/

















































































































































































































































































Author: Васильев Б.Ю.
Tags: электротехника электроэнергетика электрооборудование электропривод автоматизация
ISBN: 978-5-91359-155-5
Year: 2015
Similar



Text
Б. Ю. ВАСИЛЬЕВ
ЭЛЕКТРОПРИВОД.
ЭНЕРГЕТИКА
ЭЛЕКТРОПРИВОДА
Ученик предназначен
для бакалавров и магистров, обучающихся по направлению
«Электроэнергетика и электротехника»
и других электротехнических и энергетических направлений
подготовки специалистов различных профилей и уровней
Москва
СОЛОН-Пресс
2015
УДК 621.31
ББК 31.2
В19
РЕЦЕНЗЕНТЫ
Георгий Борисович ОНИЩЕНКО
доктор технических наук, заслуженный деятель науки РФ, профессор,
ФГБОУ ВПО «Московский государственный университет машиностроения»,
председатель Совета Ассоциации инженеров по электроприводу
Олег Викторович КРЮКОВ
кандидат технических наук, доцент,
главный специалист ОТД и НТИ ОАО «Гипрогазцентр»
ВАСИЛЬЕВ Богдан Юрьевич
В 19 Электропривод. Энергетика электропривода. Учебник. – М .: СОЛОН-Пресс,
2015. – 268.
ISBN 978-5-91359-155-5
Дается анализ нормативной базы в области энергосбережении. Показана роль
электроприводов в энергосбережении. Рассмотрены вопросы практического энерге-
тического обследования электроприводов и обоснования технико-экономической,
энергетической и эксплуатационной эффективности регулируемых электроприво-
дов. Рассмотрены энергетические характеристики электроприводов с асинхронными
двигателями и преобразователями частоты, показатели электромагнитной, электро-
механической и энергетической совместимости электроприводов и их влияние на
энергетику электропривода. Рассмотрены методы повышения энергетических харак-
теристик электроприводов. Рассмотрены вопросы выбора асинхронных двигателей
для регулируемых и нерегулируемых электроприводов, преобразователей частоты,
тормозных резисторов и других элементов. Приведены примеры использования,
структуры и состав оборудования современных электроприводов на промышленных
объектах и в технических средствах топливно-энергетического комплекса.
Книга, представленная в виде учебника, предназначена для бакалавров и ма-
гистров, обучающихся по направлению «Электроэнергетика и электротехника» и
других электротехнических и электроэнергетических направлений подготовки спе-
циалистов различных профилей и уровней. Может быть интересна специалистам в
области разработки, проектирования и эксплуатации автоматизированного электро-
привода, энергосбережения.
УДК 621.31
ББК 31.2
ISBN 978-5-91359-155-5
СОЛОН-Пресс, 2015
Б. Ю . Васильев, 2015
B. VASILEV
ELECTRICAL DRIVE.
ENERGY ELECTRICAL DRIVE
Energy efficiency and energy saving tools electrical drive
in electrotechnical systems fuel and energy complex
Electromagnetic, electromechanical and energy compatibility
industrial electrical drive
Advanced technology structure energy efficiency
industrial electrical drive
The book intended for bachelors and masters
students in the direction «Electrical power and electrical engineering»
and other electrotechnical and electric power
specialist training programmes different profiles and levels
2015
THE REVIEWERS
George ONISHENKO
doctor of engineering science, honored worker of science Russian Federation, professor,
« Moscow state university of mechanical engineering»,
chairman of the Board Association of engineers on electrical drive
Oleg KRYUKOV
candidate of technical sciences, docent,
main specialist department of the technical documentation
and the scientific and technical information OAO «Giprogazcentr»
VASILEV Bogdan
Electrical drive. Energy electrical drive. Тextbook. – М.: SOLON-Press, 2015. – 268.
ISBN 978-5-91359-155-5
The analysis normative base in the field of energy saving are done. The role of
electrical drives in energy saving are shown. The questions of practical electric energy in-
spection of electrical drives and rationale for choosing of technical, economical, energeti-
cally and operational efficiency controlled electrical drives are considered. The energeti-
cally characteristics of electrical drives with induction motors and frequency converters,
parameters electromagnetic, electromechanical and energy compatibility and their effect
on the energy electrical drive are considered. The methods improving the energy character-
istics electrical drive are considered. The questions of choice induction motors for con-
trolled and uncontrolled electrical drives, frequency converters, brake resistor, and other
elements electrical drives modern electrical drives are considered. The examples use,
structures and configuration equipment modern electrical drives at industrial facilities and
technical tools of the fuel and energy complex are given.
The book intended for bachelors and masters students in the direction «Electrical
power and electrical engineering» and other electrotechnical and electric power specialist
training programmes different profiles and levels. The textbook may be interest specialists
in the development, design and operation of the automatic electrical drive, energy saving
and energy efficiency industry equipment.
ISBN 978-5-91359-155-5
SOLON-Pess, 2015
B. Vasilev, 2015
5
ИЗ РЕЦЕНЗИИ
профессора Георгия Борисовича ОНИЩЕНКО
« ... Актуальность темы сомнений не вызывает. Повышение
энергоэффективности машинного производства и энергосбереже-
ние являются в настоящее время приоритетными направлениями
развития экономики страны.
Поскольку электрический привод является основным потре-
бителем электрической энергии, то его энергетические характери-
стики и возможность оптимизации на его основе технологических
процессов определяют значение автоматизированного электропри-
вода в решении задач повышения энергоэффективности хозяйства
страны.
К сожалению, этим вопросам в программе подготовки бака-
лавров по направлению «Электроэнергетика и электротехника» уде-
ляется недостаточное внимание. Рецензируемая книга в определен-
ной мере восполнит имеющийся пробел ... ».
ИЗ РЕЦЕНЗИИ
доцента Олега Викторовича КРЮКОВА
« ... Актуальной научно-технической проблемой современной
промышлености является обеспечение энергоэффективности и кон-
курентоспособности. На первое место в их обеспечении выходят
вопросы эффективного и рационального использования электриче-
ской энергии потребителями, главным из которых является элек-
трический привод различных машин и механизмов, комплексов и
систем. Обеспечение энергетической эффективности в электропри-
водах является межотраслевой задачей, именно поэтому, для под-
готовки высоко востребованных на рынке труда специалистов в
этой области требуются междисциплинарные учебники и учебные
пособия.
Данная книга содержит обобщенный материал в области
энергоэффективности и энергосбережения средствами современно-
го автоматизированного электропривода и предоставит студен-
там электротехнических и электроэнергетических специальностей
и направлений подготовки возможность целостно его усвоить ... ».
6
FROM THE REVIEW
professor George ONISHENKO
« ... Actuality of the theme beyond doubt. Improving the energy ef-
ficiency of machine production and energy saving are now priority direc-
tions of development the economy of our country.
Since the electric drive is the main consumer of electrical energy, it
is therefore energy characteristics and the possibility optimization on its
basis technological processes determining the value of the automatic elec-
trical drive in problems solving improve energy efficiency the industry of
our country.
Unfortunately, these questions in the training program for bache-
lors and masters in a direction «Electrical power and electrical engineer-
ing» insufficient attention is given. The book will fill the gap ...»
FROM THE REVIEW
docent Oleg KRYUKOV
« ... Actual scientific and technical problems of modern industry is
provision energy efficiency and competitiveness. The question provision
effective and rational use of electrical energy is on the first place. The
main consumer electrical energy is electrical drive different machines and
mechanisms, complexes and systems. Provision energy efficiency in elec-
trical drive is interdisciplinary problem and which is why now these
textbooks requiring for the preparation of high demand in the labor mar-
ket professionals in the fields energy efficiency and energy saving.
This book contain summarize information in the fields energy sav-
ing tools electrical drive and given students electrotechnical and electric
power speciality training possibility integrally learn basic knowledge in
the fields energy saving and energy efficiency provision modern automatic
electrical drive ...»
7
ОГЛАВЛЕНИЕ
ВВЕДЕНИЕ ...................................................................................................................... 10
1. ЗАКОНОДАТЕЛЬСТВО, МЕХАНИЗМЫ ОБЕСПЕЧЕНИЯ И МЕТОДЫ ОЦЕНКИ
ЭНЕРГОЭФФЕКТИВНОСТИ ........................................................................................ 15
1.1. Топливно-энергетический комплекс Российской Федерации ......................... 15
1.2. Нормативно-техническая документация в области энергосбережения и
энергоэффективности ................................................................................................ 20
1.3. Значение электропривода в энергосбережении
на промышленных
предприятиях .............................................................................................................. 22
1.4. Энергетическое обследование и оценка эффективности электротехнических
комплексов и систем с электроприводами ............................................................... 24
1.5. Методы технико-экономического обоснования эффективности использования
электроприводов на промышленных объектах........................................................ 31
1.5 .1. Обоснование эффективности использования электрической энергии ... 32
регулируемыми электроприводами ..................................................................... 32
1.5 .2. Обоснование
эффективности
использования
электроприводами
топливно-энергетических ресурсов..................................................................... 37
1.5 .3. Обоснование
эффективности
эксплуатационно-технических
характеристик регулируемых электроприводов................................................. 46
2. ЭНЕРГЕТИЧЕСКИЕ
ХАРАКТЕРИСТИКИ
ПРОМЫШЛЕННЫХ
ЭЛЕКТРОПРИВОДОВ С АСИНХРОННЫМ ДВИГАТЕЛЕМ ................................... 47
2.1. Коэффициент полезного действия нерегулируемого электропривода ........... 47
2.2. Коэффициент мощности и коэффициент нагрузки нерегулируемого
электропривода........................................................................................................... 52
2.3 . Коэффициент полезного действия асинхронного электропривода с
полупроводниковым преобразователем частоты .................................................... 55
2.4. Потери мощности в переходных режимах работы электропривода ............... 59
2.5. Электромагнитная совместимость промышленных электроприводов и
качество электрической энергии............................................................................... 63
2.5.1. Состав показателей качества электрической энергии .............................. 65
2.5.2. Дополнительные
замечания
к
терминологии
параметров
несинусоидальности ............................................................................................. 69
2.5.3. Влияние несинусоидального напряжения на коэффициент полезного
действия и коэффициент мощности электропривода ........................................ 72
2.5.4. Влияние несимметрии напряжения на коэффициент полезного действия
электропривода ..................................................................................................... 75
2.5 .5. Влияние медленного изменения напряжения на коэффициент полезного
действия и коэффициент мощности электропривода ........................................ 76
2.5.6. Влияние отклонения частоты напряжения на коэффициент полезного
действия и коэффициент мощности электропривода ........................................ 78
2.6 . Электромеханическая совместимость промышленных электроприводов и
качество электромеханического преобразования .................................................... 79
2.6.1. Определение и состав показателей качества электромеханического
преобразования ..................................................................................................... 80
8
2.6 .2. Влияние несинусоидального напряжения на электромагнитный момент
электропривода ..................................................................................................... 81
2.6 .3. Влияние пульсаций электромагнитного момента на коэффициент
полезного действия электропривода ................................................................... 83
2.6 .4. Влияние несимметрии напряжения на электромагнитный момент
электропривода ..................................................................................................... 85
2.6 .5. Влияние
несинусоидального
напряжения
на
срок
службы
электродвигателя .................................................................................................. 86
2.6 .6. Проблема «длинного кабеля» в электроприводе с преобразователем
частоты................................................................................................................... 87
2.6 .7. Проблема возникновения резонансных явлений в электроприводе c
преобразователем частоты ................................................................................... 90
2.6 .8. Проблема возникновения подшипниковых токов в асинхронных
двигателях электроприводов................................................................................ 91
2.6.9. Проблема снижения виброакустических характеристик электропривода
c преобразователем частоты ................................................................................ 92
2.6.10. Явление магнитоскрипции в асинхронных двигателях ......................... 93
2.7. Энергетическая совместимость
промышленных электроприводов и
технические средства ее обеспечения ...................................................................... 94
2.7 .1. Определение понятия энергетической совместимости промышленного
электропривода ..................................................................................................... 94
2.7 .2. Технические средства обеспечения энергетической совместимости ..... 95
3. МЕТОДЫ И ТЕХНИЧЕСКИЕ СРЕДСТВА ОБЕСПЕЧЕНИЯ ВЫСОКИХ
ЭНЕРГЕТИЧЕСКИХ ХАРАКТЕРИСТИК ЭЛЕКТРОПРИВОДОВ И ИХ ОЦЕНКА 97
3.1. Использование энергоэффективных электродвигателей в промышленных
электроприводах......................................................................................................... 97
3.2. Использование энергоэффективных полупроводниковых преобразователей
частоты ........................................................................................................................ 99
3.2 .1. Использование энергоэффективных полупроводниковых элементов в
коммутаторах преобразователей частоты .......................................................... 99
3.2 .2. Использование
высокочастотных
транзисторов
в
автономных
инверторах преобразователей частоты ..............................................................102
3.2 .3. Использование активных выпрямителей в преобразователях частоты
электроприводов ..................................................................................................103
3.2 .4. Использование активных фильтров в системе электроснабжения
электропривода ....................................................................................................105
3.3. Использование энергосберегающих систем и алгоритмов управления
электроприводом .......................................................................................................108
3.3 .1 . Энергетические характеристики электроприводов с реостатным
регулированием....................................................................................................110
3.3 .2. Энергетические характеристики электроприводов с параметрическим
регулированием....................................................................................................112
3.3 .3. Энергетические характеристики электроприводов с частотным
регулированием ....................................................................................................114
3.3 .4. Энергетические
характеристики
электроприводов
с
релейно-
импульсным регулированием .............................................................................116
9
3.4. Использование эффективных модуляционных алгоритмов управления
преобразователем частоты .......................................................................................122
3.4 .1. Алгоритм широтно-импульсной модуляции и методы повышения его
эффективности .....................................................................................................122
3.4 .2. Алгоритм пространственно-векторной модуляции и методы повышения
его эффективности ...............................................................................................128
4. ВЫБОР, РАСЧЕТ И ПРОВЕРКА ЭЛЕКТРОТЕХНИЧЕСКОГО ОБОРУДОВАНИЯ
РЕГУЛИРУЕМЫХ ЭЛЕКТРОПРИВОДОВ .................................................................138
4.1. Режимы работы и характеристики приводных асинхронных двигателей .....138
4.1.1. Номинальные режимы работы электроприводов ....................................138
4.1.2. Нагрузочные характеристики рабочих механизмов электроприводов ..142
4.1 .3. Переходные характеристики электроприводов .......................................143
4.2. Методы выбора и проверки асинхронных электродвигателей для различных
режимов работы ........................................................................................................144
4.2.1. Расчет мощности асинхронного двигателя различных рабочих
механизмов ...........................................................................................................144
4.2.2. Методы выбора и проверка асинхронного двигателя .............................146
4.2.3. Проверка асинхронного двигателя по перегрузочной способности ......150
4.2 .4. Дополнительные замечания к методам выбора асинхронных двигателей
...............................................................................................................................150
4.3 . Выбор и проверка полупроводникового преобразователя частоты ...............151
4.4 . Выбор и проверка тормозных резисторов для преобразователей частоты ...155
4.5. Коммутационные аппараты и защитные устройства регулируемых
электроприводов .......................................................................................................157
4.6. Дополнительные устройства регулируемых электроприводов ......................158
5. СОВРЕМЕННЫЕ ЭЛЕКТРОПРИВОДЫ С АСИНХРОННЫМИ ДВИГАТЕЛЯМИ
И
ПРЕОБРАЗОВАТЕЛЯМИ
ЧАСТОТЫ
ОБЪЕКТОВ
ТОПЛИВНО-
ЭНЕРГЕТИЧЕСКОГО КОМПЛЕКСА .........................................................................160
5.1 . Электротехническая
система
перемещения
и
динамического
позиционирования буровой платформы..................................................................160
5.2. Электропривод движителей плавучего добывающего
комплекса
корабельного типа .....................................................................................................164
5.3 . Электроприводные агрегаты для транспортировки углеводородов по
континентальным трубопроводам ...........................................................................167
5.4 . Подводные электроприводные комплексы для транспортировки глеводородов
по шельфовым трубопроводам ................................................................................174
5.5 . Электропривод
механизмов
экскаваторно-транспортного
комплекса
(карьерных экскаваторов и самосвалов) .................................................................177
5.6 . Электропривод механизмов забойных горных машин (проходческих и
очистных комбайнов)................................................................................................182
ЗАКЛЮЧЕНИЕ ..............................................................................................................186
ПРИЛОЖЕНИЕ А ..........................................................................................................188
ПРИЛОЖЕНИЕ Б ...........................................................................................................202
ПРИЛОЖЕНИЕ B...........................................................................................................234
ПРИЛОЖЕНИЕ Г ...........................................................................................................256
СПИСОК ИСПОЛЬЗУЕМОЙ ЛИТЕРАТУРЫ ............................................................263
10
ВВЕДЕНИЕ
Главным вектором развития топливно-энергетического ком-
плекса и всей экономики Российской Федерации в целом является
повышение эффективности и конкурентоспособности. Одним из ос-
новных средств достижения этих целей является повышение энерге-
тической эффективности и энергосбережения на промышленных
предприятиях топливно-энергетического комплекса.
Хорошо известно, что от 60 % до 75 % всей вырабатываемой
электроэнергии расходуется электроприводами, которые использу-
ются в различных электротехнических системах и промышленных
комплексах на производственных объектах, обеспечивая протекание
сложнейших технологических процессов. Абсолютное значение доли
потерь электрической энергии также приходится на электроприводы
и составляет около 80 %. Таким образом, электроприводы, исполь-
зуемые на промышленных предприятиях, имеют наибольший потен-
циал энергосбережения, и от их рационального использования зави-
сит уровень энергоэффективности и конкурентоспособности про-
мышленности Российской Федерации, в том числе предприятий топ-
ливно-энергетического комплекса.
В первой главе приведены главные цели, задачи, пути и меха-
низмы обеспечения энергетической эффективности и энергосбере-
жения в главных отраслях топливно-энергетического комплекса Рос-
сийской Федерации (горной, нефтяной, газовой, угольной и энерге-
тики). Показана роль электротехнических комплексов с электропри-
водами в вопросе энергоэффективности и энергосбережения. Рас-
смотрены основные нормативно-технические документы и законы в
области энергосбережения и энергоэффективности.
Вопросы практического энергосбережения на промышленных
предприятиях, безусловно, связаны с энергетическим обследованием
(энергоаудитом) всех энергетических систем и крупных потребите-
лей. На многих промышленных объектах высоковольтные электро-
приводы большой мощности обеспечивают до 95 % от общего по-
требления электроэнергии. Именно поэтому, в первой главе подроб-
но рассмотрен вопрос энергетического обследования электроприво-
дов, включая электродвигатели, преобразователи частоты, транс-
форматоры и другое электротехническое оборудование, входящее в
состав электроприводов.
11
Важной частью повышения энергоэффективности и энергосбе-
режения промышленных предприятий, помимо непосредственного
(инструментального) энергетического обследования, является выра-
ботка рекомендаций по повышению ресурсосбережения (энергосбе-
режения). Основным
вопросом
здесь
является
технико-
экономическое обоснование эффективности предлагаемых энерго-
сберегающих мероприятий. В первой главе подробно рассмотрены
методы технико-экономического обоснования использования элек-
троприводов на различных предприятиях топливно-энергетического
комплекса, которые могут быть адаптированы к предприятиям дру-
гих отраслей. Большое внимание уделено обоснованию эффективно-
сти не только между регулируемым и нерегулируемым электропри-
водом. На многих предприятиях остро стоит вопрос обоснования вы-
бора типа привода, например, между газотурбинным и электриче-
ским. Метод такого технико-экономического обоснования, также,
изложен в первой главе. Дополнительно, рассмотрен метод оценки
эксплуатационно-технических характеристик регулируемых элек-
троприводов, который можно выполнить на основе экспертной оцен-
ки характеристик технических решений электроприводов, рекомен-
дованных к внедрению.
Основными энергетическими характеристиками промышлен-
ных электроприводов являются коэффициент полезного действия и
коэффициент мощности. Во второй главе рассмотрены потери элек-
трической энергии во всех электротехнических элементах, из кото-
рых состоят как регулируемые, так и нерегулируемые электроприво-
ды: трансформаторов, входных реакторов, полупроводниковых пре-
образователей частоты, выходных дросселей и приводных асинхрон-
ных двигателей. Рассмотрен вопрос значения коэффициента мощно-
сти и коэффициента нагрузки нерегулируемого электропривода и ре-
гулируемого электропривода с преобразователем частоты.
Основной проблемой современных промышленных электро-
приводов является обеспечение электромагнитной совместимости
преобразователей частоты с сетью электроснабжения.
Электромагнитная совместимость промышленного электро-
привода – это способность преобразователя частоты функциониро-
вать без негативного влияния на качество электрической энергии се-
ти электроснабжения, не оказывать негативного электромагнитного
воздействия на окружающее электротехническое оборудование, а
12
также, выполнять необходимые технические задачи при низких по-
казателях качества электрической энергии в энергоснабжающей сети
и под действием электромагнитного воздействия окружающего элек-
тротехнического оборудования.
Другой значимой проблемой промышленных электроприводов
является обеспечение электромеханической совместимости преобра-
зователей частоты с приводными электродвигателями.
Электромеханическая совместимость промышленного электро-
привода – это способность электрического двигателя обеспечить
удовлетворительный уровень электромеханического преобразования
при отклонении параметров качества потребляемой электрической
энергии, получаемой от преобразователя частоты, от нормативно ус-
тановленных значений.
Современные электроприводы, в преобразователях частоты ко-
торых установлены активные выпрямители, могут обеспечивать воз-
врат электрической энергии в сеть электроснабжения (рекуперацию)
при торможении. Это обстоятельство позволяет выделить взаимный
обмен электроэнергией электропривода и сети электроснабжения в
отдельную научно-техническую проблему и говорить об энергетиче-
ской совместимости электропривода.
Энергетическая совместимость промышленного электроприво-
да – это способность двухстороннего обмена электрической энергией
между электроприводом и сетью электроснабжения.
Вопрос электромагнитной, электромеханической и энергетиче-
ской совместимости, показателей качества электроэнергии, электро-
механического преобразования и рекуперации, а также их взаимо-
связь и влияние на энергетические и динамические характеристики
асинхронных электроприводов рассмотрены во второй главе.
В настоящее время, для повышения энергетической эффектив-
ности промышленных электроприводов и решения проблем в части
электромагнитной, электромеханической и энергетической совмес-
тимости, можно выделить несколько путей, которые можно разде-
лить на технико-структурные и алгоритмически-модуляционные ме-
тоды.
Одним из наиболее простых способов повышения энергетиче-
ской эффективности электроприводов, является использование элек-
тродвигателей с высоким коэффициентом полезного действия, так
называемых, энергоэффективных электродвигателей.
13
Другой способ заключается в использовании полупроводнико-
вых преобразователей частоты, в состав которых входят высокотех-
нологичные коммутаторы, типа активный выпрямитель и автоном-
ный инвертор. Такие преобразователи частоты способны обеспечить
работу асинхронного электропривода, который является активно-
индуктивной нагрузкой для сети электроснабжения, с единичным ко-
эффициентом мощности.
Повысить энергетические характеристики асинхронных элек-
троприводов можно за счет использования высокоэффективного ал-
горитмического обеспечения, которое способно обеспечивать высо-
кие динамические характеристики электроприводов и эффективное
использование электрической энергии, как в установившихся, так и в
переходных режимах. К таким системам управления режимами рабо-
ты приводных асинхронных двигателей можно отнести векторное и
релейно-импульсное управление. К последним можно отнести сис-
темы прямого и фаззи-логического управления электромагнитным
моментом асинхронного двигателя.
В значительной степени, эффективность использования преоб-
разователей частоты регулируемых электроприводов, влияет на их
энергетические показатели в целом. Так, например, в части управле-
ния полупроводниковыми транзисторными ключами автономных
инверторов, стандартным решением является использование алго-
ритмов широтно-импульсной модуляции. Для повышения эффектив-
ности этого алгоритма используют методы предварительной модуля-
ции управляющего сигнала (предмодуляции). В современных преоб-
разователях частоты все чаще используются алгоритмы пространст-
венно-векторной модуляции, для повышения эффективности кото-
рых, также разработано несколько методов.
Методы и технические средства обеспечения высоких энерге-
тических характеристик электроприводов, а также оценка их эффек-
тивности, рассмотрены в третьей главе.
Конечно, для эффективного функционирования электроприво-
дов на промышленных предприятиях, на стадии проектирования и
разработки каждого электропривода, должен быть выполнен рацио-
нальный выбор его элементов. Во многом от этого зависит не только
качество работы самого электропривода, но и протекание технологи-
ческих процессов, которые он обеспечивает, а также, работа других
электротехнических систем и комплексов предприятий. Вопрос ра-
14
ционального выбора, расчета и проверки основного оборудования
регулируемых асинхронных электроприводов рассмотрен в четвер-
той главе.
В пятой главе рассматриваются структурные решения совре-
менных электроприводов с преобразователями частоты, используе-
мых на различных промышленных объектах и в технических средст-
вах топливно-энергетического комплекса.
В приложениях приведено большое количество практических
задач и примеров их решения.
В процессе написания книги использовались труды ведущих
отечественных специалистов электротехников – электроприводчи-
ков, ученых, докторов технических наук, профессоров, например,
А.С.Сандлера, Ю.А.Сабинина,
Г.Б.Онищенко, Ю.М.Инькова,
И.Я.Браславского, Р.Т.Шрейнера, А.Е.Козярука, Г.С.Зиновьева,
Н.Ф.Ильинского, Г.Г.Соколовского, В.М.Терехова, В.В.Москаленко,
В.И.Ключева, Б.И.Фираго и других.
Автор выражает искреннюю и глубокую благодарность рецен-
зентам доктору технических наук, заслуженному деятелю науки РФ,
профессору кафедры «Электрические системы» ФГАОУ ВПО «Мос-
ковский государственный университет машиностроения», председа-
телю Совета Ассоциации инженеров по электроприводу, профессору
Георгию Борисовичу Онищенко и кандидату технических наук,
главному специалисту отдела технической документации и научно-
технической информации ОАО «Гипрогазцентр» доценту Олегу
Викторовичу Крюкову за внимательное отношение к рецензируе-
мой книге, ценные замечания к структуре, содержанию и изложению
материала, которые содействовали ее улучшению.
Замечания по содержанию книги, предложения по изменениям
и дополнениям можно присылать по e-mail: vasilev.bu@yandex.ru.
15
1. ЗАКОНОДАТЕЛЬСТВО,
МЕХАНИЗМЫ ОБЕСПЕЧЕНИЯ
И МЕТОДЫ ОЦЕНКИ ЭНЕРГОЭФФЕКТИВНОСТИ
1.1. Топливно-энергетический комплекс
Российской Федерации
Основным документом в Российской Федерации, определяю-
щим направления развития топливно-энергетического комплекса
страны, является Энергетическая стратегия на период до 2030 года
[1]. Предшествующим документом была Энергетическая стратегия
Российской Федерации на период до 2020 года [2]. Рассмотрим цели,
основные задачи, ориентиры, механизмы и пути достижения постав-
ленных целей, описанные в Энергетической стратегии на период до
2030 года.
Важнейшими и наиболее крупными отраслями топливно-
энергетического комплекса Российской Федерации являются мине-
рально-сырьевая и энергетическая отрасль. В настоящее время, глав-
ными векторами перспективного развития этих отраслей являются
[1, 2]: переход на путь инновационного и энергоэффективного разви-
тия; изменение структуры и масштабов производства энергоресур-
сов; создание конкурентной рыночной среды; интеграция в мировую
энергетическую систему.
Главной целью развития топливно-энергетического комплекса
Российской Федерации является создание инновационной и эффек-
тивной промышленности, отвечающей как потребностям растущей
отечественной экономики в энергоресурсах, так и внешнеэкономиче-
ским интересам страны.
Достижение указанной цели требует решения следующих ос-
новных задач:
повышение эффективности воспроизводства, добычи и пе-
реработки минерально-сырьевых ресурсов;
модернизация и создание новой энергетической инфра-
структуры на основе масштабного технологического обновления то-
пливно-энергетического комплекса;
повышение энергетической и экологической эффективности
промышленных предприятий топливно-энергетического комплекса, в
том числе за счет активизации технологического энергосбережения.
16
Российская Федерация занимает одно из ведущих мест в миро-
вой системе оборота энергоресурсов, активно участвует в междуна-
родном сотрудничестве с целью развития технологий для топливно-
энергетического комплекса, а также, в смежных отраслях промыш-
лености, например, машиностроительной, химической и других.
В последние годы Российская Федерация занимает лидирую-
щие позиции по объему добычи нефти и обеспечивает около 12 %
мировой торговли нефтью. Свыше 80 % объема российской нефти
экспортируется в Страны Европейского союза. Доля Российской Фе-
дерации на этом рынке составляет около 30 %.
Российская Федерация занимает первое место в мире по запа-
сам природного газа (23 % мировых запасов) и по объемам его еже-
годной добычи, обеспечивая 25 % мировой торговли этим энергоно-
сителем. Обладая уникальной газотранспортной системой, Россий-
ская Федерация также играет важную роль в обеспечении поставок
газа из стран Центральной Азии в страны Европейского Союза. В
ближайшее время Российская Федерация станет крупнейшим по-
ставщиком природного газа в страны Азиатско-Тихоокеанского ре-
гиона.
Российская Федерация удерживает второе место в мире по за-
пасам угля (19 % мировых запасов), пятое место по объемам его еже-
годной добычи (5 % мировой добычи) и обеспечивает около 12 %
мировой торговли энергетическим углем.
Отечественная атомная энергетика составляет 5 % мирового
рынка атомной электрогенерации, 15 % мирового рынка реакторо-
строения, 45 % мирового рынка обогащения урана, 15 % мирового
рынка конверсии отработанного топлива и обеспечивает 8 % миро-
вой добычи природного урана.
Главными стратегическими ориентирами долгосрочной госу-
дарственной энергетической политики являются:
энергетическая безопасность страны;
энергетическая эффективность промышленности;
экологическая безопасность энергетики.
К числу основных составляющих государственной энергетиче-
ской политики относятся:
рациональное использование полезных ископаемых, вклю-
чая все стадии освоения их месторождений;
17
формирование рационального топливно-энергетического
баланса;
развитие инновационной и научно-технической деятельно-
сти в топливно-энергетическом комплексе.
Основными инструментами реализации государственной поли-
тики в топливно-энергетическом комплексе являются:
создание экономических условий для функционирования и
развития всех отраслей топливно-энергетического комплекса;
ускоренное внедрение технических регламентов, нацио-
нальных стандартов и норм, способствующих повышению темпов
достижения поставленных целей, включая повышение энергоэффек-
тивности;
стимулирование и поддержка инвестиционной, инноваци-
онной, энергосберегающей, экологической и другой деятельности,
имеющей приоритетное значение для топливно-энергетического
комплекса.
Стратегической целью Российской Федерации в сфере повы-
шения энергетической эффективности топливно-энергетического
комплекса является максимально рациональное использование энер-
гетических ресурсов, за счет повышения энергосбережения и энерго-
эффективности.
Стратегической целью инновационной и научно-технической
политики в топливно-энергетическом комплексе является создание
устойчивой национальной инновационной системы, обеспечивающей
отечественную промышленность российскими высокоэффективными
технологиями и оборудованием, научно-техническими и инноваци-
онными решениями, востребованными не только в Российской Феде-
рации, но и иностранной промышленностью.
Инновационная и научно-техническая политика должна осно-
вываться на современных и перспективных научно-технических дос-
тижениях фундаментальной и прикладной отечественной и мировой
науки в топливно-энергетическом комплексе, обеспечивая создание
и внедрение новых высокоэффективных технологий.
К числу основных проблем в указанной сфере относятся:
высокая зависимость предприятий отраслей от импортных
технологий и оборудования;
несоответствие технического уровня предприятий топлив-
18
но-энергетического комплекса современным требованиям;
отсутствие в отраслях развитой инновационной инфра-
структуры (центров трансфера технологий, технопарков, центров
подготовки кадров для инновационной деятельности и др.).
Для достижения стратегической цели инновационной и науч-
но-технической политики в топливно-энергетическом комплексе не-
обходимо решение следующих задач:
воссоздание и развитие научно-технического потенциала,
включая фундаментальную науку, прикладные исследования и раз-
работки, модернизацию экспериментальной базы и системы научно-
технической информации;
создание благоприятных условий для развития инновацион-
ной деятельности, направленной на коренное обновление производ-
ственно-технологической базы предприятий, ресурсосбережение, по-
вышение экономичности, надежности, безопасности и экологичности
энергетических установок и систем;
использование потенциала международного сотрудничества
для применения лучших мировых достижений и вывода отечествен-
ных разработок на более высокий уровень;
сохранение и развитие кадрового потенциала и научной ба-
зы, интеграция науки, образования и инновационной деятельности.
Инновационная
направленность
развития
топливно-
энергетического комплекса, также предполагает формирование усло-
вий для развития непрерывного процесса поиска и практической реа-
лизации новых научно-технических и технологических решений.
Рассмотрим
приоритетные
направления
научно-
технического прогресса в топливно-энергетическом комплексе.
По направлению «Нефтяной комплекс»:
увеличение коэффициента извлечения нефти на разрабаты-
ваемых и вводимых в разработку месторождениях, в том числе не-
традиционных видов углеводородного сырья;
внедрение современных методов увеличения нефтеотдачи;
научно-технологическое обеспечение повышения качества
светлых нефтепродуктов;
внедрение технологий и оборудования для малотоннажного
производства синтетического жидкого топлива в местах добычи по-
путных нефтяных газов.
19
По направлению «Газовая промышленность»:
разработка и освоение технологических комплексов по бу-
рению и добыче углеводородов на континентальном шельфе аркти-
ческих морей, в том числе подводных технических средств освоения
шельфа;
создание отечественного оборудования, технологий и мате-
риалов для повышения надежности скважин, вскрытия пластов, в
том числе залежей низконапорного природного газа;
создание отечественного оборудования, технологий и мате-
риалов для строительства и эксплуатации магистральных трубопро-
водных систем с повышенными характеристиками и распредели-
тельных сетей из полимерных материалов.
По направлению «Угольная промышленность»:
повышение качества геолого-разведочных работ;
повышение уровня развития материально-технической и
научно-исследовательской базы по охране труда, предупреждению и
ликвидации аварий в угольной промышленности;
разработка и внедрение системы мероприятий по повыше-
нию качества угольной продукции;
коренное техническое перевооружение угледобывающего
производства;
повышение эффективности научных исследований по про-
блемам безопасности угледобывающей промышлености.
По направлению «Электроэнергетика»:
создание высокоинтегрированных интеллектуальных сис-
темообразующих и распределительных электрических сетей нового
поколения;
создание проводников с использованием новых композит-
ных материалов, позволяющих увеличить токонесущую способность
и уменьшить потери в сетях;
широкое развитие распределенной генерации;
развитие силовой электроники и устройств на их основе,
прежде всего, различного рода сетевых управляемых устройств;
создание
высокоинтегрированного
информационно-
управляющего комплекса оперативно-диспетчерского управления;
создание высоконадежных магистральных каналов связи
между различными уровнями диспетчерского управления;
20
создание и широкое внедрение централизованных систем
противоаварийного управления, охватывающих все уровни Единой
энергетической системы Российской Федерации;
создание комплекса высокоэффективного экологически
чистого силового гидроэнергетического оборудования;
создание водородных систем аккумулирования энергии и
покрытия неравномерностей графика нагрузки с коэффициентом ре-
куперации электроэнергии не менее 50 %.
1.2. Нормативно-техническая документация
в области энергосбережения и энергоэффективности
Как видно из анализа Энергетической стратегии на период до
2030 года, приведенного в предыдущем разделе, основным направ-
лением развития топливно-энергетического комплекса и всей про-
мышленности Российской Федерации в целом является повышение
энергетической эффективности и энергосбережения промышленных
предприятий.
В настоящее время, в Российской Федерации основополагаю-
щим нормативно-правовым документом, регулирующим область
энергосбережения и повышения энергетической эффективности
субъектов экономической деятельности, является Федеральный за-
кон No 261 «Об энергосбережении и о повышении энергетической
эффективности и о внесении изменений в отдельные законодатель-
ные акты Российской Федерации». До вступления этого документа в
силу действовал Федеральный закон No 28 «Об энергосбережении»,
который и положил начало формированию новой системы государ-
ственного регулирования в области энергосбережения и повышения
энергетической эффективности [3, 4].
Для исполнения действующего Федерального закона No 261
разработано и принято большое количество подзаконных норматив-
но-правовых актов Правительства Российской Федерации и уполно-
моченных федеральных органов исполнительной власти. Кроме того,
законодательство об энергосбережении и о повышении энергетиче-
ской эффективности, также состоит из законов и иных нормативно-
правовых актов субъектов Российской Федерации. В качестве при-
мера таких, дополняющих основной закон, документов можно при-
21
вести: Указ Президента Российской Федерации No 889 «О некоторых
мерах по повышению энергетической и экологической эффективно-
сти российской экономики»; Распоряжение Правительства Россий-
ской Федерации No 512 «Государственная программа Российской
Федерации «энергоэффективность и развитие энергетики»; ГОСТ Р
51541-99 «Энергетическая эффективность. Состав показателей» и
другие.
Показатели энергоэффективности, в соответствии со стандар-
том ГОСТ Р 51541-99, классифицируют следующим образом по:
а) группам электротехнического оборудования (например, по-
казатели энергоэффективности электродвигателей, преобразователей
частоты, трансформаторов и других);
б) виду используемых энергоресурсов (например, показатели
энергоэффективности использования электроэнергии, тепловой энер-
гии, органического топлива и других);
в) методам определения показателей:
расчетно-аналитический (основывается на использовании
методик определения расчетных значений показателей при проекти-
ровании оборудования);
опытно-экспериментальный (основывается на данных спе-
циально организованных экспериментов с опытными образцами
энергопотребляющих электротехнических систем с проведением
специальных измерений характеристик для оценки показателей энер-
гоэффективности);
статистический (основывается на подборе и обработке ста-
тистических данных по показателям энергоэффективности оборудо-
вания);
приборный (основывается на проведении специальных ис-
пытаний промышленных образцов оборудования и измерений фак-
тических значений показателей энергоэффективности);
смешанный (представляет собой комбинацию двух или
большего числа рассмотренных методов);
г) области использования (прогнозируемые показатели, плани-
руемые показатели, фактические показатели). Например, показатели
энергоэффективности регулируемого электропривода переменного
тока, производственного технологического комплекса, системы энер-
госнабжения предприятия и других.
22
1.3. Значение электропривода в энергосбережении
на промышленных предприятиях
Главным механизмом обеспечения высокого уровня конкурен-
тоспособности
отечественных
предприятий
топливно-
энергетического комплекса, в Энергетической стратегии России на
период до 2030 года, является повышение их энергетической эффек-
тивности, за счет использования энергосберегающих технологий.
Энергосбережение является самым эффективным, дешевым и
безопасным способом увеличения энергогенерирующих мощностей.
Так, хорошо известно, что затраты на экономию 1 кВт мощности об-
ходятся в 4 – 6 раз дешевле, чем стоимость вновь вводимого 1 кВт
мощности.
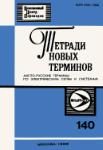
На рис.1.1 приведена диаграмма расхода энергетических ре-
сурсов по отраслям экономики Российской Федерации. Из диаграм-
мы видно, что наибольшая часть потребления приходится на про-
мышленность. Следовательно, и наибольший потенциал в энергосбе-
режении приходится на эту отрасль.
До 75% всей потребляемой электроэнергии на промышленных
предприятиях используется электроприводами различных машин и
механизмов. На рис.1.2 показана диаграмма потерь электроэнергии
по видам электротехнического оборудования промышленных пред-
приятий. Хорошо видно, что основная доля потерь электроэнергии в
промышленности приходится на электрические машины и сети элек-
троснабжения. Так, на электрические двигатели приходится около
70% всех электрических потерь. На трансформаторы еще почти 10 %
потерь. На сети электроснабжения почти 15% потерь.
ЖКХ
Промышленость
Транспорт и
связь
Сфера услуг
Потери Строительство
СХ
Рис.1.1 . Структура энергопотребления в России по отраслям экономики
23
Большие потери электрической энергии в электроприводах
возникают по различным конструктивным, техническим и эксплуа-
тационным причинам. Например, одна из главных причин заключа-
ется в том, что подавляющая доля электроприводов, используемых в
промышленности, до сих пор являются нерегулируемыми (неавтома-
тизированными), что значительно увеличивает их энергопотребле-
ние. Другой, причиной, является значительный запас по мощности
установленных электродвигателей. Такие электродвигатели потреб-
ляют больше электрической энергии, а их коэффициент полезного
действия становится значительно ниже номинального.
Таким образом, наиболее значительная экономия электроэнер-
гии может быть достигнута при использовании высокоэффективных
энергосберегающих электроприводов для управления технологиче-
скими процессами, протекающими на промышленных предприятиях,
что в сочетании с возможностями автоматизации может обеспечить
оптимальное использование электроэнергии и других ресурсов.
Одним из главных технических мероприятий по повышению
энергетической эффективности промышленных предприятий являет-
ся внедрение новых энергосберегающих электроприводов взамен ус-
таревших.
Обследование электротехнических комплексов и систем про-
мышленных предприятий на предмет возможного внедрения энерго-
сберегающих технологий и систем, в том числе и электроприводов,
является предметом энергетического обследования (энергоаудита).
В следующих разделах будут рассмотрены вопросы энергоаудита
(раздел 1.4) и изложены некоторые методики технико-
экономического обоснования эффективности внедрения энергосбе-
регающих электроприводов (раздел 1.5).
Прочие
Трансформаторы
Двигатели
Кабели
Рис.1 .2. Структура потерь в электрооборудовании промышленных предприятий
24
1.4. Энергетическое обследование и оценка эффективности
электротехнических комплексов и систем
с электроприводами
Особенности энергетического обследования промышленных
предприятий определяются сферой их деятельности, используемым
технологическим и электротехническим оборудованием, энергопо-
требляющими комплексами и устройством энергоснабжающих сетей.
Энергоаудит на крупных производственных предприятиях из-за
больших объёмов производства и потребления различных видов
энергоресурсов приобретает особую сложность, вследствие того, что
все системы таких предприятий (тепловые, гидравлические, пневма-
тические, электрофизические, электрохимические) неразрывны и
представляют собой единый технологический комплекс. Эту техни-
ческую взаимосвязь необходимо учитывать при проведении энерго-
аудита. Например, реализация непродуманных предложений по эко-
номии одного вида энергоресурсов может повлечь за собой увеличе-
ние потребления другого вида или негативно отразиться на функ-
ционировании всего промышленного предприятия.
Можно выделить три этапа энергетического аудита: предвари-
тельный; сбор данных об энергопотреблении и определение направ-
лений повышения энергоэффективности; составление и согласование
энергетического паспорта предприятия. Содержание этих этапов
раскрыто в табл. 1.1 [5].
Основная задача, которую решает энергетическое обследова-
ние промышленных предприятий – это определение мест потерь
энергии, ее неоправданного или нерационального использования и
разработка энергосберегающих рекомендаций.
Энергетический аудит электротехнических комплексов на ос-
нове электроприводов большой мощности целесообразно проводить
по пути преобразования электрической энергии в механическую, т.е.
обследовать установки в следующем порядке: сеть электроснабже-
ния; трансформатор; полупроводниковый преобразователь частоты;
приводной электродвигатель; передаточное устройство; механизм.
Рассмотрим более подробно этапы и содержание работ по
энергетическому обследованию промышленных предприятий, в том
числе, производств с технологическими установками, в состав кото-
рых входят высоковольтные электроприводы большой мощности.
Т
а
б
л
и
ц
а
1
.
1
Э
т
а
п
ы
э
н
е
р
г
е
т
и
ч
е
с
к
о
г
о
о
б
с
л
е
д
о
в
а
н
и
я
No
Н
а
и
м
е
н
о
в
а
н
и
е
С
о
д
е
р
ж
а
н
и
е
1
П
р
е
д
в
а
р
и
т
е
л
ь
н
ы
й
И
з
у
ч
е
н
и
е
п
р
е
д
п
р
и
я
т
и
я
:
с
б
о
р
и
а
н
а
л
и
з
п
р
е
д
в
а
р
и
т
е
л
ь
н
о
й
и
н
ф
о
р
м
а
ц
и
и
.
С
о
с
т
а
в
-
л
е
н
и
е
п
р
о
г
р
а
м
м
ы
э
н
е
р
г
о
а
у
д
и
т
а
.
2
С
б
о
р
д
а
н
н
ы
х
о
б
э
н
е
р
г
о
п
о
т
р
е
б
л
е
н
и
и
.
О
п
р
е
д
е
л
е
н
и
е
н
а
п
р
а
в
л
е
н
и
й
п
о
в
ы
ш
е
н
и
я
э
н
е
р
г
о
э
ф
ф
е
к
т
и
в
н
о
с
т
и
С
б
о
р
и
н
ф
о
р
м
а
ц
и
и
о
б
э
н
е
р
г
о
п
о
т
р
е
б
л
е
н
и
и
п
о
н
а
п
р
а
в
л
е
н
и
я
м
:
д
а
н
н
ы
е
и
з
п
р
о
-
е
к
т
н
о
й
,
и
с
п
о
л
н
и
т
е
л
ь
н
о
й
и
э
к
с
п
л
у
а
т
а
ц
и
о
н
н
о
й
д
о
к
у
м
е
н
т
а
ц
и
и
;
д
а
н
н
ы
е
о
с
т
р
у
к
т
у
р
е
э
л
е
к
т
р
о
-
и
т
е
п
л
о
п
о
т
р
е
б
л
е
н
и
и
;
д
а
н
н
ы
е
о
с
о
с
т
а
в
е
,
т
е
х
н
и
ч
е
с
к
и
х
х
а
р
а
к
т
е
р
и
с
т
и
к
а
х
,
в
р
е
м
е
н
и
р
а
б
о
т
ы
э
н
е
р
г
о
п
о
т
р
е
б
л
я
ю
щ
е
г
о
о
б
о
р
у
д
о
в
а
н
и
я
.
А
н
а
л
и
з
ф
у
н
к
ц
и
о
н
и
р
о
в
а
н
и
я
э
н
е
р
г
е
т
и
ч
е
с
к
и
х
с
и
с
т
е
м
:
р
а
с
п
р
е
д
е
л
е
н
и
я
и
п
о
т
р
е
б
-
л
е
н
и
я
э
н
е
р
г
е
т
и
ч
е
с
к
и
х
р
е
с
у
р
с
о
в
.
С
б
о
р
р
е
т
р
о
с
п
е
к
т
и
в
н
ы
х
д
а
н
н
ы
х
о
с
о
с
т
а
в
е
о
б
о
р
у
д
о
в
а
н
и
я
,
э
н
е
р
г
о
п
о
т
р
е
б
л
е
н
и
и
п
р
е
д
п
р
и
я
т
и
я
,
п
о
к
а
з
а
т
е
л
я
х
э
н
е
р
г
е
т
и
ч
е
с
к
о
й
э
ф
ф
е
к
т
и
в
н
о
с
т
и
в
ы
п
о
л
н
е
н
н
ы
х
э
н
е
р
г
о
-
с
б
е
р
е
г
а
ю
щ
и
х
м
е
р
о
п
р
и
я
т
и
й
.
П
р
о
в
е
д
е
н
и
е
и
н
с
т
р
у
м
е
н
т
а
л
ь
н
о
г
о
э
н
е
р
г
е
т
и
ч
е
с
к
о
г
о
о
б
с
л
е
д
о
в
а
н
и
я
э
л
е
к
т
р
о
т
е
х
-
н
и
ч
е
с
к
и
х
к
о
м
п
л
е
к
с
о
в
и
с
и
с
т
е
м
.
О
п
р
е
д
е
л
е
н
и
е
п
р
и
о
р
и
т
е
т
н
ы
х
н
а
п
р
а
в
л
е
н
и
й
п
о
в
ы
ш
е
н
и
я
э
н
е
р
г
о
э
ф
ф
е
к
т
и
в
н
о
с
т
и
3
С
о
с
т
а
в
л
е
н
и
е
и
с
о
г
л
а
с
о
в
а
н
и
е
э
н
е
р
г
е
т
и
ч
е
с
к
о
г
о
п
а
с
п
о
р
т
а
п
р
е
д
п
р
и
я
т
и
я
С
о
с
т
а
в
л
е
н
и
е
э
н
е
р
г
е
т
и
ч
е
с
к
и
х
б
а
л
а
н
с
о
в
п
о
т
р
е
б
л
е
н
и
я
э
л
е
к
т
р
и
ч
е
с
к
о
й
,
т
е
п
л
о
в
о
й
э
н
е
р
г
и
и
и
д
р
у
г
о
г
о
т
о
п
л
и
в
а
.
Р
а
с
ч
е
т
п
о
к
а
з
а
т
е
л
е
й
э
н
е
р
г
е
т
и
ч
е
с
к
о
й
э
ф
ф
е
к
т
и
в
н
о
с
т
и
.
О
ц
е
н
к
а
п
о
т
е
н
ц
и
а
л
а
э
н
е
р
г
о
с
б
е
р
е
ж
е
н
и
я
и
р
а
з
р
а
б
о
т
к
а
м
е
р
о
п
р
и
я
т
и
й
п
о
э
н
е
р
г
о
-
с
б
е
р
е
ж
е
н
и
ю
и
п
о
в
ы
ш
е
н
и
ю
э
н
е
р
г
е
т
и
ч
е
с
к
о
й
э
ф
ф
е
к
т
и
в
н
о
с
т
и
.
О
ц
е
н
к
а
э
ф
ф
е
к
т
и
в
н
о
с
т
и
и
о
к
у
п
а
е
м
о
с
т
и
э
н
е
р
г
о
с
б
е
р
е
г
а
ю
щ
и
х
м
е
р
о
п
р
и
я
т
и
й
.
П
о
д
г
о
т
о
в
к
а
о
т
ч
е
т
а
п
о
э
н
е
р
г
е
т
и
ч
е
с
к
о
м
у
о
б
с
л
е
д
о
в
а
н
и
ю
.
25
26
Системы электроснабжения. В системы электроснабжения
предприятия обычно входят электрические подстанции и электриче-
ские сети напряжением 6/10/0,4 кВ.
Энергетическое обследование системы электроснабжения про-
мышленных предприятий проходит в несколько этапов. Во-первых,
проверяется соответствие имеющейся в составе документации пред-
приятия схемы электроснабжения фактической схеме системы элек-
троснабжения предприятия. Проверка проводится от точки раздела
балансовой принадлежности с энергоснабжающей организацией до
энергоприемников. Анализ схемы электроснабжения предприятий
необходимо проводить с учетом перспективы развития (вновь вво-
димых мощностей и отключения потребителей), технического со-
стояния электрооборудования, внутренних и внешних электрических
сетей, силовых элементов электроприводов, системы освещения и
других потребителей.
Во-вторых, если это необходимо, уточняется схема системы
электроснабжения и силового энергетического оборудования, вхо-
дящего в состав системы. Далее, на уточненной схеме электроснаб-
жения намечаются точки, в которых нужно проводить инструмен-
тальное обследование.
По результатам инструментального обследования этих систем
составляется реальный баланс электроэнергии. Для составления ба-
ланса электроэнергии и получения общей картины электропотребле-
ния проводятся обследования каждой энергетической подстанции и
наиболее крупных потребителей. Анализируется фактический и нор-
мативный удельный расход электроэнергии. Также, необходимо про-
вести обследование технического состояния коммерческого и техни-
ческого узла учета потребляемой электроэнергии.
По результатам измерений строятся суточные и недельные
графики изменения электрических величин, формируется баланс
электроэнергии. Для более полного анализа состояния системы элек-
троснабжения и разработки энергосберегающих программ, периоди-
чески, в течение суток определяются значения наиболее важных по-
казателей качества электроэнергии.
В разделе 2.5 будут подробно рассмотрены основные парамет-
ры качества электрической энергии и их влияние на энергетические
характеристики всех элементов электроприводов промышленных
предприятий топливно-энергетического комплекса.
27
Трансформаторы. Современные силовые трансформаторы,
используемые в системах электроснабжения и электроприводах про-
мышленных предприятий, имеют простое и высоконадежное устрой-
ство. Тем не менее, их кажущаяся, на первый взгляд, эффективность,
не всегда подтверждается на практике. Выявление существующих
потерь при работе трансформаторов и является предметом энергети-
ческого обследования.
На первом этапе энергетического обследования трансформато-
ров производят изучение их номинальных параметров, режимов ра-
бот и истории их эксплуатации.
На втором этапе проводится инструментальное обследование
используемых трансформаторов. Для этого, проводятся следующие
измерения:
активной и реактивной мощности;
показателей качества электрической энергии на входе и вы-
ходе трансформатора;
токов нагрузки трансформаторов;
времени включения и выключения электроприемников в те-
чении суток.
Для инструментального обследования могут быть использова-
ны следующие приборы: токоизмерительные клещи, электрические
счетчики, информационно-измерительные системы, анализаторы ка-
чества электрической энергии.
На основании инструментальных обследований определяются:
фактические годовые потери активной и реактивной энер-
гии трансформаторов;
нагрузочные потери в силовых трансформаторах;
потери холостого хода трансформаторов;
уровень загрузки трансформатора.
Также, с целью диагностики и выявления потерь и неисправно-
стей трансформаторов при энергетическом обследовании целесооб-
разно выполнять тепловизионное обследование трансформаторов.
Это может позволить заблаговременно выявить следующие неис-
правности: нарушения изоляции отдельных элементов магнитопро-
вода; нарушение в работе охлаждающих систем; нагревы внутренних
контактных соединений обмоток с выводами трансформатора; меж-
витковое замыкание в обмотках.
28
Полупроводниковые преобразователи частоты. При прове-
дении энергетического обследования полупроводникового преобра-
зователя частоты, основное внимание необходимо уделять не только
коэффициенту полезного действия и оценке эффективности преобра-
зования электрической энергии в отдельных элементах преобразова-
теля, но и определить уровень электромагнитной и электромеханиче-
ской совместимости, которую он обеспечивает с сетью электроснаб-
жения и приводным электродвигателем.
Основным источником искажения напряжения в сетях электро-
снабжения промышленных предприятий являются именно преобра-
зователи частоты электроприводов. При энергетическом обследова-
нии необходимо, во-первых, установить мощность, используемых
преобразователей частоты, номинальные напряжение и ток, структу-
ру и состав электрооборудования. Необходимо определить заявлен-
ный производителем уровень электромагнитной совместимости и
степень влияния преобразователя частоты на показатели качества
электрической энергии сети электроснабжения и электродвигателя.
Далее, необходимо определить реальный уровень электромаг-
нитной совместимости преобразователя частоты путем его инстру-
ментального обследования, а именно, определить реальный уровень
показателей качества электрической энергии на входе и выходе. Для
этого, необходимо рассмотреть два главных аспекта: высшие гармо-
ники, генерируемые преобразователем в сеть электроснабжения и
обмотку приводного двигателя, т.е. измерить суммарный коэффици-
ент гармонических составляющих напряжения, определить коэффи-
циент мощности и величину потерь мощности в преобразователе.
При энергетическом обследовании преобразователей частоты
высоковольтных электроприводов, которые имеют шкафное испол-
нение, необходимо выполнять тепловизионный контроль каждого
полупроводникового коммутатора и всех силовых полупроводнико-
вых приборов. Это поможет выявить нарушения в работе полупро-
водниковых ключей преобразователя частоты, например, повышен-
ный уровень потерь, остаточный ресурс его элементов и преобразо-
вателя частоты в целом и другие эксплуатационные характеристики.
На основе проведенных инструментальных исследований и со-
поставления их значений с паспортными данными возможна разра-
ботка мероприятий по повышению энергетической эффективности
обследуемого преобразователя частоты.
29
Приводные электродвигатели. На многих промышленных
объектах и предприятиях топливно-энергетического комплекса
крупнейшими потребителями электроэнергии являются именно элек-
трические двигатели, которые могут быть постоянного или перемен-
ного тока, регулируемыми или нерегулируемыми.
При проведении энергетического обследования электрических
двигателей, во-первых, необходимо определить их паспортные дан-
ные: тип и марку приводного электродвигателя; номинальное напря-
жение; номинальную мощность; коэффициент полезного действия;
коэффициент мощности; режим работы.
Во-вторых, осуществляется инструментальное обследование
электроприводов. На этом этапе измеряются параметры качества
электрической энергии, потребляемой электродвигателем. Измеряет-
ся сопротивление изоляции кабелей и обмоток электродвигателей.
Производится тепловизионное обследование приводных электродви-
гателей. Измеряются суточные и недельные графики напряжений,
токов, активной и реактивной мощности, скорости вращения, элек-
тромагнитного момента двигателей. Также, определяется время ра-
боты электродвигателей в режиме холостого хода в течении суток.
