/





























































































































































































































































































Author: Абросимов В.К.
Tags: вычислительная математика численный анализ авиация авиатехника
ISBN: 978-5-9902339-8-0
Year: 2017



Text
В. К. Абросимов
В. К. Абросимов
КОЛЛЕКТИВЫ
ИНТЕЛЛЕКТУАЛЬНЫХ
ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Издательский Дом «Наука»
Москва
2017
УДК 519.687.1
А 16
Рецензенты:
Жданов А. А.,
д.ф.-м.н., профессор,
Институт точной механики и вычислительной техники
им. С.А. Лебедева РАН
Райков А. Н.,
д.т.н., профессор,
Институт проблем управления им. В.А. Трапезникова РАН
А 16
Абросимов, В. К.
Коллективы интеллектуальных летательных аппаратов: монография.
— М.: Издательский Дом «Наука», 2017. — 304 с.
ISBN 978-5-9902339-8-0
В монографии рассмотрены вопросы управления группами летательных
аппаратов, обладающих особенными групповыми свойствами. Они выполняют
общую коллективную миссию, осуществляют активный обмен информацией
друг с другом на основе создания единого информационного «облачного»
ресурса, обладают высокой живучестью за счет реализации принципа «один
за всех и все за одного», самостоятельно распределяют роли в соответствии
с тем, кто покажет лучшие возможности для решения задач, готовы к самопо-
жертвованию во имя достижения коллективных целей. Такие группы названы
коллективами интеллектуальных летательных аппаратов, чтобы подчеркнуть их
автономность в принятии решений и способность к самоорганизации.
Коллектив рассматривается как многоагентная система, а его члены пред-
ставляются при моделировании в виде интеллектуальных агентов. Вопросы
коллективного управления рассматриваются при выполнении задач в сложных
враждебных средах, вносящих существенные ограничения на функционирова-
ние агентов и выполнение коллективной миссии. Это вызывает необходимость
интеллектуализации системы управления отдельного летательного аппарата и
формирования специальных, коллективных стратегий управления коллективом.
Для научных сотрудников, специалистов в области кибернетики, робото-
техники, искусственного интеллекта, преподавателей, студентов и аспирантов
ВУЗов авиационного и ракетно-космического профиля. Книга может быть так-
же интересна всем, интересующимся вопросами инноваций в области систем-
ного анализа, теории принятия решений, многоагентных систем.
УДК 519.687.1
© Абросимов В. К., 2017
©Тарасюк М.А. (иллюстрации), 2017
ISBN 978-5-9902339-8-0 © ид «Наука» (оформление), 2017
СОДЕРЖАНИЕ
Предисловие.................................................... 7
От автора...................................................... 10
Благодарности.................................................. 15
Введение....................................................... 17
1. Современные научно-технические вызовы,
влияющие на стратегии поведения объектов управления......... 27
2. Общие тенденции развития летательных аппаратов.............. 33
2.1. Гиперзвуковые летательные аппараты..................... 33
2.2. Развитие беспилотной авиации........................... 38
2.3. Миниатюризация летательных аппаратов................... 41
2.4. Современные достижения в области группового управления. 44
2.5. Общий научно-технический ландшафт
и программа исследований.................................. 53
3. Летательные аппараты как интеллектуальные агенты............ 58
4. Сетецентричность среды. Принцип ситуационной
осведомленности.......................................... 69
5. Коллектив летательных аппаратов и летательный аппарат
в коллективе................................................. 75
6. Синтез обликов летательных аппаратов с заданными
агентскими свойствами........................................ 86
6.1. Облик летательного аппарата как основной элемент
моделирования............................................. 88
6.2. Принцип фоторобота - перебор вариантов................. 90
4
В. К. Абросимов
6.3. Синтез конструкции................................... 92
6.4. Синтез среды движения................................ 94
6.5. Синтез системы управления движением.................. 95
6.6. Синтез полезной нагрузки............................. 96
6.7. Проверка ограничений................................. 97
6.8. Формирование облика.................................. 98
7. Принципы объединения летательных аппаратов в коллективы... 103
8. Назначение на роль и идентификация агента с ролью
в коллективе летательных аппаратов........................... 108
8.1. Значение и функции роли в коллективе летательных аппаратов ... 108
8.2. Методические подходы к представлению ролей........... 111
8.3. Определение и атрибуты ролей в коллективах
летательных аппаратов..................................... 116
8.3.1. Определение роли в коллективе летательных аппаратов. 116
8.3.2. Концептуальный уровень представления роли........ 119
8.3.3. Логический уровень представления роли............ 120
8.4. О возможности и готовности агента занимать и исполнять роль .. 122
8.5. Ролевая идентификация агентов в коллективах
летательных аппаратов..................................... 125
8.6. Алгоритм выбора агента для назначения на роль........ 130
8.7. Выбор агента на роль разведчика в задаче о «диффузной бомбе» .. 131
9. Рекуррентная задача маршрутизации как основа
целераспределения в коллективах летательных аппаратов........ 137
9.1. Ограниченность классической задачи коммивояжера
для задач коллективного движения.......................... 137
9.2. Задачи маршрутизации транспорта...................... 139
9.3. Общие постановки и методы решения задач маршрутизации... 140
9.3.1. Разнообразие постановок и методов решения задач
класса VRP.............................................. 140
9.3.2. Краткий обзор подходов к решению задач класса VRP
с использованием природных алгоритмов................... 146
9.3.3. Возникновение итерационности в задачах коммивояжера. 150
9.3.4. Стратегия корректировки маршрута методом релокации 153
9.4. Упрощенный метод релокации........................... 158
Содержание 5
10. Стратегия распределения коллектива летательных аппаратов
по целям................................................... 162
10.1. Постановка задачи целераспределения для коллектива агентов ... 162
10.2. Методика формирования маршрутов агентов
в цикле мониторинга........................................... 167
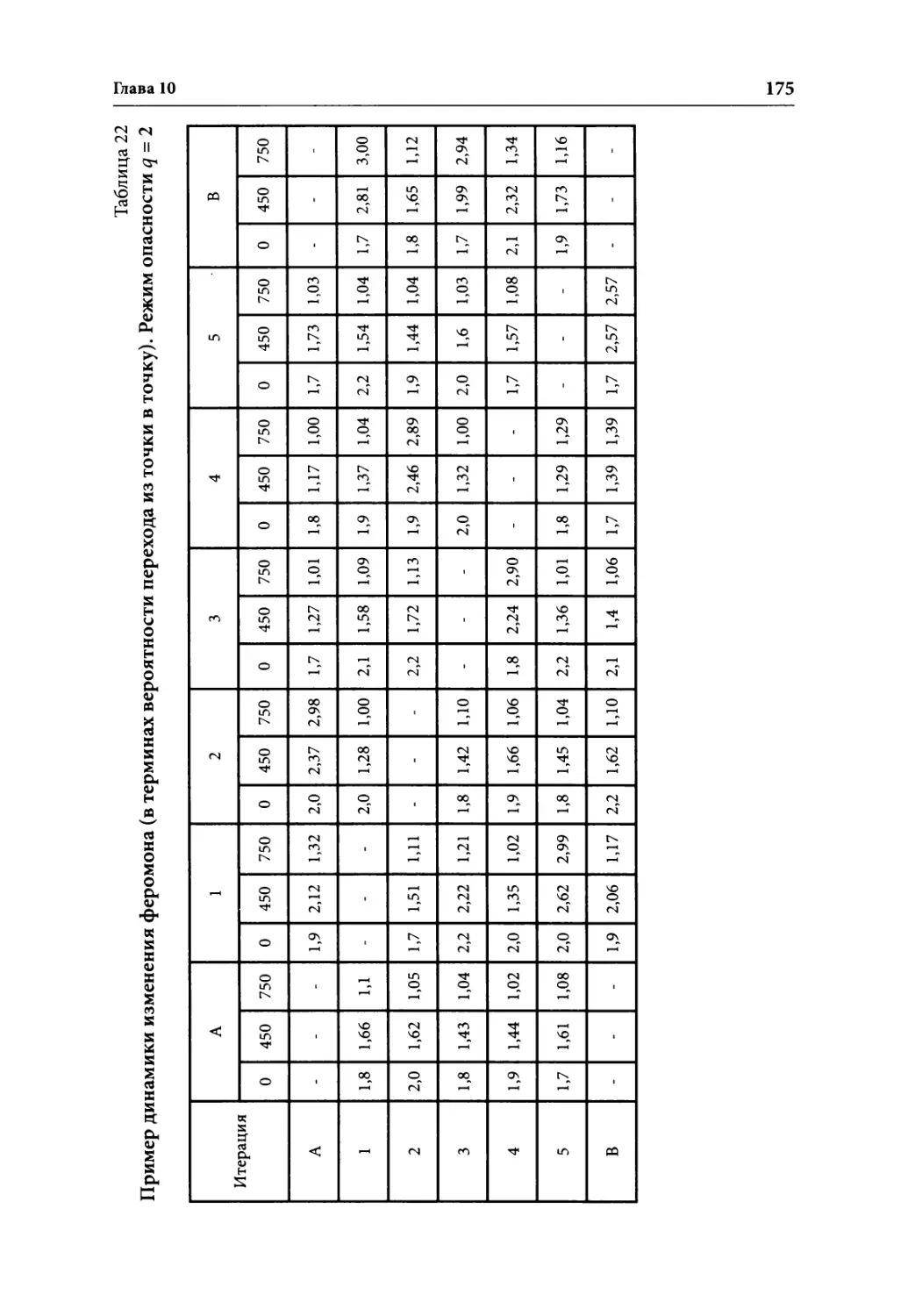
10.3. Пример. Мониторинг группировкой летательных аппаратов
зоны резкого «всплеска» радиоактивности.................... 171
11 Исследование свойства «жертвенности» агента.............. 179
11.1 . Требование «жертвенности» агента и ее проявление....... 179
11.2 . Постановка проблемы.................................... 182
11.3 . Анализ литературы...................................... 186
11.4 . Определение понятия «жертвенность»..................... 192
12. Модели агентов-потенциальных «жертв»..................... 197
12.1. Формализация понятий «обязательства», «убежденность»,
«намерения» агента......................................... 197
12.1.1. Обязательства агента............................... 197
12.1.2. Убежденность агента................................ 199
12.1.3. Намерение агента................................... 201
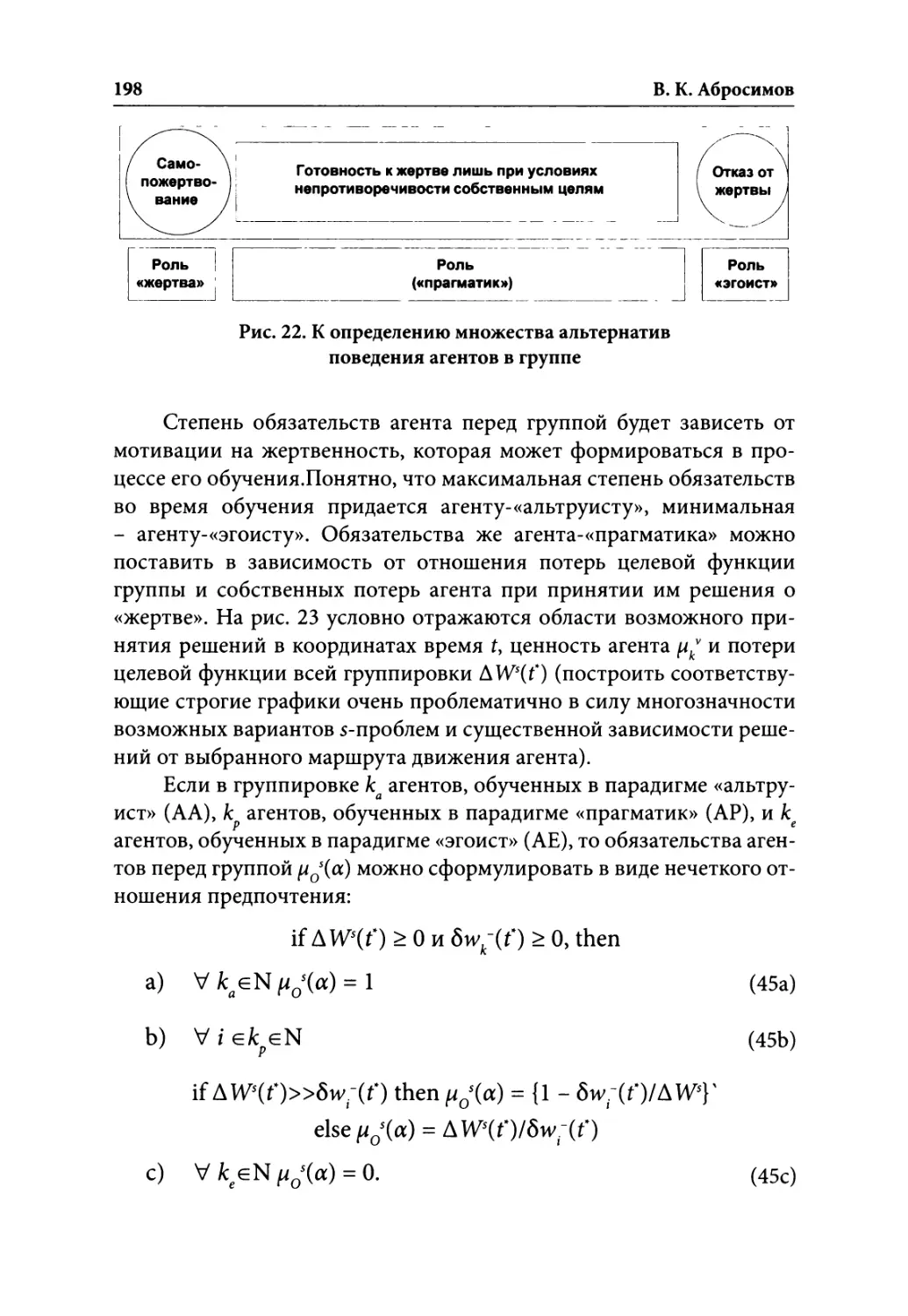
12.2. Условия принятия решения агентом о «жертвенности»....... 203
12.3. Назначение Лидером агента на роль «жертвы».............. 205
12.4. Необходимые и достаточные условия «жертвенности» агента. 210
12.5. Алгоритм реализации стратегии «самопожертвования»....... 214
12.6. Организация переговоров агентов по выбору
потенциальной «жертвы» в коллективе без Лидера............. 215
12.7. Примеры выбора агента на роль «жертвы».................. 218
12.7.1. Выбор агента«жертвы» при мониторинге зоны возгорания.... 218
12.7.2. Выбор агента«жертвы» в задаче о «вскрытии»
характеристик системы обороны............................. 224
12.8. О «жертвенности» в технических системах................. 226
13. Разработка стратегий мониторинга территорий группировками
летательных аппаратов........................................ 232
13.1. Основные условия эффективного мониторинга............... 232
13.2. Программный комплекс «Агентный мониторинг».............. 235
6
В. К. Абросимов
13.3. Стратегия действий коллектива при мониторинге территории
во враждебной среде....................................... 239
13.3.1. Общее решение коллектива до начала мониторинга.. 240
13.3.2. Стратегия действий летательного аппарата-агента.. 241
14. Задача о трансграничном мониторинге..................... 245
14.1. Актуальность и основные принципы трансграничного
мониторинга............................................... 245
14.2. Меры транспарентности в зоне трансграничной чрезвычайной
ситуации................................................... 251
14.3. Агентная архитектура построения международной
группировки летательных аппаратов в составе системы
трансграничного мониторинга............................... 253
14.4. Разработка мер доверия для совместной работы в зоне
трансграничной чрезвычайной ситуации...................... 254
14.5. Алгоритм функционирования международной группировки
авиационных средств....................................... 257
14.6. Имитационное моделирование трансграничного мониторинга
зоны наводнения........................................... 260
Завершающий взгляд.......................................... 264
Литература.................................................. 271
Перечень сокращений......................................... 290
Таблица основных обозначений................................ 292
От редакции................................................. 301
ПРЕДИСЛОВИЕ
Эта книга посвящена отдельным вопросам важнейшей пробле-
мы социально-экономического развития, повышения конкуренто-
способности и национальной безопасности любой страны - разра-
ботке искусственного коллективного интеллекта.
По всей видимости, в рамках становления 6-го технологиче-
ского уклада (в частности, NBIC - Нано-, Био-, Инфо-, Когно-) сле-
дующий этап развития технологий связан с преимущественной
ориентацией на прогнозно-познавательную поддержку групповой
и командной управленческой деятельности, поддержкой взаимодей-
ствий «субъект»-«субъект» с использованием когнитивно-рефлек-
сивных моделей, разработкой принципов самоорганизации и само-
реализации, развитием экспертных сообществ и технологий сетевых
экспертиз, созданием инструментов конвергентного инжиниринга,
обеспечивающего устойчивую и целенаправленную коллективную
деятельность.
Данная работа вносит определенный вклад в столь актуальный и
перспективный тренд научно-технологического и прорывного разви-
тия на примере управления группой интеллектуальных летательных
аппаратов и автономного целенаправленного поведения таких объек-
тов. Причем основными аспектами исследования являются именно те
особенности группового поведения, к изучению которых пока ученые
и инженеры подступались только фрагментарно и эпизодически.
Действительно, до настоящего времени основной парадигмой
коллективного принятия решений было голосование или выявление
«у кого идея лучше». Здесь очевидна неявная конкуренция и умаление
мотивации. Например, в процессе обсуждения некоторого вопроса
в формате «мозгового штурма», который, как правило, носит дивер-
гентный (расходящийся) характер, генерируется много различных
идей, решение же зачастую принимает Руководитель, и, в результате,
обязательно остаются недовольные. Как проявлялось это недоволь-
8
В. К. Абросимов
ство в дальнейшей реализации решения всегда оставалось на совести
модераторов, ведь мотивация «подмятых» окончательным решением
недовольных явно не способствовала интересу дела.
Автор настоящей книги вносит в развитие существующей па-
радигмы коллективного разума оригинальную и смелую интригу.
Он рассматривает, на первый взгляд, не совсем жизнеспособные и
даже фантастичные схемы, когда «переговоры» объектов управления,
представляемых в виде агентов, проводятся в формате даже не столь-
ко сотрудничества, сколько «бескорыстной дружбы», доходящей до
уровня самопожертвования. Но если для человеческих коллективов
такие своего рода идеально альтруистические схемы легко могут
быть подвержены критике, то для технических систем, особенно со-
временных, ничего невозможного нет. Достаточно вспомнить при-
меры из кинематографа, типа опускающегося «по собственной воле»
и «для общего блага» в расплавленный металл Терминатора. Именно
для таких, техногенных, построений предложено использовать ин-
тересный и перспективный математический аппарат многоагентных
систем, уже хорошо зарекомендовавших себя на практике.
В первой части книги автор разбирается с терминологией, на-
мечает возможные подходы, предлагает разделить его мысли по пово-
ду возможного коллективизма в группах объектов управления. Далее
мы встречаем уже некоторые алгоритмы, которые отражают опре-
деленные закономерности и призваны реализовать элементы пред-
лагаемого коллективизма, обеспечивать прогнозирование поведения
коллективов летательных аппаратов в процессе решения общих за-
дач. Особенно интересным и одновременно дискуссионным является
исследование свойства упомянутого выше понятия «жертвенности»
агента, тесно переплетающегося с сакральными и понятными нам об-
щечеловеческими ценностями альтруизма, прагматизма и даже свое-
го рода «патриотизма». Пока, конечно, самолет-эгоист с пилотом-че-
ловеком воспринимается как некая виртуально-этическая сущность.
Но вот беспилотник, обученный «жертвенности» - дело, как пред-
ставляется, ближайших лет. Ведь вопрос не только в том, чтобы стать
«жертвой», но и найти наиболее эффективное коллективное решение
в труднореализуемых даже на современных суперкомпьютерах опе-
ративных оптимизационных расчетах сложнейших задач, например
защиты от внешне хаотически, а на самом деле специально сложно
организованной пространственно-временной структуры атаки на за-
Предисловие
9
щищаемые объекты разнотипных средств при значительной неопре-
деленности стратегий их поведения.
Следует заметить, что автор достаточно близко подошел к реа-
лизации в системах управления групповым движением летательных
аппаратов принципов самоорганизации в интенсивно развивающей-
ся среде Интернета вещей. Действительно, этот тренд существует и
еще слабо исследован, тем более применительно к такой сложной
предметной области, как групповое движение. Научная новизна та-
кой идеи несомненна.
Темп изменений в робототехнике и в области искусственного
интеллекта сейчас очень высокий. В этом контексте, на наш взгляд,
книга представляет явный интерес как источник практического опы-
та решения сложных задач и совокупность ярких идей, развитие ко-
торых, можно с уверенностью сказать, обеспечит синхронизацию
темпов реализации наших прорывных проектных решений с актуаль-
ными потребностями практики.
Александр Райков,
доктор технических наук, профессор,
Лауреат Премии Правительства Российской Федерации
в области науки и техники,
ведущий научный сотрудник Института проблем
управления им. В А Трапезникова РАН,
Генеральный директор ООО «НСА»
ОТ АВТОРА
Когда вам покажется, что цель недостижима,
не изменяйте цель -
изменяйте свой план действий.
Конфуций
Есть неписанное правило издателей - первое впечатление от
прочтения названия книги должно быть шокирующим и интригую-
щим. Действительно, как соединяются термины «коллектив» и «лета-
тельный аппарат»?
Научные друзья автора хорошо знают его пристрастие к интел-
лектуальным системам и современной робототехнике. Поэтому они
постоянно подбрасывают в «топку» его сомнений о правильности вы-
бранного научного пути свежие интернет-описания зарубежных раз-
работок в этой области. Конечно же, бегающие по горкам интеллекту-
альные роботы-собаки, устойчивые к сильным пинкам разработчиков,
искренне поражают автора и не только его. Впечатление усиливается
интернет-зрелищем полутора десятков летающих швейцарских беспи-
лотников, роями пчел-разведчиков ВМС США \ которые на бреющем
полете обследуют местность. Обзор зарубежных публикаций приводит
к обнаружению статей по фемто- и наноспутникам, сотнями выводи-
мым на околоземные орбиты «для геофизических целей» и поддержи-
вающим расстояния между собой за счет микродвигателей. Уже совсем
реальны так называемые зоороботы: робот-мул, робот-муравей и др.
Количество возможных примеров переваливает за сотню. И хотя имя
им еще не легион, но неявно уже появляется неожиданная мысль о том,
что в сфере искусственного интеллекта основные задачи решены.
Действительно, с одной стороны, интеллектуальность в ее луч-
ших проявлениях, таких, например, как внешняя разумность и ос-
мысленность действий роботов (не говоря уже о схожести обликов
роботов с животными, а также с людьми, прежде всего женского
1 Перечень сокращений, используемых в монографии, представлен на С. 290-291
От автора
11
пола!), достаточно искусно реализована технически. С другой сторо-
ны, как только возникает сложная научно-техническая задача, напри-
мер появление принципиально нового по свойствам объекта управ-
ления, так стремление наделить его систему управления высокой
степенью интеллектуальности приводит к геометрическому возрас-
танию сложности разработки такого объекта. Возникает законный
вопрос - может ли объект управления (даже интеллектуальный!) в
одиночку решить достаточно сложную задачу?
Наблюдения за феноменами проявления природного интеллек-
та в живой природе приводят к выводу, что как только количество
особей превышает цифру «два», так они становятся несвободными в
своих действиях. Давно замечено, что появляется своего рода коллек-
тивный, групповой интеллект. Иногда в группе выделяются лидеры,
определяющие поведение остальных (косяк рыб в поисках пищи). По-
рой такого лидера выделить трудно; так, стая пчел, которая образова-
ла новый рой, перемещается в поисках пристанища, а лидер-матка -
спокойно становится ведомой, следуя в плотной охране внутри роя
«куда кривая вывезет», преследуя свою, индивидуальную цель, о ко-
торой остальные особи роя могут и не подозревать.
Что же происходит с группами людей? В принципе то же самое.
Первомайская демонстрация покорно следует за руководителями,
идущими впереди колонны, и коллективно кричит «ура!» после соот-
ветствующего сигнала. При резком крике справа толпа на митинге с
неизбежностью качнется влево. Можно привести много других при-
меров, когда задача решается не индивидуально, а как бы групповым,
коллективным разумом.
Но рассмотрим полет летательных аппаратов, например само-
летов пилотажной группы «Стрижи» или «Русские витязи». Красота
строя определяется указаниями командира группы. Строй группы
восхищает, однако здесь, фактически, нет интеллекта, а есть только
очень строгое следование двум простым правилам - следить за веду-
щим, соблюдать высоту и дистанцию. Но это - парадное построение.
