/




































































































































































































































Similar




Text
И.И.Абрамович
ГА. Котельников
♦
И.И. Абрамович ЕА. Котельников
КОЗЛОВЫЕ КРАНЫ общего назначения
Второе издание, переработанное
МОСКВА
«МАШИНОСТРОЕНИЕ-1983
ББК 39.9 А16
УДК 621.873.12
Рецензент инж. М. В. Пустнльиихов
Абрамович И. И., Котельников Г. А.
А16 Козловые краны общего назначения. — 2-е изд., пере-раб. и дои. — М.! Машиностроение, 1983. — 232 с., ил.
В пер.: 1 р. 10 к.
Рассмотрены вопросы выбора, расчета, проектирования, монтажа, ремонта и эксплуатация козловых кранов. Даны рекомендации по определению , оптимальных параметров, статических и динамических нагрузок, мощности электропривода, по расчету металлических конструкций.
Во втором издании (1*е изд. 1968 г.) описаны конструкции современных козловых кранов и их ошошых механизмов; уделено большое внимание предохранительным устройствам; рассмотрены показатели экономической эффекта ввести.
Книга предназначена для инженерно-технических работников, занимающихся проектированием, изготовлением, модернизацией, ремонтом и эксплуатацией кранов.
ж 3601030000-146 038(01)-83
ББК 39.9 6Л5.6
146-83
ИБ № 3310
Исаак Иосифович Абрамович
Геннадий Алексеевич Котельников
КОЗЛОВЫЕ КРАНЫ ОБЩЕГО НАЗНАЧЕНИЯ
Редактор В. В. Фролова
Художественный редактор Ю. Г. Ворончихин
Технический редактор Н. В. Тимофеенко
Корректоры: О. Е. Мишина, Л. Е. Хохлова
Оформление художника М. В. Швыряева
Сдано в набор 14.07.82. Подписано в печать 25.04.83. Т-09126.
Формат 60х90х/1в- Бумага типографская Ns 3. Гарнитура литературная Печать высокая. Усл. печ. л. 14,5. Усл. кр.-отт. 14,5. Уч.-изд. л. 16,29. Тираж 29 000 экз. Заказ 200. Цена 1 р. 10 к.
Ордена Трудового Красного Знамени издательство «Машиностроение», 107076, Москва, Стромынский пер., 4
Ленинградская типография Ns 6 ордена Трудового Красного Знамени Ленинградского объединения «Техническая книга» им. Евгении Соколовой Союзполиграфпрома при Государственном комитете СССР по делам издательств, полиграфии и книжной торговли.
193144, г, Ленинград, ул. Моисеенко, 10.
© Издательство «Машиностроение», 1983 г.
ВВЕДЕНИЕ
Козловые краны являются одним из основных видов средств механизации перегрузочных и складских работ в различных отраслях народного хозяйства.
По назначению козловые краны разделяют на три основные группы: общего назначения, или перегрузочные, строительномонтажные и специального назначения. Перегрузочные краны эксплуатируют на открытых складах и погрузочных площадках, обслуживаемых средствами наземного рельсового и безрельсового транспорта; грузоподъемность их обычно 3,2...50 т, пролеты. 10, .,.40 м, высота подъема в зависимости от условий aitpyikn-разгрузки транспортных средств или штабелированйя грузов 7...16 м.
Строительно-монтажные краны предназначены преимущественно для монтажа оборудования промышленных предйриятий, энергетических установок и сборных транспортных сооружений. Грузоподъемность этих кранов 300...400 т, пролеты 60...80 м и высота подъема 20...30 м. Краны рассчитаны на легкий режим работы; конструкция их часто обеспечивает быстрое перебазирование, сборку в различных исполнениях с варьированием грузоподъемности, пролета, высоты подъема и т. п. Эти краны выполняют как двухконсольными, так и бесконсольными.
Краны специального назначения, обслуживающие гидротехнические сооружения, обеспечивающие секционную сборку судов, и др., крайне разнообразны по конструкции и рабочему оборудованию; их параметры изменяются в самых широких пределах.
Монтажные и специальные краны часто изготовляют на базе перегрузочных козловых кранов. В число последних входят также специализированные краны для перегрузки крупнотоннажных контейнеров, пакетов длинномеров и других грузов. Эти краны часто имеют грузовые подвески с пространственной канатной системой или жесткими направляющими, предотвращающими раскачивание груза.
Однако преимущественным распространением пользуются более простые по конструкции и менее металлоемкие краны общего назначения с гибкой подвеской грузозахватного органа: крюко-1* «'
вые,- а также аналогичные им по конструкции грейферные и магнитные.
Простота управления и обслуживания, относительно низкая стоимость изготовления и эксплуатации обусловили все увеличивающееся применение козловых кранов в народном хозяйстве. Выполненные по типовой схеме козловые краны с двухконсольным мостом и рельсо-колесной ходовой частью перекрывают площадки относительно большой ширины — 60 м и более. При их использовании не требуется устройство дорогостоящих подкрановых эстакад или наличие проездов для наземных подъемно-транспортных средств. Такие краны позволяют наиболее целесообразно организовать склад, размещая транспортные пути под консолями.
Они достаточно просты в изготовлении; фактические затраты на эксплуатацию у них лишь незначительно больше, чем у мостовых кранов соответствующих параметров.
В настоящее время наметилось стремление к увеличению пролеюв кранов, их грузоподъемности, рабочих скоростей и, следовательно, производительности.
Авторы выражают свою благодарность всем организациям и лицам, предоставившим соответствующие материалы и другими способами содействовавшим написанию этой книги.
Главы 1—5, 7—9 и 11 написаны И. И. Абрамовичем, главы 6 и 10 — совместно И. И. Абрамовичем и Г. А. Котельниковым.
Глава 1 ТИПЫ И ОСНОВНЫЕ ПАРАМЕТРЫ
1. ТИПЫ КРАНОВ
Козловые краны изготовляют по различным -конструктивным схемам, в зависимости от которых выполняют не только остов и грузовую тележку крана, но, в значительной мере, и остальные его узлы и механизмы.
На рис. 1 приведена классификация двухконсольных козловых кранов, а на рис. 2 — их схемы. Наиболее распространены краны с двухстоечными опорами (рис. 2, а—г). Пролет этих кранов L определяется опорной базой В, принимаемой в пределах (0,25... 0,45) L. При высоте подъема Н =• 7...12 м это обеспечивает транспортирование через опоры большинства штучных грузов, а также возможность относительно простого монтажа путем стягивания опорных стоек, как правило, достаточно несложных по конструкции и обладающих малой металлоемкостью. .
Современные краны этого типа обычно имеют .однобалочный мост с двухрельсовой подвеской грузовой тележки (рис. 2, а). Однако конструкция ходовой части таких тележек относительно сложна; необходимость образования проемов для прохода ходовых колес тележек усложняет узлы примыкания стоек к мосту. Эти недостатки устранены в кранах с монорельсовой подвеской грузовой тележки (рис. 2, б). Вместе с тем износостойкость полок монорельсов обычно невелика, а грузовые тележки подвержены поперечному раскачиванию. Поэтому такие краны целесообразно изготавливать для условий ограниченной интенсивности эксплуатации и для грузоподъемности не более 20...32 т.
В кранах, схема которых показана на рис. 2, в, мост прикреплен одной стороной к опорным рамам; грузовая тележка имеет несущую каретку и удерживающие ролики, перемещающиеся по верхней и нижней балкам моста. В этих кранах можно использовать надежные в работе и простые в изготовлении тележки с ходовой частью опорного типа. В двухбалочных кранах (рис. 2, г) применяют простые по конструкции двухрельсовые опорные грузовые тележки типовых мостовых кранов; размещение подвески между балками моста позволяет на 10... 15 % уменьшить высоту крана. Но двухбалочные мосты сложны при изготовлении и металлоемки, что оправдывает использование таких схем только в кранах с относительно небольшими (до 25 м) пролетами или при наличии каких-либо дополнительных условий.
б
Рис. 1. Классификация двухконсольных козловых кранов по конструктивным типам
Рис. 2. Схемы козловых кранов
6
Краны с одностоечными опорами (рис. 2, д) позволяют транспортировать грузы значительной длины из-под консолей в пролет с разворотом на 90° около стоек опор, (рис. 3, а), перемещать длинномерные и крупногабаритные грузы одновременно двумя кранами (рис. 3, б), а также беспрепятственно обслуживать пересекающиеся подкрановые пути, конвейеры и другие установки (рис. 3, в). Металлоконструкцию таких кранов выполняют коробчатого сечения. По мосту прямоугольного сечения перемещается консольная грузовая тележка (рис. 2, д), а при меньшей грузоподъемности электрическая таль.
Рис. 3. Схемы использования кранов с одностоечными опорами и консольными грузовыми тележками'
В кранах с одностоечными опорами, так же как и в двухбалочных кранах, общая высота меньше; здесь можно применять узлы ходовой части типовых грузовых тележек,
Недостатками кранов с одностоечными опорами являются сложность их монтажа по сравнению с двухбалочными кранами, повышенная металлоемкость, которая обычно на 10... 15 % превышает металлоемкость кранов с двухстоечными опорами, так как стойки и нижние ходовые балки интенсивно работают на изгиб.
Относительно небольшое расстояние от грузовой подвески до опор (обычно не более 3,5 м даже у крупных кранов) препятствует (или, по крайней мере, затрудняет) работу с крупногабаритными грузами. В результате применение таких кранов ограничено, хотя принципиальная схема их известна уже очень давно.
Для перегрузочных операций иногда используют бесконсоль-ные краны, имеющие, как правило, решетчатый мост с передвигающейся по его верхним поясам опорной грузовой тележкой. Несмотря на простоту конструкции, отсутствие консолей существенно усложняет организацию перегрузочных работ, поэтому такие краны используют преимущественно для монтажных работ.
Козловые краны различают также по виду опор (с обеими жесткими, с одной жесткой, а другой гибкой — шарнирной опорой), приводу грузовых тележек (самоходный или канатно-тяговый) и другим конструктивным особенностям.
На рис. 4 приведены общие виды современных козловых кранов! крана КК-12,5-32 грузоподъемностью 12,5 т с однобалочным мостом и двухрельсовой грузовой тележкой (рис. 4, в); крана
7
И
Рис. 4. Козловые краны различных.моделей
КС-5 грузоподъемностью 5 т с однобалочным трубчатым мостом и электроталью (рис. 4, г); крана ККО-20/5 грузоподъемностью 20/5 т с однобалочным мостом и консольно-подвесной грузовой тележкой (рис. 4, а); крана К-12.5М грузоподъемностью 12,5 т с двухбалочным мостом (рис. 4, д)\ крана ККЛ-32 с одностоечными опорами и консольной грузовой тележкой (рис. 4t б); бес-консольный кран К:30-32 грузоподъемностью 30 т (рис. 4, e)j; бесконсольный кран КС-50-42М грузоподъемностью 50 т с выходом вспомогательной тележки на консоли нижнего пояса моста (рис. 4, ж).
2. ВЫБОР ТИПА КРАНА
Рассмотренное многообразие типов кранов сложилось исторически вследствие разработки и изготовления крацов многочисленными организациями и предприятиями. Это привело к использованию в народном хозяйстве разнотипных кранов с идентичными параметрами, что нежелательно. Практика эксплуатации выявила целесообразность одновременного выпуска козловых кранов, по крайней мере, двух исполнений — нормального и облегченного, что характерно также и для других перегрузочных кранов, например мостовых.
Краны нормального исполнения по конструктивным особенностям приближаются к типовым мостовым двухбалочным кранам. Металлоконструкцию таких кранов выполняют из листов. Механизмы кранов состоят из отдельных агрегатов, соединенных зубчатыми муфтами, все зубчатые передачи выполнены в виде редукторов, ходовые колеса смонтированы на угловых буксах и т. п. Такие особенности конструкции соответствуют условиям длительной (20...30 лет) работы в среднем и тяжелом режимах.
В случаях, когда объемы грузопотоков существенно ниже предусмотренных верхней границей среднего режима или краны интенсивно работают только при занимающей ограниченное время погрузке-разгрузке, они могут иметь металлическую конструкцию, рассчитанную на ограниченную выносливость. В качестве направляющих для ходовых колес грузовых тележек могут быть использованы непосредственно несущие элементы металлической конструкции. Сравнительно редкая замена ходовых колес позволяет использовать менее металло- и трудоемкие решения, например монтировать снабженные зубчатыми венцами колеса на неподвижных осях. Грузовые тележки можно заменять элек-троталями.
Краны, обладающие такими особенностями, называют облегченными, их металлоемкость и стоимость существенно (в ряде случаев до 50 %) меньше, чем у кранов нормального исполнения.
Представление о распределении потребностей в козловых кранах может дать табл, 1.
10
Таблица 1
Ориентировочное распределение потребностей в козловых кранах общего назначения, в %
Исполнение Грузоподъемность, т Итого
3,2...5 | 1 8...12,5 | I 20...32
Пролеты, м
10...16 20...25 16. .-.25 25... 4С 16...20 25...32
Облегченное 17 13 . ю 20 2 10 72
Нормальное — — 5 15 — 8 28
Итого 30 50 20 100
Примечание. В соответствии о ГОСТ 23940 — 79 ерок службы до списания кранов облегченного исполнения (в том числе в всех кранов о электроталями) 15 лет, нормального — 25 лет. Также различается и средний ресурс кранов до списания
Краны грузоподъемностью 3,2...5 т предназначены преимущественно для объектов с грузооборотом до 30 тыс. т в год. К ним относятся прирельсовые склады небольших предприятий, погрузочные площадки, обслуживаемые автомобильным транспортом; ремонтные предприятия; объекты, обычно позволяющие отказаться от управления сравнительно мало загруженным краном с помощью специально выделяемого рабочего-крановщика, и т. п.
Перечисленным условиям соответствуют однобалочные краны з электроталями. В настоящее время для кранов грузоподъемностью 3,2...5 т с электрическими талями следует считать типовой конструкцию с балочным (трубчатым или сварным) мостом [см. рис. 4, г), который при пролетах более 25 м целесообразно усиливать шпренгельной системой.
Краны грузоподъемностью 8... 12,5 т (преимущественно 10... 12,5 т) и пролетами 25...32 м широко используют для обслу-кивания складов длинномерных грузов (металла, леса и т. п.), предприятий промышленности строительных материалов, в том шсле открытых полигонов заводов железобетонных изделий, лтрузочных площадок машиностроительных заводов. Можно выделить три вида объектов, на которых используют краны определенных параметров: на железнодорожных станциях Министер-:тва путей сообщения СССР — краны грузоподъемностью 12,5 т 1 пролетом 16 м, на складах и торговых базах Госкомсельхоз-'ехники — краны грузоподъемностью 12,5 т и пролетом 25 м I на нижних складах леспромхозов — краны грузоподъемностью О...12,5 т пролетом 32 м.
Условия работы кранов крайне разнообразны. Так, на одном i том же заводе железобетонных изделий могут быть установлены
11
Таблица 2
Рекомендуемые конструктивные схемы козловых кранов
Грузоподъемность, т Пролет, м Расчетная годовая производительность, ТЫО. т Режимы работы Исполнение крана Конструктивная схема крана
3,2...5 10...25 30...80 Средний Облегченное Однобалочный мост трубчатой или листовой конструкции с электро-талью
8... 12,5 16...32 100... 150 Легкий и средний Облегченное Однобалочный мост листовой, трубчатой или решетчатой конструкции с электроталью или подвесной грузовой тележкой
32...40 Однобалочный мост решетчатой конструкции с подвесной тележкой
16...25 150...250 Средний н тяжелый Нормальное Двухбалочный мост с опорной тележкой или однобалочный мост листовой конструкции с двухрельсовой подвесной или консольно-подвесной тележкой
25...40 Однобалочный мост листовой конструкции с подвесной двухрельсовой или консольно-подвесной тележкой
20... 32 16...20 200...300 Легкий и средний Облег-ченное Однобалочный мост листовой или решетчатой конструкции с подвесной тележкой
25...32 Однобалочный мост листовой Конструкции с подвесной тележкой
16...20 300...600 Средний и тяжелый Нормальное Двухбалочный мост с опорной тележкой или однобалочный мост листовой конструкции с двух рельсовой подвесной или консольно-подвесной тележкой
25...32 Однобалочный мост листовой конструкции с двух рельсовой подвесной или консольно-подвесной тележкой
12
крюковые краны грузоподъемностью 12,5 т пролетом 32 м — на отгрузочной площадке и открытых полигонах. Интенсивность их работы находится в пределах среднего режима, однако в первом случае кран может перерабатывать до 200 тыс. т груза в год, а во втором — не более 50 тыс. т.
Таким образом, здесь целесообразно использовать краны двух исполнений — нормального для отгрузочной Площадки, облегченного — для полигонов. Аналогичное положение может быть на объектах других видов. В качестве облегченных кранов здесь можно использовать краны с электрическими талями (например, краны производства НРБ). Однако по скоростным характеристикам тали часто не могут обеспечить требуемой производительности. Помимо этого монорельсовые тележки неудобны для подвески кабины крановщика, без которой при пролетах более 25 м иногда трудно обеспечить безопасное ведение перегрузочный работ. Учитывая ограниченные требования к долговечности, длц облегченных кранов пролетами 32...40 м рекомендуется применять наименее металлоемкие однобалочные' двухстоечные конструкции с решетчатым мостом и двухрельсовыми подвесными грузовыми тележками (см. рис. 4, в). При меньших пролетах (16...25 м) могут быть достаточно эффективными однобалочные трубчатые мосты.
Краны нормального исполнения целесообразно изготовлять только с мостами листовой конструкции и подвесными или консольно-подвесными грузовыми тележками (см. рис. 4, а). При пролетах до 20 м, но не более 25 м, оправданно использование кранов с двухбалочными мостами (см. рис. 4, д).
То же можно сказать и о кранах грузоподъемностью 20...32 т. Рекомендации по выбору конструктивных схем и исполнений кранов сведены в табл. 2. Они не исключают, в обоснованных случаях, использования кранов других типов, например с одностоечными опорами. Очевидно также, что при выборе типа крана для производства на конкретном предприятии следует учитывать и требования унификации с козловыми и мостовыми кранами других типов, выпускаемыми этим предприятием или соответствующим производственным объединением.
3. ОСНОВНЫЕ ПАРАМЕТРЫ
К основным параметрам козловых кранов помимо грузоподъемности относятся пролет, рабочие вылеты консолей, высота подъема захватного органа над уровнем головок подкрановых рельсов, а также скорости рабочих движений. Существенное значение имеют также размеры, определяющие условия транспортирования груза от консолей к пролетной части: у кранов с двухстоечными опорами это расстояние в свету между стойками опоры, в значительной мере зависящее от опорной базы, а у кранов с одностоечными опорами — расстояние от грузовой подвески до передней
13
грани опорной стойки. Для устойчивого передвижения кранов по крановым путям должно быть обеспечено определенное (обычно 1 2 5...1 i 7) отношение пролета к колесной базе. Ширина ходовых тележек и нижних частей крана определяет возможные пределы приближения к подкрановым путям штабелей груза, транспортных средств, сооружений и наземного оборудования. Имеет значение также и уровень расположения выступающих элементов ходовой части. Вертикальные нагрузки на ходовые колеса крана, в значительной мере определяющие расходы на сооружение и эксплуата-
Рис. 5. Схема установки крана на складе: »w габарит приближения строений «С»; габарит подвижного еостава «1В»
цию подкрановых путей, также должны быть включены в число основных параметров козловых кранов.
Типовая схема установки козлового крана на объекте наиболее распространенного вида — складе, обслуживаемом железнодорожным и автомобильным транспортом, приведена на рис. 5. Пролет L определяется, как правило, планировочными условиями объектам необходимой вместимостью склада, размерами пропарочных камер для изготовления железобетонных изделий и т. п.
Вылет консолей LK целесообразно принимать исходя из условия равенства моментов от подвижной нагрузки в пролете и у опор. Однако вылет должен обеспечить складирование груза и беспрепятственное безопасное обслуживание транспортных средств. Во всех случаях, в соответствии с требованиями Правил Госгортехнадзора [42], расстояние между выступающими частями крана и наземными предметами-или транспортными средствами на высоте 2,0 м от уровня земли должно быть не менее 700 мм, а на высоте более 2 м — не менее 400 мм. Вместе о тем эти части не должны выступать за линию предельного габарита, устано-14
вленного ГОСТ 9238—73. Вылет консолей должен быть достаточным для перекрытия всей ширины вагона или платформы безрельсового транспортного средства (2,5...3,3 м). При перегрузке крупноразмерных грузов, например железнодорожных контейнеров массой 5 и 20 т, часто бывает достаточным, если вылег будет на 150...250 мм превышать расстояние от опор подкранового рельса до центра вагона.
Обычно для обслуживания железнодорожных вагонов достаточно иметь вылет 4,2...4,5 м; при работе с крупнотоннажными контейнерами минимально допустимый вылет 3,4...3,6 м. Вылет консолей должен составлять 0,20...0,30 пролета. Рекомендуется избегать увеличивать вылет консолей, так как при этом резко возрастают их прогибы, что может потребовать дополнительного усиления моста. Помимо этого при выходе груза на такую консоль бывает трудно обеспечить необходимый запас сцепления у ходовых колес противоположной опоры.
Высота подъема определяется из условия, что зазор между транспортируемым грузом и наземными предметами должен быть не менее 0,5 м. При работе с железнодорожным транспортом высота подъема должна составлять не менее 8 м; у кранов, используемых для перегрузки контейнеров, ее следует увеличивать до 9 м. В большинстве случаев высота подъема 9... 10 м бывает достаточной как для обслуживания транспортных средств, так и для штабелирования грузов. Иногда, например, для кранов лесных складов ее принимают по наибольшей допустимой высоте складирования 16 м.
Расстояние в свету между стойками опор должно обеспечивать возможность перемещения без разворота наиболее часто транспортируемых грузов и разворотом—грузов всех видов, для работы с которыми предназначен кран.
Следует иметь в виду, что разворот груза на весу, даже при наличии приводного поворотного устройства, увеличивает длительность перегрузочного цикла. Для ручного, разворота длинномерных грузов массой более 5 т необходимо не менее двух человек. Чтобы избежать разворота грузов над железнодорожными платформами и в особенности полувагонами, расстояние между стойками должно быть достаточным для перемещения на необходимой высоте поперечно расположенного груза (рис. 6, а). Груз, подвешенный на свободно вращающемся крюке, при проходе через опору может самопроизвольно развернуться. Поэтому для интенсивно эксплуатируемых кранов расстояние между стойками необходимо назначать исходя из наибольшего размера груза (например, диагонали пакета или контейнера). Зазор между грузом и стойками опор должен быть не менее 500 мм. Это же относится и к тем случаям, когда приходится разворачивать груз в пролете или под консолями.
Практика показывает, что для кранов грузоподъемностью 3.2...5 т универсального назначения при колесной базе В =*
15
*=6.5...7,5 м удается обеспечить практически беспрепятственное транспортирование груза через опоры; у кранов большей грузоподъемности этот размер должен быть 9...11 м.
При В> (1,2... 1,5) Н конструкция и условия работы стоек опор и узлов их примыкания к мосту усложняются. В то же время с увеличением опорной базы удлиняются подкрановые пути. Поэтому в ряде случаев для увеличения расстояния между стойками на заданной высоте их выполняют Г-образной формы или укрепляют мост дополнительными поперечными кронштейнами.
Рис. 6. Минимальные расстояния между грузом и стойками опор: а — кранов с двухотоечными опорами; б — кранов « одностоечными опорами
Аналогично обеспечивают и наименьшее допустимое расстояние между грузовой подвеской и передней гранью опорной стойки у крана с одностоечными опорами (рис. 6, б). Здесь размеры опорной базы определяют исходя из условия беспрепятственного перемещения крана по путям, а также необходимости обеспечения примерного равенства вертикальных нагрузок на ходовые колеса. Следует максимально ограничивать ширину ходовых тележек и нижних частей кранов. Выступающие части механизмов передвижения, в том числе корпуса редукторов и зубчатые венцы ходовых колес, не должны располагаться ниже головки рельса. Опыт показывает, что более низкое расположение этих элементов резко увеличивает опасность их загрязнения и поломок.
Для выбора скоростей движения можно использовать общие указания, приведенные в технической литературе [24 ] При этом следует учитывать также безопасность работы, удобство управления, требуемую точность установки груза.
На производственных объектах (сборочных площадках, открытых полигонах по изготовлению железобетонных изделий и т.. п.), где работающие -на технологических операциях люди не могут следить за перемещением крана, при отсутствии ограждений подкрановых путей скорость передвижения крана не должна превышать 1 м/с. Это относится и к кранам с управлением из кабины. Однако для складов и площадок, где- находится не-16
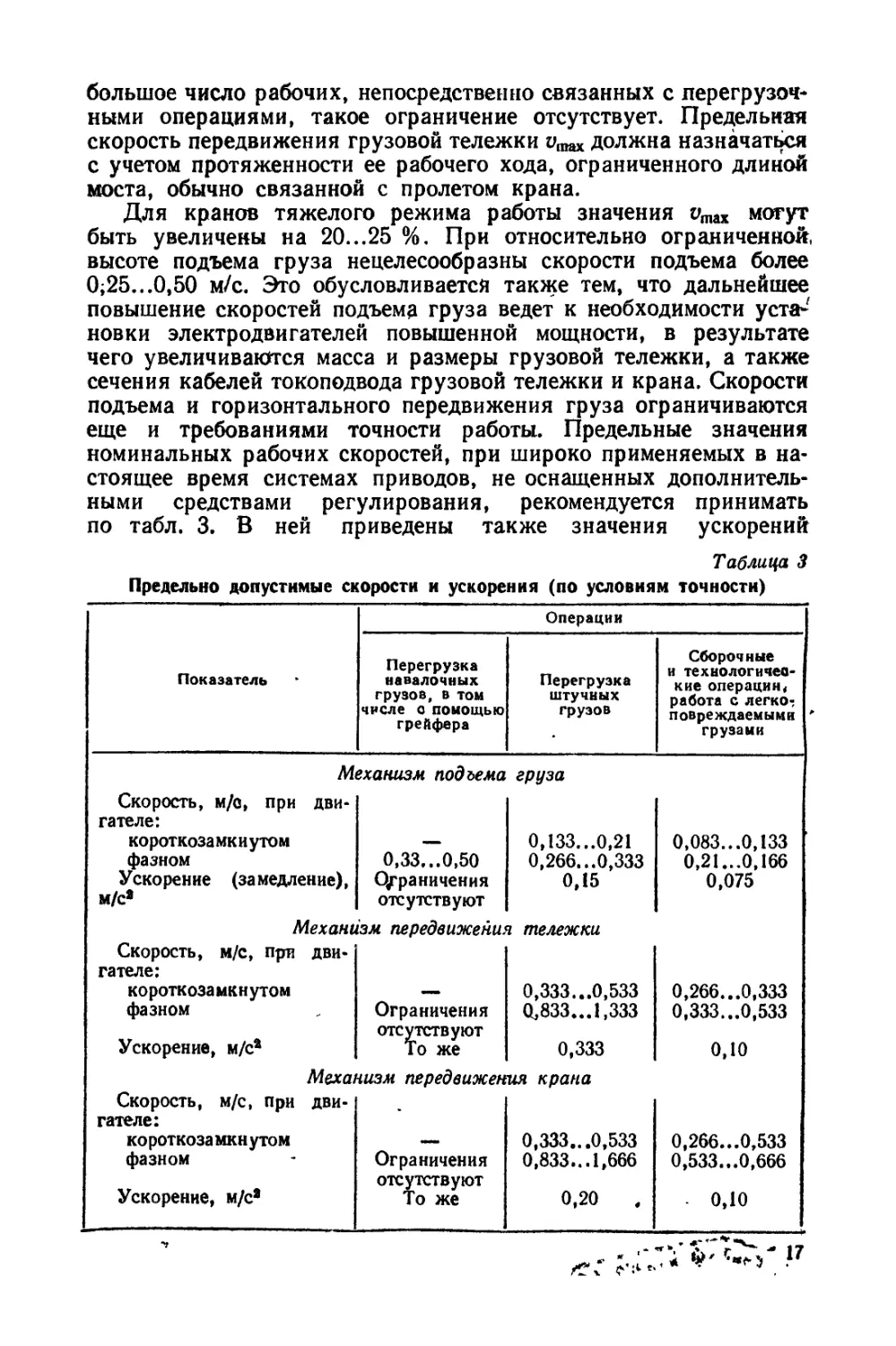
большое число рабочих, непосредственно связанных с перегрузочными операциями, такое ограничение отсутствует. Предельная скорость передвижения грузовой тележки у1пах должна назначаться с учетом протяженности ее рабочего хода, ограниченного длиной моста, обычно связанной с пролетом крана.
Для кранов тяжелого режима работы значения итах могут быть увеличены на 20...25 %. При относительно ограниченной, высоте подъема груза нецелесообразны скорости подъема более 0;25...0,50 м/с. Это обусловливается также тем, что дальнейшее повышение скоростей подъема груза ведет к необходимости уста-' новки электродвигателей повышенной мощности, в результате чего увеличиваются масса и размеры грузовой тележки, а также сечения кабелей токоподвода грузовой тележки и крана. Скорости подъема и горизонтального передвижения груза ограничиваются еще и требованиями точности работы. Предельные значения номинальных рабочих скоростей, при широко применяемых в настоящее время системах приводов, не оснащенных дополнительными средствами регулирования, рекомендуется принимать по табл. 3. В ней приведены также значения ускорений
Таблица 3
Предельно допустимые скорости и ускорения (по условиям точности)
Показатель Операции
Перегрузка навалочных грузов, в том числе о помощью грейфера Перегрузка штучных грузов Сборочные и технологические операции, работа с легко-повреждаемыми грузами
м Скорость, м/о, при двигателе: короткозамкнутом фазном Ускорение (замедление), еханизм подъема 0,33...0,50 Ограничения груза 0,133...0,21 0,266...0,333 0,15 0,083...0,133 0,21...0,166 0,075
м/с’ Механь Скорость, м/с, при двигателе: короткозамкнутом фазном отсутствуют 1зм передвижении Ограничения ? тележки 0,333...0,533 0,833... 1,333 0,266...0,333 0,333...0,533
Ускорение, м/с’ Mexai Скорость, м/с, при двигателе: короткозамкнутом фазном Ускорение, м/с’ отсутствуют То же чизм передвижек Ограничения отсутствуют То же 0,333 ия крана 0,333...0,533 0,833...1,666 0,20 0,10 0,266...0,533 0,533...0,666 - 0,10
Таблица 4
Техническая характеристика кранов с электрическими талями
Показатель К КТ-3.2 (СССР) ККТ-5 (СССР) КС-5 (СССР) Краны । (ЧССР) «е <Л'-’ SB-12,5 (ПНР)
Грузоподъемность, т 3,2 5 5 8 12,5 8 12,5
Пролет, м 12,5 12,5 16 20 20 16 20
Вылет консолей, м 3,6 3,6 4,5 3 3 4,5 4,5
Высота подъема, м 7.1 7,1 7.1 8,5 8,5 8 8
Колесная база, м Скорости передвижения, м/с. 7 7 а 6 6 8 8
тали 0,333 0,333 0,333 0,333/0,166 0,333/0,166 0,333 0,333/0,10
крана Масса ирака, • 0.533 0,533 0,833 •м 0,516 С,50
10 11 13,2 16 20
Примечание. Скорость подъема груза крана SB-12,5 (ПНР) соаавляет 0,125/6,012 м/с; скорость подъема груза остальных кранов 0,133 м/с
Таблица 5
Техническая характеристика кранов с грузовйми тележками и двухстоечными опорами
Показатель К-8М 1 ККС-10 | 3 ж КК-12,5 КС-12,5 1 КК-12,5-32 I ККП-12,5 I ККС-20/5-32 ККО-20/5 20/5Т25 1 КК-32 J
Грузоподъемность, т 8 10,0 12,5 12,5 ,12,5 12,5 20 20 20 20/5 32/8
Пролет, м 25 32 16 16 25 32 32 33 32 32 32
Вылет консолей, м 6,3 7,5 4,5 4,5 6,3 8 10 8 8 6 8
Высота подъема, м 9 10 10 9 9 9 11,8 10 10 10 10
Колесная база, м Скорости, м/с: 9 14,2 9,5 10 10 10 13,4 11,2 13,3 11,2 14,0
подъема груза 0,14 0,23 0,22 0,13 0,2 0,21 0,26 0,17 0,17 0,1 0,17
передвижения грузовой тележки 0,67 0,6 0,58 0,87 0,67 1,05 0,97 0,67 0,87 0,66 0,53
передвижения крана 1,05 0,58 1,05 0,83 0,83 1,33 1,22 0,83 0,83 0,66 1,05
Масса крана, т 41 39 35 30 36 40 62 60 72 86 66
Исполнение по ГОСТ 7352 — 81 2 — 2 2 1 1 — 1 2 — 1
ТВ
Особенности конструкций кранов с двухстоечными опорами
Таблица 6
Кран Рабочее оборудование Металлическая конструкция Механизм передвижения тележки Место установки кабины управления Расположение механизма подъема груза
моста опор
К‘8М (рис. 2, г) Крюк Двухбалочиая листовая коробчатая Коробчатая лнстоаая Самоходный Стойка опоры На тележке
К*12,5М (рно. 2, г) » То же То же > То же То же
20/5Т25 (риа. 2, е) > » Решетчатая безрас-косная из стали различных профилей Тележка »
КС-12,5 (рва. 2, б) » Решетчатая трех-граниая из стали различных профилей Решетчатая из стали различных профилей Канатно-тяговый » На мосту
КК-12,5-32 (рис. 2. а) Решетчатая трехгран-вая из труб Трубчатая То же На тележке
К К-32 (риа. 2, а) > Решетчатая орехграи-ная из труб и стали различных профилей » » То же
ККС-10* (рис. 2, б) Трехкрюковая траверса Решетчатая четырехгранная из стали различных профилей Решетчатая из стали различных профилей > Тележка, стойка опоры
КС-20/5-32 (рис. 2« б) Крюк То же То же » -То же На мосту
К-12,5 (риа. 2, о) » Труба с двумя на-пра аляющими Трубчатая > Стойка опоры На тележке
ККП-12,5 (рис. 2. а) Трехкрюковая траверса Трапециевидная без-раскосная балка Коробчатая Самоходный Тележка То же
К КО-20 (рис. 2, в) Крюк Оболочечная балка Оболочечная » »
ККЛ-8* (риа. 2, в) * Краны предка Трехкрюковая траверса значены для транспор Трехграииая трубчато-балочная твровавия длинномерных Трубчатая ; грузов. » * На поворотной платформе тележки
' Таблица 7
Техническая характеристика кранов с одностоечными опорами
Показатель К КЛ-32 | | К-50 Краны фирмы Алкома (Франция) Краны фирмы Демаг (ФРГ)
(СССР)
Грузоподъемность, т Пролет, м Вылет консолей, м Вылет грузовой подвески до передней грани опорной стойки, м Высота подъема, м Колесная база, м Скорость, м/с: подъема груза передвижения грузовой тележки передвижения крана Масса крана, т . 32 32 12 3 14 14 0,22 1 1 135 50 42 10 3 15,4 7 0,13 0,52 0,6 130 5 20 6 6 4,5 ~т 19 10 9 2,5 5 4 0,4 11 20 6 4 10 8,6 44 12,5 35,3 7,35 0,17 16 24,8 2,1 0,67
Таблица 8
Техническая характеристика бесконсольных кранов
Показатель X ? ж «о КСК-30-42В КС-50-425 К-651
Грузоподъемность, т Пролет, м Вылет консолей нижнего пояса, м Высота подъема, м Колесная база, м Скорость, м/с: подъема груза передвижения грузовой те-" лежки передвижения крана Масса крана, т 32 32 10,5 6 0,13 0,42 0,37 55 32 40 13 8 0,23 0,54 0,85 90 30/10 42 12; 16 18- 12 0,12 0,96 0,62 87 50/10 42 10 14 9 0,13/0,026 0,28 0,24 103 65/5 30 0,4 23,5 12,1 0,5 0,5 0,3 128
Примечание. Кран ЛТ-62 предназначен для грейферной перегрузки длин* номерного лева; остальные кранм — для монтажных работ
20
(замедлений) рабочих движений, которые рекомендуется учитывать при проектировании систем управления приводами. Скорости крана должны обеспечивать его рабочий цикл, определяемый техническим заданием, а также расчетной Производительностью крана.
Основные параметры крюковых кранов общего назначения среднего режима работы регламентированы ГОСТ 7352—81, рас-пространяющимся как на краны с электрическими талями грузоподъемностью 3,2... 12,5 т, так и на краны с грузовыми тележками грузоподъемностью 8...32 т и пролетами 12,5...32 м.
В Табл. 4...8 приведены технические характеристики некоторых кранов отечественного и зарубежного производства, изготовленных в 1978—1981 гг. Сведения по кранам более ранних выпусков приведены в работе И. И. Абрамовича и Г. А. Котельникова [1 ].
Зарубежные краны с грузовыми тележками изготовляют в основном по индивидуальным заказам. Находят применение преимущественно краны с однобалочными трубчатыми мостами решетчатой конструкции и подвесными двухрельсовыми грузовыми тележками, Грузоподъемность таких кранов доходит до 40 т, а пролеты — до 90 м. Скорости подъема груза 0,33...0,66 м/с, а передвижения крана и тележки — до 2 м/с.
Глава 2
РАСЧЕТНЫЕ НАГРУЗКИ И УСЛОВИЯ УСТОЙЧИВОСТИ
1. ИСХОДНЫЕ ПОЛОЖЕНИЯ МЕТОДИКИ РАСЧЕТА
Козловые краны по конструктивной схеме являются достаточно сложными сооружениями; в качестве грузоподъемных механизмов их относят к категории объектов повышенной опасности. Поэтому независимо от содержания и объема предварительных и проектных расчетов недопустимо изготовление даже опытных образцов кранов при отсутствии достаточно подробного проверочного расчета их прочности и выносливости, а также электрооборудования и электропривода, а в необходимых случаях устойчивости против опрокидывания.
В настоящее время в качестве обязательных регламентированы гигиенические показатели условий работы крановщика, и в том числе уровни шума и вибрации в кабине (ГОСТ 23940—79). Достаточно точные методы определения гигиенических показателей еще отсутствуют. Однако может быть предложен ряд мероприятий, направленных на.ограничение уровней шума и вибрации.
Методы расчетов. Расчеты металлических конструкций кранов выполняют методами предельных состояний или допускаемых напряжений. Метод предельных состояний, позволяющий наи-
21
.более эффективно обеспечить надежность и экономичность сооружений и машин, уже давно принят в качестве обязательного при расчете строительных конструкций.* Его с успехом используют при расчетах башенных кранов, металлоконструкций мостовых .перегружателей и других грузоподъемных машин. Он также в.достаточной мере апробирован при расчете металлоконструкций козловых кранов. Однако применительно к расчету механизмов и электрооборудования этот метод разработан еще недостаточно и не прошел должной практической проверки. Поэтому здесь приходится использовать метод допускаемых нагрузок (напряжений), при котором действующие нагрузки не должны превосходить допускаемых значений, определенных по предельной несущей способности с учетом нормированных коэффициентов запасов.
При выборе значений показателей (коэффициента перегрузки, запаса прочности и т. п.) должна учитываться одинаковая, не зависящая от принятого метода расчета, природа возникновения возможных перегрузок, нарушений в эксплуатации и других факторов, определяющих работоспособность конструкций.
Характеристика условий работы и процессов нагружения козловых кранов. При эксплуатации и перебазировании на краны действуют нагрузки, различающиеся как по характеру действия, так и по степени необходимости учета их при расчетах элементов кранов. Все эти нагрузки как по значению, так и по повторяемости и направленности являются случайными или обусловлены случайными процессами. Однако введение их в расчет в качестве случайных функций еще затруднено из-за отсутствия необходимых исходных статистических данных.
Для расчета козловых кранов в настоящее время ограничиваются детерминированными значениями нагрузок, повторяемость которых назначается в зависимости от нормированных режимов работы. Возможная изменчивость нагрузок учитывается назначением соответствующих коэффициентов перегрузок (запасов прочности), также в ряде случаев зависящих от режимов работы.
Для работоспособности козловых кранов существенными являются не только нагрузки, но и возникающие при работе деформации металлических конструкций. Эти деформации не только влияют, например, на точность наводки груза и гигиенические условия крановщиков, но в ряде случаев приводят к значительному увеличению динамических нагрузок. Поэтому в состав расчетов обязательно включают определение деформаций (или оценку жесткости) металлической конструкции.
2. РЕЖИМЫ РАБОТЫ
Понятие режима работы введено как оценка работоспособности крана (или определенной группы его узлов) при заданных условиях эксплуатации. Оно является комплексной характеристикой, 22
учитывающей изменение и длительность действия на кран (его узлы) нагрузки, а также в необходимых случаях и другие показатели, влияющие на работоспособность узлов крана (например, температуру окружающей среды).
Действующими в краностроении нормативами предусмотрено несколько режимных групп, показатели каждой <Сз которых Должны соответствовать определенным условиям использования крана.
Нормируют режимы работы самих кранов, их металлоконструкций, механизмов и электрооборудования.
Режимы работы кранов характеризуются зависимостью нагрузки от массы поднимаемого груза, а также продолжительностью работы механизма подъема за год или, что более правильно, числом циклов работы механизма подъема за срок службы крана. Остальные режимы предназначены для расчета и выбора соответствующих узлов и элементов крана.
Режим работы металлической конструкции часто отождествляют с режимом работы крана. Однако число и характер нагружения элементов металлоконструкций далеко не всегда определяются массой транспортируемого груза и числом циклов работы механизма подъема груза. Режим работы механизма зависит от действующей на него нагрузки и времени работы за срок службы. Режим работы электрооборудования зависит от грузоподъемности, времени его использования, а также числа включений в час и температуры окружающей среды.
В настоящее время в СССР номинальные режимы работы кранов регламентированы правилами Госгортехнадзора. При этом режим работы крана характеризуется режимом работы механизма подъема с учетом средней грузоподъемности, а также использованием во времени в течение года и суток.
Однако нормированные показатели режима не содержат информации, достаточной для оценки долговечности. Помимо этого между показателями легкого и среднего режима имеется слишком большая разница. Краны, работающие в легком режиме, по существу работают эпизодически, например ремонтные краны машинных залов. А при среднем режиме краны работают с относительно большим грузом (до 75 % номинального) в течение 2...3 ч в смену.
Кроме классификации по правилам Госгортехнадзора применяются системы классификации режимов, отраженные в последние годы в ряде нормативов: в принятом в 1980 г. стандарте ИСО 4301—1980, в стандарте ФРГ DIN 15018, в Нормативах Европейской Федерации подъемно-транспортного машиностроения (FEM) [411.
В стандарте ИСО режим работы устанавливается в зависимости от класса использования, числа циклов нагружения за срок службы крана (или элемента металлической конструкции) и класса нагружения (табл. 9). Класс нагружения характеризуется пред-
23
Таблица 9
Классы нагружения (по данным стандарта ИСО 4301 — 1980]
Класс нагружения кр Характеристика работы
1 — легкий 0,125 Очень редкая работа с номинальными грузами, как правило, с легкими Довольно частая работа с номинальными грузами; постоянная работа с грузами средней массы
2 — средний 0,25
3 — тяжелый 0,50 Частая работа с номинальными грузами; постоянная работа с тяжелыми грузами
4 — весьма тяжелый 1,0 Регулярная работа с грузами, по массе приближающимися к номинальным
ставляемым графически или аналитически распределением массы транспортируемого груза (или нагрузки на элемент конструкции) за время службы крана или его элемента.
В соответствии с нормативами СЭВ и ИСО класс нагружения устанавливается по спектру нагружения, характеризующемуся коэффициентом распределения грузов
где nt — число циклов работы крана, на который действует нагрузка Q} от массы груза; пт — общее число циклов работы крана за срок службы, пт в = Snf, QHOm — нагрузка от номинального груза.
Рис. 7. Варианты спектров распределения относительных масё грузов Р</РШах для расчетного числа циклов подъема груза п за срок службы крана:
а — Кр - 0,125; б — Кр = 0,25; в — Кр — 0,5; е — Кр - 1
Примеры спектров распределений даны на рис. 7. Классы использования устанавливают по числу циклов работы меха* низма подъема груза (табл. 10).
Режимные группы определяют в соответствии с табл. 11; предусмотрено восемь групп — от А1 до А8.
Для оценки соотношений между классификацией режимов работы по Правилам Госгортехнадзора и ИСО применяют данные табл. 12; примеры использования козловых кранов различных 24
Таблица 10
Классы использования [по данным стандарта ИСО 4301 <— 1980)
Класс использо-аания Максимальное число циклов-работы л/104 Характеристика работы
t/o L6 Нерегулярная
Ui 3,2
и2 6,3
1 и3 12,5
U4 25 Регулярная ограниченная
50 Регулярная прерывистая
и* 100 Нерегулярная интенсивная
U, 200 Интенсивная
и. 400
и* Боле» 400 »
Таблица 11
Группа режимов работы [по данным стандарта ИСО 4301 — 1980)
Класс нагружения Класс использования
У. 17, и, и, и4 ut и. и, и, и.
1 А1 А2 АЗ А4 А5 А6 А7 А8
2 А1 А2 АЗ А4 А5 А6 А7 А8
3 А1 А2 АЗ А4 А5 А6 А7 А8
4 А2 АЗ А4 А5 А6 А7 А8
Таблица 12
Соотношения между режимными группами правил Госгортехнадзора и стандарта ИСО 4301 — 1980
Режим работы по правилам Г осгортех и адзора Рекомендуемые, дополнительные показатели Группа режима по ИСО
М Слолнеиие крана Срок службы до списания, год •
Легкий (Л) Облегченное 15 А1, А2
25 АЗ
Средний (С) 15 А4
Нормальное 25 А5
Тяжелый (Т) 15 А6
» 25 А7
режимных групп приведены в табл. 13. Очевидно, во всех случаях определять режимную группу крана следует на основании соответствующих расчетов; данными табл. 12 и, 13 рекомендуется пользоваться только при отсутствии информации об условиях использования кранов.
С 1984 г. в СССР вводится в действие стандарт СЭВ — СТ СЭВ 2077—80 «Техника безопасности. Краны грузоподъем-.
25*
8
Использование козловых кранов на типовых объектах
Таблица 13
Вид объекта Основное технологическое назначение крана; условия работы Грузоподъемность крана, « Проле* крана, м Рабочее оборудование крана Классификация Срок служба, год
По правилам Госгортехнадзора По стандарту ИСО
Класс использования Класс нагружения Группа режима
Нижи не склады леспромхозов Погрузка круглого леса в вагона 10 32 Крюк, моторный С и,—и, 2 А4—А5 15...20
То же Вагрузка пачек длинномерного леса из транспортввх средств 30...32 32...40 грейфер То же С Оа 3 А4 15...20
Предприятия по производству железобетонных изделий Обслуживание открытых полигонов- и пропарочных камер 26...32 10...20 Крюк Л и4—и. 1 А2—АЗ 15...20
То же Погрузка а автомобильный н железнодо- 25...32 Ю..ЛО То же С. т и.-и. 1-2 А5—А6 15...25
Контейнерные площадки станций МПС рожный транспорт Погрузка-разгрузка и сортировка контей- Б...30 16...25 Автоматический захват Та С U.-U, 1—2 АБ—А7 15...25
Склада оборудования промышленных в транспортных предприятий Эпнзоднческое использование 5...32 16...32 Крюк Л и,—и, 1 А1—АЗ 15...25
То же Регулярное использование 5...32 16...82 То же Л« С и,—и. 2 АЗ—А4 _ 15...25
Склада насапных грузов и заготовок промышленных предприятий Ограниченнее грузопотокв; работа с регулярными перерывами Регулярное использование Б...30 16...32 Моторный грейфер, магнит Ла С и,-и. 1—2 А2-А4 15...25
То же 5...20 25...82 Двухканатный грейфер. е. т и,-и. 2—3 А5—А7 25
Кнрпнчнхе завода Погрузка кирпича в транспортные средства 3,2...5 10...16 Крюк, специальный захват с, т и,-и, 2—3 А4—А5 15
Площадки ремонтных предприятий, монтажные и сборочные площадки Обслуживание сборочных работ 5...32 12,5...32 Крюк л и,-и, 1 А1—А2 15
ные. Классификация механизмов по.режимам работы», а с 1985 г. ГОСТ 25546—82 «Краны грузоподъемные. Режимы работы». Эти стандарты по построению близки к стандарту ИСО, однако стандартом СЭВ предусмотрено шесть rjjynn режима работы, ГОСТом — восемь, а класс использования характеризуется по стандарту СЭВ общим временем работы механизма, по ГОСТу — общим числом циклов работы крана за срок его службы.
Режимы работы электрооборудования назначают в соответствии с Правилами Госгортехнадзора.
Во всех перечисленных нормативах приведены общие рекомендации по отнесению кранов различных типов и технологического назначения к определенным группам режима работы. Конкретные указания для отдельных элементов конструкции с учетом особенностей их нагружения приведены далее в соответствующих главах.
3. КЛАССИФИКАЦИЯ НАГРУЗОК И ВОЗДЕЙСТВИЙ
Для расчета кранов нагрузки целесообразно классифицировать исходя из условий их возникновения при эксплуатации в нормальных условиях, предельных условиях и при испытаниях кранов.
Таблица 14
Нагрузки для расчета козловых кранов
Нагрузки (по характеру возникновения) нормаль- ® ная £ предель- эки з 5 I? Нагрузки (по характеру возникновения) Вид ч сх к О я S X нагру i 3 к с х зкн gS иЗ
Вертикальная; вес груза вес конструкции Ветровая: в рабочем состоя* нии крана в нерабочем состоянии крана Г оризонтальная составляющая весовой нагрузки от уклона подкрановых или подтележечных путей Статическая от перекоса Динамические: от работы механизма подъема (вертикальная и горизонтальная) * При расчете мета +• + +* + + + ллнчес) 1 1 1 1 1 1 + 1 '* + + + + :онстр от пуска-торможения механизма передвижения тележки от пуска-торможения механизма передвижения крана горизонтальная (в том числе от перекоса) От наезда на концевые упоры (буферная): тележки крана Монтажные Транспортные Сейсмические От тепловых деформаций Особые «укциП вводится коэффицн + + ।I++++ । ! Я _ 4> | + + ++I111+ | + + + >ки.
27
Нормальные условия характеризуются работой при соблюдении требований эксплуатационной и нормативной технической документаций, с учетом вероятных отклонений, не являющихся следствием грубых нарушений правил эксплуатации. Предельные условия могут наступать при возможных отказах, например внезапных выводах из строя одного из двигателей или отключении электропитания. Необходимость учета таких случаев должна быть предусмотрена в техническом задании на кран. Испытательные нагрузки определены программами испытаний или условиями их проведения.
• Повторяемость нагрузок, соответствующих предельным и испытательным условиям, невелика, ориентировочно 10...50 раз за срок службы крана, и при проверке выносливости их не учитывают.
В табл. 14 перечислены нагрузки; которые рекомендуется учитывать при расчете козловых кранов.
4. ВЕРТИКАЛЬНЫЕ НАГРУЗКИ
Вертикальными нагрузками являются вес крана и вес груза, зависящие от их массы. При работе почти невозможно избежать эпизодического подъема грузов, превышающих номинальную грузоподъемность крана [64]. Условия, создаваемые во время исследовательских испытаний при расчетах, не учитывают.
Вероятность возникновения и величина такого превышения хотя и случайны, но в определенной мере обусловлены' видом транспортируемых грузов и технологией перегрузочных работ. Данные эксплуатации и результаты математической обработки статистических данных по кранам других типов показывают, что с увеличением интенсивности работы вероятность перегрузки возрастает [10]; у кранов относительно небольшой грузоподъемности она больше.
Ниже приведены рекомендуемые для расчетов значения коэффициентов перегрузки при различных режимах работы и грузоподъемности.
Режим работы крана ...................
Грузоподъемность, т: до 5
5 ... 12,5
12,5 ... 20 .....................
20 ... 50 .................................
Легкий
1,15...1,20
1,10...1,15
1,10
1,10
Средний
1,25...1,35 1,20...1,25 1,15...1,20 1,10...1,15
Тяжелый
1,50
1,50
1,40
1,30
Эти коэффициенты могут быть использованы при расчете крюковых кранов, снабженных приводными захватами различных видов, например захватами для леса и др. Коэффициенты перегрузки относятся только к грузоподъемности крана (без учета
массы грузозахватного органа).
Для двухчелюстных грейферов, используемых при работе с насыпными грузами, коэффициент перегрузки п == 1,1 ... 1,2; с грузами повышенной вязкости п = 1,5... 1,6. *
При расчете кранов с подъемными электромагнитами следует учитывать возможность захвата большего груза или притягивания груза к металлическому основанию. При работе со. стальным прокатом коэффициент перегрузки п =- 1,6... 1,8 (ббльшие значения при укладке груза на сплошное металлическое основание); при работе со скрапом в аналогичных условиях п =J,5...1,7. ’ Необходимо иметь в виду, что эти коэффициенты соответствуют паспортным данным грейферов и магнитов.
В обоснованных случаях значения коэффициентов перегрузки можно варьировать на основании достоверных сведений об условиях работы крана. Меньшие значения приведенных коэффициентов следует применять тогда, когда ожидается работа по стабильной технологии, снижающей вероятность возникновения перегрузок. Для испытательных нагрузок коэффициент перегрузки для всех грузоподъемностей и режимов следует принимать равным 1,0.
В расчетах следует учитывать возможную неравномерность распределения нагрузки между ветвями грузовой подвески. Для кранов с подвеской груза на двухветвьевой или пространственной траверсе (например, для транспортирования пакетов круглого леса, крупнотоннажных контейнеров и других грузов) следует учитывать возможное смещение центра масс груза относительно вертикальной геометрической оси подвески. Это смещение в ряде случаев может достигать больших значений. Так, для двадцатитонных контейнеров, имеющих длину 6 м, нормированное продольное смещение центра масс составляет 1,2 м. Эта величина определяется характером транспортируемого груза и должна задаваться в техническом задании на проектирование крана.
Нагрузки от массы конструкции крана принимают по данным спецификаций или при проверочных расчетах — по данным по-узлового взвешивания крана. Для предварительного назначения массы крана могут быть использованы данные, приведенные в табл. 4, 6—8, а также в ГОСТ 7352—81.
Масса кранов некоторых типов (в т) может быть приближенно, е точностью до 10 %, определена по эмпирической формуле
(1)
где Q — грузоподъемность крана, т; L — пролет крана, м; aj, a2 — степеннее показатели.
Значения показателей и а2 получены методом множественной корреляции а использованием данных фактически выполненных машин (табл. 15).
Данные этой таблицы относятся к двухконсольным кранай с рабочим вылетом консолей, равным около */< пролета; режим работы кранов средний.
Показатель степени а2 существенно (в 1,7...3 раза) больше показателя степени а1Ф Это говорит о преобладающем влиянии пролета на массу крана и о неправомерности часто применяемой
29
Таблица 15
Даяние для приближенного определения массы кранов
Крав а, Пределы применимости формулы (1) ।
По груао-подъем-ностн Q, т | По пролету £., и По высоте подъема Н, м
; Однобалочный листовой или трубчатой конструкции с влек-ФППТЯ HklA 0,40 0,73 2...12,5 10...25 ' 7...10
1 pUl а ЛЫи Однобалочный листовой конструкции с подвесной или консольной подвесной грузовой тележкой 0,32 0,95 10.. Л2 16. ..40 в...12
Однобалочный решетчатой конструкции с подвесной грузовой тележкой 0,45 0,76 10...32 20...40 8...12
Двухбалочный листовой конструкции с опорной грузовой тележкой 0,40 0,93 10...25 16...32 9...11
для сопоставительной оценки масс кранов различных пролетов величины Q X L.
Краны с листовой конструкцией относят к конструкциям нормального, остальные — облегченного исполнений.
Опыт проектирования и изготовления козловых кранов показывает, что очень часто их мрссу на этапах проектирования несколько занижают по сравнению с массой опытного образца и первых серийных образцов. Затем по мере освоения серийного производства кранов конструкции их совершенствуются и массы кранов уменьшаются.
Центр масс без учета грузовой тележки крана лишь в редких случаях располагается по центру пролета. Это объясняется как различным исполнением опор (гибкой и жесткой), так и расположением электроаппаратуры, кабины управления и других механизмов у одной из опор. При предварительных расчетах можно принять распределение нагрузки от массы крана в соответствии с данными табл. 16.
Коэффициент перегрузки рекомендуется принимать равным Г,00... 1,03: большие значения — для кранов небольшой грузоподъемности (3,2...5 т), для которых существенную роль играет увеличение массы вследствие установки дополнительного оборудования (осветительных приборов, ограждений и т. п.).