На основе данных, полученных в результате инструментально-
го обследования, составляются графики нагрузок. Анализируется пи-
ковая мощность, коэффициент мощности и коэффициент загрузки
электродвигателей. Устанавливается соответствие нагрузки и мощ-
ности электродвигателя. Также, анализируется эффективность ис-
пользования существующих в данный момент на объекте или пред-
приятии энергосберегающих мероприятий, например, эффективность
компенсации реактивной мощности или высших гармоник.
Затем, на основе анализа этих данных формируются рекомен-
дации по энергосбережению. Например, обеспечить паспортный
размер нагрузки на электродвигатель; использование энергоэффек-
тивных двигателей; выравнивание фаз; исключение пониженного
или повышенного напряжения; использование энергоэффективных
систем и алгоритмов управления электродвигателями; замена или
ремонт неэффективных передаточных устройств; отключение двига-
телей, когда они не требуются; применение устройств мягкого пуска;
статических компенсаторов реактивной мощности и фильтров. Раз-
личные современные и высокоэффективные методы энергосбереже-
ния средствами электропривода будут рассмотрены в главе 3.
30
В результате тщательного изучения технологических режимов
работы электротехнических комплексов и систем с электропривода-
ми и энергетического обследования всего оборудования, должны
разрабатываться конкретные технические решения с их технико-
экономическим обоснованием, подтверждающие техническую воз-
можность и экономическую целесообразность создания энергосбере-
гающих систем и технологий на рассматриваемом объекте. Результа-
ты обследования должны давать ответы на следующие вопросы [6]:
какие способы и средства регулирования режимов работы
исполнительных механизмов целесообразно применять на рассмат-
риваемом объекте;
на каких установках выгодно применение регулируемого
электропривода и какие его виды следует использовать в данной ус-
тановке;
какое количество агрегатов из устанавливаемых на объекте
следует оснащать регулируемым электроприводом;
какие изменения следует внести в технологическую схему
объекта и в состав его оборудования;
какие изменения следует внести в схему энергоснабжения
объекта и в состав его электрооборудования;
каким образом скомпоновать устанавливаемое оборудова-
ние (на существующих производственных площадях или в дополни-
тельных помещениях);
по каким технологическим и электрическим параметрам
надлежит регулировать режимы работы объекта;
какая экономия энергии и других ресурсов будет получена в
результате создания энергосберегающих систем и технологий;
как снизятся эксплуатационные затраты при выполнении
энергосберегающих мероприятий;
какие потребуются инвестиции для реализации энергосбе-
регающих мероприятий;
каков срок окупаемости энергосберегающих мероприятий.
Для энергетического обследования электротехнических ком-
плексов и систем с электроприводами разрабатываются специальные
методики, например, методики энергетического обследования раз-
личных объектов, методики принятия принципиальных технических
решений, методики технико-экономического обоснования рекомен-
дуемых энергосберегающих мероприятий.
31
1.5. Методы технико-экономического обоснования
эффективности использования электроприводов
на промышленных объектах
На различных этапах разработки, проектирования, эксплуата-
ции и обследования электротехнических комплексов и систем на ос-
нове электроприводов объектов топливно-энергетического комплек-
са необходимо выполнять технико-экономическое обоснование раз-
личных технических решений в части электропривода и рекомен-
дуемых энергосберегающих мероприятий. Технико-экономическое
обоснование служит основой для выявления объектов первоочеред-
ного внедрения, для подготовки предложений по корректировке про-
ектной документации вновь сооружаемых объектов, для подготовки
технологических требований и технических заданий на разработку и
проектирование энергосберегающих систем и технологий.
Разработка энергосберегающих мероприятий предполагает
системный подход к решению задач и проблем, возникающих при их
реализации. Такой подход характеризуется согласованным решением
задач автоматизации и энергетических проблем при сохранении на
всех этапах разработки приоритетного значения технологических
процессов, протекающих на промышленных предприятиях.
При разработке и проектировании электротехнических ком-
плексов и систем с регулируемыми электроприводами необходимо
уделять внимание выбору между регулируемыми и нерегулируемы-
ми электроприводами, а также, их взаимодействию. При этом, на не-
которых объектах топливно-энергетического комплекса, например,
на компрессорных станциях магистральных газопроводов, стоит
проблема выбора между газотурбинными и электрическими приво-
дами центробежных нагнетателей газоперекачивающих агрегатов.
При внедрении регулируемого электропривода приходится
корректировать компоновочные решения, поскольку их использова-
ние позволяет укрупнить единичную мощность электротехнических
комплексов и уменьшить их количество. Благодаря этому, можно уп-
ростить технологическую схему предприятия. Кроме того, появляет-
ся возможность уменьшить строительные габариты зданий вновь со-
оружаемых объектов. При модернизации действующих объектов
возможно размещение более мощного оборудования на существую-
щих производственных площадях.
32
1.5.1. Обоснование эффективности
использования электрической энергии
регулируемыми электроприводами
Данная методика обоснования эффективности использования
регулируемого электропривода, в части использования электриче-
ской энергии, разработана Научно-исследовательским институтом
электроэнергетики и Московским энергетическим институтом. Ме-
тодика утверждена Министерством топлива и энергетики Российской
Федерации 19 декабря 1995 г [7].
Прежде всего, данная методика учитывает основные аспекты
энергосбережения и позволяет сделать предварительную оценку ре-
сурсосбережения в насосных и вентиляционных установках общего
назначения, используемых на разных промышленных объектах, в том
числе топливно-энергетического комплекса.
Методика нацелена на оценку энергетической и экономической
эффективности использования регулируемых электроприводов и не
отражает другие преимущества, связанные с их применением, на-
пример, улучшение характера протекания переходных режимов,
снижение затрат на обслуживание, уменьшение шума и пр. Этот ас-
пект можно оценить, используя методику, изложенную ниже в пунк-
те 1.5.3 (квалимметрический метод оценки качественных показате-
лей различных электроприводов). При этом, надо учесть, что мето-
дика (первая) распространяется на установки, находящиеся в экс-
плуатации, т.е., когда не изменяется запроектированная технологиче-
ская схема. Для вновь проектируемых установок с регулируемыми
электроприводами должны быть учтены аспекты, связанные с упро-
щением и удешевлением технологической схемы, например, отказом
от применения обратных клапанов, исключением заслонок, задви-
жек, уменьшением числа насосов и вентиляторов и др.
Способы и примеры предварительной оценки эффективности
применения регулируемого электропривода предназначены для пер-
сонала, разрабатывающего мероприятия по энергосбережению и от-
ветственного за эксплуатацию действующих насосных и вентиляци-
онных агрегатов на объектах топливно-энергетического комплекса,
например, теплоэлектростанциях, нефтеперекачивающих насосных
станциях, компрессорных станциях магистральных газопроводах и
других объектах.
33
Таблица 1.2
Исходные данные для расчета показателей энергоэффективности
регулируемого электропривода
Показатель
Единица
измерения
Обозначение
Номинальный расход турбомеханизма
м
3
/час
Qном
Номинальный напор турбомеханизма
мм р.cт.
Нном
Коэффициент полезного действия турбомеханизма
–
в.ном
Номинальная мощность двигателя
кВт
Рном
Номинальная скорость вращения двигателя
об/мин
nном
Коэффициент полезного действия двигателя
–
дв.ном
Потребляемая электродвигателем мощность
кВт
Р
Производительность турбомеханизма
м
3
/час
Q
Максимальное энергопотребление
кВт
Рmax
Максимальная производительность
м
3
/час
Qmax
Рассмотрим методику обоснования энергетической и экономи-
ческой эффективности использования регулируемого электроприво-
да взамен дросселирования. Такая оценка электропривода произво-
дится по заданным диаграммам требуемого расхода при расчетном
цикле работы приводного механизма. Исходные данные для расчета,
представлены в табл. 1.2.
Затем, строят зависимость потребляемой электродвигателем
мощности от относительного расхода, который можно посчитать
следующим образом
max
*
Q
Q
Q
.
(1.1)
Пример построения такой зависимости показан на рис.1.3. При
расчете энергетического и экономического эффекта от внедрения ре-
гулируемого электропривода, участвующих в процессе производства
электроэнергии, например на теплоэлектростанциях, график данной
зависимости перестраивается в аналогичную зависимость от относи-
тельной мощности энергоблока, с которой производительность пере-
оборудованного механизма находится в пропорциональной зависи-
мости следующим образом
*
max
max
*
Q
Q
Q
N
N
N
.
(1.2)
34
Пример построения зависимости потребляемой электродвига-
телем мощности от относительной мощности энергоблока показан на
рис.1.3, с учетом нижней шкалы.
Далее, определяют необходимую мощность полупроводнико-
вого преобразователя частоты
max
пч
2,1
1,1
P
P
.
(1.3)
После этого, необходимо построить зависимость потребляемой
электродвигателем мощности от относительного расхода или отно-
сительной мощности блока, при частотном регулировании скорости
вращения приводного электродвигателя по формуле
3
*
max
Q
P
P
,
(1.4)
и получают кривую 2 на рис. 1.3. Из графиков видно, что разница
между кривыми 1 и 2, соответствует величине экономии мощности
при частотном регулировании скорости вращения электродвигателя.
Затем, по величине номинальной мощности приводного элек-
тродвигателя, с помощью кривой 2, оценивают допустимый расход
турбомеханизма при номинальном режиме электродвигателя, и про-
веряют следующее условие
*
доп
1Q
,
(1.5)
где Q
*
доп – допустимый расход турбомеханизма при номинальном
режиме электродвигателя. Слишком большой запас по расходу сви-
детельствует о неудачном выборе приводного электрооборудования
и преобразователя частоты.
Рис. 1 .3. Зависимость потребляемой
электродвигателем мощности
от относительного расхода
(относительной мощности)
Р, о.е.
1
0
Рmax
ΔР
1
2
Q, о.е.
N, о.е.
1
1
0
35
После этого строят диаграмму зависимости относительного
расхода или относительной мощности блока от времени цикла рабо-
ты электропривода. Пример такой диаграммы показан на рис. 1.4. За
цикл, в данном случае, удобно принять число часов работы электро-
привода в году.
Затем, диаграмму относительного расхода, представленную на
рис.1.4, перестраивают с помощью рис. 1.3 в диаграмму сэкономлен-
ной мощности, определяя величину сэкономленной мощности на ка-
ждом интервале по соответствующему значению относительного
расхода. Пример такой диаграммы показан на рис. 1.5.
С использованием построенных диаграмм определяют количе-
ство сэкономленной энергии за цикл (сутки) работы регулируемого
электропривода. Это можно сделать следующим образом
m
i
i
it
P
ц
Э
,
(1.6)
где ΔPi – величина сэкономленной мощности; ti – интервал работы;
m – число участков цикла с разными величинами потерь мощности.
Затем определяют количество сэкономленной энергии за год
Тц
г
Э
Э
,
(1.7)
где Т – время работы электропривода в год.
Затем, определяют стоимость сэкономленной электроэнергии
за год при заданном тарифе на электроэнергию следующим образом
ээ
ц
ээ
Ц
Э
Э
,
(1.8)
где Цээ – стоимость одного киловатта в час (цена электроэнергии).
Рис.1 .4 . Диаграмма
относительного расхода
Рис.1 .5. Диаграмма
потерь мощности
ΔP
t
0
Tц
t1
tm
t2
Q
t
0
Tц
t1
tm
t2
36
Для широкого круга электроприводов турбомеханизмов срок
окупаемости выбранного электротехнического оборудования можно
определить следующим образом
k
T
ээ
пч
ок
Э
Ц
,
(1.9)
где Цпч – стоимость выбранного оборудования; k > 1 – коэффициент,
учитывающий эффект дополнительного ресурсосбережения, который
можно принять равным k = 1,25 ÷ 1,35.
Для электропривода насосов теплоэлектростанций при оценке
срока окупаемости нового электротехнического оборудования регу-
лируемого электропривода, сначала, определяют возможное увели-
чение номинальной мощности энергоблока. Это можно сделать сле-
дующим образом
ном
02
,
0
01
,
0
KN
N
,
(1.10)
где К = Р∑пч / Р∑ – коэффициент, равный отношению мощности элек-
троприводов, оснащенных преобразователями частоты (Р∑пч) к об-
щей мощности электроприводов предприятия (Р∑); Nном – номиналь-
ная мощность энергоблока.
Затем, определяют стоимость нового строительства электро-
станции
N
NС
эс
Ц
,
(1.11)
где СN – стоимость одного киловатта вновь сооружаемого объекта.
Наконец, определяют срок окупаемости регулируемого элек-
тропривода с использованием следующего соотношения
ээ
ээ
эс
ээ
Ц
Ц
Ц
С
С
T
.
(1.12)
Если значение Ц 0, то это означает, что затраты на новое
строительство превышают затраты на установку регулируемого
электропривода и его установка безусловно выгодна.
Пример расчета энергетической и экономической эффективно-
сти использования регулируемого электропривода приведен в при-
ложении А.
37
1.5.2. Обоснование эффективности
использования электроприводами
топливно-энергетических ресурсов
Одним из объектов топливно-энергетического комплекса, где
стоит задача обоснования эффективности расходования топливно-
энергетических ресурсов, являются газоперекачивающие агрегаты,
используемые на компрессорных станциях для транспортировки
природного газа по магистральным газопроводам.
При реконструкции старых компрессорных станций магист-
ральных газопроводов и строительстве новых станций, а также при
энергетическом обследовании компрессорных станций и разработке
энергосберегающих мероприятий, необходимо производить расчет
затрат топливно-энергетических ресурсов газоперекачивающими аг-
регатами и вспомогательным оборудованием.
Особенность оценки эффективности топливно-энергетических
ресурсов, расходуемых на объектах магистрального газопровода, за-
ключается в том, что оценка эффективности работы, собственно,
привода газоперекачивающего агрегата, является недостаточной. Не-
обходимо производить оценку эффективности компрессорного цеха,
состоящего из нескольких агрегатов, и компрессорных станций, со-
стоящих из нескольких цехов. Также, необходимо определить эф-
фективность взаимодействия агрегатов с газотурбинными и электри-
ческими приводами, а также регулируемых и нерегулируемых агре-
гатов, цехов и станций.
На эксплуатируемых сегодня компрессорных станциях, 87%
агрегатов имеют газотурбинный привод центробежных нагнетателей,
и всего 13% – электрический, причем, в большинстве случаев, этот
электропривод является нерегулируемым. Таким образом, при ре-
конструкции компрессорных станций и газоперекачивающих агрега-
тов, установленных на них, стоит вопрос технико-экономического
обоснования типа привода центробежных нагнетателей.
В подразделе 1.5.1 показан алгоритм технико-экономического
обоснования эффективности использования регулируемых и нерегу-
лируемых электроприводов турбомеханизмов. Эту методику можно
использовать, если на подлежащей реконструкции компрессорной
станции установлены нерегулируемые электроприводные газопере-
качивающие агрегаты.
38
Рассмотрим методику технико-экономического обоснования
регулируемого электропривода, если на компрессорной станции ус-
тановлены газотурбинные агрегаты. Данную методику можно адап-
тировать и для других объектов и предприятий, если необходимо
сделать технико-экономическое обоснование электрического приво-
да, в замен привода, работающего на другом виде топлива (природ-
ном газе, бензине, дизельном топливе и т.д.).
Изложенная методика оценки эффективности использования
топливно-энергетических ресурсов газоперекачивающими агрегата-
ми на компрессорных станциях, основана на СТО Газпром 2-1.20-
114-2007 «Методика энергоаудита газотранспортной системы» и
СТО Газпром 2-3.5-113-2007 «Методика оценки энергоэффективно-
сти газотранспортных объектов и систем» [8-10].
На этапе
документальной
подготовки
к
технико-
экономическому обоснованию производят обобщение и анализ пла-
новых, отчетных, технических и технологических документов, с це-
лью расчета показателей эффективности расхода топливно-
энергетических ресурсов на ретроспективном годовом интервале.
Для технико-экономического обоснования используется следующая
информация:
схема работы компрессорного цеха (тип нагнетателя, тип
газоперекачивающего агрегата и их количество, количество рабо-
тающих агрегатов, номинальная мощность агрегатов);
входное и выходное давление газа на входе и выходе цен-
тробежных нагнетателей;
температура газа на входе и выходе нагнетателей, темпера-
тура газа после аппаратов воздушного охлаждения;
плотность перекаченного газа;
коммерческий объем перекаченного газа;
состав или низшая теплота сгорания газа;
фактическая товарно-транспортная работа;
расход топливного газа, расходуемого на компримирование
и транспортировку природного газа;
объемы газа, расходуемые на прочие технические нужды
(продувки пылеуловителей, фильтров-сепараторов, объемы газа,
стравленного из контуров нагнетателя, либо количество стравлива-
ний за месяц, расход импульсного газа, объемы газа, стравленного
39
при капитальном ремонте коммуникаций и оборудования цеха);
другие потери газа;
ежемесячные показания счетчиков активной и реактивной
электроэнергии на входных фидерах, по которым производится ком-
мерческий расчет с поставщиком электрической энергии;
потребление электроэнергии на компримирование и на про-
чие технологические нужды.
Показатели, используемые для оценки эффективности расхода
топливно-энергетических ресурсов газоперекачивающими агрегата-
ми, представлены в табл. 1.3. В табл. 1.3 приняты следующие сокра-
щения: ГГПА – газотурбинный газоперекачивающий агрегат; ЭГПА
–
электроприводной газоперекачивающий агрегат. Также, в табл. 1.3
приведены необходимые исходные данные для расчета.
Таблица 1.3
Показатели энергоэффективности газоперекачивающих агрегатов
Исходные данные для расчета энергоэффективности
газоперекачивающих агрегатов
Показатель
Единица
измерения
Обозначение
Массовый расход топливного газа
кг/с
GТГ
Фактическая массовая низшая теплота сгорания
топливного газа
кДж/кг
QM
Фактическая низшая теплота сгорания
топливного газа
кДж/кг
QH
Внутренняя мощность центробежного
нагнетателя
кВт
Ni
Температурный показатель политропы
–
mТ
Показатель псевдоизоэнтропы
–
(k-1)/k
Расчетные показатели энергоэффективности
газоперекачивающих агрегатов
Показатель
Единица
измерения
Обозначение
Характеристика
Коэффициент полезного
действия ГГПА
–
ηГГПА
Коэффициент полезного
действия ЭГПА
–
ηЭГПА
Относительный
показатель
энергоэффективности
Удельный расход
топливного газа ГГПА
кг у.т./ кВт ч
EТГ
ГГПА
Удельный расход
электроэнергии ЭГПА
кВтч/кВтч
EЭЭ
ЭГПА
Удельный показатель
энергоэффективности
40
Коэффициент полезного действия газоперекачивающего агре-
гата с газотурбинным приводом вычисляется следующим образом
пол
е
ГГПА
,
(1.13)
где ηе – эффективный коэффициент полезного действия газотурбин-
ной установки; ηпол – политропный коэффициент полезного действия
центробежного нагнетателя.
Эффективный коэффициент полезного действия газотурбинной
установки вычисляется следующим образом
Н
ТГ
е
е
Q
G
N
,
(1.14)
где Nе – эффективная мощность на муфте привода; GТГ – массовый
расход топливного газа; QН – фактическая низшая теплота сгорания
природного газа.
Эффективная мощность на муфте привода вычисляется сле-
дующим образом
м
е
i
N
N
,
(1.15)
где ηм – механический коэффициент полезного действия центробеж-
ного нагнетателя (принимается равным 0,985 или оценивается при
проведении специальных испытаний); Ni – внутренняя мощность
центробежного нагнетателя.
Политропный коэффициент полезного действия центробежно-
го нагнетателя можно вычислить следующим образом
Т
пол
1
1
m
k
k
,
(1.16)
где mТ – температурный показатель политропы; (k-1)/k – показатель
псевдоизоэнтропы.
Коэффициент полезного действия газоперекачивающих агрега-
тов с электроприводом вычисляется по формуле
пол
пу
дв
пч
ЭГПА
,
(1.17)
где ηпч – коэффициент полезного действия преобразователя частоты;
ηдв – коэффициент полезного действия электродвигателя; ηпу – коэф-
фициент полезного действия преобразовательного устройства.
41
Удельный расход топливного газа газоперекачивающего агре-
гата с газотурбинным приводом можно рассчитать следующим обра-
зом
Н
ГГПА
ГГПА
ТГ
3600
Q
E
.
(1.18)
Удельный расход электроэнергии на компримирование элек-
троприводным газоперекачивающим агрегатом
ГПА
ГПА
ЭЭ
1
Э
Э
E
.
(1.19)
Для анализа причин возможного снижения показателей энерго-
эффективности газоперекачивающего агрегата с газотурбинным при-
водом используются показатели технического состояния газотурбин-
ной установки и центробежного нагнетателя. Эти показатели приве-
дены в табл. 1.4.
Таблица 1.4
Показатели технического состояния
газоперекачивающих агрегатов с газотурбинным приводом
Показатель
Единица
измерения
Обозначение
Характеристика
Коэффициент технического
состояния газотурбинной ус-
тановки по мощности
–
kNe
Коэффициент технического
состояния газотурбинной ус-
тановки
по топливному газу
–
kТГ
Показатели
технического
состояния
газотурбинной
установки
Коэффициент технического
состояния
центробежного нагнетателя
–
kн
Режимный коэффициент
работы нагнетателя
–
kр
Показатели
технического
состояния
центробежного
нагнетателя
Для
оценки
эффективности
расходования
топливно-
энергетических ресурсов компрессорных цехов используют локаль-
ные и системные показатели энергоэффективности, представленные
в табл. 1.5. Также, в табл. 1.5 приведены необходимые исходные
данные для расчета.
42
Таблица 1.5
Показатели энергоэффективности компрессорного цеха
Исходные данные для расчета энергоэффективности
компрессорного цеха (КЦ)
Показатель
Единица
измерения
Обозначение
Коэффициент рециркуляции газа в технологической
обвязке цеха
–
kрец
Степени повышения давления газа компрессорным
цехом
–
ε
Номинальное значение политропного коэффициента
полезного действия
–
ηпол0
Объем расходуемого топливного газа
т у.т.
Qтг
кц
Объем природного газа, расходуемого на техноло-
гические нужды
тыс.м
3
Qтн
кц
Политропная работа сжатия
кВт ч
Lкц
Расход электроэнергии
кВт ч
Wээ
кц
Установленная мощность
тыс. кВт
Nуст
кц
Календарное время работы
ч
Tк
Эквивалентная товаротранспортная работа
компрессорного цеха
млн м
3
км
Aкц
Расчетные показатели энергоэффективности
компрессорного цеха
Показатель
Единица
измерения
Обозначение Характеристика
1. Показатели локальной энергоэффективности КЦ
Коэффициент полезного действия
–
ηКЦ
Эксплуатационный коэффициент по-
лезного действия
–
ηН
Удельный расход топливного газа
кг у.т./кВт ч
EТГ
КЦ
Удельный расход газа
на технологические нужды
м
3
/кВт ч
EТН
КЦ
Удельный расход электроэнергии
кВт ч/кВт ч
EЭЭ
КЦ
Удельный расход
топливно-энергетических ресурсов
кг у.т./кВт ч
EТЭР
КЦ
2. Показатели системной энергоэффективности КЦ
Удельный показатель эффективности
расхода газа
м
3
/млн м
3
км
ЭГ
КЦ
Удельный показатель эффективности
расхода электроэнергии
кВт ч/
млн м
3
км
ЭЭЭ
КЦ
Удельный показатель
эффективности расхода
топливно-энергетических ресурсов
кг у.т ./
млн м
3
км
ЭТЭР
КЦ
На единицу
эквивалентной
товаротранс-
портной
работы
компрессорного
цеха
43
Таблица 1.6
Коэффициенты влияния гидравлических сопротивлений
коммуникаций цеха в зависимости от степени повышения давления газа
Параметр
Значение параметров
Степени повышения давления
1,1
1,2
1,3
1,4
1,5
1,6
Коэффициенты влияния гид-
равлических сопротивлений
коммуникаций цеха
10,0
5,7
3,9
3,1
2,6
2,3
Коэффициент полезного действия компрессорного цеха можно
определить следующим образом
н
рец
с
КЦ
k
k
,
(1.20)
где kс – коэффициент влияния гидравлических сопротивлений обвяз-
ки компрессорного цеха; kрец – коэффициент рециркуляции газа в
технологической обвязке цеха; ηн – эксплуатационный коэффициент
полезного действия центробежного нагнетателя.
Коэффициенты влияния гидравлических сопротивлений ком-
муникаций цеха в зависимости от степени повышения давления газа
компрессорным цехом выбирается по табл. 1.6.
Эксплуатационный коэффициент полезного действия центро-
бежного нагнетателя вычисляется следующим образом
пол0
пу
р
н
Н
k
k
,
(1.21)
где kн – коэффициент технического состояния; kр – режимный коэф-
фициент работы; ηпол0 – номинальное значение политропного коэф-
фициента полезного действия.
Удельный расход топливного газа на компримирование ком-
прессорным цехом вычисляется следующим образом
3
Н
кц
кц
тг
КЦ
ТГ
10
7000
Q
L
Q
E
,
(1.22)
где Qтг
кц
–
объем расходуемого топливного газа; Lкц – политропная
работа сжатия.
Удельный расход газа на технологические нужды вычисляется
следующим образом
к
кц
уст
кц
тн
КЦ
ТН
Т
N
Q
E
,
(1.23)
44
где Qтн
кц
–
объем природного газа, расходуемого на технологические
нужды; Nуст
кц
–
установленная мощность компрессорного цеха; τ –
календарное время работы.
Удельный расход электроэнергии на компримирование газа
компрессорным цехом вычисляется следующим образом
3
кц
кц
ээ
КЦ
ЭЭ
10
L
W
E
,
(1.24)
где -Wээ
кц
–
расход электроэнергии на компримирование газа.
Удельный расход топливно-энергетических ресурсов на ком-
примирование газа компрессорным цехом за расчетный период вы-
числяется следующим образом
3
кц
кц
стн
ээ
кц
стн
г
3
кц
кц
тэр
КЦ
ТЭР
10
10
L
W
k
Q
k
L
В
E
,
(1.25)
где Втэр
кц
–
расход топливно-энергетических ресурсов; Qстн
кц
–
расход
газа; Wстн
кц
–
расход электроэнергии; kг – коэффициент перевода при-
родного газа в условное топливо; kээ – коэффициент перевода элек-
троэнергии в условное топливо.
Коэффициент перевода природного газа в условное топливо
можно рассчитает следующим образом
7000
H
г
Q
k
.
(1.26)
Коэффициент перевода электроэнергии в условное топливо
принимается равным
325
,
0
ээ
k
.
(1.27)
Расход газа для электроприводных компрессорных цехов явля-
ется исходным. Для газотурбинных компрессорных цехов этот пара-
метр можно определить следующим образом
кц
тн
кц
тг
кц
стн
Q
Q
Q
.
(1.28)
Расход электроэнергии для газотурбинных компрессорных це-
хов является исходным. Для электроприводных компрессорных це-
хов его можно определить следующим образом
кц
эгпа
кц
стн
2,1 W
W
,
(1.29)
где Wэгпа
кц
–
потребляемая электроэнергия электроприводными газо-
перекачивающими агрегатами.
45
Удельный показатель эффективности расхода газа компрес-
сорным цехом рассчитывается следующим образом
3
кц
кц
стн
КЦ
Г
10
А
Q
Э
,
(1.30)
где A
кц
–
эквивалентная товаротранспортная работа цеха.
Удельный показатель эффективности расхода электроэнергии
компрессорным цехом рассчитывается следующим образом
3
кц
кц
стн
КЦ
ЭЭ
10
А
W
Э
.
(1.31)
Удельный показатель эффективности расхода топливно-
энергетических ресурсов компрессорным цехом рассчитывается сле-
дующим образом
3
кц
кц
тэр
КЦ
ТЭР
10
А
В
Э
.
(1.32)
При оценке экономической эффективности расхода топливно-
энергетических ресурсов газоперекачивающими агрегатами ком-
прессорных цехов, необходимо определить следующие показатели:
капитальные затраты на строительство компрессорной
станции с разным типом привода газоперекачивающих агрегатов
(проект, стоимость оборудования, стоимость материалов, монтаж и
наладку, налоги и др. статьи);
разницу в стоимости капитальных затрат на строительство и
затрат на расчетный период стоимости эксплуатации компрессорной
станции с разным типом привода газоперекачивающих агрегатов;
стоимостный эффект от расхода топливно-энергетических
ресурсов компрессорными станциями с разным типом привода газо-
перекачивающих агрегатов;
экологические аспекты эксплуатации разных типов приво-
дов газоперекачивающих агрегатов;
срок окупаемости мероприятия оборудования разных типов
приводов газоперекачивающих агрегатов.
Пример расчета показателей энергоэффективности газоперека-
чивающих агрегатов, а также дополнительные задания приведены в
приложении А.
46
1.5.3. Обоснование эффективности
эксплуатационно-технических характеристик
регулируемых электроприводов
Для оценки качественных характеристик промышленных элек-
троприводов можно использовать квалиметрический метод, который
основан на экспертной оценке технических характеристик [11]. Су-
ществует несколько видов экспертных оценок:
1. Непосредственная численная оценка (субъективная). Этот
метод заключается в присваивании характеристикам электропривода
числовых значений, по установленной шкале.
2. Система ранжирования (приоритеты целей). Этот метод за-
ключается в расположении электроприводов в порядке убывания,
руководствуясь одним или несколькими выбранными показателями
сравнения характеристик.
3. Система баллов (соответствие ожиданиям). Этот метод за-
ключается в присвоении характеристикам электропривода оценки в
баллах.
Для оценки динамических характеристик электропривода этим
методом, в качестве критериев оценки, могут быть выбраны:
возможность регулирования скорости вращения;
диапазон регулирования скорости вращения;
направление регулирования скорости вращения;
плавность регулирования скорости вращения;
точность регулирования скорости вращения;
допустимая нагрузка на двигатель и другие параметры.
Для оценки энергетических характеристик электроприводов
этим методом, в качестве критериев оценки, могут быть выбраны:
суммарный коэффициент гармонических искажений на-
пряжения на входе и выходе;
возможность регулирования коэффициента мощности;
значение коэффициента мощности;
значение коэффициента полезного действия и другие пара-
метры.
Пример оценки характеристик регулируемых электроприводов
квалиметрическим методом, а также дополнительные задания, при-
ведены в приложении А.
47
2. ЭНЕРГЕТИЧЕСКИЕ ХАРАКТЕРИСТИКИ
ПРОМЫШЛЕННЫХ ЭЛЕКТРОПРИВОДОВ
С АСИНХРОННЫМ ДВИГАТЕЛЕМ
2.1. Коэффициент полезного действия
нерегулируемого электропривода
Электроприводы промышленных предприятий потребляют
около 75% всей вырабатываемой электроэнергии. Поэтому, эффек-
тивность использования этой электроэнергии имеет огромное тех-
ническое и экономическое значение.
Анализируя эффективность использования электрической
энергии промышленным объектом, следует различать энергетиче-
скую эффективность самого технологического процесса, который
осуществляется технологическим комплексом с электроприводом, и
эффективность собственно электропривода, характеризуемую его
коэффициентом полезного действия, который является основным
энергетическим показателем.
Многие промышленные электроприводы являются нерегули-
руемыми, и их электроснабжение осуществляется от сети перемен-
ного тока с постоянной амплитудой и частотой 50 Гц. Структурная
схема такого электропривода приведена на рис.2.1.
Коэффициент полезного действия нерегулируемого электро-
привода представляет собой отношение механический мощности,
развиваемой механизмом, к потребляемой электрической мощности
пу
дв
тр
2
рм
/
1
2
1
/
1
1
рм
нэп
P
P
P
P
P
P
P
P
,
(2.1)
Рис. 2 .1. Структурная схема
нерегулируемого электропривода
Рис. 2 .2. Коэффициент полезного действия
асинхронного электропривода
P/Pном
η
1
0.5
0
1
0.5
ηтр
ηдв
ηнэп
АД
РМ
Uст = const
f=50Гц
Uсэ = const
f=50Гц
Р1
ΔРтр
Р1
/
ΔРдв
Р2
ΔРпу
Ррм
ТР
48
где Р1 – мощность электрическая, потребляемая электродвигателем;
P1
/
–
мощность вторичной цепи трансформатора; Р2 –мощность ме-
ханическая на валу асинхронного двигателя; Ррм – мощность меха-
ническая на валу рабочего механизма; ηтр – коэффициент полезного
действия трансформатора; ηдв – коэффициент полезного действия
двигателя; ηпу – коэффициент полезного действия передаточного
устройства.
Коэффициент полезного действия приводного асинхронно-
го двигателя определяется следующим образом
дв
2
2
/
1
2
дв
P
P
P
P
P
,
(2.2)
где ΔPдв – потери, возникающие в электродвигателе [12-15].
При известном значении номинального коэффициента полез-
ного действия (ηдв ном), который является паспортным параметром,
величину потерь в асинхронном двигателе, работающего в номи-
нальном режиме, можно определить следующим образом
ном
дв
ном
дв
2
ном
дв
2
ном
дв
2
ном
дв
1
P
P
P
P
.
(2.3)
Потери в асинхронном двигателе принято разделять на посто-
янные, которые также называются магнитными, и переменные, ко-
торые также называются электрическими. Потери в асинхронном
двигателе можно выразить следующим образом
пер
пост
дв
P
P
P
,
(2.4)
где ΔPпост – постоянные потери; ΔPпер – переменные потери.
Под постоянными потерями асинхронного двигателя подразу-
мевают потери, не зависящие от нагрузки. К ним относятся потери
на возбуждение, возникающие вследствие протекания тока намагни-
чивания в обмотке статора, и механические потери, которые можно
разделить на потери трения, возникающие вследствие трения в под-
шипниках, и вентиляционные потери, возникающие вследствие тре-
ния ротора и охлаждающего вентилятора электродвигателя о воздух.
Постоянные потери можно выразить следующим образом
вен
тр
воз
мех
воз
пост
P
P
P
P
P
P
,
(2.5)
где ΔPвоз – потери на возбуждение; ΔPмех – механические потери;
ΔPтр – потери от трение; ΔPвен – вентиляционные потери.
49
Необходимо отметить, что постоянные потери не зависят от
нагрузки, но зависят от амплитуды и частоты питающего напряже-
ния, величины магнитного потока и скорости вращения ротора.
Под переменными потерями асинхронного двигателя подра-
зумевают потери, зависящие от нагрузки. К ним относятся электри-
ческие потери в статоре и роторе, возникающие вследствие протека-
ния тока статора и ротора в обмотках, соответственно, и добавочные
потери, возникающие вследствие пульсаций индукции. Переменные
потери можно выразить следующим образом
доб
р
ст
пер
P
P
P
P
,
(2.6)
где ΔPст – потери в статоре; ΔPр – потери в роторе; ΔPр – потери от
пульсаций индукции.
Электрические потери в статоре определяются как
ст
2
ст
ст
3R
I
P
,
(2.7)
где Iст – ток статора; Rст – активное сопротивление обмоток статора.
Электрические потери в роторе определяются как
/
р
2
/
р
р
2
р
р
3
3
R
I
R
I
P
,
(2.8)
где Iр – ток ротора; Rр – активное сопротивление обмоток ротора;
Iр
/
–
приведенное значение тока ротора к току статора; Rр
/
–
приве-
денное значение активного сопротивления ротора к активному со-
противлению статора.
Переменные потери в асинхронном двигателе в общем виде
можно выразить следующим образом
/
р
ст
1
/
р
ст
0
пер
1
1
R
R
s
P
R
R
s
M
P
,
(2.9)
где М – электромагнитный момент; ω0 – синхронная частота враще-
ния (частота вращения магнитного поля статора); s – скольжение.
С учетом описанных потерь в асинхронном двигателе, зависи-
мость коэффициента полезного действия от нагрузки можно выра-
зить следующим образом
пер
ном
2
дв
ном
2
дв
дв
P
P
P
,
(2.10)
где βдв – коэффициент загрузки асинхронного двигателя; Р2ном – но-
минальное значение мощности на валу электродвигателя.
50
Коэффициент загрузки определяется как
ном
2
2
P
P
.
(2.11)
В общем виде кривая зависимости коэффициента полезного
действия асинхронного двигателя от нагрузки показана на рис. 2.2.
Из графика видно, что при работе электропривода с неполной на-
грузкой электродвигателя, коэффициент полезного действия снижа-
ется. Аналогичная ситуация происходит и при перегрузке асинхрон-
ного электродвигателя.
Коэффициент полезного действия трансформатора, кото-
рый используется для согласования уровней напряжения сети элек-
троснабжения и приводного электродвигателя, а также для гальва-
нической развязки между ними, можно определить как
тр
/
1
/
1
1
/
1
тр
P
P
P
P
P
,
(2.12)
где ΔPтр – потери мощности в трансформаторе.
Потери мощности в трансформаторе принято разделять на по-
тери холостого хода, которые также называются магнитными, и по-
тери короткого замыкания, которые также называются электриче-
скими. Потери в трансформаторе можно выразить как
кз
xx
тр
P
P
P
,
(2.13)
где ΔPхх – потери холостого хода; ΔPкз – потери короткого замыка-
ния.
Потери холостого хода в трансформаторе не зависят от на-
грузки и складываются из потерь на вихревые токи и гистерезис
хх2
хх1
хх
P
P
P
,
(2.14)
где ΔРхх1 – потери на вихревые токи; ΔРхх2 – потери на гистерезис.
Потери короткого замыкания в первичных и вторичных цепях
трансформатора можно представить следующим образом
2
2
2
1
2
1
2
к
1
к
кз
3
3
R
I
R
I
P
P
P
з
з
,
(2.15)
где ΔРкз1 – потери короткого замыкания первичных обмоток транс-
форматора; ΔРкз2 – потери короткого замыкания вторичных обмоток
трансформатора; I1 и I2 – токи первичных и вторичных цепей транс-
форматора, соответственно; R1 и R2 – активные сопротивления пер-
вичных и вторичных цепей трансформатора, соответственно.
51
С учетом описанных потерь в трансформаторе, зависимость
его коэффициента полезного действия от нагрузки можно выразить
следующим образом
,
1
хх
тр
ном
тр
кз
2
тр
кз
2
тр
хх
хх
тр
ном
тр
кз
2
тр
тр
ном
тр
тр
P
Р
Р
Р
P
P
Р
Р
Р
(2.16)
где Рном тр – номинальная мощность трансформатора; βдв тр – коэффи-
циент загрузки трансформатора
тр
ном
2
2
тр
ном
1
1
тр
I
I
I
I
,
(2.17)
где I1ном тр – номинальный ток первичной цепи трансформатора;
I2ном тр – номинальный ток вторичной цепи трансформатора.
Коэффициент полезного действия передаточного устрой-
ства, используемого в электроприводе для согласования частоты
вращения ротора приводного электродвигателя и рабочего механиз-
ма, не является постоянной величиной. Значение этого параметра
передаточного устройства существенно зависит от его вида, струк-
туры и прикладываемых на входе и выходе моментов.
В общем виде коэффициент мощности передаточного устрой-
ства можно выразить следующим образом
пу
рм
рм
2
рм
пу
P
P
P
P
P
,
(2.2)*
где ΔPпу – потери мощности в передаточном устройстве электропри-
вода.
В качестве передаточных устройств в электроприводе исполь-
зуются ременные передачи, трансмиссии, электромагнитные муфты
и редукторы различного устройства, например, цилиндрические (го-
ризонтальные,
вертикальные,
планетарные),
коническо-
цилиндрические и червячные редукторы.
Наибольшим значением коэффициента полезного действия
обладают планетарные редукторы, также, они обладают удовлетво-
рительными показателями по шумовым и массогабаритным харак-
теристикам.
52
2.2. Коэффициент мощности и коэффициент нагрузки
нерегулируемого электропривода
Асинхронные двигатели потребляют из сети электроснабже-
ния не только активную мощность, но и реактивную. Если первая,
преобразуется в полезную механическую мощность на валу элек-
тродвигателя, то реактивная мощность потребляется электродвига-
телем для создания электромагнитного поля. Поступая в асинхрон-
ный двигатель, реактивная мощность, возвращается обратно в сеть
электроснабжения с удвоенной частотой и вызывает дополнитель-
ные потери в сети электроснабжения и трансформаторах. По неко-
торым оценкам, около 60% всей реактивной мощности потребляется
асинхронными двигателями, а еще 25% – трансформаторами.
Если электроснабжение приводного электродвигателя осуще-
ствляется от сети с синусоидальными токами, то для оценки потреб-
ляемой реактивной мощности можно использовать коэффициент
мощности, который можно выразить следующим образом
2
1
2
1
1
1
1
cos
Q
P
P
S
P
,
(2.18)
где S1 и Q1 – полная и реактивная мощность, потребляемая электро-
приводом, соответственно [16].
Потери в линиях сети электроснабжения, в которых протекают
синусоидальные токи, можно определить следующим образом
2
2
сэ
этс
2
1
этс
2
сэ
2
1
2
1
сэ
cos
1
U
R
P
R
U
Q
P
P
,
(2.19)
где Rэтс – активное сопротивление электротехнической системы (на-
грузки сети); Ucэ – напряжение сети электроснабжения.
Из выражения (2.18) видно, что коэффициент мощности асин-
хронного двигателя, влияет на величину потерь в сети электроснаб-
жения следующим образом: чем выше коэффициент мощности элек-
тродвигателя, тем ниже потери мощности в сетях электроснабжения.
Также, при увеличении коэффициента мощности приводного асин-
хронного электродвигателя уменьшаются потери на всех силовых
элементах электропривода, находящимися между источником элек-
трической энергии и, собственно, приводным электродвигателем.
Таким образом, коэффициент мощности является важнейшей энер-
гетической характеристикой электропривода.
53
Для полного анализа эффективности использования электри-
ческой энергии, кроме коэффициента мощности, целесообразно ис-
пользовать коэффициент нагрузки, т.к. при значениях коэффициента
мощности близких к единице, значение потребляемой реактивной
мощности еще достаточно значительно. Например, при значении ко-
эффициента мощности 0,957, потребляемая нагрузкой реактивная
мощность составляет 30 % потребляемой активной мощности, а при
коэффициенте мощности 0,7, величина потребляемой реактивной
мощности практически равна величине активной мощности.
Коэффициент нагрузки (или коэффициент реактивной мощно-
сти) характеризует величину потребления реактивной мощности по
отношению к активной мощности, и может быть выражен как
1
1
tg
P
Q
.
(2.20)
Значения полной, активной и реактивной мощности при раз-
ных коэффициентах мощности и коэффициентах нагрузки приведе-
ны в табл. 2.1 [16].
Передача реактивной мощности к потребителю и ее потребле-
ние в сети электроснабжения приводят к дополнительным потерям
активной мощности. Потери активной мощности в сети электро-
снабжения через коэффициент нагрузки можно выразить следую-
щим образом
этс
2
сэ
2
2
1
2
2
сэ
этс
2
1
сэ
tg
1
cos
1
R
U
P
U
R
P
P
.
(2.21)
Таблица 2.1
Значения полной, активной и реактивной мощности
при разных коэффициентах мощности и коэффициентах нагрузки
P1, % 100 100 100 100 100 100 100 100 100 100
Q1,% 10
15
20
25
30
35
40
45
50
55
S1, % 100,4 101,1 101,9 103,0 104,4 105,9 107,7 109,6 111,8 114,1
cos φ 0,995 0,988 0,980 0,970 0,957 0,943 0,928 0,911 0,894 0,876
tg φ 0,1 0,15 0,2 0,25 0,3 0,35 0,4 0,45 0,5 0,55
P1, % 100 100 100
100 100 100 100 100 100 100
Q1,% 60 65
70
75
80
85
90
95
100 173
S1, % 116,6 119,2 122,0 125 128 131,2 134,5 137,9 141,4 199
cos φ 0,857 0,838 0,819 0,8 0,780 0,761 0,743 0,724 0,707 0,5
tg φ 0,6 0,65 0,7
0,75 0,8 0,85 0,9 0,95
1 1,73
54
Из выражения (2.21) следует, что при неизменных параметрах
и режимах работы асинхронного двигателя, напряжении и сопро-
тивлении электротехнической системы (электропривода), потери
мощности в сети электроснабжения обратно пропорциональны
квадрату коэффициента мощности электродвигателя
2
сэ
cos
1
f
P
.
(2.22)
В табл. 2.2 приведены результаты расчета величины потерь
мощности в сети электроснабжения при различных значениях коэф-
фициента мощности и коэффициента нагрузки приводного электро-
двигателя [16].
Используя данные табл. 2.1 и 2.2, построены зависимости по-
терь мощности в сети электроснабжения от коэффициента мощности
и коэффициента нагрузки электродвигателя, которые приведены на
рис.2.3 и рис.2.4, соответственно.
Таблица 2.2.
Расчет потерь мощности в сети электроснабжения
при разных коэффициентах мощности и коэффициентах нагрузки
Р1, %
cos φ
tgφ
Q1, %
S1, %
ΔPсэ, %
1
0
0
100
10
0,9
0,484
48,4
111
12,3
0,8
0,75
75
125
15,6
0,7
1,02
102
143
20,4
0,5
1,732
173
200
40
0,316
3,016
301,6
316,5
100
Рис. 2 .3. Коэффициент мощности
Рис. 2 .4. Коэффициент нагрузки
cos φ
ΔРсэ, %
100
50
0
1
0.5
75
25
tgφ
ΔРсэ, %
100
50
0
3
1.5
75
25
55
2.3. Коэффициент полезного действия
асинхронного электропривода
с полупроводниковым преобразователем частоты
На современных промышленных объектах топливно-
энергетического комплекса, с целью обеспечения высокого уровня
автоматизации и энергосбережения, используют регулируемые элек-
троприводы. Для регулирования частоты вращения в силовой канал
асинхронного электропривода включается полупроводниковый пре-
образователь частоты, с помощью которого осуществляется элек-
троснабжение и управление режимами работы приводного двигате-
ля и рабочего механизма. Структурная схема регулируемого элек-
тропривода с полупроводниковым преобразователем частоты при-
ведена на рис.2.5.
Коэффициент полезного действия регулируемого электропри-
вода с полупроводниковым преобразователем частоты можно пред-
ставить следующим образом
пу
дв
пч
тр
2
pм
/
2
2
/
1
/
2
1
/
1
рэп
P
P
P
P
P
P
P
P
,
(2.23)
где Р2
/
–
мощность на выходе преобразователя частоты; ηпч – коэф-
фициент полезного действия преобразователя частоты.
Рис. 2 .5. Структурная схема
регулируемого электропривода
Рис. 2 .6. Структурная схема
двухзвенного преобразователя частоты
К трансформатору
и сети электроснабжения
Автономный
инвертор
Выпрямитель
К приводному
асинхронному двигателю
АД
U2 = const
f=50Гц
Uст = var
f=var
ПЧ
ТР
Uсэ = const
f=50Гц
Р1
ΔРтр
Р1
/
ΔРдв
ΔРпч
Р2
/
РМ
Р2
ΔРпу
Ррм
56
Коэффициент полезного действия полупроводникового
преобразователя частоты можно определить следующим образом
пч
/
2
/
2
/
1
/
2
пч
P
P
P
P
P
,
(2.24)
где ΔРпч – потери в преобразователе частоты.
На сегодняшний день, наибольшее распространение получили
полупроводниковые преобразователи с двухзвенной топологией, в
состав которых входят: трехфазный мостовой диодный выпрями-
тель; звено постоянного тока; транзисторный автономный инвертор.
Структурная схема такого преобразователя представлена на рис. 2.6.
Потери в рассматриваемом полупроводниковом преобразова-
теле частоты можно представить следующим образом
аи
зпт
в
пч
P
P
P
P
,
(2.25)
где ΔРв – потери мощности в выпрямителе; ΔРзпт – потери мощности
в звене постоянного тока; ΔРаи – потери мощности в автономном
инверторе [17].
В любом режиме работы электротехнического комплекса с ре-
гулируемым электроприводом, транзисторы автономного инвертора
могут находиться в трех состояниях [18]:
1. в полностью закрытом состоянии (режим отсечки);
2. в полостью открытом состоянии (режим насыщения);
3. в активном состоянии (режим коммутации).
При работе транзисторов в различных режимах, возникающие
потери мощности различны по величине. Таким образом, потери
мощности в автономном инверторе преобразователя частоты можно
представить следующим образом
тр
дин
рн
ро
тр
аи
P
P
P
N
P
N
P
,
(2.26)
где N – количество транзисторов в автономном инверторе; ΔРтр –
потери мощности в одном транзисторе; ΔРро – потери мощности в
транзисторе в закрытом состоянии; ΔРрн – потери мощности в тран-
зисторе в открытом состоянии; ΔРдин тр – динамические (коммутаци-
онные) потери в транзисторе.
По величине потерь в транзисторах и тепловому сопротивле-
нию можно определить температуру нагрева транзисторов автоном-
ного инвертора следующим образом
57
тр
тр
тр6R
P
,
(2.27)
где Rтр – тепловое сопротивление транзистора (берется из паспорт-
ных данных транзисторов или определяется экспериментально).
Потери мощности, возникающие в транзисторе, когда он на-
ходится в закрытом состоянии, можно определить следующим обра-
зом
кэ
к0
ро
5,0 U
I
P
,
(2.28)
где Iк0 – неуправляемый ток коллектора (ток утечки); Uкэ – напряже-
ние коллектор-эмиттер, прикладываемое к запертому транзистору.
Потери мощности, возникающие в транзисторе, когда он на-
ходится в открытом состоянии, можно определить следующим обра-
зом
ост
кэ
ном
к
рн
5,0
U
I
P
,
(2.29)
где Iк ном – номинальный ток, протекающий через транзистор; Uкэ ост –
остаточное напряжение коллектор-эмиттер в открытом состоянии.
В различных режимах работы автономного инвертора, при пе-
реключении транзисторов, коммутируются значительные токи, ко-
торые могут превышать номинальные в несколько раз. Возникаю-
щие при этом потери называются динамическими потерями. Эти по-
тери являются преобладающими в полупроводниковом преобразова-
теле частоты в целом. Динамические потери, выделяемые в виде те-
пловой энергии, могут вызвать перегрев и пробой транзисторов.
Динамические потери зависят от частоты коммутации авто-
номного инвертора, инерционных свойств транзисторов, вида схемы
преобразователя и характера нагрузки. Динамические потери возни-
кают как при включении, так и при выключении транзистора. Одна-
ко, при включении динамические потери в транзисторе оказываются
ничтожно малыми и их можно не учитывать при инженерных расче-
тах. В общем случае динамические потери в транзисторах автоном-
ных инверторов можно определить следующим образом
k
f
U
I
P
к
тр
ост
кэ
ном
к
тр
дин
,
(2.30)
где fк – частота коммутации; k –коэффициент динамических потерь,
зависящий от вида схемы преобразователя и режимов работы тран-
зисторов (берется из паспортных данных транзисторов).
58
Полупроводниковые диоды выпрямителя, входящего в состав
преобразователя частоты, могут находиться в трех состояниях [18]:
1. в проводящем состоянии (прямое включение диода);
2. в запертом состоянии (обратное включение диода);
3. в переходном состоянии (режим коммутации).
Таким образом, потери мощности в диодном выпрямителе
преобразователя частоты можно выразить следующим образом
ддин
обр
пр
д
в
P
P
P
K
P
K
P
,
(2.31)
где K – количество диодов в выпрямителе; ΔРд – потери мощности в
одном диоде; ΔРпр – потери мощности в проводящем состоянии;
ΔРобр – потери мощности в запертом состоянии; ΔРдин д – динамиче-
ские (коммутационные) потери.
Потери мощности в проводящем состоянии диода можно оп-
ределить следующим образом
ср
д
пр
5,0
I
U
P
,
(2.32)
где ΔUд – падение напряжения на диоде; Iср – среднее значение вы-
прямленного тока через диод.
Падение напряжения на открытом диоде можно выразить сле-
дующим образом
д
дин
ср
0
д
R
I
U
U
,
(2.33)
где ΔU0 – пороговое напряжение диода; Rдин д – динамическое сопро-
тивление диода. Для инженерных расчетов пороговое напряжение
германиевых диодов можно принять 0,5 В, а кремниевых –1 В. Ди-
намическое сопротивление берется из паспортных данных диодов.
Потери мощности, возникающие при нахождении диода в за-
пертом состоянии, можно определить следующим образом
обр
обр
обр
5,0
I
U
Р
,
(2.34)
где Iобр – ток, протекающий через диод в запертом состоянии (ток
утечки); Uобр – обратное напряжение диода.
Динамические потери мощности в диоде можно определить
следующим образом
д
ср
обр
д
дин
5,0
I
U
Р
,
(2.35)
где τд – эффективное время жизни дырок в диоде. Для импульсных и
высокочастотных диодов τд = (0,14 ÷ 0,3) мкс, для сплавных низко-
частотных диодов τд (10 ÷ 20) мкс.
59
2.4. Потери мощности
в переходных режимах работы электропривода
На потери электрической энергии в переходных процессах
влияет множество факторов, например: структура электропривода;
алгоритмическое обеспечение; характер и величина нагрузки и мно-
гое другое. Важнейшим фактором, оказывающим влияние на вели-
чину потерь в асинхронном электроприводе, является способ регу-
лирования частоты вращения в переходных процессах. В общем ви-
де потери мощности можно представить, как разницу потребленной
мощности и мощности на валу за время переходного процесса
М
М
P
P
P
0
2
1
,
(2.36)
где ω – частота вращения ротора асинхронного двигателя.
Как известно, способы регулирования частоты вращения
асинхронного двигателя можно разделить по характеру изменения
синхронной частоты вращения. При параметрическом и реостатном
регулировании, синхронная частота остается постоянной, т.е.
const
0
,
(2.37)
а при частотном – изменяется
var
0
.
(2.38)
Рассмотрим потери мощности в асинхронном электроприводе
при постоянном значении синхронной частоты. При таком управле-
нии механические потери имеют много большее значение, чем элек-
трические, что позволяет пренебречь последними. Постоянные по-
тери составляют около 5% от общих потерь в электродвигателе при
переходном процессе.
Потери мощности в электроприводе за время переходного
процесса (при пуске или торможении) в режиме холостого хода при
постоянном значении синхронной частоты вращения в общем виде
можно выразить следующим образом
T
T
dt
t
M
dt
t
Р
P
0
0
01
1пп
,
(2.39)
T
T
dt
t
M
dt
t
Р
P
0
02
2пп
,
(2.40)
где Т – период переходного процесса; t – время [12].
При работе электродвигателя в режиме холостого хода дина-
мический момент электродвигателя можно выразить следующим
60
образом
t
M
dt
d
J
M
M
M
с
дв
дин
,
(2.41)
где Мдв – момент электродвигателя; Мс – момент сопротивления; J –
момент инерции ротора электродвигателя и рабочего механизма.
Тогда, изменение потребляемой и выходной мощности асин-
хронного двигателя при изменении частоты вращения можно выра-
зить следующим образом
0
0
0
0
1пп
2
1
J
d
J
dt
t
M
P
T
,
(2.42)
ср
0
2пп
2
1
J
d
J
dt
t
M
P
T
,
(2.43)
где 1 и 2 – начальная и конечная частота вращения асинхронного
двигателя в переходном процессе, соответственно; ср – среднее
значение частоты вращения за время переходного процесса.
Следовательно, потери мощности в асинхронном электродви-
гателе в переходном процессе можно записать в следующем виде
ср
0
ср
0
2пп
1пп
пп
J
J
J
P
P
P
,
(2.44)
1
2
,
(2.45)
1
2
ср
5,0
.
(2.46)
Значение потерь электрической энергии в переходных процес-
сах в различных режимах работы электропривода на основе асин-
хронного двигателя приведены в табл. 2.3 [12].
Таблица 2.3
Значение потерь в электроприводе в различных режимах работы
Режим работы
Торможение
Параметр
Пуск
Динами-
ческое
Противо-
включение
Реверс
Начальная частота вращения
ω1=0
ω1=ω0
ω1=ω0
Конечная частота вращения
ω2=ω0
ω2=0
ω2=-ω0
Средняя частота вращения
ωср = 0,5ω0
ωср= 0,5ω0
0
Изменение частоты вращения
Δω=ω0
Δω= -ω0
Δω= -ω0 Δω= -2ω0
Потребляемая мощность
Jω0
2
0
Jω0
2
2
Jω0
2
Мощность на валу
0,5Jω0
2
-0,5Jω0
2
-0,5Jω0
2
0
Потери в роторе
0,5Р1
0,5Jω0
2
3Jω0
2
/2
2Jω0
2
Потери в статоре
ΔРр(R1/R2
/
)
61
При работе электродвигателя с постоянной нагрузкой, если
принять, что Мдв = Мср, то динамический момент и уравнение дви-
жения электродвигателя можно выразить следующим образом
dt
d
J
M
M
M
с
ср
дин
.
(2.47)
Отсюда можно выразить приращение времени
дин
M
d
J
dt
.
(2.48)
Тогда, изменение потребляемой и выходной мощности при
изменении частоты вращения можно выразить следующим образом
0
0
дин
с
0
0
0
1пп
1
2
1
K
J
M
M
J
d
J
dt
t
M
P
T
,
(2.49)
ср
ср
дин
с
0
2пп
1
2
1
K
J
M
M
J
d
J
dt
t
M
P
T
,
(2.50)
где К – коэффициент увеличения момента инерции.
Используя эти выражения можно выразить потери мощности в
асинхронном электродвигателе в переходном процессе при измене-
нии частоты вращения ротора с постоянной нагрузкой
.
ср
0
ср
0
2пп
1пп
пп
K
J
K
J
K
J
P
P
P
(2.51)
Динамический момент асинхронного двигателя может быть,
как отрицательным, так и положительным, и зависит от режима ра-
боты электродвигателя. При пуске электропривода, значение дина-
мического момента больше нуля, следовательно, и коэффициент
увеличения момента инерции больше единицы
0
дин
M
,
1
K.
