/












































































































Text
www.vokb-la.spb.ru - Само^етс^
ПРАКТИЧЕСКОЙ
АЭРОДИНАМИК
1 и * «мЛ!** 11* ***/*.’’ ‘‘••’••Х*’**’Л *
.• - Ч4-Ж
/
/
“’ i*
- y-isi. ....
1
•Л- ’V.-x,’I;?
д. trap шенин
A. N. МАРТЫН 08
www.vokb-la.spb.ru - Самолёт своими руками?!
Д. С. ГОРШЕНИН,
А. К. МАРТЫНОВ
МЕТОДЫ И ЗАДАЧИ
ПРАКТИЧЕСКОЙ АЭРОДИНАМИКИ
ИЗДАНИЕ ЧЕТВЕРТОЕ,
ПЕРЕРАБОТАННОЕ И ДОПОЛНЕННОЕ
Допущено
Министерством высшего и среднего специального образования СССР
в качестве учебного пособия
для студентов авиационных специальностей
высших учебных заведений
Москва
«М А Ш И Н О С Т Р О Е Н И Е»
1977
www.vokb-la.spb.ru - Самолёт своими руками?!
УДК 533.601.07/08(075.8)
Рецензент канд. техн, наук В, Д. Вотяков
Горшенин Д. С., Мартынов А. К. Методы и задачи прак-
тической аэродинамики. М.» Машиностроение, 1977, 240 с.
В книге изложены теоретические основы и методы, на ко-
торых базируются типовые экспериментальные работы в сов-
ременных аэродинамических лабораториях, описаны приборы,
применяющиеся для таких работ, и приведены формулы длч
обработки результатов экспериментов.
В данное учебное пособие включено 25 работ, представ-
ляющих наибольший интерес как с позиций авиационной прак-
тики, так и с позиций создания общих представлений об ос-
новных проблемах аэродинамики.
Учебное пособие предназначено для студентов авиацион-
ных вузов; оно будет полезно также инженерам, занимаю-
щимся аэродинамическими экспериментами.
Табл. 11, ил. 166, список лит. 15 назв.
31808-175
038(01)-77 ,75‘77
(g) Издательство «Машиностроение», 1977 г.
ПРЕДИСЛОВИЕ
За последние годы в области аэродинамики происходит все убы-
стряющийся процесс расширения и углубления исследований во
всех се направлениях. Если еще сравнительно недавно основное
внимание уделялось исследованиям, связанным с повышением
скорости течения газа, то в настоящее время большое внимание
уделяется также повышению числа Рейнольдса, что приводит
к увеличению масштаба исследуемых моделей и размеров аэро-
динамических труб и роли нестационарное™ процессов при
обтекании тел.
Широкое внедрение электронных вычислительных машин (ЭВМ)
в исследовательскую практику позволило решать такие задачи,
которые ранее были совершенно недоступны. ЭВМ позволили так-
же значительно усовершенствовать и ускорить обработку резуль-
татов эксперимента.
В настоящее время в практику экспериментальной аэродинами-
ки внедрены такие достижения физики, как лазерные и голографи-
ческие устройства. Появились новые экспериментальные установки,
существенно отличающиеся от прежних, и значительно ускорился
процесс совершенствования оборудования для аэродинамических
лабораторий.
Следует, однако, отметить, что большинство задач, стоящих пе-
ред экспериментальной аэродинамикой, остаются прежними. Это
измерение аэродинамических сил и моментов, определение местных
скоростей течения воздуха и местных углов притекания потока,
исследование распределения давления по поверхности обтекаемого
тела и т. п.
Перед экспериментальной аэродинамикой практика все время
ставит новые задачи, которые необходимо решать. Поэтому каж-
дый авиационный инженер независимо от его узкой специальности
должен уметь разобраться в правильности постановки опыта, оце-
нить точность эксперимента и уметь сделать выводы из получен-
ных результатов.
В книгу включены 25 работ, представляющих наибольший инте-
рес при освещении типового аэродинамического эксперимента.
Настоящее учебное пособие составлено применительно к суще-
ствующему оборудованию и установкам аэродинамической лабора-
3
www.vokb-la.spb.ru - Самолёт своими руками?!
тории Московского авиационного института имени Серго Орджо-
никидзе. Однако большинство предлагаемых работ может быть вы-
полнено в любой аэродинамической лаборатории, особенно в усло-
виях учебных лабораторий других родственных институтов.
Каждая лабораторная работа рассчитана на два академических
часа, включая объяснение преподавателя.
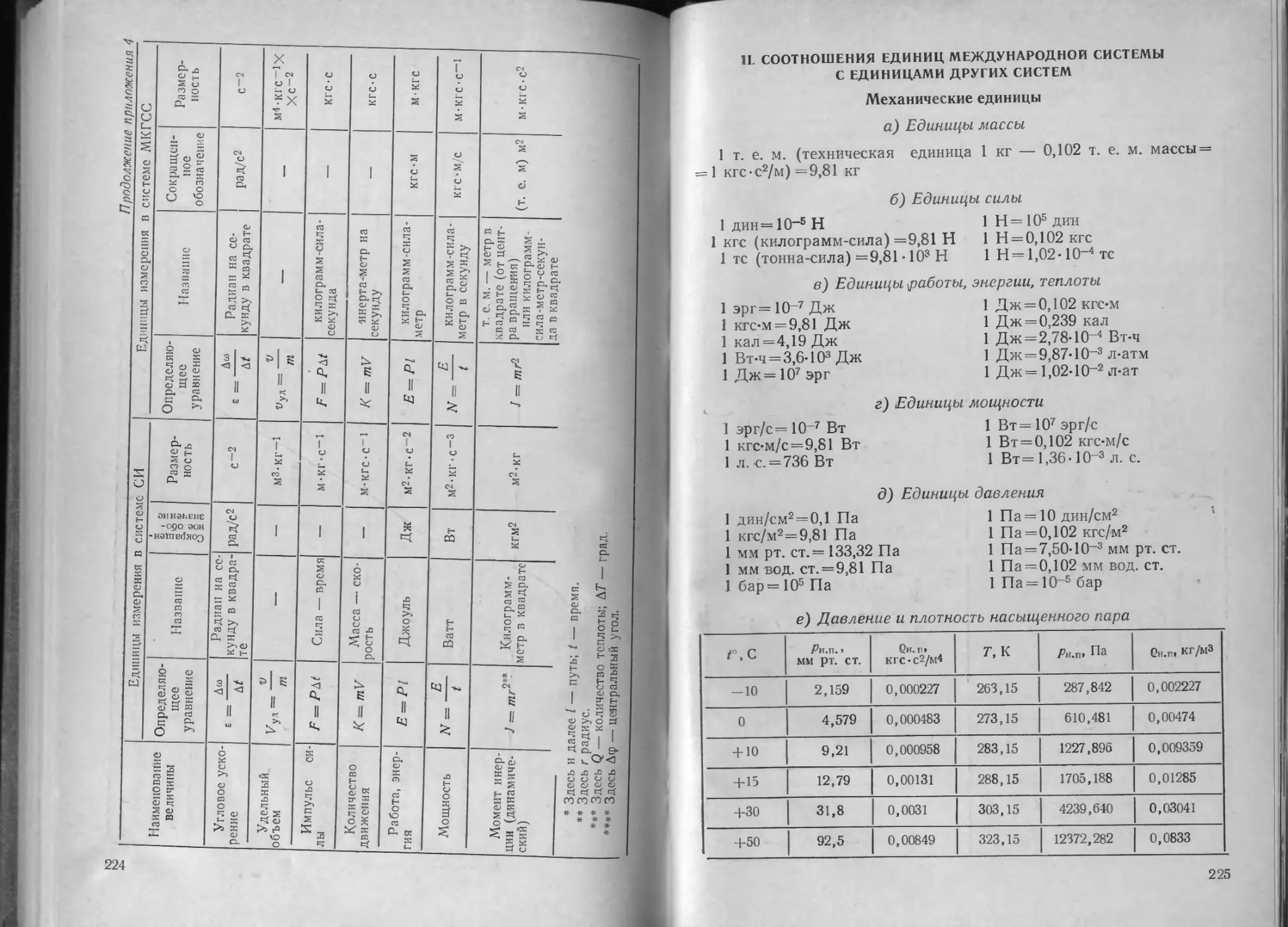
В приведенных лабораторных работах используются единицы
измерений физических величин СИ и соответствующие производ-
ные единицы.
Необходимые формулы применительно к системе МКГСС, а так-
же соотношения единиц СИ с единицами МКГСС и других систем
даются в приложении 4.
Термины, определения и буквенные обозначения, использован-
ные в книге, соответствуют ГОСТ 20058—74 и ГОСТ 4401—73.
Авторы приносят глубокую благодарность О. В. Флоринскому
за полезные советы и пожелания, а также доценту В. Д. Вотякову,
сделавшему ряд ценных замечаний при рецензировании работы.
ОСНОВНЫЕ УСЛОВНЫЕ ОБОЗНАЧЕНИЯ
а — скорость звука в м/с, положение уровня жидкости в узкой трубке
микроманометра при опыте в мм;
а0— положение уровня жидкости в узкой трубке микроманометра до
опыта в мм;
В —атмосферное давление в барах (1 бар = 105 Н/м2);
b — хорда профиля в м;
Ьв — хорда руля высоты в м;
Сха — коэффициент лобового сопротивления;
Cxi — коэффициент индуктивного сопротивления;
Схв —коэффициент волнового сопротивления;
СХр —коэффициент профильного сопротивления;
Сх/ — коэффициент трения;
Суа — коэффициент подъемной силы;
Ао — высота уровня спирта в микроманометре до опыта в мм;
h — высота уровня спирта в микроманометре при опыте в мм;
К — коэффициент микроманометра; аэродинамическое качество крыла,
самолета;
/ — линейный размер; длина, размах крыла в м;
М— критерий подобия, учитывающий сжимаемость воздуха (число
Л1аха);
Mz — момент тангажа в Н м;
Мп1 —шарнирный момент в Нм;
zn2, С т коэффициент момента тангажа;
тш — коэффициент шарнирного момента;
р— давление, упругость водяных паров в атмосфере в Н/м2;
Ра—атмосферное давление в мм рт. ст. (1 мм рт. ст.= 133,322 Н/м2);
р — коэффициент давления;
q — скоростной напор в Н/м2;
R — радиус воздушного винта в м, удельная газовая постоянная, рав-
ная 287,14, в Дж/кг °С;
Ял — аэродинамическая сила;
Re — критерий подобия, учитывающий вязкость (число Рейнольдса);
5 — площадь крыла в м2;
— площадь миделевого сечения в м2;
Т —температура в К;
* Тн.в — сила тяги воздушного винта в Н (кг-м/с2);
t — температура в градусах Цельсия, время;
и — скорость в пограничном слое в м/с;
— скорость на границе пограничного слоя в м/с;
У — скорость потока Vxa—Vf поступательная скорость воздушного
винта в м/с;
Ya — подъемная сила в Н;
X,i —сила лобового сопротивления в Н;
Ха, Уа, Za — текущие координаты скоростной системы;
X, Y, Z — текущие координаты связанной системы;
5
www.vokb-la.spb.ru - Самолёт своими руками?!
а — угол атаки в ...° (1°«=л/180 рад), абсолютный коэффициент тя-
ги воздушного винта;
Р — абсолютный коэффициент мощности воздушного винта, коэффи-
циент объемного расширения воздуха, равный 1/273; угол сколь-
жения в ... °;
Лак—угол косизны потока в аэродинамической трубе в ...° (1°=
=зт/180 рад);
5 —толщина пограничного слоя в мм;
6О —угол отклонения органа управления тангажом в ...°;
i бя — угол отклонения органа управления рысканием в ... °;
бзак — угол отклонения закрылков <в ... °;
бносок — угол отклонения носка крыла в ... °;
е — степень турбулентности потока, угол скоса потока;
т] — КПД воздушного винта, сужение крыла;
9 — полярная координата, угол клина носовой части тела;
w=*cPlcv — отношение удельных теплоемкостей;
X — удлинение крыла, относительная поступь воздушного винта;
— коэффициент поля аэродинамической трубы, коэффициент дина-
мической вязкости в Нс/м2 (кг/м с);
v — коэффициент кинематической вязкости в м2/с;
у — удельный вес (масса единицы объема) в Н/м2;
р — массовая плотность в кг/м2;
5 — коэффициент приемника воздушного давления (ПВ Д);
то —напряжение трения на поверхности тела в Н/м2;
<р — угол наклона трубки микроманометра, угол установки стабили-
затора в ... °;
% — угол стреловидности крыла в ... °.
ВВЕДЕНИЕ
Эксперимент в аэродинамике играет ведущую роль. Именно
благодаря эксперименту стало возможным подтвердить основные
законы аэродинамики, наблюдать действительную картину обте-
кания летательных аппаратов и их отдельных элементов воздуш-
ным потоком, уточнить для расчета аэродинамические характе-
ристики.
Особенно высоко оценивали эксперимент основоположники сов-
ременной аэродинамики Н. Е. Жуковский и С. А. Чаплыгин, соз-
давшие целый ряд аэродинамических лабораторий.
В 1902 г. Н. Е. Жуковский основал аэродинамическую лабора-
торию в Л1ОСКОВСКОМ университете, а в 1906 г. была создана аэро-
динамическая лаборатория в Московском высшем техническом учи-
лище (МВТУ), которая в дальнейшем была переведена в Москов-
ский авиационный институт им. Серго Орджоникидзе (МАИ).
В 1910 г. возникла аэродинамическая лаборатория при Петербург-
ском (ныне Ленинградском) политехническом институте.
За последнее время эксперимент в аэродинамике изменился су-
щественным образом. Так, для проведения эксперимента при опре-
делении характеристик самолета потребовались аэродинамические
трубы больших размеров, в которых можно испытывать целые са-
молеты, вертолеты и другие летательные аппараты или их крупные
модели. Были созданы специальные аэродинамические трубы для
испытания двигательных установок с их гондолами. Испытания
проводятся как для турбореактивных и турбовентиляторных, так и
для прямоточных двигателей и других силовых установок.
Особенно большое применение нашли аэродинамические трубы
больших скоростей (дозвуковые и сверхзвуковые). В большинстве
из них можно создавать переменное давление, что обеспечивает
лучшие условия подобия между обтеканием испытываемой модели
и натурного объекта, которому соответствует модель. Сверхзвуко-
7
www.vokb-la.spb.ru - Самолёт своими руками?!
вые аэродинамические трубы создаются как по схеме кратковре-
менного действия (баллонные и баллонно-вакуумные), так и по схе-
ме постоянного действия (с установкой высоконапорного компрес-
сора). В этих трубах требуется размещать целый ряд сложных
агрегатов: подогревателей, охладителей, осушителей воздуха
и т. д. Необходимо заметить, что мощность привода сверхзвуковой
аэродинамической трубы может достигать десятков и даже сотен
тысяч киловатт.
Переход к исследованиям в области гиперзвуковой аэродинами-
ки (М^б), аэродинамики разреженных газов и магнитной газоди-
намики привел к появлению целого ряда новых исследователь-
ских установок. Потребность в колоссальных мощностях для при-
ведения в действие некоторых из этих установок вынудила иссле-
дователей уменьшать масштабы эксперимента. Это, несомненно*
временное явление, так как внедрение в практику новых мощных
источников энергии создаст условия для увеличения масштабов
испытательных установок.
Аэродинамические трубы, применяемые для исследования тече-
ний очень больших скоростей, доходящих до космических, позволя-
ют изучать процессы нагрева и охлаждения поверхностей летатель-
ных аппаратов.
Все перечисленные выше задачи для больших сверхзвуковых и
гиперзвуковых скоростей могут быть решены при помощи аэроди-
намических труб, в которых используется газ с температурой кон-
денсации меньшей, чем у воздуха, например, гелий. В этом случае*
правда, нельзя моделировать явления, которые происходят в воз-
духе при высоких температурах (диссоциация, рекомбинация и т. п.).
Большое распространение получили трубы с подогревом. Очень
высокие скорости течения можно воссоздать в ударных трубах, в
которых газ расширяется вслед за бегущей ударной волной. В удар-
ной электромагнитной трубе волна создается от мощной батареи
конденсаторов, что обеспечивает течение газа с температурой в де-
сятки тысяч градусов. В этих установках ввиду высокой степени
электропроводности силыю ионизированного газа можно исследо-
вать проблемы магнитной газодинамики. Газовые потоки высоких
температур получаются и в так называемых адиабатических тру-
бах.
Широкое распространение получили в настоящее время баллис-
тические установки. В них исследуется движение объекта, выстре-
ливаемого из специальной пушки в длинную трубу. Скорость при
испытании может быть увеличена, если в самой трубе создается
встречный поток.
Параллельно с быстрым развитием исследовательских устано-
вок интенсивно изменялась и техника эксперимента, которая обога-
щалась все новыми и новыми приемами измерений.
В динамометрии от элементарных чашечных или пружинных
аэродинамических весов сначала перешли к механическим весам с
автоматическим уравновешиванием, а затем — к тензометрическим
весам.
Появляются динамометры, в которых модель удерживается в по-
токе аэродинамической трубы сильным магнитным полем.
В пневмометрии создаются разнообразные типы приемников
воздушного давления, но основное внимание было уделено созда-
нию регистраторов давления различных схем. Развиваются как
жидкостные, так и механические быстродействующие манометры и
микроманометры. За последнее время очень распространились эле-
ктрические датчики давления: индуктивные, емкостные и тензомет-
рические.
В баллистических установках применяют телеизмерительную ап-
паратуру. Внутрь выстреливаемой модели помещают радиопередат-
чик, вдоль траектории движения модели устанавливают антенны,
при этом антенны фиксируют радиосигналы передатчика. Исследо-
вания гиперзвуковых потоков чрезвычайно осложнены необходимо-
стью проводить измерения в очень ограниченные промежутки вре-
мени; быстрота измерения определяется в ряде случаев миллисе-
кундами. Быстрыми темпами внедряется в практическую
аэродинамику лазерная техника. Она позволяет измерять с высо-
кой точностью величины местных скоростей потока, углы притека-
ния струй и другие величины.
Необходимо, чтобы студент отчетливо представлял себе смысл
и величины поправок, вводимых в результаты проведенных опытов,
а также мог бы реально оценить точность опытов, которые он про-
водил.
Большое значение имеет аэродинамическая лаборатория в ус-
тановлении у студента отчетливых представлений о физической
сущности отдельных процессов, характеризующих кинематику и
динамику воздушных течений при обтекании элементов летатель-
ных аппаратов. Эти представления совершенно необходимы сту-
денту при прохождении курсов «Аэродинамика», «Прикладная га-
зовая динамика», «Динамика полета».
9
www.vokb-la.spb.ru - Самолёт своими руками?!
Приступая к выполнению работ в аэродинамической лаборато-
рии, необходимо прежде всего ознакомиться с соответствующим
разделом курса прикладной и экспериментальной аэродинамики *.
После получения задания на лабораторную работу и ознакомления
с ней необходимо разработать схему установки, на которой ведется
опыт, с указанием способа крепления экспериментального объекта
к установке, а также схему действия и передачи сил по звеньям
экспериментальной установки. Чертеж экспериментального объекта
(крыло, фюзеляж, воздушный винт) должен быть выполнен акку-
ратно, в достаточно крупном масштабе и с указанием основных
размеров **.
* Определение погрешностей при проведении различных аэродинамических
экспериментов дано в приложении 7.
* * Формы бланков для лабораторных работ даны в приложениях 1 и 2.
ТРЕБОВАНИЯ К ПОСТАНОВКЕ ЭКСПЕРИМЕНТА
В АЭРОДИНАМИЧЕСКИХ ТРУБАХ
Приступая к проведению исследований в аэродинамических тру-
бах, необходимо отчетливо представить себе те условия, которым
должен удовлетворять эксперимент при его постановке. Опыт в
аэродинамической трубе может быть весьма разнообразным—это
качественные визуальные исследования обтекания, количественное
определение действующих на модель сил и моментов, измерение
распределения давления по поверхности модели, нахождение вели-
чин локальных скоростей и углов притекания потока и другие
исследования. При постановке любого опыта, как и при проведе-
нии всякого физического эксперимента, необходимо, как уже было
указано, сформулировать тс условия, при которых возможно осу-
ществление опыта, обеспечивающего надежное практическое
использование полученных из опыта результатов. Для этой цели
необходимо, чтобы опыт был принципиально правильно поставлен,
достаточно надежен и точен.
Прежде всего нужно, чтобы были удовлетворены законы подо-
бия. Это значит, в первую очередь, чтобы было осуществлено стро-
гое геометрическое подобие. В целом ряде случаев недопустима
схематизация модели по сравнению с натурным объектом, и требу-
ется соблюдение подобия даже в элементах (приемники воздушного
давления, антенны и т. п. детали аппаратов).
Наилучшим решением было бы соблюдение полного подобия.
Это значит, что кроме геометрического подобия должно быть вы-
держано равенство чисел Рейнольдса Re, Маха М, Струхаля Sh,
Фруда Fr и степени турбулентности потока е для модели и натур-
ного объекта. Такое подобие осуществляется очень редко. Обычно
это бывает при испытании самого объекта или его макета при ско-
ростях, соответствующих натурным скоростям полета. Трудность
реализации таких условий эксперимента вынуждает переходить к
частичному подобию. Это значит, что при опыте выдерживается
равенство хотя бы одного из критериев подобия, например Re
или М. Иногда удается осуществить частичное подобие по двум
критериям: Re и М, Re и Sh и т. д. Еще реже создается возмож-
ность обеспечить частичное подобие по трем критериям, например,
Re, М и Sh. В обычной практике аэродинамического эксперимента
испытания ведутся в различных аэродинамических трубах, напри-
мер, один и тот же объект исследуется в дозвуковом потоке с целью
11
www.vokb-la.spb.ru - Самолёт своими руками?!
учета влияния числа Рейнольдса, а в сверхзвуковом потоке — с
целью выяснения влияния числа Маха.
Если не удается реализовать и частичное подобие, то прибегают
к условному подобию. Условное подобие основывается на явлении
автомодельности. Под этим мы понимаем независимость любого
коэффициента аэродинамической силы или момента от ’произволь-
ного критерия подобия, например Сха от Re, Суа от М и т. д. Наи-
более часто мы используем условное подобие при определении ко-
эффициента Сха для различных частей летательного аппарата. Этот
коэффициент остается примерно постоянным в пределах от Re^
^3-105 до тех чисел Re, при которых начинается сказываться влия-
ние сжимаемости среды.
Опыты желательно вести в условиях, при которых начальная
турбулентность потока в аэродинамической трубе соответствует ус-
ловиям натуры, т. е. обычно малой степени турбулентности. Это
особенно важно в тех случаях, когда при опыте необходимо соблю-
сти постоянство положения точки перехода пограничного слоя из
ламинарного в турбулентное состояние и точки отрыва погранично-
го слоя. Для соблюдения этих условий даже создаются специаль-
ные «бестурбулентвые» трубы с очень малой степенью турбулент-
ности. В целом ряде случаев, например для ликвидации ламинар-
ного отрыва на модели, прибегают, наоборот, к искусственной тур-
булизации потока в некоторых зонах аэродинамической трубы или
же всего потока трубы.
К изготовляемым для опытов моделям предъявляют высокие
требования. Эти требования сформулированы в различного типа
руководствах. В виде примера можно сказать, что допуск в вы-
держивании контура профиля крыла по шаблону составляет до
0,01% от величины хорды профиля. Требования к соблюдению по-
добия по шероховатости поверхности, сводящиеся к выдержива-
нию постоянства величины относительной шероховатости Ahll\
приводят к необходимости тщательной полировки поверхности мо-
дели.
Поток аэродинамической трубы должен быть установившимся^
прямолинейным и равномерным как вдоль продольной оси, так и
по главным осям поперечного сечения рабочей части трубы. В хо-
рошо сконструированной аэродинамической трубе скоростной напор
в любой точке поперечного сечения ее рабочей части не должен
отклоняться от среднего значения более чем на ±1%, максималь-
ное отклонение углов косизны потока в вертикальной плоскости не-
должно быть более ±0,25°, а в горизонтальной — ±1°. В потоках:
сверхзвуковой скорости отклонение числа М в рабочей части тру-
бы от среднего значения не должно превышать 0,6—0,7%.
Большие требования предъявляются и к динамометрическим, а*
также к регистрирующим устройствам, измеряющим величины на-
грузок, приложенных к испытываемым в аэродинамической трубе
моделям. Для аэродинамических весов механического типа относи-
тельная погрешность при измерениях в условиях лабораторной про-
12
верки при больших измеряемых величинах доходит до 0,0001 от
измеряемой -величины, а при малых измеряемых величинах — до
0,0005. Введение автоматизации, например, в форме автоматичес-
кого весового элемента, мало отражается на величинах погрешно-
сти: относительная погрешность увеличивается в 1,5 раза. Для тен-
зометрических весов относительная погрешность может возрасти до
0,002 от измеряемой величины.
При измерении скорости воздушного потока необходимо распо-
лагать характеристиками градуировки приемника воздушного дав-
ления (ПВД) или датчиков давления любого типа (индуктивный,
емкостный и др.). Особенную осторожность нужно проявлять при
измерении скорости на околозвуковых режимах, где при некоторых
схемах ПВД погрешность в измерении скоростного напора может
дойти до ~10%. При определении скорости потока по перепаду
давлений коэффициент ц в формуле Vpa6.4= |/ —--------— (здесь
Pi —- давление в форкамере; р2 — давление в рабочей части) дол-
жен быть найден при помощи специальной градуировки. При изме-
рении температуры торможения потока коэффициент восстановле-
ния датчика сра должен быть найден путем специальной градуиров-
ки в аэродинамической трубе.
Манометр и микроманометр также должны иметь градуировоч-
ную характеристику. Если при опытах, как это чаще всего бывает,
применяют жидкостный микроманометр, необходимо знать плот-
ность жидкости, налитой в бачки манометра, вводить температур-
ную поправку. Ввиду того, что точность визуального отсчета столба
жидкости не превышает 0,5 мм, следует при малых размерах стол-
бов жидкости увеличивать масштаб измерения путем наклона из-
мерительной трубки микроманометра. В особо точных измерениях
используют специальные оптические системы с большим увеличе-
нием.
Руководствясь всем сказанным, можно рассчитывать на воз-
можность применения полученных из опыта результатов в практи-
ческих приложениях.
В последнее время приобретает большое распространение так
называемый численный эскперимент. Под этим обычно понимают
такой способ исследования физического явления, при котором оно
представляется математической моделью. Затем, пользуясь боль-
шим быстродействием и памятью цифровых и аналоговых вычисли-
тельных машин, меняя исходные параметры исследуемого явления,
получают искомые характеристики. В некоторых областях физики
такой численный эксперимент оказывается -более экономичным
средством и представляет больше информации, чем путь создания
моделей для физического эксперимента. В экспериментальной
аэродинамике, как показывает практика, численный эксперимент
не может заменить физический эксперимент. Однако было бы не-
правильным отрицать и в аэродинамике пользу численного экспе-
13
www.vokb-la.spb.ru - Самолёт своими руками?!
римента, который может в предварительном порядке, после про-
верки большого числа вариантов, отобрать для реального физи-
ческого исследования те модели и те параметры этих моделей,
которые представляют наибольший интерес для исследования.
Большое значение введения в практику ЭВМ для эксперимен-
тальной техники неоспоримо. Пользуясь вычислительными маши-
нами, экспериментатор чрезвычайно быстро получает результаты
эксперимента, обработанные согласно специальной программе с ав-
томатическим введением в эти результаты необходимых поправок.
Больше того, располагая графопостроителями, можно получить
синхронно с экспериментом готовые графики зависимостей харак-
теристик исследуемого объекта от задаваемых параметров.
Тем не менее, следует помнить, что применение ЭВМ позволяет
только ускорить опыт, упростить и ускорить обработку материалов
опыта. Для составления программы, закладываемой в ЭВМ, необ-
ходимо хорошо знать теорию и практику эксперимента. А это воз-
можно только в процессе проведения нормального физического
эксперимента с детальным изучением всех его этапов.
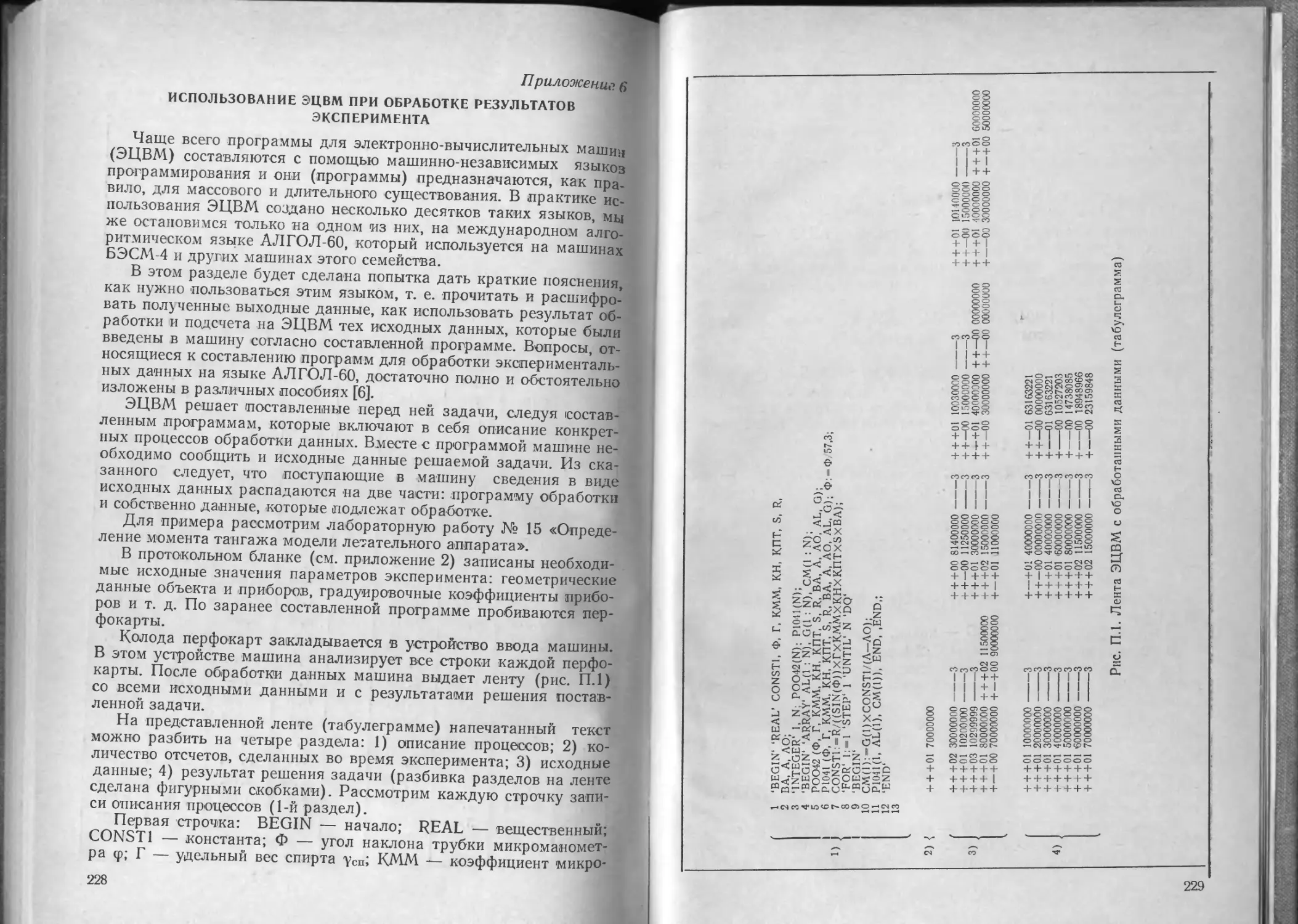
Пример расшифровки данных, выдаваемых ЭВЦМ БЭСМ-4 на
языке АЛГОЛ-60, применительно к лабораторной работе № 15 дан
в приложении 6.
В данном разделе требования к постановке эксперимента сфор-
мулированы в общем виде. В дальнейшем отдельные требования
будут учтены при детальном изучении конкретных работ.
ОПРЕДЕЛЕНИЕ ОСНОВНЫХ ПАРАМЕТРОВ
(ДАВЛЕНИЯ, ТЕМПЕРАТУРЫ, ПЛОТНОСТИ)
Разобравшись в схеме постановки опыта и в деталях его про-
ведения, студент должен сделать ряд измерений (атмосферного
давления, температуры и влажности воздуха в экспериментальном
помещении, характеризуемой величиной давления пара рп), кото-
рые являются обязательными для всех опытов. Эти измерения по-
могут получить важнейшую величину, характеризующую условия
эксперимента, — плотность воздуха р.
Измерение атмосферного давления производится по барометру.
Полезно делать два измерения: перед опытом и после опыта и в
случае различия показаний брать среднеарифметическую из двух
измерений. Требуемая точность измерений ±0,1 мм рт. ст.
Обычно температура воздуха определяется по международной
стоградусной шкале Цельсия. Ввиду того что при длительной ра-
боте установок температура с течением времени может сильно из-
меняться, повторные измерения температуры совершенно необхо-
димы. Расчетная температура на данном отрезка времени при опы-
те также устанавливается путем нахождения среднеарифметичес-
кого. Допустимая точность при измерении температуры — не ме-
нее 0,5° С.
14
Величина плотности может быть определена (если пренебречь
влиянием влажности) по уравнениям Бойля-Мариотта и Гей-Люс-
сака
0_=_Р (1 + ^с) _ Р (273 + 4). _Р_ £с_
Qc Pc (1 + ₽0 Рс (273 + 0 ’ С Ре Т ’
где р — коэффициент объемного расширения воздуха, равный 1/273
или по графикам (рис. 0.1).
Рис. 0.1. График зависимости плотности воздуха от барометрического дав-
ления и температуры
Принимая по стандартной атмосфере начальные значения плот-
ности Qc= 1,225 кг/м3, давления рс = 760 мм рт. ст. и температуры
fc=15° С или 77—288 К, получим
^88р=0 4М22L.
760 (273 + 0- т
Влажность воздуха при определении величины плотности в боль-
шинстве опытов не играет существенной роли, но в условиях повы-
шенных температур или при состоянии воздуха, близком к насы-
щению водяными парами, может существенно сказаться на резуль-
татах опыта. Поэтому желательно определение влажности воздуха
при обычных опытах на малых скоростях обтекания и совершенно
необходимо — при проведении экспериментов в высокоскоростных
аэродинамических трубах или на открытом воздухе в условиях по-
вышенной влажности. Большое значение имеет учет влажности при
летном эксперименте.
Влажный воздух всегда легче сухого при одинаковых темпера-
турах и давлении. Влажность воздуха чаще всего определяется
величиной относительной влажности х, представляющей собой от-
ношение количества водяного пара, находящегося в воздухе, к ко-
15
www.vokb-la.spb.ru - Самолёт своими руками?!
личеству водяного пара, насыщающего воздух при той же темпе-
ратуре:
Y л/ Y н.п Оп/Он.п •
Для каждой температуры имеется предельное количество водя-
ного пара, которое насыщает выделенный объем воздуха. Этому
состоянию насыщения, как известно, соответствует давление насы-
щенного водяного пара рп.п и плотность рп.п. В приложении 4 да-
ются величины давления и плотности водяного пара при различных
температурах воздуха. В приведенном диапазоне температур от
—10 до 4-50° С уравнение состояния справедливо и для газов и для
пара. Поэтому можно написать рп=-*Рн.п-
Установим соотношения для нахождения плотности влажного
воздуха рвл. Согласно закону Дальтона давление смеси газов рав-
няется сумме парциальных давлений газов, образующих смесь. По-
скольку уравнение состояния справедливо и для сухого воздуха и
для водяного пара, мы можем, выразив плотность влажного воз-
духа через сумму плотностей сухого воздуха р и водяного пара оп
(Qb.t = Q + Qii), получить следующую формулу:
где R и /?п — соответственно газовые постоянные для воздуха и
водяного пара. Из закона Дальтона следует, что р=рВл—Рп-
Отсюда плотность влажного воздуха может быть выражена
окончательно:
Овл
Рвя -ХРн.п
ЯГ
ХРв.п
Rut
Рт
R„T
ХРн.В
Рви
R„
После подстановки численных значений /?=287,14 и /?п=462,05
получим окончательную формулу для определения плотности влаж-
ного воздуха
Овл
__ Рт
яг
0,378 ).
Рвл /
(0.1)
Из этой формулы следует, что при температуре в эксперимен-
тальной установке £=50° С и большой влажности, характеризуе-
мой коэффициентом х=1, ошибка от неучета влажности в величи-
не плотности воздуха превышает 4,5%.
Для того чтобы можно было пользоваться формулой (0.1), не-
обходимо знать величину относительной влажности х. Обычно в
практике аэродинамических лабораторий относительную влаж-
ность определяют при помощи психрометров, измеряющих парци-
альное давление водяного пара рп в рабочем помещении. Психро-
метр (рис. 0.2) состоит из двух термометров; шарик одного термо-
метра сухой, шарик другого обернут влажной марлей. Вследствие
16
испарения влаги последний термометр охлаждается и показывает
более низкую температуру, чем сухой термометр. Обозначим тем-
пературу, определенную по влажному термомет-
ру, через Г, а температуру, определенную по
сухому, являющуюся температурой внешней сре-
ды, через t.
Окончательная формула для определения
давления водяного пара по психрометрическим
измерениям в аэродинамических трубах будет
иметь вид
А.=А.п-6,6а(/-/,)Ю-4. (0.2)
В этой формуле атмосферное давление ра и
давления ри.п и рп выражены в мм рт. ст.
По приведенной выше формуле составлена
специальная таблица, которая позволяет без
всяких расчетов, зная показания сухого и влаж-
ного термометров, определить относительную
влажность окружающего воздуха в процентах.
Рис. 0.2. Схема
действия психро-
метра
МЕТОДЫ ОПРЕДЕЛЕНИЯ СКОРОСТИ ВОЗДУШНОГО
ПОТОКА В АЭРОДИНАМИЧЕСКОЙ ТРУБЕ ДОЗВУКОВЫХ
СКОРОСТЕЙ
1. ОПРЕДЕЛЕНИЕ СКОРОСТИ ПОТОКА ПРИЕМНИКОМ
ВОЗДУШНОГО ДАВЛЕНИЯ (НАСАДКОМ)
Наиболее распространенным в настоящее время методом опре-
деления скорости потока в аэродинамических трубах является спо-
соб, связанный с применением насадка, называемого приемником
воздушного давления (ПВД).
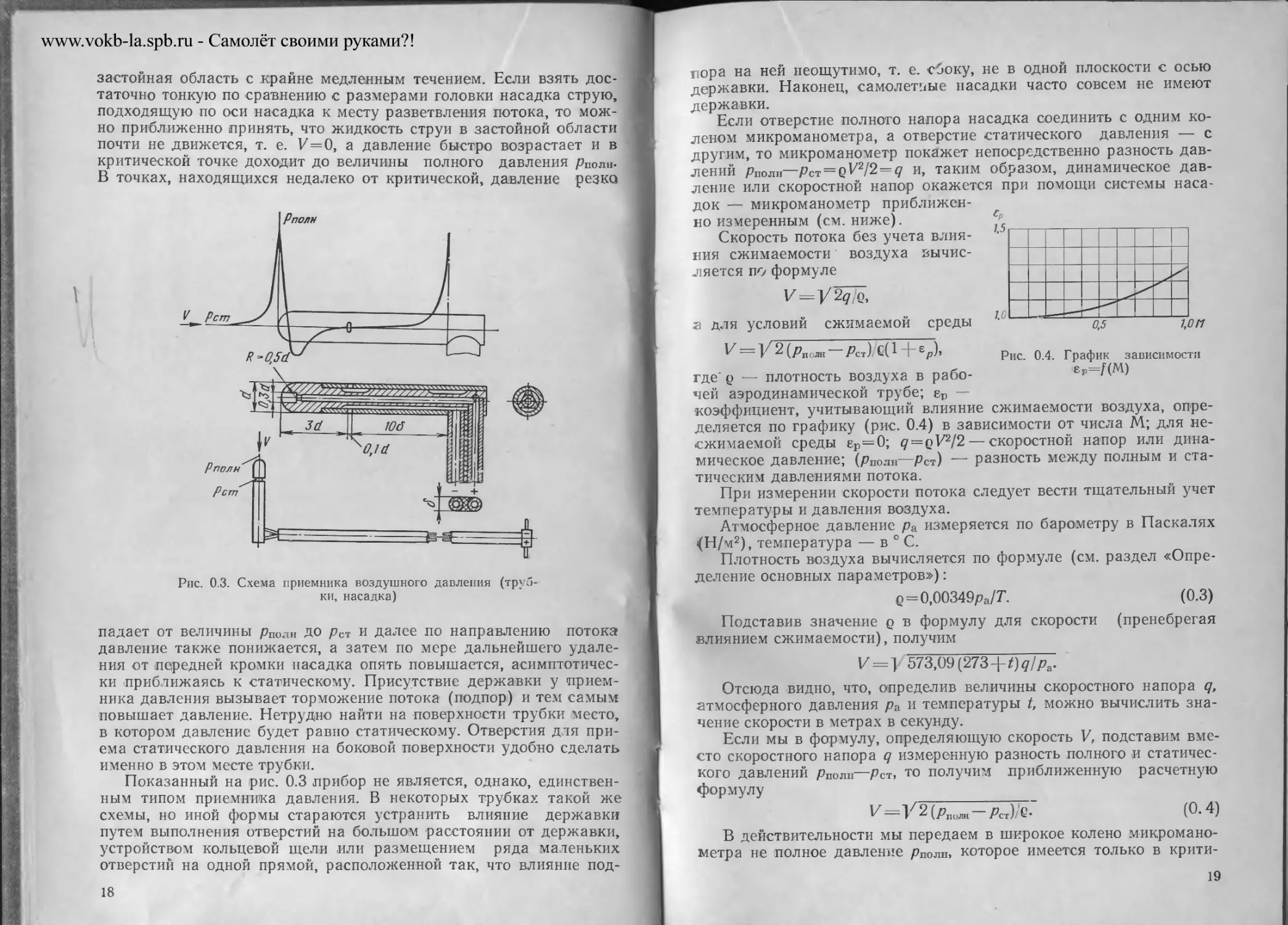
Приемник давления (насадок) представляет собой сочетание
трубки полного напора и приемника статического давления (рис.
0.3). Этот прибор регистрирует разницу между полным напором,
воспринимаемым отверстием трубки полного напора насадка, и
статическим давлением, воспринимаемым статическими отверстия-
ми насадка.
Величина статического давления потока рст связана с величи-
ной скоростного напора ^ = qV2/2 для несжимаемой среды уравне-
нием Бернулли
Аюлн=(Q V1/2)+А=(е v i/2) 4- А == const
и, как видно, изменяется с изменением скорости V.
Картину обтекания насадка можно схематически представить
себе следующим образом. Струйки потока вблизи насадка искрив-
ляются, и сам поток разветвляется. В месте разветвления потока
скорость сильно уменьшается и перед насадком образуется как бы
17
www.vokb-la.spb.ru - Самолёт своими руками?!
застойная область с крайне медленным течением. Если взять дос-
таточно тонкую по сравнению с размерами головки насадка струю,
подходящую по оси насадка к месту разветвления потока, то мож-
но приближенно принять, что жидкость струи в застойной области
почти не движется, т. е. V=0, а давление быстро возрастает и в
критической точке доходит до величины полного давления рПолн-
В точках, находящихся недалеко от критической, давление резка
Рис. 0.3. Схема приемника воздушного давления (труб-
ки, насадка)
падает от величины рПолн до рст и далее по направлению потока
давление также понижается, а затем по мере дальнейшего удале-
ния от передней кромки насадка опять повышается, асимптотичес-
ки приближаясь к статическому. Присутствие державки у прием-
ника давления вызывает торможение потока (подпор) и тем самым
повышает давление. Нетрудно найти на поверхности трубки место,
в котором давление будет равно статическому. Отверстия дтя при-
ема статического давления на боковой поверхности удобно сделать
именно в этом месте трубки.
Показанный на рис. 0.3 прибор не является, однако, единствен-
ным типом приемника давления. В некоторых трубках такой же
схемы, но иной формы стараются устранить влияние державки
путем выполнения отверстий на большом расстоянии от державки,
устройством кольцевой щели или размещением ряда маленьких
отверстий на одной прямой, расположенной так, что влияние под-
18
пора на ней неощутимо, т. е. -сбоку, не в одной плоскости с осью
державки. Наконец, самолетные насадки часто совсем не имеют
державки.
Если отверстие полного напора насадка соединить с одним ко-
леном микроманометра, а отверстие статического давления — с
другим, то микроманометр покажет непосредственно разность дав-
лений Рполн—Pct = qI/2/2 = 9 и, таким образом, динамическое дав-
ление или скоростной напор окажется при помощи системы наса-
док — микроманометр приближен-
но измеренным (см. ниже).
Скорость потока без учета влия-
ния сжимаемости воздуха вычис-
ляется по формуле
17=У 2^/р,
а для условий сжимаемой среды
Рис. 0.4. График зависимости
еР=/(М)
^ = У2(/7полн-Ат),с(1+еД
где' Q — плотность воздуха в рабо-
чей аэродинамической трубе; ер —
коэффициент, учитывающий влияние
коэффициент, учитывающий влияние сжимаемости воздуха, опре-
деляется по графику (рис. 0.4) в зависимости от числа М; для не-
сжимаемой среды Ep=0; 9 = qV2/2— скоростной напор или дина-
мическое давление; (рПолн—Рст) *— разность между полным и ста-
тическим давлениями потока.
При измерении скорости потока следует вести тщательный учет
температуры и давления воздуха.
Атмосферное давление ра измеряется по барометру в Паскалях
(Н/м2), температура — в ° С.
Плотность воздуха вычисляется по формуле (см. раздел «Опре-
деление основных параметров»):
р = 0,00349ра/Г. (0.3)
Подставив значение q в формулу для скорости (пренебрегая
влиянием сжимаемости), получим
V=У 573,09 (273+/) q]p^
Отсюда видно, что, определив величины скоростного напора q>
атмосферного давления ра и температуры t, можно вычислить зна-
чение скорости в метрах в секунду.
Если мы в формулу, определяющую скорость V, подставим вме-
сто скоростного напора q измеренную разность полного и статичес-
кого давлений рПоли—Рст, то получим приближенную расчетную
формулу
^=Г2(/7подн-Ат)/е.' (0.4)
В действительности мы передаем в широкое колено микромано-
метра не полное давление рПолп, которое имеется только в крити-
19
www.vokb-la.spb.ru - Самолёт своими руками?!
ческой точке, а некоторое среднее давление потока, имеющее место
на поверхности переднего отверстия насадка, так как это отверстие,
как бы мало оно не было, практически занимает всегда некоторую
конечную площадь и не является точкой. Кроме того, статическое
давление мы измеряем при помощи насадка неточно и, как легко
видеть, не в той же точке, где измеряется полное давление. Может
оказаться, что даже в свободном потоке статическое давление в
двух точках, расстояние между которыми равно расстоянию между
отверстиями насадка, неодинаково.
Следовательно, разность давлений рПолн—Рст, которую мы фак-
тически передаем на микроманометр, зависит от формы и размеров
насадка и не равна разности между полным и статическим давле-
ниями потока *в одной и той же точке *.
Чтобы учесть поправку, в формулу (0.4) вводится коэффициент
g, называемый коэффициентом насадка, после чего формула примет
вид
V=V 2 (рполн - Ат) Ve. (0.5)
По опытным данным g колеблется от 1,01 до 1,04.
Выразив разность давлений рПолн—Рст через высоту вертикаль-
ного столба микроманометра, будем иметь
Аолн —Ат=(л —^o)Y«=eV,2/2=TB^W. (0. 6)
где ув — вес единицы объема воздуха при рС“Ю,13-104 Па и /=
= 15° С в Н/дм3 (кг/м2-с2); уж — вес единицы объема жидкости при
этих же условиях.
Воспользовавшись зависимостью между (рПолн—Рст) и (h h0)
и приняв уж—у, получим новое выражение для скорости потока:
1Z = ] 2(/z-/z0)ye/c. (0.7)
Это выражение не учитывает индивидуальных особенностей потока
в аэродинамической трубе и микроманометра; кроме того, оно вер-
но только для микроманометра с вертикальными трубками.
Для подсчета скорости невозмущенного потока в сечении трубы,
где будет находиться исследуемая модель (рис. 0,5) при условии,
когда трубка микроманометра наклонена под углом ср, т. е. Лн=
= h—/z0= (а—a0)sin<p, вводим в формулу (0.7) следующие вели-
чины: коэффициент манометра К и коэффициент поля трубы ц.
Тогда формула (0.7) примет вид
1/ = ] 2 (а~а0) sin ?уАГВр/с. (0.8)
Ниже дается подробное описание микроманометра, насадка и
способов получения их коэффициентов.
Воспользовавшись формулой (0.3), можно дать оценку влияния
изменений давления и температуры на величину плотности при про-
* Кроме того, разность давлений зависит от характера потока, в который
помещен насадок.
20
ведении опытов обычной продолжительности. Так, например, если
атмосферное давление изменилось к концу опыта на 660 Па (чта
является редким случаем), то относительное изменение плотности-
воздуха при неизменной температуре (t=tc) окажется равным
юо=———100=0,65%,
е0 10,13-104
если же температура воздуха изменилась при том же давлении
(р—ро) на 3° С, то
Ю0=—• 100= 1,05%.
Q 288
Изменение температуры на 3°С можно нередко наблюдать при
проведении опытов. Приведенный пример показывает, что измене-
ние температуры в большей
влияет на плотность. По-
этому необходимо осо-
бенно тщательно контро-
лировать температуру во
время опыта.
Для того чтобы опре-
делить необходимую и
возможную точность от-
счетов по микроманомет-
ру, формулу (0.6) пред-
ставим в виде
степени, чем изменение давления
Рис. 0.5. К методу определения скорости воз-
душного потока в аэродинамической трубе
приемником давления:
V=4 2gY>K(A —А0)/ув.
Если микроманометр
наполнен спиртом с ве-
сом единицы объема при
/с=15°С, равном уж=
= у^7,85 Н/дм3*, вес
же единицы объема воз-
духа при нормальных ус-
Р1—р2=ЛнТж; hH=(a—a0)sin ф+ДЛ; Ah=[(a—ао)Л/Г„
где f — площадь отверстия стеклянной трубочки;
F— площадь поверхности жидкости, находящейся в-
бачке
ЛОВИЯХ ув = 0,012017
Н/дм3 и, следовательно, их отношение уж/ув=653. Выражая (п—
hG) в миллиметрах, т. е. в тех единицах, в которых эту величину
отсчитывают, получим скорость в метрах в секунду:
Л 2-9,81;653_ h_h 3 571 h_h
\/ 1000
Таким образом, разности высот в 1 мм спиртового столба со-
ответствует скорость воздуха 3,57 м/с.
* Это значение принято лишь для удобства расчета и встречается очень
редко. При вычислении же скорости по показанию микроманометра очень важно
знать действительное значение у.
21
www.vokb-la.spb.ru - Самолёт своими руками?!
Если принять во внимание, что насадки достаточно надежно
воспринимают давление при Re= VdHac/v^700, то нижний предел
скорости потока, при которой можно проводить измерения насад-
ком, будут определяться выражением V^700v/JHac.
2. ОПРЕДЕЛЕНИЕ СКОРОСТИ ПОТОКА
МЕТОДОМ ПЕРЕПАДА ДАВЛЕНИЙ
В аэродинамических трубах, в особенности в трубах замкнутого
типа с открытой рабочей частью, скорость воздушного потока часто
определяется по перепаду давлений. Для этого выбирают две конт-
Рис. 0.6. К методу определения ско-
рости воздушного потока в аэродина-
мической трубе по перепаду давле-
ний:
Pi—Р2=^НУЖ; hn = (a—ab)sin <p+Ah;
Ah=[(a—a,)f]/F,
/—площадь отверстия стеклянной трубоч-
ки; F—площадь поверхности жидкости,
находящейся в бачке
рольные плоскости; обычно пер-
вая контрольная плоскость сов-
падает с входным сечением соп-
ла, вторая — с выбранным сече-
нием в рабочей части тр^бы.
В выбранных сечениях / и II
(рис. 0.6) в стенках трубы дела-
ют 6—10 отверстий, которые во
избежание случайных ошибок
при измерении давления объеди-
няют в самостоятельные коллек-
торы (для каждого сечения свой
коллектор).
Резервуар микроманометра
при помощи резиновой трубки
соединяется <с отверстиями в
стенке аэродинамической трубы,
сделанными в каком-нибудь се-
чении ее форкамеры (сечение /),
а измерительная трубка микро-
манометра так же соединяется с
другими отверстиями в стенке,
которые сделаны в исследуемом
сечении рабочей части (сечение
/7).
Если труба открытого типа
(см. рис. 3.1), то измерительную
открыть прямо в атмосферу, не-
рабочей части можно
трубку микроманометра нужно
скольку в этом случае статическое давление в
принять равным атмосферному ра=:Рст.
Запишем для двух этих сечений уравнение Бернулли
А+е’/?/2=А+е^/2+^/2 (0.9)
и уравнение постоянства расхода
(0.10)
где £ — коэффициент гидравлических потерь между рассматривае-
мыми сечениями; Fi — площадь первого сечения; Е2 — площадь
второго сечения.
22
Из уравнений (0.9) и (0.10) получаем величину перепада дав-
лений
Ьр=Р1- А=е V22/2[l + с - (F^J.
Из этого уравнения скорость V2 определяется в следующем видег
где рпер — коэффициент перепада, характеризующий данную аэро-
динамическою трубу и равный
^Пер=1/1+С-(^У.
\FlJ
Этот коэффициент определяется опытным путем для данных кон-
кретных условий и расположения отверстий, измеряющих перепад
давлений.
Учитывая угол наклона трубки микроманометра, удельный вес
жидкости и коэффициент поля трубы ц, включающий в себя коэф-
фициент перепада рПер и коэффициент потерь по длине от сече-
ния II до сечения III (см. рис. 0.6), получим формулу скорости не-
возмущенпого потока в сечении, где будет находиться модель
V = '^^/r-j- (а — я0) sin
(0.11}
Поскочьку приведенные методы определения скорости потока
дают тождественные результаты, применение того или иного метода
обуславливается исключительно местными условиями и конструк-
цией тр^бы. Так, например, при закрытой рабочей части чаще
используется насадок, а при открытой рабочей части применяют
метод перепада давлений.
Произведение коэффициентов gp в формуле (0.8) численно рав-
но коэффициенту р в формуле (0. 11) при прочих равных условиях.
Порядок проведения работы по определению скорости потока
с помощью контрольного насадка
1. Установить насадок в контрольном сечении трубы так, чтобы ось насадка
совпала с направлением потока или продольной осью трубы.
2. Подключить насадок к микроманометру.
3. Спять показания микроманометра до эксперимента, т. е. нулевой от-
счет а0.
4 Перед началом опыта и после его проведения определить барометричес-
кое давление ра и температуру воздуха t в рабочем помещении.
5 Фиксировать показания микроманометра во время эксперимента, т. с. ве-
личину а.
6. По результатам показаний микроманометра (а—я0) и значениям ра и t
(берутся средние значения показаний до опыта и после его проведения) опреде-
лить скорость невозмущенного потока V в рабочей части трубы но формуле (0 8>.
23*
www.vokb-la.spb.ru - Самолёт своими руками?!
Порядок проведения работы по определению скорости потока
по перепаду давлений
1. Соединить коллекторы, ведущие к отверстиям в форкамере и к рабочей
'части трубы, с микроманометром посредством резиновых трубок (или трубок из
других материалов).
2. Спять показания микроманометра до эксперимента, т. е. нулевой от-
счет По-
3. Перед началом опыта и после его проведения определить барометрическое
давление ра и температуру воздуха t в рабочем помещении.
4. Во время эксперимента фиксировать показания микроманометра, т. с. ве-
личину а.
5. По результатам показаний микроманометра (а—а0) и значениям р& и t
(берутся средние значения показаний до опыта и после его проведения) опреде-
лить скорость невозмущенного потока V в рабочей части трубы по формуле
(0.11).
Контрольные вопросы
I. Какое назначение имеют отдельные части аэродинамической трубы: сопло,
диффузор, форкамера, рабочая часть и др.?
