/














































































































































































































































































































































































































































































Author: Александров П.С.
Tags: алгебра линейная алгебра аналитическая геометрия
ISBN: 978-5-8114-0908-2
Year: 2009




Text
КЛАССИЧЕСКАЯ УЧЕБНАЯ ЛИТЕРАТУРА
ПО МАТЕМА1ИКЕ
П. С. АЛЕКСАНДРОВ
КУРС
АНАЛИТИЧЕСКОИ
rЕОМЕТРИИ
ИЛИНЕИНОИ
АлrЕБрыI
.
УЧЕБНИК
Издание второе,
стереотипное
ь
ЛАНЬ@
САНКТ
ПЕТЕРБурr. МОСКВА. КРАСНОДАР
2009
ББК 22.143, 22.151.5
А46
Александров п. с.
А 46 Курс аналитической rеометрии и линейной ал
rебры: Учебник. 2
e изд., стер.
СПб.: Издатель
ство «Лань», 2009.
512 с., ил.
(Учебники для
вузов. Специальная литература).
ISBN 978-5-8114-0908-2
Книrа представляет собой учебник по объединенному курсу
аналитической rеометрии и линейной алrебры для университе
тов. Наряду с традиционной тематикой книrа содержит OCHOB
ные сведения из мноrомерной аналитической rеометрии, вклю
чая аффинную классификацию rиперповерхностей BToporo по
рядка. Кроме Toro, в книrе излаrаются простейшие понятия
rеометрии n
MepHoro проективноrо пространства.
Учебник рассчитан на студентов
математиков и CTyдeHTOB
физиков университетов и пединститутов, а также на все KaTero
рии читателей, серьезно интересующихся математикой.
ББК 22.143, 22.151.5
Обложка
А. ю. ЛАПШИН
Охраняется законом рф об авторском nраве.
Воспроизведение всей кни2и или любой ее части
запрещается без nисьмеНН020 разрешения издателя.
Люб ые попытки нарушения закона
будут nреследоваться в судебном порядке.
@ Издательство «Лань», 2009
@ п. с. Александров, наследники, 2009
@ Издательство «Лань»,
художественное оформление, 2009
оrЛАВЛЕНИЕ
Предисловие . . . . . .
.... ............ .... ..... ....
Ч А С Т Ь 1. АНАЛИТИЧЕСКАЯ rЕО1\\ЕТРИЯ
.......
r л а D а 1. Простейшие понятия ана
1итиqеской rеометрии
1. Векторы На плоскости и в про
транстве ....
2. П роекции .........................
3. Кол.Т'Iин
арныс и Коt,JПЛ2нарные векторы; координаты
относите.т:ьно данноrо базиса .........
4. Координаты н а плоскости и в пространстве ..
э 5. Прямая .'IИНИЯ в П..l0СКОСТИ ...........
6. Плоскость и пр ямая D пространстве ......
[сктора
. . .
r л а в а II. ПараБО.ТIа. Э..1ЛИПС. rиперБО
lа ...
1. Пар а бо .ТIa ..............
э 2. Элли пс ...............
3. rипербола ................
4. Директрисы эллипса и rиперболы .................
5. Фокальный параметр. Уравнсния эллипса, rиперболы и параболы
в полярных координатах ......................
. . .
rЛ8ва
111. Преобразование координат. Движения и аффинные преобра..
30 ван и я .........,......................
Переход от одной аффинной системы координат к др уrой
Переход от ОДНОЙ ПрЯ
10уrольной системы КО()Р;l.ИН2Т I{ друrоЙ.
Ориентация пространства (плоскости) ...............
Yr.rrbI Эй..ТIера ............................
Определение движения и аффинноrо преобразования плоскости
и пространства ...........................
Преобрэзование векторов при аффинном преобразоnании плоско..
сти
пространства. Основные свойства аффинных преобразо..
в а н и I{ . . . , . . . . . . . , . . . . . . . . . . . . . . . . .
1.
2.
3.
4.
5.
6.
7. Аналитическое выражение аффинных преобразоnаний
......
r л а в а IV. Алrебраические пииии и поверхности. Комплексная плос-
кость и комплексное пространство ................
1. Определен ие алrебраических линий и поверхностей .......
2. ПреобраЗОВ2ние мноrочлена второй степени при преобразовании
координат .........................
3. Аффинная эквивалентность линий и поверхностей
9 4. Комплексная П.ТIоскость и комплексное пространство ......
5. Распадающиеся линии и поверхности. Цилиндрические и кони.
ческие поверхности. Поверхности вращения ..,........
.....
7
. .
9
9
9
14
18
23
41
55
69
69
72
75
80
85
89
89
91
96
103
105
107
113
116
116
119
1:24
126
132
4
оrЛАВЛЕНИЕ
r л а в а V. Различные ВИДЫ кривых BToporo порядка ..........
9 1. О ЛИНИЯХ, определяемых уравнениями второй степени с двумя
неизвестными .......................
2. Инварианты мноrочл€на второй степени
3. Центральный случай ............
4. Параболический случай: б
О ..........
5. Аффинная классификация кривых BToporo порядка
. . .
r л а в а VI. Общая теория кривых BToporo порядка . . . . . . .
э 1. Асимптотические направления кривых BToporo порядка ....
2. Пересечение кривой BToporo порядка с прямой неасимптотичес-
Koro направления. Касательные ..................
3. Пересечение кривой BToporo ПОрЯДl{З с прямой асимптотичеСI<оrо
направления. rеометрическая характеристика асимптотических
и неасимлтотических на правлен ий ................
4. Центр кривой BTcporo порядка ..................
5. Диаметры I<рИВОЙ BToporo порядка ................
6. Взаимно сопряженные веI{ТОРЫ (направления). Диаметры и каса-
те J1 ь Н ые ...............................
7. Вид уравнения кривой. если оси координат имеют сопряженные
направления ............................
8. Теорема единственности для кривых BToporo порядка. О полноте
системы ортоrональных инвариантов ...............
9. Оси симметрии и rлавные направления кривой BToporo порядка
10. Основная теорема об аффинных преобразованиях . . . . . . . .
r л а в а VI 1. Краткое описание различных видов поверхностей 8Toporo
порядка ................
1. Распадзюшиеся поверхности
2. Цилиндрические поверхности
З. Конусы BToporo порядка ........
9 4. Эллипсоиды и rиперболоиды
5. Параболоиды ..........
6. Прямолинейные образующие . . . . .
r л а в а VII]. Общая теория поверхностей BToporo порядка. I .....
э 1. PaHr и детерминант малой и большой матрицы мноrочлена вто-
рой степен и .............................
2. Пересечение поверхности BToporo порядка с плоскостью ...
3. Пересечение поверхности BToporo порядка с прямой. Асимптоти-
ческие направления. Касательные прямые и касательная плос-
кость. Особые точки поверхности BToporo порядка .......
4. Асимптотические направления, конус асимптотичеС1\ИК направ-
лений, лрямолинейные образующие поверхностей BToporo поряд-
ка ...........................
5. Центр поверхности BToporo порядка ........
r л а в а I Х. Общая теория поверхностей BToporo порядка. 11
1. Диаметральные плоскости. Особые нап рав.ления .
2. Диаметральные ПЛОСКОСТИ поверхностей различных видов
3. Сопряженные направления ...............
4. Уравнение поверхности Broporo порядка относительно коорди"
натной системы с сопряженными направлениями осеЙ .....
9 5. Теорема единственности ......................
9 6. r лавные направлени я .......................
э 7. Приведение к каноническому виду уравнения поверхности BToporo
пор ядка ...............................
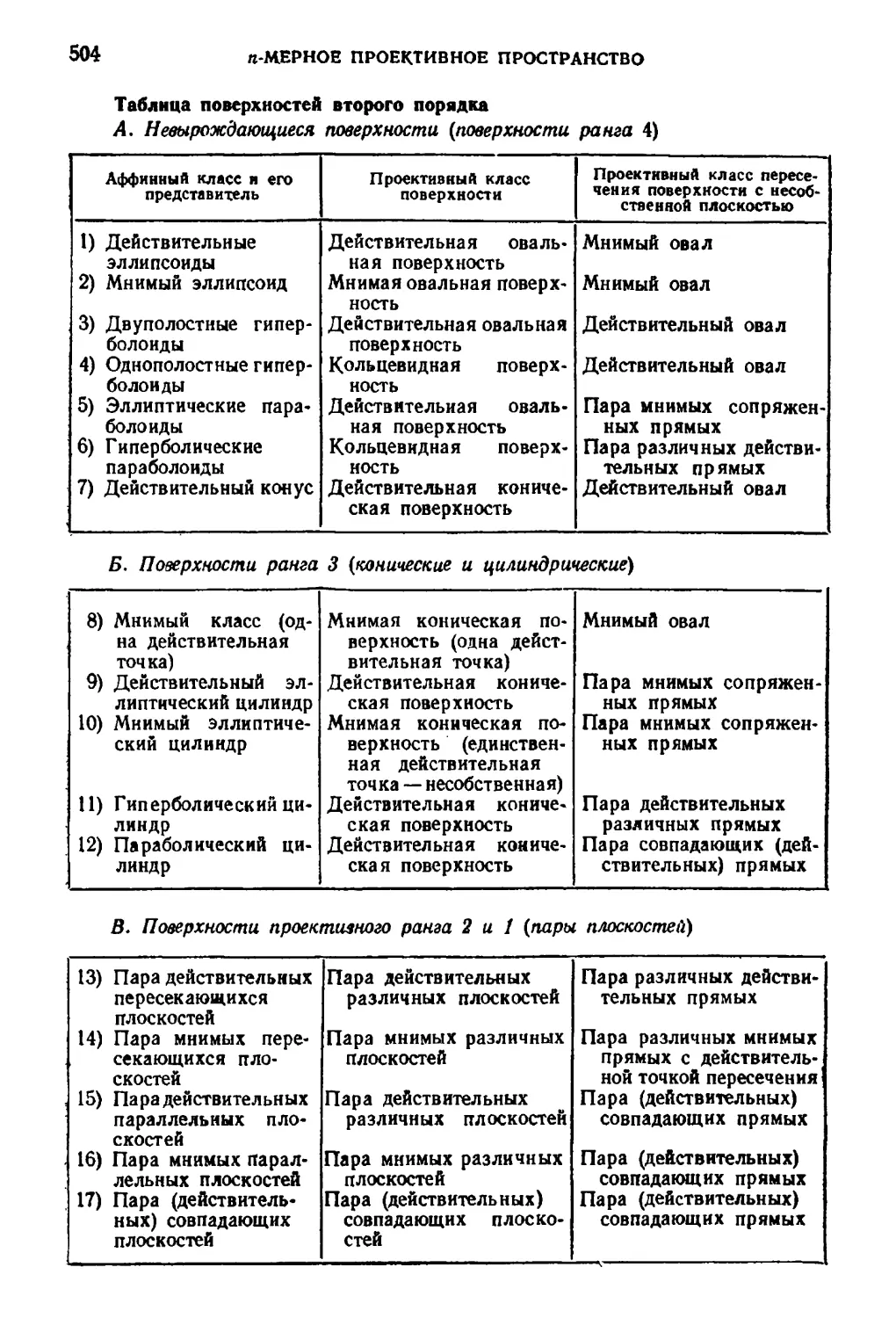
В. Аффинная классификация поверхностей BToporo порядка ...
. .
140
141
145
150
153
156
160
160
165
. .
167
169
172
174
178
181
186
192
195
195
197
)98
201
208
212
218
218
220
222
226
2,,5
240
240
247
251
253
254
257
264
275
оrЛАВЛЕНИВ
r JI а в а Х. Проективная ПnОСКОСТЬ. Kp
IBble BToporo порядка на "роек-
тивной плоскости ..........................
1. Перспективное соответствие между плоскостыо и связкой ...
2. Однородные координаты точек на плоскости и лучей в связке
3. Координаты прямой, арифметическая проективная плоскость,
общее определение проективной плоскости ............
4. Принцип двойственности для проективной плоскости .....
5. Проективная система координат в связке и на проективной
плоскости ...............................
6. Проективные преобразования и отображения проеКТИВIiОЙ плос..
7.
8.
9.
кости ............
Кривые BToporo пор ядка на
единственности .......
Пересечение кривой BToporo
асимптоты ..........
Проективная классификация
............
просктивной плоскости. Теорема
порядка с прямой. Касате.пьные;
.
..................
крив
х BToporo порядка
.....
Ч А С Т Ь 11. ЛИНЕЙНАЯ АлrЕБРА
5
280
281
283
288
292
296
ЗО
315
320
325
r JI а в а Х 1. Линейные пространства ...... . . . . . . . . .. 330
9 1. Определение линейноrо пространства ...... . .. 330
Э 2. Размерность. Базис. Координаты . . . . . . . . . . . 335
3. Теорема об ИЗО:\10рфизме между любыми ДВУ:\1Я .'1инеЙ ными про.
странствами одной и той же размерности ......... 338
4. ПОДПрОСТрЭlIстпа линей Horo простра нства. Да
'1ьнеЙШJfе теоремы
о линеЙной зависимости векторов и о базисе липеЙноrо про-
стра нства .............................. 339
5.. Алrебраическая (в частности, прямая) сумма подпространств 344
Э 6. Теорема о paHre матриuы ...................... 346
Э 7.. Системы линейных однородных уравнениii .. . . . 349
Э Вь Комплексификаuия н овеществление ......... . . .. 354
r л а в а Х I 1. Аффинное п..мерное прос.rраиство ............. 358
1. Опредсление п.McpHoro аффннноrо просr'ранства .......... 358
9 2. Системы координат. Арифметическое аффинное пространство.
Изоморфизм B
ex п
l\.H.:'pIIUIX пространств между собой ..... 360
Э 3. ,-мерные плоскости п
MepHoro аффинноrо пространства; т-мерные
па р аллелепипеды .......................... 362
4. rеометрически llезависимые СНСТС:\1Ы точек. Барицентрические
координаты СИl\1Плексы ........... . . . . 366
9 5. Системы линейных уравнений ................... 372
.
rлзва XJII. Линейные отображения..... .......... 378
1. Определение и простсйшие свойства линейных отображений 378
2. Матрица линейноrо отображени я . . . . . . . .. 380
3. Действия с линейными оrrератирами ..... .. . . . . .. 382
Э 4. Ядро и образ ЛИ нейноrо опера тора ..... .. . . . . .. 384
5. Инвариантные подпространства и собственные векторы линей.
Horo оператора ........................... 387
r л а в а XIV. Линейные, билltllейные и квадратиqные ФУНКЦИИ на линей-
ны х пространствзх ......................... 395
1. Л и н е й н bl е фу JI К Ц Н И ............................ 395
2. Билинейные функции и билинеЙные формы ............. 400
З. Матрица билннейной н квадраТИЧ1l01f формы и re прео6разова.
нне при переходе к новому баЗIIСУ ................. 403
6
or ЛАВЛЕНИЕ
6.
7.
8.
PaHr билинейной и квадратичной формы (билинейной и KBaдpa
тичной функции) ..........................
Существование каноническоrо базиса для всякой квадратичной
и всякой БИJ1инейной функции (
приведение квадратичных форм
К каноническому виду
) ......................
Нормальный вид квадратичной формы .............
Закон инерции для вещественных квадратичны х форм ....
Положительно определенные квадратичные функции и формы
406
4.
5.
408
412
413
414
r л а в а Х v. Каноническая форма 'nинейноrо оператора ......... 419
1. Жорданова форма .......................... 419
2. ,..
матрицы. ЭJlементарные преобразования л-матриц ...... 421
3. Нормальная форма л
матрицы .................. 423
4. Теорема о приведении матриц оператора к канонической форме 428
r л а в а XVI. Евклидовы и унитарные пространства .......... 432
1. Положительно определенные эрмитовы функции В линеЙном
пространстве ................. . . . . . . . . . . .. 432
2. Евклидовы И унитарные пространства и их простейшие свойства 436
З. Подпространства унитарных и евклидовых пространств. Opтoro-
нальное дополнение. Ортоrональная проекция . . . . . .. 439
4. Линейные операторы В унита рном пространстве ........ 442
5. Структура ПРОИЭВОJ1ьноrо линейноrо оператора в евклидовом
пространстве .................... . . . . . . . .. 447
r л а в а XVII. Преобразования аффинноrо пространства . . .. 450
1. Аффинные прео6раЗОВ8НИЯ ................ . .. 450
2. Движения вффинноrо евклидова пространства ......... 454
3. Классификация движений ..................... 457
r л а в а XVIII. fиперповерхности 8Toporo порЯдка в п..мерном аффинном
пространстве ....................... 463
1. Общая теория rилер поверхностей BToporo порядка ...... 463
2. Классификация rиперповерхностей 8Toporo порядка ...... 471
r ла в а Х 1 Х. Элементы rеометрии n-мерноrо проективноrо пространства 479
1. Проективное пространство; ero плоскости и прямые ...... 479
2. Проективные координаты. Проективные преобразования .... 481
3. rиперповерхности BToporo порядка в п
MepHOM просктивном
IJрострэнстве. Теорема единственности .............. 486
4. Проективная классификация rиперповерхностей BToporo порядка 490
5. Проективно
аффинная классификация поверхностей BToporo
порядка в трехмерном пространстве .. . . . . . . . . . . . . 495
Предметный указате
1Ь . . . . . . . . . . . . . . . . . . . . . . . . . . " 505
ПРЕДИСЛОВИЕ
Эта книrа представляет собой учебник объединенноrо
курса аналитической rеометрии и линейной алrебры для
университетов.
Книrа состоит из ЛВУХ частей. Первая часть посвя"
щена собственно аналитической rеометрии и включает
в себя первые десять rлав книrи. Во второЙ части
(rлавы XI
XIX) излаrается обязательный
1атериал
из J1инейной алrебры и основные сведения из MHoroMep"
ной аналитической rеометрии, включая простейшие ПОНЯ
тия rеометрии n-мерноrо проективноrо пространства.
Исходя из реальных целей университетскоrо препо-
давания, а также будучи стесненным требованиями
объема, я отказался от дублирования материала, ВХО"
ДЯПlеrо в обязательный университетский курс алrебры.
В первую очередь это относится к теории определите..
лей и матриu, а также к некоторым частным вопросам
теории систем линейных уравнений.
Книrу эту, предназначенную для университетских
студеНТОIЗ-первокурсников, я старался писать так. чтобы
она была доступна каждому студенту..... при единствен-
ном условии, что он вообще склонен к I\1зтематике
и желает серьезно заниматься ею.
Из вещей, не входящих в проrрамму средних клас-
сов общеобразовательной школы, этот «Курс» предпо-
лаrает лишь знание комплексных чисел, так что книrа
может служить и целям самообразования; я ДУI\.tаю. что
она доступна всем тем учащимся старших классов cpeд
ней школы, которые любят математику, интереСУfОТСЯ
ею и rOTOBbJ шаr за шаrом ее изучать, не стремясь
8
ПРЕДИСЛОВИЕ
ВО что бы то ни стало начинать это изучение с пости-
жения так называемых «последних СЛОВ науки».
Приношу искреннюю блаrодарность рецензентам этой
книrи
профессору Льву Дмитриевичу Кудрявцеву
и академику АН rрузсср rеорrию Северьяновичу Чоrо-
швили за ценные советы и замечания, которые немало
u
послужили улучшению предлаrаемои читателю книrи.
Кроме Toro, я очень блаrодарен Алексею СераПИQНО-
вичу Пархоменко за чрезвычайно ценные советы по пер-
вой части этой книrи. Ero советы и предложения ока.
зали большое влияние на ее окончательное формирование.
Наконец, я блаrодарен моему ученику, научному
сотруднику кафедры высшей rеометрии и тополоrии
MOCKoBCKoro университета кандидату физика-математи-
ческих наук В. И. Зайцеву за мноrообразную помощь,
оказанную им при моей работе над этой книrой.
П. Александров
Москва,
27 декабря 1978 f.
ЧАСТ Ь 1. АНАЛИТИЧЕСКАЯ rЕОМЕТРИЯ
rЛАВА 1
ПРОСТЕЙШИЕ ПОНЯТИЯ АНАЛИТИЧЕСКОЙ rЕОМЕТРИИ
1. Векторы на плоскости и в пространстве
1. Определение. Алrебраические операции над векторами. Н аправ-
леННblМ оmрезком называется упорядоченная пара точек Р и Q
пространства. Первая из двух точеI{ называется началом направ-
ленноrо отрезка, вторая
ero кон.ЦОАt. Направленный отрезок
называют короче вектором.
Вектор с нача,,'10М Р и концом Q обозначается через PQ, точка Р
называется точкой прuложения вектора PQ.
Вектор, начало и конец KOToporo совпадают, называется нуле-
вым вeKmopo/
l, и обозначается через О == АА (точка А при этом
любая). Направление нулевоrо вектора не определено. Расстояние
между точками А и В называется длиной или ;11,одулем вектора A
B;
модуль вектора 1113 обычно обозначается через I A
B 1.
Оп р е Д е л е н и е (равенство векторов). Вектор А 13 равен век-
тору CD , если выполнено одно из следующих условий:
10 А==В и C==D.
20 А =1= В; точки С и D лринадлежат прямой АВ, причем : CD ! ===
== IA B I и ТОЧI{а D лежит с той же стороны от С, с какой точка В ........
от А (рис. 1).
30 А, В. С, D
четыре различные точки, никакие три из кото-
рых не принадлежат одной прямой; прямые АВ и CD параллельны,
и прямая АС параллельна прямоЙ BD (рис. 2). Равенство векто-
ров АВ и ('D записывается так: АВ == CD . Отметим следующие
свойства отношения == между векторами:
1. АВ == Сй (отношение == рефлеКСИ8НО).
2. Если АВ == е6 . то со == АВ (отношение == симметрично).
3. Если АВ == CD и cl5 == ЕР , то АВ == ЕР (отношение == тран-
зитивно ).
10 ПРОСТЕVfШИЕ ПОНЯТИЯ АНАЛИТИЧЕСКОй rЕОМЕТРИИ
Выполнимость свойств 1
.3 часто формулируют в следующем виде:
отношение == есть отношение эквива.пентности.
4. Если .48 == CD, то I АВ 1=== I w 1.
5. Для ,,1Jобых трех точек А, В и С существует единственная
точка [) такая, что
Ав == ш.
Рассмотрим неКQТОРЫЙ вектор АВ
жество всех векторов, равных вектору
вается классом эквивалентности.
порожденным вектором АВ. Если
CD принадлежит U, т. е. если
сЬ === АВ , то каждый вектор из u
равен вектору CD и все векторы,
равные вектору CD , nринадле-
А
о
в
.:
)r o-----
D
с
о
р НС. 1.
и обозначим через U мно"
АВ . Это множество назы-
в
с
Рис. 2.
жат U. Следовательно, u будет также и ]{лассом эквива.пеНТ4
ности, порожденным neKTOpO:v1 сй .
Класс эквивалентности u представляет собой новый математи-
ческий объект, и мы называем этот объект свободным вектором,
лорожденным каждым из равных между собой векторов, состав..
ляющих данный класс.
Мы будем часто писать U == АВ === Сй =:!... и ПОНИ
1ать под u
как любой из равных между собой векторов АВ , CD и т. Д., TaI{
и весь образованный ими класс, т. е. свободный вектор.
Определим теперь .пинейные операции над свободными BeI{TO-
рами (сложение и умножение на число).
1 о Сложение пекторов. Пусть даны свободные векторы U 1 и U 2 .
Приложим вектор U 1 к какой
нибудь точке о: получим U 1 == ОА .
Затем nриложим U 2 к точке А: получим U 2 == АВ. По определе-
нию, вектор 08 == U З называется суммой векторов U 1 и U 2 (рис. 3),
т. е.
08 ::::: ОА + АВ &
Единственный элемент nроизволз, содержащийся в этом опредеJlе-
НИИ. есть выбор точки О
'сочки приложения вектора и 1 8 Прила-
BE
TOPЫ НА ПЛОСКОСТИ И В ПРОСТРАнства
11
rая вектор 01 к ка-кой-нибудь друrой точке О' (рис. 4), получим
вектор (5; А ' == ОА == U 1 ; построим вектор А' В'
U 2 ; вектор О' В ' :;;=
==o'A'+
A'В', очевидно, равен вектору ОВ ==М+ АВ .
Если дан вектор u == оА , обозначим через
u свободный Bel{-
тор, порожденный вектором АО . Тоrда свободный вектор u + (
и)
представляется вектором 00' и, А
значит, равен О.
о
U 1 + 1.12
в
8
А
О'
U 1 + U z
Р не. 4.
Рис. 3.
т е о р е м а 1. Сложение векторов обладаеfп следующими свойст-
вами:
1. Для любых двух векторов u и v сущеСfпвуеm единственный
вектор u + V
называемый суммой векпl0РО8 u u v.
2.. Для любblХ U и v u + v == v + u (коымутативность сло-
жения).
З. ДЛЯ любых U, v и w (u +v) +w
u +(v +w) (ассоциатив-
ность сложения).
4. СущеспZ8уеm единственный 6ек/пор О, называемый нулевым
вектором, такой, ЧlrlО 0+ u == U для всех о.
5. Для любосо вектора u суu
еСПlвуепl единственный ве"mор ...... u
та
ОЙI Чlпо U + (
u) == О. ВеКЛlОр ........ u называется eeKтopo.4t t про-
тuвопОЛОЖНblАt BeKпzopy и.
АссоциаТИЕНОСТЬ сложения векторов позволяет rоворить о сумме
трех векторов U 1 + и 2 + и а , понимая под этим Bel{TOp
V == U 1 + (и 2 + uз) == (и 1 + u 2 ) + u з .
По индукции может БыIьь опредеJlена и сумма любоrо числа век-
торов
и 1 + U 2 +. . . + U n ,
12 ПРОСТЕАШИЕ ПОНЯТИЯ АНАЛИТИЧЕСКОй rЕОМЕТРИИ
причем из ассоциативности следует, что, например, в случае
четырех векторов мы имеем
и 1 +U2 + uз + U4
111 + (U 2 +uз + U4)
== (u x + Uз) + (u з + U4) == (и 1 + u 2 + uз) + и4.
При этом В силу коммутативности можно произвольно менять
порядок слаrаемых.
Из сказаНllоrо вытекает следующее удобное на практике правило
сло)кения любоrо числа векторов (<<правило замыкающеrо вектора»).
Для Toro чтобы сложить дан..
ные п векторов. надо записать их
в любом порядке:
ПрИ
lJОЖИТЬ первый вектор к ка..
кой
нибудь точке О, а каждый
следующий вектор
к КОНЦУ пре..
дыдущеrо, так что
и 1 == ОА х ,
А.; и 2 == А 1 А 2' ..., U n == Aп
lA n
(рис. 5). Тоrда сумма Ul+U2+...
Рис. 5. . . . + и п есть замыкающий век...
тор ОА п .
20 Умножение вектора на число. Определим теперь произведе
ние вектора U на число л. Это произведение тоже является век..
тором и обозначается через ЛU.
Если u * О и л> О. то выберем точку А, вектор u == АВ, при..
ложенный к точке А, и такую точку С, что С лежит на прямой АВ
по ту же сторону от точки А, что и В и I АС 1=== л I АВ {. Тоrда
ЛU
свободный вектор t порожденный вектором АВ. Если u =1= О
и 'А < О, положим
\ I и 2
и\
А,
и х , и 2 . .., Оп е
j
u ==
«
л) и).
Наконец, положим
Ou == О для любоrо вектора U;
лО === О для любоrо числа л.
т е о р е м а 2. У .множение вектора на число обладает следgю
щи.мu свойствами:
1. Для любоzо BeKrпopa U и л/обоzо числа 'Jv существует и eдин,
ствен, вектор ли.
2. (Ах + Л 2 ) u == л. u + Л2U для всех чисел л'1 и Л2 и всех u.
3. (А 1 А 2 ) u == Л 1 (л 2 u) для всех чисел л'1 и
и всех и.
ВЕКТОРЫ НА ПЛОСКОСТИ И В ПРОСТРАнстве
13
4. ,,, (u 1 + U 2 ) == л'U 1 + '"u 2 для любых векторов и 1 u и 2 и Лl0(;ОсО
числа л.
5. 1. U == U для лю60ёО вектора u.
Выражение
1-1 U 1 + 1
2U2 +. . . + л'пUп,
тде U 1 ' ..., U n
векторы, а Л t , ..., '),'/1
какие
IIибудь веществен
ные числа, называется ЛUflеuной комбинацией векторов Ul, U2' ...
. . ., U N С коэффициентами ""1' л'2' .. . , !vп. При п == 1 получаем просто
вектор вида Л 1 U 1 .
2. ОСЬ. Координата вектора на оси. Пусть на прямой дан
единичный вектор, т. е. вектор, который принят за единицу изме
рения длин, а ero направление объявлено положительным на всей
этой прямой. Тоrда мы rоворим, что наша прямая превращена
в ось. Можно, очевидно, сказать и так: ось ecпlb прямая, на Koтo
рой 8ыбрана единица измерения длин и одно из двух направлений
названо положительным. Если это сделано, то всякий вектор ДЛИНbI
единица и ПОЛО)l{ительноrо направдения и будет единичным век..
тором данной оси.
Отношение лю6020 вектора U на данной оси к едuниЧflОМУ век..
тору этой оси называется алее6раичеСКU.,фt значением или коорди..
натой вектора U на даflНОЙ оси. Алrебраическое значение век..
тора АВ будем обозначать (АВ). Из этоrо определения непосред
ственно BbITeKaIoT следующие предложения.
1. Два вектора на данной прЯА!ОЙ равнЬ! mozaa и только mОсда,
коеда равны их координаты.
2. Если два веК1110ра U/Ylеют одну и ту же длину, но проmиво..
пОЛОЖНbl по направлеНll/О, то их алzебраuческие значения имеют
OaUfl и mOtп же .модуль
но пропlивопОЛОЖНbl по знаку:
(АВ) + (8 /"1)
О.
3. I(оордиН,аmа едuн,UЧflО20 вектора равна 1.
Имеет Т\Iесто слеДУIОlцее предложение, ЯВJ1яющееся ЛИIllЬ reo..
метрическим истолкованием правила сложения чисел (с про из..
вольными знаками).
4 (лемма Шаля). При Лlобом расположении точек А, В II С на
оси U.fiteelil ,Jrlectпo числовое paeeHcrпeo
(АВ) + (В С) == (АС).
в самом деле, если две из трех точек А, В, С совпадают (напри.
мер, А == В или А == С), то равенство
(АВ) + (ВС) == (АС)
сводится к тождеству (АС) == (АС) или к тождеству (АВ) + (БА) == о.
14 ПРОСТЕйШИЕ ПОНЯТИЯ АНАЛИТИЧЕСКОй rЕОМЕТРИИ
Пусть все три точки А, В, С попарно различны. Тоrда одна
из них лежит между двумя друrими 1). Если В лежит между А
и С, то I (АВ) 1+1 (ВС) I == I (АС) j и векторы А В, ве и АС имеют
одно и то же направление, их а
1Jrебраические значения имеют
один и тот же знак, значит, число (АС) равно сумме (АВ) + (ВС),
т. е. доказываемое равенство справедливо.
Пусть теперь С лежит между А и В. Тоrда по ТО"lЬКО что
замеченному
(АС) + (СВ) == (АВ),
т. е.
(АС) == (АВ)
(СВ).
Поскольку ...... (СВ) == (ЕС), то равенство
(АС) == (АВ) + (ВС)
снова справедливо.
Аналоrично доказывается и третий случай, коrда А ле}t{ит
между В и С.
2. Проекции
Пусть на плоскости дана прямая d и прямая d', не параti1
lель..
ная прямой d.
d'
'd'
А
d
d
I
)
Ad
o
р не. б.
Рис. 7.
Через произво.пьную точку А плоскости проводим прямую d A ,
параллельную прямой d' (рис. 6); она пересекает прямую d
в точке Ad' называемой nроекцuей точки А на прямую d вдоль
(или параллельно) прямой d'.
.l) Это утверждение может служить пр имером одной из аксиом. принимаемых
без доказательства при аксиоматическом построении rеометриИ.
ЛРОЕКЦИИ
15
Если в пространстве даны прямая d и плоскость /)', не парал-
лельные между соБОЙ t то для каждой точки А определены:
1) nроекцuя Ad н,а прямую d вдоль плоскости б,...... это точка
пересечения прямой d с плоскостью БА, проведенной через точку А
параллельно плоскости б' (рис. 7);
2) nроекцuя A
, на плоскость 6' вдоль прямой d...... это точка
пересечения плоскости б' с прямой d A , проведенной через точку А
параллельно прямой d (рис. 8).
Если дан вектор АВ , то, беря проекции Ad и Bd ero начала
.........
и конца, получим вектор AdBd' называемый nроекцией вектора АВ
на прямую d вдоЛЬ прямой d' (рис. 9) (соответственно ВДОЛЬ
плоскости б' (рис. 10).
/i
I
7
d
А
Рис. 8.
Рис. 9.
Аналоrично вектор АО'Вб" есть nроекцuя вектора А В на пло
CKOCпlb 6' (вдоль прямой d) (рис. 11).
Проекция вектора АВ на прямую d (на плоскость б') обозна-
чается через ПРd АВ (про, АВ), а иноrда (коrда невозможны недо-
разумения) и просто через пр АВ .
Перечислим простейшие свойства проекций.
1. Проекцuя вектора АВ равна нулю (т. е. является нулевым
вектором) mОсда а только lпocдa
КОсда данный eeKпzop параллелен
той пРЯ.l11.0Й или плоскосmu
вдоль КОПlОРОй происходит проектuро-
еание (рис. 12).
2. Проекции любосо веКПlора на две параллельные прямые (пло-
скости) равны между собой (рис. 13).
3. Проекцuи двух равных векторов равны.
Пусть даны векторы U 1 == ОА, U 2 == iiA.' и их замыкающий век-
тор u == 0/1 ' == U 1 + и 2 . Тоrда при лроектировании на прямую d
(вдоль какой-нибудь прямой d' или плоскости 6') или на
16 ПРОСТЕйШИЕ понятия АНАЛИТИЧЕСКОй rЕОМЕТРИИ
,
d
...............
о
rj'
d
/и
1
I
I
/
.......оА
'
Ad
о ..
о
Рис. 10.
d ' = d '
А
8
В
I
Рис. 12.
Рис. 11.
/
Рис. 13.
ПРОЕI<UИИ
плоскость б' (ВДОЛЬ прямой d) (рис. 14)
ti7
ПРdUl === OdAd, ПРd U 2 === AdAd,
т. е.
17
nPd u == OdAdt
nPd (u 1 + U 2 ) == ПРdUl + ПРd U 2'
Вообще проек.цuя замыкающе20 вектора дaн,Нhex n векторов "1' U 2 '.'.
. . .
" п есть замыlaIoщuйй вектор nроеКЦUЙ данных векторов) или:
4. Проекцuя суммы двух (или более) векторов есть сумма про..
екцuй эrпuх векторов (рис. 14).
а;
tI
о
rry
,
I
,
I
I
В)
Рис. 14.
Р)
Без труда доказывается формула
пр (лu) == л пр u (1)
(надо рассмотреть отдельно случаи л> О, л < О. '
== О).
Из (1) и п. 4 вытекает
пр (Л 1 U 1 +...+ "
пuп) == л'l пр u 1 +...+ Л п ПР U п . (2)
Полученные результаты кратко объединяются В следующем пред"
ложении:
18 ПРОСТЕViШИЕ ПОНЯТИЯ АНАЛИТИЧЕСI<Ой rЕОМЕТРИИ
ЛuН,ейН,ьt.e операции над вектора'м'и (Т. е. сложение векторов и
их умножение на число) neреместuтельны с операцией nроекти-
рованuя.
3. Коллинеарные и компланарные векторы; координаты
вектора относительно данноrо базиса
1. Коллинеарные и КОМПЛ8нзрные векторы. Несколько векто-
ров называются коллuН,еарН,ымu (соответственно ко,М,план,арн,ымu)
между собой, если все они, будучи приложенными к ОДНОЙ и той
же точке, оказываются лежащими на одноЙ прямой d (рис. 15)
U,
)
U5
/
"5
r/
Рис. 15.
Рис. 16.
(соответственно в одной плоскости n (рис. 16»). в этом с.пучае
rоворят также, что рассматриваемые векторы коллинеарны пря-
моЙ d (компланарны плоскости л).
т е о р е м а 3.
1. Нулевой вектор коллинеарен всяко"иу векп:ору.
2. Если несколько векторов коллuнеарны Me:JlCay собой, то они
u подавно между собой KOA-fJlланаРНbl.
3. КаждыЙ eeKnlOp коллuнеарен, самому себе.
4. Всякие два вектора между собой КО
ff,плаflарНbl.
5. Пусть U 1
каКОЙ
fluбудь ненулевой векп10р. ТОсда все векторы
вида ЛU 1 , еде л
любое вещественное число, tl Пl0ЛЬКО векторы этоео
вида коллинеарны вектору U 1 .
6. ПусrrlЬ на плоскостu даны две прямые d 1 u d 2 , nересекаю-
щиеся в некоторой точке о. Tozaa любой вектор u == оА есть
сумма своих nроекций u 1 и U2 н,а эти прямые (проекцuи берутся
на каждую из двух прямых вдоль друеой прямой).
J(ОЛЛННЕАРНЫЕ И КОМПЛЛНА'J'НЫЕ ВЕКТОРЫ
19
7. Пусть через точку О пространства проходят три nрЯА4ые,
не лежащие в одной плоскости. Тоеда любой вектор u == оА есть
.,
сумма своих nроекцuи и 1 , U 2 , U З на эти nрЯАtые, причем nроекции
берутся на каждую пРЯАfУ'0 вдоль плоскости, несущей две друсие
прямые.
Д о к а 3 а т е.П Ь с т в о. Утверждения 1
4 являются непосред-
"
ственными следствиями опреде.пении коллинеарности II компла
нарНОСiИ.
Доказательство утверждения 5.
Если U 1
каКОЙ
lIибудь неНУtllевой вектор, то, по определению
умножения вектора на число, вектор ЛU! КОЛ,,1инеарен вектору U 1 .
Обратно, пусть U 1 и U2
два коллинеарных вектора. Прилаrая их
к одной точке о, ПО.,1УЧИМ векторы U l == ОАl И U 2 == оА 2 , лежащие
на одной прямой. Пусть вектор и 1 == о. Тоrда l дА 1 \ =F О, и поэтому
определено вещественное число л, обозначаемое U 2 : U 1 и называе.
мое отношением вектора U 2 к вектору U1' ПО опреде.пению,
I л! == 'ОА 2 1
J БА 1 1 '
а знак л берется положительным, если векторы оА. 1 и ОА 2 на-
правлены в одну и ту же сторону, и отрицательным
если они
напраВL1ены в противоположные стороны. Если U 2 === о, то л === о.
т аким образом, если U 2 : u 1 == Л, то, по самому определению
умножения вектора на число, имеем u 2 === лu 1 . Утверждение 5 до.
казано.
Доказательство утверждения 6.
Утверждение очевидно. если вектор u лежит на одной из наших
прямых, например на d 1 , тоrда u == U l , U 2 == о.
Пусть вектор U не лежит ни на одной из двух данных ПрЯ 4
МЫХ. Пусть оА 1 И 6А 2 суть проекции вектора u == оА на К3ЖДУIО
из наших прямых вдоль друrой прямой. Тоrда OA
есть диаrона.пь
параллелоrрамма, построенноrо на БА l === U 1 И О А 2 == U 2 , 1I [I ==
== Ul + U 2t что И требова..тIОСЬ доказать.
Доказательство утверждения 7.
.i\10ЖНО оrраничиться случаем, I{оrда вектор u == ОА не ЛС>IПIТ
ни в одной из П.поскостей, несущих две каI<ие
нибудь из наших
трех прямых. Тоrда лроекции вектора u == ОА на каждую ПРЯМУIО
(вдоль плоскости, несущей две друrие прлмые) образуют три
ребра ОА 1 . ОА 2 . оА э парадлелепипеда с диаrона.пью дА и
ОА == ОА 1 + ОА 2 + ОА з .
Теорема 3 доказана.
20 nРОСТЕйШИЕ ПОНЯТИЯ АНАЛИТИЧЕСКОй rЕОМЕТРИИ
Из теоремы 3 вытекает следующая основная теорема:
т е о р е м а 4. Пусть в плоскости даны два н.еколлuнеаРНblХ
веКПlора е 1 и е2' ТО2да каждый веКlпор u еСЛlЬ линейная комбинация
u == х 1 е 1 + Х2е2
( 1)
век то ров е 1 u е2 и коэффицuенпlЫ Х 1 и Х 2 определены однозн,ачно
как алсебраические значения nроекциЙ вектора U на оси, несущие
соотвеmсmеенно единичные векторы е 1 и е 2 (проекция на каждую
ось берется вдоль друсой оси).
ПУСfпь в простра1lс!пве даны три неКОJrtпланарных вектора е 1 ,
е 2 , е з . ТОсда каJlCдыu вектор u еСlпь линейная КОJftбинация
u == x 1 e 1 +х 2 е 2 +хзе з
(2)
векторов е 1 , е 2 , е з , в КОnl0рОЙ коэффициенты X 1 , х 2 , х з определены
однозначно как аЛ2ебраическuе значения nроекций вектора u на оси,
определенные единиЧНЫJ11.И вeK
"lора.ми е 1 , е 2 , ез (проекция
на КQждУl0 ОСЬ берется вдоль
плоскости, определеflНОЙ двумя
дРУ2ими осями).
Доказательство совершен-
но одинаково в обоих слу
чаях
плоскости и простраIl
ства. Оrраничиваемся случаем
плоскости. Приложим BeI<TO
ры е 1 и е 2 к какоЙ-нибудь
точке О (рис. 17); получим
ОБ 1 == е 1 , ОЕ '} == е2' Тоrда
вектор u == О А есть сумма
своих проекций и 1 == ОА 1 И
и 2 == ОА 2 на прямые, несущие векторы е 1 и е 2 , причем векторы и 1
и U2 однозначно определены условием U == и 1 + U 2 и требованием
КОЛJ]инеа рности векторов и 1 и и 2 векторам е 1 и е 2 .
Из этоrо последнеrо требования вытекает, что и 1 == x 1 e 1 , и 2 ===
== х 2 е 2 , rде Х 1 и Х 2 определены однозначно как алrебраические
значения векторов и 1 , U 2 на соответствующих осях (несущих со..
ответственно векторы е 1 и е 2 ).
Итоrом Bcero сказанноrо является следующее
О с н о в н о е о п р е д е л е н и е. Л/обая пара неколлuнеарных ве/(,-
торов е 1 .1 е2 на плоскости u любая тройка некомпланарных ве/(,-
торов е 1 , е 2 , е з в пространстве, данных в определенно
и порядке,
называется базисом множества всех векторов, лежащих соответст-
венно в плоскости или в пространстве; сами eeKtrlOpbt e t , е2' е з
называются базиснымu илu единичными векторами. Однозначно
y
81
Е,
..
х
РИС. 17.
КОЛЛИНЕАРНЫЕ И КОМПЛАНАРНЫЕ ВЕКТОРЫ 21
определеННЫ8 коэффициенmы Х 1 . Х 2 (соответствеН,Н,о х., Х 2 , XJ)
в представленuях
U == X 1 еl + х 2 е 2 , (32)
u ==х1еl +х 2 е 2 +хз е з (3 а )
На3ываl0mся координатами вектора u относитеЛЫ-lО aaHHOZO базиса
(Х 1
первая, Ха
вторая, хз
третья координата).
Каждая координата вектора u есть алrебраическое значение
лроекции вектора u на ось, несущую соответствующий базисный
вектор.
Равенства (32) и (3з) записываются часто в виде
u == {х 1 , Х 2 }
u === {х 1 , Х 2 . х з }.
(3;)
(З
)
и
Сделаем два важных замечания.
Замечание 1. Мы знаем, что проекции равных векторов
равны, поэтому равные векторы имеют (относительно данноrо
базиса) соответственно равные координаты. Обратно, если даны
координаты Х 1 , Х 2 (соответственно Х1' Х 2 , х з ) вектора, то дан и
вектор u == Х 1 е 1 + х 2 е 2 (соответственно U == х 1 е 1 + х 2 е 2 + х з е з ) как CB
бодный вектор. Друrими словами, представления (32)' (3з) Ka
саются свободных векторов, они не зависят от точек приложения
векторов.
3 а м е ч а н и е 2. Мы знаем, что при умножении вектора на
какое
либо число л на это же 'А умножается и проекция вектора
(на любую ось); мы знаем также, что проекция суммы двух век..
торов равна сумме проекций этих векторов. Отсюда и из опре..
деления координат вектора следует:
При умножении вектора на данное число л 1ta это же число л
умножаются и к,оординаты вектора. Каждая координата СУММЫ
двух векторов есть сум.ма соответствующих координат сла
аеАtblХ
векторов.
Друrими словами. если U ==x1e 1 +х2е2, v == Уl е 1 + У2е2' то
u + v :::2 (Х 1 + Уl) е 1 + (Х 2 + У2) е2'
ЛU == (лх 1 ) еl + (лх 2 ) е 2 .
2. Линейная зависимость и независимость векторов. Линейная
комбинация
л'l U l +Л 2 U 2 +'...+ ЛnU п
векторов U., " 2 , ..., U n называется нетривиальной., если в ней
хотя бы один из коэффициентов Л 1 , .., t л'п отличен от нуля. Ли-
нейная комбинация вида
О. u.
О. U 2 +...+ О. U n
называется тривиальной; она равна нулевому вектору.
22 ПРОСТЕйШИЕ ПОНЯТИЯ АНАЛИТИЧЕСКОй rЕОМЕТРИИ
Система векторов U 1 t U 2 , ..., U N называется линейно зависимой,
если существует хотя бы одна нетривиальная комбинация зтих
векторов. В противном случае векторы называются линейно неза-
вИСllАtblМИ.
Предлаrаем читателю доказать следующие простые t но важные
утверждения о линейной зависимости.
1 о Если среди ееКlпоров U 1 , ... t и п есть хотя бы один нулевой
веКП20Рt то вся сuотема векторов линейно завuсиАtа.
2° Если среди векторов U 1t ..., U n некоторые образуют линейно
зависи.л,zу/о систему, то и вся система U!,..., U n линейно за..
вис U.t""a .
3° Если cucmeA-tа U 1 , ..., U n линейно заВUСUhtQ, то по крайней
мере один из век/поров U 1t ..., U n раоен линейной ко
tбинацuu
оспlаЛЬНblХ.
rеометрический смысл линейной зависимости векторов заклю-
чается в следующем:
(а) система t состоящая из двух векторов, линейно зависима
тоrда и только тоrда, коrда векторы ]{оллинеарны;
(Ь) система, состоящая из трех векторов, линейно зависима
тоrда и только тоrда, коrда данные три вектора комлланарны;
(с) всякие четыре (или более) вектора в пространстве линейно
зависимы.
О п р е Д е л е 11 и е. Векторное мноrообразие есть такое непустое
множество V векторов, что любая линейная комбинация векторов,
принадлежащих этому множеству, также принадлежит ему. Наи..
большее число векторов, образующих линейно независимую си-
стему в данном мноrообразии, называется размерностью этоrо
мносоо6разия.
П р е Д л о ж е н и е. Пусть V
какое
лuбо векторное мноеообра-
зuе. Возможны ЛИИlЬ следу/ощuе САучаu:
(А) V сос/поит из односо ЛИUlЬ нулевоео вектора, тozaa размер.
Н,ость V равна НУЛ/О.
(Б) V состоит из всех векторов, коллинеарНbLХ какой
лu60 пря
мой, mОсда размерНОСfпь V равна 1.
(В) V состоит из всех векторов t компланарных н еl(оторой пло
скосп1И, п20сда размерность V равна 2.
(r) v состоит из всех вообще векторов трехмерНОёО простран..
ствй, lпоzда размерНОСlllЬ }/ равна 3.
Д о к а 3 а т е л ь с т в о. Заметим преждс Bcero, что всякое век-
торное мноrообразие V содержит нулевой Bel{Top. В самом деле,
по определению Bel{TOpHOro мноrообразия MHO}l{eCTBO V непусто,
Т. е. содержит хотя бы один BeI(TOp U, но тоrда, по определению
BeKTopHoro мноrообразия, вектор О. U == О также содержится в мно"
)I{ec тве V.
Может случиться, что все множество V состоит из одноrо ну-
JIeBOrO Bel{TOpa, Tor да МЫ находимся в случае (А).
КООРДИНАТЫ НА ПЛОСКОСТИ И В ПРОСТРАНСТВЕ
23
Пусть в V содер}кится хотя бы один вектор e 1 =1= о. Тоrда в V
содержатся и все векторы вида x 1 e 1 . rAe Х 1
любое вещественное
ЧИС&l10. ЕСLrJИ все ыножество V этими векторами исчерпывается, то
это множество есть мноrообразие размерности 1, состоящее из всех
векторов, КО"lлинеарных вектору е 1 . Тоrда мы находимся в слу-
чае (Б).
Предпо.пожим, что в множестве V И
Iеется вектор e 1 , Не кол..
линеарный вектору е 1 . Тоrда в V содержатся и все векторы вида
х 1 е 1 + х 2 е 2. Т. е. все векторы, КОМПJ1анарные плоскости, несущей
Два неколлинеарных вектора е 1 и е2' Если все множество V исчер-
пывается 9ТИМИ векторами, то мы находимся в случае (В).
Если же в множестве \1 иыеется хотя бы один вектор е з , не
компланарный паре векторов е 1 , е 2 , то в V содержится тройка
некомпланарных векторов е 1. е 2 , е з , а следовате&l1ЬНО, содержится
и всякий вектор u вида
u
х 1 е 1 + х 2 е 2 + хзе з .
По теореме 4 I3сякий neI{TOp u пространства может быть пред
ставлен в таком виде, и мы находимся в случае (r). ПреДJ10же
ние доказано.
4. Координаты на плоскости и в пространстве
1. Аффинная система координат на плоскости. Аффинная система
координат на ПL10СКОСТИ задается точкой О (начало координат) и
парой приложенных к ней He
коллинеарных векторов e 1 ===
::::: ОЁ 1 И е 2 == ОБ ? (рис. 18), дан-
ных в определенном порядке: еl
есть первый, а е 2
второй BeK
тор; векторы е. и е2 опреде-
ляют две оси, пересекающиеся
в точке О,
пepeYfO u 8lпору'о
оси коордuнаПl
и являются,
по определению, единичными
векп1пра.ми этих осей. Первая
ось называется также осыо аб..
сцисс или ОСЬЮ ОХ, а вторая.........
осью ординат ИЛИ ОСЬЮ Оу дан...
ной координатной системы.
Сама система координат обозначается через Oe 1 e z или через Оху.
Пусть М
какая-нибудь точка плоскости; обозначим через Мх
и Ми проекции точки М соответственно на первую и вторую ось
координат (проекции на каждую ось берутся вдоль друrой оси)
(рис. 19). Алrебраические значения векторов ОМ Х и ОМ у назы
у
81
Е[
.х
Рис. 18.
24 ПРОСТЕйШИЕ ПОНЯТИЯ АНАЛИТИЧЕСКОй rЕОМЕТРИИ
ваются соответственно первой и в/порой координатой (абсциссой и
ординаl1Z0Й) точки М.
Любая пара чисел х, у однозначно определяет точку М, дЛЯ
которой х является первой, а у
второй координатой. Точка М
с координатами х, у обозначается так: М == (х, у)..
Система координат Oe 1 e 2 включает в себя базис е 1 , е 2 множе.
ства всех BeI{TOpOB на плоскости. Координаты лроизво.пьноrо век-
тора u относительно базиса e t , е 2 называются KoopauHatпaMu
вектора u относительно системы координат Ое 1 е 2 ; они являются
х
м
Рис. 19.
Рис. 20.
алrебраическими значениями nроеl{ЦИЙ вектора u на оси координат
и не зависят от выбора начала координат (рис. 20). Вектор u
с координатами х, у обозначается так: u == {х, У}; тоrда
u == хе 1 + уе 2 8
Условие х == О характеризует векторы, коллинеарные оси ординат,
а условие у === о хараl{теризует векторы, коллинеарные оси абсцисс.
Очевидно, координаты любой т оч
и М в данной системе коор-
динат суть координаты вектора ОМ в этой системе координат.
Два вектора А В и С й равны тоrда 11 только тоrда, коrда
равны их соответствующие координаты.
Если А === (х 1 , Yl)' В == (х 2 , У2)' то для координат х, у век..
тора АВ имее.М,
х == Х 2
X 1 ,
у == и2
Yl'
2. Аффинная система координат в пространстве. Все сказан-
ное с очевидными изменениями применяется и к случаю простран-
ства. Аффинная система координат в пространстве состоит из
КООРДИНАТЫ НА ПЛОСКОСТИ И В ПРОСТРАНСТВЕ
25
точки О («начало координат») и лри.поженных к этой точке трех
некомпланарных единичных векторов е 1 , е 2 , ез (рис. 21), данных
в определенном порядке (еl...... пеРВЬ1Й, е 2
второй, е з ...... третий).
Каждый из этих векторов определяет проходящую через начало
О ось, единичным вектором которой он является; эти оси назы
ваются первой, второЙ и третьей осью координат или COOTBeT
ственно «осью Ох» (осыо абсцисс), «осыо Оу» (осью ордuна11l)
и «ОСЬЮ Oz» (осыо аппликат;
последнее название, впрочем,
употребляется нечасто). Каж-
дые две координатные оси оп-
ределяют ПРОХОДЯЩУЮ через
них координатную плоскость.
Так, оси Ох и Оу определяют
координатную плоскость Оху
или Oe 1 e 2 и т. Д.
ПервоЙ, второй, третьеЙ
координатой даННО20 вектора u
называются соответствующие ero
координаты относительно бази-
са e 1t е 2 , ез, т. е. соответствую-
щие коэффициенты в представ-
лении
Z
Е,
е 1
.:с
u
xel +уе 2 +zе з .
Они равны алrебраическим зна-
чениям проекций вектора U на
оси, определенные соответственно векторами е 1 , е 2 , е з (проекции на
ка}l{ДУЮ ось берутся вдоль плоскости, несущей две друrие оси).
Координаты BeI{TOpa не зависят от выбора начала координат О.
Координаты точки М суть, по определению, координаты век-
тора ОМ (рис. 22). Если Мх, Му, Л'lz суть проекции точки М,
а U x == ОМ х , U y == ОМ у, U z == OM z ...... проекции вектора ом на оси
координат. то координаты х, у, z точки А1 суть алrебраические
значения векторов OM x==u x , ОМ у == U y , OM z==u z . Тоrда
Рис. 21.
U x
хе 1 , U y == у е 2' U z == zе з ,
ОМ == u == хеl + уе 2 + zез.
(1)
Векторы, коллинеарные данной координатной оси, характеризуются
тем, что равны нулю их координаты, соответствующие двум дру-
rим осям.
МЬ1 уже знаем, что при сложении векторов их одноименные
координаты складываются, а при умножении вектора u на число л
на это л умножается каждая координата вектора u. Отсюда сразу
26 ПРОСТЕйШИЕ ПОНЯТИЯ АНАЛИТИЧЕСКОй rЕОМЕТРИИ
следует, что два вектора тоеда u только mоеда коллuнеарНbl, коюа
координаты одНО20 из них пропорцuональны координатам дРУ2020.
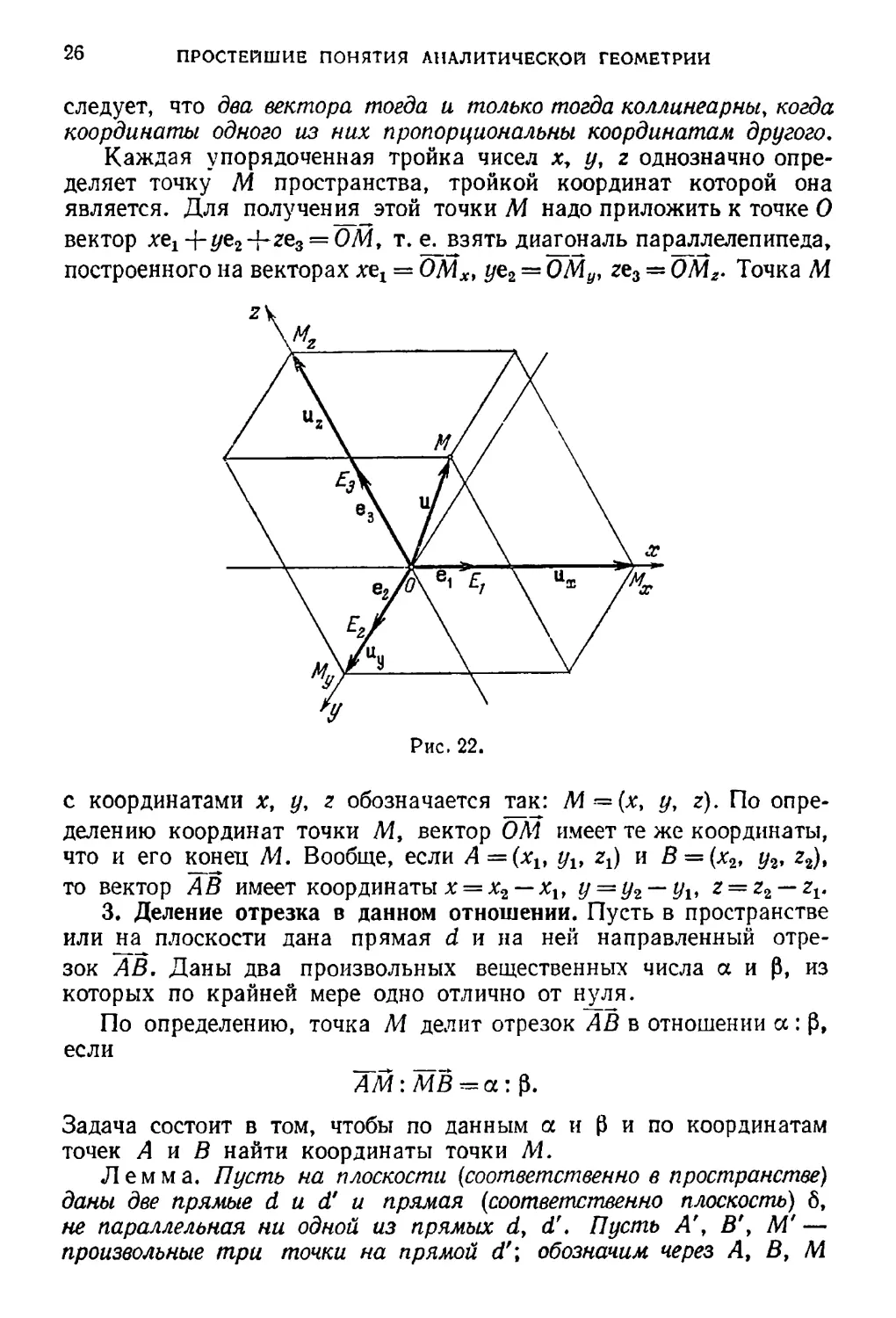
Каждая упорядоченная тройка чисел х, у, z однозначно опре-
деляет точку М пространства, тройкой координат которой она
является. Для получения этой точки М надо приложить к точке О
вектор хе 1 +уе 2 +zе з == ОМ , т. е. взять диаrональ параллелепипедз,
nOCTpoeHHoro на векторах хе 1 == ОМ х . уе 2 == ОМ У' zез == OM z . Точка М
Рис. 22.
с координатами х, у, z обозначается так: М:=: (х, у, z). По опре-
делению координат точки М, вектор 01\1 имеет те же координаты,
что и ero конеп М. Вообще, если А == (х 1 , Уl' Zl) И в == (х 2 , У2' Z2).
то вектор АВ имеет координаты х == Х 2
Х 1 , У == У2
Уl' Z === Z2
Zl'
3. Деление отрезка в данном отношении. Пусть в пространстве
или на плоскости дана прямая d и на неЙ направленный отре-
зок АВ . Даны два произвольных вещественных числа сх и
, ИЗ
которых по крайней мере одно отлично от нуля.
По определению, точка М де
ТIИТ отрезок А В в отношении CG :
,
если
AM : M B==a:
.
Задача состоит в том, чтобы по данным ct и
и по координатам
точек А и В найти коор.LIИН аты тачки л,1.
Л е м м а. Пусть на плоскости (соответственно в пространстве)
даны две прЯМhlе d u d' u прямая (соответственно плоскость) б,
не параллельная ни одной из прямых d, d'. Пусть А', В', М'
nроuзвольные три точки на прямой d'; обозначим через А, В, М
КООРДИНАТЫ НА ПЛОСКОСТИ И В ПРОСТРАНСТВЕ
27
их nроекции вдоль 6 на прямую d. Тоеда
А,м""7 АМ
==
.
М'В' Л1 8
(2)
Доказате,,'IЬСТВО этой леммы оставляем читателю в качестве упраж-
нения.
Если обозначить через Ах, Вх, jИ х проекuии точек А. В. М
на ось /абсuисс, то из этой J1eMMbI сразу следует, что
АМ: м в == а :
== A.\.
G: Мх В: == (АхМх) : ( k1 x B x).
fIo (на оси Ох) имеем (AxMx)==X......Xl' (M.кBx)=-x.2
X' ТаК что
(х
X 1 ) : (Х 2
х) == а :
,
откуда
aX2+
Xl
Х == а+р
и аналоrично
У
аУ2 +
Yl aZ2+
Zl
a+
· z== a+
что дает во всех случаях определенную ТQЧК.У М == (
. у, z) пря-
мой, за исключением случая Q, +
== О, Т. .е. а.:
.:II::........ 1 (коrда
получаем единственную несобственную, или «бесконечно удален-
ную», точку нашей прямой).
При а ==
точка М будет серединой отрезка АВ и для коор-
динат середины отрезка мы получаем следующие формулы:
X
Хl+Х2 Y
Уl+У2
2 '
2 '
ZI + 22
z=== 2 ·
(3)
а
Если а +
=1= О и
=1= О, то, полаrая f; == Л J можем переписать
полученные формулы в виде
Хl +ЛХ2 Уl +ЛУ2 Z1 +л. Z 2
х ===- 1 +л J У ::=;
l +л ' z ==:; 1 +А . (4)
4. Прямоуrольная система координат на плоскости и в про--
странстве. Задание прямоуrо.,1ЬНОЙ системы координат на плоскости
или в пространстве прех{де Bcero предпо.лаrает, что выбрана одна
определенная единица дЛUНbl l посредством которой измеРЯIОТСЯ длины
всех отрезков (на ПЛОСI{ОСТИ или в пространстве). Такую единицу
Д,,'IИНЫ будем называть масшп10бом; считая ero раз навсеrда выбран..
ным, мы наЗblваем ОРПlО.;И ВСЯI{ИЙ вектор, длина KOToporo равна 1.
После Toro, как масштаб выбран, прямоуrольная система коор-
динат определяется (]{аи частный случай общей аффинной системы)
требованием, чтобы единичные координатные векторы (el и е 2 на
плоскости; е 1 , е 2 . ез в пространстве) были взаuмно пepпeHдиKY
лярны.мu ортами,
28 ПРОСТЕйШИЕ ПОНЯТИЯ АНАЛИТИЧЕСКОй rЕОМЕТРИИ
3 а м е ч а 1-1 и е. Далее в этом пункте мы будем лредполаrать,
что система координат прямоуrольная. Все проеКЦИИ также пред"
полаrаются прямоуrольными.
у
у Масштао
...............
.:с
х
Рис. 23.
Рис. 24.
Пусть дан вектор u ==:: {х, у} (рис. 23). Приложим вектор u
к началу координат:
u== OM .
Длину вектора u === ОМ обозначаем через 1 u 1 ==: ! ONl !. Обозначая
через М х , Му проекuии точки ,И на оси координат, имеем х
== (ОМ Х ), У == (ОМу) и (по теореме Пифаrора)
! ОМ 12 === I ом х '
+ I ОМ у 1\
т. е.
I u 12 == 10/\112 == х 2 +у2.
Аналоrично в пространстве для вектора
u == {х) у, z}
имеем
I u 12 == х 2 + у 2 + Z2
квадрапl длины веКПlора равен сумме квадратов есо координат.
Отсюда непосредственно вытекает формула для расстояния
р (/\-11' М 2 ) ме)({ду двумя точками (рис. 24):
M 1 == (Х 1 , Уl' ZI)' М 2 == (х 2 , У2' Z2)'
Так как MIM
== {х 2 ....... Хl' У2
У.}, то
Р (M 1 , Nf 2 ) == I iИIМ
( == + V (Xz
.... х 1 )2 + (У2 ..... Yl)2.
КООРДИНАТЫ НА ПЛОСКОСТИ И В ПРОСТРАНСТВЕ
29
Аналоrично в пространстве для точек
М 1 == (X 1 , Уl, Zl)' М 2 === (Х2, У2, Z2)
имеем
р (M 1 , М 2 ) == 1 м1JИ; 1== + V(x 2
х 1 )2 + (У2
Уl)2 + (Z2
Z1)2.
Пусть на плоскости дана система прямоуrольных координат.
Рассмотрим на этой плоскости окружность с центром С == (а, Ь)
и радиусом r (рис. 25). Эта окружность есть множество всех
точек М (х, у) плоскости, расстояние которых от точки С равно (.
Друrими словами, необходимым и достаточным условием, чтобы
точка М == (х, у) лежала на нашей !I
окружности, является условие
р(С, M)==r,
}/(х
а)2 + (у
Ь)2 == r. (5)
Так I<al( r > О, то уравнению (5)
эквивалентно
т. е.
е 2
(х
а)2 + (у
Ь)2 == ( 2 . (6)
Уравнение (6) называется урав-
н'ение,Лt окружности с центром
С:=: (а, Ь) и радиусом '. В про-
странстве с данной прямоуrольной системой I{оординат сфера (ша-
ровая поверхность) с центром С == (а, Ь, с) и радиусом , опреде-
,пяется как rеометрическое место точек М ==: (х, У. z). расстояние
которых от точки С равно '. Поэтому уравнение
(х
а)2 + (у
Ь)2
(z
с)2 === ,2
о
81
:.
Рис. 25.
(6')
выIажаетT необходимое и достаточное условие для Toro, чтобы
точка М == (х, у, z) лежала на нашей сфере: уравнение (6') есть
уравнение сферы с 1lентром С == (а, Ь, с) и радиусом '.
5. Уrол между двумя векторами. Пусть (в пространстве или
на ПЛОСКОСТИ с выбранным раз навсеrда единым масштабом) даны
два вектора U 1 и U 2 , отличных от нулевоrо. Прилаrая их к какой.
нибудь точке О пространства так, что и 1 === ОА , и 2
08 (рис. 26),
получаем уrол (в самом элементарном смысле слова) между этими
векторами (или несущими их ПО.пупрямыми, исходящими из точки О).
Обозначим этот уrол через <р; он ле)кит в плескости, несущей
прямые ОА и ОБ, и по величине заключен междv О и л. Считая,
что каждый из векторов и 1 , и 2 задает положительное н(]прав
пепие
на несущей ero прямой, мы каждую из этих прямых превращаем
в ось и, следовательно, М0жем rоворить об алrебраическом 3Ha
чении (прямоуrольной) проекции каждоrо вектора на ось, несущую
30 ПРОСТЕИШИЕ ПОНЯТИSl АНАЛИТИЧЕСI\Ой rЕОМЕТРИИ
друrой вектор:
аз ПР U l U 2 ,
аз прu!u 1 ,
Эти алrебраические значения положительны, если уrол q> острый
(рис. 27, а); они отрицательны,
если уrол Q) тупой (рис. 27, б),
n
и равны нулю, если <P
2.
Из подобия ПрЯМоуrоль..
ных треуrольников ОАА'
и ОВВ' заключаем, что
Jl5В1
'ОА'I
1081
IOAI' Т. е.
I аз nP Ut и2[
r аз ПРu2U1 ,
:U2
I Ul r
Так как, кроме Toro, аз ПРU1U2
и аз п P L1 2 U 1 имеют один и тот
же знак (положительный, еС,IIИ
уrол ер острый, отрицатель-
ный, если этот уrол тупой), ТО
аз прu! и2 аз nPU2 u 1
J и2 J I Ut i
Каждое из этих отношений МО-
Рис. 26.
Рис. 27.
жет быть ПРИНЯТО за опредедение косинуса уrла ер между векторами
U 1 и U 2 :
аз прu и2
COS ер ==
I U 2 I
8З прuz Ul
i Ul/
(7)
Как видно из рис. 27, это определение cos q> совладает с опреде-
лением, известным из триrонометрии.
КООРДИНАТЫ НА ПЛОСКОСТИ И В ПРОСТРАНСТВЕ
31
Из формулы (7) вытекает
аз ПРU!"2 == r U 2 r cos q> (8)
аЛ2ебраuческое значение nроекции одНО20 вектора на OCb
опреде-
леН"lУ'О дpY2и.M,
равно длине проектируеМО20 вектора, умноженной
на косинус У2ла между двумя векпl0ра
иu.
6. Направляющие косинусы. Пусть (1 == {х, у, z}...... какой-нибудь
ненулевой вектор, а,
, у
УfЛЫ между этим вектором и ортами
е} t е 2 , е з координаТНЬJХ осей (рис.
28). Тоrда cos а, cos
, cos '\' Ha
ЗLJваются направЛЯ10ЩU
ИU КОСИНУ
са.ми вектора U.
Так как х
аз ПРе1U, У
== аз ПРе2U' Z == аз прсзu, то в силу
ФОР
'fУЛЫ (8) имеем
Х:::: 1 u 1 cos а, у
I u r cos р,
z == I 111 cos у. (9)
в частности, если u есть орт, то
lul::::cl и
х == cos а, у == cos р, z == cos у
z
3:
Рис. 28.
координаты орта равны есо направляющи'м' косинусам. Далее
из (9) получаем
I U J2 == х 2 + у2 + Z2 == I u 12 (С05 2 а + С05 2 Р + cos 2 у),
откуда, сокращая на I u 12 =F О, имеем
cos 2 а + cos 2
+ С05 2 у === 1 (10)
.......... C!j,
tJ{a квадра/пов Nаnравля/ощих косинусов люБО20 вектора u =1=
=1= О равна 1.
Пусть даны произвольные три числа ;, 11,
, удовлетворяющих
рапенству
S2 + 112 +
2 == 1.
( 1 О')
ОТ.10ЖИМ на осях координат векторыI ОС 1 , ОС 2 , OC:
, алrебраичес-
кие значения которых соответственно равны qисла
, Ч,
, и
построим на этих векторах (прямоуrольный) пара.пле.,lепипед.
Исходящая из точки О диаrональ ос этоrо параллелепипеда имеет
ДJlИНУ, равную
2+rI2+
2 == 1, и является ортом с координатами
=== cos а, 11 === cos
,
== cos у. Итак, любая тройка чисел
, 't'l, с.
удовлетворяющая уравнению (10), является ТРОЙI{ОЙ координат
( «направляющих косинусов») HeKoToporo орта в пространстве.
7. Скалярное произведение двух некторов. Введем тепер ь сле-
дующее фундаментальное опредеJIение: скаЛЯРflЫ,М, проuзведенuе'м'
32 ПРОСТЕP'fШИЕ ПОНЯТИ51 АНАЛИТИЧЕСКОЯ rЕОМЕТРИИ
двух векторов 11., U 2 называется число (U 1 , и 2 ), равное произведе-
пию длин этих векторов на косинус уr.па <р между ними:
(U l , и 2 ) ==: ull.! и 2 1 cos ер. (11)
Скалярное произведение нулевоrо вектора на любой вектор пола-
rается равным нулю.
Свойства скалярноrо произведения:
1. (и 1 . и 2 ) == (u 2 , и1)'
11. (и 1 , U 2 ) == о тоrда и ТОcllЬКО тоrда, коrда векторы U 1 и и2
перпендикулярны между собой. Если U 1 === U 2 === U, то <р == О, cos <р ::::::;;
== 1, I и ! 1 == I u 2 1 === 1 U 1. Итак,
111. (u, u)=='uI2
скалярное произведение вектора на саМО20
себя («скалярный квадрат вектора») равно квадрату е20 длины,
скалярный квадрат равен нулю для Лl0БО20 нулевО20 вектора и поло-
жителен для вСЯКО20 вектора, отЛИЧНО20 от нулевО20.
Подставляя значение cos ер из (7) в (ll), получаем
lV. (u 1 , (12) == I U 2 : аз np U 2 U 1 == I u11 аз ПРUtU2
скалярное произве-
дение двух векторов равно проuзведеНИ10 длины одНО20 из них на алиб-
раическое значение nроекции дРУ2020 вектора на ОСЬ, несущую первый.
В частности. для любоrо вектора U
{х, у, z} и координатных
ортов e lt е 2 , еа имеем (u, е 1 ) == аз ПРеtU == ХИТ. Д., т. е.
У. Х == (и, e j ), у == (u, е 2 ). z == (u, ез)
координаты люБО20 век-
тора в пРЯМОУ20ЛЬНОЙ систе.ме координат равны скалярным произ-
ведениям эmою вектора на орты осей координат.
Из равенства IV вытекае1: каково бы ни было вещественное
число Л-, имеем
(Л-u 1 , U 2 ) == I u 2 1 аз ПРU)"U l == 1 u21 лаз ПРU:!U l == Л-I и 2 1 аз ПРU2Ul,
т. е.
VI. (ЛU t , U 2 ) == л (и 1) и 2 )
числовой .множитель можно выносить
за знак скалярноw проuзведеНllЯ.
Из Toro х{е равенства IV вытекает далее
(111 + и 2) v) == I v I аз прv (u 1 + t1 2 ) == I v I аз ПРVUl + I v I аз ПРV U 2,
т. е.
VII.
(U 1 + U 2 , v) == (и., v) + (u 2 , v)
(12)
свойсп180 аuсlпрu6Уl1l1UJI-lОСlпU относительно сложения.
Из VI и VII следует, что СJ<алярное произведение двух линей
ных комбинаций векторов MOiI{HO вычислить по правилу умноже
ния мноrочленов, например:
(Лз. U 1 + л'2 U 2 + лзu з ,
1 v t + f.t 2 V 2 ) ==
==Лl
l(Ul, V t )+Л 2 1l1(U 2 ' V 1 )+Лзfll(U З ' V1)+Лl
12("llt V
)+
+ Л 2 1l2 (и 27 v 2) + Л э f.12 (uз, v 2 ).
КООРДИНАТЫ НЛ ПЛОСКОСТИ И В ПРОСТРАНСТВЕ
33
Пусть на плоскости)
U 1 === {Xl' Уl}'
U 2 == {Х 2 , У2}'
Это значит, что
U 1 === x1e. + Уl e
, и 2 == Х2 е 2 + У2 е 2-
Тоrда в силу V
VII имеем
(U 1 , и 2 ) == (x1e 1 + y 1 e 2 , xze} + У2 е 2)
==X 1 X2(e 1 , e 1 )+YI X 2(e z , e l )+x 1 Y2(e 1 , е 2 ) +УIУ2(е 2 , е 2 ).
Но оекторы1 e 1 и е 2 суть взаимно перпендикулярные орты, так
что (е 1 , е 2 ) == (е 2 , e 1 ) == О и (e 1 , e 1 ) == (е 2 , е 2 ) == 1; значит,
(u 1 , U 2 ) == X 1 X 2 + YIY2' (132)
в пространстве дЛЯ
U 1 =={X 1 , Уl, Zl}' и2
{X2' У2' Z2}
совершенно так же получаем
(U 1 , 112)
Х 1 Х2 + У!У2 + Z l Z2' (13з)
Эти формулы очень важны и имеют мноrочисленные лримене 4
ния. В частности, они позволяют определить уrол ер между двумя
векторами U 1 ==
Xl' У1' Zl} И U 2 == {Х 2 , У2' Z2} по координатам этих
векторов: для этоrо достаточно переписать формулу (11) в виде
(Ul t L1 2 )
cos <Р == I Ul I . I u 2 1
и подставить в нее значение длины векторов U1' U 2 И их скаляр-
Horo лроизведения (13з). Получаем
XIX2 + У1У2 + ZlZ2
cos <р == у XI+Yr+zi. JI xi+Y;+z
(14)
(корни в знаменателе берутся положительные).
Леrко получить также формулу, дающую алrебраическое зна-
чение проекции произвольноrо вектора u == {х, у, z} на ось снаправ..
ляющими косинусами cos сх, cos
, cos у. Для этоrо переписываем
формулу (11) в виде
1 11 I cos <р := (Ul, и2)
2 I Ul ! ·
т. е. в виде
(иl, и2)
8З ПР U 1 U 2 == I Ul 1 ·
Если u 2 ==u=={x, у, z}, U 1 ==е== {cosa, cosp, cosy}, Т. е.
1 u11 == I е 1== 1, то мы получаем
аз преu == Х cos сх + у cos
+ Z cos у. (15)
Эта формула очень удобна в применениях.
34 ПРОСТЕPIШИЕ ПОНЯТИ5I АНАЛИТИЧЕСКОй rЕОМЕТРИИ
8. Векторное пронзведение. Рассмотрим в пространстве прямо-
уrольную систему координат Ое 1 е 2 е з . Пусть u, У, W
тройка
некомпланарных векторов. данных в определенном порядке (в том,
в каком они написаны). Приложим их к точке о:
u==дA, v=== OB , w==OC
и построим на них параллелепипед. Пусть в системе координат
Oe 1 е 2 ез
u == {Хl. Уl' Zl}' V == {х 2 , У2, 2 2 }, W == {х з , Уз. zз}.
Остав.ляем читателю в качестве упражнения доказательство
следующеrо предложения: объем параллелеnuпеда, натянуmО20 на
вeKtrlOpbl U == ОА, v == l5Ё, w == ОС, равен I (u, v, ,у) 1, zae
Хl иl 2'1
( U, v, w) == Х2 У2 2'2 .
Х3 Уз ZЗ
О n р е Д е л е н и е. Объемом ориентuрованное.о параллелепuпеда,
построенное.о на векторах u, у. w, называется число (и, v, w).
Если (и, V, w) > О, то rоворят, что репер Ouvw ориентирован
положительно относительно репера Ое 1 е 2 е з ; в противном случае
репер Ouvw называется отрицательно ориентированным относительно
Ое 1 е 2 е з .
О п р е Д е л е н и е. Векторным проuзведенuеАt вектора u на век-
тор v называется вектор п, модуль KOToporo равен произведению
модулей векторов u и V на синус уrла fP между ними: I n I == I u I х
х I v I sin q>; этот вектор перпендикулярен к плоскости п, в которой
лежат векторы u и У, если их отложить от одной точки; он нап-
равлен так, что упорядоченная тройка векторов u, у) n имеет
поло}кительн ую ар иентаЦИIО.
Векторное произведение вектора u на вектор v обозначается
через r u, у].
Свойства BeKTopHoro произведения:
1. Векторное проuзведенuе [u, у] равно нулю mozaa и только
пl02aa
кос.да векторы (1 и v коллuнеарны.
11. [11, v]===
[v, u].
111. [лu, vJ==[u, ЛV]==Л[U, v], 2де 'Л......проtlз80лЬflое вещест-
венное число.
lV. [(u'+u"), v]===[u', v]+[u", v],
r u, (v' + v/)] == [u, v'] + [u, v"].
v. Скалярное произведение вектора [u, v] на каКОЙ
fluбудь век-
тор w равняется об'ьеАtу ориентuроваННО20 nараллелепuпеда, на-
тЯНУf1l020 на векторы u, v, w:
([u, у], w)==(u. V, w).
CnoiiCTBa 1.... 111 являются непосредственными следствиями
определен ия Bel{TOpa [11, V J.
КООРДИНАТЫ НЛ ПЛОСКОСТИ И В ПРОСТРАНСТВЕ
35
Доказательство свойства v. Предположим сначала, что век-
торы и, v, w компланарны. Тоrда правая часть равенства
([u, v], w) == (u, V, w) обращается в нуль. Докажем, что и левая
часть равна нулю. Это очеВИДНО t если векторы u и v коллине-
арны
тоrда [u, v]==Ot знаЧИТ t и ([и, v], w)==O. Пусть u и v
неколлинеарны, и пусть п
несущая их плоскость. Поскольку
векторы и, V t W компланарны, то и w лежит в плоскости л.
Но вектор [и, v] перпендикулярен к плоскости л, значит,
([ u, v], w) == о. Итак, в случае компланарности векторов u, V, w
равенство ([u, v], w)==(u, v, w) верно
обе ero части равны
нулю.
Пусть теперь векторы и, v, w не компланарны. Положим
n == [и, v] и будем считать параллелоrрамм, построенный на век-
торах u и v, основанием параллелепипеда, построенноrо на век-
торах u, v, w. Площадь этоrо параллелоrрамма равна I n 1, так что
формула ([и, V]t w) == (о, V, w) переписывается в виде
(о, v, w) == I n 1 . аз прп W.
С друrой стороны, скалярное лроизведение ([u, v], w} может быть
записано в виде
([u, v], w) == (о, w) == 1 n (. аз npnw,
что и требовалось доказать.
3 амеч а н ие. Формула
(u, v, w) == ([о, V], w)
может служить определением функции (и, v, W), которая при
таком подходе к ней называется с.мешан,ны,М, nроuзведен,uем трех
векторов u, v, w.
Пусть теперь в какой"нибудь прямоуrольной системе коорди-
нат Ое 1 е 2 е з имеем
u == {Хl' Yl' Zt}, V == {х 2 , У2' Z2}.
Найдем координаты Х, У, Z вектора 0== [u, v]. Так как система
координат прямоуrольная, то
Х == (п, е 1 ) == ([и, v], е 1 ) == (u, v, ev,
и аналоrично
у == (u, V, е2)' Z == (u, v, е з ).
Но е 1 == {1, О, О}, е 2 == {о, 1, О}, е з == {О, О, 1}; поэтому
Хl Уl 2'1
Х == Х2 Ytj %2 == I Уl %1 1 .
1 О О Ys %2
Аналоrично
у == I %1 Хl I '
Z2 Х2
z == I Хl Уl 1 .
Х2 Уа
36 ПРОСТЕАШИЕ ПОНЯТИЯ АНАЛИТИЧЕСКОЯ rЕОМЕТРИИ
Друrими словами, если в прямоуrольной системе координат Ое 1 е 2 е з
векторы u и v даны в виде u == {х 1 , Yl, Zl}' V == {х 2 , У2' Z2}' то век-
тор [u, v] может быть записан в виде разложенноrо по элементам
первой строки детерминанта:
е!
ез
[u, v] == Xl УI Z. .
Х2 Y<,J Z
)Jоказательство свойства IV.
Вследствие свойства 11 достаточно доказать одну какую
нибудь
из формул IV, например первую. Пусть u' == {х', у', z'}, u" ===
:::; {х", у", z"}, v == {х, у, z}. Тоrда u' + u" == {х' + х", у' + у", z' + z"},
и мы имеем
х' + х" у' + у" z' + z"
{(u' + u"), v] == х у z
еl е2 ез
Х' у' z' х" у" z"
х у z + х у z == [о', у] + [и", У],
еl е2 ез еl е2 ез
что и требовалось доказать.
9. Уrол от одноrо вектора до друrоrо на плоскости. Враще-
нием плоскости BOKpyr данной ее точки О (центр вращения) мы
будем наЭЬ1вать движение этой плоскости по себе самой, эаклю-
чающееся в том, что точка О остается неподвижной, а все осталь-
ные точки перемещаются по лежащим в нашей плоскости окруж-
ностям с центром о.
Вращение плоскости BOKpyr центра О можно производить
В двух направлениях: по часовой стрелке и против нее.
Предположим, что в плоскости задаНа прямоуrольная система
координат Oe 1 e 2 . Посредством вращения BOKpyr точки О орт еl
можно совместить с ортом е2 двумя способами: повернув ero
n 3л
на уrол "2 в одном или на уrол 2" в противоположном направ-
лении. Мы условимся считать поло}кительным ТО из двух направ-
лений вращения, которое переводит орт е 1 в орт е 2 посредством
поворота на
. Таким образом, если на плоскости дана прямо-
У20льная система "оордuнат
то определено и положительное
направленuе вращения.
Пусть на данной плоскости одно ИЗ двух возможных направ-
лений вращения выбрано в качестве положительноrо. Возьмем
на нашей плоскости два вектора u и V. Приложим оба вектора
к одной и той же точке О, так что
u ==ОА,
v == ОВ.
КООРДИНАТЫ НЛ ПЛОСКОСТИ И В ПРОСТРАНСТВЕ
37
Назовем уелом от веклwра u до векnwра v или наклоном век-
тора v к вектору U тот уrол q>, на который в положительном
направлении надо повернуть вектор u так, чтобы ero направле-
ние совпало с направлением вектора У. Этот уrол изменяется
от О до 2п. Если u
единичный вектор какой-либо оси, то уrол
от вектора u до вектора V называется У2ЛО.м наклона или просто
наклоном вектора v к данной оси.
Пусть в плоскости дана прямоуrольная система к<,ординат.
Для yr ла наклона а вектора v == {
, 1l} к оси абсцисс имеем,
очевидно,
6 · т}
COS а == iVI' SlП а == IVl.
Если векторы U 1 и U 2 наклонены к оси абсцисс соответстоенно
под уr.пами CX 1 и а 2 . то уrол <р от вектора U 1 до вектора U 2 есть,
очевидно.
<р == а 2 ....... аl'
Пусть U 1 == {X 1t Yl}' U 2 == {х 2 , У2}' Тоrда
. . ( ) . · хlу2....... Х2Уl
SlЛ <р :; SIП а 2
Cl 1 === Sln а 2 cos аl ....... cos а 2 SlП а 1 == I I I I t
U 1 · и в
COS ер == COS (а 2 ....... ( 1 ) == cos а 2 cos СХ 1 + sin а 2 sin CX 1 ==
....... XIXZ + иlу2 ....... (Ul' [' 2 )
....... j u 1 I · I U2 I ....... r u 1 I · J U j I ·
10. Полярная система координат на плоскости. Для определе-
ния системы полярных координат на плоскости надо задать:
]0 Масштаб (т. е. единицу измерения длины).
20 Направление вращения в плоскости) считаемое положи-
тельным.
30 Точку О (называеМУIО «началом» или полюсом системы коор-
динат).
40 Полупрямую Ох, исходящую из точки О (рис. 29) (эта
полупрямая называется полярной осью). Положительное направ-
ление на полупрямой задается вектором ОБ (аде Е
любая ее
точка} отличная от точки О).
Если, таким образом, выбрана полярная система координат,
то дЛЯ каждой точки М (рис. 30) плоскости определеНbl ее
полярные координаты, а именно:
J) уrол наклона q> вектора ОМ к полярной оси (Т. е. уrол
ОТ вектора ОБ дО вектора ОМ );
2) расстояние , точки М от начала О (т. е. длина вектора
ОМ).
Уrол q> наЗblвается полярным У2ЛО.м. точки М или первой поляр-
ной координатой этой точки. Полярный уrол определен для всех
точек М плоскости (и заключен между О и 2п), за единственным
38 ПРОСТЕИШИЕ ПОНЯТИЯ АНАЛИТИЧЕСКОй rЕОМЕТРИИ
исключением точки О, дЛЯ которой он делается неопределенным.
Число , называется полярным радиусом или второй полярной
координатой точки М. Полярный радиус любой точки М, отлич-
ной от О, положителен; для точки О он равен НУЛIО.
Иноrда бывает целесообразно считать полярный уrол точки
определенным лишь с точностью до слаrаемых вида 2k1t, rде
k
любое целое число, т. е. считать наряду с данным <р и всякое
число <р + 2kл: за значение лолярноrо уrла: если дано произ-
вольное положительное r и произвольное не оrраниченное никаким
ДОПО.пнительным УС
10вием действительное ЧИС.;10 <р, то) взяв
М{Jсштао
а l
Масштаб
I .
м
+ п
2
О Е .х ......
Е х
Рис. 29. Рис. 30.
на полярной оси вектор 0"11 ДЛИНЫ , И повернув ero в положи..
тельном направлении BOKpyr точки О на уrол <р, получим вектор
О М, конец KOToporo будет иметь полярные координаты <р и '.
ТОЧI<У М, полярные координаты которой равны данным <р и "
будем обозначать так: М == (<р, ().
Если на плоскости дана полярная система координат, то этим
vпределена и некоторая лрямоуrольная система координат: за мас-
штаб и начало координат в этой прямоуrольной системе берем
масштаб и начало полярной системы; полярную полуось объявляем:
положительной полуосью абсцисс. Таким образом определена ось
абсцисс (вместе с ее направ.пением). Так как в определение поляр-
ной системы входит и направление положительноrо вращения
плоскости, то мы можем определить ось ординат как ту ось,
u б
в которую переидет ось а сцисс при повороте ее на уrол 2"
в положительном направлении.
Полученную таким образом прямоуrольную систему координат
будем называть cucme,wou 1 определенной данной полярной системой
(рис. 31).
КООРДИНАТЫ НА ПЛОСКОСТИ И В ПРОСТРАНСТВЕ
39
Обратно, если дана какая
нибудь прямоуrольная система коор-
динат, то однозначно определяем полярную систему, сохраняя
в ней масштаб и начало данной прямоуrольной системы и тре-
буя, чтобы полярная полуось совпадала с положительной полуосью
абсцисс, а положительное направление вращения было тем враще-
нием, которое переводит ось абсцисс в ось ординат поворотом
На уrол
. Очевидно, если мы лля полученной таким образом
полярной системы координат построим определенную ею прямо-
уrольную, ТО вернемся к ис-
ходной прямоуrольной си-
стеме.
Итак, каждой полярной
системе координаm соответ-
ствует вполне определенная
пРЯАtОУ20ЛЬНая система, и
обратно.
Посмотрим, как связаны
между собой координаты х,
у и (}), , какой-нибудь точ-
ки М плоскости в обеих си-
стемах.
Имеем очевидные формулы:
х == , c
s <р, } (16)
у == r SlП q>.
!I
МuсштtJо
I I
!I
...
х
о
Рис. 31.
Они позволяют перейти от
полярных координат точки М
к прямоуrольным. Но они же позволяют произвести и обратный
переход по формулам
,2 == х 2 + у2, 1
Х х
cos q> ===
=:: .
,. + V х 2 + у2 I
. у у
Sln <р ==
== .
r +Ух 2 +у2
(17)
11. Полярная система координат 8 пространстве. Для ее оп..
ределения необходимы следующие элементы (рис. 32):
10 Плоскость (называемая далее основной) с выбранной в ней
полярной системой координат: начало О, полярная полуось Ох
(с положительным направлением ОБ ), масштаб, принимаемый
в качестве единоrо масштаба для всех измерений отрезков во
всем пространстве.
40 ПРОСТЕИШИЕ ПОНЯТИЯ АНАЛИТИЧЕСКОй rЕОМЕТРИИ
20 Выбор на прямой OZ, перпендикулярной к основной пло-
скости, одноrо из двух ее ортов в качестве положительноrо (что
дает нам на этой прямой систему координат с началом О).
Основная плоскость разбивает пространство на два полупро
.,
странства; то из них, которое содержит положительныи орт пря-
tОЙ Oz, считаем положительным.
Теперь для каждой точки М пространства (не лежащей на
прямой Oz) определяются ее координаты в данной системе поляр
ных координат, а именно:
а) полярныЙ радиус р точки М, т. е. длина вектора I ОМ 1;
имеем всеrда р
о; только для точки М == О имеем р == о;
и
z
Масштаб
,
х
Рис. 32.
б) дол(
оmа <р точки М
это полярный уrол ортоrональной
проекпии Лt10 точки NI на основную плоскость относительно дaH
ной в этой плоскости полярной системы координат; долrота изме
няется в пределах О
<р < 2п;
в) широта 11' точки м
это уrол между вектором Ol
и ero
лроеl{цией ОМ О на основную плоскость, считаемый положительным,
Jt
О
'ф
2" ' для точек М положительноrо ло.лупространства и
отрицательным,
;
11'
о, дЛЯ точек отриuательноrо полу-
пространства.
Та же полярная система координат в пространстве позволяет
ДЛЯ каждой точки 1\-1 пространства определить и так назы
ваемые цилиндрические координа",ы ее, а именно: полярные KOOp
динаты <р, , (в основной плоскости) точки Мо (проекции точки М
на основную плоскость) и аппликату, или высоту точки Лr! над
основной плоскостью, Т. е. координату точки М 1 (ортоrональной
ПРЯМАЯ ЛИНИЯ В ПЛОСКОСТИ
41
проекции точки М на ось Oz) относительно системы координат,
данной на этой прямой (рис. 33).
Полярная система координат в пространстве определяет пря-
моуrольную систему t состоящую из прямоуrольной системы Оху,
порожденной в основной плоскости заданной в ней полярной
системой, и оси Oz.
z
#tlсштоо
,
Е
Без труда устанавливаются следующие соотношения, связы-
вающие полярные координаты р, " 'Ф и прямоуrольные коорди-
наты х, у, z в пространстве:
х == р cos 'Ф cos <р,
у == р COS 'Ф sin «р,
z == р sin ,р.
Эти формулы позволяют выразить х, у, 2 через р, 'Р, 'Ф, и об-
ратно.
Что касается соотношений между цилиндрическими и прямо-
уrольными координатами точки NI, то аппликата z в обеих -этих
системах ОДНа и та же, а связь между q> и , uилиндрической
системы и х, у прямоуrольной дается уже известными нам фор-
мулами
х== r cos
.
у == r sin <р.
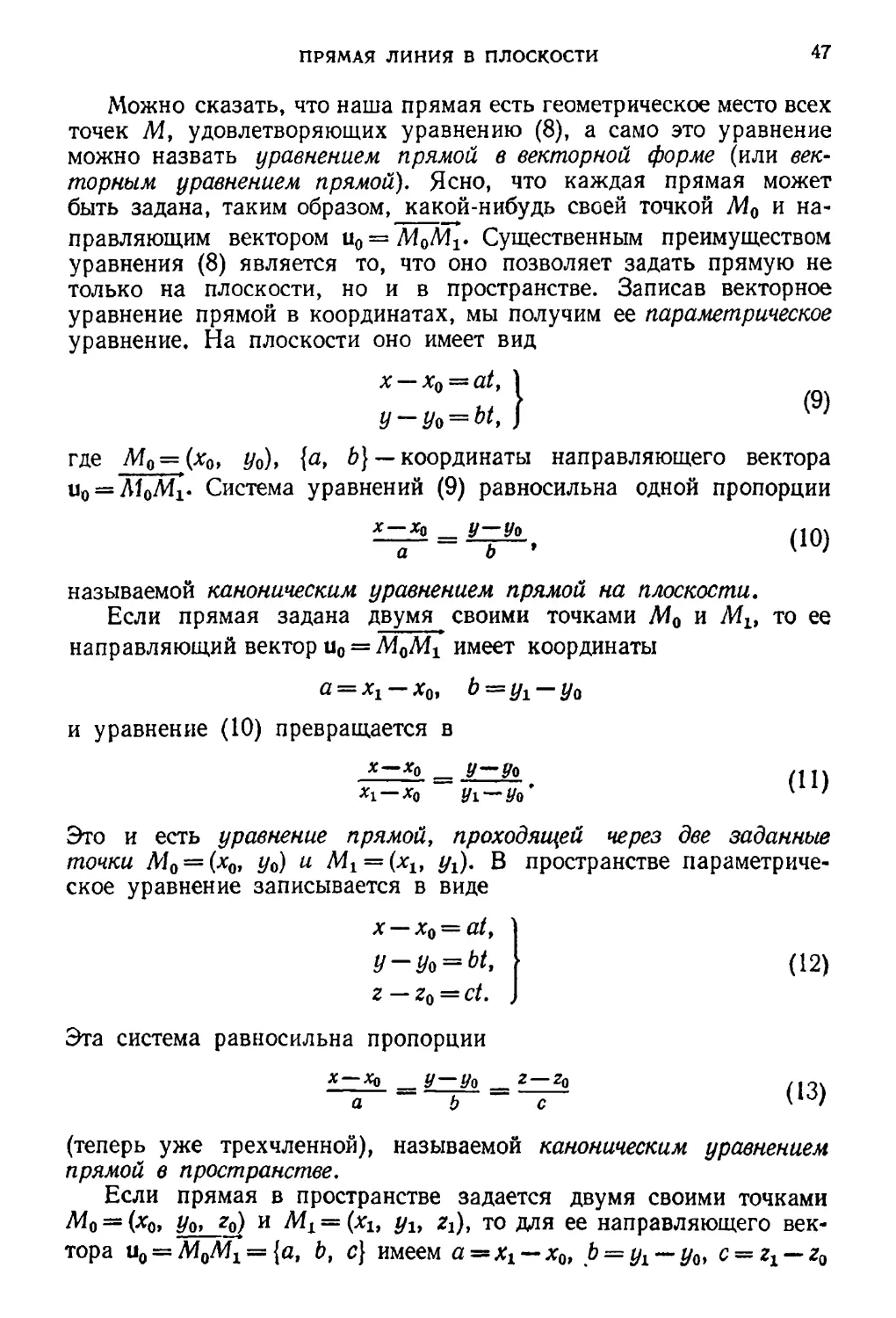
5. Прямая линия в плоскости
1. Уравнение прямой. Определение. Всякий lIенулевой
вектор, коллинеарный данной ПРЯМОЙ 1 называется ее направля-
юu,им веt(mоро
и.
42 ПРОСТЕйШИЕ ПОНЯТИ5I АНАЛИТИЧЕСI(Ой rЕОМЕТРИИ
Так как всякие два направляющих вектора U 1 . U 2 ОДНОЙ И той
же прямой коллинеарны между собой) то один ИЗ них получается
из друrоrо умножением на некоторое число =1= О..
Предположим, что в данной плоскости раз навсеrда выбрана
некоторая аффинная система координат.
Рассматриваем сначала случай прямой d, параллельной ОДНОЙ
из координатных осей. Если прямая d параллельна оси ординат,
то ее направ,пяющими векторами являются все векторы вида
{О, 'r}} и только они (здесь 1')
про..
извольное число =1= О). Точно так же
ненулевые векторы вида {s, О} Jf
только эти векторы являются направ-
ляющими векторами любой прямой,
параллельной оси абсцисс.
Пусть прямая d параллельна оси
ординат и пересекает ось абсцисс в
точке А == (а, О) (рис. 34). Тоrда все
векторы ОМ, rде М..... произвольная
точка прямой, при лроектировании
на ось абсцисс (вдоль оси ординат)
переходят в один и тот же вектор
О А; дЛЯ всех точек М нашей пря..
мой (и только для них) имеем
х == а.
:с
Рис. 34.
Это и есть уравнение прямой, лараллельной оси ординат. Анало-
rично прямая. параллельная оси абсuисс, имеет уравнение
у == Ь.
При этом лараллельностъ лонимается в широком смысле
сама
ось ординат имеет уравнение Х:;: О, а ось абсцисс и == о.
Имеет место следующее простое предложение:
Для всех наnравЛЯ10ЩUХ векторов u == {х, у} данной прямой,
не nараллельн,ой оси ордИн'ат
отношение у: х ординаты вектора
к е20 абсциссе uMeerп одно u то же постоянное значение k, назы-
ваемое уzловым КQэффuцuенmОlft данной nРЯМ,Ой.
В самом деле) если и 1 === {хн Уl} И О 2 ;::: {х 2 . у2}...... два направ-
ляющих вектора данной прямой d, то U 2 == ЛU 1 , т. е. одновременно
Х 2 :::::::: ЛХ 1 . и2 === ЛУt,
И, значит (так как Х 1
О, Х2 =1= О),
и2 = Х 2
Уl : x 1 '
НаЙдем теперь уравненпе прямой d, не параллельной оси
ординат. Обозначим уrловой коэффициент прямой d через k,
а точку ее пересечения е осью 011 через Q с::: (О, Ь) (рис, 35).
ПРЯМАЯ ЛИНИЯ В ПЛОСКОСТИ
43
Если М::::: (х, у)
произвольная точка прямой d, отличная от
точки Q, то вектор Qлi == {х, у...... Ь} есть направляющий вектор
прямой d и, следовательно,
y
b ==k.
х
Друrими словами, все точки М == (х, у) прямой d удовлетво-
ряют уравнению
у == kx + Ь. ( 1 )
Обратно, всякая точка М 1 == (X 1 , Уl)' удовлетворяющая урав-
нению (1), лежит на прямой d: в самом деле, существует един-
ственная точка М' с абсцис...
сой X t , лежащая на прямой d,
и эта точка, имея ту же абс-
циссу Xl, что И точка Ml'
удовлетворяет уравнению (1)
и, значит, имеет ординату
Yl ==kx 1 +Ь
ту же, что и
точка M 1 . Значит, М'==М 1 ,
т. е. точка M 1 лежит на пря..
мой d.
Итак, уравнению (1) удов-
летворяют все точки прямой х
d и только они, а это и
значит, что уравнение (1)
есть уравнение прямой d.
Пусть мы каким бы то
ни было способом нашли Рис. 35.
уравнение вида (1), которому
удовлетворяют все точки данной прямой d и только они. До-
кажем, что тоrда непременно Ь есть ордината Q пересечения d
с осью ординат, а k есть yr ловой коэффициент этой прямой.
Первое утверждение очевидно: для нахождения точки Q пере-
сечения прямой d с осью ординат надо в уравнение (1) подста-
вить х == О, получаем у == Ь, т. е. Q == (О, Ь). Далее, при любом
выборе отличной от Q точки м == (х, у) прямой d вектор ОМ ==
;::: {х, у
Ь} есть направляющий вектор этой прямой, и, следо-
вательно, у х Ь == k есть yr ловой коэффициент прямой d.
И так, существует единственное у равнение вида (1), являющееся
уравнениеА." данной прямой d (не параллельной оси ординат).
Это уравнение
первой степени; так как и прямая. параллельная
оси ординат, определяется уравнением первой степени х с:: а. то
мы доказали, что всякая прямая на плоскости определяется не-
которым уравнением первой степени, связывающим координаты ее
точек.
44 ПРОСТЕАШИЕ ПОНЯТИЯ АНАЛИТИЧЕСКОй rЕОМЕТРИИ
Верно и обратное утверждение: каждое уравнение первой сте-
пени относительно х и у
Ах+Ву+С==О (2)
., .,
является уравнением нек.оmороu прям.оu.
Д о к а 3 а те л ь с т в О. Возможны два случая: В == О и В ,*0.
Рассмотрим первый случай: В == о. Тоrда уравнение (2) имеет вид
Ах + с == О (2)
и А =1= О (иначе не было бы уравнения. а было бы верное или
неверное тождество С:::; О); следовательно,
С
X==
A'
т. е. уравнение (2) является уравнением не которой прямой, парал-
лельной оси ординат. Переходим КО второму случаю: В =F о.
Тоrда уравнение (2) переписывается в виде
А С
У с:::
B
х
в
и опре11.еляет прямую d, пересекающуlО ось ординат в точке Q ==
== (о,
; ) и имеющую уrловой коэффициент k ==
. что и
тре60валось доказать.
А
3 а м е ч а н и е. Так как k ==
B
' то вектор
"o=={
B. А}
есть направляющий вектор прямой (2). Это утверждение верно и
при В:::; О (т. е. для прямых. параллельных оси ординат). Отсюда
следует, что направляющими векторами прямой d, определенной
уравнением (2), являются все векторы
u=={s. '1},
rде
== .......... 'АВ, 11 == лА (при каком
нибу дь л =j:. О). Очевидно, эти
векторы удовлетворяют уравнению
As + 811 == о.
Обратно. если вектор u == {s. '1} удовлетворяет этому уравнению,
то
: '1 ==
в : А) т. е. U есть направляющий вектор прямой d;
CJlучай прямой, параллельной оси ординат исключением не ЯВ-
ляется. Друrими словами: все векп10РЫ u == {s. 11}, (Jдовлетворя
ющие урсюненuю
As + 811 == О.
и только они КОЛАuнеарНЫ прямой/ определенной уравнением (2).
ПРЯМАЯ ЛИНИЯ В ПЛОСКОСТИ
45
2. Расположение двух прямых на плоскости. Пусть теперь
даны два уравнения:
Ах+Ву+С==О,
А'х+В'у+С' ==0.
(2)
(2')
Посмотрим, коrда прямые d и d', определяемые этими уравне-
ниями, лараЛ.1Jельны в широком смысле, коrда они совпадают,
коrда параллельны в собственном смысле (т. е. не имеют ни одной
общей точки).
Ответ на первый вопрос получается сразу: прямые d и d'
тоrда и только тоrда параллельны в широком смысле, коrда их
направляющие векторы uo=={
B, А} и u
=={
B', А'} колли-
неарны, т. е. коrда имеет место пропорция (
B):A==(
B'):A'
а следовательно, и пропорция
А I : В' === А : В. (3)
Если эта пропорция может быть продолжена до пропорции
А I : В' : С' ;::: А : В : С, (4)
то прямые d и d' совпадают: в этом случае все коэффиниенты
одноrо из двух уравнений (2), (2') получаются из коэффициентов
друrоrо умножением на некоторое л и, значит, уравнения (2) и
(2') эквивалентны (всякая точка М == (х, у), удовлетворяющая од..
ному уравнению, удовлетворяет и друrому).
Обратно, если две прямые d и d' совпадают, то имеет место
пропорция (4).
Докажем это сначала в случае, коrда наши прямые парал-
лельны оси ординат. Тоrда В == В' == О, и нам нужно доказать
только равенство С': А' == С : А. Но последнее равенство (в кото-
ром А' =#= О, А * О) вытекает из Toro, что обе (совпадающие) пря-
мые пересекают ось абсцисс в одной и той же точке с абсциссой
С' С
A'==
A.
Пусть теперь совпадающие прямые d, d' не параллельны оси
ординат. Тоrда они пересекают ее в одной и той же точке с ор-
С' С
динатой
В' ==
в' и мы имеем пропорцию В': С' == В : С, ко..
торая вместе с пропорцией (3) (выражающей параллельность пря-
мых d и d' в широком смысле) и дает нам искомую пропор...
цию (4).
Параллельность в собственном смысле означает, что имеет
место параллельность в широком смысле (Т. е. выполнено усло-
вие (3»), но нет совпадения (т. е. не выполнено (4». Это озна-
чает, что пропорция
А' : В' == А : В
(е)
46 ПРОСТЕPfШИЕ ПОНЯТИSl АНАЛИТИЧЕСI\Ой rЕОМЕТРИИ
имеет место, тоrда как
А' : В' : С' :;t= А : В : С.
(5)
Совокупность двух соотношений (3) и (5) обычно записывают
в виде ОДНОЙ формулы
А В С
А' == В' * с' ·
(6)
Подведем итоr всему доказанному:
т е о р е м а 5. Всякая прямая d на плоскости, снабженной аф...
финной системой координат, определяется некоторым уравнением
первой степени между координатами ее точек. Обратно# всякое
уравнение первой степени
Ах+Ву+С==О (2)
является уравнением некоmорой (единственной) прямой d; при
этом все векторы U == {
, ll}, коллинеарные этой прямой, и только
они удовлетворяют однородному уравнению
As + 811 == О, (7)
та1\, что# в частности, вектор ио == {
B, А} R8ляется направля-
ющим вектором нашей прямой. Два уравнения
Ах+Ву+С== О, (2)
А'х+В'у+С' ==0 (2')
mО2да и толыw mozaa определяют одну и ту же прям.ую, кozaa
А' : В' : С' == А : В : С. ( 4)
Пропорция
А' : В' == А : В
(3)
выражает условие, необходимое u достаточное, чтобы уравнения
(2) и (2') определяли прямые, параллельньre в широком с.мblсле
Для параллельностu в собственном смысле необходuмыlM и до-
статочным является требование, чтобы 8ЫnОЛНЯЛОСЬ условие (3)
без выполнения условия (4), Ч"lО записывается и в виде (6).
Пусть дана какая-нибудь точка МО и вектор Uo =1= О, который
считаем приложенным к точке J\.-1 0 :
............... .........
Uo == МОМ!.
Эти данные определяют прямую d как rеометрическое место кон-
цов всевозможных векторов вида
МоМ ::::: t · МОМ! (8)
rде t пр обеrает все вещественные числовые значения. Вектор u o ==
:;; MoM
, очевидно, является направляющим вектором прямой d.
ПРЯМАЯ ЛИНИЯ В ПЛОСКОСТИ
47
\ОЖНО сказать, что наша прямая есть rеометрическое место всех
точек М, удовлетворяющих уравнению (8), а само это уравнение
можно назвать уравнением прямой в векторной форме (или век-
торным уравнением прямой). ЯСНО, что каждая прямая может
быть задана, таким образом, какой
нибудь своей точкой
o и на.
....
правляющим вектором и о :::::: МОМl. Существенным преимуществом
уравнения (8) является то, что оно позволяет задать прямую не
только на плоскости, но и в пространстве. Записав векторное
уравнение прямой в координатах, мы получим ее парам.еmрuческое
уравнение. На плоскости оно имеет вид
х
Хо == at, } (9)
y
yo===bt,
rде Мо == (х о , Уо), {а, Ь}...... координаты направляющеrо вектора
,
Uo == Л1 0 М!- Система уравнений (9) равносильна ОДНОЙ пропорции
x
xo
Y
Yo
а
Ь '
(10)
u
называемои каноническим уравнением прямоu на плоскости.
Если прямая задана д вумя своими точками Мо и Ml' то ее
направляющий вектор и о == Mo M
имеет координаты
а == Х 1 ..... Хо, Ь == У! ..... УО
и уравнение (10) превращается в
х..... ХО
у.... УО
Xl
Ха
Yl....... Уо ·
(11)
Это и есть уравнение прямой, проходящей через две заданные
точкu N10 == (хо, Уо) u М 1 == (х 1 , Yl)' В пространстве параметриче..
ское уравнение записывается в виде
х
Хо == at, )
y
yo==Ы,
z
Zo == ct.
a система равносильна пропорции
(12)
X
Xo
y
Уо ...... 2
Zo
а ....... Ь
( 13)
(теперь уже трехчленной), называемой канонuческим уравнением
прямой в пространстве.
Если прямая в пространстве задается двумя своими точками
Мо == (Ха, Уо, Zo) и М 1 == (Хl, Уl, 21)' то для ее направляющеrо век-
тора и о == MoM
== {а, Ь, с} имеем а == Хl ..... Хо, .Ь == 111 ..... Уа, с == Zl ...... ZQ
48 ЛРОСТЕRШИЕ ПОНЯТИЯ АНАЛИТИЧЕСКОй rЕОМЕТРИИ
и пропорция (13) превращается в ПРОПОРЦИЮ
x
xo Y
Yo z
zo
== == ,
Хl
Xo Yl
Yo Zl
zo
(14)
которая и определяет прямую (в пространстве), проходящую через
две заданные точки.
3. Две полуплоскости, определяемые данной прямой на ПJlО-
скости. Пусть на плоскости дана прямая d своим уравнением
Ах+Ву+С==О.
(15)
Для всех точек М == (х, у) этой прямой и только для этих точек
трехчлен
F (х, у) == Ах+Ву+С
обращается в нуль; если же точка М == (х, у) не лежит на прямой
(15), то для нее либо F (х, у) > О, либо F (х, у) < О. Мы rоворим,
что прямая (15) разбивает плоскость на дtЗe полуплоскости; одна
из этих полуплоскостей определяется как множество всех точек
М == (х, у), для которых F (х, у) > О, а друrая
как множество
всех тех точек М == (х, у), для которых F (х, У) < о; первая полу-
плоскость называется положительной по отношению к данному
уравнению (15) нашей прямой, а вторая
отрицательной.
Если ту же прямую d задать каким
либо друrим уравнением
А'х+В'у+С' ==0,
(15')
1'0 имеется такое число. Л, что А' == лА, В' == Л-В, С' == Л-С, так
что, обозначая левую часть уравнения (15') через F'(x, У), имеем
Е'(х, у) == 'АР (х, у). Отсюда сразу следует, что при л> о положи;;.
тельная и отрицательная ПОЛУПЛОСКОСТИ дЛЯ уравнения (15) сов..
падают с положительной и отрицательной полуплоскостями отно-
сительно уравнения (15'), а при 'А<О эти полуплоскости меняются
местами: положительная лолуплоскость относительно уравнения
(15) делается отриц?тельной для уравнения (15'), и наоборот. 1--10
Всеrда две точки, принадлежащие к одной или разным полуплос..
костям относительно одноrо из двух уравнений (15). (15'), сохра..
няют это свойство и при переходе к друrому уравнению.
Имеет место следующая
т е о р е м а 6. Если точки Мо == (хо, Уо) и М 1 == (х 1 , YJ) лежат
в ра зных полуnлоскоспlЯХ, определенных прямой (15), то отрезок;
М оМl пepeceKaenz Эfпу прямую в некоторой точке М' (рис. 36, а);
если же точки Мо и М 1 леJlсаm 8 одной и той же полу плоскости ,
то 8 этой же nолупЛОСКОС"lU лежит и весь отрезок Nl o Ml (рис. 36, б).
Д о к а з а т е л ь с т в о. Пусть точки Мо и М 1 лежат в разных
полуплоскостях. Напишем уравнение прямой, проходящей через
ПРЯМАЯ ЛИНИЯ В ПЛОСКОСТИ
49
точки Мо и Ml' В параметрической форме:
х === Ха + at,
У==Уо+Ы,
rIle за направляющий вектор U o :::::: {а, Ь} взят вектор MoMt, так
что а == Х 1
ХО, Ь == Yl
Уо. Поэтому те и только 'Х'е точки М == (х, у)
нашей прямой пр инадле- l/
жат отрезку МоМ! этой .
прямой, для которых О
t
1. Посмотрим, какие
значения принимает трех-
член F (х, у), коrда точка
М == (х, У) пробеrает HaJIIY
прямую. Для этоrо подС'та.. (с
вим В трехчлен F (х, У) зна-
чения Х и у из равенств
х == Ха + at,
у==уо+ы.
Получаем
Р(х, у)==(Ахо+Вуо+С)+
+(Aa+Bb)t. о)
Обозначая константы Ахо+
+Вуо'+С и Аа+ВЬ СООТ-
ветственно через Jl и л"
видим, что трехчлен F (х,у)
превратился в линейную
функцию от переменноrо t:
F (х, у) == лt + !--t.
При t == О уравнения пря-
мой дают нам координаты
Хо, Уо точки Мо, а при t == 1
(напомним, что а == Х 1
Хо, Ь == Yl
Уо)
I{ООРДИ-
наты X l , У! точки M 1 . Так
как по предположению числа F (хо, уо) и F (X 1 , Yl) раэноrо
знака, то и значения линейной функции ').J + f.t при t == О и t == 1
имеют разные знаки, а тоrда для HeKOToporo промежуточ-
Horo значения t', 0< t' < 1, которому соответствует точка М'
== (х', у') отрезка МОМ1 ' функция лt+f.t И, значит. трехчлен
F (х, у) обратятся в ну ль. Тоrда точка М' является точкой пере-
сечения отрезка МоМ! и прямой (15)
первое утверждение тео-
ремы доказано.
:;с
о)
Рис. 36.
50 ПРОСТЕАШИЕ ПОНЯТИЯ АНАЛИТИЧЕСКОЯ rЕОМЕТРИИ
Доказываем второе утверждение. Помня, что а == Хl ......... Хо, Ь ==
== Уl
уо, представляем F (х, у) в виде
Р(х, у)==(Ахо+Вуо+С)+[А (Х 1
xo)+B(Yl
yo)]t,
т. е.
F (х, У) == (1
t) Р (Ха, уо) + ,р (Х 1 , Уl).
Если 0< t < 1, то числа как t, так и 1
t положительны, по-
этому если F (Ха, Уо) и F (X 1 , Yl) одноrо знака, то число F (х, у)
=== (1
t) F (хо, уо) +tP (Xl' Уl) будет иметь тот же знак , что и оба
числа Р (х о , Уо) и F (хl' У})
любая точка М отрезка M o J\t1 1 при-
надлежит той же полуплос-
g кости, что и обе точки Мо
и М.8 Теорема 6 полностью
доказана.
4. Прямая на плоскости
.-
в прямоуrольнои системе ко-
ординат. Нормальное урав..
нение прямой на плоскости.
До сих пор предполаrалось,
что на плоскости дана про-
х извольная аффинная система
координат.
ПреДПОЛО}l{ИМ теперь, что
эта система координат прямо-
уrольная. Тоrда уравнению
всякой прямой на плоскости
может быть придан так назы-
ваемый нормальный вид.
Рассмотрим орт е, перпен-
дикулярный к нашей пря-
мой d, причем если прямая d
Рис. 37. проходит через начало КООР"
динат, то понимаем под е про-
изво-пьный из двух взаимно противоположных ортов, перпен-
дикулярных к п
ямоА d, а если эта прямая не проходит
через начало координат, то обозначаем через е тот из этих
двух ортов, который направлен от начала координат О к прямой
(рис. 37). Отсюда следует, что на оси, несущей BeI{TOp ON (или,
что то же, орт е), имеем
(ON) == аз ПРе ON == р
О, (16)
rде р есть расстояние от начала координат до прямой d. Обозна-
чая координаты орта е через
и t}, и Meel\1
== cos а) 11 == sin а,
rде а...... уrол наклона орта е к оси абсцисс. Итак,
е == {cos а, sin а}.
ПРЯМАЯ ЛИНИЯ В ПЛОСКОСТИ
51
Пусть М:= (х, у)....... какая-нибудь точка плоскости. В том и
только в том случае, коrда точка М лежит на прямой d, ее (орто-
rональная) проекция на прямую ON совпадает с точкой N t а про-
екция вектора ОМ совпадает с вектором ON . Следовательно. для
всех точек М == (х. у) прямой d и только ДЛЯ этих точек выпол"
нено условие
8З ПРе ом == р. (17)
Так как ом -=r {х. у} И е с= {cos (t, sin а}. то
8З "Ре ОМ == х cos а+ у sin а,
так что условие (17) переписывается в виде уравнения
х cos а+ у sin а....... р === о. (18)
Это уравнение и называется нормальным уравнением прямой d.
Пусть теперь дано какое-нибудь уравнение
Ах+Ви+С==О
(19)
нашей прямой d.
Так как уравнения (18) и (19) являются уравнениями одной
и той же прямой в одной и той же системе координат, то суще-
ствует такое число Л, что коэффициенты уравнения (18) полу-
чаются из коэффициентов уравнения (4) умножением на л:
C
S а == Ал, }
Sln а == Вл,
р == Сл.
Последнее из уравнений (20) (в случае С =1= О) позволяет сразу
определить знак л: так как р> О, то
Сл ==
р < О
и знак л, противоположен знаку с.
Для определения модуля числа л возводим каждое из двух
первых уравнений (20) в квадрат и складываем. Получаем
(А2 + В2) л 2 == cos 2 а + sin 2 а =: 1,
(20)
откуда
1
J л I ::::::: 6
]1 А2+В9
t
Числа л, модуль котОрОёО есть V t а знак противоположен
А2+В2
знаку С. называется нормирующим множителем уравнения (19):
при С == О эна1(, л .можно выбрать произвольно.
Умножая обе части уравнения (19) на нормирующий множи"
тель Л, мы превращаем это уравнение в нормальное уравнение (18)
той же прямой.
52 ПРОСТЕЯШИЕ ПОНЯТИЯ АНАЛИТИЧЕСКОй rЕОМЕТРИИ
3 аметим, что вектор {А, В} == n всееда nерnендuкулярен к пря-
мой (19). Это вытекает из Toro, что векторы е и п=== {А, В} кол-
линеарны, а вектор е перпендикулярен к прямой d, определяемой
уравнением (19).
5. Расстояние от точки до прямой (на плоскости). ПОД рас..
стоянием от точки Мо плоскости до прямой d, лежащей в этой
плоскости, понимается длина перпендикуляра, опущенноrо из
точки Мо на прямую d.
Т е о р е м а 7. Пусть 8 плоскости, снабженной nря.моу20АЬНОЙ
сuсте.МОЙ координат, задана прямая d своим нормальным уравне-
нием
xcosa+ysina
p==O. (21)
Tozaa расстояние р (МО, d) nрОUЗ80АЬНОЙ точки Мо == (х о , уо) Ofn
прямой d равно числу
1 хо cos а + Уа s i n а
р 1.
Д о к а 3 а т е л ь с т в о. Через точку Мо проведем прямую d',
параллеЛЬНУIО прямой d, и рассмотрим ось, несущую приложен-
ный к началу координат орт е == {cos а, sin а}; эта ось перпенди-
кулярна к обеим прямым d и d' и пересекает их соответственно
в точках N и N'. Длина вектора N JJi, равная модулю ero ал..
rебраическоrо значения (N N') на определенной выше оси, и есть
искомое расстояние р (Мо, d) между точкой Мо и прямой
р (М о , d) == I (N N')'.
Имеем на той же оси
т. е.
(ON') == (ON) + (NN'),
(N N') == (ON')...... (ON),
rде
............
(ON') == аз ПРе ОМО == ХО cos а + Уо sin а,
(ON) == р.
Следовательно,
(N N') == хо cos а+ Уо sin а........ р,
р (М О , d) == I (N N') I == I хо cos а + уо sin а...... р 1,
что и требовалось доказать.
Если прямая d задана своим общим уравнением
Ах+Ву+С==О,
то для определения ее расстояния от точки Мо == (хо, Уо) надо
сначала привести уравнение прямой к нормальному ВИДУ, т. е.
1
умножить обе ero части на у . в результате получается
A
+B2
ПРЯМАЯ ЛИНИЯ В ПЛОСКОСТИ
53
формула
( М d) ==, ' Ахо+Вуо+С 1 .
р О, V A2+Bs
6. Уrлы, образуемыедвумя прямыми на плоскости. 3'2ЛОАt между
двумя пряМ,ыМ,u на плоскости называется уrол между любым на-
правляющим вектором одной
и люБЬ1М направляющим векто-
ром друrой прямой (рис. 38).
Очевидно, это определе
ние дает нам не ОДИН, а два
yr ла, дополняющих друr
друrа до п, т. е. оба смеж- d z
ных уrла, образуемых двумя
пересекающимися прямыми.
Предположим, что наши
прямые d 1 и d 2 даны их урав-
нениями (в прямоуrольной
системе координат)
Akx+Bky+C==O,
k == 1, 2. (I t 11) Рис. 38.
Тоrда в качестве направляющих векторов этих прямых мы можем
взять, например, векторы
U 1 == {
BH А)}. U 2 == {
82. А 2 }. (22)
Уrол q> между векторами U 1 и U 2 дается косинусом:
АIА2+ВIВ2
cos Q)
(+ у Ai+B
) (+ у A
+B
).
Если А 1 А 2 + 8182> О, то мы получаем по этой формуле ост-
рый уrол меж1.У прямыми d. и d 2 .
Если 41A2+BIB2<O
TO тупой.
Равенство
А 1 А, + В.В2:=::: О
(23)
выражает необходимое и достаточное условие для 1lерnен'дuкуляр-
насти прямых d 1 и d 2 t
Если на плоскости выбрано положительное направление вра-
щения, то можно rоворить об уrле от первой прямой до второй,
понимая ПОД этим снова уrол от любоrо напраВЛЯlощеrо вектора
первой до любоrо направляющеrо вектора второй прямой (рис. 39).
Так определенный уrол 61.2 определен с точностью до слаrаемых
вида k1t, rде k
целое.
Обозначая через а 1 , соответственно (Х 2 , уrол наклона к оси
абсцисс пюбоrо напраВЛЯlоU!еrо вектора соответственно первой и
54 ПРОСТЕйШИЕ ПОНЯТИЯ АНАЛИТИЧЕСКОй rЕОМЕfРИИ
второй прямой (Т. е. уrол от орта оси абсцисс до соответствую..
щеrо направляющеrо вектора), мы также получаем уrлы, опреде..
.ТIeHHыe с ТОЧНОСТЬЮ ДО слаrаемых вида kп. При этом все время
:J.;
Рис. 39.
ТО'-IНОСТЬЮ ДО слаrаемых вида kn имеем 61,2 == а 2
CXl, откуда
sin 61,2 == sin а 2 cos CX 1
COS а 2 sin Ct 1 , } (24)
cos 61, 2 == cos а 2 COS СХ 1 + s in СХ 2 sin а 1 .
Беря снова напраВЛЯЮLцие векторы
U 1 == {
B1' A 1 }, U2 == {
82' В 2 },
ПО"ТIучаем
А/
sin а, ==
V Al+B
)
BI
COS (1" ==
YAi+B1
(i==I,2)
И, подставляя эти значения в формулы (24), находим
. О A1B2
А 2 В 1
Sln
1, 2 V 2 2 Jf 2 2'
Аl +8j. A2+Bg (25)
в AIA2+BIB2
cos ==
1,2 YA
+B
'YA
+B
J
t AIB2
A2Bl 26
g б 1 , 2 == AIA2+B1B2 · ( )
плоскость и ПРЯМАЯ R ПРОСТРАНСТВЕ
55
Если один из векторов U 1 , U2 заменить на противоположный, то
изменится знак как у синуса уrла (вследствие изменения направ-
пения вращения на противоположное), так и у косинуса (полу-
чается уrол, смежный с рассмотренным): знак же TaHreHca уr.па
от nepBoro вектора до BToporo при такой замене не меняется.
Если прямые (1) и (11) даны своими уравнениями с уrловым
коэффициентом;
у == kjx +Ь/. j == 1, 2,
rде k 1 == tg Ct 1 ' k 2 == tg а 2 , то
t
t ( ) tga2
tga)
g Ul, 2 == g а 2 ....... аl == 1 + tg аl tg a
'
Т. е.
t в k2
kl
g 1, 2 == 1 + k 1 k 2 ·
(26')
Если прямые (1) и (11) взаимно перпендикулярны, ТО можно
n t 1
положить CXi == а 1 +"2 t значит, g а2 ==
ctg "1, т. е. k 2 ==
k 1 '
или
k 1 k 2 ==........1 (условuе перпен.дuкулярностu). (23')
Формулы (26) и (25) можно получить и пользуясь общими урав-
нениями прямых (1) и (11)....... подставляя в формулы (26) и (23')
значения уrловых коэффициентов
k Аl k А2
1 ==
В 1 ' а ==........ Bt ·
6. Плоскость и прямая в пространстве
t. Параметрическое и общее уравнения плоскости. Всякую
плоскость в пространстве можно задать, указав какую-нибудь ее
точку Мо == (хо, Уо, Zo) и
два произвольных прило-
женных к этой точке
неколлинеарных вектора
(рис. 40) u 1 =r {а 1 , b 1t C 1 } ==
== Mo
и U2 == {а 2 , Ь 2 , С2} ==
== ""10М 2. Рассмотрим МНО.
жество, состоящее из
всех векторов U, являю-
щихся линейными комби-
нациями векторов U 1 и U 2 ; Рис. 40.
прилаrая векторы u к
точке Мо. получим всевозможные закрепленные векторы вида
А10 М == SU 1 + tu 2 . (1)
56 ПРОСТЕYfШИЕ ПОНЯТИЯ АНАЛИТИЧЕСКОА rЕОМЕТРИИ
rде s и t
произвольные вещественные числа; концы М этих век-
торов U заполняют плоскость, проходящую через точку Мо и два
приложенных к ней вектора Ul и и 2 .
В координатной форме уравнение (1) переписывается так:
х
ХО == sa 1 + ta 2 , )
у
Уо == sb 1 + tb 2 ,
2
Zo == sc) +tc 2 .
Давая в этих уравнениях переменным s и t всевозможные число-
вые значения, получим все точки нашей плоскости и только ТОЧI<И
этой плоскости. Поэтому векторное уравнение (1) (или равносиль-
ная ему тройка числовых уравнений (1» называется пара.метри-
ческuм уравнением плоскости.
Уравнения (1) выражают линейную зависимость столбцов
матрицы
(1)
X
Xo аl 02
Y
Yo Ь 1 Ь 2 ,
Z
20 Сl С2
что в свою очередь эквивалентно равенству
X
XO
01
а2
Y
Yo
Ь.
b
z
zo
Сl == О
С2
(2)
или уравнению
А (х
Хо) +8 (у
уо) +с (z
20) == о,
(3)
rде
А == I ы1 Сl I ) в == I Cl 01 I ' с == I й1 Ь 1 1 .
Ь 2 С2 CI й t й2 Ь 2
(4)
Таким образом, уравнение (3) предстаВJlяет собоЙ необходимое и
достаточное условие, чтобы точка М == (Х, у, z) принадлежала пло..
скости, определяемой уравнением (1), т. е. уравнение (3) есть
уравнение плоскости, проходящей через точку Мо == (Х о , Уо, 20) и
через пару неколлинеарных векторов U 1 == {a 1 , b 1 , с 1 }, и 2 == {а 2. Ь 2 , С 2 }.
3 а д а ч з. Найти уравнение плоскости, проходя щей через три
данные неколлинеарные точки
Мо == (Х о , Уо, zo), М 1 == (Xl' Yl' 21), М 2 == (Х2' У2' 2?).
Искомая плоскость содержит точку Мо и неколлинеарные векторы
моМ; == {Х 1 ...... Х о , Уl ...... Уо, Zl...... 20} И моМ; == {Х 2 ...... Хо. 112
Уо,22
2о};
ее уравнение. следовательно, есть (2), т. е.
I х
ХО у
110 z....... Zo I
Хl
xo Уl
Yo 21
zo == О,
XI
Xo Y2
YO Z2
Zo
ПЛОСКОСТь и ПРЯМАЯ В ПРОСТРАНСТВЕ
57
что может быть переписано и в виде
х У z 1
ХО Уо Zo J ....... О
Хl Уl %1 1
·
Х2 У2 %, 1
Мы установили, что всякая плоскость есть множество всех
точек М == (х, у, z), являющихся решениями иекотороrо уравне-
ния первой степени с тремя неизвестными, а именно уравнения (3).
Верно и обратное утверждение: множество всех точек М == (х, у, z),
координаты которых удовлетворяют некоторому уравнению первой
степени, есть плоскость. Итоrом Bcero сказанноrо выше является
следующая теорема:
т е о р е м а 8. Всякая плоскость в пространстве, снабженном
аффинной системой координат, есть .множество всех точек, удов-
летворяющих некоторому линейному уравнению
A"x+By+Cz+D ==0.
(5)
Обратно, множество всех точе" М == (х, у, z), являющuхся реше-
ниями nроизвольноzо уравнения вида (5), есть плоскость.
Оп р е де л е н и е. Всякое уравнение (5), которому удовлетво-
ряют все точки данной плоскости, называется уравнением этой
плоскости.
2. Условие КОМПJlанарности вектора плоскости. Связь между
уравнением плоскости (5) и соответствующим однородным уравне-
нием
As+BfJ+Ct==O
(6)
дается следующим предложением:
т е о р е м а 9. Для тozo ч,тобы вектор u == {
, 1), t} был комп-
ланарен плоскости
Ax+8y+Cz+D==O,
необходимо u достаточно, чтобы было
А6 +81] +Ct ==0.
(5)
(6)
д о к а 3 а т е л ъ с т во. 1 о Пусть вектор u == {
, т), t} компланарен
плоскости (5). Берем какую-нибудь точку Мо == (х о , Уо, 20) этой
плоскости н прилаrаем к ней вектор u; получаем вектор с нача-
лом в Мо и концом М == (х о +
, Уо +11, Zo +
), лежащим в пло-
скости (5), значит,
AXo+Byo+Czo +D == О,
А (х о +6) +8 (Уо + fJ) +С (zo +t) +D ==0.
(50)
Вычитая, получаем
A
+Bl1 +C
== о.
(6)
58 ПРОСТЕЯШИЕ ПОНЯТИЯ АНАЛИТИЧЕСКаЯ rЕОМЕТРИИ
20 Пусть u == {
, 'fJ, ,} удовлетворяет уравнению (6). Прилаrая
вектор u к какой
нибудь точке Мо == (хо, Уа, Zo) плоскости (5), по..
пучим вектор МоМ , I{OHeu М ==(xo+
, Yo+fJ, zo+
) KOToporo
в силу (5) и (6) лежит в плоскости (5). Так как и начало Мо
этоrо вектора лежит в плоскости (5), то и весь вектор лежит
в этой плоскости. Теорема доказана.
С л е Д с т в и е. Прямая
X
Xo
Y
Yo
z
zo
а
Ь
(7)
тоеда и только тО2да параллельна (8 широкоAt смысле) плоскости
Ax+By+Cz+D ==0,
(5)
Kozaa
I Аа+вь+сс==о. 1
Если, кроме тО20, выполнено условие
Ахо +ВУо +Cz o +D == О,
(8)
(50)
то (и тольк.о 8 атом случае) прямая (7) лежит 8 плоскости.
В самом деле, условие (8) означает, что направляющий век..
тор {а, Ь, с} прямой (7) компланарен плоскости (5), а условие (50)
означает, что точка Мо == (Х о , Уо' zo) прямой (7) лежит в этой пло-
скости.
3. Взаимное расположение двух плоскостей. Если две плоскости
параллельны (в широком смысле), То всякий вектор, компланар-
ный одной из них, будет КQмпланарен и друrой плоскости. Две
параллельные в широком смысле плоскости имеют одно и то же
множество компланарных им векторов. Обратно, если у двух пло..
скостей 11;1 и 11;2 одно И то же мноrообразие компланарных им
векторов V, то они параллельны в широком смысле слова, если,
кроме Toro, эти плоскости различны, то они не имеют ни одной
общей точки (Т. е. параллельны в узком смысле слова): если бы
плоскости Л 1 И п 2 имели общую точку Мо, то, прилаrая к этой
точке все векторы мноrообразия V, мы бы получили все точки
каждой из плоскостей 1t 1 и 11;2 И эти плоскости были бы тождест-
венны.
Итак. две плоскости, определяемые соответственно уравне-
ниями
и
Ax+By+Cz+D==O
A'x+B'y+C'z+D' :=::0,
(9)
(9')
параллельны в широком смысле слова тоrда и только тоrдз, коrда
ОНИ определяют одно и то же мноrообразие компланарных им
плоскость и ПРЯМАЯ В ПРОСТРАНСТВЕ
59
векторов, Т. е. коrда уравнения
A
+Bll+C
==O
А'; + В' 11 + С'
== о
(10)
(! О')
11
имеют ОДНО И то }ке множество решений. А это, как мы видели,
сывает тоrда и только тоrда, коrда
I А' : А == В' : В == С' : С.
t
(11 )
Если, более Toro,
А' : А == В' : В == С' : С == D' : D,
(12)
ТО У равнен ия (9) и (9') раВНОСИ
lЬНЫ, определяемые ими плоско
сти совпадают. Обратно, если плоскости (9) и (9') совпадают, то
совпадают МI-Iоrообразия компланарных им векторов, т. е. выпол-
нено (11), и, следовательно,. при некотором л
А' == лА, В' == лВ, С' == 'Ас.
Дока}кем, что тоrда и D' ==. лD, т. е.. имеет место nропорция (12).
В самом деле, если Мо == (хо, Уо, 10)
каl{ая
нибудь точка СОВПа-
дающих между собоЙ плоскостей (9) и (9'), то имеем тождества
Ахо + ВУо + CZ o ==......... D, А I хо + В' уо + с' 10 ==........ D',
в которых А' ==лА, В' ==.лВ, С' ==.лС, а следовательно, и D' ==лD.
Утверждение доказано.
Итак, пропорция (12) является необходимым и достаточным
условием для совпадения плоскостей (9) и (9').
Наконец, параллельность плоскостей (9) и (9') в собственном
смысле означает, что имеет место параллельность в широком
смыс.пе, но нет совпадения плоскостей. Друrими словами, верна
пропорция (11), но неверна пропорция (12), а это значит) что
А' : А == В' : В == С' : С =1= D' : D. (13)
11ToroM всему ЯRляется
т е о р е ы а 10. Два уравнения первой степени (9) u (9')
Ах + Ву + Cz + D == О,
А'х+В'у +C'z+D' == О
тozaa u ,полько тоада определяют одну и ту же плоскость) коеда
8ыполнено условие
А' : А == В' : В == С' : С == D' : D. (12)
60 ПРОСТЕPfШИЕ ПОНЯТИSl АНАЛИТИЧЕСI\Ой rЕОМЕТРИИ
Уравнения (9) и (9') тО2да и толыш тО2да определяют две
плоскости, параллеЛЬНble в широком СМblсле слова, КО2да выполнено
условие (11).
HaкoHeц
эти уравнения тО2да u только то2да определяют две
плоскости, nараллеЛЬНЫЕ в собственном смысле, КО2да имеет
.место (13).
4. Прямая как пересечение двух плоскостей. Взаимное распо-
ложение двух прямых в пространстве. Пусть две плоскости, за-
данные уравнениями
Ax+By+Cz+D==O
(9)
A'x+B'y+C'z+D' :::;0, (9')
не параллельны, т. е. А: В : С =1= А' : В' 1 С'. Tor да по крайней
мере один из трех детерминантов
а == 1
, g, 1. ь == I g,
,I. с == '
,
.I
отличен от нуля, и уравнения (9) и (9') совместны; чтобы найти
их совместное решение, т. е. точку Мо == (х о , Уо, zo), принадле..
жащую обеим плоскостям (9) и (9'), достаточно в предположении,
что, например, с == '
.
,I *' О, взять произвольное значение Z == Zo
и решить по правилу Крамера систему уравнений
Ax+By==
D
Czo,
А' х + В' у ==
D' ....... С' zo.
Итак, пусть Мо == (х о , уо, zo) есть какая-нибудь точка, принадле-
>кащая обеим плоскостям (9) и (9'). Все остальные точки М,
общие двум нашим плоскостям, найдутся, если приложить к точ"
ке Мо всевозможные векторы
u == Мо М == {s, 11, t}.
лежащие одновременно как в одной, так и в друrой плоскости,
или, что то же самое, всевозможные векторы-решения системы
однородных уравнений
A6+B11+C
=:O, (10)
A's + В'11 +C'
== о.
Так как А: В : С =1= А' : В' : С', то все эти векторы коллинеарны
одному из них, например, вектору
uo == {а, Ь, с}.
Все общие точки наших двух плоскостей суть точки М, опреде..
ляемые векторным уравнением
МоМ == tu o ,
ПЛОСКОСТЬ И ПРЯМАЯ В ПРОСТРАНСТВЕ
61
они образуют прямую, проходящую через точку Мо и имеющую
вектор U o == {а, Ь, с} своим направляющим вектором. Каноническое
уравнение этой прямой есть
x
xo
Y
Yo
z
zo
а
Ь
с '
rде a t Ь, с заданы равенствами
а == I :'
,I, ь == I
,
, 1, с == l
, :' 1.
Две прямые
X
XO
Y
Yo
z
zo
а
Ь
с
(1)
и
, , ,
x
xo
Y
lJo
Z
Zo ( 1' )
а'
Ь'
с'
MorYT быть или не быть компланарными.
Положим
Мо == (Х о , Уо, 10)' M
== (x
, y
, Z
).
ДЛЯ компланарности прямых (1) и (1') необходимым и достаточ
ным условием является компланарность трех векторов
M
M
== {x
Хо, y
Уо, Z
zo},
U o === {а, Ь, с},
, { ' Ь ' , С , } ,
uo
a,
т. е. равенство
,
х о ...... ХО
а
а'
,
Yo
Yo
Ь
Ь'
Z
..... 20
С == О.
с'
Следовательно, прямые скрещиваются, т. е. не лежат в одной
плоскости тоrда н только тоrда, коrда последнее равенство не имеет
места.
Найдем уравнение плоскости, содержащей две компланарные
JJрямые (1) и (1'). Предположим сначала t что прямые (1) и (1')
пересекаются и что Мо == (хо, Уо, 10)
их точка пересечения. Тоrда
плоскость, в которой лежат обе наши прямые, есть плоскость,
лроходящая через точку Мо == (х о , Уо' zo) и два приложенных к ней
неколлинеарных вектора U o == {а, Ь, с} н Ц; == {а'. Ь', с'}. Урав-
нение этой плоскости имеет вид
X
Xo Y
Yo
а Ь
а' Ь'
z ..... 20
С
с'
O
I
(2')
оно и дает ответ на поставленный вопрос.
62 ПРОСТЕPfШИЕ ПОНЯТИSl АНАЛИТИЧЕСI\Ой rЕОМЕТРИИ
Пусть теперь прямые (1) и (1') параллельны. Тоrда векторы
U o и u; коллинеарны, следовательно, уравнение п,поскости (2') обра-
щается в тождество и ничеrо нам не дает. Чтобы определить урав-
нение плоскости, содержащей две данные паралле,пьные прямые
(1) и (1'), заметим, что эта плоскость содержит точку Мо ==
(Хо, Уо, zo) одной из наших прямых, ее напраВ.:1ЯIОЩИЙ Bel
TOp
U o == {а, Ь, с} и вектор MoM
== {x
Х о , y
Уо? Z
zo}.
Поэтому уравнение искомой плоскости есть
x
xo Y
Yo Z
Zo
x
xo Y
Yo z
zo == О.
а Ь с
5. О двух полупространствах, определяемых данной ПЛf)..
скостью. ЭтОТ вопрос совершенно аналоrичен вопросу о двух по-
луплоскостях, определяемых данной прямой на плоскости.
IlYCTb плоскость Л задана уравнением
F(x, у, z)=:Ax+By+Cz+Dc:O. (14)
Плоскость n разбивает пространство на два полупространства,
одно из которых состоит из всех точек М == (х, у, z), для кота..
рых F (х, у, z) > О, друrое
из всех точек М == (х, у, z), для КО..
торых F (х, у, z) < О. Первое полупространство называется поло-
жительным, второе ...... отрицательным по отношению к. даяному
уравнению (14) плоскости п. При переходе к какому-нибудь дру"
rOMY уравнению той же плоскости оба полупространства MorYT
или остаться неизменными, или поменяться местами: положитель-
ное полупространство для одноrо уравнения сделается отрица-
тельным для друrоrо. Первый или второй случай наступает в за...
висимости от знака Toro множителя, на который надо почленно
помножить одно уравнение, чтобы получить друrое.
Имеет место утверждение, аналоrичное теореме 6.
т е о р е м а 11. Если точки Мо == (х о , Уо, zo) и М 1 == (х 1, У1, Zl)
лежапl в р азныlx n олуnросmранствах, определяемых плоскостью (14),
то отрезок МОМ1 пересекает плоскость; если же точки Мо и M 1
лежат в одно.м и том же полупростра нстве , то в это.м, же nо-
луnросmрансmве лежит и весь отрезок МОМ1 (рис. 41).
Наrлядный смысл этой теоремы таков же, как в случае ана-
лоrичной теоремы о двух полуплоскостях, определяемых на пло-
скости данной прямой. Плоскость (14) не может быть параллельна
сразу всем трем координатным осям. Пусть, например, она не
параллельна оси Oz. Тоrда каждая точка Мо == (Хо, Уо, zo), не ле-
жащая на плоскости (14), лежит «выше» или «ниже» этой пло-
СКОСТИ
В следующем смысле. Через точку мо== (хо, Уо' 'О) про-
ходит единственная прямая, параллельная оси Oz; она пересекает
плоскость (1) в некоторой точке M 1 == (Хl? У1, Zl) (рис. 42). Если
zo> Zl' то rоворим, что точка Мо == (Х о , Уо, Zo) лежит выше плQ-
ПЛОСКОСТЬ И ПРЯМАЯ В ПРОСТРАНСТВЕ
63
скости (1); если же Zo < ZlJ ТО rоворим, что точка Мо лежит ниже
плоскости (14).
/
/10
Рис. 41.
т е о р е м а 12. Все точки пространства, лежащие 8Ьиие пло..
скости (14), образуют одно из двух полупространств, на Koтo
рые эта плоскость разбивает пространство; все точки, лежatЦuе
ниже плоскости (14), образуют второе полупространство.
Наконец, имеет место следующая теорема.
z
И О
:.с
х
Рис. 42.
Рис. 43.
Теорема 13. Если плоскость п задана ypaвHeHueJ4 (14), то
вектор n == {А, В, С}, приложенный х какой-либо точке Мо =:
== (х о , Уо, zo) этой плоскости (рис. 43), направлен 8 положитель-
ное flолупространсmво опlносuтелы'tО уравнения (14).
64 ПРОСТЕйШИЕ понятия АНАЛИТИЧЕСКОА rЕОМЕТРИИ
6. Плоскость в прямоуrольной системе координат. Предпола-
raeM до конца rлавы, что система I{оординат лрямоуrольная.
т е о р е м а 14. П!JСfпь пЛОСКОСfrlЬ n задана (в прям'ОУZОЛЬНОЙ
системе KoopaUHanl) своим уравнением
Ах +By+Cz +D ==0.
(15)
ТОсда BeKlrlOp n == {А, В, C
перпендuкулярен к плоскости л.
В самом деJlе, если u == {s, 11,
}
ПРОИЗВО.JIЬНЫЙ вектор, ле-
жащиЙ в плоскости 1[, то
(п, u)::::: A
+ 811 + C
== О.
что означает, что вектор n перпендикулярен КО ВСЯI{ОМУ вектору,
лежащему в плоскости 1[, т. е. перпендикулярен к плоскости 1(;,
что и требовалQCЬ доказать.
Проведем теперь через начало
(<<flормаль») ON к данной плоскости
координат О перпендикуляр
n (рис. 44); через N обозна-
чаем точку пересечения плос-
}{ости n с этой нормалью.
Если плоскость n проходит
через нача
по ксординат (т. е.
О == N), то положительное на-
правление на нормали выби-
раем произволыI;; в против
ном случае считаем положи..
bHЫM направление вектора
ON (т. е. направление от на-
чала координат к плоскости
n). Орт этоrо направления
обозначаем через ero направ
ляющие косинусы
через
cos а, COS р, COS 1', так что
е == {cos а, COS р, COS у}.
f-Ia ОСИ ON алrебраическое
значение вектора ON есть
число р
О, равное расстоя..
пию плоскости 1(; от начала координат. Пусть М == (х, У, z)......
какая-нибудь точка пространства. В том и только в том
случае. коrда она лежит в ПЛОСКОСТИ Л. ее ортоrональная
проекция на ось орта е есть точка N, а проекция вектора ОМ
есть вектор ON. Следовательно, для всех точек 1\1 == (х, У, z)
ПЛОСКОСТИ n и только ДЛЯ них имеем
z
.х
Рис. 44.
аз ЛРе ом == Ре
ПЛОСКОСТЬ И ПРЯМАЯ В ПРОСТРАНСТВВ 65
НО левая часть этоrо равенства есть
Х COS сх, + у cos р + z cos у,
так что точки М == (х, у, z) плоскости n и только они удовлет-
воряют уравнению
х cos а, + у cos
+ z cos у .... р == О, (16)
которое есть, следовательно, уравнение плоскости 31:; оно назы-
вается н,ормаЛЬНЬt,М уравнением этой плоскости.
Пусть теперь дано какое-нибудь уравнение
Ax+BU+Cz+D==O (15)
плоскости п. Как, отправляясь от этоrо уравнения, получить нор-
мальное уравнение той же плоскости?