(2.52)
Таким образом, пуск асинхронного двигателя под нагрузкой
соответствует пуску электродвигателя с увеличенным моментом
инерции, а, следовательно, и увеличенными потерями мощности.
При торможении электропривода, динамический момент
меньше нуля и коэффициент увеличения момента инерции меньше
единицы
0
дин
M
,
1
K,
(2.53)
что соответствует режиму торможения с большим моментом инер-
ции, и с меньшими потерями.
62
Теперь можно рассмотреть потери мощности при частотном
способе регулирования, когда в процессе изменения частоты враще-
ния вала ротора, изменяется синхронная частота. При частотном ре-
гулировании и постоянном моменте сопротивления, значение дина-
мического момента можно записать следующим образом
t
M
M
t
M
дин
cр
,
(2.54)
t
t
0
.
(2.55)
Расход потребляемой мощности за время переходного процес-
са можно записать следующим образом
.
2
1
2
1
0
дин
c
0
0
1пп
d
K
J
d
t
M
M
dt
t
t
M
P
T
(2.56)
Расход механической мощности на валу за время переходного
процесса можно записать следующим образом
.
2
1
2
1
дин
c
0
2пп
d
K
J
d
M
M
dt
t
M
P
T
(2.57)
С учетом этого, потери мощности в электроприводе при час-
тотном регулировании можно записать следующим образом
ср
0
2пп
1пп
пп
K
J
P
P
P
,
(2.58)
дин
с
M
M
,
(2.59)
M
,
(2.60)
где ΔМ – изменение момента при изменении частоты вращения.
Потери мощности во время торможения при регулировании с
изменением синхронной частоты будут иметь выражение, зависящее
от значения динамического момента, приведены в табл. 2.4 [12].
Таблица 2.4
Значение потерь в электроприводе в различных режимах торможения
Торможение
Параметр
Δω>0
Δω<0
Δω=0
Синхронная частота
ω0=ω -Δω
ω0=ω+Δω
ω0=ω
Потери мощности
J|K|(Δω)[(ω1-ω2)] J|K|(Δω)[-(ω1-ω2)]
0
63
2.5. Электромагнитная совместимость
промышленных электроприводов
и качество электрической энергии
Одной из главных проблем использования регулируемого
электропривода с полупроводниковым преобразователем частоты
является обеспечение его электромагнитной совместимости с сетью
электроснабжения и приводным электродвигателем.
Снижение уровня электромагнитной совместимости преобра-
зователя частоты выражается следующим образом:
снижение качества электрической энергии в системе элек-
троснабжения (генерирование высокочастотных составляющих тока
и напряжения в сеть электроснабжения);
снижение коэффициента мощности сети;
повышение потерь мощности;
нагрев электротехнических элементов систем электроснаб-
жения (проводов, трансформаторов, дросселей и др.);
ухудшение работы систем автоматизации и телемеханики;
ложное срабатывание систем автоматики и защиты;
образование электромагнитных полей, которые оказывают
негативное влияние на систему автоматического управления самого
электропривода;
провалы напряжения и перенапряжения при пуске и тор-
можении электрических двигателей.
Международные и отечественные стандарты жестко ограни-
чивают эмиссию высших гармоник тока и напряжения в сеть элек-
троснабжения и определяют уровень электромагнитной совмести-
мости различных потребителей.
В настоящее время в Российской Федерации действует стан-
дарт ГОСТ 32144 – 2013 «Электрическая энергия. Совместимость
технических средств электромагнитная. Нормы качества электриче-
ской энергии в системах электроснабжения общего назначения». Ра-
нее действовал стандарт ГОСТ 13109–97 «Нормы качества электри-
ческой энергии в системах электроснабжения общего назначения»
[19-20].
В действующем стандарте ГОСТ 32144 – 2013, уровень элек-
тромагнитной совместимости определен как регламентированный
уровень кондуктивной электромагнитной помехи, используемый в
64
качестве опорного для координации между допустимым уровнем
помех, вносимым техническими средствами пользователей электри-
ческих сетей, и уровнем помех, воспринимаемым техническими
средствами, подключенными к электрической сети, без нарушения
их нормального функционирования.
Упрощённое определение электромагнитной совместимости
электропривода можно сформулировать как способность электро-
привода функционировать в реальных условиях под воздействием
электромагнитных помех, при этом, не создавая недопустимых по-
мех для работы другого электрооборудования и окружающей среды.
Международные и национальные стандарты, регламентирую-
щие качество электрической энергии, электромагнитную совмести-
мость электротехнических комплексов и систем, и применение элек-
троприводов с полупроводниковыми преобразователями частоты,
создаются различными международными организациями и ассоциа-
циями, например [21]:
европейские нормы – EN;
международные электротехнические стандарты – IEC;
немецкие индустриальные нормы – DIN и нормы ассоциа-
ции немецких электротехников – VDE;
японские индустриальные стандарты – JIS и нормы ассо-
циации производителей электрических машин Японии – JEM;
нормы Института инженеров электриков и электронщиков
США – IEEE.
Международные стандарты электромагнитной совместимости
представлены в Приложении Б.1. Международные и национальные
стандарты, регламентирующие различные аспекты применения ре-
гулируемого электропривода с полупроводниковыми преобразова-
телями частоты представлены в на схеме Приложении Б.2.
Таким образом, воздействие полупроводниковых преобразова-
телей частоты промышленных электроприводов на сеть электро-
снабжения и других потребителей, обусловлено влиянием полупро-
водниковых преобразователей на качество электрической энергии. В
ГОСТ 32144 – 2013 качество электрической энергии определено как
степень соответствия характеристик электрической энергии в дан-
ной точке электрической системы совокупности нормированных по-
казателей качества электрической энергии.
65
2.5.1. Состав показателей
качества электрической энергии
В стандарте ГОСТ 32144 – 2013 определены следующие пока-
затели качества электрической энергии [19].
Отклонение частоты – отклонение значения основной часто-
ты напряжения от номинального значения
ном
f
f
fm
,
(2.61)
где fm , fном – действующее и номинальное значение частоты.
Медленные изменения напряжения – отклонения напряже-
ния от номинальных значений, длящиеся более одной минуты. По-
казателями качества электрической энергии, характеризующими
медленные изменения напряжения, являются отрицательное откло-
нение и положительное отклонение напряжения в точке передачи
электрической энергии от номинального значения, соответственно,
100
ном
ном
U
U
U
U
,
(2.62)
100
ном
ном
U
U
U
U
,
(2.63)
где U(−), U(+) – значения напряжения, меньшие и большие номиналь-
ного, соответственно; Uном – номинальное значение напряжения.
Колебания напряжения электропитания – одиночное бы-
строе отклонение амплитуды напряжения от номинального значе-
ния, длящееся менее одной минуты,
100
ном
1
U
U
U
U
i
i
t
,
(2.64)
где Ui, Ui+1 – значения следующих один за другим экстремумов оги-
бающей действующие значения напряжения основной частоты, оп-
ределенных на каждом полупериоде основной частоты.
Несинусоидальность напряжения – отклонения формы на-
пряжения от синусоидальной. Показателями качества электрической
энергии, характеризующими несинусоидальность напряжения, яв-
ляются коэффициент n – ой гармонической составляющей напряже-
ния и суммарный коэффициент гармонических составляющих на-
пряжения, соответственно:
66
100
%
100
ном
1
U
U
U
U
K
n
n
n
U
,
(2.65)
100
%
100
ном
40
2
2
1
40
2
2
U
U
U
U
K
n
n
n
n
U
,
(2.66)
где U(n) – амплитудные (действующие) значения гармонических со-
ставляющих напряжения; U(1) – амплитудное (действующее) значе-
ние основной гармонической составляющей напряжения. Допусти-
мые значения этих параметров приведены в табл. 2.5 и 2.6.
Несимметрия напряжений – отклонения действующих зна-
чений основных составляющих линейных напряжений трехфазной
системы или углов сдвига фаз между основными составляющими
линейных напряжений от равных значений. Показателями качества
электрической энергии, характеризующими несимметрию напряже-
ния в трехфазных системах, являются коэффициент несимметрии
напряжений по обратной последовательности и коэффициент не-
симметрии напряжений по нулевой последовательности, соответст-
венно,
100
1
1
1
2
2
U
U
KU
,
(2.67)
100
3
1
1
1
0
0
U
U
KU
,
(2.68)
где U0(1), U2(1), U1(1) – действующие значения первой гармоники на-
пряжения нулевой последовательности, первых гармоник напряже-
ния прямой и обратной последовательностей, соответственно.
Провал напряжения (перенапряжения) – временное умень-
шение (увеличение) напряжения. Показателями качества электриче-
ской энергии, характеризующими провалы напряжения являются
длительность провала напряжения (перенапряжения)
нач
кон
п
t
t
t
,
(2.69)
и глубина (высота) провала напряжения (перенапряжения), соответ-
ственно
100
ном
min
ном
п
U
U
U
U
,
(2.70)
100
ном
max
ном
п
U
U
U
U
,
(2.71)
67
частота провалов напряжения (перенапряжений)
п
п
п
п
N
t
U
m
F
,
(2.72)
где tнач, tкон – начальный и конечный моменты времени провала на-
пряжения (перенапряжения), соответственно; Umin , Umax – мини-
мальное и максимальное значения напряжения, соответственно;
т(Uп, tп) – число провалов напряжения (перенапряжений) глуби-
ной (высотой) Uп и длительностью tп за период времени наблюде-
ния; Nп – суммарное число провалов напряжения за период времени
наблюдений.
Импульсное напряжение или временное перенапряжение –
перенапряжение, представляющее собой одиночный импульс на-
пряжения или колебание напряжения, длительностью до нескольких
милисекунд. Показателями качества электрической энергии, харак-
теризующими временное перенапряжение являются длительность
временного перенапряжения и коэффициент временного перенапря-
жения
ном
max
и
2U
U
K
.
(2.73)
Длительность временного перенапряжения вычисляется по
формуле аналогичной (2.69).
Прерывание напряжения – снижение напряжения меньше
5 % номинального значения напряжения. Прерывания напряжения
характеризуются длительностью и подразделяются на длительные
(более 3 мин) и кратковременные (не более 3 мин).
В современных промышленных электроприводах, в которых
используются полупроводниковые преобразователи частоты, элек-
тродвигатель длительное время работает под воздействием несину-
соидальных и несимметричных напряжений и токов, что оказывает
сильное влияние на его энергетические и динамические характери-
стики. Также, длительным фактором воздействия на электродвига-
тель могут быть медленные изменения напряжения. Рассмотрим бо-
лее подробно влияния несинусоидальных напряжений, несиммет-
ричных напряжений, медленных изменений напряжения и отклоне-
ние частоты питающего напряжения на работу электроприводов с
асинхронными двигателями.
68
Таблица 2.5
Предельные значения суммарных коэффициентов гармонических составляющих
Уровень напряжения сети электроснабжения
0,38 кВ
6-20 кВ
35 кВ
110-330 кВ
Значение
суммарного
коэффициента
гармонических
составляющих
12,0%
8,0 %
6,0 %
3,0 %
Таблица 2.6
Значения коэффициентов гармонических составляющих напряжения
Действующие значения гармоники напряжения Un, %U1
Порядок
гармоники
напряжения
n
0,38 кВ
6-20 кВ
35 кВ
110-220 кВ
2
2
1,5
1
0,5
3
5
3
1,5
4
1
0,7
0.5
0,3
5
6
4
3
1,5
6
0,5
0,3
0,3
0,2
7
5
3
2,5
1
8
0,5
0,3
0,3
0,2
9
1,5
1
0,4
10
0,5
0,3
0,3
0,2
11
3,5
2
2
1
12
0,2
0,2
0,2
0,2
13
3,0
2
1,5
0,7
14
0,2
0,2
0,2
-
15
0,3
0,3
0,2
16
0,2
0,2
0,2
-
17
2,0
1,5
1
0,5
18
0,2
0,2
0,2
-
19
1,5
1
1
0,4
20
0,2
0,2
0,2
-
21
0,2
0,2
0,2
22
0,2
0,2
0,2
-
23
1,5
1
1
0,4
24
0,2
0,2
0,2
-
25
1,5
1
1
0,4
>25
-
-
-
-
69
2.5.2. Дополнительные замечания к терминологии
параметров несинусоидальности
Параметры несинусоидальности напряжения,
установленные в Российской Федерации
Показатели качества электрической энергии, характеризую-
щие несинусоидальность напряжения, их название в действующем
стандарте ГОСТ 32144 – 2013 и устаревшем стандарте ГОСТ 13109
–
97 и обозначения приведены в табл. 2.7.
Таблица 2.7
Параметры несинусоидальности напряжения
No
ГОСТ 13109-97
(действовал до 2013 года)
ГОСТ 32144 – 2013
(действует с 2014 года) Обозначение
1. Коэффициент n-ой гармонической
составляющей напряжения
Коэффициент гармонической
составляющей напряжения
KU(n)
2.
Коэффициент искажения
синусоидальности
кривой напряжения
Суммарный коэффициент
гармонических
составляющих напряжения
KU
Параметры несинусоидальности сигналов,
используемые в радиоэлектронике и электротехнике
Данные термины могут использоваться в радиоэлектронике и
электротехнике, но в силовой электронике целесообразно использо-
вать термины стандартов Российской Федерации или международ-
ные термины.
Рассмотрим параметры несинусоидальности сигналов, исполь-
зуемые в радиоэлектронике и электротехнике [22]:
1) коэффициент искажений сигнала (КИ) – отношение дейст-
вующего значения основной (первой) гармоники к действующему
значению сигнала:
А
А
А
А
K
n
n
А
1
и
,
(2.74)
где А(n) – действующее значение n-ой гармоники; А – действующее
значение сигнала.
2) коэффициент нелинейных искажений сигнала (КНИ) –
отношение среднеквадратичной суммы действующих значений
высших гармоник сигнала (кроме постоянной составляющей) к
среднеквадратичной сумме всех действующих значений гармоник
70
100
...
...
2
n
2
4
2
3
2
2
2
1
2
n
2
4
2
3
2
2
нA
A
A
A
A
A
A
A
A
A
K
.
(2.75)
3) коэффициент гармонических искажений сигнала (КГИ) –
отношение среднеквадратичной суммы действующих значений
высших гармоник сигнала к первой гармонике
100
...
1
2
n
2
4
2
3
2
2
гA
A
A
A
A
A
K
.
(2.76)
Рассмотрим параметры мощности:
1) коэффициент мощности – отношение абсолютной величины
активной мощности к полной мощности
S
P
K
м
.
(2.77)
2) искаженный коэффициент мощности – произведение коэф-
фициента мощности и коэффициента искажения напряжения и тока
м
1
и
1
и
ми
K
K
K
K
I
U
.
(2.78)
Отличие коэффициента нелинейных искажений сигнала от ко-
эффициента гармонических искажений сигнала заключается в сле-
дующем. Коэффициент гармонических искажений показывает, какая
доля энергии содержится в высших гармониках сигнала по сравне-
нию с энергией, содержащейся в первой гармонике сигнала, а коэф-
фициент нелинейных искажений показывает, какая доля энергии со-
держится в высших гармониках по сравнению с полной энергией
сигнала. Разница значений параметров несинусоидальности пред-
ставлена в табл. 2.8. Зависимость значений параметров несинусои-
дальности от формы сигнала представлена в табл. 2.9.
Таблица 2.8
Значения параметров несинусоидальности
КнА
КгА
0%
0%
20%
20%
30%
29%
40%
37%
50%
45%
60%
51%
70%
57%
71
Таблица 2.9
Зависимость параметров несинусоидальности от формы сигнала
Форма сигнала
Коэффициент
искажений
сигнала
Значение
коэффициента
нелинейных
искажений
Значение
коэффициента
гармонических
искажений
Идеальная синусоида
0%
0%
Форма сигнала незначительно
отличается от синусоиды,
но искажения на осциллограмме
не видны
3%
3%
Форма сигнала незначительно
отличается от синусоиды, но
искажения на осциллограмме видны
1
5%
5%
Форма идеального
симметричного
треугольного сигнала
0,99
12%
12%
Форма трапецеидального
или ступенчатого сигнала
-
21%
22%
Форма идеального симметричного
прямоугольного сигнала (меандр)
0,9
43%
48%
Форма идеального
пилообразного сигнала
-
63%
80%
Параметры несинусоидальности напряжения,
установленные в странах Европейского Союза
В странах Европейского Союза действует стандарт качества
электрической энергии EN 62040-3. Рассмотрим параметры несину-
соидальности сигналов, используемые в этом стандарте [23]:
1) individual harmonic distortion – ratio of the r.m.s. value of a
special harmonic component to the r.m.s. value of the fundamental com-
ponent (пункт 3.3.29).
Индивидуальное гармоническое искажение – отношение сред-
неквадратичного значения гармоники к среднеквадратичному зна-
чению фундаментальной гармоники.
2) total harmonic distortion (THD) factor – ratio of the r.m.s. value
of the harmonic content of an alternating quantity to the r.m.s. value of
the fundamental component quantity (пункт 3.3.27):
total harmonic distortion of voltage (THDU);
total harmonic distortion of current (THDI).
72
Коэффициент полного гармонического искажения – отноше-
ние среднеквадратичного значения гармоник (кроме первой) к сред-
неквадратичному значению фундаментальной гармоники. Для на-
пряжения (THDU) и тока (THDI) вычисляется соответственно
100
...
1
2
2
4
2
3
2
2
U
U
U
U
U
THDU
n
,
(2.79)
100
...
1
2
2
4
2
3
2
2
I
I
I
I
I
THDI
n
.
(2.80)
3) total distortion factor (TDF) – ratio of the r.m.s. value of the to-
tal harmonic content to the r.m.s. value of the alternating quantity (пункт
3.3.28).
Коэффициент полного искажения – отношение среднеквадра-
тичного значения гармоник (кроме первой) к среднеквадратическо-
му значению всех гармоник
100
...
...
2
n
2
4
2
3
2
2
2
1
2
n
2
4
2
3
2
2
A
A
A
A
A
A
A
A
A
HDF
.
(2.81)
Связь коэффициента полного гармонического искажения и ко-
эффициента полного искажения выражена следующим образом
2
1 TDF
TDF
THD
,
(2.82)
2
1 THD
THD
TDF
.
(2.83)
2.5.3. Влияние несинусоидального напряжения
на коэффициент полезного действия
и коэффициент мощности электропривода
Используемые в асинхронных электроприводах преобразова-
тели частоты, генерируют высокочастотные гармонические состав-
ляющие напряжений и токов, как в сеть электроснабжения, вызывая
дополнительные потери мощности в трансформаторах и линиях
электроснабжения, так и в обмотки асинхронного двигателя, вызы-
вая дополнительные потери мощности в приводном двигателе.
73
Потери мощности в асинхронном двигателе, с учетом потерь,
вызванных высокочастотными гармоническими составляющими,
можно выразить следующим образом
дв
гар
пер
пост
дв
P
P
P
P
,
(2.84)
где ΔPгар дв – потери мощности в электродвигателе, вызванные воз-
действием высших гармонических составляющих.
Тогда, коэффициент полезного действия асинхронного двига-
теля можно выразить следующим образом
дв
гар
пер
пост
2
2
дв
2
2
дв
P
P
P
P
P
P
P
P
.
(2.85)
Потери мощности в электродвигателе, вызванные воздействи-
ем высших гармонических составляющих, можно выразить сле-
дующим образом
40
2
2
2
п
ст
дв
гар
2
n
n
U
n
n
K
К
P
Р
,
(2.86)
где Кп – кратность пускового тока асинхронного двигателя [24].
Потери в трансформаторе, с учетом потерь вызванных высо-
кочастотными гармоническими составляющими, можно выразить
следующим образом
тр
гар
кз
хх
тр
P
P
P
P
,
(2.87)
где ΔPгар тр – потери мощности в трансформаторе, вызванные воз-
действием высших гармонических составляющих.
Тогда, коэффициент полезного действия трансформатора
можно выразить следующим образом
тр
гар
кз
хх
/
1
/
1
тр
P
P
P
P
P
.
(2.88)
Потери мощности в трансформаторе, вызванные воздействием
высших гармонических составляющих, можно выразить следующим
образом
40
2
2
кз
кз
хх
тр
гар
6,0
n
n
U
U
n
n
K
U
P
K
P
P
,
(2.89)
где Uкз – напряжение короткого замыкания трансформатора (в про-
центах) [24].
74
Потери мощности в сети электроснабжения, с учетом потерь
вызванных воздействием высших гармонических составляющих,
можно выразить следующим образом
,
40
2
сэ
2
сэ
40
2
пэ
сэ
2
сэ
сэ
гар
сэ
общ
сэ
n
n
n
n
n
R
I
Р
К
R
I
Р
Р
Р
Р
(2.90)
где ΔPгар сэ – потери мощности в сети электроснабжения, вызванные
воздействием высших гармонических составляющих; I(n) – гармони-
ческая составляющая тока, вызванная гармонической составляющей
напряжения; Rсэ – сопротивление линии электроснабжения; Kпэ – ко-
эффициент, учитывающий влияние поверхностного эффекта [24].
Коэффициент мощности электропривода с преобразователем
частоты, на выходе которого напряжения и токи по форме отлича-
ются от синусоидальной, можно вычислить следующим образом:
ном
ном
)1(
1
1
ном
ном
1
1
1
cos
I
U
I
U
I
U
P
S
P
,
(2.91)
где Iном – номинальное значение тока; I(1) – действующее значение
основной гармоники тока [12, 13].
Выражение коэффициента мощности асинхронного электро-
привода с полупроводниковым преобразователем частоты (2.91),
можно записать следующим образом
)1(
1
1
cos
I
UK
K
,
(2.92)
где KU(1) и KI(1)– коэффициент первой гармонической составляющей
напряжения и тока, соответственно. Зависимости коэффициента
мощности электропривода от загрузки и коэффициентов гармониче-
ских составляющих приведены на рис. 2.7 и рис. 2.8.
Рис. 2 .7. Коэффициент мощности
электродвигателя
Рис. 2 .8. Коэффициент мощности
электропривода с преобразователем частоты
P/Рном
λ
1
0.5
0
1
0.5
KU(1)= 0,95
KI(1) = 0,95
KU(1) = 0,9
KI(1) = 0,9
соs φ
1
0.5
0
1
0.5
P/Рном
75
2.5.4. Влияние несимметрии напряжения
на коэффициент полезного действия электропривода
При использовании преобразователей частоты в электропри-
водах, автономный инвертор которого работает в режиме широтно-
импульсной модуляции, формируемое на обмотках статора асин-
хронного двигателя трехфазное напряжение является несимметрич-
ным. Такое напряжение вызывает появление тока обратной последо-
вательности, протекающего в обмотках асинхронного двигателя.
В результате протекания в обмотках асинхронного двигателя
токов обратной последовательности, возникают дополнительные по-
тери в электродвигателе [24], которые можно вычислить следующим
образом
2
0
2
п
ст
дв
нес
41
,
2
U
K
К
P
P
.
(2.93)
Величину потерь в асинхронном двигателе с учетом потерь,
вызванных несимметрией напряжения, можно представить следую-
щим образом
дв
нес
дв
гар
пер
пост
дв
P
P
P
P
P
,
(2.94)
а коэффициент полезного действия асинхронного двигателя –
дв
нес
дв
гар
пер
пост
2
2
дв
2
2
дв
P
P
P
P
P
P
P
P
P
.
(2.95)
Дополнительные потери в трансформаторах, возникающие
под действием несимметричных напряжений, можно определить
следующим образом
2
0
кз
кз
хх
тр
нес
U
K
U
P
P
P
.
(2.96)
Потери и коэффициент полезного действия трансформатора,
соответственно, можно выразить следующим образом
тр
нес
тр
гар
кз
xx
тр
P
P
P
P
P
,
(2.97)
тр
нес
тр
гар
кз
хх
/
1
/
1
тр
P
P
P
P
P
P
.
(2.98)
Таким образом, несимметрия напряжения, подводимого к об-
моткам статора асинхронного двигателя, приводит к снижению
мощности на валу электродвигателя.
76
Таблица 2.10
Значение коэффициента снижения
мощности асинхронного двигателя
Рис. 2 .9. Зависимость
коэффициента полезного действия
от несимметрии напряжения
К0U,% Kсм,% К0U,% Kсм,%
0
1.00
3.0
0.89
0.5
1.00
3.5
0.85
1.0
1.00
4.0
0.82
1.5
0.97
4.5
0.78
2.0
0.95
5.0
0.76
2.5
0.93
–
–
В табл. 2.10 приведено значение коэффициента уменьшения
мощности электродвигателя (Kсм) при различных значениях коэффи-
циента несимметрии напряжения по нулевой последовательности.
На рис. 2.9 приведены зависимости коэффициента полезного дейст-
вия от несимметрии напряжения [25].
2.5.5. Влияние медленного изменения напряжения
на коэффициент полезного действия
и коэффициент мощности электропривода
Асинхронные двигатели, выбираются таким образом, чтобы
при работе в номинальном режиме их коэффициент полезного дей-
ствия и коэффициент мощности имели максимальные значения, что
достигается при равенстве постоянных и переменных потерь мощ-
ности. Изменение напряжения влияет как на постоянные, так и на
переменные потери в асинхронном двигателе, таким образом, одно-
значного влияния на характеристики двигателя изменение напряже-
ния не оказывает и зависит от нагрузки на валу.
При работе с номинальной нагрузкой увеличение напряжения
повлечет увеличение магнитного потока, и, как следствие, увеличе-
нию тока холостого хода и постоянных потерь. Вследствие этого,
уменьшаться коэффициент полезного действия и коэффициент
мощности двигателя. Уменьшение напряжения опасно тем, что это
приведет к уменьшению критического электромагнитного момента
асинхронного двигателя. Это может привести к тому, что резкое
увеличение нагрузки на валу электродвигателя, может привести к
нарушению устойчивого режима работы.
K0U, %
η
1
0.5
0
2
Pном
1
3
0,5Pном
77
При работе электродвигателя с неполной нагрузкой и пони-
женным напряжением статора, угроза нарушения устойчивого ре-
жима работы асинхронного двигателя отсутствует, так как умень-
шение постоянных потерь приведет к увеличению коэффициента
полезного действия и коэффициента мощности.
На рис. 2.10 и рис. 2.11 приведены зависимости коэффициента
полезного действия и коэффициента мощности асинхронного двига-
теля, соответственно, от напряжения при разной загрузке [25].
Изменение параметров асинхронного двигателя при изменении
напряжения приведено в табл. 2.11.
Рис. 2 .10. Зависимость коэффициента
полезного действия от напряжения
Рис. 2.11. Зависимость коэффициента
мощности от напряжения
Таблица 2.11
Изменение параметров и характеристик
электропривода при изменении напряжения
Изменение напряжения
Характеристика
- 10%
+10 %
Коэффициент полезного действия при
Р2 = Рном
-2%
1%
Р2=0,75Рном
const
const
Р2 = 0,5 Рном
-1%÷2%
1%÷2%
Коэффициент мощности при
Р2 = Рном
1%
-3%
Р2=0,75Рном
2%÷3%
-4%
Р2 = 0,5 Рном
4%÷5%
-5%÷-6%
Ток ротора при номинальной нагрузке
14%
11%
Ток статора при номинальной нагрузке
10%
-7%
Пусковой ток
-10%÷-12%
10%÷-12%
Синхронная частота вращения
const
const
Скольжение, %
23%
-17 %
P1/Pном
1
0.5
0
1
0.5
Uном
0,75Uном
cos φ
Р/Рном
η
1
0.5
0
1
0.5
Uном
0,75Uном
78
2.5.6. Влияние отклонения частоты напряжения
на коэффициент полезного действия
и коэффициент мощности электропривода
Отклонение частоты напряжения от номинального значения
при постоянном напряжении приводит к снижению энергетических
характеристик электроприводов с асинхронными двигателями.
Известно, что магнитный поток асинхронного двигателя, соз-
даваемый током намагничивания, протекающий в обмотках статора,
можно представить в следующем виде
об1
1
ст
м
44
,
4
K
w
f
U
Ф
,
(2.100)
где w1 – количество витков обмотки статора; Коб1 – конструктивный
обмоточный коэффициент; f – частота напряжения статора.
Ток ротора можно представить в следующем виде
cos
м
м
2
Ф
C
M
I
,
(2.101)
где γ – угол сдвига фаз между ЭДС и током ротора; См - конструк-
тивный коэффициент.
При увеличении частоты напряжения, пропорционально воз-
растает частота вращения ротора электродвигателя. Если нагрузка
электродвигателя имеет «вентиляторную» характеристику, то нагру-
зочный момент возрастает пропорционально квадрату частоты вра-
щения ротора электродвигателя, т. е. частоты напряжения, а магнит-
ный поток асинхронного двигателя уменьшается обратно пропор-
ционально изменению частоты. Это приводит к резкому увеличению
тока ротора. При возрастании частоты на 10% ток ротора асинхрон-
ного двигателя, используемого в электроприводе турбомеханизма,
увеличивается примерно в 1,5 раза, что приводит к дополнительным
потерям мощности и снижению коэффициента полезного действия.
При уменьшении частоты напряжения увеличиваются значе-
ния магнитного потока и тока намагничивания. В асинхронных дви-
гателях уменьшение частоты на 10% приводит к увеличению тока
намагничивания на 20-30%. Так как, ток намагничивания является
практически реактивным, его рост приводит к увеличению потреб-
ления реактивной мощности и снижению коэффициента мощности.
79
2.6. Электромеханическая совместимость
промышленных электроприводов
и качество электромеханического преобразования
В современных асинхронных электроприводах с преобразова-
телями частоты, выходное напряжение автономного инвертора
представляет собой высокочастотную последовательность прямо-
угольных импульсов и содержит в своем спектре высшие гармони-
ческие составляющие. Под действием каждой высшей гармоники
напряжения, в обмотке статора электродвигателя протекает соответ-
ствующая гармоника тока, которая индуцирует соответствующее ей
магнитное поле. Эти электромагнитные процессы оказывают сле-
дующее влияние на работу приводного двигателя:
снижение качества электрической энергии подводимого к
обмоткам приводного электродвигателя (генерирование высокочас-
тотных составляющих тока и напряжения);
повышение пульсаций электромагнитного момента;
снижение виброакустических характеристик приводного
электродвигателя, т.е. увеличение акустического шума и появление
вибраций;
появление резонансных явлений в электродвигателе;
ухудшение прочностных характеристик механических час-
тей электродвигателя;
ускоренное электрическое старение обмоток приводного
электродвигателя;
сокращение срока службы;
возникновение проблемы «длинного» кабеля.
Таким образом, электромеханические аспекты электромагнит-
ной совместимости автономного инвертора и приводного двигателя
можно выделить в отдельную научно-техническую проблему [26].
В теории электропривода для характеристики управления элек-
тродвигателем используются такие характеристики, как: диапазон ре-
гулирования; плавность регулирования; точность регулирования; бы-
стродействие и другие. В общем, эти понятия тоже можно отнести к
качеству электромеханического преобразования, но этот термин ха-
рактеризует, именно, влияние качества электроэнергии на механиче-
ские и эксплуатационно-технические параметры электродвигателя.
80
2.6.1. Определение и состав показателей
качества электромеханического преобразования
Понятию электромеханической совместимости можно дать
следующее определение. Электромеханическая совместимость – это
способность электрического двигателя обеспечить удовлетвори-
тельный уровень электромеханического преобразования при откло-
нении параметров качества потребляемой электрической энергии от
нормативно установленных значений.
Под качеством электромеханического преобразования можно
понимать степень соответствия механических и технико-
эксплуатационных характеристик приводного электродвигателя ус-
тановленным значениям, отклонение которых может происходить
под воздействием возмущающих электромагнитных факторов, при
которых сохраняется эффективное функционирование электротех-
нического комплекса с электроприводом или протекание обеспечи-
ваемого электроприводом технологического процесса.
Причинами снижения качества электромеханического преоб-
разования является снижение качества электрической энергии. Ос-
новными, наиболее значимыми, факторами, влияющими на качество
электромеханического преобразования, является гармонические со-
ставляющие напряжения, тока и несимметрия напряжения.
Показателями качества электромеханического преобразования
можно считать следующие характеристики:
коэффициенты гармонических составляющих электромаг-
нитного момента электродвигателя;
паразитные электромагнитные поля и моменты;
колебание электромагнитного момента;
колебание частоты вращения;
величину обратного скольжения;
величину электромагнитного и механического шума;
вибрацию электродвигателя;
резонансные частоты;
длину кабеля, соединяющего преобразователь частоты и
электродвигатель;
величину сокращения срока службы электродвигателя;
величину подшипниковых токов.
81
2.6.2. Влияние несинусоидального напряжения
на электромагнитный момент электропривода
Наибольший негативный эффект на электромеханическое пре-
образование в приводном асинхронном электродвигателе оказывают
гармонические составляющие напряжения.
Электромагнитный момент асинхронного двигателя в общем
виде можно выразить следующим образом
b
a
pC
M
5,1
,
(2.102)
где р – число пар полюсов асинхронного двигателя; С - коэффици-
ент, значения которого представлены в табл. 2.12, в зависимости от
выбора векторов a и b, где kст = Lм/Lст; kр= Lм/Lр; σ = 1– kст kр – коэф-
фициенты электромагнитной связи статора, ротора и коэффициент
рассеяния, соответственно, Lст, Lр, Lм – индуктивность обмотки ста-
тора, ротора и цепи намагничивания, соответственно [27].
Если к обмоткам статора асинхронного двигателя прикладыва-
ется синусоидальное трехфазное напряжение, то есть спектральный
состав напряжения представлен только основной гармоникой, то
электромагнитный момент асинхронного двигателя, представленный
через ток статора и потокосцепление ротора, можно записать в сле-
дующем виде
р
ст
р
2
3
I
k
M
,
(2.103)
sin
1
р
1
ст
1
I
M
.
(2.104)
На основе этого выражения строится классическая система
векторного управления – система трансвекторного управления.
Таблица 2.12
Значение коэффициентов уравнения
электромагнитного момента асинхронного электродвигателя
b
Ψст
Iст
Ψр
Iр
Ψм
Ψст
0
1
–kстkр/σLм
–kст
–
Iст
–1
0
–kр
-Lм
–1
Ψр
kстkр/σLм
k
р
0
–1
–
Iр
k
ст
L
м
1
0
1
a
Ψм
–
1
–
–1
0
82
В регулируемых электроприводах к обмоткам асинхронного
двигателя подводится несинусоидальное напряжение, которое мож-
но разложить в гармонический ряд следующим образом
,
cos
...
11
11
cos
7
7
cos
5
5
cos
cos
3
2
ст
n
t
n
t
t
t
t
U
U
d
(2.105)
где Ud – напряжение на входе автономного инвертора.
Гармонические составляющие напряжения статора вызывают
появление гармонических токов и магнитных потоков, которые
можно разложить в гармонический ряд следующим образом
,
cos
...
11
11
cos
7
7
cos
5
5
cos
cos
3
2
ном
ст
ст
n
t
n
t
t
t
t
I
I
(2.106)
,
cos
...
11
11
cos
7
7
cos
5
5
cos
cos
3
2
ном
р
р
n
t
n
t
t
t
t
(2.107)
где Iст ном, Ψр ном – номинальный ток статора и поток ротора.
При взаимодействии гармоник тока статора и потокосцепле-
ния ротора одного порядка, угол сдвига между ними остается посто-
янным, поскольку эти вектора вращаются с одинаковой частотой.
Следовательно, и электромагнитные моменты, создаваемые гармо-
никами одного порядка, будут постоянными. Уравнение такого
электромагнитного момента можно записать в следующем виде
n
n
n
n
I
M
sin
р
ст
.
(2.108)
При взаимодействии гармонических составляющих тока ста-
тора и потокосцепления ротора разного порядка, частота вращения
и угол, между которыми разные по величине и изменяются во вре-
мени, значение электромагнитного момента будет изменяться.
Уравнение такого электромагнитного момента можно записать как
ip
p
i
ip
I
M
sin
р
ст
,
(2.109)
где M(ip) – высокочастотная гармоника электромагнитного момента,
которая создается в результате i-ой гармоники тока и p-ой гармони-
ки потокосцепления ротора, между которыми образуется ip-ый угол;
Iст(i) – высокочастотная гармоника тока статора; Ψр(p) – р -ая высоко-
частотная гармоника потокосцепления ротора; φ(ip) – угол между i-ой
гармоникой тока и р-ой гармоникой потокосцепления ротора.
Например, если вектор основной гармоники тока статора вра-
щается с угловой частотой ω, а вектор пятой гармоники потокосце-
83
пления ротора, вращается с угловой частотой 5ω, то естественно,
что угол между этими векторами будет изменяться по синусоидаль-
ному закону. Следовательно, электромагнитный момент, создавае-
мый основной гармоникой тока статора и пятой гармоникой пото-
косцепления ротора можно выразить следующим образом
)15(
5
р
1
ст
)15(
sin
I
M
.
(2.110)
Причем, значение этого момента будет изменяться по сину-
соидальному закону с частотой 6ω, т.е. его колебания будут в шесть
раз выше, чем у момента, созданного основными гармониками тока
статора и потокосцепления ротора.
С учетом высших гармонических составляющих электромаг-
нитного момента, которые образуются под воздействием высших
гармонических составляющих напряжения, результирующий элек-
тромагнитный момент можно записать следующим образом
22
2
1
ipip
n
n
M
M
M
M
.
(2.111)
Знак «+» имеют гармонические составляющие электромагнит-
ного момента, направление которых совпадает с направлением элек-
тромагнитного момента, создаваемого основными гармониками. Та-
кие составляющие момента называются вращающими. Знак «–»
–
если их направление противоположно направлению электромагнит-
ного момента, создаваемого основными гармониками. Такие состав-
ляющие момента называются тормозящими.
2.6.3. Влияние пульсаций электромагнитного момента
на коэффициент полезного действия электропривода
В результате влияния вращающих и тормозящих гармониче-
ских составляющих электромагнитного момента, его результирую-
щее значение не постоянно, а имеет пульсирующий характер. Ре-
зультирующее значение электромагнитного момента, выраженное
формулой (2.111), можно переписать следующим образом
t
M
M
M
sin
ср
,
(2.112)
где Мср – среднее значение электромагнитного момента; ΔМ – ам-
плитуда пульсаций электромагнитного момента.
Соответственно, пульсирующий электромагнитный момент
будет вызывать колебания частоты вращения вала электродвигате-
84
ля. Тогда выражение частоты вращения также можно представить
следующим образом
t
sin
ср
,
(2.113)
где ωср – среднее значение частоты вращения; Δω – амплитуда пуль-
саций частоты вращения.
Средние потери мощности в асинхронном двигателе, рабо-
тающем с пульсирующим электромагнитным моментом, можно рас-
считать следующим образом
dt
М
Т
P
Т
п
0
0
п
пул
1
,
(2.114)
где Тп – период пульсаций [12].
Вычислив интеграл с учетом выражения (2.49) и (2.50), выра-
жение потерь мощности от пульсации электромагнитного момента
можно записать следующим образом
t
M
M
P
cos
2
ср
0
ср
пул
.
(2.115)
Если сравнить полученное выражение с выражением (2.9), где
величина потерь вычислена при условии, что асинхронный двига-
тель потребляет синусоидальные ток и напряжение, то
пул
пер
P
P
.
(2.116)
Величину потерь мощности в асинхронном двигателе с учетом
потерь, вызванных пульсирующим электромагнитным моментом,
можно представить следующим образом
пул
дв
нес
дв
гар
пер
пост
дв
P
P
P
P
P
P
,
(2.117)
а коэффициент полезного действия асинхронного двигателя –
.
пул
дв
нес
дв
гар
пер
пост
2
2
дв
2
2
дв
P
P
P
P
P
P
P
P
P
P
(2.118)
Таким образом, наличие высокочастотных составляющих
электромагнитного момента, вызванных низким качеством электри-
ческой энергии, приводит к увеличению потерь мощности и сниже-
нию коэффициента полезного действия электродвигателя. Можно
заключить, что уровень пульсаций электромагнитного момента, ве-
личины вращающих и тормозящих момента являются важными по-
казателями качества электромеханического преобразования.
85
2.6.4. Влияние несимметрии напряжения
на электромагнитный момент электропривода
Несимметрия напряжения в системах электроснабжения про-
мышленных предприятий оказывает значительное влияние на рабо-
ту отдельных электроприводов технических установок. При несим-
метрии напряжений в обмотках статора протекают токи прямой, об-
ратной и нулевой последовательности. Токи прямой последователь-
ности создают магнитное поле, вращающееся синхронно с ротором,
а обратной – магнитное поле, вращающееся со второй синхронной
скоростью в направлении, обратном направлению вращения ротора
1
обр 50
n
fp
n
.
(2.119)
Если принять, что номинальное скольжение асинхронного
двигателя в установившемся режиме находится в пределах (0,01 ÷
0,05), то скольжение ротора относительно обратного магнитного по-
ля статора можно определить следующим образом
2
1
1
1
1
1
2
1
обр
n
s
n
n
n
n
n
s
,
(2.120)
где n1 и n2 – скорости вращения магнитного тока статора и ротора.
Следовательно, обратное поле создает тормозящий момент, а
токи обратной последовательности создают дополнительные потери,
снижающие коэффициент полезного действия. Также, несимметрия
напряжения обуславливает противодействующий вращающий мо-
мент асинхронного электродвигателя, который уменьшает номи-
нальный электромагнитный момент. Уменьшение вращающего мо-
мента зависит от квадрата коэффициента несимметрии напряжения.
На рис. 2.12 показа-
ны механические характе-
ристики. Из него следует,
что под влиянием токов
обратной последователь-
ности,
результирующий
момент двигателя снижа-
ется и скольжение при том
же моменте сопротивления
на валу возрастает (Мпр,
Мобр – прямой и обратный
момент) [25].
Рис. 2 .12. Характеристики
асинхронного двигателя и нагрузки
M
s
M
sобр
11
20
Mпр
Mобр
Mс
86
2.6.5. Влияние несинусоидального напряжения
на срок службы электродвигателя
Потери мощности, вызванные воздействием высокочастотных
гармоник напряжения и тока, а также несимметрией напряжений,
вносимых преобразователем частоты, приводит к повышенному на-
греву обмоток асинхронного двигателя. Хорошо известно, что об-
мотка статора асинхронных двигателей очень чувствительна к пере-
греву, который может вызвать ускоренное старение изоляции.
Воздействие преобразователя частоты на приводной асин-
хронный электродвигатель приводит к перегреву двигателя, величи-
ну которого можно выразить следующим образом
,
пер
пост
пул
дв
нес
дв
гар
ном
ном
пул
дв
нес
дв
гар
ном
P
P
P
P
P
P
P
P
P
(2.121)
где τном – номинальная рабочая температура электродвигателя.
Коэффициент снижения срока службы асинхронного двигате-
ля под воздействием токов высших гармоник и несимметрии напря-
жения можно представить следующим образом
2
)
086
,
0(
086
,
0
2
cc
K
.
(2.122)
Снижение срока службы асинхронного двигателя можно вы-
разить следующим образом
cc
норм K
t
t
,
(2.123)
где tнорм – нормальный срок службы электродвигателя [24].
Из приведенных выражений видно, что наличие высокочас-
тотных гармоник тока, протекающих в обмотках статора асинхрон-
ного двигателя, под действием несинусоидального напряжения на
выходе преобразователя частоты, несимметрия напряжения и пуль-
сирующие электромагнитные моменты асинхронного двигателя,
приводят к сокращению срока службы приводного двигателя. Таким
образом, коэффициент снижения срока службы асинхронного дви-
гателя можно считать одним из показателей качества электромеха-
нического преобразования.
87
2.6.6. Проблема «длинного кабеля»
в электроприводе с преобразователем частоты
Переключение транзисторов автономных инверторов совре-
менных преобразователей частоты происходит в высокочастотном
режиме. На выходе автономного инвертора, работающего в режиме
широтно-импульсной модуляции, формируется последовательность
импульсов напряжения. Линейное напряжение на выходе автоном-
ного инвертора показано на рис. 2.13 [28].
Импульсы напряжения, формируемые на выходе преобразова-
теля частоты, вызывают волновые процессы в силовом соедини-
тельном кабеле электропривода, что является причиной перенапря-
жения на клеммах асинхронного двигателя. Форма линейного на-
пряжения на клеммах асинхронного двигателя представлена на рис.
2.14 (tU – время нарастания напряжения на выходе преобразователя
частоты). Это позволяет рассматривать силовой соединительный ка-
бель как длинную линию с распределенными параметрами. Схема
силового соединительного кабеля между автономным инвертором и
асинхронным двигателем представлена на рис. 2.15, на котором
приняты следующие обозначения: Rк, Lк – последовательное сопро-
тивление и индуктивность силового соединительного кабеля; Gк, Cк
–
параллельная проводимость и емкость силового соединительного
кабеля; Z1, Z2 – входное и выходное сопротивление соединительного
кабеля.
Рис. 2 .13. Форма линейного напряжения
на выходе автономного инвертора
Рис. 2 .14. Форма линейного напряжения
на клеммах асинхронного двигателя
Uпч
dU/dt
tU
t
Ud
-Ud
0
Uст
t
Ud
-Ud
dU/dt
tU
0
88
Рис. 2 .15. Схема длинной линии
между автономным инвертором и асинхронным двигателем
Так как величина последовательного сопротивления и парал-
лельной проводимости силового соединительного кабеля пренебре-
жимо малы, то волновое сопротивление кабеля можно определить
следующим образом
к
к
0
С
L
Z
.
(2.124)
Входным сопротивлением силового соединительного кабеля
электропривода является выходное сопротивление транзисторов ав-
тономного инвертора и является относительно малой величиной, ко-
торой также можно пренебречь
0
1
Z
Z .
(2.125)
Выходным сопротивлением силового соединительного кабеля
электропривода является входное сопротивление обмоток статора
приводного асинхронного двигателя, которое можно представить
следующим образом
ст
2
0
L
Z
Z
U
,
(2.126)
где ωU – эквивалентная частота напряжения.
Эквивалентную частоту напряжения можно определить сле-
дующим образом
U
U
t
.
(2.126)
Таким образом, при прохождении импульса напряжения,
входная часть силового соединительного кабеля электропривода ра-
ботает в режиме короткого замыкания, а выходная часть – в режиме
холостого хода. Скорость распространения волны напряжения в та-
Rк
Lк
Gк
Z1
Z2
AД
Uст
Uпч
Gк
Lк
Rк
Cк
Cк
89
кой линии можно вычислить следующим образом
к
к
1
С
L
VU
.
(2.127)
Длину волны, распространяющуюся с такой скоростью, мощ-
но определить следующим образом
U
U
U
V
2
.
(2.128)
Время прохождения импульса напряжения от выхода авто-
номного инвертора до клемм приводного асинхронного двигателя
можно определить следующим образом
U
U
V
T
1
.
(2.129)
Если это время (время прохождения импульса напряжения)
больше или равно времени нарастания напряжения на выходе пре-
образователя частоты, то в конце силового соединительного кабеля,
на клеммах асинхронного двигателя, образуется отраженная волна
напряжения. В результате, на клеммах асинхронного двигателя об-
разуется напряжение
2
пч
ст
1n
U
U
,
(2.130)
где n2 – коэффициент отражения волны. Значение этого коэффици-
ента лежит в пределах от 0 до 1.
Если время прохождения импульса напряжения от выхода ав-
тономного инвертора до клемм приводного асинхронного двигателя
меньше времени нарастания напряжения на выходе преобразователя
частоты, то коэффициент отражения можно рассчитать следующим
образом
U
U
t
T
n
n
max
2
2
.
(2.131)
Максимальной длиной силового соединительного кабеля счи-
тается длина, равная половине длины волны
2
max
U
L
.
(2.132)
Пример определения максимальной длины силового соедини-
тельного кабеля для электропривода приведён в Приложении Б.
90
2.6.7. Проблема возникновения резонансных явлений
в электроприводе c преобразователем частоты
Механические колебания вращающихся частей двигателя,
возникающие из-за наличия колебательных моментов, в силу их ма-
лости, в обычных условиях не приводят к проблемам. Исключение
составляют случаи, когда необходимо использовать электродвига-
тель при частотах вращения, составляющих несколько оборотов в
минуту и ниже, а также случаи, когда необходимо высокоточное ре-
гулирование. В этом случае, если частота вращающего момента ста-
новится равной фиксированной частоте крутильных колебаний сис-
темы «электродвигатель – рабочий механизм», то наступает явление
резонанса, сопровождающееся сильным шумом и вибрациями, а,
иногда, и механическими повреждениями [26].
На резонансной частоте скорость вращательных перемещений
в механической системе достигает максимальных значений. Также,
угловая скорость и момент совпадают по фазам.
Резонансную частоту можно определить следующим образом
J
f
2
1
рез
,
(2.133)
где λθ – податливость упругого элемента
Возникновение колебательных моментов, обусловленных
высшими гармоническими составляющими напряжения, может при-
вести к крутильным колебаниям вращающихся частей электродвига-
теля с довольно большими скоростями, в том случае, если частоты
колебательных моментов совпадут с резонансной частотой механи-
ческой системы «электродвигатель – рабочий механизм», опреде-
ляемой выражением (2.133). Это обстоятельство и объясняет появ-
ление негативных последствий для асинхронного двигателя, о кото-
рых говорилось выше [26].
Системы автоматического управления современных преобра-
зователей частоты позволяют осуществлять регулирование частоты
вращения ротора асинхронного двигателя с пропуском резонансных
частот при разгоне и торможении. Как правило, есть возможность
задания от 2 до 5 резонансных частот. Также, на некоторых преобра-
зователях частоты, система автоматического управления позволяет
задавать ширину резонансной зоны.
91
2.6.8. Проблема возникновения подшипниковых токов
в асинхронных двигателях электроприводов
При использовании в электроприводах преобразователей час-
тоты с высокой частотой коммутации полупроводниковых ключей
автономных инверторов, возникает проблема ускоренного износа
подшипников вала приводного электродвигателя. Ускоренный износ
подшипников происходит под влиянием подшипниковых токов.
Протекание подшипниковых токов может проходить непре-
рывно, а может в виде разрядов, после чего на поверхности элемен-
тов подшипников образуются эрозионные кратеры, которые приво-
дят к повышенному механическому износу и нагреву подшипников.
Значение подшипниковых токов крупных машин может достигнуть
50 – 600 А. Последствия от протекания подшипниковых токов при-
ведены на рис. 2.16.
Подшипниковые токи возникают по двум основным причи-
нам: несимметрия магнитного поля асинхронного двигателя, возни-
кающая вследствие несовершенной конструкции статора и ротора;
несимметрия напряжения, формируемого преобразователем часто-
ты. Пути протекания подшипниковых токов зависят также от струк-
туры электропривода, мощности и исполнения двигателя.
В асинхронном двигателе, из-за несовершенной конструкции
статора и ротора, магнитное поле является несимметричным. В ре-
зультате этого пакеты стали ротора и его вал пересекаются пульси-
рующим магнитным полем, вследствие этого, на валу наводится на-
пряжение, которое и является причиной подшипниковых токов.
Рис. 2 .16. Износ подшипников вследствие протекания подшипниковых токов
92
Рис. 2 .17. Внутренний контур
протекания подшипникового тока
Рис. 2 .18. Внешний контур
протекания подшипникового тока
Если это напряжение достигнет величины, достаточной для
преодоления сопротивления масленой плёнки подшипников, то по
цепи «вал – подшипники – корпус» будет протекать круговой ток.
Контур этого тока показан на рис. 2.17.
Трехфазное напряжение, формируемое на выходе преобразо-
вателя частоты практически всегда является несинусоидальным.
Вследствие чего, на корпусе образует высокочастотный электриче-
ский потенциал относительно нуля (обычно относительно земли или
отрицательного звена шины постоянного тока). Существующие па-
разитные емкости между двигателем и землей, могут проводить ток
на землю, образуя контур, проходящий через ротор, вал и подшип-
ники и завершающийся экраном (заземлением). Контур, по которо-
му протекает ток в этом случае, показан на рис. 2.18 [29].
Для предотвращения подшипниковых токов рекомендуется
использовать специальные кабели и систему заземления, разрыв це-
пей подшипниковых токов, высокочастотные фильтры.
2.6.9. Проблема снижения виброакустических характеристик
электропривода c преобразователем частоты
Уровень шума зависит от конструкции двигателя, числа пар
полюсов, формы напряжения, частоты коммутации, основной часто-
ты напряжения и скорости вращения ротора электродвигателя.
Увеличение уровня шума асинхронного двигателя, при пита-
нии от преобразователя частоты, по сравнению с питанием от сети с
синусоидальным напряжением является относительно небольшим,
если частота переключения преобразователя выше 3 кГц. Для низ-
кочастотных преобразователей частоты, увеличение уровня шума
может быть значительным и достигать 15 дБ.
ПЧ
ЭП
АД
Iпд
Iпд
93
Взаимодействия между высокочастотными гармониками тока
и магнитным потоком, приводящее к появлению вращающих и тор-
мозящих моментов, вызывают механическую вибрацию и повыше-
ние общего уровня шума. Также, значительная вибрация возникает
при работе электродвигателя вблизи резонансных частот.
Также, шум приводного электродвигателя, может быть вызван
вращающимся вентилятором, который увеличивается с частотой
вращения двигателя и становится доминирующим для 2-х и 4-х по-
люсных двигателей уже при частоте 50 Гц. Если частота вращения в
дальнейшем увеличится, то и уровень шума будет выше. Увеличе-
ние уровня шума может быть вычислено следующим образом
1
2
log
60
n
n
L
,
(2.134)
где L – увеличение уровня звукового давления при увеличении
скорости вращения с n1 до n2.
2.6.10. Явление магнитоскрипции
в асинхронных двигателях
В современных автономных инверторах полупроводниковых
преобразователей используются высокочастотные транзисторы. В
результате очень быстрого переключения транзисторов инвертора
при широтно-импульсной или случайной модуляции наблюдаются
акустические эффекты, которые оказывают негативное воздействие
на электродвигатель. Быстрое переключение транзисторных ключей
инвертора приводит к возникновению широкополосного спектра
сигнала помех, который воздействует на окружающую среду через
кабели двигателя.
Непрерывные изменения индукции, вызванные импульсами
напряжения на выходе автономного инвертора, приводят к незначи-
тельным изменениям длины листов сердечника электродвигателя,
что приводит к возникновению характерного модулированного шу-
ма в пакете сердечника статора электродвигателя. Эффект измене-
ния объёма и линейных размеров магнитопровода асинхронного
двигателя называется магнитоскрипцией. Величину акустического
шума в процессе магнитоскрипции можно считать показателем ка-
чества электромеханического преобразования.
94
2.7. Энергетическая совместимость
промышленных электроприводов
и технические средства ее обеспечения
2.7.1. Определение понятия энергетической совместимости
промышленного электропривода
Асинхронные двигатели, как и любые электрические машины,
являются обратимыми, т.е. могут работать как в двигательном, так и
в генераторном режиме. При торможении, асинхронный двигатель
вырабатывает электрическую энергию, которую необходимо отво-
дить от электродвигателя, для того чтобы не допустить его перегре-
ва. Наиболее рациональным является возврат этой электрической
энергии обратно в сеть электроснабжения, для чего необходимо
обеспечить такую техническую возможность. Это позволяет выде-
лить взаимный обмен электропривода и сети электроснабжения
электроэнергией в отдельную научно-техническую проблему и го-
ворить об энергетической совместимости электропривода [30, 31].
Энергетическая совместимость промышленного электропри-
вода – это способность двухстороннего обмена электрической энер-
гией между электроприводом и сетью электроснабжения.
Проблема обеспечения энергетической совместимости наибо-
лее актуальна для электроприводов, работающих в высокодинамич-
ном режиме, с частыми пусками, торможениями и реверсами. Обес-
печение возможности рекуперации электрической энергии может
обеспечит значительную экономию электрической энергии.
Возможность обеспечения энергетической совместимости
электропривода с сетью электроснабжения определяется структурой
преобразователя частоты, используемого в электроприводе.
В генераторных режимах в процессе возврата электрической
энергии в сеть электроснабжения, к ее качеству должны предъяв-
ляться такие же требования, как при работе электропривода в двига-
тельном режиме, при ее потреблении, как по гармоническому соста-
ву, так и по энергетическому содержанию.
При торможении асинхронного двигателя, в электроприводе с
преобразователем частоты с диодным выпрямителем, для отвода
электрической энергии от электродвигателя и ее преобразования в
тепловую, могут использоваться тормозные резисторы. В таком
электроприводе возврата электрической энергии не происходит.
95
2.7.2. Технические средства обеспечения
энергетической совместимости
Для обеспечения рекуперации электрической энергии в сеть
электроснабжения можно использовать два способа: использовать
преобразователь частоты с активным выпрямителем; использовать
рекуператор электрической энергии. При использовании этих спо-
собов обеспечения энергетической совместимости электроприводов
с сетью электроснабжения обеспечивается высокая динамика при-
водного асинхронного двигателя в тормозных режимах.
При использовании активного выпрямителя в преобразователе
частоты с асинхронным двигателем решаются три основные задачи:
обеспечение потребления электроприводом синусоидальных токов
из сети электроснабжения; поддержание коэффициента мощности
электропривода на уровне единицы; обеспечение рекуперации элек-
трической энергии в сеть электроснабжения в тормозных режимах
асинхронного двигателя. Первые две задачи относятся к решению
проблемы электромагнитной совместимости электропривода, а тре-
тья – к энергетической совместимости. Структурная схема электро-
привода с преобразователем частоты, в состав которого входит ак-
тивный выпрямитель представлена на рис. 2.19. Вопрос работы и
устройства активного выпрямителя более подробно будет рассмот-
рен в главе 3.