2. Какова физическая сущность коэффициента поля трубы р,, коэффициента
манометра К и коэффициента насадка g?
3. Что такое полное давление, статическое давление и скоростной напор воз-
душного потока?
4. Как изменяются скорость и давление по длине сопла и диффузора?
5. Что такое коэффициент гидравлических потерь д?
6. Как влияет сжимаемость воздуха на величину се скорости?
МЕТОДЫ ОПРЕДЕЛЕНИЯ ЧИСЛА М СВЕРХЗВУКОВОГО
ПОТОКА В АЭРОДИНАМИЧЕСКОЙ ТРУБЕ
1. ОПРЕДЕЛЕНИЕ ЧИСЛА М ПОТОКА ОПТИЧЕСКИМ МЕТОДОМ
Если в сверхзвуковой поток поместить точечный источник воз-
мущений, то в результате обтекания этого источника потоком газа
(воздуха) образуется конус слабых возмущений, в вершине кото-
рого будет находиться сам источник возмущения (рис. 0.7).
Предлагаемый метод в основном сводится к фиксированию ко-
нуса слабых возмущений при помощи оптического прибора (осно-
ванного на методе полос) путем зарисовки на экране (кальке) или
фотографирования.
Рассмотрим характер обтекания остроконечного тела потоком
со сверхзвуковой скоростью. Предположим, что тело чрезвычайно
мало, тогда и волны возмущения, вызванные телом, будут очень
слабы. Эти волны сферического типа очень малой интенсивности;
они распространяются со скоростью звука а. В результате волны
давления будут образовывать семейство сфер с радиусом от нуля
до at на рассматриваемом отрезке времени (рис. 0.8, а).
При движении точечного источника возмущений со скоростью
V<Za сферические волны смещаются в сторону источника, но опе-
режают его, т. е. источник находится внутри сферической волны,
вызванной им самим (рис. 0.8,6). В этом случае, как и в преды-
24
дущем, по истечении достаточного времени возмущения заполнят
все пространство, занимаемое воздухом (газом).
Предположим, что скорость источника возмущений тогда
волны возмущений будут концентрироваться внутри конуса, в вер-
Рис. 0.7. Конус слабых возмущений
шине которого находится источник возмущений. Этот конус являет-
ся огибающей поверхностью сферических поверхностей возмуще-
ний, который называется конусом границ слабых возмущений, или
Рис. 0.8. Образование волны слабого возмущения при сверх-
звуковых скоростях движения тела:
a— V=0; б— V<a; в— V>a
просто конусом возмущений (рис. 0.8, в). Если этот конус рассечь
плоскостью, проходящей через его ось, то мы получим прямые CD
и CDi, называемые линиями возмущений. Половину угла при вер-
25
www.vokb-la.spb.ru - Самолёт своими руками?!
шине конуса обозначим через р. Угол ц связан со скоростью дви-
.жения тела и скоростью звука следующей зависимостью:
sinp.=a/I/ = l/M,
откуда M=l/sinp.
Из уравнения видно, что с уменьшением угла р увеличивается
скорость К а значит, и число М. При
р=л/2, sinp=l, т. е. a=V.
Волна, или конус возмущений, есть поверхность передних фрон-
тов звуковых волн, набегающих друг на друга и находящихся в
Рис. 0.9 Различные формы волны
слабого возмущения
вызывают линии возмущения,
судить О местной скорости (Ум
зуясь для этой цели формулой
фазах уплотнения. На рис. 0.9 по-
казаны различные конфигурации
волн возмущения. При V<Za сфе-
рическая волна давления отходит
от тела вперед, так как ее скорость
больше скорости движения тела.
При V—a волна образует прямой
фронт. При V>a образуются линии
слабых возмущений. Если возму-
щения, вносимые в поток телом
становятся большими, что наблю-
дается при конечных размерах те-
ла, то перед телом образуется уже
скачок уплотнения. Неровности те-
ла (6j горки, риски и т. п.) обычно
По наклону этих линий мы можем
?ст) потока, обтекающего тело, поль-
_ дмест
sin P-мест ^1П Р-мест
Дмест
9мест 20,1 З^^мест .
Sin р-мест
Ммест—Имест/&мест 1/Sin Рмест*
Здесь индексы «мест» относятся к физическим величинам, со-
ответствующим рассматриваемому сечению.
Таким образом, зарисовывая или фотографируя линии возму-
щения, можно установить число М потока в трубе, а также вели-
чины местных скоростей обтекания тела сверхзвуковым потоком.
Для этого вначале с необходимой точностью определяется угол
а затем и число М. Угол р можно измерить при помощи обыч-
ного транспортира или другим способом.
2. ОПРЕДЕЛЕНИЕ ЧИСЛА М ПУТЕМ ИЗМЕРЕНИЯ ПОЛНОГО
И СТАТИЧЕСКОГО ДАВЛЕНИЙ
При обтекании тупоносого тела сверхзвуковым потоком воздуха
перед телом на некотором расстоянии от него образуется криво-
26
линейный скачок уплотнения (головная ударная волна). В цент-
ральной части скачка имеется участок, где угол наклона скачка
Р = 90° (прямой скачок). Поэтому между носком тела и скачком
уплотнения всегда будет существовать область, где скорость потока
меньше скорости звука. Примем, что тело стоит неподвижно, а по-
ток набегает на него со сверхзвуковой скоростью Vi (рис. 0.10)_
Тогда в сечении 1—1 будем иметь ско-
рость Vi, давление плотность воз-
духа Qi и число Л4ь соответственно
обозначим все величины для сечения
2—2 значком 2, а для сечения 3—3
значком 3.
В сечении 3—3 точка А называется
критической точкой, или точкой полно-
го торможения потока, в которой ско-
рость Р3=0, АВ — участок дозвуко-
вых скоростей, ВС — участок сверх-
звуковых скоростей течения воздуха.
В точке В скорость течения воздуха
скачкообразно уменьшается от вели-
чины Vi до Уг, которые связаны меж-
Рис. 0.10. К определению дав-
ления в критической точке unit
наличии прямого скачка уплот-
нения перед телом
ду собой уравнением aKp2=ViV2, где акр — критическая скорость.
Связь параметров потока дозвуковых скоростей в сечениях 2—
2 и 3—3 можно выразить через уравнение Бернулли
< . х — 1 @2^2 х—1
Рз=А Н
2х ръ
Давления pi и р^ связаны между собой уравнением
Р2 = (^i —#кр).
Подставив в последнюю формулу величину
2 2 2 I
#кр — О'! "т
и решив совместно три последних уравнения, получим отношение
давления в критической точке А при сверхзвуковом потоке воздуха
к начальному давлению (так называемую формулу Релея):
Рз 2х ^2 х — 1 /Г 4х_______________2(^—1) Ъгт
А *4-1 1 *4-1 / (*4-1)2 (х + 1)2м2
Введя в формулу Релея величину х=1,4, получим формулу
А/А= 166,92Ml/(7Mi- I)2’5/
Определение полного давления
в критической точке, производится
ком полного давления (рис. 0.11)
жинным манометром.
Рз за скачком уплотнения, т. е.
обычным насадком — приемки-
и присоединенным к нему пру-
2Т
www.vokb-la.spb.ru - Самолёт своими руками?!
Формула для определения полного давления при помощи пру-
жинного манометра имеет вид
А—РЛА зоо .
где — полное давление за скачком в критической точке в мм
рт. ст.; /1 — показание пружинного манометра во время опыта (ко-
личество делений по шкале манометра); ///300 — цена деления по
шкале образцового пружинного манометра, здесь Н — предельная
Рис. 0.11. Приемник полного
давления
Волны
Рис. 0.12. Приемник статического давления
величина измерения давления по манометру в мм рт. ст.; ра —
атмосферное давление в мм рт. ст. Если атмосферное давление
измерено в миллибарах, переход производится по соотношению
Ра = В/1,333.
Статическое давление сверхзвукового потока /л обычно изме-
ряется специальным насадком, которому часто придают форму
либо иглы, либо сильно заостренной стамески (рис. 0.12).
Приемное отверстие насадка сделано на плоской стороне при-
бора, для того чтобы избежать образования скачка уплотнения
перед отверстием, через которое передается статическое давление.
Статическое давление при помощи латунной трубки передается
U-образному ртутному манометру.
Формула для определения статического давления имеет вид
Р1 = Ра—АЛ,
где pi — статическое давление невозмущенного потока в мм рт. ст.;
iA/z = /zi—Л2 — разность уровней ртути в коленах манометра в мм
рт. ст. при эксперименте.
28
Определив величину отношения pdp^ по графику М=/(Р1/рз)
(рис. 0. 13), построенному по формуле Релея, получаем значение
числа М потока в аэродинамической трубе во время опыта.
Число М сверхзвукового потока в аэродинамической трубе ча-
ще определяется из отношения статического давления невозмущен-
ного потока рст=Р1 к (полному давлению в форкамере рПолн=Ро,
где скорость потока (дозвуковая) сравнительно невелика (рис.
Рис. 0.13. График за-
висимости числа М
от отношения стати-
ческого давления к
полному давлению за
прямым скачком уп-
лотнения
Рис. 0.14. К методам определения числа М:
;_фОркамера; спрямляющая решетка; 3—сопло Лава-
ля. ^—рабочая часть; 5—трубка, соединяющая дренаж-
ное отверстие па стенке рабочей части с манометром;
6—U-образные манометры; 7—приемник полного давле-
ния; 8—пружинный манометр; 9—игла па державке как
источник слабых возмущений и приемник статического
давления; 10—сверхзвуковой диффузор
0.14). В таких случаях используется уравнение давлений газа в
изэнтропическом течении
РсТ _/1 7-— 1 д^2\~
Ро \ 2 '
или М2=—— х — 1 .
X ~~1 \ Pci /
Обычно число М определяется по газодинамическим таблицам
(см. приложение 5), в которых M.=f(pjpo) или M.=f(pt/p3).
Статическое и полное давления подсчитываются по следующим
формулам:
—дл: Ро=а +-4^/300.
Если рст>Ра, АЛ имеет знак /плюс, а если рСт<Ра, АЛ имеет знак
минус.
Помимо измерения давления насадком, один из образцов кото-
рых показан на рис. 0.12, статическое давление можно измерить
непосредственно на стенке рабочей части трубы. Для этого на
стенке делается дренажное отверстие (или несколько отверстий,
объединенных коллектором), которое соединяется посредством тру-
бочки (металлической или резиновой) с манометром. На рис. 0.14
показаны способы измерения статического давления и получения
29
www.vokb-la.spb.ru - Самолёт своими руками?!
конуса слабых возмущений посредством иглы как точечного источ-
ника возмущений.
Приведенные выше манометры и приемники воздушного давле-
ния (насадки) не являются единственными разновидностями при-
боров, которые используются при определении скорости потока и
числа М. Существующие микроманометры и насадки имеют очень
разнообразные принципы действия и конструктивные формы. В этой
книге даны описания только некоторых типов манометров и насад-
ков, получивших наибольшее распространение в практике аэроди-
намических лабораторий.
Если при данном числе М будет известна температура потока
Г, то по известной формуле можно определить скорость звука
а=] х/?Г=20,1] Г, а затем скорость потока V=JAa.
Температура потока измеряется обычным способом, т. е. при по-
мощи термометра сопротивления и указателя температуры.
Студентам предоставляется возможность сравнить между собой
результаты определения чисел М, полученные различными мето-
дами.
Порядок проведения работы по определению числа М
оптическим методом
1. Проверить по манометру давление в баллонах.
2. Установить экран оптического прибора.
3. Включить подсветку оптической установки и навести на резкость изобра-
жение на экране.
4. Открыть крап подачи воздуха.
5. Открыть пускорегулировочный кран, отрегулировав его до необходимого
давления в форкамере.
6. Нанести на экране изображение скачков и линий возмущения.
7. Определить по наклону линий возмущения числа МмеСт-
Порядок проведения работы по определению числа М
методом {измерения давления
1. Проверить по манометру давление в баллонах.
2. Открыть кран подачи воздуха.
3. Открыть пускорегулировочный кран, отрегулировав его до необходимого
давления в форкамере.
4. Зафиксировать показания манометров.
5. После эксперимента обработать результаты опыта.
Контрольные вопросы
1. Что такое давление торможения?
2. Как изменяется скорость, давление, плотность и температура по длине
сопла Лаваля при расчетном режиме?
3. Как найти угол конуса слабых возмущений р?
4. Какая зависимость скорости звука от температуры?
5. Какая зависимость числа М от угла конуса слабых возмущений?
6. Что такое критическая скорость, давление, плотность и температура?
7. Что такое число М?
30
РАБОТА № 1
ГРАДУИРОВКА МИКРОМАНОМЕТРА
Цель работы — приобретение навыков в обращении с основ-
ным прибором, применяемым во всех последующих работах, и оз-
накомление с его конструкцией; оценка ошибок измерений, а так-
же изучение способов обработки экспериментального материала
(правильной и рациональной организации вычислений и методов
построения диаграмм).
Результат работы представляется в виде диаграммы, опреде-
ляющей коэффициент градуируемого микроманометра.
Общие сведения
Одним из основных измерений в экспериментальной аэродина-
мике является измерение избыточного давления в потоке воздуха,
например, это может быть разница между статическим давлением
в потоке и атмосферным давлением. Важнейшим измерением явля-
ется также определение разности между полным напором и ста-
Рис. 1.1. Микроманометр с пе-
ременным наклоном трубки
тическим давлением потока. Кроме этих измерений на практике
приходится постоянно проводить определение и других разностей
давлений. Все эти измерения производятся при помощи микромано-
метров (рис. 1.1).
Микроманометр или манометр является очень распространен-
ным прибором. В настоящее время существует большое количест-
во разновидностей этих приборов, что объясняется различием за-
дач: измерение больших и малых перепадов давлений, малых дав-
лений (вакуумметрия), переменных давлений с очень высокими
частотами колебаний и т. и. Основными типами манометров явля-
ются жидкостные, пружинные (пластинчатые и трубчатые), дат-
чики давления, преобразующие давление в электросигнал (индук-
ционные, «емкостные, тензометрические). Со всеми этими разновид-
31
www.vokb-la.spb.ru - Самолёт своими руками?!
костями приборов имеет дело современная аэродинамика. «Класси-
ческим» наиболее распространенным прибором является жидкост-
ный манометр или микроманометр. Используемая в манометре
жидкость должна иметь малую вязкость и малую величину капил-
лярной постоянной, малую испаряемость и малую склонность к за-
грязнению, быть химически стойкой и не поглощать влагу из ок-
ружающей среды. Удельные веса жидкостей, применяемых в ма-
нометрах, колеблются от 7 до 40 Н/дм3, исключение составляет
Рис. 1.2. Схема микроманометра типа ЦАГИ
ртуть с удельным весом 133,4 Н/дм3. Конструктивное оформление
микроманометров и манометров жидкостного типа довольно раз-
нообразно; это разнообразие вызвано в основном необходимостью
повышения точности измерений.
Необходимость большего быстродействия привела к использо-
ванию пружинных манометров и различного типа датчиков давле-
ния. Хотя все они обладают меньшей точностью, тем не менее в
настоящее время они приобрели значительное распространение.
Наиболее распространены мембранные и сильфонные приборы, а
также датчики всех перечисленных ранее типов.
В процессе прохождения занятий в аэродинамической лабора-
тории студенты знакомятся с различными типами манометров и
микроманометров. Однако для создания ясного представления о
принципах и точности измерений давления микроманометром в
наибольшей степени /полезно проведение градуировки микромано-
метра.
Микроманометр (рис. 1.2) представляет собой двухколенную
трубку, заполненную жидкостью. К обоим коленам прибора при
32
помощи трубок из резины или другого материала подводятся дав-
ления, разность которых необходимо измерить. Обычно одно из во-
лен микроманометра (бачок) делается со значительно болыпи»
поперечным сечением, чем другое (стеклянная трубка).
Повышенное давление подводится к бачку манометра, понижен-
ное — к стеклянной трубе, при этом уровень жидкости в бачке
понижается, а в стеклянной трубке — повышается.
Обозначив повышенное давление через pi, а пониженное — через
pz (при равновесии), получим
— — Д/г=——\-ан sin <р,
Тм Тм
где —Yr,‘ Y — вес единицы объема жидкости в микроманомет-
ре (в пустоте); yv — вес (в пустоте) единицы объема воздуха, дав-
ления в котором pi и р2 измеряются; аи — разность уровней жид-
кости в стеклянной трубке, которая измеряется по длине трубки от
начального (нулевого) положения; Д/г — перемещение уровня жид-
кости в бачке от начального (нулевого) положения; <р — угол, об-
разуемый осью трубки манометра с горизонтом. Следовательно,
разность давлений будет равна
А — A=(aH+^/sin®) sin<pyM, (1.1)
Обычно принимают ум=у-
В формуле (1.1) величина ан= (а—а0), где а и aG отсчитыва-
ются по шкале на боковой поверхности узкого стеклянного колена
соответственно до опыта и во время его проведения.
Разность давлений определяется изменением положения менис-
ка жидкости. При данной разности давлений (pi—р2) это измене-
ние будет тем больше, чем меньше угол наклона трубки маномет-
ра Таким образом, уменьшение угла ср приводит непосредст-
венно к увеличению отсчитываемой величины, т. е. к повышению
точности отсчета, а значит, и точности измерения. Однако это вер-
но только до определенного предела; при sin ф= 1/25 и меньше на-
чинают проявляться ошибки, обусловленные капиллярными зако-
нами жидкости, налитой в микроманометр.
Кроме того, повышение точности отсчета в прецизионных мано-
метрах специальных типов достигается применением оптических
приспособлений.
Если площадь (в мм2) зеркала жидкости, налитой в бачок мик-
романометра, обозначим через F, а площадь поперечного сечения
стеклянной трубочки — через Д то простой подсчет объема жидко-
сти, вытесненной из широкого колена и вошедшей в узкое, приводит
к равенству
F н
Так, например, когда ось бачка расположена вертикально, а
диаметр его D= 100 мм, то при диаметре трубочки d=7 мм ДЛ со-
ставляет 0,5% от ан.
2 1743
35
www.vokb-la.spb.ru - Самолёт своими руками?!
Для измеряемой разности давлений после подстановки в фор-
мулу (1.1) величины АЛ получаем следующее соотношение:
Pi — /’2=aHsin<Py(l+//F sin <р),
из которого видно, что величина ДЛ учитывается введением по-
правки К= 1 +f/F sin <р, называемой коэффициентом микромано-
метра. Введение коэффициента К позволяет ограничиться только
одним отсчетом — отсчетом величины ав. При этом ошибка отсчета
уменьшается вдвое.
Таким образом, рабочая формула микроманометра принимает
вид
Pl — tz0) sin (1.2)
Обозначим через ус удельный вес жидкости в микроманометре
для некоторой определенной температуры tc, который заранее опре-
деляется при помощи ареометра. Если опыт проводится при темпе-
ратуре t° С, то у необходимо привести к температуре опыта по
формуле
где ус — вес единицы объема жидкости в микроманометре при тем-
пературе /с=15°С; у — то же при температуре опыта /; 0— коэф-
фициент объемного расширения жидкости.
Для спирта при средних температурах, близких к нормальной,
0=0,0011 и поэтому для получения величины с ошибкой у в 1%
д/=/—10 должно быть не менее 10°. При меньшей разности темпе-
ратур Д/ температурной поправкой на изменение плотности жид-
кости в манометре можно пренебрегать.
Прежде чем пользоваться рабочей формулой для микромано-
метра (1.2), учащийся должен самостоятельно установить, в каких
единицах должна быть выражена величина у [см. формулу (1.3)],
чтобы можно было подставлять в формулу измеренные по шкале
микроманометра в миллиметрах величины а и а0, не переводя их
в другие единицы длины.
Наклон узкой стеклянной трубочки микроманометра, характе-
ризуемый величиной sin ф, осуществляется или поворотом трубоч-
ки вместе с бачком или поворотом только одной трубочки при не-
подвижном бачке. В обеих системах наклон трубочки или измери-
тельного колена может изменяться. Положение трубочки фиксиру-
ется на специальном кронштейне, причем каждое отверстие крон-
штейна имеет цифровой индекс, соответствующий значению simp.
Различают первичную и вторичную градуировку микромано-
метра. Под первичной градуировкой понимают установление абсо-
лютной цены деления прибора. Первичную градуировку проводят
обычно для эталонных приборов. Обычный прием первичной гра-
дуировки — способ подлива. Он состоит в последовательном доли-
вании в резервуар микроманометра небольшого, строго дозирован-
34
ного по объему и весу количества жидкости. Одновременно отсчи-
тываются перемещения мениска жидкости по наклонной трубке.
Если площадь поперечного сечения широкого колена микромано-
метра равна F, то количество жидкости Q, наливаемое в это ко-
лено. повысит уровень жидкости на величину AA=Q/yF. Это повы-
шение эквивалентно дополнительному давлению в узком колене,
равному
Др= Д/гу —-^-он sin ср ( 1-]—-4-У
г F \ F sin т J
В результате такой градуировки установим зависимость дейст-
вительной высоты поднятия жидкости в трубке микроманометра
манометр
Рис. 1.3. Схема установки для градуировки микрома-
нометра:
1—кран; 2—винт; 3—резиновая груша; 4—корпус; 5—плун-
жер; 6—микроманометры; 7—резиновые трубочки
Лист от разности давления Др и найдем коэффициент /С7—Лист/ЛМан
в функции величины Лман (высота столба жидкости, отсчитанная по
шкале микроманометра).
Гораздо более распространена так называемая вторичная гра-
дуировка. Она постоянно применяется в эксплуатационных усло-
виях любых лабораторий, ведущих измерение давления. Работа
№ 1 и заключается в проведении подобной градуировки в сравне-
нии показаний двух микроманометров, один из которых является
эталонным, а второй градуируемым.
На рис. 1.3 приведена схема установки для градуировки мик-
романометра. В данной работе ставится задача определения коэф-
фициента К для вычисления разности давлений по формуле (1.2).
Величины а и а0 отсчитываются по данному микроманометру, вели-
чины ф и у заведомо известны. Помимо того, что на показания мик-
романометра влияет капиллярность, учитываемая эксперименталь-
но, имеется еще одна причина, в силу которой коэффициент К, под-
2* 3?
www.vokb-la.spb.ru - Самолёт своими руками?!
Рис. 1.4. К определению коэф
фициента Кг градуируемого
микроманометра
считанный по формуле /C=l+//Fsin<p, не может соответствовать
действительному его значению. Эти причины заключаются в недо-
статочной точности калибрования трубки микроманометра (вели-
чина внутреннего диаметра d может изменяться по длине трубки),
а также в дефектах изготовления бачка.
Величину К определяют опытным путем, сравнивая показания
эталонного микроманометра с известным значением Ка с показа-
ниями градуируемого микроманометра. Для этого оба микромано-
метра соединяются, как это показано на рис. 1.3, и им сообщается
одинаковая разность давлений.
В рабочих формулах, указанных
ниже, все величины, относящиеся к
эталону, имеют индекс «э»; величины,
относящиеся к градуируемому микро-
манометру, — индекс «г». Из схемы
установки видно, как обеспечивается
равенство измеряемой разности дав-
лений pi—р2 для обоих микроманомет-
ров; эта разность оказывается равной
Ра—ро, где ра — атмосферное давле-
ние; ро — разрежение, создаваемое в
измерительных коленах микромано-
метров специальным прибором — ас-
пиратором.
Перед началом градуировки с по-
мощью винта 2 и плунжера 5 сжима-
ют резиновую грушу 3, закрывают кран 1, затем при помощи
шлангов 7 соединяют кран с микроманометрами 6. Открывая кран
в аспираторе, создают некоторое давление, и после уравновеши-
вания столбов жидкости с микроманометров снимают показания.
При выполнении работы необходимо тщательно следить за тем,
чтобы температура жидкости в обоих микроманометрах была оди-
наковой.
Так как каждый отсчет по микроманометру как эталонному, так
градуируемому может иметь свои случайные ошибки, то при оп-
ределении величины Кг необходимо взять несколько отсчетов. Для
этого вновь открывают кран и опять, сжимая винтом и плунжером
резиновую грушу, уменьшают разрежение в трубочках микрома-
нометров и опускают уровень спирта до нуля. Средняя величина
Кг определяется при помощи графика (рис. 1.4), для чего полу-
ченную зависимость представляют в виде
tgfr—(g~о°)э .
(й
Таким образом, коэффициент градуируемого манометра
X’r=tg& const,
где const=sin %/(уг sin <pr).
Отсчеты по микроманометрам должны проводиться одновремен-
но, если наблюдаются какие-либо колебания в положении менис-
ков жидкости. Для этого необходимо между наблюдателями уста-
новить сигнализацию.
Диаграмма испытания строится на основании записи и обра-
ботки наблюдаемых величин в протокольном бланке [в координа-
тах (а—а0)э и (а—ао)г, как показано на рис. 1.4]. Для определе-
ния tg-б рекомендуется после проведения прямой линии через экс-
периментальные точки при небольшом их разбросе наметить на этой
прямой две какие-либо далеко расположенные друг от друга точки
с координатами Xi, yt и х%, уя и затем определить tg-О как отноше-
ние разности ординат точек к разности их абсцисс.
Кроме приведенного, существуют и другие способы определе-
ния коэффициента манометра /Сг- Поскольку зависимость между
(а—а0)э и (а—а0)г имеет линейный или близкий к нему характер,
то для примера можно воспользоваться таким выражением:
„ ,, Уэ sin <f3 У, (а - гг0)|
А г--Л э
Yr Sin <fr у (а — а0)э (а — а0)г
Аппаратура и материалы
1. Два микроманометра, наполненные спиртом, с заранее определенной вели- L
чиной у; для одного из микроманометров должна быть известна величина коэф-
фициента микроманометра К.
2. Аспиратор для создания разрежения в измерительных трубках микрома- ।. фо-
нометров (при отсутствии аспиратора и необходимости получить пониженное
давление в трубках отсосом необходимы металлический зажим и тройник).
3. Резиновые шланги для соединения трубок микроманометров.
Рабочие формулы
Pa — Po=(a — а0)а sin <?9уэКа,
Ра~ Ро=(а—ао\ sin <ргуг/Сг;
(а—а0)в sin (а — а0)г sin <?гугКг;
Кт— <°~~с0э const_ |g ft consf. const— sin УэУэ^э .
(a — a0)r sin <pryr
Порядок проведения работы
1. Ознакомиться со схемой и конструкцией микроманометра.
2. Установить эталонный и градуируемый микроманометры, присоединить их
к аспиратору или шлангу с зажимом и проверить герметичность.
3. Провести измерения столбов спирта в пределах всей шкалы отсчетов
4. Отработать экспериментальный материал и построить график (а—Оо)г=
=/(а—а0)э.
37
www.vokb-la.spb.ru - Самолёт своими руками?!
Контрольные вопросы
1. Какие конструкции манометров существуют? Опишите их принцип дей-
ствия.
2. Каковы особенности первичного и вторичного методов градуирования
микроманометров?
3. Можно ли определить абсолютные величины двух давлений, если извест- .
на их разность?
РАБОТА № 2
ГРАДУИРОВКА ПРИЕМНИКА ВОЗДУШНОГО
ДАВЛЕНИЯ (НАСАДКА)
Цель работы — определение коэффициента приемника давле-
ния g, сравнивая показания градуируемого приемника давления
с показаниями эталонного, и определение влияния угла установки
приемника давления на его коэффициент g.
Результаты работы должны быть представлены двумя диаграм-
мами, одна из которых позволяет определить коэффициент градуи-
руемого насадка, а другая — судить о степени чувствительности
этого приемника давления к точности угла установки.
Общие сведения
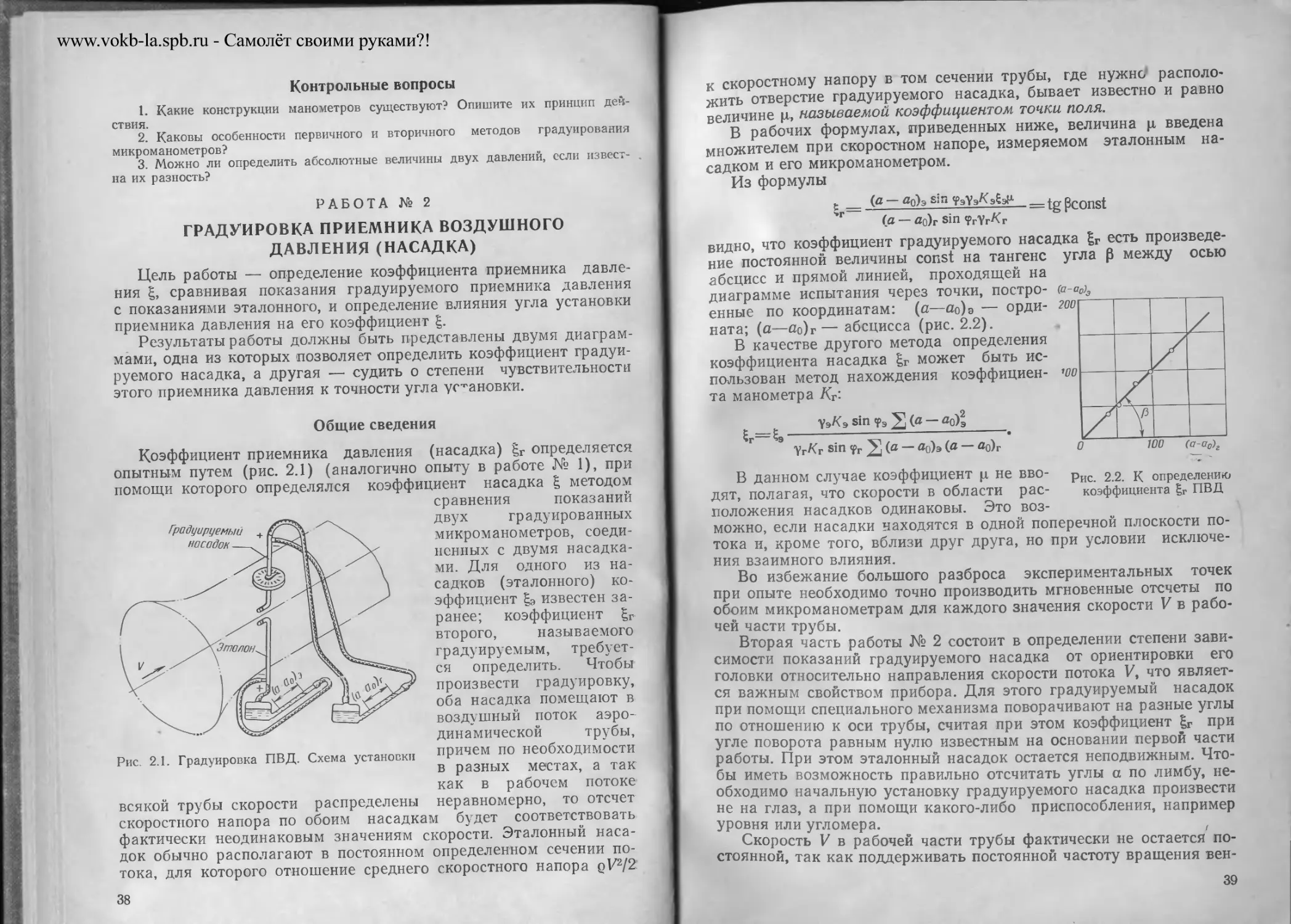
Коэффициент приемника давления (насадка) gr определяется
опытным путем (рис. 2.1) (аналогично опыту в работе № 1), при
помощи которого определялся коэффициент насадка g методом
сравнения показаний
Рис. 2.1. Градуировка ПВД. Схема установки
всякой трубы скорости распределены
двух градуированных
микроманометров, соеди-
ненных с двумя насадка-
ми. Для одного из на-
садков (эталонного) ко-
эффициент gg известен за-
ранее; коэффициент gr
второго, называемого
градуируемым, требует-
ся определить. Чтобы
произвести градуировку,
оба насадка помещают в
воздушный поток аэро-
динамической трубы,
причем по необходимости
в разных местах, а так
как в рабочем потоке
неравномерно, то отсчет
скоростного напора по обоим насадкам будет соответствовать
фактически неодинаковым значениям скорости. Эталонный наса-
док обычно располагают в постоянном определенном сечении по-
тока, для которого отношение среднего скоростного напора qV2/2
38
к скоростному напору в том сечении трубы, где нужно располо-
жить отверстие градуируемого насадка, бывает известно и равно
величине р, называемой коэффициентом точки поля.
В рабочих формулах, приведенных ниже, величина ц введена
множителем при скоростном напоре, измеряемом эталонным на-
садком и его микроманометром.
Из формулы
$ =tg ₽const
г (а — а0)г sin утутКт
видно, что коэффициент градуируемого насадка £г есть произведе-
ние постоянной величины const на тангенс угла 0 между осью
абсцисс и прямой линией, проходящей на
диаграмме испытания через точки, постро-
енные по координатам: (а—ао)э — орди-
ната; (а—ао)г— абсцисса (рис. 2.2).
В качестве другого метода определения
коэффициента насадка £г может быть ис-
пользован метод нахождения коэффициен-
та манометра Кт\
£г=^э
уэ/<э sin уэ (а — Др)э
угКг sin уг 2 <в — ао)э (« — «о)г
Рис. 2.2. К определению
коэффициента £г ПВД
В данном случае коэффициент р не вво-
дят, полагая, что скорости в области рас-
положения насадков одинаковы. Это воз-
можно, если насадки находятся в одной поперечной плоскости по-
тока и, кроме того, вблизи друг друга, но при условии исключе-
ния взаимного влияния.
Во избежание большого разброса экспериментальных точек
при опыте необходимо точно производить мгновенные отсчеты по
обоим микроманометрам для каждого значения скорости V в рабо-
чей части трубы.
Вторая часть работы № 2 состоит в определении степени зави-
симости показаний градуируемого насадка от ориентировки его
головки относительно направления скорости потока V, что являет-
ся важным свойством прибора. Для этого градуируемый насадок
при помощи специального механизма поворачивают на разные углы
по отношению к оси трубы, считая при этом коэффициент |г при
угле поворота равным нулю известным на основании первой части
работы. При этом эталонный насадок остается неподвижным. Что-
бы иметь возможность правильно отсчитать углы а по лимбу, не-
обходимо начальную установку градуируемого насадка произвести
не на глаз, а при помощи какого-либо приспособления, например
уровня или угломера. z
Скорость V в рабочей части трубы фактически не остается по-
стоянной, так как поддерживать постоянной частоту вращения вен-
39
www.vokb-la.spb.ru - Самолёт своими руками?!
тилятора в течение опыта и избежать колебаний скорости во вре-
мени вообще не удается. Поэтому необходимо делать приведение
к постоянной скорости, для чего нужно отсчитывать скоростной
напор по микроманометру эталонного насадка одновременно с от-
счетом по микроманометру градуируемого насадка. В результате
опыта по записям в протокольном бланке строится кривая
g^r- consti = q в функции угла а. Примерный вид такой
(fl #о)э
кривой приведен на рис. 2.3. Кривая указывает на постоянство от-
счетов по градуируемому насадку в пределах некоторых значений
углов а.
Заменим в формуле (0.5) рПОлн—Рст по формуле (1.2) микрома-
нометра (см. работу № 1), а плотность воздуха выразим через
температуру и давление в Паскалях так, как это было проделано
выше. Тогда получим
К=]Л573,09 (273 + ГС)- (а-д0) sin yy/Q. (2.1)
\ Ра
Формула (2.1) является рабочей для определения скорости при
измерении насадком и микроманометром. Если величины g и К
Рис. 2.3. График отсче-
тов при градуировке
ПВД под разными угла-
ми отклонения
известны для данного насадка и для его
микроманометра, то по этой формуле
можно вычислить V в м/с. Принимая во
внимание постоянство во время опыта ря-
да величин, стоящих под радикалом, фор-
мулу (2.1) можно записать в виде
V = \/\а — а0) const. (2. 2)
Обычно скорость воздушного потока
аэродинамической трубы необходимо знать
в том месте, где устанавливается исследу-
емый объект (в данном случае градуируе-
мый насадок). Контрольный насадок аэро-
динамической трубы всегда устанавлива-
ется на некотором расстоянии (вперед по
потоку) от исследуемого объекта. Вследствие этого в формулу
(2.1) необходимо ввести коэффициент поля трубы ц, который за-
ранее должен быть определен (см. работу № 3), тогда
У=1/ 573,09 (273 + (а - а0) sin «pyfrfr (2.3)
|/ Ра
или в общем виде
V = |/Л-^-(а — а0) sin . (2.4)
Если принимать в расчет наличие водяных паров или влажно-
сти воздуха, то в формулу (2.3) нужно ввести некоторые уточне-
ния.
40
Такая уточненная формула для вычисления скорости
,Г 573,09 (273 + -°С)- 1 ----{а-ай} sin уу/Cfr. (2.5)
РЯ
Аппаратура и материалы
1. Два микроманометра с известными величинами у спирта и значениями
коэффициентов К.
2. Эталонный насадок с известным значением коэффициента g9.
3. Градуируемый насадок с приспособлением для его установки под углом а
по отношению к оси аэродинамической трубы, например с уровнем, угломером.
4. Лимб, позволяющий установить градуируемый насадок под различными
углами а в пределах ±45° с делениями не более чем через 5°.
5. Шланги для соединения отводных трубок насадков с микроманометрами.
Рабочие формулы
—ao)s sin<p9Y9^$9p; Vr = (а—а;о)гsin ’РгУЖЛги
lz9=’/r; (а — а0)9 ьт<р9уэ/С&р.==(а — а0)г sin<pryr^r;
gr=^~-—— const=tg const; — const!,
(a — #o)r (.a — до)э
где const5in^*,
sin<pryr/<r Sin «РэУэ^эБэИ
Порядок проведения работы
1. Ознакомиться со схемой и Конструкцией насадка.
2. Составить схему установки насадков в аэродинамической трубе.
3. Установить насадки относительно направления потока трубы.
4. Провести опыт с изменением скорости при неизменной установке градуи-
руемого насадка.
5. Провести второй опыт при постоянной скорости и переменных углах уста-
новки градуируемого насадка.
6. Обработать материалы опытов и построить графики
{a—a0)r=f(a—п0)э и q=fi(a)
Контрольные вопросы
1. Какие конструктивные формы имеют приемники полного и статического
давлений при измерениях в дозвуковом и сверхзвуковом потоках?
2. Как теоретически можно представить себе картину обтекания насадка
(приемника давления) при сферической форме закругления переднего конца?
3. Как присоединяется насадок к микроманометру?
4. Каково влияние формы насадка на чувствительность насадка к углам ско-
са потока?
41
www.vokb-la.spb.ru - Самолёт своими руками?!
РАБОТА № 3
ОПРЕДЕЛЕНИЕ КОЭФФИЦИЕНТА
ПОЛЯ СКОРОСТНЫХ НАПОРОВ В РАБОЧЕЙ ЧАСТИ
АЭРОДИНАМИЧЕСКОЙ ТРУБЫ
Цель работы — выяснить, насколько поток воздуха является
равномерным по величине и направлению скоростей в каждом се-
чении рабочей части.
Результат работы должен быть представлен графиком распре-
деления коэффициента поля р скоростных напоров в выбранном
сечении рабочей части аэродинамической трубы.
Общие сведения
Если мы будем измерять скоростной напор потока, давление в
потоке, углы скашивания потока по отношению к продольной оси
аэродинамической трубы, совпадающей с направлением скорости
(причем эти измерения будут проводиться вдоль выбранной пря-
мой в интересующем нас поперечном сечении аэродинамической
трубы), то график, изображающий распределение этих величин
вдоль выбранной прямой, и будет характеризовать поле скорост-
ных напоров и углы косизны потока в вертикальной или горизон-
тальной плоскости. Мерой отклонения величин местных значений
скоростного напора, измеренных вдоль некоторой оси, перпенди-
кулярной к потоку, от средней величины скоростного напора, ха-
рактеризующей равномерность поля скоростных напоров, является
коэффициент поля скоростных напоров
= (р^2/2)точ
Ртсч (QV2/2)cp ’
п
v? л
1 Vnep
где ({) 1/2/2 )ср Qср.пер ’
или
(б1‘/Л2/2)Ср.к.нас
Чаще величину jit определяют как отношение скоростного напо-
ра в выбранной точке к скоростному напору в фиксированной точке
расположения контрольного насадка, или к скоростному напору,
измеренному по перепаду давлений. Тогда
„ _ (QV2/2)TO4 _ (еГ2/2)точ
^тсч (pV2/2)K.Hac Гтич (еУ2/2)иер
Здесь индексы у рассматриваемых величин указывают, что они
были определены либо в данной точке («точ»), либо при помощи
контрольного насадка («к.нас»), либо методом перепада давле-
42
НИЙ («пер»)- Индекс «ср» соответствует среднему значению скоро-
стного напора.
Среднее значение коэффициента поля рабочей части трубы в
области расположения модели
п
Р* == Р*ср Нточ/^”
1
Помимо поля скоростных напоров могут быть определены поле
давления, поле косизны потока и т. п.
Устанавливаем в рабочей части аэродинамической трубы граду-
ированный насадок* с известным коэффициентом g так, чтобы
его передний конец находился в исследуемом сечении поля (в плос-
кости YaOZa). Насадок должен передвигаться вдоль выбранной
прямой (оси Ya или Za, для круглой трубы эта прямая будет од-
ним из его диаметров): посредине исследуемого сечения — через
10 см, у стенок трубы или вообще у границ потока, где скорость
быстро меняется,— через 15—20 мм (рис. 3.1). Этот насадок на-
зывается насадком поля и соединяется с дифференциальным мик-
романометром. При помощи этих приборов мы можем измерить
скоростной напор в каждой точке поля выбранного нами сечения.
Так как определение местных скоростей поля трубы не может быть
проведено при таком способе во всех намеченных точках одновре-
менно, то может оказаться, что они будут соответствовать разным
значениям скорости набегающего потока и, следовательно, послед-
нюю необходимо также определять при каждом отсчете скорости
поля. Для этого используют метод определения скорости воздушно-
го потока в аэродинамической трубе приемником давления или ме-
тод перепада давлений, как это показано на рис. 3.1.
Величины скорости поля УСеч в данном поперечном сечении тру-
бы и скорости по перепаду Vnep нужно вычислить по рабочим фор-
мулам, которые могут быть преобразованы к виду формулы (2.2) в
работе № 2, если подставить в них постоянные приборов. Следует
заметить, что более точные данные подсчета скоростей УСеч и Vnep
были бы не по формуле (2.4), а по формуле (2.5), которую также
можно привести к виду формулы (2.2).
Последовательностью указанных выше формул определяется
порядок записи отсчитанных величин в протоколе испытания. От-
четная диаграмма испытания представляет собой график
Нточ=f (0» Ч ^?тр >
где I — расстояние плоскости отверстия полного напора насадка
поля от оси трубы, на которой располагается начало координат си-
стемы отсчета, связанной с трубой; Дтр — радиус трубы (для круг-
лого сечения рабочей части), или половина стороны (в случае иной
формы сечения рабочей части).
* См. работу № 2.
43
www.vokb-la.spb.ru - Самолёт своими руками?!
При определении знака величины I нужно иметь в виду, что си-
стема координат — правая. Диаграмма испытания (рис. 3.2) стро-
ится в произвольном, но удобном для чтения масштабе.
Таким образом, мы получим коэффициент поля скоростных на-
поров р, в сечениях F2, и других (см. рис. 3.1).
Рис. 3.2. График значений ко-
эффициента поля скоростных
напоров в заданном поперечном
сечении рабочей части трубы
Рис 3.1. Схема установки для определения
коэффициента поля скоростных напоров в
рабочей части аэродинамической трубы
Так как коэффициент поля р мало отличается от единицы, то
его можно определить по формуле
п
P*===ctcp 1 Д^ТОЧ^’
1
где Д|иТОч = Рточ—1, а п — число точек.
Последний способ дает более точные результаты определения
коэффициента поля трубы.
Аппаратура и материалы
1. Два микроманометра с известными значениями у и К.
2. Насадок для определения скоростей потока в выбранном сечении трубы
(насадок поля).
3. Координатник для передвижения насадка поля.
4. Шланги, тройники и другие детали для соединения насадка поля с его
микроманометром и для соединения отверстий перепада давлений в стенках аэ-
родинамической трубы с микроманометром перепада.
5. Контрольный насадок в случае определения скорости при помощи измере-
ния скоростного напора.
Рабочие формулы
Р*ср Р'точ/^’’
1
__ #точ _(0^/2)704 __ Аточ __ (2^2/2) гоч ,
Р'Т0Ч— ?пер (2^2/2)пер’ Гт°Ч <7к.нас (QK2/2)K.HaC ’
(7тОЧ & ^о)тоЧ sin Тточ^т Ч^ТОЧ^ТСЧ’
(7пер ^о)пер ТпеР^пер^перРпеР’
^к.нас1^ ^())к.нас Sin фк.нас^к.нас^к.нас^к.нас’
^пер — коэффициент потерь скоростного напора между сечения-
ми сопла Л и F2 (см. выше).
Порядок проведения работы
1. Составить схему установки.
2. Проверить установку контрольного насадка или систему измерения скорос-
ти по перепаду давлений.
3. Установить насадок поля на координатнике и соединить его с микромано-
метром.
4. Произвести эксперимент. __
5. Обработать результаты опыта и построить график цточв/(0-
Контрольные вопросы
1. Может ли быть коэффициент поля трубы р, меньше единицы?
2. Как будет выглядеть поле скоростей в поперечном сечении рабочей части
аэродинамической трубы?
3. Чему будет равно (с достаточной точностью) статическое давление в от-
крытой рабочей части аэродинамической трубы?
РАБОТА № 4
ВИЗУАЛЬНЫЕ МЕТОДЫ ИССЛЕДОВАНИЯ
Цель работы — ознакомление с визуальными методами аэроди-
намических исследований в сверхзвуковом и “дозвуковом потоке.
Результат работы должен быть представлен в виде спектров об-
текания исследуемых моделей, снятых на фотографическую пленку
или зарисованных на кальку.
1. ПОЛУЧЕНИЕ СПЕКТРОВ ОБТЕКАНИЯ
ИССЛЕДУЕМЫХ МОДЕЛЕЙ В СВЕРХЗВУКОВОМ ПОТОКЕ
Общие сведения
Спектры обтекания тел сверхзвуковым потоком достаточно хо-
рошо получаются при помощи оптического прибора ИАБ-451 сис-
темы Д. Д. Максутова. Картины систем скачков уплотнений и
линий слабых возмущений, образующихся в результате обтекания
различных тел потоком при М>1, кроме качественного анализа
45
www.vokb-la.spb.ru - Самолёт своими руками?!
протекающего процесса дают возможность получить еще и количе-
ственные зависимости некоторых параметров потока. Так, напри-
мер, пользуясь фотографией, приведенной на рис. 0.7, можно опре-
делить угол конуса слабых возмущений р, который получается
благодаря установке в воздушном потоке точечного источника
возмущений в виде тонкой иглы.
При обтекании сверхзвуковым потоком тела вращения с остро-
конечной головной частью с 0<0пред на его носке образуется при-
соединенный косой скачок уплотнения. При обтекании полусфе-
рической головки того же тела вращения и при такой же сверх-
звуковой скорости потока головная ударная волна становится
отсоединенной, т. е. возникшая волна находится на некотором
расстоянии от предмета и движется с той же сверхзвуковой ско-
ростью, что и тело. Между ударной волной и носком тела образуется
область дозвуковых скоростей с повышенной плотностью. С увели-
чением числа М расстояние между скачком и телом сокращается,
также уменьшается и дозвуковая область, что, как известно, при-
водит к снижению коэффициента волнового сопротивления. Пре-
дельное отсоединение скачка уплотнения от носка соответствует
наибольшему волновому сопротивлению обтекаемого тела.
В тех случаях, когда головная ударная волна отходит от носка
обтекаемого тела дальше предельного значения, интенсивность ее
падает, что приводит к уменьшению коэффициента волнового соп-
ротивления. Необходимо напомнить, что отсоединенная ударная
волна образуется лишь при условии, когда угол клина (местный
угол) носовой части тела 0 больше предельного угла 0пред ДЛЯ
данного числа М независимо от формы носовой части тела. Для
каждого конкретного случая предельный угол 0пред определяется
по ударной поляре (годографу скоростей).
Если постепенно снижать скорость сверхзвукового потока, то
существующая отсоединенная головная волна перед телом будет
двигаться от носка против потока, а угол (3 наклона скачка увели-
чиваться, и в конце концов при М^1 станет близким к прямому
по всей его длине. Одновременно интенсивность скачка падает и
при скорости потока, близкой к скорости звука, скачок преобразу-
ется в поверхность слабых возмущений (фронт звуковых волн).
Затем, когда число М принимает меньшее значение чем Мкр (кри-
тическое число Маха), скачки уплотнения и волны слабых возму-
щений полностью исчезают.
К сказанному выше для иллюстрации приведены фотографии
спектров обтекания различных исследуемых моделей сверхзвуко-
вым потоком с числом М=1,7. Так, по фотографии на рис. 4.1, а
нетрудно установить угол наклона р присоединенного косого скач-
ка уплотнения, а по фотографии на рис. 4.1, б — угол наклона р
отсоединенного головного скачка.
На фотографии (рис. 4.2) показана картина обтекания тела
вращения, установленного под большим углом атаки а=25°. На
нижней поверхности отчетливо видны два сливающихся скачка
46
уплотнения. От кончика носка отходит присоединенный косой ска-
чок, а от места перехода цилиндрической части в коническую от-
соединенный скачок, который сливается с головным скачком. На
Рис. 4.1. Обтекание
сверхзвуковым потоком (М=1,7) тел вращения с раз-
личными формами носовой части:
а—конус; б—полусфера
верхней поверхности никаких скачков нет, так как происходит рас-
ширение потока.
Рассмотрим рабочий процесс в сверхзвуковой трубе кратковре-
менного действия с закрытой рабочей частью (рис. 4.3).
Перед началом эксперимента открывается кран 6 подачи воз-
духа в сборной трубе 5, к которой присоединены трубы, отходящие
от каждого баллона. Такая
конструктивная схема обеспе-
чивает одновременное выте-
кание воздуха из всех балло-
нов. Для пуска аэродинамиче-
ской трубы необходимо отк-
рыть щель в пускорегулиро-
вочном кране S, через который
воздух поступает в ресивер 9.
Размер щели в кране устанав-
ливается отводом иглы 7 ь
зависимости от требуемого
расхода воздуха для данного
сопла 11. Из пускорегулиро-
вочного крана воздух посту-
пает в ресивер, где происходит
значительное выравнивание
Рис. 4 2. Обтекание сверхзвуковым по
током (М»2,5) тела вращения, установ-
ленного под углом атаки а=25°
потока с уменьшением пуль-
саций и завихрений. После это-
го воздух по трубопроводу по-
следовательно попадает в фор-
камеру 10, сопло Лаваля и,
пройдя со сверхзвуковой скоростью некоторый участок в рабочей
части трубы, входит в диффузор 13, а затем вытекает в свободную
атмосферу. Весь процесс эксперимента, начиная от открывания
47
www.vokb-la.spb.ru - Самолёт своими руками?!
крана до его закрывания, продолжается обычно 8—12 с (в зависи-
мости от числа М). За это время записывают показания измери-
тельных приборов, а также фиксируют скачок и линии возмуще-
ния на экране путем фотографирования или зарисовки.
При закрытой рабочей части трубы защитные стекла 22 дол-
гам быть вмонтированы в стенки рабочей части. Конечно, когда
рабочая часть закрытая, осложняется процесс смены моделей
сопел Лаваля.
Рис. 4.3. Схема сверхзвуковой
аэродинамической трубы крат-
ковременного действия с опти-
ческой установкой Д. Д. Мак-
сутова:
/—электродвигатель: 2—компрес-
сор; 3—очиститель (разделитель);
4— баллонная станция; 5—сборная
труба; 6—кран подачи воздуха; 7—
игла; 8—пускорегулировочный
кран; 9—ресивер; 10—форкамера;
//—сопло Лаваля; 12—модель: 13—
диффузор; 14—источник света; 15—
диафрагма; 16—зеркально-мениско-
вый объектив коллиматора; 17—
зеркально-менисковый объектив
наблюдательной трубы; 18—опти-
ческий нож; 19—линза; 20—мато-
вый экран; 21—диагональные зер-
кала; 22—защитные стекла
Заполнение баллонной станции 4 сжатым воздухом производит-
ся при помощи компрессора 2, приводимого в движение электро-
двигателем 1. В очистителе 3 из воздуха выделяется вода и масло,
которые в виде паров присоединяются к воздуху во время процесса
его сжатия в компрессоре.
Существует большое количество оптических приборов, выпол-
ненных по различным схемам, оспованным на методе полос. Одна
из схем, по которой собран прибор,— зеркально-менисковая опти-
ческая схема Д. Д. Максутова (рис. 4.3 и 4.4). Эта схема состоит
из двух оптических систем: 1) коллиматорной, с помощью которой
происходит просвечивание параллельным пучком света исследуемой
рабочей части аэродинамической трубы, а также проектирование
щели диафрагмы 15 (см. рис. 4.3) на фокальную плоскость наблю-
дательной трубы; 2) наблюдательной, с помощью которой фотогра-
фируют спектр обтекания моделей, расположенных в рабочей части
аэродинамической трубы.
Оптическая система коллиматора (см. рис. 4.3) состоит из ис-
точника света 14, диафрагмы 15, имеющей несколько отверстий и
регулировку размера щели; диагонального зеркала 21, .предназна-
48
ценного для изменения направления лучей; длиннофокусного зер-
кально-менискового объектива коллиматора 16, состоящего из зер-
кала, мениска и защитного стекла 22.
Оптическая система наблюдательной трубы сходна с системой
коллиматора и состоит из подобного же длиннофокусного зеркаль-
но-менискового объектива 17, защитного стекла 22, диагонального
зеркала 21, ножа 18, представляющего собой непрозрачную плас-
тинку с острым прямолинейным краем, расположенную в фокусе
объектива 17, линзы 19 для изменения масштаба изображения и
матового экрана 20.
Рис. 4.4. Оптическая схема Д. Д. Максутова:
/—коллиматора 2, 10—сферические зеркала; 3—источник мо-
нохроматического света; 4—диафрагма; 5, 11—диагональные
зеркала; 6, 9—мениски; 7—рабочая часть; 8—наблюдатель-
ная труба; 12—нож; 13—фокус; 14—экран
Принцип работы оптической установки заключается в следую-
щем. Осветитель и нож помещены в фокусах зеркально-менисковых
объективов. Если в рабочей части трубы по всему сечению и по
длине плотность воздуха постоянна, то изображение на экране бу-
дет освещено равномерно. При обдувании сверхзвуковым потоком
модели 12, помещенной в рабочей части трубы, будут образовы-
ваться скачки уплотнения, появится градиент плотности воздуха.
При прохождении через появившиеся в воздухе уплотнения вслед-
ствие иного коэффициента преломления лучи света отклонятся от
своего первоначального направления. Если нож будет задерживать
отклоненные лучи, то зоны, соответствующие уплотненному воздуху,
будут изображаться на экране в виде темных полос и, наоборот,
когда нож будет пропускать отклоненные лучи, то зоны уплотнения
будут на экране изображены более светлыми полосами.
На место матового экрана можно поместить камеру фотоаппа-
рата и сфотографировать спектр обтекания.
Схема прохождения световых лучей через поле неравномерной
плотности в сверхзвуковом потоке приведена на рис. 4.5. На схеме
показано пунктиром, как отклоненные световые лучи при прохож-
дении области оптической неоднородности задерживаются в фо-
49
www.vokb-la.spb.ru - Самолёт своими руками?!
Рис. 4.5. Принципиальная схема
оптического прибора:
S—источник монохроматического света;
D—диафрагма; Li и L2—линзы; Р Ч—
рабочая часть (поперечное сечение);
Qi — поле неравномерной плотности;
Н—нож; F— фокус; Э—экран (условно
повернут относительно оси у)
калькой плоскости оптическим ножом. В результате на экране (ус-
ловно повернутом на некоторый угол вокруг оси у), кроме силуэта
иглы как точечного источника, будет видно изображение конуса
слабых возмущений, вершиной которого является кончик иглы.
То, что на экране видны только образующие конуса возмущений
в плоскости хоу, можно пояснить следующим примером (см.
