность вероятности Рис. 1.17
внутри окружности радиуса R
(область D на рис. 1.17). Совместная плотность распределения
случайных величин Хи У выражается формулой
fix v\- [«прих2 + ^<Л2;
[О при дг + у- > R L .
Из условия нормировки функции f(x, у) получаем
00 00
J jf(x,y)dxdy=jjdxdy=l,
—00 —00 D
поэтому
Покажем, что в этом примере случайные величины X и Y
являются зависимыми. Если случайная величина Y приняла
значение 0, то случайная величина X может с равной вероят-
вероятностью принимать все значения от — R до +R. Если же случай-
случайная величина Y приняла значение R, то случайная величина X
может принять только одно-единственное значение, равное
нулю, т.е. диапазон возможных значений X зависит от того,
какое значение приняла величина Y. Поэтому случайные ве-
величины X и Y являются зависимыми. Теперь выясним, явля-
являются ли они коррелированными. Найдем их взаимно корреля-
5 Зак. 341 49
ционный момент К^ (случайные величины X и Y центриро-
центрированные):
К = \\xyf{xy)dxdy = -^2 \\xydxdy.
D nK D
Так как оси х, у (см. рис. 1.17) являются осями симметрии
области D, то интеграл jj xydxdy равен нулю, т.е. К^ = 0.
D
Полученный результат говорит о том, что случайные ве-
величины X и Y не коррелированы. Поэтому из некоррелиро-
некоррелированности случайных величин не всегда следует их независи-
независимость. Однако при практических расчетах коэффициент кор-
корреляции дает качественную информацию о взаимозависимос-
взаимозависимости двух случайных величин. Например, если г > 0, то при
возрастании одной из случайных величин другая имеет тен-
тенденцию в среднем тоже возрастать и при /¦„, < 0 при возрас-
возрастании одной случайной величины другая имеет тенденцию в
среднем убывать.
Дисперсии и корреляционные моменты для двух случайных
величин можно представить в виде матрицы
К= « J* (.K^DX, К =D). A.60)
Для системы п случайных величин дисперсии и корреля-
корреляционные моменты можно, как и для систем двух случайных
величин, представить в виде корреляционной матрицы
Ку Y Ку у ... Ку у
х\х\ ХГ~1 Х1хп
*= . **,*, = л*,. A.61)
или в виде нормированной корреляционной матрицы
50
1 г ... г
xlxl х\хп
ГХу. 1
К= Vx . A.62)
/v, 1
Числовые характеристики суммы и произведения двух слу-
случайных величин. Математическое ожидание суммы двух слу-
случайных величин равно сумме их математических ожиданий:
М[Х+ Y} = M[X) + M[Y]. A.63)
Дисперсия суммы двух случайных величин равна сумме их
дисперсий плюс удвоенный корреляционный момент:
D(X+Y) = Dx+Dy + 2Kxy. A.64)
Математическое ожидание произведения двух случайных
величин равно произведению их математических ожиданий
плюс корреляционный момент:
M[XY] = M[X]M[Y] + Kxy. A.65)
Дисперсия произведения независимых случайных величин
равна
D (ЛТ) = М[X2] ¦ М [ Y2] - т2хт2у , A-66)
где М[X2] = Dx+m2., M[Y2] = Dy + m2y.
Для центрированных случайных величин
° о A.67)
D{XY) = DxDy.
§ 1.7. Комплексные случайные величины
Часто при решении прикладных задач приходится рассмат-
рассматривать не только действительные, но и комплексные случайные
величины, поэтому возникает необходимость в обобщении по-
понятия математического ожидания, дисперсии и корреляцион-
корреляционной функции на комплексные случайные величины. Комплекс-
5* 51
ной случайной величиной называют такую случайную величину,
возможные значения которой — комплексные числа, т.е.
Z=X+iY, A.68)
где X, Y — действительные случайные числа; / — мнимая еди-
единица.
Особенно большую роль комплексные величины играют в
теории случайных функций.
Рассматривая выражение A.68) как сумму случайных вели-
величин, получаем в соответствии с A.63) математическое ожидание
случайной величины Z:
mz = mx+ imy . A.69)
Дисперсией комплексной случайной величины Z называют ма-
математическое ожидание от квадрата модуля центрированной
о
случайной величины Z:
DZ = M[\Z\2), t1-70)
о
где | Z\ — модуль центрированной случайной величины.
При таком определении дисперсия комплексной случайной
величины всегда действительна и положительна, т.е. сохраня-
сохраняется основное свойство дисперсии.
О О О 0 0
Так как | Z\2 = ZZ* = X2 + Y2 ,
о
где Z* — сопряженная комплексная величина, то из A.70)
получаем
DZ=M[X2+ Y2] = DX+Dy. A.71)
Корреляционный момент двух комплексных случайных ве-
величин X = Х\ + iXi и Y = У} + /У2 в частном случае, когда
X = Y, должен быть равен дисперсии Dx. Это имеет место,
если принять
Kxy-MIXY*], A-72)
52
где Y* — центрированная сопряженная случайная величина.
Действительно, при таком определении корреляционного
момента при X = Y получаем
Для произвольных комплексных случайных величин
= М[{ХХ + /ад - гЩ = КЧх + КЧг + /(А^ - KXxh) .A.73)
Корреляционный момент комплексных случайных величин
зависит от порядка, в котором берутся случайные величины, а
именно при изменении порядка случайных величин их корре-
корреляционный момент переходит в комплексную сопряженную
величину
Kxy=M[XY*] = M[X*°Y] = Kyx. О-74)
§ 1.8. Числовые характеристики функций случайных аргументов
Часто при решении различных технических задач, связан-
связанных с анализом случайных явлений, приходится рассматривать
случайные функции, зависящие от случайных величин, законы
распределения которых известны. Зная законы распределения
аргументов сложной функции, можно установить и ее закон
распределения. Но, как правило, при решении прикладных
задач бывает достаточно числовых характеристик функции от
случайных аргументов, получить которые существенно проще,
чем закон распределения.
Рассмотрим задачу определения числовых характеристик
функции у от случайного аргумента х при известном законе
распределения аргумента х, т.е. требуется определить ту и Dy,
если
> = ф(*). A-75)
53
Для прерывной случайной величины Xизвестны вероятнос-
вероятности появления дискретных значений х,-, известен закон распре-
распределения (xj-*ph. Поэтому из A./5) имеем (yj->pp, где
к = ф(х:), т.е. получаем табл. 1.2:
Таблица 1.2
Ряд распределения ф (х: )
Ф(Х,) ф(*2> Ф(Х3) ... ф(*„)
Р\ I Рг I Рз I - I Рл
Эта таблица аналогична табл. 1.1, определяющей закон
распределения случайной величины X. В табл. 1.2 <р (х;) не
обязательно идут в возрастающей последовательности, кроме
того, возможны совпадения ср (х.) при разных х.-, но всегда
можно расположить величины ср (х) в порядке возрастания,
объединить столбцы с равными ср (х,), сложив их вероятности,
т.е. получить таблицу, полностью соответствующую функции
распределения. Поэтому для дискретной случайной величины
Y математическое ожидание равно
M[Y] = М[Ф(х)] = X ф(х^-= пф . <176)
М
Для непрерывной случайной величины Y
00
M[Y]= \<v{x)f{x)dx=my. С-77)
—00
Дисперсия функции, зависящей от одного случайного ар-
аргумента,
00
^=Д[Ф(х)]= |[Ф(х)-ш//(х)аЬс. (L78)
—00
Для функции, зависящей от двух случайных аргументов,
Z=<P(A\ У) A.79)
54
математическое ожидание и дисперсия равны соответственно
со со
M[Z]= j f ф (х, У) f(x, y)dxdy = mz; A.80)
—со —со
00 00
Dz = D [ф (х, у)} = J J [ф (х, у) - «J2/(*, ЗОЛм!)'¦ A81>
—00 —СО
В первой главе были приведены в кратком изложении ос-
основные разделы теории вероятностей.
Для более глубокого изучения теории вероятностей можно,
например, рекомендовать следующие учебники и монографии
[12, 13, 29, 30].
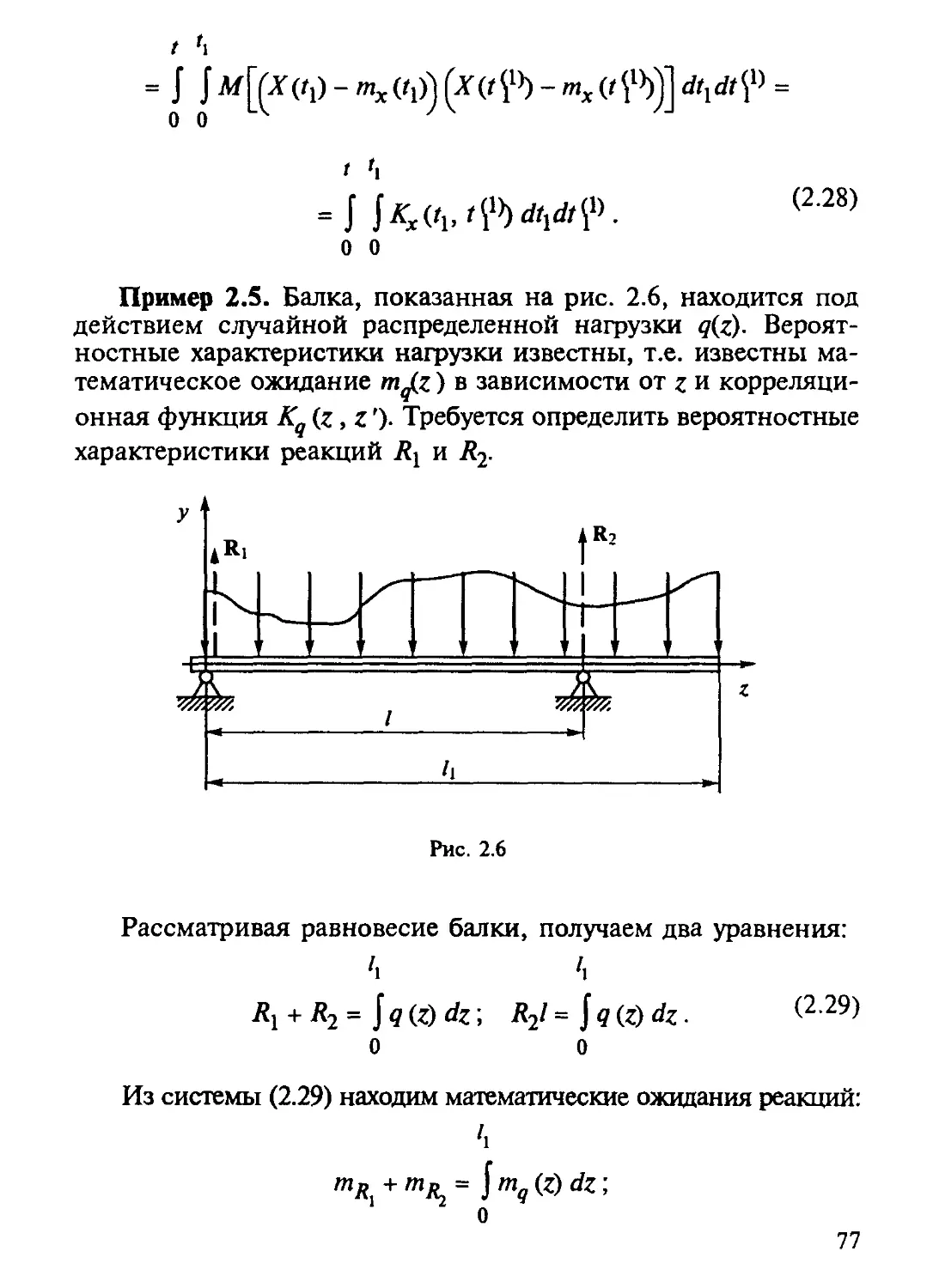
Глава 2. НЕСТАЦИОНАРНЫЕ СЛУЧАЙНЫЕ ФУНКЦИИ
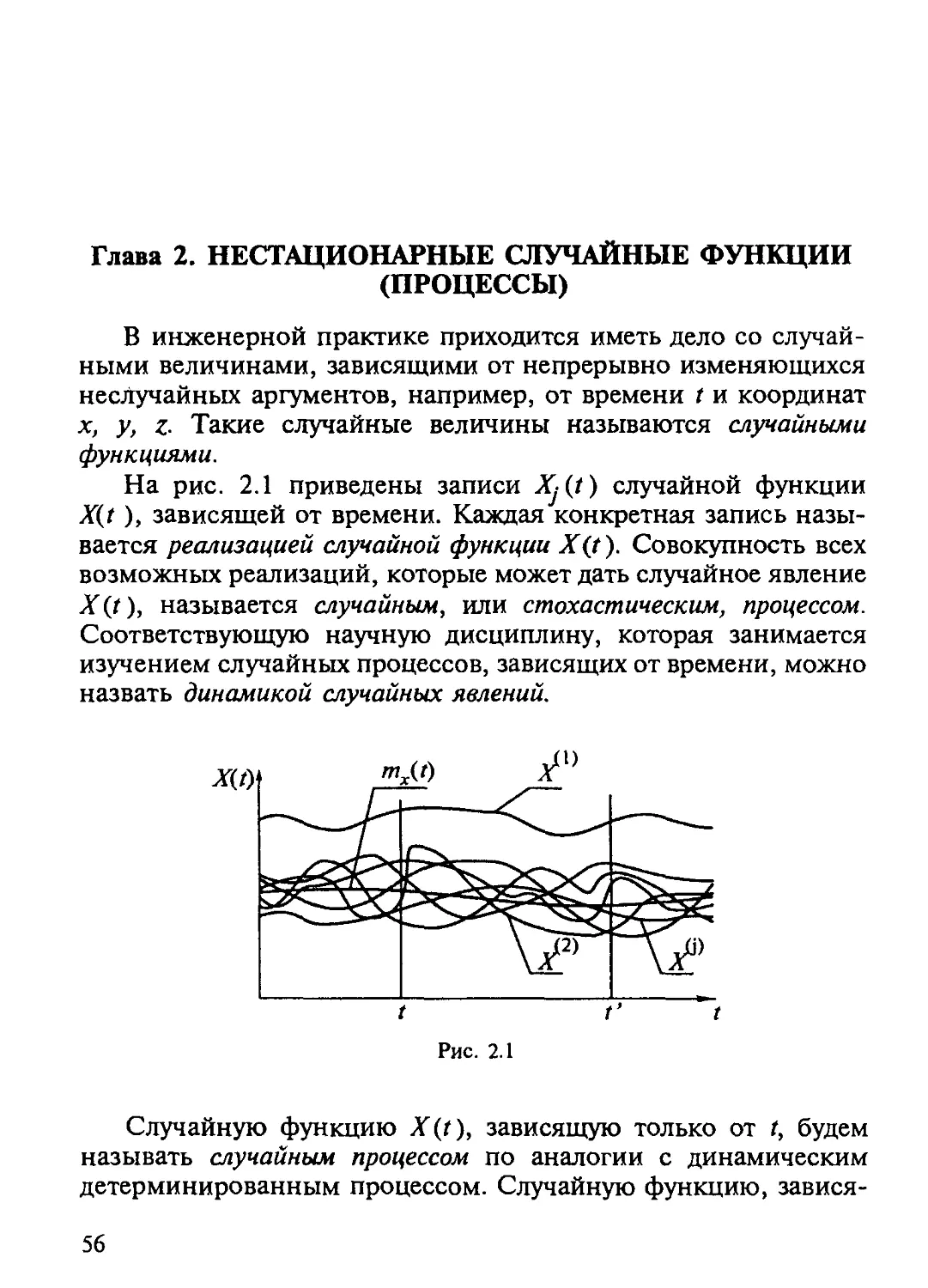
(ПРОЦЕССЫ)
В инженерной практике приходится иметь дело со случай-
случайными величинами, зависящими от непрерывно изменяющихся
неслучайных аргументов, например, от времени t и координат
х, у, z- Такие случайные величины называются случайными
функциями.
На рис. 2.1 приведены записи X.(t) случайной функции
X(t), зависящей от времени. Каждая конкретная запись назы-
называется реализацией случайной функции X(t). Совокупность всех
возможных реализаций, которые может дать случайное явление
X(J), называется случайным, или стохастическим, процессом.
Соответствующую научную дисциплину, которая занимается
изучением случайных процессов, зависящих от времени, можно
назвать динамикой случайных явлений.
Рис. 2.1
Случайную функцию X(t), зависящую только от t, будем
называть случайным процессом по аналогии с динамическим
детерминированным процессом. Случайную функцию, завися-
56
щую от координат и времени, принято называть случайным
пространственно-временным процессом или, когда это не при-
приводит к недоразумению, более лаконично — случайным процес-
процессом.
Во введении приводились примеры динамических систем,
исследование которых требует решения дифференциальных
уравнений возмущенного движения, вызванного случайными
силами, изменяющимися во времени. Эти задачи относятся к
«динамическим случайным явлениям», т.е. к случайным про-
процессам. Например, случайной функцией является разброс AR
тяги двигателя R, который зависит от времени (см. рис.В.2).
Следует отметить, что при изучении случайных процессов ис-
исследуют не свойства отдельных случайных функций X:(t), ха-
характеризующих процесс, а свойства всего множества функций
в целом. Это дает возможность при анализе движения механи-
механической системы, находящейся под воздействием случайных
возмущений, исследовать ее поведение не по отношению к
какому-либо одному воздействию, а по отношению к целой
совокупности возможных случайных воздействий.
Рассмотрим случайную функцию X(t). Предположим, что
произведено «л» независимых опытов, в результате которых
получено «л» реализаций Х(О (см- Рис- 2.1). Каждая реализа-
реализация есть неслучайная функция, но предсказать, как будет из-
изменяться Xj (t), до опыта нельзя. Ставшее известным при опыте
изменение Xj(t) от нуля до ^ не позволяет предсказать пове-
поведение Xj(t) при t > /j, т.е. Xj(t) при t > /j неопределенно. Если
зафиксировать аргумент f = fj, то случайная функция X(t)
превратится в случайную величину X, которая является пред-
предметом рассмотрения в теории вероятностей. Условимся назы-
называть эту случайную величину сечением случайной функции X(t),
соответствующим данному моменту fj (см. рис. 2.1). При / =
= t{ получаем л значений случайной функции. Можно, зафик-
зафиксировав время, рассматривать изменение процесса по множе-
множеству испытаний. Поэтому каждая реализация, характеризующая
процесс, зависит от двух неслучайных аргументов — дискрет-
дискретного номера реализации и непрерывного времени. Например,
если записывать вертикальные ускорения в какой-либо точке
автомашины (см. рис. В.1, а), то при каждом проезде по одной
4 Зак. 341 57
и той же дороге с одной и той же скоростью получаем одну
реализацию X,(J)\ совокупность этих реализаций определяет
случайный процесс.
В инженерной практике наибольший интерес представляет
анализ случайных колебаний машин, приборов и конструкций,
от которых очень существенно зависит их работоспособность
(усталостная прочность, надежность и ресурс). Нет ни одной
отрасли промышленности, где бы при проектировании новой
техники не использовались при расчетах те или иные разделы
статистической механики и, в частности, один из основных
разделов, посвященный теории и численным методам анализа
случайных процессов.
Рассмотрим более подробно колебания механических сис-
систем, вызванные случайными возмущениями. На рис. В.2 пока-
показан старт ракеты с наклонной направляющей. Из-за случайных
суммарных технологических и газодинамических эксцентриси-
эксцентриситетов (линейного е и углового а), переменных во времени тяга
R направлена не по оси ракеты, что приводит к появлению
двух случайных возмущений — силы Nc = \R\a и момента
Мс = | R | е (кроме разброса тяги AR). На рис. В.1, а показан
автомобиль, который движется по дороге со случайными не-
неровностями (А (х)). Так как при постоянной скорости х = vt, то
h (vt) является случайной функцией, зависящей от времени.
На рис. В.5 показано высотное сооружение (например,
телебашня), на которое действует ветровая нагрузка (распреде-
(распределенная аэродинамическая сила q (f)), имеющая из-за случайной
составляющей скорости потока случайную составляющую, т.е.
«(О = «Ь(О + Д«Г(О,
где qQ (О — детерминированная составляющая распределенной
нагрузки; Aq(t) — случайная составляющая распределенной
нагрузки, зависящая от времени.
Нагрузки q0 и Д^ соответственно зависят от vo(/) и Д v (t),
где vo(t) — модуль детерминированной составляющей скорости
ветра; Д v (t) — модуль проекции случайной составляющей ско-
скорости потока на направление вектора v0. Если скорость ветра
по высоте постоянна (не зависит от z), то случайная распре-
58
деленная нагрузка q(t) зависит только от времени. В общем
случае скорость ветра v для высоких сооружений может зави-
зависеть и от координаты z. Поэтому
v(t,z) = vo(.z,t) + Av(z,t),
где A v (z, О ~ одномерная векторная случайная функция.
При действии случайной ветровой нагрузки на элементы
конструкций типа пластин и оболочек возникающая распреде-
распределенная аэродинамическая нагрузка зависит от двух координат
и времени (рис. 2.2):
Рис. 2.2
В инженерной практике приходится иметь дело с различ-
различными случайными процессами, методы описания которых в
значительной степени зависят от их природы, поэтому целесо-
4*
59
образно случайные процессы как-то классифицировать, чтобы
облегчить их выбор при исследовании прикладных задач, что
требует введения соответствующей терминологии, которая по-
позволяла бы отвечать на вопрос: какой конкретно случайный
процесс рассматривается.
Напомним, что в классической аналитической динамике и
теории колебаний рассматриваются детерминированные про-
процессы (под динамическим процессом понимается реакция сис-
системы на внешнее детерминированное возмущение, изменение
которого во времени известно точно). Основная особенность
детерминированных процессов заключается в том, что поведе-
поведение процесса в будущем можно точно предсказать, зная его
поведение в прошлом.
В статистической динамике аналогом детерминированных
процессов являются случайные процессы, которые могут быть
нестационарными и стационарными — аналоги детерминиро-
детерминированных неустановившихся и установившихся процессов. Отне-
Отнесение динамических процессов к детерминированным или слу-
случайным не всегда бесспорно. Детерминированные и случайные
процессы — это два предельных случая. В любом реальном
динамическом процессе всегда содержится случайная состав-
составляющая. Когда ее влияние на конечный результат мало — она
не принимается во внимание и процесс рассматривается как
детерминированный. Но часто малые случайные составляющие
могут привести к большим конечным разбросам результатов,
которыми пренебречь нельзя.
Можно утверждать, что все физические процессы не явля-
являются полностью детерминированными, так как всегда возмож-
возможно появление неконтролируемого случайного возмущения, ко-
которое сделает вначале детерминированный процесс случайным.
Случайные динамические процессы, возникающие в механи-
механических системах, есть реакция системы на случайные внешние
силы, которые, в свою очередь, представляют собой случайные
процессы.
Чтобы исследовать случайное движение механической сис-
системы, необходимо иметь, как минимум, подробную информа-
информацию о случайных внешних силах, например, вероятностных
характеристиках случайных процессов. Поэтому данная глава
посвящена изложению общей теории случайных функций —
60
случайных процессов, частным случаем которых являются слу-
случайные процессы, описывающие внешние нагрузки («вход»),
действующие на механические системы. Без знания вероят-
вероятностных характеристик «входа» невозможно получить вероят-
вероятностные характеристики «выхода», которые необходимы для
оценки «прочности» конструкции.
§ 2.1. Вероятностные характеристики нестационарных
случайных функций
Рассмотрим случайную функцию X(t) (см. рис. 2.1), кото-
которая при каждом фиксированном значении аргумента t является
случайной величиной, полной вероятностной характеристикой
которой является ее закон распределения при данном значе-
значении х. Этот закон распределения называется одномерным зако-
законом распределения случайной величины X, зависящей от параметра
t, и может быть задан одномерной плотностью вероятности
f(x, t). Однако для случайной функции X(t) одномерный закон
распределения/(*, /) не является ее полной характеристикой.
Функция f(x, t) характеризует только закон распределения
X(t) для данного, хотя и произвольного t. Зная/(х, /), нельзя
ответить на вопрос о зависимости случайных величин X(t) при
различных t. Более полной характеристикой случайной функ-
функции X(t) является двумерный закон распределения
/(*!, х2 ; tu *з), B.1)
представляющий собой распределение системы двух случайных
величин X(tx), X(t-2) (см. рис. 2.1) для двух произвольных се-
сечений случайной функции X(t). Но и эту характеристику в
общем случае нельзя назвать исчерпывающей, так как еще
более полной характеристикой является трехмерный закон рас-
распределения
/(*!, х2, хъ; tx, t2, t3). B.2)
Теоретически можно неограниченно увеличивать число ар-
аргументов и получать при этом все более подробную информа-
информацию о случайной функции. Однако использовать в расчетной
практике столь громоздкие характеристики, зависящие от мно-
61
гих аргументов, практически невозможно. Поэтому в приклад-
прикладных задачах анализа случайных динамических процессов, как
правило, используются только одномерные и двумерные рас-
распределения. Теория случайных функций, использующая только
одномерные и двумерные законы распределения, называется
корреляционной теорией.
В первой главе было показано, что в теории вероятностей
очень большую роль играют неслучайные числовые характе-
характеристики случайных величин: математическое ожидание и дис-
дисперсия — для одной случайной величины, математические ожи-
ожидания и корреляционная матрица — для системы случайных
величин. Числовые характеристики представляют собой весьма
гибкий и мощный математический аппарат, позволяющий
сравнительно просто решать многие практические задачи. Ис-
Искусство пользоваться ими составляет основу прикладной тео-
теории вероятностей.
Для случайных функций также вводятся простейшие основ-
основные характеристики, аналогичные числовым характеристикам
случайных величин, и устанавливаются правила действий с
этими характеристиками. Такой аппарат оказывается достаточ-
достаточным для решения многих практических задач. В отличие от
числовых характеристик случайных величин, представляющих
собой определенные числа, характеристики случайных функ-
функций в общем случае не числа, а функции.
Рассмотрим сечение случайной функции X(t) при фикси-
фиксированном г. В этом сечении мы имеем обычную случайную
величину. Определим ее математическое ожидание. Очевидно,
в общем случае математическое ожидание зависит от t, т.е.
представляет собой некоторую функцию t (см. рис. 2.1):
mx(t) = M[X(t)]. B.3)
Таким образом, математическим ожиданием случайной
функции X(t) называется неслучайная функция mx(t), кото-
которая при каждом значении аргумента t равна математическому
ожиданию соответствующего сечения случайной функции.
Аналогичным образом определяется дисперсия случайной
функции.
62
Дисперсией случайной функции X(t) называется неслучайная
функция Dx(t), значение которой для каждого /равно диспер-
дисперсии соответствующего сечения случайной функции:
Dx(t) = D[X(t)]. B.4)
Дисперсия случайной функции при каждом t характеризует
разброс возможных реализаций случайной функции относи-
относительно среднего, иными словами, «степень случайности» слу-
случайной функции.
Так же как и для случайных величин, Dx(t) есть неотри-
неотрицательная функция. Извлекая из нее квадратный корень, по-
получаем функцию ax(t) — среднее квадратическое отклонение
случайной функции:
ах(О = л/дЛ7). B-5)
Математическое ожидание и дисперсия представляют собой
весьма важные характеристики случайной функции; однако для
описания основных особенностей случайной функции этих
характеристик недостаточно. Чтобы убедиться в этом, рассмот-
рассмотрим две случайные функции Х^ (Г) и X2(t), наглядно изобра-
изображенные семействами реализаций на рис. 2.3, а и б.
Случайные функции Х{ (О и Х2 (t) имеют почти одинаковые
математические ожидания и дисперсии; однако характер изме-
изменения реализаций этих случайных функций совершенно раз-
различен. Для случайной функции Х1 (t) (рис. 2.3, а) характерна
ярко выраженная зависимость между ее значениями при раз-
различных t. Напротив, случайная функция X2(t) (рис. 2.3, б)
имеет беспорядочный колебательный характер. Для такой слу-
случайной функции характерно быстрое уменьшение зависимости
между ее значениями при f и t при увеличении интервала
t' -t.
Внутренняя структура этих случайных процессов совершен-
совершенно различна, но это различие не улавливается ни математичес-
математическим ожиданием, ни дисперсией. Поэтому вводится еще одна
неслучайная характеристика, которая называется корреляцион-
корреляционной функцией (иначе — автокорреляционной функцией). Кор-
Корреляционная функция характеризует степень зависимости
63
Рис. 2.3
между сечениями случайной функции, относящимися к двум
различным моментам времени (t и t').
Рассмотрим два сечения случайной функции Х\ (t)
(рис. 2.3, а), относящихся к различным моментам: t и f. Оче-
Очевидно, что при близких значениях /и /' величины X^(t) и
Хх (t') связаны тесной зависимостью: если величина Aj (/) при-
приняла какое-то значение, то и величина Х\ (t') с большой веро-
вероятностью примет значение, близкое к нему. Для случайной
функции Х2 (t) это далеко не очевидно. При увеличении ин-
интервала между сечениями t, t' зависимость между X,{t) и
Xj (t') вообще должна ослабевать.
Степень зависимости величин X(t) и Х(С) может быть в
значительной мере охарактеризована их корреляционным мо-
моментом.
64
Таким образом, корреляционной функцией случайной функции
X(t) называется неслучайная функция двух аргументов
Кх (/, t'), которая при каждой паре значений t, t' равна корре-
корреляционному моменту соответствующих сечений случайной
функции:
Kx(t,t') = M[X(t)X(f)], B.6)
где
X(t) = X(t)-mx(t), X(t') = X(t')-mx(f)
о о
(А"(О, X(f) — центрированные случайные функции.)
При одинаковых математических ожиданиях и дисперсиях
рассмотренные в качестве примера случайные функции Х^ (t)
и Х2 (J) имеют совершенно различные корреляционные функ-
функции. Корреляционная функция случайной функции Хх (t) (см.
рис. 2.3, а) медленно убывает по мере увеличения промежутка
(г, /'); напротив, корреляционная функция случайной функции
X2(t) (см. рис. 2.3, б) быстро убывает с увеличением этого
промежутка.
Корреляционная функция Кх (/, / ')> когда ее аргументы со-
совпадают, равна дисперсии случайной функции:
Kx(t,f) = M[\X(t)j \ = Dx(t). B-7)
Так как корреляционный момент двух случайных величин
X(t) и X{t') не зависит от последовательности, в которой эти
величины рассматриваются, то корреляционная функция сим-
симметрична относительно своих аргументов, т.е. не меняется при
перемене аргументов местами:
Kx{t,C) = Kx(f,t). B.8)
Качественный характер изменения Кх от t и /' показан на
рис. 2.4.
65
Рис. 2.4
Вместо корреляционной функции Кх (t, t') можно пользо-
пользоваться нормированной корреляционной функцией
г«П- КЛиП B9)
которая представляет собой коэффициент корреляции величин
X(t), X(t'). Нормированная корреляционная функция анало-
аналогична нормированной корреляционной матрице системы слу-
случайных величин. Она удовлетворяет условию, аналогичному
условию A.59):
\rx(t,f)\<l,
так как
\Kx(t,f)\<ax(t)ax{f).
При t' = t нормированная корреляционная функция равна
единице:
66
Рассмотрим, как изменяются основные характеристики слу-
случайной функции при прибавлении неслучайного слагаемого и
при умножении на неслучайный множитель. Эти неслучайные
слагаемые и множители могут быть как постоянными величи-
величинами, так в общем случае и функциями t.
Прибавив к случайной функции X(t) неслучайное слагае-
слагаемое ф (t), получаем новую случайную функцию:
7@ = *@ + ф@- B.10)
По теореме сложения математических ожиданий имеем
му(О = »»х(О + ф(О. B.11)
т.е. при прибавлении к случайной функции неслучайного сла-
слагаемого к ее математическому ожиданию прибавляется неслу-
неслучайное слагаемое.
Получим корреляционную функцию и дисперсию случай-
случайной функции 7@:
Ку (t,t') = M[Y(t) Y{t')] = М[G@ - ту (t))G(f') - ту (t'))] =
= А/[(ЛГ0 + Ф@-тх@-ф@ХЛ'(О + Ф(П-юх(О-ф(''))] =
= М[(X(t)~mx(t))(X(t') - тх(t'))] = Кх(t, t');
Dy(t) = Bx(t),
т.е. от прибавления неслучайного слагаемого корреляционная
функция и дисперсия случайной функции не меняются.
Умножим случайную функцию А'(О на неслучайную функ-
функцию ф (О:
7@ = Ф (t)X(t). B.12)
Вынося неслучайную функцию ф (О за знак математичес-
математического ожидания, имеем
my(t) = M[<?(t)X(t)) = (p(t)mx(t), B.13)
67
т.е. при умножении случайной функции на неслучайный мно-
множитель ее математическое ожидание умножается на тот же
множитель.
Получим корреляционную функцию и дисперсию:
Ky(t,f)=M[Y(t) Y{t')] = М [(У (О - ту (t ))(Y(t') - ту (t'))] =
= М[Ф (О Ф {t')(*(/)-mx(t)) (X(t') - mxit'))] =
= ф@ф(О*х(',о;
Дк(/) = Ф2(О^х(О, <214)
т.е. при умножении случайной функции на неслучайную функ-
функцию ф (t) ее корреляционная функция умножается на
Ф (/) ф (/'), а дисперсия — на ф2 (t).
В частности, когда ф (t) = с (не зависит от /), корреляцион-
корреляционная функция умножается на с2.
Пример 2.1. Требуется определить нормированную корре-
корреляционную функцию, если случайная функция
X(t) = AfTat,
где А — случайная величина с известным математическим ожи-
ожиданием тА и дисперсией DA.
Математическое ожидание случайной функции
mx = M[Afs-at} = e-atmA.
Корреляционная функция случайной функции
Kx(t, t') = М[(Ае~а' - тАе-а')(Ае-аГ - тАе-аГ )] =
= е -<х/е -at' М[(А _ тл Jj = e -ait+f) DA .
Дисперсия случайной функции X(t)
Dx(t) = DAe-2"'.
Средние квадратические отклонения X(t) для моментов
времени t и f соответственно равны
68
ax(t) = GAe-at;
Нормированная корреляционная функция
KAt,f) Л, е'а<'+''>
г (t t'1 = ^——-— = — = 1
Wt) ox(t)ax(t') <%е-««+П
Полученный результат говорит о том, что между значения-
значениями случайной функции X(t) в разные моменты времени / и
/' имеется линейная зависимость.
Пример 2.2. Требуется определить корреляционную функ-
функцию случайной функции X{t), если
X(t) = A sin ю t + 2?cos со /,
где А и В — случайные величины, для которых известны тА,
тВ' °А>аВи КАВ (тА =тВ= °>-
По определению,
Кх (t, t') = M [(A sin mt+B cos cor) (A sin at' + В cos Ш')] =
= М [ A2 sin cat sin cof' + AB sinco t cos (at' +
+ AB cos со/ sin at' + В 2 cos at cos со/'] ,
или
Kx(t, t') = sinco/sinco/' M[A2] + sinco(/ + /') M[AB] +
+ cos со/cos at' M[B2] .
Окончательно получаем
Kx (/, /') = ст^ sin со/ sin со/' + A^sin co(/ + /') +
+ од cos со/ cos at'.
В частном случае, когда КАВ = 0, о2л - а2в, имеем
Кх (/,/') = о2А cos со(/-/').
69
§ 2.2. Системы случайных функций и их вероятностные
характеристики
Рассмотрим систему двух случайных функций X{t) и Y(t),
характеризующих различные случайные процессы. Например,
при старте на ракету действуют случайная сила Nc и случайный
момент Мс (см. рис. В.2). Поэтому при исследовании возму-
возмущенного движения ракеты полезно знать о корреляционной
зависимости этих случайных функций.
Рассмотрим второй смешанный момент от вещественных
о о
центрированных случайных функций X и Y для различных
моментов времени:
M[X(t)°Y(t')] = Kxy{t,t'), B.15)
где Куу (t, t') — взаимная корреляционная функция.
Взаимной корреляционной функцией двух случайных функций
называется неслучайная функция двух аргументов г и Г, кото-
которая при каждой паре значений t, t' равна корреляционному
моменту соответствующих сечений случайной функции X(t) и
случайной функции Y{t).
Взаимная корреляционная функция не удовлетворяет усло-
условию симметрии относительно своих аргументов, т.е.
но при одновременной перестановке моментов времени и ин-
индексов имеем
К^а, Г) = Аух(Г', О- B.16)
Если взаимная корреляционная функция К^ не равна тож-
тождественно нулю, то случайные функции X и Y по аналогии со
случайными величинами называют коррелированными; если
же Кп тождественно равна нулю, то такие случайные функции
называют некоррелированными.
В прикладных задачах удобно использовать нормированную
взаимную корреляционную функцию
70
r (t n= Кху«><') B.17)
Как и для системы двух случайных величин, можно ввести
корреляционную матрицу
*"|/^(г,О JyfcoJ" B18)
Для системы л вещественных случайных функций имеем
корреляционную матрицу
* = • B.19)
К К К
Рассматривая случайные функции X.-(t) как компоненты
л-го вектора, матрицу К B.19) можно представить в более
компактной форме записи, используя диадное (тензорное) про-
произведение двух векторов
— 2.
K=M[X(t)®X(t')] .
Для комплексных случайных функций по аналогии с ком-
комплексными случайными величинами взаимная корреляционная
функция равна
Kxy(t,f) = M[X «)?•«•)], B.20)
о
где Y* — центрированная сопряженная случайная функция.
Корреляционная функция B.20) в частном случае при t= f и
Х= Y есть дисперсия случайной комплексной функции X, ко-
которая должна быть положительной, что имеет место в том
случае, если берется произведение комплексной функции
X(t) на сопряженную функцию X* (t):
71
Dx(t) = M\X{t)X* (/)] = M[{XX (t) + tff2 (Г)) (*j (О - Я2 (О)] =
= M[(X21+Xl)].
Покажем, что для комплексных случайных функций вы-
выполняется условие
*^(/, г о = *;,(*•, о. <2-21)
Корреляционные функции А"^(Г,/') и Л"^ (?',?) в более
подробной записи равны
К^ (г, Г) = М {{Хх (t) + iX2 (t)) (Yx (t') - /T2 (t'))] =
= ^дсЛ + Kx2y2 + ' (^,y2 - Kx2y1 ) ;
^(/', О = M[{YX (f) + iY2{t'))(Xl (t)-iX2(t))] =
= Kxxyx + Kx1y1 - ' (Kxxy2 - Кх^г ) •
Поэтому сопряженная функция К^Ц', t) равна #„,G, Г')-
В соответствии с B.21) элементы корреляционной матрицы
для комплексных случайных функций, симметричные относи-
относительно главной диагонали, являются комплексными сопряжен-
сопряженными функциями.
Пример 2.3. Имеются две случайные функции A'j =
= A cos а ^ , Х2 = В cos a2t. Амплитуды А и В являются случай-
случайными величинами с известными вероятностными характерис-
характеристиками тА, ms, DA, DB и КАВ. Требуется определить взаимную
корреляционную функцию и найти значение этой функции при
t= t'.
По соотношению B.15)
Кх = М[(А - тА) cos cojf (В- тв) cos ®2t ] =
= A^g COS (Ojf COS <?>2t' .
При t=t'
Kxx, ('»') = Kabcos ш1'cos <02t •
72
72
Пример 2.4. На рис. 2.5 показана балка, нагруженная со-
сосредоточенными, случайными по величине моментами Мх и
Му с известными вероятностными характеристиками тх, ту,
Др Dy и А^у. Требуется найти: 1) математическое ожидание и
дисперсию максимального нормального напряжения в произ-
произвольном сечении; 2) максимальное значение максимального
напряжения в опасном сечении, считая, что максимальное
напряжение имеет нормальное распределение.
Рис. 2.5
Изгибающие моменты в произвольном сечении
Максимальное нормальное напряжение в произвольном сг-
чении
где хх, ух — координаты точки, максимально удаленной от
нейтральной линии, al = yJJx, a2 = xx/Jy.
1Ъ
Математическое ожидание максимального нормального на-
напряжения
т°т=а1Г~~1 }тх+аг\1--[ W
Корреляционная функция максимального нормального на-
напряжения
= \\ - Ц\ - ^ [a\Dx + 2а1а2Кяу + a\Dy) .
Дисперсия нормального напряжения в произвольном сече-
сечении
D°.= [1 ~ 1) (°i^+2wK*y+a*Dy) ¦
В рассматриваемом примере опасным сечением является
сечение при z — 0, поэтому, воспользовавшись правилом трех
сигм, получим
тахстт = /пст +3аст .
/л /п
Если предельное состояние для стержня связано с появле-
появлением пластических деформаций, то конструктивные параметры
стержня при известных случайных моментах должны выбирать-
выбираться из условия
(Ту
max ат = ,
т "Tt
где аТ— предел текучести материала, из которого сделан стер-
стержень; nTt — коэффициент безопасности.
74
§ 2.3. Линейные преобразования случайных функций
Рассмотрим линейные преобразования случайных функций,
когда с помощью линейных операторов L устанавливается связь
между «входом» и «выходом»:
Y(t) = L[X(t)]. B.22)
Имеется в виду статистическая связь между входом и вы-
выходом, когда по известным вероятностным характеристикам
случайной функции X(t) надо определить вероятностные ха-
характеристики У (О-
Рассмотрим наиболее часто употребляемые при исследова-
исследовании случайных колебаний линейные преобразования случай-
случайных функций.
1. В случае, если вход X и выход Y — случайные л-мерные
векторы — связаны линейным соотношением вида
Y(t) = B(t)X(t),
где B(J) — матрица (л х л), элементы которой by (/) являются
неслучайными функциями, математические ожидания компо-
компонент yj вектора Y, корреляционная матрица K(t, t') и взаимно
корреляционные функции Kv v равны
П 1 "
my.{t) = M Zbjixi(O = Z*y/wx((O (У-1,2,..., л);
' hi ы
КУ?Х КУХУ2 ¦" КУ\У„
K(t, O = M[Y@®Y@]= " ' " , B.23)
к к к
-*Чу, лУ„У2 ¦" УпУ«
где
о о " "
Кщ = М [ Yj (О Y-, (Г)] = X ? bip (/) fy, (/') KvJit, t').
p=l u=l
75
Дисперсия компонент вектора Y
п п
V) = I Е у) **,(') *Vuc t'). <2-24>
р=1 и=1
2. Интеграл от случайной функции X(t)
t
nt)=\X(tl)dtl. B-25)
О
Считая, что операции осреднения и интегрирования пере--
становочны, находим математическое ожидание:
¦/ I 1 t
my(t) = M \Xdtx = f M[X] dtx = \mx(tx) dtx . B.26)
0 0 0
Перестановка операции математического ожидания с дру-
другими линейными математическими операциями используется
и в последующих преобразованиях.
Корреляционная функция
К (Г, t') = M^Y(t )-my(t)) (Y{t') - my (t'))] =
' f I B.27)
= Af\ f^)-m,^)]*! l[X(t\lb-mx(t[lb]dt[4.
Произведение двух интегралов под знаком математического
ожидания в B.27) можно записать как двойной интеграл
t /'
J jfX^-m^hat^b-m^t^d^dt^,
о о4 J
поэтому
" tf
Ky(t,f) = M ^(X^-m^t^Xit^-m^t^dt^ =
76
/ 'l
0 0
/ h
= jJKx(tl,t^dhd^. B28)
о о
Пример 2.5. Балка, показанная на рис. 2.6, находится под
действием случайной распределенной нагрузки q(z)- Вероят-
Вероятностные характеристики нагрузки известны, т.е. известны ма-
математическое ожидание m^z) в зависимости от z и корреляци-
корреляционная функция KAz,Z')• Требуется определить вероятностные
характеристики реакций Щ и R2-
Рис. 2.6
Рассматривая равновесие балки, получаем два уравнения:
Rl + R2=\q(z)dZ; R2l=jq(z)dz. <2-29)
о о
Из системы B.29) находим математические ожидания реакций:
/,
mR1 + mR2= \mq{z)dz;
о
77
78
/m^= \mq{z)dz.
о
о о
Центрированные случайные величины i?j и /?2 равны
'.
Rl = l(q(Z)-m)](zfj(\-j)dz;
h
R2= l(q(z)-mq(z?)(j]dz.
Дисперсии реакций
^, = ^ bb(*i)(i-7)*i Jft(«)(i-5)* =
= ^ J J<fo(*i) 9O(dfl -7l[l -7 ] dzfizi =
00 \ Д J
= \ J^[ft(*i)eb«][l-f](l-7]**i-
3. Вероятностные характеристики случайной функции
У(/) = в(/)с+J^tt/!)^)*!, B.30)
о
78
где a(t), к {t, ф — неслучайные функции; с — случайная вели-
величина с известными тс и Dc; X(tx) — случайная функция с
известными тх (t) и Кх (/, t ')•
Математическое ожидание Y(t)
t
mft) = M a(t)c+\k{t,tx)Xdtx =a(t)M[c] +
о
< ' B.31) •
+ }k(t, tx)M[X) dtx = a(t) mc + )k(t, /j) mxdtx .
о о
Корреляционная функция, если с и X независимы,
( ' ~\
Ky(t,f) = M a(t)c+jk(t,tl)Xl(tl)dtl x
о
г f \
х a(t')c+ jk(t\t\lbX(t\lbdt\^ =
I ° JJ
t 'i
= a(t)a{f) mCc2 ) + J jk(t, tx)k{f, tf) Kx(tu t[l>) d^dt^ .
0 0
B.32)
4. Рассмотрим производную от случайной функции
1ЧО-^(/). B33)
Математическое ожидание Y(t)
Г<Шм1 rf ^@B.34)
Корреляционная функция
Ку (t, t') = M^Y{f )-my(t fj (Y(t') - my (t'))] =
79
Y о V о V
dX{S) dX{t') {235)
dt df
л j \ j.
Произведение производных под знаком математического
ожидания можно представить в виде
ih^-z&g**. азе,
В результате получим
Ay(.t,t)-M Qtdv I
З2 о о д2 Kx(t, t') /0 о7ч
Если случайные функции Л" (О и Y(t) связаны соотноше-
соотношением Y(t) = J-1-, то корреляционная функция Kv(t,t')
dt
равна
Для общего случая, когда
у dnX B.39)
корреляционная функция равна
?пХ B.40)
у dtndfn'
5. Взаимная корреляционная функция случайной функции
Л!" и ее производной
80
^^адШ^МйИЗ. B.41)
Аналогично получаем выражение для взаимной корреляци-
корреляционной функции производных различных порядков случайной
функции X(t):
_d^Kx(t,t') B.42)
V«~ dtPdt'4
где p, q — порядки производных (р = 0, 1,..., n, q = 0, 1,..., ri).
Пример 2.6. Определить корреляционную функцию и дис-
дисперсию для производной случайной функции X(t), если
X(t) = A sin t {Щд и ад известны).
Корреляционная функция случайной функции
Кх (t, t') = M\UA - т? sin i\ f(A - m? sin / 'Yl = sin t sin t' o\ .
Воспользовавшись формулой B.37), получим
Ky{t, f) = Kx(t, t') = o^ cos /cos t'.
Дисперсия
Z)i.(/) = /Lcos2r.
Пример 2.7. Определить корреляционную функцию случай-
случайной функции
где а (О, b(t)- неслучайные функции; X— случайная функция
с известными характеристиками тх = 0 и Кх (t, t').
Корреляционная функция
Ky(t,f) = M[°Y(t)Y(t')],
или
7 Зак. 341 81
Так как
M\x(t)^p^y^M[X(t)X(t')} = -^Kx(t,t'),
то после преобразований получим
дКх
Ky(t, t') = a{t) a(f)Kx + a(t) b{f)-^ +
дКг сгAL. /Л ._.
§ 2.4. Вероятностные характеристики решений линейных
дифференциальных уравнений при нестационарных случайных
возмущениях
1. Линейное неоднородное дифференциальное уравнение
первого порядка
y + ky = X(t), B.44)
где X(t) — случайная функция, для которой известны tnx(t) и
Kx(t,f).
Уравнение B.44) описывает физический процесс, изменя-
изменяющийся во времени, например, работу двигателя, показанного
на рис. 2.7. В установившемся режиме работы момент двигателя
Mq (J) уравновешивается моментом сопротивления Мс (со), за-
зависящим от угловой скорости со, и моментом нагрузки Мн.
Случайное изменение момента нагрузки на АМН приведет к
изменению угловой скорости на Дсо и появлению инерционного
момента, равного J—тг, где /— момент инерции вращающихся
деталей, приведенных к оси вала.
82
Рис. 2.7
Уравнение возмущенного вращения двигателя имеет вид
,</Дсо д, и B.45)
J~W = АМ» ~ АМ*'
где ДМС — изменение момента сопротивления.
При малых отклонениях от стационарного режима работы
можно принять АМС = к^А со. Тогда уравнение B.45) принимает
вид, аналогичный B.44):
-5- + тДсо=-г. B.46)
Общее решение уравнения B.46) при произвольной правой
части (если положить у = А со и ДМН (/)//= X(t))
^ce-^+Je-**'-'.)*^)^ (*=у]- B'47)
о ^ ^
Вероятностные характеристики случайного момента ДМН
известны (тшу) и Ад^г, Г).
При Г = 0, у @) = у0, поэтому с = у0. (Начальное значение
у может быть как неслучайным, так и случайным.)
Рассмотрим случай, когда начальное значение у0 случайно,
причем случайная величина j>0 и случайная функция X(t) не-
независимы. Считаем, что вероятностные характеристики j>0 из-
известны и равны /я0 и Dq.
г 83
Математическое ожидание решения уравнения B.47) и кор-
корреляционная функция соответственно равны
t
my=M\yoc-kt]+ Щ^^Лх^Л^
О
= moe-to + f e-^'i)/^) dtx ; B.48)
о
Ky (t, f) = M \yQe-kt+ f с-к«-'0Х«х) dt\ x
i °
x f Oe-to0) + f e-*C-'A)> °X(t[lb dt[41. B.49)
о о
Так как yQ и X(t) независимы, то после преобразований
получаем
t f
Ky(t,t>) = Doc-k«+tl)+l je-bV-Vt-tV-'?) Kx{tu t^dttdt^.
О О
B.50)
Для получения дисперсии надо после интегрирования в
выражении B.50) положить t' = t.
Найдем корреляционную функцию и дисперсию решения
уравнения B.47), если ДМН — случайная функция с нулевым
математическим ожиданием и постоянной дисперсией Dn (при
t = 0, у = 0). После преобразований из B.50) получаем
Д,(О = р(е-*'-1J.
84
При решении прикладных задач часто бывает необходимо
знать вероятностные характеристики производных у. Полезной
бывает и информация, которую можно получить, рассмотрев
взаимно корреляционную функцию Куу. Из уравнения B.44)
получаем выражение для производной
y(t) = -ky(t) + X(t). B.51)
Это же выражение можно получить и дифференцируя ре-
решение B.47) по L При дифференцировании входящего в правую
часть соотношения B.47) интеграла надо воспользоваться пра-
правилом дифференцирования интеграла по параметру:
PC) P(/W/, ,ч B-52)
<x(f) <x(O
Дифференцируя B.47), с учетом B.52) получаем
( ' Л
y = -k ce~*'+ J е"* <*"'i> X{tx) dtx + X(t)
о
ч J
ИЛИ
y = -ky + X{t).
Математическое ожидание и корреляционная функция для
у соответственно равны
my{t) = -kmy(t) + mx{t);
= к2Ку- kM[y{t) °X(t')J-kM[y(t Wit)\ + Kx.
Так как случайное начальное отклонение уои X(t) незави-
независимы, то после преобразований получаем
t
Mb<t)X(f)] = Je-^'"'.^^ , f)dtx;
о
85
t'
о
Окончательно имеем
t
Щ t') = k 2Kfl, t ')KX (t, f) + J e"* <"i> Kx (tx , t \l>) dtx +
о
t'
+ /е-*(''-'|1Ч(Л1).ОА^1). B53)
о
Взаимно корреляционная функция
о
Kyfan-м miL^7-1 •
После преобразований получаем
Kyfi, t') = -кКр, О + f e~* (w^i , /') *! • B54)
О
2. Линейное уравнение второго порядка с постоянными
коэффициентами и случайной правой частью имеет вид
y + 2ny + ply = X(t). B.55)
Общее решение уравнения B.55) можно представить в виде
у = Clyi(O + с2/2(О + f *(/- h) X(t$ dtx, B56)
о
где
/i = fnt cos pt, /2 = e""' sin ^/;
g(t- t{) = e-"(-'i) sinp{t- Ц), (p = ipl-n2) .
Выражение для производной у по времени имеет вид
86
> = с,/1 + с2л4^^*('1И'1- B57)
Произвольные постоянные Cj и с2 определим из начальных
условий (Г = 0, у = у0, у = у0):
с\=Уо> с2 = (Уо + пУоУР-
Выражение для у принимает вид
t
y = yofn + ^f2@+jg(t-t1)X(tl)dtl, B-58)
р о
где
/l2=/l+^/2-
При определении вероятностных характеристик можно вос-
воспользоваться результатами § 2.3.
Считая начальные данные у§ и j>0 и возмущение X(t) неза-
независимыми случайными величинами, вероятностные характе-
характеристики которых известны, найдем математическое ожидание
t
™у = «у/и + ту/г + J^ С - 'i> «х Ci) *i B59)
о
и корреляционную функцию
Ку = M[°Y(t), °Y(t')} =fn(t)fxif) Dyo +f2(t)f2(f) Dyo +
+ \ \g(t-tx)g(f-t \») A; (/x , / ^> A ?> *!. B.60)
о о
3. Рассмотрим линейное неоднородное уравнение второго
порядка с переменными коэффициентами:
y + ai(t)y+a2 (t)y = X«). B.61)
87
Полагая у = Z\ , у = Z2, представим уравнение B.61) в виде
системы двух уравнений первого порядка
[ц + alzl + a2Z2 = X,
[Zi-Zi-0
или
Z + A(t)Z = 1, B.62)
где
Z2 ' -10 ' 0| '
Решение уравнения B.62) имеет вид
t
Z = B(f)C+\Gbtx)t(ti)dtx, B63)
0
где B{t) — фундаментальная матрица решений однородного
уравнения B.61), удовлетворяющая условию 5@) = Е; Е— еди-
единичная матрица; G(t, t{) — матрица Грина,
G(t,tl) = B(t)B-%); B.64)
С — вектор начальных данных.
Компоненты вектора С могут быть как детерминированны-
детерминированными, так и случайными. Примем, что вероятностные характе-
характеристики компонент вектора С (вектор С равен Z@)) известны:
тс , Dc и Ксс. Математическое ожидание вектора Z (при
случайных начальных данных)
t
шг = В (О шс + J G {t, /,) m^) dtu B.65)
о
или в скалярной записи
t
mzx = ту= *ПтС, + bnmc2 + hnmfdt\ '
о
88
/
mz2 = my = b2lmCx + b22mC2 + h2lmfdh ¦
0
Матрица корреляционных функций для компонент вектора Z
Го о I \К7. К..
К=М Z@®Z(O = „" * .
1 J [кыкы
Согласно принятому условию о том, что компоненты век-
векторов С и f независимы, имеем
Г о о]
K=M[B(t)C®B(t')C\ +
' г Г 1
о о L J
После преобразований получаем
' г
К=Кс+\ \K}dtxdt{ . B.67)
О О
Элементы матриц Кс и Kf равны
Zc,cj = ЫПЬд (Г) KC{Ci + 6Л(О йу2(Г) А-СЛ +
+ *д(?) bn{t) A-C2C] + *д(/) bj?f') А-СгС2;
%. ('1 .' l') = fti('i) ?yi('i) ^x Ci .до-
.дополученные в этом примере вероятностные характеристики
эешения уравнения B.61) в векторно-матричной форме записи
легко обобщаются на случай, когда вектор Z имеет п компо-
компонент.
Глава 3. СТАЦИОНАРНЫЕ СЛУЧАЙНЫЕ ФУНКЦИИ
(ПРОЦЕССЫ)
Широкое распространение имеют случайные процессы, ко-
которые протекают во времени приблизительно однородно и
имеют вид непрерывных случайных колебаний относительно
некоторого среднего значения, а вероятностные характеристи-
характеристики процесса не зависят от выбора начала отсчета времени, т.е.
инвариантны относительно сдвига по времени. В соответствии
с этим случайная функция X(t) называется стационарной, если
вероятностные характеристики случайной функции X(t+t')
при любом /' тождественно совпадают с соответствующими
характеристиками X(t), что имеет место только в том случае,
когда математическое ожидание и дисперсия случайной функ-
функции не зависят от времени, а корреляционная функция зависит
только от разности аргументов (/'-?)• Стационарный процесс
можно рассматривать как протекающий во времени неограни-
неограниченно долго. В этом смысле стационарный процесс аналогичен
установившимся колебаниям, когда параметры установивших-
установившихся колебаний не зависят от начала отсчета времени.
§ 3.1. Вероятностные характеристики
стационарных случайных функций
В прикладных задачах, когда приходится иметь дело только
с моментами первых двух порядков — математическими ожи-
ожиданиями и корреляционными функциями, постоянство мате-
математического ожидания и дисперсии и зависимость корреляци-
корреляционной функции только от разности аргументов достаточны для
того, чтобы случайную функцию считать стационарной. Такие
случайные функции называются стационарными функциями в
широком смысле [29].
90
Стационарная случайная функция X(t), у которой все за-
законы распределения всех возможных порядков fn (Xj , x2 ,...,
хп > h > h > ¦ ¦¦' {п) зависят только от интервалов /2 ~ h > h ~
-ix ,...,in-t\ и не зависят от положения этих интервалов на
оси времени, называется стационарной функцией в узком смысле.
В дальнейшем, говоря о стационарных функциях, будем
иметь в виду только стационарные функции в широком смысле,
которые наиболее часто используются в прикладных задачах.
Остановимся более подробно на основных свойствах стацио-
стационарных функций.
Как уже было сказано, случайную функцию X(t) называют
стационарной, если математическое ожидание и дисперсия не
зависят от времени, т.е.
mx(t) = const; Dx(t) = const. C.1)
Рассмотрим корреляционный момент K(t, t') случайной
стационарной функции X(t) (рис. 3.1) для двух моментов вре-
времени, разделенных интервалом т. Для стационарного процесса
корреляционный момент не зависит от конкретных значений
t и t', а зависит только от их разности Z" - t = x, т.е.
Кх (t, f) = Kx (t, t+x) = Kx (т). C.2)
Из соотношения C.2) следует, что корреляционная функ-
функция Л^Сг) стационарного случайного процесса есть функция
одного аргумента т.
Рис. 3.1
91
Поскольку корреляционная функция симметрична B.8):
Kx(t,t') = Kx(f,t),
то, полагая t' - t = i, получаем
Кх(т) = Кх(гч), C.3)
т.е. корреляционная функция является четной функцией.
Дисперсия случайной функции равна
Dx(t) = Kx(f,t),
поэтому для стационарной случайной функции имеем
Dx=Kx{0). C.4)
Часто вместо корреляционной функции Л^СО используют
нормированную корреляционную функцию
Кх(х)
Р*Ю = -Щ- ¦ C-5)
Так как | px(t) | < 1, то из C.5) следует
\Kx(x)\<Dx.
В приложении 3 приведены графики наиболее часто ис-
используемых в прикладных задачах автокорреляционных функ-
функций К (I). Среди них имеется корреляционная функция, про-
пропорциональная дельта-функции Дирака, которая называется
стационарным белым шумом, или дельта-коррелированным слу-
случайным процессом:
К(х) = ^05(т). C.6)
Здесь So — постоянный множитель; 8 (т) — дельта-функция
Дирака (см. приложение 1).
Белый шум — это случайный процесс, когда значения слу-
случайной функции X(t) для сколь угодно близких моментов
времени являются некоррелированными. Случайный процесс
типа белого шума нереализуем в действительных условиях, так
как, во-первых, при достаточно близких моментах времени
92
(при очень малых т) случайные функции практически всегда
зависимы и, во-вторых, из C.6) следует, что при т = 0 дисперсия
процесса равна бесконечности. Поэтому для реализации такого
процесса требуется бесконечная мощность, что в реальных
условиях получить нельзя. Тем не менее случайные процессы
типа белого шума широко используют во многих разделах
статической динамики.
Пример 3.1. Требуется выяснить, является ли случайная
функция
п
X(t) = Y< (Aj cos ®jt + Bj sin ®j i) C-7)
M
стационарной случайной функцией, если Aj и Bj — случайные
взаимно независимые величины с нулевыми математическими
ожиданиями и равными дисперсиями фА = DB = Dj).
Математическое ожидание случайной функции X(t) равно
нулю.
Корреляционная функция
'(" )
Кх (t,t') = M Y, Dj cos ajt + Bj sin (oy- О x
.U1 J
(" ¦ )l
x Y, (Ak cos ak r + Bk sin ®k {') •
[k=l JJ
После преобразований получим
n
Кх«,Г') = ^ЦСО8«>;({-{')- C-8)
Полученное выражение C.8) зависит только от разности
t-t', т.е. X(t) является стационарной функцией. Дисперсия
случайной функции X(t)
п
Dx=Kx@) = ZDf. C.9)
>1
93
Пример 3.2. Требуется найти корреляционную функцию
Кх, если случайная функция X равна
п
*=Е4-е/<0;'' C10)
м
где Aj = Ay + iA2j- — комплексная амплитуда; / — мнимая едини-
единица.
Некоррелированные случайные величины Ау и А2; имеют
равные нулю математические ожидания и равные между собой
дисперсии.
Воспользуемся формулой B.20), полагая Y*(t') = X*(t'):
( " V" Y
Kx(t,t-) = M[X(t)X\f)] = M ?yi,e'V ?4е-'Ч'' ,
.U1 Jl*-1 J.
meA*k = Alk-iA2lc.
После преобразований получим
n n
Kx(t,f) = X mUjA]]^^-^10 = X 2Dye'Tffl . C.11)
Из C.11) следует, что случайная функция C.10) при
m\j - m2j ~ ^> Ау = Ау = -^у Л^ некоррелированных Лу, ^2у яв~
ляется стационарной случайной функцией.
Рассмотрим систему двух случайных функций Xx(j) и
X2(t).
Две случайные функции Xfi), X2(t) одного и того же ар-
аргумента называют стационарно связанными, если их взаимная
корреляционная функция зависит от разности аргументов, т.е.
Кхл«,1') = Кхл(х) (x = t'-t). C.12)
Если для случайных стационарных функций Л\ и Х2 выпол-
выполняется условие C.12), то говорят, что эти функции стационар-
стационарны и стационарно связаны. Из свойства взаимной корреляци-
корреляционной функции следует, что
94
или для действительных случайных функций
^Лео = ^,и)- (з.13)
В общем случае взаимные корреляционные функции не явля-
являются четными функциями аргумента т.
Система X.(t) (j = 1,2,..., п) стационарных и стационарно
связанных случайных функций характеризуется корреляцион-
корреляционной матрицей
ЯХЛ(т)....А^Л(т)
*(т)= •
кхлю....кхлы
Пример 3.3. Требуется определить взаимные корреляцион-
корреляционные функции KjM, t') и KyJJ, t') случайных стационарных
функций
X(t) = А^ cos ш t + 2?! sin со t;
У(О = -y4j sin со f + 5j cos со ,
где i4i, Bi — независимые случайные величины с нулевым
математическим ожиданием и равными дисперсиями D.
Взаимные корреляционные функции (при t' - t = -с) равны
о о
К^,С) = М[Х«) Y(f)} = D sin (ох ;
о о
Kyjit, t') = M[X(t) Y(t')] =-Z)sincoT.
Из полученных соотношений следует, что случайные функ-
функции Л^О и У (Г) являются стационарно связанными. Если в
выражении для К^ заменить т на -т, то будет выполняться
условие C.13)
VT> = V"T)- <ЗЛ4)
95
Рис. 3.2
График функции Ку^-х) есть зеркальное отражение графика
функции Kfyii) (рис. 3.2).
§ 3.2. Эргодическое свойство стационарной случайной функции
Для получения характеристик стационарной случайной
функции (математического ожидания тх и корреляционной
функции Кх (t)) необходимо иметь значительное число реали-
реализаций случайной функции X(t). По записям реализации можно
найти приближенные значения тх и К?х). Возникает вопрос:
нельзя ли получить те же характеристики по одной реализации
случайной функции X(t). Поскольку случайный процесс явля-
является стационарным и протекает однородно во времени (мате-
(математическое ожидание не зависит от времени, а корреляционная
функция — от начала отсчета), естественно предположить, что
одной единственной реализации достаточно для определения
характеристик случайной функции. Возможность получения
вероятностных характеристик для стационарной случайной
функции по одной ее реализации имеет большое практическое
значение, так как позволяет уменьшить объем эксперименталь-
экспериментальных исследований, а тем самым уменьшить и материальные
затраты.
Стационарные случайные функции, для которых можно по
одной реализации установить вероятностные характеристики,
называют случайными функциями, обладающими эргодичес-
ким свойством, или просто эргодическими стационарными слу-
случайными функциями. Эргодическое свойство заключается в том,
что каждая отдельная реализация случайной функции дает
96
возможность судить о статических свойствах всей совокупности
реализаций. Если случайная функция X(t) обладает эргодичес-
ким свойством, то для нее среднее значение по времени (на
достаточно большом интервале наблюдения) приближенно
равно среднему значению по множеству наблюдений, т.е.
1 г C15)
О
где тг — среднее значение по множеству реализаций;
Т
-=, ) X(t) dt — среднее значение по времени для одной реализа-
0
ции.
Следует выяснить, при каких условиях выполняется при-
приближенное соотношение C.15).
Интеграл в правой части соотношения C.15) для разных
реализаций имеет разные случайные значения, поэтому
YT=±]x(Odt, <3-16)
о
где Yj — случайная величина.
Для выполнения приближенного равенства C.16) необхо-
необходимо и достаточно, чтобы дисперсия случайной величины Ут
была мала. Дисперсия случайной величины YT равна
Гг Т
D[Yt] = M[(YT- mxJ] = М 1 j(X- *y dt =
.1 °
1 о о
Из C.17) следует, что выражение C.15) для математического
ожидания стационарной случайной функции будет точным ра-
равенством при достаточно большом Т
97
т
mx = \imj,\X(t)dt C18)
О
только в том случае, если выполняется условие
т Т
ton D[YT]= ton -Ц f \Kx(t-t')dtdf = 0. C19)
Г->°0 7"->CQ ¦/ Q Q
Преобразуем выражение C.19), переходя к новой перемен-
переменной x = t-t'. При изменении t и Г в пределах интервала
@, Г) т меняется в интервале (—Г, Г), поэтому
Г Г Т rT-f \
7 о о i о I -г
Так как Кх (т) = Кх (-г), то отсюда следует, что Кх (т) есть
функция от | х \. Изменяя порядок интегрирования, полу-
получаем
^ffj^^^f1-^]^*- A21)
1 -Т\\т\ J -Г- '
Так как функции 1 - -^ I и Кх (т) четные, то
Г
/-¦|j(l-bW(T)A. C.22)
Согласно C.22), для того чтобы случайная стационарная
функция X(t) обладала свойством эргодичности (т.е. чтобы
выполнялось условие C.19)), необходимо и достаточно, чтобы
ее корреляционная функция удовлетворяла условию
Т
lim^jfl -l\Kx(x)dx = 0. C.23)
Г-*со-/ (Д J )
98
98
Достаточным условием эргодичности случайной стационар-
стационарной функции является условие неограниченного убывания ее
корреляционной функции К^ (т) по модулю при | т [ —> оо.
Так как корреляционная функция Кх (т) стационарной слу-
случайной функции может быть представлена в виде
Kx(x) = M[X(t)X(t + T)] C.24)
и от времени t не зависит, то и ее можно найти по одной
реализации, осреднив по времени / правую часть выражения
C.24), т.е.
т
Kx{t)*j\X(t)X(t + i)dt,
о
или, перейдя к пределу,
Кх (т) = lim \ lX(t)X(t+ т) dt. C-25)
Г-х»У 0
Соотношение C.25) справедливо, если выполняется доста-
достаточное условие [29]: при | т | —> со Кх (т) -> 0.
Пример 3.4. Установить, является ли стационарная случай-
случайная функция X(t), корреляционная функция которой
A^W^e-M,
эргодической.
Подставив Кх(т) в соотношение C.23), получим
Т
lim-Ufl--bVe-A =
= lim i[-1 (e-^- 1) 3 Г_ Ie-^- -^ e-r + ^]] = 0.
r-^co-'L а Г ^ a a2 a2j_
Стационарная случайная функция ^(/) является эргодичес-
эргодической.
99
§ 3.3. Производные и интегралы от стационарных функций
3.3.1. Вероятностные характеристики производных
стационарных случайных функций
Воспользуемся полученными в § 2.3 выражениями для ве-
вероятностных характеристик производных нестационарных
функций.
Если
Y(t) = ftX(t), C.26)
то математическое ожидание стационарной функции Х{1)
равно нулю:
Корреляционная функция B.37) для стационарной функ-
функции X(t)
XT ,f f f4 * V ' ' МС V I
^' }~ dtdf ~ dtdf '
Так как х = f - /, то переходя к производной по х, получаем
Аналогично можно найти корреляционную функцию вто-
второй и последующих производных:
Из C.28) следует, что производные стационарной функции
являются стационарными функциями, так как их корреляци-
корреляционные функции зависят только от т.
Рассмотрим несколько примеров дифференцирования кор-
корреляционной функции стационарной случайной функции.
Требуется определить корреляционные функции Ку.
100
При
имеет
2)Kx(x) = D^\{\+a\i\);
3) Kx=Dxe<t\x\cos$x.