Рис. 2 .19. Структурная схема преобразователя частоты
с активным выпрямителем
К трансформатору
и сети электроснабжения
Автономный
инвертор
Активный
выпрямитель
К приводному
асинхронному двигателю
96
Преобразователь частоты с диодным неуправляемым выпря-
мителем, полупроводниковые приборы которого обладают односто-
ронней проводимостью, не могут обеспечить рекуперацию электри-
ческой энергии в сеть электроснабжения. В этом случае, для обес-
печения энергетической совместимости могут использоваться моду-
ли рекуперации. Структурная схема электропривода с модулем ре-
куперации представлена на рис. 2.20.
Модуль рекуперации представляет собой автономный инвер-
тор, выполненный на полностью управляемых полупроводниковых
приборах (транзисторах или тиристорах), подключенный к звену
постоянного тока преобразователя частоты параллельно диодному
выпрямителю в обратном направлении. При переходе приводного
двигателя в генераторный режим, диодный выпрямитель преобразо-
вателя частоты не пропускает электрическую энергию в сеть элек-
троснабжения. Возврат электрической энергии осуществляется че-
рез модуль рекуперации.
Рис. 2 .20. Структурная схема преобразователя частоты
с активным выпрямителем
Сеть
электроснабжения
Автономный
инвертор
Выпрямитель
Модуль
рекуперации
АД
Преобразователь
частоты
97
3. МЕТОДЫ И ТЕХНИЧЕСКИЕ СРЕДСТВА ОБЕСПЕЧЕНИЯ
ВЫСОКИХ ЭНЕРГЕТИЧЕСКИХ ХАРАКТЕРИСТИК
ЭЛЕКТРОПРИВОДОВ И ИХ ОЦЕНКА
3.1. Использование энергоэффективных
электродвигателей в промышленных электроприводах
Одним из способов повышения энергетической эффективности
и обеспечения энергосбережения на промышленных объектах топ-
ливно-энергетического комплекса, является использование энерго-
эффективных двигателей.
До недавнего времени, в разных странах для классификации
электродвигателей по энергоэффективности использовались негар-
монизированные национальные стандарты. Например, страны Евро-
пейского союза ориентировались на нормы стандарта CEMEP, при-
нятого в 1999 году. В США действовал стандарт Energy Policy Act
(EPACT), принятый в 1997, а в Российской Федерации –
ГОСТ Р 516772000.
С целью устранения несогласованности стандартов по энерго-
эффективности в 2008 г. был принят международный стандарт
IEC 60034-30 «Классы энергоэффективности односкоростных трех-
фазных асинхронных двигателей». Стандартом предусмотрено три
класса энергоэффективности: IE1 – стандартный; IE2 – высокий;
IE3 «Премиум». В настоящее время идет разработка требований к
двигателям класса IE4 и IE5. Установленные области классификации
электродвигателей по энергоэффективности показаны на рис. 3.1.
Рис. 3 .1. Классы энергоэффективности асинхронных электродвигателей
η,%
72
77
82
87
92
Р, кВт
0,75
30
375
110
5,5
IE1
IE2
IE3
IE4
IE5
98
Новые требования по энергоэффективности стандарта
IEC 60034-30 касаются всех двигателей в диапазоне мощностей от
0,75 кВт до 375 кВт. Внедрение нового стандарта на промышленных
объектах стран Европейского союза будут проходить в три этапа: с
января 2011 года все двигатели должны соответствовать классу IE2;
с января 2015 года все двигатели мощностью от 7,5 до 375 кВт долж-
ны быть классом не ниже IE3 (при этом допускается использование
двигателей класса IE2, но только в регулируемом электроприводе); с
января 2017 года все двигатели мощностью от 0,75 до 375 кВт долж-
ны быть классом не ниже IE3 (при этом будет допускаться использо-
вание в регулируемом электроприводе двигателей класса IE2).
Главной целью внедрения стандарта энергоэффективности
электродвигателей IEC 60034-30 на промышленных объектах топ-
ливно-энергетического комплекса является сокращение экономиче-
ских затрат на обеспечение необходимых технологических процес-
сов предприятия. Очевидно, чем выше коэффициент полезного дей-
ствия используемых электродвигателей, тем ниже потребление элек-
трической энергии при той же установленной мощности.
При использовании асинхронных двигателей высокого класса
энергоэффективности обеспечивается значительное снижение потерь
электроэнергии и энергопотребление. Так, например, при замене
электродвигателя мощностью 100 кВт (коэффициент полезного дей-
ствия 0,9, коэффициент мощности 0,7) класса энергоэффективности
IE1 на электродвигатель класса IE2 (коэффициент полезного дейст-
вия 0,945, коэффициент мощности 0,75), происходит снижение по-
терь электроэнергии на величину, которую можно определить, как
кВт.
3,5
100
945
,
0
100
100
9,0
100
дв
22
дв
2
дв
22
дв
12
дв
1
дв
12
дв
22
дв
12
дв
21
дв
11
дв
2
дв
1
P
P
P
P
P
P
P
P
P
P
P
(3.1)
Таким образом, при использовании электродвигателя с коэф-
фициентом полезного действия на 5 % выше, величина потерь сни-
жается на 42 %, а энергопотребление снижается на 8,5 %. Подробный
расчет эффективности использования энергоэффективных двигате-
лей и дополнительные задания приведены в приложении В.
99
Следует отметить, что с ростом коэффициента полезного дей-
ствия увеличивается и срок службы двигателя. Это объясняется сле-
дующим. Источником нагрева электродвигателя являются потери
мощности, выделяемые в нем в виде тепла. Опыт эксплуатации и ис-
пользования электродвигателей показывает, что срок службы изоля-
ции уменьшается в два раза при увеличении температуры на 100oС.
Таким образом, срок службы двигателя с повышенным коэффициен-
том полезного действия несколько больше, так как потери и, следо-
вательно, нагрев энергоэффективного двигателя меньше.
3.2. Использование энергоэффективных
полупроводниковых преобразователей частоты
Энергетические характеристики современного электропривода
и уровень совместимости в значительной степени определяются
структурой преобразователя частоты. Для повышения эффективно-
сти работы преобразователей частоты и электропривода в целом,
можно выделить следующие способы:
использование полупроводниковых ключей с низким сопро-
тивлением в открытом состоянии для повышения коэффициента по-
лезного действия;
использование высокочастотных полупроводниковых клю-
чей для снижения несинусоидальности напряжения и тока;
использование активного выпрямителя для обеспечения ко-
эффициента мощности электропривода;
использование активных фильтров, для компенсации выс-
ших гармоник напряжения, генерируемых группой электроприводов,
и повышения их коэффициента мощности.
Рассмотрим каждый из этих способов повышения энергетиче-
ской эффективности электроприводов с преобразователем частоты
более подробно.
3.2.1. Использование энергоэффективных
полупроводниковых элементов
в коммутаторах преобразователей частоты
Структурна схема полупроводникового преобразователя часто-
ты, состоящего из мостового диодного выпрямителя и транзисторно-
го автономного инвертора, показана на рис. 3.2.
100
В процессе преобразования постоянного напряжения в пере-
менное, автономный инвертор подключает обмотки асинхронного
двигателя к шине постоянного тока. Возможные схемы включения
автономного инвертора показаны на рис. 3.3 (D1 ÷ D6 – диоды, Т1 ÷
Т6 – транзисторы, S1 ÷ S6 – коммутационные функции).
Как можно видеть из приведенных схем, коэффициент полез-
ного действия автономного инвертора будет зависеть от величины
сопротивления транзисторов в открытом состоянии. Коэффициент
полезного действия автономного инвертора преобразователя частоты
можно представить следующим образом
аи
вых
аи
вых
аи
вх
аи
вых
аи
аи
P
Р
Р
Р
Р
,
(3.2)
где Раи вх и Раи вых – входная и выходная мощность инвертора.
Рис. 3 .2. Структурная схема электропривода
с преобразователем частоты
Рис. 3 .3. Схемы коммутации
автономного инвертора
(ZA, ZB, ZC – комплексное
сопротивление обмоток статора)
ZAZBZC
ZAZBZC
ZAZBZC
ZAZBZC
ZAZBZC
ZAZBZC
АД
D5
D2
S1
С
и
с
т
е
м
а
а
в
т
о
м
а
т
и
ч
е
с
к
о
г
о
у
п
р
а
в
л
е
н
и
я
S2
S3
S4
S5
S6
D1
D3
D6
D4
T5
T2
T1
T3 T6
T4
Сеть
С
и
с
т
е
м
а
у
п
р
а
в
л
е
н
и
я
а
в
т
о
н
о
м
н
о
г
о
и
н
в
е
р
т
о
р
а
101
Как видно из выражения (2.28) и (2.29) рассеиваемая мощность
на каждом транзисторе в открытом состоянии равна
2
ном
к
тp
ном
к
ном
к
ост
кэ
ном
к
ост
кэ
ном
к
рн
5,0
5,0
5,0
I
R
I
I
U
I
U
I
P
,
(3.3)
где Rтр – сопротивление транзистора в открытом состоянии.
Если в такой схеме автономного инвертора использовать тран-
зисторы, величина сопротивления в открытом состоянии которых
меньше в два раза, то потери будут иметь следующее значение
.
5,0
25
,
0
5,0
5,0
5,0
рн
1
2
ном
к
2
тp
1
2
ном
к
2
тp
2
2
ном
к
2
тp
2
рн
2
P
I
R
I
R
I
R
P
(3.4)
где ΔР1рн, Δ Р2рн – потери мощности в транзисторах с сопротивлени-
ем R1тр, R2тр, соответственно; I2к ном – номинальный ток транзистора с
сопротивлением R2тр.
При этом, уменьшится величина падения напряжения на от-
крытых транзисторах, и увеличится величина линейного и фазного
напряжения на выходе инвертора (обмотках статора приводного
асинхронного двигателя). Это приведет к уменьшению тока статора
и, соответственно, токов, протекающих через транзисторы. Так, на-
пример, если величина тока уменьшится на 5 %, то величина потерь
уменьшится
.
225
,
0
225
,
0
9025
,
0
25
,
0
95
,
0
25
,
0
25
,
0
рн
1
2
ном
к
1
тp
1
2
ном
к
1
тp
1
2
ном
к
1
тp
1
2
ном
к
2
тp
1
рн
2
P
I
R
I
R
I
R
I
R
P
(3.5)
где I1к ном – номинальный ток транзистора с сопротивлением R1тр.
Также, при уменьшении тока снизятся динамические потери
транзисторов
k
k
f
U
I
f
U
I
P
к
тр
2
ост
кэ
2
ном
к
1
к
тр
2
ост
кэ
2
ном
к
2
тр
дин
2
95
,
0
.
(3.6)
Одним из направлений развития полупроводниковой техники,
в том числе, силовых полностью управляемых транзисторов, являет-
ся уменьшение сопротивления в открытом состоянии, что обеспечи-
вает повышение их коэффициента полезного действия. Быстрое раз-
витие полупроводниковой техники и обновление выпускаемых раз-
102
личными компаниями полупроводниковых приборов требует от спе-
циалистов-схемотехников непрерывного отслеживания современных
технических решений в этой области и использование высокоэффек-
тивных транзисторов и диодов в проектируемых преобразователях
частоты и комплектных электроприводах.
Помимо повышения коэффициента полезного действия, ис-
пользование транзисторов с низким сопротивлением в открытом со-
стоянии снизит количество выделяемого тепла при работе преобра-
зователя частоты. Это позволит уменьшить размеры радиатора охла-
ждения и повысить массогабаритные параметры преобразователя
частоты, а также снизить его стоимость.
3.2.2. Использование высокочастотных транзисторов
в автономных инверторах преобразователей частоты
Второй способ повышения эффективности полупроводниковых
преобразователей частоты заключается в использовании высокочас-
тотных транзисторных ключей. Повышение частоты коммутации ав-
тономного инвертора (при сохранении величины сопротивления
транзисторов в открытом состоянии и динамических потерь посто-
янными), позволяет значительно снизить амплитуды высших гармо-
нических составляющих напряжения и тока, а следовательно и поте-
ри, вызванные их воздействием на обмотки статора и ротора. Это по-
зволяет снизить нагрев обмоток приводного электродвигателя высо-
кочастотными составляющими напряжения и тока.
Суммарные потери в обмотках статора и ротора асинхронного
двигателя при воздействии полигармонических токов можно выра-
зить следующим образом
1
ст
2
ст
гар
ст
3
n
n
R
I
P
,
(3.7)
1
/
р
2
/
р
гар
р
3
n
n
R
I
P
,
(3.8)
где Ip(n)
/
–
ток высших гармонических составляющих ротора.
Из приведенных выражений видно, что при снижении ампли-
туд гармонических составляющих тока статора и ротора уменьшатся
и коэффициенты n-ых гармонических составляющих тока статора и
ротора, соответственно. При уменьшении последних в два раза, по-
тери мощности в статоре и роторе уменьшатся в четыре раза.
103
3.2.3. Использование активных выпрямителей
в преобразователях частоты электроприводов
Третий способ повышения эффективности электроприводов,
который заключается в использовании в структуре преобразователя
частоты активного выпрямителя, обеспечит поддержание коэффици-
ента мощности электропривода на уровне единицы в установившем-
ся режиме работы электропривода. На рис. 3.4 показана структурная
схема электропривода с активным выпрямителем (АВ).
Система управления активным выпрямителем выполнена на
основе векторного алгоритма с ориентацией по вектору напряжения
сети электроснабжения. Система управления содержит два канала
управления компонентами тока, потребляемого активным выпрями-
телем из сети электроснабжения. Для обеспечения коэффициента
мощности сети на уровне единицы при активно-индуктивной нагруз-
ке, уставку на реактивный компонент, потребляемого тока, устанав-
ливают равной нулю. Уставка на активный компонент, потребляемо-
го тока, формируется внешним контуром регулирования выпрямлен-
ного напряжения. В контурах регулирования системы управления
могут использоваться ПИ и ПИД регуляторы. Управление полупро-
водниковыми ключами активного выпрямителя осуществляется по
алгоритму широтно-импульсной модуляции.
Рис. 3 .4. Структурная схема электропривода с активным выпрямителем
АД
T10
T5
T4
T2
S1
Система автоматического
управления АД
UBb UCc
UAа
S2 S3S4
S5 S6
Система управления
Автономный инвертор
Активный выпрямитель
С
е
т
ь
T1
T3
T7
Система автоматического
управления АВ
UCc
UAа
S2S1S
4S3S6
Система управления АВ
T8
T6
T9
S5
UBb
T11
T12
104
На рис. 3.5 показаны осциллограммы напряжения и тока, по-
требляемого электроприводом с активным выпрямителем.
Поддержание коэффициента мощности электроприводов с
асинхронными электродвигателями на уровне единицы с помощью
активного выпрямителя, позволит значительно снизить потери мощ-
ности в сетях электроснабжения.
Как известно, около 75% всей вырабатываемой электроэнергии
потребляется электроприводами. Если путем внедрения регулируе-
мых электроприводов с активными выпрямителями преобразовате-
лей частоты повысить коэффициент мощности потребителей на 5%.
Тогда с учетом того, что потери в сети электроснабжения обратно
пропорциональны квадрату коэффициента мощности, то потери
электроэнергии уменьшатся
1
сэ
2
2
1
сэ
2
2
1
сэ
2
сэ
907
,
0
1025
,
1
1
05
,
1
P
P
P
P
,
(3.9)
где ΔРсэ1 – потери мощности в сети без использования в электропри-
водах активных выпрямителей; ΔРсэ2 – потери мощности в сети при
использования активного выпрямителя.
Рис. 3 .5. Осциллограммы напряжения и тока,
потребляемого электроприводом с активным выпрямителем
105
Таким образом, при повышении коэффициента мощности по-
требителя на 5 %, потери в распределительных сетях электроснабже-
ния снижаются почти на 10 %.
Этим не исчерпывается энергетическое значение повышения
коэффициента мощности электроприводов. Повышение коэффици-
ента мощности и снижение потребления реактивной мощности вы-
свобождает соответствующее значение мощности генераторов на
электростанциях. Если учесть, что для производства электроэнергии
нужно обеспечить добычу, транспортировку, переработку и выра-
ботку электроэнергии из первичных ресурсов (нефть, газ, уголь,
торф), то можно представить всю экономическую выгоду от умень-
шения потребления реактивной мощности.
Повышенное потребление реактивной мощности из сети при
низких значениях коэффициента мощности потребителей вызывает
необходимость увеличения сечений проводов и кабелей в электриче-
ских сетях для уменьшения потерь. При коэффициенте мощности
потребителей меньше 0,7, вызываемый перерасход цветных металлов
(меди и алюминия) составит более 50%.
Низкий коэффициент мощности приводит к излишней загрузке
сетей реактивной мощностью понижающих подстанций, поэтому не-
обходимо увеличивать мощность трансформаторов или их количест-
во. Повышенная загрузка сетей реактивным током вызывает пони-
жение напряжения в сети, а резкие колебания значения реактивной
мощности – колебания напряжения в сети и, как следствие, ухудше-
ние качества электроэнергии.
3.2.4. Использование активных фильтров
в системе электроснабжения электропривода
На многих предприятиях топливно-энергетического комплекса
используется большое количество регулируемых асинхронных элек-
троприводов с полупроводниковыми преобразователями частоты ма-
лой и средней мощности. Их работа без использования средств по-
вышения качества электроэнергии может привести к частым отказам
систем защиты и автоматики, ускоренному электрическому старению
изоляции трансформаторов и линий электроснабжения, повышенно-
му износу электрооборудования.
106
В этом случае, замена преобразователей частоты с диодными
выпрямителями на преобразователи частоты с активными выпрями-
телями нецелесообразна, как по экономическим причинам, так и по
техническим причинами, прежде всего из-за трудоемкости и сложно-
сти процесса и высоких капитальных вложений.
Для таких промышленных предприятий наиболее рациональ-
ным решением повышения качества электроэнергии является ис-
пользование активных фильтров.
Силовая часть активного выпрямителя представляет собой
трехфазный мост, собранный на основе высокочастотных полностью
управляемых транзисторов, который может включаться как парал-
лельно, так и последовательно. Также, использование активных
фильтров может сочетаться с применением пассивных фильтров. Та-
кие фильтры называются гибридными. На рис. 3.6 показана схема
параллельного включения активного фильтра, на рис. 3.7 – схема по-
следовательного включения активного фильтра, на рис. 3.8
–
схема
гибридного активного фильтра.
В активных фильтрах параллельного включения используется
трехфазный полностью управляемый коммутатор, который работает
в инверторном режиме. Система автоматического управления актив-
ного фильтра (САУ АФ) осуществляет расчет коммутационной
функции фильтра и формирует управляющие сигналы для транзи-
сторов коммутатора. В результате коммутации активного фильтра, в
сеть электроснабжения генерируются высокочастотные гармониче-
ские составляющие тока, такие же, какие генерируются преобразова-
телями частоты электроприводов, но с противоположным знаком.
Эти гармоники, накладываясь друг на друга, компенсируются. В ре-
зультате, в сети электроснабжения протекают синусоидальные токи
и напряжения.
При параллельном включении активного фильтра, силовой
коммутатор подключается через трансформатор, образуя независи-
мый источник электроэнергии. Система автоматического управления
обеспечивает регулирование амплитуды и фазы напряжения генери-
руемого в сеть электроснабжения. Силовой коммутатор активного
фильтра функционирует в широтно-импульсном режиме. Активные
фильтры, такой схемы включения, позволяют снизить амплитуды
высших гармоник напряжения, поддерживать амплитуду напряжения
и уменьшить колебания и провалы напряжения.
107
Рис. 3 .6. Схема активного фильтра параллельного включения
Рис. 3 .7. Схема активного фильтра последовательного включения
Рис. 3 .8. Схема гибридного активного фильтра
(АФ – активный фильтр; ПЧ – преобразователь частоты;
Iсэ – ток сети электроснабжения)
В состав гибридных активных фильтров входят как силовой
коммутатор параллельного включения, так и пассивные фильтры, на-
строенные на компенсацию определенных гармонических состав-
ляющих напряжений.
Ucэ
Сеть
ПЧ1
АД
ПЧ2
АД
ПЧ3
АД
АФ
Ud
U(n)
Ucэ
Сеть
ПЧ1
АД
ПЧ2
АД
ПЧ3
АД
АФ
Ud
U(n)
Icэ
САУ
АФ
Сеть
ПЧ1
АД
ПЧ2
АД
ПЧ3
АД
АФ
Icэ+∑ I(n)
-∑ I(n)
Ud
108
3.3. Использование энергосберегающих систем
и алгоритмов управления электроприводом
Электромеханическая и механическая характеристики трех-
фазного асинхронного электродвигателя можно записать как
2
/
р
ст
2
/
р
ст
ст
р
X
X
s
R
R
U
I
,
(3.12)
2
/
р
ст
2
/
р
ст
0
/
р
2
ст
3
X
X
s
R
R
s
R
U
M
,
(3.13)
где Xст – индуктивное сопротивление обмотки статора; Xр
/
–
приве-
денное значение индуктивного сопротивления обмотки ротора.
Скольжение можно вычислить следующим образом
0
0
0
s
,
(3.14)
p
f
2
0
,
(3.15)
где ω0 – синхронная частота вращения [32].
Критический момент и критическое скольжение трехфазного
асинхронного электродвигателя можно записать следующим образом
2
/
p
cт
2
cт
2
cт
0
2
cт
к
2
3
X
X
R
R
U
M
,
(3.16)
2
/
p
cт
2
cт
/
p
к
X
X
R
R
s
.
(3.17)
Также, при анализе электромеханических процессов можно
использовать упрощенную форму Клосса для записи уравнения ме-
ханической характеристики, которая выглядит так
к
к
к
s
s
s
s
M
M
,
(3.18)
а выражение для расчета критического скольжения –
1
2
ном
к
s
s
,
(3.19)
109
где λ – перегрузочная способность асинхронного двигателя –
ном
М
М
.
(3.20)
Из выражения механической характеристики видно, что управ-
ление механическими координатами асинхронного двигателя можно
осуществлять следующими способами: изменяя сопротивление рото-
ра электродвигателя, такое управление называется реостатным; из-
менением амплитуды подводимого к обмоткам статора напряжения,
такое управление называется параметрическим; изменением частоты
питающего напряжения, такое регулирование называется частотным.
Кроме названых способов регулирования механических коор-
динат асинхронного двигателя может использоваться другой способ
регулирования, который заключается в переключении схемы соеди-
нения обмоток статора, изменяющим число пар полюсов. Для этого
используются специальные двигатели и дополнительная коммутаци-
онная аппаратура. Электропривод с такими двигателями получается
двухскоростным и позволяет осуществлять регулирования только в
первом квадранте. Схема такого электропривода, и его характери-
стики показаны на рис. 3.9, рис. 3.10, рис. 3.11 [25].
Рассмотрим первые три способа регулирования с точки зрения
энергетической эффективности.
Рис. 3 .9. Структурная
схема переключения
обмоток двигателя
Рис. 3 .10. Механические
характеристики
двигателя
Рис. 3 .11. Энергетические
характеристики
двигателя
P/Рном
соs φ
1
0,5
0
0,5
соs φY
соs φΔ
P/Рном
η
1
0,5
0
0,5
ηY
ηΔ
sω
M
sк
1ω0
Y
Δ
MкрY MкрΔ
Y
АД
Uст = const
f=50Гц
Δ
110
3.3.1. Энергетические характеристики
электроприводов с реостатным регулированием
Этот способ регулирования частоты вращения можно реализо-
вать при использовании в электроприводе асинхронного двигателя с
фазным ротором. Для этого, в каждую фазу ротора асинхронного
двигателя включают добавочные сопротивления, как это показано на
схеме, представленной на рис. 3.12.
При использовании реостатного регулирования, амплитуда и
частота подводимого к обмоткам статора напряжения остаются по-
стоянными. При этом, как видно из выражения механической харак-
теристики асинхронного двигателя и ее компонентов (3.13), (3.16),
(3.17), что при изменении сопротивления обмотки ротора критиче-
ский момент электродвигателя остается постоянным, а критическое
скольжение изменяется прямо пропорционально величине активного
сопротивления ротора, т.е. получается
р
д
р
/
р
/
д
/
р
кр
к
R
R
R
R
R
R
s
s
,
(3.21)
где Rд – добавочное сопротивление ротора.
Рис. 3 .12. Структурная
схема реостатного
регулирования
Рис. 3.13. Механические
характеристики
двигателя
Рис. 3 .14. Энергетические
характеристики
двигателя
P/Pном
соs φ
1
0.5
0
0.5
соs φ = const
P/Pном
η
1
0.5
0
0.5
Rp
Rд1
Rд2
sω
M
sк
Mкр
sкр1
sкр2
1ω0
Rр
Rд1
Rд2
АД
Uст= const
f=50Гц
Rд1
Rд2
111
Семейство механических характеристик электропривода с рео-
статным регулированием представлено на рис.3.13.
С точки зрения обеспечения динамических характеристик
электропривода, реостатное регулирование может обеспечить сту-
пенчатое изменение частоты вращения. Также, можно наблюдать,
что при уменьшении частоты вращения, за счет введения дополни-
тельных сопротивлений в цепь ротора, происходит снижение жест-
кости механической характеристики. Регулирование частоты враще-
ния можно осуществлять только в первом квадранте.
С энергетической точки зрения реостатное регулирование час-
тоты вращения асинхронного электропривода является самым неэф-
фективным из всех возможных. Потери мощности в асинхронном
двигателе с реостатным регулированием можно представить сле-
дующем образом
.
)
(
0
1
0
0
0
1
0
0
2
1
s
P
P
M
M
M
P
P
P
(3.22)
Анализ выражения (3.22) показывает, что потери мощности в
асинхронном двигателе при любой нагрузке пропорциональны
скольжению.
Величина потерь на активном сопротивлении ротора и допол-
нительных сопротивлениях с учетом (3.22) распределяется соответ-
ственно следующим образом
д
р
р
1
р
2
R
R
R
s
P
P
,
(3.23)
д
р
д
1
2д
R
R
R
s
P
P
.
(3.24)
Из приведенных выражений видно, что при изменении частоты
вращения, за счет введения дополнительных сопротивлений в цепь
ротора асинхронного двигателя, потери в обмотке ротора увеличи-
ваются. Таким образом, при снижении частоты вращения асинхрон-
ного электродвигателя, коэффициент полезного действия электро-
привода будет уменьшаться. Чем ниже частота вращения и произво-
дительность электропривода, тем ниже коэффициент полезного дей-
ствия. Коэффициент мощности асинхронного двигателя при реостат-
ном регулировании не изменяется (рис. 3.14) [33].
112
3.3.2. Энергетические характеристики
электроприводов с параметрическим регулированием
Анализ выражений (3.13), (3.16), (3.17) показывает, что регу-
лирование частоты вращения асинхронного электропривода, можно
реализовать, за счет изменения амплитуды, питающего обмотки ста-
тора, напряжения. Для реализации этого способа регулирования ис-
пользуется тиристорный преобразователь напряжения, который
обеспечивает регулирование амплитуды напряжения, подаваемого на
обмотки статора электродвигателя. Схема электропривода с пара-
метрическим регулированием представлена на рис.3.15. Механиче-
ские и энергетические характеристики приведены рис.3.16 и рис.3.17.
При изменении амплитуды питающего напряжения с помощью
тиристорного преобразователя будет изменяться величина критиче-
ского момента пропорционально квадрату этого напряжения, а вели-
чина критического скольжения будет постоянной.
Параметрическое регулирование позволяет изменять частоты
вращения только в первом квадранте вниз от номинальной частоты.
В отличии от реостатного регулирования, обеспечивается высокая
плавность регулирования, но диапазон регулирования частоты вра-
щения является ограниченным.
Рис. 3 .15.
Структурная схема
параметрического
электропривода
Рис. 3 .16. Механические
характеристики
двигателя
Рис. 3.17. Энергетические
характеристики
двигателя
P/Рном
η
1
0.5
0
0.5
Ucт
U1
U2
P/Рном
соs φ
1
0.5
0
0.5
Uст
U1
U2
АД
РМ
U2 = const
f=50Гц
Uст = var
f=50Гц
ТП
ТР
Uсэ = const
f=50Гц
sω
M
sкр
Mкр
Mкр1
Mкр2
Uст
U1
U2
1ω0
113
При уменьшении амплитуды напряжения обмоток статора, при
постоянной частоте этого напряжения, магнитный поток асинхрон-
ного двигателя снижается пропорционально этому напряжению.
Снижение магнитного потока приводит к резкому снижению пере-
грузочной способности, допустимой нагрузке.
Так как, в процессе регулирования частоты вращения при из-
менении напряжения, синхронная частота асинхронного двигателя
остается постоянной, потери в электродвигателе при работе в номи-
нальном режиме можно выразить следующим образом
s
M
P
P
P
0
2
1
.
(3.25)
Тогда, допустимые потери при регулировании частоты враще-
ния можно определить как
s
M
P
0
доп
доп
.
(3.26)
Значение допустимого момента асинхронного электродвигате-
ля определяется перегрузочной способностью и, в большинстве слу-
чаев, находится в пределах двух-трех, то есть выражение (3.26) мож-
но записать следующим образом
s
M
P
0
ном
доп
3
2
.
(3.27)
При снижении частоты вращения и повышении скольжения на
20% вниз от номинальной, для сохранения потерь в роторе на том же
уровне, будет необходимо снизить значение момента на валу элек-
тродвигателя в три раза. Если не обеспечить снижение момента, это
приведет к резкому росту потерь. При значительном росте потерь
может нарушиться тепловой режим работы электродвигателя, что
приведет к его перегреву и выходу из строя.
Таким образом, параметрическое регулирование является
крайне неэффективеным для использования в продолжительном ре-
жиме. Даже при использовании электропривода с параметрическим
регулированием с вентиляторной нагрузкой необходимо двух-
трехкратное завышение установленной мощности двигателя с повы-
шенным скольжением для обеспечения перегрузочной способности
электропривода на сниженной частоте вращения.
Дискретный режим работы тиристорного преобразователя на-
пряжения вызывает появление гармонических составляющих напря-
жения и тока, пульсации момента и частоты вращения электродвига-
теля, что вызывает дополнительные потери мощности.
114
3.3.3. Энергетические характеристики
электроприводов с частотным регулированием
Из выражений (3.13) – (3.15) вид-
но, что регулирование механических ко-
ординат электродвигателя возможно за
счет изменения частоты питающего на-
пряжения. При этом, нужно обеспечить
пропорциональное изменение амплиту-
ды питающего напряжения, для обеспе-
чения поддержания магнитного поля
электродвигателя на номинальном зна-
чении и перегрузочной способности.
Для реализации этого способа регулиро-
вания используется полупроводниковый
преобразователь частоты. Схема элек-
тропривода с частотным регулировани-
ем представлена на рис. 3.18.
Рис. 3 .18. Структурная схема
регулируемого электропривода
В зависимости от характера нагрузки используется специаль-
ный закон управления амплитудой и частотой напряжения статора
асинхронного двигателя. В табл. 3.1 представлены законы частотно-
го управления при разной нагрузке электропривода.
Механические характеристики асинхронного электропривода с
преобразователями частоты, реализующим разные законы частотно-
го (скалярного) управления представлены на рис. 3.19 [34]. Проана-
лизируем изменение потерь мощности при частотном регулирова-
нии механических характеристик асинхронного двигателя. На
рис. 3.20 и рис. 3.21 показаны зависимости коэффициента полезного
действия и коэффициента мощности от загрузки.
Таблица 3.1
Виды нагрузки и законы частотного управления
Вид нагрузки
Вид нагрузки
Закон управления
Нагрузка с постоянным
моментом сопротивления
Mc = const
U
ст /f=const
Нагрузка с постоянной
мощностью сопротивления
Mc=kω
Uст
2
/f=const
Вентиляторная нагрузка
Mc=kω
2
Uст /f2
= const
АД
РМ
U2 = const
f=50Гц
Uст = var
f=var
ПЧ
ТР
Uсэ = const
f=50Гц
115
Рис. 3 .19. Механические характеристики асинхронного двигателя
с частотным регулированием
Рассмотрим переменные потери в асинхронном двигателе,
представленные выражением (2.9). Заменим значение синхронной
частоты вращения и критического скольжения выражениями (3.15) и
(3.17). Тогда, выражение переменных потерь примет следующий вид
ст
/
р
ст
/
р
/
2
1
0
пер
1
X
X
p
R
R
М
R
R
s
M
P
.
(3.28)
Из полученного выражения видно, что переменные потери не
зависят от частоты напряжения и частоты вращения вала двигателя.
Таким образом, частотное регулирование обеспечивает посто-
янное значение потерь в асинхронном двигателе и коэффициент по-
лезного действия. Также, за счет пропорционального изменения ам-
плитуды напряжения статора и его частоты, обеспечивается постоян-
ство магнитного потока и перегрузочной способности двигателя.
Рис. 3 .20. Коэффициент мощности
Рис. 3 .21. Коэффициент нагрузки
P/Рном
соs φ
1
0.5
0
0.5
соs φ = const
P/Рном
η
1
0.5
0
0.5
η = const
s
M
sкр1
Mкр1
Mкр2
Mкр3
sкр2
sкр3
Mc=kω
2
f=fном
f =0,8 fном
s
M
sкр1
Mкр3
Mкр2
Mкр1
sкр2
sкр3
f=fном
f = 0,8fном
f=0,6fном
Рс = const
s
M
sкр1
Mкр
sкр2
sкр3
Mс=const
f = 0,8fном
f = 0,6fном
f =fном
116
3.3.4. Энергетические характеристики электроприводов
с релейно-импульсным регулированием
В последнее время, для управления координатами электропри-
водов с преобразователями частоты и асинхронными двигателями,
получают распространение релейно-импульсные алгоритмы. К сис-
темам управления на их основе можно отнести: системы прямого
управления моментом и системы фаззи-логического управления [35].
Энергосберегающий эффект от использования этих систем
обеспечивается за счет снижения пульсаций электромагнитного мо-
мента, при работе в установившихся режимах и ограничения момен-
та в переходных процессах. Также, за счет обеспечения максимально
возможного быстродействия динамические характеристики электро-
привода остаются на самом высоком уровне.
Система прямого управления моментом. Главные особенно-
сти системы прямого управления моментом заключаются в исполь-
зовании релейных регуляторов, и табличного выбора результирую-
щего напряжения, формируемого на выходе автономного инвертора.
Основные преимущества системы прямого управления момен-
том заключаются в простоте, надежности управления, а также инва-
риантности к внешним и параметрическим возмущениям за счет от-
сутствия в системе преобразователей координат, регуляторов состав-
ляющих тока статора и специальных аппаратных и программных
средств, для обеспечения модуляционного управления преобразова-
телем частоты.
Структурная схема электропривода с системой прямого управ-
ления моментом представлена на рис. 3.22 а. В системе управления
установлены следующие регуляторы: двухуровневый регулятор по-
токосцепления статора (ДРП); трехуровневый регулятор момента
(ТРM). Результирующий вектор выходного напряжения автономного
инвертора и комбинация коммутируемых полупроводниковых клю-
чей автономного инвертора выбираются по таблице переключений
(ТП). В зависимости от структуры и требований к динамическим ха-
рактеристикам электропривода, таблица переключений может иметь
различное внутреннее содержание.
Обратная связь в системе прямого управления моментом обра-
зуется с помощью вычислителя ненаблюдаемых координат, который
в режиме реального времени по измеренным значениям напряжения
117
статора, тока статора и напряжения звена постоянного тока, произ-
водит расчет действующих значений векторов электромагнитного
момента и потокосцепления статора, а также величину его угла по-
ворота. Вычисленные значения электромагнитного момента и пото-
косцепления статора сравниваются с заданными (M и Ψст). Рассогла-
сования поступают (εΨст, εM) на вход релейных регуляторов. Характе-
ристики регуляторов представлены на рис. 3.23.
Выходные сигналы релейных регуляторов (dΨs и dM) и значение
угла поворота вектора потокосцепления статора поступают на вход
блока «Таблица переключений», по которой выбирается вектор ре-
зультирующего напряжения автономного инвертора. После этого, в
системе прямого управления автоматически формируется коммута-
ционная функция управления полупроводниковыми ключами (SA, SB,
SC), при замыкании которых образуется выбранный вектор. Условия
выбора результирующего вектора представлены в табл. 3.2.
Принцип функционирования системы управления проиллюст-
рирован на рис. 3.24. Если вектор потокосцепления статора в опреде-
ленный момент времени находится в первом секторе и необходимо
увеличить его амплитуду и уменьшить электромагнитный момент, то
по таблице переключений система управления выберет и сформирует
на выходе преобразователя частоты шестой вектор напряжения (U6).
а) с системой
прямого управления моментом
б) с системой
фаззи-логического управления
Рис. 3 .22. Структурная схема электропривода
(M*
,Ψ
*
ст – действующие значения электромагнитного момента
и потокосцепления статора; θ – угол поворота вектора потокосцепления статора)
Ψст
M
M*
Ψ*
ст
θ
ФП
ФМ
БЗ
μΨст
μM
μθ
ФУ
εM
εΨст
Uст
Iст
Вычислитель
ненаблюдаемых
координат
Ud
SС
SА
SВ
АИ
Ψст
M
M*Ψ
*
ст
θ
ДРП
ТРМ
Uст
Iст
SС
SА
SВ
ТП
dΨст
dM
Вычислитель
ненаблюдаемых
координат
εΨст
εM
Ud
АИ
118
Таблица 3.2
Условия выбора результирующего вектора напряжения
в системе прямого управления моментом
dΨст
1
0
dM
0
0
-1
1
0
-1
θ1
U5
U
7
U
6,
U1
U
0
U
2
θ2
U1
U
0
U
4
U
3
U
7
U
6
θ3
U3
U
7
U
5
U
2
U
0
U
4
θ4
U2
U
0
U
1
U
6
U
7
U
5
θ5
U6
U
7
U
3
U
4
U
0
U
1
θ6
U4
U
0
U
2
U
5
U
7
U
3
Рис. 3 .23. Характеристики
релейных регуляторов
Рис. 3 .24. Годограф потокосцепления статора
асинхронного двигателя
Система фаззи-логического управления электроприводом.
Структурная схема системы фаззи-логического управления асин-
хронным электроприводом представлена на рис. 3.22 б. Система
управления имеет три входа и один выход. На входы поступают сиг-
налы, соответствующие рассогласованию по моменту и потокосцеп-
лению статора, а также угол поворота вектора потокосцепления ста-
тора. Вычислительный алгоритм на основе нечеткой логики состоит
из трех этапов: фаззификации, фаззи-логического вычисления и де-
фаззификации.
Фаззификация входных сигналов выполняется с использовани-
ем функций принадлежностей. Функция принадлежности рассогла-
εΨст
dΨст
а)
HΨ
εM
dM
б)
HM
U1
α
β
U2
U3
U4
U5
U6
U0,
II
III
IV
V
VI
I
Ψcт↓ M↑ Ψcт↑ M↓
Ψcт↑ M↓
Ψcт↓ M↓
Ψcт↑ M↑
Ψcт↓ M↑
U7,
119
сования по потокосцеплению статора (ФП) представлена тремя мно-
жествами: ZF – близкое к нулю, РF – положительное; NF – отрица-
тельное. Функция принадлежности рассогласования по моменту
(ФП) также представлена тремя множествами: ZM – близкое к нулю,
РM – положительное; NM – отрицательное. На третий вход нечеткой
системы управления поступает сигнал, соответствующий угловому
положению вектора потокосцепления статора (ФУ). Величине этой
переменной соответствуют шесть нечетких множеств θ1 к θ6.
Функции принадлежности входных координат представлены
на рис. 3.25: а – потокосцепления статора; б – электромагнитного
момента; в – угла поворота вектора потокосцепления статора.
Этап фаззи-логических вычислений выполняется на основе ба-
зы знаний (БЗ). База знаний связывает входные и выходные сигналы
в соответствии с правилами управления, которые формулируются в
форме: если εΨст = Ai; εM = Bi; θ = Ci то U = Ui. При заданных функци-
ях принадлежности входных сигналов количество таких правил бу-
дет 54. Эти правила приведены в табл. 3.3.
Рис. 3 .25. Функции принадлежности входных координат
Таблица 3.3
Фаззи-логические правила базы знаний
εΨст
εМ
θ1
θ2
θ3
θ4
θ5
θ6
PM
U2
U
3
U
4
U
5
U
6
U
7
ZM
U0
U7
U
0
U
7
U
0
U
7
РF
NM
U6
U
1
U
2
U
3
U
4
U
5
PM
U2
U
3
U
4
U
5
U
6
U
7
ZM
U7
U
0
U
7
U
0
U
7
U
0
ZF
NM
U6
U
1
U
2
U
3
U
4
U
5
PM
U3
U
4
U
5
U
6
U
1
U
2
ZM
U7
U
0
U
7
U
0
U
7
U
0
NF
NM
U5
U
6
U
1
U
2
U
3
U
4
1
-1
μΨст
εΨ
0
μθ
θ
θ1
θ3θ4θ5θ6
θ2
0
2π
μM
εM
01
-1
а)
б)
в)
120
Для дефаззификации используется алгоритм логического вы-
вода Мамдани, который основан на минимаксном выборе, реализуе-
мом в два этапа. На первом этапе вычисляется весовой коэффициент
,
,
min
ст
ст
M
M
i
,
(3.29)
U
Ui
i
Ui
,
min
*
,
(3.30)
а затем, вычисляется переменная с максимальным весовым коэффи-
циентом
U
M
Ui
U
*
max
.
(3.31)
Схема фаззи-логического регулирования представлена на
рис. 3.26.
Рис. 3 .26. Схема алгоритма фаззи-логического регулирования
На рис.3.27 представлены осциллограммы изменения электро-
магнитного момента (а) и потокосцепления статора (б), а также годо-
граф потокосцепления статора (в). Осциллограммы слева – электро-
привода с прямым управлением, справа – с фаззи-логическим.
На осциллограмме рис. 3.27 а видно, что пульсации момента,
при использовании фаззи-логического управления значительно ниже,
чем у электропривода с прямым управлением моментом. Регулиро-
вание потокосцепления статора (рис. 3.27 б), также осуществляется с
большей точностью, а переходный процесс протекает с меньшей ко-
лебательностью, что видно по годографу (рис. 3.27 в).
εΨст
εM
θ
μΨст
μM
μθ
No 1: если εΨст=PF; εM=PM; θ=θ1 то U=U2
No 2: если εΨст=PF; εM=ZM; θ=θ1 то U=U0
No 3: если εΨст=PF; εM=NM; θ=θ1 то U=U6
No 54: если εΨст=NF; εM=NM; θ=θ12 то U=U4
Max
U1-U7
Вход
Фаззи-
фикация
Нечеткое регулирование
Дефаззи-
фикация
Выход
121
а)
б)
в)
Рис. 3.27. Результаты моделирования электроприводов с
фаззи-логическим и прямым управлением моментом
122
3.4. Использование эффективных модуляционных
алгоритмов управления преобразователем частоты
Для управления транзисторами автономного инвертора, струк-
турная схема которого приведена на рис.3.2, в электроприводах мо-
гут использоваться следующие модуляционные алгоритмы: релейной
модуляции; широтно-импульсной модуляции; пространственно-
векторной модуляции. Такое разделение можно сделать условно, так
как, регулирование выходного напряжения во всех этих случаях
осуществляется за счет изменения скважности импульсов управле-
ния. Тем не менее, разные режимы работы автономного инвертора с
этими алгоритмами, разный вычислительный алгоритм управляющих
функций и разные методы модернизации этих алгоритмов с целью
повышения эффективности работы автономного инвертора допуска-
ют такую классификацию. На рис.3.28 приведены структурные схе-
мы этих алгоритмов и формы управляющих сигналов: а – алгоритма
релейной модуляции; б – алгоритма широтно-импульсной модуля-
ции; в – алгоритма пространственно-векторной модуляции [36].
При использовании релейного алгоритма модуляции, автоном-
ный инвертор работает в режиме источника тока. Управляющие сиг-
налы здесь формируются элементами типа двухпозиционного реле с
гистерезисом, на вход которых подаются сигналы ошибки формиро-
вания фазного тока. Изменение состояния реле происходит в том
случае, если ошибка станет равной или больше заданного значения
гистерезиса Δ. Таким образом, обеспечивается поддержание фазного
тока с точностью ±Δ. Поэтому, режим работы автономного инверто-
ра с таким алгоритмом называют «токовый коридор». Релейная мо-
дуляция характеризуется переменной частотой коммутации [27].
3.4.1. Алгоритм широтно-импульсной модуляции
и методы повышения его эффективности
Принцип алгоритма широтно-импулсной модуляции основан
на сравнении управляющих сигналов (UAa, UBb, UCc) и сигнала раз-
вертки (Us). В моменты времени, когда сигналы равны, формируются
импульсы управления, которые подаются на соответствующие тран-
зисторы. При синусоидальной форме управляющих сигналов, на вы-
ходе инвертора формируются напряжения, эквивалентные значения
которых изменяются по синусоидальному закону. Такой алгоритм
называется синусоидальной широтно-импульсной модуляцией.
123
а) алгоритм релейной модуляции
б) алгоритм широтно-импульсной модуляции
в) алгоритм пространственно-векторной модуляции
(С (converter) – преобразователь; Е (estimator) – вычислитель)
Рис. 3.28. Схемы формирования управляющих сигналов
и формы этих сигналов при разных алгоритмах управления
UAa
UСс
UВb
T1T2T0
N
U1
U3
U2
U4
U6
U5
ПВМ
SA
SB
SC
Uf
U
Uα Uβ
C
E
E
UAa
UВb
UСс
Предмодуляция
UN0
Us
ШИМ
SA
SB
SC
UAN
UBN
UСN
IAa
IВb
IСс
РМ
SA
SB
SC
A
ДТДТДТ
A
В
С
АИ
АД
B
C
IA
IB
IC
I*
A
I*
B
I*
C
124
В современных преобразователях частоты для управления
ключами автономного инвертора может использоваться алгоритм
пространственно-векторной модуляции. Принцип этого алгоритма
основан на том, что вектор выходного напряжения автономного ин-
вертора формируется на одном модуляционном периоде за счет по-
следовательного переключения основных векторов. Данный алго-
ритм позволяет обеспечить плавное перемещение результирующего
вектора напряжения на выходе автономного инвертора, что делает
его наиболее перспективным. Не смотря на преимущества алгоритма
«классической» пространственно-векторной модуляции, он может
быть модернизирован с целью повышения эффективности управле-
ния ключами, обеспечения более высоких энергетических характери-
стик и электромагнитной совместимости преобразователя частоты с
приводным электродвигателем.
Для повышения амплитуды вектора выходного напряжения ав-
тономного инвертора при широтно-импульсной модуляции может
использоваться метод предмодуляции управляющего сигнала. Для
этого, к управляющим сигналам UAa, UBb, UCc добавляют сигнал ну-
левой последовательности UN0 специальной формы и частоты. Блок
«UN0» рассчитывает необходимую частоту и амплитуду сигнала
предмодуляции UN0 в зависимости от частоты и амплитуды управ-
ляющих сигналов UAa, UBb, UCc.
На рис. 3.29 а показан управляющий сигнал синусоидальной
широтно-импульсной модуляции. Сигнал нулевой последовательно-
сти (сигнал предварительной модуляции) равен нулю.
При реализации алгоритма широтно-импульсного управления с
синусоидальной предмодуляцией третьей гармоникой, сигнал нуле-
вой последовательности рассчитывается следующим образом
t
А
UN
3
sin
15
,
0
0
,
(3.32)
где А – амплитуда управляющего сигнала, ωt – частота управляюще-
го сигнала. При использовании синусоидальной предмодуляции,
управляющий сигнал имеет форму, представленную на рис. 3.29 б.
На рис. 3.29 в представлен сигнал треугольной предмодуляции
третьей гармоникой, частота и амплитуда которого определяется по
следующему выражению
t
А
UN
3
sin
arcsin
25
,
0
0
.
(3.33)
125
а) синусоидальная
б) с синусоидальной
предмодуляцией
в) с треугольной предмодуляцией
Рис. 3 .29. Формы управляющих сигналов
широтно-импульсной
модуляции
При использовании различных форм сигналов нулевой после-
довательности обеспечивается различный уровень электромагнитной
совместимости автономного инвертора, результаты исследования ко-
торой будет представлен ниже.
На рис. 3.30 а, 3.30 б, 3.30 в представлены формы кривых вы-
ходных токов автономного инвертора и первой гармоники напряже-
ния при синусоидальной широтно-импульсной модуляции, широтно-
импульсной модуляции с синусоидальной предмодуляцией и тре-
угольной предмодуляцией, соответственно. Данные кривые получе-
ны при коэффициенте модуляции 1 и несущей частоте 1000 Гц.
На рис. 3.31 приведены зависимости коэффициентов суммар-
ных гармонических составляющих тока от коэффициента модуляции
при разных несущих частотах и зависимости коэффициента мощно-
сти от несущей частоты при разных коэффициентах модуляции (КМ)
при разных способах управления автономным инвертором.
126
а) синусоидальная
б) с синусоидальной предмодуляцией
в) с треугольной предмодуляцией
Рис. 3.30. Основная гармоника
выходного напряжения
автономного инвертора
с широтно-импульсной
модуляцией
и потребляемый нагрузкой ток
При синусоидальной широтно-импульсной модуляции на не-
сущей частоте 10 кГц обеспечивается минимальное искажение кри-
вой тока во всем диапазоне изменения коэффициента модуляции.
При несущей частоте 1000 Гц и коэффициенте модуляции 1 суммар-
ный коэффициент гармонических искажений тока равен 5,5 %.
При широтно-импульсной модуляции с синусоидальной пред-
модуляцией третьей гармоникой на несущей частоте 10 кГц обеспе-
чивается минимальное значение суммарного коэффициента гармо-
нических искажений тока около 7,5 %. При несущей частоте 1000 Гц
и коэффициенте модуляции 1 суммарный коэффициент гармониче-
ских искажений тока повышается до 9,5 %.
Искажение синусоидальности кривой тока при широтно-
импульсной модуляции с треугольной предмодуляцией самый высо-
кий из трех рассмотренных алгоритмов и равен 13 % при несущей
частоте 1000 Гц и коэффициенте модуляции 1. При увеличении не-
сущей частоты до 10 кГц и коэффициента модуляции до 1,15 сум-
марный коэффициент гармонических искажений тока равен 10 %.
127
а) синусоидальная
б) с синусоидальной предмодуляцией третьей гармоникой
в) с треугольной предмодуляцией третьей гармоникой
Рис. 3 .31. Зависимости коэффициента синусоидальных искажений тока
от коэффициента модуляции при разных несущих частотах и
коэффициента мощности от несущей частоты при разных коэффициентах модуляции
128
Амплитуда первой гармоники выходного напряжения при си-
нусоидальной широтно-импульсной модуляции равна 78,55 % от ве-
личины напряжения в звене постоянного тока. При использовании
широтно-импульсной модуляции c предмодуляцией, первая гармо-
ника выходного напряжения равна 100 % напряжения звена постоян-
ного тока, что обеспечивается за счет возможности увеличения ко-
эффициента модуляции до значения 1,15.
На рис. 3.31 видно, что увеличение коэффициента мощности
при увеличении несущей частоты характерно для всех способов
управления ключами. При широтно-импульсной модуляции с пред-
модуляцией при коэффициенте модуляции 1,15 обеспечивается ко-
эффициент мощности на уровне 0,7 на высоких несущих частотах,
при максимально возможном коэффициенте мощности 0, 7864.
3.4.2. Алгоритм пространственно-векторной модуляции
и методы повышения его эффективности
Алгоритм вычисления управляющих функций транзисторами
автономного инвертора, а затем, и формирование коммутационных
функций, включает в себя следующие этапы расчета: вычисление
модуля и фазы эталонного вектора напряжения, формирующегося на
выходе системы автоматического управления режимами электродви-
гателя; определение сектора, в котором находится эталонный вектор
напряжения; вычисление временных интервалов включения основ-
ных векторов напряжения T1, T2, T0; формирование коммутационных
функций управления ключами автономного инвертора.
Компоненты вектора эталонного напряжения UАа, UВb и UСc, на
первом этапе алгоритма модуляции, преобразуются из трехфазной
системы координат (АВС) в двухфазную – (α-β), а затем, вычисляют-
ся модуль и фаза эталонного вектора по следующим выражениям
2
2
U
U
U
,
(3.34)
U
U
U arctan
,
(3.35)
где Uα, Uβ – компоненты вектора эталонного напряжения в двухфаз-
ной системе координат (α-β). По величине фазы эталонного вектора
напряжения определяется сектор, в котором находится этот вектор.
Границы секторов образуют активные векторы выходного напряже-
ния автономного инвертора. Эти секторы представлены на рис. 3.32а.
129
а)
б)
Рис. 3 .32. Секторное разбиение координатной плоскости α-β
Далее вычисляются временные интервалы (Т1, Т2, Т0) действия
основных векторов на периоде пространственно-векторной модуля-
ции Tf. Если эталонный вектор представить как
0
7,0
1
1
1
0
7,0
2
1
1
U
U
U
T
T
U
T
T
U
T
T
U
U
i
i
f
f
i
f
i
,
(3.36)
где i=1÷6 – номер активного вектора, γ – относительная длительность
коммутации; то временные интервалы включения основных векторов
для каждого из шести секторов можно определить по выражениям
2
sin
2
sin
1
U
f
kT
T
;
(3.37)
3
sin
sin
2
U
f
kT
T
;
(3.38)
2
1
0
T
T
T
T
f
;
(3.39)
f
f
f
T1
;
(3.40)
d
U
U
k
2
3
,
(3.41)
где ff – частота несущего сигнала.
U1
U3
U4
U2
(T2/Tf)U1
U
(T1/Tf)U2
β
αА
B
U′
Сектор 1
Сектор 2
Сектор 3
Сектор 4
Сектор 5
Сектор 6
U5
U6
U0
U7
T0/
U0
Tf
T1/
T2/ T1/
T2/ T0/
T0/
T0/
U1U2U7U7 U1
U2 U0
0011110
0111
0
111
0001100
SA
SB
SC
t
t
t
Uf
t
U
UAa
UBb
UCc
130
Формы управляющих сигналов алгоритма пространственно-
векторной модуляции представлены на рис. 3.28 в, а процесс форми-
рования коммутационных функций представлен на рис. 3.32 б.
Таким образом, если эталонный вектор находится в первом
секторе, как это показано на рис. 3.32 а, то для формирования такого
же результирующего вектора напряжения на выходе инвертора, на
одном модуляционном периоде, должны последовательно включать-
ся транзисторы, обеспечивающие работу векторов U0 – U1 –U2 – U7 –
U7–U2–U1–U0втечениивремениТ1,Т2иТ0.
Для сравнения эффективности методов повышения алгоритма
пространственно-векторной модуляции целесообразно использовать
следующие критерии: амплитуда основной гармоники выходного на-
пряжения; частота коммутации; коэффициент суммарных гармони-
ческих составляющих выходного тока и напряжения.
Повышение эффективности алгоритма, за счет угловой
дифференциации координатной плоскости. Повысить эффектив-
ность работы алгоритма пространственно-векторной модуляции
можно путем угловой дифференциации (разбиения) координатной
плоскости на подсекторы. На рис. 3.33 а, 3.33 б и 3.33 в показано
разбиение координатной плоскости на 36, 72 и 120 подсекторов, со-
ответственно.
Угловая дифференциация координатной плоскости (α-β) по-
зволит обеспечить улучшение формы кривой тока, а именно, снизить
коэффициент искажения выходного тока и увеличить амплитуду ос-
новной гармоники выходного напряжения. При этом, нет необходи-
мости структурного изменения схемы автономного инвертора.
а)
б)
в)
Рис. 3 .33. Разбиение координатной плоскости α-β на подсекторы
U1
U2
β
α
3̊
n=120
Сектор 1
С
е
к
т
о
р
2
Сектор 6
U1
U2
β
α
5̊
n=72
Сектор 1
Сектор 6
С
е
к
т
о
р
2
U1
U2
β
α
10̊
n=35
Сектор 1
Сектор 6
С
е
к
т
о
р
2
131
При этом, изменится алгоритм вычисления интервалов вклю-
чения основных векторов. Расчет временных интервалов Т1 и Т2 с
учетом подсектора (n), в котором находится эталонный вектор, мож-
но осуществить с помощью следующих выражений
U
U
d
f
n
n
U
U
T
T
sin
3
cos
cos
3
sin
3
1
;
(3.42)
1
3
cos
sin
1
3
sin
cos
3
2
n
n
U
U
T
T
U
U
d
f
.
(3.43)
На рис. 3.34 представлены формы кривых выходного тока ав-
тономного инвертора, фазного напряжения и первой гармоники фаз-
ного напряжения при величине подсекторов: а – 60̊ и б – 3̊. Видно,
что при величине сектора 60̊ характер пространственно-векторной
модуляции соответствует синусоидальной широтно-импульсной мо-
дуляции. При уменьшении величины подсекторов и увеличении их
количества увеличивается частота коммутации инвертора. В свою
очередь, это обеспечивает лучшую форму кривой выходного тока.
Максимальное значение выходного фазного напряжения автономно-
го инвертора равно 66,7 % от величины постоянного напряжения на
входе автономного инвертора. Максимальное значение основной
гармоники выходного фазного напряжения равно 61 % постоянного
входного напряжения автономного инвертора.
На рис. 3.35 представлены зависимости, характеризующие из-
менение коэффициента искажений выходного фазного напряжения и
тока, при изменении относительной длительности коммутации авто-
номного инвертора и величины подсектора.