Так как уравнения (15) и (16) определяют одну и ту же пло-
скость 31:, то их соответствующие коэффициенты пропорциональны,
Т. е.
cos а == Л-А, I
cos
== 'АВ,
cos у == лС ,
........ р == лD
при некотором А. Иэ равенств (17) определяем л, а именно: из
первых трех равенств (17) имеем
д," (А2 + ва + С 2 ) == cos 2 а + cos 2
+ cos 2 у == 1,
(17)
откуда
1
I л l == у . (18)
А2+В2+С 2
Знак л определяем лишь в случае D rp О из четвертоrо равен-
ства (17): так как Р> О, то 'AD < О и, следовательно, л имеет
знак, противоположный знаку о.
О п р е д е л е н и е. Число Л, имеющее моду ль -./
У А2+ 82+ С 2
и знак, противоположный знаку коэффициента D, называется нор.
мирующим множителем уравнения (15). При D == О можно знак
л выбрать произвольно.
Мы установили: для тО20 чтобы из nроuзвольноzо (<<общеrо»)
уравнен u я nЛОСI(,остu ( 15) получить нормальное у равнение плоско..
сти (16), надо обе части у ршзнен.uя ( 15) помножить на нор .klU-
рующий множитель этоzо уравнения.
Аналоrично случаlО прямой на плоскости, нормальное уравне-
ние ПЛОСI{ОСТИ позволяет определить расстояние любой точки про-
странства до этой плоскости.
т е о р е м а 15. РасСlпояние р (М О , п) от точки Мо == (ХО' Уо, zo)
до плоскости п, данной своим нормальным уравнением (16), равно
66 ПРОСТЕйШИЕ ПОНЯТИSl АНАЛИТИЧЕСI\Ой rЕОМЕТРИИ
модулю числа, nолучаеМО20, еслu в левую часть УрOJJНенuя (17) под-
ставить Х == Хо, у == Уо' z == Zo, nl. е.
р (М о' п) == I хо cos а. + Уо cos
+ Zo cos V
Р 1.
Если плоскость n задана общим уравнение
f (15), то расстоя-
ние ОТ точки Мо == (х о , Уо, zo) ДО ЭТОЙ плоскости находится по
формуле
(М )
I AXo + BYo+Czo+D I
Р o,n
У А2+В2+С 2 ·
7. YrOJJ между прямой и плоскостью; уrол между двумя пло-
скостями'! Уеол между прямой d и плоскостыо 3't есть, по опре-
де.пению, уrол '1' между этой прямой и ее лроекцией на пло-
скость 3't. Это определение дает не один, а два уrла (острый и
тупой), дополняющих друr друrа ДО 11 (рис. 45); каждый из этих
yr лов заключен ме}l{ДУ О и 1t.
n
.7z'
/
/'
I I
/ I
I I
I .
I
/ I
Рис. 45.
Рис. 46.
в зависимости от выбора налравляющеrо вектора прямой d и
нормальноrо вектора к плоскости пимеем Bcero четыре уrла
(рис. 46), образующих две пары вертикальных уrлов. Обозначим
через
уrол между любым направляющим вектором u прямой d
н любым вектором п, нормальным к плоскости. Так как уrол 'ф
заключен между О и п, то ero синус неотрицателен, причем, как
леrко видеть, всеrда
sin 'ф == 1 cos q> 1.
Если прямая d дана уравнением
X
Xo Y
Yo z
zo
а == Ь ==
'
(19)
плоскость и ПРЯМАЯ В ПРОСТРАНСТВЕ
67
а плоскость п..... уравнением
Ax+By+Cz+D==O, (20)
То уrол q> между векторами и о == {а, Ь, с} и n == {А, В, С} нахо-
дится по формуле
cos == Аа+ВЬ+Сс .
ер у А2+В2+С2 . Jl a 2 +b 2 +c i '
значит,
. r Аа+ВЬ+Сс1
srn Ф == "1/ "1/ ·
r А2+В2+С З . , а 2 +Ь 2 +с*
УСЛО8ие перпендuкулярносmи прямой (19) и плоскости' (20) есть
условие параллельности векторов uo и П, т. е.
а Ь с
А == в == С'
За У20Л между двумя плоскостями
Ax+By+Cz+D==O (20)
и
A'x+B'y+C'z+D' ==0
(20' )
принимаем уrол <р между любыми двумя перпендикулярпыми к ним
векторами (что опять дает два уrла, острый и тупой, дополняю...
щих друr друrа до л), например между
n == {А, В, С}, п' == {А', В', С'}.
Получаем
АА' +В8' +СС'
cos ер ==
YAz+B2+C2.YA,2+B,2+C,2 ·
JlСЛО8uеJJ перпендuкулярносmu двух nлоскоспwй (20) и (20') явля-
ется
АА' +В8' +СС' ==0.
Рассмотрим в заключение следующую задачу.
3 а д а ч а. Написать уравнения перпендикуляра, опущенноrо
из данной точки М 1 == (Хl' Yl, Zl) на прямую d (не ПРОХОДЯЩУIО
через точку л.,1 1 ), данную уравнением
x
xo Y
Yo z
zo
а == Ь == с
И найти ero длину. При этом лод nерпендuкуляро.м, опущенным
из данной точки М 1 на прямую d, понимается прямая, проходя..
щая через точку М 1 и пересекающая прямую d в некоторой ее
точке М 2 под прямым уrлом. Длина отрезка М 1 М 2 называется
68 ПРОСТЕйШИЕ ПОНЯТИЯ АНАЛИТИЧЕСКОй rЕОМЕТРИИ
длиной nерпендuкуляра. Для решения поставленной задачи,
во
первых, проводим плоскость через точку М 1 И прямую d. Эта
плоскость, неся на себе векторы
U o === {а, Ь, с}, моМ; ==U 1 == {Х 1
Хо, Уl
Уо, Z1
Zo}
и содержа точку Мо, имеет уравнение
x
xo Y
Yo %
Zo
Х1
xo Уl
Yo %1
zo == О.
а Ь с
Во-вторых, проводим плоскость через точку М 1 === (X 1 , Уl' Zl)
перпендикулярно к прямой d. Уравнение ЭТОЙ плоскости есть
а (X
Xl) +Ь (y
!/1) +с (z
Zl) == О.
Пересечение этих двух пл-оскостей дает искомую прямую, прохо..
дящую через точку M 1 , пересекающую прямую d и перпендику'"
лярную к ней.
Длину перпендикуляра, опущенноrо из точки М 1 на прямую
d, найдем как высоту параллелоrрамма, nOCTpoeHHoro на векто...
рах Лtl0М
и u o , отложенных от точки Мо. считая основанием
сторону U o . Площадь S этоrо пара.плелоrра мма е сть аБСОЛIотная
величина BeKTopHoro произведения вектора MoM
на вектор u o ,
а длина ero основания есть I U o 1; ПОЭТО!\'IУ дЛЯ расстояния р (M 1 , d)
имеем
р (Nl 1 )
d) == I [
М;, uo] I ==
I Но I
VI Уl
Yo :1-;:012 + I :1
:o Хl---;ХО 12 + I Хl -:;ХО
y
+
+
Уl ;- у О 12
.
r л А В А I1
ПАРАБОЛА. эллипс. rИПЕРБОЛА
Во всей этой rлаве предполаrается, что в плоскости (в KOTO
рой лежат все рассматриваемые далее фиrуры) выбран определен-
ный масштаб; рассматриваются лишь прямоуrольные системы
координат с этим масштабом.
1. Парабола
Парабола известна читателю из курса средней школы как кри-
вая, являющаяся rрафиком функции
у == ах 2 +Ьх+с.
(1)
( ь 4ас
Ь 2 ) u
Точка с координатами
2а ' 4а называется вершинои пара-
болы. В частности, если Ь == с === О, ТО
у == ах 2 ,
(2)
и вершина параболы находится в начале I{оординат.
Поменяем названия осей, т. е. перейдем к новой системе коор-
динат, в которой осью ординат будет старая ось абсцисс, а осью
абсцисс
старая ось ординат. В этой новой системе уравнение
1 1
(2) запишется в виде у2 ===
х или, если число
обозначить
а а
через 2р, в виде
у2 == 2рх, р> о (рис. 47).
(3)
Уравнение (3) называется каноническим уравнением параболы:
прямоуrольная система координат, в которой данная парабола
имеет уравнение (3), называется канонической системой координат
(для этой параболы).
Установим rеометрический смысл коэффициента р. Для этоrо
возьмем точку
p==(
. о).
(4)
70
ПАРАБОЛА. эллипс. rИЛЕРБОЛЛ
называемую фокусом параболы (3), и прямую d, определенную
уравнением
р
X
2.
(5)
Эта прямая называется директрисой параболы (3) (см. рис. 47).
Пусть М == (х, у)
произвольная точка параболы (3). Из урав-
нения (3) следует, что Х;?; О. Поэтому расстояние точки М от
директрисы d есть число
cS м
+ х. (6 )
Расстояние точки М от фокуса F есть '
+ Y(x
y +у2.
Но у2==2рх, поэтому ,==x+.
== б м .
d
9
IJ
d
8 н
о
РИС4 47.
р
"2
Рис. 48.
Итак, все точки М параболы ранноуда,,'!ены от ее фокуса и
директрисы:
r == б м .
(7)
Очевидно обратное: каR<дая точка М, удовлетворяющая условию
(7), лежит на параболе (3).
Мы доказали, что каждая парабола (3) eC"lb 2еомеmрическое
место точек
равн'оудален/'i,ыlx от фокуса F и от директрисы d
этой параболы.
ПАРАБОЛА
71
Вместе с тем мы установили и 2еомеf11раческuй СМhLCЛ КОЭффи
цшнта р в уравнении (3): число р равно расстоянию между фокусом
u директрисой параболы.
Пусть теперь на плоскости даны произвольно точка F и прямая
d, не проходящая через эту точку. Докажем, что существует
парабола с фокусом F и директрисой d. Для эrоrо проведем через
точку F прямую g (рис. 48), перпендикулярную к прямой d;
точку пересечения обеих прямых обозначим через D; расстояние
JDF I обозначим через р. Прямую g превратим в ось, приняв на
ней направление
в качестве ПОЛО1Кительноrо.
y ось сделаем
осью абсцисс лрямоуrольной системы координат, началом которой
является середина О отрезка DF . Тоrда F == (
, о) и прямая d
по.пучает уравнение х ==
. Теперь мы можем в выбранной
системе координат написать каноническое уравнение параболы:
у2 == 2рх, (3)
причем точка F будет фокусом, а прямая d
директрисой пара-
болы (3).
Мы установили выше, что парабола есть rеометрическое место
точек М, равноудаленных от точки F и прямой d. Итак, мы
можем дать такое rеометрическое (т. е. не зависящее ни от какой
системы кО<)рдинат) определение параболы.
О п р е Д е л е н и е. Параболой НазЬ18аеmся ееометрuческое .Atecтo
точек
равн,оудаленнblX от некоторой фиксированной точки (<<фоку..
са» параболы) и некоmорой фиксированной прямой (<<директрисы»
параболы) .
Обозначая расстояние между фокусом и директрисой параболы
через р, мы можем всеrда найти лрямоуrольную систему коорди
нат . каноническую для данной параболы, т. е. такую, в которой
уравнение параболы имеет канонический вид
у2 == 2рх.
(3)
Обратно, всякая кривая, имеющая такое уравнение в некоrорой
прямоуrольноЙ системе координат, является параболой.
Расстояние р между фокусом и директрисой параболы назы..
вается фокальным параметром. или просто параметром параболы.
Прямая, проходящая через фокус перпендикулярно к директрисе
параболы, называется ее фокальной осью (или просто осью); она
является осью симметрии параболы
это вытекает из TorO t что
ось параболы является осью абсцисс в системе координат, отно-
сительно которой уравнение параболы имеет вид (3). Если точка
М == (х, у) удовлетворяет уравнению (3), то этому уравнению
удовлетворяет и точка М' == (х, ....... у), симметричная точке М отно-
сительно оси абсцисс.
72
ПАРАБОЛА. эллипс. rИПЕРВОЛЛ
Точка пересечения параболы с ее осью называется вершиной
параБО.1JЫ; она является началом системы координат, канонической
для данной параболы.
2. Эллипс
О п р е Д е л е н и е. Эллипсом Н,а3ЬLвается 2ео.метрuческое .место
пwчек плоскосmu
Су.мма расстояний которых от двух данных точеl(
Р 1 и F 2 (рис. 49) есть nоспiоянное число; эmо число .мы обозначаем
через 2а. Точки Р 1 и Р 2 на.
зываются фокусами эллипса;
расстояние между ними обо-
значается через 2с и назы-
вается фокусным расстоя
нием. Число а называется
большой полуосью эллипса (по
.:с причинам, которые выяснятся
в дальнейшем). Середина О
отрезка F 1 F 2, соединяюще20
ФОКУСbl, назы8еmcяя центром
эллипса, а вся прямая Р 1 Р 2
называется е20 фокальной
или первой осью. Прямая
проходящая через цеНfпр эллипса neрпендикулярно 1(, фокальной
оси J называепlСЯ второй осыо эллипса.
Пусть М
какая
нибудь точка эллипса. Так как 2а == I Р 1 М f +
+I F2M I
IF1F21==2c, то a
c. Однако если а==с, то получаем
совокупность всех точек М, дЛЯ которых I Р 1 М '+! Р 2 М I ==! р 1 р 2 1,
т. е. отрезок FIF2 ' Этот случай мы в да.пьнейшем рассматривать
не будем и поэтому будем предполаrать, что а> с.
Ч иСАО
t Y
........
Рис. 49.
с
e==
а
называется эксцентрuсuте11l0лt эллипса; оно все2да < 1. Эксцентри-
ситет эллипса равен нулю тоrда и только тоrда. коrда фокусы
эллипса совпадают: F 1 ::=Р 2 . В этом случае эллипс превращается
D rеометрическое место точек М, расстояние которых от точки
Рl == F 2 равно а, т. е. в окружность радиуса а с центром 0=== Fl ==
== Р 2 ; под осью окружности понимаем всякую прямую, проходя..
щую через ее центр о.
Пусть нам дан эллипс; значит. даны ero фокусы Р 1 И F
и
дана ero большая полуось а. Значит, нам известно и число с<а,
равное половине расстояния между фокусами.
Построим на плоскости прямоуrольную систему координат,
которую будем называть канонической системой (для данноrо
эллипс
73
эллипса). Ее начало О есть nентр эллипса, а ось абсцисс совпа
дает с фокальной осью. Положительным направлением на ней
считаем направление вектора р 1 р 2 ' Положительное направление
на оси ординат выбираем ПРОИ3ВО
ТIьно..
В этой системе координат имеем Fl == (......... С, О), Р 2 ::= (с, О);
.фокус Р 1 условно называем леВblАl, фокус Р 2
правым.
Предположим теперь, что М == (х, у)
произвольная точка
эллипса. Пусть '1 == Р (Р 1 , М) И '2 === Р (F 2 , Л1)
расстояния точки
М до фокусов Р 1 , соответственно Р 2 . Числа '1 и '2 называются
фокальными радиуса ми точки М . Имеем
'l==У(х+с)2+у2, '2==Y(x
c)2+y2.
Точка М == (х, у) является точкой Э.алипса тоrда и только тоrдз,
1{ or да
'1 +'2 == 2а,
(1)
Т. е.
(1 ')
У(х+с)2+у2+ Y(x
c)2+y2==2a.
Это уравнение и есть уравнение эллипса в выбранной системе
координат.
Преобразуем уравнение (1) к виду, который называется каН,о...
н'uчеСКUАt уравнением эллипса. Для этоrо перенесем второй ради...
кал в праВУIО часть. Возведя после этоrо обе части уравнения
в квадрат, получае
(х+с)2 + у2 == 4а 2
4а Y(x
с)2 + у2 + (х
с)2 + у2 (2)
И.lIИ (после очевидных преобразований)
(а 2
с 2 ) х 2 + а 2 у2 === а 2 (а 2
с 2 ). (3)
Так l{aK а> С, то число а 2
с 2 по ложительно; обозначим ero через
Ь 2 , называя число Ь == + V а 2
с 2 малой полуосью эллипса. Теперь
равенство (3) можно переписать в виде
Ь 2 х 2 + а 2 у2 == а 2 Ь2
ИЛИ
х2 у2
а 2 + 12 == 1.
(4)
Покажем теперь, что уравнение (4) действительно есть ypaB
нение нашеrо ЭЛ.пипса, ведь пока мы доказали только, что каждан
точка М == (х, у), удовлетворяющая уравнению (1 '), удовлетворяет
и уравнению (4). Остается доказать обратное утверждение, а именно,
что каждая точка М == (х, у), удовлетворяющая уравнению (4),
есть точка эллипса J т. е. что для нее выполнено условие'l +'2 == 2а.
74
ПАРАБОЛА. ЭЛЛИПС. rИПЕРБОЛА
Итак, пусть М == (х, у)
nроизвольная точка, удовлетворяю
щая уравнению (4). Найдем расстояния '1, '2 ТОЧКИ М от фокусов
Р 1 И Р 2 . Имеем
'1 == + V (х+с)2+ у2,
(5)
причем из (4) имеем
уВ == Ь 2 (1
:: ) .
(6)
Но lJI == a t ..... с 2 , поэтому
с 2
У 2 == а 2 ....... с 2
х 2 +
х2.
а 2
Это значение у подс тавим в (5); по лучим
/ C
/ ( с ) 2
'1==+ r 2сх+а 2 .+ а2 х 2 ===+ r a+-а Х ,
откуда
r 1 == + (a+ ; х)== + (а+ех). (7)
Слева...... положите.,'Iьное число r 1; справа надо взять такой знак,
чтобы правая часть была тоже положительной. Но из (4) следует,
что !хl
а; кроме Toro, О
е < 1; значит, !ех! < а, т. е. всеrда
а + еХ > О, так что справа в (7) надо взять знак + , и мы получаем
I r 1 == а + ех. I
(1)
Точно так же
1 rB==a
ex,1
(11)
Из (1) и (11) получаем '1 +'2 == 2а, точка М
(х, у) принадлежит
нашему эллипсу.
Итак, мы доказали, что уранение (4) действительно есть урав-
нение эллипса; оно называется каноническим уравнением эллипса.
Кроме Toro,
V Ь2 V a2
b2 Ь V
e
1
==
== 1
e2.
а 2 а t а
Из уравнения (4) леrко находятся некоторые свойства эллипса.
Прежде Bcero, если точка М;:: (х, у) лежит на нашем эллипсе,
т. е. удовлетворяет уравнению (4), то тем же свойством обладает
и точка М' == (х,
у) (рис. 50), симметричная точке Л1 относи
тельно оси абсцисс, а также точка М" == (
Х, у), симметричная
точке М относительно оси ординат. Итак, обе оси эллипса являются
ezo осями симметрии.
(8)
rИПЕРБОЛА
75
Центр эллипса является е20 центром симметрии: в самом деле,
при нашем выборе системы координат центр есть начало коорди-
нат о; если точка М == (х, у) удовлетворяет уравнению (4), то и
точка М* == (.......х,
у), симметричная точке М относительно центра
О, также удовлетворяет уравнению (4), откуда утверждение
следует.
ЗамеТИМ,наконец,что
в силу уравнения (4), ко-
торому удовлеТВОРЯIОТ все
точки эллипса'....... для каж-
ДОЙ точки М == (х, у) эл-
липса имеем
х2 у2 А,
а 2
1, Ь 2
1,
т. е. .lxJ
а, 'Уl
b
вecь
эллипс лежит в nрямо-
уrольнике, оrраниченном
прямыми х== + а, y
+ bt
параллельными (второй и
первой) осям эллипса и отстоящими от них соответствено на
расстояние а и Ь. ЭТОТ прямоуrольник называется OCH08HtJl.М, пря..
моуеодьником для данноrо эллипса.
Точки Al == ( ..... а, О), А 2 === (а, О), а также точки 81 == (О, ..... b)t
82 == (О, Ь), т. е. точки пересечения эллипса с е20 осям.и, назы-
ваются вершинами эллипса.
Таким образом, у эллипса
(не являющеrося окружно-
стью) имеется четыре вер-
шины.
8,
Рис. 50.
!I
3. rипербола
Оп р е Д е л е н и е. Fuпep-
болой называется ееометрuче-
ское место точек плоскости,
МlJдуль разности расстояний
каждоЙ из которых до двух
фикси роваН,ных точек F 1 и F 2 Рис. 5 t ·
(рис. 51) есть положитель-
ная постоянная. Эту поспlОЯННУЮ обозначим через 2а. Число
а будем называть первой полуосью 2ипер60Лbl. Точки Fl и Р 2 НQЗbI
еаются фокусами zиперболы. Расстояние между ними обозначается
через 2с и называется фокусным расстояние'м'. Середина отрезка
FJ.F2 НClЗIJlвается центром 2иперболы. Прямая, на которой лежат
z
76
ПАРАБОЛА. эллипс. rИПЕРЕОЛА
фоКУСbl 2uперБОЛbl
называется фокальной или пepBOll осью 2uперБОЛbl.
П рямая
проходящая через центр перпендикулярно " первой оси
сипер60Лbl
называется ее второй осью.
Из рис. 51 ясно, что
I FIF2 1
II MFl l
I MF2 Ir, Т. е. c
a.
Если с == а, то мы получаем точки М, дЛЯ которых или
I MPl l
' MF 2 1==/ F 1 F 2 /,
или
I МР 2 1
1 МР 1 1 ==
F 1 F 2 1.
Эти точки М заполняют две полупрямые, дополняющие отрезок
FtF2 до всей прямой. Поэтому случай с == а в дальнейшем рассмат-
ривать не будем, т. е. предполаrаем, что с> а. Как и в случае
с
эллипса, число а н, азыlаемM эксцеflПlриситетОАt zиперБОЛbl u обозна-
чаем через е. 11 меем
с
e==
>l.
а
Пусть нам дана rипербола, т. е. даны ее фокусы Рl и Р2'
а также числа а и с. Построим на плоскости прямоуrольную
систему координат, которую будем называть канонической (.аля
данной rиперболы). Начало этой системы координат лежит
в центре О rиперболы, ось абсцисс совпадает с фокальной осыо
rиперболы. За положительное направление оси абсцисс примем
направление вектора Ё
P2' Тоrда Р 1 == (
c, О), Р 2 == (с, О).
Пусть М == (х, у)
произвольная точка rиперболы. Обозначим
через '1
Р (Р 1 , М) И '2 == Р (Р 2 , Nl) расстояния точки М == (х, у)
соответственно До фокусов Рl И Р 2 . Числа '1 и '2 называются
Фо/(,аЛЬНblJJtи радиуса ми точки М. Имеем
'l==У(х+с)2+ у 2, '2==Y(x
c)2+y2. (1)
Точка М == (х, у) есть точка rипербо,пы тоrда и только тоrда,
коrда
I , 1
'2 I == 2а
(2)
или
r 1
r 2 == + 2а.
Если принять в о внимание раве нства (1), т о имеем
Y(x+c)2+y2
Y(x
c)2 +у2== + 2а.
(3)
Это уравнение и есть уравнение нашей rиперболы в выбранной
системе координат.
rlfПIZРВОЛА
77
Преобраэуем уравнение (3) к виду, который называется KaHO
lIическим. Для этоrо уединим первый радикал. Возведя затем обе
части уравнения в квадрат, получаем
(х +с)2 + уЗ == 4а 2 + 4а У(х
с)2 + у2 + (х....... с)2+ у2
или (после простых преобразований)
(с 2 ....... а 2 ) х 2 ....... а 2 у2 == а 2 (с 2 .... а 2 ) . ( 4)
Так как с> а, то числ о с 2
а 2 положительно; обозначим ero
через Ь 2 , считая Ь;:;= + У с 2 .... а 2 . Равенство (4) можно переписать
в виде
Ь 2 х 2
а 2 у З == а 2 Ь 2
или
х2 у2
а 2 ...... Ь 2 :::= 1.
(5)
Осталось показать, что уравнение (5) действительно есть урав-
нение нашей rиперболы; как и в случае э.плипса. еще надо дока-
зать, что каждая точка М == (х, у). удовлетворяющая уравнению
(5), удовлетворяет и уравнению (2).
Пусть М == (х, у)........ произвольная точка, удовлетворяющая
уравнению (5). Найдем фокальные радиусьr '1 и '2 точки 1\-1.
Имеем
'I== V (х+с)2+у2,
'1 === ....J
(а + ех).
Совершенно аналоrично имеем
'2== + (a
ex).
(11)
(6 1 )
(62)
Так как '1 и ,2....... положительные числа, то надо знак перед скобками
выбрать так, чтобы и правые части равенств (61) и (62) были по
ложительными. Для этоrо исследуем различные возможные случаи,
предстаВJ]яемые равенствами (61) и (62). Из уравнения (5) HaXo
дим прежде Bcero, что I х I
а > О. Поэтому имеем два основных
случая: в зависимости оТ Toro, лежит ли точка М == (х, у) в пра-
вой полуплоскости х> О или в левой х < О. Так как е> 1, то
в обоих случаях имеем
I ех I > а. (7)
При х> О внутри скобки в (61) стоит положительное ЧИСJIО,
поэтому скобку на до взять со знаком +, и м ы получаем
I r 1 ==а+ех при х> О. (I+)
78
ПАРАБОЛА. ЭЛЛИПС. rИПЕРВОЛА
Из (7) следует, что при х> О внутри скобки (62) стоит отрица-
тельное число, ск обку надо взять со знаком
, так что
I ra==
a+ex при х>О. {II+}
Из (1+) и (11+) следует, что при Х>О имеем
r 1
'2 == 2а,
и точка М == (х, у), удовлетворяющая уравнению (5), лежит на
rиперболе.
Пусть х < о; из (7) следует, что теперь внутри скобки (6)
стоит отрицательное число, значит, перед скобкой надо взять
знак ......., так что
I rl==
a
ex при х<О. (I
)
Зато внутри скобки в (6) стоит теперь число поло)кительное,
значит,
r2==a
ex при Х<О. (II
)
Имеем
r 2
, 1 == 2а.
Итак, во всех случаях всякая точка, удовлеТВОРЯIОlцая уравне-
нию (5), лежит на rиперболе
мы доказали, что уравнение (5)
действительно является уравнением нашей rиперболы. Оно назы-
вается каноническим уравнением zиnерболы.
Формулы (1), (11) линейно выражают фокальные радиусы лю
бой точки rиперболы через ее абсциссу.
Заметив, что с 2 == а 2 + Ь 2 , получаем
2
с 2
а 2 +Ь 2
1 + (
' ) 2
e
2
2
,
а а а
== v е 2
1, е == ... / 1 + (
) I .
а V ,й
Из уравнения (5) вытекает (как и в случае э.плипса), что обе оси
rиперболы являются ее осями симметрии, а центр rиперболы есть
ее центр симметрии.
Переписывая уравнение rиперболы (5) в виде
у2 х'!
-
==
1
Ь 2 а 2
(8)
(9)
и замечая, что ero левая часть всеrда
О, видим, что для точек
х 2
rиперболы до,пжно быть й2"
1
О, т. е. I х 1;:::: а. Друrими словами,
в полосе
а < х < а, оrраниченной прямыми х == + а (на рис. 52
эта полоса заштрихована), в частности на второй оси х == О, не
содержится точек rиперболы: все они лежат или вправо от пря-
мой х == а, или влево от прямой х ==
а, кроме двух точек А 1 ==
::::::: (
a, О), А 2 === (а, О), лежащих на самих этих прямых и являю-
щихся точками пересечения
rиперболы с ее фокальной
осью. Эти две точки назы-
ваются вершинами rиперболы.
Итак, rипербола распа-
дается на две ветви: «правую»,
для точек которой абсцисса
х
а, и «левую», для точек
которой х
а.
Чтобы ближе познако"
миться с общим видом rипер..
балы, надо определить пря-
мые, называемые ее асимпто-
тами.
Как и в случае эллипса,
основным пРЯМ,ОУ20ЛЬН,ИКО.м, rи-
перболы называется прямоуrольник, оrраниченный прямыми, па-
раЛJ1ельными второй и первой осям rилерболы и ОТСТОЯЩИМИ от
них соответственно на расстояния а и Ь (рис. 53). В канонической
системе координат уравнения этих прямых суть х == + й, у
+ Ь,
тоrда как уравнение самой
rилерболы имеет вид
х2 у2
......
=== 1
а 2 Ь 2 ·
(10)
Диаrонали OCHOBHoro пр я..
моуrольника суть прямые,
имеющие своими уравнениями
Ь
у == +
x. (11)
а
Эти прямые называются
асимптотами rиперболы.
ь
Прямую У=={iХ будем на-
rИПЕРБОЛА
79
!I
...
:с
Рис. 52.
.r
Рис. 53..
.... Ь"..
зывать первои, а прямую у:=: ....... аХ
второu асимптотои.
Возьмем какое
нибудь значение переменноrо Х, Х
а. Ему
соответствует в верхней полу плоскости точка М rнперболы с абс...
циссой х (см. рис. 53) и точка М' (первой) асимптоты с той же
абсциссой х:
м == (х, у),
м' == (х, У').
80
ПАРАБОЛА. ЭЛЛИПС. rИПЕРВОЛА
При ЭТОМ
y==
v x2
a2,
а
, ь
У ==
Х.
а
I1ри неоrраниченном возрастании х разность
, аЬ
у
Y== ,
х+ У x2
a2
оставаясь положительной, монотонно убывает и стремится к нулю,
т. е. точки М и М', уходя в бесконечность, неоrраниченно сбли-
жаются между собой. При этом точка М rиперболы все время
остается под точкой М' асимптоты.
На нижней полуплоскости положение аналоrично, что след) ет
из симметрии фиrуры, составленной из rиперболы и пары ее
асимптот, относительно оси rиперболы.
Мы исследовали взаимное расположение точек rиперболы и
пары ее асимптот при х
а. Картина при х
а получается
по симметрии. В целом общий вид rиперболы ясен из рис. 53.
4. ДиреКТРИСbl эллипса и rиперболы
ДиректрисоЙ эллипса (rиперболы), соответствующей данному
фокусу Р, называется прямая d, перпендикулярная к фокальной
u а
оси кривои, отстоящая от центра на расстояние e
и лежащая по
ту же сторону от центра, что и фокус F (рис. 54 и 55).
l
у
a
Рис. 54.
Таким образом, и у эллипса (не являющеrося окружностью),
и у rиперболы....... две директрисы.
Если взята каноническая для данной кривой прямоуrольная
система координат, то уравнение директрис d 1 , d 2 (соответствую..
ДИРЕI(ТРИСЫ ЭЛЛИПСА И rИПЕРБОЛЫ
81
щих фокусам F 1 , F 2 ) будет соответственно
а
х==
,
е
а
Х==е 8
( 11)
(12)
Для эллипса е < 1, поэтому директрисы эллипса удалены от
центра на расстояние, большее а. т. е. расположены за пределами
OCHOBHoro прямоуrольника (см. рис. 54).
!I
Рис. 55.
Для rиперболы е> 1, поэтому директрисы rиперболы удалены
от ее центра на расстояние, меньшее а. они пересекают основ..
ной прямоуrольник и проходят между центром и соответствующей
вершиной rиперболы (см. рис. 55).
Заметим, наконец, что расстояние Li директрисы от соответ..
ствующеrо ей фокуса есть
1) в случае эллипса
а 1
е 2 1 Ь а
A==
ае==а
==
8
8
е е е а'
2) в случае rиперболы
а е 2
1 1 Ь 2
==ae
==a
==
.
е е е а'
Итак, для эллипса и для rиперболы имеем
1 Ь 2
L\==
.
е а.
(2)
82
ПАРАБОЛА. ЭЛЛИПС. rИПЕРБОЛА
Если в случае rиперболы (при данном а) фокусное расстоя-
ние с, а значит, и эксцентриситет е ==
увеличиваются, то (острый)
уrол между асимптотами уменьшается, а директрисы все более
приближаются ко второй оси (и сближаются между собой).
Если в случае эллипса (при данном а) фокусное расстояние с,
с
а значит, и эксцентриситет е
а уменьшаются, то эллипс стано..
вится Бсе более похожим на ОI{РУЖНОСТЬ, а ero директрисы ухо"
дят все дальше и дальше от второй оси (и друr от друrа). Нако.
нец, для окружности е == О и директрисы исчезают (<<уходя в бес.
конечность»)
окружность не имеет директрис.
Пусть дан какой
нибудь эллипс или rипербола с; один из
фокусов кривой С обозначим через Р, соответствующую ему ди-
ректрису
через d. Для произвольной точки 1\.1 обозначим через r
расстояние этой точки М от точки Р, через б
расстояние точки М
от прямой d. Докажем, что для всех точек М кривой С имеем
r
-б== е. (3)
Достаточно доказать это равенство для случая, коrда F == Р 1 ........
первый (левый) фокус (система координат
каноническая).
Тоrда имеем
r;:la+exj. б;:/х+
1.
откуда
r
б ==е.
Итак, равенство (3) имеет место для всех точек кривой С.
Докажем обратное утверждение: если для какой-нибудь точки
М == (х, у) плоскости выполнено равенство (3), то точка М лежит
на кривой С.
в самом де.пе, пусть снова р....... левый фокус кривой С, т. е.
F == (
c, О), а прямая d имеет уравнение
а
X==
.
е
Тоrда
r 2 == (х + с)2 + у2,
62;: (х+ : )2;: (х+ :2 у.
По предположению для точки М выполнено условие (3), так
что
,2 с2
e 2........
S2
........ а 2 ,
т. е.
(а 2
с 2 ) х 2 + а 2 у 2 == а 2 (а 2
с 2 ).
(4)
ДИРЕКТРИСЫ ЭЛЛИПСА И rИПЕРБОЛЫ
83
Если кривая С
эллипс t ТО е ==
< 1, а 2
с 2 === Ь ! И уравнение
(4) переписывается в виде
х9 у'-
+
== 1
а 2 b'J
...... точка М лежит на эллипсе С.
с
Если же кривая С ....... rипербола, то е == а > 1, с 2
а 2 == Ь 2 и
уравнение (4) можно написать в виде
х! у"
.......
== 1
а'1 Ь 2
точка М лежит на rиперболе с.
Итак, доказана следующая теорема:
Как эллипс} пlaK и с.ипербола С с эксцеflmРUСUlпето,М, е есть сео-
меmрическое место точек М плоскости
удО8леm80рЯIОlцих следу/о-
щему условию: отношение расстояния точки М до проuзвольно
8ыбраflНО20 фокуса кривой /(, расстоянию точки М до cooпzвeпlcт-
вующей этому фокусу директрисы равно е.
Пусть теперь на плоскости даны точка Р, прямая d, не про..
ходящая через эту точку, и положительное число е *' 1.
Докажем, что при е < 1 существует эллипс и при е> 1 ........ rипер..
бала с эксцентриситетом е, фокусом F и соответствующей ему
директрисой d.
В самом деле t опустим из точки F перпендикуляр FD на пря-
мую d и обозначим через А точку, делящую отрезок FD в отно-
шении е, а через А'
точку, делящую тот же отрезок РЬ в отно-
шении
e, что
FA
==e t
AD
РА'
e
;rь
·
(5)
Нетрудно показать, что тоrда середина О отрезка АА' делит
отрезок FD в отношении
e2: т. е.
OF == е 2 ОО .
(5')
Из равенств (5) и (5') следуеТ t что точки Ft D и А лежат по
одну сторону ОТ точки О.
Выберем прямоуrольную систему координат Оху с началом
в точке О и положительным направлением OF оси Ох. Пусть
в этой системе
F == (с, О), D == (d, О) А == (а, О).
84
ПАРАБОЛА. ЭЛЛИПС. rИПЕРБОЛА
Так как точки А, F и D лежат на положительном луче оси
Ох, то все три числа а, с и d являются положительными, причем
c+ed
а== l+е '
с == е 2 · d.
(6)
Чтобы установить, что точка F и прямая d являются фокусом и
директрисой кривой с центром О, первой полуосью а и эксцен-
триситетом е, достаточно показать, что
ае == с,
а
d
е
·
Имеем
c+ed ее + e 2 d ес+с
а.е== .е== == ==с
l+e l+e l+e
и
== c+ed == e 2 d+ed ==d
е (1 + е) . е (1 + е) . е ·
Утверждение доказано.
Эксцентриситет ЭЛ.пипса (не являющеrося окружнос.тью) есть
положительное число е < 1; эксцентриситет rиперболы е > 1.
Определим эксцентриситет для всякой параболы, положив ero
равным е == 1. Теперь любое положительное число е является
эксцентриситетом или эллипса, или параболы, или rиперболы, и
мы получаем следующий результат:
Класс Kpивыx
являющихся эллипсами (KpOJfte окружносmu)
параболами или GиlZер60ламu
может быть определен следующu.м
Dб разом:
Каждая кривая С Э/n020 класса (и только кривая этоzо класса)
r
есть zеомеmрическое место точек M
для KOfrlOpblX отношение
6
1v!.
м
расстояния 'м точки Л'l от некопlОрОЙ фиксированной точки F
(<<фокуса кривой С») " расстоянu/о б м тOttKU М от некоторой
фиксированной прямоЙ (<<директрисы кривой С») есть постоянное
положительное число e
r
е ==
(для всех mоч ек /уl кривой С),
6м
называемое эксцентриситетом кривой с.
l(рuвая С есть
8ллuпс
если е < 1,
парабола, если е == 1.
2ипе рбола I если е > 1.
ФОКАЛЬНЫА ПДРДМЕТР
85
5. Фокальный параметр. Уравнения ЭЛJlllпса, rиперболы
и параболы в полярных координатах
1. Фокальный параметр. Пусть С
эллипс или rипербола.
Проведем через какой
нибудь фокус F кривой С прямую. перпен-
дикулярную к ее фокальной оси. Эта прямая пересечет }(рИDуIО С
В двух точках Р и Р'. Длину полученной таким образом хорды
рр ' обозначаем через 2р; величина р называется фокальным nара-
метром кривой С.
Фокальный параметр окружности. очевидно. равен ее радиусу.
Возьмем каноническую для данной кривой С систему коор-
динат, тоrда фокальный параметр кривой С равен модулю орди-
наты каждой из точек Р, Р'. Вычислим ero.
Если кривая С
эллипс
х2 у2
а 2 + Ь Э
1,
то для любой точки М (х. у) этоrо эллип са
у == + !!.. V а 2
х 2 .
а
Подставляя сюда абсциссу фокуса Р, т. е.
х == + с,
получим для ординат точек Р, Р' зн ачения
у == + !!.. V а 2
с2 == + Ь'1. .
а а
Итак, фокальный параметр эллипса есть
Ь 2
Р ==а-
Для точки М == (х. у) rилерболы
(1)
х2 у'1.
== 1
а 2 Ь 2
имеем
у == 4
V х 2
а 2 8
а
Для х == + с получаем
у == + .!. V с 2
а2 == + Ь 2 .
а а
ФокаЛЬНbJЙ параметр rиперБОЛbl также есть
Ь 2
р ==-а 8
(1)
86
ПАРАБОЛА. эллипс. rИПЕРБОЛА
Вспомним, ЧТО мы нашли (
4) для расстояния А между
фокусом и соотвеТСТВУЮIЦей директрисой как эллипса, так и
rиперболы выражение
1 Ь 2
11 :::::
·
е а'
Теперь мы ВИДИМ, что это расстояние d может быть выражено
и через фокальный параметр:
==.!!.
е
(2)
и это выражение rодится не только для эллипса и rнперболы,
НО и для параболы (для которой, как мы знаем, е == 1 и
== p)
Таким образом, для всех наших кривых (кроме окружности)
фокаЛЫtЫЙ пара.метр р может быть определен как число р == e
,
zде d
расстояние от фокуса до дupeKтpиcы
а е...... зксчентрuсumem.
rI
:J;
J}
Рис. 56.
2. Уравнение эллипса, rиперболы и параболы в полярных
координатах. Получим уравнение эллипса, rиперболы и параболы
в полярных координатах. Этими уравнениями постоянно поль-
зуются в астрономии и во мноrих вопросах механики.
Начало полярной системы координат помещаем в фокус F
(левый в случае эллипса (рис. 56), правый в случае rилерболы
(рис. 57) и в единственный фокус в случае параболы (рис. 58));
полярная ось направлена от полюса в сторону, противоположную
от соответствующей директрисы d.
Для любой точки М нашей кривой обозначаем через r рас-
стояние от М до фокуса Р, через ()
расстояние от М до d.
Наша кривая С есть rеометрическое место точек М, дЛЯ которых
r
7;== е, т. е.
r :;: ед.
(3)
ФОI(АЛЬНЫА ПАРАМЕТР
87
Но , есть полярный радиус точки М. Вычислим 8. Обозначая
через D точку пересечения директрисы d с фокальной осью,
а через M
проекцию точки М на эту ось, ВИДИМ, что б есть
d
]}
$
Рис. 57.
Рис. 58.
длина вектора DM x, лежащеrо на оси абсцисс (канонической
системы). Для алrебраических значений векторов на этой оси имеем
(DM x ) == (DF) + (РМ Х ),
(4)
НО
'
""""""" I р
(DF)==,DF ==
,
е
тоrда как
(Р М х ) === r cos ер,
rде <р
уrол наклона вектора ЕМ к полярной ОСИ, Т. е. поляр-
ный уrол точки М. На кривой С (в случае rиперболы на правой
88
ПАРАБОЛА. ЭЛЛИПС. rИПЕРБОЛА
ее ветви) (DM x ) == 1 DMx } == б. Подставляя в равенство (4) найден..
ные значения входящих в Hero величин, получаем
р + S p+ercosq>
u ж:::2
r со <р == .
е е
Наконец, подставляя это значение 6 в (3), имеем
r
р+еrсоsЧ',
или
р
r == 1
t сos q> ..
(5)
Это и есть уравнение параболы, эллипса и (ветви) rиперболы
в полярных координатах.
r л А В А Ilt
ПРЕОБРА30ВАНИЕ КООРДИНАТ. ДВИЖЕНИЯ
И АФФИННЫЕ ПРЕОБРА30ВАНИЯ
1. Переход от одной аффинной системы координат
к друrой
1. Переход от одной аффинной системы координат к друrой
с тем же началом. Аффинная координатная система
или аффин-
ный репер 8 пространстве 1), есть тройка некомпланарных BeKTO
ров е 1 , е 2 , ез, данных в определенном порядке и приложенных
к точке О
началу репера.
Тройка векторов е 1, е 2 , е з называется иноrдв базисом репера
или координатной системы.
Если наряду с репером О е 1 е 2 е з , который будем условно назы-
вать «старым», дан «новый» репер с началом О' и базисом е 1 , ez,
ез, то возникает общая задача преобразования координат: по
координатам произвольной точки М (произвольноrо вектора u)
u u u
воднои И3 двух систем координат наити координаты тои же
точки (Toro же вектора) в друrой системе.
Предположим, что оба репера имеют одно и то же начало о.
Тоrда новый репер вполне определен, если заданы векторы eJ,
е2, ез своими координатами (относительно cTaporo базиса), Т. е.
если даны коэффициенты aik, i, k == 1, 2. 3, в равенствах
з
,
,
ek ==
aik el-
i r:;. 1
(1)
Матрица
ан а21 аз!
А * == а19 а22 аЗ2
аlЗ а2З азэl
называется матрицей перехода от базиса e t , е2, е з к базису ej,
, , u
е2, ез, а также матрицеи перехода от nepBoro репера ко второму.
Так как векторы eI, е2, ез линейно независимы, то детерминант
;1) МЫ иэлаrаем случай пространства! случай плос!{ости отличается ОТ Hero
только большей просrоrой.
90
ПРЕОВРАЗОВАНИЕ КООРДИНАТ
матрицы А* отличен от нуля
Mampицa перехода от одн.О20 базиса
к, дРУ20МУ есть всееда невырожденная матрица. Так как векторы
еl, е2, ез образуют базис, то каждый из векторов e 1 , е2, е з в свою
очередь однозначно представим как линейная комбинация векто-
ров ' , , ·
el, е2, ез.
3
el::::
akie;'
k== 1
...... уравнения (1) однознлЧН,о fX13решu},f,Ы относительно старых еди"
ничных векторов e 1 , е 2 , е з .
Посмотрим, как связаны между собой координаты х, у, z
и х', у', z' произвольной точки М (произвольноrо вектора u
== ОМ ) в старой и новой координатных системах.
Вектор u== OM записывается, во
первых, как линейная комби-
нация векторов e 1 , е2' е з с коэффициентами Х, У, z Н, BO
BTOpЫX,
как линейная комбинация векторов еl, е2, ез с коэффициентами
х', у', z', так что имеем тождество
(1 ')
u == хе 1 + уе 2 + zе з == x'ei + y'ei + z'ез.
Вносим в это тождество выражения еl, е2, ез из (1); получаем
u === xe 1 + уе2 + ze a == (а 11 х' + й12У' + аJзz') е 1 +
+ (aZ1x' +а 2 2У' +
зz') е 2 + (аЗI Х ' +а э 2У' +йзз z ') е з ..
Но вектор u единственным образом представляется как линейная
комбинация векторов еl. еа, ез. следовательно, коэффициенты при
векторах e 1 , е 2 , е з в левой и правой частях последнеrо равенства
должны быть одни и те же, т. е.
Х:::: a 11 x' + а l 2У' + a13 Z " I
у :::: й21 х' + й22У' +
зZ' ,
Z == аз1х' + а з 2У' + аззz' ·
Эти формулы и выражают старые координаты Х. у, Z точки М
(вектора u) через новые. 1\t\атриuа
(2)
I ан а12 GIЗ
А == I a2t а22 а23 ,
азt йЭ2 азз
(3)
дающая это выражение, называется .матрuц!й nреобразованuя
координат; она является транспонированнои по отношению
к матриuе А * перехода от базиса e 1 , е2, е з к базису e
, е;, е;. Обе
матрицы имеют один и тот же отличный от нуля детеРМlIнант..
2. Переход от одной аффинной системы координат к друrой
с изменением начала координат. Общий случай перехода от репера
Оеlе2ез к реперу О' e
e
e
сводится к комбинации двух случаев:
прямоуrОЛЬНАЯ СИСТЕМА КООРДИНАТ
91
переноса начала и только что разобранноrо случая перехода от
одноrо базиса к друrому. В самом деле, рассмотрим наряду
с двумя реперами Ое1е2ез и O'e
e
e
еще третий, «промежуточный»,
имеющий начало О' == (хо, Уо, zo) и базис e 1 , е 2 , ез; координаты
точки относительно этоrо промежуточноrо репера обозначим
" " " Т I ./' + " + " "
через Х , у, z. or да Х == ХО т А., У == Уо у, z == Zo z, r де х ,
у". z" выражаются через х' t у', z' по формулам (2) (в которых,
естественно, надо х, у, z (слева) соответственно заменить на х",
у", z"). Получаем окончательно:
в пространстве:
X==XO+a11x' +a l 2Y' +а1зz', !
у ==Уо+a 21 x' +a 2 2!J' +
z',
z == 20 + аз! х' + а з 2У' + азз z ' ;
(4 з )
на плоскости
х == ХО + а l1 х' + a 1 'JlJ', }
(42)
У == Уо + а21 Х ' +
2Y' ·
Это и есть общие формулы преобразования координат для двух
произвольных аффинных координатных систем.
Матрица
ан а12 а13
А == а21 а22 а23
аЗ1 аЭ2 йзз
коэффициентов a'k в равенствах (4з) соответственно (42) называется
матрицей nреобраэован.ия координат.
2. Переход ОТ ОДНОЙ прямоуrОJlЬНОЙ системы координат
к друrой
1. Случай прямоуroльноrо репера на плоскости. Можно orpa-
ничиться реперами с общим началом. Базис прямоуrольноrо репера
состоит из двух взаимно перпендикулярных ортов. Такие базисы
будем называть пРЯМОУ20ЛЬНЫ.м.и или орmонормальными.
Л е м м а. Пусть Oe1e Z и Oe
e
два ортоzонаЛЬНblХ репера на
плоскости с общим н.ачалом О. Т02да поворотом репера Oe 1 e2
в несущей еео плоскости вокруе точки О на некоторый У20Л а
можно перевести репер Ое 1 е 2 лцбо 8 репер Oe
e
, либо в репер
Ое; (
e;) (рис. 59 и 60). ДРУ2ими словами: репер Oe;e
получается
из репера Ое 1 е 2 либо пoeOPOmOM 1 либо поворотом и последующим
отражением (относительно прямой. несуU{eЙ вектор е;).
Д о к а 3 а т е л ь с т в о. Репер Oe 1 e 2 определяет некоторое поло-
жительное направление вращения плоскости, а именно то направ-
ление, в котором уrол от орта e 1 до орта е2 равен i (а не 3: ).
92
ЛРЕОБРАЗОВАНИЕ I(ООРДИНАТ
Обозначим через а уrол от орта е 1 до орта e
. Повернув репер
Ое 1 е 2 (в ero плоскости) в положительном направлении на уrол а,
мы совместим орт е 1 с ортом е;; тоrда орт е 2 , будучи перпенди..
ку.пярен к орту е 1 , либо совместится с ортом e
(рис. 59), либо
.:с
а)
о)
Рис. 59.
;х
:с
а)
б)
Рис. 60.
совместится с противоположным ему ортом ..... e
(рис. 60). Утверж..
дение доказано.
Из доказанноrо следует, что относительно базиса e 1 . е 2 орт e
имеет координаты COS а, sin а:
e
=== {cos сх, sin а},
тоrда как для е2 имеем две возможности:
.1Iибо
e2=={cos(a+
). sin(a+
)}.
прямоуrОЛЬНАЯ СИСТЕМА КООРДИНАТ
93
Т. е.
е2 == {
sin а, cos а},
либо
е2 == {
sin а, cos а},
и тоrда
е2 == {sin а, ....... COS а}.
Матрица перехода от базиса e 1 , е 2 к базису еl, е2 имеет вид:
в первом случае
С ==
C?S а sin а 1 1 de t С == 1, (1 )
\1
Sln а cos а \ '
во втором
с
11
::
:
11 ' det С
1. (II)
Базисы е 1 , е 2 и ei, е2 называются в первом случае одноименными
или одинаково ориентированными, а во втором
разноименными
или противоположно ориентированными.
Так как det С == 1 в случае одноименных, det С ==
1 в случае
разноименных базисов, то только что высказанное определение
можно сформулировать и так:
О п р е Д е л е н и е. Два ортО20нальных базиса (репера) одно"
U./rf.eHHbL, если мапlрuца перехода от одНО20 из них к дРУ20,М,У имеепz
положительный детерминант, u разноименны, если этоm aerпep
минант отрицателен.
Формулы преобразования координат даются матрицами, TpaHC
понированными к матрицам перехода от одноrо базиса к друrому;
это будут формулы:
Х:= х' COS а
у' sin а, }
У::: х' sin ct + у' cos а в случае одноименных базисов,
х == х' COS а + у' sin а, }
У === х' sin cl
у' cos а в случае разноименных базисов.
2. Ортоrональные матрицы. ПРЯ
lоуrольные (ортоrональные)
реперы в пространстве. Дадим следующее
О п р е Д е л е н и е. Квадратная матрица С любоrо порядка п
называется ортОё.ональноu, если транспонированная к ней мат...
рица С* является ее обратной матрицей:
С* == C
l. (1)
Через Е обозначаем, как всеrда, единичную матрицу. Тоrда
равенство (1) эквивалентно каждому из равенств СС* == Е, С*С == Е.
Если расписать равенство сс. == Е t приравнивая каждый эле
мент матрицы СС* соответствующему элементу матрицы Е, то
94
ПРЕОВРАЗОВАНИЕ КООРДИНАТ
получатся (ДЛЯ всех i == 1, 2, ..., п; j === 1, 2, ..., n) соотноше
ния CilCjl +. . . + ClпCjn == О (при i =F j), С?l +. . . + cl ft == 1, называе
мые соотношениями орmОZОflаЛЬflости (точнее, ортонормальности)
по строкам. Точно так же, расписывая поэлементно равенство
С*С === Е, получим соотношения ортоrональности по столбцам:
C 1 IClj':+.' ,+CпICпj ==0 (при i * j), C
l+.. .+C
l === 1.
Нами доказана
т е о р е м а 1. ОртО201ШАЬНОСlпь .матрицы С в смысле равен-
ства ( 1 ) эквивалентна как о ртоеон.альности по строкам, так и
ортоеональностu по Сfполбцам.
т е о р е м а 2. Детерминант всяlООй ортоеональной матрицы С
равен + 1.
В самом деле,
det С. det C
l == det Е === 1,
но дЛЯ ортоrональной матрицы C
l == C'J<, значит, det C
l == det С* ==
det С, и мы получаем
(det С)2 == 1, det С === + 1.
rеометрический смысл понятия ортоrональной матрицы вто"
poro или TpeTbero порядка заключается в следующем:
т е о р е м а 3. Орmосональные матрицы u только они являются
JШтрuцй},f,U neрехода от одноео орт020налыюео базиса к друеому.
Д о к а з а тел ь СТ В о. Если матрица
t:1l Cli С13
С == С21 С22 С2З
СЗ1 СЗ! СЗЗ
ортоrональна и в пространстве дан произвольиый ортоrональный
базис el, е 2 , е з , то, полаrая
e
== с 11 е 1 +С 1 2 е 2 +с 1з е з, I
е; == С 21 е 1 + с 22 е 2 + с2зеЗt
е; == C Bl е. + св2е2 + сззез,
получим снова ортоrональный базис е;, е;, е; в самом деле,
равенство единице скалярноrо квадрата каждой строки матрицы С
u , , , б
означает, что каждыи из векторов e I , е 2 , ез есть орт, а тре ова..
ние равенства нулю скалярноrо произведения двух различных
строк означает, что любые два из этих ортов перпендикулярны
между собой.
Обратно: если С есть матрица перехода от ортоrональноrо
б 6 ",
азиса е 1 , е 2 , е з к ортоrональному азису е 1 , е2, ез, то строки
С ' , ,
матрицы выражают векторы еl, е2, ез, поэтому пх скалярные
квадраты равны 1, а скалярные произведения двух различных
строк равны нулю
матрица С ортоrональна (по строкам). Тео-
рема 3 доказана.
(2)
прямоуrопЬНАЯ СИСТЕМА КООРДИНАТ
95
3 а м е ч а н и е. Координаты С 11' С 1 2' С 1 3 орта е; относительно
репера е 1 , е 2 , е з суть направляющие косинусы этоrо орта, Т. е.
ero скалярные произведения с ортами е 1 , е2, е з , так что
С 1 1 == (e
, е 1 ), C12 == (e
, е2), С 13 == (e
, е з )
и аналоrично
С 21 == (е;, е 1 ),
С З1 == (e
, e 1 ),
с 22 :::::: (e
, е 2 ),
С З2 == (e
, е 2 ),
С2З ::::: (e
, е з ),
С З3
(е з , еа)'
Отсюда сразу следует, что столбцы матрицы С суть орты e 1 , е 2 ,
б ",
ез, записанные их координатами относительно азиса e I ,
l, ез.
Ортоrональность по сто-пбцам означает, таким образом, что
орты е 1 , е2, е з образуют ортоrональный базис, транспонированная
матрица С* есть матрица перехода от базиса e
, e
, e
к базису
e 1 , е 2) е з (поэтому она и совпадает с обратной!).
Итак, если в ПрОС1ранстве дан произвольный ортоrонапьный
базис е 1 , е 2 , ез, то для всякой ортоrональной матрицы С суще..
ствует такой (однозначно определенный) ортоrональный базис е;,
e
, e
, что элементы Clk матриuы С суть косинусы уrлов между
векторами el и ek, 1, k == 1, 2, 3. В точности такое же утвержде-
ние (с заменой п == 3 на п == 2) верно, разумеется, и для плоско-
сти, в чем леrко убедиться, если записывать координаты х, у
какоrо
нибудь орта е не в виде х == cos а, у == sin ct, а в виде ска-
лярных произведеннй х == (е, е 1 ) == COS (х, У == (е, e 1 ) == COS Р (rде а,
р....... уrлы между ортом е и координатными ортами еl и
). TorAa
рассуждения для плоскости будут дословно теми же, что и в слу-
чае пространства.
Однако для матриц BToporo порядка верна и следукхцая
т е о р е м а 4. Для всякой ортО20Н,йЛЬН,Ой матрицы С втОро20
порядка можно найти такой У20Л a
что
С ==
COS . а sin а
I если d t С 1
11
SIn а сos а f ' е ==,
(1)
и
С == 11 ' СOS , а. sin а. ' 1 если d t С 1
SIn а
cos tX I ' е ==
·
(11)
в самом деле, матрица С есть матрица перехода от произ..
вольноrо opTOrOHa.,1JbHOrO репера Ое 1 е 2 к HeIiOTopOMY ортоrональ-
НОМУ реперу Oe;e
. Репер Oe
e
получается из репера Oe 1 e 2 или
поворотом на некоторый уrол а (уrол наклона вектора e
к век..
тору e 1 ), или поворотом с последующим отражением относительно
прямой, несущей вектор e
.
Мы видели, что в первом случае матрица С имеет вид (1), во
втором случае
вид (11).
96
ПРЕОБРА30ВАНИЕ КООРДИНАТ
з. Ориентация пространства (плоскости)
Назовем в пространстве (или на плоскости) два координатных
базиса (два репера) одноименными, если матрица перехода от
одноrо из них к друrому имеет положительный детерминант;
в противном случае (т. е. если детерминант матрицы перехода
отрицателен) назовем базисы разноименными. В случае opToro-
нальных базисов на плоскости это определение и ero rеометриче-
ский смысл нам уже известны из
2. Одноименность двух бази-
, , , б
сов еl' е 2 , е, и eJ, е2' е з удем иноrда записывать так: е 1 е 2 е з "'-J
, , ,
"-' е 1 е'Аез.
Покажем, что данное определение одноименности удовлетво-
ряет так называемым аксиомам равенства, т. е. требованиям реф-
лекси8ности (е 1 е 2 ез '" е 1 е 2 е з ), симметрии (из е1е2езI"J e
e
e
следует
"' ) ( '" ",
е 1 еi е з '" е 1 е 2 ез и транзитивности из еlе2еаI""Vеlеiез и е 1 е 2 е з f"V
N " " " " " )
"-' еl e i ез следует е 1 е2ез I"J еl e
е а .
Рефлексивность вытекает из Toro, что матрица лерехода от
базиса е 1 е 2 е з к нему самому (т. е. матрица тождественноrо преоб-
Р8эования) есть единичная м"атрица, имеющая детерминант 1.
Симметрия вытекает из Toro, что детерминанты матрицы и
обратной к ней матрицы C
l имеют один и тот же знак. Для
Toro чтобы убедиться в транзитивности, рассмотрим три базиса:
1: e 1 , е 2 , е з ; 11: е;, e
, e
: 111: е;, е;, е;.
Если обозначить матрицы перехода от 1 к 11, от 11 к 111 и от 1
к 111 соответственно через СЬ, CBr, cfIIt то cl II == СПIС
I' зна-
чит, и det C
II
det СИI det cfr, откуда утверждение следует.
Из сказанноrо следует:
Множество всех базисов пространства (пЛDСКОСПlU) распа-
дается на попарно не nересека/ощuеся классы, обладающие тем
свойством, что все базисы, принадлежащие одному какому-нибудь
классу, одноименны, а всякие два базиса, принадлежаu(их различ-
НЫМ классам, разноименны между собой.
Докажем, что число эпlUХ классов равно двум.
Для Toro чтобы убедиться, что имеется по крайней мере два
класса, возьмем какой
нибудь базис е., е 2 , е з и заметим, что
матрица перехода от el' е 2 , е з к e 1 , е 2 , (
ез) есть
1 О О
О 1 о.
t
О О
I
ее детерминант равен
1, значит, базисы е 1! е 2! е з и el' е 2 , (
ез)
разноименны, они при надлежат к различным классам.
Теперь мы покажем, что всякий базис е;, е;, e
принадлежит
к одному из двух классов: либо к классу, содержащему базио
e 1 , е 2 , е з , либо к классу, содержащему базис el' е2' (....... ев), Дру-
ОРИЕНТАЦИЯ
91
u б ",
rими словами, докажем, что всякии азис еl' eg, еа, не ОДНО4
именный базису е 1 , е 2 . е з , одноименен базису е 1 , е 2 , (
ез).
В самом деле, матрица перехода от e 1 , е 2 , ез к e
, е;, e
имеет
(в силу раЗI-Iоименности этих базисов) отрицательный детерминант:
матрица перехода от е 1 , е 2 , (........... е з ) к e 1 , е 2 , ез имеет детерминант
1; значит, матриuа перехода от е 1 , е 2 , (
ез) к e
, e
, e
(будучи
лроизведением двух названных матриц) имеет положительный
детерминант. Утверждение доказано.
В каждом из двух классов базисов имеются ортоrональные
базисы. В самом деле, берем какой
нибудь ортоrональный базис
е 1 , е 2 , ез. Он содержится в одном из наших двух классов; ОрТО4
rональный базис е 1 , е 2 , (
eB) содержится тоrда во втором классе.
Два базиса, лолучающиеся ОДИН из друrоrо одной транспози-
цией (Т. е. перестановкой двух каких-либо из трех векторов,
образующих данный базис), всеrда разноименны. В самом деле,
б ", б
пусть азис е., e
, ез получается из азиса еl' et, е з перестанов-
кой двух каких
нибудь векторов этоrо последнеrо, например век-
торов e 1 и е2' так что
,
е. ==
I
ei == е 1 ,
,
ез ==
,
ез.
Тоrда соответствующая матрица перехода
"
"
o о 111
имеет детерминант
1.
Поэтому два базиса, получающихся один из друrоrо произ.
вольной перестановкой их векторов, одноименны, если эта пере
становка четная, и разноименны, если перестановка нечетная:
базисы
е 1 , е 2 , е з ; е 2 . е з , C t ; Сз, е 1 , е 2
входят в один класс, а базисы
е 2 , е 1 , e
; е з , е 2 , е 1 ; еl' ез, е 2
в друrой.
Введем теперь слеДУlощее весьма важное определение.
Скажем, что базис е 1 , е 2 , ез переходит в базис e
, е;, e
по-
средством непрерывной деформации. если для каждоrо числа t,
принадлежащеrо некоторому отрезку а
t
Ь, дан базис
, e
.
e
, а именно:
з
e
==
Qkek'
k ;;:: I
i == 1, 2, 3,
98
ПРЕОБРАЗОВАНИЕ КООРДИНАТ
так что все координаты C
l' c:
и Т. д. являются непрерывными
функциями от t на отрезке а
t
Ь, причем при t:::= а мы полу..
чаем ИСХОДНЫЙ базис е 1 , е 2 , е з , т. е.
ct;) == 1,
с:. == о,
С: 1 == О,
C
2 == О,
c
== 1,
С: 2 == О,
C
3 == О,
3 === О,
С:з ==81,
а при [:=: Ь получаем базис e
t
, e
:
з
е; ==
Cfkek'
k :
1
i == 1, 2, 3.
Теперь предположим, кроме Toro, что базис e
, e
,
приложен
к точке О, === (x
, y
, Z
), rде X
, 110, Z
суть также непрерывные
на отрезке а
t
Ь функции от t, причем х: == и: == z: == о, х: ==
=== Х о ' y
== У о ' Z
== zO' О' == (Ха, Уа, zo). Тоrда мы rоворим, что
репер Ое}е 2 е з переходит в репер O'e
e;e; посредством непрерывной
деформации.
Наrлядный смысл этих определений таков.
Считая параметр t временем, изменяющимся от начальноrо
момента t == а до конечноrо t === Ь, мы имеем непрерывно меняю...
u
ийся (<<деформирующийся») во времени репер 0te
e
e
, начальное
состояние KOToporo (при t === а) есть паш исходный репер Ое 1 е 2 еЗt
а конечное
репер O'e
e
e; (в который превратился репер Ое 1 е 2 е з
в результате процесса деформаuии, длившеrося отрезок времени
a
t
b).
Имеет rv:eCTo слеДУЮlцее очевидное преДJIожение.
Если базис e 1 , е 2 , е з переходит в базис е;,
, e
посредством
деформации, которая длится, положим, отрезок времени а
t
Ь б 1" б " " "
:::;; , а 8ЗИС еl, е 2 , ез переходит в азис е 1 , е-1, ез посредством
деформации, которая длится в течение отрезка времени Ь
t
С,
то базис e 1 , е 2 , е з переходит в er, е;, е3' посредством деформации,
которая длится в течение отрезка времени а
t
с.
Далее, если базис e 1 , е 2 , е з переходит посредством непрерыв",
ной деформации (а
t
Ь) в базис e
, е;, e
, то и базис e
, e
,
e
переходит посредством непрерывной деформации в базис e 1 ,
,
е з . Действительно, положим t' == (а + Ь)
t и
з
*1'
t
ei == L..J C ik e k .
k == 1
Тоrда при t' == а получаем t == Ь и, следовательно, ет а == e
и т. д.,
t ' Ь t :.. ь а
при ;;:; имеем
а, значит, еl == еl н Т. Д.
ОРИЕНТАЦИЯ
99
.&
налоrичные предложения, разумеется, верны и для деформа
ции реперов.
3 а м е ч а н и е. Обычно за отрезок а
t
Ь берут единичный
отрезок О
t
1.
Докажем следующее основное предложение:
la. Еслu базис еl'
, еа пepexoauпz в базис e
, е;. e
посред-
Cп160M непреры.вной деформации, то оба базиса одноu/"tеННbt.
В самом деле, положим
Сll (/) Сl! (t) С13 (t)
D (t) === С21 (t) cd (t) С2З (t) ,
С31 (t) СЗ2 (/) сзз (t)
а
t
Ь;
надо доказать, что числа D (а) и D (Ь)...... одноrо и Toro же знака.
Но детерминант D (t), будучи мноrочленом от своих элементов
С 11 (t), С1з (t), ..., ЯВЛЯЮЩИХСЯ непрерывными функциями от t,
есть непрерывная функция от t на всем отрезке а
t
Ь. Если
бы ее значения в концах этоrо отрезка имели разные знаки. то
существовало бы промежуточное значение t o , а < 'о < Ь, для кота-
poro D (t o ) == О. Но этоrо не может быть, так как D (/0) как детер-
минант матрицы перехода от базиса e 1 , е 2 , ез к базису e
o, e
o, e
o
всеrда отличен от нуля.
Теперь мы докажем обратное предложение:
16. Всякие два одноименных базиса (репера) ,моеут быпlЬ пере-
ведены друе в дРУ2а непрерывной деформацией.
План доказательства таков. Мы сначала доказываем, что вся-
кий репер может быть непрерывной деформацией переведен в пря-
моуrольный. После этоrо доказываем, что всякие два одноимен-
ных прямоуrольных репера MorYT быть переведены друr в друrа
движением в пространстве, т. е. специальным видом непрерывной
деформации.
Предположим, что мы доказа"llИ оба эти факта. Пусть Ое 1 е 2 е з
О ' , I О
И еjе:2ез
два произвольных одноименных репера, е 1 е 2 е з r-....J
r-v О' e
e
e
; переводим их непрерывной деформацией соответственно
в прямоуrольные реперы ОВ1828з и О'8'е'в'. TorAa ОВIВ2вз'""-'Оеlе2езrv
"-' О' e
e
e
rv О' 8
8
B
, следовательно (по свойству транзитивности),
О О , , " Н О О , , , ,
е 1 8 2 8 з r-....I 8J8
8з,. О одноименные реперы 81828з, 818-й8з орто-
rональны; значит, по сделанному преДПОJl0жению они MorYT быть
переведены друr в друrа непрерывной деформацией. Переводим
теперь непрерывными деформациями последовательно
Ое 1 е 2 е з в 081828з, (А)
081е
з в O'8
B
8
, (Б)
O'8
e;S
в O'e
e; (В)
(последнее возможно: раз существует деформация, переводящая
O'e
e;e; в O'E
e;
, то существует, как мы видели, и Деформация,
100
ПРЕОБРАЗОВАНИЕ КООРДИНАТ
переводящая O'E;e;e
в O'e;e;e
). В результате трех последователь-
ных деформаций (А), (5), (В) получаем искомую деформацию,
переводящую Ое 1 е 2 е з в O'e;e;e
. Основное предложение доказано.
Переходим к выполнению намеченноrо плана..
Доказываем первое утверждение: всякий репер может быть
непрерывной деформацией переведен в ортоrональный.
Докажем это утверждение сначала для плоскости. Пусть
Oe1e
данный репер, e
== OE
, e
== оЩ .. Построим ортоrональныЙ
репер Oete
так, чтобы орт еl == о Щ лежал на оси, несущей вектор
e
=== БЩ, а орт e
== ОЩ (перлендикулярный к e
) лежал в той же
Е!
Е- О
2
о)
Е' E t
1 I
Е О
'J
о
а)
Е/ E t
I I
Е О
I
о
?ис. 61.
полу плоскости (из двух полуплоскос
.J!: определяемых прямой
OЬ"
), в которой лежит вектор е; == OE
. Тоrда, если уrол <"р,
О < fP < л, между векторами e
и eg острый (рис. 61, а), то он
весь лежит внутри прямоrо уrла между оЩ и оЩ, а если уrол
<р тупой (рис. 61, 6), то он, наоборот, содержит прямой yrou'I
между OEl и OE
.. Для каждоrо t, О
t
1, обозначим через
t t
Е н соответственно через E
точку отрезка E
El, соответственно
E
E4 ) делящую этот отрезок в отношении t : (1 ------ t). При любом
t, 0< t < 1, вектор e
== оЩ лежит на полупрямой о Щ, несущеЙ
вектор e
, а вектор e
лежит внутри треуrольника OE
E4, имею-
щеrо с полупрямой О Щ единственную общую точку о.
Поэтому векторы оБi , OE
при любом t не коллинеарны,
б О t t u
т. е. о разуют репер ele
, непрерывно меняющиися при изме-
нении t от О до 1 и осуществляющий непрерывный переход
(деформацию) от репера Oe
e
к реперу Oele
.
Переходим к случаю пространства. В плоскости Oe1e
произ-
ведем те же построения, как и выше. Обозначим через еА == OEl
ОРИЕНТАЦИЯ
101
орт, перпендикулярный к плоскости Oele
и направленный в ту же
сторону от этой плоскости, что и вектор e
(рис. 62).
В полной аналоrии с предыдущим случаем обозначаем через
t
Е 3, О
t
1, точку отрезка E
E
, делящую этот отрезок в отно-
шении t: (1
t) при любом t, 0< t < 1. Таким образом, опреде-
O
E t t О t t t u t
лены вектор 3== ез и репер еJе,!ез, непрерывно зависящии от и
осуществляющий при изменении t от О до 1 непрерывный переход
от данноrо репера Oe1e
eg к прямоуrольному реперу Oe
e
e
. Пер..
вое утверждение доказано.
Е! Е/ EJ1
Е О
z
Рис. 62.
Рис. 63.
Переходим к доказательству BToporo утверждения. Всякий
прямоуrольный репер Ое 1 е 2 ез может быть посредством непре..
pbIBHoro движения, являющеrося, как было сказано выше частным
случаем непрерывной деформации, переведен во всякий друrой
одноименный с ним лрямоуrольный репер O'e;e
e;.
Посредством сдвиrа на вектор 07У можно прежде Bcero сов-
местить начала О и О' обоих реперов; поэтому можно оrраничиться
случаем, коrда оба репера имеют оБUl.ее начало о. Теперь начи-
наем с Toro, что совмещаем орты ез == оЕ; и е; == о щ. Для этоrо
проведем через эти орты (имеЮULие общее начало О) плоскость
ОЕзЕ; (рис. 63) и восставим к этой плоскости в точке О пер-
пендикуляр d. Совершим теперь поворот репера Ое 1 е 2 еэ (как
твердоrо тела) BOKpyr прямой d на уrол б, О
е ::::;; п, между
ортами е з и e
в таком направлении, чтобы орт ез == оЕ; совме..
............
..............
стился С ортом е; == ОБ;. Этот поворот переведет орты еl == ОЕ!
и e2== O
в какие"то взаимно перпендикулярные орты еТ и е:.
102
ПРЕОБРАЗОВАНИЕ КООРДИНАТ
лежащие в плоскости, перпендикулярной к орту о Щ (и лрохо-
дящей через точку О), т. е. в плоскости OE;E
. Теперь остается
поворотом репера Oere;e; BOKpyr прямой, несущей орт е;, сов-
местить орт ef == оЩ с ортом ОБ;. Эroт поворот, оставляя пару
ортов ОЩ и ощ в ИХ плоскости (которая есть плоскость OE
E
)
н совмещая орт оЩ с ортом ОБ; ==е;, переведет орт ОБ : (с кото-
рым' еще ранее был совмещен орт о Е;) в орт, перпендикулярный
к оЩ == e
, т. е. либо в e
, либо в (
e
). Но вторая возможность
исключена, так как реперы Ое 1 е 2 ез и Ое; (
e
) e
разноименны и
поэтому не MorYT быть совмещены движением в пространстве.
Утверждение доказано.
Вместе с ним завершено доказательство и следующеrо резу ль..
тата (BepHoro как для плоскости, так и для пространства):
т е о р е м а 5. Для тосо Чlrlобbl два репера (два базиса) были
однои.меННbl J необходимо II достаточно, ЧПlобbl один из них можно
было. непрерывной деформациеЙ перевести в друzой. Если данные
реперы пря.мОУZОЛЬНЫ J то их .можно перевести друс в друеа даже
движение-м в пространстве. Если реперы разноимеННbl J mo их
нельзя перевести друс в друса даже никакой деформациеЙ 1 значит,
и подавно никаким движением.
Эту теорему можно сформулировать следующим образом.
т е о р е м а 5'. Два прямоуzольных репера (на плоскости иllи
в пространстве) mоzда u только тОсда одноименны , КОсда один
llЗ них может быть переведен в apyzoa непрерывным двиalсениеJt
(в плоскости, соответственно в пространстве).
П О О , , , ,
усть e 1 e 2 e;-) и еlе
ез
два прямоуrольных разноименных
репера. Тоrда реперы Ое 1 е 2 е з и O'e
e
(
e;) одноименны И, например,
первый из них может быть движением перевед€н во второй.
Но репер О'е;е; (
e
) является зеркальным отражением репера
O'e;ц
относительно плоскости O'e;
. Поэтому имеет место
т е о р е м а 6. Если орmО20налЬflЬ/R реперы Ое 1 е 2 е з и О' e
e
разноuменны, та один из них };fО'Жеm быть переведен в друеой
flосредспизом, движения со следующим за Н,им (или предшествующи'м
ему) зеркальным отражением.
Доказательство следующеrо замечания можно в качестве упраж..
нения предоставить читателю.
3 а м е ч а н и е. Беря зеркальные отражения относительно произ..
вольноЙ плоскости всех баЗИЗ0В (реперов) одноrо какоrо
нибудь
класса в пространстве, получим все базисы (реперы) друrоrо класса.
АналоrиЧНЫЙ результат, разумеется, имеет место и в плоскости.
О п р е д е л е н и е. Ориентировать плоскость или пространство ........
значит один из двух классов базисов (реперов) объявить поло-
жительным (а друrой
отрицательным). Тоrда и всякий базис
(репер) называется положительным или отрицательным в завися..
мости от Toro, к какому классу он принадлежит.
yrлы ЭйЛЕРА
103
Для TOrO чтобы ориентировать (плоскость или пространство),
достаточно задать один какой
нибудь базис и объявить положи-
тельными все с ним одноименные базисы.
4. Уrлы Эйлера
Вернемся к теореме 5; нас интересует утверждение этой Teo
ремы, касаlощееся возможности перевести посредством движения
данный прямоуrолъный репер в любой друrой прямоуrолъный
репер, одноименный с данным. Мы можем леrко дополнить эту
теорему установлением тех rеометрических элементов (тех «пара
метров»), которые определяют положение BToporo репера Oe
e
e
относительно первоrо Ое 1 е 2 ез (МЫ предполаrаем сначала, что
у обоих реперов одно и то же начало О).
Из рассуждений, проведенных на стр. lOl
102, вытекает, что по..
О ' , , d
ложение репера еlе
ез вполне определено, если известны: прямая
(перnендикуляр, восставленный в точке О к плоскости Оезе
) и
два уrла: уrол б, на который надо повернуть репер Ое 1 е 2 е з BOKpyr
прямой d, чтобы совместить орт еэ с ортом e
, и уrол Toro пово
рота, который после этоrо надо сделать, чтобы совместить вектор
еТ (в который перешел вектор еl после первоrо поворота) с век-
тором е; (после этоrо BToporo поворота репер Ое 1 е 2 ез, как мы
видели, оказался полностью совмещенным с репером Oe
e
e
).
Рассмотрим ближе всю картину. Прежде Bcero прямая d,
проведенная через начало О перпендикулярно к плоскости Оезе;,
есть, очевидно, прямая пересечения плоскостей Оеlе2 и Oe
e;.
Плоскость Ое 1 е2, в которой, таким образом, лежит прямая d,
ориентирована самим данным в ней репером Oe 1 e2; поэтому поло.
жение прямой d определено наклоном какоrо
либо ее направляю
щеrо вектора к вектору е 1 . За направляющий вектор прямой d
примем такой ее орт е; (рис. 64), что репер Оезе;е; одноименен
с репером Ое1е2ез. Уrол от орта еl до орта еТ (в ориентированной
плоскости Ое 1 е2) мы обозначим через 'Ф, о
", < 2л. Тоrда пово",
ротом репера Ое 1 е 2 BOKpyr оси, несущей орт ез (ось апп..тrикат
координатной системы Ое 1 е z е з ), на уrол 'ф в ПО.п
ожительном направ-
лении вращения 1) мы совместим орт е 1 с ортом e
. При этом
.. .. "
повороте орт е 2 переидет в какои
то орт е 2 , а орт ез останется
на месте.
Теперь совмещаем вектор е з с вектором e
посредством крат...
чайшеrо поворота на некоторый уrол 6, О
е
Л, BOKpyr пря
мой d, несущеЙ орт e
. Так как репер Оезе
е; одноименен с репером
1) ПОД положительным направлением вращения BOKpyr какой
ни6удь
(направленной) оси мы в этом параrрафе всеrда понимаем направление враще
ния, определенное репером Оеlе
з. На нашем рисунке направление вращения
против часовой стрелки для зрителя, стоящеrо ВДОЛЬ орта ЭТОЙ оси, ноrами.......
в начале, rоловой
в конце орта.
104
ПРЕОБРА30ВАНИЕ КООРДИНАТ
Ое 1 е 2 ез, ТО этот поворот ПРОИСХОДИТ в положительном направле-
нии. Он переводит репер Ое;е;е з в репер Oe;e;"e
, причем плос-
кость Ое}е 2 совместилась с плоскостью Oe;e
. Нам остается только
сделать поворот репера Oe;e
"e
BOKpyr оси Oz' (несущей
орт e
) на уrол ер от вектора er до вектора е; (в ориентированной
плоскости Oe;e
, в которой лежат оба вектора ei и е;), тоrда
", ,
и вектор e
совместится с вектором е 2 .
Три уrла:
'Ф, о
'1' < 2л, от e 1 до е; в плоскости Ое 1 е2'
6, О
в
Л, от ез до e
в плоскости Оезе
,
<р, О
ер < 2л, от ei до e
в плоскости Oe
e;,
называются эйлеРО8ЫМU уеламu репера Oe
e
e
относительно репера
Ое 1 е 2 е з . Зная репер Ое}е 2 е з и эти уrлы 'Ф, в, <р, мы сразу же
можем определить единствеННЬJЙ репер Oe
e;e
, имеющий эти уrлы
своими 9йлеровыми уrлами и одноименный с репером Ое 1 е 2 ез.
В самом деле, мы сначала совершаем поворот репера Ое 1 е 2 е з
BOKpyr оси, несущей вектор еа (ось аппликат координатной системы
Ое 1 е 2 е з ) на уrол 'ф в положительном направлении. Этот ПОБОрОТ
переводит орт еl в орт er, определяющий ось d (и весь репер
Oe1eZe:l
в Ое;е;ез). После этоrо совершаем поворот репера Oeie;e 3
BOKpyr оси d на уrол 6 в положительном направлении. При этом
u u, V
орт ез переидет в некоторыи орт ej\, орт еl останется на месте,
а орт е; перейдет в новый орт e
"; репер Оеrе;е з перейдет в (прямо-
уrольный) репер Oe
e
"e
. Наконец, делаем поворот на уrол q>
в положительном направлении BOKpyr оси орта e
. Этот поворот,
, " ",
оставляя орт ез на месте, переведет орты еl, e
в некоторые
ОПРЕДЕЛЕНИЕ АФФИННЫХ ПРЕОБРА30ВАНИPl
105
, , О " ", , ( О )
орты e 1t е2, а весь репер elei еа значит, и е 1 е 2 е з
в одно..
значно определенный предыдущим построением прямоуrольный
репер Oe
e;e
(одноименный с Ое 1 е 2 ез).
Для репера Oe
e;e; ero уrлы Эйлера (относительно исходноrо
репера Ое t е 2 е з , остающеrося фиксированным) ЯВЛЯIОТСЯ независи-
мыми параметрами (определяющими этот репер); «независимость»
означает, что этим параметрам мы можем давать совершенно
произвольные значения (в пределах изменения О
<р < 2л, 0<
в
31, О
<р < 2л каждоrо из них); каждому набору значений
пзрзметров соответствует вполне определенный репер Oe
e;e
.
5. Определение движения и аффинноrо преобразования
плоскости и пространства
Оп р е Д е л е н и е. Движением плоскости (пространства) ма.зы..
ваеtncл всякое преобразование
которое может быть задано следую-
щи.Аt образОМ. Берется некоmoрый (произволыlыl)) «исходный»
nРЯМОУ20ЛЬНЫЙ репер Ое}е 2 на плоскости (соответственно прЯАfО
уzольныu репер Ое 1 е 2 ез в пространстве); наряду с ни,М задается
у g
g
е 2
О 81
о)
е 2
:х О е1
Рис. 65.
::с
б)
«новый» прямоуzольный репер O'e
e
(соответственно O'e
e
e
)
с mEJt же масиlтабо.м,
чmo и первый. Этими данными определяется
преобразование плоскости (пространства), состоящее в тOM
чпzо
каждой точке М ставится в соответствие точка M'I и.ме/ощая
относительно 81nОрО20 репера те же caA-tbtе KoopaUHaпlbl
которые
точка М имела отНОСИlпельно исходНО20 репера (рис. 65).
Если первый репер одноименен со старым, исходным, то дви-
жение называется собствеННblМ (рис. 65, а), в противном случае
движение называется несобственным (рис. 65, б)..
106
ПРЕОБРДЗОВДНИЕ КООРДИНАТ
Из определения движения сразу следует, что при движении
сохраняется расстояние между любыми двумя точками. В самом
деле, пусть даны какие-нибудь две точки М( и М 2 своими коор-
динатами в исходной системе координат Ое 1 е 2 :
М 1 == (Х 1 , Уl)' м 2 === (х 2 , У2).
Расстояние между ними есть число
р (М 1 , М 2 ) == У(Х 1 ..... х 2 )2+(Уl
У2)2.
При данном движении точки М 1 и ЛJ 2 переходят в точки .'\1), 1\-12,
имеющие те же координаты X 1 , Yl, соответственно Х 2 , У2' но только
в новой системе координат O'elef. Так как эта новая система тоже
прямоуrОJlьна и имеет тот же масштаб, что и старая, то рассто-
яние между точками М 1 и М 2 выражается (в той же единице
длины) тем же числом
р (M t , М 2 ) == У (X 1
х 2 )2 + (Уl
У2)2-,
ЧТО И расстояние между точками Л1 1 и М 2 ,
На неизбежно возникающий вопрос:
Что получится с нашим определением движений, если оmlШ-
заmьcЯ от требования прямоусольносmи систем KoopaUflaпL, в это
определение входящих?
отвечаем:
получится определение
иHHЫX преобразований.
!/'
х'
М
:с
а)
Рис. 66.
м
6)
и т ак, пусть снова в плоскости (в п рост ранстве) задан а
на этот
раз совершенно nрОUЗ80ЛЬНал аффиННая....... систе'м'а координат Oel
(соответСf11fJенно Ое 1 е 2 е з ). Если, наряду с этой (<<старой», или «исход..
нои») сuctneМОЙ координат, задать также совершеННQ nроизвольную
ПРЕОБРАЗОВАНИЕ ВЕКТОРОВ
107
«Н08УЮ» аффинную координатн.ую систе,м,у O'eie2 (соответственно
О' еiе2ез), tпo определится nре06разованuе, сосmОЯlцее в mо,м" что
каждой ftWЧке М плоскости (соответственно npocтpaHcпlBa) ста-
вится в соответствие п10чка М' t которая 8 новой коордUl-lаmной
z'
о)
:с.
о)
Рис. 67.
системе имеепl те са,М,ые координаты, какие точка М имела в ста-
рой системе (рис. 66 и 67). Преобразование, которое .может быть
задано эти,М способом, называется аффuН,Н,ы,,м,. Очевuдно, движенuя
явЛЯ10тся частным случаем аффинных преобра.зований.
Рис. 66 и 67 пOMorYT читателю составить себе наrлядное пред-
ставление о ТОМ, что может происходить при аффинном преобра-
зовании.
6. Преобразование векторов при а
инном
преобразовании плоскости и пространства. Основные
свойства аффинных преобраЗ0ваний
Возьмем на плоскости (или в пространстве) какой-нибудь век-
тор м.;л1 1 (рис. 68). При аффинном преобраэовании точки Мо, М !
переходят соответственно в точки Мо, М 1 , имеющие относительно
HOBoro репера те же координаты, которые точки Мо, M 1 имели
относитеJ1ЬНО cTaporo. Так как координаты вектора получаются
.
вычитанием координат ero начальнои точки из координат ero
конца, то координаты вектора МоМ 1 относительно HOBoro репера
те же, что и координаты вектора Mo Ml относительно стзроrо
репера. Итак:
108
ЛРЕОБРАЗОВАНИЕ КООРДИНАТ
}О При аффинно},f, прео6разооании век/пору U == JИ О М 1 ставится
о соответствие вектор u' == Мо М), имеющиЙ относительно нов020
1/' репера те же KOOpaUHal11bl,
которые вектор u имел
относительно стаРО20.
Отсюда сразу следует,
что при аффинном преоб-
разовании равным векто-
рам соответствуют равные,
так что:
20 Аффинное преобра-
зование плоскости (прост-
ранства) порождает взаим-
но однозначное отображе-
ние на себя (преобразование)
.множества V всех свобод-
ных векmoрО8 плоскости
(соопюеmcrrюенно nростран-
81 cmвa).
Это преобразование об-
ладает следующим свойст..
вом линейности: если при
данном преобразовании век-
moра'м U, v соотвеmcт-
ву/от векторы u', v', то
вектору u + v будет соот-
ветствовать вектор u' + v', а вектору I"u..... вектор лu' (доказы-
вается сразу переходом к координатам).
Из свойства линейности вытекает, далее:
30 Если при данном аффинном преобразованиu векторам U 1 , ...
, , ., и",
. . ., u n соо/nветствуют векторы Ul, ..., 11 п? то всякои линеuноu
комбинации
Л 1 U 1 +Л 2 U 2 + ... +ЛпU n
векторов u 1 , ..., U n соответствует линейная комбинация
л'lUl + Л2U2 + ... + tlfпU
векnwров Ul, ..., u
(с теми же коэффициентами Л 1 , Л 2 , ..., Л п ).
Так как при аффинном преобразовании нулевому вектору, оче-
видно, соответствует нулевой, то из доказанноrо следует:
40 При аффинном преобразованuи линейна}: зависимость векто-
ров сохраняется (и, значит, всякие два КОЛЛUf:,J'lРНЫХ вектора nере-
ходят в коллинеарны.е, всякие три компланарных вектора перехо-
дят в компланарНblе).
50 Обратное nреобразованuе к, аффинному nреобразованuю eCfпb
аффuнное п реоб разован uе.
ПРЕОВРА30ВАНИЕ ВЕКТОРОВ
109
в самом деле, если данное аффинное преобраэование
плос-
КОСТИ задается переходом от репера Oele2 к реперу O'e.e:Z, то аффин-
ное преобрвзование, задаваемое переходом от репера O'eie2 к реперу
Ое 1 е 2 , есть, как леrко видеть, преобразоввние, обратное к преоб-
разованию d.
То же и для пространства.
Мы видели, что при аффинном преобразовании линейная зави-
симость векторов сохраняется. Сохраняется и линейная независи-
мость векторов.
60 При аффинном, преобразовании d всякая линейно незавuси-
.мая система векторов и 1 , и 2 , ... переходит 8 линейно независu-
м,у/о
в противном случае при аффинном преобразовании d
lt
обратном к
, линейно зависимая система иl, и2, _.. перешла бы
в линейно независимую, что, KaI{ мы знаем, невозможно.
Так как репер есть система линейно независимых векторов
(двух на плоскости, трех в пространстве), ПРИЛО}l{енных к данной
точке О, то при аффинном преобразовании всякий репер перехо-
дит в репер_ Более Toro, имеет место предложение
70 При аффинном отображении (заданном переходом от репера
1 1(, реперу !') всякий репер 11 переходит в репер 11' u всякая
точка М (всякий вектор u) переходит в точку М' (в вектор u')
с теми же координатами относипlельно репера 11', какие точка
М и вектор u имели относительно репера 11.
Доказательство в случае плоскости и в случае пространства
одно и то же. Оrраничимся случаем плоскости. Пусть 11 есть
репер 08182' а 11'
репер 0'8182- Докажем сначала утверждение,
касающееся векторов. Если вектор u имеет относительно репера
0
182 координаты 6, f), то u ==
81 +1182. Но тоrда образ вектора u
есть, по свойству 30, вектор
, t ' + '
u ==
81 l1е2,
имеющий координаты s, f) относительно репера 0'8182. Пусть точка
М имеет координаты 6, 't') относительно репера ов 1 е 2 - Тоrда оМ ==
== 681 +1182' так что, по предыдущему, относительно репера 0'8}82
вектор о' м' , а значит, и точка М' имеют координаты
, f). Утвер-
ждение доказано.
Доказанное утверждение является существенным: из Hero сле-
дует, что, задав аффинное преобразование переходом от каКО20
нuбудь
репера Ое 1 е 2 к реперу О' eie2J мы МiJжем задать е20, взяв в качесп'tве
исходНОёО любой репер ое 1 е 2 и указав тот репер 0'8.82, в кoпlOPblU
ОН должен пepeaпzu.
В качестве приложения только что сделанноrо замечания дока-
жем, что произведение двух аффинных преобразований d 1 и е4 2
есть аффинное преобразование.
В самом де.не, пусть аффинное преобразование е4 1 задается
переходом ОТ репера 1 к реперу 11. Аффинное преобразонание
110
ПРЕОБРА30ВАНИЕ КООРДИНАТ
G/! 2 мы можем, по только что доказанному, задать переходом оТ
репера 11 к KaKOMY
TO реперу 111. Тоrда аффинное преобразова-
иие, задаваемое переходом ОТ репера 1 к реперу 11, есть, очевидно,
произведение t27t 22/t 1 преобразования этt 1 на преобразование e/t 2.
Продо-нжаем перечисление простейших свойств аффинных преоб-
разований и отображений.
Три точки M 1 , М 2 , М з тоrда и только тоrда коллинеарны
(Т. е. лежат на одной прямой), коrда векторы м;л1 2 и М 2 М З кол..
линеарны. А так как коллинеарность векторов при аффинном
преобразовании сохраняется, то сохраняется и коллинеарность
точек. Отсюда вытекает:
80 П ри аффинном' отображенuи (плоскости или пространства)
прямая переходит в прямую.
Мы сейчас даДИМ второе доказательство этоrо факта.
Пусть дано аффинное отображение. Оно состоит в ТОМ, что
каждая точка М с координатами х, у (в координатной системе
Oe 1 e 2 ) переходит в точку М', имеЮIЦУЮ те же координаты во ВТО-
u О , " О
рои системе ete2. тсюда следует:
90 При данном' аффинном отображении (определенном neрехо-
дом от репера Ое}е 2 к реперу 0'ele2) М,ножества всех П'lОчек, коор-
динаты которых (8 координатной системе Oe 1 e 2 ) удовлетворяют
некоторому уравнению, переходит в М,ножество точек, координаты
которых в системе О'еlе2 удовлетворяют тому же УРШJненuю.
В частности, прямая с уравнением
Ах+Ву+С==О
(1)
(в системе Oel
) перейдет в прямую, имеющую то же уравнение,
О , , ,
но только в системе координат ele2.
Точно так же при аффинном преобразовании пространства
(определенном переходом от репера Ое 1 е 2 е з к реперу 0'еiе2ез)
плоскость, имеющая в системе Ое 1 е 2 ез уравнение
Ax+By+Cz+D ==0,
(2)
переходит в плоскость, имеющую то же уравнение (2), но только
О , , , ,
в системе координат еlе2ез.
Прямая, заданная в пространстве своим «общим уравнением»
A 1 x+B 1 y+C 1 z+D 1 ==0,
А 2 х+В 2 у+ C 2 z+D 2 ==0
ИЛИ той ИЛИ иной ero специальной разновидностью, например
каноническим уравнением
x
xo
а
g ...... 90
Ь
z ...... %0
С
t
ЛРЕОБРАЗОВАНИЕ ВЕКТОРОВ
111
при данном аффинном преобразовании перейдет в прямую, имею-
щую те же уравнения, но только в системе координат 0'еtе2ез.
Итак, доказана
т е о р е м а 7. При аффUНflО.м. nреобраЗО8Шluи плоскоспlU, соот-
вemCl1)eeHHo пространства, nрямы,е переходят 8 nрЯJdble, плоскости
переходят 8 плоскосmu.
При этом сохраняется параллельность.
В самом деле, если две прямые (или две плоскости, или пря-
мая и плоскость) параллельны, ТО их уравнения относительно
репера Ое 1 е 2 ез удовлетво",
ряют известным условиям
параллельности; но образы
этих прямых (плоскостей)
имеют те же уравнения ОТ-
носительно репера О' eie2e3
и, значит, удовлетворяют
тем же условиям парал...
лельности.
т е о р е м а 8. При аф-
финном прео6разованuu
плоскости (пространства),
переводЯll{eJA. прЯAfУЮ d в
прямую d', оmрезок МоМ !
прямой d переходит в 'от-
резок М о М1 прямой d', а
точка М прямоЙ d, деля...
щая отрезок М;М l 8 дан-
НО-М отношении Л, перехо-
...............
дит в точку М' прямой d', делящу/о Оn7резок МоМ в том же
отношении л, (рис. 69).
Д о к а з а т е л ь с т в о. Так как пр и пол ожительном л мы полу-
чаем ТОЧI{И, лежащие внутри отрезка МОМ! (соответственно МоМ }),
а при отрицательном
вне этоrо отрезка, то из BToporo утвержде-
ния теоремы 8 следует первое. Доказываем второе утверждение
теоремы 8, оrраничиваясь случаем ПЛОСКОСТИ,. Пусть (в системе
координат Oele
) имеем
11.'
1
.:е'
J.:
Рис. 69.
Мо == (Хо, Уо), М! == (х 1 , иl)' М == (х, у).
Так как точка М делит отрезок МОМ! в отношении Л, то
Хо+Ах! У
уо+'АУl
х=== 1+""
1+"-
(3)
(в пространстве к этим равенствам присоединится еще равенство
z == Z;t
ZI ). При данном аффинном преобраэовании точки Мо.
112
ПРЕОБРА30ВАНИЕ КООРДИНАТ
M 1 , М перейдут в точки М О) Mi, м с теми же координатами,
что и у точек Мо, Мl' М, но только в координатной системе
O'eiez. Эти координаты связаны по-прежнему соотношениями (3),
из которых следует, что М' делит отрезок МоМ ! в отношении
OI.
Этим теорема 8 доказана.
Докажем в заключение этоrо параrрафа следующее предло-
жение:
т е о р е м а 9. Существует одно u только одно аффuяное nре-
образование плоскости. переводящее данную тройку неколлuнеаРНblХ
/nочек
О, А, В
этой плоскости в (проuзвольную вторую) тройку н,еколлинеарных
точек
О', А', В'
той же плоскости.
Аналоеuчно существует одно и только одно аффинное преобра-
зованuе пространства, переводящее данную четверку некомпланар-
н,ых точек
О, А, В, С
в (пРОUЗ80ЛЬНУЮ) вторую четверку некомпланаРНblХ точеl\,
О', А', В', С'.
Доказательство в обоих случаях, плоскости и пространства,
одно и то же. Оrраничимся случаем плоскости.
Берем координаТНУIО систему с началом О и единичными век...
торами
е 1 == ОА , е 2 == 08,
О ,
а также координатную систему с началом и единичными век-
торами
ei == О'А' ,
.............
, О ' В '
е2== .
Этим определено аффинное преобразование
, переводящее каж-
дую точку М, имеющую в системе Oe 1 e 2 координаты Х, у, в точку
м' с теми же координатами, но в системе О'еlе2. в частности,
точка О == (О, О) перейдет в О', точка А == (1, О)
в точку А',
.................... ...................
точка В == (0,1)
в точку В' t а векторы е 1 == ОА и е 2 == 08 перейдут
...............
соответственно в еl == О' А' и е2 == О' Bf.
Таким образом, преобразование
удовлетворяет требованиям
теоремы. Оно есть единственное аффинное преобразование, YДOB
летворяющее этим требованиям. В самом деле, всякое аффинное
лреобразование, лереводящее точки О, А, В соответственно в О',
А', В', переводит векторы еl' е2 соответственно в e
, e
значит,
совпадает с преобраэованием
.
АФФИННЫЕ ПРЕОБРАЗОВДНИЯ
113
7. Аналитическое выражение аффинных преобразований
IlYCTb аффинное преобразование плоскости задается переходом
ОТ репера Ое 1 е 2 к реперу O'e;e
.
Ilокажем, как вычислить в исходной системе координат Ое}е 2
координаты преобразованной точки М' по координатам данной
точки Лt' (РИС. 70).
Векторы e
, е; даны своими координатами относительно CTaporo
репера:
Кроме Toro, известны координаты а, Ь HOBoro начала О'. Тоrда
координаты х', у' любой точки М' относительно CTaporo репера
связаны с координатами 6',
1')' той же точки М' относи-
тельно HOBoro репера соотно-
шениями
х' === C 11 S' +С 12 Т]' + а, }
(2)
у' === C 21 S' + С 22 11' + Ь.
Нам даны: произвольная
точка М с координатами х
и у относительно CTaporo
репера и ее образ М', имею-
щий относительно HOBoro ре-
пера те же координаты х, у,
которые точка М имела от-
носительно CTaporo репера.
Требуется найти координаты
точки М' относительно ста..
poro репера. Решение этой
задачи дается формулами (2),
в которые вместо 6', f}' надо подставить координаты точки М'
в новой системе, т. е. х и у; тоrда в левой части будут искомые
координаты х', у' точки М' (в старой системе), и мы получим
х' ==C}l X + C t2Y+ a , I СН C12 1 *0. (3)
у' ==с 21 х+с 22 у+Ь, С21 С22
ЭТО И есть формулы, дающие координаты преобразованной точки М'
по координатам точки М (те и друrие координаты берутся при
этом относительно одноrо и Toro же «CTapOrO» репера).
Обратно, если дана невырожденная матрица
С == 11
:
:: 11
е; == clle} + с 21 е 2 ,
е; == с 12 е} + с 22 е 2 ,
I С11 С12 I =#: о.
Сп С22
(1)
х
Рис. 70.
114
ПРЕОБРАЗОВАНИЕ КООРДИНАТ
и два числа а, Ь, то, ставя в соответствие каждой точке М == (х, у)
точку м' == (х', у'), rде х' и у' определены по формулам (3), мы
получим аффинное преобразование плоскости
оно определено
переходом от исходноrо репера Ое 1 е2 к реперу O'e
e;, rде
е; == c 11 e 1 + с 21 е 2 ,
е; == c 12 e 1 + с 22 е 2 .
Итак, мы можем определить аффинное преобразованuе плоскости
как такое преобразованuе J которое ставит в cooтвeпlcтeue каждой
точке М == (х, у) точку М' == (х', у'), координаты х', у' которой
находятся из координат х, у пl0ЧК,И М по формулам (3): система
координат
одна и та же. Аффинное преобразование вполне опре-
деляется системой координат Ое.е 2 , матрицей коэффициенmов С
и числами й, Ь в фор1ttулах (3).
Так же доказывается и аналоrичный результат ДЛЯ простран-
ства:
Аффинное преобра:зование пространства вполне определено, если
8 пространстве даны аффинная система координат Oe.e 2 e:J, невы-
рожденная матрица
С11 С12 С13 11
С == С21 С22 С23"
СЗI. СЗ2 Сзз J
называемая матрицей аффUННО20 nреоБI'П:Зf'f?ЙНUЯ, и три числа а,
Ь, с; определенное эпlUМ,U данными преобразованuе состоит в "10М,
чmo каждой точке М == (х, у, z) ставится в соотвепlсmвие точка
1' == (х', у', z'), еде
х: == С ll Х + С l 2У + С]З Z + а, J
у ===С
НХ+С22У+С2ЗZ+Ь'
z' == С З1 Х + С З '1У + СззZ + с.
Система координат
одна и та же.
3 а м е ч а н и е. Матрица аффинноrо преобразования, очевидно,
является транспонированной к матрице перехода от исходноrо
репера к реперу, задающему данное аффинное преобразование.
Поэтому аффинное преобразование будет собственным или несоб-
ственным в зависимости от Toro, имеет ли матрица этоrо преобра-
З0вания положительный или отрицательный детерминант.
Выведем из только что доказанноrо одно Ba)l{HOe следствие
(сначала для плоскости}.
Пусть на l1ЛОСКОСТИ с выбранной на ней лрямоуrольной систе-
МОЙ координат даны два вектора: Ul == {хl' Уl}' и 2
{Х2' У2}' Мы
знаем, что площадь ориентированноrо лараллелоrРЗММЗ J натяну..
Toro на эти векторы, есть
(Ul' U 2 ) == 1::
: 1.
(4)
АФФИННЫЕ ПРЕОБРА30ВАНИЯ
115
При аффинном преобразовании g' ПЛОСКОСТИ с матрицей С BeK
торы Ul' U 2 переходят соответственно в u; == {x
, y
}, и;
{X
, y
}, rде
Xh == C 11 X h + C 12 Yh,
Yh == C 21 X h + C 22 Yh
(h == 1, 2),
так что
(U
, U
) == I CllXl +C12Yl C21 X . +C22Yl I
Сl1 Х 2 + С12У2 С21 Х 2 + С22У2 ·
110 справа СТОИТ произведение детерминантов
I СН С12 1 . 1 Хl Yl 1 ,
С21 С22 Х2 У2
поэтому
<u
, U
) == det С · (и 1 , U 2 ).
Пусть в .пространстве дана прямоуrольная система координат.
Тоrда для любых трех векторов и 1 , и 2 , UЗ И аффинноrо лреобра-
(J7 , , ,
зования
, переводящеrо эти векторы соответственно в U1, U
, Uз,
доказывается формула
(и;, u;, U
> == det С · (и 1 , и 2 , uз).
Итак, имеет место
т е о р е м а 1 о. При аффинном nреобразованuu плоскости (соот-
ветсrrюенно пространства) площадь opueHmupoвaHHOZO параллело..
ерамма , построенною (в данной плоскости) на двух каких-либо
векторах (соответственно объем ориентированноео nараллелеnипеда,
nостроенноео на трех векторах), умножается на детерминант
преобразования.
С л е д с т в и е. При аффинном nреобразованиu плоскости (соот..
eetпCmeeHHO пространства) отношение площадей nараллелоzраММО8
соответственно объемов параллелеnиnедов) сохраняется.
r л А В А IV
АлrЕБРАИЧЕСКИЕ линии и ПОВЕРХНОСТИ.
КОМПЛЕКСНАЯ ПЛОСКОСТЬ И КОМПЛЕКСНОЕ
ПРОСТРАНСТВО
1. Определение алrебраических линий и поверхностей
Алеебраuческu.м уравнением от переменных Хl,...
Х п назы-
вается уравнение вида
F (X 1 , ..., Х n ) == О,
(1)
в котором левая .часть F (х 1 , ..., Х n ) есть мноrочлен от этих пере-
менных. Степень мноrочлена F (Х 1 , ..., Х n ) называется степенью
уравнения (1).
в аналитической rеометрии линии на плоскости и поверхности
в трехмерном пространстве принято определять соответственно
как мноrообразия решений алrебраических уравнений
F (х, у) == о для линий, (12)
F (х, у, z) == О для поверхностей. (1з)
Примеры нам известны: прямая линия и плоскость суть соответ-
ственно нулевые мноrообразия мноrочленов первой степени от двух
и трех переменных; известные нам кривые
эллипс, rипербола,
параБО&l1а
суть мноrообразия решений своих канонических урав-
нений; сфера с центром в начале прямоуrольной системы координат
есть множество решений уравнения
х 2 + у2 + Z2 == ,2,
rде , есть радиус сферы. Само собой разумеется, для Toro чтобы
эти определения линий и поверхностей имели смысл, необходимо,
чтобы в плоскости (в пространстве) была выбрана определенная
система координат. При этом, если уравнение (12)' сооmеетСПlвенно (1з),
определяющее дан-ную ЛUН-Иl0 (или пoeepXHOCfпv), UMeelrl степен-ь /n,
то еоворяm, что эmа лuн-uя (или поверхн-осmь) UAteem порядок т.
Однако с определением линии и поверхности не все обстоит
так просто) как кажется на первый вэrляд. 1\\ножество всех точек
ОПРЕДЕЛЕНИЕ АлrЕБРАИЧЕСКИХ ЛИНИй и ПОВЕРХНОСТЕI'I 117
плоскости, удовлетворяюu
их уравнению х 2 == о, совпадает с множе.
стном точек, удовлетворяющих уравнению х == О, и есть ось ординат
координатной системы, положенной в основу наших рассуждений.
Получается, что прямая линия (в данном случае прямая х == О)
определяется не только своим «естественным» уравнением пер
вой степени, но еще и некоторыми уравнениями более высоких
степеней. Однако в аналитической rеометрии считают, и к этому
имеются серьезные основания, что уравнение х 2 == О есть уравне-
ние не просто оси ординат, а «Дважды взятой оси ординат»
кривой BToporo порядка, являющейся парой слившихся прямых,
каждая из которых есть прямая х == о. Далее, нулевое мноrообра.
зие каждоrо из мноrочленов х 2 + у2 + 1 и 2х2 + 3у2 + 7 есть пустое
множество; приравнивая эти мноrочлены нулю, мы получим урав"
нения, не определяющие никаких реальных линий. Это второе
затруднение устраняется пополнением плоскости, соответственно
пространства, так называемыми мнимыми точками, что приводит
к комплексной плоскости и к комплексному пространству, rде уже
не будет уравнений с пустым множеством решений.
Уже первое замечание
об уравнении х 2 == О
приэодит к важ..
ному утверждению. Ясно, что два пропорциональных между собой
мноrочлена от данноrо числа переменных имеют одНо и то же
нулевое мноrообразие. Возникает обратный вопрос: можно ли
утверждать, что два мноrочлена одной и той же степени (от двух
или от трех переменных), имеющих одно и то же нулевое MHoro..
образие, пропорциональны между собой? Оказывается, что ответ
на этот вопрос положителен, если под решениями х, у соответ-
ственно х, у, z понимать наборы комплексных чисел. Однако это
утверждение представляет собой совсем не очевидную и вовсе не
так просто доказываемую теорему алrебры. Для мноrочленов вто"
рой степени от двух и трех переменных теорема эта под назва..
нием (<теоремы единственности» будет доказана в r лаве VI (
8)
для линий и в rлаве IX (
5) для поверхностей BToporo порядка.
Только после Toro, как эта теорема будет доказана, и после Toro,
как произойдет ПОПОI/1Jнение плоскости и пространства мнимыми
точками, определение линии и поверхности BToporo порядка как
множества точек, являющихся решениями уравнения второй сте.
пени от двух, соответственно от трех, переменных, станет на твер-
дую почву. Пока же в уверенности, что разыrравшаяся маленькая
драма получит счастливую развязку, мы вынуждены пользоваться
следующим, так сказать, рабочим определением:
Задать алrебраическую линию на плоскости
значит задать
некоторое алrебраическое уравнение (12) с двумя пеРtменными и
некоторую аффинную систему Оху координат на плоскости; тоrда
те и только те точки М (х, у), координаты которых в данной
координатной системе удовлетворяют уравнению (12)' считаются
лежащими на данной линии (или принадлежащими ей).
118
АлrЕВРАИЧЕСКИЕ линии и ПОВЕРХНОСТИ
Аналоrично для поверхностей: задать алrебраическую поверх-
ность в трехмерном пространстве
значит задать алrебраическое
уравнение от трех переменных (l з ) и систему координат в трех-
мерном пространстве. Те и только те точки J\tl === (х, у, z) про-
странства, координаты которых удовлетворяют уравнению (1з),
называются точками, лежащими на данной поверхности.
При этом мы считаем, что два уравнения тОсда и только тоеда
определяют одну u ту же линию или поверхность, коеда одно из
этих уравнений получается из друеоео nочленным умножением на
некоторый числовой множитель л.
Если На плоскости дана система координат Oe 1 e 2 , то левая
часть уравнения (12)
мноrочлен F (х, у)
определяет функцию
от точки плоскости: каждой точке М, имеющей в данной системе
координат координаты х, у, соответствует число F (М) == F (х, у).
Если мы перейдем к друrой системе координат O/e
e;, то та же
точка М, имевшая в системе Oe 1 e 2 координаты Х, у, получит
О ' , , ,
в системе elei новые координаты х, у, связанные со старыми
формулами преобразования координат:
х === C 11 X' + с 12 у' + С 1 , }
(2)
у == C 21 X' +С 2 2У' +С 2
...
с матрицеи
с === 11 Cl1 С}2 I1
С21 С 22
и детерминантом
det С == I С11 С12 1 =#= о.
С21 С22
Для Toro чтобы вычислить значение Toro же числа F (М) через
новые координаты х', у' точки М, надо в мноrочлен F (х, у)
вместо х и у подставить выражения (2) этих переменных через
х' и у'; от этоrо мноrочлен F (х, у) тождественно преобразуется
в мноrочлен Р' (х', у') от новых переменных х', у':
F (М) == F (х, у) == F (C 11 X' + C 12 Y' + c 1J C 21 X' + C 2 'll1' + С 2 ) ==
==. р' (х', у'). (3)
Координаты х' J у' какой
либо точки М в системе O'ele
тоrда и
только тоrда удовлетворя
уравнению
Р' (х' J у') == О, (1
коrда координаты х, у той же точки в системе Oe 1 e 2 удовлетво-
ряют уравнению
F (х, у) == о.
(12)
Таким образом, задавая какую...нибудь алrебраическую линию
ее уравнением (12) в данной системе координат Oe 1 e 2 , мы сразу
ПРЕОБРАЭОВАНИЕ мноrОЧЛЕНА ВТОРОЯ СТЕПЕНИ
t 19
же можем написать и ее уравнение (1;) в любой друrой системе
координат О'еl е ;
оба уравнения (12) и (1;), рассматриваемые
соответственно относительно координатных систем Ое 1 е2 и O'ele
,
задаlОТ одну и ту же алrебраическую линию. При этом, если
алrебраическая линия задаНа в данной системе координат Oe 1 e 2
уравнением (12) степени т, то и ВО всякой друrой системе коор"
динат О' ei e
она задается уравнением ( l
) той же степени т.
В самом деле, при подстановке (2) каждый член axPyQ мноrочлена
F (х, у) переходит в выражение
а (C 11 X' +С l 2У' +с 1 )Р (C 21 X' +с 22 у' +c 2 )q,
которое после раскрытия скобок и приведения подобных членов
дает нам некоторую совокупность членов мноrочлена р' (х', у'),
кажДЫЙ из которых имеет степень
р + q. Итак, при переходе
от координатной системы Oe 1 e 2 к координатной системе O'ele; сте-
пень мноrочлена F (х, у) не может повыситься. Но она не может
и понизиться, так как тоrда при обратном переходе от О'еlе;
к Oe 1 e 2 степень мноrочлена должна была бы повыситься.
Итак, степень уравнения (1), задающеrо (в какой"нибудь
системе координат) данную алrебраическую линию, есть число,
не зависящее от выбора системы координат; это число и назы...
вается порядком ал
ебраuческой линии, задаваемой уравнением (1).
Все сказанное о кривых дословно переносится и на случай
поверхностей.
2. Преобразование мноrочлена второй степени
при преобразовании координат
Так как мы в дальнейшем будем заниматься лишь линиями
и поверхностями BToporo порядка, то мноrочлены второй степени
имеют для нас лреимущественный интерес.
Каждый мноrочлен второй степени от двух переменных
F (х, у) == а 11 х 2 + 2а 12 ху + а 22у 2 + 2а 1 х + 2а 2 у + ао (12)
может быть записан в виде
F (х, у) == q> (х, у) + 21 (х, у) + а о ,
(1
)
rде
(f) (х, у) == a 11 x 2 + 2a 12 xy + а 22 у2
(22)
называется квадратичной формой старших членов мноrочлена
F (х, у), а
1 (х, у) ==a 1 x+a2!l
--- линейной формоЙ мноrочлена F (х, у).
120
АлrЕБРАИЧЕСКИЕ линии и ПОВЕРХНОСТИ
Полаrая а 2 1 == a 12 , получаем симметричную матрицу BToporo
порядка
А == 11 а11 а12 11 ,
а21 й 22
называемую матрицей квадратичной формы
Q) (х, у) == al 1 x 2 + 2а 12 ху + а22У 2 ;
детерминант
б == I а1]: a12 1
a2i 022
называется дискриминантом фОрМЫ <р (х, у).
Подобное же положение вещей мы имеем и в случае MHoro
члена второй степени от трех переменных. Общий вид TaKoro
мноrочлена есть
F (X t у, z) == a 11 x 2 + 2a 12 xy+a22Y 2 + 2а1зхz + 2а 2з уz + а зз z 2 +
+ 2а 1 х + 2а 2 у + 2азz + ао, (1з)
причем члены BToporo порядка этоrо мноrочлена образуют ква д..
ратuч.НУIО форму
q> (х, у, z) == a 11 x 2 + 2а 12 ху + а 2 2У 2 + 2а1зхz + 2а 2з уz + а зз z 2 , (2з)
а члены nepBoro порядка......... линейную форму 21 (х, у, z), rде
1 (х, у, z) == a 1 x+a 2 y +а з z,
так что весь мноrочлен F (х, у, z) может быть записан в виде
F (х, у, z) == q> (х, у, 2) + 21 (х, у, z) + ао.
Нас интересует вопрос, как преобразуются мноrочлены F (х, у),
соответственно F (х, у, z) при преобразовании координат. Как мы
знаем, каждое преобразование координат слаrается из OДHOpOД
Horo преобразования, которое в случае двух переменных х, у
записывается в виде
х == С ll Х: + + С 12 У:, } , с == 11
11
12 11 J det С =1= О, (3)
У == С 21 Х С 22 У , 21 22
и из сдвиrа
х == х' , +хо, }
У == У + Уо. (4)
Однородное преобразование (3) соответствует переходу от перво-
начальноrо репера Oe 1 e 2 к реперу Oele
с тем же началом, а npe
образование (4)
сдвиrу начала координат на вектор 00' == {Х о , Уо}.
Посмотрим сначала, как преобразуется мноrочлен F (х, у) при
сдвиrе (4).
ЛРЕОБРАЭОВАНИЕ мноrОЧЛЕНА ВТОРОй СТЕПЕНИ
121
Подставляя в F (х, у) значения х == х' + Хо, у;:: у' + Уо, полу-
чаем (считая всеrда а 21 === a 12 )
F (х, у) == F (х' + Хо, у' + уо) == а 11 (х' + хо)2 +
+ 2а 1 2 (х' + хо) (у' + Уо) + а 22 (у' + уо)2 + 2а 1 (х' + хо) +
+ 2а 2 (у' + уо) + а о == a 11 x,2 + 2а 12 х' у' +
1.2y,2 +
+ 2 (а 11 х о + а 1 2УО + a 1 ) х' + 2 (а 21 х о + а 22 уо + а 2 ) у' +
+ а11Хб + 2а 12 х о уо + a22Y
+ 2а 1 х о + 2а 2 уо + а о == F (х',
Обозначая преобразованный мноrочлен через
Р ' ( ' ' ) ,,2 + 2 ' , , + ' ,2 + 2 ' , + 2 ' , + '
х, у == аl1Х aJ2x У а22У аlХ a:Jj а о ,
у').
( 1;)
имеем
I I
ан == а 1Н
,
a J2 == а 12 ,
,
й22 ==
2' (52)
a
== а 11 х о + a 12 yo + а 1 , J
a
== а 21 х о + а'1.2Уо + а 2 ,
a
::::: F (х о , Уо).
На эти формулы мы будем MHoro раз ссылаться. Первые три
из равенств (5), а именно a
l == a 11 , a
2 === а 12 , a
2 == а 22 , означают,
что при сдвuее (4) к'оэффициенты при старших членах М1tосочлена
F (х, у) не меняются.
Все это можно повторить и для случая трех переменных: МНО"
rочлен F (х, у, z) переходит в
F' (х', у', 2') == a
lx,2 + 2a
2X' у' + й,;,2у,2 + 2а
зх' z' +
2
+2а
зу'z' +а
з2' +2a
x' +2a
y' +2a
2' +a
, (1
)
rде
, , , ,
ан ::::: й 1 1, aH
=== а 12 , a
2 == а 22 , а13 == а 1з ,
a
== a 11 x O + а l 2Уо + а 1 э z о + a 1 ,
a
::::: а 21 х о + а 22 уо + а 2э z о + а 2 ,
a
== а З1 Ха + а з2 уо + аззzо + аз,
a
== F (х о ' Уо, Zo).
Что касается однородноrо преобрззования (3), то H(lC интере.
суют в первую очередь }{вадратичные формы <р' (х', у') и ({/ (х', у', z'),
в которые при этом преобразовании то)кдественно лереходят формы
q:> (х, у) и q> (х, у, z). Исчерпывающий ответ на интересующий нас
вопрос дает слеДУlощая
т е о р е м а 1. МаПlрuца А' квадратичной формы <р' (х', у'),
соответственно (р' (х', у', z') выражаеtпся через матрицу А фор..
мы ер (х, у), соответственно ч> (х, у, z) u через .маПlрUЦУ С
, , I
а
з == а 2з , азз == йЭ3,
I
J
(5з)
122
АлrЕБРАИЧЕСКИЕ линии и ПОВЕРХНОСТИ
nреобразова/t,UЯ следующuм образом:
А'==С*АС,
(6)
еде С*, как всееда, есть матрица, транспонированная к. с.
Доказательство этой теоремы получается непосредственным
вычислением и оставляется читателю в качестве упражнения.
Так как det С* == det С, то ИЗ формулы (6) вытекает
det А' == det А · (det С)2. (7)
Если обе координатные системы, старая и новая, лрямоуrольны,
то матрица С ортоrональна, det С == + 1 и
det А' == det А.
Как мы уже отмечали выше, в заданной системе координат
Ое 1 е2 (соответственно Ое 1 е 2 ез) мноrочлен F (х, у) (соответственно
F (х, у, z» определяет ФУНКЦИЮ от точки плоскости (соответст-
венно пространства). Рассмотрим подробнее функции, задаваемые
однородными мноrочленами от двух или трех переменных второй
степени
такие мноrочлены в алrебре называются квадратичными
формами. Для сокращения изложения оrраничимся лишь случаем
трех переменных.
Начнем со следующеrо определения. Предположим, что задано
правило, ставящее в соответствие каждой паре векторов u и v
пространства некоторое число 'l' (u, v); пусть, кроме Toro, 9та
функция линейна по каждому aprYMeHTY, Т. е.
ч' (л1ul + Л2U2, v) == л 1 '1' (и 1 , v) + л'2'1' (u 2 , v),
'у (и,
Vl +Л2 V 2) =='''1'1' (u, Vl)+
Ч' (u, V 2 )
дЛЯ любых векторов u 1 , u 2 , и; V 1 , V 2 , V И чисел Лl' Л 2 . Тоrда
rоворят, что 'р'
билинейн.ая функция от aprYMeHToB u и у. Если
векторы u и v относительно базиса el, е 2 , е з записываются в виде
U == X 1 е 1 + х 2 е 2 + хае з , v == Уl е 1 + У2 е 2 + узез,
то леrко видеть, что
з
'l' (u, v) ==
XIYj'l' (el, ej),
i, j == 1
или, если положить Ч' (е" ej) == ац,
3
'1' (u, v) ==
aijXiYj.
i, j == 1
(8)
Мноrочлен в правой части равенства (8) называется бuлuнеЙНQU
формой от переменных XJ, У/. Матрица
А == \\ aij /11. 1== 1
ПРЕОБРАЗОВАНИЕ мноrОЧЛЕНА ВТОРОй СТЕПЕНИ 123
называется матрицей бuлинейноu формы относительно базиса еl,
е 2 , ез. Билинейная форма называется СUJw,М,етрuчн.ой, если симмет..
рична ее матрица А, т. е. если ац == ajl.
Билинейная функция '1' (u, у) называется сuм...wеmрuчной, если
для любых двух векторов u и v 'I! (u, У) == ч' (у, u). Тоrда а,} ==
== '1' (el, ej) == '1' (ej, e/);=: ан
матрица А оказывается симметрич-
ной. Верно и обратное: если в каком-нибудь базисе билинейная
функция записывается в виде симметричной билинейной формы,
то она симметрична (докажитеl).
Любая функция f (u, v) от двух переменных определяет функ-
цию g (u) от одноrо nepeMeHHoro, если положить
g (u) == f (u, u).
Функция Ф, полученная по этому правилу И3 симметричной би-
линейной функции 'у:
Ф (u) === '1' (u, u),
называется квадратичной функцией, порожденной билинейной ФУНК-
иией '1' .
Для произвольной квадратичной функции Ф существует одна
и только одна порождающая ее симметричная билинейная функ-
ция Ч', называемая полярной бuлинейн ой функцией от даннои
квад ратuчной.
Действительно, пусть 'l'
какая
нибудь симметричная билиней-
ная функция, порождающая данную квадратичную функцию Ф:
Ф (u) == '1' (U, u).
Поскольку
'I'(u+v, u+v)=:'I'(u+v, U)+Ч'(U+V, v)==
== 'l' (u, u) + 2Ч" (u, У) + 'р' (У, У) == Ф (u) + 2'1' (u, v) + ф (У),
то
1" ( )
ф (u+v)
ф (u)
ф (У)
у U, V
2 t
(9)
что позволяет вычислить значение функции '1" для любой пары
векторов u, У, зная значения функции Ф для каждоrо из векто-
ров u, v, u+v. Формула (9) называется полярным разложением
симметричной билинейной Функuии Ч' (u, v).
Если в данном базисе симметричная билинейная функция
ч1 (u, v) записывается в виде
з
'1' (u, У) ==
aljXIYj,
i)j::=1
ТО
3
Ф (u):::=
aijX,X"
i. j == 1
124
АлrЕБРАИЧЕСКИЕ линии и ПОВЕРХНОСТИ
т. е. квадратичная функция Ф (и) == 'р (u, u) во всяком базисе
записывается в виде квадратичной формы, имеющей ту же мат...
рицу, что и билинейная форма, являющаяся записью функции '1'.
Мы закончим этот параrраф перечислением некоторых теорем
о билинейных и квадратичных функциях, полные доказательства
которых мы отложим до rлавы XIV.
Рансом билинейной, а также ранео'м квадратичн'ОЙ формы на...
зывается paHr ее матрицы. Имеет место следующий замечатель-
ный результат: все билиН,ейН,ые (все квадра"luчные) формы, пред-
ставляющuе 8 различных базисах одну и ту же билинейную
(соответственно квадратичную) функцию, имеют один и тот же
ране.
Далее, билинейная, а также квадратичная форма, матрица
которой диаrональна, называется канонической формой данной би..
линейной (соответственно квадратичной) функции. Имеет место
следующая теорема: для любой квадратичной функции Ф сущест..
вует канонический базис, т. е. базис e 1 , е 2 , е з , 8 котором данная
функция имеет каноническую запись. При этом. 80 всех канони..
ческих записях квадратичной функции Ф:
Ф (u) == alX
+ a 2 xi + азх:, u == x 1 e 1 + X2 e Z + хэе s ,
число положительных коэффициентов среди a 1 , а 2 , аз одно и то
же (оно называется индексом данной квадратичной функции).
3. Аффинная эквивалентность линий и поверхностей
Пусть на плоскости выбрана аффинная система координат
Ое 1 е 2 . Мы знаем, что задать аффинное преобразование
пло..
скости
значит задать, наряду с исходным репером Ое 1 е2, новый
репер O'e
e
; аффинное преобразование
, определенное этим
репером, ставит в соответствие каждой точке М точку М', имею..
щую относительно репера O'e
e
те самые координаты, которые
точка М имела относительно исходноrо репера Ое 1 е 2 .
Рассмотрим теперь какую
нибудь линию, определенную в исход..
ной системе координат Ое 1 е 2 уравнением
Р(х, у) ==0.
( 12)
При аффинном преобразовании
каждая точка М, лежащая на
этой кривой, перейдет в точку М', лежащую на линии, имеющей
то }I{e уравнение (12)' но уже относительно системы координат
О , , ,
eJe
.
В соответствии с этим мы rоворим, что при аффинном преоб-
разооании
кривая 1, заданная уравнением (12) в системе коор"
динат Oelez, переходит в кривую 11, заданную тем же уравне-
нием, но в системе координат О' e
e;. Очевидно, кривая 11 пере..
АФФИННАЯ ЭКВИВАЛЕНТНОСТЬ
125
ХОДИТ В кривую 1 при аффинном преобразовании
l, обратном
к преобразованию
.
rоворят также, что кривая 11 является образом кривой 1 при
преобразовании e,
.
О п р е Д е л е н и е. Две кривые 1 и 11 называются аффUн'flО
эквивалентными, если одна из них переходит в друrую при HeKO
тором аффинном преобразовании
.
Леrко видеть (читатель должен это проверить), что отношение
аффинной эквивалентности удовлетворяет условиям р
лексивно-
сти, симметрии и транзитивности. Поэтому, в частности, две кри"
вые, аффинно эквивалентные одной и той же третьей, аффинно
эквивалентны между собой.
Из сказанноrо выше непосредственно следует:
Пусть дана алrебраическая кривая 1 своим уравнением
F (х, у) == о
( 12)
в системе координат Ое 1 е 2 . Тоrда аффИНflО эквивалентными кри-
вой 1 будут те u только те кривые 11, которые в какой-нибудь
системе координат O'e;e
имеют то же уравнение (12).
Пусть В плоскости дана система координат Ое 1 е 2 . Тоrда, как
мы знаем, всякое аффинное отображение задается формулами
х: == С ll Х + С12У +Cl' }
У == С 21 Х + С 22 У + С 2)
(2)
выражающими для каждой данной точки М (х, у) координаты х' t
у' лреобразованной точки М' (в той же системе Oe 1 e 2 ).
Теперь леrко решить задачу: пусть дана кривая 1 своим урав-
нением (12) в координатной системе Ое 1 е2. Найти в той же си-
стеме координат Ое 1 е 2 уравнение кривой 11, в которую перейдет
кривая 1 при данном аффинном преобразовании (2).
Решение просто: ведь надо найти уравнение, которому YДOB
летворяют х' и у', связанные с х и у соотношениями (2), если
эти х и у удовлетворяют уравнению (12). Искомое уравнение по
лучится, если выразить х и у через х' и у' из (2) и подставить
полученные значен ия в уравнение (12)'
Все сказанное о кривых можно повторить и в применении
к поверхностям.
В следующей r лаве мы, в частности, решим задачу аффинной
классифнкаuии кривых BToporo порядка, т. е. задачу перечисле
нмя всех аффинных классов, на которые распадается множество
всех кривых BToporo порядка.
В rлаве IX мы реIllИМ аналоrичную задачу аффинной класси-
Фи]{ации всех поверхностей BToporo порядка.
126
АлrЕБРАИЧЕСКИЕ линии и ПОВЕРХНОСТИ
t 4. Комплексная плоскость и комплексное пространство
Вся суть аналитической rеометрии заключается в том, что,
выбрав (скажем, на плоскости) систему координат Ое 1 е 2 , мы ПОД"
мениваем точки плоскости парами (х, у) координат этих точек,
а линии задаем их уравнениями вида
F (х, у) === о.
Однако уже из школьноrо курса алrебры мы знаем, сколь убоrим
получается исследование даже уравнений второй степени с ОДНИМ
неизвестным, если при рассмотрении их решений ПО.'lьзоваться
лишь вещественными числами. Поэтому неудивительно, что, orpa-
ничиваясь в анаЛllтической rеометрии вещественными значениями
координат, мы не построим rармонической теории, так как будем
постоянно натыкаться на досадные исключения, несносные для
математика. Единственный радикальный способ их избежать..... это
допустить в качестве возможных значений координат точек любые
комплексные числа.
Мы приходим, таким образом, к следующему построению.
Пусть дана обыкновенная (<<вещественная») плоскость и про..
иэвольная аффинная система координат Ое}е 2 в ней 1). Точку М
плоскости мы отождествляем с парой ее координат х, у. Теперь
мы всякую пару х, у комплексных чисел также будем считать
точкой (комплексной) плоскости, а сами числа х, у будем назь[-
вать координатами точки л1 комплексной плоскости относительно
данной системы координат Ое 1 е 2 . При этом точку М (х, у) будем
называть мнимой точкой плоскости, если хотя бы одна из ее
координат есть комплексное число, не являющееся вещественным.
Дальше все идет автоматически. Пара точек М 1 == (Х 1, Yl) И
М 2 (х 2 , У2)' данных в определенном порядке (М 1 ..... первая, М 2 .......
вторая точка), называется вектором, приложенным к. точке М Т
или закрепленным в этой точке, и обозначается через u == М 1 М 2 .
Точка М 1 называется начальной точкой, а точка М 2
конечной
точкой (концом) вектора М 1 М 2 . Комплексные числа
х == х 2 ..... Х 1 ,
у === у",
Уl
называются координата.ми вектора M 1 M z .
Два вектора М 1 М 2 и M
M; называются равными, если равны
их соответственные координаты. Таким образом, множество всех
векторов комплексной плоскости распадается на классы равных
между собой векторов (любые два вектора одноrо класса равны
между собой, никакие два вектора, принадлежащие к разным клас-
сам, не равны между собой). Эти классы, как и в случае вещест"
1) Речь идет при этом лишь об обыкновенных, «вещественных» реперах.
КОМПЛЕКСНЫЕ П.ТIоскость И ПРОСТРАНСТВО
127
венных чисел, называются свободными векторами; они обозна-
чаются так:
U == {х, у},
rде х, y
лара координат какоrо
нибудь (закрепленноrо) вектора,
входяп
еrо в данный класс равных между собой векторов.
Таким образом, мы можем сказать: любая лара комплексных
чисел х, у определяет, во
первых, точку М == (х, у), BO
BTOpЫX,
свободный вектор U == {х, у} с координатами х, у. Каждая пара
точек М 1 == (х 1 , Уl) И М 2 == (х 2 , и2) определяет свободный вектор
u == {х, у} с координатами х == х 2 ...... Х 1 , У == У2
Yl; точка М 1 ==(х 1 , Уl)
И вектор u == {х, у} определяют точку М 2 == (Х 1 + Х, Yl + у)...... КО48
lIец вектора и, приложенноrо к точке M 1 .
Суммой двух векторов u == {Х, у} и u'
{х', у'} называется век-
тор u+u' == {х+х', у+у'}, произведенuем вектора U == {х, у} на
nрОUЗ80ЛЬНое (комплексное) число л называется вектор ЛU == {АХ, лу}.
Вектор О == {О, О} по-прежнему называется нулевым вектором;
вектор
u == {
x,
у} называется вектором, nроmuвoположны'м'
вектору u == {х, у}.
Понятия линейной зависuмости и ЛUнейной независи,М,ости вво-
дятся для векторов с комплексными координатами совершенно
так же, как и в вещественном случае, только, разумеется, в ка-
честве коэффициентов в линейных комбинациях векторов теперь
допускаются любые комплексные числа. При этом все алrебраи...
ческие теоремы о линейной независимости сохраняют свою силу.
В частности, два вектора U 1 == {Х 1 , Yl} и U2 == {Х 2 , У2} тоrда и
только тоrда линейно зависимы, коrда координаты одноrо вектора
пролорциональны координатам друrоrо, т. е. коrда
I
:
: I == О.
Два линеЙно зависимых вектора мы будем называть коллинеар-
ными. Важно сразу же установить и ДЛЯ векторов с комплекс-
ными координатами основное предложение.
Три вектора на комплексной плоскости всеrда линейно зави-
симы (и, следовательно, один из них есть линейная комбинация
двух друrих).
В самом деле, это утверждение справедливо, если среди трех дан-
ных векторов u., U 2 , U З каК
1е
нибудь два, например О 1 и а2,
линейно зависимы. Пусть векторы Ut == {SI' 'r11} И U 2 == {
2' f)2} ли-
нейно независимы. Докажем, что тоrда всякий третий вектор U ::м
;::: {
, f)} является линейной комбинацией векторов U 1 и U 2 :
U == X 1 U 1 + X
Ut,
причем коэффициенты Хl и Х2 В этой линейной комбинации ОДНО-
значно определены.
128
АлrЕБРАИЧЕСКИЕ линии и ПОВЕРХНОСТИ
в самом деле, из линейной независимости векторов U 1 == {
l' Т)1}
и U2 == {;2, 'fl2} следует. что
I
: 1* о.
А тоrда система уравнений (относительно неизвестных Хl и Х 2 )
===
lXl +
2X29
'1 == 'YII X l + 'YI2 X 2
(равносильная одному уравнению u == Х 1 и 1 + X 2 U 2 ) имеет единствен-
ное решение относительно Хl и Х2. что И доказывает наше утвер'"
ждение.
Существенным является следующее
3 а м е ч а н и е. Мы определили комплексную плоскость, взяв
обыкновенную. вещественную плоскость с заданной в ней аффин-
ной системой координат Ое 1 е2. Эта система координат лежит
в основе caMoro определения комплексной плоскости и будет назы...
ваться ее «основной» системой координат. Начало этой системы
координат есть вещественная точка О == (О, 0)9 а единичными век..
торами являются векторы e 1 =={I, О} и е2=={О' I}. Каждый вектор
комплексной плоскости может быть записан, и притом единствен-
ным образом, в виде
u == хеl + уе2'
(1)
rде х и у
комплексные числа.
Задать е комплексной плоскости какую
нибудь «HOBYIO» (Т. е.
отличную от основной) вещественную 1) систему аффинных коор-
динат
значит задать вещественную точку
О' == (а, Ь)
........ начало новой системы координат и пару линейно независимых
вещественных векторов
e
== {C 11 , С 21 } == c11el + с21е2,
e
== {C 12 , С 22 } == с 12 е 1 + с 22 е 2
(все числа Clk, i. k == 1, 2, при этом являются вещественными).
Тоrда вектор u, записывающийся в основной системе координат
в виде (1), однозначно записывается и в виде линейной комбина...
, ,
ции векторов еl и
:
, ' + ' ,
u == х еl У е2.
(1 ')
Коэффициенты х' и у' в этой линейной комбинации называются
координатами вектора u в системе координат О'е;е; (они, как н
в случае вещественных векторов, не зависят от выбора начала О').
) Только такие будут рассматриваТЬС}l,
КОМПЛЕКСНЫЕ ПЛОСКОСТЬ И ПРОСТРАНСТВО
129
I<оординатыI точки М в системе н:оординат O'e
суть координаты
вектора О'М в этой системе координат. При определении :JТИХ
координат остаются в силе все рассуждения rлавы 111, и итоrом
этих рас
уждений являются формулы
х == C 11 X' + с 12 у' + а, }
(2)
у === с 21 х' + С22У' + Ь,
т. е. формулы преобразования координат, полученные на стр. 113.
Эти формулы в комплексной плоскости таковы же, как в веlцест
пенной, и коэффициенты C 11 , C 1 2; С21' С22; а, Ь в них...... веществен-
11 ые числа.
TaI{ же, как в вещественном случае, прямую линию на комп"
лексной плоскости естественно определить как линию первоrо
порядка, т. е. задать ее уравнением первой степени
Ах+Ву+С==О. (3)
Из общих теорем об уравнениях первой степени элементарно
выводится, что если прямая задана каким"нибудь уравнением (3),
то все уравнения вида
(kA) х+ (kB) у+ (kC) == О,
rде k
какое-нибудь комплексное число, и только эти уравнения
задают ту же прямую. Если среди этих уравнений имеется урав..
нение, все коэффициенты KOToporo kA, kB, kC вещественны, то
прямая (3) называется вещественной; в противном случае она на..
зывается мнимой.
Например, прямая
2ix + 3iy
i == О
есть вещественная прямая: она может быть задана уравнением
2х + Зу
1 == о.
Прямая
х + ёу == О
является мнимой.
Вообще, алrебраическая кривая, заданная уравнением
F (х, у) == О,
rде F (х, у)
какой
нибудь мноrочлен от двух переменных, назы..
вается вещеСПlвенноu, если комплексное число л =1= О может быть
подобрано таким образом, что в мноrочлене лF (х, у) все коэффи-
пиенты суть вещественные числа. Может, однако, случиться, что
на веlцественной кривой не лежит ни одной вещественной точки.
Так, например, кривая, задаваемая уравнением
х 2 +у2+ 1 ==0,
130
АлrЕБРАИЧЕСКИЕ линии и ПОВЕРХНОСТИ
u
есть вещественная кривая, однако на неи нет ни ОДНОИ вещест-
венной точки. Эта кривая называется окружностью радиуса i (при-
чина тзкоrо названия читателю, вероятно, ясна 1).
Кривая, задаваемая в прямоуrольной системе координат урав-
нением
x2+y2
O,
(4)
называется окружностью нулевоrо радиуса. Она имеет единствен...
ную вещественную точку О == (О, О). Эта кривая распадается на
пару мнимых прямых
x+iy==O,
x
iy
O,
(5)
так так
х 2 + у2 == (х + iy) (x
iy).
Среди всех линий на плоскости мы в этом курсе будем рас-
сматривать, кроме прямых, лишь вещественные кривые BToporo
порядка и будем всеrда задавать их уравнениями
F (х, у)
О,
все коэффициенты в которых вещественны.
Пополнение TpeXMepHoro пространства мнимыми элементами............
мнимыми точками и мнимыми векторами
происходит совершенно
аналоrично введению мнимых точек и векторов на плоскости.
Предполаrается, что в 06ыкновенном (<<вещественном») трехмерном
пространстве дана произвольная аффинная система координат
Ое 1 е 2 е з . Это позволяет каждую точку М пространства отождест..
ЕИТЬ с тройкой вещественных чисел, ее координат:
М == (х, у, z).
После этоrо мы всякую тройку Х, Yt Z комплексных чисел также
объявляем «комплексной» точкой пространства, а сами комплекс..
вые числа х, у, z
называе
f коордuнатаАtи точки М в коорди-
натной системе Ое 1 е 2 е з . Множество всех комплексных точек обра..
зует комплексное трехмерное пространство. Все вновь присоеди..
ненные точки, т. е. все точки М == (х, у, z), у которых хотя бы
одна из трех координат является невещественным числом, назы-
ваются мнимыми точками комплексноrо TpeXMepHoro пространства.
1) к сожалению, общепринятая терминолоrия (с которой невозможно не
считаться) в этом пункте непоследовательна: окружность X
+ у2 + I == О мни...
Moro радиуса i обычно называется мнимой окружностью; вообще, кривая, за...
х 2 уl
даваемая уравнением а 2 + ь2 + 1 ==0, называется .мнимы.м эллиnсо-м, ХОТЯ она
соrлзсно только что данному общему определению является действительной
кривойl
КОМПЛЕI(СНЫЕ ПЛОСКОСТЬ И ПРОСТРАНСТВО
131
Упорядоченная пара точек М 1 == (х 1 , Уl' Zl)' М 2 == (х 2 , У2, Z2)
kомплексноrо пространства называется векторо'м', nрuложеН,Нbtм
1(. точке М (или закреnленным, в ней). Комплексные числа х ==
== ХЗ
Хl' У == У2
Yt, z == Z2
Zl называются координатами заКреп-
ленноео вeK"lOpa. Два вектора равн'Ы, если соответственно равны
их координаты. Классы равных между собой векторов наЗЬ1ваются
свободными векторами; они взаимно однозначно соответствуют
тройкам комплексных чисел х, у, z
тройкам координат всевоз
можных закрепленных векторов, являющихся элементами Данноrо
класса. Свободные векторы обозначаются так:
u == {х, у, z}.
Линейные операции
сложения векторов и умножения вектора на
комплексное число
определяются так же, как и в случае пло..
скости, т. е. «покоординатно», только КООрДИнаТ сейчас три, а не
две, в этом вся разница. Автоматически вводится и исследуется
также и понятие линейной независимости векторов. Как и в слу-
чае точек, мы называем веществеНн'ыми лишь те векторы u ===
== {х, У, z}, У которых все три координаты х, у, 2 суть вещест
венные числа. Все остальные векторы называются мнимыми.
Существенно отметить, что в комплексном пространстве, так
же как и в КОМП.,1ексной плоскости, мы рассматриваем наряду
с основной системой координат (введенной при самом определении
комплексноrо пространства) и друrие системы координат O'e;e
e;,
но всееда лишь вetЦeCтвeHHыe; это значит, что и новое начало О(
, , ,
есть вещественная точка лростр.анства и векторы еl, е2, ез суть
вещественные векторы. Поэтому переход от одной координатной
системы к друrой задается формулами линейноrо преобразования,
все коэффициенты в которых суть вещественные числа. Словом,
все происходит так, как в случае плоскости, с единственной разни-
цей, что вместо размерности n == 2 теперь имеем n == 3.
Веществен'НОЙ поверхностью мы называем такую алrебраическую
поверхность, которая задается уравнением
F (х, у, z) == О
с вещественными коэффициентами.
3 а м е ч а н и е. Определенное в этой rлаве «комплексное» про-
странство следовало бы называть комnлексН,ым nростран'сmво-м
с выделенн'ЫМ в нем веществен'НЫМ подnросmран'ством. (которое пе-
реходит в себя при всех аффинных преобразованиях с веществен..
ной матрицей С, никаких друrих мы, как неоднократно упомина
лось, рассматривать не будем). Такое же замечание можно сде..
лать, разумеется, и о комплексной плоскости.
132
АлrЕБРАИЧЕСКИЕ линии и ПОВЕРХНОСТИ
5. Распадающнеся линии и поверхности. Цилиндрические
н конические поверхности. Поверхности вращения
1. Распадающиеся линии и поверхности. Если мноrочлен F (х, у)
есть произведение двух мноrочленов Рl (х, у) и F 2 (х, у):
F (х, у) == F 1 (х, у). F 2 (х, у),
1'0 те и то.пы{о те ТОЧКII лежат на линии
F (х, у) == о,
(1)
которые лежат хотя бы на ОДНОЙ из двух линий
F1(x, у) ===0, (2)
Р 2 (х, у) === о. (3)
В этом случае rоворят, что кривая (1) распадается на кривые (2)
и (3).
Например, кривая BToporo порядка, заданная уравнением
х 2
у2
о,
распадается на пару действительных прямых
х+у==О и x
y==O,
а кривая
х 2 +у2 ==0,
KaI{ упомянуто выше, распадается на пару мнимых прямых
x+iy==O, x
iy==O,
называемых сопряженными.
То же имеет место и для поверхностей. Если
Р(х, у, z)==F1(x, у, Z).P2(X, у, z),
то поверхность
Р(х, у, 2)==0
распадается на пару поверхностей
F 1 (х, у, z) == о, F 2 (х, у, z)::::: о.
Так, например, поверхность BToporo порядка
х 2 + 2ху + у2
Z2 == О
распадается на пару плоскостей
x+y+z==o и x+y
z==o.
2. Цилиндрические поверхности. О п р е Д е л е н и е. Алrебраи..
ческая поверхность называется цилиндрической (или цилиндром),
РАСПАДАЮЩИЕСЯ ЛИНИИ И ПОВЕРХНОСТИ
133
если внекоторой афq)инной системе координат она может быть
задана уравнением, не содер,кащим одну из координат, например
уравнением
не содержащим координату z.
Кривая, определяемая уравнением (4) в плоскости Оху, назы-
вается иноrда основанием или направляющей цилиндра.
Если точка М == (х, у, z) лежит на цилиндре (4) (рис. 71), то
псе точки М' == (х, у, z'), rде z' сопершеНIIО ПрОИЗНОЛЬНО, то}ке
лежат на цилиндре (4). Все эти точки
образуют прямую, проведенную че
рез одну из них, например через
точку Мо == (х, у, О), параллельно
оси Oz. Таким образом, всякая пря
мая, проведенная параллельно оси Oz
через какую.. нибу дь точку М о =:
== (х, у, О) цилиндра, всеми своими
точками .пежит на цилиндре; все эти
прямые называются образующими ци
линдра. Их объединение 11 образует
множество всех точек, лежащих на
uилиндре.
Обратно, пусть дана алrебраиче
ская поверхность S, обладающая тем
свойством, что всякая прямая, парал
лельная некоторому (одному и тому
же) направлению и проходящая через
какую
нибудь точку этой поверхности,
всеми своими точками лежит на ней.
Покажем, что эта поверхность
является цилиндрической. В самом
деле, не оrраничивая общности раССУ}I{дений, МО}({НО прсдпо..
JIОЖИТЬ, что направление, о котором идет речь, есть направление
оси z некоторой системы координат.
Пусть уравнение поверхности S есть F (х, у, z) == о. ВСЯJ(ИЙ
мноrочлен F (х, у, z) от трех переменных может быть записан
в виде
F (х, у, z) == Zk g (х, у, z) + f (х, у),
rде k
l. Докажем, что в нашем случае g(x, у, z) == и.
в противном случае пусть существуют такие значения Хо, Уо, Zo,
что g (х о , уо, Уо) == А =f= о. Тоrда
F (Ха, Уа, zo) == Az
+ f (х о , уо)
{(х, у) ==0,
(4)
...........
.х
Рис. 71.
и существует лишь конечное число значений z, для которых
F (хо. уо, z) == о. Пусть Z1 ..... одно из них. Тоrда точка Мо == (х о , Уо, Zl)
134
ллrЕБРАИЧЕСКИЕ ЛИJIИИ И ПОВЕРХНОСТИ
лежит на поверхности S, но прямая
х ::::: Хо,
у =t: Уо,
проходящая через эту точку в направлении оси z, уже не ,,'Iежит
целиком на поверхности S
вопреки нашим предположениям.
Итак, действительно g (х, у, z) == О, и уравнение поверхности S
имеет вид
'(х, у)==О,
чем и доказано, что S
цилиндрическая поверхность.
lv\bI будем в дальнейшем рассматривать лишь цилиндрические
поверхности BToporo порядка; их основаниями являются кривые
BToporo порядка.
:.с
:JJ
,""
...
""',
/
/
'"
,;
,;
/
I
I
\
Рис. 72.
Рис. 73.
3. Конические поверхности. О п р е Д е л е н и е. Конической
поверхностью п-со порядка называется алrебраическая поверхность,
задаваемая в некоторой аффинной системе координат Oxyz урав-
нением
ф (х, У. z) == О,
(5)
rде Ф (х, у, z) есть однородный мноrочлен (форма n-й степени
от переменных х, у, z).
Леrко доказывается слеДУЮIЦее основное свойство конических
u
поверхностеи:
(*). Если точка М == (х, у, z) лежит на конической поверхно-
сти (5) (рис. 72), то и вся прямая ОМ лежит на этой поверх-
ности (О при этом есть начало координат).