рис. 4.5). Параллельный пучок лучей монохроматического света
направлен вдоль оси z. Лучи света
II, проходящие области оптической
неоднородности, совпадающие с
фронтом возмущений, отклоняются
в плоскости yoz по направлению
пунктирных линий и отсекаются
оптическим ножом, вследствие чего
уменьшается освещенность этих
мест на экране. При этом кромка
ножа должна быть установлена
строго в плоскости xoz и параллель-
но оси х. Лучи света I, проходя об-
ласти оптической неоднородности в
диаметральной плоскости xoz, от-
клоняются в этой же плоскости и не
задерживаются ножом, а только
скользят по его кромке. В этом слу-
чае освещенность экрана не изме-
няется. Изображение конуса возму-
щений не имеет четкой границы вну-
три самого конуса по сравнению
с внешней границей, так как лучи
света, проходящие вблизи лучей II,
кроме отклонения в плоскости xoz имеют некоторое отклонение
и в плоскости yoz,
В современной оптической установке для использования метода
полос вместо классической схемы с собирательными линзами (см.
рис. 4.5) применяют более громоздкую схему Д. Д. Максутова.
Это объясняется тем, что для проведения измерений по спектро-
граммам требуется полное устранение сферической и хроматичес-
кой аберрации, что повышает четкость изображения.
Оптическая схема Д. Д. Максутова обеспечивает уничтожение
сферической аберрации. Из курса физики известно, что лучи, исхо-
дящие из источника света, при их отражении от сферического зер-
кала прибора вследствие сферической аберрации будут непарал-
лельны друг другу и оси симметрии системы (см. рис. 4.4). Угол
наклона лучей будет тем больше, чем дальше лучи будут отстоять
от оси симметрии системы. Лучи света, пропускаемые через выпук-
ло-вогнутую рассеивающую линзу — мениск коллиматора, — пре-
образуются в параллельный пучок, который проходит рабочую
часть аэродинамической трубы в направлении оси z.
50
Объясняется это тем, что и линза-мениск и сферическое зеркало
имеют сферическую аберрацию. Сферическую аберрацию мениска
•считают .положительной, а зеркала — отрицательной; наложение
этих двух аберраций друг на друга уничтожает ее вообще.
Параллельный пучок света после рабочей части аэродинамиче-
ской трубы проходит мениск наблюдательной трубы и рассеивается
под разными углами, т. е. мы имеем картину, обратную той, кото-
рую наблюдали в коллиматоре. Такой рассеянный пучок лучей по-
падет на сферическое зеркало и, отразившись от него и от диаго-
нального зеркала, сходится в одной точке — фокусе. Здесь опять
происходит сложение сферических аберраций разных знаков. Так
уничтожается сферическая аберрация в оптической системе
Д. Д. Максутова. Хроматическая аберрация также отсутствует в
рассматриваемой системе. У сферического зеркала хроматической
аберрации вообще пет. В отличие от других линз форму мениска
можно подобрать таким образом, что у него хроматическая абер-
рация будет отсутствовать.
Аппаратура и материалы
1. Оптическая установка системы Д. Д. Максутова.
2. Экран (рамка с подставкой, на которую натянута калька), фотокамера,
пленка.
3. Исследуемые модели.
Порядок проведения работы
1. Проверить по манометру давление в баллонах.
2. Установить экран оптического прибора с натянутой калькой и присоеди-
нить фотокамеру, заряженную пленкой.
3. Включить подсветку оптической установки и навести на резкость изобра-
жения на экране и пленке фотокамеры.
4 Открыть кран подачи воздуха.
5. Открыть пускорегулировочный кран, отрегулировав его до необходимого
давления в форкамере.
6. Нанести на кальке экрана изображение скачков, линий возмущений и сде-
лать фотоснимок.
7. Сделать анализ протекавшего процесса по полученному спектру.
2. ПОЛУЧЕНИЕ СПЕКТРОВ ОБТЕКАНИЯ КРЫЛА
И ДРУГИХ МОДЕЛЕЙ В АЭРОДИНАМИЧЕСКОЙ ДЫМОВОЙ ТРУБЕ МАИ
Общие сведения
В современных аэродинамических лабораториях применяются
дымовые спектры. Они позволяют определить линии тока на ма-
лых скоростях движения. Визуализация потоков представляет
большой интерес и особенно в тех случаях, когда обтекание иссле-
дуемой модели сопровождается образованием вихрей и отрывом
потока от стенки. Для этой цели с большим успехом используется
аэродинамическая дымовая труба МАИ и подобные ей установки.
В виде примера приведен ряд фотографий спектров обтекания
51
www.vokb-la.spb.ru - Самолёт своими руками?!
моделей в дымовой аэродинамической трубе, общий вид которой
представлен на рис. 4.6. На рис. 4.7 показано обтекание плоской
пластинки под углом, близким к прямому. Рис. 4.8 и 4.9 дают кар-
тины обтекания толстого крылового профиля под большим поло-
жительным и малым отрицательным углами атаки. На рис. 4.9 по-
Рис. 4.6. Дымовая груба МАИ
Рис. 4.7. Обтекание плоской пластин-
ки при а—90°
казан дополнительный выпуск дыма из небольших отверстий на
нижней кормовой части модели. Это устройство позволяет увидеть
характер отрыва потока на поверхности модели. На рис. 4.10 по-
казано обтекание профиля крыла с отклоненным элероном. Здесь
наглядно демонстрируется, что увеличение вогнутости профиля
крыла путем отклонения хвостовой его части приводит к увеличе-
нию подъемной силы. Образование вихревой пелены, сбегающей с
Рис. 4.8. Обтекание толстого профи-
ля под большим положительным уг-
лом атаки
Рис. 4.9. Обтекание толстого профиля
под малым отрицательным углом
атаки
верхней поверхности изолированного крыла (составленного из двух
консолей без фюзеляжа), иллюстрируется на фотографии рис. 4.11.
Приведем основные технические и конструктивные данные ды-
мовой трубы МАИ.
52
Дымовая аэродинамическая труба является трубой открытого
типа с закрытой рабочей частью прямоугольного сечения; она сос-
тоит из следующих частей: деревянного внешнего кожуха, дымоге-
нератора, внутреннего корпуса трубы, вентиляторной установки,
коллектора, гребенки с дымопроводом, системы управления мо-
делью, дымовыми струйками, светом, вентилятором.
Конструктивная схема трубы приведена на рис. 4.12. При по-
мощи центробежного вентилятора 17 воздух засасывается из ат-
мосферы через мелкую проволочную сетку 1 и через небольшую
форкамеру и сопло 2, затем попадает в рабочую часть 3 прямо-
угольной формы размером 40X530 мм.
Рис. 4.10. Обтекание профиля крыла
с отклоненным элероном
Рис. 4.11. Картина обтекания верхней,
поверхности изолированного крыла
В рабочей части трубы создается плоский поток. Из рабочей ча-
сти поток воздуха через перфорированную перегородку 6 попадает
в успокоительную камеру — ресивер 8 откуда вентилятор выбра-
сывает воздух через рабочую часть аэродинамической трубы по
трубопроводу 11 в атмосферу. Для создания дымовых струек в соп-
ле установлена гребенка 21 из большого количества тонких трубо-
чек. Дым в гребенку поступает по трубе 9 из дымогенератора 16,
в котором происходит неполное сгорание и испарение веретенного
масла на небольшой металлической чашке 14, установленной на
электронагревателе 15. Масло на чашку подается из масленки 13
при поднимании шприцевой иглы 10.
Изменение положения дымовых струек относительно обтекаемо-
го тела (модели), например поднятие и опускание осуществляется
при помощи механизма управления гребенкой 22.
Скорость потока воздуха устанавливается в зависимости от
частоты вращения вентилятора. Изменение частоты вращения эле-
ктродвигателя 18 производится реостатом 19. Включение и -выклю-
чение электродвигателя осуществляется поворотом выключателя
27, включение и выключение света — выключателем 26, а дымоге-
нератора — выключателем 28.
Корпус трубы 7 — деревянный. Передняя прозрачная стенка
рабочей части выполняется из стекла или плексигласа. Задняя от-
53
www.vokb-la.spb.ru - Самолёт своими руками?!
кидная стенка обивается черным бархатом или окрашивается в чер-
ный цвет, чтобы создавался необходимый фон для получения хоро-
шей видимости дымовых струек.
Исследуемая модель устанавливается на штырь механизма уп-
равления. Этот механизм при помощи рукояток 24 и 25 и шнуров
20 позволяет устанавливать углы атаки а модели. Контроль углов
-атаки осуществляется по шкале, нанесенной на передней прозрач-
Рис. 4.12. Схема аэродинамической дымовой трубы
МАИ:
/—сетка проволочная; 2— сопло; 3—рабочая часть; 4—дроссель;
5—лампа подсветки; 6—перфорированная перегородка; 7—корпус;
8—ресивер; 9—труба, 19—шприцевая игла; //—трубопровод; 12—
трубка; 13—масленка, 14—чашка: /5—электронагреватель; 16—
дымогенератор; /7—центробежный вентилятор; 18—электродвига-
тель; 19—реостат; 20—шнуры кожаные; 21—гребенка; 22—меха-
низм управления гребенкой; 23—ручка; 24, 25—рукоятки; 26, 27
и 28—выключатели
ной стенке рабочей части. Изменение положения органов управле-
ния (элеронов, рулей и т. д.) по углам бр производится поворотом
рукоятки 25.
Чтобы придать дымовому спектру обтекания большую четкость
и рельефность, в корпусе аэродинамической трубы в верхней и
нижней ее рабочих частях установлены осветительные газонапол-
ненные трубчатые софитовые лампы 5.
На протяжении всей рабочей части трубы струйки дыма сохра-
няют свою первоначальную форму в виде тонких линий. Скорость
струек дыма равна скорости основного воздушного потока в рабо-
чей части трубы.
54
Аппаратура и материалы
1. Аэродинамическая дымовая труба МАИ.
2. Различные препарированные модели: крыло, цилиндр, парашют и др.
3. Веретенное масло для получения дымовых струй.
Порядок проведения работы
1. Ознакомиться с устройством дымовой аэродинамической трубы.
2. Установить испытуемый объект на штыри механизма управления мо-
делью.
3. Привести трубу в действие.
4. Сфотографировать или зарисовать спектры обтекания.
3. ДЕМОНСТРАЦИЯ ОБТЕКАНИЯ МОДЕЛЕЙ ЭЛЕМЕНТОВ
ЛЕТАТЕЛЬНЫХ АППАРАТОВ СВЕРХЗВУКОВЫМ ПОТОКОМ
С ПОМОЩЬЮ ГАЗОГИДРАВЛИЧЕСКОЙ АНАЛОГИИ
Общие сведения
Для визуализации сверхзвукового потока можно воспользовать-
ся методом газогидравлической аналогии, основанным на формаль-
ной аналогии, существующей между движением воды, текущей в
открытом канале тонким слоем, как несжимаемой жидкости и плос-
ким движением невязкого сжимаемого газа. В данном случае ана-
логия со слабыми волнами возмущения и скачками уплотнения до-
стигается с помощью поверхностных волн и прыжков уровня воды
в газогидравлическом лотке. При этом скорость движения воды в
лотке будет примерно в тысячу раз меньше, чем скорость воздуш-
ного потока.
Впервые объяснение газогидравлической аналогии было пред-
ложено Н. Е. Жуковским.
Уравнения движения и уравнение неразрывности для движущей-
ся тонким слоем в открытом канале невязкой жидкости будут за-
писаны в таком виде: _ i
_1 - V _I дУУКХ dh .
^^жх1Г±жу~дГ~~ТдР
I рг dVж у I дУуку dh .
£ dt жх дх жу ду h ду
dh । д(ЬУжх) . д(ЬУжу)_С}
dt ‘ дх ду
где Ужх, УЖ2/ — составляющие скорости движения жидкости; h —
глубина свободно текущего слоя жидкости в открытом потоке;
C~V gh — скорость распространения поверхностных волн, при
условии пренебрежения влиянием поверхностного натяжения т,
глубины слоя h и длины волны Л. Тщательный анализ показал, что
глубина слоя не должна превышать 8 мм.
55
www.vokb-la.spb.ru - Самолёт своими руками?!
Плоское движение невязкого газа определяется из следующих
уравнений:
х । I/ dVrх I 17 дVгх аг др .
dt ГХ дх ГУ ду ~ Q дх'
д^гу I/ dVry 117 дУгу аг др #
dt ’ ГХ дх ГУ ду - Q ду'
dQ I d(Q^rx) I _л
dt ~Г дх * ду
где VTX, Vry — составляющие скорости движения газа.
В методе газогидравлической аналогии при выводе необходимых
соотношений делаются следующие допущения:
1) газ и жидкость не имеют вязкости;
2) поверхностное натяжение в жидкости отсутствует;
3) условно полагают, что газ имеет показатель адиабаты х = 2;
4) вертикальные составляющие скорости в потоке воды прини-
маются равными нулю.
Для определяемых в одномерном установившемся изэнтропичес-
ком течении параметров невязкого газа (температуры, давления,
плотности и числа iMaxa) существуют аналогии в движущейся по
прямоугольному открытому каналу жидкости необходимой глу-
бины.
Некоторые из наиболее распространенных аналогий приведены
в табл. 1.
Таблица 1
Плоское течение невязкого газа Течение невязкой жидкости (воды) в неглубоком канале со свободной поверхностью
Отношение плотностей Q, Qo Отношение глубины h/h ©о
Отношение давления Р/Д) Отношение квадратов глубин (k/hoo)
Отношение температур т/т0 Отношение глубин h/h^
Число Маха М=Уг/аг Число Фруда Рг—Уж/ с— =Кж/-| gh
Энтальпия (теплосодер жание) /0=а2/(х-1) Полный напор Н, hfj
56
В таблице индексом «О» обозначаются условия заторможенного^
газового .потока, а индексом «оо» обозначается глубина невозму-
щенного слоя воды, текущего в лотке.
Если обратиться к схеме течения в лотке с пограничным слоем
(рис. 4.13) и к спектру обтекания водой модели в лотке (рис. 4.14),
то можно сделать замеры следующих глубин:
йсо — глубина невозмущенного слоя воды;
Лист — глубина воды за вычетом толщины пограничного слоя
ВОДЫ, ЛИст = Лоо «ДЛцогр.сл»
Лпр — максимальная высота «прыжка» (определяется у поверх-
ности модели);
h — уровень воды в любой точке у поверхности модели, а так-
же в любой точке поверхности «прыжка»;
й0— аналог полного давления воздушного потока в миллимет-
рах водяного столба /?0=/Zeo --------•
Равенство критериев подобия
M=r^ar==Fr==V'1K/|/gA
является одним из основных условий аналогии. Скорость течения
воды при горизонтальном положении лотка определяется по изве-
стной формуле ^«=1 2g//. В этой формуле не учитываются поте-
ри полного напора. При наклонном лотке скорость текущей по
нему воды будет
V^=\ 2^(/70+/-Л),
здесь Яо —уровень воды в напорном баке (рис. 4.15), //i=/sin(p—
глубина наклонной части лотка.
В нашем случае при Я=0,4 м и горизонтальном лотке скорость
течения воды Еж=У2-9,81-0,4 = ~2,8 м/с.
Следует помнить, что приведенная в таблице аналогия соотно-
шений физических величин действительна для газа, имеющего по-
казатель адиабаты х=2. Такой газ называют «гипотетическим»
газом.
Как известно, в скачке уплотнения происходит резкое увеличе-
ние давления, плотности и одновременно с этим падает скорость.
В газогидравлическом лотке по аналогии со скачком уплотнения в
сверхзвуковом потоке происходит гидравлический «прыжок», сопро-
вождающийся резким повышением уровня жидкости и замедлением
скорости в «прыжке». Если число М газового потока соответствует
числу Fr лотка, а также одинаковы и углы поворота потока, т. е.
углы клиньев моделей 6, то при таких условиях угол наклона скач-
ка р будет соответствовать углу распространения гидравлического
«прыжка» (поверхностной волны) рв.пр (см. рис. 4.14).
Влияние формы носовой части исследуемого тела и числа М
потока на систему скачков уплотнения, а также зависимость на-
клона скачка уплотнения от угла поворота потока в можно успеш-
57
www.vokb-la.spb.ru - Самолёт своими руками?!
Рис. 4.13. Схемы пограничного
слоя
но демонстрировать в лотке. Для этого нужно иметь различные
модели и необходимые измерительные инструменты, чтобы опре-
делить уровень воды, свободно текущей в лотке, а также высоту
«прыжка» при обтекании мо-
дели, установленной в лотке.
Измерив глубину уровня
водяного потока h по контуру
модели, можно подсчитать ко-
эффициент давления по сле-
дующей формуле:
Лод=[ (г-У- 11/М2.
L \ "ист / J
Вместо Лист можно под-
ставить полную глубину водя-
ного слоя Лоо, текущего в отк-
пограничного слоя, но при этом
погрешность эксперимента несколько увеличится.
Для того чтобы перейти к давлению воздушного потока и сде-
лать пересчет с х=2 на х=1,4, можно воспользоваться формулой
рытом лотке, включая толщину
Рис. 4.14. Спектр обтекания водою
модели в лотке
Ргаз=Аод - 0,3 (М2 - 1)“2 М‘£2.
Здесь угол е является суммой
углов атаки а и местного угла
поверхности исследуемой части
модели 6, т. е. е=а±6. Следует
заметить, что приведенная фор-
мула дает удовлетворительные
результаты только для углов
8^12°.
Рис. 4.15. Схема течения в лотке
Анализ показывает, что газогидравлическая аналогия дает хоро-
шие результаты при М^2. При увеличении значений числа М сверх
М=2 точность метода соответственно понижается. Уменьшение ве-
личины Лоо благотворно сказывается на точности.
Общий вид установки для получения газогидравличбских ана-
логий показан на рис. 4.16. С помощью водяного насоса И вода
перекачивается из сливного бака 9 в напорный бак 2. Производи-
58
тельность насоса должна быть такой, чтобы был обеспечен необхо-
димый максимальный расход воды. Расчетный расход воды каж-
дый раз достигается посредством регулировочного крана 16, кото-
рый вмонтирован в напорный трубопровод 13. Глубина слоя
текущей воды в открытом лотке 7 регулируется задвижкой 5 с по-
мощью винта 4. Наклон лотка осуществляется при помощи не-
Рис. 4.16. Установка для получения газогидравлических ана
логий:
1, 3—спрямляющие решетки напорного бака; 2—напорный бак; 4—винт
подъема задвижки; 5—задвижка; 6—исследуемая модель; 7—лоток:
с --домкрат лотка; 9—сливной бак; 10—кран; //—водяной насос; 12—
сливной кран; 13— напорный трубопровод; 14—домкраты опорные; 15—
основание установки; 16—регулировочный кран
большого домкрата 8. Исследуемая модель 6 устанавливается на
дно лотка, а фиксация производится штифтами, которые запрессо-
ваны в дно лотка. Под штифты у модели сделаны специальные от-
верстия. Лоток изготовлен из органического стекла, благодаря
чему создаются благоприятные условия для фотографирования с
использованием подсветки. Местоположение спрямляющих реше-
ток 1 и 3 по высоте определяется в процессе установления равно-
мерного движения слоя воды в лотке. Слив воды из напорного бака
происходит через сливной кран 12, а из сливного бака — путем
59
www.vokb-la.spb.ru - Самолёт своими руками?!
его наклона. Кран 10 предназначен для закрытия доступа воды из
сливного бака в водяной насос. Нивелировка лотка производится
опорными домкратами 14, укрепленными в нижней части основания
15 установки.
Аппаратура и материалы
1. Установка, наполненная водой.
2. Набор различных моделей.
3. Измерительные инструменты для измерения уровней воды.
Порядок проведения работы
1. Проверить наличие необходимого количества воды в напорном и сливном
баках.
2. Установить нужный наклон лотка.
3. Опробовать и настроить насос на расчетный расход воды.
4. Подготовить исследуемые модели и измерительный инструмент.
5. Зарисовать или сфотографировать спектры обтекания.
4. ВИЗУАЛИЗАЦИЯ ДРУГИХ ФИЗИЧЕСКИХ ЯВЛЕНИЙ
Общие сведения
Для более глубокого усвоения некоторых процессов и законо-
мерностей в аэродинамике, кроме указанных экспериментов, в дан-
ной работе приводятся другие опыты, которые наглядно раскры-
Рис. 4.17. Прибор, демонстрируют!:й
применение уравнения Бернулли
Рис. 4.18. Шарик в наклонной
струе воздуха
вают физический смысл явления. Так, например, демонстрация
применения уравнения Бернулли производится на приборе, который
показан на рис. 4.17. Из опыта будет видно, что в вертикально на-
правленной струе воздуха вес шарика уравновешивается силой
давления струи. В зависимости от диаметра и веса шарик займет
положение на определенном расстоянии от сопла. При отклонении
струи воздуха от вертикали шарик не выходит из струи, а следует
60
за ней до определенного угла ее поворота. В этом случае верхняя
поверхность шарика находится в струе, а нижняя в какой-то сте-
пени выходит из нее и воспринимает атмосферное давление (рис.
4.18). Подъемная сила шарика, уравновешивающая его вес, будет
равна
К = j (р — ра) cos Gda,
Рис. 4.19. Прибор для демонстрации са-
мовращения крыла
где do — элементарный участок площади шарика.
Конструктивно прибор состоит из поворачивающегося сопла
(имеющего выходное отверстие диаметром £>=25 мм), через кото-
рое выбрасывается струя воз-
духа. Для опыта желательно
иметь целый набор деревян-
ных (или из другого материа-
ла) полых шариков диаметром
d=50, 40, 30 мм и т. д. и мас-
сой (соответственно) 12; 6;
2 г и т. д.
Наблюдение за самовраще-
нием крыла (это явление у
крыльев было впервые обна-
ружено Н. Е. Жуковским еще
в 1906 г.) можно провести при
помощи прибора, который по-
казан на рис. 4.19.
Самовращение крыльев
(любой формы в плане) под
действием воздушного потока наблюдается главным образом в об-
ласти критических и закритических углов атаки. Рассмотрим са-
мовращение крыла более подробно. Крыло, установленное на при-
веденном выше приборе, может вращаться относительно оси, сов-
падающей с направлением невозмущенного потока, причем центр
тяжести крыла также совпадает с осью X. Предположим, что кры-
ло находится под каким-то углом атаки к невозмущенному воз-
душному потоку, непосредственно следующему за критическим
углом акр (см.график Cya=f2(a) рис. 11.2). Если крыло начинает
вращаться, то каждое его сечение (в направлении хорды) приоб-
ретает окружную скорость, направление которой в двух симмет-
ричных сечениях с различных сторон крыла (на расстоянии Z от
оси X) будет взаимно противоположным. Поэтому и углы атаки
таких двух сечений будут изменяться по разному — с одной сто-
роны возрастать, а с другой — убывать. Углы атаки сечений кон-
соли крыла (при его нормальном расположении к потоку), конец
которой идет вниз, будут больше на величину приращения Да,
т. е. асеч=а+Да, а углы атаки сечений противоположной консоли
61
www.vokb-la.spb.ru - Самолёт своими руками?!
будут меньше на ту же величину, т. е. асеч=а—Да.
угла
Да=arctg ~ ,
& V V V
Приращение*
Рис. 4.20. Установка для демонстрации
обтекания тел воздушным потоком при по-
мощи шелковинок
где иу — окружная скорость приращения крыла; V — скорость
набегающего невозмущенного потока; сох — угловая скорость вра-
щения крыла; z — координата сечения.
Изменение углов атаки повлечет за собой изменение местных
элементарных сил, приложенных к элементам крыла шириной dz,
В результате образуется
пара сил, которая начинает
вращать крыло относитель-
но оси X с определенной уг-
ловой скоростью.
Для прекращения само-
вращения крыла можно
указать на такие способы,
как вывод крыла на угол
атаки, при котором ,все ре-
зультирующие углы атаки
сечений крыла асеч были
бы меньше критического уг-
ла акр или угол а, который
соответствовал бы нулевой
подъемной силе, т. е. когда
^*^=0.
Установка для наблюде-
ния обтекания тел воздуш-
ным потоком при помощи
шелковинок представлена на
рис. 4.20.
Распределение касательных напряжений, т. е. напряжений сил
вязкости (трения) на поверхности пластинки, можно наблюдать
при помощи прибора, показанного на рис. 4.21.
Если в элементарном объеме жидкости (газа) выделить два
параллельных слоя, то давление, действующее на элементарную
поверхность, характеризует нормальное напряжение, а сила вязко-
сти, действующая вдоль рассматриваемой элементарной поверхно-
сти при движении выделенного объема, характеризует касательные
напряжения. Сила трения пропорциональна площади dS, градиен-
ту скорости по нормали к выделенным площадкам dujdy и дина-
мическому коэффициенту вязкости ц:
dXf^dS—.
dy
Напряжение сил трения
dXf du
7 as dy
62
Пользуясь полученным спектром распределения скоростей по
нормали к поверхности (рис. 4.22), можно достаточно точно опре-
делить местные градиенты скорости dujdy нахождением угла угр ск
А-А
Рис. 4.21. Прибор для демонстрации распределения касательных напря-
жений:
/—корпус; 2—стальная лента; 3—рукоятка; 4—ролики; 5—стеклянные стенки при-
бора; 6—баллон; 7—шприцевая игла; 8—поршень шприца; 9—державка; 10— нап-
равляющая; //—пружина; /2—основание; /3—чернильный след; 14—груз
между касательными к следу и нормалью к ленте. Зная коэффици-
ент ц, производят подсчет величин касательных напряжений при
заданных значениях координаты у. Для воды при 15° С коэффици-
ент р= 1,141-10~3 Па-с.
Прибор (см. рис. 4.21) состоит из корпуса I, заполненного жид-
костью (водой), в которой прямолинейно движется тонкая сталь-
ная лента 2, имеющая прямоуголь-
ное отверстие. Перемещение ленты
Производится при помощи рукоят-
ки 3 и роликов 4. Один конец ленты
прикрепляется к ролику с рукоят-
кой, к другому концу для натяже-
ния подвешивается груз 14.
Используя баллрн 6, заполнен-
ный чернилами или метилвиолетом,
и шприцевую иглу 7, нажимая на
Рис. 4.22. Спектр распределения
скоростей в пограничном слое
поршень шприца 8, от отверстия в
ленте до поверхности жидкости соз-
дают вертикальный чернильный
след 13. Затем, вращая рукоятку 3, приводят ленту в движение.
При этом чернильный след деформируется и показывает распре-
деление относительных скоростей по нормали к ленте.
63
www.vokb-la.spb.ru - Самолёт своими руками?!
Баллон вместе с иглой укрепляется на державке 9, которую
можно перемещать по направляющим 10. Пружины 11 удерживают
державку в верхнем положении. Направляющие заделаны в осно-
вании 12, которое устанавливается на стеклянные стенки 5 при-
бора.
Возникновение подъемной силы (эффект Магнуса) можно на-
глядно показать па вращающемся цилиндре в воздушном потоке
аэродинамической трубы (рис. 4.23).
Рис. 4.23. Прибор для показа образования подъем-
ной силы у цилиндра, вращающегося в воздушном
потоке
При вращении цилиндра в вязкой среде, например, в воздухе,
вокруг него создается циркуляционное движение воздуха. Если
вращающийся цилиндр находится в плоскопараллельном потоке
воздуха со скоростью V, то цилиндр будет отклоняться в сторону.
Как известно, направление аэродинамической силы (подъемной)
будет перпендикулярно к вектору скорости набегающего потока л
получается путем поворота этого вектора на 90° против направле-
ния циркуляции. Подъемная сила цилин -ра будет увеличиваться с
увеличением скорости его вращения. Опыты показывают, что наи-
большие значения Су получаются тогда, когда окружная скорость
цилиндра ц==41/.
Сущность явления заключается в том, что с одной стороны ци-
линдра, где воздух и поверхность цилиндра движутся в одну сто-
рону, пограничный слой будет увлекаться вперед. Поэтому в дан-
ных условиях возвратное движение в пограничном слое возникнуть
не может, и, следовательно, не может быть и отрыва потока.
С другой стороны цилиндра, где его стенка и воздушный поток
движутся во встречных направлениях, пограничный слой заторма-
живается, а затем и отрывается. Возникает мощный вихрь, а затем
и циркуляция вокруг цилиндра.
64
На рис. 4.24 схематично показан прибор для демонстрации об-
разования подъемной силы на вращающемся цилиндре. Этот при-
бор состоит из вращающегося цилиндра 12, приводимого во вра-
щательное движение электромотором 4 посредством приводного
ремня 1. Электромотор 4 вмонтирован в корпус 3. Благодаря на-
личию двух шариковых подшипников 5 корпус 3 может свободно
Рис. 4.24. Прибор для демонстрации образования
подъемной силы:
1—приводной ремень; 2—шкив; 3—корпус; 4—электромо-
тор; 5—шариковые подшипники; 6—вал; 7—гнездо сто-
ла; 8—кронштейн; 9—втулка; 10, 13—шариковые подшип-
ники; 11—ось; 12—вращающийся цилиндр
вращаться на валу 6. Вал 6 имеет конический хвостовик, который
вставляется в гнездо стола 7. На оси электромотора 4 закреплен
небольшой шкив 2, предназначенный для надевания приводного
ремня 1. К корпусу 3 прикреплен кронштейн 8, на конце которого
имеется втулка 9, которая служит для крепления оси 11. Монтаж
цилиндра 12 на ось И производится с помощью подшипников 10 и
13. В нижней части цилиндра имеется канавка для надевания при-
водного ремня 1.
Следует заметить, что указанные приборы для визуальных ме-
тодов исследований аэродинамических процессов не являются един-
ственными. Имеется очень большое количество приборов, которые
используются для данной цели.
Контрольные вопросы
1. Какие существуют методы получения спектров обтекания тел потоком воз-
духа?
2. На каком свойстве световых лучей основан способ полос?
3 1743 65
www.vokb-la.spb.ru - Самолёт своими руками?!
3. В чем заключается сущность визуализации потока в дымовой трубе?
4. Как схематически изобразить спектр обтекания профиля крыла при дозву-
ковой и сверхзвуковой скоростях потока?
5 В чем заключается сущность газогидравлической аналогии?
6. Как возникает подъемная сила на вращающемся цилиндре в воздушном
потоке?
7. Почему происходит самовращение крыла?
РАБОТА № 5
ИССЛЕДОВАНИЕ ПРОФИЛЯ СКОРОСТЕЙ
В ПОГРАНИЧНОМ СЛОЕ КРЫЛА
ПРИ дозвуковых скоростях
Цель работы — определение толщины пограничного слоя на мо-
дели крыла и картины распределения скоростей по высоте слоя.
Распределение скоростей в пограничном слое исследуется на
модели крыла прямоугольной формы в плане.
Результаты работы необходимо представить в виде двух диаг-
рамм uluQ-f(y) распределения скоростей по толщине пограничного
слоя, соответствующих ламинарному и турбулентному режимам
течения. Рекомендуется также определить картину распределения
скоростей в пограничном слое в зоне отрыва или за отрывом.
Общие сведения
Структура пограничного слоя схематически показана на рис. 5.1.
Пограничный слой на поверхности обтекаемого тела (крыла) про-
стирается от его передней кромки до точки отрыва S. Толщина чо-
Рис. 5.1. Схема пограничного слоя
граничного слоя б — величина условная. Она определяется гради-
ентом скорости по нормали к поверхности (duldy)y=t, который на
границе слоя будет равен нулю, а скорость иъ на границе перехо-
дит в местную скорость невозмущенного потока «о- От передней
кромки крыла до точки перехода Т находится ламинарный слой,
вдоль по течению которого происходит увеличение скорости; это
объясняется тем, что градиент давления dp/dx вдоль по потоку
меньше нуля. В зоне точки Т скорость пограничного слоя достигает
своего максимума, а градиент давления dp/dx равен нулю. На не-
бе-
большом расстоянии от этой точки по потоку (фактически это не
точка, а некоторая область) пограничный слой переходит из лами-
нарного состояния в турбулентное.
Турбулентный слой распространяется от точки Т до точки S
(тоже некоторая область). Положение точки перехода Т (от перед-
ней кромки крыла) находится по формуле xt = ReKp/Re, где Re^ —
критическое число Рейнольдса, зависящее от степени начальной
турбулентности потока, качества отделки поверхности, величины
числа Маха и др. В области турбулентного слоя скорость также
направлена вдоль потока, но постепенно замедляется, гра-
диент давления меняет свой знак и становится больше нуля. По-
скольку направление скорости в пограничном слое совпадает с на-
правлением внешнего потока, то градиент скорости на стенке по
нормали к поверхности в любом месте слоя будет положительным,
т. е. (6Zu/di/jj,=o>O. В точке S градиент скорости на стенке стано-
вится равным нулю, т. е. {duldy)v^=0, и начинается отрыв погра-
ничного слоя. Отрыв пограничного слоя связан с возникновением
обратных течений. Это приводит к тому, что далее в потоке уже не
существует пограничного слоя, а образуется след, зона возмущен-
ного движения, где градиент скорости в ряде точек даже меняет
свой знак, т. е. (duldy)v=0<zQ.
Скорость и и толщина б пограничного слоя для тонкой пластин-
ки, расположенной вдоль потока, определяются по следующим фор-
мулам (расстояние х отсчитывается от ее передней кромки):
«л / 2 У //2\. “т = ( у Y/n
Wq \ ft ft^ J Uq \ ft /
(здесь показатель «=74-10 берется соответственно в зависимости
от числа Re = 5-1044-107);
8Д=5,8 У 8Т=0,37 (т/ЯрУ/М'5,
или в другом виде
&л==5,8—f=-; Ь.=0,37 ——.
При исследовании сверхзвукового потока в толщину погранич-
ного слоя, полученную по приведенным выше формулам, необходи-
мо ввести поправку — коэффициент ф, который учитывает сжи-
маемость воздуха, т. е.
= ^несж^ б •
Здесь и далее индекс «л» относится к ламинарному погранич-
ному слою, а «т» — к турбулентному; индекс «несж» — к несжи-
маемой среде (воздух), а индекс «сж» — к сжимаемой.
Коэффициент Цб определяется по графику на рис. 5.2 в зави-
симости от структуры пограничного слоя.
3*
67
www.vokb-la.spb.ru - Самолёт своими руками?!
Для непосредственного подсчета толщины пограничного слоя в
сжимаемом газе можно воспользоваться формулами:
Ел—5,8 1-J-—М2) —для ламинарного слоя;
8т=0,37 ——— (1 ——- М2 J — для турбулентного слоя.
1 Rex ' 15 '
Рис. 5.2. Изменение попра-
вочного коэффициента т]5=
*==бсж/бнесж В ЗаВИСИМОСТИ
от числа М:
/—ламинарный пограничный
слой; 2—турбулентный погра-
ничный слой
Кривая распределения скоростей по нормали к поверхности
крыла, называемая профилем скоростей, строится по результатам
опыта в координатах и/и0 (абсцисса),
/ (ордината), где и — скорость в пог-
раничном слое при заданном значении
У и х в м/с; у — расстояние от поверх-
ности крыла по нормали до той точ-
ки в пограничном слое, в которой
измеряется скорость, в мм; uq — ско-
рость внешнего потока при данном
значении х в м/с.
И теория и опыт показывают, что
статическое давление в произвольном
поперечном сечении можно считать
постоянным по всей толщине погра-
ничного слоя 6, т. е. градиент давле-
ния по нормали к поверхности
dpldy—G, Таким образом, статическое
давление на поверхности крыла и на
границе пограничного слоя будет од-
но и то же.
Примерные графики для профиля скоростей в ламинарном и
турбулентном слое, полученные из опыта, приведены на рис. 5.3.
Толщина пограничного слоя 6 измеряется в миллиметрах в за-
висимости от расстояния х сечения профиля от передней кромки
крыла. Это дает возможность практически определить границы об-
ласти перехода пограничного слоя из ламинарного состояния в тур-
булентное. Действительно, если после измерения толщины слоя б
в нескольких сечениях профиля построить кривую б=/(х) в коор-
динатах х (абсцисса), б (ордината), то плавный характер кривой
должен в области перехода нарушиться, так как толщина б в этой
области резко возрастает. Кроме того, точку перехода Т и точку от-
рыва S легко определить по эпюрам распределения скоростей в
исследуемых сечениях пограничного слоя.
Специальное препарирование модели позволяет достаточно удоб-
но выполнить измерения и, у, х. На поверхности модели сделаны
два ряда отверстий (рис. 5.4): один ряд по линии а—а, перпенди-
кулярной размаху крыла, другой — по линии b—Ъ, образующей с
первой угол 30°. Такое расположение отверстий исключает взаим-
ное влияние приемников давления при измерении полных напоров
одновременно в нескольких точках.
68
Каждое отверстие в ряде b—b расположено на одинаковом рас-
стоянии х от передней кромки крыла с соответствующим отверсти-
ем в ряде а—а. От каждого из отверстий идет заложенная внутри
модели дренажная трубка, при помощи которой можно давление
от любой точки передать к микроманометру. Соединение трубочек,
расположенных внутри модели, с микроманометрами осуществля-
ется резиновыми трубками, присоединяемыми одним концом к вы-
ходным ниппелям трубок дренажа, а другим — к ниппелям мик-
Рис. 5.3. График испытаний при определении скоростей
в пограничном слое крыла:
а—профиль скоростей в ламинарном пограничном слое; б—про-
филь скоростей в турбулентном пограничном слое
романометра. Отверстия ряда b—b предназначены для того, чтобы
в них вставлять насадки для измерения полного давления потока
в пограничном слое при разных значениях у, отверстия ряда а—а
для измерения только статического давления при тех же значени-
ях х. В данном случае используется основной закон аэродинамики
пограничного слоя — закон постоянства статического давления по
всей толщине слоя б и равенства его значению давления на гра-
нице слоя.
В отверстия ряда b—b можно вставлять микронасадок полного
напора *, укрепленный в механизме специального микрокоординат-
ника (рис. 5.5), причем последний устанавливается на стрингеры
внутри модели крыла. Микронасадок в сечении имеет овальную
форму и толщина его равна 0,4—0,5 мм.
Насадок 2 полного напора (рис. 5.6) зажимается в ползунке 1
микрокоординатника и передвигается с помощью ходового винта 3.
Винт 3 получает вращательное движение от червячного редуктора
4, червяк которого соединен с рукояткой, находящейся вне аэро-
динамической трубы.
Величина подъема или опускания микронасадка 2 измеряется
путем определения количества оборотов червяка редуктора, так как
величина поступательного перемещения ползунка, несущего наса-
док, будет зависеть от передаточного числа редуктора и шага ходо-
* Без отверстия, воспринимающего статическое давление.
69
Рис. 5.4. Схема препарирования
модели:
/—отверстия приемника статического
давления; 2—козырек; 3—микронаса-
док; 4—отверстия для установки на-
садка полного давления
Рис. 5.5. Схема установки для исследования скоростей в
пограничном слое крыла:
/—ползунок; 2—насадок; 3—ходовой винт; 4—червячный редуктор
70
Рис. 5.6. Кинематическая
схема микрокоординатника:
/—ползунок; 2—микронасадок;
3—ходовой винт; 4—червячный
редуктор
вого винта 3. Передаточное число редуктора 1= \ : 20, а шаг ходо-
вого винта /=0,45 мм.
Если используется только один микрокоординатник, то при из-
менении расстояния х в пограничном слое от передней кромки кры-
ла микрокоординатник перестанавливается на другрй стрингер в
препараторской мастерской так, чтобы микронасадок оказался в
отверстии ряда на заданном расстоянии
х и чтобы дальнейшее перемещение на-
садка, изменяющее расстояние у, проис-
ходило по нормали к поверхности кры-
ла. Толщина профиля крыла часто бы-
вает меньше габаритов микрокоординат-
ника, в этих случаях микрокоординатник
следует укреплять на поверхности кры-
ла с противоположной насадку стороны.
Величина у определяется по формуле
y=095dQ + (п — п0) //=O,5do + (п — nQ) h,
где t—шаг ходового винта в мм; i —
передаточное число редуктора; d0 —
толщина микронасадка в мм; h=it —
ход микронасадка за один оборот червя-
ка редуктора (рукоятки привода) в мм;
п — количество оборотов червяка (руко-
ятки привода); по — количество оборо-
тов червяка до момента отрыва микро-
насадка от поверхности модели.
Соединяя отверстие микронасадка с
резервуаром микроманометра, а отвер-
стие статического давления в ряду а—а,
находящееся на том же расстоянии х от
с наклонной измерительной трубкой микроманометра, измеряют
скоростной напор в данной точке и определяют скорость и.
Скорость на границе пограничного слоя при данном значе-
нии х определяется при помощи тех же приборов и будет, очевид-
но, соответствовать той величине скорости, по достижении которой
при увеличении значения у прекратится изменение показаний мик-
романометра, соединенного с микронасадком.
передней кромки крыла,
Высота у, соответствующая величине Us=O,99wo (^о — скорость
внешнего потока), и будет толщиной пограничного слоя б.
Если нужно определить скорость в пограничном слое на опреде-
ленном расстоянии от поверхности крыла или же только положе-
ние точки перехода пограничного слоя из ламинарного в турбу-
лентное состояние и расположение точки отрыва пограничного слоя,
то можно применить более простой экспериментальный прием.
Сущность этого приема заключается в том, что над отверстием в
ряду Ь Ь делается козырек из эмалита (рис. 5.7). Для того чтобы
71
изготовить этот козырек, на поверхность крыла кладется тонень-
кая проволочка диаметром в 0,05—0,10 мм по направлению набега-
Рис. 5.7. Изготовление эмалитовых
козырьков на поверхности модели
крыла:
1—дренажное отверстие; 2—проволоч-
ка; 3—капля эмалита; 4—козырек
ния потока; затем на эту проволоч-
ку наносится капля эмалита. После
застывания эмалита проволочку
выдергивают и аккуратно обреза-
ют часть капли так, чтобы при этом
образовался козырек с отверстием,
обращенным в сторону набегания
потока.
Если нужно найти скорости в
пограничном слое не непосредствен-
но у поверхности крыла, а на неко-
тором расстоянии от нее, то при об-
разовании козырька под проволоч-
ку подкладывают калиброванную
пластинку.
Постоянный насадок данной аэродинамической трубы и его
микроманометр служат в этой работе только для определения сред-
ней скорости опыта.
Аппаратура
1. Препарированная модель прямоугольного крыла с козырьками.
2. Микронасадок.
3. Микрокоординатник с приводом.
4. Два микроманометра.
Рабочие формулы
г;=]/(а —а0) const; const=]Z2 sin <ру/С/с;
и==и/и0==У'(а — а0)/(а — а0)0; Rex=Vz/v;
V ^ср.оп 2 (а, ^о)к ТкТЛк^/Q,
^=О,5^о-|-(п —п0)Л,
где индекс «к» означает «контрольный прибор».
Порядок проведения работы
1. Ознакомиться со схемой установки и приборами.
2. Установить крыло под углом атаки а=0°.
3. Установить микронасадок в крайнее нижнее положение и сделать нулевой
отсчет по счетчику.
4. Произвести измерение полного напора на микроманометре микронасадка
5. Переставить микронасадок, подняв его на заданное значение у мм, и про-
извести новое измерение полного напора
6. Повторять измерение полного напора потока в пограничном слое до тех
пор, пока напор не перестанет изменяться, все время передвигая микронасадок
па заданные расстояния по нормали.
7. Построить эпюру u—f(y) и найти толщину пограничного слоя б.
72
Контрольные вопросы
1. По каким законам происходит нарастание толщины пограничного слоя
для ламинарного и турбулентного слоев вдоль плоской пластинки?
2. Что можно сказать о статическом давлении в пограничном слое по нор-
мали к поверхности тела?
3 Как влияет сжимаемость воздуха на толщину пограничного слоя?
4. По каким законам происходит изменение скорости в ламинарном и турбу-
лентном слоях?
5. Отчего зависит положение точки перехода ламинарного слоя в турбулент-
ный?
6 Влияет ли форма профиля крыла на положение точки перехода Г?
РАБОТА № 6
ИССЛЕДОВАНИЕ РАСПРЕДЕЛЕНИЯ ДАВЛЕНИЯ
ПО ПОВЕРХНОСТИ ОБТЕКАЕМОГО ТЕЛА
В ПОТОКЕ ДОЗВУКОВОЙ СКОРОСТИ
Цель работы — получение результатов распределения давле-
ния, построенных для крыла в координатной форме (т. е. при про-
ектировании элементов поверхности крыла на плоскость хОх), опре-
деление коэффициента подъемной силы крыла и критического чис-
ла Маха Мкр при заданных углах атаки.
В результате шроведения работы должны быть получены эпюры
распределения давления при нескольких характерных углах атаки
в одном или нескольких сечениях крыла. Рекомендуются следую-
щие углы:
а) угол атаки, соответствующий нулевой подъемной силе;
б) угол атаки, соответствующий режиму полета с' максималь-
ным качеством;
в) критический угол атаки.
Общие сведения
Исследование распределения давления по поверхности тел яв-
ляется одной из наиболее часто встречающихся задач в практике
аэродинамических лабораторий. Это исследование позволяет уточ-
нить условия обтекания тела, дает исходные данные для расчета
на прочность, а также ряд других необходимых материалов.
Исследование распределения давления ведут при помощи спе-
циально препарированных моделей, описание которых дается ниже.
На основании отсчетов по батарейному манометру и микрома-
нометру вычисляется безразмерная величина
Р = Ризб/9 = ( Дгоч — P„)/0,5qV2,
называемая коэффициентом давления, а затем строятся графики
распределения давления.
Здесь индекс «изб» соответствует избыточному давлению в рас-
сматриваемой точке («точ»), а индекс «ст» — статическому.
73
Полученные картины распределения давления на поверхности
крыла позволяют определить аэродинамические силы и их коэф-
фициенты.
Рассмотрим эпюру распределения давления по профилю крыла
(принимая dz=\), построенную в векторной форме (рис. 6.1). Вы-
делим элементарную часть профиля, шириной по хорде, равной dx.
Элементарная сила dNB действует на отрезок верхней поверхности
профиля dSB под некоторым углом фв к хорде. Соответственно на
Рис. 6.1. Эпюра распределения давления
нижней поверхности выделенного элемента профиля действует сила
dN^. Здесь и далее индекс «в» обозначает «верхняя поверхность»,
а индекс «н» — «нижняя поверхность».
Для любой силы, например dNB, действующей по нормали к
элементарной поверхности крыла, можно записать равенство
d^3 Р w&dS ^dz •
Избыточное давление представим в виде
/?изб (/\оч ZVt)b»
тогда dNB=(рточ - РсТ)в ,
или dNn=^qdSB.
Силу dNB можно разложить на две составляющие: элементар-
ную нормальную силу dYB и элементарную продольную силу dXB.
Пользуясь формулами перехода от связанных осей координат к
скоростным и полагая, что р = 0, можно принять равенство СуажСу..
Имеем
tZKB=rfjVBcos<pB, или ^KB=pB^zSBcos<pB,
где dSR cos <?в=dx.
Тогда dY„—p^qdx.
Для выделенного элемента профиля подъемная сила
dY=dY B-dYB.
Заменяя dY коэффициентом давления р, получим
dY—p^dx^ — pBqdx,
или dY=(pK —pn)qdx.
Заменяя рн—Рв=р, получим
dY=pqdx.
Полная подъемная сила для профиля
ь
Коэффициент подъемной силы
ь
Суа=-^ = -^-, или Суа= — jpqdx.
В безразмерной форме, когда Xi=xjb, будем иметь
1 _
J pdx.
о
Пользуясь полученным графиком распределения давления (рис.
6.2, 6.3 и 6.4), произведем графическое интегрирование. Последнее
уравнение будет иметь вид
Cya=Flmn,
где F — площадь в см2, ограниченная кривой; т — масштаб еди-
ницы р\ п — масштаб единицы х.
Продольная сила X определяется аналогично нормальной силе
Y, только нужно помнить, что сила X будет определена без учета
сил трения, т. е. будет определена только проекция силы давления
на ось Ох.
Так как на крыле, где-то у передней кромки, при любом угле
атаки имеется критическая точка, соответствующая полному тор-
можению потока рТоч=Рпол, в которой скорость равна нулю, а из-
быточное давление должно быть наибольшим и равным для условий
несжимаемости среды скоростному напору, то на диаграмме рас-
пределения давления должна быть точка, где /7= + 1. Обычно эту
точку опытным путем найти не удается, но можно определить,
между какими точками она находится. Поэтому диаграмму для
каждого сечения крыла необходимо вычертить так, чтобы кривая
касалась горизонтальной прямой в точке с отсчетом /э = + 1.
Для скоростей потока, при которых проявляется сжимаемость
воздуха, величина р в критической точке оказывается больше еди-
ницы, т. е. р> 1.
Это объясняется тем, что давление в критической точке будет
Риол Рточ Pct И- Q (1 И- •
75
Рис. 6.3 График распределения давления по симметричному профилю
крыла при к=4° (условные обозначения см. на рис. 6.2)
76
Подставляя значение рТОч в формулу коэффициента давления
получим ^=1 + ер; здесь ер является поправкой на
Ч
сжимаемость воздуха (см. рис. 0.4).
Для случая, когда /7 = 0, т. е. рТоч=Рст, местная скорость равна
скорости
л
набегающего невозмущенного потока или VTo4 = V. Мак-
симальная местная скорость VTO4==Vmax будет соответ-
ствовать минимальному местному давлению, т. е.
Рточ = Рп11п.
При определении критического числа Мкр необходи-
по графику распределения давления для данного уг-
атаки а найти значение /Ъптпесж, как это показано
рис. 6.2 и 6.3, а затем по графику зависимости
е-
МО
ла
на
МКр = / (pniln несж ) (рис. 6.5) получить ЧИСЛО МКр.
Работу рекомендуется начинать с подробного озна-
комления с препарированием модели для опыта.
Модели крыльев, предназначенные для исследова-
ния распределения давления, изготавливаются из дере-
ва или металла (стали). На верхней и нижней поверх-
ностях модели делаются канавки, в которые заклады-
ваются медные или латунные трубки. Концы трубок,
которые находятся в модели, должны быть глухими, за-
паянными. Вторые
концы
з
Ь=0,75м
трубок выводятся через ка-
Рис. 6.5. График зависимости
MKp=f (pmin пес ж)
Рис. 6.4. График распределения давления
по симметричному профилю крыла при
==14° (условные обозначения см. на рис.
6.2)
навки наружу или в торец крыла (если оно имеет прямоугольную
форму в плане), или через центральное сечение крыла (если оно
отклоняется от прямоугольной формы). Канавки, в которые зало-
жены трубки, обрабатываются шпаклевкой; если модель металли-
ческая, канавки запаиваются, а затем поверхность крыла тща-
тельно обрабатывается по шаблону.
77
В выбранном сечении, перпендикулярном продольной оси крыла,
в заложенных трубках нормально к поверхности сверлят отвер-
стия очень малого диаметра порядка 0,3—0,5 мм. После проверки
герметичности дренажных отверстий поверхность деревянной моде-
ли полируется, а металлической — шлифуется и контролируется по
Рис. 6.6. Батарейный манометр и схема присоединения его к модели и
приемнику статического давления
шаблону. Положение центра каждого отверстия относительно пе-
редней кромки хорды профиля должно быть зафиксировано и точ-
но отмечено на шаблоне данного сечения. Отверстия дренирован-
ного крыла нумеруются.
На свободные концы медных трубок, выведенные наружу, на-
девают тонкие резиновые шланги, с помощью которых можно пере-
дать на манометр то давление, которое наблюдается на поверхно-
сти крыта в точке, соответствующей центру отверстия. Поскольку
ось малого отверстия, просверленного в медной трубке, нормальна
к поверхности крыла, на манометр передается лишь нормальная
составляющая напряжения — «гидродинамическое давление»*.
* Приведенного описания модели, разумеется, недостаточно, и учащимся
необходимо ознакомиться с дренированием моделей при посещении препара гор-
ской мастерской.
78
Для измерения давления служит прибор, называемый батарей-
ным манометром (рис. 6.6). Прибор приспособлен для измерения
давления одновременно в большом количестве точек поверхности
модели. Батарейный манометр состоит из бачка большого объема
и ряда вертикальных калиброванных трубок. Бачок^ расположен на
такой высоте, чтобы общий уровень жидкости (спирта или воды)
был достаточно высок; это позволит производить отсчет при пони-
жении уровня жидкости в тех трубках, внутри которых будет при
опыте действовать повышенное давление. Вертикальные трубки
имеют общую шкалу; отметка «О» этой шкалы поставлена на сере-
дине вертикального размера шкалы. Сверху к бачку подведена
трубка А. Соединяя какую-либо из вертикальных трубок с точкой
на крыле, где необходимо определить давление рТОч, а трубку А —
с измерителем статического давления потока рСт (см. работу № 2),
по батарейному манометру измерим разность давления
РпзЬ Рюч Рсч (^0 ^точ) Y*
Если давление рТоч>Рст» то спирт в стеклянной трубке опустит-
ся ниже нуля шкалы, если же рТоч<Рст, то спирт поднимется; по-
этому положительные отсчеты по батарейному манометру нужно
отсчитывать вниз, а отрицательные — вверх от нуля.
Во время опыта при большом количестве включенных трубок
спирт в каждой из них поднимется или опустится до какого-то
уровня (своего для каждой трубки) и уровень жидкости в бачке
изменится.
Рассчитать изменение уровня в бачке путем сравнения объемов
вошедшей в бачок и вышедшей из бачка жидкости в данном случае
не представляется возможным вследствие большого числа верти-
кальных трубок. Коэффициент К для батарейного манометра не
может быть определен градуировкой, поэтому его величину можно
принять равной единице*. Происходящая от этого допущения по-
грешность уменьшается тем, что уровень жидкости в бачке изме-
ряется во время опыта с помощью маленьких стеклянных трубочек,
выведенных на общую доску по обеим сторонам от основных трубок.
Эти маленькие трубочки обоими своими концами соединены с бач-
ком, и спирт в них всегда находится на том же уровне, что и в
бачке.
Перед испытанием крыло монтируют на аэродинамических ве-
сах или каком-либо ином приборе, позволяющем изменять углы
атаки. Если опыт проводится в трубе с открытой рабочей частью
(со свободным потоком), то статическое давление рСт с достаточ-
ной точностью можно приравнять к атмосферному, и конец трубки
А батарейного манометра можно открыть прямо в атмосферу.
В этом случае скорость потока удобнее измерять по методу пере-
пада давлений.
* Градуировку батарейного манометра для особо точных исследований мож-
но провести «первичным» методом (см. работу № 1).
79
В трубе с закрытой рабочей частью установку монтируют со-
гласно схеме рис. 6.7. Давление рСт подводится к бачку от соответ-
ствующего отверстия постоянного насадка аэродинамической трубы
через тройник, так как это же давление нужно передать в стеклян-
ную измерительную трубку микроманометра, служащего для изме-
рения скоростного напора.
Рис. 6.7. Схема установки для определения распределе-
ния давления по поверхности крыла:
1—модель; 2—батарейный манометр; 3— приемник воздушного
давления; 4—микроманометр
Испытание желательно проводить по методу мгновенных отсче-
тов. Лучше всего для отсчетов показаний батарейного манометра
и микроманометра, фиксирующего скоростной напор, применять
фотозапись.
Для построения графика испытания нужно вычертить на милли-
метровке по шаблону профиль крыла с точками, в которых изме-
рялось давление. Подобные графики вычерчиваются для всех дре-
нированных сечений.
Графики испытаний имеют вид, изображенный на рис. 6.2, 6.3
и 6.4. По оси абсцисс отложена хорда крыла в данном сечении
(в масштабе модели с разметкой точек, где измерялось давление), а
по оси ординат — коэффициент давления, причем вверх отклады-
ваются его отрицательные значения, а вниз — положительные.
Полученные точки соединяют плавной кривой: точки, лежащие на
верхней поверхности крыла сплошной линией, а на нижней — пунк-
тиром.
В качестве примера определения коэффициента Суа профиля
крыла при угле атаки а=14° используем график, приведенный на
80
рис. 6.4. С помощью планиметра определим площадь F, заключен-
ную между кривыми рн и рв (заштрихованная площадь). В найюм
случае F=6,8 см2.
Согласно графику масштаб единицы р будет т=1,2 см. При-
нимая я = 1 за 100%, масштаб единицы х\ соответственно графику
будет п = 4,5 см. Таким образом, коэффициент
Суа=F/mn=6,8/1,2 • 4,5 = 6,8/5,4 = 1,25.
Аппаратура и материалы
1. Контрольный насадок аэродинамической трубы.
2. Микроманометр контрольного насадка аэродинамической трубы.
3. Дренированная модель крыла.
4. Шаблон крыла с отметкой расположения отверстий на поверхности мо-
дели по контуру профиля.
5. Батарейный манометр * **.
6. Прибор для установки модели под заданными углами атаки.