Минимальное значение коэффициента искажений выходного
тока (рис. 3.35 а) достигается при величине подсектора равного 3̊ и
работе автономного инвертора в режиме перемодуляции, т.е. при от-
носительной длительности коммутации выше 0,866. Минимальное
значение коэффициента искажения фазного напряжения (рис. 3.35 б)
достигается при величине относительной длительности коммутации
автономного инвертора равной 0,866 и находится ниже 3 %.
132
а)
б)
в)
г)
Рис. 3 .34. Выходной ток автономного инвертора,
фазное напряжение и первая гармоника фазного напряжения
а)
б)
Рис. 3 .35. Коэффициенты искажений и спектры фазного напряжения
на выходе автономного инвертора
при различной угловой дифференциации координатной плоскости
133
Повышение эффективности, за счет изменения алгоритма
активации основных векторов.
Алгоритм пространственно-
векторной модуляции, изложенный выше, обеспечивает формирова-
ние и плавное перемещение результирующего вектора выходного
напряжения автономного инвертора, за счет включения основных
векторов на модуляционном периоде с симметричным расположени-
ем нулевых векторов. Такой алгоритм можно назвать – «симметрич-
ный», когда нулевые вектора симметрично размещены в начале, се-
редине и конце модуляционного периода, а при формировании ком-
мутационных функций используется треугольная развертка
(рис. 3.32 б). Для реализации пространственно-векторной модуляции
можно использовать сигналы разверток других форм, например, пи-
лообразные сигналы с передним или задним фронтом. Процесс фор-
мирования коммутационных функций с такой разверткой показан на
рис. 3.36.
Модифицировать алгоритм пространственно-векторной моду-
ляции с целью минимизации переключений транзисторов инвертора
и снижения частоты коммутации можно за счет изменения последо-
вательности активации основных векторов. Например, можно ис-
пользовать следующие последовательности переключений, состоя-
щихизпятивекторов:U0–U1–U2– U1–U0илиU2–U1–U7– U1–
U2. Эти переключения показаны на рис. 3.36 б и рис. 3.36 в.
Формы управляющих сигналов алгоритма пространственно-
векторной модуляции при ее модернизации за счет изменения несу-
щего сигнала не изменяются и аналогичны сигналам, показанным на
рис. 3.28 в. Процесс формирования выходного напряжения с исполь-
зованием треугольной и пилообразной разверток показан на
рис. 3.37 а и рис. 3.37 б, соответственно. Вычисление сигнала тре-
угольной развертки можно организовать следующим образом
f
f
f
U
sin
arcsin
.
(3.44)
Поэтому, такую модуляцию можно назвать «синусоидальной»
пространственно-векторной модуляцией, а при использовании пило-
образной развертки – «пилообразной» пространственно-векторной
модуляцией. На рис. 3.37 в показаны формы фазного напряжения и
тока на выходе автономного инвертора и коммутационные функции
анодной группы транзисторов.
1
3
4
а
)
б
)
в
)
Р
и
с
.
3
.
3
6
.
Ф
о
р
м
и
р
о
в
а
н
и
е
у
п
р
а
в
л
я
ю
щ
и
х
и
м
п
у
л
ь
с
о
в
в
а
л
г
о
р
и
т
м
е
п
р
о
с
т
р
а
н
с
т
в
е
н
н
о
-
в
е
к
т
о
р
н
о
й
м
о
д
у
л
я
ц
и
и
1
1
1
1
1
1
1
1
T
1
/
2
U
2
T
2
/
2
T
2
/
2
T
1
/
2
U
1
U
1
U
7
U
2
0
0
1
1
1
1
0
0
0
1
1
1
0
1
1
1
T
f
T
0
S
A
S
B
S
C
t
t
t
U
f
t
U
U
A
a
U
B
b
U
C
c
T
0
/
2
U
0
T
f
T
1
/
2
T
1
/
2
T
0
/
2
T
2
U
1
U
2
U
0
U
1
0
1
1
1
0
0
0
1
0
0
0
0
0
0
0
t
t
t
S
A
S
B
S
C
U
f
t
U
U
A
a
U
B
b
U
C
c
T
0
/
4
U
0
T
f
T
1
/
2
T
2
/
2
T
1
/
2
T
2
/
2
T
0
/
4
T
0
/
4
T
0
/
4
U
0
U
1
U
1
U
2
U
7
U
2
U
7
1
1
1
1
1
1
0
0
1
1
1
1
0
0
0
0
S
A
S
B
S
C
t
t
t
U
f
t
U
U
A
a
U
B
b
U
C
c
1
1
0
0
0
0
0
0
130
135
а)
б)
в)
Рис. 3 .37. Работа автономного инвертора с симметричной
пространственно-векторной модуляцией
Если сигнал нулевой последовательности симметричной про-
странственно-векторной модуляции имеет гладкую форму (рис.3.37а
и рис.3.37б), то при пространственно-векторной модуляции с изме-
ненным алгоритмом активации основных векторов, сигнал нулевой
последовательности имеет точки разрыва. Поэтому, такой алгоритм
можно назвать «разрывной» пространственно-векторной модуляци-
ей. Также, при такой модернизации алгоритма пространственно-
векторной модуляции изменяются формы управляющих сигналов и
они могут иметь различный вид.
На рис. 3.38 показаны управляющие сигналы и сигналы нуле-
вых последовательностей при разрывной (пятивекторной) простран-
ственно-векторной модуляции: а – при U0 – U1 – U2 – U1 – U0, кото-
рую по форме нулевой последовательности можно назвать «зубча-
той» пространственно-векторной модуляцией; б – при U2 – U1 – U7 –
U1 – U2, которую можно назвать «пиковой». На рис. 3.38 в показаны
формы фазного напряжения и тока на выходе автономного инвертора
и коммутационные функции анодной группы транзисторов.
136
a)
б)
в)
Рис. 3 .38. Работа автономного инвертора с разрывной
пространственно-векторной модуляцией
Как видно из приведенных графиков (рис. 3.37 в и рис. 3.38 в),
число переключений транзисторов автономного инвертора при ис-
пользовании разрывной пространственно-векторной модуляции, и,
как следствие, частота коммутации, снижается, за счет большей доли
действия нулевых векторов на модуляционном периоде. Так, при
симметричной пространственно-векторной модуляции с треуголь-
ным несущим сигналом (рис. 3.32 б) на одном модуляционном ин-
тервале происходит шесть коммутаций автономного инвертора, а при
использовании разрывной пространственно-векторной модуляции –
только три (рис. 3.37 в и рис. 3.38 в). Таким образом, частота комму-
таций автономного инвертора снижается на 33 %. На практике это
означает, что при использовании такого алгоритма управления тран-
зисторами автономного инвертора будут снижаться коммутационные
потери, а значит, можно снизить габариты технических средств,
обеспечивающих отвод тепла от транзисторов.
С другой стороны, появляется возможность увеличить частоту
коммутации на 33 % для обеспечения более высокой электромагнит-
137
ной совместимости автономного инвертора, например, с приводным
электродвигателем, если первый используется в электроприводе пе-
ременного тока. На рис. 3.39 приведены зависимости коэффициента
искажения тока и напряжения на выходе автономного инвертора с
разрывной пространственно-векторной модуляцией.
а)
б)
Рис. 3 .39. Коэффициенты искажений и спектры фазного напряжения
на выходе автономного инвертора
с разрывной пространственно-векторной модуляцией
Из приведенных зависимостей видно, что при увеличении от-
носительной длительности коммутации, коэффициенты искажений
токов и напряжений снижаются, что свидетельствует о том, что фор-
ма кривой тока становится близкой к синусоидальной. При этом, ал-
горитм зубчатой пространственно-векторной модуляции обеспечива-
ет меньшие искажения синусоидальности тока и напряжения, чем
пиковая пространственно-векторная модуляция. Так в первом случае
суммарный коэффициент гармонических искажения равен 3,12 %, а
во втором случае – 7,45 %, при величине модуляционного периода
равного 0,001 с.
138
4. ВЫБОР, РАСЧЕТ И ПРОВЕРКА
ЭЛЕКТРОТЕХНИЧЕСКОГО ОБОРУДОВАНИЯ
РЕГУЛИРУЕМЫХ ЭЛЕКТРОПРИВОДОВ
4.1. Режимы работы и характеристики
приводных асинхронных двигателей
4.1.1. Номинальные режимы работы электроприводов
Номинальные режимы работы электродвигателей установлены
в стандарте ГОСТ 183-74 «Машины электрические вращающиеся.
Общие технические условия» [37]. Рассмотрим эти режимы более
подробно.
Продолжительный режим (S1) – режим работы электродви-
гателя с постоянной нагрузкой, при котором температура всех ее
частей достигает установившегося значения. Диаграмма работы
электродвигателя в этом режиме показана на рис. 4.1.
Кратковременный режим (S2) – режим работы электродви-
гателя с постоянной нагрузкой и длительностью рабочего периода
10, 30, 60 и 90 минут, при котором длительности периода нагрузки
недостаточно для нагрева всех частей двигателя до максимального
значения, а длительности остановки достаточно для охлаждения
всех частей двигателя до температуры окружающей среды. Диа-
грамма работы двигателя в этом режиме показана на рис. 4.2.
Рис.4.1 . Диаграмма
работы электродвигателя
в продолжительном режиме
Рис.4 .2. Диаграмма
работы электродвигателя
в кратковременном режиме
P
ΔP
T
t
N
Tmax
P
ΔP
T
t
N
Tmax
139
Повторно-кратковременный режим (S3) – режим работы
электродвигателя с постоянной нагрузкой и продолжительностью
включения 15; 25; 40 и 60 %, при котором кратковременные перио-
ды работы (рабочие периоды) чередуются с периодами отключения
машины (паузами), причем как в рабочие периоды, так в паузы, тем-
пературы частей электрической машины не достигают установив-
шихся значений.
Диаграмма
работы
электродвигателя
в
повторно-
кратковременном режиме показана на рис. 4.3.
Основной характеристикой повторно-кратковременного ре-
жима работы является относительная продолжительность включе-
ния, которую можно определить следующим образом
100
%
R
N
N
ПВ
,
(4.1)
где N – время рабочего периода; R – время паузы.
Перемежающийся режим (S6) – режим с продолжительно-
стью нагрузки 15, 25, 40 и 60 %, при котором рабочие периоды че-
редуются с периодами холостого хода (паузами), причем как в рабо-
чие периоды, так и в паузы, температуры частей электрической ма-
шины не достигают установившихся значений. Диаграмма работы
электродвигателя в перемежающемся режиме показана на рис.4.4.
Рис. 4 .3. Диаграмма
работы электродвигателя
в повторно-кратковременном режиме
Рис. 4 .4. Диаграмма
работы электродвигателя
в перемежающемся режиме
P
ΔP
T
t
N
Tmax
V
tц
P
ΔP
T
t
N
Tmax
R
tц
140
Основной характеристикой перемежающегося режима работы
электродвигателя является продолжительность нагрузки, которую
можно определить следующим образом
100
%
V
N
N
ПН
,
(4.2)
где N – время работы под нагрузкой; V – время холостого хода.
Кроме основных номинальных режимов работы электродвига-
телей S1, S2, S3 и S6 в качестве рекомендуемых режимов установле-
ны: повторно-кратковременный с частыми пусками (S4); повторно-
кратковременный с частыми пусками и электрическим торможением
(S5); перемежающийся с частыми реверсами при электрическом
торможении (S7); перемежающийся с двумя или более частотами
вращения (S8). Рассмотрим эти режимы более подробно.
Повторно-кратковременный режим с частыми пусками
(S4) – повторно-кратковременный режим с продолжительностью
включения 15, 25, 40 и 60 %; числом включений в час 30, 60, 120 и
240 при коэффициенте инерции 1,2; 1,6; 2,0; 2,5; 4,0; 6,3 и 10,0. Диа-
грамма работы электродвигателя в этом режиме показана на рис. 4.5.
Коэффициент инерции – отношение суммы приведенного к
валу двигателя момента инерции приводимого механизма и момента
инерции ротора двигателя к моменту инерции ротора электродвига-
теля.
Рис. 4 .5. Диаграмма
работы электродвигателя
в повторно-кратковременном режиме
с частыми пусками
Рис. 4 .6. Диаграмма работы электродвигателя
в повторно-кратковременном режиме
с частыми пусками
и электрическим торможением
P
ΔP
T
t
Tmax
R
tц
DNF
P
ΔP
T
t
Tmax
R
tц
N
D
141
Рис. 4 .7. Диаграмма
работы электродвигателя
в перемежающемся режиме
с частыми реверсами
при электрическом торможении
Рис. 4 .8. Диаграмма
работы электродвигателя
в перемежающемся режиме
с двумя или более
частотами вращения
Повторно-кратковременный режим с частыми пусками и
электрическим торможением (S5) – повторно-кратковременный
режим с продолжительностью включения 15, 25, 40 и 60 %; числом
включений в час 30, 60, 120 и 240 при коэффициенте инерции 1,2;
1,6; 2,0; 2,5 и 4,0. Диаграмма работы электродвигателя в этом режи-
ме показана на рис.4.6.
Продолжительность включения электродвигателя в этом ре-
жиме можно определить следующим образом
100
%
V
N
D
N
D
ПН
,
(4.3)
где D – время пуска.
Перемежающийся режим с частыми реверсами при элек-
трическом торможении (S7) – перемежающийся режим с числом
реверсов в час 30, 60, 120 и 240 при коэффициенте инерции 1,2; 1,6;
2,0; 2,5 и 4,0. Потери при реверсировании в этом режиме оказывают
существенное влияние на превышения температуры отдельных час-
тей машины. Диаграмма работы электродвигателя в этом режиме
показана на рис. 4.7.
Перемежающийся режим с двумя или более частотами
вращения (S8) – перемежающийся режим с числом циклов в час 30,
P
ΔP
T
t
Tmax
tц
D
N1
F
N2
P
ΔP
T
t
Tmax
tц
DN
F
142
60, 120 и 240 при коэффициенте инерции 1,2; 1,6; 2,0; 2,5 и 4,0. Про-
должительность нагрузки на каждой из частот вращения устанавли-
вается для каждого электродвигателя индивидуально.
Диаграмма работы электродвигателя в перемежающемся ре-
жиме с двумя или более частотами вращения показана на рис.4.8.
4.1.2. Нагрузочные характеристики
рабочих механизмов электроприводов
Момент сопротивления рабочего механизма электропривода
характеризуется начальным статическим моментом при трогании с
места и характером изменения момента сопротивления в зависимо-
сти от частоты вращения. В общем виде, для большинства рабочих
механизмов, момент сопротивления выражается формулой
100
ном
нач
с
ном
с
нач
с
с
Р
M
M
M
M
,
(4.4)
где Мс нач – начальный момент сопротивления рабочего механизма;
Мс ном – номинальный момент сопротивления рабочего механизма;
Р – показатель степени, который определяет характер нагрузки [21].
Промышленные электроприводы, используемые в технологи-
ческих установках, являются движителями различных рабочих ме-
ханизмов, каждый из которых имеет свою собственную механиче-
скую характеристику. Однако, из них можно выделить четыре ос-
новных вида механических нагрузок электроприводов. Из выраже-
ния (4.4) их можно определить, устанавливая различный показатель
степени. Рассмотрим четыре вида нагрузок более подробно.
Момент сопротивления не зависит от частоты вращения (Р =
0, Mс = const). Такую механическую характеристику имеют различ-
ные подъемные механизмы (лебедки, краны и другие), механизмы
подачи металлорежущих станков, конвейеры и т.д. На рис. 4.9 такая
механическая характеристика обозначена как первая (1).
Момент сопротивления увеличивается по линейному закону с
увеличением частоты вращения (Р = 1). Такая зависимость присут-
ствует в генераторе постоянного тока с независимым возбуждением,
если сопротивление нагрузки постоянно. На рис. 4.9 такая механи-
ческая характеристика обозначена как вторая (2).
143
Рис. 4 .9. Виды нагрузок
электроприводов
Рис.4 . 10. Экскаваторная нагрузка
электропривода
Момент сопротивления изменяется обратно пропорционально
частоте (Р = –1). Данная механическая характеристика присуща ме-
таллорежущим станкам, мельницам, бетономешалкам. На рис. 4.9
такая механическая характеристика обозначена как третья (3).
Момент сопротивления увеличивается по нелинейному закону
с увеличением частоты (Р = 2). Эта механическая характеристика
часто называется «вентиляторной», потому что характерна различ-
ным вентиляторам, насосам, турбокомпрессорам. На рис. 4.9 такая
механическая характеристика обозначена как четвертая (4).
В электромеханических системах машин экскаваторно-
транспортного комплекса электроприводы главных рабочих меха-
низмов находятся под воздействием экскаваторных нагрузок. При
работе с такой нагрузкой частота вращения электродвигателя по ме-
ре увеличения момента сопротивления до определенного значения
остается постоянной, а затем резко снижается до нуля. Таким обра-
зом, экскаваторная характеристика обеспечивает ограничение тока и
момента приводного электродвигателя определенными значениями.
Экскаваторная характеристика представлена на рис. 4.10.
4.1.3. Переходные характеристики электроприводов
Время, за которое асинхронный двигатель достигает заданной
(максимальной) частоты вращения, называется временем ускорения.
Время, за которое электродвигатель снижает частоту вращения с на-
чальной (максимальной) до остановки, называется временем замед-
ления.
ω
M
ω0
Mном
Mк
0
ω
M
1
2
3
4
0
144
Рис. 4 .11. Типы ускорений и замедлений двигателя
Ускорение и замедление может осуществляться как по линей-
ной зависимости (L – образная кривая), так и по S или U-образным
кривым. Разгонные и тормозные кривые асинхронного двигателя
показаны на рис. 4.11.
Выбор вида кривой разгона приводного электродвигателя дол-
жен, прежде всего, определяться характером нагрузки. Очевидно,
что электропривод с L – образной кривой разгона целесообразно ис-
пользовать с линейной нагрузкой, а U – образную – с вентиляторной
нагрузкой.
4.2. Методы выбора и проверки
асинхронных электродвигателей
для различных режимов работы
4.2.1. Расчет мощности асинхронного двигателя
различных рабочих механизмов
При выборе электродвигателя для привода любого рабочего
механизма, сначала, определяются необходимые для расчета мощ-
ности приводного двигателя параметры этого механизма. Для неко-
торых рабочих механизмов необходимую мощность на валу привод-
ного двигателя можно определить следующим образом [38]:
1. Мощность электропривода вентилятора
3
пу
вен
вен
вен
з
2
10
H
Q
k
P
,
(4.5)
ω
t
ωном
Время
разгона
S
L
U
S
U
L
Время
торможения
0
145
где Qвент – производительность вентилятора; Нвент – давление на вы-
ходе вентилятора; ηвент – коэффициент полезного действия вентиля-
тора; kз – коэффициент запаса.
2. Мощность электропривода насоса
3
пу
н
н
н
з
2
10
H
gQ
k
P
,
(4.6)
где Q н – производительность насоса; g – ускорение свободного па-
дения; H н – расчетная высота подъема; ρ – плотность перекачивае-
мой жидкости; ηн – коэффициент полезного действия насоса.
3. Мощность электропривода поршневого компрессора
3
пу
ком
ком
з
2
10
A
Q
k
P
,
(4.7)
где Qком – производительность компрессора; А – работа изотермиче-
ского и адиабатического сжатия атмосферного воздуха объемом од-
ного кубического метра давлением 1,1·105 Па до требуемого давле-
ния; ηком – коэффициент полезного действия компрессора.
4. Мощность электропривода конвейеров
к
тр
к
з
2
367
Lk
Q
k
P
,
(4.8)
где Qк – производительность конвейера; L – длина конвейера; kтр –
коэффициент трения в подшипниках; ηк – коэффициент полезного
действия конвейера.
5. Мощность электропривода подъемного механизма
3
пм
п
н
0
з
2
10
v
G
G
k
P
,
(4.9)
где G0 – вес подъемной платформы; Gн – номинальный вес подни-
маемого груза; vп – скорость поднимания груза; ηпм – коэффициент
полезного действия подъемного механизма.
6. Мощность электропривода металлорежущего станка
3
ст
р
2
10
Kqv
P
,
(4.10)
где К – удельное сопротивление резанью; q – сечение пружины; vр –
скорость резания; ηст – коэффициент полезного действия станка.
Далее, по вычисленному значению необходимой мощности
146
рабочего механизма, необходимо определить развиваемый электро-
двигателем момент. Это можно сделать следующим образом
3
2
3
2
3
2
10
10
55
,
9
10
30
P
n
P
n
P
M
.
(4.11)
Дополнительно необходимо сопоставить значение пускового
момента асинхронного электродвигателя и приводного механизма.
Затем, определяется активная и полная мощность, потребляе-
мая электродвигателем. Это можно сделать следующим образом
дв
2
1
P
P
,
(4.12)
cos
дв
2
1
P
S
.
(4.13)
4.2.2. Методы выбора и проверка
асинхронного двигателя
Выбор электродвигателя при работе с переменной нагрузкой и
частотой вращения может производиться путем сравнения макси-
мальной температуры электродвигателя за цикл с допустимым зна-
чением температуры нагрева, установленной производителем вы-
бранного двигателя. Этот метод требует сложных расчетов темпера-
тур электродвигателя на каждом участке его работы и построения
кривой нагрева, что является весьма сложной задачей [39].
На практике целесообразно использовать косвенные методы
оценки температуры нагрева электродвигателя, например: метод
средних потерь; метод эквивалентного тока; метод эквивалентного
момента; метод эквивалентной мощности.
Метод средних потерь. Метод заключается в сравнении сред-
них потерь за цикл работы электродвигателя (ΔРср) с номинальным
значением потерь мощности
ном
ср
P
P
.
(4.14)
Величину средних потерь мощности можно определить сле-
дующим образом
ц
1
3
2
1
3
3
2
2
1
1
ср
...
...
t
t
P
t
t
t
t
t
P
t
P
t
P
t
P
P
n
i
i
i
n
n
n
,
(4.15)
147
где ΔPi – мощность потерь на i-ом интервале нагрузочной диаграм-
мы, которую можно определить следующим образом
i
i
i
i
P
P
1,
(4.16)
ном
ном
ном
ном
1
P
P
,
(4.17)
где ηi – коэффициент полезного действия двигателя при мощности
на валу Рi; ti – продолжительность i-ого интервала; tц – продолжи-
тельность цикла интервала; n – число интервалов в цикле.
Если величина средних потерь мощности меньше номиналь-
ного значения потерь, т.е.
ном
ср
P
P
,
(4.18)
то среднее превышение температуры двигателя будет не больше до-
пустимого значения, т.е.
ном
ср
.
(4.19)
Если средние потери мощности больше номинальных, то не-
обходимо увеличить мощность выбранного двигателя, в противном
случае уменьшить мощность двигателя.
Сложность этого метода заключается в том, что при его ис-
пользовании необходимо вычислить значение потерь мощности на
каждом интервале работы электропривода и построить диаграмму
потерь мощности. Поэтому, этот метод в меньшей степени исполь-
зуется на практике для выбора приводных электродвигателей.
Метод эквивалентного тока. Если в качестве исходных дан-
ных имеется нагрузочная диаграмма тока электродвигателя, то целе-
сообразно использовать метод эквивалентного тока для выбора элек-
тродвигателя.
Под эквивалентным током, в данном случае, подразумевается
неизменяющееся значение тока, который вызывает такой же нагрев
электродвигателя, что и фактический ток в течение всего цикла ра-
боты электродвигателя.
Величину эквивалентного тока можно определить следующим
образом
ц
1
2
3
2
1
2
3
2
3
2
2
2
1
2
1
экв
...
...
t
t
I
t
t
t
t
t
I
t
I
t
I
t
I
I
n
i
i
i
n
n
n
,
(4.20)
где Ii – ток электродвигателя на i-ом участке диаграммы тока.
148
Выбор электродвигателя по нагреву осуществляют при вы-
полнении следующего условия
ном
экв
I
I
,
(4.21)
т. е. необходимо, чтобы номинальный ток двигателя был больше ли-
бо равен значению эквивалентного тока.
Затем, полагая, что значение номинального тока необходимого
электродвигателя равно значению эквивалентного тока, а также за-
давшись необходимым значением коэффициента полезного дейст-
вия и коэффициента мощности, определяют необходимое значение
мощности выбираемого для электропривода асинхронного двигате-
ля. Это можно сделать следующим образом
cos
3
ном
экв
ном
расч
ном
I
U
P
.
(4.22)
Асинхронный двигатель выбирается из следующего условия
расч
ном
ном
P
P
.
(4.23)
Далее, для выбранного асинхронного двигателя уточняется
значение коэффициента мощности и коэффициента полезного дей-
ствия, и определяется значение номинального тока следующим об-
разом
cos
3
ном
ном
расч
ном
ном
U
P
I
.
(4.24)
Далее, выбранный двигатель должен быть проверен по пере-
грузочной способности.
Метод эквивалентного момента. Для использования этого
метода необходимо наличие нагрузочной диаграммы момента, раз-
виваемого асинхронным электродвигателем.
Сначала, определяют значение эквивалентного момента сле-
дующим образом
ц
1
2
3
2
1
2
3
2
3
2
2
2
1
2
1
экв
...
...
t
t
M
t
t
t
t
t
M
t
M
t
M
t
M
M
n
i
i
i
n
n
n
.
(4.25)
где Мi – момент электродвигателя на i-ом участке диаграммы тока.
Номинальный момент выбираемого асинхронного двигателя
должен быть больше значения эквивалентного момента, т.е. должно
выполняться следующее условие
149
ном
экв
M
M
.
(4.26)
Однако, номинальное значение момента электродвигателя в
каталожных данных не приводится. Из-за этого, выбор асинхронно-
го электродвигателя производится следующим образом. Если при-
нять, что значение эквивалентного момента равно номинальному
значению выбираемого электродвигателя, определяют значение рас-
четной мощности следующим образом
ном
экв
ном
экв
расч
ном
55
,
9
n
M
M
P
.
(4.27)
Затем, выбирается асинхронный двигатель, так, чтобы выпол-
нялось следующее условие
расч
ном
ном
P
P
.
(4.28)
Затем, для выбранного асинхронного электродвигателя опре-
деляется значение номинального момента
55
,
9
1
ном
ном
ном
0
ном
ном
ном
ном
n
P
s
P
P
M
.
(4.29)
Полученное значение проверяют на выполнение условия
(4.26). Выбранный двигатель также должен быть проверен по пере-
грузочной способности.
Метод эквивалентной мощности. Для использования этого
метода необходимо наличие нагрузочной диаграммы по мощности,
представленную зависимостью мощности от времени.
Сначала, определяют значение эквивалентной мощности сле-
дующим образом
ц
1
2
3
2
1
2
3
2
3
2
2
2
1
2
1
экв
...
...
t
t
P
t
t
t
t
t
P
t
P
t
P
t
P
P
n
i
i
i
n
n
n
,
(4.30)
где Рi – мощность электродвигателя на i-ом участке диаграммы.
Так как мощность асинхронного двигателя является основным
каталожным параметром, то электродвигатель выбирают при усло-
вии выполнения следующего неравенства
экв
ном
P
P.
(4.31)
Затем, выбранный двигатель должен быть проверен по пере-
грузочной способности.
150
4.2.3. Проверка асинхронного двигателя
по перегрузочной способности
Для проверки выбранного асинхронного двигателя по пере-
грузочной способности, по нагрузочной диаграмме и тахограмме на
каждом участке определяется значение момента. Это можно сделать
следующим образом
i
i
i
P
M
,
(4.32)
где ωi – частота вращения двигателя на i-ом участке тахограммы.
Далее, необходимо определить максимальное значение мо-
мента асинхронного двигателя за цикл работы (Мmax). Для выбран-
ного электродвигателя должно выполняться следующее условие
ном
max
M
M
,
(4.33)
где λ – перегрузочная способность выбранного электродвигателя.
Косвенно, проверку электродвигателя по перегрузочной спо-
собности можно выполнить с использованием значений тока асин-
хронного двигателя следующим образом
ном
max
I
I
,
(4.34)
где Imax – максимальное значение тока, определенное по нагрузочной
диаграмме тока.
4.2.4. Дополнительные замечания к методам выбора
асинхронных двигателей
При работе в кратковременных и повторно-кратковременных
режимах на некоторых интервалах рабочего цикла двигатель не ра-
ботает. Для двигателей с самовентиляцией это приводит к тому, что
теплоотвод от электродвигателя снижается. Это обстоятельство не-
обходимо учитывать при расчете эквивалентных параметров элек-
тродвигателя.
Например, если используется метод эквивалентной мощности,
то значение эквивалентной мощности необходимо определять сле-
дующим образом
151
р
т
п
1
2
ц
1
2
факт
экв
t
t
t
t
P
t
t
P
P
n
i
i
i
n
i
i
i
,
(4.35)
где α и β – коэффициенты, учитывающие ухудшение условий охла-
ждения электродвигателя при пуске и торможении, соответственно.
При расчете эквивалентной мощности по нагрузочной диа-
грамме, вычисленное значение эквивалентной мощности соответст-
вует фактической продолжительности включения, которая опреде-
ляется следующим образом
100
%
факт
факт
факт
факт
R
N
N
ПВ
.
(4.36)
Как правило, фактическая продолжительность включения при-
водного двигателя отличается от номинальной. В этом случает, элек-
тродвигатель выбирается так, чтобы номинальная продолжитель-
ность включения была максимально близка к фактической, а значе-
ние эквивалентной мощности корректируется следующим образом
ном
факт
факт
экв
расч
экв
ПВ
ПВ
P
P
.
(4.37)
4.3. Выбор и проверка
полупроводникового преобразователя частоты
При проектировании регулируемого электропривода с преоб-
разователем частоты и асинхронным двигателем, после выбора при-
водного электродвигателя, главным вопросом остается выбор пре-
образователя частоты. Выбранный преобразователь частоты должен
обеспечивать все необходимые (заданные) динамические и энерге-
тические характеристики электропривода.
При выборе преобразователя частоты для управления асин-
хронным двигателем необходимо учитывать следующие факторы
[40]:
нагрузочную диаграмму, которая определяет максималь-
ную мощность на валу (потребляемую) электродвигателя и мощ-
ность в переходных режимах;
152
тахограмму, которая определяет время ускорения и замед-
ления, максимальную и минимальную скорость вращения; диапазон
регулирования;
количество приводных электродвигателей;
энергетические характеристики, которые должен обеспе-
чить преобразователь частоты: коэффициент полезного действия;
коэффициент мощности; суммарный коэффициент гармонических
составляющих тока и напряжения на входе и выходе;
конструктивные характеристики преобразователя частоты:
массогабаритные характеристики; исполнение и другие.
Выбор преобразователя частоты, при известном типе и харак-
теристиках приводного двигателя, целесообразно выполнять в сле-
дующем порядке:
расчет тока, протекающего через преобразователь частоты;
расчет мощности;
расчет пускового момента (мощности);
расчет момента инерции;
проверка времени ускорения;
проверка времени замедления.
Рассмотрим каждый этап расчета и проверки преобразователя
частоты более подробно.
Для определения тока, протекающего через преобразователь
частоты электропривода, состоящего их одного приводного асин-
хронного двигателя, при работе последнего в установившемся ре-
жиме, можно воспользоваться известным выражением
cos
3
55
,
9
дв
ном
уст
уст
дв
уст
U
M
n
I
,
(4.38)
где nуст, Муст – скорость вращения и момент асинхронного электро-
двигателя при работе в установившемся режиме (определяется по
нагрузочной диаграмме).
Значение потребляемого (протекающего через преобразова-
тель частоты) тока, при работе приводного двигателя в переходных
режимах можно определить следующим образом
153
cos
3
55
,
9
дв
ном
дин
ном
уст
дв
пер
U
M
M
n
I
,
(4.39)
уст
ном
ном
55
,
9
n
Р
M
,
(4.40)
пер
уст
дин
55
,
9t
n
J
M
,
(4.41)
где tпер – длительность переходного процесса.
Ток, потребляемый асинхронным двигателем в установившем-
ся режиме, не должен превышать номинального тока преобразовате-
ля частоты (Iном пч), а ток двигателя в переходном режиме не должен
превышать пускового тока преобразователя частоты (Iп пч), т.е. долж-
ны выполняться следующие неравенства
пч
ном
дв
уст
I
I
,
(4.42)
пч
п
дв
пер
I
I
.
(4.43)
При работе электропривода в установившемся режиме, полная
мощность преобразователя частоты должна быть несколько больше
мощности приводного двигателя, т.е. должно выполняться следую-
щее условие
пч
ном
дв
ном
S
S
.
(4.44)
Номинальную полную мощность асинхронного двигателя в
установившемся режиме можно рассчитать следующим образом
cos
дв
ном
ном
дв
ном
P
n
S
.
(4.45)
Расчет полной мощности, потребляемой приводным электро-
двигателем в переходном процессе, при разгоне электродвигателя с
нулевой скорости (пусковой мощности), можно выполнить следую-
щим образом
154
пер
ном
ном
дв
ном
дв
пер
55
,
9
cos
55
,
9
t
n
J
M
n
S
.
(4.46)
При выборе полной мощности преобразователя частоты долж-
но выполняться следующее условие
пч
п
дв
пер
5,1 S
S
.
(4.47)
Суммарный момент инерции электропривода можно вычис-
лить следующим образом
рм
дв
J
J
J
,
(4.48)
где Jдв – момент инерции приводного двигателя; Jрм – момент инер-
ции рабочего механизма.
Преобразователь частоты должен обеспечивать заданные та-
хограммой ускорения и торможения приводного двигателя. Для про-
верки выбранного по мощности и току преобразователя частоты не-
обходимо выполнить расчет времени ускорения и замедления.
Время ускорения асинхронного двигателя можно рассчитать
следующим образом
с
ном
2
1
р
55
,
9
M
M
n
n
J
t
,
(4.49)
где – коэффициент коррекции момента при пуске. Для скалярных
систем автоматического управления коэффициент коррекции мо-
мента при пуске находится в пределах 1,2 ÷ 1,5; для векторных сис-
тем управления – 1,5 ÷ 2, для систем прямого управления моментом
–
2÷3.
Время торможения асинхронного двигателя можно рассчитать
следующим образом
с
дв
2
1
т
55
,
9
M
M
n
n
J
t
,
(4.50)
где β – коэффициент коррекции момента при торможении (без тор-
мозного резистора 0,1 ÷ 0,3; при наличии тормозного резистора –
0,8 ÷ 1,5).
155
4.4. Выбор и проверка тормозных резисторов
для преобразователей частоты
При необходимости уменьшить скорость торможения асин-
хронного двигателя, особенно для электроприводов, работающих с
большим моментом инерции, применяются тормозные резисторы.
От правильного выбора тормозного резистора для преобразователя
частоты зависит динамика электропривода при торможении. Схема
включения тормозного резистора приведена на рис. 4.12.
Рис. 4 .12. Схема включения тормозного устройства
(САУ ТУ – система автоматического управления тормозным устройством;
ДН – датчик напряжения)
При торможении, асинхронный двигатель переходит в генера-
торный режим. Генерируемая электрическая энергия поступает в
звено постоянного тока и вызывает повышение напряжения. Для
снижения уровня напряжения в звене постоянного тока используют
тормозные устройства, с помощью которых излишняя электрическая
энергия преобразуется в тепловую.
Основными элементами тормозного устройства являются тор-
мозной транзистор и тормозное сопротивление. В преобразователях
частоты тормозной транзистор находится в стандартной комплекта-
К трансформатору
и сети электроснабжения
К приводному
асинхронному двигателю
ДН
САУ ТУ
Rт
VTт
Выпрямитель
Автономный
инвертор
Тормозное
устройство
156
ции, а тормозное сопротивление необходимо рассчитать и вы-
брать [41]. Рассмотрим расчет тормозного сопротивления.
Максимальный тормозной момент асинхронного двигателя
можно определить следующим образом
т
2
1
max
тор
,55
9t
n
n
J
M
.
(4.51)
Максимальную мощность торможения асинхронного двигате-
ля можно определить следующим образом
т
2
1
max
тор
max
тор
2
,55
9t
n
n
M
Р
.
(4.52)
Максимальную электрическую мощность торможения асин-
хронного двигателя можно определить следующим образом
2
max
тор
2
max
тор
1
kР
Р
Р
,
(4.53)
где k – коэффициент уменьшения нагрузки при торможении. Этот
параметр можно выбрать из табл. 4.1.
Таблица 4.1
Выбор коэффициента уменьшения нагрузки при торможении
Мощность асинхронного двигателя,
кВт
Коэффициент уменьшения нагрузки
при торможении
> 1,5
0,25
2,2÷4
0,20
15<
0,08
Период торможения в цикле работы электропривода можно
определить следующим образом
ц
т
т
T
t
T
.
(4.54)
Максимально-допустимое значение сопротивления тормозно-
го резистора можно определить следующим образом
max
тор
1
2
max
т
Р
U
R
d
,
(4.55)
Величину тормозного сопротивления можно определить сле-
дующим образом
157
к
max
тор
1
т
K
Р
R
,
(4.56)
где Кк – корректировочный коэффициент, который можно выбрать
по графику рис. 4.13.
Рис. 4 .13. Корректировочный коэффициент
При установки тормозного резистора необходимо предусмот-
реть дополнительные устройства для отвода тепла от него, в качест-
ве которых можно использовать радиаторы охлаждения, вентилято-
ры или другие устройства.
4.5. Коммутационные аппараты и защитные устройства
регулируемых электроприводов
В электроприводе используются коммутационные аппараты
специального назначения, для отключения питания, предохраните-
ли, устройства защитного отключения [21]. Также, используются
различные виды защит электропривода.
Устройство отключения питания используется для отключе-
ния электропривода от сети электроснабжения. В устройстве отклю-
чения питания необходимо использовать коммутационные устрой-
ства следующих типов: выключатель-разъединитель; разъединитель,
имеющий вспомогательный контакт, который, прежде чем разомк-
нуть главные контакты разъединителя, во всех случаях заставляет
коммутирующие устройства разорвать цепь нагрузки; автоматиче-
ский выключатель.
0
20
40
60
80
Тт
2
4
6
8
10
Кк
158
а) неправильно
б) правильно
Рис. 4 .14. Схема заземления преобразователя частоты
Предохранители используются для защиты входного коммута-
тора преобразователя частоты (выпрямителем) от внешних коротких
замыканий. Предохранители устанавливаются по одному для каждо-
го фазного проводника.
Устройство защитного отключения применяется в качестве
дополнительной меры защиты от поражения людей электрическим
током.
Преобразователь частоты должен обеспечивать следующие
защиты приводного асинхронного двигателя: защиту от тока пере-
грузки; защиту от перенапряжениий; защиту от понижения напря-
жения; защиту от замыканий на землю; контроль фаз питающей се-
ти; контроль фаз выходной цепи; защиту двигателя от заклинивания;
защиту привода от работы с недогрузкой; защиту двигателя от пере-
грузки. Обязательным является обеспечение заземления экранов ка-
белей электропривода, корпусов преобразователя частоты и привод-
ного двигателя. В случае использования нескольких преобразовате-
лей частоты, их заземляющие проводники не должны образовывать
петлю. Схема заземления показана на рис.4.14.
4.6. Дополнительные устройства
регулируемых электроприводов
В электроприводах с асинхронными двигателями и преобразо-
вателями частоты применяются различные дополнительные устрой-
ства для повышения их эксплуатационно-технических характери-
стик, расширения функций преобразователя частоты, а также, для
повышения совместимости преобразователей частоты.
ПЧ
ПЧ
ПЧ
ПЧ
ПЧ
ПЧ
159
К дополнительным устройствам можно отнести следующие
устройства: дистанционный пульт управления; программируемые
логические контроллеры; фильтры; модуль рекуперации электриче-
ской энергии [21].
Дистанционный пульт управления позволяет осуществлять
управление всеми функциями преобразователя, осуществлять на-
стройку, перенастройку и диагностику неисправностей без непо-
средственного контакта с корпусом преобразователя частоты.
Программируемый логический контролер используется для
автоматического управления устройствами в различных технологи-
ческих процессах. Контроллер выполняет также функции пропор-
ционального, пропорционально-интегрального или пропорциональ-
но-интегрально-дифференциального регулятора.
Фильтры в электроприводе предназначены для обеспечения
норм качества электрической энергии в сетях, где используются пре-
образователи частоты. В электроприводах используются следующие
виды фильтров:
фильтр входного напряжения (дроссели) – устанавливается
на входе электропривода и обеспечивает сглаживание формы на-
пряжения и тока сети электроснабжения;
синус фильтр – устанавливается на выходе преобразователя
частоты и обеспечивает сглаживание формы напряжения и тока для
снижения шума и вибраций двигателя, а также для снижения скоро-
сти нарастания выходного напряжения на выходе преобразователя,
что позволяет увеличить длину силового соединительного кабеля и
продлить срок службы изоляции обмоток двигателя;
специальный выходной фильтр переменного тока – исполь-
зуется при пуске двигателя от преобразователя частоты для сниже-
ния вибрации;
фильтры радиопомех и электромагнитного излучения – ис-
пользуются для подавления излучения преобразователя частоты в
диапазоне радиоприема и электромагнитного излучения.
Рекуперативный модуль устанавливается для реализации ре-
куперативного торможения и возврата энергии в питающую сеть.
Рекуперативное торможение применяется в тех случаях, когда ско-
рость двигателя должна уменьшаться без достижения полной оста-
новки.
160
5. СОВРЕМЕННЫЕ ЭЛЕКТРОПРИВОДЫ
С АСИНХРОННЫМИ ДВИГАТЕЛЯМИ
И ПРЕОБРАЗОВАТЕЛЯМИ ЧАСТОТЫ
ОБЪЕКТОВ ТОПЛИВНО-ЭНЕРГЕТИЧЕСКОГО КОМПЛЕКСА
5.1. Электротехническая система перемещения
и динамического позиционирования буровой платформы
Северные и арктические моря, в которых в настоящее время
производится разведка и эксплуатация наиболее перспективных
шельфовых месторождений углеводородов (нефти, газа, конденса-
та), представляют собой экстремальную среду для работы электро-
оборудования, которое используется в составе технических средств
освоения шельфа. Воздействие ветра, волн, соленой воды и удален-
ность от берега делают вопросы надежности и технического обслу-
живания оборудования чрезвычайно важными.
В состав электротехнического оборудования современных бу-
ровых и добывающих платформ входит система перемещения и ди-
намического позиционирования. Одной из наиболее современных
буровых установок по добыче нефти является платформа Stena Don,
которая обеспечивает бурение скважин в Северном море. Внешний
вид платформы Stena Don представлен на рис.5.1 а [42-44]. Другими
задачами платформы также являются открытие новых и эксплуата-
ция существующих месторождений нефти, расположенных на глу-
бине до 500 м.
Вся конструкция платформы, включая буровую вышку, буро-
вое оборудование и вертолетную площадку, располагается на двух
скрепленных между собой понтонах, каждый из которых примерно
43 м в высоту и 95 м в длину. Под каждым понтоном установлены
три азимутальных поворотных движителя (АПД), которые даже при
экстремальных погодных условиях удерживают платформу на за-
данной позиции с помощью системы динамического позициониро-
вания. По норвежской классификации «Dynamic Positioning» данная
система позиционирования отвечает самым высоким требованиям.
Работа всех шести азимутальных поворотных движителей, ко-
торые без якорей удерживают буровую платформу в заданном месте
и перемещают ее с одной рабочей площадки на другую, осуществля-
ется с помощью системы динамического позиционирования. Струк-
161
турная схема системы перемещения и динамического позициониро-
вания буровой платформы представлена на рис. 5.2.
В состав электротехнической системы привода системы пере-
мещения и динамического позиционирования платформы входят
следующие элементы: дизель генераторы (девять блоков с номи-
нальной мощностью 4375 кВА); распределительные устройства (три
блока с номинальной мощностью 5000 кВА); трансформаторы
(шесть блоков с номинальной мощностью 800 кВА); высоковольт-
ные щиты управления (три блока с номинальной мощностью
800 кВА).
а)
б)
Рис. 5 .1. Внешний вид
буровой платформы Stena Don
и электроприводов системы
динамического позиционирования
162
Рис.5.2 . Структурная схема системы перемещения
и динамического позиционирования буровой платформы
Каждая система электропривода АПД состоит из трех основ-
ных элементов: высоковольтного электродвигателя Siemens H-modul
Т1
4МВА
АД1
3,3 кВт
4,16 кВ
АПД1
АВ1
И1
ПЧ1
4 МВА
Т2
АД2
АВ2
И2
АПД2
Т3
АД3
АВ3
И3
АПД3
Т4
АВ4
И4
Т5
АВ5
И5
Т6
АВ6
И6
АД4
АПД4
АД5
АПД5
АД6
АПД6
ГРУ
163
мощностью 3,3 МВт; преобразователя частоты Siemens Simovert MV
(VFD) мощностью 4,0 МВА; трансформатора Geafol мощностью
4,2 МВА. Внешний вид элементов электроприводов системы дина-
мического позиционирования представлен на рис.5.1б.
Асинхронные электродвигатели, входящие в состав АПД,
имеют вертикальную конструкцию и водяное охлаждение. Они
представляют собой трехфазные асинхронные 6-полюсные машины
переменного тока, работающие при напряжении 4,16 кВ.
Преобразователи частоты Siemens Simovert MV мощностью
4000 кВА рассчитаны на напряжение 4,16 кВ. В состав преобразова-
теля частоты входят трехуровневые коммутаторы типа активный
выпрямитель и автономный инвертор, выполненные на полностью
управляемых транзисторах (IGBT). Их применение позволяет обес-
печить высокий уровень электромагнитной совместимости преобра-
зователя без дополнительных силовых схем (фильтров, компенсато-
ров и других устройств). Звено постоянного тока выполнено в виде
конденсаторных накопителей. Преобразователи частоты и электро-
двигатели имеют водяное охлаждение и степень защиты IP54.
На входе каждого преобразователя частоты установлены
трансформаторы Geafol, которые имеют мощность 4200 кВА, рас-
считанные на напряжение 11 кВ. Их степень защиты IP23. Для вы-
работки электрической энергии на буровой платформе используются
девять дизель-генераторов, а электроснабжение электроприводов
АПД осуществляется напряжением 11 кВ.
В электроприводе АПД применяется векторное управление с
ориентацией по потокосцеплению ротора. Использование векторно-
го управления в сочетании с трехуровневой структурой коммутато-
ров преобразователя частоты обеспечивает генерацию синусоидаль-
ных токов статора асинхронного двигателя без использования вы-
ходного фильтра.
Регулирование частоты вращения АПД позволяет подобрать
скорость гребного винта в соответствии с определенными условия-
ми. Так, например, можно запустить все шесть движителей для дос-
тижения максимальной скорости перемещения при движении от од-
ной буровой площадки до другой, или удерживать платформу в оп-
ределенном положении в сложных погодных условиях. Можно так-
же работать в режиме «холостого хода» при одном или двух запу-
щенных движителях в условиях спокойного моря.
164
Система автоматизации плавучей платформы включает систе-
мы управления технологическими процессами, электропитанием, а
также систему динамического позиционирования и систему теле-
коммуникации. Система управления электропитанием компании
Siemens обеспечивает автоматическое управление и мониторинг
процессов генерации и распределения электроэнергии платформы.
Она включает меры по обеспечению высокого качества электро-
энергии. Всесторонний контроль и мониторинг способствуют уве-
личению потенциала экономии энергии благодаря использованию
регулируемых электроприводов.
5.2. Электропривод движителей
плавучего добывающего комплекса корабельного типа
На борту плавучего добывающего комплекса корабельного
типа (Floating Production Unit – FPU) производится переработка га-
за, а также разделение газа и конденсата. Внешний вид плавучего
добывающего комплекса представлен на рис.5.3. Добывающие ком-
плексы аналогичной конструкции используются при освоении
Штокмановского месторождения углеводородов.
Рис. 5 .3. Внешний вид плавучего добывающего комплекса корабельного типа
Основной технологический процесс включает сепарацию газа,
воды и конденсата, с последующей осушкой первого. Обеспечивает-
ся откачка конденсата и раздельное нагнетание газа и конденсата в
165
трубопроводы. Передвижение добывающего комплекса возможно
благодаря электроприводной гребной установке, структурная схема
которой показана на рис.5.4 [46,47].
Рис.5 .4. Структурная схема гребной установки плавучего добывающего комплекса
Т2
Т3
Т4
В2
В3
В4
В1
АИ2
АИ3
АИ4
ДПР1
ДПР2
АД1
4,1 кВт
600об/мин
ГРУ
6,3 кВ
50 Гц
ВРК1
8 кВт
АД2
4,1 кВт
600об/мин
ВРК2
8 кВт
АД3 АД4
Т1
АИ1
ПЧ1
166
В качестве главных источников электроэнергии используют-
ся четыре главных дизель-генератора (ГДГ) переменного тока, про-
изводства компании «Wartsila» (Финляндия): два синхронных трех-
фазных генератора мощностью по 6000 кВт и два мощностью по
4500 кВт. Генераторы обеспечивают поддержание напряжения на
уровне 6,3 кВ частотой 50 Гц. Частота вращения синхронного гене-
ратора 750 об/мин.
Главные дизель-генераторы в различных режимах работы
судна, например, на ходу и при маневрировании, используются для
питания электроприводов гребной установки, подруливающего уст-
ройства, общесудовых потребителей, а при стоянке и при спасатель-
ных работах - для питания насосов специального пожаротушения,
подруливающего устройства и общесудовых потребителей.
Для обеспечения электроэнергией электроприводов гребной
установки используется главное распределительное устройство
(ГРУ) 6,3 кВ. Компанией производителем такого ГРУ является «Aker
Kvaerner Power and Automation Systems» (Норвегия).
В качестве движителей в гребных установках используются
две азимутальные винто-рулевые колонки (ВРК), производства ком-
пании «Steerprop» (Финляндия). Мощность каждой колонки состав-
ляет 8000 кВт. Для привода ВРК используются четыре гребных
электродвигателя переменного тока фирмы «Aker Kvaerner Power
and Automation Systems». Приводные трехфазные асинхронные элек-
тродвигатели имеют номинальную мощность 4100 кВт каждый. Час-
тота вращения 600 об/мин. На каждый вал ВРК установлено по два
двигателя, получающих питание от разных секций ГРУ.
Для обеспечения плавного регулирования частоты вращения
каждого гребного электродвигателя используются полупроводнико-
вые преобразователи частоты, выполненные по двухзвенной схеме, с
емкостным звеном постоянного тока. В состав каждого преобразова-
теля частоты входит трансформатор с двумя вторичными обмотками
(Т1). К вторичным обмоткам трансформатора подключен 12-
пульсный выпрямитель (В1) с параллельным соединением выпрями-
тельных трехфазных диодных мостов. На выходе преобразователя
частоты установлен автономный инвертор (АИ1), выполненный по
трехуровневой схеме, на полностью управляемых транзисторах
(IGBT). Преобразователь
частоты
произведен
компанией
«Aker KvaernerPower and Automation Systems».
167
Система автоматического регулирования частоты вращения и
мощности приводных электродвигателей выполнена на основе век-
торного алгоритма. Система управления обеспечивает постоянство
мощности во всем диапазоне регулирования частоты вращения ВРК
от режима швартовки до режима полного хода, а при увеличении
нагрузки на винтах сверх располагаемой мощности, частота враще-
ния ВРК снижается вплоть до нулевого значения, при этом, момент
на валу не превышает 1,7 от номинального. Кроме того, система
обеспечивает ограничение мощности ГДГ при недостаточном запасе
мощности в сети 6,3 кВ (при этом учитывается количество рабо-
тающих ГДГ и мощность, потребляемая судовым оборудованием).
Основным достоинством регулируемого электропривода ВРК
на основе асинхронных двигателей, преобразователей частоты и
векторных алгоритмов системы автоматического управления заклю-
чается в обеспечении высоких динамических характеристик. Кроме
того, для автоматического регулирования мощности ГДГ преду-
смотрена система управления электроэнергетической установкой,
являющаяся частью интегрированной системы управления, контроля
и сигнализации.
Несмотря на ряд недостатков асинхронных электродвигателей
(потери на скольжение, пониженный коэффициент мощности), их
использование дает серьезные преимущества по сравнению с син-
хронными машинами, которые заключаются в следующем: отсутст-
вие оборудования для системы возбуждения (трансформаторы, сис-
тема управления возбуждением и т.д.); уменьшение массогабарит-
ных характеристик; повышение надежности; упрощение обслужива-
ния при эксплуатации.
5.3. Электроприводные агрегаты для транспортировки
углеводородов по континентальным трубопроводам
В приводе насосных агрегатов на нефтеперекачивающих стан-
циях, в настоящее время, используются синхронные и короткозамк-
нутые асинхронные электродвигатели. В качестве синхронного при-
вода в основном используются высоковольтные электродвигатели
типа СТД (мощностью 1250-8000 кВт) и СТДП (мощностью 630-
12500 кВт). В асинхронном электроприводе насосных агрегатов ис-
пользуются высоковольтные электродвигатели типа 4АТД (мощно-
168
стью 500-5000кВт).
В составе электроприводных газоперекачивающих агрегатов
(ГПА) на компрессорных станциях используются как синхронные
(СТМ-4000, СТД; СТД-12,5; СДГ-12,5; ЭГПА-25; ЭГПА-Ц-6,3), так
и асинхронные электрические (АЗ-4500-1500) двигатели различных
производителей. Основные преимущества современных электропри-
водных ГПА, по сравнению с агрегатами других типов (газотурбин-
ными и газомоторными), заключаются в следующем: высокая на-
дежность; минимальные затраты на капитальный ремонт; большой
моторесурс узлов и деталей; простота автоматизации и управления
(регулирования); экологическая чистота; пожаробезопасность.
В настоящее время, основу электроприводных установок
транспортировки углеводородов составляют синхронные двигатели.
Основные преимущества электрических машин этого типа заклю-
чаются в следующем: обеспечивают возможность работы электро-
привода с единичным коэффициентом мощности; обладают мень-
шей чувствительностью к перепаду питающего напряжения; обеспе-
чивают постоянство частоты вращения при изменении нагрузки на
валу. С другой стороны, синхронные двигатели обладают рядом не-
достатков по сравнению с асинхронными, а именно, их конструкция
значительно сложнее. Пуск синхронной машины осуществляется в
несколько этапов, а силовые управляющие устройства и их алгорит-
мическое обеспечение сложнее и менее надежное, чем в асинхрон-
ных электроприводах.
Электропривод на основе асинхронных электродвигателей
превосходит синхронный практически по всем параметрам. Асин-
хронные двигатели обладают простой конструкцией. В частотно-
регулируемом асинхронном электроприводе обеспечивается просто-
та регулирования частоты вращения во время пуска и поддержание
ее в установившихся режимах. Единственным минусом асинхрон-
ных электроприводов, который не позволял широко использовать
его при больших мощностях, более 6000 кВт, низкий коэффициент
мощности и отсутствие возможности его регулирования. В настоя-
щее время, этот недостаток полностью компенсирован за счет ис-
пользования в преобразователях частоты активных выпрямителей.
В процессе транспортировки углеводородов по магистраль-
ным трубопроводам требуется осуществлять плавное регулирование
давления и напора на выходе центробежного нагнетателя. Наиболь-
169
шее распространение получили два способа регулирования: дроссе-
лированием (перепуск части транспортируемого сырья с выхода
центробежного нагнетателя обратно на вход) и изменением частоты
вращения центробежного нагнетателя.
Преимущества второго способа широко известны, главное из
которых заключается в снижении потребления электроэнергии про-
порционально частоте вращения центробежного нагнетателя. Для
регулирования частоты вращения приводного электродвигателя в
современных агрегатах используются полупроводниковые преобра-
зователи частоты, которые могут иметь различную топологию и ха-
рактеристики. К электротехническим комплексам предъявляются
самые высокие требования по уровню электромагнитной совмести-
мости и энергетическим характеристикам, которые в значительной
степени определяются структурой и эффективностью управления
ЭП агрегата.
В настоящее время, производство высокоэффективных элек-
троприводных перекачивающих агрегатов осуществляется по двум
компоновочным схемам [48, 49]: с использованием выносного ком-
прессора и электропривода в виде автономного агрегата; с использо-
ванием капсулированной компоновки, при которой агрегат создает-
ся в виде герметичного блока, в корпусе которого размещен элек-
тропривод с магнитным подвесом, а на консольных участках вала
ротора двигателя смонтированы рабочие колеса.
В современных электроприводных транспортирующих агрега-
тах могут использоваться различные топологии. Одними из наибо-
лее распространенных топологий являются: двухтрансформаторная
структура и преобразователь частоты с 12-пульсным выпрямителем
и трехуровневым инвертором.
Структурная схема двухтрансформатороного преобразователя
частоты электропривода центробежного нагнетателя представлена
на рис. 5.5. В схеме преобразователя осуществляется двойная транс-
формация напряжения с помощью понижающего (Т1) и повышаю-
щего (Т2) высоковольтных трансформаторов. Двойная трансформа-
ция позволяет использовать для регулирования частоты относитель-
но низковольтный преобразователь частоты, который выполнен по
двухзвенной схеме.
Преобразователи частоты с такой структурой отличают отно-
сительная простота практической реализации высоковольтного
170
электропривода. Вследствие этого, они наиболее часто применяются
для управления высоковольтными электродвигателями в диапазоне
мощностей до 3 МВт. При большей мощности электропривода
трансформатор (Т2) вносит существенные искажения в процесс
управления электродвигателем. Основными недостатками двух-
трансформаторных преобразователей являются высокие массогаба-
ритные характеристики, меньшие по отношению к другим схемам
коэффициент полезного действия и надежность.
В составе преобразователя частоты, выполненного по двух-
трансформаторной схеме, могут использоваться как диодные не-
управляемые, так и активные выпрямители. Автономный инвертор
выполнен по трехфазной мостовой схеме на полностью управляе-
мых транзисторах IGBT. На рис. 5.5 приняты следующие обозначе-
ния: В – силовой полууправляемый выпрямитель; LC – силовой
фильтр звена постоянного напряжения; АИ – автономный инвертор
напряжения; ФКУ – фильтрокомпенсирующее устройство; ДР –
дроссель.