Снеговые нагрузки учитывают обычно только у кранов с развитыми в ширину горизонтальными поверхностями моста и принимают в соответствии со строительными нормами, за
Таблица 16
Распределение нагрузки от массы между опорами 1 и 2 кранов различных типов (в %)
- Расположение кабины в грузовой лебедки
Схема крана на грузовой тележке у опоры 2 краны о талью, управление а пола
Опора 1 — гибкая Опора 2—жесткая Обе опоры жесткие ! 40...45 СО...55 43...46 51... 54 35...45 65...55 40...45 60... 55 42...45 58...55 46...48 54...52
Примечание Меньшие значения относятся к кранам с пролетами
5. ВЕТРОВЫЕ НАГРУЗКИ
В соответствии с ГОСТ 1451—77 ветровые нагрузки определяют по формуле
F = qkcnA,
где q — динамическое давление ветра; k — коэффициент, учитывающий изменение динамического давления по высоте; с — коэффициент аэродинамической силы (аэродинамический коэффициент); п — коэффициент перегрузки; А — расчетная площадь элемента конструкции или груза.
При расчетах козловых кранов в настоящее время учитывают только статическую составляющую ветровой нагрузки по ГОСТ 1451—77. Динамическую составляющую ветровой нагрузки, вызываемую пульсацией ветрового потока, принимают во внимание при расчете сооружений башенного типа [10, 471. Специфика козловых кранов не позволяет распространить на них методику расчета, разработанную применительно к указанным сооружениям. Вместе с тем многолетний опыт эксплуатации козловых кранов рассматриваемых типов позволяет сделать вывод, что динамическая составляющая ветровой нагрузки лишь незначительно влияет на напряженное состояние конструкции.
Следует сказать,, что пульсация ветровой нагрузки существенно влияет на рельсовые противоугонные захваты, двигатели и тормоза механизма передвижения крана. Эти элементы, как правило, рассчитывают с ограниченным запасом. Однако принятые в настоящее время методики расчетов не учитывают динамическую составляющую ветровой нагрузки. Работы по созданию динамических расчетов козловых кранов на действие ветровой нагрузки ведутся [50 ].•
При расчете кранов в нерабочем состоянии в зависимости от района установки рекомендуется принимать различное динамическое давление (от 270 до 1000 Па), изменяющееся от высоты
31
крана (что учитывается коэффициентом k по ГОСТ 1451—77). Если точно известно, что кран будет установлен в застроенном районе, в лесу и т. п. значение k может быть уменьшено на 10... 30 %. Нормированные значения q, аналогичные значениям по строительным нормам, соответствуют средней скорости ветра, которая превышается один раз в 5 лет; за время службы кранов (15...25 лет) бывает и более сильный ветер. Это учитывается коэф-
Рис. 8. Продолжительность действия ветровой нагрузки для некоторых местностей СССР:
/ -*• Владивосток; 2 — Кемерово; 3 — Ленинград
вводимым при расчете нагрузок, действующих на кран в нерабочем состоянии. Для кранов в рабочем состоянии в зависимости от ожидаемых условий работы крана давление ветра принимают равным 50...500 Па; обычно рекомендуемое значение 125 Па.
В ГОСТ 1451—77 приведены значения динамического давления ветра по районам СССР только для кранов в нерабочем состоянии. Для кранов в рабочем состоянии эти значения зависят от скорости ветра и назначения крана. Анализ ста
тистических данных метеорологической службы показал, что для основной части территории СССР (I...III районов) продолжительность действия ветра с динамическим давлением 125 Па составляет 4...5 % календарного времени, а 90 Па — 8...9 % (рис. 8). На основании этого при проектировании приводов и тормозных систем механизмов передвижения крана и грузовой тележки принимают расчетные давления ветра в пределах 50...90 Па. Однако стопорные тормоза рассчитывают так, чтобы они удерживали кран (или тележку) при ветре с q = 125 Па.
При расчете двигателей механизмов передвижения на нагрев можно принимать q = 60 Па. В то же время мощность двигателя должна быть достаточной для преодоления ветра с q яг 90 Па и соответствовать рекомендациям ГОСТ 1451—77.
Оценивая действия ветра на краны, нужно учесть, что максимальные (или достаточно близкие к максимальным) ветровые
нагрузки влияют на кран только при направлении ветра в пределах ±459 от нормали к продольной оси моста. Учитывая также возможные отклонения направлений ветра, расчетную повторяемость ветра давлением 125 и 90-Па можно принять равной соответственно 3...4 и 5...6 %.
Для определения наветренных площадей А и коэффициентов аэродинамической силы с помимо ГОСТ 1451—77 можно использовать и другие источники, например 147, 71 L
32
Практика применения ГОСТ 1451—77 показала, что расчеты ветровой нагрузки козловых кранов могут быть существенно упрощены без сколько-нибудь заметного (в пределах 5...7 %) снижения точности получаемых результатов. Упрощение сводится к отказу от учета наклона и взаимного затенения стоек опор и оценке влияния ограждений, лестниц и токоподвода галерей коэффициентом 1,05... 1,10.
Для все чаще применяемых цилиндрических элементов следует учитывать состояние поверхности и наличие на ней выступов (табл. 17).
Таблица 17
Значение коэффициента сх для цилиндрических элементов с различным состоянием поверхности (при фЫ*>22,5 Н)
Вад поперечного сечения и состояние поверхности //d-7 lid =25
( Л Небольшие неровное» \ J та (окрашенный металл) 0,50 0,55
Р Ц Значительные неров- С S ности (скругленные вы- С_ -Э ступы) 0,80 0,90
j 1 Весьма значительные 4^—неровности (острые выс- 1,0 1,2
- У* тупы) -
\ Грани с ровной и не- 1 j ровной поверхностью и k J острыми кромками 1,2 1,4
Влияние закруглений кромок на коэффициент лобового сопротивления сх элемента квадратного сечения иллюстрируется графиками рис. 9. Следует отметить, что при действии ветра вдоль диагонали квадрата и qkc? = 13 Н эти закругления не сказываются на ветровом сопротивлении. Это же относится к случаю действия ветра на более широкую (d = 2b) грань элемента прямоугольного сечения.
В табл. 18 приведены значения расчетной ветровой нагрузки для кранов различных типов грузоподъемностью 12,5 т и пролетом
2 Абрамович И. И. и др. 33
32 м (ветер вдоль подкрановых путей). Видно, что нагрузка на мост составляет 60...80 % общего ее значения; это заставляет особо внимательно относиться к проектированию мостов'.
Ряс. 9. Аэродинамические коэффициенты сопротивления для квадратного стержня со скругленными кромками
, Следует отметить, что стремление снизить до минимума ветровые нагрузки явилось одной из основных причин, обусловливающих внедрение козловых кранов трубчатой решетчатой метал-
Таблица 18
Расчетные ветровые нагрузки на козловые краны грузоподъемностью 12,5 t пролетом 32 м при динамическом давлении ветра 125 Па
Кран Мост Размеры моста, м Нагрузка, кН
длина высота на МОСТ на опоры на кран без груза
КК-12,5-32 Трехгранный решетчатой конструкции о трубчатыми стойками 56 2,5 12,5 3,5 18
ККП-12,5 Трапециевидный безрас-косный листовой конструкции; опоры с коробчатыми стойками 58 2,3 32 8 43
ККЛ-12,5 Трубчато-балочный; опоры с трубчатыми стойками 59 2,5 30 7 43
ККО-12,5 Оболочечный мост; опоры в оболочечными етойками 58 2,3 37 7 47
12,5Т40 Двухбалочный листовой конструкции; решетчатые опоры из уголковой стали и швеллеров 53 1,7 36 8 46
ККУ-12,5 Четырехгранный решетчатой конструкции с ездовым монорельсом; решетчатые опоры из уголковой стали и швеллеров 54 2,7 28 9 40
34
лической конструкции, получающих все более широкое распространение.
Для ориентировочной оценки ветровой нагрузки на кран без груза при динамическом давлении q = 125 Па может быть использована эмпирическая формула (в Н)
F = kKLH, где L—пролет крана, м; Я —высота подъема, м; kK — коэффициент, завися* щий от типа конструкции крана:
с трубчато-балочным мостом и электроталью ....... 12,0
с решетчатым мостом из профильной стали........' . 17,5
с решетчатым трубчатым мостом ..................’ 8.0
с двухбалочным сплошностенчатым листовым мостом ... 17,5 с однобалочным листовым сплошностенным мостом . . . .’ 20,0
Для грубой оценки можно принять, что ветровая нагрузка крана в рабочем состоянии составляет 275...550 Н на 1 т суммарной массы крана с грузом. При этом между опорами нагрузка распределяется, как правило, не поровну. Не учитывая тележки с грузом (влияние которой оценивается отдельно), для предварительных расчетов можно принять, что ветровые нагрузки между опорами распределяются так же, как и весовые (см. табл. 16).
При действии ветра поперек подкрановых путей ветровые нагрузки уменьшаются в 2...4 раза. Такую нагрузку обычно учитывают только для районов с очень высоким давлением на кран в нерабочем состоянии (1000 Па и выше) или же при. проверке устойчивости кранов с относительно большими вылетами консоли 0,35...0,40), или при относительно небольшой собственной массе крана (Qfm 0,4...0,5).
Необходимо отметить, что ветровая нагрузка практически (на 60...80 %) определяет мощность приводов механизма передвижения крана. Требования обеспечения плавного пуска и торможения этого механизма при сравнительно редко действующей ветровой нагрузке часто заставляет усложнять как сами приводы, так и их системы управления. С повышением ветровой нагрузки увеличивается опасность угона кранов ветром и соответственно повышаются требования к противоугонным устройствам. Ветер влияет также на напряженное состояние элементов металлоконструкции, в особенности стоек опор.
6. НАГРУЗКИ ОТ УКЛОНА
Составляющие весовых нагрузок от уклона подкрановых рельсовых путей принимают в пределах максимально допустимого уклона. Уклон подтележечных путей (направляющих) от разности уровней противоположных подкрановых рельсов обычно невелик (порядка 0,5—1,0 °/00), и при расчетах его не учитывают.
Для механизмов передвижения грузовых тележек следует учитывать наклон подтележечных путей, возникающий вследствие 2* 35
упругих деформаций моста от подвижной нормативной нагрузки (без учета коэффициентов перегрузки); при консолях значительных вылетов (LKIL >0,3), а также при расположении на них оборудования (лебедок, электроаппаратуры и др.) — и от веса конструкции. При этом следует иметь в виду наличие строительного подъема моста.
7. ДИНАМИЧЕСКИЕ НАГРУЗКИ
При расчете и проектировании кранов приходится считаться с этими нагрузками, длительностью их действия, а также динамическими деформациями элементов конструкции.
Динамические нагрузки, возникающие при работе любого из механизмов, могут быть определены путем анализа процессов, протекающих в соответствующей динамической системе и описываемых системой дифференциальных уравнений. При наличии вычислительной техники в этом случае принципиальных трудностей не возникает.
Однако такие расчеты даже при используемых обычно упрощениях трудоемки, а точность полученных результатов ограничена. Это объясняется отсутствием до настоящего времени достоверных статистических данных о ряде изменчивых в широких пределах показателей, значения которых зависят от случайных процессов (податливости канатов, характера работы приводов й т. п.).
Рассмотрим особенности динамических процессов в козловых кранах. Для использования в практических расчетах рекомендуются приведенные ниже упрощенные формулы, учитывающие основные динамические нагрузки.
При расчетах козловых кранов динамические нагрузки, действующие в элементах механизмов и на металлические конструкции, определяют отдельно.
Нагрузки, действующие в механизмах, обусловлены в значительной мере высокочастотными и импульсными процессами (зазорами в зубчатых передачах, пусковыми колебаниями электромагнитного момента двигателя, пиковыми начальными тормоз--ными моментами и т. п.).
Сопутствующие этим процессам динамические деформации и перемещения, как правило, невелики и не могут сколько-нибудь существенно влиять на нагруженность как канатных систем, так и металлической конструкции кранов. Нагрузки для расчета элементов механизмов могут приниматься по действующим в кра-ностроении общим методикам (например, [45 ]).
Нагрузки от работы механизма подъема груза. Вследствие несимметричности схемы нагружения козлового крана при работе механизма подъема помимо вертикальных деформаций остова возникают горизонтальные и продольные. Особенно это проявляется при отрыве груза от основания, когда обладающий 36
значительной массой мост за короткое время (порядка 0,25... 1,5 с) должен сместиться в продольном направлении вместе с грузовой тележкой и верхними частями опор. Наибольшие смещения будут при подъеме груза на консоли жесткой опоры, когда эта опора поворачивается относительно кранового рельса (рис. 10, а). Здесь
Рис. 10. Схемы к определению динамических нагрузок при работе механизма подъема груза:
а — деформации остова крана; б — приведение масо остова крана
Рис. 11. Виброграммы перемещений моста'крана ККП-12,5 при подъеме груза) а *- консоль жесткой опоры, груз на консоли жесткой опоры, вертикальные колеба-Вия; б — центр пролета, груз в центре пролета, вертикальные колебания; в — груз йа консоли жесткой опоры; горизонтальные колебания
горизонтальные перемещения моста обычно имеют один порядок о вертикальными, а горизонтальные динамические нагрузки достигают 6... 10 % нагрузки от массы моста. Характер динамических перемещений крана иллюстрируется виброграммами рис. 11.
Остов крана является упругой системой с распределенной и сосредоточенными массами и имеет бесконечное число частот собственных колебаний. Экспериментальные данные показывают, что практически достаточно учитывать две низшие частоты.
Вводят две расчетные массы, приводимые к точке подвеса груза (рис. 10, б). Масса Mlt совершающая вертикально пере-
%
мещёния, включают в себя массу грузовой тележки и приведенные массы элементов моста и опор, перемещающихся при вертикаль* ном смещении точки приведения. Масса Л12 образована полными массами тележки, моста и приведенными массами опор. Для приведения масс целесообразно использовать приближенные методы, например энергетический метод Релея.
Дальнейший расчет — составление дифференциальных уравнений движения для последовательных этапов движения системы — может выполняться известными способами [51 ].
Результаты расчетов с точностью 10...20 %, совпадающие с данными экспериментов, показывают, что частота колебаний первого тона в 2,5...6 раз ниже частоты колебаний второго тона (табл. 19) и лишь незначительно зависит от наличия груза и положения грузовой тележки. Она близка к парциальной частоте колебаний моста (в рад/с), которая может быть определена по приближенной формуле
где М2 приведенная масса, М2 == (тм -f- mT + (mM, тт— массы
моста в сборе и тележки; 1>т0 — суммарная масса опорных стоек); б1х — перемещение моста крана от силы х = 1 (см. рис. 10, б).
Аналогичным образом может быть найдена при необходимости и вертикальная парциальная частота колебаний рь близкая к частоте колебаний системы. В этом случае Alj « mT + ЛПр/пм» ^пр — коэффициент приведения; при расположении груза на консоли крана с одной и обеими жесткими опорами может быть принят равным соответственно 0,30 и 0,45, а в центре пролета для кранов обоих видов 0,50.
Результаты многочисленных испытаний, которые частично иллюстрируются данными табл. 19, показывают, что отношения динамических прогибов к статическим обычно находятся в пределах 1,1...1,4. При этом наибольшие значения бывают не только при подъеме груза с подхватом, обычно рассматриваемом в качестве наиболее неблагоприятного случая [62 ]. ,
Напряжения от вертикальной динамической нагрузки относительно невелики и не превышают 15 % суммарных расчетных напряжений. Это позволяет для оценки динамических нагрузок использовать приближенные методы.
При этом, как и в ряде современных зарубежных нормативов! нормах FEM, стандартах DIN 15018 (ФРГ), BS: 2573 (Англия) и др. — в качестве основного фактора, определяющего нагрузки, принята скорость подъема груза. Так как жесткости мостовых и козловых кранов по вертикали имеют один порядок, то для оценки вертикальных динамических нагрузок Рд.в в козловых кранах могут быть использованы рекомендации, разработанные при обработке данных замеров, проведенных на большом числе мостовых кранов [3 h Рд. в = aQ (где Q — нагрузка на подъем-38
Таблица 19
Характеристика колебаний металлической конструкции крана при работе механизма подъема груза
Основные данные крана и показатель колебаний КС-5 *? ж х К КС-10 ККО-12,5 ККП-12,5 К К-12,5-32 ККО-20/5 20/5Т25 ККТС-20
Грузоподъемность крана, т Пролет, м Скорость подъема груза, м/с Период вертикальных колебаний Т, с: низкий тон высокий тон Прогиб от номинального груза 6верт, мм: статический динамический Логарифмический декремент колебаний: * низкий тон высокий тон 5,0 16 0,133 0,8 0,7 0?35 26 15 29 16,5 0,22 0,14 6,0 16 0,33 0,93 0,9 0,18 0,17 22 9 28 14 0,15 0,15 0,20 0,20 10,0 32 0,25 1,2 1,2 0,4 0,37 20 13 22 и 0,1 0,15 0,2 0,15 12,5 32 0,26 1,53 1,8 0,6 0,56 32 19 40 22 0,2 0,2 0,3 12,5 32 0,26 1,4 1,3 0,5 0,42 26 13 30 15 0,1 0,1 0,15 0,15 12,5 32 0,21 0,8 0,85 28 14 43 17 0,2 0,25 20/5 32 0,166 1.0 1,1 28 13 34 19 0,12 0,13 20/5 32 0,15 1,5 1,45 0,37 0,42 31 12 37 15 0,12 0,12 0,15 0,15 20,0 40 0,133 1,45 1,46 0,5 0,5 26 38 31 42 0,1 0,15 0,2 0,2
Примечания: 1, Край КК-6 имеет двухбалочный мост и самоходную грузовую тележку, обе опоры — жесткие; кран ККТС-20— однобалочный мост и канатную грузовую тележку, одна опора — гибкая; данные по остальным кранам приведены в табл. 6. 2. Для крана ККО-12,5 период горизонтальных колебаний Т = 1,5с, прогиб от номинального груза бгоП =• 17 мм; для крана ККП-12,5 Т = 1,15с, 6гор = 26 мм. V 3. В числителе приведены показатели при расположении груза на консоли, в знаменателе — в пролете. 4. Отсутствие данных говорит о том, что колебания не зарегистрированы.
ные канаты от массы груза и грузозахватного органа). Графики для определения а, составленные с учетом вида привода, приведены на рис. 12. Для упрощения расчетов целесообразно использовать округленные значения а.
Номинальная скорость подъема груза, м/с.....................До 0,2
Рекомендуемые значения а в зависимости от вида привода (системы управления):
короткозамкнутый двигатель ..................... 0,18
фазный электродвигатель, реостатный пуск .... 0,12
система плавного регулиро-
вания скорости......... 0,07
0,2 ... 0,4 0,4 ... 0,8 Св. 0,8
0,40 — —
0,25 0,45 0,60
0,12 0,20 0,30
Так кек вертикальные нагрузки по графикам рис. 12 определены исходя из вертикальных деформации моста, нормированные значения продольных горизонтальных нагрузок Рд. в могут
Рис. 12. Зависимость относительной динамической вертикальной нагрузки а от скорости подъема груза с учетом вида привода:
1 — короткозамкнутый двигатель; 2 —фазный электродвигатель, реостатный пуск;
3 — нормы FEM; 4 — система плавного регулирования скорости
быть найдены из отношений между податливостью конструкции крана в вертикальном и горизонтальном направлениях
РД.Г = ^д.в^гор*
Здесь
^гор = ^yyt^yxi
где Ьуу — перемещение точки подвеса груза в вертикальном направлении от приложенной в этой же точке единичной вертикальной силы; &ух—перемещение точки подвеса груза в горизонтальном направлении от приложенной в этой же точкё единичной вертикальной силы.
Ниже приведены значения коэффициента Лгор, которыми можно пользоваться при ориентировочных расчетах.
Для крана с гибкой и жесткой опорами при расположении грузовой тележки:
на консоли жесткой опоры.................................0,60
в центре пролета.........................................0,45
на консоли гибкой опоры..................................0,30
Для крана с обеими жесткими опорами при расположении грузовой тележки:
в центре пролета ........................................0
на консоли (любой из опор) ............................ 0,15
49
Нагрузки от пуска-торможения механизма передвижения грузовой тележки. Пуск и торможение механизма передвижения грузовой тележки сопровождаются возникновением динамический нагрузок, действующих в горизонтальном направлении вдоль моста крана и вызывающих изгиб опорных стоек. Эти нагрузки, как правило, относительно невелики. При малых пролетах мостов скорость передвижения тележек не превышает 0,5...0,8 м/с, что уже само по себе ограничивает возможность возникновения значительных нагрузок. У кранов с более крупными пролетами (32... 40 м) массы мостов существенно (в 2—3 раза и более) превышают массы тележек с грузом, что в свою очередь способствует поглощению конструкцией крана динамических нагрузок.
Динамическая модель для определения таких нагрузок должна учитывать влияние раскачивающего груза, податливость и распределение масс остова крана; у кранов с канатно-тяговым приводом механизма передвижения грузовой тележки следует считаться и с упругостью тягового каната [1].
Для ориентировочных расчетов горизонтальные динамические нагрузки
Л.г.т = (тт 4- mr/3) kax,
где тт — масса грузовой тележки; тр — масса груза и грузозахватного органа; k — коэффициент, характеризующий тип механизма, для самоходных тележек k = 1,0, для канатно-тягового механизма k = 0,60; а — коэффициент, характеризующий вид привода, при короткозамкнутом двигателе а= 1,0, при двигателе с фазным ротором а = 0,75; £ — условное расчетное горизонтальное ускорение тележки, определенное по максимальному (опрокидывающему) моменту электродвигателя исходя из разгона тележки с грузом, равным }/а номинального груза.
Нагрузки от пуска-торможения механизма передвижения крана. Рассматриваемые нагрузки, действующие вдоль подкрановых путей, опасны для прочности элементов металлоконструкции, в частности опорных стоек и примыкающих к ним участков пролетного строения.
Схема действия динамических нагрузок на кран показана на рис. 13, а. Для наглядности инерционные усилия заменены системой сосредоточенных нагрузок tntXi, учтены также инерционные нагрузки грузовой тележки /итхт, грузатгхги ходовых частей (/п^ь m2x2) и т. п. Движение крана вызвано действием тяговых усилий приводов [Pi (Xi); Р2 (х2) ], или в периоды торможения — инерционных сил. Помимо этого на кран действуют сопротивления передвижения от сил трения 1F1TP, 1F2Tp (в которые могут входить также и тормозные усилия); ветровая F и горизонтальные составляющие весовой нагрузки от уклона подкрановых путей. Вследствие упругости остова крана общее перекосное движение последнего будет сопровождаться относительным смещением, (забегом) опор.
Если учесть пространственную податливость металлоконструкции крана и многообразие возможных сочетаний внешних
41
нагрузок, изменчивость пусковых и тормозных режимов и др., динамические расчеты, приводимые по схеме на рис. 13, а, будут весьма трудоемкими. Нагрузки, действующие на кран, вызывают различные деформации, которые можно свести к двум видам: поперечным деформациям и деформациям от перекоса. Нагрузки, вызывающие деформации от перекоса, превалируют.
Рис. 13. Схемы к расчету крана на горизонтальные динамические нагрузки» а - схема действия нагрузок на остов крана; б — расчетная модель для определения нагрузок при перекосе
Расчеты и данные испытаний выполненных конструкций показали, что деформация от перекоса крана определяется в основном закручиванием опорных стоек. Этому соответствует расчетная модель крана, образованная путем введения ряда упрощающих предпосылок, основной из которых является представление остова крана в виде жесткого диска, упруго закрепленного на опорах. Сопротивление от внутреннего трения материала и дополнительного трения реборд из-за его относительно малого влияния не учитывается. Остальные предпосылки и допущения (линейная зависимость между усилиями и перемещениями, постоянство сопротивлений передвижению и т. п.) обычны в практике динамических расчетов кранов и не требуют дополнительного обсуждения.
«2
(2)
. Схема расчетной модели представлена на рис. 13, б. Здесь приняты следующие обозначения:
т — масса крана, с учетом редуцированных масс вращающихся элементов механизмов передвижения, кг; J — момент инерции масс крана относительно центра масс О, кг«м2; тг — масса груза и грузозахватного органа, кг; Ci — жецг, кость остова крана при перекосе, Н м-1; С8— приведенная жесткость rpyi зовой подвески, Н м-1, С2= mrg/la', Wlt W2— сопротивления (нагрузки) ОТ ветра и уклона путей, приведенные к опорам 1 и 2, Н; №\Тр, №8тр — сйлЫ статического сопротивления от трения передвижению отор соответственно I и 2 с учетом тормозных усилий, Н; Рь Р2 — тяговые усилия двигателей механизмов передвижения опор соответственно 1 и 2, Н; принимают линейно зависимыми от частоты вращения двигателей (скоростей движения опор).
Движение модели, показанной на рис. 13, б, описывается системой дифференциальных уравнений:
тгхг С2 (хг — хс — tpd) = 0;
тхс — С2(хг — хс — <pd) 4- №i -j- W2 №1тр sgn 4-
4- №2ТР sgn х2 — Pi — Р2 = 0;
/ф — С2(хг — хс — <pd)d4- cpPCi — (fl^iTpSgnXi — Pi)b 4-
4- (№г Я- ПР2тр sgn х2 — Р2) (/ — Ь) = 0;
где Хх = хс — фд; хг = хс 4- ф (/ — Ь).
Полученная система из трех дифференциальных уравнений второго порядка интегрируется по отдельным этапам в замкнутом виде. При имеющем наибольшее значение случае торможения (Pt = Р2 = 0) она может быть сведена к одному линейному уравнению четвертого порядка.
Модель, показанную на рис. 13, б, можно представить в виде совокупности двух парциальных систем, одна из которых образована двумя колеблющимися массами т и тг, связанными упругим элементом, а вторая — жестким диском, колеблющимся относительно центра масс О и преодолевающим упругость элементов Сг и С2.
Механика образования динамического перекоса иллюстрируется графиками, приведенными на рис. 14, которые относятся к случаю торможения движущегося без груза крана, когда скорости движения опор xlt х2 и перекоса ф меняются по гармоническому закону, а центр масс О крана движется равнозамедленно (линия а). Здесь принято > W2.
С началом торможения опора 1 начинает отставать от опоры 2. В момент времени 4 = 0; закон движения крана меняется
(рис. 14, а). До момента времени t2 опора 2 продолжает движение 6 первоначальном направлении, в этот момент перекос ф достигает наибольшего значения, а затем уменьшается; остаточная его величина фш определяется сопротивлением
При большей начальной скорости (рис. 14, б)
Е>« - ^ + ^2 п
-----т----V
43
скорости Я/ и х2 уравниваются еще в процессе движения, чему соответствует максимально возможный для данных условий перекос
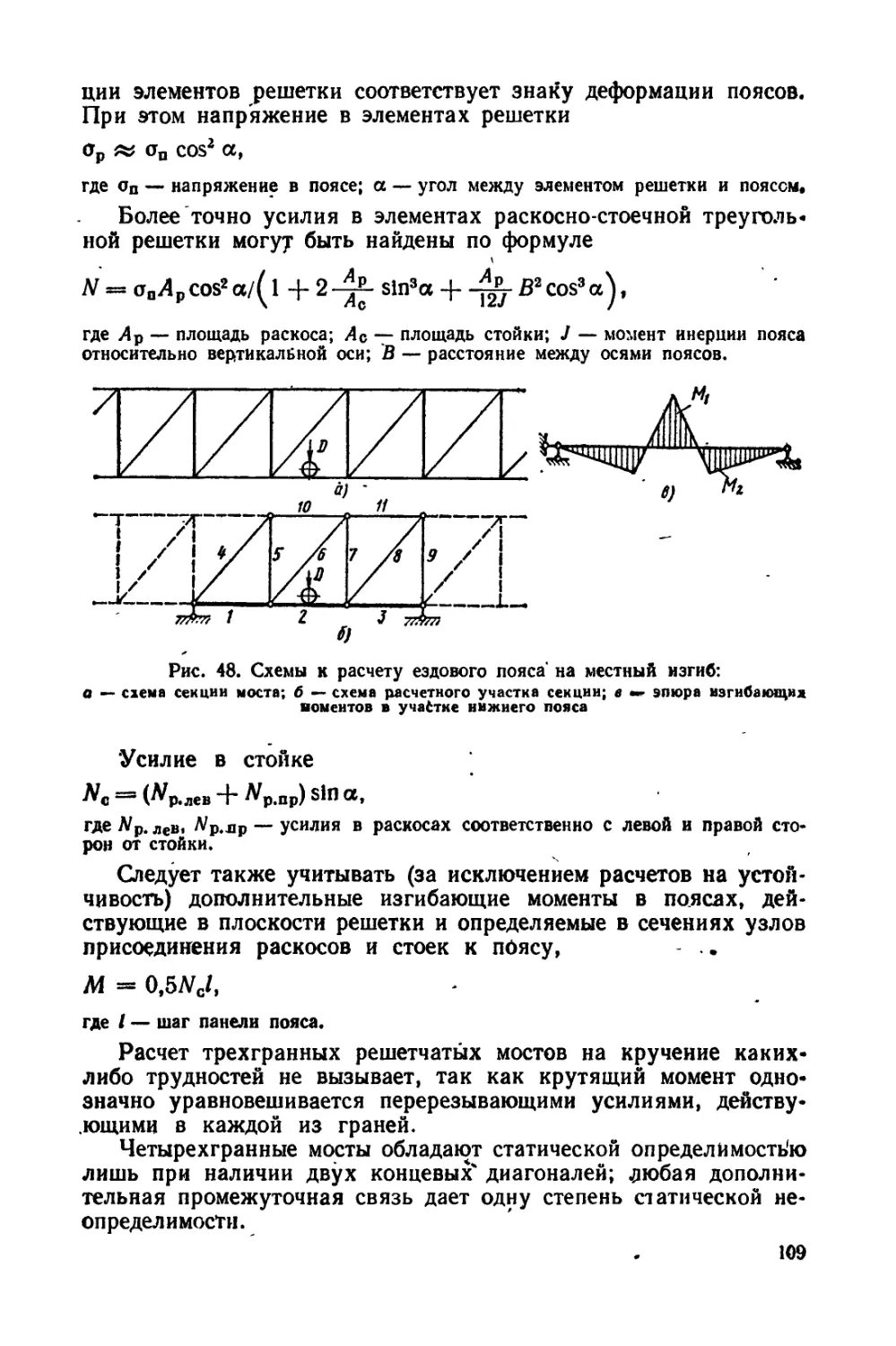
Фгаах = 2фст>
где со — собственная частота поворотных колебаний крана; <рСт — условный статический перекос, который имел бы место при установившемся движении крана с приложением движущего усилия к центру масс О, ,
Фот» ,
При начальной скорости, обеспечивающей два цикла колеба-ний при перекосе (ц> = 2ок), остаточный перекос будет отсутство-
Рис. 14. Схема образования динамического перекоса при торможении крана без груза:
Д~ Р0<РК; б“Р0>РК’ в“°ов2°к
вать (рис. 14, в). При дальнейшем увеличение скорости ~п0 перекос не будет превышать <ршах, а только возрастет число циклов колебаний при перекосе.
При движении с грузом характер движения несколько усложняется, оставаясь качественно таким же. По упругому перекосу <р может быть определена динамическая нагрузка от перекоса ТД=С1Ф/.
Аналитические решения системы (2), которые приходится выполнять последовательными этапами, громоздки и трудоемки, в особенности для случая пуска. Исключение составляет случай торможения крана, движущегося без груза.
Здесь для первого этапа движения (при / = 0; <р = Фо = 0) Ф '== [(1 — cos Ы) WJ — W2(l — &)]/(Ci/2), где ’______
Q)=//2C1/J.
В момент времени 4, при котором скорость отстающей опоры станет равной нулю, начинается второй этап движения —- поворот' крана относительно остановившейся опоры.
44
(О
Для того чтобы на первом этапе движения перекос достиг максимального значения, должно быть обеспечено условие
Fj + я ----m-------
Изложенные теоретические положения были подтверждены данными, полученными при натуральных испытаниях ряда козловых кранов и на действующей масштабной модели крана ККТС-20.
• Примерная экспериментальная осциллограмма (рис. 15) пока* вывает, что динамические колебания при перекосе быстро зату»
Рис. 15. Экспериментальная осциллограмма перекосов при одностороннем торможении крана 20/5 Т25
хают, это объясняется наличием в системе значительных сил трения, и четко проявляется перекос/ вызванный односторонним торможением гибкой опоры.
В результате экспериментов и расчетного анализа, выполненного с использованием АВМ и ЭВЦМ установлено, что снижение жесткости Ci при перекосе при относительно малых скоростях установившегося движения (0,5 и 0,6 м/с) ведет к уменьшению нагрузок при перекосе. Изменение длины подвеса груза сказывается несущественно. Наибольшие деформации и усилия при перекосе имеют- место при односторонних торможениях и пусках крана. Однако при значительных скоростях движения (1... 1,5 м/с), даже при одновременной работе тормозов двигателей обеих опор, динамические нагрузки при перекосе довольно велики.
Ветровые нагрузки, действующие в периоды пуска-торможения, не приводят к существенному увеличению динамических перекосов, так как последние определяются в основном характеристикой привода.
При проведении практических расчетов использование дифференциальных уравнений, даже при наличии ЭВМ, представляет известные технические трудности. Поэтому были проанализированы основные размерно-жесткостные и нагрузочные показатели козловых кранов различных типов и размеров. В результате определено ограниченное число типовых сочетаний для машинного
45
расчета, который проводили с использованием безразмерных переменных уй — xjl\ у? = xjl\ ф = ydll и системы коэффициентов mJ tn, glla, dll, CJtnk, k = ml2IJ.
Для кранов рассматриваемой группы характерны следующие усредненные показатели gHn — 5,0; mJ tn — 0; 0,15; 0,25; dll = = 0,67; Ы1 = 0,55; k = ml2! J = 0,26; CJmk = 2,0; 6,0.
Вследствие того, что для кранов различной конструкции отношения ветровой нагрузки (определяющей в основном тяговые и тормозные усилия) к произведению массы крана на пролет (ml)
Рис. 16. Расчетные графики относительных динамических перекосов при тор* можении: '
а — тр •=• 0: б — т^/т = 0,15; в — тр(т *= 0.25
относительно стабильны, принимают по два значения приведенных суммарных сопротивлений передвижения для случая торможения (Wlml) и номинальных тяговых усилий (Pjrnl), определенных исходя из изложенных предпосылок. При этом считают, что грузовая тележка с полным рабочим грузом расположена на консоли более тяжелой опоры, привод которой развивает меньшее тяговое или тормозное усилие, а при одностороннем торможении вообще не действует.
Расчетные нагрузки для проверки прочности элементов конструкции определялись при двух случаях торможения: нормальном и предельном. В обоих случаях груз расположен на консоли более тяжелой опоры; тормоз создает меньший момент или разомкнут. Нормальный случай — остановка движущегося на полной скорости крана с мгновенным приведением в действие тормозов механизмов передвижения обеих опор, причем тормоза должны быть отрегулированы исходя из расчета удержания крана на месте с запасом в 1,25. При двух приводах можно принять, что тормозные усилия между опорами распределяются в соотношении 1 : 1,3. Этим учитывается возможность отклонений коэффициентов трения 46
тормозных обкладок и неточности регулирования тормозов. Предельный случай — внезапное приведение в действие одного из тормозов.
За последнее время помимо двухдвигательного стал распространяться также четырехдвигательный привод. Здесь вероятность рассеяния характеристик двигателей противоположных опор меньше. В предельном случае (расчетном) возможен выход из строя только одного из приводов.
В настоящее время наиболее распространены краны с двухприводным механизмом передвижения. Для них построены типовые графики углов ф динамических перекосов в функции относительной скорости установившегося движения: у0 = xQll (рис. 16) при характерных значениях относительных сопротивлений передвижению (Wi/mb, значения их как для случая нормаль-
ного (/, //), так и для одностороннего (///, IV) торможения сведены в табл. 20. В значениях сопротивлений учтены также тормозные усилия.
Таблица 20
Расчетные сочетания сопротивлений при различных случаях торможения
mr/m I 11 ill IV
Wjml й7,/т/ Wt/ml Wjml WJml WJml
0 0,008 0,011 0,016 0,022 0,0017 0,011 0,0017 0,022
• 0,15...0,25 0,010 0,011 0,020 0,022 0,0023 0,011 0,0023 0,01 Г
Для определения динамических нагрузок (в Н) при перекосе может бйть использована следующая приближенная (погрешность в пределах 10...20 %) формула, полученная путем аппроксимации расчетных графиков:
Т№В = 6- < 2Тст, (3)
где Тст = (l-bjyi.
Следует иметь в виду, что определяемая на основании схемы рис. 13 нагрузка Т при перекосе является по существу условной — значение ее находят исходя из деформации упругой модели при перекосе системой инерционных воздействий. Однако опыт эксплуатации кранов ряда типов, рассчитанных с учетом нагрузки от перекоса, определяемой по формуле (3), показал пригодность такой предпосылки.
Результаты расчетов для условий пуска показывают, что характер изменения перекосов примерно соответствует случаю торможения. Однако (в том числе и для форсированного пуска, когда развиваемые двигателями тяговые усилия доходят до максимально возможного значения), динамические нагрузки при 47
перекосе тормозных периодов существенно превосходят пусковые и являются поэтому в большинстве случаев расчетными.
1 При оценке напряженного состояния некоторых элементов конструкции (консолей, моста, опорных стоек при значительной ширине моста и др.) приходится учитывать непосредственно усилия, возникающие вследствие горизонтальных перемещений масс крана. Однако соответствующие напряжения относительно невелики, что снижает требования к точности определения нагрузок данного вида.
Для практических целей эти нагрузки могут быть определены как Рвд = 1,5таср, где т — масса груза или элемента крана, аср — среднее ускорение (замедление) при работе механизма передвижения крана.
При необходимости значения этих нагрузок можно уточнить непосредственным расчетом, используя схему рис. 13, а.
8. НАГРУЗКИ ОТ УДАРА О КОНЦЕВЫЕ УПОРЫ (БУФЕРНЫЙ УДАР)
Удар грузовой тележки нли крана о концевые упоры может явиться следствием нарушений в эксплуатации — ошибочных действий крановщика, выхода из строя тормозов или концевых выключателей. Тем не менее такие случаи имеют место при работе кранов, и необходимо рассмотреть соответствующие нагрузки.
Особенностью козловых кранов является относительно податливый остов, что существенно снижает эффект от буферного удара, при оценке которого следует учитывать также и дефор ма-тивность буферов. При расчетах обычно принимают, что наезд на буфера происходит со скоростью, составляющей 50 % номинальной. Однако иногда (например, для электроталей без тормозов на механизмах передвижения) приходится учитывать полную скорость.
Данные испытаний и расчетов показывают, что при буферном ударе грузовых тележек, перемещающихся со скоростью 0,5...0,66 м/с, на металлическую конструкцию передается относительно небольшая нагрузка. Горизонтальное ускорение моста при этом не превышает 0,6 м/с2. Это объясняется также и относительно большой массой моста, которая поглощает кинетическую энергию грузовой тележки, пропорциональную второй степени скорости ее передвижения. Более точно нагрузку, возникающую при ударе тележки об упор, можно определить, анализируя дифференциальные уравнения движения системы грузовая тележка — упругий буфер — упругий остов крана. Здесь могут быть применены расчетные модели и методика расчета, разработанная применительно к .мостовым перегружателям, близким к козловым кранам по конструктивной схеме [70].
Опыт показывает, что вследствие податливости остова крана даже при отсутствии упругих упоров и скорости движения кранов, 48
напримк э м/с, буферный удар крана не приводит к ка^им-либо пог, рдениям конструкции, но.вызывает значительное рас* качивание груза и ощущаемые крановщиком неприятные толчки.
Следует считать, что в тех случаях, когда концевые выключатели механизма передвижения приводят в действие тормоза на расстоянии, достаточном для снижения скорости до_0,8 м/с при подходе к упорам, нагрузки от буферного удара при расчете металлических конструкций можно не учитывать. .При скоростях передвижения 1...1,5 м/с такое снижение скорости легко достижимо. У более быстроходных кранов следует предусматривать, устройства, автоматически снижающие скорость передвижения* при подходе к отклоняющим линейкам концевых выключателей.
В случае необходимости динамические процессы при наезде крана на концевые упоры могут быть проанализированы с использованием схемы на рис. 13, а, а также решений, разработанных для случая буферного удара мостовых кранов (действие ветра и наличие уклона крановых путей здесь можно не учитывать).
9. СТАТИЧЕСКИЕ СОПРОТИВЛЕНИЯ ПЕРЕДВИЖЕНИЮ КРАНА
И НАГРУЗКИ ОТ ПЕРЕКОСА ПРИ УСТАНОВИВШЕМСЯ
ДВИЖЕНИИ
На козловые краны при перемещении действуют различные нагрузки вдоль крановых путей. В общем случае эти нагрузки не уравновешиваются тяговыми усилиями механизмов передвиже-' ния. Это приводит к возникновению «перекосного» момента (М =* = 77), вызывающего взаимное относительное смещение опор (перекос) от пары нагрузок, приложенных вдоль путей к опорам крана (нагрузок при перекосу.
Эти нагрузки в свою очередь увеличивают сопротивление передвижению в результате возрастания трения реборд о головки рельсов. Это вызывает необходимость совместно рассмотреть воздействия обоих видов.
Удельные сопротивления передвижению в ходовых колесах складываются из сопротивлений о>тр, пропорциональных вертикальным нагрузкам на ходовые колеса о»тр, и дополнительных сопротивлений от перекоса крана ^р. В свою очередь toTP = + №р,
где w0 — удельное сопротивление от трения качения ходовых колес и потерь в подшипниках; w0 — удельное сопротивление от поперечного проскальзывания ходовых коЛес; wp — удельное сопротивление от трения реборд ходовых колес о головки подкрановых рельсов.
Для существующих кранов ^(колеса диаметром 500...700 мм на подшипниках качения) о»0 может быть принято равным 5 Н/кН. Для уточнения значений и»0 следует пользоваться принятой в кра-ностроении методикой [45]. Значительные силы поджатия реборд к рельсам, возникающие вследствие погрешностей в установке ходовых колес, обусловливают & 4 Н/кН.
49
• ’Это определено исходя из условия, что реборды ходовых колес поджимаются к рельсам с силой N = 7?р, причем плечо трения реборды о головку рельса составляет около 15 % диаметра колеса, а коэффициент трения между ребордой и рельсом рр = 0,15.
При движении колеса, установленного с перекосом в гори-вентальной плоскости относительно продольной оси, оно проскальзывает в поперечном направлении. Соответствующее этому проскальзыванию сопротивление передвижению будет та кое же, как и сопротивление от трения качения в подшипниках, и пропорционально вертикальной нагрузке на ходовые колеса; оно также пропорционально коэффициенту трения при поперечном скольжении кодес по рельсу и тангенсу угла между плоскостью колеса (проходящей через диаметр колеса) и направлением движения крана. ,
Обмеры ряда эксплуатируемых кранов показали, что вследствие погрешностей изготовления и монтажа установочные угловые отклонения ходовых колес от параллельности в горизонтальной плоскости весьма часто составляют 1 % и более (при предельной норме 1...2 °/м), при этом wc — 1,5 Н/кН. Тогда щтр = 5 4-4- 1,5 + 4 = 10,5 Н/кН.
Значение может быть найдено только после определения перекосных нагрузок и вызываемых ими дополнительных осевых реакций, для чего следует знать распределение тяговых усилий между приводами. Тяговые усилия при установившемся движении, в сумме равные сопротивлению передвижению, распределяются между механизмами передвижения в зависимости от Характеристик их приводов и в меньшей мере от отклонений диаметров ходовых колес.
Фактическое отклонение характеристик крановых электродвигателей не превышает 6 %. В то же время замеры, выполненные более чем на 60 эксплуатируемых кранах различных моделей, выявили, что моменты двигателей при полностью выведенных пуско-регулирующих сопротивлениях различаются в среднем в 1,4... 1,6 раза. Это объясняется значительной разницей в длине роторных проводов противоположных опор (до 80 м) и наличием в них многочисленных контактных соединений.
Чтобы моменты приводных электродвигателей различались не более чем на 15 %, следует предусмотреть в роторных цепях нёвыключаемые резисторы, равные (2,0...2,5) Rp. В расчетах, учитывая эти резисторы, можно принимать коэффициент неравномерности распределения тяговых усилий
?.= RA/RB = 0,75...0,85.
При обследованиях ряда кранов выявлен существенно неодинаковый (3...6 мм по диаметру) износ поверхностей качения ходовых колес противоположных опор. Это вызвано тем, что в ряде 'случаев схемы перегрузочных работ предусматривают работу крана с подачей груза преимущественно на одну из консолей, 50
а также применяют термически не обработанные колеса. Однако вследствие относительно мягких характеристик двигателей влияние отклонений значений диаметров колес на перераспределение тяговых усилий невелико — не более 8 °/м при относительных отклонениях диаметров AD/D = 3°/00.
Схемы действия, нагрузок в период установившегося движения для кранов с одной и обеими жесткими опорами приведены на рис. 17. Значения Я, Г и ге4р можно определить, рассматривая равновесие крана в горизонтальной плоскости.
Рис. 17. Схемы действия нагрузок на опоры крана в период установившегося движения:
а — одна опора гибкая; б — обе опоры жесткие
Формулы для определения дополнительных осевых нагрузок Н на ходовые колеса и нагрузок Т от перекоса сведены в табл. 21.
Наибольшее значение статической осевой нагрузки на ходовые колеса (и элементы их крепления} можно получить, суммируя нагрузку, возникающую от перекоса ходового колеса относительноподкранового рельса, с нагрузкой Я:
Ятах = ""Ь Я,
где /?шах— максимальная вертикальная нагрузка.
Результаты расчетов показывают, что при отсутствии ветра и уклона и работе обоих двигателей нагрузки от перекоса составляют 2...4 Н на 1 кН силы тяжести крана с грузом. Если работает один двигатель, эти нагрузки могут достигать 6...10Н/кН. При наличии ветра = 60 Н/кН) эти нагрузки увеличиваются: при работе одного двигателя до 18 и двух двигателей до 40 Н/кН. Дополнительные сопротивления к4Р при у = 0,70...0,80 и На — 5,0 составляют 5... 10 % суммы остальных сопротивлений передвижению.
Для расчета сопротивлений передвижению козловых кранов от трения (в Н) может быть рекомендована формула
Гтр = (С1 + <Ъ) Н + Aw},
51
где Gj + G2 — суммарная сила тяжести щ>ана с грузом^ Н; Да» — дополнительное удельное сопротивление от трения реборд и др.,. Н/кН, принимают в зависи-мости от условий движения крана:
Ветровые нагрузки и уклон путей Да» при работе двигателей опор: одной ’............................
обеих ..... .................
Отсутствуют Имеются
15 ... 6 6 ... 9
7 ... 8 10 ... 16
Большие значения следует принимать при неудовлетворительном состоянии механизмов передвижения и подкрановых путей.
Таблица 21
Формулы для определения И и Т при различных случаях установившегося движения
Одна из опор крана гибкая ' Обе опоры жесткие
Работают оба двигателя Работает двигатель опоры В Работают оба двигателя Работает двигатель опоры В
я = Wa — №вУ Осев Я -Т-“ Нагруз» О. Уа ' — / 1—2& — а ая нагрузка Я = 0,5 X х — 1ГвТ -у-О+т) (! + *)-— 2k <а от перекоса Т = WA — ^ВУ И = 0,5 X X- W*
'Т-7-(1 + т)-2* т = _ Уа — ^ВУ -|-(1 + *)-2Л Т = Wa
1 + у —26 — а ~ ,, 2k 1 1—2-уА-г-^-1 + k О
Обозначение: W д, W & — отнесенные к опорам соответственно А, В'суммарные сопротивления (нагрузки) без учета дополнительных потерь на трение в ребордах ходовых колес w ; А — коэффициент сопротивления от трения реборд; k = 0,032.
10. МОНТАЖНЫЕ НАГРУЗКИ
В большинстве случаев напряженное состояние определяется практически одной нагрузкой — собственным весом элементов крана. Поэтому для того, чтобы предотвратить повреждения несущих элементов вследствие возможных в процессе монтажа толчков, отклонений от предусмотренной проектом строповки груза и других случайных воздействий, расчетное значение коэффициента перегрузки от собственного веса рекомендуется несколько увеличивать — до 1,2... 1,3. В соответствующих случаях учитывают также и ветровую нагрузку, от динамического давления q =» = 50.^80 Па.
И
It. ТРАНСПОРТНЫЕ НАГРУЗКИ
В период транспортирования элементов крана помимо нагрузок от их веса приходится учитывать также и динамические нагрузки, возникающие вследствие толчков от перемещения транспортных средств по неровностям и закруглениям. При перевозке частей крана автомобильным транспортом приходится считаться с действием на груз дополнительных вертикальных нагрузок, составляющих 200...250 % собственного веса. Вертикальные динамические нагрузки при транспортировании частей крана железнодорожным транспортом могут составлять 60...80 % собственного веса крана. Помимо этого следует также учитывать поперечные и продольные нагрузки (соответственно до 60 и 190 %). Более точные данные приведены в работе А. Д. Малова и др. 1441.
12. СЕЙСМИЧЕСКИЕ НАГРУЗКИ
Нагрузки этого вида вызываются землетрясениями вследствие колебательных смещений грунта. Для оценки силы землетрясений используют двенадцатибалльную шкалу Меркали; при этом землетрясения силой до шести баллов включительно практически не имеют значения при расчетах сооружений, так как не причиняют заметных повреждений. В действующем в СССР СНиП П-7—81 предусмотрена проверка на сейсмичность при семи, восьми и девяти баллах. Этим баллам соответствуют произвольно направленные ускорения соответственно в 0,1; 0,25 и 0,5 м/с2. При этом грузоподъемность рекомендуется учитывать коэффициентом 0,3 только при определении вертикальной сейсмической силы. При ориентировочных расчетах инерционной сейсмической нагрузки на элемент массой т можно использовать формулу
Рс = maka, где а — сейсмическое ускорение; Ад — динамический коэффициент, &д => =» 1/(1 — (Т/Т0)2] (Т — период собственных колебаний конструкций, с; — период вынужденных колебаний при землетрясении, То I с).
Ряд указаний приведен также в работе М. Коса [651, относящейся к сейсмическим нагрузкам в мостовых кранах.
13. НАГРУЗКИ ОТ ТЕПЛОВЫХ ДЕФОРМАЦИЙ
На козловые краны действуют нагрузки от тепловых деформаций пролетного строения, которые возникают в результате сезонного перепада температуры (от —40 до +40 °C). В листовых конструкциях иногда приходится считаться с односторонним нагревом — в двухбалочных мостах вследствие нагрева одной балки могут возникнуть существенные внутренние усилия. В кранах с обеими жесткими опорами односторонний нагрев моста приводит к его деформации. Это может вызвать защемление ходовых
53
колес,. Перепад температур между отдельными элементами конструкции (например, балками моста) может составлять 15 °C.
В кранах с пролетами меньше 40 м тепловые деформации обычно не учитывают.
14. ОСОБЫЕ НАГРУЗКИ
К этой группе относятся разнообразные нагрузки, возникающие в результате специфических условий эксплуатации: нагрузки, возникающие от подвешенного на крюке крана вибратора, от подсоса грейфера при выемке груза из-под воды и др. В некоторых случаях приходится учитывать нагрузки от перекоса, которые могут возникнуть от внезапного заклинивания одной из опор крана. Возможность возникновения таких нагрузок должна быть предусмотрена в техническом задании на кран.
15. НАГРУЗКИ НА ХОДОВЫЕ КОЛЕСА
Эти нагрузки учитывают при расчете ходовых частей крана, а также при расчете и выборе кранового рельсового пути. При их определении весовые и ветровые нагрузки принимают без учета коэффициентов перегрузки; не учитывают и отклонения в точности изготовления крана и укладки путей. Горизонтальные нагрузки определяют с учетом нагрузок от перекоса, а для кранов с обеими жесткими опорами — и горизонтальных реакций, возникающих при деформации крана под действием веса подвижного груза. При этом, в кранах с одностоечными опорами и несимметричным относительно продольной оси остовов следует учитывать также и различия в осевых нагрузках на ходовые колеса каждой из опор.
У кранов с балансирными ходовыми тележками следует учитывать неравномерность распределения нагрузок между колесами, возникающую вследствие приложения горизонтальной, например ветровой, нагрузки к шарниру подсоединения тележки.
16. УСТОЙЧИВОСТЬ ПРОТИВ ОПРОКИДЫВАНИЯ
Для обеспечения безопасности работы кранов должно быть исключено их опрокидывание как во время работы, так и в нерабочем состоянии при действии ураганного ветра.
Дополнительная проверка грузовой устойчивости не требуется, если кран выполняют в соответствии с указаниями: консоли составляют не более 0,35 пролета, высота подъема груза 10...13 м. Следует иметь также в виду, что необходимость обеспечения сце* пления ходовых колес крана о рельсами сама по себе обычно гараи* тирует достаточный запас грузовой устойчивости.
М
Для проверки грузовой устойчивости рекомендуется пользоваться следующей формулой: ...
Мв4-Мг«г 1,25Л4ВОС,
где Л1В — момент от действующего вдоль крана ветра давлением q-= ,125 Па; Мг — момент от веса груза и грузозахватного органа; AfBoo — момент от веса крана.
Эти моменты определяются относительно головки одного из подкрановых рельсов при расположении грузовой тележки на консоли более тяжелой опоры (или на обеих консолях при различной их длине). Момент определяют без учета коэффициента перегрузки.
В нерабочем состоянии должно быть обеспечено условие
Обычно считают, что опрокидывание будет происходить поперек путей, причем моменту от действия ветра нерабочего состояния противостоит момент от действия собственного веса крана М'в.,
Как правило, при динамическом давлении ветра q = 700... 1000 ГТа устойчивость крана в нерабочем состоянии обеспечена. При ветре давлением более 1000 Па рекомендуется проверить продольную устойчивость. В особых случаях можно дополнительно учитывать удерживающее действие рельсовых захватов или других крепежных устройств: противоугонные захваты должны иметь определенную конструкцию [61; ходовые тележки должны быть оборудованы стопором. Крановые пути должны иметь специальный участок для стоянки крана; пути на этом участке должны быть рассчитаны на отрывающие нагрузки. При оснащении крана стопорами около путей устраивают соответствующие якоря.
Глава 3
МЕТАЛЛИЧЕСКИЕ КОНСТРУКЦИИ КРАНОВ
1. МАТЕРИАЛЫ И СОРТАМЕНТ
В связи с тем, что для козловых кранов не исключена возможность работы при температуре до —40 °C, следует обращать внимание на выбор материала с соответствующими показателями.
Опыт эксплуатации и проведенные исследования показали, что достаточная надежность обеспечивается при соблюдении рекомендаций СНиП. Для несущих элементов наиболее распространены стали ВСтЗпсб и ВСтЗспб по ГОСТ 380—71 (для металлических конструкций толщиной соответственно 10 и 25 мм); для металлических конструкций большей толщины следует применять низ
55
кодированные стали, например 09Г2С по ГОСТ 19282—73. Для кранов, изготовляемых предприятиями Минтяжмаша СССР, применение углеродистых сталей предусмотрено при температуре не ниже —20 °C.
Для трубчатых конструкций используют также качественную конструкционную сталь марок 10—20 по ГОСТ 1050—74. Для кранов, работающих при более низких температурах, применяют низколегированные стали, преимущественно 09Г2С, 15ХНСД, 10ХНСД по ГОСТ 19282—73.
Возможно применение легких сплавов на алюминиевой основе, обладающих высокими ударной вязкостью при низких температурах и коррозионной стойкостью. Особенностью алюминиевых конструкций является возможность относительно легкого получения специальных профилей, весьма удобных для образования сечений крановых мостов. Основные указания по выбору материалов, а также расчету и проектированию алюминиевых конструкций даны в работе [27].
Для изготовления несущих элементов металлических конструкций используют листовую, профильную и фасонную сталь, а также холодногнутые профили. Для кранов с монорельсовыми грузовыми тележками перспективно применение сварных биметаллических двутавровых балок. У таких балок в качестве нижнего пояса используют сниженный тавровый профиль из стали повышенной прочности, имеющий полки увеличенной толщины [38]; стенка и верхний пояс — из стали обычного качества.
Все более часто применяют элементы из труб, изготовленных различными способами. Однако в элементах с подвергающимися плющению концами следует избегать использовать прямошовные сварные трубы.
При назначении сортамента металла для конструкций с плоскими стенками толщину листов рекомендуется принимать не менее 4 мм. Для трубчатых конструкций толщину можно уменьшить до 3 мм при условии хорошего доступа для окраски и осмотра.
Для предотвращения повреждений стержневых элементов при транспортировании и монтаже гибкость их независимо от условий работы следует ограничивать X <з 200. По этим же соображениям не следует применять уголковые профили сечением менее 40Х40Х Х4 мм и трубы диаметром менее 45 мм.
2. СОЕДИНЕНИЯ ЭЛЕМЕНТОВ МЕТАЛЛИЧЕСКИХ КОНСТРУКЦИЙ
Элементы металлических конструкций соединяют обычно дуговой сваркой, реже — контактной и точечной сваркой. Более экономичны стыковые соединения; однако такие соединения подлежат обязательному контролю неразрушающими методами и в ряде случаев трудны для выполнения.
, При монтажной сварке швы располагают так, чтобы обеспечить наибольшее удобство сварки; желательно, чтобы расчетные на
пряжения в них не превосходили 75 % предельно допускаемых напряжений для швов данного типа.
Эксплуатация кранов легкого и среднего режимов работы по-‘ казала надежность выполнения соединений с помощью ромбических или овальных накладок. При этом зазор между торцами стыкуемых элементов рекомендуется перекрывать швами, предотвращающими попадание влаги. При расчете накладок и прикрепляющих их фланговых швов стыковые швы не учитывают, что исключает необходимость контроля их неразрушающими методами.