7. Шланги для соединения трубочек модели крыла с батарейным мано-
метром.
Для крепления исследуемого объекта в аэродинамической трубе могут слу-
жить или аэродинамические весы с угломером, или центровой прибор, описание
которых' дается в работах № 11 и 15.
Рабочие формулы
**
-= Ризб —Esl.- Др=/7изб=рточ —ат=(й0—Лточ)у;
<7 Я
q={д,—«о)к sin v = l/" Y — «0)к sin
p=fero'! const; Cua=— ; const=--------------------.
(fl — a0)K w mn sin ^ук/<к5к(л
Здесь индекс «к» означает «контрольный прибор».
Порядок проведения работы
1. Ознакомиться с батарейным манометром и составить схему присоединения
трубочек модели к батарейному манометру.
2. Установить модель в аэродинамической трубе под заданным углом атаки.
3. Произвести эксперимент. __
4. Обработать полученные результаты опыта и построить график p^f(x).
* В случае проведения опыта в аэродинамической трубе со свободным пото-
ком в камере или в трубе с закрытой рабочей частью необходим тройник для
обеспечения передачи статического давления к бачку батарейного манометра
и стеклянной трубке микроманометра контрольного насадка.
** Для уточнения коэффициента р в величину статического давления рСт
необходимо ввести поправку на градиент давления dpjdx в потоке трубы. Тогда
Рст=Рк+ (dpldx)x, где х — расстояние от места установки приемника давления
до исследуемой модели.
81
Контрольные вопросы
1. Что такое коэффициент давления р? __ __
2. Каково значение местной скорости, если р=1, р=0 и p=pmm?
3. Как влияет форма профиля и угол атаки на картину распределения дав-
ления?
4. Как повлияет сжимаемость воздуха на коэффициент давления в крити-
ческой точке (V=0).
5. Что такое критическое число МНр и как его определить по эпюре дав-
ления?
РАБОТА № 7
ОПРЕДЕЛЕНИЕ КОЭФФИЦИЕНТА ДАВЛЕНИЯ
НА ТОНКОМ ПРОФИЛЕ КРЫЛА
В СВЕРХЗВУКОВОМ ПОТОКЕ
Цель работы — построить эпюры распределения коэффициента
давления р на тонком профиле в сверхзвуковом потоке при различ-
ных углах атаки, числах М и Re.
В результате проведения эксперимента должны быть получены
эпюры распределения давления при нескольких углах атаки в виде
графиков p=f (x, а, М, Re).
Угол атаки а рекомендуется изменять в пределах от 0° до 8°.
Общие сведения
Эпюры давления позволяют исследовать распределение нагру-
зок от сил давления по хорде профиля, подсчитать момент тангажа,
определить коэффициент подъемной силы профиля и др.
Рис. 7.1. Эпюра давления:
а—чечевицеобразный профиль; б—шестигранный профиль
Вид эпюры давления при заданной скорости потока V зависит
главным образом, от формы профиля и угла атаки. На рис. 7.1
показаны в векторной форме примерные эпюры давления при об-
текании сверхзвуковым потоком чечевицеобразного и шестигран-
ного профилей при нулевом угле атаки. В отличие от дозвукового
потока в сверхзвуковом на участках течения сжатия, где происхо-
дит поворот потока в сторону уменьшения развернутого угла (рав-
ного 180°), скорость уменьшается, а давление повышается. На уча-
стках течения расширения, т. е. когда отклонение потока увеличи-
82
вает развернутый угол, скорость возрастает, а давление падает.
Эпюры давления в координатной форме для шестигранного про-
филя при угле атаки а = 0° и а>0° даны на рис. 7.2.
Как известно, при переходе от связанной системы координат к
хкоростной в диапазоне малых углов атаки при угле скольжения
а=О
Верхняя и нижняя
-Р
Рис. 7.2. График распределения давления по хорде
крыла:
а—при угле атаки а=0°; б—при угле атаки <х>0°, причем
а<0, 6В=0Н; — X—верхняя поверхность; —о — нижняя
поверхность
/
£=0 можно принять Cv та Суа; тогда коэффициент подъемной силы
крыла (принимаем длину крыла равной единице, т. е. dz=l)
' = а а
уа~~ qS qb\
(7.1)
Выразим подъемную силу профиля через коэффициент давления
Г=Ризб/^= (Рюч—Pct)!q. равную в линейном приближении
ь _ b _
уа=<1 f Рв cos 0Hr/SH — q [ рв cos 0BdSB;
о о
ь _ ь_
Уа=Ч f (Рн—Рв) dx=q f pdx,
(7.2)
так как для симметричного профиля
cos 0Brf5H=cos bBdSB—dx,
где рв и рв — коэффициенты избыточного давления, приложенного
к площадкам шириной dSB и dSB, выделенным из нижнего и верх-
него (соответственно) контуров профиля и лежащим на одной ор-
динате у (рис. 7.3); 0Н, 0в — местные углы, образованные хордой и
касательными к точкам на нижней и верхней поверхностях профиля
(соответственно), как это показано на рис. 7.3.
83
Полученное выражение подъемной силы (7.2) подставим в урав-
нение (7.1), тогда формула для определения коэффициента подъ-
емной силы будет иметь вид
ь
сиа=-\- \ ~pqdK
qt J
1
b
1 г
b J
о
о
где х—х/Ь.
Пользуясь методом графического интегрирования, получим ко-
эффициент подъемной силы профиля крыла
Cya=Flmn,
где F — площадь диаграммы распределения коэффициента давле-
ния по контуру профиля в см2; т — масштаб единицы р; п — мас-
V
Рис. 7.3. Схема профиля крыла
штаб единицы хь
Полученные опытным путем ко-
эффициенты давления, а также ко-
эффициент подъемной силы можно
сравнить с коэффициентами рп, Рв,
су, подсчитанными по формулам
линейной теории обтекания тонкого
профиля.
Теоретически коэффициент дав-
ления для некоторой точки, лежа-
щей на нижней поверхности,
А=2(0н+а)//М^ГГ,
а для верхней поверхности
Л>==-2(0в+а)//М2-1. '
Коэффициент давления р, действующего на выделенный элемент
профиля, нормально к хорде в поперечном сечении будет
р=Рв -Лв=2[2а+(0Н+ев)]/]/м2 -1.
Для симметричного профиля [известно, что 2Дх = 1 и сумма
местных углов S(0a+0B) =0] коэффициент подъемной силы
С^=4а//ЖП,
где а — угол атаки.
Сравнивая эпюры распределения давления, полученные опыт-
ным путем при сс=О, с эпюрой, построенной по теоретическим рас-
четам (см. рис. 7.2, а), мы обнаружим некоторое несовпадение
значений коэффициентов давления. Это расхождение обуславлива-
ется влиянием вязкости воздуха. В результате образования погра-
ничного слоя, толщина которого по длине профиля непрерывно
увеличивается, местные углы вытеснения 8 внешнего потока всегда
несколько отличны от местных (соответственно) углов профиля 6.
84
На конфузорной части профиля углы вытеснения 8 будут больше
углов 6, а это значит, что давление на данном участке профиля
увеличится. Углы 8 на диффузорном отрезке профиля меньше углов
0, а давление становится больше теоретического, так как поток де-
лает поворот на меньший угол.
Приведенные выше эпюры давления (см. рис. 7.1 и 7.2) получе-
ны для крыльев со сверхзвуковой передней кромкой, т. е. когда
дренажные отверстия, сделанные на профиле крыла, лежат в плос-
кости хОу, а передняя кромка крыла совпадает с осью z, В этом
Рис. 7.4. Эпюры давления по профилю при V>a:
а—сверхзвуковая передняя кромка Vn «= V cos %°>а, коэффициент
подсасывающей силы CF~0; б—дозвуковая передняя кромка Vn =
=V cos %°<а, коэффициент подсасывающей силы СF>0
случае опыт проводится с крылом прямоугольной формы (в пла-
не), установленным под углом атаки а^О; угол скольжения [3=0.
Эпюра давления, изображенная на рис. 7.4, а, показывает, что
здесь имеет место сверхзвуковое обтекание профиля. Если, не из-
меняя скорости потока (М = const), повернуть крыло относительно
оси у на некоторый угол скольжения, то между осью z и передней
кромкой крыла образуется угол, который у стреловидного крыла
называется углом стреловидности %. Для того чтобы передняя кром-
ка была дозвуковой, необходимо удовлетворить условие, по кото-
рому нормальная составляющая скорости набегающего потока к
передней кромке крыла была бы меньше скорости звука, т. е. Vn =
= Vcos%<a или Mn=Mcos%<l. Плоскость расположения дре-
нажных отверстий совпадает с этой проекцией скорости.
При дозвуковой передней кромке эпюра давления (рис. 7.4, б)
соответствует дозвуковому обтеканию. При сверхзвуковой перед-
ней кромке (см. рис. 7.4, а) результирующая от проекций элемен-
тарных сил давления на ось х будет настолько мала, что ее можно
не учитывать. Когда же передняя кромка дозвуковая, то результи-
рующая проекций сил давления на ось х может иметь значитель-
ную величину и направлена против потока, вследствие чего она
уменьшает сопротивление крыла. Эту результирующую силу назьь
вают «подсасывающей», а ее коэффициент обозначают через
Коэффициент CF имеет отрицательный знак.
Коэффициент лобового сопротивления крыла в сверхзвуковом
потоке
С ха — Схр + Схв — Ср-
85
Коэффициент профильного сопротивления Схр включает в себя
сопротивление трения (Схтр) и сопротивление давления (Схдав),
называемое иногда вихревым сопротивлением. В свою очередь, ко-
эффициент волнового сопротивления Схв включает в себя индук-
тивно-волновое (Схгв) и профильно-волновое (Схрв) сопротив-
ления.
Исследование распределения давления по контуру профиля про-
изводится в сверхзвуковой аэродинамической трубе. Подробное
описание трубы кратковременного действия дается в работе № 4.
Рис. 7.5. Схема установки модели крыла в рабочей части
аэродинамической трубы:
/—форкамера; 2—спрямляющая решетка; 3—сопло Лаваля; 4—ра-
бочая часть: 5—модель крыла; 6—диффузор; 7—ГРМ; 8—приемник
полного давления; 9—манометр пружинный; 10—датчик температу-
ры; //—указатель температуры; /2—приемник статического давления
Схема установки модели крыла в рабочей части трубы и уста-
новки контрольно-измерительных приборов приведена на рис. 7.5.
Описание препарирования модели дается в работе № 6. Давле-
ние торможения потока или полное давление в форкамере рПолн=Ро
определяется с помощью приемника (трубки) полного напора 8 и
пружинного манометра 9 по формуле
/?полн==Ро==::/?а “Ь Ризб»
где ра — атмосферное давление; рИзб=71 ///300 — избыточное дав-
ление, определяемое по манометру 9 в мм рт. ст.
Для того чтобы определить температуру торможения (принятую
за температуру 7Ф воздуха в форкамере), в форкамере помещен
датчик температуры 10 в виде сопротивления из манганиновой про-
волоки, включенного в мостовую схему. Изменение температуры
воздуха приводит к изменению сопротивления датчика и к разба-
€6
лансу моста. Разбаланс моста регистрируется указателем темпера-
туры //. Шкалу указателя можно проградуировать в градусах
абсолютной температуры.
Статическое давление потока в рабочей части рСт и давление
в выбранных точках на профиле рТОч подсчитываются по форму-
лам
Рст == Ра Ризб.ст» Рточ== Ра ' Ризб.точ»
где
А1зб.ст — — ^о)ст^ст’ Лзб.точ — ^о)точ^точ’
Здесь N и No — показания ГРМ во время опыта и до опыта
(соответственно) в делениях шкалы (числах оборотов); Кст и
/Сточ — коэффициенты группового ре-
гистрирующего манометра (ГРМ) —
числа, соответствующие измеряемым
давлениям в мм рт. ст., приходящим-
ся на одно деление шкалы (цена де-
ления).
L1H1J ц ш ш
==-_0
1 72 Г Uf Т Тб
Величины ризб.ст и Ризб.точ автома-
тически фиксируются на ленте или ви-
зуально снимаются со шкалы ГРМ 7.
Рис. 7.6. Образец записи на
ленте ГРМ
На рис. 7.6 показан образец запи-
си избыточного давления рИзб на ленте ГРМ. Отпечатанные на
ленте значения соответствуют числу (количеству делений шкалы)
W= 131,65.
Как отмечалось выше, статическое давление можно измерить
при помощи приемника давления или воспринять через отверстие
на стенке рабочей части трубы (см. рис. 0.14). Полное давление не-
возмущенного потока определяется посредством приемника (труб-
ки) , помещенного в форкамере.
Схема ГРМ показана на рис. 7.7.
Статическое давление или давление, возникающее в какой-либо*
точке на поверхности крыла, посредством соединительной дренаж-
ной трубки 1 передается к сильфону 2. Рычаг 3, к которому при-
соединен сильфон, отклоняется и замыкает верхний 4 (при пони-
жении давления в сильфоне) или нижний 5 (при повышении дав-
ления) контакт. Соответственно включается верхний 23 или
нижний 18 электромагнит, который в свою очередь, вводит
фрикционное колесо 19 в зацепление с постоянно вращающимся
фрикционным колесом 20 или 21.
Вращаясь, фрикционное колесо 19 начинает вращать вал 17.
Через редуктор 16 вращение вала 17 передается к ходовым винтам
8 и 13. Винт 13, вращаясь, передвинет указатель 15, и таким обра-
зом по шкале 14 визуально можно установить изменение давления
в сильфоне. На винте 8 жестко укреплен барабан 12, на цилиндри-
ческой поверхности которого рельефно выгравированы деления и
цифры, которые соответствуют шкале 14. В момент равновесия ры-
чага 3 посредством цифропечатающего механизма И на ленте 9
87
фиксируется изменение давления в сильфоне. Равновесие рычага 3
осуществляется при помощи пружины 6. Вращением ходового вин-
та 8 производится перемещение гайки 7; создающее соответствую-
Рис. 7.7. Схема ГРМ:
1—дренажная трубка; 2—сильфон; 3—рычаг; 4—верхний контакт; 5—ниж-
ний контакт; 6—пружина; 7—гайка; 8, /3—ходовые винты; 9—бумаж-
ная лента; 10, 22—электродвигатели; 11—цифропечатающий механизм; 12—
барабан; 14—шкала; 15—указатель (стрелка); /6—редуктор; 17—вал; 18—
нижний электромагнит; 19, 20, 21—фрикционные колеса; 23—верхний
электромагнит; 24— пружины
щее натяжение пружины 6. Пружины 24 выводят из зацепления
фрикционное колесо 19.
Постоянное вращение фрикционных колес 20 и 21 обеспечивает-
ся электродвигателем 22, а движение каретки цифропечатающего
механизма — электродвигателем 10.
Аппаратура и материалы
1. Дренированная модель прямоугольного крыла.
2. Механизм а для установки угла атаки модели крыла.
3. ГРМ для регистрации давления в заданных точках на профиле и стати-
ческого давления потока.
4. Пружинный манометр для измерения полного давления (давления в фор-
камере) .
5. Шаблон крыла с разметкой дренажных точек.
88
6. Резиновые шланги и металлические трубки для соединения манометров
с моделью и полостью трубы.
7. Приемник статического давления.
Рабочие формулы
Р Т^изб/Q (Рточ Per) Q’
ИЛИ P=[(N — NО)ст/Сст — (N — N о)гоч^точ]/9,
если принять, что K104=K<.t—K, a No=O, то
р=[(7VCT - 7VTC4) 00,7 (а - 7VCT/<)M2,
где ргоч=ра—(Л^—М,иЛточ — давление в точке; рст=ра — (N —
— А\))ст^ст— статическое давление в потоке, ра— атмосферное дав-
ление; Кточ, О —коэффициенты ГРМ; р„, „„=р0= Ра +АН/300 —
полное давление или давление торможения в мм рт. ст.; где А —
показание пружинного образцового манометра во время опыта
(количество делений по шкале манометра); /7/300 — цена деления
шкалы манометра в мм рт. ст.; Н — предел измерения давления
по манометру;
q=(J 1/2/2=сМ2а2/2=t М2х АтА=*М2/?ст/2=0,7М2 Ат;
f [Pz-JРполо}у
где
AlO.lH
/?СТ
X — 1
Г
м2
X
х—1
»
число М определяется по таблице (см. приложение 5); Re=pVfe/p
или после преобразования
Re=0,0637 A -U рм,т\ (1-0,167Х2)2>5,
Н /Л)
где b — характерный линейный размер (хорда профиля); р =
= Рс(П273)0’75 — динамический коэффициент вязкости воздуха
(здесь рс= 17,89-10~6 — коэффициент вязкости воздуха при / = 0°С
и рс = 760 мм рт. ст.; Т — температура невозмущенного потока в
рабочей части трубы; определяется по таблицам, если известного);
Х=1//акр = М]Лx-|-l/l/(x—1)М24-2 коэффициент скорости, кото-
рый можно определить по таблицам; Т^=Т^—Т I 1-J—-—М21 —
температура торможения, приравненная к температуре воздуха
в форкамере (скорость в форкамере принимается Уф~О).
Используя газодинамические таблицы, по известным значениям
числа М и температуры торможения 70 можно определить коэффи-
циент скорости X и температуру невозмущенного потока в рабочей
части Т.
89
Порядок проведения работы
1. Ознакомиться со схемой установки и используемыми в эксперименте при-
борами.
2. Установить модель в рабочей части аэродинамической трубы и соединить
трубки, ведущие к отверстиям на поверхности модели с ГРМ.
3. Вычертить схему установки.
4. Закрыть дверь помещения аэродинамической трубы.
5. Проверить давление в баллонах.
6. Произвести эксперимент.
7. Обработать полученные результаты опыта и построить график p=f(x).
_ 8. По теоретическим формулам для данного числа М и угла а подсчитать
р и полученные значения для сравнения нанести на график.
Контрольные вопросы
1. Как распределяются эпюры давления по поверхности крыла в дозвуковом
и сверхзвуковом потоках?
2. Какова форма графика на рис. 7.2, б, если местный угол клина 0>а?
3. Каковы эпюры давления для пластинки при сс>0°, для ромбовидного и
чечевицеобразного профилей в векторной и координатной формах?
4. Объясните принцип действия ГРМ.
РАБОТА № 8
ИССЛЕДОВАНИЕ ДОННОГО ДАВЛЕНИЯ
НАТЕЛАХ ВРАЩЕНИЯ
Цель работы — определение донного давления на телах враще-
ния: 1) при дозвуковых скоростях; 2) при сверхзвуковых скорос-
тях.
Модель тела вращения должна быть геометрически подобна на-
туре (рис. 8.1).
Результаты работы представляются в виде графиков зависи-
мости
Рлон = ./\(^дон)> Pnx)ir==f'2 Рдон==^з(^)
И Рдон=Л (формы, ХФ).
Корпусы или фюзеляжи современных летательных аппаратов,
совершающих полеты как при сверхзвуковых скоростях (V>g),
так и при дозвуковых (V<a), часто имеют форму тела вращения.
Коэффициент лобового сопротивления тела вращения при угле
атаки а = 0° можно представить в виде суммы коэффициента тре-
ния, коэффициента волнового сопротивления и коэффициента дон-
ного сопротивления:
^*х0= СJTTP Отв + С х юн*
Как видно, донное сопротивление является одной из составляю-
щих силы лобового сопротивления тел вращения или тел иной фор-
мы, имеющих донный срез. Величина донного сопротивления зави-
сит от величины донного разрежения, которое, в свою очередь, за-
90
висит от площади донного среза, формы носовой
обработки поверхности, геометрических
удлинения Хф), а также от чисел Re и М.
части, чистоты
тела (т. е. от
размеров
Рис. 8.1. Расположение дренажных отверстий на донном
срезе тела вращения
Зависимость коэффициента донного давления от коэффициента
донного сопротивления выражается формулой
Схдон — ( Рдон) ДОН»
Г ДЕ дон *^дон/*^м •
Здесь 5Дон — площадь донного среза; 5М — площадь миделе-
вого сечения.
Из приведенных формул видно, что уменьшение площади донно-
го среза приводит к уменьшению коэффициента донного сопротив-
ления.
1. ОПРЕДЕЛЕНИЕ ДОННОГО ДАВЛЕНИЯ ТЕЛА ВРАЩЕНИЯ
ПРИ ДОЗВУКОВЫХ СКОРОСТЯХ, Т. Е. ПРИ М<1
Общие сведения
При дозвуковых скоростях донное давление в основном зави-
сит от структуры и толщины пограничного слоя, т. е. от числа
Рейнольдса и состояния пограничного слоя.
Известно, что с увеличением числа Re коэффициент трения плос-
кой пластины Cxf убывает как для ламинарного, так и для турбу-
лентного пограничного слоя (рис. 8.2). Естественно, уменьшение
коэффициента трения приводит к уменьшению толщины погранич-
ного слоя. Сравнение показывает, что турбулентный пограничный
слой при равных условиях имеет большую толщину, чем ламинар-
ный (бт>бд). Поэтому при уменьшении участка ламинарного слоя,
т. е. при xt—>0, пограничный слой в кормовой части тела утол-
щается, донное давление растет и донное сопротивление уменьша-
ется. С ростом удлинения тела вращения Хф толщина пограничного
91
слоя у кормового среза также увеличивается, а донное сопротивле-
ние уменьшается.
Влияние толщины пограничного слоя на степень донного разре-
жения объясняется тем, что за донным срезом тела образуется
застойная зона с пониженным давлением *, которая защищена от
воздействия внешнего потока своеобразной трубкой, образованной
из пограничного слоя, сбегающего с кормовой части тела, как схе-
матично показано на рис. 8.3. Кольцевая струя внешнего потока
обладает эжектирующим свойством, благодаря чему за донным
Рис. 8.2. Коэффициент трения плос’
кой пластинки в зависимости от чис-
ла Re и точки перехода xt
Застойная зона (след)
Пограничный слои
Рис. 8.3. Спектр обтекания тела вра-
щения
срезом происходит сильный отсос воздуха. Опыты также подтвер-
ждают, что чем больше толщина пограничного слоя, тем выше дон-
ное давление (меньше вакуум). Увеличение толщины пограничного
слоя приводит к снижению эжектирующего эффекта внешнего по-
тока. Толщина пограничного слоя б и положение точки перехода Т
в основном — зависят от числа Рейнольдса Re, удлинения корпуса
Лф = Лф/£)ы и шероховатости поверхности. Толщина слоя б будет
тем больше, чем меньше число Re и меньше величина xt (см. рис.
8.2), а также чем больше Хф и больше высота бугорков шерохова-
тости на поверхности.
Следует заметить, что увеличение Хф (более 9) не приводит к
существенному уменьшению донного разрежения. Это объясняется
следующим. Сбегающий пограничный слой становится настолько
толстым и интенсивным, что он захватывает почти всю донную об-
ласть, в результате чего за телом вместо разрежения образуется
повышенное давление. Аналогичное положение создается и при сры-
вах пограничного слоя с поверхности тела вращения. Зона срыва
также распространяется на всю донную часть, вследствие чего дав-
ление повышается. Поэтому, когда тела вращения имеют значи-
тельные удлинения (Хф>10), донное сопротивление становится не-
значительным и его можно не учитывать.
* Здесь и далее рассматривается случай, когда двигатель, установленный
в фюзеляже или гондоле, не работает.
92
В виде иллюстрации к сказанному приведен примерный график
яд0Н=/(М) для тел вращения с конусной формой носовой части,
удлинением Лф=5-?-7 и сужением т)КОрмы=1 (рис. 8.4). Как видно,
в дозвуковой зоне чисел М вначале при увеличении числа М соот-
ветственно и числа Re происходит некоторое нарастание толщины
Рис. 8.4. График изменения
Рдон в зависимости от числа
М:
/—теоретическая кривая (РДОн=
= —1,43 м2 при полном вакууме);
2—опытная (осредненная) кривая
пограничного слоя, что приводит к повышению донного давления.
Затем, когда точка перехода сместится к передней кромке тела
вращения, с ростом числа Re толщина б уменьшается, а донное
разрежение повышается.
После проведения испытания по данным эксперимента сначала
строится график зависимости ^ДОн=/(^дон) (рис. 8.5), по которому
определяется среднее значение j/дон, а затем — график />дон=/(Ке)
(рис. 8.6).
Рис. 8.5. График зависимости рДОн
—f (^дон)
Рис. 8.6. График зависимости
Рдон==/(Re)
Экспериментальные значения коэффициента донного давления
Рдон и числа Рейнольдса Re подсчитываются по экспериментальным
данным для заданных точек по формулам:
/Тдон.точ Р1КЭб!Я------(РтОЧ Pct}!Q* ^ДОН ^2:точ//7дон,
где
Р1ОЧ Рст (^ТОЧ ^ст)^>
а0) sin
^=д1/2/2=(л—а0) sin<py^|i; V
93
Рис. 8.7. Схема установки:
/—модель; 2—подвеска аэродинамических весов;
3—рабочая часть аэродинамической трубы; 4—
резиновые или латунные трубочки; 5—батарей-
ный манометр; 6—контрольный насадок (прием-
ник давления); 7—микроманометр; 8—весовой
элемент аэродинамических весов
£дон — расстояние от центра донного среза до центра дренаж-
ного отверстия (см. рис. 8.1); б/дон — диаметр донного среза.
Осредненное значение коэффициента донного давления ^ДОа
при заданном числе Re определяется по графикам, подобным гра-
фикам на рис. 8.5, по фор-
муле
1.^ДОН
2
J tnn
**дон
2
где F — площадь в см2, ог-
раниченная КРИВОЙ /Эдон=
=/(^доп, Re); т — масштаб
1^дон,’ п — масштаб 1йдон-
Рассмотрим схему уста-
новки (рис. 8.7). Дрениро-
ванная модель 1 тела вра-
щения с помощью подвески
аэродинамических весов 2
удерживается в потоке ра-
бочей части 3 аэродинами-
ческой трубы при а = 0°.
Дренажные отверстия на
донном срезе модели пос-
редством резиновых, латун-
ных или медных трубочек 4
соединяются с батарейным
манометром 5. Статическое
давление контрольного на-
садка 6 подводится к наклонной трубке микроманометра 7 и бата-
рейному манометру (к бачку и к так называемой «нулевой» труб- I
ке). Полное давление от контрольного насадка подается к бачку
микроманометра.
Если на аэродинамических весах одновременно с определением
донного давления измерить полную силу лобового сопротивления
исследуемого тела вращения, то можно определить, какую долк>
полного сопротивления составляет донное сопротивление.
Аппаратура и материалы
1. Дренированная модель тела вращения.
2. Подвеска аэродинамических весов для крепления модели.
3. Батарейный манометр.
4. Контрольный насадок аэродинамической трубы.
5. Микроманометр для контрольного насадка.
6. Резиновые трубки для соединения дренажа модели с батарейным мано-
метром.
94
Рабочие формулы
Рдон =х Ризб1 Q [Рдоп Р<л Q »
где / ДОН Лт== АЛУб = (^ТОЧ.ДОН ^ст) Уб’
0=сУ2/2=(а —а0) sin<py/C;u;
Re=’/£ф/у,
где Ьф—полная длина тела вращения в м;
у=|/ — (а — а0) sin «ру/С^ —скорость невозмущенного потока в
м/с; v=p-/q—коэффициент кинематической вязкости, определяемый
по графику на рис. 10.1.
Порядок проведения работы
1. Ознакомиться со схемой установки и приборами. Описание аэродинами-
ческих весов дается в работе № 11.
2. Установить модель тела вращения в рабочей части трубы на подвеске ве-
сов при а=0°.
3. Собрать схему и присоединить дренажные трубки модели к батарейному
манометру.
4. Произвести эксперимент.
5. Обработать результаты опыта и построить графики:
Т’дон.точ = /1 (^дон); Рдон == /2(Re)j
Л1ОН = /4 (формы , Хф).
Контрольные вопросы
1. Что такое донное давление и как оно влияет на сопротивление летатель-
ного аппарата?
2. Какое влияние число Рейнольдса оказывает на донное давление?
3. Как толщина пограничного слоя влияет на донное давление?
4. Как толщина пограничного слоя зависит от положения точки перехода xt
и числа Рейнольдса?
5. Какова зависимость донного давления от удлинения тела вращения Хф?
2. ОПРЕДЕЛЕНИЕ ДОННОГО ДАВЛЕНИЯ ТЕЛА ВРАЩЕНИЯ
ПРИ СВЕРХЗВУКОВЫХ СКОРОСТЯХ, Т. Е ПРИ М>1
Общие сведения
При сверхзвуковом обтекании тел вращения образование косых
скачков уплотнения за донным срезом тела вращения вследствие
изменения направления потока существенно влияет на донное дав-
ление. Но все же немаловажным фактором, влияющим на донное
давление, является толщина пограничного слоя.
Влияние толщины пограничного слоя на величину донного дав-
ления при сверхзвуковых скоростях потока такое же, как и при до-
звуковых. Кроме того, поворот потока в кормовой части и образо-
вание скачков, как это показано на рис. 8.8, сужает след за дон-
ным срезом тела вращения. Увеличение числа М потока увеличивает
95
тока измеряется трубкой полного напора 6 и пружинным мано
метром 7.
Статическое давление можно определить с помощью ГРМ (см.
работу № 7), восприняв это давление отверстием, сделанным в се-
чении рабочей части трубы.
Изменение числа М потока производится путем смены сопла
Лаваля 8.
Аппаратура и материалы
1. Дренированная модель.
2. Державка для крепления модели в рабочей части трубы.
3. Контрольный насадок статического давления.
4. Контрольный приемник полного давления.
5. ГРМ, описание которого и способ расшифровки записи на лепте даны
в работе № 7.
6. Пружинный манометр.
7. Латунные и резиновые трубки для соединения дренажа модели и конт-
рольных насадков с манометрами.
Рабочие формулы
£дон--7?изб/*7-(/?дон Per) Q == 1(^ст ' ^\oh)
где р™=р.А — Л^лон^он —донное давление в мм. рт. ст.; рст=А —
—7VCT/CCT — статическое давление невозмущенного потока в ммрт. ст.
Здесь ра = £/1,353 — атмосферное давление в мм рт. ст.; ?/дон>
jVct — показания ГРМ в числах оборотов; Лдон, Лет — коэффици-
енты ГРМ IB ММ рТ. СТ./об, ПРИНЯТО Лдон = Лст = Л;
^=еУ2/2 = сМ2л2/2=хрстМ2/2=0,7дстМ2.
Здесь х=сР/су=1,4; М = /(рст/ро) (число М определяется по га-
зодинамическим таблицам, см. приложение 5), где Ро=Рфорк=
=ра+Д — — полное давление в мм рт. ст.
Для определения числа М можно воспользоваться и оптическим
методом (см. раздел «Определение числа М потока оптическим ме-
тодом»). В этом случае необходимо перед моделью в воздушном
потоке рабочей части аэродинамической трубы установить тонкук>
иглу, которая явится источником слабых возмущений. При помощи
прибора ИАБ-451 следует зафиксировать фронт звуковых волн„
который будет представлять собой конус, угол при вершине которо-
го составит 2ц. После измерения угла ц легко установить значение
числа М потока из выражения М = 1/sin ц.
Порядок проведения работы
1. Ознакомиться со схемой установки и приборами.
2. Установить модель тела вращения в рабочей части аэродинамической тру-
бы под углом а*=0°.
3. Составить схему дренажа от модели к прибору ГРМ.
4. Закрыть дверь (помещения трубы.
5. Проверить по манометру давление в баллонах.
98
6 Открыть кран подачи воздуха и произвести эксперимент.
7 После окончания эксперимента полученные данные обработать и построить
графики ___ _ _____ ____________
А'ЮН — /1(^дон)1 /?ДОН “ /з(М) И />ДОН — /4 (формы, Хф).
Контрольные вопросы
1 Что такое донное давление?
2 Как толщина пограничного слоя у кормы тела вращения влияет на дон-
ное давление?
3. Как наклон хвостового скачка уплотнения влияет на разрежение за доп-
НЫМ срезом?
4. Как носовая форма тела вращения влияет на донное сопротивление?
5. Какое влияние оказывает удлинение тела вращения па его донное дав-
ление?
РАБОТА Ле 9
ИССЛЕДОВАНИЕ ПОГРАНИЧНОГО СЛОЯ
ТОНКОЙ ПЛАСТИНКИ ПРИ СВЕРХЗВУКОВЫХ
СКОРОСТЯХ потока*
Цель работы — используя полученную фотографию спектра об-
текания топкой пластинки при угле атаки а = 0 и числе М>1, в за-
данном сечении на некотором расстоянии х от передней кромки
определить толщину пограничного слоя б, а также распределение
скорости, плотности и температуры по толщине слоя.
Результат работы следует представить в виде трех графиков:
распределение скорости, плотности и температуры по толщине по-
граничного слоя.
Общие сведения
Краткие сведения о структуре пограничного слоя при дозвуко-
вых скоростях даны в работе № 5 «Исследование профиля скоро-
стей в пограничном слое крыла при дозвуковых скоростях». Здесь
же кратко рассматриваются особенности пограничного слоя, кото-
рые связаны со сжимаемостью воздуха при сверхзвуковых ско-
ростях.
Для исследования поля скоростей в пограничном слое часто
применяются оптические методы, например оптический нож. В дай-
ной лабораторной работе совместно с оптическим ножом исполь-
зуется решетка, состоящая из наклонных расфокусированных ни-
тей. Решетка устанавливается перпендикулярно пучку световых
лучей, как это показано на рис. 9.1.
В результате проведения эксперимента получается фотография
(рис. 9.2), на которой изображены деформации наклонных расфо-
кусированных нитей в области пограничного слоя тонкой пластин-
ки, которая установлена по направлению сверхзвукового потока.
„ * Методика проведения данной работы была разработана в аэродинамичес-
£о^г лабоРатоРии Военно-воздушной инженерной академии им. Н. Е. Жуков-
4*
99
Схематическое изображение деформированных наклонных расфоку-
сированных нитей показано на рис. 9.3.
Параллельные лучи света, проходящие через рабочую часть аэ-
родинамической трубы по нормали к направлению скорости воз-
Рис. 9.1. Схема опыта:
1—источник монохроматического света; 2—диафрагма; 3—коллиматор; 4—защитные стекла;
5—рабочая часть; 6—тонкая плоская пластина; 7—наблюдательная труба; 8— оптический
нож; 9—решетка с наклонными расфокусированными нитями; 10—экран
душного потока, на своем пути встречают поле оптической неодно-
родности, в нашем случае это будет область пограничного слоя
пластинки. Оптическая неоднородность потока вызывает неодно-
родность полей плотности среды и соответственное различие вели-
Рис. 9.2. Фотография дифракции света от решетки с наклонными расфокуси-
рованными нитями при обтекании тонкой пластинки сверхзвуковым потоком
чин показателя преломления световых лучей п. Лучи света, прохо-
дящие через поле переменной плотности, будут отклоняться на не-
который переменный угол е.
100
Известное соотношение
(lQ dtl
dy dy '
(9.1)
где A=(n—OZq показывает, что деформация изображения наклон-
ных нитей решетки происходит в направлении увеличения плотно-
сти пограничного слоя. В результате этого наибольшая деформация
будет в слое, который прилегает к пластинке. Поскольку отклоне-
ния световых лучей е малы, вполне допустимо вместо sin е принять
У“
Сечении
Деформированное
изображение нити
при V>0
в-----
4---
з---
2-—
7---
1
2
3
i-i
I
Положение нити при V=O
Рис. 9.3. Схема измерения деформации изображения рас-
фокусированной наклонной нити благодаря дифракции
величину самого угла 8, тогда формулу для определения величины
деформации изображения нити Дх можно написать в таком виде:
Дх=зз ctgc.
(9-2)
Здесь ф — угол наклона нити (в нашем случае ф = 75°);
Л— f—у- — коэффициент, зависящий от оптических
свойств системы, где т — масштабный коэффициент, который оп-
ределяется из соотношения толщины пластины на изображении к
натурной толщине пластины, т. е. m=h1X3Q^lhR^ S — расстояние
от центра сечения рабочей части аэродинамической трубы до лин-
зы приемной части оптического прибора ИАБ-451; f — главное фо-
кусное расстояние оптической системы прибора ИАБ-451 (/=
= — 1917,0 мм); I — расфокусировка, т. е. расстояние от фокаль-
ной плоскости ИАБ-451 до решетки.
Угол отклонения луча света е, проходящего через пограничный
слой после прохождения поля, выражается зависимостью
(9.3)
где z координата по направлению луча света, т. е. поперек ра-
очеи части трубы; L — оптический ход луча в поле переменной
р^°Тд°|С)ТИ’ в нашем случае ширина рабочей части трубы (см.
101
Формулу (9.3) для плоского течения можно заменить соотно-
шением
* = (9.4)
dy
которое строго действительно для течений с малыми градиентами
плотности.
Подставляя значение угла е из уравнения (9.4) в уравнение
(9.2), получим окончательную формулу
Zctg?. (9.5)
dy
Из уравнения (9.5) находится производная
d£jdy=C\x,
где С= l/o&Z,ctg?.
Известно, что для воздуха при нормальных условиях, т. е. когда
р = 760 мм рт. ст., /=15° С и q= 1,225 кг/м3, коэффициент k=
=0,000238 кг/м3.
Плотность воздуха в пограничном слое на некотором расстоя-
нии от пластинки определяется из формулы
/ dQ \
Qi=Co~ (----Уч для первого сечения,
\dy /
а для z-ro сечения (см. рис. 9.3)
= — Су^Ьх.
i—1
Необходимые отношения физических величин в -пограничном
слое и внешнем потоке определяются следующими уравнениями:
= Гр— 7; (7~о/^8)—(Л/У5).
е8 ~ Ti ’ ^б.ч “ г0 - ~ (Го/Т6) - 1
2
1)Мраб.ч
___________2 7,-
~ ' (X - 1) Мраб>ч 78 •
Принимаем, что параметры потока на границе пограничного
слоя 7\ ръ, иъ соответствуют параметрам потока в рабочей
ЧаСТИ трубы, T. е. Ръ = Рст.впш; s ^^ст.внш» Wg = 0,99 Ураб.ч-
Зная температуру торможения То и число Мраб.ч потока, исполь-
зуя формулу Г0=Гст<вни1
х — 1 »,2 \
“ Мраб.ч I,
можно вычислить стати-
102
ческую температуру потока трубы Тст-виш, а температура восста-
новлепия Тг подсчитывается по формуле
-^-=1 + гг^-М2ра6.ч-
Здесь гт = 0,9 — коэффициент восстановления температуры для
турбулентного слоя, а = 0,85 —тот же коэффициент для лами-
нарного пограничного слоя. Отношение удельных теплоемкостей
принимается равным х=1,4.
В форкамере аэродинамической трубы, где скорость очень ма-
ла (допустимо принять ее равной нулю), измеренное давление и
температуру воздуха можно считать за давление и температуру
торможения, т. е. /7ф=Ро, а Гф = Т0-
Давление в форкамере измеряется манометром, присоединен-
ным к приемнику полного давления, а температура определяется с
помощью термопары и присоединенным к ней милливольтметром.
Плотность заторможенного воздуха (в форкамере) определяет-
ся из уравнения состояния
Со=Ло/^о-
Здесь удельная газовая постоянная 7?=287,14 Дж/кг-К, число М,
температура и плотность воздуха в рабочей части подсчитываются
по формулам:
Рст.внш Рв f 1 Н 2 Мраб.чу >
Для определения плотности Qi и температуры внутри погра-
ничного слоя можно воспользоваться и другими формулами, а
именно:
1 I' ст.внш
Ci/йст •внш'
= 1 +(х - 1/2араб.ч) (1/^аб.ч - uh
(Мраб.ч Ui) .
х — 1
Мраб.ч
Скорость звука определяется по формуле
Мраб.ч
ст.внш»
а скорость потока — из соотношения
Мраб.ч Мраб.ч^'рзб.ч’
После определения распределения температуры по высоте
пограничного слоя д, учитывая, что статическое давление по нор-
мали к пластинке постоянно, т. е. pi=pz =рСт.внш, можно опреде-
лить изменение плотности по формуле
Qi Pcr.mmJ i ,
103
так как закон изменения плотности рг- обратен закону изменения
температуры по толщине пограничного слоя.
Толщину пограничного слоя 6 принимаем за расстояние */=бот
поверхности пластинки до зоны, где скорость составляет 99% от
скорости потока в рабочей части трубы Граб.ч- Вне пограничного
СЛОЯ скорость потока Граб.ч *и ПЛОТНОСТЬ Рраб.ч остаются постоянны-
ми, в силу чего и не происходит деформация нитей (см. рис. 9.2).
Форма деформаций нитей точно соответствует изменению скорости
и по толщине пограничного слоя. Зная скорость
и/и?
Рис. 9.4. Гра-
фик зависимос-
ти
Wg=^Vpa6 ч
на границе пограничного слоя, равную
= 0,99VPa6.4, легко определить скорости в погра-
ничном слое и на заданных значениях координа-
ты у. Для этого по изображению пограничного
слоя (ом. рис. 9.2) нужно найти при а/ = 0 ли-
нейную величину Ахо, которая и будет в неко-
тором масштабе соответствовать скорости
- Ураб.ч. Затем для каждой координаты Уг из
соотношения (ДЛ'о—ЛХг)/Лх0 находим скорость
Ui, По полученным данным строится график за-
висимости u/ut>=f (у), как показано на рис. 9.4.
Используя формулы ujui = 2у18—у21& и
Цт/пз = (t//6)I/?, можно с достаточной точностью
определить структуру пограничного слоя (лами-
нарный или турбулентный) в выбранном сечении на расстоянии х
от передней кромки пластинки.
Поскольку измерение полного давления (давления в форкаме-
ре) /?о и статического давления потока в рабочей части трубы рст.ВНпг
производится одновременно, то, используя газодинамические таб-
лицы, по отношению рСт.впш/Ро находим число Мраб.ч. 3*атсм из со-
отношений Тст.внш/Т'о и рст.внш/ро подсчитываются значения темпера-
туры и плотности воздушного потока.
Описание сверхзвуковой аэродинамической трубы типа СТ-
МАИ и оптической установки, выполненной по схеме Д. Д. Максу-
това, достаточно подробно дано в работе № 4 «Визуальные методы
исследования». В данной работе мы кратко остановимся на общей
схеме (рис. 9.5).
Процесс пуска трубы и выход на рабочий режим производится
обычным порядком. После открытия запорного крана трубопрово-
да, который соединяет аэродинамическую трубу с емкостью высоко-
го давления, посредством регулятора давления 4 (редуктора) в
форкамере 2 создается необходимое давление, которое измеряется
манометром 5. Температура воздуха в форкамере фиксируется с
помощью термопары 3 и милливольтметра 1. Статическое давле-
ние потока в рабочей части трубы 8 определяется по манометру 6,
который может быть представлен в виде ГРМ, описание которого
приведено в работе № 7 «Определение коэффициента давления
на тонком профиле крыле в сверхзвуковом потоке». Плоская пла-
стинка 7 устанавливается в рабочей части параллельно потоку.
104
Используемая оптическая установка состоит из коллиматора 9Г.
наблюдательной трубы 10 и приставки, которая представляет со-
бой наклонные расфокусированные нити И, вмонтированные в ту-
бус 12. Дифракционная картина от наклонных расфокусированных
нитей довольно хорошо будет видна на экране 13.
Рис. 9.5. Схема сверхзвуковой трубы кратковременного действия:
/—милливольтметр; 2—форкамера трубы; 3—термопара; 4—регулятор давления; 5—манометр;
ft’—манометр для измерения статического давления; 1—тонкая пластинка; 8—рабочая часть
трубы; 9—коллиматор; 10—наблюдательная труба; 11—решетка с наклонными нитями; 12—
тубус; 13— экран полупрозрачный (матовый)
Лучи света, пройдя пограничный слой, будут отклоняться на
некоторый угол е, в зависимости от места расположения по толщи-
не слоя, как это показано на рис. 9.2. Эти лучи, попадая на расфо-
кусированные наклонные нити, начнут огибать их и отклоняться от
прямой линии, и в результате на экране мы увидим деформирован-
ное изображение тех частей нитей, которые попадают в область по-
граничного слоя. Дифракционный спектр деформированных нитей
соответствует изменению скорости в пограничном слое. Следует от-
метить, что в нашем случае наклон нитей на угол ср = 75° обеспе-
чивает видимость их деформации. Это объясняется тем, что при
вертикальном положении нитей в плоскости ху, перпендикуляр-
ной к световому потоку, отклонение лучей света на угол е будет
105*
происходить в направлении самой нити, т. е. вдоль вертикально рас-
положенной нити, и не будет фиксировать деформацию. Диаметр
проволочек для наклонных нитей должен быть порядка 0,5 мм.
Аппаратура и материалы
1. Плоская пластинка.
2. Фотоаппарат.
3. Термопара и милливольтметр для измерения температуры в форкамере
трубы То.
4. Манометры для измерения полного давления в форкамере р0 и статичес-
кого давления в рабочей части трубы рст.впш-
5. Приставка с расфокусированной дифракционной решеткой к оптическому
чтрибору ИАБ-451.
6. Экран.
Рабочие формулы
^раб.ч У\(.Агг.внш/Ро)» ИЛИ Мраб.ч [(Ро/рст.внш) Ч’
Рис. 9.6. Градуировка термопары
Здесь А — количество делений пружинного манометра; Я — пре-
дел измерения пружинного манометра в мм рт. ст.; К — цена деле-
ния ГРМ; N — показания ГРМ;
7""ст,внш — - -»
(1+0.2М^б,ч)
То
106
где j и д — цена и количество делений милливольтметра; В — ат-
мосферное давление ра в мбарах. Определение То возможно и по
градуировочному графику, который показан на рис. 9.6:
С/ == Сст.внш Су, Дх,
/—1
ГДе С = Xj^zkL, Ctgо), С/'/^ст.внш^^^ст.внш/^*/»
^Дх^Ллгл + ДхЛ;
i—1
Ui = 1 / ______J_____L 1________5------11--.
Мраб.ч Г °>2Мраб.ч °’2Мраб.ч ^ст.внш
Последняя формула позволяет проверить правильность построе-
ния графика ulub=f(y) (см. рис. 9.4);
мраб.ч == ^раб.ч^раб.ч’
где ______________
Мраб.ч = 1 хРст.внш/Сст.внш» х ~ Cp!^v = 1,4, 1П = ^изобр/^иат’
где т — масштаб; /гиз0бр — толщина пластинки, изображенной на
экране или фотографии; Лнат — толщина пластинки в натуре.
Порядок проведения работы
1. Ознакомиться с установкой.
2. Установить тонкую пластинку в рабочей части трубы параллельно воз-
душному потоку.
3. Произвести следующие измерения
а) / — расстояние от фокуса до
дифракционной решетки (расфокуси-
ровка);
б) S — расстояние от центра трубы
до линзы приемной части прибора
ИАБ-451;
в) L — оптический ход (ширина
пластинки, равная ширине рабочей час-
ти трубы);
г) Ф— Угол наклона нитей решетки
(ф = 75°).
и занести их в протокол опыта:
В нашем случае /=365 мм; S= Рис. 9.7. Графики зависимости:
— 2640 мм; £ = 30 мм; ctg 75°=0,2679; a—T=f(y); 6—Q=ft(y)
4. Установить экран и фотоаппарат.
5. После проведения эксперимента обработать результаты опыта и построить
графики, как показано ни рис. 9.4 и 9.7.
Контрольные вопросы
1. Каким образом можно определить толщину пограничного слоя в задан-
ном сечении на расстоянии х от передней кромки пластинки?
2. Как определить структуру пограничного слоя (ламинарный или турбу-
лентный) в заданном сечении?
107
www.vokb-la.spb.ru - Самолёт своими руками?!
должен в этом случае сопровождаться увеличением сопротивления,
что справедливо также и для других тел обтекаемой формы.
Шар обтекается в вязкой жидкости с образованием погранич-
ного слоя и этот последний всегда отрывается от поверхности.
Отрыв пограничного слоя происходит вблизи точек поверхности,
в которых напряжение трения т0 обращается в нуль и затем меняет
знак. Чем больше величина То, тем больший путь пройдут частицы
воздуха в пограничном слое вдоль поверхности тела прежде чем
то станет равным нулю.
Отсюда ясно, что при смешанном пограничном слое, когда на
задней полусфере шара имеется турбулентное течение с повышен-
ными значениями напряжения трения т0 или когда точка перехода
предшествует точке отрыва, отрыв произойдет дальше от передней
критической точки, чем при ламинарном пограничном слое.
Чем дальше от передней критической точки на поверхности ша-
ра происходит отрыв, тем уже область, заполненная отходящими
от шара вихрями, образующаяся'за шаром. В этой зоне всегда соз-
дается подсасывающий эффект, связанный со срывом потока. Сле-
довательно, чем меньше та часть поверхности задней полусферы,
на которую действует пониженное давление, тем ближе обтекание
к обтеканию идеальной жидкостью и, наконец, тем меньше асим-
метрия в распределении давления относительно миделевого сече-
ния шара.
Опыт показывает, что несмотря на увеличение сопротивления
трения при переходе от ламинарного к турбулентному слою, кризис
обтекания в силу только что описанного явления приводит к умень-
шению полной силы лобового сопротивления шара. Сказанное верно
также и для плохо обтекаемых тел иной формы.
Закон распределения давления для различных условий обтека-
ния шара показан на диаграмме (рис. 10.2).
Из этой развернутой диаграммы зависимости коэффициента
давления /й=рИзб/<7= 1—р (см. работу № 6) от угловой координа-
ты точки на сфере (широты) 6 в градусах мы видим, что в задней
(кормовой) критической точке шара (0 = 180°) и вблизи нее давле-
ние гораздо выше при отрыве турбулентного пограничного слоя
вязкой жидкости (закризисное число Re = 4,6-105), чем при отрыве
ламинарного пограничного слоя (докризисное число Re= 1,72-105).
Это давление, однако, не достигает значения давления в передней
критической точке, что наблюдается при отсутствии всякого отры-
ва, т. с. при обтекании потенциальным потоком идеальной жид-
кости.
Этот кризис при прочих одинаковых условиях наступает тем
скорее (точнее говоря при меньшем значении числа Re опыта), чем
больше степень начальной турбулентности набегающего потока.
Шар вследствие большой чувствительности к начальной турбу-
лентности потока в экспериментальной аэродинамике выбран ука-
зателем степени начальной турбулентности.
НО
Ниже 'приводится достаточно простой критерий оценки степени
турбулентности, вытекающий из измерения разности давления на
передней и задней полусфере шара при различных значениях чис-
ла Re.
Из графика распределения давления по шару (см. рис. 10.2)
видно, что изменение числа Re=V£>/v наиболее сильно сказывает-
ся на картине давлений в кормовой части шара. В самом деле, если
—.---потенциальный поток; —S-----докритический Re=
= 1,72- 10s; —о—закритический Re=4,6 • 105
в условиях докризисного обтекания за шаром преобладало разре-
жение, то при закризисном обтекании в этой зоне наблюдается
повышенное давление. Местная величина pi меняет знак.^ Опыт
показывает, что именно кормовая зона шара в наибольшей степе-
ни реагирует па изменение числа Re. Эта зона определяется по-
лярными координатами 0=1504-210°.
На основании этой особенности обтекания шара и разработан
метод нахождения начальной турбулентности набегающего потока
по измерению перепада давлений на поверхности шара. Изменяя
степень начальной турбулентности 8 потока, мы, как известно, бу-
дем получать различные значения ReKP. Чем больше начальная
турбулентность потока, тем меньше значение ReKp (рис. 10.3). В то
же самое время изменение начальной турбулентности потока при-
водит к изменению характера течения кривой в кормовой
части шара.
Если мы сделаем одно приемное отверстие для измерения дав-
ления в критической точке шара, а другое — в кормовой зоне с
полярной координатой 0=157°ЗО', то изменение условий обтекания
значительно повлияет на перепад давлений в этих точках.
Ш
www.vokb-la.spb.ru - Самолёт своими руками?!
Ось сверления каждого из четырех отверстий образует с на-
правлением потока угол в 157°30'. При помощи коллекторной труб,
ки 9 давление осредняется и передается к наклонной трубке мик-
романометра 7.
Скоростной напор потока ^ = qV2/2 измеряется во время опыта
при помощи приемника давления 10 и микроманометра 11.
Аппаратура и материалы
1. Полый специально препарированный шар с пятью малыми отверстиями и
внутренней проводкой для измерения давления.
2. Крестообразная державка для установки шара на аэродинамических весах.
3. Аэродинамические весы.
4. Пневмопроводка для передачи давления от поверхности шара к микро-
манометру.
5. Микроманометр для измерения разности давлений на поверхности шара.
6. Контрольный насадок аэродинамической трубы.
7. Микроманометр контрольного насадка аэродинамической трубы.
Рабочие формулы
= Л:сб — Ркорм = (а — д0)ш const.
Я (fl Ло)к
const=' sin _ у Djv=У (а — «0)к const!;
sin <PkYkKk5kP-
COnsti=^ 1/573,09 273+ rc sin ?KYK^.
V pa
Здесь индекс «ш» относится к показаниям микроманометра, изме-
ряющего давление на поверхности шара, а индекс «к» — к конт-
рольному манометру.
Порядок проведения работы
1. Составить схему установки.
2. Установить шар на подвеске аэродинамических весов и соединить его от-
верстия посредством шлангов с микроманометром.
3. Провести опыт.
4. Обработать результат эксперимента и построить график Pi=/(Re).
5. По графику Pi=fi(Re) определить ReKP, а по графику E=f3(ReKp) найти
степень начальной турбулентности потока аэродинамической трубы ев %.
Контрольные вопросы
1. Какая связь существует между степенью начальной турбулентности потока
и критическим числом ReKp?
2. Что такое критическое число Рейнольдса?
3. Как изменяется давление на поверхности шара?
114
2. ОПРЕДЕЛЕНИЕ ЛОБОВОГО СОПРОТИВЛЕНИЯ ШАРА
И НАЧАЛЬНОЙ ТУРБУЛЕНТНОСТИ ПОТОКА
АЭРОДИНАМИЧЕСКОЙ ТРУБЫ
Общие сведения
Практика показала, что между степенью начальной турбулент-
ности и критическим числом ReKp существует определенная связь.
Начальная степень турбулентности потока сильно влияет на лобо-
вое сопротивление тел, обтекаемых с отрывом. Шар, обладающий
большой чувствительностью к начальной турбулентности потока,
приняли за эталон при нахождении величины степени начальной
турбулентности потока, которая обычно выражается в процентах:
to т
iooo0;
Vcp
где ] —среднеквадратичная пульсационной скорости пото-
ка: Vcp — средняя скорость потока; т — приращение по времени.
Понятие турбулентности потока
связано с беспорядочным отклоне-
нием от среднего значения действи-
тельной скорости потока по вели-
чине и направлению, а также дав-
ления и других физических вели-
чин, характеризующих поток в рас-
сматриваемой точке пространства.
X'am, Н
10
J ReW5
Рис. 10 7. График зависимости Хаш-=
=f(Re)
Рис. 10.6. Кривая V~f(t) для тур-
булентного потока
На рис. 10.6 показан в виде примера график изменения величины
скорости турбулентного потока по времени в произвольной точке.
В результате проведения опыта будут получены значения лобо-
вого сопротивления шара в зависимости от скорости потока
или от числа Рейнольдса Re (рис. 10.7).
По графику зависимости Xam=/2(Re) можно судить об измене-
нии обтекания шара, вызванном образованием турбулентного по-
5* 115
www.vokb-la.spb.ru - Самолёт своими руками?!
граничного слоя на поверхности шара, а именно о перемещении
точки отрыва S с лобовой части шара (рис. 10.8, а) на кормовую
(рис. 10.8, б), а также о сближении точки перехода Т с точкой от-
Рис. 10.8. Схема обтекания шара:
а—до критического режима; б—после критического режима
рыва и, наконец, совмещении точки перехода с точкой минимума
давления. При критическом режиме обтекания уменьшение следа
за шаром приводит к уменьшению сопротивления Хаш. После уста-
новления на поверхности шара турбулентного пограничного слоя
увеличение числа Re, так же как и при ламинарном пограничном
слое, приводит к увеличению
сопротивления Хаш.
График испытания шара
приведен на рис. 10.9. По оси
абсцисс отложены значения
Re-10“5, по оси ординат Схаш
шара.
Рис. 10.10. Градуировка державки
трехкомпонентных аэродинамичес-
ких весов АВНК при испытании ша-
ра на определение коэффициента
Cxa=f(V) (с изолированным шаром)
Рис. 10.9. График для опре-
деления лобового сопро-
тивления шара
Область, где Схаш резко падает, называется критической. Кри
тическое число ReI{p условно принимается соответствующим Схаш=
= 0,3.