Усложним задачу туманом, полетом на низкой высоте, требова-
нием четкого времени пролета над определенным районом местно-
сти. Пусть среда движения при этом нейтральна. Задача усложняется,
но незначительно; успех определяется мастерством пилотов. Еще бо-
лее усложним задачу наличием системы противовоздушной обороны
противника. Тут степень неопределенности ситуации существенно
возрастает, красота полета не является основным критерием. Лидер
12
В. К. Абросимов
не обладает всей полнотой информации, но ставит задачу преодолеть
зону ПВО, используя все средства, которые есть в наличии. Однако в
таких условиях стратегия поведения «каждый умирает в одиночку»
не выдерживает критики. Российская система ЗРС-400 «Триумф» од-
новременно сопровождает до 300 трасс целей, одновременно обстре-
ливает до 36 целей. Маневрирование, выстреливание инфракрасных
ловушек и другие ранее эффективные приемы не помогают...
Заменим летящие самолеты группы «Стрижи» в зоне действия
ПВО роем боевых пчел. Есть основание полагать, что в информаци-
онном аспекте система ПВО должна «захлебнуться». Единственный
путь - направить противоракету в центр роя и там взрывом боевой
части просто «разметать» его... А рой разделяется и разлетается на
различные по объему маленькие подрой... каждый со своей зада-
чей.. . А далее следует группа уже боевых летательных аппаратов (на-
пример, ударных беспилотников размером с хороший самолет), обла-
дающая коллективным интеллектом. Они самостоятельно оценивают
текущую ситуацию; обмениваются между собой информацией и про-
водят «переговоры», чтобы понять, как лучше совместно решить за-
дачу преодоления ПВО; выбирают тех, кто может пожертвовать собой
для решения общей задачи; меняют свои планы в процессе полета...
И тут по этому рою бьет новое российское оружие, которое «...не
уничтожает дроны физически, не создает для них помехи, а гаран-
тированно выводит из строя радиоэлектронные бортовые системы,
превращая дрон в бесполезный кусок мертвого железа и пластика...».
Пока этот сценарий пока смотрится как фантастический. Одна-
ко что это, как не реализованные положения доктрины сетецентри-
ческой войны (Network centric warfare), которая вот уже более чем
десятилетие является приоритетной в вооруженных силах различ-
ных стран? Боевые пчелы? Уже в разработке! Рой небольших беспи-
лотников - реальность! Стайное движение - активная тема научных
исследований. О новом российском оружии уже объявил «главный»
источник информации - телевизор.
Основными общими чертами этих новых постановок задач яв-
ляются общность целей группы и необходимость коллективного при-
нятия решений. Слово «коллектив» у людей из советского прошлого
неразрывно связано с четкими ассоциациями. Примеры: дружный
- крепкий - работоспособный - сплоченный - целенаправленный -
продуктивный - трудовой/научный/воинский коллектив. В реальной
жизни мы всегда находимся в окружении коллектива. Коллеги по ра-
боте, семья, группа друзей, собравшихся в лес «на шашлыки» - все это
От автора
13
коллективы. Объединение в коллектив дает очень существенные пре-
имущества - позволяет объединить усилия и компетенции каждого
для достижения общей цели. Еще до конца не осознанный и трудно
выражаемый формально синергетический эффект как раз наилуч-
шим образом возникает и реализуется именно в коллективах.
Распространим теперь такие ассоциации на группу интеллекту-
альных летательных аппаратов, выполняющих общую задачу. В нем
аппараты обмениваются информацией, совместно принимают реше-
ния, меняются ролями в зависимости от ситуации. Таким образом,
летательные аппараты не просто образуют некоторую группу со-
вместно движущихся объектов управления. Они способны обладать
коллективной стратегией поведения и в этом смысле образуют на-
стоящий коллектив. Сфера использования коллективов летательных
аппаратов на практике может охватывать разведку и исследование
местности; мониторинг состояния и охрану промышленных объек-
тов; обеспечение безопасности на массовых мероприятиях; участие
в поисково-спасательных работах на местах ЧС; оперативное разво-
рачивание сети связи над участком местности; доставку требуемых
материалов в удаленные труднодоступные районы. Особенно инте-
ресными и перспективными являются структуры с коллективным по-
ведением для оборонных приложений.
Предвидим возражения: а просто группа летательных аппара-
тов? А стая летательных аппаратов? Чем они отличаются от коллек-
тивов?
Отличаются, и порой очень существенно. Основная особен-
ность коллектива - отношения сотрудничества и взаимопомощи в
противовес отношениям конфликтности и конфронтации. Группа
людей - еще не коллектив! Черты психологии человеческого коллек-
тива: наличие общей цели; совместные интересы; устойчивость и от-
крытость информационного обмена; сплоченность на основе един-
ства взглядов и позиций; четкость распределения функций и ролей;
организованность и упорядоченность, поддержка действий друг дру-
га, убеждение в их оправданности; доверие к другим членам коллек-
тива; дружелюбие друг к другу; готовность к принятию новых членов.
Черты коллектива летательных аппаратов: выполненение общей мис-
сии; наличие общей целевой функции; активный обмен информаци-
ей друг с другом; высокая живучесть за счет реализации принципа
«один за всех и все за одного»; распределение ролей по принципу «кто
лучший», а не «кто главный»; готовность к «жертвенности» во имя
решения коллективных задач. Различия очевидны (рис. 1).
14
В. К. Абросимов
Рис. 1. Одиночный, группа «поссорившихся»
и коллектив летательных аппаратов
Автор полагает, что приведенные в данной книге мысли и неко-
торые алгоритмы продолжат его идеи, содержащиеся в предыдущих
работах, и позволят по-новому взглянуть на проблему формирова-
ния коллективного поведения летательных аппаратов в сетецентри-
ческой среде, в которой определяющей является ситуационная осве-
домленность.
Автор считает своим долгом отметить, что представленные ма-
териалы не являются стройной теорией. Скорее, они представляют
различные, выраженные в формате научного поиска подходы к ре-
шению некоторых новых задач, связанных с движением группировок
интеллектуальных летательных аппаратов, выполняющих единую
коллективную задачу (миссию). Поэтому все недостатки работы ав-
тор, естественно, берет на себя. Но он был бы признателен читателям
за замеченные противоречия, погрешности, неувязки, высказанные в
любой форме.
Все используемые в монографии материалы взяты из открытых
источников и на них сделаны соответствующие ссылки.
Публикация монографии частично поддержана научным гран-
том Российского Фонда Фундаментальных исследований РФФИ
№ 16-08-00832-а.
БЛАГОДАРНОСТИ
Автор испытывает благодарность 1 к ссвоим давним друзьям -
доктору физико-математических наук, профессору Сергею Викторо-
вичу Ульянову, докторам технических наук, профессорам Александру
Николаевичу Райкову и Александру Павловичу Рыжову за дружеские
застольные разговоры на научные темы и электронные письма, будо-
ражущие научное воображение.
Автор высоко оценивает монографию доктора физико-матема-
тических наук, профессора и превосходного художника Александра
Аркадьевича Жданова «Автономный искусственный интеллект»,
чтение которой инициировало много раздумий и полезных мыслей,
и выражает ему признательность за рецензирование и плодотворное
обсуждение результатов работы.
Знакомство с книгой «Как управлять сложными системами?
Мультиагентные технологии для создания интеллектуальных систем
управления предприятиями», недолгие, но ценные беседы с одним
из ее авторов - руководителем самарской научной школы мультиа-
гентных технологий, доктором технических наук Петром Олеговичем
Скобелевым позволило более четко ориентировать тематику книги.
За эти обсуждения автор ему искренне благодарен.
Повторное «спасибо» Александру Николаевичу Райкову за ре-
цензирование и «Предисловие»!
Автор признателен доктору технических наук, доценту, полков-
нику Владимиру Ивановичу Гончаренко за проявляемый постоянный
интерес к теме настоящей монографии.
1 Испытывать благодарность, по меткому выражению русского философа И.А. Ильина, -
радоваться не только дару, но и доброте дарящего.
16
В. К. Абросимов
Благословение на данную работу, данное священником Евгени-
ем Тереховым ( Храм Софии Премудрости Божией, что у Пушечного
Двора на Лубянке), заставило более вдумчиво относиться к выводам,
не фиксируя их как «истину в последней инстанции».
Поразительно точно молодая перспективная художница Марина
Тарасюк отразила идеи автора в нестандартных, шутливых по форме,
но серьезных по содержанию иллюстрациях к книге, за что автор хо-
тел бы выразить ей отдельную благодарность.
Хотелось бы также поблагодарить выпускников 2015 года ме-
ханико-математического факультета Московского государственного
университета им. М.В. Ломоносова Владислава Иванова и Михаила
Кречина за воплощение мыслей автора в небольшие полезные про-
граммы.
Автор благодарен сыну Руслану за моральную поддержку и не-
ослабную веру в успех отца.
При подготовке книги автор активно и беззастенчиво пользо-
вался свободным временем, которое предоставляла ему многолетняя
и надежная спутница жизни, оказывающая спокойную и все понима-
ющую поддержку даже в - увы! - частые минуты научного отчаяния.
Множество раз автор гордо рассказывал ей о своих идеях, она всегда
внимательно слушала, и каким-то образом ей удавалось заставить
проблемы казаться менее значительными, чем они были до разговора.
Марина! Огромное тебе спасибо!
Спасибо всем, кто, увидев книгу, остановился и заинтересовался
ее названием!
Большое спасибо тем, кто взял книгу в руки!!
Искреннее спасибо прочитавшим Введение!!!
И колоссальное спасибо тем, кто пролистал шелестящие страни-
цы и задержался на чем-то взглядом!
С уважением и робкой надеждой
на полезность этой книги
Автор
ВВЕДЕНИЕ
Есть нечто более сильное, чем все на свете войска:
это идея, время которой пришло.
Виктор Гюго
За многие десятилетия в теории полета летательных аппаратов
(ЛА) сформировалось несколько научных направлений, различаю-
щихся между собой методами решения задач и классами ЛА, для ко-
торых разрабатывались соответствующие теоретические положения
по динамике движения.
Так, теория полета ракет рассматривает движение ракет малой,
средней и межконтинентальной дальностей при полной исходной ин-
формации на активном и пассивном участках их движения.
Теория полета космических аппаратов, оставляя расчет участка
выведения на методы полета ракет, рассматривает движение по ор-
битам, переход с орбиты на орбиту, сход с орбит; немаловажным до-
полнением при этом является также разработка методов маневриро-
вания при межорбитальных перелетах.
Экспериментальная баллистика изучает основные закономерно-
сти и свойства реального движения баллистических объектов, опре-
деляемого по результатам измерений.
Характерной общей особенностью указанных теорий является
то, что в них, как правило, рассматривается один объект управления,
хотя в ряде задач (например, сближение на орбитах) - несколько объ-
ектов, но не более двух-трех.
Решение возникающих на практике задач синтеза траекторий
для таких ЛА, как правило, осуществляется на основе громоздких и
трудоемких вычислительных расчетов с использованием итерацион-
ных методов. Очень значительное внимание уделяется оперативно-
18
В. К. Абросимов
сти расчетов траекторий ЛА, обусловленной требованием учета со-
вокупности многих важных факторов - как конструктивных, так и
связанных с особенностями применения.
Вместе с тем развитие науки и практика решения различных на-
роднохозяйственных и оборонных задач все время выдвигали так на-
зываемые «вызовы», при анализе которых численные методы расчета
траекторий становились своего рода тормозом. Появились новые клас-
сы ЛА, например ракеты наземного и морского базирования с новы-
ми обликами и характеристиками - маневрированием на различных
участках траекторий, исключительно высокими скоростями движения
и др. Такой новый класс ЛА, как беспилотные летательные аппараты,
поставил задачи учета новых влияющих факторов (легкий беспилот-
ный аппарат существенно сносит с заданной траектории даже неболь-
шим ветром), исключение влияния погрешностей его пилотирования
оператором и др. В ожидаемой перспективе средства ПВО столкнутся с
новым типом целей - гиперзвуковыми крылатыми ракетами. Прогно-
зирование движения и маневрирования такой ракеты, движущейся на
скоростях свыше 10-12 М \ представляет собой крайне нетривиальную
задачу. Очевидно, что гиперзвуковые ЛА станут существенным науч-
но-технологическим прорывом, который коренным образом скажется
на методологии построения как систем атаки, так и защиты, приведет
к необходимости разработки принципиально новых форм и способов
боевого применения летательных аппаратов.
Определяющей во многих практических задачах становится
уже не точность, как таковая, а правильность оценки ситуаций, в
которых наблюдается и прогнозируется движение объектов управ-
ления. Особенно сложным при этом будут задачи, в которых пред-
полагается одновременное функционирование целых группировок
разнообразных ЛА, осуществляющих одновременное движение по
сравнительно близким траекториям в некоторой ограниченной об-
ласти пространства. Заметим, что для каждого ЛА из группы не-
ким управляющим органом (либо самостоятельно при автономном
управлении) задается собственная цель. Всей же группе может зада-
ваться коллективная задача (по зарубежной терминологии - «опреде-
ляться миссия»).
1 М - число Маха - упрощенно отношение скорости движения летательного аппарата к
скорости звука.
Введение
19
Особая сложность при этом возникает в четырех основных слу-
чаях.
1. Расчеты, требующие массовости. При одновременном количе-
стве объектов управления (например, более 10 одновременно
движущихся ЛА) оперативность моделирования движения,
прогнозирования параметров траекторий может снижаться до
неприемлемых величин.
2. При неполноте исходных данных об объекте управления. Тра-
диционные методы конструктивно-баллистического анализа
не дают возможности получить или воссоздать требуемые для
расчетов недостающие исходные данные, что вызывает субъек-
тивность оценок.
3. Расчеты характеристик маневров ЛА на различных участках
движения. Основная проблема состоит в достаточно широкой
трубке траекторий таких маневров, что требует максимально
оперативных расчетов в условиях, не допускающих использо-
вания традиционных методов численного интегрирования.
4. При неопределенности в условиях применения ЛА. Многообра-
зие таких условий становится столь значительным, что делает
затруднительным выделение из них тех, которые представляют
особый интерес при наблюдении за движением группы ЛА.
Существующие мето-
ды распознавания угроз от
новых типов ЛА станут, как
представляется, ограничен-
ными. Изучение одновре-
менного движения сово-
купности ЛА и требование
слежения за ними, прогнозирования их траекторий заставляют раз-
рабатывать новые алгоритмы и методы, как правило, аналитические,
так как даже очень мощные вычислительные ресурсы оказываются
неспособными обеспечить решение таких многомерных задач.
Однако в последнее время прослеживается еще одна важная тен-
денция - часто говорится о том, что «умные» ЛА слишком дороги, а
их потеря - слишком критична. Поэтому все большее внимание уде-
ляется созданию небольших по размерам ЛА, которые, объединяясь
в группы, решают возникающие задачи не в одиночку, а коллективно.
Три вещи никогда не возвращаются об-
ратно - время, слово, возможность. По-
этому: не теряй времени, выбирай слова,
не упускай возможность.
Конфуций
20
В. К. Абросимов
Остановимся здесь, например, лишь на одной принципиально
новой возможности, не существовавшей или, по крайней мере, не вы-
делявшейся ранее в отдельное направление. Речь идет о формирова-
нии в зависимости от размеров отдельного аппарата группы, роя или
даже «облака» спутников, движущихся по орбите на небольшом уда-
лении друг от друга и решающих единую задачу. Принципиальными
особенностями группового полета являются автономная навигация
отдельного аппарата в составе группы и управление их взаимным от-
носительным положением в группе.
В настоящее время теория группового движения объектов
управления переживает настоящий бум. Прежде всего это связано с
задачами робототехники и разработкой методов группового движе-
ния интеллектуальных роботов. К числу наиболее интересных задач
относятся также и задачи специально организованного группового
движения: развернутым строем, в заданных боевых порядках, стая-
ми, роями и др. С точки зрения решения оборонных задач интерес-
ным является и такое еще слабоизученное научное направление, как
организованное целенаправленное движение группы с внешним про-
явлением при наблюдении как хаотическое.
Прекрасные аналоги предоставляет природа. Каждый, кто видел
в лесу муравейник, наблюдал за движением пчелиного роя, видел пе-
рестроение в стаю сотни журавлей, покидающих российские болота в
поисках жарких стран, не может оставаться равнодушным. Остается
непреходящее впечатление высокой разумности особей, входящих в
такие группы. Однако такое впечатление обманчиво. Последние ис-
следования показывают, что коллективый интеллект природных осо-
бей, выработанный миллионами лет эволюции путем поистине ко-
лоссального количества проб и ошибок, на самом деле представляет
собой довольно простые, но весьма эффективные правила1.
Можно говорить о том, что в рамках современной теории полета
объектов управления формируется новое научное направление - тео-
рия группового полета ЛА, в которой изучается движение как отдель-
ного ЛА из группы (но в составе группы!), так и совокупности ЛА,
выполняющих коллективную миссию. Принципиальной особенно-
стью такого группового полета является самостоятельность отдель-
1 Хотя, кто знает, что там «на самом деле»? (прим, автора)
Введение
21
ного объекта управления в составе группы, но также и учет при этом
стратегий движения и реализуемого поведения других объектов.
Следует особо подчеркнуть, что движение любого объекта управ-
ления обязательно осуществляется в некоторой среде. Можно выделить
три принципиально различных типа сред: дружественные, нейтраль-
ные и враждебные. Внутри каждого из этих сущностей можно в свою
очередь указать как объективные, так и субъективные факторы, харак-
теризующие среду. Дружественная среда содействет движению, упро-
щает принятие решений. Такой ситуации (например, применительно к
полету самолетов или беспилотных средств) объективно способствуют
хорошая, безоблачная погода, безветрие и пр. Дружественность среды
также может создаваться получением в процессе движения необходи-
мой для принятия решений информацией или непротиводействием ее
получению средствами наблюдения. Нейтральные среды, на первый
взгляд, даже по сущности своего названия, не оказывают влияния на
движение летательных аппаратов рассматриваемого класса. Вместе с
тем нельзя считать враждебными объективные возмущения, изменя-
ющие первоначальные планы, - сопротивление атмосферы, солнечный
ветер (для космических аппаратов) и др. Здесь вопрос заключается
только в правильности учета действующих сил и возмущений.
Враждебные же среды по своей сути препятствуют движению. В
них могут существовать области различной геометрической формы,
в которых движение летательных аппаратов либо опасно с точки зре-
ния выполнения коллективной миссии, либо даже недопустимо. Есть
две принципиально различные модели поведения группировки в
этих условиях: либо обойти указанные зоны, используя собственные
возможности по маневрированию, либо, говоря военным языком,
попытаться «прорваться» через них, чем-нибудь жертвуя...Различа-
ют пассивную и активную враждебность среды. В основе пассивной
враждебности лежат объективные факторы: туман, дым от пожаров,
дождь, ночные условия наблюдения, высокая радиоактивность и др.
Пассивная враждебная среда образуется спонтанно, слабо регули-
руется, но в общем случае как-то все же прогнозируется. Активная
враждебная среда создается специально, ее влияние организуется и
крайне трудно прогнозируется. В качестве примеров можно привести
движение группы ЛА в зоне ответственности средств воздушно-кос-
мической обороны, радиоэлектронное противодействие и др. Во всех
случаях враждебная среда препятствует функционированию коллек-
тива и достижению коллективной цели.
Рис. 2 Группировка боевых средств в наступлении (фантазия автора)
В. К. Абросимов
Введение
23
Какие же идеи реализуются в рассматриваемом направлении в
других странах? Наряду с активными исследованиями в сфере робо-
тотехники, направленной на решение мирных задач, особое значение
управлению группировками придается в оборонных приложениях.
Так, в работе [1] основное значение отводится «непилотиру-
емое™» будущих наступательных и оборонительных систем, что
выдвигает требование их автономности. При этом подчеркиваются
значение групп непилотируемых средств и их преимущества: высо-
кая живучесть; создание сети датчиков; альтернативность дорогим
и сложным единичным средствам; возможность дозаправки анало-
гичных средств других группировок при одновременном ослаблении
требований к их конструкциям и др. Особая роль отводится стаям и
роям незатратных по стоимости аппаратов, действующих небольши-
ми группами. Показана необходимость использования многоагентно-
го подхода и выделяется основная роль координации тысяч агентов,
которые могут отражать и моделировать разнообразные функции
оборонительных систем.
Агентство по перспективным оборонным научно-исследова-
тельским разработкам США (DARPA) приступило к реализации про-
екта под рабочим названием Gremlins. Главная цель - создать новый
вид вооружения - недорогие многоразовые многофункциональные
дроны, промежуточный вариант между боевыми самолетами и кры-
латыми ракетами. Дроны будут наделены искусственным интел-
лектом, смогут действовать в группе, выполнять разведку, и в то же
время их можно будет использовать в качестве управляемых ракет с
отложенным сроком действия. При этом аппараты внутри стаи таких
дронов самостоятельно выбирают «вожака» и следуют за ним в поле-
те. Оператор лишь отдает им общие команды: «куда лететь» или «что
снимать». Кроме того, беспилотники, собирая информацию и обме-
ниваясь ею, анализируют получаемые данные и принимают решения
о полете, основываясь на результатах этого анализа [2]. Сейчас с тру-
дом и большой озадаченностью представляются широта возможно-
стей и принципы боевого применения такой группировки.
Важное значение придается автономному планированию и рас-
пределению объектов по целям, причем координация должна осу-
ществляться не только для объектов, но и для целых систем. Выде-
ляется также задача передачи преимуществ одной группы объектов
управления другой в зависимости от ситуации.
24
В. К. Абросимов
В исследовательской программе DARPA на 2015 год [2] выделя-
лись следующие основные направления исследований для группиро-
вок объектов управления.
1. Составление схем и алгоритмов координации для мультиа-
гентных систем в интересах «специальных миссий». Подчер-
кивалось, что, несмотря на успехи в составлении отдельных
алгоритмов координации, пока еще недостаточное внимание
уделяется созданию специальных «дизайнеров» (конструкто-
ров) для выбора системы, наиболее приемлемой для выполне-
ния заданной миссии!.
2. Корректировка поведения в процессе возникновения опасной
ситуации. Считается, что преимущества можно получить на
пути использования природных биологических алгоритмов,
которые требуют минимальной степени координации и вычис-
лений. При этом подчеркивается, однако, отсутствие в настоя-
щее время инструментов, подтверждающих, что выбранные ре-
шения в будущей сложной обстановке окажутся правильными.
3. Взаимопроникновение и конфликтность задач. Когда большое
количество роботов одновременно выполняет коллективную
миссию, увеличивается вероятность неумышленного «вмеша-
тельства» отдельных роботов в функционирование друг друга.
Поэтому важно разделение задач в реальном масштабе време-
ни между группами роботов, тем более однотипных.
4. Коммуникация и связь. Считается важным, чтобы взаимосвязь
технических систем осуществлялась по аналогии с принципа-
ми взаимодействия биологических систем - через информа-
цию о взаимном положении, взаимодействии, использовании
цвета, запаха и др.
Важнейший ориентир развития беспилотных средств связан с
организацией их группового взаимодействия, уже с учетом необхо-
димости преодоления рубежей ПВО. В принципе такие группировки
беспилотных ударных средств (правда, пока малочисленные) уже соз-
даны и испытываются [4, 5, 6].
В ряде работ отмечается, что «.. .исследования в области группо-
вой робототехники (если под этим понимать обобщенное название
1 Нами предложена идея такого подхода в работе [3].
Введение
25
коллективной, роевой и т.п. робототехники) носят весьма фрагмен-
тарный характер...» [7]. Это справедливо и для рассматриваемой те-
матики. Все указанные вопросы по существу сводятся к единственной
научной проблеме - организации построения пространственно-вре-
менной структуры движения совокупности разнотипных ЛА в недру-
жественной, враждебной, антагонистической среде. В наиболее об-
щей постановке это так называемая задача о «диффузной бомбе»1 [8].
Выделим основные вопросы, которые при этом требуют своего
разрешения и разработки.
• Синтез группировок ЛА.
• Синтез обликов перспективных ЛА, входящих в группировку.
• Модель формирования интегральных ограничений на движение
группировки ЛА.
• Синтез целей движения группировки ЛА.
• Модель активной/пассивной среды, включая аспекты обнаруже-
ния группировки ЛА и противодействия активности действиям
группировки.
• Модель информационного поля, в котором осуществляется дви-
жение группировки ЛА.
• Модели движения ЛА, входящих в группировку, с учетом стра-
тегии движения всей группировки.
• Стратегия предварительного целераспределения ЛА группиров-
ки по целям.
• Модель обеспечения/нарушения связи ЛА, функционирующих в
составе коллектива, между собой и с центром управления.
• Стратегия выполнения колллективной миссии группировкой
ЛА при движении в различных средах.
• Алгоритм «переговоров» ЛА в процессе выполнения коллектив-
ной миссии.
Методам решения отдельных важных вопросов из этой совокуп-
ности и посвящена настоящая работа.
1 Очень удачный, но крайне непривычный для военной среды и русского научного уха ино-
странный термин
Александр Жданов «Наступают...»