В соединениях, работающих на сдвиг, применять болты нормальной точности рекомендуется только в менее ответственных конструкциях. В ответственных соединениях следует применять болты повышенной точности, устанавливаемые с натягом, или высокопрочные болты [46 ].
Элементы конструкций, соединенные сваркой, имеют ряд недостатков: уменьшение прочности при действии циклических нагрузок, невозможность последующей разборки, ухудшение механических свойств термически обработанного металла в околошовной зоне. Частично лишены этих недостатков элементы, соединенные -высокотемпературной пайкой, нашедшие применение при изготовлении конструкции из труб и профилей, а также в определенной мере и клеевые соединения [21, 37]. Применение паяных и клеевых соединений в металлоконструкциях козловых кранов позволит сочетать элементы из разных материалов (например, алюминиевую обшивку со стальными поясами), выполнять качественные стыки трубчатых стержней и др.
Отверстия под болты повышенной точности должны развертываться на заводе-изготовителе при контрольной сборке крана или отдельных узлов. В соединениях на чистых болтах после двух-трех сборок и разборок посадка нарушается. Поэтому в кранах, которые за срок службы должны несколько раз перебазироваться с разборкой металлоконструкций, представляется целесообразным применение фланцевых стыков с болтами нормальной точности.
Закладные пальцы особенно широко применяют в монтажных соединениях. Для облегчения установки на них обязательно следует предусмотреть конусную заходную часть длиной не менее 0,5 диаметра при наклоне около 30°.
Пальцы, которые используют для соединения рабочих элементов металлоконструкций, должны устанавливать по посадке ЯП/dll; в монтажных соединениях можно предусматривать гарантированные зазоры до 5 % диаметра пальца. Следует избегать комбинированных соединений, в которых усилия должны одновременно передаваться болтами и пальцами, так как вследствие неизбежных зазоров распределение силовых факторов в таких соединениях между пальцами и болтами делается неопределенным, что приводит к перенапряженном в отдельных элементах металлоконструкций и часто является причиной выхода соединения из строя. ‘
57
Этот недостаток устраняют, применяя конусные вкладыши, затягиваемые после окончания монтажа крана.
3. УЗЛЫ РЕШЕТЧАТЫХ КОНСТРУКЦИЙ
В узлах несущих конструкций не следует допускать пересечений швов и располагать их перпендикулярно продольной стороне элемента с внешней стороны узла (рис. 18, а).
Узловые косынки должны иметь возможно меньшие размеры, определяемые из условия размещения швов, крепящих примыкаю-
а) б)
Рис. 18. Типовые узлы примыкания элементов решетки: а — уголковая конструкция; б — трубчатая конструкция
щие к узлу элементы. Толщину косынки обычно выбирают в зависимости от принятой толщины сварных швов и действующих усилий:
Максимальное
усилие в стержнях
решетки, кН. . .30 ... 80 90 ... 150 160 ... 250 260 ... 400 410 ... 600 Толщина ко-
сынки, мм ... 5 6 8 10 12
При приварке уголка только фланговыми швами их концы рекомендуется вывести на торец стержня на 20 ... 30 мм.
Элементы решетки должны центрироваться на геометрическую ось пояса; при слабонагруженных элементах они могут центрироваться и на обушок пояса.
В связи с повышением интенсивности эксплуатации возникает опасность появления усталостных разрушений решетчатых конструкций в узлах. Эту опасность можно снизить, применив врезные косынки с соответствующими переходными участками.
В работах М. М. Гохберга [161, И. В. Кудрявцева и Н. Е. На-умченкова [261 даны более подробные рекомендации по выполнению соединений и узлов с достаточным сопротивлением усталости, а в работе В. Д. Телушкина и др. [541 — по выполнению сварных соединений и узлов при эксплуатации машин в районах с холодным климатом.
58
, Узлы трубчатых решетчатых конструкций (рис. 18, б) следует выполнять с фасонной резкой концов примыкающих элементов на газорезательных автоматах. Автоматы одновременно снимают фаски с кромок трубы.
Для улучшения условий сварки рекомендуется между примыкающими стержнями обеспечивать расстояние 30 ... 40 мм; допускается эксцентриситет е с 0,25D. По данным испытаний при качественной сварке разрушения, в том числе и усталостные, происходят в околошовной зоне поясных труб. Поэтому при других равных условиях прочность соединений повышается с увеличением отношения 6/D, приводящего к повышению местной жесткости пояса.
Соединения с плющением или окуполиванием концов труб с помощью косынок (в особенности врезных) можно применять только в узлах, не испытывающих знакопеременной нагрузки. Более подробные указания по выполнению узловых соединений труб приведены в работе Я. Брудка [12].
4. ЗАЩИТА ОТ КОРРОЗИИ
Наиболее целесообразными являются трубчатые и коробчатые конструкции, у которых скорость коррозионно-механического изнашивания в 1,5 ... 2 раза ниже, чем у прокатных или гнутых профилей. Указания по защите металлических конструкций от коррозии приведены в работе М. М. Сахновского и др. 1331. Чтобы
Таблица 22
Минимальные зазоры между элементами сечений, мм
Зазор
Примерная схема сечения
Расстояние между кромками смежных профилен
Расстояние между кромками поясов составных или П-об-разных стержней
350-------
120----------f J
О ---------1----------1 -
о 300 600 Ь,ММ
350[------
Расстояние между стенками составных стержней
09
не задерживать влагу, все карманы должны иметь дно с уклоном не менее 1/20; диаметр дренажных отверстий должен быть не менее 20 мм. Эти отверстия следует предусматривать у оснований (иди у глухих стыковых фланцев) опорных стоек и т. п., наклонно или вертикально установленных коробчатых и трубчатых элементов. В последних не должно быть поперечных ребер или диафрагм, которые могут задерживать конденсационную влагу.
В табл. 22 приведены рекомендуемые минимальные зазоры* между элементами сечений, необходимые для обеспечения возможности проверки, очистки и окраски внутренних поверхностей [по DIN 15018 (ФРГ)].
5. ТИПЫ И КОНСТРУКЦИИ МОСТОВ (ПРОЛЕТНЫХ СТРОЕНИЙ)
Масса мостов обычно составляет 60 ... 75 % общей массы металлической конструкции. Ввиду значительных размеров ветровая нагрузка на мост не более 85 % общей ветровой нагрузки на кран. Поэтому изготовление мостов относительно трудоемко. Сказанное заставляет обращать особое внимание на рациональный выбор конструкции моста.
Основные размеры моста. Расчеты показали, что у однобалочных мостов, если отношение длины консоли к пролету составляет 0,2 ... 0,3, меньшей металлоемкостью обладают как безраскосные листовые, так и решетчатые конструкции при Uh = 13 ... 15. Отношение высоты к ширине сечения однобалочного моста принимают обычно в пределах 1,0 ... 1,5.
У одно- или двухбалочных мостов сплощностенчатых листовых конструкций оптимальная высота обычно несколько меньше.— C/ie—1/18) L. У кранов с обеими жесткими опорами, обладающими более высокой пространственной жесткостью, соотношение может доходить до V^, но при этом металлоемкость повышается. Поэтому такие соотношения оправданы для мостов кранов с относительно небольшими (20 ... 25 м) пролетами. Отношение высоты к ширине балки двухбалочного моста находится в пределах 1,2/1 ... ... 2,5/1.
Выбирая высоту сечения моста, следует иметь в виду, что при определенной зависимости между высотой сечения и массой моста отступление от наивыгоднейшей высоты изменяет массу балки незначительно. Например, при увеличении или уменьшении высоты на 20 % масса коробчатой балки повышается на 6 ... ... 10 %.
Мосты длиной более 25 м для облегчения транспортирования обычно изготовляют из секций, соединяемых сваркой или болтами. Если длина моста или его секций превышает 24 м, требуется проверить расчетную негабаритность груза при прохождении криволинейного участка пути. Расчленение моста на секции должно обеспечить возможность сборки крана с одним из меньших нормализованных пролетов; кроме этого, для. мостов решетчатых конструк-60
ций,по технологическим соображениям целесообразно обеспечить во всех секциях одинаковый шаг панелей.
Строительный подъем частично компенсирует наклон ездовых направляющих под действием весовой нагрузки. Как в пролете, так и на консолях, обычно принимают 6 — Vaf, где f — прогиб от весовой нагрузки.
Строительный подъем обеспечивают, как правило, соответствующим устройством монтажных или заводских соединений моста. Однако на кранах с монорельсовыми тележками более целесообразным может быть создание необходимого профиля направляющих путем придания соответствующего очертания монорельсовым балкам или изменения размеров элементов соединения с несущей балкой.
Строительный подъем приводит к определенному усложнению металлоконструкции моста; необходимость в нем устанавливается в результате расчета механизма передвижения тележки. Введение его часто бывает необходимым в кранах с электроталями, лишенными тормозов на механизме передвижения. В ряде случаев ограничиваются только строительным подъемом консолей.
В качестве направляющих для ходовых колес тележек в перегрузочных козловых кранах используют железнодорожные узкоколейные рельсы типов Р15 ... Р25, а также квадраты или полосы из стали повышенной прочности (обычно из сталей Ст5, Стб) или, что еще лучше, из марганцовистых сталей типа 20Г, ЗОГ (ГОСТ 4543—71).
Применение конструкций, в которых ходовые колеса грузовой тележки перекатываются непосредственно по полкам двутавровых балок, уголков и других профилей, изготовленных из обычных сталей с относительно низкой износостойкостью, рекомендуется только в кранах облегченного исполнения.
В кранах нормального исполнения должна быть предусмотрена возможность замены ездовых монорельсовых балок или подтележечных направляющих. При этом у кранов среднего режима работы допускается приваривать указанные элементы. Здесь конструкция моста должна быть выполнена так, чтобы при удалении ездового элемента для замены при ремонте была бы сохранена ее форма. Этому требованию удовлетворяют, например, трубчатые мосты с тавровыми направляющими.
Однобалочные мосты. Различают две основные схемы мостов — однобалочные и двухбалочные. Наибольшим распространением пользуются однобалочные мосты.
Для широко распространенных кранов с электроталями грузоподъемностью до 5 т основным требованием часто бывает требование минимальной трудоемкости изготовления. Для кранов грузоподъемностью 1 ... 3,2ти пролетами 8 ... 12,5 м это требование удовлетворяется применением сечений из двутавровой балки с усилием верхнего пояса листом или швеллером; более совершенно сечение, показанное на рис. 19, б, где верхний пояс образо
61
Ван гнутым листом корытного профиля, а нижний пояс образован половиной разрезанной вдоль двутавровой балки, приваренной к полосе.
Сложны в изготовлении имеющие значительно более высокую пространственную жесткость коробчатые мосты трапециевидного (рис. 19, а) и треугольного (рис. 19, в) сечений. Первое сечение используют в кранах пролетом 10 ... 12,5 м, где из-за относительно небольших ширины и высоты листов еще отсутствует необходим мость в подкреплении их ребрами жесткости. Сечение, показанной
Рис. 19. Поперечные сечения монорельсовых мостов из лнетовых н профильных элементов:
а — сечение моста открытого профиля краев грузоподъемностью 3,2 * пролетом 12.5 и; 6 — трапециевидное сечение моста крана грузоподъемностью 3,2 т, пролетом 11 м; a — треугольное сечение моста крана грузоподъемностью 5 г, пролетом 30 и
на рис. 19, в, использовано заводом Баумеханик Барлебен (ГДР) для козловых кранов грузоподъемностью до 8 т и пролетом до 35 м. Это сечение образовано гнутым двухскатным верхним поясным листом, боковыми листами и двутавровой балкой. Пространственная жесткость сечения обеспечивается поперечными и продольными ребрами.
Аналогичные сечения находят применение также и в ряде кранов грузоподъемностью до 12,5 т и пролетами 20 ... 25 м, выпускаемых в ЧССР и ПНР.
В кранах, выпускаемых за рубежом, находят применение и другие типы мостов листовых конструкций с монорельсовыми направляющими; следует отметить четырехгранные мосты прямоугольного сечения в кранах с одностоечными опорами, у которых ездовая тавровая балка приварена к нижней кромке передней стенки.
В СССР распространены впервые предложенные в 1961 г. краны с трубчатой несущей балкой [А. с. № 142391 (СССР)]. При несомненной простоте изготовления в них отсутствует характерное для прямоугольных и трапециевидных сечений суммирование по углам контура напряжений от вертикальных и горизонтальных нагрузок. 62
Сечения, показанные на рис. 20, а, находят применение в кранах грузоподъемностью 3,2 ... 5 т и пролетами 10... 12,5 м. В частности, мост крана ККТ-5-12,5 изготовлен из трубы, к которой приварен стенкой по зигзагообразной линии тавровый профиль из разрезанного двутавра № 36М с усиливающей полосой. Для повышения горизонтальной жесткости стенку таврового профиля рдогда укрепляют поперечными ребрами. Этого же достигают в}(конструкции, показанной на рис. 20, б, где участки стенки разведены в противоположные стороны [А. с. № 303279 (СССР) 1.
а) Ь) б) г)
Рис. 20. Поперечные сечения трубчатых мостов: а — с тавровым монорельсом; б — с тавровым монорельсом и отогнутыми участками стенки монорельса; в — в промежуточными планками; г — в креплением двутавровой балки через швеллер
В конструкции, показанной на рис. 20, в, тавр подвешен с помощью системы отогнутых планок [А. с. № 520316 (СССР)]. Сечение их плавно уменьшается по направлению к трубе, что снижает изгибающий момент в месте приварки к трубе. Достоинством такой конструкции является возможность варьировать в определенных пределах вертикальную изгибную жесткость сечения, изменяя размеры планок.
В настоящее время наибольшим распространением пользуются мосты, выполненные по схеме на рис. 20, а, где между двутавровой балкой и трубой расположен промежуточный швеллер. Такая конструкция наиболее проста в изготовлении; однако расположение относительно больших масс металла (верхней полки балки и швеллера) вблизи нейтральной оси сечения несколько снижает их экономичность. Сечен недоказанное на рис. 20, г, применено в кране КС-5 грузоподъемностью 5 т пролетом 16 м (см. рис. 4,6) и ряде его модификаций. Здесь использована труба 429X8 в сочетании со швеллером № 10 и двутавром № ЗОМ.
При увеличении пролета свыше 16 м приходится по условиям вертикальной жесткости применять трубы диаметром 800 мм и более, в результате чего увеличивается масса и повышаются местные кольцевые напряжения в стенках трубы. Этого можно избежать, применяя шпренгельные системы; при соответствующем конструктивном оформлении они без изменения сечения несущей балки позволяют увеличить пролет до 25 м и более.
63
Секции трубчатых мостов соединяют с помощью сварных монтажных стыков (рис. 21\ [А. с. № 420544 (CCCP)L На заводском стенде к краям смежных секций приваривают соединенные распорными трубками 1 бобышки 2. К краям одной из смежных труб приваривают центрирующие ребра 3. Затем мост разбирают и транспортируют на место установки крана. Здесь секци моста- выставляют на подкладки и соединяют с помощью шпилек; зазоры между терцами секций заполняют шпатлевкой или заваривают. Устаиаа-
Рис. 21. Монтажный стык трубчатого моста
ливают и приваривают фасонные полунакладки 4 трубы и ромбовидные накладки 5 стенки двутавровой балки. После этого с нижней полки двутавровой балки удаляют бобышки и перекрывают эту полку накладкой 6.
Решетчатые мосты с монорельсовыми тележками применяют преимущественно в более крупных кранах — грузоподъемностью 5 ... 30 т и пролетами 20 ... 40 м.
По весовым показателям оптимальной схемой является показанная на рис. 22, а схема трехгранного сечения моста с трубчатыми верхними поясами и раскосами и нижним поясом двутаврового или таврового сечения. Необходимо отметить, что центр кручения такой системы смещен в сторону верхней грани. Это обусловливает возникновение значительных крутящих моментов от действующей на тележку горизонтальной нагрузки, что существенно сказывается на напряженном-состоянии "раскосов. Другой недостаток — затрудненность замены ездового профиля.
Ряд предприятий выпускает краны с мостами решетчатой конструкции, образованными взаимно перпендикулярными вертикальной и горизонтальной фермами (рис. 22, б). Вертикальная ферма состоит из ездовой двутавровой балки верхнего пояса и раскосностоечной решетки. К узловым косынкам последней приварены пластины, к которым на болтах или приваркой прикреплена двутавровая балка. Боковые нагрузки воспринимаются нижней горизон-64
тальной фермой, пояса которой поддерживаются наклонными под* косами.
Раздельное восприятие нагрузок (вертикальные — только центральной фермой, боковые — только нижней) существенно упрощает расчет конструкции. Жесткость моста на кручение мала, что делает целесообразным применение их для кранов, которые могут перемещаться по неровным путям — взаимный поворот опор не вызывает перенапряжений в конструкции.
Рис. 22. Решетчатые мосты с ездовыми монорельсами:
а — трехгранный трубчатый кран грузоподъемностью 5 v пролетом 35,1 м; б -»мост тавровой схемы} • — четырехгранный мост крана ККС-Ю. грузоподъемностью 10 » пролетом 32 м
Конструктивно стойки вертикальной и поперечной горизонтальной ферм совместно с подкосами образуют собираемые предварительно трехгранные рамки, к которым затем крепят верхний и боковые пояса. Размеры сечения мостов приведены ниже.
Грузоподъемность крана, т . . ' . . . 5
Пролет, м.............................. 16
Размеры сечения моста, мм (рис. 22, б): h................................. 1100
Ь................................. 1400
Сечения поясов: нижнего............................. I№ ЗОМ
верхнего...................... 2ц. 100Х
X 100Х 10 боковых........................ L Ю0Х
X 100X8
12,5 12,5 25 32 2620 2710 2400 2540
I№ 36М 2L 125Х X 125Х 10
L 80Х Х80Х8
I№ 45М 2|_ 125Х X 125Х 12
L Ю0Х X 100Х 10
Четырехгранные мосты с монорельсовыми ездовыми балками еще применяют в ряде козловых кранов грузоподъемностью 10 и 20 tj ККС-10, КК-20/5 и т. п. Сечение таких мостов (рис. 22, в) образовано четырьмя поясами из расположенных в тавр уголков. Пояса соединены раскосно-стоечными решетками из уголков. Двутавровая ездовая балка прикреплена на болтах к косынкам нижней грани и поддерживается размещенными в каждой панели фермы
3 Абрамович И. И. и др. 65
парными подкосами. Нижние пояса часто снабжают продольными полосами для боковых упорных роликов тележек.
Эта конструкция хорошо приспособлена для изготовления из уголковых прокатных профилей. Однако-наличие четырех граней, а также дополнительной подвески для монорельса усложняет ее изготовление и увеличивает металлоемкость. Тавровые составные стержни поясов и раскосов боковых решеток хорошо работают на продольный изгиб, но смежные внутренние поверхности их уголков не доступны для окраски. Ветровое сопротивление таких мостов велико. Здесь нужно отметить, что вне зависимости от принятого сортамента элементов фермы аэродинамическое сопротивление четырехгранных конструкций существенно (на 20 ... 30 %) выше, чем у трехгранных конструкций одинаковой с последними теневой площадью.
Изложенные соображения не позволяют рекомендовать схему, показанную на рис. 25, в, для применения во вновь разрабатываемых конструкциях, в особенности предназначенных к серийному изго'убвлению.
Об14йм недостатком мостов рассматриваемого типа является низкая долговечность ездового профиля, полки которого при интенсивной эксплуатации зачастую изнашиваются в течение 2 ... 6 лет. Это может быть устранено применением сниженных тавровых профилей, но отечественной промышленностью в настоящее время выпускаются преимущественно профили относительно малых размеров.
В некоторых конструкциях тавровый профиль крепят к стенке нижнего пояса болтами; применяют также направляющие с прикрепленными к полке двутавровой балки узкоколейными рельсами. Однако такие конструкции более металлоемки и в изготовлении трудоемки. Это относится также и к направляющим с ездовыми поверхностями, усиленными полосами из износостойкой стали.
Монорельсовые тележки неустойчивы в боковом направлении, что особенно неблагоприятно при креплении к тележке кабины управления.
К достоинствам мостов с двумя направляющими следует отнести снижение нагрузки на колеса ходовых тележек, обеспечение боковой устойчивости последних, а также возможность применения взамен тавровых профилей износостойких легкосъемных рельсов. Эти обстоятельства предопределили широкое использование разнообразных конструкций данного типа в кранах грузоподъемностью 3 т и выше.
Получили распространение мосты с двумя подвесными двутавровыми монорельсами, несущие конструкции которых имеют трех- и четырехгранное сечение. Здесь ездовые балки крепят на болтах или приваривают к поперечинам нижнего пояса; саму несущую конструкцию сваривают из труб или из уголковых профилей.
66
Интерес представляет мост (рис. 23), сваренный из алюминиевых элементов и примененный в кране грузоподъемностью 3 т пролетом 25 м, который предназначен для установки в приморском районе с повышенной влажностью. Пояса 1 выполнены из прессованных уголковых профилей, на концах полок которых предусмотрена разделка для сварки встык с листами 2 обшивки. Диафрагмы, сваренные из двутавровых элементов 3, при сборке мостов совместно с поясами образовали его каркас. Листы 2 крепят к диафрагмам заклепками через дистанционные прокладки.
Рис. 23. Мост из легкого сплава:
а » поперечное сечение; б «~ ездовая балка; в — поясной профиль
К нижней грани моста на болтах прикреплены специальные алюминиевые двутавровые профили 4, каждый из которых несет два стальных узкоколейных рельса 5.
Применение легких сплавов в данном случае позволило снизить массу металлической конструкции на 50 % по сравнению со стальной.
В местах с двумя двутавровыми направляющими боковые грани свободны, что обеспечивает удобное прикрепление опорных стоек. Однако работающие на изгиб поперечины нижнего пояса и две ездовые балки, не участвующие в работе моста, увеличивают массу конструкции, а ходовая часть грузовой тележки существенно усложняется в результате увеличения числа ходовых колес, перекатывающихся по обеим полкам каждой из двутавровых балок; долговечность последних ограничена. Это делает целесообразным использование таких схем преимущественно при единичном или мелкосерийном изготовлении кранов, где выгодно применение монорельсовых тележек типовых электроталей.
Некоторые предприятия изготовляют краны, у которых ездовые двутавровые балки являются нижними поясами. Однако несущая способность двутавровых балок, прикрепленных только верхней полкой, на сжатых участках снижается в результате эксцен-
3* 67
тричного действия продольной нагрузки и возможной потери их устойчивости. Поэтому иногда горизонтальную решетку пристыковывают непосредственно к стенкам балок. Здесь, в свою очередь, приходится считаться с дополнительными крутящими моментами, действующими на нагруженные только с внешних сторон балки. Замена изношенных ездовых балок возможна только в заводских условиях.
Наибольшее распространение в последнее время получили мосты с подвесными грузовыми тележками, перемещающимися по консольно расположенным направляющим. Здесь нужно выделить
Рис. 24. Мост крана КК-12,5-32: а — сечение моста; 'б — удел нижнего пояса; в — фланцевый стык поясов
группу решетчатых трубчатых кранов, изготовляемых преимущественно с наиболее экономичными трехгранными мостами. На рис. 24 показано сечение моста крана КК-12,5-32 1А. с. № 208913 (СССР) L Верхний пояс выполнен из одиночной трубы; подтележечный рельс уложен на полку неравнобокого уголка (рис. 24, б).
В ФРГ фирма К. Кайенбург применила для нижних поясов моста кранов грузоподъемностью 10 т сечение, показанное на рис. 25, а, где выполненные из пластмассы безребордные ходовые колеса и горизонтальные направляющие ролики перекатываются непосредственно по полке и стенке швеллера. Это исключает необходимость применения подтележечных рельсов и устраняет шум при движении тележки.
В конструкции крана, предложенной также в ФРГ, к трубё прикреплен поддерживаемый ребрами тавровый профиль, что позволило устранить неблагоприятно действующую эксцентричную нагрузку (рис. 25, б) и вместе с тем существенно повысило верти-68
кальную изгибную жесткость пояса и упростило размещение стыковых болтов.
На рис. 25, в показан узел нижнего пояса крана КК-32, где сплющенные концы раскосов примыкают непосредственно к вершине уголка. Такая конструкция хотя и относительно проста в изготовлении, но вследствие нйзкой прочности сварных соединений может быть рекомендована только при малой интенсивности использования крана.
На рис. 24, в показана конструкция монтажного стыка нижнего пояса крана КК-12,5-32. Во фланцах предусмотрены вырезы
Рис. 25. Нижние пояса трехгранных трубчатых мостов: а для неметаллических ходовых колес; б —• с промежуточным тавровым профилем} в « примыканием плющевых раскосов к вершине уголка
для пропуска подтележечных рельсов и имеются выточки для установки центрирующих втулок. Такое соединение, несколько трудоемкое в изготовлении, обеспечивает точное и надежное стыкование секций моста.
Нижние пояса крана КК-32 соединяют с помощью вильчатого стыка с закладным пальцем. В таком соединении практически невозможно избежать взаимной подвижности соединяемых элементов, что делает его непригодным для интенсивно эксплуатируемых кранов. Стыки верхних поясов обычно фланцевые, болтовые.
Некоторые зарубежные фирмы для увеличения пространственной жесткости иногда применяют четырехгранные трубчатые решетчатые мосты. Однако соответствующие показатели могут быть обеспечены и у более простых в изготовлении и экономичных трехгранных конструкций.
Для интенсивно работающих и рассчитанных на длительный срок службы кранов предпочитают применять мосты листовой конструкции.
В СССР получили распространение краны с мостом трапециевидного сечения (А. с. № 175196 (СССР) ]. Такой мост (рис. 26) имеет верхний утолщенный поясной лист, к которому примыкают наклонные боковые стенки. В местах скрепления стенок с уширенным листом нижнего пояса размещены коробки, несущие подтележечные рельсы. В стенках и нижнем поясе образованы проемы»
69
Пространственная жесткость обеспечена установленными в каждой панели рамными диафрагмами, а также продольными ребрами жесткости.
Проемы со скругленными углами, которые целесообразны при сечении моста высотой более 2 м, снижают на 5 ... 10 % металлоемкость конструкции, уменьшают на 15 ... 20 % ветровые нагрузки, обеспечивают возможность беспрепятственного доступа в полость моста, что позволяет размещать проходную галерею, электрооборудование и механизмы.
Рис. 26. Мост крана ККП-12,5 трапециевидного сечения: а -* сеченые моста; б — боковой вид панели моста
Значительная толщина верхнего пояса исключает необходимость подкрепления его ребрами жесткости, а более широкий нижний пояс хорошо воспринимает боковые нагрузки. Вместе с-тем в результате значительного объема сварочных работ, в том числе выполняемых вручную, трудоемкость изготовления таких мостов довольно высока.
Следует также иметь в виду, что эксплуатация кранов в зимнее время может быть затруднена вследствие набивания снега и льда в карман между стенками и подтележечными направляющими. Поэтому грузовую тележку рекомендуется оборудовать отвалами и щетками; в стенках для стока воды следует также предусматривать отверстия диаметром не менее 20 мм.
Для кранов грузоподъемностью до 30 т и пролетом 20 ... 40 м разработан мост замкнутого прямоугольного сечения, по нижнему поясу которого пропущены проведенные через стенки поперечины. На консольные концы последних уложены двутавровые балки, несущие подтележечные рельсы [691.
Стремление избавиться от выполнения сварочных работ в замкнутых полостях привело к созданию трубчато-балочного моста (рис. 27), в котором нижний поясной лист окаймлен двутавро-70
выми балками, несущими подтележечные рельсы [А. с. № 470469 (СССР) ]. Стенка имеет трубчатые верхний и нижний пояса, что обеспечивает пространственные жесткость и устойчивость конструкции. Боковые пояса поддерживаются поперечными ребрами. Такое сечение использовано в кранах ККЛ-12,5 и ККЛ-8. В последнем случае для снижения ветровой нагрузки в вертикальной стенке выполнены окна.
Примером использования трубчатых элементов заводского изготовления в кранах ограниченного пролета (16 ... 20 м) может
Рис. 27. Трубчато-балочный мост кранов типа ККЛ:
а — сечение мосте; б — узел боковой балки
Рис. 28. Трубчатый мост крана К-12,5
служить мост крана К-12,5 (рис. 28), где сваренные из уголковых профилей подтележечные балки подвешены к несущей трубе (А. с. № 812699 (СССР)]. Ходовые поверхности балок усилены полосой из износостойкой стали. Трудоемкость изготовления такого крана минимальна, что вполне оправдывает некоторый перерасход металла вследствие трубчатого сечения.
У пролетных строений, выполненных по схемам, показанным на рис. 24—28, в общем небольшая масса. Однако использование нижних поясов в качестве подтележечных направляющих несколько усложняет конструкцию. Кроме этого, примыканию опорных стоек по всей высоте моста препятствует необходимость оставления проемов для проходов ходовых частей тележек, в особенности приводных. Поэтому приходится устраивать дополнительные кронштейны для крепления стоек или придавать верхним частям последних Г-образный вид.
Этот недостаток отсутствует в кранах с внутренним расположением подтележечных направляющих, которые изготовляют по двум схемам — с замкнутым и открытым сечениями моста [1 ].
В первой схеме подтележечные балки с помощью болтов крепят на консолях кронштейнов, прикрепленных к нижней поперечине замкнутой несущей фермы. Балки и кронштейны в работе сечения не участвуют, а лишь передают нагрузку от грузовой те-
71
лежки на узлы несущей конструкции. Вследствие этого на 15 ... ... 20 % увеличивается масса моста. Однако здесь удобно выверить положение подтележечных рельсов. Упрощена конструкция ходовых частей тележки.
Вторая схема характеризуется тем, что подтележечные балки прикреплены к стойкам поперечных П-образных рам незамкнутого сечения, таким образом, тележка размещается внутри сечения моста. Однако поперечные рамы должны обладать достаточной жесткостью для того, чтобы предотвратить горизонтальное смещение подтележечных направляющих вследствие нагружения эле-
Рис. 29. Мост оболочечной конструкции крана грузоподъемностью 12,5 т пролетом 32 м:
а »» сечение места; б •- вид моста сбоку; в — узел крепления ездовой двутавровой балки
ментов этих рам изгибающими моментами. Наличие рам увеличивает металлоемкость мостов и сложность их изготовления, что в сочетании с затрудненным доступом к механизмам тележки, сделало применение этой схемы редким.
Конструкция пролетной балки, предназначенная преимущественно для кранов с однорельсовой консольно-подвесной грузовой тележкой и двухстоечными опорами грузоподъемностью 8 ... 32 т пролетами 40 м, представлена на рис. 29 (А. с. № 248939 (СССР) ].
Мост имеет каркас, образованный двутавровой балкой 1, несущей подтележечный рельс 2, системой вертикальных трубчатых стоек 3 и нижней балкой корытного профиля или двухтавровой балкой 4, внутренние полки которой являются направляющими для удерживающих горизонтальных роликов грузовой тележки. К вертикальной стенке двутавровой балки и внешним поверхностям полок балки 4 приварены кромки криволинейных тонкостенных обечаек 5.
По обеим сторонам каждой из стоек к внутренним поверхностям обечаек приварены дугообразные ребра 6. Пара этих ребер совместно со стойкой образует поперечную диафрагму. 'Вертикальная нагрузка от ходовых колес тележки распределяется балкой 1 72
между поперечными диафрагмами. Это разгружает тонкостенную оболочку от местного изгиба.
Наличие только двух пар продольных швов Существенно упрощает изготовление; для обеспечения местной устойчивости криволинейная оболочка не требует подкреплений. Поясные элементы способствуют увеличению несущей способности моста; в нем также не суммируются напряжения от вертикальных и горизонтальных нагрузок.
При изготовлении заранее собирают каркас из балок 1 и 4 и стоек 3, с которым затем соединяют обечайки 5 с заранее приварен-
Рис. 30. Мосты однобалочных кранов с консольными грузовыми тележками!
а — крана ККЛ-32 грузоподъемностью.32 т пролетом 32 м, б — кран К-50 грузоподъемностью 50 т пролетом 40 м >
ными ребрами 6. Таким образом, исключается необходимость трудоемкой и нежелательной сварки вручную в полости моста.
В однобалочных кранах с одностоечными опорами мосты, нагруженные крутящими моментами от консольных грузовых тележек, изготовляют только сплошностенчатыми. В этих кранах могут быть использованы все схемы, разработанные для мостовых кранов Пб, 58]. Однако в отечественном краностроении нашли применение мосты, показанные на рис. 30, а и б. При этом конструкция, показанная на рис. 30, б, с удерживающей двутавровой направляющей, характеризующейся относительно низкой износостойкостью, может быть рекомендована только для кранов ограниченной интенсивной эксплуатации.
Двухбалочные мосты. Пролетные балки двухбалочных мостов по конструкции обычно сходны с балками мостовых кранов. Такне мосты имеют сравнительно большую массу; использование их оправдано преимущественно в кранах небольших пролетов (16 ...
73
Рис. 31. Балки мостов двухбалочных кранов:
а — грузоподъемностью 8... 20/5 т пролетом 32 м;
б — грузоподъемностью 8... 12,5т пролетами 16...
... 25 м
лого режима работы
... 25 м), где абсолютная разница в металлоемкости не очень велика. Также весьма существенна возможность изготовления пролетных балок на технологически отработанных линиях производства балок мостовых кранов и применения типовых опорных грузовых тележек.
На рис. 31 показаны сечения балок, основные размеры которых даны в табл. 23. Сравнительно большая по сравнению с мостовыми кранами ширина пролетных балок вызвана необходимостью увеличения горизонтальной жесткости балок. В особенности это относится к балкам кранов К-12,5М (рис. 31, б), мосты которых имеют только концевые поперечные связи.
-В конструкции листовых мостов применяют монтажные болтовые стыки как с накладками, так и фланцевые. Как правило, листовые конструкции используют в кранах, предназначенных для длительного использования на одном объекте без перебазирования. Это делает целесообразным использование сварных монтажных стыков. Для кранов тяже-такие стыки следует выполнять на стыко
вых швах с применением неразрушающих методов контроля. Для менее интенсивно эксплуатируемых кранов целесообразно использовать стыки на накладках с дополнительными фиксирующими приспособлениями.
Пример болтового фланцевого стыка крана ККТС-20 (грузоподъемностью 20 т пролетом 40 м) приведен на рис. 32. В нем
Таблица 23
Характеристики балок двухбалочных мостов кранов
Показатель 1 CJ X 8 •о CJ £ * Г8Т40 20/5Т25
Грузоподъемность, т 12,5* 12,5 8 20/5
Пролет, м 16 25 32 32
Высота стенки h, мм 916 1250 1560 1500
Ширина пояса Ь, мм 50 750 750 750
Толщина стенки 60» мм 5 5 5 6
Толщина пояса 6П, мм 8 10 10 16
* Рельс расположен около внутренней стенки балкн.
74
Рис. 32. Фланцевый стык моста крана ККТС-20 грузоподъемностью 20 т пролетом 40 м
rio углам предусмотрены шпильки увеличенного сечения, изготовленные из высокопрочного материала и рассчитанные на передачу усилий, действующих по поясам. Фланцы подкреплены системой ребер жесткости, связывающих их с накладками, размещенными по периметру сечения.
6, СТОЙКИ ОПОР
Стойки опор помимо весовой нагрузки должны воспринимать также ветровые и инерционные горизонтальные нагрузки, действующие вдоль моста крана и крановых путей.
По сочленению с мостом различают жесткие опоры, рассчитанные на восприятие действующих вдоль моста нагрузок, и гибкие опоры, податливость стоек которых должна компенсировать деформацию остова крана и неточности его изготовления и укладки подкрановых путей. Иногда гибкие опоры выполняют с шарнирным соединением стоек с мостом.
У кранов с двухстоечными опорами стойки каждой из опор образуют портальную раму. Расчеты и исследования показали, что изгибающие моменты, действующие по стойкам в направлении крановых путей, относительно невелики. Зато стойки интенсивно работают в поперечном направлении, что в значительной мере обусловливает их размеры и конструктивные особенности.
Поэтому в большинстве новых конструкций сечения стоек жестких и гибких опор не развивают в направлении плоскости опор. Часто соответствующие размеры сечений ограничивают из условий продольного изгиба.
Стойки жестких опор. В кранах с одной гибкой и другой жесткой опорой при относительно небольшой высоте (10 ... 12 м)
75
Рис. 33. Стойки i
а — жесткой опора крана КК-12,5-32 грузоподъемностью 12,5 т пролетом 32 и; б —' ;
• ККО-12,5, грузоподъемностью 12,5 т пролетом 32 м; г — короб i
применяют преимущественно двухветьевые стойки. Ширину их по ! верху для лучшего восприятия нагрузок, действующих вдоль моста, принимают в пределах V8 ... г/& высоты. По верху, а также и у фланцев крепления к мосту, пояса стоек соединяют поперечинами. Там же обычно находятся проушины для соединения с шарнирами моста.
Конструктивно наиболее просто стойки выполняют с поясами • из труб или коробок постоянного по высоте сечения и соединенных сваркой прокатных или гнутых профилей (рио. 33, а). У верхних ( концов пояса стоек снабжены проушинами. У нижнего конца одна из труб стойки проведена до опорного фланца, что позволило ограничиться фасонной обрезкой и приваркой только второй трубы. В некоторые.конструкциях в нижней части стойки предусмотрена ! опорная коробка переменного сечения из двух полутруб, перекрытых трапециевидными листами. Коробка соединена с поясными .трубами поперечной диафрагмой.
У кранов, монтируемых в два этапа, в месте разъема у верхних секций стоек предусмотрены поперечины, снабженные фланцами j для соединения с ходовыми тележками.
76 j
опор кранов:
крана КС-12,5, грузоподъемностью 12,5 т пролетом 25 м; в — жесткой опоры крана чатая стойка крана К-12.5М, грузоподъемностью 12,5 т пролетом 16 м
Применяют также стойки с поясами из прокатных швеллеров и двутавровых балок (рис. 33, б). Здесь в плоскости наименьшей жесткости для обеспечения устойчивости пояса связывают поперечинами и раскосной решеткой. Размеры стоек некоторых кранов даны в табл. 24.
Более экономичны стойки с поясами переменного сечения; на рис. 33, в показана конструкция оболочечной стойки крана ККО-12,5. Пояса образованы гнутыми профилями 1 постоянного по длине сечения, к которым внахлестку приварены боковые листы 2 переменного сечения. Несмотря на то что поперечины стоек нагружены относительно слабо, в углах их сопряжения с поясами могут действовать существенные изгибающие моменты, что следует учитывать при конструировании стоек.
В двухбалочных кранах грузоподъемностью 8 ... 12,5 т применяют одноветвевые стойки коробчатого сечения; ширина таких . стоек в верхней части составляет 1/9 ... Vjj их высоты. На рис. 33, г показана стойка опоры крана К-12.5М. Пояса стоики образованы гнутыми профилями корытного сечения. Листовая обшивка подкреплена' уголками жесткости. Стойка имеет коробчатый оголо-
77
Таблица 24
Характеристика двухветвевых стоек жестких опор козловых кранов
Показатель Краны с одной жесткой, другой гибкой опорами Краны с обеими жесткими опорами
КС-б “1 2 £ £ * ККП-12,5 К К-20/5 КК-32 1 К КТ-5-12,5 КС-12,5 КК-12.5М ККЛ-12,5
Г рузоподъемность крана, т 5 12,5 12,5 12,5 20/5 32 5 12,5 12,5 12,5
Пролет, м 16 16 32 32 32 32 12,5 25 25 ’ 32
Вертикальная на* грузка на ходовую тележку, кН Основные размеры, мм: 80 200 220 280 320 410 80 200 210 380
h 9400 12 560 14 250 16 100 17300 17000 8600 10 800 14 400 17 500
hi 9100 11900 12 866 14 800 15 500 14 700 8600 10 800 11 700 16 000
b 1600 2 500 3800 2800 3 500 2 600 1250 3 600 3600 2 400
bl Сечение ветви стой- 360 500 Круглое 530 350 Квад|: 600 >атное 500 ззохТ 350 'лое 273x5 650 Шве. 300 плер 350 Круглое 530x8
ки, мм 273X6 426x6 429x8 400 X X 500 x6 350Х X 480X8 № 30 № 30
Масса стойки, кг 1070 1850 2800 3300 3000 4000 850 1570 2030 5000
вон, соединяемый о проушинами кронштейна моста осями с раз-
резными конусными втулками.
В разработанных ранее кранах ККС-10, К-6Б и др. применены более сложные по конструкции и громоздкие пространственные решетчатые стойки трех- и четырехгранного сечений. Использование стоек такого вида (преимущественно трубчатых) может быть оправданно в кранах в увеличенной высотой подъема.
некоторых кранов, например у
Рис. 84. Опоры в увеличенным проемом между стойками:
а — а наклонными кронштейнами; б — с промежуточными проставками
Стойки гибких опор по конструкции обычно аналогичны ветвям стоек жестких опор. Однако у у крана ККС-10, стойки выполняют с увеличивающимся по высоте сечением из двух швеллеров, соединенных раскосной решеткой или системой стоек.
У кранов в одностоечными опорами стойки имеют прямоугольное сечение. Наличие консольной нагрузки заставляет развивать сечения стоек в направлении крановых путей. У крана К-50 стойки прикре
плены к ходовым балкам шарнирно и удерживаются расположенными е тыльной стороны наклонными подкосами.
Иногда для увеличения габаритных размеров опорных рам применяют Г-образные стойки. Однако в месте перегиба возни-
кают дополнительные крутящие моменты и существенная концентрация напряжений, что требует дополнительного усиления узла и особо тщательного его изготовления.
Непрямолинейность стоек также приводит к возникновению при монтаже значительных изгибающих моментов от усилий в стяжных полиспастах. Поэтому целесообразно, оставляя стойки прямолинейными, вводить в местах их примыкания промежуточные кронштейны (рис. 34, а).
На рис. 34, б показана схема опорной части унифицированных козловых кранов фирмы Аумунд. Здесь при нормальной сборке стойки примыкают непосредственно к мосту. В исполнении, предназначенном для работы с длинномерными грузами, к пролетному строению крепят дополнительные проставки (на рисунке показано штриховой линией), что увеличивает проем в свету между стойками опор до необходимого размера.
Стойки болтовыми фланцами, расположенными в нижней части, опираются на ходовые тележки или ходовую балку. При опирании на тележку в центре фланцевого соединения предусматривают центрирующий штифт, что позволяет при наличии овальных отверстий под болты выверять при монтаже положение ходовых тележек в горизонтальной плоскости.
У кранов в балансирными тележками стойки часто снабжены кронштейнами с проушинами для оси шарнира тележки. Эти
79
кронштейны также соединяют со стойками фланцевыми соединениями.
При конструировании стоек следует особо внимательно подходить к выполнению технологических поперечных стыков. При соединении частей стоек через диафрагмы швами угловых соединений необходимо предусматривать систему усиливающих косынок.
Однако более целесообразно соединять части стоек швами стыкового соединения; такими же швами рекомендуется соединять профили и полосы, из которых сваривают стойки коробчатого сечения.
7. УЗЛЫ СОПРЯЖЕНИЯ СТОЕК ОПОР С МОСТОМ
Эти узлы являются одними из наиболее ответственных элементов крана. Они должны быть выполнены без зазор'а. Кроме того, конструкция их должна обеспечивать удобный доступ при монтаже крана, а также компенсировать возможные погрешности монтажа, желательно без применения монтажной сварки.
В настоящее время для большинства кранов предусмотрен монтаж путем стягивания стоек. Это предопределяет необходимость сопряжения последних с мостом с помощью шарниров, оси которых параллельны продольной оси моста, а также фланцевых болтовых соединений, которые рассчитывают на сравнительно небольшие нагрузки, действующие перпендикулярно продольной оси стойки.
Рис. 35. Узел примыкания опорных стоек к мосту крана ККП-12,5
В конструкции, показанной на рис. 35, фланцы подняты над нижней гранью моста для пропуска ходовых колес грузовой тележки, что несколько усложняет конструкцию моста и увеличивает нагрузку на элементы крепления стоек. Этот недостаток отсутствует у кранов с монорельсовыми тележками, имеющими свободные боковые грани моста. Часто кронштейны фланцев стоек приваривают после окончания стягивания стоек и соединения их по низу стяжкой.
80
При наличии в шарнирах хотя бы небольших зазоров под действием горизонтальных нагрузок, особо интенсивно проявляющихся у быстроходных кранов, стойка будет смещаться относительно моста, что приведет к перегрузке отдельных элементов металлоконструкций. Например, фланцевые соединения начинают .передавать крутящие моменты в плоскостях разъема, на что эти соединения и примыкающие к ним элементы не рассчитаны. Для устранения этого недостатка предложен ряд усовершенствованных конструкций сопряжения стоек с мостом.
Шарнир, показанный на рис. 35, применяют в кранах ККП-12,5, ККЛ-8 и др. [А. с. № 222620 (СССР)!. Палец 1 посажен без зазора в центральную проушину 2 и застопорен от случайных перемещений болтом 3, Между наружными поверхностями его конусных хвостовиков и внешними проушинами помещены разрезные конусные втулки 4, которые затягиваются с помощью гаек 5. При монтаже гайки ослабляют, что дает возможность свободно поворачивать опоры относительно моста. После окончания монтажа гайки затягивают, и втулки полностью выбирают зазоры в соединении.
Стойки обеих жестких опор крана КС-12,5 разбиты на две секции, соединенные болтовым стыком IA. с. № 549406 (СССР)]. Верхние секции, по длине примерно равные высоте моста, имеют шарниры и крепежные фланцы. Йх достаточно точно, с минимальными зазорами в шарнирах, подгоняют к мосту в заводских условиях. Фланцевые соединения передают в основном сжимающие нагрузки. Помимо крепежных болтов одно фланцевое соединение каждой стойки имеет поперечный шарнир, другое — опорные болты, позволяющие изменять угол наклона нижней секции в пределах, необходимых для компенсации неточностей изготовления крана. После выверки в зазоры между фланцами заводят прокладки.
В кранах ККС-10 (рис. 36) каждая из стоек жесткой опоры соединена с нижним поясом моста с помощью плоской промежуточной фермы. Эта ферма воспринимает как осевые нагрузки, так и боковые, возникающие при перекосе крана. Между боковыми фланцами промежуточной фермы и стойкой жесткой опоры установлены компенсирующие прокладки. Этим обеспечивается сборка опоры крана с мостом без применения монтажной сварки. Болтовыми фланцами ферма соединяется с кронштейнами моста, которые приварены к дополнительным стойкам моста. Стойки, выполненные из гнутого корытного профиля, имеют около- верхнего пояса моста проушины для осей верхнего шарнира стойки.
В ряде случаев наиболее целесообразно крепить стойки с помощью расположенных почти горизонтально фланцевых болтовых соединений; такие соединения, передающие преимущественно сжимающие усилия, надежны в работе. При этом монтажные шарниры располагаются в внешних сторон фланцев и выполняются со значительными зазорами; при расчете узла в рабоче.м состоянии их не учитывают.
81
Рис. 36. Узел примыкания стойки жесткой опоры к мосту крана КК.С
82
Пример выполнения такого узла показан на рис. 37. Здесь крепление стойки 1 к мосту 2 осуществляют с помощью шарнира 3. Крайнее положение стойки 1 в процессе монтажа крана ограничивается упорами 4.
В последнее время в некоторых отечественны^ и зарубежных
кранах начали применять самоустанавливающиеся шарнирные узлы сопряжения опорных стоек с мостом. У крана КК-12,5-32 [А. с. № 600077 (СССР) ] (рис. 38, а) в гнездах кронштейнов верх* него пояса моста посажены эксцентриковые втулки /, служащие
опорами для осей 2 крепления стоек. Эти оси имеют бочкообразную рабочую поверхность, что обеспечивает само-установку проушин 'стоек. Наличие эксцентриковых втулок позволяет путем их поворота регулировать положение стоек опор. Помимо этого каждая из стоек крепится к конструкции моста 3 с помощью поперечной тяги 4, снабженной вертикальными шарнирами 5 и 6 (рис. 37, б). При работе крана тяга не препятствует самоустановке стойки шарнирной опоры. Такие узлы, просты в сборке, однако требуют повышенной точности изготовления, необходимой для предотвращения быстрого ослабления шарниров.
Рис. 37. Фланцевое соединение опорной стойки: / — кронштейн моста; t — стойка; 3 — ограничительные упоры
В кранах с двухбалочными мостами стойки опор обычно крепят к стойкам поперечных П-образных рам, соединяющих между собой пролетные балки моста. У кранов Г8Т40 и их модификаций стойки П-образных рам имеют в нижней части кронштейны, на
которые шарнирно опираются балки моста, удерживаемые также с помощью боковых фланцевых соединений. Рамы выполнены
каждая из двух половин, скрепленных болтовыми стыками с на
кладками; сверху они связаны легкими диагоналями из уголковых элементов. Рамы сложны по конструкции; они обладают массой, составляющей 8 ... 15 % массы пролетных балок.
Скрепление рам с балками с помощью шарниров и болтовых фланцевых соединений создает неопределенность напряженного состояния узла, что часто приводит к преждевременному выходу
его из строя.
В кранах КК-12,5-25 конструкция П-образных рам упрощена тем, что каждая из стоек болтами крепится к кронштейнам, соединенным со стенками балки моста. Здесь стыки воспринимают все рабочие нагрузки; головные шарниры используют только для монтажа крана.
Такая конструкция более проста в изготовлении и имеет несколько меньшую массу, хотя число стыковых болтов здесь существенно больше.
83
В рассмотренных конструкциях пролетные балки, помимо П-образных рам, соединены между собой и концевыми балками коробчатого сечения. Таким образом, балки связаны между собой несколькими поперечными связями, что существенно усложняет их изготовление. Расчет таких кранов трудоемок. Распределение усилий в элементах моста и опорных узлов в значительной мере определяется качеством выполнения многочисленных шарнирных и болтовых соединений.
Рис. 38. Шарнирное сочленение стойки опоры с мостом крана КК-12,5-32: а — узел крепления головки стойки к кронштейну верхнего пояса моста; б — тяга крепления стойки к конструкции моста
В некоторых кранах этот недостаток частично устранен тем, что в опорных узлах размещают не две, а одну раму. По такой схеме выполнены опорные узлы крана КК-5, где к основаниям П-образных рам подсоединены промежуточные коробки с горизонтальными фланцами для соединения с фланцами коробчатых опорных стоек; на всех фланцах предусмотрены проушины для внешних монтажных шарниров.
При относительно небольших вылетах консолей удается вообще отказаться от сложных и металлоемких поперечных рам, сохранив, однако, достаточно жесткие концевые балки.. В результате упрощаются изготовление и расчет кранов. Так, выполнены, например, краны К-12.5М (см. рис. 4, г) и К-8 Комсомольского-на-Амуре завода подъемно-транспортного оборудования. Для повышения жесткости моста на этих кранах увеличена ширина пролетных и концевой балок (см. табл. 23), также толщина стенок на консолях (до 6 мм); стойки крепят к кронштейнам моста с помощью шарнир* ных осей с зажимными конусными втулками (см. рис. 35) и болтовых фланцевых соединений.
8. СТЯЖКИ
Стойки двухстоечных опор связаны стяжками (рис. 39), прикрепляемыми к нижним частям стоек или непосредственно к ходовым тележкам.
Ь4
При шарнирном креплении концов стяжки являются только соединительным элементом, испытывающим растяжение-сжатие. Здесь стяжки изгибаются только под действием собственной силы тяжести, за исключением случаев, когда они несут противоугонные захваты. Крепят такие стяжки с помощью пальцев, что упрощает монтаж крана. Однако вследствие значительной податливости стоек опор при изгибе влияние возможных зазоров в шарнирных соединениях несущественно.
Рис. 39. Стяжки опор
Стяжки этот4© вида применяют при центрировании стоек в плоскостях опор на оси ходовых колес (или балансиров двухколесных тележек). При креплении непосредственно к рамам тележек (рис. 39, а) стяжки могут быть расположены в непосредственной близости от рельса. Это упрощает установку на стяжках противоугонных захватов. Вместе с тем снижается опасность стягивания стоек при деформации стяжки под действием случайно упавшего на нее груза; для полного исключения такой возможности, а также для предотвращения их разрушения стяжки иногда оборудуют поддерживающими роликами, перекатывающимися по крановым рельсам.
При двухколесных балансирных тележках соединение стяжек непосредственно с рамами тележек может повлечь за собой перенапряжение металлической конструкции вследствие поворота тележки от прохода по стыку, схода колес с рельсов и т. п. Поэтому такие конструкции могут быть рекомендованы только при качественном устройстве и содержании подкрановых путей.
Стяжки, прикрепляемые к рамам тележек (только одноколесных) с помощью болтовых фланцевых соединений, несколько осложняют монтаж крана. Однако при этом повышается жесткость опорных рам; такое крепление в определенной мере способствует повышению устойчивости стоек. Вместе с тем в заводских условиях можно собрать тележки со стяжкой с необходимой точностью.
При креплении стяжек к основаниям стоек (рис. 39, б) упрощается демонтаж ходовых тележек. Стяжки должны быть рассчитаны на нагрузку, действующую на них при вывешивании ходовой
85
части; приходится также считаться с дополнительными изгибающими моментами, нагружающими стойки и являющимися следствием смещения стяжки, по отношению к осям ходовых колес (или шарниров балансирных тележею.
У некоторых кранов для упрощения конструкции стяжки выполняют в виде концевых балок, снабженных ходовыми колесами и механизмами передвижения. Балки (рис. 39, в) работают на изгиб в вертикальной плоскости от вертикальных нагрузок на ходовые колеса и в горизонтальной плоскости — от осевых нагрузок. Осевые нагрузки вызывают скручивание стяжек, это в 1,5 ... ... 2 раза увеличивает их массу.
Однако смещение оснований стоек от осей колес улучшает компоновку механизмов передвижения при применении вертикальных и горизонтальных зубчатых редукторов.
Для обеспечения монтажа путем стягивания стоек концевые балки выполняют из двух частей, соединенных болтами, а у оснований стоек помимо фланцевых соединений размещают монтажные шарниры.
Сечения стяжек образуются четырьмя уголками, связанными раскосной решеткой, или двумя швеллерами, соединенными горизонтальными поперечными планками. При колесной базе более 8 м, стяжкам иногда придают трапециевидное очертание, изготавливая их из окантованных уголками листов. Применяют также трубчатые стяжки.
Размеры сечений стяжек назначают исходя из условий обеспечения их жесткости в вертикальной плоскости; высота их обычно составляет 1/25 ... 1/30 длины и на 30 ... 40 % превышает ширину. При меньшей высоте стяжки легко деформируются.
9. ПЛОЩАДКИ ОБСЛУЖИВАНИЯ, ГАЛЕРЕИ, ОГРАЖДЕНИЯ
Краны должны быть оборудованы системой площадок, лестниц и галерей для доступа к механизмам крана и электрооборудованию. Устройство и расположение их должны соответствовать требованиям Правил Госгортехнадзора.
Вдоль всего пролетного строения должна быть предусмотрена проходная галерея. Исключение составляют краны с электроталями без подвижных кабин управления и при отсутствии на мосту устройств, нуждающихся в регулярном обслуживании. Эта галерея должна обеспечивать возможность доступа на нее из кабины при остановке последней в любом месте моста.
Краны с двухбалочными мостами листовой конструкции иногда оборудуют боковыми площадками, прикрепляемыми к балкам моста. Несущие площадку кронштейны следует приваривать непосредственно против ребер или диафрагм или размещать под ними промежуточные подкладки, распределяющие сосредоточенную на* грузку на значительную площадь стенки [23].
86
Замеры, проведенные при испытаниях крана с приваренным к верхнему поясу балки настилом, показали, что по всей его ширине напряжения распределяются достаточно равномерно и практически равны напряжениям в верхнем поясе. Вместе с тем в местах перерыва настила, на верхнем поясе, были выявлены напряжения, примерно в 2 раза превосходящие напряжения в соседней точке пояса балки, что является результатом резкого изменения сечения пояса, возникающего вследствие приварки настила с перерывом.
Для расположения настила боковой площадки на уровне верхнего пояса его можно крепить двумя способами: на болтах к поддерживающим кронштейнам со свободным опиранием на верхний пояс балки; приваривать сплошным швом к верхнему поясу.
При втором способе настил учитывают при расчете балки; однако он должен быть выполнен из стали соответствующей марки, приварен сплошным качественным швом, при необходимости снабжен ребрами жесткости и т. п. Такой способ крепления настила в результате включения его в работу верхнего пояса позволяет на 10 ... 20 % увеличить вертикальную и особенно горизонтальную жесткость балки.
На одной из опор обычно предусмотрены площадки для обслуживания механизмов грузовой тележки. У кранов с электроталями площадки часто выполняют откидными: при работе их поднимают, и они не препятствуют передвижению тали с грузом.
В тех случаях, когда питание крана током осуществляется с помощью троллей, на конце моста предусматривают люльку для обслуживания токосъемников.
Для доступа к элементам, обслуживают которые только при монтаже крана или эпизодически (например, стыковые соединения пролетных балок), могут служить лестницы и проходы, не снабженные ограждениями. На местах работы монтажников должны быть предусмотрены элементы для крепления предохранительных поясов. Для элементов и устройств, обслуживают которые крановщики или не подготовленные для верхолазных работ рабочие, должны быть предусмотрены соответствующие ограждения.
Эти требования не обязательны, если кран обслуживают с помощью сторонних средств, например автомобильных гидроподъемников, или кран оснащен люльками или площадками, подвешиваемыми на мост и стойки опор Для проведения осмотров, окраски и ремонтов.
Суммарная масса ограждений, лестниц, площадок и других элементов для кранов пролетом 16 и 32 м может быть соответственно 0,5 ... 0,8 и 0,6 ... 1,5 т: меньшие значения — для кранов без специально устроенных проходных галерей моста.