РЛСПАДАЮЩИЕСЯ ЛИНИИ И ПОВЕРХНОСТИ
135
в самом деле, если точка ""1' == (х', у', z')
какая",нибудь точка
lIРЯМОЙ ОМ, то для вектора ОМ ' имеем равенство ОМ' == л олi
при некотором числовом множителе л. А это значит, что х' == ')..х,
у' == 'Ау, z' == лz. Так как Ф (х, у, z)....... ОДНОРОДНЫЙ мноrочлен п...й
степени, то Ф ('\.оХ, лу, лz) == Л,llф (Х, у, z); так как точка 1\.1
== (Х, у, z) лежит на поверхности (4), то Ф (х, у, z) ==0, значит,
и Ф(х', у', Z/)
/\lnФ(Х, у, z)==O, т. е. точка М' также лежит
на поверхности (5). Итак, всякая коническая поверхность ела-
rается целиком из прямых, проходящих через точку О (рис. 73)..
Рассмотрим систему координат Oe 1 e2ea с началом О и едиНИЧНЫМИ
векторами e 1 , е 2 , параллельными плоскости л; вектор еэ опреде-
ЛИМ как какой",нибудь вектор 00' , конец KOToporo лежит в пло-
скости л. Таким образом, в этой плоскости определена коорди-
натная система O'e 1 e.l, а сама плоскость п в системе Oel
e, имеет
уравнение z === 1. Пусть кривая К, лежащая в плоскости п, имеет
в координатной системе O'el
уравнение
F (х, у) == О, z == 1 (6)
степени n. Пусть М == (х, у, z)
какая"нибудь точка поверхно..
сти s. Тоrда прямая ОМ пересекает плоскость л; в точке Мо ==
== (Ха, Уо, 1 ), координаты Хо, Уо которой удовлетвор нют равен.
ству
F (Ха, Уо)::::: о.
(7)
Вектор ОМ О == {хо, Уо, 1} является направляющим вектором пря
мой ОМ, следовательно, ее параметрическое уравнение имеет вид
х == xot, }
У == yot, (8)
z==l.t.
Так как лежащая на прямой (8) точка М == (х, у, z) есть произ
вольная точка поверхности S, то мы доказали следующее пред
пожение: для Toro чтобы точка М == (х, у, z) лежала на поверх-
ности S, необходимо и достаточно, чтобы ее координаты удовлет..
воряли при некотором t уравнениям (8), rде Хо, Уо удовлетворяют
уравнению (6).
Подставляя в (7) значения
х у t
ХО == Т, Уо == т' == z
из (8), переписываем уравнение (7) в виде
P (
JL ) ==o.
z' z
Именно этому уравнению удовлетворяют все (отличные от точки О)
точки М == (х, У, z) поверхности s. Мноrочлен F ( ; ,
) есть
136
ллrЕБРАИЧЕСКИЕ ЛИJIИИ И ПОВЕРХНОСТИ
мноrочлен n
й степени относительно
, JL, значит, мноrочлен
z z
ф (х, у, z) == znF ( : ' ; )
'tCTb однородный мноrочлен относительно х, у, z. Среди точек
М == (х, у, Z), не лежащих в плоскости 2 == О, уравнению
Ф (х, у, z) ==0 (5)
удовлетворяют все точки поверхности S и только они. Само урав..
нение (5) определяет коническую поверхность порядка n, МНО-
=кество точек которой получается присоединением к поверхности
S точек, лежащих в плоскости z == О и удовлетворяющих уравне..
нню Ф (х, у, z) == о.
4. Поверхности вращения. Пусть в пространстве дана прямо-
уrольная система координат Oxyz.
Рассмотрим мноrочлен F (и, z) от двух переменных, одно из
которых, а именно и, есть х 2 +у2, та-к что
F (и, z) == F (х 2 + у2, z).
Очевидно, выражение F (х 2 + у2, z) тождественно равно неI{ОТОРОЙ
сумме одночленов от трех переменных х, у, Z, Т. е. некоторому
мноrочлену f (х, у, z) от этих переменных.
Если потребовать, чтобы мноrочлен f (х, у, z) был при этом
второй степени, то в выражение F (х 2 + у2, z) aprYMeHT х 2 + у2
может входить только в первой степени, а 2 может входить во
второй и в первой степени. Итак, общий вид мноrочлена второй
степени f (х, у, 2), допускающеrо запись f (х, у, 2) == F (х 2 + у2, Z),
есть
'(х, у, z):=F(X 2 +y2, z)а::эА (x 2 +y2)+az 2 +2bz+c.
Но вернемся к общему случаю мноrочлена f (х, у, z) любой
степени, допускающеrо запись вида f (х, у, 2) == F (х 2 + у2, z), и
рассмотрим алrебраическую поверхность S, задаваемую уравне..
нием
F (х 2 + у2, z) == о.
(9)
Пусть точка Мо == (хо, уо, Zo) лежит на поверхности (9). В пло-
скости 2 == 20' проходящей через точку Мо параллельно плоскости
Оху (рис. 74), возъмем окружность у с центром Q == (О, О, zo),
проходящу ю чер ез точку Мо. Радиус этой окружности, очевидно,
есть r == V x
+ y
, а ее уравнение
х 2 + у2 == ,2, Z == zo.
Так как точка Мо лежит на поверхности (9), то F (,2, 2) == О, а
так как во всех точках М == (х, у, 2) окружности У имеем х 2 + у2 ==
РЛСПЛДЛЮЩИЕСЯ линии и ПОВЕРХНОСТИ
137
== ,2, Z == ZO' то псе эти точки лежат на поверхности (9). Итак,
если данная точка Мо лежит на поверхности (9), то на той же
поверхности лежат и все точки М, в которые попадает точка Мо
при вращении пространства BOKpyr ОСII z. Поэтому поверхности,
уравнения которых при
надлежащем выборе пря-
моуzольной системы коор-
динат Mozym быть запи..
саны в виде (9), называют..
сл поверхностями враще..
пия. В частности, уравне..
ние поверхности BToporo
Порядка, являющейся по-
верхностью вращения, за-
писывается в виде
z
:J;
А (x 2 +y2)+az 2 +
+ 2bz+c==O.
Jlиния, получающаяся при
пересечении поверхности Рис. 14.
вращения плоскостью, про-
ходящей через ось вращения (в нашем случае через ось Z), на..
зывается .меридианом этой поверхности вращения. Например, ме..
рИДИ8НОМ поверхности вращения
F (х 2 +у2, z) === О
является сечение этой поверхности плоскостью у == о, Т. е. линия
F (х 2 , z) == О, У == о.
Поверхность вращения описывается при вращении линии, являю...
щейся ее меридианом, околе оси вращения.
Рассмотрим, например, коническую поверхность
х 2 + у2
22 == о. (1 О)
Ее меридианом, лежащим в плоскости у == О, является пара
прямых
X2
Z2 == (X+Z)(X
z)==0, у==о;
конус (10) описывается при вращении этой пары прямых BOKpyr
оси z (рис. 75).
Рассмотрим в качестве BToporo примера поверхность, зада-
ваемую уравнением
z == х 2 + у2
(система координат все время прямоуrольная). Эrо снова поверх-
ность Broporo ПОрЯДка, являющаяся поверхностью вращения. Она
138
АлrЕБРАИЧЕСКИЕ линии и ПОВЕРХНОСТИ
АЕ
I
I
...............
,
,-.,;
I "
, ,
/' r \
,'/ I I
'<.
..J
I , I
1, I
" I
\ ,
,
х
Рис. 75.
Рис. 77.
Рис. 76.
..Z
I
I I
I I
7f
,
I /
',
,,..
I / I )
+
t , / I I
" / I I
" ,/ I
I I
I
:.с
Рис. 78.
РАСПАДАЮЩИЕСЯ ЛИНИИ И ПОВЕРХНОСТИ
139
nслучается вращением около оси z параболы
2 == х 2 , У == о;
вид полученной поверхности вращения совершенно ясен, эта по-
верхность изобра)кена на рис. 76; она называется параболоидом
вращения.
Поверхности, заданные урав-
нениями
у
Рис, 79.
х 2 + у2 ...... 22 == 1,
соответственно
х 2 + у2...... Z2 ==
1,
z
z
Рис. 80.
получаются, как леrко проверит читатель, при вращении BOKpyr
оси 2 равнобочной rиперболы. лежащей в плоскости у == о и
имеющей ось z соответственно своей второй и первой осью
(рис. 77, 78).
Читатель сам напишет уравнения поверхностей, получающихея
от вращения эллипса BOKpyr ero осей (рис. 79, 80).
rЛАВА v
РАЗЛИЧНЫЕ ВИДЫ КРИВЫХ BTOPOrO ПОРЯДКА
в
1 этой rлавы будет показано, что единственными кривыми
BToporo порядка являются:
эллиncы (включая так называемые мнимые эллипсы, опреде
ляемые в надлежащей системе координат уравнениями вида
х2 у2
а 2 + 1)2 + I :=: О),
еипе рБОЛbl,
параболы
и кривые, распадающиеся на пару пРЯАfblХ (пересекаЮЩИХСЯ t
параллельных или совпадающих); при этом прямые Moryr быть
действительные или мнимые сопряженные 1); прямая в паре сов-
падающих прямых всеrда действительна.
В э9 2, 3, 4 будет показано, как определить вид кривой по ее
общему уравнению.
В
5 будет дана аффинная классификация кривых BToporo
порядка.
Рассмотрим уравнение
F (х, у) == О,
rде
Р(х, y)==al1x2+2a12xy+a22y2+2alx+2a2y+aO (1)
общий мноrочлен второй степени. Л\ы хотим найти прямоуrоль..
ную координатную систему, в которой уравнение кривой F (х, y)
o
приняло бы возможно простой
«канонический»
вид.
Начальную координатную систему будем предполаrать прямо..
уrольной (если бы она не была таI{ОВОЙ, мы бы перешли к новой
прямоуrольной системе координат и этим преобразовали бы пер"
воначальный мноrочлен F (х, у) в новый мноrочлен, то)ке второй
степени, с KOToporo и начали бы наши дальнейшие рассуждения).
1) Две мнимые прямые называются СОЕРЯЖ
I1НЫ
Иt если они MorYT быть
заданы уравнениями Ах+Ву+С==О и Ах+Ву+С==:О, о которых коэффи.
циенты А и .4, в и В, с и С являются взаимно сопряженными комплексными
числами.
линии. ОПРЕДЕЛЯЕМЫЕ УРАВНЕНИЯJ\НI ВТОРОй СТЕПЕНИ 141
9 1. О линиях, определяемых уравнениями второй
степени с двумя неизвестными
1. При ведение квадратичной формы от двух переменных к ка-
ноническому виду при помощи преобразований прямоуrольных
координат. Первый шаr заключается в том, чтобы поворотом на...
чальноrо прямоуrольноrо репера Ое}е2 на некоторый уrол а пре
образовать квадратичную форму <р (х, у) == а 11 х 2 + 2а 12 ху + а22у2
старших членов мноrочлена
F (х, у) := allx2+2a12xy+a2iY2+2alx+2a2y+aO (1)
к каноническому виду
, ,2 + ' ,2
аl1 Х a i 9.Y'
Итак, делаем преобразование координат
х == х' cos а
у' sin а, }
у ==х' sin а+ у' cos а.
Получаем ТО)l{дественно
F (х, у) == ан (х,2 co
2 а
2х'у' cos а sin а + у,2 sin 2 а) 4---
+ 2a 12 (х,2 COS а sin с{.
х' у' sin 2 а
у,2 sin а cos а + х' у' cos 2 а) +
+ а 22 (х,2 sin 2 сх.
2х' у' cos а sin ct + у/2 cos 2 а) +
+ 2a 1 x' cos а
2а 1 у' sin а + 2а 2 х' sin а + 2а2У' cos а + а о ==
F ' ( ' ' ) ,,2 + 2 , " + ' , 2 + 2 ' , + 2 ' ' +
== .х, у == а l1 х a l2 x У а 22 у а 1 х aj,Y а(},
(2)
rде
a
1 == ан cos 2 а + 2al
cos а sin а + а 22 siп 2 а,
, " ( 2 . 2 )+ .
al'l ==
а 1 } COS а. stn а +а 12 cos а
SlП а а 2 2 COS а. Sln а,
, "2 2 . + 2
аи == ан SIn а
а 12 cos а Sln а а 22 COS а,
a
=== а 1 cos а. +
sin а,
a
==
Ql sin сх. + а 2 cos а.
Определим уrол а требованием, чтобы было а;') == О, Т. е. требо
ванием
а 12 cos 2 а + (а 2 2
a 11 ) cos а sin а
a 12 sin 2 а === О, (4)
(3)
причем естественно предположить, что а 12 =1= О (при a 12 == О нечеrо
было бы делать
форма q> (х, у) уже имела бы вид a 11 x 2 + а22у2).
Из (4) получаем
t au
all:!: Y(a22
all)2+4a
g сх. :::;::
2 а 12
(5)
142
РАЗЛИЧНЫЕ ВИДЫ КРИВЫХ BTOPOro ПОРЯДКА
Так как (а 22
а 11 )2 + 4a
2 > о, то по формуле (5) нужный нам уrол tX
всеrда можно определить.
Полаrая для сокращения письма аl1 == 'Л 1 , GZ2 == Л 2 , сформули-
руем полученный результат.
Поворотом координатной системы Ое 1 е 2 на уrо.п а, определяе-
мый из (5), можно преобразовать квадратичную форму
!р (х, у) == а 1l х 2 + 2a 12 xy + а 22 у2
к каноническому виду
, ( ' ' ) "l ,2 + "l ,2
q> х, у == АI Х {\,'l,y,
а весь мноrочлен F (х, у) к виду
р' (х', у') ==
X,2 +
..2Y,2 + 2а;х' + 2а;у' + а о . (1 ')
Оба коэффициента Л'1 и Л 2 не MorYT одновременно быть ну-
лями: если бы было л'1 == Л 2 == О, то мноrочлен второй степени F (х, у)
при преобразовании (2) перешел бы в мноrочлен первоЙ степени,
что, как мы знаем, невозможно.
Итак, возможны два основных случая:
10 Л 1 *0, л 2 =*о.
20 ОДИН из двух коэффициентов Л 1 , Аз отличен от нуля, дpy
rой равен нулю.
2. ПервыА ОСНОВНОЙ случай: л'1 =1= О, л'2 =1= О. При переносе Ha
чала координат в какую
нибудь точку О' == (x
; y
), т. е. при пре-
образовании
х' == х' +X
,
у' == у" + y
мноrочлен р' (х', у') принимает вид
Р' (J6' t у') == F" (х", у") ==
== л 1 х,,2 + л 2 у,,2 + 2 (ЛIХ
+ a
) х" + 2 (Л2У
+ a
) у" + a
, (6)
rде свободный член a
есть
a
:::I:
x
? + Л2У
2 + 2a
x
+ 2a
y
+ а о
F (x
, y
).
Подберем теперь такие координаты x
, y
HOBoro начала О",
чтобы коэффициенты при х" и у" в (6) обратились в нуль, т. е.
чтобы
л.х
+ a
== О, Л2У
+ a
== о.
(7)
Так как "'1"* О, Л 2 =1= О, то уравнения (7) дают нужные значения
дЛЯ X
, y
. Итак, в системе координат O'e 1 e2 первоначальное урав-
нение F (х, у) == о нашей кривой преобразуется к виду
x'" + 'А"у,,2 + а; == О. (8)
ЛИНИИ. ОПРЕДЕЛЯЕМЫЕ УРАВНЕНИЯМИ ВТОРа А СТЕПЕНИ 143
Переходим к исследованию уравнения (8). Имеем два случая:
С л у чай А
rиперболический: коэффициенты ;"1 и
разных
знаков.
С л у чай Б...... эллиптический: коэффициенты л'1 и
одноrо и
Toro же знака.
А. r и пер б о л и ч е с к и й с Л у чай. Пусть сначала a
* О,
один из коэффициентов Лl' Л 2 имеет тот же знак, что и a
; пусть
это будет, например, л'2; тоrда "-1 и a
ПРОТИВОПОЛО)l{НЫ по знаку.
Переписываем уравнение (8) в виде
х" 2 у.2
1
+
.
a
a
......
"'2
(8')
а'
Знаменатель ...... ...Q. В пе р вом члене есть положительное число; обо-
Лl
а'
значаем ero через а 2 , знаменатель ...... л: отрицателен; обозначаем
ero через ........ Ь 2 . У равнение (8'), т. е. уравнение (8), приняла вид
х,,2 уп2
а 2 ...... Ь 2 == 1.
Это
каноническое уравнение еuперболы.
Если в rиперболическом случае a
== О, то можно без оrрани-
чения общности предположить, что Л 1 > О, Л2 < о; введем обозна-
чения Л 1 == а 2 , Л 2 ==
Ь 2 ; уравнение (8) переписывается в виде
а 2 х,,2
Ь 2 у,,2
О, Т. е. (ах" + Ьу") (ах" ...... Ьу") == о. (9)
Это...... уравнение пары прямых, пересекающихся в начале коорди-
нат О'. У равнение (9). считаеJ,f каноническим уравнением кривоЙ,
распадаюu
ейся на пару действительных пересекающихся прям.ых.
Б. Э л л и п т и ч е с к и й с л у чай. Теперь Л 1 и Л 2 одноrо знака.
Снова предполаrаем сначала, что a
=t= о. Если общий знак чисел
Л 1 и л'2 противоположен знаку a
, то, переписав уравнение (8)
а' а'
В виде (8'), видим, что оба знаменателя ....... л; и
л: положи-
тельны; обозначив их соответственно через а 2 и Ь 2 , получим
х"2 у"З
а2 + ь2 == 1
Если же общий знак Лl и
совпадает со
менатели в (8) отрицательны, и мы получаем
t у'"
......
== 1
а 2 Ь"1 ·
каноническое уравнение эллипса с полуосями а, Ь.
,
знаком а о , то эна-
уравнение
(10)
144
РАЗЛИЧНЫЕ ВИДЫ КРИВЫХ nTOPOrO ПОРЯДКА
Это
уравнение «мнимоrо эллипса», или эллипса с мнимыми по-
луосями ai и bi; нет ни одной действительной точки плоскости,
которая бы этому уравнению удовлетворяла.
Пусть теперь в эллиптическом случае a
== о. Уравнение (8)
принимает вид
Л 1 х н2 + Л2У,,2 == о.
Так как "-1 и Л2 одноrо знака, то это уравнение можно пере..
писать в виде
a2x"
+ Ь 2 у"2 == О или в виде (ах" + biy") (ах"
ЬЁу") == о. (11)
Это
каноническое уравнение кривой, распадающейся на пару
пересекаlОЩИХСЯ мнимых сопряженных прямых; оно у довлетво.
ряется единственной действительной точкой О'
точкой пересечения
двух мнимых сопряженных прямых
ах" + iby" == о, ах"
iby" == о.
Итак, в эллиптическом случае уравнение (8)
а значит, и Ha
чальное уравнение (6)
определяет или обычный эллипс (<<дейст.
вите.ПЫ-IЫЙ»), или «мнимый» эллипс, или пару мнимых сопряжен
ных прямых с одной общей действительной точкой.
3. Второй основной случай: Л 1 А 2 === о. Пусть из коэффициентов
Л 1 'Л2 в уравнении (1') ОДИН, например Л 1 , отличен от нуля, а Л 2 == о.
Тоrда в системе координат Oe
e
уравнение
F (х, у) == о
принимает вид
F' (х', у') ==
x,2 + 2а;х' + 2a
y' + а о == о.
(12)
ИмеlОТСЯ две дальнейшие возможности:
А. a
* о. Тоrда уравнение (12) можно реП1ИТЬ относительно
у', Т. е. представить ero в виде
у' ::::z рх,2 + qx' + r,
наша кривая есть rрафик трехчлена второй степени, Т. е. па-
рабола.
Б. а2== о. Тоrда уравнение (12) есть
Л1х,2 + 2а;х' + а о == о. (13)
Это
квадратное уравнение отн осительно х'; оно имеет два ре-
шения:
Х ' , Х '
Х2 '
== Xt,
(14)
мы имеем пару параллельных прямых (14)
действительных,
если корни x
и X
квадратноrо уравнения (13) действительны,
MIUtMblX и сопряженных, если таковы корни x
и х; уравнения (13).
ИНВАРИАНТЫ мноrОЧЛЕНА BTOrOA СТЕПЕНИ
145
Наконец, если X
== х;, то rоворят, что уравнение (12), а значит
и уравнение (1), определяет пару слuвшихся (или совпадающих)
действительных прямых.
Подведем оБЩИЙ итоr.
Всякая кривая етОРО20 порядка есть
или эллипс (действиmeлы'lЫЙ или .мнимый),
или 2иnербола,
или парабола,
или пара прямых: пересек.аюu
ихся (действиmеЛЫlblХ или ,мнимых
сопряженных),
параллеЛЬНblХ (в собственном смысле) (действиmeлы.,ых или мни..
JrlblX сопряженных),
совпадающих (действительных).
Ilриведенное доказательство этоrо результата содер>кит в себе
и способ определения вида кривой по ее уравнению. однако прак-
тически удобным этот способ не является; удобный способ будет
дан в следующих параrрафах.
9 2. Инварианты мноrочлена второй степени
Пусть дан какой
нибудь мноrочлен второй степени от пере..
менных Х, у:
F (х, у) ==
(х, у) + 2l (х, у) +а о . (1)
({) (х, у) ==al1x2+2a12xy+a22Y2, 1 (х, у) ==alX+
Y. (2)
Обозначим через б детерминант
б == I
::
:: 1.
Напомним, что детерминант б называется дискриминантом квадра-
тичной формы ср (х, у).
При переходе от прямоуrольной системы координат Оху к новой
прямоуrольноЙ системе координат О' х' у' мноrочлен F (х. у) пере
ХОДИТ в мноrочпен
р' (х', у') == ер' (х'. у') + 2[' (х', у') + a
.
(1 ')
Так как общее преобразование координат сводится клереносу
начала и к переходу к новой координатной системе с тем же
началом, то рассмотрим отдельно оба этих частных случая. Как
мы знаем (rл. IV,
2), при переносе начала, т. е. при преобра
зовании х == х' + х о , у::::: у' + Уо, коэффициенты ан, a 1 2, а 22 при
старших членах мноrочлена F (х. у) остаются неизменными. Друrими
словами, остается неизменной матрица квадратичной формы <р (х, у),
а значит, и ее дискриминант б.
146
РАЗЛИЧНЫЕ виды КРИВЫХ BToporo ПОРЯДКА
Если )I{e новая координатная система имеет то же нача.по
О'
o, что и старая, то
, ( I ' ) ,,2 + 2 , " + ' ,2
<р Х t У == йl1 Х ali x У
'J.lJ,
[' (х', у') == а;х' + a
y',
причем (как мы видели в rл. IV,
2) имеем
б' === I a
1 a
2 1 :::::: l a l1 а12 1 == б.
a 2t а 22 аи 022
Теперь сформулируем два определения.
6 n р е д е л е н и е 1. Общее (неоднородное) nреобразование
х == C 11 X' +C l 2lJ' +C 1 , } (3)
у == С2.1 Х ' + C'1.2!J' + С,
называется ортоеональн.ьt.М, если ортоrональна ero матрица
Сll Cl
11
11 С21 С22
'
т. е. матрица, составленная из коэффициентов при переменных.
О n р е Д е л е н и е 2. Пусть дана целая рациональная функция 1)
J (a 11 , а 12 , а 2 2' а 1 , а 2 , а о ) от коэффициентов мноrочлена
F (х, у) :=-а 11 х 2 + 2а 12 ху.+ а 22 у2 + 2a 1 x + 2а 2 у + а о .
При произвольном ортоrонаЛЬНQМ преобраэовзнии (3) мноrоqлен
F (х, у) тождественно переходит в
F (х', у') == a
lx,2 + 2а;2 Х ' у' +
iy,2 + 2а;х' + 2a
' + a
.
Если при этом Бсеrда, т. е. для любоrо ортоrональноrо преобра-
З0вания (3), при любом наборе значений a 11 , а 12 , й22, й 1 ,
, G.o
J(a;l' a;
, a
, a
, a
, a
)==J(allJ Q 1 2, а 2 2, а 1 , а 2 , tЧ), (4)
то функция J называется ортоеоналЬНblМ, инвариантом MHoro-
члена F (х, у).
Примером ортоrональноrо инварианта мноrочлена может слу-
жить
б == 6 (а 11) а 12 , й22, Qt, й2, а о ) == I ан 012 1 .
а21 а22
Точно так же ортоrональным инвариантом является и ФУНКUИЯ
s :=: S (а 1 !, й12, а 22. а 1 ,
, йо) == йl1 + а 22 .
1) Целая рациональная функция (от каких-то переменных
, '1, С, ...)
ЭТО
просто мноrочлен от этих переменных. В данном случае
===al1' Т)==а12 ИТ. д.
ИНВАРИАНТЫ мноrОЧЛЕНА ВТОРОИ СТЕПЕНИ
147
в самом деле, ес"ТIИ преобразование (3) есть ПОБорот координат..
Horo репера (на какой
то уrол а), то из первой и третьей формул (3)
1 с.педуеТ t что
S' == s.
н о функция S, очевидно, не меняется и при отражении
х ::::: х' t У ==
у' ,
а также при переносе начала координат, следоватеЛЬНО t и при
любом ортоrональном преобразовании.
ДокажеМ t наконец, инвариантность функции
ан а12 аl
А === d (а 11 , а 12 , а 22 , а 1 , а 2 , а о ) == 021 а2!
·
а1 а2 Gt
Для этоrо наряду с мноrочленом F (х, у) рассмотрим квадр'атич.
ную форму
Ф (х, у, t) == а 11 х 2 + 2а 12 ху + a 2 2!J 2 + 2a 1 xt + 2a 2 yt + aJ2,
а наряду с преобразоввнием (3) рассмотрим преобразование
х == с 11 х' + с 12 у' + c 1 t', j
у == С 21 х' + с 22 у' + c 2 t' ,
t == Ох' + Оу' + 1 . t' .
(5)
При этом преобразовании квадратичная форма Ф (х, у, t) переходит
в квадратичную форму
ф' (х', у', t') ==a
lx,2 +2a
x'y' +а22У'1 +2a
x't' +2a
/t' +a
t,t
(rде коэффициеНТbI а;., a;
и т. д. те же, что и в мноrочлене
F (х', у'»). Дискриминант квадратичной формы Ф (х, у, t) есть наш
детерминант
ан аlЭ al
А == 021 022 а2 ·
а1
00
При преобразовании (5) он помно)кается на квадрат детерминаНТа
этоrо преобразования, Т. е. на
откуда и следует,
d (a
t, a
i' a;i' a
, а;, a
) == L.\ (а 1 1' а 12 , а 2 2' al,
, а о ).
С 11 С 12 С}
С 21 С 22 С2 C 11 C 12 == 1,
О О 1 С 21 С 22
что
Нами доказана
148
РАЗЛИЧНЫЕ ВИДЫ I(РИВЫХ BTOPOrO ПОРЯДК.А
Теорема 1. Функции
s
a 11 + a
2'
6=== I ан 012 1 ,
а21 а 22
ан й12 йl
t1 == 021 022 а2
йl а2 ао
от коэффициентов мноеочлена (1) явЛЯlотся орmосонаЛЫ-lьиvtu инва-
риантами этО20 .мно
очлена.
3 а м е ч а н и е 1. Из наших рассуждений следует; если MHoro-
член F (х, у) удовлетворяет какому-нибудь из условий б
О, д
О,
то при переходе к Лlобой аффинной координатной системе О' х' у'
он nреобразуется в мноrочлен F' (х', у'), удовлетворяющий тому же
условию (потому что детерминанты б', 11', построенные дЛЯ F' (х', у'),
получаются соответственно из б и
умножением на положительное
число
квадрат детерминанта преобразования).
При этом, если квадратичная форма <р (х, у) старших членов
мноrочлена F (х, У) ЯВ.:'Iяется знакоопределенной, т. е. если для
любых х, у qJ (х, у) имеет определенный знак, то коэффициенты а 1 1
и
2' а значит, и их сумма S == а 11 + а 22 сохраняют свой знак
при любом невырожденном линейной преобразовании. Для неопре-
деленной формы <р (х, у) это не так.
Из теоремы 1 мы выведем сеЙчас такое фундаментальное
С л е д с т в и е. Если каки.М, бы то ни было ортО20нальным nре-
образованием
' + '
х
с 11 х C 12 Y,
' + '
у
C 21 X С 22 У
.мы привели форму
fP (х, у) == a 11 x 2 + 2a 12 xy + a 22y <J
к каноническому виду
, ( ' ' ) ,,2 + ' ,2
<р х, у == а ll Х a'J.'J,Y'
(2')
то коэффициенты а;. и a
2 непременно являются корнями квадрат-
11020 уравнения
л 2
Sл+б== о.
(6)
в самом деле, из инвариантности S и {, следует, что
S == а 1 1 + а 22 == a
1 + a;
, }
I ан а12 I I a
1 О I " (7)
u
== О ' == a1la
2,
а21 022 a
2
т. е. что сумма чисел а;. и a
равна S, а их произведение равно В.
А это и значит, что сами эти числа суть корни уравнения (6).
Уравнение (6) называется характеРUСfпuческим уравнением Кбадра..
ИНВАРИАНТЫ мноrОЧЛЕНА ВТОРОИ СТЕПЕНИ
149
п1UЧНОЙ формы
(х, у). Оно всеrда имеет действительные корни,
что сразу следует из Toro. что дискриминант уравнения (6) есть
82..... 46 === (Йll + a i 2)2
4 (а ll а 22 ..... а;2) == (а 11 ....... й22)2 + 4ai
о. (8)
3 а м е ч а н и е 2. Этот дискриминант равен нулю тоrда и только
тоrда, коrда одновременно
G 11 == а 22 ,
а12 == о.
(9)
Равенства (9) выражаlОТ условие, необходимое и достаточное
для Toro, чтобы корни характеристичеСI{оrо уравнения были равны
между собоЙ.
Л\ы знаем, что поворотом на уrол а (определяемым из фор-
мулы (5) Э 1) квадратичная форма
fP (х, у) == Gl1 X2 + 2a 12 xy + а22у 2
б ' ( ' ' ) "С] + ' ,2 "
прео разуется в <р х, у == йl1Х a'J.9J/, причем ан и ан всеrда
суть корни характеристическоrо уравнения (6). Но если корни
этоrо уравнения суть /...1 и л'2, то мы не знаем, какой из них есть
коэффициент при х,2 (Т. е. a
.), а какой
коэффициент при y'
.
Считая, что корни
и ""2 характеристическоrо уравнения даны,
найдем уrол ('Х, на который надо повернуть систему координат,
чтобы форма ч> (х, у) перешла именно в л 1 х,2 + l'w2!J,2 (а не в л 2 х,2 +
+ л I у,2). Этот уrол будет вместе с тем уrлом наклона новой оси
абсцисс (оси Ох') к старой Ох. Для этоrо переписываем первые
два равенства (3) из
1:
, '\ 2 +2 . + . 2
ан == 1'''1 == ан COS а а 12 cos ct sln а а 2 2 Sln а,
, О . + 2 '2 + .
а li == ==
- a 11 cos а SIП а a 12 cos а..... a 12 Sln а а 22 cos а Sln (Х.
Умножаем первое нз этих равенств на cos а, второе на
sin а и
складываем. Получаем
Л 1 cos ('Х == a 11 (со
З а + cos а, sin 2 ('Х) + 2а 12 cos 2 а sin а
a 12 cos 2 а sin а + а 12 siп З а + а 22 (sin 2 ('Х cos а
cos а. sin 2 а),
Т. е.
л'l COS ('Х == а 11 cos а + а12 sin а.,
откуда
tg а == Лl
all .
a12
(10)
Это и есть уrловой коэффициент новой оси абсцисс! Заметим, что
если a 12 == о, то форма
(х, у) уже имеет канонический вид и нет
надобности ни в каком повороте системы координат.
150
РАЗЛИЧНЫЕ ВИДЫ кривых BToporo порядКА
3. Центральный случай
ИТЗI{, ПОБОРОТОМ первоначальной прямоуrольной системы коор-
динат на уrол а, определяемый из формулы (10) преДЫДУШ,еrо па-
раrрафа, мы приводим мноrочлен
Р(х, y) :=: allx2+2a12xy+a22y2+2alx+2a2y+aO (1)
к виду
x,2 + Л2У,t + 2а;х' + 2a
y' + ао. (1 ')
Дальнейшее исследование кривой F (х, у) == о 3ЗI{Лlочалось
в разборе двух случаев: центральноrо (коrда Л 1 =1= О, j"2 * О) и
параболическоrо (коrпа лишь одно ИЗ двух чисел Л 1 , '
отлично
от нуля). Так как '\'lЛ 2 == <5, то uентральный случай есть случай
6 ::/= О, а парасолический
== о.
Предположим, что б =1= о. Докажем, что в этом случае можно
до всякоrо поворота системы координат Оху переносом начала,
Т. е. преобразованием
Х == s + Хо, }
(2)
У == 1} + Уо,
преобр.азовать мноrочлен F (х, у) в
F* (
, 1]) == all
2 +2al
Y} + а 22 'У}2 + а6 . (1 *)
При этом Х о , Уо В (2), Т. е. координаты HOBoro начала О' == (х о , Уо)
являются однозначно определенными. В самом деле, подставим
X==S+Xo, У==l1+Уо в (1). Получим
F (х, у) == aJl
2 +2a12
Т) +a2
112 + 2 (аllх о +a 12 yo +a 1 )
+
+ 2 (a21xO + а 22 уо + й2) ''1 + F (х о , уо).
Теперь определяем Хо и УО так, чтобы коэффициенты при
и 1}
обраТlJЛИСЬ в нуль, Т. е. чтобы
QklXO + ak2Yo + ak === О, k == 1, 2. (3)
Так как по предположению
б == I 01 t 012 I
О,
а21 а 22
то уравнения (3) решаются однозначно и дают нам искомые хо, Уо.
Теперь, имея корни "-1' л'2 харзктеристическоrо уравнения
л З
Sл+<5 == О,
нам остается только определить уrол а из формулы (10) преды-
дущеrо параrрафа и........ посредством ПОБорота координатной системы
O'Sf} на этот уrод а
преобразовать мноrочлен (1) в
р' (х', у') == Л1Х'
+
,з + а*. (I)
ЦЕНТРАЛЬНЫй СЛУЧАй
151
Определим свободный член а*. Для этоrо воспользуемся инва-
риантностью детерминанта
==
ан G12 а)
а21 а22 а2
аl а2 ао
J"1
о
о
о о
Л2 О
О a
== /"1 л 2 а: == оа: ,
откуда
*
ао == б ·
Итак, при переходе от первоначальной системы координат Оху
к новой системе О' х' у' мноrочлен F (х, у) тождественно преобра..
зуется в
2 2 Д
Р(х', y')==
x' +
y' +6.
Нами доказана следующая
т е о р е м а 2. Пусть в пРОU380ЛЫ-lОЙ пРЯМО!:/20ЛЬНОЙ системе
/(oopauHanz Оху кривая впwp020 порядка дана своим уравнением
F (х, у) == a 11 x 2 + 2а12ХУ+ a 2 2!J 2 + 2a 1 x + 2а 2 у + а о == О,
при'Ее.М,
б == I ан а12 ] =1= о.
a21 а22
Возьме.м. новУ'0 систему координат О' х' у'
начало ко/пороЙ есть
moчка О' == (хо , Уо), определенная уравнениямu (3), а ось абсцисс
О' х' наклонена к оси Ох под уелом а, определенным ypaвfteHueM (1 О)
предblдущеzо nараzрафа. В системе координат О' х' у' кривая
F (х, у) == о имеет У равнеl-lие
" ,1 '\ ,1 Д О
/\'1 Х + 1\,2!I + б
== ·
(4)
3 а м е ч а н и е 1. Как ВИДНО из уравнения (4), точка О' == (хо, Уо),
являющаяся началом новой координатной системы О' х' у', есть центр
симметрии нашей кривой. Мы увидим в следующей rJ1aBe. что
в случае 6 =1= О кривая F (х, у) == О имеет единственный центр
симметрии. Поэтому крпвая F (х, у) == о называется в этом случае
центральной.
Уравнен ие (4) называется п риведенны.4! у равнением централь.
ной кривой. Ero исследование быстро доводится до конца.
При
== О уравнение (4) имеет вид
1'1 ,1 '\ ,. О
/\'1 Х + Л2У ==
(4' )
и определяет пару прямых, пересекающихся в начале координат
О' (т. е. в центре кривой). Эти прямые, действительные при
6 ==л 1 л'2 < О, мнимые (сопряженные) при о ==Лl
> о.
152
РАЗЛИЧНЫЕ ВИДЫ КРИВЫХ BTOPOrO ПОРЯДКА
Пусть
=1= О, уравнение (4) переписывается тоrда в виде
х,2 у,2
Д + L\ == 1. (5)
БЛ1 ...... БЛ 2
Имеем два случая:
а) Случай rиперболический. 6==л 1 л 2 <О; обозначая
через Лl тот из двух корней характеристическоrо уравнения,
знак KOToporo совпадает со знаком А, полаrаем
L1 L1
а 2 ==
> O
b2==
< о (6)
бл!' БЛ2'
получаем уравнение rиперболы
х,2 у,2
.......
== 1 ( 6' )
а 2 Ь 2 ·
б) Случай эллиптический. 6==л 1 л 2 >0 числа Л 1 и Л 2
ОДНоrо знака, и этот знак совпадает со знаком их суммы s.
Если ЭТОТ знак S противоположен знаку д, то можно поло-
жить (обозначая через л'l тот из двух корней л'1' ')"'2 характери-
стическоrо уравнения, для KOToporo I л'll
I Л 2 /)
L1 L\
a2
> O b2
> O ( 7 )
бл. '
БЛ2 '
получаем уравнение эллипса
х,2 у,2 .
G2 + ь2 == 1, (7')
если же знак S совпадает со знаком д, то полаrаем
L\ L\
а 2 == бл
' Ь 2 == БЛ
' (8)
уравнение (5) превращается в уравнение
....... х,2
у,2 == 1 (8' )
а 2 Ь 2
мнимоrо эллипса.
Подведем итоr.
В центральном случае, б =1= О, имеем такие возможности:
I .6 == О, .6 * О
случай вырождения
rиперболический случай, Пара пересекающихся rипербола
6<0 действительных прямых
Эллиптический случай, Пара мнимых сопряжен- действительный,
если S и А раз.
6>0 ных пересекающихся ных знаков
прямых Эл липе мнимый, если
S и L\ OAHoro
знакв
ПАРАБОЛИЧЕСКИй СЛУЧАй
153
3 а м е ч а н и е 2. Мы видели (замечание 1
2), что если MHoro
член F (х, у) удовлетворяет какому
нибудь из УСJIОВИЙ {) == О,
б * О, б > О, б < О, д
О, L\ * О,
> О,
< О, то тому же
условию удовлетворяет и мноrочлен р' (х', у'), в который лере
те", мноrочлен F (х, у) при переходе от координатной системы
Оху к произвольной аффинной координатной системе О'х'у'. AHa
лоrичное утверждение верно и для инварианта S (в случае опре
деленной квадратичной формы «р (х, у»). Поэтому только что
лриведенная таблица, решающая вопрос о том, находимся ли мы
в центральном или нецентральном (параболическом) случае, а также
в эллиптическом или rиперболическом, вырождающемся или невы..
рождающемся случае, сохраняет свою силу при произвольно
выбранной аффинной координатной системе.
* 4. Параболический случай: 6:=0
В любом случае, в том числе и параболическом, можно пово...
ротом координатной системы на уrол а, определяемый из равен...
ства (10)
2, преобразовать уравнение
F (х, у) == a 11 x 2 + 2a 12 xy + а 2 2!1 2 + 2a 1 x + 2а21/ + а о == О (1)
исследуемой кривой к виду
Р' (х', у') ===
x'! + Л2У,. + 2a
x' + 2a
y' + ао == о. (1 ')
При этом б::::
Л2.
Так как теперь В === О, то один из корней харsктеристическоrо
уравнения равен нулю.
Пусть Л 1 ==0, л'2*0. Тоrда S:::
+
==
и уравнение (1')
может быть написано в виде
J
F' (х', у') == Sy' +2а;х' +2
y' +ао ===0. (1 *)
В уравнении (10)
2 надо положить Л 1 == О, так что для опре-
деления уrла а получается особенно простая формула:
tg а ==
ан ===
аа . (2)
а 12 a
Исследование уравнения (1*) начнем с вычисления инварианта
. Имеем
аll а19 аl О О а'
1 ,1 S
А=== а21 а22 02
О S а'
........ а 1. ,
2
йl а2 ао а' а' ао
1 i
откуда
,z А I а; I == 11
. (3)
йl ==
s '
так что a
тоrда и только тоrда обращается в нуль, Коrда l\ == о.
154
РАЗЛИЧНЫЕ ВИДЫ КРИВЫХ BToporo ПОРЯДКА
Рассмотрим сначала случай
== О, Т. е. a
== О, тоrда уравне-
ние (1 *) имеет вид
S ,2 2 " О
У + a
y +а о == .
Перепишем уравнение (4) в виде
S ,2 + 2 ' , + S ( , + a
) 2 + ' О
У а2У а о == у S а о ==,
(4)
(5)
rде
s
, а'2
ao==ao
s.
Посредством сдвиrа
х" == х' ,
,
y"==y'+
системы координат преобразуем уравнение (5) к виду
Sy
1 +a
== о. (5')
Положим
1 1 1 == Ь 2 .
Теперь возможны три случая:
,
1 о а о > О
S '
,
а о
Ь 2
S
,
(5 ' )
уравнение записывается в виде
у"
+ Ы,
имеем пару параллельных мнимых сопряженных прямых:
2 Q
,
<О,
а'
.....
Ь 2
S
,
уравнение (5') записывается в виде
у" == + Ь
u
различных деиствительных параллелъных
и определяет пару
прямых;
30
,
йо
O
s
,
уравнение (5') принимает вид
. О
У ==
и определяет пару слившихея прямых.
ПАРАБОЛИЧЕСКИй СЛУЧАй
155
Переходим КО второму случаю: А =1= О, Т. е. a
=1= о. Кривая
F (х, у) == о имеет в системе координат О' х' у' уравнение
F' (х'
у') == Sy,2 + 2а;х' + 2й;у' +а о == О, (1 *)
т. е. является параболой (что нам известно уже из
1, п. 3).
Найдем ее параметр р. Д,ПЯ этоrо сделаем переное начала
координат
х: ==
+xo, }
у == 11 + Уе.
(6)
Внося (6) в (1 *), получаем
F (х', у') == S1}2+2al
+2 (SYo +
) 11 +Sy
+ 2a
+2a;Yo +а о == о.
Так как S == "-2 =#= О, то, приравнивая коэффиnиент при 1') нулю,
получаем уравнение
SYo +a
== о.
из KOToporo определяем Уо:
Уо ==
S.
После этоrо приравниваем нулю выражение
Sy
+ 2a
xo + 2a
yo +ао.
Так как а; =/= О, получаем уравнение относительно Хо:
S y
+ 2а;хо + 2a;Uo + ао == О,
(7)
(8)
откуда и определяем Хо.
В системе координат O'
l1 уравнение F (х, у) == о принимает
вид S'Y}2 + 2a;
== О или
а'
112 ==
2 s 6-
(9)
Л\еняя, если нужно
положительное направление оси 0'6 на
противоположное, всеrда можно добиться Toro, чтобы число
a
р==
з
было положительным. ОI{ончательно записываем уравнение (9)
в виде
1}2 === 2p
,
р>о,
(10)
rде
Направление оси
правление ОСН O'
,
P==Y
a '
параболы есть (с точностью до
т. е. направление оси Ох'.
(11)
знака) на-
Ее yr лавой
156
РАЗЛИЧНЫЕ видьr КРИВЫХ BTOPOrO ПОРЯДКА
коэффициент (по отношению к старой системе координат Оху) есть
tg а ==
ан ==
a 12 .
аll а22
Для попноrо определения располо}кенпя параболы нужно знать
еще координаты вершины О' == (х о , Уо), а также, в какую сторону
парабола обращена воrнутостью.
Простое решение этих вопросов будет дано в rлаве VI,
9.
5! Аффинная классификация кривых BToporo порядка
Мы сейчас покажем, что аффинная классификация кривых ВТО-
poro порядка дается самими наименованиями кривых, т. е. что
аффинными классами кривых BпZOp020 порядка являются классы:
действительных эллипсов,
мнимых эллипсов,
zипербол,
пар действительных nересекающuхся прямых,
пар .МНИМЫХ (сопряженных) пересекающихся прямых,
парабол,
пар параллельных действительных прямых,
пар параллеЛЬflblХ мнимых сопряженных прямых,
пар совпадаlОlцих деifсп-lвительныlx прямых.
Надо доказать два утверждения:
А. Все кривЫЕ одНО20 /{,аиАfенованuя (т. е. все эллипсы, все rи-
перболы и т. д.) аффtlННО эквuвалент/f,Ы между собой.
Б. Две кривЫЕ различных наименовании никоеда не являю/пел
аффuнно эквивале/f,mНЫ1rtи.
Доказываем утверждение А.
При аффинном преобразовании
, 1 I 1
х ==й Х , у ==Ь У
эллипс, заданный уравнением
х 2 у'-
a
+ bi == 1,
переходит в окружность х2 + уl == 1. Аналоrично показывается,
что всякая rипербола
х2 у2
а2
b l == 1
аффинно эквивалентна равнобочной rиперболе
х 2
у2 == 1.
Значит, все эллипсы, соответственно все rиперболы аффинно ЭК-
вивалентны между собой. Все мнимые эллипсы, будучи аффИННQ
АФФИННАЯ КЛАССИФИКАЦИЯ КРИВЫХ BToporo ПОРЯДКА 157
эквивалентными окружности х 2 + у2 ==
1 радиуса ", также аф
фИННО эквивалентны между собой.
Докажем аффинную эквивалентность всех парабол. Мы ДOKa
жем да}ке больше, а именно, что Бсе парабо.пы подобны между
собой. Достаточно доказать, что парабола, данная внекоторой
системе координат своим каноническим уравнением
у2 === 2рх,
подобна параболе
у2 == 2х,
что очевидно, если подверrнуть плоскость преобразованию по
добия
1
6 == рХ,
1
fl==
Y.
р
Переходпм к распадающимся кривым. В
1 было доказано,
что кривая, распадающаяся на пару пересекающихся прямых,
внекоторой (да)ке прямоуrольной) системе координат имеет ypaB
пение а 2 х 2
Ь 2 у2 == О, если она действительная, а 2 х 2 + Ь 2 у2 == О,
еСt/7JИ она мнимая.
Делая дополнительное преобразование координат
х == ах' , у == Ьу' ,
ВИДИМ, что всякая кривая, распадающаяся на пару пересекающихся
действите/IЫIЫХ, соответственно мнимых сопряженных, прямых,
имеет в некоторой аффинной системе координат уравнение
х 2
у2 == О, соответственно х 2 + у2 == О.
Что касается кривых, распадающихся на пару парал,,!ельных пря
мых, то кз)кдая из них может быть задана уравнением
у2
Ь 2 == О
для действительных, соответственно
у2 + Ь 2 == О
для мнимых прямых. Преобразование координат х == Ьх', У == у'
позволяет в этих уравнениях положить Ь == 1 (или для совпадаю..
щихся прямых Ь == О). Отсюда следует аффинная эквивалентность
всех распадающихся кривых BToporo порядка, имеющих одно и
то же наименование.
Переходим к доказательству утверждения Б.
Заметим прежде Bcero: при аффинном преобразовании плоско..
сти порядок алrебраической кривой остается неизменным. Далее:
всякая распадающаяся кривая BToporo порядка есть пара прямых,
а при аффинном преобразовании прямая переходит в прямую,
пара пересекающихся прямых переходит в пару пересекающихся,
158
РАЗЛИЧНЫЕ виды кривьrх BTOPOrO ПОРЯДКА
а пара параллельных
в пару параллельных; кроме Toro, деЙстви-
тельные прямые переходят в действительные, а мнимые
в мнимые.
Это вытекает из Toro, что все коэффициенты в формулах, опреде-
ляющих аффинное преобразование, суть действительные числа.
Из сказанноrо следует, что линия, аффинно эквивалентная
данной распадающейся кривой BToporo порядка, есть распадающаяся
кривая Toro же наименования.
Переходим к нераспадающимся кривым. Опять-таки при аффин-
ном преобразовании действительная кривая не может перейти
в мнимую, и обратно. Поэтому класс мнимых эллипсов аффинно
инвариантен.
Рассмотрим классы действительных нераспадающихся кривых:
эллипсов, rипербол, парабол.
Среди всех кривых BToporo порядка всякий эллипс и только
эллипс лежит в некотором прямоуrольнике, тоrда как параболы
и rиперболы (равно как и все распадающиеся кривые) простираются
в бесконечность. При аффинном преобразовании прямоуrОЛЬНИI{
ABCD, содержащий данный эллипс, перейдет в параллелоrрамм,
содержащий преобрззованную кривую, которая, таким образом,
не может уходить в бесконечность и, следовательно, является
эллипсом.
Итак, кривая, аффинно эквивалентная эллипсу, есть непре-
менно эллипс. Из доказанноrо следует, что кривая, аффинно
эквивалентная rиперболе или параболе, не может быть эллипсом,
а также, как мы знаем, не может быть и рзспадающейся кривой.
Поэтому остается лишь показать, что при аффинном преобрззовании
плоскости rипербола не может перейти в параболу, и наоборот.
Это, пожалуй, проще Bcero следует из Toro, что у параболы нет
центра симметрии, а у rиперболы он есть. Но так как отсутствие
центра симметрии у параболы будет доказано лишь в следующей
rлаве, то мы сейчас даДИМ второе, тоже очень простое доказатель-
ство аффинной неэквивалентности rиперболы и параболы.
Л е м м а. Если парабола имеет общие точки с каждой из двух
полуплоскостей, определяемыlx в плоскости данной пря'м'ОЙ d, nzo
она и,М,еет хотя бы одну общую п:очку и с пРЯАl,ОЙ d.
В самом деле, мы видели, что существует такая система коор-
динат, в которой данная парабола имеет уравнение
у2 == х.
Пусть относительно этой системы координат прямая d имеет урав-
нение
Ах+Ву+С==О.
(1)
По предположению на параболе 11 == х имеются две точки М 1 ==
(Xl' Yt) и М 2 ==(х 2 , Yi)' ИЗ которых одна, положим Ml' лежит в
положительной. а друrая, М!',..... в отрицательной полуплоскости
АФФИННАЯ КЛАССИФИКАЦИЯ КРИВЫХ BToporo ПОРЯДКА 159
относитеJlЬНО уравнения (1). Поэтому, помня, что Х 1 == y
, Х2 == y
,
MO)I<eM написать
Ay
+BYl+C>O, Ay
+BY2+C<O,
так что мноrочлен А у 2 + Ву + с принимает в двух концах Уl и
У2 отреЗI{а [У., У2] числовой прямой значения, противоположные
по знаку. Но тоrда существует значение у===- Уо, лежащее между
Уl и У2' при котором мноrочлен А у 2+Ву+С принимает значение
нуль:
Ауб+Вуо+С==О.
Точка М (Ха, Уо), rде хо == y
, лежит на параболе у2 === Х, и на пря-
мой Ах + Ву + с == О. Лемма доказана.
Пусть при некотором аффинном преобразовании
rипербола
К переходит в кривую К'; докажем, что К' не может быть пара..
болой. Для этоrо обозначим через d вторую (так называемую
«мнимую») ось rипербо-лы К. При преобразовании
прямая d
перейдет в некоторую прямую d', а лолуплоскости, определяемые
прямой d, перейдут в полуплоскости, определяемые прямой d'.
rилербола К не имеет ни ОДНОЙ общей точки с прямой d, но имеет
общие точки с каждой из двух полуплоскостей, на которые пря..
мая d разбивает плоскость; кривая К' обладает теми же СВОЙСТ-
вами относительно прямой d'. Поэтому в силу только что доказан-
ной леммы кривая К' не может быть параболой
и утверждение
об аффинной неэквивалентности rиперболы и параболы доказано.
Вместе с тем закончена аффинная классификация кривых ВТО-
poro порядка.
r л А В А vr
ОБЩАЯ ТЕОРИЯ кривых BToporo ПОРЯДКА
1. Асимптотические направления кривых BToporo порядка
Рассмотрим кривую, заданную в произвольной аффинноЙ си-
стеме координат Oe 1 e 2 уравнением
F (х, у) == rp (х, у) + 2l (х, у) +а о == О,
(1)
rде, как всеrда,
<р (х, у)
а}}х 2 + 2a 12 xy + а22У 2 , }
1 (х, у) == а 1 х + а 2 у.
При переходе к новой системе координат Oe
e; мноrочлен F (х, у)
'fождественно переходит в мноrочлен р' (х', у'), а квадратичная
форма <р (х, у) старших членов мноrочлена F (х, у) тождественно
переходит в квадратичную форму <р' (х', у') старших членов мно"
rочлена р' (х', у'). Поэтому квадратичная форма старших членов
уравнения (1), задающеrо данную кривую BToporo порядка в лю..
бой аффинной системе координат, определяет одну и ту же KBaд
ратичную функцию на множестве свободных векторов плоскости,
задаваемую равенством
(2)
ф (и) == q> (а, Р) дЛЯ u == {а, Р}.
в системе Oe
e.; та же функция Ф (и) запишется в виде
Ф (и) == q>' (а', Р'),
если а',
'
координаты вектора и относительно базиса e
, e
.
О n р е д е л е н и е. Вектор и == {а,
} имеет по отношению к кри-
вой (1) асимптотическое направление, если
Ф (и) == a 11 a 2 +2а 12 аР +a22
2 == О. (3)
Из сказанноrо следует, что ceoucrпeo вектора иметь асимпто-
тическое направление по 01rlношению к данной кривой зависит
толыro от данНО20 вектора u, данной кривой и не зависит от коор-
динатной cucmeМbl, в которой .мы их рассматриваем.
АСИМПТОТИЧЕСКИВ НАПРАВЛЕНИЯ
16)
Из условия (3), определяющеrо асимптотические направления,
леrко следует, что всякая кривая BToporo порядка имеет два
асимптотических направления, которые MorYT быть действитель-
ными и различными, действительными и совпадающими или мни-
мыми сопряженными. В самом деле, все три коэффициента Qll'
a 12 , а 22 не MorYT быть одновременно равны ну ЛIО. Если a 11 =1=- О,
то для определения асимптотических направлений {о:.:
} имеем
квадратное уравнение
a11(
/ +2a12(
)+a22==O, (3 L )
из KOToporo находим два значения для отношения a:
:
а
a12 + V аТ2
аl1 а 22
13 == ан . (41)
Если известно, что а 22 * О, то вместо (31) для определения а:
мы бы написали уравнение
а 11 +2а 12 (
) + а 22 (
y ==0, (3:,)
откуда
_
а12 :!: V аТ2
Ql1 Q "l2
а а22
(4z)
Пусть один из коэффициентов ан, а=!2 равен нулю. Если. на-
пример, a 11 == О, то уравнение (3) превращается в
(2a 12 a + a22
) == О,
п одним НЗ двух асимптотических направлении является направ"
ление а * О,
== О, соответствующее оси абсцисс.
НаI{онец, при а 1 1 == а 22 == О, а 12 =F О УСJIовие (3) превраlцается
в 2a12a
== О, оно определяет направления а == О,
=1= О Il а =1= О.
В == О, т. е. направления осей координат выбранной нами коорди-
натной системы.
Дискриминант квадратноrо уравнения (31) ИЛИ (3J ССТЬ
a
2
a 11 a 22 ==
б, rде, как всеrда,
<5 == I ан а12 1 .
а 12 а22
Итак, асиМn"lоmuческuе направления кривой втОрО20 порядка
действителыtоl и различны, КОсда б < О, т. е. косаа Кривая.... zu-
перболическоzо типа; они явля/отея MHUМblMU и сопряжеНН1Jlми
в эллиптическом случае, т. е. Kozaa б> о; наконец, кривые пара-
БОАuчеСКО20 типа (6 == О) характеризуются тем. чпlО у них им,еlОlпся
162
ОБЩАЯ ТЕОРИЯ КРИВЫХ BToporo ПОРЯДКА
два совпадаfощих вещественных асимптотических н,аправления,
а именно (как следует из (41) или (42) при «5 == О):
а
а12
а22
13
ан
........ a12 .
(5)
Рассмотрим частный случай окружности. Всякая окружность
в любой координатноЙ системе задается уравнением вида
х 2 + у2 +2а 1 х + 2а2У +а о ==0,
и всякое уравнение этоrо вида определяет окружность. Для на-
хождения асимптотических направлений {а:
} имеем условие
а 2 +
2 =:; О, из KOToporo следует, ЧТО все окружности имеют одни
и те же мнимые асимптотические направления, а именно напраВ4
ленин. записывающиеся в любой прямоуrолыIйй системе коорди-
нат в виде
а : р ==:: + i.
(6)
Эти направления называются изотропными направлениями на пло-
скости.
Асимптотические направления эллипса, заданноrо в канонн..
-.
ческои для Hero системе координат уравнением
х 2 1/2
а 2 + Ь 2 ::::2 1,
суть а: р ==
r
i. как сразу видно из определяющеrо эти на..
а2
2
прав.пения условия а 2 + Ь 2 == о. Так как ни одно действительное
направление не является для эллипса асимптотическим, то всякая
веществеflная прямая пересекает эллипс в двух действumелы./'ых
или мнимых различных или совпадаюu{их точках. При этом ко вся-
" u u u U
кои вещественнои прямои можно наити параллельную еи прямую.
пересекаЮЩУIО эллипс в двух различных вещественных точках.
Для этоrо достаточно взять прямую, параллельную данной и про..
ходящую через центр эллипса (Т. е. через нача"ТIО канонической
для данноrо ЭЛ..1Iипса системы координат).
Для rипербо.пы
х 2
у2 == 1
а 2 Ь 2
(7)
получаем асимптотические направления
р : а == + Ь : а.
Это направления диаrоналей OCHoBHoro прямоуrольника rиперболы,
Т. е. прямых
ь
У == +
x,
а
АСИМПТОТИЧЕСКИВ НАПРАВЛЕНИЯ
163
уже названных нами в rлаве 11 асимптотами rиперболы; они и
действительно являются асимптотами в общем смысле: каждое из
.. + Ь
уравнении у ==
t т. е.
а
+
== о и
1L == О,
а Ь а Ь
(8)
несовместно с уравнением (7), что де..'1ается очевидным, если урав-
нение (7) переписать в виде
(
+ i
) ( ;
:
) == 1.
Дока)кем, что никаких друrих асимптот, кроме прямых (8),
у rиперболы (7) нет.
В самом де.,1е, всякая асимптота должна иметь асимптотиче-
ское направление, т. е. направляющий вектор {а, + Ь}. Прямая
с напраВJ1ЯЮЩИМ вектором {о, Ь} И
1еет параметричеСRое уравнение
х == Хо + af, } (9)
у == Уо + ы.
Найдем общие точки rипербо.пы (7) и прямой (9). Подставляя зна...
чения х, у из (9) в (7), получаем для определения точек пересе...
чения rилерболы с прямой (9) уравнение (относительно t)
X
y
I 2 I Хо Уо \ t
1
а 2
&2 Т \ а
7; }
·
Это уравнение имеет единственное решение, за исключением слу-
чая, Kor да
ХО
O == о.
а Ь '
(10)
в этом случае оно превращается в противоречивое тождество 0== 1
и прямая (9) деliствитеvlЬНО оказывается асимптотой. Покажем,
ь
что ее уравнение есть у == а х. в самом деле, система параметри...
ческих уравнений (9) Э!{ВIII3а
1еIIтпа одному уравнению
а (у
Уо) == Ь (х
Х о ), (11)
а ТОЖ;'l,ество (1 О) может быть пеrеписано в виде ЬХ О == ауо, так что
уравнение (11) получает вид
ау
ЬХ, Т. е.
ь
У ==
х.
а
Итак. единственная аСИ
lптота rипербо..тIЫ (7), имеющая направ-
ЛЯЮЩИЙ вектор {а, Ь}, есть даОIIО известная нам асимптота
Ь
y===
x.
а
164
ОБЩАЯ ТЕОРИЯ КРИВЫХ BTOPOrO ПОРЯДКА
Совершенно так же доказывается, что единственная асимптота
rиперболы (7), имеющая направляющий вектор {а,
Ь}, есть
Ь
асимптота у ==
аХ.
Друrих асимптот у rиперболы нет.
Для параболы
y2
2px==O
(12)
квадратичная форма <р (х, у) сводится к одному члену у2; асимп-
тотические направления
:a определяются из условия
2 == о;
это два слившихся направления, каждое из которых совпадает
с направлением
== О, т. е. с направлением оси параболы.
Каждая прямая у == с этоrо направления имеет с парабо.!IОЙ
единственную общую точку (
: ' с); таким образом, ни одна из
прямых асимптотическоrо направления не является асимптотой
параболы
у параболы асимптот нет.
Рассмотрим, наконец, случай, коrда кривая BToporo ПОрЯДI<а
распадается на пару прямых. Если эти прямые пересекающиеся,
то их можно принять за оси координат некоторой аффинной си-
стемы Оху и уравнением пары этих прямых будет
F (х, у) == ху == о.
Здесь F (х, у) == ер (х, у) и асимптотические направления опреде-
ляются из УР2внения
ар == о.
Это направления а == О и р === о наших прямых.
Такой же результат мы получим и для кривой, распадаlощейся
на пару параллельных (в широком смысле) прямых. Взяв систему
координат, ось абсцисс которой является средней прямой между
обеими данными, а ось ординат произвольна, видим, что полу-
чаем каноническое уравнение,...... в надлежащей системе координат
эта кривая имеет уравнение
у2 + Ь 2 == о.
Здесь (как и в случае параболы) ч> (х, у) == у2, И мы получаем
пару СJIИВШИХСЯ асимптотичес&их направлений р2 == О, !<аждое из
которых совпадает с общим направлением двух данных парал..
лельных прямых.
КАСАТЕЛЬНЫЕ
165
2. Пересечение кривой BToporo порядка с прямой
неасимптотическоrо направления
Касательные
Берем снова кривую BToporo порядка, заданную (о произволь-
ной аффинной системе координат) уравнением
F (х, у) == ер (х, у) +2l (х, у) +00 ==0, (1)
rде
<р (х, у) == а 11 х 2 + 2а 12 ху + а 22У 'А.
l(x, у) == а 1 х+а 2 у.
Введем следующие обозначения:
Fk(x, у) == akl x + akzY+ak, k=: 1, 2.
Решая уравнение (1) совместно с уравнением данной прямой
х == Хо +at, }
Y==Yo+Pt, (2)
получим
е (t) == At 2 +2Bt+C===O,
(3)
rде, как ПОI{азывает леrкий подсчет,
А == (j) (а,
), В == Р 1 (Ха, Уо) а + Р 2 (х о , Yo)
' с == F (Х о . Уо). (4)
Мы теперь предполаrаем, что
А == ер (а,
) * О,
так что уравнение (3) имеет два корня t 1 , t 2 . Пусть t 1 == t 2 , тоrда
прямая (2) пересекает кривую (1) в двух совпадающих точках и
наЗIJIпается касательной к этой кривой: обе точки пересечения
СJIИ.ПИСЬ в одну точку касания. Для нахождения уравнения Kaca
тельной удобно взять за точку Мо == (х о , Уо) прямой (2) как раз
ту ТОЧI{У, которая принадле)lПfТ и кривой (1), и прямой (2).
Тоrда
с == F (хо, уо) ==: о
И уравнение (3) принимает вид
t(At+2B)==O;
(3')
оно имеет I{ореиь t == о. Если в точке Мо == (х о , Уа) сливаются обе
точки пересечения кривой (1) и прямой (2), то оба корня урав"
нения (3) совпадаIОТ и равныI нулю. А это может случиться лишь
при
в == F 1 (х о , Уо) а + Р 2 (хо, Уо)
=== О,
OTI{ У да
.
F 2 (хо? Уо)
а. ·
F 1 (ХОI Уо) ·
166
ОБЩАЯ ТЕОРИЯ КРИВЫХ BToporo ПОРЯДКА
Следовательно, уравнение (2) касательной, переписанное в виде
x
xo Y
Yo
а. 13
получает вид
x
xo
F 2 (хо, Уо)
==
Y
Yo
F 1 (хо, Уо)
или
F 1 (Ха, Уо) (х
хо) + F 2 (х о , Уо) (у
Уа) == о.
(5)
Подставляя в (5) значения Р 1 (хо, Уа)' Р 2 (Ха, Уо), раскрывая
скобки и принимая во внимание, что F (х о ' Уо) == О, переписываем
уравнение (5) в виде
(а 11 х о +a 12 yo + Q 1 ) х+ (a 21 x O +а 22 уо +
) y+a1x O + а2Уо + tlo == О. (6)
3 а м е ч а н и е. Для нераспадающихся кривых BToporo порядка
(для которых F 1 (Ха, Уо) и F 2 (хо, Уо) не MorYT одновременно обра-
титься в нуль) уравнение касательной в виде (5) совпадает с урав-
нением, даваемым в курсах анализа: ведь
1 дР 1 дР
Fl (х, у) == 2: дх I Р 2 (х, у) =="2 ду ·
Из уравнения (5) ВИДИМ, что уrловой коэффициент к
сательной
есть
k ==.! ==
Fl (хо, уо)
а; Р 2 (хо, Уо).
в случае эллипса
х2 у 2
а 2 + Ь 2 == 1
уравнение (6) касательной в точке Мо == (Х о ' Уо) получает вид
ХоХ + Yo
:::= 1
а 2 Ь 2 '
что и является самой удобной формой уравнения касательной
к эллипсу в ero точке Мо == (Х о , Уа).
Аналоrично в случае rиперболы
х 2 .... у? == 1
а 2 Ь 2
из (6) получаем
ХоХ ....... УоУ
1
а 2 Ь 2
·
Для параболы
у2 ...... 2рх == О
ХАРА
ТЕРИСТИ
А АСИМПТОТИЧЕСКИХ НАПРАВЛЕНИй 161
уравнение (6) касательной в точке Мо == (Хо. Уо) имеет вид
рх + УоУ
РХо :=1 О,
ИЛИ, после очевидных преобраЗQваний,
УоУ :::: Р (х + хо).
I 3. Пересечение кривой BToporo порядка с прямой
асимптотическоrо направления. rеометрическая характеристика
асимптотических инеасимптотических направлениА
Пусть дана кривая
F(x, у) == al1x2+2a12xy+az2y2+2alx+2a2Y+ao==0 (l)
и прямая
х === хо +at, }
(2)
у == Уо +
t,
имеющая асимптотическое направление по отношению к кривой (1).
Это значит, что
А == <р (се, Р) == Qll а 2 + 2a 12 ap + a2a
1 =z о.
Уравнение (3) предыдущеrо параrрафа, определяющее точки пе-
ресечения прямой (2) с кривой (1), превращается в
2Bt + с == о. (З)
Возмо)кны следующие случаи.
С л у чай 1. В * о; тоrда уравнение (3) определяет одну-един-
ственную точку пересечения прямой (2) с кривой (1).
С.п у чай 11. В == О, с." =1= о; прямая (2), не имея с кривой (1)
ни ОДНОЙ точки пересечения, является асимптотой этой кривой.
С л у чай 111. В === С == о; у равнение (3) есть тождество О == о,
каждая точка ПрЯ
fОlUl (2) лежит на кривой (1). Эта кривая рас-
падается на пару пря
лых, одноЙ из которых является прямая (2).
1TaK, nря_иая, U-,Jtеюtцая по отношению к данной кривой eпzo-
pozo порядка аСUАtпl11.0тuческое направление, либо целuко
11, сосmоипl
из fпоч.ек, лежаu{uх на данной !(,ривой, либо содеР:JlCиm не более
одноЙ такой точки. Если же пРЯ.мая имеет неаси.мпmОlпuческое
направленuе, то она nересекает кривую 8 двух вещеспlвенных (или
AfHUJ,lblX сопряженных) точках, которые, одна!,о, AtOZyпz сливаться
в одну ПIОЧКУ
tпочку касания.
Но пара сдившихся точек rеоыетрически ниче\1 не отличается
от одной точки, поэтому пока мы еще не умеем охарактеризовать
асимптотические (соответственно неасимптотические) направления
rеомеТрllчески, не прибеrая к уравнению кривоЙ. Такая характе-
ристика дается следующим предложением:
168
ОБЩАЯ ТЕОРИЯ КРИВЫХ BToporo ПОРЯДКА
Теорема 1. Пусть Р(х, у)==О
крuвая второео порядка, не
являющаяся парой слuвшuхся прямых, u {a:
} есть напра8ление,
неасимптотическое по отноше'J./ию к кривой (1). ТОсда существует
прямая направления {а:
}, пересек.ающая кривую в двух различных
пlочках Р и Q. П ри эmом, если кривая содержиm более одноЙ
деЙСlnвительной точки (т. е. не является мнимым эллипсом или
парой мнимых сопряженных прямых) u направление {a:
} деист--
вительно, то дейспlвительны u точки Р, Q.
Д о к а з а т е л ь с т во. t.lерез каждую точку Хо, Уа кривой (1)
проведем прямую
х ==хо +a.t, у == УО +
t (2)
неасимптотическоrо направления {а:
}.
Требуется доказать, что среди прямых (2), проведенных через
всевозможные точки (хо, Уо) кривой (1), имеется по крайней мере
одна прямая, не являющаяся касательной к кривой (1) в точке
(х о , Уо). Но если прямая (2) есть касательная к кривой в точке
(хо, Уо), то, как мы знаем из предыдущеrо параrрафа, должно
быть
В ==' Р 1 (х о , Уо) а+Р2 (Ха, Уо)
==
== (аll а +tltl
) ХО + (а 12 а +
2
) Уа +а 1 а + a2
== о.
Если это верно для каждой точки (х о , Уо), лежащей на кривой
(1), то все эти точки должны удовлетворять соотношению
(а 11 а + a12
) хо + (а 21 (Х + a22
) Уо + (a1CL + a2
) == о. (40)
в этом равенстве коэффициенты al1a+a12
и a21ct+a22
при Хо и
Уо не MorYT быть одновременно равны НУЛЮ; в самом деле, умно-
жая обе части равенств
allcx+a12
==0,
а21 а +a22
== О,
соответственно па а и. р и складывая ИХ, мы получили бы
а 11 а 2 + 2a12a
+ a22
2 == О,
что означает, что направление {а:
}, вопреки нашим предлоло
жениям, является асимптотическим. Итак, равенство (40) есть
уравнение первой степени относительно ХО и Уо, которому YДOB
летворяют все точки (хо, уо) кривой (1); друrими словами, все
точки этой кривой должны лежать на прямой
(а 11 ct + a12
) х + (а21 а + a
2
) У + (а 1 а + а 2 Р) == о. (4)
Но среди кривых BToporo порядка лишь кривая, являющаяся
парой слившихея прямых, обладает тем свойством, что все лежа...
щие На ней точ]{и принадлежат одной прямой; поэтому кривая
ЦЕНТР КРИВОй BToporo ПОРЯДКА
169
(1), обладающая этим свойством
есть пара слившихся прямых,
каждая из которых задана уравнением (4)...... случай, который мы
исключили.
Итак, существует точка Мо == (хо, Уо) кривой (1), об,,1адающая
тем свойством, что проходящая через нее прямая d неасимптоти
ческоrо направления {а:
} Не является касательной; значит, эта
прямая пересекает кривую (1) в двух различных точках Мо и M 1 .
Если кривая содержит более одной и, следовательно, беско
нечное множество действительных точек и {а:
}
действительное
неасимптотическое направление. то, повторяя наше рассуждение
лишь для действительных точек кривой (1), видим, что найдется
прямая, имеющая направление {a:
} и проходящая через дейст",
вительную точку Мо кривой и пересекающая ее в двух различ..
ных точках. Но если точка Мо == (х о , Уо) действительна, то деЙст
вительной должна быть и вторая точка пересечения M 1 . Теорема
доказана.
4
Центр кривой BToporo порядка
Пусть в произвольной аффинной системе координат дана
кривая
Р(х, у)
al1x2+2a12xy+a22Y2+2alx+2a2Y+ao==O (1)
и прямая
x==xo+at, }
у == УО +
t
(2)
неасимптотическоrо направления; обозначим через М 1 z:= (X 1t У!) И
М 2 == (х 2 , У2) точки пересечения кривой (1) с прямой (2).
Решим следующую задачу: коrда хорда, имеющая направле...
нне {a:
}, делится в точке Мо=={Хо. 00) пополам?
Для этоrо, очевидно, необходимо и достаточно, чтобы было
Х
Хl + X
У
Yl + У2
O
2' O
2 ·
(3)
Но
x1==xO+at H Yl==YO+
tlt
Х 2 == Хо + at 2 , У2 =:2 Ув +
t2.
Подставляя эти значения в (3), получаем
t 1 +t'J
O А ti+ t 2
O
а 2 ........, t' 2
.
Так как а и
{как координаты направляющеrо вектора прямой
(2») не MorYT быть равны нулю одновременно, то условие (3)
равносильно условию
t 1 + t 2 == О. ( 4)
170
ОБЩАЯ ТЕОРИЯ КРИВЫХ BTOPOro ПОРЯДКА
Но t. и t 2 суть корни квадратноrо уравнения
At 2 + 2В! + с == о;
2B
значит, (1 + t 2 :::::: А ' и условие (4) означает В == О ИЛИ
Рl (хо, уо) ct + Р 2 (хо, Уо) Р == о. (5)
Это и есть усло вие для Toro, чтобы точка Мо == (х о , Уо) была
серединой отрезка MIM2' т. е. хорды, высекаемой кривой (1) из
прямой (2).
Определение центра. Напомним прежде Bcero, что точкой,
СU.А-tметрuчной точке М == (х, у) относительно точки С == (х о , Уо),
Рис. 81.
называется точка А1' == (х', у'), обладающая те1\! свойством, ЧТО
точка С есть середина отреЗI<Э iYIA1'. Координаты х', у' точки /\:1'
однозначно определяются из условиЙ ХО == Х1 Х ' , Уо == У1 У ' . Точка
С называется центро!.! CU/vf.Meтpuu (или просто центрО
f) данной
инии, если, какова бы ни была точка М, .пе>Iсзиtая на этой
JIiIНИlI, ТОЧI<а М', СИ:\fметричная точке 1\1 относите..1Ь1-IО ТОЧНН С,
так}ке 811е){{ит на данноЙ линии (рнс. 81). ЭтZI опреJ.С,,1ення сохра..
НЯIОТ силу И для комплексноЙ IJv10СКОСТИ.
JloKa)KeM слеДУЮUlее предложение:
т е о р е м а 2. Для тОеО чтобы точка Мо == (Ха' Уо) была цеНfп.
ро.м кривой (1), liсабходи.но u дОСlnаmочно, чтобы коордllНй1l1Ы
Хо, УО Э/710Й точки удовлеl1Z80РЯЛU следУЮЩUАt !Jра8неНUЯ,,1t (назыеае.Нbl"'t
<
!Jравненuя.МU цеНtlzра»):
Fl (х, у) == a11x + й12У + a 1 === О, } (6)
Р 2 (х, у) == а 21 Х + а 22 у + й 2 == О.
Д о к а з а т е л ь с т в о. А. У с л о в и е н е о б х о д и м о. Пусть
Мо == (ХС), уо) есть центр I{РИВОЙ (1), и пусть хотя бы ОДНО ИЗ
дву х чисел Fl (Хо, Уо), F2, (Х О ' Уо) отлично от нуля, Приведем ЭТО
ЦЕНТР КРИВОЯ BTOPOrO ПОРЯДКА
171
предположение к противоречию. Рассмотрим равенство (5) как урав-
нение относительно а и р. Перелисывая ero как пропорцию
r. : а == ....... F 1 (хо, Уо): F 2 (х о , 110)'
ВИДИМ, что оно удовлетворяется векторами лишь одноrо направ-
ления, а именно направления
o : а о
Р 1 (хо. 90): F 2 (Хо. 1/0).
Между тем для любоrо неасимлтотическоrо направления (а тако..
выми являются все направления, кроме двух) условие (5) ДОЛЖНО
быть выполнено (так как прямая (2) этоrо направления пересе..
кает кривую (1) в двух точках М 1 и М 2 И точка Мо есть сере...
дина отрезка M 1 M 2 ). Противоречие получено, необходимость нашеrо
условия доказана.
Б. Условие достаточно. Пусть точка Mo
(xo, Уо) удов"
летворяет условию (6). Перенесем начало координат в точку
Мо == (х о , Уа)' т. е. выполним преобразование координат
х == хо +х',
у == Уа + у' ·
Оно переводит уравнение F (х, у) == о в уравнение р' (х' t у')::::а О,
rде
F (х, у) == р' (х' t у') == йl1 (Ха +х')2 +2а 12 (х о +х') (Уо + у') +
+ а 22 (Уо + у')2 + 2a 1 (х о +х') + 2а 2 (Уо + у') +а о ==
== a 11 x,2 + 2а 12 х'у' +а 2 2У,2 +2 (а 11 х о +а 12 уо +а 1 ) х' +
+ 2 (a 21 x O +а 22 уо+а 2 )у' +a
==0
ао == F (х о , Уо).
и
Но ввиду равенств (6) последнее уравнение имеет вид
F' (х', у') == al1X'
+ 2а12Х' у' + а 2 2У''.! + ао == о.
в этом уравнении отсутствуют члены первой степени, откуда сле-
дует, что новое начало, т. е. точка Мо === (х о ' уо), есть центр сим..
метрии нашей кривой. Теорема доказана.
Из докаэанноrо вытекает, что в центральном случае, т. е.
коrда
б
I а11 й12 1 =F О.
021
3
кривая (1) имеет единственный центр симметрии Мо == (Х о, 90)'
координаты KOToporo и находятся из уравнений (6).
Если центральная кривая задана своим уравнением в канон и..
..
ческои системе координат
то начало координат и есть, как мы
теперь знаем, единственный центр кривой.
172
ОБЩАЯ ТЕОРИЯ КРИВЫХ BTOPOro ПОРЯДI<А
Заметим вообще, что уравнения (6) имеют силу для любой
аффинной системы координат. Поэтому для определения центра
какой-либо кривой мы можем оrраничиться рассмотрением ее
уравнения в канонической для нее координатной системе.
Единственным центром пары пересекающихся прямых является
их точка пересечения: это сразу следует из каноническоrо урав-
нения
а 2 х З + Ь 2 у2 == о.
(7)
в параболическом случае мы имеем или параболу, ее канони
ческое уравнение есть
у2
2рх == О,
или пару параплельных (в широком смысле) прямых
х 2 + а 2 == о.
(8)
(9)
Для параБОЛЫ t заданной уравнением (8), уравнения центра при-
обретают вид
O.x+O.y
p==o, }
О.х+ l.у+О==О.
(10)
Уже первое из этих уравнений противоречиво (так как р =1= О),
поэтому система (10) HeCOBMeCTHa
y параболы центра нет.
Для пары параллельных прямых, заданных уравнением (9),
уравнения (6) имеют вид
1.x+0.y+O==O, }
о.х+о.у+о==о.
(11 )
Они определяют прямую х === о, все точки которой и ЯВЛЯIОТСЯ
центрами симметрии пары прямых (9), что очевидно и reOMeTpl[
чески: пара параллельных прямых имеет прямую центрап (это
средняя прямая между двумя данными).
5. Диаметры кривой BToporo порядка
Рассмотрим все прямые, имеющие одно и то же неаСИМПТОТII
ческое направление {а:
}; на каждой из этих прямых возьмем
в качестве точки Мо == (х о , Уо) середину хорды, высекаемой из
&той прямой кривой
F (х, у) == а11х2 + 2а 12 ху + а22у2 + 2а 1 х + 2а 2 у + ай == о. (1)
Эти точки Мо == (Х о , уо) (координаты Х о , Уо теперь уже перемен-
вые!) удовлетворяют уравнению (9 4, (5»
Р 1 (х, у) а + F 2 (х, у)
== О. (2)
т. е.
(а 11 х + a l 2Y + а 1 ) а + (а 21 х + а 2 2У + а 2 )
== О,
ДИАМЕТРЫ
ривой BTOPOrO ПОРЯДКА
173
Которое, rруппируя nO
HOBOMY ero члены, переписываем в виде
(a11rt +a12
) х + (a 21 ct +
2
) у + (а 1 а + a2
) == о. (2')
Это уравнение есть уравнение некоторой прямой d. на котороЙ
и лежат середины всех хорд данноrо неасимптотическоrо направ"
ления (рис. 82). Прямая d называется auaMefnpOM кривой (1),
сопряженным направлению {сх:
}.
Центр (или центры, если их MHoro) кривой (1), очевидно, удо-
влетворяет уравнению (2), каково бы ни было направление {а:
},
и поэтому лежит на любом диаметре кривой (1).
,..
:с
Рис. 82.
Только что данное определение диаметра имеет силу для лю-
бой кривой BToporo порядка (как nентральной, так и параболи-
ческой). При этом направляющим вектором диаметра, сопряжен..
Horo направлению {а :
}, является вектор {а,'.
'}, rде а,' ===
::::
(a
Ha + a2
)'
' == a 11 ct + a12
.
Пусть теперь (1)
центральная кривая. Возьмем какую
нибудь
прямую d неасимптотическоrо направления, проходящую через
единственный центр Мо == (Хо. 110) кривой (1); уравнение прямой
d записывается в виде
A(x
xo) +8 (y
90) ==0, (3)
rде (х о , Уо) удовлетворяют уравнениям центра, Т. е. уравнениям
(6) предыдущеrо параrрафа.
Мы ищем направление {а:
}, для KOToporo прямая d была бы
сопряженным диаметром, и решаем для этоrо уравнения
Qll CG + a12
== А,
a21a+a22
В.
174
ОБЩАЯ ТЕОРИЯ КРИВЫХ BToporo ПОРЯДКА
Уравнения эти решаются однозначно (так как по предположению
б =1= О) и позволяют переписать (3) в виде
(a 11 (% + a12
) (х
Хо) + (а 21 сх + a22
) (у
Уо) == о,
(2').
(4)
что представляет лишь друrую запись уравнения
В самом деле, переписываем (4) в виде
(a11a + a12
) х + (
la + a22
) У ==
(a11a +a12
) ХО + (а21 а +a22
) Уо. (4')
Но ввиду уравнений центра, которым удовлетворяют числа Х О ' Уо.
правая часть равенства (4') есть
al
a2
' т. е. (4') принимает
вид (2').
Итак, всякая пРЯА1ЙЯ d неаси
иппl0пlическоzо направления, про..
ходяи
ая через (единственный) центр центральной кривой втОрО20
порядка, есть диaMemp
сопрЯ:JlCеН1iЫЙ некопl0рОМУ вполне опреде-
ленному направлению {а.,:
}.
Посмотрим, что дает уравнение (2') в случае, коrда направле-
ние . {а :
} асимптотическое. Тоrда уравнение (2'), то}кдественное
уравнению (2), есть уравнение асимптоты. Таким образом, естест-
венно считать асимптоту диаметром, СОПРЯ}I{енным своему собст-
венному направлению (хотя при этом первоначальный, наrлядно
rеометрический смысл диаметра, сопряженноrо данному направ.пе..
нию, утрачивается, так как хорд асимптотическоrо направления
не существ ует).
Теперь диаметры цеfU11ральноu кривой второео порядка Mo
yт
быть определены npOCfnO ка" nрЯАtые, проходящие через цеНfl1р дан..
ной кривой.
3 а м е ч а н и е. Из сказанноrо выше следует, что если направ...
ление данноrо диаметра неасимптотическое, то и направление,
ему сопряженное, также неасимптотическое.
6. Взаимно сопря}кенные векторы (направления).
Диаметры и касательные
1. Взаимно сопряженные векторы. Особое направление. Диа..
метр, сопряженный направлеНИIО {а.:
}, имеет направляющий век-
тор {а',
/}, rде
а , ' ==
(а 21 а +a22
)' }
(1)
== а 11 сс + a12
.
Векторы {а,
} и {а',
'} связаны СООТНОIlJением
а11а.а,' +а 12 (o:
' +a'
) +a22
' == О, (2)
получающимся, еепи почленно сло)кить уравнения (1), предвари-
тельно умно,кив обе части перnоrо из ННХ на ......
', а BToporo...........
ВЗАИМНО СОПРЯЖЕННЫЕ ВЕКТОРЫ
175
на а.!. Но левая часть равенства (2) есть не что иное, как сим-
метричная билинейная форма 'Ф (а,
; а',
'), полярная к квадра-
ТlIЧНОЙ форме
<р (а,
) == ава.! + 2a 1z a.B +a22
2.
Поэтому естественно ввести следующее
Оп р е Д е л е н и е. Ненулевы.е векторы u == {а,
} и u' == {а',
/}
(а также определяеJиые U,,'ZU направления {а:
} и {а':
'} называlоmся
взаимно сопряженнымu опlН,осuтельно квадратutlНОЙ формы <р (х) у)
== а 11 х 2 + 2a J2 xy +а 22 у2, если они удовлеrпворя/оm уравнению
'ф (и, о') == W (С%,
; а',
') == а l1 аа.' + а 12 (a
' +
a') + a22
' == о.
Заметим прежде Bcero: при переходе от координатной
системы Оху к произвольной новой координатной системе ох у
билинейная форма
(а,
; а', Р') переходит в би.пинейную форму
'i' (а,
; а',
'), выражающую ту же билинеЙНУIО ФУНI{ЦИЮ 'IJ (u, u'),
полярную к квадратичной функиии Ф (u), записывающейся в коор-
динатной системе Оху в виде квадратичной формы ер (а,
) и в коор-
динатной системе о ху в виде tp (ёl,
). Поэтому билинейная функ-
ция 'i' (u, о'), обращение в нуль которой характеризует сопряжен-
НОСТЬ векторов u и о', в любой координатной системе записывается
в виде билинейной формы, полярной к квадратичной форме стар-
ших членов уравнения F (х, у) == О, определяющеrо в этой системе
координат данную кривую BToporo порядка. Свойство двух векто-
ров быть или не быть сопряженными относительно формы q> (х, у)
не зависит от выбора той или иной системы коордuнаm l а ЗQ8u-
сит только от квадратичной функции Ф (и), определенной (в какой.
нибудь системе координат) формой q> (х, у).
Мы будем также rоворить, что векторы u и и' (и их направ-
ления) сопряжены относительно данной кривой BToporo порядка,
если они сопряжены относительно квадратичной формы старших
членов уравнения этой кривой (в какой
нибудь, все равно в какой
именно, системе координаl). Это позволяет нам в дальнейшем
писать условие сопряженности, пользуясь какой-нибудь опреJlе-
ленной, например канонической для данноЙ кривой, системой
координат.
Зная одно из двух сопряженных направлений, например
нпправление {
:
}, друrое определяем без труда; для этоrо пере-
n IIcыаемM равенство (2) в виде
а/ (a 11 a+a 1 a!3) -
' (a21a,+a22
)' (2')
что означает пропорцию
' : а' :CI ........ (Йl1 а +a12
) : (a21
+ Йt2Р)' (2")
определяющую направление вектора {а',
'}. Точно так же выра..
жается {а, Р! через {а',
'}:
р : а ==
(Йl1 а ' + a12
') : (a 21 (%' + а22Р').
176
ОБЩАЯ ТЕОРИЯ I(РИВЫХ BToporo ПОРЯДКА
Посмотрим, коrда два сопряженных между собой направления
совпадают. Очевидно, тоrда и только тоrда, коrда
...... (а 11 а + a J2 P) : (а 21 сх + a22
) ===
: а,
Т. е. КОl'да
а 11 а 2 + 2a12a
+a22
2 == о.
Друrими словами, направление тоrда и только тоrда совпадает
со своим сопряженным, коrда оно является асимптотическим.
Поэтому асимптотические направления называются иначе са.МОСО-
пряжеН/f,bLМU.
Посмотрим, не может ли случиться, что направление {rx:
}.
сопряженное направлению {а':
/}, перестанет быть определенным.
В этом случ&е направление {а':
'} назовем особым.
Очевидно, направление {а':
'} будет особым тоrда и только
тоrда, коrда оно удовлетворяет системе уравнений
а 11 сх' + a12
' :::: О, }
(3)
а21а' + a22
' ::::z о.
Но вектор {а',
'} не есть нулевой вектор, поэтому равенства (3)
MorYT иметь место, лишь если
б == I al1 a12 1 == О,
а21 а22
Т. е. если кривая F (х, у) == о параболичеСI(ая.
I
Io это еще не все: умножая обе части первоrо ИЗ уравнений (3)
lIa а', а BToporo
на
' и складывая, получаем
a 11 rx,2 + 2a12a,'
' + a22
/1 === О,
Т. е. направление {rx':
'} есть асимптотическое направление.
ИТЗI{, только для параболuтutlескоа кривой и дм (единствен-
II 020) ее асuмптоmuчеСКО20 наПР(JJ3ленuя. сопряжеllflOS направление
перестает быть определеNНbl.м,.
С друrой стороны, единственное асимптотическое направлснне
(1.,' GJ2 022
тt ==
a
==
а21
параболической }(ривой F (х, у) == о удовлетворяет условиям
a 11 a' + a12
' == О,
а 21 а,' +a22
'
О,
Т. е. УСЛОВИЮ
<р(а.,
; а',
') == (а 11 а' +a12
')a+{a21a' +a22
')
==0
для любоrо направления {а:
}.
ВЗАИМНО СОПРЯЖЕННЫЕ ВЕКТОРЫ
177
Итак, в случае параболической линии ее асuмnтотuчеСКQe направ-
ление сопряжено всякому направлению, т. е. является осоБЫМ.
Вернемся теперь........ в случае любой кривой BToporo порядка
F (х, у) == о
к уравнению (2')
5:
(а1l
+ a12
) х+ (a21 a +а 22 Р) у+ (a1a +а 2 Р) == O
Т. е. к уравнению диаметра, сопряженноrо направлению {а:
}.
Какова бы ни была кривая BToporo порядка F (%, 11) == О, ее
диаметр, сопряженный направлению {CI Z Р}. имеer направление
{а' :
'}, сопряженное направлению {Gt:
}. Если кривая F (х, у)==О
центральная, то диаметр, сопряженный направлению {а,':
'},
будет иметь направление {CI:
}.
Два диаметра центральноа кривоа НllЗb18аются взаимно сопря-
женными между собой, если сопряжены их напраоления. Каждыа
из двух сопряженНhLX между собоа диаметров делит пополам
xopabl 1 параллеЛЬНЬLe apYZOMY.
Переходим к параболическому случаю. Если данная криваg
F (х, у) == о распадается на пару параллельных прямых, то у нее
один
единственный диаметр (<<средняя) прямая по отношению
к двум данным); этот диаметр является rеометрическим местом
середин хорд любоrо направления, 011 является прямой центров
нашей кривой (1), ero направление..... особое, оно сопряжено любому
направлению.
у па раболы середины всех хорд данноrо направпения {
: Р}
лежат, как мы видели, на вполне определенной прямой. и прямая
эта имеет асимптотическое направление Р' : а/ == ......... йll : Q12 ::::::;;
===
а 12 : а 22 , она является диаметром параболы (сопряженным
данному направлению).
ДОI<эжем, что 8 случае параболы всякая прямая аси.мптотuче-
СКОсО направления есть диaMeтp
сопряженный некоторо.м.у вполне
определенному направлению.
При доказательстве мы вправе выбрать любую систему коор.
дннат; возьмем такую, в которой уравнение параболы имеет вид
у!
2рх &::: о. (4)
Прямые асимптотическоrо направления суть просто прямые, парал-
лельные оси абсцисс. Пусть
у ::2 т (5)
таI{ая произвольная прямая.
Уравнение (2')
5, Т. е. уравнение диаметра, сопряженноrо
направлеНИIО р: а, имеет в нашем случае вид
Y
ра IC:I о. (6)
Для Toro чтобы оно определяло ту же прямую, что и уравнение (5),
необходимо и достаточно, чтобы было p
... m. ЭтИМ условием отно-
178
ОБЩАЯ ТЕОРИЯ КРИВЫХ nTOPOro ПОРЯДКА
шеине
: ct == Р : т определено однозначно, и наше утверждение
доказано.
Таким образом, диаметры параболы Mozym быть определены
как прямые асuмnmотuческоzо nаnравления.
7. Вид уравнения кривой) если оси координат имеют
сопряженные направления
Пусть дана кривая BToporo порядка своим общим уравнением
F (х, у) == а 11 х 2 + 2a 12 xy + а 22 у2 + 2a 1 x + 2а2У + а о == о. (1)
Посмотрим сначала, каковы диаметры, сопряженные напраВ
lIениям
осей координат. Уравнение диаметра, сопряженноrо направлению
{а :
}, есть
(а 11 а +а 12 Р) х + (a 21 Ct +а 22 Р) g + (a1a +а 2 Р) == о. (2)
Если а == 1,
== о (Т. е. вектор {а,
} есть направляющий век-
тор оси абсцисс), то уравнение (2) превращается в
+ + О (2 ' )
а 11 х a1?U йl == ·
Если же а::::: О,
== 1, то уравнение сопряженноrо диаметра есть
+ + О (2 " )
а 2 1 Х а 2 2У а 2 == ·
ИтаК t диаметр, сопряженный направлению оси абсцисс, имеет
уравнение (2'), а диаметр, сопряженный направлению оси орди-
нат t имеет уравнение (2").
Предположим теперь, что ось ординат имеет ПрОИ3Больное,
неасимптотическое для данной кривой напраВ
lIение, а ось абсцисс
является диаметром, сопряженным направлению оси ординат.
Тоrда уравнение (2") есть уравнение оси абсцисс, т. е. BbIpa)l,aeT
ту же прямую, что и уравнение
у == о.
Следовательно, коэффициенты
021' а 22 , а 2
уравнения (2") должны быть пропорциона-пьны коэффициентам
О, 1, О
уравнения оси Ох, а ЭТО значит, что
а21 ==0, а 22 *0,
==0.
СледоваТeJJЬНО, в нашей системе координат кривая (1) имеет урав-
нение
а11х2 + '4.2!l 2 + 2а 1 х + ао == о.
(3)
ВИД УРАВНЕНИЯ КРИВОй
179
Рассмотрим отдельно два случая:
1 о Кривая (1)
центральная.
2 G Кривая (1)
параболическая (парабола или пара парал-
лмьных прямых).
В первом случае из Toro, что ось абсцисс представляет собой
диаметр, сопряженный направлению оси ординат, следует, что
и o
ь ординат имеет направ.:Iение, сопряженное оси абсцисс.
Если при этом нача.,10 координат ле)I{ИТ в центре кривой, то обе
оси координат являются сопряженными ме)кду собой диаметрами.
Но тоrда ОСЬ ординат, будучи диа
lетром, сопряжеННbIМ оси
абсцисс, имеет уравнение (2'), которое ДО.-1ЖНО быть равносильно
уравнению
х == о.
Значит, коэффициенты
й 1 1, a 12 , аl
уравнения (2') должны быть пропорциональны коэффициентам
1, О, О
уравнения оси Оу, т. е.
a 11 =1= О, a 12 == О, a 1 == о;
следовательно, уравнение (3) имеет вид
a ll x 2 + а22у2 + а() == о. (4)
Итак, если оси координат образуют пару сопряженных диамет-
ров данной (произвольной) центральной кривой второю порядка,
!I
:с
:с
1/\
а)
б)
Ри€. 83,
пw уравнение эпl0Й кривоЙ в этой системе KoopauHatп имеет вид (4)
(рис. 83).
Случай расладаIощейся центральной кривой характеризуется
тем, что в уравнении (4) имеем а о == О (центр, Т. е. начало КООР"
динат, есть точка кривоЙ) (рис. 84).
180
ОБЩАЯ ТЕОРИЯ КРИВЫХ BTOPoro ПОРЯДКА
Пусть теперь кривая (1) (уравнение которой уже пр иведено
к виду (3» есть кр.ивая параболическая. Тоrда а 11 а 22 == а;2; но
в уравнении (3) коэффициент a 12 == О, значит, a 11 a 22 === О, а так как
а 22 =F о, то а 11 == о.
Итак, если в случае параболической кривой ось ординат направ-
лена по произвольному, неасимптоmuческому направлению, а ось
Л\
\
х
Ри
. 84.
Рис, 85.
абсцисс есть диаметр, сопряженный атому 1-(f'!.правленuю (и, сле-
довательно, имеющий асuмпmoтuческое HarL , равление) то ypaвHe
ние кривой в этой системе координат имеетп вид
а22у2+2аlх+ао===0. (5)
Если наша кривая распадается на пару параллельных пря-
мых (рис. 85), То Ll == о, т. е.
О О 01
О й22 О ===
aia 22 === о.
01 О йо
Так как а 2 2 * о, то непремеНIlО аl == О, И уравнение (5) пеобхо..
дима имеет вид
а22у2 +а о == О,
V йо
у== +
.
а22
(6)
Если же наша кривая есть нераспадающаяся параболическая
кривая, то непременно а 1 =1= о.
Сделаем теперь перенос начала в точку пересечения О' кри-
ПОЙ С осью Х, т. е. преобразование координат
х == х' +Хо, у == у',
rде ХО определено требованием, чтобы ТОЧI{а О' == (хо, о) удовлет"
воряла уравнению (5), т. е. чтобы было
а 22 . О +2а 1 х о +а о ==О.
ТЕОРЕМА ЕДИНСТВЕННОСТИ
181
в преобраэованной системе координат уравнение (5) приобретает
вид
а 22 у,2 + 2а 1 х' + (2a 1 x O +а о ) == О.
Т. е. вид
й22у,2 + 2а 1 х' == о.
(7)
Найдем точки пересечения оси ординат О'у' с параболой. Для
этоrо положим в уравнении (7) х'
о; получим а 22 у,2
О. Т. е.
11'
.1:'
Рис. 86.
Рис. 87.
ось ординат О'у' пересекается с параболой в двух сливаIОЩИХСЯ
ТОЧI{(1Х (совпадающих с точкой О'), и, следовательно, является
касательной к параболе (рвс. 86). Если при этом ось абсцисс
перПСIIдикулярна к оси ординат, то, деля пополам перпендику"
J1ярные к ней хорды, она ока}кется осыо параболы (рис. 87).
8. Теорема единственности для кривых 8Toporo порядка.
О полноте системы opTOrOHaJlbHbIX инвариантов
J. Теорема единственности.
т е о р е м а 3. Если два урасненuя впlОрОЙ спzеllСН,U
F (х, у) == a 11 x 2 + 2а 12 ху + Q2z.Y 2 + 2a 1 x + 2а 2 у + а О == О, (1)
u
F (х, у) == ыI22 + 2Ь 12 ху + Ь 22 у2 + 2Ь 1 х + 2Ь 2 у + Ь О == О (i)
удов.1flпвОРЯIОl11СЯ одни.+! u f11еЛl же множеством точек С комплекс..
ной I1лоскоспlU, пzo одно из Эl11UХ уравнен'ий получается из дpy
o
o
поЦ,ленным !j/;IHOJ.'CCNUe_1l на неКОlпорый числовой множиmель.
182
ОБЩАЯ ТЕОРИЯ КРИВЫХ Бтороrо ПОРЯДКА
с л е Д с т в и е. Если известно лишь. что множество действи..
тельных точек плоскости, удовлеmворяющuх уравнения.м. (1) u (1 '),
одно и пlO же и состоит более чем из Qдной точки, то утвержде-
ние теоремы 3 остается в силе.
Вспомним. что неасимптотические направления lсс:
} по отно-
шению к кривой (1) характеризуются тем, что имеется прямая
данноrо направления {а:
}, имеющая с множеством С ровно две
(различные) общие точки, поэтому всякое направление, неасимпто-
тическое для одной ИЗ двух кривых (1) и (1), будет неасимптоти"
ческим и для друrой кривой.
Выбираем некоторое определенное неасимптотическое направ-
ление {a:
} для кривых (1) и (i).
Одну из прямых d направления {а: Р} примем за ось ординат,
а диаметр, сопряженный направлению {а: р}, ..... за ось абсцисс
координатной системы О'х'у'. Из результатов предыдущеrо napar-
рафа следует, что уравнения (1), (i) получат в системе координат
О'х'у' вид
Р ' ( ' ' ) ,,2 + I ,2 + 2 ' , + ' О (2)
х , у == a 2 'lY аl1Х аl Х ао == ,
Р' (х', у') == b
2y,2 + b 11 x!2 + 2Ь 1 х' + b
== о. (2)
Здесь a
О (и b;g;P О), в противном случае единичный вектор
{О, 1} оси у', удовлетворяющий уравнению
'9' (х', у') == ailx,2 +tz;gy,2 == О,
имел бы, вопреки предположению, асимптотическое направление.
.;,;'
-ж'
Nно,жестdо СО DjlCтO
Рис. 88.
Ино,жестdо СО
codnuuocт с DjJIIнои 8":0
Рис. 89.
Пересечение множества С с ОСЬЮ у' == о обозначим через СО.
Возможны следующие случаи:
lQ Множество СО пусто (рис. 88). Этот случай осуществляется
тоrда н только тоrда, коrда какое
нибудь (и тоrда каждое) из
ТЕОРЕМА ЕДИНСТВЕННОСТИ
183
равенств
f (х') == allX'Z + 2ахх' + a
== О,
f (х') == b 11 x,2 + 2b 1 x' + b
== О
противоречиво, т. е.
коrда один какой
нибудь (и тоrда каждый)
из мноrочленов f (х'), f (х') тождественно равен отличной ОТ нуля
постоянной a
, соответстзенно b
.
20 Множество СО совпадает со
всей ПРЯ\fОЙ у' == о (рис. 89). Это
происходит тоrда и только тоrда,
коrда каждый из мноrочленов f (X')
1 (х') ТО,l\дественно Р(1вен ву ...110.
30 Н и один из случаев 1 о, 20
не имеет места. Тоrда множество
СО состоит ИЗ одной точки (рис.
90), или из пары (быть может,
совпадающих между собой) точек
(рис. 91), являющихся парой KOp
ней как уравнения
, ,2 + 2 ' + 1 О
а I J Х а 1 х ао == ,
(3)
так и уравнения
b 11 x,2 + 2Ь 1 х' + b
== о.
(3)
х'
МНQжеr:тdо С()
состоит
ОЭ 001f!Jt.' /!1!JlI/(U А
Рис. 90.
Рассмотрим ближе этот случай. 1а1< как уравнения (3) и (з)
имеют одни и те же корни, то при некотором f1 * О имеем
b 11 x,2 + 2Ь 1 х' + b
== f.t (allx,2 + 2aix' + a
)
Ь'
И, значит, полаrая 'А == ;2 , имеем
а 2з
р' (х', у') == a
2y'2 + (al1x,2 + 2аlХ' + O
),
F (х', у') == ла
2у,2 + J-t (al1x,2 + 2alx' + a
).
Докажем, что ')." ==
. Для этоrо даДП
I переменному х' значе..
, ,
нне х == XI, являющееся корнем уравнения
а} lX,2 + 2аlХ' + a
== 1,
и наЙдем значения у', УДОВ,,1етворяющпе уравнению
F ' ( ' I ) , /2 1 О
х 1, У == Qj.2Y + === f
т. е.
Yl:=: + lf
+r
r а2:&
184
ОБЩАЯ ТЕОРИЯ КРИВЫХ BTOPOrO порядКА
Значит, точка (Xl, Yt) принадлежит множеству С; следовательно,
р' (Xl, Уl)
Ла
"АУ12 + fl. 1 == Ла
(
) + J.L == О,
а 22
Т. е. л == 11, и 'р' (х', у') == лF' (х', у'), значит, и
F (х, у) == 'АР (х, у).
Итак, в случае 30 теорема доказана.
о) МножестВо СО
состоит us tlиy.r lещест!ен
1111/3: mO'leK 11 и В
.z'
б) I1ножестdо СО
состоит ш o
.r HHUHIJIZ
СОЛflR:JICВНН6/Z mOl/8H
1&'
6) МножестВо СО
(1Остоит из o6j1c.Z'
сodлиtJоющu.z тOI/BI( А
Рис. 91.
в случае 2 Q имеем
Р ' ( ' ' ) ,,2 , О р .... , ( ' ' ) Ь ,,2 Ь '
О
х , у == а 2 'АУ . a2
-+, х , у == 'J
y , ':12..,...... .
Ь' ,...,
Полаrая л ==
. получим Р' (х'» у') == 'AF' (х', у')
утвер>!{дение
а 22
теоремы верно и в этом случае.
Наконец, в случае 1 о уравнения (2) и (2) принимают ВИД
Р' (х', у') == a
'1Y,2 + a
== О, a
* О.
р' (х', у') == b
2!J'2 + b
== О J b
=1= О
ТЕОРЕМА ЕДИНСТВЕННОСТИ
185
..... множество С есть пара прямых, определенная каждым из урав-
нений
, V a
у === + ............ ......,....
а 22
,
+ V b
или У
Ь '.
29
Для Toro чтобы эти уравнения были эквивалентны, очевидно,
а' Ь'
необходимо и достаточно, чтобы было
=== Ь ,О , т. е. b
2 === ла
2'
Q2j 22
Ь '
,
b
2
О == /\,а о при I\i == ..........., .
а 22
Теорема 3 доказана во всех случаях.
2. О полноте системы opTorOHaJlbHblX инвариантов. Будем рас-
сматривать на плоскости лишь прямоуrольные системы координат
с одним и тем же масштабом. Имеет место следующая основная
т е о р е м а 4. Пусть на плоскости даны две нераспадающuеся
на пары параллеЛЬ1iblХ прямых кривые втОрО20 порядка С и С',
имеющие внекоторой пРЯМ,ОУ20ЛЬ1iОй системе координат Оху соот-
ветственно уравнения
Р(х, у) ==0
(4)
и
Р' (х, у) == о.
( 4')
Для тО20 чтобы кривые С и С' были метрuчески эквивалентНbl,
необходимо и достаточно, чтобы после доМ,ножения одНО20 из двух
Аtноеочленов F (х, у), Р' (х, у) на некоторый числовой ,Множитель
k оба эти М,НО20члена имели соответственно одни и те же инва-
рианты б, d, s.
Д о к а 3 а т е л ь с т в о. Н е о б х о д и м о с т ь. Если кривые С и
С' метрически эквивалентны, то посредством HeKOToporo ДВИ)l{ения,
Т. е. ортоrональноrо преобразования плоскости, кривая С' может
быть преобразована в кривую С. При этом прсобразовании инва
рианты б, д, S мноrочлена р' (х, у) (будучи ортоrональными
инвариантами) не изменятся, а сам мноrочлен Р' (х, у) перейдет
в мноrочлен G (х, у), имеющий то же нулевое мноrообразие, что
и мноrочлен F (х, у), так что в силу теоремы единственности
О(х, y)==kF(x, у) при некотором k=l=O.
vlTaK, инварианты мноrочлена Е' (х, у) совпадают с COOTBeT
СТВУIОЩИМИ инвариантами МlIоrочлена kF (х, у)
первая часть тео-
ремы 4 доказана.
Переходим к доказательству второй части.
Д о с т а т о ч 1-1 О С Т ь. Если мноrочлены Р' (х, у) и kF (х, у)
Иi\fеют одни и те же инварианты б, /1, S, то кривые р' (х, у) == о и
kF (х, у) метрически эквивалентны. Но кривая kF (х, у) == О, оче-
видно, совпадает с кривой F (х, у) == О, чем эквивалентность КрИ
вых F' (х, у) == о и F (х, у) == о доказана.
186
ОБЩАЯ ТЕОРИЯ КРИВЫХ BTOPOrO ПОРЯДКА
Полученный результат иноrда формулируют так:
Ортоzональные инварианты б. d, S образуют полную систему
ортоzонаЛЬНblХ инвариантов кривых второео порядка, не распада-
ющихея на пару параллеЛЬН,blХ прямых.
9. Оси симметрии и rлавные направления кривой BToporo
порядка
Пусть прямая d есть ось симметрии данной кривой BToporo
порядка с. Возможны два случая:
А. Направление, перпендикулярное к прямой d, является для
кривой С асимптотическим.
Б. Направление. перпендикулярное к прямой d, не есть асимп-
тотическое направление для кривой с.
d'
d' 8 d"
А,
А,
d d
d"
I
А 2
А 2
Рис. 92.
р не. 9'.3.
Пусть имеет место случай А. Возьмсм каКУlо
либо пару точек Аl'
А 2 кривоЙ С, СИl\'lметричных друr друrу относите.п:ьно прямой d.
Так как прямая d' == А 1 А 2 пмеет асимптотическое направление и
в то же время содержит две точ!{и А 1 и А 2 кривой С, то она
вся входит в состав этой кривой: кривая С распадается на пару
прямых d', d", одна из которых d' перпеНДИI<улярна к прямой d.
Вторая прямая d" не MOfKeT быть наклонной к прямой d, так как
в этом случае ПрЯ:\1ая d, очевидно, не f\lожет быть осью симмет-
рии фиrуры, составленной из двух прямых d l , d", ИЗ которых
одна перпендикулярна, а друrая наклонна к прямой d. Поэтому
прямая d" или тоже перпендику.пярна к прямой d, или совпада--
ет с ней. В первом с.тIучае линия С состоит ИЗ двух параллель-
ОСИ СИММЕТРИИ И rЛАВНЫЕ НАПРАВЛЕНИЯ
187
ных прямых (рис. 92), и тоrда всякая прямая, к этим прямым
перпендикулярная, является осью симметрии линии с; кроме
тoro, осью симметрии линии С является и единственный ее диа-
метр б
средняя прямая между прямыми d' И d".
Во втором случае линия С есть пара взаимно перпендикуляр-
ных прямых d' и d" ==d (рис. 93); каждая из этих прямых есть
ось симметрии линии с. Кроме Toro, осями симметрии являются
две биссектрисы б
и б" двух пар вертикальных прямых уrлов,
образованных прямыми d и d'. Эти биссектрисы являются (вза-
имно перпендикулярными) сопряженными диаметрами: каждый
из них делит пополам хорды, ему перпендикулярные (и парал-
.пе.пьные второй биссектрисе).
Итак, в случае А кривая распадается на пару параллеЛЬНblХ
или на пару перneндUКУЛЯРНblХ между собой прямых и имеет в
nep
oм' случае бесконечно MHOZO d'
осеи симметрии, а во вто..
ром
четыре оси симметрии.
Переходим к случаю Б:
направление, перпендикуляр. tI
ное к оси симметрии d, не
является асимптотическим для
кривой с. Пусть d'
какая- А,е
нибудь прямая, перпендику-
..YJярная к прямой d. Кри..
вая С пересекает прямую d' Рис. 94.
в двух точках А 1 и А 2 (быть
может, мнимых, быть может, совпадающих), симметричных от носи-
тельно прямой d, так что прямая d делит пополам хорду A1 A s
(р.ис. 94). Друrими словами, прямая d является диаметром кри-
вой С, сопряженным направлению, перпендикулярному к прямой d.
О п р е Д е л е н и е. Н аправленuе называется 2лавным относитель-
но данной кривой второсо порядка C
если эmо направление и пер-
пен.дuкулярное к HeJrfY являются взаимно сопряженными наnравле-
flllЯМU относительно эпzой кривой. r лавное направление относи..
fllельно кривой С Н,азываепzся maKJlCe zлавным направлением квадра-
п
llЧНОЙ функции, определенной квадраmИf.lНОЙ формой <р (Х. у)
CfllapUlllX членов уравнения кривой С в л/обои прямоуzольн.ой сис-
теме KoopдиHam
а также елаВНbl,М направлением любой такой
квадраП/llЧНОЙ фор.мы. Дuамеt1zр кривой С, сопряженный перпенди-
кулярНо/),tУ к нему направлению, называется zлавНЫJrf, диaMeтpo
кривой с. Направление 2лавноzо диаметра, очевидно, является
славным направлением.
Из определения r лавноrо направления непосредственно выте-
кают такие с..педстпия:
1 о Н аправленuе I nерпендuкулярн.ое 1с елавНОМУJ тоже является
eIlСЮНЬ1Аt.
188
ОБЩАЯ ТЕОРИЯ КРИВЫХ BTOPOrO ПОРЯДI<А
20 Особое направление кривой С является 2лавны.м для этой
кривой.
В самом деле t особое направление сопрял
ено всякому направ-
лению, в том числе и перпендикулярному к нему. Итак, асимпто-
тическое напра
ление параболы является rлавным для нее направ-
лением. У параболы все диаметры имеют rлавное направление,
но, как мы видели в
6, среди этих диаметров только один со-
пряжен перпендикулярному к нему направлению, и, следователь-
но, только один является rлавным диаметром
это ось параболы.
Ось параболы
единственная ее ось симметрии.
Из утверждения 1 о следует, что направление, перrrендикуляр-
ное к асимптотическому направлению параболы, также является
rлаВIIЫМ направлением. Никакое направление {а:
}, кроме асим-
птотическоrо и перпендикулярноrо к нему направления, не явля-
ется rлавным направлением параболы (так как единственное на-
правление, сопряженное направлению {а:
}t есть асимптотичес-
ксе направление и оно не перпендикулярно направлению {а:
}).
Итак, у параболы имеются ровно два zлавНblХ направления: асим-
птотическое и перпендикулярное к нему.
По тем же соображениям и линия, распавшаяся на пару па-
раллельных прямых d и d', имеет два rлавных направления: общее
направление прямых d и d' и перпендикулярное к этим прямым
направление.
Переходим к центральным кривым. Если направление {a:
}
rлавное для центральной кривой С, то (перпендикулярное к нему)
сопряженное ему направление {а':
'} тоже rлавное. Ни одно из
rлавных направлений центральной кривой не может быть асим"
птотическим (потому что в случае центральной кривой каждое
направление сопряжено одному
единственному направлению, а
асимптотическое направление сопряжено лишь самому себе). По-
этому диаметр центральной кривой, имеющий rлавное напраВ"ТIе...
ине, является rлавным диамеТРОМ t а значит, является осью сим-
метрии кривой. Из сказанноrо вытекает, что всякая кривая emopozo
порядка UMeelп по крайней .мере одну пару взаимно перпендику"
ЛЯрНblХ елавных направлений.
l-iз предыдущих рассуждений следует
т е о ре 1\1 а 5. За искл/очением случая, Kozaa данная кривая вто-
pozo порядка С есть пара параллельньа или пара перпендикуляр"
ных между собой прЯМblХ
всякая ОСЬ симметрии кривой С есть
2ла8Нblй дuаJr1.еl11р эпl0Й кривой.
Обратно, елавный диаметр кривой С. очевидНО 1 есть ОСЬ сим-
Merl1pUa кривой с.
Переходим к нахождению rлавных направлений. Система коор"
ДIIнат до конца параrрафа прямоуrольная.
J\'\bI ищем такое направление, чтобы вектор {а, Р} этоrо на-
пра1Зления был перпендикулярен к сопряженному ему вектору
ОСИ СИММЕТРИИ И rЛАВНЫЕ НАПРАВЛЕНИЯ 189
{а',
'}. По формуле (2")
6 имеем
': а/ == (al1a.+a12
): (a21a+a22
)'
Условие перпендикулярности векторов {а, р} И {а', Р'} есть
аа' +
' ==0, Т.. е.
р' : а' ==a:
, Т. е..
(а 11 а + a12
) : (a 21 C(, + a22
) == а :
.
ЭТО условие означает СУlllествование TaKoro Л, что
а 11 (% + a12
Ла, }
(1)
а 21 а + а22Р == лР
или
(а 11
л) с(, + a12
== О, }
a 21 a + (а 22
'А) Р == О..
Рассмотрим сначала центральный случай: 6 =F о. Требуется
найти ненулевой вектор
решение {а,
} однородной системы (1');
это возможно, лишь коrда детерминант системы равен нулю, т. е.
(1')
I ан
л ai2 I == о.
а21 а22
Л
(2)
Взяв в качестве 'А какой-либо корень уравнения (2) и подставив
ero в (1 '), заключаем
именно в ввиду равенства ну лю детерми
нанта (2),
что оба уравнения (1) эквивалентны между собой
и дают одно и то же направление
: а == (л
а 11 ) : a 12 == а 21 : (л
а 22 ).
(3)
Здесь, как только что сказано, л
какой
нибудь корень ypaBHe
пия (2). Но этих корней
два, так как уравнение (2)
KBaдpaT
ное уравнение, которое в развернутом виде есть
л2
Sл+б==:О
(2')
(здесь, как всеrда, S == a 11 +а 22 , б == a 11 a 22
ai2). Обозначая корни
уравнения (2) через 1\..1 и Л 2 , получаем из (3) два rлавных направ"
лен ия:
l : а 1 == (Л 1
ан) : a 12 == а 21 : (Л 1
а 22 )
(31)
и
2 : а 2 == (Л 2
a 11 ) : а 12 == а 21 : (Л 2
а 22 );
(32)
мы получили давно известные нам формулы. Эти направления
действительны, Т31{ как действ ительны корни
л
s ::!: VS2
4б
S :!: У(аl1
a22)2+4a
1.2
2
2
190
ОБЩАЯ ТЕОРИЯ КРИВЫХ BTOPOrO ПОРЯДКА
уравнения (2). Эти корни совпадают в единственном случае, коrда
Qll == а 22 и a 12 == О, Т. е. коrда рассматриваемая I(ривая есть окруж"
ность.
Заметим, ЧТО в центральном случае б *" О ни один из корней
Л 1 , Л 2 уравнения (2) не равен нулю, так как, подставив 'А == О
в (2), получили бы б == о.
Име!отся ли случаи, коrда два эквивалентных уравнения (1')
(Т. е. (3)) не ПОЗВОЛЯIОТ определить rлавное направление? В силу
(3) это может случиться, только KorAa одновременно а 12 == О,.л == ан,
л == 022' т. е. снова JlИШЬ в случае окружности (а 12 == О, а 11 == а 22 ). Для
окружности всякий диаметр есть ось симметрии, всякое направ"
ление rлаВI-Iое. Если х{е наша кривая не есть окружность, то фор МУЛl>I
(3) ПОЗI30ЛЯIОТ совершенно однозначно определить два rлавных
направдения. Они заведомо различны, так как в центральном
случае, который мы рассматриваем, являются направлениями двух
взаимно перпендикулярных сопряженных диаметров. Итак, дока..
зана
т е о р е м а 6. За еданственным иСКЛfоченuем окружности (KOZ
да всякое направление
zлавное) , мы и.меем для каждой централь..
ной f\,рU80Й второса порядка два и только два zлавных наnравле..
нuя (и, значu,'п, не более двух осей симметрии с неасимnтоти..
чес/(uмu направлениями).
Два славных направления центральной кривой nерnендиКУЛЯРНbl
ме :ж:д у собой.
Мы уже установили непосредственно, что парабола и пара
пара,п,,'1ельных прямых имеют два взаимно перпендикулярных rлав"
ных направления, одно из Которых....... асимптотическое. Леrко убе..
диться в этом и посредством простоrо вычисления. В самом деле,
пусть б == о. Тоrда уравнение (2) удовлетворяется при л == Л 1 == о.
Второй корень уравнения (2) не может равняться нулю, так как
тоrда было бы ан == й22, a 12 == О, S == л'l + Л 2 == о, Т. е. S == 2a J1 == 2а22 ===
== О
мноrОЧ..1ен F (х, у) БыIпп бы мноrочленом не выше первой сте-
пени. fJодстановка 11. == О В уравнения (1') дает
a 11 a + a12
== О,
а 21 а +a22
== О,
ЧТО сразу приводит к асимптотическому rлавному направлеНИIО
р : а ==
аа ==
а12 параболической кривой. Второй корень Л2 == S
G12 а22
дает rлавное направление
': а' == (8
a 11 ) : а 12 == а22 : а 12 == а 12 : G 11 ,
перпеНДIIКУЛЯРНое к асимптотическому направлению
: а (пола-
rая cf., ==
ан, р::: а 12 , а' == а 12 ,
'::: йl1, имеем аа' +
' == о).
Теперь мы леrко можем найти по обще
fУ уравнению пара..
балы и уравнение ее оси. Ось параболы имеет уrловой коэффи-
циент k ==
ан ==
Gl! И является в то же время диаметром, со..
а 12 а22
ОСИ СИММЕТРИИ И rЛАВIIЫЕ НАПРАВЛЕНИЯ
191
пряженным к хордам перпендикулярноrо направления, Т. е. хор-
дам с yrJJOBblM коэффициентом а12 == а22 (или С направляющим
ан a12
вектором {а,
}, rде можно взять а == a 11 ,
== а 12 или а === а 1 2'
== а. 22 ).
Уравнение диаметра, сопряженноrо хордам с направ,,'!яющим
Еектором {а,
}, есть
р 1 .(х, y)a.+Fz(X, у)р==о.
Значит, полаrая а == ан,
== а 12 , получаем уравнение оси пара..
болы в виде
Рl (х, у) a 11 + Fz (Х, у) а 12 == О,
т. е.
(ail +a
) х + а 12 (a 11 + а 22 ) У + a11a 1 + a12aZ == о.
Из a
== йl1й22 вытекает
ат. + a
== а 11 (а 11 + а 22 ).
Поэтому уравнение оси перелисывается в Биде
al1Sx+a12Sy+al1al +a 12 a 2 ==0,
Т. е. окончатеJ]ЬНО в виде
+ + allal + a1 2 a 2 О
а 11 Х а l 2У S ==.
Ана..10rично, полаrая а == а 12 ,
=== а 22 , получаем для оси уравнение
+ + Q12al + а22 а 2 О
a 1 2 x a 2z y S ==.
При a 1 2 =1= О МО)КНО пользоваться любым из Э7ИХ уравнений. При
а12 == О И аl1 == О (значит, а 22 =1= О) надо пользоваться вторым, при
а 22 == О (и, значит, а 11 =1= О)
первым. Получаем соответственно
уравнение оси в первом случае в виде
а 22 у + а 2 == О,
ВО втором С
1учае в виде
a 11 x+ а 1 == о.
Найдя уравнение оси параболы, мы сразу же находим и вершину
О' параболы (как точку пересечения параболы с ее осью).
Принимая вершину параБОtllЫ О' за начало новой системы
координат, ось параболы
за новую ось O'
, а касательную в вер..
шине
за ось O''t'), определим положительное направление О';
так, чтобы в новой системе координат O'
ll уравнение параболы
имело вид 112 == 2p
, Р > о.
Для нахождения интересуюrцеrо нас положительноrо направле-
ния O'
вспомним (rл. y
9 4), что после поворота ИСХОДНОЙ
192
ОБЩАЯ ТЕОРИЯ I(РИВЫХ BTOPOrO ПОРЯДI<А
системы координат Оху на уrол а и последующеrо переноса начала
координат в точку О' уравнение параболы приняло вид f)2
== 2 (
)
, rде (rл. V,
1, формула (3)) a
== а 1 cos а. +а 2 sin а..
а'
Для TOrO чтобы было
s > О, надо на уrол а., определяемый
из уравнения tg сх. =: ........ ан , наложить дополнительное требование,
a12
заключающееся в том, чтобы числа S и йl cos а. + а 2 sin а имели
противоположные знаки. Найденный таким образом уrол а, и дает
нам положительное направление оси O'
канонической системы
координат O'
'Y).
lOI! Основная теорема об аффинных преобразооаниях
Элементарная теория кривых BToporo порядка позволяет дать
простое доказательство одноrо из важнейших свойств аффинных
преобразований плоскости.
Пусть при аффинном преобразовании еЛ плоскости кривая
BToporo порядка К переходит в кривую К'. Так как при аффин-
ном отображении отрезок переходит в отрезок, причем середина
отрезка переходит в середину отрезка, то при преобразовании
центр кривой К переходит в центр кривой /('.
Так как при аффинном преобразовании параллельность пря
мых сохраняется, то всякий пучок параллельных хорд кривой К
переходит в пучок параллельных хорд кривой К', середины хорд
первоrо пучка переходят в середины хорд BToporo пучка, а зна.
чит, диаметр, сопряженный хордам первоrо Пучка, перехо-
дит в диаметр, сопря}кенный хорда!\1 BToporo пучка. Отсюда DЫ с
текает
Т е о р е м а 7. Пусть при данно.М аффинном nреобразованиu
данная кривая 8tпOp020 порядка К переходит в кривую К'
тоеда
всякая пара сопРЯ:JlсеННblХ диаметров кривой К переходит в пару
сопряженных диа1Уtепlров кривой к.'.
Выведем ОТсюда следующее основное своЙство аффинных пре-
образований:
т е о р е м а 8. Всякое аффинное nреобразованuе плоскости Я8ЛЯ-
еrпся rzроuзведение'м' собствеННО20 или несобсmвеfl1tО20 дви
/сения и
двух сжатий (растяжении) плоскости
nроисходЯЩtlХ в двух вза-
имно nерпендикулярных направлениях.
Д о к а 3 а т е л ь с т D о. Возьмем аффинное преобразование eТt
l f
обратное к преобразаванию Q/t, и рассмотрим какую-нибудь окруж-
ность К' радиуса 1 с центром О'. При аффинном преобразова...
нии
l окружность К! переходит в эллипс К, а центр О'
окружности К' переходит в центр О эллипса К. При этом вся-
кая пара взаимно перпендикулярных, т. е. сопряженных, диаметров
ОКРУЖНОСТИ К' переходит в пару СОI1РЯ}i\енных диаметров эллипса К.
ОСНОВНАЯ ТЕОРЕМА
193
При отображении <2-71, обратно, эллипс К переходит в окруж'"
ность К', центр О ЭС/1Jлипса К переходит в иентр О' окружности К' $
а всякая пара сопряженных диаметров эллипса К переходит
в пару сопряженных, Т. е. взаимно перпендикулярных, диаметров
окружности К'. Но среди пар сопряженных диаметров эллипса
имеется пара ero rлавных осей (и они взаимно перпендикулярны).
Сделаем эти rлавные оси эллипса (фокальную и вторую) осями
координат аффинной системы Оху (рис. 95), единичные векторы
...............
......
кото рой суть соответс.твенно векторы е. :::::: О А и
:::::: О В, ведущие
в соответствующие вершины А и В эллипса (длины векторов е 1 , еl
обозначим через а и Ь). При на-
шем аффинном преобразовании <2-71
пара rлавных осей эллипса пе..
рейдет в пару сопряженных и,
следовательно, взаимно перпенди"
кулярных диаметров окружности,
которые примем за оси координат
системы О' х' у'. За единичные век-
торы этой системы примем ра..
диусы e
, e
(они имеют длину 1).
При аффинном преобраэовании <2-71
пара взаимно перпендикулярных
прямых Ох и Оу переходит в
пару взаимно перпендикулярных
прямых О' х' , О' у' , а отрезки
.......
............
t} == ОА, е 2 == 08, лежащие на Ох,
иу и имеющие соответственно
длины а и Ь, переходят в отрезки
e
, e
длины 1, лежащие на О' х', О' у'. в чем же состоит аффин-
ное лреобразование e/t? Очевидно, в движении (собственном или
несобственном), которое переносит пару взаимно перпендикуляр-
ных прямых Ох И Оу соответственно в пару взаимно перпендп-
кулярных прямых О'х', О'у', и в последующем сжатии или растя-
жении вдоль этих последних прямых в отношении а: 1 и Ь: 1.
Теорема 8 доказана.
Из теоремы 8 вытекает
С л е Д с т в и е. Пусть аффинное преобразованuе <2-71 предс/псюлено
в виде произведения ортоzоН,альН,оzо преобразован'ИЯ (т. е. собствен-
IiOzo или Н,есобственН,оzо движения) u двух сжатий с коэффициен-
тами k 1 и k 2 . ТО2да отношен'ие длины образа любоzо отрезка к длине
прообраза эmО20 оmрезка заключено между числами k 1 u k'a.
В самом деле, пусть u == {а,
}
какой. нибудь вектор и'
{a',
'}
ero образ при преобразовании <2-71. Так как opToro..
нальное преобразование не меняет длины вектора, то можно пред-
положить, что преобразование есть произведение двух сжатий
a z
о
:с
РИl'. 95.
194
ОБЩАЯ ТЕОРИЯ КРИВЫХ BTOPOrO ПОРЯДКА
к осям прямоуrольноЙ системы координат с коэффиuиентами k 1 и
k 2 . Без оrраничения общности можно преДПОJlОЖИТЬ, ЧТО, напри-
мер, kl
k2. Тоrда
а' == k1a,
А' /; ., п
t'I == "2r.
Поэтому
I и' 1:::: V (1.,12 +
,2 :=: Vkia 2 +k
2
k 1
I а 2 +
2 == k 1 J u 1.
Аналоrично
1 и' 1
k 2 I u r J
т. е.
I и' I
k 1
ТUТ
k2'
ЧТО И требовалось доказать.
Если при ЭТОМ k 1 := k 2
k, то дЛЯ любоrо вектора u и ero
образа u' имеем
о'
ТUl == k
преобразование е7! есть преобразование подобия. Итак:
Аффинное преобразование, являющееся произведением opToro-
нальноrо преобразовзния и двух сжатий с ОДНИМ и тем же коэф-
фиuиентом, есть преобразование подобия. ОТСlода в СБОЮ очередь
в виде непосредственноrо следствия вытекает
т е о р е м а 9. Аффинное преобразован'uе, отображающее какую-
нибудь окружность на окружность, есть преобразованuе подобия.
r л А В А VII
КРАТКОЕ ОПИСl
liИЕ РАЗЛИЧНblХ ВИДОВ ПОВЕРХНОСТЕЙ
BTOPOrO ПОРЯДI(А
в этой r.паве будут перечислены различные виды поверхностеЙ
BToporo порядка. В rлаве IX мы покажем, что ка>кдая из поверх-
ностей BToporo порядка является одной из упомянутых D настоящей
rлаве, т. е. что мы перечислили все поверхности Бтороrо порядка.
Система координат 130 всей этой r лаве предполаrается прямо..
уrо.ТIЬНОЙ.
1. Распадающиеся поверхности
Ес"ТIИ мноrочлен второй степени F (х, у, z) есть произведеНIIЭ
двух ыноrОЧ.пенов первоЙ степени:
Р(х, у, Z) == (AIX+Bly+ClZ+Dl)(A2X+B2y+C2Z+D2)'
то поверхность F (Х, у, z) == О распадается на пару плоскостей зt{
и П 2 : AIX+Bly+ClZ
Dl==O и A 2 x+B 2 y+C 2 z+D 2 ==O. ЕСс.fJИ эти
пЛОСКОСfпu пересек а ,'ОПlСЯ , то сделаем прямую их пересечения осыо
аппликат, а биссе!{торные П,,1JОСКОСТИ двуrранных yr лов, образуе..
мых этими плоскостями, ПрИI\fем за координатные n
7JOCKOCTII Oyz
и Oxz пряыоуrольной систеыы координат, беря в качестве плоскости
любую n
lIOCKOCTb, перпендику.пярную к линии пересечения данных
плоскостей (рис. 96). Тоrда данные плоскости Лl и зt 2 получат
уравнения Ах + Ву == О 1I Ах
Ву == О, а поверхность F (х, у, z) == О,
распавшаяся на эти плоскости, будет поверхностью
(Ax+By)(Ax
Bи)==O, т. е. A2x2
B2y
==O. (1)
Итак, всякая поверхность 8Jll0p020 nорядка J распада/ощаяся на пару
пересеl\аЮll
UХСЯ nлоскоспlей J в н.екоторой сиспzе.ме координат U.l
teelil
уравнение (1).
Если поверхность распадается на пару nаралеЛЛЬНblХ плоское..
тей Л 1 и П 2 , то примем за плоскость Оху прямоуrодьной системы
координат среднюю плоскость n между плоскостями П 1 И п 2 . Начало
прямоуrОJlЬНОЙ систеl\lЫ координат О и векторы е 1 и е 2 возьмем
в плоскости л, а вектор е з направим перпендикулярно к плоскости зt
(рис. 97); тоrда плоскости пl и П 3 будут сосэтветственно иметь
196 РАЗЛИЧНЫЕ ВИДЫ ПОВЕРХНОСТЕН BToporo ПОРЯДКА
уравнения z == а и z == ....... а; уравнение пары плоскостей п!. "2 будет
Z2
а 2 == о. (2)
Наконец, мы rоворим, что уравнение
(Ax+By+Cz+D)2=:O
определяет пару совпадающих 'м'ежду собой плоск.остеiJ.
Ax+BU+Cz+D ==0.
Приняв эту плос!{ость за плоскость z == О новой координатной
системы, мы ВИДИМ, что всякая поверхность BToporo порядка,
z
Рис. 96.
rl1C. 97.
НВЛЯlощаяся парой совпадающих ые)иду собой плоскостеЙ, в BeKO
т()рой системе координат может БLIТЬ задана уравнением
Z2 == о. (3)
1\lы УПIIДИМ (в rл. IX), что поверхность, распадзющаяся на
пару л1flllАtblХ (соnряжеflНЫХ) плоскосmей
может быть задана ypaB
неннем
Al x 2+B2 y 2 ==о,
если эти плоскости пересеКЗIОТСЯ, и уравнением
:2 +а 2 == О,
если они параллельны.
UИЛИНДРИЧЕСКИЕ ПОВЕРХНОСТИ
197
2. Цилиндрические поверхности
Цилиндрическая noвepXflOCfrlb втОрОёО порядка задается в неко"
торой наДvlежаще выбранной Д
1JЯ данной поверхности канонической
системе координат уравнением
F (х, у) == О,
rде F(x, у)
мноrочлен второй степени
от переменных х и у. Кривая, оп
е.
деленная уравнением (1) в плоско-
сти Оху, является направляющей кри-
вой (основанием) цилиндрической по-
верхности. Эта кривая может быть эл-
липсом, действительным или мнимым,
rипербо.пой или параболой, в зависи-
мости от чеrо мы и различаем эллипти-
ческие (рис. 98). мнимые эллuпmuче-
CKиe
2uперболuческue (рис. 99) и пара-
болические (рис. 100) цилиндры, кано-
нические уравнения которых совпадают
с каноническими уравнениями их На-
правляющих кривых (1). Если направ-
ляющая (1) есть пара прямых, то ци-
линдрическая поверхность вырождается
в пару плоскостей (пересекающихся, параллельных
z
f
I 1
I I
I 1
1 ,j"....
I
1
1 ,"
1,.0'
I
Рис. 99.
(1)
!!
I
I
I......
....
....-"1' ...
, ,
.... I "
1,'" I
1,/ I
y
I
I
I
I
I
I
f
f
I
I
f /
J.
/
......
....
....I / "
,
I /
'" /
/' О , /
1" 1/
.(
..,....
'1 /" I
I / 1
// I
I
I
.
,(
Рис. 98.
или совпа-
Z!
I r
I ..............
i
I ""....
I .....---
I /."......
f'"
,
/
/
/ /
..J.
.. t
/ .............
/ "'.....
I"!....'"
...-.
,z-
Рис. 100.
даЮIЦИХ t действительных или мнимых
в зависимости от соответ"
ствующеrо свойства лежащей в основании пары прямых).
198 РАЗЛИЧНЫЕ ВИДЫ ПОВЕРХНОСТЕН BToporo ПОРЯДКА
3. Конусы BToporo порядка
Под дейспlвuтельным конусом вmороео порядка
поверхность BToporo порядка, которая внекоторой
ной системе координат задается уравнением
х2 у2 Z2
а 2 + ь2
"С2==О,
понимается
прямоуrо.пь-
(1)
Это уравнение и система координат, в которой данный конус им
задается, называются каноническими для этоrо конуса (рис. 101).
Поверхность, получающаяся от вращения BOKpyr заданной пря
мой б какой
нибудь прямой d, пересекающейся с прямой <5, называется
круелым конусом или конусом
,Z вращения. Выведем уравнение
круrлоrо конуса. Для этоrо
примем прямую о за ось
Рис. 101.
!Z
I
I
,
..--
. ............
.......... J "
\ /
,
\/" f
....................
.....
......
1, .
, \ I
I
:с
--
i
'
-
/;
'......
........,...,
..............)
d
b'"
Ркс. 102.
апп.пика1', течку ее пересечения с прямоЙ d
за начало коорди.
нат, а плоскость, ПРОХОДЯЩУIО через ПРЯ
.-Iые б и d,
за плос
кость Oxz прямоуrОJ1ЬНОЙ системы координат (рис. 102). Уравне-
u d О 'хl t
вие пря
лои в плоскости xz МОЖНО записать в виде ТZI == ga,
у == О, rде
острый уrол наклэна ПрЯ
fОЙ d 1<: оси Oz. Тоrда
конусы BToporo ПОРЯДКА
/
,
/"
: \
......"'(.
I '\
, 1 "-"-.............i
....
"-,,- t
t:
i
I "- I "
"
.....с;
+
".."-'!.
\ I ",,-
\ I "-
\ I "-
\ I
\ I
\ I
\ I /
\ I //
'\, /
V
.....
I
"
t
l
199
.
u')
о
....
()
==
Q.c
.
о
C.J
:Q
.
ci)
о
.....
(j
а..
200 РАЗЛИЧНЫЕ виды ПОВЕРХНОСТЕА BToporo ПОРЯДКА
уравнение поверхности вращения будет
х 2 + у2
k 2 z 2 :::= О, (2)
rде k == tg а. Уравнение (2) и есть каноническое уравнение Kpyr-
,,1]oro конуса.
Плоскость, пара.плельная плоскости Оху, пересекает конус (2)
по окружности (например, плоскость z === 1 ..... ПО окружности х 2 +
+ у2 == k 2 ). Если HeMHoro наклонить эту плоскость, то в сечении
получится эллипс (рис. 103) (читателю предлаrается проверить это).
Плоскости, параллельные плоскостям Oyz и Oxz, пересекают
конус (2) по rиперболам: например, в сечении конуса (2) плоскостью
х == Ь получаем кривую
k 2 z 2 ..... у2 == Ь2,
ь
Т. е., полаrая k
а,
rиперболу (рис. 104)
Z2 у2
......
== 1
а 2 Ь 2 ·
(3)
Не только эллипс и rипербола, но и парабола являются
плоскими сечениями круrлоrо конуса (2). Для простоты положим
k == 1, тоrда уравнение конуса будет
х 2 + у2
Z2 == о. ( 4 )
Докажем, что параболой является, например, сечение !{онуса (4)
плоскостью п, заданной уравнением
x
z+l==O
(рис. 105). Сделаем преобразование прямоуrольных координат:
х'
z' 1 , х' +z' 1
х == У2
2' У
у, z == У2 + "2 ·
в новой системе координат плоскость 1t является координатной
плоскостыо z' ==Ot а поверхность (4) получает уравнение
у' 2
2х' z'
х' у 2 == О,
поэтому ее сечение плоскостыо z' == о есть парабола
у,2 == х'у 2 .
Итак, и эллипс. и rипербо.па, и парабола являются сечениями
конуса (даже круrлоrо конуса). Поэтому эти кривые 11 называются
коничеСКUАfИ сечениями. К плоским сечениям поверхностей BToporo
порядка мы еще вернемся с более обlцей точки зрения в rлаве VIII.
Наряду с действительными конусами BToporo порядка суще
СТВУЮТ еще мнимые I{оиусы, которые в канонической для них
ЭЛЛИПСОИДЫ И rИПЕРБОЛОИДЫ
201
системе координат имеют уравнение
х 2 у2 Z2 О
t;2+bi+Ci==.
(5)
Единственная действите
пьная точка мнимоrо конуса есть точка
О
(О, О, О). Их дальнейшее изучение интереса для нас не представ-
л яет .
Заметим, наконец, что цилиндрические и конические поверх-
ности BToporo порядка (охватывающие, как мы видели, в виде
ч
стноrо случая и все распадающиеся поверхности BToporo порядка)
будут объединены ПОД общим наименованием вырождающuхся по-
верхностей втор oro порядка; им
в качестве невырождающихся
поверхностей
противополаrаются эллипсоиды, rиперболоиды и па..
раболоиды, к определению и краткому описанию которых мы
и переходим.
4t Эллипсоиды и rиперболоиды
Эллипсоидом (веи{ественным') называется поверхность, имеющая
внекоторой (<<канонической» для нее) прямоуrольной системе
координат (<<каноническое») уравнение
х 2 у2 Z2
a 2 +fj2+&==1. (1)
Положительные числа а, Ь, с называются пОЛУОСЯJrtU эллип-
соида (1).
Эллипсоид лех{ит внутри прямоуrольноrо параллелепипеда
a<:.x
a,
b<y
b,
c
z
c.
Друrими словами, эллипсоиды суть оrраниченные поверхности.
Все плоские сечения эллипсоида явЛЯЮfпся пОЭflZО..ну 02раfltlчеНflЬ!.IНU
кри8blJrlИ втОрО20 порядка, т. е. эллипсами.
Оби
ий вид эллипсоида изображен на рис. 106.
Предположим, что а 2
Ь 2 ;;:::: с 2 (изменяя, если нужно, ос 11
координат, мы всеrда можем достиrнуть этоrо). Если а==Ь*с,
то сечения эллипсоида плоскостями z == h суть окружности
х 2 у2 h2
а 2 + а 2 == 1
С2' z == h
(радиуса rh ==
v с 2
h 2 , вещественноrо лишь при I h 1
С), а сам
с
х 2 Z2
эллипсоид получается вращением эллипса а 2 + с2 == 1, у == о вокрур
оси z. Так как с < а, то вращение эллипса происходит BOKpyr
ero второй оси (рис. 107), и полученный при этом эллипсоид
естественно назвать сжатым эллипсоидом вращения. Если же
202 РАЗЛИЧНЫЕ виды ПОВЕРХНОСТЕЯ BTOPOrO ПОРЯДКА
а> Ь :::= С, ТО сечения эл
Т)ипсоида плоскостями х == h суть ОКРУЖНОСТI1
у2 Z2 h 2
7ft + Ь2 == 1 ....... а 2 ' Х == !
.
Радиусы этих окружностей равны rh==.!Vа2
h2(ОНИ вещественны
а
..туишь при ! !ll
а); ЭЛ,,1ИПСОИД получается ОТ вращения Э.,'J..1JИflса
z
$
I
3J
.f
FlIC. 103. Рис. 107.
а'2 +
Ъ-?; == 1, у == О (или эллипса а 2 + ь2 == 1, z == О) BOI{pyr оси Ох,
т. е. BOKpyr ero фокальной оси. Полученная поверхность называется
8ЫI11януты},! эллuпсоuдОАt вpaи(e
)Z
fl!lЯ (рис. 108). "
Наконец, при а == Ь == с э.п
.
"Т]ИПССIlД (1) ЯВilяется сфероЙ
радиуса а (рис. 109).
t z
Рис. lС8.
Рис. 109.
Поверхность, эадавае
ая в какой
нибу дь прямоуrольной системе
!{ООРДllнат уравнением
х 2 y
Z2
а2 + Ь2 + ci ==
1,
ЭЛЛИПСОИДЫ И rИПЕРБОЛОИДЫ
203
пазывается МIlИМЫ.А! эллипсоидом. 1\'\нимыЙ эллипсоид не имеет
НИ ОДНОЙ вещественной точки.
Однополостным} соответственно двуполостным 2uперболоидОАt
НС1зывается поверхность, имеющая внекоторой прямоуrольной
системе координат уравнение
х 2 у2 Z2 1 ( u
а 2 + 7i2
с2 == однопо.лостныи rиперболоид (рис. 110)), (2)
х 2 у2 Z2
........ а 2
ь2 + с2 == 1 (двуполостный rиперболоид (рис. 111 ). (3)
Пряыоуrольная система координат, в котороЙ данный rипер-
БО.10НД имеет уравнение вида (2), соответственно (3), называется
канонической для этоrо rиперболоида, а сами уравнения (2) и (3)
называются каноническими уравнеНUЯЛlU ёuперболоuдов. Положитель-
ные числа а, Ь, с называются полуосями rиперболоидов (2) и (3).
х 2 у2 Z2
Конус а2 + Ь 2
с2 == О определяется KaI{ общий асимптотический
конус обоих rиперболоидов (2) и (3) (рис. 112).
Из уравнений (2) и (3) ВИДНО, что начало канонической ДЛЯ
данноrо rиперболоида системы координат является ero центром
симметрии, координатные плоскости прямоуrольной канонической
системы
ero плоскостями симметрии, а оси координат этой
системы
осями симметрии. Всякий rиперболоид имеет три плоско-
сти симметрии.
Если а == Ь == С, то rиперболоид называется nравuльн.ым.
Плоскость z
h пересекает однополостный rиперболоид (2) по
кривой
х 2 у2 ....... 1 h 2
а 2 + Ь 2
+ с 2 '
z == h.
(4)
h 2 2
По.лаrая 1 +
== Лh, ВИДИМ, что кривая (4) есть эллипс
х2 у2
(а Лh)2 + (Ь Лh)2 == 1, z ==h.
Все эти эллипсы подобны между собой: отношение их полvосеЙ
Ь Лh Ь
а Лh == а одно и то же, их эксцентриситеты равны эксцентриси-
тету эллипса
х2 у2
а 2 + ь2 == 1,
z == О,
являющеrося лересечением однополостноrо rиперболоида (2) с
П..10СI{ОСТЬЮ Z == о; этот эллипс называется еорловым эллипсом данноrо
однополостноrо rиперболоида. При а == Ь эти сечения являют-
ся окружностями, а rиперболоид (2) делается однополостн.ЫА1.
204 РАЗЛИЧНЫЕ виды ПОВЕРХНОСТЕй BTOPOrO ПОРЛДКА
c's
......
C.J
:;.1
/,/
' \
I
I
I
I
.
I
..........., " I
.......... 1 "
......... '- I i .......
1
"1
I j -',- I u
, 1" ::.:.
'
а..
\ / ' )
\ .
"" \ !'
" \/
',-
...
о
..........
..........
u
=:.:
эллипсоиды и rИЛЕРЕОЛОИДЫ
205
2unерБОАоuдОАl вращенuя
ОН получается при вращении rиперБО/Iьr
n
..... " == 1, У:=2 О (или rиперболы 2 ...... 2 == 1, х == О) БОКР yr оси
а'" С'" а с
Zt являющейся второй осью КЗ}l{ДОЙ ИЗ этих rипербол.
Сечения однопо.постноrо rиперболоида (2) плоскостнми у::= '
суть кривые a
-ёз == 1 ...... 7)9. Полаrая Л
=== 1 ...... bi при r h 1< ь
и АХ == z:
1 при Ih/>b, видим, что
эти кривые суть соответственно rи-
перболы (рис. 113)
х 2 z
...... == 1, Y ==h и
{а ЛhР (с Лh)
z'JI X
(с Лh)i (а Лh)
== 1, у == h.
Аналоrично ДОI{ззываем, что се.
чения однополостноrо rиперболоида
(2) плоскостями х == h суть rиперболы
у2
(Ь Лh)3
Z2
(с л h)2 == 1,
x==h
h
при I h I < а, л,
== 1
2 '
а
Z2 у2
(с л'h)2 (Ь Лh)
== 1, х == h
.
!/
при !hl>a, Ц ==
:
1. Сечение Рис. 113.
ОДIIОПОJIостпоrо rиперБОv10нда (2) каждой из плоскостей у == .
..
ь
есть пара прямых
х 2 Z2
..
== о У == + Ь
а 2 c'l. ,
.
Точно ТЭI< же сечение однопо.постноrо rипербо.попда (2) каждой
нз плоскостеЙ х ==
r а есть пара прямых
у'! 22
-
== о
Ь 2 с 2 ,
x::=: :I
a.
РаСС
10ТрИМ теперь пересечения двуполостпоrо rипербо.поида
х 2 ц2 Z3
а 2 ...... Ь 2 + с 2 == 1 (3)
с плос}{остями, парал.пе.пьными координа rНЬП.l.
ПЛОСI{ОСТЬ z == Jl при I h ! < с пересе((ает поверхность (3) по мни..
мым эллипсам, при l/ll > с
по вещественным. Ес.пи а == Ь, ТО эти
206 РАЗЛИЧНЫЕ виды ПОВЕРХНОСТЕй BToporo ПОРЯДКА
эллипсы ЯВЛЯЮТСЯ окруя<ностями, а rиперболоид (3) есть rипербо..