(выбор автора)
1. СОВРЕМЕННЫЕ НАУЧНО-ТЕХНИЧЕСКИЕ ВЫЗОВЫ,
ВЛИЯЮЩИЕ НА СТРАТЕГИИ ПОВЕДЕНИЯ
ОБЪЕКТОВ УПРАВЛЕНИЯ
Проблемы важнее решений.
Решения могут устареть,
а проблемы остаются.
Нильс Бор
В Российской Федерации практически прекращена подготовка
специалистов по теории полета летательных аппаратов как отдель-
ной самостоятельной специальности [9]. Это неудивительно, так как
современные подходы к построению систем образования - как граж-
данского, так и военного - по существу разрушили взаимосвязи по-
требностей и возможностей подготовки необходимых специалистов.
В результате важнейшей проблемой, например, стала «...разработка
алгоритмического обеспечения формирования (расчета) полетных
заданий и выдачи данных координатного целеуказания для всей но-
менклатуры ракет (в том числе аэробаллистической компоновки) с
доведением результатов расчетов до объектов сопряжения...» [10], т.е.
задача, для решения которой в советское время создавались целые на-
учные школы, в одной из которых обучался и автор.
Между тем в настоящее время Россия сталкивается с рядом раз-
нообразных научно-технических вызовов, которые требуют активно-
го участия специалистов по теории полета в этих непростых сферах.
К ним прежде всего отнесем следующие.
Ограниченность финансовых средств. Не раскрывая хорошо из-
вестной сути вещей и не останавливаясь на подробностях финансиро-
28
В. К. Абросимов
вания в Российской Федерации научных исследований, заметим, что
уже многие годы сменяемость президентов и депутатского корпуса не
изменяет ситуации: финансовых ресурсов как не было, так и нет. Ис-
ходя из целей настоящей работы, в этих условиях можно утверждать
существенно возросшую актуальность и роль имитационного моде-
лирования. Созданное в 2011 г. Некоммерческое партнерство «Нацио-
нальное общество имитационного моделирования» (http://simulation.
su/ru.html) призвано решать важные проблемы применения методов
имитационного компьютерного моделирования в науке, технике и
технологиях, системах поддержки принятия решений, управлении ри-
сками, в нашем случае - в области управления сложными объектами.
На проводимых НОИМ конференциях и в многочисленных научных
статьях убедительно доказано, что без такого моделирования многие
практические проекты будут финансово обречены.
Возрастающая сложность системных интеграционных проек-
тов. Анализируя проблемы инновационного развития крупнейших
экономик мира, можно заметить, что в настоящее время редко ка-
кая научно-техническая задача решается «с нуля» [11]. Как правило,
существуют решения многочисленных сущностно близких задач в
своего рода «эпсилон-окрестности» новой проблемы; решение в та-
ком случае получается в результате интеграции уже существующих
решений при их соответствующей доработке. Применительно к рас-
сматриваемой предметной области, можно говорить о том, что во-
просы построения систем управления и даже частичной интеллекту-
ализации отдельных ЛА в принципе решены: более того, не новыми
оказываются и вопросы объединения объектов управления в груп-
пы. Однако задача совместного движения группы ЛА, реализующих
коллективную миссию, усложненная противодействием враждебной
среды, с учетом различных возможностей ЛА, при потере внешнего
управления и необходимости самостоятельного принятия решения
внутри самой группировки ЛА является неординарной, интеграци-
онной и сложной. Путь самоорганизации в таких условиях представ-
ляется наиболее целесообразным.
Синергетические эффекты. Для простейших задач эффект, как
правило, непосредственно выражается через показатели назначения
задачи, если такие удается разработать. Для сложных задач должны
возникать и возникают так называемые синергетические эффекты.
Они состоят не только в том, что результирующий эффект превышает
суммарный, рассчитанный по отдельным составляющим. Примени-
Глава 1
29
Автоматизация создает новые
области занятости: требуется
все больше и больше людей для ис-
правления ошибок.
Неизвестный автор
тельно к группировке ЛА может проявляться явная неаддитивность,
т.е. возможности группировки, состоящей из интеллектуальных ЛА,
оказывающих, например, помощь
друг другу, заведомо больше, чем
простая сумма возможностей ее
отдельных элементов. Только в
составе группировки может про-
являться свойство эмерджентно-
сти [12], когда целевые функции
отдельных элементов не совпадают с целевой функцией самой си-
стемы, но система тем не менее существует и решает задачу. Кроме
того, синергетичность в контексте движения и выполнения коллек-
тивной миссии группировкой непосредственно связана с появлением
новых, дополнительных качеств и свойств группировки при самоор-
ганизации ее элементов, в частности, с разнообразием потенциаль-
ных решений по образованию новых пространственно-временных
структур (формаций) движения. С точки зрения оборонных прило-
жений основной синергетический эффект состоит в возможности
существенного увеличения энтропии группировки, как меры ее не-
определенности, с точки зрения внешнего наблюдателя - противника.
Весьма интересным для исследования становится определение точек
бифуркаций (состояний) при движении группировки, когда она под
влиянием незначительных управлений резко меняет свое состояние/
характеристики для внешнего наблюдателя, т.е. при переходе всей
группировки в состояние «упорядоченного хаоса».
Отсутствие кадров с системным мышлением. Достаточно по-
читать отзывы современных руководителей о молодых кадрах, чтобы
заметить, что системность как обязательное условие выполнения круп-
ных интеграционных проектов перестает быть основой подготовки и
принятия необходимых управленческих и научно-технических реше-
ний. Повсеместно стремление заменить рабочий проект на так называ-
емый «системный»; действительно, последний, в отличие о рабочего, не
ГОСТирован, что позволяет за общим правильным словом не учиты-
вать важнейшие требования. Отсюда и пренебрежение эскизным про-
ектированием, которое для интеграционных проектов как раз требует
имитационного моделирования. Здесь и замыкается круг исключения
из анализа важнейших системных элементов, в результате чего произ-
водится одноразовый, непродуманный в деталях, некрасивый по фор-
ме и неудобный в эксплуатации продукт/ объект/ услуга.
30
В. К. Абросимов
Сетецентричность среды. Современная армия в военных кон-
фликтах последних лет воюет дистанционно. Ключевой концепцией
является пространственная ситуационная осведомленность (Space
Situation Awareness).
Наступило понимание, что сетецентричность существенно ме-
няет условия боевого применения систем вооружений [13]. Но гене-
ралы, как известно, «...готовятся к прошедшей войне» \ Достаточ-
но указать, что, несмотря на ряд важных современных практически
правильных решений (маневрирование боеголовок стратегических
ракет, гиперзвуковые крылатые ракеты и др.), сценарии боевых дей-
ствий во многих случаях описываются в устаревших терминах [14].
Интеллектуализация систем управления. Достижения послед-
них лет в области робототехники и построения интеллектуальных
систем с очевидностью демонстрируют тренд интеллектуализации
систем управления. Рассматриваются уже довольно экзотические
варианты создания роботов с учетом их психотипа [15]. Все чаще в
составе систем управления используются блоки на основе элементов
искусственного интеллекта - нейронных сетей, экспертных систем,
нечеткой логики, интеллектуального анализа данных, так называе-
мых «природных» алгоритмов. Можно с уверенностью прогнозиро-
вать, что с тенденцией снижения контроля и в целом возможности
управления человеком робототехническими средствами в нетра-
диционных экстремальных динамических средах (космос, условия
активного противодействия, подводный мир, техногенные аварии,
опасные производства и др.) вопросы навигации и самоорганизации
систем и, как следствие, их интеллектуализации будут только услож-
няться, а количество проблем будет только возрастать.
Неосвоенность воздушного пространства на высотах от 30 до
80-100 км. Человечество в активном развитии научно-технического
прогресса как-то «перескочило» указанный выше диапазон высот.
Действительно, 20-25 км - это практический потолок современной
авиации, дирижаблей, воздушных шаров и др. Минимальная высота
спутников на низких круговых орбитах - не менее 300-400 км, прак-
тическая высота - свыше 500 км. Пространство 25-300 км надо как-то
1 Изречение принадлежит премьер-министру Великобритании сэру Уинстону Черчиллю
(1874-1965). Многочисленных генералов (друзей автора) прошу не обижаться - из «песни»
слов не выкинешь! (Прим. авт.).
Глава 1
31
осваивать! Если говорить о военно-технических задачах, то возника-
ет необходимость и возможность для атакующей стороны - создания,
а для защищающейся стороны - наблюдения и противодействия ата-
ке на высотах от 25-30 до 150-200 км (возможны так называемые су-
борбитальные траектории ЛА с высотами около 100-120 км). Соглас-
но классификации Международной авиационной федерации (ФАИ),
космическим считается полет, высота которого превышает 100 км
(линия Кармана - высота над уровнем моря, которая условно прини-
мается в качестве границы между атмосферой Земли и космосом), т.е.
по существу арена борьбы так или иначе переходит в космос. Несмо-
тря на существующие международные ограничения ’, можно легко
предположить, что вопрос допустимости военных действий на этих
высотах будет при необходимости легко снят (достаточно вспомнить,
как легко отказались США от Договора по ПРО 1972 года, когда он
стал ограничивать их интересы и планы).
Групповое решение задач. В практических задачах последних
лет, особенно оборонного значения, можно заметить снижение роли
Лидера как в управлении процессами, так и в принятии решений. За-
дачи решает группа. При этом она действует в рамках поставленной
коллективной цели, но порой автономно, самостоятельно распределяя
задачи между членами группы и контролируя их выполнение. Пока
роль человека еще велика, но она неуклонно снижается. Такой вызов
требует принципиально иного подхода к построению системы управ-
ления всеми процессами - от обследования и получения исходных
данных по текущей ситуации до принятия и исполнения решений.
Выше кратко перечислены лишь основные вызовы, требующие
внимания и разработки методов решения новых задач управления
движением летательных аппаратов. Спроектированный специали-
стами с отсутствием системного мышления без предварительного
имитационного моделирования летательный аппарат, действующий
автономно, на привычных и отлично контролируемых противником
высотах, без учета синергетического эффекта управления движением
в составе группы, в условиях сетецентрической войны обречен. Это
1 Согласно ст. 4 Договора по космосу, государства-участники обязались не выводить на
орбиту вокруг Земли любые объекты с ядерным оружием или с любыми другими видами
оружия массового уничтожения, не устанавливать такое оружие на небесных телах и не
размещать его в космическом пространстве каким-либо иным образом.
32
В. К. Абросимов
же относится и к решению ряда важных системных народнохозяй-
ственных интеграционных задач (многомерная логистика, например)
с использованием других объектов управления; здесь сетецентрич-
ность заменяется неопределенностью ситуаций, а обреченность - не-
оправданными финансами на разработку проектов и неэффективным
использованием возможностей объектов.
Перечисленные вызовы - лишь верхушка айсберга. Но уже и
они распадаются на многочисленные проблемы и задачи, требующие
своего оперативного решения. В этих условиях целесообразно выдви-
нуть и исследовать гипотезу о том, что эффективное решение таких
задач возможно не отдельными объектами, системами, элементами,
комплексами, а группами таких объектов, систем, комплексов, обра-
зующих своего рода сети технических систем и реализующих коллек-
тивные стратегии поведения.
2. ОБЩИЕ ТЕНДЕНЦИИ РАЗВИТИЯ
ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Б.Н. Ельцин - Биллу Клинтону:
«Билл, давай-ка ликвидируем крылатые ракеты как класс!»
Билл Клинтон:
«Борис, если я приму такое решение,
то до Америки не долечу - меня свои же собьют!»
Политический анекдот
(1997 г., Хельсинки).
2.1 Гиперзвуковые летательные аппараты
Гиперзвуковые летательные аппараты (ГЗЛА) - общее название
семейства летательных аппаратов различного назначения (испыта-
тельные, транспортные, разведывательные, ударные и др.), полет ко-
торых в атмосфере происходит со скоростями, соответствующими
числам Маха по величине 5М и более (по разным оценкам, до ЗОМ) I
Полет на гиперзвуковых скоростях принципиально отличается
от полета на сверхзвуковых или дозвуковых скоростях и представ-
ляет колоссальную научно-техническую проблему в различных об-
ластях науки и техники. При таких скоростях вокруг ЛА создается
плазменная оболочка, а температура поверхности корпуса и крыла
ЛА превышает 2000° С. Эти условия движения предъявляют особые
1 Материалы по ГЗЛА частично предоставлены д.т.н, доцентом В.И. Гончаренко (Москов-
ский авиационный институт - Национальный исследовательский университет).
34
В. К. Абросимов
требования к конструкционным материалам ГЗЛА, к реактивным и
воздушно-реактивным двигательным установкам, к бортовым систе-
мам управления полетом.
К основным проблемам относятся следующие.
В области аэродинамики. Для обеспечения прочности конструк-
ции и высокоточного наведения на цель требуется исключительно
высокая эффективность аэродинамических органов управления при
минимальных площадях стабилизирующих и управляющих поверх-
ностей. Особенно это важно при подлете в район цели на скоростях
около 1-2 км/с, а также при отсутствии двигателей и осуществлении
планирующего полета в атмосфере.
В области силовых установок. ГЗЛА могут оснащаться различ-
ными типами двигательных установок: жидкостными, твердотоплив-
ными, гиперзвуковыми прямоточными воздушно-реактивными, ра-
кетными двигателями. Есть теоретические проработки по ядерным
ракетным двигателям и др.
Для обеспечения прямолинейного полета наиболее перспек-
тивными считаются прямоточные воздушно-реактивные двигатели
(ПВРД). Они просты в конструкции, поскольку практически не имеют
подвижных частей. Однако верхний предел обеспечиваемой скорости
определяется принципиальной возможностью сгорания топлива в
проходящем воздушном потоке и составляет не более 15-17 М. Рабо-
чие скорости - лишь 5-7 М. Кроме того, возникает проблема малого
отношения тяги ПВРД к его массе - всего 2-3, что примерно в 50 раз
хуже этого же показателя для ЖРД. Продолжительное нахождение в
атмосфере при этом означает большие аэродинамические потери.
В области топлива.Требование обеспечения топливом выдви-
гает на первый план инфраструктуру аэродромов для базирования
ГЗЛА (заправочной техники, топливного комплекса и т.п. систем,
предназначенных для работы с топливом). Это становится крупной
проблемой. Одним из самых эффективных решений является ис-
пользование в топливных смесях значительного количества водоро-
да. Указанное, однако, достаточно сложно осуществить технически,
так как газообразный водород имеет крайне малую плотность, а хра-
нение жидкого водорода создает другие непреодолимые технические
сложности.
В области технологий создания теплозащитных покрытий.
Температура на поверхности гиперзвукового аппарата в полете мо-
Глава 2
35
Еще никто так не глушил рыбу как русские
- в Тихом океане да еще и космической ор-
битальной станцией!
И? разговоров в курилке
Роскосмоса
жет быть свыше 1900-2000° С, в то время как для нормального функ-
ционирования бортовой аппаратуры температура внутри отсека
должна быть не выше 70° С. Поэтому корпус аппарата должен иметь
жаропрочную оболочку из высокотемпературных материалов и мно-
гослойную теплозащиту из термостойких сплавов.
В вопросах управления движением. При движении ГЗЛА в ат-
мосфере со скоростями более ЗМ ударная волна начинает приобре-
тать свойства ионизированного газа и плазмы. Плазма не отражает
радиоволны, блокирует передачу радиокоманд, что исключает ис-
пользование каналов внешнего управления [16].
Однако у ГЗЛА есть
и одна важная позитивная
особенность - реализация
принципиально новых ти-
пов траекторий и, следова-
тельно, возможность созда-
ния принципиально новых
условий построения пространственно-временных структур движения.
К наиболее известным способам управления ГЗЛА при полетах
на значительную дальность является использование режима много-
кратного рикошетирования на пассивном участке траектории, при
котором нахождение в плотных слоях атмосферы чередуется с дви-
жением в разреженной среде. В плотных слоях атмосферы органы
управления обеспечивают аппарату максимальное аэродинамическое
качество [17]. Основным преимуществом использования рикошети-
рующих траекторий является существенное (более чем на порядок)
уменьшение тепловых нагрузок, действующих на летательный аппарат.
В зависимости от направления подъемной силы У1 различают траекто-
рии с пикированием (У < О) и кабрированием (У > О). При значитель-
ной величине коэффициента аэродинамического качества К = Су/Сх
кабрирующие траектории приобретают волнообразный характер с
несколькими рикошетами. Смысл волнообразной траектории ГЗЛА в
следующем. За счет разгона аппарат выходит из атмосферы и выключа-
ет двигатель, экономя топливо. Затем под действием гравитации ГЗЛА
возвращается в атмосферу и снова включает двигатель (ненадолго - на
20-40 с), который опять выводит аппарат в космос. Высота полета не
превышает 60 км, а шаг волны составляет около 400 км.
36
В. К. Абросимов
Как следует из изложенного, рикошетирующие траектории есть
частный случай волнообразных, когда вместо двигателя использует-
ся аэродинамическая сила. Но режим «управляемого рикошетирова-
ния» при погружении в атмосферу требует точной ориентации ЛА
(ведь аэродинамические органы неэффективны), поэтому необходи-
мо оснащение ЛА двигателями реактивной силовой установки.
Использование современных методов численного моделирова-
ния рикошетирующих траекторий полета летательного аппарата с
периодически включающимся прямоточным воздушно-реактивным
двигателем показало [18], что максимальную дальность полета (до
7000-11 000 км) обеспечивает оптимальный выбор участков включе-
ния и времени работы двигателя при запасе топлива на борту, состав-
ляющем 76-88% начальной массы аппарата [19, 20].
Наиболее реальным в среднесрочной (около 10 лет) перспек-
тиве представляется вариант гиперзвукового ЛА, которому за счет
ракеты-носителя на высотах 60-70 км будут придаваться такие зна-
чения и вектор гиперзвуковой скорости, чтобы на межконтиненталь-
ных дальностях он находился в диапазоне высот 40-60 км. Далее он
будет двигаться на цель с соответствующими маневрами уклонения.
Понятно, что такой ГЗЛА будет оснащаться определенной системой
коррекции траектории полета, необходимой как для выполнения ма-
невра уклонения, так и для точного наведения на цель на конечном
участке. Маневр укловнения может выбираться из совокупности за-
ранеее просчитанных типовых маневров уклонения либо рассчиты-
ваться в режиме on-line. В литературе есть информация о том, что
наведение на цель может осуществляться посредством коррекции по
радиоконтрастному эталону местности в районе цели [21].
Выделяют следующие три основные особенности ГЗЛА, существен-
но затрудняющие решение задач по их обнаружению, сопровождению,
распознаванию и поражению, возложенных на средства системы ПВО
(ВКО) государства, против которого они будут применяться [22].
1. Возможность использования новых областей пространства -
диапазона высот от 30 до 120 км.
2. Способность ГЗЛА осуществлять полет и решать боевые зада-
чи на ранее недостижимых скоростях как в атмосфере, так и
частично в околоземном космическом пространстве.
3. Использование смешанных трудно прогнозируемых (аэроди-
намических, пассивных эллиптических, активных баллистиче-
Глава 2
37
ских) траекторий полета к объекту поражения как в космосе,
так и в атмосфере.
В военно-технической литературе активно подчеркивается, что
имеющаяся в настоящее время и большая часть создаваемых средств
воздушно-космической обороны как России, так и особенно других
стран не готова к решению задач по борьбе с ГЗЛА. В информацион-
ной системе ВКО ограничения, заложенные алгоритмически и аппа-
ратно в средства радиолокационной разведки, не позволят в необхо-
димом объеме решать задачи обнаружения и сопровождения ГЗЛА и
выдачи радиолокационной информации о них активным средствам
ВКО. По высотам и скоростям их возможности позволяют работать с
гиперзвуковыми целями, выполняющими полет в скоростном диапа-
зоне не более 5-7 М. Кроме того, алгоритмы обработки информации
большинства РЛС кругового обзора не позволяют осуществлять «за-
вязку» трасс целей, летящих по сложным «смешанным» траекториям,
так как рассчитаны на прямолинейное или криволинейное (по опре-
деленному радиусу) движение цели (рис. 3).
Ничего
не видел.
Рис. 3. Гиперзвуковая ракета атакует объект,
«подныривая» под область ответственности РЛС ВКО
и «проскакивая» область ответственности РЛС ПВО
38
В. К. Абросимов
В алгоритмы работы существующих информационно-разведы-
вательных средств системы предупреждения о ракетном нападении
(СПРН) заложено исключение из обработки целей со скоростями по-
лета более 2 км/с. Задача обнаружения и сопровождения ГЗЛА перед
ними не ставилась «...из-за отсутствия таковых» [23].
Новые типы траекторий и объекты с очевидностью могут соста-
вить существенные проблемы для задач построения систем обороны.
За счет высокой энергетики они могут совершить сложный маневр,
чтобы не допустить поражения средствами ПВО/ПРО противника.
Более того, благодаря такой способности ГЗЛА выходит непосред-
ственно на цель с любого направления и в большом диапазоне высот.
Таким образом, в целом, исходя из баллистических возможно-
стей по решению задач преодоления всевозможных систем обороны,
ГЗЛА, как представляется, будут очень перспективны 1 для атакую-
щей стороны и проблемны для защищающейся стороны.
2.2. Развитие беспилотной авиации
Определение беспилотного авиационного комплекса вводится
в разных работах, но наиболее интересным является определение,
данное в работе [24]. «...Беспилотным авиационным комплексом бу-
дем называть эргатическую (человеко-машинную) систему, включаю-
щую в себя определенное число беспилотных летательных аппаратов
(БЛА), мобильные наземные пункты управления, получения, обра-
ботки и передачи целевой информации, технические средства взлета
(старта) и посадки БЛА, их ремонта и технического обслуживания и
персонал, обеспечивающий функционирование комплекса. При этом
...термин «беспилотный авиационный комплекс (БАК)» в отличие от
используемых в настоящее время понятия «беспилотная авиацион-
ная система» и «комплексы с БЛА» является общепринятым в ВВС и
широко используется в практической деятельности ведущих отече-
ственных предприятий - разработчиков БЛА».
1 В Массачусетском технологическом институте (США) создали новый метаматериал, не-
видимый для радиоволн. Эта структура представляет собой медный штырь с множеством
кубических и цилиндрических структур, отделенных вставками из пластика. Специально
подобранное расстояние между этими структурами позволит им пропускать электромаг-
нитные волны на определенных частотах. Если из подобной проволоки создать куб, то мож-
но скрыть объект от лучей радаров, угадав ту частоту, на которой он работает (источник
- журнал «За науку», № 1 (1943), 2016 г.).
Глава!
39
За последние 10-15 лет наблюдается несколько значительных
трендов развития беспилотной авиации [25].
Первый тренд - резкое увеличение количества беспилотных
летательных средств. Количество разновидностей аэродинамиче-
ских схем БАК исчисляется сотнями, количество произведенных ап-
паратов (основные страны-производители: США, Израиль, Германия,
Великобритания) - уже многими десятками тысяч (рис. 4). Второй
тренд - увеличение количества и сложности задач, возлагаемых на
БАК. Если на заре развития беспилотной авиации это было в основ-
ном наблюдение, то сейчас функции БАК расширены на цели развед-
ки, мониторинга последствий чрезвычайных ситуаций, оценки со-
стояния трубопроводов, сельского хозяйства и др. В военной области
БАК разрабатываются для постановки радиопомех, разведки, исполь-
зования в качестве гидроакустических буев и даже ударных средств.
Так отмечается, что установка беспилотника на боевых машинах пе-
хоты на платформе «Армата» принципиально улучшает ситуацион-
ную осведомленность при движении в тактическом звене.
Рис.4 «Птицы» XXI века
(источник: URL:http://navoine.info/uav-survival.html)
40
В. К. Абросимов
Существенным недостатком беспилотных средств является пока
еще продолжающееся активное использование человека/пилота в си-
стеме управления таким аппаратом с наземных пунктов управления.
Беспилотники управляются дистанционно через разнообразные ка-
налы передачи данных. Перехват частот радиоканалов, создание по-
мех на этих частотах, посылка ложных GPS сигналов могут оказать
существенное негативное влияние на систему ориентации и навига-
ции беспилотника [26].
Хороший обзор технологий и методов оценки эффективности
БАК дан в работе [29]. Подчеркивается, что многие БАК осуществляют
автономный полет с использованием спутниковой системы навигации
GPS или инерциальной навигационной системы по заранее предвари-
тельно запрограммированным определенным пунктам маршрута или
используют ручное управление, при котором осуществляется возврат
к автономному полету в случае прекращения или потери связи. Но в
ряде разработок уже используются интеллектуальные системы управ-
ления для беспилотных средств, например, облачные технологии
управления [27], управление автоматической посадкой и движением в
горной местности [28], которые, однако, пока еще трудно считать дей-
ствительно интеллектуальными. Так, признаком интеллектуальности
считается возможность корректировки маршрута полета (проекты
ZEPHYR/MERCATOR GULL (Великобритания), «Хаски» (Россия) и
др.), но это можно реализовать и иными методами, например, разме-
щением на борту совокупности различных полетных заданий.