В кранах с подвижными кабинами предусмотрены посадочные площадки, монтируемые обычно на опоре. Эти площадки в местах перехода в кабину должны быть оборудованы дверями или откидными ограждениями (цепочками, штангами и т. п.), которые
87
обеспечивают безопасное нахождение людей на площадке при отсутствии около нее кабины. Желательно, чтобы кабина была оборудована промежуточной переходной площадкой, стыкующейся со стационарной.
При применении подвижных кабин должна быть обеспечена возможность аварийного выхода обслуживающего персонала на мост (или площадку) при любом положении кабины в пролете. ,}
При расположении лебедок на мосту около них предусматрИ', вают площадку обслуживания; над лебедками целесообразно устраивать навес, защищающий их от дождя и снега.
Самоходные грузовые тележки следует снабжать легкосъемными кожухами. Допускается в месте стоянки тележки укреплять на мосту защитный кожух или щит. Такой же щит необходим для электроталей, которые, как правило, плохо приспособлены для работы вне помещения. Легкосъемными кожухами должны снабжаться установленные вне общих ограждений тормоза и, желательно, электродвигатели.
10. ВЫБОР ТИПА МЕТАЛЛИЧЕСКОЙ КОНСТРУКЦИИ КРАНА
Основные положения. При надлежащих конструктивных формах и размерах элементов металлической конструкции работоспособность и долговечность может быть обеспечена при любом ее типе — листовой, решетчатой из профильной стали или трубчатой и т. д.
Тип металлической конструкции выбирают каждый раз на основании данных технико-экономического анализа с учетом производственных возможностей предпр и яти я-изготовителя.
Основное внимание следует обращать на наиболее трудоемкий в изготовлении элемент — мост.
При проектировании кранов выбор вариантов металлоконструкции основывают на анализе и сопоставлении ряда показателей, часть из которых может иметь качественную оценку.
К этим показателям относят: стоимость изготовления с учетом металлоемкости, трудоемкости и необходимых производственных площадей; вертикальные нагрузки на ходовые колеса крана, влияющие на расходы по устройству крановых путей; ветровую нагрузку рабочего состояния, от которой зависит мощность приводов механизмов передвижения, а следовательно, их стоимость и расход электроэнергии (в значительной мере этим обусловливаются также и перекосные нагрузки на кран); ветровую нагрузку нерабочего состояния, обычно учитываемую при выборе противоугонных захватов; общую площадь поверхностей элементов конструкции крана, окрашиваемых при изготовлении и эксплуатации (периодичность окраски поданным практики 2—3 года); транспортные расходы, обусловленные дальностью перевозки, числом транспортных мест, числом необходимых единиц железнодорожного состава, а также номенклатурой необходимого перегрузочного обо-S3
рудования; трудоемкость монтажа, которая зависит от массы конструкции, типа и конструктивного выполнения стыковых соединений и др.
Основным критерием выбора типа конструкции является ее экономическая эффективность, определяемая соответствующим расчетом. Однако при сопоставлении данных различных типов конструкций, в случае выявления существенной разницы в значениях основных показателей, можно не определять приведенного экономического эффекта.
Выбор конструктивной схемы крана. Влияние конструктивной схемы на металлоемкость кранов и на трудоемкость их изготовления можно оценить, сопоставляя их массу.
Однако приходится считаться с различным подходом к проектированию и расчету кранов. Поэтому представляют интерес и результаты специально выполненных и основанных на одинаковых исходных предпосылках проектов.
В табл. 25 приведены значения линейной массы мостов кранов грузоподъемностью 12,5 ... 32/8 т пролетом 32 м и вылетом консолей 8 м.
Расчеты выполнены для прогибов на консоли от подвижной нагрузки в 1/225 и 1/150 вылета консоли; в последнем случае вводилось также ограничение и по действующему напряжению; минимальная толщина листов 6 = 5 мм.
В табл. 26 приведены данные, характеризующие расчетную трудоемкость изготовления мостов различных типов.
Расчетные массы кранов с оболочечным, однобалочным и двухбалочным мостами равны соответственно 71, 72 и 89 т.
Данные, приведенные в табл. 25 и 26, показывают нерациональность кранов с двухбалочными мостами. Примерно такие же соотношения имеют’место и у кранов с другими размерными показателями. Для двухбалочных кранов, характеризующихся сравнительно низкими балками, при увеличении вылета консолей масса будет резко увеличиваться.
В табл. 27 приведены сопоставительные данные по мостам козловых кранов грузоподъемностью 12,5 т пролетом 32 м при среднем режиме работы. Приведенные в этой таблице соотношения сохраняются в основном и для кранов других пролетов.
Необходимо отметить, что резкое уменьшение ветровой нагрузки позволяет для трубчатых решетчатых кранов, при прочих равных условиях, уменьшать на 30 ... 45 % мощность механизмов передвижения крана.
Соответствующие расчеты показывают, что при скорости передвижения 1,2 ... 1,5 м/с для кранов грузоподъемностью 12,5 ... 20т пролетом 25 ... 32 м только в результате уменьшения мощности самих механизмов передвижения масса крана снижается на 250 ... ... 600 кг и эксплуатационные расходы на 0,5 ... 0,8 тыс. руб. в год. С учетом снижения массы и трудоемкости изготовления противоугонных захватов, металлоемкость, стоимость изготовления
Таблица 25
Линейная масса мостов листовой конструкции, кг/м___________
Тип моста Высота балки h, мм Расчетный прогиб (1/150)£.к Расчетный прогиб (i/22)5LK
Грузоподъемн ость крана, т
12,5 20/5 32/8 12,5 20/5 32/8
Оболочечный 2100 400 470 690 460 700 900
2300 440 440 520 440 560 930
Однобалочный короб- 2100 530 740 930 740 970 1100
2200 590 590 570 560 620 950
2400 610 610 610 610 670 980
<8
d_ Ы
Двухбалочный короб- 1600 670 690 870 680 680 1280
чатый
<8
Таблица 26
Показатели трудоемкости изготовления мостов различных типов
Показатель Тип конотрукции
Оболочечная, h «-2300.ММ Однобалочная, k » 2200 мм Двухбалоч> иая
Число деталей сварной конструкции Протяженность сварных швов, м Трудоемкость сборкн-еварки 1 т моста/нормо-чао Примечание. В числителе при ле — при автоматической сварке. 680 800 520 21 ведена общая 780 1120 670 26 длина швов 840 1150 460 30 в анаменаее-
SO
Таблица 27
Сопоставительные данные (в %) мостов кранов грузоподъемностью 12,3 т пролетом 32 м при среднем режиме работы
Конструкция 3 и со 2 Трудоемкость Число деталей Протяженность сварных швов Ветровые нагрузки Площадь окрашиваемой поверхности
Листовая сплошностенчатая:
двухбалочная 100 100 100 100 100
однобалочная коробчатая 78 87 92 >97 90
однобалочная оболочечная Решетчатая из профильной стали: 60 70 81 ,70 95 80
трехгранная с монорельсом 50 82 220 45 70 80
четырехгранная с монорельсом 55 88 240 50 80 90
Решетчатая трубчатая трехгранная двухрельсовая 45 75* ПО 35 45 50
« При наличии специального оборудования для фасонной резки концов труб.
и эксплуатационные расходы снизятся соответственно на Г ... 2, 2...3 и 3 ... 5 %. Помимо этого уменьшение ветровой нагрузки позволяет на 1 ... 3 % снизить массу несущей металлической конструкции. С учетом снижения металлоемкости и трудоемкости изготовления самой металлоконструкции, суммарные значении (в сравнении с решетчатой конструкцией из уголков) составят соответственно 8 ... 12, 5 ... 10 и 2 ... 5 %.
Очевидно в зависимости от серийности изготовления и конкретных условий производства эти значения могут варьироваться в широких пределах.
У кранов, предназначенных для работы в тяжелом режиме, приходится учйтывать относительно высокую концентрацию напряжений, характерную для узлов металлоконструкций. Это часто приводит к тому, что металлоемкость кранов решетчатых конструкций делается равной или большей, чем у кранов листовых конструкций, менее трудоемких в изготовлении.
Из числа листовых конструкций, при прочих равных условиях предпочтение следует отдать оболочечным. Помимо прочих особенностей, они более надежны в эксплуатации — криволинейные оболочки менее чувствительны к местным повреждениям.
Двухбалочные козловые краны, характеризующиеся относительно высокой металлоемкостью, рекомендуются к применению только тогда, когда это диктуется требованиями унификации с выпускаемыми на тех же предприятиях мостовыми кранами.
91
Г лава 4
РАСЧЕТ МЕТАЛЛИЧЕСКИХ КОНСТРУКЦИЙ
1. МЕТОДЫ РАСЧЕТА. ОСНОВНЫЕ ПОЛОЖЕНИЯ
Металлические конструкции козловых кранов следует рассчитывать по методу предельных состояний. Для козловых кранов рассматривают три вида предельных состояний: первое — потеря несущей способности от нагрузки, которая может возникнуть хотя бы один раз за срок службы крана; второе — потеря несущей способности при многократном действии нагрузки; третье — нарушение требований эксплуатации вследствие наступления чрезмерно больших по значению, или времени действия деформаций.
Первое предельное состояние. Целью проверки является предотвращение разрушения, обеспечение устойчивости формы и положения при возможных неблагоприятных условиях эксплуатации, а также в период испытаний, транспортировки и монтажа. Этот вид проверки имеет наибольшее практическое значение.
Первому предельному состоянию в общем случае соответствует условие
о < Яу, (4)
где а — приведенное расчетное напряжение, определенное с учетом коэффициентов перегрузки и коэффициентов устойчивости; R — расчетное сопротивление материала, определяемое исходя из нормативного сопротивления с учетом коэффициента надежности по материалу ут', у — коэффициент условий работы рассматриваемого элемента конструкции.
Значения коэффициента ут обычно принимают в соответствии с рекомендациями СНиП в зависимости от марки стали, — = 1,025...1,15; для наиболее употребительных сталей СтЗ по ГОСТ 370-81 принимают R = 225...215 МПа, для стали 09Г2С по ГОСТ 19282 —73 Я = 330...310 МПа.
Второе предельное состояние. По этому предельному состоянию проверяют выносливость конструкции. В общем виде это условие может быть записано так:
оЛ> < aRoy,
где о0 — приведенное расчетное напряжение, определенное без учета коэффициентов перегрузки, и устойчивости; k9 — коэффициент эквивалентности, учитывающий переменность нагрузки, испытываемой элементом за срок службы; а — коэффициент, учитывающий' число циклов нагружения за срок службы элемента; Ro — расчетное сопротивление усталости.
Выносливость можно проверять в соответствии с рекомендациями, приведенными в работе И. В. Кудрявцева и Н. Е. Научен-кова [26 ], а также данными СНиП и некоторых зарубежных нормативов (FEM, DIN), содержащих как дифференцированную режимную классификацию, так и построенные на ее основе методы расчета выносливости. Ряд указаний содержится в РТМ' 24.090.53—79.
92
Третье предельное состояние. Критериями для этого предельного состояния могут являться статическая жесткость конструкции, ограниченная линейными или угловыми деформациями, и динамическая жесткость. Последняя может характеризоваться как динамическими деформациями, так и частотой и длительностью колебаний, возникающих при действии динамической нагрузки.
. 2. РАСЧЕТНЫЕ СОЧЕТАНИЯ НАГРУЗОК
При работе кранов могут возникать нагрузки многих видов. Их вероятные расчетные сочетания могут быть наиболее точно определены статистическими методами. Однако до настоящего времени применительно к козловым кранам рассматриваемого вида еще не накоплены необходимые сведения, поэтому расчетные сочетания приходится выбирать исходя из данных практики. При этом надо иметь в виду следующие положения:
а) при расчетах по статическим характеристикам материала (первое предельное состояние) необходимо учитывать сочетания нагрузок, возникновение которых возможно хотя бы один раз за срок службы крана;
б) при расчетах на выносливость (второе предельное состояние) не учитывают нагрузки, которые возникают при практически возможных во время эксплуатации нарушениях правил управления краном (резком пускег подъеме груза с подхватом и т. п.) или при неисправных механизмах крана (неправильном регулировании тормозов, выходе из етроя концевых выключателей и т. п.);
в) при расчетах допускаемых деформаций конструкции (третье предельное состояние) за основу принимают номинальные нагрузки от масс груза и элементов крана;
г) нагрузки, которые могут возникать при аварийных условиях (сходе колес с рельсов, торможении на ходу одного из механизмов передвижения крана при работающем втором механизме, отрыве закрепленного груза и т. п.), учитывают только при особых требованиях к условиям эксплуатации кранов и по разрабатываемым для таких случаев специальным нормативам;
д) для различных элементов металлической конструкции расчет следует вести по различным сочетаниям нагрузок: так, для кранов с одной жесткой, а другой гибкой опорой, для последней наиболее неблагоприятные условия могут возникать при нахождении груза на консоли гибкой опоры, а для моста — в центре пролета или на консоли жесткой опоры, и т. д.
Наблюдение за эксплуатируемыми кранами показывает, что резкие пуски механизмов крана бывают относительно редко так как они затрудняют управление перемещением груза и вызывают неприятные для крановщика колебания крана. Тем не менее возможно одновременное возникновение принимаемых в расчет и близких к предельным динамических нагрузок от двух и более видов движений. Например, движение крана может быть начато
93
только после подъема груза на определенную высоту; за это время амплитуда колебаний остова крана, начавшихся после отрыва груза, существенно уменьшается. То же самое относится к совмещению начала действий расчетного ветра, возникающего весьма редко, и расчетных динамических нагрузок и т. п.
Таким образом, одновременный учет максимально возможных нагрузок приводит к неоправданному утяжелению конструкции.
Приведенные в табл. 28 примерные сочетания соответствуют основным видам нагрузок (см. табл 14); это не исключает учета в необходимых случаях нагрузок других видов.
Таблица 28
Рекомендуемые сочетания нагрузок для основных случаев расчета
Нагрузке Проверка по статическим характеристикам материала 1 Проверка на выносливость
при нормальной работе при предельно возможных рабочих нагрузках 1 при нерабочем состоянии i X О я Е
Обозначение сочетания
I U 11» IV V VI VII VIII IX
От массы крана и грузозахватного устройства + 4- 4- + 4- 4- 4- 4- 4-
От массы груза Ветровая: + 4- 4- + 4- 4- — — 4-
в рабочем состоянии крана в нерабочем состоянии крана — 4- — — — — — 4-* —
Динамическая от работы меха-
низма :
подъема груза + 4- 4- — — — 4- — 4-*
передвижения тележки — — 4- — — — — — —
передвижения крана От перекоса: — — — 4- — — — — —
при установившемся движение 4-
динамическая при одностороннем торможении — — — — — — — —
От наезда на концевые упоры:
крана — — — -— 4- — — —>
тележки ——- — —— —— 4- — мм
От уклона подкрановых путей 1 1 4-
Учитывается 50% расчетной нагрузки.
Для уменьшения трудоемкости расчетов часто ограничивают число расчетных сочетаний по сравнению о числом сочетаний, указанным в табл. 28. Однако прове ку по сочетаниям I, IV, VIII и IX следует считать обязательной. В то же время при машинном 94
расчете число расчетных сочетаний может быть существенно увеличено.
Обычно нет необходимости проверять все элементы конструкции на нагрузки всех рассматриваемых расчетных сочетаний. Это иллюстрируется данными табл. 29.
Таблица 29
Наиболее употребительные сочетания нагрузок для расчета металлоконструкций козловых кранов с однобалочным двухконсольным мостом по первому предельному состоянию
Элемент и проверяемый участок Расположение грузовой тележки Расчетные сочетания в соответствия с табл. 28
Мост: • консоли середина пролетной части вблизи жестких опор вблизи гибкой опоры Стоики жестких опор Стойки гибкой опоры • Для кранов с одной жести Проверяемая консоль Пролетная часть, консоль То.же Консоль гибкой опоры Консоль жесткой опоры Консоль гибкой опоры ой и другой гибкой опорами. I ... II I ... V (I ...VI)* I ... VI I, II, V VIII I, II, IV, V, VIII
Для кранов с подвеской груза на двухветвевой пли пространственной траверсе необходимо учитывать эксцентричное приложение к мосту передающихся от ходовых колес грузовой тележки нагрузок. При поперечном смещении центра масс это приведет к неравномерности распределения нагрузок между поясами моста, при продольном — к увеличению фактического вылета поднятого груза. Это обстоятельство следует учитывать при Определении воздействий на металлическую конструкцию для I—IV сочетаний нагрузок.
Ветровую нагрузку рабочего состояния принимают действующей вдоль крановых путей. Ветровую нагрузку нерабочего состояния обычно учитывают только при динамическом давлении ветра 700 Па и выше.
На выносливость проверяют преимущественно элементы пролетного строения, так как напряжения в стойках опор от действия вертикальных нагрузок невелики (30 ... 60 МПа), даже с учетом распора.
Металлические конструкции козловых кранов легкого режима работы на выносливость можно не проверять. При среднем режиме работы рассчитывают те решетчатые конструкции, в которых имеет место значительная концентрация напряжений, в особенности в узлах примыкания раскосов к поясам.
95
Сплошностенчатые конструкции, выполненные с учетом требований снижения концентрации напряжений (например, отсутствие резких переходов сечений, поперечных сварных швов) можно не проверять на выносливость при среднем режиме работы. При тяжелом режиме работы подлежат проверке металлические конст-
Рис. 40. Схема для определения числа нагрузочных циклов элементов конструкции крана
рукции всех видов.
Для определения числа нагрузочных циклов и действующих по элементам конструкции усилий при отсутствии более точных сведений можно пользоваться схемой, приведенной на рис. 40, на которой в процентах от общего числа рабочих циклов показана повторяемость прохода грузовой тележки по отдельным участкам моста.
При расчетах металлических конструкций козловых кранов на вычислительных машинах обычно используют типовые программы, разрабо-
тайные для расчета стержневых строительных конструкций (программа ПАРАДОКС-73, вычислительный комплекс
РАСК и др.). В отдельных случаях, в особенности для балочных конструкций, целесообразно использовать универсальные матричные методы, Причем для решения полученных уравнений применяют широко распространенные стандартные про-
граммы.
Необходимо отметить, что во многих случаях при расчете на ЭВМ можно получить достоверное представление о напряженном состоянии конструкции. Это относится к обладающим высокой степенью статической неопределимости двухбалочным кранам с пролетными балками, соединенными промежуточными портальными рамами, и концевыми балками, а также к кранам с решетчатым четырехгранным мостом при расчете на кручение, вызванное перекосом. В решетчатых конструкциях в этом случае при расчете узлов примыкания опорных стоек к Мосту следует учитывать жесткость узлов стержневой системы, что практически возможно только при использовании ЭВМ. Погрешность при представлении этих систем в качестве шарнирных может достичь 200 %.
Гибкость стержневых элементов находят по формуле
^пр — р///*,
где I — геометрическая длина стержня; р — коэффициент приведения длины, учитывающий вид опирания концов стержня, наличие промежуточных креплений и его конфигурацию [53]; г — наименьший радиус инерции сечения стержня.
69
Гибкость стержневых элементов вне зависимости от действующих в них напряжений не должна превышать значений, приведенных ниже. Стойки опор: в проектном положении...........................................
при монтаже........................................
Стяжки опор ....................................................
Сжатые элементы поясов решетчатых пролетных строений, стоек и стяжек Растянутые элементы поясов решетчатых пролетных строений........
Сжатые элементы внешних граней решеток..........................
Растянутые и поддерживающие элементы внешних граней.............
Сжатые элементы поперечных диафрагм- ...........................
Растянутые и поддерживающие элементы поперечных диафрагм........
110 130 120 120 150
120 150 150 200
3. РАСЧЕТ ОСТОВА КРАНА НА ДЕЙСТВИЕ ВЕРТИКАЛЬНЫХ НАГРУЗОК
- В вертикальной плоскости остов крана представляет собой портальную раму с двухконсольным ригелем; деформации последнего под нагрузкой приводят к возникновению реакций на ходовых колесах, — так называемых распорных усилий. У кранов с одной жесткой, а другой гибкой опорой разгружающим влиянием распорных усилий на напряженное состояние моста можно пренебречь. Пр]£ расчете кранов с обеими жесткими опорами приходится учитывать возможность осевого перемещения ходовых колес крана в пределах выборки зазоров между их ребордами и головками крановых рельсов, что иногда приводит к заметному уменьшению распорных усилий. '
Изгибающие моменты в стойках опор от распорных усилий определяют, не учитывая возможные смещения ходовых колее в осевом направлении. Распорные усилия от веса моста обычно можно не учитывать, так как консоли в значительной мере уравновешивают пролетную часть.
При определении распорных усилий рекомендуется учитывать податливость не только основных элементов конструкции (опор, моста), но и узлов крепления стоек к пролетному строению, образующих ригель опорной рамы.
- При расчетах обычно не учитывают отклонения в укладке крановых путей, неточности изготовления крана и другие факторы, обусловливающие неравномерность распределения горизонтальных и вертикальных опорных реакций. У обладающих симметричной нагрузкой кранов с двухстоечными опорами вертикальные опорные реакции принимают попарно равными для каждой из опор, а все распорные усилия — одинаковыми.
В кранах с одностоечными опорами и консольными грузовыми тележками вертикальные опорные реакции можно определять исходя из геометрических соотношений опорного контура. При этом, учитывая относительно большую податливость остова крана для ориентировочных предварительных расчетов, можно использовать условный метод Андре [59].,
4 Абрамович И. И. и др. , 97
Опорный контур крана (рис. 41) соединяется условными шарнирными балками АВ, BD, DC, СА, к которым в свою очередь через условные шарнирно подсоединенные балки а—а, б—б и др.
Рис. 4k Схемы к определению вертикальных опорных реакций:
а*— сх^йа остова крана; б — Схема опорной части
прикладывается проектирующаяся на опорную плоскость крана вертикальная нагрузка. Однако при смещении грузовой тележки от центра пролета в расчете возможны погрешности в результате того, что большая часть составляющих опорных реакций, вызванных наличием консольной нагрузки, воспринимается близлежащей опорой. Этого можно избежать, рассматривая распределение нагрузок в статически неопределимой системе, где за лишнюю неизвестную может быть принят, например, крутящий момент моста.
Распорные реакции кранов с противоположных торцов крана
попарно равны; для их определения следует решить статически не
определимую систему с одним лишним неизвестным, за которое
Рис. 42. Эпюры изгибающих и крутящих моментов в остове одностоечного крана
можно принять, например, горизонтальный изгибающий момент моста. На рис. 42 показана примерная эпюра изгибающих и крутящих моментов от вертикальной сосредоточенной консольной нагрузки в остове одностоечного крана, показанного на рис. 41.
98
Распорные усилия у кранов, с одной гибкой, а другой жесткой опорой невелики. Их следует учитывать только при расчете стоек гибких опор. На стойки опор двухстоечных кранов в плоскостях опор действуют также изгибающие моменты. Когда ригель рамы опоры очень жесткий, можно считать, что стойки работают только на сжатие. В противном случае приходится рассматривать статически неопределимую раму, при этом податливостью стяжки от продольных усилий можно пренебрегать.
По данным расчетов кранов различных конструкций видно, что равнодействующие вертикальных опорных реакций и усилий в стяжке, действующих в плоскостях опор, незначительно отклоняются от геометрических осей опорных стоек, что и обусловливает соответственно небольшие значения изгибающих моментов, которые, однако, могут заметно влиять на напряженное состояние элементов крепления стоек к ригелю.
4. РАСЧЕТ ОСТОВА КРАНА НА ДЕЙСТВИЕ
ГОРИЗОНТАЛЬНЫХ НАГРУЗОК
Стойки опор и мост испытывают действие, изгибающего момента от горизонтальной продольной нагрузки (ветровая, от инерционных сил и др.), которую обычно считают приложенной к торцу моста.
Для кранов с одной гибкой опорой влиянием ее жесткости на распределение горизонтальных нагрузок можно пренебрегать во всех случаях, так как остов крана принимают статически определимым. Для кранов с обеими жесткими опорами принимают, что горизонтальные нагрузки распределяются поровну между опорами. При наличии обеих жестких опор система приобретает одну лишнюю связь; однако, так как сечение стоек обеих опор всегда выполняют одинаковыми, эпюра изгибающих моментов будет симметричной и ее нулевая точка будет расположена в центре пролета.
Горизонтальные поперечные нагрузки (ветровые, от инерционных сил и др.) приложены к грузовой тележке, мосту и опорам крана. В общем случае они вызывают изгиб и скручивание моста, а также опорных стоек. Соответствующие расчеты в 'необходимых случаях выполняют, используя методы строительной механики [52].
Важным являетсй то, что портальные опорные рамы обычного типа (угол наклона стоек около 75 ° и ширина нижней, стороны ригеля в пределах */< ... % высоты стоек) испытывают лишь незначительный изгиб от поперечной нагрузки, приложенной к мосту крана. Часто это позволяет упростить расчет, заменяя распределенные ветровые и весовые нагрузки примерно эквивалентной им сосредоточенной перекосной силой. Однако при более круто установленных (вплоть до вертикального положения) стойках’ действующий на них изгибающий момент увеличивается, что обус; ловдивает необходимость непосредственного учета поперечных сил!
4* 99
Типовая расчетная схема опорной рамы и эпюра действующих на ее элементы изгибающих моментов показаны на рис. 43, а.
Следует иметь в виду, что при жестком креплении оснований стоек к стяжке и жесткости Гм ее длины, равной 20 % и более от средней жесткости 1 м длины стоек, расчет следует вести так же,
как для внешне статически определимой замкнутой плоской рамы. Примерная схема такой рамы и эпюра изгибающих моментов даны на рис. 43, б.
5. РАСЧЕТ ОСТОВА КРАНА НА ДЕЙСТВИЕ
НАГРУЗОК ПРИ ПЕРЕКОСЕ
При перекосе остов крана испытывает сложную деформацию — мост скручивается и изгибается, стойки опор изгибаются в двух плоскостях (рис. 44).
Так как форкы металлической конструкции весьма разнообразны, то для оценки деформаций целесообразно использовать расчетную схему, приведенную на рис. 45.
При переменной жесткости моста и опор их заменяют стержнями постоянного сечения. В этом случае расчетная жесткость заменяющих стержней должна быть эквивалентна фактической жесткости моста и опор. Приведенная жесткость зависит от характера деформации, которую испытывает соответствующий элемент. Так как деформаций стержней 1 и 2 должны полностью соответствовать деформациям опорных систем, то элементы АВ и CD условно приняты абсолютно жесткими.
Принимаются следующие предпосылки:
а) все опорные точки (Л—D) лежат в одной плоскости и могут перемещаться только в направлении рельсов;
б) деформации крана прямо пропорциональны приложенным нагрузкам и выражены линейной зависимостью; f
J00
в) ходовые колеса свободно поворачиваются в горизонтальной плоскости, так как момент от силы трения на линии контакта относительно невелик.
Последнее допущение верно и для балансирных тележек, так как жесткость при кручении опорных стоек обычно относи-
Рис. 44. Эпюры изгибающих и крутящих, моментов в элементах остова крана' при действии нагрузок от перекоса
тельно невелика. Для многоколесных тяжелых кранов с пространственно развитыми конструкциями опорных стоек оно оправды-. вается не во всех случаях.
Построенная с учетом этих предпосылок система (рис. 45) при действии нагрузки Р будет дважды статически неопределимой.
Рис. 45.’ Схема к расчету остова крана на действие нагрузок от перекоса: а — упрощенная схема остова; б — эпюры изгибающих и крутящих моментов
За лишние неизвестные удобно принять крутящий момент AfK моста и координату у нулевой точки эпюры изгибающего момента элемента 3.
' Для расчета принимаем следующие обозначения: Cld, См, C3d — приведенная жесткость при кручении (коэффициенты жесткости) элементов /, 2, 3; С3х — приведенная жесткость моста при изгибе в горизонтальной плоскости; С[х, С^х — приведенная жесткость опор по углу поворота верхнего сечения под действием горизон-
101
тальной нагрузки; С[л, С$х — то же, под действием сосредоточенного момента; С\х, C"ix — приведенная жесткость опор при горизонтальном смещении верхнего сечения под действием горизонтальной силы.
Решив статически неопределимую систему (см. рис. 44, а), получим крутящий момент
• «Координата нулевой точки эпюры изгибающих моментов
№ = 1 ( / [“csr + h (тЬ"+ 'сЬ')] •
Полученные таким образом значения лишних неизвестных дают возможность определить значения изгибающих моментов в любом элементе крана, а также'осевых реакций на ходовые колеса. Соответствующие эпюры изгибающих и крутящих моментов показаны на рис. 45, б. Условные эпюры, показанные на рис. 45, близки к фактическим эпюрам для однобалочных кранов с одностоечными опорами.
Для кранов с обеими жесткими опорами у — 1/2, при наличии гибкой опоры Cld < См, у « /.
При кручении весьма жесткого моста (l/C3d) -> 0 и при одинаковых стойках Мк = (РЛ/2) (СХ1СХ). Для крана со стойками постоянного сечения (например, у однобалочных кранов) можно принять, что Сх « Сх и Мк = Рл/2. При кручении весьма, податливого моста
AfK 0.
Деформация от перекоса силой Р = 1
+К^г+-^-)+Л1^-Л1"л(сЬ+сЬ)=
= «е+бм+«;+б1-б;, (5)
где 6с — деформация от скручивания опор; 6М — деформация от изгиба моста; б* — деформация от изгиба опорных рам в их плоскостях поперечной нагрузкой;
— деформация от скручивания моста моментом Л4К; б" — деформация от изгиба опорных рам в их плоскостях от крутящего момента.
Крутящий момент Л4К, нагружающий мост, изменяется в широких пределах — от 0 до 3 кНм на 1 кН усилия от перекоса.
Расчетные значения перекосных деформаций 6 для кранов с двухстоечными опорами Грузоподъемностью 5 ... 32 т и пролетами 11,3 ... 40 м находятся в пределах 0,05 ... 0,40 м на 10 кН. При этом для отдельных составляющих деформаций имеют место следующие соотношения (в %): бс = 95 ... 60, бм = 2 ... 21; 10S.
6с — 4 ... 13; 6м = (—4-IO”3) ... (4,5). Таким образом, деформации от перекоса в основном определяются скручиванием опор с раздельными стойками, каждая из которых изгибается под воздействием осевых нагрузок независимо от второй стойки.
Деформации моста и опор (6„, 6с), вызванные действием, крутящего момента, весьма невелики, и обычно их можно не учитывать. Анализ характера упругой линии моста показал, что упругая линия остова крана незначительно отклоняется от прямой. Это позволяет при расчетах принимать, что при действии нагрузок от перекоса кран в плане поворачивается как жесткий диск относительно упругоскручивающихся опор.
Расчетные данные были проверены путем замеров, проведенных на ряде кранов, причем установлено, что зависимость между нагрузкой и перемещением близка к линейной [1].
Таблица,30 Деформации козловых кранов от перекоса
Показатель £ КС-5 £ к ККП-12,5 ККО-20/5 ККЛ-8
. Грузоподъемность, 5 5 8 12,5 12,5 12,5 20/5 8 .
т Пролет, м 11,3 16 32 ’25 32 32 32 40 ’
Деформации от перекоса, мм/кН: расчетные 34 27 37 14 12
фактические 38 31 27 13 10 14 10 16
В табл. 30 приведены значения деформации от перекоса ряда кранов, полученные путем экспериментов; видно, что данные расчета совпадают с результатами замеров (с учетом влияния зазоров, неопределенности работы конструкции в узлах крепления опор и т. д.).
6. ОСОБЕННОСТИ РАСЧЕТА ОПОРНЫХ СТОЕК , ‘
Для современных козловых кранов характерна' тенденция выполнения стоек в виде стержневых одноветвевых (для гибких опор) или двухветвевых (для жестких опор) конструкций. Для упрощения изготовления предпочитают применять готовые прокатные профили или трубы, что ограничивает размеры поперечйык сечений элементов. Это обусловливает их относительно высокую’ гибкость и делает необходимым уточнять расчеты устойчивости.
Остов крана представляет собой пространственную раму, нагруженную системой вертикальных и горизонтальных сил. Из'
103»
Рис. 46. Схема деформации стоек гибкой опоры в плоскости опорной рамы
последних определяющее значение обычно имеют нагрузки от перекоса.
Данные расчетов, подтвержденные результатами экспериментов, показывают, что в стойках опор напряжения от поперечного изгиба обычно не менее чем в 2—3 раза превышают напряжения от сжатия; упругие смещения имеют один порядок с поперечными размерами сечений. В этом случае целесообразно вести расчет по деформированной схеме [39]. Наиболее точные результаты могут быть получены при расчетах на ЭЦВМ, например, методом последовательных приближений. Однако до настоящего времени расчеты такими методами ввиду их сложности практически не ведутся.
Для уточнения результатов расчетов, выполняемых без применения ЭЦВМ; за последнее время разработаны методы расчета опорных стоек некоторых видов, и в том числе упрощенный деформационный метод.
Рассмотрим порядок расчета стоек крана с одной гибкой, а другой жесткой опорами, находящимся под действием обобщенной вертикальной на
грузки Q и горизонтальной нагрузки Г. В таком кране перемещение остова достаточно точно определяют исходя из деформаций моста и жесткой опоры.
Первоначально рассмотрим напряженное состояние стоек гибкой опоры от силовых факторов, действующих в ее плоскости ?(рис. 46). Здесь учитывают вертикальную нагрузку Qt от моста, весовую нагрузку от верхних частей стойки и нагрузку Т от перекоса, вызывающую продольные и поперечные реакции Т\ и Т2, приложенные к основаниям стоек 1 и 2. Ригель 3 обычно бывает жестким, и деформацию его не учитывают; в данном случае принято также, что стяжка 4 соединена 90 стойками шарнирно и по осям ходовых колес 5.
В недеформированной раме нагрузка вследствие симметрии системы вызывает только сжатие стоек осевыми силами К'. Вследствие изгиба стоек силами Та (показано штриховой линией) воз-никают дополнительные изгибающие моменты от продольных сил К = К' + Данные анализа расчета показывают, что направление сил может быть принято в первом приближении неизменный, т. е. по осевым линиям- стоек 1 и 2.
Изгиб стойки силой К вызывает ее деформацию 6, что приводит к возникновению деформационного момента второго 104
порядка. Деформация может быть оценена известной зависимостью
6x = 60V(vx— 1), (6)
где 60 — прогиб от поперечной нагрузки (силы Т2); vx — запас устойчивости По Эйлеру, определяемый, как для рамного стержня.
Нужно иметь в виду, что при весьма жестком ригеле 3 расчетная длина стоек при любом их наклоне находится в пределах 4 < Гх < 2Z/, практически она обычно находится в пределах (1, 4... 1,5)4.
Рис. 47. Схема деформации остова от перекоса
В плоскости, перпендикулярной плоскости опор, деформации стоек гибкой опоры определяются деформациями моста и жесткой опоры и очень мало зависят от поведения стоек гибких опор.
Рассматривая деформации остова от перекоса (рис. 47), можно принять, что в плане кран изгибается и поворачивается относительно жесткой опоры (штриховой линией показано положение, которое занимали бы стойки гибкой опоры при свободном осевом перемещении их ходовых колес). Этому соответствует условное смещение fv. В то же время основания стоек стремятся сместиться и в горизонтальном положении в результате деформации моста от вертикальной нагрузки (условное смещение Однако сме-
щению основания опоры на / = Л +.А препятствует крановый рельс, удерживающий ходовое колесо на месте.
Вследствие деформации стойки в ней будет действовать изгибающий момент
М = 6Л.
105
Без значительной погрешности можно принять
Яв == Rb “j~ Rat
где — вертикальная реакция от действия силы при перекосе, Я* = Thlb; Я" — вертикальная реакция от действующей на опору вертикальной нагрузки р, = р/2.
Если пренебречь продольным смещением Д моста в месте примыкания стоек (обычно на порядок меньше /), то получим максимальную стрелку прогиба стойки опоры « 0,20/. Тогда М'у = 0,20//?в.
Этот момент действует примерно посредине высоты стойки (х « /72).
Помимо этого стойки испытывают поперечный изгиб от реакции Rr:
М; = RTx.
Реакцию Rr можно найти, например, по условному смещению/. При стойке постоянного сечения
R, =
где EJ — жесткость стойки при изгибе.
Для определения расчетной приведенной длины в данной плоскости стойку можно рассматривать как стержень, одним концом шарнирно опертый, а вторым защемленный от поворота без возможности поперечного смещения. Расчетная длина /;«0,70(/УЧ-г), где г — радиус ходового колеса или расстояние от шарнира балансирной тележки до головки краяового рельса.
Деформацию в направлении оси у можно определить, используя формулу, аналогичную формуле (6).
Начальные несовершенства стоек обычно учитывают, увеличивая деформации (или на 6о = 1/1000.
Учитывая изложенное, можно принять, что изгибающие моменты в сечении стойки составят:
1 в плоскости опоры м. = М„ + К (« + м ;
в перпендикулярной плоскости
м, = М„, +Я. (« + «.)
где Мих. Моу — суммарные моменты поперечного изгиба.
Напряжения от изгибающих моментов Мх, Му суммируют с напряжением от осевой силы N. Коэффициенты продольного изгиба вводят только для ветвей решетчатых или безраскосных стоек. Если мост обладает значительной жесткостью на кручение 106
(например, при замкнутом коробчатом сечении), опора будет испытывать действие реактивного крутящего момента, препятствующего повороту ригеля 3 и в определенной мере разгружающего стойки. Влияние этого момента может быть учтено так же, как и для сил Т.
Деформации в мржно определять аналитическим путем, причем для наглядности рекомендуется графическое построение упругой линии. У кранов, имеющих треугольное (или приближающееся к треугольному трапециевидное) очертание стоек жестких опор, влияние нагрузок Q и Т учитывают так же, как и для гибкой опоры. Однако в стойках действуют и осевые усилия ±N" от нагрузки Rv, приложенной к ободу ходового колеса. Если пояса стойки центрированы не на головку кранового рельса, следует учитывать также местный изгибающий момент.
В расчет вводят деформационный изгибающий момент от действия по поясу суммарного усилия W = /С + 7\ + N". Однако при определении расчетной длины сжатого пояса следует иметь в виду, чтд наличие поперечин и жесткого соединения поясов у основания двухветвевой стойки жесткой опоры существенно повышает критическую нагрузку. Менее нагруженный (или даже полностью разгруженный) пояс поддерживает пояс, сжатый силой N. На основании полученных данных можно принять, что установка одной верхней, средней и двух промежуточных поперечин одинакового сечения с сечением поясов увеличивает критическую для пояса стойки силу соответственно на 160, 280 и 285 % по сравнению со стойкой с жестко соединенными по низу и не связанными по верху поясами [221.
Эти соображения могут быть использованы для оценки устойчивости поясов в плоскости опоры, например, по методике, принятой СНиП для сжатых или сжато-изогнутых стержней.
7. ОСОБЕННОСТИ РАСЧЕТА РЕШЕТЧАТЫХ КОНСТРУКЦИЙ
. Расчет решетчатых конструкций (в особенности мостов) наиболее целесообразно проводить с помощью ЭВЦМ, что не только экономит время, но и позволяет отказаться от приводящего в ряде случаев к погрешностям представления о шарнирном опирании концов стержней. При этом часто используют хорошо разработанный в строительной механике матричный метод [521.
Однако в ряде случаев, например при предварительных оценках, еще широко используют традиционные методы «ручного» расчета. Здесь значительную пользу могут оказать незаслуженно забытые графические методы, изложенные в работах М. В. Кирпи-чева, И. М. Рабиновича и др. Вопросы пространственного расчета стержневых' статически определимых конструкций. достаточно ясно представлены в работах С. П. Тимошенко и И. М. Рабиновича, а более сложных статически неопределимых систем — в работах А. А. Уманского. Вместе с тем использование таких методов
107
может повлечь за собой неточности в оценке напряженного состояния некоторых элементов конструкции.
Характерное для настоящего времени повышение уровня действующих напряжений заставляет даже дри расчете по статически определимой схеме учитывать влияние деформаций конструкции [301. При действии внешних нагрузок мост крана деформируется, и его пояса теряют свое первоначальное прямолинейное очертание. При этом ездовые (нижние или верхние) пояса вследствие евоей относительно большой жесткости могут создавать определенное сопротивление изгибу и испытывать заметные напряжения.
Рассмотрим решетчатый мост в качестве балки постоянного сечения с моментом инерции JM, определенным из условий равенства прогибов этой балки и моста. При учете момента инерции пояса (или двух поясов) Ja суммарный момент инерции
Прогиб пояса равен прогибу моста, и очертание кривой прогибов последнего соответствует очертанию кривой прогибов пояса. Это позволяет принять, что прогиб пояса вызывается нагрузками, подобными нагрузкам моста, и пропорциональными моментами инерции этих элементов.
Тогда для любого сечения моста
Мм-Л^Г
Ма.= М„
где Мо Общий расчетный изгибающий момент, действующий в данном сечении моста; Мм — изгибающий момент, воспринимаемый мостом, в предположении работы последнего как статическй определенной конструкции; Л4П — изгибающий момент, воспринимаемый поясом.
У мостов кранов пролетом более 25 м целесообразно учитывать влияние податливости элементов решетки мостов на изгиб ездового пояса от давления D ходовых колес. В рассматриваемом случае достаточно учитывать только податливость элементов панелей, расположенных непосредственно вблизи рассматриваемой панели. Примерная расчетная схема показана на' рис. 48; нижний пояс представлен в виде неразрезной балки 1—2—3, а для остальных Элементов 4 ... 11, подсоединенных с помощью шарниров, учитываются только продольные деформации.
Моменты Mi и Mit нагружающие нижний Пояс, определяют По известным методам строительной механики.
При центральном нагружении решетчатых стоек или сжатии — . растяжении поясов граней решетчатых конструкций раскосы также участвуют в передаче продольного усилия. Знак деформа-'108
ции элементов решетки соответствует знаку деформации поясов. При этом напряжение в элементах решетки
ор « ап cos2 а,
где сп — напряжение в поясе; а — угол между элементом решетки и поясом.
Более точно усилия в элементах раскосно-стоечной треуголь-ной решетки могу? быть найдены по формуле
W = аоЛрСО52а/( 1 4- 2-ф- sln3cc 4- В2 cos3 а V
v \ 1&J /
где Др — площадь раскоса; Дс — площадь стойки; J — момент инерции пояса относительно вертикальной оси; В — расстояние между осями поясов.
Рис. 48. Схемы к расчету ездового пояса' на местный изгиб: о — схема секции моста; б — схема расчетного участка секции; в эпюра изгибающих моментов в участке нижнего пояса
Усилие в стойке
= (^р.лев 4~ ^р.пр) Sin а»
где Л/р. Лев, Л/р.лр — усилия в раскосах соответственно с левой и правой сторон от стойки.
Следует также учитывать (за исключением расчетов на устойчивость) дополнительные изгибающие моменты в поясах, действующие в плоскости решетки и определяемые в сечениях узлов присоединения раскосов и стоек к поясу,
М = 0.5ЛЦ,
где I — шаг панели пояса.
Расчет трехгранных решетчатых мостов на кручение каких-либо трудностей не вызывает, так как крутящий момент однозначно уравновешивается перерезывающими усилиями, действующими в каждой из граней.
Четырехгранные мосты обладают статической определимостью лишь при наличии двух концевых диагоналей; любая дополнительная промежуточная связь дает одну степень статической неопределимости.
109
Так как в каждой из панелей обычно предусматривают перекрестные или К-образные диагонали, число лишних неизвестных соответствует числу панелей фермы.
Для предварительных ориентировочных расчетов можно учи-тывать наличие только одной — трех диафрагм, равномерно распределенных по пролету моста. В этом случае вычисления очень упрощаются, и можно воспользоваться разработанным П. А. Кудрявцевым способом расчета пространственных ферм на кручение. Этот способ основан на том, что мост расчленяется на плоские фермы-грани, которые загружаются и уравновешиваются не только внешними силами, но и силами взаимодействия со смежными фермами.
Прй большом числе неизвестных можно рекомендовать способы, основанные на представлении моста в виде тонкостенной коробчатой конструкции с заменой решетчатых панелей внешних граней и диафрагм эквивалентными стенками.
8. ОСОБЕННОСТИ РАСЧЕТА МОСТА В ЗОНЕ ПРИМЫКАНИЯ ОПОРНЫХ СТОЕК К ПРОЛЕТНОМУ СТРОЕНИЮ
Определенные трудности вызывает в ряде случаев выявление напряженного состояния моста в зоне примыкания к нему стоек жесткой опоры при действии перекосных нагрузок.
Рис. 49. Схемы к расчету опорного узла при действии нагрузки при перекосе
На рис. 49, а показана схема жесткой опоры узла остова крана, находящегося под действием нагрузки Т при перекосе. На основания опор действуют горизонтальные осевые реакции Н и вер*-тикальные реакции Яв. В сечении моста действуют поперечная сила Т (сила перекоса), а также горизонтальный Мг и крутящий Мк моменты, их определяют в соответствии с приведенными указаниями.
110
Осевые реакции Н зависят только от крутящего момента* действующего относительно оси Z; они не связаны непосредственно с силой Т и реакциями R. Это позволяет образовать раздельные нагрузочные системы (рис. 49, б. и в).
В данном случае
М, =
Реакции Н соответствуют усилиям действующим по поясам стойки и передающимися на верхние шарниры моста в вйде усилий К (рис. 49, г). Вертикальные составляющие этих реакций (рис. 49, д) создают две взаимно уравновешенные пары iKzd, скручивающие опорную секцию моста.
Составляющие Nx и (рис. 49, е и ж) образуют две пары, стремящиеся развернуть секцию моста относительно вертикальной оси; этот момент уравновешивается продольными усилиями £/' в поясах моста (штриховые линии на рис. 49, е и ж).
Сила Т, действующая в плоскости опоры, приводит к возникновению усилий NK в шарнирах крепления стоек опор, и усилий S, нагружающих тяги, соединяющие пояса стоек с мостом (рис. 49, з и и). Система усилий NK и S вызывает закручивание секции моста относительно оси х; эта система уравновешивается моментом Мк = НЬ, а также поперечной силой 71.
Усилия и напряжения в элементах моста определяют, используя известные способы строительной механики.
Следует отметить, что усилия Л/, как правило, существенно превалируют над усилиями в элементах, возникающих от силы Т.
Приведем пример определения усилия в опорной секции трехгранного решетчатого моста.
Схема опорного узла показана на рис. 50, а (элементы решетки моста условно не показаны). Принято, что крутящий момент, создаваемый усилиями AZ, уравновешивается парой сил, создаваемой продольными усилиями Т, действующими в поясах моста.
Выделяем из опорной секции призму. К ее вершинам 9 и 10 приложены, горизонтальные составляющие 2NV (рис. 50,6). Составляющие Nx стремятся развернуть относительно точек 9 и 10 треугольные фермы 1—2—13 и 6—7—13: эти фермы уравновешиваются силами Л/' (рис. 50, в) также нагружающими призму в точках 9 и 10. Составляющие Nz стремятся повернуть грани 6—10—7—8—5 и 1—9—2—4—3 относительно точек 10 и 9. Этому повороту препятствуют усилия в стержнях 3—12 и 12—5, равно как и усилия в стержнях 8—12 и 5—11, передающиеся на нижиие вершины 11 и 12 призмы.
Нагрузки от составляющих Nz на верхние узлы определяются из условия равенства моментов
= N'Ji.
После определения нагрузок, приложенных к вершинам призмы (рис. 50, б), усилия в ее стержнях находят без труда. Следует отметить, что внешние нагрузки N’x, Ny и 7V' вызывают в наклонных раскосах 11—10', 71—9 и др. усилия одного знака.
Ш
Аналогично могут быть найдены и усилия в элементах секции моста от нагрузки Т при перекосе.
Приведенный упрощенный равчет не учитывает жесткости узлов фермы. Более точные расчеты, выполненные в помощью ЭЦВМ, а также результаты тензометрических испытаний показы*
Рис. 50. Схемы к расчету опорного узла крана с трехгранным решетчатым мостом
вдют, что в данном случае, так как жесткость узлов не учтена, продольные усилия в стержнях опорной секции увеличены на 20 ... 40 %, что, однако, идет в запас.
9. РАСЧЕТ МЕТАЛЛИЧЕСКИХ КОНСТРУКЦИЙ КРАНОВ
' С ДВУХБАЛОЧНЫМ МОСТОМ НА НАГРУЗКИ ОТ ПЕРЕКОСА
’ В общем случае остов крана является многократно статически неопределимым при наличии связей по концам балок и над опо-рами и в особенности при сдвоенных П-образных поперечных рамах и несимметричной схеме остова. Расчеты таких систем* рекомендуется выполнять с помощью ЭЦВМ, например, в матричной форме. Такие расчеты, с использованием метода сил, разработаны в МВТУ им. Н. Э. Баумана.
Методику упрощенного расчета, позволяющего оценить напряженное состояние основных элементов конструкции, рассмотрим на примере унифицированных козловых кранов грузоподъемностью 8 и 20/5 т и пролетом 32 м. Одна опора — жесткая, вторая— гибкая. Балки 1 моста (рис. 51, а) жестко соединены по концам поперечными балками 2 и шарнирно опираются на кронштейны П-образных рам 3.
Осевая нагрузка Н — ТИа на ходовые колеса стоек жесткой опоры вызывает на осях головного шарнира стойки усилия N = = HhJb, передающиеся на П-образные рамы. Эти реакции разложены на вертикальные и горизонтальные Nv составляющие 112
(рис. 52). Усилие Н = Ng поровну воспринимается двумя болтовыми фланцевыми соединениями стойки с рамами. Нагрузка Т от перекоса, действующая в плоскости опорных рам, воспринимается поровну балками моста. Возникающие от нее усилия (о учетом вертикальных составляющих Тв = Th/a), передающиеся на • П-образную раму, удобно определить графически
3 *
(см. рис. 49, в). Так как рама симметрична относительно вертикальной оси, в центр ригеля П-образной рамы вводят условный шарнир, что делает систему статически определимой. Действующие на стойки усилия Р вызывают реакции R, направленные нормально к плоскости фланцевого соединения, и реакции О на осях шарниров. Последние раскладываются на составляющие, нормальные и параллельные стойкам П-образных рам.
Вторая опора крана — гибкая, и поэтому здесь достаточно учитывать только усилия, действующие в ее плоскости (рис. 52).
Изгибающие моменты, нагружающие мост в горизонтальной плоскости, можно приближенно определять по схеме, показанной на рис. 53, а; для грубой оценки можно использовать схему на рис. 53, б.
ПЭ
Вертикальные составляющие усилий (см. рив. 52, б) могут быть определены при рассмотрении напряженного*состояния простран* ственной системы моста. Однако о учетом того, что усилия от осевых нагрузок NB на ходовые колеса существенно больше
Рис. 52. Схема усилий, действующих иа пролетное строение: а — в горизонтальной плоскоств; б — в вертикальной плоскости
т/^
Рис. 53. Схемы к расчету двухбалочного моста в горизонтальной плоскости
|7/» , 7/4| |ГД
а)
Рис. 54. Схема к расчету двухбалочного моста в вертикальной плоскости на действие нагрузки от перекоса:
а — расчетная схема моета, б — расчетные эпюры крутящих и изгибающих моментов для половины моста
£
усилий от собственно нагрузок Ов при перекосе, для ориентировочного определения изгибающих моментов можно использовать схему на рис. 54, а; здесь плоская замкнутая рама нагружена системой сил N3.
ГМ
Необходимо иметь в виду, что по данным уточненных расчетов в местах примыкания П-образных рам к пролетной балке могут возникнуть значительные крутящие и изгибающие моменты. При использовании приближенных методов расчета это обстоятельство рекомендуется учитывать введением дополнительных коэффициентов неточности расчета 1,8.
Для кранов симметричной схемы и без затяжек расчеты существенно упрощаются. Такая система (рис. 55, а) в силу ее симметрии и обратной симметрии нагрузки, будет иметь только два
Рис. 55. Схемы к расчету двухбалочного крана на нагрузки при перекосе: а — расчетная схема остова; б «•» основная система
неизвестных, за которые целесообразно принять крутящие моменты и вертикальные перерезывающие силы в поперечных балках (соответственно Fx и Fa на рис. 55, 6). Горизонтальную ,силу находят из условия = ТИ2а. Вертикальные реакции (в основной системе) ±7? = 2KhH.
10. ОСОБЕННОСТИ РАСЧЕТА БЕЗРАСКОСНЫХ МОСТОВ
В безраскосных мостах (рис. 56, а) пояса помимо общего изгиба находятся еще и под действием местного. Поверочные расчеты таких мостов, являющихся многократно статически неопределимыми системами, рекомендуется выполнять известными в строительной механике способами с использованием ЭЦВМ.
При приближенных расчетах напряжения от общего изгибающего момента УИ0 находятся по известной формуле о = Mo/Wo, * (7)
где W — момент сопротивления сечения с учетом наличия проемов (окон)^ '
Расчетная схема для определения местных изгибающих моментов показана на рис. 56, б. Здесь безраскосная система представлена в виде стержневой рамы, заменяющие стержни располагаются по линиям центров тяжести соответствующих элементов.
Определяя напряжения от давлений ходовых колес грузовых тележек, изгибающий момент находят как для неразрезной, например трехпролетной, балки с пролетами I на жестких опорах.
На
Момент от действия поперечной нагрузки Р определяют, предполагая, что поперечные силы распределяются между поясами 1 и 2 пропорционально их жесткости: Рг + Ра = Р, (Pj/P2) = = (J1/J2). При.этом нулевые точки эпюр моментов в поясах располагаются посредине панелей (рис. 56, б), а в стойках — пропор-
- а)
Рис. 56. Схемы к расчету безраскосного моста: а — схема балки моста; б — эпюра изгибающих моментов
йионально жесткости поясов = (Л//2)1- Такой способ дает достаточно точное значение моментов для панелей, удаленных от концевых сечений балки и места приложения внешней нагрузки; для элементов других панелей значения изгибающих моментов рекомендуется увеличивать на 15 ... 20 %.
Рис. 57. Схемы переходных участков окон
Напряжения находят для. моментов, действующих в местах сопряжения поясов и стоек.
.При сопряжении стойки с поясом радиусом переходного участка r^t 1,5b (рис 57, а) рассчитывать можно, не учитывая концентрации напряжений по моменту, действующему в начале скругления (сечение 1—1 на рис. 56, а и б). При г = b прочность узла сни-116
жается на 20 ... 25%; при прямолинейном переходном участке (см. рис. 57, б) на 40 ... 45 %. Наилучшие результаты (практи-ческая равнопрочность) дает более трудоемкая в изготовлении конструкция, показанная на рис. 57, в
При отсутствии плавного перехода напряжения увеличиваются в 1,8 ... 2,5 раза и более в результате значительной концентрации напряжений и влияния изгиба стойки. За расчетное при этом следует брать сечение по углу проема (панель А, сечение 2—2 на рис. 56).
Указания по учету влияния конструкции переходного участка можно найти в работах Н. В. Баренцева [9] и А. 3. Локшина и Л. И. Рябова [291.
И. РАСЧЕТ ЕЗДОВЫХ ПОЛОК НА МЕСТНЫЕ НАГРУЗКИ
Нижние полки ездовых профилей монорельсовых* грузовых тележек работают в условиях сложного напряженного состояния. Они испытывают общую деформацию, являясь элементом’ моста или пЬдвешенной к нему балки (включая изгиб в двух плоскостях, растяжение-сжатие и кручение,— стесненное, в отдельных случаях свободное). Специфическими для ездовых профйлей яв-. ляются напряжения местного изгиба. Определению этих напряжений' посвящено много теоретических и экспериментальных работ, дающих близкие результаты.
На рис. 58 приведены полученные Г. Менделем [681 графики, иллюстрирующие изменение относительных поперечных тх/Р и продольных ти1Р моментов< по ширине плоской и наклонной полок, нагруженных сосредоточенной нагрузкой Р, приложенной на расстоянии с от стенки. Напряжения в элементе полки толщиной б
охм = Ртх , ОрМ = Рти g2 • (8)
: Нижние полк!( балок, в особенности двутавровых часто Усиливают подваркой полосы. При а’гом рекомендуется увеличивать расчетную толщину полки на 50 % толщины усиливающей полосы. ; . : . j '
Непосредственно в точке приложения нагрузки, в верхних волокнах полки, возникают контактные напряжения, которые также влияют на общую прочность профиля [631.
При определений эквивалентного напряжения оэ .обычно учитывают только главное нормальное напряжение. Наибольшее расчетное напряжение о,, может возникнуть только при одновременном сочетаний всех неблагоприятных нагрузок, поэтому при определении его не следует учитывать динамические и ветровые нагрузки Следует также иметь в виду, что превышение о8 нормативного сопротивления R не влечет за собой разрушения полки. Однако при интенсивной эксплуатации крана (средний и тяжелый
117
Рис. 58. Графики для определения местных напряжений в ездовых полках монорельсов:
а — плоской; б — наклонной
режимы работы) на поверхности последней развиваются пластические деформации, приводящие к быстрому выходу из строя ездового профиля.
12. УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ ЭЛЕМЕНТОВ
Устойчивость центрально сжатых элементов рассчитывают обычно в соответствии с указаниями СНиП. При этом в некоторых случаях (изгиб раскосов из плоскости фермы, раскосы конструкций из одиночных уголков и др.) предусмотрено уменьшение расчетных длин элементов.