Так как
то дифференцируя Кх последовательно два раза по т, получаем
(см. приложение 1):
= JDxa|"-ae-lTl(signTJ + e-lTl^^j =
= Dx a [25 (т) - a (sign тJ ] e^ ITI =
= D^ [25 (t) - a (sign тJ ] e""'TI;
2) Ay = - Dx-^ [ - ae^l1' sign т A + a | т |) + ae-alTl sign т ] =
= D^2-^ [e-»Msignt |т | ] = Dxa2^(е"°|т'т) =
= i)xa2[-ae-alTlsignT-T + e-4XlT|] = Aca^^l^a-altl);
3)J^ = -i);c^f-ae-alTl^^cospT-pe-alTlsinpTl =
p 2
= -Z)x «^""'''f^] cosPT-ae-alTl^flcospT +
101
+ 2ape-alTl-^^sinpT-p2e-(XlTlcospT =
= X>xe"a ITI Г(Р2 - a2 sigrA) cos рт + 2a5 (x) cos рт - 2apsinp | т |] .
(d.pi<i.^^,, *a.{'s;:J)
Так же можно получить выражение для взаимной корреля-
о
ционной функции стационарной случайной функции ХA) и
о
ее производной X(t):
Kx5c(t,f) = MX(t)-^X(<t')L
Из C.29) следует, что стационарная функция X(t) и ее
первая производная являются стационарно связанными слу-
случайными функциями.
Так как А^(т) — четная функция т, то
аЛ^ _0
Л т = 0
о
т.е. стационарная функция X{t) и ее производная для одного
и того же момента времени являются некоррелируемыми слу-
случайными величинами. Корреляционные функции первых двух
производных стационарной случайной функции X(t) равны:
т.е. являются стационарно связанными.
102
3.3.2. Вероятностные характеристики интеграла
от стационарной случайной функции
Рассмотрим интеграл B.25) от стационарной случайной
функции X(t), корреляционная функция которой равна
К^ (т) = Dx cos сот.
Корреляционные функции Ky(t,t') и Кх (t, t') связаны со-
соотношением B.28). В рассматриваемом случае имеем
t t'
о о
или
t f
Ky(t,f)=\ \DX cos ш (t{ - tx) dtx dt{ .
о о
Интегрируя, получаем
К, (Г, /') = —^ cos сот + —т A - cos at - cos cof ')•
y со со
Из полученного соотношения следует, что случайный про-
процесс Y(t) не является стационарным, т.е. (это справедливо и
для общего случая) интеграл от стационарной функции не
обладает свойством стационарности.
§ 3.4. Спектральное представление стационарных случайных
процессов
Графики реализаций случайных функций X^(t) и Х2 (t) (см.
рис. 2.3, а, б) показывают, что изменение во времени этих
функций различно.
Для оценки характера поведения случайных функций во
времени была введена неслучайная функция — корреляционная
функция Кх (t, t'), или К^ (т) для стационарного процесса, ко-
которая отражает внутреннюю структуру соответствующего ей
103
случайного процесса, например процесса, показанного на
рис. 2.3, б. Все реализации этого процесса имеют явный коле-
колебательный характер. Это говорит о том, что процесс должен
характеризоваться спектральными свойствами по аналогии с
детерминированным колебательным процессом. Как известно,
если какой-либо колебательный процесс представляется в виде
суммы гармонических функций с разными частотами, то спект-
спектром этого процесса называется функция, описывающая рас-
распределение амплитуд по частотам. Спектр показывает, какие
слагаемые преобладают в данном колебательном процессе.
Рассмотрим случайную функцию
п
x{t) = Y, Цcos °v'+Bjsin aj')» C'30)
м
где Aj, Bj — независимые случайные величины с нулевыми
математическими ожиданиями и разными дисперсиями
(DAj = DBJ = DJ).
Было показано (пример 3.1), что X(t) есть стационарная
функция. Ее корреляционная функция Kx(t) равна
л
кх (т) = y, Dj °>,-cos °v *• C31)
При 1 = 0 получаем дисперсию случайной функции X(t):
4,-ZW- C32)
Н
Формула C.32) показывает, что дисперсия Dx распределена
по различным частотам. Качественный характер распределения
Dx по частотам показан на рис. 3.3. Спектр, показанный на
рис. 3.3, называется дискретным спектром. Дисперсия Dx ко-
конечна, поэтому при числе слагаемых п, стремящихся к беско-
бесконечности, можно считать, что дисперсии амплитуд D: есть
малые величины АВ:, т.е.
104
При увеличении числа слагаемых дискретный спектр будет
приближаться к непрерывному, в котором малому интервалу
частот Дсоу соответствует элементарная дисперсия ADj (a>j). Так
как AD: мало, то отложим по оси ординат отношение
ADj/A(s>j, которое характеризует собой среднюю (конечную)
плотность дисперсии.
Введем для средней плотности дисперсий обозначение
АД-
Sx(a>j) = —*. C.34)
ЛСО;
Средняя плотность дисперсий есть конечное число. График
дискретных средних значений дисперсий аналогичен графику,
показанному на рис. 3.3.
Корреляционная функция C.31) при большом я с учетом
C.33) и C.34) равна
п
Кх (т) = Y, $х Фу) А(Оу cos "V T-
Рис. 3.3
105
00 °°
В пределе (при л-»оо) имеем со,-> со; Дсо,-» ск>; ^Г -> J;
М О
? (со.) -» 6" (со), поэтому получаем
00
Кх (т) = J ?х (со) cos со xd со. C35)
О
Функция iS^ (со) называется спектральной плотностью. Так
как спектральная плотность характеризует распределение дис-
дисперсий, она всегда положительна (?х(со) > 0) и является четной
функцией от со:
?(со) = ?(-со). C.36)
Воспользовавшись обратным преобразованием Фурье, по-
получаем еще одно полезное соотношение
00
Sx (со) = - f Kx (т) cos шт*. C.37)
71 о
Можно получить более общее соотношение C.37), если
рассмотреть случайную функцию вида
п
м
где А: — независимые комплексные случайные величины с
нулевыми ожиданиями и равными дисперсиями. В этом случае
корреляционная функция Кх равна
п
^(т) = Х^е/ш>т, C.38)
М
или при п ->• оо
п
А:х(т)= Jjx(©)eMTrf©. C.39)
М
106
Воспользовавшись формулой обратного преобразования
Фурье, получаем
СО
?х(ш) = -|^(т)е-/мтЛ. C4°)
Если в выражении C.38) взять сумму от —п до + п, то (при
| п | -> «>) получим
00
Л^(т)=/^(ш)е*»»Л); C'41)
-оо
00
^(со) = ^/^(т)е-'^Л. C42)
-00
Соотношения C.41) и C.42) называются формулами Вине-
Винера—Хитина. Соотношения C.35) и C.37) являются частными
случаями формул C.41) — C.42), когда мнимые части интегра-
интегралов равны нулю, что имеет место в том случае, если функции
^(оз) и Кх(х) — четные.
Дисперсия стационарной функции связана со спектральной
плотностью соотношением
00
Dx^Kx(O) = jSx(a)d(u, C43)
—00
или
оо
Dx = Кх@) = 2 jsx(a)da.
О
Рассмотрим еще один вариант вывода соотношения C.41).
Воспользуемся представлением центрированной случайной
функции X(t) в частотной области (преобразование Фурье):
00
Х(О= \хоA(й)ешс1®.
—00
Находим корреляционную функцию комплексной функции
107
Kx(t,t') = M[X(t)X\f)] =
= м\ Jf^(/co) Л^/со') е/сй'е-/ш''A> rfcodco'l ,
или
«> » C.44)
A^f, Г) = М J jAf [Aq(kd) ^5(/со')] e'>'-ffl''') <Wco'.
—00-00
Для стационарной функции корреляционная функция за-
зависит от разности моментов времени. Поэтому, если X(t)
стационарная функция, то корреляционная функция Кх будет
зависеть от разности моментов времени, если положить
М [Хо (/со) Х*0(т')} = Sx (/со') 5 (со' - со). C.45)
Подставив C.45) в правую часть соотношения C.44) и ин-
интегрируя по со', получим
оо
Кх (t, t')=jSx (со) е''^'-' Vco = Кх (т) (Г - f = т).
—00
3.4.1. Спектральные плотности производных стационарных функций
В § 3.3 были получены корреляционные функции произ-
производных стационарных функции
d2Kx d*Kx
х dx2 x di4
Поскольку
00
Кх= j5I»e/coTrfco,
-оэ
ТО
00
Кх=\51» со2 е''ит do. C.46)
-оо
108
Из C.46) следует, что спектральная плотность производной
стационарной функции X(t) равна
Sk((u) = Sx(a)(o2. C-47)
Аналогично получаем спектральную плотность второй про-
производной (и так далее):
Sx(<a) = Sx(<o)o\ C-48)
3.4.1. Определение спектральных плотностей
Пример 3.5. Корреляционная функция случайной стацио-
стационарной функции X(t) (рис. 3.4)
ЗД^е-М.
Воспользовавшись формулой C.42), получим
00 00
Sx(со) = ^- fZbT^le-*01 A = ^ \t-a^\-bxck =
х 2% J ^ 2я J
—00 —00
D Г ° W ] D C9)
2л[_; о J л (а2+ю2>
График изменения ^(ю) показан на рис. 3.5.
Рис. 3.4 Рис. 3.5
Пример 3.6. Корреляционная функция имеет вид
Кх (т) = Dx e-°-1TI cos Рт (а > 0).
Так как
cosPT = ^(e''PT + e-''PT),
109
то получаем
со
Sx (со) = -^ J е*1т I (е'рт + е"'' Рт) е"''шт Л ,
—00
или
о
Jx (со) = ^ J е<" (е;' Рт + е"'' Рт) е'сот А +
-00
+ ^|еат(е'Рт + е-/Рт)е''штА.
После преобразований имеем
с f л ДЯ а а 1 C-50)
S (СО) = —- —z г + —г ^ .
2я [а2 + (со + рJ а2 + (со - PJJ
Характер изменения 5"х (со) от со для: 1) а = 1, Р = 2; 2) а = 3,
Р = 2 показан на рис. 3.6 (при Dx = 1).
Из графиков следует, что
при а = 1 (кривая 7) спектр
случайной функции обнаружи-
обнаруживает ярко выраженный макси-
максимум в области частот со = ± р.
При а = 3 (кривая 2) спектраль-
спектральная плотность в значительном
диапазоне остается почти по-
постоянной.
Рис. 3.6
Пример 3.7. Корреляцион-
Корреляционная функция имеет вид
Кх(х) = Z)^""ITI fcos рт + -sin p | т |1 =
= К& (т) + Dx- e-« ITI ~ .
х х р 2i
Спектральная плотность
ПО
"со со
x |е-а|т| + /р|т|-/ш^т_ Je-a|i|-ip|i|-toTA
—00 —00
Первое слагаемое S^ (со) равно спектральной плотности
предыдущего примера. Рассмотрим слагаемые, зависящие от
интегралов, которые можно преобразовать к виду
00 00
Je-a, I т | - Лот Д _ je-a2 | т | - Лат Л>
-00 -00
где а! = а - /C, а2 = а + /C.
Далее каждое из этих слагаемых представляем в виде
ОО 00 00
Je-a, | т | -/сот ^ = Je(a,-;co) д + Jg-^+fa)* Л .
—00 —ОО О
СО 00 00
J е-а2 | т | -Лот Д = J e(a2-to) д + J е-(а2+/со)т д
—00 -00 О
Полученные слагаемые легко интегрируются, и после пре-
преобразований имеем следующее выражение для спектральной
плотности:
s (a) = ^*1 а2 + C2 C-51)
х я (и2 - р2 _ а2J + 4aV "
Пример 3.8. Корреляционная функция имеет вид
Спектральная плотность
00
—00
Воспользуемся известной формулой
111
|елА 2Вх-С dx=^l <Га~ (А > 0). C53)
—00
В рассматриваемом случае А - а ; 22? = /ш; С= 0.
В результате получаем
Пример 3.9. Корреляционная функция равна
Кх (т) = Dx е'0-2*2 cos рт. (З-55)
Спектральная плотность
" 00 00
Sr (ш) = Dx v- f e-«2t2- /ШТ+''РТ Л + [ е"а2т2- tot- 'Рт А .
In J J
—ОО —00
Воспользовавшись формулой C.53), после преобразований
получаем
x(?0) = ^^Le4«2 +e4«2J- ^56>
В качестве последнего примера рассмотрим стационарный
белый шум, корреляционная функция которого зависит от
5-функции Дирака:
Ах(т) = .У05(т).
Найдем спектральную плотность белого шума:
—00
или
Sx(fo) = -? C.57)
112
(так как Js (х) е~ы <к = 1).
—ОО
Напомним одну полезную при преобразованиях формулу,
связывающую 5-функции Дирака с интегральным преобразо-
преобразованием Фурье:
00 00
5 (т) = y Je/o)T da, или 5 (т) = j- /cos со id a . C-58)
-00 -00
Из полученного результата следует, что спектральная плот-
плотность стационарного белого шума постоянна (равна SQ). Как уже
было сказано, дисперсия белого шума равна бесконечности. Для
создания такого случайного процесса, когда, например, случайная
сила непрерывно получала бы случайные приращения с беско-
бесконечной дисперсией, необходима бесконечная мощность. Поэтому
понятие белого шума является математической абстракцией. Од-
Однако эта абстракция очень полезна при решении многих при-
прикладных задач, где используются обобщенные функции.
В приложении 3 приведены графики корреляционных
функций и соответствующих им спектральных плотностей.
§ 3.5. Взаимные спектральные плотности и их свойства
Если взаимно корреляционные функции Kx?c(t, t') стацио-
стационарных случайных функций Xj (t), Xv (t) зависят от разности
моментов времени (/'-/ = т), то такие стационарные случайные
функции называют стационарно связанными (§ 3.1).
Воспользовавшись формулой Винера-Хинчина C.42), полу-
получаем взаимную спектральную плотность
^(*>)»^/^(х)е-*»А. C-59)
-со
Из C.59) имеем
: оо
¦V(/ю)=i /Ov(т) е""т+**л (-т) e'WTl]A=
9 Зак. 341 43
О 00
-co О
Поскольку
то
00
"V(/ш) = i |[^Л(т) е"'ШТ + *V, W е/С0Т]А • C-60)
Для взаимной спектральной плотности ,5V v (/со) имеем ана-
V/
логичное выражение
00
V, <to> - -к ![***(т) e"/fflT+Vv(T) e'bT]A • C-61)
Сложив спектральные плотности C.60) и C.61), получаем
00
^Л (*»») + S^ (Ad) = ^ J (KXjXv + A"V;) (е- + е"'-) А ,
или
со
Sx/v (Ad) + JVy (/со) = ^ J (KXjXy + ^.) coscoxA . <3-62>
Правая часть соотношения C.62) есть вещественная вели-
величина, поэтому сумма спектральных плотностей есть веществен-
вещественная функция от со. Так как спектральные плотности можно
представить (как и любую функцию, зависящую от мнимого
аргумента) в виде суммы
^/v (*») = S^W + iSfy (со),
•V/to) = J^((D) + /J®y(a)),
то из соотношения C.62) следует
114
*<&(«) —*$.(«), C-63)
поэтому
со
^(«) + ^(»)-^J(^; + ^)COeWTA- C'64)
Правая часть соотношения C.64) есть четная функция от-
относительно со, поэтому iS"x и Sx г есть четные функции, т.е.
Л Л C.65)
J^(»)-J№l(-4D).
Из этого результата следует общий вывод: действительные
части взаимных спектральных плотностей есть четные функции
от ш. Покажем, что мнимые части взаимных спектральных
плотностей есть нечетные функции со. Из C.59) получаем
00
Sxlx (со) + iS® (со) = 4~ J Kxx cos ют А -
-00
00
-4~ \кхх sin ют А. C.66)
—00
Отсюда
J©(»)-^J^.sin«xA. C67)
—00
Правая часть соотношения C.67) есть нечетная функция
относительно со. Поэтому S^ (со) есть нечетная функция
J®(e,)-J®(-4»), C-68)
т.е. мнимые части взаимных спектральных плотностей есть
нечетные функции от со.
9* И5
9*
Для системы п случайных стационарных и стационарно
связанных функций X (t) можно получить матрицу (аналогич-
(аналогичную матрице взаимно корреляционных функций)
S{k>)= *Л *Л . C.69)
/Vi 5*Л
Диагональные члены матрицы S{<s>) есть вещественные не-
неотрицательные четные функции со:
¦S^H^xft Н^-
Пример 3.10. Дана стационарная случайная функция X (/) с
вероятностными характеристиками тх = 0, J^ (т) = Z)x е"а'х I.
Требуется найти взаимную спектральную плотность стационар-
стационарной функции и ее первой производной. Выражение для вза-
взаимно корреляционной функции C.29)
К* = 4-К (х) = - Я а е"а Ix I sin тА .
ах
Для определения взаимной спектральной плотности вос-
воспользуемся соотношением C.59):
00
S- (ив) = - -^ f e"a Ix I-*»x sign хек =
м 2п J
—ОО
г~°° °
= --^р- J е-<а+'ш>т A) <к + J еат-''шх (-1) dx =
О -оо
= _ ^ f J е-Са^х rfT _ J е-(а-/Ш), J = _ УЮ
2п I JQ J тг(а2 + ш2)
116
§ 3.6. Определение спектральных плотностей решений линейных
дифференциальных уравнений с постоянными коэффициентами
При решении линейных дифференциальных уравнений при
стационарных возмущениях возможны следующие случаи.
1. Уравнение (или система уравнений) имеет переменные
во времени коэффициенты, как например, уравнение B.61). В
этом случае при стационарной правой части решение уравне-
уравнения будет нестационарным при любой длительности процесса.
Примером нестационарного движения системы, которая опи-
описывается дифференциальными уравнениями с переменными
коэффициентами, является старт летательного аппарата (см.
рис. В.2).
2. Уравнение имеет постоянные коэффициенты (например,
уравнение B.55)). В этом случае возможны два режима движе-
движения системы при стационарных возмущениях: 1) нестационар-
нестационарное и 2) стационарное. Нестационарное движение (например,
колебания) системы при действии стационарных случайных
возмущений имеет место, когда система до действия случайных
возмущений находится в покое.
Стационарные колебания имеют место при стационарных
возмущениях после определенного интервала времени от на-
начала колебаний.
Стационарные случайные колебания возможны в устойчи-
устойчивых системах. Рассмотрим алгоритм определения спектральной
плотности решения, считая, что при стационарном возмуще-
возмущении имеет место стационарный режим движения системы.
Ограничимся уравнениями первого и второго порядка. (Более
общий случай определения спектральных плотностей решений
систем уравнений л-го порядка изложен в главе VI.)
Напомним основные сведения из операционного исчисле-
исчисления, связанные с преобразованием Лапласа. Если имеется не-
некоторая функция/(О независимой вещественной переменной
t, то преобразование Лапласа (а — прямое и б — обратное)
определяется формулами
со
а)/0(Р)= Sf(t)e-P'dt;
О
117
со
б)/(О= lfo(P)^"dp, <37°)
О
где р — некоторая комплексная величина.
Функцию f{t) называют оригиналом, а функцию /q(j>) —
изображением. В табл. 3.1 при нулевых начальных значениях
даны оригиналы и изображения функции/(?) и ее производных
и функции с запаздыванием f(t - tQ). В третьей строке таблицы
даны изображения тех же функций по Фурье. Прямое и обрат-
обратное односторонние преобразования по Фурье имеют вид
00
/0(/ш) = ± jf(t)t-btdt,
71 о
C.71)
/@= J/o(/co)e/w'rfco;
О
двусторонние преобразования:
00
/0(/ш) = ^|/(Ое-'ыЛ,
-00
C.72)
/@= J/0(/cu)e/<B'</co.
Таблица 3.1
Функции и их изображения
Оригинал
Изобра-
Изображение
В частот-
частотной об-
области
dt
РД(Р)
(©/0(/0))
d^
(№J/0(Ю>)
dnf
dt"
?ш
(Ао)"/0(ко)
/С -'о)
е-П/,(р)
J/@*
i/o(P)
/,(р) +/2(р)
/oi('a) +/02('и)
Рассмотрим уравнение первого порядка
118
где/(/) — стационарная функция с нулевым математическим
ожиданием и известной спектральной плотностью.
Если функция/(О имеет отличное от нуля математическое
ожидание, то ее можно представить в виде
/(О = «/+/(/),
о
где f(t) — центрированная случайная функция.
Так как /и,- есть постоянная величина при стационарных
колебаниях, математическое ожидание ту будет постоянным и
равным
ту = ~к mj'
Поэтому после преобразования получаем уравнение C.73),
где /(/) и Y(t) являются центрированными стационарными
функциями. Воспользовавшись преобразованием Лапласа (при
нулевых начальных данных), получим
00
L ip) = j[Y(t) + kY(t)-fit)] fV'dt^pYip) + kYip) -fo(p) = 0.
0
Изображение функции Y(t)
У(Р) = -frhr/o (P) = Щ(Р)/<0)> C.74)
где W(p) — передаточная функция.
В частотной области
У(/Ш) = (/ш + ?)/о(/(о) = ^(/со)/0 (/с°)- C.75)
Воспользовавшись обратным двусторонним преобразовани-
преобразованием Фурье, получим
00
7@= Jr0(/co)e'b'Jco. C-76)
-00
119
Поэтому корреляционную функцию Ку (Г, t') можно пред-
представить в виде
^((,(') = М[У(/)Г(г')] =
у» \/«> у
= М J Уо (/со) e/t0/tfco J У5(/со') е"'03'''Ло' ,
—QO —00
Л J \ Л
или
00 00
Яу = J \М [ Г (/со) У* (/со')] е;' С0'-*0''') rfcorfco' . C77>
—оо—оо
Чтобы функция /Гу зависела от разности моментов времени
(t - t' = т), что должно быть при стационарном процессе, не-
необходимо выполнение условия
Л/[У(/со) Y* (/со')] = ^(со') 5 (со' - со).
Подставив это соотношение в левую часть C.77) и интег-
интегрируя по со', получим
00
KyiXi=lsy(ja)tkmAa. C-78)
-ОО
Корреляционную функцию Ку (/, t') можно получить, восполь-
воспользовавшись уравнением C.75):
Ky(t,t') = M[Y(t)Y*(t')} =
"со оо
= М J(V(/co)/o(/co) еЫ <*d) \(w\lti)fl ('«О е"/<В'Г Л»') •
—оо —оо
или
ОО 00
Ky(t, f) = J J W(fa) \?\Ы)М[/ь (/co)/S(/co')l e''(m'-ffl7'> tfcorfco'.
—OO— OO
C.79)
120
Функция К (t, t') будет зависеть от разности моментов вре-
времени при условии
М[/о (/ю)/о (/со')] = Sf(p') 5 (со' - со). C.80)
Исключив математическое ожидание произведения функ-
функций Уд и /о C-80) из правой части C.79), получим
00
Ку (т) = f W{ha) W* (/со) Sf(a) etoT da. C-81)
—00
Так как C.78) и C.81) есть два представления одной и той
же функции К (т), то должно выполняться тождество
00
J [ Sy (со) - W(ka) W (/со) Sf(fa)] e~ax da = 0. C82)
-00
Поэтому из C.82) получаем
Sy (со) = W(m) W* (/со) Sfda) = | W{m) |2^y(co), C-83)
где | Wx (/со) р — квадрат модуля частотной функции.
Соотношение C.83) устанавливает связь между спектраль-
спектральной плотностью «входа» ^(со) и спектральной плотностью «вы-
«выхода» Sy (со).
Для уравнения второго порядка
Y+a1Y+a2Y=kf(t)
в частотной области получаем
7о «<¦>) = г/. ч2 Л 7-^0<*»>) = ^('ю)/о («>), Cl84)
[(коГ + Осо) а{ + а2]
где
W{m) = 5 •
[(/co)z + (/со) ах + а2]
Соотношение C.84) аналогично C.75), поэтому спектраль-
спектральная плотность Sy (со) равна
8 Зак. 341 121
Sy(fo) = \W(b)\2Sf(fu). C.85)
Этот результат справедлив для любого линейного уравнения
с постоянными коэффициентами (имеется в виду уравнение
л-го порядка), для которого частотная функция РГ(/со) равна
W(im) = г—^ г .
[(ко)" с0 + (/со)" Ol + (/ш)"-2 я2 +...+ ап]
Зная спектральную плотность «выхода», можно определить
дисперсию Dy:
00
^@) = ^= j5y(<D)db.
-00
Спектральную плотность Sy (со) можно представить для об-
общего случая в виде
с / ч i и/г \1\ с / ч ! G (/й>) C-86)
где
С (/со) = *о('соJи-2 + б^/соJ" + ... + 6„_1 :
Д/со) = ao(i®)n + а^/со)" + ... + ап .
Поэтому
C.87)
Значения интегралов /„ приведены в приложении 2.
Глава 4. ОСНОВЫ ТЕОРИИ МАРКОВСКИХ ПРОЦЕССОВ
В предыдущих разделах были рассмотрены только первые
два момента теории случайных функций — математическое
ожидание и корреляционная функция. К сожалению, далеко
не все прикладные задачи могут быть решены методами кор-
корреляционной теории — например, часто возникающая при ана-
анализе динамических систем задача об определении вероятности
превышения ординаты случайной функции заданных значений.
Эти задачи можно решить, если ограничиться процессами,
обладающими некоторыми специальными свойствами, но
представляющими практический интерес. В предыдущих пара-
параграфах методы корреляционной теории использовались для
анализа систем с линейной связью между входом и выходом.
В этом случае корреляционная теория дает возможность полу-
получить вероятностные характеристики решения дифференциаль-
дифференциальных уравнений, если известны вероятностные характеристики
возмущений. Получить решение нелинейных уравнений мето-
методами корреляционной теории нельзя. Однако, если ограничить-
ограничиться процессами, обладающими специальными свойствами,
можно получить решение и для нелинейных задач статисти-
статистической динамики. К таким процессам относят марковские про-
процессы, для полной характеристики которых достаточно знать
только двумерные законы распределения.
§ 4.1. Непрерывные одномерные марковские процессы
В теории марковских процессов принимается, что закон
распределения ординаты процесса в любой будущий момент
времени /,- зависит только от значения ординаты в данный
момент времени tHi и не зависит от того, какие ординаты
функция имела в прошлом, т.е. дополнительное знание значе-
значений случайной функции при / < t^ не изменяет характера
8* 123
распределения ординат функции при t>tt. Физически эта осо-
особенность случайного процесса эквивалентна процессам без
последствия (процессам, которые не зависят от предыстории).
Для марковского процесса любые многомерные законы рас-
распределения могут быть выражены через двумерные. В качестве
примера рассмотрим трехмерную плотность вероятности
/(х2, t2, Xy, ty, Xq, 1q) — плотность вероятности трех ординат слу-
случайного процесса, взятых в три последовательных момента
времени t0, ty, t2 (t2 > ty > tQ). В соответствии с общей формулой
для условных законов распределения A.48)
/(Х2, t2, Xy, ty, Xq, tQ) =/(X2, t2 | Xb ty, Xq, /q)/^, ty, Xq, tQ). D.1)
В свою очередь,
f{Xy, ty, Xq, t0) =/(Xy, ty I Xq, tQ)f(XQ, ty, D.2)
но, так как
f{X2, t2\Xy,ty, Xq, t0) =f(X2, t2\Xy, ty)
(это свойство только марковских процессов), то окончательно
имеем
/(Х2, t2, Xy, ty, Xq, t0) =f(X2, t2 I Xy, ty)f(Xy, ty \ Xq, tO)f(XQ, tQ). D.3)
Аналогично можно получить и для л-мерной плотности
вероятности
f(xn, tn ,..., kQ, Го) =f(xn, tn | xn_y, t^y) x
x f(-xn-h fn-l I Хп-Ь *п-2>-Ях0> '<))> D.4)
т.е. плотность вероятности ординат марковского процесса лю-
любого порядка может быть выражена через условные двумерные
плотности вероятности ординаты процесса в момент времени
ty. Для функций/(jc,-, t\xt_y, tj_y) должны выполняться соотно-
соотношения (справедливые для любой плотности вероятности)
/(Х1,^\х;_у)>0; D.5)
124
00
Г D.6)
J/(*/> ',l*/-i> ti_i)dXj= 1.
—00
Кроме того, двумерная плотность вероятности/(х,-, tb хм,
гм) связана с условной плотностью вероятности соотношением
/(*!, ty, XM, fM) = /(Х(-, f, | ХМ, ГМ)/(ХМ, *м). D.7)
Из D.7) следует
00
/(*/. '/) = //(*/» h xi-l> {i-l> dXi-l =
-00
oo
= J/(x, 11 xM, ^^/(x^l /M) dx^ . D.8)
—oo
Рассмотрим три последовательных момента времени: ?0, т
и /(/0 < т < /). В момент /0 (рис. 4.1) процесс имел ординату х0.
Тогда элементарные вероятности перехода из состояния х0 на
интервал (z , Z + dz) (где z = х(т)) в момент т и на интервал
(х, х + dx) в момент / равны соответственно f(z, т | Xq, tQ) dz и
/(х, 11 x0, t0) dx .
Рис. 4.1
Вероятность перехода из состояния (z, т) на интервал
(х, х + dx) в момент г равна /(х, Г | z , т) dx. Полная вероятность
перехода из состояния (х, х + dx) в момент / получается интег-
125
рированием произведения вероятностей (х, fix, t \ z , т) dx x
xf(z , т | Xq, x0) dz) no всем промежуточным значениям z, т.е.
f{x, 11 х0, t0) dx = J/(x, t\z, x)fiz , т | x0, /0) Л? <&,
—00
Ч /
ИЛИ
оо
fiX, t\ Xq, tQ) = I fiX, t \Z , T) fiZ , T | X0, tQ) dZ . ^4-9>
-oo
Уравнение D.9) в математической литературе называют
уравнением Чепмена—Колмогорова, в литературе по физике —
уравнением Смолуховского, который получил его при исследо-
исследовании броуновского движения частицы. Уравнение D.9) накла-
накладывает весьма жесткие ограничения на вид условной плотности
вероятности перехода, а именно, интегрирование по z должно
привести к исключению z, причем вид функции / должен
остаться неизменным.
Пределы интегрирования не обязательно должны быть
равны бесконечности.
§ 4.2. Уравнение Фокера-Планка—Колмогорова
Получим уравнения, которым удовлетворяет условная плот-
плотность вероятности fix, 11 Xq, t0) (уравнения Колмогорова) для
непрерывного случайного процесса. Процесс X(t) считают не-
непрерывным, если за малые промежутки времени X(t) может
получить заметные по величине приращения лишь с малой
вероятностью. Для этого в уравнении D.9) положим т = /0 +
+ д t (Д t>0), т.е.
00
fix, t\xQ, tQ) = J/(x, t\z,to + At)fiz , t0 + Д t\ x0, tQ) dz . DЛ0)
—00
Разложим функцию fix, t\z, tQ + At) в ряд Тейлора по z в
окрестности точки z = х0 (ограничившись первыми тремя чле-
членами разложения):
126
f(x, t\z , t0 + A t) = f(x, t\x0, tQ + Д n + -^-(Z-xQ) +
+ ^Й^-хоJ + 7Гз(г-^оK + - D-11)
Подставив D.11) в уравнение D.10), получим
00
f(x,t\xQ,to)= J \f(.x,t\xo,to + At) + -&-(z-xd +
-оо L
+ \^z-xo>2 + Z^(-z-xo>3\f^to + At\xO'to>dz- DЛ2>
Так как
lf(Z,to + At\xQ>tQ)dZ=l, DЛЗ>
-ОО
то после преобразований имеем
00
fix, 11 х0) /q) -f(x, t\xo,to + At) = ^-j(z- xQ)f(z , t0 +
+ At\xo,tQ)dz + ^^? l(.z-xQJf(z,t0 + At\x0, to)dZ +
00
+ l&J(z-Xo)lf(z,to + At\xOyto)dz. «-И)
Разделив обе части уравнения D.14) на A t и перейдя к
пределу, получим
df(x,t\xQ,tQ) ъ[_ bA^i (±$1 <4-15)
dt0 ~°ldxi)+2 ду2+ 6 ахЗ'
где
127
00
ах = ах (xq, Го) = lim — \(z- xo)f(z, tQ + A t \ Xq, t0) dz ;
00
bx = bx (xq, tQ) = lim l(z-xoJf(z,tQ + At\xQ, to)dz; D.16)
Д'-^О-ОО
с»
С! = ct (x0, r0) = lim —- J (z - xQKf(z , t0 + A 11 x0, f0) ^ .
д r->0 д г_да
Введенные коэффициенты имеют специальные названия:
Qj — коэффициент сноса; Ьх — коэффициент диффузии.
Выражения для коэффициентов ах, Ьх и q можно предста-
представить и в более компактной форме записи:
M[z-x0) М[дг1
fli = lim = lim —'—*•;
д/->0 At At-+o At
M [(z - xQJ ] м Г л т2 1
b, = lim / = lim ^p . D 17)
ДГ-Й) A' ДГ->0 A/
c^limM[a-XQK]=lim^^i.
д/-*о Л' дг-^о А^
В выражениях D.17) операция М[ ] есть операция услов-
условного математического ожидания. Коэффициент ах (х0, /0) есть
предел отношения математического ожидания разности орди-
ординат случайного процесса к интервалу времени A t, для которого
ординаты взяты при стремлении этого интервала к нулю, т.е.
а1 (*()> 'о) характеризует скорость изменения случайной функ-
функции. Коэффициент Ьх (Xq, t0) характеризует предел отношения
математического ожидания квадрата разности ординат к ин-
интервалу времени A t при стремлении A t к нулю, т.е. характе-
характеризует скорость изменения условной дисперсии случайной
функции.
Обычно в теории марковских процессов принимают, что
момент третьего порядка M[(z-Xq)^] стремится к нулю бы-
быстрее, чем A t, поэтому
128
сг = fan л , ° = 0- D.18)
Принимаемое условие q (х0, fy) = 0 не является очевидным
и должно рассматриваться как предположение о том, что ве-
вероятность больших отклонений z-Xq должна убывать с умень-
уменьшением Л t настолько быстро, чтобы все моменты этой разнос-
разности, начиная с третьего, стремились к нулю быстрее, чем A t.
Это требование позволяет рассматривать случайную функцию
X{t) в системе, подвергающейся действию случайных импуль-
импульсов, как непрерывно изменяющуюся величину. Следовательно,
решение уравнения D.15) справедливо (при Cj = 0) только для
интервалов времени А /, много больших интервалов времени
между импульсами.
Окончательно получаем следующее уравнение (первое урав-
уравнение Колмогорова):
Ж. Ж. a &L
-tra'whxA' Dл9)
Уравнение D.19) дает возможность определить условную
плотность вероятности fix, t \ x0, /q) как функцию начального
состояния, так как независимыми переменными являются
«прошлое» время tQ и «прошлое» состояние х0.
Получим уравнение, позволяющее определить изменение
условной плотности вероятности в будущем, т.е. уравнение,
связывающее производные fix, 11 х0, /q) по t и х, а не по /0 и
Xq, как в первом уравнении Колмогорова. Уравнение, в котором
независимыми переменными являются tux, называют вторым
уравнением Колмогорова.
Воспользуемся выводом, приведенным в работе [17]. Введем
в рассмотрение некоторую произвольную функцию R (х), ко-
которая во всей области изменения случайной функции ЛГ(О
является непрерывной дифференцируемой до второго порядка
и обращается в нуль на границах интервала (а, Ь) изменения
х вместе с первыми двумя производными:
R(a) = R(b) = R'(a) = R\b) = R"(a) = R"ф) = 0. D.20)
1-29
Обычно (по аналогии с нормальным законом распределе-
распределения) считают, что область возможных значений х равна
(-оо, оо), т.е. а = -оо, b = оо. Рассмотрим определение частной
производной:
d/(x,t\xQ, /q) f(x,t + At\xo,t^-f(x,t\xQ,t^ D.21)
= lim .
В отличие от вывода первого уравнения Колмогорова, где
момент т берется близким к моменту t0, при выводе второго
уравнения Колмогорова момент т берется близким к моменту t.
Умножим соотношение D.21) на R(x) и проинтегрируем в
пределах от -оо до оо, тогда
"э/(дс, t\xp, /р)
J jf R (x) dx =
—00
Воспользуемся уравнением D.9), в котором заменим t на
/ + А /, а т — на f. В результате получим
00
/(х, t+ A 11 Xq, t$ = J/(x, Г+ A /| г , O/(Z , /| x0, Г0) dZ . D.23)
—00
Исключим/(x, / + A 11 Xq, /q), входящие в выражение D.22),
использовав уравнение D.23):
"ГЭ/(х, Г|хо, t0)
J R(x)dx =
—00
оо Гоо
= lim -f- J jf(x, t + At\z,t)f(z,t\xQ,tQ)R (x) йГг-
^-*0АЦ-со
_ Гоо
-/(X, 11 Xq, tQ) R (X) dX = lim -f; J/(Z , t\ Xq, fQ) X
J д/->одг _„
130 L
00 00 1
xjf(x,t+At\z,t)R{x)dxdz-lf(x,t\x0,tQ)R(x)dx . D-24)
—00 -OO
Если в выражении (слагаемое в D.24))
00 00
jf(Z, t\xQ, tQ) \f(x, t + At\z,t)R{x) dxdz
—OO —OO
переменные интегрирования х заменить на z, получим
—00
СО 00
= lim -J-J/(x, t\xQ,tQ) jf(z,t + At\x,t)R(z)dz-R(x) dx.
д'-+°А'_оо \L
Разложим функцию R (z) в ряд Тейлора вблизи точки z = х
по степеням (х - z)'.
R (z) = R (х) + R '(х) (х - z) + \ R "(х) (х - zJ + О (х - z),
где О (х - z) — слагаемые более высокого порядка малости.
Рассмотрим выражение
оО
J/fc , / + Д 11 х, t)\R(x) + R '(х- z) + \ R "(x-zJ + 0(x- z)\dz =
00 »
= j/U ,t + At\x,t)R (x)dx+ R \x) \{x-z)f{Z, t + A t\ x0, to)dz +
—00 —00
00
+ \R"(x) f(x-zJf(z, t + At\x,t)dz. D-25>
-00
Так как
00
jf(Z,t+At\x,t)dZ=l,
—00
131
то, отбросив слагаемые ряда О (х - z), получим
—00
QO
= J Г/(х, 11 Xq, tQ) R '(x) ax(x, t) + ±R "(x) bx(x, t )]dx, D-26)
где
00
ax = О]{х, t) = lim --- J(x- z)f(Z ,t + At\x,t)dZ = lim M^~Z] ;
00
bi = bi(x,t) = ]im -j-l(x-zJf(z,t + At\x0,tQ)dz =
,lim «Ife=il. D.27)
Д Г->0 Л '
В D.25) принято, что
00
lim -Mo(*-*)/(z,f + Af|*.O<ft = 0.
л'->оД'_1
Выражения D.27) для коэффициентов ах и 6j аналогичны
D.16) и D.17), но теперь они зависят от х и t.
Интегрируя входящие в D.26) слагаемые
00 00
jfR'^dx, jfR-'bidx
—ОО —00
по частям, получаем (при R (-оо) = /?(») = 0)
00 00 00
\faxR'dx = - \^-х(/а^с!х+(/а^)\^ = - \^- Rdx;
—со —со —со
\fbyR "dx =\R , dx. D.28)
J дх2
—CO —CO
132
Подставив D.28) в D.26), получим
Так как функция R (х) произвольна, тождественное обра-
обращение в нуль левой части соотношения D.29) возможно только
при
#+*A)_i?*A>_0 D.30)
at+ ax 2 а*2
Полученное уравнение D.30) есть второе уравнение Кол-
Колмогорова для одномерных процессов, позволяющее определить
изменение условной плотности вероятности в будущем при
известной плотности вероятности в начальный момент време-
времени.
При исследовании задач статистической динамики и теории
случайных колебаний второе уравнение Колмогорова получило
наибольшее распространение. По существующей классифика-
классификации дифференциальных уравнений в частных производных
уравнения Колмогорова D.19) и D.30) принадлежат к парабо-
параболическому типу уравнений. Для того чтобы решение уравнения
было однозначным, необходимо знать начальные и граничные
условия для искомой функции (для плотности вероятности
f(x, 11 х0, /о)). Кроме начальных и граничных условий, функция
/ должна удовлетворять условиям, справедливым для любой
плотности вероятностей:
00
/>0, jf(x,t\xo,to)dx=l.
-оо
Возможны два случая начальных условий при t= t0: 1) зна-
значения ординаты случайной функции х — xq являются случай-
случайными величинами с известной плотностью вероятности
/(*0> 'о)' 2) значение ординаты случайной функции х0 является
заданным (неслучайной величиной).
В первом случае должно выполняться условие
133
fix, 11 Xq, to)\t=tQ =f(x0, /"о). D.31)
Во втором случае, когда х0 задано,
/(х,г|хо,Го)Ц = 5(х-хо). D.32)
Это условие можно получить следующим образом. При
заданном х0 вероятность того, что возможные значения х % xq,
равна нулю. Поэтому плотность вероятности при t = t0, которая
должна удовлетворять условию
jf(x,t)dx=l,
—00
можно представить в виде
%-е хо+е „
J/(x, to)dx + J/(x, to)dx + J f(x, to)dx = 1, D.33)
где е — малая положительная величина.
Первый и третий интегралы в левой части выражения D.33)
равны нулю, так как они равны вероятностям появления зна-
значений х, меньших и больших Xq. Поэтому
°J/(*,,0)<?c=l. <4-34>
хо-е
Соотношение D.34) при е -> 0 является одним из условий,
определяющих 6-функцию:
f(x, /o) = 8(x-xo). D.35)
Если случайная функция x(t) может принимать любые
значения в интервале (- <ю, об), то в качестве краевых условий
следует брать условия на ± да.
При нахождении распределений, однородных во времени,
функция / и коэффициенты а и b не зависят от t, поэтому
уравнение D.30) принимает вид
134
^[*,W/]-^ [«!«/]= О, D.36)
или после интегрирования
^ [*!(*)/]-2Cl(x)/= с. D-37)
Если предположить, что при х -> « /и -/¦ стремятся к нулю,
то с = 0, поэтому решение уравнения D.36) имеет вид
Постоянную интегрирования q найдем из условия
00
//(Л)Л=1.
—оо
Приведем несколько примеров решения уравнения D.30).
Пример 4.1. Рассмотрим частный случай при Oj(x, 0 = 0 и
Ь{(х, /) = 610 = const:
3f«ifcft^ D.39)
Требуется найти рещение уравнения D.39) для интервала
изменения х (- да, оо), удовлетворяющее условиям:
l)f=0, fix, t\xQ,0) = 5(x-x0y,
00
2) jf(x,t\xQ,O)dx=l; D.40)
—ОО
3)/>0.
Решение уравнения D.39), удовлетворяющее условиям
D.40), имеет вид
135
(*-ХрJ
f(x,t\xo,O) = —±— e2V . D-41)
Правую часть D.41) можно преобразовать к виду
/= — /жГт2<х-хо>2 (|Я = —1_).
л/я л/2^10Г
При t -» 0 /и -> оо, поэтому правая часть D.41) при f -> 0 есть
дельта-функция (приложение 1).
Полученное выражение D.41) для условной плотности ве-
вероятности есть нормальный закон распределения Гаусса, из-
изменяющийся во времени, с математическим ожиданием
тх = х0 и дисперсией Dx = b^t.
Рассмотрим случайный процесс, когда он является одно-
однородным по координате х, т.е. вероятность перехода из состоя-
состояния Xq в состояние х зависит только от разности х - Xq .
В этом случае коэффициенты Cj и Ь± не зависят от х.
Поэтому из уравнения D.30) получаем
1=".«>|+>>0- («2)
Введем новую переменную
/ t
xx=x-\A(tx)dtx; /2=J !?(/!)*!.
О О
Тогда уравнение D.42) преобразуется к виду
ж. ^ii
щ~^- <4-43>
Решение уравнения D.43) аналогично D.41) (при тех же
начальных условиях):
[х-хо-г>,A)]2
f(x, Ax^,0)= l e 2eJ@ г
136
где
/ t
al(t)=\B{tx)dtl; bl(t)=JA(tl)dtl.
0 0
Уравнения D.19) и D.30) дают возможность исследовать
изменение условной плотности распределения во времени, од-
однако для полного решения этих уравнений необходимо в общем
случае иметь явную зависимость коэффициентов а^ и Ь± от
переменных х0 , (q для первого уравнения и от х, t — для второго.
Так как условные плотности вероятности, определяемые урав-
уравнениями D.19), D.30), описывают (в вероятностном смысле)
состояние какого-то объекта, например механической системы,
то должна существовать связь между уравнениями Колмогорова
и уравнениями движения системы. Для установления этой
зависимости рассмотрим уравнение движения системы первого
порядка
jc = Fix) + 8@ , D.44)
где е(О ~ случайное возмущение (белый шум) с известными
вероятностными характеристиками тг = 0, ке = S05 (т). Дис-
Дисперсия и мощность белого шума равны бесконечности, что
противоречит механическим и физическим представлениям о
реальных процессах, т.е. дельта-коррегированная случайная
функция является весьма сильной абстракцией. Тем не менее
белый шум (и его свойства) широко используется в теории
случайных процессов и, в частности, в теории марковских
процессов. Использование белого шума в теоретических иссле-
исследованиях позволило получить классические результаты в ста-
статистической динамике нелинейных систем.
Проинтегрируем уравнение D.44) в пределах от t до t+At.
Тогда
t+At t + At
x(t+At) = Ax = x-z= \F{x)dt\ + J zdtx ,
t t
или, воспользовавшись теоремой о среднем, получим
137
t+A t
Ax = x-z= F(x)At + J edtl . D-45)
Условное математическое ожидание от обеих частей равен-
равенства D.45)
00
M[x-z) = \{x-z)fi.Z,t + At{xit)dx,
—00
или
i + At
М[х-z] = М[F(x)A t] + M J z(tx)dt{ . <4-46)
t
Так как F(x) берется при фиксированном х, то
t + A t
М [х - z] = F(x) Д t + J т^Щ = F(x)At. D.47)
t
Разделив обе части соотношения D.47) на Д t и перейдя к
пределу в D.27), получим
,. 1 M\x-z\ т?, ч
в'=4^"АГ й" D48)
Коэффициент Ьх (х, t) найдем, рассмотрев условное мате-
математическое ожидание квадрата разности (х - z)'
г 2-1
( t+At \
Ьх = ton Mt^"^l = Hm -Ц М F(x)A t + f е(Л)Л,
-V у -
/+д f /+д /
= lim F\x)At2+ J JAg^, t^dt^ .
A r->0 , ,
Так как
АЕ(г1)г2) = Ае(г2-г1) = 1У05(г2-/1),
138
то получаем
/+Д / t+A t
bx = lim -^ f J5 (t2- t$dtxdt2 = So . <4-49>
Д /->0 A ' t t
Пример 4.2. На рис. 4.2 показан жид-
жидкостный демпфер. На шток поршня дей-
действует случайная сила е(О- Считая шток и
поршень безынерционными, получим
уравнение движения поршня ах = е(/), где
а — коэффициент вязкого трения; е(О —
случайное стационарное возмущение
(сила) с известными вероятностными ха-
характеристиками тъ = 0, Ке = .У05(т). Рис 42
Требуется определить условную плот-
плотность вероятности f(x, t \ х0, 0) смещения штока х в произволь-
произвольный момент времени /, которая при t = 0 должна удовлетворять
условию
f(x,0\x0,0) = 5(x-xo), D.50)
а при произвольном t — условию нормировки
00
jf(x,t\xo,O)=l. D.51)
-00
Условие D.51) для данной задачи является приближенным,
так как смещения поршня ограничены (-1<х<1). Коэффици-
Коэффициенты <3j и Ьх для данной задачи
«1=0,
t+At t+At
b^-^ I lЬ«*-»*«¦%¦ <4S2)
Поэтому уравнение для определения условной плотности ве-
вероятности имеет вид
139
Уравнение D.53) совпадает с уравнением D.39).
Воспользовавшись выражением D.41), получим решение
уравнения D.53):
а2 (х-У
fix,t\xQ0)=^-^c 2V D.54)
Рассмотрим установившийся (стационарный) режим, при
котором условная плотность вероятности f(x, t \ Xq, /о) и коэф-
коэффициенты уравнения D.30) не зависят от времени. Это равно-
равносильно предположению, что при больших промежутках време-
времени, прошедших с начала процесса, условную плотность веро-
вероятности можно считать не зависящей от разности t - t0.
В этом случае из уравнения D.30) получаем
Уравнение D.55) проинтегрируем по х:
^((blf)-2a1f=c. D.5б)
Было показано (уравнение D.37)), что с = 0.
Из D.56) при с = 0
df BаЛ db.
Интегрируя D.57), получаем
/»-ттт«2]^»Л- D58)
ь\ (X)
Произвольную постоянную С} найдем из условия
00
//(*)<&= 1.
—00
140
Пример 4.3. На рис. 4.3 показано тело массой т, которое
движется горизонтально под действием силы R$ + AR, где Rq —
номинальное значение силы тяги, а АЛ — случайная состав-
составляющая. Уравнение движения тела имеет вид
mv+F(v) = RQ + AR, D.59)
где v — скорость движения; F(v) — сила сопротивления. Ско-
Скорость движения тела v из-за разброса тяги AR равна
v=vo + Vj, где v0 — скорость тела при AR = 0; Vj — разброс
скорости из-за разброса тяги.
Рис. 4.3
Примем, что случайная функция ДЛ представляет собой
процесс типа белого шума с нулевым математическим ожида-
ожиданием и корреляционной функцией KAR = 8 (t- /j). Требуется
определить установившееся распределение вероятностей /(vj)
и дисперсию скорости Vj.
Разложим F(y) в ряд вблизи v = v0, считая, что сила сопро-
сопротивления AF является нечетной функцией от Vj:
В результате получаем уравнение
v, + ^(v,) = е (О [е(О = ^1, D.61)
где
г, . \ (dF\ 1 5^1 %\ з
F^ = т [^ ^ + 6 ^ k ^J = alVl + «^ ¦
141
Для определения коэффициентов ах и bt проинтегрируем
уравнение движения D.61) в пределах t, t + A /:
f+Д /
Avx =-F{At+ J e(t)dt.
i
Коэффициенты at и i, в соответствии с D.48) и D.49):
а{ = lim — М [Д vL] = - F^);
д г->0Л т
Ьх = lim -i- М [Д Vl(/) Д vj (^1 = -§ .
Второе уравнение Колмогорова для рассматриваемой задачи
имеет вид
или
yj^l(vi)/=c D-62)
Можно считать, что вероятность появления больших зна-
значений Vj мала, поэтому плотность вероятности должна удовле-
удовлетворять условию /(Vj) |v _>o0 = 0. Если, кроме того, предполо-
предположить, что производная /(Vj) при | Vj | —> «з также равна нулю,
то из уравнения D.62) следует, что с = 0. Обоснованием пра-
правильности принятых предположений о поведении плотности
вероятности и ее производной при больших значениях Vj может
служить полученное решение. Если оно удовлетворяет приня-
принятым допущениям, можно считать эти допущения справедливы-
справедливыми.
При с = 0 решение уравнения D.62) имеет вид
142
-4JWvi D.63)
/= C^ a 0
Произвольную постоянную Cj найдем из условия нормиро-
нормирования
00
\fdvx = 1.
—00
Например, в рассматриваемом случае при
имеем
/=Cie-7hT + a^J D.64)
Из D.64) следует, что / и -j- при | vj | -> « обращаются в
нуль. Так как математическое ожидание Af[vj] равно нулю, то
дисперсия
—00
При линейной зависимости силы сопротивления от v1; т.е.
при Fx = ajVj, распределение плотности вероятности подчиня-
подчиняется нормальному закону D.64).
Найдем приближенное значение постоянной интегрирова-
интегрирования cj, полагая
i^VKl-^vl D-66)
Тогда
143
1 = Cl JeV^^.^f^-^^ . D.67)
—00 —00
После интегрирования получаем
Гл/ло _ а2 ЗУ1та5 1
Ч^Г'За2 2af/2J'
откуда
с ^7 D.68)
' •*[-%')
Приближенное значение дисперсии
vJ'^t'-lMb D69>
после интегрирования принимает вид
ду4^Ш1-^4 D.70)
Подставив выражение D.68) в D.70), получим
§ 4.3. Многомерные марковские процессы
Основные понятия одномерного марковского процесса
можно обобщить для случая многомерных процессов. Много-
Многомерный процесс является марковским, если закон распределе-
144
ния системы случайных величин Хх, Х2, ¦¦¦, Хп в момент t, вы-
вычисленный при условии, что значения jc10, х2о> ..., хп0 случайных
величин Xi, Х2, .., Хп в момент tQ известны и не зависят от того,
какие значения случайные функции Xt(t) имели в предшест-
предшествующие моменты времени. В этом случае, как и для одномер-
одномерного марковского процесса, исчерпывающей характеристикой
процесса будет двумерная условная плотность вероятности
/(*1> Х2> •••> хп>11 ХЮ> х20> ••¦> хп0> О =/(*> * I Xq> {о) >
где ху х0 — векторы с компонентами jc,- и хй.
Для многомерных процессов уравнение Смолуховского
имеет вид
/(xl> ^I'-'-i хп> М -"'Ю' х2й'-—> хп0> 'о) =
00 00
= J- if(xl,...,xn,t\zi,...,Zn,i)x
—00 —00
х/(Zl,-, Zn, т | х10,..., хп0, tQ)dzx,..., dzn .
Не останавливаясь на выкладках, приведем второе уравне-
уравнение Колмогорова для многомерных случайных процессов [17,
40]:
В частном случае для двумерного случайного процесса
Э/ d{a{f) d{a2f) _ i ?{bnf) _ i a2^/) _
dt дхх дх2 2 дх\ 2 дх\
1 d\bnf) ! д>ф2Х/)
2 дххдх2 2 dx{dx2 DJ3)
Коэффициенты
11 Зак. 341 145
1 M [A х,]
a, = lim —-M[Xi-Zj]=\im——— ; D.74)
Д /->ОЛ ' Д f->0 д '
I M [A Xj A X: ]
Ьу = Ьл = lim — М [(х, - zi )(х- - гу)] = Um ^ .
Решение уравнений Колмогорова представляет большие
трудности (кроме простейших частных случаев). Эти уравнения
в частных производных относятся к классу параболических
уравнений. Поэтому для получения однозначных решений не-
необходимо знать начальные и граничные условия, которым
должна удовлетворять функция А (закон распределения плот-
плотности вероятности).
Пример 4.4. Рассмотрим механическую систему, когда
силой инерции пренебречь нельзя (рис. 4.4). Движение массы
т описывается уравнением второго порядка:
x + 2nx + ]?x = E(t). D-75)
Рис. 4.4
Чтобы полностью описать движение массы т, необходимо
знать не только значение х при t = fy, но и значение первой
производной к, а следовательно, и значение х при t < /0 (процесс
с последействием). Поэтому воспользоваться одномерным мар-
марковским процессом для исследования такой системы нельзя,
однако, если уравнение D.75) представить в виде двух уравне-
уравнений первого порядка (положив х = Х], х = х2)
х1 = - 2^-/7^2 + 6@; D-76)
и рассматривать Xj и х2 как координаты точки на фазовой
плоскости, то при решении системы уравнений D.76) могут
146
быть использованы методы марковских процессов. Процесс с
последействием можно свести к процессу без последействия
путем увеличения размерности фазового пространства. Если
состояние системы, которое описывается, например, диффе-
дифференциальным уравнением второго порядка, задать двумя коор-
координатами Xj и х2 в двумерном фазовом пространстве, то будем
иметь процесс без последействия. Для определения совместной
плотности вероятности /(Xj, х2, t) = f(x, х, t) для уравнения
D.75) надо решить уравнение D.73) с учетом соответствующих
начальных и граничных условий. В общем случае систему
уравнений движения механической системы вида
У = ^i (У, У, О + ej(O D.77)
всегда можно представить в виде систем уравнений первого
порядка
ij = F{ (x1(x2, /) + Et; D.78)
Х2 = Х1 '
где у = х1 ; у = х2 .
х.
Вводя вектор х = , получаем
Х2
x=F(x, О + е (е = (е1,О)Т), D.79)
или в скалярной форме
i, = Ft (xx, x2,..., xn,t) + Е|-(t) . D.80)
Следует подчеркнуть, что компоненты е.- (t) вектора е (О
есть стационарные случайные функции типа нормального бе-
белого шума Qnz= 0, Кге = SQjj5 (т)). Только в этом случае сис-
система уравнений D.78) может исследоваться с применением
марковских процессов.
Если компоненты вектора е не являются белым шумом,
например, е,- (J) независимы и имеют корреляционные функции
вида
А;.(т) = а?е-«11Т1, D.81)
11* 147
то функции е,(О надо представить как процессы, подчиняю-
подчиняющиеся линейным дифференциальным уравнениям первого по-
порядка:
dt:
-^ + а;€,. = а/е(О, D.82)
где е (О — нормальный белый шум с корреляционной функцией
Ag (т) = Sob (т); о,- — неизвестные коэффициенты.
Из уравнений D.82) находим спектральные плотности
л с
St (со) = -Ру . D.83)
е'Л (ш2 + а2)
Спектральные плотности Se (ш) при известных корреляци-
корреляционных функциях Л^ (О D.81) можно получить из соотношения
C.42) Винера—Хинчина:
s (ffl) = а\а' . D.84)
Е- я(со2 + а?)
Приравняв правые части выражений D.83) и D.84), находим
неизвестные коэффициенты о,-:
of = -V • D-85)
В результате получаем совместную систему уравнений D.78)
и D.82) первого порядка, содержащую случайную функцию
е (t) (белый шум), которую можно исследовать методами мар-
марковских процессов.
Для определения коэффициентов уравнения D.72) восполь-
воспользуемся уравнениями движения D.80). Проинтегрируем эти
уравнения в пределах (t, t + A t):
f + At t+bt
Дх,= JFi(xl,x2,...,xn,t)dt+lEi(t)dt. D.86)
148
Применяя теорему о среднем, получаем (аналогично D.45))
t+A t
AXi=Fj(Xl, х2, ..., хп, t)At+ f e,(O dt. <4-87>
Воспользовавшись D.74) и D.87), найдем коэффициенты
ait by уравнения D.72):
ai = lim — [Fi(xlt x2,...,xn, ОА/] = ^;
Д /->0 Л *
t +Д t t +Д t
bv=^-tt FiFj^2+ J J ^(h-QWh =V
Для стационарного режима, при котором условная плот-
плотность вероятности / и коэффициенты at, by не зависят от
времени, из D.72) получим
»=1 ' i=l J=l ' J
или для двумерного процесса
д (Ol/) + д (о2л _ 1 а2 (бп/) _ i а2 (&22/) _
дхх + дх2 2 эх2 2 ду2
_1?<ЬйЛ*<Ы1^ D.89)
2 axj5x2 2 3x^X2
§ 4.4. Определение вероятности достижения границ области
возможных значений случайной функции
Теория марковских процессов позволяет исследовать зада-
задачи, связанные с анализом переходных процессов в механичес-
механических системах, решение которых методами корреляционной тео-
теории получить невозможно. К таким задачам, которые решают
методами марковских процессов, относятся задачи определе-
149
ния вероятности достижения границ возможных значений слу-
случайной функции.
Рассмотрим одномерный случайный процесс. Требуется оп-
определить вероятность того, что в течение интервала времени
(Yo, tQ + ty для случайной функции X{t) выполняется условие
xx<x(t)<x2. D.90)
Предположим, что задано начальное распределение
f(x,tQ)=f0(x). D.91)
Тогда искомая вероятность
Р(х{<Х< х2) = jf(x, t)dx. D.92)
х\
Среднее время, в течение которого выполняется условие
D.90), равно t = t- tQ . Ограничимся случаем, когда коэффи-
коэффициенты flj и by не зависят от времени. Это имеет место, например,
если на вход системы действует стационарное случайное возмуще-
возмущение е {t) с нулевым математическим ожиданием и ^ = Бф (т).
Можно принять, что в начальный момент времени ни одна реа-
реализация процесса не успела достигнуть границы, поэтому
П'о)=1- D.93)
При большом значении времени t любые возможные реа-
реализации процесса достигнут границ, т.е. при t -> <ю Р (») -> 0.
Внутри области изменения независимых переменных
(х1 < х < х2 ; г"о ^ t<, со) условная плотность вероятности / изме-
изменяется в соответствии с уравнением D.30):
1.!М,1^М D.94)
dt дх 2 dx2 "
Одна из особенностей данной задачи заключается в том,
что область изменения ординат случайной функции х ограни-
ограничена, что необходимо учесть в формулировке краевых условий.
150
Вероятность того, что траектория пересекла отрезок
х, х + А х, ни разу не коснувшись границы в течение времени
t - tQ, равна
AP = f{x,t)Ax. D.95)
На границе при х = Xj 2 и / > t0 такие траектории практичес-
практически отсутствуют, поэтому /(х, t) должна удовлетворять краевым
условиям
/(х1,/)=/(х2,О = 0. D.96)
Граничные условия D.96) и начальное условие D.93) одно-
однозначно определяют функцию / Предположим, что решение
уравнения D.94), удовлетворяющее краевым и начальному ус-
условиям, найдено. Тогда известна функция Р(/)и можно найти
Рх — вероятность того, что х (О за время t - tQ коснется границы:
Р1 = Р(Г0)-Р(/)=1-Р(О. D-97)
Дифференцируя выражение D.97) по t, находим плотность
вероятности
/.<»>~тР- <498)
Полагая t- to + tx, где tx - случайная величина, получаем
Соотношение D.99) позволяет найти среднее время (mt)
движения системы до достижения границы (/j > 0):
00 00
Щ. -\hh Ci) dh = ~ J^i^Co + 'i) • D.100)
о о
Проинтегрировав правую часть выражения D.100) по час-
частям, получим
оо
о
151
или (так как Р (со) = 0)
ч-}™*. D101>
о
Решение уравнения D.94) при данных краевых и начальных
условиях позволяет определить вероятность достижения слу-
случайной функцией X(t) границ к фиксированному моменту
времени Т. Эту вероятность находим из соотношения D.95):
Р(Г)=//(х, T)dx. <4-102>
хх
Пример 4.5. Уравнение движения безынерционного поршня
(см. рис. 4.2), на который действуют постоянная сила а и
случайная сила е (/¦), имеет вид
ссх=о + е(/), D.103)
где ссх — сила сопротивления. Случайная сила е (t) является
случайным процессом типа белого шума с нулевым математи-
математическим ожиданием и корреляционной функцией А^ = So 8 (т).
Требуется определить вероятность того, что случайная функция
х (О (смещение поршня) в течение времени Т не выйдет за
пределы интервала (- XqXq), если при t - 0 х@) = 0.
В этом случае коэффициенты а^ = а/а ; b\ = Sq/o.2. Уравне-
Уравнение D.94) принимает вид
?+?#-44=°- D-Ю4)
dt а дх 2а2 Эх2
Искомая плотность вероятности /(х, /) должна удовлетво-
удовлетворять начальному условию
/(х,0) = 5(х). D.105)
Воспользуемся методом Фурье для решения уравнения
D.104):
f=X{t)T(x). D.106)
152
В результате получаем уравнения
dt dx2 So dx SQ
решения которых соответственно имеют вид
Г=сA)еА
D-107)
Тх
Х= е о (cj cos XjX + с2 sin A.t x),
где
Плотность вероятности /(х, /) должна удовлетворять крае-
краевым условиям D.96), поэтому получаем два уравнения для
определения q и с2 :
Z(xn) = с, cos Х]Лп + с7 sin /\.ixn = 0;
01 1-^2 10' D.109)
X(-Xq) = Cj cos X^Xq - c2 sin AjX0 = 0.
Система уравнений D.109) имеет нетривиальное решение
(cj * 0) при с2 = 0 и cos Х{х0 = 0, откуда
, Bк+1) п D.110)
Чк= 2 х0-
Из D.108) находим
,2_ ^0 fB/:+lJ7i2 й2а2>)
Окончательно получаем следующее выражение для решения
уравнения D.104):
да оо
/(x,0 = e'yo*X(^cosB^^e-^'). D.111)
Ы) 2 Х°
ЮЗак. 341 153
В начальный момент времени (г = f0 = 0) полученное выра-
выражение D.111) должно удовлетворять начальному условию
D.105):
JVf B&+ 1) тех]
из которого получаем
Г ?BЛ+1)ЯХ, f SnX Bi+l)ltt., . , /4 1191»
сЛ J cosz Л—r—L— dx - J e о cos ^^—-z—L— 5 (x) dx . D.112)
Из D.112) следует сЛ= 1/х0.
Выражение D.111) принимает вид
ад /" оо N
Искомая вероятность
Р(Ов|/(х;/)Л-^^*?^^сов^|^Л.D.114)
После интегрирования получим соотношение, справедли-
справедливое для любого фиксированного момента времени t = Т:
2ch ~рг Хп оо _Х2 7V 1ч2+? l
Р(о ^о ° thT(-\?+kbk DИ5)
" м (f **) '
, Bк + 1) я
да**в 2 ^'
Как и следовало ожидать, полученное значение для веро-
вероятности Р(Т) не зависит от знака силы а. Обобщением рас-
рассмотренного примера является пример, когда границы области
возможных значений случайной функции x(t) в начальный
154
момент времени являются случайными (х0 — случайные вели-
величины) с известным законом распределения, например
/(*o) = 4^-cos|^. D.116)
В этом случае решение D.111) при t = 0 должно удовлетво-
удовлетворять условию
аа ( оо N
S Х v1 Bк+1)КХ П ПХ
te=O 0 0 0
V /
которое позволяет определить ск:
х ад
ск = ~Е\ъ ° cos + cos^ —\dx. D.11/)
-х0 \ у
Определив коэффициенты ск, находим f(x, t), а затем ве-
вероятность P(t), как в предыдущем случае. Полученное выра-
выражение D.115) позволяет определить среднее время движения
поршня без касания торцов цилиндра по формуле D.100):
Преобразуем выражение D.118), введя безразмерный пара-
параметр Yj = — Xq и характерное время ^ . За характерное время
принято время tk, за которое поршень под действием силы а
пройдет расстояние, равное х0. Так как неслучайное движение
безынерционного поршня описывается уравнением
ах= а,
то время tk равно
ю* 155
Разделив на tk выражение D.118), получим безразмерное
среднее время движения поршня без касания торцов:
mh о . ^ (-1J+кBк+\) Г411оч
где
, рк +1)
*о 2
В примере 4.5 было принято, что сила инерции поршня по
сравнению с силой сопротивления мала и ею можно пренебречь.
Рассмотрим механическую систему, движение которой опи-
описывается дифференциальным уравнением первого порядка,
аналогичным уравнению D.44). На рис. 4.5 показан вращаю-
вращающийся вал с диском. На вал действует известный момент Мо
и случайный момент б (J). Пренебрегая моментом сопротивле-
сопротивления, имеем следующее уравнение вращения диска:
/со = М) + б@. D-120)
Рис. 4.5
В начальный момент времени угловая скорость равна нулю.
Требуется определить среднее время mt, при котором угловая
скорость достигнет значения ооо. В результате для определения
среднего времени т, получаем выражение, аналогичное D.120),
в котором следует х0 заменить на со0, а а — на /.
156
Глава 5. СЛУЧАЙНЫЕ КОЛЕБАНИЯ СИСТЕМ С ОДНОЙ
СТЕПЕНЬЮ СВОБОДЫ
Теория случайных колебаний механических систем находит
все большее применение в практике проектирования почти во
всех отраслях промышленности. К таким задачам относят: рас-
расчет системы защиты объектов при действии случайных возму-
возмущений; анализ вибраций элементов конструкций летательных
аппаратов, вызванных, например, действием атмосферной тур-
турбулентности; старт летательных аппаратов; движение транспорт-
транспортных средств по дорогам со случайными неровностями и т.д.
Теория случайных колебаний позволяет решать задачи, в ко-
которых требуется оценивать надежность и ресурс конструкций.
Большую роль теория случайных колебаний играет в вибро-
виброакустической диагностике.
§ 5.1. Свободные случайные колебания линейных систем
Рассмотрим движение детерминированной системы (систе-
(системы, не содержащей случайных параметров), вызванное случай-
случайными начальными отклонениями от положения равновесия.
В реальных условиях реализовать движение механической
системы с абсолютно точными значениями начальных условий
невозможно, так как всегда имеет место разброс начальных
данных. Поэтому реальное движение отличается от расчетного,
и возникает необходимость в оценке возможных отклонений
движения от расчетного. Задача определения вероятностных
характеристик движения — обобщенных координат и их первых
производных — при свободных колебаниях, вызванных случай-
случайными отклонениями начальных данных, является наиболее
простой. Для ее решения достаточно знать линейные преобра-
преобразования случайных функций, изложенные в § 2.4.
157
Рис. 5.1
Рассмотрим свободные колебания линейной системы с
одной степенью свободы (рис. 5.1) с учетом силы сопротивле-
сопротивления, пропорциональной скорости, которые описываются урав-
уравнением
у + 2пу + ply = О, E.1)
где 2л = а/т ; р\ = с/т.
Решение уравнения E.1) имеет вид
у = t~nt(c\ cospt+ c2 sinpt). E.2)
При t==0y=yQiiy = y0 (наиболее общий случай). После
определения произвольных постоянных Cj и с2 получим
У = е~"'\Уо (cospt+ Z sinpt) + -j^ sinpt . E 3)
Начальные данные у0 и Уо являются случайными величи-
величинами с известными вероятностными характеристиками (извест-
(известны их математические ожидания mv , /м„, дисперсии Д, , Д,
"О 'О Л) "О
и корреляционный момент Kv \, ). Требуется найти вероятност-
ные характеристики у и первых двух производных у и у.