Национальная технологическая инициатива по развитию рынка
АэроНет Агенства стратегических инициатив прогнозирует создание
нового глобального сетевого рынка информационных, логистических
и иных услуг, предоставляемых флотом беспилотных аппаратов, по-
стоянно находящихся в воздухе и на низких космических орбитах (ан-
нотация к плану мероприятий («дорожной карте») по развитию рынка
АэроНет [30]). Следует, однако, заметить, что практические задачи для
БАК разрабатываются в основном как для индивидуальных объектов
управления. Вопросы эффективности группового движения БАК так-
же начали рассматриваться, но, как представляется, четкие критерии
преимуществ группового полета пока еще не осознаны и не приняты
широкой научной общественностью, что сдерживает их реализуемость.
На мировом рынке вооружений сейчас предлагается уже более
300 моделей беспилотников. Подчеркнем лишь самую малую область
их применения:
Глава 2
41
• ведение радио-, радиотехнической, телевизионной, фотографи-
ческой, инфракрасной и других видов технических разведок;
• наблюдение за назначенным районом, обнаружение, идентифи-
кация, а также уничтожение (при наличии на борту вооруже-
ния) целей;
• радиоэлектронная борьба, выработка целеуказаний, подсветка
целей;
• поиск источников опасности для войск и техники, доставка экс-
тренных грузов специального назначения; бомбометание с ма-
лых высот, пуски ракет «воздух-земля» по труднодоступным
целям (например, по пещерам в горах), работа в качестве ре-
транслятора для систем связи ВМФ и др.
Подчеркнем, что в настоящий момент появились и активно раз-
виваются решения в принципиально новой нише - обнаружении и
«подавлении» беспилотных летательных аппаратов. Малые беспилот-
ники представляют большие проблемы для систем ПВО. Последние
публикации (см., например, [31, 32]) подтверждают, что подавление
БАК будет осуществляться путем не физического уничтожения, а ско-
рее, нарушением функционирования: нарушением связи с оператором,
перехватом команд, радиоэлектронным подавлением электроники ав-
топилота БАК и др. Этот путь представляется самым оптимальным.
Как будут развиваться события - покажет время.
2.3. Миниатюризация летательных аппаратов
Тренд миниатюризации летательных аппаратов формируется в
настоящее время, исходя из трех основных факторов.
а) Сокращающаяся востребованность крупных и дорогих в из-
готовлении ЛА. Безусловно, они остаются необходимыми. Однако ос-
новная проблема состоит в том, что срок разработки таких аппаратов
составляет до 5-7 лет. А сроки «вброса» на рынок новых технологий
становятся все меньше; уже сейчас отдельные технологии меняются
за 3-4 года. Таким образом, большой и многофункциональный ЛА
устаревает еще да начала своего фактического использования. Идея
применения в этих условиях совокупности малых ЛА является явно
прогрессивной.
б) Существенные достижения в области миниатюризации ком-
понент информационно-вычислительной техники. Основные миро-
42
В. К. Абросимов
вые достижения получены в области объединения миниатюрных
электронных компонент с сопоставимыми по размерам механически-
ми элементами различной сложности. Такое объединение позволяет
достигнуть уникальных функциональных возможностей, например,
объединить в единую конструкцию датчик, процессор и механиче-
ский привод [33].
в) Новые военно-технические концепции применения миниа-
тюрных летательных аппаратов. Основная общая идея - оснащение
миниатюрных ЛА всевозможными датчиками и видеокамерами (теле-
визионные или тепловизионные камеры, биохимические, радиацион-
ные, акустические и сейсмические датчики и др.) для решения самого
разнообразного спектра задач. Разрабатываются миниатюрные виде-
окамеры, инфракрасные датчики, датчики биологического и химиче-
ского анализа для обнаружения опасных концентраций различных
веществ и др. [34]. В военной области использование ЛА малых форм
связано с обеспечением новых разведывательных возможностей.
Предполагается создавать системы оперативной разведки поля боя,
которая должна соединять преимущества космических аппаратов
(недосягаемость для средств ПВО противника и глобальность развед-
ки) с достоинствами воздушных беспилотных летательных аппаратов
(большая продолжительность наблюдения и высокая оперативность
получения данных) [35]. Следует подчеркнуть и тренд миниатюриза-
ции беспилотных летательных аппаратов. Здесь достигнуты поистине
поразительные успехи, прежде всего в части конструкции.
Проектов использования малых ЛА очень много. Так, совокуп-
ность таких аппаратов может непрерывно, в режиме реального време-
ни мониторить значительные пространства. Рассматривается активное
использование таких аппаратов при ликвидации чрезвычайных ситуа-
ций, контроле границ, обеспечении ситуационной осведомленности в
зоне боевых действий и др. Интересны и коммерческие приложения:
наблюдение живой природы, аэро-, фото- и видеосъемка недвижимо-
сти, исследование атмосферы и ближнего космоса, решение телеком-
муникационных задач. Google заявляет о возможности обеспечения
глобального и бесплатного покрытия всей Земли Интернетом и др.
Самым существенным ограничением для малых ЛА остается
проблема обеспеченности энергией. Электрические силовые установ-
ки являются наиболее эффективными источниками движения таких
ЛА. Но из-за малых габаритов и грузоподъемности они не способны
нести ни запасы топлива, ни аккумуляторы. Поэтому испытываются
Глава 2
43
схемы с солнечными батареями, водородными источниками энергии
и др. С этим ограничением связана малая вычислительная мощность
таких аппаратов, необходимая для решения задач на борту. Из-за ма-
лых размеров и слабой энергетики на них пока невозможно устано-
вить мощные процессоры.
Требования к миниатюрным ЛА довольно разнообразны и фор-
мируются исходя из ставящихся перед ними задач и области деятель-
ности. Они заключаются в незначительных размерах (сантиметры
и даже менее), небольшой взлетной массе (граммы - килограммы),
сравнительно высокой скорости полета (до 70-90 км/час). Как пра-
вило, предъявляются высокие требования к продолжительности по-
лета (для авиационных средств - до нескольких часов), максимально
возможному радиусу действия (километры). К числу чувствительных
проблем при создании малых ЛА относятся вопросы создания систем
управления. Малые размеры аппаратов существенно ограничивают,
а в ряде случаев и полностью исключают возможность применения
на них традиционных систем навигации и управления полетом. Дей-
ствительно, с уменьшением размеров управляемого летающего объ-
екта площадь его поверхности уменьшается в квадрате, масса - в
кубе, потребная мощность - в разы, а моменты инерции - в пятой
степени от изменения линейного размера. Ручное управление таки-
ми аппаратами становится не всегда возможным, и все большую роль
приобретает автоматизированное управление. Поэтому полет ми-
ниатюрных аппаратов предполагается выполнять по командам опе-
ратора с использованием данных, получаемых от бортовых средств
обнаружения [33, 36]. Традиционные проблемы при этом - слабая об-
ученность операторов, неустойчивая связь и др.
Как отдельное направление следует выделить так называемые
мини- (до 1 тонны), микро- (до 100 кг), нано- (10-100 кг), пико- (0,1—
-10 кг) и фемто- ( до 100 г) космические аппараты [36].Сфера их при-
менения в основном пока ограничивается проектами дистанционного
зондирования Земли, исследования геофизических полей вокруг Земли,
характеристик верхней ионосферы и атмосферы Земли, внешней маг-
нитосферы, солнечного ветра и др. В настоящее время интенсивно раз-
рабатываются проекты полетов группировок малых спутников для про-
ведения физических и других экспериментов. Так, проект «Formation
Flying» состоит из нескольких спутников, объединенных одной целевой
задачей и выполняющих совместный полет на небольшом удалении
друг от друга (от десятков метров до десятков километров) [37].
44
В. К. Абросимов
К числу основных направлений современных исследований ма-
лых ЛА относятся:
• анализ потенциально возможных обликов и конструктивных
схем малых ЛА;
• исследования особенностей полета при малых числах Рейнольдса;
• анализ принципов построения систем управления малыми ЛА;
• исследование вопросов доставки малых ЛА в зону функциони-
рования и их последующего использования (возвращение, унич-
тожение и др.);
• разработка специальной аппаратуры для систем управления ЛА,
систем сбора и передачи информации (датчиков, видеокамер и др.).
Таким образом, можно с уверенностью утверждать, что появ-
ление принципиально новых ЛА малых форм как современных об-
разцов робототизированной авиационной техники, коллективно
управляемых либо движущихся сравнительно автономно, - вопрос
времени. При этом наиболее целесообразной организационной фор-
мой их совместного применения станет именно группировка ЛА.
2.4. Современные достижения
в области группового управления
Выше указывалось, что исследования группового движения наи-
более активно осуществляются в сфере робототехники. Но, как спра-
ведливо отмечается в работе [15], «...проводить даже поверхностный,
укрупненный обзор проектов из области групповой робототехники...
нецелесообразно, так как... слишком велико количество существую-
щих не только теоретических моделей, но и реально работающих си-
стем». Однако там же подчеркивается фрагментарный характер как
исследований, так и результатов. Пытаясь вписаться в этот разносто-
ронний строй исследователей, уточним и обозначим наши намерения.
Единого определения робота, как и летательного аппарата, нет. Для
наших целей наиболее интересно определение робота как электронно-
механического устройства, способного к целесообразному поведению в
условиях изменяющейся внешней обстановки. Типовая классификация
роботов включает три основных крупных класса: роботы-манипуля-
торы, роботы-«андроиды» и роботы-автоматы. В ряде работ [15 и др.]
отмечается, что основное отличие робота как машины заключается в
Глава 2
45
свойстве «биологичности» и своего рода естественности решаемых за-
дач и (что, возможно, самое главное) общения во внешнем мире.
Класс потенциально востребованных задач групповой робото-
техники охватывает почти полностью задачи образования компакт-
ной группы, распределения ролей и места роботов в пространстве,
создания различных геометрических форм группы роботов в про-
странстве, координации движения роботов в группе и др. В качестве
основных направлений приведем следующие [15]:
• агрегация (Aggregation). Задача образования компактной группы;
• распределение (Dispersion). Задача распределения группы робо-
тов в пространстве, причем так, чтобы сохранялась возможность
связи между ними и при этом покрывалась нужная область;
• создание форм группы (Pattern Formation). Создание различных
геометрических форм путем изменения местоположения от-
дельных роботов;
• согласованное движение (Collective Movement). Задача коорди-
нации движения группы роботов и их группового перемещения;
• распределение задач (Task Allocation). Задача распределения ро-
лей, фрагментов большой задачи между членами группы;
• поиск источника (Source Search). Поиск некоего источника сиг-
нала, который может быть как точечным, так и распределенным
(источник звука, запаха и т.п.);
• коллективная транспортировка объектов (Collective Transport of
Objects). Совместное перемещение некоторого объекта группой
роботов;
• коллективное картографирование (Collective Mapping). Согласо-
ванное построение карты области.
В Российской Федерации можно выделить несколько групп ис-
следователей, затрагивающих вопросы коллективного управления при
групповом движении объектов управления. С одной стороны, эти груп-
пы ориентированы на решение теоретических задач групповой робо-
тотехники, с другой - на решение прикладных задач группового дви-
жения. Даже удивительно, что в условиях безвременья конца прошлого
- начала этого века удалось сохранить прекрасные научные школы \
1 Автор глубоко сожалеет, что его лучшие научные годы по объективным причинам прошли
вне стен этих научных школ.
46
В. К. Абросимов
Наилучшие теоретические результаты были получены в следую-
щих организациях.
а) Лаборатория «Интеллектуальные системы» НИИ МВС ЮФУ
(школа И.А. Каляева). Лаборатория работает над проблемами создания
интеллектуальных систем уже более 20 лет. К наиболее интересным ре-
зультатам следует отнести итоги НИР «Разработка методов организа-
ции и алгоритмов функционирования распределенных, самоорганизу-
ющихся и реконфигурируемых информационно-управляющих систем
наземных транспортных средств» (2006-2008 гг.) и НИР «Разработка
научных основ организации и функционирования систем группового
управления беспилотными летательными аппаратами при решении за-
дач мониторинга» (2011-2013 гг.). В контексте настоящей работы пред-
ставляются важными публикации [41-49] этой лаборатории;
б) Лаборатория интеллектуальных систем и автономных робо-
тотехнических систем Санкт-Петербургского института информа-
тики и автоматизации РАН (школа В.И. Городецкого). В Институте
проводятся активные исследования по многоагентному моделирова-
нию, моделированию коллективного поведения роботов и их группо-
вому взаимодействию. К числу наиболее интересных практических
разработок относятся [50-54];
в) Лаборатория робототехники НИЦ «Курчатовский инсти-
тут» (школа В.Э. Карпова). В целом лаборатория ориентируется на
разработку моделей социального поведения в групповой робототех-
нике. Здесь получены достаточно интересные теоретические резуль-
таты, включающие математическую модель кооперации роботов как
агентов, подход к управлению поведением роботов, основанный на
механизме эмоций, модели эмоционального и темпераментного пове-
дения роботов. Проводятся исследования командного и «эгоистично-
го» поведения агентов, анализируются процедуры голосования в од-
нородных коллективах роботов, которые позволяют выявлять лидера
в группе, и др. К наиболее интересным работам лаборатории можно
отнести [15, 38-40];
г) НИИ роботехники и процессов управления Южного Феде-
рального Университета (школа В.Х. Пшихопова). Институт прово-
дит активные исследования в области создания воздушных и морских
роботов, интеллектуальных систем управления различными объекта-
ми и системами на основе методов нечеткой логики, искусственных
нейронных сетей и других видов интеллектуальных технологий для
управления автономными подвижными объектами. Системы интел-
Глава 2
47
лектуального группового управления подвижными объектами в ус-
ловиях неопределенности разрабатываются на основе неустойчивых
режимов, нечеткой логики и графо-аналитических методов. Наибо-
лее интересные результаты получены в области так называемых «по-
зиционно-траекторных» систем управления.
К числу наиболее интересных публикаций отнесем [188-192].
д) Институт проблем управления им. Трапезникова (шко-
ла Д.А. Новикова). В работах этой школы определено место теории
группового движения в общей теории управления системами. Дан-
ной школе принадлежит также очень интересная постановка задачи о
«диффузной бомбе» [8], в неявной, но весьма практической форме за-
трагивающей групповое движение. Ряд интересных результатов при-
веден в работах [199-206].
е) группа компаний «Генезис знаний» (Самара) (школа
П.О. Скобелева). Компании ориентированы на решение сложных
задач распределения, планирования, оптимизации, согласования и
контроля ресурсов, когда качество и эффективность принимаемых
решений зависят от реального времени. Каждая компания группы
имеет ярко выраженный инновационный характер и активно разра-
батывает принципиально новые модели, методы и алгоритмы реше-
ния сложных задач, используя теорию сложных адаптивных систем,
сетецентрический подход, онтологии и мультиагентные технологии.
К числу наиболее интересных продуктов компаний отнесем
«Мультиагентную систему планирования совместных действий групп
беспилотных летательных аппаратов». Система представляет собой
эффективный инструмент планирования и управления в реальном
времени совместными действиями беспилотных летательных аппара-
тов, которые могут функционировать как автономно, так и под управ-
лением операторов. Система позволяет определять и согласовывать
порядок совместных действий автономных БАК при совместном
выполнении поставленных задач, строить планы полетных заданий,
определять количество и состав БАК различных типов, необходимых
для гарантированного выполнения решаемых задач. Отличительной
особенностью комплекса является возможность динамической кор-
ректировки полетного задания и роли каждого БАК в ходе его вы-
полнения с учетом текущих наборов технических средств и характе-
ристик в режиме реального времени.
Наиболее интересными являются публикации [55-61, 187] этой
группы компаний.
48
В. К. Абросимов
ж) «Объединенная приборостроительная корпорация» \ К
наиболее интересному научно-техническому решению корпорации
в контексте настоящей работы отнесем комплекс группового управ-
ления беспилотными летательными аппаратами «Вологда». Комплекс
«Вологда» способен одновременно контролировать четыре БЛА, об-
рабатывать и передавать данные воздушного наблюдения в регио-
нальные штабы или ситуационные центры на любые расстояния.
«Вологда» предназначен для воздушного контроля любых объектов
и территорий в режиме реального времени. Он работает с беспи-
лотниками малой дальности, которые не требуют специально под-
готовленных взлетных площадок и могут запускаться практически в
любых условиях. Система управления обеспечивает одновременное
применение беспилотников разных типов от разных производите-
лей. Комплекс «Вологда» может автономно функционировать до семи
суток. Он обеспечивает оперативную доставку персонала и техники,
предполетную подготовку, запуск и управление беспилотниками, он-
лайн-передачу данных на практически неограниченные расстояния в
защищенном режиме, видеоконтроль за окружающей обстановкой.
Включает пять автоматизированных рабочих мест оператора, а также
выносной терминал управления. Для передачи полученной информа-
ции используются спутниковые, радиорелейные, беспроводные кана-
лы связи. Время развертывания комплекса - 15 минут.
В целом развитие научных исследований и прикладных разра-
боток в области робототехники и мехатроники и их использование
в различных сферах Российской Федерации проводятся под общим
управлением Научного Совета по робототехнике и мехатронике РАН.
Нельзя не упомянуть и другие научные школы, работающие
над указанными проблемами в рамках различных научных тем и от-
дельных проектов. К ним , в первую очередь, отнесем исключитель-
но практически ориентированный Центр «Робототехника» МГТУ
им. Н.Э. Баумана, хорошо известный разработками систем управле-
ния роботов и многокомпонентных робототехнических систем; Ин-
ститут проблем морских технологий Дальневосточного отделения
РАН, активно разрабатывающий групповые стратегии управления
для морских объектов; МИРЭА, развивающий технологии автома-
1 В структуру корпорации входят концерн радиостроения «Вега», концерн «Созвездие»,
интегрированная структура «Системы управления» и Центральный научно-исследователь-
ский институт экономики, информатики и систем управления.
Глава 2
49
Наука - это то, чего не может быть. А
то, что может быть, - это не наука, а на-
учно-технический прогресс.
П.Л. Капица
тизации синтеза и обучения интеллектуальных систем управления;
ФГБУН Институт механики им. Р.Р. Мавлютова УНЦ РАН, ИПМ
им. М.В. Келдыша РАН и др. Интерес к разработкам в области груп-
пового управления проявляют крупные промышленные компании
(ГК «Ростех», «Транзас» и др.). Есть и значительное количество от-
дельных исследователей, работающих в этом направлении. Можно
выделить такие публикации, как [62-64 и др.]. На специализирован-
ных конференциях, проводимых в Южном федеральном округе -
«Перспективные системы и задачи управления» (2006-2016 гг.) теме
группового управления
роботизированными ком-
плексами были посвящены
десятки докладов. Важные
и интересные работы про-
водят также организации
Министерства Обороны РФ.
Но если рассматривать исследование указанных проблем груп-
пового движения роботов/агентов/летательных аппаратов за рубе-
жом, то становится явным, к сожалению, российское отставание. По
личной оценке автора, только в Европе работает не менее 350-400 на-
учных коллективов, профессионально исследующих вопросы коллек-
тивного управления группами различных объектов управления. Ста-
тьи по мультиагентным технологиям, например, публикуются более
чем в 50 журналах. Специализированных журналов по этой тематике,
где автор встречал интересные статьи по групповому управлению,
более 10 (Autonomous Agents and Multi-Agent Systems, International
Journal of Agent-Oriented Software Engineering, International Journal of
Agent Technologies and Systems, Cognition and Multi-Agent Interaction,
Web Intelligence and Agent Models и др.)! Только по направлению «ро-
евая робототехника» издаются пять журналов (Swarm Intelligence,
International Journal of Swarm Intelligence, Swarm and Evolutionary
Computation, International Journal of Swarm Intelligence Research,
Swarm Intelligence and Its Applications)!
За рубежом проводится также значительное количество специ-
альных мероприятий, на которых выступают отдельные ученые и
представители научных коллективов по тематике группового движе-
ния летательных аппаратов. Однако в России какой-либо регулярной
специальной конференции по групповому движению в литературе и
в научном окружении автора не обнаружено. Существует и ситуация
50
В. К. Абросимов
терминологической невнятности. Так, принятая логичная иерархия
в организации группы на примере роботов: роевая робототехника в
виде простой однородной совокупности роботов; групповая и/или
стайная робототехника - более сложно организованная структура с
признаками неоднородности и возможным лидерством; коллективная
робототехника и др. - до сих пор в научных кругах не узаконена [15].
Основные направления исследований и разработок целесоо-
бразно выделить, конкретизируя отдельные термины выбранной те-
матики исследований.
Основным ключевым термином в наших исследованиях являет-
ся «летательный аппарат». В русском языке это словосочетание имеет
довольно общий смысл. Но в английском языке есть смысловые раз-
новидности такого понятия:
• Aircraft (airplane) - обычно это любой летательный аппарат тя-
желее воздуха;
• Vehicle - как правило, обозначает обычное транспортное сред-
ство (автомобиль), но активно используется и в космонавтике
для обозначения космических аппаратов различного назначения;
• Helicopter - вертолет и его разновидности;
• Unmanned Aircraft Vehicle (UAV) - специальное обозначение бес-
пилотных летательных аппаратов.
Выделим научные общественные некоммерческие организации,
активно работающие в этом направлении (табл. 1). В их журналах и
трудах конференций публикуются интересные результаты с ключе-
выми словами «группа», «движение», «летательный аппарат».
Отдельно выделим наиболее представительные конференции по
многоагентным системам [65], показанные в табл.2.
Некоторые интересные конференции проводились по этой те-
матике и ранее, но в настоящее время их активность не поддержи-
вается (например: CEEMAS-International Central and Eastern European
Conference on Multi-Agent Systems - последняя конференция в 2007 г.).
К сожалению, за редким исключением, в редколлегиях таких
журналов, в организационных и программных комитетах подобных
конференций, как правило, нет представителей Российской Федера-
ции. Все это лишь подтверждает актуальность настоящей работы.
Глава 2
51
Таблица 1
Зарубежные организации и интересные конференции
с включением в тематику вопросов группового движения
Устойчивое сокращение Организация Устойчивое сокращение Название конференции
IAENG International Assotiation of Engineeries. Организация активно pa- ботает в области изучения инженерных приложений и компьютерных наук, имеет членов более чем в 100 стра- нах мира. ICCIIS International Conference of Computing Intelligence & Intellect Systems
ICAIA International Conference of Artificial Intelligence and Application
IFAC International Federation Automatic Control. Организация занимается проблемами автоматического контроля в области производ- ства, экономики и социаль- нойсферы. ICONS The International Conference of Automatic and Control
IFAAMS International Foundation for Autonomous Agents and Multiagent System Организация специализи- руется по международным исследованиям искусствен- ного интеллекта, автономных агентов и многоагентных систем. AAMAS International Joint Conference on Autonomous Agents and Multiagent Systems Одна из наиболее ин- тересных и представи- тельных конференций в мире
WASET World Academy of Science, Engineering and Technology. Организация объединяет исследователей в 30 областях науки, инженерии и техноло- гий и проводит ежемесячно до сотни разнообразных кон- ференций по всему миру. ICIST International Conference on Intelligent Systems and Technologies
ICSOST International Conference on Smart Objects, Systems and Technologies
IAT International Conference on Intelligent Agent Technology
IADIS International Association for development of the Information Society. Организация ставит главной целью создание кооперации единомышленников для раз- вития сферы информацион- ного общества. MCCSIS Multi Conference on Computer Science and Information System
52
В. К. Абросимов
Окончание таблицы 1
Устойчивое сокращение Организация Устойчивое сокращение Название конференции
KES Knowledge-Based Intelligent Engineering Systems Center. Центр по исследованию интеллектуальных систем Южной Австралии AMSTA Conference on Agent & Mathematical Agent Systems
IEEE Institute of Electrical and Electronics Engineers. Одна из крупнейших между- народных организаций в области инженерии, компью- терных наук и электроники; разработчик национальных стандартов. ICAART The International Conftrence of Agent and Artifitial Intellect
Таблица 2
Зарубежные конференции по многоагентным системам
Инициатор Устойчивое сокращение Название конференции
Университеты Германии MATES German Conference on Multiagent Technologies
Porto Polytechnic University and National Center for Scientific Reseach (France) PAAMS International Conference on Practical Applications of Agents and Multi- Agent Systems
European Assotiation of Multy-Agent Systems EURAMAS European Conference on Multi-Agent Systems
Нет сведений PRIMA Principles and Practice of multi-Agent Systems
Различные научные структуры Европы HoLo MAS International Conference on Industrial Applications of Holonic and Multi-Agent Systems
The Society of Digital Information on Wireless Communication AIPR International Conference on Artifitial Intellect and Pattern Recognition
IEEE CDC IEEE Conference on Decision and Control
International Association for development of the Information Society ICISA International Conference Intelligent Systems and Agents
International Academy, Reseach and Industru Accociation) IADIS INTELLI International Conference on Intelligent Systems and Applications
Глава 2
53
Окончание таблицы 2
Инициатор Устойчивое сокращение Название конференции
International Federation for Informatization Processes ICNP International Conf of Mathematical Problems in Engeneering, Aerospace and Science
Ресурс научных конце- ренций WiKiCFP IVA International Conference on Intelligent Virtual Agents
2.5. Общий научно-технический ландшафт
и программа исследований
Проанализируем современные условия (своего рода научно-тех-
нический «ландшафт»), в которых требуется проведение специальных
исследований группового движения интеллектуальных летательных
аппаратов с использованием современных методов искусственного
интеллекта.