116
На рис. 10.3 приведен график зависимости степени начальной
турбулентности потока е в % от значения ReKp.. Порядок определе-
ния е в % по диаграмме испытания шара CxaHI=/2(Re) (см. рис.
10.9) в данной аэродинамической трубе и по графику 8=f3(ReKp)
(см. рис. 9.3) указан стрелками на прилагаемых примерных гра-
фиках (см. рис. 10.9 и 10.3).
Так как данным способом степень турбулентности потока опре-
деляется на основании результатов измерения силы лобового со-
противления шара в потоке, то этот способ называется динамичес-
ким.
Коэффициент лобового сопротивления шара вычисляется по из-
вестной формуле экспериментальной аэродинамики:
где Хаш= (Qh3m—А<2Дер) — лобовое сопротивление шара в Н. Здесь
Qn3M — показание весового элемента Q для данной скорости потока
в Н; Лфдср — лобовое сопротивление державки шара и подвески
весов при той же скорости потока в Н.
Величина Дфдер определяется по графику на рис. 10.10 в зави-
симости от показания микроманометра (а—aG).
Выражая скоростной напор потока через высоту столба (а—а0)9
отсчитанную по наклонной шкале микроманометра с учетом посто-
янных приборов, т. е.
q=QV2/2—(a — а0) sin yyKfy,
и подставляя значение площади миделевого сечения шара
5Ш = -^^ = О«785^Ш’
где Dm — диаметр шара, мы получим рабочую формулу для шара
Оизм Дфдер
ха ш= “ •
(а — а0) sin
Изменяя скорость потока V, обдувающего шар, получим различ-
ные значения и различные значения числа Re опыта.
Число Re может быть вычислено по формуле
Re = l/Z?Jv.
Определяя скорость потока по формуле
V = (а—ао) sin ,
будем иметь для числа Re формулу
Re ==-5ш_ (а — а0) sin
117
www.vokb-la.spb.ru - Самолёт своими руками?!
Здесь v — кинематический коэффициент вязкости воздуха, который
определяется по графику v=/(pa, t) (см. рис. 10.1).
В данном эксперименте на трехкомпонентных аэродинамических
весах измеряется одно лишь лобовое сопротивление шара на весо-
Рис. 10.11. Схема установки для определе-
ния лобового сопротивления шара-
1—шар; 2—державка; 3—шарнир передней под-
вески весов; 4—шарнир задней подвески весов;
5—контргрузы
вом элементе Q. Меха-
низмы других компонен-
тов Рх и Р2, а также ме-
ханизм перестановки уг-
ла атаки выводятся из
работы с помощью арре-
тиров. Схема установки
изображена на рис. 10.11.
Шар 1 насаживается на
державку 2 крестообраз-
ной формы. Необходимо
обратить внимание на то,
что вся подвеска шара
расположена позади него,
и сама державка примы-
кает к задней полусфере.
Это не случайно, так как
только такая система
крепления обеспечивает
сравнительно небольшое
влияние всей системы
подвески шара на его ло-
бовое сопротивление.
Державка прикрепляет-
ся в трех точках к под-
веске весов — к двум ша-
рнирам передней подвес-
ки 3 и к одному шарниру
задней подвески 4. Конт-
ргрузы 5 так же, как и в случаях установки модели самолета или
крыла, придают системе подвески устойчивость во время опытов.
Подробное описание схемы и конструкции трехкомпонентных
аэродинамических весов дается в работе Ке 11.
Аппаратура
1. Шар, укрепляемый посредством крестообразной державки к аэродинами-
ческим весам
2. Микроманометр контрольного насадка аэродинамической трубы.
3. Аэродинамические весы.
4. Контрольный насадок аэродинамической трубы.
Рабочие формулы
хат —
Хаш
Q^m
—^^-constj; Re— (а — а0) const2>
(а — ап) v
118
где
const —-------------—«-; const2=
sin
— 1/^— sin <ру^[А.
V у Q
Здесь Ош — диаметр шара.
Порядок проведения работы
1 Ознакомиться с установкой шара на подвеске аэродинамических весов и
составить схему установки.
2. Проверить по уровню горизонтальность державки, на которой укреплен
шар, после чего ненужные в данном опыте весовые элементы и механизм а
весов поставить на арретиры.
3. Поставить рабочий груз и рейтер весового элемента в нулевое положение,
т. е. совместить риски нониусов груза и рейтеры с нулями шкал.
4. Сбалансировать весовой элемент Q вспомогательным грузом и рейтером,
т. е. совместить стрелку с отметкой «О» на шкале.
5. Присоединить микроманометр к контрольному насадку трубы и снять с
микроманометра нулевой отсчет.
6. Произвести эксперимент, после чего обработать полученные из опыта
данные по прилагаемым формулам и построить график Сха m=f(Re).
Контрольные вопросы
1. Что такое начальная степень турбулентности потока?
2. Какие причины вызывают критические явления, зависящие от числа Re?
3. Как сопротивление шара зависит от числа Re?
РАБОТА № 11
ОПРЕДЕЛЕНИЕ ОСНОВНЫХ АЭРОДИНАМИЧЕСКИХ
КОЭФФИЦИЕНТОВ МОДЕЛИ ЛЕТАТЕЛЬНОГО
АППАРАТА ИЛИ ИЗОЛИРОВАННОГО КРЫЛА
Цель работы — по полученным опытным данным на трехкомпо-
нентных аэродинамических весах определить коэффициенты Сха,
Суа, гПг(Ст), К и Хд в зависимости от угла атаки а при дозвуковых
скоростях.
Результаты работы представить в виде поляры первого рода
^?/а=/(Ста), а также кривых Сха=А(а); £^=/2(0); ^z(Cm) =
=/з(а); Л=/4(а) и хд=/5(а).
Коэффициент подъемной силы летательного аппарата (ЛА)
можно представить в виде следующей суммы коэффициентов подъ-
емных сил отдельно взятых частей ЛА, отнесенных к полной пло-
щади крыла:
• ___*$Кр
yaj\K ^уакр с
о
► 5ф
I/дф
' *^оп
уаг
5г
S
И ^-^уавз'
119
www.vokb-la.spb.ru - Самолёт своими руками?!
По аналогии коэффициент лобового сопротивления ЛА
С* ____С ^кр _i_ С I С ^оп । р ।
^хаЛА — °д-акр $ “Г^ляф Тилдоп Тьхсг ~Г
+ Сладот^+АСХСвз.
В свою очередь, физический коэффициент Схо приводит к сле-
дующей зависимости:
С ха Слтр 4" С х давл “Ь х/ -|- Сх ДоН.
Поскольку исследования аэродинамических характеристик в
наших условиях производятся в области докритических чисел М»
то, естественно, волновое сопротивление будет отсутствовать.
Необходимо заметить, что в аэродинамических лабораториях
часто применяют крыло прямоугольной формы в плане и стан-
дартного удлинения, которое в СССР принято равным 5. На таком
крыле обычно исследуют характеристики сечения крыла.
Общие сведения
Поляра первого рода (рис. 11.1) представляет собой кривую»
очерченную концом вектора полной аэродинамической силы 7?д»
построенную в скоростных осях в заданном диапазоне углов атаки
Рис. 11.1. Поляра крыла
а. Эта важнейшая характеристика ЛА или его элемента (крыло»
оперение, корпус) является основой для аэродинамических расче-
тов. Располагая полярой, можно установить величину и направле-
ние равнодействующей аэродинамических сил, приложенных к кры-
120
иЛи ЛА. Кроме того, по графикам зависимости Сха, Суа,
£ х (рис. 11.2) можно найти значения аэродинамических
коэффициентов и углов атаки на различных режимах полета, при
эТОм число М не должно быть больше, чем Мкр. Так, например»
при определении максимальной скорости полета по кривой Сха =
^^(а) находится угол атаки ао, соответствующий Схтш=Схро*
Рис. 11.2. Аэродинамические характеристики крыла
а для режима посадки по кривой Cya=f2(u) — критический угол
атаки акр, соответствующий Суаmax- График rnz(Cm) = f3(«) позволя-
ет судить о продольной статической устойчивости и определить ба-
лансировочный угол атаки аг>ал- Для оптимального режима полета
по кривой /С=Д(сс) устанавливается наивыгоднейший угол атаки
«нв, соответствующий значению максимального качества /Стах-
Наглядную картину изменения положения центра давления дает
график Хд=Д(а) и т. д. Значение коэффициентов Сха min, Суа max
и /Стах, а также соответствующие им углы атаки ао, оскр и аНв мож-
но определить по поляре, как это показано на рис. 11.1. В зависи-
мости от геометрических параметров профиля (например, с, f и
’Г- Д.) и формы крыла в плане (Z, т]) происходит сдвиг кривых, а
также изменение характерных значений коэффициентов (Сха mtn-
^уа max, Атах и т. д.) и углов атаки (а0, акр, анв и т. д.). На рис. 11.1
и 11.2 приведены графики для симметричного профиля. Легко заме-
тить, что поляра Cya=f(Cxa) расположена симметрично относи-
* Схр0 — профильное сопротивление, соответствующее Суа=0. Для симмет-
ричного профиля ао=0°.
121
www.vokb-la.spb.ru - Самолёт своими руками?!
тельно оси
рез начало
абсцисс, а кривые ^=/2(0) и Cm=f3(a) проходят че
координат. Кривая < '
Cxa=fi(a), в свою очередь, также
Рис. 11.3. Трехкомпонентные весы АВНК:
/—механизм а; 2— балансировочные грузы
сектора изменения угла атаки; 3—верхнее
строение передней подвески; 4—передняя под-
веска; 5—ножевой шарнир рамы 8; 6—ноже-
вой шарнир верхнего строения 3; 7—сектор
изменения углов атаки; 8—качающаяся ра-
ма; 9—балансировочные грузы качающейся
рамы; 10—шарниры для крепления задней
подвески; //—продольная переменная база
(на одной раме с сектором изменения углов
атаки): 12—задняя подвеска; 13—контргрузы;
14—проволока; 15—весовые элементы (рыча-
ги); 16—качалка компонента О
симметрична, но только отно-
сительно оси ординат. В слу-
чае несимметричного профиля
поляра становится также не-
симметричной и одновременно
сдвигается вверх, кривые
Cxa==fi(s%) И Cya==f2 (ci) CMe-
щаются влево. Соответственно
ао (угол при СУа=О) стано-
вится отрицательным, а кри-
вая Cm=f3(a) передвигается
вправо, т. е. «бал принимает
положительный знак. Здесь
необходимо отметить, что кри-
вая хд=/й(а) для профилей»
не имеющих постоянного поло-
жения центра давления (Сгп#=
=7^0) при a=ao, т. е. когда
Суа=0, претерпевает разрыв.
Испытание модели лета-
тельного аппарата или крыла
производится на трехкомпо-
нентных аэродинамических ве-
сах АВНК (рис. 11.3), обеспе-
чивающих независимое изме-
рение силы лобового сопротив-
ления, подъемной силы и мо-
мента тангажа при заданных
углах атаки а. На этих весах
подъемная сила Ya измеряется
на двух весовых элементах Pt
и Р?, а лобовое сопротивление
Ха — на весовом элементе Q.
Момент тангажа Мг подсчиты-
вается из уравнения равнове-
сия моментов аэродинамиче-
ских сил, измеренных на весо-
вых элементах Рь Р2 и Q.
Таким образом, во время экс-
перимента для каждого угла
атаки на весовых элементах
определяются величины Рь Р?
и Сизы в Н. Измерение подъемной силы Ya двумя весовыми эле-
ментами позволяет определять в передней точке крепления моде-
ли к подвеске некоторую часть подъемной силы Yf и полностью си-
лу лобового сопротивления Ха. Кроме того, относительно передней
122
точки определяется момент тангажа Л42=У2/б cos а. Первая сос-
тавляющая подъемной силы к измерительному весовому эле-
менту Pi передается без изменения и будет найдена из равенства
моментов (рис. 11.4)
УМ=(Л-ЛоМ,
ИЛИ Y 1 = — Рю)>
где d — плечо силы Ki и силы (Pi—Рю), т. е. расстояние между
шарнирами качающейся рамы и верхнего строения передней под-
Рис. 11.4. Схема трехкомпонентных весов АВНК
вески. Передача второй составляющей подъемной силы Y2 к весо-
вому элементу Р2 зависит от угла атаки, поэтому составляющая Y2
исправляется путем введения коэффициента с2, а именно:
У21б cos а=(Р2 — Ао)
/?
откуда К2=(Р2 - Р20) —— .
/б cos а
123
www.vokb-la.spb.ru - Самолёт своими руками?!
В результате подъемная сила модели будет равна
у а=Уi+А=(А - Ао)+(А - АД
где А и А — показания соответствующих весовых элементов во
время опыта для данного угла атаки; Ао и Ао — «нулевые», ис-
ходные показания весовых элементов для каждого данного угла
атаки без воздействия потока на модель.
Практически для стандартных продувочных моделей (см. рис.
11.6, 11.7 и подобные им) при всех углах атаки величина Ао оста-
Рис. 11.5. Градуировочный график
для определения сопротивления
подвески трехкомпонентных аэро-
динамических весов АВ НК
ется постоянной и равна значению
Рю при угле атаки сс=О°. Величина
Ао различна для каждого угла ата-
ки а.
с2=Р а/(/б 'cos а) — передаточ-
ный коэффициент весового элемен-
та А, где А =300 мм — радиус
сектора 7 (см. рис. 11.3 и 11.4);
/б — продольная переменная база,,
установленная на данной модели
(см. рис. 11.4); а — угол атаки.
Лобовое сопротивление исследу-
емой модели так же, как и сопро-
тивление подвески весов, к весово-
му элементу Q передается без из-
менений. Это видно из приведенных
соотношений (см. рис. 11.4):
XaL=Q'L/2
и Q'r/2=(Q„3M — AQno J г,
откуда Q' = (QH3M — AQn03B)2r/r.
Тогда 2faZ,=(QH3M Д-Qnow) 2Z./2.
Отсюда следует, что лобовое сопротивление модели
— О^изм п одв Л
где QH3m — показания весового элемента Q во время опыта пр^г
данном угле атаки; Л Q под в — лобовое сопротивление подвески в Н
при скорости потока, соответствующей моменту отсчета по весово-
му элементу при данном угле атаки.
Величина сопротивления подвески Дфподв по скоростям находит-
ся путем предварительной градуировки и построения графика
ДФподв=/(<7) или AQnc^B=f (а—ао) (Рис- Н.5). Величина Qo в рабо-
чую формулу для Сха не вводится, так как она имеет практическое
нулевое значение при всех углах атаки.
Как видим, рабочие формулы для Ya и Ха не включают парамет-
ров «всех промежуточных рычагов, массы контргрузов, а также мас-
сы модели.
124
Момент тангажа относительно передней точки крепления моде-
ли к подвеске весов (рис. 11.6 и рис. 11.7) подсчитывается по фор-
муле (учитывая направления знаков)
7И' = —K2Z6 cos а=— (Р2 — — Z6 cos а=—(Р2 — Р20) R«.
z Iq cos а
Для общего случая уравнение равновесия моментов относитель-
но заданной точки центра тяжести (см. рис. 11.6) будет
К2 —т-cos (а + ?)+^ 1
sin 3
—— cos(a — у) + Хс sin (а —у),
sin у sm Y
где h — расстояние от центра тяжести до оси шарниров (задается
заранее при препарировке модели); углы у и р — подсчитываются
Рис. 11.6. Схема крепления модели самолета к подвеске
весов АВНК
по заданным величинам h, Iq, li и /2, которые определяются на пре-
параторской плите.
Когда модель крыла на подвеске весов установлена так, как
показано на рис. 11.7, момент тангажа относительно передней кром-
ки (перенесем аэродинамические силы Ya и Ха в точку О') будет
иметь вид
Mz = —К2/б cos a Ya a cos a Д- a sin a.
Обозначим — M'=K2/6 cos a, тогда
Mz=— M'z-[-Yaa cosa-j-JQr sin a.
125
www.vokb-la.spb.ru - Самолёт своими руками?!
По полученным значениям Ха, Ya и Mz вычисляем коэффициенты
{-'ха, Суау fl'l'z(Cm)» -К И Хд’
Cxa — ^al^^ = (Qvi3\t ДФпочв)/?^’»
Cya=y(i/qS=(Yl + Y2yqS=[(Pi - Р1о) + с2 (Р2 - P2o)]/?S;
т = = —K2£2cos(a + Р) + [К! cos (а — у) + bin (а--Y)] fei .
qSb&.
q __ Mz ______ Mz । Yaa cos а . Xaa sin а ,
m~ qSbh~~^ qSbK qSbk qSbk ’
Cm= — C'm + Cyak3 cos а + Cxak3 sin a;
Рис. 11.7. Схема крепления модели крыла к подвеске
весов АВНК
Здесь S — площадь крыла в м2; Ьк — средняя аэродинамическая
хорда крыла в м; Ст' — коэффициент момента тангажа крыла от-
носительно точки О'; k^h/siny, /e2=/z/sinp, k3=a!bk — константы.
Средняя скорость опыта определяется по формуле
1/==|/Г“ (а — а0) sin
Тогда д=^^==(а — а0) sincpyK^.
2
После вычисления аэродинамических коэффициентов строим по-
ляру первого рода и графики
^хв=/1(а); Сда=/2(а); mz(Cm)=f3(a); ЛГ=/4(а) и xR=fb(a).
Полярная диаграмма первого рода Cya=f(Cxa) строится в коор-
динатах; Сха — абсцисса, Суа — ордината; отдельные точки на
126
кривой помечены значениями истинного угла атаки а (см. рис.
11.1)-
Для построения остальных графиков необходимо указать на оси
абсцисс масштаб угла атаки сс, а на оси ординат — масштабы ко-
эффициентов Cyai TT'lz^Crrt), И Хд (СМ. рИС. 11.2).
Помимо указанных кривых, можно построить параболу индук-
тивного сопротивления для крыла произвольной формы (в плане)
По уравнению
С2
^=-^•(1 + 8),
а для прямоугольного крыла
где б — коэффициент, характеризующий форму крыла (в плане),
для прямоугольного крыла 6 = 0,052; K=l2IS — удлинение крыла;
S — площадь крыла; b — хорда крыла; I •— размах крыла.
Последняя кривая, т. е. парабола индуктивного сопротивления,
на образце диаграммы испытания не приводится, так как ее форма
и расположение должны быть ясны из основ аналитической гео-
метрии.
Величины углов атаки, размеченных на поляре первого рода,
должны быть истинными, т. е. исправленными с учетом влияния
стенок трубы (если труба с закрытой рабочей частью). В такой
трубе угол цт между хордой крыла и осью трубы будет, как изве-
стно, меньше истинного угла атаки а на величину угла скоса пото-
ка Дат, обусловленного индукцией трубы:
Дат == 57,3k Суа’, а=ат+ 57,3k Суа,
г г
где S — площадь крыла, равная бХ/ (крыло прямоугольное); F—
площадь сечения рабочей части трубы; £ = 0,125 — коэффициент
для трубы круглого сечения рабочей части.
Индукция границ потока или стенок трубы вызывает также из-
менение величины коэффициента лобового сопротивления крыла.
Следовательно, если мы обозначим полученный согласно рабочей
формуле коэффициент через Схт, то он будет меньше истинного ко-
эффициента на величину
CxlT=k—C*
XII р уа
и, следовательно,
Сха — с хг + Cxi т,
или Сд,=Слг + 0,125Ас2а.
127
www.vokb-la.spb.ru - Самолёт своими руками?!
Таким образом, для вычисления Сха получаем формулу
Cw=CXT + 0,159 J- C2fl=CXT+qaconst2,
где D — диаметр рабочей части трубы;
const2 = 0,159 S/D2.
Кроме скоса потока, вызванного ограниченностью размеров по-
тока или влиянием стенок трубы, существует еще косизна потока,
т. е. несовпадение геометрической продольной оси рабочей части с
направлением воздушного потока. Возможен как поперечный, так
и продольный скос *.
При учете последнего получим
аисГ=ат + дат + Ааксс» Сха=Схт-|-С2 const24------С\/й,
и*-* 11 11 ки-7 ли л т • yd & I 37 3 У***
где Дапос — угол косизны потока.
Приведем краткое описание конструкции трехкомпонентных аэ-
родинамических весов АВНК.
Весы расположены в верхней кабине трубы и состоят из сле-
дующих основных частей (см. рис. 11.3):
1) трех весовых элементов Р4, Р2 и Q (с максимально допусти-
мыми пределами измерения сил 18, 12 и 12 даН — соответст-
венно);
2) ленточной подвески (передней и задней) ;
3) механизма а (механизма для установки и контролирования
углов атаки);
4) сектора изменения углов атаки а;
5) продольной переменной базы (па одной раме с сектором из-
менения углов атаки);
6) качающейся рамы;
7) качалки компонента Q;
8) станины весов (на рис. 11.3 не показана).
Для проведения опыта модель укрепляется на подвеске в трех
точках в перевернутом положении, так что при положительных уг-
лах атаки подъемная сила действует вниз. Конструкция весов поз-
воляет делать предварительную загрузку весов контргрузами, в
несколько раз большими, чем аэродинамические силы, которые мо-
гут возникнуть даже в случае отрицательных углов атаки, когда
аэродинамическая сила Ya действует вверх.
Подвески 4 и 12 состоят из тонких стальных лент, имеющих в
сечении симметричный обтекаемый профиль с незначительной аб-
солютной величиной лобового сопротивления.
Измерение аэродинамических сил на всех трех весовых элемен-
тах производится «нулевым» методом при мгновенном отсчете, т. е.
когда стрелки весовых элементов устанавливаются против рисок,
нанесенных на шкале, с отметкой «О».
* В круглой трубе МАИ угол косизны потока AaKoc~9',20.
128
Рассмотрим схему весов. Качающаяся рама 8 опирается на
ива ножевых шарнира, установленных на неподвижном остове
металлической конструкции (рама на бетонном фундаменте), на
которых она может только качаться. Металлическая рама в виде
буквы П, на траверсе (полке) которой, расположенной вперед по
потоку по отношению к шарнирам, установлено верхнее строение
передней подвески 3.
Противоположные концы рамы (направленные по ходу потока)
загружены подвижными грузами 9, предназначенными для стати-
ческой (до проведения эксперимента) балансировки качающейся
рамы со смонтированной на ней передней подвеской 4 относительно
оси ножей. Эта балансировка дает возможность разгрузить весо-
вой элемент Pi. Окончательная статическая балансировка компо-
нента Pi производится вспомогательным грузом и рейтером весово-
го элемента Pi.
Верхнее строение передней подвески 3 — металлическое, имею-
щее форму несимметричной четырехгранной пирамиды, в углах ос-
нования которой укрепляется ленточная подвеска. Таким образом,
нижняя часть передней подвески состоит из двух отдельных частей,
составленных из двух лент каждая (обтекаемого профиля), в виде
буквы V в плоскости направления потока с углом развала в 60°,
причем угол между вертикалью и передней лентой составляет 40°,
.а между вертикалью и задней лептой 20°. В месте стыка двух лент
вмонтирован шарнир, к которому крепится крыло модели посредст-
вом специального кронштейна. Полностью собранная передняя под-
веска вместе с верхним строением балансируется относительно оси,
проходящей через опоры ножей, с таким расчетом, чтобы она опро-
кидывалась по направлению потока. Это необходимо для осущест-
вления предварительной загрузки весового элемента Q.
Передняя подвеска покоится на двух ножевых шарнирах 6; ножи
заделаны в верхнее строение, а подушки укреплены на траверсе
качающейся рамы 8. Шарниры передней подвески, а также и ка-
чающейся рамы снабжены дополнительным устройством в виде
плоских тонких лент (па рис. 11.3 не показаны), расположенных
горизонтально вдоль по потоку в плоскости острия ножей. Такие
ленты предохраняют раму и подвеску от сдвига со своих мест под
действием скоростного напора потока или других каких-либо внеш-
них сил и в то же время обеспечивают качание рамы и подвески на
остриях ножей, не создавая дополнительного трения и требуя со-
вершенно незначительных, практически неощутимых усилий для
деформации на изгиб.
Сектор 7 является вспомогательной частью для изменения угла
атаки, а переменная продольная база 11 служит для измерения
расстояния между передней и задней подвесками, которое соответ-
ственно должно быть равным размеру продольной базы модели /б-
Сектор изменения углов атаки конструктивно выполнен так.
Цапфы неравноплечей рамы насажены на шариковые подшипники,
Укрепленные на кронштейнах станины весов, которые показаны на
129
www.vokb-la.spb.ru - Самолёт своими руками?!
рис. 11.4. В конец рамы (направленный по ходу потока) вмонтиро-
ван сектор с укрепленной на нем лентой, соединяющей механизм ос,
имеющий постоянный радиус А =300 мм. По двум направляющим*
переменной базы 11 (см. рис. 11.3) перемещаются шарниры 10, не-
сущие на себе специальный узел для крепления задней подвески 12.
Переменная база дает возможность в зависимости от исследуемой
модели изменять расстояние между передней и задней подвесками
В пределе ОТ /бтт = 200 ММ ДО /бтт = 450 мм.
На противоположном конце рамы сектора И помещены два
подвижных груза 2, предназначенных для статической балансиров-
ки, т. е. для предварительной балансировки сектора и задней под-
вески с целью разгрузки весового элемента Р% без воздушного по-
тока в трубе (V=0).
Задняя подвеска 12, как и передняя, сделана из двух стальных
лент с сечением обтекаемого профиля. Верхние концы лент крепят-
ся к шарнирам 10 продольной переменной базы, а нижние — к
шарниру, соединяющему заднюю подвеску с моделью таким обра-
зом, что ленты образуют в плоскости, перпендикулярной потоку,
угол развала в 21° (в виде буквы V).
Плоская стальная лента, идущая вверх от сектора (где сна
закреплена), присоединяется к барабану механизма 1 изменения
угла атаки. Барабан вращается посредством червячного редуктора
и сматывает или наматывает на себя ленту. Барабан и редуктор
смонтированы на траверсе; конец, к которому подходит лента, сое-
динен с весовым элементом Р% отвесной тягой так, что продольная
ось ленты является продолжением оси этой тяги. Второй конец тра-
версы покоится на двух шарнирах, находящихся в одной верти-
кальной плоскости, проходящей через центры передней подвески.
При этом центры шарниров (вокруг которых происходит качание
сектора и .передней подвески) лежат на одной горизонтальной пря-
мой; вертикальная плоскость, проходящая через эту прямую, явля-
ется нормалью к потоку. На этой же прямой находится и центр
качания шарнира вертикальной тяги, соединяющей весовой эле-
мент Р^ и качающуюся раму.
ТакихМ образом, передняя подвеска, задняя подвеска, траверса,
сектор изменения угла атаки и сама укрепленная по подвеске мо-
дель составляют параллелограмм, сохраняющийся при всех углах
атаки модели.
Для того чтобы системе подвески придать жесткость и устой-
чивость во время испытаний в аэродинамической трубе, в трех точ-
ках подвески, где происходит крепление подвески с кронштейнами
модели, на проволоках 14 подвешиваются контргрузы 13, весом по
5—6 даН каждый.
Весовой элемент Q соединяется вертикальной тягой с длинным
концом разноплечей качалки 16 компонента Q, а короткий конец ее
соединяется стальной лентой с верхней частью верхнего строения
передней подвески. Весовые элементы 15 (А, А и Q) см. рис. 11.3
и качалка компонента Q смонтированы на станине-
130
Весовой элемент (рис. 11.8) состоит из двух стальных труб 5,
соединенных траверсами 2, 6, 9, по которым перемещаются грузы
Гр и Гв, заменяющие гири, а по двум верхним линейка^м 3 — рей-
теры /Ср и /Св, отсчет положения которых определяется по шкалам,
нанесенным на эти линейки.
Положения грузов Гр и Гв определяются по шкалам нижних ли-
неек <
Рис. 11.8. Схема весового элемента весов АВНК:
/—стрелка; 2, 6, 9—траверсы; 3—линейки верхние; 4—линейки нижние; 5—
направляющие трубы; 7—опорные ножи; 8—подвижной груз; 10—тяга; Гр и
Гк—мерные грузы; Кр и Кв— рейтеры
Шкалы рейтеров разбиты на граммы, а шкалы грузов — на ки-
лограмм-силы.
Рычаги весовых элементов сбалансированы относительно опор-
ных ножей 7 с помощью подвижных грузов (балансиров) 8.
Нагрузку весовых элементов от веса модели, веса конструкции
системы промежуточных рычагов и веса контргрузов, передаю-
щуюся через тягу 10, уравновешивают при угле атаки а=0° вспо-
могательными грузами Гв и вспомогательными рейтерами /Св.
Основным рабочим грузом Гр и рейтером /Ср пользуются во вре-
мя эксперимента, уравновешивая ими возникающие аэродинамиче-
ские силы, действующие на модель.
Показания всех трех весовых элементов записываются в одно
и то же время в момент нахождения стрелок / в нулевом (исход-
ном) положении.
При установке модели на весы (см. рис. 11.4) необходимо обес-
печить выполнение следующих условий.
1. При любых заданных для модели углах атаки плоскость, про-
ходящая через точки качания передней подвески и центры шарни-
ров, предназначенных для крепления модели к передней подвеске,
131
www.vokb-la.spb.ru - Самолёт своими руками?!
должна быть строго вертикальна, перпендикулярна к направлению
скорости потока и параллельна плоскости, проходящей через центр
шарнира задней подвески (точка крепления модели) и центры шар-
ниров задней подвески на переменной базе.
2. Плоскость, проходящая через центры шарнира передней и
задней подвесок (точки крепления модели), должна быть парал-
лельна плоскости, проходящей через центры шарниров сектора из-
менения угла атаки и центры шарниров задней подвески на пере-
менной базе. При угле атаки а = 0° эти плоскости должны быть го-
ризонтальны и при изменении угла атаки не должны изменять
взаимного параллельного расположения.
3. Направления сил, загружающих качающуюся раму, ось сек-
тора изменения угла атаки и ось передней подвески должны сов-
падать с осями координат Ха и Уо, начало которых лежит на гори-
зонтальной линии, проходящей через ось шарниров передней под-
вески.
4. Контргрузы Кп (передний) и К3 (задний) должны находить-
ся на вертикальных линиях, проходящих через точки крепления мо-
дели к подвескам.
Аппаратура
1. Модель самолета или крыла с державками.
2. Трехкомпонентные аэродинамические весы АВНК (см. рис. 11.3).
3. Контрольный насадок аэродинамической трубы.
4. Микроманометр контрольного насадка аэродинамической трубы.
Рабочие формулы
'а=^= -12ns—А(?по-'1в) const;
qS (а — а0)
(^1 - -Р1.) + С2 (Р2 - Р2о)
° const;
» __ 1 а
уа~ qS
(а — а0)
Mz Mz ,
— const,;
qSbA (а — а0)
Mz ____ Г'’ I Г" А ...
т <]SbA
К Y а!Xа Суа[ Q ха, X*---K jb А st: tnzlCya ъ
или хд ~ С т]Суа.
Для модели летательного аппарата (см. рис. 11.6)
7Иг= —Y2k2 cos (а + р) + [Г, cos (а — у) -±Xa sin (а — у)]
const = 1/sin yyKfyS; const, — 1/sin <?yKfySbA;
здесь (см. рис. 11.4 и 11.6)
П=(Л-Р10); r2=c2(P2-P2o); Xfl=(QH3M-AQnoJ:.
с2=А’а//б СО5а; Л, —Л/sin у; Л2=Л/э1пр; Л3=а/Ла.
132
Для модели крыла (см. рис. 11.7)
Mz=—а-{-Хаа sin а.
Здесь —Л1/= Уг/б cos а — момент тангажа, относительно центра
шарнира передней 1подвески (точки О');
Cm=~^SbA;
а — расстояние от передней кромки крыла (точки 0) до оси
шарнира передней подвески (точки О'); ЬА — средняя аэродинами-
ческая хорда крыла.
Порядок проведения работы
1. Ознакомиться с трехкомпонентными аэродинамическими весами АВНК.
2. Составить схему весов.
3. Укрепить модель крыла или летательного аппарата на аэродинамических,
весах к шарнирам подвески и выверить установку модели по уровню.
4. Проверить согласно схеме правильность параллелограммов на весах, после
чего установить модель на угол атаки а—0е.
5. Установить рабочие грузы и рейтеры на весовых элементах в нулевое ис-
ходное положение. Показания весовых элементов занести в протокол.
6. Произвести статическую балансировку всей системы весов при помощи
вспомогательных грузов и рейтеров весовых элементов. Контроль статической,
балансировки весов осуществляется по стрелкам и нулевым рискам (при их сов-
падении), нанесенным на шкалах.
7. При всех углах атаки ос, на которых будет проводиться опыт, необходимо
на весовых элементах зафиксировать «нулевые» исходные отсчеты Pi о, Р2 о и QOt.
используя для этой цели рабочие грузы и рейтеры. Полученные показания весо-
вых элементов записать в протокол. Значения Pi о и Qo на всех углах атаки ос-
таются постоянными, причем Qo^O.
8. Произвести эксперимент и последующую обработку полученного материа-
ла и построить графики
Суа — f (,Сха)> Сха ~ fl (а)> Суа — (С0> (Ст) = /з (а)»’
/< = /4(а) и хд=/5(а).
Контрольные вопросы
1. Что такое поляра первого рода?
2. Что такое Сха mm, Суа max, Кт ах, хд и другие коэффициенты?
3. Каков основной принцип работы аэродинамических весов?
4. Как определить углы атаки акр, ссо, абал, сбив?
5. Как учитывается сопротивление подвески весов и державок модели?
6. Что такое скос и косизна потока?
7. Как влияет форма профиля крыла на аэродинамические коэффициенты;
Суа max, Сха mln, Kmax, Хд И Др.?
РАБОТА № 12
ОПРЕДЕЛЕНИЕ АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК
МОДЕЛИ ЛЕТАТЕЛЬНОГО АППАРАТА
В СВЕРХЗВУКОВОМ ПОТОКЕ
Цель работы — ознакомление со способами получения основ-
ных аэродинамических характеристик летательного аппарата в.
сверхзвуковом потоке воздуха.
133.
www.vokb-la.spb.ru - Самолёт своими руками?!
Результат работы должен быть представлен в виде поляры пер.
*вого рода Cya=f(Cxa) и графиков Сха, Cya=fДа) при заданном чис-
ле М.
Общие сведения
Поляры крыла или всего летательного аппарата при обтекании
модели сверхзвуковым потоком с ростом числа М обычно показы-
вают уменьшение значений как Сха, так и Суа. Однако при этом
происходит снижение максимального качества /Стах. В некоторых
Рис. 12.1. Графики зависимостей Суа—f(Сха),
Cxa==fl(ct), Cya!==fl (ОС)
-O-^a-=HCxa); -И-Сха=Л(а); _*-Суа=№)
случаях смещение поляр
влево и увеличение нак-
лона кривой Cya=j\(a)
приводит к тому, что по-
ляры пересекают друг
друга подобно тому, как
это показано на рис. 12.1.
Это можно объяснить с
позиций линейкой теории.
Кроме того, по мере рос-
та числа М (от М>1,1)
коэффициенты Сха и Суа
убывают, поскольку они
примерно пропорцио-
нальны tg ц = 1/УМ2—1.
В области трансзвуко-
вых скоростей, т. е. в ин-
тервале Мкр < М < 1,1,
подобные явления не на-
блюдаются. Следует за-
метить, что в этой обла-
сти линеаризированная
теория профиля крыла не
приемлема.
Для расширения поставленной задачи желательно опытным
путем получить наглядную картину, иллюстрирующую влияние чис-
ла М на аэродинамические коэффициенты Сха и Суа при a=const
Результатом эксперимента явится семейство графиков, характери-
зующих зависимость Сха и C^a=/(M, а).
Коэффициент лобового сопротивления после достижения крити-
ческого числа Мкр начинает резко возрастать вследствие возникно-
вения волнового сопротивления (рис. 12.2, а). Максимальному зна-
чению волнового сопротивления обычно соответствует число М=
= 1,14-1,2, когда перед затупленным носком профиля крыла обра-
зуется отсоединенный прямой скачок, который переходит в криво-
линейный, а по мере удаления от носка профиля — в косой. При
дальнейшем увеличении числа М область дозвуковых скоростей
между передней кромкой крыла и прямым скачком сужается, и,
13 4
яконец, скачок становится присоединенным косым скачком. Бла-
годаря изменению системы скачков с ростом чисел М волновое соп-
ротивление падает.
г При приближении к критическому числу Мкр в докритическои
зоне увеличение коэффициента подъемной силы Суа (рис. 12.2, б)
происходит вследствие влияния эффекта сжимаемости воздуха.
И теория и опыт показывают, что в первом приближении Сйасж =
= Суа несж/УТ—М2. После достижения Мкр коэффициент продолжает
увеличиваться, но уже благодаря образованию сверхзвуковой зоны
Рис. 12.2. Графики зависимостей:
c-Cxa=fc(M); 6-Cvo=f2(M)
и скачков уплотнения на верхней поверхности крыла. Образование
скачков уплотнения на нижней поверхности приводит к уменьше-
нию коэффициента Суа. В области чисел М>1 изменение коэффи-
циента Суа можно найти для тонких профилей по линейной теории.
Для малых углов атаки принято считать, что коэффициент Суа.
пропорционален углу атаки а и углу р, т. е. Суа=^и tgp =
=4а/уМ^—1.
Изменение числаМ потока лучше всего производить изменением
контура сопла. Обычно, однако, это производится путем смены сопел>
Лаваля.
Для построения поляры и графиков зависимости Сха, Cya=fi(a)
необходимо иметь значения коэффициентов Сха и Суа по углам
атаки а при М = const. В общем виде коэффициент лобового сопро-
тивления летательного аппарата можно представить в виде следую-
щей суммы:
Сха Л х “ хатр 4“ хаъ “И ха ин Д’ Д’
где Сха тр — коэффициент сопротивления трения, которое мала
зависит от угла атаки; Схав — коэффициент волнового сопротив-
ления, который распадается на две части: 1) Схрв — коэффициент
профильно-волнового сопротивления, зависящий только от формы
профиля крыла, фюзеляжа и оперения; 2) Схг-В — коэффициент
индуктивно-волнового сопротивления, зависящий исключительно от
угла атаки, т. е. от подъемной силы летательного аппарата; Сха дон-
135
коэффициент донного сопротивления (если имеется донный срез);
ЛСха вз — коэффициент приращения сопротивления, учитывающий
взаимное влияние крыла и фюзеляжа; Сха оп — коэффициент соп-
Рис. 12.3. Схема трехкомпонентных аэродина-
мических тензовесов:
1—исследуемая модель; 2—рама; 3—шкала; 4, 9—
гибкие элементы; 5, 10—тензодатчики; 6—соедини-
тельная тяга; 7, 17—контргрузы; 8—коромысло; 11—
•стрелка; 12—державка; 13—сектор; 14—направляю-
щая; /5—рукоятка; 16—шестеренка; 18—рамка; 19—
тяга; 20—кронштейн
ротивления оперения.
Коэффициент подъ-
емной силы также можно
представить суммой
С уа Л А ~ Суа кр у а ф “F
ОП
где С да кр — коэффици-
ент подъемной силы изо-
лированного крыла, т. е.
крыла, составленного из
двух консолей; Суа ф — ко-
эффициент подъемной си-
лы изолированного фю-
зеляжа (корпуса);
^Суа вз коэффициент
дополнительной подъем-
ной силы от взаимного
влияния крыла и фюзе-
ляжа, т. е. коэффициент,
учитывающий влияние
фюзеляжа (корпуса) на
крыло и крыла на фюзе-
ляж; С^а оп — коэффици-
ент подъемной силы опе-
рения.
Все представленные
выше коэффициенты дол-
жны быть приведены к полной площади крыла, т. е. с учетом ее
подфюзеляжной части.
Полученные экспериментальные значения силы лобового сопро-
тивления Ха, подъемной силы Ya и момента тангажа Mz выража-
ются через аэродинамические коэффициенты
Cxa=Xa!qS\ Cya=Ya!qS\ mz=Mz]qSb.
Формулы для определения скоростного напора q аэродинамичес-
ких сил Ха, Ya и момента Mz, а также числа М даются ниже.
Испытание модели летательного аппарата с целью получения
поляры проводится в сверхзвуковой аэродинамической трубе на
тензометрических весах. Схема трехкомпонентных тензовесов по-
казана на рис. 12.3.
Рассмотрим измерительный блок компоненты силы лобового
сопротивления Ха и компоненты момента тангажа Mz.
Исследуемая модель 1 укрепляется на державке 12, которая, в
свою очередь, жестко заделывается в секторе 13. Поворот сектора
136
вокруг точки 0 оси Z, проходящей через начало координат, на лю
бой заданный угол атаки а (в пределах возможного, обусловлен-
ного конструкцией «весов) осуществляется с помощью рукоятки 15
и шестеренки 16. Шестеренка находится в постоянном зацеплении с
зубцами, нарезанными на секторе. Угол атаки модели визуально
отсчитывается посредством стрелки 11 по шкале 3. Две направляю-
щие 14, несущие на себе сектор, смонтированы на рамке 18, кото-
рая висит на четырех гибких элементах (плоских пружинах) 9,
прочно укрепленных на раме 2 блока компонента У. Гибкие эле-
Проволочный
Рис. 12.4. Мостовая схема:
/—шкала отсчета; 2—реохорд; 5—реверсивный двигатель;
4—усилитель; 5—регистрирующее устройство; 6—измеритель-
ный мост тензовесов
менты сделаны так, что обеспечивают рамке 18 только одну сте-
пень свободы, т. е. перемещение ее -вдоль оси X (в направлении
скорости потока). На гибких элементах наклеены проволочные тен-
зодатчики 10. Таким образом, сектор 13, рамка 18 и гибкие эле-
менты 9 образуют измерительный блок компонента Q, т. е. блок
силы лобового сопротивления Ха.
Разность показаний нижних (<2ниж) и верхних (QBepx) тензодат-
чиков с учетом сопротивления державки и сектора весов), умно-
женная на условное плечо /усл (расстояние между нижними и верх-
ними тензодатчиками), дает нам момент тангажа Mz относительно
точки 0 (начало осей координат, см. рис. 12.3).
Для того чтобы на измеряемые компоненты Q и У как можно
меньше оказывали влияние державка 12 и сектор 13, последние за-
ключают в специальные обтекатели. Обтекатели укрепляются на
отдельной, изолированной от весов державке (на свою «землю»),
причем между ними и сектором с державкой должен быть неболь-
шой зазор.
При изменении угла атаки модели обтекатели должны синхрон-
но с сектором перемещаться по заданным углам а. На прилагае-
мой схеме весов обтекатели не показаны.
137
Измерительный блок подъемной силы Ya также состоит из рЯ
мы 2, двух гибких элементов 4, на которых наклеены проволочные
тензодатчики 5 и двух тяг 19, прикрепленных через шарниры к
кронштейнам 20 и образующих классический параллелограмм, ко-
торый дает возможность раме 2 смещаться только в направлении
подъемной силы Уа, т. е. вдоль оси У.
При помощи соединительной тяги 6
коромысла 8 (на котором находятся
контргрузы 7) и контргрузов 17 произ-
водится статическая балансировка весов
вместе с моделью.
Под действием силы лобового сопро-
тивления и подъемной силы гибкие эле-
менты деформируются (соответственно),
вызывая изменение омических сопротив-
лений тензодатчиков, которые включены
каждый в свой электрический мост (рис.
12.4).
Проволочные тензодатчики изготов-
ляются из тонкой константановой прово-
локи, приклеиваемой в виде зигзагооб-
разной решетки на бумажную или мате-
рчатую основу, как показано на рис.
12.5. Омическое сопротивление проволоч-
Рис. 12.5. Проволочный тен-
зодатчик:
/—металл; 2—клей; 3—основа;
4—проволока тензодатчика; 5—
основа; 6—выводные провод-
ники
ных тензодатчиков, даже при больших
деформациях, изменяется в очень малых
пределах. Поэтому при использовании
проволочных тензодатчиков применяет-
ся мостовая схема, которая позволяет
измерить лишь абсолютные значения
приращения сопротивления датчиков Д7?.
Для регистрации сил, действующих на модель, используется ре-
гистрирующее устройство, состоящее из усилителя и регистрирую-
щего прибора (см. рис. 12.4). В основу его работы положен прин-
цип автоматического уравновешивания моста, отвечающий уравне-
нию Для уравновешивания моста служит проволочный
реохорд, перемещение подвижного контакта которого осуществляет-
ся реверсивным двигателем, управляемым через электронный уси-
литель сигналом разбаланса моста. Питание электрического моста
производится переменным током напряжением 12 или 24 В.
В данной работе так же, как и в работе № 11, при определении
коэффициента лобового сопротивления Сха не учитывается влияние
скоса (Дат) и косизны потока трубы (Дак).
Аппаратура и материалы
1. Препарированная модель летательного аппарата.
2. Двухкомпонентные аэродинамические электрические тензовесы. t
138
3. Приемник для измерения полного давления потока ро в форкамере и пру-
жинный манометр.
4. U-образный ртутный манометр.
5. Регистратор показаний аэродинамических нагрузок, воспринимаемых эле-
ктрическими тензовесами или ГР/М.
н Е 5 Резиновые и металлические трубки для соединения приемника полного*
давления с манометром и ГРМ — с отверстием в стенке рабочей части.
Рабочие формулы
Cya=yalqS-, Cxa=Xa/qS; mz=MzlqSb‘, !A=f2(p„/p0);
P0=a + -4^; 9==vAtM2=0,7a‘M2;
oUU
Ya=(N-N^yky-№, Xa=QK3M-bQ;
Qh3M = (Qhh>k ~Г Сверхн) = (N ^о)лн^\н Ч~
^2 = [(QlIH/K QbcPXh) ] ^усл
(для случая, когда модель на весах установлена в перевернутом
положении, т. е. положительное направление подъемной силы на-
правлено в сторону нижних тензовссов), где Дй— показание U-
образного манометра в мм рт. ст.; S — площадь крыла в м2 (вклю-
чая подфюзеляжную часть); b — хорда крыла в м; ра = ^/1,333 —
атмосферное давление в мм рт. ст. (здесь В — атмосферное дав-
ление в миллибарах); А — показание манометра; ///300 — цена
деления шкалы манометра в мм рт. ст. (где Н — предел измерения
манометра в мм рт. ст.); Мн; Мсв; Ny — показания регистрирующе-
го прибора (нижнего и верхнего тензодатчиков) компонент Q и Y
(соответственно) во время опыта; Nqx11; Nqxb\ Noy — показания ре-
гистрирующего прибора до опыта (нулевые показания) компонент
Q и Y (соответственно); /<хп; Кхв; Ку— коэффициенты, учиты-
вающие (соответственно) цену деления регистрирующего прибора;
ДР, AQ — поправки, учитывающие (соответственно) подъемную*
силу и лобовое сопротивление державки и сектора весов во время
опыта (определяются по графикам, аналогичным графикам на
рис. 12.6 и 12.7); /усл — условное плечо в м, представляющее рас-
стояние между верхними и нижними тензодатчиками компонен-
ты Q. /усл определяется опытным путем посредством статической
градуировки весов на стенде.
Полученное значение отношения давлений PvJpv позволяет при
помощи газодинамических таблиц определить число М потока.
Статическое давление потока можно измерить и при помощи
ГРМ, описание которого дается в работе № 7. В этом случае фор-
мула для подсчета статического давления будет следующей:
Рст — Ра ст
где (М—Nq) ст — показание ГРМ; /Сст — цена деления шкалы ГРМ.
Если скоростной напор q при данной температуре опыта выра-
жается >в Н/м2, то в этом случае и статическое давление нужно вы-
139
разить в Н/м2, для чего полученное значение рСт в мм рт. ст. ум.
ложается на удельный вес ртути ус=13,6 при 0°С и ускорение g.
Рис. 12.6. График градуи-
ровки державки и сектора
весов по числам М и углам
атаки а
Рис. 12.7. Градуировочный
график зависимости сопро-
тивления державки и секто-
ра весов по углам а и чис-
лам М
Для приведения удельного веса ртути к условиям температуры
стандартной атмосферы (MCA) используется уравнение (1.3):
*¥с-рт
где ррт = 0,00018 — коэффициент объемного расширения ртути.
Порядок проведения работы
1. Ознакомиться с конструкцией трехкомпонентных аэродинамических тензо-
весов.
2. Составить схему весов и электрического моста.
3. Записать показания барометра и термометра.
4. Перед каждым испытанием установить модель в положение, соответствую-
щее заданному углу атаки а согласно принятой программе опыта.
5. Снять нулевые показания с регистрирующих приборов компонент Q и Y
при данном угле а.
6. Произвести эксперимент, после чего полученные данные обработать по
имеющимся рабочим формулам и построить графики Cya=f(Cха ), Сха—/1(с0>
Cya^fi (а) при заданных значениях чисел М.
Контрольные вопросы
1. Какое влияние оказывает увеличение числа М на аэродинамические коэф-
фициенты Сха И Cj/a?
2. Что такое волновое сопротивление?
3. Каковы факторы, влияющие на величину Сх min?
4. На каком принципе основана техника измерения аэродинамических сил
на весах?
140
РАБОТА № 13
НАХОЖДЕНИЕ ПРОФИЛЬНОГО СОПРОТИВЛЕНИЯ
КРЫЛА МЕТОДОМ ИМПУЛЬСОВ
Цель работы — исследование распределения скоростей в следе
за крылом и нахождение профильного сопротивления в сечении
крыла.
В результате работы должен быть построен график, характери-
зующий распределение полных напоров в следе за крылом, при по-
мощи которого определяется профильное сопротивление сечения
крыла.
Коэффициент сопротивления крыла можно написать в виде
суммы
Сха=СХр + ^xi “Г
В любом случае, будет ли течение дозвуковым или сверхзвуко-
вым, а крыло конечного или бесконечного размаха, профильное
сопротивление всегда будет представлять собою сумму сопротивле-
ния трения и сопротивления давления (результирующая давлений
между носовой и кормовой частями профиля), т. е.
С хр = С х TP С х давл •
Общие сведения
Причиной образования следа, расширяющегося по мере удале-
ния от крыла, является вязкость воздуха, обтекающего крыло.
В следе происходит турбулентное перемешивание возмущенного
воздуха с невозмущенным и, как следствие, расширение границ
следа. Исследуя распределение скоростей в следе, можно опреде-
лить профильное сопротивление обтекаемого тела (крыла). В этом
случае определение профильного сопротивления для малых углов
атаки основано на теореме импульсов — секундное изменение ко-
личества движения жидкости в данном объеме равно импульсу сил,
действующих на эту жидкость, т. е.
Хр=JJ ои(У — u)dydz9
где V — начальная невозмущенная скорость потока; и — скорость
потока в следе за крылом; у — координата по ширине следа; z —
координата вдоль размаха крыла; р — плотность воздуха.
Если принять u=V, то Qp = 0, отсюда получим, что применяе-
мое уравнение дает результат только внутри следа за крылом.
Эксперимент по нахождению профильного сопротивления ме-
тодом потерянных импульсов имеет большое принципиальное и
практическое значение. Он позволяет найти энергию, потерянную
при обтекании произвольного контура, точнее проекцию потерян-
ного импульса на выбранную ось (в нашем случае ось направления
течения).
141
Рис. 13.1. Схема для определения силы лобо-
вого сопротивления крыла методом импульсоз
Таким образом, при обтекании крыла могут быть учтены поте-
ри энергии, за исключением индуктивных потерь.
Индуктивные потери связаны со скоростью, перпендикулярной к
направлению основного потока, и поэтому не учитываются данным
экспериментальным методом.
Предложенный метод позволяет найти сопротивление произволь-
ного отсека крыла без использования аэродинамических весов.
Задача может решаться как в условиях q = const, так и в усло-
виях сжимаемой среды. Здесь мы для простоты рассмотрим слу-
чай q=const. Решение
задачи для сжимаемой
среды приведено в книге
А. К. Мартынова «Прик-
ладная аэродинамика»
(«Машиностроение»,
1972).
Нами рассматривает-
ся плоская задача, т. е.
производится определе-
ние профильного сопро-
тивления сечения крыла
(на единицу размаха
dz=l). Для контрольно-
го сечения следа АВ (рис. 13.1), которое удалено от крыла до-
вольно далеко, можно принять равенство статических давлений
в начальном и конечном сечениях, т. е. а уравнение запи-
сать в виде
Практически вместо проведения контрольной плоскости АВ на
очень большом расстоянии от крыла рассматривают плоскость EF,
расположенную на сравнительно малом расстоянии (до 0,5 хорды).
Для упрощения решения задачи в этом случае принимают допу-
щение о действительности уравнений Бернулли для струек в следе
за телом. Это означает, что полные давления в струйках за телом
ВСЮДУ ПОСТОЯННЫ, Т. е. Р1 поли = /?2 поли-
Уравнение расхода для элементарных сечений EF и АВ
при единичной ширине сечения и постоянной плотности воздуха
будет
u2dy2l = u1dyA,
откуда
dy2
«1 = ^2
dy
142
Уравнение Бернулли для сечений струйки плоскостями EF и АВ
запишется в виде
р2полн--Р11ГЭЛН Р2 '2 Pl ’ 2 ’
е«1 .
/?2полн Р2 I 2 Р 1~ 2
9 2
0^2 . ®и1
ИЛИ 2 — Р2полч Р2ч /?2по.чн Р*
откуда «1=']/Л-^-(/’2пОлн — р), а А='|/<-|-(АпОлИ —А)-
Полный напор в начальном сечении CD
Риоля. Р ~F /^»
откуда
После подстановок полученных выражений в основное уравне-
ние для силы профильного сопротивления Qp получим
Л F
Qp=f№(Vr — Ui)dy2=^QV2^ (1 —y\dy2,
Е Е
откуда формула для величины Схр будет иметь вид
Qp____Чр___2 Г 1 /~ Дгполн Pl fl _1 Р2полн Р J.
Cxp~qS~^~b\V дполн-р V1 V ритк-р} У2‘
— Ь\ е
Разность полного давления в сечении следа EF и статического
давления невозмущенного набегающего потока в сечении CD на-
пишем в таком виде:
Аполн — Р=Аполн—Р+А—А=А — (р—А);
Р21ЮДН Р 42 (Р Р'2)
Рполн — Р Q Q
Здесь р—р2 — разность статических давлений в сечениях CD и EF.
Подставляя полученные выражения в формулу для Схр, будем
иметь
Е
143
Воспользуемся для вычисления
нием. Обозначив
Схр графическим интегрирова
F
2 ।
схр=— Y?[y)dy2,
Е
строим зависимость <р(у) в виде графика, как показано на
13.2.
Рис. 13.2. График характерис-
тики следа за моделью крыла
Если скорость потока в
мя всего опыта постоянной,
Здесь (рис. 13.3):
Я ао)пер ФперТпер^перР'пер
(определение скорости воздушного по-
тока проведено методом измерения пе-
репада давления);
где grp — коэффициент трубки в гре-
бенке:
ДЛ —(Атсч ^ст)л
аэродинамической трубе будет’ во вре-
то
q2[q=kh const,
где const=y$rp/(« - а0)пер sin <рпсРТ„е1ЛпеРР-11еР.
Значение р—р2 определяется по формуле
р — Р2=(а — sincpy/C,
где (а—Яо) — показания микроманометра 7.
По полученным из опыта данным строится график ф(у) =f (г/2)
(см. рис. 13.2) в масштабах m—1у2 = 1 : 2 и п—1ф = 12 : 1.
На этом графике определяется площадь F в см2, ограниченная
кривой ф(у), после чего коэффициент профильного сопротивления
получаем по формуле
с __ 2 Р
хр~ b тп *
В аэродинамической лаборатории МАИ опыт проводится в
плоской трубе ПТ-1 МАИ, в которой скорость воздушного потока
определяется методом измерения перепада давлений. Опыт может
быть также поставлен в любой аэродинамической трубе. Определе-
ние скорости потока может быть произведено как по методу изме-
рения перепада давлений, так и при помощи контрольного насадка-
144
Ниже дается описание установки в плоской трубе ПТ-1, схема
которой приведена на рис. 13.3.