Z2 х 2
JIОИД вращения: ОН получается при вращении rиперболы ё2
li2 ===
== 1 У == О ( или
----- у2 == 1 х == О )
t с2 а'2 , /
BOI<pyr оси z (являющейся фо..
кальной ОСЬЮ каждой из этих
rипербол). При I h 1== с получасы
пару мнимых сопряженных пря..
мых с ОДНОЙ вещественной точ-
}<ОЙ (О, О, С), соответственно
(О, О,
С).
Плоскости х == h и у == 11 пере-
секают rиперболоид (3) по rипер"
балам (р ис. 1 14) (плоскости х ===
== + а, у == + Ь ИСКЛlочения не
предстаВЛЯIОТ).
Мы определили асимптотиче-
ский конус для обоих rипербо..
ЛОИДОВ (2) И (3) как I<ОИУС
х? Y?
o
а? + Ь 2 с 2
·
Сравним сечения Пv10СКОСТИ
Z == h с каждым из rиперболои..
ДОВ (2), (3) и с КОНУСОМ (5). При ЭТОМ предполаrаем h > с.
Получаем эллип сы. пол уоси которых суть
ah == а
/
+ 1 J
r
:: (сечение с ОДНОПОJlOСТНЫМ
,
/ h 2 J rиперболоидом (2).
b h := Ь r с2 + 1
соответственно
"
/ h 2
а h == а r С2.......
Ь h == ь
/ !!:.. .......
JI с 2
И, наконец,
z
/
Рис. 114.
(5)
(6)
1, } 1 (сечение с двуполостным
rиперболоидом (3))
I
(7)
ah == а J!:l.. l
с '
I h
(сечение с !\:ОН ус()м (5».
bh==b с J
МЫ ВИДИМ, что
(8)
а'; < ah < ah. Ь'; < b h < b h 8
Эro значит, что в каждой плоскости z==h ЭЛЛИПС J явпяющийся
ЭЛЛИПСОИДЫ И rИПЕРБОЛОИДЫ
207
сечение?vI этой плоскости с конусом (5). лежит между эллипсами,
ЯВЛЯЮЩИМИСЯ сечениями той же плоскости с rиперболоидами (2)
и (3): общий асимптотический конус обоих rиперболоидов располо-
жен «между» обоими этими rипер60лоидами, как показывает
рис. 115.
Далее, имеем
, " (
1" h 2 ... 1" h 2 ) 2
ah
ah
а V с2 + 1
JI с2 ......... 1 == y h 2 y h2 '
+1 +
1
с 2 с 2
Т. е. выражение, стремящееся к нулю при I h 1--+ 00. Итак, при
I h I
со И
lеем ah
a'h ---+ о И (аналоrично) b'L
b'h
о и подавно
ah
ah
О, b h
b h ---+ О. С.педова-
те.пьно, три эллипса, являющиеся
сечениями плоскости z::::: h с rипер-
балоидами (2), (3) и ИХ асимпто-
тическим конусом (5), имея об-
щие направления осей и общий
центр. неоrраниченно сближаются.
Можно сказать, что при
121.-+ 00 оба rиперболоида (2) и
(3) неоrраниченно сближаются со
своим оБЩИМ асимптотическим ко-
нусом.
Определение. Прямая, все-
ми своими точками лежащая на
данной поверхности, называется
пря.молuн.еЙIl0Й образующей этой
поверхности.
В g 6 этой r лавы мы пока-
}Кем, что у однополостноrо rипер-
болоида имеются прямолинейные
образующие.
Сейчас мы док:з>кем, что у ДВУПО.J10стноrо rиперболоида вещест...
венных прямолинейных образующих нет. В самом деле, предпо
.ложим, что вещественная прямая d является прямолинейной обра-
зующеЙ rилерболоида (3). Прямая d не может пересекаться с пло-
скостью Оху (или лежать в ней), так как плоскость Оху не со...
держит ни одной вещественной точки rиперболоида (3). Но прямая d
не может быть и параллельной плоскости Оху, потому ЧТО в этом
случае она содержалась бы в пересечении rилерболоида (3) с не...
которой плоскостью z == h, что невозможно, Tal( как это пересече-
нпе есть эллипс (вещественный или мнимый) и, значит, не содер"
жит никакой прямой. Утверждение доказано.
Ы видели, что начало канонической для данной поверхности
системы координат является ее центром симметрии (единственным,
!/
Рис. 115.
208 РАЗЛИЧНЫЕ виды ПООЕРХНОСТЕй BToporo ПОРЯДКА
I<aK мы докажем в rлаве УI 1 1). Поэтому Э.,1JЛИПСОИДЫ И rипербо
10HДЫ получат в r лаве V 111 общее название центральных невы-
pOJlCaeflftblX nовеРХНОСlпей onzopozo порядка (класс вырожденных
цснтральных поверхностей составят конусы BToporo порядка).
5. Параболоиды
ЭллuптuчеСКU"tt, соответственно 2uперболuческим параболоuдо..и
называется всякая поверхность, которая в некоторой (канони-
ческой для данной поверхности) прямоуrольноЙ системе координат
Ое 1 е 2 е з имеет каноническое уравнение
2 х2 у2
Z ==
+
для эллиптических параболоидов,
р q
2z ==
для rиперболических параболоидов;
р q
(1)
(2)
при этом р и q
положительные числа (<<параметры» парабо..
лондов).
Общий вид эллиптическоrо параболоида представить себе очень
леrко (рис. 116): он расположен весь по одну сторону от пло..
.z I скости Z
О, а именно в полу-
""
""
""
7t
........., пространстве. z
о; сечения
.,."....;.... ' 1 // J ' \ плоскостями Z == h, h> О, суть
, /' /
\ ,,/ , // I х 2 у2
)L
-J
L
.
кривые
+
== 2h, т. е. эл
1\ /1 I Р q
I \ /, I
\ \ //, I липсы
\ / I 1
\ / I I
\ / I / х2 у2
, \ I I
+
1 z
h. (3)
, \ ,/ 2ph 2q/1,
,
\ \ ,
)-
.....
\ ;....,......, // I ....).
\ // I / I / /
/
.f!
...J
7"
I \ // I / /.
" ,/ I ,/
" -:,ol",
/
ох
Сечения эллиптическоrо па
раболоидз (1) плоскостями у == о
и х == О суть соответственно па..
раболы
х 2
2pz,
у==о
(4)
и
Рис. 116. у2 == 2qz, х == О (5)
2лавные параболы параболоида (1); при этом параболу (4)
условно назовем неподвuжноu, а параболу (5)
подвижной.
Сечение эллиптическоrо параболоида (1) плоскостью z == О есть
пара l\IНИМЫХ сопряженных прямых с единственной вещественной
точкой О (<<вершина параболоида»).
Все эллипсы (3), являющиеся «rОРИЗ0нтальными» сечениями
эллиптическоrо параболоида (1), подобны между собой
они имеют
ПАРАБОЛОИДЫ
209
ОДНО И ТО же отношенпе полуосей: Y2qh == .. / q . и ОДИН и тот же
Y2ph JI р
эксцентриситет. В частности, если р == q, то все эти ЭЛll1ИПСЫ суть
окружности радиусов V 2ph ; параболоид в этом случае есть пара-
болоид враu(ения: он получается враlцением параболы х 2 === 2pz
(раСПОЛQ}кенной в плоскости у == О) BOKpyr ее оси (рис. 117).
Эллиптический параболоид веrцественных прямолинейных обра
эующих не имеет. В ca
OM деле, прямая d, паралле.пьная пло-
скости Оху, лежит в некото-
рой плоскости z === h, следова-
тельно, все ее точки пересече-
ния с параболоидом (1) при..
надлежат эллипсу, по кото-
рому плоскость z == h пересе..
кает параболоид (значит, у
нее не БО
J}ее двух обlЦИХ
точек с параболоидом (1).
Если }и
е прямая d не па-
ра.плельна плоскости Оху, то
целая ее полупрямая лежит
в полупространстве z < О, не
содержащем ни одной ТОЧКИ
параболоида (1).
Итак, никаl{ая прямая не
может быть образующей па-
раболоида (1).
Можно дать следующее Рис. 117.
очень Har лядное построение
эллиптическоrо параболоида посредством СКОЛЬ)I{ения одной па-
раболы ВДОЛЬ друrой (система координат все время предполаrается
прямоуrольной).
Возьмем сечение параболоида (1) плоскостыо х==х о (рис. 118);
получим в этой плоскости, снабженной (прямоуrольной) системой
координат Оое 2 е з . rде 00 == (Х о , О, О), кривую, уравнение которой
бу дет
у2 х2
=== 2z
х == ХО
q р'
или
у2 == 2q (z
20), х == Хо, (6)
rде
х 2 (7)
Z
"
о
2р ·
Перейдем в плоскости х === хо от системы координат Оое 2 е з к си..
стеме координат О'е 2 ез, rде О' == (х о , О, zo) есть точка пересечения
210 РАЗЛИЧНЫЕ виды ПОDЕРХНОСТЕй BToporo ПОРЯДКА
плоскости х == ХО с неподвижной параболой
х 2
2pz, У == О. (4)
Перенеся начало !{оординат системы Оое 2 ез в точку О', мы произ-
ве
lJИ преобразование координат
, ' +
у ;:::;:: у , z == z 20,
В результате KOToporo уравнение кривой (6) получило вид
,2 2 '
у == pz, х === Ха; (8)
кривая (6) есть та же «подвижная» парабола, но перенесеннзя
пара
lле.пьно себе в плоскость Х == Хо, перенос этот можем осущест-
вить TaK t что вершина подви}кной параболы скользит по непо-
дви)кноЙ параболе из точки О в точку О', а сама парабола при
Рис. 118.
ЭТОl\'1 перемещается, как твердое те,,'! О, оставаясь все время в пло.
скости, парал.пельноЙ плоскости Oyz. Этот результат мы можем
сформулировать так:
Эллuптический параболоид (заданный уравнением (1» есть 11
верхность, описываемая при движении одной (<<подвижной») пара-
болы (5) вдоль друzой, неподвuжной (4), так, что вершина по-
двuжной параболы СКОЛЬЗUfп по неподвuжной, а плоскость u ось
подвижной параболы остаются все время параллеЛЬНblМU са.л1,UМ себе,
причем nредполazается, что обе параболы (nодвuжная u неnодвuж-
н'QЯ) обращены вО2нутостью в одну и ту же cnzopOHY (а именно
в положительную сторону оси z).
ПАРАБОЛОИДЫ
21 t
АналоrичныЙ способ построения применим и к rиперболиче-
скому параболоиду (рис. 119), поверхности, нэr лядное предстэв..
ление о которой при первом знакомстве с ней обычно требует от
учащеrося HeKOToporo небольшоrо усилия.
Сеченияыи rиперболическоrо параболоида (2) с плоскостями
у == о ИХ:;:: О CHJBa являются две «rа-'1звные» параболы:
неПОДВIпкная парабола
х 2 == 2pz, у == О (4)
и подвижная
у2 ==
2qz,
x
o,
(9)
обраlценные теперь воrнутостью в противополо)кные стороны: не..
подвижная
«вверх» (Т. е. в ПОЛОiките,,'1ЬНОМ напраВJlении о
и z),
8 подвижная
({ВНИЗ» (в
отрицательном направле.
нии оси z). Сечение плос..
костью х == ХО имеет в си-
стеме координат Оое
ез (rде
00 == (хо, О, О) уравнение
у2 X
q ==
2z + р
ИЛИ
у2 ==
2q (z
zo), }
(10)
х == хо,
rде
х 2
Z
O
о
2р ,
(7)
)..Z
о)
z
или, наконец, после пере..
несения начала координат
в точку О' == (хо, О, zo)
(лежащую на параболе х 2 ==
;::: 2pz, У == О), уравнение
,2 2' }
у ==
qz, ( 11 )
х == Хо.
Последнее уравнение пока..
зывает, что кривая (10) б)
есть та же подвижная па-
рабола (9), только сдвину- Рис. 119.
тая па раллельно себе по..
средством скольжения ее вершины ВДОЛЬ неподвижной параболы из
точки О в точку О'. Отсюда следует, что euперболuческий пара..
6оlЮuд (задсш1tый 8 прямоуzолыюй системе координат уравнением
1/
212 РАЗЛИЧНЫЕ ВИДЫ ПОВЕРХНОСТЕй Broporo порядКА
(2) есть поверхность, описываемая подвижной параболой у2 =::
2qz,
х == О при ее деи"сении вдоль неподвижной параБО/lbl (4) так} что
eeplUllHa подвижной параболы. скользит по неподвuжной nара60Ае,
а плоскость u ось подвижной параболы остаются все время парал-
леЛЫ-lblJrlи себе самим, при ,том 06е параБОАЫ 8О2нутостью все
ере.МЯ 06раtцеНbl в противоположные стороны: неподвuжная
еоену-
mостью «вверх», т. е. е noложu.
тельном направлении оси z, а под-
вижная
«ВНИЗ».
ИЗ 9Toro построения ВИДНО,
что rиперболический параболоид
3; имеет вид седла.
Сечение rиперболическоrо па-
раболоида плоскостью % == О есть
пара (вещественных) прямых
(рис. 120)
(Vp + ;J(Vp
fq )==O
j.Z
Рис. 120.
(f:ВЛЛЮЩИХСЯ парой образующих rипербо.пическоrо параболоида).
Сечение плоскостью z === h rF О есть rипербола, уравнение кото-
рой есть (в системе координат Ohele2t rде Oh
ТОЧI<а пересечения
оси z с плоскостью z == h, а векторы е 1 , е 2 те же, что и в исход-
ной системе Ое 1 е 2 е з )
х2 у2
2ph ..... 2qh == 1, z == '7,.
При 11 > О фокальная ось этой rиперболы направлена по вектору
{l, О, О}, Т. е. параЛ.:1е.пьно оси абсцисс, а при }l<О
параCl1"
лсльно оси ординат, так что проекции на ПЛОСI<ОСТЬ Оху rипербол,
по.лучающихся в сечении параболоида (2) плоскостями
z ;:: h и z ==
h,
ЯВЛЯIОТСЯ сопряженными rиперболами в ПЛОСКОСТiI Оху.
При ! h !
00 эти r иперб олы и меют неоrраПИЧСПIIО возрастаю-
щие полуоси у 2р ! h I и V2q 1/1:, отношение KOTOphIX постоянно
И равно V :
, так что все rиперБОJlЫ, являющпеся rОрl!ЗОlJта.1IЬ
НЫ
IИ сеченпями rиперболическоrо параболоида, подобны между
собоЙ.
6. Прямолинейные образующие
Нас интересуют в этом параrрафе лишь вещественные прямо..
линеЙные образующие только что рассмотренных поверхностей. Мы
видели, что эллипсоиды, двуполостные rиперболоиды и эллипти-
ПРЯМОЛИНЕYlНЫЕ ОБРАЗУЮЩИЕ
213
ческие параболоиды их не имеют вовсе. Докажем, что через каж-
дую точку однополостноrо rиперболоида и rиперболическоrо пара-
болоида ПРОХОДЯТ (по крайней мере) две (различные) вещественные
прямолинейные образующие.
1. Прямолинейные образующие однополостноrо rиперБОJlоида.
Пусть однополостный rиперболоид задан своим каноническим
уравнением
1,2 у2 Z2
а2 + Ь 2 ....... с 2 == 1.
Перепишем это уравнение в виде
х 2 Z
у2
;:::: 1
а 2 с?, Ь 2
(1)
( }')
или
(= + :)( =
:) == ( 1 + 0 (1
). (2)
Рассмотрим теперь пару вещественных чисел а,
, не равных одно-
вреыенно нулю, и для каждой такой пары напишем систему
уравнений
а( : + :) ==
(l+
). j
( :
)==a(l
: ).
в частности, при (Х * О,
о получаем
!... + !..==О )
а с '
1
==O
ь '
(3)
(4)
а при а == о,
:f= О
1 +
== о, j
х z
== о.
а с
(5)
Для каждой пары чисел а,
наши уравнения определяют пару
плоскостей, как леrко видеть, не параллельных (в широком смысле
слова) И, следовательно, пересекающихся по прямой. Прямая эта
uеЛИI<ОМ лежит на rиперболоиде (1). В самом деле, каждая ее
точка М == (х, у, z) удовлетворяет обоим уравнениям (3), а следо-
вательно, уравнению, полученному почленным перемножением уран..
нений (3), И, значит, уравнению (1). Случай, коrда один из MHO
жителей сх.,
равен нулю, исключения не представляет, так как
ТОЧI<а М == (х ) у, Z), удовлетворяющая системе уравнений (4) или
(5), удовлетворяет и уравнению (1).
214 РАЗЛИЧНЫЕ виды ПОnЕРХНОСТЕП BToporo ПОРЯДКА
Итак, мы получили семейство прямолинейных образующих
rиперболоида (1) (рис. 121). СемеЙство это назовем семейством 1;
оно, очевидно, зависит от одноrо параметра
и ==
: а.
Докажем, что через каждую точку Мо == (х о , Уо, 20) rиперболоида (1)
проходит одна
единственная прямая семеЙСТЕа 1.
В самом де,,'IС, мы ищем прямую (3), проходящую через точку
Мо === (Ха, Уа, Zo) и у дов.петворяющую уравнению (1), так что для
t z опреде..1ения отношения р: ct имеем
ураппения (3), которые (после за-
мены х, у, z на Ха, Уа, Zo) MorYT
быть записаны в виде следующих
пропорций:
р : а == (
+
) : ( 1 +
) I (311
: а == ( 1
) : (
.
). (32)
причем выполнено тождество
(
+
o ): (1 + У; ) ==
== (1
) : (
%; ). (20)
получающееся, если п одс та вить
в (1) координаты х == Ха, У == Уа,
z == Zo точки "'10. В силу тожде..
ства (20) мы можем для определе-
ния отношения
: а воспользо-
ваться любым из уравнений (31)'
Рис. 121. (32). Первое из них делается
неопределеННЫI\'I, лишь если одно"
временно 1 + У Ь О == О и ХО + Zo == о; НО в этом случае мы можем
а с
воспользоваться уравнением (32)' так как при 1 +!ff == о ВО вся..
ком с.пучае 1.......
=1= О и, значит, отношение
: а определится из
(32). Итак, если задана точка 1\.10 == (хо , Уа, 20)' то однозначно нахо-
дится отношение р: а, определяющее прямую семейства 1, прохо-
дящую через точку Мо.
Отсюда следует, что никакие две ПРЯМЬfе семейства 1 не пере..
секаются (так как если бы они пересекались 8 некQТОРОЙ точке Аl н
то эта точка была бы точкой rиперболоидз (1), через которую
проходят две прямые семейства 1, а такой точки, по только что
ДОl{азанному, не СУlцествует).
ПРЯМОJ1ИНЕАНЫЕ ОБРАЗУЮЩИЕ
215
Леrко проверить, что среди прямых семейства 1 нет двух па
ралле.пьных.
Ана"ryоrично уравнениям (3) можно было бы для ЛIобой пары
чисел а',
', не равных OДHOBpe
eHHO НУЛЮ, написать систему
уравнений
а' (
+ !..., ==
' ( 1
) J
\ а с / \ Ь' (3')
' (
\ == а' ( 1 + .!L )
\а с) \ Ь t
определяющую ПрЯ
.IУЮ, лежащую на rиперболоиде (1): каждая
точка Л1 == (х, Yt Z)t у ДОВ
ТIетворяющая двум уравнениям (3'), у дов"
летворяет и уравнеНИIО, ПОt7Iученному от почленноrо перемноже..
ния этих уравнен
й, И, значит, удовлетворяет уравнению (1).
Итак, уравнения (3') также определяют семейство nрямоли
нейных образующих ОДНОПО,,10стноrо rиперболоида (1), зависящее
от одноrо параметра v == В' : а'; это семейство мы назовем ceMetlcrп..
вам 11 (рис. 121).
Совершенно так же, как выше, мы убеждаемся в том, что через
ка)l{ДУЮ точку /',t1 == (х, у, z) rиперболоида (1) проходит одна..един-
ственная образуюrцая семейства 11.
Наконец, совместное рассмотрение уравнений (3) и (3') (для
данных р: (J., == u и
/: а,' === v) позволяет установить, что каждая
образующая семейства 1 пересекается с каждой обраЗУlощей се..
мейства 11 (или параллельна ей в узком смысле слова). Читателю
пред.паrается (в виде задачи) провести относящиеся сюда paccy
ждения.
2. Прямолинейные образующие rиперболическоrо параболоида.
Начнем с чисто rеО:\1етрическоrо рассмотрения вопроса. Пусть дан
парабо
10ИД
х2 у2
2z==
р q .
Рассмотрим аффинное преобразование
, х , у
х == ур ' у == yq '
Тоrда уравнение параболоида при
ет вид
2z' == х,2
y'Z .
Рассматриваем сечения параболоида (7) плоскостями
у' :=: х' + с, (8)
у' :=: ........ х' + с, (9)
параЛ"YJедьными плоскостям у' == + х'. Подставляя (8) в (7), ВИДИ
I,
что пересечение параболоида (7) с плоскостью (8) есть прямая
2z' ==
2сх' ....... с 2 , у' == х' + с. (10)
(6)
z' == z.
(7)
216 РАЗЛИЧНЫЕ виды ПОВЕРХНОСТЕй BTOPOrO ПОРЯДКА
Аналоrично. пересечением параболоида (7) с плоскостью (9)
есть прямая
2z' :::: + 2сх'
с 2 , у' == ......... х' + с.
(11 )
Коrда с пробеrает все значения от
со до + 00, плоскость (8)
(так же как и плоскость (9» пройдет через все точки парабо-
JIоида, который, таки
образом. оказывается покрытым двумя
семействами прямых 1 и 11, определяемыми уравнениями (10) и
(11) (рис. 122). Через каждую точку Л1 параболоида (7) проходит
единственная плоскость вида (8) и единственная плоскость вида
Рис. 122.
(9), а знаЧИТ t и единственная прямолинейная образующая каж...
доrо из семейств 1 и 11. При этом все образующие семейства 1
параллеtПЬНЫ плоскости у' == х', а все образующие семейства 11
параллельны плоскости у' ==
х'.
Можно было бы получить тот же результат и для любоrо
параболоида, заданноrо своим каноническим уравнением
6
2z ===
( )
р q
(только вместо плоскостей у' == + х' были бы рассмотрены плоско
сти .;. р + .; q == о ) .
Прямолинейные образующие rиперболическоrо параболоида
MorYT быть аналитически найдены способом разложения на MHO
жители, аналоrичным тому, который мы применили в случае
однополостноrо rиперболоида. Именно, перепишем каноническое
уравнение
х' у2
2z==
р q
(6)
ПРЯМОЛИIJЕйНЫЕ ОВРЛЗУIОЩИЕ
217
rиперболическоrо параболоида в виде
(; р + у q) (ур
Vq) == 2z
(12)
и рассмотрим для каждой пары чисе.П а,
, не равных нулю
одновременно, уравнения двух плоскостей:
а (ур + у q )==2
Z, I
( ур
Vq )==a.
Эти плоскости пересекаются по прямой, целиком лежащей на
параболоиде (6). Прямые (13), каждая из которых определена
отношением
: а, образуют одно семейство прямолинейных обра..
зующих параболоида. Второе семейство получим, если рассмотрим
(ДЛЯ каждой пары чисел а',
, не равных нулю одновременно)
систему уравнений
(13)
a' (;p
;q )==2
'Z, }
,( ;p + Vq )==a'.
Снова доказываем, что через каждую точку rиперболическоrо
параболоида (6) проходит по одной образующей каждоrо семей..
ства, что две образующие, принадлежащие к разным семействам,
пересекаются, а принадлежащие к одному и тому же семейству
всеrда скрещиваются.
Наконец, очевидно, что образующие семейства 1, определяемоrо
уравнениями (13), параллельны плоскости
(13')
х у О
Ур
yq === ,
а образующие семейства 11, определяемоrо уравнениями (13'),
параллельны плоскости
х у
у р + Jf q == о.
r л А В А \ТПI
ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТЕЙ BTOPOrO ПОРЯДКА. I
1
PaHf и детерминант малой и большой матрицы
u
мноrочлена втором степени
РассмаТрИDаем общее уравнение поверхности BToporo ПОрЯДI{3
в произвольной аффинной системе координат Oxyz:
F (х, у, z) == a 11 x 2 + 2а 12 ху + а 2 2у2 + 2а 1з хz + 2а 2з уz +
+ аз з z2 + 2a 1 x + 2а 2 у + 2а з z + а о == о. ( 1)
Как всеrдз, полаrаем
ер (х, у, z) == a 11 x 2 + 2а 12 ху + a2zy2 + 2а1зхz + 2а 2з уz + а зз z 2 . (2)
ВВОДИМ еще CJIедующие обозначения:
I ан Q12 а13 йl
А
021 а22 а23 02
F......... ,
аЗl 032 азэ аз
аl а2 аз ао
' 1 аll аи аlЗ
А, == I
1 а22 а23.
IJ аз! аЗ2 0зз
Матрицу Ар называем большой .матрицей уравнения (1), матрицу
Aq>
"иалой MaтpUl!etl. Ранrи этих матриц называем соответственно
БОЛblutlА-t и малым раНсОА! поверхности, задаваемой уравнением (1),
и обознзчае:\1 их соответственно через R и (. l\\bI сейчас увидим,
что эти рЗНfИ не зависят от выбора системы координат, в кото..
рой задается уравнение поверхности. Детерминанты матриц A F и
А<р обозначаются соответственно через
и б.
l\1bI знаем, что при сдвиrе начала координат малая матрица,
а значит, и ее детерминант не меняются.
При .пинейном однородном преобразовании
' + " ' )
х == С 11 Х С 12 У I С 1З Z ,
' + ' + '
у == С 21 Х С 2 2У C 23 Z ,
' + ' + '
z == С З1 Х С з2 У СззZ ,
С11 С12 СlЗ
С21 С22 С 2 Э == С =1= О,
С31 СЭ2 СЗ3
(3)
paHr , матрицы AqJ не меняется, а детерминант б (как дискрими..
нант квадратичноЙ формы <р (х, у, z» умножается на с 2 .
PAHr и ДЕТЕРМИНАНТ МАЛОй П БОЛЬШОй МАТРИЦЫ 219
Так как всякое преобразование координат сводится к сдвиrу
начала координат и к однородному преобразованию вида (3), то
при переходе от системы координат Oxyz к произвольной новоЙ
О , , , , А
системе координат х у z paHr r маТРИЦbl ер не меняется, а ее
детерминант б умножается на квадрат детерминанта преобра-
зования.
Докажем аналоrичное утверждение для большоrо paHra R и
детерминанта Д.
Возьмем общие формулы преобразования координат:
' I ' + ' I d )
х
.- C 11 X
I
C 12 Y C 13 Z Т 1,
, I ' + ' I d
У == C 21 X '
C 2 2!J С 2з Z I 2'
' + ' + 'L d
z == Сз1Х С з2 У СззZ
I 3'
I С11 С12 Cl3
I С,Н С22 С21 == С * о.
СЗ1 С 32 СЗЗ
(4)
Наряду с мноrочленом F (Х, у, z) рассмотрим квадратичную форму
Ф(х, у, z, t)==аl1х2+2аl?ху+а22у2+2аlзхz+2а2ЗУZ+
+ а зз z 2 + 2а 1 х' + 2a2l/t + 2a a zt + a o t 2
и преобразование
х == C 11 X' +с 12 у' +С1зZ' +d 1 t',
у==с 21 х' +С 2 2У' +С 2 эZ' + d 2 t',
z == с з1 х' + c:nu' + Ca.,z' + dst',
t === t' .
Тоrда Ар есть матрица формы Ф (х, у, z, t), а L1
ее дискрими-
нант. При преобразовании (4') paHr R формы Ф остается неиз..
менным, а ее дискриминант умножается на квадрат детерминанта
преобраЗQвания (4'), Т. е. на
(4')
Са С12 С13 d 1 Са С12 С1З
С21 С22 С2З d 2
d з
С21 С22 С23
СЗl СЗ2 СЗ3 СЭ! СЗ2 Сзз
О О О 1
(5)
Мы доказали следующее предложение:
О с н о в н а я .п е ]':1 м а. П ра преобразоваНllа координ-аln (4) раН2а
R и r мат.риц Ар u Ац> остаются неизменными, а их детерми"
нанты Д u б умножаются на квадрат деmер.минанmа преобразо-
ванuя (4) и, следовательно, сохраняют свой знак.
3 а м е ч а н и е 1. Если преобразование (4) есть сдвиr начала
координат, то С 11 === С 22 == С
З == 1, а C 12 == Cl
== С 21 == С 23 == С З1 ==
== CO
== 01 так что детерминант (5) равен 1. Поэтому при переносе
начала координат не только детерминант 6, но и детерминант d
сстаются неизмен ными.
3 а 1\1 е ч а н и е 2. Так как детерминант б есть детерминант
TpeTbero порядка, то при умножении всех ero элементов на
1
220 ОБЩАЯ ТЕОРИЯ пав ErXHOCTEA BToPoro ПОРЯДКА. r
знак б меняется на обратный. Зато знак детерминанта
не меня..
ется при умножении ero элементов (т. е. всех коэффициентов
уравнения (1» на ....... 1, значит, и на любой вообще множитель
Л=t=О.
2. Пересечение поверхности BToporo порядка с плоскостью
Пусть даны поверхность BToporo порядка и плоскость. Пе'..
рейдем к такой системе координат Oxyz, в которой данная лло..
скость была бы ПЛОСКОСТЬЮ Оху, т. е. имела бы уравнение
z == о.
Запишем в этой системе координат уравнение нашей поверх-
ности:
F (х, у, z) == a 11 х 2 + 2а12ХУ + a 2 2U 2 + 2а 1з хz + 2а 2з уz +
+ йззz2 + 2а 1 х + 2
y + 2а з z + ао :=: О, (1)
и будем решать ero совместно с уравнением
z==O. (2)
Получим уравнение
Р(х, y)==al1x2+2a12xy+a22Y2+2alx+2
y+ao==0. (3)
Этому уравнению и удовлетворяют точки, одновременно лежащие
на поверхности (1) и на плоскости (2). Мы видим, что, вообще
rоворя (т. е. за исключением особоrо случая a 11 === а 12 == а 22 ::::: О,
который мы сейчас отдельно разберем), уравнение (3) есть урав-
нение второй степени, определяющее HeKoTopYIO (лежащую в пло...
скости z == О) КРИВУЮ BToporo порядка, которая и является пере-
сечением данной поверхности BToporo порядка с данной плоскостыо.
Переходим к случаю
а 11 == а 12 == й22 == о.
Предположим, что по крайней мере один из коэффициентов йl, а 2
отличен от нуля. В этом случае пересечение поверхности (1)
с плоскостью z == О есть прямая
2а 1 х+2а 2 у+а о ==0.
Пусть теперь не только a 11 == a 12 == й22 == О, но II
а 1 == а 2 === о.
Если при этом и ао
О, то уравнение поверхности (1) имеет вид
z (2а 1з х + 2а 2з у + йззZ + 2а з ) == О
поверхность распадается на пару плоскостей:
z == о, 2а1зх + 2а 2з у + аззz + 2аз == О,
ПЕРЕСЕЧЕНИЕ ПОВЕРХНОСТИ С ПЛОС
ОСТЬЮ
221
ОДНОЙ ИЗ которых является данная плоскость z == о. Наконец,
последняя возможность состоит в ТОМ, что
011 == й12 == а 22 == йl == а 2 == о, но й о =1= о.
Тоrда уравнение (3) ПРИВОДИТ к противоречию: 00 == о (Tor-
да как дано, что йо:;=О), означающему, что нет ни ОДНОЙ ТQЧ..
КН (ни вещественной, ни мнимой), которая лежала бы OДHOBpe
менно на данной плоскости и на данной поверхности BToporo
порядка.
11так, доказана
т е о р е м а 1. П ри nересеченuu поверхности втОрО20 порядка
с плоскостью Mozym nредставляmься лишь следующие случаи:
(а) поверхность пересекается с плоскостью по кривой вmоросо
порядка;
(б) поверхность пересекается с nЛОСКОСlnЫО по (вещественной)
nрЯ.
tОЙ линии;
(в) поверхность распадается на пару плоскостей, одной из
КОПZОрЫХ является данная плоскость (входЯlцая, тOKUAl образом,
в сос/пав рассматриваемой пoвepXHocrпu);
(r) поверхность не имеет с плоскостью на одной общеЙ точки
(ни веt.цеспl('енной, на мнимой) 1).
3 а м е ч а н и е. В случае (а) кривоЙ BToporo порядка, являю..
:цеЙся пересечение
1 данной поверхности BToporo порядка с данной
плоскостью, может быть
(а 1 ) нераспадающаяся действительная или мнимая кривая, Т. е.
эллипс (действительный или мнимый), rипербола или парабола;
(а 2 ) пара пересекающихся вещественных прямых;
(аз) пара мнимых сопряженных прямых. имеющих единствен-
ПУIО вещественную (общую) точку, которая и является единствен-
ной вещественной точкой, лежащей одновременно на данной поверх..
ности BToporo порядка и в данной плоскости;
1) Эта Teope
la с указанными в вей четырьмя различными случаями пред-
ставляется довольно уродливой; в rлаве Х мы перейдем от обыкновенноrо
(KOMn
'
KCHoro) пространства К проектнвному о:ространству, ПОJlучаемому из
оБЫКIlовенноrо пространства пополнением ero бесконечным множеством таи:
называемых несобственных (или бесконечно удаленных) точек, образующих
в своей совокупности нссобственную (И.'lИ бесконечно удаленную) плоскость
(с J1
}кащими в ней несобствеинЬ1ЫИ, впи бесконечно удаJlенны
и прямыми).
Если рассматривать нашу поверхность в проективном пространстве, то случай
(6) будет состоять в том, что лересеченые поверхности
ПЛОСКОСТЬЮ является
кривой BToporo порядка, распавwейся на пару прямых, одна из которых лежит
D нссобс1Dенной плоскости (<<ушла в бесконечносты), а случай (r)...... в том, что
пересечением является пара совпадающих между собой несобственных прямых.
Таким образом, в проективпом пространстве возможны лишь два с..'lучая: либо
пересечение ПОDСрХНОСТИ BToporo порядка с П.поскостыо есть кривая DToporo
Порядка, либо поверхность распадается на лару плоскостеЙ, одноЙ из которых
является данная плоскость.
222 ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТЕй BTOPOrO ПОРЯДКА. 1
(34) пара параллельных D собственном смысле вещественных
или мнимых сопря){{енных пря!...IЫХ;
(а 5 ) пара совпаД3!ОЩIIХ вещественных лряыых.
ZA
Zt
I
z
с)
Рис. 123..
Как мы увидим ниже, ВОЗМО)l{НОСТИ ( а 2 ), (аз), (35) ха рактери..
ЭУЮТ различные С"ryучаи касания данной поверхности BTOPOI'O
порядка с плоскостью (рис. 123).
3! Пересечение поверхности BToporo порядка
с прямой. Асимптотические направления.
Касательные прямые и касатеv1ьная П,,'10СКОСТЬ.
Особые точки поверхности BToporo порядка
То, что rоворилось в r.паве УI
екой кривой с прямой, можно было
очевидными изменениями
повторить
ческой поверхности
опересечении алrебраиче..
бы
с несущественными и
и опересечении алrебран"
F (х, у, z) == О
(lA)
КАСАТЕЛЬНЫЕ ПРЯМЫВ И КАСАТЕЛЬНАЯ плоскость 223
с прямой
х == Ха + at, )
у === Уо + pt,
Z == Zo + "lt.
Как всеrда, мы будем предлолаrать, что и поверхность (1 А) и
прямая (2) являются вещественными; в соответствии с ЭТИ
f все
коэффициенты Б уравнениях (1 А) и (2) всеrда предполаrDЮТСЯ
вещественными.
Мы оrраничимся случаем, }(оrда данная поверхность (l А )
вто..
[-.oro порядка, Т. с. коrда ее уравнение ест[)
F ,Х, у, z) == a 11 x 2 + 2al
Y + а 22у 2 + 2а 1з хz + 2а 2э уz +
а
зz2+2аlХ1
2а2у+2азz+ао
О. (1)
(2)
Старшие члены мноrочлена F (х, у, z) образуют квадратичную
форму
fP(x, у, 2)==аllх2+2а12ху+а22у2+2аlзхz+2
зУz+а.JЗz2. (3)
Мы будем пользоваться еще следующими обозначениями, которых
будем постоянно придерживаться в этой rлаве 1 ):
Fk(x, у, z)==аklх+аk2У+аkзz+аk, k==l, 2,3. (4)
Для нахождения точек пересечения поверхности (Х) с прямой (2)
подставим (2) в (1); после приведения подобных членов получим
уравнение второй степени относительно [, а именно:
At 2 + 2В! + с == О,
(5)
r де, как леrко проверить,
А == ер (а,
, ,\,) == аl1 а 2 + 2a12a
+ a22
2 + 2а 1з ау +
+ 2а2з
l'+аззv2,
В == Рl (Ха, Уо, zo) а + Р 2 (Х о , Уо, zo)
+ F3 (Ха, Уо, zo) у,
С == F (х о , Уа, Zo).
Уравнение (5) есть квадратное уравнение, за исключением Toro
С
1учая, Kor да
(6)
<р (а,
, ,,) == о.
(7)
дР дР дР
;1) Читатель, знающий, что такое частные производные
д ,............... д '
д
х у z
ФУНКЦИИ F (х. у, z) от трех пере
1СННЫХ, сразу заметит, что Р 1 (Х, у, z) ===
1 oF 1 д F 1 дР
'2 дх ' F
(xl у, Z)===
2
ду ,Fэ(х, у, Z)==
2 az ·
224 ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТЕй BToporo ПОРЯДКА. r
BeKпlOp U == {ct,
, у}, удовлетворяющий условию (7), называется
вектОРОА'" асимпmотuчеСКО20 направления или просто асимптоти-
ческим вектором поверхности (1); прямая, наnршзляющий вектор
КОfпорой является асимптотическим, наЗbl8ается прямой acUJ;tптo-
mичеСКО20 направления для данной поверхности.
3 а м е ч а н и е. Повторяя в точности рассуждения
3 rлавы
VI, убеждаемся в том, что вопрос о том, является ли данное
направление асимптотическим или нет ДЛЯ данной поверхности
BToporo порядка, зависит то
пько от этой поверхности и от данноrо
направления и не зависит от системы координат, в которой задано
уравнение этой поверхности.
Если прямая (2) имеет неасимптотичеСI{ое направление, то
уравнение (5) квадратное и имеет два корня t 1 , t 2
веществен-
ные различные, или мнимые сопряженные, или совпадающие
(вещественные). Подставляя эти значения /1 и t 2 В равенства (2),
получим две точки пересечения (вещественные или мнимые, быть
может, совпадающие) прямой (2) и поверхности (1). Итак:
Если прямая (2) имеет неасuмnтотическое направление, то
она пересекает поверхность (1) в двух точках
различных (дейст-
вительных или мнимых сопряженных) или совnада/ощuх (действи-
тельных), nолучаЮU{UХСЯ J если подставить в (2) любой из двух
корНей t
11 или t == t 2 квадратНО20 уравнения (5).
Если обе точки пересечения прямой (2) с поверхностью (1)
сливаются в ОДНУJ т. е. уравнение (5) имеет совпадающие корни,
то прямая (2) называется касательной к поверхности.
В этом случае за точку Мо == (Х о , Уо, zo) прямой (2) возьмем
точку, лежащую на поверхности (эта точка и будет точкой при-
косновения прямой к поверхности). Тоrда С == F (х о ' Уо, zo)
О и
уравнение (5) принимает вид At 2 + 2Bt == О, Т. е.
t(At+2B)==O.
Один ero корень есть /1 == О, второй /2 ==
2: ; для Toro чтобы
он тоже был равен нулю, надо, чтобы было В == О, т. е.
Р 1 (х о , Уо, zo) ct + Р 2 (хо, Уо, zo) Р + Ра (Х о , уо, zo) у == о. (8)
Это и есть условие, которому должен удовлетворять направляю-
щий вектор {а,
, у} прямой (2), проходящий через точку Мо ==
== (х о , Уо' zo) поверхности (1), чтобы эта прямая была касательной
(и тоrда она будет касательной в точке Мо).
Имеется бесконечное множество прямых, проходящих через
ТОЧI{У /vl o , С направляющими векторами, удовлетворяющими усло-
вию (8), т. е. бесконечное множество касательных к поверхности
(1) в данной ее точке Мо. Пусть М ==: (х, у, z)
произвольная
точка любой из
тих прямых. Тоrда {х
ХО' у
Уо, z
Zo} есть
КАСАТЕЛЬНЫЕ ПРЯМЫЕ И КАСАТЕЛЬНАЯ плоскость 225
направляющий вектор этой прямой, и он удовлетворяет уравнению
F 1 (Ха, Уа, 20) (х
ХО) + F 2 (Хо. Уо, Zo) (у
Уо) +
+ F з (х о , Уо, zo) (z
%0) :=1 о. (9)
Итак, все точки М == (х, у, 2) всех касательных, проведенных
к поверхности (1) в точке Мо == (Х о , уо, zo), удовлетворяют уравне-
нию (9); уравнение (9)
первой степени, следовательно, это урав..
нение некоторой плоскости, проходящей через точку Мо. Плоскость
эта называется касательной плоскостью к поверхности (1) в точке
Мо: она несет на себе все прямые, касающиеся поверхности (1)
в точке М о == (х о , УО' 20). J1 равнение (9) II есть уравнение каса-
тельной плоскости к поверхности (1) в ее точке Мо==(Х о , Уо' zo).
В развернутом виде это уравнение записывается так:
(a11xO +a l 2fJo + а1зz о + а 1 ) х + (a 21 x O +
2YO +
ЗZО + а 2 ) У +
+ (а з1 х о + а з 2Уо + аззzо +а з ) 2 + (a1x O + а2Уо +llзZо +а о ) == о. (9')
Уравнение (9) может быть переписано в виде
(
)o (x
xo)+(
: )o (у
уо) +( :: )0 (z
Zo) ==0,
rде через (
: )o и т. д. обозначены значения соответствующ их
частных производных функции F (х, у, z) в точке Мо == (Х о , Уо, zo).
В этом виде в курсе анализа записывается уравнение касатель..
ной плоскости к поверхностям, значительно более общим, чем
поверхности BToporo порядка (и алrебраические поверхности
вообще ).
О с о б ы е т о ч к и п о в е р х н о с т и в т о р о r о пор я Д к 8. Воз-
никает вопрос: КО2да уравнение (9) к,асшпельН,ой nЛОС1СОсти стано-
вuпlСЯ неоnределеННblМ?
Очевидно, это происходит лишь тоrда, коrда одновременно
F k (Х о , уо, Zo) == QklXO +ak2Yo + akз z 0 + ak
О, (1 О)
причем в то же время
F (хо, уо. 20) == о.
(10)
Но
F (хо, Уо, zo) == (а 1l х о + а 12 уо + а 1з z о + а 1 ) ХО +
+ (
lXO +а 2 2Уо + а 2З z о +а 2 ) Уа + (a
lxO +а з2 уо +ЙЗзZо +йз)zо +
+аl Х О +
Yo +aazo +llo. (11)
Если выполнено (10), то тождество (11) превращается в
F (х о , Уо, 20) === a1x O + а2Уо +ilэZо +йо.
а (1 о)
в
alxO+
YO+a&Zf)+ao ==0.
(12)
226 ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТЕй BToporo ПОРЯДКА. 1
Это равенство вместе с равенствами (10) показывает, что четверка
чисел (х о , Уо, zu, 1) образует ненулевое решение системы уравне-
ний
{ akl x + ak2Y + ak3 z + ak t == О, k:=I, 2 , 3,
a1x +
y + азz + aot ;::::; о.
Значит,
ан й12 alS аl
d== а21 а22 а2З
== о. (13)
аз! аз:! йзв аз
al й2 аз ао
Поверхности вmОрО20 порядка, данные уравнением (1), коэффи-
циенты KOnlop020 удовлетворя/оm условиJО (13), называются выро..
ждающu.AtиСЯ 1 а точка Мо == (х о , Уо, zo), удовлетворяющая уравне-
ниям (10) и (10), называется особой точкой поверхности (1).
Из доказанноrо следует, что только у вырождающихся поверх..
настей MorYT быть особые точки.
Итак, только в случае вырождающейся поверхности BToporo
порядка и только в ее особой точке Мо == (X Ot Уо, 10) касательная
плоскость к поверхности (1) оказывается неолределенной. Попутно
мы доказали, что при выполнении условий (10) условия (10) и (12)
эквивалентны .между собой.
4. Асимптотические направления, конус
асимптотических направлений, прямолинейные
образующие поверхностей BToporo порядка
Пусть вектор {а.,
, 'У} есть вектор асимптотическоrо направ
ления для поверхности BToporo порядка
Р(х, у, z) == О,
т, е. пусть "(f1 (а.,
, у)::::; о. Прямая
х
Хо + at, )
y
yo+
t,
z
Zo +'\'t
имеет вектор {а.,
, ')'} своим направ.ПЯЮЩИМ BeKTopOM t Т. е. есть
прямая асимптотическоrо направления. Тоrда коэффициент А
в уравнении (5) предыдущеrо параrрафа равен НУЛIО, н само это
уравнение приобретает вид
2Bt +С == о.
(1)
(2)
(3)
Возможны следующие случаи:
1 о В =1= о; тоrда ур.авнение (3), т. е. уравненпе (5) предыдущеrо
параrрафа, есть уравнение первой степени; единственный ero
АСИМПТОТИЧЕСКИЕ НАПРАВЛЕНИЯ
227
корень определяет единственную точку пересечения поверхности
(1) с прямой (2).
20 В:=; О, С =F о; уравнение (З) противоречиво (так как при-
нимает вид С == О при С ==1= О), уравнения (1) и (2) несовместны,
прямая (2) не имеет с поверхностью (1) ни одной общей точки)
ни действительной, ни мнимой. В ЭТО!\1 случае прямая (2) назы..
вается асимптотой поверхности (1).
30 В == С:== о; уравнение (3) обращается в тождество О == О,
оно удовлетворяется при всех значениях t, все точки прямой (2)
принад.лежат поверхности (1), прямая (2) есть прямолинейная
образующая поверхности (1).
Доказана следующая
т е о р е м а 2. П РЯ.мая (2), U.меющая асимптотическое наnрав...
ленuе по оmНОLuенuю к пoaepXHocпlU (1) 8тopo
o порядка, А10жеfn
находUlпься в одном из следующих положений:
1 с Она uhtee.71 с поверхностью (1) eдuH.cmBeHHYlo t/, тozaa н.епре..
.менно вещесmвеftНУ'О общую точку.
20 Она является асимптотой поверхнос/пu (/п. е. не ИАlеет
с ней ни одной общей тОЧI(,и, ни вещественной I ни мн,и.м.ой).
30 Она является nрямолuнеuной образующей поверхности (fп. е.
Bce.Atu CBOU.Atu точками лежит на поверхности (1)).
Посмотрим теперь, каковы асимптотические направления поверх..
настей различных видов, определенных в предыдущей r лаве.
В случае эллипсоида. заданноrо своим каноническим уравне-
х2 у2 Z2
нием а 2 + 7i2 + с2 === 1, асимптотические направления {а :
: у} опре..
а 2
2 1'2
деляются из уравнения а 2 + Ь 2 + с 2 == о; все эти направления
ЯВЛЯIОТСЯ мнимыми.
Асимптотические направления однополостноrо и двуполостноrо
rиперболоидов, заданных их каноническими уравнениями
а2 + ь2 ...... с2 == 1, соответственно --- а2 ..... ь2 + с2 == 1, ( 4)
суть направления образующих их общеrо действительноrо аСИ1\1
птотическоrо конуса
х! у2 Z2
а 2 + Ь 2 ...... с2 :::= 1. (5)
Эллиптический параболоид
х2 у2
p+q==2z. р>О, q>O, (6)
1I
1eeT асимптотические направления {а:
: у}, удовлетворяющие
уравнению
а.
2
+
==0.
р q .
228 ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТЕЯ BToporo ПОРЯДКА. I
все эти направления мнимые. за исключением одноrо, а именно
направления {о: о: у}, ,,+ о, оси % канонической для данноrо
параболоида системы координат. Асимптотические направления
rиперболическоrо параболоида
х 2 11'
.........
==2z
р q ,
определяются условием
р>О, q>O,
(7)
а.'
Э
==0.
р q t
это всевозможные направления, коллинеарные какой"либо одной
(или обеим) из плоскостей
х у
JI р + Jlq ==0,
х у
Ур
JI q
o.
(8)
Все эти направления действительны.
Все прямые, являющиеся образующими асимптотическоrо конуса
(5) обоих rиперболоидов (4), суть асимптоты каждоrо из этих
rиперболоидов; любая друrая прямая асимптотическоrо направле
ния пересекает двуполостный rиперболоид
х 9 у2 Z2
...... a
ь2 + с2 == 1
в единственной точке; в случае однополостноrо rиперболоида име-
ются, кроме Toro, и прямолинейные образующие (известные Ha
'1
НЗ
6 предыдущей rлавы).
Все действительные прямые асимптотическоrо направления по
отношению к эллиптическому параболоиду (6) параллельны между
собой (они параллельны оси z) и пересекают параболоид в един
ственной точке; читатель леrко проверит это. У .9ллиптическоrо
параболоида нет ни действительных асимптот, ни (как мы уже
знаем из предыдущей rлавы) действительных прямолинейных обра
sующих.
Прямая, имеющая асимптотическое направление по отношению
к rилерболическому параболоиду (7), параллельна одной из двух
плоскостей (8); она или является ПрЯМОJlинейной образующей
(см. rл. VII,
6), или пересекает параболоид в одной точке, или,
наконец, не имеет с ним ИИ одной общей точки (является ero
асимптотой).
Асимптотические направления конуса суть направления ero
образующих. Асимптот конус не имеет. Всякая прямая, имеющая
по отношению к конусу асимптотическое направление и не явля-
ющаяся ero образующей, пересекает ero в одной точке.
Переходим к асимптотическим направлениям цилиндрических
поверхностей.
АСИМПТОТИЧЕСКИЕ НАПРАВЛЕНИЯ
229
10 Асимптотические направления эллиптическоrо цилиндра
х2 уЗ
а 2 + 12 == 1
суть направления {сх: р : у}, удовлеТВОРЯЮЩие условию
(%2
2
.
а2 + bi
О,
среди них действительным является лишь направление {о: О : у},
'v =1= О, оси z канонической системы координат.
20 Асимптотические направления rиперболическоrо цилиндра
х2 у2
==l
аЗ Ь 2
суть все направления, параллельные ОДНОЙ (или обеим) из двух
плоскостей
х у
а-+ь ==0,
х у
а
b == о.
30 Асимптотические направления параболическоrо цилиндра
у? == 2рх
суть все направления, параллельные плоскости у == о. Прямая,
имеющая асимптотическое направление по отношению к данному
цилиндру, может находиться в любом из трех положений, пре
дусмотренных теоремой 2: эта прямая может быть образующей
цилиндра, она может быть параллельной образующей и не иметь
с цилиндром ни одной общей точки, наконец (в случае rипербо-
лическоrо и параболическоrо цилиндров), она может пересекать
поверхность в единственной точке.
Асимптотические направления поверхности, распавшейся на
пару плоскостей, суть направления, параллельные одной из этих
плоскостей (или им обеим).
Если все векторы, имеющие относительно данной поверхно-
сти (1) BToporo порядка асимптотические направления, прилаrать
к какой
нибудь точке Мо, за которую удобнее Bcero брать начало
данной системы координат, то эти векторы (и ИХ концы) запол-
нят коническую поверхность с вершиной Мо; если 1\-10 == (О, О, О),
то уравнение этой поверхности есть q> (х, у, z) == о. Эта кониче-
ская поверхность называется конусом асимптотических направле-
нии данной поверхности.
Если поверхность центральная, то конус асимптотических
u u
направлении с вершинои в центре даинаи поверхности называется
просто асu.мппwmuческим конусом поверхности.
Асимптотический конус rиперболоидов известен нам уже из
rлавы VII; асимптотическим конусом эллипсоида является мнимый
конус, заданный (в канонической для данноrо эллипсоида системе
230 ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТЕЯ BToporo ПОРЯДКА. 1
КJ. у2 Z2
координат) уравнением а 2 + ь2 + с2 === о. Конус асимптотических
направлений параболоидов
хЗ у2
2z==
+
Р q
распадается в лару пересекающихся плоскостей, мнимых и сопря-
женных:
х2 у2
Р + q==O,
для эллиптическоrо параболоида, и действительных:
x2
y2 ==o
р q ,
ддя rиперболическоrо параболоида.
Асимптотический конус конической поверхности совпадает
с самой этой поверхностью. Наконец, конус асимптотических
z
!I
I
,;
; ,)
)1
1 /1
! /1
J 11
J 11
J I1
1 11
1 1:
I 1I
I
I "
..... //
.....
I '-;1..........,/ I
:;:.::;.....
-l .......... ,/
., ",--
"'"
Ja
:с
о)
d)
Рис, 124,
направлений цилиндрической поверхности есть пара плоскостей ..........
мнимых и сопряженных (пересекающихся по действительной пря--
МОЙ), если ЦИЛИНДР эллиптический; пересекающихся действите"JJЬ"
ных, если цилиндр rиперболический (рис. 124, а); совпадающих
(и действитеЛЬНЫХ)t если цилиндр параболический (рис. 124, б).
Наиболее интересными среди прямых, имеющих по отношению
I{ данной поверхности асимптотическое направление, являются
прямолинейные образукхцие этой поверхности.
Прямая (2), проходящая через точку Мо == (х о , Уо' 20) поверх..
пости (1), является образующей этой поверхности, если для нее
АСИМПТОТИЧЕСКИЕ НАПРАВЛЕНИЯ
231
выполнены условия А == О, В == О (условие С == О выполнено авто-
матически: оно означает, что точка Мо лежит на поверхности (1»)..
Первое из этих ус.повий, т. е. А == О или
<р (а, р, 1') == о, (9)
означает, что прямая (2)
HMeeT асимптотическое направление;
второе условие В == О, Т. е.
F 1 (хо, Уо, 20) CG + Р 2 (хо, Уа, Zo)
+ F з (х о , Уа, Zo) У == О, (1 О)
означает, что прямая (2) IIryе}кит в касательной плоскости к поверх-
ности (1) в ее точке Мо. Итак:
т е о р е м а 3. ПРЯМО/luнейные образуюu
uе поверхности (1), nро-
ходящие через nWЧКУ Мо этой nоверхнос/пи, суть не что иное, Ka
прямые асuмпто:пuчеСКО20 напрадленuя, про.ходящие через точку М()
и леJкаlцuе в касательной пЛОСКОСПlU к поверхности в э/поu ее точке.
3 а м е ч а н и е 1. Так как мы раССl'.fатривае
прямолинейные
образующие, проходящие через данную точку 1\10 поверхности, то
дЛЯ их нахождения нам надо только определить их направляю..
щие векторы. Но эти векторы ДОЛi1(НЫ удовдетварять условиям (10)
и (9). 11з уравнения (1 О) MO}l{HO, вообще rоворя, одну какую..
нибудь координату, например 1', выразить через две друrие
а-
Н
И подставить полученные для нее выра)кения в (9); после
этоrо квадратное уравнение (9) даст нам два значения (действи-
тельных или мнимых) Д
lIЯ отношения a:
; этим и дан способ
фактическоrо нахождения прямо.пинейных образующих. Так как
они лежат в касательной плоскости, то они и составляют ту
(распадающуюся) кривую BToporo порядка, по которой касатель-
ная плоскость в точке А10 пересекается с поверхностью (1).
Рассу>кдение это делается несостоятельным, если одно из двух
уравнений (9) и (1 О) является следствием друrоrо, в частности,
если уравнение (1 О) обращается в тождество, что имеет место,
если поверхность (1) есть I{ОПУС, а точка Мо == (хо, Уо, zo)...... er'Q
вершина; тоrда
F 1 (х о , Уо, zo) == F 2 (х о , Yo
zo) == F 3 (хо, Уо, zo) == о.
Если же поверхность распадается на пару лересекаrощихся пло..
скостей, то уравнение (9) эквивалентно двум линейным однород..
ным уравнениям, опредеv1ЯЮЩИМ двумерные векторные мноrообра..
зия, соотвеТСТВУЮULие тем Пс.1JОСКОСТЯМ, на которые распадается
поверхность (1). Если neI{TOp {а,
, у} принадлежит векторному
мноrообразию, соответствующему тоЙ П.:l0СКОСТИ, В которой ле)i{ИТ
точка (х о , Уо, zo), то у равнение (1 О) есть следствие уравнения (9).
В противном случае уравнения (9) и (10) неСОБместны.
Если поверхность нераспадающаяся и (в случае, коrда она
конус) точка -"'10 не есть вершина конуса, то все обстоИТ блаrо..
получно, в чем Чllтате,,1Ъ леrко может убедиться, переЙдя к кано-
232 ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТЕй BToporo ПОРЯДКА. I
ническим уравнениям соответствующих поверхностей. Полное
исследование случая невырождающейся поверхности дается следую-
щим предложением:
т е о ре 1\1 а 4. Касапzeльная плоскоспzь к ftеВblрождающейся пoвepx
llасти вmоросо порядка в данной ее точке Мо пересекается с этой
nоверхносmыо по паре различных nрЯМblХ. Эти nрямы,е и являются
едuнственными двумя образу/ощuмu пoeepxHocтU 1 nроходящи.мu
Jlерез точку 1\10-
Д о к а 3 а т е л ь с т в о. Возьмем систему координат, началом
которой является данная точка Мо, а плоскостью О' х' у'
каса-
тельная плоскость к нашеЙ поверхности в точке МО. Так как
начало координат ..1\10 == О' лежит на поверхности, то ее уравне-
ние в выбранной системе координат будет иметь вид
Р ' ( ' , ' ) ,,2 + 2 , , , + ' ,2 + 2 , " +
х , у, z == аl1Х анх У a
'JY а1зх z
+ 2a
aY' z' + а
зz,2 + 2a
x' + 2
y + 2a
z' == О
(свободный член равен ну,,'!ю). Уравнение касательной. плоскости
fi точке А1 == (О, О, О) имеет вид
Р; (О, О, О) х' + p
(О, О, О) у' + p
(о, о, О) z' == о.
Но эта плоскость есть плоскость z' ==:: о. Значит,
P
(O, О, 0)==0, P
(O, 0,0)==0. (11)
Так как p
(О, О, о) == a
, Р; (о, О, О) == a
, то равенства (11) озна-
чают, что a
== a
== О, так что уравнение поверхности имеет вид
F' (х', у', z') == a
lx'2+2a
2x'y' +а
2у'2+2а;зх'z' +
+ 2 , " + ' ,2 + 2 " О
a'J.3Y z азз z aa Z ==:: .
(1 ')
Решая ero совместно с уравнением z' == О, получаем для кривой
пересечения нашей поверхности с (касательной) плоскостью Z' :::::::: О
уравнение
, ,2 + 2 ' , , + ' ,2 О
анх аи х У а22У == .
(12)
Это
уравнение распадающейся кривой BToporo порядка. Если бы
эта кривая была парой совпадающих прямых, то было бы
I arl
a
H
a
2 1
О
,
t
а 22
Но Tor да
, , 11 О
ан а 12 ан
, , , О 1 , , 1
л' === a i1 QJS а sз
л
2 а 11 а , 12 == О
Ll , , , ,
......
,
а 81 а зs а,з аз a SH а 2 2
О О а' О
а
И поверхность (1)>> вопреки предположению» была бы вырождаю
щейся. Теорема 4 доказана. Из нее вытекает такое
АСИМПТОТИЧЕСКИЕ НАПРАВЛЕНИЯ
233
с л е Д с т в и е. /(аcat11EЛЬНQЯ плоскость к невырождаЮllJ,ейся пoвepx
ности вmОрО20 порядка в произвольной ее точке Мо nересекает эту
поверхность по паре различных прямых, действительных или Mн'и
.мых сопряженн'ЫХ
а именно по паре проходящих через пwчку Мо
прямолuнейных образующих данной поверхности. Эти ПРЯМЫЕ
имеют асиА1nтоmическuе для данной поверхности направления. Они
действuтельны
если noBepXHOC11lb есть одноnолосmный 2uпер60лоид
или 2иперболическuй параболоид; они являюrпcя мнимыми для д8Y
полосmноео 2uперболоuда и эллиптичеСКО20 параболоuда
а также
и для эллипсоидов.
3 а м е ч а н и е 2. Аналитическим критерием для Toro, будут ли
прямо.пинейные образующие, проходящие через неособую точку
вещественной нераспадающейся поверхности, действительными раз
личными, мнимыми сопряженными или, наконец, действительными
совпадающими, может служить знак детерминанта d: при д > о
образующие действительны, при L\ < О они мнимые, при Д === о
они совпадают.
В самом деле, из инвариантности знака детерминанта f1 MHO
rочлена второй степени с тремя переменными относительно пере
хода от одной аффинной системы координат к друrой (9 1) BЫTe
> >
кает, что если Д ==== о, то соответственно д' ==== о. Поэтому, если
< <
L\ > о, то и
A'
a '2 I a
1 a
I>o ' ан аА2 1<о
il
3 " ,и, следовательно, :: .
а 21 а 22 a
H а 2 2.
ЛИНИЯ пересечения поверхности (1') с касательной плоскостью
z' == О, определяемая уравнением (12), есть пара прямых, прохо
I а' а' I
дящих через вещественную точку О' == Мо, и так как
1 :2 < о,
а 2 1 а 22
то В этом случае линия (12) распадается на пару .вещественных
прямых.
Точно так же покажем, что если д, а следовательно, и д'
число отрицательное, то уравнение (12) определяет пару мнимых
прямых.
Предположим, наконец, что
== о И, значит, д'
о; тоrда
2 1 а' а' I I а' а' I
из равенства 11' ==
a
1
2 вытекает, что
1
2 == О, так
I а' а' I а21 а 22 а 21 а 22
как если бы :1
2 =1= о, a
== О, то уравнение (1') определяло бы
а 21 а 22
коническую поверхность с вершиной в начале координат О', Т. е.
в точке Мо, а мы предположили, что точка Мо
неособая, сле..
I а' а' I
довательно,
1
== О и уравнение (12) определяет пару слив..
a
H а а2
шихся прямых.
Существенно отметить, ЧТО вопрос о том, является ли пересе-
чение нераспадающе
ся поверхности BToporo порядка с касатель-
234 ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТЕй BTOPOro ПОРЯДI<А. 1
НОЙ плоскостью к ней в данной неособой точке парой действитель
ных (различных или совпадающих) или мнимых прямых, решается
ДЛЯ всех неособых точек поверхности одинаково; мы УВИДИМ, что
решение этоrо вопроса вполне определяется аффинным классом
данной поверхности.
rеометрическая характеристика асимптотиче
ских и неасимптотических направлений для дaH
н о й п о в е р х н о с т и в т о р о r о пор я Д к а. Совершенно так же,
как в случае кривых, мы доказываем слеДУIощее предложение,
аналоrичное теореме 1 rлавы VI (
3):
т е о р е м а 5. Пусть
F (х, у, z) == о
(1)
поверхность Bmopozo порядка, не все точки которой лежат
в одной. плоскости. Если {сх:
: ,,}
направлен'uе, неасuмптотиче
ское для данной поверхности, то существует прямая этО20 направ-
ления) содержащая ровно две различные точки поверхности (1).
Напротив, всякая прямая, имеющая асимптотическое для данной
поверхности (1) направление {а:
: у}, или целиком состоит из
точек, лежащих на поверхности (1), или же содержит не более
одной точки, лежащей на поверхности (1).
Надо доказать лишь утвеР}l{дение, касающееся неасимптоти-
ческоrо направления {а:
: ')'}. Через каilСI.УЮ точку (Х О ' Уо, Zo),
лежащую на поверхности (1), проводнм ПРЯМУIО
х == х{) + at, ) "
У == Уо +
t,
Z == Z(J + ),t
(2)
направления {а:
: у}. Требуется доказать, что не все эти пря-
мые ЯВ,,'Iяются касате,пьными I{ поверхности (1). Предположим
противное: пусть }{аждая пряыая (2) касается поверхности (1)
в соотвеТСТDующей точ[{е (хо, Уо, Zu). Тоrда имеет место равеНСТП0
В == Р 1 (хо, Уо' zo) CG + Р 2 (х о , Уо, zo)
+ Р3 (хо, Уо, zo) l' ==
== (а 11 а + a12
+ а 1з ')') Ха + (а 21 (1., + a22
+ а 2з 'V) Уо +
+ (аЗl ct + a32
+ азз')') Zo + (a1a + a2
+аз'V) == о.
Среди коэффиuиентов аl1fX+а12
+аlЗУ' а21а+а22
+а2З1',
аЗICG +a32
+аз з 1' при Ха, Уо, Zo по крайней мере один отличен
от нуля; в противном случае мы бы имели одновременно
а/на + ak2
+ аkЗ1' == О, k == 1, 2, З.
Умножая эти равенства соответственно на а,
, " и складывая,
мы бы получили
a 11 (X.2 + 2a12a
+
2 + 2а1зау + 2а 2з fly + аэзу2 == О,
ЦЕНТР ПОВЕРХНОСТИ BToporo ПОРЯДКА
235
т. е. направление {а:
: у} было бы, вопреки нашим предполо-
}l{ениям, асимптотическим.
ИтаК t равенство
(alla+a12
+а 1з у)х о + (anа+а22
+
y)yo +
+ (аз1а + азJS +аззv) Zo +(ala+
+а з 1')-== о (13)
представляет собой уравнение первой степени относительно ХО,
УО) ZOt которому удовлетворяют все точки хо, Уо, Zo, лежащие на
поверхности (1). Все эти точки лежат, таким образом, на пло-
скости, определяемой уравнением (13),
вопреки предположению.
......
lсорема доказана.
5.
eHTp поверхности BToporo порядка
Пусть снова даны: произвольная аффинная система коорди-
пат Oxyz, поверхность BToporo порядка с уравнением
Р(х, у, z):=:O (1)
н прямая
х == хо +<:%t, I
y==yo+
t)
z == zo+yt
(2)
неасимптотическоrо направления.
Точки пересечения прямой (2) с поверхностью (1)
1\11 == (X 1 , Yl, Zl) И М 2 == (Х2' y
, 22)' rде
X 1 == ХО + at 1 , Уl == Уа +
tl' Zl == 20 + yt 1 ,
Х 2 == ХО + а/ 2 , У2 == Уа +
t2' Z2 == Zo + yt 2 ,
а /1 и t 2 суть корни квадратноrо уравнения
At 2 + 2Bt +С == О,
в котором ко
мциенты А, В, С суть
А==<р(а,
,1'), }
В === Fl (Хо, Уа, zo) CG + Р 2 (х о , Уа, zo)
+ F з (хо, Уо) zo) у,
С == F (х о , Уа, zo)
суть точки
(3)
(4)
и, как всеrда,
F k (Хо, уо, zo) == aklxO + ak2llo + йkЗZО + ak,
k == 1, 2, 3. (5)
т очка Мо == (хо, Уо, Zo) является серединой отрезка М 1 М 2 тоrда
и ТОЛЬКО тоrда 7 коrда одновременно
t 1 +t 2
O А t 1 +t 2
O t1+tз О
а 2 ......., t" 2 ......, l' 2 ==
236 ОБЩАЯ ТЕОРИЯ nOBEPXHOCTEl'l BTOPOrO ПОРЯЛКЛ. 1
Т. е. (так как среди чисел а,
, у по крайней мере одно отлично
от нуля) коrда t 1 + t 2 == о.
28
Но /1 + t 2 ==
A
) следовательно:
ТО2да и т олько mО2да точка Мо
(х о , Уо, Zo) есть середина
оmрезка МIМ2' КО2да В == О, т. е. КО2да
Р 1 (хо, Уо, zo) а + Р 2 (хо, Уо, Zo)
+ F з (х о , Уо, zo) у == о. (6)
Теперь возникает вопрос: нет ЛИ такой точки Мо == (хо, Уо, Zo),
которая являлась бы серединой всякой хорды, через нее ПРОХОДЯ.
щей? Заметим, что такой точкой Мо является всякий центр сим..
метрии нашей поверхности (если он существует).
Итак, мы ищем те точки Мо == (х о , Уо, Zo), для которой усло-
вие (6) выполняется при любом выборе неасимптотическоrо направ-
лени я а:
: у.
Докажем, что для искомых точек Мо == (хо, Уо, Zo) должны
одновременно удовлетворяться равенства
F1(x O , уо, Zo) == О, Р 2 (х о , Уо, Zo)===O, Fз{х о , Уо. zo)===o. (7)
л е м м а. Для всякой поверхности втОрО20 порядка (1) MO:JICHO
найти три неасимптоmичес/(uх направления, не компла1ШрНblХ
между собой.
В самом деле, рассмотрим мно}кество всех точек М == (х, у, z),
удовлетворяющих уравнению
<р (х, у, z) == a 11 x 2 + 2а 12 ху + а22у2 + 2а 1з хz + 2а 2з уz + а зз z 2 == о. (8)
Точки М == (х, у, z), удовлетворяющие этому уравнению, и только
они обладают тем свойством, что вектор ОМ == {х, у, z} имее1'
асимптотическое направление.
В плоскости z::=: 1 уравнение (8) определяет кривую BToporo
порядка
аl1 х 2 + 2а 12 ху + a 2 2!J 2 + 2а 1з х + 2а 2з u + азз == О (9)
(быть может, если al1==a12==a22==O, вырождающуюся в прямую).
Возьмем на плоскости z == 1 три неколлинеарные точки М 1 =::
=== (а 1 . Р1' 1'1), М 2 == (а 2 .
2' '\'2), м з :=: (аз,
з, '\'з). не лежащие на
............... ...............
кривой (9). Тоrда ОМ 1 == {a 1 , Рl' 1'1}, ОМ 2 == {а2'
i' У2}' ОМЗ ==
== {аа. Рз, Уз} дадут нам три некомпланарных неасимптотических
направления. Лемма доказана.
Итак, пусть {а 1 , Рl' У1}' {a z . Р2' '\'2}' {аз. Рз, уз}
три неком-
лланарных направления, не асимптотических по отношению к по-
8ерхности (1). Для каждоrо из них должно по предположению
выполняться равенство (6), т. е. должно быть одновременно
р 1 (хо, Уо, zO)ak+ F 2(XO, Уо, Zo)P.+
+Ра(Хо. Уа, Ч)УII==О. k
l, 2, З. (10)
ЦЕНТР ПОВЕРХНОСТИ BToporo ПОРЯДКА
231
Но векторы {а 1 , Рl, i'l}, {а 2 ,
2' 'У2}' {а. з .
3' 'Уз! не компланарны,
Т. е. в матрице
а1
l Yl
а2
2 '\'2
аз
з '\'з
строки, а значит, и столбцы линейно независимы, а это значит,
что в равенствах (1 О) коэффициенты Р 1 (Хо. Уо, Zo), Р 2 (хо, Уо, 20)'
РS (х о , Уо, Zo) ДОЛЖНЫ равняться НУЛIО. Утверждение доказано:
всякий центр симметрии Мо == (х о , Уо, Zo) поверхности (1 ) удав..
летворяет равенствам
Fk (хо, Yo
Zo) == О, k == 1, 2, 3.
или, в развернутом виде,
aklxO + ak2Yo + akз z 0 + й" == О, k == 1, 2, 3. (11)
Докажем Te
epь обратное предложение.
Всякая точка Мо == (Хо, Уо, Zo), координаты которой удовлет-
воряют уравнениям (11), есть центр симметрии поверхности (1).
Для доказательства вспомним (I'Л. IV,
2), что при замене
переменных
х ==х' +Хо, у == у' +Уо,
z == z' + Zo,
соответствующей перенесению начала координат в точку Мо ==
=== (Хо, Уо, Zo), мноrочлен F (Х, у, z) переходит в мноrоч.пен
F' (х', у', z') == q> (х', у', z') + 2аlХ' + 2a
' + 2a
z' + a
, в котором
фф ""
коз Иllиенты а., а 2 , аз, ао суть
a
== а 11 х о + a l 2!Jo + а 1з 2 0 + Ql. a
== a21 x O + а22УО + а 2 з z о + a z .
a
== аз1хо + Йа2Уо + аззz о + аз, a
== F (х о , Уо, zo).
Итак, если, сохраняя единичные векторы системы координат
Oxyz, мы перенесем ее начало в точку М 0=== (хо, Уо, Zo) == О', У ДОВ"
летворяющую уравнениям (11), то в полученной таким образом
новой системе координат O'x'y'z' уравнение поверхности (1) будет
Р' (х', у', z') == a 11 x,2 + 2a 12 x'y' +
2Y,2 +2а 1з х'z' +
+ 2а 2з у'z' +аззz,2 + a
== О, (1')
rде a
== F (хо, Уо, zo). ИЗ этоrо уравнения ясно, что новое начало
координат О' t Т. е. точка Мо, есть центр симметрии поверхности
(1'). Утверждение доказано.
Заметим, что уравнения (11) решаются однозначно тоrда и
только тоrда. КОI'да
1 аll а12 аlЗ I
б == а21 ап а2З -=1= О,
аЗ1 аЗ2 азз
238 ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТЕА BToporo ПОРЯДКА. 1
Т. е. дискриминант квадратичной формы ({) (х, у, z) отличен от
нуля. Поверхности, удовлетворяющие этому условию, принято
называть ценmральными: это те поверхности второео порядка,
KOnWpbte цмеюm центр симметрии, u притом только один.
Пусть поверхность (1) является центра.пьной, т. е. ПУСТЬ б =1= О
(или t ЧТО то же, , == 3), а значит, поверхность (1) имеет един
ственный центр О' == (хо, Уо' Zo). Положим a
== F (Ха, Уо, Zo) и
перенесем начало координат в точку О' == (хо, Уо, zo). В получен
НОЙ таким обrазом новой системе координат O'x'y'z' (единичные
векторы котороЙ суть те ){{е, что и в первонача.пьной системе Oxyz)
уравнение (1) нашей поверхности ПрИНИ:\'i8ет вид
Е' (х', у', z') == a 11 x,2 + 2а 12 х' у' + а 22 у,2 + 2а 1з х' z' +
+ 2а 2з у' z' + Qазz,2 + a
== о. (1')
Заметим, что бо..1ЬШОЙ детерминант /1' ==: 6. мноrОЧ..1ена F' (х', у', z')
есть
ан Q12 йlЗ О/
d=:::. а21 а22 а2З О == а
б,
аз! аЗ2 аэз О
О О О а'
о
т. е.
a
== -} == F (Ха, Уа. za).
( 12)
Итак, в любой системе аффинных координат, начало которой
есть единственный центр центральной поверхности (1), уравнение
этой поверхности имеет вид
4
р' (х', У', z') == ер (х', у', z') + б
О,
rAe
, , ' ) ,2 + 2 " + ,2 + 2 " + 2 " + ,2
fP (х t у, Z == а 11 х а 12 х У а22У а 1З Х z а 2 зу z аззz.
Если !:!. =1= О. то и a
==
== F (Ха. Уа. Za) =1= О. Разделив с caMoro
начала обе части уравнения (1) на ......... F (х о , Уо, Zo), можем пред-
положить, что a
==
1, т. е. что уравнение (1') имеет вид
<р (х', у', z') ==
,2 + 2 " + ,2 + 2 " + 2 " + ,2 1
== a 11 x а12Х У а 22 у а 1з х z а 2з у z а зз z == ·
Если же /1 == О, то уравнение (1') IIмеет вид
( ' , ') ,2 + 2 " + ,2 +
ер х, у , z === a11x а 12 х У а22У
+ 2a 18 x' z' + 2а 2 зу' z' + а зз z,2 == о.
ЦЕНТР ПОВЕРХНОСТИ BToporo ПОРЯДКА
239
в нецентральном случае, т. е. в случае б
О, раиr r матрицы
аl1 a13 аlЗ
А<р == а21 а22 а2З
аЗl аЗ2 азз
не превосходит 2.. В этом случае уравнения (11) либо несовместны,
и тоrда поверхность не имеет ни одноrо центра, либо система
этих уравнений совместна, и тоrда точки, ЯВЛЯЮIЦИеся решениями,
заполняют целую прямую {при , == 2) или целую плоскость (при
r
1).
Выясним, наконец, коrда центр (или один из центров) Мо:=
=== (хо, Уо, Zo) поверхности (1) лежит на самой этой поверхности.
Для этоrо нужно, чтобы кроме равенств (11) имело место еще
и равенство F (Х о , уо, 20) === о. Как было установлено в
З, послед-
нее равенство при выполнении равенства (11) эквивалентно равен-
ству tltXo + а2Уо + азz.о + а() == о. Друrими словами, необходимое и до-
статочное условие для Toro, чтобы точка Мо == (.х о , Уо, zo) была
ле)l{ащим на поверхности (1) центром этой поверхности, заклю-
чается в том, 'Чтобы координаты точки удовлетворяли системе
четырех уравнений:
{ aklXO
+ak2Yo +аkЗZО +ан == О, k::::: 1., 2, 3,
. (13)
a1xo + а 2 уо +азzо +а о == о.
Как мы уже напоминали в
3, система этих уравнений сов-
местна, лишь коrда равен нулю детерминант
ан ан! аlЗ аl
L1== а21 а22 а2З а2
а31 аз! азз аз
аl а2 аз clo
Т. е.. коrда поверхность (1) является вырожденной. Точка
Л'1 0 === (хо, Уо, Zo), удовлетворяя уравнениям (13), есть особая точка
поверхности (СМ. конец 9 3). Итаl{, лежащий на (вырожденной)
поверхности центр ее является особой точкой поверхности 1).
j\lbI увидим в следующей rлаве 1 что особые точки имеются
лишь у слеДУIОЩИХ поверхностей BTOPQrO порядка:
1) Конус: единственная особая точка, являющаяся вместе
с тем единственным центром конуса, есть ero вершина.
2) Пара пересекающихся плоскостей: прямая пересечения этих
плоскостей есть вместе с тем прямая центров распавшейся поверх-
ности, совпадающая с множеством ее особых точек.
3) Поверхность, являющаяся парой совпадаlОЩИХ плоскостей,
ВСЯ состоит из особых точек: каждая из них есть центр поверх-
н ости.
1) Мы видели в
4, что касательная плоскость в особой точке поверхно-
сти перестает быть определенной.
r л А В А 'х
ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТЕЙ BToPoro
ПОРЯДКА. 11
t. Диаметральные плоскости. Особые направления
1. Плоскость, сопряженная данному неасимптотическому на-
правлению. Пусть (в какой
нибудь аффинной системе координат)
дана поверхность BToporo порядка
F (х, У, z) == ер (х, У, z) + 21 (х, У, z) + а о == О, ( 1 )
rде, как всеrда,
<р (х, у, z):== a 11 x 2 + 2a 12 xy +а 22у 2 + 2а 1з хz + 2а 2з уz +а зз z 2 ,
1 (х, У, z) == а 1 х +а 2 у +азz.
Рассмотрим совокупность всех прямых d, имеющих одно и
то же неасимптотическое для данной поверхности направление
{a:
:y}.
Ка>кдая такая прямая d пересекает поверхность (1) в двух
точках Mf, M
(вещественных, быть может, совпадающих или
мнимых сопряженных); отрезок M
м: называется хордой, Bыce
каемой на данной прямой d поверхностью (1).
Уравнение прямой d записывается в виде
x==xo+at, )
y==yo+
t,
Z == Zo +yt,
rде Ма == (Х О' Уо' zo) ---- какая"'нибудь произвольно зафиксированная
точка этой прямой.
Точка Мо == (х о, Уа, Zo) прямой d тоrда и только тоrда явля-
ется серединой хорды, высеченной из этой прямой поверхностью (1 ).
коrда выполнено условие
Р 1 (Х О' Уо, Zo> а + Р 2 (х@, Уо, Zo)
+ РЗ (Хо, Уо. Zo) у == О,
(2)
(3)
rде, как всеrда, положено
F k (Х о ) Уо. Zo) == aklxO + ak2YO + аkЗZ(J + ak,
k == 1, 2, 3. (4)
ДИАМЕТРАЛЬНЫЕ ПЛОСКОСТИ
241
Перепишем уравнение (3)J внося в Hero значения Fl' Р2' F з из (4)
и отбрасывая индекс нуль у координат. Получим
(a 11 a +a21
+a J1 y) х + (a 12 a. + a22
+а з2 у) у +
+ (а1зсх +а 2З Р + аззу) z + (а 1 а. +а 2 Р +а з у) == о. (3')
Уравнению (3'), которое есть уравнение некоторой Па,ryоскости Ла
'V'
удовлетворяют все те и только те точки, которые являются сере-
динами ХОРД, высекаемых поверхностью (1) из всевозможных
прямых направления {а:
: у}. Друrими словами: плоскость (3')
есть zeометрuческое место середи1t хорд поверхности (1), u.меl0ЩИХ
напРOJJленuе {а: р : 1'}; эта плоскость называется плоскостью J . соп ря..
женной направлению {а:
: 'У} относительно поверхности (1).
3 а м е ч а н и е 1. Плоскость na
y' сопряженная данному направле-
НИIО, определена rеометрически как rеометрическое место середин
хорд направления {а:
: у}, поэтому она не зависит от выбора
той или. иной системы координат.
2. Плоскость, сопряженная асимптотическому направлеНИIО;
общее определение диаметральной плоскости. В определении пло..
скости, сопряженной данному направлению, предполаrалось, что
это направление неасимптотическое. Это предположение обосно.
вано, так как из прямой асимптотическоrо направления поверх-
ность не высекает никакой хорды.
Однако уравнение (3') может иметь смысл и для асимптоти-
ческоrо направления {а: р : у}; определенную этим уравнением
плоскость мы будем и в случае асимптотическоrо направления
{а :
: ",} называть плоскостью, сопряженной направлению {а:
: у}.
Наконец, назовем какую-нибудь плоскость диаметральной
плоскостыо поверхности (1), если существует (хотя бы одно) Ha
правление, неасимптотическое или асимптотическое, для KOToporo
эта плоскость является сопряженной относительно поверхно-
сти (1).
у равнение
нию {а:
: у},
диаметральной плоскости, сопряженной направле
всеrда будем писать в виде
Lx+My+Nz+P==O,
(5)
rде
L ==a 11 cx+a 12 P +аlЗУ,
м == а 21 а, +a22
+а 2з 'У,
N == a31cx+a32
+азз'У,
Р==аlа+
р+аз'У.
3 а м е ч а н и е 2. Диаметральную плоскость, сопряженную На-
правлению {а:
: у}, будем называть, коrда это покажется удоб-
ным, и плоскостью, сопряженной любому вектору этоrо На-
правления.
(6)
242 ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТЕй BToporo ПОРЯДI{А. 11
з. Простейшие свойства диаметральных плоскостей. Пусть
(X Ot YOt 20)
точка, являющаяся центром поверхности (1) (может
быть, не единственным). Тоrда
F 1 (Х о , Уо, zo) == F 2 (х о , Уо' 20) == F 3 (х о , Уо, zo) == О,
и уравнение (3) (или, что то же, уравнение (3'» удовлетворено
при любых сх, р, 1'.
Друrими словами:
1. Всякая диаметральная плоскость содержит все центры дан-
ной поверхности.
f\tlbI увидим (в 9 2, пп. 1 и 2), что если поверхность (1) имеет
хотя бы один центр, то верно и обратное предложение:
Всякая плоСКОСmb
содержащая все центры данной поверхн.осmИ 1
является ее диаметральной плоскостью.
11. Точка Мо, nрин,о,длежащая всем диаметральным плоскостям
(или хотя бы всем тем из Hиx
которые сопряжены неасuмnтотu..
ческим направлениям), является центром поверхности.
В самом деле t точка Мо == (хо, Уо, Zo) есть середина проходя-
щей через нее хорды любоrо неасимптотическоrо направления,
а это означает (rл. VIII, Э 5), что удовлетворены уравнения
центра
Рl (хо, Уо, 20) == Р 2 (х о , Уо, 20) == F з (х о , УО' Zo) == о.
111. Если для дан.Н,О20 аcuм.птоmuчеСIООZ0 направления {а: р : у}
существует сопряженная ему плоскость
то она параллельн,а Ha
правленuю {а: р : у}. Обраmно
если направление {а:
: у} nарал
лельно сопряженной ему плоскости, то эmо направление является
асимптотическим.
В самом деле, непосредственным подсчетом проверяется. что
La + M
+ Ny == <р (а,
, 'У). (7)
Условием параллельности вектора {а,
, ,,} и диаметральной пло-
скости
Lx + 1\1у + N z + р == о
является равенство
La+M
+N'Y==O,
т. е.
(а,
, 1') == о, это равенство означает, что вектор {а:
: 1'}
имеет асимптотическое направление.
IV. Пусть вектор u === {a
} 'У} есть линейная комбинация
векторов U 1
{а 1 ,
l' 1'1} U U 2 :::::: {С!2' Р2' 1'2}, т. е.
а == Л 1 а 1 +
a2'
:::::: Лl
l +
2'
v == Лl1'l + Л 2 1'2.
ДИАМЕТРАЛЬНЫЕ плоскости
243
Если векторам Ul и U2 сопряжены диаметральные плоскости 311 u 11;21
mo плоскость л 1 1t 1 +л 2 1t 2 является диаметральной плоскостью,
сопряженной вектору u.
Возьмем уравнения плоскостей, сопряженных соответственно
направлениям {а:
: ')'}, {а 1 :
1 : Уl}, {сх 2 :
2 : '\'2}' Коэффициенты
этих уравнений обозначим соответственно через
L, М, N, Р,
Ll' М 1 , N 1, P 1 ,
L2,J М 2 , N а' P z ,
причем из caMoro определения (6) этих коэффиuиентов следует. что
L == ')"lL 1 + A 2 L 2 ,
м ==
1Ml + 102М2,
N == л 1 N 1 + л 2 N z,
Р=='''l Р l +Л 2 Р 2'
rеометрическое содержание по.пученноrо важноrо резу льтата
таково:
1 V'. Пусть векторам U!J U 2 сопряжены cooтeeпzcmeeHHo плоско
ста 1t 1 , Л 2 " To
дa всякому векnwру U) КО.мпланарflОМУ обоим век..
торам U 1 и U 2 ' сопряжена плоскость 1t J прuнадлежащая пучку
плоскосmеU J определенно.му плоскостями п 1 u 1t 2 .
Значит, если плоскости пl и п2 пересекаются, ТО плоскость 3t
проходит через прямую их пересечения, а если они nараллеЛЬНЫ t
то и плоскость п им парадлельна.
4. Особые направления. ПОСМОТРИМ t не может ли случиться,
что для данноrо направления не существует сопряженной ему
плоскости. ОчеВИДНО t ЭТО произойдет тоrда и только тоrда, коrда
в уравнении (5) все три коэффициента L, М, N при переменных
х, у, z обращаются в нуль. Тоrда система однородных уравнений
L == аl1 а + a12
+ а 1 зу === О, I
м == a21 Ct + a22
+ а2З'У == О,
N == аз! rx. + аЗ2
+ азз')' == О
определяет направление {а: р : у}.
Оп р е Д е л е н и е. Направлен.ие {а: р : ')'} называется осоБЫМ 1
если оно удовлетворяет системе уравнений (8).
В r лаве VI 11, 9 1, мы назвали малым рзиrом поверхности (1)
paHr квадратичной формы
(х, у, Z), т. е. рзиr r матрицы
ан Ql! й13
А<}) === au ан а23 .
I
U ааl аЗ2 а3:)
(8)
244 ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТЕА 8TOPOrO ПОРЯДI<А. 11
Из определения особоrо направления непосредственно следует
предложение: поверхность м.аЛО20 ранеа , и/
eem 3.... , и не более
линейно незавuсимых особых направлений.
В частности, центральные поверхности (для них fJ Ф. О и, зна-
чит, , == 3) вовсе не имеют особых направлений.
Умножая первое из уравнений (8) на а, второе на
. третье
на l' и складывая, получаем
La+Mp+Ny==<p(c.t,
, ,\,)==0;
всякое особое направление являепlСЯ асимптотическим. Итак, только
в нецентраАЬНО.м случае u только асимптотическое направление
может оказаться особым; для всех неособых направлений сопряжен-
ная плоскость существует и определена однозначно.
Посмотрим, какие имеются особые направления поверхностей
различных типов. Параболоиды и центральные цилиндры (ВКЛIО-
чая поверхности, распадающиеся в пару пересекающихся плоско-
стей) суть поверхности, для которых r == 2; У них имеется един-
ственное особое направление. Если эти поверхности даны СDОИМИ
каНОНJlческими уравнениями:
Xl у9
2z :::;::
+
(параболоиды),
р q
х с}, у?
а 2 + ь7.' == + 1 (центральные ЦИЛИНДР1;>l),
x2 + y2
o
а 2
Ь 2
(пары пересекающихся плоскостей),
ТО их единственным особым направлением является направление
{о: о: l}, Т. е. направление оси Oz. В этом сразу убеждаемся.
написав для наших канонических уравнений уравнения (8), опре-
деляющие особые направления; . это будут
1
a==O
р ,
1
== О,
q
о ::::: о.
в случае центральных цилиндров (и пары пересекающихся плоско-
стей) полученное направление есть направление прямой центров
рассматриваемой поверхности.
Для эллиптическоrо параболоида особое направление ЯВ.1Iяется
и единственным вещественным асимптотичеСКИhl направлением; то
же справедливо и для эллиптическоrо цилиндра. Но во всех че-
тырех случаях (эллиптических и rиперболических параболоидов и
цилиндров) единственное особое направление есть направление
(вещественной) прямой пересечения тех двух плоскостей (вещест-
венных или мнимых), на которые распался конус асимптотических
ДИАМЕТРАЛЬНЫЕ ПЛОСКОСТИ
245
направлений поверхности, а именно плоскостей:
х у О Х у О б
J . ! Р + у q == , "1/ Р ...... '/
q == для rипер олическоrо
r r параболоида;
': р + '
q === о, ,
Р
'
q
о для эллиптическоrо
f у r r параболоида;
: +
== о, :
о для rиперболическоrо
цилиндра;
+ l:JL ::;::: о
iy == О ДЛЯ эллиптическоrо цилинд р а
а Ь ' а Ь
(вещественноrо и мнимоrо).
Для поверхностей, у которых r == 1, имеется два независимых
особых направления; значит, особыми являются все направления,
параллельные некоторой плоскости. Так обстоит дело у парабо..
лическоrо цилиндра
у2 == 2рх
и у пары параллельных плоскостей
у2 == С.
11 в том и в друrом случае уравнения (8) превращаются в
0==0, 1.
===O, 0==0;
им удовлетворяют все векторы {а,
, у}, у которых
О, а а и
'\' какие уrодно, т. е. все векторы, параллельные плоскости у
о.
Так как конус асимптотических напраВJIений параболическоrо
цилиндра вырождается в пару слившихся плоскостей у2 == о, то
все асимптотические направления параболическоrо цилиндра явля-
ются особыми.
Леrко доказывается следующее предложение:
У. Для тоао чтобы направление {л: f..t: "} бblЛО осоБЫ'м'1 необхо..
димо u досmатоЧн'ОI чтобы оно бы,Ло параллельно всякой диамет-
ральной плоскостu.
В самом деле, пусть дана диаметральная плоскость
Lx+My+Nz+P==O,
сопряженная направлению {а:
: у}, так что
L == al1 a + a12
+ а1зу,
М == a21a+
2P + а zз у,
N == tlзl СХ +аnР + O-а3У,
Р == a1a +
p +азу.
Условие параллельности направления {А: Il: у} плоскости (5) есть
LЛ+МJ1+Nv==О. (9)
(5)
(6)
246 ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТЕА 8TOPOrO ПОРЯДI<А. 11
Подставляя в это равенство значения L, М, N из (6), рас...
I<рывая скобки и по"новому rруппируя члены, переписываем ра...
венство (9) в виде
(а 11 л +
lfL + а зl ") а + (а 12 л +
2l1 + а з2 ") 13 +
+ (а1зл+ а 2 зll+ аззv)" ==0. (10)
Если направление {л: fl: ,,} особое, то выражения в скобках, ЯВ-
ляющиеся коэффиuиентами при а,
, у в равенстве (10), равны
НУЛЮ, и условие параллельности направления {л: 11 : "} плоскости,
сопряженной любому направлению {а:
: 1'}, выполнено. Первое
утверждение предложения V доказано.
Докажем второе утверждение. Итак, известно, что для дан..
Horo направления {л: f.1: ,,} и любоrо (неособоrо) направления
{а: р : у} выполнено условие (10); требуется доказать, что направ-
ление {л: J.1 : v} особое.
Берем три некомпланарных неасимптотических направления
{a 1 :
1 : 1't}, {
: Р2 : 1'2}, {аз:
3 : уз}
такие существуют для всякой
поверхности BToporo порядка в силу леммы Э 5 rлавы VIII
и
пишем для них уравнения (10):
(а l1 л +
lfl + аЗl") а 1 + (а 1 ?,л + а 22 ,.... + а з2 V)
1 + I
+ (а1З Л + а2з
t + а зз ,,) 1'1 == О,
(а 11 л + a 21 11 + аз!V) а 2 + (а 1 2 Л +
211 + llз2'V)
2 +
+(tltзл+
зf.t + йзз") 1'2 == О,
(iltl A +
11l + а з1 ") аз + (a 1 Jv + tle2fJ. + a:N'V)
з +
+ (а 1 з Л +
зfl + аззv) Уз == о.
Так как векторы {CG 1 )
1' 1'1}, {CX 2t
2' 1'2}, {аз,
3' 'Уз} не КОМПJ1а-
нарны, то строки, а значит, и столбцы матрицы
(11 )
'а!
1 '\'1
а2
2 1'2
,аз
3 УЗ
линейно независимы. Значит,
ан/л +a 2 kll + a31
" == О,
k == 1., 2, 3,
т. е. направление {л : 11 : "} особое. Предложение V доказано.
Дока)l{ем в заключение этоrо параrрафа слеДУlощее предло.
'жение:
V 1. П лоскоспlU Л 1 и п 2, сопряженные относительно данной
поверхности ( 1) двум разЛUЧнь/''м направлеНUЯАl {Cl 1 :
1 : 1'1} и
{а 2 :
2 : 1'2}
тО2да и толыw тО2да параллеЛЫtьt .между собой
коеда
плос
осmь Л J несущая оба направления {а 1 :
l: J'l} II {сх 2 :
2 : 1'2},
параллельна (HeKonzopOMY) ()собому напршзленuю поверхности (1).
ДИАМЕТРАЛЬНЫЕ ПЛОСКОСТИ ПОВЕРХНОСТИ
247
д о к а 3 а т е л ь с т в о. Обозначим коэффициенты при х, у, z
в уравнении плоскостей, сопряженных направлениям {Cl 1 :
l : 'Vl},
соответственно {а 2 :
2 : 1'2}' через L 1 , М 1 . N}, соответственно L 2 ,
М 2 , N 2
запишем условие параллельности этих плоскостеЙ в виде
пропорции
Lr
М 1 ....... N 1
Л
L 2
M j
N 2 .......
л;
или
iWILl + л 2 L 2 == О,
ЛI М l +'''2М2
o,
""1 N 1 + ')
2N 2 :::;; о.
Подставляя сюда значения
L 1 :::;; a11!X 1 + a12
1 + йlЗУ1, L 2 :::;; all
2 + a12
2 + a 1 ::s 1'2,
Л 1 [1
а 21 а} + a22
1 + а2з1'1, М 2 :::;; a 21 ct 2 + a22
2 + а2:з1'2,
N 1 == аз1Cl} + a32
l + а зз 1'l' N 2 == а З1 !Х 2 + аЗ2
2 + а зз 1'2'
получаем после раскрытия скобок и переrруппировки члеrIОВ
равенства:
akl (л 1 а I + Azx2) + alr2 (Лl
l + л.
Р2) + ak3 (J\ll1'1 + 1"21'2) == о,
k
1, 2, 3,
по
прежнему выражающие необходимое и достаточное УС"Т'Iовие
парал.пе.пьности (в широком смысле слова) п,лоскостей зt 1 и Л 2 .
НО эти же равенства выражают условие) необходимое и достаточ..
ное для Toro, чтобы направление
(Jw1CX 1 + Л 2 rl 2 ) : (Лl
l +
"2
2) : (Л 1 1'1 + ""21'2),
очевидно, лежащее в плоскости 1t, было осоБЫМ t Т. е. чтобы пло...
СКОСТЬ Л была пара.плельна некоторому особому направлению.
Предло}кение УI доказано.
2. Диаметральные плоскости поверхностей
разw'lИ чных видов
1. ЦентраЛЬНЬiе поверхности (поверхности с. единственным
центром). Докажем. что:
Всякая плоскость) проходящая через (единственныЙ) центр
п0верхности вmopo
o порядка
F (х, у, z) == О,
( 1)
является диаметральной плоскостью" сопряженной некотОрОМ!I
однозначно определенному напРOJJденuю {а: р : у}.
248 ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТЕА BToporo ПОРЯДI(А. 11
д о к а 3 а т е л ь с т в о. Предположим, что начало координат
находится в центре поверхности. Тоrда уравнение поверхности
записывается в виде
ер (х, у, z) + а о
О,
а уравнение данной плоскости, проходящей через центр,
в виде
Ax+By+Cz== о.
Для определения направления {сх,:
: у}, для KOToporo эта пло-
скость является сопряженной, надо решить систему уравнений
а 11 сх, + a12
+ а 1з 1' == А,
a 21 cx, + а 22 Р + а 2з 1' == В,
QЗI СХ + a32
+ аззу == С,
что и де.llается однозначно ввиду Toro, что детерминант этой си-
стемы есть б =1= о.
2. Поверхности с прямой центров и с плоскостью центров.
Поверхности с прямой центров суть «центра.пьные цилиндры», Т. е.
цилиндры над некоторой центральной (быть может, расладающейся)
кривой BToporo порядка. В надлежаще выбранной аффинной си-
стеме координат уравнение такой поверхности имеет вид
х 2 + у2+ ао ==О. (2)
Единственным особым направлением поверхности (2) является
(как показывает непосредственная проверка) направление вектора
{О, О, 1}, т. е. направление оси z выбранноЙ координатной системы.
В этой же координатной системе уравнение диаметральной
плоскости, сопряженной направлению {а: р : у}, есть
ax +
y==o.
Итак, всякая плоскость, проходящая через прямую центров,
u
и только такая плоскость является диаметральнои плоскостью
нашей поверхности, а направление прямой центров есть (единст-
венное) особое направление.
Мы знаем (предложение VI
1), что всяким двум направлениям,
лежащим в некоторой плоскости, параллельной особому направ-
лению поверхности BToporo порядка, сопряжены диаметральные
плоскости, параллельные между собой. В данном случае для поверх-
ности (2) эти плоскости совпадают: два направления, не коллинеар-
ные (единственному) особому направлению поверхности (2), Т. е.
направлению оси z, лежащие в плоскости, параллельной оси z,
задаются векторами вида
{а,
, Уl} И {а, Р, У2}'
ДИАМЕТРАЛЬНЫЕ ПЛОСКОСТИ ПОВЕРХНОСТИ
249
rде по крайней мере одно из чисел а, р отлично от о. Обоим
этим направлениям сопряжена относительно поверхности (2)
диаметральная плоскость ах +
y == о (знаки при
y соответствуют
знакам при у2 в уравнении (2». Конус асимптотических направ
лений поверхности х 2
у2 + ао == О распался на пару действительных
плоскостей
х+у==о,
x
y==O.
( 11:1)
( 11:2)
Каждому направлению, лежащему в одной из этих плоскостей и
КО..тIлинеарному оси Z, например направлению {1 : 1 : у}, лежащему
в плоскости Л2' сопряжена сама эта плоскость.
Если поверхность (1) имеет плоскость центров, то эта плоскость
н является единственной диаметральной плоскостью поверхности
(1) (так как всякая диаметральная плоскость должна содержать
все центры поверхности). Все направления, пара,"ле
ТIьные плоскости
центров, являются особыми.
ПовеРХНОСТЬ t имеющая плоскость центров, распадается на пару
параллельных плоскостей; сама плоскость центров есть средняя
плоскость между двумя плоскостями, составляющими данную
поверхность; направления, параллельные этим плоскостям, суть
асимптотические для нашей поверхности; все они особые.
Остается рассмотреть тривиальный случай двух слившихся
плоскостей п. Здесь каждая точка плоскости 1t есть центр поверх
ности, значит, имеется одна-единственная диаметральная пло-
скость
сама плоскость п. Она есть rеометрическое место всех хорд
поверхности, каждая из которых вырождается в пару своих
слившихся концов (и определяется прямой, не параллельной
плоскости п).
Все направления, параллельные плоскости л, являются особыми.
3. Поверхности без центров. Малый paHr такой поверхности
равен или двум (параболоиды), или единице (параболический ци-
линдр).
Мы уже видели, что единственным особым направлением
параболоида (rиперболическоrо или э.плиптическоrо) является Ha
nравление прямой пересечения d тех двух плоскостей п 1 и П 2 ,
.,
на которые распался конус асимптотических направлении пара-
болоида. В силу предложения V всякая диаметральная плоскость
параболоида параллельна этой прямой d. Докажем, что и, обратно,
всякая плоскость, параллелъная единственному особому направ'"
лению параболоида, является ero диаметральной плоскостью.
J{ля этоrо воспользумся уравнениями
X2+y2==2z (3)
и
х 2
у2 == 22
(4)
250 ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТЕй 8Toporo ПОРЯДI{А. 11
соответственно эллиптическоrо и rиперболическоrо параболоидов
в надлежаще выбранной (аффинной) системе координат.
Диаметральная плоскость, сопряженная направлению {а:
: у},
будет в той же системе координат иметь уравнение
ax+
y
y==O,
соответственно
ах
ру
у == о.
Очевидно, всякая П,,7JОСI{ССТЬ t пара.п,,1(\.lьная оси Z, может быть
при надлежаще подобранных а,
, l' задана КЗ)l(ДШl из этнх
ур авнеНliЙ, причем различным наЛР2r.пениям сопря)кены различные
диаметральные плоскости.
Итак, диаметральными плоскостями параболоида являются все
плоскости, паралле,,1ьные (единственному) особому направлени[о
параболоида, н только они.
3 а м е ч а н и е 1. Из доказанноrо следует, что всякая плоскость,
парал.пе,,1ьная диаметра,,'lЬНОЙ П"lОСКОСТИ параболоида, сама ЯВи1Яется
диаметраи1ЬНОЙ плоскостью этоrо параболоида.
3 а м е ч а н и е 2. Пусть поверхность (1) есть параболоид.
Наряду с ней будем рассматривать пару плоскостей Л 1 и Л 2 , на
которые распался конус асимптотических направлений
([) (х, у. z)==O (5)
параболоида (l}. Обе поверхности (1) и (5) имеют, очевидно, одни
и те же асимптотические и одно и то же (единственное) особое
направление. Леrко ПрОЕерить также, что плоскости, сопряженные
относительно ПОЕерхностей (1) и (5) одному и тому же направлению
{а:
: у}, парал.пе,,1ЬНЫ (коэффициенты L, М, N в уравнениях
этих П,,10скостей будут ОДНИ и те же). Но мы видели, что для
поверхности (5) плоскостью, сопряженной асимптотическому направ
лению, .7Jежащему в данной плоскости Лi, i == 1, 2, будет сама эта
плоскость nl. Поэтому диаметральная П,,'Iоскость парабо.поида (1),
сопряженная (неособому) асимптотическому направлению {а:
: 1'rt
пара.плельна той из двух Ли1JОСКОСтей 111' Л2, которая несет на
себе направление {а:
: у}.
Переходим к параболическим цилиндрам. Конус асимптотических
направлений параболическоrо цилиндра
у2 == 2рх (6)
вырождается в пару совпадающих ПiIоскостей
у2 == О
(<<дважды взятая» ПЛОСКОСТЬ у == о).
Так как у параболическоrо ЦИ"lиндра имеется двумерное МНО..
rообразие особых направлений, то все асимптотические направления
параболическоrо ЦИ
lIиндра ЯВ
7JЯЮТСЯ особыми.
СОПРЯЖЕННЫЕ НАПРАВЛЕНИЯ
251
Докажем, что диаметральными плоскостями параболическоrо
цилиндра (6) являются все плоскости, параллеЛЬhые плоскости
у == о, и только они.
это непосредственно следует из Toro, что плоскость, сопр яженная
направлению {c
:
: 1'} относительно поверхности (6), имеет урав-
нение
y
ра == о.
3. Сопряженные направления
Пусть дана поверхность BToporo порядка, определенная в веко-
торой аффинной системе координат уравнением
F (х, у, z) == q> (х, у, z) + 21 (х, у, z) +а о == О, (1)
("р (х, у, z) == a 11 x 2 + 2a 12 xy + а 22 у2 + 2а 1з хz + 2
зуz + а зз z 2 ,
1 (х, у, z) == аlХ+I1
+азz.
Квадратичная форма <р (х, у, z) определяет билинейную функцию
'I' (.'1' U 2 ) от двух векторов: если U 1 , U 2
два произвольных вектора,
заданных своими координатами в выбранной нами системе коор-
динат Oxyz:
U 1 == {а 1 ,
l' 1'1}'
и 2 == {
, Р2, 1'2},
то
'У(иl) u 2 ) == 'P(a 1 ,
l' 1'1; а 2 , Р2) 1'2)==
== al 1 a 1 a 2 + a 12 (а 1 Р2 + Ct 2 Pl) + a22
lP2 + а 1з (а 1 1'2 + a21'1) +
+ а 2з (
11'2 +
2Yl) + аЗ3
l1'2. (2)
БИЛJlнейная функция 'у не зависит от выбора системы коорди-
нат: если мы возьмем друrую систему координат Ох' у' z', то век-
, А' , ,
торы U 1 И и 2 получат координаты CGt, JJl, 'VI, соответственно а 2 ,
, 1'
, а форма 'Ф (al t
1' 'Уl; СХ 2 , Р2' 'У2) перейдет в форму
'1" (a
, P
, 1'
; a
,
;, 1'
), причем если векторы и 1 , и 2 имели в ко..
ординатных системах Oxyz и Ох' у' z' соответственно координаты аl)
1) 1'1; a
,
, 1'
и ( 2)
2) 1'2; (1.,
t P
t ,,
, то
'Ф (а 1 t
1, 1'1; а2,
2) 1'2) == '1" (cx
,
, 1'
; a
,
;, 1'
),
так что имеет место тождество
ч' (и 1) U 2 ) == 'ф (a 1t
1' 1'1; СХ 2 ,
2' 1'2) == ЧJ' (a
,
, y
; а;,
;, 1'
). (2')
В частности, если для !<аl{их"нибудь двух векторов U 1 , u 2 имеем
ч' (и 1) и 2 ) == о, то этот факт не зависит от Toro, как мы выбрали
координатную систему t в которой задавалось уравнение (1) по-
верхности.
Оп р е Д е л е н и е. Два вектора и 1 , и 2 называются сопряжен-
ными ОПlносumельно поверхности (1) (или относитедьно квадратич-
ной формы q> (х, У, z) старших членов уравнения этой поверхности
252 ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТЕй BTOPOrO ПОРЯДКА. II
в любой системе координат). если для этих векторов
'1' (U 1 , U 2 ) == о.
Если векторы Ul' U 2 заданы в системе координат Oxyz своими
координатами
U 1 == {a 1 .
1. 1'1}'
U 2 == { а 2' Р2' 1'2}'
то условие их сопряженности записывается так:
'1' (u 1 , U 2 ) == 11' (а 1 , Рl' 1'1; а2. Р2' 1'2) == a 11 Cl 1 a 2 +a 12 (a 1 P2 + a2
1) +
+ a22
1
2 +а 1з (а 1 1'2 +a 2 1'1) +а 2 з (
11'2 +
21'l) +а зз 1'l1'2 ==
== (a 11 a 1 + a12
1 + а 1з 1'l) а 2 + (a 21 ct 1 + a22
1 + а 2з 1'l)
2 +
+ (а з1 а 1 + а З2 Рl + аз
1'l) 1'2 ==
==(аl1а2+аI2
2+аlЗУ2)ctl + (а 21 а 2 +а 22 Р2 +а 2з 1'2) Рl +
+ (а З1 СХ 2 + а З2 Р2 + а зэ 1'2) 1'1 == О.. (3)
Из симметрии условий (3) относительно векторов U 1 , U 2 следует,
что сопряженность двух векторов есть понятие взаимное, не за-
ВИСЯtЦее от порядка, в котором рассматриваются векторы.
Очевидно, далее, что вектор " 2 , сопряжеНJ1ЫЙ векторам U 1
и V 1 , сопряжен и любой их линейной комбинации ли 1 +flVl"
Отсюда, в частности, вытекает, что из сопряженности векторов
U 1 и U 2 следует и сопряженность любых векторов /"'IUl и /"'2U2,
Т. е. любых векторов, имеющих соответственно те )ке направления,
что и векторы U 1 и U 2 " Поэтому мы rоворим, что два направления
сопряжены между собой, если вектор одноrо из этих направлений
сопряжен вектору друrоrо.
Из равенства (3), далее, очевидно, вытекает, что особое напра...
вление {а 1 :
1 : 1'1} сопряжено всякому н аnравлен и/о {а :
: ,,}.
Верно и обратное предложение: если направление {а 1 : Рl : 'Уl} со-
пряжено всякому направлению {а:
: у}, то оно является особым.
Это вытекает из следующеrо предложения.
VII. Если {аl :
1 : Уl}
не особое направлен,ие
то сопряженными
ему являются те и только те направления {а: Р ! У}} которые
лежат в плоскости, сопряженной направлению {аl: Pl : 1'l}.
В самом деле, уравнение плоскости, сопряженной направлению
{al:Pl
Yl}' есть
Lх+Л1у+Nz+Р
ОJ
rде
L == а 11 а 1 + a12
1 + а 1З Уl'
М == а 21 (1,1 + а 22 Рl + а 23 1'I'
N == аЗ 1 С!1 +a
2
1 +а зз 1'l'
р ==a1Ct 1 +ai
l +аз1'l.
УРАВНЕНИЕ ПОВЕРХНОСТИ BTOPoro ПОРЯДКА
253
Всякий вектор {а,
, у}, лежащий в этой плоскости, и только
такой вектор {а, р, у} удовлетворяет условию
La+M
+N"( == о,
которое как раз и есть условие сопряженности вектора {а 1 ,
l' 1'1}
вектору {а,
, ,,}.
Из ДОК8З8нноrо следует, что свойство направления {а,:
: у}
быть или не быть особым относительно данной поверхности
не зависит от 8ыбора той или иной системы координат.
4. Уравнение поверхности oroporo порядка
относительно координатной системы
с сопряженными направлениями осей
Пусть дана поверхность BToporo порядка. Возьмем ПРЯМУIО d,
направление которой не аСИlvlПТОТИЧНО относительно данной поверх
ности. Если поверхность центральная, то предполаrаем, кроме
Toro, что прямая d проходит через центр поверхности. Пло-
скость п, сопряженная направлению прямой d, не может быть
параЛ.1Jельной прямой d (так как неасимптотическое направление
не компланарно сопряженной ему плоскости). Плоскость n пере
секает прямую d в некоторой точке О, которую и объявим нача
лом новой координатной системы. При этом, если поверхность
центральная, то О
ее центр. Осью z сделаем прямую d, а осталь
ные две оси возьмем в плоскости п.
Плоскость п, будучи плоскостью Оху нашей координатной
системы, имеет уравнение
z == о.
(1 )
Пусть в выбранной нами координатной системе уравнение данной
поверхности есть
F (х, у, z)!!::s a 11 x 2 + 2а 12 ху + а 2 2У 2 + 2а 1з хz + 2а 2з уz +
+ а зз z 2 + 2a 1 x + 2а 2 у + 2а з z + ао == о. (2)
Так как плоскость (1) сопряжена вектору {О, О, 1}, то ее ypaB
нение в нашей системе координат должно быть
(a 11 . 0+а 11 . о +а18 .1)Х+(й,1. О +a I2 . o+
. 1) у+
+ (аВ1. О+ааа. О+а зз .1) z+a 1 . О +а 2 . О +а з .1 == о,
т. е.
а 1 аХ + а 2з у + Оаа : + аз == о. (3)
Так как уравнения (1) и (3) определяют одну и ту же ПЛОСI{ОСТЬ,
ТО непременно
а 1 8 =:z О. a 18 == О, а 8 == о, а зз =1= о.
МЫ доказали следующее предложение:
254 ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТЕА BTOPOrO ПОРЯДI{А. 11
Если координатная система выбрана так, что ее ось z имеет
направление, не асимптотическое относительно данной поверхно-
сти BToporo порядка, а П.,1lоскость Оху является сопряженной
к направлению оси Oz относительно той же поверхности, то в этой
системе координат данная поверхность имеет уравнение вида
(a 11 x 2 + 2a 1 2 x y + а 2 2У 2 + 2a 1 x + 2а 2 у + а о ) + а зз z 2 ;::;: О. (4)
rде
а зз =F о.
Пусть теперь наша поверхность центра.пьная. Тоrда в ypaB
нении (4) имеем 01 == а 2 == О. от осей Ох и Оу мы требовали пока
только, чтобы они лежали в плоскости, сопряженной напраВ&I'lе..
нию оси Oz. Теперь мы МО}l(ем, кроме Toro, потребовать, чтобы
ось Ох имела неасимптотическое направление. Сопряженную ей
плоскость (она проходит через ось z, так как направления осей
Ох и Oz сопряжены) объявим П..'Iоскостью Oyz, так что ось у,
как пересечение плоскостей Оху и Oyz, будет сопряжена и оси Z,
и оси х; итак, все три оси координат имеют теперь попарно соп.
ряженные направления. Плоскость у == О, будучи сопряжена BeK
тору {О, 1, О}, имеет уравнение
al
+ а 22 у + а з2 z + а 2 == О,
так что
012 == О,
а32 == о,
== о.
т е о р е м а 1. У РCl1Зненuе центральной поверхности в сисmе.ме
координат I направления осей ко/порой попарно сопряжены Jrleжду
соБОЙ J UAteem вид
a 11 x 2 + а22у2 + а зз z 2 + а о == О.
Основным приложением только что полученноrо результата
является «теорема единственности», доказанная в следующем па..
раrрафе.
5! Теорема единственности
Содержание этоrо параrрафа совершенно аналоrично содержа..
нию
8 r,,1aBbl VI.
т е о р е м а 2. Два А1flоzочлена Вtпорой степени F 1 (х, у, z)
u Р 2 (х, у, z) тО2да u только тоzда и.л-tеюm одно и пlO же нулевое
МНО2006разие l КО2да они nроnорционаЛЬНbl между .соБОЙ 1 ,n. е. КО2да
один из них получается из дpY20
O умн.оженuе"м, на flекопzорое чи..
ело л=F О .
Как' и в случае мноrочленов от ДВУХ переменных, только одна
половина этой теоремы нуждается в дока'-3ательстве: надо дока-
зать, что два мноrОЧv1ена второй степени Р 1 (х, у, z) и F z (х, у, z),
ТЕОРЕМА ЕДИНСТВЕННОСТИ
255
имеющие одно и то же нулевое мноrообразие C F1 ==CP1==C, про..
лорциональны между собой.
Рассмотрим поверхности
Рl (х, у, z) == О (1)
и
Р 2 (х, у, z) == о. (2)
Берем какое-нибудь направление {а:
: ,,}, неасимптотическое для
поверхности (1); оно будет неасимптотическим и для поверхно-
сти (2).
Диаметральная плоскость п поверхности (1), сопряженная
направлению {а :
: у}, будет и диаметральной плоскостью
поверхности (2), сопряженной тому же направлению.
Возьмем теперь систему координат О' х' у' z', ось z' которой
имеет направление {а : р : у}, а две друrие оси лежат в плоскости п.
В этой системе координат уравнения (1) и (2) примут соответст-
венно вид
Р; (х', у', r) == а
зz,2 + '
(х', у') :=:0,
p
.(х', у', z') == ь
зz,2 + j; (х' J у') == О,
(1 ')
(2')
rде
1 ' 1 (х ' , ' ) ,,2 + 2 , , , + ' ,2 + 2 ' I + 2 ' , + '
у == аll Х al
X У a2'1l} а 1 х а 2 у аО )
'
(х', у') == b;tx,2 + 2b
2X' у' + b
y,2 + 2b
x' + 2Ь:,у' + b
.
Здесь а
з =1= О (и Ь
З =1= О), в противном случае единичный вектор
{О) О) 1} оси z', удовлетворяя уравнению
I ( ' , ' ) ,,2 + 2а ' , , + ' ,2 + ' ,2 О
ЧJl Х, у, z == анх 1
у a
-1Y а зз z ==
был бы вектором асимптотическоrо направ.пения для поверхности
(1) (соответственно для (2»)
вопреки нашим предположениям.
Нам надо доказать пролорциональность мноrочленов Р 1 (х, у, z)
11 Р 2 (х, у, Z)t т. е. пропорциональность тождественно равных иы
МIIоrочленов Р; (х', у' t z') И Р; (х', у', z'). Для этоrо обозначим
через СО лересечение MHOiKeCTBa С' с плоскостью z' == о. М ноже...
<"'1'130 СО есть MIIO)J{eCTI30 всех точек плоскости О' х' у', в которых
обращается в нуль ОДИН какоЙ-нибудь (и
следовательно, любой)
из мноr-очленов '; (х', у'), f
(х' t у'). Др-уrимп словами, ЭТО есть
(.1'Jежащее в ПЛС)СКОСТИ О'х'у') нулевое мноroобразие каждоrо из
SТИХ мноrочленов.
Возможны следующие случаи:
}О Множество СО пусто. Этот случай осуществляется тоrда
Ji ТО.,1ЬКО тоrда, котда какое.ни6удь (и тоrда каждuе) из равенств
(; (х', у') ::::О, f
(х', у') === о противоречиво, Т. е. коrда один какой..
нибу дъ (и Tor да l<а)I{ДЫЙ) lIЗ мноrочлеНОD f
(..
', у'), '; (х', у')
256 ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТЕй 8TOPoro ПОРЯДI<А. 11
тождественно равен отличной от нуля постоянной a
, соответст-
венно b
.
20 Множество СО совпадает со всей плоскостью О' х' у'. Это
происходит тоrда и только тоrда, коrда один какой-нибудь (и то-
rда каждый) из мноrочленов f
(х'. у'). t; (х', у') тождественно
равен нулю.
30 Ни один из случаев 1 о, 20 не имеет места.. Тоrда множе-
ство СО есть множество всех точек КРИВОЙ BToporo порядка, опре-
деляемой в плоскости О' х' у' каждым из уравнений
t
(х', у') == о, t
(х' t у') == о.
(3)
в этом случае в силу теоремы единственности для мноrочленов
второй степени от двух переменных имеем '
(х', у') == f.tf
(х', у')
Ь'
при некотором f.t =1= о.. Полаrая л. ==
:i (что возможно, так как
а зз
а
з
О), можем написать
p
(х', у', z') == а;зz,2 + '
(х' tY'),
F
(х', у', z') == Ла
зz,2 +
f
(х' ,у')..
llля Toro чтобы доказать в случае 30 пропорциональность MHoro
членов p
(х', у', z') и p
(х', у', z') надо только показать, что
JJ. == л. Так как мноrочлен '; (х', у') не равен тождественно посто
янной, то существуют значения х' == х;, у' == y
. для которых
'; (x
, y
) == 11).. Найдя такие значения. решаем относительно z'
уравнение
Р ' ( ' , ' ) ,,1 + 1 О
1 Хl. Уl. Z == аз;.z ==.
Получаем Z
== ... /
.. Итак, точка М 1 == (х;, y
, Z
) принадле)f{ИТ
у аз:!
множеству с. Следовательно,
p
(x
, y
, Z
) == ла;з (
) + f.t.. 1 == О, т.. е..
== л.
а зз
Итак, в случае 30 утверждение теоремы 2 доказано.
1) в самом деле, если в мноrочлене fr (х', у') хотя бы один ИЗ коэффици-
ентов ан, а21 отличен ОТ нуля, например ан =1= О, то, полаrая в уравнении
'
(х', у') === 1 значение у' == Уl == 1. получаем квадратное уравнение для опре-
деления x
. Если a
l
a;I==O, a;
=1= О, то уравнение '
(х', у')== 1 можно ЭЗПlf 4
сать в виде 2 (a
y' + a
) х' + 2a
y' + a
== 1. Ползrая в нем у' равным любом у
а'
числу y
=1=
+ t получаем уравнение первой степени для определения X
.
а. 1
Наконец, если в fJ (х', у') все коэффициенты при членах второй степени равны
нулю, то f
(х', у) == 1 есть уравнение первой степени с двумя неизвестными,
имеющее бесчисленное множество решений X
t y
.
r ЛДВНЫЕ НАПРАВЛЕНИЯ
257
в случае 20 имеем
Р ' ( ' , ' ) ,,2
t Х t У t 2 == аз:!2 ,
F ' ( ' , ' ) Ь ,,2
9 Х t У , z == 33 z t
а
з =1= О,
Ь
З =1= О
Ь'
и, следовательно, полаrая 'Л, == a
:! , имеем p
(х', у' t z') ==
:i3
== лF
(х' t у', 2'); утверждение теоремы 2 верно и в этом случае.
Наконец, в случае 1 о уравнения (1 '), (2') принимают вид
F ' ( ' У ' , ' ) ,,2 + ' О '
1 Х , Z == азз z а,. ==, ао =1= О t
F
(х', у', 2') == b;:
z,2 + b
== о, b
=1= о.
Множество С есть пара пло
<остеЙt определяемая каждым из
уравнений
z' == + ... /
_l!,
или
JI a 3 :J
2 ' ==+ Y
Ь ' ·
33
Для Toro чтобы эти уравнения были эквивалентны, очевидно, не-
a
Ь
",
обходимо И достаточно, чтобы было
, == b
,.
' т. е. Ь зз == Лаза, Ь О ==
а. 1з 33
== Ла
при л ==
.
. Теорема 2 доказана во всех случаях.
а З8
Аналоrично тому, что мы сделали в r лаве VI t
8, мы теперь
можем определить поверхность BToporo порядка I\3K множество
всех точек комплексноrо TpeXMepHoro пространства, координаты
которых в некоторой аффинной координатной системе удовлетво-
ряют уравнеНИIQ второй степени F (х, у, z) === о. При этом два TaK;fX
уравнения определяют в одной и той же системе координат тоrда
и только тоrда одну и ту же поверхность BToporo порядка, коrда
одно из этих уравнений получается из друrоrо почленным умно-
жением на некоторое ЧИСJIО л =1= о.
6. rлавные направления
В этом параrрафе и до конца r лавы рассматриваются лишь
прямоуrольные системы координат.
Пусть дана поверхность BToporo порядка своим уравнением
F (х, у, z) == ч> (х, у, z) + 21 (х, у, z) + й о == о (1)
относительно некоторой прямоуrольной системы координат Oxyz.
Обозначим через Ф (u) квадратичную ФУНКllИЮ, эаписывающуюся
в этой системе координат в виде формы
Ф (u) == <р (х, у, z) == a ll x 2 + 2a 1 ?,Xy + a22!J 2 + 2а 1з хz + 2a2,3YZ + а зз z 2
( есл и u == {х, у, z}) .
258 ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТЕй BToporo ПОРЯДКА. 11
Направление {а:
: у} называется славным, если оно перпенди-
кулярно ко всем сопряженныJtf, ему направлениям. В частности,
всякое особое направление (если оно существует у поверхности (1)
r лавное, потому что сопряжено всякому направлению, в том числе
и всякому направлению, к нему перлендикулярному.
3 а м е ч а н и е 1. ТаК как понятие сопряженности двух направ-
лениЙ относитеll1ЬНО данной поверхности не зависит от выбора
тои или иной системы координат, то Не зависит от этоrо выбора и
понятие rлавноrо направления.
3 а м е ч а н и е 2. Пусть {а:
: ')'}
неособое направление, пер-
пеНДlIкулярное К каким-нибудь двум сопряженным ему направ-
лениям. Тоrда направление {а:
: у} перпендикулярно к сопря..
жен ной ему диаметральной плоскости и, следовательно, является
rлавным.
Итак, для Toro чтобы направление было rлавным, достаточно
(и, разумеется, необходимо), чтобы оно было перпендикулярным
к двум сопряженным ему направлениям.
Пусть направление {а:
: у} r лавное. Если оно особое, то
L == a11a
a12
+ а1зу == О,
М == a 21 a +a22
+а 2з у == О,
N == аз1а. + аЗ2
+а зз ')' == о.
Если {а: р : у} rлавное, НО не особое направление, то оно пер-
пендикулярно к сопряженной ему диаметральной плоскости
Lx+My+Nz+P==O,
и тоrда вектор {а,
, y
коллинеарен нормальному вектору
{L, М, N
плоскости, т. е.
L == аllа+а12
+а131'==Ла, I
м == a 21 ct + a22
+
зУ == A
,
N == а:нсх + a32
+ а зз ')' == АУ
(2)
при некотором А =1= О.
11так, ,<акова бы ни была прямоуrольная система координат,
относительно которой поверхность задана своим уравнением (1),
всякое rлавное направление удовлетворяет уравнениям (2), причем
для особых направлений имеем л == О, а для неособых л =1= о.
Обратно, всякое направление {а:
: у}, удовлетворяющее ypaB
нениям (2), есть rлавное направление, особое, если л == О (и только
в этом случае). Следовательно, вопрос о нахождении еЛа8Н,blХ Ha
правленuй есть вопрос о нахождении ненулевоао вектора {а,
, у},
удовлетворяюrцеео системе уравнений (2) при некоmoром Л j рШJНОМ
нулю или Heпl.
rЛАВНЫЕ НАПРАВЛЕНИЯ
259
Переписываем эту систему уравнений в виде
(ан
л) а + a12
+ а 1з l' == о, I
а 21 сх + (а22
л) р + а 2з 1' == о,
Q з1 rJ.. + аЗ2
+ (а зз
'А) l' == о.
Она тоrда и только тоrда имеет ненулевое решение, коrда
ан
л а12 аlЗ
D(л) == а21 а22
Л а23 ==0. (3)
а:Jl аЗ2 аЗ:J
л
(2')
Уравнение (3) на
ывается характеристическим уравнением квaд
ратичной формы <р (х, у, z) и выражаемой ею квадратичной ФУf{К
ции ф (u); левой частью этоrо уравнения является мноrоч.пен
D (л) третьей степени; мноrочлен этот называется xapaKтepиcти
ческu.м, мноеочленом, а корни ero
харакmeристически.ми числами
функции Ф (u) и формы <р (х, у, z).
л"lноrочлен D (л), очевидно, есть дискриминант квадратичной
формы
б л (х, у, z) == <р (х, у, z)
л (х 2 + у2 + Z2).
Этот мноrочлен является ортоrональным инвариантом. Для тота
чтобы убедиться в ЭТОМ t достаточно заметить, что при переходе
от одноrо ортонормальноrо базиса к друrому форма х 2 + у2 + Z2
,2 ,2 ,2 Ф (
переходит в форму х + у + z и, следовательно, орма <р х, у, z)
л (х 2 + у2 + Z2) переходит в форму
ч/ (х', у' t z')
л. (х,2 + y'Z + Z,2).
ИЗ доказанной таким образом ортоrональной инвариантности
мноrочлена D (л) вытекает следующее утверждение:
Если при переходе от прямоуеольн'ОЙ сиСтЕМЫ координат Oxyz
к Hoвoй
тоже прямоуzольной системе координат Ox'y'z'
Kвaдpa
тичная форма <р (х, у, z) преобразуется в квадратичную фор"чу
, ( ' , ' ) ,,2 + 2 , , , + ' ,2 + 2 , " + 2 , " + ' ,'l.
<р х, у, Z == al1x al
X У a
'lY аlЗ Х z a-},;iУ z аззz)
пw при л/обол! л
a
1
л , a
a ан
л а]2 а13
a J2
а;l a
2
A , а21 а22
л а 2 з
а 2з
а;l a
2 а;:!
л аЗ1 аЗ2 аза
л
Так как характеристический мноrочлен D ('А) не зависит от
выбора той или иной прямоуrольной системы координаТ t то то же
справедливо для ero корней, характеристичеСI
ИХ чисел л 1t л 2 , Аз
формы ер (х, у, Z)t они вполне определены самон l{вадраТНЧНОll
ФУНJ{цией Ф (u) == ер (х, у, z).
260 ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТЕй BToporo ПОРЯДКА. П
Уравнения (2') суть не что иное, как уравнения, определяющие
особые направления формы в (х, у, z) == q> (х, у, z)
л (х 2 + у2 + Z2).
Ilo:JToMY rлавные направления формы ер (х, у, z)
это особые
направления формы в (х, у, z). Отсюда мы снова ВЫВОДИМ, что
r.павные направления не зависят от выбора системы координат;
для их определения можно написать уравнения (2'), пользуясь
при этом любой прямоуrольной координатной системой.
Переходим к доказательству OCHoBHoro факта:
1. Для каждой квадратичной формы ер (х, у, z) сущесп18уеm
прямоуеольная система координат Ох' у' z' I в которой фQрма при-
нимает канонический вид
А ,2 В ,! С ,I
<р (х, у, z) == х + у + . z .
Д о к а 3 а т е л ь с т в о. Л1ноrочлен D (л)
третьей степени; по-
этому по крайней мере один из корней яе.пяется Fещественным;
пусть это будет, например, Л 3 . Этому корню соответствует веще-
ственное r.павное направление, и мы мо;,кем с caMoro начала
лреДПОЛО)j-
ИТЬ, что ось z исходной координатной системы Oxyz
имеет именно это направление; тоrда ортом ero является вектор
{О, О, l} и уравнения (2') должны удовлетворяться, если в них
подставить ct == О.
== О, У == 1, так что имеем
(ан
ЛЗ).О+ а 12 .О+а 1з .l ==0,
а 21 . О + (а'/.2
Л 3 ) · О + G tэ . 1 == О,
а З1 . О + а 32 . О + (а зз
Аз) . 1 == о,
т. е. а 1з == О, а 2з == Ot ааз === Аз
Б избранной системе координат
квадратичная функция Ф (u) заl1исывает
я в виде (
)Op!\1Ы
Ф (u) == ер (х, у, z) == а 11 х 2 + 2a 1 'l.xy + а22у2 + л з z 2 .
Как известно из r лавы V,
1, можно поворотом координат-
ной системы Оху в ее плоскости (BOKpyr точки О) на некоторый
уrол а перевести ее в такую систему Ох' у', в которой квадра-
тичная форма a 11 x 2 + 2а 12 ху +а 22 у2 примет канонический вид
a
lx,2 + a
'ly,2. Этот ПОБОрОТ можно рассматривать !(ак ПОБОрОТ
Bcero пространства BOKPYI' (остающейся неподвижной) ОСИ z на
тот )I{e уrол (1... В результате получаем прямоуrольную коорди-
натную систему Ох' у' z', в которой ФУН(ПIИЯ (1) (u) записывается
в виде
) ' ( ' , , ) 1,2 ,,2 " ,2
Ф (и) == qJ (х, У. z == {Р х, у, z == а 11 х + а
'ly + ",з z ·
Утверждение 1 доказано.
Заметим, ЧТО если бы не только ось Zt но и оси х и у имели
rлавные направления, то и векторы {l, О, О} и {О, 1, О} удовлет-
воряли бы уравнениям (2' )
откуда CJ1едовало бы. что и a1 2 == о.
Итак,
rЛАВIIЫЕ I1ЛПРЛОЛЕНИЯ
261
11. Если оси прямоуеольной системы координат Ох' у' z' имеют
2лавные направления относительно квадратичной функции Ф (U),
mo в такой системе координат функция Ф (u) непременно и.меет
канонuчески й вид
ф (u) == <р' (х', у', z') == Ax'Z + ву,2 + CZ,I.
(4)
Докажем теперь следующее утверждение:
111. Если в какой.нибудь прямоуzoльной системе координат
Ox'y'z' квадратичная функция Ф(u) имеет канонический вид (4)
то коэффициенты А} В} С 8 этом КQН,оническом представлении
непременно равны характерисmuчески},! числам функции Ф (u).
В самом деле, в системе координат Ох' у' z' характеристический
мноrОЧ
'1ен D (л) записывается в виде
А
л. О О
D(л)== о B
A О ==(А
л)(В
л)(С
л);
о о C
A
ero корнями, очевидно, являются А, В, с, откуда и следует
утверждение.
ТЭJ< как функция Ф (u) деЙствительна, так же как и рас.
сматриваемые нами системы I<оординат, то всякая квадратичная
форма, изобра>кающая функцию Ф (u), имеет действительные
коэффициенты: поэтому действительны и коэффициенты 13 I<aHO.
ническом представлении функции, т. е. характеристические числа
л'lt
, ''-3. Итак:
IV. Все характеристические числа любой (действительноЙ)
квадратичной функции действительны.
Доказываем теперь утверждение
У. Если 8 дан.ной nРЯМОУ20ЛЬНОй системе координат Ох' у' z'
квадратичная Фу.чкция ф (u) имеет канонический вид Ф (U) ==
== л 1 х,2 + Л2У,2 + л э z,2, то направления осей э/nой координатной
системы непременно являются елавНЫ},fи направлеНИЯ.,4,Ul функции
Ф (u).
Это утверждение вытекает из Toro, что в системе координат
Ох' у' z' уравнения (2'), определяющие rлавные направления, имеlОТ
вид
(Лl
л)а==О, I
(Л 2
}.)
== О,
(л з
л) у == О
и при л == Л 1 вектор {1, О, О}, при л == Л 2 вектор {О, 1. О}. при
л == Л-З вектор {О, О, l} этим уравнениям удовлетворяют.
Мы убедились сначала в том, что существуют прямоуrОJ1ьные
системы координат, в которых форма <р (х, у, z) принимает кано.
нический вид; затем мы докаЗЗЛИ t что оси всякой такой системы
(5)
262 ОБЩЛЯ ТЕОРИЯ ПОВЕРХНОСТЕй BToporo ПОРЯДКА. II
координат имеIОТ rлавные направления. Отсюда следует, что для
всякой квадратичной формы существует по крайней мере одна
тройка взаимно перпендикулярных rлавных направлений. Сейчас
мы полностью выясним вопрос и о числе таких троек. Оказы
вается, ответ на этот вопрос зависит от кратности корней xapaK
теристическоrо уравнения.
1\\ы докажем последовательно следующие утверждения:
УI. П ростому корню характерuстическоzо уравнения coomвeт..
сmвуеПl одно
единственное 2лавное направление.
V 11. r лавные направления J соотвеlncmвУfощuе двум различным
корням харакmeристичеСКО20 уравнения, взаимно перпендикулярны.
Непосредственным следствием предложений VI и VII является
предложение
VI 11. Если все три корня характеристичеСКО20 уравнения раэ
ЛиЧНЫ между собой
то U.меюпzся три и только три 2Лавных
направления
u они взаимно перnендикулярны.
Друrими словами, имеется одна
единственная ТРОЙI{а Взаимно
перпендикулярных rлавных направлений.
Далее, имеет место предложение
IX. Если из трех корней л'lt
, Л:. два равны между собой II
u/nлиЧНbl от mpeтbezo, например:
л'1 === Л 2 =1= А Зt
то все наnрО13ления, nерпендакуляр,Ч,ые к единственному направ-
лению, СООПlветствуюu{ему корню Л3
являются славными Haпpaв
лениями, соответсmву,ощимu корню А 1 == "'2. Таким образом, име-
ется бесконечно МНО20 троек взаимно nерпендuкулярных 2Лавных
направлений; каждая из этих троек содержит единственное 2лав-
ное направление е ЗJ соответствующее простому корню Аз, тО2да
как два apyzux направления суть произвольные направления el
е 2 ,
перпен.дикулярныle между собой и перпендикулярные к направле-
нию е з .
И HaKoHeU t
Х. Если все nlрИ корня харакrnерuстическоzо уравнения равны
MeJlCay собой, то каждое направление являепzся 2лавным.
Переходим к доказательствам.
Доказательство утверждения VI. Возьмем прямоуrольную
систему координат Oxyz, относительно которой форма
(х, Yt z)
имеет канонический вид. Относительно этой системы координат
уравнения (2') принимают вид (5).
Пусть Аз
простой корень, Аз =1= л'1' Аз =1= Л 2 . Тоrда система
уравнений (5) превращается при л.
Аз в
(А1
Аз) а :=: О (т. е. а == О) t ]
(Л 2
Л а )
== о (т. е.
:=: О),
О . У ;; О.
(5')
rЛАDНЫЕ НАПРАВЛЕНИЯ
263
Единственное не нулевое направление ia:
: ,,}, определяемое этой
системой, есть {о: О : l}.
Доказательство утверждений VI 1
х.
llycTb Л 2 =1= Аз. Так как л'1 не может одновременно совпадать
и с Л 2 И С Аз (=1= л 2 ), то без оrраничения общности можем пред
ПОu10)КИТЬ, что Л 1 =1= 1"з (но, может быть, "'1 == А 2 ). Тоrда л з ока-
зывается простым корнем, и ему, как только что доказано, COOT
ветствует единственное rлавное направление, записывающееСfl
в нашей системе координат в виде {о: о: 1}.
Посмотрим, какие направления соответствуют корню Л 2 - Пра
л
}
2 система уравнений (5) превраrцается в
(л}
}"2) а == О, )
О .
== О, (5")
(;"3
""2) у == о (т. е. l' ==: О).
При Л 1 =1= Л 2 получаем единственное направление а === О, 1'::: О,
=1= О, т. е. {о: 1 : О}, и оно перпендикулярно к направлению
{о: О : l}, соответствующему корню 1...з-
При Аl ==
"2 уравнения (5") превращаются в
О . сх, === О, )
о.р==о
(Аз
1.7) у == о;
(5"')
им удовлетворяют все векторы вида {а,
, О}. Т. е. все векторы,
nерпендикулярные к вектору ез == {О, О, l}. и только они.
Эrим доказано и утверждение VII (значит, и VIII), и утверж-
дение IX.
HaKOHeitt при Л 1 == А 2 == Аз уравнения (5"') превращаются в тож"
дества
О · а == О,
О · Р == О,
О .)' == о;
им удовлетворяет любое направление {а:
: у}, чем доказано
утверждение х.
Рассмотрим случаЙ t коrда имеется равный нулю корень xapal\
теристическоrо уравнения, например Аз == о; как мы знаем, COOT
ветствующее этому корню rлавное направление является особым.
Направим по этому направлению ось z, так что вектор {О, О, l}
является особым; подставив а == О, Р == О, У == 1 в уравнения
L == а ll а. +a12
+а 1з 1' === О, )
'Н а 2 1 а + а 22 Р + а9,З1' =::; О,
N == аз1а +
2
+ аsз'V == О)
(6)
264 ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТЕА BTOPOrO ПОРЯДКА. 11
которые характеризуют особые направления, получим
аJЭ == О,
з == о, аза == о. (7)
Итак, в прямоуrольной системе координат, в которой ось z
имеет особое направление, форма <р (х, у, z) имеет вид
q> (х, у, z) == а l1 х 2 + 2a J2 xy +а 2 2.У 2 +0. Z2,
а после поворота на надлежащий уrол имеет вид
(j) (х, у, z) == qJ' (х', у', z') == л'l х ,2 + л 2 у,2.
Если при этом имеется лишь одно особое направление, то r == 2,
И, значит, л. =t= о,
=1= о. Если же имеется два различных осо-
бых направления, то их имеется нелое двумерное мноrообразие,
так что можно, например, осям z и у придать взаимно перпен-
дикулярные особые направления. Подставляя в уравнения а == О,
Р == 1, у == о, получим в добавление к (7) еще и
а 12 == О, а 22 == о, а З2 == о, (7')
так что в такой координатной системе будет
q> (х, у, z) == а н х 2 + о. у2 + о. Z2,
rAe a 11 === Л 1
единственный не равный нулю корень уравнения (3).
Все дальпейшие упрощения в уравнении
F (х, у, z) == q> (х, у, z) + 2а 1 х
r 2a'1ll + 2а з z +а о == О
достиrаются надлежащим переносом начала координат (и в одном
случае еще дополнительным поворотом осей координат).
7. Приведение к каноническому виду уравнения
поверхности BToporo порядка
Пусть дана поверхность BToporo порядка своим уравнением
F (х, у, z) == (Р (х, у, z) + 21 (х t у, z) + а о == О ( 1 )
относительно некоторой прямоуrольной системы координат Oxyz.
Как мы видели в
6, всеrда существует по крайней мере одна
лрямоуrольная система координат Ох' у' z', оси которой имеют
rлавные направления. В этой системе координат уравнение поверх-
ности (1) имеет вид
F' (х', у', z') == л'tх,2 + л'2..
/2 + Л,зz,2 + 2a
x + 2а2У +
+ 2a;z' + ао == о. ( 1 ')
Начнем с центральноrо случая: б =1= о, r == 3. В этом с
rrучае л'1 =1= О,
Л2 =1= о, Л З =1= О. Если перенести начало координат О системы Ох' у' z'
в единственный центр поверхности (1), то уравнение (1') примет
ПРИВЕДЕНИЕ К КАНОНИЧЕСКОМУ ВИДУ
265
ВИД
F (X t у, z) == F" (х", у", z") == /"'tx"2 +
"2 + Л,зz,,2 + ао ==0. (1)
ПОМНЯ, что большой и малый детерминанты А и б суть OpTOrO"
нальные инварианты, можем для их вычисления воспользоваться
правой частью уравнения (1), что дает б == Л1)"'2Л3' L\ == /"'l
ЛзаОt т. е.
ао ==
(результат, известный нам еще из rлавы VIII,
5). Итак,
окончательный вид уравнения (1) в выбранной нами прямоуrоль..
ной системе координат eCTb l )
л 1 х 2 + Л2!j2 + А.эz 2 + : == о. (I *)
Здесь все коэффициенты однозначно (с ТОt(Ностью до общеrо числовоrо мно..
жителя k) определены уравнением (1) поверхности, в какой бы исходной пря.
моуrольной системе хс)()рдинат Oxyz мы ero ни задавали. Если та же поверх.
насть задана в той же исходной системе координат друrим уравнением:
а (х, у, z) ==0,
то в силу теоремы единственности все коэффициенты мноrочлена а (х, у, z)
по..1УЧЗЮТСЯ из соответствующих коэффициентов мноrочлена F (х, у, z) YMHO
)кением на некоторое число k =1:- о. Так как при переходе к новой системе
координат O'x'y'z' мноrочлеllЫ F и G тождественно преобразуются соответст.
венно в мноrОЧ.llены р' (х', у', z') и G' (х', у', z'), то и для соответствующих
приведенных мноrочленов f' и О' сохраняется соотношение О' ==kF', так Что.
в частности, характеристиче-::кие числа мноrочлена G (т. е. квадратичной формы
ero старlПИХ членов) получаются из характеристических чисел мноrочлена F
11
умножением на То же k; то же справсдливо и для отношения
б
(при б * О).
Последнее ясно и непосредственно: так как детерминант &
четвертоrо
порядка. а cs
TpeTbero, ТО при умножении всех коэффициентов мноrочлена
F (х, у, z) на k детерминант & умножается на k 4 , а детерминант б
на kЗ,
L\
значит, .7) умножается на k. Отсюда следует, в частности, что. умножая. е:ли
нужно, обе части уравнения F (х, у, z) == О на k ==
1, мо>кно всеrда достиr
L\
нуть Toro, чтобы (при б * о) число
б было отрицательным (или равным
1). Эта нормировка уравнения центральной поверхности совпадает с той,
о которой мы rоворили в
5 rлавы VIII. так как
есть значение мноrочлена
F (х, у, z) 8 единственном центре центральной поверхности (1).
Теперь имеется две возможности: 1\ == О и
=1= о. Начнем
с первой.
1 о А === О. Получаем конус BToporo порядка, ве[пественный,
если среди характеристических чисел Л 1 , /"'2' /"'3 имеются числа
разных знаков 2). УмножаЯ t если понадобится, обе части ypaBHe
1) Пишем снова х, у, z вместо Х'. !J, r'.
2) Здесь uелесообразно привести так называемое правило Декарта для
определения знаlНШ корней алrебраическоrо уравнения, все корни KOToporo.
действительные числа. Это правило в применении к уравнению третьей сте..
266 О13ЩАЯ ТЕОРИЯ ПОВЕРХНОСТЕй BTOPOrO ПОРЯДКА. 11
ния (1) на
1, можем предположить, что среди ero коэффицисн
тов л'1' л'2, /"3 имеется два положительных и один отрицательный.
Изменив, если потребуется, наименования осей координат и обо-
1 1
значая положительные коэффициенты через а 2 ' Ь 2 ) а отрицатель
ный через
ё:
J можем представить при 1\ == О уравнение (1 *)
в виде
х 2 у2 Z2
а2 + ь2
с2 == О
(причем здесь и всюду дальше берем а, Ь, с с положительными).
Это каноническое уравнение вещественноrо конуса.
Заметим, что равенство л'l == л'2 означает а == Ь; тоrда мы иыеем
l<руrовой конус или конус вращения, ero сечения плоскостями
z == h суть окружности; если л'1 === л'z ==
Аз, то уравнение конуса
превращается в
х 2 + у2
Z2 == О
имеем круrовой конус, обраЗУЮlцие KOToporo наклонены к ero
1t
оси Z под yr лом 4
.
Если все характеристические числа
одноrо знака, мы можем
переписать уравнение (1 *) при 8. == О в виде
х 2 у2 Z2
а2 + 1)2 + с2 == О.
Это каноническое уравнение мнимоrо конуса.
20 Пусть теперь А =1= О; это значит, что мы имеем невырожден-
ную центральную поверхность.
Переписываем тоrда уравнение (1*) в виде
х 2
!l +
бл!
у2 +
tl
БЛ2
Z2
== 1.
б
(1**)
Возможны четыре случая:
а) Все три характеристические числа имеют один н тот же знак
(тоrда тот же знак имеет и <5) и d > О, тоrда можем положить
11
2 11
Ь 2 11
2
БЛ1
а, ОЛ2
, блз
с ,
лепи с действительными корнями можно сформулировать так. Пусть дано урав-
нение ахЗ
Ьх2+сх+d:::;:::;О. Назовем «переменой знака» лару соседних I{Оэф
фициеНТОD в этом уравнении (Т. е. (а, Ь), (Ь, с) И.НИ (с, d)), состоящую ИЗ двух
чисел различных знаков. Оказывается, что число положительных корнеЙ урав-
Ilенил третьей степени (все корни KOToporo действительны) равно числу пере.
мен знака в этом уравнении. При этом корни считаются вместе с их KpaTHO
стями. Доказате.пьство мож:но найти, например, в «Курсе высшей а,,'ll"ебры»
А. [. Курошз, Э 41, стр. 258 (издание восьмое).
ПРИВЕДЕННЕ К КАНОНИЧЕСКОМУ ВИДУ
267
причем а, Ь, с всеrда считаем положительными. Переписываем
уравнение (1**) в виде
х 2 у']. Z2
.==l
а 2 Ь 2 с 2
получили каноническое уравнение мнимоrо эллипсоида.
б) Нсе три характеристических числа имеют один и тот же
знак и Д < О. Тоrда полаrае
.1
ОАl == а 2 ,
б'А2
== Ь 2 ,
бl; ==с 2
получаем каноническое уравнение вещественноrо эллипсоида
х 2 у2 Z2
+
+
==l
а 2 Ь 2 с 2 .
в) Характеристические числа имеют разные знаки и Д < о.
Предпо.пожим, что числа А 1 и А 2 имеют одинаковые знаки, а Аз
ИМЕет знак, им противоположный (знак б совпадает со знаком Аз).
ПО"lаrаем
2
БЛl
а ,
Получаем уравнение
8
b 2
ОА2
,
il
БХ
==с 2 .