Дифференцируя E.3), найдем выражение для скорости и
ускорения массы т:
У = УоА+У<}/2'> У = УоЛ+Уо/2> E.4)
где
158
1
/i = e""' (cos pt + - sin pt); /2 = - e""' sin /tf. E.5)
Для решения сформулированной задачи необходимо найти
вероятностные характеристики решения, т.е. my(t), Dy{t), и
автокорреляционную функцию Ку (/, /j). Воспользовавшись
формулой для математического ожидания суммы случайных
функций, получим
my(t) = M[Y] = myf>e-nt (cos pt+-sin pt) + -myo(Tnt sin pt. E.6)
Автокорреляционная функция решения
Ky = М [ Y(О Y(/j)] = Z) e-"<'+'i> (cos /rf + - sin pt) x
x (cos pty + — sin pt{) + — Ку^ e~n^Mi) (cos pt + — sin pt) x
x sin /tfj + e~"('i+') (cos pti + — sin pt{) sinp^ I +
+ ^fs\npt sin ^ e-"('i+'). E-7)
Дисперсию прогиба получим из выражения E.7):
Dy(t) = Dyofi + 2Ky^flf2 + Dyofj. E.8)
Для некоррелирующих начальных данных (Kv ь _ п) имеем
Dy(t) = Dyofl + Dyofl E.9)
Аналогичный вид имеют выражения для математических
ожиданий и автокорреляционных функций первых двух про-
производных решения:
ту = ту0А + тУ0& '
.. .. E.10)
ту= туйп+ ту/2;
159
Ky (t, tj = Dyjx (O/i (tx) + \Ky^ [/i (O/2 ('1) +/1 W2 (t)] +
+ \h (O/2 (>i). E-11)
*» (r, /!> = Dyjx @/1 (rj) + кУоУо [/i(o72(^i) +7iCi)/2(O] +
+ ^/2@/2 (h).
В отличие от классической теории колебаний при исследо-
исследовании случайных колебаний систем с одной степенью свободы
необходимо иметь две неслучайные функции, характеризующие
случайные колебания (как свободные, так и вынужденные),
ту (О и Ку (t, t{). Поэтому классическую теорию колебаний
можно рассматривать как частный случай теории случайных
колебаний, когда выполняются условия
Какой практически полезный результат можно получить из
приведенных вероятностных характеристик решения E.6)—
E.9)?
Рассмотрим расчетную схему рис. 5.1. Для нормальной ра-
работы прибора необходимо, чтобы максимальные нормальные
напряжения, возникающие в заделке при случайных колебани-
колебаниях, не превышали предела текучести материала упругого эле-
элемента, т.е.
аТ E.12)
max (ст) < — ,
где а-р— предел текучести; пт— коэффициент запаса по пределу
текучести.
Максимальное нормальное напряжение Cjj^ (в сечении 0)
связано с прогибом у соотношением
3EJX E.13)
СТтах = 7чГ}''
где Е — модуль упругости материала; Jx, wx — соответственно
момент инерции и момент сопротивления сечения стержня.
160
Математическое ожидание напряжения атах и дисперсия будут
соответственно равны
"Чшх=¦¦атуМ'» E.14)
Da =a2D(t) (a = 3EJx/l\).
max J
Считая, что в каждый момент времени для стах (/) имеет
место нормальное распределение, для определения максималь-
максимального напряжения max (сГд^) воспользуемся правилом «трех
сигм»:
max(amax) = amy(t) + 3auy(t) (оу=Щ). E.15)
Так как максимальное напряжение зависит от времени, то
следует определить такое значение tt, при котором max (Стл^)
принимает максимальное значение во времени. После опреде-
определения tt получим окончательное условие, выполнение которого
гарантирует нормальную работу упругого элемента:
max @max) = ату (О + Здсту (О < — ¦ E-1б)
Т
К свободным колебаниям можно отнести движение систе-
системы после прекращения действия кратковременного случайного
импульса (время действия которого много меньше периода
собственных колебаний).
Пример 5.1. На рис. 5.2 приведена механическая система с
одной степенью свободы, состоящая из абсолютно жесткого
тела, часть которого подвергается действию ударной волны. В
этом случае на тело действует импульс момента JM, сообщаю-
сообщающий некоторую начальную угловую скорость (при нулевом
начальном угле отклонения), т.е. при / = 0, ср0 = 0, ф = ф0. Им-
Импульс момента связан с начальной скоростью соотношением
/Л/=/0Ф0' E-17)
где /0 — момент инерции тела относительно оси, перпендику-
перпендикулярной чертежу и проходящей через точку О.
161
Требуется определить параметры
системы амортизации (с и а) из условий:
1) максимальный угол отклонения тела
при действии импульса момента не дол-
должен превышать допустимого фд; 2) за
заданное время tk амплитуда угловых ко-
колебаний тела должна уменьшиться в к
раз. Если вероятностные характеристи-
характеристики случайного импульса JM известны
(nij и Dj), то известны и вероятностные
характеристики начальной угловой ско-
скоту Dj
ростиФо(%о = -^,2)фо = -^).
Уравнение движения тела имеет вид
Рис. 5.2
•• а/2 • с/2 п
Так как ср0 = 0, то вероятностные характеристики решения
следующие:
mv = -f е~П'sin Pr>
K^ = -^еГ*мд sin pt sin ptx;
^ E.19)
oq) = -^e-"/sin/>/ {p=^pl~n2 ;pl = ~;n = ^—).
Максимальное значение угла ф для любого момента време-
времени (с использованием правила трех сигм)
(mJ+3oj) . E.20)
Фтах = тс + 3стФ = j^ e &тР* ¦
162
Первый максимум (по времени) функция <ртах достигает в
момент времени ^ = -~ —, поэтому, пренебрегая влиянием сил
трения (е~Л/« 1, р »/?д) на интервале времени @, ^ ) и используя
первое условие, получим
mj+3aj E.21)
Из E.21) находим
jmJ+ За,J E.22)
Полное время (см. второе условие)
B*, - 1)
'* = h + \ (% = 2р я ' (kl = h 2' "Я ¦
Из выражения E.20)
(mj+2aj) -nt . E.23)
Фтах = Фд^ = J— е ' sin /7^ .
После преобразований из E.23) получим
(г*, - iOt/it
В зависимости от конкретных значений к и кх из E.24)
находим пи - корень уравнения E.24). Зная пи, определим
оптимальный коэффициент силы вязкого трения в системе
амортизации:
_ 2Ро-Го"и E.25)
163
§ 5.2. Вынужденные случайные колебания линейных систем
5.2.1. Нестационарные колебания
Уравнение вынужденных колебаний линейной системы с
одной степенью свободы с постоянными параметрами имеет
вид
y + 2ny + ply = -f(t), E.26)
где /(О — случайная сила.
Для определения вероятностных характеристик решения
уравнения E.26) необходимо иметь вероятностные характерис-
характеристики входа и вероятностные характеристики начальных дан-
данных, т.е. rrif,Kf, тУа, т^, А^, Dy^ D^, Kfy^ Kfy<. Ограничимся
рассмотрением случая, когда начальные данные и случайная
сила/являются независимыми, т.е. Kvil = К*. = Ке. = 0 .
"(КО -"О ™0
Решение уравнения E.26) для произвольной правой части
можно представить в виде
у = е"л/Uo\cospt + — s\npt | + — sinpt \ +
t
+ -^ f e-n('^) sin p{t- т)/(т) ax. E.27)
0
Математическое ожидание и автокорреляционная функция
решения
mv = <z~nt mv cos pt + — sin pt + —- sin pt +
У I y°{ P ) P J
+ — J e-"(M) sinp (t - x) m, ax; E-28)
mp * r\ / j ,
Г ( n \ ( n \
Ky (t, t{) = e~"('+'i) Dy cos pt + - sin pt\ • cos ptx + - sin ptx +
164
1 ' ''
+ Дг A, sin pt sin pU + -4-х J J е""^ sin p(t-x) e^'r^ x
/>2 * J m P о 0
x $\np(tl-T.l)Kf(T., x^diidx. E.29)
Дисперсия решения
Г 2 1
Dv(t) = e~2"' Z)v fcosp? + - sinpt | + —т Dv sin2/?r +
^ LI p ) p
t '.
+ -4t I f е"л('"т) e-^'i^ sin^ (/-x) sinp (л - т,) Kfdixdx. E.30)
w P о о
В частном случае, когда yQ = yQ = 0,
t
mv = — Je-"(/-T> sin p (t - x) /яДх) A ; E-31)
у mp JQ J
У >»P о 0
x sin (t-x) sinp(tl-xl)Kf(x,x])dxckl . E.32)
Рассмотрим частный случай, когда в системе прикладыва-
прикладывается случайная постоянная сила, сохраняющая в дальнейшем
свое значение, т.е./= aH(t), где а — случайная величина (сила)
с известными вероятностными характеристиками та и Da;
H(j) — функция Хевисайда.
Вероятностные характеристики решения в этом случае
имеют вид
t
ту = —\е-"('-т> sin;? (t -x)dx; E.33)
тР 0
165
Kv = ^гт I Jе~"(/~т) Г*™ sinp(t-x) sinp (Л -t,)AA[.
' "»V о 0
E.34)
После интегрирования получим
mv = — 91 ? tP (! - cos ptQ-nt) - n sin/rfe-"' ] ; E.35)
y % (p2 + л2)
Kv = ~тЧ •> l 11 [~n sin P* er^ + pil- cospt e-nt)] x
y mrp2- Qr + try
x \-n %шр^~м\ +p A - cos/rt^-"'!)] . E-36)
Дисперсия решения
Dy = 2 i 2—Г2 [-л яп^е-л/ + рA - cos^r е-"')]2.E.37)
y mrp1 (pz + nAy
Если уравнение малых колебаний содержит переменные во
времени коэффициенты, то получить решение в аналитической
форме, как правило, нельзя. Например, приближенное уравне-
уравнение малых колебаний двигателя (рис. 5.3), вызванных случай-
случайным разбросом тяги AR из-за неравномерного горения заряда,
имеет вид
m(t)Ax + a.Ax+cAx = -AR E.38)
или
Ax + a1(t)Ax+a2(t)Ax=f(t), E.39)
Рис. 5.3
166
Представим уравнение E.39) в виде системы двух уравнений
первого порядка, положив Д к = у1; А х = у2 '¦
У\ + а\У\ + а2 у2 = /; у2 - ух = 0, E.40)
или в векторной форме
y + A(t)y = f, E.41)
где
Решение однородного уравнения E.41)
Уо = *(ОУоо, E-42)
где К (О — фундаментальная матрица решений, удовлетворяю-
удовлетворяющая условию К@) = Е (Е — единичная матрица); у00 — вектор
начальных данных. Элементы матрицы K(t) получить в ана-
аналитической форме не всегда удается, но в этом и нет необхо-
необходимости при численном решении уравнений.
Найдем общее решение уравнения E.41), воспользовавшись
методом вариаций произвольных постоянных Лагранжа. Счи-
Считая у00 функцией времени, подставим E.42) в уравнение E.41):
*Уоо + *Уоо + Л*Уоо = *- E.43)
Так как удо удовлетворяет однородному уравнению, то из
E.43) получим
*yoo = f, E.44)
откуда
yoo=f^-1(T)f(T)rfT + C. E45)
о
Общее решение уравнения E.41) с учетом E.45)
Y = K(tyC+lG(ttt)tb)<k, EA6)
о
167
где G(t, т) = K(t) К !(т) — матрица Грина.
Основная трудность при численном получении решения в
форме E.46) заключается в определении матрицы K(t, т), за-
зависящей от обратной матрицы К~1(х), которую при численном
счете надо получать на каждом шаге. Для уравнений, решение
которых может быть получено в специальных функциях (урав-
(уравнения Бесселя, Лежандра, Эрмита и т.д.), матрицу K{t, т)
можно представить в аналитическом виде через специальные
функции.
Для уравнений с постоянными коэффициентами матрица
Грина зависит от разности аргументов:
G(t,x) = K(t-x).
Когда требуется получить решение для фиксированного
момента времени {t=tk), матрицу Грина G(t,x) можно полу-
получить без определения матрицы К~х (т).
Продифференцируем тождество К(х)К~^ (т) = Е:
-^ К(х)К~\х) + *(т) ^^ = 0. E.47)
Умножим E.47) справа на матрицу K(i), тогда
К+ КК~1К= 0. E.48)
Матрица К удовлетворяет уравнению
^(т) + Л(т)Г(т) = 0,
поэтому, исключая К, получаем
-АК+КК-1К=0, E.49)
откуда
Кк~1-А = 0. E.50)
Умножим слева уравнение E.50) на А":
к-\х)-К-\х)А(х) = 0. E.51)
168
Уравнение E.51) умножим слева на матрицу K(tk) и пре-
преобразуем к виду
^G(tk,x)-G(tk,x)A(x) = O, E52)
где G{tk,x) = K(tk)K-\i).
Отсюда следует, что матрица Грина удовлетворяет матрич-
матричному уравнению E.52). К уравнению E.52) применим опера-
операцию сопряжения (транспортирования для матриц с действи-
действительными элементами), тогда
^--(GA)* = 0, E.53)
ах
или (так как (GA)* = A*G*)
^--A*G* = 0. E.54)
ах
Значение матрицы Грина известно при т = tk (так как
G = K(tk )Л(т), то при i = tk, G= E), поэтому следует перейти
к новой независимой переменной tj -tk-i, после чего урав-
уравнение E.54) принимает вид
^ + A\xl)G* = 0. E.55)
Так как значение интеграла при фиксированных пределах
в выражении E.46) не зависит от направления интегрирования
(x = tk-i{), то матрицу G*(tk,X]), полученную при решении
уравнения E.55), после операции сопряжения используют при
вычислении интеграла (второе слагаемое в E.46))
'* 0 '*
JG(tk, т) f (т) dz = - j G(tk , Tj) f (x{) *i = j G(tk , хг) f (Tl) *! .
0 tk 0
Изложенные методы определения решения уравнения E.41)
и матрицы Грина справедливы не только для системы второго
порядка E.40) (на примере которой были проделаны все необ-
169
ходимые преобразования), но и для систем любого порядка,
что будет использовано в дальнейшем при исследовании слу-
случайных колебаний систем с п степенями свободы и систем с
распределенными параметрами.
При численном счете матрицу К *(tk , x) можно получить
следующим образом. Рассмотрим векторное уравнение вида
4* + Ач)ь = о. E56)
Решив уравнение E.56) два раза (или 2 л раза для системы
с п степенями свободы) при следующих начальных условиях:
1)т1 = 0:^ = 0:62 = 0;
2)т1=0;61 = 0;62=1,
получим столбцы матрицы G* или строки матрицы Грина.
В скалярной форме решение E.46) имеет вид
t
ух = кпс{ + кпс2 + \gn(t, x)fdx ;
0 E.57)
Уг = к2\с\ + Л22С2 + \вг\Ц, *)fdv ¦
о
Так как при t = 0 у @) = у10 , у2 @) = у20, а Кф) = Е, то про-
произвольные постоянные равны q = у10 , с2 = y2Q .
Найдем вероятностные характеристики решения E.57), счи-
считая Ую , y2Q и / независимыми:
г
тУ{ = *п«у10 + кпту20 + Ьцт/А ;
0 E.58)
t
ту2 = к21ту]0 + *22иум + fftlw/A J
0
*у, = VllC^llCl) + Vl2(O^l2('l) +
170
t t
+ J J?ll('> T) J^nC^i , ix)Kfckdtx ;
00
КУг = DyJbiV Ш*\> + Dyjvtf )*22('i) + E-59)
"i
+ J JftlC T)S2l('l • ^\)Kfdxdix .
00
В общем случае подсчет интегралов, входящих в выражения
E.59), представляет определенные трудности. Наиболее просто
интегралы вычисляются, когда автокорреляционная функция
силы может быть представлена в виде произведения двух функ-
функций, зависящих только от одного аргумента, т.е.
^(т,т1) = Оф(т1)Ф(т). E.60)
Если автокорреляционная функция возмущения имеет вид
E.60), то интегралы, входящие в E.59), можно представить в
виде
' '.
J jg,j (.t, t) g,j (tx , xdKjb, Tj) (k<kx =
0 0
t 'l
= a jgjj(t, т) ф (т) ck \giJ(tx , x{) ф (Tt) dix . E.61)
0 0
Рассмотрим несколько примеров случайных нестационар-
нестационарных колебаний системы с одной степенью свободы.
Пример 5.2. На рис. 5.4, а показана мачта с антенной.
Антенна находится в сферической «прозрачной» для радиоволн
оболочке. Масса антенны считается точечной. Для увеличения
жесткости мачты в плоскости ZOYk ней прикреплены два троса
натяжением No. В момент времени /0 = 0 на мачту с антенной
внезапно подействовал однородный поток воздуха, скорость
которого v есть случайная величина. В результате возникнет
случайная аэродинамическая сила F, постоянная во времени
(рис. 5.4, б). Считаем, что вероятностные характеристики силы
171
^известны (tnF, DF). Аэродинамическими силами, действую-
действующими на мачту, пренебрегаем. Требуется определить макси-
максимально возможный угол у отклонения луча антенны от задан-
заданного направления, приняв, что угол у подчиняется нормально-
нормальному закону распределения.
Рис. 5.4
При колебаниях из-за изменения усилий в тросах возникнет
сила АР, зависящая от перемещения ул (рис. 5.5, б).
172
Рис. 5.5
Рассмотрим отклоненное положение мачты (рис. 5.5, а).
Изменения усилий в тросах A/Vj и AN2 (рис. 5.5, 6) зависят от
«удлинений» А/[ и А /2, т.е. ДЛ^ = с A /j , AN2 = с Д /2.
Изменения длин тросов равны
Al{=yA cos pjj Л /2 = уА cos р0 . E.62)
Так как уА и 5 Cj малые величины, то Д /j = у^ cos р0 •
На рис. 5.5, ? показаны усилия в тросах Л^ и N2. Проецируя
TVj и N2 на ось у, получаем силу АР, которая возникает при
колебаниях
АР = N{ cos Р! - N2 cos р2 = C/Vo + сА /j) cos (Po — 6 Pj) —
-GV0-cA/2)cos(p0 + 5p2),
или
АР = 2yA с cos2 р0 + 7V0 sin Po 5 Pt + 7V0 sin Po 5 p2 . E.63)
Из рис. 5.5, а следует
/5p1=^sinp1;/5p2 = sinp0.
Исключая из E.63) 5Pj и 5р2, получаем
\Л -г^ W %0 •+-jJiuHo>'>A = ЧУ а ¦ Ъ'&)
Воспользовавшись методом сил, получим уравнения малых
колебаний мачты с антенной (см. рис. 5.4, а) (без учета дис-
сипативных сил):
y = 5n(-My + F) + 8nAPl (AP^-AP);
yA = 62l(-My + F) + 522APl. E' 5)
Исключая из системы E.65) уА (АРХ = -схуА), после преоб-
преобразований получаем уравнение
173
где
7_ A + д522)
Решение уравнения E.66) при нулевых начальных данных
имеет вид
t
y = ±\smp0(t-i)jj& = ±(l-cosp0ojj. <5-67)
Угол поворота массы М (угол у) можно получить, восполь-
воспользовавшись методом сил:
1 Ы>A)/? (J+F)l2
y~EJ[2 + 2 у
или
r_^[_S^i + fc*JbJEK?]. E.68)
Исключая из E.68) ул и у, после преобразований получаем
а ( ci/i52i lA
где EJ — изгибная жесткость мачты.
Находим математическое ожидание и дисперсию угла у :
ту = -~A - cospot)mF;
E.69)
Dy = -~^(l-cos Pot)DF.
Максимально возможное отклонение угла у равно
max у = my + 3ay = -^j(l - cospot)(mF+ 3aF). E-'°)
174
Найдем максимальное значение max у во времени. Диффе-
Дифференцируя E.70) по /, получаем
4 (max у) o(.mF+3aT) .
_L__I2 s _ Pq smpot = о.
Максимальное значение достигается в момент времени
max(maxy) = 2 ^j(mF + 3oF). ^5-71^
Определив максимальное значение угла у при возникающих
случайных колебаниях мачты с антенной, можно проверить
выполнение условия безотказной работы антенны
max(max у) < у0 , E.72)
где у0 — допустимое значение угла отклонения луча антенны.
Пример 5.3. На рис. 5.6, а показан механизм подъема. Масса
т укреплена на конце растяжимого троса. При подъеме (бара-
(барабан вращается с постоянной угловой скоростью соо) из-за слу-
случайного изменения силы трения между массой т и направля-
направляющими возникают продольные колебания массы т, которые
приведут к появлению динамического натяжения троса AN, что
необходимо учитывать при расчете троса на прочность и дол-
долговечность. Считая, что случайное динамическое натяжение
распределено нормально, найдем максимально возможное на-
натяжение по формуле (при m&N = 0)
^тах = т^+3аД^' E-73)
где сгд^у — среднее квадратическое значение случайного дина-
динамического натяжения. Можно считать, что сила трения между
массой т и направляющими является силой сухого трения. С
учетом случайного разброса сила сухого трения равна
FT= FT0 sign о - AFT, E.74)
175
где AFT — случайная составляющая силы трения; о — скорость
движения груза,
о = и0 + Д к (и0 = cog7" - c°nst) ,
где А х — удлинение троса при колебаниях груза.
а б
Рис. 5.6
Приняв скорость о0 больше максимально возможной слу-
случайной скорости Ах (поэтому sign со = 1), запишем
г-р = Ff q — A F'p.
Воспользовавшись принципом Даламбера, получим
(рис. 5.6, б) уравнение
J-mg+N-FT=0. E.75)
Так как
/=-/ии; N=N0 + AN;
Nq = mg+ FTQ; AN=-AxEF,
из E.75) получаем уравнение малых колебаний массы
176
... EF . . P E.76)
m Ax + —г- Дх = AFT. v '
При определении длины троса / можно пренебречь удлине-
удлинением, вызванным колебаниями груза, т.е. можно положить
/ = /0 - и0Л
Уравнение E.76) малых колебаний массы принимает вид
рр AFT
Ах + — Дх = —-. E.77)
Заменой аргумента t на
Л1 EFlo\l-^t}
Л = 2 у = а У 1 - -г t
уравнение E.77) приводится к уравнению Бесселя.
Решение однородного уравнения Бесселя можно предста-
представить в аналитической форме записи через функции Бесселя:
Ax=c1t1Jl(tl) + c2tlYl(t1);
(Ь./о)
9 РР
Ах--[с1/0(Г1) + саУ0(/1)]^,
или, возвращаясь к аргументу /, получаем
дх = с1/11(/) + с2/12(О;
Ах=с1/21(О + С2/22(О-
Матрица Грина для данного случая
D D E.80)
K' ' h\<f /22^) -Ы* )/2lW /22(' Vl l(T> -/2l(^ 1/12W '
D D
где 1>=/11(тУ22(т)-/12(тУ21(т).
13 Зак. 341 177
Решение уравнения E.77) при нулевых начальных данных
имеет вид
А .. _ 'г l/j«)/22(т) -fn(tУ21(т)) Aiy ^ Egl)
О ^
. 'г [/2i(O/22tt> -/яУШ*)] ^Т , E 82)
Л * " J Z)w
Экспериментальные исследования показывают, что случай-
случайный разброс силы сухого трения можно представить в виде
процесса, показанного на рис. 5.7. Случайную составляющую
силы трения AFj можно приближенно рассматривать как ста-
стационарную случайную функцию, ограниченную по модулю со
случайными моментами времени изменения знака. Одна из
реализаций такого процесса показана на рис. 5.7. Для полной
характеристики процесса нужно знать еще распределение точек
перехода через нуль (распределение нулей), т.е. вероятность
Р{п,х), где п — число нулей на интервале времени т (п —
случайная величина).
Представленный на рис. 5.7 график изменения AFT(t) во
времени является идеализированным, так как мгновенное из-
изменение силы трения (случайной составляющей) на конечную
величину невозможно, однако идеализация позволяет восполь-
воспользоваться законом распределения Пуассона (см. § 1.4)
Р(и,т) = ^е-^, E.83)
Рис. 5.7
где ц — средняя частота нулей, прихо-
приходящаяся на единицу временного интер-
интервала.
Математическое ожидание (пара-
(параметр а) можно выразить через ц и время
t, полагая а = ц?, что и сделано в выра-
выражении E.83).
Сечение случайной функции
AFT(t) имеет закон распределения,
представленный рядом
178
AFj(t)...-AFn;+AFn
Так как моменты перемен знака функции AFT никак не
связаны со значением случайной функции, то нет основания
считать какое-либо из значений + AFm , - AFn наиболее веро-
вероятным, поэтому
mAF= + 2AF™~2AF™ = °'
D^t-AF^^AF^AF^. E'84)
Найдем корреляционную функцию, воспользовавшись ее
определением (см. § 2.2):
KbFT<!> h) = M\ AFT(t)AFT(t)] . E.85)
Произведение AFT(t) AFT(t{) равно — 1, если между момен-
моментами времени произошло нечетное число перемен знака, и
+ 1, — если четное. Вероятность того, что за время т = tx - t
произойдет четное число перемен знака,
Вероятность того, что за время т произойдет нечетное число
перемен знака,
р ^ (цтJот+1 >1Т ите^ + е^т E.87)
н"^Bт+1)! " 2
Зная Рн и Рн, найдем
KAFr(t, t{) = AF2n Рч - AF2m Ри = е-2^ AF\ . E-88)
Полученное выражение справедливо для ^ > t. Аналогично
при /j < t получим
13* 179
KAfT(t,h)-AF^c-^K E-89)
Объединим E.88) и E.89), тогда
KAFr(t,h) = AF2ne-2^\. E.90)
Корреляционная функция решения
t t{
клх= J J*2lC> *Ш*1>Ч) А^гое^|т|АЛ1 (е = т-Т!). E91)
о о
Дисперсия случайного натяжения
(FF\2 ' ' A92)
V ) 00
Проинтегрировать правую часть выражения E.92) можно
только численно, но при этом надо знать значение коэффици-
коэффициента A (средняя частота нулей), который может быть определен
только экспериментально. Поэтому найдем максимальное зна-
значение aAN (или DAN). Из выражения для DAN следует, что
максимальное значение -Оддг* будет при е ^'E' = 1, что соот-
соответствует предельному случаю ц = 0. Для этого предельного
случая
2 С f
Дд*<ЛдЛГ = (пГД*71>] J*2ltt*)* • E-93)
v Jo
\ J
В результате вычислений получаем верхнюю границу воз-
возможных максимальных значений натяжения в тросе, приняв,
что A./V, имеет нормальное распределение:
^max. = mg+3aANy
Рассмотрим нестационарные колебания массы т (уравне-
(уравнение E.26)) при стационарной случайной силе типа белого
шума:
180
*f('-'l) = .sb8('-'l). E-94)
где л0 — интенсивность (спектральная плотность) стационар-
стационарного белого шума.
Белый шум E.94) является случайной функцией, значения
которой при х * Tj не коррелированы. Физически условие о
некоррелированности двух значений случайной функции для
сколь угодно малого интервала времени эквивалентно условию
об абсолютной безынерционности процесса, что, конечно, не-
неверно. Любой реальный физический процесс инерционен, поэ-
поэтому значения случайной функции, характеризующей процесс,
в данный момент времени частично определяют и ее значения
в близкие моменты времени.
Любые физические величины, в том числе и время, изме-
измеряют с определенной погрешностью; все значения рассматри-
рассматриваемой величины, разность между которыми меньше погреш-
погрешности, считают совпадающими. Поэтому практически случай-
случайную функцию можно считать белым шумом, если корреляция
между ее значениями распространяется только на интервалы
изменения аргумента меньше минимально различимого при
принятой точности измерений. В качестве характерного интер-
интервала времени может быть взят шаг интегрирования h = At.
Корреляционную функцию стационарной случайной функции
можно представить в виде
А^(т) = Х>/Ф (т), E.95)
где ф (т) — убывающая функция аргумента т (<р @) = 1 при
т = 0).
Относительное изменение корреляционной функции в пре-
пределах шага интегрирования
А = -^р- = ф (Л) .
Если при принятой точности решения можно положить
А » 0, то случайную функцию/(О можно считать белым шумом.
При приближенных расчетах, когда время процесса много
больше интервала корреляции, случайную функцию можно
181
приближенно считать белым шумом, интенсивность которого
(частный случай формулы Винера—Хинчина при со = 0)
ОС)
J0=J^(T)*,
—оо
где Kf(i) — реальная корреляционная функция, отличная от
5-функции. Например, если
KrDft-°\'\, E.97)
то интенсивность «реального» белого шума
—00
Найдем корреляционную функцию Ку для случая, когда До-
Доопределяется выражением E.94):
"i
Ку = -у2 J \k (t- z)k (tx - хх) зф (т - хх) ckdix , E.98)
т Р о о
или
'Г'1
Ky = -^i\k{t-x) \k{fx-xl)b{x-tl)dxx ch =
т Р о о
t
= -Ti\k(t-x)k{tx-i)dx, E.99)
где
к (tx - т) = e-"('i"т) sin j? (tx - т).
Дисперсия решения
182
t
А,@ = -^ J^C-t)*. E-100)
тУ 0
5.2.2. Стационарные вынужденные колебания
Если линейное уравнение малых колебаний системы с
одной степенью свободы имеет постоянные коэффициенты и
решение однородного уравнения асимптотически устойчиво,
то в такой системе возможны случайные стационарные коле-
колебания (при случайной стационарной правой части).
Рассмотрим стационарные случайные колебания систем с
одной степенью свободы. Если движение системы описывается
линейными уравнениями с постоянными коэффициентами,
однородная часть которых имеет асимптотически устойчивые
решения, то возможен режим стационарных колебаний (при
стационарной правой части).
Для стационарной случайной функции/(уравнение E.26)),
зная ее корреляционную функцию А^-(т), можно найти спект-
спектральную плотность:
Sf(a) = у JKf(z) cos сот А. EШ)
—ОО
В § 3.6 было показано, что спектральная плотность входа
связана со спектральной плотностью выхода соотношением
Sy(<a) = \W(i(o)\2Sf(fo), E.102)
где
I W(m) | = j-^ 5- •
т [(/со) + 2/j/co + р^ ]
По спектральной плотности выхода S (со) можно найти
корреляционную функцию выхода и дисперсию:
00
Ку (т) = J S (со) cos сот da =
-со
183
= -U —j-^ j 2 A(«,) cos cot A ; E-ЮЗ)
ml_^ (/иг + 2/i/co +/jg y
А,-Л1 —Г -г'*/(«>*. EЛ04)
' m2^ (/соJ + 2л/со+^ '
В частном случае, когда случайное возмущение можно при-
приближенно считать белым шумом (&(со) = So = const), получаем
KyV = -2i r,2 о- Л cos сот Л; E.105)
о °° 2
А, = 4J —2~J 2 ^ш • E106)
Интегралы, входящие в выражения E.104) и E.106), можно
представить в виде C.87):
/ 1 J-^toL^. E.107)
Значения интегралов Jn приведены в приложении 2.
Если, например,
то спектральная плотность равна
SAw) = Df , - = ^ .
У /(а2 + со2) |а + /со|2
Воспользовавшись E.104), получаем
D = 2aDA I 2 dm
у т2 (/соJ + 2/сои +Pq | а + /со |2 '
или
184
D 2Dfa r fa E.108)
y m2 \ (/соK + Bл + а)(/шJ + (pl + 2na) /со + р^а \2
Интеграл в выражении E.108) является частным случаем
интеграла E.107) при С(/со) = 1. Воспользовавшись приложе-
приложением 2, получим
D=\ <2: + aJ 2- E.109)
Дисперсии первой и второй производной решения
оо
Dy=\\W(m)\2m2Sf(v)d,
-00
или
оо
D. = ШИ [ ~ (и>J d°> ¦ E.110)
У т2 -оо I ^'ш^3 + @п + а)(/<0J + (Ро + 2па) /со +^оа Р '
Z>.«H3?J - (^L ^ . E.111)
у т2 _оо| (/соK + Bл + а)(/соJ + О?о + 2ла) /со + /^а |2
Воспользовавшись значением /3 (приложение 2), получим
D,a _
п _ _/ 5 .
у т2 n(j>Q + 2па + а2) '
Dfa n(pl + 2na) E.112)
у т2 n(j>Q + 2па + а2)
Пример 5.4. Для определения горизонтального ускорения
на борту ускоренно движущегося тела массой т (рис. 5.8)
находится акселерометр массой ту Тело движется под дейст-
действием силы R, имеющей стационарную случайную составляю-
составляющую АЛ (О с известной корреляционной функцией (mAR = 0):
*A*(<> = ^e-a|T|fcospT + |sinp|T|l. EЛ13>
12 3ак. 341 185
Рис. 5.8
Требуется определить дисперсию смещения массы ть вы-
вызванного случайной составляющей силы R. Уравнение случай-
случайных колебаний массы т^ имеет вид
Axl + 2nAxl+plAxx=kAR (?=—), E-114)
где Axj — случайное относительное смещение массы т-у, вы-
вызванное действием AR.
Спектральная плотность разброса тяги
00
SAR(a) = DAR Je-*lTlfcospr + ^sinp|T|lcosa>T*. E-115)
—aO ^ J
После интегрирования получим
с г ч лп a(a2 + B2)
SAR«») = 4DAR^2_J_p^4a2a2. EЛ16)
Выражение E.116) можно представить в виде
42>д о a (a2 + р2)
t"W°|W42.W,a4>'r <5117)
Спектральная плотность смещения Ах1
4k2 DAR a (a2 + p2)
SAx(a>) = - 5 , -^ = ^. E.118)
Axi |(/шJ + 2тш+^|2|(/шJ + 2а(/со) + ос2 + р2|2
Дисперсия случайного смещения
^^Дд^аС^ + р2)^
D^\l М(/со)|2
186
где
| А (/со) |2 = | (/соL + 2(а + л)(/соK + (а2 + р2 + 4ла + р\ (/соJ +
+ [2«(а2 + р2) + 2<vg] (/со) +^ (а2 + р2) |2 =
= | а0 (/соL + aj (/соK + а2 (/соJ + а3 (/со) + а4 |2 .
Воспользовавшись приложением 2, получаем
4^2/?дДа(а2 + р2O1
Ах>~ р20 (а2 + р2)^2, + а\аА - аха2аъ) '
Считая, что Axj имеет нормальное распределение, можно
оценить максимально возможную ошибку показаний акселе-
акселерометра (тАх = 0):
А = 3стдх,-
Рассмотрим стационарные колебания массы т, вызванные
стационарной силой/(/) с известной спектральной плотностью
SArrif- 0) (рис. 5.9). Найдем максимально возможное значение
нормального напряжения ат, возникающего в сечении стержня
при z = 0, считая, что ат имеет нормальное распределение.
Наиболее просто уравнение малых колебаний массы т с учетом
демпфирующего устройства можно получить, воспользовав-
воспользовавшись методом сил, использующим принцип суперпозиции.
По методу сил перемещение масс Gum равно сумме
перемещений от каждой из сил, приложенных к системе, т.е.
У = бп(/+/) + 512# (J=-nty);
yk = 52l(J+f) + 522N,
где 5(у — податливости системы; N — сила вязкого сопротивле-
сопротивления, N= - аук.
Метод сил является одним из наиболее эффективных ме-
методов вывода уравнений малых колебаний (когда возникающие
в упругих элементах напряжения удовлетворяют закону Гука).
Например, получить уравнения малых колебаний для механи-
12* 187
ческой системы, приведен-
приведенной на рис. 5.9, воспользовав-
воспользовавшись уравнениями Лагранжа
второго рода, очень сложно.
Интересной особеннос-
особенностью данной задачи является
то, что для системы с одной
степенью свободы получено
два дифференциальных урав-
Рис. 5.9 нения. Дело в том, что меха-
механическая система, показан-
показанная на рис. 5.9, относится к системам с дробным числом
степеней свободы. Система уравнений E.119) имеет третий
порядок.
Получим изображения уравнений E.119) в частотной об-
области:
У(/со) = - 5п/л(/соJ У(/со) - 512а (/со) Yk (/со) + 8п/о(/со);
E.120)
Yk (/со) = - 521/n(/coJ У (/со) - 522а (/со) Yk (/со) + 521-/о('ш).
Из алгебраической системы уравнений E.120) находим изо-
изображения У и Уд. в частотной области:
У (/со) = Wx (/со)/0(/со);
E.121)
У(/со) = W2 (/ш)/о(/со),
где
Ъп+а{.т-){ЬпЪп-ЪпЪ21)
Wx (да) = ;
52i
А = A + 5п/я (/соJ )A + 522а (/со)) - 512б21а2 (/соK .
Максимальное нормальное напряжение в стержне при z — 0
равно
188
(п_МЮ. E-122)
где М — изгибающий момент; W — момент сопротивления
сечения.
Изгибающий момент равен
Л/(О = 2/(/+/) + М,
или
M=-2lmy + 2lf-aykl. E.123)
Перейдя к изображению E.123) в частотной области, полу-
получим
Мо (/со) = - 21т (/соJ 7(/со) - a l(ia)Yk (/со) + 2lfQ(b) .E.124)
Исключив из E.124) Y(/со) и Yk(i(o), имеем
Мо (/со) = \УЪ (/со)/0 (to), E.125)
где
[2Д - а (/со) 522 - 2/и (/соJEи + а (/co)En522 - 812521)]
»^3 (/со) = /.
Так как
% (/@) = "ЖМ°(ко) = "Ж Жз ('ш)^0 (/со)'
то спектральная плотность максимального напряжения и дис-
дисперсия равны
Sg (/co) = -^2|^3(/co)|2^(co);
E.126)
D° = "^2 I I ^3 (*») I2 -S/(») Л> •
т уу J
-со
Максимально возможное значение ат
max ат = 3 V^~ .
189
§ 5.3. Колебания, вызванные случайным кинематическим
возбуждением
Рассмотрим колебания одно-
массовых механических систем,
которые вызываются принуди-
принудительным случайным смещением
(или поворотом) дискретных
точек (рис. 5.10, а) или сечений
(рис. 5.10, б) упругих элемен-
элементов.
Одна из особенностей при-
приведенных на рис. 5.10 систем в
том, что кинематические возму-
возмущения связаны с безмассовыми
точками и это осложняет вывод
уравнений колебаний сосредо-
сосредоточенных масс т.
Рис. 5.10
5.3.1. Нестационарные случайные колебания
при кинематическом возбуждении
Уравнения малых колебаний массы т получим, воспользо-
воспользовавшись методом сил, введя неизвестную силу Р при линейных
кинематических перемещениях, приложенных в точке К (на
рис. 5.10, а сила Р показана пунктирной линией), или неиз-
неизвестный момент Мк при угловых кинематических перемеще-
перемещениях (рис. 5.10, б) и силы инерции J=-my и сопротивления
Fc = -ay. Например, для системы, показанной на рис. 5.10, а,
получаем два уравнения: '
E.127)
yK@ = S21(-wiy-ay) + 522/>@,
где 5,у — податливости системы; ук (/) — заданная функция.
Исключая из первого уравнения системы E.127) силу Р,
после преобразований получаем уравнение
190
I 51252ll • ¦ 512 E-128)
К Ь22 ) 622
или
3) + 2/iy + pgy= Ьхук, E.129)
где
. _а_. 2 ^22 . , = h\
П - т ' Ро ~ т (Ьх {Ъ12 - 512521) ' 1 тф1 fa - 512521) '
Решение уравнения E.129) с определением вероятностных
характеристик у (при известных вероятностных характеристи-
характеристиках правой части) изложено в § 5.2 (соотношения E.28), E.29)
и E.30)).
Рассмотрим задачу, когда требуется определить изменение
во времени максимально возможной силы Р, возникающей в
сечении при нестационарных колебаниях массы т при нулевых
начальных данных. При определении максимально возможной
силы Р примем, что распределение плотности вероятности
силы P(t) подчиняется нормальному закону. Получим выра-
выражение для силы P(t) из второго уравнения системы E.127):
1 ^21
р(О = — Ук- — (-ту-ау). E.130)
522 б22
Из уравнения E.128) находим
Sj2 522
(-ту-а.у) = (у- — ук)—— •
522 Ell522-51252l)
Исключая (- т'у'-ау) из уравнения E.130), получаем
Р(О = У1Ук-У2У> E-131)
где
5ll S21
1 E11522 —512S2l) ' 2 E11522-512521>
При нулевых начальных данных решение уравнения E.129)
имеет вид
^ 191
y = -± Je-"('-T>sinp(t-x)yk(t) * = -J- \gV-x)yk(x) ch .
P 0 P 0
Математическое ожидание
"ip (т) = Yi тУк -у2ту.
Запишем выражение для корреляционной функции и дис-
дисперсии случайной силы Р:
КР it, f) = M [(Yl yk(t)-y2y (t )Xn Ук С') - Y2 У С'))],
или, опуская промежуточные преобразования,
t f
KP(f, f) = у] Kh{t,tl)+ijg(t-x)g(t'-x ') Kyt(t, t') A A ' -
0 0
r /
- YiY2 b(>' - *') *yt С т) A ' - YiY2 J«:C- t) ^C, т) А ;
о о
Z)p(f) = ^(/,f')|,, = ,.
Максимально возможное значение случайной силы P(t) (с
использованием правила трех сигм) равно
max P (О = ,@ +За^О-
На рис. 5.11 показана масса т, связан-
связанная со случайно движущимся основанием.
Для большей определенности примем, что
движение основания началось в момент
времени t = 0.
Уравнение движения массы т имеет вид
У + 2пу + р^у = 2пуо + р^уо. E.132)
Решение уравнения E.132) при нулевых
Рис 5 п начальных данных
192
о
где
k(t-i) = Q-"^)smp(t--z).
Смещение у0 считаем нестационарной случайной функцией
с известными вероятностными характеристиками ту и
Для получения вероятностных характеристик решения надо
знать вероятностные характеристики производной случайного
смещения у0 и произведения y^>Q . В § 2.4 были получены выра-
выражения для вероятностных характеристик производной случайной
функции и произведения случайной функции и ее производной:
dmy о о дКу
dKv ctKy E.134)
Vo~ dtx ' ш~ dtdtx"
Вероятностные характеристики решения уравнения E.132):
2 ' '
my = ^jk(t-x)myodT + ^ \k(t-z) myth ; EЛ35)
р о р о
' 'l
+ -^r)]k{t-x)k(tx-xx)-^<kdxx +
Poo ^i
' h
+ —j4/*(*-!)*(*!-T!) — AAl +
/> 00 ^
193
В результате решения уравнения E.132) получили вероят-
вероятностные характеристики у при нестационарном кинематичес-
кинематическом возбуждении.
При действии стационарного кинематического возбужде-
возбуждения возможны как нестационарные колебания (если время
процесса меньше времени tn , необходимого для практического
затухания переходных процессов), так и стационарные, если
время процесса много больше времени /„ .
Рассмотрим нестационарные колебания системы при дей-
действии стационарного кинематического возбуждения (рис. 5.12).
Точечная масса т находится на конце упругого элемента из-
измерительного прибора, жестко связанного с основанием, ко-
которое случайно смещается в вертикальном направлении. Вер-
Вертикальное смещение у0 является стационарной случайной
функцией с известными вероятностными характеристиками
т = 0;
0 E.137)
До включения прибора масса т из-за жесткой связи А не
имеет возможности смещаться относительно основания. В мо-
момент времени t = t0 = 0 связь А исчезает и масса т начинает
двигаться. Положение массы т в
произвольный момент t показано
на рис. 5.12 штриховой линией.
Требуется определить среднее
квадратическое отклонение раз-
разности у0 - ук в фиксированный
момент времени tk. Разность
у0 - у представляет собой случай-
случайное смещение массы т относи-
относительно основания. Уравнение
Рис. 5.12 малых колебаний массы
194
y + 2ny + ply = plyo + 2nyo. E.138)
Для определения корреляционной функции решения
можно воспользоваться выражением E.136). В рассматривае-
рассматриваемом случае корреляционная функция Kv, входящая под знак
интегралов E.136), имеет вид
Производные Ку по х и Xj
« = п = Л ——: ^ -г = -А, ае °4Elsigne;
5т ^о 5т уо д\е\ ek dt У о °^
dKv ~-а I е |
= Dv = Dv осе а'е I sign e .
Вторая производная Kv по т и т,
Выражение для корреляционной функции решения после
преобразований принимает вид
Р 00
х [pi + 8л2 а5 (т - хх) - 4л2 а2 ] A dtx
или
Я (р2 - 4«2 а2) "'
^ (/, tx) = -^ j //*(*-*)*(*,- tj) e"« I T"Ti I А А! +
Р 00
+ !^},(/i_Ti),(/_Ti)Ai. E.139)
^ о
195
Дисперсия
D< (pl-4n2a2)''\
Dy(t) = — г )]k(t-x)k(t-x1)x
P 00
8Л, г? а '
xe^l^JAA^-\— f^a-^A. E-140)
^ о
Для определения среднего квадратического отклонения раз-
разности А у = у0 - у\ необходимо найти корреляционную функ-
функцию КАу (j, tx):
KAy(t,tl) = M[Ay(t)Ay(tl)] = M[yo(t)-y(t)][yo(tl)-y{tl)} =
= КУо (t, t{) + Ку (t, t{) -M{-M2,
где
Ml = M[yQ(t)y(tl)) и M2 = M{yu(tx)y(t)\.
Подставив выражение для решения y{t^) в B.120), найдем
МХ = М yu(t)^-\k{tx- Т!) \р\ у0 (Tt) + 2л у0 (хх)} екх =
р 0
Г '.
= Цр1 1к«х-хх)М[у0«)у0(-!Х)}с1ч+2п lk(trxl)M[yo(t)yQ(xl))d-z .
[о о
E.141)
Математические ожидания, входящие под знак интегралов,
можно представить в виде
М [у0 (t)yQ (х{)} = Куо (Г, хх) = DyQ e^ I ^i I;
М\уо(пЩ = ^-М[уо(Пуо^)) =
196
= — Dv e^l'-^ = ai)v e^l'-^lsign^-T,).
dx{ y° y<>
После преобразований выражение для Afj принимает вид
tl
Мх=^ jk^- хх) [pi + 2n a sign (t- xx)) e^l'"Ti I dxx . E.142)
P 0
Проделав аналогичные преобразования с М2, получим
D '
Щ = — \ к V - т) I р1 + 2и а sign Ci ~ т>] е~*'''"'' А •
р о
E.143)
Дисперсия Дув момент времени ^
F о
х [pg + 2/i a sign (^ -1)] e~a I '*"T I dx .
Так как tk > x, то
F 0
E.144)
Среднее квадратическое отклонение Ay
oAy(tk) = WAy(tk).
Рассмотрим стационарные колебания системы с одной сте-
степенью свободы при стационарном кинематическом возбужде-
возбуждении. На рис. 5.13, а показан прицеп, который движется по
дороге со случайными неровностями с постоянной скорос-
скоростью v. Воздействие дороги на прицеп при установившемся
режиме движения можно рассматривать как случайный стаци-
стационарный процесс. Примем, что точка О крепления прицепа к
автомашине практически не имеет вертикальных перемещений.
Требуется найти вероятностные характеристики стационарных
колебаний прицепа (угловых колебаний прицепа относительно
197
точки О). Для решения задачи необходимо знать, какое влияние
оказывает дорога на прицеп при разной скорости движения,
т.е. необходимо знать спектр возмущений со стороны дороги,
который зависит от микропрофиля дороги и скорости движе-
движения.
Рис. 5.13
На рис. 5.14 в качестве примера показан участок дороги
(профиль участка дороги) со случайными неровностями. На
различных участках дороги имеются неровности самой разно-
разнообразной формы и протяженности. Последовательность высту-
выступов и впадин случайна, поэтому величина и продолжительность
действия импульсов сил при движении колеса по этим неров-
неровностям случайны. Для исследования случайных колебаний ма-
машины при движении по дороге со случайными неровностями
надо иметь зависимость функции h от времени. Для этого
достаточно поделить абсциссу графика на рис. 5.14 на скорость
движения v. В результате получается реализация случайной
функции h во времени. Если координату х поделить на еди-
единичную скорость (v0 = 1 м/с), то значения функции профиля
дороги А (х) совпадут со значениями функции воздействия
h (J). При прочих равных условиях величины и чередования
импульсов сил, действующих на машину при движении по
определенному участку дороги с постоянной скоростью, не
зависят от того, когда машина проезжает данный участок,
следовательно, воздействие данного участка на дорогу будет
Рис. 5.14
198
одним и тем же в любой момент времени, т.е. стационарным
процессом.
Статистическая обработка результатов замера микропрофи-
микропрофилей дороги позволяет получить вероятностные характеристики
случайной стационарной функции h (t), т.е. mh и Kh (т), и, что
особенно важно, спектральную плотность Sh (со). Получить ве-
вероятностные характеристики воздействия дороги на машину,
справедливые для всех типов дороги, нельзя, поэтому условно
дороги разбивают на ряд классов в зависимости от средней
квадратической высоты неровностей. Более подробные сведе-
сведения о статистических характеристиках дорог и методах их по-
получения содержатся в специальной литературе. В частности,
корреляционные функции воздействия дорог Kh (т) на машину
могут быть аппроксимированы функцией вида
Kh (т) = Dh t~°-1TI cos (Зт , E.145)
где а , р — параметры, зависящие от типа дороги и от скорости
движения. Параметры а и Р можно представить в виде явной
зависимости от скорости движения v, м/с:
a = alv; Р = P:v,
где ctj , Pi — значения параметров при единичной скорости
движения, зависящие только от типа дороги.
Спектральная плотность воздействия дороги на машину
определяется из соотношения (для принятой функции Kh (т))
1 °°, 4Z>A а (а2 + Р2 + со2)
Sh (<°) = -z~ Kh (т) cos со т dx = ~ х-^ = =—z -г- ,
27t_i * [(а2 + Р ) + 2(а - Р ) «> + « 1
или с учетом зависимости коэффициентов а и р от скорости
движения машины v:
с ,,Л 4Д„уа1(у2у1+со2)
% [v4yf + Iv'-i^ + со4]
где У1 = а2 + pf ; у2 = а2 - р2 .
199
Корреляционная функция, характеризующая воздействие
проселочной дороги с дерново-подзолистой почвой при сухой
погоде (при v = 1 м/с), на основании обработки эксперимен-
экспериментальных исследований принята в виде
Kh (т) = 61,40 е^'06271TI cos 0,196 х .
Соответствующая функции Kh (т) спектральная плотность,
зависящая от скорости движения машины,
с / ч <i ™ Г 0,0627v 0,0627v I
Su (CO) = 61,40 =Г , + тг2 ~ .
Л [0,0039Л-(«о+ 0,196vJ 0,0039V2 + (со - 0,196vJJ
E.147)
График изменения Sh (©) от со при v = 1 м/с приведен на
рис. 5.15.
Рис. 5.15
Выражение для Sh(a) E.147) можно преобразовать к виду
Sh^ = 7M -(bJ + 4,28.10-V
А | (/соJ + 0,125v/co + 4,28V2 ¦ 1012 К '
Пренебрегая массой шасси, прицеп можно рассматривать
как систему с одной степенью свободы. Уравнение малых
угловых колебаний прицепа относительно точки О имеет вид
(рис. 5.13, а, б)
200
Ф + 2лф+^ф=^|а + 2/1^, E149)
где 2п = а 12//0 ; Pq = cI 2//0 .
В частотной области получаем
[(/соJ + 2л (/со +^)] ф (/со) = ^(р% + 2п (ко))#(/со).
Поэтому частотная функция для уравнения E.149) равна
рк + 2я/со
ИЧ*»>=,„. ,2 о • г:» EЛ50)
/ ((ног + 2лгш + рф
а спектральная плотность решения
¦) 2
0n + 2/J/C0 ,,- кп
1Уи(со)= ^ т Л(<о). E151)
ф /[(/соJ + 2л/со+^] Л
После подстановки имеем
7^ \Ъ\ (/<аL + 62 (/с°J + &з1
ф /2 | (/соL + Qj (/соK + д2 ('ЬJ + аъ (/со) + о4 I2 '
где
*2 = - (Ро + 2 ¦ 4>3 • 10v2): h = 4>3 • 10"V^ ; bx = 4я2 ;
ax = @,125у+2л); а2 = 2« • 0,125v + 4,3 • l(rV+^;
a3 =p% ¦ 0,125v + 2/i • 4,3 • lO'V ; a4 = 4,3 • lO'^v2 .
График изменения спектральной плотности S от со приве-
приведен на рис. 5.16 при v = 20 м/с, п = 0,3.
Дисперсия углового отклонения
00
/>ф=|.Уф(со)^со = /?ф(р0,л,у). E.152)
—00
201
Значения интегралов вида E.152) даны в приложении 2,
воспользовавшись которым A>ф = /4), найдем
a0Z>3
- 0^2 + -^— (а0о3 - а^д
Л = 2п —^ .
2а0 (а0аз + а1а4 - °1°2аз)
Полученное выражение
для дисперсии в зависимости
от параметров системы и ско-
скорости движения дает возмож-
возможность исследовать их влияние
на дисперсию углового откло-
отклонения. На рис. 5.17, а приве-
приведен график изменения средне-
среднеквадратичного значения угла
Ф в зависимости от v при п =
= 0,3, на рис. 5.17, б— график
Рис- 516 изменения стф в зависимости
от коэффициента силы вязко-
вязкого сопротивления п при v = 10 м/с. Для расчета подвески
прицепа необходимо знать силу, действующую на нее при
движении прицепа по дороге со случайными неровностями.
Для рассматриваемой упрощенной модели эта сила равна
#=с(Л-ф/) + а(А-ф/) = /и/ф. E.153)
Рис. 5.17
202
Спектральная плотность силы N (соотношения E.153) и
B.102))
SN(co) = \Wl (p)\2Sh(a), E-154)
где
|^i(co)|2= с {if + а (/соK 2
[(/со) + 2/нсо +/>q]
Так как при стационарном процессе математическое ожи-
ожидание постоянно, то математическое ожидание производной
случайной функции h равно нулю. Поэтому математические
ожидания угла ф и силы N равны
тФ = у mh ' mN=Q-
Дисперсия силы N
00
DN=jSN(m)dm.
—00
Напряжения, возникающие в упругой подвеске, пропорци-
пропорциональны силе N, т.е. а = kN. Зная вероятностные характерис-
характеристики mN и DN силы N, находим вероятностные характеристики
напряжения а : та = 0, аа = л адг.
Рис. 5.18
203
Выражение E.154) с учетом E.150) можно преобразовать к
виду, удобному при интегрировании:
с- (пЛ 12,5v[-(toN + 4,3-10-V(toL]
О»г(ф) = " 7 —Т т ?) •
I (fay + аг (fay + а2 (fay + аъ (fa) + аА р
На рис. 5.18, а, б приведены графики изменения средне-
среднеквадратичных значений aN в зависимости от скорости движе-
движения прицепа v при п = 0,3 (рис. 5.18, а) и от коэффициента
п при v = 10 м/с (рис. 5.18, б).
§ 5.4. Задача о выбросах при случайных колебаниях
Во многих прикладных задачах возникает необходимость
определения вероятности превышения случайной функцией
заданного уровня, например, при движении автомобиля по
дороге со случайными неровностями. Практический интерес
представляет задача о вероятности «пробоя» подвески. При
«пробое» возникают большие ударные нагрузки, которые не-
нежелательны. Если относительное вертикальное смещение под-
подвески уп рассматривать как случайную функцию, то задача
вероятности «пробоя» подвески эквивалентна задаче о вероят-
вероятности превышения yn(t)>уп0, где уп0 — свободный ход под-
подвески (рис. 5.19). Эта задача является частным случаем общей
задачи о выбросах. При стационарных колебаниях автомобиля
можно получить соотношение, связывающее спектральную
плотность S (со) относительного смещения уп (t) со спектраль-
спектральной плотностью воздействия дороги Sh (ш):
Syn (со) = | WyJ2 Sh (со), E.155)
где | Wv | — модуль передаточной функции, связывающей вход
h(t) с относительным смещением подвески уп .
Считая, что для уп имеет место нормальное распределение,
можно найти математическое ожидание mv и среднее квадра-
тическое отклонение ctv .
¦'л
204
Рис. 5.19
Зная параметры нормального распределения, находим ве-
вероятность того, что относительное смещение уп превысит зна-
значение у„ :
"о
00 _?
Р(уп«)*у„о) = — je 2 Л = Ф(оо)-Ф(г1), EЛ56)
V2tT г,
где 11 = .
Пример 5.5. Рассмотрим упрощенную модель системы, при-
приведенной на рис. 5.19, пренебрегая смещением корпуса маши-
машины по сравнению со смещениями подвески. В этом случае
вертикальное смещение подвески можно рассмотреть отдельно,
что приведет к системе с одной степенью свободы (расчетная
схема показана на рис. 5.19). Обычно при проектировании
рассматривается задача о превышении конструктивного дина-
динамического хода подвески уп без учета влияния ограничителя
хода на колебания подвески. Динамический ход уп выбирают
в зависимости от допускаемой вероятности «пробоя» подвески
при расчетной скорости движения в заданных дорожных усло-
условиях. Найдем вероятности превышения уп заданного значения
уп в зависимости от скорости движения автомобиля по булыж-
булыжной дороге.
205
Числовые значения параметров системы:
т = 3 Н • с • см; с = 300 Н ¦ см4; а = 1,5 Н • с • см;
л = 0,5 с; ,Р = ^ = ^=1Ос~1; >Ч = 8см-
Уравнение движения массы т было приведено в § 5.3
(уравнение E.138), где надо yQ заменить на Л):
уп + 2пуп + р\ уп = Ink + p\h , E.157)
где In = а/т ; р§ = с/т .
Вероятностные характеристики дорожных неровностей
примем равными
юЛ = 0; ^(T) = 20e-°-05lTlcM2;
Л 1^0,002^ + ©2J
где v — в м/с.
Дисперсия
?, 2^°°г 2nb+pl fa E.159)
*« ~ V_^ (/шJ + 2/н'со + р§ | /со + 0,05v |2 '
или
D =2% (-4n2W2+pt)d°>
У" V_il ('fflK + Bл + O,O5v)OcoJ + (pi + 0,lnv) /со + 0,05v^ |2 '
Взяв значение интеграла /3 из приложения 2, получим
' 2 Bл + 0,05у)^"
0,05v^
L ^° J E.160)
[- 0,05vpl + Bл + 0,05v)(p§ + 0,1 лу)]
На рис. 5.20 приведен график изменения о\, (при
п = 0,05^0) в зависимости от скорости движения автомобиля.
206
Рис. 5.20
Вероятность р превышения уп значения уп в зависимости от
скорости движения машины показана на рис. 5.21. Например,
при скорости движения 30 км/ч (8,3 м/с) вероятность превыше-
превышения динамического хода подвески равна 0,02. Вероятность р =
= 0,02 — это вероятность наступления предельного состояния
(«пробоя» подвески), которое не может рассматриваться как
массовое событие, т.е. это число не позволяет судить о качестве
конструкции. Но если сравнить две конструкции, то оптималь-
оптимальной будет та, для которой р меньше.
Рис. 5.21
Нормальный режим, правильно рассчитанный, не должен
приводить к «пробоям», или, вернее, вероятность «пробоя»
должна быть очень малой величиной, которая зависит от кон-
конкретных условий эксплуатации и требований к надежности
конструкции. Случайные колебания подвески приводят к слу-
случайным напряжениям в упругих элементах подвески, от кото-
которых зависит долговечность конструкции. Переменные во вре-
207
мени случайные напряжения приводят к непрерывному накоп-
накоплению усталостных повреждений, поэтому для оценки долго-
долговечности надо знать как минимум среднее число превышений
заданного уровня напряжений, например предела выносливос-
выносливости, за известное время tK. При линейной характеристике уп-
упругих элементов подвески напряжения пропорциональны от-
относительному смещению подвески, т.е. превышения заданного
уровня напряжений эквивалентны превышению заданного от-
относительного смещения подвески, например уп на рис. 5.22.
Рис. 5.22
Рассмотрим дифференцируемый случайный процесс дли-
длительностью /к (рис. 5.23). Такая реализация на конечном ин-
интервале времени имеет конечное число максимумов и мини-
минимумов с различными значениями хтах@ и ^^(О- График
изменения случайной функции X{t) может несколько раз пере-
пересекать фиксированный уровень х$ как снизу вверх (с положи-
положительной производной), так и сверху вниз (с отрицательной
производной). Первое пересечение (функция X(t) в первый
раз достигает заданного уровня) происходит в момент времени
tv Если случайная функция X(t) пересекает уровень Xq снизу
вверх, то принято говорить о положительном выбросе, если же
сверху вниз — об отрицательном.
Рис. 5.23
208
Найдем среднее число пересечений случайного процесса
X(t) с заданной кривой a(t) (рис. 5.23). Частным случаем этой
задачи является задача о выбросах, когда
a (t) = Xq = const.
В дальнейшем считаем, что a(t) является непрерывной
однозначной функцией t, случайная функция X(t) дифферен-
дифференцируема, а совместная плотность вероятности для функции
X(t) и ее первой производной известна. Покажем, что число
нулей для некоторой функции f(t) на интервале (t0, tK)
(рис. 5.24) определяется формулой
* E.161)
и = J 1/@1 8 [/@1 А-
'о
Произведем замену переменных, полагая f(t) = z ¦
Тогда, так как dz — fdt, выражение E.161) преобразуется к
виду
Ч
\b(z)dZ 0</(О<°о; E.162)
-К
- | 5 (z) flfe -°o</(/)<0, E.163)
где ZX =f(tQ); Z2=f(tK)-
Рис. 5.24
15 Зак. 341
209
Интегралы E.162), E.163) при г*0 равны нулю. При
г, = О интеграл E.162) равен
J 5(z)cfe=l,
где Zi — нуль функции f(t).
Аналогично интеграл E.163) при z, = 0 равен
*,+е z-г
- j S(.z)dz=j 5(z)dz=\.
Поэтому полное число нулей функции f(t) на интервале
(?0 , tk) равно сумме интегралов, т.е.
п z,+e п Ъ+г
л = Х j^(z)dz-YJ \b{z)dz = n+ + n_,
где л+ — число нулей на интервале (fy , tk) с положительной
производной (/"(Г) > 0) и л_ — число нулей на интервале
(t0 , tk) с отрицательной производной (f(t) < 0).
Воспользуемся полученными результатами для определения
среднего числа пересечений случайной функции х (t) неслу-
неслучайной кривой a(t). Для этого введем функцию
/(О = е(О-о(О.
Пересечения случайной функции x(t) с заданной кривой
a(t) на интервале (fj , f2) совпадают с нулями случайной функ-
функции е(О, поэтому
h
п= \\x-a\d(x-a)dt.
U0
Число нулей п будет разным для разных реализаций про-
процесса, следовательно, п — случайная величина, случайно ме-
меняющаяся от одной реализации к другой, поэтому среднее
число нулей равно математическому ожиданию от п, т.е.
* Г оо оо
N=M[n] = \ J j\x-a\5(x-a)f(x,x)dxdx Л.EЛ64)
/0 -со-»
В выражение E.164) входит совместная плотность вероят-
вероятности fix, х) случайной функции х и ее первой производной х.
Методы определения fix, х) изложены в работе [39]. В общем
случае (для нестационарных случайных процессов) получение
совместной плотности вероятности представляет значительные
трудности, так как требуется большой объем информации о
поведении случайной функции. Задача получения совместной
плотности вероятности упрощается, если известно, что случай-
случайный процесс нормальный.
Для нормального случайного процесса совместная плот-
плотность вероятности (в момент времени t)
fix, х) = === х
2похсх Vl-A^j.
1 (x~mf 2^(х-/яр (х-т? (х-ткJ
хеA-^>[ стх " °Л 4 J; E.165)
где кхх — нормированная взаимная корреляционная функция.
Для стационарного процесса взаимная корреляционная
функция кхх (если хих взяты в один и тот же момент времени)
равна нулю (см. § 3.3), поэтому совместная плотность вероят-
вероятности принимает вид
1 (х-т/ jx-mj2
f(x,x) = ~—е 2 ст* е Ъ1 = Fix) Fix). E.166)
2пахск
15* 211
Выражения для N E.164) можно упростить, выполнив интег-
интегрирование по х (воспользовавшись свойством 6-функции), т.е.
00
J/(xN(x-a)<fr=/(e).
-оо
После преобразований получим
Woo
N=\ \\x-a\f{a,x)dx dt.
Пусть ti — моменты времени, соответствующие пересечению
случайного процесса кривой a(t) на интервале (f0, tk), т.е.
xHt-f = a(tj). Как было показано выше, общее число пересечений
п равно
п = п+ + п_ ,
где
п+ = j(x - а) 5 (х - a) dt (х > 0);
'о
п_ = J(x - а) 5 (х- a) dt (х < 0).
'о
Среднее число пересечений:
с положительной производной
4°° 1
с отрицательной производной
'° 1
N_ = М[п_] = - J |ё (t)f(a, a + k)dz dt.
Общее среднее число пересечений
212
N=N+ + N_.
Найдем среднее число пересечений заданного уровня, если
a(t) = const = х0 (см. рис. 5.23). В этом случае
'*
л+= /в 6 (е-до) Л (б>0);
'о
'*
«_ = - /б 8(е-До)Л (к <0).
'о
Среднее число пересечений
'*Гоо
7V+=J jkf(xo,k)dk dt;
4°
'*гО и E.167)
N_=j jkf(xo,k)dk dt.
Если х0 = 0, то среднее число нулей процесса x(t) на ин-
интервале времени (t0 , tk)
*кГ*> -I '*гО и E.168)
N=N+ + N_=j jkf(xo,k)de dt-j \kf{xQ,k)dk dt.
%L° J 4-00
Для получения числового результата по формуле E.168)
необходимо знать закон распределения плотности вероятности
производной случайной функции е (/). Для стационарных слу-
случайных процессов выражения для N+ и N_ упрощаются (так
как внутренние интервалы в E.168) от времени не зависят):
00
м+ = «к-{о) /ё/(яь,б)</ё;
о
213
о
N_ = -(tk-to)jbf(ao,k)ds. E-169)
-СО
Выражения E.169) позволяют установить среднее число
пересечений случайной стационарной функцией x(t) заданного
уровня в единицу времени:
~ N+ + N * °г <5Л7°)
N= — — = J е f(x0 ,s)de - J ё (xo,k)de.
'*~'° о ^
Найдем среднее число пересечений нормального стационарно-
стационарного процесса x(t) с горизонтальной прямой Xq = const, воспользо-
воспользовавшись соотношениями E.169) и совместным законом распреде-
распределения E.165). В этом случае ?^ = 0, поэтому из E.167) получаем
2 E-171)
(t M (xo-mf ° j?_
л л -oo
Из E.171) следует, что N+ = N_ , следовательно, полное сред-
среднее число пересечений нормальным стационарным процессом
заданного уровня N= 2N+ .
После вычислений получим
Х_(?к-*0>ахс 2с2х E.172)
Найдем среднее время пребывания случайной функции
x(t) выше уровня х0 [39]. Вероятность этого
00
P(X>xQ)=lf[x(t)]dx.
ао
Разобьем интервал (tK , t0) на п равных малых интервалов
Д г,-, каждый из которых расположен вблизи моментов време-
214
ни tj. Интервалы A tt считаем настолько малыми, что случаями,
когда функция (х - о0) меняет знак внутри этих интервалов,
можно пренебречь. Введем систему случайных величин А/; каж-
каждая из которых равна соответствующему интервалу Д t-t или 0 в
зависимости от того, будет ли в этом интервале случайная
функция больше или меньше х0. Тогда общее время пребыва-
пребывания случайной функции x(t) выше заданного уровня х0
п
ы
Среднее время пребывания случайной функции выше за-
заданного уровня xQ в течение времени (tk - /0)
п г <*> \
Та = М\\\ = И МЩ М [Д/1 = А '/ J/W <Ь ¦ E.173)
1=1 х0
\ У
В пределе при л-х» из E.173) получим
'*»
Та=\ lf(x)dxdt. E-174)
'о ^
Среднюю продолжительность выброса найдем, разделив выра-
выражение E.174) на среднее число положительных выбросов N+ , т.е.
'* со
J \f(x)dxdt
та 'о *о E.175)
х"~ N+~ W^ : "
J jxf(xo,x)dx dt
'oh
Для стационарного случайного процесса выражения для
Та и ха принимают вид
215
00
Ta = (tk-tQ)jf(x)dx; E.176)
00
I f(x) dx
*o E.177)
Tfl ~ oo
\xf(xQ,x)dx
0
Для нормального стационарного случайного процесса
^h^f)} <5i78)
Пример 5.6. Корреляционная функция угла ф (см. рис. 5.13)
при нормальных стационарных колебаниях прицепа (тф = 0)
Kv (т) = aj e^^fcos (Зт + ^sin p |т |1.
Требуется определить среднее число превышений углом (р
допустимого значения а0 = ф0 = ± 5° за 10 мин и среднюю про-
продолжительность выброса ха. Числовые значения параметров
известны: аф = 2° ; а = 0,1 1/с ; C = 0,6 1/с .
Так как
oJ-^U-oJ^ + P2),
то, воспользовавшись формулой E.172), получим
216
^^2±Ее-2^в 600 о,б1. 0,043-5.
л л
Средняя продолжительность выброса
Подставив числовые значения, найдем
ха = Q-^jj 23,104 A - 0,9948) » 0,7 с .
§ 5.5. Нелинейные случайные колебания
Нелинейные механические системы, нагруженные случай-
случайными силами, имеют широкое применение в технике. Напри-
Например, в амортизаторах систем виброзащиты приборов, машин,
конструкций, а также в системах управления летательными
аппаратами и т.д. Решение нелинейных задач динамики, как
правило, связано с большими трудностями. Как известно, по-
получить решение нелинейного уравнения общего вида в анали-
аналитической форме (даже для наиболее простого уравнения вто-
второго порядка) нельзя — не говоря уже о решении системы
нелинейных уравнений движения механических систем, нагру-
нагруженных детерминированными или случайными силами.
Еще сравнительно недавно считалось, что при детермини-
детерминированных нагрузках решение нелинейных уравнений является
детерминированным, а при случайных нагрузках — случайным.
Исследования в области нелинейной динамики, которые про-
проводились в последние годы с использованием вычислительной
техники, позволили установить новые физические явления,
казавшиеся ранее просто невозможными в рамках традицион-
традиционной механики. Было установлено, что в детерминированной
нелинейной системе возможны хаотические (непредсказуемые)
движения, т.е. нелинейные системы без внешних случайных
воздействий могут сами являться генераторами случайных про-
процессов. Причем приближенные численные методы решения,
14 3ак. 341 217
использующие, как правило, различные упрощения и допу-
допущения, могут привести не только к количественным ошиб-
ошибкам, но и к качественно разным результатам. Поэтому ранее
разработанные приближенные численные методы решения
уравнений нелинейных случайных колебаний (например,
метод статистической линеаризации, метод моментных функ-
функций) не всегда могут дать решение с требуемой точностью.