П8
Таблица 31
Увеличение несущей способности трубчатых сжатых стержней в сравнении со стержнями из открытого профиля, в %
Марка стали Гибкость стержня Л,
20 40 60 70 75 80 85 90 95 100 105 но 115 и более
СтЗ 4 6 9 10 11 12 12 12 12 12 17 3 0
10ХНСД 4 8 10 11 11 10 4 0 0 0 0 0 0
При дальнейшем уточнении расчетов устойчивости рекомендуется иметь в виду следующее. Трубчатые элементы при действии продольных усилий не испытывают дополнительных дефор
маций от кручения или изгиба, что отражено в табл. 31, составленной с использованием норм FEM.
В существующих нормах предусмотрен учет концевых защемлений только для стержней из одиночных уголков; в действительности такое защемление имеет место и в других типах элементов. В особенности это относится к элементам решетки, примыкающим к сравнительно мощным поясам.
Для учета влияния жесткости узлов можно воспользоваться рекомендациями, приведенными в работах Ф. Блейха.
Для ориентировочных расчетов можно рассматривать сжатые элементы решетки как стержни, повороту концевых сечений
Рис. 59. Эпюры продольных оп и кольцевых ок напряжений на наружной поверхности трубы и ездовой балки в сечении 1—/ от вертикальной нагрузки SP = 125 кН: а — схема приложения нагрузки; б — эпюра' кольцевых напряжений; в — эпюра продольных напряжений,----------замеренные напряжения;
—• — — — напряжения, определенные по элементарной теории
которых препятствует жесткость поясов и примыкающих к узлу растянутых элементов. При этом можно воспользоваться известными готовыми формулами для определения приведенной расчетной длины центрально сжатых и упруго-опертых стержней [531.
Расчет оболочечных конструкций. Рассмотрим оценку прочности специфических для мостов козловых кранов конструкций, в которых вдоль обра-119
зующёй оболочки размещён направляющий элемент, воспринимающий нагрузку от ходовых колес грузовой тележки.
Эти конструкции выполняют по двум основным схемам: с тонкостенной трубой, к нижней стороне которой прикреплен монорельс (см. рис. 20); с верхней и нижней хребтовыми балками, соединенными системой поперечных диафрагм и дугообразными боковыми тонкостенными оболочками (см. рис. 29). Мосты первого, типа исследовались в Днепропетровском инженерно-строительном институте [11].
При теоретических исследованиях рассматривали ~ работу монорельса и цилиндрической оболочки; исходя из условия их совместной деформации находили распределение поперечной нагрузки между этими элементами. Напряжение в трубе оценивали с учетом изгиба ее в радиальном (поперечном) направлении.
Результаты расчетов, выполненных с применением ЭЦВМ, подтверждены данными экспериментов.
На рис. 59 показаны экспериментальные эпюры напряжений в сечении одной из исследованных конструкций. Здесь четко проявляются относительно высокие кольцевые напряжения в местах примыкания к трубе кромок промежуточного швеллера, вызванные деформацией контура трубы под нагрузкой. Эпюра продольных напряжений, в общем, следует закону, соответствующему использованию элементарной теории сопротивления материалов; имеющие в верхней и нижней зонах трубы отклонения отражают влияние поперечных кольцевых напряжений. -
Слёдует отметить, что при наиболее употребительных соотношениях между диаметром и толщиной стенки трубы D/Ъ — 60,... 80, влиянием кольцевых*напряжений, а также отклонений от прямолинейности эпюры продольных напряжений обычно можно пренебречь. Однако при относительно более тонких стенках кольцевые напряжения в зоне примыкания ездового монорельса могут ограничивать несущую способность моста; увеличиваются также продольные напряжения на нижней полке двутавровой балки.
Очевидно, эти неблагоприятные факторы сильней сказываются при относительно малых пролетах мостов, где больше проявляется влияние поперечной силы. Здесь использование элементарной теории может привести к необоснованному завышению фактической несущей способности конструкции.
Отклонения нагрузки от вертикали на 6 ... 7° существенно не влияют На напряженное состояние конструкции.
Глава 5
СЦЕНКА ЖЕСТКОСТИ МЕТАЛЛИЧЕСКИХ КОНСТРУКЦИЙ
1. КРИТЕРИИ ОЦЕНКИ ЖЕСТКОСТИ,
Расчет по третьему предельному состоянию предопределяет необходимость оценки показателей жесткости металлических кон-, струкций.
Применительно к козловым кранам по жесткости металлической конструкции могут быть выделены следующие критерий ограничения; I
гигиеническое ограничение — недопущение неблагоприятных! для здоровья крановщика виброскорости и продолжительности колебаний рабочего места;
критерий точности и стабильности работы — недопущение возникновения статических или динамических перемещений эле*
12Й
нентов конструкции, снижающих точность выполнения рабочих операций или представляющих опасность для сохранности транспортируемых грузов, элементов конструкции и окружающих предметов;
критерий выносливости — недопущение повторных колебаний, неблагоприятно отражающихся на усталостной прочности металлической конструкции;
критерий устойчивости движения крана — недопущение возникновения фрикционных автоколебаний-остова кранов.
Ниже приведены соображения и рекомендации по оценке и нормированию жесткости металлических конструкций козловых кранов. Рассматривая их, следует иметь в виду, что в ряде случаев применение приводов с установочными скоростями или плавным пуском и торможением позволяет значительно снизить требования к жесткости кранов.
Существенно снижает вибрацию кранов и их элементов применение виброзащитных устройств. -
2. НОРМИРОВАНИЕ ЖЕСТКОСТИ
ПО ГИГИЕНИЧЕСКИМ ПОКАЗАТЕЛЯМ
В соответствии е действующим ГОСТ Г2.1.012—78 гигиеническими характеристиками вибраций, действующих на человека, являются среднеквадратичные значения виброскорости в м/с, или ее логарифмические уровни в децибеллах. Относящиеся к кранам нормы допустимых уровней вибрации приведены в табл. 32.
Таблица 32
Гигиенические нормы вибрации для грузоподъемных кранов по октавным полосам
Виды вибрации Среднегеометрическая частота, Гц
2 4 8 16 31,6 63 125 250 600 1000
5 Общая — си* 3,5 1,3 (ЦВ 0^56 0^56 (Х56
денье и опора ног Локальная — 117 108 102 5,0 101 5,0 101 3,5 101 2,5 1.8 1.3 0,9 0.65
рычаги управления 120 120 117 114 111 108 105 102
Примечание. В числителе приведены нормы вибрации в м/с-КН; в аир* менателе в дБ.
Уровень общей вибрации нормируют по трем ортогональным направлениям, локальной — по направлению действия усилия руки оператора на рукоять управления. Методы замера вибраций
121
приведены в «Руководящем техническом материале Минтяжмаша» РТМ 24.090.58—79.
Анализ данных, приведенных в табл. 32, показывает, что амплитуды гармонических колебаний, соответствующих средне* квадратичным значениям виброскорости, весьма невелики. Например, при частоте 2 Гц они составят 3,9 мм, а при частоте 8 Гц — только 0,13 мм. Вибрации с такими амплитудами в кранах прак* тически неустранимы, однако следует иметь в виду, что фактиче* ский уровень вибраций должен оцениваться не по мгновенным пиковым значениям (например, при пуске механизма), а по средне* квадратичному значению виброскорости за типовой цикл работы крана. Цикл работы включает в себя наряду g периодами неувта-новившегося и установившегося движения, а также и внутри* цикловые простои крана и его механизмов. Это позволяет суще* етвенно расширить диапазоны допустимых пиковых виброско-ростей.
Методы расчета, которые предотвращают возникновение вибраций, превышающих нормированный уровень, еще не разработаны. Тем не менее имеющиеся теоретические разработки и экспериментальные материалы позволяют с известной степенью достоверности проектировать краны, работа которых не приводит к возникновению неблагоприятных с точки зрения вибраций гигиенических условий.
Данные эксплуатации и результаты замеров показывают, что в подавляющем числе случаев для кабины крановщика следует считаться только о колебаниями, возникающими при работе механизма подъема груза. При этом проявляются преимущественно низкие частоты (порядка 0,5 ... 1,2 Гц), соответствующие продольным колебаниям остова.
Для конструкций козловых кранов характерно наличие шарниров; краны обычно устанавливают на сравнительно податливом и обладающим повышенными диссипативными свойвтвами рельсовом пути а деревянными шпалами и гравийным балластом. Это обусловливает повышенные показатели затухания; их логарифмические декременты находятся в пределах 6М = 0,10 ... 0,20. При этом большие значения относятся к кранам в канатными грузовыми тележками, смещающимися при горизонтальных колебаниях моста. В определенных пределах для оценки жесткости козловых кранов можно пользоваться методикой, длительное время применявшейся для расчета мостовых кранов.
Время затухания продольных колебаний
= 2п 1п/„/(ре), (9)'
где /ст — статическое перемещение моста крана в горизонтальном направлении под действием нагрузки, равной весу груза, см; 6 — логарифмический декремент затухания; р — парциальная частота горизонтальных колебаний.
Это время не должно превышать для кранов тяжелого и среднего режимов работы соответственно 15 и 25 в.
122
Однако необходимо отметить, что время затухания колебаний лишь отдаленно характеризует динамические свойства крана, что заставляет рассматривать данный- критерий как ориентировочный 15).
При проектировании мостов кранов обычно используют найденные эмпирическим путем нормы допустимого прогиба моста от подвижной нагрузки от масс груза и грузовой тележки. Ограничение прогиба предотвращает возникновение длительно действующих низкочастотных колебаний остова крана, в особенности сказывающихся у кранов с одной жесткой, а другой гибкой опорами. Кроме этого, ограничение направлено на предотвращение непроизвольного перемещения грузовой тележки вследствие наклона подтележечных рельсов, которое может быть в электрических 'талях, лишенных тормозов на механизмах передвижения.
В настоящее время могут быть рекомендованы следующие предельно допустимые относительные прогибы мостов кранов как при расположении грузовой тележки в центре пролета L, так и предельном рабочем вылете LK на консоли (табл. 33). Прогибы следует определять без учета деформаций опор и просадок подкрановых путей, а также при фиксированном в осевом направлении положении ходовых колес кранов. Необходимо отметить, что в консольных кранах практически во всех случаях прогиб в пролет^ не превосходит 1Z1000... 1/1250 пролета. Одновременно необходимо отметить, что соблюдение нормативов прогибов на консолях приводит к недоиспользованию несущей способности металла. Это фактически всегда имеет место у конструкций листовых мостов, где напряжения от вертикальных нагрузок; зачастую не
Таблица ЗЭ
Допустимые относительные прогибы моста
Краны Краны с обоими жесткими опорами Краны с одной жесткой и другой гибкой опорами
Расположение грузовой тележкн/место определения прогиба
в центре пролета на консоли в центре пролета на консоли
Краны тяжелого режима и краны всех .режимов, транспортирующие раскаленные и взрывоопасные грузы Все остальные краны * Для кранов с электрическими тал жеиия. L/800 L/600 ями без т< LK/250 Lk/150 (Lk/200)* эрмоэов на L/1000 L/800 механизме А к/300 LK/200 передан-
123
превышают 80 МПа. Однако дальнейшее снижение жесткости может привести к нежелательному повышению уровня вибраций моста. Влияние их может *быть устранено применением различного ряда виброгасительных устройств.
Следует также иметь в виду, что продольные колебания моста вне зависимости от причины их первоначального возникновения (работы механизмов подъема груза или передвижения тележки) в значительной мере определяются податливостью стоек опор. В качестве первого приближения за критерий можно принять время затухания горизонтальных колебаний портальной рамы, эквивалентной по жесткости остову крана. При этом массу моста, верхних частей стоек и тележки принимают сосредоточенной над опорами. В формулу (9) подставляют частоту собственных колебаний такой системы, за горизонтальное смещение /ст принимают перемещение моста при подъеме груза или при действии инерционных сил, возникающих при пуске-торможении механизма передвижения грузовой тележки.
8. ОГРАНИЧЕНИЕ ЖЕСТКОСТИ ПО КРИТЕРИЯМ ТОЧНОСТИ
И СТАБИЛЬНОСТИ РАБОТЫ 4
Ниже рассматриваются ограничения, связанные только с податливостью металлической конструкции. В этом случае приходится сталкиваться с неблагоприятным влиянием податливости остова моста в вертикальной плоскости. Эта податливость может сказываться как в снижении точности работы (а в предельных случаях — в отказах) механизма, передвижения грузовой тележки вследствие наклона подтележечных направляющих, так и в неблагоприятном воздействии длительно продолжающихся колебаний моста. Сам по себе прогиб не может сказываться на движении грузовой тележки; здесь влияет наклон моста под колесами тег лежки.
Башенные строительные краны, в том числе с относительно нежесткими в вертикальной плоскости коромысловыми стрелами, снабжаются передвигаемыми с помощью канатно-тягового механизма грузовыми тележками. У таких стрел наклон под грузом часто составляет 2 ... 3° и более, что, однако, не препятствует, нормальной работе кранов. .
Аналогичный вывод сделан также и в ряде работ, касающихся исследований жесткости пролетных балок мостовых кранов. Все эти данные не противоречат сведениям о работе козловых кранов". Следовательно, наклон подтележечных путей следует учитывать тоЛькб при расчете двигателей и тормозов механизмов передвижения грузовых- тележек.
При использовании электроталей без тормозов на механизме передвижения предельный угол наклона в соответствии с требованиями правил Госгортехнадзора не должен превышать ф0 = = 0,003,- При обычных соотношениях LK/L = 0,25 имеет место 124
соотношение f/LK « 0,9ф. Весь наклон под действием веса моста и 50 % наклона от подвижной нагрузки может быть компенсирован строительным подъемом консолей. Тогда можно принять расчетный наклон ф = 2ф0 «0,006 и f/Ln = 0,0054, или 111ю пролета. Практика подтверждает допустимость выполнения' мостов с такими прогйбами консолей.
Опыт эксплуатации перегрузочных кранов показывает, что при таких показателях жесткости колебания металлической конструкции существенно не влияют на точность работы, однако для монтажных и других кранов, где приходится считаться с требованиями особо точной посадки груза, рекомендуется на 20 ... 30 % не доходить до указанных предельных значений.
4. УЧЕТ ВЛИЯНИЯ КОЛЕБАНИЙ НА ВЫНОСЛИВОСТЬ
Колебания металлической конструкции вызывают возникновение в ее элементах дополнительных изменяющихся во времени напряжений. Эти напряжения накладываются на напряжения, возникающие от действия весовых, ветровых и других нагрузок. Для моста, испытывающего значительные нагрузки, влияние нагрузок от колебаний обычно несущественно. Однако его следует учитывать при оценке усталостной прочности стоек опор, где напряжения от вертикальных нагрузок относительно невелики. Здесь для предотвращения развития нежелательных усталостных явлений рекомендуется ограничивать время затухания колебаний в соответствии с приведенными указаниями.
5. НОРМИРОВАНИЕ ЖЕСТКОСТИ ОТ ПЕРЕКОСА
Снижение жесткости от перекоса приводит к уменьшению динамических нагрузок от перекоса, быстрому затуханию колебаний от перекоса и способствует' значительным потерям трения в ходовой части. Однако при движении по рельсам вследствие неизбежных отклонений в установке ходовых колес, укладке рельсов и др. периодически возникают сопротивления 118]. Эти сопротивления при установившемся движении крана могут привести к возникновению периодически возникающих колебаний, по своему характеру близких к фрикционным автоколебаниям. Для предотвращения таких колебаний, нарушающих устойчивость движения кранов, жесткость при перекосе рекомендуется принимать не ниже приведенных значений:
Скорость передвижения крана, м/с .... До 0,5 0,5 ... 1,0 Св. 1,0
Жесткость при перекосе, Н/м....... 100 000 150 000 200 000
125
Г л а в а б
МЕХАНИЗМЫ КРАНОВ
1. ГРУЗОВЫЕ ТЕЛЕЖКИ И МЕХАНИЗМЫ ИХ ПЕРЕДВИЖЕНИЯ
Механизмами козловых кранов общего назначения являются рабочие механизмы подъема груза, передвижения тележки и передвижения крана. При управляемом захвате груза возможна установка двухбарабанной лебедки — например, подъема и замыкания грейфера. Иногда грузовые тележки оборудуют механизмом поворота лебедки, обеспечивающим ориентацию груза в плане, а также системами жесткого подвеса груза, препятствующими раскачиванию последнего.
Общими для всех механизмов требованиями являются возможность их демонтажа и монтажа без разборки всего крана или основных элементов его металлоконструкции. Это же самое необходимо обеспечивать и для узлов механизмов: замена ходовых колео не должна вызывать демонтаж ходовых тележек; замена канатных барабанов — демонтаж грузовых тележек и т. п.
В зависимости от конструкции моста грузовые тележки по виду ходовой части разделяют на подвесные монорельсовые и двухрельсовые, опорные для двух- и однобалочных кранов, однорельсовые опорные, консольно-подвесные для однобалочных кранов и консольные.
В зависимости от размещения привода механизма передвижения и подъема груза различают тележки самоходные и с канатной тягой. Последние выполняют со стационарным расположением механизма подъема груза — на мосту, или с установкой его непосредственно на грузовую +ележку. В козловых кранах большой грузоподъемности (судостроительных, монтажных и др.) иногда применяют самоходные грузовые тележки со стационарным расположением механизма подъема груза. В этом случае механизм передвижения часто имеет зубчато-реечный привод.
Грузовые тележки с канатным приводом применяют преимущественно для кранов легкого и среднего режимов работы. Достоинством их является малая подвижная нагрузка (1,07 ... 1,10 номинального груза) на металлоконструкцию. В обслуживании и ремонте краны с канатным приводом менее удобны вследствие быстрого изнашивания канатов. Кроме того, провисание последних создает ряд неудобств в работе: потерю производительности при необходимости точной посадки груза; относительно долго незатухающие продольные колебания тележки. Необходимо применять тросоподдержки и лебедки для подтягивания каната пере; движения тележки, утяжелять блочную обойму. Подсчеты показывают, что с учетом затрат на ремонт* и содержание такой тип тележек часто уступает самоходным приводным.
Однако ввиду трудностей комплектации механизмов передвижения малогабаритными редукторами тележки с канатной тягой 126
нередко применяют и в новых конструкциях кранов с подвесными тележками.
Рассмотрим отдельные типы грузовых тележек.
Монорельсовые подвесные тележки. Наибольшее распространение получили передвижные электрические тали (тельферы). В настоящее время отечественной промышленностью освоен выпуск талей типа ТЭ по ГОСТ 22584—77 грузоподъемностью 0,25 ..» 5,0 т.
Такие тали предназначены преимущественно для внутрицехового транспорта; они имеют небольшую массу и габаритные размеры. Их изготовляют крупными сериями. Эти обстоятельства обусловили широкое применение талей в козловых кранах легкого и среднего режимов работы и соответствующей грузоподъемности.
Однако следует иметь в виду, что технические характеристики и эксплуатационные качества электроталей не полностью удовлетворяют условиям работы на козловых кранах. Тали недостаточно защищены от атмосферных осадков. Поэтому на мосту крана следует предусматривать специальный стояночный участок, оборудованный щитом, предотвращающим попадание осадков на корпус электротали.
Серийно выпускаемые тали имеют одну скорость подъема груза (0,13 м/с) и передвижения (0,33 м/с), что не всегда удовлетворяет условиям работы. Отсутствует тормоз механизма передвижения; это резко снижает точность остановки тали и не гарантирует ее от самопроизвольного перемещения вдоль моста при действии случайных нагрузок. Крюковая обойма, подвешенная на двух ветвях, слабо сопротивляется закручиванию, неизбежному при навеске на крюк поворотного захватного органа.
В ряде случаев на козловые краны устанавливают тали грузоподъемностью 10 т типа ТЭ, выпускаемые Харьковским заводом ПТО им. В. И. Ленина; находят применение также и поставляемые из НРБ тали грузоподъемностью до 5 т, по своим показателям близкие к талям ТЭ. Однако тали НРБ имеют тормоза на механизмах передвижения.
. В кранах производства некоторых зарубежных фирм используют электротали с увеличенным по ширине расстоянием между ходовыми колесами. Такие тали, перемещающиеся по краям нижних полок коробчатых балок, обладают хорошей поперечной устойчивостью..
При использовании талей нужно иметь в виду, что в ряде их конструкций по мере подъема груза грузовая подвеска смещается вдоль барабана, что обусловливает неравномерное распределение нагрузок на ходовые колеса.
В зимнее время ездовые полки монорельсов могут покрываться снегом и льдом, что вызывает пробуксовывание ходовых колес. Поэтому для улучшения работы механизма передвижения на местах эксплуатации на ходовых тележках электротали иногда монтируют стальные щетки, очищающие полки.
>27
В ряде случаев козловые краны оборудуют монорельсовыми грейферными или магнитными тележками, выполненными с применением механизмов подъема и передвижения электроталей.
В качестве примера конструкции монорельсовой канатной грузовой тележки может быть рассмотрена тележка крана грузоподъемностью 10 т, опирающаяся на 12 ходовых колес диаметром 170 мм (рис. 60). Колеса объединены тремя балансирами, образующими четырех- и восьмиколесные тележки. Каждый балансир имеет две листовые щеки с вваренными между ними втулками для осей колес.
Четырехколесная тележка состоит из двух боковин /, усиленных вертикальным наружным и горизонтальным внутренним швеллером. Балансиры своими реками охватывают верхнюю часть боковин и соединяются с ними пальцами. Между собой боковины соединены шпильками с распорными втулками.
Аналогично собрана восьмиколесная тележка, также имеющая в середине ось 2 для подвески рамы блоков. На средней части этих осей установлены шаровые шарниры. Шарниры смазываются через сверления в осях. Рама 3 с блоками для полиспаста подъема груза, подвешивается в двух точках. Точки подвески размещены так, что давления на колеса распределяются поровну.
Подвеска рамы с помощью шаровых шарниров позволяет ей поворачиваться при отклонении канатов в боковом направлении. Благодаря этому предотвращается изгиб рамы и повышается равномерность распределения давлений на ходовые колеса. Между 128
швеллерами рамы на осях установлены блоки четырехкратного полиспаста подъема груза.
С наружной стороны восьмиколесной тележки установлен пружинный амортизатор, к которому крепят тяговый канат. Далее канат запасован на лебедку, установленную на мосту; другую его ветвь крепят на тележке кабины, сцепленной с грузовой тележкой. Для натяжения каната предусмотрена упрощенная ручная лебедка. х
Схемы запасовки канатов механизмов подъема груза и передвижения даны на рис. 61. Грузовая лебедка (рив. 61, а) имеет
Рис. 61. Схема- запасовки канатов козлового крана грузоподъемностью 10 т:
а —• каната подъема груза; б «* каната передвижения груЗовой тележке
канатный барабан с трехслойной навивкой каната. Сбегающий с барабана канат проведен по концевым блокам моста и идет на блоки грузового полиспаста. Второй конец каната крепится неподвижно. Для предотвращения провеса грузового каната масса крюковой подвески увеличена до 300 кг.
Лебедка передвижения тележки (рйс. 61, б) имеет канатоведущий шкив 6, охватываемый тремя витками тягового каната.
Использование вместо обычно применяемых канатных барабанов канатоведущего шкива (рис. 62) упрощает конструкцию лебедки и существенно уменьшает ее габаритные размеры. Кроме этого, упрощается компоновка крана, так как канат на шкиве практически не смещается в сторону; это позволяет располагать лебедку в непосредственной близости от отклоняющих блоков 5 (см. рис. 61, б).
Однако такие лебедки работают лишь при постоянном значительном предварительном натяжении -каната, для чего на тележке 3, связанной с кабиной 2 управления помимо винтовой натяжки / предусмотрена пружинд 4. Как показала практика, при пусках канат интенсивно проскальзывает по шкиву, что вызывает его усиленное изнашивание и требуется частое натягивание каната для компенсации его вытягивания.
Поэтому они могут быть рекомендованы только для редко работающих кранов и при скорости передвижения тележки 0,3 ...
5 Абрамович И. И. в др. ,129
0,6 m/g; шкивы должны иметь закаленную рабочую поверхность (НВ 280—520).
Более совершенен канатный механизм передвижения, примененный в кране КС-12,5 грузоподъемностью 12,5 т. Компенсация
Рис. 62. Тяговая лебедка с канатоведущим шкивом
Рис. 63. Качающаяся грузовая натяжка: а установки натяжки на мост; б — рычаг натяжки
вытягивания каната обеспечивается с помощью винтовой натяжки (рис. 63, а) многожелобчатыми шкивами, а для нормальной работы канатоведущего шкива 1 по обе стороны от него установлены грузовые рычажные натяжки. Натяжка (рис. 63, 6) выполнена в виде качающего рычага 2, несущего на свободном конце шарнирно подвешенный груз 4\ на осях этого груза и опорного кронштейна 3 смонтированы отклоняющие блоки 5.
130
Набегающая на шкив ветвь каната, натягиваясь, отклоняет установленный на ней рычаг вверх; противоположный рычаг, опускаясь, компенсирует ослабление сбегающей ветви. Наличие двух натяжек обеспечивает надежную работу механизма при движении в обоих направлениях. Недостатком такого механизма является его сложность, обусловленная наличием еще и грузовых натяжек; в то же время увеличивается число перегибов канатов.
Рис. 64. Схема запасовки канатов грузовой тележки для работы с длинномерными грузами
Иногда натяжение каната создается под действием силы тяжести смонтированного, на качающейся раме привода, снабженного канатоведущим шкивом.
Канатные монорельсовые тележки (рис. 64) применялись также на кранах ККУ-7,5 м грузоподъемностью 7,5 т пролетом 32 м. Особенностью этих кранов являлось оснащение их траверсами 6 для работы с длинномерными грузами, что определило как конструкцию рамы тележки, так и расположение на ней блоков.
С барабана / (рис. 64) лебедки две ветви каната через отклоняющие 2 блоки направляются на пару входных 3 блоков, расположенных горизонтально. После них канаты разводятся на вертикальные блоки 4, расположенные на коромыслах, проходят по блокам 5 траверсы, возвращаются обратно и через пару выходных блоков 7 проходят к креплениям на конце противоположной консоли моста.
Рама тележки состоит из продольной балки с ходовыми колесами. Она несет четыре горизонтальных блока и поперечную балку с двумя парами вертикальных блоков. На концах поперечной балки установлены кронштейны с упорными роликами, предохраняющие тележку от поперечного раскачивания. ,
Несмотря на значительную массу траверсы (600 кг), провисание канатов в пролете (длина моста 56 м) составляет несколько метров. Поэтому на кране по длине моста устанавливались шесть
5* Ш
тросоподдержек (рис. 65), каждая а двумя неподвижными кронштейнами с роликами по обеим сторонам ездового монорельса. Для предохранения каната от схода о ролика по бокам расположены отклоняющиеся секторы, удерживаемые в вертикальном положении пружинами. При проходе мимо тросоподдержки тележки упоры, установленные на последней, разворачивают сек*
торы, что дает возможность грузовому канату сойти или спуститься на ролики кронштейнов.
Тележка козлового крана ККС-10 (рис. 66), предназначенного для работы преимущественно с длинномерными грузами, несет на себе грузовую лебедку. Рама 1 тележки шарнирно подвешена с помощью серег к двум четырехколесным ходовым тележкам 2. Последние в средней части
Рис. 65. Тросоподдержка поворот- Рис. 66. Грузовая тележка крана ного типа ККС-10
илеют шарнирную траверсу для навешивания рамы; щеки тележек связаны между собой шпильками с распорными втулками. С внутренних сторон между колесами приварены предохранительные упоры.
Для предотвращения раскачивания тележки при движении на ней установлены четыре угловые стойки 3, несущие упорные ролики 4, крепление которых позволяет регулировать их положение по высоте. Ролики перекатываются по двум квадратам, приваренным по всей, длине нижних поясов моста. Постоянный зазор между роликами и квадратами обеспечивается прокладками необходимой толщины в местах крепления ездового монорельса к мосту.
132
. К раме грузовой тележки шарнирно прикреплена рама двухколёсной тележки кабины, подвешенной в точке, близкой к своему центру масс. Вследствие этого грузовая тележка не испытывает дополнительных нагрузок от массы кабины. Рама грузовой тележки закрыта настилом для обслуживания механизмов, на котором размещен механизм подъема 5 и блоки полиспаста 6.
Рис. 67. Грузовая траверса крана ККС-10
Каждый конец двух независимых ветвей грузового канала закреплен на барабане и в средней части, намотка производится к краям снабженного ребордами барабана.
Блоки грузовой траверсы (рис. 67) и верхние блоки тележки, лежащие в одной вертикальной плоскости, расположены так, что при верхнем крайнем положении траверсы канаты полиспаста имеют строго вертикальное положение. Такая схема запасовки обеспечивает две точки подвеса траверсы и устойчивое положение ее при подъеме груза со смещением его центра масс. По центру трарерсы шарнирно установлен десятитонный крюк для подъема штучных грузов. По концам траверсы расположены скобыхстропов для перегрузки длинномерных грузов.
- У крана ККС-10 лебедка передвижения тележки установлена на мосту «около гибкой опоры. Лебедка имеет барабан диаметром 310 мм. Канат диаметром 8,5 мм закреплен у концов барабана, его запасовка осуществляется при крайнем положении тележки; в этом случае одна ветрь каната полностью намотана, другая пол-' ностью смотана. Так как проход по мосту расположен по середине его, лебедка поднята и по длине моста расположены три сдвоей-
133
ных поддерживающих ролика, которые могут перемещаться поперек моста. Через блоки, установленные на концах консолей, ветви канатов направляются под монорельс к грузовой тележке. Один из концов каната соединен с тележйой через винтовое натяжное приспособление.
На линии присоединения канатов щеки ходовых тележек соединяются по месту жесткой стяжкой, облегчающей работу узлов подвески грузовой тележки.
Рис. 68. Самоходные двухрельсовые подвесные грузовые тележки: а » для передвижения по обеим полкам двутавровых направляющих; б — для передвижения по внешним полкам двутавровых направляющих
Кабельные каретки крана ККС-10, передвигающиеся по монорельсу, используют так же, как передвижные тросоподдержки, для чего они снабжены дополнительным роликом для нижней ветви тягового каната.
Двухрельсовые подвесные грузовые тележки. Краны с монорельсовыми тележками имеют ряд недостатков, к основным из которых относятся низкая износостойкость монорельсов и поперечное раскачивание тележки. Этого недостатка лишены краны € двухрельсовыми подвесными тележками, которые выполняют как самоходными, так и канатными.
Некоторые краны оборудованы монорельсовыми тележками, перемещающимися по двум укрепленным на мосту подтележечным рельсам. В ходовой части грузовых тележек применяют типовые тележки передвижных талей. На рис. 68 приведена схема дележки фирмы Ау’мунд (ФРГ), Где в механизме подъема также 134
использованы типовые электротали. Одна из них укреплена на подпружиненном кронштейне, связанном с концевым выключателем ограничителя грузоподъемности.
Более распространены краны с тележками, перемещающимися непосредственно по элементам нижнего пояса (рис. 68, б). Безре-бордные ходовые колеса тележек иногда оборудуют бандажами из пластмассы, что позволяет им перемещаться непосредственно по поверхностям профилей нижнего пояса. Для восприятия го-
Рис. 69. Самоходная подвесная грузовая тележка с перемещением по коробчатым элементам нижних поясов
ризонтальных нагрузок здесь* предусматривают горизонтальные направляющие ролики.
В самоходной двухрельсовой подвесной грузовой тележку (рис. 69) ходовые колеса балансирных тележек перемещаются по направляющим, уложенным на коробки нижних поясов. Ведущие . 1W
колеса ходовых тележек 1 приводятся компактными червячным# мотор-редукторами 7. Относительно малые размеры этих редукторов создают благоприятные условия для крепления стоек опор к пролетному строению. Равномерное распределение давлений на колеса» вне зависимости от деформаций и погрешностей изготовления моста и рамы тележки, обеспечивается трехточечным креплением последней. Рама <3, несущая механизмы главного 6 и вспомогательного 4 подъема, опирается одним концом на ведущие ходо-
Рис. 70. Грузовая подвесная тележка крана КК-12,5-32
вые тележки /. На втором конце рама снабжена кронштейном 2, шарнирно связанным с поперечной балкой 5.
В качестве вспомогательного механизма подъема использована электроталь. Кабина управления прикреплена на консольном кронштейне рамы, что нужно учитывать, определяя нагрузки на ходовые колеса. В данном случае шарнирное опирание рамы, вызывающее определенное усложнение конструкции тележки, оправдано — выверка направляющих, укладываемых, на поясах, затруднительна, а в данной конструкции всегда обеспечивается надежный контакт всех ведущих колес с рельсами.
. Следует отметить; что рациональную компоновку узлов примыкания опор к мосту при таких тележках можно обеспечить только при наличии малогабаритных редукторов механизма пере: движения.
На рис. 70 показана грузовая тележка крана КК-12,5-32 конструкции Харьковского завода ПТО им. В. И. Ленина. Рама несет грузовую 1 и тяговую 5 лебедки; последняя имеет нарезной барабан, с которого сбегают четыре ветви каната, попарно проведенные к концам консолей моста. На консолях предусмотрен^ отклоняющие блоки для уравнительных петель канатов. Разме-136
щение тяговой лебедки непосредственно на тележке более чем вдвое сокращает длину тягового каната, что существенно улучшает работу механизма, уменьшая колебания тележки вследствие упругих деформаций каната и упрощая натяжное устройство. Кроме этого, устраняются отклоняющие блоки. Наличие двух пар ветвей каната исключает нецентральное приложение тяговых усилий. Ходовые колеса смонтированы на стойках, одна из пар которых прикреплена к поперечной балке, соединяющейся с рамой
Рис. 71. Грузовая подвесная самоходная тележка крана ККЛ*12,5
телеинигшарнирндй о$ью 4 и несущей лебедку 5. В результате получается трехточечное опирание грузовой тележки. Стойки связаны стяжками 2. Кабина управления снабжена собственными ходовыми колесами и связана с шарнирной проушиной 3 рамы тележки.
вбегающие с уравнительного блока грузового полиспаста канаты взаимодействуют с дополнительными отклоняющими бло-ками, посаженными на эксцентриковую ось, которую используют для приведения в действие ограничителя грузоподъемности типа ОГП.
В двухрельсовой подвесной самоходной тележке (рис. 71) кранов ККД-8 и ККЛ-12,5 (Александрийский завод ИТО им. 60-летия Великой Октябрьской социалистической революции)
137
применена трехопорная схема опирания грузовой тележки. Коробчатые стойки /, несущие ходовые колеса, соединены с рамой 2 тележки и балкой балансира с помощью фланцев и шарниров. Наличие последних позволяет при незакрепленных фланцах отводить стойки в стороны, выводя ходовые колеса за габарит рельсов. Привод механизма передвижения образован электродвигателями, двухпарным цилиндрическим редуктором, с обоими концами выходного вала которого зубчатыми муфтами соединены
Рис. 72. Механизм поворота траверсы крана КК.С-10 встроенные в жестко закрепленные стойки тележки зубчатые передачи. С помощью последних вращение передается на ведущие ходовые колеса. k ;
Краны ККЛ-12,5 предназначены преимущественно для работы с длинномерными грузами, для обеспечения удобства перегрузки которых механизм подъема смонтирован на поворотной платформе. По условиям компоновки последней здесь применен механизм подъема, состоящий из двух лебедок. Платформа смонтирована на вертикальной цапфе, вращающейся в подшипниках рамы грузовой тележки. Верхний конец цапфы несет зубчатое колесо 3 поворотного механизма. Грузовые канаты лебедок запасованы на блоки грузозахватной траверсы. Кабина управления крана ККЛ-12,5 подвешена непосредственно к консольным балкам рамы грузовой тележки.
В результате исключения ходовых колес кабины несколько уменьшается длина подтележечных направляющих моста. Однако при этом часто возникают трудности с обеспечением равномерного распределения нагрузок на ходовые колеса грузовой тележки. Возможность разворота траверсы весьма благоприятна для работы с плохо центрированными в продольном направлении длинномерными грузами, например пачками круглого леса. В то же время такое выполнение механизма существенно усложнило грузовую тележку и увеличило ее массу. Поэтому часто для разворота грузов используют монтируемые непосредственно на траверсах поворотные механизмы.
На рис. 72 показано размещение механизма поворота на траверсах кранов ККС-10 при оснащении их моторными захватами Для леса. Механизм содержит двигатель / мощностью 2,5 кВт, 138
через двухпарный червячный редуктор 2, вращающий верти* кальную цапфу 3, к которой подвешивают захват.
Двадцатитонная канатная тележка крана ККТС-20 (рис. 73) перемещается по двум подтележечным квадратам на четырех двухколесных балансирных ходовых тележках. В каждой из них закреплены по две оси с фланцами; на консолях осей на двух шарикоподшипниках вращаются колеса диаметром 250 мм. Рамы
Рис. 73. Канатная подвесная тележка крана ККТС-20
балансиров с внутренней стороны имеют предохранительные опорные кронштейны на случай поломок осей.
Две продольных балки для блоков полиспаста соединены жестко с передней поперечной коробчатой балкой и шарнирно с задней балкой. В продольных балках закреплены оси прти блоков подъемного полиспаста.
Кабина управления крана ККТС-20 подвешена на дополнительной тележке, связанной с грузовой с помощью двух шарнирных тяг. К передней поперечной балке на пальцах прикрепляют ручную лебедку для выбора слабины каната передвижения тележки. На задней балке канат укрепляется за оси с помощью сжимов.
На боковой площадке кабины предусмотрена телескопическая лестница для выхода на мост в любом месте остановки тележки 156]. Для предохранения от схода каната внутренние блоки имеют приваренные к балкам ограничители; наружные блоки снабжены отодвигающимися ограничителями, что облегчает запасовку каната.
Опорные грузовые тележки. На козловых кранах с двухбалочными мостами применяют, как правило, грузовые тележки мостовых электрических кранов соответствующих грузоподъемностей и режима работы. Конструкция их достаточно подробно рассмотрена в технической литературе [58]. Следует только отметить, что тележки должны быть оборудованы легкосъемными кожухами, защищающими их механизмы от атмосферных воздействий. В некоторых кранах на раме грузовой тележки предусмо .139
трены проушины для крепления дополнительной кабинной те-'лежки.
Опорные тележки бесконсольных козловых кранов обычно выполняют в виде плоской рамы, на консолях которой монтируют блоки грузовых канатов, проведенных по обеим сторонам моста.
Плоская рама грузовой тележки (рис. *-74) козлового крана* грузоподъемностью 30 т опирается на четыре ходовых колеса 2
Рис. 74. Опорная грузовая тележка бесконсольного крана
диаметром 500 мм, перемещающихся по направляющим моста, Эта рама образована двумя поперечинами и шестью продольными балками. На консольных частях рамы смонтированы канатные блоки, 1 двух раздельных грузовых полиспастов, поддерживающих поперечную захватную траверсу. Концы тягового каната 4, подходящего к тележке с обеих сторон, охватывают центральные блоки 5 и закрепляются в ползуне 6, перемещающемся с помощыд винта. При работе канаты фиксируются также винтовыми ско-баМи 3. Возвратные ветви тяговых канатов поддерживаются роликами. С торцов на раме тележки закреплены деревянные»буферные подушки; тележка снабжена также настилом и ограждением, что Облегчает ее обслуживание.
Консольно-подвесная грузовая тележка. Для кранов с одно-балочным пролетным строением, прикрепляемым к опорам с одной стороны, производственным объединением «Кран» разработана грузрвая тележка, (рис. 75). Тележка перемещается по одному 140
Рис. 75. Консольно-подвесная грузовая тележка грузоподъемностью 12,5 т
рельсу, уложенному на верхнем ноясе моста. Желоб нижнего нояса играет роль направляющей для колес, препятствующих раскачиванию тележки и воспринимающих боковые нагрузки.
Основными элементами тележки являются ходовая часть /, скоба 2 и подвесная рама 3 с механизмом подъема груза 4, аппаратным шкафом и кабиной управления. Ходовая часть образована двумя двухколесными балансирными каретками, на которые опирается продольная коробчатая балка или верхние части скобы. В ходовой части использованы элементы типовых мостовых кранов, что значительно упрощает изготовление тележки.
Рамы балансирных кареток снабжены предохранительными кронштейнами, охватывающими с обеих сторон головку подтележечного рельса.' Опираясь на продольную балку, скоба крепится к ней с помощью двух вертикальных пальцев; она выполнена в виде листовой коробки криволинейного очертания и замкнутого сечения.
В нижней горизонтальной части коробки укреплены две горизонтальные
оси, заведенные в проушины боковых щек подвесной рамы. На щеках имеются консольные фланцы для дополнительного крепления со скобой. Это обеспечивает жесткое соединение рамы со скобой и позволяет с помощью прокладок выравнивать положение рамы по горизонтали. Для регулирования по высоте служат подкладные шайбы в опорных местах между скобой и продольной рамой.
По обеим сторонам грузовой лебедки к поперечным балкам рамы прикреплены стойки листовой конструкции. В верхней части они имеют гнезда для соединения с осями скобы и фланцы для установки горизонтальных роликов, перемещающихся в нижней направляющей моста.
Продольные балки рамы выпущены консольно в обе стороны. С одной стороны между ними закреплена кабина управления, с другой — уравновешивающий ее аппаратный шкаф. Кабины и шкаф имеют консольные площадки в уровень настила рамы. На одной передней части рамы на кронштейнах прикреплена площадка с ограждением для обслуживания механизмов и прохода
141
из одной кабины в другую. Кроме того, по обеим сторонам стоек также предусмотрены настилы с ограждением. На другой продольной стороне прикреплена площадка и ограждения с лестницей для аварийного выхода на мост.
На скобе установлена лестница для прохода к механизмам передвижения.
Консольные грузовые тележки. В консольных тележках механизм подъема груза обычно расположен на консольной части рамы/
Рис. 76. Консольные грузовые тележки:
а,— грузоподъемностью I ... й т; б — грузоподъемностью 6 ... 15 т
В получивших наибольшее распространение в козловых кранах мостах с опорным рельсом, расположенным над передней стенкой балки, ведущие колеса тележек перемещаются по этому рельсу. Для уменьшения нагрузок на удерживающие колеса вылет крюка (от опорного рельса) обычно ограничивают 0,8 ... 2,0 м.
Консольные тележки имеют плоские рамы; у тележек с нижними упорными колесами к рамам прикреплены отъемные при транспортировании кронштейны для установки этих колес.
Фирма Каррузерс (Великобритания) применяет тележки (рис. 76, а) на кранах грузоподъемностью 1 ... 5 т. Рама имеет две консольные балки /, несущие электроталь 2. Посредине рамы предусмотрена поперечина 8, к которой прикреплен свободный конец грузового каната. Мотор-редуктор 4 механизма передвижения тележки приводит в движение опорные ходовые колеса 5, перекатывающиеся по подтележечному рельсу 6. Кронштейн тележки образован двумя парами стоек 7 и подкосов S, концы которых прикреплены к нижней балке, снабженной передними упорными роликами, взаимодействующими с нижней горизонтальной направляющей. Тыльные упорные ролики укреплены на кронштейне с противоположной стороны рамы тележки. Крепле-ш
Таблица 34
Техническая характеристика грузовых тележек некоторых козловых кранов
Показатель ККС-10 К-12.5С К-12.5М КК-12,5-32 КК-12,5 ККП-12,5 ККС-20/5 ККО-20/5 ККЛ-32»
Грузоподъемность крана, т 10 12,5 12,5 12,5 12,5 12,5 20/5 20/5 2X16
Скорость, м/с: подъема груза передвижения тележки 0,233 0,60 0,20 0,66 0,20 0,66 0,208 1,05 0,133 0,866 0,20 1,0 0,166 0,666 0,166 0,878 0,20 1,0
Ходовая часть грузовой тележки Мс 1 норельсов 1 1 1 ЗЯ Д вухрельсо) зая Монорельсовая Опорная однорельсовая Трех» рельсовая
Привод передвижения грузовой тележки 1 1 1 Канатный Самоходная Канатный Самохо дная
Расположение тяговой лебедки На мосту На те лежке — На мосту — —
. Вид рабочего органа тяговой лебедки Барабан Шкив Барабан Шкив — ' Барабан - —
Расположение грузовой лебедки На те--лежке * На м юсту 1 {а тележке На мосту На тел ежке
Масса грузовой тележки, т 2,1 0,5 0,7 3,7 4,2 6,3 3,5 8,0 19,0
Примечания. 1. На тележке крана ККЛ-32 установлены две лебедки. 2. На кране KKO-20/S консольно-подвесная тележка, на кране ККЛ-32 — консольная: на остальных кранах — подвесная.
Таблица 35
Техническая характеристика механизмов подъема груза и передвижения грузовых тележек
Показатель К Кв-ю К-12, КЗ К-12.5М КК-12,5-32 КК-12,5 ККП-12,5 ККС-20/5 ККО-20/Б К К Л-32
Главный механизм и юдъема груза
Диаметр барабана, мм Диаметр каната, мм Кратность полиспаста Мощность двигателя, кВт (ПВ = 25 %) Межосевое расстояние редуктора, мм 400 15 2X3 27 500 410 19,5 4 36 650 408 19,5 4 . 36 650 410 18 2X2 36 500 375 15 2X3 15 400 420 18,5 2X2 36 ' 500 536 22,5 6 36 650 520 18,5 2X3 36 650 410 16,5 2X2X4 2X36 650
Механизм передвижения
Число ходовых колес Диаметр ходовых колес, мм Мощность двигателя, кВт (ПВ = 25 %) Диаметр барабана или шкива, мм Диаметр'каната, мм Межосевое расстояние редуктора, мм 8 190 3,5 310 8,8 350 8 180 5 265 8,5 350 16 180 5 265 8,9 350 4 200 5 410 2X6,9 400 8 200 1,7 300 9,9 250 4 320 7,5 350 16 180 13 310 13,5 400 4 320 2X5 400 6 500* 2X16 500
Примечание. Крана ККП-12,5, К КО-20/5 и К К Л-32 оборудована самоходное ррузовей тележкой.
ние стоек и подкосов на закладных пальцах упрощает сборку тележки при монтаже крана.
Тележки грузоподъемностью 6 ... 15 т (рис. 76, б) той же фирмы выполняют о компактной червячной лебедкой. Механизм подъема груза такой лебедки содержит основной приводной двигатель 9, на свободном конце вала которого посажены шкивы колодочных электромагнитных тормозов. Основной приводной двигатель 9 прифланцован к корпусу червячного редуктора 10. С противоположной стороны корпуса находится мотор-редуктор 11 малой скорости. Верхний блок канатного полиспаста смонтирован на поворотной траверсе 12. Мотор-редуктор 4 механизма передвижения тележки через открытую зубчатую передачу приводит в движение опорные ходовые колеса. Упорные ролики смонтированы на балке собранного на пальцах кронштейна рамы тележки, а также с тыльной стороны этой рамы. Мотор-редуктор 4 снабжен дисковым электромагнитным тормозом, находящимся на хвостовом конце вала двигателя. Ходовые колеса вращаются на неподвижных осях; ведущие колеса имеют зубчатые венцы.
В тележках «Каррузерс» ходовые колеса часто для уменьшения шума и местных давлений на балку изготовляют с пластмассовыми ободами. *
Аналогичная по схеме грузовая тележка применена в кране ККЛ-32. У кранов К-50 в тыльной части рамы грузовой тележки смонтированы балансирные тележки с удерживающими колесами, перекатывающимися по верхним полкам укрепленного над стенкой балки монорельса. Такие тележки более просты по конструкции и не требуют установки дополнительного тыльного рельса. Однако здесь резко увеличивается нагрузка на передний рельс, который воспринимает не только всю суммарную весовую нагрузку, но и реакцию от опрокидывающего момента. Это обстоятельство, а также низкая износоустойчивость полок двутавровой балки ограничивают область применения таких тележек относительно редко используемыми кранами.
В табл. 34 и 35 приведены данные о грузовых телёжках и механизмах подъема груза и передвижения тележек некоторых кранов.
2. ХОДОВЫЕ ТЕЛЕЖКИ
Механизмы передвижения козловых кранов общего назначения выполняют с раздельным электроприводом от асинхронных двигателей обычно с фазным ротором. Приводными выполняются не менее 50 % ходовых колес. Ходовые колеса — двухребордные, монтируют их на подшипниках качения.
Конструктивно механизмы передвижения выполняют в виде скрепляемых с основанием стоек опор одноколесных или балансирных тележек и, реже, ходовых, балок, на которые попарно опираются две стойки. Как правило, тележки скрепляют с основа-145
нием стоек опор с помощьр болтовых фланцев. Рассчитывать последние следует’ с учетом нагрузок, действующих как при ра* боте, так и при монтаже кранов.
Механизмы передвижения обычно комплектуют зубчатыми цилиндрическими редукторами; за рубежом находят применение также червячные или конические редукторы.
Рие. 77. Кинематические схемы механизмов передвижения крана
Типовые кинематические схемы приводов механизмов передвижения приведены на рис. 77.
На выходном валу редуктора механизма передвижения крана (рис. 77, а) посажена шестерня, сцепляющаяся с зубчатым венцом ходового колеса (или с зубчатым колесом, посаженным на консольный конец вала колеса). Обычно используют- зубчатый цилиндрический двухпарный горизонтальный редуктор, установленный на площадке рамы ходовой тележки. Такие схемы используют в кранах с ограниченной интенсивностью эксплуатации и преимущественно при ограниченной мощности приводного двигателя — 3 ... 5 кВт.
Опыт эксплуатации показывает, что консольная реверсивная нагрузка на вал редуктора при интенсивной работе механизма передвижения быстро (в ряде случаев за 2 ... 3 месяца) приводит к разбалтыванию крепления редуктора и даже к поломке его лап. Попытки усилить крепления, увеличив прочность болтов, уста-146
новив упоры и др., обычно положительного результата не дают. Поэтому эксплуатирующие организации, а иногда и заводы-изготовители переделывают выходной вал редуктора, устраивая для него третью, дополнительную опору [56I. Этим удается уменьшить нагрузку на корпус редуктора, однако выверка трехопорного вала трудоемка, а распределение нагрузок между его опорами неопределенно. Иногда вал ведущей шестерни одним концом опирается на выносную опору, а другим — на гнездо выходного вала редуктора, причем крутящий момент передается через муфту последнего.
В некоторых конструкциях вал ведущей шестерни монтируют на двух опорах и соединяют с редуктором зубчатой муфтой. Однако это приводит к существенному увеличению ширины ходовой тележки.
На рис. 77, б приведена схема механизма передвижения с редуктором, навешенным на конец вала колеса. В этой схеме исключена консольйая нагрузка, отсутствуют быстроизнашивающиеся и требующие регулярного ухода открытые передачи. Иногда валы редуктора и колеса соединяют с помощью жесткой тарельчатой муфты.
Такие механизмы наиболее эффективны при использовании фланцевых электродвигателей и креплении тормоза непосредственно на двигатель или на навесной редуктор. ,
Однако следует отметить, что широкое внедрение данной схемы встречает^.затруднения вследствие недостаточных пока еще масштабов производства навесных редукторов.
В двухколесных балансирных тележках избежать применения открытых передач при обоих ведущих колесах тележки практически невозможно. Здесь используют преимущественно две схемы. При установке редуктора на центральный вал (рис. 77, в)' улучшается работа открытой зубчатой передачи, так как вращение передается от центральной шестерни на два колеса. Однако в ряде случаев компоновка механизмов, по этой схеме оказывается неудобной. Тогда привод ходовых колес выполняют по схеме, приведенной на рис. 77» г. Иногда такие тележки выполняют с венцовыми зубчатыми колесами, также связанными между собой паразитной шестерней. В этом случае один из венцов приводится с помощью шестерни, посаженной на консольный вал редуктора или на дополнительный промежуточный вал.
. В схемах, приведенных на рис. 77, а—г, можно применять также и червячные редукторы, что часто уменьшает ширину ходовой части. Кинематическая схема одного из таких механизмов (фирмы Вико) показана на рис. 77, д. Наиболее компактны механизмы передвижения с мотор-редуктором, выходной вал которого несет коническую шестерню, сцепляющуюся с коническим венцом ходового колеса (рис. 77, е). В этом случае, например, фирма Аумунд часто располагает мотор-редуктор наклонно перед опорной стойкой, что сводит к минимуму ширину ходовой части.
В козловых кранах находят применение различные конструкции узлов установки ходовых колес. Часто используют типовые узлы мостовых кранов — кованые (штампованные) колеса на вращающихся валах, подшипники которых посажены в расточках угловых букс. Такие узлы выпускают с ходовыми колесами диаметром 320 ... 800 мм на максимальные давления 100 ... 600 кН. Достоинствами их являются простота демонтажа и монтажа ходовых колес, а также возможность приобретения обладающих относительно высоким качеством узлов или заготовок крупносерийного изготовления.
Однако угловые буксы трудоемки в обработке; для точной их установки нужна механическая обработка рам тележек, что далеко не всегда осуществимо. Необходимость придания соответствующей формы приводит к усложнению рам тележек; при этом размеры торцовых частей рам часто оказываются недостаточными для крепления противоугонных захватов. Для устранения этого недостатка иногда располагают ходовые телёжки буксами внутри опоры; поэтому приходится размещать стяжку высоко над тележками.
В козловых кранах находят применение упрощенные буксовые узлы (с цилиндрическими буксами, сварными буксами с косым разъемом и др.). Такие узлы наиболее целесообразны в балансирных тележках, так как позволяют получить необходимую точность установки ходовых колес путем расточки рам тележек.
Для кранов с ограниченной интенсивностью эксплуатации с успехом применяют значительно более простые в изготовлении и установке колеса на неподвижных осях и с венцовыми зубчатыми колесами. При изготовлении венца и ведущей шестерни из термически обработанной стали 40 ... 55 (йли им соответствующих) срок их службы даже в условиях среднего режима составляет 3 ... 5 лет, что приемлемо в условиях эксплуатации.
Далее рассмотрим конструкции основных типов ходовых тележек и механизмов передвижения.
В ходовых приводных тележках кранов ККС-10 рама тележки выполнена из двух балок швеллерного сечения, к которым приварен кронштейн наклонного соединительного фланца. В щеках кронштейна посажена ось для крепления монтажного полиспаста. С противоположной стороны предусмотрены кронштейны с вертикальной осью для крепления противоугонного захвата.
Ось ходового колеса посажена в усиленных накладками расточках швеллеров; она несет ходовое колесо с двумя сферическими роликоподшипниками и зубчатым венцом открытой передачи.
Вал ведущего колеса открытой передачи, вращающийся в двух опорах, соединен в выходным валом редуктора зубчатой муфтой. Такое соединение удобно для сборки и ремонтов. Точность зацепления обеспечивается специальным сборочным накладным кондуктором, который базируется на расточке' для оси ходового колеса. По этому кондуктору на контрольных штифтах устанавли-148 •
Рис. 78. Ходовое колесо крана ККС-10
рают и заваривают по месту пальцы крепления корпусов подшипников вала. После установки ходового колеса и вала монтируют остальные механизмы.
До установки редуктора, двигателя и тормоза к их лапам на болтах крепят гнутые подставки; после»установки и регулирования механизма эти подставки приваривают. Это значительно уменьшает трудоемкость изготовления, так как исключает раз-метку и свержение отверстий под крепящие болты и регулирование по высоте с помощью прокладок. Все механизмы закрыты съемными кожухами.
Ходовое колесо (рис. 78) изготовляют из углеродистой стали 75 и проводят сорбитизацию (или глубинную закалку) обода до твердости НВ 300—350. Зубчатый венец посажен на ступицу с натягом и крепится с помощью ввертных шпилек.
Ходовые части козлового крана ККТ-5-12,5 грузоподъемностью 5 т пролетом 12,5 м имеют балки-стяжки, выполненные каждая из двух швеллеров, на которые опираются стойки опор. Ходовое колесо • смонтировано на угловых буксах. Один из концов вала колеса несет ведомое зубчатое колесо. На второй конец устанавли
вают монтажный барабан. Ведущее зубчатое колесо посажено на выходной вал горизонтального редуктора, установленного на консольной площадке балки. На торце последней смонтирован щит с двумя резиновыми буферными упорами и ручным клещевым противоугонным захватом.
В этой конструкции для монтажа крана приходится вывешивать ведущее ходовое колесо, что несколько усложняет проведение монтажных работ.
Для кранов, работающих в условиях частых перебазировок, используют другие системы привода монтажных барабанов. В самомбнтирующихся строительных козловых кранах с установкой ходовых колес на вращающихся валах монтажный барабан'также сажают на свободный конец вала. Крутящий момент от вала передается на колесо с помощью заклиненной на валу' крестовины, соединяющейся с колесом с помощью легкосъемных пальцев. При'монтаже эти пальцы удаляются и вал разъединяют с колесом.
149
У кранов с колесами, вращающимися на неподвижных осях» монтажный барабан устанавливают на оси колеса. На период монтажа барабан соединяют с колесом.
В ходовой тележке крана КК-12,5-32 (рис. 79) вал ходового колеса смонтирован в двух упрощенных буксовых подшипниках. Этот вал зубчатой муфтой соединен с выходным валом редуктора ВК-400, опорный фланец которого прикреплен к промежуточной
Рис. 79. Ходовая тележка крана КК-12,5-32
подставке. В последней предусмотрены расточки для несущих пальцев, посаженных в рамы ходовой тележки.
Достоинством такой конструкции является отсутствие открыв тых зубчатых передач; существенно упрощается и облегчается рама тележки.
Балансирная двухколесная ходовая тележка упрощенной конструкции предназначена для бесконсольных кранов грузоподъемностью 32 т пролетом 32 м. Неподвижные оси колес укреплены в швеллерных балках рамы. Колеса смонтированы на подшипниках качения и несут зубчатые венцы. Между ходовыми колесами размещена промежуточная шестерня, посаженная непосредственно на ось балансира. В тележке применен двухпарный редуктор, выходной вал которого заменен на трехопорный и снабжен выносным подшипником. Тележка снабжена ручным клещевым противоугонным захватом.