:1
х 2 у2 Z2
t--
==l
а 2 Ь 2 с 2
....... каноническое уравнение ДВУПОJIостноrо rиперболоида. И наконец,
r) Характеристические числа имеют разные знаки и
> о.
Предположим снова, что числа 1..1 и А 2 имеют одинаI(овые знаки,
а число }"3
знак, им противоположный. Тоrда, полаrая
........
== а2
Ь 2
!J..
== с 2
ОА] , 6Л 2
'БАз '
придаем уравнению (1**) вид
х 2 у2 Z2
а2 +
b2
с2 == 1.
Это каноническое уравнение одпополостноrо rиперболоида.
Итак, каждая цеНlпральн.ая поверхность второсо порядка есть
либо конус (действительный или MHи.мый)
либо эллипсоид (ael'Clп
вuтельныu или мнимый)
либо 2иперболоид (двуполостный или oдHO
пОЛОСfпН,blй) .
ПОЛО}I<ительные числа а, Ь, с в каноническом уравнении цент..
ральной поверхности, являющиеся ее полуосями, выражаются через
характеристические числа Л 1 , ,.Л 2 , Аз и детерминанты 1\, Ot т. е. через
ортоrональные инварианты
'Iноrочлена F (х, у, Z), и, значит, не Me
няются при переходе от прямоуrольной координатной систеМЬJ
Oxyz, в ({оторой задано уравнение F (х, у, z)
: () рассматриваемой
поверхности, к любой друrой прямоуrольной координатной сис
268 ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТЕй BToporo ПОРЯДКА. I1
теме. Но они не зависят также и от Toro, каким из уравнений,
определяющих в первоначальной системе Oxyz данную поверх-
ность, мы ВОСПОЛЬ30вались. В самом деле, уравнения эти отлича..
ются друr от друrа только числовым множителем k. Но при YMHO
жении всех коэффициентов мноrоч.пена F (х, у, z) на данное число
6-
k на это же k умножаIОТСЯ и
[;, и все характеристические числа
"-1, А 2 , Аз; поэтому а 2 , Ь 2 , с 2 , ЭIlа чит, И а, Ь, с оста юте я неизмен
ными. Итак, полуоси центральн
й поверхности не зависят ни от
выбора прямоуzольной системы координат, ни от то20 уравнения (из
числа определяющих данную поверхность), котОРЫА1. в этой сиспlеме
координат мы нашу поверхность задали; ОН!! зависят только от
саJ..tОЙ пoвepXHocпlU как zео.метрuческой фuzуры, т. е. как мно-
жества точек в пространстве.
Обратно, если дано наименование центральной поверхности
и ее полуоси а, Ь, с, то поверхность вполне определена с ТОЧ
ностью до ее положения в пространстве. В самом деле, две OДHO
именные поверхности с одними и теми }ке полуосями имеют одно
и то же каноническое уравнение; знаЧИТ J отличаться они MorYT
лишь тем, что первая из них этим уравнением определена в одной
прямоуrольной координатной системе, а вторая
в друrоi'l; но,
совмещая первую координатную систему со второй посредством
собствеНlIоrо или несобствеIII-Iоrо движения, мы совместим одну
из наших поверхностей с друrой.
Итак, две центральны.е поверхности тО2да и только тО2да изо-
метриЧНbl между соБОЙ J коеда они имеют одно и то :лсе HaиMeHoвa
ние и КО2да их полуоси (соответствующие членаJrt каноничеСКО20
уравнения данных знаков) соответственно равны между собой.
Заметим, что (как непосредственно следует из определений
чисел а, Ь, с) во всех рассмотренных случаях два характеристи
ческих числа равны между собой тоrда и только тоrда t коrда
соответствующие две полуоси центральной поверхности равны и
входят в каноническое уравнение поверхности с одним и 1ем же
знаком.
Мы видели (в rл. УI 1 1), что равенство двух каких
либо полу
осей, например а == Ь, эллипсоида означает, что мы имеем эллип
соид вращения (сферу, если а == Ь == с). Поэтому признаком эллип..
соида вращения является равенство двух характеристических чисел,
а признаком сферы
равенство Л 1 == Л2 == л'3.
Точно так же однополостный rиперболоид является rипербо-
лоидом вращения, если а 2 == Ь 2 , Т. е. "'1 == Л2t ТО же верно и для
двуполостноrо rиперболоида, и для конуса. Итак, равенство ДВУХ
характеристических чисел необходимо и достаточно для Toro, чтобы
центральная поверхность была поверхностью вращения, а paBeH
ство Л 1 == "'2 =::;: Аз верно для сферы (действительной или мнимой),
и TOJIbKO дл Я нее.
ПРИВЕДЕНИЕ К КАНОНИЧЕСКОМУ ВИДУ
269
Переходим к ел учаю поверхности (1) раиrа ,== 2. Покажем,
что в этом случае уравнение (1) определяет: при 1\ * О (Т. е. R == 4)
па(JВболоид,
эллиптический, если
< О,
rиперболический, если 1\ > О,
а при Д == Ot R == 3
«центральный» (Т. е. эллиптический или rи
перболический) цилиндр, вырождающийся при R:::: r === 2 в пару
пересекающи хея плоскостей.
Итак, пусть r == 2. Тоrда среди характеристических чисел мно"
rочлена F (х, Yt z) два, положим Л 1 И 1...2' отличны от нуля и Аз == о.
в некоторои прямоуrольной системе координат Ox'y"z' (с тем же
началом, что и исходная система Oxyz) уравнение (1) принимает
вид
р' (х', у', z') == л J х,2 +
y,2 + 2а;х' + 2a
y' + 2a
z' + а о :::: О.
Имеем
л.1 О О а'
1
д== О Л2 О а' ==
а
2ЛIА2'
2 (2)
о о о а'
з
а' а' а' ао
1 2 3
откуда заключаем, что 1.\=#=0 тоrда и ТОЛЬКО тоrда, коrда a
*O.
Рассмотрим сначала случай, коrда Д =1== О И t следовательно,
аз =1= о. Перенос начала координат О в ПРОИ3ВОЛЬНУIО точку О' ==
== (Хо, YU t z
), т. е. преобразование
х' == х" + хо,
У ,
У " I Y
т \/,
z' == z" + zu,
переБОДИТ мноrочлен р' (х', у', z') в
F" (х", у//, z") :=; л 1 х// 2 + л 2 у,,2 + 2 (л1хо + а;) х'/ +
+ 2 (л2!lо + а.;) у" + 2a
z" + л1хо2 + л2уо2 + 2а;хо +
+ 2а;уо
2a
zo + ао :::: О.
Определяя x
, y
и Z
из уравнений
ЛJХ
+ а; == о, Л2!j;' + а; == О,
Лlх
2 + 'Лzу
2 + 2a
x
+ 2a
y
+ 2a
z
+ а о
О,
получаем
р" (х", у", z") == л.1Х"
+ Л2У"2 +2a;z" == о.
Итз}{, В надлежаще выбр
нной прямоуrольной системе коорди"
нат уравнение всякой поверхности раиrа r == 2, R == 4 принимает
вид
X"'1 + л.
!/f2 + 2a
z" == о.
(11)
270 ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТЕй BTOPOrO ПОРЯДКА. 11
Из (2) получаем
l'l,j !!
I аз I == r
л'1"'2 ·
Так как а;
вещественное число, то
имеет всеrда знак,
противоположный знаку Л.Л 2 . Друrими словами, Д положителен,
если характеристичеСI{ие числа Л 1 и Л 2 разных знаков (rипербо..rIИ-
ческий случай), и отрицательно, если Л 1 If л'2 одноrо и Toro же
знака (эллиптический случай). Изменив, если нужно, положи..
тельное направление оси z на противоположное, всеrда мо)кем
предположить, что знаI< а; противоположен знаку Л 1 , так что
уравнение (11) можно переписать в виде (МЫ отбрасываем штрихи
при координатах)
х2 у2
2z == , + ( 1 I * )
а;: а; ,
Лt
Л2
а'
rде
л: есть положительное число, ко торое М Ы обозначим через р:
p==
{
== + V
Л
2 ·
а'
Число
"': положительно, если знак Л 2 совпадает со знаком л'l
(т. е. в ЭЛ.пиптическом случае, L\ < О), и отрицательно, если Л 1 и
л'2 разных знаков (т. е. в rиперболическом случае, L\ > О).
Поэтому, лолаrая в обоих случаях
q==I
: I==+V
d
"'lЛ
'
имеем
а;
q ==
"'2 В эл.Н иптическом случае,
a
q == х; в rиперболическом случае.
Соответственно получаем: в эллиптическоы случае уравнение
х 2 у?
2z
+
р q
эллиптическоrо, а в rиперболическом случае уравнение
х2 у2
2z ==
р q
rнперболическоrо параболоида. Параметры р 11 q параболоида
выражаются через ортоrональные инварианты
, ""1' Л 2 И поэтому
не зависят от той лрямоуrольной системы координат, в которой
БЫ
10 задано первонача.пьное уравнение (1) параболоида. Они не
ПРИВЕДЕНИЕ: К КАНОНИЧЕСКОМУ ВИДУ
271
меняются при умножении мноrочлена F (х, у, z) на числовой
множитель k (так как при этом Л умножается на k4, а Л 1 и л'2
на k),
поэтому они зависят лишь от самой поверхности (рассматриваемой
как множество ее точек) и в свою очередь определяют ее одно..
значно (с точностью до ее положения в пространстве).
Равенство Л 1 == Л 2 означает, что мы имеем эллиптический пара-
болоид с равными пара
етрами р === q, Т. е. параболоид вращения.
Пусть теперь Ll === О, значит, и a
=== о. Тоrда большой рапr
R
3. Уравнение (1') в этом случае приобретает вид
)"lх,2 + л z у,2 + 2ujx' + 2а2У' + а о === О.
Применим к этому ypaBHeHlIlO преобразование параллельноrо
переноса
(3)
х' === х" + Хо,
у'
у" + Уа,
z' == z".
Тоrда будем иметь
л 1 х,,2 +
y"2 + 2 (Л 1 Х о +а!) х" + 2 (j"2YO +а2) у" +ао::: О, (4)
rде
ао === л 1 х о 2 + л 2 уf/ + 2arxo + 2uzyo + а о .
Определяя Ха и Уо из уравнений
лIх
+ йl === о,
Л2У
+ а2 == О,
приведем уравнение (4) к виду
л 1 х,,2 + л 2 у,,2 + a
== О, (111)
причем R == 3, если a
=* о, и R == 2, если a
о. Уравнение (1)
задает (в системе I{оординат О' х"у" z") цилиндр над лежащей
в плоскости z" == о центральной кривой BToporo порядка, имеющей
(в прямоуrольной системе координат О' х"у") то же уравнение (111).
П
и R == 3 (Т. е. a
=1= О) эта кривая нераспадающаяся, при R === 2
она распадается на пару прямых, а ЦИЛИНДР (111) выро){{дается
в пару пересекающихся плоскостей. Любая плоскость z" == h пере..
секает цилиндрическую поверхность (111) по кривой, имеющеЙ
то х{е уравнение (111), в плоскости z" === h (в системе координат
с началом О" == (О, О, h) и те
и же направлениями осей х" и y"
что и в координатной системе О' x"y"z"). Все эти кривые KOHrpy"
энтны между собой
достаточно знать одну из них, чтобы цилинд"
рическая поверхность (111) была определена. Пусть R == 3. Тоrда
полуоси а, Ь кривой (111) (называемые также полуосями ЦUЛUн'дРll
ческой пORepXHOCfпu (111)), иместе с ее наименованием, полностью
определяют новерхНОСТЬ (111) с точностью ДО ее положения
212 ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТЕй BToPoro ПОРЯДКА. 11
в простран(тве и в свою очередь всецело определяются ею. Чтобы
определить полуоси а, Ь по первоначальному уравнению (1), надо
,
только определить а о .
j1ля определения числа ао надо найти какую
нибудь точку
прямой центров (и 3 системы определяющих ее уравнений в исход-
ной системе координат) и подставить координаты этой точки в левую
часть первоначальноrо уравнения поверхности. Полученный резуль
тат не за ПИСIfТ от выбора точки на прямой центров.
Переписывая уравнение кривой (111) в каноническом виде,
мы получаем и каноническое уравнение
х"2 у,,2
a2
+ ь2 === I
э.ллиптическоrо, соответственно rиперболическоrо цилиндра, а
х',2
Tal{)I{e (если кривая (111) есть мнимый эллипс) уравнение
а 2
.,2
УЬ 2 == 1 мнимоrо эллиптическоrо цилиндра в прямоуrольной
системе f<оординат О' X"y"Z". Снова равенство л'1 == Л 2 является
признаком Toro, что наша ЦИL1Jиндрическая поверхность есть
поверхность вращения, т. е. так называемый КРУ2ЛЫЙ цилиндр;
ero сечения плоскостями, перпендикулярными к образующим,
суть окружности.
Пусть теперь R == r == 2, тоrда a
== О и уравнение (111) пре-
врашается в уравнение
л t х"2 +
y"2 == О,
задающее (в прямоуrольной системе координат О' x"y"z") пару
пересеиающихся плоскостей (вещественных, если л'l и 1.2 разных
знаков; мнимых, если Л 1 и А 2 одноrо знака). При этом отношение
Лl v
;
' характеризующее двуrранныи уrол между плоскостями, пол
ностью определяется этой парой плоскостей и в свою очередь
полностью ее определяет.
Переходим к поверхностям paHra , == 1. Для этих поверхностей
лишь одно характеристическое число, пусть
, ОТcJ1ИЧНО ОТ нуля
и л'1 == Аз == о.
Если ось Оу' прямоуrольной системы координат направить
по единственному rлавному направлению, соответствующему отлич-
ному от нуля корню характеристическоrо уравнения, а оси Ох'
и Oz' взять под прямым уrлом в плоскости, перпендикулярноЙ
к уже выбранной оси Оу' (а в остальном
произвольно), то БО
ВСЯI{ОЙ такой системе координат уравнение нашей поверхности
будет иметь вид
F (х, у, z) == р' (х', у', z') == л 2 у,2 + 2аlХ' + 2а2У' + 2азz' + а о === о. (5)
Для поверхности paHra ,== 1 всеrда R
3.
ПРИВЕДЕНИЕ К КАНОНИЧЕСКОМУ ВИДУ
213
Пусть R == з; тоrда по крайней мере один из коэффициентов
а., аз отличен от нуля (иначе в матрице коэффициентов MHoro
члена F' (х', у' , z') все детерминанты TpeTbero пор ядка будут
равны нулю).
Пусть, например, a
=1= о. Покажем, что в рассматриваемом
случае поверхность (5) будет параболическим UИЛИНДРО
f. Наша
задача сейчас
найти такую прямоуrольную систему координат,
в которой уравнение (5) приыет канонический вид
у2 == 2рх. (1 У)
Д u О ' , ,
ля SToro произведем поворот координатнои системы х у z во..
Kpyr оси у' на некоторый, ПОI{а произвольный, уrол а, т. е. сде..
лаем ортоrональное преобразование координат
х' == х" cos ct
z" s i n сх',
у' == у",
z' == х" sin а + z" cos а.,
что тождественно преобразует левую часть ураuнения (5) в
р" (х", у", z") ==
y"2 + 2а. (х' cos а.
z" sin а) + 2а2У" +
+ 2аз (х" sin а + z" COS а) + а о == л 2 у,,2 -1
2а2У" +
+ 2 (аl cos а +аз sin а) х" + 2 (аз cos а
ai sin а) z" +ао::::; о.
Приравниваем коэффициент при z" нулю, что дает триrонометри-
ческое уравнение
, ,. О
азсоsа
аl SlnCX== ,
из KOToporo и определяем et:
а'
ctg а
.
0з
в полученной прямоуrольной системе координат уравнение (5)
приобретает вид
Л'l!/,2 + 2а2У" + 2Ьх" + а о === О, (6)
r де поло}кено
ь == а! cos а +аз sin а.
При этом Ь =F О (иначе матрица козффициентов уравнения (6)
1:
Ie.;!a бы paHf
2 вопреки преДПОЛО}l(еНИIО, что R == 3).
У.равнение (6) есть уравнение цилиндра над параболой, лежа..
Iцей в плоскос.ти z" == о и имеlощей (в системе координат Ох"у")
то же ураnнение (6). Остается только произвести сдвиr начала
координат (в той же плоскости Ох"у"). Мы получим после этоrо
сдвиrа прямоуrольную сист
му координат, в которой уравнение
(6) параболы, а следовательно, и построенноrо над HelO цилиндра
примет каноническиЙ вид (IV). Поставленная задача решена.
274 ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТЕй BToPoro ПОРЯДJ(А. II
Число р, ЯВЛЯЮlцееся параметром параболы, получающейся при
сечении параболическоrо цилиндра плоскостью, перпендикулярной
к ero обраЗУЮЩИМ t называется параметро.м параболuческоzо
цилиндра. Это число определено самим цилиндром и в свою оче
редь определяет ero с точностью до ero положения в пространстве.
Пусть теперь R
2. Тоrда поверхность является парой парал
лельных (в широком смысле) плоскостей 1(1, Л 2 ; канонической
системой координат будет произвольная лрямоуrольная система
координат, одна из осей которой (положим, ось у) перпендику
лярна к плоскостям 1(1, Л 2 , а две друrие оси распо.пОЖfНЫ
в средней плоскости между этими плоскостями. Тоrда уравнение
пары плоскостей зt 1 , :1;2 будет
у== + Ь. (7)
К этому реЗУ.пьтату можно прийти и из рассмотрения уравнения
(5), в котором теперь непременно йl === аз == О (если хотя бы один
из коэффициентов a 1 , аз был =1= О, то мы имели бы парабо.пи
ческий цилиндр и, значит, R == 3).
Итак, уравнение (5) имеет в нашем случае вид
Л2У,2 + 2а2У' + а о === О.
Посредством сдвиrа начала координат по оси ординат преобра
зуем ero в
y,,2 + k == О,
(У)
что эквивалентно каноническому уравнеНИIО (7).
Общим итоrом этоrо параrрафа ЯВJlяется
т е о р е м а 3. Каждая поверхность, определяе.Аfая ypaeHeHueht
второй степени с вещественными коэффuциеН1l1а.ми
принадлежит
1с одному из следующих семнадцати классов:
1. Эллипсоиды вещественные.
2. Эллипсоиды мнимые.
3. rиперболоиды однополостны.е.
4. Fuперболоиды двуполоспlные.
5. Конусы вещеСfпвеН1tые.
6. Конусы мнимые.
7. Параболоиды эллиптические.
8. Параболоиды 2uперболическuе.
9. Цилиндры эллиптические вещественные.
1 О . Цилиндры эллиптические мнимые.
11. Цилиндры zиперболuческие.
12. Цилиндры параболические.
13. Поверхности
распадающuеся на пару пересекаЮU{llХСЯ веще
ственных плоскостей.
14. ПовеРХНОСfпu
расnадаюu
иеся на пару nересекаl0ЩUХСЯ мни-
мых сопряженных плоскостей.
АФФИННАЯ КЛДССИФИКДUИЯ ПОВЕРХНОСТЕй
275
15. ПовеРХНОСПlU, распада!ои.
uеся на пару (различных) парал..
лельных вещественных плоскостей.
16. Поверхности, распадающuеся на пару (различных) парал..
дельных мнu.л.tblХ сопряженных плоскостей.
17. ПовеРХНОСПlИ, распадающuеся на пару совпадающих вещест..
венных пЛОСКОСf1zей.
8. Аффинная классификация поверхностей BToporo порядка
Докажем, что любые две поверхности, принадлежащие к KaKOMY
нибудь одному из перечисленных в конце предыдущеrо параrрафа
классов, аффИННQ эквивалентны между собой.
Для этоrо достаточно показать, что каждая из перечисленных
поверхностеЙ аффинно эквивалентна некоторой простейшей поверх..
ности Toro же наименования.
80зьмем эллипсоид, заданный в канонической (прямоуrольной)
системе координат Oxyz уравнением
х2 у2 Z2
а2 + 7i2 + с2 ==: 1.
Рассмотрим аффинное преобразование
, х , у , z
х ===а' у ===Ь' Z ==с.
(l)
Это преобразование переводит эллипсоид в сферу, имеющую в той же
(прямоуrольной) систеl\.1е координат Oxyz уравнение
х 2 + у2 + Z2 == 1.
Такиы образом, кажл.ый эллипсоид аффинно эквивалентен еllИНИЧ
ной c
pe, концентрической с данным эллипсоидом.
То же аффинное преобrазование (1) переводит однополостный
rиперболоид
х 2 у2 Z2
+
l
а 2 Ь 2 с 2
8 rиперБОv10И.1
х 2 + у2
Z2 == 1;
двупо.псстный fнперБО,,10ИД
X
у2 Z2
а2
Ь 2 +
ё2
=== 1
....
в rнперболонд
х 2
у2 + Z2 == 1;
конус
х 2 у2 Z
+
o
а 2 Ь 2 с 2
276 ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТЕй BToporo ПОРЯДI(А. 11
в конус
х 2 + у2
Z2 == о;
МНИМЫЙ конус
х 2 у2 Z2
+
+
o
а 2 Ь 2 с 2
в мнимый конус
х 2 + у2 + Z2 == О.
Возьмем теперь эллиптический параболоид
х 2 + у2 ::::: 2z
р q
и применим к нему аффинное преобраЗОВ8ние
, Х I У I
Х == ур t У == Vq Z == z.
(2)
Это преобразование переводит данный параболоид в простейший
параболоид, имеющий в той )I{e системе координат уравнение
х 2 + у2 == 2z.
То }ке преобразоnание (2) переводит rиперболичеСl\ИЙ пара-
болоид
х2 у2
== 2z
р q
в параболоид
х 2
у2 === 2z.
Эллиптический цилиндр
х 2 у2
а 2 + Ь 2 == 1,
мнимый эллиптический цилиндр
х2 у2
а 2 + Ь 2 ===
1.
пара мнимых пересекающихся плоскостей
х 2 и 2
а 2 + Ь 2 ==== О.
rиперболический uилиндр
х2 у2
а 2
Ь 2 == 1.
пара действительных пересекающихся плоскостей
х2 у2
==o
a
Ь 2
АФФИННАЯ КЛАССИФИКАЦИЯ ПОВЕРХНОСТЕй
277
аффинным преобразованием
, х
Х ==
а '
, у
у ==
b
'
z' == z
(3)
переводятся соответственно в одноименные поверхности, имеюuцие
в той же системе координат уравнения
х 2 + у2 == 1,
х 2 + у2 ==
1,
х 2 + у2 == О,
х 2
у2 == 1,
x2
у2==О.
Параболический цилиндр
у2 == 2рх
после преобразования
,
х === рх,
,
у == у,
z' == z
(4)
получает уравнение
у2 == 2х.
Поверхности, распадающиеся на парbI параллельных ПЛОСI<О"
стей
х 2
а 2 == О,
аффинно эквивалентны соответственно поверхностям
х 2 + 1 == О
(верхний знак + соответствует МНИМЫМ, НИ){{IlИЙ знак
дсйст
вительным плоскостям).
Остается доказать, что две поверхности, при надлежащие к раз
ЛИЧНЫМ классам, не MorYT быть аффинно эквивалеНТНbJМИ. Мы
сейчас дадим чисто rеометрическое доказательство.
Рассмотрим прежде Bcero свойство повеРХНОСТrl быть централь..
ной, т. е. иметь единственный центр симметрии. Так как при
аффинном преобразовании центр симметрии данной фиrуры лере..
ходит в центр симметрии преобразованной фиrуры, то всякий
аФ:I)инный образ поверхности BToporo порядяа с единственным
центром снова есть поверхность BToporo порядка с единственным
центром 1).
Итак, лри аффинном преобразоеании всякая центральная
поверхность переходит снова в центральную.
1) Если бы у преобразованноЙ поверхности было несколько центров, то
при обратном преобразовании все эти центры переш.ли бы в центры первона
ча.льной поверхности. А у нее по предположению имеется лишь один центр.
278 ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТЕН BToporo ПОРЯДКА. 11
Далее, среди центральных поверхностей невырожденные xapaK
теРIIЗУЮТСЯ тем, что их центр не лежит на данной поверхности.
Поэтому аффинный образ невырожденной (соответственно вырож
денной) центральной поверхности есть неВЫРОЖ,п.енная (COOTBeT
ственно вырожденная) центрас.ттьная поверхность.
Невырожденные центральные поверхности суть эллипсоиды,
однополостные и двуполостные rипербо.поиды; ни одна из этих
поверхностей не может при аффинном преобразовании перейти
в поверхность друrоrо наименования.
В са\10М деле, эллипсоид не может быть аффинно эквива.Тlентен
никакой друrоЙ поверхности BToporo порядка, так Kal{ среди всех
поверхностей BToporo порядка ЛИIlIЬ эллипсоиды обладают свойст
вом лежать внутри HeKoToporo параллелепипеда (все OCTa,fJbHhle
повеРХI:IОСТИ BToporo порядка прсстираются в бесконечность 1).
Двуполостныи и однополостный rиперболоиды аффинно не экви
валентны, так как у двупол:)стных rиперболоидов нет BeI..ЦecTBeH
ных прямолинейных обраЗУIОЩИХ, а у однополостных они есть.
Очевидно также, что при аффинном преобразовании вещественный
эллипсоид не может перейти в мнимый, так же как вещественный
конус не может перейти в мнимый.
Итак, любой аффинный образ центральной поверхности данноrо
паименоrзания есть необходимо центральная поверхность Toro же
наименования.
Переходим к нецентральным поверхностям.
Прежде Bcero очевидно, что аффинный образ всякой поперх
ности, распадающейся в пару пересекающихся, соответственно
пара.:lлельных (в широком или собственном смысле) плоскостей
есть снова поверхность Toro же наименования, причем сохраняется
и свойство поверхности быть вещественной или мнимой.
ОстаlОТСЯ параболоиды и цилиндры.
Нецентра"ryьная поверхность при аффинном преобразовании
не может перейти в центральную (иначе обратное преобразование
перевело бы центральную поверхность в неllентра.пьную). Поэтому
аффинный обраЗ параболоида или цилиндра не может быть цент.
ральной поверхностью; не может он быть и парой плоскостей.
Далее, аффинный образ параболоида не может быть ни э.плип
т!тчеСКИМ t ни rиперболическим цилиндром (так KaI{ у параболои
дов нет ни одноrо центра, а у названных цилиндров имеется
целая прямая центров).
rиперболнческий и эллиптический параболоиды аффинно раз
JlИЧНЫ, так как у rиперболическоrо параболоида имеются (вещест
венные) прямолинеЙНI)те образующие, а у эллиптическоrо парабо
лонда их нет.
1) Ср. (' аналоrичным СВОЙСТВОМ, выделяющим эллипсы среди всех кривых
BToporo порядка.
АФФИННАЯ КЛАССИФИКАЦИЯ ПОВЕРХНОСТЕй
279
По этой же причине эллиптический параболоид аффинно ОТ
lИ"
чен ОТ параболическоrо цилиндра. Аффинная неэквивалентность
rиперболическоrо параболоида и параболическоrо цилиндра выте..
}<ает из Toro, что асимптотические векторы rиперболическоrо
параболоида заполняют два различных двумерных векторных :"YtHO"
rообразия (это все векторы, параллельные одной какой"нибудь из
двух пересекаюLЦИХСЯ плоскостей), тоrда как асимптотические
направления параболическоrо цилиндра образуют одно
единствен"
ное двумерное векторное мноrообразие.
Неэквивалентность (KaKoro бы то НИ БЫ
10) цилиндра лараболо
иду вытекает также из Toro, что у цилиндра все образующие
паралле,,1ЬНЫ между собой, тоrда как ни один параболоид этому
условию не удовлетворяет.
Из сказанноrо следует, что аффинным образом эллиптическоrо
(соответственно rиперболическоrо) параболоида может быть ТО.пько
параболоид Toro же наименования.
Аффинным образом rиперболическоrо или эллиптическоrо
цилиндра не может быть ни парабоЛОИДt ни пара плоскостей, ни
центральная поверхность; не может им быть и параболический
цилиндр, у KOToporo нет ни одноrо центра, тоrда как у эллипти
ческоrо и rиперболическоrо цилиндров имеется прямая центров.
Остается доказать, что эллиптический и rиперболичеСКIfЙ
цилиндры аффинно различны. Это вытекает из Toro, что совокуп..
ность вещественных асимптотических векторов rиперболическоrо
цилиндра есть объединение двух двумерных векторных мноrообра
зий, тоrДа как мноrообразие всех вещественных асимптотических
векторов эллиптическоrо цилиндра одномерно.
Аффинная неэквива.пентность эллиптическоrо и rилерболиче..
CKoro цилиндров вытекает таl{же из Toro t что у эллиптическоrо
цилиндра имеются плоские сечения, являющиеся эллипсами, TorAa
как у rиперболическоrо цилиндра таких сечений нет (читате&l1Ь
должен это ДОI{азать).
Из предыдущеrо анализа вытекает, наконец, что парабо.пиче..
ский цилиндр аффинно отличен от поверхностей всех друrих на..
званных выше типов.
Задача аффинной классификации поверхностей BToporo порядка
решена до конца.
rЛАВА х
ПРОЕКТИ8НАЯ плоскость. I(РИВЫЕ BToporo
ПОРЯДКА НА ПРОЕКТИВНОЙ ПЛОСКОСТИ
1. Перспективное соответствие мен(ду плоскостью и связкой
Л
ножество всех прямых и плоскостей TpeXMepHoro простран-
ства, проходящих через данную точку о, называется связкой
с центро," О ИЛИ, кратко, связкой о. Возьмем какую
нибудь плос-
кость 1[, не проходящую через точку о. Тоrда через каждую
точку М плоскости l' про
ходит единственная прямая
111 == ом связки о. Прямые
связки будем называть луча
),IU. Таким образом, установ-
лено соответствие, называе
мое перспектU8НЫ,М, coomвem
ствuем, между всеми точками
плоскости 1[ и лучами связ-
ки о.
При перспективном СООТ'"
ветствии I{а)кдой прямой d,
лежащей в плоскости зt, со-
ответствует некоторая вполне
определенная плоскость связ
Рис. 125. ки
плоскость б, проходя
щая через точку О и пря..
MYIO d. Плоскость эта образована всеми лучами, идущими из точки О
в точ!{и прямой d; мы будем ее обозначать через б == Od (рис. 125).
Итак, при перспективном cooтвemclrюuu точкам плоскос/пu 11
соответсmвУЮfn лучи связки o
а прямым плоскости п
пЛОСКОСfпи
С8Я3КU О.
Назовем луч и плоскость связки О инциденmными .между собой,
если данный луч лежит в данной ПЛОСКОСТИ. Точно так же пазо..
вем точку и пРЯМУ10 на плоскости л uнциденmнымu между собой,
если данная точка лежит на данной прямой. Очевидпо, при
перспективном соответствии ме){{ду связкой О и плоскостью 11
инцидентность сохраняется: если на плоскости n точка М инци-
ПЕРСПЕКТИВНОЕ СООТВЕТСТВИЕ
281
дентна прямой d, ТО соответствующие луч ОМ и плоскость Od
связки будут также ИНцидентнЫ можду собой, и обратно.
Возникает вопрос: является ли перспективное соответствие
между плоскостью л и связкой О взаимно однозначным?
Леrко видеть, что этой взаимной однозначности нет: лучи связки
параллельные плоскости n, не соответствуют при перспективном
соответствии НИl<акой точке плоскости п, а ПtllОСКОСТЬ связки,
параллельная плоскости Л, не соответствует никакой прямой плос
кости л. Для сокращения речи назовем особым лучом связки
всякий луч, параллельный плоскости п, а особой плоскостью
связки назовем единственную плоскость. принадлежащую этой
связке и лараллельную плсс-
кости л. Особые лучи и oco
бая плоскость СВЯЗI{И не co
ответствуют никаким ТОЧКЗ\1
и никакой прямой плоскости
n. В каждой неособой плос-
кости СВЯ31{И имеется един-
ственный особый луч и oco
бые лучи заполняют всю
особую плоскость связки.
Посмотрим, в каком слу-
чае две плоскости Od и Od'
СВЯЗI{И пересекаются по оса..
бому лучу (рис. 126). Так
как особый луч связки не
имеет общих точек с плос-
костью nt то плоскости Od
и Od' не MorYT иметь обu\их
точек, принад.пежащих плос
кости Л, т. е. прямые d и d', лежащие в ЛЛОСКССТIf Л не ИМ€IОТ
никакой общей точки, следоватеJJЬНО t они параЛJJельны. Обратно,
если две прямые d и d' в плоскости л параллельны, то COOTBe'i'..
ствующие им плоскости Od и Od' не MorYT иметь общих точеК t ле
жащих в плоскости Л, т. е. луч, по которому плоскости Od и Od'
пересекаются, параллелен плоскости 3t t он является особым лучом.
Итак, две плоскости Od u Od' связки О тОёда и только тОсда
nересекаЮl1lCЯ по особому лучу, коzда соответствующие им nрЯ/vtЬte
d и d' параллеЛЬНbl.
Представляется естественным пополнить плоскость новыми
«несобственными», или «бесконечно у далеННЫМИ»t
ТОЧI<ами, обра
зующими несобствеННУЮ t или бесконечно удаленную, прямую, и
поставить их в соответствие с особыми лучами связки так, чтобы
перспективное соответствие между связкой и пополненной п.по
скостью было уже взаимно однозначным. На введенные таким
образом несобственные элементы мы распространим понятие инци",
Рис. 126.
282
ПРОЕКТИВНАЯ ПЛОСКОСТЬ
дентности, считая, что данная обыкновенная прямая d плоскости
л инцидентна несобственной точке МОО тоrда и только тоrда, коrда
особый луч, которому точка Моо соответствует, инцидентен пло
скости Od; несобственная прямая, по определению, ннцидентна
любой несобственной точке. ИтаI<., при лерспективном (теперь
уже взаимно однозначном) соответствии между пополненной пло
скостью И связкой отношение инuидентности сохраняется.
т аким образом, пополнение плоскости fteсобсmвеННblми элемеlt
тами (несобствеННblМU точками u несобсmвенНОЙ прямой) пpoиc
ходит при соблюдении следУ10ЩUХ условий:
1 о Каждая прямая d плоскости 11 пополняется единственноЙ
нес06ственной точкой (соответствующей единсmвelutому особому
лучу плоскости Od).
20 Две прямые d, d' плоскости n пzo2C)a и только mozaa имеют
общую несобственную точку, КО2да они параллельны (т. е. тоеда
и только товда, коеда плоскости Od и Od' имеют общий особый
луч ).
30 Совокупность всех несобсtnВeнных точек плоскости образует
несобственную прямую (совокупность всех особых лучей связки
образует особую плоскость этой связки).
Пополненная несобственными точками и несобственной прямой
плоскость 11 называется nроекmuвной плоскостью 1); мы будем ее
обозначать через 11: . Перспективное соответствие между проектив
ной плоскостью 1t И связкой есть взаимно однозначное COOTBeT
ствие между точками и прямыми плоскости, С одной стороны, и
лучами и плоскостями связки, с друrой стороны; это соответствие
сохраняет инцидентность.
Из условий 1 О, 2C>t 3° t которым подчинено пополнение пло
скости несобственными точками, вытекают следующие два свойства
проективной плоскости:
А. Всякие две прямые d и d' nроекmивной плоскости пepece
каются в одной точке.
В самом деле, если прямые d и d' собственные и если на
первоначальной обыкновенной плоскости 11 они пересекаются
в точке М, то эта же точка М является и точкой пересечения
прямых d и d' на проективной плоскости 11; так как несобствен"
ные точки пересекающихся прямых d и d' различны, то точка М
есть единственная общая точка прямых d и d' на проективной
ПЛОСI{ОСТИ. Если прямые d и d' t рассматриваемые на обыкновен
ноЙ плоскости 11, параллельны между собой, то на проективной
плоскости л они имеют одну и ту же несобственную точку, и
она является их единственной общей точкой.
.1) Точнее, nроективноЙ П..тIОСКОСТЬЮ 8 ее первом изображении или первоА
моделью проективной ПЛОСКОСТИ.
ОДНОРОДНЫЕ КООРДИНАТЫ
283
Наконеи, н.есобствеН,flая пРЯА(ая nересекаеmся со всякой собст
венной прямой в несо6сmвенной точке этой последней.
Предложение А можно сформулировать ТЭIС для всяких двух
различных nрЯhtblХ nроективной плоскости u
wеется единственная
moЧКQ, которой обе эти прямые инцидентны.
Этому предложению двойственно предложение
Б. ДЛЯ всяких двух различных точек на проекmивной плоскости
имеется единственная прямая, которой обе эти точки иHци
дентнЬе.
Это известно, если точки собственные. Предположим, что даны
две точки А и В, из которых одна, положим А, собственная,
а друrая В
несо6ственная. Тоrда В есть несобственная точка
некоторой прямой Ь и всех прямых, параллельных прямой Ь.
ПОЭТОМУt проведя через точку А прямую Ь', параллельную пря
мой Ь (а такая прямая единственная), мы и получим прямую,
инцидентную собственной точке А и несобственной точке В.
Наконец, единственная прямая, инцидентная двум несобствен
ным точкам, есть несобственная прямая.
Аналитически пополнению плоскости несобственными точками
соответствует введение так называемых однородных координат,
к которому мы сейчас и переходим.
2. Однородные координаты точек на плоскости
u
И лучеи в связке
1. Определение однородных координат. Определение 1.
Предпо.пожим, что на плоскости л дана система аффинных коорди
нат oe t e 2 0 Пусть М
произвольная точка плоскости, х и у
ее
координаты в системе ое 1 е 2 . Тоrда всякая тройка чисел
Х 1 , Х 2 , Ха,
пропорциональная тройке
Х, у, 1,
называется тройкой однородных координат точки 1\1 (в данной
аффинной координатной системе oe 1 e2).
Решим две простые задачи:
э) по аффинным координатам точки М найти все тройки
однородных координат этой точки;
б) по одной какой
нибу дь тройке однородных координат данной
точки найти ее аффинные координаты.
Первая задача решена самим определением однородных каор...
динат: тройки однородных координат данной точки М === (Х, у)
суть все тройки X 1 , Х 2 , Х з , пропорциональные тройке х, у, 1.
Вторая задача состоит в том, чтобы по данной тройке Х 1 , Х 2 , Х З
однородных координат точки М найти ту тройку Х, у, 1, к ото...
284
ЛРОЕКТИВНАЯ ПЛОСКОСТЬ
рой тройка Х., Х 2 , Ха пропорциональна. Значит, надо решить
прспорцию
х : у: 1 == Х. : Х 2 : Х Зt
ОТК У да
Xi
Х ==
Хз t
ХЗ
y
Хз.
(1)
Каждая точка М == (Х, у) плоскости получила бесконечное
MHO}l{ecTBO троек однородных координат.
Какими свойствами обладает это множество троек?
Во.. первых, в нем содержится «запрещенная тройка», состоя
щая из трех нулей. так как :JTa тройка не MO}l{eT быть тройкой,
пропорuиональной тройке вида Х. У. 1. ни при каких х и у.
Во-вторых, любые две тройки, являющиеся элементами этоrо
множества, пропорциональны между собой.
В-третьих, всякая тройка. пропорциональная какой-либо тройке,
входящей в наше множеСТВО t сама входит в это множество.
Друrими словами: JrlftO"CeCmrзo всех троек однородных координат
какой-либо точки nлоскосmи есть один из классов, на кomOpbte рас-
падается .множество всех вообще незапрещенных числовых троек.
если счиmmаь эквивалентными всякие две nроnорционаЛЬНblе между
о60Й тройки.
Возникает обратный вопрос: всякий ли класс пропорциональ"
ных троек есть множество троек однородных координат какой..
либо точки плоскости?
Пусть дан какой"нибудь класс троек Kt и пусть Х 1 , Х 2 , Х з
какая
нибудь тройиа, I3ходящая в этот класс. Возможны два
случая:
либо Х з * О, тоrда мы эту тройку х 1 , Х2' Х З назовем обыкно-
венной;
либо х з == О, тоrда мы назовем тройку X t , Х 2 ' Х З особой.
При этом, если в класс входит хотя бы одна обь[кновенная
-тройка, то все тройки этоrо класса обыкновенные; если в класс
входит хотя бы одна особая тройка, то все тройки этоrо класса
особые.
Если класс К состоит из обыкновенных TpOel(t то, взяв какую
нибудь одну ИЗ НИХ, X 1 . X 2t Х з . мы можем найти точку М == (х, у)
по формулам (1); ЭТD и будет точка. для {{отарой X 1 . Х 2 ' Х З является
одноЙ из троек однородных координат, а потому и весь данный
класс К будет классом троек однородных координат точки М.
Ес.ли же данный KJ1ac:c состоит из особых точек, то в нем нет
тройки вида х. у, 1, следовательно, такоЙ класс не является
I<J!accoM, соответствующим какой-либо точке плоскости.
Ита]{, /nочки плоскости находятся во взаимно однозначном соот..
8emcпlBUU с классами обыкнооен, ны,х числовых троек.
ОДНОРОДНЫЕ КООРДИНАТЫ
285
Посмотрим, каков rеометричеСКIIЙ смысл этоrо соответствия и
что можно сказать об особых J<лассах, т. е. о классах, состоя..
щих ИЗ особых троек.
Для этоrо вернемся снова к связке с каким"нибудь центром
О. Возьмем произвольную аффинную координатную систему Ое]е2ез
в пространстве с началом в точке о. Координаты какоrо"нибудь
вектора относительно этой координатной системы будем обозначать
через XI' Х 2) х з .
Оп р е Д е л е н ч е 2. Пусть дан лроизвольный луч связки.
Тройку координат 1:.., Х 2 , Х З любоrо наllравляющеrо ве!{тора ЭТОI'О
луча назовем (пройкой однородных координат этоrо луча (в дан...
ной аффинной координатной системе Ое 1 е 2 е з ).
Так как существует беСI{онечное множество напраВЛЯIОЩИХ
векторов данноrо луча, то каждый луч свя 31{И получает бесконеч..
ное мно}кество троек однородных координат. Среди этих троек
нет запрещенной тройки О, О, О, так как она не может слу"
жить тройкой координат никаI<оrо напраВ.IIяющеrо вектора. Все
эти трой!{и пропорциональны между собой; наконец, если дан
какой"нибудь направляющий вектор {х 1 , X
, х з } данноrо луча
u , , , u
И если троика Xl, X 2t Ха пропорниональна троике X 1 , Х 2 , Х Э ,
то вектор {Xt, X
t X
} также будет напраВ,ПЯIОiЦИМ вектором
Toro же луча. Итак, множество всех троех< однородных KOOp
динат ПрОИЗI30льноrо луча СВЯЗI<И есть класс пропорuиона.пьных
троек.
liетРУДНО видеть, что любой класс числовых троек является
К,,1ассом троек однородных координат Hel<oToporo луча связки.
В самом деле, пусть дан ПРОИЗВОЛЬНЫЙ l<ласс и в нем произволь..
ная тройка Х}, Х 2 , Х з . Так как эта тройка не состоит из одних
пулей, то она является тройкой координат HeKOToporo Bel{TOpa u,
отличноrо от нуля. Этот вектор есть направляющий BeI<TOp вполне
определенноrо луча связки, и, значит, тройка Х], Х 2 , Х з И все
пропорциональные ей тройки ЯВcl1ЯЮТСЯ тройками однородных
координат именно этоr'о луча.
Каким же лучам связки СООТВЕ:ТСТВУЮТ, в }(ачестве троек их
координат, особые тройки вида X 1 , Х 21 О? Очевидно, тем и только
тем лучам, которые лежат в плоскости Oe 1 e 2 .
Это положение вещей позволяет нонять rеОlнетрический смысл
введения однородных координат на ПЛОСКОСТИ.
Пусть, в самом деле, дана плоскость л с системой аффинных
координат oe 1 e 2 на ней. Возьмем аффинную систему Ое 1 е 2 е з в про..
странстве с началом О *- О, С теми же двумя векторами е., е 2 ,
что !1...... в системе ое]е 2 на ПЛОСКОСТII Л, И С третьим вектором
е э == 00 (рис. 127).
Всякую такую координатную систему Ое 1 е 2 е з в пространстве
называем системой, естественно связанной с сиСтЕМОЙ oe 1 e 2 (в пло..
скости n). В системе координат Оеlе
сз плоскость Л, очевидно,
286
ПРОЕ1(ТИВНАЯ плоскость
3 а м е ч а н и е 1. Если в плоскости дана аффинная система
координат ое 1 е 2 , то для каждой точки плоскости определены ее
однородные координаты относительно системы оеlе2' причем ДЛЯ
собственных точек плоскости
аффинные и однородные KOOp
динаты связаны между собей
формулами (1). Пополнение
плоскости несобственными точ
ками состоит в том, что каж
дому классу особых троек вида
X 1 , Х 2 , О ставится в COOTBeTCT
вие несобственная точка плос
кости.
В резу .пьтате этоrо ПОПОLТУне
ния множество всех без исклю-
чения классов числовых троек
оказывается поставленным во взаимно однозначное соответствие
с множеством всех точек плоскости.
Точку Лr' с однородными ({оординатами Х 1 , Х 2 , Ха записываем
так:
имеет уравнение
I
I
I
I
M
\
\
\
. \
\
Рис. 127.
Хз == t.
(2)
м === (Х } : Х 2 : х з ).
3 а м е ч а н и е 2. Пусть М
несобственная точка плоскости,
тоrда
м == (Х 1 : Х 2 ; О).
Пара чисел Х 1 , Х 2 есть пара координат HeKoToporo не paBHoro
нулю вектора {х 1 , Х 2 } плоскости; несобственные точки
М == (Х 1 : Х 2 : О) и N == (УI : У2 : О)
совпадают тоrда и только тоrда, коrда тройки Х 1 , Х 2 ) О И Уl' У2, О,
Т. е. пары X t , Х 2 И Yl, и2, пропорционалыI,, а это значит, что
векторы {X 1 , Х 2 }, {Уl, У2} коллинеарны, или определяют в пло-
скости одно и то же направление (являются направляющими BeK
торами одной и той же прямой).
Таким образом, несо6ственные точки плоскости взаимно одноз
н,ачно соответствуют направлениям в пЛОСКОСlпи (при этом надо
помнить, что два противоположных вектора определяют одно и
то же направление). Несобственные точки называют также беско
нечно удаленными и rоворят, что бесконечно удаленная точка
М === (x 1 : Х 2 : О) «удалена в бесконечность» в направлении вектора
{х 1 ) Х 2 } (или {
Xl:
Х 2 }). т. е. в направлении прямой. имеющей
эти векторы своими направляющими векторами.
ОДНОРОДНЫЕ КООРДИНАТЫ
287
2. Уравнение прямой на плоскости в однородных координатах.
Пусть на плоскости n дана прямая d своим уравнением
а1х+а2У+аз==О (3)
в системе координат oe 1 e 2 .
Найдем уравнение, которому удовлетворяет всякая тройка
однородных координат любой точки прямой d. Для этоrо, взяв
произвольную точку М == (х, у) прямой d и какую-нибудь тройку
Xt, Х 2 , Х З однородных координат этой точки, выразим аффинные
координаты х и у точки 1\1 через ее однородные координаты
Х 1 , Х 2 , Ха по формулам (1) и подставим полученные значения
Хl
X===
Ха '
Х2
Y===
хз
в уравнение (3). Получим
Хl Х2 О
а 1 ХЗ + а 2 ХЗ + аз =:::; ,
Т. е.
a 1 x 1 +
Х2+lIaXз==О.
(4)
Это и есть искомое уравнение.
Обратно, пусть дано уравнение (4); предположим сначала, что
в этом уравнении по краЙней мере один из коэффициентов йl, а 2
отличен от нуля. Посмотрим, каковы те собственные точки пло..
скости, которые удовлетворяют этому уравнению. Пусть собствен..
иая точка М плоскости 1t имеет тройку однородных координат
Хl, Х 2 , х з , удовлетворяющую уравнению (4). Тоrда и всякая тройка
однородных координат точки М удовлетворяет уравнению (4); в част..
ности, этому уравнению удовлетворяет и тройка х, у, 1, rде
х и у
аффинные координаты точки М. Итак, если однородные
координаты точки М удовлетворяют уравнению (4), то аффинные
координаты х и у ЭТОЙ точки удовлетворяют уравнению (3) и, сле
довательно, лежат на прямой (3).
Но на проективной плоскости n имеется инесобственная
ТОЧI<а, и притом только одна, удовлетворяющая уравнению (4).
В самом деле, если X 1 , Х 2 ' О
тройка однородных координат
несобственной точки, удовлетворяющей уравнению (4), то
a 1 x 1 + а 2 Х 2 == О, (4')
откуда
Х 1 : Х 2
a2 : a 1 ;
единственная несо6ственная точка. удовлетворяющая уравнению
(4), есть точка
(
tlz : а 1 : О).
(5)
288
ПРОЕКТИВНАЯ ПЛОСI(ОСТЬ
Тройки класса (5) и только они суть тройки координат един.
CTBeHHoro несобствеНlIоrо луча. лежащеrо в плоскости Od. Так как
при перспективном соответствии rv.ежду связкой О и плоскостью n
ОТ
lошение инцидентности сохраннется, то несобственная точка (5)
ДО.,т]жна считаться инцидентноЙ прямой d, т. е. эта точка есть
несобственвая точка прямой d.
Как If следовало ожидать, две прямые тоrда и только тоrда
имеют оБПlУЮ несобственную точку, коrда они лараллельны.
Мы до сих пор рассматривали случай, коrда в уравнении (4)
по крайней мере один из (iоэффициентов a 1 , а 2 отличен от нуля.
Если оба ){оэФФицнента а} == а2 == О, то третий коэффициент аз =1= О
и уравнение (4)t имея вид Qзхз == О, аз =#: О, равносильно ypa
Бнению
Х З === О.
(6)
Этому уравнению удовлетворяют все несобственные точки плоско..
сти И только они. Уравнение (6) есть уравнение первой степени,
ero и естественно считать уравнением несобственной прямой пло
скости.
3. Координаты прямой, арифмеТИtlеская проективная
плоскость, обlЦее определение проективной плоскости
t. Координаты прямой. Читателю уже давно известно, что
координаты можно определить не только ДЛЯ точек, но и для
друrих rеометричеСI<ИХ объектов; например, мы с caMoro начала
этоrо «Курса>} rоворим о координатах вектора и только что ввели
лонятие однородных координат .пуча связки.
Пусть на проективной плоскости 1t дана прямая своим урав..
нением
й 1 Х} + а 2 Х 2 + азх з == о.
(1)
Тройка коэффициентов й., а 2 , аз вполне определяет уравнение
(1) и, следовательно, ПрЯМУIО, выражаемую этим уравнением. При
5ТОМ два уравнения (1) II
b1x 1 + Ь 2 Х 2 + ЬзХз == О (2)
тоrда и только тоrда определяют одну и ту же прямую, если их
коэффициенты лропорциональны между собой, т. е. если
Ь 1 : а 1 == Ь 2. : а 2 == Ь 3 : аз. ( 3 )
В самом деле, если уравнения (1) и (2) определяют одну и ту же
прямую. то всякая тройка чисел Х 1 , Х2, х з , удовлетворяющая
одному из этих уравнений, удовлетворяет и друrому. Т. е. урав-
нения (1) и (2) эквивалентны. но два однородных уравнения (1)
ОБЩЕЕ ОПРЕДЕЛЕНИЕ ПРОЕJ<ТИВНОП ПЛОСКОСТИ
B9
и (2) эквивалентны тоrда и только тоrда, коrда их коэффиuиенты1
пропорциональны.
О п р е Д е л е н и е 3. Тройка коффициентов а 1 , а 2 , llэ любоrо
уравнения данной прямой d называется троЙкой (однородных)
координат этой прямой
а также тpJUKOU координат плоскосrr.u
Od связки О (в системе координат Ое 1 е 2 е Зt естественно связанной
с системой oe1e. Zt данной в плоскости л).
Очевидно: «запрещенная» тройка О, О, О не может быть ТрОЙ
кой координат никакой прямой. Далее, И3 только что доказанноrо
след ует:
(. Любые две троiiки координат данной прямой пропорцио...
нальны между собой.
2. Если данная тройка а 1 , а 2 , аз есть тройка координат дaH
ной прямой, то и ВСЯJ{ая тройка, пропорциональная тройке al
a"l' а Зt есть тройка координат той же прямой.
Итак, всякая (незапрещенная) пlройка чисел может pacCMam
рuваfllЬСЯ u как пzройка одн'ОРодных ЮJордuнаtп некоторой точки
на проекти8НОЙ плоскости, u как пzpOUKa координат HeKOl1lopOIi
прямой. Две тройки определяюпz при ЭПIОМ, одну и ту же mочку
COOfllBeтcmBeHHO одну и ту же прЯ},tу.Ю
тozaa и только пlОi!да
КОсда они пропорцuональны между собой.
Прямую с координатами И 1 , и 2 , ИЗ мы обозначаем так:
{и 1 : И2 : из}.
Прямая {иl: И 2 : из} и точка (Хl: Х 2 : х з ) инцидентны, если
U 1 X 1 + и
2 + UзХ з == о.
При м е р. Прямая Х == у или х.
Х 2 ==
есть прямая {I : ........ 1 : О};
пряман у==l или Х2
ХЗ===О есть прямая {O:+l:
I}; прямаq
х -:= О (ось ординат) или Х 1 === О есть прямая {l : О : О}; несобственная
прямая х з === О есть прямая {о: О : I }.
2. Арифметическая проективная ПЛОСКОСТЬ. Теперь читатель
rOTOB к введению следующеrо определения:
Оп р е Д е л е н и е 4. АрифмеПlllf{,еской проеК'llивной nЛОСКОСfпью
называется множество Prtp элементов двух родов, называемых
соответственно «арифметическими точками» и «арuфмепlичеСКИ/l'tu
пря.мы.ми». И те и друrие суть классы пропорциональных ыежду
собоЙ числовых троек, снабженные отметкой, указываIощеЙ t имеется
ли в виду «точка» или «прямая»: точки обозначаются, например,
через (Х 1 : Х 2 : Ха), а прямые........ Чfрез {и 1 : и 2 : из}. При этом между
точками и прямыми установлено отношение инцидентности, COCTO
ящее в том, что точка (X t : Х 2 : х з ) и прямая {И 1 : И 2 : из} называются
UНl
идеНf1:НblМll между собой, если
1/1 х 1 + и2 Х 2 + l' эХ Э =:::: О. ( 4 )
290
ПРОЕКТИВНАЯ ПЛОСКОСТЬ
3 а м е ч а н и е 1. Ставя в соответствие точкам (х. : Х 2 : х з ) и пря-
мым {и 1 : и 2 : uз} арифметической проективной плоскости прямые и
плоскости связки О, имеющие в некоторой фиксированной системе
координат соответственно координаты х., Х 2 , Ха и и 1, И 2 , U z , видим,
что получаем взаимно однозначное соответствие между элементами
арифметической лроективной плоскости и элементами связки,
сохраняющее отношение инцидентности (точка и прямая арифметичес-
кой п,носкости инцидентны между собой тоrда и только тоrда, коrда
инцидентны соответствующие им луч и плоскость связки).
3. Общее определение проективной плоскости. Наконец, мы
можем дать и следующее общее
О п р е Д е л е н и е 5. П роекmuвной плоскостью называется вообще
всякое множество Р, состоящее из элементов двух родов, называемых
соответственно «точками» и «прямыми», и связанных между собой
некоторым отношением, называемым отношением ин.цидентности
между какой"нибудь «точкой» И какой"нибудь «прямой», При этом
требуется, чтобы существовало сохраняющее инцидентность вза...
имно однозначное соответствие между «точками» И «прямыми»
лроективной плоскости Р, с одной стороны, и лучами и плоское...
тями связки, с друrой стороны: «точка» И «прямая» проективной
плоскости Р инцидентны между собой тоrда и только тоrда, коrда
инцидентны соответствующие им луч и плоскость связки. В част
ности, проективной плоскостью является и сама связка, если ее
лучи называть «точками», а плоскости
«прямыми».
3 а м е ч а н и е 2. Взаимно однозначное соответствие между эле...
ментами (точками и ПрЯl\1ЫМИ) двух проективных плоскостей, cox
раняющее отношение инцидентности, называется UЗОАtОрфНЫМ соот...
eeтcп18ue.lW (U30АtОрфUЗМОМ) этих двух плоскостей. Мы видим, что
все проективные плоскости изоморфны связке и, следовате,,1ЬНО,
изоморфны между собой. Очевидно также, что всякая проектив
ная плоскость изоморфна арифметической лроективной плоскости
(так как связка ей изоморфна).
3 а м е ч а н и е 3. До тех лор, пока в пространстве не выбрана
аффинная координатная система Ое 1 е 2 ез, все лучи связки О и все
плоскости этой связки (т. е. все «точки» и все «прямые» проектив..
ной ПЛОСI{ОСТИ) равноправны между собой
никаких несобствен-
ных «точек» И никаких несобственных «прямых» связка О сама
по себе не знает. Не знает их и проективная rеометрия, ко...
торая есть не что иное, как ееомеmрuя связки. Лишь ПОС.не Toro,
как выбрана система координат Ое 1 е 2 е з с началом в центре связ
ки,
И этим выбором установлен определенный изоморфизм между
связкой и арифметической проективной плоскостью
можно rOBo"
рить о несобственных лучах связки (несобственных точках ллос..
кости) как о лучах (о точках), третья координата Х з которых равна
нулю; можно rоворить и о несобственной прямой {О : О : l}, которой
все эти точки инцидентны.
ОБЩЕЕ ОПРЕДЕЛЕНИЕ ПРОЕКТИВНОЯ ПЛОСКОСТИ
291
Поэтому, изучая любую проективную плоскость Р, мы можем
всеrда заменить ее по нашему желанию связкой или арифмети-
ческой проективной плоскостью Р ар . Последнее особенно целесо
образно, если же.пательно с caMoro начала выде
ТIИТЬ несобственные
элементы. При этом удобно и законно представлять себе ариф..
метическую проективную плоскость как результат введения OДHO
родных координат (относите.пьно некоторой «исходной» аффинноЙ
коорлинатной системы oele
) на данной обычной плоскостн Л, как
это мы делали в начале Э 2.
П роекmиВНУ'0 плоскость с выделенной на ней несоБСlnвенноu
nря
tОЙ называl01Т! «аффllнно
проекrrtUВНОЙ» плоскостью
по причи-
нам, ,{оторые выяснятся в 9 6.
4. Комплексная проективная плоскость. Мы оrраничимся опре-
делением арифметической комплексной проективной плоскости.
Ко.мплексной арифметическоЙ пpoeKпlu8HOU плоскоспzыо назы-
вается множество эле
1ентов двух родов, называемых соответственно
КОJ1tплеКСНЫ.Мll арифмеmическими mОЧКQJИU и комплексными арuф-
меnluческимu пря.мымu 1). 1-1 те и друrие суть классы пропорцио
на.1ЬНЫХ между собой троек, теперь уже произвольных комплекс
ных чисел, снабженных по
прежнему отметкой, указывающей,
идет ли речь о точках или прямых; ТОЧI{И будут обозначаться
через (Х 1 : Х 2 : Х з ), прямые
через {и 1 : и 2 : и з }. Среди всех троек
комплексных чисел лишь одна тройка о, О, о по"прежнему OCTa
еТС5! запреUlенноЙ. Точка (соответственно прямая) называется
вещественноЙ (деЙсп18uтеЛlJНОЙ) , если среди троек Х..., Х 2 , Х з , I{лаССО(-.1
которых она ЯВ.fJяется, имеется тройка, состоящая из действитель-
н ых чисе"l. Так, точка М == (i : i : i) есть действительная точка:
она может быть заппсана и в виде М
(1 : 1 : 1). Все не дейст-
вительные точки (пряыые) называlОТСЯ .мНUМЫМИ.
N\ежду точками и прямыми комплексной проективной плоскости
установлено отношение инцидентности: точка (X 1 : Х 2 : х з ) и пря
мая {и 1 : и 2 : Uз} называются инцидентными между собой, если
U1X 1 + и 2 Х 2 + UзХз == о.
Так же можно rоворить и о комплексной связке как о МIdО
жестве всех комп,-тrексных прямых (лучей связки) и плоскостей,
проходящих через одну какую
нибудь действительную точку О
КОМП..lексноrо TpeXMepHoro пространства. В даJIьнейшем (уже
в С.'1еДУlоще
л параrрафе) мы бу ДС:\1 предпо.паrать, что в связке О
(вообще rоворя, КОМП,,!IексноЙ) дана систе:\l(} координат Ое 1 е 2 ез,
которая всеrда бу дет предпо.ааrаться действительноЙ (т. е. не
TO..fJbKO точка О, но и векторы e 1 , e z , е з будут всеrда веществен-
ными). Ото)кдеСТВ
1ЯЯ луч связки, имеlОЩИЙ в I1збранной «исход
ноЙ» CI1CTeMe ]\оординат Oele
e
координаты Х 1 ' "\2' Х з , С точкой
J)
\ы, естественно, будем их называть просто пlОЧКQми и прямы.4-tu.
292
ПРОЕКТИВНАЯ ПЛОСI(ОСТЬ
{Х 1 : Xz: Ха), а плоскость связки, имеющую координаты И 1 , и 2 , ИЗ,
С прямой {U 1 : и 2 : Из} арифметической проективной плоскости, мы
и саму связку можем отождествить с арифметической проектив"
ной плоскостью.
4. Принцип двойственности для проективнной ПЛОСКОСТИ
Вернемся к УСЛОВИIО инцидентности
U 1 X 1 + и 2 Х 2 + ИзХз === О (1)
точки (Х 1 : Х 2 : Хз) и прямой {и 1 : и 2 : Из}.
Псставим в соответствие каждой точке (х 1 : Х 2 : Ха) проектив-
ной плоскости прямую {X 1 : Х 2 : Хз} с теми же координатами (и,
наоборот, прямой {И 1 : И<,; : из}
точку (иl: И 2 : Из», т. е. сделаем
взаимно однозначное отображение множества всех элементов (точек
и прямых) проективноЙ плоскости на себя, записывающееся в виде
(Х 1 : Х 2 : х з )
{Хl : Х 2 : Ха}. (2)
Тоrда имеет место следующий очевидный и тем не менее заме-
чательный факт.
Отображение (2) сохраняет отношение инцидснтности, т. е.
переводит точку (Xt: X
: Ха) И ПРЯМУIО {U 1 : и 2 : u з }, инцидентпые
между собой, в прямую {Х 1 : Х 2 : Хз} и точку (U 1 : и 2 : Из), по
преж--
неыу инцидентные между собой.
В самом деле, условие ннцидентности (1) не зависит от Toro,
считаем ли мы тройки Х 1 , Х 2 , Ха и lll' И2' из троЙками координат
точки и прямой или, наоборот, ПРЯ
'10Й и точки, т. е. не зависит
ст Toro, какую из двух трсек X 1 , Х 2 , Х З И И 1 , и 2 , ИЗ мы заключаем
в круrлые, а какую
в фиrурные скобки.
I
Iепосредственным следствием этоrо факта является следующий
Принцип двойственности для проективной пло..
с к о с т и. Пусть верно какое
нuбудь предложение, каса/ощееся точек,
прямых и отношенuя инцuденmноспlи .м.ежду ними. ТОсда будет
верно и двойственное предложение, получаемое, если в данном пред-
ложении поменять слова «прямая» и «пzочка».
В самом деле, речь идет о предложении, которое может заклю-
чаться лишь в утверждении инцидентности таких
то прямых
{U 1 : И 2 : uз} и таких
то точек (х 1 : Х 2 : Х з ). Эти утверждения Bыpa
жаIОТСЯ в тождествах вида (1), в которых ничеrо не изменится,
если мы в формулировке нашеrо предложения заменим прямые
точками, а точки
прямыми (т. е. заменим фиrурные скобки Kpyr..
лыми и наоборот).
Прежде чем ПрИБОДИТЬ примеры взаимно двойственных пред..
JIожений, сделаем следующее общее замечание.
В плоской аффинной rеометрии точки и прямые не были рав-
ноправны: плоскость состояла из точек, а прямые определялись
ПРИНЦИП ДВойСТВЕННОСТИ
293
как множества точек, координаты которых удовлетворяли урав-
нениям первой степени.
Теперь мы можем стать на друrую точку зрения: и прямые
и точки суть совершенно равноправные rеометрические объекты,
и те и друrие взаимно однозначно соответствуют классам число-
вых троек; эти rеометрические объекты связаны между собой основ.
HbfM отношением ИНJ.I,И, дентности выражающимся условием (1).
Если мы в (1) будем считать прямую {U 1 : и 2 : из} данной, то равен-
ство (1) является уравнением, определяющим множество точек,
инцидентных данной прямой. Если же мы в уравнении (1) будем
считать данной точку (X 1 : Х 2 : Х з ), то оно превращается в уравне...
иие, определяющее множество всех прямых {U 1 : и 2 : Uз}, инцидент-
ных данной точке, т. е. пучок прямых с центром в данной точке.
С таким же правом, как мы раньше считали первоначальным
понятие точки, а прямую определяли как множество точек, у дo
влетворяющих уравнению (1), мы моrли бы считать первоначаль...
HbfM понятие прямой и определять точку как множество инцидент
ных ей прямых (как пучок прямых), удовлетворяющих тому же
уравнению (1). Свое полное выражение это равноправие точек
и прямых проективной плоскости и находит в сформулированном
выше принципе двойственности.
Приведем примеры двойственных в указанном смысле предло-
жений; их доказательства будут тоже «двойственны»: одно полу
ЧИТСЯ из друrоrо, если в каждый момент доказательства слово
«прямая» заменить словом «точка» С сохранением ка)кдый раз
отношений инцидентности.
т е о р е м а 1. КО всякu"и' двум Т е о р е м а 1'. КО всякuм
различным точкам AI В имеется двум различным пРЯ/tlblМ a l Ь
едИн'ственная прямая I им инци- имеепlСЯ единственная mОЧl:а l им
дентная; она обозначается через uнцидентная; она обозначается
...48 (или просто через АВ). через (а. Ь) (или просто через а. Ь).
Доказательство
Пусть al: a z : аз и b 1 : Ь 2 : Ь з суть две данные различные
точки j прямые.
Мы ищем всевозможные
прямые J точки
1 :
2 : 6з,
инцидентные двум данным
точкам t прямым
Л 1 : а 2 : аз) &1: Ь'1. : Ь з . Искомые ;1:;2 :
з удовлетворяют условиям
а 1 ;l +a 2 s t +аз
з == О, (3)
bl
l + b2
2 + Ь э 6:s == О, (4)
294
ПРОЕКТИВНАЯ плоскость
откуда следует, что
l :
2 :
3 == I
:
: I : I
:
I : I
J ( 5 )
Т. е. что координаты
1:
2 :
з определены с точностью до про
порuиональноrо множителя однозначно; значит, существует
единственная
1
прямая {
1: 62 :
3} : точка (;1:
2 :
3)'
инцидентная данным двум
точкам прямым
(а 1 : а 2 : аз), (Ь 1 : b z : ь з ) {a 1 : а2: аз}, {Ь 1 : Ь 2 : ь з }.
3 а м е ч а н и е. Теорема 1 выражает XOpOI1JO известный чита...
те
lЮ из школьноrо курса rеометрии факт: через всякие две раз..
личные точки проходит одна п только одна прямая. Двойственная
теореме 1 теорема l' в более привычной формулировке звучит
так: всякие две различные ПРЯl\-Iые пересекаются в одной точке,
собственноЙ или несобственной; в собственной точке они пересе
каются тоrда, коrда пересекаются на обычной (не пополненной
несобственными точками) плоскости, в несобственной
тоrда, коrда
они на обычной плоскости параллельны. На проекmи8Н,Ой плоско..
сmи параллеЛЬН,blХ прямых нет.
Вернемся к доказательству теорем 1 и 1'. Единственная пря
lаЯ (точка), инцидентная двум данным точкам (прямым) а 1 : а 2 : аз
и b 1 : Ь 2 : Ь з , имеет координаты, определяемые формулами (5):
l :
2 :
3 == I
:: I : I :; :
I : I
: 1.
Если А == (a 1 : а 2 : аз) и в == (Ь 1 : Ь 2 : Ь з ) суть две различные точки,
то прямая (5) есть прямая {
1: S2 : 6з}, этим двум точкам инцидент..
ная; ее уравнение есть
lXl +
2X2 + SзХз == О, (6)
r де Sl'
2'
з даны пропорцией (5), так что уравнение (6) можно
переписать в виде
Xl Xs Ха
01 а2 аз == о.
Ь 1 Ь 2 Ь а
Уравнение (6) или (7) есть уравнение, которому удовдетворяют
координаты всех точек, инцидентныx прямой {
1 : ;2 :
3}. Это ypaB
пение (7) выражает тот факт, что первая строка матрицы
Xl ХЭ ХЗ I
аl 02 аз l
Ь 1 Ь 2 Ь а
(7)
ПРИНЦИП ДВОйСТВЕННОСТИ
5
есть линейная комбинация второй и третьей, Т. е. что
Xz == Лаl + J.Lb z , 1 == 1. 2, 3. (8)
Давая параметрам л и fl всевозможные числовые значения (кроме
запрещенной пары значений л == fl == О), будем получать по фор-
1улам (8) тройки однородных координат всевозможных точек М
прямой АВ. Очевидно при этом, что двум пропорuиона.,1ЬНЫМ
парам л': f.t' == л" : f-t" будут соответствовать пропорциона.,1ьные
тройки X
: Х; : Х; и xr : Х; : Х;. Обратно, если формулы (8) опреде-
ляют ДЛЯ данных значений л',
t', соответственно 'А".
", одну и
" 1" "
ту же точку, т. е. две пропорциональные троики XI, Х2, Ха И Хl,
" " '\" "1" " . ,\1., '\"."
X'l, ХЗ, то пары fIw, fl и fIw,
пропорциональны. fIW. fl ;:: fIW . f.t .
В " k ' " k ' " k ' Т
самом деле, пусть Х. == XI, X
== X
, ХЗ == Хз. оrда
л"аl + ".,"b 1 == k (л' az +
'bl),
т. е.
(л"
kл') аl == (kf.t'
") Ь "
l == 1, 2, 3,
откуда следует, что или л Н == k'A', f.t" == kfl', т. е. л":
" == л' :
',
или тройки a 1 , а 2 , аз и b 1 , Ь 2 , Ь з пропорциональны и, значит,
точки А и В совпадают между собой
вопреки предположению.
Итак, точки прямой {
1:
2 :
3} == АВ взаимно однозначно соот-
ветствуют классам пропорциональных пар значений параметров 'А,
J..t, поэтому система уравнений (8) называется системой пapa
teт-
рических уравнений или, для краткости, просто параметрическим,
уравнением прямой АВ. Однако с.педует помнить, что для Toro.
чтобы написать эту систему уравнений, надо не только знать
самые точки А, В, определяющие нашу прямую, но и выбрать
среди Tl)oeK однородных координат этих точек определенную
тройку a 1 , а 2 , аз, соответственно b 1 , Ь 2 , Ь з .
Если а === {а 1 : а 2 : аз} и Ь == {Ь 1 : Ь 2 : ь з } суть две различные пря-
мые, то формулы (5) определяют их точку пересечения (а. Ь) ==
(
1 :
2 :6з). Уравнение (6) или (7) есть уравнение (относительно Х 1 ,
Х 2 , х з ), которому удовлетворяет любая тройка координат всякой
прямой d == {Х 1 : Х 2 : Х з }, инцидентной точке (а. Ь) == (
l : 62 : Sз) (т. е.
проходящей через эту точку); друrими словами, уравнение (7)
есть уравнение пучка прямых с центром (а. Ь). Уравнения (8)
образуют систему параметрических уравнений этоrо пучка; они
выражают давно известный нам факт, что каждая прямая пучка
есть линейная комбинация двух каких-нибудь прямых этоrо пучка.
Из доказанноrо вытекает
т е о р е м а 2. Пусtnb Xl' Х 2 , Ха, а 1 ,
, аз, Ь 1 , Ь 2 , Ь а суть про-
извоЛЬНblе тройки координат каких-нибудь трех
t11IJЧeК. [ прямых.
296
ПРОЕКТИВНАЯ ПЛОСКОСТЬ
Необходимым u достаточным условием для m020
чтобы эти три
I
точки ! пряJrtblE
были uнцuденпZНbl одной u той же
прямоЙ точке
(пх. е. чтобы три aaHHblE точки (т. е. чmoбы три aaHflbte прямые
лежали на одной прямой), проходили через одну пlОЧКУ),
Я8ляеrrwя равенство (7), т. е. выражаемая им линейная зависимость
между (проuзвОЛЫtbtми) тройками координат
Хl' Х 2 , хз: al'
' а з ; Ь 1 , Ь 2 , Ь з
данных трех
точек. I nРЯМblХ.
5. Проективная система координат в связке
н на проективной плоскости
Пусть снова дана связка О (действительная или комплексная),
и пусть, наряду с аффинной системой координат Ое1е2ез, дана
вторая система координат Oe
e'e
с тем же началом О, единичные
, " u
векторы еl, e
, e:
которои получаются из векторов e 1 , е 2 , е з YMHO
жением их на одно и то же число л. Две такие координатные
системы назовем эквuваленmНblJИU. Всякая ТрОЙI{а чисел Хl, Х 2 , Ха,
яв.пяющихся тройкой координат какоrо-нибудь вектора u в одной
из двух эквивалентных координатных систем, будет тройкой KOOp
динат коллинеарноrо веlПора ли (соответственно
u) в друrой
системе. Поэтому совокупность всех троек однородных координат
какоrо-нибудь луча связки будет в двух эквивалентных коорди
натных системах одной и той же.
Леrко доказать и обратное утверждение. Если относите.ПЬНО
двух координатных систем Ое 1 е 2 е з и Oe;e
e
в связке О каждый
луч этой связки имеет ОДНИ и те же однородные координаТbI, то
О О ",
системы еlе2ез и е.е;!ез эквивалентны.
В самом деле, так как луч, несущий BeI{TOp е;, имеет в системе
Oe
e
e
ТРОЙI<У координат {1, Ot О}, то В обеих системах Ое 1 е 2 е з
и Oe
e
e
тройками координат этоrо луча являются все
тройки вида {Л 1t О, О}, 1"1 =1= О, и только они, откуда, в частно..
СТИ, следует, что вектор е; имеет в системе Ое 1 е 2 е з координаты ""1'
О, О, rде л'1 * О, так что е;
l'..le 1 . Аналоrично e
== л 2 е 2 , e
== лзе з .
Остается доказать, что Л 1 == ""'2 == лз. Но луч, несущий вектор е'
=== e
+ e
+ е;, имеет по предположению в обеих системах Ое}е 2 е з и
Oe
e
e
одну и ту же координатную запись {1 : 1 : l}, ТЗl{ что мы
имеем для caMoro вектора е' равенство е'=:;л(е 1 +е 2 +ез) при
ПРОЕКТИВНАЯ СИСТЕМА КООРДИНАТ
297
некотором л * о. Так как, с друrой стороны, е' == A1e l +
e2 + Аэе3'
10 Л. === Л 1 :=: "-2 ==:: Аз, что и требовалось доказать.
3 а м е ч а н и е 1. Из приведенноrо доказательства вытекает,
что для эквивалентности двух координатных систем Ое 1 е 2 е з и
Oe
e
e; в связке О необходимо и достаточно, чтобы три коорди-
натных луча {l :о:о}, {о: 1 :О}, {о:о: l} и «единичный луч»
{l : 1 : l} одной системы имели бы ту же координатную запись
{I: О:О}, {о: 1 :О}, {о: о: l} и {l: 1: l} и в друrой системе коор-
динат.
Вводим теперь следующее
Определение 6 (первое определение проектив-
н о й с и с т е м ы к о о р Д и н а т). Задать 8 связке О CUCfпeMY nроек-
тивных координ.ат
значит задать в пространстве какую"нибу дь
систему аффинных координат с начаoll0М о. При этом две экви"
валентные системы аффинных координат, по определению, задают
в связке одну и ту же систему проективных координат.
Друrими словами: cucтe.lwa nроекmU8НЫХ координат в связке
с цен,ПlРОм, О ecпlb класс аквавалепт!tblх, между Собой аффинных
KoopJuHaпlflblX CUClпe.At с началом о.
ПОСМОТРИМ t l{aK опреде.,1ИТЬ этот класс rеометрически.
Чтобы задать аффИННУIО систему координат с началом О, можно,
вместо Toro чтобы задавать сами единичные векторы ОЕ 1 =:::: еl'
ОЕ 2 ==:: е 2 . ОЕ з === е з . задать несущие их прямые OE 1 == Х 1 , ОЕ 2 == Х 2 ,
ОЕ з==Х з (оси координат) и точку E==(l, 1. 1). Проекции Е 1 ,
Е 2, Е з этой точки Е на оси координат 1) и определят единичные
векторы OE l == e l , i5Ё2-=
e2' ОЕ з === е з , причем ОБ =:; OE l + ОЕ 2 + ОЕ зо
Точка Е называется единичной точкой данной аффинной системы
координат. Очевидно, две аффинные системы координат с нача..
лом О тоrда и только тоrда эквивалентны, коrда у них одни и
те же ОСИ t а единичн
е точки лежат на одном и том же луче
на «единичном» луче Е связки.
Поэтому определение 6 может быть сформулировано и следую-
щим образом:
Оп р е Д е л е н и е 6' (в т о р о е оп р е Д е л е н и е про е к т и В-
н о й с и с т е м ы к о о р Д и н а т). Задать nроективну'о cucme.A.ty
.координат в связке
значит задать в этой свя зке три некомпла..
нарных координатных луча Х 1 . Х 2 , Х З И четвертый, «единичный»
луч Е,
He ко мп
анарный ни с какими двумя из координатных
лучей X l , Х 2 , X,i.
l1
CTb В связке О дана проективная система координат
Х 1 Х 2 Х з Е. Спрашивается: как найти класс эквивалентных между
-собой аффинных координатных систем, определяющих (о смысле
1) Здесь (и далее) проеКЦИИ на какую--либо координатную ось берутся
.вДОЛЬ плоскости. несущей Аве друrие оси координат.
298
ПРОЕКТИВНАЯ плоскость
nepBoro определения) данную проективную систему координат?
Для этоrо возьмем на единичном луче Е данной проективной
координатной системы Х 1 Х 2 Х з Е произвольную точку Е (рис. 128),
обозначим через E 1 , Е2' Е з ее лроекции на оси координат (т. е.
на лучи X 1 , Х 2 , х з ), получим векторы е 1 == ОЕ 1 , е 2 == ОЕ 2, е з === ОЕ з .
Аффинная координатная система Ое 1 е 2 е з и все системы Oe;e
e
,
ей эквивалентные, и образуют, очевидно, класс, определяющий
данную проективную систему Х 1 Х 2 Х з Е. Каждая система Ое 1 е 2 е з ,
входящая в этот класс,
получается, если на том
же единичном луче Е взять
каКУIо
нибудь точку Е' и
ее проекции E
, E
, E
на
лучи Х 1 , Х 2 , Х З .
Из этоrо построения
ясна и роль единичноrо
луча Е проективной KOOp
динатной системы: если
L брать разные тройки BeK
торов е;, e
, e
, лежащих
соответственно на коорди
ватных осях X 1 , X 2t х з ,
И не связывать эти тройки
требованием, чтобы сумма
векторов каждой тройки
была направляющим BeK
тором одноrо и Toro же
(для всех троек) луча
связки О, то будем получать различные, вообще rоворя, не экви
валентные между собой аффинные координатные системы.
Тройки координат проuзвольносо луча связки О в аффUННОЙ KOOp
динатной системе Оеlе2ез uлu, что пw же, в любой аффинной KOOp
дuнатной системе, эквивалентной системе Ое1е2еЗt и называются,
по определению, тройками проективных координаm этоzо луча
в проекпzивной системе Х 1 Х 2 Х з Е.
В частности, координатные лучи Х 1 , X z , Х З И единичный луч Е
получают в системе Х 1 Х 2 Х з Е соответственно координатную запись
X 1 ===(1 :0:0), х 2 ==(0: 1 :0), Х з==(О:О: 1), Е==(I: 1: 1).
Далее. любая тройка коэффициентов U 1 , и 2 , из любоrо уравнения
U 1 X 1 + и 2 Х 2 + ИзХ з == О
произвольной плоскости связки О относительно системы коорди-
нат Ое 1 е 2 е з является, по определению, тройкой проектив ны х K.Q0P
динат этой плоскости в проективной системе координат Х 1 Х 2 Х з Е.
Все ЭТО переносится посредством изоморфноrо, а именно пер-
спективноrо отображения и на плоскость Р == Л, получаемую попол-
7(r
\
\
,
\
e s \
,
\
\ I
E f\, / /
:1
r""
<J, """
{е ,./7'
;
\
!\
'
ё
/l' f1 e"\ I
е / i:
I 2 \
;'/ / '
/ I \
/ I \
Е
Рис. ]28.
ПРОЕКТИВНАЯ СИСТЕМА КООРДИНАТ
299
нением обычной плоскости л несобственными точками. Все оста-
ется по
прежнему, только вместо «луч связи О» надо rоворить
«точка плоскости P»t а вместо «плоскость связки О»
«прямая
плоскости Р». Координатные лучи Х 1' Х 2' Х З п
евращаются в точ-
ки Хн Х 2 , Х З (рис. 129); эти точки принято называть вершинами
координаmНО20 треУ20льнuка. СОСТОЯIдеrо из трех точек Х 1 , Х 2 , Х 3
И трех ПРЯМЫХ Х 1 Х 2! Х 2 Х З , Х З Х 1 , инцидентных парам этих точек;
эти прямые называются Х
сm'.;ронами координатноео 3
треУ2Jльнuка. Единичный Х Э
луч Е делается единичной \ Ё
точкой Е. Четыре точки \
X 1 , Х 2 , Х з , Е называются \
Фунда.lwенmаЛЬ1lЫМU (и.ни \
ба
uснымu) mоч
а.м,u дaH
\
нои проективнои коорди" \
натноЙ системы на плос.. \
кости. //
\
/\
3 2 П / \ // \
а :\1 е ч а н и е . усть f-
","
Е \
:тt
плоскость TpeXMepHoro р.
\ е з \ \\ // \
пространства с заданной
.л'
*';
Х,
В ней аффинной системой \
1\ \ e , //t;
Х,
П \ /"2' \ /
координат oe 1 e 2 . остроим /\J:
"'y
в пространстве аффинную //
систему координат Ое 1 е 2 е з , ///
естественно связанную с //
u /
системои ое 1 е 2 на плос
кости п. Система Ое 1 е 2 е з
определит на проективной
плоскости Л, происшедшей Рис. 129.
от пополнени я П"ТIоскости n
несобственными элементами, проективпую систему координат
Х 1 Х 2 Х з Е (рис. 130), причем проеКТИБная плоскость л отобра-
жена на связку О естественным изоморфизмом, а именно пер..
спективным отображением. Очевидно, что проективные коор-
динаты точек плоскости л относительно системы Х 1 Х 2 Х з Е суть
не что иное, как их однородные координаты относительно аффин"
ной системы координат oe 1 e 2 . Поэтому только что определенная
нами на проективной плоскости л проективная система координат
Х 1 Х 2 Х з Е называется однородной системой координат, соответству-
ющей данной аффинной координатной системе oe 1 e 2 на л. Из трех
вершин координатноrо треуrольника Х 1 Х 2 Х З вершины
X 1 ==(1 :0:0), х 2 :::(0: 1 :0)
CYTb t очевидно, несобственные точки соответственно оси абсцисс
и оси ординат систе:мы oe 1 e 2 (<<точки, удаленные в бесконечность
зоо
ПРОЕКТИВНАЯ ПЛОСКОСТЬ
в направлении соответственно прямых ох и оу»), тоrда как точка
Ха == (О : О : 1) есть начало I{оординат системы oelez, а точка Е ==
== (1 : 1 : 1)
точка плоскости п, имеющая в системе координат
oe 1 ez координаты х == у == 1.
Прямая ХЗХ 1 (т.е. прямая, инцидентная точкам Х З и X t ) есть
ось абсцисс, а прямая Х З Х 2
ось ординат координатной системы
ое 1 е 2, прямая X 1 X Z есть несобственная прямая.
\
\
\
\
\ е з Е
\
\ I /
\ I /
\ I /
О' /
j.
-
-
//\ 81
// I \
/ I \
/ /е! I \
/ I \
I \
.х
Рис. 130.
Вообще, если проективная система координат определена Bep
шинами координатноrо треуrольника Х l' Х 2 , Х З И единичной точ-
КОЙ Е', то прямая Х З Х 1 должна иметь такие координаты Ul' и2, U з ,
чтобы Точки )(з == (О : О : 1) и X 1 == (1 : О : О) удовлетворяли ypaB
нению
и 1 Х 1 + и 2 Х 2 + llзХз == О,
откуда сразу вытекает, что из == и 1 == О (тоrда, как, естественно,
третья координата и 2 отлична от нуля). Итак, прямая ХЗХ t имеет
координаты о: 1 : О. Аналоrично заключаем. что прямые ХЗХ2 и
X t X 2 имеl0Т соответственно I{оординаты 1: О : О и о: О : 1.
Итак, наряду с формулами
X1==(1:O:0), J
Х 2 == (о: 1 : О),
Ха == (О : о: 1),
(1)
дающими координатную запись вершин Х 1 , X 2t Ха координатноrо
треуrольника, имеем следующую КООРДИIlЗТНУIО запись сторон
ЛРОЕI(ТИВНЛЯ СИСТЕМА КООРДИНАТ
301
этоrо треуrольника:
х эХ 1 == {О : 1 : О}, J
х эХ 2 === {1 : О : О},
X 1 X 2 == {о: о: 1}.
( 1')
Отождествляя каждую точку плоскости n с классом троек ее
ОДНОРОДНЫХ координат, мы превращаем плоскос.ть л в арифмети
ческую проективную плоскость с данной в ней ОСНОВНОЙ t «приви
леrированной», проективной координатной системой Х 1 Х 2 Х эЕ, r де
точки Х 1) Х 2) Х Э , Е, как точки арифметической проективной пло
скости, даны своей записью (1). Эта система координат называ
ется системой однородных координат на арифметической npoeK
тU8НОЙ плоскосtпu.
Пусть в связке О (или какой
нибудь плоскости Р, изоморфно
отображенной па связку О) даны две проективные координатные
системы
исходная Х 1 Х 2 Х з Е и «новая» система X
X
X;E'; НОlSая
система задана каl{ИМИ
ТО тройкаV!и координат ее фундаменталь
ных точек X
, X
, X
, Е' относительно исходной системы:
X
=== (СВ: С 21 : С зl ),
X
== (С 12 : С 22 : С З2 )t
X
== (с 1з : С 23 : СЭЗ)t
Е' == (е 1 : €2 : t з ).
(2)
Требуется написать «формулы преобразования координат), BЫ
ражаlощие координаты Х 1 , Х 2 , ХЗ любой точки М относительно
u , , , u
исходнои системы координат, через координаты Х., Х:!) ХЗ тои же
точки в «новой» системе координат.
Предположим сначала, что трсйки координат (2) ка>кдой из
точек х;» X
, X
, Е' выбраны соzласоваН1ШМU t т. е. так » что имеет
место векторное равенство
{C 11 , C 21t С э1 } + {с 12 , С 22 ' С 32 } + {C 1J , С 2э , С ЗЗ } == {B 1t 82, E
}; (3)
тоrда, считая векторы 1)
e
== {C J1t C 21t СЗl}t e
== {С 12 , С 22) C:)2}t e
== {С 1Зt C
:}, с зз } (2')
единичными векторами аффинной системы координат в связке О,
ВИДИМ, что эта аффинная координатная система задает именно
проективную систему X
X
X
E' и что, следовательно, проектив
ные координаты какоrо
либо луча ,п связки О (и соответствующей
ему точки М плоскости Р) в системе X
X;X
E' суть не что иное,
как координаты Toro же луча в а
txI>инной системе Oe
e;e
.
А) Данные своими координатами в си(т
ме Оеlе2ез.
302
ПРОЕI(ТИВНАЯ ПЛОСКОСТЬ
Вернемся тепеrь к системе Ое 1 е 2 ез.
Выберем на луче Е какой-нибудь вектор ОБ == е * О и возь-
мем ero проекции сi"Ёl' 7iE 2t ОЕ з на лучи Х 1 , Х 2. х з . Тоrда
Oele2e:
есть аффинная система координат в связке, задаI{)щая
проективную систему Х l Х 2 Х з Е . Каждая тройка X 1 , Х 2 , Х З проек-
тивных координат R системе Х 1 Х 2 Х з Е луча т есть тройка коор-
динат в аффинной системе Ое 1 е 2 е з HeKoToporo направляющеrо век-
тора u этоrо луча 1).
С друrой стороны, тройка координат X
, X
, X
луча т в си-
стеме X;X;X
E' есть тройка координат (в аффинной системе коор-
динат Oe
e.;e
) kakoro-то напраВЛЯЮlцеrо вектора u' == ЛU Toro же
.,1уча т. Поэтому из (2') и из формул преобразования аффинных
координат получаем (имея в виду, ЧТО координаты вектора u
О ' , , 1, I , 1 ' )
в системе еlе.l е з суть 1: Х 1 , Т Х 2 , 1: Ха t что
3 ,
Х/
! СI! i '
;
1
Т. е. что
з
ЛХl ==
Cl,X/,
1==1
Это И есть формулы перехода от проективной системы Х 1 Х 2 Х з Е
I{ проективной системе .X';X;X
E' в предположении, что для коор-
.;:{инатной записи фундаментальных точек Х;, х;, Ха, Е' выбраны
(относительно системы Х 1 Х 2 Х з Е) соrласованные тройки коорди-
нат (2').
flредпо.ложиr..f теперь, что выбраны [{акие уrодно, может быть,
It не cor ласованные между собой, тройки координат (2) точек
х;, X
, х;, Е'. Тоrда их надо заменить опредеЛЯЮlциl\tи те же
точки cor ласованными тройками, т. е. надо найти такие отличные
от нуля множители Al' J0I2' Аз, чтобы
i
1, 2 t 3.
(4)
х;
(л1с 11 , Л 1 С 21 ' ЛtС З1 ), J
X
== (л 2 с 12 , Л 2 С 22 , Л 2 С З2 ),
Х З == (ЛэСIЗ' Л 3 С 23 ' ) OI З С ЗЗ)
И чтобы, кроме Toro, имело место векторное равенство
Л 1 {C 11 , C 21 ' С З1 } + Л 2 {C 12 , С 22 ' СЗ2} + Аз {C lз , С 2З , с зз } == {81' 82' е з }.
(2")
(3')
1) Выбор друrоrо вектора е == ОБ на луче Е привел бы к аффинной системе
координат, эквивалентной системе Оеlеtез: каждая тройка координат луча т
в одной ИЗ этих координатных систем была бы тройкоЙ координат Toro же
луча и в друrой системе, так что для последующих рассуждений не имеет
вначения, какой именно вектор е взят на луче Е,
ПРОЕКТИВНАЯ СИСТЕМА КООРДИНАТ
303
Но векторное равенство (3') равносильно системе уравнений (отно-
сительно Л 1 , А2' Аз)
3
Сljл'j == е"
i==l
i == 1, 2t 3.
(3")
Детерминант d этой системы отличен от нуля (так как столбцы
матрицы коэффициентов линейно независимы), поэтому система
(3") решается однозначно по правилу Крамера. При этом ни oд
но из чисел Al'
, Аз не равно нулю. В самом деле, имеем,
например,
81 С12 С13
82 С 22 С2З
Л 1 == ез СЗ2 С:iЗ
d
Если бы числитель этой дроби был равен нулю, то столбцы
стоящеrо в числителе детерминанта были бы линейно зависимы,
что невозможно, так как эти столбцы суть тройки координат не
коллинеарных между собой точек Е', X
, х;.
Найдя из уравнений (3") значения л'1, Л 2t Аз И подставив их
в (21'), получим координатную запись (2) точек x
, X
, Х;, Е'
уже посредством соrласованных троек координат и формулы пре
образования координат:
3
ЛХl ==
CljXj,
i==l
(4' )
rде
Clj ::::: Л;Сij,
i, j == 1, 2, 3.
3 а м е ч а н и е 3. Пусть на проективной плоскости Р задана
некоторая привилеrированная (<<исходная») проективная система
координат, например, на арифметической проективной плоскости
задана исходная система однородных координат. Координаты
каI<ой
нибудь точки в ЭТОЙ исходной системе будем обозначать
через Х 1 , X 2t Х з . Тоrда переход к какой
нибудь новой системе
координат определяется просто некоторой певырождающейся MaT
рицей С
матрицей коэффициентов в фОрМУ
'lах (4) или (4').
Поэтому можно, не вдаваясь в приведенные выше «rеометриче
ские» рассуждения, просто сказать: задать на ариф"wеmической
проективной плоскости систему проективных координат х;, х;,
X
значит задать невырожденную .матрицу с. В определенной
эпlОй матрицей новой системе координат точка М получает в ка...
честве координат всевОЗМОЖНblе тройки вида
з
х;
"л
dijXj, i == 1) 2, 3, (5)
i
l
304
ПРОЕКТИВНАЯ ПЛОСКОСТЬ
zae MampUl{a коэффuцuенmoв D есть обратная матрица к Maт
рице С коэффициентов в (4)1 так что формулы (4) u (5) эквllва
.лен-тНbl между собой u выражают взаимно однозначное соопюетст-
вие .между классами троек старых «однородных» u новых «проек-
тивных» координат какой
лuбо точки nроекmU8НОЙ плоскости.
6. Проективные преобразования и отображения
...
проеКТИ8НОJt ПЛОСКОСТИ
1.. Опреде
r:ение и аllалитическая запись проективных преобра-
З0ваний. Пусть на проективной плоскости Р задана определенная
( «исходная») система проективных координат. Без оrраничени я
об[Цности можно предположить, например, что есть арифмеТilче..
скан проективная п.поскость с системоЙ однородных координат
на ней. Задать на плоскости Р проективное преобразование
значит задать некоторую новую проективную систему координат;
этим определится преобразование плоскости Р, состоящее в том,
что каждой точке lИ ПЛОСКОСТИ, координаты которой в исходной
системе пусть будут Х 1 : Х 2 : х з , ставится в соответствие точка М'
плоскости, имеlощая те же координаты Х 1 : Х 2 : х з , но уже в новой
системе координат. Читатель видит, что это определение проек-
тизных преобразований совершенно аналоrично опредепению аф-
фИННЫХ преобразований, данному в r лаве 11 I.
Из этоrо определения непосредственно следует, что преобразо
вание проеI<ТИDНОЙ П..!}оскости Р, обратное к проеКТИВJlОМУ преоб..
разоваНИIО, есть проеl{тивное преобразовзнне. Очевидно также,
что ТО)l{дественное преобразованне п"Т}оскости Р есть проективное
преобразован ие.
Если новая система координат задана матрицей С, то, I{ЗК
непосредственно следует из формул преобразования координат,
данныx в предыдущем параrрафе, точка М', имеющая в новой
системе координат координаты X 1 , Х 2 ' Х з , будет иметь в старой
системе координаты
3
Х! == л
C/jX/,
i==1
i=== 1, 2, 3.
(1)
Поэтому проективное преобразованuе можно определить как
nреоброзование, ставящее в соответствие f{аждой пlочке 1Vl
.:
(х, : Х 2 : хз) проектuвной плоскости точку Л,1':=:. (x
: X
: X
), еде
координаты X
, X
, X
даны фоР.l
tула.м,и (1), причем aeтepJrfUHaHт
мапlриЦbl (... nрео6раЗQ8QНUЯ «() не равен о. Система координат
при это.М все вреJ.tя одна u та :)/Се 1).
1) Множитель л. в правой части равенств (1) позволяет по одной какой.
:flибудь тройке координат ТОЧКИ М' найти любую тройку КООРДИlfат
ТОЙ точки..
ПРОЕКТИВНЫЕ ПРЕОВРАЗОВАНИЯ
305
Задается проективное преобразовапие JlЮбой неособой невы...
рожденной матриuей с. Поэтому, считая исходную (<<однородную»)
систему координат раз HaBcer да данной, мы будем обозначать
проективное преобразование той же буквой, что и задающую ero
матрицу.
Если проективные преобразования
и Q
задаются соответ..
ственно матрицами А и В, то произведение матриц А и В задает
проективное преобразование, являюшееся произведением преобра..
зований d и
. Отсюда следует, что произведение двух проек"
тивных преобразований есть проективное преобразование.
Л.налоrично. если проеI{ТlIвпое преобразование W задается MaT
рИllеЙ С, то матрица C
l задает проеКТИi3ное преобразование, об..
ратное к преобразованию W; преобразование, обратное к проек"
ТИВkОМУ t есТЬ проективное преобразование. Tat{ как, наконец,
тождественное преобразование, очевидно, является проективным,
то из доказанноrо вытекает
т е о р е м а 3. CoeoKyпfloCtпb всех nроекmивных прео6разованuй
проектU8flОЙ плоскости есть еруппа (подеруппа 2руппы всех преоб-
разованuй проекmивной плоскости).
При проективном преобразовании
множество точек Л1 ==
== (Х 1 : Х 2 : Ха) какой...,1ибо прямоЙ d:=:: {и 1 : и 2 : uз}, определенной
уравнением
и 1 Х 1 + и 2 Х 2 + UзХ з == О, (2)
п
реходит в множество точек М', координаты которых внекото..
рой новой проективной системе координат удовлетворяют тому
же уравнению (2) и I{OTOpbIe поэтому образуют некоторую прямую
d'. Уравнение этой прямоЙ d' в исходноЙ системе координат
ПОJIУЧИТСЯ, если подставить в (2) вместо координат Х 1 , Х 2 , ХЗ
какой"нибудь ТОЧIО'f М их значения, выраженные через коорди"
наты х;, X
, х; (в той же исходной координатной системе) точки
М' ==
'M. Эти значения получаются, если решить уравнения (1)
относительно Х 1 , Х 2 , Ха, т. е.
з
Xi ==
/
dtjXf, i == 1, 2, 3, (3)
;===1
rде матрица D коэффициентов d 1k есть матрица, обратная к с.
Очевидно, формулы (3) равносильны формуда
1 (1). Внося (3)
в (2)t получим
и. (d l1 x; +d12X
+ d13X
) + и 2 (d 21 X; 1
d22X; +d2:JX
) +
+ из (dЗIХ
+ d з2 х; + d зз х;) == О
или
(d 11 U 1 + d 21 U 2 + dэ1u з ) X
+ (d 12 U 1 + d 22 U 2 + d з2 ll з ) x
+
+ (d 1З U 1 + d 2З !!2 + dззuз) х; ==: о.
306
ПРОЕКТИВНАЯ ПЛОСКОСТЬ
Полаrая
3
а, ==
diju{,
i==J
j== 1, 2, 3,
(2')
видим, что при проективном преобразовании
всякая прямая d
с координатами и 1 , и 2 , u з переходит в прямую d' с координатами
и;, и
, и
. Так как образом прямой при проективном преобразо-
вании всеrда является прямая, то проективные преобразования
называются иначе КОААинеарНЫ.ми преобразованuям'U (или, короче,
коллинеациямu): они сохраняют коллинеарность точек 1).
2. Основная теорема о проективных преобразованиях плоско..
сти. Докажем сначала следующее предложение. Пусть при про-
ективном преобразовании 9/1 проективной (аРИф\fетической) плос-
кости четверка фундаментальных точек У 1 , У2' УЗ' Е некоторей
проективной системы координат переходит в четверку точек y
,
y
, Y
, Е'. Так как никакие три из точек У;, Y
, y
, Е', ПО
только что сказанному, не лех{зт на одной прямой, то эти четыре
точки определяют снова проективную систему координат. Пусть
М
проuзвольная точка проекmивной плоскости} М'
ее образ
при nреобраЗО8анuu
-/f. ТО2да М' имеет оmносumeЛЬflО системы
Y
Y
Y
E' те же KoopauHamы l какие точка М имела относительно
системы У1У2УзЕ.
В самом деле, пусть координатная запись точек У 1, У 2' У 3,
Е в исходной системе координат Х 1 Х 2 х з rff есть
У 1 == (а 1 : а 2 : аЗ)t У2 == (Ь 1 : Ь 2 : ь з ), Уз == (С 1 : С 2 : Сз),
Е == (81 : 82 : 8 з ),
причем в каждой скобке тройки координат выбраны соrласованно,
Т. е. так, что
{аl' а 2 , аз} + {b 1t b 2t ь з } + {С 1 , С 2 , СЗ} == {B 1t 82' t з }.
Тоrда t по сказанному в
5 (формулы (2) и (4»t однородные
координаты Х 1 , X 2t Ха произвольной точки М связаны с коорди
натами Ylt У2, Уз той же точки в системе У 1 У 2 У з Е соотношениями
ЛХk == akYl + b k Y2 + СkУЗ, k == 1, 2, 3. (4)
Проективное преобразование CY't задано тем, что, наряду с исход-
ной (однородной) системой координат х 1 х 2 х з rff, дана некоторая
проективная система x;X
X;<8', так что тройки координат точки
М' относите.ПЬНО системы x;x
x
' суть не что иное, как тройки
координат Х 1 : Х 2 : Х З точки М в исходной однородной систе
ле.
1) Верно и обратное утверждение: всякое nреобразОfJQние (6еlцеСfпвеНflОй) про.
ек.тU8НОЙ плоскости, сохраняющее КQЛЛUНt?арНОСПlЬ rпv:.teK. ес/nЬ проекmивное
прео6 разQ8анuе.
ПРОЕI(ТИВНЫЕ ПРЕОБРАЗОВЛНИЯ
307
Это верно для любой точки М. Так ках, в частности, точки
У;, }/
, y
, Е' суть образы точек Y t , У2' УЗ, Е при преобразо
ванни Q/t, то ТРОЙКИ координат точек У;, y
, y
, Е' OTHO
сите
Т}ьно системы X;X
X
6' пропорциональны ТРОЙI<ам однородных
координат точек Y 1 , У2' Уз, Е, т. е. соответственно тройкам а 1 ,
а 2 , аз; Ь 1 , Ь 2 , ь з ; С 1 ' С2' С З 1{ е 1 , 82, 8 з . Значит, формулы преоб
разования координат. соответствующие переходу от системы
X;s',<
x
g' к системе }T;Y
Y
E', имеют ту же матрицу коэффици
ентов, что и преобразование (4). Поэтому, обозначая через У; : Y
: y
координаты точки /у1' в системе Y;Y
Y
E' и помня, что в системе
x;x
x:;в' координаты точки Л1' суть Х 1 : Х 2 : Хз, будем иметь
АХ; == akY
+ bkY
+ CI(Y
' k == 1, 2, 3. (4')
Так как и (4) и (4'), рассматриваемые как уравнения относи
, , ,
тeJlbHo Уl' У2' Уз, соответственно Yl' У-А' Уз однозначно разрешимы,
то мы ВИДИМ, что ТРОЙI<И координат точки М' в системе Y;Y;Y
E'
совпадаIОТ с тройками координат точки л,1 в системе УIУ2УзЕ.
Наше утверждение доказано.
vfз доказанноrо утверждения мы выведем следующий основной
фаI{Т:
Теорема 4. Пусть у 1 , У2' Уз, Е u У;, y
, y
, E'
двe
четзерки точек проективно,1 плоскости, удовлсmfJОрЯ/Оlцuе тому
УСЛО8UIО, что никакие три точки, принадлежаtцuе одн,ой u !nой же
четверке, не коллuнеарНbl Mealcay саБО!l. Т 02да существует одно и
только одно проективное прео6разованuе (4 проектuвной плоскости,
перееодящее каждую из точек одноЙ четверки в соответствующую
точку дРУ20Й (пl. е. Y 1 в У;, У 2 в y
, УЗ в y
u Е в Е').
В самом деле, рассматривая данные чеТЕерки !{зк четверки
фундаментальных точек двух прсективных координатных систем
и стаllЯ Б соответствие каЖLОЙ точке М ту точку М', которая
v У ' У ' У ' Е '
{)тносите.пьно координатнеи системы 1 'l 3.J имеет те самые
'Тройки координат, KCTOpьY€ точка 1\1 имела относительно системы
у 1 У
}/r з Е , мы получим проективное n реGбразование, переводящее
OOTBeTCTBeHHO точки У 1 , У 2' У 3' Е в точки у;, Y
, y
, Е'.
Это преобразование единственно, так J<aK, по только что ДOKa
заННО\1У, при всяком проектиI3НОМ преобразовании Q/t, переводя-
ще
"I ТОЧI\Н У 1, У 2, УЗ, Е соответственно в точки у;, y
, y
, Е',
ТрОЙКJI I<оординат точки (2.,.( М относительно системы Y
Y
Y
E'
суть не что иное, как тройки координат ТОЧКИ М относительно
системы У1У2УзЕ.
3 Q
.l е ч а н и е 1. Непосредственными с..1едствиями теоремы являются такие
ПРОСТЬУС утверждения:
}О Существует бесконечно MHoro rrроектиnных rтреобразованиЙ плоскости,
пеРСDОДЯЩИХ данные три e
неКОЛJ1инсарные точки А, В, С в любые три некол-
.линеарные ТОЧl(И А', В' I С'. Тем более существует бесконечно MHoro nроективных
!Jреобразоnаннй, персводящих одну заданную точку в друrую.
308
ПРОЕКТИВНАЯ плоскость
20 Существует бесконечно MHoro проективных преобразований ПЛОСКОСТИ t
пер
водящих пару заданных прямых d, g в пару заданных прямых d', g'.
Достаточно взять любые две точки А, В На прямой d, две точки С и D на
прямой g, а также точки А', В' на прямой d', точки С', D' на прямой g'
и построить проективное преобразование, переводящее точки А, В, С, D
соответственно в А', В', С', D'.
Тем более существует бесконечно MHoro проективных преобразований, пере..
!30ДЯЩИХ одну ИЗ двух данных прямых в друrую, а также отображающих
лю1ую даННую прямую саму нз себя.
Предползrая, что в плоскости выбрана определенная система проективных
координат, запишем t в частности, преобрззование, отображающее одну из КООР"
динаТIIЫХ прямых на лруrую, положим прямую Xl ==0 на прямую хз==о. Таким
преобразованием является, например, преобразование
X
== Ха,
х; == Х2,
,
Х J == Хl.
Запишем в качестве BToporo лримера преобразование, переводящее любую
прямую {al: 02 : аз} в одну из координатных прямых, например, предполаrая,
ЧТО а 1 *- О, В прямую Xl == о. в качестве TaKoro преобразования можно взять
X
==alxl +а2Х2+азхз,
,
X
::::; Х2,
,
Х з == хз.
3. Задание проектнвных преобразований проективной плоскости
аффинными преобразоваНИЯМII TpeXMepHoro пространства. Проек
тивную плоскость рассматриваем как связку с центром о. Данное
nроективное преобразование c27't задается переходом от исходной
nроективной системы координат Х 1 Х 2 Х з Е к новой системе коор"
динат X;X
X
E'. Берем в классе аффинных координатных систем
с началом О, соответствующих проективной I{оординатной системе
Х 1 Х 2 Х з Е, какую
нибудь определенную систему Ое 1 е 2 еЗJ а в классе
аффинных систем, соответствующих проективной координатной
системе X; X
X
E',
какую
нибудь систему Oe
e
e
. Аффинное преоб-
разование, задаваемое переходом от системы Оеlе2ез к системе
Oe
e
e
J переводит каждый луч 111 == ОМ связки О в луч
C27'tт== OM 'J
ЯВЛЯЮLUИЙСЯ образом луча ОМ при преобразовании Q/
, и в этом
смысле опредеol1яет в СВЯ3I{е О заданное в ней проективное преоб-
разованне (24.
Обратно, каждое аффинное преобразование Q.:тt TpeXMepHoro
пространства, задаваемое переходом от (какоЙ
нибудь) аффинной
координатной системы Oe 1 e z eg к (каI(ой
нибудь) координатной
системе Oe
e
e
(с тем же началом О), определяет проек"
тивное преобразование
свнзки О, задаваемое переходом
от проективной системы координат Х1Х2.УзЕ (состоящей из
класса Bce
аффинных систем, эквиваJ.i.
Н..!Н
IХ
системе Ое 1 е 2 е з )
к проективной координатной системе Х
Х;л-
Е' (состоящей из
ПРОЕI(ТИВНЫЕ ПРЕОБРАЗОВДНИЯ
309
всех аффинных систем, эквивалентных системе Oe;e:e
). Спраши
вается: коrда два аффинных преобразования Q
' Jf
" (оставля
ющих неподвижной точку О) определяют одно и то же проектив
ное преобразоваНJ-!е f2--/f связки О? Без оrраничения общности
можно преДПОЛОiКJlТЬ, что оба преобразования е/!' и е/!" опре-
делены переходом от одной и той же аффинной системы коорди-
О О ", О """ Д
нат е 1 е z е з соответственно к система
f еiе
ез и еl е
ез. ля Toro
чтобы они определяли одно и то же проеI{ТИВНое преобраЗОВЗНi{е,
очевидно, необходимо и достаточно, чтобы системы Oe;e;e
и Oe
e
e;
были эквивалентны, т. е. чтобы существовало такое л =1= О, что
, '1
n , "l" ''1....."
е 1 ===
1 , е-А == I\.e
, ез ==
3 ·
Но тоrда аффинное отображение CV(" получается из аффинноrо
отображения е/!' умножением ero на ра
тяжение (rомотетию)
с uеитром О и ]{оэффициентом раСТЯ}I{ения л. Итак, доказана
т е о р е м а 5. Всякое проективное преобразованuе связки О
порождается некоторым аффUННЫМ преобразоваfluем трехм.ерносо
пространства, оспlавляющим неподвuжной точку о; обратно,
всякое аффинное nреобразованuе nрос!nранства, оставляющее Heпoд
вИJlСНОЙ точку О, nорождаеm 1leКlJfnOpOe nроек/пивное преобразова
ние связки о; два аффИННЫХ nреобразования (оставляющих Heпoд
вuжной точку О) mОсда И только mozaa порождают одНО и то же
проекпlивное прео6раз06йние связки О, Ko
дa KaJlCaOe uз этих аффИfl-
ных nреобразоеаflИЙ получается из дРУ2020 последу'ощим расmяже
нием. пpocтpaHClnoa с l{ентром' о.
4. Подrруппа проективно..аффннных преобразований. Проектив-
ное преобразование проективно-аффинной ПJ10СКОСТИ (т. е. проек-
тивной плоскости с выделенной в ней несобственной прямоЙ 1)
наЗЬ1вается проективно..афU1UlblМ, если оно отображает несобствен-
JlYJO ПfJЯМУIО саму на себя (Т. е. отображает ВСЯI<УIО несобствен-
ную точку на несобственную).
3 а м е ч а п и е 2. Для Toro чтобы rrроективное преобразование было проек-
ТИВlJо
афtНlНIIЫМ, достаточно, чтобы ОНО отображало две J{акие
lIи6удь несо6ст-
венные точки M 1 И М 2 Н(] несоОСтвенные же точки A1
и A1
: TorAa и несоб
ственнэя прямая, будучи инцидеllТНОЙ точкам Л1 1 и 1Hz) отобразится на прямую,
инци,центнуlO несобственным точкам M
п M
, Т. е. на несобственную прямую.
3 а м е ч а 11 и С з. При проекпlllвно
аффиf{,НОм' прео6разованuи 7f
всякая собственная fпОЧ1Ш М отображается на собспюеНН,УIО точку
М'.
В самом де.туе, пусть точка М' == g' м несобственная. В силу
взаимной однозначности отображения g' точка М', будучи образом
собственной ТОЧI<И А-1, не может быть образом никакой несо6ст-
Еенной точки. Поэтому из сделанноrо предположеНIIЯ следует,
1) Можно оrраничиться рассмотрением арифметической проективноА плос-
кости с несобственной прямой Ха == О на ней.
310
ПРОЕКТИВНЛЯ ПЛОСКОСТЬ
что при отображении ?r несо6ственная прямая отоораЖЭ.ется на
свою ИСТИННУIО часть, что невозможно, так как при проективном
преобразовании всякая прямая (как множество Инцидентных ей
точек) отображается на прямую.
Итак, при проективно-аффин'н'ОМ отображении g' nроекти8ноа
плоскости происходит отображение множесrrюа всех собственных
точек плоскости на себя, т. е. происходит некоторое nреобразо-
вание 7;0 той аффинной плоскости, от пополнения которой нес06-
crпвeHHЫMи элементами произошла данная nроективная плоскость.
ДокажеМ t что это преобразованuе g:'o является аффинным.
Предполаrаем, что данная проективная плоскость есть арифме
тическая лроективная плоскость с несобственной прямой х з === о.
Рассмотрим сначала какое-нибудь проективное преобразовзние
, задаваемое формулами
3
Хl == л
CliX/,
;==1
i== 1, 2, 3,
(1)
, , ,
выражающими однородные координаты Х.. X
, Ха точки
М' ==
M
через однородные координаты Х 1 , Х 2 , Х з точки М.
Предположим, что при преобразовании
образом несобствен
ноЙ точки всеrда является несобственная же ТОЧI<а. Тоrда, пола
rая в последнем равенстве (1)
х з == О.
будем при любых значениях Х 1 и Х З BcerAa иметь X
== о. НО ЭТО
возможно лишь тоrда, коrда
С 31 == С З2 :=: о.
Так как детерминант матрицы С отличен от нуля, то
С зз * О,
так что преобразование (1) записывается в виде
х; === л (С 11 Х 1 + С 12 Х 2 + с1зхз),
х; == л (С 21 Х l + C Z2 X 2 + С 23 Х З ) ,
X
== ЛС зз Х з ,
СН С12 С1З I
I CB С]2 О
det С == С21 C2
С2З == С ЗЗ * .
О О С21 С 22
Саз
(5)
Перейдем к аффинным координатам собственных точек арифме..
тической проективной плоскости. Для этоrо поделим левую и
ПРОЕКТИВНblЕ ПРЕОБРАЭОВАНИЯ
311
правую части равенств (5) на х;
ЛсззХз; ПОЛУЧИМ
,
Х 1
СН Xl + С12 Х2 + СIЗ
-
,-
,
Х: ! Сзз ХЭ С33 ХЭ С33
,
Х 2 == С21 Xl + С22 Х2 + С2З ;
X
Сзз Хз Сзз ХЗ Сзз
полаrая
, ,
Хl Х2, Х 1 , Х.
Х == -. ХЗ
, У ==
X; , х == Х; ' у == Х; ,
Ct1
аl1 ==
,
Сзз
С12
a 1 2 ===
,
Сзз
С13
а 1з == Сзз '
С21
а 21 ==
,
Сзз
С22
а 22 ==
,
СЗЗ
С2З
а 2 з =:::: ............... ,
С33
получим
Х' == а 11 Х + а 12 у + а 12 ,
у' == а 21 х + a 2 zY + а 2з ,
I a1l а12 1 =* о.
021 а22
(6)
Итак, проективно-аффинное преобразование, рассматриваемое
на множестве собственных точек плоскости, есть аффинное преоб-
разование.
Обратно, если дано аффинное преобразование
х' == a11x + а 12 у + а 1з ,
у' == а 21 х + а 22 у + а 2з
плоскости, то, переходя к однородным координатам, можем
написать
X
Хl Х 2
== а 11
+ а 2
+ а З
х ' Х 1 Х 1 ,
J 3 3
X
Хl Х2
;
== а 21
+ а 22
+ а з.
Ха ХЗ Ха 2
Отсюда
X
: (а 11 Х 1 + а12 Х 2 + а 1з х з ) == X
: Х з == X
: (а 21 Х 1 + а22Х2 + а 2з х з ) == Л,
так ЧТО
X
== л (а ll Х 1 + а 12 Х 2 + а 1з х з ), !
Х2 == Л (а 21 Х l +а 2 2 Х 2 + а 2з х 1 ),
X
== ЛХ з ,
что дает при ХЗ == О непременно х; == О,
получаем проективное
преобразование, оставляющее на месте несобственную прямую,
Т. е. проективно
аффинное преобразование. Доказана следующая
т е о р е м а 6. Всякое проективно-аффUНн'ое преобразованuе, pac
с.матриваемое лишь на множестве Co6cпlBeHHblX точек проектuвной
плоскостu, есть аффинное преобразованuе.
(7)
312
ПРОЕКТИВIfАЯ ПЛОСI(ОСТЬ
Обратно, всякое аффинное пре06разованuе посредством, форAtgл
(7) можеm быть распространено на 8С/О проектU8НУЮ плоскость
таким образом, что получится проекmU8н'о
аффинное nре06разова-
ние nроектuвной плоскости.
Отсюда леrко следует, что совокупность всех n.роектUflНО
аффuн..
НЫХ nрео6разований есть под2руnпа 2руппы всех проективных преоб..
разованuй проекти8НОЙ плоскости, изоморфная 2руппе всех аффuн"
libtX преобразованuй (обыкновенной аффuнн.ой плоскости)1.
1ноrда доказанную теорему кратко, но неточно формулируют
так: аффинные преобразования суть проективные преобразования,
при которых несобственная прямая отображается на себя.
В заключение покажем, какой вид имеет в аффинных коор-
динатах любое проективное преобразование, если ero рассматри-
вать J1ИU1Ь на множестве собственных точек плоскости.
Итак, пишем снова ФОРМУJ1Ы проективноrо преобразования (1)
и переходим к аффинным координатам, для чеrо переписываем
эти форму лы в виде
Х'
I
,
Х З
Хl Ха
СН
+ Сlа
+ С13
ХЗ ХЗ
Х[ Xt '
СЗI
+ СЗ2
+ Сзз
ХЗ ХЗ
Хl + Х2 +
, С 2 1
С 22
С23
Х:)
ХЭ ХЗ
,
Х! Xt + Ха
СЭl
СЭ2
+ С33
Ха ХЗ
и полаrаем в них
Х!
X:=:
.
Xs
Х 2
У ==
,
Ха
, X
Х ==
,
Х!
, х;
у == ....,
.
Х,
Получаем
, Сll Х + С 12У+СIЗ I
Х === ,
СЗI Х + С З2У+СЗЗ
, С 2 1 Х + С 22У +С 2 3
У == СSI Х + С З2У+СЗЗ .
(8)
Это и есть форму.пы, дающие проективное преобразование собст-
венных точек плоскости D аффинных координатах. Эти формулы
nepecтalOT действовать для точек, лежащих на прямой С З1 Х +
+ С З 2У +Сзз == О, Т. е. на прямой СЗ1Х 1 +С З2 Х 2 +СззХ з == о.
Но, как показывает последняя из формул (1), эти точки при
нашем преобразовании переходят в точки вида (х(: Х2 : О), т. е.
в несооственные точки плоскости; естественно, что мы не можем
найти аффинных координат этих точек.
J) То, что проективио
аф.1>инные преобразооания образуют rpyrHtYt без
труда выводится из caMoro их определения.
ПРОЕКТИВНЫЕ ПРЕОБРАЗОВАНИЯ
313
Пусть дано какое.нибудь проективное преобраэование плос-
кости, не являющееся проективно
аффинным. Оно переводит несоб-
ственную прямую в некоторую обыкновенную прямую d. Пусть
при этом несобственные точки (1: О : О) и (о: 1 : О) оси абсцисс
и оси ординат какой
нибудь (хотя бы прямоуrольной) координат-
ной системы переходят соответственно в точки 01 И 02 прямой
d. Тоrда два несо6ственных лучка прямых х == а и у == Ь, парал
лельных (на обыкновенной плоскости) соответственно оси ординат
и абсцисс выбранной лрямоуrольной координатной системы,
перейдут соответственно в пучки с центрами 01 и 02, а квадратная
сетка, изображенная на рис. 131, а, перейдет в сетку четырех
уrольников, изображенную на рис. 131, б. Эти рисунки, а также
сделанный на их основе рис. 132 помоrут читателю составить
себе наrлядное представление о том, что может происходить при
проективном преобразовании.
5. Проективные отображения ОДНОЙ ПЛОСКОСТИ на друrУIО.
Перспективные отображения. До сих пор мы рассматривали лишь
проективные преобраэования, Т. е. проективные отображения
какой
либо проеКТИВIfОЙ плоскости на себя. Однако леrко опре-
делить и взаимно однозначные проективные отображения одной
проективной плоскости Р на друrую р'. Для Toro чтобы задать
такое отображение, надо задать на плоскостях Р и р' по про-
ективной координатной системе Х 1 Х 2 Х з Е и Х 1 Х 2 Х;Е', этим опре
делится отображение 'if плоскости Р на плоскость р' t которое
каждой точке М плоскости Р ставит в соответствие ту точку Л1'
плоскости р', которая в системе Х 1 Х 2 Х з Е' имеет те самые тройки
координат, какие точка М имела в системе Х 1 Х 2 Х з Е.
Пусть 11 и п'
две плоскости в трехмерном пространстве;
пополняем их соответствующими несобственными точками до про
ективных плоскостей n и л '. Берем какую-нибудь точку О, не
лежащую ни в одной ИЗ двух плоскостей nил;'. Каждой точке
М проективной плоскости л ставим в соответствие ту собственную
или несобственную точку М' плоскости n', в которой эту лло
скость N' пересекает луч т === о/и связки О (рис. 133). Получен
ное таким образом отображение плоскости n на плоскость л;'
называется перспективным опlображенuем с центром перспек-
ти8Ы о.
Леrко видеть, что всякое перспектнвное отображение является
проективным. В самом деле, возьмем в связке О какую
нибудь
систему проективных координат XtX2XsE. Она определит в пло-
скости n проективную систему Х 1 Х 2 Х з Е, а в плоскости п'
систему
Х1Х2ХзЕ'. Очевидно, и точка Лtl плоскости л; (в системе Х 1 Х 2 Х з Е)t
И точка М' плоскости Л' в системе Х t Х 2 Х з Е' будут иметь те
самые координаты, которые луч т == ОМ == ОМ ' имеет в системе
Х]Х 2 Х а Е.
314
ПРОЕI(ТИВНАЯ nпOCI(OCTb
а)
Рис. 131.
Il
а)
Рис. 132.
КРИВЫЕ НА ПРОЕКТИВНОА ПЛОСКОСТИ
ЗJ5
3 а м е ч а н и е 4. Важность перспективных отображений вытекает из сле-
дующей теоремы, выражающей одИН из основных
фактов проект ивн ой rеометрии:
Всякое проективное отображение плоскости n на плоскость п' либо отобра-
жает нссобствеНIIУЮ прямую плоскости n на несобственную прямую плоскости
11 ' (и. следовательно, сводится к аффинному отображению плоскости n на
Рис. 133.
плоскость п'), либо может быть осуществлено посредством c06cTBeHHoro или
несобственноrо движения П.,'10СКОСТИ л В пространстве, пополнения леремещенной
плоскости л' до проек ти вной плоскост
Л' И последующеrо перспективноrо
отображен и я плоскости 11 на плоскость л'.
Доказательство этой теоремы читатель может найти в книrе Л. с. Пархо..
менко и П. С. Моденова «rеометрические преобразования» (М., Изд. Mry,
1961). Эта книrа вообще может быть рекомендована читателю, желающему
в доступном изложении подробнее ознакомиться с основными свойствами про..
ективных преобразований.
7. Кривые BToporo порядка на проективной плоскости.
Теорема единственности
Алсе6раuческой кривой порядка п на проективной плоскости
(действительной И,;YJИ комплексной) называется множество всех
точек этой плоскости, координаты которых впекоторой проектив"
ной СlIстеме координат удовлетворяют уравнению вида
Ф (X 11 Х 2 , х э ) == о, (1)
316
ЛРОЕКТИВНАЯ ПЛОСКОСТЬ
rде Ф (X 1 , Х 2 , Х з ) есть однородный мноrочлен (форма) степени n
от переменных Xt, Х 2, Х Зt коэффициенты KOToporo мы будем всеrда
предполаrать действительными.
При переходе от одной проективной координатной системы
к друrой координаты испытывают однородное линейное преобра.
зование, переводящее форму Ф (X 1t Х 2 , Хз) в форму ф' (Хl, XZ t Хз)
той же степени п от новых координат, поэтому данное выше
определение порядка кривой не зависит от выбора той или иной
системы проективных координат. Если не oroBopeHO противное,
мы будем считать, что на плоскости выбрана привилеrированная
спсте;\.tа координат и что Х 1 : Х 2 : Х З являются координатами по
отношению к этой системе.
Проще Bcero представить себе при этом данную проективную
плоскость как арифметичеСКУIО проеКТИВНУIО плоскость или, что
сводится к тому же, но Har ляднее, как проеь.тивную плоскость
Л, происшедшую от пополнения несобственными точка
v1И обычной
плоскости 1t с аффинной системой координат oe 1 e2 на ней,
а систе
IУ проективных координат на проективной плоскости n
как ОДНОРОJ,НУЮ систему, соответствуюrдую аффинной системе
о e 1 e 2 . Тоrда несобственные точки (х 1 : Х 2 : Х з ) характеризуются
условием
Х З == О,
которое и ЯDляется уравнением несобствепной прямой. При пер-
спективном отображении плоскости it на связку О координаты
X 1 : Х2: Х З како й
ниб удь точки М п.пОСКОlТИ 1'[ переходят в коорди-
наты луча m == ОМ связки, а уравнение (1) превращается в уравне...
ине коническоЙ поверхности с вершиной в центре связки О, сече-
нием которой П,,10СКОСТЬЮ п и является кривая, опреде.пенная
в этой плоскости тем же уравнением (1). Мы будем рассматривать
лишь кривые BToporo порядка, так что левая часть уравнения
(1), задающеrо данную кривую, будет всеrда квадратичной фор-
мой и уравнение кривой будет иметь вид
.ф (X 1 , Х 2 , х з ) == al1 x f + 2a 12 X 1 X 2 + a22X
+ 2а 1З Х I Х З +
+2а 2з х 2 х з +аззх
== о. (2)
В силу ТОЛЬКО что сказанноrо кривые BToporo порядка суть
.плоские сечения конуса BToporo порядка.
Кривая BToporo поря!\ка называется невыlожда/ощейся,, если
.левая часть ее уравнения есть квадратичная фОр:Vlа paHra R == 3.
Посмотрим чем ОТ.пичаются кривые [}TOpOrO порядка, опреде-
.ленные на проективной ПЛОСКОСТИ n от давно известных нам кри-
вых на аффинной плоскости л.
Возьмем аффинную систему !{оординат о е 1 е 2 , соотвеТСТВУIОЩУЮ
данноЙ однородной системе Х 1 Х 2 Х З . Тоrда мно}кество Х собствен-
.ных 'rочек проективной плоскости П, удовлетворяющих уравнению
КРИВЫЕ НА ПРОЕI(ТИВНОI'I ПЛОСКОСТИ
317
(2), совпадет с множеством точек аффинной плоскости П, коорди'"
наты KQTOPblX
Хl Х2
Х == Хз ' у == ХЗ
(относительно системы oe 1 e 2 ) удовлетворяют уравнению
Р(х, у) == аllх2+2а12ХУ+
2у2+2аlзх+2а2зу+азз==О. (3)
J\.\ножество Х пусто в том и только в том случае, коrда ypaBHe
иие (3) противоречиво, т. е. коrда а зз * о, а все остальные коэф
фициенты а 11 , а 12 , а 22 , al
, а 2з равны ну JIЮ. В этом случае уравнение
(2) превращается в
аззхj == О,
(200)
Т. е. в X
== о, и является уравнением дважды взятой несобствен
ной прямой. Итак:
т е о р е м а 7а. Если все точки кривой (2) н,есобственные l то
кривая (2) есть дважды взятая Ilесобсmвенная прямая; mО2да ее
уравнение Henpe/t1eflHO имее11! вид (200).
Предпо.пожим теперь, что кривая (2) содержит все несобствен
ные точки плоскости и хотя 6ы одну собствеНfiУIО. В силу только
что доказанноrо в ЭТО:\.I С"lучае хотя бы один из коэффициентов
ан, а 12 , а 22 , а 1з , а 2з отличен от ну ля.
По нашему предположению, всякая несобственная точка
(x 1 : Х 2 : О) удовлетворяет уравнению (2), Т. е. равенство
Ф (X 1 , Х 2 , О) == a 11 xi + 2a i2 x 1 X 2 + a 22 xi === О
есть тождество, верное для любых значений Х 1 ' Х 2 . Это значит,
что
a 11 == й12 -== а 22 == о,
и уравнение (2) имеет вид
2а 1з х 1 х з + 2а 23 х 2 х з + а зз хi == О,
т. е.
Х з (2а 1З Х 1 + 2а ZЗ Х 2 + а 3З Х;j) == О, (2
)
в котором по краЙней мере один из коэффициентов а 1з , а 2з отли",
чен от нуля.
Кривая (2) в этом случае распадается На пару различных
прямых: несобственную прямую х з === О и собственную прямую
2а 1 З Х l + 2а 2З Х 2 + а зз х з == о.
Итак:
т е о р е м а 76. Если кривая (2) содержит все н,есобствеННble
точки плоскости и хотя бы одну собсmвеНflУIО, то она распадается
на пару различных прямых, из которых одна есть несобственная
прямая. Jlpaв1teHUe (2) в этом случае непременно UJrteeт вид (2
).
318
ПРОЕКТИВНАЯ ПЛОСКОСТЬ
Очевидно и обратное утверждение: если уравнение (2) имеет
вид (2
), то кривая (2) распадается на пару прямых: на несоб-
ственную прямую
Х З ::: О
и на прямую
2а 1З Х 1 + 2а 2З Х 2 + аззх з ::: о;
это вторая прямая оказывается несобственной тоrда и только
тоrда, I{оrда а 1з == а 2з === О (и тоrда непременно а зз =1= О).
Предположим теперь, что не все несобственные точки плоско-
сти лежат на кривой (2) (Т. е. что несобственная прямая не содер...
жится R кривой (2). Тоrда среnи коэффипиеНТОR ан, а 12 , а 22
по крайней мере один отличен от нуля и уравнение (2) опреде-
ляет на аффинной плоскости л с координатной системой ое 1 е 2
некоторую КРИВУI0 BToporo порядка.
Для определения несобственных точек кривой (2) подстаВ..r1яем
в уравнение (2)
Х З == о.
Получаем
a 11 xi + 2a 12 x t x 2 + a22X
== о. (4)
Это уравнение опреде.пяет два значения (действительные различ-
ные, мнимые сопряженные или совпадающие действительные) для
отношения Х 1 : X
. Итак:
т е о р е м а 7в. l(рuвая вmОрО20 порядка (2), не содержаll
ая
н.есобственную пря.мУ'0
имеет лишь две несобствеННblе точки: дей-
ствительные (быть может, совпадающие) или мнимые сопряженные.
Так как вектор {х], Х2}' удовлетворяющий уравнению (4),
есть вектор асимптотическоrо напраВ
7Jения кривой (3), то несоб-
ственные точки кривой BToporo порядка, не содержащеЙ несобст-
венную ПРЯ
.1УЮ
суть точки, удаленные в бесконечность в одном
ИЗ двух направлений, асимптотических для данной кривой.
Из доказанноrо леrко c"ТIeдyeT
l' е о р е м а 8 (т е о р е м а е д и н с т в е н н о с т и). Если два урав-
нения
Ф (Xl' Х 2, Хз) ==
== a l1 xi + 2a 12 x 1 X 2 + a22X
+ 2а 1з х 1 х з + 2а 2з х 2 х з + аззх: == О (2)
и
ф' (х 1 , x 2t х з ) ==
== a
lxi + 2a
x lХ2 + a
'lX
+ 2а
JХIХЗ + 2а;З Х 2 Х З + а;зхj == О, (2')
рассмаmривае.мые ()тНОСUПlелы
,о одной и той же cucme
tbl проек,...
тивных координат, опредеЛЯlоm одну u ту же крuву/о enZOp020
порядка, ,по одно из двух уравнений (2), (2') получается из дРусО20
почленным умножением на некоторый чиСАОВОЙ множитель л.
КРИВЫЕ НА ПРОЕКТИВНОPl плоскости
319
д о к а з а т е л ь с т в о. Без оrраничения оБЩНОСТИ можем пред
ПО.пожить, что выбранная проективная координатная система есть
однородная система, соответствующая некоторой аффинной коор-
Динатной системе ое.е 2 . Рассматриваем три случая.
I о Кривая у состоит из одних несобственных точек. Тоrда
в сиду теоремы 7а оба уравнения (2) И (2') имеют вид
аззх
== О
и
, 2 О
аззх з == ,
и утверждение теоремы 8 доказано.
20 Кривая у есть пара прямых, одна из которых есть несоб-
ственная прямая Х З == О, а друrая
собственная прямая d. Тоrда
по теореме 76 уравнения (2) и (2') имеют соответственно вид
х з (2а 1З Х 1 + 2а 2 З Х 2 + аззх з ) == о
и
Х з (2a
IXl + 2a
3X2 + а
зхз) == О,
а прямая d определяется каждым из уравнений
2а 1З Х 1 + 2а 2З Х 2 + аззх s == О
и
2a
;1Xl + 2а
ЗХ2 + а
зхз == о,
из чеrо следует, что при некотором л =1= О
а
з ::::= Ла 1з , а;з == J..а 2з , а
з == Ла ЗЗ .
Так как, кроме Toro,
а 11 == a
. === О,
a 12 == a
=== О,
а 22 === a
<! == О,
то утверждение теоремы единственности доказано и в случае 20.
30 Кривая у не содержит несобственной прямой. В этом случае
кrивая у, определяемая уравнениями (2) и (2'), имеет две (быть
может, слившиеся) несобственные точки и только ими отличается
от КрИБОЙ BToporo порядка, определяемой на плоскости ое 1 е2 урав-
нениями
Ф (х, У, 1) == a 11 x 2 + 2a 12 xy + a 2 zY 2 + 2а 1з х + 2а 2з у +а зз ==0, (3)
ф' (х, у, 1) == а;lх2 + 2a
2XY + a
2y2 + 2а
зх + 2а
зу + а
з == о. (3')
Так как кривые (3) и (3') по предположению состоят из одних и
тех же точеК t ТО в силу теоремы единственности rлавы VI,
2, коэф-
фициенты уравнения (2'), т. е. коэффициенты формы Ф' (X 1 , Х 2' Х З ),
получаются из соответствующих коэффициентов уравнения (2),
Т. е. из коэффициентов формы Ф (x 1 , Х 2 , Хз), умножением их на
неКQТОРЫЙ числовой множитель л =1= о. Теорема 8 доказана.
320
ПРОЕКТИВНАЯ ПЛОСКОСТЬ
8. Пересечение кривой BToporo порядка с прямой.
Касательные; асимптоты
Пусть дана кривая BToporo порядка у своим уравнением
Ф (х 1 , Х 2 , хз) == a 11 Xr + 2a 12 X 1 X 2 + a22X
+ 2а 1 З Х I Х З +
+ 2а 2з х;:х з + аззхi == о (1)
и прямая t заданная двумя своими точками Р == (Рl : Р2 : Рз) и
Q == (ql: q2: qз) и имеющая t С,,'Iедовательно, параметрическое урав-
нение
Х 1 === РI А + QtJ!, J
Х 2 == Р2 Л + q2f.!,
хз == Рз Л + qз
t
(параметры Л, J.1 принимаlОТ всевозможные числовые значения, за
исключением случая, )(or да ')'" === О, fl == О одновременно).
Найдем точки пересечения кривоЙ (1) и прямоЙ (2). Для этоrо
подставим значения Х 1 , Х2, Ха из (2) в уравнение (1). Получим
после при ведения подобных членов уравнение
(2)
Ал 2 + 2ВЛ
t + Cll- 2 == о.
(3)
Обозначая '=Iерез ч' (х 1 , Х 2 , Хз; Уl' У2, уз) билинейную форму,
ПОЛЯРНУIО К квадратичной форме Ф (X 1t Х2, Хз), имеем, как нетрудно
вычислить,
А =:;Ф(Рl' Р2, Рз), 8 == Ч!(Рl' Р2' Рз; ql' q2' qз), С==Ф(qlt q2t qз). (4)
Если в уравнении (3) все три коэффициента обращаются в ну.ПЬ,
ТО это уравнение обращается в тождество, означающее, что при
любых значеНlIЯХ л и f.L точка с координатами (2) лежит на кри-
вой (1), т. е. вся прямая (2) входит в состав кривой (1) (кото-
рая в этом случае яв.пяется распаJ.ающейся).
За ИСI{лючением этоrо случая, из однородноrо уравнения (3)
всеrда определяются два
действительные, мнимые или совпадаю
ll1.ие
значения для отношения л: f.L, которые обозначим через
Л 1 : J.11 и 1"2:
t2. Внося эти значения в равенство (2)t получим две
точки пересечения кривой (1) с прямой (2).
Посмотрим, при I{аких условиях эти две ТОЧКИ пересечения
сливаются в одну точку, т. е. прямая (2) касается кривой (1).
Без оrраничения общности MO)l{eM взять в качестве точки Р =::
== (Pl : Р2: Рз) именно ТОЧI<У касания прямой (2) и кривой (1). Тоrда
двойнзя точка пересечения кривой (1) и прямой (2) должна полу-
читься при значениях л =1= О, ,..., == О, так как точка Р == (Рl ; Р2 : Рз)
взята на кривой (1), то в уравнении (3) надо положить
А ==: Ф (Рl' Р2, Рз) == о;
КАСАТЕЛЬНЫЕ, АСИМПТОТЫ
321
ypaBHeHI
(3) примет вид
2ВЛJ.1 + Cfl2 :.= О
или
Jl (2В'Л + Cf!)
о.
(5)
Это уравнение ДОЛЖНО иметь корень J1 === О своим двойным KopHe
.
А это означает, что и уравнение
2Вл+С
::= О
ДОЛЖНО иметь корень Jl == О, т. е. что 2В'Л == о. Но так как (при
}.t == О) заведомо ,\. =1=- О, то условие, чтобы прямая (2) касалась
кривой (1) в ТОЧJ<е Р, есть
В == '1' (Pl' Р2, Рэ; ql' q2' qз) == о
ИЛИ
(а ll Р1 + QI2P2 + QIЗРЗ) ql + (a ZJ pl + а 22 Р2 + а 2з рэ) Ч2 +
+ (а:J1Р) +а Э2 Р2 + QззРз) Qз == О (6 ч )
ДЛЯ любой точки Q === (q] : q2 : qз) прямой (2). Поэтому уравнение
(6q), в котором теперь естественно однородные координаты про.
извольноЙ ТОЧJ<И Q обозначать через Х], Х 2 , Х З (вместо q., Q2' Qa),
e
TЬ уравнение касательной к КРИВОЙ (1) в ТОЧl<е Р -== (РI :Р2 : Рз).
Это уравнение мы переписываем в виде
чr (РI f Р2, p:J; Х., Х 2 , х з ) == о
или, подробнее, в виде
(а ll Рl +a J JJ2 + а 1З Р:J) Х 1 + (a 21 Pl +а 22 Р2 +а 2з рз) Х 2 +
+ (a:JJPI + аЗ2Р2 + а: i зрз) Ха == о. (7)
Итак, касательная к кривой (1) в ее точке Р == (Pl : Р2 : p
)
есть прямая (7), Т. е. прямая с координатами
S1 == a11Pl + a 12 P2 + QIЗРЗ, I
62 == a
lPl + аО;.2Р2 + Q2ЗРЗ,
3 == a&lPl + а З2 Р2 + аз
рз,
(6)
(8)
Не MO)J{eT ли случиться, что всякая прямая, nРОХОДЯlцая через
rочку Р == (Рl : Р2 : Рз) кривой (1), пересекает эту кривую в двух
совпадающих точках (или целиком содержится в наluей кривой)?
Очевидно, это происходит тоrда и только тоrда, коrда уравнение
(6q) удовлетворяется для Лlобой точки Q == (ql : Ч2 : qз), что в свою
очередь означает, что все коэффициенты этоrо уравнения равны
нулю) т. е. что
анр. + а 12 Р2 + а]зрз === О, I
а21Рl +а 2 2Р2 +а 2э рз === О,
аЗ1Рl
r а З 'lР2 + а
:JРЗ == О.
(6*)
322
ПРОЕКТИВНАЯ ПЛОСКОСТЬ
Точка Р == (Рl : Р2 : Рз), УДОDлетворяющая системе равенств (6*),
называется особой или двойной точкой кривой (1). Если кривая
(1) нераспадаЮlцаяся, то детерминант системы уравнений (6*) OT
личен от нуля, система не имеет ни одноrо ненулевоrо решения,
нераспадающаяся кривая не имеет особых точек. Если кривая (1)
распадается на пару различных прямых d 1 , d 2 , то из rеометрических
соображений ясно, что она имеет единственную особую точку,
а именно точку пересечения Р прямых d 1 , d 2 .
Из доказанноrо следует, что эта точка Р непременно удовле
творяет системе уравнений (6*). Наконец, у кривой, являющейся
парой совпадающих прямых, все точки особые. Формально алrеб
раическое доказательство этих утверждений предоставляется
читателю.
Посмотрим, какая прямая является касаrе.'1ЬНОЙ к кривой (1)
в ее несобетвенной точке
р == (а : р : О).
(9)
Так как Р
несобственная точка кривой (1), то {а,
} есть вектор
асимптотическоrо направления. Подставляя Рl == а, Р2 == р, Рз === О
в уравнение (7), получаем уравнение искомой касательной:
(ана +а 12 Р) Хl + (а 21 а +а 22 Р) Х 2 + (аЗl а + а з2 Р) хз == о. (10)
Но мы видели в rлаве VI (э 3, стр. 168, формула (4», что урав-
нение асимптоты есть
(а 11 а +а 12 Р) х + (
la +a22
) у + (а з1 а +аЗ2
) == о (10')
при условии, что {а, Р} есть вектор асимптотическоrо направления.
Переходя в уравнении (101) от обыкновенных координат к одно-
родным, получаем как раз уравнение (10)......... касательной в несобст-
венной точке кривой (1). Итак, асимптоты кривой вmОрО20 порядка
Cyпzb касательные" этой кривой в ее несобствеН1lЫХ точках.
Мы видели, что кривая BToporo порядка (не содержащая несоб.
ственную прямую) имеет две (быть может, совпадающие) несобст.
венные точки, удаленные в бесконечность в асимптотических для
данной кривой направлениях. Поэтому кривые эллиптическоrо типа
(эллипс и пара мнимых прямых) пересекают несобственную прямую
в двух мнимых сопряженных точках; кривые rиперболическоrо типа
(rипербола и пара действите.ПЬНЫХ пересекающихся прямых) пере
секают несобственную прямую в двух различных действительных
70чках.
Наконец, парабола и лара параллельных прямых имеют с несоб-
ственной прямой пару слившихся точек пересечения: парабола
касается несобспюенноu прямой. В соответствии со сказанным выше
естественно считать несобственную прямую асимптотой параболы.
Восстанавливается полная rармония:
КАСАТЕЛЬНЫЕ, АСИМПТОТЫ
323
ЭЛ.пипе имеет две мнимые сопряженные асимптоты,
rипербо.па ........... две действительные,
парабола имеет две с.пившиеся с несобственной прямой асимптоты.
Найдем несобственные точки окружности.
Систему координат ое 1 е2 на плоскости 3t предполаrаем прямо-
уrольной. Тоrда уравнение (1) изображает окружность, еели
а 1 1 == а 22 * О, а 1 2 == о.
Поэтому несобственные точки окружности суть точки, координаты
которых Х 1 : Х 2 удовлетворяют уравнению
а 11 х 1 2 + а22Х22 == О
или, сокращая на а 11 == а 22 ,
х 1 2 +х 2 2 ==0,
Т. е.
(Х 1 + iX2) (Х 1
iX2) == о
или
Х 2 : Х 1 == + i.
Итак, все окружности имеют одни и те же несобственные
точки
и
(l:i:O)
(1 :
i:O).
(11)
(11 ')
Эти точки называются КРУ20выми (или циклическими) точками
(арифметической комплексной) проективной плоскости зt , снабжен-
ной однородной системой координат, соответствующей прямоуrоль-
ной системе координат на плоскости j't. KpyroBbIe точки удалены
в бесконечность в изотропНblХ направлениях.
Докажем, что всякая кривая BToporo порядка, проходящая
через две KpyroBble точки, есть 01{РУЖНОСТЬ (с действительным.
мнимым или нулевым радиусом).
В самом деле, подставляя в уравнение (1) координаты
Х 1 == 1, Х 2 == + i, Х З =: О
KpyroBblx точек, получим
а 11 + 2a 12 i
а 22 == о.
Так как аl'l,а 1 2,а 22
действительные числа, то из этоrо равенства
следует а 11
а 22 == О, а 12 == О, откуда в свою очередь вытекает, что
кривая (1) есть окружность.
Итак:
т е о р е м а 9. Среди всех кривых emopozo порядка окружности
характеризуются meM 1 что они проходят через две КРУ20вы.е moЧКU.
324
ПРОЕКТИВНАЯ ПЛОСКОСТЬ
Выведем отсюда следующее очень Ba)f{f(Oe предложение:
т е о р е м а 10. Среди всех проективных преобразованuй пAOCKO
сти Р == n преобразованuя подобия 1) характеризуются тем, что
они не только отображают на себя flесобспlвеН-НУIО прямую, но
отображают ее так, что каждая из двух KpyzoeblX nwчек отобра..
жаеmся на пlY же самую или на друсую круzовую точку.
Д о к а з а т е л ь с Т в о. Если данное проеl\тивное преобразование
7f есть преобразовзние подобия, то, будучи аффинным преобразо-
ванием, оно отображает несобственную прямую на себя. Так как
при преобразонании ?f каждая окружность К переходит в неко"
торую окружность К' t то пересечение окружности К снесобствен..
ной прямой, состоящее из пары KpyroBblx точек, переходит в пере-
сечение окружности К' с несобственной прямой, т. е. снова
в пару KpyroBbIx точек. Итак, при преобразованиях подобия
несобственная прямая отображается на себя и каждая круrовая
точка или остается неподвижной, или переходит в друrую Kpyro..
вую точку.
Первое утверждение теоремы доказано.
Докажем второе утверждение. Если данное проективное пре..
образование переводит несобственную прямую внесобственную,
то оно является аффинным; если оно, кроме Toro, переводит КРУ"
rOBbIe точки в KpyroBhIe, то оно переводит ВСЯКУЮ кривую вто"
poro порядка, ПРОХОДЯЩУЮ через KpyroBbIe точки, в кривую вто"
poro порядка, также проходящую через KpyroBbIe точки, т. е..
переводит всякую окружность в окружность. А тоrда, как было
доказано в rлаве VI, преобразование является преобразованием
подобия.
С л е Д с т в и е. Е'слu при данном аффинном преобразованul/, 7f
плоскости л хотя бы одна окружН,осtnb К переходит в окружность
К', то nреобразоеание се еС1пь прео6разование подобия.
В ca:\.iOM деле, допо.;lНИ
аффинное преобразопание r: до про..
ективноrо пр ео бразования 7J проективной плоскости л. При пре-
образовании g' несобственная прямая d oo отображается на себя.
Пара KpyroBbIx точек (как пересечение прямой dJj с окружностью
К) отображается на пересечепие прямой d oo с окружностью /(',
Т. е. на пару KpyroBbIx точек. Значит, по Teop
Me 10 преобразо-
вание rf есть преобразование подобия.
Определение 7. Множество, состоящее IIЗ двух элементов:
несобственной прямой и пары KpyroBbIx точек на ней,
называ-
ется абсолютом евклuдовой 2eoMernpuu.
1) Следовало бы сказать: «лроективные преобразования, являющиеся пре.
образованиями подобия, если их рассматривать на обыкновенной плоскости n
(состоящей из собственных точек rтроективной плоскости n )>>
см.
6, п. 4
9Той rлавы. Упомянув об этом один раз, мы освобождаем себя от дальнейшеrо
повторения аналоrичных замечаний.