Но при малых нелинейностях приближенные численные ме-
методы решения могут быть полезными. Получить точные чис-
численные решения нелинейных уравнений статистической ди-
динамики без линеаризации исходных уравнений можно мето-
методами теории марковских процессов и методами статистичес-
статистических испытаний. В этом параграфе для решения нелинейных
уравнений первого и второго порядка изложены наиболее
популярные в вычислительной практике методы: метод ста-
статистической линеаризации, метод, использующий марков-
марковские процессы, и метод статистических испытаний (метод
Монте-Карло).
5.5.1. Метод статистической линеаризации
На рис. 5.25, а показана система с одной степенью свободы,
у которой упругая характеристика пружины (рис. 5.25, б) яв-
является нелинейной функцией смещения х. Сила сопротивления
F2 (x) (сила трения между массой т и направляющей) также
нелинейно зависит от скорости движения х.
Уравнение вынужденных колебаний массы т
mx + F(pc,x)=fo{t), E.180)
где F(x, х) = F{(x) + F2(x). J
В каждом случае имеет место конкретная явная зависимость
функций F\ и F2 соответственно от х и х. Например, для
показанной на рис. 5.25 конической пружины до определенных
значений х можно принять (рис. 5.25, б)
Fl(x) = cx+clxi. E.181)
При квадратическом законе сопротивления функцию F2
можно представить в виде
218
Рис. 5.25
F2 (х) = осе2 sign х.
Рассмотрим метод статистической линеаризации, который
заключается в замене нелинейной случайной функции
F(x , х) линейной, т.е.
Fix , х) * F,, = ах + u2Xq + а3х0 , E.182)
где х0 и х0 — центрированные случайные функции; а{ — про-
произвольные коэффициенты, которые определяются из условия
минимума дисперсии случайной функции
AF = f(x,x)-F.. E.183)
Метод статистической линеаризации применим для стаци-
стационарных нелинейных колебаний, которые возможны только в
том случае, когда внешняя сила f0 (t) является стационарной
случайной функцией. Кроме того, предполагается, что решение
(х, х) имеет нормальное распределение. Для линейного урав-
уравнения (например, для уравнения E.26)) при стационарной
случайной функции f0 (t), имеющей нормальный закон распре-
распределения, его стационарное решение было бы обязательно нор-
14* 219
мальным, так как линейные преобразования не изменяют нор-
нормальность закона распределения. Решение нелинейного урав-
уравнения при нормальном законе для стационарной случайной
функции f0 (Г) не является нормальным, однако можно пред-
предположить, что при малых нелинейностях оно мало отличается
от нормального.
Если колебания стационарные, то дисперсия случайной
функции /S.F
00 СО
М[(ДЛ2] = 1 S[F(x,k)-al-a1xQ + a3?co)f(x,x)dxdx, <5Л84)
—СО -СО
где/(хх) — совместная плотность распределения вероятности
х и х, которая для стационарных случайных функций от вре-
времени не зависит.
В формуле E.184) /(х, х) — неизвестная функция, поэтому
приходится ввести допущение, что функция /(х, х) близка к
двумерному нормальному закону распределения независимых
случайных функций, т.е. можно считать, что
Г(*-"д21 х2'
'ЬЬ'ъ^гА* ^' EЛ85)
так как для стационарного процесса т^ = 0.
Произвольные параметры а^ , а2 и а3 найдем из условий
^-^ = 0 (/=1,2,3). EЛ86)
После преобразований из E.186) получим следующие зна-
значения для коэффициентов:
со со
а\ = J \F(x,x)f(x,x)dxdx;
—СО—ОО
00
°2 = ~2 1 F(-x> хК* ~ mx)f(x> x)dxdx;
Л—qo
220
00 00
a3 = ji I \F(x,k)kf{x,k)dxdk. EЛ87>
X _00 —00
Из E.187) найдем зависимости
a/ = at(mx ,(jx,o?. E.188)
В результате операции осреднения функции F(x, x) вместо
уравнения E.180) получаем линейное уравнение
a-i а-, 1 . mf- ал
Так как х0 и /0 — центрированные случайные функции, то,
взяв математическое ожидание от обеих частей уравнения
E.189), получим
mf- а{ = 0 (а{ = ах{тх , ах, сх)). E.190)
Окончательно имеем уравнение
*о + 5*о + !*о = ^/о@. E.191)
Спектральные плотности х и х
Sx (о) = | W(b) |2 ^(co), Sx' (to) = | JV(i(o) p со2 Sf(a),
поэтому среднеквадратичные значения х и х находят из соот-
соотношений
—00
И
00
а2=/|Ж(/со)|2со2^а). <5Л93>
—00
В результате получаем три уравнения E.190), E.192), E.193)
для определения трех неизвестных тх, ах и ах в зависимости
ОТ ГПг И Qt.
221
Пример 5.7. Требуется найти среднее число N превышений
центром тяжести массы т уровня о0 за заданное время tk.
Характеристика пружины нелинейна. Рассмотрим стационар-
стационарные случайные колебания массы, представленной на
рис. 5.25, а, причем считаем, что характеристика пружины
F± (x) может быть представлена в виде E.181), а сила сопро-
сопротивления линейно зависит от х.
На массу т действует стационарная случайная сила типа
нормального белого шума. т.е.
mf = const, Sf = Sn .
J0 •'О
Уравнение движения массы т при нелинейной силе сопро-
сопротивления имеет вид
x + 2nx + i$x+io? = ±{f0 + mfj [и = ^]- E-194)
При ц = О уравнение E.194) становится линейным, а его
решение — нормальным стационарным процессом. При ц * О
решение уравнения E.194) не является нормальным процессом,
но при малых значениях р. можно предположить, что оно мало
отличается от нормального, и это дает возможность восполь-
воспользоваться формулами E.187) для определения коэффициентов
ах , а2 и аъ. После вычисления интегралов E.187) получим
ах = \хтх (ml + За^); а2 = Зц (т2х + <зх); аъ = 2п . E.195)
Линеаризованное уравнение запишется как
/о + т/
х0 + 2пхо+ pl(x0 + тх) + а2х0 + а{ = —^-^ . E.196)
Из E.196) имеем
ТПг
2 Л>
P0mx+al= — ¦
Воспользовавшись выражением для ах E.195), получим пер-
первое уравнение, связывающее т*стхнах:
222
mf
ц^ + За^^Я- EЛ97>
После вьщеления из уравнения E.196) постоянных состав-
составляющих получаем уравнение относительно центрированных
случайных функций:
хо + 2пхо + (р2) + а2)хо = -^. E.198)
В рассматриваемом случае спектральные плотности х и х
равны
5 = 5 ;
х т2 | (/соJ + 2л/со +Ро + а2\2'
s = W
х т2 | (/соJ + 2л/© + pi + а2 |2 '
поэтому из E.192) и E.193) получаем
<*г = i—т— i т~; ctJ = —^. E.199)
х 4лт2 [^ + Зц (т2 + а2)] х 4пт2 К }
Из уравнений E.197), E.199) определяем тх,ох и а^. В
частном случае, когда т*= 0, получаем
х 6ц \ 36ц Пл/и2^
где а2 = ~ — дисперсия решения при ц = 0; а = ;
0 2apg ^0
(ii = -^-j — безразмерный малый параметр.
Щ
223
Число превышений уровня о0 найдем, воспользовавшись
формулой E.172) (число превышений в 2 раза меньше числа
пересечений уровня а0):
Зпах
Пример 5.8. На рис. 5.26 схематично показан акселерометр,
представляющий собой упруго закрепленную массу т на пру-
пружинах с линейной характеристикой (с суммарной жесткостью
с). На массу т, кроме медленно меняющейся инерционной
силы (которую должен замерять акселерометр), действует ста-
стационарное возмущение/q (J), вызывающее колебания массы т.
Для уменьшения влияния случайного возмущения на показа-
показание акселерометра масса т находится в полости, заполненной
жидкостью. При движении массы сила сопротивления пропор-
пропорциональна квадрату скорости к. Так как номинальная сила,
действующая на массу т, меняется во времени очень медленно,
то скорость движения массы в номинальном режиме мала и силой
сопротивления можно пренебречь, поэтому сила сопротивления
основное влияние оказывает на случайные колебания.
Рис. 5.26
Обозначив через Д х отклонение массы т от номинального
положения, запишем выражение для силы сопротивления:
Fc = ctj А х2 sign Д к .
224
Вероятностные характеристики случайного возмущения
считаем известными:
2ао}
т, = const; Sf = , ° (Л>= а} е^ Iт I).
Требуется определить математическое ожидание тл х , сред-
среднее квадратическое отклонение а^ случайного смещения
массы т, считая, что имеют место стационарные случайные
колебания. Уравнение движения массы т имеет вид
•9 7 f ( а1 I
Д х+ «jA x^sign Ax + Pq Ax = •/- «j =— . E.201)
Нелинейную силу сопротивления л2 Д х2 sign Д х заменим
линейной:
«j Д х2 sign Д х » «j + o3A jcq ¦
Найдем Oj и о3 по формулам E.187). После вычислений
имеем
а1 = 0;а3 = —-аАх; т&х = ~.
В результате получаем линейное уравнение относительно
центрированного случайного смещения
2 л ^0 E.202)
AxQ + a3Ax0 + pfiAx0 = — .
Дисперсии Д Xq и Д Xq соответственно равны:
f 4/7i 1
^ = -L = , d^ J v E-203)
2 Г 2 4wi г)
^ V2^ ^
225
г— 2
п _„2 V7ICCCT/ E.204)
Г" I 9 4Л1 ? I
^2 стдх Ро + —ал*а + а
Из выражения E.204) определяем од^, а затем аАх по
формуле E.203).
Изложенный выше метод статистической линеаризации дает
приближенное решение простейших задач динамики нелинейных
систем, справедливое при ряде ограничений на входное воздей-
воздействие и механическую систему. К таким ограничениям относят
следующие: малость нелинейных членов в левой части уравнения
E.180) и предположение, что закон распределения решения бли-
близок к нормальному. Эти ограничения существенно уменьшают
информацию о случайном процессе, позволяя получить только
приближенные значения вероятностных характеристик решения.
Для случая, когда нелинейности нельзя рассматривать как малые,
а также при анализе нестационарных процессов метод статисти-
статистической линеаризации не применяют.
Для того чтобы ответить на вопрос, каков истинный закон
распределения решения уравнения типа E.180) при стационар-
стационарной правой части, надо воспользоваться теорией марковских
процессов.
5.5.2. Решение нелинейных уравнений с использованием
марковских процессов
Изложенный в предыдущем пункте метод статистической
линеаризации позволяет нелинейное уравнение свести к ли-
линейному. Но ответить на вопрос, с какой точностью получено
решение, нельзя. Для этого надо знать точное решение, кото-
которое, например, в ряде случаев можно получить, воспользовав-
воспользовавшись теорией марковских процессов.
Рассмотрим уравнение E.194), которое можно представить
в виде системы двух уравнений первого порядка, полагая
х = У\, х-у>2 (ограничимся случаем, когда Шу= 0, а/0 — возму-
возмущение типа белого шума с Kt= s0 5 (т)):
У\ + 2пУ\+РоУ2 + ^Я = ~' У2-У\=о- E.205)
226
Второе уравнение Колмогорова D.89) для стационарного
процесса имеет вид
-?72 = 0 (/=/0i ,^2» • E-206)
Уравнение E.206) можно представить в виде
+ -Т~" + 2/1Т~ bl/+ о а = °- E.207)
^2 ^ljl 4л/п2 S^J
Для решения уравнения E.207) положим
/Ol ,J2)=/lO;i)/2O;2)'
т.е. примем, что j>L и у2 независимы.
В этом случае двумерный закон распределения можно пред-
представить в виде произведения одномерных законов распределе-
распределения A.52). В результате получим уравнение
+ (^ + 2d)\fLfl+Jof\Lo, E.208)
[ дУг дУ1I [1 4пт2дУ1)\
которое обращается в тождество, если функции/[ и/2 удовле-
удовлетворяют уравнениям
2 ° E.209)
dh Ann? . .
-т— + у, /i = 0.
227
Решения уравнений E.209) имеют вид
Ann? 2
/l-c,"**;
E.210)
Ann? 2 2 Ann? 4
f2 = c2e ° e адо
Произвольные постоянные Cj и с2 находим из условий
00 00
1) J/i(yi)rfKi = i;2) J/2(y2)^2=i. EШ)
—ОО —00
Из первого условия E.211) имеем
= JW . E.212)
Из полученных выражений для /j и /2 следует, что закон
распределения у± (первой производной у) нормальный, а закон
распределения у2 не является нормальным, как предполагалось
в методе статистической линеаризации. Только при ц = 0 f2
переходит в нормальный закон.
Зная законы распределения /j и f2, находим дисперсии
^-Ь^ЫЛС!)^; E213)
—00
Dyrol = c2)yif2iy2)dy2. ^214>
—00
Из E.213) находим выражение для дисперсии а^, точно со-
совпадающее с выражением E.199), полученным по методу статис-
статистической линеаризации. Уравнение E.208) дает возможность чис-
численно определить сг^ при любом ц в отличие от выражения E.200),
справедливого только для малых значений \х.
228
Рассмотрим алгоритм решения примера 5.8 с использованием
теории марковских процессов. Основная особенность этого при-
примера в том, что случайное возмущение не является белым шумом,
так как спектральная плотность S* зависит от со.
Процесс с корреляционной функцией вида
всегда можно представить как результат прохождения белого
шума через линейную систему первого порядка вида (§ 4.3)
/0 + о/0 = ^аа/е(О, E.215)
где е (О — стационарное случайное возмущение типа белого
шума с тъ = 0, Ке = sq 5 (т).
Из уравнения E.215) получаем спектральную плотность
случайной функции /, совпадающую с примером E.8):
2ас}
J or + or
Уравнение E.215) надо рассматривать совместно с уравне-
уравнением E.201), которое можно представить в виде системы двух
уравнений первого порядка. В результате получаем систему трех
уравнений:
ух + пху\ sign У! +р1у2 = — Уз>
У2-У1 = 0' E-216)
у3 + ау3 = лЙаоуе(/),
где yf= А х, у2 = А х , уъ =/0 .
Система уравнений E.216) описывает трехмерный марков-
марковский процесс. Второе уравнение Колмогорова для этого случая,
считая, что имеют место стационарные колебания массы т
(частный случай уравнения D.88)), можно записать в виде
229
^^¦^¦i^S'1 <5-217)
Если коэффициенты ai линейно зависят от yt, a by — по-
постоянные, то решение уравнений типа E.217) можно получить
в аналитической форме. Метод решения уравнений многомер-
многомерных марковских процессов для случая, когда
л
ai = % + X а№ > bij = const'
изложен в работе [35].
5.5.3. Метод статистических испытаний
(метод Монте-Карло)
Выше были изложены два метода решения нелинейных
уравнений первого и второго порядка: метод статистической
линеаризации и метод, использующий марковские процессы.
Первый метод является приближенным, поэтому, как уже из-
известно, оценить точность и достоверность получаемых этим
методом результатов нельзя. Чтобы обезопасить себя от грубых
результатов, сделаем оговорку, что метод статистической ли-
линеаризации дает приемлемые результаты при малых нелиней-
ностях, например, при малом ц, входящем в уравнение E.194).
Но установить интервал изменения \i, на котором его можно
считать малым и какая будет для этого интервала изменения
(j. и погрешность решения, нельзя.
Недостатком метода является и необходимость постулиро-
постулирования законов распределения решения, которые неизвестны.
Так как до решения информация о законах распределения
«выхода» отсутствует, то приходится вводить вероятностные
гипотезы, например, считать, что законы распределения «вы-
«выхода» являются нормальными. Обосновать достоверность тако-
такого предположения нельзя. Установить точность решения с ис-
использованием метода статистической линеаризации можно
только зная точное решение. Но если известно точное решение,
то необходимость в приближенном решении отпадает. Поэтому
область применения метода статистической линеаризации в
230
прикладных задачах (когда надо нести ответственность за ре-
результаты расчетов) очень ограничена. Но основную идею ме-
метода — замену в уравнении нелинейных слагаемых линейны-
линейными — полезно знать, так как эта идея используется и при
линеаризации нелинейных уравнений детерминированных ко-
колебаний (в основном уравнений второго порядка). Применение
метода статистической линеаризации при решении систем не-
нелинейных уравнений, когда надо вводить в алгоритм решения
многомерные законы распределения, приводит к практически
непреодолимым вычислительным трудностям.
Метод марковских процессов позволяет (теоретически) по-
получать точные законы распределения компонент вектора со-
состояния нелинейной динамической системы любой размернос-
размерности и точные значения вероятностных характеристик компонент
вектора состояния в любой момент времени. На практике, к
сожалению, это далеко не так. Получить точное решение урав-
уравнения Колмогорова, особенно когда надо учитывать реальные
случайные возмущения (а не белый шум), для реальной нели-
нелинейной механической системы с несколькими степенями сво-
свободы практически невозможно. Поэтому опять остаются только
приближенные методы решения уравнения Колмогорова, тре-
требующие введения в алгоритм решения упрощений и предпо-
предположений, что приводит, как и в методе статистической лине-
линеаризации, к несоответствию приближенного и точного реше-
решения. Оценить это несоответствие нельзя, так как нет точного
решения. Свободным от этих недостатков является метод ста-
статистических испытаний (метод Монте-Карло). Метод основан
на численном решении исходных нелинейных уравнений без
их упрощения.
Рассмотрим подробнее алгоритм решения нелинейных
уравнений методом статистических испытаний на примере
простейшей системы (рис. 5.27, а), имеющей один вход х и
один выход у. Получив л решений для п реализаций случай-
случайной функции х (t), пользуясь формулами математической
статистики, находим математическое ожидание и дисперсию
решения
231
Рис. 5.27
л
л
Точность получаемых вероятностных характеристик реше-
решения математического ожидания и дисперсии зависит от числа
решений п и оценивается средними квадратическими отклоне-
отклонениями оценок на основании формул математической статис-
статистики:
<Я(г) = >/ф,(о)/л; E218)
л Г~2~ ~ E-219)
Более полная оценка точности получаемых при решении
результатов может быть получена на основе вычисления дове-
232
рительных вероятностей различных отклонений оценок ту и
Ъу от соответствующих истинных вероятностных характерис-
характеристик. Эти вероятности могут быть оценены приближенно при
условии, что законы распределения оценок близки к нормаль-
нормальным, по следующим формулам:
P^PUm -ти<еЛ = 2Ф — ;
где Pj , Р2 "~ доверительные вероятности; ej , е2 ~ заданные
границы отклонения оценок; Ф (ej/cj" ) и Ф (e2/aj) ) — интег-
интегралы вероятности.
Воспользовавшись соотношениями E.218) и E.219), полу-
получим
Р1 = 2ФМ— ;
Р2 = 2Ф-^Л .
I Пу )
В табл. 5.1 и 5.2 приведены значения чисел испытаний
(решений) п, необходимых для получения результатов с задан-
заданными относительными отклонениями Vj = ej/V/) , v2 = e2/Dy и
точностью Pj и Р2.
Приведенные таблицы показывают, что с повышением тре-
требований к точности вероятностных характеристик my(t) и
Dy(t) необходимое число решений п значительно увеличивает-
увеличивается. Поэтому метод статистических испытаний из-за отсутствия
быстродействующей вычислительной техники не получил рас-
распространения в практике проектирования. В настоящее время
233
проведение большого числа вычислительных экспериментов
особых сложностей не вызывает.
Таблица 5.1
Число испытаний для определения математических ожиданий
при различных значениях vj
P1
0,6
0,7
0,8
0,9
vi
0,2
18
27
41
68
0,15
31
47
73
121
0,10
70
108
164
272
0,05
281
431
651
1090
0,01
7000
10800
16400
27200
Таблица 5.2
Число испытаний для определения дисперсии при различных vj
Р2
0,6
0,7
0,8
0,9
V2
0,2
37
55
83
137
0,15
63
95
147
243
0,10
141
217
239
545
0,05
563
863
1300
2180
0,01
14000
21600
32800
54400
Если необходимо получить закон распределения выходной
величины у (см. рис. 5.27, а) в момент времени tk, то получен-
полученные численные значения yj(tk), соответствующие случайным
функциям X; (см. рис. 5.27, б), делят на разряды (интервалы
значений yv (?)) и подсчитывают число к: значений yt (tk), при-
приходящихся на v-й интервал. Это число делят на общее число
решений и получают частоту Pv появления числового значения
решения У,(^), соответствующего данному интервалу
( kv]
(yv у ^v+l) Л> = — • В результате получается гистограмма
(рис. 5.28). Увеличивая число решений п, интервалы
( yv > Ущ.i) можно уменьшить, а их число увеличить. При этом
234
Рис. 5.28
гистограмма будет приближаться к некоторой кривой, которую
можно рассматривать как плотность вероятности функции
y(tfc) в момент tk. При рассмотрении механической системы с
конечным числом степеней свободы с одной случайной функ-
функцией на «входе» можно получить одномерные законы распре-
распределения для обобщенных координат и их первых производных
в любые моменты времени. Полученная методом статистичес-
статистических испытаний информация о законах распределения обоб-
обобщенных координат и их скоростей достаточна для решения
сложных прикладных задач, когда не требуется знания много-
многомерных законов распределения компонент вектора состояния
механической системы.
Метод статистических испытаний может быть применен как
к нелинейным системам, где он особенно эффективен, так и
к линейным, причем любой размерности. При применении
этого метода к нелинейным системам в каждой математической
реализации следует учитывать все действующие случайные воз-
возмущения, так как для нелинейных систем принцип суперпо-
суперпозиции не выполняется.
Глава 6. СЛУЧАЙНЫЕ КОЛЕБАНИЯ СИСТЕМ
С КОНЕЧНЫМ ЧИСЛОМ СТЕПЕНЕЙ СВОБОДЫ
В главе изложены теория и методы исследования случайных
колебаний механических систем с конечным числом степеней
свободы. Рассмотрены конкретные примеры, иллюстрирующие
алгоритмы численного решения задач при нестационарных и
стационарных случайных колебаниях.
§ 6.1. Свободные случайные колебания линейных систем
Представление реальной механической системы как систе-
системы с одной степенью свободы, как правило, является прибли-
приближенным. Например, показанная
на рис. 6.1 система, которая
обычно рассматривается как сис-
система с одной степенью свободы,
есть система с двумя степенями
свободы (если пренебречь инер-
инерцией стержня и рассматривать
движение массы только в плос-
плоскости чертежа), так как реальная
сосредоточенная масса имеет от-
отличный от нуля момент инерции
Jq относительно центральной оси,
перпендикулярной к плоскости
чертежа.
Воспользовавшись методом
сил, получим следующие два
уравнения движения (рис. 6.2):
у = 511(-т>') + 512(-/0ф);
Ф = 521(-/и у ) + 522(-/0 Ф). F-1)
Рис. 6.2
Рис. 6.1
236
где
/3 /3 /
Систему уравнений F.1) можно представить в векторной
записи:
ДЛ/у + у = 0, F.2)
где
LS21 522j ' L°'oJ>y~H'
Векторная форма записи существенно упрощает изучение
колебательных систем со многими степенями, так как уравне-
уравнение F.2) справедливо и для систем, имеющих любое конечное
число степеней свободы:
Му+Су = 0 (С=Д"!) F.3)
или
У + ^У = 0, F.4)
где
Ах = М'х С.
Для решения на ЭВМ необходимо уравнение F.4) предста-
представить в виде системы двух уравнений первого порядка, что
можно сделать, если ввести новые неизвестные векторы
zt = у , z2 = у . В результате получаем систему
Zj + A1z2- О,
z2-Z! = 0 F.5)
или
Z + A Z = 0, F.6)
где
237
Вектор Z имеет размерность 4, его называют вектором
состояния системы. Первые п A, 2, ..., п) компонент вектора
Z являются производными от обобщенных координат по t, a
последующие п компонент (п + 1, п + 2, ..., 2а) есть обобщен-
обобщенные координаты.
Система уравнений F.5) не учитывает силы сопротивления.
С учетом сил сопротивления, если принять, что силы сопро-
сопротивления пропорциональны первым производным от обобщен-
обобщенных координат, в уравнение F.3) надо ввести еще одно сла-
слагаемое В Z, где В — матрица, элементы которой by являются
коэффициентами сил трения.
Уравнение F.3) с учетом сил сопротивления принимает вид
Му + Ву+Су = 0. F.7)
При учете сил трения в уравнении F.6) изменится только
матрица А:
\м~1в а[
А =
-Е О
Элементы матрицы М~1В в дальнейшем обозначаются через
by. При случайных свободных колебаниях начальные данные
при t = 0 являются случайными величинами, вероятностные
характеристики которых считаем известными, т.е. известны их
математические ожидания т. и дисперсии D. (для F.6) с
учетом сил вязкого сопротивления). В более общем случае,
когда компоненты вектора Z в начальный момент времени
между собой коррелируют, известны корреляционные моменты
К7 . Решение уравнения F.6) в векторной форме имеет вид
Ч 0 *•] О
Z = K(t)C, F.8)
где K(t) — фундаментальная матрица решений системы одно-
однородных уравнений; С — произвольный вектор.
При численном решении уравнения F.6) можно выбрать
алгоритм получения столбцов матрицы K(t) такой, что при t =
238
= 0 матрица ДО) равна единичной, т.е. ДО) = Е. В этом случае
произвольный вектор С равен вектору начальных данных Zo,
т.е.
Z = K(t)Z0. F.9)
Все предыдущие выкладки и запись решения уравнения
F.6) в форме F.9) справедливы и когда начальные данные
детерминированные. Найдем математические ожидания, кор-
корреляционные и взаимно корреляционные функции компонент
вектора Z.
Математическое ожидание вектора Z
Л/[/]=юг = Дг)шг0, F.10)
где шг — вектор, компонентами которого являются математи-
математические ожидания компонент вектора Z; т^ — вектор, компо-
компонентами которого являются значения т7 .
zj0
Математические ожидания компонент вектора Z
2л
mzr^kumzJ0- F.11)
М
Для определения корреляционных и взаимно корреляцион-
корреляционных функций компонент вектора решений представим решение
F.9) в скалярной форме записи:
2л
м
Зная математические ожидания т, можно получить выра-
выражение для центрированных случайных компонент вектора ре-
решений:
2л
О О
zt (/) = Z-, (t)-mz(t) = Y, kijzjo >
М
Mp/(/)^fc(/')] = K% =
239
у in \f in v
= M %kv(t)°xjQ S^vColo ¦ <613)
i*1 Jl^1 J.
Для частного случая, когда К. r =0, имеем
•so** о
2п
v=l
2л
v=l
2л
^,. = Z4(o^o.
v=l
В результате получены все вероятностные характеристики
компонент вектора состояния при случайных свободных коле-
колебаниях линейной системы с конечным числом степеней сво-
свободы, вызванных случайными начальными данными.
При расчете наибольший интерес представляют случайные
динамические напряжения, возникающие в элементах кон-
конструкции, например нормальное напряжение в сечении к
стержня (см. рис. 6.2). Найдем вероятностные характеристики
нормального напряжения в сечении к:
CTmax- цг > F.15)
где i?j — реакция в шарнире.
Воспользовавшись принципом Даламбера, получаем
*1 = (^)(~/и/2 + Л/и)> F16)
где /и, Мн — соответственно инерционные сила и момент,
Jn = ~т У > ми = - Jo Ф ¦
Из уравнений F.1) определяем
*в""ЙУ + ^Аф (Д = 8П822-512521);
240
821 5U F.17)
Ф = -г-г У - ут Ф •
/0 А /0 А
После преобразований с учетом F.16) и F.17) получаем
CTmax = V+^> FЛ8)
где
Для определения максимально возможного значения cr,^,
зависящего от двух случайных функций у и ф, необходимо знать
совместный закон распределения/(у, q>, t). Считая, что закон
совместного распределения у и ср является нормальным зако-
законом распределения, находим параметры закона распределения
случайной функции атах, линейно зависящей от случайных
функций у и ф F.18). В этом случае распределение сттах будет
также нормальным со следующими параметрами:
mSaJt ) = blmy(t) + 62/яф (О : F-19)
(aCiJ2 = 6?aJ (Г) + b\al {t) + 2^6^ (/), F-20)
где
Kw = K^(r,O- F-21)
Взаимно корреляционная функция F.21) есть частный слу-
случай F.12) при п = 2 (если начальные данные независимы).
Определив параметры нормального распределения для
атах, находим максимально возможное значение нормального
напряжения атах в каждый момент времени:
max (amax(?)) = ms^ {t) + За^/). F.22)
§ 6.2. Колебания при случайном импульсном нагружении
Часто в прикладных задачах приходится рассматривать дви-
движение системы, вызванное действием случайного импульса
17 3ак. 341 241
силы (или системы сил). На рис. 6.3 показан случай наезда
автомобиля на единичную неровность, резко отличающуюся от
остальных неровностей дороги по высоте. При большой ско-
скорости горизонтального движения автомобиля действие этой
неровности эквивалентно одиночному импульсу силы, который
приведет к резкому изменению полного вектора скорости
v = v0 ij + у i2 и угловой скорости со = ф .
Считаем, что при движении автомобиля смещение центра
тяжести (точка 0) и поворот автомобиля как жесткого целого
происходит в плоскости чертежа. В более общем случае воз-
возможен наезд колесом на неровность, что приведет к возник-
возникновению пространственных колебаний (если до этого колеба-
колебания были в плоскости чертежа).
В зависимости от конкретных условий задачи и целей, для
которых предназначена конструкция, конечная цель расчета
может быть различной. Например, при расчете конструкции,
показанной на рис. 6.4, при ее импульсном нагружении J;
инженера-расчетчика могут интересовать следующие вопросы:
1) максимально возможные отклонения масс от вертикального
положения; 2) максимально возможные динамические напря-
напряжения, возникающие в конструкции. Рассмотрим последова-
последовательно эти задачи. При действии на массы w,- импульсных
нагрузок J; (рис. 6.4) массы после прекращения действия им-
импульса приобретают скорости, равные (при J,- = /,• ij)
*н(°) = тг ('=1.2,..., к). F.23)
mi
Рис. 6.3
242
Считаем, что законы распределения Jj
известны (рис. 6.5 или рис. 6.6).
Рассмотрим вначале наиболее про-
простой случай, когда направления J,- извест-
известны, например случай, когда а = 0. После
окончания действия импульсов сил
массы получают скорости, например, при
J,- = J( ц
J, F.24)
11 rrij
которые можно рассматривать как на-
начальные данные последующего свободно-
свободного движения системы. (При импульсном
нагружении смещения Ху после оконча-
окончания действия импульса равны нулю.) ис'
Рис. 6.5
Рис. 6.6
В данном случае вектор начальных данных
^о ~ (^п > ^12 » •¦¦> х\п > ^•¦•^ ) >
17* 243
т.е. данную задачу можно рассматривать как частный случай
предыдущей задачи. Поэтому вероятностные характеристики
компонент вектора Z равны (при к = п)
п п
V , V / '' F-25)
м м J
п п
^. = 11МОМ''>^0- F-26)
v=l Л=1
Пример 6.1. Рассмотрим систему с двумя степенями свобо-
свободы без учета сил сопротивления (рис. 6.7).
Рис. 6.7
На массу т^ при t = 0 внезапно подействовал случайный
кратковременный импульс / (с известными ntj и Dj), после
окончания действия которого масса т^ получила случайную
скорость д>10.
Надо найти математическое ожидание и дисперсию смеще-
смещения массы т^ в произвольный момент времени, т.е. требуется
найти ту (О и D (t). Воспользовавшись методом сил, получим
следующие уравнения движения:
У\ = 8ц(-т1 У\ - сху{) + 512(-ifi2 У2 ~ с2У2) ;
у2 = Ь2{(-т1 у{ - схух) + Ъ22{-т2 у2 - cyj) F.27)
или
а\\У\ + апУ'г + ьпУ\ + Ь\2У2 = ®\ F-28)
244
°21 У\ + аП h + Ь1\У\ + *22^2 = °-
Здесь
au = 5nmi ; al2 = 512w2 ;?„ = / + бцС, ;
A12 = 5I2c2 ; a21 = 521/И! ; д22 = 622w2 ;
bl\ = 521C1 J 622 = /+ 522C2 •
Систему уравнений F.28) можно свести к системе уравне-
уравнений первого порядка, однако в данном частном случае решение
можно получить сразу для исходной системы. Полагая
ух = Ах cos pt; уг = А2 cos pt F.29)
или
у{ = Вх sin р/; у2 - В2 sin />^, F.30)
из системы F.28) получим
(Ьп - апр2) Ах + (Ьп ~ а12р2) А2 = 0;
2 2 F-31)
F21 - a2XpL) Ах + (ZJ2 - а22^ ) А2 = °-
Определив р1 и /»2 из F.31), находим коэффициенты рас-
распределения:
_^21 _ ^12-^12^1 .
^11 6, 1 - Яц/>2 '
11 п2 F.32)
^ _ ^22 _ _ ЬП ~ a\lPl
Ап h\-a\\p\
В результате получаем решение системы F.27):
ух = Ах cos pxt+ Bx sin pxt + А2 cosp2t+ B2 sinp2t;
F.33)
y2 = ^i^i cosp^ + Bxkx sin pxt + A2k2 cos p2t +B2k2 sinp2t.
Так как при t = 0 yx = y2 - y2 = 0, a yx = yl0 , то после
определения произвольных постоянных Av Bl получим
245
к{ уl0 sin p{t _к2У10 sin p2t F.34)
Ух ~ P\ (k2 - k{) p2 (k2 - kx)
Математическое ожидание и дисперсия ух равны соответ-
соответственно
Г кх sin p-(t к2 sin p2t
V) = [pfo-kd ~р2Ф1-к1)\т^ !
л Г^вш^/ _ к2 sin p2t~\ F.35)
У1( } [р^кг-кд Р2{к2-кх)\ ho'
Входящие в выражения F.35) rtiy и Dy связаны с вероят-
вероятностными характеристиками случайного импульса соотноше-
соотношениями
mJ . п DJ
/И;, = , U:, — ^ .
•^ю т1 У ю ггп
Приняв, что смещения yt и их первые две производные
имеют нормальное распределение, получим максимально воз-
возможное отклонение массы тх
/ Г &! sin/),/ k2sinp2t "I
max (у,) = 77 г— - — — (mj+ За,).
Рассмотрим случай импульсного нагружения конструкции,
когда направление импульсов Jt случайно (см. рис. 6.4), на-
например, векторы J;- параллельны плоскости Х[Х3 и произвольны
по направлению (а ф 0). Импульс силы, действующей на массу
mv сообщает ей скорость (при J;- = /^ ij + Jt \2)
J.
u/0 = ХЮ М + *20 h = — 0=1,2,...,/:). F.36)
В случае произвольного направления векторов Jf- в плос-
плоскости XjX2 считаем, что законы распределения модуля | /,-1
известны (см. рис. 6.5, 6.6). В уравнения движения войдут
246
проекции J;- на оси х^ и Xj (J/x и Jix), которые связаны
дополнительным условием
(V+(V=iJ'i2- F-37)
В этом случае надо знать закон распределения модуля слу-
случайной величины, распределенной по нормальному закону,
плотность вероятности которой подчиняется закону
П\М) = ^~= е~~Ц~ + е~~^Г , F-38)
где ttij и oj — математическое ожидание и среднее квадрати-
ческое отклонение исходного нормального закона распределе-
распределения [38] для /;-. На рис. 6.8 приведены графики изменения
/(| J,-1) для ряда значений trij .
Рис. 6.8
Считая, что компоненты вектора Z имеют нормальные рас-
распределения, воспользуемся правилом трех сигм для определе-
определения максимально возможных их значений в произвольный
момент времени:
max(^(O) = «// + 3aJr (/= 1, 2,..., 2л). F.39)
Первые л соотношений F.39) есть максимально возможные
скорости масс т.-, последующие (л + 1, п + 2, ..., 2л) соотно-
соотношения есть максимально возможные отклонения масс от со-
247
стояния равновесия. Для получения максимально возможных
ускорений масс от,- (перегрузок) из уравнения F.6) находим (с
учетом F.9)) производную вектора состояния
Z = -AKLQ. F.40)
Первые п компонент вектора Z есть ускорения (в данном
примере линейные ускорения масс). Математические ожидания
и дисперсии первых я компонент вектора Z (при К, . =0,
если i*k):
{ "Ч1
zj *-> Jv *ov *ov mv\
v=\ \ y)
" ( DA
v^l [ mv)
где k$ — элементы матрицы А^1^ = —AK.
Максимально возможные ускорения масс ntj
max(t/) = т. + Ъа. . F.41)
Движение системы (см. рис. 6.4) после прекращения дей-
действия импульсов сил с учетом сил вязкого сопротивления ана-
аналогично уравнению F.7) или (переходя в систему уравнений
первого порядка) уравнению F.6):
Z + АЪ = 0, <6-42)
где
[-Е 0 J' Ы W
Решение уравнения F.42) имеет вид
Z = K(t)Z0 (Кф) = Е).
При импульсном нагружении имеем следующие начальные
данные:
Zi@) = X@), Z2@) = 0, F.43)
причем ряд компонент вектора Zj(O) может быть равен нулю,
если к < п (где п — число степеней свободы; к — число масс,
на которые действуют импульсы сил).
248
Импульсы J,- имеют случайные совпадающие между собой
направления, параллельные плоскости ххх2 (см. рис. 6.4). При-
Примем, что J;- связаны соотношениями
J/ = Ml- F-44)
Если каждая масса имеет две степени свободы (смещение
по осям Xj и х2), в отличие от частного случая, рассмотренного
выше, система уравнений F.42) имеет размерность 4л, так как
теперь допускается движение масс по двум осям х1 и х2. После
прекращения действия импульсов каждая масса начнет дви-
двигаться со скоростью (начальные условия)
*Ь/ = *1 /О Ч + *2Ю »2 = ^ Jlx, Ч + ^ ^ h > F-45>
где Jlx , /1х^ — проекции вектора Jl на оси xj и х2 (рис. 6.9):
/1х = | Jj | cos a; J\x = | Jj | sin a, F.46)
где а — случайный угол.
Первые In компонент вектора начальных условий Хо из-
известны (Х1Оу, Х2оу), U — 1,2 ..., п). Остальные 2л компонент
вектора Z равны нулю.
Компоненты вектора Z с учетом F.45) и F.46) можно
представить в виде
Zj = ап cosa | J! | + аа sina | ^ |. F.47)
(Явный вид коэффициентов ап, <зд приведен ниже.)
Если использовать соотношения F.47) для получения ве-
вероятностных характеристик решения уравнений движения, то
необходимо иметь информацию о случайном угле а (необхо-
(необходимо знать закон распределения угла а).
Если закон распределения а известен,
например, угол а подчиняется в интер-
интервале 0 < a < 2л закону равномерного
распределения, то можно определить все
вероятностные характеристики zt, одна-
однако при таком варианте решения нельзя
ответить на вопрос о наихудшем воздей-
воздействии импульсов Jj на систему, что в
первую очередь интересует инженера-
расчетчика. Рис. 6.9
16 Зак. 341
249
Рассмотрим метод решения уравнения F.42) с определени-
определением максимальных значений компонент вектора состояния сис-
системы в произвольный момент времени и их вероятностных
характеристик. В изложенном ниже методе требуется знание
закона распределения случайного угла а, что существенно уп-
упрощает получение статистической информации о входе, т.е.
достаточно знать закон распределения F.38) модуля вектора
импульса силы.
Рассмотрим решение уравнения F.42), имея в виду обоб-
обобщенное решение для рассматриваемого случая, когда массы т.-
имеют две степени свободы:
Z = K(t) Zo (Zo = (i$ , *$ ,..., i$ , x$ , 0...0O).
Вектор Zo с учетом F.45) можно записать в виде
Zo = PJ, F.48)
где
'h. о о"
т\
о — о о
о о
о о
р= р* ;
о о — о ...о
О О -^-...0
тп
0 0 0
0 0
т
J = {*\хх ' J\x2 > ^lx, > Jlx2 > ^lx, > J\x2 ' ° "• °\ •
250
Поэтому
Z = ДО pJ. F.49)
В скалярной форме из F.49) получаем
Z, = an(t) Jfr + aa(t) Jxx2 , F.50)
где
a k h. + k h + k h+ +k hi.
On = Л.-) + to + Ла; + ... + Л,->„ .
" " ГП1 '4 W2 Й W3 "" /Я„
Представим F.50) в виде скалярного произведения
*/ = («,Jl), F-51)
где
ai = ап4 + aah ' Ji = \ h + ^ц 'з •
Проекции импульса J} удовлетворяют условию
А п
Jlxi j4_ _ . F.52)
I ? |2 | i 12 ~ lj
которое можно представить в виде
/¦ г 1 П>
УТР °
(C3l.Jl) = l С= ' ll , . F-53)
о —Ц
Найдем выражения для максимальных значений компонент
F.51) при дополнительном условии F.53), воспользовавшись
множителем Лагранжа:
/ = (a,- ¦Jl)-X [(а{ ¦ Зх) - 1] = max, F.54)
где X — множитель Лагранжа.
Максимум функционала / определяется из условия
16* 251
8J_ _ n F.55)
или
щ = ХСЗх. F.56)
Умножим F.56) на матрицу С:
CT^-TUp F.57)
Умножив скалярно левые и правые части уравнений F.56)
и F.57), получим (с учетом соотношения F.53))
X2 = {С~\ ¦ а,), F-58)
откуда определяем множитель
х = Vcc-V»/) ¦ F59)
Зная множитель Лагранжа, находим вектор из соотношения
F.57)
С'1 л, С-\
Ji* = ~~1— = ~ZZZZZH • F-6°)
Х Vcc-U,.»,.)
Максимальное значение компонента вектора решения z,-
max (Zi) = (а,- • J,) = V(C4 ¦,-¦,:) = X, F-61)
или
max (zi) = | Ji | Vo?! + a?2 . F-62)
Выражение F.62) для max Zj позволяет определить вероят-
вероятностные характеристики максимальных значений компонент
вектора состояния системы (mzi и azi):
_ (п
max(mzi) = Van(/) + 4(O Я/, 5 ' F63)
max (az.) = Vfln@ + 4@ ^/,. F>64)
где
252
(тЛ (тЛ1
ntj = 2 т, Фо —1 + сту ф —L ; F-65)
1 12 °"j ' cry
V / ч Л1
Ух) <2я 0 F.66)
а^ = ст/ + от^ - т т
Ji J\ J\ J\
(nij , aj — параметры нормального закона распределения).
Получим законы распределения максимальных значений
компонент max (zj), линейно зависящих от случайного модуля
вектора импульса силы (соотношение F.62)). В соответствии с
общей теорией определения законов распределения монотонно
изменяющихся функций случайных аргументов имеем
x e 2b2№\ + e 2*?('K , F.67)
где
bt @ = V4 + aj7 , zim - max ft/) .
Максимально возможное значение максимальной компо-
компоненты вектора решения Zj (например, смещения массы т.)
найдем из условия, аналогичного правилу трех сигм:
РФ <zim<z-m) = 0,99, F.68)
или
г] max
J/л («л, • О *л, - 0,99. F.69)
о
253
Из F.69) для произвольного фиксированного момента вре-
времени определяем z*m • Изложенный метод позволяет определить
максимально возможные значения каждой из компонент век-
вектора состояния системы, например максимальное отклонение
к-й массы max (x^) или ее максимальной скорости max (xj/c).
Зная закон распределения максимальных отклонений масс сис-
системы, можно определить вероятность того, что максимальное
отклонение у'-й массы удовлетворяет условию F.62). Аналогич-
Аналогичные задачи имеют место и при расчете системы подвески
транспортных систем (см. рис. 6.3) при наезде на единичные
неровности. Эта вероятность
д
Л@ < zim < А) = jfn(zim ,t)dZim (yim = у0). F70>
о
Для автомашины (см. рис. 6.3) выражение F.70), позволяю-
позволяющее определить у0 (у0 — вертикальное смещение подвески),
справедливо только в интервале времени tk — l/v0 (до наезда
задних колес).
Полученное выражение для вероятности зависит от време-
времени t. Момент /, когда Pj достигает максимального значения,
находим из условия
dPx
ИГ"°- F.7D
Зависимость P^t) можно получить для ряда дискретных
значений, а затем, воспользовавшись сплайн-функциями, по-
получить аналитическое выражение для P\(t).
Аналогичным методом можно определить и максимальные
значения ускорений (первые п компонент вектора Z):
max (*,) = | ^ | = | J, | АД(О. F.72)
По аналогии с F.67) получаем закон распределения макси-
максимальных значений ускорений масс системы:
254
Максимально возможное значение ускорения (max (max zj) -
= max z*) находим из условия
г* max
ifa(zim,nd(zim) = Q,99. <6-74)
о
Зная закон распределения ускорений, можно определить ве-
вероятность того, что перегрузки, действующие на сосредоточенные
массы системы, будут находиться в заданном интервале значений:
Pi(O<zim<zra) = !fa(zim,nd(zim), F-75)
о
где Zjg — верхнее значение допускаемых ускорений. Момент
времени, при котором Р2 достигает максимального значения,
находим из условия
dP2
-аТ-°-
В качестве иллюстрации изложенного метода рассмотрим
систему с двумя степенями свободы (рис. 6.10), на которую в
точке .AT действует случайный, произвольно направленный им-
импульс в плоскости jcjX2. Воспользовавшись методом сил, полу-
получаем следующие уравнения малых колебаний системы (без
учета сил сопротивления):
у2 = 8п (-Мх2) + 812(-/0 ф) ;
(о./о)
Ф = 52i {-МЦ + 522(-/0 ф).
Рис. 6.10
255
В данном примере нет необходимости переходить к системе
уравнений первого порядка, так как решение можно получить
в аналитической форме записи. Находим начальные скорости
системы после прекращения действия импульса из следующих
соотношений:
Jx2ss~Мк2й'
JxH=-JQyQ.
Решение системы F.76) имеет вид
х2 = Cj sin р^ + с2 cos р^ + c3 sin p*t + c4 cos p2t;
<p = Cjcxi sin Pi t + c2ai cos Pit + 53a2 sin p2t + c4a2 cos p2t.
При / = 0 x2 — Ф — 0, поэтому c2 = c4 = 0. Произвольные
постоянные
1 P\P2 («2 - al) ' 3 />l/>2 <a2 - al>
В результате имеем
X2 = a\Jxy + a2Jx2 5
Ф = V*, + Vxj.
где
a2 = У!i sinPit-y2i sinp2t;
a2 = y22 sin p2t - у п sin pit;
b\ =Ynai smpit-y2ia2sinp2t;
b2 = y22 sin p2t - y12a! sin/?^;
711 /оРЛ («2 - al> ' Yl2 />i(<x2-al)'
256
HPi _ [Jo M)
721 /0 (fl2 - ax) Plp2 ' b2 P2(a2 - a{i '
Получим выражения для максимального значения смеще-
смещения х2 и х2. В соответствии с ранее изложенным алгоритмом
рассмотрим функционал
/=(a-J)-M(a-J)-l],
где
(¦•j)-2>,/v c= IJI .
[ ° jj?
Из условия F.55) следует уравнение
а = ХС J.
Воспользовавшись условием F.53), получаем
x = vijp(o?+fli)Mj|V(e?+fli),
или
Я. = | J | \Сц sin7>j/+ c22 sirr/>2^+ ci2 sin/?!/ • sinp2t,
где
cll=Yll+Yl2; С22 = Г?1+У22;
c12 = -(YllY21+Y22ri2)-
Максимальное значение х2 F.55)
max (дс2) = Я. = | J| VofTof =
= | J | "УСц sin P\t+ q2 sin/jj/sin/^/H- c22 sin2 p2t.
В соответствии с F.67) получаем закон распределения для
max (x2) и max (x2):
Пгт'П ~^Ш~ь[* ] +е ' J* F77)
257
где
b = Vflf+^l •
Проделав аналогичные выкладки для х2 :
х2 = axJXi + a2J^ ,
определяем max х2 и соответствующий ему закон распределе-
распределения:
max х2 — | J | "Vfli + flf .
№г-()"даК ^ +е" * J- <б-78>
^! = -4а\ + а\ ; х2т = max (xj) , х2т = max (*г) •
С изменением времени законы распределения непрерывно
изменяются, а при дискретных моментах времени законы рас-
распределения х2т, х2т подобны законам распределения модуля
случайного импульса (см. рис. 6.8).
Максимально возможное отклонение max (x2m) и скорость
max (x2m) найдем из условий
/»*, = J/x, («5» , О *2., - 0,99; <6-79>
о
Am
/Vf4C^.O</*2., = 0,99, F8°)
о
где
х*2т = max (x2m), x2m = max (x2/n).
Определить х\т и х^, из F.79) и F.80) можно только
численно для ряда конкретных значений времени t.
258
Изложенный метод анализа механических систем при дей-
действии случайных импульсов произвольного направления позво-
позволяет определить максимально возможные динамические эф-
эффекты в системе и выбором параметров системы их миними-
минимизировать.
§ 6.3. Нестационарные случайные колебания линейных систем
Системы с одной степенью свободы, как правило, позво-
позволяют получать решение уравнений движения в аналитической
форме, что существенно упрощает последующее определение
вероятностных характеристик «выхода» при известных вероят-
вероятностных характеристиках «входа». Причем для уравнений с
постоянными коэффициентами вероятностные характеристики
выхода в ряде случаев можно получить и в аналитической
форме, удобной для анализа. Для систем с конечным числом
степеней свободы, например линейных с постоянными пара-
параметрами, решение можно, в принципе, получить в аналитичес-
аналитической форме записи, но существенной пользы от такого решения
вследствие громоздкости формул по сравнению с численным
решением нет, поэтому, как правило, численным методам ис-
исследования случайных колебаний отдается предпочтение.
В качестве введения в раздел нестационарных случайных
колебаний линейных систем рассмотрим систему с тремя сте-
степенями свободы (рис. 6.11, а), где массы mjсчитаем точечными.
На рис. 6.11, а число внешних сил равно числу степеней
свободы, но возможны случаи, когда число возмущений мень-
меньше числа степеней свободы или больше, как показано на
рис. 6.11, б, когда возмущения приложены в безмассовые
точки. Возможны и механические системы (системы аморти-
амортизации), когда элементы, реализующие сосредоточенные силы
вязкого трения (а,-к), связаны с безмассовыми точками
(рис. 6.11, б).
В дальнейшем будем считать, что все необходимые сведения
о случайных силах (вероятностные характеристики случайных
возмущений) известны. При такой постановке основная труд-
трудность, связанная с получением этих вероятностных характе-
характеристик, не рассматривается, что допустимо при изложении
математических методов решения дифференциальных уравне-
259
Рис. 6.11
ний, но недопустимо при решении конкретных задач, с кото-
которыми приходится сталкиваться инженеру в повседневной ра-
работе.
В большинстве случаев вероятностные характеристики слу-
случайных сил (или других видов случайных возмущений), кото-
которые могут действовать на проектируемую конструкцию в ре-
реальных условиях эксплуатации, отсутствуют. К тому же слу-
случайные возмущения могут зависеть от самой конструкции,
которой тоже пока нет. Поэтому решению уравнений предше-
предшествует очень большая подготовительная работа по получению
информации о случайных возмущениях экспериментальными
методами с последующей обработкой экспериментальных дан-
данных для определения вероятностных характеристик «входа»,
что особенно трудоемко, когда требуется иметь информацию
о вероятностных характеристиках нестационарных случайных
процессов.
Эта трудоемкость существенно ограничивает возможности
теории нестационарных случайных колебаний при решении
прикладных задач.
На подготовительную работу по определению вероятност-
вероятностных характеристик входа требуется несоизмеримо больше вре-
времени, чем для решения уравнений движения при известном (в
вероятностном смысле) входе. В конечном счете надежность
260
работы механической системы целиком зависит от того, на-
насколько точно заданный в решении вход отражает реальную
физику процесса. В ряде случаев вероятностные характеристи-
характеристики входа не зависят от самой конструкции и являются хорошо
изученными случайными функциями. Например, в результате
обработки большого числа экспериментальных данных полу-
получены вероятностные характеристики неровностей дорог [36],
неровностей аэродромного покрытия, скорости ветра для раз-
различных районов и т.д. В этом случае при анализе движения
системы можно использовать известные вероятностные харак-
характеристики входа.
Основные методы решения уравнений движения при не-
нестационарных случайных возмущениях частично изложены в
§2.4.
Воспользовавшись методом сил, получим систему уравне-
уравнений малых колебаний (рис. 6.11, а):
У! = 6п(.-т1 й - Ьх у{) + 512С-/и2 h ~Ь2У2) +
+ 813(-/и3 h - ьъ Уз) + 514Л/+ 5n/i + 513/3;
у2 - 521(-т1 й - Ъх ух) + Ь22(-т2 у2 -Ь2у2) +
+ 52з(-/И3 h ~ ЬЪ УЪ> + 62l/l + 823/3 + &2АМ> ^6'81)
у3 = 531(-m! j)t - Ьх у{) + 532(-/п2у2 -Ь2у2) +
+ 533(-/я3 у3 - Ъъ у3) + 531 fx + 833/3 + 534Л/,
или в векторной форме записи (после преобразований)
My + By+Cy=D{f фг = &-%). F-82)
Здесь
8ji 5j2 5j3 /Wj 0 О
Д= §2ls22523 , М= 0 т2 0 ,
531 532 533 О О /И3
261
5n5i2514] Г/Л \ЬХ О О
Д1= 521523824 , f = /2 , В = О Ь20 .
531533534J [М\ 1° ° *3
В более общем случае силы вязкого трения могут зависеть
и от относительных скоростей. Тогда матрица В имеет вид
Ьп ... bln
В= .
Ьп\ ¦• Ьпп
Уравнение F.82) преобразуем к виду
Z + AL = DF, F.83)
где
А = [—^То—J' z = \y\' D = [~oW\' F = [oJ-
Компоненты/- вектора F являются случайными функциями
с известными вероятностными характеристиками (известны
mfx и КАА).
В дальнейшем принято, что число компонент fj вектора F
меньше или равно числу степеней свободы системы. Решение
уравнения F.83) при нулевых начальных условиях имеет вид
Z= JG(r,t)Z)(T)F(T)*;
О
Сйт) = ^)Г'(т), F.84)
где К (О — фундаментальная матрица решений однородного
уравнения F.83).
В § 5.2 был приведен алгоритм определения матрицы Грина
G (J, т). Для уравнений с постоянными коэффициентами мат-
матрица Грина
G(t,x)=G(t-z) = K(t-x).
262
Для вероятностных характеристик компонент г,- вектора
состояния системы Z F.84) (приняв число возмущений fj рав-
равным числу степеней свободы) запишем (при ?)(х) = Е)
п t
>о о
п n't' F.85)
>2 v=l 0 0
Рассмотрим два частных случая: 1) ,/J — независимые слу-
случайные функции и2)/(- независимые случайные величины.
Если yj- независимые случайные функции, то
п t г
*V,('>'') = ? JJftv('.*)fcv(''.'Otf/v/v**'. F.86)
v=l 0 О
Автокорреляционные функции и дисперсии компонент
л ' ''
^г( С О = ? J b,v tt x) gh (J ; x') iT/v/v dx A'; F.87)
v=l 0 0
Яг, (O = E J J&v tt x) g/v (/, x') Kfjv dx dx'. F.88)
v=l О О
В частном случае, когда возмущения являются случайными
величинами, т.е. при
mf = const; Kff (x, x') = Kiv = const,
выражения для математических ожиданий и взаимно корреля-
корреляционных функций решения принимают вид
л л it1
^ttO-Z Z%v J J^ttx)ft»(r.xOAA';
>=1 v=l 0 0
263
п '
Ы ° F.89)
n n t t'
Dz, = 11 KUV J Uij С *) ft* (>'. *') A A' •
v=l j=\ " 0 0
Рассмотрим второй частный случай, когда возмущения
fi {t) являются случайными функциями типа белого шума:
K/ifj=Sy5(t-t{), F,90)
поэтому
п п t Г t'
Kztzk С '') = Z Z ¦S/V J^ (r. ^) f S*v С'. ^') S(t' - t) A' A ,
j=l v=l 0 0
или
n n t
(=1 v=l 0
Для дисперсий компонент ц вектора Z получаем следующие
выражения:
п п t
К, С > » Z Z */v \sij <S \ т) гь ft т) А . F.92)
Ы v=l 0
Для независимых fx имеем
поэтому
и '
Kzfik С О = Z °v J^/v С ^) Sb, (f '• -1) A ;
v=l 0
264
" ' 2 F.93)
^.(O = ZCTvJbv(^)l dx.
' v=l 0L J
§ 6.4. Метод главных координат при исследовании
нестационарных колебаний
Рассмотрим метод решения системы неоднородных линей-
линейных уравнений с постоянными коэффициентами при нестаци-
нестационарных случайных колебаниях, позволяющий получать реше-
решения в аналитической форме записи.
Если силами сопротивления можно пренебречь или если
силы сопротивления удовлетворяют определенным условиям,
то для решения системы уравнений F.81) может быть исполь-
использован метод главных координат.
Предварительно рассмотрим задачу об определении собст-
собственных значений Pj и собственных векторов для системы одно-
однородных уравнений малых колебаний без учета сил сопротивле-
сопротивления. Уравнение свободных колебаний (при by = 0) имеет вид
(частный случай уравнения F.29))
Му+Су = 0. F.94)
Решение уравнения F.94) ищем в виде
у = u cos pt
и в результате получаем
Р2Ми + Си = 0
ИЛИ
[С-р2М]и = 0. F.95)
Частоты Pj определяем из уравнения
det [C-p2M] = 0. F.96)
Зная частоты, находим соответствующие векторы и®, ко-
которые удовлетворяют алгебраическим однородным уравнениям
(считаем, что все частоты различны и отличны от нуля):
[C-pfM]u(i) = 0, F.97)
или в скалярной форме записи
265
л
?<$«« = 0 (*= 1,2, ....л). F.98)
v=l
Здесь с$ — элементы матрицы С®,
CU = [C-pfM].
Из общей теории линейных алгебраических уравнений из-
известно, что система F.98) всегда совместна и имеет решение,
отличное от тривиального (при условии, что ранг матрицы
системы был меньше числа неизвестных). Например, можно
п — 1 компонент вектора и^ выразить через компоненту и$,
взяв первые (л — 1) уравнений системы F.98):
df = dfS (/=1, ...,я-1). F.99)
В результате для каждой из частот pt получаем
y» = u«cos^, F.100)
где (л — 1) — компонент вектора и®, находят из системы урав-
уравнений F.99). Компоненту и$ вектора и^ можно взять любой
и, в частности, равной единице.
Векторы и(') удовлетворяют условию
(^-/^(MiiCV^O, F.101)
или (при pf ф pj)
(MuWUW) = 0 (/*;), F.102)
которое называют условием ортогональности векторов м® и
и0).
Составим из компонент векторов и^ матрицу U:
'41) ... «f
U* 2 " 2 («i-l;/* 1,2,...,«)
и рассмотрим преобразование
266
У=Щ, F.103)
где q — вектор новых неизвестных.
Подставив F.103) в уравнение F.82) (без учета сил сопро-
сопротивления), получим
MU'q + CUq = D{f. F.104)
Умножим уравнение F.104) на транспонированную матри-
матрицу:
UTMUq+UTCUq=UTDlf. F.105)
Можно показать, что матрицы UTMU и UTCU с учетом
условия ортогональности F.102) являются диагональными:
UTMU= M(l), UTCU= А{х).
Диагональные элементы матриц Л/1 и А1 соответственно
равны
W=IDL> *Nl"b- F1О6)
>1 М
В скалярной форме из F.105) с учетом условий ортогональ-
ортогональности F.101) получаем
п
Wft-т ' Fл07)
I («РJ щ
hi
п
где e/v = 2] (ujkd$), d$ - элементы матрицы D\.
Если система нагружена только силами./} (случайных мо-
моментов нет), приложенными к массам /и,- (см. рис. 6.11, а), то
матрица D\ равна единичной, т.е. Dx = Е и d $ - 0 при v * к.
267
Введенные новые неизвестные qt называют главными коор-
координатами. Решение уравнений F.107) при нулевых начальных
условиях имеет вид
^-Msin/^-T) ?p,v/vW А, FЛ08)
Pi 0 [ *=1
ИЛИ
л '
v=lO
где
P/v = T^— J ^ = ^sin^.(r-t)P/v.
ы
Зная ?,-, находим решение уравнения F.82) без учета сил
сопротивления:
п п '
j* = ?4*4 = Z Jfcv/v*. F-109)
*=1 v=l 0
п
гае 9ь = Z "w ^v •
При наличии сил вязкого сопротивления уравнение движе-
движения системы F.82) после замены у на ?/у и умножения на
транспонированную матрицу U Т принимает вид
UTMUq+ UTBUq+ UTCUq= UT iP^f. F-110)
При учете сил сопротивления необходимо, чтобы матрица
U T BU была также диагональной. Это имеет место, если
В=2пМ+2ХС, F.111)
где 2л и 2Х — скалярные множители.
268
Умножив F.111) слева на матрицу UT, а справа — на
матрицу U, получим
UrBU=2n(UTMU) + 2\(UTCU). F.112)
С учетом F.112) из F.110) получаем в скалярной форме
уравнения
л
2>/v/v(o
ъ+гпм+йъ-^ , F-113)
Z<4°>2*y
м
где
n^n + Xpj. F.114)
Так как распределение сил трения практически неизвестно,
а известен (экспериментально) только интегральный эффект дей-
действия сил трения, то можно принять любую гипотезу о распре-
распределении сил трения, эффект действия которых эквивалентен
интегральному эффекту. Поэтому естественно предположить, что
сила трения распределена так, что выполняется условие F.114),
т.е. главные координаты для консервативной системы остаются
главными и для неконсервативной системы, учитывающей силы
вязкого трения. Решение уравнения F.113) имеет вид
qi = e~ni' (с ^ cos p,t+ с ^ sin ptt) +
+ ± je-V'-)sin/>,.(/-1) XP,v/v *, FЛ15)
Pl 0 v=l
или в более компактной форме записи
п ' F.116)
qt = е""/'(с р cosptt+c $ sinPit) + Y, J^v} ft t)/v (т) А ,
v=l 0
где
269
p. = Ъ>
P(v „
I («f J rrij
Определив qt, найдем компоненты вектора у и первых двух
производных:
л
и F.117)
h = Hukj'Vj-
При нулевых начальных данных имеем
?* = S ЬйЧ*- (б118)
v=l О
Например, для у^ после преобразований получаем следую-
следующее выражение (при нулевых начальных данных), аналогичное
F.109):
я t
Ук = Т Й/v^, F.119)
v=l 0
Находим вероятностные характеристики компонент вектора
состояния у:
270
»4=Z Ы3ЧЛ; FЛ20)
v=l О
п п ' *'
кУкУГТ Z J Iffliotfinfyihik'. F.121)
v=l р=1 О О
Рассмотрим нестационарные колебания при внезапно при-
приложенных постоянных во времени случайных силах, например,
как показано на рис. 6.12. Высотное сооружение представлено
здесь как система сосредоточенных масс mt, соединенных безы-
безынерционными упругими стержнями. Рассмотрим два случая
колебаний конструкции: 1) случайные силы/лежат в плоскос-
плоскости чертежа и параллельны оси х^ и 2) случайные силы парал-
параллельны плоскости х1Ох2 и параллельны между собой, но на-
направления их произвольны, аналогично ранее рассмотренному
случаю импульсного нагружения (см. рис. 6.4).
Рис. 6.12
В первом случае, если главные оси сечений стержня совпа-
совпадают по направлению с осями х1 и х2, колебания масс mt
происходят в плоскости XiOx2. Так как ft параллельны, то
можно положить
271
f, = P/f,- F.122)
Уравнение малых колебаний аналогично уравнению F.82)
(/>! = Е):
Мхх + Вхх + Схх = f (f = (fx ,/2 , ...,/„ )*) , F.123)
где 5 — диагональная матрица.
Поскольку модули сил f,- не зависят от времени, то из F.89)
с учетом F.122) получаем вероятностные характеристики ком-
компонент вектора Xj:
п '
тхк = "у, ? Pv Js*vA;
v=l О
п п * *'
Кх?к = \ Z I P/ Pv J Ь/,- (Г, т) ^ (г ',т') А А';
/=1 v=l О О
/1 л ' ' F.124)
v=l М ' v0 О У
Можно воспользоваться и выражениями F.120), F.121),
полученными с использованием главных координат. Считая,
что компоненты вектора Х[ имеют нормальное распределение,
можно определить их максимально возможные значения в каж-
каждый момент времени, воспользовавшись правилом «трех сигм»:
гпахх^ = тх + Зах . F.125)
При расчете наибольший интерес представляют напряже-
напряжения, возникающие в конструкции при нагружении ее случай-
случайными силами. Например, в конструкции, показанной на
рис. 6.12, при постоянном сечении стержня при нагружении
ее случайными силами /}, направленными в одну сторону,
опасным сечением будет сечение в заделке. Изгибающий мо-
момент Мм в заделке от внешних сил, действующих на массы /п,-
(включая и силы вязкого сопротивления FiTp),
272
п л
^и = Е 'Р(/Гр + Ур + ^р) = X 'Р(/р- «p*lp-ap*lp) • F-126)
р=1 р=1
Воспользовавшись уравнением движения массы тр , найдем
п ( п \
Выражение для компонент вектора состояния системы
*v-? W.a- <6128)
v=l О
Подставив F.128) в F.127), получим
K=i jfiuw*, FЛ29)
v=l 0 ^р=1
где
^ = Zcpyi3).
Максимальное нормальное напряжение в заделке
М п '
*2 vtlO
j n F.130)
?v = ЦТ La 'p 9pv •
*2р=1
При нагружении случайными силами, постоянными во вре-
времени, имеем
*=? k*-/v. F131>
v=l 0
19 Зак. 292 273
Считая, что а имеет нормальное распределение, получаем
максимально возможное его значение (при /v = pv/j)
о* = та + 3аа, F.132)
где
п t
mo = Z \qv<kmf<k (m^ = pv/и/();
v=l О
n n t t
v=l p=l 0 0
Пример 6.2. На массу m2 (jn2 = т{) (рис. 6.13) внезапно
подействовала случайная сила Р = Р$Н{1), где H(t) — функция
Хевисайда. Вероятностные характеристики случайной величи-
величины Pq известны: тр и Dp . Требуется определить математичес-
математическое ожидание и дисперсию максимального нормального на-
напряжения в заделке. Уравнения малых колебаний масс
ух = Ьп(-тх ух) + б12 (-т2 Уг) + 512Р0 Я(Г);
у2 = 521(-/я, ух) + 822 (~т2 Уд + hlP0 я(О •
Рис. 6.13
Находим частоты
/»,-0,585 Л/Ж^; А« 3,881 V3Zl
тх12 тх12
и собственные векторы (положив «ц = и12 = 1)
274
ul = 0. M2l)' U2 = (!. 2>.
где м21 = 3,132; u22 = -0,319.
Перейдем к главным координатам qx и q2:
yi = wi + »n<b-> F133)
>2 = 1^1 + М22?2 •
В результате получаем следующие уравнения движения:
2
2 ~; Ыу1 J 4,132P0H
^+W-2 =ЩA + ЗЛ32У
Е "/1 wy
2 F.134)
2 J^2 У 0,681Р0Я
92 + ^2 = |~Г= -2d + 0,319V
Z "/2 ОТУ
Решения уравнений F.134) при нулевых начальных данных
имеют вид
0,382/>0
Ч\ = y~ A ~ cos Р\1) >
т\Р\
F.135)
р
q2 = 0,618 —^ A - cos лО .
Определив qj, находим у^ и у2 F.133):
0,382Р0 0,618/»0
У\ = г"^1 -c°s^iO + ^-(l-cos^r);
тхр\ тхр\
1,196Р0 Ро
у2 = ^ A - cos^O - 0,191 —^ A - сов/у).
Изгибающий момент в заделке
19* 275
М = I {-ml yx) + 2/ (rml yx + Po),
или
M= @,382 cospxt+ 0,618 cos p2t + 2,392 cos pxt-
- 0,382 cos p2t+2) pQl =F(t)PQl.
Максимальное нормальное напряжение в заделке
М F(t) ,р
°тах- цгх~ Wx °"
Математическое ожидание и дисперсия соответственно
равны
Fit) ,
D .ihat2D
^сттах- W2 ' иРй '
Считая, что атах распределено по нормальному закону,
находим максимально возможное значение напряжения в за-
заделке
max (агах) = -Щ-1 (тро + Зо^).
Рассмотрим случай, когда внезапно приложенные постоян-
постоянные во времени силы L параллельны, т.е. выполняется условие
Г- = р.- Г-, и параллельны плоскости хх Ох2, а направления их
произвольны. Векторы Г- удовлетворяют условиям, аналогич-
аналогичным F.53):
(с<НФ = 1, (f/=/telii+/^»2). FЛ36>
где п — число случайных сил, принятое равным числу сосре-
сосредоточенных масс.
При условии, что главные оси сечений конструкции совпа-
совпадают по направлению с осями хх и х2, уравнения малых коле-
276
баний масс в плоскостях х^ Ох3 и Xj Ох2 независимы, поэтому
имеем соответственно два векторных уравнения вида
М^ + В^щ + C^x^f^; F.137)
Mx2 + B&k2+C&x2 = fX2, F.138)
"*lll [X2l] ^xx ^1х2
Х12 *22 /2xj /2x2
Х1 = > Х2 = > *х, = ' > *Xj =
X1«J [X2/.J Лх, /nx2
Рассмотрим алгоритм численного решения исходных урав-
уравнений F.137) и F.138) без использования главных координат,
которые при численном решении мало полезны. Решения урав-
уравнений при нулевых начальных данных имеют вид
х1 = JG^dit ; F-139)
о
х2= JG©Af F.140)
О
В рассматриваемом случае /ы и /^ зависимы, так как
являются проекциями векторов f,. Проекции векторов f,- удов-
удовлетворяют условиям F.136). Так как векторы f,- параллельны,
имеем
P?(C<1>fifi) = l. F-141)
Рассмотрим задачи, возникающие при исследовании коле-
колебаний механических систем при действии внезапно приложен-
277
Рис. 6.14
Рис. 6.15
ных случайных постоянных во вре-
времени сил произвольного направле-
направления. Например, к таким задачам от-
относят задачу расчета системы амор-
амортизации с ограниченным ходом. На
рис. 6.14 показана система аморти-
амортизации объекта, допускающая (до
удара объекта о стенки конструкции)
ограниченное угловое перемещение,
зависящее от А. При расчете систе-
системы амортизации требуется опреде-
определить максимально возможное пере-
перемещение точки к (рис. 6.14) при
наихудшем действии f, в заданном
направлении, которое должно быть
меньше А. В общей постановке тре-
требуется определить максимально
возможное перемещение (или ско-
скорость) массы /и,- по заданному на-
направлению, определяемому еди-
единичным вектором е (рис. 6.15), т.е.