Достоинством тележки является ее относительно небольшая ширина. Однако промежуточная шестерня на оси балансира чрез* вычайно затрудняет ремонт. Неудобен и трудоемок демонтаж ходовых колес. Вместе с тем гнезда под оси колес и балансира могут быть без каких-либо затруднений расточены с одной установки, что обеспечивает высокую точность расположения колес.
•КО
На рис. 80, а показана конструкция балансирной ходовой тележки, примененной производственным объединением. «Кран» в козловых кранах грузоподъемностью 20/5 т оболочечным мостом. Здесь использованы ходовые колеса от крана ККС-10 (см. рис. 78). Рама тележки образована двумя боковыми листами, соединенными в верхней части продольным горизонтальным листом. В раму вварены бобышки для оси балансира, пол у корпуса угловых разъемных корпусов крепления осей ходовых колес, полукорпуса подшипников навесного двухпарного редуктора и гнезда оси промежуточной шестерни. Все эти элементы могут растачиваться с одной установки, что обеспечивает необходимую точность размещения передач. Двигатель связан с редуктором удлиненной зубчатой муфтой.
Балансирная ходовая тележка (рис. 80, б), используемая Александрийским заводом ПТО в козловых кранах, представляет собой сварную из листов раму, на которой болтами прикреплены типовые угловые буксы, несущие подшипники двухребордных ходовых колес. На валу одного из колес посажен вертикальный редуктор с передаточным числом 25. Через его корпус пропущен палец, в головке которого предусмотрено гнездо для прохода тяги /, противоположный конец которой проведен через втулку 2 рамы тележки. По концам тяга имеет гайки 3. Тяга несет распорную трубку 4. Самоустановка тяги обеспечивается сферическими шайбами 5 и 6. Тяга воспринимает реактивный крутящий момент, удерживая от проворота редуктор. Двигатель мощностью 17,5 кВт имеет фланец для крепления к корпусу редуктора;- валы двигателя и редуктора соединены с помощью зубчатой муфты. Подставка для тормоза ТКГ-200 также укреплена непосредственно на корпусе редуктора. Для передачи вращения на второе колесо служат посаженные на валы ходовых колес зубчатые колеса. Колеса связаны е промежуточной шестерней, вращающейся на конце оси, которая посажена в гнезда рамы тележки.
Применением навесного редуктора в сочетании с фланцевым электродвигателем, несущим тормоз, предельно упрощены как конструкция, так и монтаж тележки, снижена ее металлоемкость.
В табл. 36 приведены данные пр ходовым частям некоторых кранов, а в табл. 37 — по их механизмам передвижения.
Основной причиной, вызывающей преждевременный выход из строя ходовых колес, преимущественно их реборд, является перекос ходовых колес в горизонтальной плоскости. Регламентированный ГОСТ 23940—79 допускаемый относительный перекос ходовых колес в 1/500 следует считать верхним пределом отклонений в параллельности. Для хорошей работы ходовых частей перекос желательно снизить до 1/1000—5/10 000, что реально, например, для колес балансирных тележек.
Во всех случаях конструкция ходовых частей должна обеспечивать возможность проверки положения ходовых колес как при монтаже, так и при эксплуатации. Для этого в рамах тележек
1S1
ОШ
152
Таблица 36
Техническая характеристика механизмов передвижения козловых кранов
Показатель ККТ-5-12,5 КС-5 ККС-10 й К-12.5С КК-12,5-32 ККС-20/5 ККО-20/5
Грузоподъемность, т 5 5 10 12,5 12,5 12,5 20/5 20/5 32 .
Пролет, м 12,6 16 32 . 25 25 32 32 , 32 32
Нагрузка ‘ на ходовую тележку, кН 70 82 190 195 180 200 310 390 640
Скорость передвижения крана, м/о Число ходовых колес: 0,533 0,533 0,583 1,05 0,833 0,833 0,833 0,833* 1,0
общее 4 4 4 4 4 4 8 8 12
приводных 2 2 2 2 2 4 4 8 8
Масса ведущей ходовой тележки, т — 0,8 1,9 1,0 1,05 1,0 1,6 t 1,6 2,7
Ширина ходовой тележки, мм 950 1000 1470 1500 1170 980 1300 1330 1175
П p-в м е ч а разрезвой балки. । в в е. У крана ККТ-Б-12,5 ходовая часть выполнена в виде ве-
должны быть предусмотрены соответствующие окна. Для возможности регулирования положения ходовых колес соединительные фланцы ходовых тележек снабжают центральными шипами, а для крепежных болтов .предусматривают удлиненные отверстия. Такая возможность должна быть предусмотрена в любом случае, хотя бы ценой срезки и последующей приварки выполненных соответствующим образом элементов конструкций. Так, оси балансиров рекомендуется сажать не в расточки основных листов рамы те» лежки, а в приваренные к последним и поддающиеся перестановке накладные листы; это же относится и к неподвижным осям ходовых колес. Для кранов с обеими жесткими опорами целесообразно предусматривать возможность смещения (хотя бы й пределах 10 ... 20 мм) ходовых колее в осевом направлении. На' практике это обеспечивается соответствующим выполнением опорных стоек.
В ходовых частях, а также при необходимости и в стяжках опор должны быть предусмотрены элементы, обеспечивающие возможность вывешивания ходовых колес и тележек для их замены и регулирования.
153
Таблица 37_
Техническая характеристика механизмов передвижения козловых кранов
Показатель К КТ-5.12,5 KG-5 ККС-10 I х X й «А £ К КС-20/5 ККО-20/5 ККЛ-32
Диаметр ходовых колес, мм Мощность электродвигателя, кВт (ПВ= 25%) 400 500 500 500 500 500 500 500 500
2,4 5 7,5 9,0 7,5 5,0 13,0 11,0 13,0
Межосевое расстояние редуктора, мм Число зубьев зубчатого колеса открытой пары: 350 350 400 400 350 475 400 350 600
ведущего 48 25 28 40 33 — 35 42
ведомого 58 65 57 40 62 41 68 —
Модуль зацепления открытой зубчатой пары, мм 6 8 8 8 8 10 8
Примечание. У кранов ККТ-5-12,5, К-12.5М; КК-12,5-32.н ККЛ-32 под-
шипники ходовых колес расположены в > буксах , у остальных • — в самих колесах.
3. ОСОБЕННОСТИ РАСЧЕТА МЕХАНИЗМОВ
Для расчета механизмов козловых кранов на прочность и вы* носливость могут быть использованы общие руководства и нормативы по расчету крановых механизмов [451. При этом, однако, следует учитывать некоторую специфику конструкций и условий работы, присущую механизмам рассматриваемых кранов. /
Грузовые тележки с траверсами. Для таких тележек приходится учитывать возможную несимметричность приложения нагрузок на подъемные канаты. Поскольку нецентральное нагружение возникает относительно редко, то во время проверки канатов для возникающей при этом предельной нагрузки можно брать уменьшенные запасы прочности: например, при легком режиме работы механизма — запас по нормам легкого режима. Ходовые колеса тележки, ее раму и другие элементы следует проверят^ с учетом указанной несимметрии. '
Канатные грузовые тележки. При расположении лебедки подъ* ема груза на мосту масса грузовой подвески
1,5^от|пт|о.б//, ‘
154
где q — масса 1 м грузового каната; I — расстояние между опорами каната; a — кратность грузового полиспаста; т|п — КПД грузового полиспаста; rjo.6 — КПД отклоняющих блоков; f — допускаемый провес грузового каната, f« = 1 ... 1,5 м.
Чтобы исключить проскальзывание каната, блоки, поддерживающие грузовые и тяговые канаты у кранов с канатными грузовыми тележками, должны монтироваться только на подшипниках качения. При этом внутренний диаметр блока (по дну ручья) £>бл > или Рбл > 2DH.O,
где dK — диаметр каната; DH.n — Диаметр наружного кольца подшипника качения.
При расчете тяговых канатов следует учитывать как нормальные эксплуатационные' нагрузки, так и предельно возможные, которые могут возникать при ударе тележки о концевые упоры.
Натяжение тягового каната не должно превосходить максимального допускаемого значения
Л < Рдоп = Qpaap/^,
W Qpasp — разрывное усилие каната; п — коэффициент запаса прочности каната.
Ниже приведены значения коэффициента л.
Нагрузка ...................................Нормальная Предельно
> , возможная
Коэффициенты запаса прочности при различных
режимах работы механизма передвижения: .легком............................................ 5,0 1,75
среднем....................................... 5,5 2,0
тяжелом....................................... 6,0 . 2,25
Соответствующие расчетные значения натяжений каната при нормальной эксплуатации
Ро = ^тр 4“ Р«) + "з“ Wиакл>
где ЙГтр суммарное сопротивление передвижению грузовой тележки от трения в колесах и на блоках; — ветровая нагрузка на груз и тележку при динамическом давлении ветра 50 Па; 1РНакл — составляющая весовой нагрузки грузовой тележки н груза, соответствующая максимальному наклону подтележечных направляющих.
Помимо натяжения при нормальной эксплуатации следует учитывать динамические натяжения, возникающие при предельно возможных условиях.
Общие соображения по определению динамического натяжения цаната даны в работе [11. Для практических целей наибольшее натяжение каната в период пуска
Рпйх.пуск “ 2Mmax/rg,
где Afmax — максимальный момент приводного электродвигателя, приведенный к валу барабана; rq — радиус барабана.
155
В предельном случае для тележки в жесткими упорами натяжение каната при наезде на упор может быть найдено по формуле# полученной из условий равенства кинетической энергии вращающихся масв привода потенциальной энергии деформации тягового каната!
Р l/* В/©2£КДК »
* шах.дин у --------jr----»
где SJ©8 — удвоенная кинетическая энергия вращающихся частей привода; £к — модуль упругости каната; Ли — площадь сечения проволок каната; 1К — длина отрезка каната от тележки до барабана при расположении тележки у упора,.
Рис» 81, Схема к расчету натяжения тягового каната
Диаметры блоков и барабанов механизма передвижения принимают по нормам Госгортехнадзора для соответствующих режимов работы.
Однако при стационарно установленной лебедке блоки грузового каната рекомендуют выбирать исходя из норм следующей по интенсивности режимной группы. Это обеспечивает повышение срока службы канатов, испытывающих перегибы как при подъеме груза, так и при передвижении тележки.
При барабанной лебедке механизма передвижения натяжное устройство может не быть автоматическим; оно должно обеспечивать'выборку не менее 3% полной длины каната. Надежна^ работа механизмов с канатоведущими шкивами возможна только прй поддержании необходимого минимального натяжения, чтЬ практически возможно только при наличии автоматически действующих натяжных устройств. Здесь приходится вводить в расчёт наиболее неблагоприятный случай, соответствующий началу движения тележки о грузом с консоли в пролет и уклону против ветраг (рис. 81).
Под действием натяжения Ртах тяговая ветвь каната вытягивается на Д/, натяжное устройство при ходе, соответствующем этому значению, должно обеспечивать q учетом числа обхватов необходимое натяжение набегающей ветки Pmln. Значения сопротивлений передвижению, а также соотношения между Ршах и Pmln определяют в соответствии с принятой в краностроении методикой [45L '
156-
У самоходных грузовых тележек выносливость элементов механизмов передвижения (как с центральным, так и о раздельным приводом) рассчитывают в предположении, что тяговые усилия распределяются между всеми ведущими колесами поровну. Прочность элементов механизма передвижения тележки проверяют по статическим характеристикам материала на нагрузку, возникающую при проскальзывании (или пробуксовывании) ходовых колес по подтележечным рельсам.
Коэффициент трения между колесом и рельсом здесь принимается равным 0,25.
В механизмах передвижения кранов за расчетную нагрузку, учитываемую при проверке прочности элементов механизма по статическим характеристикам материалов, принимают наибольшую из нагрузок, соответствующих максимальному моменту, который может развивать электродвигатель, и тормозному моменту, определенному с учетом коэффициента перегрузки, равному 1,3.
Валы и оси ходовых колес проверяют на прочность по максимальной статической нагрузке /?тах; горизонтальная нагрузка при этом может приниматься в 0,1/?тах.
Выносливость элементов каждого из механизмов передвижения кранов рассчитывают на нагрузку
Л< =
где Робщ — общая расчетная, нагрузка; г — число приводных механизмов; Л — коэффициент. неравномерности распределения нагрузки, при двух приводах Л= 1,20, при четырех k— 1,10.
Выбор ходовых колес. Механизмы передвижения козловых кранов оборудованы одно- или двухколесными (реже — трехколесными) балансирными тележками. Обычно в кранах грузоподъемностью 10 ... 12,5 т применяют одноколесные ходовые тележки, а в более тяжелых — двухколесные.
При выборе типа тележки следует учитывать, что современные крановые колеса обладают высокой несущей способностью. Однако козловые краны общего назначения рассчитывают на перемещение по путям с гравийно-щебеночным балластом,.что заставляет принимать нагрузку на ходовые колеса, равной 200 ... 250 кН.
Вне зависимости от допускаемых нагрузок следует избегать применения ходовых колес диаметром менее 400 мм. Это объясняется тем, что с уменьшением размеров колес увеличиваются толчки при проходе через стыки наземных рельсовых путей.
Глава 7
ПРИВОДЫ, ЭЛЕКТРООБОРУДОВАНИЕ, КАБИНЫ УПРАВЛЕНИЯ
1. ПРИВОДЫ РАБОЧИХ МЕХАНИЗМОВ
В козловых кранах обычно применяют типовые приводы, электрооборудование и кабины управления, разработанные применительно к мостовым кранам. Однако не всегда учитывают специфику козловых кранов, обусловленную преимущественно работой их на открытом воздухе, наличием консолей у мостов значительной длины и большей ветровой нагрузкой на кран, а также повышенным расположением центров давления и масс.
Механизмы передвижения козловых кранов выполняют только о раздельным приводом. Необходимости применения каких-либо дополнительных синхронизирующих устройств у кранов общего назначения не имеется. Это объясняется также и относительной сложностью и низкой надежностью таких устройств П 1. .
Следует отметить, что предлагаемая иногда для козловых кранов простейшая система синхронизации (путем электрического согласования роторов) в данйЪм случае будет неэффективна. Причиной этого является работа приводов как в двигательном,- так и в тормозном (при попутном ветре) режимах. Вмесге с тем практически после каждого тормозного процесса синхронизация двигателей будет нарушаться, и при электрическом рассогласовании их роторов около 180° во время пуска двигателей неизбежно возникают сильные толчки [571.
Характерной особенностью работы механизмов передвижения козловых кранов являются значительные ветровые нагрузки, составляющие (при q = 90 Па) 200 ... 350 Н на 1 т массы крана, что существенно превосходит сопротивление от трения (70... 100 Н/т). Другой особенностью этих механизмов является значительная (в 2 ... 3 раза и более) разница между вертикальными нагрузками на противоположные опоры, что обусловлено наличием консолей пролетного строения.
Исходя из этого следует в первую очередь выбирать число приводных колес; оно должно быть всегда не менее половины общего числа колес. При этом должны быть выполнены определенные условия.
Первое условие — при предельном ветре рабочего состояния (q = 125 Па), уклоне 3 %0 и коэффициенте сцепления ходовых колес с рельсами р = 0,12, а также при замкнутых тормозах кран должен удерживаться на месте (как с грузом, так и без него):
2Ri|x + SRs»Tp&1.25(Fls + Fy3),
где 27?! — сумма вертикальных нагрузок на приводные (тормозные) хоДовые колеса; ST?2 —сумма вертикальных нагрузок на неприводные колеса; и>Тр — удельное сопротивление от трения в ходовых колесах; 1,25 — коэффициент 158
eanaca; F{№ — ветровая нагрузка на кран при q — 125 Па; VFyj — составляю* щая от веса крана (и груза) от уклона 3 %0.
Значения ZRx и определены с учетом действия на кран горизонтальных нагрузок, причем принято, что последние приводят к уменьшению нагрузок на колеса.
Второе условие — кран должен двигаться против ветра с q = = 90 Па л уклона 3 %0:
5 /?ip 1,25 + 2 /?2аутр + Fjx, + Wуз),
где w' — удельное сопротивление от трения, колес по рельсам; F99 — ветровая нагрузка на кран при <7 = 90 Па.
Третье условие — при нормальных условиях движения, за которые в данном случае можно ‘принимать ветер, направленный вдоль подкрановых путей с q = 60 Па и уклон 1,5 °/оо должно быть обеспечено с 25 %-ным запасом сцепление ходовых колес каждого из приводов с грузом.
Для проверки достаточности сцепления в этом случае тележку с номинальным грузом размещают в крайнем положении на консоли более тяжелой опоры. Для противоположной опоры должно быть обеспечено условие
2 R\l^ 1,25(2 № + S Я&’тр + Feo + W'у1.6), (10)
где Feo,, Wy!* — части нагрузок на кран соответственно от ветра q = 60 Па и уклона 1,5/ %о, приходящиеся на опору.
Невыполнение этого условия приведет к тому, что ходовые колеса на менее нагруженной опоре будут при движении против ветра пробуксовывать.
Для обеспечения сцепления необходимо выполнять все ходовые колеса приводными, что одновременно приводит к снижению нагрузок от перекоса и повышению эксплуатационной надежности механизма передвижения. Это особо целесообразно для быстроходных интенсивно эксплуатируемых кранов, для которых также рекомендуется учитывать и пусковые инерционные нагрузки. Однако при этом увеличиваются сложность и стоимость как ходовой части крана, так и его электрооборудования.
Для относительно мало загруженных кранов, если условие (10) не может быть выполнено, допускается ограничение передвижения крана с грузом на консоли.
Иногда для улучшения сцепления предусматривают дополнительную нагрузку ходовых колес, для чего в полостях стоек опор или на стяжках размещают балласт из гравия или бетона.
Выбор мощности приводных электродвигателей. Как правило приводные двигатели должны обеспечивать длительную работу в* заданном цикле при ветре давлением q = 60 Па, действующем вдоль подкрановых путей, и уклоне путей 1,5 %0. В то же время двигатели должны иметь достаточную мощность, чтобы работать «течение короткого времени (5 ...10 мин), при ветре давлением q = 90 Па и уклоне 3 %0.
159
В обоих случаях направление действия ветра совпадает с направлением подъема подкрановых путей; учитывается также возможное 10 %-ное падение напряжения питающей сети.
Результаты замеров, неоднократно проводившихся на эксплуатируемых кранах, показали, что отклонения сопротивлений роторных цепей бывают весьма значительными. В среднем отно-. шение между эквивалентными сопротивлениями двигателей, противоположных опор составляет 1,4... 1,6, у некоторых кранов 2,0...2,2. Такие отклонения объясняются различной длиной роторных проводов противоположных опор, неисправностями контактов и др. Это обусловливает существенно различные моменты, развиваемые фазными двигателями.
Отклонения в диаметрах ходовых колес противоположных опор, практически достигающие 2...3 мм (или 2...5 °/оо), незначительно сказываются на распределении загрузки между двигателями. Для уменьшения степени различия в загрузке следует уравнивать сопротивления роторных цепей двигателей противоположных опор; кроме этого, необходим и тщательный надзор за состоянием контактов аппаратов управления, включенных в роторные цепи.
Так как полностью исключить все факторы, вызывающие отклонения, практически невозможно, в роторных цепях желательно предусматривать дополнительные невыключаемые резисторы сопротивлением 2...2,5 /?р. Наличие таких резисторов существенно уменьшает различие в загрузке фазных электродвигателей.
Так как двигатели всегда рассчитывают на значительную ветровую нагрузку, смягчение их характеристик не отразится сколько-нибудь существенно на скорости передвижения крана.
При соблюдении указанных условий.для расчета-коэффициент неравномерности загрузки фазных двигателей можно принимать = 0,85 ... 0,90. При отсутствии невыключаемых резисторов или невозможности обеспечения регулярного контроля за состоянием роторных цепей этот коэффициент следует снижать до 0,60... 0,70, что равносильно требованию существенного увеличения мощности устанавливаемых двигателей.
В настоящее время в отечественной практике механизмы передвижения козловых кранов оснащают преимущественно фазными электродвигателями с неавтоматическим управлением.
Короткозамкнутые двигатели находят применение лишь в некоторых моделях козловых кранов малой грузоподъемности (3,2...5,0 т) и при скорости передвижения не свыше 0,83 м/с.
Необходимость значительного повышения установленной мощности двигателей механизмов передвижения, рассчитываемых на относительно редко действующую ветровую нагрузку, приводит к тому, что при отсутствии ветра и полностью введенных пускорегулирующих резисторах, кран быстро разгоняется до полной скорости.
При обычно используемых системах управления регулирование скорости передвижения практически возможно только в резуль-160
тате повторных импульсных включений. Это затрудняет управление краном, снижает его производительность и резко уменьшает долговечность элементов приводов.
Для устранения этих недостатков созданы различные усовершенствованные системы управления приводами; ряд таких устройств внедрен в настоящее время и в отечественной практике.
Тормозные системы рассматриваемых механизмов также должны удовлетворять противоречивым требованиям: обеспечивать как удержание крана на месте при действии ветра давлением q = 125 Па и наличии уклона путей 3 °/00, так и плавную остановку кранов.
Первое требование записывается таким образом1 Рт^1,1б(Г1аб+^уз~ ^Tp)/i,
где Pf — установочное тормозное усилие; i — число тормозов механизмов передвижения крана.
Как правило, механизмы передвижения комплектуют электро-гидравлическими или электромагнитными тормозами, автоматически накладывающимися при отключении приводных двигателей.
Ветер давлением 125 Па действует редко; при меньшем ветре или его отсутствии наложение тормозов сопряжено с чрезмерно быстрой остановкой, препятствующей нормальной эксплуатации крана. Поэтому, как правило, краны работают с сильно ослабленными тормозами. Очень часто тормоза полностью бездействуют или вообще приведены в негодность. Эксплуатация кранов с такими тормозами опасна и на практике является основной причиной угона кранов даже при действии относительно слабого ветра.
Имеются также случаи работы кранов с различными усилиями затяжки тормозов противоположных опор, что приводит к возникновению значительных нагрузок от перекоса. Устранить этот недостаток можно только применением систем, обеспечивающих плавное и, желательно, избирательное торможение.
Нерационально устраивать систему торможения так, чтобы она обеспечивала плавную остановку крана во всем диапазоне ветровых нагрузок. Это объясняется тем, что такая система будет сложной по конструкции и трудоёмкой в эксплуатации. Поэтому целесообразно проектировать систему торможения так, чтобы она обеспечивала достаточно плавную остановку крана при ветре давлением 30 ... 60 Па. При большем ветре можно допустить резкую остановку крана, соответствующую срабатыванию тормозов, рассчитанных на удерживание кранов на месте.
Таким образом, в зависимости от места установки крана плавная его остановка будет обеспечена в пределах 90 ... 98 % общего времени работы.
Рассмотрим некоторые системы и устройства, повышающие плавность пуска и торможения и применяемые в выпущенных за последние годы 'козловых кранах.
J/a6 Абрамович И И. и др. 16!
Для кранов К-6Б, ККС-10, передвигающихся со скоростью 0,5 ... 0,66 м/с, по данным А. В. Харлампиева, часто хороший эффект дает размещение на быстроходном валу дополнительного маховика. Это практически возможно только при механизмах, снабженных двигателями с пс = 1000 об/мин. Диаметры маховиков составляют 350 ... 450 мм, их масса 35 ... 50 кг. При этом маховой момент маховика составляет 70 ... 90 % приведенного махового момента механизма
Рис. 82. Маховик механизма передвижения крана К-6Б
передвижения и крана, что обеспечивает соответствующее увеличение времени разгона-торможения. Опыт эксплуатации показывает, что такое увеличение (до 5 с) благоприятно сказывается на работе крана, позволяя, в частности, работать с тормозами, отрегулированными в соответствии с инструкцией по эксплуатации.
На рис. 82 показан маховик механизма передвижения 10 т крана К-6Б, скрепленный с внешней обоймой упругой муфты. Этот механизм снабжен двигателем MTF-211-6 мощностью 7,5 кВт при 930 об/мин; скорость передвижения крана 0,6 м/с; его масса около 43 т.
При четырехдвигательном приводе механизма передвижения без каких-либо существенных усложнений электросхемы могут быть осуществлены
ступенчатые пуск и торможение. Вторая пара двигателей может включа'ться вручную или автоматически с помощью реле времени.
Первую пару тормозов регулируют на момент, соответствующий давлению ветра 30 ... 50 Па: вторая пара тормозов включается через 2 ... 4 с тогда, когда при нормальных условиях движения кран должен остановиться, или, по крайней мере, скорость его сильно снизится.
Для интенсивно работающих кранов при установке маховиков следует проверить двигатели на нагрев.
Хорошие результаты дали попытки оснащения механизмов передвижения козловых кранов электромагнитными порошковыми тормозами [14]. Такие устройства значительно компактнее обычных индукционных тормозов; вместе с тем они обеспечивают достаточно плавную остановку механизма; колодочные тормоза здесь используют в качестве стопорных.
Момент, развивае'мый тормозом, мало зависит от частоты вращения двигателя; его можно регулировать в широких пределах, изменяя силу тока возбуждения, что и позволяет плавно останавливать кран.
162
Порошковые тормоза вследствие инерции магнитного поля также смягчают пусковые толчки.
Были попытки применения в механйзмах передвижения козловых кранов систем динамического торможенйя [1]. Однако, несмотря на усложнение схемы, такие системы не обеспечивали плавного пуска и движения на сниженной скорости.
На ряде крупных козловых кранов с четырехдвигательным приводом применена разработанная ВНИИПТМАШЕМ схема со встречным включением двигателей. В период пуска или для снижения скорости движения крана два привода работают в двигательном режиме и два — в режиме динамического торможения с питанием статорной обмотки постоянным током. Скорость передвижения здесь снижается в 6 ... 10 раз. Остановка крана осуществляется методом динамического торможения. Необходимого снижения скорости и интенсивности торможения достигают соответствующим подбором двигательных и тормозных характеристик. Применение схемы несколько усложняет электрооборудование крана; однако несомненным ее достоинством является то, что она работает на типовом электрооборудовании.
Известны и другие системы управления фазными электродвигателями механизмов передвижения козловых кранов — например, тиристорный привод с импульсным управлением в цепи выпрямленного тока роторов. Несмотря на хорошие технические показатели (глубокое регулирование скорости с жесткими характеристиками, плавное торможение и др.) таких систем, для их работы необходимо нестандартное оборудование, которое существенно усложняет электросхему крана. Поэтому до настоящего времени эти системы практического применения не нашли.
Для приводов с короткозамкнутыми двигателями может быть рекомендовано в первую очередь применение маховиков; интерес представляют попытки использования гидромуфт, наряду с маховиками довольно широко применяющихся за рубежом в аналогичных приводах.
Использование двух- и более скоростных короткозамкнутых двигателей затруднено необходимостью смягчения толчков, возникающих в момент переключения скоростей. Разработанные для этого специальные системы управления довольно сложны и их изготовление весьма ограниченно.
Механизм передвижения грузовой тележки. При проектировании приводов этих механизмов учитывают сопротивления от трения в ходовых колесах, ветра и уклона подтележечных направляющих. Для тележек с канатным механизмом передвижения в расчет принимают также нагрузки и сопротивления от перекатывания по блокам тяговых и подъемных канатов, которые определяют по известным методикам.
Механизмы передвижения самоходных грузовых тележек имеют обычно 50 % ведущих ходовых колес. При этом, как показывает
163
практика эксплуатации, всегда обеспечивается сцепление ходовых колес, необходимое для нормальной работы механизма.
Двигатели механизма передвижения тележки должны обеспечивать работу с номинальным грузом при ветре давлением 90 Па и наклоне направляющих, равном V2 максимального. Двигатель на нагрев проверяют при давлении ветра в 60 Па и уменьшенных на 40 % (по сравнению с предыдущим случаем) сопротивлениях от наклона направляющих и трения в канатных блоках. Массу груза принимают равной 0,60, 0,80 и 1,0 номинальной массы соответственно для легкого, среднего и тяжелого режимов работы.
Очевидно, максимальный момент, развиваемый двигателем (с учетом возможного падения напряжения питающей сети и примерно 30 % запаса), должен быть достаточен для преодоления максимально возможных суммарных сопротивлений (давление ветра принимают равным 90 Па). Тормоз должен удерживать тележку при наличии максимальных нагрузок и сопротивлений и ветре давлением 125 Па.
Какие-либо специфические требования к приводам механизмов передвижения грузовых тележек отсутствуют; в них обычно применяют обычное электрооборудование мостовых кранов. В необходимых случаях можно использовать описанные устройства и схемы.
2. СИСТЕМЫ ТОКОПОДВОДА
Подвод тока к кранам. Ток к кранам подводится преимущественно с помощью гибкого кабеля. При протяженности перемещения свыше 100 м иногда применяют гибкие троллеи с соответствующими токосъемниками. В отдельных случаях краны оборудуют токоприемными шинами, взаимодействующими с установленными на столбах контактными элементами. Иногда жесткие троллеи или токоподводящие контактные колонки располагают в устраиваемых вдоль подкранового пути и снабженных сдвижными укрытиями траншеях или наземных коробах. Для подвода тока к крайам используют гибкие шланговые кабели КРПТ, ГРШС и др.
Находят применение три схемы кабельного токоподвода! с укладкой кабеля на землю и непосредственным креплением его к остову крана или с наматыванием кабеля на приводной барабан, и со шторной подвеской кабеля.
В .первых двух случаях для предотвращения повреждений кабеля вдоль путей устраивают деревянный лоток шириной 300 ... ... 400 мм и глубиной около 250 мм. При непосредственном креплении к крану при его передвижении кабель трется об основание, что способствует быстрому изнашиванию его оболочки. Кроме того, кабель часто путается, не исключено попадание его под колеса крана и т. п. Поэтому такой способ токоподвода может быть рекомендован только для относительно редко перемещающихся 164
кранов и при регулярном надзоре за укладкой кабеля. Протяженность хода крана не должна превышать 100 м.
. Кабельные барабаны монтируют на стойках опор; они должны обеспечивать автоматическое наматывание и сматывание кабеля по мере перемещения крана. К ним предъявляют следующие требования; натяжение кабеля S у барабана, вне зависимости от направления движения крана численно должно быть равно 5dK, т. е. S « 5dK (в Н), где dK — наружный диаметр кабеля, мм; радиус навивки должен быть не менее 1 QdK. Этим требованиям удовлетворяет грузовой привод, при котором барабан вращается с помощью груза, перемещающегося по направляющим одной из опорных стоек. Натягиваемый этим грузом канат приводит во вращение дополнительный барабанчик, связанный с основным барабаном.' Недостатком грузового привода является необходимость применения громоздкого натяжного груза массой 100 ... ... 200 кг, системы канатных блоков и др.
Известны барабаны с приводом от электродвигателя. Здесь наиболее целесообразным представляется привод от асинхронного фазного двигателя, работающего в так называемом «стопорном» режиме. Для этого сопротивления в цепи ротора подбирают так, чтобы обеспечить ограниченный крутящий момент, остановку двигателя под напряжением и вращение его ротора в направлении, противоположном направлению вращения магнитного статора при сматывании кабеля. Однако здесь приходится существенно увеличивать габаритные- размеры электродвигателя.
Хорошие результаты должно дать применение для привода кабельных барабанов линейных электродвигателей [67]. В настоящее время практически используют только грузовой привод.
Барабан, устанавливаемый на краны Производственного объединения «Кран» грузоподъемностью 8 ... 20 т (рис. 83, а), включает в себя основание /, монтируемое на стяжке опоры. На этом основании укреплена полая ось 2, несущая контактные кольца кольцевого кранового токосъемника. Вращающийся корпус 3 его связан тягами с обечайкой 4 барабана. Торцовый щит 5 последнего прикреплен к ступице барабанчика 6, подшипники которого пощажены на ось 2. Для доступа к токосъемнику предусмотрена съемная крышка.
Участок навивки кабеля снабжен ребордами, образованными трубчатыми ободьями, поддерживаемыми радиальными спицами. Навиваемый на барабан гибкий кабель подводится к щеткам токосъемника через сальник 7; кабель, соединяющий кольца токосъемника с приемниками энергии на кране, проходит через полость оси 2.
Этот барабан рассчитан на намотку 100 м кабеля диаметром до 40 мм.
Кабельный барабан, показанный на рис. 83, б, предназначен для кранов грузоподъемностью до 5 т. В нем применены токосъемники 8 от фазных электродвигателей.
6 Абрамович И. И. и др. 165
7-м....- ... Г- „ ~
QQSI Ф 1 вод<г>
Рис. 83. Кабельные барабаны с грузовым приводам:
о — с подводом кабеля через полую ось; б — с подводом кабеля через‘торцовую кршпяу барабана
166
Рис. 84. Ловители натяжного груза кабельного барабана
Сплошной вал 9 совместно с ребордами 10 участка навивки натяжного каната вращается в подшипниках И. Траверса токосъемных щеток укреплена на неподвижном щите /2, через который проходит кабель питания приводов крана. Предусмотренное на торцовом листе кольцевое ребро 13 образует лабиринтное уплотнение, защищающее полость барабана от попадания воды и грязи.
Натяжные грузы выполняют в вйде монолитного или наборного блока (или ящика для скрапа), перемещающегося по направляющим стойкам опоры. Если хода груза недостаточно для обеспечения числа оборотов барабана, необходимого для наматывания кабеля заданной длины (обычно 50 м), применяют полиспасты. Это, однако, ведет к соответствующему увеличению массы груза.
На кранах грузоподъемностью более 5 т блок рекомендуется оборудовать упрощенными ловителями. Это предотвратит падение груза вследствие внезапного обрыва каната, надзор за которым обычно затруднен. Такие ловители (рис. 84) выполняют в виде
смонтированных на грузе 1 двух подпружиненных рычаров 2, верхние концы которых связаны с петлей, соединенной с коушем натяжного каната. При обрыве последнего рычаги под действием пружин разворачиваются и нижние концы их выходят за пределы блока, вступая во взаимодействие с предусмотренными вдоль направляющих упорами.
Когда протяженность хода крана не превышает 60 ... 70 м и укладка кабеля на земле нежелательна по условиям планировки площадки, можно применять шторную подвеску. В этом случае вдоль путей размещают опоры, поддерживающие гибкий элемент, по которому перемещаются каретки и кольца, поддерживающие токоведущий кабель. Однако при такой системе затруднен доступ к кабелю для его обслуживания; поэтому шторный токоподвод применяют преимущественно для питания грузовых тележек.
Концы кабеля должны быть надежно и без возможности перегибов прикреплены к кронштейну ходовой части крана и к месту вывода кабеля около подкрановых путей. В последнем случае целесообразно кдешп’ь кабель зажимным хомутом, соединенным с основанием цепью, воспринимающей тяговое усилие.
Для троллейного токоподвода целесообразно применять элементы типовых троллейбусных токосъемников. Для троллей следует использовать фасонные медные провода ТФ-85. Провода трол-
6* 167
лейного токоподвода располагают в горизонтальной плоскости; вертикальное размещение нежелательно, так как здесь возникает опасность короткого замыкания при обледенении проводов.
На рис. 85, а показана конструкция штангового токосъемника с троллейбусной токосъемной головкой, применяемого для тока силой 100 ... 150 А.
Рис. 85. Токосъемники^ а штанговый; б — с пантограф» ным шарнирным механизмом
*)
Штанговый токосъемник (рис. 85, а) для тока силой 100 ... ... 150 А включает в себя горизонтальную траверсу /, йа которой с помощью изоляторов 2 смонтировано основание 3, несущее поворотные кронштейны штанг 4 токосъемных головок. Поджатие головки к троллейному проводу с силой 30 ... 40 Н обеспечивается регулируемой пружиной 5. Шарнирное крепление кронштейнов допускает поворот штанги в горизонтальной плоскости со смещением головки на ±(40—50) мм.
168
Для крупных, кранов целесообразно применять токосъемники с подпружиненным шарнирным механизмом (по типу используемых на железнодорожном транспорте).Такой токосъемник показан на рис. 85, б. Здесь для съема тока предусмотрены медно-графитные шины, ширина которых компенсирует боковые смещения крана. Шины поджаты пружиной. Допускаемая сила тока 150 ... 200 А.
Для обслуживания токосъемников краны должны быть оборудованы подвесными люльками.
Для троллейного токоподвода могут быть также использованы типовые токосъемники ДТ-12Б-142, рассчитанные на силу тока до 160 А. Они допускают относительно небольшое поперечное смещение — до 40 мм, что не всегда можно обеспечить в козловых кранах.
Элементы гибкого токоподвода допускают силу тока 150 ... 250 А, что соответствует установленной мощности двигателей 150 ... 200 кВт.
Токоподвод с подвешенными на кране токосъемниками (лыжами) не' имеет этого ограничения, но он весьма громоздок. Здесь опоры, несущие контактные элементы, приходится устанавливать с шагом 10 ... 12 м ho сравнению с 40 ... 50 м у токоподвода с гибкими троллеями.
Токоподвод с расположением контактных колонок в траншеях сложен и дорог в постройке и в эксплуатации, его следует применять только при невозможности устройства наземного токоподвода.
Подвод тока к тележкам. Для подвода тока к грузовым тележкам в. настоящее время используют почти исключительно систему со шторной подвеской кабеля, достаточно надежную в работе и обладающую относительно небольшой массой.
В двухбалочных кранах иногда встречаются системы с петлевым кабельным токоподводом, применяющиеся в мостовых кранах. Устройство троллейного токоподвода, в особенности с жесткими троллеями, нецелесообразно вследствие его громоздкости, вызываемой им опасности поражения током обслуживающего сонала и др.
В небольших кранах с электроталями кабель иногда хомутами крепится к кольцам, перемещающимся по проволоке или канатику, натянутому вдоль ездового монорельса. Такая подвеска имеет простую конструкцию и невысокую стоимость, но кольца и проволока быстро изнашиваются, а кабель перегибается на хомутах.
Для* обеспечения эксплуатационной надежности системы токоподвода кабель должен поддерживаться каретками, снабженными ролйками. Подвеска кабеля должна предотвращать возможность его перегиба (радиус перегиба должен быть примерно 5... 10 dK). Кроме этого, петли кабеля должны иметь возможность разворачиваться относительно вертикальной оси. Это позволяет петлям
169
при перемещении тележки сближаться на минимальное расстояние. Чтобы разгрузить кабель от растягивающих усилий, каретки соединяют между собой канатиком, >длина которого несколько меньше длины кабеля.
Усовершенствованная конструкция поддерживающей кабель каретки, предназначенной для перемещения по стальному канатику, показана на рис. 86, а. Ее ролики выполнены из пластмассы (полиэтилен, полиуретан). Предусмотрена дуга 1, на которую укладывают пакет кабелей, фиксируемый нажимной скобой 2.
4
Рис. 86. Кабельные каретки: а — Комсомольского-на-Амуре завода подъемно-транспортного оборудовании; б — для перемещения по двутавровому монорельсу (ПО «Кран»)
Резьбовой шток 3, несущий дугу и скобу, может свободно поворачиваться в гайке 4. Должны быть предусмотрены приспособлен ния для ндтяжения несущего каретки каната; для уменьшения его провеса на грузовых тележках иногда монтируют поддерживающие ролики.
При пролетах моста 20 ... 25 м вследствие.значительного провеса грузового каната каретки обычно монтируют на жестких направляющих.
На рис. 86, б показана кабельная каретка крана ККС-10, предназначенная для перемещения по двутавровой балке. Здесь кабели крепят в ручьях дугообразных пластмассовых обойм /, подвешенных на штыре 3. Сферическая головка последнего обеспечивает самоустановку петли кабеля в любом направлении. Ролик 5 предназначен для поддержания тягового каната грузовой тележки крана. Каждая из щек 6 снабжена колесом 7. I7Q
Перспективным является применение взамен пакетов круглого кабеля более гибких и менее склонных к повреждениям плоских многожильных кабелей. Однако вследствие невозможности поворота кабеля сближение кареток ограничено. При длине передвижения более 50 м и скоростях передвижения тележки более 1,2 м/с начинают неблагоприятно сказываться присущие кабальному токоподводу недостатки! неравномерность перемещения отдельных кареток, заедания, толчки, взаимные их удары и др.
Рис'. 87. Траверса грузовой подвески с корзиной-ловителем
Эти недостатки устраняются при использовании для передвижения кареток линейных электродвигателей, которые стали применять за рубежом на крупных крановых установках [66].
Токоподвод к грузозахватным органам. У грузовых тележек с грузовыми лебедками для навивки токоподводящего кабеля можно использовать типовые кабельные барабаны с приводом от редуктора или канатного барабана.
На канатные тележки иногда устанавливают пружинные барабаны. На кранах ККУ-7,5 при оборудовании их моторными грейферами для выборки кабеля применяли монтированные на раме подвижной кабины вытяжные полиспасты.
Известно большое число видов приспособлений для проводки и укладки кабеля питания грузозахватного органа; многие из них описаны в патентной литературе. Однако при вертикальном ходе крюка в пределах 5 ... 8 м и средней интенсивности эксплуатации на практике часто обходятся без каких-либо дополнительных устройств.
Хорошие результаты обычно дает установка на обойму или траверсу грузовой подвески корзины-ловителя для кабеля, кото-рый под действием собственной силы тяжести опускается туда при подъеме крюка. На рис. 87 показана траверса крана грузоподъемностью 12,5 т с прикрепленной на ней корзиной.
171
3. ОСОБЕННОСТИ РАЗМЕЩЕНИЯ И УСТАНОВКИ ЭЛЕКТРООБОРУДОВАНИЯ И ЭЛЕКТРОПРОВОДКИ
Для уменьшения трудоемкости и длительности монтажных работ на месте установки крана, а также повышения эксплуатационной надежности следует максимально возможный обьем работ по установке электрооборудования и укладки проводки выполнять на заводе-изготовителе. При этом на отдельных частях конструкции (секциях моста, стойках опор) провода укладывают в трубах, лотках пли металлических рукавах. Их можно размещав также и в полостях коробчатых и трубчатых элементов. По концам проводов предусматривают клеммные коробки, соединяемые на монтаже проводами в металлической! оболочке.
Кабина и грузовая тележка должны поставляться с полное!ыо законченным электромонтажом, часто удается значительную часть проводки размещать в полостях и каналах конструкции.
На Сухоложском механическом заводе и Харьковском заводе ПТО им. В. И. Ленина предложено дальнейшее усовершенствование размещения электрооборудования — установку всей пуско-регулпрующей аппаратуры непосредственно па кабину. У крана КК-12,5-32 удалось установить всю пуско-регулирующую аппаратуру в шкафах и ящиках, укрепляемых с внешней стороны кабины управления. Это дает возможность не только осуществить заводской монтаж оборудования, по и опробовать его на стенде, имитирующим полную электросхему крана.
4. КАБИНЫ УПРАВЛЕНИЯ
В части общего устройства и внутреннего оборудования к кабинам управления козловых кранов предъявляют в общем те же требования, что и к кабинам мостовых кранов [601. При этом кабины должны соответствовать требованиям ГОСТ 23940—79.
Следует остановиться только па условиях обзора из кабин, а также на некоторых особенностях, связанных с передвижением их совместно с грузовыми тележками. При работе должно быть обеспечено беспрепятственное наблюдение крановщика за грузом и захватным органом при любых положениях последних по пролету моста и по высоте. Желательно также, чтобы крановщик имел возможность при любом положении кабины наблюдать за всеми четырьмя ходовыми тележками крапа и подкрановыми путями. Зону обзора определяют путем графического построения.
Опыт эксплуатации показывает, что при пролетах 16 ... 25 м и отсутствии каких-либо дополнительных требований достаточно удобно управлять краном из неподвижной кабины. Последнюю целесообразно размещать у одной из опор, смещая в пролет на 1 ... 3 м с тем, чтобы уменьшить помехи обзору от стоек опоры.
Крановщик располагается лицом в сторону пролета; для улучшения обзора вдоль мосга в боковых стенках кабины жела-172
тельно предусматривать окна с форточками или сдвижными стеклами для связи с обслуживающим персоналом. В полу кабины (или, по крайней мере, в передней ее части) следует также устраивать окно. Для того чтобы не препятствовать обзору в тыльном направлении, входную дверь с площадкой следует располагать с одной из боковых сторон кабины.
Сложные условия обзора из кабины козловых кранов пролетов более 25 м (при всех способах их установки) заставляют настоятельно рекомендовать оснащение их свободно вращающимися относительно вертикальной оси креслом (пли креслом-пультом) крановщика.
Из неподвижной кабины обзору подкрановой площадки могут мешать штабели груза. Кабину приходится располагать со стороны обычно проходящего под консолью железнодорожного пути, что необходимо по условиям безопасности погрузочно-разгрузочных работ. Однако при этом затруднено наблюдение за противоположной консолью, под которую подается автомобильный транспорт.
Оснащение кранов механизированными захватными органами, требующими повышенной точности управления, обусловливает дополнительные трудности при управлении из неподвижной кабины. Иногда для улучшения обзорности устанавливают кабину непосредственно под торцом моста, лицевой стороной в пролет. Однако крановщик оказывается удаленным на значительное расстояние от противоположной консоли; приходится считаться также с вертикальными колебаниями коцсоли.
На кранах КС-12,5 грузоподъемностью 12,5 т и пролетом 32 м кабины крепят на кронштейне, который можно устанавливать в любом месте трехграпного решетчатого моста — в зависимости от планировки подкрановой площадки.
На кране с трубчатым мостом грузоподъемностью 12,5 т и пролетом 16 м кабина установлена на площадке стойки жесткой опоры с возможностью установочного поворота относительно вертикальной оси. [А. с. № 701919 (СССР) ]. Однако такие усовершенствования могут устранить недостатки, присущие неподвижным кабинам лишь в отдельных, конкретных, случаях.
Таким образом, область наиболее .целесообразного применения неподвижных кабин ограничивается преимущественно кранами малых пролетов и большепролетными кранами, предназначенными преимущественно для обслуживания складов оборудования и монтажных площадок.
Подвижные кабины можно устанавливать по различным схемам.
Наиболее распространены схемы, при которых кабина перемещается совместно с грузовой тележкой. Здесь кабину снабжают отдельной рамой, одной стороной опирающейся на пару ходовых колес, а другой стороной шарнирно соединенной с рамой грузовой тележки. Недостатком такой установки кабины является необ-
173
ходимость соответствующего увеличения длины моста или, по крайней мере, подтележечных направляющих.
Этот недостаток устранен в кабинах, подвешенных непосредственно к раме грузовой тележки. Однако здесь на кабину в большей мере передаются вибрации рамы тележки, возникающие при работе ее механизмов. Кроме этого, часто не удается обеспечить равномерное распределение нагрузок на ходовые колеса грузовой тележки, что особо неблагоприятно для интенсивно работающих на изгиб поясов решетчатых мостов. •
Рис. 88. Установка кабины управления на кране ККЛ-32
У кранов с однобалочным мостом (рис. 88) кабину крепят на удлиненном кронштейне, прикрепленном к раме грузовой тележки. При подвижной тележке следует особенно тщательно проверять условия обзора из кабины с учетом позы крановщика.
Если у кранов с неподвижным расположением кабины лишь относительно небольшое время грузовая подвеска располагается вблизи от крановщика, то у кранов с подвижной кабиной крановщик постоянно находится вблизи груза. Кабины, как правило, располагают на расстоянии 1,5 ... 2,5 м по горизонтали от грузовых канатов. При этом для того, чтобы обеспечить наблюдение за находящимся на уровне земди грузом, крановщик (рис. 89) должен наклонять верхнюю часть туловища на угол 30 ... 45% что чрезвычайно неудобно при длительной работе (рекомендуемый предельный угол наклона в пределах 10 ... 15°). Здесь следует иметь в виду, что удобному наблюдению за грузом через нижнее стекло препятствуют защитная решетка стекла, относительно ограниченные размеры светового проема, неизбежное за-174
грязнение стекла и, наконец, ноги самого крановщика. Часто наблюдению за грузом мешают также траверса грузовой подвески или закрывающее груз захватное устройство.
Более рационально для обзора в переднем направлении выполнена кабина крана КК-12,5-32, где увеличены размеры нижнего окна, размещенного в наклонной грани, что, однако, несколько усложняет конструкцию каркаса кабины.
Имели место попытки, преимущественно в башенных кранах, улучшить обзор путем устройства в передней стенке выемок для
Рис. 89. Схемы к определению позы крановщика:
а — общая схема обзора из кабины; 6 — позы крановщика; ----- — угол обзора при
наклоне иорпуса крановщика из 10°; — — — —то же, при наклоне на 40°
коленей крановщика и выполнения этой стенки со смотровым скосом (36]. Это позволяло уменьшить наклон тела крановщика. Однако такая кабина ограничивает его подвижность и сложна в изготовлении.
Проверки, выполненные как графическим способом, так и непосредственно на эксплуатируемых кранах, показали, что удобная поза крановщика может быть обеспечена при отнесении кабины на расстояние 5 ... 7 м от грузовых канатов. Практически это можно обеспечить только применением кабин, перемещающихся раздельно от грузовой тележки.
В настоящее время такие кабины вследствие усложнения конструкции крана применяют преимущественно на крупных установках. Однако проведенные разработки выявили бесспорную целесообразность оснащения такими кабинами и козловых кранов общего назначения.
Имеются два варианта установки подвижных кабин. По одному из них самоходная кабина перемещается по боковым направляющим в пределах пролетной части моста. Здесь перемещения грузовой тележки и кабины полностью взаимонезависимы, однако у кабины нет выхода на консоли, а установка дополнительных направляющих^ и консольное крепление кабины несколько усложняют конструкцию крана.
Кабина, перемещающаяся по общим путям с грузовой тележкой, может быть выполнена самоходной. Однако в этом случае
175
следует предусмотреть средства для уравнения скоростей движения тележки и кабины.
Более простое решение получается при канатном приводном механизме передвижения грузовой тележки [А. с. № 594017 (СССР) ]. Здесь ha кабинной тележке «монтируют вспомогательную лебедку, канатоведущий шкив которой охватывается тяговым канатом грузовой лебедки. Шкив соединяется с валом посредством сцепной муфты. При замкнутой муфте и заторможенном шкиве кабина перемещается совместно с грузовой тележкой. При включении лебедки кабина смещается относительно тележки. Наконец, при разомкнутой муфте кабина может быть застопорена в любом удобном для работы месте моста.
У кранов, оснащенных передвижными кабинами, следует обеспечивать безопасный выход из них при остановке в любом месте моста. В ряде конструкций кранов (например, у кранов с двухбалочным мостом или с решетчатым однобалочным мостом) проблема выхода на мост каких-либо трудностей не представляет. В кранах с однобалочным мостом листовой конструкции и подвесной грузовой тележкой выход через нижнюю грань последнего обычно невозможен. Иногда тележку снабжают телескопической лестницей. В сдвинутом состоянии эта лестница не препятствует проходу тележки под узлами примыкания опорных стоек к мосту. В раздвинутом состоянии лестница позволяет крановщику достигнуть предусмотренной вдоль моста галереи. Для этого же по длине настила галереи предусматривают ряд люков, причем шаг последних должен обеспечивать при любом положении тележки в пролете выход с нее в один из люков.
У кабин, перемещающихся совместно с грузовой-тележкой, часто приходится считаться с шумом и вибрацией, возникающими при работе механизмов тележки.
Для защиты от шума и высокочастотной вибрации в узлах подвески кабины целесообразно предусматривать резиновые прокладки или втулки. Корпус кабины должен иметь звукопоглощающую обшивку или покрытие.
У кранов с тонкостенным, однобалочным коробчатым мостом или при тонкостенных трубчатых поясах часто мост или пояса играют роль резонатора. В особенности они усиливают шум, возникающий при передвижении грузовой Тележки с неточно установленными ходовыми колесами. Для снижения шума целесообразно устанавливать подтележечные направляющие на неметаллических подкладках, например пластинах из полиэтилена толщиной 2 ... ... 3 мм. Однако наилучшие результаты дает применение пластмассовых ходовых колес.
Для снижения уровня вибраций следует применять демпфирующую подвеску кабины; такие подвески в настоящее время стали внедрять" на мостовых и козловых кранах.
176
Г лава 8
ПРЕДОХРАНИТЕЛЬНЫЕ И ВИБРОЗАЩИТНЫЕ УСТРОЙСТВА
1. ПРИБОРЫ ДЛЯ ЗАМЕРА СКОРОСТИ ВЕТРА
Рис. 90. Датчик сигнализатора давления ветра
Рассмотрим устройства, предназначенные для козловых кранов общего назначения.
В соответствии с ГОСТ 23940—79 для кранов с управлением из кабины и при пролетах, более 16 м установка приборов обязательна. При срабатывании приборы приводят в действие звуковую сигнализацию крана, а при оснащении крана приводными или автоматическими противоугонными захватами — захваты и отключают механизм передвижения крана.
Так как для козловых кранов опасным является действие ветра вдоль подкрановых путей, они обычно снабжаются ветроизмери-тельяыми приборами направленного действия — сигнализаторами давления ветра СДЁ-М. Этот сигнализатор содержит датчик и электронный сигнальный блок. Датчик (рис. 90) должен устанавливаться в наивысшей точке остова крана в месте, свободном от аэродинамических помех. Крыло 1 ветроприемника должно быть расположено вдоль моста крана. Оно уравновешивается противовесом 2 и крепится вместе с ним на головке 3, Последняя посажена на верхний конец вертикального вала 4, нижний конец которого заключен в коробку 5 с рычажным механизмом' и микропереключателями. Датчик настраивают на срабатывание при скорости
ветра 12,5 ± 0,5 м/с, что соответствует динамическому давлению ветра 90 ... 100 Па; можно отрегулировать и на скорости 10 ± 0,5 и 16 ± 0,5 м/с.
Сигнальный электронный блок имеет схему предварительной сигнализации; после срабатывания датчика зажигается установленная на блоке лампа предварительной сигнализации; одновременно приводится в действие реле времени, которым можно устанавливать выдержку времени 1,5, 2 или 3 с. По истечении этого времени
177
замыкается цепь устройств (звуковая сигнализация, противоугон--ные захваты). Блок содержит схему контроля, обеспечивающую возможность проверки его Исправности.
В комплект устройства входит также тарировочное приспособление. Это приспособление содержит шкив, укрепляемый на вал 4 вместо головки 5, кронштейн с отклоняющим блоком и мерный груз, прикрепленный к концу нити, охватывающей шкив и проведенной по отклоняющему блоку. Правильность срабатывания устройства должна проверяться 2 раза в год.
Иногда на козловые краны устанавливают анемометры М-95М, разработанные для башенных строительных кранов. Вертушка этого прибора смонтирована на флюгере, что обеспечивает одинаковое* действие при любом направлении ветра, в том числе и вдоль моста крана. Сигнальный блок анемометра снабжен вольтметром, отградуированным на скорость ветра 2 ... 50 м/с; границы срабатывания сигнализации 12 ... 24 м/с. По сравнению с сигнализатором СДВ-М прибор М-95М менее надежен и более сложен в обслуживании (наличие вращающихся частей, более сложная электрическая схема, чувствительность к механическим повреждениям).
Известны и другие виды ветроизмерительных приборов, устанавливаемых на кранах — от простейших ветромеров флюгерного типа с качающимся крылом-доской до ветроизмерительных станций, содержащих помимо сигнального прибора (анемометра или прибора СДВ-М) анерумбометр дистанционного действия с расположенными в кабине крановщика указателями направления и скорости ветра. Такие станции устанавливают на особа* крупных и ответственных кранах.
2. ПРОТИВОУГОННЫЕ' УСТРОЙСТВА
Эти устройства должны предотвращать, самопроизвольное движение крана и грузовой теле^кки, при ветре давлением, превосходящим допустимое для кранов рабочего состояния (обычно q = 125 Па), и достигающим предельного значения, нормированного ГОСТ 1451—77 для района установки крана.
Противоугонные устройства являются одним из наиболее ответственных элементов крана; они регламентированы рядом обязательных нормативных документов. В соответствии с ГОСТ 23940—79 козловые краны должны быть оборудованы противоугонными захватами с машинным или ручным приводом. При использовании машинного привода должна быть предусмотрена возможность приведения в действие устройств вручную или должны устанавливаться дополнительные ручные захваты или стопоры.
Стандарт СЭВ СТ СЭВ 725—77 для кранов с пролетом более 40 м предусматривает обязательное применение приводных противоугонных устройств; при этом краны меньших пролетов можно 1X8-
оснащать противоугонными устройствами о ручным приводом, если доступ к* ним при эксплуатации не затруднен.
Правила устройства и безопасной эксплуатации грузоподъемных кранов Госгортехнадзора требуют, чтобы при использовании рельсовых захватов в качестве противоугонных устройств их конструкция должна позволять закрепление крана на всем пути его перемещения. Если применены захваты, губки которых охватывают головки крановых рельсов с нижних сторон, то в соответствии с ГОСТ 23940—79 на каждом рельсе должно быть установлено по два захвата. Этим предотвращается отказ захвата от работы при расположении его под соединительными рельсовыми накладками.
Для козловых кранов общего назначения можно выделить следующие основные группы этих устройств: стопоры, ручные л приводные рельсовые захваты (принудительного и автоматического действия).
Стопоры нашли применение только в особых случаях — в районах с особо высокой ветровой нагрузкой кранов нерабочего состояния—динамическим давлением 1500 ... 1700 Па, когда трудно или невозможно удерживать краны с помощью рельсовых захватов. Стопоры выполняют в виде закладных штырей, заводимых в гнездо рам ходовых тележек и проушин кронштейнов якорных блоков, размещаемых у стояночного участка кранового пути.
Рельсовые захваты целесообразно выполнять автоматическими с приведением их в действие при достижении ветром заданной скорости вне зависимости от наличия на кране электропитания.