ПРОЕКТИВНАЯ КЛАССИФИКАЦИЯ КРИВЫХ
325
Название это основано на том, что евклндова rеометрия по
преимуществу является rеометрией подобия: все теоремы, каса-
ющиеся «формы» тех или иных фиrур (а не их размеров), суть
теоремы, выражаЮJдие те или иные свойства фиrур, сохраня...
lощиеся при преобразовании подобия. Мы доказали, что абсолют
как бы «управляет» всеми этими свойствами, потому что лреобра-
З0вания подобия
это как раз проективные преобразования,
сохраняющие аОСОЛIОТ.
9. n роективная классификация кривых BToporo порядка
Пусть дана кривая BToporo порядка
Ф (X 17 Х 2 , X
J):::::; aJlxi + 2a 12 X t X 2 + a.
2X
+ 2а 1з х 1 х з + 2а 2з х 2 х з + аззх
== О
( 1 )
на проективной плоскости
.
Предположим сначала, что квадратичная форма Ф (Х 1 , Х 2 , Х 3 )
-имеет раиr 3, т. е. что кривая (1) нераспадающаяся. Тоrда невы...
pOiKLLeHHbIM линейным однородным преобразованием
' + ' + ' I
Х 1 == С l1 Х. С 12 Х-1 С 1з Х а,
' + ' + I
X
== C21X1 C2
X
С 23 Х а '
Ха === C:il X ; + C32X
+ еЗ:iХ
(2)
форма Ф (х), Xz, Х з ) может быть привеnена к форме Ф' (х;, X
, X
),
.иыеlощей один из следуrощих видов:
,! ,2 + ,2
Х. + X
Х з ,
,2 ,2 ,2
Х I + Xi
X:
,
,2 ,2 ,1
x.
X,! +хз .
,! ,2 ,2
х. ...... х...
Х 3 ·
Здесь тр
тья И четвертая строчки получаются соотнетственно из
второй и первой умножением на
1. 1 ак как нас llHTepeCYIOT
не сами формы Ф (х 1 , Х 2, Х з ), а уравненнн, полученные ПРИР8В'"
ниванием этих форм нулю, и так как формулы (2) суть формулы
перехода от однородных координат Х] : Х 2 : Х з к проеI,ТИВНЫМ KOOp
, , ,
динатам х. : Х;! : хз, то мы можем высказать следующее предложение:
Всякая нераспадаюu:.аяся кривая втopo
o порядка в надлеЭ/СQu{е
выбранной cucпzeMe nроективн.ых координат получает одно uз еле...
дующих УРШJнен.иu:
,2 + ,2 + ,1 О }
ХI X
Ха == t
,! ,2 ,'! О
Хl +Xj
хз == .
(3)
326
ПРОЕКТИВНАЯ ПЛОСКОСТЬ
Ра зрешая уравнения (2) относительно X
, Х;, Х; (что возможно,
так как det С =1= О), получаем
х; == d 11 X 1 + d 12 X 2 + d1зх з , )
X
== d 21 X 1 + d 22 X 2 + d23ХЗ
D == I]dikll ::::: C
l.
Ха == d З1 Х 1 + d З2 Х 2 + dззх з ,
Эти формулы мы можем рассматривать как формулы проективноrо
преобразования плоскости: каждой точке Х с однородными коор"
динатами X 1 : Х 2 : Ха В силу формул (4) соответствует точка Х'
с однородными координатами X
: X
: X
. При этом, если X 1 , Х 2 , Хз
удовлетворяют уравнению
Ф (Х 1 , Х 2 , X:;t),
(4)
, , ,
то Х 1 , Х2, Ха удовлетворяют уравнению
Ф ' ( ' , ' )
Х., Х 2 , Ха .
(1 ')
Друrими словами, при проективном преобразовании, опреде-
ляемом формулами (4), кривая (1) переходит в кривую
ф' (x
, Х;, х;)
о.
Следовательно, полученный результат может быть сформулирован
и так:
Надлежаще подобранным проектuвным пре06разованием 8СЯКая
нераспадающаяся кривая вторО20 порядка у может быть nреобра
8Ована в кривую у' одНО20 из двух следующих видов:
+
+
O
или
2 + 11 2 О
Х. X
Ха == .
(6)
При этом уравнения всех кривых рассматриваются в одной
и той же системе проективных координат; мы будем ее считать
системой однородных координат на проективной плоскости п ,
а именно системой, соответствующей данной аффинной системе
координат на плоскости л.
Кривая вида (5) не содержит действительных точек; она назы..
вается .мнимым овалом.
Кривая вида (6) при переходе к неоднородным координатам
в системе ое 1 е2 получает уравнение
х 2 + у2
1::= о. (7)
Если система координат ое}е 2 прямоуrольная, то кривая (7)..........
просто окружность.
Итак, всякая действительная нераспадающая кривая BToporo
порядка проективным преобразованием может быть преобразована
ПРОЕКТИВНАЯ КЛАССИФИКАЦИЯ КРИВЫХ
327
в окружность. Следовательно, любые две действительные нерас-
падающиеся кривые BToporo порядка MorYT быть переведены друr
в друrа; все такие кривые образуют один и тот же проективный
класс
класс действительных овальных кривых.
Как следует из результатов, установленных в
7, действи..
тельная овальная кривая является эллипсом, rиперболой или
параболой в зависимости от Toro, как она расположена относи..
тельно несобственной прямой: эллипсы пересекают несобственную
прямую в двух различных мнимых точках, rиперболы
в двух
различных действительных точках, параболы касаются несобствен-
ной прямой. Найдем проективное преобразование, переводящее
rиперболу
х 2
у2 == 1
(8)
в окружность
х 2 + у2 == 1 (7)
(система координат ое 1 е 2 прямоуrольная).
Для этоrо перепишем уравнение (8) в однородных координатах
х;
X
х: == о (9)
и сделаем проективное преобразование:
Х: == Ха. )
Х2 == Х 2 ,
,
Ха == X 1 .
(10)
rипербола (8) переходит при этом преобразовании в кривую,
состоящую из всех точек М' == (x
: X
: X
), удовлетворяющих урав-
нению
,2 ,2 ,2 О
ХЗ
X
Xl == .
(11 )
Так как в уравнении (11) через X
, X
, X
обозначены координаты
u
переменнои точки в тех же однородных координатах, то нет
надобности обозначать эти координаты штрихованными буквами:
просто при проеI{ТИВНОМ преобразовании (10) кривая (9) перехо..
дит в кривую
xi + X
Х: :::::: О
ИЛИ, В неоднородных координатах, в окружность
х2 + у2 == 1.
Полученный результат естественно вытекает из Toro, что при
преобразовании (10) несобственная прямая
хз == О
перешла в прямую Х 1 == О, а в несобственную прямую Хэ
О
перешла прямая X 1 ===0, Т. е. ось ординат, с которой rипербола
328
ПРОЕКТИВНАЯ ПЛОСКОСТЬ
(8) не имела общих действительных точеJ<. Поэтому преобраЗОВ8Н-
иая кривая не будет пересекать в действительных точках образ
оси ординат, т. е. несобственную прямую; она будет вся распо-
ложена в I{онечной части плоскости.
Возьмем параболу
у2 == 2х
( 12)
или, в однородных координатах,
X
2х 1 х з == о.
При проективном преобрззовании
, 1
х. ==X 1
2 Х з ,
() 3)
,
Xi == Х 2 ,
, + 1
ХЗ==Х 1 2 ХЗ
( 14)
( t , + 1, , , + ' ) ( 13)
при котором х. == "2 Хl 2' Ха, Х 2 == X
, Х З ==
Х. Ха кривая
переходит в кривую с уравнением
,1 ( ,1 '2 ) О
X i
Ха
Х I == ,
Т. е.
,2 ,2 ,2 О
Х, +X
хз == ,
или, в прямоуrольных координатах, в кривую с уравнением
х 2 + у2
I == О.
Кривая эта представляет собой окружность. Итак, проективное
преобразование (14) переводит параболу у2 == 2х в окружность (7).
Переходим к случаю, коrда форма Ф (X 1 , Х 2 , X
) имеет paHr 2.
Тоrда эта форма преобразованием (2) приводится к одному ИЗ
двух видов:
,2 ,2
Х1 +Xi ,
,8 ,2
Xt
Х'}) ·
Кривая (1) проективным преобразованием (4) переводится либо
в кривую
X
+x
== о, т. е. (X 1 + ix 2 ) (х}
ix 2 ) == о, (15)
либо в кривую
Xi ...... X
== О, т. е. (x 1 + х 2 ) (Х 1
х 2 ) == о. (1 б)
Кривая (15) есть пара мнимых прямых; их уравнение в не од-
нородных координатах есть
х + iy ==:;. о) Х
iy ==:;. о.
ПРОЕКТИВНАЯ КЛАССИФИI(АЦИЯ КРИВЫХ
329
Кривая (16) есть пара действительных прямых
х+у==о, x
y==o.
Наконец, если раиr формы Ф (X t , Х 2 ' Ха) равен 1, то эта qюрма
преобразованием вида (2) приводится к виду
,2
х. .
Это значит, что некоторым проективным преобразованием (4) кри-
вая (1) переводится в кривую
xi == о
в пару совпадающих прямых.
Итак, имеет место следуюu,ая
т е о р е м а 11. f/евырождающаяся кривая впюрО20 порядка у
есть овал (действительный или мнимый); некоторым nроективным
nреобразование.м она переводится соответственно в действитель-
ную окружность
х; +х: +xi == о,
т. е.
x2+y2
I ==0,
или в мнимую окружность
x;+x
+xi==O,
т. е.
х 2 + у2 + 1 == о.
Вырожда/ощаяся кривая второео порядка есть пара прямых,
действительных (быть может, совпадающих) или мнимых сопря..
жеННblХ.
В то же время все перечисленные пять типов кривых проек-
тивно различны: очевидно, ни одна из них не может быть пере.
6едена в друrую посредством проективноrо преобразования.
ЧАСТЬ 11. ЛИНЕЙНАЯ АлrЕБРА
r л А В А XI
ЛИНЕЙНЫЕ ПРОСТРАНСТВА
lt Определение Jlинейноrо пространства
Оп р е Д е л е н и е 1. Линейное пространство над полем k (k==R
или (]) есть множество V произвольных элементов, называемых
векторами, удовлетворяющее следующим условиям (<<аксиомам
линейноrо пространства»):
1. Для любых двух векторов U 1 и U 2 определен вектор U,
называемый суммой векторов U 1 и U 2 И обозначаемый через U 1 + U 2 .
При этом для .ТIюбых двух векторов U 1 и U 2 имеем
U 1 + U 2 == и 2 + Ul (свойство коммутати8ности сложеftuя) , (1)
а для любых трех векторов U 1 , U 2 , U З
(иl +U 2 )+UЗ==U 1 +(u 2 +u з ) (свойство ассоциативности
сложения). (2)
2. В множестве V имеется элемент О, называемый нулевы,м,
вектором, удовлетворяющий для любоrо вектора u условию
u+O==u. (3)
З. Ко всякому вектору u имеется BeI{TOp
и, называемый
противоположным вектору u и удовлетворяющий условию
u +(
и) ==0. (4)
4. Для любоrо вектора u и любоrо числа t.. Е k определен
вектор ли, называемый произведенuем вектора u на число ')..,. При
этом для любых двух векторов U t , и 2 имеем
л (U 1 + и 2 )
/\'и 1 +ЛU 2 (первая дuспlрибутивносtпь); (5)
для ,,'!юбоrо BeI{TOpa u и любых двух чисел л'1 и ""2 имеем
(Л 1 + ""2) u == л,. u + л'2U (вторая дистрu6уt1luвность) (6)
н
')..,1 (Л 2 U) == (""1 Л 2) u (ассоциаn1,ивнос/nь умноженuя на число). (7)
ОПРЕДЕЛЕНИЕ ЛИНЕАноrо ПРОСТРАНСТВА
331
Наконец,
1 . u === u.
(8)
Вот и все aKCUOJ.tbl лuнеuносо пpOCml2QHCmea.
Если поле коэффициентов k == IR, то линейное пространство
над k называется вещественным линейным пространсmвом.. В слу..
чае k == ([) мы имеем комплексное линейное пространство.
Укажем на некоторые простейшие С.педствия аксиом линейноrо
пространства.
1 о Из то20, что вектор О, удовлетворяющий условию 0+ u === u
для люБО20 вектора u, существует, вытекает, что он единственный.
В самом деле, пусть существуют два нулевых вектора
О' и О", так что для любоrо вектора u имеем
О' + u == u, О" + u === u.
в частности,
О' + О" == O"t
О" + О' :=:: О' .
в СИ",1У коммутативности сложения отсюда вытекает, что О' == О",
что и требовалось доказать.
20 Из т 020 , что к каждому вeKпwpy u существует противопо-
ложный ему вектор
u, удовлетворя/оu,ий условию (4), вытекает,
чпw этот противоположный вектор eдиHcmвeн, 1).
В самом деле, пусть к данному вектору u имеются два «про-
1 "
тивоположных» вектора u и u , так что
...L' О + " О
U1U==, U U===.
Прибавим к обеим частям первоrо из этих двух равенств по век-
тору u". Получим
(u" + u) + u' === 0+ u".
Но u" + U == О, поэтому
О + u' === О + u",
, "
т. е. u == U .
3 а м е ч а н и е. Из аксиомы 2 следует, что линейное простран-
ство всеrда есть непустое множество векторов. Но состоять из
одноrо нулевоrо век тер а О оно может. В Э1"ОМ «нулевом» линейном
пространстве действия таковы:
О + о == О, 1\.0 == О при любом л.
Определим теперь разность
BYX векторов, полаrая
U 1
и 2 == и! +(
u 2 )t
так что u
U == О для любоrо u. Так как для чисел Л 1 и Л а
Bcer да Л 1 + (
"'2) == Л 1
л 2 , то из (6) следует
(Л 1
Л 2 ) U == л1u
л 2 u. (6')
J) Свойства }О, 2:) вытекают из Toro. что линейное пространство есть
rруппа по отношению к сложению.
ЗЗ2
ЛИНЕйНЫЕ ПРОСТРАНСТВА
При Л 1 ==
ОТСlода следует
О.и==О
(9)
для лю60rо вектора о.
Далее,
(
1). U ==
U (8')
ДЛЯ любоrо вектора о.
В самом деле, принимая во внимание (8) и (9), имеем
u+(
1).u== l.u+(
1).и==[1 +(
l)].u==O.u::;;:O,
откуда в силу аксиомы 3 следует (8).
Пусть L
некоторое линейное пространство над полем k, и 1 , .. .
. . ., О п Е L. Выражение вида
Л j U 1 + ... +Л п U Il
называется линейной комбинацией векторов " 1 ' ..., " nо
JIинейная комбинаuия
'\.1 О l + A 2 U 2 -1
. .. + л'Il U Il
векторов U 1 ' О 2 , ..., О п Е I.J называется нетрИ8иаЛЬJtой, если
в ней хотя бы один из коэффиuиентов Л 1 , ..., Л п отличен от нуля.
Линейная комбинация вида
О . U 1 + о . и 2 + . .. + о . U n
называется nzри8UQЛЬН,ОЙ; она, очевидно, равна ну.пепому вектору.
Оп р е д е л е н и е 2. Система векторов и 1 , U 2 , ..., U n наЗblваеrпся
линейно зависимой, если существует хотя бы одна н.етрuвuальная
комбинация этих векторов, равная нулевому вектору. В противном
случае, nl. е. если пlОЛЬКО пzрuлuаЛЬNая Лllнеtlflая комбинация дaH
НЫХ векторов равна ну левОJИУ lJeK m ору , век/поры HG..3blBa 10т ся
линейно незавUСtiМЫ.А-IU.
.lloKa)J.:eM неСI{ОЛЬКО простых, НО важных предложений о ли
нейной заВИСИМQСТII; они имеlОТ чисто алrебраический характер и
постоя Н Н О при 1\1 е н я IOTC Я .
1. Если среди век/nоров U 1 , ..., U n eCtпb хоrпя бы один нуле60й
ве1Сnl0р, ,по вся cucmeJ..tQ neKnzop08 линейно зависима.
В самом де/lе, ес,ни, например, и 1 == О, то, положив 11.1 == 1,
Л.! == ... == Л п == О, получим нетривиальную линейную комбинаUИJО
1 . u 1 + о · u 2 + . .. + о . u ll === о.
2. Если среди eeK11l0p08 U 1 , ..., О п некоторые образу/от AUHeй
НО ЗQ8исиМУIО систему, ,по и вся система "1' ... J U n линейно
зависима.
В самом деле, пусть векторы 111' . о., U p , р
п, линейно
зависимы. Значит, существует нетривнальная линейная комбина
ция л'1"1 + .. . + )"pU p , равная ну левом у вектор у о Н о Tor да) пола-
ОПРЕДЕЛЕНИЕ ЛИНЕйноrо ПРОСТРАНСТВА
ззз
rая л. Р + 1 == О, ..., А п === О, получим также нетривиальную линейную
комбинаuию
Л 1 U 1 + ... +ЛрUр+О. U p + 1 +... +0. и п ,
равную нулевому вектору.
НепосредствеНI-IЫМ лоrическим следствием предложения 2
является
2' . Если система векrпоров и 1 , ..., U л линейно независима) то
II всякая ее подсисmема линейН,о независuма.
3. Если систе.ма U lt ..., и 1l линеuн.о зависима, то по крайней
мере один u:з векторов 111, ..., Ufl равен линейной комбинации
ОСinаЛЬНblХ.
В самом деле, пусть
Аl"1 +Л 2 U 2 + ... + л'пUп == О,
rде по крайней мере один коэффициент отличен от нуля. Пусть,
например, л'l =1= О. Тоrда последнее равенство можно переписать
в виде
"1 == (
t
)"2 + .., + (
: ) "п.
т. е. U 1 есть линейная комбинация векторов U 2 , ..., U п .
Обратно:
4. Если среди векторов "., ..., U n один какой-нибудь есть
линейн ая комбинация остальных, то cucme.hta "1, ..., U n линейно
зависима.
В самом деле, если, например, U n == Л 1 U 1 + ... + Лп
lUп
l' то
нетривиальная линейная комбинация л,. Ь 1 + . . . + Лп'
l Un-
1 + (
1) u n
равна нулевому вектору.
Следующее часто применяемое пред.пожение усиливает предло
жение 3:
5. Если CUCfпeMa векторов U t , U 2 , ..., U n линейно зависима,
а система U 1 , и 2 , ..., U n 1 линейно неЗа8исuма, то вектор "п равен
линейноЙ комбинации eeKпzopoe и 1 , ..., UIl
l'
В самом деле, так как система и 1 , ...
О п линейно зависима,
то существует нетривиальная линейная комбинация Л 1 U 1 + . ..
... +Лп
lUп
l+ЛпUп, равная нулевому вектору; в ней лп=l=О,
так как в противном случае векторы U t , U 2 , ..., On
1 были бы
.., ел ( Лl ) + + ( Лп
1 \
линеино зависимы. едовательно, U" ==
Л N U 1 . · ·
i:;) и п
1'
что и требовалось доказать.
При м еры.
1 о Одним из ва}l{неЙIUИХ примеров линейных пространств
является так называемое n.мерное арифметическое пространство
k n (k == IR или
). k п
это множество всевозможных упорядоченных
последовательностей из n элементов вида
(а 1 , ..., а n ),
334
пИНЕАНЫЕ ПРОСТРАНСТВА
r де а, Е k, п
фиксированное целое число. Две последователь-
ности называются paBHblJtlU, если равны их соответствующие эле-
менты. Операции сложения последовательностей и умножения
последовательности на число определяются по формулам
Ь (йl' ..., ал) == (Ьа 1 , ..., Ьа п ),
(а 1 , ..., an)+(b 1 , ..., bn)==(a 1 +b 1 , ..., Йn+Ь n ).
Леrко проверить выполнение всех аксиом (1)
(8). Таким обра-
зом, k п является линейным пространством над полем k.
20
\ножество М т . п (k) матриц с т строками и n сто.пбцамн
над полем k образует линейное пространство над k относительно
операций сложения матриц и умножения матрицы на число. Пос-
кольку числовые последовательности длины n можно рассматри-
вать как матрицы из М 1 . n (k), то п
MepHoe аРИф:'v[етическое про-
странство k п есть линейное пространство матриц М 1 . n (k).
Закончим этот параrраф важнейшим понятием изоморфизма
между двумя линейными пространствами и и v. Два линейных
пространства и и v над одним и тем же полем коэффициентов
k называются uзоморфными, если между их элементами можно
установить такое взаимно однозначное соответствие, при котором
сумме векторов пространства и отвечает сумма соответствующих
векторов V, а произведению числа на вектор пространства U
отвечает произведение Toro же числа на соответствующий вектор
n ростр анства v.
Взаимно однозначное соответствие, обладающее указанными
свойствами, называется изоморфизмом.
11з определения изоморфизма следует, в частности, что для
любых двух векторов u Е и, v Е V, соответствующих друr друrу
при данном изоморфизме:
u
v,
будем иметь
O.U++O.V (10)
и
(
l)u ++(
l)v. (11 )
Так как О. u есть нулевой вектор пространства и, а О. v
нулевой вектор пространства V, то из (1 О) следует, что при изо-
морфном соответствии между двумя линейными пространствами
их нулевые векторы соответствуют друr друrу.
Так как (.......l)u==
u, (
l)v==
Vt то из (11) вытекает: если
U ++ V,
то
(
u) ++ (
v).
(12)
РАЗМЕРНОСТЬ. БАЗИС. КООРДИНАТЫ
335
Читатель леrко выведет из доказанноrо следующий общий факт.
Если при данном изоморфизме между линейными простран..
ствами и и v имеем
U 1
V 1t
U 2 ++ V 2 ,
(13)
U m ++ V m ,
то при любых числах А 1 , "'2' ..., Л т Е k имеем
Л 1 U 1 +Л 2 U 2 +... +ЛтU т ++ л. 1 V 1 +Л 2 V 2 +... +л.тV т . (14)
Отсюда в свою очередь леrко вытекает, что при изоморфном
соответствии между двумя линейными пространствами линейно
зависимые системы векторов одноrо пространства соответствуют
линейно зависимым системам друrоrо (и, значит, линейно неза-
висимым системам одноrо пространства соответствуют линейно
неэависимые системы друrоrо).
2. Размерность. Базис. Координаты
1. Базис. Если в линейном пространстве V над полем k имеется
хотя бы один отличный от нуля вектор u (а следоватеЛЬНО t име-
ются и векторы ЛU при любом л), то в V имеется по крайней мере
одна линейно независимая система векторов; такой системой во
всяком случае является система, состоящая из одноrо вектора u.
Предположим теперь, что в данном линейном пространстве V
существует линейно независимая система, состоящая из п векто..
u u u u
ров, и нет никакои линеино независимои системы, состояu
еи из
большеrо, чем п, числа векторов. Тоrда мы rоворим, что V есть
n-мерное лuнеЙfl'Jе пространство над k, а число n называем ero
числом измерений или размерностью над k. Если TaKoro числа п
нет, то линейное пространство называется бесконечномеРНЫАt. В бес-
конечномерном линейном пространстве существуют линейно неза-
висимые системы, состоящие из любоrо сколь уrодно бо.пьшоrо
числа векторов.
Бесконечномерные линейные пространства существуют 1); более
Toro, значение их в современной математике чрезвычайно велико;
но изучаются они в функциональном анализе.
1) Например, рассмотрим множество всех целых рациональных ФУНКЦИЙ
(мноrочленов) Р == Р (х) с действительными коэффициентами
р (х) == аох п + alxn
1 +... + а п (n произвольно);
мы причисляем к ним и все константы Р (х) == ао (мноrочлены нулевой степени).
в том числе и мноrочлен, тождествеН1IО равный нулю, Р (х) == О. При сложе
нии мноrочленов, а также при умножении мноrочлсна на любое действител ьное
л получаем снова мноrочлен; сложение мноrочлеllОВ и умножение их на
336
ЛИНЕйНЫЕ ПРОСТРАНСТВА
о n р е д е л е н и е з. Пусть V есть n
MepHoe линейное ПРОСТ-
ранство. ВСЯI<3Я линейно независимая система, состоящая из n
векторов пространства V, называется базисом этоrо пространства.
Т е о р е м а 1. Если е., е 2 . ..., е п
базис лuнейноzо пpocmpaH
сmeа V над полем k, пlO всякий вектор u эm020 пространства
единственным образом может быть представлен в виде линейноЙ
комбинации
U == x1e. +х 2 е 2 +. . . +хпе п
базисных векторов е 1 , e z , ... t е п . ОдНОЗНQЧНО определенные коэффu
ЦUСН,n1,Ы Х., Х 2 ' '.., Хп. Е k назьюаются координатами вектора u
отНОСtlfпельн.о базиса е 1 . е 2 , .... е п .
Ii о к а з а т е л ь с Т в о. Так ка к в V не СУlцествует линейно
независимой системы, СОСТОЯIuей из п + 1 векторов, ТО система
u , е L . е 2 , ..., е п
зависима, то('да как e 1 , е 2 . ..., е"
независимая система. Поэтому
u == х.е. + х 2 е 2 +. . .
xпe'l.
сли бы существовало второе такое представление
u == у 1 е. + У2 е 2 + . . . + у "е п ,
ТО было бы
(Х 1
Yl)e 1 +(Х 2
У?,) е 2 +.. .+(Х п
Уп)е" ==0,
откуда, вследствие линейной независимости систеМbI е 1 , е 2 , ..., е п ,
в ыте к а ет . что Х 1 === У.. ..., х n :=::: у ,р
Теорема 1 доказана.
Пусть даны
Ba вектора
u == Х I е 1 + х 2 е! + . . . + хпе п
и
, ' + ' + + '
u === Xtel x i e 2 . . . х"е n .
ДСЙ ствнтельнсе число удсвлеl поряют nсем аксиомам линсйноrо пространства;
нулевым вектором D этом пространстве является МНОl'очлеll, тождественно
равный "улю. Докажем, что линейное пространство всех мноrочленов беско-
нсч J{OMepIlO. Деистпи rелыю. час rHbIM случаем мноrочленоn ЯВ.r1ЯЮТС я И ОДНО-
qЛСIJЫ, например, одночлены
Ро(х)== 1. P 1 (х)==х, Р2 (х)==х 2 , ..., рп(х)===х п .
rде п
любое натуральное число. Но эти одночлены образуют линей но неза-
висимую систему векторов линейноrо пространства всех мноrочленов. В самом
деле, пусть какая-нибудь линеЙная комбинация наших векторов Р О , P 1 , .... Р п
ос коэффициентами Со. Сl' ... . Сп равна нулевому вектору; это значит, что
со +С.Х+С2х2+... +спх п
есть мноrочлен. тождественно равный нулю; но тоrда все коэффицие нты
Со. ... 'Сп ДОЛЖНЫ равняться нулю. Таким образом, в линейном пространстве
всех мноrочлеНО8 можно наЙти линейно lIезависимую систему. состоящую из
JJюбоrо числа элементоо, что и требовалось доказать.
РАЗМЕРНОСТЬ. БАЗИС. КООРДИНАТЫ
337
COrJ1aCHO правилам вычислений с векторами, содержаlЦИМСЯ вакси...
омах .пинейноrо пространства, имеем
u+u' ==(Х 1 +Xt)e. +.. .+(XII+x
)ell'
Т. е. при сложении векторов их COOfпeemcmвeHHbl,e координаты
складblваlотся.
Точно так же, если вектор
U ::::: x1e 1 + х 2 е 2 +. . . + х 1l е п
умножается на число Л, то получается
лu == лх 1 е 1 + лх 2 е 2 +. . . + лхпе п
......... при умножении вектора н,а число л все координаты векnwра
умножаются на эпw число.
2. Переход от одноrо базиса к друrому. Пусть е 1 , ..., е п ;
еl, ..., e
два базиса линейноrо пространства L. Обозначим
координаты произвольноrо вектора U относительно этих базисов
, ,
соответственно через X 1 , ..., Х п И Хl, ..., Х п , так что
U == x1e l +. . . + хпе п , (1)
, , + + " ( 1 ' )
U == х.еl . . . xrte,l.
Пусть координаты векторов е;, i == 1, ..., n, относительно базиса
e t , ..., е п равны соответственно Сн, ..., Cпl, i == 1, ..., п, так что
е; == сне !
r. . . + Cпieп' (2)
Подставляя (2) в (1'), по.пучаем
,1 rr /! I п ) п ( п \
U ==
Xiei ==
x
e; ==
Xk {
Clkel ==
ClkXk j e,.
i == 1 k == I k == . \ l == \ i
1 \k == I
ПОСКОЛЬКУ координаты Х 1 ..., Х п вектора и относительно базиса
e l , ..., е" ол ределены однозначно. то
п
,...., ,
Xi == L..I CiliXk,
k == J
Эти формулы
<<фОр.lИУЛЬt преобразованuя Координат»......... выра/l<ают
координаты Х\,..., Х п ПрОИ3ВО.:'1ьноrо вектора u относительно
б ' ,
аЗllса е н ..., е п через координаты Xl, ..., Х п Toro же вектора
относительно баЗIJса е', ..., e
. Матриuа
i==l,
. . ., n.
(3)
Сll Сlа ... Cl ll
С == С21 С22 · · · С 21l
(4)
IC п 1 С п2 ... Спп,1
называется Аtатрuцеu преобраэавания координат, соотвеТСТВУlощеrо
перехода от базиса e 1 , ..., е п к базису е" ..., e
. Матрица этоrо
перехода есть транспонированная матрица С* к матрице С.
338
ЛИНЕйНЫЕ ПРОСТРАНСТВА
3. Теорема об изоморфизме между Jlюбыми двумя
v v u
линеиными пространствами однои и тои же размерности
Т е о р е м а 2. Для тосо чтобы два конечномерНblХ линейных пpo
странсmва над одни.м U тЕМ же полем k были изоморфны .между
собой, нео6ходимо и достаточно, чтобы они имели одну u ту же
размерность над k.
Д о к а з а т е л ь с т в о. Условие необходимо. Из скззанноrо
в конце
1 об изоморфизме следует: если в одном из двух изо
морфиых между собой прсстранств имеется линейно независимая
система, состоящая из п векторов, и нет линейно независимой
системы, состоящей из большеrо числа векторов, то то же спра
ведливо и для BToporo пространства.
Друrими словами: два изоморфных между собой пространства
имеют одну и ту же размерность.
Условие достаточно. Чтобы убедиться в этом, докажем, что
всякое n
MepHoe линейное пространство и над полем k изоморфно
n
MepHOMY арифметическому пространству k n . Пусть U 1 , U2' ..., Uп
произвольный базис пространства u. Тоrда каждый вектор U Е и
однозначно записывается в виде U == X 1 и 1 + X Z U 2 +. . . + хпи п - Ставя
в соответствие вектору U ===X1Ul +х 2 и 2 +.. .+хпи n Е {} вектор
v == {хн Х 2 , ..., Х п } Е k n , мы и получаем искомое изоморфное COOT
ветствие между пространствами и и k n (доказательство непосред
ственно вытекает из Toro, что при сложении двух векторов u Е и,
и' Е и их соответственные координаты складываются, а при YMHO
жении вектора u Е и на какое"нибудь число л на то же "л YMHO
жаются и координаты вектора u).
Замечание. Так как
и 1 == 1 . иl + о . U 2 +.. . + о . и n ,
U 2 == О . и 1 + 1 . u 2 +. . . + о . U п ,
.................
и n == о · U 1 + о . и 2 +. . . + 1 . и n ,
то при только что установленном изоморфизме между векторными
пространствами и и k п базис и 1 , U 2 , ..., U n пространства и пере
ходит в систему векторов
e 1 =={I, О, ..., О},
=={O, 1, ..., О},
..........
еn=={О, О, ..., 1}
пространства k n , и эта система векторов образует базис простран
ства k п .
Вообще пусть U и у........ два изоморфных линейных простран
ства. При (произвольно выбранном) изоморфном соответствии
ПОДПРОСТРАНСТВА ЛИНЕАноrо ПРОСТРАНСТВА
339
U ++ V между пространствами и и v любому базису и 1 , U 2J ..., U n
пространства и соответствует некоторый базис У 1 , V2' ..., У п про
странства V и всякому вектору u == Хl U 1 + X2U2 + . .. + XnU n про
странствз и соответствует вектор V ==XtV t +X 2 V 2 + _.. +xпv п про-
странства V, имеющий относительно базиса V 1 , У 2 , ..., У п те самые
координаты, которые вектор U имеет относительно базиса U 1 , и 2 , ...
. . ., u л - Обратно, выбирая в двух п
MepHЫX пространствах по
произвольному базису Ul' "2'...' и п И V 1 , v 2 ,..., V 11 И сопоставляя
друr с друrом всякие два вектора U == X1U. +X 2 U 2 + .. . +xпu п Е U
И V == X 1 V 1 +X 2 V 2 + . .. +xпv п Е V, имеющие относительно этих бази-
сов одни и те же координаты Х 1 , Х 2 , ..., Х п , получим изоморфизм
между пространства:wи и и v.
4. Подпространства линейноrо пространства.
Дальнейшие теоремы о линейной зависимости
векторов и о базисе линейноrо пространства
1. Определение подпространства линейноrо пространства.
Пусть в линейном пространстве V дано множество векторов L,
удовлетворяющее следующим условиям:
1 о Каковы бы ни были векторы U 1 и U z из L, их сумма также
принадлежит множеству L.
20 Каковы бы ни были вектор U из L и число л" вектор ЛU
также принадлежит множеству L.
Всякое множество L, удовлетворяющее этим двум условиям,
называется подпространством линейноrо пространства V . Условия
1 о и 20 в своей совокупности, очевидно, эквивалентны одному
условию:
30 Всякая линейная комбинация л'lU 1 + Л Z U 2 + . .. + }"kUk век-
торов 111' ..., Uk, принадлежащих множеству L, есть вектор, при-
наД,,1ежащий этому множеству.
Поэтому подпространство линейноrо пространства V может
быть определено как множество L. удовлетворяющее условию 30.
3 а м е ч а н и е 1. Пусть все элементы линейноrо пространства
и являются в то же время элементами линейноrо пространства
V, причем линейные операции над веl{торами в и те же самые,
как и в объеМЛlощем пространстве v. Тоrда и, рассматриваемое
как множество векторов пространства V, очевидно, удовлетворяет
условиям 10, 20.
Очевидно и обратное: всякое множество и с: У, удовлетворя-
ющее этим условиям, есть линеиное пространство, элементы кото-
poro суть векторы из У, причем линейные операции в и те же,
что и в У.
3 а м е ч а н и е 2. Очевидно, все пространство V, а также про..
странство, состоящее из одноrо нулевоrо вектора, являются под
пространствами пространства v.
340
.лИНЕйНЫЕ ПРОСТРАНСТВА
Пусть теперь В
какое"нибудь, совершенно произвольное,
конечное или бесконечное, множество векторов пространства v.
Рассмотрим множество В, состоящее из всех векторов, являю
щихся линеЙНblМИ комбинациями всевозможных B
KTOpOB, принад
лежащих множеству В. Очевидно, множество В удовлетворяет
условиям 1 о и 20 и поэтому является подпространством простран"
ства v. Это подпространство называется подпространством, поро..
жденным множеством В или линейной оболочкой (или линейным
замыканием) множества В; множество В в с
ою очередь называется
.множеством, порождающим пространство В, или множеством или
системой образующих пространства В.
Может, разумеется, случиться, что пространство В совпадает
со всем пространством V, например, если В есть какой"нибудь
базис пространства v. Итак, всякий базис пространства V явля
ется системой ero образующих, притом линейно независимой. Мы
скоро докажем и обратное предложение: всякая линейно неззви"
симая система образующих конечномерноrо линейноrо простран..
СТЕа является ero базисом.
При м ер. Пусть на плоскости даны две пересекающиеся
прямые d 1 и d 2 ; обозначим через Ll множество всех векторов,
коллинеаРНblХ прямой d l , а через Lz
множество всех векторов,
коллинеарных прямой d 2 ; каждое из этих двух множеств ЯВЛЯ
ется (одномерным) подпространством пространства V всех BeKTO
ров плоскости, но объединение В == L. U L 2 множеств Ll и Lz
линейным пространство
м не является (почему?). !\1ежду тем век..
торное пространство В, порожденное множеством В, есть все
пространстно V.
Следующее очень важное предложение почти очевидно:
т е о р е м а 3. Если подпространство L кон
ч.Н/)А
ерНО20 линей...
HO
O пространства V UA1ceпl ту же размерность, что и У, то
оно coeпaaaeпz со BCeAt v.
д о к а з а т е л ь с т в о. Пусть L и V имеют одну 11 ту же раз..
мерность n. Возьмем в L линейно независнмую систему из n
векторов U 1 , ..., U л ; эта система ЯВ.пяется базисом обоих про..
странств: L и v. Поэтому каждый вектор U Е V, будучи линеЙ..
ной ком6инацией векторов U 1 , ..., U л (содержащихся в L),
принад.пе)кит подпространству L, т. е. V f; L, и, значит,
V === L.
2. Теорема
тейница «о замене». Теперь будет доказана од...
на из основных теорем, касающихся линеЙНblХ подпространств
и линейной независимости векторов в них, так называемая
Теорема Штейнипа «о замене» (теорема 4). Пусть
aa!lJ линейное пpocтpaпCl1zeo У, порожденное (конечным) Аtноже...
ство.м своих элементов
U 1 . "2, ..., U т .
(1)
ПОДПРОСТРАНСТВА ЛИНЕАноrо ПРОСТРАНСТВА
341
17усmь, кроме mozo, 8 V дана линейно незавuси.мая система, cocтo
ящая из п веКlпоров
V J , V 2 , ..., Ул.
(2)
ТО2да непременно п < т и среди векторов U), и 2 , ..., и т МОЖНО
KaKlle
тo п векторов вычеркнуть и заменить векторами V 1 , V 2 , ...
. . . ,V п, так что получится вновь совокупность векторов, порождаю
щая пространство у.
Докажем эту теорему посредством индукции по п. Пусть
дана система векторов (1), порождающая линейное пространство
У, и линейно независимая система (2), состоящая из одноrо BeK
тора V J Е У; ЭТО означает просто, что в V дан вектор У) =1= о.
Тоrда прежде Bcero п == 1 < т.
Так как V) Е У, а V состоит из линейных комбинаuий век.
торов U н ..., U т, ТО
V == C 1 U 1 + .. . +сти т ,
( 3)
причем по крайней мере один из коэффициентов C t , ..., С т отли
чен от нуля; пусть, например, C t * о. Тоrда вектор U t есть линей
ная комбинаuия вектора V 1 и векторов U 2 ' ..., Um, а именно:
1 С2 С т
и 1 == 'ё
v 1
с; U 2
...
и т .
(3')
Всякий вектор u Е V есть линейная комбинаuия векторов U 1 , ....
..., Um:
u == а} U 1 + .. . + а т U т.
Заменяя в этом равенстве и 1 через ero выражение (.3'), получим
равенство вида
U === b 1 v. + b 2 U 2 + ... + bтu m ,
показывающее, что вектор u Е V есть линейная комбинаllИЯ BeK
тора у 1 И векторов и 2 , ..., U m . l-Iта К, при п === 1 теорема Штей
"ниа доказана.
Дока)l{ем ее теперь для п, предполаrая ее уже доказанной
для n
1. Система Bel{TOpOB v 1 , V 2 , ..., Yп
), как подсистема ли
нейно неэависимой системы (2), линейно независима: она состоит
из п
1 элементов; поэтому по предположению индукции некото"
рые п
1 из векторов ( 1)
пусть это будут векторы u., U 2 , ...
.. ., Uп
1
MorYT быть заменены векторами V., ..., Vп
l' так что
в результате получится совокупность векторов
v 1 , У2, ..., Vn
l' uп, ..., U m ,
(4)
пораждающая пространство У. Так как вектор V n принадлежит
этому пространству, то он является линейной комбинацией
V n == CI V l + ... +Cп
lVп
l +CnU n + ... +cтu т (5)
342
ЛИНЕI'IНЫЕ ПРОСТРАНСТВА
векторов (4). Если мы докажем, что в (5) хотя бы ОДИН из коэ4r
фициентов Сп, ... ,С т отличен от нуля, то это будет, прежде Bcero,
означать, что среди векторов (1) имеется хоть один Ul, номер
KOToporo i
п, т. е. будет доказано равенство т
n. Но если
бы все коэффициенты сп, ..., С т были нулями, то соотношение (5)
означало бы, что система (2) линейно зависима вопреки предполо
жению. Итак, действительно т;;:;: n и среди коэффициентов Сп, ...
. . . t С т по крайней мере один
пусть это будет Сп
отличен от
нуля. Но тоrда (5) может быть переписано в виде
1 Cl Cп
l С п +l С т (6 ' )
u п ==
Vn
Vl
...
Vn
l
Un+l"""'" ...
uт,
СП Сп Сп Сп Сп
означающем, что U n есть линейная комбинация векторов
V 1 , ..., V n , U n + 1 , ..., U m .
(7)
Пусть теперь u
произвольный вектор из v. Он является
линейной комбинацией векторов (4); если в этой комбинации за
менить вектор U n ero значением (6), то вектор u также выразится
в виде линейной комбинации векторов
V 1 , ..., V N , U n + 1 , ..., U т ,
т. е. система векторов (7) порождает все пространство v. Теорема
«о замене» доказана.
Самым важным ее утверждением является, пожалуй, неравенство
т
n, заслуживающее быть выделенным в виде особой теоремы.
т е о р е м а 5. В линейном nространстве } порожденном, т вe"
пwpaMи u., .. ., U m (т. е. соспwящем из линейных комбинаций этих
векторов) не .может cyuJ,ecп180eaтb линейно независимои cиcтeм'Ы
со-
сто"сицей более чем из т векторов.
Друrими словами, размерность линейНО20 пространства не
может nревосходuть числа элементов какой
нuбудь проuзвольной
системы 06разу/ощих эmоzo nространства.
Теперь в двух словах. доказывается
т е о р е м а 6. Линейно независимая система образующих В
лuнейНО20 пространства L является е20 базисом.
В самом деле, пусть число элементов в данной системе обра-
разующих В есть т, а размерность пространства L есть n. Так
как система В независима t ТО т
n. С друrой CTOPOHbI t мы только
что видели, что п
т. Значит, т == n, система В есть линейно
независимая система, состоящая из п векторов n
MepHoro прост-
ранства, т. е. базис этоrо пространства.
Т е о р е м а 7. ВСЯi':ая система образу/ощих В пространства L
ра.змерности п > О содержит базис эtn020 пространства.
Д о к а з а т е л ь с т в о. Скажем, что линейно независимая сис-
тема векторов
V 1 , ..., v р.
(8)
ПОДПРОСТРАНСТВА ЛИНЕАноrо ПРОСТРАНСТВА
343
принаДJJежащих В, .м.аксимальна в В, если, пополняя ее произ-
вольным вектором v Е В, получим уже линейно зависимую систему.
Построим в В максима.пьную систему. Для этоrо выберем в В
какой
нибудь вектор V 1 -=j; О (он существует, так как мы предпо
ложили, что размерность L положительна). Если линейно неза-
висимая система, состоящая из одноrо вектора V 1 , максимальна
в В t то наше построение закончено. Если нет....... выбираем в В
такой вектор V 2 , чтобы система V 1 , У 2 была линейно независимз.
Если она максимальна, то построение закончено. Если нет
полу
чаем линейно независимую систему трех векторов Vl, V 2 , V З И
так далее. Так как пространство L имеет конечную размерность
n, то после конечноrо числа шаrов придем к линейно неза..
висимой системе
V 1 , V 2, ..., V т
(9)
векторов из В, которая будет максимальной в В.
Покажем, что эта система (9) и есть базис (и, следовательно,
состоит из п элементов: т == п).
На основании предыдущеrо для этоrо достаточно доказать,
что (9) есть система образующих Bcero пространства V, т. е. что
всякий вектор u Е V есть линейная комбинация векторов (9).
Пусть сначала u ЕВ. Тоrда в силу максимальности системы (9)
в В система u, V 1 , V 2 , ..., V т линейно зависима, а так как (9)........
линейно независимая система, то u есть линейная комбинапия
векторов (9). rlYCTb теперь u
произвольный вектор, взятый в V;
так как В есть система образуюпtих пространства V, то вектор u
есть линейная комбинация
u
Л 1 W 1 +Л 2 W 2 +.. .+ЛsW s
( 10)
каких-то векторов W 1 , W 2 , ..., W s из В; но каждый из векторов,
принздлежащих В, значит, и каждый из векторов W 1 , W 2 , ..., W s
есть линейная комбинация векторов V 1 , ..., V т . Подставляя
в равенство (10) вместо каждоrо вектора Wl ero линейное Bыpa
жение через векторы V 1 , ..., V т , мы выразим и u в виде линей..
ной комбинации векторов (9). Утверждение доказано.
Доказано также равенство т == п; ero можно формулировать
так:
т е о р е м а 8. Размерность конечном.ерНО20 лuнейНО20 простран"
ства V равна .м.акси.м.альном.у числу линейно неЗl1iJuсиМblХ векто ров
8 произвольном, множестве образующих пространства у.
3 а м е ч а н и е 3. Попутно мы доказали и следующее предло-
жение.
т е о р е м а 9. Всякая линейно неэаеиси.мая система век/поров
пространства L" может 6Ь/,тЬ дополнена до базиса простран-
ства Ln.
344
ЛИНЕйНЫЕ ПРОСТРАНСТВА
5. Алrебранческая (8 частности, прямая)
сумма подпространств
Пусть L
и L
два подпространства пространства L"'; их
бъ
Динение В == l"i u L
(Т. е. множество векторов, принаllлежа
.шее хотя бы од.НОМУ ИЗ двух пространств 1.J':.' L:) порождает под
пространство L
, состояшее из всех векторов U вида U 1 + U 2 . rде
U 1 Е: Lf, U 2 S L:. Пространство L
называt:тся (алибраuческой)
tCy,wMOU nросmранств ["f 11 L: и обозначается через L
== Lf + L:.
Обозначим через D nересечеНllе подпростrанств Lf и L: (Т. е. MHO
жество Lr n L
всех Bel\TopoB, содержащихся и в Lr, и в L:).
1\\ножество D есть линейное пространство (подпространство про-
странства Lп и ка}l{доrо из пространств Lf и L
). Это следует из
'ТOfО, что всякая линейная комбинация л'JUl +... -1
л'I/Uk любых
векторов U!' ..., Uk, прннаД.i1ежащих множ{'ству D == Lf n L:, coдep
ж'!тся как в ["f, Ta
< и в L
, значит, и в D. Обозначим размер
ность rrpocrpaHCTBa D через d (МЫ уже обозначили через Р. q. s
размерность пространств Lf, L:, L
). Докаж.ем ваЖНУIО формулу
s==p+q
d. I
(1)
Пусть U!t ... t Ud
пронзволыlйй базис пространства D; будучи
линейно независнмой сист€'мой векторов, лежаи
их как в прост
ранстве Lf, так и в пространстве L
, система U., .... Ud
ожет
быть дополнена до базиса U.. ..., U(,; Ud+l' ..., U p пространства L
и до базиса U 1 , ..., Ud; V d+l' ... t V Q пространства L:.
Рассмотрим систему векторов
U 1 . ..., Ud; Ud+lt ..., U p ; Vd+l. ..., V q .
(2)
Каждый вектор u Е Lf есть линейная комбинация векторов " 1 , ...
u L q u
. . .. Ud; Ud+l' ..., u p ; каждыи Bel<TOp v Е i есть линеиная ком..
бннация векторов U}, ..., Ud; Vd+l, ..., V q ; значит, каждый век..
тор V Е L: и u Е Lf есть линейная комбинация векторов системы (2);
то же, естественно, имеет место и для каждоrо вектора w == u + У,
{'де u Е Lf, V Е L
, т. е. для каждоrо вектора w Е L;. Итак,
множество всех векторов (2) есть система образующих простран-
ства L;.
Докажем, ЧТО эта система линейно независима и, следовательно,
есть базис пространства L;; так как число BeI{TOpOB (2) есть
d + (р
d) + (q
d) ;:;:: р + q ...... d. то форму па (1) этим будет доказана.
длrЕБРАИЧЕСКЛЯ СУММА ПОДПРОСТРАНСТВ
345
Итак, пусть
Л]U 1 +.. . + A"Ud + Лd+IUd+l +. . .+A
Up +Лd + IVd+l +.. . + Л
Vq ==0. (3)
Требуется доказать, что
Л J == . . . == Лd == Лd + I ==. . . == Л
::::: л;j + I ==. . . == л; == о. (30)
nолаrаем
w == Лd+ 1Vd+l +.. .+j,,
Vq, (4)
так что w Е L
, и nереписываем (3) в виде
w
Лd+ IVd+) +... + Л;V q ==
==
"'1 U I
.,.
ЛdUd
Лd
IUd
l
...
'
Op, (5)
откуда следует, что вектор w является линейной комбинаuией
векторов О 1 , ..., Ud; Ud+), ..., U p и, значит, содержится J.I в L
.
Поэтому w Е Lf n L
=:;: D, так что
W == J!) U 1 +. · . + JldUd.
Из (4) и (6) следует, что
J.1I U . +. . . + f!dUd
Лd+ !Vd+1
. ..
)..
V
== о.
(6)
(7)
Так как система веl<ТОРОВ U 1 , ..., U t /; V r.+J, ..., V q линейно неза
висима (она есть базис пространства Li), то все коэффиuиенты
в равенстве (7) равны нулю, так что, в частности,
Лd + I == . . . == Л
== о
и равенство (3) принимает вид
Л)U] +.. . + AdUd +Ad+ JUfНJ +.. . + Л
Uр == о.
(8)
Система векторов U}, ..., Ua; Ud+l, ..., U p (являясь базисом про...
странства Lf) линейно независима, поэтому
Л t == . . . == Лd == Лd + 1 ==. . . == Л
== О,
что вместе с (8) дает нам искомое равенство (30). Формула (1)
Jlоказана.
О п р е Д е л е н и е 4. Ал rебраическая сумма
L;
Lf +L: (9)
двух подпространств (пространства Ln) называется прямой су.4tМОЙ
этих подпространств, если пересечение D === Lf n L
состоит из
одното нулевоrо вектора (и. следовательно, имеет размерность
d :=: О).
346
ЛИНЕйНЫЕ ПРОСТРАНСТВА
Для прямой суммы (9) формула (1) превращается в
s == р + q. ( 1 О)
Т е о р е м а 10. Если су.ммл (9) прямая, то для каждоео век...
тора w Е L; СУUIf!ствует единственное представление в виде
w == u + v, еде u Е Lf, v Е Li . ( 11 )
В самом деле, если бы существовало два представления этоrо
вида
W==U 1 +V 1 ,
w == " 2 + У 2 ,
(12)
то было бы U 1 + V 1 == U 2 + V 2 и, знаЧИТ t
U,2
Ul==Vl
V2.
Вектор w' == " 2 ......... " 1 == V 1
V 2 отличен от нуля (иначе оба пред..
ставления совпадали бы); он содержится и в Lf (так как w' ==
== " 2
" 1 ), и в L
(так как w' == V 1
V 2 ) вопреки предположению,
что Lf n L: состоит лишь из нулевоrо вектора.
6. Теорема о раиrе матрицы
Пусть
ан
А == й21
а12 ... al n
а2! . . . atп
Е М m , п (k)
а т l а т 2 ... а тn
произвольная матрица.
О п р е Д е л е н и е 5. РаН20.м матрицы А называется наиболь-
шее число r такое, что в матрице А содержится невы рождаю-
щаяся матрица Р порядка '.
Матрица, состоящая из одних нулей, и только такая матрица
имеет paHr О. Матрица имеет тоrда и только тоrда paHr 1, коrда
среди ее элементов имеются отличные от нуля и коrда в то же
время всякие две ее строки и всякие Два ее столбца пропорцио..
нальны между собой. Далеко идущим обобщением последнеrо
утверждения ЯВЛЯIОТСЯ следующая
т е о р е 1\1 а 11 (т е о р е м а о р а н r е м а т р и Ц ы). Ране матри-
ЦЫ А Я8ляеlllСЯ наиБОЛblUUМ таким числом " что в матрице А
имеется r строк (, столбцов), образующих линейно независимую
систему.
Из этой теоремы, в частности, с..rlедует, что максимальное число
линейно независимых строк матрицы равно максимальному числу
ее линейно независимых столбцов...... факт замечательный и неожи-
данный.
ТЕОРЕМА О PAHrE МАТРИЦЫ
347
д о к з з а т е л ь с т в о. Пусть раИf матрицы А равен (. Требу-
ется докаЗ3ТЬ t что в матрице А имеется r столбцов (строк), обра-
ЗУЮЩИХ линейно независимую систему, и что всякие '+ 1 столб-
цов (строк) образуют линейно зависимую систему. Доказательство
для строк и столбцов одно и то же, проведем ero для столбцов.
Раз paHr матрицы равен " то в ней имеется минор Р с отлич-
ным от нуля детерминантом. Не оrраничивая общности рассуж-
дений, можно предположить, что этот минор Р является rлавным:
йll · .. a 1r
a 1 ,r+l · .. a tn
....... ...........
a r1 · .. a rr
a r + 1 ,1 ... ar+1,r
a r ,r+l · .. a rn
a r + 1 ,r+l ... a r + 1 ,n
............... .
а т l . .. a mr
a т ,r+l · .. а тп
й 1 1 ... а 1!,
detp ==
. . . .
*0.
a r1 ... a rr
Так как det Р =1= о, то векторы
w 1 =={a 11 , ..., Q r l}' ..., w,.=={a 1r , ..., a,.r}
(столбцы минора Р) линейно независимы и подавно линейно незз-
висимы векторы
Vl=={a ll , ..., a r1 , ..., й т l}, ..., v r =={a 1 ,., ..., a rr , ..., a тr }
(столбцы матрицы А).
В самом деле, если бы существовало линейное соотношение
л'l V l +
V2+'. .+лrvr==О,
то это значило бы, что при любом i == 1, 2, ..., " ..., т имело
бы место
л 1 а l1 + л'2 й i2 +. . . + ')..,,al,. == о. (1)
В частности, соотношения (1) выполнены при i == 1, 2, ..., r, т. е.
')..,1 W 1 +. . . + Л,.W,. == О,
что ввиду независимости векторов W 1t W 2 , ..., W r означает, что
коЭФ1>ициенты Л 1t ..., Л,. все равны НУЛЮ.
Итак, во всякой матрице А paHra , имеется линейно незави-
симая система, состоящая из r столцбов. Первое утверждение тео..
ремы доказано.
Переходим к доказательству BToporo утверждения: всякие r+ 1
столбuов матрицы А (рзнrа ') линейно зависимы. Предполаrаем
снова, что отличен от НУЛЯ детерминант уrловоrо минора порядка
348
ЛИНЕйНЫЕ ПРОСТРАНСТВА
, матрицы А. Вспомним, что среди векторов, являющихся линей
ными комбинациями данных , векторов, нельзя найти более r
линейно независимых; поэтому достаточно доказать, что каждый
столбец
V h == {а 111 , a 2 f&, ..., а mh
матрицы А является линейной комбинаuией первых r столбuов:
v 1 =={a ll , ..., a т1 }, V Z =={Q12' ..., ат2}' ..., v,.=={a ir , ..., aтr
,
Разумеется, при доказательстве этоrо утверждения можно лред
положить h > '. Взяв любое i -Е; (п, построим детерминант
а 11 ... а 1" a 1 h
. ... ....
D i ==
a r1
ан
a rr arh
al,. alh
и докажем прежде Bcero, что при любом i он равен нулю. В самом
деле, если i
" то этот детерминант имеет две одинаковые
строки
на i
M и (' + 1 )
M месте
и поэтому равен нулю. Если
же i > (, то DI есть детерминант HeKoToporo минора (, + l)
ro
порядка матриuы А, и он равен нулю, так как paHr матрицы А
по преДполо)кению есть (. Итак, Dl == О при любом i
,n.
Разложим детерминант D i по элементам последней строки.
Коэффициенты этоrо разложения суть адынI{тыы элементов (, + l)..й
строки детерминанта Dt, а именно:
а12 ... atr
А 1 == (
1) ( r
1)
. 1 . . . . . .
ar
... a rr
ath
. . . ,
arh
...............................
ан ... al.k
l al.k+l'" аl, alh
A/l == (
1 )\" -i 1) +k . . . . . . . . . . . . . . . . . . . ,
a r l ... ar.k
l a r .k+l." a rr arh
наконеи,
ан ... аl,.
A r + 1 == . · · · · ·
det Р * о
a r l ... а,.,.
адьюнкта последнеrо элемента aih. в (, + 1 )
й строке.
Существенно, что эти коэффициенты Al' ..., Ar+l не зависят
от i, поэтому их и можно было обозначить через А 1 . ..., A r + 1 .
Мы имеем
0== D, == A 1 a l1 + A2al2 +. . . + А,а" + Ar+1a,h
(ДЛЯ любоrо i == 1, 2, ..., т).
СИСТЕМЫ ЛИНЕйНЫХ ОДНОРОДНЫХ УРАВНЕНИЯ
349
Эти соотношения, написанные для всех i == 1, 2, ... t т, Bыpa
>кают равенство
А 1 У 1 + A 2 V 2 +... + Arvr
Ar+1Vh == О,
в котором заведомо коэффициент A r + 1 == d
t Р отличен от нуля
и которое поэтому можно разрешить относительно Vh:
Vh == i"lV] +. . . + ЛrV r при J"1 ==
A Al , ... t 'Ar ==
A Ar .
r+l r+1
Мы представили произвольный СТО..тIбеu Vh маТрИLlЫ в виде
JIинеЙной комбинааии первых r сто.пбuов этой матриuы и этим
З3i\ОНЧИЛИ доказательство теоремы о paHre матрицы.
3 а м е ч а 11 и е. Из приведенноrо доказательства следует, что
при подсчете paHra матрицы можно, найдя некоторый не равный
НУЛIG детерминаНТ t перебнрать лишь «окаймляющие» ero детерми-
Н3НТЫ.
7. Системы линейных однородных уравнений
Рассмотрим систему однородных уравнений
fI
LQkJt; ==0, k == 1, ..., т,
;
I
(1)
с коэффиuиентами akj, принадлежащими полю Il. Вектор v ==
== {Х 1 ,.. ., Xп
арифметическоrо n-мерноrо пространства k п 1) назы...
вает
я peUleftUe.l
t cucmeМbl (l)t еСJIИ, подставив в (1) значенин
t 1
.':1, ..., t n == X llt получим ТОЖДество 0==0.
Если вектор V=={x 1 , ..., Х n } есть реll!ение системы (1), то
ре[uением этсй системы ЯВЛЯЕТСЯ и вектор AV при ЛICбом А Е k;
если v и v'
решения системы (l)t то и вектор V + v' есть рсше
ине. Отсюда следует, что множество всех neI{TOpOB V == {х 1 , ..., Xn
арифметичеСI{оrо пространства k n , являющихся решениями сие...
темы (1), есть линейное подпространство Х с= k п , на зываемое
npOCnlpaHcmeo."1. решений cucme
lbl (1). Найдем базис этоrо лрост
ранства и определим ero размерность.
1\\ы уже знаем, что однородное уравнение
а 1 t 1 + a 2 t 2 + . . . + а,. t n ==== О ( 1 ')
называется линейной комбинацией уравнений (l)t если век-
тор {а., .... а n } есть линейная комбинация строк матрицы
1) Вместо арифметнческоrо rтpoCTpaHCToa k n можно взять любое n
MepHoe
линейное npOtTpaHCTBO Lп с выбранным в нем раз навсеrда базисом е(, ... , е".
Тоrда каждый вектор v
xlel +... + х"е,. такж
можно З8писать в виде v ==
== {Хl' ..,. Х п }.
350
ЛИНЕйНЫЕ ПРОСТРАНСТВА
коэффиuиентов
a 11 a 12 ... а 1п I
А ===
l а 22 ... a zп
(2)
. . . . . . . . .
а т1 а т2 ... а тп
(Т. е. если левая часть уравнения (1') есть линейная комбинация
левых частей уравнений (1 »).
После этоrо линейная независимость системы однородных линей.
ных уравнений и связанные с ней понятия определяются aBTOMa
тически. В частности, раН20М сисmеА1Ы уравнений (1) называется
paHr матрицы (2); он равен максимальному числу уравнений сис-
темы (1), образующих линейно независимую подсистему .
Две системы линейных уравнений (с n неизвестными) назы.
ваются эквивалентными, если они имеют одно и то же простран-
ство решений Х с= k n .
Пусть система уравнений (1) имеет paHr (. Возьмем в ней
какую
нибудь максимальную линейно независимую подсистему;
без оrраничения общности можно предположить, что такую под...
систему образуют первые r уравнений
n
2: akjt j == О,
j
J
системы (1); остальные уравнения системы (1) являются линей-
ными комбинациями уравнений системы (3), поэтому всякое реше-
ние системы (3) есть и решение системы( 1); очевидно и обратное
утверждение:. всякое реlllение системы (1) есть решение подсис-
темы (3). Итак, система однородных линейных уравнений (1)
эквивалентна (всякой) своей максимальной линейно независимой
подсистеме (3). Будем решать систему (3). В матрице
k===l, ..., (,
(3)
ан а12 ... аlп
a2J й22. .. а2п
(4)
a r l a r 2. .. a rп
r строк. и они образуют линейно неЗ8ВИСИМУЮ систему; значит,
paHr матрицы (4) равен r и в ней имеется r столбцов. образующих
линейно независимую систему. Без оrраничения общности можем
предположить. что эта линейно независимая система образована
первыми , столбцами. Тоrда отличен от нуля детерминант
а 11 а 12 . . . a 1r
D== а 21 а 22 . . . a 2r
. . . . .
a r1 a r2 a rr
СИСТЕМЫ ЛИНЕАНЫХ ОДНОРОДНЫХ
РАВНЕНИА
351
Перепишем систему (3) в виде
aH'l +... +at,fr ==
a l . r+l'r+l
...
alп'п, }
.......................
(3')
a r1 t 1 +. . . + arrt r ===
a r . r+l t r+l .......... . .
arпt n
и дадим переменным t'+1' ..., t n какие
нибудь числовые значения:
lr+l == Sr+l' ..., t n === ;n, (5)
так что правые части уравнений (3') суть известные числа. Так
как детерминант системы (3') отличен от нуля, то система (3')
однозначно решается по правилу Крамера: t} == Х 1 , ... t t, == Xr.
Итак, каждому набору чисел (5) однозначно соответствует решение
{Х 1 , ..., X r , Sr+l' ...,
п} (6)
системы (3) (являющееся решением и системы (1»). Возьмем,
в частности, следующие наборы (5)):
1, О, ..., О, (51)
О, 1, ..., О, (52)
О, О, ..., 1. (5 п
r)
Им будут соответствовать следующие решения системы (3'):
{ (1) (1) 1 О
V 1 := Х. , ..., X r , , ,...,
{ (21 (2) О 1
V 2 == Х 1 , ..., X r , , ,...,
О},
О},
(7)
.... ..... .......
{ (n
() (п
') О О 1 }
V1J
r == Х) , . . . , X r ", . . . , .
Докажем, что векторы-решения (7) образуют базис простран-
ства Х всех решений (l). Прежде Bcero докажем, что векторы (7)
линейно независимы. В самом деле, пусть
Л1V. +.. '+Лп
rVn
r == о.
Расписывая это равенство соответственно по (, + 1 )
й, (, + 2)
й, . . .
. . ., n
й координате входящих в Hero векторов (7), получим
Л 1 . 1 + л'2 . О + . . . + Лп
r . О === О,
Л 1 .. О + л'2 · 1 + . . . + Лn
r · О === О,
. . . . . . . . . . . . . . . . .
· о + Л2 . 0+. . . + Лn
r' 1 == О,
Т. е. Л 1 == А.2 ==. . . == A.n
r == О, что и требовалосъ доказать.
Остается доказать, что каждое решение
V-={X 1t Х 2 , ..., X r , ..., Х п }
352
ЛИНЕйНЫЕ ПРОСТРАНСТВА
есть линейная комбинация решения (7). Рассмотрим вектор
У О == V
Xr+tVl
.. .
xпvп
r.
(8)
Очевидно, (r.+ 1 ).Я, (, + 2).я, ..., п
я координаты этоrо вектора
равны нулю, так что вектор V o имеет вид
YO=={
I' ...,
r, О, О, О, ..., O
.
Так как вектор V o есть линейная I<омбинация векторов.решений
У, У 1 , ..., V п
T системы (3), ТО и V o есть решение этой системы.
Значит, подставляя в эту систему координаты вектора у о , т. е.
полаrзя /1 ==
1' ..., [ т ==
r, t r + 1 ==. . . ==: t n == О, превратим систему (3)
в систему тождеств
r
akj
1 == О,
;===1
означающую, что вектор {S1t ..., Sr} есть реLнение системы OДHO
родных уравнений
k==== 1, ..., r,
,
}: akjt; == О, k == 1, ..., r. (9)
1== 1
Но детерми.нант этой системы не равен нулю, поэтому нуле
вое решение
l == . . . ==
r == О есть единственное решение :JТОЙ си-
стемы и вектор V o
нулевой. Значит, прои3волы-lеe решение v
системы (1) есть линейная комбинация
V == Xr+1V 1 +... +xnvп
r
реШtНИЙ V), ..., Yп
T. Эти решения, будучи линейно независимыми,
образуют базис пространства х. Наша цель достиrнута
доказана
слел.Уlощая основная
т е о р е м са 12. Пусть дана система (1) линейных однородных
уравнений с п неиЗReсmными. Пусть Ln
арифметическое п..мерн.ое
пpocmpaHClnВO (или л/обое п..мерное линейное пространство с фИК
сирО8аННЫМ 6азисом е 1 , е 2 , ..., е п ). Если paHz системы (1) равен
r I то множество всех eeK"lOpOB
V ==: {X 1 , Х 2 , ..., Х п },
Я8ЛЯЮЩUХСЯ реUiенuями системы (1), есть (п
()"мерное пoдпpo
cmpaHcпleo пространства Ln.
Из теоремы 12 сразу вытекает важнеЙUlее
С л е Д с т в и е. Для тО20 чтобы система однородных уравнении
( 1 ) имела flеflулевое решение J необходимо и достаточно. чтобы
раН2 системы был меньИle числа неuзвесmflЫХ.
В частности:
1 о Всякая система однородных линейных уравнений, в Iromopou
число уравнений меньше числа неuзвестНЫХ 1 uмееl11 ненулевое ре-
UIeHue.
СИСТЕМА ЛИНЕPlНЫХ ОДНОРОДНЫХ УРАВНЕНИPI
353
20 Система, соспwящая из n однородных уравнений с n неизвесm-
ными, тоzда и только то2да имеет N.eнулевое решение, Kozaa де-
терминант системы равен нулю.
Рассмотрим еще отдельно случай системы И3 п независимых
однородных линейных уравнений с n + 1 неизвестными; paHr такой
системы равен n, следовательно, пространство решений одномерно:
если
v == {х 1 , ..., Х п , Х n + 1 }
одно какое-нибудь ненулевое решение данной системы, то все
решения имеют вид V
'Avo. Без оrраничения общности можно
предположить, что детерминант минора, состоящеrо из первых
столбцов матрицы наUIей системы, отличен от нуля. Тоrда, запи-
сывая данную систему в виде
a
l
l:-:'::-
l
t
.
. a
.
+
t
+1: } (10)
a n1 t 1 +.. .+annt " ==
аn, n+l t n+l
И давая неизвестному t n + 1 произвольное значение t n + 1 == Х n +l' мо-
жем определить и значения неизвестных t 1 == Х 1 , ..., t n == х" по
правилу Крамера, а именно:
Al
Xl ==
A Хn+l'
11+1
rде Al есть умноженный на (
1 )/+1 детерминант матрицы, полу-
ченной вычеркиванием из матрицы
a
l. :.: . а:". .
l. .п
l .
IJ ал! · .. й пn ап. п+l
данной системы i
ro столбца. Итак, решениями системы являются
все векторы v == {
1' ...,
n+l}' rде
1 : 62 : .. · :
п+l == А 1 : А 2 : · · · : А n + 1 .
Сформулируем теперь и докажем теорему, обратную к тео-
реме 12.
т е о р е м а 13. Пусть дано линейное пространство L n раз-
мерности n с ФиксиРО8СЖНЫ.м базисом е 1 , С 2. ..., еп' Всякое р-
м.ерное подпространство LP пространства Ln, O
p
n, есть
nространство решений некоторой системы IlUHeUHbiX однородНЫХ
УРШJнений с n неизвестными ранеа q == n
р, а именно линейно
независu.4ЮU систеАШ из q уравнений.
Д о к а з а т е л ь с т в о. Пусть в пространстве LP дан какой.
нибудь базис, состояuций из векторов
C
. !C
l'.
1
'. .:..' .с 1 .,,}: } (11)
С р
{е р1 , c PiI .." С рп }.
354
ЛИНЕйНЫЕ ПРОСТРАНСТВА
Без оrраничения общности можно предположить, что детерминант
d==
СВ ... Сlр
*0.
Если
с рl . . . с рр
х == {х l' ..., х р' ..., Х п }
......... произвольный вектор пространства LP, то матрица
Св . . . Сlр . . . Сlп
. . . . . . . . .
С р ! . . . С рр . . . С рп
Х, Х р . .. Х п
имеет paHr р; поэтому координаты вектора х удовлетворяют сле-
дующей системе п......... р уравнений:
Сll ... Сlр Сl. р+l
......... .
== О,
С р1 ... С рр Ср, р+l
Хl ... Х р Хр+l
С11 ... С1р С1. р+!
..........
С С С == о,
рl ... рр р. p+l
Х 1 . .. Х Р Х р+2
.6.......
С11 ... Сlр Сlп
........
С С С == о.
рl ... рр рп
Хl ... Х р Х п
Эти п
р уравнений линейно независимы, так как в матрице,
составленной из коэффициентов этих уравнений, минор порядка
n
р, состоящий из последних n
р ее столбцов, имеет детерми
нант, отличный от нуля. Он имеет диаrональный вид, причем на
r л
вной диаrонали стоит одно и то же число.
Вместе с тем мы получаем способ построения одной из систем
уравнений пространства LP, если нам известны координаты век-
тора, составляющеrо ero базис.
8. Комплексификация и овеществление
В этом параrрафе мы описываем способ перехода от вещест..
BeHHoro линейноrо пространства к комплексному (комп.пексифика..
ция вещественноrо пространства) и обратный переход (овещест-
вление комплексноrо пространства).
Пусть L
вещественное линейное пространство. Рассмотрим
множество Lc, состоящее и з всех формальных сумм вида х + iy.
r де х, у Е L, i..... мнимая единица,
КОМПЛЕКСИФИКАНИЯ и ОВЕЩЕСТВЛЕНИЕ
355
Две формальные суммы Xt + iYl и Х 2 + iY2 считаIОТСЯ p3BHЫ
ми, если Х 1 == Х 2 И У! == У2.
Введем в множестве LC операции сложения и умножения на
комплексное число правилами:
(Х 1 + iYl) + (Х 2 + iY2) == (Х 1 + Х 2 ) + i (Yl + Y'l)'
л(х+iу) == (a+i
) (х + iy) == (ax
y) +i (ау +
x);
здесь л. == а + i
произвольное комплексное число. Леrко прове.
рить, что множество Lc с определенными таким образом линей..
НhlМИ операциями превращается в комплексное линейное прост"
ранство. НулеВhlМ вектором этоrо пространства является формаль
ная сумма 0+ iO. Пространство Lc называется комnлексифиКQцией
вещественноzо лuнейноzо пространства L.
Теорема 14.
1 о Система векторов и 1 , ... t Uk пространства L линейно неза-
вuсu.ма или линейно зависима одновременно с системой векто-
ров U 1 + iO, ..., Uk + iO пространства [
}
20 Размерность над полем ({) пpocmpaflcтea Lr, равна размер-
ности над R пространства L.
Д о к а з а т е л ь с т в о.
1 о Пусть векторы Ul' ..., Uk Е L линейно независимы. Рас-
смотрим равенство
Л 1 (П 1 + iO) + ... +Лk (Uk + iO) == О,
rде л'l == а 1 + i
l' ... t 'A k == ak + i
k
комплексные числа. По
определению операций в пространстве Lc, имеем
л't(U 1 +iО)+...+Лk(Uk+ iО )==
== a 1 u 1 +. . . + akUk + i (
lUl +. . . +
kUk) == О + iO,
откуда atu 1 +... + akUk == О,
lUl +... +
kUk == о. Следовательно,
все коэффициенты а; И
; равны НУЛIО, т. е. векторы U 1 + iO t ...
. . ., Uk + iO линейно независимы в пространстве Lc. Обратно,
пусть векторы
Ul + iO, ..., Uk + iO
образуют линейно неззвисимую систему в LC. Если бы существо-
вала нетривиальная линейная комбинация CX t U 1 +... + (XkUk Е L,
(Xlt ..., ak Е IR, обращающаяся в нуль в L, то в нуль обраща-
лась бы нетривиальная линейная комбинация
(a 1 + iO) (u 1 + iO) +... + (ak + iO) (Uk + iO) Е LQ)t
что невозможно.
20 Пусть e 1 , ..., е п ......... нек
торый базис пространства L. Со-
rласно п. 1 о теоремы векторы е 1 + iO, ..., е п + iO образуют ли..
нейно неэависимую систему в комплексном линейном пространст-
356
ЛИНЕйНЫЕ ПРОСТРАНСТВА
Ее LC. ДЛЯ Toro чтобы доказать, что векторы е 1 + iO, ... , е п
iO
образуют базис пространства LC' достаточно показать, что любоЙ
вектор из [с есть линейная комбинация из векторов е 1 + iO, ...
.. ., е п + iO. Пусть U + iv Е Lc. Тоrда U и v принадлежат прост",
ранству L и, следовательно, линейно выражаются через ero базис:
u == а 1 е 1 +. . . + аllе п , V ==
lel +. . . + Рпеп.
Поэтому
u + iv == (а.еl + . . . + алел)
i (
Jel + . . . + р nen) ==
(ct 1 e 1
:
iPl e l) + . . . + (апе п + i
пеп) ==
== (а 1 + iPl) (е 1 + iO) +... + (ал + i
п) (е п + iO),
что и требопалось доказать.
В качестве несложноrо упражнения пред.паrаем читателям
показать, что комплексификацией n-мерноrо вещественноrо ариф..
метическоrо пространства Rn является п
MepHoe комплексное
арифметическое пространство (СП.
Пусть теперь S
некоторое комплексное линейное пространство.
f.-\ножество векторов, обраЗУIОЩИХ S, можно рассматривать в то }}(е
время и как вещественное линейное пространство SIR, в котором
1) операция сложени я совпадает со сложением в пространст-
Ве s;
2) для любоrо вещественноrо числа а и любоrо вектора u
au == (а + iO)u,
rде правая часть есть произведение вектора u На число а + ЁО,
определенное в S (проверьте!).
Переход от комплексноrо пространства S к вещественному про..
странству SIR называется овеществлением ком.плеКСНО20 простран..
ства S.
Теорема 15.
Пусть S
n
MepHoe комплексное линейное пpocmpaHcтвo l
SR
вещественное линейное пространство, полученное из S овещест-
влением.
To
дa
1 v если U 1 , . . ., Uk
линейн.о Неза8uсимая (соответствен.но
линейно зависимая) система векторов пространства 81 то U 1 ,
iu 1 , ..., Uk, iUk
линейно н.езависимйЯ (соответственно линейно
зависимая) система векторов пространства SR 1);
20 вещественная размерность пространства SiR равна 2п;
при этом всякому базису е 1 , ..., е п пространства S соответст-
вует базис e 1 , i e 1 , ..., е n , ie n пространства S IR.
1) Произведение iUj определяется по rrравилу, заданному в S. и является
элементом пространства S. следовательно. и элементом пространства Sr<.
J<ОМПЛЕКСИФИКАUИЯ И ОВЕЩЕСТВЛЕНИЕ
357
д о к а з а т е л ь с т в О.
1 о Пусть U}, ..., Uk Е S
некоторая линейно независимая
система векторов. Предположим, что в S[R существует нетриви"
альная линейная комбинация
(1,lU 1 +
liul +... + akUk +
kiUk
(a 1 ,..., a.k'
l'."
kER),
обраw.а'ощаяся в нуль. Поскольку
a 1 u 1 +
liul +... + ak U k +
kiuk == (а} + iO)u 1 +
+ (
l + iO) iU 1 +. . . + (ak + iO) Uk + (Pk + iO) iUk ==
== (СХ 1 + i
l) U 1 +. . . +(ak + i
k) Uk,
то В S существует нетрив
'а/1ьная линейная комбинация век то..
ров U 1t ..., Uk, обращающаяся в нуль. Полученное противоречие
доказывает линейную независимость в SR векторов " 1 , iu 1 ,...
. . . , Uk, i Uk.
Обратно, пусть векторы " 1 , iu 1 , ..., Uk, iUk линейно незави",
симы в SR' Рассмотрим в S равенство
л'lU. +.. . + л'kUk === О, (1)
rде 'Aj == а; + iPj, j == 1, ..., k,
комплексные числа. Имеем
л' l U 1 +.. · + л'kUk == (a 1 + i
t) " 1 +. . . + (ak + i
k) Uk ==
== C'X.IU 1 + i
lUI +...
akuk + iPkUk ==
== Cl 1 U 1 +
liu, + · · . + C'X.kUk +
kiUk'
откуда следует, что равенство (1) выполняется тоrда и только
тоrда, коrда все 'Aj == о. Таким образом, векторы U 1 , ... ,Uk ли..
нейно независимы в S.
20 Пусть e 1 , ... ,Сп
базис пространства S. Так как векторы
e 1 , ie 1 , ..., еп., ien, (2)
линейно независимы в S!R' то для Toro, чтобы доказать, что BeKTO
ры (2) образуют базис S
, достаточно показать, что любой вектор
из S[R есть линейная комбинация векторов (2). Пусть U Е S;;<
некоторый вектор. Как множество S
совпадает с S, поэтому u
можно рассматривать как элемент пространства S. В пространстве
S вектор u представляется в виде линейной комбинации
u == л'lеl +... + л'пеп, Лk == a.k + iPk Е с.
Имеем
u == (tX 1 + i
l) е} +. . . + (а п + iPn) е п ==
== а 1 е 1 +
tiel +. . . + <хпе п + Pnieп.
что завершает доказательство теоремы 15.
r л А В А хн
АФФИННОЕ n
MEPHOE ПРОСТРАНСТВО
1. Определение n
MepHoro аффинноrо пространства
В трехмерном пространстве мы имели дело и с точками, и
с векторами; каждые две точки А, В, данные в определенном
порядке, однозначно определяли вектор u === АВ; каждый вектор
u мы Mor ли приложить К любой точке М, и это определяло нам
точку N
конец вектора и, приложенноrо к М. Прикладывая
вектор u одновременно ко всем точкам пространства, мы получали
вполне определенное преобразование
сдвиr Bcero пространства
на вектор u. При получающемся таким образом взаимно одно-
значном соответствии между векторами и определенными ими пре...
образованиями пространства (сдвиrами) сумме двух BeI{TOpOB соот-
ветствует сумма ПрОИЗБОДИМЫХ ими сдвиrов. Поэтому мы пришли
к возможности отождествлять (свободные) векторы с производимыми
ими сдвиrами пространства.
Все это мы хотим теперь обобщить с трех на произвольное
число п измерений.
О п р е Д е л е н и е 1. Аффинное п-мерное пространство Rn над
полем k есть множество, состоящее из элементов двух родов:
«точек» И «векторов» пространства, о природе которых мы не
делаем никаких предположений. При этом предполаrаются выпал-
heHJ-1:ЫМИ следующие четыре условия
«аксиомы п..мерноео аффин",
ноео пространства» 1):
1. !\1ножесmво всех векторов пространства Rп есть n...мерное
линейное пространство над k l которое будем обозначать через v n
U называть npocmpaHcnZ80M трансляциЙ аффин н 020 простран-
ства Rn).
[1. Каждые две точки А, В (данные в определенном порядке)
определяют единственный вектор
u == АВ.
(1)
1) Они были впервые сформулированы одним из наиболее выдаюu\ихся
математиков первой половины текущеrо столетия repM8HOM Вейлем (Her..
mann Weyl. 1885
1955).
ОПРЕДЕЛЕНИЕ АФФинноrо ПРОСТРАНСТВА
359
111. Если даны произвольный вектор u и nроuзвольная точка
А" то существует единственная тачка В такая" что
u :::: А В.
Друrими словами: точка А и вектор u определяют единствен-
ную точку В таким образом, что вектор, определенный (по ак-
сиоме 11) парой точек А и В, есть именно вектор u.
Пара «точка А и вектор u» называется «вектором U, прило..
жеННblМ к точке А» (или «закрепленныl» в этой точке); сама
точка А называется начальной точкой приложенноrо к ней век-
тора u, а точка В называется концом вектора u (приложенноrо
к точке А). Мы ВИДИМ, что закрепить вектор u в точке ,,4
зна-
чит записать ero в виде (1). Иноrда нам будет удобно rоворить,
что вектор АВ есть вектор, ведущий из точки А в точку В.
Формулируем, наконец, последнюю аксиому:
IV. Если и 1 == АВ и U 2 == ВС, то
и 1 + U 2 :::: АС .
(2)
Выведем первые следствия из этих аксиом, Но сначала сделаем
несколько замечаний, удобных для дальнейшеrо.
1. Если АВ == А С == W, то С == В
это непосредственно следует
из аксиомы 111.
2. При любом выборе точки А вектор АА есть нулевой BeK
тор О.
в самом деле, если О == А В , то для любоrо вектора u == МА
должно быть u + 0== U, т. е. М "А + АВ == М"А или м в == М А,
а это в силу утверждения 1 означает В == А и 0== АА .
3. Если U == АВ , то
U == вА .
в самом деле,
u есть единственный вектор, удовлетворяющий
условию u + (
u) == О, но АВ + БА === А А == о, откуда И следует
БА ==
о.
4. Если даны вектор u и точка В, то существует единственная
точка А такая, что А В::=: О.
В самом деле, возьмем вектор
u и приложим ero к точке
В, т. е. найдем ту единственную точку А, дЛЯ которой
u ==:
== вА ; тоrда U ==
(
и) == АВ. Если А 'В == о, то
u == Б А',
откуда (в силу утверждения 1) заключим, что А' == А.
В силу аксиомы 111 и утверждения 4 имеет место утверждение
5. Произвольно данный вектор u порождает вполне опреде-
ленное взаимно однозначное отображение множества всех точек
пространства Rn на себя.
Эrо отображение, называемое сдвиео.м пространства Rп на век-
тор u, состоит в ТОМ, что кажрой TO
Ke А Е Rn ставится в СООТ-
360
АФФИННОЕ n.
MEPHOE ПРОСТРАНСТВО
ветствие KOHeu В приложенноrо к точке А вектора u == АВ . При
сдвиrе (в СИ,,1JУ аксиомы IV) сумме векторов соответствует сумма
произведенных ими сдвиrО8 пространства.
Пусть u == PQ
какой-нибудь вектор, и пусть при сдвиrе на
вектор v точки Р и Q переходят соответственно в р' и Q'; это
значит, что v== p p' :=: Q(j . Докажем, что тоrда P'q == PQ ==u. НО
PP '+ P'Q '+ Q'Q == PQ , т. е. v+ P'Q '+(
v)==u, или pi'Q '==u,
что и требовалось доказать.
2. Системы координат. Арифметическое аффиное
пространство. Изоморфизм всех n-мерных
пространств между собой
Система координат в п-мерном аффинном пространстве Rn над
полем k, по определению, состоит
из некоторой точки О (<<начало координат»)
и из базиса е 1 , е 2 , ..., е п пространства трансляций Vn дан-
HOrO аффинноrо пространства Rn.
Коордuна
какоrо-нибудь вектора u в этой системе коорди-
нат суть координаты этоrо вектора отн осительно базиса el, е 2 , . . . , е п ;
они не зависят от выбора начала координат.
Координатами произвольной точки М пространст
а называются
координа
вектора ОА1 .
Вектор u с координатами Х 1, Х 2, ..., Х п обозначаем через u ==
== {х 1 , Х 2 , ..., Х п }, точку м с координатами X 1 , Х2' ..., Х п обо-
значаем через
м == (х 1, Х 2 , ..., Х п ). (1)
Таким образом, запись (1) означает то же, что и запись
ОМ == {x 1t Х 2 , ..., Х п }. (1')
Так как координаты данноrо вектора относительно данноrо
базиса определены однозначно, то и координаты данной точки л1
относительно данной системы координат (совпадая, по определе-
нию, с координатами вектора ОМ ) также определены однозначно.
Пусть дан какой-нибудь вектор
u == АВ,
причем u == {Х 1 , Х 2 , ..., Х п }, А == (а 1 , а 2 , ..., ап), в ==
==(b 1t Ь 2 , ..., Ь п ). Тоrда дА == {а 1, tlt, ..., а п }, 08 == {Ь 1, Ь 2 , ..., ы l ..
НО ОА + АВ == 08 ; так как при сложении векторов их коорди-
наты складываются, то последнее равенство равносильно системе
равенств
а, +Xl == Ь;,
i==l, 2, ..., n,
СИСТЕМЫ I(ООРДИНАТ
361
т. е.
XI == b l
al.
i
1, 2, ..., п,
(2)
при любом закреплении вектора u ero координаты равны раз
ностям между соответствующими координатами концевой и на.
чалъной точек вектора.
Или, друrими словами: прилаrая вектор U == {X 1 , Х 2 . ..., Х п }
к точке А == (а 1 , а 2 , ... t а п ), получим U == АВ, rде
в == (а I +Хl' й2+Х2' ..., й n +Х п ).
Переход от одной системы координат Oe 1 e 2 ... е п к друrой
O'e
e; ... e
производится совершенно так же t как при п == 3;
соответствующие формулы отличаются от трехмерных формул
лишь тем, что теперь матрицы С и С* суть матрицы любоrо по
рядка n.
В качестве важнейшеrо примера n
MepHoro аффинноrо про-
странства построим n-мерное арифметическое пространство А" над
полем k следующим образом 1). И точка, и векторы этоrо про
странства суть наборы из п чисел X 1t Х 2 , ..., Х " Е k, отмеченные
дополнительным значком, указывающим, является ли данный на..
бор точкой или вектором; за этот значок можно принять, напри-
мер, скобки
Kpyr лые в случае точек, фиrурные
в случае век..
торов. Итак, М == (x 1 , Х 2 , ..., Х Il ) есть точка, а U == {Xl' Х 2 , ..., Хn}
есть вектор пространства Аn.
1. Векторы U == {X 1 , Х 2 , ..., Х n } при этом образуют арифмети-
ческое линейное пространство V'
; это значит, что
{X 1 , Х 2 , ..., Х n }+{Уl' У2' ..., Yn}=={X 1 +Yl' Х 2 +У2, ..., Хn+Уn},
л {X 1 , Х 2 , ..., Х n } == {лх 1 , ЛХ 2 , ..., лх п },
О=={О, О, ..., О}.
Связь между точками и векторами, описываемая аксиомами 11
IV, осуществляется следующим образом:
11. Пара точек А == (а 1, а 2 , ... t а п ) и в === (b 1 , Ь 2 , . . ., Ь п ) опре.
деляет вектор
u== AB =={b1
al' b2
a2' ..., bп
aп}.
111. Точка А == (a 1 , а 2 , ..., а п ) и вектор u == {Х 1 , Х 2 , ..., Х n }
определяют точку
В == (йl +Хl' а 2 + Х 2 , ..., а п +Х n ).
1) ЭтОТ ПрНМf'р, как МЫ УВИДИМ В ЭТОМ же параrрафе, на самом деле ис-
черпывает все содержание понятия n-мериоrо аффинноrо пространства: несколь-
кими строками ниже мы определим изоморфизм двух аффинных пространств и
докажем, что все п-мерные аффинные пространства изоморфны пространству
Ап и. следовательно, изоморфны между собой t
352
АФФИННОЕ п
MEPHOE ПРОСТРАНСТВО
При этом аксиома IV выполнена (так же как, очевидно,
выполнены и аксиомы 1, 11, 111).
Пусть дано взаимно однозначное отображение множества всех
точек и векторов аффинноrо пространства А соответственно на
множество всех точек и векторов аффинноrо пространства В,
являющееся изоморфным отображением пространства трансляций
пространства А на пространство трансляuий пространства 8 и удов"
леТВОРЯlощее, кроме Toro, следующему условию:
(*) Если при данном отображении точки А 1 и А 2 простран-
ства А отображаются соответственно на точки 81 и 82 простран-
ства В, то и вектор u == A IA 2 отображается на вектор v == 818'1. .
Такое отображение называется изоморфным отображенuем
аффинноrо пространства А на аффинное пространство В. Прост-
ранства А и 8 называются изоморфными между собой, если одно
из них можно изоморфно отобразить на друrое. Так как изомор"
физм между аффинными пространствами включает в себя изомор-
физм их пространств трансляций, то, очевидно, всякие два изо-
морфных аффинных пространства имеют одну и ту же размерность.
Докажем, что и, обратно, два аффинных пространства, имеющих
одну и ту же размерность, изоморфны между собой. Этот изо-
морфизм мы получим, построив изоморфное отображение произ..
BOJlbHOrO п"MepHoro аффинноrо пространства R" на арифметическое
п"мерное пространство А". ДЛЯ этоrо возьмем и Rn какую"нибудь
систему координат Oe 1 e 2 ... е n . TorAa каждая точка ./\1 и каждый
вектор u пространства Rn однозначно записываются в виде
м
(x 1 , Х 2 , ..., Х n ),
u == {Х 1 , Х 2 , ..., Х п },
и сама эта запись устанавливает взаимно однозначное отобра)({е-
ние множества всех точек и множества всех векторов простран-
ства Rп соответственно на множество всех точек и всех векторов
пространства Ап, удовлетворяющее, очевидно, условию (*). Изо-
морфизм между любым пространством Rп и пространством А",
а значит, и между любыми двумя п-мерными аффинными прост-
ранствами Ап и 8 п этим доказан.
3. r-мерНblе плоскости n-мерноrо аффинноrо
пространства; r-мерНblе параJlлелепипеды
1. Прямая в n-мерном пространстве. Оп р е Д е л е н и е 2.
Пусть в п-мерном аффинном пространстве Rп дан.а точка А :::=
== (a 1 , а 2 , ..., а п ) и ненулевой вектор Uo === {а 1 , (Х 2 , .. . , а 1l }. Этими
данными определено множество л 1 , состоящее из всех точек М,
являющихся концевыми точками всевозможных векторов вида tu o ,
rде t
произвольное число из подя k, приложенных к точке А.
Так определенное множество n 1 называется прямой, проходящей
плоскости АФФинноrо ПРОСТРАНСТВА
363
через точку А (в пространстве Rn) и имеющей (или «несущей на
себе») направляющий вектор ОО.
Точка М == (Х 1. Х 2 , ..., Х п ), являющаяся концом вектора
АМ == tu o , приложенноrо к точке А, имеет, очевидно, координаты
Х 1 === a 1 + ta 1 .
Х 2 == а 2 + ta 2 ,
(1)
Х п === an+taпa
Эта система равенств, в которой параметр t пробеrает все дей.
ствительные или комплексные значения, дает нам все точки пря.
мой n 1 и только точки прямой л 1 ; поэтому система (1) называется
парамеmрuческuм уравнением этой прямой; единственное число
«уравнение», не «уравнения» объясняется (как и в случае n === 3)
тем, что система уравнений (1) представляет собой координатную
запись Bcero ЛИllJЬ одноrо BeKTopHoro уравнения
AM==t AB , rде AB ==u o , (1')
которому удовлетворяют все точки прямой 311 И только они. До
конца п. 1 мы будем предполаrать, что Rn
аффинное простран..
ство над полем веlцественных чисел.
Пусть А
(a 1t ..., аn) н в === (Ь 1 , .. а, Ь п )
две ero l1рОИЗВОЛЬ.
ные точки; построим прямую, проходящую через точку А и имею.
тую вектор АВ своим направляющим вектором. Это будет пря...
мая, проходящая через две точки А и В; она единственная
ее
параметрическое уравнение будет (1') или
Х 1 == а 1 + 1 (Ь 1
а 1 ),
Х 2 == а 2 + t (Ь 2
а 2 ),
...........
(2)
xп==an+t(bn
an).
При t == О получим точку А, при t == 1
точку В; точки, полу..
чающиеся из (1') или (2) при t, удовлетворяющем неравенству
О
t
1, по определению, образуют замкн.Уmblй оmрезок АВ
нашей прямой. При 0< t < 1 получаем открытый отрезок пря.
мой л;1.
Равенства
(2) можно переписать в виде
Хl === (1
t) аl + tb lt i == 1, 2,
или, полаrая s == 1
t, в виде
Х 1 == sa 1 + tb 1t
Х 2 == sa 2 + tb 2 ,
. . а, n.
(2')
(2")
Х п == ш п + tb п ,
364
АФФИННОЕ n-МЕРНОЕ ПРОСТРАНСТВО
ЧТО мы кратко записываем так:
М ==sA +t8.
(2)
Здесь числа s и t пробеrают всевозможные действительные зна-
чения, связанные между собой лишь равенством
5+t==l.
Эrи числа s и t называются барицентрическими координатами
точки М (на прямой) в системе барицентрических координат,
состоящей из пары точек А и В.
Точки OTKpblToro отрезка АВ при этом, очевидно, характери-
зуются тем, что 0< t < 1 (значит, и О < s < 1), т. е. что и 5,
И t положительны.
Как известно из механики (в случае п == 3), точка с положи-
тельными барицентрическими координатами s и t есть центр тяжести
масс s и tt помещенных соответственно в точках А и В. ОТСfода
и название «барицентрические координаты» (barycentrum
центр
тяжести); поэтому равенство (2) выражают словами, rоворя, что
точка М есть взвешенная сумма точек А и В (числа s и t суть
«веса», С которым точки А и В входят в сумму Л1 == sA + t8).
2. Общее определение r-мерной плоскости n-мерноrо аффинноrо
пространства Rn. Вернемся к определению прямой на стр. 362.
Если вектор U o отличен от нуля, то множество всех векторов вида
tu o есть одномерное линейное пространство, а именно одномерное
линейное подпространство пространства Vllt и каждое одномерное
подпростраНСТБО V1cVп состоит из всех векторов Вида tu o при
некотором Uo * о. Поэтому данное выше определение прямой может
быть кратко сформулировано так:
Прямая л 1 есть множество всех точек М, получаемых, ес.пи
к какоЙ"нибудь фиксированной точке А Е Rn прилаrать все векторы,
принадлежащие некоторому одномерному подпространству прост-
ранства трансляций аффинноrо пространства Rll.
rIепосредственным обобщением этоrо является
О п р е Д е л е н и е 3. Пусть дано какое"нибудь ,..мерное О
,
n,
линейное подпространство Vr пространства Vn трансляций n-мер-
Horo аффинноrо пространства Rn. Будем прилаrать всевозможные
векторы v Е Vr К какой-нибудь фиксированной точке А Е Rn;
множество полученных точек М
концов векторов АМ == v Е Vr
есть, по определеНИЮ t ,-мерная плоскость л r (заданная точкой А
и ,..мерным линейным пространством Vr). Векторы v этоrо про-
странства Vr называются векторами, лежащими в плоскости jt r .
Беря в линейном пространстве vr какой"нибу ДЬ базис и 1 , ...
. . .. U r , можем, очевидно сказать:
Всякая ,..мерная плоскость n r Е Rп задается точкой А и
линейно независимой систеМОЙ t состоящей из , векторов U 1J ...
ПЛОСКОСТИ АФФинноrо ПРОСТРАНСТВА
365
..., u,. пространства Rn, как множество точек, получаемых, если
к точке А прилаrать векторы вида
v == t 1 U 1 + . . . + t,.u,.,
rде коэффициенты t 1 , ..., t,. лро6еrают независимо друr от друrа
всевозможные значения из поля k. Полученная плоскость п,. наЗh[
вается r
.мерноЙ плоскостью, натянутой на точку А и векторы
U 1 ' ..., U,..
В такой форме наше определение является непосредственным
обобщением задания обыкновенной плоскости в трехмерном прост
ранстве точкой и парой неколлинеарных векторов.
Пространство всех векторов v Е Vr, лежащих в плоскости n",
есть множество всех векторов вида v == pQ, rде Р и Q суть точки
плоскости л r .
В самом деле, пусть v Е V r И Р Е л r ; при.пожим Bel{TOp v к
точке Р; получим v == PQ , надо доказать, что Q Е п". НО
J5Q== PA +AQ,
Т. е. AQ == PQ
J5A == PQ +АР. ПО предположению v == PQ Е V",
а так KaI{ РЕП", то и АР Е V"; поэтому AQ Е V r , т. е. Q Е n r .
Пусть, обратно, Р Е n r , Q Е п"; докажем, что PQ Е У". Имеем
PQ == pA +AQ::=
A p +AQ. Так KaI{ и A
PEVr, И AQ EVr
............... '
то н PQ Е Vr, чем утверждение доказано.
Из доказанноrо следует, что точки плоскости л r И векторы,
лежащие в этой плоскости, удовлетворяют (при действиях над
векторами и точками, определенными в Rn) ЭI{сиомам '
MepHoro
аффинноrо пространства. Друrими словами: всякая r
мерная пло
скость пространства Rn, рассматриваемая как множество лежащих
в ней точек и Еекторов, является ,-мерным аффинным подпрост
ранством пространства Rn. Обратно, пусть р' есть '
MepHoe аффин-
ное подпростраНСТDО аффинноrо пространства Rn (т. е. '
MepHoe
аффинное пространство, точки и векторы KOToporo суть COOTBeT
ственно ТОЧКИ и векторы пространства Rn, причем СООТНО[llения,
связываюи
ие векторы, а также векторы и точки в pr, суть те же
самые, которые для этих векторов и точек установлены в Rn).
Тоrда, прилаrая к какой-нибудь точке А Е р' все векторы аффин
Horo пространства pr, получим В силу аксиом 11 и 111 все точки
М Е р' И только точки М Е pr, так что р' есть ,-мерная пло
скость пространства Rn.
Итак, понятие r-мерной плоскости n-мерноrо аффинноrо про-
странства совпадает с понятием '
MepHoro аффинноrо подпрост-
ранства пространства Rn. При этом О
r
n. При r === О получим
нульмерную плоскость, состоящую из единственной точки А: в
ней лежит лишь нулевой вектор. При r === n единс.твенной r-мерной
плоскостью пространства R." является само I1ространство R".
366
АФФИННОЕ n-МЕРНОЕ ПРОСТРАНСТВО
Очевидно, одномерными плоскостями пространства R.1I являются
ле>hащие в Rп прямые.
По определению ,...мерной ПЛОСI{ОСТИ, натянутой на точку А
и векторы U!, ..., U r , ее точки М == (х 1 , ..., Х n ) удовлетворяют
следующему векторному уравнению:
АМ == t1u] + t 2 U 2 +.. . + t,.u r , (3)
rде параметры t 1 . [ 2 . ..., t n пробеrаlОТ независимо друr от друrа
все значения из поля k. Пусть
{ (11 (Р I""I(II }
U 1 === (Ха , "g , ..., Vwп ,
{ (21 (21 '21 }
U
1""1 r<I r<l ll ,
2
1..Nl , \.N
, .... \.N
. . . . . . . . . . .
U
{ I""I(r) a (r) ,..,(r) }
r
1..N a '
,. · ., \N n .
Если приравнять между собой, при каждом i == 1, 2. ..., п, i-e
координаты векторов, образующих левую и правую части уравне-
ния (3), то получим следующую систему уравнений, эквивалент..
ную уравнению (3):
( 11 ! + 121 t + + ( r) t
x 1
а 1 == аl 1 а1 2 . · . СХ] r,
Х 2
а 2 == a
J)/ 1 + a.
2)t2 +. . . + a.<;)t r .
(4)
.................. ..
(l) t (2) / (r) t
Х п
aп == а п 1 +a/i 2 +.. .+а п r.
Уравнение (3) или эквивалентная ему система (4) называется
параметрuческuм уравнением ,-мерной плоскости.
Если в случае вещественноrо аффинноrо пространства в урав-
нении (3) или эквивалентной ему системе (4) рассматривать лишь
значения параметров t 1 ,..., t r , принадлежэщие cerMeHTY [О, 1].
то полученные точки М образуют множество, наЗblваемое (r
l\fepHblM)
параллелеnunедом, натянутым на точку А, и приложенные к ней
векторы U 1 , . . ., U r .
4. rеометрически независимые системы точек.
Барицентрические координаты. Симплексы
Все аффинные пространства, рассматриваемые в этом параrрафе,
предполаrаются вещественными.
Начнем со следующей простой леммы.
Пусть О
р < ,
n. Всякая р
мерная плоскость пР в п-мер-
ном аффинном пространстве Rп содеР)f{ИТСЯ внекоторой ''''мерной
плоскости.
В самом деле, возьмем в пР какую.нибудь линейно незави-
CHMYIO систему, состоящую из рвекторов Ul'...' и Р . Так как
БАРИUЕНТРИЧЕСКИЕ КООРДИНАТЫ
367
р < r :::;; п, то эта система может быть дополнена до линейно
независимой системы, состоящей из r векторов U 1 , . .. , U", U p +lt . . . , U r .
Эти векторы порождают '
MepHoe подпространство VI' линейноrо
пространства уn всех векторов, лежащих в Аn. Произвольная
точка А и линейное пространство Vr определя:от r
мерную
плоскость jt r , очевидно, содержащую плоскость пР.
Пусть в пространстве Rn дано множество, состоящее из конеч...
Horo числа, , + 1, точек
Ао, Аl'''.' Ат. (1)
Рассмотрим всевозможные векторы AIA j, nе.дУlцие из ,,1юбой из
этих точек в любую друrую. Подпространство, порожденное всеми
этими веl{торами (в пространстве всех вообще векторов, лежащих
в Rп), сбозначим через У (А о , ..., Ar), ero размерность
через
р==р(А о , ..., Ат). Так как
AI A; == A
+ A
A; ==
A
+ A
,
то все векторы А;А , линейно выражаются через векторы, ведущие
из одной какой
нибудь фиксированной точки (1), например из
точки Ао, во все остальные, так что множество, СОСТОЯlцее из
векторов
U 1 == АоАl ' ..., U r -== A
oAп
(2)
является системой образующих пространства У (А о , ..., Ат), MaK
симальное число линейно независимых среди них равно размер-
ности р Bcero пространства V (А о , ..., Ar) И, значит,
p
r.
Нумерацию точек (1) выберЕМ та.к, чтобы первые р среди векто-
ров U[, Т. е.
Ul === A
l' U 2 == A
oA2' ..., U p == АоАр, (3)
составляли линейно независимую систему. Тоrда р
мерная П,,'Iос
кость Л;:= 1t (А о , ..., Ар), натянутая на точку Ао, и векторы (3),
содержа все векторы (2), содержит и все концы этих векторов.
Т. е. все точки (1). Не существует плоскости размерности < р,
которая содержала бы все точки (1), так как тоrда в этой плос..
кости лежали бы и псе векторы (3), что противоречит их линей..
ной независимости. Всякая плоскость, содержащая БСС точки (1),
содержит как точку Ао, Tal( и векторы (3), значит, содержит и
плоскость п, натянутую на них. Итак, доказано следующее пред"
ложение:
Пусть дано конечное множество точек
А о ) Al' ..., АI' (1)
з68
АФФИННОЕ п
MEPHOE ПРОСТРАНСТВО
пространства Rn. Тоrда определено наименьшее число р ==
==р (Ao.Al' . . ., Ar), являющееся размерностью плоскости простран-
ства Rn, содержащей все 5ТИ точки (1); это число (которое можно
было бы назвать «мерой независимости» точек (1)) равно наиболь..
шему числу линейно независимых среди векторов, ведущих из
какой.нибудь определенной точки системы (1) (например, из
точки AJ) во все остальные точки этой системы. При этом имеется
одна
единственная р-мернзя плоскость, содержащая все точки (1).
и эта р
мерная плоскость пР -.:=; Л (А о > .. ., Ar) называется плоскостью,
натянутой на точки Ао, А}, ... t А,..
Дополним этот результат следующим определением:
Если р (А о , А 1 , ..., Ar) == " Т. е. если мера независимости
rочек Ао, А}, ..., Ar имеет наибольшее возможное значение "
то ТОЧI{И Ао, А}, ..., Ar называются zeо.метрuческ.u незавUСUМ,blми
(или просто незавUСUМ,blМ,U) между собой в пространстве Rn.
Из предыдущеrо следует:
Точки Ао, А 1 , ..., Ar тоrда и только тоrда rеометрически
независимы, Kor да векторы A
l' АоА 2' ..., AoA r линейно неза..
висимы, или, что то же, коrда точки (1) {векторы (2») не лежат
ни в какой плоскости размерности < '.
Во всякой r
мерной плоскости пространства Rn можно (беско
нечным числом различных способов) выбрать независимую систему
из '+ 1 точек; всякая неззвисимая система из , + 1 точек п
Mep'"
Horo аффинноrо пространства RII содержится в единственной '
Mep-
ной плоскости этоrо пространства.
Рассмотрим в пространстве R" независимую систему из r + 1
точек, заданных своими координатами (в какой
нибудь системе
координат пространства Rn):
А
(а О а l) а ()
о
_, i.. · · , п,
А 1 == (al, a
, ... t a
),
(4)
Ar == (a
, a
, .... a
).
Единственную r
мерную плоскость, содержащую эти точки, обо..
значим через n r .
Положим
Ь} == AoA l'
U 2 == АоА 2'
· · · t
U r === A
r.
Тоrда
( . о t О i О )
U, == а;
аl, a;.l
йg, ..., а п
а п ,
i == 1, 2, .... (.
Плоскость л r натянута на точку Ао и BeI{TOpbI Ь 1 , ..., U r , поэтому
I{оординаты Х 1 , Х2, ..., Х п любой ТОЧКИ М == (x 1 , ..., Х n ) плоскости
БАРИUЕНТРИЧЕСКИЕ КООРДИНАТЫ
369
fir однозначно записыва
ся в виде
Xk == а: + Л 1 (аl
a
) + л 2 (аl
a
) +. ... + л, (а';
a
),
k
l, 2, ..., n. (5)
Давая параметрам Л 1 , ... , Л r всевозможные действительные
значения, получим из уравнений (5) всевозможные точки М ==
==(х 1 , .... Х n ) плоскости п " и только точки этой плоскости.
Положим
л о == I ....... Л 1 ...... Л2 ........ . . .
Л r .
Тоrда система равенств (5) переходит в систему равенств
Х 1 === лоа
+ Л 1 а: +. . . + л,а
,
Х 2 == Лoll
+
a
+. · · + Лrа
, (6)
......... ......
Х п == Аоа: +
a
+. . . + Лrll
,
что мы кратко переписываем в виде одноrо равенства
М ===АоАО+ЛIАl +.. .+ArAr
(6)
...... точка М есть взвешенная сумма точек A(J, Аl' ... t Art взятых
соответственно с весами
, Л 1 , ..., Л,.. Веса Ао, Л 1 , .. ., Л r В равен..
стве (6) пробеrают всевозможные действитеЛЬНblе значения. связан..
ные единственным соотношением
}vo ==: 1
л. ...... . . .
Л r ,
Т. е.
Ао +""1 +Л 2 +... +Л r == 1.
(7)
Для каждой точки М Е л;r единственным образом определяются
у довлетворяющие условию (7) числа "'3' Л 1 , ..., Л r
веса точки
М во взвешенной сумме (6).
Обратно, всякий набор чисел Ао, ..., Л,., удовлетво
яющих
условию (7), однозначно определяет по формулам (6) или (6) точку
М, если дана независимая система точек Ао, Аl' ..., Ar.
КоэффициеНТbI л. о , Л 1t ..., Л r В представлении (6) или (6) назы-
ваются барицентрическими координатами точки М относите..'IЬНО
системы точек Ао, А 1. ..., А, в r-мерной плоскости n", опреде-
ленной этими точками 1).
1) Таким образом, система барицентрических координат в какой
либо ,-мер-
ной плоскости n r аффинноrо пространства RlI задается любой независимой
совокупностью '+ 1 точек Ао, А 1 . ..., А, этой плоскости. Понятие барицент-
рических координат ввел немецкий reoMeтp А. Ф. Мебиус (1790
1868).
370
АФФИННОЕ п
MEPHOE ПРОСТРАНСТВО
Множество тех точек М Е п", все барицентрические координаты
которых (относительно системы Ао, Аl' .. . , Ат) положительны, назы-
вается '
Mepн'Ы.м открытым симплексом с вершинами Ао, А}, .. ., А,.;
точки, барицентрические координаты которых относительно той же
системы Ао, Аl' ..., А,. неотрицательны, образуют, по определе-
нию, за"uкнутblй симплекс с вершинами Ао, А 1 , ..., А,.. Очевидно,
замкнутый симплекс содержит в
себе открытый симплекс с ТеМИ
же вершинами.
Мы уже видели, что одно-
мерный симплекс с вершина-
ми Ао, А 1 есть просто отрезок
АоАl (открытый, соответственно
эамкнутый).
Леrко доказать, что дву-
мерный симплекс с вершинами
Ао Ао, А}, А 2 есть просто откры-
тый треуrольник AoAlA2 (Т. е.
Рис. 134. множество всех внутренних
точек этоrо треуrольника).
В самом деле, всякая внутренняя точка
треуrольника есть
внутренняя точка единственноrо отрезка вида А о Л1' , rде
' есть
(внутренняя) точка отрезка AIA 2 (рис.134).
Поэт
му
м ==лоАо+л'М',
"'1' ==
1Al +
2A2'
r де '''о > о, л' > о, л о + л' == 1,
rде
l > О, f.12 > О, f.11 + J.t2 === 1.
(8')
(8")
Подставляя (811) в (8'), получим
М == i"oAo + 'А' (J1 1 A 1 + J!2 A 2),
т. е.
м == лоА о + AIAl + А2А2'
rде
Л 1 == Л' f!1, Л 2 == л' f.t2.
При этом все числа AOt л.,
положительны и
Ао + Л 1 + '''2 == л о + А' (
1 +
2) == Ао + л' == 1.
Обратно, пусть М == лоА о + л 1 А 1 +
A2' приче
1 л о > О, Лl > О.
Л2> О и "-о + Л 1 +
== 1. Можно написать
М == Ao.t4 u + (Л 1
r
) (
lAl + J!2 A 2).
БАРИЦЕНТРИЧЕСКИЕ КООРДИНАТЫ
311
rде
Лl
fLl == л'1 +
'
л'2
fL2 == л'l +Л2'
зна чит,
Jll>O, J.L2>O,. ""'1 + J.12 === 1.
Точка J.11Al + f.L2A2 == М' есть внутренняя точка отрезка АIА2 '
и М ==л.оАО+(Л 1 +
)M', rде л'U +(Л 1 +
) == 1, так что М есть
внутренняя точка отрезка Ao
', т. е. внутренняя точка треуrоль
ника АоАlА2.
Читателю предоставляется CaMO\iY убедиться (основываясь на
только что доказанном и продолжая рассуждать аналоrичным
образом), что трехмерный открытый симплекс с вершинами Ао, Аl'
А 2 , Аз есть (открытый) тетраэдр А()А 1 А 2 А з .
3 а м е ч а н и е. Множество Х точек п
MepHoro пространства
Rп называется выпуклым, если, каковы бы ни были две точки Р и Q
этоrо MHOiKeCTBa, оно содержит и все точки отрезка PQ.
Все пространство Rn, а также всякая лежащая в нем плоскость,
является выпуклым множество
. Выпуклым множеством является
также и симплекс любоrо числа измерений (как открытый, так
и замкнутый), а также любой параллелепипед (пусть читатель
докажет все эти утверждения). Выпуклым является также как
пустое множество, так и всякое одноточечное множество, т. е.
множество, состоящее лишь из одной точки. I-'lмея в виду пос
леднее утверждение, читатель леrко докажет важную теорему:
пересечение любой (конечной или бесконечной) совокупности BЫ
пуклых множеств, лежащих в данном Rn, есть выIуклое множество.
Всякое множество х, лежащее в Rn, содержится внекотором
выпуклом множестве (за которое можно взять, например, все
пространство Rn). Поэтому можно rоворить о (непустой) COBO
кулности всех выпуклых множеств Z 2 Х J содержащих данное
произвольное множество Х с Rn. Следовательно, определено и
выпуклое множество Х, являющееся пересечением всех выпуклых
множеств Z, содержащих .данное множество х. Множество Х
называется «выпу1\,ЛЫм. заМЫ1«1Jlue.м» (или выпуклоЙ оБJЛОЧКОЙ) MHO
жества х. Оно является наименьшим выпуклым множеством,
лежащим D данном Rn и содержащим данное множество х.
Последнее УТDерждение имеет следую
ий смысл: каково бы
ни было Dыпуклое множество У. содержащее множество Х, мно-
жество У содержит и х. Полезным упражнением для читателя
было бы доказательство следующей важной теоремы. Пусть Х
конечное множество точек а о ,... J a r , образующих в Rn reoMeT
рически независимую систему. Тоrда выпуклое замыкание Х
множества Х есть замкнутый симплекс с вершинами а о . a 1 ,..., a r -
372
АФФИННОЕ n
MEPHOE ПРОСТРАНСТВО
5. Системы линейных уравнений
в r лаве Х 1 мы рассматривали лишь системы однородных
линейных уравнений, теперь рассмотрим любые системы. Итак.
пусть дана система т уравнений первой степени с п неизвестными:
a 1 1 t l +a 12 t 2 + ... +Й1п t п == Ь 1 ,
а 21 /1
f-- a 22 t 2 + · · · + а 2n ! п == Ь'}.,
(1)
a т1 t 1 + a m2 t 2 +... +amnt п === Ь т .
Решением этих уравнений является, как и в случае однородной
системы, всякий набор чисел X 1 , ..., Ха, обращающий при под-
становке t 1 == X 1 , ..., t n == Х п систему (1) в систему числовых тож-
деств. 110, в отличие от случая однородной системы, мы теперь,
в общем случае, будем решение Х 1 , ..., Х п рассматривать не как
вектор, а как точку 1\1 == (x 1t ..., Хп) арифметическоrо простран-
ства Rn (или, что приводит К тому же, любоrо п"MepHoro аффин-
Horo пространства с заданной в нем системой координат). В част-
ном случае, коrда система (1) оказывается однородной, мы будем
отождествлять точку М ==: (х 1 , Х 2 , ..., Х п ) с вектором ОМ ===
== {x 1 , Х", . . ., Х п}, что позволит нам по-прежнему rоворить о реше-
ниях однородных систем как о векторах.
Матрицей системы (1) будем по..прежнему называть матрицу
ан ан . .. al n
А== а21 а..!2 ... а2п (2)
. . . . .
атl а т 2 . .. а тn
составленную из коэффициентов при неизвестных; ее paHr назы-
вается раН20.м, системы уравнений (1).
Матрица
а11 012 ... al n Ь 1
А 1 == а21 а22 ... а 2п Ь 2 (3)
. . . . . .
а т l а т 2 . . . а тп Ь т
называется расширен'НОЙ матрицей cUCтeAtbl (1) (или, коrда невоз..
можны недоразумения'......... просто «расширенной матрицей»). Систе..
ма (1) называется линейно н,езавuсuмой, если совокупность
всех строк расширенной матрицы (3) есть линейно независимая
система.
СИСТЕМЫ пИНЕАНЫХ УРАВНЕНИЯ
373
Если заменить правые части в уравнениях (1) нулями, то
получится однородная система уравнений
Qll t l + Q12t2 + · 8. + Йlпtп == О,
a'l.1 t l + a 22 t t + · . . + Й2п t п == о, ( 1 )
о
................
Q m l t l +a т2 t 2 +.. .+Qmnt n == О,
называемая однородной сисmeмой
соответствующей системе (1).
Начнем с некоторых совершенно простых, но важных предло-
жений. Прежде Bcero, в отличие от однородных систем, которые
U u
всеrда имеют по краинеи мере ОДНО решение, а именно нулевое
{О, О, ..., О}, неоднородная система может не иметь ни одноrо
решения; в этом случае система называется н,есовместной. При
мером несовместной системы может служить система
Х ! + Х 2 == 1,
2х ! + 2Х 2 === о.
Менее тривиален следующий пример. Пусть в трехмерном про
странстве даны плоскость
Ax+By+Cz+D
o
(1)
и прямая, определяемая уравнениями
A t x+B 1 y+C 1 z+D 1 ==0, }
А 2 х+ B 2 y+C 2 Z +D2 == о.
Тоrда три уравнения
Ах+ Ву +Cz +D == О, J
A 1 x+B 1 y+C 1 z+D 1 ==0,
А 2 х+ В 2 У +c 2 z +D2 == о
тоrда и только тоrда несовместны, коrда прямая (11) парал...
лельна (в собственном смысле) плоскости (1).
В этом СLттучае все векторы, лежащие на прямой (11), лежат
и в плоскости (1); матрица системы (111) имеет paHr 2; расширен
ная же матрица имеет paHr 3 (если бы она имела paHr 2, то пря
мая (11) лежала бы в плоскости (1».
Имеет место
т е о р е м а 1. Для тО20 чтобы система уравнений (1) была
совместной, необходимо и достаточно
чтобы paн,
матрицы А
системы был равен раН2У расширенной матрицы А l'
В самом деле, если система (1) совместна и имеет решение
(х 1 , ..., Х n )' то вектор Ь
{Ь 1 , ..., Ь n } есть линейная комбинация
веКТОРОВ
СТОtпбцов 8[, i == 1 t 2, ..., n, матрицы А, а именно:
Ь
Х 1 а 1 + Х 2 8 2 + · 8 · + Х п а n 8
(II)
(111)
314
АФФИННОЕ п.Л\ЕРНОЕ ПРОСТРАНСТВО
в этом случае вектор Ь содержится в линейном пространстве
V, порожденном векторами 31' 82' ..., 3n, так что обе системы
векторов
81, 32' ..., 3 п
(4)
и
31' а 2, ..., 3 n , Ь
( 4')
являются системами образующих одноrо и Toro же пространства.
По теореме 8 rлавы XI максимальное число линейно независимых
элементов, содержащихся соответственно в (4) и в (4'), одно
и то же. А это значит, что максимальное число линейно незави-
симых столбцов в матрицах А и А 1 одно И то же, ранrи этих
матриц равны.
Если система (1) не имеет решения, то вектор Ь == {Ь., Ь 2 , ..., Ь п }
не ЯВ.пяется линейной комбинаuией векторов-столбцов а 1 , ..., 3 п
матрицы А.
80зьмем какую-нибудь максимальную линейно независимую
подсистему системы а 1 , ..., 3 п ; пусть она состоит из r векторов
3f, например из 31' ..., a r . Это означает, что paHr матрицы А
равен '. Так как вектор Ь, не будучи линейной комбинацией
векторов 31' ..., а n , тем более не является линейной комбина..
цией векторов а 1 , ..., 3 r , то система 81' ..., 3 r , Ь есть линейно
независимая система, состоящая из r + 1 столбцов матрицы Аl'
так что paHr этой матрицы больше 1) paHra r матрицы А. Теорема
1 доказана.
Л е м м а. Пусть (а 1 , ..., а n )
какое
нибудь определенное реше..
н.ие системы (1). Всяк ое решение (х 1, ..., Х п ) системы (1) может
быть записано в виде
Х 1 == а. + 61' ..., Х п === а п + 6п, (5)
2де {Sl' ...,
n}
какое-нибудь решение однородной системы (10).
Обратftо
всякая точка ""1 == (x 1 , ..., х п ), получаемая по фор-
муле (5) из Фи!(,сироваННО20 решения (а 1 ..., а n ) системы (1)
и любоzо решения (
1' ...,
n) системы (10)' является решение.м.
системы (1).
Теперь в двух словах доказывается
Теорема 2. Пусть (1) есть совместная система ранаа '.
ТО2да множество ее решений М === (x 1 , Х 2 , ..., х n ) ectnb плоскость
п.меРНОёО пpocmpaHcmвa
имеющая размерность р == n .... '.
Обратно, всякая р-.мерная плоскость п
MepH020 пространства
есть множество всех решений некоmорой (линейно независимой)
системы, состояtЦeЙ из r == n
р уравнений первой степени с n
неизвестными (и.меюtЦeu, очевидно, раН2 ().
1) Нетрудно в идеть, что ОН равен r +..
СИСТЕМЫ ЛИНЕйНЫХ УРАВНЕНИЯ
375
Доказательство. Системы (1) и (10) имеют рапr '; мно-
жество всех реlпений системы (10) есть p
MepHOet р == п .
" BeK
торное пространство. Пусть Мо == (а 1 , ... t а n )
какое"нибудь опре
деленное решение системы (1). Тоrда все решения системы (1)
получаются в виде (5), rде {Sl' ;2, ...,
п}
какой
нибудь вектор
из V; друrими словами, все решения М == (x 1 , ..., Х п ) системы
(1) (и только они) суть концевые точки всевозможных векторов
МоМ
{51' 62' ...,
п} Е V, приложеннЬ!х к точке Мо. А это
и значит, что множество всех решений системы (1) есть р
мерная
плоскость (натянутая на точку Мо и какие
нибудь векторы
U 1 , ..., Up, образующие базис пространства У).
Первое утверждение теоремы 2 доказано.
Доказываем второе утверждение. Пусть пР есть р
мерная
плоскость n-мерноrо аффинноrо пространства Rn. Предполаrаем,
что в Rn выбрана некоторая система координат, тоrда все точки
lИ И все векторы u пространства Rn записываются их координа
тамм: М == (Х 1 , Х 2 , ..., Х п ), U == {;1'
2'...' ;п}. В плоскости пР
берем произвольную точку М() == (а 1 , ..., а п ). Тоrда любой вектор
u == {;l' ..., 6n} плоскости пР И только вектор, лежащий в пло
скости пР, может быть записан в виде u == МоМ ; этим равенством
установлено взаимно однозначное соответствие между всеми век-
торами u и всеми точками ,И, лежащими в плоскости пР; при
этом, если u == {;1, ..., ;п}, а м == (x 1 , х 2 , ..., Х п ), то
(5'}
Но множество всех векторов, лежащих в пло
кости пР (будучи
p
MepHЫM подпространством линейноrо пространства V), есть
множество решений 61 == x 1
а 1 , ..., Sn
Х п
а п некоторой OДHO
родной линейно независимой системы из r == n
р уравнений с n
неизвестными; пусть эта система есть
al1
1 +a 12 S 2 +... + alп
п ::=: О,
a21
1 +a22
2 +... +а 2n 6n == О,
1 == Х 1
a 1 , ..., 6п == Х п
а п .
(6)
................
arl
l + a r2 S 2 +. . . + атn;n === О
ИЛИ, если заменить
l' ..., 6п их зна чениями (5),
а 11 (x 1
a 1 ) +a I2 (Х 2
а 2 ) +... +a 1n (Х n
а n ) == О, }
(6')
a
l (x
1) +
r: (
2'
2)'+' : . +'a
n (;n
'a
) · '0.
Вектор u == МоМ == {
l' ..., sn} тоrда и только тоrда удовлетво"
ряет системе (6), если ero конец М == (х}, Х 2 , ..., Х п ) удовлетво
ряет системе (6'), в которой неизвестными служат уже X 1 , Х 2 , . . . t Хn.
Но все равно, сказать ли, что вектор M
M
{X 1
а 1 , ..., х n
а п }
316
АФФИННОЕ п
MEPHOE ПРОСТРАНСТВО
лежит в плоскости пР (т. е. удовлетворяет системе (6'» или что
в этой плоскости лежит ero конец; поэтому множество всех точек
М == (х 1 , Х 2 , ..., х n ), удовлетворяющих системе (6'), совпадает
с множеством всех точек плоскости 1(,р. Полаrая
a 11 a 1 + al'fl2 +. . · + а 1n а n == Ь 1'
................
a r1 a 1 + a r2 a 2 + . . . + arna n == Ь r,
можем представить систему (6') в виде
а 11 Х 1 + а 12 Х 2 + . . . + а 1п Х п == Ь 1 ,
а21 Х l + а 22 Х 2 +. . · + aznx n == Ь 2 ,
(7)
................
a r1 x 1 +a r2 x 2 +... +arnX II == b r .
Эrо и есть искомая независимая система из r == п......... р уравнений,
множество решений которой есть множество всех точек данной
р"мерной плоскости и которая поэтому называется. общей систе-
мой уравнений данной плоскостu.
3 а м е ч а н и е (о параллельности). Плоскость 1t размерности
р и плоскость п' размерности р', р
р'
п...... 1 t В n-мерном про-
странстве Rп называются параллеЛЬНhIМU между собоЙ (в шuроко.м
смысле), если пространство V всех векторов, лежащих в плоско-
сти п, содержится в пространстве V' всех векторов, лежащих
в плоскости 1(,'. Если две параллельные (8 широком смысле) пло-
скости 1(, и ,,;' имеют хотя бы одну общую точку Мо, то одна из
двух плоскостей
Ta t размерность которой меньше
......... целиком
лежит в друrой. Доказательство может быть предоставлено чита-
телю. В частности, если обе параллельные (в широком смысле)
плоскости имеют одну и ту же размерность, то они либо совпа-
дают между собой, либо не имеют ни одной общей точки. Во
втором случае эти плоскости называются naраллельнымu в соб-
ственном см,ысле слова. Для (п.
1 )
MepHЫX плоскостей в п-мерном
пространстве получаем условия параллеЛЬНОСТИ t которые совер-
шенно аналоrичны условиям параллельности обыкновенных дву-
мерных плоскостей в трехмерном пространстве.
Плоскости размерности п
1 в n-мерном пространстве Rп
часто называются 2иneрnлоскостям,и п"MepHoro пространства.
Каждая rиперплос!{ость задается одним линейным уравнением
аlХl+а2Х2+...+апхn+аn+l==О (8)
между координатами точек п
MepHoro пространства Rn, и каждое
уравнение вида (8) определяет некоторую rиперплоскость в Rn.
Два уравнения этоrо вида тоrда и только тоrда эквивалентны
между собой (Т. е. определяют одну и ту же rиперплоскость),
КОI'да их коэффициенты пропорциональны.
СИСТЕМЫ ЛИНЕйНЫХ УРАВНЕНИй
371
Каждая rиперплоскость вещественноrо аффинноrо пространства
заданная уравнением (8), разбивает пространство на два полупро
странства: одно состоит из всех точек М == (х 1 , Х2' ..., Х n ).
н которых мноrочлен
L (Хl' Х 2 , ..., Х n ) == а 1 Х 1 +а 2 Х 2 +... +апХ п +а n +l
принимает положительные значения, друrое
из тех точек, в KOТO
рых этот мноrочлен принимает отрицательные значения. Про две
точки Р==(Рl' Р2' '''z Рn) и Q==(ql' Q2' ..., qn) rоворят, что они
лежат по одну или по разные стороны от rиперплоскости (8),
в зависимости от Toro, принадлежат ли они к одному или к
разным ПQлупространствам, определяемым данной rиперплоскостью.
Существенно отметить следующие факты: если две точки Р
и Q принадлежат к одному полупространству (лежат по одну
сторону от rиперплоскости (8», то к тому же полупространству
принадлежат и все точки отрезка PQ . Друrими словами: каждое
полупространство является выпуклым множеством. Если же точки
р и Q принадлежат к разным полупространствам (леж ат по раз-
ные стороны от rиперплоскости (8», то отрезок PQ пересекает
rиперплоскость (8) ровно в одной точке.
r л А В А XIII
ЛИНЕЙНЫЕ ОТОБРАЖЕНИЯ
1. Определение и простейшие свойства линейных
отображений
Пусть d: и --+ V
отображение линейноrо пространства и
в линейное пространство V t ставящее в соответствие каждому
вектору U пространства и вектор V == du пространства v_
Оп р е Д е л е н и е 1. Отображение d называется лuнеЙНbl"(,
если оно удовлетворяет следующим двум условиям (<<условиям ли-
нейности» ):
1) Для любых двух векторов U 1 и и 2
d (U 1 + и 2 ) ==
иl + du 2 0
2) Для любоrо вектора U и любоrо числа л имеем
d (АН) === л, (.
u).
Из условий J), 2) сразу следует, что при линейном отобра..
жении всякая линейная комбинация Л 1 U 1 +... + ЛтU т каких
либо
векторов u 1 ,..., U m Е U переходит в линейную комбинацию
Л 1 У 1 +. .. +ЛтV т векторов V 1 == dU 1t . . ., V m == dU m Е V С теми же
коэффициентами /"1'...' л'т.
Линейные отображения л
нейноrо пространства в себя назы...
ваются линеuньt.Мu операторами.
Установим простейшие свойства линейных отображений.
1 ОПри линейном отображении нулевоЙ вектор Ои простран-
ства [1 переходит в нулевой вектор Оу пространства V:
dO u == Оу_
в самом деле, Оu == О . u (rде u
произвольный вектор про-
странства И). Значит, d (Оu) === О. du === Оу. Отсюда непосредствен-
но следует
20 Если векторы U 1 ,..., U n линейно зависu.мы, то и их образы
У 1 == du 1 , .. ., V N ==
ип также линейно зависимы (<<линейная зави-
симость векторов сохраняется при всяком линейном отображении»).
ОПРЕДЕЛЕНИЕ И ПРОСТЕАШИЕ СВОйСТВА
379
в самом деле, если U 1 ,..., U ,. линейно зависимы, то сущест-
В}ЮТ такие числа "'-t,..., Л п , не все равные нулю, что
Л 1 U 1 + ... + ЛnU п == Ои.
Но тоrда по только что доказанному и
Q/'t (Лl U 1 + . .. + ЛпU п ) == л. Q/'t U 1 + . . . + лпQ./t u n == Q/'tOи
Ov,
векторы Q/'tu 1 ,..., Q/'tU n линейно зависимы.
е л е Д с т в и е. Пусть е/1
лuнейное оmoбраженuе пpocтpaH
cmвa и на пространство V u еекторы V 1 ,..., Vk образу/от лu
нейно неэОАИСU,UУЮ СИСlnем.у в У. To
дa 8 и сущесmвуеm линейно
незавuсuмая система, состоящая из k еекnwров u 1 ,..., \lk ото6ра..
жающuхся соответственно в У.,..., Vk:
Q/'tu. == V.' ..., Q/'tUk == Vk.
в самом деле, для каждоrо вектора v Е V существует по
крайней мере один такой вектор u Е и, что Q/'t U == V (ведь (24
отображение на все пространство V). Поэтому можно найти в и
такие векторы U 1 '...' Uk, ЧТО e4'U.==V 1 ,..., <27f'Uk==Vk. Система
U 1 , . . ., Uk линейно неззвисима (в противном случае в силу 20 си
стема V 1 , ..., Vk была бы зависима).
Из доказанноrо вытекает, далее:
Если т"мерное пространство и линейно отображено на п"мер..
ное пространство V, то т;::: n. В самом деле, по преДПОJ10жению
в V существует линейно независимая система, состоящая из п
векторов; но Tor Да такая система существует и в и, так что
m
n.
30 Пусть
есть взаимно однозначное линейное отображение
лuнейноео пространства U на линейное пространство У. Тоеда
определено обратное оmoбраженuе
l пространства V на про..
странсmво u.
Докажем, что оно также есть линейное отображение. Докажем
в самом деле, что отображение Q/t
1 удовлетворяет обоим усло
виям линейности.
Пусть V 1 И У 2
произвольные векторы из У, пусть V == V 1 + \'2.
Надо доказать, что d
.Vl +Q/'t
lV2 == aТt
lV. Пусть U == Q/'t
lVl +
+ Q/'t
lV2. Тоrда, вслеДС1вие линейности преобразования Q/'t, имеем
е4
l V1 + <2А! Q/'t
lV2 == eтfu,
т. е. V 1 +V 2 ==Q/'tU, но V 1 +V 2 ==V' значит, GV1'U==V и U
lVt
что И требовалось доказать.
Положим u ==
1y. Тоrда
и == V и в силу линейности отоб...
ражения е4
Q/'tлu == ЛеЛ U == AV;
380
ЛИНЕйНЫЕ ОТОБРАЖЕНИЯ
значит, с?4!'
.е4лu == e/t
.лv, т. е. ЛU ==
.лv, или, наконец (если
подставить в это равенство u == d
lV),
лd
lv == d
l"лv,
что и требовалось доказать.
Из доказанноrо следует, что взаимно однозначные линейные
-отображения одноrо линейноrо пространства на друrое суть не
что иное, как изоморфные отображения (изоморфизмы), рассмот-
ренные на\1И в rJ1aBe XI.
В частности, взаимно одноэначные лuнейн.Ьte отображенuя (изо-
.морфuзм'Ы) линейноzо пространства и на себя называются лuней
ными nреобразованuями. Из доказанных в r лаве Х 1 свойств изо-
морфизмов следует, что при линейном преобразовании всякая ли-
нейно независимая система векторов переходит в линейно незз...
висимую, а всякий базис пространства U переходит в базис это..
ro пространства.
2. Матрица линейноrо отображения
Пусть d есть линейное отображение т"MepHoro линейноrо
пространства и на n"мерное линейное пространство v. Мы знаем,
что тоrда п
т.
Пусть е 1, е 2 , ..., е т
какой",нибудь базис пространства и.
При отображении
векторы ен е 2 , .. о , е т переходят соответствен..
но в векторы de}t 9.4е 2 , ....
em. Каждый вектор
U === x1e t +х 2 е 2 + . о . +хте т Е и (1)
переходит при отображении e7't в вектор
du ==x 1 eТCe 1 +х 2 С?/&е 2 + .. о +xmde m .
(2)
Таким образом линеЙное отображение
линеuноео пространства
и полностью определено
формулой (2),
если заданы обрйЗbl
е 1 ,
е 2, ..., d е т век.rrюров е], е 2 , · о . t е т , образующих какой...
нибудь базис пространства u.
Пусть '.. ..., ' n ---- базис пространства v. Векторы de 1 , . ..
. r., d е т Е V линейно выражаются через базис ' 1 , ..., ' п :
п
cvt ek ==
a'k f "
1==1
k == 1 t ..., т.
Матрица
I Q 11
А == a
l
аn1
019 ... аlт I
2
. .: О. .a
. ,
a1d ... й пт
МАТРИUА ЛИНЕАноrо ОТОБРАЖЕНИЯ
381
столбцы которой есть координаты векторов (;)/1 e 1t .. '. аЛ е т в ба
зисе ' 1' .... ' п , называется матрицей отображения Q/t: U
V
относительно базисов {е. . ... t е т } с и и {f 1 , ... t f п } Е у. Если
U == xte. + ... + хте т
некоторый вектор из и, то координаты
91, .."., Уn вектора enru Е v относительно базиса f. t ..., f л вычис
ЛЯЮТС51 следующим образом. Имеем
аЛu == аЛ(х1е 1 +... +хте т ) == X 1 enre 1 +... + xmde m ==
== x 1 ( ;
O/lf/ ) +... +Х т ( i: Oiтf/ ) ===
L
I 1
1
== ( i; 01kXk ) f. + · .. + ( f OnkXk \ 'по
k==1 \Н==1)
Поскольку координаты вектора однозначно определены, то
т
У! ==
aj /c,Xk,
k==1
j == 1, ... t n.
(3)
Запишем координаты векторов u и <27'1u ОТltосительно базисов
e 1 , ..., е т и ' 1 , ..., ' n соответственно в виде столбцов. Тоrда
равенства (3) означают, что координатный столбеu Bel{TOpa du
в базисе f l , ... t f n равен координатному столбцу вектора u в ба-
зисе е 1 , ..., е т , умноженному на матрицу А отображения d:
I}
V:
иl
ан 012 . . . 01m
й21 022 . . . 02т
Хl
ип а п l а п 2 ... Опт Х т
в частности, если e/t: и --+ и
линейный оператор в n"Mep
ном пространстве и, то в любом базисе е 1 , ..., е п ему соответ..
ствует квадратная матриuа А == 11 ац 11 относительно этоrо базиса.
ЭтИМ важнейшим частным случаем мы сейчас и займемся.
Мы установили взаимно однозначное соответствие между ли...
нейными операторами пространства и и квадратными матрицами
порядка n. Однако для этоrо потребовалось сначала выбрать
в и некоторый базис e 1t ..., ел. Изменив ero t мы изменим
соответствие. В результате одному и тому же линейному опера..
тору d в различных базисах буДУТ отвечать различные матрицы
А, А'. Найдем связь между ними.
Пусть е., ..., е п и e
, ..., e
два базиса в пространстве и,
s
матрица перехода (e
, ..., e
) == (е., ..., еп) S. Обозначим
через Х, У соответственно столбцы координат векторов u,
u
в базисе е 11 ... t е п . Аналоrично через Х', У' обозначим столбцы
координат векторов u, du в базисе e
. ..., e
.
382
ЛИНЕйНЫЕ ОТОБРАЖЕНИЯ
Из правила преобразования координат следует, что
Х == SX', у === SY'.
Cor ласно (3) действие оператора А задается матричными равен-
ствами
У==АХ, У'==А'Х'.
Значит, S1/' == ASX', откуда У' == S
lASX', Т. е.
А' == S
lAS.
(4)
Матрииы А п А', связанные соотношением (4), называются по..
доБНblми.
Таким образом, матрицы линейноrо оператора d в различ-
ных базисах подобны между собой, причем подобие осуществля..
ется матрицами перехода от одно)'о базиса к друrому.
3. Действия с линейными операторами
1 о Рассмотрим в линейном пространстве L ДВа линейных опе-
ратора e
и cfJ8.
Суммой линейных операторов d и $J называется отображе-
ние Q/C + 8iЗ пространства L на себя, определяемое равенством:
(Q/t + cfJ8) (и)
e7fu + d9Зu
для любоrо вектора u eL.
Покажем, что d +:iJЗ
линейный оператор. Действительно.
(d +
) (о:и +
v) ==
(aи +
v) +$З(а.u +
v) ==
=== a.du +
dv+a$iu +
V == (J., (du +
u) +
+
(dv+cffdv) ==a(d +8(3) (u) +
(d +$d) (v).
что и требовалось.
Найдем матрицу линейноrо оператора d + d1З. Пусть в неко-
тором базисе е 1 , ..., е п операторы d,dJa имеют матрицы А, В.
Обозначим матрицу оператора
+dJd в этом базисе через с.
Пусть Х
коо
динатный столбец вектора UEL, а У
коорди-
наТНЬJЙ столбец вектора (
+$d)u.
Поскольку (aТt + е6JЗ) U == du +
u, то
У ===сх == АХ +ВХ ===(А +В)Х,
Т. е. С == А + В. Следовательно, матрица суммы операторов равна
сумме их матриц.
20 Отображение, полученное в результате применения к век-
тору UEL сначала оператора d: L
L, а затем умножение полу-
чившеrося вектора QЛ!u на число ЛЕk, называется произведе...
нием А на
и обозначается через 1
(2,.,{. Таким образом,
(лd) (и) == л . rd (u).
ДЕЯСТВИЯ С ЛИНЕ1'JНЫМИ ОПЕРАТОРАМИ
383
Так же как в случае суммы линейных операторов, убеждаемся,
что 'Ае4....... линейный оператор. В качестве очень простоrо упраж-
нения предлаrаем читателю доказать, что матриuа операто-
ра 'AQТ! равна произведению числа л на матриuу А оператора с>Л.
Обозначим через (fj: L---+-L
«нулевой» оператор в L, определя-
емый формулой
@(u) === о
ДЛЯ любоrо вектора UEL.
Имеют место следующие очевидные соотношения:
1) а (
) == (a
) е4, О. е4 ===@, 1. е4 === <24',
2) е4 +$d:::ffd+d,
3) е4 + (с9Э+ g') == (G>Ar +$8) + W,
4) е4 +@==е4.
5) (а+Р)е4 == ае4 +ре4,
б) а(е4+$З)==аQЛ!+ac$d,
которые показывают, что множество End (L) всех линейных опе-
раторов пространства L является линейным пространством над
полем k ко
ициентов пространства L.
30 Пусть eТt ,rf1J
два линейных оператора в пространстве L.
Применяя к произвольному вектору UEL сначала оператор cfJВ, а
затем е4, мы получим некоторый вектор
v==e4($du).
Отображение, переводяш.ее вектор u в вектор v, назовем компо...
зицией операторов
и $J (в указанном порядке) и обозначим
через е40cf!З или просто через е4 $а. К омпозиuия <2/t rffd линей-
ных операторов является линейным оператором. Действительно,
е4$В (rIU +
v) == е4 (:ffd (au +
v» == Q/E (а$Вu +
$v) ==
==
(a
u)+e4 (P
v) ==
== acd (9Ju) +
Q/t (ffdv) == а27fс9Э (u) +
e4rfJd (v),
что и требовалось.
JIerKo проверить, что матрица композиции двух линейных
операторов равна произведению матриц этих операторов (в том
же ПОРЯДI<е).
Если е4 t $d и g'
три линейных оператора, то имеют место
соотношения:
1) (
$d) g' == td ($815').
2) е4. (ffJ+
) ==
rffd+rdW.
3) (
+:Ja) g' ==eA!g' +
.
384
ЛИНЕI'IНЫЕ ОТОБРАЖЕНИЯ
Обозначим через 0..... тождественный оператор, эадаваемый пра-
вилом
&u === u для любоrо вектора о.
4) <27f g == g <27f == <27f .
Свойства 1)
.. 4) композиции и 2)
4) операций сложения
показывают. что множество End(L) всех линейных операторов
пространства L является ассоциативным кольцом с единицей
относительно операций сложения и композиции.
40 Если для линейноrо оператора r;v(: L--+L существует такой
оператор rflВ: L---+L, что
td rfJd == rffde4 == е.
(1)
то CfJd наЗЬ1вается обратJШJt оператором по отношению к f2/!.
а сам оператор r;v( называется обратuмыJt. Леrко видеть, что
каждый обратимый оператор имеет только один обратный. Дейст-
вительно, если е4 имеет два обратных оператора rfJd 1 и rfJЗ 2 ,
то, взяв В левой и правой частях равенства
Q,
$d2==g
композицию с оператором $31' действующим слева, и пользуясь
ассоциативностью композиции, получим
б$d2 == rffd 1 & или $dl == $82.
Оператор, обратный к
, обозначается через ry(
1. Соотно-
шения (1) симметричны. поэтому (<27f
1)
1 ==ry(.
В
1 этой rлавы мы показали, что
1
линейный оператор.
Кроме Toro, очевидно, а также следует из результатов
1, что
оператор
обратим тоrда и только тоrда. коrда он является
взаимно однозначным отображением пространства L на себя.
Так как композиция операторов
и
1, взятых В любом
порядке, есть тождественный оператор G, матрица Koтoporo, оче-
видно, есть единичная матрица Е, то произведение матриц опе-
раторов <27f и
1 есть Е. ОТСlода BЫT
KaeT, что матрица опера-
тора <27f
1, обратноrо к оператору 27f, есть матрица A
l.
4. Ядро и образ линейноrо оператора
Пусть е4
некоторый линейный оператор в линейном про-
странстве L.
ЯдроJt оператора ry( называется множество всех векторов
ueL таких, что e4u == о.
Образом оператора <27f называется множество всех векторов
пространства L, имеющих вид
U, rде u пробеrает пространст-
во L. Ядро оператора е4 обозначается через Ker
, образ опе-
ратора
обозначается lm,з.,{.
ЯДРО И ОБРАЗ ЛИНЕйноrо ОПЕРАТОРА
385
Теорема 1. Ядро u образ оператора d Jl8ЛЯJОmcя линей.
ными подпространствами 8 L.
Д о к а з а т е л ь с т в о.
1) Пусть Ul' U 2 EKerd. Следовательно, dU 1 ==du 2 ==0.
В силу линейности оператора <27f для любых
, "'2 Е k (k == IR или (])
d(
Ul+
U 2 )==Л 1 dU 1 +Л 2 du 2 ==O,
Т. е. л' l U 1 +Л 2 U 2 Е Ker d.
Соrласно определению 1 Э 4 rлавы XI это означает, что
Kerd
подпростраНС1ВО линейноrо пространства L.
2) Предположим, что U 1 , U2 Е 1т d. Тоrда существуют такие
векторы V 1 , V 2 Е L, что dVl === Ul' dV 2 == U 2 . Следовательно, для
любых чисел Лl' л'2 Е k линейная комбинация л'lU 1 +
и2 Е 1т d.
поско.!]ьку Л1Ul+Л2U2==Лl dVl+
dv 2 ==d (Л1Vl+л...),v2).
Теорема доказана.
Размерность ядра Ker d называется дефектом оператора Q,.,{.
а размерность образа Iln d
рансоМ, оператора d.
т е о р е м а 2. Сумма paHza u дефекта лuнейноzо оператора d
равна ро:змернос/пu пространства L.
Д о к а 3 а т е л ь с т в о. Обозначим через r размерность образа
Iln e7t и через d размерность ядра Ker d оператора d. Выберем
в линейном подпространстве Inl d с: L некоторый базис еl' . . . t e r
и обозначим через f}t..., ',. элементы из Lt переводящиеся опера w
тором ет1 соответственно в е},..., е т ,
Векторы f 1 , . . ., f,. линейно независимы, так как из равенства
л 1 f 1 +... +л,.f,. == О
вытекает, что
G/! (л 1 f 1 +. . . + л'rfr) == л 1 е 1 +. . . + лrе,. == О,
3 это возможно лишь в случае, коrда Лl ==... == Л r == о. РаССМОТрИ
t
в L подпространство L 1 , порожденное векторами ' 1 ,..., f,.. Векторы
'1' ... t f,. линейно неээвисимы и поэтому являются базисом под-
пространства L 1 . G.ТIедовательно, раЗf\'1ерность L 1 равна r.
110кажем, что пространство L является прямой суммой своих
подпространств L 1 и Ker (2,
. Соrласно определению для этоrо ДOCTa
точно покаэать, что
L:::::: L 1 + Ker
и L 1 n Ker <24 == {О}.
Покажем, что L == L 1 + Ker d. Для этоrо возьмем произвольный
вектор d Е L и положим v == еЛ'U Е 1т Q/C. Bel{TOp V линейно
выражается через e 1 ,..., е т :
V == л1еl +. . .
t- л,.е,..
Пусть
w 1 == Л 1 f 1 +. · . + лrf r,
W2==U
Wl.
386
ЛИНЕйНЫЕ ОТОБРАЖЕНИЯ
Так как
<24'w 1 == л'l <24'f 1 +. . . + Л r
fr == л'l е l +. . . + лrе r == У,
ТО
e4w 2 == e.4u
<2A!'w 1 == V
V == о.
Следовательно, w 2 Е Ker
. Итак, мы показали, что вектор u
представляется в виде
u==w.+w 2 ,
rде Wl Е Ll' W2 Е Ker cv'!, а это и означает, что L == L 1 + Ker e-
.
Покажем теперь, что L 1 n Ker (2/1 == {О}. Пусть u
некоторый
вектор, принад.пежащий одновременно L 1 и Ker
. Так как
u Е Ll' то U представляется в виде
u == л)f 1 +... +лrf п
так как u Е Ker Q/C, то
u ==0, Т. е.
<24' (Лl f l +. . . + лrf r ) == Лlеl +. . . + лrе r === о.
Но, как уже указывалось, последнее равенство возможно тоrда и
только тоrда, коrда Л 1 ==. . . == Л r === о. СледоватеJIЬНО, u == О, что
и требовалось.
Итак, мы показали, что L....... прямая сумма подпространств L 1
и КеТ cv'!. Поскольку сумма прямая, то размерность L равна сумме
размерностей подпространств [1 и Ker rvt, т. е. сумме paHra
и дефекта линейноrо оператора е4.
Теорема 2 доказана.
Следующее утверждение является обращением теоремы 2.
Т е о р е м а 3. Пусть L
n-J1tерное линейное пространство. Ка-
ковы бы ни были подпространства L 1 , L 2 С L, су,и.ма размерностей
KO"lOPblX равна n, существует линейный операп10Р rYt: L ---+ L
для которОсО Ker cv'! == L 1 , 1т cv'! ==: L 2 .