Модель крыла 1 устанавливается в рабочей части аэродинами-
ческой трубы под углом атаки сс = Оэ. За моделью на расстоянии
10% хорды крыла укрепляется на державке 5 гребенка 2. Гребен-
ка имеет трубочки 3 и 4 для приема полного и статического давле-
ния. Статическое давление от трубочек 4 посредством резиновых
шлангов передается в коллектор 9, а оттуда с помощью шланга —
Рис. 13.3. Схема установки для определения сопротив-
ления крыла методом импульсов:
1—модель крыла; 2—гребенка; 3—приемники полного давления;
4—приемники статического давления; 5—державка; 6, 7—мик-
романометры; 8, 11—тройники; 9—коллектор; 10—батарейный
манометр
к «нулевой» трубке батарейного манометра 10. Полные напоры пе-
редаются от каждой трубочки 3 гребенки 2 к соответствующей
трубке батарейного манометра. Скоростной напор воздушного пото-
ка аэродинамической трубы измеряется микроманометром 6.
Разность статических давлений р—р2 невозмущеппого потока и
в следе за моделью определяют по микроманометру 7. Посредст-
вом шлангов и тройников 8 и 11 бачок микроманометра присоеди-
няется к дренажным отверстиям, расположенным на выходном
сечении сопла (начало рабочей части аэродинамической трубы),
а трубочку микроманометра соединяют с коллектором 9. В коллек-
торе 9 статическое давление в следе осредняется.
Для упрощения проведения эксперимента разность статических
давлений р—р2 можно определить заранее, и тогда микроманометр
7 в ехему установки включать не нужно.
Если полученную разность давлений отнести к скоростному на-
пору набегающего потока, получим постоянную поправку
Хр=(р — p2)/q.
6 1743
145
Тогда формула для коэффициента профильного сопротивления
примет вид
Е
или, обозначив
?(У)=|/Л-у (1 — ’ I
будем иметь
Схр=~\ <?(У)с1у2- I
Ь «]
Е
Однако следует помнить, что использование микроманометра 7
повышает точность эксперимента.
Аппаратура и материалы
1. Модель крыла.
2. Гребенка для исследования следа за крылом.
3. Батарейный манометр.
4. Контрольный насадок аэродинамической трубы при определении скорости
насадком.
5. Микроманометр для определения скорости потока воздуха в трубе при
помощи контрольного насадка или по методу перепада давлений.
6. Резиновые шланги для соединения гребенки с батарейным манометром
и отверстий перепада давлений в стенках аэродинамической трубы с микромано-
метром перепада или с контрольным насадком.
7. Тройники для присоединения шлангов.
Рабочие формулы
(р — Рд
Ч
Обозначив через
будем иметь
или
где F — площадь в см2, ограниченная кривой <р(у) =f(y2) (см. рис.
13.2); т — масштаб 1г/2 (принимаем т = 0,5); п — масштаб 1<р(у)
(принимаем п=12).
146
Порядок проведения работы
1 Ознакомиться со схемой установки.
2 Установить модель в аэродинамической трубе под углом атаки а=0°, при
ом указательную стрелку прибора совместить с «нулем» шкалы лимба.
ЭТ 3 Проверить герметичность соединений шлангов с манометрами, гребенкой
отверстиями перепада давлений или с контрольным насадком.
1 4. Измерить и занести в протокол испытания расстояние трубочек полного
напора гребенки от продольной оси модели.
5. Измерить расстояние от задней кромки модели до отверстий полного
давления гребенки.
6. Провести эксперимент с измерением величин перепадов полных и стати-
ческих давлений, повторив измерение несколько раз для повышения точности.
7. После испытания обработать результаты опыта, построить график q(y)
и при его помощи определить Схр-
Контрольные вопросы
1. Чго такое профильное сопротивление тел?
2. Какие допущения сделаны в методе определения профильного сопротив-
ления?
3. От чего зависит профильное сопротивление?
4. Можно ли определить этим же методом лобовое сопротивление других
тел?
Р ХБОТА № 14
ОПРЕДЕЛЕНИЕ ЛОБОВОГО СОПРОТИВЛЕНИЯ
ТЕЛ ВРАЩЕНИЯ (ФЮЗЕЛЯЖА)
Цель работы — определение коэффициента лобового сопротив-
ления тела вращения (фюзеляжа) на дозвуковых скоростях.
Результат работы представляется в виде графика
Слвф=/(’4 Re).
Общие сведения
В области дозвуковых скоростей лобовое сопротивление фюзе-
ляжа или корпуса при угле атаки а=0° складывается из сопротив-
ления сил трения, давления и донного давления, т. с. коэффициент
лобового сопротивления
• {-'ляОф —^лтр.фЧ^'лдавл.ф ^лдон’
Когда же фюзеляж или корпус находится под некоторым углом
атаки, общее сопротивление увеличится на величину индуктивного
сопротивления. Коэффициент полного сопротивления фюзеляжа или
корпуса, находящегося под углом атаки а, определяется по фор-
СХа$~ ^лОф + ^xi ф*
При сверхзвуковых скоростях эта сумма имеет другой вид:
С ха ф = Сх тРеф -р С х в.ф с х доН.
6*
147
Здесь, как было сказано выше (см, работу № 12), волновое со-
противление Схв.ф распадается на профильно-волновое и индуктив-
но-волновое, т. е. Сх в.ф ~ Схр в.ф “h СХг в.ф.
График определения коэффициента лобового сопротивления фю-
зеляжа (аналогичный график будет и для любого тела вращения)
дается как в форме зависимости Стаф=/(Ке), так и в виде Схаф=
=А(Ю (рис. 14.1).
На графике достаточно наглядно показано уменьшение коэффи-
циента СхОф с ростом числа Re при а=0°. Такое изменение согла-
Рис. 14.1. Коэффициент лобового сопротивле-
ния тела вращения в зависимости от скорости
и числа Рейнольдса
суется с характером из-
менения Cxf И Рдоп При
тех же числах Re (см.
рис. 8.2 и рис. 8.6). Доля
сопротивления от сил
давления на поверхности
корпуса (вихревое сопро-
тивление) будет незначи-
тельной по сравнению с
силами трения и донным
давлением, поэтому вих-
ревое сопротивление ма-
ло влияет на характер
кривой Сха 0ф=/(Re).
Следует отметить, что в данной работе необходимо ввести по-
правку на градиент статического давления в рабочей части трубы.
В аэродинамических трубах с закрытой рабочей частью вслед-
ствие гидравлических потерь статическое давление по длине рабо-
чей части непостоянно. Изменение давления по длине рабочей ча-
сти происходит и в трубе с открытой рабочей частью, в этом случае
оно пренебрежимо мало.
Наличие градиента статического давления влияет на истинную
силу лобового сопротивления испытуемого тела вращения; соответ-
ственно изменяется и аэродинамический коэффициент Схаф.
Чтобы получить истинный аэродинамический коэффициент,
пользуются формулой
С ха ф Схф.оп
Ххаф
9изм" AQlcp А
_____________ dx 1
ХСф (а —^о) sin
где Сх ф.оп — аэродинамический коэффициент, полученный из опы-
та с учетом лобового сопротивления державки; ДСхА — поправка
на градиент статического давления аэродинамической трубы:
Qn3M — сопротивление модели, державки и подвески весов, изме-
ренное во время опыта при заданной скорости потока; ДС2дер — соп-
ротивление державки *и подвески весов при той же скорости потока;
148
определяется по графику рис. 11.5; А — объем испытуемого тела в
м3*; dp/dx градиент статического давления, получаемый по
данным исследования распределения статического давления вдоль
оси рабочей части трубы.
Вид А
Рис. 14.2. Определение лобового сопротивления фю-
зеляжа (схема установки):
1—модель фюзеляжа; 2, 4—державки; 3, 5—шарниры; 6—
контргрузы
Величина dpldx принимается положительной, если статическое
давление уменьшается в рабочей части аэродинамической трубы в
направлении потока. Для каждой аэродинамической трубы величи-
на dpldx известна.
Поправка обычно велика у удлиненных тел, имеющих ма-
Дое лобовое сопротивление.
При опытах полный объем тела разбивается на отсеки, соответствующие
постоянным значениям dpldx вдоль по потоку.
149
Схема установки для определения лобового сопротивления
зеляжа показана на рис. 14.2.
Модель фюзеляжа 1 при помощи державок 2 и 4 подвешивает-
ся посредством шарниров 3 и 5 к подвеске трехкомпонентных аэро-
динамических весов. Натяжение подвески осуществляется контр-
грузами 6. Продольную ось модели фюзеляжа необходимо устано-
вить параллельно потоку, пользуясь для этого механизмом а (см.
рис. 11.3). После установки модели фюзеляжа в нужное положе-
ние весовые элементы Pi и Р2, а также механизм а должны быть
зафиксированы, т. е. поставлены на арретиры.
Аппаратура
1. Модель тела вращения или фюзеляжа с державкой для крепления к под-
веске аэродинамических весов АВНК.
2. Аэродинамические весы АВНК, описание которых дается в работе № 11.
3. Контрольный насадок аэродинамической трубы.
4. Микроманометр контрольного насадка.
Поскольку в задачу данного эксперимента входит определение одного лишь
лобового сопротивления при а=0°, то весовые элементы Р2 и механизм сс
аэродинамических весов АВНК устанавливаются на арретиры.
Рабочие формулы
где
Сллф=Слф.,п-ДСхЛ=-^—Д/^мид;
X л
ЛСф— , л
dx ,
-----Г--COnst!,
(а — я0)
COllStj — 1/sin ^Гсф==^изм ”^Qiep’
ПАф ________
Re=-----= | (а — а0) const3,
где I/=J/(&—a0)const2; const2=l/ — sin const3=—const2;
r e v
SM — площадь миделевого сечения тела вращения (фюзеляжа)
в м2; £ф — длина тела вращения (фюзеляжа) в м; v = pi/p — ко-
эффициент кинематической вязкости, определяется по графику (см_
рис. 10. 1) в зависимости от температуры и барометрического дав-
ления.
Порядок проведения работы
1. Ознакомиться с установкой модели фюзеляжа или корпуса летательного
аппарата.
2. Проверить, чтобы строительная ось фюзеляжа или корпуса была парал-
лельна направлению потока.
3. Ненужные в данном опыте весовые элементы и механизм поставить на
арретиры.
150
4 Поставить рабочий груз и рейтер весового элемента в пулевое положе-
* е. совместить риски нониусов груза и рейтера с нулями шкал.
яие’ з' сбалансировать весовой элемент вспомогательным грузом и рейтером, т. е.
вместить стрелку рычага с отметкой «О» на шкале.
С° 6 Присоединить микроманометр к контрольному насадку аэродинамической
<rDv6bi и снять отсчет с микроманометра.
7 Произвести опыт, после чего обработать полученные экспериментальные
данные по прилагаемым формулам и построить график.
Контрольные вопросы
1. Как влияет форма носовой части тела вращения на лобовое сопротив-
ление?
2. Зависит ли коэффициент лооового сопротивления корпуса летательного
аппарата от формы кормы?
3. Как влияет градиент статического давления вдоль оси трубы на коэффи-
циент лобового сопротивления фюзеляжа (корпуса)?
РАБОТА № 15
ОПРЕДЕЛЕНИЕ МОМЕНТА ТАНГАЖА
МОДЕЛИ ЛЕТАТЕЛЬНОГО АППАРАТА
Цель работы — ознакомление с простейшим методом измере-
ния моментов аэродинамических сил летательного аппарата при
разных положениях его центра тяжести на дозвуковых скоростях.
Результат работы представляется в виде сводной диаграммы
при двух различных положениях центра тяжести само-
лета.
Общие сведения
Модель самолета или летательного аппарата другого типа ус-
танавливается в аэродинамической трубе на специальном приборе,
называемом моментным центровым прибором (рис. 15.1). При этом
предполагается, что центр тяжести (ЦТ) самолета совмещен с на-
чалом координат. Изменение центровки осуществляется путем пе-
ремещения модели вдоль оси X. Модель закреплена таким образом,
что она имеет только одну степень свободы движения в трубе, в
то время как самолет в полете имеет шесть степеней свободы или,
вернее, еще больше, если учесть деформации самолета, движения
рулей, элеронов и прочих органов управления.
Единственное движение, которое может при такой установке
совершать модель самолета, — это движение, изменяющее угол
атаки а, т. е. вращение вокруг связанной оси Z. Опыт проводится
пРи угле скольжения р = 0; используется связанная система
координат.
Заметим, что при положении модели, изображенной на рис. 15.1,
момент силы тяжести модели относительно оси OZ равен нулю, так
как направление вектора веса модели параллельно оси OZ, а
моментом трения относительно этой оси можно пренебречь. Поэто-
151
му три переходе от модели к натуре нет необходимости во введе
нии поправок на вес модели и трение в приборе.
Задача настоящей лабораторной работы заключается в том, что
бы найти балансировочный угол атаки абал, соответствующий ус
ловию т2 = 0, и определить характер этого равновесия (рис. 15.2)
Рис. 15.1. Схема установки для определения продольной статической
устойчивости модели самолета:
1, 2, 4, 5—трубы телескопические; 3—штифт; 6—лимб; 7—поводок; 8—стрелка; 9—
блоки; 10—фланец
а также определить значения момента тангажа в зависимости от
задаваемых углов атаки.
По законам механики возможно существование трех видов рав-
новесия твердого тела, а именно:
а) устойчивое равновесие, определяемое возникновением таких,
моментов, которые возвращают тело в положение равновесия, когда
тело почему-либо выходит из него;
152
б) неустойчивое равновесие, определяемое возникновением та-
ких моментов, которые при выходе тела из положения равновесия
увлекают тело в сторону еще большего отклонения от первоначаль-
ного положения;
в) безразличное равновесие, при котором в любом новом поло-
жении тела, не очень удаленном от начального, не возникает ника-
ких моментов.
С этой целью должны быть построены графики изменения ко-
наклон кривой в области баланоиро-
v dmz п
то самолет устойчив; при о —
самолет находится в безразличном
эффициента mz=f(a). Если
dmz л
вечного угла атаки -----< О
б/СС
v dmz л
неустойчив, а при ——=0
равновесии.
Для определения знака
угла а, а также характера
равновесия модели при уг-
ле Обал *» При котором CVM-
марный момент аэродина-
мических сил (момент отно-
сительно оси Z) равен ну-
лю, нужно воспользоваться
существующим стандартом
осей координат.
На схеме (см. рис. 15.1)
изображена правая система
осей X, У, Z. Направление
положительного момента
относительно оси Z (+7WZ)
на этой схеме указано
стрелкой.
В системе X, Y, Z положительный момент Mz будет моментом
на кабрирование (поднимающим нос самолета), и тогда положи-
тельное отклонение относительно оси Z будет увеличивать угол
атаки а.
Обратим внимание на то, что ось моментного центрового при-
бора или ось вращения модели, как это видно из схемы, может
быть расположена произвольно по отношению к самой модели. Но
чтобы измеряемые моменты отвечали подобию явлений, наблюдае-
мых и на модели и на самолете, эта ось должна быть выбрана так,
чтобы она проходила через точку, соответствующую центру тяже-
сти (ЦТ) самолета. Положение центра тяжести определяется без-
размерной координатой
xT—xJb,
* Если пренебрегать в данной работе поперечным углом косизны потока.
153
где b — хорда крыла (это может быть средняя аэродинамическая
средняя геометрическая, корневая и т. д.); хт — расстояние от пе-
редней кромки крыла данной хорды до центра тяжести.
Когда хт имеет небольшую величину, то центровку называют
передней. Задняя центровка будет при больших значениях хт.
Моментный центровой прибор, при помощи которого проводит-
ся испытание, состоит из следующих основных деталей: верхней
штанги, нижней штанги с укрепленным на ней лимбом и не пока-
занной на чертеже штанги с двумя блоками, через которые прохо-
дят нити от лимба к чашкам весов. Нижняя и верхняя штанги
должны быть соосны, а их общая ось располагается вертикально.
Верхняя штанга состоит из стальной трубы 1 (см. рис. 15.1), ко-
торая закреплена в потолке аэродинамической трубы; внутрь тру-
бы 1 вставлена другая стальная труба 2, которая контрится вин-
том. На конце трубы 2, выходящем в рабочую часть аэродинами-
ческой трубы, находится стальной круглый штифт 3, который
свободно вращается на двух шариковых подшипниках, вмонтиро-
ванных в трубу 2. Труба 2 может свободно двигаться в трубе 1.
Нижняя штанга состоит из трубы 4, вставленной в направляю-
щий фланец 10, который укреплен на нижней стенке аэродинами-
ческой трубы. Труба 4 во фланце 10 может перемещаться в осевом
направлении и фиксироваться в любом положении при помощи
зажимного винта. В трубу 4 вставлена труба 5, которая имеет воз-
можность вращаться в трубе 4 на шариковых подшипниках. На
нижнем конце трубы (находящемся в нижней кабине) наглухо за-
креплен металлический лимб 6 с нанесенными по всей его окруж-
ности градусными делениями (через 0,5°), а на верхний конец тру-
бы 5, входящий в рабочую часть аэродинамической трубы, надет
поводок 7.
На направляющую трубу 4 надета и зажата винтом с рукояткой
стрелка 8. На горизонтальной штанге (на чертеже не показана)
укреплены блоки 9, через которые проходят нити от лимба к чаш-
кам весов.
Установка прибора и модели осуществляется следующим обра-
зом. Из кабины трубы в направляющую трубу 4 вставляется тру-
ба 5, которая для устранения продольного смещения фиксируется
специальным винтом, затем опускается прижатая к потолку штан-
га с блоками, натягиваются нити, закрепленные у лимба так, что-
бы они попали в желоба на лимбе и проходили через желоба ро-
ликов, будучи горизонтальными. К концам нитей прикреплены чаш-
ки весов. Визируя глазом параллельность и горизонтапьность
нитей, можно устранить угол между обеими нитями, идущими
к чашкам, опуская или поднимая горизонтальную штангу иии
каждый блок в отдельности. Проверив, хорошо ли затянуты винты,
зажимающие горизонтальную штангу и трубу 4, можно приступить
к установке модели.
На верхний конец трубы 5 в нижней штанге, в зависимости от
препарирования модели и от ее размеров, надевают поводок 7,
154
сстояние между центрами которого может быть различным в за-
висимости от задаваемых положений центра тяжести. Надев пово-
Б к нужно непременно проверить, не имеет ли он люфта и хорошо
^и он насажен на штифт. Затем на поводок надевают модель с
препарированной державкой, имеющей ряд отверстий, соответст-
вующих различным положениям оси вращения (ЦТ самолета),
державка привернута шурупами к крылу модели.
Надев модель на нижнюю штангу, ослабляют винт верхней
штанги, которая опускается в верхнюю державку модели, привер-
нутую к другому концу крыла.
Необходимо следить за тем, чтобы державки модели одинаково
плотно без зазоров были соединены как со штифтами верхней штан-
ги, так и со штифтами поводка. Верхняя штанга не должна нажи-
мать на державку, а в отверстие державки должен пройти штифт
штанги с таким расчетом, чтобы между торцом штифта и поверх-
ностью державки оставался зазор и не было трения (заедания) при
движении модели.
Установив модель на прибор, необходимо снова проверить, нет
ли люфта между прибором, поводком и моделью.
Для того чтобы определить положение модели, соответствую-
щее сх = 0°, |3 = 0° и у=0° относительно направления потока (так
называемое нулевое положение), используется приведенный ниже
способ.
Перед установкой модели в нулевое положение для создания
удобства в работе желательно нить с блоков горизонтальной штан-
ги снять. При таком способе лимб довольно трудно сбить с уста-
новки.
Вначале шаблон профиля крыла модели привинчивают к про-
стой линейке или для соблюдения большей точности к линейке с
уровнем с таким расчетом, чтобы хорда, проходящая через шаблон,
находилась на равном расстоянии от ребра линейки. Затем на мо-
дель надевают линейку с шаблоном. Линейку устанавливают гори-
зонтально по уровню, а потом к ее концам прикрепляют при по-
мощи пластилина или воска два отвеса так, чтобы они находились
в непосредственной близости от пола трубы. В пол трубы врезана
Целлулоидная линейка с риской. Линейка указывает направление
оси трубы. Наша задача — установить модель так, чтобы ее хорда
была параллельна оси трубы. Если хорда модели не совпадает
с осью, а оказывается сдвинутой вправо или влево, но параллельно
оси, то это особенного значения не имеет.
После установки модели на 0° нужно проверить, чтобы попереч-
ная ось модели Z была перпендикулярна полу аэродинамической
трубы, что проверяется визированием по отвесу, опускаемому с по-
толка трубы. Установив продольную ось «модели параллельно оси
аэродинамической трубы, необходимо стрелку 8, находящуюся на
тРУбе 4, совместить с нулевой риской на лимбе, после чего стрел-
ка фиксируется специальным зажимным винтом.
155
Перед пуском трубы нужно уравновесить прибор так, чтобы при
легком простукивании лимб не выходил из первоначального поло*
жения; в то же время он должен начать отклоняться на одинако-
вый угол при загрузке правой и левой чашек гирями в 20—30 Н.
Опыт начинается с отсчета по лимбу угла сссал, т. е. угла балан-
сировки модели при данном положении центра тяжести и угле ус-
тановки рулей высоты, при котором ТИ2=О. Этот угол будет отве-
чать условию ничем не нагруженных чашек прибора. При нагру-
жении чашек гирями модель занимает в потоке различные
положения и, следовательно, изменяется угол атаки а.
При всяком а=#абал очевидно, что Л12У=0 и модель уравнове-
шивается моментом силы натяжения нитей, касательных к окруж-
ности лимба; последняя сила равна величине нагрузки G на чаш-
ку, так как блоки, как известно из механики, преобразуют лишь
направление силы G, не изменяя ее величины (если пренебрегать
моментом трения). В зависимости от нагружения правой или левой
чашки (от наблюдателя) получается уравновешивающий момент
Mz=Gr (того или иного знака). В рабочих формулах через г обоз-
начен радиус лимба. Знак момента Gr всегда противоположен зна-
ку ТИ2, но для удобства его принято подставлять в рабочие фор-
мулы, приписывая ему знак аэродинамического момента. Напри-
мер, при нагружении правой чашки (для наблюдателя, смотрящего
на лимб сверху между блоками) получается момент Gr*
вращающий лимб и связанную с ним модель по направлению дви-
жения стрелки часов вокруг оси Z. Если принятая правая система
координат есть система X, У, Z (см. рис. 15.1), то этот момент яв-
ляется отрицательным. Это значит, что уравновешиваемый им мо-
мент Л42, наоборот, положителен. Поэтому нагрузке G на правую
чашку в данном случае нужно приписать знак плюс и с этим зна-
ком занести ее в протокол. Такими же соображениями нужно руко-
водствоваться и при определении знака угла а, отсчитываемого при
помощи стрелки по лимбу.
Результат испытания изображается в виде кривой m2=f(a)r
где mz — ордината, а—абсцисса (см. рис. 15.2.)
Примечания. 1. Коэффициент момента тангажа или момента продольной
устойчивости обозначается mz. Момент Mz относится к площади крыла S модели
и к условному плечу Ь, которое равно средней герметической хорде крыла или
его средней аэродинамической хорде ЬА.
2. Как и при испытании, на поляру при проведении опыта нужно бра™»
мгновенные отсчеты нагрузки на чашки весов прибора, угла атаки и высоты
столба спирта по микроманометру, но при этом следует позаботиться об одно-
временности всех трех отсчетов.
3. Полезно провести опыт и получить соответствующую кривую mz=f(a)
для модели летательного аппарата без горизонтального оперения.
Аппаратура и материалы
1. Контрольный насадок аэродинамической трубы.
2. Микроманометр контрольного насадка аэродинамической трубы.
3. Препарированная для установки на моментном центровом приборе модель
летательного аппарата.
156
4. Моментный центровой прибор.
5, Два отвеса для установки модели под углом атаки а=0° к оси аэооди-
намической трубы. Е
6. Шаблон крыла модели в его характерном сечении.
7. Миллиметровая бумага для построения контрольного графика нагохзки
8 Разновесы. н- •
Рабочие формулы
mz=Mz]qSbA (используется то обстоятельство, что р = 0);
Mz=Gr\ q=QV2/2=(a — а0) sin vyKfy;
mz
&
—----------const,
(а —Оо)
где
const=r/sin
Порядок проведения работы
1. Ознакомиться с устройством моментного центрового прибора и его уста-
новкой в аэродинамической трубе.
2. Установить модель самолета под углом атаки а*=0° и совместить стрелку
лимба с нулем шкалы.
3. Провести эксперимент при двух положениях центра тяжести самолета при
постоянной скорости потока в диапазоне углов атаки ±25°.
4. Обработать результаты испытания и построить графики лпг=/(а) при
двух положениях центра тяжести самолета.
Контрольные вопросы
1. Что такое статическая продольная устойчивость летательного аппарата?
2. Что такое балансировочный угол атаки?
3. Как оценить степень продольной статической устойчивости летательного
аппарата?
РАБОТА № 16
ИСПЫТАНИЕ МОДЕЛИ ГОРИЗОНТАЛЬНОГО
ОПЕРЕНИЯ ДЛЯ ОПРЕДЕЛЕНИЯ ШАРНИРНОГО
МОМЕНТА РУЛЯ ВЫСОТЫ
Цель работы — получение коэффициента шарнирного момента
руля высоты как функции угла его отклонения при различных уг-
лах установки оперения на дозвуковых скоростях.
Результат работы должен быть представлен в виде кривой из-
менения коэффициента шарнирного момента тш.в в функции угла
отклонения руля высоты 6В при определенном угле установки опе-
рения mIII.B=f(6B).
Общие сведения
Шарнирным моментом, т. е. моментом аэродинамических сил,
Действующих на руль высоты или другой орган управления отно-
сительно оси вращения (оси шарниров), определяется величина
Усилия на ручку управления при заданном положении центра тя-
157
жести самолета или другого летательного аппарата, данном уГЛе
атаки крыла и угле установки стабилизатора.
Зная с достаточной точностью шарнирный момент руля из ис-
пытания модели оперения, конструктор может судить о величине
усилия на ручку управления самолетом. Для вычисления натур,
ной величины шарнирного момента пользуются безразмерным ко-
эффициентом шарнирного момента тш,ъ.
Рис. 16.1. Схема установки для определения шарнирного
момента Мш.к руля высоты:
1—модель руля; 2—модель заднего отсека фюзеляжа; 3—мо-
ментный центровой прибор
При определении шарнирного момента при скоростях, далеких
от волнового кризиса, особенно важно соблюсти геометрическое по-
добие и подобие по числам Re. Оба эти условия требуют при не-
большой скорости потока, которой обычно можно располагать в
учебной лаборатории, возможного увеличения размеров модели
оперения.
На модели испытываемого горизонтального оперения остав-
ляем: стабилизатор, руль направления и киль, а также задний от-
сек фюзеляжа, которому у переднего обреза придается обтекаемая
форма во избежание завихрений и срывов потока, несвойственных
этой части потока в натуре.
Модель руля высоты 1 (рис. 16.1) устанавливается отдельно от
стабилизатора, фюзеляжа и вертикального оперения (задний отсек
фюзеляжа 2) на моментный центровой прибор 3* так, чтобы ось
* См. работу № 15.
158
хней и нижней штанг прибора являлась продолжением осп шар-
БрОВ. Затем в рабочей части аэродинамической трубы отдельно
Нстан а вливается (при правильном взаимном расположении) часть
фюзеляжа со стабилизатором и вертикальным оперением без же-
£ткой связи с рулем. Для этого фюзеляж и стабилизатор прикреп-
ляются к -стенкам трубы стальными проволоками, допускающими
регулирование при помощи тандеров, или устанавливают фюзеляж
на специальную державку.
Кормовая часть фюзеляжа, стабилизатор и вертикальное опере-
ние необходимы для того, чтобы создавать в зоне расположения
руля высоты поле скоростей и давлений, близкое к действительным
условиям полета. В этом случае величина шарнирного момента бу-
дет в наибольшей степени соответствовать величине момента в ус-
ловиях полета самолета. Иногда исследуют шарнирный момент
«изолированного» оперения. В этом случае в непосредственной
близости от руля высоты располагается только стабилизатор.
Испытание руля высоты без стабилизатора никакого смысла не
имеет, так как характер потока у руля определяется в основном
формой расположенного впереди стабилизатора.
При отсутствии стабилизатора, т. е. когда оперение состоит из
полностью отклоняемой поверхности, естественно, Л4Ш.В определяет-
ся для этой поверхности относительно оси ее вращения.
При выполнении опыта необходимо руководствоваться ГОСТом
20058-—74. По этому стандарту:
а) угол отклонения руля высоты, измеряемый между хордой ру-
ля и хордой стабилизатора, считается положительным при откло-
нении руля вниз в полетном положении самолета;
б) знак момента считается положительным в направлении на
кабрирование.
На рис. 16.1 изображен руль, у которого ось вращения смеще-
на от передней кромки назад с целью приблизить ее к центру дав-
ления и этим уменьшить величину шарнирного момента. Такое
смещение оси называется осевой компенсацией.
Дальнейший ход работы аналогичен опыту на продольную ус-
тойчивость (см. работу № 15).
Шарнирный момент 7Иш.в уравновешивается моментом от на-
грузки G на чашки прибора. Следовательно,
Дп.в — Сг,
где г — радиус лимба прибора. При измерении 7ИШ.В во время опы-
та нагружают чашку весов, удерживая моментом Gr перемещение
стрелки лимба.
Одновременно с уравновешиванием 7Иш.в производится отсчет
скоростного напора по шкале микроманометра контрольного на-
садка.
159
Нагрузку G и отсчет а—aQ заносят в протокол и по ним вычис-
ляют тш,в.
Общий вид диаграммы испытания /пшв=/(дв) приведен
рис. 16.2.
Рис. 16.2. Графики зависимости
коэффициента шарнирного мо-
мента тш в от угла изменения
руля ВЫСОТЫ бр.в
Аппаратура и материалы
1. Модель оперения, препарированная для установки на центровой прибор
так, чтобы ось вращения руля высоты совпадала с осью вращения прибора.
2. Контрольный насадок аэродинамической трубы.
3. Микроманометр контрольного насадка аэродинамической трубы.
4. Моментный центровой прибор.
5. Набор разновесов.
6. Расчалки с тандерами для установки и регулирования отсека фюзеляжа,
находящегося при опыте в потоке, или специальная державка, предназначенная
для той же цели.
Рабочие формулы
^ш.в ^Ш.В^^В^В’ ^^Ш.В-----------------‘^Ш.вД/^В^В’
G . , г
тш в=-----------const; const =---------------- .
(а — а0) sin <f>xK&Snbn
Порядок проведения работы
1. Ознакомиться с установкой руля высоты на моментном центровом приборе
и проверить установку стабилизатора и хвостовой части фюзеляжа.
2. Установить руль высоты под углом бв=0°, при этом стрелка лимба долж-
на показывать 0°.
3. Произвести испытание при определенном угле установки стабилизатора,
постоянной скорости потока в диапазоне углов отклонения руля высоты бш
=±20с
4. Обработать результаты испытания и построить график тт (бв) при
данном угле установки стабилизатора.
160
Контрольные вопросы
1 Что такое шарнирный момент?
2 Какие существуют типы аэродинамических компенсаторов шарнирного
^о^З^Какова зависимость коэффициента тш.в от угла а и угла [3?
РАБОТА № 17
НАХОЖДЕНИЕ УГЛА СКОСА ПОТОКА *
И КОЭФФИЦИЕНТА ТОРМОЖЕНИЯ
СКОРОСТИ У ОПЕРЕНИЯ
Цель работы — определение угла скоса потока у оперения и
коэффициента торможения скорости.
Результат работы представляется в виде графиков mz=f(ct, (р);
/пгб.г.о=/1(«); е=Л(а); А’г.0=/з(«)>
Общие сведения
В первой части работы находят угол скоса потока у оперения,
который является одним из важнейших параметров, необходимых
для анализа устойчивости и управляемости самолета. Знание угла
скоса потока у оперения необходимо при расчете балансировки
самолета, при определении условий устойчивости и нахождении
усилий при управлении самолетом.
Коэффициент полного момента тангажа самолета равен алгеб-
раической сумме коэффициента момента самолета без горизонталь-
ного оперения и коэффициента момента горизонтального оперения,
т. е.
^ = mz6.r.o + "^r.o-
После проведения испытаний модели самолета при нескольких
углах установки стабилизатора, а также испытаний без горизон-
тального оперения определяют при заданном положении центра
тяжести самолета коэффициенты <р) и /nZ6.r.o=fi(«) по
формуле
Gr
mz = ——=-------------------.
q SbA (а — sin у К 6 P-5 bA
Коэффициент момента горизонтального оперения модели можно
представить в виде разности коэффициентов моментов:
т*г.,=tnz - тгб.г.о=КТЛДаг.о (а ф- о - е).
Из приведенной формулы видно, что эта разность равна произ-
ведению следующих величин: коэффициента торможения скорости,
коэффициента статического момента площади оперения, производ-
ной функции cypQ=f (аг.о) и алгебраической суммы углов (атаки,
Установки оперения и скоса потока у оперения) *.
Следует заметить, что указанная сумма углов будет определять угол ата-
ки оперения аг.о=а+ф-£.
161
По полученным данным на одном графике наносят кривые за.
висимостей ф) и mZ6.r.o=A(a), как это показано на рИс'
17.1. В точках пересечения кривой mZ6.r.o с кривыми mz величины
ГПгт.о будут равны нулю.
Этому условию будут соответствовать определенные углы атаки
а, которые определяются по графику, а углы установки стабилц,
затора ф задаются при монтаже стабилизатора на модель само-
лета.
Рис 17.1. Графики зависимости коэффициента момента тангажа
тг модели самолета от }гла атаки а и угла установки стабили-
затора (р и коэффициента момента тангажа той же модели без;
горизонтального оперения mz б.г о от угла а гаки а
Из условия равенства
тгГ.о=КглАагл (а-)-?—г)=0
получим уравнение связи для величин углов
е = 0.
Угол скоса потока у оперения при данных условиях будет ра-
вен алгебраической сумме угла атаки и угла установки стабилиза-
тора г = а+ф. Полученные данные наносят на график е=/Г2(с0
(рис. 17.2).
График показывает, что угол скоса потока е у оперения изме-
няется почти пропорционально коэффициенту подъемной си ты Су*
(на линейном участке), почему обычно и принимают E = DCya, где
D — коэффициент пропорциональности.
Вторая часть работы состоит в определении коэффициента /Сг.о
торможения скорости в зоне горизонтального оперения или произ-
ведения
162
При нормальной схеме самолета уравнение для
пО7ного момента самолета имеет вид
коэффициента
tnz=tnz6,TM-K .4ar.0(a+c-s),
откУДа
Кг.о^г.о —
^гб.г.о mz
А (а 4- о — е)
Задаваясь рядом значений угла атаки а при постоянном значе-
нии угла установки стабилизатора ср и неизменном положении
Рис. 17.2. Графики зави-
симости угла е скоса по-
тока у оперения от угла
атаки а и коэффициента
Кг.о торможения скоро-
сти у оперения от угла
атаки a
центра тяжести самолета и находя угол скоса потока 8 по графи-
ку па рис. 17.2 для задаваемых углов а, а mz б.г.о и mz — по гра-
фику на рис. 17.1, получим величины /Сг.о, аг,о.
Величина производной аг.о зависит от удлинения горизонтально-
го оперения Хг.о.эф, которое можно определить по графику на рис.
17.3. Удлинение горизонтального оперения для нормальной схемы
подсчитывается по формуле
^Т.о = ^г.о/*5*г.о’
где /г.о — размах горизонтального оперения в м; Sr.o — площадь
горизонтального оперения в м2.
Для данного летательного аппарата коэффициент А остается по-
стоянным и определяется по формуле
A=SrMLrjSbk.
Рис. 17.3. Зависимость аг.о от
^г.о.эф
В случае выполнения вертикального
оперения в виде двух шайб, которые
расположены по концам горизонталь-
ного оперения, удлинение горизон-
тального оперения Хг.о.эф подсчитыва-
ется по следующей эмпирической фор-
муле:
+.олф=хг.о (1 + 1,66 М,
\ *г.о /
где 1В 0 — высота вертикального оперения (шайбы); /г.о — расстоя-
НИе между килями (шайбами).
Коэффициент торможения скорости определяется по формуле
__ ^зб.г.о mz
г‘° Л«г.о (« + У — Е)
163
После проведения вычислений строится график зависимости
Л7.о=/з(а) (см. рис. 17.2).
По результатам проведенного эксперимента и построения гра,|
фиков можно судить об эффективности горизонтального оперения
Следует помнить, что найденные величины углов скоса потока 1
оперения характеризуют средние значения скоса потока в области
оперения.
Угол скоса -потока и эффективность оперения сильно зависят от
взаимного влияния частей самолета (фюзеляжа с крылом и т. д.)
Для получения коэффициента полного момента тангажа модели
самолета при заданном положении центра тяжести самолета и при
различных углах установки стабилизатора ср необходимо модель
самолета установить на моментном приборе аэродинамической
трубы (см. работу № 15).
Аппаратура и материалы
1. Препарированная модель самолета со съемным оперением.
2. Шаблоны крыла и горизонтального оперения модели в их характерных
сечениях.
3. Моментный (центровой) прибор.
4. Набор разновесов.
5. Контрольный насадок аэродинамической трубы.
6. Микроманометр контрольного насадка.
7. Два отвеса для установки крыла модели под углом атаки «=0° к оси
аэродинамической трубы.
Рабочие формулы
tnz=MzlqSb^
mz —---—— (для определения mz полной модели и mz6ro модели
(а — а0)
без горизонтального оперения),
где const = ----,7—л/—;
" sin wK&Sb.
А
е=а-|-? для условия ^гб>г>о=0;
mz6.r.o — mz т, ЧГг IS ^гб.г.о— mz
-------------- ИЛИ Л —---------------------у
А (а + у — Е) * Лаг.о (а 4- ? — О
где ф — угол установки стабилизатора (рис. 17.5); в — угол скоса
потока; /(г.о = <7г.о/ф—коэффициент торможения скорости; Яг.о^
=дСу(1г.о1даТХ) (здесь аг.о — угол атаки оперения; С^г.о — коэффи-
циент подъемной силы оперения); £г.о — плечо аэродинамической
силы, действующей на оперение относительно центра тяжести само-
164
а (рис. 17.4) в м; А — коэффициент статического момента пло-
оперения; S — площадь крыла в м2; ЬА — средняя аэроди-
^мическая хорда (САХ) в м; Sr.o — площадь горизонтального-
рпер^пия -в м2.
рис. 17-4. К определению коэффи-
циента торможения скорости у
оперения
Рис. 17.5. Схема обтекания потоком горизонтального оперения
фициен
Порядок проведения работы
1. Ознакомиться с установкой.
2. Установить препарированную модель самолета на моментном приборе'
аэродинамической трубы при заданном положении центра тяжести самолета иод
углом а=0°, при этом указательную стрелку прибора совместить с нулем шкалы
лимба.
3. Установить стабилизатор под заданным углом <р.
4. Присоединить контрольный насадок к микроманометру и взять нулевой
отсчет.
5. Произвести испытание модели в аэродинамической трубе в заданном диа-
пазоне углов атаки.
6. Изменить угол установки стабилизатора и повторить испытания. Испыта-
ние повторяется столько раз, сколько углов установки стабилизатора намечено
в программе проведения опыта.
7. Снять с модели самолета горизонтальное оперение.
8. Произвести испытание модели самолета без горизонтального оперения
при тех же значениях угла атаки, что и в п. 5.
9. После окончания эксперимента полученные данные обработать и построить-
графики mz=f(a, <р); mz б.г.о=А(а); e=f2(ct) и Кг.о^/з(а).
Контрольные вопросы
1. Что такое угол скоса потока у оперения?
2. Как определить истинный угол атаки у оперения?
3. Что такое коэффициент торможения скорости?
4. Как влияет £г.о на величину коэффициента торможения скорости?
РАБОТА № 18
ОПРЕДЕЛЕНИЕ КОЭФФИЦИЕНТОВ
ДЕМПФИРУЮЩИХ МОМЕНТОВ
ь работы — ознакомление с методикой определения коэф-
тов демпфирования при заданных значениях М и Re опыт-
ным путем при дозвуковых скоростях.
165»
Результаты работы должны быть представлены в виде про? 1
кола испытаний, расчетов и графика Ai+T=f(Ai). " °'
Общие сведения
При изучении устойчивости продольного движения летательного
аппарата пользуются уравнениями короткопериодического движе-
Электродвигатель
Рис. 18.1. Принципиальная схема ДУ:
МП—моментный центровой прибор; ИС—искро-
вой самописец; ЛП—лентопротяжный механизм
ния в связанной системе
осей координат XOY
(18.1)
Возникновение угловой
скорости coz около попереч-
ной оси Z вызывает допол-
нительный, так называемый
демпфирующий момент, ко-
торый стремится погасить
угловую скорость вращения
аппарата, отклоняющегося
на угол 'О*. Кроме демпфиру-
ющего момента на летатель-
ный аппарат действует мо-
мент от запаздывания скоса
потока у оперения. Этот мо-
мент * действует в том же
направлении, что и момент
демпфирования и по суще-
ству является также демп-
фирующим моментом. Урав-
новешивание моментов про-
изводится при помощи ру-
ля, отклоняющегося на
угол 6Б. ’1
Входящие в уравнение
(18.1) члены, характеризу-
ющие демпфирование, мож-
но получить экспериментальным путем по методу свободных коле-
баний модели летательного аппарата.
В результате опыта найдем сумму производной коэффициента
демпфирующего момента т™г и производной коэффициента про-
дольного момента по углу запаздывания скоса потока у оперения
т* исследуемой модели Опыт проводится на
специальной динамической установке (ДУ) (рис. 18.1). Эта уста-
новка позволяет регистрировать колебательные движения модели
166
тОке аэродинамической трубы при заданных числах М и Re от-
носительно оси Z.
н Исследование модели летательного аппарата проводится в аэро-
намической трубе при постоянной скорости потока. Возникающие*
^чебания при помощи искрового самописца запишутся на ленте.
к0‘ Уравнение движения на ДУ имеет вид
zcdfi' z z) dt
+(/и:+/и:пр)Да+7Иг1р=0, (18.2)
г„е цс — момент инерции всей системы относительно оси Z, т. е..
модели и ДУ (моментного центрового прибора и приставки);
— производная демпфирующего момента по угловой
* да
скорости, зависящая от конструктивных параметров летательного,
аппарата и от критериев подобия М и Re; Mz—^-^- — произ-
водная продольного момента, связанная с запаздыванием -скоса-
потока у оперения a = da!dt\ Maz=—^ — производная продоль-
л да
ного момента по углу атаки; /Игпр=——— — производная момен-
та от пружины по углу атаки; Mz тр — -момент трения; Да =
= а— «бал — приращение угла атаки, отсчитанное от балансировоч-
ного угла.
Свободные колебания модели и соответственно стрелки с раз-
рядником задаются путем отклонения модели па некоторый угод
атаки от установившегося положения (или от балансировочного*
угла ссбал), лежащего в пределах линейной зависимости Суа=Сауаа.
Необходимо убедиться, чтобы стрелка прибора не выходила за
края бумажной ленты. Установка пружин увеличивает частоту
колебаний исследуемой модели летательного аппарата, потому что
момент пружин входит слагаемым в коэффициент при Да уравне-
ния (18.2).
Момент трения 7MZTp, возникающий при колебательном движе-
нии модели, действует в том же направлении, что и демпфирующий
чомент. Определение его очень сложно, так как трение зависит не
только от конструктивных особенностей установки, но еще от скоро-
сти потока и угловой скорости колебания модели. Поэтому при
проектировании и последующей наладке установок такого типа
стремятся к тому, чтобы момент трения был доведен до минимума.
Принимая Mz тр = 0, уравнение (18.2) запишем в виде
Лс + +(7и:+ти:11р) Да=0. (18. 3)
dt^ dt
Как известно из теории дифференциальных уравнений, решение
Уравнения (18.3) можно представить в виде Да = сех/.
Тогда а
dt dfi
I67~
Подставляя эти выражения в уравнение (18.3), получим хапа ’
•герпетическое уравнение вида
ЛсХ2 + ( М/+Aff) k+(ти: + М“пр) = 0.
Разделив все члены характеристического уравнения на /гс
«обозначая
л# + Mi M*z + м*пр
«1=-----7-----и а2=-----------
* ZC. IZC
получим характеристическое уравнение в виде
^2+аЛ+а2=0.
Корни этого характеристического уравнения будут
^1,2 —
В случае колебательного движения они должны быть комплекс-
ными и сопряженными, что требует следующего неравенства:
а\
Тогда
Обозначив черзз п, а
через
т, будем иметь
JV1Z~ - 2V1z
^1,2= —n ± itn. Здесь n=—=-----------------коэффициент затуха-
2 2/zc
ния; m —угловая частота.
Поскольку в своем большинстве исследуемые модели бывают
статически устойчивы, т. е. (dmz/da)<ZG и, кроме того,
то в нашем случае коэффициент затухания п всегда величина от-
рицательная и колебания будут затухающими.
Увеличение периода Т^=2л1т создает удобство записи на ленте
(образец которой показан на рис. 18.2), для чего натяжение пружи-
ны (см. рис. 18.1) подбирается так, чтобы угловая частота была
небольшой величиной.
Уравнение колебаний для случая мнимых корней запишется
в виде
Да=AQe~nt sin (т/-(-ф),
тде AGe~nt — мгновенное значение амплитуды колебания; гр — на-
чальная фаза колебаний. Значения Ао и гр определяются из на-
1168
чаЛЬных условий. Например, полагая при /_л л
==(Да)о=О, находим ри Да=Дао и да =
'^о Sln У' ^ао> tg'!>==m/n.
Нетрудно показать, что амплитуды Аг убывают в геометричес-
кой прогрессии. В самом деле, в моменты времени tf и ti~\-T
и Ai+T=A^~n(ti+r\
Рис. 18.2. Образец записи на ленте
Отношение амплитуд в эти моменты времени будет равнее
A i+t/Ai=е-/1( /<-+7')/е-п/''=е-п(/'‘+= е~пГ.
Следовательно, амплитуда колебаний через каждый период ме-
няется по закону убывающей геометрической прогрессии, знамена-
тель которой равен е~лГ.
Обозначив через D величину е~л7’ , которую назовем декремен-
том затухания, получим
\gD= — nl' Igo,
откуда коэффициент затухания
(18.4)
74g е
Из равенства видно, что чем больше п, тем быстрее затухают
колебания. Для того чтобы не определять величины Ло и ф, посту-
пают следующим образом.
На ленте, где записаны колебания испытуемой модели (см.
рис. 18.2), выбирают участок наблюдения (пропустив одно-два на-
чальных колебания). Обозначив порядковыми номерами вершины
амплитуд, строят график Ai+T=f(Ai) величин, соответствующих
максимальных амплитуд (рис. 18.3).
Проведя прямую линию через нанесенные на графике экспери-
ментальные точки, находят тангенс угла наклона этой прямой к оси
абсцисс, который и будет равен декременту затухания D, а именно:
ALL=tga=£>.
169
Период колебания Т определяется путем подсчета количеств
промежутков N, соответствующих изменению направления тока Ва
выбранном участке от Д- до Ai+T (см. рис. 18.2), а затем получи
мое значение N умножается на частоту переменного тока, равлу^
Рис. 18.3. График для
определения декремента
затухания
где
f=l/50 с или T=Nf=N/50.
Подставляя в уравнение (18.4) значения
lge=0,434, tgc и период колебания Т
можно подсчитать коэффициент затухания
п—lgtgo/0,434r и, следовательно, сумму
коэффициентов демпфирования /n“z4-m“.
Выше было отмечено, что производные
7И“г и 714“ зависят от конструктивных
особенностей летательного аппарата, кри-
териев подобия чисел М и Re и, кроме это-
го, от угловой скорости <joz, в силу чего
практически определить их раздельно не-
возможно. Поэтому при выполняемых аэро-
динамических расчетах пользуются суммой
коэффициентов демпфирования
Af“z + М*
2 А
лг.+л:=2Илс = ^!^/„; ».=^;
d^z
V
z A
4n/zc
Z 1 z
со dmz
mz=—-
dcoz
cn „О-
П1/'Ь' mzZ =
А
дДа
та =-----
z dt
dt
2M“zV 2Л4/
^V2SbAbA = QVSb\ ;
2М“
а__z
Z
m“r—; m,—------s-.
г4д 2 QVSb\
Момент инерции Izc всей системы, которая включает в себя
и исследуемую модель, заранее должен быть известен.
Метод определения момента инерции Izc дается в прило-
жении 3.
ДУ (см. рис. 18.1) состоит из моментного центрового прибора
(описание которого дано в работе № 15) и приставки, включающей
в себя искровой самописец и лентопротяжный механизм.
Искровой самописец приставки (рис. 18.4) состоит из разряд-
ника 2, который расположен над бумагой 3 и латунной пластинкой
11 под бумагой. Между разрядником, имеющим заостренный конец,
и бумагой устанавливается небольшой зазор, величина которого
регулируется в процессе наладки. Разрядник прикрепляется к длин-
ному концу стрелки 4, ось 5 которой жестко (без люфтов) присое-
170
яеТСя посредством зажимного винта 7 к штанге 6 моментного
Литрового прибора.
u Для удобства отклонения стрелки и модели от исходного поло-
ения служит ручка 8, прикрепленная к противоположному (ко-
^ткому) концу стрелки. К этому же концу присоединены пружи-
Р д натяжение которых регулируется при помощи специального»
дата 10- ~ _
Рис. 18.4. Схема искрового самописца:
1, 2—разрядники; 3—бумажная лента; 4—стрелка; 5—ось; 6—
штанга; 7—стопорный винт; 8—ручка; 9—пружина; /(?—специ-
альный винт; 11, 12—латунные пластинки
Нанесение нулевой линии (отметки) производится разрядником
1, который устанавливается посредине ленты. Напротив разрядни-
ка также под бумагой помещена латунная пластинка 12.
Перед началом эксперимента разрядник 2 необходимо строго*
совместить по одной линии с разрядником 1 нулевой отметки. Раз-
рядники 1 и 2, а также латунные пластинки 11 и 12 питаются то-
ком высокого напряжения с обеспечением периодических разрядов
между разрядниками и пластинками через бумагу. В результате на
движущейся с постоянной скоростью ленте получаются небольшие
отверстия. Разрядник 2 делает отверстия, расположение которых
соответствует кривой затухания колебаний. Разрядник 1 делает
отверстия в виде прямой линии посредине ленты (см. рис. 18.2) г
являющейся осью абсцисс кривой затухания.
171
Питание прибора электроэнергией (рис.18.5) может осуще л
влиться от сети переменного тока с напряжением 220, 127 или Цпц
или от источника постоянного тока с напряжением 24 В. При пит
нии прибора от сети переменного тока напряжение сети понижаете'
трансформаторолм и выпрямляется селеновым выпрямителем. На**
пряжение после выпрямителя равно 24 В. При питании прибора от
-сети постоянного тока выпрямитель отключается блокировкой.
Рис. 18.5. Схема электропитания прибора:
1—бумажная лента-. 2—изоляторы; 3—испытуемая модель; 4—индикатор; 5—прерыва-
тель; 6—конденсатор; 7—выпрямитель; 8—трансформатор; Р—блокировка; 10—блоки-
ровка безопасности; //—выключатель индуктора; 12—выключатель двигателя; 13—
реостат, регулирующий скорость движения бумажной ленты; 14—двигатель, приво-
дящий в движение бумажную лепту
Для записи электроискровым методом к разрядникам и медным
пластинкам подводится ток высокого‘напряжения 5—6 кВ от индук-
тора с механическим прерывателем. Включение и .выключение ин-
дуктора производится специальным выключателем.
В целях безопасности обслуживания прибор закрывается кожу-
хом, при снятии которого блокировка безопасности разрывает цепь
индуктора и последний не может быть включен.
Передвижение ленты осуществляется при помощи лентопро-
тяжного механизма, схема которого показана на рис. 18.6. Бумаж-
ная лента 1, намотанная на деревянный сердечник 2, передвигает-
ся с постоянной скоростью при помощи ведущего барабана 3, у
которого имеются небольшие иголочки, прокалывающие бумагу.
Лента к барабану прижимается резиновым валиком 4, насаженным
на рамку 5, и пружиной 6. Иголочки на ведущем барабане и при-
жимной валик обеспечивают движение ленты без проскальзывания.
С иголочек барабана лента снимается при помощи съемника 7, ко-
торый прижимается к ведущему барабану пружиной 8. Концы иго-
лочек заострены, высота их невелика, всего 0,4—0,5 мм, а расстоя-
ние между ними 4—5 мм.
172
Вращение ведущего барабана с постоянной угловой скоростью
. спечивается двигателем постоянного тока с параллельным воз-
- ждением. Скорость движения бумажной ленты также будет пос-
т, быть известной до эксперимента. Регулирование
тоянна и должна
Рис. 18.6. Кинематическая схема лентопротяжного меха-
низма:
1—лента бумажная; 2—сердечник деревянный; 3—ведущий ба-
рабан; 4—валик резиновый; 5—рамка; 6, 8—пружины; 7—
съемник
частоты вращения двигателя для получения требуемой скорости
движения ленты производится до эксперимента и достигается рео-
статом в цепи якоря (см. рис. 18.5). При этом контроль частоты
вращения барабана производится тахометром или счетчиком оборо-
тов и секундомером. Включение и выключение двигателя лентопро-
тяжного механизма осуществляется выключателем в момент нача-
ла и конца (соответственно) колебательных движений исследуемой
модели.
Аппаратура и материалы
1. Контрольный насадок аэродинамической трубы.
2. Микроманометр контрольного насадка аэродинамической трубы.
3. Моментный центровой прибор.
4. Приставка к моментному прибору с механизмом для регистрации колеба-
тельного движения модели.
5. Бумажная лента. j
Рабочие формулы
4- т* = п const;
n—\gtga1\geT, M = V]a\ Re==VbjJx\
У=р/”.-|-(a —a0) sincey/C^,
где lg<?=0,434; const=4Zzc/cVS^; T=Nf.
Здесь n — коэффициент затухания; tgcr=Z) — декремент затуха-
Ния; 4с — момент инерции системы (ДУ с моделью) в кг-м2; f=
173
= 1/50 с — частота электрического тока; N — количество разрыве
между точками на ленте в данном периоде Т (количество измещЛ
ний направления тока за период Т).
Порядок проведения работы
1. Ознакомиться с ДУ.
2. Установить препарированную модель летательного аппарата на момент-
ном приборе при заданном положении центра тяжести.
3. Присоединить контрольный насадок к микроманометру и взять нулевой
отсчет.
4. При небольшой скорости потока зафиксировать модель на аба л и остано-
вить поток трубы. При этом искровой самописец не должен быть присоединен
к моментному прибору.
5. Разрядник искрового самописца совместить на одной линии с разрядни-
ком нулевой отметки, после чего жестко присоединить моментный прибор к иск-
ровому самописцу.
6. Произвести испытание модели при заданной скорости потока
7. После окончания эксперимента полученные данные обработать, построить,
график Ai+T—определить коэффициент затухания п и сумму коэффици-
ентов демпфирующих моментов + /п®).
Контрольные вопросы
1. Что такое демпфирующий момент?
2. В каком направлении действует момент, возникающий от запаздывания
скоса потока?
3. Что такое коэффициент затухания?
4. С какой целью в опыте увеличивают период колебания?
РАБОТА № 19
ОПРЕДЕЛЕНИЕ МОМЕНТА РЫСКАНИЯ
МОДЕЛИ ЛЕТАТЕЛЬНОГО АППАРАТА
Цель работы — установить степень путевой статической устой-
чивости 'Модели летательного аппарата для различных углов сколь-
жения при постоянном угле атаки и неотклоненном руле направ-
ления (6ц = 0°), а также без вертикального оперения.
Результат работы должен быть представлен в виде графика
ПРИ постоянном угле атаки и неотклоненном руле направ-
ления (6н = 0°) и графика my—fi(fi) без вертикального оперения.
Общие сведения
При анализе боковой устойчивости момент рыскания Му и мо-
мент крена Мх рассматриваются вместе. Это объясняется тем, что
поворот ЛА относительно оси Y на угол скольжения р вызывает
возмущения, которые воздействуют на момент рыскания Му и на
момент крена Мх. Однако в аэродинамических лабораториях часто
ведут исследования по определению зависимостей коэффициентов
ту и тх от угла скольжения раздельно. Имея график зависимости
174
==f(p). ПРИ Различных углах атаки можно определить знак и
Дичину производной статической устойчивости -^~-=ту. По
„ 'дти
характеру производной можно судить о статической путевой
устойчивости самолета.
У Если величина то самолет обладает статической устой-
чивостью пути, если т£>0, то самолет не обладает этой устойчи-
востью, и если «4=0, то самолет нейтрален в путевом отношении.