Захваты принудительного действия с машинным приводом могут работать только при наличии электропитания, что несколько снижает надежность защиты крана от угона ветром. Очевидно, ручные захваты, приводящиеся в действие непосредственно крановщиком или подкрановым рабочим, не могут в ряде случаев обеспечить необходимую безопасность крана. Однако на практике подавляющее большинство козловых кранов общего назначения оснащено ручными противоугонными захватами (включая и относительно крупные краны грузоподъемностью 10 ... 20 т и пролетами 32 ... 40 м).
Приводными захватами снабжены преимущественно краны большой грузоподъемности и значительных пролетов, а также имеющие большую стоимости специальные, например, контейнерные краны.
Такое положение объясняется рядом причин.
Одной из них является относительно высокие сложность и стоимость приводных противоугонных захватов принудительного действия, составляющая 10... 15 % стоимости самого крана.
Захваты автоматического действия опасны своим внезапным срабатыванием при частых в эксплуатации отключениях электропитания. Приводные захваты всех видов требуют особо тщатель-
479.
jioro регулирования* и ухода; они весьма чувствительны к неисправностям крановых путей.
Вместе с тем практически можно, обеспечить определенную степень безопасности против угона ветром кранов с ручными противоугонными захватами лри исправном состоянии механизма передвижения крана и крановых путей и надлежащем обслуживании кранов. В особенности это относится к небольшим кранам с электроталью, обладающим относительно небольшой парусностью и не выходящих по высоте за пределы десятиметровой зоны. Весьма благоприятны с данной точки зрения и краны с трубчатой решетчатой металлоконструкцией.
Во всех случаях, за редкими исключениями, при увеличении скорости ветра исправно действующие тормоза механизма передвижения при наличии работоспособной ветровой сигнализации позволяют крановщику оставить кабину крана и привести в действие ручные противоугонные захваты. Однако для крупных кранов, часто перекрывающих трудные для перемещения крановщика площадки, например, нижние склады леспромхозов, бассейны-отстойники, штабели насыпного груза и др., следует признать необходимым применение приводных захватов. Особенно это относится к интенсивно эксплуатируемым* кранам, где становятся ощутимыми потери времени на закрепление и особождение ручных захватов. Во всех случаях при выборе типа и конструкции захватов следует иметь в виду, что к ним, как и ко всем устройствам безопасности, предъявляются повышенные требования надежности, стабильности работы, удобства и минимальной трудоемкости обслуживания.
По способу взаимодействия с рельсами различают самозатяги-вающиеся (самозаклинивающиеся) захваты и захваты с принудительным зажатием головки рельса.
' Удерживающее усилие; создаваемое захватом, должно на 10 ... 20 % превышать угонную силу. При определении расчетного значения этой силы, приходящейся на каждый из захватов, следует учитывать наиболее неблагоприятное распределение ветровой нагрузки и горизонтальной составляющей весовой нагрузки между опорами.
При оценке разгружающего действия сопротивления передвижению, удельные сопротивления .передвижению следует принимать без учета дополнительных сопротивлений на ребордах колес.
При расчете захватов действие тормозов следует учитывать только при наличии систем плавной остановки. При этом для двухдвигательного привода вводимое в расчет тормозное усилие не должно превышать минимальной силы сцепления, определенной с учетом уменьшения вертикальной нагрузки.
Захваты всех типов удерживаются на рельсах в результате сил трения между поверхностями головок рельсов и рабочими поверхностями захвата (губками рычагов, эксцентриками).
180
Коэффициент р сцепления рабочих поверхностей с рельсом может изменяться в широких пределах в зависимости от формы поверхности губок, термообработки и состояния губок и рельса (попадание смазочного материала, загрязнения и т. п.). Наибольшим этот коэффициент может быть при наличии насечки на поверхностях губок (или эксцентриков) и твердости их материала HRC 55. х
Расчетные значения коэффициентов сцепления сведены в табл. 38.
Таблица 38 Значения коэффициента сцепления
Характер поверхности губок Материал губок Термообработка 1*
Острая насечка Насечка притуплена до площадок шириной 0,15 мм Насечка отсутствует То же 1 Сталь 65Г, 60С2, J У8А, У10А Сталь 45, 50 . Сталь СтЗ HRC 55 НВ 350 0,3 0,18 0,15 0,12
Рекомендуемый профиль насечки на рабочей поверхности губок показан на рис. 91. Шаг насечки К обычно принимают равным 5 ... 6 мм, угол у = 90... 110°.
Площадь рабочей поверхности губок (проекция на плоскость) может быть определена исходя из напряжений смятия, принимаемых для закаленных губок равными 300 ... 400 МПа, незакаленных — 100 ... 150 МПа.
Для эксцентриков допускаемые контактные давления могут быть увеличены в 1,5 ... 1,8 раза.
Противоугонные захваты должны обеспечивать необходимое усилие зажатия и при уменьшении ширины головки кранового рельса на 8 ... 10 мм в результате изнашивания, а также при опускании губок захвата относительно проектного положения на 5 мм вследствие износа рабочих поверхностей ходовых колес и подкрановых рельсов. Крепление захватов к конструкции крана должно обеспечивать возможность самоустановки захватов по отношению к крановым рельсам.
Из всего многообразия конструкций рельсовых захватов рассмотрим те, которые уже эксплуатируются на козловых кранах или испытаны и могут быть рекомендованы к установке.
Ручные противоугонные захваты следует выполнять только самозатягивающимися, так как при принудительном зажатии необходимо приложение сравнительно больших усилий, а также трудно гарантировать стабильность ручной затяжки.
Чаще употребляют относительно простые по конструкции и достаточно надежные в работе ручные клещевые самозатягиваю1
181
щиеся захваты. Основными элементами их (рис. 92) являются рычаги 1 и 2, губки которых охватывают голавяу репса. Рычаги соединены нажимным винтом 5, снабженным рукояткой рычаги имеют вертикальные прорези для пальца 4, закрепленного в кронштейнах рамы ходовой тележки.
При установке захвата его при разведенных рычагах вручную опускают на рельс. Вращением винта 3 поджимают губки рычагов, к головке рельса. Если кран под действием ветра начнет
Рис. 91. Профиль насечки
Рис. 92. Клещевой противоугонный захват
перемещаться, захват под воздействием пальца поворачивается вследствие выборки зазоров между губками и головкой рельса и местных деформаций металла (показано штриховой линией). Силы трения, возникающие в местах контакта кромок губок, должны обеспечивать фиксацию захвата, а вместе с ним крана на месте.
При конструировании и расчете захватов такого типа необходимо иметь в виду следующее. Масса захвата, который при переводе в нерабочее положение разворачивается на 1В0°, не должна превышать Г5 кг. Учитывая нижнее расположение захвата, усилие, с которым рабочий действует на рукоятку, должно быть 100 ... 120 Н; по этим же соображениям длина рукоятки должна быть 150 ... 220 мм.
Условие надежного крепления захвата
Q «г 1,22?|*Ч
где Q — угонная сила, приходящаяся на захват; 7? —реакция на губках захвата; р' — коэффициент трения на кромках губок, определенный с учетом наклона поверхностей последних.
Реакция на губках захвата
/? (Я- р'Лг) = Q (Л + Лг).
Так как рычаги ручных захватов, как правило, изготовляют из стали СтЗ, а угол наклона рабочих поверхностей губок составляет 15 ... 20°, для расчетов можно принять
р == 0,12; р' = p/cos а « 0,13.
182
Расчетная высота головки рельса hr^ 30 мм; размер h по компоновочным условиям обычно равен 200 ... 300 м. Тогда ширина губок Ь, необходимая для обеспечения надежного крепления (самозатягивания) захвата, должна находиться в пределах 70 ... ... 100 мм.
• При перекосе захвата кромки губок несколько сминаются (по данным испытаний на 0,2 ... 0,4 мм}. Однако это не может отрицательно* сказаться на работе захвата, так как появление
угонной силы расчетного значения за срок службы крана бывает 3 ... 5 раз.
Элементы захвата на прочность следует рассчитывать с учетом изгиба его рычагов как угонной силой Q, так и горизонтальными поперечными составляющими реакции R. Так ка’ сила Q обычно прикладывается на небольшом расстоянии от верха прорези рычагов, местный изгиб их ветвей можно не учитывать. Горизонтальная составляющая К реакций (рис. 93, а)
Рис. 93. Схема к расчету прочности рычагов ручного захвата: а — схема приложения нагрузок; 6 — расчетная эпюра моментов
губках может быть принята
В этом случае, учитывая возможное изменение конфигурации губок и головки рельса, следует принять а' = 30° и Л « 0,3/?. Нажимной винт будет испытывать усилие N = 2К ~ 0,6/?. Его прочность проверяют также и на наибольшую из нагрузок, испытываемых им при затяжке (максимально возможное усилие на рукоятке винта 200 ... 300 Н). Напряжения в рычагах захвата можно определять в соответствии с эпюрой изгибающих моментов, приведенной на рис. 98, б.
После изготовления опытных образцов захватов их следует подвергнуть статическому испытанию с приложением тяговой нагрузки, на 20 ... 30 % превышающей расчетную угонную силу.
На рис. 94, а показан ручной клещевой захват, рассчитанный на угонную силу 29... 30 кН. Он крепится на кронштейне /, который смонтирован на торце ходовой тележки. В нижней части захвата предусмотрен сбрасывающий щиток 2. В верхней части кронштейна имеется основание 3 для резинового буфера. Рабочие губки рычагов образованы их отогнутыми концами, а также приварными вкладышами 6. Свободный конец зажимного винта защищен трубкой 5> приваренной к рычагу. Эта трубка вместе с головкой винта захвата служит опорой при развороте его вверх 18а
350
в нерабочее положение. Для фиксации захвата в этом положении на щеках кронштейна предусмотрены гнезда 4. .
На рис. 94, б показан ручной клещевой захват усовершенствованной конструкции, рассчитанный на угонную силу 30 ... 40 кН. Рычаги поверху соединены шарниром. В сочетании с шарнирным креплением нажимного винта и применением трубчатой гайки, связанной с рычагом фиксирующим ригелем, это обеспечивает одновременное смыкание или размыкание обоих рычагов при вращении рукоятки, что существенно упрощает работу с захватом.
Рис. 95. Накладной самозатягиваютийся захват
Сварные рычаги двутаврового сечения при относительно малой массе обладают повышенной прочностью. Необходимо отметить,-что тавровое сечение рычагов обеспечивает постоянство точек контакта губок с рельсом, что способствует стабильности работы захвата.
Профиль губок рассчитан на использование захвата с рельсами типов Р38, Р43 и Р50.
За рубежом иногда применяют накладные рычажные самозатя-гивающиеся захваты; рычаги таких захватов (рис. 95) своими хвостовиками свободно укладываются в гнезде рамы ходовой части крана. Рычдги имеют пазы, несколько превосходящие по ширине головку рельса; рабочая ширина контактных поверхностей.рычагов ‘ уменьшена для повышения возможности самозаклинивания последних. Действие накладных захватов аналогично действию захватов с боковыми рычагами; однако в ряде случаев при накладных рычагах компоновка узла захватов более удобна. Вместе с тем исключаются препятствия работы захвата в виде стыковых накла- * док; устраняются трудоемкие операции по установке и выведению в нерабочее состояние захвата.
В то же время увеличивается ширина ходовой части крана. Несмотря на применение двух рычагов вследствие практически
186
неустранимой разницы в величине зазоров в пазах рычагов, в работу может включаться только один захват, что вызовет изгиб рельса в горизонтальной плоскости. Это обстоятельство следует учитывать при проектировании и расчете захватов такого рода.
Другой разновидностью самозатягивающихся захватов явля* ются эксцентриковые захваты. У них в качестве рабочих органов используют снабженные насечками эксцентрики. Эти захваты сра* батывают при контакте эксцентриков с боковой поверхностью головки рельса и последующем смещении крана; для обеспечения
Рис. 96. Схема эксцентриков: о — кругового профиля; б — логарифмического профиля; -------- — начальное положение .эксцентрика;-------— при предельном уменьшении ширины головки рельса;
--------. при наибольшей ширине головки рельса
эффективного действия при обоих направлениях движения крана эксцентрики снабжают пружинами, удерживающими их вне работы в нейтральном исходном положении.
Эксцентриковые захваты выполняют с фиксированным положением осей эксцентриков или с предварительным подводом эск-центриков к боковым поверхностям головки рельса. В первом случае приходится считаться с неизбежными отклонениями в ширине головки рельса, что сказывается на изменении угла а подъема профиля эксцентрика в точке контакта с рельсом (рис. 96). Для обеспечения работоспособности захвата при круговом очертании профиля эксцентрика должно быть выполнено условие
ttjnax + Й|А7(2Лшах), где р — коэффициент трения на поверхности рельса; агаах — угол подъема профиля при наименьшей ширине головки рельса (контакт в точке /); d — п&а-метр оси эксцентрика; /imax — плечо действия угонной силы Q; р* — коэффициент треиия на оси эксцентрика.
Усилие, на которое следует рассчитывать элементы захвата,
N ________________5__________
““ {<g «шт + (4/2) Лцйп tg р'} л »
ДО
где п = 1 и п — 2 соответственно при одно- и двустороннем расположении эксцентриков в захвате; агаш — минимальный угол подъема профиля при наибольшей ширине головки (контакт в точке 2).
Для захватов второго типа (рис. 97) углы определяют исходя из проникновения зубьев эксцентрика в материал рельса и учитывая упругие деформации элементов захвата; ориентировочно (X = 4 ... 6°.
• Профиль эксцентрика может быть выполнен по логарифмиче* ской спирали (см. рис. 96, б), что обеспечивает постоянный угол подъема. Однако такие эксцентрики более сложны в изготовлении.
575 575
Рис. 97. Ручной клещевой захват с зажимными эксцентриками
Клещевой захват с зажимными эксцентриками (см. рж. 97) предназначен для установки на козловые краны ККС-10 и рассчитан на угонную силу до 70 кН. Захват смонтирован на вертикальном штыре 1, посаженным в гнезде торцового кронштейна рамы ходовой тележки.' С передней стороны захват снабжен направляющими роликами 2* взаимодействующими с боковыми сторонами головки рельса и обеспечивающими самоустановку захвата относительно последнего. Корпус захвата несет оси 3 рычагов 4, верхние концы которых стягиваются винтом 5, снабженным штурвалом. Для сигнализации о положении захвата предусмотрен концевой выключатель 6.
Нижние концы рычагов несут эксцентрики 8, удерживаемые в нейтральном положении с помощью пружин 7. На корпусе захвата смонтирован резиновый буфер. Этот захват по сложности и металлоемкости (масса около 100 кг) значительно превосходит ранее описанные ручные захваты. Однако верхнее расположение штурвала упрощает приведение его в действие; исключается трудоемкая операция по развороту захвата в нерабочее положение; вследствие того, что стыковые накладки не препятствуют работе 137
захватов, число их может быть уменьшено с четырех до двух. Это обусловливает целесообразность .установки таких захватов на относительно крупный краны — пролетами 20 ... 32 м.
При выборе типа приводного захвата следует иметь в виду следующие соображения.
Захваты автоматического действия при выполнении их само-, затягивающимися могут управляться силовым устройством относи-' тельно небольшой мощности (тормозным электрогидротолкателем, электромагнитом станочного типа и др.), которое должно только обеспечивать подведение рычагов или эксцентриков к подкрановому рельсу.
Выполнение автоматических захватов возможно и с силовым приводом — например, с приводом от ходовых колес крана, от силового устройства, питающегося от электрического или пневмогидравлического аккумулятора [17, 43].
Наличие автоматически действующих захватов приводит к резким остановкам крана при перерывах в электропитании. В особенности это характерно для самозатягивающихся захватов, зажимное усилие которых повышается по мере увеличения коэффициента трения между губками захватов и рельсами. Коэффициент трения при соответствующих условиях в 1,5 ... 1,8 раза может превышать значения, приведенные в табл. 37.
Также опасны возможные случаи одностороннего срабатывания захвата, приводящие к возникновению^ чрезвычайно больших нагрузок от перекоса. Снижение неблагоприятного эффекта от срабатывания захватов может быть достигнуто путем его подпружиненной установки. Это, однако, существенно усложняет конструкцию крана и может быть применено только в особо крупных кранах или перегружателях.
В ряде конструкций применяют гидравлические демпферы и другие замедлители, обеспечивающие выдержку времени срабатывания захвата, в течение которой благодаря действию тормозов механизма передвижения крана скорость последнего должна снизиться до безопасного предела. Однако такие замедлители снижают необходимое в аварийных ситуациях быстродействие захвата. Помимо этого они часто бывают неэффективными (например, при разомкнутых тормозах, наличии попутного ветра) и не могут обеспечить необходимой безопасности действия захвата. Перечисленные обстоятельства ограничили применение автоматически действующих захватов.
Эти соображения относятся и к нашедшим определенное распространение захватам с приводом от ходового колеса крана. В этих захватах приходится считаться и с дополнительным недостатком — уменьшением вертикальной нагрузки на находящиеся с подветренной стороны крана ходовые колеса, что приводит к соответствующему уменьшению как действующего на колесо крутящего момента, так и нажимного усилия кинематически связанного с крдесом захвата.
158
Тем не менее ряд организаций продолжает разработку автоматически действующих противоугонных захватов, которыми оснащаются преимущественно относительно тихоходные монтажные краны.
Один из таких захватов (рис. 98, а) разработан Харьковским филиалом института Энергомонтажпроект [А. с. № 512912 (СССР) L Вертикальный шток 3 несет замыкающие грузы /; в нерабочем состоянии при движении крана шток удерживается электро-гидротолкателямй (на рисунке не показаны), действующими на закрепленную на штоке траверсу 2. При включении захвата двигателя электрогидротолкателей отключаются от сети, и шток опускается. Его конический клин действует на ролики верхних концов рычагов 5, оси 8 которых соединены планками 7 и могут свободно перемещаться в горизонтальном пазу поперечины Ц корпуса захвата. Нижние концы рычагов 5, снабженные сменными регулируемыми губками, зажимают головку кранового рельса. На концах осей 8 закреплены кронштейны с горизонтальньрии направляющими роликами 9, при движении крана перекатывающимися по боковым поверхностям головки подкранового рельса. Таким образом самоустанавливаются рычаги захвата относительно рельса. Для смягчения боковых ударов роликов 9 о рельс оси имеют возможность поворота. При этом к одному из торцов каждой оси жестко прикреплен рычаг 10, с помощью пружины 6 связанный с корпусом захвата. Другой конец рычага имеет ограничительный упор. В исходное положение рычаги 5 возвращаются стяжными пружинами 4. Для предотвращения местных выработок рабочих поверхностей клина шток следует периодически поворачивать.
Достоинством захвата является использование надежных типовых приводов — электрогидротолкателей. Однако он обладает относительно сложной конструкцией.
На рис. 98, б показан разработанный той же организацией и изготовляемый* Запорожским энергомёханическим заводом автоматический клещевой гидравлический захват. Основными элементами этого захвата являются гидроцилиндр 12 и зажимные рычаги 13. Около одного из ходовых колес смонтирован редуктор, на входном валу которого посажена шестерня, находящаяся в зацеплении с зубчатым венцом ходового колеса крана; выходной вал редуктора соединен с валом насоса. В комплект захвата входят также резервуар и гидропанель с дистанционно управляемым золотником. При работе крана золотник свободно перепускает рабочую жидкость. В нерабочем состоянии или при срабатывании ветровой защиты золотник подключает гидроцилиндр к насосу. Если кран придет в движение, насос начнет подавать рабочую жидкость в гидроцилиндр, что и приведет к срабатыванию захвата.
Плавающая подвеска рычагов выполнена так же, как и у захвата, показанного на рис. 98, а. Суммарное передаточное отношение механической передачи 51,2. Рабочее давление в гидро-189
s
Рис, 98. Автоматически действующие клещевые'захваты; в •» с грузовым ввмвквнвем; б «• гвДравлвямкв*
системе до 8 МПа. Удерживающее усилие НО кН. Масса захвата 800 кг. Захват устанавливают на монтажные краны, монтируемые на эстакадах и подверженные повышенной ветровой нагрузке.
Захваты принудительного действия могут проработать только при наличии на кране энергии. Применительно к козловым кранам общего назначения речь может идти только о внешней питающей электросети. Здесь необходимо считаться с отказом захватов от
Рис. 99. Клиновой захват принудительного действия
срабатывания при прекращении электропитания — в этом случае приходится пользоваться аварийным ручным приводом захватов или резервными ручными захватами, что снижает степень безопасности защиты кранов от угона ветром.
Широко распространены винтовые клиновые захваты принудительного действия. В этих захватах (рис. 99) ползун с клиновыми направляющими пазами для роликов верхних плечей рычагов перемещается с помощью вертикального винта, гайка которого действует на ползун через пружину.
Электродвигатель мощностью 1 ... 1,5 кВт через редуктор 1 вращает вертикальный винт 2. Гайка 7 этого винта заключена
в коробке ползуна 6, перемещающегося'по вертикальным направляющим корпуса захвата. При движении крана с захватом в нерабочем состоянии гайка 7 находится в верхнем положении; при этом крышка коробки ползуна опирается на верхний торец гайки. Ролики верхних концов рычагов 5 находятся на нижних участках пазов ползуна; при этом рычаги совместно с их траверсой находятся в верхнем положении, а их губки не соприкасаются с головкой кранового рельса. При срабатывании ветровой защиты или при выводе крана в нерабочее состояние электродвигатель приводит во вращение винт. Гайка начинает вместе с ползуном и подвешенными к нему рычагами перемещаться вниз до упора траверсы 4 в головку кранового рельса.
При дальнейшем вращении винта ползун начнет смещаться относительно рычагов, действуя на их ролики, и отводя верхние концы рычагов в стороны. Губки рычагов входят во взаимодействие с головкой рельса и стопорят рычаги. Винт продолжает смещаться, и гайка перемещается вниз, преодолевая сопротивление пружины, нажатие которой через клиновые поверхности ползуна передается на рычаги. При высоте пружины в сжатом состоянии, соответствующей заданному усилию прижатия губок, предусмотренный на гайке упор воздействует на смонтированный на ползуне концевой выключатель 3. В результате этого двигатель захвата отключается от сети. Установленный в верхней части корпуса выключатель 8 обеспечивает остановку двигателя при подъеме ползуна в верхнее положение. Срабатывание этого выключателя также позволяет включить приводы крановых механизмов.
Корпус захвата связан с рамой ходовой, тележки с помощью вертикального шарнира с пальцем. Для центрирования захвата относительно рельса на кронштейнах корпуса смонтированы горизонтальные направляющие ролики. На корпусе захвата укреп* лен также резиновый буфер.
Захват развивает зажимное усилие 240 кН,' что обеспечивает удерживающую силу 70 ... 140 кН; масса захвата 340 кг.
, Клиновые захваты с винтовым приводом обеспечивают относительно большое усилие 7V зажатия при относительно небольшом усилии К нажатия гайки
N = Ki tg (0 + р) п,
где I — отношение верхнего и нижнего плечей рычагов, обычно 1—3... 4; Р — угол между рабочей поверхностью клинового паза и вертикалью Р = = 4 ... 8°; р — приведенный угол трения, учитывающий сопротивление роликов рычагов, для роликов на подшипниках качения р = 1°10', на подшипниках скольжения р = 3°; т] — КПД шарниров, т] — 0,95.
Наличие в кинематической цепи захвата тарированной пружины обеспечивает стабильность усилия зажатия. Однако клиновые захваты обладают рядом недостатков. Прй отказе одного из выключателей продолжение работы двигателя после достиже-нйя ползуном крайнего положения приводит к поломкам элементов захвата, в особенности винта.
193
Недостатком конструкции, показанной на рис. 99, является также малый отход губок от головки рельсов в нерабочем состояний; в сочетании с недостаточной прочностью относительно часто выходящих из строя направляющих роликов это приводит к поломкам при задевании губок за стыковые неровности рельсовых путей.
В захватах, выполненных по аналогичной схеме, но выпускаемых Запорожским энергомеханйческим заводом, эти недостатки устранены, хотя и ценой определенного усложнения конструкции и увеличения металлоемкости. У этих захватов, рассчитанных на удерживающее усилие до 11£> кН, ход ползуна обеспечивает подъем губок клещей выше уровня головки рельса на 20 ... 25 мм (что, однако, увеличивает время срабатывания захвата до 25 с). Применена плавающая установка рычагов захвата, схожая с установкой, предусмотренной в захватах по рис. 98. Для привода винта использован червячный редуктор; на свободный конец вала посажена рукоятка аварийного привода.
Необходимо отметить, что выпускаемые Запорожским энергомеханическим заводом противоугонные захваты проходят проверку и наладку на специальных стендах, что исключает необходимость последующего регулирования на месте установки крана и существенно повышает надежность их работы.
3. ОГРАНИЧИТЕЛИ ПЕРЕКОСА
Эти устройства должны предотвращать перекосы остова крана (или, что то же самое, относительные забеги опор), возникающие при движении крана. Такие устройства выполняют по различным схемам [1]. Однако все попытки использования их на козловых кранах общего применения практически успеха не имели. Это объясняется их относительно высокой сложностью и недостаточной надежностью. Недостатком ограничителей перекоса является также их неработоспособность при возникновении наиболее опасных для прочности крана экстремальных динамическх нагрузок (например, при одностороннем наезде крана на препятствие). Поэтому в настоящее время такие устройства к установке на козловые краны не рекомендуются.
Нагрузки от перекоса следует ограничивать содержанием механизмов передвижения кранов и крановых путей в исправном состоянии, а также путем соблюдения установленных правил эксплуатации кранов. Однако в некоторых случаях применение ограничителей перекоса может быть , и целесообразным. В частности, это относится к кранам, авария которых может привести к особо тяжелым последствиям (например, при установке кранов над котлованами с работающими людьми). По мере увеличения применения крупнопролетных быстроходных кранов, в особенности с одной гибкой и другой жесткой опорами, повышается опасность развития усталостных явлений в местах примыкания стоек опор к мосту.
193
Это указывает на необходимость продолжения работ в направлении создания надежно работающих ограничителей перекоса. Перспективно применение тензореле, датчики которых регистрируют деформации перекоса элементов металлической конструкции (например, в верхних частях поясов стоек жесткой опоры) 128]. Тензореле через соответствующую промежуточную электрическую аппаратуру связано с системой управления приводом механизма передвижения крана.
4. БУФЕРА И КОНЦЕВЫЕ УПОРЫ
Козловые краны, как правило, оборудованы резиновыми бу-
ферами. Типовые буфера имеют литые амортизаторы, изготовля-
емые из морозостойкой резины средней твердости с пределом проч-
ности при разрыве не менее 200 % и ОСТ 24 191.37—78.
Рис. 100. Резиновый буфер с литым амортизатором
не менее 4 МПа, относительным удлинением твердости по ТИР в пределах от 50 до 65 Конструкция таких буферов показана на рис. 100, а основные размеры и технические данные буферов приведены в табл. 39.
Амортизатор крепится к торцовому щиту ходовой тележки с помощью приварного ’воротника. Находят применение также и наборные буфера из резиновых пластин, соединенных стяжками Указания по расчету резиновых буферов даны в работе [40]. За рубежом находят применение буфера из пористых полимерных материалов; при осадке такого буфера воздух выдавливается через поры внутренних полостей, что повышает эффективность работы буфера.
Особенностью резиновых буферов являются их сравнительно небольшие осад-
ки, что при жестких несущих конструкциях может вызывать повышенные значения замедлений при концевых ударах. Однако остовы козловых кранов общего назначения обладают
Таблица 39
Характеристика резиновых буферов с литыми амортизаторами (ОСТ 24.191.37 — 78)
Показатель БР-40 ЬР-63 БР-100 БР-160 Б Р-250 БР-350
Диаметр, мм Максимальное рабочее усилие, кН Максимальный рабочий ход, м\) Максимальная энергоемкость, кН-м 40 3,28 0,(Н2 0,02 63 8,13 0,02 0,08 100 20,5 0,032 0,32 160 52,5 0,054 1,43 250 128 0,088 5,68 350 250 0,124 15,55
194
относительно высокой податливостью, что и обеспечивает дополнительное уменьшение ударных нагрузок.
При предварительном выборе принимают, что буфера должны поглощать 30 ... 40 % суммарной кинетической энергии всех поступательно перемещающихся и вращающихся элементов крана или грузовой тележки. Более низкие значения замедлений можно обеспечить путем применения пружинных или гидравлических буферов [58 1. Однако такие буфера вследствие сложности и трудоемкости изготовления на козловых кранах общего назначения получили весьма ограниченное применение.
5. УСТРОЙСТВА ДЛЯ ГАШЕНИЯ ВИБРАЦИЙ
И ЗАЩИТЫ ОТ НЕЕ
Применение устройств такого рода целесообразно на всех кранах. Они повышают уровень комфортности оператора, улучшают условия управления краном и снижают нагруженность элементов конструкции. Их можно разбить на две основные группы устройства, обеспечивающие защиту непосредственно крановщика от вибраций, и устройства, обеспечивающие гашение колебаний остова крапа.
Устройства первой группы выполняют в виде демпфированных подвесок кабин управления или кресла крановщика. Частота собственных колебаний кабины или кресла, снабженных вибро-защитной подвеской, должна быть в 2—3 раза меньше низшей частоты собственных колебаний остова крана Для гашения случайных толчков и предотвращения свободного раскачивания кабины в состав подвески включают гидравлические демпферы.
Кресло-пульт 1 подвешено в кабине (рис 101) на параллельных тягах 2, что изолирует кресло от вибраций в горизонтальной плоскости. При этом кресло связано с полом кабины двумя парами гидравлических амортизаторов <3. Необходимо иметь в виду, что устройства такого рода не только защищают крановщика от вибраций, но и в определенной мере способствуют гашению колебаний конструкции крана благодаря поглощению в амортизаторах кабин части энергии колебаний остова крана.
В козловых кранах для гашения колебаний их остова можно применять разнообразные устройства и приспособления. Действие их основано на поглощении кинетической энергии колебаний элементов конструкции в гидравлических или, реже, фрикционных амортизаторах.
В связи с особенностями козловых кранов — возникновением при работе механизма подъема одновременно вертикальных и горизонтальных колебаний — разработаны два типа гасителей колебаний.
Действие рычажного гасителя колебаний основано на изменении расстояния между мостом и стойкой опоры [А. с. № 470472 (СССР)]. Гаситель (рис. 102) представляет собой штангу /, шар-
195
Рис, 101, Кабина с виброзащищенным креслом-пультом
Рис. 102. Схема виброгаси- Рис. 103. Схема размещения виброгасителя на теля с креплением штанги стойке жесткой опоры двухбалочного моста к стойке гибкой опоры
196
нирно прикрепленную одним концом к балке моста, а другим — к коромыслу 2, действующему на амортизатор 3. При работе крана вследствие деформации его остова расстояние между точками а и б изменяется, в результате чего коромысло 2 поворачивается и приводит в действие амортизатор. Ориентировочно эффективность действия такого гасителя можно оценить, сопоставляя потенциальную энергию Ер, накопленную остовом крана вследствие его деформации, с энергией Е, рассеивающейся в демпфере.
В первом приближении потенциальная энергия
Ер = ~2” Qfст
(где Q — нагрузка от массы груза; f — статический прогиб от нагрузки Q), а рассеивающаяся энергия
e = S4-;Ps»>
(где I — число циклов колебаний до их затухания; Р — сопротивление амортизатора; s0 — ход штока амортизатора в начале колебательного процесса).
Исходной зависимостью будет
Ер = Е или Q/ст = iPs0.
Задаваясь значением I и имея в виду, что s0 (хотя бы при статическом характере деформаций) однозначно связано с /Ст. можно найти требуемое значение Р. Возможно также и решение обратной задачи — определение I по известному Р. Очевидно, если Р зависит от скорости перемещения штока амортизатора, надо знать частоту собственных колебаний остова крана. Значения i можно принимать равными 5 ... 8.
В кранах обычно используют гидравлические гасители тележек пассажирских вагонов типа КВЗ. Приближенно можно принимать, что в интервале скоростей 1,0... 12 см/с развиваемая ими сила сопротивления (в кН) численно равна скорости.
Длительные эксплуатационные испытания устройства, выполненного по схеме, показанной на рис. 102, и установленного на козловом кране грузоподъемностью 12,5 т и пролетом 32 м, показали, что оно уменьшает время затухания колебаний с 30 до 10 с.
Кинематика рычажной системы устройства и место его установки должны быть выбраны так, чтобы ход гасителя был не менее 15 мм.
На рис. 103 показано размещение виброгасителя на жесткой опоре козлового крана грузоподъемностью 20 т, пролетом 16 м. Для увеличения рабочего хода штанга подведена к основанию стойки, что одновременно обеспечивает разгрузку последней от дополнительного изгибающего момента, создаваемого усилием в штанге.
Устройства рассмотренного типа способствуют гашению колебаний от перекоса, также сопровождающихся деформацией опорных стоек.
Устройства второго типа имеют инерционную массу, размещенную в полости моста и подвешенную н& шарнирных тягах
197
[А. с. № 246802 (СССР ]. Длину последних подбирают так, чтобы собственная частота колебаний массы была несколько ниже (на 10 ... 20 %) относительно стабильной частоты продольных колебаний моста. При возникновении последних масса начинает интенсивно раскачиваться, приводя в действие связанный с нею амортизатор, в котором и рассеивается энергия колебаний. Масса виброгасителя составляет 0,5 ... 1 % массы моста.
Такие виброгасители наиболее целесообразно устанавливать в однобалочные мосты замкнутого сечения; их конструкция относительно несложная. Однако они не обеспечивают гашения колебаний от перекоса.
Внедрение виброзащитных устройств позволит устранить или значительно смягчить приведенные в табл. 33 ограничения жесткости металлоконструкций козловых кранов. По мере развития конструкций виброзащитных устройств и накопления опыта эксплуатации кранов с виброзащитными устройствами следует ожидать, что последние станут типовым оборудованием кранов. Это позволит существенно снизить металлоемкость кранов вследствие полного использования несущей способности материала и особенно актуально для листовых конструкций из сталей повышенной прочности.
Глава 9
МОНТАЖ И ИСПЫТАНИЯ КРАНОВ.
ПОДКРАНОВЫЕ ПУТИ
1. МОНТАЖ КРАНОВ
В настоящее время практически все выпускаемые промышленностью козловые краны — самоподъемные; подъем их моста в рабочее положение происходит при стягивании стоек монтажных опор. Вместе с тем находящиеся еще в эксплуатации бесконсоль-ные козловые краны монтируются с помощью стороннего грузоподъемного оборудования с относительно большими грузоподъемностью и высотой подъема; установка их требует устройства якорей, что дополнительно увеличивает трудоемкость и длительность монтажных работ.
Известно большое число методов монтажа и самомонтажа, а также конструкций козловых кранов, обеспечивающих их ускоренный монтаж. Далее будут рассмотрены наиболее употребительные из них.
Типовые схемы монтажа крана путем стягивания стоек опор приведены на рис. 104. Мост 1 (рис. 104, а) укладывают на шпальных клетках (или козлах) 2, с ним шарнирно соединяют стойки опор 3, колеса ходовых тележек 4 которых установлены на кра-198
новые рельсы 5. К основаниям стоек или ходовым тележкам крепят обоймы 7 монтажных полиспастов. Канаты полиспастов запасо-ваны на барабаны лебедок 6. При стягивании полиспастов основания стоек сближаются, что вызывает подъем моста. Угол наклона стоек обычно принимают равным 20 ... 30°. У кранов с высотой подъема 9 ... Юм это соответствует высоте шпальной клетки, равной 3,5 ... 4,5 м.
Для того чтобы избежать подъема моста на клетках, применяют различные методы монтажа в два этапа. Этим обеспечивается также снижение усилия стягивающего полиспаста, резко возрастающего при уменьшении угла наклона стоек.
Рис. 104. Типовые схемы монтажа крана: а раздельными ходовыми тележками; б — с жесткими ходовыми балками
Наиболее распространенный из них метод заключается в выполнении стоек опор с разъемами. Первоначально ходовые тележки и обоймы полиспастов крепят к фланцам верхних частей опор, затем стягивают эти части, подводят под мост клетки, отсоединяют тележки и обоймы и крепят их к основаниям нижних частей стоек. Последнюю стыкуют с верхними частями стоек, после чего опоры стягивают до подъема моста в проектное положение.
В некоторых кранах, преимущественно небольшой (3,2 ... ... 5 т) грузоподъемности, стяжки опор выполняют в виде ходовых балок (рис. 104, б). В этих случаях для обеспечения монтажа балку выполняют разъемной и одну из частей балкц 7 крепят к рельсу в горизонтальном положении, а вторую 8 снабжают роликом или башмаком 9 для перемещения по рельсу. На балке предусмотрен шарнир 10 для стоек опор. После окончания стягивания части балок соединяют накладками и устанавливают болты фланцев оснований опор. Для того чтобы не препятствовать стыковке этих фланцев, в шарнирах 10 предусмотрены увеличенные зазоры.
Подъем кранов стягивающим полиспастом накладывает свои особенности на конструкцию опор и ходовых частей.
Лучше всего когда направление усилия полиспаста и направление оси опорной стойки пересекаются в оси балансира ходовой тележки или колеса. Однако конструктивно это не всегда выполнимо. У одноколесных тележек таких кранов ось опорной стойки совпадает с осью ходового колеса, но направление усилия полиспаста часто значительно смещено, что при подъеме вызывает дополнительный изгибающий момент в опоре. В начальном поло
199
жении точка приложения полиспаста расположена ниже оси колеса, в среднем — выще. Оптимальное положение этой точки можно найти исходя из условия равенства отрицательного и положительного моментов усилия полиспаста относительно оси колеса.
В опорах кранов, имеющих двухколесные балансирные тележки, это не возникает, но при высоком расположении опорного шарнира относительно осей ходовых колес может наблюдаться опрокидывание тележки. Это обусловливает необходимость проверки устойчивости тележек при подъеме.
У кранов с балансирными ходовыми тележками шарниры крепления стяжек, соединяющих стойки каждой из опор, обычно приходится располагать выше стягивающего полиспаста, что обусловливает нагружение стоек" изгибающими моментами. Этого можно избежать путем оснащения стоек вилочными пятами, шарнирно соединенными с тележками на уровне осей ходовых колес. Стяжка может быть выполнена разрезной из двух частей, каждая из которых шарнирно соединена с рамой одной из ходовых тележек. При этом оси шарниров также расположены на уровне осей колес. Обоймы полиспаста монтируют внутри стяжки у. мест разъема.
Стойки каждой опоры с мостом соединяются с помощью одного или двух шарниров. В первом случае при подъеме образуется трехзвенная шарнирная система, гарантирующая подъем моста без перекоса. Недостатком такой схемы часто является сложная конструкция опорных стоек, которым необходимо придавать Г-образное очертание. Особенно это проявляется в мостах прямоугольного сечения. Для двухбалочных мостов такая схема вообще не применима.
Практика монтажных работ показывает, что установка пальца, соединяющего одновременно стойки обоих опор с проушинами моста, весьма сложно. Поэтому в ряде случаев стойки соединяют с мостом с помощью расположенных в непосредственной близости один от другого шарниров. При этом, как правило, шарнирная четырехзвенная система получается достаточно устойчивой: в каких-либо дополнительных противоперекосных устройствах необходимости нет.
При увеличении расстояния между шарнирами, например при размещении их у верхних поясов мостов прямоугольного сечения, система может оказаться неустойчивой — стягивание оснований опор повлечет за собой поворот моста относительно его продольной оси, причем наклон одной из стоек будет уменьшаться, а другой — увеличиваться.
При продолжении стягивания стойки одной из сторон моста будут опускаться, а другой — подниматься. Этот процесс не приведет к подъему моста, а может закончиться разрушением элементов конструкции крана.
Устойчивость шарнирной четырехзвенной системы должна проверяться расчетом. Если возможна потеря устойчивости, сле-200
дует предусматривать ограничительные упоры или выравнивающие (синхронизирующие, блокирующие) механизмы.
Упоры ограничивают крайние верхнее и нижнее положения стоек 1А. с. № 516619 (СССР) ]. В начале стягивания (положение / на рис. 105, а), более тяжелые стойка остаются неподвижными, поворот их начинается только после остановки противоположных стоек нижними упорами. Подъем сопровождается перекосом моста на 15 ... 25° (положение //). Дальнейшее стягивание опор влечет за софой постепенное выравнивание моста (положение ///).
Рис. 105. Монтаж крана с ограничением перекоса моста упорами:
[ — исходное положение; // — подтягивание более легкой стойки. 111 — поворот более тяжелой стойки
Однако применять упоры можно только на кранах сравнительно небольшой .грузоподъемности — обычно не больше 12,5 т. Стойки, первоначально остававшиеся неподвижными, в конце первого этапа стягивания испытывают значительный поперечный изгиб вследствие перекоса моста. В ряде случаев, например у кранов с двухбалочными мостами, подъем с разворотом моста на 5 '.. 10° приведет к чрезмерному повышению нагрузки не только на стойки, но и на элементы самого моста.
Эти недостатки устраняются применением выравнивающих механизмов.
Наиболее просто выравнивающие механизмы выполняют при соединении стоек с верхней гранью моста. Эти механизмы ранее состояли из зубчатых колес, связывающих стойки опор в местах крепления их к мосту. Основным недостатком такого механизма является его высокая стоимость.
На рйс. 106 показана схема рычажно-тягового механизма, применяемого на кранах КДКК-Ю и некоторых других моделей.
Оголовки опорных стоек снабжены рычагами, наклоненными выше и ниже осей шарниров. При монтаже крана после укладки моста на шпальные клетки и соединения с ним опор кронштейны
7 Абрамович И. И и др _ 201
обеих опорных стоек соединяют двумя перекрещивающимися тягами. При подъеме моста тяги должны обеспечивать поворот опорных стоек на один и тот же угол. Однако в процессе поворота, стоек расстояние между шарнирами рычагов не остается постоянным. Это вызывает некоторый перекос моста и заставляет применять гибкие тяги, не воспринимающие сжимающих усилий. В противном случае возможно разрушение элементов крепления
Рис. 106. Рычажно-тяговый выравнивающий механизм
тяг. Поцыткц применения канатных тяг вследствие вытяжки канатов оказались неудачными. Тяги следует изготовлять из стальных полог.
Такое же явление может наблюдаться в конце подъема моста, при подхода одной из стоек к мосту до упора во фланец. Здесь механизм должен быть отключен.
Отклонение расстояния / зависит от расстояния а\ между шарнирами стоек и радиуса г осей рычагов; оно снижается при увеличении а и уменьшении г. Л
Однако увеличение размера а часто невозможно, а уменьшение радиуса г вызывает увеличение нагрузок в элементах механизма.
Обычно при конструировании целесообразную кинематическую схему механизма (рис. 106) находят, методом подбора, а иногда аналитически [81.
На рис'. 107 показан канатно-рычажный выравнивающий механизм кранов ККС-10.
У нижних поясов моста у места крепления гибкой опоры (рис. 107, б) установлены по два шарнира для крепления рычагов 1, размещенных с обеих сторон опоры. Рычаги имеют на концах блоки 2 для запасовки канатных полупетель 3 и 6. Полу-петли крепятся к пальцам 4, приваренным к внутренним поясам стоек. Полупетля 3 от пояса на левой стойке огибает блок рычага, проходит поперек моста и крепится непосредственно к поясу правой стойки, полу петля 6 — от правой стойки к левой. Рычаги свободно вращаются на осях и проходят через точки крепления полу петель.
262
Полупетли имеют натяжные винты 5, которыми регулируют натяжение канатов перед подъемом и выравнивают фермы моста в поперечном направлении после подъема. Во время подъема моста при неодинаковом угле поворота опорных стоек одна из полупетель будет натягиваться, препятствуя перекосу системы.
Механизм, показанный на рис. 107, обладает рядом преимуществ.
Рис. 107. Канатно-рычажный выравнивающий механизм: в •— схема механизма; б — установка механизма на кране ККС-10
1. Большое плечо восприятия внешних нагрузок, стремящихся вывести систему из равновесия, так как точки закрепления полупетель на стойках могут быть удалены от шарнира последних на значительное расстояние. Это позволяет применять ме* ханизм для кранов с большим расстоянием между шарнирами стоек, наличием больших, эксцентричных нагрузок или высоким расположением центра масс моста. Надежность работы позволяет' установить механизм • только на одной (гибкой) опоре крана ККС-10. . ..
7* М3
2. Неизменяемость для всех кинематических элементов в процессе подъема.
3. Невысокая стоимость изготовления и простота налаживания.
Более сложны механизмы для кранов в креплением стоек к нижней грани моста. Выравнивающий механизм крана КК-5 (рис. 108, а) содержит зубчатые секторы 7, монтируемые на временно укрепляемой между пролетными балками моста поперечине 2. К кривошипам 3 секторов подсоединены шарнирные
Рис. 108, Выравнивающие механизмы кранов с креплением опорных стоен к нижней стороне моста:
а » вубчато-кривошипный{ б • гибко* тягой
тяги 4, прикрепленные к стойкам опоры. Механизм надежен в работе, но трудоемок в изготовлении и демонтаже, когда приходится удалять механизм с уже поднятого моста.
На рис. 108, б показана схема выравнивающего канатного механизма для того же крана (А. с. № 796178 (СССР)]. Здесь использована несимметрия размещения масс крана, приводящая к тому, что стойка 5 всегда будет подтягиваться ранее расположенной с более тяжелой'стороны стойки 9. Механизм содержит канатную тягу 8, которая проведена по блокам 6 и 7, монтированным на П-образной раме моста, и подсоединена к кронштейнам стоек. Геометрия механизма обеспечивает подтягивание по мере подъема моста стойки 9 стойкой 5.
Приводом стягивающих полиспастов кранов, которые поднимают стягиванием опор, как правило, являются электрические монтажные лебедки или лебедки, встроенные в ходовую часть и приводимые в движение электродвигателями механизмов передвижения крана.
Выносные монтажные лебедки часто с успехом заменяютсй лебедками тракторов или самими тракторами.
204
Встроенными лебедками снабжены обычно краны грузоподъемностью 3,2 ... 2,5 т, предназначенные для работы в условиях частого перебазирования.
Необходимо отметить, что распространение стреловых самоходных кранов увеличенных грузоподъемности и высоты подъема позволяет, в особенности для кранов массой 20 ... 30 т, вести монтаж козловых кранов без применения стяжных полиспастов, непосредственным подъемом стреловым краном моста и шарнирно
подсоединенным^ к нему стойками опор. Такая возможность должна быть предусмотрена в инструкциях по эксплуатации.
Наиболее целесообразно проводить контрольный монтаж с пол-ной сборкой и опробованием кранов непосредственно на заводе-изготовителе. Однако' это' требование часто удовлетворить не удается. В этом случае кран отгружается с завода-изготовителя укрупненными элементами.
На примере крана ККС-10 (рис. 109) 'рассмотрим Основные этапы выполнения монтажных работ. В соответствии с чертежом на монтаж крана к началу работ на монтажную площадку завозят части крана и все необходимые материалы, оборуддвание и инструмент; сооружают якоря для крепления лебедок, подготовляют монтажные канаты, временные упоры и шпальные клетки. Монтажная организация обследует узлы крана и принимает их под монтаж; раскладывает в соответствии со схемой раскладки и порядком монтажа.
Монтируют в три этапа.
Первый этап — монтаж по высоте 0,8 ... 1,0 м (рис. 109, а). На шпальных клетках высотой ке менее 0,8 м над головкой рельсов выкладывают секции моста /. Пояса секций соединяют, между собой стыковыми накладками. Перед
205
установкой и сваркой стыковых раскосов проверяют прямолинейность поясов в вертикальной и горизонтальной плоскостях. Выравнивают и стыкуют балки ездового монорельса. Устанавливают буфера, ограничивающие перемещение грузовой тележки.
Далее монтируют блоки, переходные площадки, лебедку передвижения тележки, устанавливают подкосные фермы и подкосы опорных стоек. В проушины кронштейнов моста с помощью пальцев навешивают верхние секции 2 стоек, к их фланцам присоединяют ходовые тележки 3. С обеих сторон стоек гибкой опоры устанавливают рычаги 4 выравнивающего механизма, запасовывают и натягивают полупетли его канатов. На оси ходовых тележек навешивают монтажные блочные обоймы и производят запасовку полиспастов 5.
Одновременно с этим на мосту монтируют электрооборудование и электропроводку.
При одновременном включении лебедок мост поднимают на высоту 100 ... ... 150 мм. При этом проверяется крепление канатов полиспастов, лебедок, якорей и выравнивающего механизма. Нормальным должно быть такое положение, когда одна пара блокировочных канатов натянута достаточно сильно, а вторая — слабее. При перекосе моста более 10° его опускают обратно и фанаты подтягивают. Затем включением лебедок мост поднимают на высоту 5 м, под мост подводят две шпальные клетки и мост опускают на них.
Второй этап — на высоте 5 м (рис. 109, б) монтируют грузовую тележку и тележку кабины и регулируют положение их опорных и поддерживающих колес. Подвешивают кабину.
У входа на мост устанавливают ремонтные площадки с лестницами. На монорельсе монтируют кабельные тележки и подвешивают гибкий кабель. ХоДо-вЫе тележки отсоединяют от верхних секций стоек.
Нижние секции стоек соединяют с верхними секциями и ходовыми тележками, причем стойки опор занимают положение, показанное на рис. 109, в’, проверяют натяжку канатов выравнивающего механизма.
На гибкую опору навешивают посадочную площадку, приваривают вертикальную лестницу. Одновременно с этим на опорах устанавливают переходные коробки, провода и электрооборудование. На мосту укрепляют прожекторы, устанавливают конечные выключатели.
Включением лебедок ходовые тележки стягивают, и мост поднимается в проектное положение.
Третий этап — монтаж на полной высоте. К фланцам ходовых тележек под полиспастами устанавливают стяжки, подкосные фермы и подкосы соединяют с фланцами стоек жестких и гибких опор. Полиспаст и выравнивающий механизм демонтируют. Окончательно монтируют переходные площадки и лестницы.
Лебедки подъема и передвижения тележки оснащают канатами. Устанавливают и регулируют рельсовые противоугонные захваты, на стяжку гибкой опоры устанавливают кабельный барабан.
Оканчивают монтаж и регулирование электрооборудования, регулируют наложение линеек конечных выключателей, заземляют металлические части электроаппаратов и оборудования.
Смазывают механизмы. Опробуют электросхемы и механизмы. Кран окрашивают, после чего проводят техническое освидетельствование в объеме, предусмотренном правилами Госгортехнадзора.
Перед сдачей смонтированного крана в эксплуатацию проверяют точность сборки и установки его основных элементов, в том числе параллельность осей ходовых колес крана и грузовой тележки, отклонения в пролете крана (только при обеих жестких опорах), горизонтальность моста, отклонение подтележечных направляющих, прямолинейность элементов металлоконструкций.
При контроле состояния электрооборудования помимо сопротивления изоляции и заземления рекомендуется проверить сопротивление проводов роторных цепей двигателей противоположных опор.
Допускаемые отклонения приведены в ГОСТ 23940—79, в технических условиях на изготовление кранов и инструкциях по их монтажу и эксплуатации,
206
Объем и последовательность работ, выполняемых при монтаже, должны быть определены еще в процессе проектирования крана. Прй этом учитывают основные требования.
1. Наименьший объем монтажных, в особенности верхолазных, работ и монтажа электрооборудования; возможное исключение монтажной сварки.
2. Габаритные размеры отправочных элементов должны обеспечивать возможность транспортирования их железнодорожным транспортом. В соответствии с этим в состав проекта включают чертежи погрузки и крепления узлов на подвижном составе, выполняемые в соответствии с действующими нормами. В необходимых случаях должны обеспечиваться также и специфические требования перевозки на других транспортных средствах.
3. Наличие приспособлений и элементов для регулирования при -монтаже положения частей металлических конструкций и механизмов.
4. Беспрепятственная проверка положения этих частей, в особенности ходовых колес крана и грузовой тележки.
5. Узлы должны иметь строповочные места и приспособления. На чертежах следует указывать положение центра тяжести узла и места строповки. К инструкции по монтажу должны прикладываться чертежи способов строповки основных узлов.
2. ИСПЫТАНИЯ КРАНОВ
Опыт создания новых кранов показывает, что предваритель; ные (заводские) испытания не следует ограничивать только проверкой, часто вхолостую/ работы отдельных узлов механизмов на заводских стендах. В состав этих испытаний необходимо включать, по крайней мере, монтаж и опробование собранного крана. Основные указания по методам испытаний козловых кранов изложены в ГОСТ 25251 —82.
Часто, ссылаясь на отсутствие подкрановых путей и монтажных средств, устраивают предварительные испытания на удаленных от завода-изготовителя площадках заказчика. Однако, как правило, при этом резко увеличивается время монтажа и наладки крана, а расходы на командировки рабочих, и доставку частей крана в ходе его наладки существенно превышают затраты на устройство путей и аренду монтажного оборудования. В состав предварительных испытаний следует обязательно включать поузловое взвешивание крана, монтаж (с определением усилий в полиспастах стягивания монтажных стоек) и Проверку точности установки кодовых колес крана и грузовой тележки.
Состав работ, выполняемых при предварительных испытаниях, регламентирован соответствующей программой и методикой. Они включают в себя техническое освидетельствование в объеме, предусмотренном правилами Госгортехнадзора. Нужно иметь в виду, что при расположении груза на консоли и необкатаниых крановых путях на гравийном основании замеренные прогибы
2QT
моста могут значительно превосходить прогибы, полученные при .расчете металлической конструкции. При этих испытаниях определяют скорости всех рабочих движений как при работе вхолостую, так и с грузом. Регистрируют вертикальные, а при возможности и горизонтальные продольные колебания моста при работе механизма подъема груза.
Тележку располагают в центре полета и на консолях. Измерительный цикл имеет следующий вид: плавный подъем с предварительной вытяжкой стропов — остановка на весу — подъем веса — остановка — опускание—остановка на весу — опускание— плавная посадка груза на основание — резкий подъем с подхватом. При этих замерах следует затягивать тормоза механизма передвижения грузовой тележки — самопроизвольное перемещение тележки способствует быстрому затуханию колебаний моста.
Обязательна проверка движения крана с номинальным грузом, расположенным на предельном вылете со стороны'более тяжелой опоры. Проверяют металлоконструкцию крана на действие статической нагрузки от перекоса, равной расчетной. Одну из опор крепят к путям, а ко второй через динамометр подсоединяют тягдвый канат. Регистрируют смещение опоры по мере увеличения нагрузки.
Во время испытаний следует контролировать'скорость и направление ветра, а также напряжение в питающей электросети. Необходимо также обеспечить затяжку тормозов всех механизмов в соответствии с указаниями инструкции по эксплуатации или расчетам.
Обязательным является также проверка уровня шума и виб-. раций в кабине крановщика; методика этих испытаний изложена в ГОСТ 23940—79.
При предварительных испытаниях желательно в том иди ином объеме выявить динамические нагрузки, возникающие при работе механизмов крана, а также фактические напряжения, . возникающие в элементах конструкции. Объем этих испытаний определяется на основании анализа расчета крана с учетом реальных возможностей — наличия соответствующей аппаратуры, времени года и др. *
Практикой выработан типовой состав замеров при испытаниях. При тензометрировании определяют статические напря-жёния в мосту в центре пролета и с обеих сторон жесткой опоры. Особое внимание обращают на узлы примыкания опор, к мосту, их следует проверять при действии как вертикальной нагрузки,' так и нагрузок от перекоса. ,
Для регистрации обычно используют электронные измери-.,, тёли деформаций и проволочные тензометрические датчики с базой , в 20 мм; число Точек замера 30 ... 80.
При динамических испытаниях приходится ограничиваться двумя—четырьмя точками. На мосту датчики устанавливают в про-. лете — по центру для выявления вертикальных динамических 208
нагрузок и около жесткой опоры для выявления нагрузок от перекоса. Устанавливают также один-два датчика в верхней частиt одной из стоек жесткой опоры. Перед динамическими замерами на ленту осциллографа записывают сигналы от этих датчиков при воздействии известной статической нагрузки. Эти записи позволяют в последующем по записям динамических напряжений судить о соответствующих динамических нагрузках. Одновременно с записью напряжений следует регистрировать и показатели, характеризующие работу приводов — силу тока ротора фазного двигателя, частоту вращения одного из валов механизма* В ряде случаев удается зарегистрировать угол отклонения грузовой подвески от вертикали, а также относительный забег опор крана. Для того чтобы учесть возможные проскальзывания или пробуксовывание ходовых колес крана или грузовой тележки, рекомендуется регистрировать не только частоту вращения, вала привода, но и непосредственное смещение опоры крана или грузовой тележки относительно рельсов. Для этого можно использовать тахогенератор, связанный с холостым ходовым колесом или с дополнительным роликом, перекатывающимся по крановому рельсу.
При работе механизма подъема груза и передвижения тележки целесообразно записывать также и динамические смещения моста, например, с помощью потенциометра, приводимого стру- , ной, связанной с конструкцией крана.
Обработка данных испытаний позволяет найти ускорения, и ( замедления, возникающие при работе крана В состав испытаний , следует включать проверку надежности противоугонных рель* совых захватов, для чего к одной или обеим опорам крана при-*, кладывают соответствующую статическую нагрузку.
Определяют обзорность из кабины, в том числе и при различных положениях подвижной кабины в пролете^
При испытаниях можно определять и другие показатели.
Следует учитывать, что одними замерами невозможно гарантировать безопасную и надежную работу крана. Основными це- , лями этих замеров следует считать проверку принятой методики,, расчета, уточнение динамических нагрузок и выявление напряг . жен кого состояния тех элементов конструкции, для которых отсутствует достоверная методика инженерного расчета.