Зафиксируем следующее.
В настоящее время активно разрабатывается новый класс лета-
тельных аппаратов, основным признаком которого является ориен-
тация на интеллектуальную, максимально свободную от вмешатель-
ства пилота/оператора систему управления. При этом характерны
две основные тенденции: сверхвысокие скорости таких аппаратов и
значительное количество аппаратов малых и очень малых размеров.
Особенностью также является возможная разнотипность ЛА, когда
одновременно в пространстве в составе одной группы, выполняющих
общую коллективную миссию, функционируют разнообразные ЛА,
отличающиеся как по своему облику, так и по характеристикам.
Формируются новые условия движения. Движение осуществля-
ется в сетецентрической потенциально враждебной среде. Сетецен-
тричность приводит к тому, что пространство движения оказывается
условно наполненным разнообразной информацией, как полезной,
так и бесполезной. Враждебность среды проявляется в виде ограни-
чений на движение и необходимости активного маневрирования. Вы-
сокий темп смены технологий повышает актуальность исследований
групп летательных аппаратов с учетом их взаимодействия в процессе
движения и коллективного поведения.
Получены существенные научные заделы в области построения
современных сложных систем. К ним можно отнести теорию много-
54
В. К. Абросимов
Только те науки распространяют
свет, кои способствуют исполнению
начальственных предписаний.
М. Салтыков-Щедрин
агентных систем, методы и алгоритмы коллективного поведения и др.
Особую роль занимают так называемые природные алгоритмы, моде-
лирующие поведение биологических объектов в процессе принятия
совместных решений.
Предъявляются новые тре-
бования к управлению движе-
нием. Основное заключается в
способности изменения ранее
принятого решения непосред-
ственно в процессе движения,
посуществу в режиме on-line. Необходимо «осваивать» с единым под-
ходом высоты от 25-30 до 250-300 км при требовании учета предыду-
щих достижений для летательных аппаратов, функционирующих на
высотах до 25 км и выше 300 км. Необходимо ожидать возможных
угроз безопасности в этом же диапазоне высот. Таким образом, тре-
буется разработка единых системных решений во всем диапазоне вы-
сот - от Земли до логично предельных 500 км.
В описанных условиях появляются принципиально новые зада-
чи (рис. 5).
С одной стороны, это создание пространственно-временных
структур движения в агрессивной сетецентрической противодей-
ствующей среде с максимальной степенью неопределенности для
внешнего наблюдателя.
С другой стороны, актуальна и обратная задача - построение си-
стемы обороны и организация соответствующего противодействия
сложной атакующей пространственно-временной структуре, обла-
дающей сушественной неопределенностью в положении и скоростях
движения составляющих ее объектов управления.
Описанный научно-технический ландшафт является доволь-
но новым и сложным для исследования. Понятно, что практические
задачи обнаружения и сопровождения коллективного движения в
рамках описанного ландшафта вызывают необходимость разработки
принципиально новых подходов к созданию систем, обеспечиваю-
щих действия группировки в таких условиях.
Программа фундаментальных научных исследований Рос-
сийской академии наук на 2013-2020 годы (http://www.ras.ru/
scientificactivity/planrf.aspx) выделяет в числе приоритетных следую-
щие исследования:
Глава 2
55
Образование
коллективов
Взаимодей-
ствие
коллективов
Распределение
задач в
коллективе
Реакция
коллектива
на внешние
угрозы
Коллективное
управление
(принятие
решений)
Организация
движения
коллектива
Построение
формаций
коллективами
Рис. 5. Общий научно-технический ландшафт исследования
группового движения летательных аппаратов в сетецентрической среде
56
В. К. Абросимов
• в области математического моделирования в задачах робототех-
ники: разработка математических моделей информационных и
навигационных процессов для роботов в различных операцион-
ных средах;
• в области исследования операций: разработка моделей управле-
ния в реальном времени процессами выполнения ресурсоемких
специальных заданий в условиях неопределенности; моделей
противоборствующих сторон, оперирующих в едином инфор-
мационном поле и проведение анализа принципов ведения бо-
евых действий;
• в области математических методов поддержки принятия реше-
ний, искусственного интеллекта, нейронных сетей: разработка
теоретических основ и информационных технологий структур-
но-функционального синтеза адаптивных и самоорганизую-
щихся информационно-вычислительных систем и сетей на раз-
личных этапах жизненного цикла;
• в области общей теории систем управления информационно-
управляющих систем: создание новых методов и алгоритмов
навигации и управления движением для транспортных авиаци-
онных космических и морских объектов, систем управления ра-
кетно-космической и транспортной техникой нового поколения
в условиях неполной информации об их фазовом состоянии и
параметрах;
• в области интеллектуальных систем управления знаниями: раз-
работка методов группового стратегического принятия реше-
ний в условиях информационного противоборства и неполной
информации; развитие теории управления в мультиагентных
системах, интеллектуального управления группами роботов.
Как следует из этого краткого обзора, тематика настоящей ра-
боты - разработка стратегий управления коллективами летательных
аппаратов в условиях активной враждебной среды - находится пол-
ностью в сфере интересов фундаментальных и прикладных исследо-
ваний российской науки.
Перечень основных системообразующих задач в этом ландшаф-
те выглядит следующим образом.
Формирование обликов перспективных ЛА. Прежде всего не-
обходимо разработать теоретический подход к синтезу обликов
перспективных летательных аппаратов различного назначения. В
Глава 2
57
качестве основных объектов управления следует построить облики
беспилотных ЛА, перспективных микроЛА, гиперзвуковых ЛА.
Формирование коллективов ЛА. Требуется определить, каким
образом, по каким принципам, в каком составе «набирать» коллектив
ЛА с учетом коллективной миссии, которая может быть поставлена.
Распределение задач в коллективе. Коллективную задачу необ-
ходимо декомпозировать, распределив ее по отдельным членам кол-
лектива ЛА. При этом следует учитывать функциональность и роль,
которую в данном коллективе может выполнять ЛА.
Создание системы централизованного или децентрализован-
ного управления коллективом. Управление при этом означает прежде
всего организацию процессов оценки коллективом ЛА и его отдельны-
ми членами текущей ситуации и принятие решений в этой ситуации.
Организация функционирования коллектива. Необходимо по-
строить своего рода «линейку» моделей движения и управления движе-
нием коллектива ЛА - от самых простых до сложных. В процессе постро-
ения таких моделей необходимо также строить, как обеспечивающие,
модели антагонистической сетецентрической среды в виде простран-
ственно-временных ограничений различной конфигурации с учетом не-
четкости как их возникновения, так и возможности движения в таких
областях без потери эффективности решения коллективной задачи.
Построение системы реагирования коллектива ЛА на внешние
угрозы. Необходимо смоделировать поведение коллектива при угро-
зах выполнения коллективной миссии (поломка, недостаток функци-
ональности, уничтожение и др.), входящих в коллектив летательных
аппаратов. Здесь же следует рассмотреть вопросы обмена ролями, не-
обходимости принятия решений в коллективе ЛА при невозможности
выполнения ЛА общей задачи либо в случае гибели отдельных ЛА.
Построение коллективами ЛА заданных формаций. Необходимо
создавать и/или распознавать пространственно-временные структуры,
которые требуются коллективу для выполнения коллективной миссии.
Взаимодействие коллективов ЛА. Сложная задача может ре-
шаться несколькими коллективами ЛА. Еще в одном варианте в ин-
тересах выполнения коллективной миссии коллектив ЛА может рас-
падаться на неравномерные группы. Указанное требует построения
системы общения внутри коллективов и коллективов между собой.
Как видно из изложенного, проблемы более чем масштабные.
Далее попытаемся наметить пути исследования некоторых из них и
покажем примеры отдельных решений.
3. ЛЕТАТЕЛЬНЫЕ АППАРАТЫ
КАК ИНТЕЛЛЕКТУАЛЬНЫЕ АГЕНТЫ
Летательные аппараты тяжелее воздуха
невозможны!
Лорд Кельвин
физик, президент
Королевского Научного Общества
(1895г)
К наиболее интересным идеям при реализации принципов кол-
лективного поведения для летательных аппаратов относится наделе-
ние перспективных ЛА свойствами интеллектуальных агентов \
В работе [66] подчеркивается, что «...большинство исследовате-
лей в области теории и архитектуры агентов считают обязательным
включение в модель агента некоторого подмножества ментальных
свойств, по крайней мере таких, как знания, убеждения и цели. При-
кладные же разработки в этой области развиваются пока своим путем
и только в отдельных из них, в основном на уровне простых прото-
типов, делаются попытки реализовать идею агента с подмножеством
ментальных свойств...».
Рассмотрим эти вопросы подробнее.
В литературе выделяются следующие основные свойства агентов.
1 Всемирно известная компания Gartner (Gartner Identifiesthe Top 10 Strategic Technology
Trendsfor 2016 http://www.gartner.com/newsroom/id/3143521) включала, например, мультиа-
гентные технологии наряду с интернетом вещей, сервисными архитектурами, микросерви-
сами и др., в top-10 технологических тенденций IT-индустрии на 2016 г.
Глава 3
59
Автономность (autonomous). Под этим понимается способность
агента функционировать без вмешательства человека и при этом осу-
ществлять самоконтроль над своими действиями и внутренним со-
стоянием [66]. Определение допускает разнообразные интерпрета-
ции применительно к ЛА. Действительно, терминологически наличие
на ЛА автономной системы управления уже делает его автономным.
В силу многоплановости термина «автономное управление ЛА» ис-
ключим в дальнейшем из рассмотрения многочисленные вопросы
автономного управляемого движения (навигация, наведение, устой-
чивость и др.) В данной работе под автономностью будем понимать
самостоятельность выработки стратегии поведения и переговоров с
другими агентами без вмешательства человека (Лидера).
Таким образом, ЛА-агент находится и функционирует в составе
коллектива (возможно, неиерархической структуры) при возможном
отсутствии Лидера и реализует алгоритмы выбора собственной стра-
тегии поведения с учетом необходимости следования стратегии по-
ведения всей группировки.
Общественное поведение (socialability). Это способность функ-
ционировать в сообществе с другими агентами, обмениваясь с ними
сообщениями с помощью некоторого понятного языка коммуника-
ций [66]. Любой летательный аппарат, который обладает системой
связи (радио, видео и др.) способен двигаться в группе себе подоб-
ных и активно обмениваться информацией. Мы также будем пред-
полагать возможность обмена информацией с другими ЛА-агентами
в режиме on-line. Достаточно сложные вопросы связи в противодей-
ствующей среде находятся вне рамок настоящей работы. Отношение
к связи будет рассматриваться на логическом уровне: «связь есть» или
«связи нет». Таким образом, ЛА-агент, двигаясь в сетецентрической
противодействующей среде, способен определять свое местонахож-
дение, имеет от-line доступ к общим информационным ресурсам,
описывающим характеристики других ЛА-агентов. При этом допу-
скаются потеря и отсутствие связи на непродолжительное время.
Наличие целей (goals). Цели определяются множеством конеч-
ных и промежуточных состояний, достижение которых агент при-
нял в качестве текущей стратегии поведения [66]. Очевидно, что цели
могут быть сформулированы в виде последовательности (плана) дей-
ствий ЛА. У агента будем выделять два типа целей - индивидуальные
и коллективные. В идеальном случае индивидуальные цели подчине-
ны коллективным.
60
В. К. Абросимов
Таким образом, ЛА-агент самостоятельно формирует План дей-
ствий в виде последовательности целей, при необходимости коррек-
тируя План в процессе переговоров с другими ЛА-агентами.
Реактивность (reactivity). Под реактивностью понимается спо-
собность воспринимать состояние среды и своевременно отвечать
(реагировать) на те изменения, которые в ней происходят [66]. Этот
вопрос может решаться за счет системы датчиков и настройки систе-
мы управления ЛА на действия от датчиков. Предположим, что состо-
яние среды ЛА-агент воспринимает через информацию, находящую-
ся на общем интернет-ресурсе. Такая информация может сообщаться
как ЛА-агентами, на которых установлена соответствующая аппара-
тура, так и иными обеспечивающими структурами, например, систе-
мой космических аппаратов мониторинга ситуации либо данными
систем разведки (в военно-технических задачах).
Таким образом, по нашим предположениям ЛА-агент получает
информацию об агрессивности окружающей сетецентрической сре-
ды из общего ресурса и мгновенно на нее реагирует (для практиче-
ских задач - принимает решение об обходе препятствия, получив ин-
формацию о его местоположении и характеристиках).
Наличие знаний (knowledge). Здесь под знаниями понимается
постоянная часть информации, которой обладает агент о себе, среде
и других агентах, т.е. та часть, которая не изменяется в процессе его
функционирования [66]. Оснащение системы управления ЛА базой
знаний для современных ЛА не представляет существенных проблем.
Проблема как раз в другом - в наполнении таких баз знаниями. Но
это тема отдельного исследования.
Таким образом полагаем, что ЛА-агент имеет собственную, по-
стоянно актуализируемую базу знаний, используемую для выработки
стратегий управления и участия в переговорах.
Наличие обязательств
(commitments). Обязательства
по отношению к другим аген-
там формируются как задачи,
которые агент берет на себя по
просьбе (поручению) других
агентов в рамках кооперативных целей или целей отдельных агентов
в рамках сотрудничества [66]. Мы предполагаем, что в рамках коллек-
тива ЛА могут быть ЛА-агенты с разной степенью обученности «кол-
лективизму». Это может выражаться в требовании приоритетности
Единственное, что человек делает всег-
да искренне, так это заблуждается.
Хань-Сяо-Цзы,
китайский философ VIII в.
Глава 3
61
выполнения задачи выбранным ЛА по сравнению с другими, наличии
у ЛА еще и других задач в рамках действий в составе других коллекти-
вов. Как представляется, остальные ЛА-агенты должны знать о том,
существуют ли у других агентов обязательства по отношению к ним.
Таким образом, ЛА-агенты имеют собственные мнения относи-
тельно обязательств по отношению к другим агентам, которые реали-
зуются через поведение в переговорах.
Наличие убеждений (beliefs). Убеждениями считаются знания
агента о среде и о других агентах. Предполагается, что агент основы-
вает на этих знаниях свои выводы. Такие знания могут изменяться во
времени и становиться неверными, однако агент может не иметь об
этом информации и продолжать оставаться в убеждении, что на них
можно основывать свои выводы [66]. Знания ЛА-агента могут быть
получены либо путем обмена информацией с другими агентами, либо
из единого источника, откуда будет поступать информация для всех
ЛА-агентов. В этом контексте можно было бы систематизировать всю
информацию о среде и других агентах в некотором «облаке», которое
бы и стало источником убеждений.
Таким образом, ЛА-агенты специально не формируют убежде-
ния; информацию о среде и других агентах они получают при доступе
к специальному информационному пространству - «интернет-обла-
ку»; при этом информацию о себе, своих возможностях, желаниях и
намерениях они также выкладывают в это «облако».
Наличие желаний (desires). Желаниями в многоагентном подхо-
де считаются состояния и ситуации, достижение которых по разным
причинам является для агента желательным, однако они могут быть
противоречивыми [66]. Желания ЛА-агента применительно к задачам,
решаемым в настоящей работе, по существу совпадают с теми задача-
ми, которые ему будут ставиться или он будет решать в соответствии
с определенной ролью. Задачи, роли и предпочтения ЛА-агента могут,
действительно, не совпадать. ЛА-агент не может не иметь стремления
максимально оптимизировать свои ресурсы и использовать свои воз-
можности. Роль же может потребовать изменения желаний агента.
Таким образом, ЛА-агент формирует свои желания как задачи,
которые он может реализовать, исходя из своих возможностей и оп-
тимизируя свои ресурсы на решение этих задач.
Наличие намерений (intentions). Намерения вытекают из жела-
ний агента и из обязательств агента по отношению к другим агентам.
Очевидно, что намерения на должны противоречить обязательствам
62
В. К. Абросимов
[66]. Намерения ЛА-агента представляют собой действия по реали-
зации желаний. Однако наличие обязательств способно существенно
скорректировать намерения и ограничить желания.
Таким образом, ЛА-агент будет намереваться решать задачи и
реализовывать свои желания, но учитывать и наличие обязательств.
Обладание мобильностью (mobility). Под этим понимается спо-
собность агента мигрировать по сети в поисках необходимой инфор-
мации для решения своих задач, при кооперативном решении задач
совместно или с помощью других агентов и т.д. [66]. Данное свойство
больше относится к программным агентам. ЛА, которые представ-
ляются как агенты, по определению являются мобильными, т.е. спо-
собными перемещаться в фазовом пространстве, образуя различные
пространственно-временные структуры.
Наличие благожелательности (benevolence). Это готовность
агентов помочь друг другу и готовность агента решать именно те за-
дачи, которые ему поручает или о которых просит член коллектива,
что предполагает отсутствие у агента конфликтующих целей [66].
Указанное свойство является особо важным именно для групп
агентов. Вместе с тем анализ показывает, что это свойство слишком
«тонкое», чтобы использовать его активно в практических целях.
Правдивость (honesty) - свойство агента не манипулировать ин-
формацией, о которой ему заведомо известно, что она ложна [66].
В нашем исследовании мы предполагаем, что свойство правди-
вости присуще ЛА-агентам по определению.
Рациональность (rationality). Это свойство агента действовать
так, чтобы достигнуть своих целей, а не избегать их достижения,
по крайней мере в рамках своих знаний и убеждений [66]. В теории
принятия решений поведение всегда предполагается рациональным.
Вместе с тем это соответствует только тем коллективам, в которых
нет дружественных отношений. В дружеских коллективах такие из-
вестные человеческие отношения, как дружба, сотрудничество, вза-
имопомощь и др., при формировании аналогов для ЛА-агентов по-
тенциально предопределяют иррациональное поведение объектов
управления, например, «жертвенность», взятие на себя дополнитель-
ных задач и др. Указанное должно реализовываться через алгоритмы
переговоров агентов в спорных ситуациях и при формировании алго-
ритмов коллективного поведения.
Проактивность (pro-activity). Это свойство описывает способ-
ность агента брать на себя инициативу, т.е. способность генерировать
Глава 3
63
цели и действовать рационально для их достижения, а не только реа-
гировать на внешние события [66]. Свойство проактивности для ЛА-
агентов связано с интеллектуальностью их систем управления, спо-
собностью оценивать ситуацию и принимать решения буквально на
борту ЛА в режиме on-line. По существу проактивность определяется
наличием совокупности других уже упоминавшихся выше свойств
- рациональности, намерений, убеждений, обязательств и др. Таким
образом, свойство проактивности становится не отдельным, а инте-
гральным свойством. Очень важное значение имеет это свойство для
формирования стратегий поведения ЛА в группировке и разработке
стратегий самих группировок ЛА, в которых в процессе проведения
переговоров агентов должны вырабатываться четкие требования по
распределению ролей ЛА-агентов с учетом их лидерских качеств.
Рис.6. Свойства летательного аппарата как агента
Как видно из вышеизложенного, характеристики и функциональ-
ность летательных аппаратов понятно интерпретируются как свойства
агентов. Анализ показывает, что у агента, как математической конструк-
ции, нет таких свойств, которые нельзя было бы реализовать в совре-
менных системах управления летательных аппаратов. Действительно,
ЛА по определению мобильны. Ни один ЛА не начинает функциони-
ровать без целеполагания, либо такое целеполагание вырабатывается в
процессе решения групповой задачи. «Общественность» поведения ре-
64
В. К. Абросимов
ализуется путем использования современных каналов связи. Свойство
реактивности отрабатывается системой управления. Наличие знаний
приобретается за счет информации, поступающей от разнообразных
датчиков, а также по каналам связи и управления. Такие своего рода
экзотические для летательных аппаратов свойства, как обязательства,
убеждения, намерения, желания и др. (включая даже благожелатель-
ность и правдивость), как будет показано ниже, могут вырабатываться
в результате обучения системы управления соответствующим действи-
ям в различных ситуациях, т.е. включением в состав системы управле-
ния экспертного блока с соответствующей базой знаний
Таким образом, идея автора заключается в том, чтобы каждому
ЛА группировки поставить в соответствие интеллектуального аген-
та с соответствующими свойствами, интерпретировать его как ЛА-
агента и далее применить теорию многоагентных систем для решения
задач движения ЛА. Эта теория активно развивается, и многие теоре-
тические элементы в ней уже хорошо проработаны [12, 67-71].
Агент будет представлять ЛА в процессе моделирования. Та-
кой ЛА-агент действует автономно (автономность, мобильность,
рациональность), самостоятельно обрабатывает информацию (ре-
активность), принимает решения в зависимости от текущей ситуа-
ции (целеполагание, желания, намерения), но в интересах решения
общей коллективной миссии (обязательства). Он взаимодействует
с другими ЛА-агентами, обменивается информацией с ними через
установленное интернет-пространство с использованием облачных
решений (наличие знаний), информирует о своем текущем состоя-
нии, стратегии действий, степени выполнения порученной ему или
взятой на себя в результате переговоров агентов роли (общественное
поведение, правдивость). При этом каждый ЛА-агент учитывает цели
и намерения других ЛА-агентов (общественное поведение). Если
один или несколько ЛА-агентов по некоторой объективной причи-
не (сложные условия, влияние враждебной среды, недостаток ресур-
сов, гибель и др.) не может выполнить порученную задачу, то другие
ЛА-агенты могут взять на себя новые задачи, если у них есть на это
соответствующие ресурсы и возможности (обязательства, проактив-
1 Коллеги и друзья автора, работающие в области создания систем управления современ-
ных летательных аппаратов, подтверждают такую возможность. Правда, это потребует
определенных и довольно значительных усилий, но, как говорят, «Viam supervadet vadens»
(лат.) - «дорогу осилит идущий».
Глава 3
65
ность, благожелательность). В случае крайней необходимости ЛА-
агент даже может пожертвовать собой ради выполнения коллектив-
ной миссии (убеждения, обязательства).
Именно на этой основе целесообразно в дальнейшем разрабаты-
вать алгоритмы коллективного поведения группы ЛА.
Каждый к-й ЛА обладает собственными характеристиками, объ-
единенными в кортеж {vk, tk, Fk} \ где vk - средняя скорость движения
ЛА от одного объекта к другому; tk - максимальное время движения
ЛА, определяемое его запасами энергетики; Fk - функционал1 2, отра-
жающий возможности ЛА по решению задач, определяемые установ-
ленной на нем аппаратурой и техникой. Однако, рассматривая ЛА как
интеллектуального агента (Vfc), можно дополнительно описать его
информационным кортежем:
V, = <Кп, , Int,, St, Bel, , ОЫ. >, k= 1,..., К, (1)
к к к к’ к к v '
где Кпк - база знаний Vk\ Intk - множество намерений Vk; Stk - множе-
ство возможных стратегий действий Vk; Belk - множество убеждений
Vk; ОЫк - множество обязательств Vk.
Раскроем содержание входящих в выражение (1) аббревиатур.
База знаний Кпк представляет собой совокупность априорных
данных о приоритетности задач, важности объектов, прогнозируе-
мых препятствий на маршруте движения, степени опасности в районе
отдельных объектов (целей) и по маршруту движения к ним. Указан-
ные сведения частично являются априорными, частично обновляют-
ся ЛА-агентами в процессе решения задач. По нашему мнению, база
знаний для всех ЛА-агентов может быть единой, формироваться пу-
тем размещения на некотором информационном облачном ресурсе
и включать, например, для типовых задач мониторинга N объектов,
следующую информацию:
• степень значимости объектов (рп е [0,1] Vn е N;
• интенсивность ситуации на объектах рп е [0,1] Х/п g N;
• матрицы |U| интенсивности ситуаций на маршруте следования
между объектами п. и п. с элементами р.. е [0,1], Vп. е N, Х/п. е N, zVj;
1 Перечень основных обозначений, используемых в монографии, находится на С. 292-300
2 Здесь и далее термин «функционал» употребляется не в математическом, а в техническом
смысле, как совокупность функций, реализуемых летательным аппаратом, - движение, ма-
неврирование, мониторинг, распознавание объекта на борту и др.
66
В. К. Абросимов
• опасности функционирования в е-окрестности и-го объекта:
Р е [0,1] Vn g N;
• матрицы |Р| с элементами р.. е [0,1], Ун. g N, Vn. g N, i*j степени
опасности на маршруте следования между объектами п. и п..
Множество Intk намерений ЛА-агента определяется в результате
формирования маршрута движения, распределения ролей и закре-
пления целей за конкретными ЛА-агентами при выполнении кол-
лективной задачи. Наиболее эффективный маршрут для ЛА-агента
включает совокупность объектов, интегрально достижимых с ис-
пользованием его минимальных ресурсов (топлива, времени и др.).
При этом ЛА-агент объявляет о своих намерениях, размещая инфор-
мационном на облачном ресурсе информацию о заданном ему марш-
руте, а именно: присваивая условному показателю и-го объекта а”
значение, равное единице (ак := 1), и указывая время когда этот
объект будет посещаться/обследоваться/уничтожаться.