Преобразователи, выполненные по этой схеме, имеют огра-
ниченный диапазон регулирования частоты вращения электродвига-
теля. При снижении частоты на выходе преобразователя увеличива-
ется насыщение сердечника и нарушается расчетный режим работы
выходного трансформатора (Т2). Поэтому, как показывает практика,
диапазон регулирования ограничен в пределах 0,5nном < n < nном. Для
расширения диапазона регулирования используют трансформаторы
с увеличенным сечением магнитопровода. При увеличении выход-
ной частоты растут потери в сердечнике трансформатора Т2 на пе-
ремагничивание и вихревые токи.
Структурная схема другого преобразователя частоты электро-
привода центробежного нагнетателя представлена на рис. 5.6 a.
Внешний вид агрегата с таким преобразователям частоты представ-
лен на рис. 5.6 б[49].
Регулирование производительности агрегата осуществляется
за счет изменения скорости вращения ротора нагнетателя, соеди-
ненного с валом двигателя. Диапазон регулирования скорости вра-
щения: от 50% до 105% (4100 до 8610 об/ мин (143.7 Гц)) от номи-
нальной скорости. Параметры двигателя в основных режимах рабо-
ты приведены в табл. 5.1.
1
7
1
Р
и
с
.
5
.
5
.
С
т
р
у
к
т
у
р
н
ы
е
с
х
е
м
ы
д
в
у
х
т
р
а
н
с
ф
о
р
м
а
т
о
р
о
н
ы
х
п
р
е
о
б
р
а
з
о
в
а
т
е
л
е
й
ч
а
с
т
о
т
ы
э
л
е
к
т
р
о
п
р
и
в
о
д
о
в
ц
е
н
т
р
о
б
е
ж
н
ы
х
н
а
г
н
е
т
а
т
е
л
е
й
А
Д
3
к
В
т
6
к
В
Ц
Б
Н
Т
1
6
/
0
,
7
к
В
Д
Р
С
е
т
ь
6
к
В
А
И
Ф
К
У
Т
2
0
,
7
/
6
к
В
L
C
В
А
Д
3
к
В
т
6
к
В
Ц
Б
Н
Т
1
6
/
0
,
7
к
В
Д
Р
С
е
т
ь
6
к
В
И
Ф
К
У
Т
2
0
,
7
/
6
к
В
L
C
А
В
171
172
Таблица 5.1
Параметры двигателя
электроприводного газоперекачивающего агрегата
Наименование параметра
Режим
максимальной
длительной
мощности
Режим
максимальной
длительной
скорости
Номинальный
режим
Мощность двигателя, кВт
6600
6600
6300
Частота вращения ротора
двигателя синхронная, об/мин
8200
8610
8200
Напряжение, В
3300
3300
3300
Ток в фазе, А
1520
1520
1450
Коэффициент мощности двигателя
0,785
0,795
0,785
Частота тока при синхронной
частоте вращения, Гц
136,9
143,7
136,9
КПД двигателя
0,97
0,97
0,97
Момент
-
-
7.34
Центробежные нагнетатели природного газа, рассчитанные на
конечное давление 5,49 МПа, снабжены сухими газовыми уплотне-
ниями и магнитным подвесом. Преобразователь частоты рассчитан
на колебание питающего напряжения от минус 10 до плюс 10 про-
центов номинального значения по амплитуде и от минус 0,4 до плюс
0,4 Гц по частоте. Температура окружающей среды, при которой до-
пустима эксплуатация преобразователя, находится в пределах от
плюс 5 до плюс 40 °С.
На входе преобразователя частоты с 12-пульсным выпрямите-
лем установлен трехобмоточный трансформатор с двумя вторичны-
ми обмотками. На выходе выпрямителя установлено звено постоян-
ного тока, состоящее из высоковольтных конденсаторов. Автоном-
ный инвертор выполнен на полностью управляемых транзисторах
IGBT.
Преобразователь частоты такого электропривода имеет сле-
дующие параметры. Мощность преобразователя номинальная (при
частоте 143 Гц) 8700 кВА. Мощность преобразователя максимальная
(при частоте 143 Гц) 9150 кВА. Напряжение питания номинальное
(12-пульсный выпрямитель, через трансформатор) 2·3AC 1850 В.
Частота напряжения питания номинальная 50 Гц. Выходной ток в
173
фазе номинальный 1524 А. Выходной ток в фазе максимальный
1600 А. Выходное напряжение (трёхуровневая широтно-импульсная
модуляция), номинальное 3300 В. Выходная частота 137 Гц. Диапа-
зон регулирования скорости (без датчика) 1:20. Точность поддержа-
ния скорости (без датчика) 0,5 %.
а)
б)
Рис. 5 .6. Структурная схема и внешний вид электропривода
газоперекачивающего агрегата
ДПР
10 кВ
50 Гц
ЦБН
6,3 кВт
АД
6,3 кВт
8200об/мин
В1
Т1
АИ1
ПЧ1
174
5.4. Подводные электроприводные комплексы
для транспортировки углеводородов
по шельфовым трубопроводам
Для проектирования, обустройства месторождений и эксплуа-
тации технологических систем добычи, сбора и транспортировки
природного газа с шельфовых месторождений требуются огромные
капитальные и эксплуатационные вложения.
В настоящее время, для сбора углеводородов на шельфе ис-
пользуют подводные добывающие комплексы, «телом» которых яв-
ляются манифольды. Манифольд представляет собой закрепленную
на морском дне «статическую» конструкцию (не содержащую вра-
щающихся частей), которая объединяет несколько добывающих
скважин с помощью подводных промысловых газопроводов. При
прохождении через манифольд природный газ очищается от песка и
воды и поступает на морскую платформу или транспортное судно,
где производятся дополнительные технологические процессы и,
дальнейшая транспортировка на берег к перерабатывающему заво-
ду. В Российской Федерации манифольды используют на месторож-
дении «Сахалин-2» в Охотском море на шельфе острова Сахалин в
субарктических условиях. Для снижения затрат на освоение морских
месторождений целесообразно использование подводных перекачи-
вающих комплексов на основе регулируемого электропривода для
подводного компремирования и транспортировки природного газа.
Использование подводных комплексов позволит обеспечить
транспортировку природного газа без использования транспортных
судов и минимизирует влияние на хрупкую экосистему Северного
Ледовитого океана. Также, обеспечит высокий уровень ресурсосбе-
режения и энергоэффективности процесса освоения месторождений
природного газа, за счет экономии топливно-энергетических ресур-
сов транспортных судов, добывающих платформ и других традици-
онных технологических комплексов морских месторождений.
Подводный перекачивающий комплекс построен по принципу
интеграции различных компонентов в едином корпусе. Так, в под-
водном перекачивающем комплексе объединена совокупность тех-
нических средств (автономного инвертора, электродвигателя, цен-
тробежного нагнетателя, микропроцессорных систем связи и диаг-
ностики) в едином герметичном корпусе.
175
Рис 5.7 . Структура подводного перекачивающего комплекса
Структура подводного перекачивающего комплекса представ-
лена на рис. 5.7 [51]. Его основными элементами являются: привод-
ной регулируемый электродвигатель (3) и один или несколько цен-
тробежных нагнетателей (10), интегрированных в единый герметич-
ный корпус (2) и изолированных друг от друга с помощью газоди-
намических уплотнений (4,5). Электродвигатель и центробежные
нагнетатели имеют единый вал (8) с опорами на магнитные под-
шипники (6,7 и 11). Также, в корпус комплекса интегрированы тех-
нические средства регулирования, управления и связи (1). Транс-
портируемый природный газ подводится и отводится от комплекса
по патрубкам (9).
Мировые нефтегазовые компании, такие как Shell, Exxon,
Total, BP, Woodside, Statoil и Petrobras, на сегодняшний день, явля-
ются лидерами по разработке технических средств подводного ком-
премирования. Первый подводный комплекс был создан компанией
General Electric мощностью 850 кВт, который был испытан в 1992
году в заводских условиях [52]. В 2001 году General Electric и Aker
Kvaerner в рамках норвежской правительственной программы Demo
2000 были запущены подводные комплексы на 2,5 и 12,5 МВт. Че-
тыре модуля мощностью 12,5 МВт планируется использовать при
освоении месторождения Ormen Lange в 2016 году.
176
а) MAN Turbo’s Hofim-type
б) Siemens ECO-II
Рис. 5 .8. Внешний вид подводных перекачивающих комплексов
Разработки в области подводных технических средств ведутся
компаниями MAN и Siemens в рамках проекта компании Statoil для
месторождения Asgard. В Норвегии была испытана установка MAN
Hofim-type (рис. 5.8 а), а в 2009 году проведены испытания компрес-
сора Siemens ECO-II (рис. 5.8 б) [53].
Одним из основных требований к подводным агрегатам явля-
ется обеспечение высокой надежности функционирования транс-
портирующего комплекса в подводном положении. Для этого, с це-
лью оптимизации и сокращения элементов подводного комплекса,
электропривод может иметь структуру, представленную на рис. 5.9.
Рис. 5 .9. Структура электропривода подводного перекачивающего агрегата
Морское
дно
(до 70км)
Электроприводной
перекачивающий подводный агрегат
ФКУ
АД
ЦБН
Т
Сеть
ФКУ
Береговая
энергетическая станция
АИ
АВ
177
Основной особенностью электроприводов таких агрегатов яв-
ляется то, что высоковольтный активный выпрямитель, входящий в
состав преобразователя частоты, расположен на береговой энерге-
тической станции и, таким образом, вынесен из подводной части аг-
регата, что повышает его надежность. Высоковольтный автономный
инвертор, электродвигатель и центробежный нагнетатель размеще-
ны непосредственно на морском дне. Электроснабжение автономно-
го инвертора осуществляется по высоковольтной линии постоянного
тока (High-voltage direct current – HVDC), проложенной по морскому
дну.
5.5. Электропривод механизмов
экскаваторно-транспортного комплекса
(карьерных экскаваторов и самосвалов)
Внешний вид экскаватора ЭКГ-32 представлен на рис. 5.10.
Структурная схема электрического привода экскаватора ЭКГ-32
представлена на рис. 5.11. Комплект электрооборудования электро-
привода переменного тока экскаватора ЭКГ-32 обеспечивает пита-
ние, управление и защиту двигателей и другого оборудования, глав-
ных и вспомогательных механизмов карьерного экскаватора с объе-
мом ковша 32 м
3
.
Рис. 5 .10. Внешний вид экскаватора ЭКГ-32.
178
Электропривод выполнен на основе асинхронных двигателей
и содержит в своем составе два привода хода, два привода подъема
и один привод поворота. Электроснабжение и управление электри-
ческими двигателями осуществляется с помощью автономных ин-
верторов, выполненных по трехфазной мостовой схеме. На входе
преобразователя частоты установлены активные выпрямители.
Такая схема электропривода, по сравнению с системой элек-
тропривода, выполненного на основе двигателей постоянного тока,
например, на экскаваторах ЭКГ 5 и ЭКГ 10, значительно повышает
надежность привода, увеличивает его коэффициент полезного дей-
ствия, улучшает его динамику и снижает энергопотребление.
Рис. 5 .11. Структурная схема электропривода
главных механизмов экскаватора ЭКГ – 32
Т1
6/0,7 кВ
Сеть
6кВ
АИ1
C
АВ1
АВ2
АД1
МПВ
АИ2
АИ3
АИ4
АИ5
АВ3
АВ4
АВ5
АД2
МПД
АД2
МПД
АД2
МЧ
АД2
МЧ
179
Электропривод главных механизмов выполнен на основе
асинхронных электродвигателей марок: АДРЭ-С 850-6 УХЛ2; АД-
РВЭ-С 450-6 УХЛ2; АДРЭ-400-6 УХЛ1, АДРЭ-С 400-6 УХЛ1. Элек-
тропривод обеспечивает нормальную работу главных механизмов
экскаватора при следующих нормах качества электрической питаю-
щей сети: отклонение питающего напряжения в пределах ± 10 % от
номинального; отклонение частоты напряжения ± 3 % от номиналь-
ной; провалы напряжения до 30 % амплитудного значения и шири-
ной до 10 электрических градусов; коэффициент несинусоидально-
сти напряжения не более 5 %. Основные параметры электропривода
приведены в табл.5.2.
Карьерные самосвалы компании «БелАЗ» имеют грузоподъ-
емность до 450 т и являются одними из самых больших самосвалов в
мире. Отличительной особенностью машин этого типа является
применение в движителях мотор-колес, на основе электропривода
переменного тока. Внешний вид самосвала «БелАз» представлен на
рис. 5.12 [52, 53].
Электропривод мотор-колес предназначен для обеспечения тя-
гового, тормозного и стояночного режимов автосамосвала «БелАЗ»
грузоподъемностью 360 тонн. В комплект электропривода входит:
шкаф управления с системой диагностики; тяговые двигатели ТАД-8
(2 шт.); тяговый генератор ГСТ-2450; преобразователь частоты.
Структурная схема электропривода мотор-колес представлена на
рис. 5.13. При этом, в структуре электропривода мотор-колес само-
свала, возможно применение активного выпрямителя вместо 12-
пульсного выпрямителя. Это обеспечит более эффективную работу
всей электроэнергетической установки.
Таблица 5.2
Основные параметры электропривода главных механизмов
Наименование параметра
Значение
Номинальная потребляемая мощность, кВА
2000
Число фаз питающей сети
3
Номинальное напряжение питания, кВ
6
Частота напряжения питания, Гц
50
180
Рис. 5 .12. Внешний вид самосвала «БелАз»
Выработка электроэнергии для всего самосвала осуществля-
ются с помощью синхронных генераторов мощностью 2450 кВт. В
состав преобразователя частоты входит 12-пульсный выпрямитель,
выполненный на высоковольтных диодах. Выпрямленное напряже-
ние на выходе разделяется двумя конденсаторами равной емкости,
между которыми выпрямленное напряжение разделятся равномерно
и формируются контакты подключения автономных инверторов.
Автономные инверторы выполнены по трехфазной мостовой
схеме на полностью управляемых транзисторах большой мощности.
Управление транзисторными ключами автономного инвертора осу-
ществляется по ШИМ алгоритму.
Схема управления режимами работы электродвигателей по-
строена по векторному принципу. Особенности режимов работы
привода заключается в экстремальных условиях эксплуатации с
ударными нагрузками. В следствии чего возникает необходимость
обеспечения максимального быстродействия системы управления
электроприводом для обеспечения эффективной работы шасси само-
свала. Технические характеристики электропривода мотор-колес
представлены в табл. 5.3.
181
Рис. 5 .13. Схема электропривода мотор-колес самосвала «БелАз»
Таблица 5.3
Технические характеристики электропривода мотор-колес
Наименование параметра
Значение
Номинальная мощность электродвигателя, кВт
970
Номинальная мощность генератора, кВт
2450
Частота вращения электродвигателя, об/мин
610/3420
Режим работы
S1 (продолжительный)
В
И1
ГСТ-2450
И2
СГ
ТАД 8
ТАД 8
И1
И2
АВ
СГ
ТАД 8
ТАД 8
ГСТ-2450
182
5.6. Электропривод механизмов
забойных горных машин
(проходческих и очистных комбайнов)
На рис.5.14 приведен внешний вид проходческих (справа) и
очистных (слева) комбайнов компании Famur (Польша): в рабочих
условиях (сверху); на заводе изготовителя (снизу).
Очистной комплекс содержит следующие элементы: горный
очистной комбайн FS 200; механизированную крепь ФАЗОС 10/20-
2x2340; крепь для сопряжения, предназначенную для использования
в подлавном штреке; укомплектованный лавный конвейер FFC-750
с угледробилкой; укомплектованную поворотную станцию ленточ-
ного конвейера; установку высокого давления для питания механи-
зированной лавной крепи; комплект электрооборудования с систе-
мой визуализации.
Проходческий комбайн R-2000 предназначен для проведения
подземных горных выработок путём механизированного разруше-
ния полезного ископаемого (каменного угля) и/или пустых пород,
характеризующихся удельной сопротивляемостью сжатия до
110 МПа и погрузки отбитого материала на шахтные транспортные
средства. Максимальное поперечное сечение выработки 34,1 м
2
.
Максимальная высота проводимой выработки 4815 мм. Максималь-
ная ширина проводимой выработки 7200 мм.
Условия эксплуатации электроприводов горно-шахтного обо-
рудования имеют специфические особенности, главным образом
связанные с ограниченной мощностью, сложностью системы элек-
троснабжения, с динамичной нагрузкой, изменяющейся в широких
пределах, и с ограниченными габаритами, предоставляемыми для
электрооборудования на подвижных механизмах.
Основные требования к электроприводу забойных горных ма-
шин можно сформулировать следующим образом: безопасность; на-
дежность; высокая управляемость моментом электродвигателя при
нулевой и на малых скоростях вращения вала; высокий пусковой
момент электродвигателя для быстрого разгона; торможение элек-
тродвигателя с рекуперацией энергии; реверс электродвигателя; ми-
нимальные потери электроэнергии; минимальное потребление реак-
тивной мощности электроприводом; минимальная стоимость и бы-
страя окупаемость затрат на электропривод.
1
8
3
Р
и
с
.
5
.
1
4
.
О
ч
и
с
т
н
ы
е
и
п
р
о
х
о
д
ч
е
с
к
и
е
к
о
м
б
а
й
н
ы
183
184
Технические характеристики асинхронных двигателей элек-
троприводов, рассмотренных выше проходческих и очистных ком-
байнов, приведены в табл. 5.4 и 5.5.
Таблица 5.4
Технические характеристики электродвигателей очистного комбайна
Наименование параметра
Значение
Номинальная мощность электродвигателя, кВт
250
Частота вращения вала электродвигателя, об/мин
1480
Номинальное напряжение, В
1140
Частота питающего напряжения, Гц
50
Номинальный ток статора, А
159
Коэффициент мощности
0,84
Режим работы
S1 (продолжительный)
Класс изоляции
Н
IP
55
Таблица 5.5
Технические характеристики электродвигателей проходческого комбайна
Наименование параметра
Значение
Номинальная мощность электродвигателя, кВт
51
Частота вращения вала электродвигателя, об/мин
1483
Номинальное напряжение, В
500/1000
Частота питающего напряжения, Гц
50
Номинальный ток статора, А
75/35
Коэффициент мощности
0,91
Режим работы
S1 (продолжительный)
Класс изоляции
F
IP
55
Для управления электродвигателями (рис.5.15а) приводов рас-
смотренного очистного комбайна, используется преобразователь
частоты NXP компании Vacon. Смонтированный вид преобразовате-
ля частоты в раме очистного комбайна представлена на рис.5.15 б.
Мощность преобразователя частоты 400 кВт, напряжение
380 В. Перегрузочная способность до 150 %.
Для управления приводным асинхронным электродвигателем
используется векторный алгоритм управления с замкнутым конту-
ром скорости. Степень защиты корпуса преобразователя IP 54. Пре-
образователь обеспечивает защиту двигателя от короткого замыка-
185
ния, перегрузки и заклинивания. Обеспечивает возможность пуска с
определением направления и скорости вращения двигателя. Тормо-
жение постоянным током.
Структура силовой части преобразователя частоты электро-
привода очистного комбайна приведена на рис.5 .16. Преобразова-
тель частоты состоит из следующих основных элементов: входных
дросселей (ВД); диодного выпрямителя (В); тормозных прерывателя
(ТП) и сопротивления; инвертора (И); асинхронного двигателя (АД).
а)
б)
Рис. 5 .15. Внешний вид приводных асинхронных двигателей
и преобразователя частоты очистного комбайна
Рис. 5 .16. Структурная схема электропривода
очистного комбайна
Сеть
380В, 50Гц
В
ВД
ТП
И
АД
РО
186
ЗАКЛЮЧЕНИЕ
В книге всесторонне освещены вопросы энергосбережения
средствами автоматизированного электропривода, выполненных на
основе асинхронных двигателей и преобразователей частоты на
промышленных объектах топливно-энергетического комплекса.
Анализ нормативно-правовых документов, определяющих
развитие отраслей топливно-энергетического комплекса (горной,
нефтяной, газовой, угольной) показывает, что основным средством
повышения конкурентоспособности и энергоэффективности этих
отраслей является энергосбережение, где наибольшим потенциалом
обладают электротехнические комплексы и системы с автоматизи-
рованными электроприводами.
Одним из важнейших вопросов, в части энергоэффективности
автоматизированных электроприводов, является обеспечение элек-
тромагнитной совместимости полупроводниковых преобразователей
частоты с сетью электроснабжения и приводным асинхронным дви-
гателем. Максимальный эффект здесь обеспечивается за счет ис-
пользования новой высокотехнологичной материальной базы при
создании преобразователей частоты, структурных схемотехнических
решений и алгоритмического обеспечения.
Вопрос электромагнитной совместимости преобразователя
частоты выделен в отдельную категорию – электромеханическую
совместимость. Вопрос обеспечения электромеханической совмес-
тимости в электроприводах приобретает актуальность. Влияние ре-
жимов работы преобразователя частоты на качество электромехани-
ческого преобразования и структуру электропривода вносит значи-
тельный вклад в энергоэффективность его функционирования и
стоимость.
Одним из требований к современным электроприводам, рабо-
тающих в высокодинамичных режимах, является обеспечение реку-
перации электрической энергии, при переходе приводных асин-
хронных двигателей в генераторный режим. Важность этого вопроса
выделена в категорию энергетической совместимости.
Наиболее перспективными методами обеспечения энергосбе-
режения средствами электропривода является использование энер-
гоэффективных асинхронных двигателей, высокотехнологичных по-
лупроводниковых коммутаторов и эффективного алгоритмического
187
обеспечения.
Эти методы на разных стадиях проектирования и эксплуата-
ции автоматизированных электроприводов позволяют обеспечить
значительное энергосбережение на промышленных объектах топ-
ливно-энергетического комплекса.
Обеспечение энергоэффективности электротехнических ком-
плексов и систем с автоматизированными электроприводами, необ-
ходимо и возможно достигать за счет непрерывного внедрения по-
следних достижений в области силовой электроники и микропро-
цессорной техники, развития алгоритмов автоматического управле-
ния.
188
ПРИЛОЖЕНИЕ А
А.1. Технико-экономическая оценка эффективности
использования регулируемых электроприводов
Задача А.1. Произвести расчеты экспресс-анализа и оператив-
ного анализа энергетической эффективности двух электротехниче-
ских комплексов с электроприводами.
Исходные данные: базовый комплекс – система с нерегули-
руемым электроприводом; новый комплекс – система с регулируе-
мым электроприводом и преобразователем частоты; номинальная
мощность асинхронного двигателя 57 кВт, номинальная скорость
вращения 2933 об/мин. Среднее время работы комплекса 21 час в су-
тки. Данные для проведения экспресс-анализа приведены в табл. А.1.
Данные для проведения оперативного анализа приведены в табл. А.2.
Таблица А.1
Экспресс-анализ ресурсосбережения
Показания приборов
Дата
Часы
Потребленная мощность,
кВт ч
Расход воды,
м
3
Базовая система
13.00
06476
040512
13.03 .12
15.00
06496
040562
Новая система
13.00
06519
040827
14.03 .12
14.30
06522
040857
Таблица А.2
Оперативный анализ ресурсосбережения
Расход электроэнергии,
кВт ч
Расход воды,
м
3
Даты
Базовая
система
Новая
система
Базовая
система
Новая
система
10.05.12-24.05.12
2158
–
5212
–
25.05.12-08.06.12
–
997
–
3830
Решение. Выполним экспресс-анализ ресурсосбережения ре-
гулируемого электропривода. Определим объем потребляемой мощ-
ности нерегулируемого электропривода
189
ч
кВт
10
2
6476
6496
1
2
Т
Р
Р
РI
.
Определим объем потребляемой мощности регулируемым
электроприводом
ч
кВт
2
5,1
6519
6522
1
2
Т
Р
Р
РII
.
Определим объем расхода воды насосом с нерегулируемым
электроприводом
2
1
2
м
25
2
40512
40562
Т
Q
Q
QI
.
Определим объем расхода воды насосом с регулируемым элек-
троприводом
2
1
2
м
20
5,1
40827
40857
Т
Q
Q
QII
.
Определим эффект энергосбережения при использовании нере-
гулируемого и регулируемого электропривода
%
0,
80
100
10
2
10
100
%
Э
I
II
I
Р
Р
Р
.
Определим эффект ресурсосбережения при использовании не-
регулируемого и регулируемого электропривода
%
0,
20
100
25
20
25
100
%
I
II
I
Q
Q
Q
B
.
Выполним оперативный анализ ресурсосбережения регули-
руемого электропривода. Определим эффект энергосбережения при
использовании нерегулируемого и регулируемого электропривода
%
8,
53
100
2158
997
2158
100
%
Э
1
2
1
P
P
P
.
Определим эффект ресурсосбережения при использовании не-
регулируемого и регулируемого электропривода
%
5,
26
100
5212
3830
5212
100
%
1
2
1
Q
Q
Q
В
.
190
Задача А.2. Определить экономию электроэнергии и срок оку-
паемости регулируемого электропривода при замене им системы
дросселирования.
Исходные данные: номинальная мощность асинхронного дви-
гателя 15 кВт; номинальная скорость вращения 1430 об/мин; номи-
нальный коэффициент полезного действия 92 %; рабочих дней в году
240 дней. Относительная стоимость преобразователя частоты
7000 руб/кВт. Стоимость электроэнергии 2 руб/кВт ч. Диаграмма от-
носительного расхода представлена на рис. А.1.
Рис. А .1 . Диаграмма
относительного расхода
Рис. А.2 . Диаграмма
потерь мощности
Решение. Построим зависимость потребляемой мощности
электропривода с дросселированием от расхода воды. Для этого, не-
обходимо измерить значение потребляемой мощности при полно-
стью открытой и закрытой заслонке. Результаты измерения показаны
в табл. А.3. Диаграмма, построенная по данным табл. А.3, представ-
лена прямой 1 на рис.А.2.
Таблица А.3
Потребление электроприводом с дросселированием
электрической мощности
Относительный расход
Положение заслонки
Потребляемая мощность
Q*
=1
Заслонка полностью
открыта
Рmax = 11 кВт
Q*
=0
Заслонка полностью
закрыта
Рmin=6кВт
Рmax
Рном
1Q*
доп
Р, кВт
Q*
, о.е.
0
7
14
21
ΔР1
ΔР2 ΔР3
1
Р(Q*)
Q*, о.е.
t,ч
0
8
16
24
0,4
0,8
1,2
191
Определим требуемую мощность преобразователя частоты
кВт
5,
16
11
5,1
5,1
max
тр
пч
Р
Р
.
Определим стоимость выбранного преобразователя частоты
мощностью 16,5 кВт
руб
500
115
5,
16
7000
С
Ц
тр
пч
пч
пч
Р
.
Построим зависимость P(Q*) электропривода с частотным ре-
гулированием производительности. Такую зависимость можно по-
строить с помощью выражения
3
*
3
*
max
11Q
Q
Р
Р
.
Определим допустимую производительность при полном ис-
пользовании двигателя
кВт
3,
16
92
,
0
15
ном
ном
факт
пч
Р
Р
,
3
*
доп
max
факт
пч
Q
Р
Р
,
14
,
1
11
3,
16
3
3
max
факт
пч
*
доп
Р
Р
Q
.
Тогда, величина допустимой производительности составит
1
14
,
1
*
доп
Q
.
Определим величину потерь мощности на разных временных
интервалах работы электропривода. Это можно сделать с помощью
рис.А.2. В результате, получены следующие значения
кВт
3,3
1
Р
,
кВт
8,5
2
Р
,
кВт
2,6
3
Р
.
Определим величину сэкономленной мощности при работе
электропривода с преобразователем частоты
за цикл (сутки):
ч;
кВт
1,
52
4
2,6
3
8,5
3
3,3
Э
3
3
2
2
1
1
ц
t
Р
t
Р
t
Р
за год:
ч/год
кВт
500
12
240
1,
52
240
Э
Э
Э
ц
ц
г
T
.
192
Определим срок окупаемости электропривода за счет экономии
электроэнергии
года
62
,
4
2
12500
115500
Ц
Э
Ц
Э
Ц
ээ
г
пч
ээ
пч
1
T
.
Определить срок окупаемости электропривода с учетом допол-
нительных технико-эксплуатационных факторов, если принять зна-
чение коэффициента дополнительного ресурсосбережения k = 1,2
года
85
,
3
2,1
62
,
4
1
2
k
Т
Т
.
В качестве дополнительных факторов снижения срока окупае-
мости электропривода могут быть, например, дополнительное сни-
жение потерь тепла, расходов на ремонт и другие.
Задача А.3. Рассчитать энергетическую и экономическую эф-
фективность от применения частотно-регулируемого электропривода
на питательном насосе энергоблока теплоэнергетической станции.
Исходные данные: мощность энергоблока 210 МВт; номи-
нальная мощность приводного асинхронного двигателя насоса воды
5000 кВт; номинальный расход воды насоса 640 т/ч. Относительная
стоимость преобразователя частоты 10000 руб/кВт. Стоимость элек-
троэнергии 2 руб/кВт ч. Значение мощности энергоблока и потреб-
ляемая электроприводом мощность на каждом из трех временных
интервалов работы энергоблока, приведены в табл. А.4.
Решение. Определим расход воды насоса следующим образом
ном
ном
N
NQ
Q
.
Полученные значения расхода воды запишем в первый столбец
табл. А.5.
Таблица А.4
Исходные данные для расчета показателей энергоэффективности
Мощность энергоблока,
МВт
Мощность, потребляемая
электроприводом, кВт
Время работы
электропривода, ч
210
4960
2800
140
4080
800
80
3200
2700
193
Таблица А.5
Результаты расчета показателей энергоэффективности
Расход воды,
т/ч
Мощность, потребляемая
регулируемым
электроприводом, кВт
Сэкономленная
мощность, кВт
Стоимость,
тыс. кВт ч
640
4960
0
0
426
1469
2610
2088
243
274
3051
8239
Определим потребляемую частотно-регулируемым электро-
приводом мощность следующим образом
3
ном
max
3
*
max
Q
Q
P
Q
P
P
.
Полученные значения расхода воды запишем во второй стол-
бец табл. А.5.
Определим экономию электрической мощности частотно-
регулируемым электроприводом следующим образом
2
1P
P
P
.
Полученные значения расхода воды запишем в третий столбец
табл. А.5.
Определим объем сэкономленной электрической энергии на
каждом временном интервале работы регулируемого электропривода
следующим образом
3
ц
Э
i
i
it
P,
где i – номер интервала цикла. Полученные значения расхода воды
запишем в четвертый столбец табл. А.5.
Определим мощность преобразователя частоты, необходимого
для установленного на электростанции асинхронного двигателя,
кВт
5500
5000
1,1
1,1
дв
пч
Р
Р
.
Определим стоимость преобразователя частоты
млн.руб
55
5500
10000
С
Ц
пч
пч
пч
Р
.
Определим годовое снижение расхода (экономия) электроэнер-
гии
ч/год
млн.кВт
327
10
8239
2088
0
Э
Э
3
1
г
i
i
.
194
Определим стоимость сэкономленной электроэнергии в год
д
млн.руб/го
654
20
2
327
10
Ц
Э
С
ээ
г
ээ
.
Определим возможное увеличение номинальной мощности
энергоблока, при общей установленной мощности электроприводов
11600 кВт, следующим образом
кВт
905
210000
11600
5000
01
,
0
01
,
0
ном
KN
N
.
Определим стоимость нового строительства энергетических
мощностей, при стоимости строительства одного киловатта мощно-
сти равным 56 000 руб, следующим образом
млн.руб
680
,
50
000
56
905
С
Цнс
N
N
.
Определим срок окупаемости инвестиций на строительство
года
16
,
2
2
680
,
50
55
С
Ц
Ц
ээ
нс
пч
T
.
А.2. Технико-экономическая оценка эффективности
использования топливно-энергетических ресурсов
на компрессорных станциях магистральных газопроводов
Задача А.4. Произвести расчет и оценку энергоэффективности
газоперекачивающих агрегатов и системной эффективности ком-
прессорных цехов с электрическими и газотурбинными приводами
газоперекачивающих агрегатов.
Исходные данные: компрессорный цех с газотурбинным
приводом: количество газоперекачивающих агрегатов n = 4 шт;
мощность каждого газоперекачивающего агрегата Nгт=6,3 МВт;
мощность центробежных нагнетателей Ni = 6000 кВт; механический
коэффициент полезного действия центробежных нагнетателей
ηм = 0,985; массовый расход топливного газа GТГ = 0,965 кг/с; факти-
ческая низшая теплота сгорания природного газа QН = 32 000 кДж/м
3
;
температурный показатель политропы (k-1)/k = 0,2339; показатель
псевдоизоэнтропы mТ = 0,294; объем топливного газа, расходуемого
одним газотурбинным приводом Qтг
ггпа
= 11300 млн м
3
; объем при-
родного газа, расходуемого на технологические нужды компрессор-
ного цеха Qтн
гкц
= 10млнм
3
; объем электроэнергии, расходуемой
компрессорным цехом Wстн
гкц
= 6100 тыс. кВт ч; эквивалентная това-
195
ротранспортная работа компрессорного цеха A
кц
=3651000 млн м
3
км.
Компрессорный цех с электроприводом: коэффициент полезного
действия преобразователя частоты ηпч = 0,96; коэффициент полезно-
го действия электродвигателя ηдв = 0,82; коэффициент полезного
действия редуктора ηпу = 0,98; объем электроэнергии, расходуемой
одним электроприводом, Wк
эгпа
= 28350 тыс. кВт ч.
Решение. Рассчитаем показатели энергетической эффективно-
сти компрессорного цеха с газотурбинными агрегатами. Определим
значение эффективной мощности на редукторе агрегата
кВт
6091
985
,
0
6000
м
е
i
N
N
.
Определим значение эффективного коэффициента полезного
действия газотурбинной установки
197
,
0
32000
965
,
0
6091
Н
ТГ
е
е
Q
G
N
.
Определим значение политропного коэффициента полезного
действия центробежного нагнетателя
795
,
0
294
,
0
1
2339
,
0
1
1
Т
пол
m
k
k
.
Определим коэффициент полезного действия газотурбинного
газоперекачивающего агрегата
157
,
0
795
,
0
197
,
0
пол
е
ГГПА
.
Определим удельный расход топливного газа одного газопере-
качивающего агрегата с газотурбинным приводом
ч
кВт
м
7175
,
0
32000
157
,
0
3600
3600
3
Н
ГГПА
ГГПА
ТГ
Q
E
.
Определим расход газа компрессорным цехом с газотурбин-
ными агрегатами
.
м
млн
45210
10
11300
4
3
гкц
тн
ггпа
тг
гкц
тн
гкц
тг
гкц
стн
Q
nQ
Q
Q
Q
Определим удельный показатель эффективности расхода газа
компрессорным цехом
км
м
млн
/
м
38
,
12
1000
3651000
45210
10
Э
3
3
3
кц
гкц
стн
ГКЦ
Г
А
Q
.
196
Определим расход топливно-энергетических ресурсов ком-
прессорным цехом
т.ут.
208657
6100
325
,
0
45210
7000
32000
7000
гкц
стн
ээ
гкц
стн
H
гкц
стн
ээ
гкц
стн
г
гкц
тэр
W
k
Q
Q
W
k
Q
k
В
Определим удельный показатель эффективности расхода топ-
ливно-энергетических ресурсов компрессорным цехом
км
м
у.т./млн
кг
15
,
57
10
3651000
208657
10
Э
3
3
3
кц
гкц
тэр
ГКЦ
ТЭР
А
В
.
Рассчитаем показатели энергетической эффективности ком-
прессорного цеха с электроприводными газоперекачивающими агре-
гатами. Определим коэффициент полезного действия электропри-
водного газоперекачивающего агрегата
614
,
0
795
,
0
98
,
0
82
,
0
96
,
0
пол
пу
дв
пч
ЭГПА
.
Определим удельный расход электроэнергии одним электро-
приводным агрегатом
ч
кВт
ч
кВт
63
,
1
614
,
0
1
1
ГПА
ГПА
ЭЭ
Э
Э
E
.
Определим объем электроэнергии, расходуемый электропри-
водами всех газоперекачивающих агрегатов
ч
тыс.кВт
113400
28350
4
эгпа
к
эгпа
к
nW
W
.
Определим объем электроэнергии, расходуемый компрессор-
ным цехом с электроприводными агрегатами
ч
тыс.кВт
136080
113400
2,1
2,1
эгпа
к
экц
стн
W
W
.
Определим удельный показатель эффективности расхода элек-
троэнергии компрессорным цехом
км
м
ч/млн
кВт
27
,
37
10
3651000
136080
10
Э
3
3
3
кц
экц
стн
ЭКЦ
ЭЭ
А
W
.
Определим расход топливно-энергетических ресурсов ком-
прессорным цехом
197
.
ут
т.
44272
136080
325
,
0
10
57
,
4
экц
стн
ээ
гкц
тн
г
экц
стн
ээ
экц
стн
г
экц
тэр
W
k
Q
k
W
k
Q
k
В
Определим удельный показатель эффективности расхода топ-
ливно-энергетических ресурсов компрессорным цехом
км
м
у.т./млн
кг
13
,
12
10
3651000
44272
10
Э
3
3
3
кц
экц
тэр
ЭКЦ
ТЭР
А
В
.
Результаты расчета представлены в табл. А.6. Из приведенного
расчета видно, что газоперекачивающие агрегаты с электроприводом
имеют значительно более высокий коэффициент полезного действия,
а на компрессорных станциях с такими агрегатами расход топливно-
энергетических ресурсов существенно ниже.
Таблица А.6
Показатели энергоэффективности компрессорных цехов
Расчетные показатели энергоэффективности
газоперекачивающих агрегатов
Значение
Показатель
Единица
измерения
ГКЦ ЭКЦ
Коэффициент полезного действия
-
0,157 0,614
Удельный расход топливного газа ГГПА
м
3
/кВт ч 0,7175
-
Удельный расход электроэнергии ЭГПА
кВт·ч/кВт ч
-
1,63
Удельный показатель эффективности расхода газа
м
3
/млн м
3
км 12,38
-
Удельный показатель эффективности
расхода электроэнергии
кВт·ч/
млн м
3
км
-
37,27
Удельный показатель эффективности расхода
топливно-энергетических ресурсов
кг у.т ./
млн м
3
км
57,15 12,13
А.3. Экспертная оценка
эксплуатационно-технических характеристик регулируемых
промышленных электроприводов
Задача. А.5. Произвести непосредственную экспертную оцен-
ку эксплуатационно-технических характеристик различных преобра-
зователей частоты для регулируемых электроприводов на основе
асинхронных двигателей и сделать вывод об их эффективности.
Оценку характеристик устанавливать в диапазоне от 0 до 1.
198
Исходные данные:
вариант No 1: двухтрансформаторная схема преобразователя
частоты, состоящего из диодного неуправляемого выпрямителя и
транзисторного автономного инвертора; система автоматического
управления выполнена на основе скалярных алгоритмов управления
приводным электродвигателем;
вариант No 2: каскадный преобразователь частоты; система
автоматического управления выполнена на основе векторных алго-
ритмов управления приводным электродвигателем;
вариант No 3: преобразователь частоты с трехуровневым ак-
тивным выпрямителем и трехуровневым автономным инвертором с
унифицированными релейно-импульсными алгоритмами управления
коммутаторами преобразователя частоты и режимами работы при-
водного электродвигателя.
Решение. Результаты непосредственной экспертной оценки
эксплуатационно-технических характеристик преобразователей час-
тоты электроприводов с асинхронными двигателями заданных вари-
антов представлены в табл. А.7.
Таблица А.7
Оценка эксплуатационно-технических характеристик электроприводов
Преобразователь
частоты
No
Параметр/
характеристика
Вариант
No1
Вариант
No2
Вариант
No3
1 Простота структуры преобразователя частоты
0,5
0
1
2 Простота алгоритмического обеспечения
1
0,25
0,75
3 Эффективность управления
0,5
1
1
4 Коэффициент полезного действия
0,5
0,5
1
5 Коэффициент мощности
0,5
0,75
1
6 Уровень электромагнитной совместимости
0,5
0,75
1
7 Уровень электромеханической совместимости
0,75
1
1
8 Простота наращивания мощности
0
1
0
9 Объем и опыт применения и эксплуатации
0,75
0,75
0,5
Результат:
5
6
7,25
Вывод: преобразователь частоты под вариантом No 3 обладает
наивысшими эксплуатационно-техническими характеристиками.
199
Контрольная работа А.1.
Задание. Определить экономию электроэнергии и срок оку-
паемости регулируемого электропривода при замене им системы
дросселирования. Построить диаграмму относительного расхода и
потерь мощности электропривода.
Исходные данные для расчета контрольной работы представ-
лены в табл. А.8.
Таблица А.8
Исходные данные для расчета дополнительных заданий
Относительный расход
на интервале работы
(длительность интервала, ч)
No
вар-та
1-ый
(4, ч)
2-ой
(2, ч)
3-ий
(7, ч)
Кол-во
дней
Рном,
кВт
ηном,
%
Рmax/
Рmin
1
0,7
0,3
0,2
260
15
0,81
11/6
2
0,6
0,5
0,4
310
20
0,81
17/6
3
0,4
0,3
0,2
290
25
0,82
23/9
4
0,5
0,8
0,6
145
30
0,82
28/13
5
0,2
0,7
0,4
190
35
0,83
33/15
6
0,3
0,5
0,6
235
40
0,83
36/11
7
0,4
0,5
0,7
340
45
0,84
41/14
8
0,6
0,5
0,7
190
55
0,84
50/18
9
0,9
0,4
0,8
180
60
0,85
57/17
10
0,1
0,4
0,6
210
65
0,85
62/19
11
0,3
0,5
0,7
245
70
0,86
64/21
12
0,1
0,6
0,7
315
75
0,86
70/20
13
0,4
0,5
0,6
295
80
0,87
75/24
14
0,2
0,4
0,9
185
85
0,87
83/25
15
0,5
0,6
0,8
275
90
0,88
81/30
16
0,3
0,4
0,8
215
95
0,88
90/29
17
0,7
0,8
0,9
315
100
0,89
90/28
18
0,5
0,7
0,9
340
110
0,89
101/33
19
0,2
0,4
0,6
345
120
0,90
115/36
20
0,3
0,5
0,8
290
130
0,90
121/34
Контрольная работа А.2.
Задание. Произвести расчет и оценку энергоэффективности га-
зоперекачивающих агрегатов и системной эффективности компрес-
сорных цехов с электрическими и газотурбинными приводами газо-
перекачивающих агрегатов.
200
Исходные данные для расчета контрольной работы представ-
лены в табл. А.9.
Табл. А.9
Исходные данные для расчета дополнительных заданий
No
вар-та
nггпа,
шт
Nгт,
МВт
Ni,
МВт
Qтгггпа
,
млн м
3
Wк
эгпа
,
тыс. кВт ч
ηдв
Aгкц
,
млн м
3
км
1
4
6,3
6
11300
28400
0,84 3651000
2
5
6,3
6
11300
28400
0,85 4005000
3
6
6,3
6
11300
28400
0,86 4507000
4
7
6,3
6
11300
28400
0,87 4909000
5
8
10
9,5
17000
46900
0,87 5108500
6
4
10
9,5
17000
46900
0,88 5909000
7
5
10
9,5
17000
46900
0,89 6803000
8
6
10
9,5
17000
46900
0,9 7804000
9
7
12,5
11,5
21000
54500
0,84 8505000
10
8
12,5
11,5
21000
54500
0,85 9604500
11
4
12,5
11,5
21000
54500
0,86 10500500
12
5
12,5
11,5
21000
54500
0,87 10900090
13
6
16
15
29000
61000
0,87 11200900
14
7
16
15
29000
61000
0,88 11900030
15
8
16
15
29000
61000
0,89 13400090
16
4
16
15
29000
61000
0,9 14300040
17
5
25
23
40000
78500
0,87 14830090
18
6
25
23
40000
78500
0,88 15200900
19
7
25
23
40000
78500
0,89 15704000
20
8
25
23
40000
78500
0,9 18090000
Контрольная работа А.3.
Задание No 1. Произвести непосредственную экспертную
оценку эксплуатационно-технических характеристик различных сис-
тем автоматического управления электроприводом с асинхронным
двигателем и преобразователем частоты, состоящего из активного
выпрямителя и автономного инвертора. Для экспертной оценки ис-
пользовать следующие параметры: возможность регулирования ско-
рости; диапазон регулирования; плавность регулирования скорости;
точность регулирования; быстродействие; уровень электромеханиче-
ской совместимости. Оценку характеристик устанавливать в диапа-
зонеот0до1.
201
Исходные данные:
вариант No 1: электропривод со скалярным управлением;
вариант No 2: электропривод с векторным управлением;
вариант No 3: электропривод с системой прямого управле-
ния моментом.
Задание No 2. Произвести непосредственную экспертную оцен-
ку характеристик различных модуляционных алгоритмов управления
автономным инвертором преобразователя частоты электропривода с
асинхронным двигателем. Для экспертной оценки использовать сле-
дующие параметры: амплитуда первой гармоники; коэффициент ис-
кажения синусоидальности (выходного напряжения и выходного то-
ка). Оценку характеристик устанавливать в диапазоне от 0 до 1.
Исходные данные:
вариант No 1: синусоидальная широтно-импульсная модуля-
ция;
вариант No 2: пространственно-векторная модуляция.
2
0
2
П
Р
И
Л
О
Ж
Е
Н
И
Е
Б
Б
.
1
.
М
е
ж
д
у
н
а
р
о
д
н
ы
е
и
н
а
ц
и
о
н
а
л
ь
н
ы
е
с
т
а
н
д
а
р
т
ы
,
р
е
г
л
а
м
е
н
т
и
р
у
ю
щ
и
е
п
р
и
м
е
н
е
н
и
е
ч
а
с
т
о
т
н
о
-
р
е
г
у
л
и
р
у
е
м
о
г
о
э
л
е
к
т
р
о
п
р
и
в
о
д
а
с
а
с
и
н
х
р
о
н
н
ы
м
и
д
в
и
г
а
т
е
л
я
м
и
и
п
о
л
у
п
р
о
в
о
д
н
и
к
о
в
ы
м
и
п
р
е
о
б
р
а
з
о
в
а
т
е
л
я
м
и
Т
и
п
с
т
а
н
д
а
р
т
о
в
и
н
о
р
м
Н
а
и
м
е
н
о
в
а
н
и
е
с
т
а
н
д
а
р
т
а
E
N
I
E
C
D
I
N
,
V
D
E
J
I
S
J
E
M
I
E
E
E
М
а
ш
и
н
ы
э
л
е
к
т
р
и
ч
е
с
к
и
е
в
р
а
щ
а
ю
щ
и
е
с
я
(
н
о
м
и
н
а
л
ь
н
ы
е
д
а
н
н
ы
е
)
E
N
6
0
0
3
4
-
1
I
E
C
3
4
-
1
I
E
C
8
5
D
I
N
V
D
E
0
5
3
0
-
1
-
-
-
М
е
т
о
д
ы
о
п
р
е
д
е
л
е
н
и
я
п
о
т
е
р
ь
и
К
П
Д
в
р
а
щ
а
ю
щ
и
х
с
я
э
л
е
к
т
р
и
ч
е
с
к
и
х
м
а
ш
и
н
-
I
E
C
3
4
-
2
D
I
N
V
D
E
5
7
5
3
0
-
2
-
-
-
К
л
а
с
с
и
ф
и
к
а
ц
и
я
с
т
е
п
е
н
е
й
з
а
щ
и
т
ы
,
о
б
е
с
п
е
ч
и
в
а
е
м
ы
х
о
б
о
л
о
ч
к
а
м
и
в
р
а
щ
а
ю
щ
и
х
с
я
э
л
е
к
т
р
и
ч
е
с
к
и
х
м
а
ш
и
н
E
N
6
0
0
3
4
-
5
I
E
C
3
4
-
5
D
I
N
V
D
E
0
5
3
0
-
5
-
-
-
М
е
т
о
д
ы
о
х
л
а
ж
д
е
н
и
я
в
р
а
щ
а
ю
щ
и
х
с
я
э
л
е
к
т
р
и
ч
е
с
к
и
х
м
а
ш
и
н
-
"
-
I
E
C
3
4
-
6
D
I
N
I
E
C
3
4
-
6
-
-
-
Д
о
п
у
с
т
и
м
ы
е
у
р
о
в
н
и
ш
у
м
а
E
N
6
0
0
3
4
-
7
I
E
C
3
4
-
9
D
I
N
V
D
E
0
5
3
0
-
9
-
-
-
В
с
т
р
о
е
н
н
а
я
т
е
м
п
е
р
а
т
у
р
н
а
я
з
а
щ
и
т
а
D
I
N
E
N
2
1
6
8
0
I
E
C
3
4
-
1
1
-
-
-
-
П
у
с
к
о
в
ы
е
х
а
р
а
к
т
е
р
и
с
т
и
к
и
а
с
и
н
х
р
о
н
н
ы
х
к
о
р
о
т
к
о
з
а
м
к
н
у
т
ы
х
д
в
и
г
а
т
е
л
е
й
,
в
к
л
ю
ч
а
я
н
а
п
р
я
ж
е
н
и
е
6
6
0
В
,
5
0
Г
ц
-
I
E
C
3
4
-
1
2
D
I
N
V
D
E
0
5
3
0
-
1
2
-
-
-
М
е
х
а
н
и
ч
е
с
к
и
е
в
и
б
р
а
ц
и
и
э
л
е
к
т
р
о
д
в
и
г
а
т
е
л
е
й
-
I
E
C
3
4
-
1
4
D
I
N
V
D
E
0
5
3
0
-
1
4
-
-
-
С
т
а
н
д
а
р
т
н
ы
е
н
а
п
р
я
ж
е
н
и
я
М
Э
К
E
N
5
0
0
1
9
I
E
C
3
8
D
I
N
I
E
C
3
8
-
-
-
Б
е
з
о
п
а
с
н
о
с
т
ь
м
а
ш
и
н
н
о
г
о
о
б
о
р
у
д
о
в
а
н
и
я
E
N
6
0
2
0
4
-
1
E
N
6
0
5
2
9
I
E
C
2
0
4
-
1
-
-
-
-
П
р
и
б
о
р
ы
з
а
щ
и
т
ы
,
т
р
е
б
о
в
а
н
и
я
к
у
с
т
а
н
о
в
к
е
-
I
E
C
9
4
7
-
1
I
E
C
9
4
7
-
3
-
-
-
-
202
2
0
3
Т
и
п
с
т
а
н
д
а
р
т
о
в
и
н
о
р
м
Н
а
и
м
е
н
о
в
а
н
и
е
с
т
а
н
д
а
р
т
а
E
N
I
E
C
D
I
N
,
V
D
E
J
I
S
J
E
M
I
E
E
E
Э
л
е
к
т
р
о
м
а
г
н
и
т
н
а
я
с
о
в
м
е
с
т
и
м
о
с
т
ь
М
е
т
о
д
ы
и
с
п
ы
т
а
н
и
й
E
N
6
1
8
0
0
-
3
-
-
-
-
У
р
о
в
н
и
з
а
г
р
я
з
н
е
н
и
я
о
к
р
у
ж
а
ю
щ
е
й
с
р
е
д
ы
-
I
E
C
7
2
1
-
3
-
3
-
-
-
-
Д
о
п
у
с
т
и
м
а
я
в
и
б
р
а
ц
и
я
(
э
к
с
п
л
у
а
т
а
ц
и
я
,
х
р
а
н
е
н
и
е
и
т
р
а
н
с
п
о
р
т
и
р
о
в
к
а
)
-
I
E
C
6
8
-
2
-
6
I
E
C
7
2
1
-
3
-
3
-
-
-
-
Э
м
и
с
с
и
я
э
л
е
к
т
р
о
м
а
г
н
и
т
н
ы
х
в
о
л
н
и
э
л
е
к
т
р
о
м
а
г
н
и
т
н
а
я
и
н
т
е
р
ф
е
р
е
н
ц
и
я
E
N
5
0
0
8
1
-
2
-
-
-
-
-
М
а
к
с
и
м
а
л
ь
н
а
я
д
л
и
н
а
к
а
б
е
л
я
д
в
и
г
а
т
е
л
я
,
э
к
р
а
н
и
р
о
в
а
н
н
ы
й
и
л
и
а
р
м
и
р
о
в
а
н
н
ы
й
в
с
о
о
т
в
е
т
с
т
в
и
и
с
т
р
е
б
о
в
а
н
и
я
м
и
Э
М
С
E
N
5
5
0
1
1
-
-
-
-
-
Т
р
е
б
о
в
а
н
и
я
к
п
е
р
е
д
а
ч
е
и
н
ф
о
р
м
а
ц
и
и
в
с
и
с
т
е
м
а
х
а
в
т
о
м
а
т
и
ч
е
с
к
о
г
о
у
п
р
а
в
л
е
н
и
я
E
N
5
0
1
7
0
-
-
-
-
-
Т
р
е
б
о
в
а
н
и
я
к
и
з
о
л
я
ц
и
и
к
а
б
е
л
е
й
-
-
D
I
N
I
E
C
7
2
1
-
3
-
3
-
-
-
З
а
щ
и
т
а
о
т
п
о
р
а
ж
е
н
и
я
э
л
е
к
т
р
и
ч
е
с
к
и
м
т
о
к
о
м
-
-
D
I
N
V
D
E
0
1
0
6
,
D
I
N
V
D
E
0
1
1
3
-
-
-
Т
р
е
б
о
в
а
н
и
я
к
с
и
н
у
с
-
ф
и
л
ь
т
р
а
м
-
-
D
I
N
V
D
E
0
5
3
0
-
-
-
Т
р
е
б
о
в
а
н
и
я
к
р
а
з
м
е
р
а
м
п
о
п
е
р
е
ч
н
о
г
о
с
е
ч
е
н
и
я
к
а
б
е
л
я
-
-
D
I
N
V
D
E
0
1
0
0
,
V
D
E
0
2
9
8
Ч
а
с
т
ь
4
-
-
-
К
л
а
с
с
и
ф
и
к
а
ц
и
я
в
и
д
о
в
о
к
р
у
ж
а
ю
щ
е
й
с
р
е
д
ы
-
-
D
I
N
I
E
C
7
2
1
-
3
-
3
-
-
-
Т
р
е
б
о
в
а
н
и
я
к
с
е
т
е
в
о
м
у
д
р
о
с
с
е
л
ю
,
о
г
р
а
н
и
ч
и
в
а
ю
щ
е
м
у
о
т
к
л
о
н
е
н
и
я
н
а
п
р
я
ж
е
н
и
я
о
т
н
о
р
м
ы
п
и
т
а
ю
щ
е
й
с
е
т
и
-
-
D
I
N
V
D
E
0
1
6
0
-
-
-
Т
р
е
б
о
в
а
н
и
я
э
л
е
к
т
р
о
б
е
з
о
п
а
с
н
о
с
т
и
д
л
я
в
с
т
р
а
и
в
а
е
м
ы
х
у
с
т
р
о
й
с
т
в
-
-
V
D
E
0
1
1
3
-
-
-
М
е
х
а
н
и
ч
е
с
к
и
е
в
и
б
р
а
ц
и
и
.
М
е
т
о
д
ы
и
с
п
ы
т
а
н
и
й
-
-
-
J
I
S
C
O
9
1
1
-
1
9
8
4
-
-
203
2
0
4
Т
и
п
с
т
а
н
д
а
р
т
о
в
и
н
о
р
м
Н
а
и
м
е
н
о
в
а
н
и
е
с
т
а
н
д
а
р
т
а
E
N
I
E
C
D
I
N
,
V
D
E
J
I
S
J
E
M
I
E
E
E
В
и
д
ы
и
с
п
о
л
н
е
н
и
я
з
а
щ
и
т
ы
д
л
я
о
б
о
р
у
д
о
в
а
н
и
я
,
у
п
р
а
в
л
е
н
и
я
и
к
о
н
т
р
о
л
я
-
-
-
J
E
M
1
0
3
0
-
1
9
8
3
Р
е
к
о
м
е
н
д
а
ц
и
и
п
о
п
е
р
и
о
д
и
ч
н
о
с
т
и
о
с
м
о
т
р
а
п
р
е
о
б
р
а
з
о
в
а
т
е
л
я
ч
а
с
т
о
т
ы
о
б
щ
е
г
о
н
а
з
н
а
ч
е
н
и
я
В
с
о
о
т
в
е
т
с
т
в
и
и
с
и
н
с
т
р
у
к
ц
и
е
й
п
р
о
и
з
в
о
д
и
т
е
л
я
п
р
е
о
б
р
а
з
о
в
а
т
е
л
я
ч
а
с
т
о
т
ы
О
б
щ
и
й
с
т
а
н
д
а
р
т
п
о
э
л
е
к
т
р
о
м
а
г
н
и
т
н
о
й
с
о
-
в
м
е
с
т
и
м
о
с
т
и
.
Ч
а
с
т
ь
2
.
П
р
о
м
ы
ш
л
е
н
н
ы
е
у
с
л
о
в
и
я
-
-
D
I
N
V
D
E
0
2
5
0
,
Ч
а
с
т
ь
4
0
5
-
-
-
Т
и
п
ы
п
р
е
д
о
х
р
а
н
и
т
е
л
е
й
-
D
I
N
4
3
6
2
0
D
I
N
4
3
6
5
3
-
-
О
г
р
а
н
и
ч
е
н
и
е
п
о
в
ы
с
ш
и
м
г
а
р
м
о
н
и
к
а
м
т
о
к
а
E
N
6
0
5
5
5
I
E
C
5
5
5
,
I
E
C
1
0
0
0
-
3
,
I
E
C
1
8
0
0
-
3
-
-
-
I
E
E
E
5
1
9
-
1
9
9
2
Т
р
е
б
о
в
а
н
и
я
к
з
а
щ
и
т
н
о
м
у
з
а
з
е
м
л
е
н
и
ю
E
N
6
0
2
0
4
-
1
E
N
5
0
1
7
8
(
5
.