требуется определить максимум
функционала
Jj = (Xy , e), (x;- = x{ix + x2i2 , e = e^ + e2i2),
где x. — вектор перемещения массы /П: в плоскости xj Ox2. Из
общего решения F.137) — F.138) можно получить векторы х.-
вида
л '
х,- = 1 J^ftx)!/* (f(=/^1+/«2i), FЛ42>
t=l О
где G W (^; -с) — диагональные матрицы Bx2).
Например,
278
С учетом f,- = P(- fj имеем
fy=Z J^ftx)*^ F143)
Ы О
и условие, которому удовлетворяет вектор fj,
(C<1>f1 fi) = 1. F.144)
Рассмотрим частный случай, когда вектор е совпадает с
одним из векторов базиса { i- } , например с ij. В этом случае
Jrxh, F.145)
или, если воспользоваться выражением F.143),
' ( п Л
J. = Хп = \0Щ, dxix G® = Y,G? P/ ¦ F146)
О I Ы
Требуется определить максимальное значение F.146) с учетом
условия F.144). Матрицы G® — диагональные с элементами
itt-Z41}P/. ^-Z^P/.
поэтому G(j)T= G®.
Воспользовавшись множителем Лагранжа, получаем функ-
функционал
Из F.147) находим уравнение для определения вектора f \,
при котором функционал ,/д в момент времени t достигает
максимального значения:
279
или
jG^A-^CWfj-O. F148)
О
Соотношения F.148) и F.144) дают возможность опреде-
определить множитель Лагранжа:
Х?-(СО>>-1 JC<ft,lA JcWliA. F149)
о о
Так как GA)~1 = \fx \2E, то
\г = |/i И J(?»IA|. FЛ50)
О
Определив Xj из соотношения F.148), найдем
fj=±(C(i))-i Jc?»iA. F151)
^i о
С учетом F.151) получаем
f*_if i_0 ir и F.152)
г 1 - I fl I ~ = I fi I ll >
JcWij A
0
что и следовало ожидать, так как уравнения движения F.137)
и F.138) независимы.
Подставив выражение для f \ в F.146), получим максималь-
максимальное значение перемещения массы /л,- по направлению оси х{:
280
maxхд-|f! I J<?» 1^ = 1*11 f<?«A. FЛ53)
о о
Находим вероятностные характеристики максимально воз-
возможного отклонения массы Хд :
( { Л
mXji = aifnfi, DXji = ajDfi «,-J^A/, . FЛ54)
ч /
Закон распределения случайной величины max х» = х**
имеет вид (аналогично F.67))
х е а>\ +е °>/, . F.155)
ч /
Зная закон распределения max Хд, можно определить мак-
максимально возможное значение jcj в произвольный фиксирован-
фиксированный момент времени, воспользовавшись условием F.69):
*
•"S'lmax
J fj (^,0^1 = 0,99. <6л56>
о
Определив Хд тах из F.156) для ряда дискретных моментов
времени t, получим график изменения Хд тах во времени, по-
позволяющий определить момент времени t*, при котором
Хд тах достигает максимального значения, т.е. (max Хд тах).
Рассмотрим основной случай, когда надо определить мак-
максимально возможное значение проекции вектора смещения х.-
у-й массы на заданное направление, определяемое вектором е
(см. рис. 6.15), т.е. нужно найти максимум Jj при f,- = p,- ft:
Jj = (Xj e) = Хд cos a + Хд sin а ,
или с учетом F.142)
18 Зак. 341
281
/ / п \
Jj=l(G<l>eti)<k U?» = XGj°P/. F157)
о [ w J
С учетом условия F.144) получаем функционал
jj-llGtottddz-^Kotovo-i]. F158)
о
В соответствии с ранее изложенным методом находим fj :
,¦ о F.159)
м = >
Чс^Г1 jG^eA jG^eA
о о
или после преобразований
fl = |fi|e. F-160)
Максимальное значение функционала F.157)
max J: = max (x.- e) = к^ =
VT7 Л р Л F.161)
¦ * ¦ j^l cos arfr + J^sin a^T '
о о
v у v /
Определив максимальное значение проекции перемещения
у-й массы на заданное направление F.161), найдем параметры
закона распределения F.155) для max (х.- е) = max Xje:
г^п = п^Щ С>Х +е~ l?h ]>FЛ62)
где
282
xjg = maxxJe; cj= У Jg^cosccA + J^sinotA •
0 0
v J \ J
Максимально возможное значение Xjt найдем из условия
maxx*,
\fj{x*e,t)dx*e = Q,99. <6л63>
о
Изложенные методы исследования нестационарных коле-
колебаний линейных систем при действии случайных внезапно
приложенных сил, постоянных во времени, позволяют решить
ряд практически важных задач, в частности задачу о вероят-
вероятности нахождения масс (если иметь в виду объект, показанный
на рис. 6.4) при колебаниях в области допустимых отклонений
в пределах заданного интервала времени при наихудших внеш-
внешних случайных воздействиях на систему.
Рассмотрим в качестве примера старт летательного аппарата
(рис. 6.16, а), считая, что движение системы направляющая —
ракета происходит в плоскости чертежа и относительно этой
плоскости. До потери контакта с направляющей система имеет
две степени свободы (угол ср в плоскости XiO^ и угол и в
плоскости XjOx3). При запуске двигателя тяга R изменяется во
Рис. 6.16
18*
283
времени, как показано на рис. 6.16, б. В пределе, пренебрегая
интервалом времени @, t{), можно считать, что тяга практи-
практически мгновенно достигает своего номинального значения Rq
(это наихудший случай воздействия на систему), т.е. функцию
R можно рассматривать как внезапно приложенную постоян-
постоянную во времени силу. В реальных системах из-за технологи-
технологических погрешностей вектор тяги двигателя R не совпадает по
направлению с осевой линией летательного аппарата (отклонен
на случайный угол е) и, кроме того, смещен на некоторое
случайное расстояние е, что приводит к появлению случайной
силы f и случайного момента М (рис. 6.16, а).
В общем случае точка к приложения силы R не лежит в
плоскости чертежа (рис. 6.16, а), поэтому возникающие слу-
случайные векторы f и М имеют произвольные направления, т.е.
имеют отличные от нуля проекции на оси xh что приводит к
колебаниям системы при старте как в плоскости чертежа, так
и относительно этой плоскости. Рассматривая движение сис-
системы при старте, можно получить два линейных уравнения
(считая возникающие колебания малыми) относительно углов
Ф и и в системе координат Ж1\ связанных с направляющей
(рис. 6.16, а):
Ф + оц Ф + ап\) + 6цф + Ьп» = сц/^ + с12^ + dnM^ + dnM^ ;
о + а21 ф + а22 6 + Ь2Х Ф + Ъ22х> = с21 /^ + с22/Хз + </22Л^ + </22М^ ,
или в векторной форме
и + В» + Со = D{f+ D2M (и = (ф, и)т). FЛ64)
На рис. 6.17 в системе координат, связанных с направляю-
направляющей, показано сечение ракеты и приведенные к ее центру масс
случайные возмущения (сила f и момент М). Из рис. 6.17
следует:
f = - Rqz cos a i'3 - Rqs sin a i'2 =fx i'3 +fx \'2 ;
M = - Rq e cos a i'3 + Rq e sin a i'2 = Mx i'3 + К i'2 ,
где а — случайный угол.
284
Проекции случайной силы f и случайного момента М удов-
удовлетворяют условиям, аналогичным F.144):
(Л fl I (Ml м2х)
|^Р |%pf ' |/?oe|2 l^epf '
При старте (в момент tk потери
контакта летательного аппарата с на-
направляющей) представляет интерес
максимально возможное значение,
например, функционала
/= ах ф(^) + о2ф('*)>
который позволяет оценить разброс
ракеты по дальности, вызванный на-
начальными возмущениями ф(^) и
Ф (tk). Считая, что законы распреде-
распределения модулей | е | и | е | известны, максимально возможное
значение функционала / определяют по вышеизложенному
алгоритму.
§ 6.5. Вьшужденные стационарные случайные колебания линейных
систем
В случае, когда время процесса много больше времени
переходного процесса, колебания системы можно рассматри-
рассматривать как установившиеся или, если они вызваны стационар-
стационарными случайными силами, как стационарные.
Векторное уравнение вынужденных колебаний системы с п
степенями свободы имеет вид F.82)
My + By+Cy = Dxf. F.165)
Считаем, что вероятностные характеристики компонент
вектора f(t) известны, в частности известны спектральные
ПЛОТНОСТИ Sf (CO) И Sff (СО) .
285
Предварительно выясним, при каких дополнительных ус-
условиях центрированную стационарную случайную функцию
fk{t) можно представить в виде интеграла Фурье
О "
-со
или в векторной форме (когда имеется система случайных
функций)
О « F.166)
f(f)= |ф(со)е'ш'</со.
-оо
Корреляционная функция стационарной случайной функ-
функции должна зависеть от разности моментов времени (§ 3.1).
Рассмотрим корреляционную функцию
ГО 0 1
K/k(t,t') = M\fk(t), /jc')J =
Yoo \ /оо V
= M \<Ъкё**<Ь /Ф?е-''т'''</ш' =
—00 —00
Л J \ J.
F.167)
= J 1е1^-^''">К[ФкФк ] da dm' ,
—00
подынтегральное выражение которой будет зависеть от разнос-
разности моментов времени, если корреляционная функция
К [Фк , Ф? ] удовлетворяет условию
К [Фк (со), Ф? (о)')] = Sf (ю') 5 (со' - со). F.168)
В этом случае после интегрирования по со получим из F.168)
оо
К, (t, t') = \sf (o>) еш dm, F-169)
—оо
где т = t-t'\ Sf (со) — спектральная плотность компонента век-
вектора f
286
Аналогично получаем выражение для взаимно корреляци-
корреляционных функций
°° » F.170)
Kfj (t,f)=j je'' ((dHd7°А" [Ф* (со') ф; (со)] Ж> Ж>\
—СО —00
Из F.170) следует, что в общем случае стационарные слу-
случайные функции могут быть связаны нестационарно, так как
их взаимно корреляционная функция зависит от двух моментов
времени t и С, а не от их разности, но если
JT [ФА (ш) Ф* (©)] = .У//(со'M(сй'-со), F.171)
где Sf /-(со) — взаимная спектральная плотность, то корреляци-
¦'Jfc-'v
онная функция Kt f зависит от t-t'.
Действительно, подставив F.171) в F.170), после интегри-
интегрирования по со' получим
00
^/v(U')=Je-^/v(co)^. F-172)
-оо
Решение уравнения F.165) (стационарное решение) будем
искать в виде
00
у = Jy0 etotdB. F.173)
—00
Подставив F.173) и F.166) в уравнение F.165), получим
\\-а2М+ЬВ1 + С\\у0 = ВФ, F.174)
откуда
уо= ЩЬ)Ф, F.175)
где
W{Ua) = || - со2 М+ 1(лВх + СЦ В .
В скалярной форме
287
и
>to(») = E»V (»)*/(«>). FЛ76)
где Wkj (со) — элементы матрицы W.
Из F.173) находим решение в скалярной форме:
%-]у*о(»)еЫА>- FЛ7?)
—00
Подставив в F.177) выражения для у^, получим
00 6
Ук~ Jl »V<«L>,(«>)eto'*>. FЛ78)
-оо /=1
Взаимно корреляционные функции компонент вектора Y
равны
00 00
= J J м\ук(р) ^о(со') е' (ш'-ш'' Уа> db'l.
-00 —00 L J
Взаимно корреляционная функция Kv v зависит от разности
"lev
моментов времени t-t' только в том случае, когда выполняется
условие, аналогичное F.171):
М [Уко («) >С0 (»')] = Sy^ (со') 5 (со' - со). F.179)
Поэтому из F.179) получаем
со
v«=ivefflI4 FЛ80)
—00
Получим выражения для автокорреляционных функций
^v v СО > зависящих от спектральных плотностей «входа»:
¦'k'v
Kyky{t,f) = M[Yk{t)Y*v{t-) =
288
У°° л Vе0 п V
= М J ? V»> Ф, (ш)е/со'<Л» f 2 и'ур(ш)Ф;(ш')е-/ш7'da' =
°° «° л л F.181)
= / J Z Z "*/«)*> ^(ш^Ф/ш^со)] e/m'-'b'''do'<fa.
—00—00 ^=1 р=1
Выражение F.181) зависит от разности t- t', если выпол-
выполняется условие F.171):
М [Фу (ю)Ф*р(ш')] = Sfjf(saT) 5 (со' - ш).
Поэтому из F.181) имеем
00
Vv(T) = fI21 ^<ffl')w СД/Р(«) &imd°>- F-! 82)
—00
Приравнивая полученные выражения для взаимно корре-
корреляционных функций F.180) и F.182), получаем
00 Г " " 1 F.183)
-оо /=1 р=1
Тождественное равенство нулю левой части соотношения
F.183) (так как е'^^О) будет выполнено, если
л л
\у (») = П ^(») w >)J/./(e>)- FЛ84)
М Р=1 у Р
Из полученного соотношения F.184) находим спектральные
плотности каждой из компонент (к = v):
л л
Vе» = I Z Vм) *&«%<»)• FЛ85)
>1 р=1
В частном случае, когда fj независимы:
ГО /Vp,
289
соотношения F.184) и F.185) принимают вид
п
Syky№ = YwlcjwljSfi(-(i>y>
Г F.186)
п п
Syda) = ? wkj w ^У/e» = X I "*/12-5> (со).
Дисперсии компонент ул(/) вектора решения у
СО СО „ „
^ = ? '^(Ш?Ю = ^ ^ ^ wvW^/p(a,)dD, F-187)
—оо —оо j=\ v=l
или в частном случае, когда
«Г " ] F.188)
-00 /=1
Зная спектральные плотности, можно определить корреля-
корреляционные функции компонент вектора у:
00
^л - К(ш) cfaT А:
—00
то . F.189)
—00
Соотношения F.189) позволяют определить параметры со-
совместного многомерного нормального закона распределения
компонент ук:
00
4=v*@)=К(ш) *°;
—00
290
г = -1&— = —L— S (со) dv.
Для решения уравнения F.165) можно воспользоваться ме-
методом главных координат (аналогично ранее рассмотренному
случаю нестационарных случайных колебаний). С учетом сил
вязкого трения получаем для qj уравнения вида F.113):
п
qj+lnjqj + pjqj^ = ? d^fy (/). F.190)
Z «l/"k V=1
k=l
Воспользовавшись преобразованием Лапласа, из F.190) по-
получим
п
v=1 F.191)
( wjv = ^(P2 + 2njP + PJ)) •
Для k-й компоненты вектора решений (переходя к преоб-
преобразованию Лапласа) запишем
п
yk(p) = ZukjQj(p)- F192)
м
Подставив F.191) в F.192), получим
п ( п \
yk(p) = T,Wb<p)<i>Jp) wkV = Z"kjwvj ¦ FЛ93)
i=l { И )
Если заменим в F.193) оператор р на /со, то получим сле-
следующее выражение:
п
^(со) = Хн'^(со)Фу(ш). <6Л94>
v=l
291
Рис. 6.18
Рассмотрим частный случай, когда система имеет две сте-
степени свободы (рис. 6.18). Уравнения движения имеют вид
У\ = Ь\\<гт\У\ ~ Ь\\Уд + 812(-m^2 - Ь27У2> + 5ll/l + 512/2 !
Уг = 52^-miyi - *i i>i) + Ьгг<гтдг - 622 >2> + 52i Л + 822/2 •
Спектральные плотности S/ , S/ и А-у случайных стацио-
стационарных сил, действующих на систему, считаются неизвестны-
неизвестными. Для определения спектральных плотностей выхода
Sy , Sy и взаимно спектральной плотности S необходимо
получить выражения для wik (ш).
В соответствии с изложенным методом решения для общего
случая системы с п степенями свободы имеем
00 00
У\ = \У\&Ш<Ь*\ Уг=\у&ш**>
—00 —00
F.196)
—00 —00
Для определения ^10 и у2о получаем систему уравнений
A + Ьпш5п - а>26п)у10 + (bni(ub22 - &пт2<о2)У20 = h\®\ + 512Ф2 5
E216и/ш - 6211я1«>2)>»10 + A + b22ia>b22 - Б23т2а2)у20 =
= 521Ф! + 522Ф2 • F.197)
292
292
Из системы F.197) определяем
Ую = ^пС03) ф1 + wn (ш) Ф2 J
У20 = И'гК05) Ф1 + W22 (ш) Ф2 >
где w(y = Ay/A ;
5j j(/qA22 ~ П%2<") 5j2
521 A + 822'ff»^22 ~ 522<в2')
5j2(/(oA22 - /Ш ) ^12
522 A + 522'<»^22 ~ 522W2co2)
A + 5j iKo^n - SjjWjffl2) 52i
^ 21 = 9 '
(/©Ал-/И]© )82i 522
A +8uW)*11-511m1(D2M21
^ 22 = 9 >
(/юбц — /Wjto M12 822
A + 8j j/cofijj - Sjjmjco2) (/co^22 - /и2ш2) 812
(/ш^л - //ijffl ) 82j A + 822'и^22 ~ 822'я2а> )
В соответствии с F.183) получаем выражения для спект-
спектральных плотностей решений:
Sy<sa) = wnw*nSfi + wnw\2Sfj2 + wnw*nSf2fx + wnw\2Sf^;
\(<о) = ^21^21^/, + ^21^22^/2 + ^22^21^/, + ^22^22^ 5
Sy^a) = w,xMf2lSfi + Wnw52J/i/2 + w^w^j^ry- + w22W22Sf2 • FЛ98)
Пример 6.6. На массу я*! (рис. 6.19) действует стационарная
случайная сила/^О с известной спектральной плотностью
293
293
Рис. 6.19
Требуется определить дисперсию прогиба у^ в зависимости
от отношения масс m^/nty Уравнения движения масс т1 и т2
(частный случай уравнений F.195)) имеют вид
ml5nyl + m25ny2 + dnbuyl+yl = dnfi;
тф2\У\ + т2ь22У2 + ъ2\ь\\У\+У2 = ъ2\А > F.199)
4/3 7/3
гДе5п = 522 = -щ-; 512 = 821 = -щ-.
Перейдя к безразмерному времени ^ = pQt, где р0 — частота
колебаний массы т^ (при w2 = 0), получим следующую систему
уравнений:
•¦ 7 .. 2. ЛГ~П~ ¦ в ,
З'! + g >-2 + з ЬП \ -^Щ У\ +У\ = бц/i ;
|j>i + % + ^*п V-^^г >i + >i-»2i>i (Л1=^)- F-200)
Коэффициент Ajj можно представить в виде Ьп = т\р§пъ
где я2 — безразмерный коэффициент. Перейдем к безразмер-
безразмерному времени, тогда корреляционная функция (т — безразмер-
безразмерное время)
Kf(x) = DAc-a'^\ (a' = a/p0).
294
Получим спектральную плотность, выраженную через без-
безразмерную частоту со' = — :
Ро
2ZW
S
7< (a'2 + co'2)/>o'
Полагая а' = пр0 , где п — безразмерный параметр, получаем
2Dfn 2Dfn
S = =
7' />0(л2 + со'2) р0 | /г + /ш' |2 "
Окончательно имеем систему уравнений
F.201)
^yl + n1y2 + ^nlyl+y2 = 82lfl.
Спектральная плотность (частный случай F.198))
Syp) = I и'ц \\ , F-202)
где
wn = —: L J -•
^c Ц('»'L + H«i«2(/0)'J + («i + 1)(№'J + n2im + 11
Дисперсия амплитуды прогиба
у* PQ J n + (o' p
~oo ' '
После преобразования приходим к следующему выражению
для Dy , которое позволяет воспользоваться табличными ин-
интегралами (см. приложение 2):
295
1 npo.JA (/c°) ^o
где
Л (/со) = ^4 «i Ob'M + ^4 («i« + «i«2)('C0') + U + nl + 64 «1«2Л 1 x
x (/со'K + («i« + n + л2Х''0') + A + "/«2) /со' + n .
Воспользовавшись значениями интеграла, приведенными в
приложении 2, получим
Здесь
М5 = а0й3(-о0а3 + а1°2) + ~^~ ("а0а1а5 + °0аЗ + а1а4 - а1а2аЗ> !
Д5 = a^flj - 2аоа1а4а5 ~ а0а2аЗа5 + а0аЗа4 + а?°4 + alfl2 ~ а1а2йЗа4 !
°i = 64 Л1(л + >; а2 = 1+ п\ + мп\п2п;
а3 = п^п + п + п2; а4 = 1 + и«2 > а5 = п '
,,,Л,15 ,4 15
% = Ьх = 62 = °; 6з = 744Л1 ' Й4 = 9 ; а0 = 64И1 ¦
График изменения /5 в зависимости от ti\ — /n2/ffJj для
л2 — 0,2 и «2 = 0,6 при п = 0,05 показан на рис. 6.20.
Рассмотрим случайные колебания механической системы,
вызванные стационарными силами с запаздыванием. Напри-
Например,
fk«)=fi(-tk) (к =1,2, ...,«), F.206)
где tk (tx = 0).
296
Рис. 6.20
Подобного рода возмущения действуют, например, на авто-
автомобиль (рис. 6.21), который движется по неровной дороге.
Возмущения, действующие на колеса, зависят от неровностей
дороги. Если в момент времени / неровность находится под
передними колесами, то в момент времени t + t2, где t2 = -,
она будет находиться под задними колесами, и тогда случайные
возмущения можно представить в виде
00
/*(')=/,('-'*)= R(o»e-<'-'*)*D. F207)
-оо
Рис. 6.21
Решение уравнения F.165) ищем в виде F.177):
00
у к (() = /^0(ш) е'ш^со • F208)
—оо
Подставив F.206) и F.207) в уравнение F.165) (перейдя к
векторной записи), получим
297
|| -ш2М+ юВь + С || у0 = ^ЯФ , F.209)
где
~i о о о] Гф1
О е"ы2 0 ¦"" ..' О Фг
я= 0 о e^'sO... О . ф= .
О '"" \\[ 0 ... е"'Ч фх
Из F.209) следует:
Уо = Wj (Ю) ф [\VX (ю) = | ^о2М + ЬВХ + С Г1/)^"),
или в скалярной форме
п (п \
х- ^ v ^ F.210)
Для Л-й компоненты вектора y(f) получаем выражение
со
Ук (О = f wk (») ф1e/<D'^ • F11}
—00
После преобразований, аналогичных преобразованиям при
выводе соотношения F.185), получаем следующие выражения
для спектральных плотностей и взаимных спектральных плот-
плотностей:
V, •»*"№,• F-212)
так как S. f = Sf .
Рассмотрим стационарные колебания автомобиля при дви-
движении по дороге со случайными неровностями (рис. 6.21).
Ограничимся случаем колебаний автомашины в плоскости
чертежа (см. рис. 6.21). Требования, предъявляемые к автотранс-
автотранспорту (грузоподъемность, скорость движения, проходимость ит.д.),
298
Рис. 6.22
существенно зависят от упругой характеристики системы под-
подвески. Расчет подвески осложняется тем, что, как правило,
силы, действующие на нее со стороны дороги, носят случайный
характер. В последние годы были проведены многочисленные
экспериментальные исследования воздействия различного рода
дорог на транспортные средства, что позволило получить не-
необходимую информацию о случайных возмущениях, действу-
действующих на машину (в частности, спектральные плотности сил,
возникающих из-за случайных неровностей дороги).
На рис. 6.22 приведена расчетная схема машины (с учетом
масс систем подвесок).
При выводе уравнений движения воспользуемся уравнения-
уравнениями Лагранжа второго рода, для чего получим выражения для
кинетической и потенциальной энергии и для диссипативной
функции Релея:
т ту2 /Ф2 Щ'А ™l'A
2+2+2 + 2'
П = 1с2^-Д'1J + }с10'1-Л1J +
+ 2 С2 (Ув~ Уд1 + 2 С1 ^2 - h2>2 '
Л = %(Уа-У1J + %(Ув-У2J-
Так как
yA = y+aq>, yB = y-by,
299
то выражение для кинетической энергии, исключая ф и у,
можно представить в виде
т 1 J т Щ У\ Щ Уо
Т-^Ф^ + а^ + ^А + Ув?*-1^*-^-
Подставив выражения для Т, П и R в уравнение Лагранжа
второго рода
±(дТ_Л_дТ_ дП _ BR
Л[дд,) dqt+ d4i Ыц% F213)
после преобразований получим систему уравнений вида
mb2 + J- mab-J- , . ... . . А
~JY~ Уа + ~~JT~ Ув + С2 (Ул ~ У\>+ а <Ул ~ Уд = °;
ma2 + J- mab-J.. . . .. . . n
—^г~ Ув + —JT~ Уа + С2 (Ув ~ Уд + а (Ув - Ут> = °:
Щ У\ - Ч(Уа ~ Уд + С\(У\ hd - а (Уа - Уд = ° >
т2 у2 - с2(ув -У2> + с{(у2 h2)-a(yB-y2) = 0. F.214)
Если выполняется условие / = mab, то колебания передней
и задней подвесок становятся независимыми. В этом случае из
системы F.214) получаем две независимые системы уравнений:
тл h + с2(Уа -Уд + о.(Ул- Уд = °>
mlyl + ayl + (q + c^ -0^-%= c2hx(t);
тв'Ув+ с2(Ув-Ут) + ъ(Ув-Ут) = °.
ЩУ2 + аУ2 + (С1 + С2>У2 ~аУв- С2УВ - с\к2(*- Г2» ¦
Здесь
J+mb2 J+ma2
mA = —jT~> mB= L2 ¦
300
Рис. 6.23
Рассмотрим пример (см. рис. 6.22) со следующими конкрет-
конкретными числовыми данными: а = 240 см; Ъ = 150 см; т —
= 50 Н • см; тх = т2 = 8Н • с2 • см ; с2 - 4000 Н • см"; сх -
= ЮН- см; а = 150Н • с ¦ см. Спектральная плотность не-
неровностей дороги h (для данного типа дороги) имеет вид
Зу (со2 + 0,6V2) 25,5v
Л " (со2 - ОМ2 + 3vV ш2+ 15V2 ' F217)
где v — скорость движения автомобиля, км/ч. Числовые коэф-
коэффициенты, входящие в левую часть выражения F.217), размер-
размерные.
На рис. 6.23 показаны законы изменения спектральной
плотности Sh (со) в зависимости от со для ряда значений ско-
скорости движения v, км/ч: / — v = 20; // — v = 30; /// — v = 40;
IV — v = 50; V — v = 60. Полагая а = 0 в уравнениях F,213),
F,214), найдем четыре частоты: для системы F.215) получаем
Рц = 12,2 с, рп = 42,6 с'1; для системы F.216) ргх - 9,6 с,
р22 = 40,2 с.
Получим изображение уравнений F.215) и F.216) в частот-
частотной области:
[тА (/соJ + а (/со) + с2] YA (/со) - с2 + а/со) Yx (/со) = 0;
- (с2 + а/со) YA (/со) + [/«[(/соJ + а/со + с{ + с2] Kj(/co) = Cj#j(/co);
301
\тв (/соJ + а (/со) + с2] YB (/со) - (с2 + а/со) У2 (/со) = °;
(с2 + а/ш) YB (/со) + [т2(/соJ + а(/со) + Cj + c2] F2(/co) = с2Я2(/со),
где
Я2(/со) = Я^/со) е-/со/2.
Из полученной системы алгебраических уравнений находим
YA{to>), YB(iw), ^(/со) и У2(/со):
YA ('») = ^ (/ю) Я1 ('«>). YB('») = »д ('«») е"/сй'2 Я1('ш).
^ (/ю) = Щ (/со) ^ (/со), У2 (/со) = Ж2 (/со) e-/0)f2 Я^/со). F.218)
Здесь
Д.
Ai
с^2 + /acoCj
cLc2 + mAmx(i®)*+{mA +m{) a(/coK +(^С[ + /MjC2 + тАс$(ю)*- +
~* + a (q - c-2) (со) '
cl fm/l (/coJ + "^ + C2l F.219)
Al
Д2
(/acocj + CjC^ e~"°'2
mBm2(i(uL + a (/w^+ m2)(/coJ + (w2c2 + т^с2 + /я^ХкоJ +
+ a (q - C2) (/со) '
302
с, (mR ('соJ + шсо + с,) F.220)
W2 = - Ч ВУ ' U (t2 = L/v).
Д2
В соответствии с § 3.6 получаем спектральные плотности
перемещений уА, ув, у^, у2 и их первых производных. Ограни-
Ограничимся определением спектральных плотностей ускорений
точек А а В:
syr\wAU%^ F22i)
Sh = I ^g> I2 <о% (ш) (Ж^> = WB е~ы2).
Рис. 6.24 Рис. 6.25
Изменение спектральных
плотностей ускорения точек А
и В в зависимости от со для
разных скоростей v показано
на рис. 6.24—6.26. Найдем дис-
дисперсию вертикального ускоре-
ускорения точки с (место водителя),
которая характеризует степень
комфортабельности езды. Со-
Согласно рис. 6.22,
Ус = У + Ф ас >
или, переходя к уА и ув,
Рис. 6.26
303
уе = кАуА + КвУв> F222)
где
^=i+f; **=|т+т]-
Переходя в F.222) к изображению по Фурье, получаем
ус (/со) = КА уА (/со) + Кв ув (/со), F.223)
или, используя F.218),
ус (/ш) = (КА WA + ^Жв е-ы2)#! = Жс ^ . F-224)
Спектральная плотность смещения точки с с учетом соот-
соотношения F.224)
Syc = \Wc\2Sh{y,^, F-225)
где Wc = (KA WA + ^5^g е-/С0'2).
Спектральная плотность ускорения точки с и среднеквад-
ратическое ускорение точки с
6-^ = 1 ^рсо4^; F-226)
со
а^=||Жс|2соЧ(у,ш)</ш. F'227)
—00
Изменение среднеквадратичес-
кого значения ускорения о^ точки
с в зависимости от скорости v для
рассматриваемого примера показа-
показано на рис. 6.27. Из графика следу-
следует, что при езде по данной дороге
(характеризуемой спектральной
плотностью F.218)) имеется наи-
наиболее неблагоприятная скорость v
(v « 50 км/ч), при которой средние
квадратическис значения ускоре-
304
ний, действующих на водителя, достигают максимальных зна-
значений.
Приведем выражение для Wc к виду, удобному для интег-
интегрирования. Как известно, любую функцию /(/со), зависящую
от мнимого аргумента, можно представить в виде
/(ko)=/i(<b) + z/2(co).
Поэтому
w^w^iw^, wB=wBi + iwBi,
и выражение для Wc преобразуется к виду
Wc (/со) = ^(со) + /Ж2(со),
где
Щ = Ка^а + KBWB cos со/2 + КВ^В sin ш/2 >
^2 = КдУУд + KBWB cos со/2 + KBWB sin to/2 •
Квадрат модуля Wc (/со) равен
| Wc p = W\ (со) + W\ (со).
В результате получаем
00 00
aj (v) = J W\ <uASh (v, со) й?со + J W2o>*Sh (v, со)йГсо.
—ОО —00
Считая, что ус имеет нормальное распределение, получаем
максимально возможное значение случайного ускорения (при
mh = 0), которое действует на водителя:
max yc (у) = За-у (v).
Так как Sh(v, со) зависит от скорости движения машины v
F.217), можно определить (численно) такое ее значение v*, при
котором ус (у) достигает максимального значения:
max (max yc (v)) = max yc (vj .
21 Зак. 341 305
Глава 7. СЛУЧАЙНЫЕ КОЛЕБАНИЯ СТРУН.
ПРОДОЛЬНЫЕ И КРУТИЛЬНЫЕ КОЛЕБАНИЯ
ПРЯМОЛИНЕЙНЫХ СТЕРЖНЕЙ
В предыдущих главах, посвященных случайным колебаниям
механических систем с конечным числом степеней свободы,
считалось, что упругие элементы (например, стержневые эле-
элементы рис. 5.8, 5.9, 5.24, 6.7, 6.10) являются безынерционными.
Это, конечно, не совсем так. Это справедливо только в том
случае, когда сосредоточенные массы много больше масс уп-
упругих элементов. К сожалению, понятие «много больше» не
связано с конкретной числовой оценкой, поэтому является
неопределенным и не всегда убедительным. Все зависит от
точности, предъявляемой к конечным числовым результатам
расчета. Например, на рис. 5.24 была показана сосредоточенная
масса т, связанная с пружиной, которая рассматривалась как
безмассовая (безынерционная). Но реальная пружина имеет
массу, поэтому при колебаниях возникнут силы инерции, ко-
которые могут существенно изменить результаты расчета, полу-
полученные без их учета.
На рис. 5.4 показана мачта с антенной. При исследовании
случайных колебаний этой конструкции силы инерции стержня
(мачты) не учитывались, поэтому оценить точность полученных
результатов нельзя. Единственное, что можно утверждать: чем
больше отношение —-. (где mj — масса единицы длины мачты),
тем точнее результат. Но чтобы получить конкретные числовые
результаты влияния этого отношения на точность решения,
необходимо в расчетах учесть силы инерции мачты. Это воз-
возможно сделать только в том случае, если мачту рассматривать
306
как систему с распределенными параметрами. Аналогичные
проблемы возникают и в системах с несколькими степенями
свободы (например, рис. 6.7, 6.10). Оценить точность резуль-
результатов расчета механических систем, содержащих сосредоточен-
сосредоточенные массы, соединенные упругими элементами, когда упругие
элементы рассматриваются как безмассовые, можно только
переходя к более точным математическим моделям, таким,
которые учитывают инерционные свойства упругих элементов,
т.е. упругие элементы надо рассматривать как системы с бес-
бесконечным числом степеней свободы (системы с распределен-
распределенными параметрами).
В данной главе рассматриваются случайные колебания наи-
наиболее простых механических систем с распределенными пара-
параметрами. К этим системам относятся реальные объекты, рас-
расчетные схемы которых можно представить как струну (струна
— это стержень, изгибной и крутильной жесткостью которого
можно пренебречь), рис. 7.1—7.5; стержень, когда рассматри-
рассматриваются продольные колебания (рис. 7.6, а), или вал, когда
рассматриваются крутильные колебания (рис. 7.6, б). Случай-
Случайные колебания пространственно-криволинейных стержней рас-
рассмотрены в следующей главе.
На рис.7.1 показана натяну-
натянутая струна, которая часто ис-
используется как частотный дат-
датчик или как низкочастотный
электромеханический фильтр
(низкочастотный по сравнению
с частотным спектром электри- РИС. 7.1
ческих фильтров).
На рис. 7.2, а приведена упрощенная математическая мо-
модель канатной дороги. По натянутому тросу (струне) двигается
со скоростью v сосредоточенная масса т, на которую действует
случайная аэродинамическая сила F. В результате возникнут
пространственные случайные колебания массы т. Если огра-
ограничиться, в качестве примера, колебаниями только в верти-
вертикальной плоскости (yOz), то математическая модель может быть
представлена, как показано на рис. 7.2, б, где Fy — вертикальная
составляющая аэродинамической силы F. Возникающие при
колебаниях случайные ускорения могут быть весьма значитель-
21*
307
Рис. 7.2
ными. Определив максимально
возможные значения ускоре-
ускорений, действующих на массу т
при движении по тросу, можно
уменьшить, изменяя натяжение
(?10, скорость движения массы.
Но это можно сделать только в
том случае, если имеется реше-
решение (аналитическое или числен-
численное) сформулированной задачи.
На рис. 7.3, а показан учас-
участок провода (струны), с кото-
которым контактирует, например,
движущийся троллейбус. Кон-
Контактное устройство (токосъем-
(токосъемник) можно представить как со-
сосредоточенную массу т и жест-
жесткость Cj (рис. 7.3, б). Из-за слу-
случайных неровностей дороги (Л)
точка к^ получает случайные
вертикальные перемещения,
что приводит к кинематическо-
кинематическому возбуждению системы. В за-
зависимости от вероятностных
характеристик дороги, скорости
движения V и остальных пара-
параметров системы (m, Cj, (?10) при
возникающих колебаниях воз-
возможны случаи, когда контакт-
контактная сила между проводом и мас-
массой т в дискретные моменты
времени обращается в нуль.
Это может иметь место, так как связь между проводом и массой
односторонняя. В реальных условиях всегда имеется небольшое
провисание провода (штрихпунктирная линия на рис. 7.3, а),
что очень сильно увеличивает вероятность нарушения кон-
контакта.
На рис. 7.4, а показан лентопротяжный механизм в системе
записи и воспроизведения информации. Система находится на
основании, которое имеет случайное перемещение YQ(t)
Рис. 7.3
308
(рис. 7.4, б). В результате возникают случайные колебания
движущейся ленты, что приводит к искажению информации.
Рис. 7.4
На рис. 7.5 показан участок шланга, внутри которого дви-
движется жидкость (шланг — это частный случай трубопровода, у
которого изгибные и крутильная жесткости равны нулю, т.е.
его можно рассматривать
как абсолютно гибкий стер-
стержень). Шланг имеет в сече-
сечении к (рис. 7.5, а) локаль-
локальную двустороннюю связь,
которая имеет случайное
вертикальное перемещение,
что приводит к кинемати-
кинематически возбуждаемым коле-
колебаниям шланга. Режимы
случайных колебаний зави-
зависят от скорости движения
жидкости w и давления р.
На рис. 7.6, а показан
стержень переменного сече-
сечения с сосредоточенной мас-
Рис. 7.5
309
Рис. 7.6
сой т, на который действует случайная распределенная сила
qz(t) и сосредоточенная сила Pz(t). Случайные продольные
колебания стержня приводят к появлению случайных напря-
напряжений, которые необходимо учитывать при расчетах. Напри-
Например, если для нормальной работы стержня необходимо выпол-
выполнение условия (ат - crrnax) > 0, где ат — предел текучести мате-
материала стержня; ст^х — максимальное напряжение в стержне,
то при случайном а,^ и с учетом возможных разбросов аг
требуется определить вероятность выполнения неравенства, т.е.
Р [(стт- сттах) > 0 ]. Определить числовое значение Р можно в
том случае, когда имеются вероятностные характеристики
атах, которые можно получить только из решения уравнения
случайных продольных колебаний стержня.
На рис. 7.6, б показан вал переменного сечения, имеющий
сосредоточенную массу, момент инерции которой относитель-
относительно оси Z равен Jz. Вал нагружен случайным распределенным
моментом цг(О и случайным сосредоточенным моментом
Mz (t). При случайных крутильных колебаниях вала возникают
случайные касательные напряжения. Для оценки нормальной
работы вала, по аналогии с предыдущим примером, надо оп-
определить вероятность безотказной работы Р [(тт - ттах) > 0 ].
310
§ 7.1. Уравнения малых колебаний
Уравнения малых колебаний струны, продольных колеба-
колебаний стержня и крутильных колебаний вала относятся к одному
классу уравнений в частных производных — к уравнениям
гиперболического типа. В монографиях и учебниках, посвя-
посвященных уравнениям математической физики, приводятся урав-
уравнения, не учитывающие сосредоточенные массы и сосредото-
сосредоточенные силы. В основном рассматриваются волновые уравне-
уравнения или уравнения, когда действующие на струну, стержень
или вал силы распределены по всей длине. В примерах на
рис. 7.1—7.7 показано, что реальные задачи могут быть суще-
существенно сложнее не только классических задач, которые при-
приводятся в математической литературе, но и тех, которые обычно
рассматриваются в монографиях, посвященных теории колеба-
колебаний. Эти уравнения, которые приводятся без вывода для наи-
наиболее общих случаев, имеют следующий вид (с учетом сил
вязкого трения).
1. Уравнение поперечных колебаний неоднородной струны,
которая имеет сосредоточенную массу т, нагружена осевой дг
и поперечной qz (z) распределенными нагрузками и сосредото-
сосредоточенной силой Py(t) в сечении с координатами Z\,
= yz\Ql0(.Z)&\+qy(Z,t) + Py6(z-Zl), (?Л)
где у — вертикальное смещение точек осевой линии струны;
5 (г - Z\), 5 (z - Zk) — дельта-функции Дирака; a — коэффициент
силы вязкого трения.
Сила вязкого трения — это сила, приближенно учитываю-
учитывающая все потери энергии при колебаниях, зависящие от сопро-
сопротивления внешней среды, гистерезиса и т.д.
Осевое усилие Q\q(.z) и масса единицы длины струны
m^iz) известны.
311
Получим уравнение малых колебаний для движущейся стру-
струны (ленты) (см. рис. 7.4) и для шланга, заполненного потоком
жидкости (см. рис. 7.5).
На рис. 7.5, б показан элемент шланга с жидкостью. На
элемент шланга с жидкостью при колебаниях действуют силы
инерции rf/j и dJ2, равные
dJ^-m^dz, dJ2 = -m2&dz, G.2)
где mj — масса единицы длины шланга; т2 — масса жидкости,
приходящаяся на единицу длины шланга. Проецируя все силы,
приложенные к элементу шланга, на ось Y, получаем
- тх —-^ dz - т2 —^ dz + Q\q da - pFd a = 0, G.3)
где да = —4 dz.
дг
Чтобы получить уравнение в частных производных, надо
перейти к переменным, которые используются в механике
сплошной среды (переменные Лагранжа или Эйлера). В зада-
задачах, где имеется относительное движение сред, наиболее эф-
эффективными являются переменные Эйлера. Переходя в G.2) к
переменным Эйлера, получаем
2 dt2 2{dt2 dzdt 3/2J
Поэтому после преобразований из G.3) получаем следую-
следующее уравнение (с учетом силы вязкого трения):
(m1 + m2)^ + a| + 2>ml2|^ =
-[QlQ-(pF+m2w2)]^. G.4)
312
Слагаемое, содержащее смешанную производную, есть сила
Кориолиса. Из G.4) как частный случай при т^ = 0, р = О
получаем уравнение колебаний ленты (см. рис. 7.4, б)
где т2 — масса единицы длины ленты.
Если шланг в сечении с координатой Zk имеет сосредото-
сосредоточенную массу т, а в сечении Zp приложена сила Ру, то урав-
уравнение вынужденных колебаний шланга имеет вид
(m1 + m2)|f + a| + 2w/«2^ + «05a-^) =
= Q[l^ + PyHz-zp), G.6)
где Q$=QlQ-(pF+m2JV2).
2. Уравнение продольных колебаний стержня переменного
сечения с сосредоточенной массой т и нагруженного распре-
распределенной и сосредоточенной нагрузкой (рис. 7.7, а)
Рис. 7.7
20 3ак. 341 313
. . д2и ди Л., .
где и — продольное смещение сечения стержня (смещение
точек осевой линии стержня при колебаниях); F — площадь
поперечного сечения стержня; Е — модуль упругости первого
рода.
3. Уравнение крутильных колебаний вала переменного се-
сечения с сосредоточенной «массой», распределенным и сосре-
сосредоточенным моментом М (см. рис. 7.7, б)
где ф — угол поворота сечения вала; Jz (z) — полярный момент
инерции вала, имеющего круглое сечение (для вала некруглого
сечения имеется аналогичная геометрическая характеристика
сечения Jk); G — модуль упругости второго рода; It — физи-
физический момент инерции сосредоточенной массы относительно
центральной оси, совпадающей с осью z', p ~ плотность мате-
материала вала.
Если внешняя нагрузка отсутствует, то уравнения G.1)—
G.8) описывают свободные колебания, вызванные, например,
смещением точек осевой линии струны в начальный момент
времени. Получить решения уравнений G.1)—G.8) в аналити-
аналитической форме записи (за исключением частных случаев) весьма
сложно. Особенно, когда приложенные в произвольных сече-
сечениях силы изменяются во времени. Метод начальных парамет-
параметров, который обычно используется при решении задач, где
требуется стыковать участки, чтобы сосредоточенные массы и
сосредоточенные силы не входили явно в уравнения, приводит
к очень громоздким конечным результатам. Поэтому в даль-
дальнейшем при анализе случайных колебаний систем с распреде-
314
ленными параметрами используются как точные методы, по-
позволяющие получить решение в аналитической форме записи,
так и приближенные методы, которым отдается предпочтение,
так как они позволяют довести до числовых значений решения
сложных задач.
Рассмотрим нестационарные колебания струны с движу-
движущейся с постоянной скоростью V массой т (см. рис. 7.2, б).
Считаем, что вероятностные характеристики случайной аэро-
аэродинамической силы Fy(t), действующей на массу т, известны,
т.е. известны математическое ожидание mF{t) и автокорреля-
автокорреляционная функция Кр (t, t'). Требуется найти максимально воз-
возможные ускорения массы т, считая закон распределения ус-
ускорения нормальным.
Уравнение малых колебаний системы получаем из G.1) при
Wj = const, (?10 = const, qy = 0. На массу т действуют три силы:
сила веса mq; аэродинамическая сила Fy {t) и сила инерции
-т —? -z = z , поэтому
^2-frQlo^ + Fyb(Z-zk)H-m^b(Z-Zk)G-9)
Переходя к переменным Эйлера, получаем
F = &(Z-Zk), Zk=vt^
dt2 k [dz2 dzdt dz2) k
Поэтому из G.9) имеем
-@,.-»4>|f-V*-b <710)
20* 315
§ 7.2. Решение уравнений малых колебаний
Получим приближенное решение уравнения G.10) , взяв
у = ?/;•(') sin з?. G.11)
Возможные перемещения берем в виде
5, = i>ysm^f. G-12)
М
Воспользовавшись принципом возможных перемещений,
получаем систему уравнений
JL(y)sm?fdz = O (v=l,2,...,«). GЛЗ)
о
После преобразований с учетом свойств 5-функций полу-
получаем систему уравнений относительно неизвестных функций
п
ЕГ°ч/(О^+ bvj(t)fj+ cvJ(t)fj~\= bv Fy (v = l,2,...,/i). G14>
Например, ограничившись двучленным приближением, полу-
получим следующие выражения для коэффициентов а •, bvj, cv, и
к-
I . 2nvt . 2nvt . nvt
аП = т0 ~Ч + т sin —7~ > fl12 = т sin —Т~ sin ~T~'
. n\t . 2nvt I . 2 2nvt
o2i = /я sin -у- sin —j— ; й22 = m0 "9 + m sin —Г" J
, / » |71^ 271V/ . 7IV/
bx j = a ^ + 2/nv -r cos —t— sin —r-;
, n ^2^ 2?tw . 7tv?
o12 = 2mv -7- cos —j— sin -у-;
316
, - fn\ nvt . nvt
o21 = Imv -: cos —r- sin —r-;
, / - Bn) 2nvt . 2nvt
Ь22 = О. — + 2mv —r cos —г— sin —j— ;
2 (n I . 2лv/ . nvt
cn = - mv^ hr sin — sin — ;
9 (v\ . TlVt . 2nVt
c21 = - mV- \-Л sin — sin —j- ;
c22 = ею 2 Ы " ^^ It I ~r;
, „ • nvt , r, . 2nvt
bx = /^ sin — ; й2 = -^ sm —j~ '
В векторной форме записи система уравнений G.14) имеет
вид
A(t)'i +B(t)'f + c(/)f = b0 G15)
или
O + Z)@O = b, G.16)
где
Ф = (Ф1,Ф2)Г, Ф! = tfi Ji)T, Ф2 = (/1,/2)Г>
D(t)= Л^Л~\С , b^^bo.OO'.
Уравнение G.16) является линейным уравнением с коэф-
коэффициентами, зависящими от времени, и решить его можно
только численными методами. В рассматриваемой задаче время
317
процесса ограничено @ </<-). Поэтому при любой случайной
аэродинамической силе, стационарной или нестационарной,
колебания массы т являются нестационарными.
Решение уравнения G.15) при нулевых начальных данных
имеет вид
Ф = J G{t, tx) b (t{) dt (Git, txS\ = K(t)K-\tx),
о v J
G.17)
где K(t) — функциональная матрица решений однородного
уравнения G.16). Матрицы K(t) и K~l(t) определяются чис-
численными методами.
Из уравнения G.16) находим производную вектора Ф:
t
<S> = -JD(t)G(t,tl)b(tl)dtl+Ht),
О
а затем вторые производные:
/1И/2 (Ф = (/1,/2,/1,/2)Г).
А = - J[tfnC ^i)^oi@ + чп«, h)bO2(t)yy(tl)dtl + b01Fy(t),
"h = ~ J[<?2i(>. 'i)*oi@ + Ы«> 'i)*02(O]^('i)Ai + bQ2Fy(t),
где qy — элементы матрицы D(t)K(t)K~l(t);
*oi = fliY Ci)sin -j- + axi (f\)sin —j-1;
bai = 4y Ci) sin -f- + ai4 «0sin —j1
(a\p (/j) — элементы матрицы A~l(ty) ).
Ускорение массы т равно
••/ ?Ч > • nz ", . 2nz G.18)
y(z,t)=flsm — +/2sin-^, '
или
318
t
y(Z,t) = -jq(t, tlt z)fy(tl)dt1 + b (t, z)F(t), G.19)
о
где
,„ ., ч f ¦ nz ¦ 2nz], ( . nz ¦ 2nz\
g(t,h,z) = UnSin -j + q2lsm — \bol+1 ^sm — + 922sin ~ 1*02 >
b(t,z) = bQl siny + b02 sin-y^ .
Находим математическое ожидание ускорения ту (t, z) и
корреляционную функцию Ку (t, t'):
ту (t, z) = jq (t, tlt z)my (^Щ + b(t,z)my (/); G.20)
0
tf
Ky{t,t',z)=\\q(t,tbz )q (t', t2, z ) KF{tx, tj) dt^ -
00
-b(t; z) jq(t, tbz)KF(f, tY)dtx -b{t,z) \q(t; t2,z)*
о о
x KF(f, t2) dt2 + b(tltZ)b it', z)KF(t, t') . G.21)
Полагая t' = t, получаем дисперсию ускорения
Dy(t,z) = Ky(t,f,z)\r=f G-22)
Задаваясь дискретными значениями t, @ <t<tk), численно
определяем my(tj,z) и ay(tj, z)•
Воспользовавшись правилом трех сигм, получим макси-
максимальное значение ускорения для заданной скорости:
maxy(tj,Z) = my(tj,z) + 3ay(tj, z). G.23)
Качественный характер изменения максимального ускоре-
ускорения по координате Z (при фиксированных tj) показан на
рис. 7.8. В свою очередь, максимальные значения ускорения
319
maxy(tj,z) для каждого момента tj имеют максимум и по
координате Z (рис. 7.8). Поэтому при движении массы т на
участке 0 <, z ^ / максимально возможно ускорение у, равное
(при заданной скорости v)
у, = max (maxу(/,,/))
0<t<tK,0<z<l.
Рис. 7.8
Рассмотрим стационарные колебания шланга (см.
рис. 7.5, а), вызванные стационарным кинематическим воз-
возбуждением с известными вероятностными характеристиками:
т = О, S (со). Найдем спектральную плотность вертикальных
перемещений точек осевой линии шланга («?,(©, z)) и макси-
максимальное значение сосредоточенной случайной силы, возникаю-
возникающей в сечении К, считая, что она имеет нормальное распреде-
распределение. В сечении К, где имеет место принудительное смещение,
введем неизвестную сосредоточенную силу Py(t). Воспользу-
Воспользуемся уравнением G.6), полагая т = 0:
(ml + m2)^ + aft + 2wm2-^t=Q{1^+Py(t)b(z-Zk) G.24)
(Q^ = Ql0-(pF+m2w2)y
320
Для приближенного решения уравнения G.24) полагаем
,.?/,@*.*. G25)
м
Подставив G.25) в G.24) с учетом принципа возможных
перемещений, получим систему дифференциальных уравнений
п
T^iJfj+bijfj+cijfj) = bjPyit) (/=1,2,..., и). G-26)
М
Воспользовавшись преобразованием Фурье, получаем сис-
систему алгебраических уравнений
? (а0- (ЬJЬ0- (/со) + С(/ (/со)) Фу (/со) = */„, (/со), G-27)
где А;у и Ск — постоянные коэффициенты, зависящие от ско-
скорости жидкости w и давления в жидкости Р.
Из системы уравнений G.27) определим Ф,- (/со):
Фу.(/ш) = и/у(/со),Ро>,(/о)). G.28)
Приближенное выражение для ( 7.25 ) в частотной области
имеет вид
л
Y(z, /со) = ? Фу (/со) sin ^ . G-29)
>1
Исключив из G.29) Фу (/со), получим
п
Y(z, /со) = X "у (/ш)^ (/со) Sin & . G30)
Введенную неизвестную силу (изображение силы Ру) най-
найдем из условия
Y(z,b)\^Zk=Y(b), G.31)
где Yk (/со) — изображение смещения точки К.
Для определения РОу (/со) получаем уравнение
321
Yk (/о) = X wj (*») sin ^Г Р°^(to)' G32)
[m )
поэтому
yt(fa) G.33)
¦П)у (/0)) = •
( n \
njZir
X Wj (id) sin—
t>i J
В результате получаем
Г n \
Xwj(b)sm^f
Y(z, ш» = ^ 1 Yk (/со) , G'34)
ft
*?wj (to) sin*f
[m J
или
Y(z ,ia) = w(z, /со) ГЛ (/©). G.35)
Спектральная плотность вертикальных перемещений точек
осевой линии шланга и дисперсии перемещений равны
^(«>,г) = к(г,/со)|2^(со); G.36)
00
Dy(z)=l\w(z, /со) |2^ (со) rfco. G37)
—00
Найдем дисперсию возникающей в сечении К сосредото-
сосредоточенной силы Ру. Из G.33) определим спектральную плотность
^(со):
SP(G>) = \wl\2Sh(G>), G.38)
322
1
где Wj = .
2, wj (йв) sin -j-
Sl )
Дисперсия силы Py равна
00
Dp = \\wx\2S' (ю)<Л>. G39)
У К
-oo
Максимально возможное значение Pv (при тР = 0) равно
У У
max Pv = 3 V5I".
у у
3. По каналу ствола с возрастающей скоростью движется
снаряд (рис. 7.9). Сила трения между снарядом и каналом
ствола равна Р= Ро + AP(t). Вследствие возможных мгновен-
мгновенных прилипаний поверхности снаряда к поверхности канала
или уменьшения контактного давления сила Р имеет случайную
составляющую A P(t). На рис. 7.10 изображена одна из реали-
реализаций случайной функции A P(t).
Рис. 7.9
Рис. 7.10
323
Требуется найти дисперсию случайной составляющей на-
напряжения Лов стволе в момент выхода снаряда. Для упроще-
упрощения выкладок будем считать, что скорость снаряда линейно
зависит от времени, т.е. v = at, где а — постоянное ускорение.
При t = 0 тело находится в начале координат. Считая
случайную функцию Д P(t) стационарной, найдем корреляци-
корреляционную функцию КАР (г). Произведение двух значений функции
A P(t) и A P(t + x) зависит от того, лежат ли моменты времени
t и t + х в одном и том же интервале Тк или в разных интервалах.
Если в одном интервале, то
AP(J)AP(t + x) = AP\, G.40)
если в разных интервалах, то
AP{t)AP(t + z) = APkAPi. G.41)
Для получения корреляционной функции нужно просум-
просуммировать усредненные по множеству значения произведений
G.40) и G.41), умноженные на соответствующие вероятности,
для чего надо найти вероятность того, что отрезок длиной х
укладывается полностью на интервале Тк. Эта вероятность
равна вероятности того, что на взятом случайным образом
отрезке на оси времени не окажется ни одной точки разрыва
функции АР (О- Если известна функция распределения нулей
(разрывов функции АР (О) на интервале т в зависимости от
длины этого интервала, то можно найти вероятность Р (л, -с)
числа нулей функции АР (О. гДе п ~ число нулей. Вероятность
того, что на интервале х не окажется ни одного разрыва функ-
функции ДР(О. равна Р@, т). Если принять, что число разрывов
функции АР (О на любом участке времени х подчиняется за-
закону распределения Пуассона
Р(л,т) = ^р%-^
(где ц — средняя частота разрывов, которая считается извест-
известной), то вероятность равна Р@, х) = е~йт.
324
Вероятность того, что интервал т больше интервала Тк (т.е.
моменты времени t и t + x находятся в разных интервалах Тк),
равна 1 -Рф, т).
Следовательно, корреляционная функция имеет вид
КАР(х) = M[AP2k]P@, т) - M[APlcAPi] [1 -Рф, х)].
Считая, что АРк и АР; независимы и одинаково распреде-
распределены, получаем
КАР (т) = М [АР I ]Р @, т) = DAP e-*\
Спектральная плотность АР
Q0
г 2 &арН
$АР (">) = J КЛР W cos сотЛ = 7~2 27 ¦
Уравнение продольных колебаний стержня постоянного се-
сечения с учетом движущейся сосредоточенной силы (силой со-
сопротивления пренебрегаем) имеет вид
&u __ d2u KJ),^J at2) G.42)
т^2=щ^+АР(пт-т)-
Полагая в G.42)
М,з...
_ f at2) v . njz ( 2 . njat2)
после преобразований получаем уравнения для определения
функций fj(J):
^.л-,^^ у.щ м]. (,43)
Решение уравнений G.43) при нулевых начальных условиях
имеет вид
325
// = -i— Jsin p. (t - т) sin Щ^- АР (т) ск . G-44)
JJ pj lmx J ^ 4/ v
В результате получаем решение уравнения G.42):
00 ' ъ
и= ? -^-sm^lsinpj(t-^sm^-AP(x)ch.(T-^)
j=\,i...Pjmi о
Напряжение в сечениях стержня, вызванное только случай-
случайной силой Д-Р (О.
„ди v-. EnJ ц/z Г • ,„ ч • л/ах2 . „. . ,
Ао = ?-= 2- 2 у cos -^- J sin pj {t - т) sin -^ АР (T)rfc.
Дисперсия напряжения
00 00 » ~ ' '
>1,3... h=\>y..PJpV ml 0 0
n/OT2 „tor2 G.46)
x (t - t) sin -д7~ sin />? (/ - Tj) sin —ji— KAP (k ckx .
Для определения дисперсии напряжения в момент выхода
снаряда из канала ствола следует взять в выражении G.46)
верхний предел интегрирования равным
4. Для осреднения эксцентриситетов тяги R двигателя ра-
ракета при сходе с направляющей раскручивается (рис. 7.11). Для
раскручивания ракеты имеются двигатели проворота 1, которые
включаются в момент схода (этот момент можно принять за
начальный). Двигатели проворота создают момент относитель-
относительно продольной оси, который имеет постоянную Af0 и случай-
случайную ДА/(О составляющие (М= Мо + ДЛ/(/)\ Случайную со-
составляющую можно рассматривать как случайную стационар-
стационарную функцию с известной спектральной плотностью S(a>). В
326
результате действия случайного крутящего момента AM(t) воз-
возникают крутильные колебания ракеты, которые вносят погреш-
погрешности в показания приборов системы управления. Для оценки
возможных погрешностей приборов вследствие случайных кру-
крутильных колебаний необходимо знать вероятностные характе-
характеристики крутильных колебаний и, в частности, дисперсию
углового ускорения в тех сечениях ракеты, где находятся соот-
соответствующие приборы.
Рис. 7.11
Считая, что случайные крутильные колебания ракеты яв-
являются стационарными, требуется найти дисперсию углового
ускорения ракеты. При решении ограничимся простейшим
случаем, когда р/0 = const и GJ0 = const. Уравнение случайных
крутильных колебаний ракеты с учетом вязкого трения имеет
вид (частный случай уравнения D.57))
/ор0 + а? = /°С$ + АЛ/(О5(г)- G-47)
В данном случае собственные функции свободных крутиль-
крутильных колебаний стержня равны cos —г- (так как краевые условия
имеют вид 1) z = 0; -^ = 0; 2) z = I; -^ = 0, то, полагая в G.47)
oz oz
9 = Zj$<Ocos^;6fc)-?cycostfS; Cy=(-1)^, <78)
М М
327
подставив выражение для ср G.48) в уравнение G.47) и восполь-
воспользовавшись принципом возможных перемещений после преоб-
преобразований, получим систему уравнений относительно fj (О :
fj + Y^fj + pjfj = (-l)i~-lAM(t), G.49)
J /ор J J J /ор/
где
Pj Л1)-
Полученные уравнения G.48) аналогичны уравнениям
D.40), поэтому спектральная плотность решения G.48)
Sff(fu) = \w\2SAM(fo),
где
2
• 2(-iy'cos^
Ы2= I 1- •
^oP'p + fp-'W)
Дисперсия углового ускорения
00
Яф= Jlwpco4^^)^. G-50)
—оо
Полученное выражение G.50) позволяет определить макси-
максимальное значение углового ускорения, воспользовавшись пра-
правилом «трех сигм» в любом сечении ракеты.
Глава 8. СЛУЧАЙНЫЕ КОЛЕБАНИЯ СТЕРЖНЕЙ
В предыдущей главе были рассмотрены наиболее простые
задачи, относящиеся к системам с распределенными парамет-
параметрами.
К более сложным системам с распределенными параметрами
относятся стержневые элементы машин, приборов и конструк-
конструкций, так как при решении задач статики и динамики стержневых
элементов приходится, как правило, рассматривать системы диф-
дифференциальных уравнений в частных производных. На рис. 8.1—
8.4 в качестве примеров приведены упругие стержневые элементы
и элементы конструкций, которые в расчетной практике рассмат-
рассматриваются как стержни. На рис. 8.1, а, б показаны упругие стерж-
стержневые элементы приборов: цилиндрическая (рис. 8.1, а) и спи-
спиральная (рис. 8.1, б) пружины. Если приборы, в которых они
используются, находятся на ускоренно движущемся объекте, то
на них из-за разброса тяги двигателя действует случайное уско-
ускорение ac(t). Поскольку реальные упругие элементы обладают
массой, то возникающие случайные колебания могут привести к
значительным погрешностям в работе приборов.
Рис. 8.1
329
На рис. 8.1, в показана система амортизации массы т, где
используется коническая пружина. При случайном кинемати-
кинематическом возбуждении (ук (t )^ возникают случайные колебания.
Масса т может быть одного порядка с массой пружины. Поэ-
Поэтому для определения вероятностных характеристик смещения
и первых производных (у, у, у) массы т необходимо пружину
рассматривать как систему с распределенными параметрами.
На рис. 8.2 показана мачта с антенной,
которая находится в потоке воздуха, ско-
скорость которого имеет случайную состав-
составляющую. Поэтому на мачту и антенну
действуют случайные аэродинамические
силы (сосредоточенная сила F — на ан-
антенну и распределенная q — на мачту), что
вызывает случайные колебания системы.
При проектировании представляют инте-
интерес случайные характеристики угла пово-
поворота луча антенны, влияющие на точность
приема или передачи сигналов.
На рис. 8.3 показан криволинейный
участок трубопровода, заполненного дви-
движущейся жидкостью. (Например, участок
бортовой системы питания авиационного двигателя, когда за-
закрепления сечений трубопровода связаны с разными основа-
основаниями.) Трубопровод имеет локальную шарнирную связь (се-
(сечение к), которая случайно смещается (uK(f))> что приводит к
случайным кинематическим колебаниям трубопровода.
На рис. 8.4 показан трубопровод, предназначенный для
подъема конструкций со дна моря. Случайная качка корабля
Рис. 8.2
p,w
Рис. 8.3
330
Рис. 8.4
приводит к случайному смещению точки к (ик (/)), что вызы-
вызывает случайные кинематически возбуждаемые колебания тру-
трубопровода.
§ 8.1. Нелинейные уравнения движения
пространственно-криволинейных стержней
На рис. 8.5, а показан стержень в произвольный момент
времени и элемент стержня (рис. 8.5, б) с приложенными к
нему силами и моментами. На элемент стержня при движении
кроме приведенных сил действует сила инерции
„ d\ , ( dM\ (8.1)
dJu = -mi-ds \у = ^
и момент инерции (если учитывать инерцию вращения эле-
элемента стержня)
«/и»—!(/.)*, (8-2)
где / — диагональная матрица, элементами которой являются
главные физические моменты инерции элемента стержня,
длина которого равна единице,
7П 0 0 "
/= 0 hi 0 ¦ (8.3)
О 0 /Зз
331
Рис. 8.5
Для стержня переменного сечения JH зависят от дуговой
координаты s. Воспользовавшись переменными Лагранжа, по-
получаем (8.1) и (8.2) в частных производных:
jt , й ди , 9,,ч, (8 4)
Воспользовавшись принципом Даламбера, получаем сле-
следующие векторные уравнения поступательного движения и вра-
вращения элемента стержня (ограничившись одной сосредоточен-
сосредоточенной силой Р и одним сосредоточенным моментом Т):
ч?-|м*«И); (85)
д , т ч ЗМ „ „ с . ч (8.6)
где Q — вектор внутренних сил; М — вектор внутренних мо-
моментов; а>, V — соответственно вектор угловой скорости и век-
вектор линейной скорости; 5 — функция Дирака; q, ц — соответ-
332
ственно вектор распределенных сил и моментов; Р — сосредо-
сосредоточенная сила, приложенная в сечении с координатами Sf, T —
сосредоточенный момент.
Матрица /имеет элементы, не зависящие от времени только
в связанной системе координат, поэтому перейдем в уравне-
уравнениях (8.5) и (8.6) к локальным производным:
гЗш , дМ П/Г Л т (8.8)
/—— + ш х /со = —— 4-кхМ + е| xQ + T, v '
at as
где
P = q + P 8 (s - st); T = ц + T 5 (s - sv).
В общем случае распределенные и сосредоточенные силы
и моменты могут быть представлены в виде
q - q0 + <id + qc;р = ро + р^ + рс;
ц = ц0 + \xd+ цс; Т = То + Td + Тс,
где q0, Ро, ц0 и То - статические нагрузки; qd, Pd, \id не-
нединамические детерминированные нагрузки; qc , Рс , цс не-
нединамические случайные нагрузки.
В дальнейшем знак тильды в обозначении локальной про-
производной опущен. Вектор к, входящий в уравнения (8.7), (8.8),
3
K = ZK/e/.
ы
где Kj — кручение осевой линии стержня; к2, к3 — кривизны
проекции осевой линии стержня на плоскостях (ej, e2) и
(е1; е3), проходящие через главные оси сечения стержня.
Очень часто в прикладных задачах инерцией вращения
стержня пренебрегают (/со * 0), поэтому
333
f+KxM+elXQ + T = O. <8-9>
Вектор М связан с вектором к уравнением
М = Л(к-41>), (8.10)
где
'Ап 0 0"
А= 0 А22 О ; (8.11)
О О Л33
Ац — крутильная жесткость стержня; А22, Л33 — изгибные
жесткости стержня.
Компонентами вектора к^ являются кручение к10 и кри-
кривизны к2о, к3о осевои линии в естественном состоянии стержня
в связанных осях, когда они одновременно и главные оси
сечения. В естественных осях вектор к есть вектор Дарбу,
равный
« = Q1e1 + Q3e3> (8-12)
где Qj — кручение осевой линии стержня; fi3 ~ кривизна осевой
линии стержня. Поэтому для стержня круглого сечения (для
которого все оси являются главными)
K1 = ni; k2 = Q2; K3 = Q3 = ^, <8ЛЗ>
где р — радиус кривизны осевой линии стержня.
Для вектора перемещений (и = г-г0) (см. рис. 8.5) имеем
следующее уравнение (в связанных осях):
д и (8 14)
—+ кхи = е-е10. ^ЛЦ)
Рассматривая производные единичных векторов е,- и е/0 по
дуговой координате, получим уравнение, связывающее компо-
компоненты векторов к с к0 углами и.-:
334
г Зи , (п ( , .т\ (8.15)
К= l~3s+ » [u = (ollU2,u3)yJ,
где
cosu2 C0SU3 cosu2 sinu3 cosuj + cosu2 sinu3 sinuj -
+ sinu2 sinoj - sinu2 cosu|
L= -sinu3 cosuj C0SU3 coso3sinoi ; (8.16)
sinu2 cosu3 sino2 sinu3 cosu] - - sinu2 sinu3 sinu] +
- COSU2 SinUj + COSU2 COSUj
cosu2 C0SU3 0 _ sinu2
L= -sinu3 1 0 . (8.17)
sinu2 C0SU3 0 cosu2
Рассматривая производные единичных векторов связанного
базиса по времени, получим
ш = 1!^. (8.18)
Для элемента движущегося стержня получим векторное урав-
уравнение, связывающее векторы v и ш :
f—axei- (8.19)
Приведем уравнения (8.7)—(8.10), (8.15), (8.18), (8.19) к
безразмерной форме записи, полагая:
s=lr\; i=pot; et = mp0; v = vlp0;
ад тСг^ЗзСО) ~Л33@)
~А33@) ~А33@) Г ^зз@) ]l
Q = Q-1t-, 4 = 1-71--/'о = ^^74j ;
~ J< (ti) ~ An 0i) ~
Ja^ = jrj2' Ап^ = А^У к = к/'
335
где wjjCO) — масса единицы длины стержня в начале координат;
^зз(О) — жесткость стержня в начале координат; со, v и т.д. —
безразмерные величины.
В произвольном сечении стержня массу единицы длины
стержня можно выразить через т^@) в виде
Щ(Г\) = т\Ф) «iOl) = pF(Pib\),
где «1(ri) — безразмерная функция; FQ — площадь сечения
стержня в начале координат.