Множество Stk возможных стратегий поведения ЛА-агента объ-
единяет множество действий, реализуемых им в процессе решения
задач. Принципиально при этом ЛА-агент:
а) выполняет задачу, определенную ему ролью и полученную в ре-
зультате предварительного целераспределения;
б) корректирует на информационном облачном ресурсе данные:
о ситуации на маршруте; о ситуации, наблюдаемой им на объ-
екте; о своем текущем состоянии;
в) участвует в переговорах агентов по решению коллективной за-
дачи;
г) продолжает выполнять собственную задачу, или получает либо
берет на себя новые задачи.
По существу стратегия поведения ЛА-агента определяется
маршрутом и алгоритмом его корректировки при необходимости.
Множество Ве1к убеждений ЛА-агента обусловливается инфор-
мацией о ситуации при выполнении коллективной миссии. Убеждения
разделим на три основные группы. К первой относятся так называемые
внутренние убеждения ЛА-агента - алгоритмы, сценарии, оценки, за-
ложенные в него при разработке, обучении или внесенные в процессе
решения задач. В наших условиях все внутренние убеждения система-
тизируются в базе знаний Vk. Ко второй группе отнесем индуктивные
Глава 3
67
убеждения. Они возникают в результате on-line анализа степени враж-
дебности среды и формируются продукционными правилами вида:
если наблюдается фактХ, то возникает убеждение Y. Например: «если
X: степень опасности посещения и-го объекта превышает заданную
(Л* > Л®’) и возможности ЛА-агента Vk по преодолению этой опасности
ограничены (hk < hk), то Y: объект п исключается из маршрута Мк». К
третьей группе отнесем коммуникативные убеждения, возникающие
в результате взаимодействия с другими агентами. Такие убеждения
формируются продукционными правилами вида: если А сообщает о
факте X и А - источник группы, то возникает убеждение Z. Например:
«Если V/A) на пути следования между объектами п. и п обнаружи-
вает ситуацию X (например, повышение степени интенсивности ^„)»
и «Vk имеет необходимый ресурс гкп для достижения объекта п », то
формируется маршрут Мк.
При движении про-
странственно-временная
ситуация для отдельных
ЛА-агентов может сло-
житься неблагоприятно.
Это требует отказа от ранее
решаемых ими задач, пере-
ориентации на решение
других задач или даже пре-
кращения решения задач и возврата ЛА на исходное положение (аэ-
родром, космодром, дронодром, базу и др.) Действуя как агент, любой
ЛА посредством информации на информационном облачном ресурсе
может получать сведения о необходимости решения дополнительных
задач, предлагать свои ресурсы, заявлять о своей готовности обследо-
вать/разведывать/уничтожать/обеспечивать и дополнительные цели.
Именно это и составляет обязательства ЛА ОЫк. Обязательства могут
также выстраиваться как иерархическая структура, когда между ЛА
устанавливается некоторая иерархия по управлению; тогда обяза-
тельства определяются из условий подчиненности Лидеру.
В специальной литературе выделяют различные способы рас-
пределения и контроля выполнения задач для группировки ЛА. Для
первого способа агент-«менеджер» самостоятельно распределяет за-
дачи и контролирует их выполнение. Во втором варианте распреде-
ление осуществляется по принципу торгов, когда агент-«менеджер»
...Недалеко то время, когда искусствен-
ный интеллект осознает себя как некую
индивидуальность. В этот момент у него
появятся свои планы, свои мотивы, свои
цели, и, я вас уверяю, мы не будем входить
в этот смысл...
Нейролингвист
Татьяна Черниговская
68
В. К. Абросимов
распространяет объявление об общем задании, а потенциальные
агенты-«исполнители» предлагают свои услуги, и победитель отбира-
ется в результате конкурса. В третьем варианте распределение задач
осуществляется путем соревнования, когда агенты-«исполнители»
дают свои предложения уже на уровне отдельных задач, а роль «ме-
неджера» сводится к контролю и координации их действий. В нашем
случае инициатором переговоров становится ЛА-агент, объявивший
о своих проблемах и невозможности решения задач, а переговоры
проводятся по принципу дружеского аукциона. Победителем призна-
ется ЛА, имеющий максимальный остаточный ресурс решения новых
задач (например, для мониторинга вновь появившихся необследован-
ных объектов) в рамках выполнения общей коллективной миссии.
Итак, перед нами новый тип летательного аппарата - ЛА-агент.
Внешне никаких отличий от самолета, вертолета, беспилотника, кры-
латой, гиперзвуковой ракеты соответствующий ЛА-агент не имеет.
Однако при построении его модели поведения и разработке системы
управления движением, наряду с традиционными свойствами - мо-
бильности, автономности, реактивности - разрабатываются блоки,
реализующие нестандартный в настоящее время для ЛА функционал:
обладание базой знаний с собственной системой убеждений; целепо-
лагание, выраженное в форме желаний и намерений; обмен информа-
цией с другими ЛА через выделенный интернет-ресурс; обученность
при необходимости «жертвенности» в противовес рациональности;
готовность в составе группы занимать различные роли и выполнять
коллективную миссию.
4. СЕТЕЦЕНТРИЧНОСТЬ СРЕДЫ.
ПРИНЦИП СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ
Вот если можно -
соединить отвертку и наукоемкое содержание
Шутка Президента России
В.В. Путина
Слово «сетецентрический» в соответствии с правилами русско-
го языка является прилагательным. Это позволяет образовывать раз-
личные сочетания с другими сущностями, что, как оказывается, силь-
но размывает смысл сетецентричности. Ниже приводятся наиболее
часто используемые с этим понятием словосочетания.
Сетецентрический метод. Пример: «...Сетецентрический метод
организации информационного взаимодействия киберфизических
объектов и их доступа к различным телематическим сервисам при
помощи многоуровневой гетерогенной виртуальной сети...» [72].
Сетецентрический принцип. Пример: «...Сетецентрический
принцип позволяет собрать в единое информационно-коммуника-
ционное пространство все космические, авиационные, сухопутные и
иные средства, средства разведки и поражения. Видеть в реальном мас-
штабе времени всю страну, а в перспективе весь мир. И соответственно
обстановке применять необходимые в данный момент силы» [73].
Сетецентрические технологии. Пример: «...Сетецентрические
технологии подразумевают наличие единого информационного про-
странства, а также ориентированность в первую очередь на сеть...» [74].
Сетецентрическая архитектура. Пример: «...Сетецентрическая
архитектура боевого управления и связи будет реализована в полном
70
В. К. Абросимов
объеме для всех вооруженных сил США, как это декларирует руко-
водство страны, и преимущества применения данного подхода оче-
видны..» [75].
Сетецентрическое управление. Пример: «...Основой сетецен-
трического управления является компьютерная система управления
электронным документооборотом...» [76]
Сетецентрический подход. Пример: «...Сетецентрический под-
ход построения информационной системы основан на создании рав-
ноправных территориально-распределенных узлов, выполняющих
различные функции и предоставляющих пользователям возмож-
ность работы с приложениями и базами данных с помощью браузера
из любого места и с любого устройства, подключенного к Интерне-
ту....» [77].
Сетецентрическая система. Пример: «...Актуальным нужно
считать создание сетецентрических информационно-ударных систем
регионального уровня, обеспечивающих оперативное наращивание
потенциала сдерживания и деэскалации агрессии против Российской
Федерации и ее союзников...» [78].
Сетецентрический алгоритм. Пример: «...Рассматриваются во-
просы разработки сетецентрического интерактивного алгоритма уда-
ленного управления робототехническим объектом с использованием
механизма силомоментного очувствления...» [173].
Согласно общему мнению участников круглых столов «Парадокс
сетецентричности: секреты эффективного применения БАК и иных
источников информации», проводимых на международных выстав-
ках «Интерполитех-2011 и UVS-TECH-2011», «...под сетецентрично-
стью в современной России понимается «замыкание» управления на
разветвленную сеть связи. Каждый элемент системы получает воз-
можность взаимодействовать с любым иным. Сеть связи становится
основой управления ...»
Сетецентричность - принцип организации систем управления,
позволяющий реализовать режим ситуационной осведомленности,
благодаря формированию и поддержанию единой для всех ярусов
управления, целостной, контекстной информационной среды и вклю-
1 Когда автор молодым лейтенантом выдавал такого рода «откровения» в своих научных
отчетах, на полях руководство писало «Причем здесь мамины галоши?» [186].
Глава 4
71
чения в процесс ее непрерывной актуализации возможно большего
числа источников первичной информации [79].
Сетецентричность - это свойство системы, совокупности си-
стем или организаций, которая определяет открытость для взаимо-
действия с другими схожими сущностями, способность к быстрой
адаптации к непредвиденным взаимодействиям (оправданным в рам-
ках целей) и допустимую стоимость реализации этих возможностей
с помощью сети [80]. Техническим стандартом для построения таких
систем является сервис-ориентированная архитектура (англ, service-
oriented architecture, SOA) - парадигма организации и использования
распределенных информационных ресурсов, находящихся в сфере
ответственности разных владельцев, для достижения желаемых ре-
зультатов потребителем, который может быть конечным пользовате-
лем или другим приложением [81].
Идеологи «сетецентрической войны» - американцы вице-ад-
мирал Артур Себровски и эксперт Министерства обороны США
Джон Гарстка отмечали, что их концепция - это не только разверты-
вание цифровых сетей с целью обеспечения как вертикальной, так
и горизонтальной интеграции всех участников операции. Это еще и
«...изменение тактики действия перспективных формирований с рас-
средоточенными боевыми порядками, оптимизация способов раз-
ведывательной деятельности, упрощение процедур согласования и
координации огневого поражения, а также некоторое нивелирование
разграничения средств по звеньям управления...» [82].
По основному вопросу реализации концепции «сетецентриче-
ской войны» началась настоящая «сетецентрическая лихорадка». В
НАТО реализуется концепция «Комплексные сетевые возможности»
(NATO Network Enabled Capabilities), во Франции - «Информацион-
но-центрическая война» (Guerre Infocentre), в Швеции - «Сетевая
оборона» (Network Based Defense), в Китае - «Система боевого управ-
ления, связи, вычислительной техники, разведки и огневого пора-
жения» (Command, Control, Communications, Computers, Intelligence,
Surveillance, Recognizance & Kill) и т.д. Именно в сетецентризме во-
енные зарубежных стран видят инновационный инструмент повы-
шения боевых возможностей вооруженных сил и вполне объективно
рассчитывают на получение экономической выгоды [83].
Как правило, название концепции отражает ее основную суть.
Концепция же сетецентричности, как оказалось, «выбивается» из это-
го правила. Действительно, внимательное рассмотрение многочис-
72
В. К. Абросимов
ленных публикаций показывает, что, используя привлекательность
термина, авторы активно исследуют премущества сетецентричности,
связанные с ориентацией на сетевые решения и циркулирование ин-
формации в сетях. Между тем идеологи сетецентрического подхода
выделяли в числе основных совсем иное: «процедуры согласования и
координации». Как показывают работы, в которых исследуются такие
процедуры, именно они и дают основной эффект использования сете-
центрической парадигмы.
Действительно, автономные информационно-логические струк-
туры, объединные в сети, функционируют сравнительно самостоя-
тельно. Между ними возможно перераспределение нагрузки и даже
задач; для этого требуется введение достаточно жестких соглашений
и правил поведения. Сеть, построенная на основе таких принципов,
имеет важное преимущество - стабильность - и готовность реаги-
ровать на изменения (в рамках определенных заранее соглашений).
Но такая сеть имеет и крупный недостаток, вытекающий из этого до-
стоинства: стабильность не позволяет работать с нестандартными
ситуациями. Кроме того, идеальных коллективов, как хорошо извест-
но, не бывает. Как только в задаче возникают вопросы оптимизации,
то даже в правильно организованном и мотивированном коллективе
возникают противоречия. Именно такие ситуации и возникают в ан-
тагонистических средах.
Таким образом, внимательное рассмотрение принципов сете-
центричности показывает, что основной смысл сетецентричности -
не сети, и даже не информация, а согласование и координация! Ин-
формация при этом является необходимым, а сети - достаточным ус-
ловием реализации сетецентричности.
Концепция сетецентричности неразрывно связана с понятием
«ситуационная осведомленность». В нем выделяют три образующих
элемента: информация о том, что происходит вокруг; понимание соб-
ственных действий и действий других участников; прогнозирование
сценария развития ситуации. Эффективность использования ситуа-
ционной осведомленности приравнивается ведущими специалиста-
ми мира к изобретению огнестрельного оружия!
Очевидно, что все используемые для выполнения коллективной
миссии объекты управления должны рассматриваться как постав-
щики информации. Действительно, анализ показывает, что главной
проблемой современных систем является отсутствие информацион-
Глава 4
73
но-коммуникационной сети, реализующей принцип «ситуационной
осведомленности».
В чем данный принцип может проявляться практически?
Технические средства, осуществляющие мониторинг (роботы,
авиация, антенны, датчики и др.), в каждый момент времени нахо-
дятся в некоторой точке пространства. Они проводят оценку ситу-
ации в соответствии со своими ограниченными возможностями и
таким образом способны действовать лишь в своей узкой сфере от-
ветственности. Разделим условно теперь все пространство движения
на элементарные подпространства, своего рода «ячейки». Опишем их
параметрами положения центра ячеек в пространстве и размерами. В
результате получим пространственную «ячеистую» сеть. Условно раз-
местим в узлах такой сети разнообразную информацию: о том, какой
аппарат находится или собирается через определенное время нахо-
диться в ячейке; какие события происходят в этой ячейке простран-
ства; как ситуация в ячейке будет развиваться и др. Если допустить к
информации такой информационно-пространственной сети все объ-
екты управления, то они будут обладать всей полнотой информации.
В настоящей работе для задач организации движения коллек-
тивов летательных аппаратов предлагается реализовывать принцип
ситуационной осведомленности с использованием стандартных об-
лачных интернет-решений. Для этого в интернет-пространстве выде-
ляется ресурс с заданной структурой контента, к которому в режиме
on-line могут обращаться все ЛА как для получения, так и для раз-
мещения информации. На таком ресурсе предлагается выкладывать
предназначенную для всего коллектива информацию в трех различ-
ных по содержанию разделах:
• «Ситуация». В этом разделе аккумулируется текущая информа-
ция о реальной ситуации в области функционирования;
• «Пространство». В разделе описывается состояние самой «ячей-
ки» пространства: ее пространственное положение; нахождение
в ячейке в данный момент объекта управления и направление
его движения; степень опасности нахождения в данной подобла-
сти и др.;
• «Объект управления». Раздел содержит информацию о состо-
янии всех ЛА, осуществляющих мониторинг (маршрут, время
вылета, ожидаемое время появления в «ячейках», выполняет за-
дачу, не исправен, имеет остатки ресурсов и др.).
74
В. К. Абросимов
В ряде работ по многоагентным системам значительное внима-
ние обращается на проблемы передачи информации между агентами.
В частности, предполагается, что агенты могут получать информа-
цию дискретно, причем с различными временными интервалами. С
нашей точки зрения современные информационные технологии су-
щественно снижают требования к таким условиям связи. Будем пред-
полагать, что доступ объектов управления к общему интернет-ресур-
су осуществляется в режиме on-line и не ограничен1.
Тогда на таком ресурсе можно хранить описание каждой ячей-
ки, которую нужно обследовать, например, в виде кортежа с состав-
ляющими: координаты центра ячейки в пространстве; параметры
размеров ячейки; условное значение интенсивности ситуации (на-
пример чрезвычайной ситуации) в ячейке; индикатор того, что ячей-
ка обследована; условный номер объекта управления, назначенно-
го для обследования данной ячейки; момент времени, когда ячейка
обследована/будет обследована; количество фактов обследования
ячейки и др. Такая информационная сеть формирует совершенно но-
вые функции. Можно говорить, о том, что при использовании прин-
ципа ситуационной осведомленности on-line мониторинг ячеичного
пространства становится не просто обеспечивающим, а определяю-
щим процессом. В рамках системы мониторинга такого типа инфор-
мацию, получаемую on-line, можно использовать непосредственно
для принятия коллективных решений. В зависимости от ситуации
это становится исходными данными для корректировки первона-
чальных сценариев действий коллектива для обследования объектов
мониторинга соответствующими летательными аппаратами как при
изменении маршрутов.
1 Автор отдает себе отчет в том, что для многих военно-технических задач такое предпо-
ложение может быть подвергнуто критике, но задачи пространственно-временной органи-
зации связи и противодействия связи - предмет другого исследования.
5. КОЛЛЕКТИВ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
И ЛЕТАТЕЛЬНЫЙ АППАРАТ В КОЛЛЕКТИВЕ
Со стадом баранов справляется и пара овчарок,
а попробуйте управлять стаей кошек!
П.Л. Капица,
выдающийся советский физик
Общие рекомендации по созданию коллектива лучше всего про-
иллюстрировать положениями самого четкого в мире документа:
«...военнослужащий обязан ...знать свое место в строю, уметь бы-
стро, без суеты занять его; в движении сохранять равнение, установ-
ленные интервал и дистанцию» (Строевой Устав ВС РФ, ст. 26 ). По
аналогии с этим при движении в агрессивной среде для выполнения
коллективной задачи агент должен знать свое назначение (роль) в
коллективе и четко его выполнять, будучи готовым к различным не-
стандартным действиям.
Терминология группового движения ЛА, к сожалению, приходит
в отечественную литературу из зарубежной англоязычной литературы.
Группа ЛА (Fleet). В англоязычной специальной литературе сло-
во fleet имеет много значений, но в нашем контексте, скорее, тракту-
ется как «флот, флотилия». Наиболее часто в научных статьях мож-
но встретить словосочетание fleet of vehicles, что в научной деловой
лексике означает «парк транспортных средств», т.е. в русском вари-
анте просто «автопарк». Намного реже встречается калька с русского
«group of vehicles», которая переводится как «группа транспортных
средств», при этом чаще всего имеются в виду...снова автомобили.
76
В. К. Абросимов
Более интересно словосочетание «fleet ballictic missile», которое
уже носит четкий смысловой оттенок. Однако здесь слово «fleet» ис-
пользуется в прямом смысле как «флот» или «флотилия» и касается
баллистических ракет подводных лодок и/или ракет надводных кора-
блей. «Fleet aircrafts» описывает совокупность авиационных средств.
Определение коллектива ЛА, как наиболее интересного для нас
предмета исследования, целесообразно сформулировать по итогам
рассмотрения ее возможных видов и структур.
Группировка ЛА (Group, grouping). В научной литературе тер-
мины «группа» и «группировка» часто рассматриваются как синони-
мы. Для российского исследователя интуитивно понятно, что слово
«группировка» в смысловом отношении несколько шире понятия
«группа». Сравним: группировка войск и мобильная группа десант-
ников. При решении практических задач часто группировка решает
не одну, а ряд разнообразных задач в интересах выполнения общей
миссии. Поэтому дадим следущее определение.
Определение. Группировка ЛА - это совокупность ЛА, состоящая
из групп ЛА, объединенных решением частных задач в интересах вы-
полнения коллективной миссии, поставленной перед группировкой.
Таким образом, отличительная особенность группировки - ко-
личество входящих в нее объектов управления.
В смысловом отношении группировка обозначает только значи-
тельное количество ЛА. Поэтому говорить о создании группировки
для выполнения коллективной миссии вообще недостаточно. Требу-
ется указание особенностей управления ею и ее поведения в процессе
функционирования.
Группировке ЛА может быть поставлена общая коллективная
задача. Чтобы отличать ее от задач отдельных групп ЛА и тем более
от задач отдельных ЛА, коллективную цель функционирования груп-
пировки назовем миссией. В свою очередь цели функционирования
групп ЛА будем называть подзадачами, а функционирования отдель-
ных ЛА - задачами.
Формация ЛА (Formation Flying). В зарубежной литературе под
формацией понимается организованный полет двух и более летатель-
ных аппаратов под управлением Лидера. При этом допускается «авто-
номность» Лидера.
В наиболее общем случае задача построения формаций сводится
к построению траекторий и избеганию столкновений [84]. Наиболее
часто слово «формация» встречается в литературе по движению кос-
Глава 5
77
мических объектов. Здесь формацией называют группу спутников,
летящих на сравнительно близком расстоянии (от нескольких десят-
ков метров до сотен километров) и работающих совместно над вы-
полнением одной и той же задачи [85]. Подчеркивается, что управле-
ние такими спутниками осуществляется индивидуально и формация1
требует обеспечения автономной навигации по измерениям отно-
сительной дальности и/или скорости и управлению относительным
положением. Формация космических ЛА может видоизменяться /
разрушаться вследствие воздействия возмущающих факторов на
близкие по своим параметрам орбиты.
Важным свойством формации космических аппаратов являет-
ся возможность одновременного измерения характеристик среды в
различных точках пространства. Это свойство особенно важно для
метеорологии, изучения атмосферы, магнитосферы Земли, гравита-
ционного поля, геомагнитного поля, влияния солнечной радиации на
состояние атмосферы, ионосферы, т.е. различных процессов в около-
земном пространстве, характеристики которых являются не только
функцией пространственных координат, но и времени. Собственно в
этом и состоит основное преимущество использования формации ЛА.
В процессе образования формации, создания требуемой архи-
тектуры, выполнения коллективной миссии не менее важны распре-
деление целей среди ЛА, образующих формацию; обмен информаци-
ей в сетецентрической среде; «переговоры» ЛА о ходе выполнения
коллективной миссии; принятие решений и при необходимости из-
менение задач. Имеющиеся подходы к построению формаций затра-
гивают вопросы избегания столкновений в процессе движения, реа-
лизации измерительных функций. Вместе с тем это хотя и важный,
но, безусловно, обеспечивающий фактор. Определяющим для фор-
маций является образование и последующее поддержание заданной
пространственно-временной структуры.
Определение. Формацией летательных аппаратов (Group
Formation Flying) называется группа ЛА, в которой каждый ЛА реа-
лизует собственную стратегию поведения, образуя и подддерживая
в интересах выполнения коллективной миссии заданные простран-
ственно-временные структуры.
1 На наш взгляд, здесь более корректно использовать термин «Satellite formation flying«. В до-
полнение к этому можно применять термины «Aircraft Formation Flying», «Drons Formation
Flying» и др.
78
В. К. Абросимов
Таким образом, отличительная особенность формации - созда-
ние заданных пространственно-временных структур.
Приведенное определение формации как разновидности группы
ЛА не противоречит положениям, содержащимся в специальной ли-
тературе, а расширяет их на класс ЛА, моделируемых как автономные
агенты. Можно выделить следующие виды формаций.
а) Формация самолетов (Aircraft formation), используемая наибо-
лее активно. В зарубежной военной авиации существует целая
классификация формаций, связанных с движением самолетов:
«сегмент», состоящий из одного ведомого и одного ведущего;
«дивизион», состоящий из двух сегментов; «эшелон», когда все
ведомые движутся за ведущим, и др. Аналогичные построения
существуют и в российской военной авиации.
б) Формация беспилотных летательных аппаратов (Unmanned aerial
vehicle/drones formation). В настоящее время беспилотная авиация
активно развивается. Формации могут быть самыми разнообраз-
ными. СМИ услужливо «подбрасывают» многочисленные разно-
видности формаций БЛА, реализуемые главным образом в раз-
влекательных целях (шоу сотен световых дронов, например).
в) Формация гиперзвуковых летатательных аппаратов (Hypersonic
aircraft formation). Говорить о такой формации пока преждевре-
менно; еще не созданы сами гиперзвуковые ракеты и тем более
не определена стратегия их использования в группе. Но в пер-
спективе такие формации могут иметь место
г) Формация микролетательных аппаратов (Micro aerial vehicle for-
mation). Тренд миниатюризации приводит к тому, что формация
микролетательных аппаратов получает собственное название.
Рой ЛА (Swarm). Большой ошибкой было бы распространять до
конца еще не открытые законы роевого поведения биологических осо-
бей на неодушевленные объекты. Вместе с тем анализ показал, что ос-
новными особенностями роя являются незначительные размеры ЛА, их
внешняя идентичность и отсутствие фиксации взаимного положения.
При этом взаимные расстояния между ЛА не должны быть слишком
значительны: они, как правило, сравнимы с размерами ЛА. В роях каж-
1 Явное доказательство быстрого развития технологий: пока настоящая книга проходила
цикл рецензирования и издания, уже объявлено об испытаниях российской гиперзвуковой
ракеты «Циркон» (6М) (по данным СМИ).
Глава 5
79
дый ЛА может управлять своим положением относительно остальных
ЛА роя, реализуя при этом достаточно простые правила относительно-
го движения. Очень существенно, что роли ЛА в рое не выделяются. В
связи с этим и самостоятельность объектов роя вряд ли велика.
Определение. Роем ЛА называется группа объектов, в которой
роли объектов не определены и не закреплены, а расстояния между
объектами сравнимы с их размерами.
Таким образом, отличительная особенность роя - сравнивае-
мость (близость) расстояний между объектами с размерами объектов.
Облако ЛА (Cloud). Облако ЛА является одной из важных, хотя и
крайне редко встречающихся, разновидностей роя ЛА. В космонавти-
ке под «облаком» понимают пассивные микрообразования размером
в несколько миллиметров, управляемые внешними воздействиями
(давлением солнечной радиации, сопротивлением атмосферы, грави-
тационным притяжением Земли). Для целей настоящей работы нам
интересны прежде всего размеры этой структуры. Очевидно, что раз-
меры облака должны быть довольно значительны. С другой стороны,
облако должно состоять из одинаковых элементов, но при этом в силу
значительности его размеров расстояния между элементами должны
допускаться большими. Поэтому облаком ЛА будем называть рой ЛА
с несоблюдением требования соразмерности расстояния между объ-
ектами их размеру.