Д О К а з а т е л ь с т в о. Обозначим размерности пространств L 1 и
L 2 соответственно через d и , == n ....... d. В подпространстве L 2 выберем r
линейно независимых векторов f 1, . . ., { т .
Затем выберем в пространстве L базис еl, .. . е п так, чтобы пер
вые d векторов ero лежа
ryи в подпространстве L 1 . Такой выбор
возможен на основании теоремы 9 9 4 rлавы XI.
Определим оператор cv'! равенствами
d el == О, i == 1, . . . t d,
cv'! el+d == f t , i == 1, . . ., r.
Покажем, что оператор cv'! удовлетворяет условиям теоремы.
Прежде Bcero очевидно, что 1т cv'! является подпространством,
порожденным векторами ' 1 ,..., f r И, следовательно, совпадает с L 2 .
Далее, из определения оператора cv'! вытекает, что L 1 с: Кес э/!.
ИНВАРИАНТНЫЕ ПОДПРОСТРАНСТВА
387
Для завершения доказательства теоремы нам остается установить
обратное включение Ker Q/..f с: Lt.
Предположим, что для HeKOToporo вектора
n
U ==
а, el
i:::::=l
MU == о. Из определения оператора
..( вытекает, что
( п \ n r
ed'u== wt i 'S )Q1el)== i
IQIQ/..(el== j 2: 1Qi+dfl==O.
Так как векторы f 1 ,... , f r линейно независимы, то все ai+d == о.
Следовательно,
d
U ==
at el Е L18
i :::::= 1
Теорема 3 доказана.
Выясним, KaI{ связан paHr оператора <vt с paHrOM ero матриuы
в произвольном базисе пространства L.
т е о р ем а 4. Ранс. оператора <Vt, действующеzо в пространстве
L, равен ранеу еео матрицы А 8 люБОАt базисе {e 1 ,..., еп} про...
сmраflсrrюа L.
Д о к а 3 а т е л ь с т Б о. Если e 1 ,..., е п
базис линейноrо про..
странства L, то образ 1т <vt С'ператора e7
совпадает с подпростран...
СТВОМ в L, порожденным веЕторами <Vte 1 , ..., Q/..{e n . Раиr оператора
Q//, Т. е. размерность линейной оболочки векторов <Vte 1 ,..., <Vte п ,
равен максимальному числу линейно независимых векторов в
системе e.4"e 1t ..., a;
eп. Поско.пьку в (толбцах матрицы А опера
тора Q/-{f стоят координаты векторов ed' е 1, . . ., <27f е п относительно
базиса e t , . . ., e'l' то число линейно неззвисимых векторов в системе
wt ek, k == 1, . . ., n, равно числу .пинейно независимых СТО"f1бцов
в матрице А t т. е. ее раиrу.
Теорема доказана.
5. Инвариантные подпространства н собственные векторы
линейноrо оператора
О п р е Д е л е н и е 2. Пусть е4
линейный оператор в линей..
ном пространстве Ln над по.пем k. Подпространство Lo простран
ства Lп называется uнварuаНПZflblЛ1. nодпроспlранствОА! для опера..
тора rYt, еслп для любоrо вектора u Е Lo имеем e4u Е Lo (Т. е.
если оператор eТt отображает пространство Lo в себя: е4 Lo с= Lo).
Рассмотрим, в частности, случай одномерноrо инвариантноrо
подпространства L
s Ln. Тоrда ДЛЯ всякоrо Bel(TOpa u Е L
имеем
388
ЛИНЕйНЫЕ ОТОБРАЖЕНИЯ
U Е L
, Т. е.
е4u==лu,
(1)
rде л
некоторое вещественное число.
Определение 3. Всякий отличный от НУЛЯ вектор u, yдo
влетворяющий равенству (1) (при некотором числе "')t называется
собственным eeK"lOpOAt оператора М, а число л (однозначно
определенное р авеНСТ80М (1)) называется собствеНflЬt.М. значением
оператора
, соотвеТСТВУIОЩИМ данному собствен Hor...f у вектору u.
3 а м е ч а н и е. Про собственный вектор U, удовлетворяющий
равенству (1) при данном л., rО80рЯТ, что он соответствует собствен..
ному значению л. flри этом из caMoro условия (1) следует, что
каждый собствеННЬ1Й вектор оператора Q/t соответствует лишь
одному собственному значению, тоrда как данному собственному
значению соответствует бескснечное множество коллинеарных
между собой собственных векторов, но MorYT соответствовать
и линейно независимые между собой собственные векторы.
Мы видим, что каждый (отличный от нуля) Bel\Top одномер-
Horo инвариантноrо подпространства данноrо оператора
есть
собственный вектор оператора Q/C. Очевидно и обратное: одномер-
ное подпространство, порожденное данным собственным вектором
оператора
, есть инвариантное подпространство этоrо оператора.
Непосредственно из определения собственных векторов выте..
кает следующее предложение:
Если базис пространства Ln состоит из собственных векторов
e 1 , . . ., е п данноrо оператора t.27'!, соответствующих собственным
значениям
Л 1 , . . ., Л Il ,
ТО В этом базисе оператор е4 имеет матрицу А диаrональиоrо
вида:
Лl О
А== л'2
. .
. .
о Л n
(2)
Обратно, если в некотором базисе е 1 ,..., е n матрица оператора
имеет вид (2), то e 1 ,..., ел являются собственными векторами
оператора е"..(, а Л 1 ,..., Ал суть соответственно их собственные
значения. Будем разыскивать собственные векторы и собственные
значения оператора
и, следовательно, ero одномерные инва..
риантные подпространства.
Выберем в пространстве I}J какой
нибудь базис e 1 ,
, .... е п,
относительно KOToporo оператор
имеет матрицу
A==Ualjll, i, j==l, ..., n. (3)
ИНВАРИАНТНЫЕ ПОДПРОСТРАНСТВА
389
Тоrда ДЛЯ вектора u === х 1 е 1 +.. . +хпе п с координатами Xl t ...
..., Х п вектор du будет иметь координаты
Xk == aklxl +. . . + akпxn,
k == 1, ..., n.
(4)
Условие для Toro, чтобы вектор u был собственным вектором
с собственным значением л, есть
wtu == ли; (1)
расписывая это условие покоординатно, получим уравнения
аНХ 1 + а'2Х2 +. . . + ainXn == ЛХ{, i === 1, 2, ... t n, (1')
т. е. уравнения
(аl1
Л)Х 1 + а12 Х 2+'''+
Q21 X l + (а 22
л) Х 2 +...+
а 1n Х п == О,
а 2п Х п === О,
(5)
а п1 Х 1 +
а n2 Х 2 +. . . + (а пп
л) Х п == О.
Это
система однородных линейных уравнений относительно KOOp
динат X 1 , Х 2 , ..., Х п вектора u; нас интересуют лишь ненулевые
векторы
решения системы (5); они существуют тоrда и только
тоrда, коrда детерминант системы (5) равен нулю, т. е. коrда л
удовлетворяет уравнению п..й степени
ан
л а12 . .. аlп
a21 022
Л ... а2n == о.
(6)
а л l
а п 2
. .. а пл
л
Обозначим детерминант, составляющий левую часть уравнения (6).
через De СА). Значок е при D (л) поставлен потому, что мы постро-
или детерминант, 110ЛЬЗУЯСЬ базисом е == [e I , е 2 , ... t ел].
Очевидно,
De (л) === det (А
лЕ).
(6')
Докажем, что в действительности мноrочлен De (Л,) от выбора
базиса н пространства Ln не зависит, т. е. что для любоrо др у-
roro базиса е' == [е;, ..., e
] пространства Ln имеем
De (л) =aDe' (л).
Пусть матрица перехода от базиса е 1 , ... t ел к базису e
, ..., е п
есть матрица с. Относительно базиса е;, ..., e
оператор
имеет матрицу
А' ::; C
l АС
J
390
ЛИНЕйНЫЕ ОТОБРАЖЕНИЯ
так что
А'
'АЕ == C
lAC
'AE ==C
l АС
'AC
lEC ==
== C
l АС
C-
lлЕС == C
l (А
лЕ) С
и
De' (л) == det (А'
,
E) == det C
l det (А
'АЕ) det С ==
== det (А
'АВ) == De (л),
чем наше утверждение доказано.
Итак, мноrочлен п-й степени
D (л) ==
ан
л а12 ... йlп
а21 а22
Л ... а2n
...............
(6*)
anl
а п 2
... а пп
л
не зависит от выбора Toro или иноrо базиса пространства L"',
т. е. от Toro, какоЙ именно матрицей А записан данный опера..
тор d; он зависит сПИllIЬ от caMoro этоrо оператора и потому
называется харакmерuспzuческuм мн.О20членом оператора d. Урав-
нение (6), т. е. уравнение D (л) == О, называется характер ист и--
tleCKUltt уравнением оператора (Ь--( (и матрицы А, лредставляющей
этот оператор в любом базисе е 1 , ..., е n ); корни уравнения (6)
называются характеристическими числами оператора d и ero
матрицы А.
Каждое число Л, являющееся собственным значением кзкоrо-
либо собственноrо вектора оператора d, есть корень характе'"
ристическоrо мноrочлена D (л), т. е. характеристическое число
оператора Q/t. Обратно, если 'А есть корень уравнения (б)
то,
подставляя ero в уравнения (5), сможем получить ненулевое ре-
шение u === {х 1 , ..., Х n } системы уравнений (5), т. е. собственный
вектор оператора Q/t, соответствующий собственному значению л.
Поэтому характеристические числа оператора
являются соб-
ственными значениями.
Кратностью собственноrо значения 1'1 линейноrо оператора
называется кратность, с которой ').. ВХОДИТ В качестве корня в ха-
рактеристический мноrочлен оператора d.
При м е р. Рассмотрим в трехмерном пространстве над полем k
(/l == R t (С) С базисом е 1 , е 2 , е э оператор, задаваемый в этом базисе
ы1трицейй
110
А== о 1 1
1 О 1 I
Найдем собственные значения и собственные векторы опера
тора d.
ИНВАРИАНТНЫЕ ПОДПРОСТРАНСТВА
391
Вычислим прежде Bcero характеристический мноrочлен D (л)
оператора
. Имеем
1
л 1 О
D(л)== о 1
1 ===
лз+з",,2
3л'+2==
1 о 1
л
==
(л
2) (л 2 .........л+ 1).
Корни мноrочлена D (л) равны соответственно
Л, 1 ==2 , Л 2 ==
+ i Vз Л з ==
i Уз
2 2 t 2 2 ·
Если поле k == IR, то л'1 == 2 будет единственным собственным зна..
чением оператора Q/t. Если поле k == Q), оператор eтt имеет три
(
1+iV3 1
iY3 )
собственных значения ""1 == 2, ""2 == 2 ' Аз == 2 ·
Найдем собственные векторы оператора eтt в случае поля
вещественных чисел IR. Для этоrо составляем систему (5), которая
в нашем случае есть
Xl +Х2 ==0, )
Х 2 + Х З == О,
Хl
Хз==О.
Решая эту систему, получаем Х 1 == Х2 == Хз- Следовательно,
вектор u == аеl + ае 2 + аез при произвольном вещественном а будет
собственным вектором оператора eтt.
в случае поля комплексных чисел
получаем три системы
линейных уравнений
Xl +Х2 ==0, )
Х2+ХЗ==О,
Хl
хз==о}
1
t Jf 3
2 Xl+X2==O,
1
i уз
2 Х2+ Х З==0,
1
iY3
Х 1 + 2 хз==о,
(7)
(8)
1 +i"JfЗ +
2 Хl Х 2
1+iY3 +
2 Х 2 Ха == О,
+ l+iJ!з О
Хз== ·
==0,
(9)
Х1.
392
ЛИНЕйНЫЕ ОТОБРАЖЕНИЯ
Решение системы (7) есть
Хl == Х 2 == Х З == а,
rде а
лроизвольное комплексное число. Решение системы (8)
задается формулами
l
iV3 b l+iV З Ь Ь
Х 1 ==
2 ' Х 2 ==
2 ' Х З == ,
ь
произвольное комплеI{сное число. Аналоrично решение системы
(9) есть
l+iVЗ-
Х} ==
2 с,
l
iVЗ
Х 2 ===
2 с, х з == С,
с
лроизвольное комплексное число. Таким образом, собственные
ве]{торы оператора d MorYT быть представлены в виде
U 1 == ае 1 +ае 2 +ае з ,
1
i J f 3 1 + i Vз
U 2 ==
2 Ье 1
2 Ье 2 + Ье з ,
l+i)l3" l
iV'З
u a ==
2 се}
2 ce z + се з ,
а, Ь, с
произвольные комплексные числа.
Исследуем различные возможности, которые MorYT предста
виться при реIllении хараl(теристическоrо уравнения.
1 о Случай поля k ===
. в этом случае в силу основной теоремы
алrебры характеристическое уравнение всеrда имеет корень ]"0 Е k.
Следовательно, в комплексном линейном пространстве всякий
ли нейный оператор имеет хотя бы один со
твенный вектор.
2() В СJ]учае nеlцественноrо по..ТТЯ k == L
характеристическое
уравнение D (л) == о может вовсе не иметь корней в поле R. в этом
случае линейный оператор не имеет вещественных собственных
векторов. I
Iапрнмер, преобразование плоскостн, задаваемое в пр я..
моуrо.пьноЙ СlIстеме координат равенствами
]с" == Х cos а.
у sin а,
у' ==xsil1a+ycosa
(поворот вокр yr начала координат), не имеет вещественных соб
ственных векторов. Действительно, характеристическое уравнение
для оператора поворота имеет вид
I с?sа
л
sina I ==Л2
2соsа.Л+l==О
SJП а cos а
л '
откуда ""1,2 == COS а +- i sin а == e:t. ia , и если а =1= kл, k == О, + 1, + 2,
ТО это уравнение не имеет вещественных корней.
ИНВАРИАНТНЫЕ ПОДПРОСТРАНСТВД
393
т е о р е м а 5. Всякий линейныЙ оператор e/f в вещественном
линейном пространстве L n имеет инвариантное подпространство
размерности 1 или 2.
Д о I{ а з а т е л ь с т в о. Если характеристический мноrочлен D (л.)
оператора G
имеет хотя бы один веJl
ественный корень, то этот
оператор имеет хотя бы один собственный вектор, а следовательно,
имеет и одномерное инвариантное подпространство (этим вектором
порожденное ).
Требуется доказать, что если среди корней мноrочлена D (л)
нет вещественных, то оператор еТ! имеет двумерное инвариантное
ПОДПРОСТРЗНСТ80. Это вытекает из С,.Jlедующеrо вспомоrате.пьноrо
преД,,10жения:
Л е
I м а. Если J.. o == а +
i,
:;6 О, есть корень мноzочлена D (л,),
то существу/от два ли'нейно Н,еЗQвUСИ},(blХ век/пора u U У, коmoрые
в своей совокупноспzu lZорождаюПl инвариантное подпространство
оператора с7'( (и;чеЮLцее, очевидно, размерность 2).
Итаl{, остается доказать лишь лемму.
Берем каI<ой
нибудь базис е}, ..., е п пространства Ln и под..
ставляем в уравнения (5) значение Л
Л О == а + pi. Тоrда этим
уравнениям удовлетворяет набор комплексных чисел
X 1 === 61 + if]l, ..., Х п ===
п + if]п,
которые не все равны нулю. Отсюда уже следует, что из векто-
ров
u ==
lel +. . . +
пe(o V == 't11 e l +. . . + f]nen
по крайней мере один отличен от нуля; то, что они оба отличны
от нуля и, более Toro, линейно независимы, будет доказано
несколькими строками ниже. Набор комплексных чисел {X 1 , ..., Х 1l }
есть решение системы (5) при Л == Л о , так что имеет место систеt\.tа
числовых тождеств
a 11 (;1 + if]l) + а 12 (62 + i1l2) +. · · + а 1п (
n + illn) ==:
== (а +
i) (
1 + i1l1),
а 21 (
1 + i1l1) + а 22 (;2 + i1)2) +. · · + а 2п (;n + ill.'l) ==
== (а +
i) (
2 + i1l2),
...... .... ..... ......... .....
ап. (61 + i1l1) ...... а п2 (
2 + i1l2) +. · · + а пп (
n + i1'Jп) ==:
:=: (а +
Ё) (
n + i1'Jn)'
Приравнивая в этих тождествах соответственно их вещественные
и мнимые части, получаем, во
первых, систему тождеств
п
akJ;J == aSk
Pllk,
/=-1
k =:::; 1, о.., n,
394
ЛИНЕйНЫЕ ОТОБРАЖЕНИЯ
BO
BTOpЫX, систему тождеств
п
ak/'YJ/ ==
Sk + CXl1k,
/==1
k === 1, ..., n,
Т. е.
u==cxu
pv, }
v==
u+av. (10)
Друrими словами, векторы
u и
""v принадлежат векторному
подпространству Р
Ln, порожденному векторами u и v. Докажем,
что и u, и v отличны от нуля. Предположим, что u == о; тоrда по
доказанному v =1= о. Вставляя 9ТИ значения u и v в первое из
равенств (1 О), получим
О ==
pv,
и так как v =1= о. то р == О, что противоречит условию леммы. Пусть
теперь v == О и, следовательно, u =1= о; тоrда из BToporo равенства
(10) получим
о == pu,
откуда снова р == о
вопреки условию леммы.
ДокажеМ t наконец, что векторы u и v линейно неэав симы.
Предположим противное, тоrда v == ku при некотором k + о и
равенства (1 О) принимают вид
u == (сх
kP) и, } ( 10')
ku ==
U +aku.
Переписывая второе из этих равенств в виде
u==
u+au
и вычитая из Hero первое равенство (10), получим
О == (Il +
)
u,
откуда снова c
ТYeдyeT
== О, что противоречит условию леммы.
Лемма t а с.педовате.пыI,, и теорема 5 доказаны.
Пусть 'Л == Л О
некоторый корень характеристическоrо уравне..
ния кратности ,;::::: 1. Возникает вопрос: какова размерность соот..
ветствующеrо собственноrо пространства ИЛИ t иначе, сколько
линейно независимых решени й имеет система уравнений (5) при
л == л о ? Нетрудно показать, что размерность собственноrо ПОД--
пространства, отвечающеrо собственному значению л. о , не преВDС"
ходит кратности корня л о . Полный ответ на вопрос о размер..
НОСТИ собственных подпространств мы получим в rлаве ху, опре..
делив каноническую форму матрицы линейноrо оператора
.
r л А В А XIV
ЛИНЕЙНЫЕ, БИЛИНЕЙНЫЕ И КВАДРАТИЧНЫЕ
функции НА ЛИНЕЙНЫХ ПРОСТРАНСТ8АХ
1. Линейные функции
Задать числовую функцию f на п.мерном линейном простран..
стве Ln над полем коэффициентов k
значит дать правило, лоз...
воляющее поставить в соответствие каждому вектору u Е Lп неко"
торое число f (u) из поля k (значение функции f для этоrо век-
тора u).
Если в пространстве задан некоторый базис e 1 , ..., еп, поз...
воляющий Каждый вектор u Е L'1 записать в виде
u == х1еl + х 2 е 2 +. . 0+ хпе п == {х 1 , Х 2 , ..., Х n }, (1)
то возникает задача: выразить для каждоrо вектора (1) значение
f (u) через координаты X 1 , ..., Х п вектора u (посредством некото",
рой формулы).
Определение 1. Функция f, определенная на пространстве
Ln, называется линейной, если она удовлетворяет условия
:
1 о f (U 1 + U2) === f (и 1 ) + f (u 2 ) для любых двух векторов U 1 , U 2 Е. Ln.
20 f (лu) == лf (u) для любоrо вектора u Е Ln и .пюбоrо числа
лЕk.
Эти условия MorYT быть заменены одним условием:
f (Л 1 U 1 + A 2 U 2 ) == A 1 f (и 1 ) + ')"21 (u 2 ), (2)
из Koтoporo следует и общее условие:
f (Л 1 U 1 +. · · + л'пUп) == л 1 f (U 1 ) +. · . + лпf (и n )
для любых векторов u 1 , ..., U N из L п и любьrх чисел 1...1' ..., А п .
Ддя любоrо вектора u === х 1 е 1 +. . . + Х 1l е п значение функции f
есть f (u) ::=:::: Х 1 ' (е 1 ) +. · . + хn' (е п ). Обозначим значение ФУНКЦИИ f
для векторов е1' о о ., е n через
'(е 1 )==а 1 , '(е 2 )==а 2 , ..., '(еп)===аnо
(3)
Тоrда имеем
f (и) == а 1 Х 1 +. · . +аnх n (для u == x 1 e 1 +... +Хпе п ). (4)
396 JIИНЕPfНЫЕ, БИЛИНЕйНЫЕ И КВАДРАТИЧНЫЕ функции
Правая часть равенства (4) есть однородный мноrочлен пер
вой степени, или линейная форма от переменных X 1 , Х 2 , .." Х п .
Итак, если в пространстве Ln задан базис е 1 , е 2 , ..., е п , то
линейная функция f записывается в виде Аuнейн,ой формы (4),
выражающей значение f (и) через координаты вектора u (относи..
тельно эmоао базиса).
Важно заметить с caMoro начала: линейная функция (и вообще
всякая числовая функция) в пространстве Ln не зависит от выбо-
ра Toro или иноrо базиса в этом пространстве. «Функция»
это
значит: каждому вектору u поставлено в соответствие число f (u);
это число определено, как скоро определен вектор u; выбор базиса
в пространстве LЛ здесь ни при чем. Но запись (4) в виде
линейной формы, естественно, зависит от выбора базиса: если
б v б " ,
вместо азиса е 1 , е 2 , ..., ел возьмем друrои азис е., e2t ..., е n ,
б " , б
то вектор u относительно азиса e t , е 2 , ..., е п удет иметь уже
" ,
друrие координаты X t , Х-2, ..., Х п И
f (и) == Х 1 ! (e 1 ) +... +Хп! (ел) == X
! (е;) +... +X
! (e
).
Полаrая b 1 == f (e
)t ..., Ь п == f (e
), видим, что относительно
базиса e
, ... ,e
та же функция f (и) записывается в виде линей-
ной формы:
f (и) == blX
+b2X
+... +bnx
(для u == x;e
+. . . + x
e
).
Естественно спросить: как выражаются коэффициенты b 1 , . . . , Ь п че
фф , ,
рез коэ ициенты Ql, . . ., a'l' если известно, что векторы et t . . . , е п
«HoBoro» базиса даны своими координатами относительно «cTaporo»
базиса еl, ..., е п :
еЕ == C 1 i e l + C 2 i e 2 + · · · + Cnle n t
( 4')
i == 1, ..., n.
Ответ дается автоматическим вычислением:
bl==f(ei)==Cllf(el)+...+Cпif(en) для i==l, ..., п t
Т. е.
b l == C1ial + C 2 la 2 +. · · + C n i a 1L.
Мы видим, что
I Ь 1 I аl
.
2 == С
2
tJ ,
пI
при переходе от базиса е 1 ,..., е п к базису е;, ..., e
коэф
ФИIlиенты линейной формы (4) преобразуются так же, т. е. посред-
ством той же маТРИIlЫ, }<ак базисные векторы.
Рассмотрим множество (LIl)* всех линейных функций, опреде
J1eHHbIX на линейном пространстве Ln над полем k. В множестве
ЛИНЕйНЫЕ функции
397
(Ln)* естестпенным образом определены операции сло}кения функ
ций и умножения функции на число из поля k:
(1 + g) (u) == f (и) +g (u),
(лf) (u) ==
". f (u),
rде " g Е (Ln)* t U Е Lп, л Е. k.
Т е о р е м а 1. Л1НОJlсество (Ln) * всех лuН,еUН,btх функций J задан..
IlЫХ 8 nросmран'сп1ее L п над полем k J образуеtп линейное прост-
ранство над полем k.
Д о к а 3 а т е л ь с т в о. Покажем прежде Bcero, что сумма двух
линейных функций f, g Е. (/J n )* является линейной функцией. Пусть
ь, v Е Ln, 'А Е k. Тоrда
(f +g) (u +v) == 1 (u +v) + g (u +v) ==
== I(u) +1 (v) +g (и) + g (v) == [! (u) + g (u)] + [! (v) +g(v)] ==
== (! + g) (u) + (1 + g) (v),
(! + g) (лu) == / (лu) + g (ли) == лf (u) + лg (и) == л (! + g) (u).
ТаКИ
1 обраЗОМ t линейность суммы доказана. Аналоrично для
произведения а! линейной функции f на число а Е k имеем
(af) (и + v) == а . f (u + v) == а [! ( и) + f (v )] ==
== а. f (u) + а. f (v) == (af) (u) + (af) (v),
(af) (лu) == а. f (лu) ==: а. л /(u) == лаf (u) == л (af) (u).
Таким образом, мы показали, что f+g и а! являются линей-
ными ФУНКЦИЯМИ t Т. е. принадлежат множеству (Ln)*.
Нулевым элементом пространства (Ln)* является линейная
функция 6 (и), равная нулю для любоrо вектора u Е Ln. Функ-
ция (
1)! является противоположной для функции ,.
Леrко проверяется, что для (Ln)* выполняются все аксиомы
линейноrо пространства, откуда и следует теорема 1.
Оп р е Д е л е н и е 2. Линейное пространство (Ln)*, состоящее
из всех линейный функций, определенных на пространстве Ln,
наЗЬ1вается соnряжеНftbl.М пространству Ln.
Т е о р е м а 2. Если линейное пространство L п
MepHO. то
сопряженное ему пространство L * также n
MepHO.
Д о к а 3 а т е л ь с т в о. Пусть е 1 , ..., е п
некоторый базис в L.
Разложим по этому базису произвольный вектор u Е L:
u == х 1 е 1 +.. . +Хпе п .
Тоrда любой элемент f Е L *, Т. е. линейная функция на L запи-
сывается в виде
( n ,п п
f (u) == f \ М х/е/ ) ==
l Х/! (е;) == fi Xi a /.
398 ЛИНЕйНЫЕ. БИЛИНЕйНЫЕ И КВАДРАТИЧНЫЕ функции
rде ai;=: f (u), и однозначно определяется набором чисел (аl, .. ., а n )
из ПО
1Я k. ЭтОТ набор можно интерпретировать как вектор
арифметическоrо пространства k n . При сложении линейных функций
и умножении функции на число СК
1адываются и умножаются на
число коэффициенты этих функций. Следовательно, L * изоморфно
арифметическому пространству k п и поэтому п
MepHO. Теорема 2
доказана.
Пусть L n
MepHoe линейное пространство над полем k и
(е.,.. , е п )
неl{ОТОРЫЙ базис в L. Рассмотрим в пространстве L * п
линейных функций 'l, ..., ,п, задаваемых правилам
fi (е j) === б 1 j, i, j -== 1, ..., п.
)УНI\ЦlfИ {l, ..., ,п линейно независимы в L *. Действительно,
пусть
aJl + .. . + ал!п == о
для некоторых а 1 , ..., а п Е k. Тоrда a 1 f 1 (ej) + . .. + Ctnfп (е}) == О
для .пюбоrо базисноrо вектора ej, i == 1, ..., n. Из определения
функций р получаем
a.. 1 f 1 (ej) + . . . + anf n (ej) == а 1 б 1 } + . . . + а п с5 п} == (Х} == О,
что доказывает их линейную независимость. Любая функция f Е
Е L * выражается в виде линейной I<омбинации функций '1, ...
. . ., fn. Действительно, как мы уже выяснили, функци Я f OДH03
начно определяется своими значениями aj == f (ej) на базисных
векторах е}, ..., е п из L. Но эти же значения на векторах е 1 , ...
. . . t е ll принимает линейная функция a 1 f 1 + . . . anf n . Поэтому f::::::
:::::: a 1 f 1 + . . . + antll., что и требовалось.
l"ITaK, мы показаЛИ t что функции 11, ..., fn линейно незави..
симы и порождают пространство /J *, т. е. образуют базис этоrо
пространства.
Оп р е Д е л е н и е з. Базис {f 1 t ... t ,п} пространства L *, COCTO
ящиЙ из линейных функций, удовлетворяющих уравнениям {; (ej) ==
== Оц, rде {е}? ..., е п }
базис в L, называется баЗUСОАt l дуальН,ыМ,
к { е 1 t ..., е п } .
3 а м е ч а н 11 е. Построив дуа"ТIЬНЫЙ базис в L *, состояи
ий из
n элементов, мы тем самым получили новое доказательство Teo
ремы 2. Понятие дуальноrо базиса позволяет дать полеЗНУIО интер
претацию LТ1инейной формы (4)
f (u) == G 1 X 1 + .. . + апХ п .
В этой форме числа Х 1 , ..., Х п
суть координаты вектора u Е L
в базисе е 1 , ..., е п , а ЧlIсла a t , ..., а п
координаты линейной
функции f Е L * в дуальном базисе р, ..., {п.
Понятне линейной ФУНКI(ИИ на Ln допускает наrлядную reo
t.lетрическую реализацию. Рассмотрим некоторое аффинное прост"
ЛИНЕYfНЫЕ ФУНКUИИ
399
ранство Аn над полем k, для KOToporo линейное пространство Ln
является пространством трансляций. Выберем некоторую точку
О Е Аn и будем считать, что векторы из Ln отложены из точки
о. Значением функции f в точке В будем считать ее значение на
векторе u == ОВ . Тем самым функция f определена в Аn.
Имеют место следующие утверждения:
1 о Множество точек из А п, В которых линейная функция f
принимает постоянное значение, образует плоскость в Аn размер-
ности n
1.
20 Любая плоскость размерности п
1 в Аn является reoMeT-
рическим местом точек, в которых некоторая линейная функция
сохраняет постоянное значение.
30 ПЛОСКОСТИ t соответствующие разным значениям одной и
той же линейной функции f, параллельны.
Для доказательства этих утверждений достаточно записать
равенство
f (В) == f (08) == с
в координатном виде
f (В) == a 1 x 1 + . . . + апХ п =: С
И воспользоваться результатами rлавы XII.
В заключение этоrо параrрафа дадим определение сопряжен..
Horo оператора. Пусть d: L
L
линейный оператор в прост"
ранстве L.
Определение 4. Оператор (2/--(*: L*
L* в сопряженном
пространстве L* называется сопряженным к оператору d, если
для любых u Е L, f Е L * выполнено равенство
(
rt*f) (u) == / (p/
и).
Покажем, что ry{*
линейный оператор в пространстве L *. Пусть
" g Е L*, u Е L
произвольный вектор. Имеем
(
* (1 + g» (u) == (/ + g) (Q/..{u) == f (du) + g (Q/tu) ==
== (e7'(*/) (u) + (cd*g) (u)..
В силу произвольности вектора u отсюда следует, что
С?/С* (! + g) == <27'!*! + wt*g.
Для произведения а.! линейной функции f и числа а. Е k анало-
rнчно получаем
(
* (af» (u) == (a.f) (wtu) == а.. f(
и) === с(. еу(*! (u) == (a.d*f) (u).
откуда
d* (af) == acd*f,
что и требовалось доказать.
400 ЛИНЕйНЫЕ. БИЛИНЕйНЫЕ И КВАДРАТИЧНЫЕ функции
Оставляем читателю в качестве упражнения доказательство
леДУЮlцеrо утверждения. Если А
матрица оператора d в базисе
е 1 , ..., е п , то матрицей сопряженноrо оператора d* в ,11уальном
.базисе {1, ..., ,п является транспонированная матрица А *.
2. Билинейные функции и билинейные формы
Рассмотрим теперь функцию от двух переменных BeKTQPOB U,
v пространства [n, Т. е. предположим, что дано праВИЛО t ставя-
п
ее в соответствие каждой паре u, v векторов пространства LrI
некоторое число '1' (u, v). Предполо}ким, кроме Toro, что эта функ-
ция является линейной по каждому из своих aprYMeHToB, т. е.
что выполнены следующие условия:
'F (1"IUl +
U2' v) == л 1 'Р' (u 1 , v) +
42 ч' (и 2 , V),
'l' (u, A1Vl + Л2V2) :: л 1 'F (u, V 1 ) +}"2 ч' (u, V2)
'(каковы бы ни были векторы U!, U 2 , u; V, v H v 2 И числа Лl, Л 2 ).
Тоrда rоворят, что ч' есть БUЛtlнейная функция.
Спрашивается: если векторы u и V заданы СВОИМИ координа-
тами относительно данноrо базиса еl, ..., ел пространства [п., так
что u === х 1 е 1 + . . . + хпе п , V == Уlеl + .. . + Упе", то как выразится
значение билинейной функции Ч' через координаты X 1 , ..., Х п И
Yl' ..., Уп векторов u t v? Ответ очень прост. Ведь
ч' (u, v) == '1' (х}е 1 + .. . + Хпе п . Уl е l + . .. + Yrleп) ==
п п
== 2:
ХiХ;Ч! (el, е;). (1)
i==lj==l
ПО-.;10}КИМ теперь 'l'(el, ej)
alJ' Тоrда из (1) вытекает, что
11 n
'I' (u, v) == 2: 2: aijXIYJ для
i
lj
l
{ u == х 1 е 1 + ... +x ll e п ,
V == y1e 1 + . . . + Упеn,
(2)
что и дает ответ на поставленный вопрос.
МноzочлеНbl вида
n n
'Ф (X 1 , ..., Х n ; Yl' ..., Уn) == 2:
aljXiY/,
i
l j;;;::1
лuн,еuные по каждому из двух рядов 1lерем.енных
Х 1 , Х 2 ,
. . . ,
Х п ,
У}. Y2t
. . . ,
Уп,
БИЛИНЕйНЫЕ ФУНКUИИ И БИЛИНЕйНЫЕ ФОРМЫ
401
на3ыlаютсяя билuнеUНblМU формами от nеременных XI, Yj (точнее,
от двух рядов nеременных X 1 , ..., Х п ; Уl' ..., Уп). IИаmрuца
ан aIt ... а1п !
А == a
l.
2 . :... . а. 2 .'!
а п l а п 2 ... а пп
п п
называется матрицей бuлuн.ейн.ой формы
aijX'Yj илu Maпlpll
(==1 j==l
цей 6или.чейноu фУНКl{иu (2) опlНОСUlпсльно базиса e 1 , ..., е n . Били...
нейная форма называется сuммеПZРИflflОй, если симметрична ее
матрица А (т. е. если alk == ak').
Вернемся к общему понятию билинеЙной функции '1' (и, v).
Эrа функция называется сим.мепzричн,ой, если ее значение не
меняется при перестановке арrумеИТОВ t т. е. если для любых
двух векторов u и v имеем '1' (и, v) == ч' (у, и). Тоrда, в частно
сти, aij == '1' (ei, ej) == 'I' (ej, ед == aji
матрица оказывается си
мет
ричной. Обратно, если в каком"нибудь базисе данная билиней
ная функция записывается в виде билинейной формы с симмет..
ричной матрицей, ТО значение функции 'Р (u, v), равное значению
п п
мноrоч-пена
aljx'Yj' не меняется при замене в этом MHoro
i==lj==l
члене одноrо из двух рядов переменных X 1 , ..., Х n ; Yl' ..., Уп.
друrим, что означает равенство ч' (и, у) == \f (v, u), т. е. симмет
ричность функции \У (и, v). 11TaK, СU.М/ttепzрutlная БUЛtlнейная ФУНК"
ЦUЯ запUСЬ18аеmся в любом 6uзисе в виде симметричной 6илиней..
нои формы. Обратно, если 6uлинейная функция в каком.ни6удь
бuзисе записывается в виде си.мметРUЧflОЙ билинейной формы,
то она симметрична (и, следоватеЛЫ-lО, ее записью во всяком
базисе будет симметричная 6uлинейная форма).
Каждая функция f (и, v) от двух переменных определяет Функ
цию g от одноrо переменноrо, если положить
g(u)===f{u, u).
ФУНКU!1Я Ф, полученная по этому правилу из симметричной били-
нейной функции "'1':
ф (u) === "'1' (u, и),
называется квадратичной фУНКt{uей, по рожденной данной билиней..
ной функцией '1'.
т е о р е м а 3. Для каждой квадратичной функции Ф сущест..
вует лишь одна порож'даfощая ее симметричная бuлuнеuная функ..
ЦUЯ '1', называемая полярной бuлuн.еuной функцией опа данной
квад ратuчной.
402 ЛИНЕйНЫЕ, БИЛИНЕYfНЫЕ И КВЛДРАТИЧНЫЕ функции
д о к а 3 а т е л ь с т в о. Пусть 'у
какая
нибудь симметричная
билинейная функция, порождающая данную квадратичную
функцию:
ф (и) === 'у (и, и).
Для доказательства единственности ФУНI{ЦИИ '1' достаточно ДOKa
зать формулу
1
Ч'(u, V)==2{Ф(U+V)
Ф(U)
Ф(V)}' (3)
позволяющую вычислить значение функции '1' для любоЙ пары
векторов u, V, зная значения ФУНI{ЦИИ <1) для !<аждоrо из векторов
u, v, u + v. Под.пежаЩУIО доказательству формулу (3) можно пеDе..
писать в виде
Ф(u+v)==Ф(u)+2Ч'(u, v)+Ф(v) (3')
или (по определению функции Ф) в виде
ч' (u + v, u + v) === Ф (и) + 2Ч' (и, v) + Ф (v). (3")
Но в таком виде она непосредственно вытекает из билинейности
и симметрии функции Ч' (и, v):
'I'(u+v, u+v)=='I'(U+V t u)+Ч'(u+v, v)===
== '1' (u, u) + '1' (v, u)
t '1' (u, v)
t-- 'р' (У, v) ==
== '1' (и, и) + 2'1' (и, v) +
ч' (У, v),
что и требовалось доказать.
Если в данном базисе симметричная билинейная функция
Ч' (u, v) записывается в виде
n
'1' (и, v) ===
alkxiYk для
i, k ==- 1
{ U == x 1 e 1 + ... +хпе п ,
alk === akl,
v == Yl e 1 + · . · + у пеп,
то, очевидно,
n
Ф (и) == 'l' (о, о) ==
alkXixk для: U == x1e 1 + ..' +Хпе п .
{. k == t
п
Мноrочлен вида
alkX,Xk, все члены KOToporo суть одно..
i==lk==l
члены alkxixk второй степени, есть не что иное, как однородный
мноrочлеll второй степени, или квадратичная форма (от перемен.
ных Х 1 , ..., Х п ). Мы при этом предполаrаем, что aik == akl, что
не представляет оrраничения общности (при aik =1= akl мы бы заме
нили каждый из этих коэффициентов их полусуммой), так что
п п
фактически коэффициент при XtXk в
a'kXtXk при i =1= k есть
i==lk-==l
2alk === 2akl'
МЛТРИUЛ БИЛИНЕАНОА И J<ВАДРАТИЧНОI'I ФОРМЫ
403
Симметричная матрица
ан аl! ... a1n l
А == йз1 022 · · · й2n
.........
I ап! йnЭ ... й пп
n
называется .матрицей квадрап1ичной ФОР.А1,Ы
aikXIXk, ее
{, k == 1
детерминант называется дuскриминантом квадратичной формы.
l\1ы получили следующий результат: квадратичная функция
{J) (u) == '1' (u, U), nорожденная данной биАuнейно(J, функцией чr,
во всяком базисе записывается в виде квадратичной формыl' u.мею
щей пlY же .матрицу, что и билuнеuная форма, являющаяся
запuсыо функции 'У.
Друrими словами: квадратичная функция Ф и ее полярная
функция чr во всяком базисе записываются в виде форм (квадра..
тичной, соответственно билинейной), имеЮIl
ИХ одну и ТУ же
(симметричную) матрицу. Поэтому билuнеuная форма, имеющая
ту же матрицу, что l/, данная квадратичная, называется поляр..
ной фор,wой от данной квадратичной.
3. Матрица билинейной и квадратичной формы
и ее преобразование при переходе
к новому базису
В пространстве Ln с заданным базисом еl, ..., е п линейная
функция записывается в виде линейной формы
а билинейная
в виде билинейной формы.
Чтобы задать линейную форму, достаточно задать набор ее
коэффициентов а 1 , ..., а п ; для Toro чтобы задать билинеЙНУIО
(или квадратичную) форму, надо задать ее матрицу
аl1 а]2 . . . йl.'l
А== а21 а22 . . . а2п (1)
. . . . .
aпl йп2 . . . а пп
Мы выяснили в
1, }<ак преобразуется набор коэффициентов
йl, ..., а п линейной формы при переходе от базиса е 1 , ..., е п
I( HOBO
IY базису e
, ..., e: t . Спрашивается: как при переходе от
базиса еl, ..., еп. к базису e
, ..., e
преобразуется матрица А
бил и неl':'I ной ф
рмы? Мы сейчас дадим ответ на этот вопрос.
т е о р е м а 4. Пусть билинейная функция ч' (u, v) записывается
О/nНОСUfnельно базиса еl, ..., е п в виде 6uлинейн,ой формы
JJ
Ч' (U t v) ==
ai/cXiYk
i, k == l
f U ==x 1 e 1 + ... +хпе п ,
при
l v == y 1 e 1 + ... + Упеп
(2)
404 ЛИНЕйНЫЕ. БИЛИНЕйНЫЕ И КВАДРАТИЧНЫЕ функции
с .матрицей А , а относительно базиса е;, ..., e
в виде 6илUней....
ной формыl
n
'I' (u, v) ==
aikxiYk
i
k == 1
, ' + + "
{ u == Хlе1 . . . Х п е п ,
при , , , ,
v == Yt e . + . . . + Уп Сп
(2')
с .матрицей А'. Пусть
п
ek ==
Cjkej,
j==l
k == 1, ..., 11.
(3)
Лоласая
c
. . . . . .
1
I t
С пп
(4)
С 11 С 12 · · ·
С п 1 С п2 ...
имеем
п
,...., ,
Xk ==
CkjX"
j== 1
k === 1 t ..., n.
(5)
в этих обозначениях имеет .Atecтo формула
А'==С*АС,
(6)
еде С* J как вce2дa
ecпlb транспОfluрованная матрица к С (т. е.
матрица коэффициен-тов в (3).
Прежде чем доказать формулу (6), укажем на некоторые ее
непосредственные следствия.
Так как det С* == det С, то
det А' == det А . (det С)2.
Таким образом, доказана
Т е о р е 1\1 а 5. При AliHeUflOM nреобраЗО8Qнuи (5) дискриминант
п
квадра/пuчной формы Ф (u) ==
alkxiXk для u == x 1 e 1 + . .. +хпе п
i. k== l
У)ЛflожаепlСЯ на квадрат aetпepMUHQHma матрuцыl llрео6разованuя
(4) U
следовательно, сохраняет свои знак.
Д о к а з а т е л ь с т в о фор м у л ы (6). ВОЗЬ
lем матрицы
Х,
X
:
. ,
Х п
у===
Уl
: ,
У1l
(1)
СОСТОЯLЦие из одноrо столбца и n строк.
Транспонированная к Х матрица Х* состоит ИЗ одной стро-
ки и п столбцов:
Х* == (х 1 ... Х п ).
МАТРИЦА БИJIИНI::йНОй И КВАДРАТИЧНОй ФОРМЫ 405
Умножая матрицу А на матрицу У, получим матрицу
ан Уl +a12 У2 + ... +аlп Уп
А у
а21 Уl +022 У2+ ... +О2n Уп
(8)
Й п lУl +а п 2 и2 + ... +a llп Yп I
состоящую снова из одноrо столбца и п строк, а умножая Х*
на матрицу АУ, получим уже матрицу Х* АУ, состоящую из одной
строки и одноrо столбца, т. е. из одноrо элемента
Х 1 (a 11 Yl + . . . + а 1п Уп) + Х 2 (а 21 Уl + . . · +
!2Yп) + . · ·
... +Х п (а п1 Уl + ... +аппуn),
который есть не что ИНGе, как наша билинейная форма
Ф(Хl' ..., Х n ; Уl, ..., Уп).
Итак, билинейная форма 'ф (изобра)кающая функцию 'F (u, v)
может быть записана в виде следующеrо произведения матриц:
'l' (u, v) == 'ф (х 1 , ..., Х n ; Yl' ..., Уп) == Х* АУ. (9)
Запи[пем преобразование (5) в виде матричноrо равенства
I ? == с
, :.
l == С у;
Х Х У п '
n n Уп
Т. е.
Х ==СХ', У ==СУ',
(10)
И, значит,
Х* == (Х')*С*.
(11 )
Подставим (1 О) и (11) в (9), получим тождество
'1' (u, v) == '1' (x 1 , ..., Х n ; Yt, ..., Уn) == Х* А У == (Х')* (С* АС) У'.
Но в силу (9) с заменой А на С* АС матричное произведение
(Х')* (С* АС) У'
представляет собой билинейную форму ф' от переменных х;, ...
'." u С * АС
. . ., Х п . и1, ..., Уn С матрицеи и
'I'(u, V)=='Ф'(х;, ..., X
; Y
t
. . . ,
Y
)
при
{
"
+ "
u
xleJ I
." хпе п ,
I ' + + I ,
V == Ylel . . . Уп е п .
Так как мат
ица qюрмы 'Ф' (x
, ..., X
; у;'
чена через А , то формула (6) доказана.
. . . ,
y
) была обозна
406 ЛИНЕRНЫЕ. БИЛИНЕАНЫЕ И КВАДРАТИЧНЫЕ ФУНКЦИИ
Подставляя в предыдущие формулы всюду u == v и, следова
." "
тельно, Уl == X 1 , ..., у" == Х n , Уl == х., ..., Уп == Х п , получаем
С л е Д с т в и е. Пусть квадратичная функция Ф (u)" оnределен
ная в Ln, записывается О/n/1,осuтельно базиса e 1 , е 2 , ..., е п Kвaдpa
тuчной формой q> (Xl, .... Х n ) с симметричной матрицей А:
n
Ф (и) == q:> (Xl, ..., Х п ) ==
alkXiXk при u == x1e + ... +Хпе п .
1. k == 1
а относительно базиса e
,
, ( , , ) и А ,
ер Х.,..., Х п С матрицеи :
. . . ,
e
квадратич/1,ОЙ формой
n
Ф ( ) , ( , , ) "...", ,
U === ер Хl, ... t Х п == .L.J aikXCXk
i, k
1
при
, ' + + "
u == Хlе. ... хпе п ,
причем переход от базиса е 1 , ..., е п 1\, базису e
, ..., e
дается
фОР.Аlула.ми (3). ТОсда
А' == С* АС.
(6)
4. PaHr билинейной и квадратичной формы
(билинейной и квадратичной функции)
РаН20М били/1,ейной (а также раН,20М квадратичной) формы Ha
зывается paHr ее матрицы. Одна и та же билинейная (квадратич
изя) функция Ф (u) в пространстве Ln предстаВ
ТIяется, в зависи
мости от выбора Toro или иноrо базиса, ра3
ПИЧНЫ
1И би
пинейными
(соответственно квадратичными) формами, матрицы которых свя
заны формулой (6)
3. Однако имеет место замечательный факт:
у всех этих матриц раиr один и тот же. Итак, имеет место
т е о р е м а 6. Все биЛU/1,ейные (все квадратичные) формы, пpeд
ставляющие в разлиЧflЫХ базисах пространства Ln одну и ту же
билинейflУЮ (соответствеН,но квадратиЧНУ10) функцию" определеННУJО
в этом пpocтpaн'cmвe" имеют один и тОПl
lCe ранс. ВсО естест..
веНNО Н,азвать раН20М cooпzeeпZCfi lвУ'0щей ФУНКI
uи.
Для доказательства этой теоремы достаточно убедиться в том,
что матрицы, образующие левую и правую части равенства (6)
3,
имеют один и тот же paHr. Так как при этом С и С* суть HeBЫ
рожденные матрицы, то достаточно доказать С.1Jедующее вспомоrа
тельное предложение:
т е о р е м а 7. Jl М/1,ожая nроизвольную матрицу А (слева или
сnрала) на невырожде/1,Н,УЮ квадратную матрицу Q, мы не меняем
ее раН2а.
Доказательство этой теоремы, как мы увидим, опирается
На следующее предложение, с доказательства KOToporo мы и
начнем.
PAHr БИЛИНЕАНОА И КВАДРАТИЧНОА ФОРМЫ
407
Т е о р е м а 8. РаН2 произведенuя матриц не превосходиm рШl2а
каждой tLЗ перемножаемых матриц.
Теорему 8 достаточно доказать для произведения двух матриц.
Итак, пусть
ан а12
a
!1 aZ2
аlр
а2р
I ы 1
В == I Ь 21
I . -
! Ь р1
b 12
Ь 22
b 1 k
b 2k
. . - Ь 1 q I
. . . b 2q
. . . . .1'
. _ _ ь pq I
А==
ан ai2
.а;.р .1 '
aтpi
Ь р2
bpk
I a
l. а т 2
с == АВ.
Тоrда
Cik == ail b lk +ai2 b lk + -.. +aipb pk .
(1 )
Записывая это равенство для данноrо k и любоrо i == 1, 2, ..., т,
видим, что k..й столбец матрицы С есть линейная комбинация
всех р столбцов матрицы А (с коэффициентами Ь lk, b 2k , _.., ь Pk)-
Это верно для каждоrо k, так что столбцы матрицы С являются
линейными комбинациями столбцов матрицы А.
Так как paHr матрицы равен максимальному числу ее линеЙно
независимых столбцов, то из только что сказанноrо вытекает,
что раиr маТРИllЫ С не превосходит paHra матрицы А.
Аналоrично (опираясь все на то же равенство (1)) мы дока-
зали бы, что paHr С не превосходит и paHra В. Теорема 8 доказана.
Теорема 7 является леrким следствием теоремы 8. В самом
деле, пусть А
матрица paHra (, состоящая из т строк и п
столбцов. Пусть Ql
невырожденная матрица порядка n, Q2
невырожденная матрица порядка т. Тоrда определены матрицы
С 1 == AQl И С 2 == Q2 A ; докажем, что их ранrи '1 и r 2 совпадают
с paHrCM r матрицы А.
Прежде Bcero по теореме 8 имеем
rl
r, '2
(.
Но
А == C 1 Ql 1 , А == Q;:IC 2
И, значит,
,
'1, r
'2,
Т. е. r === '1, r == '2- Теорема 7) а следовательно, и теорема 6-
доказаны.
408 ЛИНЕАНЫЕ. БИЛИНЕАНЫЕ И КВАДРАТИЧНЫЕ функции
5. СуtЦествование каноническоrо базиса для всякой
квадратичной и всякой билинейной функции
(<<приведение квадратичных форм к каноническому виду»)
Квадратная матрица
а 11 . .. О .
alk == О, если i =F k,
О · а пл
(1)
все элементы которой, не лежащие на rлавной диаrонали, равны
НУЛЮ t называется маt1zрицеu дuасонаЛЬНО20 вида или просто диа-
20нальной матрицей.
КвадратичнаЯ t а также билинейная форма, матрица которой
имеет диаrональный вид, называется ФОРЛ10Й каноническоzо euaa l
или просто канонической формой
или канонической записью (Ka
нонически.м представленueм) данной квадратичной функции или
квадратичной формы.
т е о р е м а 9. Для каждой квадратичной и для каJlCдой сим..
метричной бuлинеЙ1l0Й функции
определенной в пространстве Lп l
суи{ествует канонический базис
т. е. базис е 1 , ..., en
в ко/nором
данная фу/{"f(,ЦUЯ имеет каноническую запись.
При этом число отличных от нуля среди коэффициентов а 11 , ...
.. . t a'ln во всякой канонической записи равно paHry Функ
ЦИИ.
МЫ знаем, что каждаq симметричная билинейная функция
является полярной функцией оТ одной и ТОЛЬКО от одной KBaд
ратичной функции и что обе эти функции во всяком базисе имеют
одну и ту }ке матрицу. Поэтому достаточно доказать теорему 9
для квадратичных функций. 3амети:м прежде Bcero, что paHr MaT
рицы диаrональноrо вида (I)t очевидно, равен ЧИСJ1У отличных
от ну ля ее членов a 11 , ..., ап17. Поэтому, если квадратичная фун
кция В каком
нибудь базисе имеет каноническую запись, то число
отличных от нуля коэффициентов в этой записи равно раиrу
ФУНКЦИИ
второе утвеР}l{дение теоремы 9 есть следствие первоrо.
Переходим к доказательству перэоrо утверждения. Тривиальный
случай, коrда Ф (и) == О для всех u Е Lп, оставляем в стороне.
Пусть в пространстве Lп дана квадратичная функция Ф, за..
ПИСbJвающаяся в некотором базисе elt ..., е п в виде Ф (и)
п
== <р(х 1 , ..., Х п ) ==
alkXlxk для u == х 1 е 1 + ... +х",е",_ Пусть.
i, /1
!
б u б ' ,
наряду с азисом e!t .. ., е п , дан второи азис еl, . . ., e tl .
Ддя каЖДОI'О вектора u Е Lft имеем U == x1e 1 + . . . + хпе", == x
e
+ . . .
. .. + x
e
, причем KOOpДHH
"'Ы X 1t ..., Х Il И X
, ..., X
вектора u
б "
соответственно в азисах е 1 , . . ., ел и еl, ..., е п связаны
СУЩЕСТВОВАНИЕ КАНОНИЧЕСl(оrо БАЗИСА
409
формулами преобрззования координат:
п
Xk == 2: CkjXj,
/==1
det (Clj) =1= о.
(2)
Тоrда
n п
Ф (u) ==
ail
XIXk == 2:
i, k==1 i, k==1
, "
QikXiXk .
Базис еl, ..., е п и, следовательно, представление функции Ф в ви
п
де формы q> (Х 1 , ..., Х п ) == 2: alkXIXk считаем данными; задача
i,k::=.1
состоит В том, чтобы подобрать базис e
, ..., e
или, что то же
самое, формулы преобраэовзния леременных (2) таким образом,
чтобы матрица
. ,
,а н
А'==
,
а 1n
==С* АС
, ,
Q nt ... а nп
n
u Ф ' ( , ' )
I , I u
квадратичнои ормы q> Xt,..., Х п ==
aikXiXk, лредставляющеи
i, h == 1
функцию <]), в этом базисе имела диаrональный вид, т. е. чтобы
было ai'l == о д.пя любых i =f= k. Будем рашать эту задачу индук"
цией 1]0 числу переменных...... мы увидим, что все дело сведется
к простой алrебраической выклаДI<е]).
При п == 1 форма ер имеет вид ер (x 1 ) === а}}х 2 , и этот вид уже
является каноническим. flредположим, что теорема 9 доказана
для т < n. Докажем ее при т === n. Предположим сначала, что
n
В форме <р (Х 1 , ..., Х п ) ==
aikxiXk хотя бы один коэффициент вида
i. k =:: 1
aUt т. е. l{оэ:Р
рициент при квадрате одноrо из переменных, отли
чен от нуля. Без оrраничения оБLЦНОСТИ можем предположить,
что a 11 =1= о. Тоrда выражение
(а ll Х 1 +a 12 X 2 +... +а 1п х п )2 (3)
ан
является однородным мноrочленом второй степени, Т. е. KBaдpa
тичной формой от n переменных Хн ..., Х п , В которой члены,
содержащие X 1 , суть в точности те же, что и в форме <р (х 1 , ..., Х п ).
Поэтому разность
1
q> (x 1 , ..., Х n )
(a 11 x 1 +. . . + а 1п х п )2
ан
1) Излаrаемый ниже метод доказательства теоремы 9 принадлежит вели
хому французскому математику Лаrранжу (J. L. Lagrange, 17З
1813).
410 ЛИНЕйНЫЕ. БИЛИНЕйl-lЫЕ И КВАДРАТИЧНЫЕ ФУНI<ЦИИ
есть квадратичная форма уже от n
1 переменных Х 2 , ..., Х п ,
KOTOPYIO мы обозначим через <Рl (х 2 , ... t Х п ):
QJl (х 2 , ..., Х n ) == q> (X 1 , ... t Х n )
(a11X 1 +. . . + а 1п х п )2.
ан
существует линейное преоб..
в СИЛУ индуктивноrо предположения
разование переменных Х 2 , ... t Х п :
2 . .CJ.2
::''':
2:
: I
Х п == Cп
; +.
. +С пп X
,
С2:! ... С2:ж
*0,
(2n
1)
с п2 ... с пп
приводящее форму CPl (Х 2 , ..., Х п ) к каноническому виду
, ,2 + + ,,2
a2X
. . . апХп.
Поэтому имеет место равенство
q> (х 1 , . . . t Х n ) ==
(a 11 X l +. . . + a 1n x)2 + a
x;2 +. . . + a
X
2. (4)
ан
Теперь положим
X
== a11x l + a 12 x 2 +. . . + a1пx п ,
, I
а. ==
!
аl1
(5)
что ПОЗВОJlяет нам записать (4) в виде
( ) ' ,2 + ' ,2 + + ,,2
X 1 , ..., Х п == а 1 Х ! а;!х'А . . . апХ п
(6)
форма ер (X 1 , ..., Х п ) приобрела относительно переменных х;, ...
. . . t x
канонический вид; переход от переменных X 1 , ..., Х п К пере
" u
менным хl'...' Х I1 есть линеиное преооразование переменных
с невырожденной матрицей. В самом деле, разрешая (5) относи..
тельно Х 1 , получим
1 , а12 аlп
Х 1
Xl
X2
.. .
xn.
ан ан ан
(5')
Подставляя сюда вместо Х 2) ..., Х N ИХ выражения (2п
1) через
X
, ... t X
, можем
после приведения подобных членов....... перепи..
сать (5) в виде
' + ' + ' 1 О
Х 1 == C 11 X l C 12 X;l +. . . с 1n х п , Сll ==
=1= ,
ан
.
что вместе с (2n
1) дает нам искомые формулы преобраЗQвания
переменных
Х 1 == Cl1X
+ C12X
+. · · + ClnX
,
Х 2 == C22X
+. . . + C
пX
,
(2 п )
...........
Х п ==
Cп2X
+. . . + CllпX
СУЩЕСТВОВАНИЕ I<АНОНИЧЕСl(оrо БАЗИСА
411
с детерминантом
I С22 ... С2п
det С == С 1 1 ...... =#= о.
I Спа ... С пп
Итак, преобраЗ0вание (2 п ) приводит форму <р (X t , ..., Х п ) к KaHO
ническому виду (6) и решает, таким образом, поставленную задачу
в предположении, что хоть одно аи =1= о.
Остается рассмотреть случай, коrда все ан == о. Таким образом,
для всех отличных от нуля коэффициентов aik формы qJ (X 1 , . . . , Х п ) ==
п
":=:
alkXixk имеем i =1= k. Среди этих коэффициентов имеlОТСЯ
i, k == 1
отличные от нуля (иначе было бы Ф (u) == qJ (х 1) ... t Х n ) ==:; о
тривиальный случай, исключенный выше). Итак, пусть, например,
а12 =1= о.
Тоrда q> (х 1) .. ., Х п ) == 2а 12 Х 1 Х 2 + члены, каждый из которых coдep
жит хотя бы ОДно из переменных Ха, ..., Х п 1).
Сделаем преобразование
1, )
Xl==Xl
X
) !
' + '
Х 2 == Х 1 X
,
ХЭ
Хз' , (7)
Х п == .. .. · · X
: J
детерминант KOToporo есть
1
l О ... О
1 1 О ... О
1 1
1 1
О о 1... о == 1 1 == 2 =#= о.
о о о .'. 1
Преобразование (7) переводит форму (j) (х 1 , ... t Х n ) в форму
(j)'(X
, ..., X
)t которая состоит из 2a12(Xl
X
)(X
+X
), т. е. из
2a12X
2
2a]2x
2, и из членов, содержащих по крайней мере одно
, ,
из переменных хз, ..., Х n ; ни один ИЗ этих членов не может COKpa
титься ни С 2a12x
2, ни с 2a12X
')' поэтому форма <р (X
, ..., X
)
содержит x'i, с коэффициентом 2а 12 , отличным от нуля; знаЧИТ t
q>' (х;, ..., X
) по предыдущему приводится к каноническому виду
линейным преобразованием переменных x
,..., X
к каким
то
п
1) в самом деле, в форме
alkxixk членами, не содержащими ни одноrо
i, k == 1
из персменных Хз, ..., Х п , ЯВЛЯЮТСЯ лишь аllХТ' 2а12ХIХ2, а22 X
; в наших пред
ПОЛОА<.ениях ан =:; а22:=:: О И остается только 2a12xIX2t
412 ЛИНЕАНЫЕ. БИЛИНЕАНЫЕ И КВАдРАТИЧНЫЕ функции
новым переменным xi t ..., X
. Переход от первоначальных пере-
" " (
менных X 1t ..., Х п I{ переменным ХI, ..., Х п слаrаясь из двух
невырожденных линейных преобразований) является невырожден-
ным линейным преобрззованием, приводящим форму (j) (Хl ..., Х п )
к каноническому виду. Теорема 9 доказана.
3 а м е ч а н и е. Из доказательства теоремы 9 видно, что КВад-
ратичную форму с вещественными коэффициентами можно привести
к каноническому виду с помощью невырожденноrо линейноrо пре-
образования, которое имеет вещественные коэффициенты.
6. Нормальный вид квадратичной формы
Пусть квадратичная функция Ф (и) приведена к каноничес-
кому виду
r
Ф (u) == L allXt,
i
l
(1)
rAe a 11 , ..., a rr =F О, r
paHr а) (и). Если функция Ф (u) задана
в комплексном линеЙном пространстве Lп, то мы применяем линей..
ные преобразования с комплексными ко
ициентами.
Пусть
YI == V
Х/,
Yl
Х"
если
если
" }
t >r.
(2)
Тоrда. Ф (u) может быть представлена в виде
Ф (u) == y
+y
+
..+y
,
(3)
rде Yl, ..., Yr, Yr+ l' ..., Уп
новые координаты вектора u. Bыpa
жение (3) называется нормальным видом квадратичной функции
Ф (и). Принимая во внимание, что l1реобраЗОВс1ние (2) невырож-
дено, мы получаем, что
Всякая квадратичная функция в комплексном пространстве
с ПОМОЩЬЮ HeBblpO
lCaeflHOZO лин.ейноzо nрео6разован.uя может быть
прuведен.а 1(, нормальному виду (3).
Рассмотрим теперь квадратичную функцию в вещественном
линейном пространстве и оrраничимся вещественными линейными
преобразованиями. Так как среди коэффициентов аll MorYT быть
отрицательные, положим
YI == v !аи/ XI, если
" }
Yl == Xj, если t > '.
Если первые k коэффициентов аи > О, а остальные коэффициенты
аи < О, ТО из (1) и (4) получаем
() ()I + 2') .)
Ф U == и!
C. . · Yk
Yk + 1
. ..
у;.
(4)
(5)
ЗАКОН ИНЕРЦИИ для КВАДРАТИЧНЫХ ФОРМ
413
Выражение (5) называется нормальным видом функции Ф (u)
в вещетвенном пространстве. Итак, квадратичная функция 8 веще
cmвeHHOм, пространстве с ПОМОЩЬЮ flевырождеННО20 вещесmвеН,НО20
лuнейНО20 nреобразования можеtп быть приведена к Н,ормаЛЫiОМУ
виду (5).
В следующем параrрафе будет доказано, что в вещественном
линейном пространстве число положительных и число отрицатель
ных членов в выражении (5) не зависит от способа лриведения
квадратичной функции Ф (u) к нормальному виду.
7. Закон инерции для вещественных квадраТИЧНblХ форм
Пусть Ф (и)
квадратичная функция в вещественном прост
ранстве Ln. Рассмотрим в Lп базис е 1 , ..., e пt в котором Ф (u)
записывается в виде квадратичной формы нормальноrо вида
Ф(u)==ер(Уl' ..., Уп)==уi-1
...+Уk
Уk+1
...
Y
. Числор==k по
ложительных и число q ===,
k отрицательных членов в этой Форму
ле назывзеrС51 соответственно положurпельныМ, и отрицательным
индексом формы ер. Разность (J
р
q ыежду ПОЛО}{{lIтельным и
отрицательным индексами называется cucHalпypou квадратичной
формы ер.
т е о р е м а 10. ПОЛОЖUlТlельный и оmрuцаrrlелыlйй индексы 8еще
ственной квадратичной формы qJ не зависит от выбора базиса,
в !(,отором она принимает нормальный вид.
Д о к а 3 а т е.П Ь с т в о. Пусть е;, ..., e
еще оди н ба зи с в L п ,
В котором функция Ф (u) принимает нормальный вид
<1 ) ( ) ., + + .).") :)
U == Zj . . . z;"
Zin +)
. . .
z;.
(1 )
Здесь (Zl' ..., Zn)
координаты вектора u в базисе е;, ..., e
.
Предположим, что k =1= т. Без оrраничения общности можем счи...
тать, что k> т. Пусть С == (Clj)
матрица преобразования коор-
динат при переходе от базиса {e 1 , ..., е 1l } к базису {e
. ..., e
}.
Имеем
п
Z, ==
C"Yi'
i == I
k
1, ..., п, det "С;, " =1= О.
(2)
Подставим выражение (2) в формулу (1). В результате мы полу-
чаем норма.пьныiI вид ФУНI(ЦИИ Ф (и) В переменных Yl' ..., Уп,
Т. е. и меем тождество
.) + + <)., .)., + ..... 2
Zj . . . Z,n
Z;n + I
· · ·
Zi- == Yi . . . + У;;
Y"k + 1
. . .
Yr.
(3)
Рассмотрим систему однородных линейных уравнений
с ilY 1 +. . . + с i kY k == О J j == 1, ..., т.
(4)
414 ЛИНЕ1'IНЫЕ, ВИЛИНЕйНЫЕ И КВАДРАТИЧНЫЕ ФУНКЦИИ
в этой системе число неизвестных k больше числа уравнений т.
Следовательно, система (4) имеет ненулевое решение У1, ..., yt.
Подставим это решение в тождество (3), положив ДОПО,,'Iнительно
У О
y o
o
k+l
...
n
.
Тоrда zi+.. .+Z
Z
+I
...
Z
== (у1)2+.. .+(y
)2. ОднаJ{О в этом
равенстве д.ПЯ 1
i
m на основании (2)
Zi === Cl 1 Y1 +. . . + CtnY,
== О,
поэтому
( 0 ) 2 + + ( (1 ) 2
2 2
У. ... Yk
Zт
l
...
Zr.
(5)
Левая часть выражения (5) CTporo положите.пьна t а правая либо
отрицательна, либо равна нулю. Получившееся противоречие
показывает, что k не мvжет быть больше т. А.налоrично локазы
вается, что k не может быть меньше т. Следовательно, k == т,
что завершает доказательство теоремы.
CJI ед ст в И е. Си2натура вещественной квадратичной формы <р
не зависит от выбора базиса, в котором фор"иа Ф имеет нормаль..
ный вид.
8. Положительно определенные квадратичные
функции и формы
В этом параrрафе мы будем рассматривать только веществен-
ные пространства.
ОлредеJ1ение 5. Квадратичная функция Ф(u) и представ..
ляющая ее в любом данном базисе квадратичная форма
п п
ер (х 1 , ... t Х n ) ==
aljXiXi
i==1 ;==)
называются положиmелыl,О определенными, если для Лlобоrо век..
тора u =1= о значение функции Ф (u) положительно. Итак, квад-
ратичная форма
п n
aljXIX,
i==l 1'==1
положительно определена, если она обращается в нуль, лишь
коrда обращаются в нуль одновременно все переменные X 1 , ..., Х 1l ,
И положительна, если значение по крайней мере одноrо перемен..
Horo отлично от нуля.
П р е д.п о ж е н и е. Если квадратичная функция Ф (u) поло..
:жиmельно определена, то во всяком представлении ее в виде
ПОЛОЖИТЕЛЬНО ОПРЕДЕЛЕННЫЕ КВАДРАТИЧНЫЕ ФУНКЦИИ 415
квадратичноЙ формы
п п
Ф (u) ==
aljxlXj
i==l i==1
все коэффициенты ан при квадратах nеременных положительны.
В самом деле, если положим a 11
О, то, полаrая
u == е 1 == 1 . е 1 -f
о . е 2 +. . . + О . е п ,
имеем
ф (e 1 ) == ан ::::;; О
вопреки предположению. В частности, положительны все коэф",
фициенты Л 1 , Л 2 , ..., Л п В каноническом представлении
Ф I).'Z 'l,z
(и) == !\,lХl +.,. + f\,nXп
положительно определенной функции Ф (u). Обратно, из TOrO,
что все "'1' ..., Л п положительны, очевидно, следует, что Ф (u) > О
для любоrо u==x;e;+...+x
e
, т. е. что функция Ф(u) положи..
TeiIbHO опредедена.
Итак, имеет место
т е о р е м а 11. ДЛЯ тосо чтобы квад ратuчная функция Ф (u)
(и квадратU1/Ная форма . t aIjX/Xj) в пространстве L n была nо-
t, 1==1
ложительно определенной, необходимо и достаточно, чтобы ее
раН2 и си2напzура совпадали с размерностью пространства L n .
3 а м е ч а н и е. Дискриминант положительно определенной
квадратичной формы
'1 п
2: aijxlXj
i==l i==l
положителен.
Так как при переходе от одноrо базиса к друrому дискрими
нант квадратичной формы сохраняет свой знак, то достаточно
рассмотреть дискриминант
/"'1 }"2 . · . Л п
каноническоrо представления данной положительно определенной
квадратичной формы, который (так как все ЛI > О), очевидно,
по
Т]ожителен.
Теорема 12 (критерий Сильвестра). Для положи..
тельной определенности квадратичной фующиu Ф (u) (и формы
\
q> (Х) == . i: aljXjXj) необходимо u достаточно, чтобы детерминанты
./
1
всех еЛCIOftbt.t .миноров ее Marnpul4bl были nоложип,ельны.
416 ЛИНЕйНblЕ. БИЛИНЕйНЫЕ И КВАДРАТИЧНЫЕ ФУНКЦИИ
Доказательство. Необходимость. Предположим, что
форма ч' (х) положительно определена. Возьмем произвольный
базис е 1 , ..., е п пространства L п и обозначим через L
линейную
оболочку базисных векторов e 1 , ..., ek, 1
k < n. Рассмотрим
нашу квадратичную форму на подпростраНСТВаХ LZ. Если х Е L'k,
то Х::::::= (х 1, ..., Х k , О, ... t О) t
k
q> (х) == .
a'JXIX'.
. J == I
Форма q> (х) на подпространстве L
положительно определена, так
как она положительно определена на всем пространстве Ln. Сле...
довательно, дискриминант Ak формы q> (х), рассматриваемой на
L
, положителен:
ан ... а. k
k ::::::=
>0,
akl ... akk
но дискриминант
k является детерминантом rлавноrо минора
порядка k, 1
k
п, матрицы квадратичной формы !р (х). Необ...
ходимость условия, тем самым, доказана.
Достаточность. Пусть все
k>Ot 1
k
n. ИСХОДЯ из
б u б ' ,
аэиса е 1 . ..., е n , построим новыи аэис е., ..., е п , в котором
qюрма ч' (х) имеет канонический вид. С этой целью положим
, )
е. == сне},
е; == С 21 е 1 + с 22 е 2 . I
;........ }
e
.
kl.el.
J/2:.
' : · :.C
k
k.. j
е п == с п1 е 1 + с п2 е 2 +. . . + сппе n .
(1)
Для Toro чтобы получить каноничес]{ий вид l{вадраТИЧIIОЙ qюрмы <р,
изображающей квадратичную функцию Ф, достаточно для любоrо
k, 1 < k
n, выполнить условия
'I'(ei, ek)==atk==O, i==l, ..., k
l, (2)
rде 'ф
полярная билинейная функция, соответствующая квадра-
тичной функции Ф. Тоrда коэффициенты akl вследствие симмет-
ричности матрицы квадратичной формы также обратятся В нуль
и отличными ОТ нуля окажутся лишь коэффициенты при квадра...
тах числовых aprYMeHTOB. Для выполнения условий (2) достаточно
потребовать, чтобы
'l' (el, ek) == О, 1
i
k
1 J k == 1, ..., n. (3)
ПОЛОЖИТЕЛьно ОПРЕДЕЛЕННЫЕ КВАДРАТИЧНЫЕ функции 417
Действительно, в этом случае
'у (ej, e
) === '1' (Cl 1 e 1 +. . . + CUel, ek) ==
==Cl 1 '1' (e 1 , ek) +.. '+СIl'l! (el, ek) ==0"
Переходим к построению базиса e
, ..., e
. Для упрощения BЫ
кладок прибавим к условиям (3) дополнительное условие
'1' (ek, ek) == 1. (4)
Пусть k == 1. Тоrда условия (3) исчезают и о:тается лишь уело..
вие '1' (е 1 , е;) == 1, из KOToporo получаем
1
С 11 ==
·
ан
Если положить
o == 1, то С 11 можно записать в виде
L\o
С 11 == L\1 ·
Предположим теперь, что мы уже определили все коэ:f>фициенты
C/j, входящие в первые k
1 строк уравнений (1). Для нахожде-
ния коэффициентов Ck}, 1
j
k, получаем систему уравнений
Ч'(е 1 , ek)==O, ..., 'Y(ek
l' ek)==O, 'I'(ek' ek)==I. (5)
Эту систему можно представить в виде
a 11 c kl + a 12 c k2 +. . · + QIJlCkk == о,
......................
ak
l, l C kl + ak
l, 2 C k2 +. · · + ak
l, JlCkk
О,
akl c kl + ak2 c k2 +. . . + QkkCkk == 1.
Детерминант системы (6) равен
k и отличен от нуля в силу
условия теоремы. Следовательно, существует единственное реше
иие Ckl, ..., Ckk этой системы, представляющее искомые коэффи...
циенты.
Покажем теперь, что преобразование, задаваемое формулами (]),
невы рождено. Для этоrо вычислим, исходя из системы (6), коэф-
фициент Си. Применяя правило Крамера, получим
ан ... аl. k
l О
1 ............ L\k
l
Ckk == J1 k ak
l, 1 ... ak
l. k
l О
.
Qkl ... ak, k
l 1 k
(6)
Учитывая, что матрица преобразования (1) треуrольная, вычислим
ее детерминант d:
d L\o L\l L\п
l 1
=== С 11 С 22 · · · С пп == L\l · L\2 . · .
L\n ·
Следовательно, d =1= О II nреобразование (1) невырождено.
418 ЛИНЕйНЫЕ. БИЛИНЕЯНЫЕ И КВАДРАТИЧНЫЕ функции
ВЫЧИСЛИМ теперь коэффициенты квадратичной формы в базисе
e
, ..., e
. Достаточно вычислить лишь диаrональные коэффици",
енты, так как остальные равны нулю по построению базиса
, , И
е., ... t е п - меем
akk == 'у (ek, ek) == '1' (Ckl e l +. . . + Ckkek, ek) ==
== Ckl Ч' (e 1 . ek) +.. . + Ckk Ч' (ek. ek) == Ckk'l' (ek. ek) == Ckk ==
l .
Следовательно, в этом базисе
<р (х') ==
: (х;)2 +
(x
)2 +.. . +
:l (x
)2.
Если х':;Ь о, то хотя бы одна из координат xj * О. и поэтому
q:> (х') > о. Теорема доказана.
r л А В А xv
КАНОНИЧЕСКАЯ ФОРМА ЛИНЕАноrо ОПЕРАТОРА
1. Жорданова форма
В rлаве XIII мы установили, что при любом выборе базиса
в пространстве L линейному оператору Q/t: L --+ L, действующему
в этом пространстве, соответствует I{вадратная матрица А, при..
чем при переходе к друrому базису матрица А заменяется подоб-
ной еЙ матрицей А' == S
l AS t r де S
матрица перехода .
В приложениях .ТНlнейной алrебры важное значение имеет
задача о нахождении TaKoro базиса, в котором матрица А опера..
тора Q/f имела бы максимально простой вид.
Выясним прежде Bcero, коrда матрица оператора
диаrо..
нзльна.
т е о р е м а 1. Матрица оператора Q/{: L
L дuаzональна
тozaa и только т02дa
КОсда базис (e 1 , о.., е п ) пространства L
состоит из собственных векторов wt.
Д о к а 3 а т е л ь С Т В о. Пусть {е 1 , ..., е п }
собственные векторы
оператора wt. Тоrда
еА' ei === Лiеi,
i == 1, о.., п,
и, следовательно,
l i ч 0...0
А == о л'2. .. о
10"0 .....
Обратно, если матрица А оператора
в базисе (е 1 , ..., е п ) диа-
rональна, т. е.
I ан О ... о
А == о а22'" о
......4. '
О О ... а пп
п
то eA'el ==
a;iej == aиel, Т. е. векторы el являются собственными
j===t
векторами оператора
. Теорема доказана.
420
КАНОНИЧЕСКАЯ ФОРМА ЛИНЕflноrо ОПЕРАТОРА
Как уже укаЗЬJваJ10СЬ в rлаве XIII, над полем вещественных
чисел оператор может вообще не иметь собственных векторов и,
тем самым, базиса из собственных векторов. Над полем комплекс..
ных чисе.п любой оператор имеет собственные векторы, однако
число линейно независимых собственных векторов может быть
меньше размерности простраНСТЕао Значит, и над полем комплекс..
ных чисе
п базис из собственных векторов существует не всеrда.
В последующих параrрафах этой rлавы мы изучим вопрос о нахож-
дении в классе подобных матриц матрицы наиболее простоrо вида.
Из сказанноrо выше очевидно, что решение этоrо вопроса суще
ственно зависит от поля k, над которым определено линейное
пространство и, тем самым, в котором берутся коэффициенты
матриц.
В оставшейся части rлавы ХУ мы будем преДПОJ1аrать, что
k ==
.
Пусть L
п
MepHoe комплексное пространство с базисом
е, . о ., е п . Рассмотрим в этом базисе оператор Р, задаваемый
формулами
Ре1 == ЛеJ.'
Ре 2 == е 1 + ле 2 .
Рез == е2+ Ле з,
............
Реп ==
en
1 +Ле п ,
л Е (1).
Матрица этоrо оператора в базисе еl, о о о, е п обозначается через
J п (
,,) И называется n
мерн'ОЙ жордаяовой /(леmкой, соответствую-
щей числу Ло Итак,
л, 1 О О 0'0 О О
О л 1 О ... О О
о о л 1 о.. О О
JпСЛ)==
...........
о о о о ... л 1
О О О О ... О л
На r
1Jавной диаrонали жордановой клетки стоят числа Л, на парап-
лельной ей соседней сверху диаrонали --- единицЫ, все остальные
элементы жордановой клетки
нули.
О л р е д е л е н и е 1. Матрица А имеет каноническую жорда-
нов!l форму, если ВДОЛЬ ее rлавной диаrонали расположены жор-
А
МАТРИЦЫ. ЭЛЕМЕНТАРНЫЕ ПРЕОВРА30ВАНИЯ
421
даНОБЫ клетки, а все остальные элементы матрицы А........ нули:
J k1 (1 1 ) О
J k. ("-2)
А==
.
.
о
J k (1$)
s
При ЭТОМ не исключается возможность, что k , == k, или Л, == Лj
для некоторых номеров i, j.
Ниже мы докажем, что в комплексном линейном простран-
стве L для каждоrо JIинейноrо оператора
существует базис,
в котором матрица оператора имеет каноническую жорданову
форму. rlри этом с точностью до перестановки жордановых кле-
ток каноническая форма матрицы единственна.
2. А-матрицы. Элементарные преобразования А-матриц
О п р е Д е л е н и е 2. л"маmрuцей называется квадратная матрица
р (л), коэффициенты которой суть комплексные полиномы неза..
БИСИМОЙ переменной л. Максимум степеней полиномов, являю-
щихея коэффициентами л
матрицы Р (л.), называется ее степенью.
Очевидно, что любая л-матрица Р (л.) степени , может быть
представлена в виде
р (л) == РО/../ +Рlлr
l +.. .+Pr. РО =f=:O,
rAe Р О , ... t Pr
квадратные матрицы с комплексными коэффи-
циентами той же размерности, что и Р (л).
Если Q (л) == Qол/ + Q1".,s
1 +... + Qs, Qo =t= О,
также л
маТрИII.а,
то р (л)
Q (л) тоrда и только тоrдв, коrДа r == s и l(оэффициенты
при соответствуюших степенях л равны, т. е. Р,== Qlt i === 1, 2, ..., r.
Если det Qo *- О, то степень произведения Р (л) Q (л) л
матриц
р (л) и Q (л) в точности равна r+s, поскольку коэффициент при
стаРlllей степени л r + s равен произведению матриu PoQo, а PoQo
не может обратиться в нуль при условии РО =1= О и det Qo =1= о.
Однако если детерминанты det Ро и det Qo коэффициентов при
старших степенях равны нулю, то степень произведения может
оказаться меньше r + s.
Пусть, например,
р(л)==
Лtl
H==[I
llл+
I
Q (л) ==
л
1
==
л +
1.
и
Тоrда
11 л + 1 о 11 11 1 о
11 л + 1 о 11 fl 1 о
"1 О
Р(л)Q(л)== о 1
О "-+111==
9 л+l
==
O l
л'+IО 1
.
422 КАНОНИЧЕСКАЯ ФОРМА ЛИНЕАноrо ОПЕРАТОРА
Степень произведения Р (A)Q (л) может уменьшаться более чем
на единицу, что видно из слеДУЮlцеrо примера. Положим
р (л) == 11
11 == 11
11 л +
11,
Q(л)==II
i
==
л+
.
Тоrда Р (л) Q (1.) ==
11.
Наиболее важным примером л
матрицы является характери
стическая матрица А
лЕ произвольной квадратной матрицы А.
Очевидно, что степень А
лЕ равна 1.
Для л"матриц, аналоrично матрицам с числовыми коэффици
ентами, определено понятие детерминанта. Однако, в отличие
от числовых матриц, детерминанты л.
матриц принимают значения
в кольце комплексных полиномов от А.
Например, детерминантом матрицы А
АЕ является xapaKTe
ристический полином f А (л) == det (А
лЕ) матрицы А.
Назовем л
матрицу Р (л) обратuмой, если существует такая
л.
матрица Q (л)t что Р (л) Q (л) == Q (л) р (л) === Е. Из этоrо определе
ния следует, что det Р (л). det Q (л) === 1, т. е. что детерминанты
det Р (Jw) и det Q (л)
полиномы нулевой степени (комплексные
числа). Верно и обратное утверждение, если det Р (J..) Е ([),
det Р (А) =1= О, то л
матрица Р (л) обратима (докажите!).
О п р е Д е л е н и е з. Обратимая л
матрица называется эле.мен
тарной.
Оп р ед е л е н и е 4. Элементарными nреобразованuямu л
матрицы
А (л) == (aij (л» называются операции над строками и столбцами
матрицы А (л) следующих типов.
Тип 1. Операция прибавления к i
й строке (столбцу) матриuы
А (л) j
й строки (столбца)t умноженной на некоторый полином р (л).
Тип 11. Операция перестановки двух строк (столбцов).
Тип 111. Операция умножения строки (столбца), на некоторое
число k =1= о.
Эти преобраЗ0вания можно представлять себе как умножение
л
матрицы А (л) на некоторые подходящие элементарные матрицы.
Тип 1. Обозначим через Ei} квадратную матрицу порядка п,
у которой на пересечении i
й строки и j
ro столбца стоит еди-
ница, а все остальные элементы нулевые.
Положим P1;===E+p(A)EIj, rде i=l=j и р(л)
полином. Тоrда
det IIPijll == 1 и
РцА (л.):== (Е + р (л) E ij ) А (л) == А (л) + р (л) Е I1 А (А) ===
==
арq(л)Ерq+р(л)
аiq(л)Еiq.
P.Q Q
Следовательно, РuА (л) получается из А (л) прибавлением к i
й
НОРМАЛЬНАЯ ФОРМА "'
МАТРИUЫ
423
строке J-и строки, умноженной на р (л). Аналоrичная операция
на столбцах эквивалентна умножению матрицы А (л). справа
на PJl8
Тип 11.
ПустьQtj===Е
Еil
ЕJj+Еlj+Еll, i=f=j. Тоrдаdеtl!QIАI == (
l)i+J
И QijA (л) ==
a pQ (л) Е pq
а,; (л) E 1q
p,q q
.......
ajq (л) E jq +
aiq (л) E 1q +
al q (л) EJq.
q q q
Таким образом, матрица QijA (л) получается из А (л) перестанов...
кой i
й и j
й СТрОК. Аналоrично матрица А (л) Qlj получается
ИЗ А (л) перестановкой i
ro и j
ro столбцов.
Тип 111. Эrо преобразование задается умножением слева (справа)
на матрицу
R==E+(k
1) Err,
rде r
номер строки (столбца). Обратные матрицы к матрицам
элементарных преобразований равны
Pi/ == Е
р (л) Ец, Qi/ == Qil' R
l == Е + (k
l
1) Err.
3. Нормальная форма л-матрицы
О n р е Д е л е н и е 5. л-матрица В (л) называется ЭКiJuваленmной
л-матрице А (л), если матрица В (л) получается из А (л) с помо
LЦЬЮ конечной последовательности элементарных преобразований.
Любая л-матрица В (л), эквивалентная матрице А (л)t имеет вид
В (л)
р (л) А (л) Q ( л),
rде Р (л) и Q (л)
произведения Эиlементарных матриц. ПОСКОЛЬКУ
матрицы, обратные к матрицам элементарных преобразований,
элементарны, то матрица А (л) эквивалентна матрице В (л). Кроме
TO]
O, если л-матрица А (J.) эквивалентна ",,
матрице В (л), а В (л)
эквивалентна л
матрице С (л)t то А (л) эквивалентна С (л). Таким
образом, введенное отношение на множестве л
матриц фиксиро"
BaHHoro порядка п является отношением эквивалентности.
О п р е Д е л е н и е 6. Назовем раН20М л
матрицы А (л) порядок
максимальноrо минора, детерминант KOToporo является ненуле...
БЫМ полиномом от л.
л е м м а. РаН2 л
матрuцы А (л) не uзменяеfilСЯ при элементар...
ньа nреоб разоваflUЯХ.
Д о к а з а т е л ь с т в о. Если det Р =1= О, то по теореме о раиrе
матрицы А (л) Р иРА (л) имеют одинаковый paHr.
Л е м м а. Наибольшuй общий делитель элеменmов л-матрицы
н.е меняется при элементарных nреобразованuях.
424 КАНОНИЧЕСКАЯ ФОРМА ЛИНЕАноrо ОПЕРАТОРА
Доказательство немедленно следует И3 определения элементар
ных преобразований.
т е о р е м а 2. Любая л-матрица А (л) ранеа , элементарными
преобразованиями может быть nриведена к дuа20нальному виду
1
) О
а2 (Л)
р (л) А (л) Q (л) ===
.
.
о
о
(1)
t:l- r (л)
о
причем коэффициенты при старших степенях полиномов ai (л)
равны 11 и каждый полином ct,i (л) является делителем Cl/+ 1 (л),
. . ., fY.. r (Л), i == 1 , 2,. . . t ,
1. Здесь Р (л) u Q (л)
мат рицы
элементарных nреобразований.
Дuаzональная л-матрица (1) назыlаетсяя нормальной формой.
Д о к а э а т е л ь с т в о. Покажем прежде Bcero, что если элемент
матрицы А (л) минимальной степени т не является делителем
всех элементов А (л), то А (л) эквивалентна матрице, минимальная
степень элементов которой меньше т. Пусть a pq (л)
элемент
матрицы А (л) с минимальной степенью т. Предположим, что
a pQ (л) не является делителем элемента apl (л) для HeKoToporo i,
тоrда мы можем положить
apl (л) == ь (л) a pq (л) + a
i (л),
rде степень полинома a
i (л) cTporo MeHы1ee т. Вычитая из i
ro
столбца q-й столбец. умноженный на Ь (л), мы получим эквива-
лентную л-матрицу, на пересечении р
й строки и i-ro столбца
которой находится элемент a
i (л) стелени, меньшей чем т. Те }ке
самые рассуждения применимы R случае, если a pQ (л) не является
делителем любоrо элемента al q ( л.) из q- ro столбца.
После конечноrо числа таких преобразований мы получим
матрицу. у которой элемент минимальной степени, скажем, эле
мент kpq (л). является делителем всех 'элементов, расположенных
в той же самой строке и том же самом столбце. Однако поли-
ном kp (л) может не быть делителем иекотороrо друrоrо эле-
мента k ii (л). Если это обстоятельство имеет место, рассмотрим
элементы kр/(Л) ==с(л) kр!/...(Л) , k,q ('А) ==d(л)k рq (л). rде с(л) и d(л)
некоторые ПО.пиномы. 11рибавляя к j-MY столбцу q
й столбец,
умноженный на 1
с (л), получим следующие элементы, стоящие
на местах с координатами (р, j) и (i. j):
k
j (л) == k pj (л) + (1
с (л) kpq (л) === kpq (л),
k 1i (л) == k ij (л) + (1
с (л» k 1q == k ij + (1
с (л» d (л) kpq.
Если степень элемента ki/ (л.) не меньше степени элемента kpq (л) ===
== k
j ('А), то k
1 СА) имеет минимальную степень и не является дели..
НОРМАЛЬНАЯ ФОРМА А-МАТРИЦЫ
425
телем элемента k 1j (л), находящеrося в том же самом столбце.
В этом случае минимальная степень может быть уменьшена спо..
собом, списанным выше. Итак, если kpq (л) не является делителем
HeKoToporo элемента k ij (л), то исходная л
матрица эквивалентна
матрице, минимальная степень элементов которой меньше мини-
мальной степени kpq (л).
Описанный выше процесс сопоставляет матрице А (л), элемент
минимальной степени т которой не является делителем всех эле-
ментов, эквивалентную матрицу А' (л), минимальная степень эле-
ментов которой меньше т. Если элемент минимальной степени
матрицы А' (л) не является делителем всех остальных ее элемен-
тов, процесс повторяют снова. Так как каждый шаr понижает
минимальную степень, то через конечное число шаrов мы полу.
чим матрицу В' (л) == 1I b;j (л) 11, эквивалентную А (л), в которой
элемент минимальной степени делит все остальные элементы. Пере..
ставляя строки и столбцы матрицы В' (л), можно добиться Toro,
что минимальный элемент будет стоять в левом верхнем уrлу
матрицы. Положим b
l (л) == а 1 (л), тоrда b
l (л.) == "/1 (л) b
1 (л), Ь;l (л) ==
== 8j (л) b
l (л). Вычитая первый столбец, умноженный на "/l (л), из
i
ro столбца, и первую строку t умноженную на 8} (л), из j-й строки
(i, i == 2, 3, ..., п), мы превратим все элементы первой строки и
первоrо столбца, кроме b;t (л), в нули. Следовательно, мы полу-
чили
квивалентную матрицу
(1,1 (л)
О
В (л) == о
о о
Ь 22 (л) ь 2з (л.) ...
Ь З2 (л) Ь З3 (л)
.. .
о
Ь 2п (л)
Ь Зn (л) ,
..................
о Ь п2 (л.) Ь пЗ (л) ... Ь пп (л)
в которой (Хl (л) делит все полиномы blj (л). Коэффициент при
старшей степени л полинома (Хl (л) может быть сделан единицей
при помощи преобразования TpeTbero типа.
Доказательство теоремы теперь может быть леrко получено
индукцией по порядку n матрицы А (л). Для л-матриц порядка 1
теорема тривиальна. Предположим, что теорема верна для любых
л-матриц порядка п
1. Тоrда матрица, образованная элемен-
тами b'j (л), i, j == 2, 3, ..., п, может быть элементарными "ре-
образованиями приведена к диаrональному виду
(1,2 (л)
<Хз (л.) О
..
-.
<х в (л) О ,
О ..
е.
О
rде
(л), ..., a s (л) удовлетворяют всем условиям теоремы.
Поскольку при элементарных преобразованиях наибольший общий
426
КАНОНИЧЕСКАЯ ФОРМА пИНЕяноrо ОПЕРАТОРА
делитель л
матриuы не изменяется, то все ПОЛИНОМЫ
(л), ...
..., rLs (л) делятся на
(л).
Кроме тoro, элементарные преобразования, превращающие
матрицу
bц (л)!I, i, i == 2, 3, ..., n, в диаrональную матриuу,
являются элементарными преобразованиями матрицы В (л), в кото-
рой преобразуются .,1Jишь последние п
1 строка и п
1 столбец.
Поскольку первая строка и первый столбец матрицы В (л) нуле-
вые (кроме элемента а 1 (л), то эти элементарные преобразования
не изменяют первой строки и первоrо столбuа. Так как элемен-
тарные преобразования сохраняют paHr '.
матрицы, то s == r и,
следовательно, А (л) приведена к требуемому виду. Теорема
доказана.
Из доказательства теоремы 2 леrко извлекается практический
способ для приведения л
матриuы к нормальной фJрме. Для этоrо
нужно, пользуясь элементарными преобразованиями, сначала
уменьшить степень полинома, стоящеrо в первой строке и первом
столбце, и обратить в нуль остальные элементы первой строки и
лервоrо столбца. Затем применяем тот же способ к оставшемуся
минору и т. д.
Из теоремы 2 вытекает, что каждый класс эквивалентных
1
матриц содержит по крайней мере одну л"матрицу, имеющую
нормальную диаrональную форму. Покажем теперь, что такая
матрица в каждом классе эквивалентности единственна.
О п р е Д е ,п е н и е 7. Полиномы а[ (л), i == 1, ..., " называются
инвариантными М,ножителями л"матрицы А (л). Обозначим через
Ds ('А) наибольший общий делитель детерминантов всех миноров
порядка s л"матрицы А (л) с коэффициентом при старшей степени ]""
равным 1. Элементарные преобразования типа 1 либо не изменяют
данный минор, либо лревращают ero в сумму исходноrо минора и
HeKOToporo минора Toro же порядка. Преобразования типа 1 1 по
просту переставляют миноры данноrо порядка друr с друrом, а
преобразования типа 111 умножают данный минор на константу.
отличную от нуля. Следовательно, эквивалентные матрицы име-
ют одинаковые множители Ds (л). Принимая это во внимание,
мы немедленно получаем из диаrональной формы л"матрицы,
что
Ds (л) == а 1 (л) а 2 (л) .. . ct s (л), s == 1, ... t r,
Ds==O. s>r.
D $ (л.)
Следовательно, c%s (л) == DS
l (л.) .
Вышеизложенные результаты можно выразить следующим об..
разом:
т е о р е м а 3. Две 'Л"матрицы эк,вивалентны тО2да и только
тоеда, КО2да они имеют одинаковые инвариантные множители.
Таким образом, Мbl доказали,. что в каждОAt классе ЭК8ивале,."тНblХ
НОРМАЛЬНАЯ ФОРМА "-.МАТРИUЫ
427
л-.м.аmрuц существует и единственна .матрица, имеющая нормаль-
ную дuаеональную форму.
В с.пучае л-матриц nepBoro порядка теорема 3 может быть
существенно усилена.
т е о р е м а 4. Если Ал. + В и Сл + D
невырождеННЬte л-маmрицы
nереО20 порядка, имеющие одинаковые инвариантНЫЕ множиmели,
и если det (С) =1= О, то СУUlf!сmвуют такие невырождеННblе числовые
.матрицы Р и Qt что
р (Ал+В)Q ==Сл+D.
д о к а з а т е л ь с т в о. По теореме 3 существуют такие эле-
ментарные л-матрицы Р (л.) и Q (л), что
р (л.) (Ал + В) Q (л) == Сл +D. (2)
Так как det (С) =;6 О, то существуют такие л-матрицы P 1 (л) и Ql (л.)
И числовые матрицы Р и Q, что
Р (л) == (С'Л+D) Рl(Л) + Р,
Q (л) ==Ql (л) (Сл+D) +Q.
Подставляя выражение для Р (л) и Q (л) в уравнение (2), получим
Сл+D== р (Ал+В) Q+(Сл+D) Р 1 (л) (Ал+В) Q+
+ р (Ал+ В) Ql (л) (Сл +D)+ (Сл +D) Р 1 (л) (Ал+ B)Ql (л) (Сл +D).
(3)
Поскольку
(Ал + В) Q (л.) == p
l (л) (Сл + D),
Р (л) (Ал + В) == (Сл + D) Q
l (}
),
равенство (3) может быть записано следующим образом:
р (Ал + B)Q === [Е
(Сл +D) (P 1 (л) p
l (л) +
+ Q
1 (л) Ql (л)
р 1 (л) (А л + В) Ql (л)] (Сл + D) ==
==[1
(Сл+D)R(л)](Сл+D). (4)
Здесь R (л)== Рl (л) . p
l (л).t- Q
1 (л.) Ql(Л)
Рl (л) (Ал + В) Ql (л). Если
R (л) * О, то, так как det (С) =1= Ot степень правой части
равенства (4) по меньшей мере равна 2, в то время как степень
левой части равна 1; следовательно, R (л) == О, т. е.
р (Ал+ В) Q == Сл+D.
Так как л
матрица C')\,+D невырождена, то матрицы Р и Q также
невырождены. Теорема 4 доказана.
Важным частным случаем теоремы 4 является тот случай,
ноrда 1..
маТРllЦЫ имеют вид А
лЕ, В......... лЕ. Из уравнения
р (А
лЕ)Q==В
лЕ
428
КАНОНИЧЕСКАЯ ФОРМА JIИНЕАноrо ОПЕРАТОРА
следует, что РАQ
'АРQ.........В+лЕ==О, Т. е. что
PAQ===B, PQ==E.
ПО9ТОМУ А ==P
IBQ
1 == P
IBP; друrими словами, числовые матриuы
А и В подобны. Обратно, если матриuы А и В подобны,
то л-матрицы А
лЕ и В
'АВ эквивалентны. Таким образом,
мы доказали теорему.
т е о р е м а 5. Две числовые матрицы А и В подоб1lЫ т02дa
u только mО2да l КО2да их характеристические .матрицы А
'ЛЕ u
В....... 'АЕ имеют одинаковые инвариантнш .мН,ожители.
4. Теорема о ПрНведении матриц оператора
к канонической форме
Предположим, что детерминант d (л) == det (Ал+ В) л-матриuы
Ал + в ...... нену левой полином. Пусть 'Лt, ..., As....... корни полинома
d (л), Т. е.
d (л) == (л.......
)т. (л
л 2 )m. . . . (л......... лs)т s.
в этом случае инвариантные множители j
матрицы Ал+В, будучи
делителями полинома d (л), имеют вид
«1 == (л
Лl)т t i (л
)тI2. . . (л
л s )т 1s ,
а 2 == (л
л 1 )т 2 f (л
)m22 ... ('Л
л s )т 2s ,
. . . . . . . . . . . . . . . . . . . . . .
Cl r == ('Л
л 1 )т r 1 (л
л 2 )т r2 . . . (л...... л.f)m rs ,
,
тде
тl! == т/. Так как полином а! является делителем поли
'==1
нома а/+ 1, то
т1l
т2i
.. .
mrl,
· 1 n
t == , 2, ..., s.
Определение 8. Полиномы (Л
Лj)тijt для которых mi/> О,
называются элементарными делителями л
.м.атрицыl Ал + В.
Элементарными делителями матрицы С называются элементар-
ные делители ее характеристической матрицыI С
лЕ.
Возьмем некоторую л-матриuу Ал + В, det (Ал + В) 7'= О и выпи-
шем все ее элементарные дел 11 тели. Если при этом какой-нибудь
элементарный делитель входит в несколько инвариантных мно-
жителей, то выпишем ero столько раз, во сколько инвариантных
множителей он входит.
Докажем, что система элементарных делителей определяет
матрицу Ал + В, det (Ал +В):#= О, с точностью до эквивалент..
ности. Пусть порядок матрицы Ал + в равен п, а элементарные
ПРИВЕДЕНИЕ МАТРИЦ К КАНОНИЧЕСКОй ФОРМЕ
429
делители суть
(л
л 1 )т ll , (л
л 1 )т 2 i, ..., (л
1...1) m*11,
(/\1
л 2 )т 12 , (J"
)т22, ..., (л
)mk2'1,
(1)
.....................
(л
л,)т ll , (л.
л't)т 2f , ..., (л
л,) m ktt ,
тll<т21
...
m,'l/, i==l, 2, ..., t.
Поскольку det (Ал + В) =1= О, матрица Ал + в имеет п ненулевых
инвариантных множителей а 1 (л)t ..., ап, (л). Если разложить их
на множители, получатся указанные элементарные делители (1).
Так как с/"п (л.) делится на а 1 (л), ..., an
1 (л), то в ал (л) входят
элементарные делители, при надлежащие всем биномам
1...1'
..., л
л, и притом в максимальных степенях. Следовательно,
а п (л) == (л
Л 1 ) т k11 .. . (л
Лt)т ki .
Среди оставшихся элементарных делителей максимальные должны
войти в aп
! (л), поэтому
aп
l (л) == (л
Лl)mkl
1t 1 . . . (л
l\i,)тkt-
l' t.
Продолжая этот процесс, получим все нелостоянные инвариантные
множители, скажем
а s(л), a S + 1 (л), ..., aп
l (л), а п (л), s;:::: 1.
Полаrаем а 1 (л) ===.. .
aS
l (л) == 1. Таким образом, мы однозначно
восстановили инвариантные множители матрицы Ал+В и на
основании теоремы 3 определили матрицу Ал + в с точностью ДО
эквивалентности.
Применяя эти рассуждения к характеристической матрице и
используя теорему 5, получаем следующее важное утверждение:
т е о р е м а 6. Две числовые матрицы А и В подобны nwеда и
толЬ/со тоеда, коеда их элементарные деЛU1rleЛU совпадают.
т е о р е м а 7. Пусть л 1 , .... л.
произвольный набор комплекс
ных чисеЛ, не 06язатеЛЫiО различных, т 1 , ..., т. s
положительные
цеЛЫЕ числа, сумма которых равна n. Пусть
А == J т,(Л 1 ). О
1I
О J ms (Л s ) li
...... блочно..дuа20нальная матрица порядка п, на диа20налu к'oпwpoй
расположены жордановы клетки J т . (/II}), j == 1,..., s. Тоеда.м.атрица
J
лЕ...... А иMeetп элементарные делители (л
л 1 )т 1 , ..., (л....... лs)т s .
430
КАНОНИЧЕСКАЯ ФОРМА ЛИНЕйноrо ОПЕРАТОРА
д о к а 3 а т е л ь с т в О. Матрица лЕ......... А представляется в блочно-
диаrональном виде
лЕ
А == I
I
лЕ тs
J т! (л 1 )
лЕт!
J т. (Аз)
о
о
лЕт
Jm (Л$)
s s
rде Е т ........ единичная матрица порядка т" j == 1, ..., s. Блок
1
'ЛЕт/
Jтf(Лi) имеет вид
лЕт.
J т . (л / ) ==
1 1
Л
Лi
1 О
Л
Лj
I
о
......1
Л
Л/I
поэтому det (лЕ mj
J m ; (Лj») == (/11
Aj)m,. Наибольший общий дели..
тель детерминантов миноров первоrо порядка маТРИ1lb1 'ЛЕт.
I
Jт.(Л;) равен + 1, следовательно, инвариантные множители
I
ЛтiЕтf
J т; (Ai) суть 1, 1, . . ., 1, (/..
Лj)т j , И эта матриuа с помощью
элементарных лреобразований может быть приведена к виду
1 О
. .
.
1
О т.
(Л
Л;) ,
Если мы применим эти элементарные преобразования к соответ-
ствующим строкам и сто.пбцам матрицы ,...Е
А, то результат их
действия будет таким }ке, как и для блока лЕ mj
J т; (Лj), так
как Все остальные элементы в строках и столбuах этоrо блока
равны нулю. Кроме Toro, эти преобрззования, очевидно, не
затраrивают друrих блоков. Применяя этот процесс ко всем бло
кам матрицы лЕ
А и переставляя, если необходимо, строки и
столбцы, мы прнведем ее к форме
/1... О
I 1
(л.
Лl)tn 1
(л.
Л2) т.
10
(л
лs)тs
ПРИВЕДЕНИЕ МАТРИU К КАНОНИЧЕСКОЯ ФОРМЕ
431
Изменяя, в случае необходимости, обсзначения, мы можем счи
тать, что
"'1 == · . . == Ар == а, тl
т2,
. . .
т р
и Лl =1= а для i> р. Тоrда множитель Dn СЛ) содержит бином л.
а
р
в степени
ml. Детерминант каждоrо минора порядка n
1
I
содержит по меньшей мере р....... 1 из множителей
(л
а)тl, (л.
Ct)т2, ..., ("'.......а)т р . (2)
в одном из таких детерминантов отсутствует максимальная CTe
пень (л....... а)т р , следовательно, Dn
l (л) содержит л
(J., в степени
p
1
mi. Поэтому инвариантный множитель а п содержит л....... а
1
в точности В степени тр. Аналоrичным образом детерминанты
миноров порядка п
2 содержат по меньшей мере р
2 из COM
ножите.пей (2) и один ИЗ этих детерминантов не содержит COMHO
жителей (л....... a)mp
1 и (л....... а)т р максимальных степеней. Поэтому
p
2
бином л....... а содержится в Dп
2 (л) в степени
тl, а в инвари
1
антном множителе aп
l ....... в степени тp
l. Продолжая этот процесс,
мы 8ИДИ\1 t ЧТО (2) являются элементарными делителями матрицы А.
Исследуя аналоrичным способом остальные корни, мы полу
чаем полный набор элементарных делителей
(л
л1)тi, ..., (л....... "'s)ms,
что и требоваJ1ССЬ.
Суымируя все вышеизложенное, мы получаем основную Teo
рему этой rлавы:
т е о р е м а 8. Каждая квадратная матрица с коэффuцuенпzaмu
в поле КО.мплеКСНblХ чисел (с подобна матрице, имеющей жорданову
1Шнонuческу'о форму. Две матрицы, имеющие жорданову ФОРМУ,
подобны тО2да и moЛЬКО тосда, КО2да они составлены из одина-
ковых жордановых клеток и оmлuчшотся дРУ2 от дРУ2а лишь pac
положенuеJw' клеток на 2лавнйй диаеоналu.
Приведенные рассуждения дают алrоритм для нахождения
канонической жордановой формы произвольной матрицы А ЕМ,,(С).
Для этоrо достаточно вычислить ее характеристическую матрицу
А ....... лЕ, привести ее элементарными преобразованиями к нормаль-
ному диаrона-пьному виду и разложить диаrональные мноrочлены
на множители. Эrо даст нам элементарные делители матрицы А.
по которым однозначно, с точностью до порядка жордановых кле
ток, определяется каноническая жорданова форма.
r л А В А XVI
ЕВКЛИДОВЫ И УНИТАРНЫЕ ПРОСТРАНСТВА
t. Положительно определенные эрмитовы функции
u
В линеином пространстве
Оп р е Д е л е н и е 1. Эрмumoвой функцией в линейном ПРОСТ-
ранстве Е над полем k (k == R или (С) называется функция '1' (о, У)
двух векторных aprYMeHToB о, V Е Е, обладающая следующими
свойствами:
(1) 'l' (u 1 + и 2 , v) == '1' (Ul' v) + '1' (О 2 ' У),
(2) '1' (u, V 1 + у 2 )
ч' (u, Уl) + '1' (u, у 2 ),
(3) 'V(лu, V) ==АЧ'(U , v),
(4) Ч'(u,v)==Ч'(v, u), rде U., u 2 . у 1 , У2ЕЕ, AEk,
а черта означает операцию комплексноrо сопряжения.
3 а м е ч а н и я. 1. Если k == IR, то эрмитова функция
ЭТО
В точности симметричная билинейная функция. 2. Из свойства
(4) вытекает, что ЧI (u, AV) ==
чr (u, у) и что '1' (u, и)
вещественное
число.
О п р е Д е л е н и е 2. Эрмитова функция '1' называется положи-
тельно определенной, если 'I! (и, u) > О для любоrо ненулевоrо
вектора u ЕЕ.
3 а м е ч а н и е. Во всей r лаве мы ПОД 'р' (u, у) всеrда будем
понимать положительно определенную эрмитову функцию.
Оп р е Д е л е н и е 3. Пусть 'у
положительно определенная
эрмитова функция в пространстве Е, u, V с Е. Назовем векторы
u, v ортО20наЛЬНblми относительно '1', если '1' (u, v) === о. Система
векторов u 1 , ..., U s называется ортоrональной, если при i, k ==
== 1, 2, ..., s, i =f= k, любые два вектора Ul, Uk этой системы орто-
rональны; если при этом '1' (U/, U,)
1, i == 1, ..., S, то система
векторов и 1 , ..., U s называется ортонормальной.
Л е м м 8. Всякая орmo20н.альная относительно '1' система отлич...
НЫХ от нуля векторов u 1 , ..., U s пространства Еп линейно неза-
8исима (и, значит, s
п).
Д о к а 3 а т е л ь с Т В о. Пусть v == A 1 U 1 +. . . + л,su s == О, Лj Е k.
Покажем, что при любом j == 1, .... s л'j == о. Так как v == О, то
ПОЛОЖИТЕЛЬНО ОПРЕДЕЛЕННЫЕ ЭРМИТОВЫ ФУНКЦИИ 433
'1' (v, u,) == О, поэтому
$ S
О
'I'(у, Ui) == '1'(
ЛjUj,uд ==
л./I' (U;, uд ==лl'l' (Ul, uд.
j===l j;:l
Поскольку 'l' (U[, uд =1= о, то Лj == О, что и требовалось доказать.
т е о р е м а 1. В линейном пространстве Е '1. существует базис,
орmон,ормальН,ый относurпeЛЬflО любоЙ наперед заданной nоложu..
тельно определенной эрмитовой функции '1' (u, v).
Д о к а з а т е ,Н ь с т в о. Пусть в линейном пространстве Еп дан
какой-нибудь базис U 1 , ..., U п . Мы прежде Bcero построим попарно
ортоrональные между собой отличные от нуля векторы Уl' ..., У п ,
являющиеся линейными комбинациями векторов и!, ..., и п . Постро"
ение будет вестись по индукции. Положим V 1 == и 1 . Ищем теперь
такое число Л 1 , чтобы вектор
V
U2+Л1Vl
был ортоrонален к вектору V 1 , т. е. чтобы
'l'(V 2 , v 1 )=='l'(U2, v1)+л1'I'(V 1 , vt)==O.
Так как '1' (У 1 , V 1 ) =1= О, то ИЗ условия
'1' (и 2 , V 1 ) + л1'l' (v 1 , V 1 ) == о
число Лl определяется однозначно:
Л 1 ==
ч' (U28 Vl)
ч' (Vl' Уд ·
Так как
V 2 == U 2 + Л1V 1 == U 2 +Л 1 U 1
И векторы U 1 и и 2 линейно независимы, то У 2 =1= о.
Предположим теперь, что построена ортоrональная система
от.пичных ОТ нуля векторов V 1 , ..., Vk
J' являющихся линейными
комбинациями векторов U 1 , ..., Uk
l' При любых Л 1 , ..., Лk
l
вектор
Vk == Uk +Л1V 1 +... +Лk
lVk
l (1)
является, очевидно, линейной комбинацией векторов Uk, V 1 , ...
. . ., Vk
l и, значит, линейной комбинацией векторов Uk, Ul, .. ., Uk
l:
Vk==Uk+CIUl+...+Ck
lUk
l; (1')
при этом вектор Uk входит в .пинейную комбинацию (1') с тем же
коэффициентом 1, с которым он входил в комбинацию (1); это
происходит от Toro, что векторы V 1 , ..., Vk
1 суть линейные КОМ-
бинации одних лишь векторов U 1 , ..., Uk
l'
Найдем теперь такие л'1' ..., Лk
l' чтобы вектор (1) бы." орта-
rонален к каждому из векторов V 1 , ..., Vk
l' Т. е. чтобы ДЛЯ
434
ЕВI(ЛИДОВЫ И УНИТАРНЫЕ ПРОСТРАНСТВА
каждоrо i == 1, 2, ..., k
1 выполнялось условие
'I'(Vk' vд == чr(Uk+ЛIV1+".+Лk
lVk
l' VI)==O; (2)
условие (2) может быть записано в виде
Ч" (Uk, V i) + л,Ч' (Vi, Vi) == О, (2')
откуда и определяется однозначно Лl. ОСТ2ется доказать, что.
Vk =F о. В линейную комбинацию (1') вектор Uk входит с коэффи-
циентом 1; поэтому (1') есть нетривиальная линейная комбинация
линейно независимых между собсй векторов U 1 , ..., Uk; значит,
Vk =F о. Индукция заканчивается на k == n построением opToro-
пальной (значит, линейно незэвисимой) системы векторов У 1 , ...
.. ., У n В п
MepHOM пространстве Еn, поэтому V 1 , ..., V N есть OpTO
rональный базис пространства Еn. Положим, наконец, е; ==
=== у I . VI при i == 1, 2, ..., п. Тоrда
'V (Vl' Уд
1 1
Ч" (el, е/) == V JI
'у (Vi, v,) == 1
'у (Vi' vд Ч' (v;, Vj)
базис е 1 , ..., е п является ортонормальным, и теорема 1 ДО..
казана.
т е о р е м а 2. ВСЯКУfО ортО20flаЛЬflУЮ (орmОНОр'м'альную) отно..
сuтельно данной функции '1' (u, v) систему векторов U 1t ... t U m
пространства Еn можно допОЛНtlть до базиса пространспlва E"
ортО20наЛЬНО20 (орmонормаЛЬНО20) относительно функции 'у (u, v).
Д о к а з а т е л ь с т в о. Пусть векторы U 1 , ..., U m , т
n, уже
являются попарно ортоrональными. Построение, проведенное
в доказательстве теоремы 1, дает
V 1 == U 1 , ..., V m == Um'
В самом деле, V 1 == 1110 Предположим, что равенства Vi == и,
доказаны для i == 1, ..., k
1, rде k
т. Докажем, что V'Z == Uk.
В наших предположениях равенство (1), определяющее вектор
Vk, превращается в
Vk
Uk + л'lUl +.. .+ Лk
lUk
l,
а условия (2') для определения "'1' ..., Лk
1
В
'1' (u k , Ul) + л,l'l' (Ul, uд == о, i == 1, 2, ..., k
1. (3 )
Но так как i < k
т, то чr (Uk, uд == о; кроме Toro, Ч' (Ul, Ul) =1= O
так что (3) означает npOCTO t что "'1 == О при всех i
k
1 t Т. е.
Vk == Uk.
3 а м е ч а н и е. Описанный выше переход от произвольноrо ба
зиса U 1 , ..., U n пространства Еn к базису V 1 , ..., V n ортоrональ..
НОМУ (относительно некоторой функции ч' (U, v) принято назы..
вать орmО20налuзацuей (базиса U 1 , ..., Un).
ПОЛОЖИТЕЛЬНО ОПРЕДЕЛЕННЫЕ ЭРМИТОВЫ функции 435
ЭтОТ процесс ортоrонализации с различными ero обобщениями
имеет в математике очень большие и разнообразные применения.
т е о р е м а 3. Пусть базис еl' ..., еп. пространства Еп opтo
нормален относительно функции 'Y(u, у). Для тО20 чтобы базис
е;, ..., e
также был орmонорм,ален (относительно той же ФУНК
циu), необходuм.о u достаточн,ОJ чтобы матрица перехода от базиса
е 1 , ..., е п к базису e
, ..., e
была унитарной (орtпО20наЛЬНОй J
если пространство Еп вещественно).
Д о к а 3 а т е л ь с т в о. Пусть
n
e
==
alke"
'
1
k === 1, ..., n.
Тоrда
'1' (ei, ei) === Ч' (
k akiek,
aljel \ == 1: aki l1 t/1' (ей, ед ==
l ) k. 1
== 1: аkl{1ljб kL == 1: akllikf.
k,l k
Поэтому условие Ч' (ei, ej) == б l / тождественно с условием1:аkiGk/
k
== б lj , Т. е. с условием унитарности (ортоrональности в вещест
венном случае) матрицы
I ан а21 . . . aпl
А == ,a12 С22 . . . а п 2
1.......
I al п а2п а пл
Теорема 3 доказана.
Так как матрица А является матрицей линейноrо преобразо
вания, переводяп
еrо базис е 1 , ..., е п в базис е;, ..., e
. то мы
можем сформулировать теорему 3 следующим образом:
т е о р е м а 3'. Все YHumapHbte (ортоzональные в вещественном
случае) маrnрицы u только они ЯВЛЯfотся маrrlрица},f,U линейных
преобразований
переводящuх один ортонормальн'ЫU (относительно
какой-нибудь функции чr (u, у)) базис проспzран.сmва Еп в дРУ20Й
ортоН,ормальный (относительно той же функции) базис.
3 а м е ч а н и е. В любом ортонормальном базисе e 1 , ..., е п
пространства Еп функция ч' (u, v) принимает вид
п
'1' (u, v) ==
XlYl,
1==1
(4)
rде и:=; 1: Xtel, v
YLel.
Обратно, если в некотором базисе е 1 . ..., е п для любых BeK
торов U, v Е Ь" n функция '1' (u, у) имеет вид (4), то данный базис
ОРТОНОРМ8лен относительно '1' (u, v).
436
ВВКЛИДОВЫ И УНИТАРНЫЕ ПРОСТРАНСТВА
2. ЕВКJlИДОВЫ И унитарные пространства
v v
и их простеишие своиства
Определение 4.
1 о Ввести в вещественном линейном пространстве Еп евклuдову
метрику
значит опреде.,1ИТЬ в этом пространстве положительно
определенную симметричную би.пинейную ФУНКЦИЮ ч' (и, v). Про-
странство Еп с евк.ПИДОВОЙ метрикой называется евклuдО8blМ п-
.мернЬ/,м пространство.м.
20 Аналоrичным образом ввести в комплексном пространстве
Еn унитарную .метрику
значит определить в нем положительно
определенную эрмитову функцию ч' (u, v). Пространство Еп
с унитарной метрикой называется унитарным n
MepHЫм. пpo
стра1lством.
Так как в вещественном линейном пространстве положительно
определенная эрмитова функция
это в точности положительно
определенная симметричная билинейная функция, то евклидово про-
странство можно рассматривать как частный случай унитарноrо
пространства.
Те понятия и утверждения, которые не зависят от поля коэф-
фициентов и, значит, аналоrичны для евклидовых и унитарных
лространств, MbI изложим, В целях эконо
ии места, лишь в уни-
тарном случае. В ситуациях, коrда результаты СУlцественно зави-
сят от выбора поля коэффициентов, будут приведены веществен-
ный и комплексный вариант соответствующих утверждений.
Оп р е д е
ТI е н и е 5. Значение функции '1' (u, v) для двух дан-
ных векторов u, v называется их скаЛЯРНblМ nроuзведенuем в дан-
ном унитарном пространстве и обозначается через (u, v).
Из только что данноrо определения скалярноrо ПРОИЭl3едения
(u, v) следует, что оно обладает следующими свойствами:
1 о (u, v) == (v, u).
20 (u} + U 2 , v) == (u 1 , v) + (u 2 , v).
30 (i"u, v) == л (u, v).
40 Число (u, и) для всех векторов u =1= О положительно, ДЛЯ
u == О равно нулю. Оно называется скалярным квадратом вектора u.
Оп р е Д е Л е н и е 6. Число
I u 1== + V (u, и);?; О
называется длиной вектора u в унитарном пространстве E'
. Только
нулевой вектор имеет длину, равную НУЛЮ. Если в данном OpTO
rональном базисе е 1 , е 2 , ... ,е п имеем
u=={x 1t Х 2 ' .... Х п }.
ЕВКЛИДОВЫ И УНИТАРНЫЕ ПРОСТРАНСТВА
437
Т. е.
u
x 1 e 1 +х 2 е 2 +. . . +хпе п ,
то, очевидно, I u I == V ХI Х 1 + Х 2 Х 2 +. · · + ХnХ п .
т е о р е м а 4. Для Лl06ых двух векторов и, v п
MepHoeo YHи
тарноео пространства Еп имеет место неравенство Кошu
Буня
К08СКО20
}(а, v)I
lul./vf,
(1)
причем равенство достU2ается лишь в случае, КО2да векторы u u
v коллuнеарНbl.
Д о к а э а т е л ь с т в о. Достаточно доказать это неравенство
для векторов, отличных от нуля. Положим а === (а, v). Простая
выкладка показывает, что
О
(лu +v, лu +у) == 1 л )21 а/ 2 + 2Re (ал) + I v ра. (2)
Если а ==0, т. е. (u, v)
o, то неравенство (1), очевидно, выпал..
няется. Если а =1= о, положим
а
л, ==
I u 12 (u * О по предположению).
При таком выборе i... из (2) получается неравеНСТ80
О I '1 + '2 r '2 I а 12
J\,U V I == j V j
Jiil2 '
откуда следует неравенство Коши
Буняковскоrо (1). Очевидно, что
равенство в формуле (1) достиrается тоrда и только тоrда, коrда
Iлu+vI 2 ==О, т. е. коrда v==
лu. Теорема доказана.
Из неравенства КОII1И
БУНЯКОБскоrо леrко вытекает так назы
ваемое «неравенство треуrольника для векторов», а именно:
lu+vl
luI+lvl. (3)
Для доказательства (3) наПИII1ем тождество
)u+vI 2 ==(u+v, u+v)==(u, u)+(u, v)+(u, v)+(v, v)
==! u j2+2Re (u, v) + I v 12. (4)
Так как Re (u, v)
I (u, v) 1, ТО из (4), пользуясь неравеНСТБQМ
Коши....... Буняковскоrо, выводим
I u +v 12
I u 12 + 2Re (u, v) + 1 v 12
I u [2 + 2 J (п, v) 1+1 v 12
J u 12 + 2 j u 11 v I + 1 v 12 == ( 1 u 1 + 1 v I )2,
Т. е.
Ju+vI
lu'+lvl.
Определение 7. Величuной уzла между двумя отличными
от нуля 8еl(,тора,м,и а, v в п-мерном евклuдО80At пространстве
438
ЕВКЛИДОВьr И УНИТАРНЫЕ ПРОСТРАНСТВА
назыоается число ер, О::::;;
n, определенное условием
(u, v)
cos q> == I u I . I v I . (5)
Из неравенства Коши
Буняковскоrо следует, что уrол q> (в преде
лак О
q>
Л;) однозначно определен. При этом
==
(т. е. век-
торы u и v перпендикулярны или ортоrональны между собой)
тоrда и только тоrда, коrда
(u, у)==о.
Теперь мы можем сказать, что ортонормальный базис в п"мер-
ном евклидовом пространстве есть просто система из п попарно
перпендикулярных (ортоrональных) между собой ортов, т. е. век-
торов длины 1.
Унитарная метрика в линейном пространстве позволяет ввести
метрику в аффинном пространстве.
О п р е Д е л е н и е 8. Ввести унитарную (евклидов у в вещест-
венном случае) метрику в п..мерное аффинное пространство Ап
значит ввести ее в линейное пространство Е'" трансляций аффин-
Horo пространства. Аффинное п"мерное пространство с введенной
в нем унитарной (соответственно евклидовой) метрикой называется
п"жрНblМ YHumapНblM (соответственно евклuдовым,) аффинным
nространство'м.
О п р е д е л е н 11 е 9. Координатная система Ое 1 е 2 ... е п в про-
странстве Аn, единичные веи торы е 1 ,... t е п которой образуют
ортонормированный базис пространства трансляций Еn, называ-
ется прямоуеольной или ортО20НдЛЬНОЙ сиС"lем,ой координат в Аn.
Для каждой пары точек А, В из Ап определим рассто-
яние р (А, В), полаrая
р(А, B)==IABI.
Очевидно, что р (А, В) == р (В, А) и р (А, А) == О. Если точки А и В
заданы своими координатами в какой-нибудь прямоуrольной сис-
теме координат:
А == (x 1J Х 2 , ... t Х n ), в == (Уl' У2 ..., Уn),
то для вектора АВ имеем
A
B == { у J
Х 1, У2
Х 2 , '., t У п
Х n },
так что r Ав 1 2 == (Уl
Х 1 ) (у;,
Х;) + ... + (Уп
Х n ) (Уп
Х n )
И р (А, В) == V (Уl
Х 1 ) (gl ..... Х 1 ) + ... + (Уn
Х n ) (Оп
х n ).
Подкоренное выражение в формуле для р (А, В) квадратичное
относительно разностей координат точек А и В, обычно называют
метричес"ой формой пространства Аn.
оРтоrОНАЛЬНОЕ ДОПОЛНЕНИЕ
439
Из неравенства треуrольника для векторов в пространстве
трансляций вытекает так называемое неравенство треуrольника
для точек в аффинном пространстве:
р(А, В)+р(В, С»р(А, С).
s 3. Подпространства унитарных и евклидовых пространств.
Ортоrональное дополнение. Ортоrональная проекция
Так как функция (u, v), т. е. скалярное произведение любых
двух векторов унитарноrо пространства Еn, определена, в част..
ности, и для BeKTopoB t лежащих в произвольно данном подпрост..
ранстве пространства Еп, то всякое подпространство унитарноrо
пространства есть унитарное пространство.
Пусть ЕР есть. подпространство унитарноrо пространства Еn.
Назовем вектор u Е Еп ортО20наЛЬНblJd к пoдпpocтpaHcmвy ЕР,
если он ортоrонален ко всякому вектору V, лежашему в этом
подпространстве. Так как никакой отличный от нуля вектор не
ортоrонален к самому себе, то ни один отличный от нуля вектор,
ортоrональный I{ подпространству ЕР t не лежит в этом подпрост..
ранетве. Из линейности скалярноrо произведения следует, далее,
что вектор u, ортоrональный ко всем векторам V 1t .. ., V p , обра-
ЗУЮЩИМ какой
нибудь базис подпространства ЕР, будет 0pToroHa
лен и ко всему подпространству ЕР.
Далее, если векторы U 1 , . . . , Uk ортоrональны к подпространст
ву ЕР, т. е. ортоrональны к J1Юбому v Е ЕР, то тем же свойством
будет обладать 11 всякий вектор u == Л 1 U 1 + ... +ЛkUk, являющийся
линейной комбинацией векторов U., .. ., и.
. Отсюда ера зу вытекает
следующее утверждение.
П р е Д л о ж е н и е. J."1ножество всех векторов u Е Еn I ортО20"
наЛЬНblХ к подпространству ЕР с: E'
, образуеi11 линейное noдnpocт
ранство (ЕР) l пространства Еn. Подпростран.СПlдО (EP)l. назbLва
ется ортоеональнblМ. дополнением к 1l0aпpOCfпpaHcmoy ЕР или
аННУАятором lloaпpOCmpaHcпzea ЕР в ЕЛ.
Мы уже заметили, что нулевой вектор является единственным
вектором, .пе)i{аULИМ одновременно в подпространстве ЕР и ero
ортоrональном дополнен ии (ЕР) 1.
Возьмем в подпространстве ЕР какай
нибудь ортонормаль..
ный базис
е 1 t e 2t ..., ер
и дополним ero до ортонормальноrо базиса
(1)
е 1 , . . ., ер; е р+l, ..., е п
(2)
Bcero пространства Еп.
Векторы e p + 1 '.." е п (будучи ортоrональными ко всем BeKTO
рам el'...' ер, составляющим базис подпространства ЕР) opToro..
440
ЕВКЛИДОВЫ И УНИТАРНЫЕ ПРОСТРАНСТВА
нальны ко всему подпространству ЕР И, следовательно, лежат
в (EP)J.. Отсюда следует, что подпространства ЕР и (EP)L В своей
совокупности порождают все пространство ЕЛ, а так как пересе-
чение ЕР n (EP)L ссстоит из одноrо нулевоrо вектора, то Еп есть
прямая сумма подпространства ЕР и ero ортоrональноrо дополне-
ния (EP)L. Пусть q
размерность ортоrональноrо дополнения(ЕР).L.
Докажем, что
q==n
p.
(3)
Для этоrо достаточно показать, что ортонормальная система
e p + 1 , ..., е п ,
(4)
состоящая из n
р векторов, образует базис пространства (ЕР) L.
Система (4 ), будучи ортонормальной, линейно независима, поэто"
МУ остается доказать, что каждый вектор v Е (ЕР) L является
линейной комбинацией векторов (4).
Но это почти очевидно. Если
Y
Xlel+ ... +хреР+ХР+lеР+l+ ... +xnenE(EP)L,
то
Х 1 == (у, е 1 ) == О, . . . , Х р == (у, ер) == О,
т. е.
v == х р + 1 е Р + 1 + ... +хпе п ,
что и требовалось доказать.
qpормула (3) эквивалентна основной теореме о системах одно-
родных уравнений: достаточно вспомнить, что аннулятор под-
пространства ЕР с Еn, снабженноrо каким
нибудь базисом
31 == {а 1 !, а 12 . · · ., а 1n },
ар == {ар!, а р2 ,..., арп},
совпадает саннулятором этоrо базиса, т. е. с пространством
решений системы уравнений
al1tl+aI2t
+ ... +alntn==O,
a 21 t 1 + a 22 t 2 + ... + a 2n t n == О,
.....,..........
aplt l + a p2 t 2 + ... +apnt n == О.
Таким образом, дав прямое доказательство формулы (3), мы ЭТИМ
заново и очень просто доказали основную теорему о системах
однородных линейных уравнений.
Пусть ЕР
некоторое подпространство унитарноrо простран"
ства ЕЛ,u Е Еn'. Предположим. что вектор u разлаrается в сумму
U==Vl+V Z ,
оРтоrОНАЛЬНОЕ ДОПОЛНЕНИЕ
441
rде Vl Е ЕР, а У 2 Е (EP)l. Тоrда вектор V} называется орmосоналЬ
ной nроекцией вектора u на подпространство ЕР. Ортоrональная
проекция единственна. Действительно, пусть вектор о, наряду
с разложением (5), допускает друrое разложение, скажеМ t u ==
===w.+w:z, rде W 1 EEP, w 2 e(EP)1.. Тоrда Vl
Wl==W2
V2' по-
этому
Iv.
w l 1 2 == (v}
W 1 , V 1
Wl):=: (w 2
V 2 , V 1
W 1 ) ==0, (6)
поскольку W2
w 2 Е (ЕР) 1- , V 1
W 1 Е ЕР. Из равенства (6) BЫTe
кает, что V} === W 1 , что И доказывает единственность ортоrональ
ной nроекции.
Если Аn
аффинное унитарное пространство, АР
плоскость
размерности р в нем, то точка Р с радиус-вектором t5P === У 1 Ha
зывается орmосональной nроекцией точки М еАn такой, что
ОМ == u.
11 р е Д л о ж е н и е. ОртО20нальная nроекцuя Р точки М аффUН
Н,О20 пространства Аn На плоскость АР является кратчайшей в
АР точкой к М.
Д о к а 3 а т е л ь с т в о. Пусть w == OQ
произвольный вектор
из пространства трансляций ЕР П.поскости АР. Покажем, что
I u
w I
Iv 2 1,
причем равенство достиrается лишь в случае, коrда w == у 1 , т. е.
коrда Q == Р. Положим V}...... W == w'. Тоrда u
w == V 1 +v 2
W ==
==w' +У2 И
I u
w 12 == (w' + у 2 , w' + у 2 ) == I w' 12 + I v 2 12 + 2Re (w') V 2 ) ==
== I w' 12 + I v 212,
так как (w', v 2 ) == о из
за ортоrональ ности векторов w' и v 2 . Сле
довательно, I u
w I == УI w' 12 + 1 v 2 j2 ;;::: I v 2 1, причем равенство дo
стиrается лишь тоrда, коrда w' == О (т. е. Коrда Q == Р). Предло..
жение доказано.
Решим теперь следующую задачу. Обозначим через Т линей
ное подпространство в Еn, натянутое на некоторую линейно не-
зависимую систему векторов е},..., е т . Найдем ортоrональную
проекцию v данноrо вектора u Е Еn на подпространство Т.
Пусть v == и 1 е 1 + ... + vтe т . Для нахождения коэффициентов v k ,
k == 1, . . . , т, запишем условие ортоrональности вектора u
v
каждому из векторов ej, j == 1, . . . , т. Имеем
(u
v, ej) == о. (7)
Подставим в уравнение (7) координатное выражение вектора v. Тоrда
т т
(u
2: v k ek, e J ) == (u,e J )
1: v k (ekJ ej) == О,
k
l k
1
442
ЕВКЛИДОВЫ И VНИТАРНЫЕ ПРОСТРАНСТВА
Т. е.
т
(ek, е,) vk == (и, е,), j == 1, .. . , т.
k==1
(8)
Детерминант системы (8) является дискриминантом положительно
определенной квадратичной формы (х, х) на линейно независимых
векторах e 1 ,... t е т и, значит, не равен нулю. Следовательно,
система (8) однозначно разрешима и задает искомую проекцию v.
4. Линейные операторы в унитарном пространстве
1. Сопряженные операторы. В параrрафе I мы установили, что
скалярное произведение (х,а) векторов унитарноrо пространства
Е при фиксированном а является линейной функцией от х. Тем
самым, каждому вектору а Е Е ставится в соответствие линейная
функция, определенная на Е, причем различные векторы задают
раз..1ичные функции и все линейные функции на Е получаются та-
ким способом (докажитеf).
Воспользуемся этим результатом, чтобы д.пя Jlюбоrо линейноrо
оператора wt построить однозначно определенный новый опера-
тор
*, называемый соnряженным' по отношению к (24'.
Пусть e/t: Е----+Е
некоторый линейный оператор. Выберем
в Е произвольный вектор у и рассмотрим выражение
f (х) == (
X, у), ХЕЕ.
Поскольку
f (ах! + Px
) == (
(axl + рх 2 ), у) == (a
Xl + P
X2' у) ==
== а! (х 1 ) +
! (х 2 ),
то f
линейная функция. Поэтому f (х) мuжно представить в
виде
f (х) == (х, а),
rде вектор а однозначно определен функцией f (х). Если зафик
сировать оператор
, а менять вектор у, то для каждоrо у Е Е
получится свой вполне определенный вектор а. Оператор, пере
водящий у в а, обозначается Q,7'(* н называется сопряженным
к
; таким образом, r:vt*y == а. Следовательно,
(
X, у) == (х,
*y) для люБыx Х, У ЕЕ. ( 1)
Свойство (1) однозначно характеризует сопряженный опера..
тор
*. Действительно, если какой
либо оператор $а обладает
тем 1Ке свойством
(
X, у) == (х, &зу)
ЛИНЕйНЫЕ ОПЕРАТОРЫ В УНИТАРНОМ ПРОСТРАНСТВЕ 443
для любых х, у, то имеет место следующее равенство:
(х,
*Y)
(х,
y) == (х,
* у
$Ву) == о.
Это означает, что вектор
* У..........rfJЗ у ортоrонален КО всему про-
странству Е, поэтому
<27't* у == rfId У для всех у Е Е, т. е. е4*
rlld.
Покажем теперь, что оператор <27't* линеен. На основании (1)
имеем
(х, <d*(aYl +
Y2) == (шfх, aYl +
Y2) === а (а4"х, Yl) +
+
(<27't х, У2) == ёL (х, <27't* Yl) +
(х, <27't У2 *) ==
== (х, a<27't*Yl +
*Y2) ДЛЯ любых х.
Следовательно,
*(a Yl +
У2) == сх. M*Yl +
*Y2' Т. е. опера..
тор <27't* линеен.
Операция перехода к сопряженному преобразованию обладает
следующими свойствами:
(1) (<27't*)* == rd,
(2) (а <27't)* == f1 <d*,
(3) (<27't +$8)* ===
* +
*,
( 4 ) (<27't rfJd) * == cffd * <27't * .
Доказательство этих свойств мы оставляем читателю.
Выясним, как связаны матрицы сопряженных операторов. Вы-
берем в пространстве Е ортонормированную систему (e 1 , ... , ел).
Пусть
п
е4 el == Laikek,
kz=l
п
<27't*ei == L
ikek'
k:=:l
i==l,...,п.
Умножая эти равенства скалярно на е, и пользуясь ортонорми
рованностью базиса (е 1 t . . . , е п ), получим
(
el, ej) == ац. (a4*el, ej) ==
ll.
Отсюда
aij == (cvtei,e;) == (e/, <27't*ej) == (<27't*ej, ei)
j l.
Следовательно, если матрица оператора <27't есть А, ro матрицей
сопряженноrо оператора <27't* служит матрица А *, транспониро"
ванная и комплексно..сопряженная к А. Такая матрица называ
ется эр.м,uтово-сопряжен.ной к матриuе А.
т е о р е м а 5. Если оператор e;;i имеет в ортонор-мированн.о-м
6азисе м'аmрицу AI то сопряженный оператор Q/t* будет иметь
8 это'м же базисе армu/пово-сопряженную м.аrllрuцу А *.
444
Евкпидовы и УНИТАРНЫЕ ПРОСТРАНСТВА
2. Нормальные операторы. О п р е Д е л е н и е 10. Оператор
в унитарном пространстве называется нормальным, если он ком-
мутирует со своим сопряженным, т. е. если
а4
* ==
*
.
Из теоремы 5 вытекает, что те и только те линеЙНblе опера-
торы унитарноrо пространства нормальны, матрицы которых в ор-
тонормированных базисах удовлетворяют соотношению
АА*==А*А.
т е о р е м а 6. Всякий собствеН1tыа вектор а нормальноео опе-
ратора Q/t, nринадлежаulpЙ собственному значению л, является
одновременно u собственным вектором оператора Q/t*, прuнадле-
жащuм комплексно соnряженн ому собственному значенu/о л.
Д о к а з а т е л ъ с т в о. Нам дано:
а::= Л а, т. е. (
л 8) а == о.
Следовательно,
О ==( (
л <5) а, (
л &)а) ==( (
*
T &) (rvf
л &)а, а) ==
== «
л &) (
*
т &) а, а) == «rvf* ..... J: &) а, (а4*
i 8) а),
откуда (
*
); 8) а == О, что и требовалось доказать.
т е о р е м а 7. Собственные векторы, nрuнадлежащuе разлuч
ным, собственным значениям норм,альноzо оператора Q/t I opmozo-
наЛЬНbl.
Доказательство. Пусть dа==Ла,
b==,.., Ь, л*"",. Тоrда
л (а, Ь) == (М, Ь) == (
a,b) == (а, d*b) == (а, ,..,Ь) ==,.., (а, Ь),
Т. е. (л......,..,)(а,Ь)==О, (а,Ь)==О.
т е о р е м а 8. В унитарном пространстве Е для каждоео нор..
М,аАьноео оператора
сущесrtlвуеm ортонормированный базис,
состоящий uз собственных векторов оператора d. Матрица А
имеет в этом базисе дUа20н,альН,ый вид.
Д о к а 3 а т е л ь С Т В о. Рассмотрим в пространстве Е какой..
либо собственный вектор аl =1= О оператора Q/C и обозначим через
Е 1 подпространство в Е, ортоrональное к а 1 . Если
а1==л.lаl и ХЕЕ 1 ,
ТО
(ан
X) == (
*al' х) == Л 1 (а 1 , х) === О,
т. е. подпространство El инвариантно относительно
. Из инва-
риантности Е 1 следует, что в нем найдется некоторый собствен-
ЛИНЕйНЫЕ ОПЕРАТОРЫ В УНИТАРНОМ ПРОСТРАНСТВЕ 445
ный вектор 82 оператора rYt. Обозначим через в; подпростран-
СТ80 всех векторов из Е, ортоrональных к 32, И положим Е 2 ==
::::: El n Е 2 '. Поскольку El' Е 2 ' инвариантны относительно опера..
тора е4, то инвариантным будет и подпространство Е2' в КОТО..
ром поэтому снова найдется ненулевой собственный вектор аз
оператора
. Продолжая этот процесс, получим искомый ор..
тсrональный базис (а1' ... , 8n) пространства Е, состоящий из со б..
ственных векторов оператора
.
3. Унитарные и симметричные операторы. Оп р е Д е л е н и е 11.
Неособый линейный оператор li унитарноrо пространства Е назы..
вается унитарным, если для всех а, Ь Е Е выполнено соотношение
(а, Ь) == (иа, иЬ).
Из равенства (2) следует, что
(а, ь)==(иа, иь):::::(и*иа, Ь),
(2)
отк у да
lL*lt==G,
и* == и
1,
ии* == &.
(3)
Обратно, из соотношений (3) следует, что оператор lt обратим
и что
(а, Ь) :=: (и* иа, Ь) == (иа, иЬ).
Таким образом, линейный оператор lt тоrда и только тоrда
унитарен, коrда сопряженный оператор и* совпадает с обратным.
В частности, соотношения (3) показывают, что унитарные
операторы являются нормальными. В случае, коrда лоле опре..
деления пространства Е
поле вещественных чисел, унитарный
оператор lt называется орто
ональным оператором.
Выберем в пространстве Е какой..либо ортонормированный
базис, и пусть и
унитарный оператор в Е. Если матрица опе
ратора li равна и, то cor ласно
4, п. 1, матрица сопряженноrо
оператора равна И*. Следовательно,
и И* ==Е.
(4)
Обратно, если в ортонормированной системе координат матрица
и линейноrо оператора zt удовлетворяет соотношению (4), то
оператор lt удовлетворяет соотношению (3) н, следовательно, яв-
ляется унитарным. Матрицы, удовлетворяющие соотношению (3),
называются унитарным'И. Таким образом, мы установили, что
всякий унитарный оператор имеет в ортонормированном базисе
унитарную матрицу, обратно, если линейный оператор в некото-
ром ортонормированном базисе имеет унитарную матрицу, ТО он
является унитарным оператором.
Унитарные операторы обладают слеДУЮIЦИМ характеристиче
ским свойством:
446
ЕВJ<.ЛИДОВЫ И УНИТАРНЫЕ ПРОСТРАНСТВА
Линейный оператор lL в унитарном пространстве YHU"lapeH
тО2да u только пlozaa
Kozaa он не .меняет длин векторов.
Пусть {е 1, ... t е n }
ОРТQнормированный базис в унитарном
пространстве Е и 1L
унитарный оператор в этом пространстве.
Так как унитарный оператор не меняет длин векторов и пере
водит ортоrональные в Сl{ТОРЫ В ортоrона.пьные, то система векто.
ров (lIe 1 , ..., llе п ) будет снова ортонормированным базисом в Е. Об..
ратно, допустим, что некоторый оператор 1/ переводит ортонор-
мированный базис (е 1 , ..., е п ) снова в ортонормированный базис
(Уе 1 , ..., lIe n ). Рассмотрим в Е произвольные векторы
n
а =:
akek,
k :::: 1
n
ь ==
ltek.
k==l
11MeeM
(а, Ь) == c t . akek, k t l Pkek) == k t l a kP k,
(lla, llb) == (ll C
1 ake k ) , II C
1
kek))==
== C
1 akllek, k t l
kllek)== kt ) a k
k,
Т. е. (а, Ь) == (lla, иЬ). Следовательно, оператор 1i унитарен.
Итак, для Toro чтобы линейный оператор li был унитарен,
необходимо и достаточно, чтобы lL переводил ортонормированный
базис в ортонормированный.
Отсюда непосредственно вытекает следующее
П р е Д J1 О Ж е н и е. Матрица перехода от одНО20 ортонор.миро-
ваННО20 базиса к друеому унитарна, и
обратно
если один из
базисов opтOHopMиpoвafl,
а матрица перехода унитарна, то дру-
20Й базис орmонормирован.
Для доказательства достаточно заметить, что матрица пере-
хода от одноrо базиса к друrому совпадает с матрицей линеиноrо
оператора, переВОДЯLЦеrо первый базис во второй.
Завершим наше рассмотрение унитарных операторов следующим
предложением:
Для каждО20 YHurпapHozo оператора 11 в YHuпzapHOM пpocпlpan-
стве сущеспlвует орmонормuрованн.blЙ базис, в KOnlopOM .мапlрuца и
оператора lt имеет вид
ifPl
е
. e
п!'
и=::.
о
2де <(>1, Ч>2) ...) {{>n
вещеС/116енньte числа.
ЛИНЕйНЫЕ ОПЕРАТОРЫ 8 ЕВКЛИДОВОМ ПРОСТРАНСТВВ 447
д о к а 3 а т е л ь с т 8 о. Поскольку унитарный оператор HopMa
лен, то из теоремы 8 вытекает существование базиса, в котором
матрица и оператора и имеет диаrональный ВИД
л'l О
и == о '.. -.. А} Е (1), j == 1, ..., n.
Л п
Так как uи* == Е, то для всех i == 1, ..., n л',л'j:::= 1, откуда ;.."
iф. IR
== е 1, <Р! Е .
О п р е Д е л е н и е 12. Линей ный оператор
упита pHoro про-
странства Е называется эрмиmовым. или симметрическим, если
совпадает со своим сопряженным оператором
*.
Таким образом, если
....... симметрический оператор, то
(
x, у):::= (х, <2.'t'y). (5)
Обратно, если для любых Х, у Е Е .1Jинейный оператор
YДOB
JIетворяет условию (5), то е4 симметричен.
Из условия
==
*, очевидно, следует равенство
* ===
==
*e/!, т. е. симметрические операторы являются нормальными.
П р е Д л о ж е н и е.
1 о Сумма симметрических операторов, а также произведение
Сllммеmрическоео оператора на вещеСПlвенное число являются снова
симметрическими операторами.
20 Композиция двух симметрических операторов mozaa и только
тоада является симметрическим оператором, коюа эти операторы
перестаНОВОЧНbl.
Д о к а 3 а т е л ь с т в о.
1 о Если e7t t rfld..--. симметрические операторы, а
веществен...
ное число, то
(rvt + $8)* ==е/!* +
* == rd +$J t
(a
)* ==ае?1* ===ае4.
20 Из e/!cflJ == dl1<2,
, e/t == е4*, $в == $J* следует
(we d1З) * == rfJЗ * ed * ;:::::; $d e/I == е4 $J .
Обратно, если
(e?f );)* === rd $В,
t27f == ет1 *
,
$iJ == <:tld * ,
то
е/1 rfld == (
cfId) * == rfJ3 * e/t * == $в е4 .
5. Структура произвольноrо Линейноrо оператора
8 евклидовом пространстве
В этом параrрафе мы установим простейшую форму, которую
может иметь веI.цественная матрица ортоrональноrо оператора
в еВКЛИДОDОМ простраНGтве.
448
ЕВКЛИДОВЫ И УНИТАРНЫЕ ПРОСТРАНСТВА
Т е о р ем а 9. Пусть ЕР
инвариантное пoдпpocтpaHcпl80
евклuдова пространства Еn по отн.ошению к орmО20нально.му опе-
ратору
. Тоеда орmО20нальное дополнение Eq
(ЕР)! " ЕР
также инварианmно по оm,."ошению к
.
д о к а 3 а т е л ь с т в о. Покажем прежде Bcero, что оператор
переводит инвариантное подпространство ЕР на себя.
Пусть {e 1t ..., ер}
какой
нибудь ортонормированный базис
инвариантноrо подпространства ЕР. Тоrда векторы e
== е-4'е 1, ...
..., e
==
ep лежат в ЕР и взаимно ортоrональны; так как их
число равно р, то они образуют ортонормированный базис ЕР.
р
Пусть w ==
Xtei
произвольный вектор из ЕР, тоrда вектор
i=::J
р
U ==
x,ei также лежит в ЕР и
и == w. Итак, всякий вектор w Е
i=::1
Е ЕР является образом HeKoToporo вектора u Е ЕР, Т. е. оператор
d переводит подпространство ЕР на себя.
Пусть теперь v
произвольный вектор из ортоrональноrо
дополнения Eq к подпространству ЕР. Покажем, что
y Е Е9,
Т. е. что (
Y, и) == О для любоrо u Е ЕР. ДЛЯ этоrо возьмем
вектор W==d
lUEEP. Тоrда (v, w)==O, т. е. (
v,
w)==
== (
Y, u) == О, что и требовалось доказать.
Теперь мы располаrаем всеми средствами, чтобы доказать ос-
новной результат этоrо параrрафа
теорему о структуре opToro-
нальных операторов.
т е о р е м а 10. для каждоео орmоеонаЛЬНО20 Oпepa"lOpa
8 евклидовом пространстве Еn сущесmвуеп1 opmO,."OpltlupoвaHHbtU ба
вис} в котором .матрица А опера/пора имеет вид
1
1
l
о
.