3
.
2
.
2
)
I
E
C
3
6
4
,
I
E
C
5
4
3
-
-
-
А
с
и
н
х
р
о
н
н
ы
е
к
о
р
о
т
к
о
з
а
м
к
н
у
т
ы
е
д
в
и
г
а
т
е
л
и
,
п
и
т
а
е
м
ы
е
о
т
п
р
е
о
б
р
а
з
о
в
а
т
е
л
е
й
ч
а
с
т
о
т
ы
.
Р
у
-
к
о
в
о
д
с
т
в
о
п
о
п
р
и
м
е
н
е
н
и
ю
-
I
Е
С
3
4
-
1
7
П
е
р
в
а
я
р
е
д
а
к
ц
и
я
1
9
9
2
г
.
В
т
о
р
а
я
р
е
д
а
к
ц
и
я
1
9
9
8
г
.
V
D
E
0
5
3
0
Д
о
п
о
л
н
и
т
е
л
ь
н
а
я
ч
а
с
т
ь
2
-
-
-
204
2
0
5
Б
.
2
.
М
е
ж
д
у
н
а
р
о
д
н
ы
е
с
т
а
н
д
а
р
т
ы
э
л
е
к
т
р
о
м
а
г
н
и
т
н
о
й
с
о
в
м
е
с
т
и
м
о
с
т
и
Э
Л
Е
К
Т
Р
О
М
А
Г
Н
И
Т
Н
А
Я
С
О
В
М
Е
С
Т
И
М
О
С
Т
Ь
К
о
н
д
у
к
т
и
в
н
ы
е
п
о
м
е
х
и
4
5
0
к
Г
ц
-
3
0
М
Г
ц
И
з
л
у
ч
а
е
м
ы
е
п
о
м
е
х
и
4
5
0
к
Г
ц
-
3
0
М
Г
ц
Г
а
р
м
о
н
и
ч
е
с
к
и
е
т
о
к
и
И
з
л
у
ч
е
н
и
е
п
о
м
е
х
E
N
5
5
0
1
1
C
I
S
P
R
1
1
&
1
6
E
N
5
5
0
1
1
C
I
S
P
R
1
1
E
N
6
0
5
5
5
-
2
/
I
E
C
5
5
5
-
2
П
о
м
е
х
о
у
с
т
о
й
ч
и
в
о
с
т
ь
I
E
C
8
0
1
-
2
I
E
C
1
0
0
0
-
4
-
2
I
E
C
8
0
1
-
4
I
E
C
1
0
0
0
-
4
-
4
I
E
C
8
0
1
-
5
Э
л
е
к
т
р
о
с
т
а
т
и
ч
е
с
к
и
е
р
а
з
р
я
д
ы
E
N
5
0
0
8
2
-
1
E
N
5
0
0
8
2
-
2
E
N
6
1
8
0
0
-
3
E
N
5
0
0
8
2
-
1
E
N
5
0
0
8
2
-
2
E
N
6
1
8
0
0
-
3
E
N
5
0
0
8
2
-
1
E
N
5
0
0
8
2
-
2
(
3
)
E
N
V
5
0
1
4
0
/
(
I
E
C
8
0
1
-
2
)
И
з
л
у
ч
а
е
м
ы
е
э
л
е
к
т
р
о
м
а
г
н
и
т
н
ы
е
п
о
л
я
E
N
5
0
0
8
2
-
1
E
N
5
0
0
8
2
-
2
E
N
6
1
8
0
0
-
3
E
N
5
0
0
8
1
E
N
5
0
0
8
1
-
1
-
2
E
N
6
1
8
0
0
-
3
E
N
5
0
0
8
1
-
1
E
N
5
0
0
8
1
-
2
E
N
6
1
8
0
0
-
3
E
N
5
0
0
8
1
-
1
E
N
6
1
8
0
0
-
3
205
206
Б.3. Расчет энергетических параметров
электроприводов с асинхронными двигателями
Задача Б.1. Определить коэффициент полезного действия
асинхронного двигателя при работе с нагрузкой 50, 75, 100, 125%.
Результаты расчета свести в таблицу. Построить зависимость коэф-
фициента полезного действия асинхронного двигателя от коэффици-
ента загрузки.
Исходные данные: номинальная мощность 57 кВт; номи-
нальное напряжение 400 В; номинальная скорость вращения
2920 об/мин; номинальный коэффициент полезного действия 0,92;
коэффициент мощности 0,89; отношение сопротивления статора к
приведенному сопротивлению ротора 0,6.
Решение. Определим номинальные потери в асинхронном
двигателе
Вт
4957
92
,
0
92
,
0
1
10
57
1
3
ном
дв
ном
дв
ном
2
ном
дв
P
P
.
Определим номинальную и синхронную частоту вращения ро-
тора асинхронного двигателя
с
1
306
30
2920
30
ном
ном
n
,
с
1
314
30
3000
30
0
0
n
.
Определим номинальное скольжение
0255
,
0
314
306
314
0
ном
0
ном
s
.
Определим переменные потери при работе электродвигателя в
номинальном режиме
.
Вт
2386
6,0
1
0255
,
0
314
306
10
57
1
1
3
/
р
ст
ном
0
ном
ном
дв
2
/
р
ст
0
ном
пер
R
R
s
P
R
R
s
M
P
Определим переменные потери при работе электродвигателя с
разной нагрузкой:
–
при коэффициенте загрузки 50%
207
.
Вт
597
2386
25
,
0
25
,
0
1
25
,
0
1
5,0
5,0
ном
пер
/
р
ст
0
/
р
ст
0
50%
пер
P
R
R
s
M
R
R
s
M
P
–
при коэффициенте загрузки 75%
.
Вт
1342
2386
5625
,
0
5625
,
0
1
5625
,
0
1
75
,
0
75
,
0
ном
пер
/
р
ст
0
/
р
ст
0
75%
пер
P
R
R
s
M
R
R
s
M
P
–
при коэффициенте загрузки 100%
Вт
2386
ном
пер
100%
пер
P
P
;
–
при коэффициенте загрузки 125%
Вт.
3728
2386
5625
,
1
5625
,
1
1
5625
,
1
1
25
,
1
25
,
1
ном
пер
/
р
ст
0
/
р
ст
0
125%
пер
P
R
R
s
M
R
R
s
M
P
Определим постоянные потери мощности в электродвигателе
Вт
2571
2386
4957
ном
пер
ном
дв
пост
P
P
P
.
Определим потери в асинхронном двигателе при работе с раз-
ной нагрузкой:
–
при коэффициенте загрузки 50%
Вт
3168
597
2571
50%
пер
пост
50%
дв
P
P
P
;
–
при коэффициенте загрузки 75%
Вт
3913
1342
2571
75%
пер
пост
75%
дв
P
P
P
;
–
при коэффициенте загрузки 100%
Вт
4957
2386
2571
100%
пер
пост
100%
дв
P
P
P
;
–
при коэффициенте загрузки 125%
Вт
6299
3728
2571
125%
пер
пост
125%
дв
P
P
P
.
Определим коэффициент полезного действия при работе элек-
тродвигателя с разной нагрузкой:
–
при коэффициенте загрузки 50%
9,0
3168
10
57
5,0
10
57
5,0
5,0
5,0
3
3
50%
дв
ном
2
ном
2
50%
дв
P
P
P
;
208
–
при коэффициенте загрузки 75%
916
,
0
3913
10
57
75
,
0
10
57
75
,
0
75
,
0
75
,
0
3
3
75%
дв
ном
2
ном
2
75%
дв
P
P
P
;
–
при коэффициенте загрузки 100%
92
,
0
4957
10
57
10
57
3
3
100%
дв
ном
2
ном
2
100%
дв
P
P
P
;
–
при коэффициенте загрузки 125%
918
,
0
6299
10
57
25
,
1
10
57
25
,
1
25
,
1
25
,
1
3
3
125%
дв
ном
2
ном
2
125%
дв
P
P
P
.
Результаты расчета приведены в табл. Б.1. Зависимость коэф-
фициента полезного действия асинхронного двигателя от коэффици-
ента загрузки представлена на рис. Б.1.
Таблица Б.1
Результаты расчета энергетических характеристик асинхронного двигателя
Коэффициент загрузки
50%
75%
100 %
125 %
Переменные потери, Вт
597
1342
2386
3728
Постоянные потери, Вт
2571
Полные потери, Вт
3168
3913
4957
6299
Коэффициент полезного
действия
0,9
0,916
0,92
0,918
Рис. Б.1. Зависимость коэффициента полезного действия
асинхронного двигателя от коэффициента загрузки
P/Рном
η
0.90
0.85
1
0.5
0.95
1,5
209
Задача Б.2. Определить токи трансформатора и коэффициент
полезного действия при нагрузках 50, 75, 100, 125 % от номиналь-
ной. Результаты расчета свести в таблицу. Построить зависимость
коэффициента полезного действия трансформатора от коэффициен-
та загрузки.
Исходные данные: полная номинальная мощность 69,5 кВА;
номинальные напряжения обмоток: первичной 6 кВ; вторич-
ной 0,4 кВ; потери холостого хода 600 Вт; потери короткого замы-
кания 1200 Вт; коэффициент мощности трансформатора 0,85; схема
соединения обмоток «звезда – звезда».
Решение. Определим токи первичной обмотки трансформато-
ра при разных коэффициентах нагрузки:
–
при коэффициенте загрузки 50%
А
34
,
3
10
6
3
10
5,
69
5,0
3
3
3
тр
1
ном
50%
%
05
тр
1
U
S
I
;
–
при коэффициенте загрузки 75%
А
5
10
6
3
10
5,
69
75
,
0
3
3
3
тр
1
ном
75%
%
75
тр
1
U
S
I
;
–
при коэффициенте загрузки 100%
А
7,6
10
6
3
10
5,
69
1
3
3
3
тр
1
ном
100%
%
00
1
тр
1
U
S
I
;
–
при коэффициенте загрузке 125%
А
36
,
8
10
6
3
10
5,
69
25
,
1
3
3
3
тр
1
ном
125%
%
25
1
тр
1
U
S
I
.
Определим токи вторичной отмотки трансформатора при раз-
ных коэффициентах нагрузки:
–
при коэффициенте загрузки 50%
А
50
10
4,0
3
10
5,
69
5,0
3
3
3
тр
2
ном
50%
%
05
тр
2
U
S
I
;
–
при коэффициенте загрузки 75%
А
75
10
4,0
3
10
5,
69
75
,
0
3
3
3
тр
2
ном
75%
%
57
тр
2
U
S
I
;
210
–
при коэффициенте загрузки 100%
А
100
10
4,0
3
10
5,
69
1
3
3
3
тр
2
ном
100%
%
тр100
2
U
S
I
;
–
при коэффициенте загрузки 125%
А
125
10
4,0
3
10
5,
69
25
,
1
3
3
3
тр
2
ном
125%
%
125
тр
1
U
S
I
.
Определим коэффициент полезного действия трансформатора
при разных коэффициентах нагрузки:
–
при коэффициенте загрузки 50%
;
97
,
0
600
85
,
0
69500
5,0
1200
5,0
1200
5,0
600
1
cos
1
2
2
хх
номтp
номтp
50%
кз
50%
кз
50%
хх
тр50%
2
2
P
S
P
P
P
–
при коэффициенте загрузки 75%
;
972
,
0
600
85
,
0
69500
75
,
0
1200
75
,
0
1200
75
,
0
600
1
cos
1
2
2
хх
номтp
номтp
75%
кз
75%
кз
75%
хх
тр75%
2
2
P
S
P
P
P
–
при коэффициенте загрузки 100%
;
97
,
0
600
85
,
0
69500
1
1200
1
1200
1
600
1
cos
1
2
2
хх
номтp
номтp
100%
кз
100%
кз
100%
хх
тр100%
2
2
P
S
P
P
P
–
при коэффициенте загрузки 125%
.
968
,
0
600
85
,
0
69500
25
,
1
1200
25
,
1
1200
25
,
1
600
1
cos
1
2
2
хх
номтp
номтp
125%
кз
125%
кз
125%
хх
тр125%
2
2
P
S
P
P
P
211
Результаты расчетов токов первичной, вторичной обмоток и
коэффициента полезного действия трансформатора при его работе с
разной загрузкой приведены в табл. Б.2. Зависимость коэффициента
полезного действия от коэффициента загрузки построена на рис.Б.2.
Таблица Б.2
Результаты расчета энергетических характеристик трансформатора
Коэффициент загрузки
50%
75%
100 %
125 %
Ток первичной обмотки, А
3,34
5
6,7
8,36
Ток вторичной обмотки, А
50
75
100
125
Коэффициент
полезного действия
0,97
0,972
0,97
0,968
Рис. Б.2. Зависимость коэффициента полезного действия трансформатора
от коэффициента загрузки
Задача Б.3. Определить коэффициент полезного действия не-
регулируемого электропривода при работе приводного асинхронно-
го двигателя в номинальном режиме.
Рис. Б.3. Расчетная схема
нерегулируемого электропривода
Исходные данные: расчетная
схема нерегулируемого электро-
привода с асинхронным двигате-
лем представлена на рис. Б.3. В
качестве исходных данных ис-
пользовать заданные и рассчи-
танные параметры трансформа-
тора и асинхронного двигателя
задач Б.1 и Б.2.
АД
Т
P/Рном
η
0.95
0.9
1
0.5
1
1,5
212
Решение. Определим ток вторичной обмотки трансформатора
при подключении к ней асинхронного двигателя, работающего в
номинальном режиме. Этот параметр можно определить, как ток,
потребляемый асинхронным двигателем,
.
A
100
89
,
0
92
,
0
400
3
10
57
cos
3
3
ном
ном
ном
ном
2
дв
трдв
2
U
P
I
I
Определим коэффициент загрузки трансформатора, при рабо-
те подключенного к вторичным обмоткам трансформатора асин-
хронного двигателя в номинальном режиме,
1
100
100
тр100%
2
трдв
2
трдв
I
I
.
Определим ток первичной обмотки трансформатора
A
7,6
10
6
3
10
5,
69
1
3
3
3
тр
1
ном
трдв
трдв
1
U
S
I
.
Определим номинальную активную мощность трансформато-
ра
кВт
59
85
,
0
5,
69
cos тр
ном
номтр
S
P
.
Определим коэффициент полезного действия трансформатора
.
97
,
0
600
59000
1
1200
1
1200
1
600
1
1
2
2
хх
номтp
трдв
кз
трдв
кз
трдв
хх
трдв
2
2
P
Р
P
P
P
Определим коэффициент полезного действия нерегулируемо-
го электропривода, состоящего из трансформатора и приводного
асинхронного двигателя
892
,
0
92
,
0
97
,
0
ном
трдв
нэп
.
213
Задача Б.4. Определить полную активную и реактивную
мощность, потребляемую асинхронным двигателем, величину по-
требляемого тока, коэффициент мощности и коэффициент нагрузки
при работе электропривода с загрузкой 50, 75, 100, 125%. Результа-
ты расчета свести в таблицу. Построить зависимость коэффициента
полезного действия, коэффициента мощности и коэффициента на-
грузки асинхронного двигателя от загрузки.
Исходные данные: в качестве исходных данных использовать
заданные и рассчитанные параметры трансформатора и асинхронно-
го двигателя задачи Б.1.
Решение. Определим активную мощность, потребляемую
электродвигателем из сети электроснабжения при разной нагрузке:
–
при коэффициенте загрузки 50 %
Вт
31667
9,0
10
57
5,0
5,0
3
дв50%
дв
2
дв50%
дв50%
2
50%
дв
1
P
P
P
;
–
при коэффициенте загрузки 75 %
Вт
46670
916
,
0
10
57
75
,
0
75
,
0
3
дв75%
дв
2
дв75%
дв75%
2
75%
дв
1
P
P
P
;
–
при коэффициенте загрузки 100 % (номинальный режим)
Вт
61957
92
,
0
10
573
дв100%
дв
2
дв100%
дв100%
2
100%
дв
1
P
P
P
;
–
при коэффициенте загрузки 125 %
Вт
77614
918
,
0
10
57
25
,
1
25
,
1
3
дв125%
дв
2
дв125%
дв125%
2
125%
дв
1
P
P
P
.
Определим реактивную мощность, потребляемую асинхрон-
ным двигателем при работе в номинальном режиме,
ВA
69614
89
,
0
61957
cos
cos
дв100%
1
ном
ном
P
P
S
,
.
Вар
31740
61957
69614
2
2
2
дв100%
1
2
ном
2
ном
2
ном
ном
P
S
P
S
Q
214
Как правило, величина реактивной мощности, потребляемой
асинхронным двигателем в режиме холостого хода, составляет
50÷70% от номинальной реактивной мощности. Тогда, реактивную
мощность приблизительно можно определить следующим образом
Вар
22218
31740
7,0
7,0
5,0
ном
хх
Q
Q
.
Определим реактивную мощность, потребляемую электродви-
гателем из сети электроснабжения при разной нагрузке:
–
при коэффициенте загрузки 50 %
;
Вар
24705
61957
31667
22218
31740
22218
2
2
100%
дв
1
50%
дв
1
хх
ном
хх
50%
дв
1
P
P
Q
Q
Q
Q
–
при коэффициенте загрузки 75 %
;
Вар
27620
61957
46670
22218
31740
22218
2
2
100%
дв
1
75%
дв
1
хх
ном
хх
75%
дв
1
P
P
Q
Q
Q
Q
–
при коэффициенте загрузки 100 % (номинальный режим)
;
Вар
31740
61957
61957
22218
31740
22218
2
2
100%
дв
1
100%
дв
1
хх
ном
хх
100%
дв
1
P
P
Q
Q
Q
Q
–
при коэффициенте загрузки 125 %
.
Вар
37160
61957
77614
22218
31740
22218
2
2
100%
дв
1
125%
дв
1
хх
ном
хх
125%
дв
1
P
P
Q
Q
Q
Q
215
Определим полную мощность, потребляемую электродвигате-
лем из сети электроснабжения, при разной нагрузке:
–
при коэффициенте загрузки 50 %
ВА
40164
24705
31667
2
2
2
дв50%
1
2
дв50%
1
50%
дв
1
Q
P
S
;
–
при коэффициенте загрузки 75%
ВА
54231
27620
46670
2
2
2
дв75%
1
2
дв75%
1
75%
дв
1
Q
P
S
;
–
при коэффициенте загрузки 100% (номинальный режим)
ВА
69614
31740
61957
2
2
2
дв100%
1
2
дв100%
1
100%
дв
1
Q
P
S
;
–
при коэффициенте загрузки 125%
ВА
86051
37160
77614
2
2
2
дв125%
1
2
дв125%
1
125%
дв
1
Q
P
S
.
Определим коэффициент мощности асинхронного двигателя,
при разной нагрузке:
–
при коэффициенте загрузки 50 %
79
,
0
40164
31667
cos
дв50%
1
дв50%
1
50%
дв
S
P
;
–
при коэффициенте загрузки 75%
86
,
0
54231
46670
cos
дв75%
1
дв75%
1
75%
дв
S
P
;
–
при коэффициенте загрузки 100 % (номинальный режим)
89
,
0
69614
61957
cos
дв100%
1
дв100%
1
100%
дв
S
P
;
–
при коэффициенте загрузки 125 %
9,0
86051
77614
cos
дв125%
1
дв125%
1
125%
дв
S
P
.
Определим коэффициент мощности асинхронного двигателя,
при разной нагрузке:
–
при коэффициенте загрузки 50 %
78
,
0
31667
24705
tg
дв50%
1
дв50%
1
50%
дв
P
Q
;
216
–
при коэффициенте загрузки 75%
59
,
0
46670
27620
tg
дв75%
1
дв75%
1
75%
дв
P
Q
;
–
при коэффициенте загрузки 100% (номинальный режим)
51
,
0
61957
31740
tg
дв100%
1
дв100%
1
100%
дв
P
Q
;
–
при коэффициенте загрузки 125%
48
,
0
77614
37160
tg
дв125%
1
дв125%
1
125%
дв
P
Q
.
Определим ток, потребляемый асинхронным двигателем при
разной нагрузке:
–
при коэффициенте загрузки 50%
A
58
79
,
0
400
3
31667
cos
3
50%
дв
ном
дв50%
1
50%
дв
U
P
I
;
–
при коэффициенте загрузки 75%
A
78
86
,
0
400
3
46670
cos
3
75%
дв
ном
дв75%
1
75%
дв
U
P
I
;
–
при коэффициенте загрузки 100% (номинальный режим)
A
100
89
,
0
400
3
61957
cos
3
100%
дв
ном
дв100%
1
100%
дв
U
P
I
;
–
при коэффициенте загрузки 125%
A
124
9,0
400
3
77614
cos
3
125%
дв
ном
дв125%
1
125%
дв
U
P
I
.
Результаты расчета приведены в табл. Б.3.
На рис. Б.4 и рис.Б.5 построены зависимости коэффициентов
мощности и коэффициентов нагрузки от коэффициента загрузки, со-
ответственно.
217
Таблица Б.3
Результаты расчета энергетических характеристик
асинхронного двигателя
Коэффициент загрузки
50%
75%
100 %
125 %
Активная мощность,
потребляемая
асинхронным двигателем
31667
46670
61957
77614
Реактивная мощность,
потребляемая
асинхронным двигателем
24705
27620
31740
37160
Полная мощность,
потребляемая
асинхронным двигателем
40164
54231
69614
86051
Коэффициент мощности
0,79
0,86
0,89
0,9
Коэффициент нагрузки
0,78
0,59
0,51
0,48
Ток, потребляемый
асинхронным двигателем
58
78
100
124
Рис. Б.4. Зависимость коэффициента мощности
от коэффициента загрузки
Рис. Б.5. Зависимость коэффициента нагрузки
от коэффициента загрузки
P/Рном
tgφ
0.6
0.4
1
0.5
1.5
0.8
P/Рном
соs φ
0.9
0.7
1
0.5
1.5
0.8
218
Контрольная работа Б.1.
Задание. Определить постоянные, переменные и полные по-
тери асинхронного двигателя, а также, потребляемую активную, ре-
активную и полную мощность, потребляемый ток, коэффициент
мощности и коэффициент нагрузки при работе электродвигателя с
загрузкой 50, 75, 100, 150 % от номинальной. Результаты расчета
свести в таблицу. Построить зависимости коэффициента полезного
действия, коэффициента мощности и коэффициента нагрузки от ко-
эффициента загрузки.
Исходные данные для расчета контрольной работы представ-
лены в табл. Б.4.
Таблица Б.4
Исходные данные для расчета контрольной работы
Вариант
Номинальные
параметры
1
2
3
4
5
6
7
Мощность, кВт
35
40
45
50
55
60 65
Напряжение, В
380
Скорость вращения, об/мин
2980
Коэффициент мощности
0,81 0,82 0,83 0,84 0,85 0,86 0,87
Коэффициент
полезного действия
0,85 0,85 0,85 0,86 0,86 0,86 0,86
Кратность сопротивлений
1,2 1,2 1,2 1,1 1,1 1,1 1,1
Вариант
Номинальные
параметры
8
9
10
11
12
13 14
Мощность, кВт
70
75
80
85
90
95 100
Напряжение, В
380
Скорость вращения, об/мин
1475
Коэффициент мощности
0,81 0,82 0,83 0,84 0,85 0,86 0,87
Коэффициент
полезного действия
0,87 0,87 0,87 0,88 0,88 0,88 0,88
Кратность сопротивлений
1
1
1
0,9 0,9 0,9 0,9
Вариант
Номинальные
параметры
15
16
17
18
19
20
Мощность, кВт
105 110 115 120 125
130
Напряжение, В
380
Скорость вращения, об/мин
985
Коэффициент мощности
0,81 0,82 0,83 0,84 0,85
0,86
Коэффициент
полезного действия
0,89 0,89 0,89 0,9 0,9
0,9
Кратность сопротивлений
0,8 0,8 0,7 0,7 0,7
0,7
219
Б.4. Расчет показателей качества электрической энергии
и оценка их влияния на энергетические характеристики
электропривода с асинхронным двигателем
и преобразователем частоты
Задача Б.5. Определить коэффициент несимметрии напряже-
ния на выходе преобразователя частоты. Дать оценку параметрам
несимметрии напряжения.
Исходные данные: асинхронный двигатель: номинальная
мощность 220 кВт; номинальное напряжение 380 В; активное сопро-
тивление обмотки статора 0,025 Ом; коэффициент полезного дейст-
вия 0,89; коэффициент мощности 0,9. Преобразователь частоты:
полная мощность 280 кВА; коэффициент полезного действия 0,93;
действующее значение линейного напряжения: UAB = 0,38 кВ;
UBС = 0,39 кВ; UСА = 0,37 кВ; действующее значение фазного напря-
жения: UA = 0,23 кВ; UB = 0,22 кВ; UС = 0,24 кВ. Расчетная схема
приведена на рис. Б.6.
Рис. Б.6. Расчетная схема
электропривода
Решение. Определим значения вспомогательных компонентов
напряжений следующим образом
кВ
04
,
0
38
,
0
37
,
0
39
,
0
2
2
2
2
вс1
AB
CA
BC
U
U
U
U
,
кВ
012
,
0
38
,
0
23
,
0
22
,
0
2
2
2
2
вс2
AB
A
B
U
U
U
U
.
АД
ПЧ
6кВ
Т
Электропривод
Сеть
электроснабжения
2
2
0
О
п
р
е
д
е
л
и
м
д
е
й
с
т
в
у
ю
щ
и
е
з
н
а
ч
е
н
и
я
п
е
р
в
о
й
г
а
р
м
о
н
и
к
и
н
а
п
р
я
ж
е
н
и
я
н
у
л
е
в
о
й
п
о
с
л
е
д
о
в
а
т
е
л
ь
н
о
с
т
и
с
л
е
д
у
ю
щ
и
м
о
б
р
а
з
о
м
к
В
.
0
2
1
1
,
0
0
1
2
,
0
,
3
8
0
2
2
,
0
4
3
0
4
,
0
,
3
8
0
3
9
,
0
4
0
1
2
,
0
3
0
4
,
0
6
1
4
3
4
3
6
1
2
2
2
2
2
2
2
2
в
с
2
2
2
в
с
1
2
2
в
с
2
в
с
1
1
0
U
U
U
U
U
U
U
U
U
A
B
B
A
B
B
C
О
п
р
е
д
е
л
и
м
д
е
й
с
т
в
у
ю
щ
и
е
з
н
а
ч
е
н
и
я
п
е
р
в
о
й
г
а
р
м
о
н
и
к
и
н
а
п
р
я
ж
е
н
и
я
о
б
р
а
т
н
о
й
п
о
с
л
е
д
о
в
а
т
е
л
ь
н
о
-
с
т
е
й
с
л
е
д
у
ю
щ
и
м
о
б
р
а
з
о
м
.
к
В
0
1
1
6
,
0
0
4
,
0
,
3
8
0
0
4
,
0
3
9
,
0
4
3
8
,
0
3
1
2
1
4
3
1
2
1
2
2
2
2
2
в
с
1
2
2
в
с
1
2
1
2
U
U
U
U
U
U
A
B
B
C
A
B
О
п
р
е
д
е
л
и
м
д
е
й
с
т
в
у
ю
щ
и
е
з
н
а
ч
е
н
и
я
п
е
р
в
о
й
г
а
р
м
о
н
и
к
и
н
а
п
р
я
ж
е
н
и
я
п
р
я
м
о
й
п
о
с
л
е
д
о
в
а
т
е
л
ь
н
о
с
т
и
с
л
е
д
у
ю
щ
и
м
о
б
р
а
з
о
м
.
к
В
3
8
,
0
0
4
,
0
,
3
8
0
0
4
,
0
3
9
,
0
4
3
8
,
0
3
1
2
1
4
3
1
2
1
2
2
2
2
2
в
с
1
2
2
в
с
1
2
1
1
U
U
U
U
U
U
A
B
B
C
A
B
220
221
Определим коэффициент несимметрии напряжений по обрат-
ной последовательности следующим образом
%
05
,
3
100
38
,
0
0116
,
0
100
1
1
1
2
2
U
U
KU
.
Определим коэффициент несимметрии напряжений по нуле-
вой последовательности следующим образом
%
6,9
100
38
,
0
0211
,
0
3
100
3
1
1
1
0
0
U
U
KU
.
Коэффициенты обратной и нулевой последовательности име-
ют значения 3,05 % и 9,6 %, соответственно, что превышает пре-
дельно допустимые значения, установленные стандартом ГОСТ
32144 – 2013 в 2% и 4 %, соответственно. Это свидетельствует о
низком уровне электромагнитной совместимости преобразователя
частоты.
Задача Б.6. Определить амплитуды и суммарный коэффици-
ент гармонических составляющих тока и напряжения на выходе
преобразователя частоты (обмотки статора); коэффициент полезного
действия приводного асинхронного двигателя; коэффициент мощно-
сти приводного асинхронного двигателя, при работе двигателя в но-
минальном режиме. Результаты расчета свести в таблицу. Дать
оценку полученных результатов.
Исходные данные: в качестве исходных данных использовать
заданные и рассчитанные параметры электропривода задачи Б.5;
кратность пускового тока асинхронного двигателя 5; значения ко-
эффициентов n – ых гармонических составляющих напряжения и
тока на выходе преобразователя частоты представлены в табл. Б.5.
Таблица Б.5
Гармонический состав напряжения и тока на выходе преобразователя частоты
n
КU(n), %
КI(n), %
1
89
99
5
20
4,6
7
14
3,4
11
9
1,9
13
7
1,1
222
Решение. Определим амплитуды n – ых гармонических со-
ставляющих напряжения на выходе преобразователя частоты
100
ном
U
K
U
n
U
n
:
В
76
100
380
20
100
ном
5
5
U
К
U
U
;
В
53
100
380
14
100
ном
7
7
U
К
U
U
;
В
34
100
380
9
100
ном
11
11
U
К
U
U
;
В
27
100
380
7
100
ном
13
13
U
К
U
U
.
Значение суммарного коэффициента гармонических состав-
ляющих напряжения можно определить следующим образом
%.
27
100
380
27
34
53
76
100
2
2
2
2
ном
2
13
2
11
2
7
2
5
ном
13
2
2
дв
U
U
U
U
U
U
U
K
n
n
U
Определим коэффициент полезного действия приводного
асинхронного двигателя с учетом несимметрии напряжения и нали-
чия высших гармонических составляющих напряжения
несдв
гардв
ном
2
2
дв
2
2
дв
P
P
P
P
P
P
P
P
.
Определим номинальные потери мощности в асинхронном
двигателе
Вт
27191
89
,
0
89
,
0
1
10
220
1
3
ном
дв
ном
дв
2
ном
Р
P
.
Определим потери мощности в асинхронном двигателе, вы-
званные воздействием высших гармонических составляющих на-
пряжения, следующим образом
40
2
2
2
п
ст
2
ном
40
2
2
2
п
ст
дв
гар
3
2
2
n
n
U
n
n
U
n
n
K
К
R
I
n
n
K
К
P
Р
.
223
Определим номинальный ток, потребляемый асинхронным
двигателем, следующим образом
A
417
9,0
89
,
0
380
3
10
220
cos
3
3
ном
ном
2
ном
U
P
I
.
Тогда, потери мощности, вызванные воздействием высших
гармонических составляющих напряжения, можно определить как
.
Вт
3237
13
13
07
,
0
11
11
09
,
0
7
7
14
,
0
5
5
2,0
5
025
,
0
417
3
2
2
2
2
2
2
2
дв
гар
Р
Определим потери мощности в асинхронном двигателе, вы-
званные несимметрией напряжения на выходе преобразователя час-
тоты, следующим образом
.
Вт
7242
096
,
0
5
025
,
0
417
3
41
,
2
3
41
,
2
41
,
2
2
2
2
2
0
2
п
ст
2
ном
2
0
2
п
ст
дв
нес
U
U
K
К
R
I
K
К
P
P
Теперь, можно определить коэффициент полезного действия
асинхронного двигателя, получающего электрическую энергию от
преобразователя частоты, следующим образом
854
,
0
7242
3237
27191
10
220
10
220
3
3
дв
.
Определим коэффициент мощности электродвигателя, полу-
чающего электрическую энергию от преобразователя частоты, сле-
дующим образом
793
,
0
9,0
99
,
0
89
,
0
cos )1(
1
1
дв
I
UK
K
.
Определим амплитуды высших гармонических составляющих
тока. Это можно сделать следующим образом
100
дв
I
K
I
n
I
n
.
Для этого определим ток, потребляемый асинхронным двига-
телем
A
494
0,793
,854
0
380
3
10
220
3
3
дв
дв
ном
2
дв
U
P
I
.
224
Теперь, рассчитаем амплитуды высших гармонических со-
ставляющих тока
A
23
100
494
6,4
100
дв
5
5
I
K
I
I
;
A
17
100
494
4,3
100
дв
7
7
I
K
I
I
;
A
9
100
494
9,1
100
дв
11
11
I
K
I
I
;
A
5
100
494
1,1
100
дв
13
13
I
K
I
I
.
Значение суммарного коэффициента гармонических состав-
ляющих напряжения можно определить следующим образом
.
%
15
,
6
100
494
5
9
17
23
100
2
2
2
2
дв
2
13
2
11
2
7
2
5
дв
40
2
2
I
I
I
I
I
I
I
K
n
n
I
Результаты расчета приведены в табл. Б.6.
Таблица Б.6
Гармонический состав напряжения и тока на выходе преобразователя частоты
n
U(n), B
КU, %
I(n), A
КI, %
5
76
23
7
53
17
11
34
9
13
27
27
5
6,15
Из расчетов видно, что используемый в электроприводе пре-
образователь частоты обеспечивает искажение кривой напряжения
на выходе 27 %, что значительно выше предельно допустимого зна-
чения, установленного стандартом ГОСТ 32144 – 2013 в 12 % для
сети 0,4 кВ. Также, используемый преобразователь частоты вызыва-
ет повышенное потребление тока на 19 % и снижение коэффициента
полезного действия на 4 %. Увеличение потребляемого тока и по-
терь мощности является следствием низкого уровня электромагнит-
ной совместимости преобразователя частоты.
225
Задача Б.7. Определить амплитуды и суммарный коэффици-
ент гармонических составляющих тока и напряжения сети электро-
снабжения 6 кВ, коэффициент полезного действия и коэффициент
мощности электропривода. Построить спектрограммы напряжения и
тока сети электроснабжения 6 кВ. Дать оценку параметрам искаже-
ния напряжения в сети электроснабжения 6 кВ.
Исходные данные: в качестве исходных данных использовать
заданные и рассчитанные параметры электропривода задачи Б.5
и Б.6. Расчетная схема электропривода представлена на рис. Б.4.
Трансформатор: мощность 400 кВА; номинальные напряжения об-
моток: первичной – 6 кВ; вторичной – 0,4 кВ; коэффициент полезно-
го действия 0,9.
Значения коэффициентов n – ых гармонических составляющих
напряжения и тока на входе электропривода представлены в
табл.Б.7.
Таблица Б.7
Гармонический состав напряжения и тока
на входе электропривода
n
КU(n), %
КI(n), %
1
99
88
5
4
21
7
3,1
11
11
2,3
6
13
1,9
4
Решение. Определим амплитуды высших гармонических со-
ставляющих напряжения сети электроснабжения
100
сэ
U
K
U
n
U
n
:
В
240
100
10
6
4
100
3
сэ
5
5
U
К
U
U
;
В
186
100
10
6
1,3
100
3
сэ
7
7
U
К
U
U
;
В
138
100
10
6
3,2
100
3
сэ
11
11
U
К
U
U
;
В
114
100
10
6
9,1
100
3
сэ
13
13
U
К
U
U
.
226
Определим значение суммарного коэффициента гармониче-
ских составляющих напряжения
.
%
9,5
100
6000
114
138
186
240
100
2
2
2
2
сэ
2
13
2
11
2
7
2
5
сэ
40
2
2
сэ
U
U
U
U
U
U
U
K
n
n
U
Определим коэффициент полезного действия электропривода
следующим образом
715
,
0
854
,
0
93
,
0
9,0
дв
пч
тр
эп
.
Определим амплитуды высших гармонических составляющих
тока. Это можно сделать следующим образом
100
сэ
I
K
I
n
I
n
.
Определим ток вторичной обмотки трансформатора
A
590
93
,
0
9,0
494
пч
тр
дв
тр
2
I
I
.
Определим коэффициент трансформации
15
400
6000
нн
вн
тр
U
U
K
.
Определим ток сети электроснабжения, потребляемый элек-
троприводом, как ток первичной обмотки трансформатора
A
39
15
590
тр
тр
2
тр
1
сэ
К
I
I
I
.
Теперь, рассчитаем амплитуды высших гармонических со-
ставляющих тока
A
8
100
39
21
100
сэ
5
5
I
K
I
I
;
A
4
100
39
11
100
сэ
7
7
I
K
I
I
;
A
2
100
39
6
100
сэ
11
11
I
K
I
I
;
227
A
6,1
100
39
4
100
сэ
13
13
I
K
I
I
.
Значение суммарного коэффициента гармонических состав-
ляющих напряжения можно определить следующим образом
%.
24
100
39
6,1
2
4
8
100
2
2
2
2
сэ
2
13
2
11
2
7
2
5
сэ
40
2
2
сэ
I
I
I
I
I
I
I
K
n
n
I
Определим коэффициент мощности электропривода следую-
щим образом
69
,
0
793
,
0
88
,
0
99
,
0
дв
1
1
эп
I
UK
K
.
Расчеты показывают, что суммарный коэффициент гармони-
ческих составляющих напряжения, имеет значение 5,9 %, что ниже
допустимого значения, установленного стандартом ГОСТ 32144 –
2013 в 8%.
Это значит, что уровень электромагнитной совместимости
электроприводов с сетью электроснабжения находится на удовле-
творительном уровне.
На рис.Б.7 построена спектрограмма высших гармонических
составляющих напряжения и тока сети электроснабжения 6 кВ.
Рис. Б.7. Спектральный состав
напряжения и тока сети электроснабжения 6 кВ
n
%
50
0
10
5
100
15
U
I
228
Контрольная работа Б.2.
Задание. Определить коэффициент несимметрии напряжения
на выходе преобразователя частоты; амплитуды гармонических со-
ставляющих напряжений и токов; суммарный коэффициент гармо-
нических составляющих напряжений и токов; коэффициент полез-
ного действия асинхронного двигателя и электропривода.
Исходные данные для расчета контрольной работы представ-
лены в табл. Б.8.
Таблица Б.8
Исходные данные для расчета контрольной работы
Вариант
Номинальные
параметры
1
2
3
4
5
6
7
P2, кВт
35
40
45
50
55
60 65
Uном, В
380
Rст, Ом
0,115 0,11 0,105 0,1 0,095 0,09 0,085
cos φ
0,81 0,82 0,83 0,84 0,85 0,86 0,87
Коэффициент
полезного действия
0,85 0,85 0,85 0,86 0,86 0,86 0,86
UAB/ UВС/ UСА/UA/UВ/UС, В
0,38/0,37/0,4/0,23/0,22/0,22 (на выходе)
КU(1)/КU(5)/КU(7)/КI(1)/КI(5)/КI(7), %
89/21/14/99/5/4 (на выходе)
КU(1)/КU(5)/КU(7)/КI(1)/КI(5)/КI(7), %
99/6/3/87/20/10 (на входе)
Вариант
Номинальные
параметры
8
9
10
11
12
13
14
P2, кВт
70
75
80
85
90
95 100
Uном, В
380
Rст, Ом
0,08 0,075 0,07 0,065 0,06 0,055 0,05
cos φ
0,81 0,82 0,83 0,84 0,85 0,86 0,87
Коэффициент
полезного действия
0,87 0,87 0,87 0,88 0,88 0,88 0,88
UAB/ UВС/ UСА/UA/UВ/UС, В
0,39/0,39/0,36/0,22/0,25/0,21 (на выходе)
КU(1)/КU(5)/КU(7)/КI(1)/КI(5)/КI(7), %
85/25/15/97/7/5(на выходе)
КU(1)/КU(5)/КU(7)/КI(1)/КI(5)/КI(7), %
99/10/6/85/25/5 (на входе)
Вариант
Номинальные
параметры
15
16
17
18
19
20
P2, кВт
105 110 115 120 125
130
Uном, В
380
Rст, Ом
0,045 0,04 0,035 0,03 0,025
cos φ
0,81 0,82 0,83 0,84 0,85
0,86
Коэффициент
полезного действия
0,89 0,89 0,89 0,9 0,9
0,9
UAB/ UВС/ UСА/UA/UВ/UС, В
0,4/0,37/0,8/0,23/0,21/0,24 (на выходе)
КU(1)/КU(5)/КU(7)/КI(1)/КI(5)/КI(7), %
80/19/10/99/10/4 (на выходе)
КU(1)/КU(5)/КU(7)/КI(1)/КI(5)/КI(7), %
98/7/3/87/15/9 (на входе)
229
Б.5. Расчет показателей
качества электромеханического преобразования
и оценка их влияния на характеристики электропривода
с асинхронным двигателем и преобразователем частоты
Задача Б.8. Рассчитать дополнительные потери в асинхрон-
ном двигателе АД2 от высших гармонических составляющих и не-
симметрии напряжения, возникающие от использования преобразо-
вателя частоты. Определить величину снижения срока службы из-за
перегрева токами высших гармоник и токами обратной последова-
тельности.
Исходные данные: номинальные данные асинхронного дви-
гателя АД2: мощность 105 кВт; напряжение 380 В; сопротивление
статора 0,07 Ом; коэффициент мощности 0,9; коэффициент полезно-
го действия 0,91; кратность пускового тока асинхронного двигате-
ля 5; нормативный срок службы 20 лет; рабочая температура 80°С.
Параметры качества электроэнергии: коэффициенты 5-ой, 7-ой, 11-
ой и 13-ой гармонических составляющих, соответственно: 6,1 %;
5,9 %; 4,6 %; 3,9 %; коэффициент несимметрии напряжения 0,03 %.
Расчетная схема приведена на рис.Б.8.
Рис. Б.8. Расчетная схема
электропривода
Решение: Определим номинальные потери мощности в асин-
хронном двигателе
Вт
10385
91
,
0
91
,
0
1
10
105
1
3
ном
ном
2
ном
Р
P
.
АД1
ПЧ
0,38 кВ
Т1
АД2
Т2
230
Определим номинальный ток асинхронного двигателя
А
U
P
I
195
9,0
91
,
0
380
3
10
105
cos
3
3
ном
ном
ном
ном
ном
.
Определим потери в статоре асинхронного двигателя
Вт
7984
07
,
0
195
3
3
2
ст
2
ном
ст
R
I
Р
.
Определим дополнительные потери от высших гармонических
составляющих напряжения
.
Вт
244
13
13
039
,
0
11
11
046
,
0
7
7
059
,
0
5
5
061
,
0
5
7984
2
2
2
2
2
2
2
40
2
2
2
п
ст
дв
гар
n
n
U
n
n
K
К
P
Р
Определим дополнительные потери мощности от токов обрат-
ной последовательности при несимметрии напряжения
Вт
433
03
,
0
5
7984
41
,
2
41
,
2
2
2
2
0
2
п
ст
дв
нес
U
K
К
P
P
.
Определим прирост температуры от токов высших гармоник и
токов обратной последовательности
С
P
P
P
21
,
5
10385
433
244
80
ном
дв
нес
дв
гар
ном
.
Определим коэффициент снижения срока службы двигателя
под воздействием токов высших гармоник и токов обратной после-
довательности
.
545
,
0
2
)21
,
5
086
,
0(
21
,
5
086
,
0
2
)
086
,
0(
086
,
0
2
2
сс
К
Определим величину снижения срока службы асинхронного
двигателя под воздействием токов высших гармоник и несимметрии
напряжения
лет
9,
10
545
,
0
20
cc
норм
K
t
t
.
231
Задача Б.9. Определить пики напряжения на клеммах асин-
хронного двигателя и оценить скорость нарастания напряжения на
выходе преобразователя частоты и клеммах асинхронного двигате-
ля. Установить необходимость установки фильтров на выходе пре-
образователя частоты.
Исходные данные: мощность асинхронного двигателя
22 кВт; мощность преобразователя частоты 30 кВт; напряжение
асинхронного двигателя 400 В; осциллограммы, представленные на
рис. Б.9 и рис.Б.10.
Рис.Б.9. Напряжение на выходе
преобразователя частоты
Рис.Б.10. Напряжение на клеммах
асинхронного двигателя
Решение. Определим изменение напряжения на выходе пре-
образователя частоты
В
452
400
2
8,0
2
8,0
8,0
дв
пч
U
U
U
d
.
Определим по осциллограмме время нарастания напряжения
на выходе преобразователя частоты
мкс
32
,
0
4,0
8,0
пч
t
.
Определим скорость нарастания напряжения на выходе пре-
образователя частоты
В/мкс
1412
32
,
0
452
пч
пч
пч
пч
t
U
dt
dU
.
Определим изменение напряжения на клеммах асинхронного
двигателя
t,c
U,В
1200
600
0
4
2
6
8
0,4 с
t,c
U,В
1200
600
0
4
2
6
8
1,25 c
1100 B
232
B
880
1100
8,0
8,0
max
дв
U
U
.
Определим по осциллограмме время нарастания напряжения
на клеммах асинхронного двигателя
мкс
1
25
,
1
8,0
дв
t
.
Определим скорость нарастания напряжения на клеммах
асинхронного двигателя
В/мкс
880
1
880
дв
дв
дв
дв
t
U
dt
dU
.
Как видно из осциллограмм напряжения и расчетов, время на-
растания напряжения на выходе преобразователя частоты и клеммах
асинхронного двигателя не ниже 0,1 мкс. Таким образом, установка
фильтров не требуется.
В соответствии с рекомендациями МЭК, скорость нарастания
напряжения не должна превышать значение 6500 В/мкс. Как пока-
зывают расчеты, этот показатель также находится в удовлетвори-
тельных границах.
Задача Б.10. Определить максимальную длину силового со-
единительного кабеля между преобразователем частоты и асин-
хронным двигателем.
Исходные данные: номинальная мощность асинхронного
двигателя 310 кВт; номинальное напряжение 0,4 кВ; последователь-
ная индуктивность кабеля 1 мкГн/м; параллельная емкость кабеля
50 пФ/м; время нарастания напряжения 1 мкс.
Решение. Определим скорость распространения волны на-
пряжения в силовом соединительном кабеле
с
м
10
141
10
50
10
1
1
1
6
12
6
к
к
С
L
VU
.
Определим эквивалентную частоту напряжения
с
1
10
16
,
3
10
1
16
,
3
6
6
U
U
t
.
Определим длину волны напряжения, распространяющуюся в
силовом соединительном кабеле
233
м
4,
28
10
4,
31
10
141
2
2
6
6
U
U
U
V
.
Определим максимальную длину силового соединительного
кабеля
м
2,
14
2
4,
28
2
кр
U
L
.
234
ПРИЛОЖЕНИЕ B
В.1. Оценка эффективности использования
энергоэффективных электродвигателей
Задача В.1. Определить значение активной, реактивной и пол-
ной мощности, потребляемой электроприводом, и величину потерь
мощности в электроприводе с различными по классу энергетической
эффективности асинхронными двигателями. Дать оценку экономиче-
ского эффекта от внедрения энергоэффективных двигателей.
Исходные данные: исходные данные для расчета приведены в
табл. B.1.
Таблица В.1
Исходные данные для расчета
Параметры электродвигателя
ЭП No1
ЭП No2
ЭП No3
Класс энергоэффективности
IE1
IE2
IE3
Номинальная мощность, кВт
55
55
55
Номинальное напряжение, кВ
380
380
380
Номинальная частота вращения, об/мин
2910
2910
2910
Коэффициент мощности
0,88
0,88
0,88
Коэффициент полезного действия
0,924
0,939
0,955
Решение. Рассчитаем активную, реактивную и полную мощ-
ность, потребляемую первым электроприводом при использовании
электродвигателя класса IE1:
кВт
5,
59
924
,
0
55
дв
1
дв
21
дв
11
P
P
;
кВА
6,
67
88
,
0
5,
59
cos дв
1
дв
11
дв
11
P
S
;
кВар
1,
32
5,
59
6,
67
2
2
2
дв
11
2
дв
11
дв
11
P
S
Q
.
Сделаем аналогичные расчеты для электропривода с энерго-
эффективными электродвигателями класса IE2:
кВт
6,
58
939
,
0
55
дв
2
дв
22
дв
12
P
P
;
235
кВА
5,
66
88
,
0
6,
58
cos дв
2
дв
12
дв
12
P
S
;
кВар
6,
31
6,
58
5,
66
2
2
2
дв
12
2
дв
12
дв
12
P
S
Q
.
и электродвигателями класса IE3:
кВт
6,
57
955
,
0
55
дв
3
дв
23
дв
13
P
P
;
кВА
4,
65
88
,
0
6,
57
cos дв
3
дв
13
дв
13
P
S
;
кВар
31
6,
57
4,
65
2
2
2
дв
13
2
дв
13
дв
13
P
S
Q
.
Рассчитаем количество потерь активной мощности в каждом
электродвигателе:
кВт
5,4
55
5,
59
дв
12
дв
11
дв
1
P
P
P
;
кВт
6,3
55
6,
58
дв
22
дв
12
дв
2
P
P
P
;
кВт
6,2
55
6,
57
дв
23
дв
13
дв
3
P
P
P
.
Если предположить, что данные электроприводы работают
24 часа в сутки, 365 дней в году, то количество теряемой мощности
можно определить следующим образом
ч
кВт
39420
8760
5,4
дв
1
1
Т
Р
РТ
;
ч
кВт
31536
8760
6,3
дв
2
2
Т
Р
РТ
;
ч
кВт
22776
8760
6,2
дв
3
3
Т
Р
РТ
.
При средней стоимости электроэнергии 2 руб. за кВт/ч, коли-
чество потерянной электроэнергии за один год каждым электродви-
гателем в денежном эквиваленте составит
руб
78840
39420
2
С
С
1
ээ
1
Т
Р
;
руб
63072
31536
2
С
С
2
ээ
2
Т
Р
;
руб
45552
22776
2
С
С
3
ээ
3
Т
Р
.
Таким образом, в случае замены обычного электродвигателя
(класс IE1) энергоэффективным (класс IE2), экономия энергии со-
ставляет 7884 кВт в год на один двигатель. При использовании деся-
236
ти таких электродвигателей, экономия составит 78840 кВт в год или,
в денежном выражении 157680 руб/год. При использовании электро-
двигателей с максимальным уровнем энергоэффективности, эконо-
мия энергии составляет 16644 кВт в год на один двигатель и
166440 кВт на десять двигателей или 332880 руб./год.
Контрольная работа В.1.
Задание. Определить значение активной, реактивной и полной
мощности, потребляемой электроприводом, и величину потерь мощ-
ности в электроприводе с различными по классу энергетической эф-
фективности асинхронными двигателями. Дать оценку экономиче-
ского эффекта от внедрения энергоэффективных двигателей.
Исходные данные для расчета дополнительных заданий пред-
ставлены в табл. В.2.
Таблица B.2
Исходные данные для расчета дополнительных заданий
Мощность
двигателя
Класс
энерго-
эффективности
Коэффициент
полезного
действия
Коэффициент
мощности
No
вар-та
ЭПNo1 ЭПNo2 ЭПNo1 ЭПNo2 ЭПNo1 ЭПNo2 ЭПNo1 ЭПNo2
1
50
IE1
IE2
0,8
0,85
0,87
2
60
IE2
IE3
0,85
0,9
0,87
3
70
IE1
IE3
0,8
0,9
0,87
4
80
IE1
IE2
0,8
0,85
0,87
5
90
IE2
IE3
0,85
0,9
0,87
6
100
IE1
IE3
0,8
0,9
0,87
7
110
IE1
IE2
0,8
0,85
0,87
8
120
IE2
IE3
0,85
0,9
0,87
9
130
IE1
IE3
0,8
0,9
0,87
10
140
IE1
IE2
0,8
0,85
0,87
11
150
IE2
IE3
0,85
0,9
0,87
12
160
IE1
IE3
0,8
0,9
0,87
13
170
IE1
IE2
0,8
0,85
0,87
14
180
IE2
IE3
0,85
0,9
0,87
15
190
IE1
IE3
0,8
0,9
0,87
16
200
IE1
IE2
0,8
0,85
0,87
17
210
IE2
IE3
0,85
0,9
0,87
18
220
IE1
IE3
0,8
0,9
0,87
19
230
IE1
IE2
0,8
0,85
0,87
20
240
IE2
IE3
0,85
0,9
0,87
237
В.2. Оценка эффективности использования
энергосберегающих и высокотехнологичных систем
и алгоритмов управления промышленным электроприводом
Задача В.2. Определить величину потерь мощности, коэффи-
циент полезного действия и коэффициент мощности электропривода
с асинхронным двигателем и реостатным регулированием. Результа-
ты расчета свести в таблицу. Построить рабочие участки механиче-
ских характеристик асинхронного двигателя при реостатном регули-
ровании. Построить зависимость коэффициента полезного действия
и коэффициента мощности от коэффициента загрузки.
Исходные данные: номинальные параметры асинхронного
двигателя: мощность 165 кВт; напряжение 380 В; коэффициент мощ-
ности 0,87; скорость вращения 2950 об/мин; перегрузочная способ-
ность 2. Нагрузка электропривода: 50, 75, 100 % от номинальной. Ра-
бочая частота вращения при номинальной нагрузке: 100, 75, 50 от
номинальной.
Решение. Определим величину потерь мощности, коэффици-
ент полезного действия и коэффициент мощности асинхронного дви-
гателя при работе с номинальной частотой вращения при номиналь-
ной нагрузке, т.е. на естественной характеристике.
Определим номинальный и критический момент асинхронного
двигателя
Нм
534
2950
10
165
55
,
9
55
,
9
3
ном
ном
2
ном
n
Р
M
,
Нм
1068
534
2
ном
к
M
M
.
Определим номинальное и критическое скольжение асинхрон-
ного двигателя
0167
,
0
3000
2950
3000
0
ном
0
ном
n
n
n
s
,
062
,
0
1
2
2
0167
,
0
1
2
2
ном
1к
s
s
.
Определим значения моментов сопротивления
Нм
267
534
5,0
5,0
ном
дв50%
M
M
;
238
Нм
400
534
75
,
0
75
,
0
ном
дв75%
M
M
;
Нм
534
ном
дв100%
M
M
.
Используя формулу Клосса, определим скольжения и скорости
вращения ротора асинхронного двигателя при работе на естествен-
ной характеристике с разной нагрузкой
008
,
0
%
50
дв
1
s
;
012
,
0
%
57
дв
1
s
;
0167
,
0
ном
%
100
дв
1
s
s
.
об/мин
2976
3000
008
,
0
3000
0
%
50
дв
1
0
%
50
дв
1
n
s
n
n
;
об/мин
2964
3000
012
,
0
3000
0
%
57
дв
1
0
%
57
дв
1
n
s
n
n
;
об/мин
2950
ном
%
100
дв
1
n
n
.
Определим значение мощности на валу асинхронного двигате-
ля при работе на естественной характеристике с разной нагрузкой
Вт
83227
55
,
9
2976
267
55
,
9
%
50
дв
1
дв50%
%
50
дв
12
n
M
P
;
Вт
124337
55
,
9
2964
400
55
,
9
%
75
дв
1
дв75%
%
75
дв
12
n
M
P
;
Вт
165000
55
,
9
2950
534
55
,
9
%
100
дв
1
дв100%
%
100
дв
12
n
M
P
.
Определим значение потребляемой мощности асинхронного
двигателя при работе на естественной характеристике с разной на-
грузкой
Вт
83898
55
,
9
3000
267
55
,
9
0
дв50%
%
50
дв
11
n
M
P
;
Вт
125847
55
,
9
3000
400
55
,
9
0
дв75%
%
57
дв
11
n
M
P
;
Вт
167796
55
,
9
3000
534
55
,
9
0
дв100%
%
001
дв
11
n
M
P
.
239
Определим величину потерь мощности при работе на естест-
венной характеристике с разной нагрузкой
Вт
671
83227
83898
%
50
дв
12
%
50
дв
11
%
50
дв
1
P
P
P
;
Вт
1510
124337
125847
%
75
дв
12
%
75
дв
11
%
57
дв
1
P
P
P
;
Вт
2796
165000
167796
%
100
дв
12
%
100
дв
11
%
100
дв
1
P
P
P
.
Определим коэффициент полезного действия двигателя при
работе на естественной характеристике с разной нагрузкой
99
,
0
71
6
83227
83227
%
50
дв
1
%
50
дв
12
%
50
дв
12
%
50
дв
1
P
P
P
;
99
,
0
1510
124337
124337
%
75
дв
1
%
75
дв
12
%
75
дв
12
%
75
дв
1
P
P
P
;
98
,
0
2796
165000
165000
%
100
дв
1
%
100
дв
12
%
100
дв
12
%
100
дв
1
P
P
P
.
Определим полную мощность, потребляемую асинхронным
двигателем, в номинальном режиме
.
ВА
92869
1
87
,
0
167796
cos
cos
%
100
дв
%
100
дв
11
ном
ном
1
ном
P
P
S
Определим реактивную мощность, потребляемую асинхрон-
ным двигателем, в номинальном режиме
Вap
95094
167796
92869
1
2
2
2
ном
1
2
ном
ном
P
S
Q
.