За редкими исключениями во время испытаний козловых кранов не удается воссоздать принятые в расчете нагрузки. Поэтому для оценки полученных при замерах данных (что целесообразно . делать уже непосредственно в ходе испытаний) следует проводить ( дополнительный расчет.
Наработку крана (обычно 1000 ... 10 000 рабочих циклов) можно включать в состав как предварительных, так и приемочных испытаний. Приемочные испытания козловых кранов проводят, как правило, на эксплуатационном объекте заказчика* В ходе их обычно ограничиваются опробованием крана и проверкой его в объеме технического освидетельствования.
Ж
3. КРАНОВЫЕ ПУТИ
При разработке технической документации на козловые краны в нее обязательно включают указания по устройству крановых рельсовых путей с укладкой рельсов на деревянные полушпалы и с щебеночным или гравийным балластом. Эти указания учитывают при разработке проекта путей, в котором предусматривают дренажную систему и устройство для подвода питающего тока. Проект должен учитывать также конкретные геологические особенности данной площадки.
Пути на инвентарных рельсовых звеньях в железобетонным балочным или бетонным ленточным фундаментом выполняют по технической документации, разрабатываемой строительными проектными организациями.
Вне зависимости от типа крановых путей точность их укладки должна соответствовать требованиям Правил Госгортехнадзора. Общими являются также требования к типам подкрановых рельсов, заземлению, устройствам токоподвода.
Основными элементами кранового пути являются земляное полотно, песчаная подушка, балласт, шпалы и рельсы с промежуточными и стыковыми скреплениями.
Для путей козловых кранов используют новые и находившиеся в эксплуатации железнодорожные рельсы типов Р43, Р50 и Р65; в некоторых случаях могут быть использованы и годные к, эксплуатации более легкие рельсы типа Р38. При нагрузках на ходовые колеса 50 ... 70 кН можно применять и рельсы типа Р24, предназначенные для узкоколейных железных дорог. •
Тип рельса зависит в основном от нагрузки на ходовые колеса; однако существенное значение имеют также шаг укладки шпал, база балансирных ходовых тележек, податливость балласта и земляного полотна.
При выборе материала, конструкции и размеров элементов путей козловых кранов часто учитывают рекомендации, разработанные для башенных строительных кранов и содержащие указания по устройству дополнительного оборудования путей заземлению, лоткам для токоподводящего кабеля и тупиковым упорам. (Инструкция по устройству, эксплуатации и перебазированию рельсовых путей строительных башенных кранов СН 78—79). Однако при использовании этих рекомендаций следует учитывать как ограниченный срок службы путей башенных строительных кранов (6 ... 10 месяцев на одном объекте), так и низкую интенсивность работы их механизмов передвижения. Поэтому при устройстве путей козловых кранов целесообразно учитывать нормативы и руководства по устройству железнодорожных рельсовых путей.
В качестве балласта следует использовать щебень из естественного камня или гравий; балласт из песка или металлургических шлаков недостаточно стабилен и применение его для путей коз-210
Таблица 40
Допускаемые напряжения в элементах подкрановых путей
Элемент Напряжении Значения напряжений. МПа
Рельсы типов Р43, Р50 и Р65 Полушпалы Щебеночный балласт из естественного камня Гравийный балласт Земляное полотно из песка Земляное полотно из суглинка и глины Кромочные и осевые напряжения в подошве рельса Смятие древесины поперек волокон под прокладками Сжатие балласта непосредственно под шпалой То же Сжатие полотна под балластом То же 250 ... 300 2,5... 3 0,5 ... 0,7 0,4 ... 0,5 0,25 ... 0,3 0,1 ... 0,13
а также для предотвращения
Рис. ПО. Типовой тупиковый упор для козловых кранов грузоподъемностью
8 ... 20/5 т
650
"Ж"
ловых кранов нежелательно. При укладке балластного слоя из щебня или дробленого гравия между ним и основанием необходимо дополнительно устраивать песчаную подушку толщиной 150 ... 200 мм. Такая подушка необходима для увеличения общей толщины ' балластного слоя, проникновения грунта в щебень, а щебня в грунт.
Для расчета путей могут быть использованы указания, приведенные в различных работах [6, 20]. При этом расчетную вертикальную нагрузку на рельс принимают без учета коэффициентов перегрузки и динамических нагрузок. Допускаемые напряжения рекомендуется принимать в соответствии с данными табл. 40.
Толщину песчаной подушки можно включать в расчетную толщину балласта, при этом показатели податливости пути (модуль упругости основания и коэффициент постели полушпал) следует уменьшать на 20 ... 30 %.
В процессе эксплуатации пути могут смещаться; для обеспечения возможности их выверки необходимо предусматривать постоянные осевые знаки или реперы.
По концам путей устраивают тупиковые упоры (рис. НО). Они содержат торцовый щит /, основание 3 и ребра — среднее 4 и боковые 5. К щиту / на болтах прикреплена деревянная подушка 2. Основание 3 пришито костылями к шпалам, а ребра приварены к рельсу и к основанию.
211
4. РАСЧЕТ МОНТАЖА КРАНА
Расчет монтажа должен содержать: проверку устойчивости, прочности элементов выравнивающего механизма и определение усилий в стягивающих полиспастах.
Для расчета устойчивости кран (рис. 111) представляют в виде четырехзвенной шарнирно-рычажной системы (механизма), образованной стойками t и 2, н мостом ABML, Для каждого из положений системы точки Oj и Оа шар-
Рис. 111. Схема к проверке устойчивости крана при монтаже:
л— схема опоры; б — графики изменения положения центра масо С и точки прнло-) ження метровой нагрузки; а — обращенный план скоростей
Мирного крепления стоек 1 и 2 принимают фиксированными. Система нахб-цится под действием весовых нагрузок элементов конструкций и ветровой нагрузки. Трением в шарнирах пренебрегают. Принимают, что вследствие неизбежных начальных несовершенств мост отклонен от начального положения на угол <р. Пру расчете устойчивости обычно рассматривают несколько положений системы, которые она может занимать в ходе стягивания стоек. Эти положения характеризуются изменением угла а. Как правило, наиболее неблагоприятным оказывается начальное положение (а = атш).
Расчет устойчивости четырехзвенной шарнирно-рычажной системы козлового крана сводится к анализу поведения этой системы с учетом несимметричного расположения масс ее элементов и действия ветровой нагрузки.
Общим условием устойчивости системы является известное положение теоремы Лагранжа о том, что в положении равновесия системы потенциальная энергия ее должна иметь минимум. В данном случае это условие может быть записано как
где U — потенциальная энергия системы, находящейся под действием весовых и ветровых F нагрузок; ф — обобщенная координата; в данном случае — -угол поворота моста относительно первоначального горизонтального положения.
Рассматривая систему (см. рис. 111), приводим вес стоек Z и 2 по правилу 212
рычага к шарнирам А кВ моста. Затем, с учетом этих весов, находим приведенный вес GM и координаты центра тяжести С моста. Аналогично может быть найдены значение и положение равнодействующей F ветровой нагрузки, точку D приложения которой в ряде случаев можно без ущерба для точности расчетов совместить с точкой С.
При развороте моста на угол <р координаты ус и xD соответственно изменяются на Аус и Лхр. С учетом этого выражение потенциальной энергии системы можно записать так:
V = GMAyc (<р) Ч- FAxd (ф).
' Определить функции Аус (ф) и Axd (ф) аналитически, даже с использованием вычислительных машин, весьма трудно. Поэтому, на практике устойчивость часто бывает целесообразно проверять графическими способами. Одним из. них является построение графиков Аус (ф) и AxD (ф) методом засечек (рис. 111J5). В пределах 0<ф<Фо приращение перемещения центра тяжести GM будет отрицательным, т. е. при наклоне моста центр его тяжести будет опускаться.
При изменении ф от 0 до ф0 Для нижней точки графика фа будет иметь место устойчивое равновесие — любое отклонение от этой точки будет сопряжено с положительным приращением потенциальной энергии системы. При Ф > Фо это условие нарушится, и система потеряет устойчивость — мост начнет самопроизвольно поворачиваться, увлекая за собой стойки опор. Поворот моста от первоначального положения в противоположном направлении (угол ф < 0) будет- соответствовать области неустойчивости — в данном случае при Значениях ир<0 приращения Аус приобретет положительные значения.
При учете ветровой нагрузки F направление ветра следует принимать наиболее неблагоприятным. Для. интервала между некоторыми значениями ф{ и ф2 для сохранения устойчивости системы должно быть обеспечено условие 6мус4* 4-1 FAxD | < 0. Очевидно, для обеспечения безопасности монтажа необходимо, чтобы угол ф не достигал граничных значений, соответствующих равновесию системы.
Во многих случаях более удобно рассматривать равновесие обращенного (повернутого на 90°) плана скоростей (рис. 111, в), к которому в точках и приложены весовая 6М и ветровая F нагрузки. -Этот план строится для выведенной из начального положения на заданный угол ф системы, причем стойки 1 и 2 изображаются соответственно линиями Oj—а и ох—Ь, а моста — контуром abml. Для равновесия системы необходимо, чтобы их равнодействующая R проходила через полюс (о2) плана скоростей; отклонение равнодействующей будет характеризовать стремление системы к искажению. В дальнейшем нужно проверить положения системы в окрестностях начального угла ф; в том случае, если при отклонениях от угла ф равнодействующая /? будет стремиться пройти через точку Oj (оа), систему можно считать устойчивой.
Заметим, что план скоростей оказывается в данном случае неуравновешен —• он будет стремиться вращаться в направлении, указанном на рис. 111, в стрелкой. Соответствующее перемещение точек ЛиВна схеме системы (рис. Ill, а) указывает на увеличение перекоса моста.
В ряде случаев оценить устойчивость системы можно уже на основании анализа ее основных размерных соотношений. При положении точки С выше ли-’ нии АВ, устойчивость не может быть обеспечена. Это объясняется тем, что здесь поворот моста в любом направлении сопряжен с опусканием его центра тяжести.
При'Положении точки С ниже линии АВ устойчивость всегда гарантируется только для систем с //& = 18 ... 20, что практически имеет место только у кранов с трехгранным мостом и при расположении шарниров стоек в непосредственной близости от верхней грани последнего. Для наиболее часто встречающихся соотношений /j/fr — 0,8 и Ijb = 0,1 . устойчивость не .обеспечивается при lib < 5. Это объясняется тем, что при относительно большой величине b подъем центра тяжести моста вследствие его поворота оказывается недостаточным для компенсации его опускания вследствие вертикального перемещения шарниров А к В. * ,
213
Выравнивающий механизм любого вида является дополни* тельной связью, исключающей лишнюю степень свободы. Аналитические способы определения усилий в этих связях весьма трудоемки; гораздо лучшие результаты дает применение известного в строительной механике кинематического метода определения усилий в стержневых системах с использованием планов скоростей. Практически это сводится к построению обращенного плана
Рис.. 112. Схемы к расчету выравнивающего механизма: а — кинематнчевкая схема; б — уравновешивание обращенного плана скоростей
скоростей искажающейся системы с приложенными к нему внешними нагрузками («рычаг Жуковского») и уравновешивания его неизвестными усилиями в разорванной дополнительной связи.
Ниже показан ход расчета механизма, приведенного на рис. 107. Тяги 4 (рис. 112, а) и 6 прикреплены каждая своими концами к противоположным сторонам стоек 1 и 2 и огибают блоки рычагов 3 и 5. При повороте, например, стойки 1 в указанном стрелкой направлении тяга 4 действует на стойку 2 с противоположной стороны, что препятствует искажению системы. Аналогичным образом действует и тяга 6.
Установка тяг с предварительным натяжением обеспечивает одновременную их работу вне зависимости от направления действия внешнего усилия. Однако для упрощения принято, что нагружена только тяга 4, в которой действует усилие F. Это усилие прикладывается к соответствующим точкам обращенного плана скоростей (рис. 112,6), причем действующие в противоположных направлениях и взаимно уравновешивающиеся составляющие не учитываются.
Усилие натяжения
F' “ (Guh0 + Fhd)/(ht + hP + hq).
214
Этот же метод может быть использован при соединении стоек перекрестными тягами (пунктир на рис. 112, а и б), а также и для других уравнительны^ устройств.' При применении в уравновешивающих устройствах подверженных вытяжке канатных тяг рекомендуется определять усилия с учетом наклона моста на угол не менее 5°. Рассчитывать следует, по крайней мере, для двух (низшего и высшего) положений моста. Ветровая нагрузка, при отсутствии особых требований может определяться исходя из давления ветра 50 Па.
a) Я
Рис. 113. Определение усилий в стягивающем полиспасте: а •— при симметричной схеме; б — при несимметричной схеме
Усилия в стягивающем полиспасте при симметричной схеме крана (рис. 113)
$ = $в -Нт, '
где So — РК& sin a); St = Р'2ш (Р — нагрузка от массы моста и связанных с ним элементов, приходящаяся на данную опору; Р' — нагрузка от массы моста, грузовой тележки, стоек опор и ходовых тележек, действующих на крановый рельс; а — угол наклона геометрической оси стойки; w — удельное сопротивление передвижению, принимают w = 100 Н/т.
При-несимметричной схеме (рис. 113, б), которая может быть, например, при подъеме моста с перекосом, следует по правилу рычага перенести все весовые нагрузки в шарнир и определять натяжение S как усилие в нижней стороне неравностороннего шарнирного треугольника, к вершине которого приложено усилие Р.
Для системы с выравнивающими механизмами при уточненных поверочных расчетах рекомендуется определять усилие стягивающего полиспаста с учетом работы механизма. Это можно выполнить, например, с использованием плана скоростей, в котором за полюс принимают ось ходового колеса одной из опор, а ко второй оси, перемещающейся вдоль кранового рельса, прикладывается уравновешивающее, усилие полиспаста.
215
Глава 10
ЭКСПЛУАТАЦИЯ, РЕМОНТ
И МОДЕРНИЗАЦИЯ КОЗЛОВЫХ КРАНОВ
1. ОСОБЕННОСТИ СОДЕРЖАНИЯ, ЭКСПЛУАТАЦИИ
И РЕМОНТА КОЗЛОВЫХ КРАНОВ
Эти особенности обусловлены установкой кранов на открытом воздухе и передвижением их по наземным рельсовым путям; для крупных кранов имеют значения также их большие размеры.
При содержании кранов следует особое внимание обращать на состояние их металлической конструкции. Действующими в настоящее время инструкциями периодичность обследований металлических конструкций кранов, работающих на открытом воздухе, установлена 15 лет. Однако для козловых кранов, в осо-бенности при интенсивной эксплуатации, такие обследования целесообразно проводить не реже одного раза в 5 ... 7 лет. При этом особое внимание следует уделять узлам примыкания стоек опор к мосту. Возможность проведения таких обследований должны предусматривать еще на стадии проектирования крана; в инструкции по эксплуатации крана должны быть приведены указания не только по периодичности проведения осмотров металлических конструкций, но и по технологии их выполнения. В инструкцию включают чертежи приспособлений для доступа к элементам металлоконструкций при отсутствии на объекте эксплуатации универсальных подъемных средств (например, люлек или подвесных площадок для осмотра пролетных балок моста). При составлении соответствующих разделов инструкций рекомендуется использовать данные Руководящего технического материала Минтяжмаша РТМ 24.090—70. «Краны мостовые и козловые грузоподъемностью до 50 т. Типовая инструкция по эксплуатации», а также указания, разработанные применительно к -строительным конструкциям и железнодорожным мостам.
Обслуживание и ремонт козловых кранов должны проводиться на основании Единой системы планово-предупредительного ремонта (ППР). Применительно к условиям работы оборудования каждой отрасли разрабатывают конкретную структуру ремонтного цикла. Периодичность ремонтного цикла составляет обычно 10 ./. 15 тыс. машиночасов; в некоторых отраслях- народного хозяйства (например, на железнодорожном транспорте) периодичность цикла определяетоя объемом переработанного груза (обычно 0,5 .... 1,0 млн. т). За время ремонтного цикла проводят 20 ... 100 технических обслуживание Трудоемкость ежесменного технического обслуживания (ЕТО) —0,3 ... 0,5 нор-мочаса; технического обслуживания ТО-1 и ТО-2 — 5 ... 15 нормочасов и капитального ремонта — 300 ... 600 нормочасов (данные относятся к кранам с грузовыми тележками грузоподъемностью 10 ... 12,5 т и пролетом 25 ... 32 м).
2IG
Методика планирования и расчета трудоемкости технических обслуживаний и ремонтов изложена в работах Э. Ф. Антоневича [71 и А. Г. Веденеева, Н. Т. Гончаренко и А. И. Якушина[13].
Для проведения ЕТО для каждого типа кранов следует разработать соответствующий регламент. В этом регламенте фиксируют последовательность выполнения отдельных операций в соответствии с движением крановщика к месту работы — начиная с осмотра крановых путей и их оборудования, осмотра токоподвода, осмотра и при необходимости очистки ходовых частей, и др.
В состав ТО (ТО-1 и ТО-2) включают осмотры (с частичном разборкой и очисткой) механизмов и электрооборудования и осмотр наиболее нагруженных элементов металлоконструкции. Во время этих , работ при необходимости заменяют изношенные элементы механизмов и электрооборудования.
Капитальный ремонт иногда проводят с опусканием моста крана. Передовые предприятия выполняют его агрегатно-узловым методом. Для этого предварительно создают обменный фонд, в который помимо грузовых и ходовых тележек, крюковых подвесок и других узлов механизмов включают также стойки опор и стяжки.
Для оценки допустимого износа элементов механизмов используют общие нормативы, принятые в краностроении; они приводятся также и в некоторых заводских инструкциях по эксплуатации.
Основные указания по ремонту металлических конструкций изложены в работе Е. М. Концевого и Б. М. Розеншейна [231. Допускаемые отклонения размеров элементов ремонтируемых металлоконструкций могут быть на 20 ... 30 % выше по сравнению с нормативами, используемыми при изготовлении кранов.
Уменьшение площади сечения элементов несущей металлической конструкции вследствие коррозийного изнашивания не должно превышать 7 %; износ полок ездовых монорельсов — 12 % первоначальной толщины; отгиб кромок нижней полки — не более 3 % ее ширины.^
Не режё одного раза в год следует проводить освидетельствование лакокрасочного покрытия металлоконструкции, возобновляя при необходимости окраску поврежденных участков покрытия. Пыль и грязь, скопившиеся на окрашенных поверхностях, удаляют скребками и щетками. Примерная периодичность капитальных ремонтов лакокрасочных покрытий 5,... 8 лет. Расход грунтовки и эмалей в зависимости от их марок колеблется соответственно в пределах 50 ... 150 и 80 ... 240 г/м2 [331.
2. СОВЕРШЕНСТВОВАНИЕ ТЕХНОЛОГИЙ ПЕРЕГРУЗОЧНЫХ РАБОТ
Одними из основных направлений повышения производительности эксплуатируемых кранов следует считать внедрение научной организации труда (НОТ) и автоматизацию работы кранов.
317
Применительно к козловым кранам могут быть использованы системы НОТ, разработанные для погрузочно-разгрузочных машин (7, 19].
Следует только отметить необходимость организации подкрановой площадки, обеспечивающей крановщику наблюдение не только за грузами, но и за обеими нитками подкрановых путей.
Из эксплуатируемых козловых кранов практически автоматизирована работа только кранов, обслуживающих нижние склады леспромхозов. Такая автоматизация повысила производительность в среднем на 10 ... 20 %. Однако широкое внедрение соответствующих автоматических систем сдерживается отсутствием на ряде складов четко организованных грузопотоков.
Помимо этого автоматизация управления требует оснащения не только крана, но и подкрановых путей координатными датчиками, что усложняет устройство и эксплуатацию крановых установок.
Эти обстоятельства в настоящее время И сдерживают распространение систем автоматического управления козловыми кранами.
В системе МПС проводят работы по применению ЭЦВМ для площадок сортирования контейнеров, обслуживаемых козловыми кранами. По имеющимся данным (например, [48]) это увеличивает производительность на 15 ... 20 % в результате рационального движения крана, снижения простоев между циклами и др.
3. МОДЕРНИЗАЦИЯ КРАНОВ
Одним из основных направлений повышения эффективности эксплуатируемых кранов является их модернизация: оснащение механизированными грузозахватными органами, в том числе и грузоподъемными магнитами; увеличение скоростей рабочих движений; частичное усовершенствование отдельных узлов конструкции для повышения надежности работы крана.
Все работы по модернизации должны проводиться в соответствии с требованиями Правил Госгортехнадзора.
Все изменения в несущей конструкции, рабочих механизмах и рабочем оборудовании могут проводиться только по документации, разработанной специализированными краностроительными предприятиями или организациями. Допускается разработка документации неспециализированными организациями при условии получения заключения на эту документацию от краностроительных предприятий или организаций.
При проведении модернизации следует обязательно учитывать фактическое состояние крана, в особенности несущей металлической конструкции. Особое внимание следует обращать на узлы примыкания опорных стоек к мосту, крепления ездового монорельса и основания опорных стоек.
218
Модернизировать краны, выработавшие свой ресуро (ГОСТ 23940—79), не рекомендуется.
Проектные и расчетные работы [следует выполнять используя действующие на период модернизации нормативы.
Рассмотрим особенности проведения типовых работ по модернизации козловых кранов.
Оснащение крана механизированными захватными органами* Для исключения тяжелого и часто опасного ручного труда, а также для повышения производительности перегрузочных работ на краны устанавливают подъемные электромагниты, моторные грейферы и другие механизированные захватное органы.
Однако интенсивность работы крана может превысить пределы режима работы, установленные паспортом крана. Это приводит к необходимости проверки выносливости металлической конструкции крана. Здесь следует иметь в виду, что нагрузки некоторых элементов металлической конструкции (например, опор) мало зависят от массы груза. Поэтому снижение грузоподъемности крана при'повышении числа нагружений крана незначительно скажется на работоспособности этих элементов.
Работа захватов некоторых видов (подъемных электромагнитов, грейферов для разборки скрапа и др.) может привести к существенным перегрузкам — притягивание магнита к массивным металлическим предметам, подъем грейфером негабаритного металлолома и т. п. Для исключения таких перегрузок краны должны быть оснащены надежно действующими ограничителями грузоподъемности. Если это невозможно, следует предусмотреть технологию перегрузочных работ, полностью исключающую подъем грузов, превышающих номинальные.
Увеличение рабочих скоростей является основным средством повышения производительности кранов. С технической стороны увеличение скоростей каких-либо существенных трудностей не представляет. Обычно оно сводится к увеличению, на основании соответствующих расчетов, мощности приводных электродвигателей, изменению передаточных отношений редукторов и т. Однако увеличение скоростей, как правило, влечет за собой повышение числа циклов работы, что, как было отмечено выше, может отрицательно сказаться на выносливости металлических конструкций. Помимо этого, увеличиваются динамические нагрузки. Сказанное следует иметь в виду при проведении расчетов, связанных с повышением рабочих скоростей.
Изменение конструкции грузовых тележек. Модернизация такого вида может проводиться с различными целями. В условиях интенсивной эксплуатации электрические тали часто оказываются мало надежными, а скорость их — недостаточна. Поэтому их иногда заменяют специальными монорельсовыми грузовыми тележ-ками. Имеется опыт замены крюковых тележек грейферными [151.
Недостатком широко распространенных кранов ККС-10 является боковое раскачивание грузовой тележки и связанной Ш
с нею кабины. Для устранения этого разработана конструкция тележки с подпружиненными упорными роликами боковых стоек. Этим обеспечивается постоянный контакт роликов с направля-
ющими полосами нижних поясов моста, смягчаются возникающие при передвижении крана боковые толчки и удары.
Усовершенствование отдельных узлов механизмов. В ряде случаев при ремонтах зубчатые или втулочно-пальцевые соединительные муфты заменяют карданными шарнирами (преимущественно от грузовых автомобилей). Такая замена снижает требо
вания к точности выверки взаимного положения узлов механизмов; срок службы карданных шарниров в условиях крановых приводов соответствует общей длительности работы всего крана.
Особенно часто модернизируют узлы механизмов передвижения крана. В этих механизмах в ряде случаев используют типовые двухступенчатые зубчатые редук-
Рис. 114. Предохранительное устройство . торы с размещением веду-снегоуборщика щей шестерни непосредствен-
но на конце выходного вала. Вследствие возникающей консольной нагрузки при интенсивной эксплуатации крепление редуктора часто ослабляется; нередки случаи поломки лап редуктора. Для устранения этого удлиняют выходной вал редуктора и устраивают для него дополни-
тельную внешнюю опору, которую закрепляют после установки на вал редуктора [25].
Иногда ходовые части крана оборудуют датчиками-щупами, срабатывающими при наезде крана на находящийся на рельсах предмет. Краны< эксплуатирующиеся в многоснежных районах, оснащаются снегоуборщиками для сбрасывания снега с подкрановых путей. При этом возможно заклинивание снегоуборщика, например, вследствие( уплотнения снега.
На рис. 114 показано устройство, предотвращающее возникновение перегрузок от такого заклинивания. Устройство представляет собой раму /, закрепленную на торце ходовой тележки крана. На раме закреплен качающийся рычаг 2, верхний конец которого посажен на ось. Ось зажата в хомутах 4 и 5, первый из которых соединен со снегоуборочным щитом 5, а второй — со штоком 8. На раме установлен также конечный выключатель 9, рычаг которого взаимодействует с регулируемым упором 7. Пружина 6, размещенная между рамой и хомутом 5, рассчитана на усилие 2,5 ... 4,0 кН, соответствующее нормальной работе устройства. При превышении этого усилия пружина сжимается, рычаг 2
220
разворачивается, и упор 7 действует на рычаг выключателя, что приводит к отключению двигателей механизма передвижения крана. Имеющийся запас хода пружины (до 50 мм) способствует уменьшению динамических нагрузок, которые могут возникать при продолжении движения по инерции.
Следует, однако, отметйть, что такие устройства могут быть достаточно эффективными только при сравнительно небольшой (0,5 ... 0,7 м/с) скорости передвижения крана. При более высоких скоростях- эффект действия таких устройств может оказаться недостаточным для предотвращения возникновёния значительных динамических нагрузок.
Краны, используемые в технологических перегрузочных ли-" ниях, иногда снабжены дополнительными приспособлениями для формирования и транспортирования грузов. К ним, в частности, относятся устанавливаемые на стяжках опор торцевыравнива-тели для пачек круглого леса, а также подвижные вместе с кранами площадки для транспортирования трех-, пятитонных контейнеров.
Такие устройства рассмотрены • в работе И. И. Абрамовича и Ю. И. Ивашко [561.
Глава И
КАЧЕСТВО И ПОКАЗАТЕЛИ
ЭКОНОМИЧЕСКОЙ ЭФФЕКТИВНОСТИ
Общие положения. Для комплексной оценки качества, например, при аттестации продукции, используют методы экспертной оценки, лто, в частности,, предусмотрено и нормативами Минтяж-маш СССР уровня качества изделий подъемно-транспортного машиностроения (РТМ 24.090—75). Вместе с тем при решении вопроса о постановке изделий на производство экономическая эффективность является определяющим показателем.
Для кранов, используемых регулярно на перегрузочных работах, при оценке экономического эффекта исходят из производительности, а для кранов, используемых эпизодически на перегрузочных, монтажных и других работах, —- из стоимости ма-шино-смены. Общую методику расчета экономической эффективности новой техники регламентируют соответствующие нормативные документы; основные указания по-применению этой методики для оценки 'эффективности подъемно-транспортных машин даны в разработанной ВНИИПТМАШ отраслевой инструкции.
Определение некоторых показателей (производительности, массы, размеров, надежности, себестоимости и трудоемкости изготовления, затрат на ремонт и установку, а также некоторых экономических показателей) козловых кранов имеет свои особен
ности. Ниже приведены указания по оценке показателей козловых кранов. Рассмотрена взаимосвязь некоторых из них с конструкцией отдельных узлов, а также комплексные и удельные показатели, используемые для экономической и для качественной оценки конструкций.
Показатели производительности. Основным показателем производительности является длительность Т рабочего цикла.
Для предварительных расчетов
Т-= i, + tB +t„ + 212Z„ +1, + /„),
где (в, /н, t0 — время, затрачиваемое соответственно на зацепку, наводку я освобождение груза и захватного органа; /п. /т, /в — время, затрачиваемое на движение в одном направлении соответственно механизма подъема, грузовой тележки и крана.
Для механизма подъема время движения в одном направлении
где 1,1 — коэффициент, учитывающий потери времени на пуск-разгон механизма; sn — ход захватного органа, м; оп — скорость подъема, м/с.
Формулы для определения /т и tK имеют такой же вид.
Ориентировочные значения t3, t0 и ta для грузов некоторых видов даны в табл. 41.
Таблица 41 Время, затрачиваемое на наводку, захват и освобождение груза
Вид груаа Грузозахватный орган Затрата времен», с
на захват и наводку, на освобождение *0
Контейнеры массой 3 ... 5 т Цепной или канатный строп 20 ... 30 10 ... 20
Приводной захват (авто- 10 ... 15 5... 10
Контейнер массой 20 т строп) Канагный строп 80 ... 100 60 ... 80
Приводной захват (спредер) 10 ... 20 4 ... 8
Лацка круглого леса мас- Канатный стрэп 50 40
сой 3 ..8 т Радиальный моторный грейфер 80 15 * '
Пакет пиломатериалов Канатный строп 50 15
массой 2 ... 4 т , Вилочный подхват 40 10
Стеновые панели массой 2 ... 6 т Канатный строп 50 20
Лестничные марши » » 80 30
Бадья с бетоном вместимостью 0,8 ... 1,6 ма Редукторы, двигатели и другие узлы механизмов массой, т: У) > • 20 10
Дд 3 Z » 60 25
3,1 ... 6,0 я > 93 35 ‘
Пакеты кирпича на под-Доие массой до 2 т Специальный захват 25 6
222
Ориентировочные расчетные значения ходов рабочих движений в одном направлении (в м) определяют по следующим формулам:
при подъеме груза sn = 0,6Л (h — высота подъема);
при передвижении тележки $т = 0,6 (LK + L) (LK — вылет консоли; L — пролет);
при передвижении крана $к = 50 м.
В большинстве случаев при работе крана можно совместить два, реже три, рабочих движения. Это может быть учтено исключением одной (наименьшей) из величин (/п, /к и /т) или уменьшением любых двух из этих величин на 25 ... 35 %. Необходимо отметить, что системы регулирования скорости в ряде случаев не уменьшают время цикла.
Следует иметь в виду, что в ряде случаев приходится учитывать дополнительные потери времени, связанные с особенностями как перерабатываемого груза, так и подъемных кранов. Например, при перегрузке крупнотоннажных контейнеров крюковыми кранами тратится значительное время на центровку контейнеров.
Показатели компактности. В этой группе наибольшее значение имеет ширина (боковой габарит) ходовой части, непоеред-ственно сказывающаяся на полезную ширину обслуживаемой краном площадки. При заданной вместимости склада уменьшение полезной ширины площадки приводит к необходимости соответствующего увеличения длины подкрановых путей.
Показатели надежности. Из всей номенклатуры показателей, предусмотренных для грузоподъемных кранов (ГОСТ 4.22—79), можно использовать следующие: средний ресурс до списания и коэффициент готовности, значения которых приведены в ГОСТ 23940—79. Помимо этого в соответствии с РТМ 24.090—75 можно учитывать удельную 'суммарную стоимость ремонта (в рублях на 1 ч работы крана) Су.Р=4С0(1-Яг)/Кг, где А — коэффициент, равный 0,0006 для кранов с электроталями и 0,0004 для всех остальных кранов; Со — оптовая цена крана, руб.; КР — коэффициент готовности.
Имеют значение также и удельные затраты на техническое обслуживание, которые ориентировочно определяют по формуле Су.0-8(1-Кг)/Кг.
Все приведенные усредненные ориентировочные показатели относятся к кранам обычного исполнения: редукторы с чугунными корпусами и нешлифованными зубьями, с открытыми передачами в механизмах передвижения, точностью установки ходовых колес в пределах 1/500 и т. п. При повышении качества узлов крана значения этих показателей могут улучшиться на 30 ... 50 %. При использовании узлов небольшой износостойкости (монорельсовых ездовых балок, грузовых полиспастов при
' 223
стационарном расположении грузовой лебедки и др.) значения показателей следует уменьшить.
При экономических расчетах коэффициент готовности используют для корректировки производительности
П = КгП',
где П — расчетная производительность с учетом простоев на устранение отказов; 77' — расчетная производительность при 100%-ной надежности.
Показатели Су. р; Су. 0 находят .применение при оценке годовых затрат потребителя; эти показатели характеризуют затраты на текущий ремонт.
Показатели технологичности. Нормативная и плановая трудоемкости изготовления могут быть рассчитаны только при наличии разработанного технологического процесса изготовления крана* что практически невыполнимо не только на стадиях предварительных вариантных проработок, но и технического проектирования. Для предварительной оценки трудоемкости изготовления приходится использовать данные, которые получают путем анализами обобщения отчетных материалов предприятий. Следует учесть, что трудоемкость изготовления козловых-кранов одного и того же типа на разных предприятиях'может быть различной не только из-за серийности выпуска и длительности нахождения машины в производстве, но. и вследствие особенностей планиро-
Таблица 42
Трудоемкость выполнения основных работ при изготовлений кранов, нормо-час
" Вид раСот
Основные показатели крана Заготовительные Сборочносварные Механическая обработка Окраска
Трубчатая металлическая конструкция, кран с электроталью Грузоподъемность | 8б ... НО 1 200 ... 300 | 150 ... 200 1 40 ... 50 3,2ч.-.-5 т, пролет _ I ' 12,5 ..,16 м | | 1 |
Решетчатая мет Грузоподъемность 12,5 т, пролет 25 ... 32 м Г р узоподъем кость 20 т, пройет 32 в аллическая а грузово 200 ... 300 300 ... 500 юнсгрукцня, тележкой 900 ... 1200 1400 ... 1600 кран с канат 300 ... 600 900 ... 800 ной 80 ... 100 130 ... J80
Листовая двухбалоч Г рузоподъемнрсть 12,5 т, пролёт 16 м ' прОДет 25 ... 32 м иая металли1 грузовая 200 ...300 250 ... 350 чесмая монет] в тележка 700 ... 800 1200 ... 1600 >укцня, само? 300 ... 500 400 ... 600 юдиая 100 ... 120 = НО ... 140
224 .
вания, размещения цехов и других факторов. Предприятия, специализированные на изготовлении только козловых кранов, отсутствуют. Поэтому на трудоемкость изготовления козловых кранов влияет также и тип всего производства.
В табл. 42 приведены значения трудоемкостей для кранов различных типов. Эти данные характерны при серийности выпуска 100 ... 250 кранов. Краны снабжены кабинами управления, все элементы механических узлов, кроме редукторов, изготовляют на заводах, выпускающих краны.
Помимо затрат труда (в нормо-часах) для оценки затрат на изготовление используют такие показатели, как массу наплавленного металла, число деталей металлической конструкции и др.
При предварительном определении себестоимости изготовления часто используют приближенные зависимости между себестоимостью и массой крана. Эти зависимости могут быть получены, например, при анализе прейскурантных цен с учетом обычных нормативных значений рентабельности (13 ... 15 %) и транспортно-складских за рат.
Ниже приведешь ориентировочные значения себестоимости в рублях, отнесенные к 1 т конструктивной массы крана (при серийности 80... 150 кранов в год):
Краны трубчатой' металлической конструкции, грузоподъемностью 3,2 ... 5 т пролетом 16 м . .................................420
Кранц решетчатой металлической конструкции с канатной грузовой тележкой грузоподъемностью 10 ... 20 т пролетом 25 ... 30 м..410
Краны с двухбалочным листовым мостом и бпорной двухрельсовой грузовой тележкой.
грузоподъемностью 8 ... 12,5 т пролетом 16 ... 25 м....500
Грузоподъемностью 20 т пролетом 32 м .... "Г...........400
Затраты на приобретение материала обычно составляют 20 ... 30 % общей стоимости, такой же порядок имеет стоимость покупных изделий.
Более дифференцированно оценить стоимость изготовления можно по дацным, приведенным ниже и относящимся к несущей металлической конструкции различных видов, изготовленной из стали СтЗ (в руб/т):
Решетчатая конструкция: из профильной стали................................ 160 ... 230
трубчатая................................... 200 ... 300
Листовая, коробчатая конструкция: . двухбалочные мосты............................. 150 ... 200
однобалочные мосты........................... 200 ... 250
Себестоимость изготовления механизмов может составлять 600 ... J000 р. за 1 т. Стоимость электрооборудования — 2000 ... 3000 р. за 1 т. Себестоимость кабины управления при оснащении ее отдельными контроллерами — 1,6... 1,8 тыс. руб., а при оснащении комбинированным пультом управления—^2...2,4 тыс. руб.
225
Себестоимость заводского электромонтажа с повышенной степенью готовности (полный монтаж электрооборудования кабины и грузовой тележки, разводка проводов по мосту и опорам) для кранов грузоподъемностью 12,5 ... 20/5 т составляет 300 ... 500 р. (меньшие значения для кранов пролетом 16 ... 20 м, большие для кранов пролетом 25 ... 32 м).
К показателям технологичности часто относят и металлоемкость. Металлоемкость характеризует расход металла на изготовление крана. Для козловых кранов с учетом коэффициента
Рис. 115. Графики удельной стоимости N перегрузки для кранов различных типов грузоподъемностью 12,5 ... 32/8 т:
м ~ облегченные краны; ------— краны нормального наполнения: О, ... О» — точки раздела аон эффективности применения кранов нормального и облегченного наполнений
использования металла она по абсолютной величине близка к конструктивной массе крана. Для козловых кранов коэффициент использования металла обычно колеблется в пределах 0,80 ... 0,93 (соответственно листовые конструкции с элементами сложной конфигурации и решетчатые конструкции из профильной стали).
Систематизированные данные о трудоемкости монтажа козловых кранов в настоящее время отсутствуют. При оценке ^качества кранов можно использовать сведения о затратах на монтаж; здесь учтены затраты не только непосредственно jia оплату рабочих, занятых на монтаже, но, что не менее существенно, и на оплату стреловых кранов и другого монтажного оборудования.
При определении расчетной стоимости монтажа механической части козловых кранов часто принимают стоимость монтажа 1 т конструкций козлового крана, около 60 руб/т. Згот норматив рассчитан для несамоподъемных кранов, монтируют которые с помощью монтажных мачт или тяжелых стреловых самоходных кранов. Для самоподъемных кранов стоимость монтажа 1 т конструкции равна 40 ... 50 руб/т. В тех случаях, когда краны проходят контрольную сборку на заводе-изготовителе (например, краны К-6Б, КС-12,5), удельную стоимость монтажа принимают равной 30 руб/т. При предварительных расчетах учитываемая отдельно стоимость монтажа электрооборудования с прокладкой проводки в стальных трубах и с монтажом оборудования кабины может быть принята: для козловых кранов с элекроталями грузоподъемностью 3,2 ...5т — 250—300 р., для кранов с грузовыми 226
тележками грузоподъемностью 10 ... 12,5 т — 600 ... 800 р. и грузоподъемностью 20 ... 32 т — 1000 ... 1300 р.
Комплексные и удельные показатели. Для кранов, регулярно используемых на перегрузочных работах, основным показателем, характеризующим их эффективность, следует считать удельную стоимость перегрузки — затраты на перегрузку единицы массы груза, определенные в сопоставимых условиях. Эти затраты определяют как отношение суммарных годовых расходов на эксплуатацию крана к единице массы Переработанного груза. Для рассматриваемых кранов затраты на перегрузку 1000 т груза составляют 30 ... 150 р. Использование этого показателя дает возможность наиболее наглядно сопоставлять эффективность применения кранов различных параметров и исполнений.
На рис. 115 показано изменение удельной стоимости перегрузки кранами грузоподъемностью 12,5 ... 32/8 т нормального и облегченного исполнений в зависимости от годовой выработки. Сплошными линиями показано изменение удельной стоимости перегрузочных работ в зоне номинальных (предусмотренных паспортными характеристиками) условий работы кранов. При превышении нормированной производительности кранов удельная стоимость повышается, что объясняется резким увеличением затрат на ремонты, вызванные чрезмерно интенсивной эксплуатацией крана.
Для сопоставления металлоемкости кранов с одинаковыми грузоподъемностями и пролетами часто используют показатель удельной металлоемкости (в т/т-м) a = m/(QL), (
где т — масса крана, т; Q — грузоподъемность крана, т; L — пролет, м.
Для сопоставления кранов с различными параметрами рекомендуется использовать показатель относительной металлоемкости (в т/т) а' а= т/т0 1/п0 — нормированное значение массы, определяемое по формуле (1)1.
Можно использовать и другие показатели, например, удельную годовую производительность, отнесенную к массе крана.
Расходы на устройство и содержание крановых путей. Для оценки экономичности крана существенное значение имеют расходы на устройство и содержание крановых путей. Ориентировочно стоимость 1 м путей на щебеночно-гравийном* балласте (для обеих ниток) (в руб) определяют по эмпирической формуле
С = 6(20 4-0,6 Л/),
где k = 2 4- 4 — коэффициент, учитывающий степень механизации работ при устройстве путей, меньшие значения при устройстве путей силами специализированных механизированных подразделений; N — наибольшая вертикальная нагрузка на ходовое колесо, кН.
• Годовые расходы на содержание 1 м пути составляют 7 ... 10 % их стоимости; срок службы путей на щебеночно-гравийном балласте 10 ... 15 лет.
227
СПИСОК ЛИТЕРАТУРЫ
1. Абрамович И. И., Котельников Г. А. Козловые краны общего назначения. М.: Машиностроение, 1971. 279 с.
2. Абрамович И. М., Спицына Д. Н., Буланов В. Б, Некоторые вопросы расчета пространственных металлоконструкций козловых кранов. — Тр„ ВНИИЦТМАШ,№ 1, Подъемно-транспортные машины, 1973, вып. 1, с. 36 ... 53.
3' . Абрамович И. И. К вопросу нормирования динамических нагрузок в мостовых электрических кранах. — Тр. ВНИИПТМАШ, 1974, № 1, Исследование грузоподъемных кранов, вып. 1, с. 65 ... 73.
4. Абрамович И. И. К вопросу выбора типа козлового крана для перегрузочных- работ..— Тр. ВНИИПТМАШ, 1975, Исследование мостовых, козловых кранов и крановых металлоконструкций, с. 12 ... 20.
5. Абрамович И. И., Федоров А. Л. К оценке показателей жесткости кранрв мостового типа — Тр. ВНИИПТМАШ, 1978, Ks 3. Исследование кранов и крановых металлоконструкций, с. 12... 23.
6. Альперович А. И., Полосин М. Д., Поляков В. И. Устройство и эксплуатация подкрановых~путей иа строительстве. М.: Стройиздат, 1975. 263 с,
7. Антоневич Э. Ф. Погрузо-разгрузочные работы. М.: Транспорт, 1972. 288 с.
8. Ауэрбах В. М. Исследование кинематических и прочностных зависимостей в элементах козлового крана при его монтаже. — Тр. ВНИИПТМАШ,. 1968, вып. 2 (82). Козловые краны, с. 159 ... 176.
д. Барабанов Н. В. Повреждения судовых конструкций, Л.: Судостроение, 1977. 400 с. ’
10. Башенные краны/Л. А. Невзоров, А. А. Зарецкий, Л. М. Волин и др. М.: Машиностроение, 1979. 292 с.
111 Братусь Н. Г., Иванков О. Ф., Спенглер И. Е. К расчету металлических Трубчатых балок. — Изв. вузов. Строительство и архитектура, 1973, № 12, с. 4 ... 7.
12. Брудка Я- Трубчатые стальные конструкции/Пер. с польск. М.: Стройиздат, 1975. 206 с.
13. Веденеев А. Г., Гончаренко Н. Т., Якушин А. И. Мой та ж, эксплуатация и ремонт кранов в лесной промышленности. М.: Лесная промышленность,
14. Гайдамака В. Ф. Новые пусковые и тормозные устройства грузоподъёмных ‘ машин. Харьков: Вища школа, 1975. 103 с.
15. Геллер И. М., Даниленко В. К. Модернизация козловых кранов на складах насыпных грузов. — Механизация и автоматизация производства* 1979, № 3, с. 5... 6.
16.‘ Гохберг М. М. Металлические конструкции подъемно-транспортных машин. Л.; Машиностроение, 1976. 456 с.
17. Ерофеев Н. И. Предохранительные и сигнализационные устройству кране®. М. Машиностроение, 1980. 152 с.
18. Жермунскнй Б. И., Степочкин Л. М. О влиянии износа ходовых колес на перекосы козловых кранов. — Вестник машиностроения, 1974, с. 24 .>, 26.
19., И ваш ков М> И. Монтаж, эксплуатация и ремонт подъем'но-транспортны* машин.' М.: Машиностроение, 1981. 336 с.
228,
20. Исследование прочности и расчет конструкций путей строительных башенных краиов/Под ред. Б. Л. Евдокимова. М,: Строй изд ат, 1980. 172 с.
21. Ицкевич А. А. Клее*металлические соединения в строительных конструкциях. M.J Стройиздат, 1976. 135 с.
22. К расчету опор козловых кранов/И. И. Абрамович, Л. Н. Куклева, Н. П. Колылец и др. — Тр. ВНИИПТМАШ, 1980, Исследование крановых металлоконструкций. Пневмо-, гидро- и электрооборудование. Эргономика, с; 12 ... 21.
23. Концевой Е. М., РозеншеЙн Б. М. Ремонт крановых металлоконструкций. М.: Машиностроение, 1979. 206 с.
24. Крановое электрооборудование/Ю. В. Алексеев, *А. П, Богословский, Е.М.Певзнер, А. Г. Яуре.; Под ред. А. Л. Рабиновича. М.: Энергия, 1979. 240 с.
25. Коротков В. Н. Пособие крановщику козлового крана. М.: Транспорт, 1976. 232 с.
26. Кудрявцев И. В., Наумченков Н. Е. Усталость сварных конструкций. М.: Машиностроение, 1976. 272 с. .
27. Левитин Б. С., Воронцов Г. А. Применение алюминиевых сплавов В крановых металлоконструкциях. М.: Машиностроение, 1969. 262 с.
' 28. Литвак В. И. Электрические устройства автоматической аварийной еащиты. М.: Машиностроение, 1980. 204. с.
29. Локшин А. 3., Рябов Л. И. Судовые кничные соединения. Л.: Судостроение, 1973. 200 с.
30. Лунден Е. Е. Оптимизация параметров балочных стрел башенных кра-' нов. — Тр. ВНИИстройдормаш, 1979, вып. 85. Исследование и создание подъемно-транспортных машин, с. 7 ... 15.
31. Львов Д. С. Экономика качества продукции. М.: Экономика, 1972. 256 с.
32. Машины для монтажных работ и вертикального транспорта/В. И. Поля-, ков. А. И Альперович. М. Д. Полосин, А. Т. Чистяков. М.:Стройиздат, 1981. 142с.
33. Металлические конструкции (техническая эксплуатация)/М. М. Сах-новекий.'Г. В. Жемчужников, Ю. Б. Дииельт, Ю. А. Здановнч. Киев: Буд1-вельник, 1976. 250 с.
34. Монтажные устройства козловых кранов/Сост.: И. И. Абрамович, В. М. Ауэрбах. М.: НИИИнформтяжмаш, 1974. 24 с. (Подъемно-транспортное оборудование: 6—74—29).
35. Оборудование козловых кранов/Сост.: И. И, Абрамович, Е. А. Соболев. НИИИнформтяжмаш, вып. А9—70, М., 1970, 67 с.
36. Пазельский Г. Н. Кабина башенных кранов для зданий повышенной этажности. — Механизация строительства; 1978, № 4, с. 20 ... 21. t
37. Пайка при производстве крупногабаритных -строительных ко и стр у к-ций/И. Е. Петрунин, П. К. Мороз, Г. И. Строколов и др. М.: Стройиздат, I960. 144 с.
38. Петренко О. С. Подвесные, рельсовые дороги. М.: Машиностроение, 1981. 272 с.
39. Пиковский А. А. Статика стержневых систем со сжатыми элементами. М.: Физматгиз, 1961. 394 с.
40. Потураев В. Н., Дырда В. И. Резиновые детали машин. М.: Машиностроение, 1977. 216 с.
41. Правила расчета подъемных устройств/Пер. со 2-го фр. изд. Документ № 1805. М.: ЦНИИЭстроймаш, 1972. 236 с.
42. Правила устройства и безопасной эксплуатации грузоподъемных кранов. М.: Металлургия, 1981. 168 с.
43. Прошив А. С. Монтажные краны электростанций. М.: Машиностроение. 1973. 244 с.
44. Размещение и крепление грузов в вагонах/А. Д. Малов, О. И. Михайлов, Г. М. Штейнфер и др. М.: Транспорт, 1980. 328 с.
45. Расчеты крановых механизмов и их деталей/Под ред. Г. М. Николаевского и И. О. Спицыной. ВНИИПТМАШ. М.: Машиностроение, 1971. 489-.С.
46. Руководство по выполнению сдвигоустойчивых соединений на высокопрочных болтах строительных стальных конструкций. ЦНИИПроектстЭль-конструкция. М.: Стройиздат, 1975. 32 с.
229
Ы. Руководство по расчету зданий и сооружений на действие ветра. М.’ Стройиздат, 1978. 224 с.
48. Смехов А. А. Автоматизация грузовой работы железнык дорог. М.| Транспорт, 1977. 286 с.
49. Снижение вибрации рабочего места оператора крана мостового типа/ Сост.: А. Л. Федоров. М.: ЦНИИТЭИТЯЖМАШ, 1981. 34 с. (Подъемнотранспортное оборудование, 6—81—33).
50. Спицына Д. Н., Буланов В. Б., Абрамович И. И. Динамическое воздействие ветровой нагрузки на козловые краны. — Тр.: ВНИИПТМАШ, 1976, № 1, Исследование кранов и крановых металлоконструкций, с. 88 ...96.
51. Спицына Д. Н., Абрамович И. И., Буланов В. Б. Динамика козловых кранов при работе механизма подъема груза. — Вестник машиностроения. 1974, № 12, с. 12 ... 16.
52. Спицына Д. Н. Строительная механика стержневых машиностроительных конструкций. М.: Высшая школа, 1977. 248 с.
53. Справочник проектировщика промышленных, жилых и общественным аданий/Под ред. А. А. Уманского. М.: Стройиздат, 1972. Кн. 1, 599 с.
‘ 54. Строительные и дорожные машины для районов с колодным клима-том/В. Д. Телушкин, В. А. Винокуров, В. А. Ряхии и др. М.: Машиностроение, 1978. 197 с.
55. Технико-экономический анализ и прогнозирование параметров строительных машин/В. А. Бауман, М. Д. Гилуа, В. Н. Вязовикин и др. М.: Машиностроение, 1980. 224 с.
’ 56. Типовые решения по модернизации и реконструкции козловых кра-нов/Сост.: И. И. Абрамович, Ю. И, Ивашко. НИИИнформтяжмаш, 1975, йып. 17—2—75. 116 с.
57. Унгру Ф., Иордан Г. Системы согласованного вращения асинхронных ЭЛектродвигателей/Пер. с нем. Л.: Энергия, 1971. 182 с.
58. Шабашов А. П., Лысяков А. Г. Мостовые краны общего назначения. М.: Машиностроение, 1980. 304 с.
59. Шеффлер М., Пайер Г., Курт Ф. Основы расчета и конструирования Грузоподъемных машин. М.: Машиностроение, 1980. 255 с.
60. Шпигель А. Ю., Парецкая Г. М. Общие эргономические требования к кабинам. — Тр. ВНИИПТМАШ, 1980. Исследования крановых металлоконструкций. Пневмо-, гидро- и электрооборудование. Эргономика, с. 167 ... 179.
61. Brandt Н. u. a. Schwingungsgedampfte Aufhangung von Krankabinen. — Stahl und Eisen, 1977, N 20, c. 922 ... 996’.
' 62. Ernst L. Massenkrafte in Laufkranen, Brucken und Portalkranen beim Heben und Senken der Hublast. — Hebezeuge und Fordermittel, 1970, N 1, c* 6 ... 10.
63. Heine P. Vorschlag zur Ermittlung der Werkstoffbeanspruchung in den’ Kranschienen der DIN 15087E. — Archiv fur das Eisenhiittenwesen, 1979,KN 5, 0. 195 ... 199.
64. Koppe U. Nutzlastkollektiv von Kranen. — Hebezeuge und Fordermittel, 1981, N 2, c. 36 ... 39.
65. Kos M. Seismische Berechnung von Laufkranen fur erdebebengefahrdete Gebiete. — Fdrdern und Heben, 1980, N 5, c. 458 ... 462.
66. Lenztes D. Erste Anlagen auf Leitungswesen. Erfahrungen nach zwei Betriebsjahren. — Fordern und Heben, 1976, N 15, 1527 ... 1529. •
67. Linear motor driven cable reels. — Deutsche Hebe — und F&rdertechnik, 1976 ... 1977, Exportausgabe, c. 86 ... 88.
68. Mendel G. Berechnung der Tragerflanschbeanspruchung mit Hilfe der Plat-tentheorie. — FQrdern und Heben, 1972, N 1, N 14, c. 805 ... 819; 2, N 15, c. 836 ... 842.
69. Novue type de grue—portique о electro-aimant. — Acier, 1977, N 4, c. 134 ... 140.
70. Prins G. Dynamische Verhalten groBer Verladebriicken. — Fordern und Heben, 1979, N 11, c. 996 ... 1001; N 12, c. 1111 ... 1113.
71. Sachs P. Wind forces in engeneering. 2ed. Oxford, Pergamon Press, 1978, 400 c.
ОГЛАВЛЕНИЕ
Введение.............................................................. 3
Глава 1. Типы и основные параметры
5
/ 1. Типы кранов ...........................................
2. Выбор типа кранов..................................
3. Основные параметры.................................
Глава 2. Расчетные нагрузки и условия устойчивости..............
1. Исходные положения методики расчета...............
2. Режим работы .....................................
. 1 3. Классификация нагрузок и воздействий................
4. Вертикальные нагрузки ...........................
5. Ветровые нагрузки................................
6. Нагрузки от уклона ..............................
7. Динамические нагрузки............................
8. Нагрузки от удара о концевые упоры (буферный удар)
9. Статические сопротивления передвижению крана и нагрузки при перекосе при установившемся движении . . .
10. Монтажные нагрузки...............................
11. Транспортные нагрузки............................
12. Сейсмические нагрузки ...........................
13. Нагрузки от тепловых деформаций .................
14. Особые нагрузки..................................
15. Нагрузки иа ходовые колеса.......................
16. Устойчивость против опрокидывания
Глава 3. Металлические конструкции кранов . -...................
1. Материалы и сортамент............................
2. Соединения элементов металлических конструкций ....
3. Узлы решетчатых конструкций .....................
4. Защита от коррозии ..............................
5. Типы й конструкции мостов (пролетных строений)....
6. Стойки опор...................................
7. Узлы сопряжения стоек опор с мостом..............
8. Стяжки ...........................*..............
9. Площадки обслуживания, галлереи, ограждения ....
10. Выбор типа металлической конструкции крана.......
Глава 4. Расчет металлических конструкций ......................
1. Методы расчета. Основные положения...............
2. Расчетные сочетания нагрузок...............• . . .
3. Расчет остова крана на действие вертикальных нагрузок
4. Расчет остова крана на действие горизонтальных нагрузок
5. Расчет остова крана на действие нагрузок при перекосе
6. Особенности расчета опорных стоек................
7. Особенности расчета решетчатых конструкций . . , . .
§ §S§S4S8 г asasassasa a sssaaass аааавчвв в ss«-<
8. Особенности расчета моста в зоне примыкания опорных стоек к пролетному строению •............................ ПО
9. Расчет металлических конструкций кранов с двухбалочным * . мостом на нагрузки от перекоса................... 1L2
10. Особенности расчета безраскосных мостов............. 115
11. Расчет ездовых полок на местные нагрузки............ 117
12. Устойчивость стержневых элементов................... 118
Глава 5. Оценки жесткости металлических конструкций................ 120
1. Критерии оценки жесткости ........................... J20
2. Нормирование жесткости по гигиеническим показателям 121
3. Ограничение жесткости по критериям точности и стабильности работы . . . . .................... 124
4. Учет влияния колебаний на выносливость ....... 125
5 Нормирование жесткости от перекоса..............'. . . 125
Глава 6. Механизмы кранов.......................................... 126
1. Грузовые тележки и механизмы их передвижения .... 126
2. Ходовые тележки ................................ . . 145
3. Особенности расчета механизмов....................... 154
Глава 7. Приводы, электрооборудование, кабины управления.......... 158
1. Приводы рабочих механизмов.......................... 158
2. Системы токоподвода-............................... 164
3. Особенности размещения и установки электрооборудования. и электропроводки........................................ 172
4. Кабины управления.............................." . . 172
Глава 8. Предохранительные и виброзащитные устройства........ 177
1. Приборы для замера скорости ветра ................... 177
2. Противоугонные устройства ........................... 178
, 3. Ограничители перекоса ............................... 193
4. Буфера и концевые упоры.............................. Г94
5. Устройства для гашения вибраций* и защиты от нее. . . 195
Глава 9. Монтаж и испытания кранов. Подкрановые пути ...... 198
1. Монтаж кранов...................................... 198
2. Испытания кранов............................... . . 207
3. Крановые пути .....................................* 210
4. Расчет монтажа кранов..............................- 212
Глава 10. Эксплуатация, ремонт и модернизация козловых кранов . . . 216
1. Особенности содержания эксплуатации и ремонта козловых кранов................................................... 216
2. Совершенствование технологии перегрузочных работ... 217
3. Модернизация кранов . ............................... 218
Глава 11. Качество н показатели экономической эффективности 221
Список литературы ............................................... 228