.
l
А==
COS ЧJl
sin qJl
sin ЧJ. cos qJl
о
cos qJk
sin <Pk
sin <Pk cos f{Jk
д о к а 3 а т е л ь с т в о. Доказательство будем вести индукцией
по размерности п евклидава пространства Еn. При n == 1 из опре-
деления вытекает, ЧТО Q,
U
+ и, Т. е. матрица имеет указанный
вид. При п == 2 мы IIолучаем поворот или отражение в двумерной
плоскости. Как было установлено в rлаве 111, поворот в
ЛИНЕйНЫЕ ОПЕРАТОРЫ 8 ЕВКЛИДОВОМ ПРОСТРАНСТВВ 449
плоскости задается матрицей
А == 11 c
sct
SlЛ а
а отражение
матрицей
sin а 11
cos а.
'
1 11 О
A==lo
111.
Итак, при п
2 теорема доказана.
Предположим, что она доказана для всех евклидовых ПрОСТ
раНСТВ размерности < n, и докажем ее для Еn.
Имеются лишь две возможности:
1 о Оператор G.71 имеет хотя бы одно вещественное характери-
стическое число.
20 Оператор d не имеет вещественных характеристических
чисел.
В случае 1 о оператор G.71 имеет собственный вектор, соответ-
ствующий характеристическому числу л == + 1. Этот вектор опре-
деляет ПОJ1пространство E
. Рассмотрим ортоrональное дополнение
E;
1 К инвариантному подпространству E
. Оно тоже инвариантно
по отношению к оператору Q/t.
Так как оrраничение оператора
на подпространство E1
I
продолжает быть ортоrональным, то соrласно предположению
индукции в E
I существует такой ортонормированный (азис
Д E п
1
е 2 , ..., е п , что matpl-.luа оrраничения gл на
имеет в нем
канонический вид, который мы обозначим через А 2 . Взяв В E
собственный вектор е 1 длины 1, получим, что в базисе e t , ..., е ,.
матрица А имеет ВИД
А==11 +
J.
которыи является каноническим видом, или превращается в Hero
после и зменения нумерации векторов е 1 , ..., е n .
В случае 20 оператор e/t имеет инвариантное двумерное под
пространство E
. В Е; существует базис е 1 , е 2 , в котором матрица А 1
оператора е4 (рассматриваемоrо лишь в E
) имеет вид
А ===
C
«р
siл <р 11 .
1 11 51П q> cos q>
Рассу)кдениями, вполне аналоrичными проведенным в п. 10,
получаем, что матрица оператора G.71 в некотором базисе имеет вид
cos q>
А
sin q>
sin ер
cos «р
о
о А21
rде матрица А 2 уже приведена к каноническому виду.
Теорема 10 доказана.
r л А В А XVII
ПРЕОБРА30ВАНИЯ АФФинноrо ПРОСТРАНСТВА
Всюду в этой rлаве мы будем рассматривать лишь веществен-
ные аффинные пространства.
* 1. Аффинные преобразования
Определение 1. Афuнным' преобразованuем ': Aп
Aп
n
MepHoro аффинноrо пространства Аn называется такое преобра..
зование этоrо пространства, при котором каждая точка с коорди"
натами (X 1 , ..., Х n ) в некоторой системе аффинных координат
переходит в точку с численно равными координатами внекоторой,
вообще rоворя, друrой системе аффинных координат.
Возьмем в аффинном пространстве Ап какой
нибудь вектор
u == MoM l. При аффинном преобразовании точки Мо, M 1 перехо..
дят соответственно в точки M
, М;, имеющие относительно HOBoro
репера те же координаты, которые точки Мо, М) имели относи-
тельно cTaporo. Следовательно, при аффинном преобразовании
пространства Ап вектор u переходит в вектор u', имеющий отно-
сительно HOBoro репера те же координаты, которые вектор u имел
относительно cTaporo репера. Отсюда в свою очередь получаем,
что при аффинном преобрззовании равным векторам соответствуют
равные, так что аффинн:се преобразование аффинноrо простран-
ства порождает пресбразование линейноrо пространства тран-
сляций.
Это преобразование линейно, т. е.
f (и + v) == f (u) + f (v), f (лu)
лf (u)
(доказывается переходом к координатам). Так как при аффинном
преобразовании нулевому вектору, очевидно, соответствует нуле
вой, то из сказанноrо выше следует, что при аффинном преобра..
зовании сохраняется линейная зависимость векторов.
Далее, обратное преобразование к аффинному преобразованию
есть аффинное преобразование.
Действительно, если данное аффинное преобразование ': An
Aп
задается переходом от репера Ое 1 ... е,. к реперу O'e
... e
, то аф...
финное преобразование, задаваемое переходом ОТ репера O'e
...e
АФФИННЫЕ ПРЕОБРА30ВАНИЯ
451
к реперу Oel... е п , является, как леrко видеть, преобразованием,
обратным к f.
При аффинном преобразовании f каждая линейно независимая
система векторов О 1 , ... t Uk переходит в линейно независимую
в противном случае при аффинном преобразовании '
1, обратном
к " линейно зависимая система u;,..., Uk перешла бы в линейно
независимую, что, как мы знаем, невозможно.
Из определения аффинноrо преобразования следует, что при
данном аффинном преобразовании, определенном переходом ОТ
репера Ое 1 ... е п к реперу O'e
... e
, множество всех точек, коор-
динаты которых в координатном репере Ое 1 ... ел удовлетворяют
v u
некоторои системе уравнении, переходит в множество точек, коор-
динаты которых в системе O'e
... e
удовлетворяют той же системе
уравнений. В частности, при аффинных преобразованиях т-мер-
ные плоскости (1
m
п) переходят в т-мерные плоскости. При
этом сохраняется параллельность.
Пусть аффинное преоБРЗЗ0вание аффинноrо пространства
задается переходом ОТ репера Ое}... е п к реперу О'е; ... e
. Пред-
, ,
положим, что векторы е 1 , ..., е п заданы своими координатами
относительно CTaporo репера
п
ek== 2: CJkej, k== 1, ..., п,
j
J
причем det "Cjkll =;6 О, а координаты точки О' относительно CTaporo
репера суть (а 1 , ..., а п ). Тоrда координаты (x
, ..., X
) любой
точки М относительно cTaporo репера связаны с координатами
(
;, ..., 6
) той же точки М относительно HOBoro репера СООТНО'"
тени ями
п
х} == L CJk
k +aj,
k==1
j == 1, ..., n.
(1)
Нам даны: произвольная точка М с координатами (х 1 , ..., х n )
относительно cTaporo репера и ее образ М', имеющий относи-
т(\льно HOBoro репера те же координаты (X 1 , ..., Х п ), которые
точка М имела относительно cTaporo репера. Требуется найти
координаты точки М' относительно CTaporo репера. Решение этой
задачи дается формулами (1), в которые вместо (S
, ..., 6
) нужно
подставить координаты точки М' в новой системе, т. е. (X 1 , .. ., Х п ).
Тоrда в левой части (1) получим искомые координаты (х;, . . . , x
)
точки М' в старой системе, Т. е.
n
х; == L CjkXk +aJ,
k==1
j == 1, ..., n.
(2)
Формулы (2) выражают координаты точки М,....... образа точки М
при аффинном преобразовании...... через координаты точки М (те
452
ПРЕОБРАЗОВАНИЯ АФФинноrо ПРОСТРАНСТВА
и друrие координаты берутся при этом Gтносительно одноrо и
Toro же «CTaporo» репера).
Обозначим через х, х' и а соответственно столбuы координат
точек М, м' и О' относительно репера Oe l ... е п , и пусть С == 11cjkll.
Тоrда формулы (2) можно переписать в матричном виде
х' :=: Сх +а, (3)
С
невырожденная матрица. Если аффинное преобразование f
задано в виде (3), то обратное к нему аффинное преобразование f
l
записывается, как
х == C
lX'
C
la.
(4)
Частными случаями аффинных преобразований (3) являются
преобразования
х' == Сх,
(5)
переводящие в себя начало координат О и называемые центро...
аффинными преобразованиями с центром О, а также преобразо..
вания
х' == х+а,
(6)
называемые nереносами или mрансляциями. Каждому центроаф...
финиому преобразованию взаимно однозначно соответствует линей...
вый оператор rvt с матрицей А, называемый оператором цeHmpo
аффuнн'ОZО nреобраэованuя, а каждому переносу взаимно одно...
зиачно соответствует вектор а, называемый вектором переноса.
Центроаффинные преобразования образуют rруппу относительно
композиции преобразований. Действительно, пусть х' == Ах и х" ==
== Вх'
два центроаффинных преобрззования. Тоrда их компози..
ция имеет вид
х" == в (х') == В (Ах) == (БА) х,
Т. е. снова является центроаффинным преобразованием. Тождест-
венное преобразование, очевидно, является центроаффинным пре...
образованием. Обратным преобраЗОllанием для центроаффинноrо
преобразоnания (5) является центроаффинное преобрззование
х' == C
lx.
Очевидно, что rруппа центроаффинных преобразований изоморфна
rруппе обратимых операторов n
MepHoro линейноrо пространства.
переносы также образуют rруппу относительно композиции,
изоморфную rруппе векторов n
MepHoro линейноrо пространства
по сложению. Действительно, композиция переносов х' ==х+а и
х' ==х+Ь имеет вид х' ==х+(а+Ь), т. е. является переносом
с вектором а+Ь. Тождественное преобразование есть переное на
нулевой вектор а ==-0, а обратным к перепосу х' ==х+а служит
,
перепое х == х ........ а.
АФФИННЫЕ ЛРЕОБРА30ВАНИЯ
453
КОМПОЗИЦИЯ двух аффинных преобразований х' == Ах + а и
х' == Вх + Ь также является аффинным преобразованием
х' ==(ВА)х+Ва+Ь.
Композиция аффинных преобразований, очевидно, ассоциативна.
Как было ранее установлено, обратное преобразование для аффин
Horo преобразования также есть аффинное преобразование. Поэтому
аффинные преобразования образуют rруппу относительно КОМПО"
зиции; rруппы центроаффинных преобразований и переносов, оче
видно, являются подrруппами этой rруппы.
т е о р е м а 1. Д ля однознаЧНО20 задания аффинноzо n реоб раэо-
ваН,uя в п"мерн'ОМ аффинном пространстве достаточно указаmь
в какие точки переходят п + 1 точек, не лежащих в одной сиnер..
плоскости.
Д о к а з а т е л ь с т в о. Пусть ': Ап ----+ Ап
некоторое аффинное
преобразование. Выберем n + 1 точек Мо, M 1t ..., М п , не лежа..
щих в одной rиперплоскости. Обозначим через N k == f (M k ) образы
точек Mk' k == О, 1, . . ., n. Свяжем с точками (М О , М1' ..., М п ) и
(N о' N l' ..., N п) аффинные реперы, приняв точки Мо и N о за
начала О и О', а векторы M
M k и fJ oN k
за базисные векторы ek
и ek. Векторы е 1 , . . . , е п линейно независимы. Действительно, если бы
векторы еl' ..., ел удовлетворяли нетривиальному соотношению
л'1 е} +. . . + лnе п == О,
то координаты точек (М О , Mt, ..., М п ) были бы связаны линейным
уравнением, Т. е. точки (Мо, М 1 , ..., М п ) лежали бы в HeKOTO
рой rиперплоскости. Таким образом, мы построили два аффинных
репера Ое}... е п и О' e
. .. . e
. Эти реперы определяют аффинное
преобразование, которое переводит точки (М о , Мl' ..., М n ) в точки
(N о' N l' ..., N п). Точки МО и N о имеют в обеих системах оди-
наковые координаты Xl === О, i == J, . . ., n. Точки M k И N k имеют
в обеих системах одинаковые координаты Xl == б 1k , i == 1, . . ., n.
Это преобразование является единственным аффинным преоб-
рззованием, переводящим точки (М п , 1\11' ..., М п ) в точки
(N о' N l' .. ., N п), поскольку построенные выше аффинные ре..
перы являются единственными реперами, в которых эти точки
имеют указанные координаты, а аффинное преобразование, опре..
деляемое двумя реперами, также единственно. Следовательно,
построенное нами преобразование совпадает с исходным преобразо..
ванием {. Теорема доказана.
Все аффинные преобразования можно разделить на два класса.
Аффинные преобразования, матрицы которых имеют ПОЛО)l(итель..
ные детерминанты, называются аффинными пре06разованuями пер..
8020 рода. Аффинныe преобразования, матрицы которых имеют
отрицательные детерминанты, называются аффинными преобразо..
вания..мu вmОрО20 рода. Так как оператор переноса
единичный
454
ПРЕОБРА30ВДНИЯ АФФинноrо ПРОСТРАНСТВА
оператор Е, то переносы являются аффинными преобразованиями
nepBoro рода.
Оставляем читателю в качестве леrкоrо упражнения доказа...
тельство следующеrо утверждения:
АффиННЫЕ преобразования neрвО20 рода образу/от под2руппу
в 2руппе всех аффиННblХ преобразований.
Пусть точка Мо n
MepHoro аффинноrо пространства Аn с КООР"
динатами х о == (x
, ..., x
) остается неподвижной при аффинном
преобразовании х' == Сх+а. Тоrда коррдинаты Х;О точки Мо удов..
летворяют соотношениям
ха == Сх О +а,
или
(E
C)xO==a.
Отсюда следует, что если det (Е
С) =1= о, то
х О == (Е
C)
l а.
(7)
Таким образом, мы установили, что аффинное преобразование,
для KOToporo матрица (Е
С) обратима, имеет единственную
неподвижную точку. Если же det (Е
С) == О, то аффинное пре..
образование может иметь MHoro неподвижных точек или не иметь
ни одной неподвижной точки
таким примером является перенос,
для KOToporo Е
А == о.
Аффинное преобразование, имеющее в координатной записи
вид
х' ........ а === л (х
а),
(8)
называется 20мотетиеu с центром в точке М с координатами а.
Два множества в аффинном пространстве, переводимые друr в
друrа rомотетией, называются 20мотеmиЧНblМ,U.
2. Движения аффинноrо евклидова пространства
Предположим теперь, что рассматриваемые нами аффинные
пространства снабжены евклидовыми метриками.
О п р е Д е л е н и е 2. Движением аффиННО20 евклuдова просm..
ранства называется такое преобразование этоrо пространства,
при котором не изменяются расстояния между точками.
т е о р е м а 2. Движенuе аффUННО20 евклuдова пространства
в координатах эапUСЬ18ается в виде
х'==Сх+а, (1)
zae С
ортоzональная .матрица.
Д о к а з а т е л ь с т в о. В основе доказательства лежит следу-
ющая
ДВИЖЕНИЕ АФФинноrо ЕВI(ЛИДО8А ПРОСТРАНСТВА 455
л е м м а. Пусть О А и 08
два вeKmopa l nрuложенн.ых к ад..
ной и пlОЙ же точке l а О' A i , О' в" ...,а.о их образы при данно.м движе-
нии. To
дa скалярные nроuзвeденuя ( О А , ОБ) U ( О' Д1, o' lY) paвНbl.
ДОК аз ател ьс тв о Л е м м ы. Имеем АВ == АО +дВ. ПОЭТОМУ
( АВ , АВ ) == ( АО +08, АО+6В),
Т. е.
} АВ j2 ==! АО 12+2 (4'0, 08)+ I 08 1'.
Поскольку IAoI==I OA ! и (Ай, OB)==
(OA, (8 ), то
2 (ОА, 08) == jOА 11 +;ОВ /2
IAв 11. (2)
Формула (2) верна для любых трех точек О, А, В, так что
имеем
2 ( 0' .4', О' B i) == I о 'А' 12 + I о' B'JZ ......1 А' 8' 1'.
(2')
Правые части равенств (2) и (2') равны, так как движение со-
храняет расстояния. Поэтому равны и левые части, Т. е.
( о' А', О'8' )==(БА, 08 ), (3)
что и требовалось доказать.
Пусть теперь О e 1 . . . е п , rде ek == OM k , k == 1, ... t п,
какой..
нибудь ортонормальный репер. При нашем дви}кении точка О пе-
реходит в О', а единичные векторы ek == OM k
СООТВ2тственно
в единичные векторы ek' == О' M k ". Так как векторы ek попарно
,
ортоrональны, то по лемме секторы ek также ортоrональны.
Следовательно, наше движение переводит ортонормальный репер
О u О , l' , К
е 1 е2 . . . е п в ортонормальныи репер е 1 е 2 ... е п . оординаты
(х 1 , ..., Х п ) любой точки Р в координатной системе О е} е 2 ... е п
суть скалярные произведения
Xk == (ОР, OM k ),
k == 1, .... n.
Координаты образа Р' точки Р в системе О' е 1 ' ... е п ' суть CKa
лярные произведения
Xk' == (О ' р" , О' M
), k == 1, ..., n.
Поэтому в силу леммы х.' == Xk. Т. е. точка р'..... образ точки Р
при данном движении имеет в новой координатной ортоrональной
системе те же координаты, которые точка Р имела в старой.
Опираясь на рассуждения предыдущеrо параrрафа, получаем, что
456
ПРЕОВРА30ВАНИЯ АФФинноrо ПРОСТРАНСТВА
Движение задается формулой
х' ==Сх+а,
(4)
rде С
невырожденная матрица. Поскольку линейный оператор
, соответствующий матрице С, переводит ортонормальный базис
{ e 1 , . . . , ел} в ортонормальный базис {е 1 ',..., е п '}, то соrласно
предложению на стр. 446 С
ортоrональная матрица. Теорема
доказана.
3 а м е ч а н и е. Из доказательства теоремы 2 BblTeI{aeT новое
определение движения. Движение
это такое преобрззование
аффинноrо евклидова пространства, при котором каждая точка
с координатами (x 1 ,..., х n ) внекотором ортонормальном репере
перехо
ит в точку с численно равными координатами в HeKOTO
ром новом ортонормальном репере. Следовательно, движение
является аффинным преобразованием. Если при некотором ДВИ-
жении множество Х переходит в множество У, то множество У
переходит в множество Х при обратном движении, и в этом слу-
чае множества Х и У называются конzруэнтными мно)кествами.
Важным примерам движения в аффинном евклидовом прост",
ранстве Е является отражение от данной m"мерной плоскости
n т с Е. Отражением от плоскости n т называется преобраЗ0вание
пространства Е, ставящее в соответствие произвольной точке
М Е Е такую точку М' Е Е, что прямая ММ' пересекает плос-
кость л m под прямым уrлом и точка пересечения прямой ММ'
и плоскости n т является серединой отрезка ММ'. Предлаrаем
читателю показать, что отражение от фиксированной плоскости
n m сохраняет расстояние между точками, т. е. является дви}ке-
нием. Частным случаем отра}l{ения от m"мерной плоскости явля-
ется отражение от ТОЧКИ t т. е. от нульмерной плоскости. Следо-
вательно, отражение от фиксированной точки Р
это преобразо-
вание аффинноrо евклидова пространства, ставящее в соответст-
вие произвольной точке М такую точку М', что точка Р лежит
на прямой ММ' и делит пополам отрезок ММ'.
Частными случаями движений (1) являются движения
х' == с х
,
(5)
переводящие в себя начало координат и называемые враll{ениям'U
BOKpyr точки О, а также переносы
х' ==х+а.
Вращения образуют rруппу относительно КОМПОЗИЦИИ t изо...
морФную rруппе ортоrональных операторов. Действительно, ком-
позиция вращений х' == C 1 Х И х' === С 2 Х имеет вид х' == (С 2 С 1 ) Х,
Т. е. является вращением с матрицей С 2 С 1 . Тождественное
преобразование, очевидно, является вращением, обратным преобра-
КЛАССИФИКАЦИЯ ДВИЖЕНИЯ
457
З0ванием для вращения (5) является вращение
х' == C
l Х == С* х. (6)
rруппа вращений аффинноrо евклидова пространства
является подrруппой rруппы центроаффинных преобразований.
В предыдущем параrрафе мы доказали, что аффинные преоб.
разования п.MepHoro аффинноrо пространства образуют rруппу
относительно композиции. Совершенно аналоrично показывается,
что множество движений n.MepHoro аффинноrо еВК.l]иДова простран..
ства является rруппой относительно композиции. Эта rруппа
является подrруппой rруппы аффинных преобразований; rруппыI
вращений и переносов, очевидно, являются подrруппами rpynnw
движений.
Так как движение является частным случаем аффинноrо пре..
образования, для задания движения достаточно указаТЬ t в каl{ие
точки переходят п + 1 точек п"MepHoro аффинноrо пространства,
не лежащих в одной rиперплоскости. Эти системы точек должны
быть конrРУЭНТНЫ t т. е. если движение задается точками (М 1 ,
М 2' . . . , М n + 1 ) и (М 1" . . . , м
+1)' то должны ВЫПОiIН яться следу.
ющие равенства:
р ( м i, М k) === Р (М [, м k), i, k
1, .. ., п + 1.
Аналоrично аффинным преобразованиям все движения аффин"
Horo евклидова пространства делятся на два класса: движения
первоrо рода и движения BToporo рода. Так же, как для аффИII"
ных преобразований, показывается, что движения первоrо рода
и их частный случай
вращения первоrо рода
образуют rруп..
пы относительно композиции.
3. Классификация движений
В rлаве ХУI (теорема 10) мы установили, что матрица С
ортоrональноrо преобразования может быть приведена l
канони..
ческому виду
1
1
о
.
.
1
с===
..
1
С 1
С 2
о
..
..
C r
458
ПРЕОБРАЭОВАНИЯ АФФинноrо ПРОСТРАНСТВА
rде С k --- матрица BToporo порядка С k :::::: 11 C
<Pk
sin (f'k
. Канони-
- sln <Pk COS <Pk I
u u
ческии вид ортоrональнои матрицы позволяет получить пол-
ную классификаuию движений аффинноrо евклидова простран-
ства.
Рассмотрим вначале вращения аффинноrо евклидсва простран-
ства. Простейшими вращениями являются вращения с матрицами
С == Е и С ==
Е. В первом случае вращение является тожде-
ственным преобразованием, во втором случае вращение имеет вид
х' ==
Х, т. е. является отражением относительно начала ко-
ординат.
Если в матрице (1) имеются лишь две первые подматрицы,
то вращение имеет вид
,
х, == х"
1
j
k,
,
х i ::::::
Х"
k + 1
j < n,
(2)
И 9 значит, является отражением от k-мерной плоскости, зада-
ваемой уравнениями
х, == О,
k + 1
i
п.
Если в матриuе (1) имеются лишь подматрицы С 1 , ..., с k, Т. е.
если матрица G" имеет вид
c
C I C2 .... 0 1 '
О с,.
(3)
то вращение, определяемой матрицей С, имеет единственную
неподпижную точку. Для Toro чтобы установить этот факт, доста-
точно заметить, что характеристический мноrочлен матрицы С
является произведением характеристических мноrочленов матриц
C k , 1
k
" и, значит, не имеет вещественных корней. Враще-
ние, задаваемое матрицей (3), называется поворото.м. вОКРУ2
начала координат.
l
о
Если в матриuе (1) отсутствует подматрица
1
.
.
.
.
о
1
а кратность собственноrо числа 1 равна т, то вращение назы-
вается поворотом вОКРУ2 т-мерной плоскости. Если же в матрице
1 О
( 1) отсутствует подматрица , а кратность cOOcTBeHHoro
О 1
числа
1 равна т, то вращение называется поворотным отраже-
нием от (п
m)
м.ерной плоскосmll.
I(ЛАССИФИКАUИЯ ДВИЖЕНИИ
459
Произвольная ортоrональная матрица вида (1) может быть
представлена в виде произведения
1 О
..
1
1
1
С]
о
.
.
C r
о
111
I
-.
о
1
I
1
LJ ..
..
1
С!
,
1
==
.
.
о
о
1
C r
откуда вытекает, что проuзвольное вращение аффинноzо евклu"
дова пространства является композицией поворота вок,руе нек,оmо-
рой m
.lttерной плоскости (8 частном случае l вокруа точки) и отра-
жения от некоmорой k-мерной плоскости.
Переходим к описанию общих движений
х' ==Сх+а
аффинноrо евклидава пространства. Если С == Е, движение пред-
ставляет собой перенос х' ==х+а. Если же C==
E, то
х' ==
x+a. (4)
Для Toro чтобы установить rеометрический смысл последнеrо
преобразования, напомним, что а == (a 1 , ..., а п ) суть координаты
точки О' относительно системы Ое 1 ... е п , Х == (х 1 , ..., х п )
КООР'"
динаты точки М, х' == (x
, ..., X
)
координаты ее образа М'.
Обозначим через Р точку с координатами
а == (
a 1 . ....
ал)
и перепишем равенство х' ==
х +а в виде
, I ( 1 )
х
2a==
X
2a ·
........
Равенство (5) эквивалентно равенству РМ' ==
РМ, откуда сле-
дует, что (4) есть отражение от точки Р.
(5)
460
ПРЕОБРА30ВАНИЯ АФФинноrо ПРОСТРАНСТВА
в случае, Kor да матрица С имеет вид
I 1
. . о
.
с== 1
l
О . .
. .
1
движение записывается формулами
xi==Xl+ai, 1
i
k,
Х; ==
Х! + Qj, k + I
j::;; n,
(6)
ИЛИ, что эквивалентно,
Х{ == х, + al, 1
i < k,
, 1 ( 1 \ k 1
х i
2: а) ==........ Х}
2: Qj), +
j
n.
Движение (6) является композицией отражения от плоскости
XI::= О, 1::::;; i
п, и переноса ВДОЛЬ этой плоскости. Такое ДВИ-
жение называется переносныltt OmpaJlCeIiueM.
Если матрица С имеет вид
С 1 . о I
с == О -.. ,
C r !
то, как указывалось выше, матриuа Е
С невырождена, и по-
этому движение обладает единственной неподвижной точкой, ко-
ординаты которой находятся из формулы
х О == (Е
C)
l а.
Такое движение мож
т быть записано в виде
х'
xO==C(x
xO)
и представляет собой вращение BOKpyr точки Р о С координатами
х о == (xf, ..., X
) .
Если в матрице С отсутствует подматрица
'
I
I
I о
1
о
l
то ДВI{)кение имеет вид
k
xj == L: CjlXl + Qj,
l===J
х! == Х i + aj,
п
k + 1
j
п. J
(7)
1
j
п ...-.. k.
КЛАССИФИКАЦИЯ ДВИЖЕНИЯ
461
k
Формулы Xt ==
СиХе + а[, 1
i
k, задаIОТ движение в k-Mep-
l==I
ной плоскости, причем матрица II c u117.1
I имеет вид 11
l .... О ' 1,
С Т I
Т. е. движение в k-мерной плоскости есть вращение. СлеДОЕа
тельно, движение (7) является композицией поворота BOKpyr (п
k)..
мерной плоскости Xi == О, i == 1, ..., k, и переноса в направлении,
параллельном этой плоскости. Таксе движение называется виf{mo
вым движением.
Если матрица С имеет вид
1
о
с==
1
С 1
о
С Т
то С можно записать в виде произведения двух ортоrональных
матриц
l
с == АВ,
О
1
.
.
о
rде
А==
l
В==
1
о
С 1
о
1
С Т
Следовательно, в этом случае
х'
Cx+a == АВх+а == ABx+AA
la == А (Bx+A
la),
т. е. наше движение есть композиция винтовоrо движения х'
== Вх + А
la и отражения от плоскости х' == Ах.
Мы получили полную классификацию движений n-мерноrо аф..
финноrо евклидова пространства. Если n
2, то все движения
сводятся к переНQСУ, повороту, отражению или переносному OTpa
жению
утверждение, известное как теорема Бернуллu
Шаля.
Покажем в заключение, что каждое дви){{ение аффинноrо eBK
лидова пространства можно реализовать в виде композиции OTpa
жений от rиперплоскостей.
т е о р е м а 3. Каждое движение n"мерносо аффи1{,НО
О евклuдова
npocтpaHcпzea является композицией не более п + 1 отражений от
2uneрnлоскостей.
До к а з а те л ЬС Т В о. Пусть ': Ап
Ап
некоторое движение.
Выберем в А п п + 1 точек МО' ..., М п , не лежащих в одной rипер..
462
ПРЕОБРАЗОВАНИЯ АФФинноrо ПРОСТРАНСТВА
плоскости, и обозначим через А1'; == f (M k ). k == О, 1, ..., n. их
образы при движении ,. Построим rиперплоскость симметрии :rto
для точек Мо и МО и отразим точки Мо, М;, М;, .,., M
от
этой rиперплоскости. При этом отражении точка МО перейдет
в точку мо. а точки м;, М;,..., M
в некоторые точки
М i, ..., M
. Построим теперь rиперплоскость :rt 1 симметрии точек
M
и Mi. Покажем, что плоскость 311 содержит точку Мо. Для
этоrо рассмотрим пересечение двумерной плоскости треуrольника
М о М.Л1; с rиперплоскостью Л 1 . Так как р (МоМ}> == р (молtf
) ==
== р (мом;), то треуrольник MoMlM
равнобедренный и, значит,
плоскость треуrольника MoMlM; пересекается с rиперплоскостью
:rt 1 по высоте треуrольника А10МIМ;. выходящей из вершины Л-1 0 .
Отразим точки м;. ..., M
от rиперплоскости :rt 1 . При :JTOM точка
1Vl; перейдет в точку М 1 , а точки М;, ..., M
перейдут в новые
точки M
', ..., M
'. rиперплоскость Л 2 содержит точки Мо и M 1 ,
так как она пересекает двумерные плоскости треуrольников
МОМ2М;' и м 1 м 2 м;' по высотам, исходящим соответственно из
вершин Л,1 0 и М 1 . Повторяя эту процедуру k раз. мы получим rипер-
плоскость :rtk, являющуюся rипсрплоскостью симметрии для точек
M k и M1 k +J). Рассматривая плоскости равнобедренных треуrоль-
НИКО в MJM kMLk+ 1), j == О, 1. ..., k
1, мы видим, что они пере-
секаются с rиперплоскостью :rtk по высотам, исходящим из вер-
111ИН Мо. М 1 , ..., Mk
l. Следовательно, rиперплоскость 1tk содер-
жит точки Мо, М 1 , ... t Mk
l. После отражения от rиперплоскости
п'l точка Mk k +l) перейдет в точку M k , а точки Mi'+'t O . ... ,M
k+l)
u М (k+2) M (k+2) 3
переидут в некоторые новые точки k+l,... , n . начит,
если k == n, то rиперплоскость 1С п совпадает с rиперплоскостью,
натянутой на точки Мо, Ml' ..., Mn
1' После отражения от rипер-
плоскости п n точка l\tl
n+l) перейдет в точку М n . Следовательно,
композиция
81'f,n · 8пn
) ..... S1to,
rде 81tk
отражение от rиперплоскости :rtk, переводит точки М.,
М;, ..., M
в точки Мо, М 1 , ..., Мn, т. е. является отображе-
нием, обратным к ':
'
1 == S п п . 8пп
) ... .. 8 nо .
Поскольку Sit
== SПk' ТО
f === (S 1€п .. . . е SпO)
l == S по. S па 8. . .8 S Jl n .
Теорема 3 доказана.
r л А В А XVIII
rИПЕРПО8ЕРХНОСТИ BToPOro ПОРЯДКА в п-МЕРНОМ
АФФИННОМ ПРОСТРАНСТВЕ
1. Общая теория rиперповерхностей BToporo порядка
1. Уравнение rиперповерхности. runерn08ерхностью втОрО20
порядка 8 n",мерно-м аффинном пространстве А п называется MHO
жесmво mочек из Ап, которые в nроuзвольной аффинной системе
координат удовлетворяют уравнению
n п
F(x 1 , ..., Xп) ==
aIIXIXi+2
bIX,+C==O. (1)
[. i
1 1==1
Предполаrается, что коэффициенты ац удовлетворяют условию
all == ajl.
Так же как в случае n == 2 и n == З, обозначим через q> (X 1 , ..., Х n )
l'
квадратичную форму
a'jXlX, и через 1 (Х 1 , ..., х n )....... линейную
1, J == l'
n
форму
Ь,х,. Тоrда уравнение (1) можно переписать в виде
i===]
F(xJ.' ..., xп) == CP(x 1 , ..., x n )+21(x 1 , ..., хп)+с==О. (1')
Обозначим через AQ) матрицу lI a ijll квадр атичной формы q> (х 1 , . . . , Х n )
и через Ар
матриuу
b I
A F ===
Аср
ь .
п
С
Ь 1 ... ь п
Детерминанты матриц Ар и Ач» обозначим соответственно через
А и б. rиперповерхность BToporo порядка (1), детерминант
KOTO
рой не равен нулю, называется не8ыlожден1iой.. Если же дeTep
минант d == О, rиперповерхность называется 6ырожденн'ОЙ.
464
rИПЕРПОВЕРХНОСТИ BToporo ПОРЯДКА
При сдвиrе
Xk==Xk+ak
начала координат уравнение (1) переходит в уравнение
(2)
п п
F(x
, ..., x
) =Z
аи (х; +al) (х! +aj)
r2
b l (xi +al) +С == О,
i,i
1 i==l
или в эквивалентное ему уравнение
11 п
F (x
, ... t x
) ==
aljxixj + 2
(аца; + b l ) Х/ +
i,j==I i t j==l
п 11
+
al;ai a ,+2
b1al+C==O. (3)
i,j==J [
)
Отсюда следует, что при сдвиrе (2) коэффициенты квадратичной
формы <р не меНЯIОТСЯ.
Покажем теперь, что ранrи R и r матриц ,"1 р и А ф не зави"
сят от выбора системы координат. Это очевидно для матрицы А ф ,
поскольку, во
первых, ее paHf не меняется при произвольном
однородном линейном преобразовании и, BO
BTOpЫX, всякое КООР"
динатное преобразование сводится к сдвиrу и однородному линей..
НОМУ преобразованию. Чтобы доказать независимость paHra R
матрицы Ар при преобразовании координат
п
Xk == L: CkjXj + d k ,
i :=.
t
det IICi;1J =1= О,
(4)
рассмотрим квадратичную форму
п п
Ф (Х 1) ... t x nt t) ===
ai;xlx; + 2 2: biXit + ct 2
i.i==1 i==J
и преобразование
п
Х/ ' ==
Ck;Xj + dkt',
1==1
t == t' .
Тоrда Ар есть матрица формы Ф, а преобразование (5) не изме-
няет ее paHra R.
2. Взаимное расположение rиперповерхности и прямой. Pac
смотрим взаимнсе расположение rиперповерхности (1) и прямой
Xk == Xk + 'k t . (6)
Подставляя координаты Xk в уравнение rиперповерхности (1),
получим уравнение второй степени относительно t:
At l +2Bt+C==O, (7)
(5)
ОБЩАЯ ТЕОРИЯ rИПЕРПОВЕРХНОСТЕЯ BTOPOrO ПОРЯДI(А 465
rде
п
А == q> (, l' ..., r 11) ==
al/' ,r 1,
'. i == I
п
В ==
(aox
+ Ьд '1,
{. i == 1
С == F (х7, ..., X
).
11
Если <р (r[, ..., 'п) ==
ац"" =/:= О, то уравнение (7)
квадрат..
i. ;==:.1
ное уравнение относительно t и, значит, имеет два реJllения:
вещественных различных, вещественных совпадающих или комп"
лексно сопряженных. В этих случаях rиперповерхность и прямая
имеют соответственно две общие точки, одну общую точку и ни
однсй общей точки. В первом случае rоворят, что rиперплоскость
и прямая пересекаются в двух точках, во втором случае
что
прямая касается rиперплоскости.
В последнем случае за точку (x
, ..., X
) прямой (6) возьмем
точку касания. Тоrда С == F (х7, ..., хй) == о и уравнение (7) при..
мет вид
t (At + 28) == о.
ОДИН ero корень ' 1 == О, друrой ' 2 ==
2; ; чтобы он тоже был
равен нулю, надо, чтобы было В == О, т. е.
1 (
1 al/Xi+b l ) ,,
O
11
или, если обозначить
ацХ, + Ь, через F i (х1, ..., X
),
1==1
11
FI (х1, ..., X
)'l == о.
i == 1
(8)
Отсюда, аналоrично трехмерному случаю, получается уравнение
касательной еuпеР'lлоскостu
Р, (x
, ..., X
) (XI ..... х2) === о.
(9)
Если прямая (6) такова, что
п
q> ('1' ..., r,,) ==
alj'l'j == О,
1. j == I
( 10)
466
rИПЕРПОВЕРХНОСТИ BToporo ПОРЯДКА
то она называется nря,м,ой асu,М,птотичеСКО20 направления
а век-
тор (rl' ..., 'п)
вeк.тopOM асим.птотuческоео направления (или
просто асимптотическим вектором) rиперповерхности (1).
Если выполнено условие (1 О) и В =F О, то уравнение (7) имеет
единственный корень. Этот корень определяет единственную точку
пересечения rиперповерхности (1) с прямсй (6). Если выполнено
(10) и 8==0, а С::рО, то уравнение (7) противоречиво
прямая
(6) не имеет с rиперповерхностью ни одной общей точки. В этом
случае прямая (6) называется асимптотой 2иперnоверхносmи (1).
Если же А == О, 8 == О, С == О. то все коэффициенты уравнения (7)
нулевые и оно тождественно удовлетворяется при всех значе
ниях t. Следовательно, все точки прямой (6) принадлежат rипер
поверхности (1). В этом случае прямая (6) называется nрямоли
нейноu образующей rиперповерхности (1).
3. Центр rиперпоsерхности. Определение 1. Точка Мо,
лежащая на rиперповерхности (1), называется ее центром сuмм,ет
рии, если при отражении от точки Мо rиперповерхность (1) пере
ходит в себя.
Пусть Мо
(X
, ..., X
)
центр симметрии rиперповерхности
(1). Тоrда для любой прямой
Xk == хЕ + 'k t , (6)
проходящей через точку Мо, точки М 1 И М 2 пересечения этой
прямой с rиперповерхностью находятся на равном расстоянии от
точки Мо по разные стороны от нее. Поэтому t 2
t 1 , т. е.
t 1 + t 2 == О для любоrо направляющеrо вектора {r 1t ..., r ,,}. Сле-
довательно, для любоrо вектора {r 1 , ... t r п}
п
В ==
F 1 (x
, ..., х:) r 1 == О,
i== 1
откуда
F 1 (X
, ..., х:) == О,
i === 1, ..., n.
(11 )
Итак, всякий центр симметрии Мо:::::; (x
, ..., Х:) rиперповерх-
ности (1) удовлетворяет системе уравнений (11), или, в развер-
нутом виде,
п
йцх1
b l :::::; о,
i
l
i == 1, ..., n.
(12)
Если rиперповерхность (6) обладает единственным центром
симметрии, то этот центр симметрии называется центром 2иnep
поверхности, а сама rиперповерхность называется центральной.
Из системы уравнений ( 12) вытекает, что rиперповерхность (1)
является центральной тоrда и только тоrда, коrда б == det Аср =1= о.
ОБЩАЯ ТЕОРИЯ rИПFРПОВЕРХНОСТЕА BTOPOrO ПОРЯДКА 461
Если же rиперповерхность (1) имеет MHoro центров симметрии
или не имеет ни одноrо центра, то она называется неценmраЛЬflОЙ
еuперповерхностью.
4. Диаметральная rиперплоскость. Особые направления. Со..
пряженные направления. Пусть дана rиперповерхность BToporo
порядка
F(x 1 , ..., Xn) == Q)(X 1 , ..., x n )+2L(x 1 , ..., хn)+с==о. (1')
Рассмотрим совокупность всех прямых d, имеющих одно и то же
неасимптотическое для Данной rиперповерхности направление
{, 1, ..., r п}. Каждая такая прямая d пересекает rиперповерхность
в двух точках Mf, M
(веlцественны х, быт ь может, совпадающих
или мнимых сопряженных); отрезок м1 м: назовем хордой, Bыce
каемой из данной прямой rиперповерхностью (1 '). Выше мы уста..
нови.пи, что точка Лt10 == (x
, ..., X
) прямой d тоrда и только
тоrда является серединой хорды, высеченной И3 прямой
Xk == X
+ 'kt
rиперповерхностью (1'), коrда выполнено условие
п
Р, (x
, ..., x
), i == О,
i== 1
или, в развернутом виде,
.t ( t aljx1 + b i ) '1 == О.
i
1 j
1
Это уравнение, по
новому rруппируя члены
нуль у координат, можно представить в виде
i
Ct. aijr/)Xt+
' bl'"i==O.
Мы получили уравнение rиперплоскости в Аn, которому удов"
летворяют те и только те точки, которые являются середина
ми хорд, высекаемых rиперповерхностью (1') из всев')зможных
прямых с направляющим вектором {'1, ... t 'п}' rиперплоскость
(14) называется 2U11ерплоскосmЬЮ 1 сопря"сенной направлению
{'lt ..., f ll } относительно rиперповерхности (1').
Выше мы предполаrали, что направление {'l' ..., 'n} неасимп
тотическое, поскольку И3 прямой асимптотическоrо направления
rиперловерхность не высекает никакой хорды. Но уравнение (14)
имеет смысл и для асимптотическоrо направления: определенную
этим уравнением rиперплоскость мы по
прежнему будем называть
rиперплоскостью, сопряженной направлению {r 1 , ..., 'п}.
(13)
и опуская индекс
( 14)
468
rИПЕРПО8ЕРХНОСТИ BToporo ПОРЯДКА
о п р е Д е л е н и е 2. rиперплоскость называется дuам.етраЛЫ-lОЙ
zuперплоскостью rиперповерхности (1 '), если существует хотя бы
"
одно направление, для которон эта rиперплоскость является co
пряженной относительно rиперповерхности (1').
У равнение диаметральной rиперплоскости будем записывать
в виде
п
LkXk+LO==O,
'==1
(15)
rде
п
Lk ==
akJrJ,
j
l
n
Lo ==
bi'l.
i == I
(16)
Так же как в С
1]учае TpeXMepHoro пространства, устанавли-
ваются следующие свойства диаметральных rиперплоскостей:
1 о Всякая диаметральная rиперплоскость содержит все центры
данной rиперповерхности.
20 Если rиперповерхность имеет хотя бы один центр, то вся
кая rиперплоскость, содержащая все ueHTpbI данной rиперповерх
насти, является ее диаметральной rиперплоскостью.
30 Точка Мо, принадлежащая всем диаметральным rипер..
плоскостям, является центром rиперповерхности.
В том и только в том случае, коrда все n коэффициентов Ll
в уравнении (15) обращаются в нуль, для данпоrо направления
{, l' ..., 'п} не существует сопряженной ему rиперплоскссти.
Оп р е Д е л е н и е 3. Направление {rl' ..., , п} называется
особым, если оно удовлетворяет системе уравнений
п
Lk ==
a'<j'i == О,
j==1
Из определения особоrо направления немедленно вытекает,
что rиперповерхность paHra r имеет не более n
r линейно не..
зависимых особых направлений. В частности, центральные rипер
поверхности вообще не имеют особых направлений.
Поскольку для особоrо направления
k == 1, ..., n.
(17)
п п
Lk'k==
akj'k'j==q>(r 1t ...t r,z)==O,
k==l k. j
1
то всякое особое направление является асимптотическим. Значит,
только в нецентральном случае и только асимптотическое направ
ленме может оказаться особым.
Квадратичная форма <р (х 1 , ..., Х п ) rиперповерхности
Р(Хl' ..., Х п ) = CP(Xl, ..., x п )+2l(x 1 , ..., хn)+с==о (1')
ОБЩАЯ ТЕОРИЯ rИПЕРПОВЕРХНОСТЕй BTOPoro ПОРЯДКА 469
определяет свою полярную билинейную форму и билинейную
функцию ч' (u 1 , U 2 ): если U 1 == {'1' ..., r п}, U z == {SI' о.., Sn}, то
n
'I' (U 1 , U 2 ) ==
aij'iSj-
i, i===l
Леrко видеть, что Е:та билинейная функция не зависит от выбора
системы координат.
О п р е Д е л е н и е 4. В екто ры u 1 == {, 1, .. ., , п } И U 2 == {8 1 , ... Sn}
называются сопряженными оmНОСllп1ельно ёиперповерхносmи (1'),
если для этих векторов Ч' (U 1 , U 2 ) == о.
Из этоrо определения следует, что особое направление сопря..
жена любому направлению. Т счно так }{{е, I<aK в случае двумер-
ной поверхности BToporo порядка, показывается, что если направ-
ление {'l' ..., 'n} сопряжено всякому направлеНИIО, то оно
является особым.
Пусть нам дана некоторая rиперповерхность BToporo порядка
(1'). Возьмем ПРОИЗВО,,'1ЬНУIО неасимптотическую относительно
данной rиперповерхности прямую d. Для центральной rиперпо..
верхности предположим дополнительно, что прямая d проходит
через центр этой rиперповерхности. rиперплоскость а, сопряжен..
иая направлению прямой d, не парал.пельна d и пересекает
прямую d в некоторой точке о. Эту точку О будем считать на..
чалом новой координатной системы. Заметим, что если rиперпо..
верхность центральная, то точка О
ее центр. Осью Х п сделаем
прямую d; остальные оси выберем в rиперплоскости а. rипер
плоскость а, таI(ИМ образом, в новой координатной системе имеет
уравнение
Х п == о.
( 18)
Пусть в выбранной нами координатной системе уравнение rипер..
поверхности имеет вид
п n
F (х l , ..., Х n ) ==
aljXiX; + 2
biXi +С == о.
{, j
1 i == 1
Поскольку rиперплоскость (1') сопрях<ена вектору {О, о, ..., О, 1},
то ее уравнение в нашей системе координат должно быть
n
ainXI + Ь 1l == о.
i===1
(19)
Так как уравнения (18) и (19) опредеЛЯlОТ одну и ту же rипер..
плоскость, то
al ll == О, i == 1, ..., n
1, Ь п == О, а пп =1= о.
470
rИПЕРПОВЕРХНОСТИ BToporo ПОРЯДКА
Следовательно, в этой системе координат данная rиперповерхность
имеет вид
п
1 n
1
aljXi x /+ 2
btXI+c+aпnXh ==0,
i.j
l i==1
причем a rtп =F о.
Пусть теперь наша rиперповерхность центральная. Тоrда мы
можем потребовать, чтобы ось Х 1 имела неасимптотическое направ-
ление. Сопряженная ей rиперплоскость проходит через ось Х п ,
так как направления осей Х. и Х п сопряжены. rиперплоскости,
сопряженные осям Х 1 И Х п , пересекаются по некоторой (п
2)
пло..
скости. Возьмем в этой плоскости некоторую неасимптотическую
прямую и объявим ее осью Х 2 . Повторяя эту конструкцию, МЫ
получим систему координат, оси которой имеют попарно сопря-
женные направления. Плоскости Xk == О сопряжены направлениям
{о, О, ...,1, О, ..., О}
и, значит, имеют уравнения
n
alkXl + b k === О,
i:: I
откуда следует, что не равны нулю лишь коэффициенты а 11 ,
2'...
.. ., а пп и, может быть, коэффиuиент с.
Итак, уравнение центральной rиперповерхности в системе
координат, направления осей которой попарно сопряжены, имеет
вид
п
akkX: + с === о.
k==l
Так же как в случае двумерной поверхности BToporo ПОрЯДJ<а,
основным приложением полученноrо результата является сле-
дующая
Т е о р е м а (т е о р е м а е д и н с т в е н н о с т и). Два МНО20члена
второй степени F 1 (х 1 , ..., Х n ) и F 2 (х 1, ..., X tl ) тОсда и mолыro
тО2да имеют одно и то же множество решений, коеда они про-
nорцuонаЛЬНbl .между собой.
Доказательство этой теоремы вполне аналоrично доказатель-
ству ее двумерноrо варианта (см. rл. IX) и оставляется читателю
в качестве упражнения.
5. rлавные направления. В этом пункте рассматриваются лишь
ортоrональные системы координат. Рассмотрим уравнение rипер-
поверхности BToporo порядка
F(Xl' ..., Xп)==CP(X 1 . ..., x n )+2l(X 1t ..., хп)+с==О (1')
КЛАССИФИКАЦИЯ rИПЕРПОВЕРХНОСТЕЯ
471
относительно некоторой ортоrоналъной системы координат. Как
было доказано в rлаве XIII, ДЛЯ квадратичной формы
п
(Р (Х 1 ) ..., Х п ) ==
aljXIX,
i, j == 1
СУlцествует таксй ортоrональный базис, в котором она имеет диа..
rональныЙ вид
q> == л1уi + ... +ЛпУ
,
причем все коэффициенты Л 1 ' ... t А п суть вещественные числа.
Направления координатных осей этоrо базиса называются 2лав
ныМ,и направленuями. Уравнение rиперповерхности (1 '), записан--
ное в координатах Yt, ..., Уn, имеет вид
F == л1yi + . .. + ')
пY.
+ 2'L b iYI + с' == о (20)
и называется уравнением rиперпсверхности, приведенным к r лав
ным направлениям.
6. Приведение к центру. Пусть rиперповерхность (1) цeHT
ральна. Если начало координат выбрано в центре этой rипер
поверхности, то rоворят, что уравнение rиперповерхности приве--
дено к центру. В этом случае в формулах (12) X
о, i == 1, ...
. . ., n, откуда следует, что Ь 1 ::::: Ь 2 === ... == Ь п == о. Обратно, если
в уравнении rиперповерхности (1) Ь 1 == . .. == Ь п == О, то в силу
(12) х7 === .. . == X
== О и центр rиперповерхности совпадает с нача-
лом координат. Итак, необходимым и достаточным условием Toro,
что уравнение центральной rиперповерхности приведено к центру,
является равенство нулю коэффициентов b l уравнения при первых
степенях координат.
2. Классификация rиперповерхностей BToporo порядка
Рассмотрим rиперповерхность BToporo порядка, заданную ypaB
нением
F (Хl' ..., Х п ) == <р (х 1 , ..., Х п ) + 21 (x 1 , ..., Х п ) + с == О,
относительно некоторой ортоrональной системы координат Ох! . . . Х п .
Как было установлено выше, всеrда СУlцествует по крайней мере
одна ортоrональная система координат OYl... Уп, оси которой
имеют rлавные направления. В этой системе координат уравнение
rиперПОВерхности имеет вид
Р' (Уl' ..., Уп)
ЛIУi + . .. + ЛпУ
+ 2b
Yl + . . . + 2b
Yп + с === о. (1)
1. Центральные rиперповерхности. Перенесем начало KOOpДH
нат О системы OYl'" Уп В иентр rиперповерхности (1). Тоrда ypaB
нение (1) примет вид
F == Л 1 (YJ)2 + ... +Л п (y
)2 +с' == о. (1')
472
rИПЕРПОВЕРХНОСТИ BTOPOrO ПОРЯДКА
в случае центральной rиперповерхности с уравнением (1') детер-
минант б матрицы Aq> равен
fJ == л'l ... ').\п,
а детерминант 6. матрицы AF-
6. == л'l ... лпс' .
Так как в случае центральной rиперповерхности 6 =1= О, то
с' == 6./6.
Итак, окончательный вид уравнения (1) в выбранной нами орто-
rональной системе координат есть
ЛIУ
+ . .. + ЛпУ
+
== о (2)
(МЫ пишем снова Yl' .. . , Уп вместо Y
, ..., Y
). Имеется две возмож-
ности 6. =1= О и
== о. в первом случае rиперповерхность называ
ется невырожденной, а во втором случае
вырожденной.
В случае невырожденной центральной rиперповерхности введем
обозначения
a
== и: I == I б
i 1. (3)
Тоrда, если числа Лf имеют одинаковые знаки, противоположные
знаку с', уравнение (2) переписывается в виде
yi y
+..'+2""==1. (4)
ai а п
rиперповерхнссть (4) называется эллиnсоида""t. Если коэффици"
енты л'i имеют одинаковые знаки, совпадающие со знаком с', то
уравнение (2) примет вид
yj y
+ ....L
==
1
2 ... I 2 ·
аl а п
(5)
УравнеНИIО (5) не удовлетворяет ни одна вещественная точка
аффинноrо пространства. rиперповерхность (5) называется М,ним.ы.м
эллunсоuдОJt.
В случае, коrда коэффициенты ЛI при i
т имеют знаки, про...
тивоположные знаку С', а коэффициенты Лi при i > т имеют
знаки, совпадающие со знаком с', то уравнение (2) переписывается
в виде
yi + + У;'"
y
+ 1
.. . . . 2 .t
aj a rп ат + 1
y
1
... Q
.
a
п
(6)
rиперПQверхнQCТЬ (6) называется еuперболоuдо/t#, индекса nt.
КЛАССИФИКАЦИЯ rИПЕРПОВЕРХНОСТЕй
473
Рассмотрим теперь случай вырожденной центральной rипер--
поверхности BToporo порядка. Обозначим \
; I через а1. Если
коэффициенты Лl имеют одинаковые знаки, то уравнение (2) можно
переписать следующим образом:
X
х 2
1 п О
i;+...+
== ·
Gi йп
(7)
Эrому уравнению удовлетворяет только одна точка
начало KOOp
динат О == (О, ..., О). Если же коэффициенты л, при i
т имеют
один знак, а при i > т
противоположный знак, то уравнение
(2) превращается в
Х 2 Х 2 Х 2 Х 2
1 т т+l п
+ . . . + 2"""
.)
...
== о. (8)
а 1 а т аin + 1 а-п
Если точка (а 1 , ..., СХ п ) удовлетворяет уравнению (8), то
этому же уравнению удовлетворяют все точки вида (лсх l , . . ., ЛСХn)
при любом л. rилерповерхность (8) называется конусом с вершu
нои в точке О индекса т, если 2т
п (случай, коrда 2т > п,
сводится к этому случаю заменой знаков). Иноrда уравнение (7)
называlОТ уравнением мни.мОёО конуса с вершиной в точке о.
Итак, каждая центральная rиперповерхность BToporo порядка
является либо конусом индекса т с вершиной в точке О (веще..
ственным или мнимым), либо эллипсоидом (вещественным или
мнимым), либо rиперболоидом индекса т.
2. Параболоиды. Рассмотрим теперь нецентральные невы рож..
денные rиперповерхности BToporo порядка.
Так как d == det AF' rде
А
A F == q>
ь '
I b 1 ,..b '1 Cп
b 1
то нецентральная rиперповерхность невы рождена ТО.пько в том
случае, коrда paHr матрицы А<р равен n
1, так как детерминант
А не МО}l{ет быть отличен от нуля, если paHr матриuы А ф меньше,
чем п
1.
Как и прежде, рассмотрим уравнение нашей rиперповерхности
в системе координат Оу!... Уп, оси которой имеют r лавные нап-
равления. Так как paHf матрицы А<р равен п
1, то. n
1 из
диаrональных элементов Лi отличны от нуля. Без оrраничения
общности можно считать, что отличны от нуля первые п
1 коэф
фициентов ЛI, i == 1, ..., n
1, а Л п == о. Итак, уравнение нашей
rиперповерхности можно записать в виде
п
АIУ! + ... +Лn
lУ
J + 2
blYl +с == О.
1 == 1
(9)
474
rИПЕРПОВЕРХНОСТИ BToporo ПОРЯДКА
Вычтем И3 уравнения (9) слаrаемое 2Ь n Уп. В результате мы полу-
чим уравнение
n
I
л 1 уf+ ... +Лп
lУ
1+2
biYI+C==O,
i == I
(10)
определяющее центральную rиперповерхность BToporo порядка
в (п
l)
MepHOM аффинном пространстве с координатной системой
ОУl... Yn
l. Приведем уравнение rиперповерхности (10) к ее центру.
В результате этоrо преобразоввния уравнение (9) перейдет в урав-
нение
Лl (y
)2 + .. . + Лп
l (Y
1)2 + 2Ь п (Y
) +с' == о. (11)
Параллельный перенос
, ".
Yi == Yi, t < п,
, " с'
Уп == Уп
2Ь п
преобраэует уравнение (11) к уравнению
л'1 (yj)2 + ... +Лп
l (y
1)2+ 2bпY
== о. (12)
Обозначим I
; I через Pl. 1 == 1. ..., п
1, и опусти,,, штрихи
у переменных в уравнении (12). Ее ли все числа Лi в этом урав-
нении имеют один и тот же знак, то оно принимает вид
Y i 1 У 2
п
I
+ 2
+ ... +
Уn,
Pl Pп
!
или, после изменения, если необходимо, направления координат-
ной оси ОУп. вид
yi + + Yh
1 == 2
... Р Уn.
РI п
l
rиперповерхность (13) носит название эллuпmuческоzо параболо-
ида.
В случае, если коэффициенты Лl при i:::;; т имеют один знак,
а при i>т
противоположный ЗНЗI{, то уравнение (12) можно
записать в виде
(13)
2 с)., 2
Уl + + Ут
У т + I
У n
1 == 2
... ... УII'
Рl Рт Рт+ ' Pп
1
(14)
или привести к этому виду изменением направления оси ОУп.
rиперповерхность (14) называется 2uперболuческu.м параболоu-
n
1
дом индекса т в предположении, что т
2 ,поскольку случай
n
l
т> 2 приводится К этому умножением всех членов уравне-
ния на --- 1 и изменением направления оси Оу",.
КЛАССИФИКАЦИЯ rИПЕРПОВЕРХНОСТЕА
475
Убедимся, что параболоиды действительно являются невырож-
денными rиперповерхностями BToporo порядка. В случае эллипти-
ческоrо параболоида (13) матрица Ар имеет вид
1
Pi .
...
о
А р ==
1
Pп
l
о
о
l
l О
Следовательно,
1
Рl
-.
..
о
л==
I
Pп
l
1 =1= о.
Pl... Pп
l
о
1
1 О
Для rиперболическоrо параболоида (14)
1
о
Рl
-.
..
о I
А р ==
1
Рт 1
,
Рт+l ..
.. I
о
Pn
1 О
.
1 О
и поэтому
(
I)m+п"'l
А == ..
*o.
Pl...Pп
l
3. 8ырожденные rиперповерхности. Вырожденная rиперповерх
ность является нецентралъной rиперповерхностью, причем paHr
матрицы ее квадратичной формы , < n. Уравнение вырожденной
rиперповерхности, приведенное к r лавным направлеНИЯМ t имеет вид
n
y} +.. .+л r у:+2
blYl +с ==0.
I
J
(15)
Вычитая из левой части уравнения (15) линейную форму
2b r + 1 Yr+l +. . · + 2Ь n уn.
476
rИПЕРПОВЕРХНОСТИ BToporo ПОРЯДКА
МЫ получим уравнение центральной rилерловерхности BToporo
порядка в '
MepHOM аффинном пространстве
Л 1 УI +.. .+'Ary;+2
b1Yt+C==O.
i == J
(16)
Приводя уравнение (16) к центру, мы преобразуем исходное урав-
нение (15) к следующему виду:
п
л. (у1)2 +. . . + лr(у;) 2 + 2
blYI + с' == о.
i==r+1
(17)
Предположим сначала, что в уравнении (17) хотя бы один из
коэффициентов Ь , отличен от нуля. Тоrда параллельный переное
, "
Yi == У i ,
i =1= j,
, " с'
Yj==Yi ........
2Ь}
переводит уравнение (17) в уравнение
n
л 1 (у'{)2 +... + л r (у':)2 + 2
biy'/ == о.
i==r+J
Совершим теперь поворот в (п
r)
мерной плоскости у'{ ==... == у'; ==
== О, переводящий вектор с координатами {b r + 1 ,... ,Ь п } в вектор
с координатами {Ь, О, ... , О}. При этом повороте уравнение (18)
переходит в следующее уравнение (МЫ опускаем штрихи у перемен-
ных ):
(18)
л 1 уi +.. . + 'ЛrУ; + 2bYr+l == о.
( 19)
в уравнение (19) не входят переменные Yr-12' .. . tYn. rиперповерх...
ность BToporo порядка, задаваемая этим уравнением, называется
параболическим цuлиндрОАt с '
MepHЫM основанием или t короче,
с '
OCHoвaHиeM. Это название объясняется тем, что уравнение (19)
является уравнением параболоида в (, + 1 }.мерной плоскости
Yr-12 ==. . . === Уп == о. в том случае, коrда этот параболоид эллипти-
ческий, наша f'иперповерхность называется параболическим цuлuнд
ром индекса о. В случае, коrда параболоид
rиперболический
индекса т, наша rиперповерхность называется параболическим
цилиндром индекса nl.
Пусть теперь в уравнении (17) все коэффициенты b i равны
нулю. Значит, уравнение (17) в этом случае имеет вид
л1уf + . . . + "лrУ; + с == о (20)
(штрихи над переменными и свободным членом мы опускаем). Так
как в уравнение (20) не входят переменные Yr+l ==. . . == Уп, ТО это
уравнение также является уравнением цилиндра. Если коэффициент
с =1= О и уравнение (20) есть уравнение эллипсоида в ,.мерной
КЛАССИФИКАЦИЯ rИПЕРПОВЕРХНОСТЕА
477
П.ПОСКОСТИ Yr+l
. . .
Уп
О, то rиперповерхность (20) называется
эллиптuческим цилиндром с (т
1 )-основанием. ЕСJlИ уравнение (20)
является уравнением rипербо.поида в r
мерной плоскости Yr+l ==...
. .. == Уп == О, то rиперповерхность (20) называется
uперболическим
цилиндром. с (,
l)
основанием, причем в случае, коrда rипербо
ЛОИД в r
мерной плоскости имеет индекс т, цилиндр называется
2uперболuцеским цилиндром индекса т. Если уравнение (20) есть
уравнение мнимоrо эллипсоида в r
мерной плоскости Yr+l == . . .
. . . == Уп == О, то rиперповерхность (20) называется мни-мым цилиндром
с (т
1 )-основанием.
Если свободный член с в уравнении (20) не обращается в ну иfJb,
а paHr r == 1, то уравнение (20) принимает вид
A1yr + с == о. (21 )
с с
В случае, коrда I; < О, обозначим
==
а 2 ; в случае, коrда
l >0, обозначим
l == а 2 . В этих обозначениях уравнение (21)
переписывается в виде
с
уУ == а 2 , если
< о,
yf ==
а 2 , если
1 > о.
(22)
(23)
Уравнение (22) является уравнением пары параллеЛЬНblХ eипep
плоскостей
Уl == а и Уl ==
а.
Уравнение (23) по аналоrии с уравнением (22) называется урав..
нением пары .мнимых еиперповерхностей
Уl
ia и Уl
ta.
в случае, коrда с
О и уравнение (20) является уравнением
конуса в r
мерной плоскости Yr+l ==. . .
Уп ==: О, rиперповерхность
(20) называется конусом с (п
r)
мерной вершиной. Этот конус
называется конусом индекса т, если т
r
т (случай, коrда
т > r
т, приводится к этому случаю умножением всех членов
уравнения на
1). При r == п, коrда вершиной конуса является
точка, конус называется конусом с rпочечной вершиной.
Если с == О и уравнение (20) есть уравнение мнимоrо конуса
в r"мерной плоскости Yr+l ==... == Уп === О, Т.:> этому уравнению
удовлетворяют лишь точки (п
r)-мерной плоскости Уl :::= . . . == У, == о.
в этом случае rиперповерхность (20) называется .мнимым конусо..,
с (п
r)
.мерной вершиной.
478
rИПЕРЛОВЕРХНОСТИ BTOPOrO ПОРЯДКА
Пусть теперь в уравнении (20) с == О и , == 2, Т. е. это урав-
нение имеет вид
А)У; +
Y
:::= о.
В зависимости от знаков коэффициентов
можно переписать в одной из двух форм:
У' + Yi
О
ai a
'
yi
Y
:::= О
2 J ·
а. a
(24)
и
уравнение (24)
(25)
(26)
Уравнение (26) есть уравнение пары пересекаюu,uхся 2unерnло-
скосmей
:
:; == о, I (27)
Уl + У2
о.
аl а2
Уравнение (27) по аналоrии с предыдущим называется уравне-
нием пары мнимых nересекаЮЩllХСЯ 2uперnлоскостей
1!l.
i У2
О I
01 а2 '
(28)
Уl + i У! == о.
аl а2
Если в уравнении (20) с == О и r == 1, ТО оно записывается в виде
уI == о, (29)
Т. е. есть уравнение пары СЛU8шихся еиnерnлоскостей.
r л А В Д ХIХ
ЭЛЕМЕНТЫ rЕОМЕТРИИ п..MEPHOrO ПРОЕl(тивноrо
ПРОСТРАНСТВА
1. Проективное пространство; ero плоскости и прямые
Начнем с Toro, что вкратце повторим для n + l-мериоrо про-
странства то, что в начале rлавы Х было сказано ДЛЯ трехмер-
Horo.
Возьмем в n + l-мерном аффинном пространстве Rn+l KaKYIO-
нибудь точку О и рассмотрим множество всех проходящих через
точку О прямых, двумерных плоскостей, трехмерных плоско..
стей, ..., n-мерных плоскостей пространства Rn+l. Это множество
называется связкой с центром О в пространстве Rn+l, мы будем
обозначать ero одной буквой о. Между различными элементами
связки
ее прямыми, 2-плоскостями, . . ., (k + 1 )
плоскостями
уста-
новлено отношение инцидентности: k
плоскость инцидентна (k + 1)..
плоскости, если она содержится в ней.
Отношение инцидентности симметрично: t'сли прямая d инци
дентна плоскости Л, то rоворим, что и плоскость 1t инцидентна
прямой d, и т. д. Прямые связки наЗblваются, коrда это удобно,
ее лучами.
l\'lbI можем переименовать связку О п + l
MepHoro пространства
в п"мерное проективное пространство рп, соответственно переиме..
новывая лучи, ..., k + l"плоскости свЯЗКи В точки, ..., k
плоско
сти лроективноrо пространства рп,
совершенно ан алоrично тому,
что мы делали в случае проективной плос]{ости и связки трех-
MepHoro пространства. Всякая аффинная система координат
Oe 1 e 2 .'. е п + 1 пространства Rn+l, начал о которой есть иентр О
данной связки, называется аффинной координатной системой
в связке о.
cllюбая упорядоченная последовательность из п + 1 чисел Х),...
.. . , X п + 1 , являющаяся координатами какоrо
нибудь направляющеrо
вектора u данноrо луча т связки О, называется набором коорди-
нат луча т (в аффинной системе координат Ое 1 е 2 ... e n + 1 ). Оче-
ВИДНО, что все наборы координат луча т образуют класс пропор
uиональных между собой числовых наборов и, обратно, всякий
класс пропорциональных между собой числовых наборов из п + 1
480
n-МЕРНОЕ ПРОЕКТИВНОЕ ПРОСТРАНСТВО
чисел Х 1 , ... ,Х п+l является классом наборов координат (относи-
тельно данной системы координат Ое 1 е 2 ... е п + 1 HeKoToporo луча
связки О).
Если при этом предполаrать, что исходное (п + 1 )-мерное аф-
финное пространство является комплексным, то в нем рассматри-
вается и CBff3Ka, СССТОЯlцая из всех комплексных прямых, k..пло..
скостей И rи, пеРП..FJоскостей проходящих через данную действи-
тельную точку О. Так получается комплексная связка О, и.НИ,
после соответствующеrо переименования ее элементов, комnлеКС/1,ое
проективн.ое npocmpaHCtrZ8o.
В предположении, что в комплексной связке выбрана система
координат Ое 1 ... eп.
1 (начало и единичные векторы которой всеrда
предполаrаются д.ействительными), мы получим, как и выше,
взаимно однозначное соответствие между всеми лучами комплек-
сной связки О и всеми классами пропорциональных наборов
(Х 1 : . . . : Х п 41)' состоящих теперь уже из произвольных комплексных
чисел X 1 , ..., Xn+l. Лишь набор, состоящий из одних нулей, как
всtrда, оказывается запрещенным. Отождествляя каждый луч
связки с классом наборов ero координат относительно данной,
раз навсеrда выбранной аффинной координатной системы Ое 1 . . . е n + 1,
мы приходим к понятию арифметическоrо проективноrо прост-
ранства, точками KOToporo ЯВЛЯIОТСЯ всевозмо)кные классы про...
порциональных между собой наборов чисел
действительных в CiIY.
чае действительноrо и !{омплексных в случае комплексноrо про-
ективноrо пространства.
rиперплоскости, т. е. (n
1 )-мерные плоскости в п.мерном
проективном пространстве, определяются каким.либо линейным
однородным уравнением
и 1 Х 1 +и2Х2 +.. .+и n + 1 Х п : 1 ==0 (1)
относительно однородных координат X 1 , ... t X n l- 1 ; множество точек
М == (Х 1 : Х 2 : ... : Х п -+ 1)' удовлетворяющих это
у уравнению, и обра-
зуют rиперплоскость, определенную данным уравнением (1). Коэф-
фициенты и 1 , и 2 , ..., и n + 1 произвольноrо уравнения (1) данной
rиперплоскости определены с точностью до общеrо ЧИСЛОЕоrо
множителя, эти коэффиuиенты I
lазываются координапlама данной
2uперплоскосmu.
Л1ножество точек М == (Х 1 : Х 2 : . . . : х n + 1 ), удовлетворяющих сис-
теме из n
r линейно независимых однородных уравнений
Uk,l X l +. . . + Uk,n+l X n+l == О, k == 1, ..., n........ " (2)
называется ,-мерной плоскос/пью или, короче, ,-плоскосmыо п-мер-
Horo проективноrо пространства. Так как paHr системы (2) p
BeH
, + 1, все ее решения Х 1 , ..., Х n + 1 суть линеЙНulе комбинации ка-
ких-нибудь независимых решений р<Р, ..., Pп.fl, l == 1, .... r + 1. Это
ПРОЕКТИВНЫЕ КООРДИНАТЫ
481
позволяет получить параметрическое представление ,-плоскости:
(I) ! ( i) t + + <r+ l) t
Х 1 == Р. 1 + Рl 2 · · · Рl '+l'
(1) / + ('1) t + P (r+ 1) t
Х2 == Р'1. 1 р'). 2 · · · + i ,+l. (3)
. . . . . . . . . . . . . . . . . . . . . .
в частности,
проективном
хn+l
p
tt l t l + P
lt2 +... + p
+l)tr+l.
о
параметрическое представление прямоя
пространстве имеет вид
X/i === Рkл' + qkJ1, k == 1, ..., n + 1,
rAe р
(Рl' ..., Pn+l) И Q == (Ql' ..., Qn+l)
некоторые фиксирован
ные ТОЧКИ, а л и J.1 пробеrают всевозможные числовые значения
кроме запрещенной пары значений л == f.1 == о. Множество всех
rиперnлоскостей n
MepHoro арифметическоrо проективноrо про-
странства, так же как и множество всех ero точек, находится во
взаимно однозначном соответствии с множеством всех классов,
состоящих из пропорциональных между собой наборов из n + 1
чисел. Точка (X 1 :...: Х n + 1 ) И rиперплоскость (И 1 : . . . : и n + 1 ) арифме
тическоrо проективноrо пространства называются uнцидентными
между собой, если они связаны равенством (1). Так же как и
в случае проективной плоскости, имеет место равноправие между
точками и rиперплоскостями проективноrо пространства, Bыpa
жающееся в слеДУЮlцем nринципе двойственности. Если верно
какое-нибудь утверждение, касающееся точек и rиперплоскостей
"
nроективноrо пространства и тех или иных соотношении инци-
дентности между ними, то, заменяя в данном предложении слово
«точка» словом «rиперплоскость» И сохраняя иицидентность, мы
получим формулировку двойственноrо утверждения.
Предлаrаем читателю в качестве весьма nолезноrо упражне-
ния установить общий принцип двойственности в n"мерном про-
ективном пространстве, вытекающий из равноправия между m-пло...
скостями и (п
т
l)"ПJIОСКОСТЯМИ.
в n-мерном
2. Проективные координаты. Проективные преобразооания
1. Проективные координаты. Две аффинные системы координат
Ое 1 ... е п +l и Ое; ... e
+ 1 в связке О (п + 1 )
MepHoro аффинноrо
пространства Rn+l называются эквuвалентными между собой, если
имеется такое число 'А =F О, что
е; == Ле!,
== ле 2 , ..., e
+ I == Ле n + 1 .
Относительно двух эквивалентных координатных систем всякий
луч связки (всякая точка проективноrо пространства) имеет одни
и те же наборы координат.
482
п-МЕРНОЕ ПРОЕКТИВНОЕ ПРОСТРАНСТВО
Как и в случае связки в трехмерном пространстве, класс
эквивалентных между собой аффинных координатных систем
в связке О пространства Rn+l называется системой пpoeк;тивНbtx
координат в связке о.
Наборами координат любоrо луча т (любой rиперплоскости сх)
В связке относительно данной системы проективных координат
являются, по определению, наборы координат этоrо луча (этой
rиперплоскости) относительно любой аффинной системы координат
(в связке О), определяющей данную проективную координатную
систему. Переименовав связку в проективное пространство и nOBT<r
ряя рассуждения
5 rлавы Х, убеждаемся в том, что каждая
проективная координатная система в проективном пространстве рп
задается n + 2 точками, из которых никакие п + 1 не лежат
в одной rиперплоскости:
n + 1 вершиной
X 1 , Х 2 , .. .., Х n + 1
координатноrо симплекса и «единичной» точкой Е. Эти n + 2 точек
называются Фундамен.таЛЬНblЯU точками данной координатной
системы.
В арифметическом n"мерном проективном пространстве имеется
привилеrированная система координат, определенная точками
Х 1 == (1 : О : . . . : О), Х 2 == (О : 1 : . . . : О),
хз==(о:о: 1 :...: о), ..., х n + 1 ==(о:о:...: 1») Е==(I: 1 :...: 1).
Orносительно этой «лривилеrироваННОЙ»t или «однородной», системы
координат наборами координат любой точки арифметическоrо про-
ективноrо пространства как раз и служат те числовые наборы,
классом которых и является, по определению, данная точка М ==
== (х 1 :...: Х n + 1 ).
Если наряду с исходной «привилеrированной», или «однород-
ной», системой координат в арифметическом пространстве дана
«новая» проективная система координат x;x
... X
+ l Е ' какими-
нибудь наборами однородных координат своих фундаментальных
точек
X
== (C1k : C2k : СМ : . . . : Сп + l.k). k == 1. .... n + 1, } (1)
Е == (в) : е 2 : . . . : в п + 1)'
то, предварительно умножив, если необходимо, каждый из на-
боров
C1k, C 2 k,. · ., Cпkt
Сп + l,k,
k==l, ..., п+l,
на надлежаще подобранные числовые множители л'1' л'2t..., Л п + 1,
всеrда можно предположить, что п +2 набора (1) являются
ПРОЕКТИВНЫЕ КООРДИНАТЫ
483
cor ласованными между собой в смысле BeKTopHoro равенства
{с 11 , С 2 1'...' Сп + 1'1} + {С 12 , С 22 ,..., С", + 1,2} +...
...+{С 1 ,n+1, С 2 ,n+1,..., С n +l''''+1}=={81,
,..., 8 n + 1 }
(СМ. об этом rл. Х,
5).
В этом предположении однородные координаты Хl' Х 2 ,..., Х п + 1
произвольной точки М связаны с проективными координатами
ТОЙ же точки относительно системы координат X
X
.. .x
+ lЕ' фор-
мулами преобразовзния координат
11.+1
Лхk ==
CkjXj,
j==1
k == 1,. . ., п + 1
(2)
(л.
произвольный числовой множитель). Матрица коэффиuиен-
тов С == llCkjll в этих формулах не вырождена.
Таким образом, переход от исходной (<<однородной») системы
к новой системе проективных координат в n
MepHOM проективном
пространстве рп осуществляется невырожденной матрицей по-
рядка п + 1. Сам переход от старых координат к новым осущест-
вляется формулами (2).
2. Проективно-аффинное пространство. До сих пор у нас
не БЫ.1JО основания для выделения среди точек, прямых, k
плос-
костей и rиперплоскостей проективноrо пространства несобствен
ных, или бесконечно удаленных. Проективное пространство, в ко-
тором какая.нибудь одна rиперплоскость выделена и названа
«нес06ственноu», называется nроектuвно
аффUННblМ nространством;
k"плоскости, лежащие внесобственной rиперплоскости, также на-
зываются несобсmвеннымu. Повод для выделения в n
MepHOM про..
ективном пространстве ero несобственных элементов тот же, как
и в случае проективной плоскости.
Пусть в (п + 1 )
MepHOM аффинном пространстве Rn + 1 дано
n
MepHoe подпространство Rп и в нем
аффинная система коор-
динат ое... .е п . Назовем аффинную систему координат Oe 1 .. .е п + 1
пространства R" + 1 естественно связанной с координатной систе-
мой оеl.. .е п п
MepHoro пространства Rn, если начало О системы
Ое 1 .. .е", + 1 не лежит в пространстве Rn. Первые п единичных BeK
торов e 1 ,..., е п в системе Ое 1 .. .е л + 1 те же, что и в системе
oe 1 . . .е п , а последний вектор е п +. есть вектор е п + 1 == 00. Очевидно,
что в системе координат Oe 1 .. .е л + 1 уравнение подпространства
R" пространства R" + 1 есть
Х п + 1 == 1.
Возьмем теперь в Rn + 1 связку О С центром о. Если. М
ПрJИЗ
вольная точка rиперплоскости Rn, координаты которqй в системе
484
n-МЕРНОЕ ПРОЕКТИВНОЕ ПРОСТРАНСТВО
oe 1 . . .e ll суть
1'... ,
п, ТО координаты этой точки в системе Ое 1 .. .e fl + 1
суть
Х 1 ==
l'. · ., х" ==
n, Х п + 1 == 1.
Поэтому наборами координат луча т == ОМ связки О являются
все наборы Х 1 ,... ,Х" + 1, пропорuиональные набору 61'... ,6", 1.
Все такие наборы называются наборами однородных "оординапl
точки М «в системе однородных координат, соответствующей аф--
финной координатной системе oe 1 .. .е п ». Таким образом, однород-
ные координаты X 1 ,..., Х п + 1 точки М связаны с ее аффинными
координатами 61'... ,
" в системе ое 1 .. .е п пропорцией
X 1 : · · · : X n + 1 ==
l : · · · : Sn : 1,
так что аффинные координаты 61,... ,6п выражаются через одно-
родные по формулам:
t: Xl t Х п
'61 ==
x ,..., ':,n ==
x ·
n+l п+l
Соответствие между точками М rиперплоскости и лучами т == ОМ
связки О называется перспе"тU8НЫм, соответствием. При этом соот-
ветствии каждой точке М rиперплоскости Rп, имеющей однород"
ные координаты X 1 ,... ,X n + 1 , соответствует луч связки, имеющий
те же координаты в системе Ое 1 .. .е п + 1 .
Обратно, каждому лучу т == (Х 1 : . . . : Х n + 1 ) связки, у KOToporo
последняя координата Х n + 1 =1= О, соответствует точка М rиперплос-
кости Rп с теми же координатами Х 1 :...: X n + 1 . Однако лучам
связки т == (X 1 : ...: Х n + 1 ), У которых Х n + 1 == О, не соответствует ни...
какая точка М rиперплоскости Rп. Чтобы перспективное соответ..
ствие между связкой О и rилерллоскостью R" сделать взаимно
однозначным, нужно дополнить rиперплоскость несобственными
точками, которым и приписать наборы однородных координат
X 1t . . ., Х п , о. Пополненная таким образом rи перплоскость пре..
вращается в проективное пространство рп == Rп, которое, естест"
венно, делается арифметическим, если отождествить каждую ero
точку А1 с классом наборов ее однородных координат. Таким об-
разом, арифметическое проективное пространст
о естественно рас-
сматривать как проективное пространство, происшедшее от попал..
нения несобственными элементами обыкновенноrо п
MepHoro аффин-
Horo пространства с заданной в нем системой аффинных координат
oe 1 .. .е n - Несобственные точки этоrо пространства суть точки
(Xl : . . . : X n + 1 ), У которых Х n + 1 == о. Эrи точки образуют несобствен-
ную rиперплоскость, уравнение которой есть
X n + 1 == о.
3. Проективные преобраЗОВ8НИЯ. П рое/(,тивн.ые преобразования
n."мериоrо проективноrо пространства определяются совершенно
ПРОЕКТИ8НЫЕ КООРДИНАТЫ
485
так же, как проективные преобразования проективной плоскости.
Задать в n
MepHOM проективном пространстве проективное преоб
u u
разование
значит задать, наряду с исходнои координатнои систе-
мой (например, однородной системой координат арифметическоrо
пространства), некоторую иовую систему проективных координат;
определяемое этим преобразование состоит в том, что каждой точ-
ке М пространства ставится в соответствие точка, имеющая в но-
и U
вои координатнои системе те самые координаты, которые точка
М имела в исходной системе координат.
3 а м е ч а н и е. Совершенно так же определяются и проектив-
ные отображения одноrо проективноrо пространства на друrое.
Из определения проективноrо преобразования следует (так же
как в случае плоскости), что проективное преобразование можно
определить как такое преобразование, которое ставит в соответ-
ствие каждой точке М == (Х 1 : . . . : Х n + 1 ) арифметическоrо проектив-
Horo пространства точку М', однородные координаты которой суть
п+t
Х, == л
CiJXJ,
j==l
i == 1,. . ., n + 1.
(3)
При этом матрица коэффициентов С == rICIjIl
,tl l есть невырожденная
матрица. Поэтому задать проективное преобразование n..MepHoro
проективноrо пространства
значит задать невырожденную MaT
рицу (п + 1 )
ro порядка.
Совершенно аналоrично теореме 4 rлавы Х доказывается OCHOB
иая теорема о проективных преобразованиях (n + 1 )"MepHoro про-
ективноrо пространства, а именно, следующее утверждение:
Теорема 1. Пуспzь А 1 ,..., А п + 1 , В u A
,..., A
+l' B'
двa
набора из п + 2 точек n"мерноео npoeKтueHozo пространства, yдoв
летворяющuх moму условию, что никакие из п + 1 mочек, nринад
лежащих одному из этих двух наборов, не лежат в одной и пlОЙ
же еиперплоскосmи. Tozaa существуеm единсmвенн,ое проективное
nреобразован,uе пространства рп, переводящее первый набор точек
во второй, nl. е. переводящее точки Al' Az,..., A n + 1 , В соответ..
ствен.но в точки А;, А;,..., A
+I' В'. Это nреобразованuе ставит
в соответствие каждой точке М пространства р'" ту точку М',
которая в nроекmuвной систе.А!е координат А;.. .A
+1 В' имеет
те же самые KOOpaUHatnbl, которы.е точка М имела в системе
At. . .А п + ! В.
Из этой теоремы вытекают следствия, анапоrичные следствиям
теоремы 4 rлавы Х, в частности, утверждение, что посредством
проективноrо преобразования n
MepHoro проективноrо простран
ства можно (и притом бесконечным числом способов) перевести
любую данную rиперплоскость n в любую друrую п'. При этом
преобразовании rиперплоскость 1t проективно отображается на
плоскость 31'.
486
п-МЕРНОЕ ПРОЕКТИВНОЕ ПРОСТРАНСТВО
Из определения проективноrо преобраэования следует, что КОМ-
позиция двух проективных преобразований пространства снова
является проективным преобразованием. Так как преобразование t
обратное к проективному, очевидно, также является проеКТИВНЫМ t
то из сказанноrо вытекает основной факт:
т е о р е м а 2. П poeKтивHЬte nреобразованuя npOeKтU81l0Z0 про-
странства образуют еруnnу (nодеруnnу в ерупne всех nреобразова-
нии пространства).
Впрочем, теорема 2 леrко выводится непосредственно из опре-
деления проективных преобразований посредством матриц: если
проективное преобразование
задается матрицей С, то обратное
преобразование 7tf
1 задается матрицей C
l; если преобразования
1 и ?f 2 задаются соответственно матрицами С 1 и С 2 , то компо-
зиция этих преобразований задается произведением их матриц.
Непосредственно переносится на пространство и все сказанное
в rлаве Х,
6, о проективно-аффинных преобразованиях.
Наконец, и для пространства имеют силу формулы, аналоrич-
ные формулам для проективной плоскости, дающие запись (в аф-
финных координатах) образов собственных точек пространства при
проективном преобразовании ero, а именно:
n
C kj
} + с k, n+l
t' i==J
<Ck ==
n
Cn+l'/ ;/+С п +l,n+l
/==1
k == 1,. . ., n.
3. rиперповерхности BToporo порядка в п
MepHOM
проективном пространстве. Теорема единственности
Алzебраической еиnерnО8ерхностью в n
MepHOM nроективном про..
странстве Н,азьюается множество точек, задаваемое 8 како:1
нибудь
nроекmи8НОЙ системе координат уравнением
(1) (x 1 , Х 2 ,..., X n + 1 ) == Ot (1)
еде Ф (Х 1 , Х2,... ,Х n + 1 )
однородный мноzочлен (форма) от перемен..
НЫХ Х 1 ,..., Х n + 1 .
При переходе к друrой системе проективных координат x
,. . .,X
+I
координаты х 1р .., Х n + 1 испытывают однородное линейное преоб-
рззование с невырожденной матрицей С, тождественно преобразу..
ющее форму Ф (Х 1 ,..., Х n + 1 ) В форму ф' (х;,..., X
+.) той же сте...
пеНИ t что и форма Ф (х 1 ,..., Х n + 1 ); степень уравнения (1), зада-
ющеrо данную rиперповерхность, не меняется при лереходе к дру-
rой системе координат, она называется порядком данной еuпер..
поверхности.
ТЕОРЕМА ЕДИНСТВЕННОСТИ для rИПЕРПОВЕРХНОСТЕЯ 487
Мы будем рассматривать лишь rиперповерхности второrо по-
рядка и в соответствии с этим будем предполаrать, что левая
часть уравнения (1) есть квадратичная 4юрма и уравнение rипер-
поверхности будет иметь вид
n+1
Ф (Хl' ... t Х n + 1 ) ==
aljX,X, == о.
1, jc:=1
(l)
Без оrраничения общности можно считать, что alf
af' (если это не
n+'
так, нужно рассмотреть форму
b1/XIX/,
1, j==J
r д е Ь аl} + ал )
u== 2 ·
Как всеrда, билинейную форму, полярную к форме
Ф (х 1 , .. ., х n + 1)' обозначаем через '1' (хн. .., Х я + 1; Yl' ..., Уn+l) или,
сокращенно, через
п+l
'I'(х, у) ==
aiJXIYj.
lt j == 1
Мы будем предполаrать, что проективное пространство рn есть
результат пополнения несобственными точками п
MepHoro аффин
Horo пространства Rп с выбранной в нем аффинной системой
координат oe 1 ... е п , порождающей раз навсеrда заданную систему
однородных координат. В соответствии с этим будем писать рn == Rn.
Если не oroBopeHo противное, будем предполаrать, что уравнения
рассматриваемых rиперповерхностей заданы именно в этой OДHO
родной системе координат. Это не помешает нам, разумеется, счи
тая эту систему координат исходной, привлекать проиэвольные
друrие проективные системы координат.
Л'ножество Х собственных точек rиперповерхности (1) совпа-
дает с множеством точек аффинноrо пространства Rn, координаты
которых в системе ое 1 .. .е п удовлетворяют уравнению
п п
F (
1' ...,
n) ==
al/
l;j + 2
al,n+ 1;1 + а n + 1 , 11+1 == о. (2)
i.j:::1 i==l
Множество Х пусто в том и только в том случае, коrда a n + I ,II+1 :;= О,
а все остальные коэффициенты ац равны нулю. В этом случае
уравнение (1) превраu
ается в уравнение
а n + 1 , 11+1 X
+ J == О (100)
дважды взятой несобственной rиперплоскости.
т е о р е м а 31. Если еuперповерхность (1) состоит из одНUХ
несоБСmlJeННblX точеК J то уравнение (1) необходим'О имеет вид (100)
и определяемая этим уравнением еиперповерхность есть дважды
взятая несоБСlпвенная еuперплоскость.
488
п-МЕРНОЕ ПРОЕКТИВНОЕ ПРОСТРАНСТВО
Переходим ко второму случаю: ПУСТЬ все несобственные точки
проективноrо пространства принадлежат rиперповерхности (1),
и пусть эта rиперповерхность, кроме Toro, содержит по крайней
мере одну собственную точку. Тоrда по крайней мере ОДИН И3
коэффициентов ац, i, j == 1, ... t n, a 1 , п + 1, ..., а п , п + 1 отличен
от нуля. По предположению всякая несобственная точка
(Х 1 : Х2: ...: Хп. : О) удовлетворяет уравнению (1), так что равенство
п
Ф (X 1 , ..., Х п , О) ==
ацХ,х! == О является при любых Х х , ..., Х п
Itj;:;:I
числовым тождеством. Поэтому в рассматриваемом случае
alj == О для всех i, i == 1, ..., п
и уравнение (1) имеет вид
Х n +l ( 2 .t al. пНХ! + а пн . пнХпн ) == о;
1
(1 ::О)
наша rиперповерхность распадается на пару rиперплоскостей, И3
которых одна есть несо6ственная rиперплоскость Х n + 1 == О, а др уrая
имеет уравнение
n
2
а" n+1XI + ап.+l,n+1Хn+l == О,
i== 1
в котором по крайней мере один из коэффициентов a 1 ,n+l, а 2 ,n+l, . . .
. . .,aп.n+l отличен от нуля и которое поэтому определяет некоторую
собственную rиперллоскость.
т е о р е м а 32. Если zunepnoвepxHocтb (1) содержит всю несо6-
ственную zиnерnлоскость, НО не совпадает с ней, то она распа-
дается на пару zиперплоскостей, из которых одна есть несобствен-
ная, а друzая
собственная 2uперnлоскость. Уравнение (1) в этом
случае имеет вид (l:x,).
Наконец, если rиперповерхиость (1) не содержит несобственной
rипеРПЛОСКОСТИ t то в ее уравнении по крайней мере один из ко*
фициентов
aiJ' i, j == 1, ..., n,
отличен от нуля. Тоrда уравнение (2) определяет в аффинном
пространстве Rп rилерловерхность BToporo порядка, совпадающую
с множеством Х всех собственных точек rиперповерхности (1).
Эта последняя получается пополнением rилерповерхности (2)
всеми несобственными точками (X 1 : ...: Х п : О), УДОВ.1Jетворяющими
уравнению (1), переходящему при Х n + 1 == О В уравнение
n
a'JX'X! == о.
1./==1
(3)
ТЕОРЕМА ЕДИНСТВЕННОСТИ ДЛЯ rИПЕРПОВЕРХНОСТЕЯ 489
Поэтому несобственные точки rиперповерхности (1) суть не
что иное, как несобственные точки, удаленные в бесконечность
в направлениях, асимптотических для rиперповерхности (2).
Совершенно так же, как в случае кривых, мы выведем из дока...
занных результатов следующую теорему единственности для rи-
перповерхностей BToporo Порядка.
т е о р е м а 4 (т е о р е м а е Д и н с т в е н н о с т и). Если два
уравнения
п+'
Ф (X 1 , Х2, ... t Х n + 1 ) s::;
alJXIX/ === О
1, 1==1
(1)
и
п+'
ф' (X 1 , Х 2 , ... t Х n + 1 ) ==
aljXlXj == о
1./
1
оnределяюm одну и ту же 2иneрповерхностЬ r вmoрО20 порядка
п
rI
в п
"wepHOM проектuвно,М nростран.стве Р === R , mo коэффициенты
lJ обоих УРШJнениях (1) и (1') cooтвeтcrпвeHН,O nponopциOHaAbНbl
.между собой.
Доказательство, как и доказательство аналоrичной теоремы
для кривых, состоит в разборе трех возможных случаев.
1 о Все точки rиперповерхности r несобственные. Тоrда урав-
нения (1) и (1 ') имеют вид а n + 1 , п+lX
+J ::= О, соответственно
a
l, n+1X
+1 == О, и утверж
ние доказано.
20 rи.перповерхность r содержит несобственную rиперплос-
кость, но не совпадает с ней. Тоrда уравнения (l) и (1 ') имеют вид
(1')
( п \
Х n +l 2
al. n+lX, + а n + 1 . n+lХn+l ) == О,
1-= 1
соответственно
Х n +l ( 2 t а/. n+Jx/ + a
+l. nНХII+l ) == о.
1== 1
Тоrда rиперповерхность r распадается на пару rиперплоскостеА,
из которых одна....... несобственная rиперплоскость K II + 1 == О, а дру-
rая
собственная rиперплоскость, определяемая любым из двух
уравнений
11
2
а" п+1Xl + a n + l . n+lХII+l -= О.
i:=ll
11
2
аl. n+1 Х ' + a
+l. n+1Хn+l == о.
1;:;1
490
А-МЕРНОЕ ПРОЕI(ТИВНОЕ ПРОСТРАНСТВО
Поэтому соответствующие коэффициенты в этих двух уравнениях про-
порциональны, так как остальные коэффициенты в уравнениях
(1) и ( 1') равны ну лю, то утверждение теоремы единственности
доказано и в рассматриваемом случае.
30 Остается последний случай: rиперповерхность r не содер-
жит несо6ственноА rиперплоскости. Тоrда множество Х собствен-
ных точек rиперповерхности r
определяется в а4кРинной коорди-
u .
ватнои системе ое 1 ... е п из уравнении
п n
aljXt x / + 2
а" n+1 Х ' + а n + 1 , 11+1 == О
1. I tta I i
1
(2)
и
n n
aljXtxj + 2
ai, n+1 X I + a
+l. n+l == О.
I,;
I (
l
(2')
Каждое из этих уравнений определяет в аффинном простран-
стве Rп одну и ту же rиперповерхность BToporo порядка. Поэтому
в силу результатов rлавы XVIII соответственные коэффициенты
в уравнениях (2) и (2'), а значит, и в уравнениях (1) и (1') про-
порциональны.
4. Проектнвная классификация rиперповерхностей
BToporo порядка
Как известно, посредством линейноrо преобразования
n+l
XIl ==
ck/xi. k == 1, ... t n + 1, (
)
j
I
квадратичная форма Ф (x 1 , ..., Х n + 1 ) может быть тождественно
преобразована к каноническому виду, т. е. к виду
,2,2 ,1
e1XI +е 2 Х 2 +.. .+ekXk
для форм paHra k, rде все коэффициенты 81' 82' ..., ek равны + 1.
При этом индекс формы Ф, т. е. число положительных коэффи-
циентов, в любом каноническом представлении данной формы
Ф (х., .... Х п + 1 ) одно И то же.
Для форм paHra k индекс может принимать значения k, ..., 1, О.
Однако при умножении формы на (
l) форма paHra k и индекса
r переходит в форму paHra k и индекса k
'. Поэтому rиперпо-
верхность BToporo порядка, заданная в однородных координатах
уравнением
'ф (Хl' ..., Х n +l) == О,
(1)
ПРОЕКТИВНАЯ КЛАССИФИКАЦИЯ rИПЕРПОВЕРХНОСТЕА 491
rде форма Ф имеет paHr k, может быть в неКQТОРОЙ новой пpoeK
тивной системе координат задана уравнением вида
elX
+... +e"xk == О (2)
(МЫ опускаем штрихи у переменных), rде все 81 равны + 1 и число
положительных среди них равно k, k
1, ..., [ k 11 ] . Bcero таких
уравнений имеется, очевидно, [
1 + 1 . Формулы линейноrо пре
образования
мы можем понимать по нашему желанию или как
формулы перехода от одной координатной системы к друrой, или
как формулы, определяющие проективное пре06разование простран...
ства. Поэтому полученный резул ьт ат мы можем сqюрмулировать
и так: всякая rиперповерхность r BToporo порядка paHra k мо-
жет быть превращена лроективным преобразованием в rиперпо...
верхность r ', уравнение которой имеет вид (2) в первоначальной
однородной координатной системе.
Так как посредством дополнительноrо проективноrо преобра
зования всеrда можно любую из координатных rиперплоскостей
XI == О, i == 1, ..., п + 1, перевести в любую друrую, то беэ orpa
ничения общности мы можем предположить, что в каноническом
уравнении (2) rиперповерхности paHra k члены с положительными
коэффициентами предшествуют членам с отрицательными. Поэтому
мы имеем следующий результат:
Всякая 2иneрповерхность втОро20 порядка r ран,2а k .может
быть посредство,," проективнО20 преобраэованuя пространства
рп == R п переведена в 2иперповерхность r ', уравнение которой в той
же UСХодной системе координат и.меет один из следУЮlЦUХ видов:
x
+x
+...+x1 ==0,
х; + X
+. . . + Xk
1 ....... xl == о,
. . . . . . . . . . . . . . . . . . . . . . . .
х; +
+. · . + xj k+l 1 + X2 [ k+l ]
X2 [ k+l ] ....... . . .
xi == о,
т т + I i +i
X
+х; +...+ Xt k
l ]
Х [ k
l l+l
...
х& == О.
Леrко подсчитать, что для rиперповерхности paHra k имеется
ровно r
] + 1 таких уравнений.
Подсчитаем общее количество S (n) канонических видов rипер..
поверхностей BToporo порядка в п
MepHOM проективном пространстве
11+1 п+ 1
S (п) == ! {[
] + l} == ! [+] + n + 1.
l k
l
492
п-МЕРНОЕ ПРОЕКТИВНОЕ ПРОСТРАНСТВО
Если п четно, т. е. п
21, то 8==12+31+1, если п нечетно, т. е.
п == 21 --- 1, то S == 12 + 21. В частности, на проективной плоскости
(п == 2) мы получаем 5 различных канонических форм; в трехмер...
ном проективном пространстве
8 различных канонических форм.
ПеренQCЯ на проективный случай терминолоrию, к которой
МЫ привыкли в аффинной rеометрии, мы скажем, что две rипер..
поверхности проективно эквивалентны, если посредством проек-
тивноrо преобразования пространства одна из этих rиперповерх-
ностей может быть переведена в друrую. Эro же опреДf.,'1ение
может
ЫTЬ
очевидно, сформулировано и так: две rиперповерх-
ности r 1 и r 2 проективно эквивалентны, если существуют две
проективные системы координат 1 и 11 такие, что уравнение rипер
поверхности r 1 в системе 1 таково же, как уравнение rиперпо-
верхности r 2 в системе 11.
Выше мы установили, что каждая rиперповерхность BToporo
порядка в n - мерном проективном пространстве попадает в один
из S (п) классов rиперповерхностей, каждый из которых опре-
делен соответствующим уравнением. Из caMoro определения этих
классов следует, что все rиперповерхности, принадлежащие
к одному из классов, проективно эквивалентны между 'собой.
Поэтому для Toro, чтобы показать, что полученные S (п)
классов образуют полную проективную классификацию веществен-
ных rиперповерхностей BToporo порядка, надо лишь убедиться
в том, что всякие две rиперповерхности, принадлежащие к раз-
ным классам, проективно не эквивалентны между собой.
т е о р е м а 5. Если (D 1 (Хl' ..., Х п t-l) == О и Ф2 (Х 1 , ..., Х n + 1 ) == О
суть Урa/Jненuя в nроектuвной системе 1WopaUHam 1 двух проек-
тивно ЭК8uвалентНblХ 2иneрnoверхностей вmороzо порядка, пю фор
.мы Фl и Ф2 имеют один и тот же ране u одну и ту же абсо-
лютную величину сиен.атуры.
В самом деле, пусть при проективном преобразовании, пере-
водящем rиперповерхность (Jl в rиперповерхность 0'2' проективная
система координат 1 переходит в проективную систему координат 1'.
Тоrда rиперповерхность 0'2 имеет в системе координат l' то же
уравнение, которое rиперповерхность 0'1 имела в системе 1, т. е.
уравнение Фl (x
, ..., X
+I) == о.
Но при переходе от системы координат 1 к системе l' урав-
нение Ф, (Х 1 , .. . , Х n + 1 ) == О rиперповерхности 0'2 тождественно преоб
разуется в какое-то уравнение Ф
(x
, ..., X
+l) == О той же rипер-
поверхности 0',. Итак, rиперповерхность O'
имеет в одной и той
же системе координат l' два уравнения: Фl (х;, ..., X
+l) == О и
Ф
(х;, . . . , X
+l)==O. Значит, формы Фl (х;, . . . , X
+I) И Ф; (X
, · · · , X
+l),
как левые части уравнений одной и той »ее rиперповерхности (J2
8 одной и той же системе координат 1', MorYT отличаться лишь
постоянным множителем, так что их сиrнатуры совпадают, а ин-
ПРОЕКТИВНАЯ КЛАССИФИКЛUИЯ rИПЕРПОВЕРХНОСТЕА 493
дексы MorYT отличаться лишь знаком. В то же время форма
Ф; (х;, ..., X
+l) получилась из формы Ф2 (Хl' ..., Х n + 1 ) тождест
венным преобразованием (переходом от переменных Xl' ..., Х п + 1
К переменным х;, ..., X
+l), значит, paHr и индекс форм Ф2 И Ф
одни и те же; поэтому ранrи форм Фl и Ф2 совпадают, а сиrна-
туры MorYT отличаться лишь знаком. Теорема доказана.
Из этой теоремы немедленно следует, что всякие две rиперпо
верхности, принадлежащие к различным классам, проективно раз-
личны между собой.
Рассмотрим, в качестве примера, поверхности BToporo порядка
в трехмерном проективном пространстве рз. l-1з Bcero сказанноrо
выше следует, что существует ровно восемь различных проектив-
ных классов таких поверхностей:
xi +xi+x
+x: == о,
xi +x
+x:
xi == о,
х; +x
х:
x% == о,
xi +x
+x: === о,
x
+x
x:==o,
х: + X
== О,
X
xi == о,
X
== о.
(Kl)
(К2)
(К3)
(К4)
(КБ)
(Кб)
(К7)
(К8)
Посмотрим, какие поверхности содержатся в каждом из перечис
ленных классов.
Класс (К8) состоит, очевидно, из поверхностей, каждая из
которых есть пара слuвшuхся плоскостей.
Класс (К7) состоит из поверхностей, распадающихся на пару
веtцесmвеlUlЬLX различных плоскостей, а класс (Кб)....... из поверхно..
стей, распадающихся на пару мнимых сопряженных плоскостей.
Переходим к остальным классам. Для определенности и удоб
ства предположим до конца предпринятоrо нами исследования
что система однородных координат, являющаяся исходной в про-
странстве рз == RЗ, соответствует прямоуrольной системе координат
оеl
ез пространства Rз.
Класс (КБ) состоит из поверхностей, называемых веществен..
НblMи коническими поверхностями; все поверхности этоrо класса
проективно эквивалентны поверхности, определяемой в однородных
координатах уравнением
х! + x
...... x
== О. (К5)
Собственные точки 9ТОЙ поверхности в системе координат ое 1 е 2 е з
удовлетворяют уравнению
ха + yl ..... Z2 == о.
494
n-МЕРНОЕ ПРОЕКТИВНОЕ ПРОСТРАНСТВО
Это уравнение обыкновенноrо вещественн.оzо КРУZЛО20 конуса. П
верхность
(К4)
которой проективно эквивалентны все поверхности класса (К4),
содержит единственную действительную точку (о: о: О : 1). При
переходе к неоднородным координатам в системе ое 1 е 2 еэ уравнение
(К4) переходит в уравнение мнимоrо конуса X 2 +y2+ Z 2::::0. По-
этому все поверхности класса (К4) называются .мнимыми конuчес
кимu nо
рхн.остями.
Переходим к поверхностям классов (К 1), (К2), (К3). Класс
(К 1) состоит из поверхностей, проеКТI1ВНО эквивалентных поверх..
v
ности, задаваемои уравнением
2 + 2 + 2 + 2 О
Х! Xj Ха Xi ==
x
+x;+x;==o,
(Кl)
или, в неоднородных координатах,
x2+!I+z 2 +1==0.
(1)
Это ур авнение мниМО20 эллипсоида, в прямоуrольной системе
ое}е 2 е з
даже мнимой сферы. Поверхности класса (К 1) не содер...
жат ни одной вещественной точки. Они называются мнимыми
оваЛЫ-lblми nоверхностями.
Поверхности, образующие класс (К2), называются действи-
тельными овальными поверхностямu l . это поверхности, проективно
эквивалентные поверхности
X
+x
+x: .........х: == о (К2)
или, в неоднородных координатах, поверхности
x2+y2+z2.........1 ==0.
(11)
в прямоуrольной системе координат оеl
ез уравнение (11) опре-
деляет обыкновенную действительную сферу. 11так, все поверхно-
сти класса (К2) суть поверхности, проективно эквивалентные
шаровой поверхности. Так как все прямолинейные образующие
u
поверхности шара мнимые, то деиствительные овальные поверхно-
сти (и тем более мнимые овальные поверхности) не имеют дейст-
вительных прямолинейных образующих.
Класс (К3) состоит из поверхностей, проективно эквивалентных
поверхности
X
+4
X: .........х: ==0
ИЛИ, В неоднородных координатах,
х 2 + у'
Zl....... 1 == о.
Это однополостный rиперболоид.
(111)
ПРОЕКТИВНО.АФФИННАЯ КЛДССИФИКДUИЯ ПОВЕРХНОСТЕА 495
Поверхности класса (КЗ) называются кольцевидными. Название
объясняется тем, что всякая поверхность класса (К3), будучи
проективно эквивалентной ОДНОПОЛОСТНОМУ rипер60лоиду целиком
" "
покрыта, как и этот ПОCJ1еднии, каждым из двух семеиств своих
прямолинейных образующих. Но прямая в проективном простран..
стее есть замкнутая линия, поэтому прямолинейные образующие
однополостноrо rиперболоида (и всякой проективно эквивалентной
ему поверхности), будучи замкнутыми линиями, и придают всей
покрытой ими поверхности кольцеобразную форму
однополост-
ный rиперболоид, пересекаясь с бесконечно удаленной плоскостью
по действительному овалу, смыкается в бесконечности в кольцо.
Приведем простой алrебраический критерий, позволяющий
судить, будет ли данная невырождающаяся поверхность овальной
или кольцевидной. Если поверхность рзнrа 4
Ф (х), Х 2 , X R , Х 4 ) == о (3)
есть действительная овальная поверхность, то дискриминант А
ФОРМbI Ф (х., Х 2 Х З , Х 4 ) отрицателен.
Для кольцевидных и мнимых овальных поверхностей этот ди-
скриминант положителен.
В самом деле, дискриминант квадратичной формы Ф при ли-
нейном преобразовании (6') перемеННbJХ умножается на квадрат
детерминанта преобразования И, значит, сохраняет свой знак.
Так как в данном случае число переменных равно 4, т. е. чет
НОМУ числу, то знак дискриминанта
не меняется и при YMHO
женин формы Ф на любой числовой множитель. Поэтому доста-
точно проверить сформулированный выше критерий после приведе
пия уравнения (1) к каноническому виду (К 1), (К2) или (К3),
что не представляет затруднений. Рекомендуем читателю перенести
результат этоrо примера на случай rиперповерхностей BToporo
порядка в произвольном n-мерном проективном пространстве.
5. Проективно-аффинная классификация поверхностей
BToporo порядка в трехмерном пространстве
В этом параrрафе мы опишем распределение по Jlроективным
классам поверхностей различных аффинных классов. Чтобы не
усложнять изложения, мы оrраничиваемся случаем TpeXMepHoro
пространства и настоятельно рекомендуем читателю обобщить pe
зультаты этоrо параrрафа на случай n
MepHoro проективноrо про..
странства.
Очевидно, все мнимые эллипсоиды принадлежат классу (К 1)
мнимых овальных поверхностей, а все действительные эллипсо-
иды
классу (К2) действительных овальных поверхностей. OДHO
полостные rиперболоиды, как мы только что видели, являются
поверхностями класса (К3); каждая поверхность BToporo порядка
496
п-МЕРНОЕ ПРОЕКТИВНОЕ ПРОСТРАНСТВО
должна попасть в один из классов (Kl)
(КВ), в частности, это
относится к двуполостным rиперболоидам и параболоидам. Но и
(двуполостные) rи перболоиды , и параболоиды суть действительные
поверхности paHra R == 4, поэтому каждая из этих поверхностей
находится в одном из классов (К2) или (К3).
rилерболические параболоиды, имея действительные прямоли-
нейные образующие, не MorYT находиться в классе (К2), значит,
они содержатся в классе (КЗ).
Наоборот, эллиптические параболоиды и двуполостные rипер..
болоиды лишены действительных прямолинейных образующих, им
нет места в классе (К3), и они попадают в класс (К2).
Итак, среди поверхностей пространства рз == R3 все действи-
тельные эллипсоиды, все двуполостные rиперболоиды и все эллип-
тические параболоиды после пополнения их несо6ственными точ-
ками оказываются действительными овальными поверхностями,
т. е. образуют класс (К2).
Однополостные rиперболоиды и rиперболические параболоиды
являются кольцевидными поверхностями, они заполняют собой
класс (КЗ).
Переходим к поверхностям paHra 3. В пространстве R3 это
конусы, действительные и мнимые, а также всевозможные цилин-
дры BToporo порядка. В проективном пространстве РЗ==RЗ все
эти поверхности попадают в классы (К4) и (К5). При этом цилин-
дры над невырождающимися действительными кривыми BToporo
порядка попадают в класс (Кб), цилиндры над мнимыми эллипсами
содержатся в классе (К4). Итак, в проективном пространстве все
цилиндрические поверхности становятся конусами; так как все
образующие цилиндра параллельны между собой, то 8 проеI<ТИВНОМ
пространстве все образующие данноrо цилиндра проходят через
одну и ту же несобственную точку......... вершину той конической
поверхности, в которую, по пополнении несо6ственными точками,
превратится наш цилиндр.
Наконец, поверхности, распадающиеся на пару плоскостей,
находят в рз свое естественное место в классах (Кб), (К7), (КВ).
Однако в классах (Кб) и (КВ) содержатся, кроме Toro, поверхно-
сти, не представленные поверхностями BToporo порядка в R3 (Т. е.
не получающиеся из них посредством пополнения их несобствен-
ными точками). Именно в классе (Кб) имеется поверхность, рас-
падающаяся на пару плоскостей, из которых одна собственная,
а друrая несобственная, в классе (КВ) имеется дважды взятая
нес06ственная плоскость.
За исключением этих двух случаев, каждой поверхности вто-
poro порядка r в проективном пространстве р3 == R3 соответствует
в RЗ вполне определенная поверхность BToporo порядка r, а именно
поверхность, состоящая из всех собственных точек поверхности r .
ПРОЕI<ТИВНО.АФФИННАЯ I(ЛАССИФИКАUИЯ ПО8ЕРХНОСТЕА 497
Для краткости мы часто будем называть поверхность r «аффинной
поверхностью» соответствующей поверхности r.
3 а м е ч а н и е. Результаты, изложенные 8 этом параrрафе,
MorYT быть получены и простым вычислением.
Покажем, что двуполостные rиперболоиды и эллиптические пара..
болонды принадлежат к классу (К2), а rиперболические парабо..
лонды
К классу (К3).
L(ля этоrо перейдем в уравнении двуполостноrо rиперболоида
х 2 + у2
Z2 ==
1
к однородным координатам; получим
xl +Х;+Х:
x; ==0.
I1роективное преобразование
,
Х. == Х 1 ,
,
Х2 =::s Х 2 ,
,
ХЗ == х..,
,
Х4 == ХЗ
переводит эту поверхность в поверхность
xi +x
+x
X: ==0,
Т. е. в шаровую поверхность X2+y2+Z2
1 ==0.
Переходим к параболоидам. Их уравнения
2z==x2 + у2
при переходе к однородным КООРДинатам превращаются в
2х з х. == xf + X
.
I1роективное преобразование
,
хl == X 1 ,
,
Х2 === Х2'
, I
Хз== Ха + ""2 Х4 '
, 1
Х4 === Х З
2- Х4 '
Т. е.
,
Х 1 == Х.,
Xt== ,
Х2,
Ха== 1,+1,
2 ХЗ 2 Х4 ,
х.== , ,
хз........ Х4.
498
п-МЕРНОЕ ПРОЕКТИВНОЕ ПРОСТРАНСТВО
переводит эти поверхности в поверхности
х' +x
....... X
+x
== о (в случае эллиптическоrо
параболоида );
х,
X
...... х! + X
== О (в случае rиперболическоrо
параболоида).
Первая из них
овальная, вторая
кольцевидная поверхность.
Покажем теперь непосредственным вычис.лением, что все
цилиндры относятся к проективному классу конических поверхно
стей. Для rиперболическоrо и эллиптическоrо цилиндров
х 2 + у2 == 1
это сразу следует из Toro, что их уравнения после перехода
к однородным координатам превращаются в
хУ +x
Х: == О, (1)
соответственно в
xf
x
.q == о.
Jlроективное преобраЗ0вание
(2)
соответственно
,
хl ==
,
Х2==
,
ХЗ == Х 1 ,
,
Х.==
х.,
,
ХI == Х 1 ,
,
Х2 === Х 2 ,
,
Хз==
,
Х.==
X j ,
Х.,
х з ,
Ха,
переводит поверхности (1), (2) соответственно в
Х " +х 'l X 'I О
I 2 ....... Э ==
'2 '2 '1 О
И ХЗ
Х2
Х} == ,
Т. е. (отбрасывая штрихи и умножая второе уравнение на
1) в
хУ +x
x
== о.
Случай цилиндра над мнимым эллипсом читатель разберет сам.
Наконец, параОО-!1ический цилиндр у2 == 2х в однородных коорди
натах получает уравнение X
2Х 1 Х 4 == О или после преобраэования
координат
] ,
Х 1 == 2 Х )
) ,
+ 2 ХЗ '
XJ==
,
Х2,
Хэ==
,
Xt ==
Х)
,
X.f,
+ Хз
уравнение XI J +X2
x;1 == о. это уравнение конической поверх-
ности.
ПРОЕКТИВНО.АФФИННАЯ КЛАССИФИКАЦИЯ ПОВЕРКНОСТЕА 499
Переходим к проективно
аффинной классификации, т. е.
к разбиению совокупности поверхностей BToporo порядка в проек"
тивном пространстве р3 == R3 на классы поверхностей, эквивалент..
ных между собой по отношению к проективно
аффинным преобра..
зованиям (см.
2).
По существу 1), проективно-аффинная классификация поверх..
ностей BToporo порядка r в R3 совпадает с аффинной классифи..
кацией соответствующих аффинных поверхностей r в R3. Если
[1 И r 2
две поверхности, принадлежащие к одному и тому же
проективно-аффинному классу в R 3 , то соответствующие им
поверхности [ 1 и r 2 в R З , очевидно, аффинно эквивалентны.
Однако если существует аффинное отображение е4 пространства R3,
переводящее поверхность [ 1 в поверхность [2, то при этом отобра
женин направления, асимптотические для поверхности r 1 , перей-
дут в направления, асимптотические для поверхности r 2 ; поэтому
проективно-аффинное преобразование е4 , являющееся продолже...
ннем аффинноrо преобразования е4 на все пространство R3 , пере..
водит несобственные точки поверхности r 1 в несобственные точки
поверхности
r2 и отображает первую из этих двух поверхностей
на вторую. Итак, две поверхности r 1 и r 2 проективноrо простран-
ства R З тоrда и только Тоrда принадлежат к одному и тому же
проективно
аффинному классу, коrда соответствующие аффинные
поверхности r 1 и r 2 принздлежат к одному и тому же аффинному
классу.
Мы покажем, что npoekmU8h,o-аффUННblЙ класс пОlJeрхности
второео порядка r в проек.mивном, пространстве R 3 или (что то
же) аффUННblU класс поверхности r 8 R3 полностью определяется
пpoeк,тuвHы.м. классо.м, данной поверхности и npoeICmuвHbUf, классом
той кривой Bтopozo порядка I которая является пересечением, дан-
ной поверхности снесобственной пЛОСКlJCmью.
Итак, посмотрим, по каким кривым поверхности различных
проективно
аффинных классов пересекаются снесобственной пло--
скостью. Заметим прежде Bcero следующее: мы видели, что если при
данном проективном преобразовании пространства какая-нибудь
плоскость 1t отображается на некоторую плоскость п', то это ото..
бражение плоскости л на плоскость п' есть отображение проектив..
ное. В частности, производимое проективно-аффинным I1реобразо..
ванием преобрззование несобственной плоскости является проектив"
ным прсобрззованием. Отсюда следует, что всякие две поверхности.
прииздлежащие к одному и тому же проективно
аффинному классу,
пересекают несобственную плоскость по проективно эквивалентным
1) То есть за исключением случая. коrда поверхность содержит Heco6crBeH..
ную плоскость.
500
n
MEPHOE ПРОЕКТИВНОЕ ПРОСТРАНСТВО
кривым BToporo порядка. П09ТОМУ дЛЯ определения проективноrо
класса кривых, по которым несобственную плоскость пересекают
кривые данноrо проективно..аффинноrо класса, достаточно взять
какую
нибудь поверхность этоrо класса, например поверхность,
задаваемую простейшим каноническим уравнением поверхностей
Данноrо класса. ЭтИМ уравнением будет для действительных кону-
сов уравнение х 2 + у2
Z2
О или, в однородных координатах,
xT+x
x!==O; (КБ)
дЛЯ мнимых конусов х 2 + у2 + Z2 == О или, в однородных коорди-
натах,
xY+x
+x
==O;
(К4)
для эллипсоидов х 2 + у2 + Z2 == + 1 или, в однородных координатах,
х1 +x
+x
+ xi ==0, (K2,I)
и Т. Д..
Заметим, во--вторых, что по сказанному в
3 несобственные точки
данной поверхности BToporo порядка совпадают снесобственными
точками ее асимптотическоrо конуса.
Как следует из простейших канонических уравнений (Кб)
и (К4) канонических поверхностей, действительный, соответственно
мнимый конус пересекается с несооственной плоскостью по дей-
ствительному, соответственно по мнимому овалу.. В rлаве VIII,
4, МЫ выяснили, каков конус асимптотических направлений
поверхностеЙ любоrо аффинноrо типа.
Конус асимптотических направлений эллипсоида является мни-
мым, а конус асимптотических направлений как двуполостноrо,
так и однополостноrо rиперболоида
действительным конусом;
конус асимптотических направлений параболоида вырождается
в пару различных плоскостей: действительных для rиперболиче-
cKoro и мнимых сопряженных для эллиптическоrо параболоида.
Итак, эллипсоид, как действительный, так и мнимый, пересе-
кается с несобственной плоскостью по МНИМОМУ овалу. rипербо-
u u
лоиды, как однополостныи, так и двуполостныи, пересекаются
с несооственной плоскостью по действительному овалу. Парабо-
лоиды касаются несобственной плоскости по паре различных прямых:
действительных в случае rиперболическоrо, мнимых и сопряженных
в случае эллиптическоrо параболоида 1). Таким образом, в приме-
1) Таким образом, rиперболоиды MorYT быть определены как невырождаю-
щиеся поверхности BToporo порядка, пересекающиеся с несобетвенной пло-
скостью по действительному овалу; среди этих поверхностей однополостные
rиперболоиды являются кольцевидными, а двуполостные
О8альными.. Пара-
болоиды MorYT быть определены как невырождающиеся поверхности, кзсаю-
щиеся не собстве н ной плоскости: при это
rиперболические параболоиды
являются кольцевидными, а эллиптические
овальными поверхнос-тями, в СООТ-
ПРОЕКТИВНО-АФФИННАЯ КЛАССИФИКАЦИЯ ПОВЕРХНОСТЕЯ 501
нении к невырождающимся поверхностям мы уже доказали наше
основное утверждение: проективно-аффинный тип такой поверх-
ности полностью определен ее проективным классом и проективным
классом ее пересечения с несо6ственной плоскостью.
Переходим к поверхностям paHra 3. Мы уже видели, что дей-
ствительный конус пересекается с несо6ственной плоскостью по
действительному овалу, а мнимый
по мнимому.
Остаются цилиндры. Как МЫ видели в
4 rлавы VIII. конус
асимптотических направлений всякоrо цилиндра вырождается в пару
плоскостей: действительных и различных для rиперболическоrо
цилиндра, МНИМЫХ и сопряженных для эллиптическоrо. Конус
асимптотических направлений параб:>лическоrо цилиндра BыpO}Kдa
ется в пару совпадаюЩИХ плоскостей. В соответствии с этим все
цилиндры дают в пересечении с несобственной плоскостью кривую,
распадающуюся на пару прямых, друrими словами, все цилиндры
касаются несоб
твенной плоскости; при этом rиперболические ци...
линдры касаются несобственной плоскости по паре различных дей-
ствительных прямых, эллиптические
по паре мнимых сопряжен-
ных прямых, параболические цилиндры касаются несобственной
плоскости по паре совпадающих прямых.
Чтобы наrлядно представить себе всю картину, воэьмем самый
обыкновенный круrлый конус и три плоскости а, а', а", прохо-
дящие через ero вершину и расположенные следующим образом.
Плоскость а пересекает конус по паре ero образующих. На
рис. 135, а плоскость а есть плоскость рисунка. Единственной
действительной точкой конуса, лежащей в плоскости а,', пусть
является ero вершина (рис. 135, б), так что плоскость а' пересе-
кает конус по паре мнимых сопряженных прямых. Наконец, пло..
скость а" возьмем так, чтобы она касалась конуса по ero обра-
зующей, которая, дважды взятая, и является пересечением пло-
скости а" с нашим конусом (рис. 135,8). Представим себе теперь
три проективных преобразования
, о/!',
" пространства рз,
переводящих соответственно плоскости а, а', а" внесобственную
плоскость. Каждое из этих преобразований превратит наш конус
в цилиндрическую поверхность: преобразование
в rипербо-
лический, преобразование (?/С'
в эллиптический, преобразование
п
В параболический цилиндр.
Переходим к поверхностям, распадающимся на пару плоскостей.
Пара различных действительных плоскостей х 2
у2 == О, соответ-
ственно х 2
1 == О записывается в однородных координатах в виде
X
X
== О, соответственно X
х: == о. Пересечение с несобствен-
ветствии С чем касание первых происходит по паре действительных, а касание
вторых
по паре мнимых сопряженных прямых. Наконец) ЭЛЛИПСОИДЫ СУТЬ
невырождзющиеся поверхности (содержащие или нет действительные точки).
пересечение которых с иесобствеиной ПЛОСКОСТЬЮ происходит ПО мнимому овалу.
502
n-МЕРНОЕ ПРОЕI(ТИВНОЕ ПРОСТРАНСТВО
ной плоскостью есть в первом случае пара различных прямых
X 1 + X 2 ==O, Х 4 == О,
ВО втором
пара совпадающих прямых
х; == О, Х, ==0.
Точно так же пара мн.имых сопряженных плоскостей
X
+Х; == О, соответственно X
+Х% == о. в пересечении с несо6ственной
.z tZ
.
........
r-
........
"'....'
,
.......... tЖ/ ...
I ....,
,. I ' /J ,,'" ...,
I " I I \
t
I
t I
у
Рис. 135.
и/
I
d}
плоскостью дает в первом случае пару мнимых сопряженных
прямых
Xl + iX 1 == О,
х. == О,
ПРОЕКТИВНО
АФФИННАЯ КЛАССИФИКАUИЯ ПОВЕРХНОСТЕА 503
во втором
пару совпадающих (действительных) прямых
== О. х. == о.
Итак, выяснение вопроса о характере расположения поверх..
ностей различных аффинных классов относительно несобственноА
плоскости закончено. Закончена и проективно
аффинная класси...
фикация поверхностей, так как из сделанноrо разбора всех пред...
ставляющихся случаев вытекает, что аф
инный класс каждой по-
верхности взаимно однозначно соответствует nape t состоящей из
проективноrо типа данной поверхности и из прэективноrо типа
ее пересечения с несо6ственной плоскостью.
Заметим, что проективный класс пересечения поверхности дан-
Horo аффинноrо класса с несобственной плоскостью леrко уста..
новить и непосредственно, не обращаясь к конусу асимптотических
направлений: достаточно взять простейшее уравнение поверхности
данноrо аффинноrо класса для эллипсоида х 2 + у2 + 22 == -+ 1,
ДЛЯ однополостноrо, соответственно двуполостноrо rиперболоида
х 2 + yS....... Z2 == + 1, для параболоидов 2z == х 2 + у", перейти затем
в этих уравнениях к однородным координатам и, наконец, поло...
жить х4. == о.
Таким образом, получаются следующие кривые пересечения
с несо6ственной плоскостью Х 4 == о:
xJ +
+ х: == о. х. == О для эллипсоида (действительноrо и мни-
Moro),
X
+ xi
х: == о, х. == О для однополостноrо н двуполостноrо
rиперболоидов,
х; + х; == О, Х 4 == О для параболоидов.
Уравнения цилиндров в однородных координатах записываются
в виде
х; + х; + xi == о для эллиптическоrо цилиндра
(действительноrо и мнимоrо),
X
х:
х: == о для rиперболическоrо цилиндра,
х;
2x 1 x. == О для параболическоrо цилиндра;
из уравнений видно, что пересечения с несобственной плоскостью
дают: пару действительных прямых
х;
х; == О, Х 4 == О для rиперболическоrо цилиндра,
пару мнимых прямых
X
+ х: == О, Х" == О для эллиптическоrо цилиндра,
пару совпадающих прямых
Х; == О, х. == О для параболическоrо цилиндра.
Итоrом Bcero исследования является следующая таблица:
504
п-МЕРНОЕ ПРОЕ«ТИВНОЕ ПРОСТРАНСТВО
Таблица поверхностей 8Toporo ПОР8АКА
А. Не8blрождающиеся nosерхности (поверхности раша 4)
Аффинный класс 11 ero
преДСТ8ВИ'teль
1) Действительные
эллипсоиды
2) Мнимый эллипсоид
3) Двуполостные rипер.
болонды
4) Однополостные rипер.
болоиды
5) Эллиптические пара-
боло нды
6) rнперболические
параболоиды
7) Действительный конус
ПроеКТИВRыА класс
поверхности
Действительная оваль-
ная поверхность
Мнимая овальная поверх..
ность
Действительная овальнзи
поверхность
Кольцевидная
ность
L(ействктельиая оваль-
ная поверхность
Кольцевидная поверх-
ность
Действительная кониче-
ская поверхность
ПроеКТИ8ныА кл асс пересе-
чеНИf[ поверхности снесоб.
СТ8енноА ПJlОСКОСТЫО
Мнимый овал
Мнимый овал
Действительный овал
поверх- Действительный овал
Пара мнимых сопряжен..
ных прямых
Пара различных действи-
тельных пр ямых
ДеАствительный овал
Б. По&ерхности раН2а 3 (коничес"ие и цuлиндричеС1(ие)
8) Мнимый клзсс (од.
на действительная
точ ка)
9) Действительный эл.
липтический ЦИЛИНДР
10) Мнимый эллиптиче
ский цилиндр
11) rиперболический ци-
линдр
12) Пs рзболическкй ци-
линдр
Мнимая коническая по-
верхность (одна дейст.
вительная точка)
Действительная кониче-
ская поверхность
Мнимая коническая п
верхность. (единствен-
ная действительная
точка
несобетвенная)
Действительная кониче...
скан поверхность
Действительная коииче-
ска я поверхность
Мнимый овал
Па ра мнимых сопряжен.
ных прямых
Пара мнимых сопряжен-
ных прямых
Пара действительных
различных прямых
Пара совпадающих (дей-
ствительных) прямых
В. Поверхности проекmшlЮZО ран.аа 2 и 1 (napbl плоскостей)
13) Пара действительных Пара Аействительных Пара различных действ и-
пересекаюlЦИХСЯ различных плоскостей тельных прямых
плоскостей
14) Пара мнимых пере- Пара мнимых различных Пара различных мнимых
секающихся плQ- ппоскостеА прямых с действитель-
скостей ной точкой пересечения
15) Па ра действительных Пара действительных Пара (действительных)
параллеJlЬ иых пло- различных плоскостей совпадающих прямых
скостей
16) Пара мнимых lТapaп- Пара мнимых различных Пара (действительных)
лельных ПJlоскостеl плоскостей совпадающих прямых
, 17) Пара (деlствитепь- Пара (действитель ных) Пара (действительных)
ных) совпадающих совпадающих плоско- совпадающих прямых
плоскостей стей
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Абсцисса 23
Аксиомы аффинноrо пространства З58,
359
линейноrо пространства 330. 331
Аннулятор 439
Асимптота кривой Bтoporo порядка 163,
]64, 168, 174, 322
....... поверхности BToporo порядка 227.
228
Асимптоты rиперболы 79
Базис 20, 24, 25, 89, 336, 360
...... билинеftной и квадратичной функ-
ции канонический 408
....... координатноА систе
ы 89, 360
....... ортоrональныи 92, 93. 433
....... ортонормальный 433
Вектор 9
асимптотическоrо направления
160
164, 224, 227
...... вещественный 131
единичный J 3, 20, 23, 25
...... закрепленный 359
замыкающий 12
......... линейноrо оператора собственный
388
мнимый IЗl
нулевой 9
ортоrональныА к подпространству
439
...... переноса 452
поверхности асимптотический 224,
466
прямой направляющий 4), 44, 46
свободный 10
Векторы базисные 20
...... взаимно сопряженные 175
инвариантные 388
КОJJJIинеарные 18, 20, 21
компланарные 18, 20, 21
Векторы сопряженные относителЬНО
поверхности 251
Величина yrJIa между двумя вехторами
в n.мерном евклидовом пространстве
437, 438
Вершина конической поверхности ) 35
кривой BToporo порядка 72, 75, 79,
191
эллипса 75
Вид билинеАной формы канонический
408
....... канонический ОрТоrональноrо оле...
ратора 448
унитарноrо оператора 446
квадратичной формы канони
ескнА
408
Вращение аффинноrо пространства 456
........ плоскости 36
rипер60JJа 75, 83. 143
rиперболоид 203
в п
MepHOM а
инном пространстве
472
двуполостный 203
индекса т 472
однополостный 203
правильный 203
....... ....... вращения 205
rиперПJJОСКОСТЪ 376
диаметральная 467
r омотети я 454
rpynna аффинных преобразований 452
вращений 456, 457
........ движений 456. 457
........ переносов 456. 457
центроаффинных преобразований 452
Движение 105, 454
винтовое 461
n-мсрноrо аффинноrо евклидова про..
странства в координатах 454
506
ПРЕДМЕТНЫR VКА3АТЕЛЬ
Движение несобственное (BToporo рода)
457
собственное (первоrо рода) 457
llеленне отрезка в данном отношении
26, 27
Jtефект линеАноro оператора 385
Jtеформация непрерывная 97
Jtиаметр кривой BToporo порядка 173,
174
Jtиаметры взаимно сопряженные 177
........ rиперболы 171
....... r лавные 187
..... параболы 178
....... центральной кривой сопряженные
177
....... эллипса 177
JtиреКТрИС8 параболы 70
Jtиректрисы rиперболы 80. 81
эллипса 80, 81
JtИСКРИМИН8НТ кваJlра rичноА формы 403
Jtлина вектора 9
отрезка 9
Jtополнение алreбраическое 344
ортоrонзльное 4а9
Единица измерения длин 13, 27
Зависимость векторов линейная 22, 332
Закон инерции ДJIЯ вещественных квад-
ратичных форм 413
Замыкание выпуклое 371
........ линейное 340
Значение вектора алrебраическое 13
........ линейноrо оператора собственное
388
......... проекции вектора алrебраическое 24
Изоморфизм аффинных пространств 362
линейных простраНСТ8 334
проективных плоскостей 290
Инварианты мноrочлена второй степени
oртоrональные 146, 141
Индекс квадратичной формы 413
.........
ФУНКЦИИ 413
Инцидентность точек прямых, плоско.
стей, rиперплоскостей 280, 479
Касательная rнперплоскость 465
к кривой 8Toporo порядка 165, 166
поверхности 8Toporo порядка 224
Касательная плоскость 225
Классификация rиперповерхностеА 8ТО..
poro порядка аффинная 471
кривых BTOpOro порядка аффин ная
156
......
проективнзя 325
......
проективно - аффинная
325
З29
поверхностей BToporo ПОРЯJlка аф-
финная 275
.......
проективна R 493
проективно-аффинная 495
Клетка жорданова 420
Комбинация векторов линейная 13, 332
Н
ТРИВИ8JIhная 21, 332
Комплексифик
ция вещественноrо ли-
нейноrо пространства 355
Композиция операторов 383
Конус аснмптотическиА 205, 229
асимптотических направлений 229
вращения 266
вырожденный индекса т 477
мнимый 266
с (п
r)"'MepHoA вершиной 477
с вершиной в точке индекса т 173
Координаты барицентрические 369
точки на прямой 364
8ектора в n.мерном аффИНIIОМ про.
странстве 360
линейном пространсrве 336
на прямой 13
rиперплоrкости в n.мерном проек-
тивном пространстве 480
однородные в пространстве 480
rипеРIlЛОСкОСТИ 4
прямой 289
плоскости в проективном простран-
стве 480
связки 480
проективные луча евя эки 285
n-мерной связки 419
ТОЧКИ однородные 283
.......
полярные 37, 40
.... ........ прямоуrольные 28, 29
........ цилиндрические 40, 41
I(ривая вещественн ая алrебраическая
116
BToporo порядка невырождающаяся
316
Кривые аффинно эквивалентные 125
8TOpOro порядка И30метрические 185
метриtWСКИ эквивалентные 185
Лемма Шаля 13
Луч связки 280
...... особый 281
ПРЕДМЕТНЫА УКАЗАТЕЛЬ
507
МаТрИl\8 аффинноrо преобраЗОn8НИЯ
451, 452
......... би
инейноА формы 401
функции 401
......... квадратичной формы 403
.........
функuии 403
линейноrо оператора 380, 381
ортоrональная 93
перехода 89
поверхности BToporo порядка боль-
шая 218
.
малая 218
преоораЗОВ8ННЯ координат 90
системы линейных уравнений 350,
372
расширенная 372
Меридиан поверхности вращения
137
Мноrообразия векторные 22
ноrочлен характеристический 390
Множество выпуклое 371
Наклон вектора к вектору 37
оси 37
Направление кривой BToporo порядка
особое 177
поверхности BToporo порядка особое
24
. 252
........ самосопряженное 177
Направления, взаимно сопряженные
относительно rиперповерхности
469
для rиперповерхностеА BToporo по.
рядка в n-мерном пространстве со-
пряженные 469
кривой BToporo порядка сопря-
женные 175
поверхности BToporo порядка со.
пряженные 251, 252
изотропные 162
кривой BToporo порядка асимптоти-
ческие 160
rлавные 187
........ поверхности BToporo порядка асимп
тотические 224
rлавные 258
Направляющая конуса 135
l1илнндра 133
Направляющие косинусы 81
Начало координат 23, 25, 37, 360
НеравеНСТ80 Коши
БУНЯКО8скоrо
437
треуrольника для векторов
437
точек 438
Оболочка выпуклая 371
линейная 340
Образ линейноrо оператора 384
Образующие прямолинейные rипербо-
лическоrо параболоида 215
217
однополостноrо rиперболоида
21З
215
поверхности BToporo порядка
207, 231
Объем ориеНТИрОВ2нноrо параллелепи-
леда 34
Овеществление комплексноrо линей
Horo пространства 356
Оператор линейный 378
нормальный 444
ортоrональнын 445
самосопряженный 447
симметрический 447
сопряженный 442
...... унитарный 445
эрмитов 447
Операции над векторами линейные
9
IЗ
Ордината 24
Ориентация 102, IОЭ
Орт 27
Ортоrоналиэация 434
Оси rиперболы 75, 76
эллипса 72
Ось t 3
абсuисс 23, 25
аппликат 25
rиперболы вторая 76
первая 75
фокальная 75
координат 23, 25
ординат 23, 25
параболы 71
фокальная 71
полярная 37, 39
симмеТрИИ кривой BToporo порядка
186, 187
эллипса вторая 72
первая 72
фокальная 72
Отношение векторов 19
Отображение аффинное 450
изоморфное 334, 362
линейных ПрОСТрансТВ линейное 378
перспективное ПЛОСКОС1И на пло
скость 313
Отражение относительно rиперплоско
сти 461
плоскости 448
k-плоскостн 458
прямой 458
......... точки 458, 459
508
ПРЕДМЕТНЫА У'КАЗАТЕЛЬ
Orражение переносное 460
поворотное от k-мерной плоскости
458
Orрезок 363
замкнутый 363
направленный 9
открытый 363
Парабола 69, 70. 84
Параболоид 208
в nамерном а
инном пространстве
473
вращения 209
rиперболический 208
индекса т 474
эллиптический 208, 474
вращения 209
Параллелепипед аффинноrо простран-
ства rамерный 366
ориентированный 34
Параллельность в широком смысле сло.
ва 376
двух плоскостей 58, 59
в n
MepHOM пространстве 376
прямых в пространстве 61, 62
прямой и плоскости 58
Параметр параболическоrо цилиндра
274
параболы 71
фокальный rиперболы 85, 86
параболы 86
эллипса 85, 86
Параметры параболоидов 208
Перенос лараллельный 456
Пересечение rиперповерхности BToporo
порядка с прямой 464
кривой BToporo порядка с прямой
165
........ поверхности BToporo пор ядка с пло--
скостью 220
Перпендикуляр из точки на прямую
53, 55
общий к двум прямым 55
Перпендику..'IЯР НОСТЬ двух векторов 32
плоскостей 67
прямой и плоскости 67
Плоскости в аффинном пространстве
,.мерные 364
в проективном пространстве 480
Плоскость а рифметиqеская проектив"
ная 289
бесконечио удаленная 483, 484
вещественная 129
диаметральная ПО&ерХНОСТИ BToporo
порядка 240
ПЛОСКОСТh комплексная 126
......... ....... проективная 291
мнимая 129
несобственнаи 483, 484-
......... проективная 282
проектнвно.аффинная 309
....... связки особая 281
центров 239
Поверхности аффинно эквивалентные
125
BToporo порядка аффинно эквива-
лентные 275
вырождающиеся 201, 226
распадающиеся 132
Поверхность 116
....... алreбраическая (16
....... вещественная 131
вращения 136
......... BToporo порядка 218
.......
....... в лроективном пространстве
495
....... ......... вырождающа яся 201
.........
....... действительная овальная 494,
496
....... ....... невырождающаяся 20 1
....... кольцевидная 494, 496
....... кон и чес ка я 134
....... мнимая овальная 494, 496
центральная 238
цилиндрическая 132, 133
Поворот BOKpyr начала координат 458
Подпространство евклидава простран-
ства 439
......... инвариантное 387
......... линейноrо пространства 339
....... УlIитарноrо пространства 439
Полуоси rиперболоидов 203
rllперболы 75
центральных поверхностей 267
....... цилиндрической поверхности 271
эллипса 72
....... эллипсоида 201
Полуось эллипса (jольшая 72
малая 73
Полуплоскость положительная 48
ПолупростраНСТБО положительное 62
Полюс полярной системы координат
31, 39
Порядок алrебраическоА кривой 116
.......
поверхности 116
Преобразование аффинных координат
89, 90, 91
координат на комплексной плоско
сти 129
....... проективно-аct$инное в n-мерном
проективном пространстве 486
.....
н а плос кости 309
312
ПРЕДМЕТНЫА VКАЗАТЕЛЬ
509
ПреобразованиЯ аффинные 450
......
несобственные (BToporo рода)
453
........
собственные (первоrо рода) 453
Принцип двойственности для n-мерноrо
проективноrо пространства 481
....... проективноl пЛОСКОСТИ 292,
293, 294
Проекция вектора на плоскость 15
прямую 15
ортоrональная 441
точки на плоскость 15
прямую 14, 15
Произведение вектора на число 12
.......... векторное 34
операторов 383
скалярное 81, 82, 436
смешанное 35
Пространство арифметическое аффин-
ное 361
линейное 333
334
.......
проективное 480
аффинное 358
359
.-.... евклидово 438
линейное 330
проективно-аффниное 483
унитарное 438
Прямая бесконечно УJl;з.ленная 28. t 282
в n-мерном а
инном пространстве
362
несо6ственная 281, 282
....... центров 239
Равенство векторов 9
Радиус полярный 38, 40
Радиусы фокальные
.лJIипса 73
Разложение вектора 20, 21
Размерность линейноrо пространства
335
PaHr 6илинейной формы (функции) 406
....... квадратичной формы (функции) 406
линейноrо оператора 385
....... поверхности BToporo порядка боль.
шой 218
малый 218
системы уравнений 350
Расположение rиперповерхности и пря.
мой в аффинном пространстве 464
двух прямых в простраНС1'ве взаим-
ное 60, 61
.......
на плоскости ВЗ8НМНое 45
Расстояние между ДВУМЯ пр ямыми 52
........
точками 28, 29
......... от точки ДО плоскости 67, (8
......
...... ....... прямой (на плоскости) 52
Расстояние <t:OКYCHoe rнперболы 75
эллипса 12
Репер 89
прямоуrольныА 91
Связка в п
MepHOM пространстве 479
комплексная 291
пр ямых И плоскостей 281
Сдвиr 358
Сиrнатура веrцественной квадратичной
формы 413
Симплекс 370, 371
замкнутый 370
...... координатный 482
открытый 310
Система векторов максимальная ли
нейно независимая 343
инвариантов кривой BToporo по.
рядка полная 185
координат аффинная в пространстве
24, 25
на плоскости 23
в проективном пространстве 482
каноническая ДЛЯ rиперболоидов
203
rиперt;олы 71
конуса BToporo порядка
198
параболоидов 208
параболы 69
эллипса 72
эллипсоида 201
на плоскости и в пространстве
23, 24, 25, 21
полярная 37, 39
40
однородная 283, 284
ортоrональная 438
проективиая 297
Сумма векторов 11
операторов 382
подлространств 344
алrебраическая 344, 345
прямая 345
Qt>epa 29
Теорема Бернулли
Шаля 461
единственности для rиперповерх.
ностей BToporo порядка 470
кривых BToporo порядка 181
поверхностей Bтoporo поряд'"
ка 254
......... о приведении матрицы К жордано-
вой форме 431
510
ПРЕДМЕТНЫй УКАЗАТЕЛЬ
Теорема о разложении движения п"мер...
Horo аффинноrо пространства в
композицию отражений 461
paHre матрицы 346
об изоморфизме линейных "рост-
ранств 338
Сильвестра (критерий Сильвестра)
415
Штеиница 340
Точка бесконечно удаленная 286
КрИВОЙ BToporo порядка двойная 322
особая 322
поверхности второто порядка ДВОЙ.
ная 487
особая 487
Точки rеометрически независимые 368
фундаментальные 482
Трансляций пространство 358
Трансляция 452
Уrлы Эйлера 104
Уrол между двумя векторами 29
плоскостями 67
прямой и плоскостью 66, 67
пр ямым.If 53
Уравнение rиперповерхности BToporo
порядка общее 463
диаметральной rиперплоскости 468
каноническое rиперболическоrо па..
раболоида 208
rиперболоида двуполостноrо 203
ОДНополостноrо 203
rиперболы 77
конуса BToporo порядка 198
мнимоrо конуса BToporo поряд.
ка 200, 201
эллипса 14З
144
Э.,lлипсоида 202, 203,
параболы 69
эллипса 73
эллипсоида 201
эллиптическоrо параболоида 208
касательной rиперnлоскости 465
к кривой BToporo порядка 165,
166
плоскости к поверхности 8ТОрОТО
порядка 225
кривой BToporo порядка общее 140
плоскости 56, 57
поверхности 8Toporo порядка общее
218
прямой 4], 43, 44
в векторной форме 47
нормальное 51
характеристическое 390
центра кривой BToporo порядка 170
Уравнение центральной rиперпо
ерхно.
сти BToporo порядка 47]
поверхности BToporo порядка 237
Уравнения параметрические плоскости
56
........
прямой 47. 362
Условие параллельности
yx плоско-
стей 58, 59
прямой и плоскости в широком
смысле 58
прямых 46
перпендикулярностн двух векторов
32
прямых 53. 55
Фокус параБОIlЫ 70
Фокусы rиперболы 75
эллипса 72, 73
Форма билинейная 401
симметричная 401
жорданова матрицы 420
421
квадратичная 402
......... линейная 395, 396
нормальная л-матриц 424
полярная от данной квадратичной
403
Функция билинеАная 400
симметричная 401
квадратичная 401
линейная 395
эрмитова 431
положительно определенная 431
Центр вращения 460
......... rипер60ЛЫ 76
rнперповерхности BToporo порядка
466
кривой BToporo порядка 169
поверхности BToporo порядка 235
связки 280, 479
симметрии эллипса 75
Цилиндр 132, 133
rиперболический 197, 269, 272
с (!
I ).MepHыM основанием
477
круrлый 272
мнимый с (,
1)"мерным основа.
нием 477
эллиптический 269, 272
параболический 197, 269, 273
индекса т 476
с '
MepHЫM основанием 476
эллиптический 157. 269, 272
с (,
l)
MepHЫM основанием 477
ПРЕДМЕТНЫА VКАЗАТЕЛЬ
511
Числа характеристические 390
Эквивалентность кривых проеКТИВН8Я
326, 327
поверхностей проективная 491, 493
Эксцентриситет rи перболы 76
параболы 84-
эллипса 72
Эллипс 72, 83. 84
действительный 143
Эллипс МИ имый 144
Эллипсоид 201
в п-мерном аффинном пространстве
472
вращения ВЫТЯНУТЫЙ 202
сжатыи 201
действительный 201, 472
......... мнимый 203, 412
Ядро линейноrо оператора 384
Павел Сер2еевuч АЛЕКСАНДРОВ
КУРС
АНАЛИТИЧЕСКОЙ rЕОМЕТРИИ
И ЛИНЕЙНОЙ АлrЕБРЫ
Учебни"
Издание BTopoe t
стереотипное
ЛР NQ 065466 от 21.10.97
rиrиенический сертификат 78.01.07.953.П.004173.04.07
от 26.04.2007 r., выдан цrсэн в СПб
Издательство «ЛАНЬ»
lan@lpbl.spb.ru; www.lanbook.com
192029, Санкт
Петербурr, Общественный пер., 5.
Тел./факс: (812)567
29
35, 567
05
97, 567
92
72.
Бесплатный звонок по России: 8
800
700
40
71
rДЕ КУПИТЬ
ДЛЯ оРrАНИЗАЦИЙ:
Д ля mozo, чтобы за1Сазать 1iеобходuмые Вам 1C1iUZU, достатОЧ1iО обратuться
8 любую UЗ mOPZ08blX 1Сомпапий И здательс1СОZО Д ома «ЛАНЬ»:
по России и зарубежью
«ЛАНЬ
ТРЕЙД». 192029, Санкт
Петербурr, ул. Крупской, 13
тел.: (812) 567
85
78, 567
14
45, 567
85
82; тел./факс: (812) 567
54
93
e
mail: trade@lanpbl.spb.ru; ICQ: 446
869
967
www.lanpbl.spb.ru/price.htm
в Москве и в Московской области
«ЛАНЬ
ПРЕСС». 109263, Москва, 7
ая ул. Текстильщиков, д. 6/19
тел.: (499) 178
65
85; e
mail: lanpress@ultimanet.ru
в Краснодаре и в Краснодарском крае
«ЛАНЬ
юr». 350072, Краснодар, ул. Жлобы, д. 1/1
тел.: (8612) 74
10
35; e
mail:lankrd98@mail.ru
ДЛЯ РОЗНИЧНЫХ ПОКУПАТЕЛЕЙ:
иптерпет
маzаЗU1iЫ:
«Сова»: http://www.symplex.ru; «OZOn.ru»: http://www.ozon.ru
«Библион»: http://www.biblion.ru
также Вы можете отправить заявку на покупку книrи
по адресу: 192029, Санкт
Петербурr, ул. Крупской, 13
Подписано в печать 18.04.09.
Бумarа офсетная. rарнитура Литературная. Формат 84хl08 1/32.
Печать офсетная. Усл. п. л. 26,88. Тираж 1500 экз.
Заказ NQ
Отпечатано в полном соответствии
с качеством предоставленных диапозитивов
в ОАО «Издательско
полиrрафическое предприятие «Правда Севера».
163002, r. Арханrельск, пр. Новrородский, д. 32.
Тел./факс (8182) 64
14
54; www.ippps.ru