В безразмерной форме получаем следующую систему диф-
дифференциальных нелинейных уравнений движения стержня
(опуская знак тильды в обозначениях локальных производных
и безразмерных величин):
ni(Ti)ff: + oxvV^-KxQ-P = 0; (8-20)
/(тО — + шх/(т0ш- — -KxM-elXQ-T = 0; (8.21)
М = Л(к-к[I)); (8-22)
I1^ + I41)-k = 0; (8.23)
dv
— + Kxv-v-<oxe1 = 0; (8.24)
g + Kxu-(l-/11)e1-/21e2-/31e3 = 0; (8.25)
Lx — -ш = 0, (8.26)
дх
где l(j — элементы матрицы L.
Из уравнений (8.20) — (8.26) как частный случай можно
получить нелинейные уравнения равновесия стержня:
336
^ + kxQ + P=O;
с/ц
^ + icxM + exQ + T = O;
di]
М = А(к-кр); (8-27)
du л
-Г- + Кxu -e, + e10 = 0.
dr\ l ш
Рассмотрим более подробно выражение (8.22) для момента
М. В представленной форме записи к^ есть вектор, компо-
компонентами которого являются кривизны, характеризующие есте-
естественное состояние стержня. Если же вектор к^ характери-
характеризует статистическое состояние стержня, то
М = А(к-к$Ъ + М0, (8.28)
где Мо — статический момент.
§ 8.2. Уравнения движения стержня в проекциях на связанные оси
8.2.1. В тензорной форме записи система уравнений (8.20)—
(8.26) принимает вид
(dvk ^1 а О.
(п) [— + чу °><vij - — - Чу <iQi -Pk = °>
о ^Ч о dMfc
Jkr^+ zkij ai Jf< шу " "Z" - 4ijKiMj + 4ij Qi ~Tk = 0'
do,
l(l)kj-T-4+lkj4j={)'>
duk
— + 4ijKiuj-5ik+lkl = °>
дц
23 Зак. 341 337
dvk
— + EkijKivj-skilai = °'>
d^ (8.29)
В развернутой форме записи в проекциях на связанные оси
имеем
(dvi ] dQ\
"id) \-gf + v3co2- v2co3j - — - <23к2 + Q2K3 - Л = 0;
fdv2 "\ 5Q2
Я1(Т1) ~яГ + У1Ш3 ~ V3ml ~ ~ ~ ^1К3 + бзк1 - Р2 = °5
Vd' .'Sri
fdv3 "I 9Q3 (8.30)
"l(Ti) I IT + У2Ш1 ~ viffl21 - — - QiK\ + QiK2 - рз = °-
J\ 1 —— + </зз - 722) C02<n3 ~ ~Г~ ~ K3A/2 - K2M3 - 7\ = 0;
от 9т|
Зса 2 ЭЛ/2
/22 —- + (/„- /33) 0)^3 - —— - к{М3 - къМх + Q3-T2 = 0;
en ax\
да3 дМъ (8.31)
/33 —- + (J22 - J\i) co^j - —— - к2Мх - кхМ2 -Q2-T3 = 0.
дх дц
M\ = AU^\ ~ K10); M2 = ^22 (K2 - K20); Щ = АЪ\ (K3 " K3o)- (8-32)
дих Эи3
/(i)iiT~+/(i)i3T~~Ki -^^ю + ^^о + ^з^о = °;
9uj 9u3
'AJ1 — + T- ~ K2 + ^2lKl0 + Z22K20 " '23K30 = °> (8-33)
9uj 5u3
'(iKi T~ + '(iK3 T~ ~ кз+ 'з1кю + 'з2к20 + 'ззкзо = °-
or) or\
—+ v3k2-v2k3 = 0;
дц
338
dv2 dv3
— + V1K3 " V3K1 = шз; — + V2K1 - V1K2 = " Ш2- (8-34)
ОЦ ОЦ
ди j
+ к2«з - К3И2 - 1 + 'и = Oj
дц
диу
+ K3«! - к^з + /21 = 0; (8.35)
дц
5м3
—+ к1«2-к2ы1 + /31 = 0.
дц
5uj 5u3
'AI1 ТГ+/AI3~^"~Ш1 =0;
ox ox
/AJ1-Г1 + ТГ-С02 = °; (8-36)
от от
5uj Э03
7AK1 — + 'A)зз "T7 - шз = °-
от от
5.22 Уравнение движения стержня в плоскости
Рассмотрим частный случай, когда стержень в естественном
состоянии имеет осевую линию, лежащую в плоскости, а одна
из главных осей сечения перпендикулярна этой плоскости. При
движении стержня в плоскости ряд компонент векторов, вхо-
входящих в уравнения (8.30)—(8.36), обращается в нуль:
ы3 = v3 = coj = ш2 = 0; Uj = о2 = 0;
Kj = к2 = к10 = к20 = 0;
е3 = л/i = л/3 = °; яъ = и = ^з = °-
Из систем D.39)—D.44) получаем уравнения:
(dv, ) dQ,
(л) ^ - у2шз] -^ + к3б2 - Л = 0;
23* 339
Л!(л) —-V!<d3—^ + k3G1-/>2 = 0. (8.37)
4 T J OX]
/33 — -—l-Q2-T3 = 0. (8.38)
дх дц
Щ = ^зз(кз - кзо)-
^-к3 = 0. (8.39)
dv,
-i-v2K3 = 0;
дц
^+у1к3 = ш3 (8-40)
Для определения перемещений в связанных осях из систе-
системы (8.35) получаем два уравнения:
— - К3И2 - 1 + cos u3 = 0;
an
ди2 . (8.41)
— + к3И! + sin и3 = 0.
8.2.3. Стержни, имеющие сосредоточенные массы
На рис. 8.6 показан стержень, имеющий сосредоточенные
массы, точечную массу т^ и неточечную массу от2. При коле-
колебаниях стержня на сосредоточенные массы действуют силы
инерции J^ и момент инерции М®, которые можно включить
в уравнения движения аналогично сосредоточенным силам,
воспользовавшись дельта-функциями. Сила инерции J^ и мо-
момент М ®, приведенные к безразмерной форме записи, имеют
вид
340
J« = - m\ f 5 (Л - Л1), J® = - ™°2 $ § (t, - Л2); (8.42)
от ox
М® = --^-(/®юM(л-Л2)- (8.43)
от
В связанной системе координат (знак локальной производ-
производной опущен) имеем
j[I) = -m?f^ + QxvJ5(^-Ti1); (8.44)
J® = -m§ I— + шху j 5 (л - Л2>; (8.45)
МB) = _ |>) Й5 + ш х jG> J 8 („ - ^ (8 46)
В приведенных выражениях (8.42)—(8.46) rrf- — безразмер-
безразмерные массы, равные
' т0/'
где wjj — масса единицы длины стержня; / — длина стержня;
j№— матрица, элементами которой являются безразмерные
моменты инерции массы т2. Если главные оси сечений стержня
совпадают с главными осями сосредоточенной массы w2, то
матрица № — диагональная, аналогичная матрице (8.3). Если
главные оси сечений стержня не совпадают с главными осями
сосредоточенной массы, то (подвижные оси связаны с главны-
главными осями сечений стержня) матрица ¦/¦ ' имеет вид
J% /@ /$
Безразмерные элементы матрицы № связаны с размерными
соотношениями
341
•' ~ m,/3 '
где J(j\ (Jffbi ~ соответственно безразмерные и размерные
величины.
Приведенные выражения для J® и М® справедливы при
условии, что массой т2 по координате г\ по сравнению с общей
длиной стержня можно пренебречь. При данном допущении
ряд элементов матрицы /^ можно положить равными нулю,
а именно:
/ft = /Q = /# = /?> = 0.
Включив сосредоточенные силы инерции J® и М® в
уравнения (8.20) и (8.21), получим уравнения движения стерж-
стержня, учитывающие сосредоточенные массы:
[пх(ц) + от{б (л - Л1> + гп\ 8 (Л - Л2>] х
xf^ + (Bxvl-^-KxQ-P=0; (8.47)
[/(Л) + /©8 (л - л2)] ^ + ш х [/(л) + /©6 (л - Л2)] *> -
от
- —-KxM-e,xQ-T = 0. (8.48)
дц
Другие уравнения системы (8.20)—(8.26) остаются без изме-
изменения.
§ 8.3. Уравнения малых колебаний стержней
8.3.1. Векторные уравнения малых колебаний стержня
Получим уравнения малых колебаний стержня относитель-
относительно состояния равновесия, считая возникающие при колебаниях
дополнительные внутренние усилия, перемещения и углы по-
поворота малыми, что возможно при малых внешних динамичес-
динамических нагрузках.
342
Положим
Q = Q0 + AQ;M = Mq + ДМ;к = ко + Дк;и=Ди;
P = P0 + AP;T = T0 + AT;q = q0 + Aq; (8.49)
H = Ho + Aji;v = Av;u = Au;<n = Ac),
где Qo, Mo, к0 , qo, Но ~ статические составляющие; Л Q,
ДМ, Дк, Aq,An,Av,Au,Aa> — векторы, компоненты ко-
которых считают малыми величинами, поэтому их произведения-
произведениями (векторными и скалярными) можно пренебречь. Рассмат-
Рассматриваются малые колебания относительно состояния равнове-
равновесия, поэтому
М = Щ + А М., (8.50)
где А М = А ¦ А к; Д к = к - к \}\
Так как
Эй
v = — + <а х и ,
5т
то при малых колебаниях можно положить © х и « 0, поэтому
_ 9и _ Эй
~ от ~ Эх '
При малых углах поворота о,- связанных осей относительно
их положения в статике вектор
дм (8.51)
дт
Получим уравнения малых колебаний стержня в связанных
осях, воспользовавшись уравнениями (8.20)—(8.26). Подставляя
в эти уравнения выражения (8.49) и сохраняя только слагаемые,
линейно зависящие от малых величин, получаем следующие
векторные уравнения в связанной системе координат:
"i(tl)e-^r-AlcxQo-*o*AQ = P;
от дг\
343
У—2" ~ Л к х Mq -KoxAM-eixAQ= I ;
5т dr|
АМ = ААк;
^ + Koxu-Ak = 0; (8-52)
5ti
—+ кохи-изе2 + и2ез = О)
где Р = q + Р<0 5 (Л - Л/); Т = ц + T<v) 5 (л - лу)-
Рассмотрим векторные произведения Д к х Qc , д к х Mq,
которые можно представить в виде
AkxQ0 = AqAk ; Дк хЩ = АмАк, (8.53)
где
' ° ^гo -Q20
aq= -е3о ° с?ю ;
Qio -Qio О
О Л/зо -М201 (8.54)
лм= -м30 о м10 .
м20 -м10 о
Аналогичным образом получаем выражения и для осталь-
остальных векторных произведений, входящих в систему (8.52). После
преобразований (исключив Дк) получаем следующую систему
уравнений малых колебаний пространственно-криволинейного
стержня:
«1(л)^-^-^Н-1ДМ + ЛАО = Р;
от дг\
7^и_ЭДМ_ у4_1дМ_ м_ Q = T
дх2 дц
-°- + Ак» -А~1АМ = 0; (8.55)
344
— + Д.и+у4] о = 0
дг\
(Д М = А Д к ),
где
0 ~кзо к20 ГО О О"
Л = КЗО 0 -к10 ; А1 = О О -1 .
.«20 «10 О J L01 °.
Систему уравнений D.127) можно записать в виде одного век-
векторного уравнения (исключив Д к)
ЛA)^ + ?2^BJ = ф) (8.56)
дх дх\
где
'aq] Г-р] Го о о -пхе~
z_ ДМ -Т .,(!)_ 0 0-/ о .
Л~ о ' 0 ' А 0 0 0 '
u J L О J 000 О
'\ AqA~x О О "
w2)_ А Ам*-1+А о о
л " О -Л Дс 0 •
О О АХА^
Если положить —- = 0, то из (8.56) получим линейное урав-
д т
нение равновесия стержня вида
дц
где Ф о зависит от статической нагрузки.
8.3.2. Уравнения малых колебаний в проекциях на связанные
оси. Из уравнений (8.55) получаем уравнения малых вынужден-
вынужденных случайных колебаний в проекциях на связанные оси:
22 Зак. 341
345
Э2«! dAQ{
"l ТГ ~ ~TT + G20A K3 " Ql(A K2 + K30AC?2 ~ <7xAQl = Л^
d^ 5AQ2
OX О J]
d\ dAQ3 (8.58)
"^T ~ ~^~ + Ql<? K2 - 220A Kl + K2(AQl ~ Kl^Ci = Py
/n —y - -r—¦ - к20АМ3 + к30ДМ2 - Л/30А к2 + Л/20А к3 = 7\ ;
са ° ч
52и2 адл/2
/22 —у - -г— - к20АМх +к10ДМ3 -М10Д к3 +Л/30Д Kt+ ДC3 = Г2;
а2и3 адм3
/,3 ^Г ~ -Т—" - Ч(АМ2 +*2<?М\ ~Щ(А К1 +^1^ К2~ А@2 = ^З-
ОТ ° Ц
(8.59)
— + к20и3 - кзои2 - Д кх = 0;
5и2
— + кзоО! - к1Ои3 - Д к2 = 0;
до3 (8.60)
— + к10о2-к20и1-Дк3 = 0.
— + к20и3 - k30w2 = 0;
Зм2
— + кзо«1 - к10«3 - и3 = 0;
аи3 (8.61)
— - к10м2 - к2оМ1 + и2 = 0.
346
АМ\ = АпА Kj, ДЛ/2 = Л22А к2, ДМ3 = Л33Д к3 . (8.62)
8.3.3. Уравнения малых колебаний относительно естественного
состояния
Приведем уравнения малых колебаний стержней относи-
относительно естественного состояния (ненагруженного). В этом част-
частном случае в (8.55) следует положить Aq = A^. В результате
получаем векторные уравнения
. . Э2и 5AQ . А _. „
/3j(T|) —¦- — А А \1 — " >
jd2D _ ВАМ _. дМ_ЛдО-Т-
—+ /4ки-Дк = 0; (8.63)
-— + А^ u +A^ v = 0 ;
А М = А А к.
Получим уравнения малых случайных колебаний стержней,
осевая линия которых есть плоская кривая. На рис. 8.1, б в
качестве примера показана спиральная пружина, осевая линия
которой как в естественном состоянии (q = 0), так и в нагру-
нагруженном (q ф 0) есть плоская кривая. Если пружину отклонить
от состояния равновесия, она начнет совершать колебания.
Если ее отклонить в плоскости чертежа, то малые колебания
будут происходить в плоскости чертежа; если пружину откло-
отклонить относительно плоскости — возникнут малые пространст-
пространственные колебания. Соответствующие уравнения можно полу-
получить из системы (8.58)—(8.62), положив
бзо = 0> ^10 = -^20 = 0> к10 = к20 = 0-
В результате из системы уравнений (8.58)—(8.62) получаем
уравнения случайных вынужденных колебаний в связанных
осях:
22* 347
348
д2их dAQx
л1 -^2" - -j^- + Q*? кз + *y?Qi = p\;
"l-^2"--^--ClOAK3-K3OAei = ^2; (8.64)
d2u3 dAQ3
n\ ~?i ~ -j^- + QvA K2 - Q2(A Ki = p3-
d2vl dAMl
JU -^2" " ~d^~ + K30 A M2 ~ МЪ<? *2 = T\ >
52u2 dAM2
hi —Г ~ -J^~ ~ K30 A ^1 + ^ЗОД «1 + AQ3 = T2 J ^8-65)
a2u, эдл/-,
— -кзоОг-Дк^О;
-^ + кзои1-Дк2 = О; (8-66)
-^-Дк3 = 0.
^ + k3oMi-u3 = O; (8-67)
ал
AMj = ^4(y Д к,-.
348
Если случайная нагрузка (например, qc (см. рис. 8.1, б))
действует в плоскости чертежа, т.е.
Чс = ?1се1 + ?2се2 = 9Х}\ + Яф ,
система уравнений (8.64)—(8.67) распадается на две независи-
независимые системы:
в плоскости чертежа
а2«! 8AQl
-?г - ~j^~ + Qx? кз + кз(АО2 = Л .
д2и2 dAQ2
"i "^Г ~ ~^~ ~ СюД кз - *3oA<2i = ^2.
а2и3 дАМ3
^-Дк3 = 0, (8-68)
ал
S^ " К30 = °'
ди2
— + кзо«1 - и3 = О,
AAf3 = Л33 А к3 ;
относительно плоскости чертежа
Э2м3 dAQ3
"l~diT~ ~5^Г + Ql°* " QloA Kl = °'
92U! 5AML
711 -?Г "~^~ + к30 А ^2 - М30А К2 = ° .
52и2 5ДЛ/2
722 —Т ~ ~J^~ ~ к30 А М\ + ^ЗОД К! + А03 = 0 ,
349
&0±
J^ - КЗО U2 " А К1 = °>
-^ + кзои1-Дк2 = О, (8.69)
ди-,
АМХ = Ау^ Л к^ , AMj = Ajj A K-2 ¦
В случае свободных случайных колебаний ненагруженного
стержня (при <210 = Q20 = Af3o = 0) из (8.68) и (8.69) получаем
следующие уравнения:
в плоскости чертежа
&их 3AQX
»i—T--^- + ^Q2 = Pi,
d*Ui dAQ7
S^u, дАМъ
*>-*-»?-«*-'¦ <870)
do?
dux 3«2
— - кзо«2 = 0, — + k3oWi - u3 = 0;
AAf3 = Л33 Д к3 ;
относительно плоскости чертежа
fu, dAQ3
dlol дАМх
350
^u, дАМ2
^22-^r--^-K30A^l+AQ3 = 0.
^ + кзои2-Дк2 = О, (8.71)
а"з
ДЛ/j = /4ц Д Kj , ДМ2 = /422 A *2 •
§ 8.4. Определение собственных значений и собственных векторов
Для численного приближенного решения уравнений сво-
свободных и вынужденных случайных колебаний стержней необ-
необходимо знать собственные векторы, характеризующие малые
свободные колебания стержней при конкретных краевых усло-
условиях.
Рассмотрим свободные колебания стержня (без учета сил
сопротивления) относительно статического напряженно-де-
напряженно-деформированного состояния, воспользовавшись уравнением
(8.56) (положив Р = Т = 0):
^(i)^+az+^)z = 0. (8-72)
5т2 дц
Решение уравнения (8.72) находим в виде
Z = Z0(^)e'^. (8.73)
Подставив (8.73) в уравнение (8.72), получим
dZQ
-j^ + B(i],X)Z0 = 0, (8.74)
где
351
\ Aq*-1 О 7?пхЁ
A, AiA^+A, Л2 О
О -А'1 Ак О
О О А, Ак
В частном случае, когда рассматриваются колебания относи-
относительно естественного состояния стержня (Qo = Мо = 0), мат-
матрица 5(ri, К) имеет вид
^00 \2пхЁ
А, Ак X2J 0
0 -АГ1 4с 0
0 0 Ах Ак
Уравнение (8.74) решается численно, например, методом
начальных параметров с последующим уточнением фундамен-
фундаментальной матрицы решений. В результате получаем
Z0 = KD,X)C, (Кф,Х) = Е), (8.75)
где К(г\, X) — фундаментальная матрица решений однородного
уравнения (8.74).
Решение (8.75) должно удовлетворять краевым условиям.
Для пространственно-криволинейного стержня имеется две-
двенадцать краевых условий (по шесть условий при ц = 0 и т\ = 1).
Например, для закрепления стержня, как показано на рис. 8.6,
имеем следующие краевые условия: 1) r) = O;u = uo = O;
2) г) = 1; AQq = Mq = 0. Чтобы выполнялись краевые условия при
г|=0, следует положить c-j — с^ = ... = с12 = 0, где с,- —
компоненты вектора С. Из краевых условий при ti = 1 получаем
систему однородных уравнений
*11с1+*12с2 + ... + ?,6с6 = 0
(8.76)
Л61С1+^62С2 + - + А:66С6 = 0-
352
Рис. 8.6
Значения Xt, при которых определитель системы (8.76) равен
нулю, являются безразмерными частотами.
Определив Я,-, находим из системы (8.76) с^, cty, <%\ с$ и
сф в зависимости от с$> (с$ — можно положить равным еди-
единице):
$ = ак$. (8-77)
Для каждого X,- решаем уравнение (8.74):
йЩ ., (8.78)
и находим
2^-ДГ(л,Ху)С» (8.79)
где С W = (а1; а2 , а3 , а4 , а5 , 1, 0, 0 ... 0)т.
Для решения уравнений случайных колебаний стержней
приближенными методами векторы Z$* удобно представить в
виде
Zg) = (v</))9WO') (8.80)
353
где Vй =(AQ[(\AM^)r; ,W = (otf>,utf>)r.
Векторы V'* и Ф^ характеризуют соответственно напря-
напряженное и деформированное состояния стержня при колебаниях
с частотой X.-.
§ 8.5. Нестационарные случайные колебания стержней
Входящие в правые части первых двух уравнений системы
(8.55) векторы
Р = Чс + Рс5(т1-т1/>)
и
Т = цс + Тс5(т1-т1л/)
являются случайными нестационарными векторами с извест-
известными вероятностными характеристиками компонент. Введем в
первое уравнение системы (8.55) силу вязкого трения а — :
ах
„l(TlH + a^-f^eAK-AAQ=P. (8'81)
Систему уравнений (8.55) с учетом силы вязкого трения для
численного решения удобнее представить в виде одного урав-
уравнения, аналогичного уравнению (8.56):
L = ^(l)^Z+y4CMZ + |Z+^2)Z_o = 0 (8.82)
где
0 0 0 аЕ'
C) _ 0 0 0 0
" 000 0 '
000 0
Для решения уравнения (8.82) воспользуемся обобщенным
принципом возможных перемещений [34], ограничившись дву-
двучленным приближением
354
Z = Z(/> (Л)Л (т) + Ztf (л)/2 (т) • (8.83)
В качестве обобщенных перемещений можно взять векторы,
пропорциональные собственным векторам Z®, т.е.
5 Zo = ЩЕъ Z(/> + 6А2ЕО Z$\ (8.84)
где 5А: — независимые произвольные малые величины;
ГО О О Е~
-_0 0 ?0
?о - о Е 0 0 •
Е 0 0 0
Под обобщенными перемещениями понимают не только
вариации линейных 5и и угловых 5о перемещений, но и ва-
вариации внутренних сил 5AQ, моментов 6ЛМ, т.е. вариации
вектора состояния системы 8Z .
Матрица Ео вводится для того, чтобы все скалярные про-
произведения (Z .Eg Z^ ) имели размерности работы (если рассмат-
рассматривать размерные уравнения (8.56)). Так как
?oz^(uJLUM[(UQ(f))r,
то скалярное произведение (Z • Ео Z§ ) в более подробной
форме записи имеет вид
(Z.E0Ztf) =
= (AQ^.u^) + (AM^-ug>) + D)-AM^) + (u^-u[()).
Подставив (8.83) в уравнение (8.82), получим
L (Z?,4 Ztf>,fltf2 ) = 5 E*0). (8.85)
Потребуем, чтобы интеграл от скалярного произведения век-
векторов 5 и 5 Zo был равен нулю:
1 _ (8.86)
/(в ¦5Z0)dr] = 0.
о
В силу независимости ЬА: получаем из (8.86) два уравнения:
355
1 _ 1
JE ¦ EQZ$b <*n = 0 и f E • ^o42)) dr\ = 0. (887)
0 0
После преобразований из (8.87) получаем уравнения для
определения fj (т):
°n/i + auf2i + bnA + bnh + cn/i + cnfl = b\ >
°21 A + °22/21 + 621 /l + ft22/2 + C21Л + c22/2 = b2 > ^8-88)
1 I
о о
1
0
1 1
*! = J (Ф • eq z ^ *i; *2 = f (Ф • ,еь z ?)> л,.
о о
В более подробной записи
l l
0 о
1 1
62 = -J(P-u(,2>)rfn- J(T-uf>)rfn.
о о
С учетом выражений для Р и Т получим
1 1
0 о
1 1
Ь2 = - J(Чс • «(J)) rfn - We• »(>2)) *1 - рс • 42)(пр) -тс • 42)(Лм).
О О
(8.89)
356
Рассмотрим случайные нагрузки вида
Чс = Чос Ш9 W; рс = РОс Шр W;
(8.90)
Не = Мое (Л)^ СО J Тс = ТОс (г))/г(т) .
Ограничимся случаем, когда qOc, РОс, цОс и ^ос известны, а
fq, /р, /^ м. fM — независимые случайные функции времени с
известными вероятностными характеристиками.
Из (8.89) после преобразований для (8.90) получим
Ь\ = ~ d\\fq-dnfvi ~ d\lfp~ dufAt>
(8 91)
b2 = - ^21 /9 - d22f» ~ d2lfp ~ d24/M >
где
1 1
dil = J (чос • u ^°) <Al ; ^,2=1 G*oc • uf»}) ^ J
0 0
de = (Рос •" &W)); ^4 = (тОс ¦ »кХчм)) ¦
Переходя к векторной форме записи, из (8.88) получаем
уравнение
Af+Bf+ CF = D$>, (8.92)
где
11 li U W , if, — f f f f f \T
И И И И ' Ф -(Jq,Jp,Ju>JM) ¦
1 2 3 4j 9 Ц
Решение уравнения (8.92) с последующим определением
вероятностных характеристик компонент векторов f приведено
в гл. 6. Решение уравнения (8.92) при нулевых начальных ус-
условиях имеет вид
t
f= JG(t,x)A-lDOdt, (8-93)
о
или в скалярной форме записи
357
t
fj = j(kA(t, x)fq + kjtf, x)fp+ kfl(t, т)/ц + kjA(t, x)fM) dx
0
(/=1,2),
где kij — элементы матрицы К= GA~lD.
Матрицу G(t, т) можно получить, решая уравнение (8.92)
методом вариации произвольных постоянных.
В результате получаем приближенное решение уравнения
(8.82):
t t
Z = J(Z (/>*„ + Z fibOfg ch + J(Z[I)A:12 + Z ^2)//. A +
о о
+ J(Z (/^3 + Z ^2з)/ц A + J(Z (/>*14 + Z [J)A:21)/M A . (8.94)
0 0
Компоненты вектора Z
r r
0 0
' ' (8.95)
+ W $kn + z $*2з)/ц A + J(z g^14 + z $k24)fM dx .
о о
Математическое ожидание компонент Zj вектора состояния
Z и их дисперсии для независимых возмущений
t t
mZj = J<* S^ll + Z g^2l)^ A + ...+ Jfe g>*14 + Z (^24I% A ;
t t
J oo
t '
*Kf(x,x ')A А' +...+Ш/ J[z §>А:14(/, x) + z ^k^t, x)] x
« о 0
358
x [z $kl4(t, x ') + z $*240. T ')] Kfif (t, т 0A A '. (8.96)
Полагая, что компоненты Zj имеют нормальные распреде-
распределения, можно определить их максимальные значения для про-
произвольного момента времени т и координаты г\:
max г, = от (л,т) + 3а (т\, т). (8.97)
§ 8.6. Стационарные случайные колебания стержней
Рассмотрим уравнение (8.82) малых вынужденных колеба-
колебаний с учетом сил вязкого сопротивления, ограничившись слу-
случаем, когда на стержень действуют сосредоточенные стацио-
стационарные сила Рс и момент Тс (qc = цс = 0). Решение уравнения
(8.82) ищем в виде двучленного приближения (8.83). Восполь-
Воспользовавшись обобщенным принципом возможных перемещений,
после преобразований получим уравнение, аналогичное (8.92):
Af+Bf+Cf= D<l*Pc + D®Tc, (8.98)
где
„а, кммут лB) kuu1/
Воспользовавшись преобразованием Фурье, найдем из
(8.98) изображение вектора f(co) в частотной области:
f (со) = W(m)DA)РС(со) + W(ia)D^Tc(ш),
где
ЩЬ) = || /со2Я+ ЬВ+ СЦ. (8.99)
В скалярной форме записи имеем
3 3
/«to = I и$ (^1 л)+s «и (^л) +
fc=0 fc=0
3 3
+ S »$<"цГ*) + I 08(^2^); (8.100)
л=о ы)
359
3 3
/B>(со) = X «fig (w2lPk) + X «$ (w22Pk) +
Ы) /ЫО
3 3
+ 1^("Л) + 1о$(*22Г,). (8-Ю1)
Ы) fc=O
Считаем, что спектральные плотности Sp , ST компонент
векторов Рс и Тс известны. Ограничимся случаем, когда ком-
компоненты векторов можно считать независимыми случайными
функциями. Тогда взаимные спектральные плотности равны
нулю. Для случая, когда векторы Рс и Тс неизменны по на-
направлению, но случайны по модулю, имеем
Ру=|Рс|(еРеу), 7}=|Тс|(егеу), (8.102)
где ер,ет— единичные векторы, совпадающие по направлению
с направлением векторов Рс и Тс.
Если модули сил являются случайными стационарными
функциями, то достаточно знать только их спектральные плот-
плотности Sp(a), iSy(co). Получим спектральные плотности /^ и
/ (' для общего случая, когда спектральные плотности компо-
компонент векторов Р: и Т: различны.
Алгоритм определения спектральных плотностей изложен
в § 6.3. Воспользовавшись этим алгоритмом, из (8.100) и (8.101)
получим (при условии, что Рс и Тс независимы) спектральные
плотности 2у@ и Sj-m :
з 3
tyiXffl) = X PifcV) \ (со) + X Y^Cb) STk (со);
3 3 (8.103)
^№(@) = X Plk2)(/C°) SPk (°>)+ Z у12)('и) ^т; (ffl) -
*=1 k=l
где
Р^AШ) = (^J УУц^! + «^ «$ wllWb +
360
+ «$ и$ wnwh + («$J wi2wi2;
yjftto) = (и$J wnw*n + и&КМ^Ь +
+ °W^W12W11 + (u^>2 W12W12 J
C^(/ш) = («^J w21w^ + «^ «^ w21vv52 +
+ "^ "^ ^22^21 + ("$>2 W22W22 I
y^C/co) = (u$J w21w21 + Ojj^^2 +
Взаимные спектральные плотности
3 3
3 3 (g Л 05)
fc=l h=l
где
Р^(/ш) = («^J w*2lwn + «^ «^ ^!>v12 +
+ "^ 4У W22W11 + ("ШJ W22wl2 >
u2) = (^2w21w11 + 4KMi-i2+ (8Л06)
+ UW!?W22W11 + (u?iJ W2>12 •
Pjt4)(/b) = («(,УJ w*nw2l + «^ «gg wj2iv21 +
+ и^ 4У wj!W22 + (м^J wl2iv22 ;
yl4) - DЙ2 ^mi + 4KM2-2, + (8ЛО7)
+ uMMlw22 + <u$J ^12^22 •
361
Выражения для спектральных плотностей S,^ (со) (8.103) и
взаимно спектральных плотностей Sai^m (со) (8.105) можно по-
получить также, используя соотношения Винера—Хинчина, свя-
связывающие корреляционные и взаимно корреляционные функ-
функции со спектральными плотностями, как это было сделано в
шестой главе.
В левую часть выражения для коэффициента C^ (8.104)
входят произведения функций м>у и w*k, зависящих от /со .
Произведения функций с одинаковыми индексами есть квадрат
модуля соответствующей функции, т.е.
wu"U = \»n\2- (8Л08>
Квадрат модуля комплексной функции есть действительная
функция. Произведение комплексных функций с разными ин-
индексами есть комплексные функции, например,
(WuWy = (цу + й^ыу - /м$) = м%\щ +
+ Ц2М2? + / M2MV - AWb. (8-109)
где iv^ , ЦУ — действительные части; м$ , м$ — мнимые
части.
Действительные части комплексных функций являются чет-
четными функциями со, мнимые — нечетными, т.е.
ЦУ(со) = *$(- со) ; Ц2!>(со) = - Ц2,>(- со) . (8.110)
Произведение нечетных функций есть четная функция.
Поэтому действительная часть выражения (8.109) является чет-
четной функцией, а мнимая — нечетной. Эти результаты будут
использованы при определении дисперсии компонент вектора
Z (8.83).
Компоненты вектора Z при двучленном приближении
имеют вид
*(л, т) = *#(л)/A)(т) + *8>(л)/б)С0 • <8-ш)
Переходя к изображению по Фурье, получаем
362
Zj (л, со) = Z $(л)/A)(ю) + Z g^)/BW • (8-112)
Спектральные плотности компонент Zi (и взаимные спект-
спектральные плотности Zj, Z/c) можно получить, воспользовавшись
алгоритмом определения S и Sv v, изложенным в § 6.5:
S^^^iztyfSfW + ztyztyx
х py<i)/B) + Sfd)f(\i\ + (z g^J Sfm , (8.113)
где Sj-w , Sj-Q) и SfWfV) определяются соотношениями (8.103) и
(8.105). Коэффициенты pjj?, yjjp (k= 1,2, 3;y= 1, 2, 3, 4), входя-
входящие в (8.105) и в (8.107), можно представить в виде
$ = рр + / рр, $ = yj^CD + / ^)B)) (8.114)
где pj^1), yj^1^ — четные функции со; pjj?®, y^® — нечетные
функции со.
Поэтому получаем
3
^0(/ш) = ?(РР>^ + у^>^) +
к=\
3
3 1 (8.115)
+ <• I @ РB) v Н2)B) V ;
3
^(.)/B) (/со) = ^ (Р f (D ^ + у gXD sM ) +
Aj=1
363
-з
ы
3
Sftofm (ко) = ? (p !t4X1) ^ + У Jt4H) «fy) +
ы
Г3 1 (8.116)
Соотношения (8.115) можно представить в виде
6>о> = .У <& + / ^,, ^а) = S0& + / J^ ; (8-И7)
^A,^, = 5^,/B) + ' ^)/Л , ^>/A) - ^/V + ' 5/^/A>- (8Л18)
При этом
(8 119)
В соотношение (8.113) входит сумма взаимных спектраль-
спектральных плотностей, которая с учетом (8.118) и (8.119) равна
луо/о + 570,A) = 2Sfi)fm , <8-12°)
т.е. оно является четной функцией ш.
Взаимно спектральные плотности компонент вектора Z
SZjZv = Z$>Z $ tyo + Z$Z fe> (^(D/W + J/O/0)) + Z g> Z ©5^2) .
Дисперсии компонент Zj
со
Д^Ц.Оъсо)^,
—00
ИЛИ
364
00 00
Dzj = ((* $ ^)J J ^/A) ^ «> + 2г g> (л) z g> 00 J J^a <*«» +
-<» -00
00
+ (z$(r\)f jSfi2>do>. (8.121)
—oo
Поскольку интегралы от нечетных функций равны нулю,
то из (8.121) получаем
3 1
аи
+ (* g; (n)f I (Pl2)A4 + yfA4 ) Л • (8-122)
Среднеквадратические значения компонент г,-
а^(л) = >Г^О. (8.123)
Рассмотрим частные случаи.
1. Одночленное приближение при Рс * О, Тс = О
Z = Z(/>/A)-
Уравнение для определения /^(т)
3
*ц/A) + *l/A) + ^l/91) = Z «g> (тц) Л (х) •
М
Частотная функция
w (/со) = Wj j( to) = —5 ГТ = w iV(ffl)+ /vv ff(ffl)-
Изображение функции /^ по Фурье
365
3
fQ\<0) = ? Ы$(тц) WH(CD) Рк (Ю).
fc=l
Из (8.105) получаем (при SM = 0, p?> = к f,1/ )
3
SfWfa) = X« $(щ) I wn l2^ (ш) .
Дисперсии г,(т), о)) равны
Г3«= 2 "I (8.124)
^(л) = (г§>(л)) ZJ("^i)) кцр^ил» .
fc=l-oo
2. Для случая Рс = 0, Тс * 0 имеем
2Г3о° 2 1(8.125)
А=1-оо
В ряде случаев входящие в Dz интегралы можно проинтег-
проинтегрировать (приложение 2). Когда этого сделать нельзя, интег-
интегралы получают численно при конечных пределах, которые за-
задаются из требования выполнения заданной точности конеч-
конечного результата. Выражения для дисперсий и среднеквадратич-
среднеквадратичных значений (8.124), (8.125) компонент zj позволяют опреде-
определить их значения в любом сечении стержня, в том числе и в
сечениях, где они достигают максимальных значений.
Воспользовавшись правилом трех сигм, получим макси-
максимально возможные значения Z: при т. = 0, равные
J *j
$<Л)«За^(л). <8-126)
Нормальные напряжения в произвольном сечении с учетом
статических напряжений равны
366
, ч (*io + *i) (Zso + Zs>x (Zep + zjy (8-127)
а(л) = —j— + —7 + —7 .
где Ziq = Q\q, Z5o = M20, ^6o = M3o> Jx> ly ~ моменты инерции
сечения; х, у — главные центральные оси сечения.
После преобразований получаем
(ЧаСп) ащ^йх аш&У?
Ф0 = °(№ + 3 —дг—+ j + j , (8.128)
1 1у 1Х
v /
Сю АГ20Х Мзоу
где а0 = —pr + j + j .
Г 1у 1Х
Максимальные напряжения в опасном сечении стержня
(GbQ. °АМ,Х ашУ\
сттах (Л) = max max ao + 3 —?+ + —j— + —)Г~ .
h F У х
ИЛИ
( * *V
,n °да °дм* стда//
атах(Л) = тах off) + 3 ~iri + —Г— + —И"
k1)«-^ + -fL + -TL . (8-129)
^ r h Lx J
где х*, у* — координаты «опасной» точки в сечении.
Нормальные напряжения атах (г|) зависят от безразмерной
координаты Л, поэтому имеется сечение ц = г\*, где атах (Л)
достигает максимального значения, т.е.
^тах(Л*) = 41)(Л*) +
t ^ ¦ 7> ^ J'
Минимальное напряжение в этом сечении (в точке с коор-
координатами (х*, у*)) равно
367
(aAO (Л*) aAM (h*)x* aAM (h*)/]
i АЦ| , ^2V ; дмз (8.131)
~ \ F I I '
\ J
Максимальные (8.129) и минимальные (8.131) нормальные
напряжения дают возможность оценить усталостную прочность
стержня.
Глава 9. ОСНОВЫ ТЕОРИИ НАДЕЖНОСТИ
В последнее время методы статистической механики полу-
получили широкое распространение во многих отраслях промыш-
промышленности при оценке надежности проектируемых конструкций.
Конечно, было бы неправильно утверждать, что проблема по-
повышения надежности в строительстве и технике возникла в
последние десятилетия двадцатого столетия.
Ярким примером необходимости применения статистических
методов при оценке качества продукции (надежности) является
приказ Петра I (приложение 5). В нем лаконично сформулированы
основные пункты, выполнение которых приведет к повышению
качества продукции. В приказе Петр I предусмотрел и наказания
за нерадивое отношение к работе, в том числе самое жестокое
наказание — «лишение воскресной чарки сроком на один год».
В предыдущих главах основное внимание было уделено мето-
методам решения задач динамики механических систем, нагруженных
случайными силами, с определением вероятностных характеристик
решений для систем с конечным числом степеней свободы и систем
с распределенными параметрами. Этой информации часто бывает
достаточно при решении многих прикладных задач. Но для оценки
надежности конструкции — одной из основных задач при проек-
проектировании — требуются новые методы и численные алгоритмы,
которые в предыдущих главах не рассматривались.
Прежде чем перейти к изложению методов оценки «проч-
«прочности» конструкций в вероятностной постановке, напомним
традиционные расчеты в детерминированной постановке. К
таким методам относятся: метод расчета по предельным состо-
состояниям (появление пластических деформаций, устойчивость) и
метод расчета по допускаемым нагрузкам.
В методе расчета по предельным состояниям максимальная
действующая нагрузка (точнее напряженно-деформированное
состояние, вызванное этой нагрузкой) сравнивается с нагруз-
нагрузкой, соответствующей предельному состоянию, которое опре-
25 Зак. 341
369
деляет несущую способность конструкции. Несущая способ-
способность конструкции — наступление предельного напряженно-
деформированного состояния, которое соответствует потере
работоспособности конструкции или ее разрушению. К таким
предельным состояниям относятся: появление пластических
деформаций, потеря статической устойчивости, разрушение.
Рассмотрим несколько примеров расчета по предельным
состояниям. На рис. 9.1, а показан прямолинейный стержень,
растянутый силой Р, причем возникающие напряжения не
должны превышать предела упругости. В этом случае предель-
предельным состоянием и соответствующей ему максимальной силой
Р будет такая сила, при которой напряжения в стержне дости-
достигают предела текучести <зт. Поэтому для нормальной работы
этого элемента должно выполняться условие
аг-а>0 (а-!]. <91>
Рис. 9.1
На рис. 9.1, б показан прямолинейный стержень, нагружен-
нагруженный растягивающей силой Р и крутящим моментом М. В
стержне возникает двухосное напряженное состояние. Поэто-
Поэтому, чтобы в стержне не возникло пластических деформаций,
должно выполняться условие
аг-тахаэ(ЛМ)>0, (9.2)
370
где в зависимости от принятой при расчетах теории «прочности»
аэ = max V а2 + 4-т2 или max стэ = max V а2 + 3-т2 (max т = -777 ;
"к
WK — для круглого стержня
равна nD*/16.)
На рис. 9.2 показана ракета
на стартовой позиции. Систе-
Система упругих связей (система
амортизации) дает возмож-
возможность при прохождении удар-
ударной волны отклоняться на угол
о (чтобы уменьшить динами-
динамические перегрузки), но угол
поворота осевой линии ракеты
ограничен предельно возмож-
возможным углом ил, который зависит
от конструкции амортизаторов
и допустимым линейным сме-
смещением.
На рис. 9.3 схематично по-
показана буровая установка. При
работе бура возникают вибра-
вибрации, в результате которых
стержень при больших откло-
отклонениях от оси симметрии
может ударяться о поверхность
скважины, что крайне нежела-
нежелательно. Поэтому перемещения точек осевой линии стержня
u(z, t) при колебаниях для нормальной работы системы без
контактов с поверхностью скважины должны удовлетворять
условию
Д-тах| u(z, Ol>0. (9.3)
На рис. 9.4 показан прямолинейный стержень, который
нагружен сжимающей силой Р. Предельным состоянием в дан-
данном случае является потеря статической устойчивости, поэтому
сжимающая сила должна быть меньше критической Рк:
Рк-Р>0. (9.4)
25* 371
Рис. 9.2
Рис. 9.3
Рис. 9.4
На рис. 9.5 схематично показан
турбореактивный двигатель, для нор-
нормальной работы которого необходи-
необходимо, чтобы появляющиеся при работе
(при со * 0) удлинения лопаток А /
были меньше зазора Л между внут-
внутренней поверхностью кожуха и ло-
лопатками при со = 0 :
Д-А/(со)>0. (9.5)
На рис. 9.6 показано изменение
нормального напряжения о во време-
времени при работе элемента конструкции.
Для нормальной работы элемента при
симметричном цикле нагружения не-
необходимо (как минимум), чтобы на-
напряжение было меньше предельного
напряжения, соответствующего пре-
пределу выносливости для данного мате-
материала:
а^-о 0, (9.6)
где а_! — предел выносливости при
симметричном цикле нагружения.
Методы расчета по предельным
состояниям позволяют наиболее
полно использовать несущую способ-
способность конструкции.
В общем случае имеем
S-F>0, (9.7)
где S — функция, характеризующая
предельные возможности конструк-
конструкции; F — функция, характеризующая
реальное состояние конструкции.
Например, iS" зависит от механи-
механических характеристик материала кон-
конструкции:
372
Рис. 9.6
S=S(oT,aB,ix,E, G),
где ав — предел прочности; (i —
коэффициент Пуассона; E,G —
модули упругости соответст-
соответственно первого и второго рода.
Функция F зависит от напря-
напряжений, возникающих в эле-
элементах конструкции при на-
гружении:
F = F(ax ,ay,az,5^,8xz, 8yz ).
Предельные состояния могут быть связаны не только с
прочностными свойствами конструкции. Например, на рис. 9.7
показана ракета, траектория движения которой не должна вы-
выходить за допустимую «трубку» траекторий (для каждого мо-
момента t — это некоторая расчетная замкнутая предельная об-
область Dg). Поэтому система управления ракеты должна обес-
обеспечить выполнение условия
Dd(t)-D(t)>0, (9.8)
где D(t) — реальная область, внутри которой находится ракета
при движении.
373
Рис. 9.5
В методе расчета по допуска-
допускаемым напряжениям вводится по-
понятие коэффициента безопас-
безопасности, и допускаемое напряже-
напряжение аэ полагается равным
г 1 ст» (99)
Рис. 9.7
где ап — предельное напряжение
(предел текучести для пластич-
пластичных материалов, предел прочнос-
прочности для хрупких материалов, критическое напряжение, соответ-
соответствующее потере статической устойчивости); п — коэффициент
безопасности.
Поэтому условия «прочности», например, для (9.1), (9.2),
(9.4) и (9.5) при расчетах по допускаемым состояниям имеют
вид
От
—-ст>0;
«1
— -тахаЛР, М)>0;
— -Р>0; (9.10)
«2
|--Д/(©)>0 (л>1).
Выполнение условий (9.10) при детерминированных значе-
значениях входящих в них величин, как принято считать, гаранти-
гарантирует «прочность» этих конструкций.
В более общей форме записи соотношения (9.10) можно
представить в виде
sd-s>o (^ = v)' <9Л1>
где /?н — несущая способность конструкции или ее элементов;
iS — допускаемое состояние, например, допускаемая нагрузка,
374
допускаемые напряжения и т.д.; S — реальное состояние; п —
коэффициент безопасности.
Входящие в соотношения (9.11) значения RH, Sun рас-
рассматриваются как детерминированные величины. В детерми-
детерминированной постановке конечной целью расчетов является
проверка выполнения неравенств (9.10). Выполнение нера-
неравенств (9.10) можно рассматривать как гарантию того, что за
время эксплуатации конструкции ее отказ полностью исклю-
исключен. (В общем случае отказ — это нарушение работы конструк-
конструкции, а не только достижение предельного состояния.)
Коэффициенты «у выбираются на основе накопленного
опыта. В каждой области техники имеются свои требования к
проектируемым изделиям, традиционные методы расчета, ко-
которые позволяют рекомендовать числовые значения коэффи-
коэффициентов безопасности. Часто их называют «нормативными ко-
коэффициентами запаса прочности», или «нормативными коэф-
коэффициентами безопасности» [15, 16]. Например, в авиационной
технике коэффициент безопасности рекомендуется брать рав-
равным п = 1,5, в ракетной и космической технике п— 1,2.
Выбранные числовые значения коэффициентов п зависят
от ответственности проектируемой техники, уровня технологии
изготовления, свойств материалов, точности задания нагрузок.
Коэффициенты безопасности уточнялись с учетом обобщения
многолетнего опыта проектирования в каждой отрасли техни-
техники, поэтому в каждой из отраслей существуют свои «нормы
прочности», которые используются в практике проектирова-
проектирования. Нормы прочности определяют состав и объем основных
работ, проводимых на всех стадиях при создании конструкций,
необходимых для обеспечения требуемой прочности. Основную
роль в создании конструкции играет проектирование, где с
учетом всех «физических» особенностей конструкции и реаль-
реальных условий ее эксплуатации учитываются все требования по
прочности, которые должны быть реализованы в опытном об-
образце.
При использовании методов расчета, основанных на нормах
прочности, при определении несущей способности конструк-
конструкции роль коэффициентов безопасности сводится в основном к
компенсации: 1) несоответствия между детерминистской фор-
формой представления результатов расчета на прочность и возмож-
возможными разбросами конструктивных параметров и нагрузок;
375
2) отклонения расчетной схемы (математической модели) от
реальной конструкции и реальных условий нагружения, что
приводит к большому разбросу коэффициента безопасности
даже при проектировании однотипных конструкций. Напри-
Например, в Англии при проектировании управляемых снарядов при-
принят коэффициент безопасности п = 1,33, а в США при проек-
проектировании близких по тактико-техническим характеристикам
управляемых снарядов п = 1,25 [3]. Аргументированно объяс-
объяснить, почему коэффициенты я разные, невозможно, поэтому
использование коэффициентов безопасности связано с неко-
некоторой долей неопределенности при расчетах.
Введение коэффициентов безопасности позволяет во мно-
многих случаях получать удовлетворительные конструкции, однако
при проектировании новой техники, когда нет ни опыта, ни
данных по эксплуатации, выбрать разумный коэффициент без-
безопасности очень сложно. Произвольно назначенный коэффи-
коэффициент безопасности может привести к неправильным решени-
решениям, следствием которых может стать или завышенный вес
конструкций, или аварийная ситуация. Основная трудность при
определении допускаемых напряжений (или деформаций), а
также определении несущей способности конструкции состоит
в согласовании расчетных данных с фактическими. Задача вы-
выбора конкретного значения коэффициента безопасности, на-
например для определения допускаемого напряжения, осложня-
осложняется тем, что механические характеристики материала (от ко-
которых зависят предельные состояния конструкции), реальные
силы и геометрические размеры элементов конструкции, от
которых зависят текущие состояния конструкции, имеют слу-
случайные разбросы. Традиционные методы расчета как при рас-
расчете по предельным состояниям, так и по допускаемым напря-
напряжениям, возможные случайные разбросы в явном виде не
учитываются, т.е. не учитывается вероятностный характер пре-
предельных состояний конструкции или вероятностный характер
реального состояния конструкции. Поэтому оценивать работо-
работоспособность конструкции логичнее не по детерминированным
неравенствам (9.1)—(9.3), а по вероятности выполнения этих
неравенств, т.е.
P[(S-F)>0], (9.12)
где Р — вероятность безотказной работы.
376
Вероятность отказа
R=l-P (R[(S-F)<0T). (9.13)
Для оценки «прочности» с учетом вероятностного характера
конструктивных параметров и нагрузок требуются другие ме-
методы, основанные на теории вероятностей и статистической
механики. Поэтому вводится понятие надежности системы Н,
которая оценивается вероятностью выполнения неравенства
(9-7):
H=P[(S-F)>0]. (9.14)
Под надежностью понимается способность машин, прибо-
приборов и конструкций безотказно работать в течение определен-
определенного отрезка времени. Безотказной работой технических объ-
объектов считается выполнение ими всех своих функций в задан-
заданных условиях эксплуатации. (Более подробное определение
надежности читается так: «свойство объектов сохранять во
времени в установленных пределах значения всех параметров,
характеризующих способность вьшолнять требуемые функции
в заданных режимах и условиях применения, технического
обслуживания, ремонтов, хранения и транспортирования».)
Переходя к вероятностным методам оценки «прочности»,
когда необходимо учитывать случайный характер нагрузок и
параметров конструкции, вместо детерминированных нера-
неравенств (9.1)—(9.8) определяют вероятности их выполнения. Для
общего случая (9.7) оценка безотказной работы связана с оп-
определением вероятности:
P[(S-F)>0]. (9.15)
Возникает вопрос, насколько вероятностные оценки «проч-
«прочности» лучше традиционных оценок с использованием коэф-
коэффициента безопасности, который столь же неконкретен, как и
вероятность. Дело в том, что вероятностные оценки «прочнос-
«прочности» учитывают объективно существующие случайные разбросы
нагрузок, механических характеристик материалов и т.д., поэ-
поэтому они более полно отражают реальные условия. В зависи-
зависимости от разброса механических характеристик и разброса на-
нагрузок при коэффициенте п = 1,3 вероятность безотказной
24 Зак. 341
377
работы может быть меньше, чем при п = 1,2, что кажется
странным, так как принято считать, что чем больше коэффи-
коэффициент безопасности, тем выше «прочность» конструкции.
Сами по себе вероятности безотказной работы системы
мало полезны (например, если Р = 0,9, то трудно сказать,
хорошо это или плохо), но если проводятся расчеты для двух
вариантов материала с учетом вероятностных свойств их меха-
механических характеристик и оказывается, что вероятность безот-
безотказной работы соответственно равна 0,9 и 0,95, то можно
утверждать, что конструкция с вероятностью безотказной ра-
работы 0,95 будет лучше. Учет случайных разбросов приводит к
качественно другим оценкам «прочности», что позволяет про-
проектировать более рациональные конструкции, обладающие
большей надежностью, долговечностью и ресурсом.
Обеспечение надежности проектируемых механических
систем является одной из основных проблем в машинострое-
машиностроении, приборостроении, авиации, ракетно-космической технике
и многих других отраслях промышленности. Это связано с
непрерывным ростом требований по надежности и долговеч-
долговечности к новой технике, которая должна нормально функцио-
функционировать в сложных условиях эксплуатации. Условно все зада-
задачи оценки надежности механических систем можно разбить на
три класса.
К первому классу относится оценка надежности конструк-
конструкции или элементов конструкции при одноразовом или при
малом числе нагружений. Задачи оценки надежности при одно-
одноразовом нагружении возникают как при статическом, так и при
динамическом нагружении, например при ударном или им-
импульсном нагружении [7, 22]. В этих задачах накопления по-
повреждений не происходит или, если число нагружений неве-
невелико, накоплением повреждений можно пренебречь.
Во второй класс входят задачи о накоплении остаточных
макроскопических деформаций на ограниченном интервале
времени @, 7) при стационарных или квазистационарных слу-
случайных нагрузках [8], когда однократные перегрузки, приводя-
приводящие к отказу системы, можно считать маловероятными. При
расчетах для этих задач требуется определить распределения
вероятности для остаточных деформаций при t = Т. Под ква-
квазистационарными нагрузками (процессами) понимаются про-
378
цессы, вероятностные характеристики которых медленно из-
изменяются во времени по сравнению с изменением самих слу-
случайных функций.
К третьему классу относятся задачи о накоплении уста-
усталостных повреждений при стационарных или квазистационар-
квазистационарных случайных нагрузках, когда превышение предела пропор-
пропорциональности напряжениями, возникающими в конструкции,
можно считать маловероятным событием, т.е. конструкция вы-
выходит из строя в результате постепенного развития усталостных
трещин [8, 19].
§ 9.1. Простейшие задачи теории надежности
Прежде чем перейти к методам определения числовых зна-
значений вероятности выполнения неравенств (8.1)—(8.6), рас-
рассмотрим простейшие задачи определения надежности системы,
когда надежность ее элементов известна.
Рассмотрим пример опреде-
определения надежности (Н) системы,
состоящей из отдельных элемен-
элементов, надежность которых равна
Нк (рис. 9.8). На рис. 9.8, а, б в
виде блок-схем показаны две ме-
механические системы с известны-
известными вероятностями Рк {Рк =
= Нк) безотказной работы каж-
каждого из звеньев, входящих в сис-
систему. На рис. 9.8, а система со-
состоит из последовательно соеди-
соединенных элементов; на рис. 9.8, б
— из параллельно соединенных Рис- 9-8
элементов.
Рассмотрим случай последовательного соединения элемен-
элементов (рис. 9.8, а), когда элементы взаимодействуют так, что их
отказы (Rk = 1 — Рк) независимы. Требуется определить на-
надежность всей системы в целом. Эта система сохраняет рабо-
работоспособность только тогда, когда все ее последовательно со-
соединенные элементы работают безотказно. Как известно, ве-
вероятность наступления совместного события, состоящего из л
независимых событий, равна произведению вероятностей на-
24*
379
ступления каждого события. Поэтому вероятность безотказной
работы системы в целом равна
Р=Н=ПЦ. (9.16)
>1
Например, если р = 4, Нх = 0,9, Я2 = 0,8, Я3 = 0,7, Я4 = 0,6,
то Н = 0,3024, т.е. надежность системы, состоящей из последо-
последовательно соединенных элементов, меньше надежности ее эле-
элементов.
Рассмотрим систему, состоящую из параллельно соединен-
соединенных элементов (рис. 9.8, б), дублирующих друг друга. В этом
случае отказ системы произойдет только при отказе всех эле-
элементов.
Вероятность отказа каждого элемента
R- = 1 - Н
Вероятность отказа всей системы (теорема о произведении
вероятностей для независимых событий)
5
Д = ПA-Я/)- (9.17)
Ы
Вероятность безотказной работы системы (надежность сис-
системы)
5
Я=1-ПA-Я,). (9.18)
ы
Например, если И1 = 0,5, то общая надежность системы
Н = 0,97. Вероятность безотказной работы системы с парал-
параллельно соединенными элементами выше, чем надежность ее
элементов, т.е. можно существенно повысить Н системы, если
вместо одного малонадежного элемента включить в общую
систему блок из нескольких параллельно соединенных элемен-
элементов. Например, в системе последовательно соединенных трех
элементов имеется один элемент с малой надежностью (Я2)
(рис. 9.9). Если Щ = 0,9, #21} = °>3> Щ = °>8> то общая надеж-
380
ность системы Н'= #j/^#3 = 0,216. Если включить в систему
вместо Ef>P блок из трех таких же параллельно соединенных
элементов (показанных на рис. 9.9 пунктирными линиями), то
надежность этого звена /^ = 1 - A - /$V = 0,657 и общая ве-
вероятность безотказной работы Н= 0,9 • 0,657 • 0,8 = 0,47.
Таким образом, надежность
системы увеличилась более чем в
два раза!
На рис. 9.10 показан авиалай-
авиалайнер, имеющий четыре двигателя.
Можно считать, что система дви-
двигателей есть система параллельно
соединенных звеньев (рис. 9.8, б).
Примем, что надежность Hj всех
двигателей одинакова и равна
И = 0,9. Авиалайнер может лететь
при отказе трех двигателей. При
независимой работе двигателей
вероятность отказа
Рис. 9.9
Рис. 9.10
R = A-#уL = @,1L = 0,0001,
поэтому Н= 1 - R = 0,9999.
Если авиалайнер может лететь только при двух работающих
двигателях, то надежность Н= 1 - @,1K = 0,999.
§ 9.2. Возможные причины отказов
К основным причинам отказов механических систем отно-
относятся: неполное соответствие между используемой в расчетах
нагрузкой и реальной нагрузкой; интенсивные нагрузки, при-
приводящие к превышению несущей способности конструкции;
пластические деформации упругих элементов; износ деталей;
превышение допустимых деформаций; потеря устойчивости и
т.д. Отказ может произойти как от случайных дефектов, кото-
которые были в элементах конструкции и получили развитие при
эксплуатации (развитие трещин), так и в результате накопления
повреждений и изменения механических характеристик мате-
381
риала (например, из-за облучения). Тяга ракеты R (см. рис. В.2)
из-за случайного изменения температуры заряда будет иметь
разброс (R = Rq + AR, где Rq — расчетное значение тяги, AR —
случайный разброс). Из-за технологических погрешностей при
сборке осевая линия ракеты и линия действия тяги могут не
совпадать, что приведет к появлению случайной силы Nc и
случайного момента Мс и в конечном счете — к недопустимо
большому разбросу точки падения ракеты, что можно рассмат-
рассматривать как отказ.
При полете летательного аппарата в неспокойной (турбу-
(турбулентной) атмосфере на него действуют случайные аэродинами-
аэродинамические силы, которые могут существенно изменить траекторию
полета с выходом ее из допустимой «трубки» (см. рис. 9.7), что
тоже является отказом. К аналогичному отказу может привести
и случайный боковой ветер. На рис. В.2 показан автомобиль,
движущийся по дороге со случайными неровностями, из-за
которых в силах взаимодействия колес автомобиля с дорогой
появляются случайные составляющие. В зависимости от «ве-
«величины» этих случайных составляющих возможны отказы типа
«пробоя подвески» или усталостного разрушения подвески.
Причиной отказов может быть и несоответствие между
расчетной схемой (математической моделью) и реальной кон-
конструкцией, например неучет в математической модели нели-
нейностей, зазоров, трения, разброса механических характерис-
характеристик материала.
§ 9.3. Определение числовых значений вероятности безотказной
работы
Напомним, что надежность Н определяется как вероятность
безотказной работы (9.14):
H=P[{S-F)>0], (9.19)
где S — функция, определяющая предельные возможности кон-
конструкции (функция несущей способности конструкции); F —
функция, определяющая текущее состояние системы.
В этом параграфе рассматриваются задачи определения на-
надежности при одноразовом нагружении или при малом числе
последовательных нагружении, когда накоплением поврежце-
382
ний в конструкции можно пренебречь. Чтобы найти вероят-
вероятность Р, надо знать совместный закон распределения f(z)
случайной величины Z = S — F при известных законах распре-
распределения S и F. Если f(z) известно, то
00
/>(Z>O)=J/fc)<fe = \\f{S,F)dSdF. (9.20)
О O(S-F>0)
Для получения численных значений Н надо знать (опреде-
(определить) закон распределения случайной величины Z, функцио-
функционально зависящей от двух непрерывных случайных величин X
и Y.
Z=y(X,Y) (9.21)
при известном их совместном законе распределения плотности
вероятности fix , у) (см. гл. 1).
В общем случае закон распределения случайной величины Z
F(z) = P(Z<z) = P[{X, Y)czD] = J J f (x, у) dxdy.(9.22)
D{Z<z)
Математическая задача определения F(z) свелась, таким
образом, к решению двукратного интеграла
F(z)=jj fix, у) dxdy.
D(Z<z)
Для случая, когда Z = X + Y, интеграл берется по области
D (рис. 9.11), где х + у < z, поэтому, фиксируя Zh полагая
у = z — х, получаем конкретные пределы интегрирования, т.е.
F(z)= ISf(x,y)dxdy=j
D
z-x
//(*, У) dy
(9.23)
dx.
Плотность распределения f(z) получим, дифференцируя
(9.23) по z, которая входит как параметр в верхний предел
интеграла
383
оо Г z-X "I oo
/(O = ^p=J-^ \f)x,y)dy\dx=\f(x,z-x)dx. (9.24)
—00 -00 I —00
Так как случайные величины Хи /равноправны, то можно
было исключать не у, а х и получить еще одно выражение для
закона распределения плотности вероятности f(z):
00
f(z)=lf(z-y,y)dy. (9.25)
—ОО
Если Хи /независимы, то плотность распределения ZpaBHa
00
/(*)= lfl(x)f2(z-x)dx, (9.26)
—оо
ИЛИ
00
f(z)=jfi(z-y)f2(y)dy.
—00
Проинтегрировав правую часть (9.26) по х, получим функ-
функцию, зависящую от z ¦
При определении вероятности безотказной работы требует-
требуется найти функцию распределения F(z) случайной величины
z , равной разности двух случайных величин s и/:
z=s-f0
384
при известном совместном законе распределения f(s, /0), т.е.
*4z)= Я f(s,fo>dsdf0.
D(Z<z)
На рис. 9.12 показана заштрихованная область, где s —fQ <
< z • Поэтому интегрирование по области D, как и в предыду-
предыдущем случае, можно заменить интегрированием по f0 при фик-
фиксированном z (fo = s — z), а затем по s:
оо Г ао
jjf(s, /о) ds dfQ = f jf(s, /0) df0 ds . (9.27)
D -oo s-Z
Рис. 9.12
Дифференцируя (9.27) no z, получим
oo Г оо "] оо
f(z) = J jz jf(s,fQ) df0 ds = jf(s, s-z)ds.
-CO S-Z -00
Если случайные величины sh/0 независимы, то имеем
00
nz)=jfl(s)f2(s-z)ds, (9.28)
-00
или, изменив порядок интегрирования,
оо Г*+/0 1
/(*) = \fz J /(*>/o) ds dfQ = J^/(*+/o>/o) rf/-
—00 —00 —00
385
00
= J/l(Z+/0>/2(/0)rf/0- (929)
—00
Рассмотрим случай, когда s nfQ имеют нормальные распре-
распределения:
(.s-mf
т = -±-е~ 2°* ; (9.30)
V 2itas
/(/n) = —-— e 4 • (9-31)
V 27IO/-
Закон распределения случайной величины z (9.28) в этом
случае равен
со (s-mf ('-*-"//
/(,) = -J— Je" 2aJ / 2ajo д> (9.32)
27tCT^/o-oo
ИЛИ
27tCJ^/0-oo
где
" 2o^o ' " 2a52 Ц ' ~ 2a? 2o?
Воспользовавшись табличными значениями для определен-
определенных интегралов, получаем
ас-в1
f^-T^-Ц * А '
2™s% А
386
387
или, после преобразований,
(z-mzJ
/(?) = —— е 2°1 , (9.33)
J2noz
где т7= т^- mf ; с = vc? + o? .
Определив/(г), находим вероятность безотказной работы
(надежность)
00
Н = Р (Z> 0) = J/(*) dc. (9-34)
о
Введя новое обозначение
az
получим
Я-^Je^dp (Po«PU (9-35)
-Ро
График подынтегральной функции показан на рис. 9.13.
Функция /(Р) симметрична относительно вертикальной оси,
поэтому
Ро о Ро Ро
-J- J=-i- J=JLj+_!_j=0M + _Lj\
-Ibt _ро л/2тс_оо >Йл ^о V2n о V2rt" о
Рис. 9.13
Окончательно числовое значение надежности
! °J Л (9.36)
#=0,5 + -!- J e 2 dp.
V2tT о
Интеграл, входящий в правую часть (9.36), является таб-
табличным интегралом («интеграл вероятности»).
Пример 9.1. Вернемся к задаче оценки «прочности» стерж-
стержня, растянутого силой Р (см. рис. 9.1, а), по детерминирован-
детерминированному (9.10) и вероятностному (9.14) критериям. При детерми-
р
нированных ат и а = -^ «прочность» оценивается коэффициен-
коэффициентом безопасности п :
ат (9.37)
п = — .
а
При наличии случайных разбросов от и а аналогом коэф-
коэффициента п является коэффициент п, равный отношению ма-
математических ожиданий ат и а :
~ «а (9-38)
п = —1.
Но коэффициент п не учитывает среднеквадратичные раз-
разбросы ат и а. Как было сказано ранее, чтобы учесть все
вероятностные характеристики ат и а при оценке «прочности»,
надо использовать «вероятностный» критерий «прочности» —
вероятность безотказной работы.
Считаем, что случайные величины ат и а имеют нормаль-
нормальные распределения (рис. 9.14), т.е. известны числовые значения
математических ожиданий (тст и та) и среднеквадратичных
отклонений ста и аа.
Для нормально распределенных случайных величин s и /
надежность (вероятность безотказной работы)
388
Рис. 9.14
, '• _?
H=P[(S-F)> 01 = 0,5 + -*- j e 2dp,
V2tT 0
где
Результаты расчетов при различных значениях вероятност-
вероятностных характеристик ат и а представлены в табл. 9.1.
Таблица 9.1
Результаты расчета
Математи-
Математическое
ожидание
предела те-
текучести,
"Ч
5- 10"
5 10"
5- 10"
5- 10"
5- 10"
5- 10"
5 10"
Математи-
Математическое
ожидание
напряжения,
2 10
2,5 • 10
3,33-10
3,8 • 10"
4,17-10"
4,35 ¦ 10"
4,55 ¦ 10"
Средне-
квадра-
квадратичное
отклонение,
5 103
5-1O3
5 103
5- 103
5- 103
5 103
5-1O3
Средне-
квадра-
квадратичное
отклонение
напряжения,
2 103
2,5 • 103
3,33 • 103
3,8 • 103
4,17 • 103
4,37 ¦ 103
4,55 • 103
Коэффи-
Коэффициент
безопас-
безопасности л,
;3
2,5
2
1,5
1,3
1,2
1,15
1Д
Вероят-
Вероятность
безотказной
работы,
Р=Н
0,9999
0,9999
0,9974
0,9719
0,8997
0,8365
0,7486
389
При определении надежности Н было принято, что сред-
неквадратические значения разбросов ат и аа равны 10 % от
математических ожиданий. Из табл. 9.1 следует, что для всех
значений коэффициента безопасности вероятность отказа R
(R= 1 - Н) не равна нулю. Как и следовало ожидать, вероят-
вероятность безотказной работы выше при больших коэффициентах
безопасности п и меньше при малых п. Как изменятся вероят-
вероятности безотказной работы, соответствующие коэффициентам
безопасности п= 1,15 и п- 1,1, если взять более качественный
материал и уменьшить возможный разброс нагрузки?
Например, среднеквадратические разбросы ат и а (а зависит
от внешней нагрузки) равны 5 % от их средних значений. В
этом случае вероятности безотказной работы равны: 1) при
л=1,15 #=0,9726;2)прил = 1,1 Я = 0,9082, что соответствен-
соответственно на 14 и на 17 % больше их значений, чем при 10%-ном
разбросе среднеквадратичных значений аст и аа при тех же
коэффициентах безопасности (см. табл. 9.1). Числовые значе-
значения вероятности безотказной работы дают возможность иссле-
исследовать чувствительность конструкции к возможным разбросам
ат и случайной силы Р.
Как уже говорилось, абсолютные значения вероятностей
безотказной работы мало полезны, но возможность установить,
как влияет на работоспособность конструкции изменение ве-
вероятностных характеристик допустимых напряжений и внеш-
внешней нагрузки, является объективной оценкой качества кон-
конструкции. Сравнивая вероятности безотказной работы, напри-
например при п = 1,1 видим, что умень-
уменьшение среднеквадратичных значе-
значений от и ст на 5 % привело к
повышению надежности на 20 %.
В качестве примера найдем веро-
вероятность безотказной работы диска
с лопатками одной из ступеней
компрессора турбореактивного
двигателя (рис. 9.15). При работе
двигателя лопатки удлиняются из-
за возникающих при вращении
диска осевых распределенных
Рис. 9.15 центробежных сил и температу-
390
ры t°. Угловая скорость вращения диска ш и температура t°
имеют разбросы; зазор Д также имеет разброс, поэтому для
оценки надежности диска с лопатками надо определить веро-
вероятность выполнения этого неравенства (А - 5 L) > 0:
Н=Р[(А-А1)>0].
Примем, что закон распределения зазора Д является равно-
равновероятностным (рис. 9.16, а):
ГШ-\а А1<А<А2 (д = —J—1 (9>39)
J() |0 Д<Д, или Д>Д2 Д, -Д, '
а закон распределения Д / подчиняется нормальному распреде-
распределению (рис. 9.16, б):
ДД/) = — е 2<> . (9.40)
л/2л ад,
Рис. 9.16
Введя случайную величину z = A- A I, находим функцию
распределения F(z):
f(z)= JJ f(A,Al)dAdAl =
O(Z<z)
391
Дифференцируя по z, получаем
Дг [(А-г)-тдI2 (9.41)
Введя новое переменное
A-(Z + mAl)
'= °М '
получим
'2 i!