Рис. 19.2. Схема установки для опреде-
ления зависимости m7J=f(p)
Рис. 19.1. Графики зависимос-
ти коэффициента момента рыс-
кания ту от угла скольже-
ния р:
/—с вертикальным оперением: 2—
без вертикального оперения
Работа выполняется в два этапа. На первом этапе испытывает-
ся модель самолета с вертикальным оперением, на втором — мо-
дель самолета без вертикального оперения.
В результате будут получены кривые зависимости (рис. 19.1)
и может быть оценена роль вертикального оперения для обеспече-
ния устойчивости пути самолета.
В данной работе используется моментный центровой прибор, ко-
торый подробно описан в работе № 15. Установка модели на цент-
ровом приборе показана на рис. 19.2.
Аппаратура
1. Моментный центровой прибор.
2. Препарированная модель.
3. Разновесы.
Контрольный насадок аэродинамической тр^бы.
5. Микроманометр контрольного насадка.
157
Рабочие формулы
My=.myqSl\ mtr=^p My=Gr, 1
оУ2 . . . G .
q=~— = (а — а0) sm^yK^u; ---------------const»
2 (а — д0)
где const=------------.
sin
Здесь G — нагрузка на чашке прибора в Н; г — радиус лимба мо-
ментного центрового прибора в м; I — размах крыла в м; S — пло-
щадь крыла в м2.
Порядок проведения работы
1. Ознакомиться с установкой модели на моментном приборе. Модель долж-
на иметь вертикальное оперение.
2. Составить схему установки.
3. Установить и закрепить руль направления под углом 6н=0.
4. Произвести эксперимент.
5. Снять вертикальное оперение, после чего произвести второй эксперимент
без вертикального оперения.
6. Обработать полученный экспериментальный материал и построить график
/пу=/(₽) Для обоих опытов.
Контрольные вопросы
1. Что такое коэффициент момента рыскания?
2. Какое влияние оказывает вертикальное оперение на статическую путевую
устойчивость?
3. Что такое угол скольжения?
РАБОТА № 20
ОПРЕДЕЛЕНИЕ ХАРАКТЕРИСТИК
ВОЗДУШНОГО ВИНТА В НАБЕГАЮЩЕМ ПОТОКЕ
Цель работы — получение основных аэродинамических харак-
теристик воздушного винта на пропеллерном режиме а, р, X, ч и
построение графика зависимости а, (3, т]=/(Х).
Результат работы должен быть представлен в виде графика за-
висимости коэффициента силы тяги а, коэффициента мощности р
и коэффициента полезного действия ц воздушного винта от относи-
тельной поступи Z для одного значения угла установки лопас-
тей <р.
Общие сведения
На основании данных, полученных после испытания воздушного
винта как пропеллера на винтовом приборе в аэродинамической
трубе, можно построить нормальные графики безразмерных вели-
чин а, р, ц=/(Л). Построенные графики (рис. 20.1) и рассматри-
ваются обычно как характеристики воздушного винта. Для соблю-
176
11Я условий подобия при эксперименте необходимо выдерживать
^еНла Re и М одинаковыми с натурой.
ч11Сцисла Re и опыта определяются по формулам
Re M=t У2 + (ЛИС£»2 = К / 1 I (2L)2, ’
а а \ \ X /
V
где а — скорость звука в м/с при температуре опыта.
Для измерения скорости потока V пользуются контрольным на-
садком аэродинамической трубы, присоединенным к микроманомет-
ру. расчетная формула для определения скорости по показаниям
насадка (см. предыдущие работы) имеет вид
V = ^//Г~ (а ~ ао) sin
Как было указано, характеристики воздушного винта при раз-
личных значениях шага и диаметра модели винта D можно опре-
делить по графику, постро-
енному в форме трех кри-
вых — коэффициента силы
тяги а, коэффициента мощ-
ности р и коэффициента
полезного действия т), отло-
женных в функции относи-
тельной поступи % при пере-
менном параметре ср угла
установки лопасти винта в
каком-либо характерном ее
сечении.
При помощи графика
(см. рис. 20.1) можно опре-
делить характерные режи-
мы работы винта. Так, для
данного конкретного случая
максимальный КПД н со-
ответствует величине
Рис. 20.1. График зависимости коэффици-
ентов силы тяги а, мощности р и полез-
ного действия т) воздушного винта от отно
сителыюй поступи X
^0,95. Коэффициент а име-
ет максимальное значение при Х=0, т. е. при работе винта «на
месте». При 7"^ 1,4 сила тяги становится равной нулю и при
Дальнейшем увеличении к наступает режим торможения винта.
После достижения значения винт перестает поглощать
мощность (р<0) и превращается в ветряной двигатель.
Можно построить график, как показано на рис. 20.2, но тогда
каждой группе студентов предлагается определить лишь одну ха-
рактеристику р=/(Х) при одном значении утла установки лопасти ср,
причем масштабы па осях координат при построении кривой долж-
ны соответствовать масштабам на рис. 20.1. Кривую КПД необ-
ходимо в этом случае построить отдельно, кроме того, на кривой р
7 1743
177
дать разметку значений КПД, соответствующих определенным зд *
чениям К. '
Характеристику серии из трех или четырех воздушных винто I
можно получить, построив на одном общем графике кривые, полу
ченные при различных углах ср разными группами студентов. Ца
этом графике нужно получить линии одинакового КПД, соединяя
равные отметки на кривых (3 плавной кривой. Если обобщение
Рис. 20.2. Характеристики модели трехлопастного
винта
графиков отдельных групп затруднительно, нужно каждой груп-
пе построить график а, р, т] в функции X, как уже было сказано
выше.
На винтовом .приборе можно одновременно измерить силу тяги
винта и момент сопротивления вращению винта раздельно на двух
разных весовых элементах при заданной частоте вращения винта
и скорости воздушного потока трубы.
Пользуясь полученными из опыта величинами; Р — силой тяги,
Мв — моментом сопротивления вращению, пс — частотой враще-
ния винта и показаниями микроманометра (а—п0), а также изме-
ренной величиной диаметра модели винта D, составим рабочие фор'
мулы для вычисления коэффициентов а, р, т) и X.
Для соблюдения подобия необходимо, чтобы безразмерные ко-
эффициенты ?v натуры и X модели были равными, т. е.
X=(l//ncD)
мо Хели ( К7/2-с^Днатуры *
178
™“Я ВМИ™" ** °™°™Ь„ой
х__ 1 (я —л0)
Л--------— const!,
«с
001151! =
— sin vyKfy
Q
D
Коэффициент силы тяги воздушного винта
а=P1qt?cD* ,
где Р=^(Ризм—Ро) — сила тяги винта в Н. Здесь ci = cp = 8 — ко-
эффициент тяговых весов (величина отношения плеч рычага);
Ризм=Рг+Рр — показания тяговых весов, т. е. сумма весов гирь,
положенных на чашку, и показания рейтера в Н; PG — первона-
чальный (нулевой) отсчет тягового рычага (гиря на чашке весов)
в Н.
Точность измерения силы тяги Р для диапазона измерения от
Ртш=15 Н до Ртах =160 Н будет лежать в пределе ДР = 0,49 Н.
Абсолютная величина ДР = 0,49 Н должна периодически прове-
ряться специальными градуировками и зависит в основном от нали-
чия силы трения в системе блока силы тяги. Эта сила трения, как
показал опыт, не зависит от силы тяги винта и остается постоянной
при частоте вращения двигателя от 400 до 1500 об/мин.
Подставляя значения величин в формулу коэффициента силы
тяги винта а, получим
а—у ~Р°) Const2,
Пе
где const2=cJqD*—8/qD\
Коэффициент мощности воздушного винта
где мощность винта T=2(d7Wbhc.
Подставляя значения величин в формулу для коэффициента
мощности р, получим
г^~2лЛ/1кпс/^Пс^=2xMjQnlD5,
где AfB = c2Q; с2 = 0,952 — условное плечо в м; <2=(<2изм— Qo) —
Действующая сила на условном плече в Н; здесь физм= (Qr—Qp) —
показания моментных весов, т. е. сумма весов гирь, положенных на
чашку и показания рейтера в Н; Qo — первоначальный (нулевой)
отсчет на рычаге моментных весов в Н; с2 = 0,119 Cq=0,1 19-8 =
"0,952 -— коэффициент моментных весов в м (условное плечо);
,119 — передаточный коэффициент в системе измерения момента
а винтовом приборе в м; Cq — .величина отношения плеч рычага
(Для данного прибора 8 ; 1 =8).
7*
179
Погрешность измерения момента винта Л7ИВ, выраженная в nnl
л, / дмв \ Ро'
центах от /Ив(—
\ м}
для диапазона измерений от
в /
= 2,9 Н-м до Л4вшах=15 Н-м, будет составлять от 1,75 до 3%.
Абсолютная величина погрешностей Мв (рис. 20.3) должна не-
риодически проверяться специальными градуировками и зависит от
наличия сил трения в планетарном меха-
низме блока момента. Как показал опыт
эта сила трения зависит от момента
винта. Я
Частота вращения воздушного винта
секунду
п—1-^ = 2 ^-=0,0333 п„, I
с 60 60
ЛпНВ ^Ю0%
ООП н /7g
Рис. 20.3. Графики зависи-
мости ошибок измерения
момента винта от величины
момента
в
где пм — частота вращения вала двига-
теля (мотора) в минуту; 1=2— переда-
точное число от вала двигателя к валу
винта.
Так как тахометр 8 (см. рис. 20.5),
примененный в конструкции данного
винтового прибора, имеет такое же пере-
даточное число iT=2, как и у самого
винтового прибора, то он будет непо-
средственно показывать частоту враще-
ния винта пс, т. е.
пс=— — = — об/с, так как — = 1,
/т 60 60 /т
где пт — частота вращения винта в минуту по тахометру.
Тогда после преобразований будем иметь
((?иЗМ Г Qo) const,
«с
где const3=2л • 0,952/qD5.
Коэффициент полезного действия воздушного винта или т) = РК/Л
или т] = а/(3к
Подставляя значения а, р и X, получим
изм — Р0)
------------------2----COnst2
Т)=-------------------—------const,
(Сизм — Qo) . пс
------9----consts Ш
ИЛИ т)— (g—go) const4) |
(Qh3M — Qo) пс
. COnsto const]
где const4 = _ L.
180
Необходимо отметить, что полученные из данного опыта значе-
я р н г] являются так называемыми тягой на валу и КПД на ва-
я так как взаимное влияние винта и прибора в опыте не учтено и,
тедователыю, эффективная тяга и эффективный КПД, характери-
зующие более полно работу винта, при данном опыте не опреде-
ляются. Под эффективной тягой будем понимать силу тяги воздуш-
ного винта за вычетом лобового сопротивления гондолы или
фюзеляжа, в котором установлен двигатель, приводящий винт в
движение.
Винтовой прибор состоит из следующих основных узлов (рис.
20.4): втулки В, в которой крепятся три лопасти модели винта за-
данного диаметра, например D = 0,7 м, блока силы тяги Р, блока
момента /И, весов ВР для измерения силы тяги винта и весов ВМ
для измерения момента винта.
Колонка Кл держит головку прибора Г, в которой смонтирован
блок силы тяги и блок .момента; сама колонка укреплена на тележ-
ке Т, на которой установлены электродвигатель N, редуктор А и
столик С с весами.
Рассмотрим конструктивную схему более подробно. Втулка В с
установленными лопастями насаживается на вал блока силы тяги
1, который свободно вращается на шарикоподшипниках, посажен-
ных в гильзу 2. Гильза вместе с валом и винтом перемещается
вдоль своей оси на шести шариках 3, помещенных в лунках гильзы
и упирающихся во внутренние поверхности колец 4, запрессованных
в корпус блока тяги. Шарикоподшипник, посаженный па палец 5,
ограничивает продольный ход гильзы и удерживает ее от вращения
вокруг своей оси. На противоположном конце вала заштифтовапа
вилкообразная муфта 6, в теле которой помещается шарикоподшип-
ник, присоединенный к горизонтальной тяге 7, связанной через
шарикоподшипник с равнотечей качалкой 8. В пазах муфты име-
ются шарикоподшипники, сидящие на пальцах, впрессованных в
корпус ведомого зубчатого колеса 9 блока момента. Такое устрой-
ство м^фты дает возможность осуществлять осевое перемещение
гильзы и вала с укрепленным на нем винтом под действием тяговой
силы и не препятствует вращательному движению вала от ведуще-
го зубчатого колеса 10. Качалка и рычаг тяговых весов связаны
между собой вертикальной тягой 11. Последняя соединена с рав-
ноплечей качалкой через шарикоподшипник, а с рычагом весов 12—
посредством призмы (ножа) 13 и подушки 14 (на рис. 20.4 пока-
заны призма и подушка рычага моментных весов, которые выпол-
нены так же, как и у рычагов тяговых весов).
В результате воздействия силы тяги винта вал и горизонтальная
тяга получают поступательное движение и поворачивают качалку
на некоторый угол. Качалка, в свою очередь, поднимает вертикаль-
ную тягу, а вместе с ней и рычаг тяговых весов. Чтобы привести
Рычаг весов к первоначальному горизонтальному положению, не-
°бходимо на противоположный конец рычага (чашку 15) прило-
жить силу (гири). Величина этой силы будет прямо пропорцио-
181
182
льна силе тяги. Предварительную загрузку тяговых весов дает
яаужина 10 (рис. 20.5), соединяющая равноплечую качалку с кор-
пусом головки прибора и работающая на растяжение.
Вращение двигателя передается через редуктор и пару кониче-
ких зубчатых шестерен 12 на вертикальную трансмиссию, а затем
также через пару конических зубчатых шестерен 16 (см. рис. 20.4)
к ведущему зубчатому колесу блока момента.
Рис. 20.5. Кинематическая схема винтового прибора:
/—блок силы тяги; 2—корпус головки; 3—соединительная муф-
та; 4—блок момента; 5—рычаг весового элемента блока момен-
та с отношением плеч 1 : 8; 6—рычаг весового элемента блока
тяги с отношением плеч 1 : 8; 7—тяга к весовому элементу
блока момента; 8—тахометр; 9—электромотор; 10—пружина,
дающая предварительную нагрузку тяговым весам; 11—пружи-
на, дающая предварительную нагрузку моментным весам; 12—
пара конических шестерен; 13—тяга к весовому элементу блока
силы тяги
Для определения частоты вращения воздушного винта пс к го-
ризонтальному «валу коробки передач (см. рис. 20.5), который через
эластичную муфту непосредственно соединен с двигателем при по-
мощи гибкого вала, заключенного в кожух, присоединен тахо-
метр 8.
Блок момента -выполнен в виде планетарного редуктора. Веду-
щее зубчатое колесо вращает двойное планетарное зубчатое колесо
(см. рис. 20.4), состоящее из двух зубчатых колес на одном ва-
лике.
Второе зубчатое колесо, в свою очередь, вращает ведомое зуб-
чатое колесо и вал винта через описанную -выше (вилкообразную
^Уфту. Направления вращения ведущего и ведомого зубчатых ко-
•лсс совпадают. Поскольку число зубьев у планетарных зубчатых
18а
колес различное, их зубья испытывают разные окружные давления
и воспринимают соответственно различные моменты силы.
В результате разности давлений планетарное зубчатое колесо *
получает вращательное движение (кроме вращения вокруг своей
оси) относительно ведущего и ведомого зубчатых колес. Планетар,
ное зубчатое колесо помещено на шариковых подшипниках водила
18, сделанного в виде качалки с углом 90°. В водило, в ведущее и
ведомое зубчатые колеса впрессовываются шарикоподшипники, IL
эти детали размещаются на трубке 19 (внутри которой проходит
горизонтальная тяга блока тяги), .вмонтированной в стальной кор-
пус, связанный с основным корпусом головки прибора.
Водило удерживается от вращения вертикальной тягой 20, сое-
диненной с ней шарикоподшипником. Второй конец тяги соединен
с рычагом моментных весов, выполненых аналогично тяговым ве-
сам.
Сила, удерживающая водило от вращения, зависит в определен-
ной пропорции от момента на ведомом зубчатом колесе, т. с. на ва-
лу винта, и для того чтобы удержать водило в походном (верти-
кальном) положении, нужно на конец рычага (чашку) 21 помес-
тить необходимый груз (гири) в зависимости от режима работы.
Предварительную загрузку моментных весов дает пружина 11 (см.
рис. 20.5), соединяющая водило с корпусом блока моментов и ра-
ботающая на растяжение.
Тяговые и моментные весы конструктивно выполнены одинако! I
во и представляют собой рычаг второй рода с отношением плеч
1 : 8 (см. рис. 20.4).
Рычаги установлены на шариковых подшипниках, заделанных в
корпусах 22 (см. рис. 20.4). Балансировка весовых элементов осу- ’
ществляется при помощи регулировочных грузов 24 относительно
центра вращения рычага (центра шариковых подшипников) —
точки 0, когда рейтеры 23 находятся на «нуле» шкат.
Чашки весов загружаются гирями, а роль разновесов выполня-
ют рейтеры, перемещение которых на 2 мм соответствует силе в
0,01 Н, измеряемой па рычаге. С учетом отношения плеч рычагов,
равного 8 : 1=8, цена деления шкал будет соответствовать 0,08 Н
при перемещении рейтеров па 2 мм.
Перед проведением эксперимента винтовой прибор устанавли-
вается в аэродинамической трубе и проверяется балансировка ве- $
совых рычагов по шкалам и стрелкам, заделанным в концы рыча-
гов, при этом рейтеры устанавливаются на нуле шкалы, а на чаш-
ках весов оставляются гири, уравновешивающие силу натяжения
пружин 10 и 11 (см. рис. 20.5). Стрелка хорошо сбалансированного
рычага должна показывать «нуль» при отсутствии параллактичес- |
кого смещения луча зрения.
Препарированный гвоздушный винт со втулкой укрепляется н<*
валу и вместе с блоком силы тяги сдвигается в сторону блока мо- i
мента так, чтобы до упора оставался зазор в 1,5—2 мм; вертикаль- I
пая тяга при таком положении блока должна держать снятый с ар- I
184
Рис. 20.6. Воздушный
части аэродинамической трубы, установ-
ленный на втулке винтового прибора
винт в рабочей
етира рычаг ВР (см. рис. 20.4) на нуле, что и достигается при
помоши регулировочного груза 24, находящегося на рычаге весов.
Водило блока момента балансируется вместе с вертикальной
тЯгой и положение его должно быть вертикальным и обеспечиваю-
щим свободу собственного уг-
лового перемещения в преде-
лах Ю—15°. При этом стрел-
ка рычага моментных весов
должна перемещаться симмет-
рично вверх и вниз относитель-
но нулевого положения.
Установка на нуль рычага
весов блока момента произво-
дится перемещением регули-
ровочного груза 24 рычага ве-
сов ВМ.
Для измерения частоты
вращения двигателя служит
тахометр, присоединяемый к
нижнему валу редуктора; пос-
ледний непосредственно свя-
зан муфтой с валом двигателя.
На фотографии (рис. 20.6)
мы видим в рабочей части
аэродинамической трубы воз-
душный винт, установленный
на втулке винтового прибора.
В результате эксперимента
мы имеем следующие данные:
величины нагрузок на тяго-
вых и моментных весах, частоту
микроманометра контрольного насадка, измеряющего скоростной
напор при опыте в трубе.
Отсчеты показаний весов, тахометра и микроманометра берут
строго в один и тот же момент времени по методу мгновенных от-
счетов, уже встречавшемуся нам в предыдущих работах.
вращения двигателя, показания
Аппаратура
1. Модель воздушного винта.
2. Винтовой прибор, установленный в трубе.
3. Полный набор специальных гирь и разновесов.
4. Контрольный насадок аэродинамической трубы.
5. Микроманометр контрольного насадка аэродинамической трубы.
Рабочие формулы
constr; const2; 9изМ^Оо
Пс пс пс
185
f|—__А —-^изм Л)) 1 ^o) const4; п —Jll.
? (Сизм — <?o) nc 60
1/ ~ sin^yK^ ]
где const =--------------; const=;
D “ qD*
const^^2 ; COnst4=—^-c?nst2- . I
QD5 const3
Порядок проведения работы
1. Ознакомиться с винтовым прибором и его схемой.
2. Установить лопасти модели воздушного винта под нужным углом ср к
плоскости вращения и укрепить винт на валу прибора.
3. Поставить блок силы тяги, блок моментов и рычаги весов в исходное или
в нулевое положение согласно приведенному описанию.
4. После испытания винта на требуемых режимах обработать результаты
опыта и построить график а, р, т]=/(1).
Контрольные вопросы
1. Что такое относительная поступь воздушного винта X?
2. Как соблюдается подобие модели и натуры?
3. Что такое коэффициенты воздушного винта а, р и т]?
РАБОТА № 21
ИСПЫТАНИЕ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА
ПРИ РАБОТЕ НА МЕСТЕ
Цель работы — получение аэродинамических характеристик
несущего (винта вертолета, работающего «на месте» (режим висе-
ния), ® виде коэффициентов а, р и т]0 на (винтовом приборе (мотор-
весах).
Общие сведения
Режимом работы несущего винта вертолета на месте (режимом;
висения) называется такой режим работы, когда винт не имеет
скорости в направлении оси его вращения (осевой скорости) и ког-
да элементы винта имеют лишь окружную и индуктивную скорости
относительно воздуха. Формулы подобия для мощности, потребляе-
мой несущим винтом, и для развиваемой им силы тяги Гн.в сле-
дующие:
AfHB=кг • м2/с3; Гнв=ayiP кг • м/с2.
Из приведенных формул следует, что при постоянных коэффи-
циентах аир, которыми характеризуется режим работы винта на
месте, и постоянных q и D сила тяги Гп.в будет прямо пропорцио-
нальна квадрату частоты вращения винта пс в с, а потребляемая
мощность Mi.b — кубу той же частоты. Поэтому коэффициент тяги*
186
пинта а удобно определять из графика, отложив по оси абсцисс (в
масштабе) 'величину ис2, а по оси ординат — Гп.в- Проведя прямую
линию через нанесенные на графике экспериментальные точки, оп-
ределяем тангенс угла б, образуемый этой прямой с осью абсцисс.
Lc8
Рис. 2'1.1. Графики, характеризующие испы-
тание воздушного винта при работе на ме-
сте
Коэффициент а получается
путем умножения tg б на
постоянную величину
consti=17el>4 (рис. 21.1).
Коэффициент мощности
несущего винта р точно так
эке определяют из другого
графика, в котором по осям
координат откладываются в
масштабах пс3 и произведе-
ние Qnc, пропорциональное
мощности Л^н.в винта в Вт.
Построив на этой диаграм-
ме по экспериментальным
точкам прямую линию, най-
дем тангенс угла у, образу-
емый этой прямой с осью абсцисс. Коэффициент р получается пу-
тем умножения tgy на постоянную 'величину const2=//(iD5.
После того как определены коэффициенты аир, нужно вычис-
лить относительный КПД т]0 испытываемого винта при работе его
на месте. Как известно из теории идеального несущего винта, ко-
эффициент
Коэффициенты а, р и т]о применяются в практике винтостроения,
б практике же вертолетостроения чаще используются другие коэф-
фициенты.
Коэффициент силы тяги несущего винта
С ^Н.В .
т о
коэффициент крутящего момента несущего винта
о
л*
Здесь Л4К — крутящий момент; со — окружная скорость. Студенты
могут в порядке упражнения построить графики и тк=
^/(Пс).
Для измерения Тн.в и пользуются прибором, называемьш
мотор-весами. Испытываемая модель несущего винта вертолета
'(рис. 21.2) укрепляется на валу электродвигателя постоянного
187
тока. В обмотку якоря и статора ток поступает через реостат Со
скользящим контактом, позволяющим изменять омическое сопро
тивлепие в цепи мотор-весов, и, следовательно, силу тока в цепи'
Рис. 21.2. Схема установки испытания воздушного винта при
работе на месте:
1—стрелка; 2—рычаг; 3—нониус; 4—псйтер; 5—опора рычага; 6~контр-
груз; 7—тяги
Сила тока I измеряется включенным в цепь амперметром. Увели-
чивая силу тока -в обмотке якоря, увеличиваем частоту вращения
общего вала якоря и винта. Амперметр градуирован по частоте
вращения винта в минуту и результат градуирования n=f(I) при-
веден на рис. 21.3.
При вращении винта с некоторой частотой вращения возникаю-^
щая на нем сила тяги Тнв будет перемещать всю систему мотор-
весов (см. рис. 21.2), свободно подве-
шейных к потолку, в направлении оси
вращения винта в сторону, противо-
положную движению отбрасываемой
винтом струи воздуха. В обоих слу-
чаях тянущего или толкающего винта
самое небольшое перемещение его
вместе с прибором может быть отме-
чено смещением стрелки 1, укреплен-
ной на конце рычага 2 (весового эле-
мента Т), с нулевой отметки нониу-
са 3.
Для того чтобы определить силу
тяги воздушного винта Гпв, необходи-
Рис. 21.3. Градуировочный гра-
фик частоты вращения в зави-
симости от силы тока
мо рейтер 4 рычага перемещать по шкале до установления рав-
новесия, которое фиксируется совпадением стрелки с нулевой
отметкой нониуса. Деления шкалы имеют отметки, соответствую-
щие числу деканьютонов и их долей.
Момент сопротивления вращению винта от воздушных сил, дей-
ствующих на его лопасти, передается через магнитное поле электро-
188
гателя от якоря к статору. Этот момент может быть измерен в
^висимости от направления вращения несущего винта при помощи
31ного (из двух) весового элемента Q. Тогда, очевидно, моменты
1ЛЫ Q будет уравновешивать момент сопротивления вращению
Датора электродвигателя. Метод измерения силы Q действующе-
го момента подобен предыдущему. Перед проведением эксперимен-
та воздушный винт должен быть сбалансирован относительно оси
вращения X так, чтобы в любом положении не выводил бы из рав-
новесия рычаги весовых элементов Q.
Зо время проведения опыта (по методу мгновенных отсчетов)
записывают отсчеты сил Т и Q по шкалам весовых рычагов и силу
тока I по амперметру. При этом очевидно, что реактивный момент
—Ql-=(Q изм — Qo) /,
а сила тяги
^н.в = (Т’изм Л))>
где / — расстояние от точек крепления тяг 7 весовых элементов Q
до оси вращения винта; QII3m, 7изм —* показания весовых элементов
во время опыта; Qo, То — показания весовых элементов до опыта,
так называемые нулевые показания.
Три отсчета (Т, Q и /) дают все необходимые величины для вы-
числения аир, так как диаметр винта D заранее известен, а плот-
ность воздуха q может быть определена до опыта по показаниям
барометра и термометра. Для этого по опытным данным строятся
графики зависимостей TH.B=/i(nc2) и Q^=/2(^c3), как это показано
на рис. 21.1.
Необходимая аппаратура
1. Модель винта.
2. Мотор-весы.
3. Амперметр.
4. Реостат со скользящим контактом.
5. Весовые элементы.
Рабочие формулы
а=Ти^п2с1>; 3=7VHn/c/zc3D6;
^н.в=Тизм — To- NKn—Qln, здесь п — частота вращения в минуту;
7Н.в 1 . о Qn I
а — —о----, р = —о---,
а=con st! — tg 8 constj; p—cons^=tg у const/,
« = /(/)• Q = Qh3M-Qo
189
Порядок проведения работы
1. Ознакомиться с установкой^
2. Определить шаг винта на r^rjR, после чего установить винт на вал м0
гора.
3. Произвести эксперимент.
4. Обработать результаты испытания и построить графики
T’h.b=/1(«c) и <?п = /2(«с)-
5. Определить коэффициенты а, £, ст, тк и т]0-
Контрольные вопросы
1. Каковы соотношения между коэффициентами а и ст, р и тк?
2. Как определить средний истинный угол установки лопасти на режиме
осевого обтекания?
3. Как определить величину индуктивного крутящего момента?
РАБОТА № 22
ОПРЕДЕЛЕНИЕ СКОРОСТИ ДВИЖЕНИЯ
УДАРНОЙ ВОЛНЫ
Цель работы — 1) определение скорости движения ударной вол-
ны относительно стенок аэродинамической трубы и 2) установление
числа Ms ударной волны как отношения скорости перемещения
ударной волны к скорости распространения звука в невозмущенном
газе перед ударной волной.
Результат работы должен быть представлен в виде найденных
значений скорости движения Vs и числа Ms ударной волны.
Общие сведения
При изучении явлений в потоках очень больших скоростей и
температур газа наиболее простой установкой является ударная
труба, в которой можно одновременно (воспроизвести гиперзвуковые
скорости и высокие температуры.
Ударная труба, схема которой приведена на рис. 22.1, представ-
ляет собой прямолинейную трубу, концы которой закрыты, что
обеспечивает ее герметичность. Канал этой трубы разделен метал-
лической или из другого материала диафрагмой (мембраной) на
две неравные части. В меньшей камере создается высокое давле-
ние, а в большей — низкое. Для нормальной работы трубы необхо-
димо обеспечить только перепад давлений между pi и р4, газы же
в обеих камерах могут быть различными, т. е. иметь разные газо-
вые постоянные и а также разные температуры 7\ и Л й
плотности Qi и Здесь индекс «1» относится к исследуемому газу,
помещенному в камеру низкого давления, а индекс «4» к так на-
зываемому «толкающему» газу.
Следует заметить, что с помощью подобных установок большей
частью ведутся исследования физических и химических процессов
190
дкнжущемся газе (воздухе) при очень больших скоростях и тем-
ператУРах- .
разрушение диафрагмы производится путем превышения давле-
я в камере 1 (рис. 22.2). В начальный момент, соответствующий
Иа3рь1.ву диафрагмы, т. е. когда /=0, давление претерпевает ступен-
чатое изменение как это по- Высокое до6леиие Диафраг„а
казано на рис. 22.1, а. В пос-
1еД} ющий момент времени
прИ /=/4>0 картина резко ме-
няется, образуются дополни-
тельные области измененных
давлений, температур, скоро-
стей и плотностей (см. рис.
22.1, б). После разрушения
диафрагмы возникает ударная
волна, которая распространя-
ется в камере низкого давле-
ния, сопровождаемая так на-
зываемой поверхностью кон-
тактного разрыва, а в проти-
воположную сторону в толка-
Поверхность контактного с„ешанная 30На
Вееп^ Ра3.рыва^,^ (пробка)
Фронт Волны
р азрежения
Pi
Ударная рыдающая
- л
ющем газе начинает свое дви-
L
/ч-----v
Давление X,______________р3=Рг
I----------Pl
.__Лг
4----------1 г» ----------Ъ
Температура J
а<,-------J -----------Vj
Скорость
Рис .22.1. Схема ударной трубы:
а—момент разрыва диафрагмы, /=0; б—пос-
ле разрыва диафрагмы t=ti>0
жение волна разрежения.
Ударная волна и волна разре-
жения, дойдя каждая до дна
трубы, отражаются, а затем
взаимодействуют друг на дру-
га.
В той области газа, где про-
шла ударная ’волна, парамет-
ры потока обозначим индек-
сом «2», а в той, где прошла
волна разрежения, — индек-
сом «3». Между областями 2
и 3 находится, как уже упоми-
налось, поверхность контакт-
ного разрыва, через которую
происходит диффузия газа. Но, пренебрегая диффузией, можно
считать, что газы областей 2 и 3 не смешиваются между собой, а
Разделяются поверхностью контактного разрыва и движутся с оди-
наковой скоростью, равной скорости перемещения поверхности
контактного разрыва, т. е. V2=V3, р2=Рз, а плотности р2 и р3 и
температуры Т2 и Т3 различны.
Область 2, иногда именуемая как «смешанная зона» или «проб-
ка», находится между ударной волной и поверхностью контактного
Разрыва. Находящийся ib этой области газ в результате сжатия в
Ударной волне имеет высокую температуру, достигающую 2000—
191
Если принять, что и толкающий и исследуемый газы являкуЯ
совершенными газами, т. е. в них отсутствует влияние вязкости *
их теплоемкости постоянны, то интенсивность ударной волны будеа
Рис. 22.2. Принципиальная схема ударной трубы:
а—простой вариант; б—гиперзвуковой вариант; /—камера высокого дав-
ления; 2—диафрагма; 3—камера низкого давления; 4—защитное стекло;
5-—ионизационным или пьезоэлектрический датчик; 6—вакуумметр; 7—ос-
циллограф; 8— манометр; 9—воздушный кран; 10—баллон; //—вакуумный
насос; 12—оптическая установка ИАБ-451; 13—тахометр; 14—электродвига-
тель; /5—барабанная киноприставка; 16—сопло Лаваля; /7—рабочая
часть; 18—вакуумная камера; 19—форвакуумный насос; 20—вакуумметр
для измерения низкого давления; 21—диффузионный насос
зависеть от соотношений удельных теплоемкостей, давлений и ско-
ростей звука:
_ ЯГ 1 1 2х4
/Ч __ " 1 у ____________1___________ —7
Pi Ь14~1 *14-1] Х4— 1 а{ [ 1 \
*14-1 ^4 \ J
где Ms=Vs/ai, т. е. равно отношению скорости ударной волны к
скорости звука в невозмущенном газе перед ударной волной; —
скорость звука в области 4.
192
Чтобы определить интенсивность волны разрежения, восполь-
зуемся известным соотношением
Рз Рз Pi P2IP1
Р4 Pl Р4 Р4/Р\
Для определения температуры газа за ударной волной приме-
няется отношение
1 + ~ 1 ^2
^2 Х1 + 1 Pl
XI + 1 Р2
а температура за волной разрежения Т3 может быть подсчитана из
соотношения
г4 \ Р4 ) \ Р4/Р1 /
При помощи ударной трубы сравнительно легко можно получить
скорость движения ударной волны порядка 5 км/с и выше. Однако
несмотря на то, что скорость движения ударной волны Vs велика,
число М небольшое, примерно 1,5—5. Продолжительность устано-
вившегося движения при этом составляет 10-3—10-6 с.
Для определения времени быстротечных явлений применяются
пьезоэлектрические или ионизационные датчики, присоединяемые к
осциллографу, или же оптическая установка ИАБ-451 в комбина-
ции с барабанной кинокамерой. Установка ИАБ-451 построена по
принципу метода полос и описана в работе № 4.
В первом случае скорость ударной волны
Vs = l/t,
где I — расстояние между двумя датчиками; t — время прохожде-
ния этого расстояния ударной волной, зафиксированное на пленке
осциллографа при помощи датчиков и отметчика времени.
Та же скорость Vs во втором случае будет определена по на-
клону следа .на кинопленке (рис. 22.3).
Кинопленка, укрепленная на барабане приставки 15 (см. рис.
22.2), 1вращается с постоянной угловой скоростью электродвигате-
лем 14; тогда линейная скорость киноленты будет Икл = л£)п, где
/г — число оборотов барабана, a D — диаметр барабана. Время t,
за которое пройдет ударная волна с постоянной скоростью Vs ка-
кое-то линейное расстояние вдоль рабочей части трубы, равно
t—ab]nDn.
Отношение величины спроектированного на кинопленку линейно-
го участка ef (см. рис. 22.3) к величине этого участка в натураль-
193
ную величину EF (см. рис. 22.2) обозначим через mi=eflEF
нейный масштаб), тогда скорость ударной волны
Vs=—
tmi
bcTiDh
abmi
TtDn
mi
Ctgo.
Экспериментальная установка состоит из камер высокого 1 и
низкого 3 давления, представляющих собой трубы, разделенные
диафрагмой 2 .в виде металлической перегородки. При помощи ва-
куумного насоса 11 из камер откачивается влажный воздух, после
чего они заполняются сухим воздухом, гелием, каким-либо другим
газом или же их смесью. В каме-
Рис. 22.3. К определению скорости
ударной волны
хождении, датчики 5 передают
рах устанавливается заданное
давление. Для этой цели исполь-
зуются баллоны 10, заранее за-
ряженные соответствующим га-
зом под высоким давлением.
Давление в камере 1 контроли-
руется манометром 8, а в каме-
ре 3 — вакуумметром 6. Иони-
зационные или пьезоэлектриче-
ские датчики 5 устанавливаются
в камере низкого давления на
расстоянии I друг от друга. Им-
пульсы, получаемые от воздейст-
вия ударной волны при ее про-
а осциллограф 7 в виде электри-
ческих сигналов, которые записываются на движущейся ленте.
К наблюдательной трубе оптического прибора 12 присоединяется
барабанная киноприставка 15, приводимая во вращательное дви-
жение электродвигателем 14, а контроль стабильности частоты
вращения осуществляется при помощи тахометра 13. Между бал-
лонами, вакуумным насосом и камерами трубы в соединительных
(дренажных) трубках вмонтированы воздушные краны 9, пред-
назначенные для регулирования давления воздуха или газов в
камерах 1 и 3.
Для обеспечения нормальной работы оптического прибора ИАБ-
451 в стенках рабочей части установлены плоскопараллельные за-
щитные стекла 4. Для получения достаточно резкого изображения
па кинокадре используется оптический нож прибора, при помощи
которого регулируется размер щели.
Барабанная кинокамера по своей конструкции очень проста.
В светонепроницаемом кожухе с большой скоростью вращает-
ся барабан, на котором укреплена кинолента. Съемка производится
в темноте. После съемки кинопленку необходимо проявить и, если
есть необходимость, сделать отпечаток на фотобумаге.
Выше было отмечено, что в ударной аэродинамической трубе,
выполненной по схеме, изображенной на рис. 22.2, а, число М полу-
чается не очень большим. Для получения гиперзвуковых скоростей,
194
т е. чисел М^б (см. рис. 22.2, б) к камере низкого давления 3
присоединяется сопло Лаваля 16, к которому, в свою очередь, при-
соединяется рабочая часть трубы, представляющая собой часть
вакуумной камеры 18. Камера низкого давления и сопло Лаваля
отделены второй диафрагмой, подобной первой диафрагме 2, кото-
рая разделяет камеры низкого 3 и высокого 1 давления. Контроль
За степенью разрежения в вакуумной камере 18 и рабочей части
трубы 17 осуществляется прибором 20. Высокая степень разреже-
ния в камере 18 достигается с помощью диффузионного насоса 21.
Принцип работы гиперзвукового варианта ударной трубы сос-
тоит з следующем. После разрушения первой диафрагмы возник-
шая ударная волна движется в камере низкого давления со ско-
ростью Vs. Ударная волна, дойдя до второй диафрагмы, разрушает
и ее, и газ, проходя через сопло Лаваля, разгоняется до больших
гиперзвуковых скоростей (М>6).
Поскольку рабочим участком трубы становится вакуумная ка-
мера, естественно, что оптическая установка ИАБ-451, все измери-
тельные и регулирующие приборы с датчиками для определения
скорости и числа М потока должны быть перенесены в вакуумную
камеру. В зависимости от режима работы ударной трубы во всех
трех камерах создаются потребные давления. Так, в камере высо-
кого давления воздух или иной газ нагнетается до давления р4=
-15004-2000 Па.
В камере низкого давления исследуемый газ (например, воздух)
находится под давлением Pi = 0,14-5 мм рт. ст., а в вакуумной ка-
мере достигает значений всего лишь 10~2 мм рт. ст.
Аппаратура и материалы
1. Ударная труба.
2. Оптический прибор ИАБ-451.
3. Барабанная киноприставка с электродвигателем и тахометром.
4 Вакуумный насос.
5. Вакуумметр.
6. Ионизационные или пьезоэлектрические датчики.
7. Осциллограф.
В Металлические трубки.
9 Баллоны со сжатым воздухом или каким-либо иным газом.
10 Манометр.
11 Воздушные краны и тройники.
Рабочие формулы
Als = Vs/tz 1,
где Vs — скорость ударной волны, равная Vs=llt. Здесь I — рас-
стояние между двумя датчиками (см. рис. 22.2) в м; t — время
прохождения ударной волны расстояния /, зафиксированное при
помощи датчиков и осциллографа.
При измерении оптическим прибором
,т nDn ,
14 =------Ctga.
195
Обычно диаметр барабана D киноприставки и его «скорость вра
щения п в об/сек постоянны. Если сохранить еще и масштаб изо'
Сражения натуры на кинопленке то
7iDnlmt = const
или Vs=ctg a const,
где or — угол наклона следа, полученного на кинопленке.
Скорость распространения звука в покоящемся воздухе или
газе перед ударной волной заранее известна, т. е. известны физи-
ческие свойства воздуха или газа, которым заполнена камера низ-
кого давления 3.
Порядок проведения работы
1. Составить схему установки.
2. Подготовить ударную трубу к работе, т. е. заполнить соответствующим
газом камеры высокого и низкого давлений и установить нужные давления.
3. Определить скорость звука в спокойном состоянии в камере низкого дав-
ления 3 (см. рис. 22.2).
4. Подготовить к включению регистрирующие приборы — осциллограф и ба-
рабанную киноприставку.
5. Поднять в камере 1 давление до предела разрушения диафрагмы 2, при
этом автоматически должны быть введены в действие регистрирующие приборы.
6. По экспериментальным данным определить скорость ударной волны V8r
а затем и число Als
Контрольные вопросы
1. Каково назначение и принцип действия ударных труб?
2. Какие существуют способы определения скорости перемещения ударной
волны вдоль камеры низкого давления Vs?
3. Как определяется число Ms ударной волны?
РАБОТА № 23
ИССЛЕДОВАНИЕ ВЗАИМНОГО ВЛИЯНИЯ
КРЫЛА И ФЮЗЕЛЯЖА НА АЭРОДИНАМИЧЕСКИЕ
ХАРАКТЕРИСТИКИ ЛЕТАТЕЛЬНОГО АППАРАТА
ПРИ ДОЗВУКОВЫХ СКОРОСТЯХ
Цель работы — экспериментальным путем показать, как взаим-
ное влияние крыла и фюзеляжа при компоновке летательного ап-
парата отражается на его характеристиках Суа и Ста, а также по-
лучить .величины приращения ЬСуа*з й &Сха^ к сумме коэффици-
ентов изолированных крыла и фюзеляжа.
Используя данные опыта, необходимо «построить графики зави-
симости Суа Кр, Суа ф, Суа, Сха кр, Сха ф, CXa = f(CL)'t kB3y, kB3x = f 1(d)’
уч ^вз х = (^) •
Необходимо заметить, что в данной лабораторной работе при
компоно1вке крыла и фюзеляжа варьируется только размах крыла,
т. е. его удлинение Z.
196
Общие сведения
flpii расчетах аэродинамических характеристик проектируемого
ПА на стадии эскизного проекта для определения основных коэф-
фициентов Суа И Сха пользуются различными источниками, напри-
мер теоретическими расчетами, результатами систематических ис-
следований частей ЛА, данными опытов разнообразных компоновок
крыльев и фюзеляжей и их комбинации, а также статистическими
данными.
Аэродинамические
эффициенты ЛА даже прос-
той схемы крыло плюс-Ь
фюзеляж не характеризует-
ся простой суммой коэффи-
циентов:
с + С
^уа ~Г ^уакр $ Г^уаф $ ’
-*х
Рис. 23.1. Диффузорный эффект при со-
пряжении крыла и фюзеляжа
ко-
-ДГ 5кр г 5Ф
ха~г ^хакр с 1 ^хаф Q -
Это объясняется тем, что при сочленении крыла и фюзеляжа
происходит наложение потоков, обтекающих тела, и увеличение
толщины пограничного слоя, что и вызывает взаимное влияние.
Скорости обтекания в месте сопряжения изменяются, изменяется
и давление. Особенно это проявляется при нарушении плавности-
обтекания на больших углах атаки. Так, если стыковка осущест-
влена по схеме «среднеплан» или особенно «низкоплан», то в месте
сочленения крыла и фюзеляжа образуется так называемая диффу-
зорная трубка (рис. 23.1), в области которой происходит повыше-
ние давления, т. е. — ^>0. Это может привести к срыву потока.
dx
Вследствие этого снижается коэффициент подъемной силы Суа и
повышается коэффициент лобового сопротивления Сха. Однако не-
зависимо от наличия диффузорного эффекта происходит перерас-
пределение давления на участке фюзеляжа, где присоединяется
крыло. На верхней части корпуса создается дополнительное раз-
режение, соответствующее разрежению на верхней поверхности
крыла, а на нижней части фюзеляжа — дополнительное повышен-
ное давление, соответствующее давлению на нижней поверхности
кРыла. Кроме того, в местах сопряжения крыла с фюзеляжем про-
исходит увеличение местных углов атаки, вследствие того, что ис-
кажение местных линий тока вызывает увеличение поперечной1
составляющей скорости Vy = Vsin «мест (рис. 23.2).
Для поведения эксперимента воспользуемся моделью ЛА, пред-
ъявляющего собой цилиндрический корпус с конической носовой
астью и укрепленным на нем по схеме «среднеплан» прямоуголь-
крылом различного удлинения. Модель может быть расчлене-
197
на, тем самым создается возможность .произвести раздельные и
пытания изолированных крыльев и фюзеляжа, а также в комбщЛ
ции крыло+фюзеляж, т. е. ЛА в целом. а'
В нашем случае фюзеляж имеет удлинение Хф = 8, а сменно
крыло может быть выбрано из комплекта крыльев следующих уд^
нений: Х=5,5; 4,0; 2,5 и 1,5, т. е. крыло может иметь как болыц0е'
так и малое удлинение; причем хорда у всех крыльев постоянна и
равна 6 = 100 мм.
Рис. 23.2. Схема взаимного влияния крыла и фюзеляжа
При подсчете аэродинамических коэффициентов изолированного
крыла за расчетную площадь принимаем площадь крыла, а при
определении коэффициентов изолированного фюзеляжа и всего ЛА
в целОхМ за расчетную площадь принимаем площадь миделевого
сечения фюзеляжа.
Экспериментальные графики зависимости коэффициентов Суа и
<Сха от угла атаки а для изолированного крыла даны на рис. 23.3,
для фюзеляжа на рис. 23.4, а для летательного аппарата в целом
на рис. 23.5.
Если 'сложить коэффициенты Суа и Сха отдельно взятых, т. е.
изолированных крыла и фюзеляжа, предварительно приведенных
к одной площади, например, в нашем случае к площади миделево-
го сечения, то мы не получим те значения Суа вз и Сха вз, которые
имеет ЛА в целом. Разница между коэффициентами Суа и Сха вз й
.суммарными коэффициентами Суакр+ф=Суакр
5Кр 5Ф
е “ГС^дф ,
^Ф ^ф
Сткр+Ф — СХдКр — {“С^ф ~ I
и будет теми приращениями АСуаъз и АСхавз, которые вызывает
взаимное влияние крыла и фюзеляжа при их компоновке.
Если подсчитываются аэродинамические коэффициенты Суа и
всего ЛА как суммы отдельно взятых коэффициентов для крыла I
Д98
Рис. 23.4. Графики зависимости Сха ф, Суаф—Ка)-
х ^ха ф* ° ja ф'
фюзеляжа, следует учитывать /приращения АСуавз и ДСхавз. тог
формулы для определения коэффициентов ЛА будут иметь -вид
Суа ЛА — Суаку__2_-^Суаф Т^-+ ЬСуаю V
^ф *^ф
СХдЛА= Схокр _2±__|_сллф ——-L дсхавз. |
*^ф ^ф
Следует заметить, что .величины ДСуавз и ДСХ вз могут иметь как
положительное, так и отрицательное значение.
Рис. 23.5. Графики зависимости СХаЛА> СуаЛА =f(a)'
х ^ха ЛА » ° ^уаЛА '
Коэффициенты Суа и Сха можно представить в другом написа
нии, а именно:
В данном случае коэффициенты kB3y и /гвзх будут учитывать при-
ращения коэффициентов Суа и Сха вследствие взаимного влияния
частей ЛА друг на друга и будут представлять собой следующие
отношения:
h —________Уа — 1 ! дТ* А ___________ Сха ______ч । “774
Лвз«/ р 1 Т р -- 1 I и<-'_Х72ВЗ’
°Х/«кр+ф Схлкр+Ф
ТЙ _ ДСдавз ~ — ДСд-нз
где а Д^хвз— •
^г/дкр+ф t'ATz кр+ф Л
•200
Влияние удлинения крыла X и угла атаки а на коэффициенты
. и кВзх показано на графиках рис. 23.6 и рис. 23.7, представлен-
пых как в функции Z при постоянных а, так и в функции а при по-
стоянных X. Эти графики получены для модели ЛА, описание ко-
торой дано выше.
Графики показывают, что наибольшее значение коэффициентов
и kB3X имеют крылья, у которых удлинение Х=2,54-3. Как уве-
личение, так и уменьшение удлинения приводит к снижению этик
коэффициентов, а это значит, что крылья очень малых и больших,
удлинений при компоновке с фюзеляжем влияют меньше.
Рис. 23.6. Графики зависимости ^ВЗ X» кпз У-f(^) •
К ^вз х» ° ^вз у
Что же касается влияния атаки на коэффициенты kB3y и kB3x, то
по графикам прослеживается, что с увеличением углов атаки влия-
ние диффузорного эффекта усиливается и, естественно, коэффици-
ент /гвз у падает, а коэффициент kB3x растет.
Опыт проводится на трехкомпонентных аэродинамических весах
АВНК, описание которых приведено в работе № 11 «Определение
основных аэродинамических коэффициентов модели летательного
аппарата или изолированного крыла». Исследуемая модель^/ (рис.
23.8), будь то изолированное крыло или фюзеляж или комбинация
крыло+фюзеляж, укрепляется на подвеске весов 2 и 3 посредством
крестообразной державки 4 (см. вид А). По показаниям весовых
элементов 5 и 6 подсчитывается подъемная сила Ya при различных
углах атаки а, а по весовому элементу 7 при тех же углах а опре-
деляется лобовое сопротивление Ха. Угол атаки устанавливается
посредством механизма а 8, который при помощи стальной ленты 9
соединен с сектором 10 продольной переменной базы 11. Скорост-
ной напор воздушного потока измеряется на микроманометре 12,
присоединенном к приемнику воздушного давления 13. Сопротивле-
ние подвески весов и крестообразной державки можно легко полу-
чить, используя график на рис. 10.10, зная скоростной напор.
201
Рис. 23.7. Графики зависимости kB3 х, kB3
X &вз а-', о &вз у
Рис. 23.8. Схема установки:
/—исследуемая модель; 2, 3—подвеска весов; 4—кресто-
образная державка; 5, 6—весовые элементы силы У; 7—
весовой элемент силы Q; 8—механизм а весов; 5—
стальная лента; 10—сектор; //—продольная переменная
база весов-. 12—микроманометр; 13—приемник воздушно-
го давления (насадка)
При подсчете истинного угла атаки аИст необходимо учитывать
лсизну потока ДаКОс, т. е. несовпадение продольной оси аэродина-
мической трубы и направление потока, а также угол скоса потока,.
рЬ131ванный индукцией трубы (см. работы № 11 и 14):
аист = а + Дат + Дак с-
Знак Дат для трубы с закрытой рабочей частью будет положитель-
ны^, а знак А^кос зависит от индивидуальных особенностей трубы
и может быть как положительным, так и отрицательным.
Аппаратура и материалы
1. Модель изолированного фюзеляжа.
2. Модели изолированных крыльев различных удлинений.
3. Крестообразные державки для фюзеляжа и изолированных крыльев.
4. Трехкомпонентные аэродинамические весы АВНК (см. рис. 11.3 и 114).
Контрольный .приемник воздушного давления аэродинамической трубы.
Микроманометр контрольного приемника воздушного давления.
5.
6.
Рабочие формулы
Схо=^~; 9=-^=((z-a0)sin<?Y^=(a-a0)const;
a
[AC^flB3 А/ялд
хдвз ^хаЛА
+А=(А—Ао)+о? (А—Ао); г2=АЛ cos
подв; ДАодв — определяется по графику рис. 10.10;
, 5кр .
£/Якр е “Г
Оф
5кР
^хакр е
\ оф
-• Д|
'уаф Q I »
г*ф J
\-С 5ф 1 •
Г ^хаф с I »
оф /
где
где
‘ Г ^кр
У а кр4-ф С/ уа ,.р
Оф
SKV=lb-,
^взу^^ 1 ^i'3X== 1 “F ^Схавз*
__ ^Суавз . _ &Схавз .
— Т; —— , ис>хавз— ,
О//акр4-ф Схдкр+ф
SФ я р SKp
с » ^ллкр+ф — ^хакр с
*^ф ^ф
г
хаф Q
5Ф
Порядок проведения работы
установкой, т. е. с «моделями, аэродинамическими весами
1- Ознакомиться с установкой, т. е. с «моделями, аэродинамическими весами
^ВНК, и составить схему.
2. Укрепить на подвеску весов крестообразную державку, предназначенную
Установки модели крыла.
3. Проверить по уровню горизонтальность крестообразной державки и парал-
сльность ее продольной переменной базе весов, при этом механизм а должен
"оказывать 0.
203
4. На крестообразную державку по уровню в горизонтальное положение I
'тановить модель крыла. Это положение будет соответствовать углу атаки и
.ли крыла а=0°. ” * °Дс'
5. Уравновесить все весовые элементы.
6. Снять «нулевые» показания с весовых элементов и механизма а.
7. Произвести эксперимент на заданных углах атаки а.
8. Снять с подвески весов крестообразную державку вместе с молопк
крыла. Ь!°
9. Установить на подвеску’ весов другую крестообразную державку с укреп,
-ленной на ней моделью фюзеляжа. Последовательно провести операции по пи ?
4, 5, 6, 7 и 8 с моделью фюзеляжа. ' А
10. Произвести стыковку крыла с фюзеляжем и провести операции по пп 3
4, 5, 6, 7 с моделью ЛА. * ’
11. Обработать экспериментальные данные и построить графики
Суа> С\а — f (<*)» ^вз — fl ^вз — fi (У).
Контрольные вопросы
1. Как определить коэффициенты &Вз у и kB3 х, учитывающие взаимное влия-
ние крыла и фюзеляжа?
2. Как влияет удлинение на коэффициенты kB3 у и kB3 х?
3. Как влияет изменение утла атаки а на коэффициенты kB3 у и kB3 х?
4. Учитывается ли сопротивление подвески весов и крестообразной державки
при подсчете коэффициента Схп?
5. Как определить истинный угол атаки аИст?
6. Каковы причины взаимного влияния крыла и фюзеляжа?
РАБОТА № 24
ИССЛЕДОВАНИЕ СПОСОБОВ УВЕЛИЧЕНИЯ
ПОДЪЕМНОЙ СИЛЫ КРЫЛА
Цель работы — экспериментальным методом определить уве-
личение коэффициента подъемной силы крыла Суа и изменение ба-
лансировочного угла «бал путем .применения закрылков.
Используя материалы опыта, построить графики Суа=f{Cxa}\ Суа=
^зак^» С ха === fl (О', ^Ззк)’ ^2 ^зак)» ^бап «/й^зак)’
^Стах=/5(б3ак), с помощью которых становится очевидной роль от-
клоняющихся закрылков в увеличении коэффициента подъемной
силы Суа, коэффициента сопротивления Сха, а также изменение ко-
эффициента момента тангажа mz и балансировочного угла атаки
«бал на больших углах атаки.
Кроме того, необходимо сравнить приращение АС^, полученного
опытным путем, с приращением, которое получится при расчете по
формуле ЛС^а = 0,0755закАазак =‘cos2%cp, используемой при эскиз-
ном или в курсовом и дипломном проектировании студентами в
учебном процессе.
Общие сведения
Увеличение подъемной силы крыла и коэффициента максималь-
ной подъемной силы Суатл^ требуется в основном на режимах ма-
невра, взлета и посадки. На практике существует два основных на-
204
плавления увеличения подъемной силы на больших углах атаки.
Первое направление базируется на так называемой механизации
крыла, т. е. на использовании различных устройств: закрылков,
предкрылков, отклоняющихся носков крыла и т. д., а второе осно-
вано на управлении пограничным слоем.
В данной работе практически показывается влияние одного из
важных путей повышения подъемной силы, использующего измене-
ние вогнутости профиля крыла.
И теория и опыт показывают, что увеличение вогнутости до из-
вестных пределов ведет к росту Суатах- Изменение вогнутости мо-
жет быть осуществлено с помощью закрылков и щитков разнооб-
разной конструкции или путем отклонения носка профиля. Обычно
отклоняющиеся носки профиля приводят как к увеличению коэф-
фициента Суа max, так и к увеличению критического угла атаки
окр, а отклонение закрылков и щитков также приводит к росту
Суа max, однако при этом угол акр несколько уменьшается или ос-
тается неизменным. Естественно, любое из этих устройств приводит
к увеличению коэффициента Сха. Так, результаты применения од-
них только закрылков можно показать на графиках рис. 24.1 и рис.