Таким образом, отличительная особенность облака ЛА - от-
сутствие требования соразмерности расстояния между объектами
с размерами объектов.
Стая ЛА (Horde). В англоязычной литературе не делается раз-
личий между стаей и роем - обе сущности характеризуются словом
«swarm». Вместе с тем в отечественной литературе стая чаще рассма-
тривается как группа, имеющая некоторый единый центр принятия
решений. В этом контексте представляется довольно обоснованным
для идентификации стаи ЛА ввести в научный оборот английский
термин «pride»J.
Еще одним термином, отражающим суть стаи, является обозначе-
ние стаи как «horde». Слово «horde» не только употребляется в значе-
нии «рой»1 2, но и включает в себя своего рода «управляющий элемент».
1В природе львиный прайд - это стадо львов с обязательным вожаком.
2 Ср. «That primitive society took the form of a horde, the leader of which the horde-father,
actuated by his sexual jealousy, habitually treated his sons with extreme brutality».
80
В. К. Абросимов
Таким образом, это группа, в которой роли ЛА в контексте
управления создаваемой пространственно-временной структуры
могут быть различны. Иными словами, стая - это распределенный в
пространстве рой с выделенным лидером, а рой - это плотная стая
без выделения лидера.
Определение. Стаей ЛА называется группа ЛА, в которой каж-
дый ЛА самостоятельно определяет и управляет своим положением
относительно остальных ЛА роя, но роли ЛА сформированы по ие-
рархически различным группам, выполняющим сходные действия по
управлению стаей.
Таким образом, отличительная особенность стаи - распреде-
ленность в ней ролей между объектами.
Кластер ЛА (Cluster). Выделим в группе несколько однородных
элементов, которые будем рассматривать как самостоятельную едини-
цу, обладающую определенными свойствами. Пусть в такой совокуп-
ности каждый ЛА выполняет одинаковые задачи, но в интересах дости-
жения коллективной цели. Группа тогда будет состоять из нескольких
таких совокупностей, которые будем называть кластерами ЛА.
Определение. Кластером ЛА называется группа ЛА, в состав ко-
торой включаются однотипные по своему облику и характеристикам
ЛА, объединяемые единством решаемых задач в интересах выполне-
ния коллективной миссии группы.
Таким образом, отличительная особенность кластера - одно-
типность облика ЛА и решаемых ими задач.
Так, в группировке ЛА, коллективно решающих задачу преодо-
ления ПВО противника, можно выделить кластер беспилотных ЛА,
решающих задачу разведки, кластер самолетов, решающих задачу
радиолокационного подавления средств ПВО и др.
Представляется интересным рассмотреть еще один термин -
созвездие ЛА (constellation). В космонавтике созвездием называется
набор спутников, движущихся по различным, но однотипным орби-
там (например, с одинаковыми радиусами и наклонениями, но с раз-
личными аргументами восходящего узла, обеспечивающими равно-
мерное покрытие поверхности Земли) и решающих единую задачу,
управление которыми, однако, осуществляется индивидуально. Со-
звездие спутников решает коллективные задачи на основе заданной
целевой структуры (например, когда спутник-клиент должен одно-
временно «видеть» несколько навигационных спутников; выполне-
ние задач непрерывного наблюдения Земли и мониторинга состояния
Глава 5
81
ее поверхности и др.). Примерами созвездий могут служить спутники
глобальных навигационных систем ГЛОНАСС, GPS.
В нашей терминологии созвездие - типичный пример кластера с
элементами роя или стаи.
Гетерогенный кластер (Heterogeneous Cluster). Термин «гетеро-
генность» в общем случае характеризует разнородность. Включение
в состав группы разнотипных по виду и различных по характеристи-
кам объектов управления может существенно изменить их коллек-
тивные возможности.
Определение. Гетерогенным кластером ЛА называется группа ЛА,
в состав которой включаются различные по своему облику и характе-
ристикам ЛА, объединяемые единством решаемых задач в интересах
выполнения коллективной миссии группировки ЛА и реализующие
процесс «переговоров» между ЛА для выработки стратегий управления.
Таким образом, отличительная особенностьи гетерогенного
кластера - разнотипность облика ЛА при однотипности задач.
В указанном выше примере в группировке ЛА можно выделить
кластер БАК, решающий задачу разведки, но состоящий из БАК, раз-
личающихся обликом и характеристиками.
В составе группировки
могут быть ЛА с различны-
ми характеристиками «ин-
теллектуальности» ’. Будем
считать интеллектуальным
ЛА, который не только об-
ладает современной систе-
мой управления, но способен также вырабатывать собственную стра-
тегию поведения и принимать участие в «переговорах» с другими ЛА
при возникновении проблемных/конфликтных ситуаций.
При анализе группы необходим учет значительного количества
факторов. Исследование показывает, что различные перечисленные
выше и другие виды групп ЛА возникают в силу выбора различных
принципов: иерархичности, типов ЛА, стратегий поведения ЛА в
В идеальном трудовом коллективе каж-
дый должен иметь хоть малейшее пред-
ставление о том. чем живут его коллеги.
Сэр Ричард Чарльз Николас Брэнсон,
британский предприниматель
1 Здесь уместно вспомнить концепцию Brilliant Pebbles (ВР), планируемую к разработке в
рамках Стратегической оборонной инициативы США в конце прошлого века, когда в со-
став космической группировки США, размещаемой над позиционными районами Ракет-
ных войск стратегического назначения МО СССР, входили разнообразные небольшие кос-
мические аппараты (ВР-солдаты, ВР-сержанты, ВР-офицеры и пр.), предназначенные для
уничтожения российских ракет.
82
В. К. Абросимов
группе, степени интеллектуальности ЛА и др. Принципиальными
характеристиками и особенностями группового полета являются:
принцип движения отдельного ЛА в составе группы; управление вза-
имным относительным положением ЛА в группе; движение группы
как целостного объекта, возможно, достаточно протяженного в про-
странстве и времени. Это могут быть статические или меняющиеся
во времени пространственные архитектуры, состоящие из различных
ЛА, совершающих групповой полет.
В работе [40] предполагается, что отличие множества осо-
бей от коллектива заключается в полноте информации о структу-
ре группы, целях и задачах. По-видимомому, коллектив образует-
ся путем последовательного увеличения такой полноты по схеме
«особь - рой - стая -...- коллектив». Определяющим здесь, как пред-
ставляется, является информационное обеспечение объектов, со-
ставляющих группу.
В наших предположениях понятие «группа летательных аппаратов»
несколько шире понятия «группа роботов». Это происходит потому, что
для целей настоящей работы при формировании группы мы идем не от
отдельного объекта к группе (как это делается в робототехнике), а группа
представляется сразу совокупностью объектов управления, объединяе-
мых для выполнения миссии. Определяющими последовательно стано-
вятся учет неоднородности группы, тип формации, степень интеллекту-
альности ЛА и тип кластера, к которому она принадлежит.
Сообщество летательных аппаратов. Термин «сообщество» по
существу происходит из биологии. Сообществом называют совокуп-
ность совместно обитающих и взаимодействующих, дифференци-
рованных по экологическим нишам, но часто конкурирующих друг
с другом организмов разных видов, представляющую собой опреде-
ленное единство по целям и задачам существования.
Определение. Сообществом летательных аппаратов называется
группа летательных аппаратов, в которой допускается их конкуренция
за наиболее выгодные условия выполнения коллективной миссии.
Таким образом, отличительная особенность сообщества - кон-
куренция.
Коалиция летательных аппаратов (Coalition) \ Коалицией мож-
но называть совокупность ЛА, образующих единую группу и пресле-
1 От средневекового лат. coalitio - союз.
Глава 5
83
дующих единую цель. Вместе с тем коалиция имеет одну особенность
- значительную самостоятельность входящих в нее объектов. Более
того, агенты, не согласные с общим решением, могут покинуть коали-
цию и присоединиться к другой коалиции. Такие образом, коалиция
является менее устойчивой группой, чем коллектив.
Определение. Коалицией летательных аппаратов называется
группа летательных аппаратов, в которой допускается принятие ре-
шения без согласования с другими летательными аппаратами.
Таким образом, отличительная особенность коалиции - слабая
устойчивость связей между объектами.
Практически интересные примеры групп ЛА приведены в табл. 3.
Обобщая сказанное, можно дать следующее универсальное
определение.
Определение. Коллективом ЛА называется группа ЛА, объеди-
ненных единством выполняемой миссии, отличающихся типами и
характеристиками ЛА, видом образуемой формации, степенью интел-
лектуальности ЛА, формой, количеством ЛА, пространственным по-
ложением в группе и местом в иерархии группы, стратегиями поведе-
ния, ролью в решении коллективных задач всей группировки (рис. 7).
Рис. 7. Коллектив летательных аппаратов на первомайской демонстрации
Некоторые виды групп ЛА, выполняющих коллективные миссии
Таблица 3
Миссия Требования
Однородность группы Наличие «переговоров» Тип решаемых задач Форма Количественный состав Возможное решение по виду группы
Мониторинг не враждебной среды Да Да Разведка Распределен- ность групп во времени и про- странстве От 10 ЛА Группа ЛА, распреде- ленных в пространстве и во времени
Действия во враждебной среде Нет Да Разведка, уничто- жение объектов противника Различная ПВС До 10-15 ЛА Гетерогенная форма- ция интеллектуальных ЛА в виде коалиции
Прикрытие (за- щита) группы важных ЛА Нет Нет Прикрытие Шар Свыше 200-300 малых ЛА Кластер ЛА в виде шарообразного роя не- интеллектуальных ЛА
Организация тре- буемой простран- ственно-времен- ной структуры движения Нет Да Создание слож- ных условий для распознавания намерений Стая Десятки ЛА Стая ЛА с постоянно меняющейся ПВС
Тушение пожаров Нет Да Поиск возгора- ний и органи- зация тушения пожаров В зависимости от ситуации До 10-15 ЛА Кластер ЛА
Доставка грузов в горные районы Нет Да Доставка грузов В зависимости от ситуации Единицы ЛА Группа ЛА, распреде- ленных в пространстве и во времени
В. К. Абросимов
Глава 5
85
Таким образом, отличительными признаками коллектива ЛА яв-
ляются:
• высокая автономность входящих в коллектив ЛА;
• индивидуальность стратегий поведения с учетом необходимо-
сти выполнения коллективной миссии;
• распределенность ролей в коллективе ЛА;
• ансамблевость ЛА, т.е. стремление двигаться не по индивиду-
альным траекториям, а образовывать разнообразные простран-
ственно-временные структуры с учетом информации, получа-
емой в результате обмена информацией входящих в коллектив
ЛА1;
• самоорганизация коллектива, т.е. способность принятия реше-
ний и изменения пространственно временной структуры, кото-
рую образует коллектив, для учета влияния антагонизма внеш-
ней среды.
Важным вопросом организации коллектива ЛА является опреде-
ление условий их взаимодействия. Для организации взаимодействия
агентов, выполняющих коллективную миссию, как это указывалось
ранее в главе 4, предлагается в интернет-пространстве выделить ре-
сурс с заданной структурой контента, к которому в режиме on-line
могут обращаться все ЛА-агенты как для получения, так и для раз-
мещения информации. Такой ресурс объявляется условным местом
переговоров агентов. Назовем такой ресурс Информационным Ресур-
сом Коллектива (ИРК). Структура ИРК определяется в параграфе 12.6.
1В работе [12] это свойство - формирование совместного поведения сложной системы в ре-
зультате взаимодействия ее агентов - названо «эмерджентностью». Поведение коллектива
ЛА является в определенной мере сложным, но до «эмерджентного интеллекта» рассматри-
ваемые в работе коллективы ЛА пока «не дотягивают», так как степень их взаимодействия
весьма условна из-за противодействия среды.
6. СИНТЕЗ ОБЛИКОВ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
С ЗАДАННЫМИ АГЕНТСКИМИ СВОЙСТВАМИ
Под фоторобот китайского грабителя
подошло 12 млн. человек.
Анекдот
Создание нового образца ЛА авиационной /ракетной /космиче-
ской /беспилотной техники всегда связано с необходимостью опре-
деления его облика. Под обликом ЛА здесь понимается совокупность
данных, определяющих его внешний вид и конструкцию. Но форми-
рование облика перспективного ЛА не является самостоятельной за-
дачей. Облик используется для моделирования различных простран-
ственно-временных ситуаций в сложных условиях применения ЛА
и оценки его потенциальных возможностей в решении задач. Такие
модели используют конструктивные, массово-инерционные и аэро-
динамические характеристики ЛА, сведения о его системе управле-
ния, окружающей среде, в которой осуществляется полет. В советское
время облик и предварительная оценка возможностей будущего ЛА
формировались в процессе разработки технического предложения
или так называемого «аванпроекта». Сейчас это слово, как и сама не-
обходимая стадия выполнения НИОКР, как представляется, прочно
забыты - начинают сразу с технического задания.
Современные летательные аппараты обладают достаточно слож-
ными системами управления. Без преувеличения можно сказать, что
такие системы управления являются интеллектуальными в смысле
способности решать задачи с учетом совокупности заранее заклады-
ваемых в них знаний (пример: крылатая ракета с наведением по циф-
Глава 6
87
ровым картам местности), наличия интеллектуального интерфейса
(пример: автопилот самолета) и с определенными средствами под-
держки принятия решений (пример: выбор вида маневра боеголовки
ракеты стратегического назначения).
Вместе с тем называть современные системы управления ле-
тательными аппаратами системами с элементами искусственного
интеллекта несколько преждевременно. Действительно, для таких
систем основным все же должно являться отсутствие человека в про-
цессах принятия решений. Это требует очень высокой степени авто-
номности системы; к такой интеллектуальности человечество еще не
приблизилось [86].
Указанное еще более относится к представлению летательных
аппаратов как агентов (табл. 4). Однако наличие агентных свойств
приближает летательный аппарат к современным объектам управ-
ления, в системах управления которых реализуются элементы искус-
ственного интеллекта.
Таблица 4
Нищета обладания современных летательных аппаратов
агентскими свойствами
Агентские свойства Ракета- перехватчик системы ПВО Ракета- перехватчик системы ПРО Крылатая ракета Стратегиче- ская ракета
РАС-3 (США) SM-3 (США) «Томагавк» (США) «Трайдент» (США)
Автономность Нет Нет Нет Нет
Наличие целей Да Да Да Да
Реактивность Нет Нет Нет Нет
Знания Нет Нет Нет Нет
Убеждения Нет Нет Нет Нет
Желания Нет Нет Нет Нет
Обязательства Да Да Да Да
Намерения Да Да Да Да
Правдивость Нет Нет Нет Нет
Рациональность Да Да Да Да
«Жертвенность» Нет Нет Нет Нет
Проактивность Нет Нет Нет Нет
88
В. К. Абросимов
Варьируя наличием совокупности таких свойств, можно созда-
вать разнообразные модели ЛА для формирования коллективов ЛА
и реализации их группового движения с коллективной стратегией
управления (табл. 5).
Таблица 5
Совершенствование возможностей перспективных ЛА
при придании им новых агентских свойств
Перспектив- ный ЛА (тип) Агентские свойства Краткое описание перспективного ЛА с агентскими свойствами Коллектив перспективных ЛА выбранного типа
Беспилотный авиационный комплекс Автономность, знания, обяза- тельства, ра- циональность, «жертвенность» Интеллектуальный беспилотный аппарат, способный действо- вать как автономно, так и в группе Стая БАК, управляемая лидером и решающая коллективную задачу (одновременный монито- ринг различных областей значительного простран- ства)
Гиперзвуко- вая ракета Намерения, ра- циональность, проактивность, знания, убеж- дения Маневрирование с созданием максималь- но неопределенной пространственно-вре- менной обстановки и принятием решений в формате «on-demand» Решение задач класса «диффузная бомба» при образовании коллектива из разнородных объектов с включением гиперзвуко- вых ЛА в состав коллек- тива
Спутник малых раз- меров Обязательства, реактивность, автономность Космический объект с крайне простой системой управления, подчиняющийся пра- вилам коллективной навигации Рой малых спутников с изменяемой формой и раз- мерами (дистанционное зондирование атмосферы Земли в интересах исследо- вания климата)
Понятно, что придание необходимых агентских свойств лета-
тельным аппаратам можно реализовать путем обучения их систем
управления. Указанное является предметом отдельного рассмотре-
ния (обучение с учителем, без учителя, самообучение и др.), но прин-
ципиальных ограничений не должно возникать.
6.1. Облик летательного аппарата
как основной элемент моделирования
Можно выделить три важных этапа, на которых облик ЛА имеет
особенно важное значение:
Глава 6
89
• на этапе предъявления требований к задачам, которые перспек-
тивный ЛА должен решать;
• на этапе проектирования и оценки вариантов будущих кон-
структивных решений;
• во время обучения летчиков, операторов, обслуживающего пер-
сонала работе с созданным ЛА.
Этап задания требований к конструкции перспективного ЛА во
многих задачах является определяющим. Его важность возрастает в
условиях, когда к ЛА предъявляются специальные требования, ориен-
тированные на конкретные прикладные задачи, например, для ликви-
дации чрезвычайных ситуаций, в сфере обороны и др. В процессе вы-
работки требований необходимо прорабатывать различные варианты
применения ЛА, в том числе в нетрадиционных условиях использова-
ния, с различным функциональным назначением и др. Такие варианты
могут различаться не только деталями, но и определяющими элемента-
ми: размерами ЛА, принципами управления, способностями функцио-
нировать в составе группировок совместно с другими ЛА, в различной
окружающей среде и др. Поэтому требуется оперативно синтезировать
различные облики ЛА, оценивать возможность использования ЛА в
сложных условиях, которые заранее невозможно предсказать.
Отметим одну современную тенденцию. Сроки создания ноых
типов ЛА (объективно - не менее нескольких лет), как правило, стали
превышать сроки активной жизни используемых при его разработке
технологий. Поэтому в процессе проектирования конструкции пер-
спективного ЛА часть его характеристик может быть окончательно не
определена или существенно изменяться по ходу разработки. Ситуа-
ция усложняется естественной неопределенностью будущих условий
его использования, необходимостью внедрения инновационных на-
учно-технических решений, причем часто будущие конструктивные
облики формируются на основе результатов предварительного мо-
делирования. При этом требуется, даже за счет упрощения модели и
соответствующего снижения точности, оперативно оценить перспек-
тивность того или иного конструктивного решения. Решение в виде
семейства отдельных моделей, каждая из которых разработана под
конкретный образец ЛА, здесь нельзя считать эффективным.
Одной из основных насущных проблем безопасной эксплуата-
ции ЛА является также качественное обучение персонала (пилотов-
операторов, технических специалистов и др.), эксплуатирующих как
90
В. К. Абросимов
сам ЛА, так и установленную на нем полезную нагрузку. Множество
катастроф ЛА связано с человеческим фактором. Определяющим
техническим средством обучения персонала являются тренажеры.
Тренажер - необходимый элемент каждой создаваемой авиационной
системы и обычно разрабатывается совместно с ЛА. На тренажеры
возлагается отработка целого ряда задач, включая подготовку к поле-
ту, выполнение взлета и посадки в разных метеоусловиях, отработку
действий экипажа ЛА в особых случаях полета и др. В настоящее вре-
мя требования к тренажеру заключаются в том, чтобы в результате
тренировок оператор мог получить практические навыки пилотиро-
вания конкретным ЛА. Но динамика смены конструкций ЛА в совре-
менный период слишком высока, и операторы не успевают переучи-
ваться. В связи с изложенным вопросы расширения функциональных
возможностей тренажеров и подготовки операторов для решения за-
дач различными ЛА в сложных условиях обстановки в процессе еди-
ного цикла обучения также остаются актуальными.
В системах управления перспективными ЛА все более исполь-
зуются элементы искусственного интеллекта, что требует форми-
рования баз данных различных непредвиденных ситуаций и со-
ответствующего обучения интеллектуальной системы управления
необходимым действиям по предупреждению и ликвидации таких
ситуаций. При этом требуется оперативно изменять облики как са-
мого ЛА, так и других объектов управления, которые ему могут про-
тиводействовать.
Учитывая сказанное, актуальной является задача разработки ме-
тодологии оперативного синтеза обликов перспективных ЛА и модели-
рования различных пространственно-временных ситуаций для оценки
возможности их будущего применения в различных условиях, возника-
ющих вследствие влияния потенциально антагонистических сред.
6.2. Принцип фоторобота - перебор вариантов
Для обоснования требований к характеристикам конструкций
и оценки летных возможностей перспективных ЛА целесообразно
использовать принцип фоторобота. Основной отличительный при-
знак идеи фоторобота - перебор разнообразных вариантов в режиме
«вопрос-ответ». Этот принцип широко распространен в криминали-
стике для составления портрета разыскиваемого лица по показаниям
свидетелей [87, 88]. Облик неизвестного человека создают, перебирая
Глава 6
91
В связи с поломкой компьюте-
ра для создания фотороботов,
Управление внутренних дел горо-
да приглашает на работу граж-
дан с богатой мимикой.
Объявление
различные варианты элементов отдельных частей лица. Существен-
но, что множество создаваемых портретов практически неограниче-
но - вопрос только в наличии исходных данных. В программах фото-
роботов используется до нескольких тысяч различных признаков,
объединенных в десятки групп: глаза, волосы, тип лица, очки, голов-
ные уборы и др. При этом ставится задача достичь максимального
сходства с оригиналом. Критерии качества сходства, однако, весьма
субъективны. Определяющим при этом является правильная по-
становка вопросов и «погружение» лица, создающего фоторобот, в
виртуальные, нетривиальные ситуации, в которых можно сделать не-
стандартные выводы.
Анализ задач оперативного
формирования облика перспектив-
ного ЛА показывает наличие суще-
ственных аналогий с принципами
создания фоторобота. Идея состоит
в том, чтобы применить принцип
фоторобота - перебор различных
вариантов отдельных элементов конструкции - для формирования
обликов перспективных ЛА и последующей оценки его летных воз-
можностей. Действительно, вопросы создания перспективного ЛА
требуют изучения и учета многих фактов из различных предметных
областей: механики, физики, математики, кибернетики и пр. При
формировании облика используются различные по составу и сути
конструктивные данные: форма, габариты, двигатели, аэродинамика
и др. В рамках этих направлений можно эффективно перебирать раз-
нообразные варианты компоновок летательных аппаратов, габарит-
ных и аэродинамических характеристик, наборов бортового обору-
дования, средств управления, связи и других элементов летательного
аппарата, с тем, чтобы получить необходимые исходные данные для
последующего моделирования полета, оптимизации конструкции,
оценки возможности решения различных задач и максимального ис-
пользования летных и эксплуатационных характеристик. Такой пере-
бор можно предложить организовать из базы готовых элементов и
блоков конструкций. Далее выбранные элементы можно поместить в
выбранную компоновку.
Различные комбинации групп элементов и модулей внутри
групп, соединенные по единой методологии, позволяют получить
множество различных вариантов обликов перспективного ЛА. Для
92
В. К. Абросимов
решения этой задачи необходимо реализовать процедуры синтеза:
конструкции ЛА, среды движения ЛА, системы управления ЛА, ком-
плекса полезной нагрузки и проверку непротиворечивости всех эле-
ментов при их объединении в единый облик.
6.3. Синтез конструкции
Параметры, необходимые и достаточные для определения кон-
струкции ЛА, можно разделить на две группы *.
К первой группе отнесем параметры, непосредственно не ис-
пользуемые в моделях оценки возможностей ЛА, но необходимые для
формирования облика ЛА. Определяющими здесь являются компо-
новочная схема и габаритные характеристики. Различают аэродина-
мическую, объемную и силовую компоновки, но для целей моделиро-
вания наиболее важна аэродинамическая (внешняя) компоновка. К
наиболее известным компоновкам для беспилотных ЛА следует отне-
сти следующие схемы: с одним несущим крылом; цельнометалличе-
ский низкоплан; биплан с тянущей силовой установкой; «бесхвостка»
с различными видами крыла и др. В качестве габаритных характери-
стик целесообразно указать длину и размах крыльев.
Ко второй группе отнесем следующие четыре подгруппы типо-
вых характеристик ЛА, непосредственно используемых в моделях
пространственно-временных ситуаций.
Массовые характеристики. Поскольку проектируемые и созда-
ваемые ЛА существенно отличаются по массе, целесообразно зафик-
сировать ряд масс из численного ряда с определенным диапазоном,
например 1...5... 10... 100...200, 500... 1000...5000... 10 000 кг.
Аэродинамические характеристики. Задавать эти характери-
стики наиболее сложно, так как, во-первых, они должны соответ-
ствовать аэродинамической компоновке ЛА, и, во-вторых, зависят
от многих параметров, детализация которых существенно услож-
няет алгоритмы фоторобота. Поэтому целесообразно привязывать
аэродинамические характеристики к компоновочной схеме и габа-
ритам ЛА и описывать их в виде проекций коэффициента лобово-
го сопротивления на оси некоторой выбранной системы координат
1 Ниже изложение проводится на примере беспилотных ЛА, как перспективного направле-
ния развития непилотируемой авиации.