/Й) = L-7= J e~2 dt,
(Д2 - At) Ш ^
где
Д1-(г + «д/) д2-(г + /ид/)
и ; /т = •
стд/ стд/
Для каждого фиксированного Zj интеграл выражается через
функции Ф (/j) и Ф (ty, которые приводятся в справочниках:
/(^) = ^[Ф(Г2'^)-Ф(^^I- (942)
Изменяя дискретно z , получаем числовые значения закона
распределения/^) случайной величины z в дискретных точках
(рис. 9.17).
Воспользовавшись сплайн-функциями, можно получить,
ограничившись некоторым конечным значением zn (которое
определяется из требований по точности), непрерывную функ-
функцию/(г), а затем определить на интервале @, zn) вероятность
безотказной работы
392
Рис. 9.17
P(z>0)=lf(z)dz* jf(z)dz.
о о
Например, при следующих числовых значениях:
Aj = 0,4 см, Д2 = 0,8 см, тА 1 = 0,6 см, ад / = 0,06 см
(f @,1 - г) Ю2 , @,5-гI02>|
^1- 12 ' Г2" 12 I
после вычислений получаем
P(z>0) = 0,972.
Оценим надежность работы прямолиней-
прямолинейного стержня, нагруженного сжимающей
силой Р (рис. 9.18). Предельное состояние
стержня в данном случае связано с потерей
устойчивости. Поэтому для нормальной работы
стержня должно выполняться условие
Рк-Р=0, (9.43)
где Рк — критическая сжимающая сила,
Рис. 9.18
Так как Рк и Р имеют случайные разбросы, то требуется
определить вероятность безотказной работы:
393
P[(Pk-P)>0].
Примем следующие законы распределения для Рк и Р :
Л (Рк) = § (Pk-РкоУ, МР) = —t— e 2°гг ,
-Лпср
где 5 — дельта-функция.
Закон распределения
f(,Pk) показан на рис. 9.19,
т.е. Рк есть детерминиро-
детерминированная величина, равная
Введем случайную вели-
величину z:
Z=Pk-P>0. (9.44)
Для определения закона
распределения f(z) найдем
функцию распределения
Рис. 9.19 F(z), зависящую от со-
совместного закона распреде-
распределения Рк и Р. Поэтому совместный закон распределения при
независимых Ркн Р можно представить в виде
f{Pk,P)^b{Pk-PkQ)f{P). (945)
Закон распределения
F(z)= JJ b{Pk-P^f{P)dPkdP. (9-46)
D(Z<z)
Фиксируя z, получаем
P=Pk~z,
поэтому
F(Z) » J | J ЯР) dP 5 (Рк - Р*о) dPk . (9.47)
394
Дифференцируя F(z) no z, получим
со
f(z) = ^1=if(Pk-z)HPlc-Pk0)dPk,
-00
ИЛИ
f(z)=f(Pk0-z).
Поэтому
или
к-сЛо-и,)]2
/ft) = —^— e 2а2г . (9.48)
Полагая
Z-(Pk-mP)
°Р '
получаем вероятность безотказной работы
§ 9.4. Определение надежности при линейной зависимости
напряженного состояния от случайных нагрузок
Рассмотрим более общий случай, когда величина, характе-
характеризующая нагруженное состояние конструкции, линейно зави-
зависит от сосредоточенных и распределенных сил (рис. 9.20):
F=kxP+k2g> (9.50)
где Р — сосредоточенная сила; q — распределенная сила.
395
Рис. 9.20
Например, максимальное напряжение в заделке для стерж-
стержня, показанного на рис. 9.20, линейно зависит от Р и q :
Вероятность безотказной работы в этом случае равна
рК - <W > 0) = Р К*т " &\р + кг9)) > 0]. (9.52)
Нагрузки Р и q могут быть как зависимыми, так и независи-
независимыми — это определяется конкретными условиями.
Рассмотрим вначале случай, когда Р и q независимы и
имеют нормальные законы распределения. Предварительно
возьмем общий случай, когда случайная величина
г-Ъ'Л (953)
ы
и требуется найти ее закон распределения f(y) при известных
(нормальных) законах распределения Хг Операция определения
закона распределения суммы независимых случайных величин
Xjt имеющих нормальное распределение, называется компози-
композицией нормальных законов [14]. При композиции нормальных
законов получается снова нормальный закон. Поэтому закон
распределения f(y) имеет вид
396
О -и/
/(У) = -=-е 2СТ^ > (9-54)
где
ту = Л aimx.i °> = > S °?CTi;. •
Для рассматриваемой задачи у = к^Р+ k2q,
(у-т/
поэтому имеем /(у) = е 2оу ,
<гкоу
где
my = kxmp+k2mq; ay = ^kja2P + k\a\ .
Считая, что случайные величины S и Y независимы и S
имеет нормальное распределение, получаем {z= S- Y) закон
распределения f(z ) (9.26):
(z-mf
f(z) = -±r-e~ Ч2 ,
У2ястг
где
mz = klmP+ k2mg- ms; az= ^k\op + kjpy + a^ .
Вероятность безотказной работы системы равна
00
H=P[(S-klP+k2q))>0] = Sf(z)dZ.
О
о
^ Z-mz
Переходя к новому переменному / = = , получаем
az
397
Рис. 9.21
398
со ^
P(Z>0\ = H=— \e 2 dt.
Изложенный в данном параграфе алгоритм определения
вероятности безотказной работы при одноразовом или при
малом числе нагружений позволяет решать задачи расчета кон-
конструкций с заданной надежностью и задачи оптимизации кон-
конструкций.
§ 9.5. Определение вероятности безотказной работы при нелинейной
зависимости случайной величины F от внешних нагрузок
Рассмотренные в предыдущих пунктах задачи на определе-
определение вероятности безотказной работы относились к случаю,
когда функция /"линейно зависела от нагрузок, а напряженное
состояние элементов конструкций было одноосным. Рассмот-
Рассмотрим более сложные случаи, когда функция F, характеризующая
реальное состояние системы, нелинейно зависит от внешних
нагрузок (например, когда напряженное состояние элемента
конструкции является двухосным). На рис. 9.21, а показан
прямолинейный стержень прямоугольного сечения, который
нагружен силами Piy Р2 и крутящим моментом М. Считается,
что законы распределения Plt Р2 и М известны. В точках А и
В сечения стержня (рис. 9.21, б, в) имеет место двухосное
напряженное состояние. Опасным сечением является сечение
при z — 0.
В точке А (рис. 9. 21, б) имеем
Pl М . .
где а — коэффициент Сен-Венана (табл. 9.2).
В точке В (рис. 9.21, в)
Р1 Р21
6
Таблица 9.2
Значения коэффициента Сен-Венана
h/b
а
Л
1
0,208
1
1,5
0,231
0,859
1,75
0,239
0,820
2
0,246
0,795
2,5
0,258
0,766
3
0,267
0,753
4
0,282
0,745
6
0,299
0,743
8
0,207
0,742
10
0,313
0,743
00
0,333
0,742
Определим вероятность того, что эквивалентное напряже-
напряжение в точках А и В меньше предела текучести, т.е.
Р[(ат-Оэ)>0]. (9.55)
Вероятность Р есть вероятность безотказной работы эле-
элемента. Эквивалентное напряжение по гипотезе энергии фор-
формоизменения [41] равно
аэ = Va2 + Зт2 .
В точках А и В эквивалентное напряжение соответственно
равно
с#> = ^Р\ + а2М2 ; (9-56)
а<*> = -4{ахРх + аъР2J + а4М2 , (9-57)
399
где ., . да) ; а2 , ЗфМ* ; *3 - Щ ; а4 . ^.
Если Л > 6, то в точке /1 касательное напряжение iA больше,
чем в точке Див зависимости от параметров стержня
(/, Ь, И) и числовых значений Pt, Р2 и М максимальное экви-
эквивалентное напряжение в сечении может быть как в точке А,
так и в точке В, Поэтому вероятность безотказной работы
стержня будет равна наименьшей из вероятностей:
/>[(ат-о?0)>0];
Р[(ат-а^)>0].
Основная трудность при определении вероятностей безот-
безотказной работы заключается в определении законов распреде-
распределения ау* и а^ при нелинейной зависимости эквивалентных
напряжений от внешней нагрузки.
Рассмотрим алгоритм приближенного решения этой задачи.
Полагаем
Рх = Р10 + Щ , Р2 = Р20 + АР2, М=М0 + АМ,
где Р10 , Р20 , Mq — математические ожидания случайных вели-
величин; Д/\ , АР2 и ДЛ/ — случайные разбросы, которые подчиня-
подчиняются определенным законам распределения, например нор-
нормальным законам распределения (рис. 9.22) или законам рас-
распределения Релея (рис. 9.23).
Считаем, что APj , AP2 и ДМ являются малыми (по сравне-
сравнению с математическими ожиданиями) случайными величина-
величинами. Например, если случайные разбросы подчиняются нор-
нормальным законам распределения, то, воспользовавшись прави-
правилом «трех сигм», находим их максимальные значения (при
нулевых математических ожиданиях):
max Д-Pj = | Задр |; max АР2 = | ЗаАР |; max ДЛ/= | ЗадЛ/|.
Поэтому, если | max Д^ | « POj (/=1,2) и | max AM |« Мо,
то случайные величины дА(/= 1»2) и ДМ можно считать ма-
400
Рис. 9.22
Рис. 9.23
лыми. Если случайные величины подчиняются законам рас-
распределения Релея, то максимальные значения находятся из
условий
тахДЛ
Р= J f(APj)dAPj=0,98. (9.58)
О
Аналогично можно определить максимальные значения
случайных разбросов и для других законов распределения, что
необходимо для обоснования предположения о малости
APi , АР2 , AM а для линеаризации нелинейных функций (9.56)
и (9.57).
Рассмотрим общий случай, когда функция F зависит от
конечного числа случайных величин х,:
27 Зак. 341
401
H=PKS-F(Xj))>0], (9.59)
где Xj = rriQj + Axj (Axj — малые величины).
Для приближенного решения надо функцию F разложить в
ряд. Ряд Тейлора для функции F в окрестности точки
F(mx , т~ ... тх ) имеет вид
\ JL П
П
F = FQ(m ) + X г-1 = mbxj +
1 н oxj J xj
2ММ dXJdX' Xj = m
Ограничившись линейной частью разложения, получаем
п
F=F0 + ^cjAxj' (9.60)
М
где
j ах,*,*""*,'
Определим вероятностные характеристики случайной
функции:
1) математическое ожидание /"равно
mF= Fo. (9.61)
2) дисперсия случайной величины F (9.60) равна
Df=m[fi} = m[(ZcjAx^ У
= I«?V5:c<cA*y (962)
а*/
Для независимых случайных величин Дх.- соответственно
имеем
402
mF = Fq,
n (9.63)
В результате получаем
n
H=P[(S- F) > 0] = P[(S- (^0 + Z ciA */» > °1- (964>
Для дальнейшего решения необходимо получить закон рас-
распределения случайной величины
п
y=/j, + ?C/AAi, (9.65)
Ы
где Д Xi — независимые случайные величины, законы распре-
распределения которых считаются известными.
Ограничимся случаем, когда законы распределения АХ яв-
являются нормальными. Получим закон распределения/(у), вос-
воспользовавшись характеристическими функциями. Характерис-
Характеристическая функция gy случайной величины у равна (t — пара-
параметр)
л
gy(t) = M[e»Y] = М[е(Р° + Ъ C/AX'} ] =
л п
= eitFo М [ П в''с< ** ] = е'^о П gAx (ctt). (9.66)
Характеристическая функция случайной величины X: =
= c.AXj, имеющей нормальное распределение, равна [13, 29]
/ftnv г-^ //(с. т. ) г—*
Поэтому для характеристической функции gy (J) получаем
27* 403
(9.67)
или
Можно показать, что характеристическая функция gy(t),
соответствующая нормальному закону распределения [29]
(У-ЩуJ
f(y) = ~^e 2°l ,
S2nay
равна
itm —2
gy«) = e 2 .
Функции f(y) ngy(t) связаны преобразованием Фурье, поэ-
поэтому характеристической функции (9.67) соответствует нор-
нормальный закон распределения
(у-туJ
/(y)=_L_; 2.) ; (ад
уГ2пау
где
п п
ту=^0+Т cjmAXj: °l = Z <7 СТДх,. •
Для рассматриваемой задачи, например для точки В, после
линеаризации эквивалентного напряжения получаем
Y =<**> = 0$ + сх А Рх + с2 АР2 + с3АМ, (9.69)
404
где
а^> = ^а1Рю+а3Р20J + а4М20 ;
1 ^aiPl0 + a3P20J + a4M20
_ d<t*> _ аъ{ахР10 + а3^2о)
С2~ QP ~ '
2 ^aiPXQ + аъР20J + aAMl
с _ ^ _ а*М*
Ш i(aiPXQ + a3P30J + a4M2
При нормально распределенных АРг , АР2 и АЛ/ закон рас-
распределения /(а^) (см. рис. 9.22) является нормальным:
(af-mo(fl»2
/(aCB>) = 1 в" ^f .
Здесь
waf = 4ff*;
Поэтому закон распределения f(z) случайной величины z,
равной z=S-F=aT- a^ , при нормальном законе распреде-
распределения
(z-mzJ
42noz
где
405
стг = с1аАР1 + <&АРг + С3СТДМ + аст •
Вероятность безотказной работы
00 (^
Р [(ат - аэкв) > 0] = -^ J Л" *. (9.70)
л/2я ^
Рассмотрим случай, когда APj , Д/*2 имеют нормальные рас-
распределения (см. рис. 9.22, а), а ДМ имеет распределение Релея
(см. рис. 9.23, б).
Требуется определить надежность (9.64) для случая, когда
случайные величины, входящие в функцию F(xj)
п
F(xp = Y,cjxj+b' <9-71>
имеют разные законы распределения. Например,
X:(J= 1, 2 ... п - 1) имеют нормальные законы распределения, а
хя имеет распределение Релея.
Представим (9.71) в виде
F(xp = y + cnKn = y + $), (9-72)
где
л-1
ы
Воспользовавшись характеристическими функциями, полу-
получаем закон распределения у + Ъ, который является нормальным
законом распределения (9.68).
Затем находим композицию законов распределения /О) и
Введем случайную величину ylt равную
У1-у + 4° • (9.73)
406
В соответствии с общим алгоритмом определения закона
распределения суммы независимых случайных величин (9.23) —
(9.26) имеем
О ' -00
ИЛИ
00
о
Пределы изменения у^ от -« до оо.
В результате получаем
H=P[(S-yi)>0].
Полагая z = S-y\, находим закон распределения/(г):
00
f(z) = lfs(s)f(s-z)ds. (9-76)
—00
Определив f(z), находим надежность безотказной работы
системы при действии независимых случайных возмущений,
имеющих разные законы распределения:
00
H=\f{z)dz. (9-77)
о
Если интеграл в правой части (9.77) не табличный, то его
можно приближенно определить численно. Для этого предва-
предварительно найти значения f(z) в ряде дискретных точек (см.
рис. 9.17), а затем, воспользовавшись сплайн-функциями, по-
получить непрерывную функцию/(^) на ограниченном интервале
изменения z и численно определить Н.
407
Глава 10. СЛУЧАЙНЫЕ ПРОЦЕССЫ
ПРИ ДЕЙСТВИИ СЛУЧАЙНЫХ ФУНКЦИЙ,
ОГРАНИЧЕННЫХ ПО МОДУЛЮ
При изложении теории случайных колебаний (см. гл. 6—8)
считалось, что все необходимые сведения о случайных возму-
возмущениях (законы распределения или вероятностные характерис-
характеристики случайных функций) известны, что позволило по извест-
известным вероятностным характеристикам входа получить вероят-
вероятностные характеристики выхода.
Кроме того, необходимым условием применения методов
теории случайных процессов является многократность осу-
осуществления случайного события в практически однородных
условиях. Только при массовых событиях имеет смысл приме-
применение вероятностных методов исследования. Однако очень
часто при исследовании конкретных задач динамики механи-
механических систем необходимая информация о случайных возму-
возмущениях или отсутствует, или же получение ее представляет
собой задачу, несоизмеримо более сложную и трудоемкую, чем
последующее решение уравнений движения.
Отсутствие необходимой информации о случайных силах
усложняет решение прикладных задач, а вводимые допущения
и предположения приводят к весьма приближенным и мало
достоверным числовым результатам.
При решении задач о случайных колебаниях автомобиля
при движении по дороге со случайными неровностями (см.
гл. 6) считалось, что необходимые вероятностные характерис-
характеристики неровностей дороги известны. Для получения этих веро-
вероятностных характеристик требуется очень большая экспери-
экспериментальная работа, поэтому эти характеристики имеются толь-
только для ограниченного числа дорог. При проектировании кон-
конструкции (например, автомобиля) должны учитываться усло-
408
вия, в которых он будет эксплуатироваться. Только с учетом
этих условий можно ставить задачу об оптимизации конструк-
конструкции и о повышении его надежности. Когда внешние условия
известны (например, известны вероятностные характеристики
внешних сил, которые будут действовать на конструкцию), то,
воспользовавшись методами теории случайных процессов,
можно определить внутренние усилия (напряжения), возни-
возникающие в конструкции, по которым можно судить о ее воз-
возможной надежности. Но если вероятностные характеристики
внешних возмущений неизвестны, то воспользоваться теорией
случайных процессов нельзя [31, 32].
Надежность работы конструкции существенно зависит от
того, насколько точно принятые в расчетах внешние возмуще-
возмущения или условия работы конструкции отражают реально дей-
действующие возмущения или условия работы. Для получения
вероятностных характеристик случайных функций надо иметь
большое число реализаций процесса, что может быть сопряже-
сопряжено с большими трудностями при проведении эксперименталь-
экспериментальных исследований или с большими материальными затратами.
Поэтому возникает задача о методах оценки воздействия слу-
случайных возмущений на механическую систему при минимально
возможной информации о случайных функциях, которую легко
получить.
Наиболее простым при
экспериментальном иссле-
исследовании является определе-
определение допуска случайной ве-
величины или области воз-
возможных значений случай-
случайной функции. На рис. 10.1
показана область возмож-
„ Рис. 10.1
ных значении случайной
функции f(t), когда экстре-
экстремальные значения функции/(/) равны по модулю и неизменны
во времени. В дальнейшем случайную функцию, заданную
областью возможных значений, будем называть случайной функ-
функцией, ограниченной по модулю. В общем случае граница области
возможных значений функции/(/) может меняться во времени
26 Зак. 341
409
(рис. 10.2). Так как информация о поведении функции /(О
внутри области возможных значений отсутствует, мы вправе
предположить, что оно может быть любым, т.е. класс функций,
характеризующий возможное поведение случайной функции
/(О. включает в себя и класс кусочно-непрерывных функций
с разрывами первого рода.
Возможное разрывное по-
поведение функции /(О во
времени показано на
рис. 10.1 и 10.2 штриховой
линией. Физически раз-
разрывное поведение возму-
возмущения во времени означа-
означает, что оно является безы-
безынерционным. Реальные
случайные возмущения об-
обладают инерционностью,
например случайная ветро-
ветровая нагрузка не может
мгновенно изменить свое направление, что равносильно мгно-
мгновенному изменению скорости ветра. Поэтому допущение о
возможном разрывном поведении случайного возмущения яв-
является идеализацией реального поведения f(t). В дальнейшем
будет показано, что такая идеализация поведения/(О приводит
к наихудшим возможным воздействиям на систему.
Для выяснения основных особенностей динамических задач
при действии разрывных возмущений, ограниченных по моду-
модулю, рассмотрим следующий пример.
Пример 10.1. Тело массой т движется горизонтально под
действием силы R (рис. 10.3). Сила R имеет разброс AR(t),
причем | Ai?max | = а = const (т.е AR (t) является случайной
функцией, ограниченной по модулю, рис. 10.4). Силу R можно
представить в виде
Л(/) = Ло(Г)±АЛ@, A0.1)
где i?o@ — расчетное значение силы R.
Уравнение движения массы т (пренебрегая всеми другими
силами, кроме R) запишем в виде
Рис. 10.2
410
Рис. 10.3
*(') = ^Л. A0.2)
Требуется определить мак-
максимально возможные разбросы
х и х, которые может иметь
тело в фиксированный момент
времени tk при действии слу-
случайной силы AR, заданной об-
областью возможных значений.
Смещение х можно предста-
представить в виде
х(О = х0(О + Л*(О, (ЮЗ)
где х0 — смещение, соответст-
соответствующее расчетному значению
Rq; Ax(t) — возможный разброс смещения, вызванный слу-
случайной силой AR (t).
Уравнение возмущенного движения тела имеет вид
Ax(t) = ±-AR. (Ю-4)
т
Полагая
Ах = хх; Ах = х2, A0.5)
получаем систему уравнений
*i=/(O;
A0.6)
х2 - х{ ,
..,.. AR
Каждому возможному поведению АЛ (t) соответствуют оп-
определенные значения хк и хк в момент времени tk. Так как
время процесса и сила AR ограничены, то ограниченными будут
A Xj и А хк, поэтому, если воспользоваться фазовой плоскос-
плоскостью, то каждому возможному поведению AR (t) будут соответ-
26* 411
Рис. 10.4
ствовать точки плоскости (Д хк , Д хк) , которые будут локали-
локализованы в ограниченной области фазовой плоскости.
На рис. 10.5 область воз-
возможных значений Д хк и Д^
заштрихована. Смещение хк и
скорость хк соответствуют рас-
расчетному режиму движения тела
в момент времени tk. Из огра-
ограниченности области возможных
значений следует, что имеется
предельная кривая, охватываю-
охватывающая область возможных значе-
значений (методы определения облас-
области возможных значений реше-
решений уравнений движения систе-
системы будут изложены ниже).
Предельная кривая делит фазо-
фазовую плоскость на две области: область значений Д хк и Д хк,
реализация которых возможна (заштрихованная область), и
область значений Д хк и Д хк, которые никогда (при данной
области возможных значений AR) не реализуются, например
значения Д хк и Ахк, соответствующие точке А на рис. 10.5.
Знание области возможных значений Д хк и Д хк позволяет
ответить на ряд практически важных вопросов, в частности:
какие возможные максимальные значения Д^ (точка а) и
Д хк (точка б) при самых неблагоприятных законах изменения
AR (t); как размеры области зависят от параметров системы и
как выбрать параметры системы, при которых область дости-
достигает минимальных размеров.
Найдем область возможных значений решения системы
A0.6), которую (при нулевых начальных данных) можно пред-
представить в виде
*t 'к'к '*
xi = J/(t) А ; х2 = j \fdi =j(t- т)/(т) A . A0-7)
0 00 0
412
Соотношения A0.7) не учитывают разрывное поведение
/(т), поэтому получим выражение для Xj и х2 с учетом возмож-
возможного разрывного /(О на интервале времени @, tk). Пусть,
например, в момент времени f (/' <tk) функция /(/) меняет
знак (штриховая линия на рис. 10.4). Для определенности
можно считать, что до t' она была равна +а, а после /' равна —а,
т.е.
Га 0±t<f; A0.8)
/vJ-1_e t'<tztk.
При таком изменении функции f(t) получаем
'г 'г *\ 'г <10-9)
xl = J оЛ - J аск , хг = a ](tk-i)di- a \ (tk - т) <к ,
0 г 0 /¦
или после интегрирования
xl = Qf-tk)a;
^ = -f[c*-''J-'^f[-c*-''J]. A010)
Возможно и несколько иное поведение функции /, а имен-
именно: от нуля до /" функция /= -а, а от f до /^ f=+a. При
таком законе изменения /знаки перед интегралами в правой
части выражений A0.9) изменятся на обратные, т.е. возможны
значения xt и дс2 с противоположными знаками. Область воз-
возможных значений Xj и х2 при t=t' ограничивается кривыми
A0.10), заданными в параметрическом виде. Если положить
tk- 1, то выражения для х} и х2 будут иметь вид
xl = {2f - \)а; х2 = аГ2/'--|-/'21при0<Г < 1.A0.11)
Выражения A0.11) дают одну ветвь предельной кривой.
Вторая ветвь будет симметричной (относительно начала коор-
координат), так как возможны значения Xj и х2, равные по величине,
но противоположные по знаку. На рис. 10.6 область возможных
значений заштрихована, она занимает лишь часть площади,
413
построенной на максимальных
значениях Xj и х^, если функ-
функция/на интервале (О, /К) имела
один разрыв. Какие значения
примут функции хг и X}, если
функция / будет иметь два или
больше разрывов? Может быть,
в этом случае получим точку на
плоскости (х1; я?), лежащую за
пределами заштрихованной об-
области. Рассмотрим случай,
когда функция /имеет два раз-
разрыва в моменты f и
Рис. 10.6 t"(t">C):
[ а при 0 <, х <, f ;
/= -априГ<т<Г ; A0.12)
а при f < т < tK .
Выражения для Xj и Xi после интегрирования будут иметь
вид (при /к = 1):
хх = Bt' -2t" + 1)а;
x2 = i[i+2(i-t»J-2a-t'J} A0ЛЗ)
Взяв два произвольных момента времени f = 0,4; /" = 0,6,
из A0.13) получим Xj и х^. хх = 0,6а ; Xj = 0,3а .
На рис. 10.6 показана эта точка, которая попала внутрь
заштрихованной области, т.е. «хуже» не получилось. Взятый
при построении области закон изменения функций (с одним
разрывом) оказался наиболее неприятным. В дальнейшем будет
показано, что, действительно, для данной системы уравнений
наихудшим законом изменения функции является закон изме-
изменения с одним разрывом. В этом частном примере возможен
такой закон изменения функции/(/= const) на всем интервале
времени, при котором достигается совместный максимум
функций Xj и Xi при t = tK (причем возможны совместные
максимумы только одного знака). Что произойдет с областью,
414
если функция будет меняться в более широких пределах, ска-
скажем, внутри полосы, ограниченной прямыми ± 2а (а не ± а,
как в примере)?
Из выражения A0.13) легко установить, что функции х1 и
х2 были бы в два раза больше, т.е. область стала бы больше,
но ее форма и положение внутри прямоугольной области не
изменились бы. Подобное увеличение или уменьшение допуска
на возмущение функции приводит к подобному изменению
области возможных значений решений системы дифференци-
дифференциальных уравнений. В рассмотренном примере область возмож-
возможных значений Ху и х2 получилась симметричной относительно
начала координат, что, однако, не всегда имеет место. Поло-
Положение области возможных значений решений системы (для
рассматриваемого примера это функции xt и х2) зависит от
границ возможных возмущений (функции/в данном примере).
Построим область возможных значений Ху и х2 для функции
/, заданной внутри полосы на рис. 10.7.
Рис. 10.7
Рассмотрим сначала случай изменения функции /, показан-
показанной на рис. 10.7 сплошной линией. В этом случае функция /
задана в виде
ГаприО<т</';
•/-|0при^т?/к. UU14)
После вычислений получим при tK = 1
x^fa; x2 = j[2f-t'2]. A0.15)
При изменении функции/
JO приО<т?Г ;
*~\а при f < т < tK
415
х1 и х2 имеют вид
xx = \-t'; x2 = ±(l-t'J. (Ю.16)
Системы A0.15) и A0.16)
определяют уравнение пре-
предельной кривой (две ветви).
Соответствующая область
показана на рис. 10.8. В рас-
рассмотренных примерах гра-
границы области, внутри кото-
которой изменялась функция /
были постоянными во вре-
времени. Аналогичным образом
может быть определена область и для случая, когда границы
области зависят от времени t, как, например, показано на
рис. 10.2, т.е.
m(t)<f(t)?M(t). A0.17)
В общем случае на систему могут действовать и несколько
случайных возмущений fk (t), ограниченных по модулю и удов-
удовлетворяющих условиям
mi(t)<fi(t)<Mi(t) (/=1,2,...*), A0.18)
где mi (О, -W/ (t) — известные функции времени, являющиеся
нижней и верхней границами области возможных значений,
внутри которой функция fj может принимать любые значения.
Предельные значения функции fi {mi и Mt) могут быть и
не зависящими от времени t. Множество функций, удовлетво-
удовлетворяющих условиям A0.18), включает в себя и детерминирован-
детерминированные функции, изменяющиеся во времени по известным зако-
законам, оставаясь внутри области возможных значений. Среди
удовлетворяющих условию A0.18) могут быть и функции, со-
сохраняющие постоянные случайные значения в течение всего
процесса, например случайные начальные данные. Для случай-
случайных функций, сохраняющих постоянное числовое значение в
течение процесса, введем обозначение /?. Функции /? могут
принимать любое значение внутри интервала:
Рис. 10.8
416
A0.19)
Ограничения типа A0.18) или A0.19) на возмущения имеют
вполне определенный физический смысл, характеризуя пре-
предельно возможные отклонения возмущений, которые могут
быть в данной системе. В технических задачах, где возмущения
fj характеризуют разбросы сил или параметров системы, допус-
допуски на отклонения этих величин от их номинальных значений
могут быть установлены достаточно точно.
Случайные функции ft и случай-
случайные величины /?, удовлетворяю-
удовлетворяющие условиям соответственно
A0.18) и A0.19), являются незави-
независимыми. Например, если на систе-
систему действуют две случайные функ-
функции/^/1) и f2(t), удовлетворяющие
условиям A0.18), то в любой мо-
момент времени их возможные значе-
значения находятся внутри прямоуголь-
прямоугольной области (рис. 10.9). В этом РИС. ю.9
случае компоненты вектора возму-
возмущений являются независимыми.
Наряду с независимыми случайными возмущениями воз-
возможны и зависимые случайные возмущения, ограниченные по
модулю. Рассмотрим в качестве примера массу т (рис. 10.10),
на которую действует сила f, случайная по направлению (угол
а случайный) и ограниченная по модулю | f | < а. Масса
находится на безынерционном упругом стержне. Ограничимся
Рис. 10.10
417
выводом условия, которому должны удовлетворять проекции
силы f на оси X, Y. В уравнение движения массы т в проекциях
на оси Хи У войдут проекции силы/,.4 w.fy, равные
/x=/cosa; /y=/sina. A0.20)
Из A0.20) можно получить соотношение
Jx+Jу J >
но так как / ограничена по модулю
|/(О| Sfl=/m,
имеем
1Mb
т.е. возможные значения возмущений ограничены областью,
показанной на рис. 10.11. В более общем случае сила /может
иметь и проекцию на ось Z, поэтому соотношение A0.21)
принимает вид
Условие A0.22) можно записать в более общем виде:
(Cff)<l, A0.23)
где С — определенно положитель-
положительная, самосопряженная квадратная
матрица. Левая часть условия
A0.23) представляет собой опреде-
определенно положительную квадратич-
квадратичную форму.
Возможны два типа случайных
возмущений fi{t), удовлетворяю-
удовлетворяющих A0.23) : а)/} (О не зависит от
Рис. Ю.п времени, т.е. это возмущения типа
418
/Р; б) случайные возмущения ft (t) можно представить в виде
fj = hjit)/®, где А,-(О — известные функции, зависящие от
времени. В случае б) случайные возмущения fj} удовлетворяю-
удовлетворяющие A0.23), изменяются во времени.
Основная задача, связанная с исследованием нестационар-
нестационарных колебаний механической системы при действии возмуще-
возмущений, удовлетворяющих ограничениям A0.18) или A0.19) и
A0.23), может быть сформулирована следующим образом. Тре-
Требуется определить область возможных значений вектора у,
характеризующего возмущенное состояние системы в фикси-
фиксированный момент времени tk, если компоненты вектора воз-
возмущений являются случайными функциями, удовлетворяющи-
удовлетворяющими условиям A0.18) или A0.19) и A0.23).
Частными случаями сформулированной задачи являются:
задача определения проекции л-й области возможных значений
вектора состояния системы при нестационарных колебаниях
на двумерные плоскости (области, аналогичные приведенной
на рис. 10.6) и задача определения максимально возможных
значений каждой из компонент у,- вектора состояния (Y в
фиксированный момент времени).
§ 10.1. Определение максимальных значений компонент вектора
состояния систем
Рассмотрим векторное уравнение движения системы вида
y + A(t)y=B(t)f(t). A0.24)
Решение уравнения A0.24) при ненулевых начальных дан-
данных имеет вид
'*
y = K(tk)y0+lG(tk,t)B(t)f(t)dt. A°-25)
о
Компонентами вектора начальных данных у0 являются слу-
случайные числа, удовлетворяющие условиям (считая, что у0, за-
заданы областями возможных значений)
(%)min^q/*(%)max- (Ю-26)
419
гле Oty)min и (%W ~ известные значения.
Вначале рассмотрим случай, когда компоненты вектора f
независимы, т.е. удовлетворяют условиям A0.18)
mi(t)<fi(t)^Mi(t).
В скалярной форме записи /п-я компонента вектора
Д ? г A0-27)
Ут С* ) = Z *m/ % + Z J rfm v/v * .
/=1 v 0
где р — число компонент вектора f, которое может быть и не
равным п; dmv — элементы матрицы D = G (т) В (т).
Максимальное значение у
п р к
max (уи) = X max (kmj yOj) + ? max J dwv/v Л . A0-28>
/=1 v=l 0
Максимальные значения слагаемых, зависящих от компо-
компонент вектора начальных данных, достигаются при следующих
значениях:
Uyn*x при *„,•>();
J l%minnPH^<0.
Максимальные значения интегралов, зависящих от /v , со-
соответствуют следующим законам изменения возмущений
Л(т): Л(т) = -Ц>(т) на интервалах времени т, где dmv{i) >0, и
^ (т) = mv (т) на интервалах времени т, где dmv(%) < 0, т.е.
JMvnpnrfmv>0;
Уу [тупри</ту<0.
Например, если ту- - значения времени, где функции dmv
меняют знак, то максимальные значения интегралов, входящих
в правую часть A0.27) (для определенности полагаем, что на
первом интервале от 0 до т^ dmv> 0),
420
t тМ t(v)
Ч Tl Т2
max J^mv/v A = \dmv Mv dx + \dmv mv A + - 00.31)
0 0 TM
В частном случае, когда l^q/minl = l%maxl = fly> lwyl =
= | M/1 = b:, максимальное значение компоненты ут
к ч
max(ym) = Y\kmj\aJ + ljbjj\dmJ\d,. A0.32)
>i >i о
В результате определяем максимально возможные значения
каждой из компонент ут A0.28) вектора состояния системы в
фиксированный момент времени, например в момент времени,
соответствующий потере контакта между ракетой и направляю-
направляющей (см. рис. В1).
Изложенный метод позволяет определить не только макси-
максимально возможные значения компонент вектора состояния
системы, но и соответствующие наихудшие законы изменения
во времени случайных возмущений, ограниченных по модулю.
Наихудшие законы изменения возмущений ft во времени, со-
сообщающие максимальные значения каждой из компонент ут
вектора состояния, различны, т.е. при одной реализации про-
процесса эти законы осуществиться не могут. Знание максимально
возможных величин компонент вектора состояния системы
весьма полезно, так как эти значения гарантированные.
§ 10.2. Области возможных значений вектора состояния системы
при действии независимых возмущений
В зависимости от изменения во времени компонент вектора
f будет изменяться модуль и направление вектора состояния у.
В силу ограниченности компонент векторов f и у0 и условий
A0.18) и A0.19) будет ограниченным и вектор у при конечном
интервале времени tk (рис. 10.12). Поэтому все точки л-мерного
фазового пространства можно разбить на два множества: мно-
множество точек, которые могут быть достигнуты вектором у при
всевозможных изменениях вектора f, и множество точек, ко-
которых вектор у достичь не может.
421
Предположим, что извест-
известны максимальные значения
проекции вектора у на на-
направления, определяемые
единичным вектором а. Про-
Проводя из концов этих проекций
при разных а перпендикуляр-
перпендикулярно к ним гиперплоскости, по-
получим некоторую замкнутую
область, заключенную внутри
плоскостей. Так как единич-
единичный вектор а зависит от и—1
параметров (проекций на ко-
координатные оси), мы получа-
получаем и—1 параметрическое семейство гиперплоскостей. Описан-
Описанный выше геометрический метод получения области сущест-
существенным образом связан с предположением о «выпуклости»
области, т.е. если какие-либо две точки принадлежат границе
области, то все точки отрезка прямой, соединяющего эти две
точки, принадлежат области. Например, если вектор f^ опре-
определяет точку 1 (точка 1 соответствует вектору состояния у^.
получающегося в результате действия вектора №, а вектор f^
— точку 2 (вектор у^), то вектор
f = X f<!> + A - Л) f<2> (Ю.ЗЗ)
при изменении X от 0 до 1 определяет все точки отрезка прямой,
соединяющего точки 1 и 2. Вектор состояния системы при
взятом f может быть представлен в виде
у = Лу<1> + A-Л)уб>, A0.34)
и при непрерывном изменении Л. от 0 до 1 вектор у «пробегает»
все точки прямой, соединяющей концы векторов у'1) и у^2\
Это свидетельствует о том, что все векторы у (при 0 < X < 1)
лежат внутри области возможных значений, т.е. область явля-
является выпуклой.
Определив максимальные значения проекции вектора у для
каждого направления вектора а, можно перейти к определению
предельной поверхности. Проекция вектора у на направление,
Рис. 10.12
422
определяемое единичным вектором а, с компонентами (а1;
а2 ,... а„) запишется следующим образом (рис. 10.12):
Уир а = (У-«). (Ю.35)
или
3>пр а = 1>(«/- A0'36)
Ы
После подстановки в условие A0.36) выражений для ут
A0.27) получим
п п *
Z\- Г /. ч г j A0.37)
где
п
9=IV.-; A0-38)
ы
ы
Среди компонент вектора f могут быть и возмущения, не
изменяющиеся во времени (/"?), поэтому представим выраже-
выражение A0.37) явно зависящим от/j- и/^ :
>w«=?o%+?b('*'^+?^/°v' A0-40)
j=l j=\ 0 itl
где
о
423
Задача определения области возможных значений вектора
возмущенного состояния системы у свелась к определению
максимально возможного значения выражения A0.40) при ог-
ограничениях, которым должны удовлетворять функции у* ,f: и
/у , максимизирующие выражение A0.40), причем функции /
принадлежат замкнутому множеству. Это условие означает, что
для них допустимы и предельные значения, т.е. Л может быть
равным на некотором интервале времени (^ , f2) своим пре-
предельным значениям, например,
/гтЛП ihst*»; (io4i)
fj=Mj(t) (t^t<t2).
Покажем, что экстремальные значения векторов у(^) (см.
рис. 10.12), образующих предельную поверхность, достигаются
на классе разрывных функций /¦, удовлетворяющих условиям
A0.18). Определим максимальное значение каждой из сумм,
входящих в правую часть выражения A0.40) отдельно. Найдем
максимальное значение первой суммы
lW/> A0-42)
при выполнении условий yim йу^й yJM, где yjm , yjM - соответ-
соответственно минимальное и максимальное возможные значения
У/q. Максимальное значение сумма A0.42) принимает, если
yfi равны yjM при ry (tk) > 0 или yfi равны yjm при гу- < 0.
Максимальное значение второй суммы в A0.40) получим,
взяв fj (т) по верхней границе полосы в интервалах изменения т,
где qj(.tk,i)>0, и по нижней границе, где ду(^,т)<0, т.е.
экстремальное значение суммы
„'*
Z \qj{tk,x)fjtk
МО
достигается на функциях вида (разрывных функциях)
424
[М, (т), если а-. > 0;
/"¦ = < J 3 C10 43)
JJ Ц(т), если ^< 0, UU4J;
что и требовалось доказать (так как законы изменения /•,
дающие экстремум скалярному произведению (у, а), опреде-
определяют и экстремальные значения вектора у (Jk)).
Для определения точек разрыва функции /¦ найдем тд, где
q: {tk, т) меняет знак. Для определения тд имеем уравнение
Зная Xjk, определяем законы изменения^-(т), дающие максимум
соответствующему слагаемому в выражении A0.40). Макси-
Максимальное значение третьей суммы получим, приняв /J равным
максимальному значению при Q ° > 0 и минимальному значе-
значению при Q J < 0. Таким образом, для каждого направления а
определяются такие значения у^ ,/*) и функции/., при которых
проекция вектора у (tk) на это направление принимает макси-
максимальное значение. Зная у$ ,/° и /•, по формуле A0.40) опре-
определим проекцию у на направление а. Компоненты вектора
у (tk) равны
У1 = ? Чур +1 Wi * + Е ^v/°, A0'44)
где
h
о
Интеграл J ^^- А с учетом закона изменения функции /
о
может быть вычислен через первообразные функции
425
о
'* A0.45)
0
Предположим, что функции fj имеют точки разрыва xjk.
Тогда
Jе^-ск-/f(хд) + Г/7(ту2)-^(тдЯ +..., A046)
о
если qj (tk , т) > 0 при 0 < т < Хд ,
'к
J Qrfch = Ffj (тд) + \Fff(xft) - Ftfw] + .... A°-47)
о
если q> (ifr, т) < 0 при 0 < т < т .j .
Рассмотрим частный случай, когда границы области воз-
возможных значений случайных возмущений /• постоянны во вре-
времени:
\fj\saj. A0.48)
Для этого класса возмущений максимальное значение вто-
второго слагаемого в выражении A0.41) будет равно
Z*fl»ft.*>l*. A0'49)
М о
Несмотря на исходные линейные уравнения, задача, свя-
связанная с определением области возможных отклонений реше-
решений системы в фиксированный момент времени, является не-
нелинейной, так как наихудшие воздействия возмущений (мо-
(моменты времени переброса возмущений с одной граничной кри-
426
вой области возможных значений на другую) происходят не в
заданные извне моменты времени, а в моменты, зависящие от
свойств самой системы. Область возможных отклонений со-
сохраняет свою конфигурацию (в смысле подобия) при пропор-
пропорциональном изменении всех возмущений. При подобном из-
изменении возмущений имеем
f1 = pf; f? = pf°, (Ю.50)
где р — скалярный множитель.
Соответственно изменяются и условия A0.18) и A0.19),
которые примут вид
рт^/ц^Щ; р/и?</0><рМ?.
Вследствие линейной зависимости решения уравнения
A0.25) от вектора возмущений f ° в р раз изменяются и ком-
компоненты вектора у (tk), определяющие предельную поверх-
поверхность, т.е. пропорциональное изменение векторов f и f° при-
приводит к подобному изменению области возможных отклонений.
Пример 10.2. Динамически устойчивое движение ракеты
может сопровождаться малыми колебаниями ее на траектории,
которые вызываются разбросом тяги двигателя, линейным и
угловым эксцентриситетами тяги и рядом других факторов.
Уравнение малых угловых колебаний ракеты (рис. 10.13) по
углу тангажа при этом имеет вид
Ja ф + ац> = Мв , A0.51)
где /ст — момент инерции ракеты
относительно оси, проходящей
через центр тяжести (перпенди-
(перпендикулярно плоскости чертежа);
Мв — случайный возмущающий
момент (вызываемый, в частнос-
частности, газодинамическими эксцент-
эксцентриситетами тяги), значение кото-
которого обычно известно в виде не-
некоторого разброса (рис. 10.14),
имеющего границы ±Ь; оф —
Рис. 10.13
427
восстанавливающий момент. Требуется определить область воз-
возможных значений угла ф' и угловой скорости ср (область на
фазовой плоскости (ф , ср)) в момент времени (к = 5 с. При
решении задачи считаем, что при / = 0 q> @) = ф @) = 0,
/0 = 104 кг • м2, а = 1,6 • 104 Н • м , | Ъ | = 200 Н ¦ м .
Рис. 10.14
Решение уравнения A0.51) в момент времени tK можно
представить в виде вектора <рк на фазовой плоскости ф О ф
(рис. 10.15). Каждому закону изменения возмущающего мо-
момента Мъ соответствует вектор решения <рк (<рк = (фк , фк)Г) .
Рис. 10.15
428
Имеется такой закон изменения момента Мк, при котором
модуль вектора <рк, направленного под углом ш к оси ф, до-
достигает своего наибольшего значения (см. рис. 10.15). Если
изменять значение угла а в пределах О...2я и для каждого
промежуточного значения а определить | q> |max, то конец век-
вектора фк опишет по фазовой плоскости некоторую замкнутую
кривую — границу области возможных значений.
Найдем максимально возможные значения срк и <рк :
'к 'к
Фк = Т7Г isinPo Ск " т) мь & : Фк = Т Jcos^o (>к -i)Mbck.
JoPo 0 •'о 0
A0.52)
Так как \Mb\< b, то
'к
Фктах = J^ Л sin^0 (>к ~^\dx [Ро = "V^J ;
'к A0.53)
Фктах =^ J|cos/»0(^-t)|A.
Для определения границ области возможных решений спро-
спроецируем вектор фк на прямую, определяемую единичным век-
вектором а:
Фа = (фк • о) = (фк cos а + —¦ sin а) . ( • )
Ро
Определив максимальное значение проекции вектора реше-
решения фа для фиксированного значения угла а и закон изменения
Мь, соответствующий фа „^^ находим значения компонент век-
вектора фк , т.е. значения фк и фк , которые являются координатами
одной из точек границы области возможных значений реше-
429
ний. Так как решение уравнения A0.51) <рк имеет вид A0.52),
то для проекции вектора <рк A0.54) получаем
'к
Фк = 7Т Jsin ^о ('к " е + «) мь * • A°'55)
•'оРо 0
Например, при <х = ^ выражение A0.55) принимает вид
Г п1
Полагая sin \pQ (tK - т) + -? = 0, находим т,- - моменты изме-
изменения знака Мь.
Учитывая, что р0 » 0,47с, при /к = 5 с получаем tj = 0,42 с;
т2 = 2,9с.
Следовательно, закон изменения момента Мь, при котором
Фа достигает максимального значения в момент tK, имеет вид
[+ Ъ при 0 <, х <, 0,42 ;
Мь = \-Ь при 0,42 <, т <; 2,9 ;
[+ * при 2,9 5 т ^ 5,0 .
Вычислим значение фк для полученного закона изменения
момента Мь:
Г-0,42 2,9
Фк = 7Т" Jsin А) (^с - т) А - Jsinpo Ск - *) А +
^О [ 0 0,42
+ Jsinp0 (^- т) А = 3,494 -—2 .
2,9 J "'ОРО
Аналогично находим фк для а = -г :
430
Произведя подобные вычисления для различных значений
угла а, получим следующие данные:
а ...
Фк •¦
<рк/р0 ...
5
0
Ю-2
0
30°
4,3 • Ю-2
2,4 • Ю-2
60°
2,4 • Ю-2
4,3 ¦ Ю-2
90°
0
5 КГ2
Область возможных значений решений в безразмерных ко-
координатах, построенная в соответствии с приведенными дан-
данными, показана на рис. 10.16.
Рис. 10.16
Рассмотрим задачу 10.2, воспользовавшись теорией случай-
случайных процессов. Для этого имеющуюся информацию о случай-
случайном моменте (поле возможных значений) дополним вероят-
вероятностными характеристиками Мь, связав их с принятым огра-
ограничением на Мъ (| Мь | < b). Предположим, что Мь является
стационарной случайной функцией с неизменным во времени
нормальным законом распределения (рис. 10.17) и корреляци-
корреляционной функцией в виде
431
Естественно принять, что
максимально возможные значе-
значения Мь связаны с дисперсией
ам соотношением (правило трех
сигм) Ъ = Ъом, следовательно,
DM=b2/9.
Рис. ю.17 Ограничившись только углом
Ф, запишем выражение для кор-
корреляционной функции решения уравнения A0.51) (см. гл. 5):
hh
DM r t II A0.56)
*ф = ТГг IJ sin Л> Ci " Ч) sinp0 (t2 - т2) e-« I TrT21 At A2 .
•'oPo о о
Для интегрирования представим выражение A0.56) без
знака модуля (А"ф = Aj> + Aj'}):
'. pi
*? = ~Л Jsin ^о Ci " ^i) Jsin Po ('2 - *2) e^(T'" ^ dx2 +
•'OPO D [ 0
h 1
+ Jsinpo(/2-'C2)e"<x(T2~Tl)^'t2 ^1 npH^'l'
T2
'2 p2
^ф0 = -Л 1sin ^o ('2 ~ *2) 1 sin Po Vi -4)^ ^ -Tl) *i +
•'OPO Z) I 0
'' 1
+ Jsinp0 ty - xt) e"" (Ti "T2> At A2 при ^ > t2 . A0-58)
T2
После интегрирования и преобразований получаем выра-
выражение для дисперсии решения:
432
x (a sin potK + p0 sin potK) + (pQ cos2 potK - a2 sin2 potK) } -^ -
J JoPo
A0.59)
После вычислений получаем среднее квадратическое зна-
значение угла ср:
аф = 0,59-^. AО.6О)
Считая, что для угла ср справедливо нормальное распреде-
распределение, имеем
Фтах = 3суФ = 1>77 Т~2 = 2'2 ' 10 ' (Ю.61)
что приблизительно в два раза меньше значения для фтах в
таблице при a = 0. Изложенный метод с использованием раз-
разрывных случайных функций, ограниченных по модулю, дает
более высокие значения максимальных отклонений систем от
невозмущенного режима, так как наихудший закон изменения
возмущения Мь , если его оценивать с вероятностных позиций,
является мало вероятным. Полученное значение фтах A0.61)
по корреляционной теории имеет смысл как характеристика
процесса только в том случае, если имеется массовая реализа-
реализация, т.е., например, оценивается в среднем возмущенное дви-
движение большого числа ракет. Естественно, что средние харак-
характеристики процесса (например, максимальные значения угла
Ф = Заф) меньше значений фтах A0.53) для отдельных ракет.
Если же имеется одна или две реализации процесса, то средние
характеристики не имеют смысла, так как при таком малом
числе реализаций выявить статистические свойства данного
процесса нельзя. Значение Фтах, найденное с использованием
разрывных случайных функций, ограниченных по модулю, яв-
является гарантированным.
29 Зак. 341 433
§ 10.3. Проекции области возможных значений вектора состояния
системы на двумерные плоскости
Для системы уравнений я-ro порядка область возможных
значений является тоже л-мерной. При практических расче-
расчетах часто бывает достаточно знать область возможных зна-
значений двух компонент вектора состояния системы, т.е. знать
проекцию л-мерной области на
двумерную плоскость.
Рассмотрим скалярное произ-
произведение вектора решений у и век-
вектора а, лежащего в плоскости,
определяемой двумя единичными
векторами «вj и <в2 (рис. 10.18).
Возьмем наиболее общий слу-
случай, когда плоскость, определяе-
определяемая векторами ш^ <о2> не совпа-
совпадает с координатными плоскос-
Рис ю.18 тями. Вектор а можно предста-
представить в виде
а = cos а а>! + sin а а>2 . A0.62)
Проекция вектора у на направление вектора а
Упр а = (У • а) = (У • el> cos СС + (У • ©г) sin а =
' п 1 Г л 1
= coscc ?>,(»„) +sincc X(y/°>2/) , A063)
или
>щ> а = Z (rl/ cos а + r2j sin °0 У# +
P '*
+ Z J [9\j cos а + Яу sin a] /i * +
>I 0
434
к
+ X[^lvcosa+F2vsina]/0, <1(Ш)
где
n n n
A0.65)
n n n
r2j = Z % с*) ю2,-; ^ = Z Qij m2/; F2y = Z ^ ш2/ •
В частном случае, когда векторы ©j и ш2 совпадают с
координатными осями, т.е. coj = е^ ; ш2 = ev > п°лучим
r\] = Kkj (*к) J Q\j = Qkj > fy = 2vy J
r2j=Kvj«k)> V\j=vnj\ V2j=Vvj.
Значение у$ определяется в зависимости от знака выраже-
выражения
Гу cos a + /v sin a .
Максимальное значение суммы интегралов достигается при
следующих законах изменения случайных функций:
fj = Mj при [<7jy cos a + q2j sin a] > 0 ;
/• = ТП: при [qy cos a + Л2; sin a] < 0 .
Максимальное значение суммы, зависящей от постоянных
во времени случайных возмущений, достигается при значениях
/°, равных
/° = MQV при [ Vlv cos a + V2v sin a] > 0;
f°v = m ° при [ Flv cos a + V2v sin a] < 0.
29* 435
§ 10.4. Определение максимальных значений динамических реакций
При исследовании движения системы тел часто требуется
определить не только вектор «состояния» системы у (коорди-
(координаты и скорости), но и силовое взаимодействие (реакции)
между отдельными телами системы. В качестве наиболее про-
простой физической модели аналогичных задач можно привести
следующую задачу. Груз массой т движется со скоростью v по
абсолютно жесткой балке с упругим закреплением
(рис. 10.19, а). Правая опора балки представляет собой пружи-
пружину с жесткостью с и демпфером жидкого трения (коэффициент
трения равен а). На массу т действует случайная сила fit),
ограниченная по модулю. Между балкой и массой т возникает
реакция N, которая зависит от поведения во времени функции
/внутри области возможных значений. При расчетах требуется
определить максимально возможное значение динамической
реакции N, возникающей между массой т и балкой.
Рис. 10.19
Для расчета на прочность необходимо знать максимально
возможные значения реакции для каждого момента времени.
Значение реакции в каждый момент времени зависит от пове-
436
дения функции f(t) с начала движения до данного момента.
Каждому возможному поведению функции f(t) в интервале
(О, tx), где ?! — произвольный момент времени, соответствую-
соответствующий положению массы т, показанному на рис. 10.19, а, будет
соответствовать определенное значение реакции. Причем среди
бесконечного множества возможных поведений функции /,
включая и разрывные изменения во времени, имеется закон
изменения /, сообщающий максимальное значение реакции в
момент t±. Если при составлении уравнений движения системы
воспользоваться методом кинетостатики, то получим уравне-
уравнения, в которые будут входить алгебраически (без производных)
неизвестные реакции. Рассмотрим общий случай движения
системы, считая, что уравнения движения системы содержат к
неизвестных реакций, входящих в уравнения алгебраически. В
этом случае полную систему п уравнений можно разбить на
две подсистемы (включая и уравнения связи, причем связи
считаются двусторонними), которые в векторно-матричной за-
записи имеют вид
ЛюУ1 + Лх!У! + Л12У1 +Al3z = ВХХХ ;
У*1 + Л21У1 + Л22У1 + ^23Z = вг4 ¦ A0.66)
где yj — вектор с п — к компонентами, которыми являются
обобщенные координаты системы; z — вектор с к компонен-
компонентами из неизвестных реакций; f j , f2 — векторы, компонентами
которых являются случайные возмущения, ограниченные по
модулю и удовлетворяющие условию A0.18); Ац, By, В2 ~ мат-
матрицы, элементы которых в общем случае могут быть функция-
функциями времени.
В дальнейшем считаем, что размерность векторов fj и f2
равна п — к. В системе уравнений A0.66) матрицы Aw, An,
Al2, A22, By и В2 прямоугольные, за исключением матрицы Л13,
которая должна быть квадратной. Для того чтобы матрица Л13
была квадратной, достаточно из общей системы уравнений
взять число уравнений, равное размерности вектора z (первое
уравнение системы A0.66)). Второе векторное уравнение сис-
системы A0.66) имеет размерность, равную п ~ к. Умножив первое
уравнение системы A0.66) на матрицу А[\, получим
437
z = A[\Bxtx - Ax\Al0yx -A[\Anyx -А[\АпУх. (Ю.67)
Разбиение общей системы уравнений на два уравнения
системы в общем произвольно, однако оно должно быть таким,
чтобы определитель образованной матрицы Ахз ни в одной
точке интервала движения не обращался в нуль, т.е. матрица
Л13 должна быть неособенной. Подставив выражение для z во
второе уравнение системы A0.66), получим векторно-матрич-
ное уравнение с исключенными алгебраическими неизвестны-
неизвестными:
Л4У1 + Л5ух + А&х = B2f2 - AnA[\Bxfx, A0.68)
где
Ал = Е- А2у4гх\Ахо; А5 = А2Х - А2ЪА\\КХХ\ А6 = А22- А2ЪА-х\Ап.
Понизим порядок уравнения A0.68), введя вектор
У1 = У2. A0.69)
и преобразуем A0.68) к уравнению вида
y + A(t)y = B2f2-B4fx, A0.70)
где
-и'
Векторы fj и f2, входящие в уравнение A0.70), имеют раз-
размерность 2 (л - к) (первые п — к компонент векторов fj и f2
отличны от нуля, остальные п — к компонент равны нулю).
Решение уравнения A0.70) может быть представлено в виде
t
y = K{t)yQ+\G(t,i) (B3f2 - Л4 ft) ck . <10-71>
о
Матрица K(t) удовлетворяет уравнению
K(t) + A(t)K(t) = 0. A0.72)
438
Для определения вектора z нас будет интересовать первая
производная от вектора у по t:
t
у = *(О У0 + J! G(t, т) E3f2- ВД dx +
+ B3(t)t?t)-B4(f)tl(t). A0.73)
Частная производная по t от матрицы Грина, входящая под
интеграл в выражении A0.73), равна
ftG(t,T) = k(t)K-lW,
или с учетом уравнения A0.72)
|ettt)B^(OCftT). A0J4)
Подставив выражение A0.74) в A0.73), получим
у = - ДО K(t) у0 -\A(t)G (t, t) 2?3f2A +
о
t
+ JA(t)G(t,T) Bftdt + Bz(t)t2{t)- B4(tyt^t). A075)
о
Так как у^ = y2, выражение для вектора z A0.67) можно
представить в виде
z = A&fl-Agy-AlQy, A0.76)
где А$, Аа, Л10 — прямоугольные матрицы. Матрицы Ад и Л10
имеют 2(и — к) столбцов и к строк. После подстановки в
A0.76) выражений A0.71), A0.75) для у, у и преобразований
получим
t t
z= Cfx -Z>f2+ Gyo+ \K\t,i)fxdi+ JK"(t, T)f2A, №-11)
0 о
439
где C=A9B4 + AS;D = A9B3; G = АдАК- A1QK; K' = [A9A-
-Al0] СЩ; K" = [Aw-A9A] GB4.
В скалярной форме A0.77) имеет вид
n-k n-k '
Ъ = Z kyflj ~ dijhj + 4 % 1 + Z J kijf\j A +
>1 >1 0
n-k t
+ Z J*"(,/?/*• ('=1.2,...,*). A°-78)
j=\ о
В случае определения максимального значения каждой из
реакций законы изменения /у и /2у определяются методом,
изложенным в § 10.1. Найдем, например, законы изменения
hi и fly ПРИ которых zp достигает максимального значения.
n-k
Максимальное значение суммы ? cpjAj Достигается при сле-
М
дующих условиях:
если cpj > 0, то fy = Mj (J);
если cfi/<0, To/v = i?iy(O.
Аналогично определяется и максимальное значение суммы
n-k
м
если dpJ > 0, то f2j = Mj(t);
если dpj < 0, то /2у = rrij (t).
Максимальные значения интегралов, входящих в правую
часть соотношения A0.78), определяются в фиксированный
момент времени следующим образом. Если kpj > 0 (или kpj' >
>0) на интервале (tv,tv+1), то /1у- = М}(т) (или /2у= Mj(x)), и
если kpj < 0 на интервале (tv , tv+ j), то fy = /и,- (т).
440
Если и начальные данные заданы в виде
•% min - % - УО/ max >
то «наихудшие» значения yOj, при которых достигается макси-
максимум zp, находятся из условий:
если ?; » 0, то yOj = yOj max ;
если 4 << 0, то^-^у^.
Пример 10.3. Определим максимальное значение реакции
N(t) (см. рис. 10.19, б), если |/(О | < а. Воспользовавшись
принципом Даламбера, получим уравнения движения балки
и массы т:
/09 +aL2Q +cI?e = -Nl;
A0.79)
my+N-f=0.
Исключив из системы A0.79) реакцию N, получим (так как
у=Щ
(/0 + /и/2)9 +aZ26 +cL2Q=fl. A0.80)
При нулевых начальных данных решение уравнения A0.80)
имеет вид
t
в,—L-- Je-^sin^z-T)/*, <1(Ш)
(/o + /m/2)oj
где
2 el?
28 Зак. 341 441
Из второго уравнения системы A0.79) после преобразова-
преобразований можно получить выражение для реакции ./V в виде
ЛГ |, ml2 ^1 , m/2c
jV= 1 ,/+ о х
^ J0 + mllj (J0 + mlz)pl
t
х Je-"('-*) sin[p1(f-T) + p]/*, A0.82)
0
где с = V/»3 + 4/i°p? ; tg p = ^ .
Максимальное значение выражения A0.82) в основном оп-
определяется интегралом, который достигает экстремального зна-
значения, если функция /(т) меняет значения с +а на —а в
моменты времени т„ , определяемые из условия
sin [/>!(*-т„)-р ] = 0.
Максимально возможное значение реакции N достигается
при t -> оо, поэтому перейдем в выражении A0.82) к независи-
независимой переменной е = t - т, которая изменяется от бесконечности
до нуля. В этом случае моменты разрыва е^ функции /(е)
находим из условия
sin [^е + р ] = 0. A0.83)
Максимальное значение реакции N
j a \ °° zH(J2LzIl'
Nrmx= т ° >2 + с1 sin(P + p1) + 2sinp1Xe р' , (Ю.84)
J0 + ml k=l
где
cml2a _P±
Cl=PoPl(JQ + miyteh=n-
Так как сумма в правой части A0.84)
442
Рис. 10.20
28*
443
-п (кп - р)
ю -Я (fat - Р) р,
5> '. = —^-, (Ю.85)
^ 1-е*
то окончательно получаем
-л (Лат - Р)
/„Г е "х
Afmax = - ~2 + сх sin (р + р!> + 2 sin р! г^г » A0.86)
где sin р = ; sin Pj = .
^pl + 4n2pf M + n*
§ 10.5. Области возможных значений вектора состояния системы
в случае нескольких участков движения
В предыдущих параграфах рассматривались задачи, когда
число степеней свободы системы на заданном интервале вре-
времени движения оставалось неизменным с неизменным числом
случайных возмущений. В реальных системах эти условия могут
быть нарушены, т.е. в процессе движения может измениться
число степеней свободы системы или число и даже тип слу-
случайных возмущений. На рис. 10.20 показана система с одной
степенью свободы. Масса т движется по абсолютно жесткой
балке со скоростью v. На интервале @, /j) на массу т действует
случайная сила/, ограниченная по модулю, а на интервале (/},
L) — случайный крутящий момент А М, ограниченный по мо-
модулю (масса т раскручивается). Область возможных значений
0 и 9 в момент потери контакта массы т с балкой будет зависеть
от двух участков движения, на каждом из которых действуют
разные случайные возмущения. На рис. 10.21 показана система
с изменяющимся числом степеней свободы. Кольцо 1 может
свободно перемещаться по жестким направляющим 2, связан-
связанным с диском 3. Моменты t-t контакта кольца с диском 4
известны. Когда между кольцом 1 и диском 4 имеется зазор,
данная система имеет две степени свободы. Если кольцо плотно
прижимается к диску 4 (предполагается, что взаимное про-
проскальзывание между кольцом 1 и диском 4 исключено), система
имеет одну степень свободы.
Рис. 10.21
Если требуется определить возможные угловые отклонения
диска 3 в фиксированный момент времени при действии слу-
случайного момента Д М, ограниченного по модулю, то необхо-
необходимо рассматривать движение системы с учетом изменения
числа степеней свободы.
Рассмотрим вначале случай, когда имеется два участка дви-
движения и размерность вектора состояния не меняется. На каж-
каждом из участков движения система описывается своим вектор-
но-матричным уравнением вида
х, + А1У1 = В$п ; У!@) = у10 @ < / < tk'); A0.87)
x2 + A2y2 = B2fl2; У2('*') + У2о W^^). (Ю.88)
444
где У1 и у2 — я-мерные векторы возмущенного состояния
системы соответственно на первом и втором участках движе-
движения; fn — вектор случайных возмущений, действующих на
систему на первом участке движения; f12 — вектор случайных
возмущений, действующих на систему на втором участке движе-
движения. Компоненты векторов Гц и f12 подчиняются условиям вида
где /и,у и My — некоторые известные функции.
Решения уравнений A0.87) и A0.88) имеют вид
'к
УЛ') = ВД)Ую + J <№» ') Mi dt; (Ю.89)
о
'к "'к
У2('к - 'к') = Чк ~ 'к') Ую + J <?2[(/к - гк'), х]В2{п ch . (Ю.90)
о
Так как yj(fK') = у2о, то, подставив в A0.90) выражение для
yj(/K'), получим
'к
У2(/к - V) = ^2 (/к - ?к0 ^(^) У10 + j K2(tK - V) х
о
'к-'х
х G&, х) Bfadi + j G2[(tK - fK'), x] 52f12A . (Ю.91)
о
В случае к участков выражение для ук будет содержать к
интегральных слагаемых с непересекающимися пределами ин-
интегрирования.
Максимальное значение проекции вектора у2 на произволь-
произвольное направление определяется так же, как и для одного участка
движения.
Пример 10.4. Уравнения движения системы на интервале
времени 0 < tu tx имеют вид
445
*ll=/i; *21=*п- A0.92)
На интервале времени tx<t<t2 уравнения движения имеют
вид
*12=/г; *22 = ~*12- A0.93)
Случайные возмущения fx и f2 удовлетворяют условию
1 </! < 1.
Область возможных значений х*и и х21 в конце первого
участка движения является областью начальных данных для
системы A0.93). Решение системы A0.93) имеет вид
h~h
хп= jf2ck + x*n;
° A0.94)
h-h
х22 = _ J (f2 _ tx - x)f2dx + x\x(t 4-4) + x*2l,
о
где Xj1; x2l — значения хп и х21 при t= tx.
Для построения области удобнее представить решения
A0.94) в форме
'i h-h
xl2 = \fxdx + J f2dx\
0 0
A0.95)
h h-h
x22 = J(^ -t)/jA - J Kt2 -t{)-x] f2dx.
0 0
Найдем максимальное значение проекции вектора х(х12, х22)
на направление, определяемое единичным вектором е:
'i
(х • е) = J [cos a + Bt{ - /j - т) sin а ] fx <k +
0
446
+ J [cos a - (t2 - tx - x) Sin a ] f2dx.
0
Максимальное значение проекции (х • e) равно сумме мак-
максимальных значений слагаемых, которые можно определить
отдельно (для каждого х определяем момент т(- разрыва функций
А ИЛ)- Так как подынтегральные выражения в A0.95) линейно
зависят от т на интервалах @, t{) и (/lf t2), они могут изменить
знак только один раз, т.е. экстремальные значения каждого из
интегралов достигаются при законах изменения /i и /2 с одним
разрывом. Каждой точке границы области ot/j A) I при t- /j
(рис. 10.22) соответствует область от/2 при t=t2, показанная
штриховой линией. Огибающая / ограничивает на плоскости
Х22хп полную область в момент t2. Когда размерность вектора
«состояния» системы ух на участках движения меняется, как,
например, в системе, показанной на рис. 10.21, на каждом из
участков движения имеем системы уравнений разной размер-
размерности.
Рис. 10.22
Пусть для большей определенности размерность вектора
равна п, а размерность вектора у2 равна v (v < и):
447
>lll |>2l"
Уп Уп
yi= ; ; y2= ; ¦
У\п\ \У\у_
Компоненты ^j ^v являются «продолжением» компо-
компонент У\\,—,У\У на втором участке движения, т.е. компоненты
векторов yj и у2 (Уц, у12) ¦¦¦ (У\у , y2v) физически тождественны.
Вектор yi(ffc') можно представить в виде
Ч
'20 У 10 0
где у2о' содержит компоненты вектора yj, не имеющие продол-
продолжения на втором участке движения. Из уравнения A0.96)
можно выделить выражение для у2о следующего вида:
'*
У20 = *'1('*')У'ю + *('*')У"ю+ J^fii^> A097)
о
где
кп кп ... klv kx v+l ... kln
^vl ^v2 ¦•¦ '"w *v, w-1 •" ^vn
PllPll -Pin
p= PllPll-Pin
PvlPvl ¦•Pvn
Матрица Kx' - квадратная (v-го порядка); матрицы Кх" и
Р — прямоугольные. Матрица Р представляет собой матрицу,
448
полученную из матрицы К\В\ с сохранением первых v строк.
Подставив выражение для у2о в A0.90), получим
Wk - '*') = 4*k ~ Ю *i W) Ую'+ Ч*к - W К\Ук) Ую"+
+ JK2(tk-tk')Pfndx+ \кгЩ-Ц)*\,В?п<к. A098)
о о
Область возможных значений вектора у2(^ - tk') возмущен-
возмущенного «состояния» системы в конце второго участка определя-
определяется так же, как и для одного участка движения.
§ 10.6. Области возможных значений вектора состояния
системы при действии зависимых возмущений
Часто случайные возмущения нельзя рассматривать как не-
независимые, например разброс координат и их первых двух
производных в некоторый момент времени, проекции случай-
случайной силы на координатные оси и т.д. Пример механической
системы, на которую действуют зависимые случайные возму-
возмущения, ограниченные по модулю, приведен в § 10.1 (см.
рис. 10.10). Зависимость между возмущениями эквивалентна
дополнительным ограничениям, накладываемым на эти функ-
функции. Одним из таких ограничений является условие A0.23)
(Cff)<l, A0.99)
где С — квадратная самосопряженная положительно опреде-
определенная матрица.
Элементы с^ матрицы С в общем случае могут зависеть от
времени. Как известно, для положительной определенности
матрицы необходимо и достаточно, чтобы ее элементы удов-
удовлетворяли критерию Сильвестра (для любого момента времени t):
А,=С11>0, Д2= ^j^2 >0,...,Д„>0.
Аналогичному условию может удовлетворять и вектор слу-
случайных начальных данных у0:
449
(СоУо-Уо)?1, A0100)
где Со ~ квадратная самосопряженная положительно опреде-
определенная матрица с постоянными элементами.