Примем значение реактивной мощности в режиме холостого
хода
Вap
47547
95094
5,0
5,0
ном
хх
Q
Q
.
Определим реактивную мощность, потребляемую двигателем,
при работе на естественной характеристике с разной нагрузкой
.
Вар
59434
167796
83898
47547
95094
47547
2
2
100%
дв
11
50%
дв
11
хх
ном
хх
50%
дв
1
P
P
Q
Q
Q
Q
240
.
Вар
74292
167796
125847
47547
95094
47547
2
2
100%
дв
11
75%
дв
11
хх
ном
хх
75%
дв
1
P
P
Q
Q
Q
Q
Вар
95094
ном
100%
дв
1
Q
Q
.
Определим полную мощность, потребляемую асинхронным
двигателем, при работе на естественной характеристике с разной на-
грузкой
ВA
102817
59434
83898
2
2
2
50%
дв
1
2
50%
дв
11
50%
дв
1
Q
P
S
;
ВA
146140
74292
125847
2
2
2
75%
дв
1
2
75%
дв
11
75%
дв
1
Q
P
S
;
ВA
192869
95094
167796
2
2
2
100%
дв
1
2
100%
дв
11
100%
дв
1
Q
P
S
.
Определим коэффициент мощности асинхронного двигателя
при работе на естественной характеристике с разной нагрузкой
816
,
0
102817
83898
cos
50%
дв
1
50%
дв
11
50%
дв
1
S
P
;
86
,
0
146140
125847
cos
75%
дв
1
75%
дв
11
75%
дв
1
S
P
;
87
,
0
192869
167796
cos
100%
дв
1
100%
дв
11
100%
дв
1
S
P
.
Определим скорость вращения ротора и скольжение асинхрон-
ного двигателя на искусственной характеристике при снижении час-
тоты до уровня 75 % от номинальной и номинальном моменте
об/мин
5,
2212
2950
75
,
0
75
,
0
%
100
дв
1
%
100
дв
2
n
n
;
2625
,
0
3000
5,
2212
3000
0
%
100
дв
2
0
%
100
дв
2
n
n
n
s
.
Определим критическое скольжение асинхронного двигателя
при работе на первой искусственной характеристике. Для этого, с
помощью формулы Клосса составим следующее уравнение
241
%
100
дв
2
2к
2к
%
100
дв
2
к
дв100%
2
s
s
s
s
M
M
;
2625
,
0
2625
,
0
1068
2
534
2к
2к
s
s
.
Решив это уравнение, получим следующее значение критиче-
ского скольжения первой искусственной характеристики
98
,
0
2к
s
.
Используя формулу Клосса, с учетом найденного критического
скольжения, определим скольжения и скорости вращения ротора
асинхронного двигателя при работе на первой искусственной харак-
теристике с разной нагрузкой
125
,
0
%
50
дв
2
s
;
19
,
0
%
57
дв
2
s
;
об/мин
2625
3000
125
,
0
3000
0
%
50
дв
2
0
%
50
дв
2
n
s
n
n
;
об/мин
2430
3000
019
3000
0
%
57
дв
2
0
%
57
дв
2
n
s
n
n
.
Определим скорость вращения ротора и скольжение асинхрон-
ного двигателя на искусственной характеристике при снижении час-
тоты до уровня 50 % от номинальной и номинальном моменте
об/мин
1475
2950
5,0
5,0
%
100
дв
1
%
100
дв
3
n
n
;
508
,
0
3000
1475
3000
0
%
100
дв
3
0
%
100
дв
3
n
n
n
s
.
Определим критическое скольжение этой характеристики. Для
этого, с помощью формулы Клосса составим следующее уравнение
%
100
дв
3
3к
3к
%
100
дв
3
к
дв100%
2
s
s
s
s
M
M
;
508
,
0
508
,
0
1068
2
534
2к
2к
s
s
.
242
Решив это уравнение, получим следующее значение критиче-
ского скольжения
897
,
1
3к
s
.
Используя формулу Клосса, с учетом найденного критического
скольжения, определим скольжения и скорости вращения ротора
асинхронного двигателя при работе на второй искусственной харак-
теристике с разной нагрузкой
24
,
0
%
50
дв
3
s
;
369
,
0
%
57
дв
3
s
;
об/мин
2280
3000
24
,
0
3000
0
%
50
дв
3
0
%
50
дв
3
n
s
n
n
;
об/мин
1893
3000
369
,
0
3000
0
%
57
дв
3
0
%
57
дв
3
n
s
n
n
.
Значения мощности на валу, потребляемой мощности, потерь
мощности, коэффициента полезного действия, реактивной и полной
мощности и коэффициента мощности асинхронного двигателя при
работе на первой и второй искусственной характеристике с пони-
женной частотой вращения до 75 % и 50 %, соответственно, опреде-
ляем аналогично расчету этих параметров при работе электродвига-
теля на естественной характеристике. Результаты расчета приведены
в табл. В.3. Механические характеристики представлены на рис. В.1,
а энергетические на рис. В.2.
Рис.В.1 . Механические
характеристики двигателя
Рис.В.2. Энергетические
характеристики двигателя
s
s2к
500
s1к
0
Мк
1
1500 M, Нм
0
0,25
0,50
0,75
Мном
1000
P/Pном
соs φ
1
0.5
0
0.5
P/Pном
η
1
0.5
0
0.5
ЕХ
1ИХ
2ИХ
243
Таблица В.3
Результаты расчета электропривода
с асинхронным двигателем и реостатным регулированием
При работе на естественной характеристике
(n=nном приМ=Мном)
Коэффициент загрузки
0,5
0,75
1
Момент, кНм
267
400
534
Скольжение
0,008
0,012
0,0167
Скорость вращения, об/мин
2976
2964
2950
Мощность на валу, Вт
83227
124337
165000
Потребляемая мощность, Вт
83898
125847
167796
Потери мощности, Вт
671
1510
2796
Коэффициент полезного действия
0,99
0,99
0,98
Реактивная мощность, Вар
59434
74292
95094
Полная мощность, ВА
102817
146140
192869
Коэффициент мощности
0,816
0,86
0,87
При работе на первой искусственной характеристике
(n = 0,75nном при М = Мном)
Коэффициент загрузки
0,5
0,75
1
Момент, кНм
267
400
534
Скольжение
0,125
0,19
0,2625
Скорость вращения, об/мин
2625
2430
2212,5
Мощность на валу, Вт
73411
101936
123750
Потребляемая мощность, Вт
83898
125847
167796
Потери мощности, Вт
10487
23911,017
44046
Коэффициент полезного действия
0,875
0,81
0,7375
Реактивная мощность, Вар
59434
74292,751
95094
Полная мощность, ВА
102817
146140
192869
Коэффициент мощности
0,816
0,861
0,87
При работе на второй искусственной характеристике
(n = 0,5nном при М = Мном)
Коэффициент загрузки
0,5
0,75
1
Момент, кНм
267
400
534
Скольжение
0,24
0,369
0,508
Скорость вращения, об/мин
2280
1893
1475
Мощность на валу, Вт
63762
79409
82555
Потребляемая мощность, Вт
83898
125847
167796
Потери мощности, Вт
20135
46437
85240
Коэффициент полезного действия
0,76
0,631
0,492
Реактивная мощность, Вар
59434
74292
95094
Полная мощность, ВА
102817
146140
192869
Коэффициент мощности
0,815996
0,8611412
0,87
244
Задача В.3. Определить величину потерь мощности, коэффи-
циент полезного действия и коэффициент мощности электропривода
с асинхронным двигателем и параметрическим регулированием.
Также, оценить перегрузочную способность асинхронного двигателя
при работе на пониженных частотах вращения. Результаты расчета
свести в таблицу. Построить рабочие участки механических харак-
теристик асинхронного двигателя при параметрическом регулирова-
нии. Построить зависимость коэффициента полезного действия и
коэффициента мощности от коэффициента загрузки. Проанализиро-
вать эффективность параметрического регулирования.
Исходные данные: в качестве исходных данных использовать
заданные и рассчитанные параметры электропривода задачи В.2.
Уровень напряжения асинхронного двигателя 100 и 95% от номи-
нального уровня при номинальной нагрузке.
Решение. Естественная механическая характеристика и расчет
энергетических характеристик асинхронного двигателя при работе с
разной нагрузкой выполнен в задаче В.2.
Определим скорость вращения ротора и скольжение асин-
хронного двигателя при снижении напряжения на 5 % и работе элек-
тропривода с номинальной нагрузкой
об/мин
2802
2950
95
,
0
95
,
0
%
100
дв
1
%
100
дв
2
n
n
;
066
,
0
3000
2802
3000
0
%
100
дв
2
0
%
100
дв
2
n
n
n
s
.
Критическое скольжение, не зависящее от напряжения элек-
тродвигателя, будет равно
062
,
0
к
1к
2к
s
s
s
.
Определим критический момент искусственной характеристи-
ки. Для этого, воспользуемся формулой Клосса
%
100
дв
2
к
к
%
100
дв
2
к
дв100%
2
s
s
s
s
M
M
;
Нм
535
066
,
0
062
,
0
,062
0
066
,
0
2
534
2
%
100
дв
2
к
к
%
100
дв
2
дв100%
2к
s
s
s
s
M
M
.
245
С учетом найденных скольжения, критического скольжения и
критического момента, используя формулу Клосса, определим
скольжения и скорости вращения ротора асинхронного двигателя
при работе на искусственной характеристике при пониженном на-
пряжении с разной нагрузкой:
–
при нагрузке 50 % от номинальной
019
,
0
%
05
дв
2
s
,
об/мин
2943
3000
019
,
0
3000
0
%
05
дв
2
0
%
05
дв
2
n
s
n
n
;
–
при нагрузке 75 % от номинальной
0315
,
0
%
57
дв
2
s
,
об/мин
2905
3000
0315
,
0
3000
0
%
57
дв
2
0
%
57
дв
2
n
s
n
n
.
Определим мощность, потребляемую асинхронным двигате-
лем при работе с пониженным напряжением и разной нагрузкой
Вт
83898
55
,
9
3000
267
55
,
9
0
дв50%
%
50
дв
21
n
M
P
;
Вт
125847
55
,
9
3000
400
55
,
9
0
дв75%
%
75
дв
21
n
M
P
;
Вт
167796
55
,
9
3000
534
55
,
9
0
дв100%
%
100
дв
21
n
M
P
.
Определим значение мощности на валу асинхронного двига-
теля при работе с пониженным напряжением и разной нагрузкой
Вт
82304
55
,
9
2943
267
55
,
9
%
50
дв
2
дв50%
%
50
дв
22
n
M
P
;
Вт
121883
55
,
9
2905
400
55
,
9
%
57
дв
2
дв75%
%
75
дв
22
n
M
P
;
Вт
156750
55
,
9
2802
534
55
,
9
%
100
дв
2
дв100%
%
100
дв
22
n
M
P
.
Определим величину потерь мощности при работе асинхрон-
ного двигателя с пониженным напряжением и разной нагрузкой
Вт
594
1
82304
83898
%
50
дв
22
%
50
дв
21
%
50
дв
2
P
P
P
;
Вт
3964
121883
125847
%
75
дв
22
%
75
дв
21
%
75
дв
2
P
P
P
;
246
Вт
11046
156750
167796
%
100
дв
22
%
100
дв
21
%
00
1
дв
2
P
P
P
.
Определим коэффициент полезного действия асинхронного
двигателя с пониженным напряжением и разной нагрузкой
98
,
0
594
1
82304
82304
%
50
дв
2
%
50
дв
22
%
50
дв
22
%
50
дв
2
P
P
P
;
968
,
0
3964
121883
121883
%
75
дв
2
%
75
дв
22
%
75
дв
22
%
75
дв
2
P
P
P
;
93
,
0
11046
156750
156750
%
00
1
дв
2
%
00
1
дв
22
%
00
1
дв
22
%
100
дв
2
P
P
P
.
Определим значение реактивной мощности, потребляемой
асинхронным двигателем с пониженным напряжением и разной на-
грузкой
Вар;
57641
167796
83898
47547
95
,
0
95094
47547
95
,
0
95
,
0
95
,
0
2
2
100%
дв
21
50%
дв
11
хх
ном
хх
50%
дв
2
P
P
Q
Q
Q
Q
Вар;
73252
167796
125847
47547
95
,
0
95094
47547
95
,
0
95
,
0
95
,
0
2
2
100%
дв
21
75%
дв
21
хх
ном
хх
75%
дв
2
P
P
Q
Q
Q
Q
Вар
95094
ном
100%
дв
2
Q
Q
.
Определим полное значение мощности, потребляемой элек-
тродвигателем с пониженным напряжением и разной нагрузкой
ВA
101796
57641
83898
2
2
2
50%
дв
2
2
50%
дв
21
50%
дв
2
Q
P
S
;
ВA
145614
73252
125847
2
2
2
75%
дв
1
2
75%
дв
21
75%
дв
1
Q
P
S
;
ВA
192869
95094
167796
2
2
2
100%
дв
1
2
100%
дв
21
100%
дв
1
Q
P
S
.
247
Определим коэффициент мощности асинхронного двигателя
при его работе с пониженным напряжением и разной нагрузкой
83
,
0
101796
83898
cos
50%
дв
2
50%
дв
21
50%
дв
1
S
P
;
87
,
0
145614
125847
cos
75%
дв
2
75%
дв
21
50%
дв
2
S
P
;
87
,
0
192869
167796
cos
100%
дв
2
100%
дв
21
100%
дв
2
S
P
.
Так как, асинхронный двигатель на естественной характери-
стике работает с теми же моментами сопротивления, что и в задаче
В.2, то и потребляемая активная, реактивная и полная мощности, ко-
эффициент полезного действия и коэффициент мощности будут
иметь такие же значения. Результаты расчета энергетических харак-
теристик электропривода с параметрическим регулированием при-
ведены в табл. В.4. Механические характеристики электропривода с
асинхронным двигателем и параметрическим регулированием пред-
ставлены на рис.В.3, а энергетические (коэффициент полезного дей-
ствия и коэффициент мощности) на рис. В.4.
Рис.В.3 Механические
характеристики двигателя
Рис.В.4. Энергетические
характеристики двигателя
s
500
sк
0
Мк
1
1500 М, Нм
0
0,25
0,50
0,75
Мк2
1000
P/Pном
соs φ
1
0.5
0
0.5
ЕХ
ИХ
P/Pном
η
1
0.5
0
0.5
ЕХ
ИХ
248
Таблица В.4
Результаты расчета электропривода
с асинхронным двигателем и параметрическим регулированием
При работе на естественной характеристике
(n=nном приМ=Мном)
Коэффициент загрузки
0,5
0,75
1
Момент, кНм
267
400
534
Скольжение
0,008
0,012
0,0167
Скорость вращения, об/мин
2976
2964
2950
Мощность на валу, Вт
83227
124337
165000
Потребляемая мощность, Вт
83898
125847
167796
Потери мощности, Вт
671
1510
2796
Коэффициент полезного действия
0,99
0,99
0,98
Реактивная мощность, Вар
59434
74292
95094
Полная мощность, ВА
102817
146140
192869
Коэффициент мощности
0,816
0,86
0,87
При работе на искусственной характеристике
при пониженном напряжении (n = 0,95nном при М = Мном)
Коэффициент загрузки
0,5
0,75
1
Момент, кНм
267
400
534
Скольжение
0,019
0,0315
0,066
Скорость вращения, об/мин
2943
2905
2802
Мощность на валу, Вт
82304
121883
156750
Потребляемая мощность, Вт
83898
125847
167796
Потери мощности, Вт
1594
3964
11046
Коэффициент полезного действия
0,98
0,968
0,93
Реактивная мощность, Вар
57641
73252
95094
Полная мощность, ВА
101796
145614
192869
Коэффициент мощности
0,83
0,87
0,87
Определим перегрузочную способность асинхронного двига-
теля с параметрическим регулированием. При работе на естествен-
ной характеристике перегрузочная способность асинхронного дви-
гателя
2
534
1068
дв100%
к
1
M
M
.
При снижении напряжения на 5 % от номинального значения
перегрузочная способность асинхронного двигателя
001
,
1
534
535
дв100%
2к
2
M
M
.
249
Задача В.4. Определить величину потерь мощности, коэффи-
циент полезного действия и коэффициент мощности электропривода
с асинхронным двигателем и частотным регулированием. Результа-
ты расчета свести в таблицу. Построить рабочие участки механиче-
ских характеристик асинхронного двигателя при частотном регули-
ровании. Построить зависимость коэффициента полезного действия
и коэффициента мощности от коэффициента загрузки. Проанализи-
ровать эффективность частотного регулирования.
Исходные данные: в качестве исходных данных использовать
заданные и рассчитанные параметры электропривода задачи В.2.
Уровень частоты питающего напряжения асинхронного двигателя
50, 75, 100 % от номинального уровня при номинальной нагрузке.
Решение. Естественная механическая характеристика и расчет
энергетических характеристик асинхронного двигателя при работе с
разной нагрузкой сделан в задаче В.2.
Определим скорость вращения ротора асинхронного двигателя
при работе на первой искусственной характеристике, т.е., при сни-
жении скорости вращения на 25 %, и номинальной нагрузке
об/мин
5,
2212
2950
75
,
0
75
,
0
%
100
дв
1
%
100
дв
2
n
n
.
Определим синхронную скорость (скорость вращения магнит-
ного поля статора) асинхронного двигателя при работе на первой
искусственной характеристике
об/мин
2250
3000
75
,
0
75
,
00
02
n
n
.
Определим критическую скорость асинхронного двигателя
при работе на первой искусственной характеристике
об/мин
2110
062
,
0
3000
3000
75
,
0
75
,
0
1к
0
0
к2
s
n
n
n
.
Определим скольжение асинхронного двигателя при работе с
номинальной нагрузкой
2625
,
0
3000
5,
2212
3000
0
%
100
дв
2
0
%
100
дв
2
n
n
n
s
.
Определим критическое скольжение асинхронного двигателя
при работе на первой искусственной характеристике
297
,
0
3000
2110
3000
0
к2
0
к2
n
n
n
s
.
250
Определим скольжения и скорости вращения ротора асин-
хронного двигателя при работе на первой искусственной характери-
стике с разной нагрузкой
об/мин
2232
2976
75
,
0
75
,
0
%
50
дв
1
%
50
дв
2
n
n
;
об/мин
2223
2964
75
,
0
75
,
0
%
75
дв
1
%
75
дв
2
n
n
;
256
,
0
3000
2232
3000
0
%
50
дв
2
0
%
50
дв
2
n
n
n
s
;
259
,
0
3000
2223
3000
0
%
57
дв
2
0
%
57
дв
2
n
n
n
s
.
Определим значение потребляемой асинхронным двигателем
активной мощности при работе на первой искусственной характери-
стике с разной нагрузкой
Вт
62923
55
,
9
2250
267
55
,
9
02
дв50%
%
50
дв
21
n
M
P
;
Вт
94386
55
,
9
2250
400
55
,
9
02
дв75%
%
57
дв
21
n
M
P
;
Вт
125847
55
,
9
2250
534
55
,
9
02
дв100%
%
00
1
дв
21
n
M
P
.
Определим значение мощности на валу асинхронного двига-
теля при работе на первой искусственной характеристике с разной
нагрузкой
Вт
62420
55
,
9
2232
267
55
,
9
%
50
дв
2
дв50%
%
50
дв
22
n
M
P
;
Вт
93252
55
,
9
2223
400
55
,
9
%
75
дв
2
дв75%
%
57
дв
22
n
M
P
;
Вт
123745
55
,
9
5,
2212
534
55
,
9
%
100
дв
2
дв100%
%
001
дв
22
n
M
P
.
Определим величину потерь мощности при работе на первой
искусственной характеристике с разной нагрузкой
Вт
503
62420
62923
%
50
дв
22
%
50
дв
21
%
50
дв
2
P
P
P
;
251
Вт
1134
93252
94386
%
57
дв
22
%
57
дв
21
%
57
дв
2
P
P
P
;
Вт
2102
123745
125847
%
001
дв
22
%
001
дв
21
%
001
дв
2
P
P
P
.
Определим коэффициент полезного действия асинхронного
двигателя при работе на первой искусственной характеристике с
разной нагрузкой
99
,
0
503
62420
62420
%
50
дв
2
%
50
дв
22
%
50
дв
22
%
50
дв
2
P
P
P
;
99
,
0
1134
93677
93677
%
57
дв
2
%
57
дв
22
%
57
дв
22
%
57
дв
2
P
P
P
;
98
,
0
2102
123745
123745
%
001
дв
2
%
001
дв
22
%
001
дв
22
%
001
дв
2
P
P
P
.
Количество реактивной мощности, потребляемой асинхрон-
ным двигателем при работе на естественной характеристике с раз-
ной нагрузкой было определено в задаче В.2. Определим значения
реактивной мощности при частотном регулировании на первой ис-
кусственной характеристике
Вар
44575
59434
75
,
0
75
,
0
50%
дв
1
50%
дв
2
Q
Q
;
Вар
55719
74292
75
,
0
75
,
0
75%
дв
1
75%
дв
2
Q
Q
;
Вар
71321
95094
75
,
0
75
,
0
75
,
0
ном
100%
дв
1
100%
дв
2
Q
Q
Q
.
Определим полную мощность, потребляемую асинхронным
двигателем, на первой искусственной характеристике с разной на-
грузкой
ВA
77112
44575
62923
2
2
2
50%
дв
2
2
50%
дв
21
50%
дв
2
Q
P
S
;
ВA
109605
55719
94386
2
2
2
75%
дв
2
2
75%
дв
21
75%
дв
2
Q
P
S
;
ВA
144652
71321
125847
2
2
2
100%
дв
2
2
100%
дв
21
100%
дв
2
Q
P
S
.
Определим коэффициент мощности асинхронного двигателя
при работе на первой искусственной характеристике с разной на-
грузкой
252
816
,
0
77112
62923
cos
50%
дв
2
50%
дв
21
50%
дв
2
S
P
;
86
,
0
109605
94386
cos
75%
дв
2
75%
дв
21
75%
дв
2
S
P
;
87
,
0
144652
125847
cos
100%
дв
2
100%
дв
21
100%
дв
2
S
P
.
Определим скорость вращения ротора асинхронного двигателя
при работе на второй искусственной характеристике, т.е., при сни-
жении частоты напряжения на 50 %, и номинальной нагрузке
об/мин
1475
2950
5,0
5,0
%
100
дв
1
%
100
дв
3
n
n
.
Определим синхронную скорость (скорость вращения магнит-
ного поля статора) асинхронного двигателя при работе на второй
искусственной характеристике
об/мин
1500
3000
5,0
5,0
0
03
n
n
.
Определим критическую частоту асинхронного двигателя при
работе на второй искусственной характеристике
об/мин
1406
062
,
0
3000
3000
5,0
5,0
1к
0
0
к3
s
n
n
n
.
Определим скольжение асинхронного двигателя при работе с
номинальной нагрузкой
508
,
0
3000
1475
3000
0
%
100
дв
3
0
%
100
дв
3
n
n
n
s
.
Определим критическое скольжение асинхронного двигателя
при работе на второй искусственной характеристике
531
,
0
3000
1406
3000
0
к3
0
к3
n
n
n
s
.
Определим скольжения и частоты вращения ротора асинхрон-
ного двигателя при работе на второй искусственной характеристике
с разной нагрузкой
об/мин
1488
2976
5,0
5,0
%
05
дв
1
%
05
дв
3
n
n
253
об/мин
1482
2964
5,0
5,0
%
57
дв
1
%
57
дв
3
n
n
;
504
,
0
3000
1488
3000
0
%
05
дв
3
0
%
05
дв
3
n
n
n
s
;
506
,
0
3000
1482
3000
0
%
57
дв
3
0
%
57
дв
3
n
n
n
s
.
Расчет значений мощности на валу, потребляемой мощности,
потерь мощности, коэффициента полезного действия, реактивной и
полной мощности и коэффициента мощности асинхронного двига-
теля при работе на второй искусственной характеристике с пони-
женной частотой вращения до 50 % определяем аналогично расчету
этих параметров при работе электродвигателя на первой искусст-
венной характеристике. Результаты расчета приведены в табл. В.5.
Механические характеристики электропривода с асинхронным
двигателем и частотным регулированием представлены на рис.В.5, а
энергетические (коэффициент полезного действия и коэффициент
мощности) на рис.В.6.
Рис.В.5 . Механические
характеристики двигателя
Рис.В.6. Энергетические
характеристики двигателя
s
s2к
500
sк
0
Мк
1
1500 M, Нм
0
0,25
0,50
Мном
sк2
sк3
1000
P/Pном
соs φ
1
0.5
0
0.5
P/Pном
η
1
0.5
0
0.5
254
Таблица В.5
Результаты расчета электропривода
с асинхронным двигателем и частотным регулированием
При работе на естественной характеристике
(n=nном приМ=Мном)
Коэффициент загрузки
0,5
0,75
1
Момент, кНм
267
400
534
Скольжение
0,008
0,012
0,0167
Скорость вращения, об/мин
2976
2964
2950
Мощность на валу, Вт
83227
124337
165000
Потребляемая мощность, Вт
83898
125847
167796
Потери мощности, Вт
671
1510
2796
Коэффициент полезного действия
0,99
0,99
0,98
Реактивная мощность, Вар
59434
74292
95094
Полная мощность, ВА
102817
146140
192869
Коэффициент мощности
0,816
0,86
0,87
При работе на первой искусственной характеристике
(n=0,75nном приМ=Мном)
Коэффициент загрузки
0,5
0,75
1
Момент, кНм
267
400
534
Скольжение
0,256
0,259
0,2625
Скорость вращения, об/мин
2232
2223
2212,5
Мощность на валу, Вт
62420
93252
123745
Потребляемая мощность, Вт
62923
94386
125847
Потери мощности, Вт
503
1134
2102
Коэффициент полезного действия
0,99
0,99
0,98
Реактивная мощность, Вар
44575
55719
71321
Полная мощность, ВА
77112
109605
144652
Коэффициент мощности
0,816
0,86
0,87
При работе на второй искусственной характеристике
(n=0,5nном приМ=Мном)
Коэффициент загрузки
0,5
0,75
1
Момент, кНм
267
400
534,
Скольжение
0,504
0,506
0,508
Скорость вращения, об/мин
1488
1482
1474,95
Мощность на валу, Вт
41613
62168
82497
Потребляемая мощность, Вт
41949
62923,73
83898
Потери мощности, Вт
335
755
1401
Коэффициент полезного действия
0,99
0,99
0,98
Реактивная мощность, Вар
29717
37146
47547
Полная мощность, ВА
51408
73070
96434
Коэффициент мощности
0,816
0,86
0,87
255
Контрольная работа Б.2.
Задание. Определить величину потерь мощности, коэффици-
ент полезного действия и коэффициент мощности электропривода с
асинхронным двигателем. Также, оценить перегрузочную способ-
ность асинхронного двигателя при работе на пониженных частотах
вращения. Результаты расчета свести в таблицу. Построить рабочие
участки механических характеристик асинхронного двигателя при
реостатном регулировании. Построить зависимость коэффициента
полезного действия и коэффициента мощности от коэффициента за-
грузки. Проанализировать эффективность параметрического регули-
рования.
Исходные данные: номинальное напряжение асинхронного
двигателя 380 В; данные асинхронных двигателей для расчета до-
полнительных заданий представлены в табл. В.6.
Таблица B.6
Исходные данные для расчета дополнительных заданий
Параметры асинхронного двигателя
No
P, кВт
n
, об/мин
cos φ
λ
Способ
регулирования
Характер
нагрузки
1
55
2975
0,85
2
реостатный
Mc = const
2
60
2975
0,85
2,5
параметрический
Mc=kω
3
65
2975
0,85
3
частотный
Mc=kω
2
4
70
2975
0,85
3,5
реостатный
Mc = const
5
75
2975
0,85
2
параметрический
Mc=kω
6
80
2975
0,86
2,5
частотный
Mc=kω
2
7
85
2975
0,86
3
реостатный
Mc = const
8
90
2975
0,86
3,5
параметрический
Mc=kω
9
95
2975
0,86
2
частотный
Mc=kω
2
10
100
2975
0,86
2,5
реостатный
Mc = const
11
105
1487
0,87
3
параметрический
Mc=kω
12
110
1487
0,87
3,5
частотный
Mc=kω
2
13
115
1487
0,87
2
реостатный
Mc = const
14
120
1487
0,87
2,5
параметрический
Mc=kω
15
125
1487
0,87
3
частотный
Mc=kω
2
16
130
980
0,88
3,5
реостатный
Mc = const
17
135
980
0,88
2
параметрический
Mc=kω
18
140
980
0,88
2,5
частотный
Mc=kω
2
19
145
980
0,88
3
реостатный
Mc = const
20
150
980
0,88
3,5
параметрический
Mc=kω
256
ПРИЛОЖЕНИЕ Г
Г.1. ВЫБОР И ПРОВЕРКА АСИНХРОННОГО ДВИГАТЕЛЯ
ДЛЯ ЭЛЕКТРОПРИВОДА
Задача Г.1. Определить режим работы асинхронного двигате-
ля; произвести выбор асинхронного двигателя методом эквивалент-
ной мощности; проверить выбранный электродвигатель по перегру-
зочной способности; построить нагрузочную диаграмму.
Исходные данные для расчета приведены в табл. Г.1.
Таблица Г.1
Исходные данные для расчета
Мощность на валу
асинхронного двигателя
Интервалы работы
асинхронного двигателя
P1
P
2
P
3
P
4
P
5
t
1
t
2
t
3
t
4
t
5
кВт
кВт
кВт
кВт
кВт
с
с
с
с
с
95
125
100
75
60
20
15
15
30
20
Решение. Нагрузочная диаграмма асинхронного двигателя, по-
строенная по исходным данным, представлена на рис.Г.1.
Рис.Г .1. Нагрузочная диаграмма асинхронного двигателя
Как видно из нагрузочной диаграммы, в течении всего цикла,
асинхронный двигатель работает под нагрузкой, следовательно ре-
жим работы электродвигателя продолжительный.
0
20
40
60
80 t,c
30
60
90
120
150
P2, кВт
257
Определим эквивалентную мощность
кВт.
75
,
89
20
30
15
15
20
20
60
30
75
15
100
15
125
20
95
2
2
2
2
2
5
4
3
2
1
5
2
5
4
2
4
3
2
3
2
2
2
1
2
1
ц
1
2
экв
t
t
t
t
t
t
P
t
P
t
P
t
P
t
P
t
t
P
P
n
i
i
i
Для работы электропривода с построенной нагрузочной диа-
граммой и эквивалентной мощностью 89,75 кВт, можно выбрать
асинхронный двигатель мощностью 95 кВт, номинальным напряже-
нием 380 В, коэффициентом полезного действия 0,87, коэффициен-
том мощности 0,83, перегрузочной способностью 2.
Проверим выполнение условия выбора
кВт
75
,
89
кВт
95
экв
ном
P
P
.
Таким образом, условие выполняется.
Определим максимальную мощность асинхронного двигателя
кВт
190
95
2
ном
расч
мах
P
P
.
Проверим выбранный асинхронный электродвигатель по пере-
грузочной способности
кВт
125
кВт
190
зад
мах
расч
мах
P
P
.
Таким образом, условие выполняется.
Задача Г.2. Произвести выбор асинхронного двигателя мето-
дом эквивалентной мощности; проверить выбранный электродвига-
тель по перегрузочной способности; построить нагрузочную диа-
грамму.
Исходные данные для расчета приведены в табл. Г.2.
Таблица Г.2
Исходные данные для расчета
Мощность на валу
асинхронного двигателя
Интервалы работы
асинхронного двигателя
P1
P
2
P
3
P
4
P
5
t
1
t
2
t
3
t
4
t
5
кВт
кВт
кВт
кВт
кВт
с
с
с
с
с
20
0
25
0
10
30
20
10
15
25
258
Решение. Нагрузочная диаграмма асинхронного двигателя,
построенная по исходным данным, представлена на рис.Г.2.
Рис. Г.2. Нагрузочная диаграмма асинхронного двигателя
Как видно из нагрузочной диаграммы, в течении рабочего
цикла асинхронного двигателя есть паузы, следовательно, режим
работы электродвигателя повторно-кратковременный, и при выборе
приводного электродвигателя необходимо учесть продолжитель-
ность включения.
Определим время цикла
c
100
25
15
10
20
30
5
4
3
2
1
ц
t
t
t
t
t
T
.
Определим время паузы
c
35
15
20
4
2
t
t
R
.
Определим время работы
c
65
25
10
30
5
3
1
t
t
t
N
.
Определим продолжительность включения асинхронного дви-
гателя
%
65
100
35
65
65
%
ПВ
.
Определим эквивалентную мощность асинхронного двигателя
при фактической продолжительности включения 65 %. При выборе
учтем, что во время пауз электродвигателя снижается теплоотдача.
Коэффициент ухудшения теплоотдачи асинхронного двигателя при-
мем равным 0,5. Тогда, эквивалентную мощность можно рассчитать
следующим образом
0
20
40
60
80 t,c
5
10
15
20
25
P2, кВт
259
кВт.
85
,
15
25
15
5,0
10
20
5,0
30
25
10
0
10
25
0
30
20
2
2
2
5
4
3
2
1
5
2
5
4
2
4
3
2
3
2
2
2
1
2
1
ц
1
2
факт
экв
t
t
t
t
t
t
P
t
P
t
P
t
P
t
P
t
t
P
P
n
i
i
i
Из расчетов продолжительности включения видно, что необ-
ходимо будет выбирать асинхронный двигатель с продолжительно-
стью включения 60 %. Тогда, значение эквивалентной мощности
можно определить следующим образом
кВт
16,5
60
65
85
,
15
ном
факт
экв
расч
экв
ПВ
ПВ
P
P
.
Для работы электропривода с построенной нагрузочной диа-
граммой, эквивалентной мощностью 16,5 кВт и продолжительно-
стью включения 60 %, можно выбрать асинхронный двигатель мощ-
ностью 20 кВт, номинальным напряжением 380 В, коэффициентом
полезного действия 0,84, коэффициентом мощности 0,81, перегру-
зочной способностью 2.
Проверим выполнение условия выбора асинхронного двигате-
ля
кВт
5,
16
кВт
20
расч
экв
ном
P
P
.
Таким образом, условие выполняется.
Определим максимальную мощность асинхронного двигателя
кВт
40
20
2
ном
расч
мах
P
P
.
Проверим выбранный асинхронный электродвигатель по пере-
грузочной способности
кВт
25
кВт
40
зад
мах
расч
мах
P
P
.
Таким образом, условие выполняется.
Г.2. ВЫБОР И ПРОВЕРКА ЭЛЕМЕНТОВ
ЭЛЕКТРОПРИВОДА
Задача Г.3. Определить минимальное время разгона для элек-
троприводов со скалярной и векторной системой управления, сис-
темой прямого управления моментом, и время торможения электро-
260
привода без тормозного резистора, со стандартным и минимально
допустимым сопротивлением тормозного резистора.
Исходные данные: номинальные параметры асинхронного
двигателя: мощность 49 кВт; скорость вращения 1450 об/мин; на-
пряжение 380 В; момент инерции двигателя 4,5 кг м
2
.
Центробеж-
ный насос: максимальный момент сопротивления 600 Нм; мини-
мальный момент сопротивления 100 Нм; скорость вращения 750
об/мин; момент инерции насоса 120 кг м
2
.
Передача: момент инер-
ции двигательного шкива 7,5 кг м
2
; момент инерции насосного шки-
ва16,5кгм
2
.
Коэффициент коррекции момента при пуске: скалярной сис-
темой управления 1,5; векторной – 1,9; прямого управления момен-
том – 2,5. Коэффициент коррекции момента при торможении: без
тормозного резистора 0,3; со стандартным тормозным резистором –
0,8; c минимально допустимым тормозным резистором – 1,5.
Решение. Определим номинальный момент асинхронного
двигателя
Нм
322
1450
10
94
,55
9
,55
9
3
ном
ном
ном
n
P
M
.
Определим максимальный и минимальный момент на валу
асинхронного двигателя
Нм
300
1500
750
600
0
нагр
max
нагр
max
c
n
n
M
M
;
Нм
50
1500
750
100
0
нагр
min
нагр
min
c
n
n
M
M
.
Определим суммарный момент инерции на валу электродви-
гателя
.
м
кг
46
1500
750
120
5,
16
5,7
5,4
2
2
2
0
нагр
н
ш2
ш1
дв
n
n
J
J
J
J
J
261
Определим минимальное время ускорения электропривода:
–
со скалярной системой управления
c
39
300
5,1
322
55
,
9
0
1500
46
55
,
9
max
c
1
ном
2
1
р1
M
M
n
n
J
t
;
–
с векторной системой управления
c
23
300
9,1
322
55
,
9
0
1500
46
55
,
9
max
c
2
ном
2
1
р2
M
M
n
n
J
t
;
–
с системой прямого управления моментом
c
14
300
5,2
322
55
,
9
0
1500
46
55
,
9
max
c
3
ном
2
1
р3
M
M
n
n
J
t
.
Определим минимальное время торможения электропривода:
–
без тормозного резистора
c
49
50
3,0
322
55
,
9
0
1500
46
55
,
9
min
c
1
ном
2
1
т1
M
M
n
n
J
t
;
–
со стандартным тормозным резистором
c
23
50
8,0
322
55
,
9
0
1500
46
55
,
9
min
c
2
ном
2
1
т2
M
M
n
n
J
t
;
–
c минимально допустимым тормозным резистором
c
13
50
5,1
322
55
,
9
0
1500
46
55
,
9
min
c
3
ном
2
1
т3
M
M
n
n
J
t
.
Задача Г.4. Произвести расчет сопротивления тормозного ре-
зистора для подключения к преобразователю частоты электропри-
вода с асинхронным двигателем.
Исходные данные: номинальные параметры асинхронного
двигателя 22 кВт; скорость вращения 1420 об/мин; момент 142 Нм;
напряжение 380 В; момент инерции нагрузки 8 кг м
2
.
Тормозной
момент 120 % от номинального значения. Время цикла 30 с.
Решение. Определим время торможения асинхронного двига-
теля с номинальной скорости до нуля следующим образом
262
c
7
142
2,1
1420
8
30
30
max
тор
т
M
Jn
t
.
Определим долю периода торможения в цикле работы элек-
тропривода
%
23
100
30
7
100
ц
т
т
T
t
T
.
Рассчитаем мощность на валу при торможении асинхронного
двигателя с максимальным тормозным моментом
кВт
34
,
25
,55
9
0
1420
142
2,1
,55
9
2
1
max
тор
max
тор
2
n
n
M
Р
.
Определим электрическую мощность торможения
кВт
6,
23
22
08
,
0
34
,
25
дв
max
тор
2
max
тор
1
kР
Р
Р
.
Определим номинальную мощность торможения
кВт
9,7
3
6,
23
к
max
тор
1
ном
тор
1
K
Р
Р
.
Определим допустимую величину тормозного сопротивления,
подключаемого к преобразователю частоты
Oм
5,
12
10
6,
23
540
3
2
max
тор
1
2
зпт
max
т
Р
U
R
.
263
СПИСОК ИСПОЛЬЗУЕМОЙ ЛИТЕРАТУРЫ
1. Энергетическая стратегия России на период до 2020 года /
Утверждена распоряжением Правительства Российской Федерации
No 1234-р от 28 августа 2003 года.
2. Энергетическая стратегия России на период до 2030 года /
Утверждена распоряжением Правительства Российской Федерации
No 1715-р от 13 ноября 2009 года.
3. Федеральный закон No 261 «Об энергосбережении и о по-
вышении энергетической эффективности и о внесении изменений в
отдельные законодательные акты Российской Федерации».
4. Федеральный закон No 28 «Об энергосбережении».
5. Фокин В.М. Основы энергосбережения и энергоаудита. М.:
Издательство Машиностроение-1, 2006 – 256 с.
6. Лезнов Б.С. Энергосбережение и регулируемый привод в
насосных и воздушных установках. М.: Энергоатомиздат, 2006 –
256 с.
7. Инструкция по расчету экономической эффективности час-
тотно-регулируемого привода / Утверждена Минтопэнерго России
19 декабря 1995 года.
8. СТО Газпром 2-3.5-113-2007. Методика оценки энергоэф-
фективности газотранспортных объектов и систем.
9. СТО Газпром 2-1.20-114 -2007. Методика энергоаудита газо-
транспортной системы.
10. СТО Газпром 2-2.1-512-201. Обеспечение системной на-
дежности транспорта газа и стабильности поставок газа потребите-
лям.
11. Мурашев Ю.Г., Гайков-Алехов А.А. Квалиметрический
анализ. СПб.: Балт. гос. техн. ун-т., 2006 – 108 с.
12. Фираго Б.И., Павлячик Л.Б. Теория электропривода. Мн.:
Техноперспектива, 2007 – 585 с.
13. Браславский И.Я.,
Ишматов3.Ш., Поляков В.Н. Энерго-
сберегающий асинхронный электропривод / под ред. И.Я. Браслав-
ского // М.: Академия, 2004 – 256 с.
264
14. Онищенко Г.Б. Электрический привод. М.: РАСХН. 2003 –
320 с.
15. Ильинский Н.Ф., Москаленко В.В. Электропривод: энерго-
и ресурсосбережение. М.: Издательский центр «Академия», 2008 –
208 с.
16. В. Овсейчук, Г. Трофимов, А. Кац и др. Компенсация реак-
тивной мощности. К вопросу о технико-экономической целесооб-
разности. Новости электротехники / Новости электротехники, No4
(52), 2008.
17. Бурин Л.И., Васильев В.П., Каганов В.И. и др. Справочник
по радиоэлектронным устройствам. Т.2 / под ред. Д.П. Линде // М.:
Энергия, 1978 – 439 с.
18. Бурин Л.И., Васильев В.П., Каганов В.И. и др. Справочник
по радиоэлектронным устройствам. Т.2 / под ред. Д.П. Линде // М.:
Энергия, 1978 – 327 с.
19. ГОСТ 32144 – 2013 «Электрическая энергия. Совмести-
мость технических средств электромагнитная. Нормы качества элек-
трической энергии в системах электроснабжения общего назначе-
ния».
20. ГОСТ 13109–97 «Нормы качества электрической энергии в
системах электроснабжения общего назначения».
21. ВРД 39-1.10-052-2001. Методические указания по выбору
и применению асинхронного частотно-регулируемого электропри-
вода мощностью до 500 кВт.
22. Коэффициент нелинейных искажений, коэффициент гар-
монических искажений – различные подходы к определению.
http://www.стабилизатор.рф.
23. EN 62040-3. Uninterruptible power systems. Method of speci-
fying the performance and test requirements.
24. Ползиков М.Н. Электромагнитная совместимость. Ново-
московск: ГОУ ВПО «РХТУ им. Д.И. Менделеева», Новомосковский
институт (филиал), 2010 – 27 с.
25. Брускин Д.Э., Зорохович А.Е., Хвостов В.С. Электрические
машины. Т.1. М.: Высшая школа, 1987 – 319 с.
265
26. Вершинин В.И., Загривный Э.А., Козярук А.Е. Электро-
магнитная и электромеханическая совместимость в электротехниче-
ских системах с полупроводниковыми преобразователями. СПб.:
Санкт-Петербургский горный институт. 2000 – 67 с.
27. Усольцев А.А. Частотное управление асинхронными дви-
гателями. СПб: СПбГТУ ИТМО, 2006 – 94 c.
28. В. И. Доманов, А. В. Доманов. Элементы систем автомати-
ки (силовой канал): учебное пособие / Ульяновск: УлГТУ, 2007 –
107 с.
29. Электромагнитная совместимость преобразователя часто-
ты с асинхронным электродвигателем. http:// www.obzor-electro.ru.
30. Зиновьев Г.С. Основы силовой электроники. Новосибирск:
Издательство НГТУ, 2003 – 664 c.
31. Ефимов А.А., Шрейнер Р.Т. Активные преобразователи в
регулируемых электроприводах переменного тока. Новоуральск:
Издательство НГТИ, 2001 – 250 с.
32. Ключев В.И. Теория электропривода. М.: Энергоатомиз-
дат, 1998. - 704 с.
33. Чиликин М.Г., Сандлер А.С. Общий курс электропривода
М.: Энергоиздат, 1981 г. 576.
34. Соколовский Г.Г. Электроприводы переменного тока с
частотным регулированием. М.: Академия, 2006. – 272 с.
35. Васильев Б.Ю., Козярук А.Е. Релейно-импульсные систе-
мы управления асинхронными электроприводами: прямого и фаззи-
логического управления. Электротехнические системы и комплексы.
2014. No 1 (22). С. 31-35.
36. Васильев Б.Ю., Добуш В.С. Эффективные алгоритмы
управления полупроводниковыми преобразователями в асинхрон-
ных электроприводах. Электричество. 2014. No 04. С. 54-61.
37. ГОСТ 183-74 «Машины электрические вращающиеся. Об-
щие технические условия».
38. Онищенко Г.Б., Аксенов М.И., Грехов В.П. и др. Автома-
тизированный электропривод промышленных установок / под общей
266
редакцией Г. Б. Онищенко. М.: РАСНХ, 2001. – 520 с.
39. Грачев П.Ю. Выбор электродвигателей, средств электро-
питания и защиты: учебно-методическое пособие. Самара: Самар.
гос. техн. ун-т, 2012. – 90 с.
40. E6581182. Руководство по применению инвертора. О вы-
боре мощности инвертора. Toshiba Schneider Inverter Corporation.
2003.
41. Рег. No 002. Преобразователь частоты векторный. Руково-
дство по проектированию. 2009.
42. Васильев Б.Ю. Автоматизированный электропривод объ-
ектов минерально-сырьевого комплекса (применение, моделирова-
ние, исследование). СПб.: Национальный минерально-сырьевой
университет «Горный»., 2014. 139 с.
43. Шрейнер Р.Т Математическое моделирование электропри-
водов переменного тока с полупроводниковыми преобразователями
частоты. Екатеринбург: УРО РАН, 2000. - 654 с.
44. Официальный сайт компании Siemens: ww.siemens.com.
45. Frank J., Bartos P. E. Medium-voltage drives shine offshore
//Process & control engineering, 2006, No 59 (7).
46. Золотухин А.Б., Гудместад О.Т., Ермаков А.И. и др. Осно-
вы разработки шельфовых нефтегазовых месторождений и строи-
тельство морских сооружений в Арктике. М.: «Нефть и газ» РГУ
нефти и газа им. И. М. Губкина, 2000 – 770 с.
47. Меньшов Б.Г., Ершов М.С., Яризов А.Д. Электротехниче-
ские установки и комплексы нефтегазовой промышленности. М.:
ОАО «Издательство «Недра», 2000 – 487 с.
48. Лазарев Г.Б. Высоковольтные преобразователи для частот-
но-регулируемого электропривода. Построение различных систем //
Новости электротехники, 2005. No 2 (32).
49. Зобов И.Б., Малиновский О.В, Лапшина А.А. Системы
частотного регулирования с крупными и высоковольтными электро-
двигателями // Информационный бюллетень, 2007, No 2.
50. Лядов К.Б., Злобин А.Г., Мордовченко Д.Д. и др. Электро-
приводные агрегаты нового поколения производства «РЭП Холдин-
267
га» // Газотурбинные технологии, 2012, No4.
51. Пат. 2485353 Российская Федерация, RU No 2485353. Под-
водный газоперекачивающий агрегат для многониточного трубо-
провода. Козярук А.Е., Васильев Б.Ю; заявитель и патентооблада-
тель ФГБОУ ВПО «Санкт-Петербургский государственный горный
университет». No 2012100910/06; завл. 11.01.2012; опубл. 20.06.2013,
бюл. No 17.
52. Толстов С.С., Мирзоев Д.А., Ибрагимов И.Э. Подводная
технология добычи углеводородов – ключевой фактор освоения ре-
сурсов шельфа Арктики // Газовая промышленность, 2011, No661.
53. Дурыманов В.В., Леонтьев С.А., Седов В.В. На суше и под
водой: капсулированный компрессорный агрегат STC-ECO-II ком-
пании Siemens // Турбины и дизели, 2010, No2.
Издательство «СОЛОН ПРЕСС»
представляет КНИГИ ПОЧТОЙ
А. А. Афонский, В. П. Дьяконов
Измерительные приборы и массовые электронные измерения
Серия «Библиотека инженера»
Под ред. проф. В. П. Дьяконова
Описаны самые современные измерительные приборы:
измерители R, C и L, мультиметры, измерительные ВЧ и НЧ
генераторы, импульсные и функциональные генераторы,
аналоговые и цифровые стационарные и портативные осцил
лографы, в том числе уникальные. Особое внимание уделено
массовым дешевым (бюджетным) приборам и технике изме
рений, в том числе с применением виртуальных и компьюте
ризированных лабораторий, и их применению в практике
электронных измерений. Ряд материалов посвящен работе с
современными цифровыми осциллографами и функциональ
ными генераторами. Рассмотрена современная элементная
база и схемотехника измерительных устройств. В книге око
ло шестисот иллюстраций и осциллограмм. Для работников
служб ремонта и сервиса сложной электронной техники, на
учных работников и инженеров, студентов, аспирантов, преподавателей и лаборан
тов вузов и университетов, а также для подготовленных радиолюбителей.
Б. Ю. Семенов
Микроконтроллеры MSP430: первое знакомство
Серия «Библиотека инженера»
Книга посвящена микроконтроллерам серии MSP430, ко
торые производятся фирмой Texas Instruments. Едва ли
удастся найти конкурента этим микроконтроллерам по вели
чине потребляемого тока и производительности, если речь
идет о разработке автономных малогабаритных приборов с
низковольтным батарейным питанием. Книга в доступной
форме поможет разобраться с архитектурой и системой ко
манд MSP430, сориентирует читателя в многообразии «соф
та» для разработки программного обеспечения, расскажет о
способах «прошивки» памяти MSP430, о существующих про
грамматорах. Приведенные схемы, печатные платы и сбо
рочные рисунки позволят собрать несколько несложных про
грамматоров flash памяти MSP430 самостоятельно.
Книга адресована инженерам, начинающим работать с
микроконтроллерами, студентам радиотехнических специальностей вузов, специа
листам, занимающимся обслуживанием и ремонтом электронной аппаратуры, ра
диолюбителям, а также всем тем, кто интересуется перспективной электронной
техникой.
Издательство «СОЛОН ПРЕСС» представляет КНИГИ ПОЧТОЙ
В. Л. Карякин
Цифровое телевидение
Серия «Библиотека инженера»
Книга посвящена рассмотрению общих принципов пост
роения систем цифрового телевидения, компрессии цифро
вых сигналов изображения и звука. Приводятся стандарты
цифровой компрессии MPEG. Обсуждаются методы построе
ния аппаратуры спутникового, кабельного и эфирного циф
рового телевидения, а также особенности методов построе
ния аппаратуры цифрового телевизионного вещания в сетях
передачи данных. Даны примеры конфигурации систем циф
рового телевизионного вещания.
Рассматриваются этапы развития нелинейного монтажа.
Особое внимание уделяется современным цифровым систе
мам видеомонтажа. Рассмотрены требования к оборудова
нию, предназначенному для монтажа видеофильмов. Дана
сравнительная оценка методов линейного и нелинейного ви
деомонтажа. Приводится технология основных этапов создания видеофильмов.
Обсуждаются особенности технологии эксплуатации оборудования цифрового
телевидения. Представлены методы телевизионных измерений, мониторинга каче
ства в цифровом телевидении. Даны основные характеристики контрольно измери
тельного оборудования для проверки и анализа потоков MPEG 2, приемо передаю
щего оборудования телевизионных центров. Приводятся эксплуатационные данные
по отечественному и зарубежному оборудованию систем цифрового телевидения.
Книга предназначена для широкого круга читателей, интересующихся информа
ционными технологиями обработки сигналов в цифровом телевидении, основами
построения систем цифрового телевидения, перспективами перехода от аналого
вого телевидения к цифровому. Материал книги может быть полезен специалистам,
занимающимся проектированием и эксплуатацией систем цифрового телевидения,
студентам высших и средних специальных заведений, специализирующимся в об
ласти телевидения.
А. А. Афонский, В. П. Дьяконов
Цифровые анализаторы спектра, сигналов и логики
Под ред. проф. В. П. Дьяконова
Серия «Библиотека инженера»
Впервые в отечественной литературе дается описание со
временных цифровых анализаторов спектра, сигналов (в том
числе близких к монохромным и телекоммуникационных), це
пей и логических состояний цифровых устройств. Особое
внимание уделено анализаторам спектров и сигналов реаль
ного времени. Описаны как стационарные, так и переносные
приборы с питанием от аккумуляторных батарей, а также при
боры приставки к персональному компьютеру. Содержит наи
более полный обзор приборов этих классов на российском
рынке. Приведены многочисленные примеры реальной рабо
ты с приборами. Для инженеров, научных работников, препо
давателей, аспирантов и студентов вузов и университетов
технического профиля.
Издательство «СОЛОН ПРЕСС» представляет КНИГИ ПОЧТОЙ
Д. А. Соснин
Электрическое, электронное и автотронное оборудование легковых
автомобилей (Автотроника 3)
Учебник для вузов
Серия «Библиотека студента»
Полноцветное издание.
В учебнике изложены основные сведения о конструктив
ных особенностях, принципах действия, эксплуатационных
характеристиках электрических, электронных и автотронных
систем бортовой автоматики современных легковых автомо
билей. Описаны составные компоненты систем, диагности
рование и ремонт некоторых из них. Уделено особое внима
ние нетрадиционным бортовым устройствам, которые ранее
не применялись на автомобилях.
Учебник является переработанным и значительно допол
ненным третьим изданием учебного пособия «Автотроника»
ранее написанного для студентов старших курсов автотранс
портного факультета МАДИ (ГТУ) по элективной дисциплине
«Электрическое и электронное оборудование импортных автомобилей».
Учебник ориентирован на студентов машиностроительных вузов и технических
университетов, обучающихся на бакалавра и магистра по профессионально обра
зовательной программе «Электротехнические и электронные системы наземных
транспортных средств». Книга может быть полезна инженерно техническим работ
никам предприятий автомобильной промышленности.
А. И. Аксенов, А. В. Нефедов
Микросхемы для бытовой радиоэлектронной аппаратуры
Серия «Ремонт», выпуск 69
В данном справочном издании приведены основные эле
ктрические параметры, назначение выводов, типовые схемы
применения, конструкции корпусов микросхем, используе
мых в телевизорах, видеомагнитофонах, в аудиоаппаратуре
и в блоках питания, прямые и функциональные зарубежные
аналоги.
Предназначена для радиолюбителей, занимающихся
эксплуатацией и ремонтом радиоаппаратуры.
Издательство «СОЛОН ПРЕСС» представляет КНИГИ ПОЧТОЙ
В. Л. Лихачев
Справочник обмотчика асинхронных электродвигателей
Серия «Ремонт», выпуск 72
Книга «Справочник обмотчика асинхронных электродви
гателей» подробно освещает назначение и классификацию
асинхронных электродвигателей первой и второй единой се
рии, единой серии 4А, крановых электродвигателей, элект
родвигателей повышенной частоты и однофазных двигате
лей. Приведены и описаны виды обмоток и способы их изоб
ражения, схемы обмоток трехфазных и однофазных двигате
лей.
В книге описаны выпускающиеся в данное время обмо
точные провода, их номенклатура и характеристика. Дана по
дробная характеристика изоляционных материалов. Описа
ны свойства и применение материалов для пропитки обмо
ток.
Приведен пересчет обмоточных данных при ремонте и
перемотке асинхронных электродвигателей, пересчет обмотки на другое напряже
ние, пересчет трехфазной обмотки на однофазную, замена диаметров проводов
(таблицы и графики).
Книга «Справочник обмотчика асинхронных электродвигателей» рассчитана на
обмотчиков мелких обмоточных цехов и мастерских по перемотке электродвигате
лей. Данный справочник рассчитан помочь обмотчикам углубить их знания и обес
печить их справочным материалом.
«Справочник обмотчика асинхронных электродвигателей» также будет полезен
обмотчикам и инженерно техническим работникам ремзаводов по ремонту асин
хронных электродвигателей и энергетикам предприятий и хозяйств.
КАК КУПИТЬ КНИГИ
Заказ оформляется одним из двух способов:
1) Пошлите открытку или письмо по адресу 123001, Москва, а/я 82.
2) Оформите заказ на сайте www.solon press.ru
в разделе «Книга почтой» или «Интернет магазин».
Бесплатно высылается каталог издательства по почте. При оформлении
заказа полностью укажите адрес, фамилию, имя и отчество получателя.
Желательно указать дополнительно телефон и адрес электронной почты.
Каталог издательства можно получить по ссылке
http://www.solon press.ru/kat.doc
Телефон: (495)
,(49)
E mail: avtor@
.ru
268
Васильев Богдан Юрьевич
Электропривод.
Энергетика электропривода.
Учебник
Ответственный за выпуск
В. Митин
Редактор
А. Родин
Обложка
СОЛОН-Пресс
ООО «СОЛОН-Пресс»
123001, г. Москва, а/я 82
Телефоны: (495) 617-39 -64, (495) 617-39-65
E-mail: avtor@solon-press.ru,
www.solon-press.ru
По вопросам приобретения обращаться:
ООО «ПЛАНЕТА АЛЬЯНС»
Тел: (499) 782-38 -89, www.alians-kniga.ru
По вопросам подписки на журнал «Ремонт & Сервис» обращаться:
ООО «Ремонт и Сервис 21»
тел.: (495) 617-39 -64, www.remserv.ru
ООО «СОЛОН-Пресс»
115142, г. Москва, Кавказский бульвар, д. 50
Формат 60×88/16. Объем 16,75 п. л. Тираж 300 экз.