24.2. Эти графики Схау Cya=f(a.y б3ак) построены по данным опыта,
проведенного с моделью самолета дозвуковых скоростей, крыло
которого в некотором масштабе изображено на рис. 24.3. Крыло име-
ет носок, отклоняющийся на максимальный угол б110ска:=26о, и за-
крылки, которые можно отклонить на угол 6зак от 0 до 33°. Закрыл-
ки выполнены по простой схеме, т. е. без образования профилиро-
ванной щели при отклонении.
Величину приращения ДСуау полученную экспериментальным
путем при использовании закрылков, полезно сравнить со значени-
ем ДС^а, которое подсчитывается по распространенной эмпиричес-
кой формуле
Д^а=0,0753\акДа:ак cos2xcp, (24. 1)
где S3aK=S3aK/S,
2^-—у—(^-1) z
Для трапециевидных крыльев 5зак =---—---------;
£зак — та часть площади крыла, которая обслуживается закрыл-
ками; ® нашем Случае 53ак = <$зКа1+5зак2;
S — полная площадь крыла (с подфюзеляжной частью);
т] — сужение крыла; I — размах крыла; /зак — размах за-
крылков. Для данного крыла /зак — /зак! “h /зак2»
Аа3ак°— изменение угла нулевой подъемной силы при отклонен-
ном закрылке, определяется по графику на рис. 24.4;
Хер — средний угол стреловидности крыла в области за-
крылка, определяемый из условия
X X 2 7] — 1
tsz^tgz-T4-TI.
205
Рис. 24.3. к определению SaaK и (6зак)Ср
206
Для исходного крыла, когда носок и закрылки не отклонены, т. е.
йноска = 0 и 63ак=0, при больших углах атаки, близких к акр, напри-
мер, Для <*=10° при отклоненных закрылках на углы бзак=И° и
бзак=33°, приращение Суа составляет (соответственно) ДС1/а=0,11
и ДСУ=0,18 (см. рис. 24.1). Если значение Суа исходного крыла
принять за 100%, то приращение будет составлять 13,8 и 22,5%.
По графикам Cya=f(a) на том же рис. 24.1 находим величины из-
менения угла нулевой подъемной силы. Так, для бзак=Н° Да3ак со-
ставляет 3,6°, а для бзак=33 Да3ак=5,7 .
Рис. 24.4. График для опреде-
ления ДОодк
Исходя из размеров крыла нетрудно получить следующие отно-
сительные геометрические величины: £зак=0,3; (6зак)ср=0,26; %Ср =
= 11°. По графику па рис. 24.4 для значения (6зак)ср=0,26 находим,
что Аазак = 3,6° и Аа3ак=8,8°. После подстановки в формулу (24.1)
полученных по графику данных приращений Суа для тех же откло-
нений закрылка будет (соответственно): ACj/a=0,08 и ДСуа —0,19.
Сопоставляя приращения Суа, полученные опытным путем, с вели-
чинами, определенными по формуле (24.1), можно сказать, что
расхождения невелики. Однако для больших углов бзак изменение -
угла нулевой (подъемной силы Аазак, определяемое по графику на
рис. 24.4, значительно разошлось с экспериментом. Естественно, в
таких случаях предпочтительнее данные, полученные из опыта.
Помимо влияния на коэффициент подъемной силы Суа шах от-
клонение закрылков также оказывает свое влияние и на коэффици-
ент момента тангажа тг и на балансировочный угол атаки «бал-
В нашем примере при заданных отклонениях закрылков на 11° и
33° наблюдается четкая зависимость балансировочного угла атаки
абал и коэффициента момента тангажа mz от угла отклонения за-
крылка 6зак, как это показано на рис. 24.5.
207
Рис. 24.6. График зависимости
Оба 3i—f (бзак)
10 -
F Рис. 24.7. График зависимости
L Лшах^/ (бзак)
Рис. 24.8. Поляра 1-го рода
Смещение графиков mz=f(a) влево при увеличении угла 6зак
вязано с ростом отрицательного угла атаки а, соответствующего
нупевой подъемной силе (т. е. при Cya = 0). Соответственно и ба-
лансировочный угол атаки аб^ч также сдвигается в сторону увели-
чения отрицательных уг-
лов атаки а. Влияние уг-
ла бзак НИ (Хбал П0КЗЗЫ-
вается на графике рис.
24.6. По сравнению с
подъемной силой лобовое
сопротивление при откло-
нении закрылков растет
более интенсивно, что
снижает аэродинамиче-
ское качество (рис. 24.7).
Для иллюстрации на рис.
24.8 приведены поляры.
Опыт проводится на
трехкомпонентных весах
АВНК, которые описаны
были в работе № 11. Схе-
ма установки приведена
на рис. 24.9. Как обычно,
исследуемая модель 1 с
помощью укрепляемых
на ней державок 2 и 3
Рис. 24.9. Схема установки:
/—исследуемая модель; 2—две передние держав-
ки модели; 3—задняя державка модели; 4—две
передних подвески; 5—задняя подвеска; б— про-
присоединяется к подвес-
кам весов 4 (передняя) и
5 (задняя). Изменение
угла атаки производится
посрсдством мех а низ м а
а 15, который соединен с
сектором продольной пе-
дольпая переменная база; 7—сектор продольной
переменной базы; 8—лента, соединяющая качал-
ку и верхнее строение; У—стальная лепта; 10—
качалка компонента Q; 11—тяга, соединяющая
качалку с весовым элементом 12; 12, 13, 16—ве-
ременной базы 7 гибкой
лентой 9. Задняя подвес-
ка 5 через шарниры при-
совые элементы- 14—тяга, соединяющая меха-
низм а и весовой элемент 13', 15—механизм а;
/7—тяга, соединяющая качающуюся раму"с‘весо-
вым элементом 16; 18—верхнее строение; 19—
качающаяся рама; 20—ПВД; 21—микроманометр;
соединяется к переменной гз-контргрузы
базе 6. Передняя подвес-
ка 4 укрепляется к верхнему строению 18, которое смонтировано
на П-образной качающейся раме 19 посредством ножевых шарни-
ров (призмы и ножи). Подъемная сила Ya измеряется на весовых
элементах 16 и 13, а сила лобового сопротивления Хп — на весовом
элементе 12. Как видно из схемы, качающаяся рама 19 соединяет-
ся тягой 17 с весовым элементом 16, а продольная переменная ба-
за 6 через механизм а 15 и тягу 14 с весовым элементом 13. Весо-
вой элемент 12 с верхним строением 18 соединяется через промежу-
точное звено-качалку 10, тягу 11 и ленту 8. Контргрузы 22 и 23 вве-
дены в схему весов как предварительная их загрузка и на случай
8 1743
2Э9
возникновения подъемной силы отрицательного направления (ск
ростной напор q измеряется с помощью приемника воздушное
давления 20 и микроманометра 21). Аэродинамические силы под°
считываются по известным формулам из работы № 11: Д'
Уа=У1+У2=(Р1-Рг0)+е2(Р2-Р20)-, ^a=QH3M-AQnoJlB;
АГг=Уу6созa==(P2 —Р20)A?a относительно передних точек крепле»
ния модели (подвеска 4).
о
Здесь с2=——— — передаточный коэффициент весов; AQnOflB—
сопротивление подвески определяется по графику на рис. 11.5; Pi
Р2, Сизм — показания весовых элементов во время проведения экс*
перимента; PiGf P2G — «нулевые» показания весовых элементов (по-
казания до опыта).
Аппаратура и материалы
1. Модель самолета с державками.
2. Трехкомпонентные аэродинамические весы АВНК (см. рис. 11.3).
3. Шаблоны для контроля установки углов бзак.
4. Контрольный приемник воздушного давления.
5. ^Микроманометр и две резиновые трубки для присоединения к контроль-
ному приемнику давления.
6. График для определения AQ подвески.
7. Бланк для регистрации экспериментальных данных.
Рабочие формулы
у Р
суа=^\ ^=(Д-Л0)+^2(Л—Р20); ^2=—° ;
qS /б cos a
Сха=-^-\ Л»=<2и3м-М>ПоЛВ; ДСпода по графику на рис. 11.5;
qS
Mz=(P2-P20)fr,
qSuCp
q=-^-=(a — a0) sin а0) const; const= sin ту/Сф;
2
Cua=———const2; Cxa=———const2; mz= — — constp
ua (a-a0) ла (a-a0) (a-a0)
const!=—!----; const2=—i— ;
const S^cp const S
AC^=0,075S3aKAa:aKcos2Zcp; ^=-^2; 5^=^,
где S — полная площадь крыла; S3aK — часть полной площади
крыла, обслуживаемая закрылком; %Ср — угол стреловидности по
передней кромке закрылка, находится по чертежу модели; Да°ак
по графику на рис. 24.4 в зависимости от угла 63ак и относительной
210
^орды закрылка (^зак)ср—(^зак) ср/^ср»’ ^ср средняя геометричес-
кая хорда <крыла (см. рис. 24.3); (63ак) ср — средняя хорда закрыл-
ка по его длине.
Порядок проведения работы
1. Составить схему установки и программу испытания модели.
2. Установить закрылки в исходное положение, т. е. 63ак=0.
3. Укрепить модель в подвеске весов.
4. Снять «нулевые» показания весов во всем заданном диапазоне углов
атаки.
5. Присоединить контрольный приемник воздушного давления посредством
резиновых трубок к микроманометру и сиять «нулевое» показание.
6. Провести эксперимент по заданной программе.
7. Отклонить только закрылки на заданный угол бзак.
8. Повторить эксперимент только в области больших углов а.
9. Обработать опытные данные и построить график
Сха> Суа> mz — /з (a)l абал ~ f 4 (°зак)^ ^max ~ (^зак)э Сца~ /б (Сха)-
10. Подсчитать по проведенной выше эмпирической формуле приращение АСуа
и произвести сравнение с АСуа полученным опытным путем.
Контрольные вопросы
1. Что такое кривизна профиля f?
2. Что такое закрылок простой схемы?
3. С какой целью необходимо увеличить коэффициент Суа max?
4. Почему отклонение закрылка приводит к увеличению подъемной силы
крыла?
5. Как влияет угол отклонения закрылка па приращение ACya?
6. Влияет ли отклонение закрылка на коэффициент Сжа?
7. На каких углах атаки применяется отклонение закрылка?
8. Что такое часть площади крыла, обслуживаемая закрылком?
РАБОТА № 25
ОПРЕДЕЛЕНИЕ КОЭФФИЦИЕНТА ЛОБОВОГО
СОПРОТИВЛЕНИЯ ПАРАШЮТА
Цель работы — экспериментальным путем получить коэффици-
ент лобового сопротивления парашюта.
После проведения опыта и обработки полученных данных долж-
ны быть получены значения коэффициента Сха пар и построены гра-
фики Сха naP=f(V), т. е. графики изменения коэффициента лобово-
го сопротивления парашюта без чехла, а также с чехлом, но после
того, как чехол будет снят -с парашюта.
Общие сведения
Применение парашюта как спасательного средства было давно
известно. После создания Г. Е. Котельниковым ранцевого авиаци-
онного спасательного парашюта парашют начинает широко ис-
пользоваться и для других целей, например, для доставки людей
8*
211
и различных грузов на землю и водную поверхность с борта само-
летов и других ЛА. С развитием скоростной авиации возникла
проблема торможения самолета во время его пробега на взлетно-
посадочной полосе (ВПП) для сокращения длины пробега, что ве-
дет к укорачиванию ВПП. Кроме применения тормозных колес
тормозных щитков, реверсирующего устройства у двигателя, дЛя’
торможения самолета на ВПП стали часто использоваться пара-
шюты. Парашют применяется для вывода самолета из штопора в
том случае, когда органы управления самолетом этого вывода не
обеспечивают.
В данной работе из большего количества экспериментальных
методов исследования аэродинамических характеристик парашютов
рассматривается только один, наиболее простой, но широко распро-
страненный. Это способ получения коэффициента лобового сопро-
тивления парашюта на аэродинамических весах.
Такие вопросы, как изучение влияния конструктивных особен-
ностей парашюта па его воздухопроницаемость, скорость снижения,
силу лобового сопротивления, на время наполнения купола и дру-
гие можно найти в специальной литературе, посвященной изучению
парашюта.
Из условия равновесия сила лобового сопротивления парашюта
Ха пар должна быть равна весу груза или парашютиста Grp и весу
самого парашютиста Gnap, а именно:
X а пар — ^пар “Ь ^гр •
Сила лобового сопротивления парашюта в прямой зависимости
от формы, материала и размеров парашюта, а также скорости сни-
жения Ксн, плотности воздуха рд на высоте применения парашюта:
V _Г елГсн
а пар ха пар %
пар»
где Схапар — коэффициент лобового сопротивления парашюта;
Snap — площадь проекции опорной поверхности купола парашюта
(площадь круга). Довольно часто за площадь принимается пло-
щадь поверхности купола парашюта.
При исследованиях парашютов в аэродинамических трубах за
скорость снижения VCH следует принимать скорость воздушного по-
тока в трубе V.
В этом случае, когда парашют используется в качестве тормоза
при пробеге самолета на взлетно-посадочной полосе, коэффициент
пар необходимо привести к площади крыла самолета, так как
все аэродинамические его характеристики приведены к этой пло-
щади. Тогда
__________ Схдпар^пар
АЬд-дпар" “ •
•^кр.сам
Из формулы для определения силы лобового сопротивления
парашюта видно, что коэффициент Схопар должен иметь возможно
212
большую величину. Необходимо иметь в виду, что увеличение ко-
эффициента Сха пар может привести:
* а) при сохранении величины проекции опорной поверхности ку-
пола 5пар И скорости снижения Йен к повышению силы сопротив-
ления парашюта ХОПар и тем самым к увеличению его грузоподъ-
емности;
б) при неизменных УСп и ЛаПар создается возможность значи-
тельно сократить поверхность купола и тем самым Snap- Изменение
Рис. 25.1. Схема установки для испытания парашюта:
а—с использованием механических весов; б—с использованием тензоэлект-
рических весов; /—парашют: 2—вертлюг; 3—подвеска весов; 4—весовой
элемент; 5—качалка компонента Q весов; 6—верхнее строение передней
подвески весов; 7—приемник воздушного давления-. 8—микроманометр; 9—
упругий элемент тензоэлектрических весов; 10—усилитель; 11—регистра-
тор показаний; 12—стойка; 13—электрические провода
поверхности купола, естественно, приведет к снижению массы са-
мого парашюта, а также к созданию лучших условий пользования
парашютом;
<в) при неизменных значениях ХОПар и Snap к уменьшению ско-
рости снижения Ven-
Однако нужно помнить, что при установившемся движении сила
лобового сопротивления купола Хапар всегда будет примерно в два
раза меньше расчетной максимальной нагрузки картах в момент
полного наполнения купола, а именно:
-Rnap шах 2Ха пар.
Максимальная расчетная нагрузка используется при расчете
на прочность купола, строп, узлов крепления, узла автосцепки па-
рашюта.
Установка для определения силы лобового сопротивления пара-
шюта на аэродинамических весах показана на рис. 25.1. Схема с ис-
213
Рис. 25.2. График для определения соп-
ротивления подвески механических ве-
сов
пользованием механических весов показана на рис. 25.1, а, а н
рис. 25.1, б изображена установка, в которой используются тензо-
электрические весы. В данном эксперименте могут быть использо'
ваны любые механические весы, как например, аэродинамические
весы АВЫК, которые подробно описаны в работе № 11 и показаны
на рисунках 11.3, 11.4, 11.8.
Парашют 1 (см. рис. 25.1, а) с помощью вертлюга 2 присоеди-
няется к подвеске весов. В зависимости от конструкции и назначе-
ния парашюта применение
вертлюга в некоторых случаях
необязательно. Сила лобового
сопротивления парашюта из-
меряется весовым элементом
4, который с подвеской весов
связан через качалку 5 и верх-
нее строение передней подвес-
ки весов 6. Скоростной напор
потока q определяется посред-
ством приемника воздушного
давления 7 и микроманомет-
ра 8.
В том случае, когда при-
меняются тензоэлектрические
к тензоэлектрическим весам 9
весы (см. рис. 25.1, б), парашют
присоединяется так же через вертлюг 2. Регистрация силы сопро-
тивления парашюта, под действием которой происходит деформа-
ция (чаще всего изгиб) упругого элемента тензоэлектрических
весов 9, на котором наклеен тензодатчик (в виде проволочного
сопротивления), производится с помощью устройства, состоящего
из усилителя 10 и регистратора 11. Мостовая схема, в которую
включается тензодатчик, подобна схеме, показанной на рис. 12.4
и подробно описанной в работе № 12. Тензоэлектричсские весы ук-
репляются к стойке 12. Электрические провода 13, идущие от тен-
зовесов к усилителю, тщательно укладываются по конструкции
стойки.
Силы сопротивления парашюта по опытным данным можно оп-
ределить:
а) по схеме рис. 25.1, а:
X а пар Оизм А^подв»
где QH3M — суммарная сила сопротивления парашюта и подвески
весов; ДСподв — сила сопротивления подвески весов, величина ко-
торой определяется по графику, подобно тому, как показано на
рис. 25.2;
б) по схеме 25.1, б:
^flnap ,
где N — показания регистратора (количество делений); — ценз
деления.
214
Зная скоростной напор потока q и площадь проекции опорной
поверхности парашюта Snap, можно подсчитать коэффициент силы
лобового сопротивления парашюта по формуле
С ха пар = а пар/*7*$пар
Рис. 25.3. Коэффициент силы
лобового сопротивления пара-
шюта в зависимости от ско-
рости воздушного потока:
—о— —парашют без чехла;
----0-----парашют в чехле
и построить графики, как показано на рис. 25.3. Скорость потока
аэродинамической трубы определяется по измерению скоростного
напора q, а именно:
у=1/>
Когда эксперимент проводится с парашютом в чехле, необходи-
мо предусмотреть прикрепление к чехлу тонкого шнура для снятия
с парашюта при заданной скорости потока трубы.
Аппаратура
1. Аэродинамические весы (механические или тензоэлектрические).
2. Модель парашюта.
3. Вертлюг.
4. Чехол с тонким шнуром.
5. Контрольный приемник воздушного давления.
6. Микроманометр.
Рабочие формулы
а пар ха пар(7*^ пар > ха пар
а пар — Qhsm ^QnolB
-=(а—Од) sin
‘ k «пар "'Г* ’ »
ай) sin
хе пар = const; const=------------ .
р (а —ао) Sin
215
Порядок проведения работы
1. Ознакомиться с аэродинамическими весами.
2. Проверить надежность присоединения к аэродинамическим весам.
3. Убедиться в правильности укладки парашюта.
4. Снять нулевые показания на приборах аэродинамических весов и на мнк
романометре контрольного приемника давления.
5. Провести эксперимент.
6. Уложить парашют.
7. Надеть на парашют чехол.
8. Повторить эксперимент со снятием чехла с парашюта при заданной
скорости.
9. Обработать полученные данные и построить графики.
Контрольные вопросы
1. Какое влияние оказывает высота парашютирования на силу сопротивле-
ния парашюта?
2. Какая взаимосвязь между коэффициентом Сха пар и площадью Snap?
3. Какой вес уравновешивает сила лобового сопротивления парашюта^
ПРИЛОЖЕНИЯ
Приложение 1
БЛАНК ЛАБОРАТОРНОЙ РАБОТЫ
Лабораторная работа № 15
Наименование работы: Определение момента тангажа модели крыла.
Содержание работы: Ознакомление с простейшим методом измерения мо-
ментов аэродинамических сиг модели крыла при раз-
личных положениях центра тяжести ЛА на дозву-
ковых скоростях.
Построить графики: Cm»=f(a)
Схема установки
Вывод рабочих формул
m~ qSK*bk
(используется допущение, что
при р = 0° можно принять Су =
Mz~Gr
QV2
q = -у = (а — а0) sin
G
Cm = ;--------г const!
(a — a0)
constl sin
217
ND
•—t
00
протокольный бланк для практических работ
Приложение 2
Содержание
работы
РАБОТА № 15
Испытание модели на моментном приборе
Труба НК-1
Основной прибор
центровой
Модель крыло
Рабочие формулы
Gm = ". " COnsti
(а - а0)
Характерная площадь 5кр = 0,1125 м2 Характерный линей- ный размер £А==0,15М Р, мм /°C Поправки Приборы х. Насадок № Н Манометр № К
Радиус сектора г == 0,15 м
1,014
Уст sin к л0, мм
0,814 0,5 1,003 3
Работуt
197—г.
consti =
_______г _
= sin
=21,1
1 1
водили
Коэффициент поля трубы Н=1>02
Обработал
а G —4° 0,3 103 0° 0,0 103 4° -0,3 103 6° -0,5 103 8° -0,7 103 11,5 -0,9 103 15° -1,1 103 1 Про1 ше да ♦ иные
(a—До) к 100 100 100 100 100 100 100
Gm -Ь0,064 t 0,0 -0,06-3 1 -0,10! > —0,14-5 3 -0,18' 9 -0,231 1 0
ND
П риЛОЖвНЦе 3
ОПРЕДЕЛЕНИЕ МОМЕНТА ИНЕРЦИИ СИСТЕМЫ /2С
УСТАНОВКИ ДУ СОВМЕСТНО С ИССЛЕДУЕМОЙ МОДЕЛЬЮ
(к работе № 18)
Для этой цели на лимб моментного центрового прибора (см.
рис. 18.1) надевается дополнительный груз в виде кольца с извест-
ным моментом инерции Д/2. Затем всей системе без потока воздуха
в аэродинамической трубе даются свободные колебания, которые
записываются на движущейся ленте. По записи на лепте определя-
ют период колебания Т2. После этого снимают дополнительный груз
(кольцо) и опыт повторяется. Свободные колебания всей системы
без дополнительного груза также записываются на ленте, после че-
го определяется период колебаний 7\.
Зная периоды колебаний Т2 и момент инерции дополни-
тельного груза (кольца) Д/2, можно найти значение момента инер-
ции всей системы Izc по формуле
Д/Л
zc^~T2 т2
1 2~~ 1 \
Эта формула получается из уравнения
Ле +М*) + (ж:+Ж“ир) La
ULZ ил
, d2Aa (<г+О . п
dft Izz dt Izc
Известно, что
Да = Aent sin {mt+ф),
Следует заметить, что при колебательном движении модели от-
носительно оси Z при V=0 в какой-то мере возникнут и демпфи-
рующие моменты
и М* —
z dt
220
Поскольку величина -^-= —[(7И^+Л1“)//гс] по сравнению с
величиной «2^=—(Л1’ + Л1“Пр)//гс очень мала,
то ею можно прене-
бречь.
Тогда
4л2 _ «+^°ЛР)
откуда Г2 Дс
или =_(А|; + Л1; ). 1 z
Для данной системы (модель и пружина) величина
— (Af“ + ^2np) постоянна, следовательно, можно записать, что
4n4zjTl=[^(Iz + Mz)]/Tl
Перепишем это в виде
hc(Tl-Tl)=MzTl
и тогда момент инерции всей системы
/
ZC '7’2
1 2 “ 1 1
221
ND
Приложение 4
I. ЕДИНИЦЫ ИЗМЕРЕНИЯ ФИЗИЧЕСКИХ ВЕЛИЧИН
Единицы измерения в системе СИ
11аименование величины Единицы измерения в системе МКГСС
Определяю- щее уравнение Название Сокращен- ное обоз- начение Размер- ность Определяю- щее уравнение 11азвание Сокращен- ное обозначение Раз- мерность
Площадь Объем Скорость S= Z2 v == Z3 V = — t Квадратный метр Кубический метр Метр в сскун- ДУ м2 м3 м/с М2 м3 М-С“1 Г « 1 II II | '*’• 'со То Квадратный метр Кубический метр Метр в секунду М2 м3 м/с м2
м3 М-С“1
Ускорение д/ Метр на се- кунду в квадра- те М/с2 М-С-2 ДУ J~ М Метр на секун- ду в квадрате м/с2 М • С“2
Масса (инер- та, техническая единица мас- сы — т. е. м.) т Килограмм кг КГ р /я = , J (т. е. м.) Килограмм-си- ла секунда в квадрате на метр кгс-с2/м М~1 - КГС - С2
Сила Р = mJ Ньютон н М-КГ’С—2 Р = mj Килограмм-си- ла кгс (кгс) кгс (кгс)
Давление (напряжение) р Р~ S Паскаль Па М-1.КГ-С-2 Р Р = —— 5 Килограмм-си- ла на квадратный 1 метр 1 КГС/М2 М-2.КГС
CO
Плотность т 1 Q = ’ 1 килограмм на кубический метр кг/м3 М-3-КГ ( „ 1 m ] Техническая единица массы на кубический метр или килограмм- зил а-секунда в квадрате на метр в четвертой сте- пени т. е. м/м3 или КГС-С“2/М4 М-4. кг С-СМ2
у = V 1 1
Удельный вес Р № V Приняв вес Р= 1 Н, имеем ньютон на куби- ческий метр Н/м3 М-2-КГ-С”2 Y=" р V Приняв силу Р=1 кгс-сила, бу- дем иметь: килог- рамм-сила на ку- бический метр кгс/м3 М-3. КГС
Коэффициент динамической вязкости Р М “ S ‘ AV Ньютон-се- кунда на квад- ратный метр Н-С/М2 М "1-КГ-С”! Р *=s Ы АУ Килограмм-си- ла-секунда на квадратный метр кге/м2-м с/м М-2-КГС-С
Коэффициент кинематической Р- v = — Квадратный метр на секунд} Джоуль на килограмм-гра- дус М2/С М2-С-1 V = F 9 Квадратный метр на секунду (kic-c/m2)/ /(КГС-С2/м9 М2-С”1
вязкости Удельная теп- 9 Дж/(кгХ Хград) м2, с М-2 X Хград"1 С = Q Килокалория на килограмм- (427 кге-м)/ /(кгс-Град) ккал/кг X Хград
лоемкость тЛТ тЛТ градус
Энтропия 5 т Джоуль на градус Дж/грал 1 м2-кг-с 2 У Хград-' ' s = AQ Т Килокалория на градус 427 кге-м/гра/ 1 ккал/град
Частота — I /=т | Герц Гц 1 С1 . ГН t Герц Гц 1 с~'
Угловая ско рость д-р**** СО = м 1 Радиан в се- кунду рад/с С-1 0) — Дер м Радиан в се- кунду рад/с С-1
_ _____________________________________________________П родолжепие приложения 4
Единицы измерения в системе СИ Единицы измерения в системе МКГСС I
Размер- ность сч 1 О М^’КГС- Хе"2 кгс-с
Сокращен- ное обозначение рад/с2 1 1
Название Радиан на се- кунду в квадрате 1 килограмм-сила- секунда
Определяю- щее уравнение 3 | С <1 11 со II £ <1 II
Размер- ность сч 1 О 7 со S М-КГ-С""1
ОИНЭЬЕМЕ -090 ЭОН -нэтпвймоэ рад/с2 1 1
Название Радиан на се- кунду в квадра- те 1 Сила — время
Определяю- щее уравнение 31 <i| < II со I V Vуд J т <3 II
Наименование величины Угловое уско- рение Удельный объем Импульс СИ- ЛЫ
кгс-с м-кге М-КГС ’С—1 м • кге•с2
1 кге-м э/w • Э 1Я (т. е. м) м2
мнерта-метр на секунду килограмм-сила- метр килограмм-сила- метр в секунду т. с. м. — метр в квадрате (от цент- ра вращения) или килограмм - сила-метр-секун- да в квадрате
К== mV 5 из из к * J =
1-3-ЭЛЛ-и сч 1 о W СЧ S со 1 о 2 сч СЧ
1 Дж £ о; S
Масса — ско- рость Джоуль Ватт Килограмм- метр в квадрате
5= II £ из 1 к. 1- II *. * сч S 1!
Количество движения Работа, энер- гия Мощность Момент инер- ции (динамиче- ский)
* Здесь и далее I — путь; t — время.
** Здесь г радиус.
*** Здесь Q — количество теплоты; ДГ — град.
**** Здесь Дер — центральный угол.
224
1L СООТНОШЕНИЯ ЕДИНИЦ МЕЖДУНАРОДНОЙ СИСТЕМЫ
С ЕДИНИЦАМИ ДРУГИХ СИСТЕМ
Механические единицы
а) Единицы массы
1 т. е. м. (техническая единица 1 кг — 0,102 т. е. м. массы =
= 1 кгс-с2/м) =9,81 кг
б) Единицы силы
1 дин = 10-5 Н 1 Н = 105 дин
1 кгс (килограмм-сила) =9,81 Н 1 Н = 0,102 кгс
1 тс (тонна-сила) =9,81 • 103 Н 1 Н = 1,02-10-4 тс
в) Единицы работы, энергии, теплоты
1 эрг= 10~7 Дж 1 Дж = 0,102 кгс-м
1 кгс-м = 9,81 Дж 1 Дж = 0,239 кал
1 кал=4,19 Дж 1 Дж = 2,78-10~4 Вт-ч
1 Вт-ч = 3,6-103 Дж 1 Дж = 9,87-10"3 л-атм
1 Дж=107эрг 1 Дж = 1,02-10~2 л-ат
г) Единицы мощности
1 эрг/с=10~7 Вт 1 Вт=107эрг/с
1 кгс-м/с=9,81 Вт 1 Вт=0,102 кгс-м/с
1 л. с.=736 Вт 1 Вт= 1,36-10~3 л. с.
д) Единицы давления
1 дин/см2=0,1 Па
1 кгс/м2=9,81 Па
1 мм рт. ст. = 133,32 Па
1 мм вод. ст. = 9,81 Па
1 бар= 105 Па
1 Па = 10 дин/см2
1 Па = 0,102 кгс/m2
1 Па = 7,50-10-3 мм рт. ст.
1 Па = 0,102 мм вод. ст.
1 Па = 10~5 бар
е) Давление и плотность насыщенного пара
г, с Рн.п., мм рт. СТ. Сн. п» КГС•с2/м4 Г, к Рн.п» Ва Он.п. кг/мз
-10 2,159 0,000227 263,15 287,842 0,002227
0 4,579 0,000483 273,15 610,481 0,00474
+ 10 9,21 0,000958 283,15 1227,896 0,009359
+15 12,79 0,00131 288,15 1705,188 0,01285
+30 31,8 0,0031 303,15 4239,640 0,03041
+50 92,5 0,00849 323,15 12372,282 0,0833
225
III. ФОРМУЛЫ ЗАВИСИМОСТЕЙ НЕКОТОРЫХ ФИЗИЧЕСКИХ ВЕЛИЧИН
ВСТРЕЧАЮЩИХСЯ В ДАННОЙ РАБОТЕ, ПРИМЕНИТЕЛЬНО
К МЕЖДУНАРОДНОЙ СИСТЕМЕ СИ
Физические величины в единицах измерения в системе МКГСС Физические величины в единицах измерения в системе СИ
а) Плотна Qo = 0,125 кг • с2/м4 о_0,125^2“_ 760 Т = 0,0473-у кг-с2/м< С учетом влажнс Спл — „от ** п -КГС-С2/М4 gRT gRnT Рнл -^Ри.и -УрН.П сть воздуха 6 = 0,125-9,81 = 1,226 кг/м3 „ о ра 288,15 0= 1,226 — — = 1,013-105 т = 0,00349 — кг/м3 Т )сти воздуха Р , Р11 , о Овт — _ + кг/м3 RT RT _ -Рвл «УРн.П -Урн.п
евл~ gRT gRnT~ РвЛ Г I -УРн.п А R gRT L рпл \ Rn / J ем = -^, (1-0,378^=-) КГ-С2/М4 gRT \ Рвл / б) Удельный вес е Yob — 0,001225 кгс/дм3 1 Yocn = 0,8 кгс/дм3 в) Скорость воздушного потока евл - RT + - Рм К -*~Рн.п Л R_ НТ |_ рвл \ /?п / J л Рзл 1 1 п 0-70 ЛГ/?н.п\ Q Овл — „ 1 — 0,378 кг/м3 RT \ Ры ) зоздуха и спирта 1 Уов= 0,001225-9,81 =0,012017 Н/дм3 1 Yocn = 0,8-9,81= 7,85 Н/дмЗ в аэродинамической трубе
V Ра V- 1/573.09 ^3'15 + '‘С\м/С Г Ра
r-]/«.2 (273 + '-C)X v_ /573,ю №5 + ^0 х V Ра
УХ (а — я0) sin «pyA^H* м/с С учетом влажнс г X («—«о) sin м/с )сти воздуха
v-\ g73+/c> X Г- |/ 573.09 g3'//.‘C>x
V X 1 V 1
1 -0,378 Рвл 1 —0,378 Рал
г X (я — Яо) sin м/с (а — во) 6in м/с
223
Продолжение
Физические величины в единицах Физические величины в единицах
измерения в системе МКГСС измерения в системе СИ
г) Удельная газовая постоянная для воздуха и водяных паров
/< = 29,27 кгсм 'кг • град R = 29,27-9,81 = 287,14 Дж/кг-град
RI = 47,1 кгсм/кг• гра д #11 = 47,1-9,81 =462,05 Дж/кг-град
д) Уравнение состояния идеальных газов
Р = g$RT । 1 Р = Q##
е) Скорость звука в газе
a~yf ^gRT м/с а = । м/с
Приложение 5
ЧИСЛО М В ФУНКЦИИ
ПОЛНОГО (Ро)
И СТАТИЧЕСКОГО (pi)
ДАВЛЕНИЙ В СВЕРХЗВУКОВОМ
ПОТОКЕ
ЧИСЛО М В ФУНКЦИИ
ДАВЛЕНИЯ ЗА ПРЯМЫМ
СКАЧКОМ (р3)
И СТАТИЧЕСКОГО ДАВЛЕНИЯ (Р1)
В СВЕРХЗВУКОВОМ ПОТОКЕ
М Pl/P3 М Pl/Рз
1,0 0,528 2,05 0,170
1,05 0,498 2,1 0,162
1,1 0,469 2,15 0,155
1,15 0,441 2,2 0,149
1,2 0,415 2,25 0,143
1,25 0,391 2,3 0,137
1,3 0,369 2,35 0,132
1,35 0,348 2,4 0,127
1,4 0,328 2,45 0,122
1,45 0,310 2,5 0,117
1,5 0,293 2,55 0,113
1,55 0,277 2,6 0,109
1,6 0,263 2,65 0,105
1,65 0,249 2,7 0,101
1,7 0,237 2,75 0,098
1,75 0,225 2,8 0,095
1,8 0,214 2,85 0,091
1,85 0,204 2,9 0,088
1,9 0,194 2,95 0,085
1,95 0,186 3,0 0,083
2,0 0,177
М Pl/Po М Pl/Po
1,0 0,528 2,05 0,118
1,05 0,498 2,1 0,109
1,1 0,468 2,15 0,101
1,15 0,439 2,2 0,094
1,2 0,412 2,25 0,086
1,25 0,386 2,3 0,080
1,3 0,361 2,35 0,074
1,35 0,337 2,4 0,068
1,4 0,314 2,45 0,063
0,45 0,293 2,5 0,058
1,5 0,272 2,55 0,054
0,55 0,253 2,6 0,050
1,6 0,235 2,65 0,046
0,65 0,218 2,7 0,043
1,7 0,203 2,75 0,040
0,75 0,188 2,8 0,037
1,8 0,174 2,85 0,035
0,85 0,161 2,9 0,032
1,9 0,149 2,95 0,029
0,95 0,138 3,0 0,027
2,0 0,128
227
Приложение, в
ИСПОЛЬЗОВАНИЕ ЭЦВМ ПРИ ОБРАБОТКЕ РЕЗУЛЬТАТОВ
ЭКСПЕРИМЕНТА
Чаще всего программы для электронно-вычислительных машин
(ЭЦВМ) составляются с помощью машинно-независимых языкоз
программирования и они (программы) предназначаются, как пра-
вило, для массового и длительного существования. В практике ис-
пользования ЭЦВМ создано несколько десятков таких языков, мы
же остановимся только на одном «из них, на международном алго-
ритмическом языке АЛГОЛ-60, который используется на машинах
БЭСМ-4 и других машинах этого семейства.
В этом разделе будет сделана попытка дать краткие пояснения,
как нужно пользоваться этим языком, т. е. прочитать и расшифро-
вать полученные выходные данные, как использовать результат об-
работки и подсчета на ЭЦВМ тех исходных данных, которые были
введены в машину согласно составленной программе. Вопросы, от-
носящиеся к составлению программ для обработки эксперименталь-
ных данных на языке АЛГОЛ-60, достаточно полно и обстоятельно
изложены в различных пособиях [6].
ЭЦВМ решает поставленные перед ней задачи, следуя состав-
ленным программам, которые включают в себя описание конкрет-
ных процессов обработки данных. Вместе с программой машине не-
обходимо сообщить и исходные данные решаемой задачи. Из ска-
занного следует, что поступающие в машину сведения в виде
исходных данных распадаются на две части: программу обработки
и собственно данные, которые подлежат обработке.
Для примера рассмотрим лабораторную работу № 15 «Опреде-
ление момента тангажа модели летательного аппарата».
В протокольном бланке (см. приложение 2) записаны необходи-
мые исходные значения параметров эксперимента: геометрические
данные объекта и приборов, градуировочные коэффициенты прибо-
ров и т. д. По заранее составленной программе пробиваются пер-
фокарты.
Колода перфокарт закладывается в устройство ввода машины.
В этом устройстве машина анализирует все строки каждой перфо-
карты. После обработки данных машина выдает ленту (рис. П.1)
со всеми исходными данными и с результатами решения постав-
ленной задачи.
На представленной ленте (табулеграмме) напечатанный текст
можно разбить на четыре раздела: 1) описание процессов; 2) ко-
личество отсчетов, сделанных во время эксперимента; 3) исходные
данные; 4) результат решения задачи (разбивка разделов на ленте
сделана фигурными скобками). Рассмотрим каждую строчку запи-
си описания процессов (1-й раздел).
Первая строчка: BEGIN — начало; REAL — вещественный;
CONST 1 — константа; Ф — угол наклона трубки микроманомет-
ра ф; Г — удельный вес спирта уСп; КММ — коэффициент микро-
228
88
§8
Рис. ПЛ. Лента ЭЦВМ с обработанными данными (табулеграмма)
229
манометра К; КН — коэффициент приемника давления £; КПТ_____
коэффициент поля трубы ц; 8 — площадь крыла 8; R — радиус
сектора моментного прибора г. '
Вторая строчка: ВА — средняя аэродинамическая хорда кры-
ла ЬА; А — показания микроманометра во время эксперимента ак\
ДО — показания микроманометра до эксперимента, нулевой отсчет
«о.
Третья строчка: INTEGER — целый; N — номер; P0042(N) —
ввод числа угла атаки a; P1041(N) •— вывод числа угла атаки а.
Четвертая строчка: BEGIN — начало; ARRAY — массив;
АЦ1; N] — угол атаки а [порядковый номер отсчета]; G[1 : N] —
нагрузка на чашке моментного прибора G [порядковый номер];
GM[1 : N] — коэффициент момента тангажа Ст [порядковый но-
мер].
Пятая строчка: Р0042 (Ф, Г, КММ, КН; КПТ, 8, R, ВА, А, АО,
AL, G) — ввод исходных данных (<р, усп, К, ц, 8, г, bA, ah, а0',
а°, G).
Шестая строчка: Р1041 (Ф, Г, КММ, КН; КПТ, 8, R, ВА, А, АО,
AL) — печать исходных данных (<р, угп, К, t, р, 8, г, bA, ah, а0, а°)’;
Ф: = Ф/57,3 — перевод градусной размерности угла в радианы.
Седьмая строчка: const 1:=Я/(8Ш(Ф) ХГхКММхКНХ
X КПТ X S х ВА) — const 1 -----------.
sm
Восьмая строчка: FOR — для, 1:= — присвоения, STEP — ша-
га, 1, UNTIL — до, N —номера, DO — выполнять, т. е. операция
следования.
Девятая строчка: BEGIN — начало.
Десятая строчка: CM[I]: =G[I]XCONST 1/(А—АО) : —
—С = —-— constj
т («к-йо)
Одиннадцатая строчка: Р1041 (I, AL[I], CM[I], END — вывод чис-
ла сс и
Двенадцатая строчка: END — конец.
В разделе количество отсчетов (2-й раздел) всего одна строчка
и она читается: 70000000 — количество номеров отсчета № 7. Раз-
дел исходных данных (3-й раздел) имеет несколько строчек, сдела-
ем их расшифровку.
Первая строчка: 30000000 — <р=30°, 81400000 — Тсп=0,814;
10030000 — коэффициент К= 1,003; 10140000 — коэффициент
= 1,014.
Вторая строчка: 10200000 — коэффициент |л=1,02; 11250000 —
площадь 8 = 0,1125 м2; 15000000 — радиус г=0,15 м; 15000000 —
хорда ЬА — 0,15 м.
Третья строчка: 10299999 —показание манометра ак=103;
30000000 — показания манометра ао=3,О мм, 40000000 — угол
а=4°, 00000000 — а =0,0°; 40000000 — а=4°; 60000000 — а = 6°.
230
Четвертая строчка: 80000000 — а=8°; 11500000 — а=11,5°;
15000000 — а=15°; 30000000 — нагрузка G=0,3 даН, 00000000 —
G = 0,0 даН; 30000000 — G = —0,3 даН, 50000000 — G = —0,5 даН.
Пятая строчка: 70000000 •—нагрузка G——0,7 даН, 90000000 —
G = —0,9 даН, 11000000 — G=—1,1 даН.
В разделе результата решения задачи (4-й раздел) количество
строк соответствует количеству отсчетов во время проведения опы-
та. В нашем случае было семь отсчетов, т. е. № 7.
Первая строчка: 10000000 — № 1 — первый отсчет; 40000000 —
угол а=—4°; 63163221 —(коэффициент Ст = +0,063163.
Вторая строчка: 20000000 № 2; 00000000 — а=0,0°,
00000000 — Ст=0,0.
Третья строчка: 30000000 — № 3: 40000000 — а=4°; 63163221—
Ст = —0,063163.
Четвертая строчка: 40000000 — № 4; 60000000 — а = 6°;
10527203 — Ст=—0,105272.
Пятая строчка: 50000000 — № 5; 80000000 — а=8°; 14738085 —
Ст= —0,147380.
Шестая строчка: 60000000 — № 6; 11500000 — сс= 11,5°;
18948960 — Ст=—0,18949.
Сепьмая стоочка: 70000000 — № 7: 15000000 — сс=15°;
231598448 — С™=—0.231598.
Для того чтобы определить знак числа, знак порядка и сам по-
рядок, воспользуемся табл. 2, с помощью которой легко уяснить
путем установления знака числа и положения запятой любого на-
печатанного на ленте числа.
Пусть на ленте произведена запись знаков арифметических дей-
ствий и восемь цифр
+ —1-01 40000000
+4—01 63000000
4----00 10530000
+ 4-4-02 11500000
4----02 11500000
Таблица 2
Первый знак отбрасывается Знак числа Знак порядка Порядок Мантисса Число
+ — + 01 40000000 — 4,0000000
+ + — 01 63000000 + 0,0630000
+ — — 00 10530000 — 0,1050000
+ + + 02 11500000 +11,500000
+ — — 02 11500000 — 0,0011500
Значения коэффициента момента тангажа крыла Ст, подсчитан-
ные с помощью логарифмической линейки и на вычислительной ма-
231
шине БЭСМ-4, введем в табл. 3, предварительно округлив до чет-
вертого знака после запятой.
Сопоставление данных показывает, что расхождение между ре-
зультатами обработки двумя методами незначительно. Если это не-
совпадение выразить в процентном отношении, то оно не будет пре-
вышать 0,3%, что вполне допустимо.
Таблица 3
а,,.. °
4 0 4 6 8 11,5 15
Подсчет на логарифмической линейке Машинный под- счет +0,6303 +0,6316 0,0 0,0 —0,6303 —0,6316 -0,1051 —0,1053 -0,1471 -0,1474 -0,1891 -0,1895 -0,2311 —0,2316
Причина несовпадения результата подсчета легко объясняется
тем, что при подсчете на логарифмической линейке const и Ст де-
лались округления цифровых значений, входящих геометрических
данных и коэффициентов приборов как в большую, так и в мень-
шую сторону.
По полученным данным можно построить график зависимости
(«), как это показано на рис. 15.2.
Прилоэкение 7
ОПРЕДЕЛЕНИЕ ПОГРЕШНОСТЕЙ ПРИ ЭКСПЕРИМЕНТЕ
Как известно, непосредственно мы можем измерить лишь не-
сколько физических величин. Такими измерениями являются —
измерение длины, массы тел, промежутка времени, температуры
и еще некоторых других величин. Однако все измерения можно
произвести лишь с ограниченной точностью. Независимо от точно-
сти измерения мы всегда при каждом отдельном измерении вели-
чины имеем лишь приближенное ее значение. Чтобы получить
более точное значение физической величины, т. е. более близкое
к ее истинному значению, измерения производят несколько раз,
а затем вычисляют среднеарифметическое значение из всех резуль-
татов отдельных измерений. Этот метод позволяет установить, с ка-
кой точностью можно определять среднеарифметическое значение
измеряемой величины. Но несмотря на простоту этого метода,
трудно судить о точности произведенных измерений. Поэтому при-
232
меняют более сложный математический метод — теорию случай-
ных ошибок. В теории случайных ошибок все положения и вы-
воды основаны на том, что они дают нам не абсолютно достовер-
ные результаты, а лишь наиболее вероятные, т. е. более близкие
к истинным значениям. Отсюда видно, что и теория случайных
ошибок также не дает нам точного значения измеряемой вели-
чины.
Среднеарифметическое значение неоднократно измеряемой
величины А = 2Л1п,
где п — число измерений величины /.
Среднеарифметическое значение является наиболее достовер-
ным значением измеряемой величины.
Разность между среднеарифметическим значением А и каждой*
из измеряемых в отдельности величин / принято называть откло-
нением отдельных измерений от их среднеарифметического значе-
ния, т. е.
А — 11 = Е1 j
А — 1г=В2’,
А — 8п
Точное значение ошибок х есть разница между истинным зна-
чением величины X и результатом измерений /, т. е.
X — li =Хь
X — lz~X,2\
п — Хп.
Складывая значения А — 1=ьи X — 1=х, получим
28=2(4 — /)
и 2х=2(Х —/).
Вычитая первое уравнение из второго, получим
£х — 2е=п(Х — /) — и(Д — 1)=пХ — nA.
Полагая, что при многократных измерениях величин сумма
отклонений 8 от их среднеарифметического значения стремится
к нулю, т. е. 28 = 0, получим
233
Как видно, среднеарифметическое значение А отличается от
истинного значения X на величину
Ух v х
----. Подставляя в уравнения А — 1=г значения А = Х —
п---п ’
f Ух Ух
получим X----—-----Z^s, а так как Х—1-\-х, то 14-х—=—• —
П п
, я*
— l — г ИЛИ г — Х-
п
Среднеарифметическая отклонений измерений от их средне-
арифметического значения А в случае ограниченного числа изме-
рений будет
п п \ п )
Среднеквадратичная отклонений
откуда
п п
Хе2 и-1
п п п
или
Как видно, среднеквадратичная величина 2б2 отклонений
от среднего значения А измеряемой величины несколько меньше,
чем среднеквадратичная истинных ошибок. Чем больше количе-
ство измерений п, тем >мы делаем меньшую ошибку.
Принимая, что (п—1)/п близко к единице, можно сделать
вывод, что среднеарифметическое значение А измеряемой вели-
чины условно можно приравнять к истинной величине X. При этом
значение X отличается от А на малую величину, т. е. X — А=2х/п.
Среднеквадратичная ошибка отдельного измерения
Заменяя Sx2=n2, будем иметь
Абсолютная величина ошибок при каком-либо измерении вы-
ражается так называемым интегралом вероятности
где е — основание натуральных логарифмов; h — мера точности.
234
Здесь мера точности равна h — — —
7 л/ 2е2
1,4142 I/ -^=—
г п — 1
Обозначим вероятную ошибку отдельного измерения через п
Эта величина г делит все случайные ошибки на две равные
половины, но с различными знаками. Это значит, что случайная
ошибка отдельного измерения лежит в пределах от -—г до +г„
Тогда мы можем написать
—г
В результате преобразования получим
г=0,4769 — .
h
Подставляя значение й, получим
г=0,6745а = 0,6745
Значение функции Ф при определенном значении меры точ-
ности h зависит лишь от величины истинной ошибки. Значению
функции Ф = 0,999 будет соответствовать величина 2,76. Следова-
тельно, предел возможных ошибок
а = 2,76/й.
Подставляя значение й, получим
а = 2,76-1,4142а=3,91а=3,91
На основании результатов многократных экспериментов с пря-
моугольным крылом были определены аэродинамические коэффи-
циенты:
• ___. а • Г'
ха QV2 ’ qV'2
2 2
Суа
Сха
для каждого отдельного
угла атаки а.
Подсчитываются среднеарифметические значения
235.
я также определяются среднеквадратичные ошибки измерений
•Сха, Cyat К, названные абсолютными ошибками, по формулам
Л 1 /~ 2 (Сха ср Сха)2
°сла=ДСха=^ ------—--------;
a I (Cf/а ср — Суа)2
%й=дс^=| ——i—’
г п — 1
Значения ошибок подсчитываются в относительных величинах
по формулам
100; -^--100; -^- = 100.
Предел возможных ошибок подсчитывается по формулам
«с =3,91 ас ; ас =3,91$с I 0^ = 3,910^.
ха ’ ха уа ’ ''уа' к ’ к
Также определяется мера точности для значений Сха,
по формулам
hc
ха
уа И К
1 , 1 , 1
----\ he ——--------» h^=------.
Ч. '/2Ч« V2V
Вероятные ошибки отдельных из*мерений Сха, Суа, К подсчиты-
ваются по формулам
rcxa=0’6745acxa; г^й=0’6745%а и ^=0,6745^.
СПИСОК ЛИТЕРАТУРЫ
1 Аржаников Н. С., Садекова Г. С. Аэродинамика больших скоростей. М.,
«Высшая школа», 1965, 259 с.
2. Броуде Б. Г. Использование газогидравлической аналогии для целей газо-
вой динамики.— «Техн. Физ.» т. XXVI, вып. 7. Изд-во АН СССР, М.—Л, 1956,
с. 1579—1594.
3. Горшенин Д. С., Мартынов А. К. Руководство к практическим занятиям в
аэродинамической лаборатории. М., «Машиностроение», 1967, 224 с.
4. Жуковский Н. Е. Аналогия между движением в узком канале и движе-
нием газа в трубе с большой скоростью. Поли. собр. соч., т. VII, ОНТИ, М —Л ,
1937. с. 390—402.
5. Краснов Н. Ф. Аэродинамика тел вращения. М., «Машиностроение», 1964,
572 с.
6. Лавров С. С. Введение в программирование. М., «Наука», 1973, 352 с.
7. Липман Г. В., Рошко А. Элементы газовой динамики. М., ИЛ, 1960, 518 с.
8. Лобанов Н. А. Основы расчета и конструкции парашютов. М., «Машино-
строение», 1965, 363 с.
9. Мартынов А. К. Прикладная аэродинамика. М., «Машиностроение», 1972,
448 с.
10. Мельников А. П. Аэродинамика больших скоростей. М., Воениздат, 1961,
424 с.
11. Мхитарян А. М. Аэродинамика. М., «Машиностроение», 1976, с 448.
12. Остославский И. В. Аэродинамика самолета. М., Оборонгиз, 1957, 560 с.
13. Попов С. Г. Измерение воздушных потоков. М.—Л., ОГИЗ, Гостехтео-
ретиздат, 1947, 296 с
14. Попов С. Г. Некоторые задачи и методы экспериментальной аэродина-
мики. М., Гостехтеоретиздат, 1952, 496 с.
15. Чертов А. Г. Международная система единиц измерения. М., Росвузиз-
дат, 1963, 167 с.
ОГЛАВЛЕНИЕ
Сто.
Предисловие.............................................................3
Основные условные обозначения......................„................... 5
Введение............................................................... 7
Требования к постановке эксперимента в аэродинамических трубах . . 11
Определение основных параметров (давления, температуры плотности) . 14
ЛТетоды определения скорости возцушного потока в аэродинамической тру-
бе дозвуковых скоростей..............................................17
Методы определения числа М сверхзвукового потока в аэродинамической
трубе................................................................24
Работа № 1. Градуировка микроманометра.............................31
Работа № 2. Градуировка приемника воздушного давления (насадка) 38
Работа ЛЬ 3. Определение коэффициента поля скоростных напоров в
рабочей части аэродинамической трубы...............................42
Работа ЛЬ 4. Визуальные методы исследования........................45
Работа № 5. Исследование профиля скоростей в пограничном слое
крыла при дозвуковых скоростях.....................................65
Работа № 6. Исследование распределения давления ио поверхности
обтекаемого тела в потоке дозвуковой скорости.....................73-
Работа № 7. Определение коэффициента давления на тонком профиле
крыла в сверхзвуковом потоке.......................................82
Работа Л° 8. Исследование донного давления на телах вращения . 90
Работа № 9. Исследование пограничного слоя тонкой пластинки при
сверхзвуковых скоростях потока . 99
Работа ЛЬ 10. Определение начальной турбулентности потока аэроди-
намической трубы двумя методами...................................108
Работа № 11. Определение основных аэродинамических коэффициентов
модели летательного аппарата или изолированного крыла . . . 119
Работа № 12. Определение аэродинамических характеристик модели
летательного аппарата в сверхзвуковом потоке......................133
Работа ЛЬ 13. Нахождение профильного сопротивления крыла методом
импульсов.........................................................141
Работа № 14. Определение лобового сопротивления тел вращения
(фюзеляжа)........................................................147
Работа № 15. Определение момента тангажа модели летательного
аппарата . .................................................151
Работа ЛЬ 16. Испытание модели горизонтального оперения для опре-
деления шарнирного момнета руля высоты............................157
Работа № 17. Нахождение угла скоса потока и коэффициента тормо-
жения скорости у оперения.........................................161
Работа ЛЬ 18. Определение коэффициентов демпфирующих моментов 165
Работа ЛЬ 19. Определение момента рыскания модели летательного
аппарата...................................................174
Работа ЛЬ 20. Определение характеристик воздушного винта в набе-
гающем потоке.................................176
238
Стр.
Работа № 21. Испытание несущего винта вертолета при работе на
месте............................................................186
Работа № 22. Определение скорости движения ударной волны . . 190
Работа № 23. Исследование взаимного влияния крыла и фюзеляжа на
аэродинамические характеристики летательного аппарата при дозву-
ковых скоростях................................................ 196
Работа № 24. Исследование способов увеличения подъемной силы
крыла.......................................................204
Работа № 25. Определение коэффициента лобового сопротивления па-
рашюта . . . . . 211
Приложения...............................-.......................... 217
1. Бланк лабораторной работы.............................217
2. Протокольный бланк для практических работ.....................218
3. Определение момента инерции системы /2С установки ДУ с исследуе-
мой моделью (к работе №18).......................................220
4. I. Единицы измерения физических величии (ГОСТ 9867—61) . . 222
4. II. Соотношения единиц международной системы с единицами дру-
гих систем ..................................................... 225
4. III. Формулы зависимостей некоторых физических величин, встреча-
ющихся в данной работе, применительно к международной сис-
теме СИ...........................................................226
5. Число М в функции давления за прямым скачком (р3) и статичес-
кого давления (pi) в сверхзвуковом потоке........................227
Число М в функции полного (р0) и статического (pi) давлений в
сверхзвуковом потоке ......................................... 227
6. Использование ЭЦВМ при обработке результатов эксперимента . 228
7. Определение погрешностей при эксперименте.....................232
Список литературы . , . ..................................237
ИБ № 897
Дмитрий Сергеевич Горшенин,
Аполлинарий Константинович Мартынов
МЕТОДЫ И ЗАДАЧИ ПРАКТИЧЕСКОЙ АЭРОДИНАМИКИ
Редактор издательства Н. В. Коръсеневская Художник Е. В. Бекетон
Технический редактор В. И. Орешкина Корректор В. Е. Блохина
Сдано в набор З/ХН 1976 г. Подписано к печати 15/П 1977 г. Т—02139-
Формат 60X90 ’Лб Бумага № 2
Печ. л. 15,0 Уч.-изд. л. 15,75
Цена 85 коп. Тираж 5000 экз. Изд. зак. 901
Издательство «Машиностроение», 107885 Москва, Б-78, 1 й Басманный пер., &
Московская типография № 8 Союзполиграфпрома
при Государственном комитете Совета Министров СССР
по делам издательств, полиграфии и книжной торговли,
Хохловский пер., 7. Тип. зак. 1743.