Решение уравнения A0.24) имеет вид
'*
y = K{t)yQ+lG(tk,i)P(i)tth. A°Л01)
о
Рассмотрим случай, когда вектор случайных возмущений
может быть представлен в виде
f=#(Of°, A0.102)
где H(t) — диагональная матрица с непрерывно зависящими
от времени элементами; г — вектор, компоненты которого
являются случайными числами, ограниченными по модулю.
Подставив выражение A0.102) в уравнение A0.101), полу-
получим
y=*,0+W,,)f»*, <1(шз>
о
гдеР(^,т)=С(^,т)Б(т)Я(т).
Условие A0.99) преобразуется к виду
(C^-f0)*; 1, A0.104)
где Сх = НСН.
Для получения области отклонений вектора у найдем мак-
максимум проекции вектора у на единичный вектор а:
Г* 1
>пре = <У-«) = <*<ОУо-а)+ J/>(/*, t)f°*. а .A°Л05)
I 0
Определим максимум выражения A0.105) при дополнитель-
дополнительных условиях A0.99) и A0.100), которым должны удовлетворять
векторы у0 и !°, Воспользовавшись множителями Лагранжа,
получим следующий функционал:
450
J=(K(t)yQ-a)+ fP(tk,x)fodxa -
4 J I 0
v J
-f[(Coyo-yo)-l]-|[(CofO-f°)-l}
или
Г '* )
J=(yo.K\t)aty+ t°jP\tk,i)di-a -
v J
-f[(Coyo-yo)-l]-|[(CofO-f°)-l]. A0Л06)
Функционал / зависит от yOj и ff, поэтому yOi и /?, при
которых / достигает экстремальных значений, находятся из
условий
U'0; ff° (Ыи2 п)- A0107)
Условия A0.107) можно получить и в более компактной
форме, дифференцируя A0.106) по векторам у0 и f °:
|f = **а-цСоУо = О;
A0.108)
'*
Векторы у« и f°, сообщающие экстремальные значения
выражению A0.106), находим из уравнений
К%)а = цСоУо; A0.109)
о
451
Умножив соотношения A0.109) и A0.110) на матрицы со-
соответственно С^1 и С^1 , получим
C-QlK\tk)a = wQ; A0.111)
'к
Cfl J/>4fc,T)Aa-tf°. <10Л12>
о
Выражение A0.109) умножим скалярно на выражение
A0.110):
[K\tk)a,C-olK\tk)a] = v?,
или
(KC^lK*a,a) = \i2. A0.113)
Аналогичным образом поступим с выражениями A0.110) и
A0.112):
С" '* 1
\p\tk , т) A a- CJ1 \p\tk , x) ch a = X2,
1° ° J
или
/PACT» JC'Aa.a =X2. A0114)
0 0
4 J
Выражения A0.113) и A0.114) определяют введенные множи-
множители Лагранжа ц и X. для каждого направления в пространстве.
Найдем максимальное значение каждого из слагаемых, оп-
определяющих вектор у. Представим вектор у в виде суммы двух
векторов :
У = У1 + У2» A0.115)
где
У1 = ^('*)Уо>
452
О О
Докажем следующую теорему: максимальное значение про-
проекции векторов yj и у2 на произвольное направление, опреде-
определяемое единичным вектором а, равно множителю Лагранжа
для этого направления. Умножим обе части равенства A0.111)
слева на матрицу K(tk):
К«к) C$K\tk)a = цК«к)у0 = цУ1. (Ю.116)
Максимальное значение проекции вектора yj на направле-
направление а найдем из соотношения
У1пра=(У1-а) = (^(^)У0-«) = (У0^^)-а)
или, воспользовавшись соотношением A0.109),
^lnpa = (Уо • ^СоУо) = И (Уо • соУо> = И- A0.117)
Аналогичным образом можно показать, что
^2пра=^" A0.118)
Сформулированная теорема доказана. Максимальное зна-
значение функционала / или проекции вектора на направле-
направление а
•/max = 3'npamax=M + ^ A0.119)
где ц и X определяем из соотношений A0.113) и A0.114).
Найдем векторы у0 и 1°, которые дают максимальные зна-
значения yt и у2 для данного направления а. Из соотношений
A0.109) и A0.110) имеем
yo-i (#*•(/*) о; <1ОЛ2О>
io3jP.(,fttX)Ae. 00-121)
К о
453
Векторы yj и у2 для данного направления а определяются
из соотношений
yi=±K(tk)C-olK\tk)a; (Ю.122)
*к '*
У2 = Х W*'^^1 lP\tk,x)cka, A0.123)
о о
или
У1 = ^С5^а.а); (Ш124>
]р<кС[1 )p*cha.
у,= .° ° = ^ A0.125)
ЛК ~ь а
У jAftq1 )P*dzaa
0 0
Формулы A0.124) и A0.125) дают возможность для каждого
единичного вектора а определить вектор у, соединяющий точку
начала координат с некоторой точкой границы области воз-
возможных значений вектора у. Формулы A0.120) — A0.123) спра-
справедливы при условии, что ц ф 0 и X * 0. Если для некоторых
направлений вектора а множители Лагранжа обращаются в
нуль, то формулы A0.120) — A0.123) неприменимы.
Из соотношений A0.116) и A0.117) следует, что в этом
случае проекции векторов у{ и у2 на некотором направлении
равны нулю (не обязательно обе проекции векторов yj и у2
одновременно обращаются в нуль). Обращение одной из про-
проекций векторов (например, у^ в нуль означает, что область
отклонений вектора yj вырождается, т.е. имеет меньшее число
измерений. Множители Лагранжа могут обратиться в нуль толь-
только тогда, когда
K\tk) a=0; A0.126)
454
W.O*-a A0127)
0
Размерность подпространства вектора а, для которого мно-
множители Лагранжа обращаются в нуль, равна рангу матриц
'*
K\tk); \P\tk,i).
о
Если ранг матриц равен и, то множители Лагранжа в нуль
не обращаются. Вектор состояния системы в фиксированный
момент времени (максимально возможное значение вектора у)
У* = У1« + У2«Ч + ш Д. (Ю.128)
W(ATja a) V(.P,aaK
где
'* '*
Кх = KCq1K*; Р{ = \Pck q1 JP *dx.
о о
Соотношение A0.128) позволяет установить, как полная
область зависит от разброса начальных данных (вектор yi«) и
от случайных возмущений, действующих при движении систе-
системы (вектор у2*).
Найдем уравнения областей возможных значений каждого
из векторов yj и у2 общего решения у. Рассмотрим выражение
для У1 A0.122):
y1=A1(/Jfc)a. A0.129)
Покажем, что матрица К± является самосопряженной, т.е.
удовлетворяет условию (Кх)* = {К\):
{КХУ = f (КС~01КУ = 1 (КУ (Со1)* {К*) =
= - ^(Cq1)* А* = - K(C*qTxK* = - КС^К* = Кх.
455
При выводе использовалось условие самосопряженности
матрицы Со.
Из соотношения A0.129) имеем
jqS^a. A0.130)
Умножив левую и правую части уравнения A0.130) скаляр-
но соответственно на К\^у^ и а, получим
(^71у1-^Т1у1) = (а.а)=1,
или
((^Т1)^! • yi) = 1- (Ю-131)
Уравнение A0.131) есть уравнение поверхности 2-го поряд-
порядка в л-мерном пространстве. Из ограниченности области от-
отклонений следует, что эта поверхность является эллипсоидом.
Аналогичным образом можно показать, что вектор у2 удовле-
удовлетворяет уравнению
((^Т^Уг-Уг)'1. <10-132)
где Р — самосопряженная матрица.
Соотношения A0.124), A0.125) определяют максимально воз-
возможное значение вектора у A0.115) в зависимости от направления
произвольного единичного вектора а. При непрерывном изме-
изменении направления вектора а в пространстве конец вектора у.
очерчивает предельную поверхность (границу области возможных
значений вектора состояния). Вектор а можно представить через
проекции в исходной координатной системе:
" A0.133)
где ht — проекции вектора а на координатные оси; е,- - еди-
единичные векторы координатных осей.
Компоненты вектора у*
y./-ZVy с-1.2,-.я). A0134)
м
456
Рассмотрим частный случай, когда требуется найти проек-
проекцию области на двумерную плоскость. При этом
а = Ajej + А2е2 = cos ае1 + sin ае2.
Из A0.134) получаем
1 п l ni A0.135)
У*2 = a2\h\ + °22Л2 ¦
Изменяя а от 0 до 360°, из соотношений A0.135) получаем
координаты точек границы проекции области на двумерную
плоскость.
Пример 10.5. Рассмотрим свободные ко-
колебания массы т (рис. 10.23). Без учета сил
сопротивления уравнение малых колебаний
массы имеет вид
У + Р2ОУ = О, (Ю.136)
2 с 1EJX
где/>„ = -; с = 7Г.
Начальные данные являются случайными
зависимыми величинами, которые удовле-
удовлетворяют условию
2 2 Рис- 10'23
[*L\Jy±\zlt A0.137)
где уОт, уОт — максимально возможные значения разброса
начальных данных.
В рассматриваемом случае условие A0.137) имеет простой
физический смысл. В начальный момент времени система
может иметь случайное отклонение у0 и случайную скорость
у0, т.е. система получает случайную энергию, равную
сУп тук
J± + -^.= W. A0.138)
457
Максимально возможная энергия, которую может получить
система, ограничена и равна Wm, причем ее можно выразить
через максимально возможное отклонение и максимально воз-
возможную скорость:
w cy®max ту®тах ПО \39)
т ~ 1 ~ 1 ' '
При произвольном отклонении и скорости
CA + ^<W (Ю.140)
или, разделив на Wm A0.139), получим
fV]2 + fV]2<1 (Ю.141)
\Уы) \У0т)
Перейдем к безразмерным величинам тиг, положив
Щ = Ъ y = zyOm.
После преобразований получаем (перейдя к безразмерной
координате и безразмерному времени)
Z + Z=0; A0.142)
^ + Ш*1 A°Л43)
где ^0/и = 17. ГТ •
0>отРо)
Условие A0.143) можно представить в виде скалярного про-
произведения
(CqZq • z0) < 1, A0.144)
458
где
>°1 п
о 1 IA
Решение уравнения A0.142) представим в виде
Г«1 Tcos т - sin т] . pbl ш К{х)
\z\ [suit costJ [ZoJ w ° vv.lijj
В момент времени t= tk или т^. = tkpQ (для упрощения записи
положим тк = 1) имеем
z = K(l)z0. A0.146)
Множитель Лагранжа A0.113) для произвольного направ-
направления единичного вектора а (см. рис. 10.18)
ц = ^КСЪ1К'аа), A0.147)
™т„ f fcosl-sinll. ^,-1 Чт ° . г* Гcos 1 sin 11
где А - [sin I coslj' C° - 0 1' ~ [- sin 1 cos lj "
После преобразований имеем
\х = ~skncos2a + ?12sin 2a + ^22Sin2a ,
или
ц = V^mcos (а - 1) + sin2(a - 1) , A0.148)
где
ku = ^omcos2 1 + sin2 1;
459
кп = ^ sin 2(- 1 + %т);
^22 = *0m sin2 * + cos2 1-
Вектор 20, при котором проекция вектора z на направление,
определяемое вектором а, достигает максимального значения,
находим из выражения
или
zo = -[%m cos (« - !) в! + sin (а- 1) е2] . A0.149)
Компоненты вектора z0:
. ^mcos(a-l)
^oi = 3) = ¦ ;
ц A0.150)
^02 = *0 = - sin (a ~ *)¦
Полученные выражения для Zq , Zq и ц должны удовлетво-
удовлетворять условию A0.144) (проверка решения). Легко убедиться,
что это так. Вектор состояния системы z в момент времени
т=1 A0.124)
z = -KCQlK*a,
Ц
или
г — — (z\m cos2 I + sin2 1) cos a + -r sin 2(^m - 1) sin a eL +
+ — \-z (z}jm - 1) sin 2 cos a + (z\m sin2 1 + cos2 1) sin a e2 .
460
Компоненты вектора состояния системы:
Z A) ="~ (Zom cos2 1 + sin *) cos а + 2 sin а sin 2($т - 1) ;
г A) = - \\ cos а sin 2(^m - 1) + (^m sin2 1 + cos2 1) sin ctl .A0.151)
Меняя угол а от 0 до 2л, из A0.151) получаем координаты
границы области возможных значений вектора состояния сис-
системы в фиксированный момент времени.
Рассмотрим частный случай, когда ^т = ц = 1 :
г A) = cos а; г A) = sin а. A0.152)
Исключая а из A0.151), получаем уравнение границы об-
области возможных значений решений z} + z? = 1, справедливое
для любого времени т.
В данном примере рассматриваются свободные колебания
консервативной системы, для которой полная энергия остается
неизменной, поэтому и область возможных значений решений
остается неизменной во времени.
Рассмотрим случай, когда на массу т (см. рис. 10.10) дей-
действует случайная по направлению и ограниченная по модулю
сила/(|f \<fm).
Уравнения движения массы т имеют вид
y + p\y = -^fy\ * + />2* = ^Л> A0.153)
где
Переходя к безразмерным параметрам tp{ =т, у = уо1,
х = х0/, после преобразований получим
461
У\
Уг
Уъ
У4
0
-1
0
0
1
0
0
0
0
0
0
-1
0'
0
0
0
. г
, I =
/г
0
/з
0
462
*oW +4W = -\, =4 ¦ A0.154)
тру °
Безразмерные компоненты вектора f удовлетворяют усло-
условию
/J k {^'rnpjij
ч / ч /
ИЛИ
(qf-D^l.
Требуется найти область возможных значений безразмер-
безразмерных координат х0, у0 массы т в фиксированный момент вре-
времени fjt (t? =/Vit) ПРИ нулевых начальных данных.
Из системы A0.154) получим систему четырех уравнений
первого порядка (опуская индекс " в безразмерных величинах):
У1+У2=А> У\-У2 = Ъ A0.155)
Уз + рЬ>А=/з> У4-Уз = °> A0.156)
где
У\=У\ У7 = У\ f\=fy\
уъ = х\ у4=х; /з=Л-
В векторной записи имеем
y + >4y = f, A0.157)
где
Матрица
7Т° ° °
J m
0 10 0
С1= .
о о4-о
0 0 0 1
Как следует из формулы A0.125), для определения вектора
состояния системы у требуется знать матрицу Р(хк, т). В рас-
рассматриваемом случае матрица Р есть матрица Грина уравнения
A0.157):
P(xk,x)=G(xk,x).
Так как матрица G {хк, т) определяется из решения одно-
однородных уравнений A0.155) и A0.156), которые независимы, то
ее можно получить, определив матрицы Грина для каждой из
систем уравнений A0.155) и A0.156). Матрицы Грина для этих
уравнений имеют вид
cos (хк - т) sin (т^ - т)
Gl(T*>T)= -8т(тЛ-т) cos(Tft-i) '
G(x ч_ COSPQ(-Xk-'C) sinPo(TA;-T)
2xk'x ~ _5щ^0(тЛ-т) caspQ(xk-x) '
G, 0
поэтому G(xk,x)= Q G .
После интегрирования матрицы G (xk, x) получим
'*
463
где
G, Г sin4 О-00811*)].
1 - A - cos x0 sin xk '
1 . \.л
~pmPoxk J<1 ~ cos Po xk)
G 2 = i i
- -HI - cos pn ti) —sin p0 ik
После преобразований получаем матрицу 5, входящую в
числитель выражения A0.125):
о о L 22J
где
= /^sin^^ + Ccos-c^-lJ (/•24-l)sinTjfc(cosx/t-l)
11 (/*-l) suit*(cos т*-1) /^(l-cos^^ + sin2^ '
По условию задачи требуется найти область возможных
значений в плоскости хОу, т.е. проекцию четырехмерной об-
области на плоскость лОд', поэтому вектор а, входящий в формулу
A0.125), лежит в этой плоскости, т.е.
" 0
а = S1" а = 0 ej + sin а е2 + 0 е3 + cos а е4 ;
cos а
А = (f\ -I) sin xk {cos ik - 1) sin а ех +
+ \f2m A - cos ik J + sin2 т J sin a e2 +
464
+ ~2 (f2m - 1) sin/>0 xk(cospQ zk- 1) cos a e3 +
A)
+ -j Г/2, A - cos />0 тл J + sin2 />0 т J cos a e4 ,
где е;- — единичные векторы координатных осей.
Знаменатель формулы A0.125) для рассматриваемого при-
примера имеет вид
a = \[/"^(l-cosT?J+sin2T?]sin2a +-j |/^,(l-cos/»oT^J+sin2/?0Tjcos2a.
Ро
Для построения проекции области на плоскости хОу необ-
необходимы проекции
Уг = \ [fli 0- - cos Ч J + sin2 тJ sin a ;
У4 = ~рГа [fit (! - cos Рохк J + 8Ш2/^тЛ] cos a .
Меняя а от 0 до 360°, получаем область возможных значе-
значений координат точки в момент времени хк.
Рассмотрим частный случай р0 = 1. После преобразований
получим
у2 = Vf2m A - cos хк J + sin2 тк • sin a ;
у4 = V/2, A - cos тд. J + sin2 T? • cos a .
Исключив угол а, получим уравнение окружности
Пример 10.6. Рассмотрим механическую систему, показан-
показанную на рис. 10.24. По абсолютно жесткой трубе, упруго закреп-
закрепленной на правом конце, движется тело массой /«j под дейст-
действием силы R. Направление силы R характеризуется двумя слу-
случайными величинами е и е, где е — линейное смещение;
31 Зак. 341
465
е — угловое смещение. Случайные смещения ограничены по
модулю
Рис. 10.24
Обе случайные величины можно считать малыми. На
рис. 10.25 показаны проекции силы R на плоскости yOz и xOz
и ее положение относительно точек О и О1( зависящее от
проекций случайных смещений ех, еу , гу и бх. Для упрощения
Рис. 10.25
примем, что в начальный момент времени координата точки
Oj равна /j/2. Из-за случайных эксцентриситетов силы R по-
появляются два случайных момента, действующих в плоскостях
yOz и xOz '¦
Мх = (zey -ey)R;
A0.158)
466
My = &x-ex)R. A0.159)
Моменты Mx и Му вызовут возмущенное движение трубы
в двух плоскостях, которое характеризуется малыми угловыми
отклонениями 9 и \\i (см. рис. 10.24). Получим уравнения
возмущенного движения относительно состояния равновесия,
в котором находится система до приложения силы R.
В момент выхода тела из трубы его ось получит угловые
отклонения 0К и iyK, а также угловые скорости 0К и \\iK, которые
образуют четырехмерную область в фазовом пространстве. Так
как проекции ех = | е | cos а , еу = | е | sin а, то получаем условие,
которому удовлетворяют случайные величины ех и еу:
(_Ц + (_Sl) <l (Ю.160)
Аналогичному условию удовлетворяют случайные величины
гхигу:
Kf + fiz?,L A0.161)
При исследовании возмущенного движения системы под
действием случайных величин ех , е , ех , гу , удовлетворяющих
условиям A0.160), A0.161), требуется определить области воз-
возможных значений вектора состояния системы в момент выхода
тела. Считая углы малыми, получим следующие уравнения
движения:
jf [JXB] + а/26 + cxl2Q = MX- mxgz ; A0.162)
¦Jt[JyV] + «/2V + сх12Ц1 = Му (Jx=Jy). A0.163)
Поскольку
зг 467
где /0 — момент трубы относительно точки 0; /01 — момент
тела относительно оси, перпендикулярной оси z и проходящей
через центр тяжести тела, после преобразований получаем
9 +anQ +о129 = Ь0 + Ьпеу + Ьиеу ; A0.164)
у + O21V + Й22^ = ^21Ех + ^22ех > A0.165)
где
2тЧг+2Г + а/2 сх1х
с2/2 «!«
a21 = flll> a22 = —j-> b0 = —J->
h h RZ- А А Л
*11 = ft21 = > bl2 = b22 = -J ¦
Считая, что малые колебания системы и малые отклонения
линии действия силы от оси z практически не влияют на
движение тела по оси z, при нулевых начальных данных полу-
получаем
Z = ^- t2 . A0.166)
Уравнения A0.164) и A0.165) связаны через правые части,
куда входят случайные величины, удовлетворяющие условиям
A0.160) и A0.161). Если ввести вектор
"el p1"
у=2 = ?. A0Л67)
У! К4
то уравнения A0.164), A0.165) можно записать в виде
у + A(t)y = В^)Ц + Bl(t)f2 + bQ(t), A0.168)
468
где
A(t) =
0
0
0
0
bn
0
0
bn
0
0
0
bn
0
0
0
0
_
'0"
0
ey
ex
_
> 0 ~
"VI
0
0
0
f, =
Решение уравнения A0.168) можно получить только чис-
численными методами, так как элементы матрицы А (/) зависят
от времени.
Общий вид решения при нулевых начальных данных имеет
вид
'*
у = JG(tK , О [ЗД +f2) + b0] dt. A0l69)
о
Матрицу K(tK , t) можно определить из решения однород-
однородного уравнения, сопряженного с однородным уравнением:
ff + ^z = 0 <*«W>. A0.170)
Фундаментальная матрица решения уравнения A0.170)
К(х) связана с матрицей G(tK , t) соотношением
K\x)=G(tK,t). A0.171)
Ограничимся определением проекции четырехмерной об-
области на фазовые плоскости @К , vJ/K ) и FК , \ук).
Возьмем произвольный вектор а» = а» (cos р , sin р , 0, 0), ле-
лежащий в плоскости (8 , i|0, и найдем проекцию вектора состояния
пмгтр.мкт v ия няппяпттр.нир. пттпе.ггр.пстр.гипр. пр.ктпппм г» •
30 Зак. 341
469
0
_¦
0
1
а2\
0
-1
°12
0
0
а22
0
0
'к
Уа = (У «О = JK(tK,t) [ЗД + fj) + Ьо] • а, Л. (ШЛ72)
О
Для построения области требуется определить максимум
проекции уа при дополнительных условиях A0.160) и A0.161),
наложенных на векторы fj и f2, т.е. надо найти максимум
функционала вида
/=^-^[E1f1.f1)-l]-^[(C2f2.f2)-l], (Ю173)
где A.J, ^2 ~ множители Лагранжа;
-у— 0 00 10 0 0
етах
0 ^—00 0 10 0
п Бтах /о
С1 = > С2 = 1
0 0 10 00"Т~ °
^тах
0 0 0 1 00 0 -J—
В соответствии с теорией, изложенной в § 10.7, максималь-
максимальное значение функционала /равно сумме множителей Лагран-
Лагранжа:
/max = ^l + ^2. (Ю-174)
определяемых из соотношений
(C-1lDa.Da.) = X21;
A0.175)
(C21Da,Z)a,) = ^)
'к
где D= liKBtfck .
470
Из выражений A0.175) следует, что достаточно один раз
определить численные значения матрицы D, чтобы получить
значения X; для любого направления вектора а, . Векторы fj и
f2, которые сообщают проекции вектора у на направление
вектора а, максимальное значение, равны:
flm = 7-CT^«.; «to.-f C~2Da*' A0Л76>
Подставив значения fim и f2m в решение A0.169), получим
'к
„,, _*. г„. , A0.177)
о
Для построения проекции области на плоскость (9К, \ук)
достаточно определить две проекции вектора ут (у1т и У2т):
K=y\m = d \%т + <* $ех/л + d 13 V + <* №хт +У\к'
VK = y2m = d[%m + d%exm + d*23eym + d%exm + y2K, (Ю.178)
где 6j,m , е^,, е^ , ехт - компоненты векторов flm и f2m A0.176).
Каждой паре чисел У\т и >%, на плоскости FК , \j/K) соот-
соответствует точка границы проекции области. В выражения для
проекций у\т и у2т A0.178) входят неслучайные составляющие
¦У1к и У2к > которые при построении области можно не учиты-
учитывать, так как они не влияют на форму области. Числовые
значения параметров, входящих в уравнения движения A0.164),
A0.165) и условия A0.160), A0.161), следующие:
/ = 6M;/, = lM;ffi^= 600 Н; /0 = 4 • 103 кг • м2; /01 = 50 кг-м2;
с2 = 4-106Н/м; а = 0;етах = 5 10-3м, Еш1Х = lO рад; Л =
= 106 Н; tK = 0,49 с.
Изменяя а (рис. 10.26) от 0 до 360° и определяя для каждого
значения о-У\т и у2т (практически для ряда дискретных значе-
значений а), получаем проекцию области возможных значений
30*
471
(рис. 10.26) угловых скоростей
оси тела в момент выхода из
трубы.
На рис. 10.26 приведена об-
область для ряда значений жест-
жесткости q. Область существенно
зависит от параметров систе-
системы, в данном случае от жест-
жесткости (при фиксированном
значении с2). Существует такое
значение Cj, при котором об-
область становится минимальной.
Это значение q можно считать
оптимальным (так как в техни-
технических задачах желательно,
чтобы область возможных значений вектора возмущенного дви-
движения системы была минимальной).
§ 10.7. Определение максимальных значений линейных
функционалов при независимых возмущениях
Часто при исследовании движения динамической системы
требуется установить экстремальные значения некоторой функ-
функции, характеризующей качество процесса и зависящей от век-
вектора у возмущенного состояния системы в фиксированный
момент времени tk, например
J=L(yk). A0.179)
Вектор у удовлетворяет уравнению вида
y + Ay = Bf, A0.180)
а компоненты ft вектора f удовлетворяют ограничениям A0.18)
илй<ГО.23).
В прикладных задачах функция L (ук) представляет собой
некоторую числовую оценку (критерий качества процесса),
характеризующую отклонение процесса от заданного состоя-
состояния. В этих случаях вектор возмущенного состояния у^ рас-
Рис. 10.26
472
сматривается как малый вектор и функцию L(yk) можно раз-
разложить в ряд
L (У*) = (Ц » У*) + (А) У* • У*) + AZ' > A0.181)
где (Lk, ук) — линейная часть разложения, представленная в
виде скалярного произведения; (L$k ,ук)~ квадратичная часть
разложения; L^ — вектор с компонентами = 0; Lo —
матрица с элементами -—-—| у = о = 0; AL' — остальная сумма
ряда.
Например, в § 10.2 было рассмотрено движение ракеты, на
которую действует случайный возмущающий момент Мв, огра-
ограниченный по модулю (см. рис. 10.13) . Такой момент может
возникать при действии случайных порывов ветра или при
случайных эксцентриситетах тяги. Получить информацию о
случайном воздействии ветра, необходимую для применения
методов теории случайных процессов, как правило, очень слож-
сложно, а пренебречь эффектом от возможного действия ветра
нельзя. Поэтому возникает необходимость в оценке максималь-
максимально возможного эффекта действия ветра при ограниченном
объеме информации о случайном ветре. Такой информацией
является информация о максимально возможных скоростях
ветра в данном географическом месте, которая позволяет оп-
определить область возможных значений возмущающего момента
Мв (см. рис. 10.14).
В примере 10.2 была получена область возможных значений
угла фифв момент времени tk. Эти значения можно рассмат-
рассматривать как угловое отклонение осевой линии ракеты (и ее
первой производной) от номинального значения , т.е. ц>к и ц>к
можно считать малыми величинами. Если под моментом вре-
времени tk понимать момент окончания действия силы R, то
дальнейшее движение тела будет происходить по траектории,
отличной от расчетной. Расчетная траектория, соответствую-
соответствующая расстоянию х0 по оси х, кончается в точке А (рис. 10.27).
Возможные траектории при прочих равных условиях зависят
473
Рис. 10.27
от ф? и ф^ . Если обозначить через А х отклонения точек падения
тела от точки А, то Д х есть функция ук и ф^. Вследствие
ограниченности области возможных значений (фд., ф^ ) и вре-
времени движения на пассивном участке траектории разброс по
дальности Д х (фЛ , ц>к) тоже есть ограниченная функция. При-
Примем, что Д хтах « х. Разложив функцию х (ф^ , ф^.) в ряд Тей-
Тейлора и ограничившись только линейной частью разложения,
получим
• ч дх дх ¦ A0.182)
Эф* дфд.
или
J=(Lk-Vk), A0.183)
дх
где Lt = ', ЧЧг= ¦ ~ компоненты вектора Lt считаются
дук
известными.
474
Из A0.183) следует, что Ах представляет собой линейный
функционал, зависящий от вектора (рк. Требуется определить
экстремальное значение Д х при известной области возможных
значений случайного возмущающего момента Мв и возможный
эффект (наихудший) от действия случайного ветра.
В общем случае данная задача формируется следующим
образом: в фиксированный момент времени tk требуется опре-
определить экстремальное значение линейного функционала вида
J=(Lk-yk), yk = y(tk) A0.184)
при условии, что вектор у удовлетворяет векторно-матричному
уравнению
y+Ay=Bf (y@) = y0), A0.185)
а компоненты вектора f — условиям A0.18) и A0.23). Вектор
Ък заданный, причем компоненты вектора L^ линейно незави-
независимы, т.е. соотношение ? Lki cc,- может выполняться только
при условии, что ctj = <х2 = ... = ап = 0.
Рассмотрим случай, когда возмущения fj независимы, т.е.
удовлетворяют условиям A0.18). Умножим скалярное уравне-
уравнение A0.185) на некоторый вектор L :
(Ly) + (LAy) = (L-Bf). A0.186)
Первое слагаемое в левой части уравнения A0.186) преоб-
преобразуем к виду
(Ly) = (Ly)*-(Ly). A0.187)
Уравнение A0.186) с использованием A0.187) принимает
вид
(L ¦ у)' - (L • у) + (L Ay) = (L ¦ ВТ). A0.188)
Проинтегрируем обе части уравнения A0.188) по /:
'* '* A0.189)
(L • У)Ц - (L ¦ y)U0 + j [(L • А у) - (L • у)] dx = j (L • В f) <k .
0 0
475
Выражение под интегралом можно преобразовать к виду
(L ¦ As) ~ (L • у) = (A* L • у) - (L • у) = (A* L - L) • у . A0.190)
Потребуем, чтобы вектор L в момент времени tk был равен
вектору Lk. Из соотношения A0.189) окончательно имеем
j=(Lkyk)=j{L-A*L)-y.dT+j(L-Bf)dz + (Loyo). A0Л91)
о о
Потребуем, чтобы введенный вектор L удовлетворял урав-
уравнению
t-A*L = 0. A0.192)
Окончательно получаем выражение для функционала
'*
/= J(L.2?f)rfr + (L0-y0). <10Л93)
о
Для решения уравнения A0.192) лучше перейти к перемен-
переменной Tt = tk - т (при xj = 0 К@) = Е):
-&-l+A*h = 0- A0.194)
Решение уравнения A0.194) (при Tt = 0 К@) = Е) имеет вид
L = K(xl)Lk. A0.195)
После всех преобразований получаем
'*
/1 =/(^(т^Ц.ЯО^+^о-уо),
о
или
'*
/^f^^^L^D^+^o-yo). A0-I96>
о
476
Вектор Lo получается из A0.195) при ij = tk, т.е.
LQ = K(tQ)Lk. A0.197)
Если вектор начальных данных у0 равен нулю, имеем
0
При случайных функциях с постоянными во времени гра-
границами (fn = ± а1) имеем
0
Из соотношения A0.198) легко установить закон изменения
компонентов вектора f, сообщающих функционалу / макси-
максимальное значение. В скалярной форме выражение A0.196)
имеет вид
Ы 0 |^>=1 I Ы
где pjj — элементы матрицы Р= В*К(\\).
п
Максимум выражения ^ (LOi, yOi) найдем, определив yQj из
hi
условий:
У01 = У1М» если Loi > 0;
У(и = Уш> еслиХ0/<0.
Пусть xik — значения времени, где подынтегральная функ-
п
ция ? PijLjn меняет знак.
М
Максимальное значение первого слагаемого правой части
A0.200) определится по формуле
477
S J I*/*/,,U.-Z I f ZV,O *. •<10'201>
Ы 0 /=1 Ы А=1 0 >1 I 'J
Под интегралом на каждом из интервалов от t{ k до tt ^+1 будет
или функция Mi, или mi — в зависимости от знака функции:
' п Л
Y,PijLkj=bi. (Ю.202)
i>l J
Если на интервале (/,¦ Л f,- ^+1) 8,- > 0, то под интегралом в
правой части выражения A0.201) будет Л/,-, если 8(<0, то /п(-.
Изложенный метод дает возможность определить не только
максимум /j, но и наихудший закон изменения функции /}.
Если границы областей возможных значений ft от времени не
зависят, т.е. f, = ± о,-, то выражение для максимального значе-
значения /j принимает вид
л * п
т ^ г. = , . v- г A0.203)
ы о ы
При определении максимального значения /j были уста-
установлены законы изменения функций f{, которые сообщают
^ максимальное значение. Если эти законы изменения ft по-
поставить в выражение A0.25), то получится некоторый вектор у.
Будет ли этот вектор находиться внутри области или он будет
касаться поверхности области возможных значений?
Если вектор у для найденных законов f-t будет находиться
внутри области возможных значений, то это значит, что мак-
максимум функционала /L достигается на «внутренних» векторах у;
если вектор у для найденных /J- касается поверхности, ограни-
ограничивающей область, то максимум достигается на векторах, оп-
определяющих предельную поверхность области отклонений.
Покажем, что максимальное значение линейного функци-
функционала /= ОЦ• ук) достигается на векторах, определяющих пре-
478
дельную поверхность области воз-
возможных значений вектора состо-
состояния системы. Для большей на-
наглядности рассмотрим частный
случай, когда вектор ук имеет две
компоненты. В этом случае об-
область возможных значений огра-
ограничена плоской кривой на фазо-
фазовой плоскости (рис. 10.28). Пред-
Предположим, что максимум /соответ-
/соответствует вектору ук (рис. 10.28):
J=(Lkyk) = max. A0.204)
Любой вектор у^, совпадаю- Рис. 10.28
щий по направлению с вектором
У к тах> может быть записан в виде
У* = *У*тах> (Ю.205)
где к — скалярный множитель, меняющийся от нуля до еди-
единицы.
Подставив уд. в выражение A0.204), получим
•^(Vyjfcmax)- (Ю.206)
Из A0.206) следует, что для любого вектора у^, совпадаю-
совпадающего по направлению с вектором ук тах, для данного угла
значение функционала / может быть только меньше, чем для
вектора ук тах, определяющего границу области, что и требо-
требовалось доказать.
Определим максимальное значение линейного функциона-
функционала в случае нескольких участков движения. Рассмотрим дви-
движение системы на интервале @, tk), когда имеется ряд интер-
интервалов времени (/,•, //+1), на которых действуют разные случай-
случайные возмущения f/( причем векторы f,- могут иметь разную
размерность (считается, что размерность векторов f(- меньше
размерности уравнений движения системы). Рассмотрим вна-
вначале случай, когда размерность уравнений движения системы
на всех интервалах движения одна и та же. Определим макси-
максимальное значение функционала / в конце движения (при
t=tk), которое зависит от всех этапов движения. На каждом
479
из интервалов времени, где действует вектор случайных возму-
возмущений f,-, уравнение движения имеет вид
у,+ AM* Btt,(i= 1, 2, ..., п), A0.207)
где п — число участков.
Линейный функционал A0.196) /= j (L • ВТ) dx + (L0 • у0)
0
свяжем с л-м (последним) участком движения:
ч
/„ = J(LB • Вп Г)„ ск + (ЬОл • уо„ @)). (Ю.208)
0
Значение Ln (tk ) известно, поэтому из уравнения A0.134)
Л
можно найти Ln@).
В свою очередь, скалярное произведение (Ln@)- у„@)) пред-
представляет собой значение функционала на предыдущем участке
движения, т.е.
'*«
(ЬОя • у„@)) = J(Ln_,- Bn_{ VO ск + (Ln_r y^O)), A0.209)
о
и так далее, поэтому можно получить выражение для функци-
функционала, зависящего от движения системы на всем интервале
@, tk): У
~~
/=2 J(L,-^if/)A + (Lol.y1(O)). A0.210)
*=1 0
Здесь L01, yj(O) — значения векторов Ц и yj в начале первого
интервала движения.
Максимальное значение функционала A0.210)
480
•Ux-Z J(Lr^fi)A +(Ь01У1@))тах, A0-211)
wl° Jmax
я
где Z '*='*¦
Ы
Метод определения максимального значения каждого из
слагаемых, входящих в правую часть выражения A0.210), из-
изложен выше.
Механическая система с изменяющейся размерностью век-
вектора состояния у показана на рис. 10.29. По стержню движется
тело, которое имеет контакт со стержнем в двух точках А и В.
В начале движения система имеет одну степень свободы
(рис. 10.29, а), а после потери контакта передней опоры (точка
В) система имеет две степени свободы (рис. 10.29, б). Возможны
и механические системы, когда размерность вектора у на пер-
первом участке движения больше, чем на втором (см. рис. 10.21).
R
Рис. 10.29
Рассмотрим систему, когда имеется два участка движения,
причем для определенности примем, что размерность п вектора
состояния yj на первом участке движения больше размерности
v вектора у2. Рассмотрим второй участок движения системы и
связанный с ним некоторый вектор L2, имеющий размерность
вектора у2. Вектор L2 удовлетворяет сопряженному уравнению
A0.194). На втором участке функционал
'*-'*,
J2 = J (L2 • В2 f2) A
о
у2@)),
A0.212)
481
где tk — время движения системы на первом участке.
Вектор у2@) равен вектору уп в конце первого участка, где
Уц — вектор с компонентами, сохраняющими свое значение и
на втором участке, т.е. вектор у2 является «продолжением»
вектора уп. Так как вектор у^ по условию задачи имеет раз-
размерность п (больше размерности вектора у2), то при t=tk
yii(tyl Гу2@)
^^"[^¦[yiKVJ- A0-213)
Вектор у12 имеет размерность п — v.
Вектор L2@) находим из решения уравнения
-^ + 44 = 0 (т = (^-^)-О- A0.214)
При т = 0 вектор L2 задан.
Введем вектор Llfc с «-компонентами
LU = [0 J- (Ю.215)
Вектор Llk есть вектор начальных данных для уравнения
-^ + А\Ц=0 (x = tki-t). A0.216)
При т = 0 Lj = L1/t. Представим вектор y^i) в виде
^'-[^-[^v] <1017)
и рассмотрим скалярное произведение (L^ y^), равное, со-
согласно A0.215) и A0.217),
(Ч*' У1('*,)) = (L02 • Уг(°)) ¦ A0.218)
В свою очередь, скалярное произведение A0.218) есть функ-
функционал, связанный с первым участком движения, т.е.
482
\
J\ = (Цк¦ Уне) = J(Li • Bifi)* + (Loi • У1(°» • A0219)
о
поэтому окончательно получаем выражение для функционала /
для двух участков движения:
'*,
/= f (Lr Bx f,) ch + J(L2 В2Цск + (Lo! • У1@)) .(Ю.220)
о о
§ 10.8. Максимальное значение линейного функционала
при зависимых возмущениях
Определим максимальное значение линейного функциона-
функционала при зависимых случайных возмущениях, удовлетворяющих
условию A0.23).
Требуется найти максимум функционала
'*
J=j(LBf)dx + (LoyQ). A0.221)
о
Вектор возмущений f можно записать в виде
f= Hit) Го,
где H{t) — диагональная матрица с непрерывно зависящими
от времени элементами; f0 — вектор, компоненты которого
удовлетворяют условию
(Cjfo- fo)<l. A0.222)
Аналогичному условию удовлетворяют и компоненты век-
вектора у0:
(Соуо- У0) ^ 1-
Воспользовавшись множителями Лагранжа, получим функци-
функционал вида
483
'к
/1== j(LBHfo)dx + (Lo.yo)-^[(Cofo-to)-l)-
0
-f [(СоУо-Уо)-1] = О. A0.223)
Так как L = A'Lq, to
/! = J KBHYKLQ ¦ f0] ch + (Lo ¦ y0) -1 [(Cofo • f0) - 1] -
о
-f [(СоУо • Уо) ~ 1] = 0 . (Ю-224)
Функционал A0.224) аналогичен выражению A0.106) для
проекции вектора состояния системы на произвольное направ-
направление, определяемое вектором ej. Поэтому его максимальное
значение равно
/iroax^+H. (Ю-225)
где X2 = {C{lD Lo Z) Lo); i) = j(BH)*Kch ; ц2 = (C^L,, • Lo).
о
Рассмотрим случай, когда компоненты ft вектора возмуще-
возмущений являются случайными разрывными функциями, ограни-
ограниченными по модулю, как, например, независимые случайные
возмущения (см. рис. 10.1). В этом случае вектор f можно
представить в виде
f=H(t)S(t)fQ, A0.226)
где Я (О — диагональная матрица, аналогичная матрице Cj,
входящей в A0.222); S — диагональная матрица, элементами
которой являются единичные разрывные функции $,-/(* )•
Функции sit(t) могут принимать значения ± 1, причем мо-
моменты разрыва функций случайны. Физически это означает,
что компоненты fi мгновенно могут менять свой знак в слу-
случайные моменты времени, в то время как компоненты вектора
484
A0.222) изменяются во времени непрерывно. Условие A0.23)
для векторов A0.226) преобразуется к виду
(C^t) fo,fQ)<l, A0.227)
где
C1(t) = (HS)* C(t)(HS).
Если матрица С(/) диагональная, то и матрица Cx(t) диаго-
диагональная. Например, для случая, когда вектор f имеет три ком-
компонента, матрица С\(О равна
|f|2
1 Imax
0
0
h
|f
0
2
22
|2
Imax
0 -
0
0
где hj; — элементы матрицы Н.
В этом частном случае (когда матрица С (t) диагональная)
условие A0.222) не зависит от sih так как в элементы матрицы
Cj(?) входят Sjj, которые равны единице.
Линейный функционал A0.223) с учетом A0.226) принимает
вид
J{ = J(L • BHSfQ) dx + (Lo ¦ y0) -1 Kqf,, ¦ f0) - 1] -
0
-f[(CoyOyo)-l]. A°-228)
Максимальное значение /j A0.228)
Jl max = К + » ' (Ю.229)
но в отличие от аналогичного выражения A0.225) множитель
Лагранжа Хт определяется с учетом возможного разрывного
изменения во времени компонент вектора Г
485
Ct(O =
В зависимости от разрывного изменения / во времени
множитель Лагранжа X может принимать различные значения,
но среди возможных разрывных изменений /• есть такие за-
законы изменения, при которых X достигает максимума. Для
этого значения X введено обозначение Хт. Найдем Хт, рас-
рассмотрев выражения для квадрата множителя Лагранжа (пояс-
(пояснение к A0.225)):
Х2т = (С[1ЪЬ) (Ь = ?(%,), A0.230)
где
?@>= ](BHS)*Kch.
о
Элементы Ъ № и dy матриц 5A) = (BHS)* и D = Ж соответ-
соответственно равны:
Ip=i J
Поэтому компоненты вектора Ь имеют вид
bK=]\f,dKVlOv h^^di, A0.231)
Так как матрица CJ1 диагональная, а ее элементы положи-
положительны, то максимальное значение квадратичной формы
A0.230), или, что то же самое, квадрата множителя Лагранжа
Хт , достигается, когда компоненты вектора b принимают мак-
максимальные значения, что имеет место при следующих законах
изменения функций:
s(m)JlrVHgK>0, A0.232)
** -1 при gK < 0,
486
где
'Ov Лкк-
Моменты времени тр, когда функция sKX меняет знак (точки
разрыва), находятся из условий
gK = 0. A0.233)
Определив s ^, находим вектор f ^"\ соответствующий этим
законам. При определении максимального значения /L исполь-
используется условие A0.107)
а/,
аг0
которое в рассматриваемой задаче приводит к соотношению
'к
jiBHSTKLoih-kmCl1^ = 0. (Ю.234)
о
Определив максимальное значение Хт и законы изменения
единичных функций s%? A0.232), находим вектор/^ :
f<bm) = ^-C[l\{BHSyK\^dx.
'к
A0-235)
Вектор tm\ при котором функционал / A0.221) с учетом
разрывного изменения во времени компонент /j7"^ достигает
максимального значения,
. A0.236)
Рассмотрим случай, когда в процессе движения системы на
разных интервалах времени действуют разные случайные возму-
возмущения, ограниченные по модулю и удовлетворяющие условиям
487
(C«fg>-fg>)Sl {C<l> = (HSyCjHS), A0.237)
где индекс j соответствует у-му интервалу движения системы.
Моменты времени начала (tOj) и конца (tKj) интервалов
известны. Ограничимся случаем, когда размерность вектора
состояния системы на всех интервалах движения остается не-
неизменной. Определим максимальное значение линейного
( т \
функционала / для момента времени tK tK = ^ tK • с учетом
X м '
действующих на систему возмущений /w (/=1,2, ... т), кото-
которые удовлетворяют условиям A0.237).
Для каждого из интервалов (tOj; tK ¦) движения можно по-
получить функционал, аналогичный A0.221):
'к
/» = JE«Z)«* L« . ф ckl+(L$ ¦ j#), A0-238)
о
где
DJ* = (BV>H®)\
Выражение для функционала /^ можно представить в виде
'к
/« = J(J»D W'LW • fg>) Ai + /^, A°-239)
0
где
'.я
/(/-l) = j Aу(М)р(М)'ь(М) • fft^) d4 + (L^D • y^-D). A0-240)
0
Ограничимся случаем, когда на каждом из участков дейст-
действует один случайный вектор Т^.
Векторы 1$ , входящие в A0.239), определяются из урав-
уравнений (при tj = t^,)
488
^ + Ар> = О (L« = Kj (ц) L«). (Ю.241)
Известно значение вектора 1$ (в конце у-го участка дви-
движения), что позволяет определить значение вектора L^ :
1#-^<^1#, A0.242)
который является значением вектора (L V~V) в конце предыду-
предыдущего участка движения:
L<H> = Ltf. A0.243)
Для последнего участка движения имеем
'к*.
/СО = f(S™D<">• l№ • #">) *! + J^l\ ^10-244)
0
Исключив последовательно j(-m~l'> из A0.244) (используя
рекуррентное соотношение A0.239)), получим
т **
/=S jiSUDOW-m^HLP-yP). A0245)
>1 о
Интефалы, входящие в правую часть A0.245), содержат век-
векторы IP, которые удовлетворяют уравнениям A0.241). Решение
уравнений можно получить, если известно значение вектора
L^ при tj = 0, т.е. известны значения LJjP . Из векторов Lj?>
известен только вектор L^ , однако этого достаточно, чтобы
получить, последовательно вычисляя, значение интегралов для
каждого из участков, начиная с последнего. Решая уравнение
A0.241) при j = т, получим L^ , который равен вектору
L^") , вектору начальных данных для решения уравнения A0.241)
на предыдущем интервале движения системы и т.д.
Так как в каждом из участков движения системы векторы
f ^ удовлетворяют условиям A0.237)
32 Зак. 341 489
(С</>#-#)<1 (/=l,2,...,m),
то, не повторяя промежуточных преобразований при опреде-
определении максимального значения /j (аналогичных ранее рассмот-
рассмотренному случаю с одним участком движения системы), полу-
получаем
т
Л™,» И-IV AО'246)
где
7$ = [{С<»)-1Ъ<1>-Ъ<»]1
'*/
b«=j5«D«Lg>A, D<t> = (B<i>H«>)'Kj. A0247)
о
Максимально возможное значение функционала /j будет
достигаться, когда X.- будут максимальные, что имеет место при
следующих законах изменения единичных разрывных функций
с(/) •
Л кк ¦
f (" 1
три 2>kv/Ov\k>0;
0) _ I Г1 J A0.248)
ЮС ~~ '
-1 при X 4cv ^v Лкк < °-
При законах изменения элементов матриц S® A0.248) ком-
компоненты векторов Ь^ равны максимально возможным значе-
значениям, и при диагональной матрице (С^) с положительными
элементами получаем максимальные значения xL . Поэтому
окончательно
т
'imax^ + EW- A0249)
М
490
Приложение 1
ЭЛЕМЕНТАРНЫЕ ОБОБЩЕННЫЕ ФУНКЦИИ
Рис. П.1
Рис. П.2
Дельта-функция Дирака. Рассмотрим функцию (рис. П.1)
«'>-?(l7pJ. <П1>
имеющую максимум при t = 0 и
убывающую с ростом модуля \t\.
Преобразуем функцию Ф (t), уве-
увеличив ее значение при t = 0 в т
раз:
0^L—^. (П.2)
1V n[l + (mtJ}
Функции Ф^т t) для ряда т
показаны на рис. П.2. Можно по-
показать, что интегралы от функций
(П.1) и (П.2) от - оо до + да равны
единице:
00 00
\<b{t)dt=\, fol(mt)dt=l.
—ОО -00
При неограниченном увеличе-
увеличении т (т -> оо) получаем функ-
функцию, называемую дельта-функцией Дирака (рис. П.З):
lim Фх(т Г) = 5@-
7Я->°0
Основные свойства 5-функции:
[о г<0; о '<<ь;
1N@= °° ^=0; 5(Г-/0)= * t=to; (П.З)
[О Г>0; 0 t>t0;
2M(О = 5(-/);
32*
491
00
3) Js(/-fo)*=l;
-00
4) 5 (О = 5 (as) = ~ 5 (e),
где е — безразмерная величина.
Интегралы, содержащие 8-функ-
цию и ее производные:
Рис. П.З
со
J<p@ 8(f-fo)*=<p(^;
—00
00 00
JФ (О 5 (г-/0)Л=-|ф (tN(t-to)dt=-y(to),
—оо —оо
где 5 — производная 8-функции.
Для производной л-го порядка получаем
00
/5я(Оф@*=(-1)яфл('о)-
—00
Производные 8-функции могут быть получены (наглядное
представление) как предел Ф" (т t) производных функций, т.е.
ton Ф 1 (т О = 8" (О-
/Я-> оо
Функция Хевисайда. Интеграл от 5-функции при перемен-
переменном верхнем пределе
/ [0 t<tQ;
J5(t-tQ)dt=H(t-tQ), Я(/-Г0) = .^ t=t0; (ПА)
[l <>t0,
где H(t) — функция Хевисайда (рис. П.4).
492
^-.<*-«. (П.5)
Функция sign t (рис. П.5):
[-1 /<0; И (<to>
3ign/=|0/=0; sign(/-/0) = j 0 t=t0; (П.6)
[i '>°; [i t>t0-
Рис. П.4
^Г-' = 26(О; Я(О = ^A+818п/).
Функция/(О = | f | (рис. П.6):
|/| = fsign/; ^ = sign/; ^-^ = 25@. (П.7)
Приложение 2
ЗНАЧЕНИЕ ИНТЕГРАЛОВ /л
00
, 1 Г g(fo) J
•'"-^i.utip'-
Рис п.5 Рис. п.6 где
у4 (ко) = а0(ко)" + a^to)" + ... + а„ ;
G (ко) = 60(/шJ"-2 + ^(коJ"-4 + ... + Vi;
1~1<W\ 2" 2aoai ' 3" 2ao(aoa3 - alfl2) '
*o("aia4 + а2аз) - %ага\ + %a\h + T~ (аоаз - а1аг)
у = аЛ
2ао(аоаз + а2а4 - а!а2а3)
493
Приложение 3
Корреляционные функции и соответствующие им спектральные плотности
Корреляционные функции
Спектральные плотности
494
Приложение 4
М.Д. Кевдалл
Гайавата ставит эксперимент
(По мотивам поэмы Г.У. Лонгфелло «Песнь о Гайавате»)
1. Всюду славен Гайавата:
Он стрелок непревзойденный.
Легкий лук он поднимает —
Десять стрел взмывают к небу,
И последняя слетает
С тетивы тугой, звенящей
Прежде, чем вонзится в землю
Первая из десяти.
Все, кто видел Гайавату,
Говорили, что, бесспорно,
Совершенства он достиг.
2. Но какой-то хитрый скептик
Тем не менее заметил,
Что в стрельбе не только ловкость,
Но и меткость ценят люди.
И добавил: было б лучше,
Если б славный Гайавата
В цель попал бы хоть однажды,
Пусть хоть выборка при этом
Будет меньшего объема.
3. Гайавата рассердился
И сказал, что он в колледже
Посвятил себя науке,
Что статистикой зовется.
Он, себя считая вправе
Поучать своих собратьев,
Тут же лекцию прочел им.
Вспомнил он закон ошибок,
Усеченные кривые,
Информации потерю,
Заявил, что он добился
Несмещенных результатов,
И сказал, что после многих
Независимых попыток,
Даже если в их итоге
В цель ни разу не попал он, —
Все равно по средней точке
495
Отклонений от мишени
Можно сделать твердый вывод,
Что стрелял он безупречно
(За возможным исключеньем
Пресловутой меры нуль.)
4. Но упрямые индейцы
Возразили Гайавате,
Что они не понимают
Столь туманных рассуждений.
Им совсем не интересен
Результат его попыток.
И они предполагают,
Что охотник должен метко
В цель стрелять. А если будет
Он впустую тратить стрелы —
Должен сам за них платить.
5. Раздраженный Гайавата
Стал цитировать обильно
Р.А. Фишера и Итса,
Приводить работы Финни,
Книги Кемпторна Оскара,
Главы Кокрана и Кокса,
Андерсена и Банкрофта.
Он взывал к авторитетам,
Убеждая несогласных,
Что в стрельбе всего важнее
Не прямое попаданье,
А научно безупречный
Статистический подход.
6. Кое-кто из возражавших
Согласился с Гайаватой,
Что в подобной точке зренья
Есть, возможно, доля смысла,
Но, пожалуй, все же лучше
Не пускаться в рассужденья,
А без промаха стрелять.
7. Наш герой в ответ на это
Предложил за луки взяться,
Чтоб строптивых оппонентов
В правоте своей уверить.
Он сказал: «Необходимо
Так построить состязанье,
Как советует учебник
Проводить эксперименты».
(Хоть научный этот способ
496
Применяется обычно
Для проверки качеств чая,
Но порою, как известно,
Приложим к другим вещам.)
Гайавата разработал
Точный план соревнований,
Чтоб случайный их порядок
В соответствие пришелся
С тем характером, который
Носят множители в славной
Той теории, что ныне
Носит имя Галуа.
8. Те, кто выразил готовность
Состязаться с Гайаватой,
Были круглые невежды
В проведеньи испытаний
И поэтому, наверно,
Все оставшееся время
Проводили в тренировках,
Соревнуясь меж собою
Или просто в цель стреляя.
9. И во время состязанья
Результаты всех стрелявших
Были просто превосходны,
Но, увы, за исключеньем
(Как ни трудно мне признаться)
Результата Гайаваты.
Гайавата, как обычно,
Вверх свои направил стрелы.
Он так ловко это сделал,
Что остался несмещенным,
Но при этом, к сожаленью,
В цель ни разу не попал.
10. «Что ж, — сказали туг индейцы, —
Мы иного и не ждали».
11. Гайавата, не смущаясь,
Попросил перо, бумагу,
Произвел расчет дисперсий
И в итоге вывел цифры,
Из которых стало ясно,
Что стрелки смогли добиться
Лишь смещенных результатов,
А дисперсии при этом
Одинаковыми были
И совсем не отличались
497
От дисперсии, которой
Гайавата сам достиг.
(Правда, следует отметить,
Что последний этот вывод
Убедительнее был бы,
Если б в данных Гайаваты,
По которым вычислял он
Результат эксперимента,
Зафиксированы были
И прямые попаданья.
К сожаленью, оппоненты,
В вычислениях не смысля,
Не могли с героем спорить,
Что бывает очень часто
При анализе дисперсий.)
12. Тем не менее индейцы,
Не поверившие цифрам,
Отобрали у героя
Легкий лук его и стрелы
И сказали, что, возможно,
Гайавата в самом деле
Выдающийся статистик,
Но при этом совершенно
Бесполезный как стрелок.
Что ж касается дисперсий,
То какой-то грубый неуч
Произнес такое слово,
Что его, сказать по чести,
В статистическом изданьи
Я не смею повторить.
13. И теперь в лесу дремучем
Бродит грустный Гайавата.
Непрестанно размышляя,
Вспоминает он нормальный
Тот закон распределенья
Отклонений и ошибок,
Что лишил его навеки
Славы лучшего стрелка.
И порою он приходит
К трезвой мысли, что, наверно,
Нужно целиться точнее,
Несмотря на риск смещенья,
Если все же в результате
Иногда ему удастся
Поражать стрелою цель.
498
Приложение 5
Из истории борьбы за качество
499
¦л... Поводем.ю хозяина. ТулЬской
оружейной фабрики Корнилу Релогллза
битЬ кнутом н сослать В (Ч^ощу в
моиастЫри, понеже он, подлец, осмс~
лнтся «ойску государеву продакатЬ
негодные лииуали и <^>у^ея.
Старшину олдериана <f"poA4
фукса битЬ кнутом и сослать в
А?о*Т пустЬ ие ставит клейм и*
плохие ру*Ья ¦*.
A JTpifkAjbiгаю руЖейной Ммцел^ни
ну FTemep^ypra псресячтЬ J Тулу и
денно и нон'ю блюсти испръКиостЬ ру*С».
ТГустЬ дУякп и ^одЬячне смол-
ряш, как олоермдм Мемм*. спм»ит, бу^е
сомнение воуЬмс/п- самим ляоверЯ'пЬ я
смо/л/>ом я'стрельбою.
Д g#a j?y*b^i Каждой меся^ стре-
стрелять, пока не испортятся.
Суде ^анинкл » Юпская приклю-
приключится, особливо при сражении, по не-
Я°гля8У дЬйков и пЬдЬячих, (ГитЬ онМа
кнутами мецадно по оголённому месту.
хозяину - 2Д" кнуто» и лени ло червонцу
}л ру*Ье; старшину олдермена - битЬ
до 6есчу»ст«мЯ1 смарысго д{.яка - от-
датЬ в унтер- of ице[& ; gЬякa-o^пga'пЬ
r лисдря ; яодЬячего -лмк/итЬ юскрес-
ной чарки сроком на одпн год.
Новому хозяину руДейной фаб'ри-
ки ^мндову повелеваю лостпроп/пЬ
дЬякам и лод&ячии ti^6~hT ga6"fcl не ху.*е
хозяйской 6"Ыа»1. Bygyni лу*е, лусжЬ
Дсчидо* не обидаетсл, ловелю диэота
лим/итпЬ- ^,
МЕРОПРИЯТИЯ
ТЕКСТ ПРИКАЗА
Меры
административного
¦оздейспяя
Оргмероприятия
Контроль контроля
Выборочный контроль
качества
Система экономических
и моральных стумуло*
повышения качества
работы
Соцкультбыт
СПИСОК ЛИТЕРАТУРЫ
1. Арсаланов A.M. Расчет элементов конструкции заданной надежности при
случайных воздействиях. М., Машиностроение, 1987.
2. Augusti G., Baratta A.,Casciati F. Probabilistic Methods in Structural Engi-
Engineering. London, New York, Chapman and Hall.
3. Балабух Л.И., Алфутов НА., Усюкин В.И. Строительная механика ракет.
М., Высшая школа, 1984.
4. Беллман Р. Процессы регулирования с адаптацией. М., Наука, 1964.
5. Бидерман В.Л. Теория механических колебаний: Учебник для вузов. М.,
Высшая школа, 1980.
6. Бендат Дж., Пирсон А. Прикладной анализ случайных данных: Пер. с
англ. М., Мир, 1989.
7. Болотин В.В. Применение методов теории вероятности и теории надеж-
надежности в расчетах сооружений. М., Стройиздат, 1971.
8. Болотин В.В. Прогнозирование ресурса машин и конструкций. М.,
Машиностроение, 1984.
9. Болотин В.В. Случайные колебания упругих систем. М., Наука, 1979.
10. Борн М. Физика в жизни моего поколения. М., Изд-во Иностранная
литература, 1963.
11. Бухголъц Н.Н. Основной курс теоретической механики. М., Изд-во
технико-теоретической литературы, 1939.
12. Вентцелъ Е.С., Овчаров Л.А. Теория вероятностей и ее инженерные
приложения. М., Высшая школа, 2000.
13. Вентцелъ Е.С., Овчаров Л.А. Теория случайных процессов и ее инже-
инженерные приложения. М., Высшая школа, 2000.
14. Вибрации в технике: Справочник. Т. 1. /Под ред. В.В. Болотина. М.,
Машиностроение, 1999.
15. Гладкий В.Ф. Динамика конструкции летательного аппарата. М., Наука,
1969.
16. Гладкий В.Ф. Прочность, вибрация и надежность конструкции лета-
летательного аппарата. М., Наука, 1975.
17. Гнеденко Б.В. Курс теории вероятностей. М., Высшая школа, 1965.
18. Гусев А.С., Светлицкий В.А. Расчет конструкций при случайных воз-
воздействиях. М., Машиностроение, 1984.
19. Гусев АС. Сопротивление усталости и живучести конструкций при
случайных нагрузках. М., Машиностроение, 1989.
20. Ермаков СМ., Михайлов ГА. Курс статистического моделирования. М.,
Наука, 1976.
21. Казаков ВА. Введение в теорию марковских процессов и некоторые
радиотехнические задачи. М., Сов. радио, 1973.
22. Капур К, Ламберсон Л. Надежность и проектирование систем. М., Мир,
1980.
23. Купер Дж., Макгиллен К. Вероятностные методы анализа сигналов и
систем: Пер. с англ. М., Мир, 1989.
500
24. Мэнпи Р. Анализ и обработка записей колебаний: Пер. с англ. М.,
Машиностроение, 1972.
25. Макаров Б.П. Нелинейные задачи статистической динамики машин и
приборов. М., Машиностроение, 1983.
26. Николаенко Н.А., Ульянов СВ. Статистическая динамика машиностро-
машиностроительных конструкций. М., Машиностроение, 1977.
27. Пановко Я.Г. Основы прикладной теории колебаний и удара. Л., Ма-
Машиностроение, 1976.
28. Проскуряков В.Б. Динамика и прочность рам и корпусов транспортных
машин. Л., Машиностроение, 1972.
29. Пугачев В. С. Теория случайных функций. М., Физматгиз, 1962.
30. Пугачев B.C. Введение в теорию вероятностей. М., Наука, 1968.
31. Светлицкип ВА. Случайные колебания механических систем. М., Ма-
Машиностроение, 1991.
32. Светпицкий ВА. Динамика старта летательных аппаратов. М., Наука,
1986.
33. Светпицкий ВА. Механика стержней. Т. I. M., Высшая школа, 1987.
34. Светпицкий ВА. Механика стержней. Т. II. М., Высшая школа, 1987.
35. Свешников А.А. Прикладные методы теории случайных функций. 2-е
изд., перераб. и доп. М., Наука, 1968.
36. Силаев АА. Спектральная теория подрессоривания транспортных
машин. 2-е изд., перераб. и доп. М., Машиностроение, 1972.
37. Скучик Е. Простые и сложные колебательные системы: Пер. с англ./
Под ред. Л.М. Лямшева. М., Мир, 1971.
38. Справочник по вероятностным расчетам. 2-е изд., перераб. и доп. /Г.Г.
Абезгауз, А.П. Тронь, Ю.Н. Копенкин, ИА. Коровина. М., Воениздат, 1970.
39. Тихонов В.И. Выбросы случайных процессов. М., Наука, 1970.
40. Тихонов В.И., Миронов МА. Марковские процессы. М., Сов. радио,
1977.
41. Феодосъев В.И. Сопротивление материалов. М., Изд-во МГТУ
им. Н.Э. Баумана, 1999.
42. Харкевич АА. Спектры и анализ. 4-е изд. М., Физматгиз, 1962.
43. Четаев Н.Г. Теоретическая механика. М., Наука, 1987.
ОГЛАВЛЕНИЕ
Предисловие 3
Введение 6
Глава 1. КРАТКИЕ СВЕДЕНИЯ ИЗ ТЕОРИИ ВЕРОЯТНОСТЕЙ .... 19
§ 1.1. Основные понятия теории вероятностей 19
§ 1.2. Функция распределения и плотность вероятности случайной
величины 24
§ 1.3. Числовые характеристики случайных величин и их основные
свойства 28
§ 1.4. Законы распределения плотности вероятности 32
§ 1.5. Определение вероятности попадания нормально
распределенной случайной величины на заданный участок 40
§ 1.6. Системы случайных величин и их числовые характеристики . 42
§ 1.7. Комплексные случайные величины 51
§ 1.8. Числовые характеристики функций случайных аргументов . . 53
Глава 2. НЕСТАЦИОНАРНЫЕ СЛУЧАЙНЫЕ ФУНКЦИИ
(ПРОЦЕССЫ) 56
§ 2.1. Вероятностные характеристики нестационарных случайных
функций 61
§ 2.2. Системы случайных функций и их вероятностные
характеристики 70
§ 2.3. Линейные преобразования случайных функций 75
§ 2.4. Вероятностные характеристики решений линейных
дифференциальных уравнений при нестационарных случайных
возмущениях 82
Глава 3. СТАЦИОНАРНЫЕ СЛУЧАЙНЫЕ ФУНКЦИИ (ПРОЦЕССЫ) . 90
§ 3.1. Вероятностные характеристики стационарных случайных
функций 90
§ 3.2. Эргодическое свойство стационарной случайной функции . . 96
§ 3.3. Производные и интегралы от стационарных функций .... 100
§ 3.4. Спектральное представление стационарных случайных
процессов 103
§ 3.5. Взаимные спектральные плотности и их свойства 113
§ 3.6. Определение спектральных плотностей решений линейных
дифференциальных уравнении с постоянными коэффициентами ... 117
Глава 4. ОСНОВЫ ТЕОРИИ МАРКОВСКИХ ПРОЦЕССОВ 123
§ 4.1. Непрерывные одномерные марковские процессы 123
§ 4.2. Уравнение Фокера—Планка-Колмогорова 126
§ 4.3. Многомерные марковские процессы 144
§ 4.4. Определение вероятности достижения границ области
возможных значений случайной функции 149
Глава 5. СЛУЧАЙНЫЕ КОЛЕБАНИЯ СИСТЕМ С ОДНОЙ
СТЕПЕНЬЮ СВОБОДЫ 157
§ 5.1. Свободные случайные колебания линейных систем 157
§ 5.2. Вынужденные случайные колебания линейных систем . . . 164
§ 5.3. Колебания, вызванные случайным кинематическим
возбуждением 190
§ 5.4. Задача о выбросах при случайных колебаниях 204
§ 5.5. Нелинейные случайные колебания 217
502
Глава 6. СЛУЧАЙНЫЕ КОЛЕБАНИЯ СИСТЕМ С КОНЕЧНЫМ
ЧИСЛОМ СТЕПЕНЕЙ СВОБОДЫ 236
§ 6.1. Свободные случайные колебания линейных систем 236
§ 6.2. Колебания при случайном импульсном нагружении 241
§ 6.3. Нестационарные случайные колебания линейных систем . . 2S9
§ 6.4. Метод главных координат при исследовании нестационарных
колебаний 265
§ 6.5. Вынужденные стационарные случайные колебания линейных
систем 285
Глава 7. СЛУЧАЙНЫЕ КОЛЕБАНИЯ СТРУН. ПРОДОЛЬНЫЕ
И КРУТИЛЬНЫЕ КОЛЕБАНИЯ ПРЯМОЛИНЕЙНЫХ СТЕРЖНЕЙ . 306
§ 7.1. Уравнения малых колебаний 311
§ 7.2. Решение уравнений малых колебаний 316
Глава 8. СЛУЧАЙНЫЕ КОЛЕБАНИЯ СТЕРЖНЕЙ 329
§ 8.1. Нелинейные уравнения движения пространственно-
криволинейных стержней 331
§ 8.2. Уравнения движения стержня в проекциях на связанные оси 337
§ 8.3. Уравнения малых колебаний стержней 342
§ 8.4. Определение собственных значений и собственных векторов 351
§ 8.5. Нестационарные случайные колебания стержней 354
§ 8.6. Стационарные случайные колебания стержней 359
Глава 9. ОСНОВЫ ТЕОРИИ НАДЕЖНОСТИ 369
§ 9.1. Простейшие задачи теории надежности 379
§ 9.2. Возможные причины отказов 381
§ 9.3. Определение числовых значений вероятности безотказной
работы 382
§ 9.4. Определение надежности при линейной зависимости
напряженного состояния от случайных нагрузок 395
§ 9.5. Определение вероятности безотказной работы при нелинейной
зависимости случайной величины F от внешних нагрузок 398
Глава 10. СЛУЧАЙНЫЕ ПРОЦЕССЫ ПРИ ДЕЙСТВИИ СЛУЧАЙНЫХ
ФУНКЦИЙ, ОГРАНИЧЕННЫХ ПО МОДУЛЮ 408
§ 10.1. Определение максимальных значений компонент вектора
состояния систем 419
§ 10.2. Области возможных значений вектора состояния системы
при действии независимых возмущений 421
§ 10.3. Проекции области возможных значений вектора состояния
системы на двумерные плоскости 434
§ 10.4. Определение максимальных значений динамических реакций 436
§ 10.5. Области возможных значений вектора состояния системы
в случае нескольких участков движения 443
§ 10.6. Области возможных значений вектора состояния системы
при действии зависимых возмущений 449
§ 10.7. Определение максимальных значений линейных
функционалов при независимых возмущениях 472
§ 10.8. Максимальное значение линейного функционала
при зависимых возмущениях 483
Приложения 491
Список литературы 500
503
Учебное издание
Валерий Александрович Светлицкий
СТАТИСТИЧЕСКАЯ МЕХАНИКА
И ТЕОРИЯ НАДЕЖНОСТИ
Редактор М.С. Винниченко
Корректор О. Ю. Соколова
Художник С.С. Водчиц
Оригинал-макет подготовлен в Издательстве МГТУ им. Н.Э. Баумана
Санитарно-эпидимиологическое заключение № 77.99.02.953.Д.005683.09.04
от 13.09.2004 г.
Подписано в печать 30.06.2004. Формат 60x90/16. Бумага офсетная.
Печать офсетная. Усл. печ. л. 31,5. Уч.-изд. л. 31,6. Тираж 1000 экз.
Заказ № 292
Издательство МГТУ им. Н.Э. Баумана
105005, Москва, 2-я Бауманская, 5.
Отпечатано с оригинал-макета в типографии ГП «Облиздат».
248640, г. Калуга, пл. Старый торг, 5.
ISBN 5-7038-1772-2
917 57С 3 о 7г 28