Глава 6
93
С^, С , С,, что позволяет в модели движения учитывать действие
аэродинамических сил.
Двигатель. При формировании облика ЛА необходимо указать,
какой двигатель ставится на ЛА: электрический, бензиновый и др. - в
интересах определения запасов энергетики. При этом целесообразно
задавать тягу из значений числового ряда, рассматриваемого в опреде-
ленном диапазоне, от первых десятков до нескольких тысяч килограмм
силы. Тягу целесообразно при этом также привязать к видам двигате-
лей, предлагаемых пользователю из предварительно созданной базы.
Запас топлива. Очевидно, что запас топлива должен соответ-
ствовать типу ЛА и его взлетной массе. При формировании требо-
ваний к характеристикам ЛА задается, как правило, не запас топли-
ва, а требование нахождения в воздухе без дозаправки определенное
количество времени (часы и десятки часов), которое определяется
этим запасом. Тип двигателя и расход топлива в нем и определяют
время непрерывной работы. Для определения расчетного запаса то-
плива можно также ввести условный коэффициент отношения запаса
топлива к взлетной массе ЛА и задавать такой коэффициент в виде
некоторого диапазона. Тогда задание массы ЛА определит и диапазон
расчетного запаса топлива.
Перечисленные характеристики формируют облик ЛА и доста-
точны для дальнейшей оценки возможности выполнения им различ-
ных задач.
Модель движения. Для описания пространственно-временных
характеристик полета ЛА можно использовать различные уравнения
движения. ЛА, как твердое тело, имеет шесть степеней свободы, и его
движение в пространстве наиболее полно описывается системой две-
надцати дифференциальных уравнений первого порядка; в общем слу-
чае они включают в себя уравнения продольного, бокового движения
по рысканию и вращательного движения по крену. Однако для пер-
спективных ЛА не требуется подробных уравнений движения. Дей-
ствительно, основное внимание уделяется лишь оценке возможности
решения будущим ЛА определенного круга задач. В таких ситуациях
полет ЛА для оценки пространственно-временных ситуаций можно
описывать упрощенно как движение материальной точки с заданной
массой и приложенными силами веса, тяги двигателя и аэродинамиче-
ских сил. В ряде простейших случаев можно использовать и аналитиче-
ские выражения. Работа системы управления при этом рассматривает-
ся как идеальная и сводится к решению лишь задач наведения.
94
В. К. Абросимов
6.4. Синтез среды движения
Движение ЛА осуществляется в определенной среде. Для ее опи-
сания достаточно знания гравитационного поля Земли, атмосферы и
условий, которые могут противодействовать движению. Такие зна-
ния необходимо закладывать в фоторобот.
Модели гравитационного поля Земли и стандартной атмосферы
с различной точностью достаточно хорошо известны. Полет беспи-
лотных ЛА осуществляется на небольших высотах (пренебрежимо
малых по сравнению с радиусом Земли), сравнительно непродолжи-
тельное время (до суток) и на незначительные расстояния (как пра-
вило, десятки, реже - сотни км). Поэтому для большинства задач до-
статочно использовать одну модель гравитационного поля Земли как
плоскопараллельного поля и одну модель атмосферы - стандартную.
Характерной особенностью моделирования полета ЛА является не-
обходимость корректного задания профилей скорости ветра, так как
для легких ЛА указанная характеристика существенно влияет на дви-
жение. Обычно задаются направление ветра и ограничение на его ве-
личину. Так традиционно определяется физическая среда полета ЛА.
При использовании принципа фоторобота для синтеза моделей
в понятие «среда» предлагается заложить дополнительный смысл.
Действительно, все больше задач решается в условиях не нейтраль-
ной, а антагонистической среды [89]. Такая среда препятствует полету
ЛА, создает ограничения, существенно влияющие либо на сам ЛА как
объект управления, либо на эффективность функционирования на-
ходящейся на нем аппаратуры. Антагонизм среды выражается либо
в наличии и пассивно противодействующих факторов, либо в созда-
нии условий, когда ЛА может быть перехвачен и физически уничто-
жен (например, при решении оборонных задач средствами ПВО). В
любом случае возникающие ограничения сводятся к областям про-
странства, в которых на протяжении промежутка времени Ат полет
ЛА либо невозможен, либо возможен со сниженной эффективно-
стью. При моделировании полета ЛА целесообразно такие области
задавать в виде пространственных геометрических фигур, например:
а) параллелепипедов с соответствующими сторонами;
б) эллипсоидов с размерами большей и меньшей полуосей;
в) конусов с размерами радиуса основания и высоты и др.
Глава 6
95
Такие геометрические фигуры совместно с заданием их центра
достаточно полно описывают пространственные ограничения на па-
раметры движения. Можно дополнительно ввести в рассмотрение
функцию, отражающую степень снижения эффективности функци-
онирования аппаратуры ЛА в зоне ограничений. Ее можно представ-
лять в виде распределения ограничений по пространству, измерять
заданной детерминированной, вероятностной или лингвистической
переменной [89, 90].
6.5. Синтез системы управления движением
С учетом способа управления полетом ЛА принципиально разли-
чают пилотируемые, дистанционно пилотируемые, автономные и не-
управляемые ЛА. Синтез системы управления сводится к моделирова-
нию трех основных подсистем: наведения, навигации и стабилизации.
Миниатюризация вычислительных систем и развитие спутни-
ковой навигации (GPS/ГЛОНАСС) позволяют считать задачи нави-
гации в целом решенными. Предполагается, что в каждый момент
времени с необходимой точностью могут быть определены текущие
координаты как ЛА, так и всех пространственных точек по траекто-
рии полета и определяющих цели его движения. Система стабилиза-
ции ЛА предназначена для парирования возмущений, а в данном слу-
чае рассматривается невозмущенный полет; поэтому модели системы
стабилизации при формировании облика можно исключить.
Рассмотрим, например, синтез алгоритма системы наведения для
БАК. Неуправляемые БАК автоматически выполняют полет по задан-
ной программе. Для БАК с автоматическим полетом по маршруту и
посадкой оператор только прокладывает маршрут, вводит его в систе-
му автоматического управления и производит запуск ЛА. Во время
полета он не вмешивается в управление ЛА, а контролирует полет; он
может ввести дополнительные точки на маршруте, дать команду на
возврат или аварийную посадку. Поэтому при выборе этой опции в
фотороботе предоставляется возможность выбора программы из со-
вокупности заранее введенных. В алгоритмы движения ЛА закладыва-
ется ряд типовых траекторий полета по заданному маршруту (автопи-
лот). При этом в фотороботе для каждого варианта задаются условия
полета (требуемая высота, скорость, время) и маршруты движения,
выбираемые из совокупности наиболее часто используемых (полет
96
В. К. Абросимов
вдоль территории, по прямой, по кругу, прямоугольнику, эллипсу и
др.), в выбранной области (параллелепипеде, шаре, конусе, эллипсоиде
и др.), с обходом заданных точек и/или областей и др.
Для беспилотных ЛА с возможностью ручного управления поле-
том оператор может изменять маршрут по время полета и совершать
различные маневры, а также производить взлет и посадку по само-
летному типу. Характеристики полета таких ЛА определяет оператор.
Фоторобот предоставляет ему возможность задания маршрута, вы-
бора программы движения и далее допускает ее оперативное измене-
ние оператором по ходу моделирования полета.
Наибольший интерес представляет наведение автономных ЛА.
Такой ЛА должен сам выбирать цели из группы заданных, двигать-
ся и принимать решения, исходя из складывающейся обстановки, в
случае необходимости изменяя даже цель движения. Исследование
возможных методов построения алгоритмов комплекса в этих усло-
виях показывает, что систему управления такого типа ЛА необходи-
мо строить на основе агентного подхода. В этой ситуации каждый
ЛА рассматривается как типовой агент. В фоторобот закладывается
модель ЛА, в задачу которого входит по заданной начальной пози-
ции при использовании собственной базы знаний об окружающей
среде (область опасности), потенциальных пространственно-вре-
менных ограничениях (невозможность пролета в опасной зоне на
определенных высотах и др.) построить траекторию движения к
самостоятельно выбранной цели и решить задачи из совокупности
поставленных. Конкретную задачу может задать как некая управля-
ющая структура (ЛА-агент более высокого уровня, пилот-оператор),
так и сам ЛА-агент самостоятельно: предполагается, что он способен
спланировать свои дальнейшие действия на основе своей базы зна-
ний, анализа получаемой информации-в зависимости от степени его
«интеллектуальности».
6.6. Синтез полезной нагрузки
Фоторобот предоставляет возможность выбирать для ЛА и
устанавливать на нем разнообразную полезную нагрузку. Тип полез-
ной нагрузки определяется функционалом ЛА. Так, например, для
российских беспилотных ЛА возможно использование до 20 типов
полезной нагрузки с установкой на одном ЛА до 4-6 типов, причем
часть аппаратуры может использоваться для решения различных за-
Глава 6
97
дач. Из большого перечня видов полезной нагрузки ЛА целесообраз-
но рассматривать следующие: устройства связи, навигации, хранения
информации, фото- и видеосъемки и др. На беспилотных ЛА устанав-
ливаются видеокамеры оптического диапазона, тепловизоры, фото-
аппараты, телевизионная аппаратура, ретрансляторы (телефонной
связи, радиосвязи), радиолокационные средства, средства разведки
(геологической, химической, радиационной, бактериологической,
экологической и др.), метеорологическое оборудование и др.
В фотороботе вводится реальное ограничение по весу полезной
нагрузки, которая не может превышать разумные пределы для выбран-
ного взлетного веса. Для этого применяется специальный коэффици-
ент по аналогии с коэффициентом массового совершенства (отноше-
ние массы полезной нагрузки к массе ракеты) в ракетной технике.
6.7. Проверка ограничений
В программах фотороботов важным элементом являются так
называемые модификаторы. Модификатор позволяет при минималь-
ных затратах времени преобразовать элементы портрета к виду, наи-
более подходящему к реальным чертам описываемого лица.
Опыт использования принципа фоторобота для создания обли-
ков и моделей движения перспективных самолетов и ракет показал,
что пользователи фоторобота могут превращать проектируемый пер-
спективный ЛА в своего рода «монстра», когда на сверхлегкий само-
лет ставится мощный двигатель, аэродинамика самолета не соответ-
ствует его геометрии, принцип управления противоречит решаемой
задаче и др. Указанное требует введения в алгоритмы фоторобота
специальных ограничений и проверок, своего рода модификаторов.
Для этого в алгоритмах фоторобота используются специальные
процедуры для проверки ограничений на выбор общей схемы ЛА,
комплекса полезной нагрузки, сценариев применения ЛА и др. Такие
ограничения вводятся в фоторобот заблаговременно, на этапе созда-
ния программы. Ограничения целесообразно соотносить с классами
ЛА. Класс ЛА определяется существенными признаками. Границы
между классами ЛА по конкретным признакам редко бывают четко
выраженными (в некоторых классификациях характеристики меня-
ются более чем на порядок!) и являются условными. Наиболее рас-
пространены следующие признаки: по взлетной массе; по продолжи-
тельности полета; по дальности полета.
98
В. К. Абросимов
Для формирования указанных ограничений и правил в фоторо-
бот введены классы, приведенные в табл. 6 (в качестве примера при-
ведены данные для беспилотных ЛА).
Таблица 6
Условные классы беспилотных летательных аппаратов
и их основные отличительные характеристики
для реализации в программах фоторобота
Класс Взлетная масса Возможности полета
Время Высота Дальность
МикроЛА Менее 10 кг До 1 часа Сотни метров До 10 км
Малые ЛА До 50 кг Несколько часов 3-5 км Менее 50 км
Легкие ЛА До 500 кг До 10 часов До 1 км До 300-500 км
Средние ЛА До 1-3 т 10-15 часов До 10 км 500-1000 км
Тяжелые ЛА Свыше 10 т До 24 часов и более До 15 км От 1000 км
Все элементы облика беспилотника (габариты, аэродинамика,
вес, тяга двигателей, полезная нагрузка и др.) распределяются по соот-
ветствующим классам. Если задаваемое значение элемента не соответ-
ствует выбранному классу, выдается соответствующий комментарий.
6.8. Формирование облика
Основным принципом, которым руководствуются эксперты-
криминалисты при создании фоторобота, является переход от обще-
го к частному. Создание фоторобота человека осуществляется мето-
дом «вопрос-ответ» и демонстрацией соответствующих фрагментов.
Аналогичный подход реализован в прототипе специализиро-
ванного фоторобота для синтеза обликов и оценки пространствен-
но-временных характеристик различных беспилотных летательных
аппаратов. На рис. 8-10 изображены компьютерные видеоформы от-
дельных элементов модуля «Беспилотные авиационные комплексы».
Пользователю предоставляется возможность в процессе ответов
на вопросы выпадающих меню определить все основные характери-
стики будущего ЛА, в частности, его облик, среду движения, систему
управления, оборудование, целевую задачу. В отдельном окне отобра-
жается условная схема синтезированного ЛА, формируется его под-
робное описание, составленное из ответов пользователя на вопросы
фоторобота модели.
Глава 6
99
Рис. 8. Формирование облика беспилотного авиационного комплекса
с использованием принципа фоторобота
В системе реализуются два вида подсказчиков, основанных на
логических правилах «if...then...else». Первый подсказчик отыски-
вает конструктивно-баллистические противоречия, связывая выби-
раемую компоновку и размеры ЛА с его летными возможностями и
отсеивая заведомо нелогичные и противоречивые варианты. Второй
подсказчик ищет нелогичные правила использования ЛА для реше-
ния задач, реализуя имеющийся опыт использования ЛА в граждан-
ских и военных целях, что носит главным образом рекомендательный
характер.
100
В. К. Абросимов
Рис. 9. Формирование перечня
решаемых беспилотным авиационным комплексом задач
Кроме того, по формулам конструктивно-баллистического ана-
лиза просчитываются и предоставляются пользователю характери-
стики летных возможностей синтезированного ЛА.
Синтезированный по принципу фоторобота ЛА может исполь-
зоваться для построения его моделей движения в воздушном про-
странстве, совершения им значительных по продолжительности и
отклонениям от опорной траектории маневров, представление его
как Лидера в группе себе подобных, так и как подчиненного объекта,
Глава 6
101
Gravitational field : | plane
Atmosphere standart
Counteraction : passive active
Wind
velocity : [ 4 м/. ।
direction : |~^th Ц
□ fog
£ fume
□ radioactivity
l< communication failure
night
□ difficult topography
p Characteristic of limitations —
semi-major axis
semi-minor axis
eccentricity
" Area restrictions Center
Latitude : I ssms^stn
Longitude ; I 37e37'51.82’E
unacces table
possibility
probability
bove average ▼
|- Monitoring duration
time
hour
Рис. 10. Формирование среды движения беспилотного
авиационного комплекса с учетом ее потенциального антагонизма
принятия им как самостоятельных решений, так и выполнения на-
значенных ему задач.
Существенно, что при оценке возможностей ЛА с использова-
нием принципа фоторобота упрощаются расчеты траекторий полета,
выводится на первый план оценка и исследование принципиальных
баллистических и траекторных возможностей летательных аппара-
тов. В результате моделируется движение своего рода «усредненного»
ЛА, но тем не менее с учетом основных особенностей его конструк-
ции и функционала.
102
В. К. Абросимов
Предложенный подход к созданию фотороботов синтеза облика
и оценки характеристики полета перспективных ЛА легко позволяет
описывать и другие объекты: самолеты различных классов, крыла-
тые, аэробаллистические ракеты и др. При незначительной доработке
принцип легко распространяется и на класс космических аппаратов,
в том числе до малых спутников включительно.
Представленная концепция применительно к конструированию
обликов летательных аппаратов является инновационной. Актуаль-
ность вопроса возрастает в условиях новой тенденции последнего
времени - процесс создания и испытаний новых ЛА отстает от уско-
ренного развития технологий, прежде всего информационных. Кро-
ме того, в соответствии с новыми международными и техническими
вызовами существенно расширяется и класс задач, которые могут
быть возложены на ЛА уже после его создания. Поэтому требуется
своего рода «подстраивание» обликов перспективных летательных
аппаратов под будущие задачи.
Технология фоторобота соответствует задачам оптимизации
конструкций объектов в условиях неопределенности, исследования
топологии компонент обликов летательных аппаратов, уменьшает
продолжительность проработки различных конструктивных схем
перспективных летательных аппаратов и позволяет оценивать воз-
можность выполнения ими разнообразных задач уже на этапе эскиз-
ного проектирования.
Использование принципа фоторобота позволяет вырабатывать
обоснованные требования к назначению ЛА, повышает эффектив-
ность процессов проектирования, существенно расширяет эффек-
тивность тренажеров для обучения летчиков и операторов дистанци-
онно пилотируемых авиационных систем.
Технология фоторобота апробирована автором еще в прошлом
веке (1989-1991 гг.) при создании обликов и траекторий движения
ЛА, характеристики которых были объективно недоступны. В насто-
ящее время она разрабатывается для синтеза обликов и оценки воз-
можностей решения задач беспилотными авиационными комплекса-
ми в условиях чрезвычайных ситуаций.
7. ПРИНЦИПЫ ОБЪЕДИНЕНИЯ
ЛЕТАТЕЛЬНЫХ АППАРАТОВ В КОЛЛЕКТИВЫ
Если бы не существовало таких точек,
в которых сходились бы интересы всех,
не могло бы быть и речи
о каком бы то ни было обществе.
Жан Жак Руссо,
французский философ эпохи Просвещения
В отношениях коллектива людей непосредственно после его об-
разования обычно преобладает формальная структура: члены кол-
лектива общаются в соответствии с должностями, поведенческими
стереотипами, присматриваются друг к другу, подлинные интересы
чаще всего скрываются; цели и методы работы совместно не обсуж-
даются; коллективная работа проявляется слабо. С течением време-
ни в наилучшем случае ситуация может кардинально измениться: в
коллективе выделяются признанные лидеры; решение принимается
коллегиально с учетом мнений всех членов коллектива; выбираются
и реализуются общие цели, причем каждый член коллектива выбира-
ет собственные методы их достижения. Определяющим в коллективе
являются принципы и способы взаимодействия членов коллектива
при решении коллективной задачи.
А что если провести соответствующие аналогии между коллек-
тивами людей и коллективами неодушевленных предметов?
ЛА-агенты могут быть включены в создаваемый коллектив органи-
зованно («сверху», принудительно) или образовать коллектив самосто-
ятельно, в соответствии с поставленной коллективной миссией. Будем
различать следующие виды коллективов летательных аппаратов (рис 11).
104
В. К. Абросимов
Пдмн зо всех,
и все за бЬпого!
Рис. 11. Типы коллективов летательных аппаратов
в зависимости от учета интересов
Независимый коллектив ЛА. Принцип независимого поведения
приводит к тому, что коллектив ЛА существует, но ЛА-агенты как
члены коллектива «уклоняются» от переговоров и взаимодействия,
рассматривая свои собственные задачи в качестве приоритетных.
Предполагается, что в независимом коллективе ЛА-агенты доста-
точно информированы, чтобы не зависеть от данных, получаемых от
других агентов. Поэтому агенты могут выполнять свою часть коллек-
тивной миссии достаточно самостоятельно. Если такой информиро-
ванности нет, то выполнение коллективной миссии, как правило, на-
ходится под угрозой.
Дружеский коллектив ЛА. Такой коллектив является полной
противоположностью независимому коллективу. Он характеризует-
ся пренебрежением агентов собственными интересами в пользу ин-
тересов как коллектива в целом, так и других агентов. В результате
дружеский коллектив перерастает в целенаправленный коллектив,
когда отношения сотрудничества достигают своего предела вплоть до
реализации функции «жертвенности».
Глава 7
105
Конфликтный коллектив ЛА. Между агентами допускаются
конфликты. Конфликты обычно инициируются теми агентами, цели
которых несовместимы с коллективной миссией. Еще одним источ-
ником конфликтов в коллективе могут стать намерения по использо-
ванию ресурсов. Здесь может проявляться как ограниченность ресур-
сов, так и борьба за ресурсы.
Вместе с тем, конфликтость - наиболее жизненная схема жизни
коллектива; конфликты исключительно полезны, так как обнажают
противоречия и способствуют поиску путей для их разрешения.
Компромиссный коллектив ЛА. Такой коллектив рождается из
конфликтного коллектива в условиях, когда учитываются интересы
агентов. Основой здесь являются компромиссы, когда агенты взвеши-
вают свои возможности и уступают тем, чьи возможности по реше-
нию проблемы максимальны.
Важно учитывать необходимость привлечения недостающего
опыта. Каждый агент обладает ограниченным набором знаний, необ-
ходимых для реализации собственных и коллективных целей. В связи
с этим ему приходится взаимодействовать с другими агентами. При
этом возможны различные ситуации: агент способен выполнить за-
дачу самостоятельно; агент может обойтись без посторонней помощи,
но кооперация позволит решить задачу более эффективным способом;
агент не способен решить задачу в одиночку. В зависимости от ситуа-
ции агенты выбирают тип взаимодействия и могут проявлять разную
степень заинтересованности в сотрудничестве.
В связи с активным внедрением в бортовые алгоритмы ЛА ме-
тодологии группового движения, важным вопросом является фор-
мирование ЛА-агентов в единый коллектив для решения коллектив-
ной задачи.
В бизнесе активно используется принцип «business on demand»
(«бизнес по запросу»). По запросу синтезируется архитектура инфор-
мационной системы, могут формироваться соответствующие услуги.
Приведем пример создания коллектива ЛА по принципу «on demand».
Используем снова принцип фоторобота, но здесь уже для образова-
ния коллектива летательных аппаратов как группы ЛА-агентов. На-
зовем такой фоторобот Фотороботом Коллектива ЛА (ФК). Основой
ФК является реестр ЛА-агентов, в котором сосредоточивается вся
информация о них: условное наименование, характеристики, потреб-
ности, возможности, ресурсы, занимаемые ранее роли, опыт участия
в решении проблем, предварительная оценка эффективности исполь-
106
В. К. Абросимов
зования и др. При этом функционал ЛА-агента рассматривается как
типовой сервис, который может быть предоставлен для выполнения
коллективной миссии.
Какие возможности ФК может предоставить потенциальному
Заказчику?
Исходным является поставленная коллективная проблема (мис-
сия). В настоящее время пока преждевременно говорить о возмож-
ности ее полного автоматического формирования и осмысления
агентами, поэтому в ФК организуется целенаправленный диалог с За-
казчиком, основной целью которого является декомпозиция исход-
ной коллективной проблемы на совокупность индивидуальных задач,
функционал которых сравним или близок к функционалу ЛА-агентов
различного типа.
Далее ФК формирует следующие сущности.
• Тип коллектива агентов (групповой, стайный, роевой, кластер-
ный гетерогенный и др.).
• Организационную структуру коллектива агентов выбраного
типа (однородную, неоднородную, смешанную).
• Пространственно-временную структуру функционирования
коллектива (правильные, неправильные геометрические, хаоти-
ческие пространственно-временные фигуры).
• Соподчиненность объектов коллектива. В ФК фиксируется либо
Лидер, либо Координатор (Лидер с ограниченным функциона-
лом) либо (в отсутствие Лидера и Координатора) утверждается
принцип самоорганизации ЛА-агентов с выбираемой стратегией
переговоров.
• Коммуникативность. По аналогии с принципом организации
воздушного движения «каждый видит каждого» в коллективе
ЛА-агентов «каждый связывается с каждым», образуя интел-
лектуальную сеть. ФК формирует специальную матрицу таких
связей. При этом элементы матрицы описывают уровень комму-
никативности (наличие, отсутствие, уровень значимости ком-
муникаций между объектами группы) и представляются нечет-
кими числами или лингвистическими выражениями.
• Исходные данные для формирования стратегии поведения ЛА-
агента. ФК позволяет формировать для ЛА-агента комплекс
допустимых действий: извещение других ЛА о возможности
Глава 7
107
и/или невозможности выполнения им задачи; участие в обме-
не информацией; запрашивание помощи (активации функций)
других агентов; запрашивание разрешения изменить сценарий
решения общей задачи и др.
• Метод проведения переговоров агентов (координации дей-
ствий). ФК позволяет делать выбор из наиболее известных моде-
лей координации: выбор решений в условиях неопределенности
и конфликта с использованием теории игр с различными прави-
лами игр (симметричная и несимметричная кооперация и ком-
промиссы); коллективное поведение автоматов (рандомизация,
самоорганизация, распределенность); модель планирования
коллективного поведения, модели на основе BDI-архитектур
(Belief-Desire-Intention); модель координации поведения на ос-
нове конкуренции (открытые и закрытые аукционы и др.).
Факт включения ЛА-агентов в состав коллектива зависит ис-
ключительно от поставленной коллективной миссии и их возможно-
стей по решению отдельных подзадач. Агенты должны согласиться с
тем, что часть присущих им свойств будет «заморожена» при вклю-
чении в коллектив; фиксация таких ограничений осуществляется в
реестре агентов автоматически. ЛА-агенты частично теряют само-
стоятельность, но обретают возможность использовать потенциал
других членов коллектива для решения коллективных задач и, в от-
дельных случаях, своих собственных. При этом в отличие от задач,
где агенты могут использовать один и тот же общий ограниченный
ресурс, что является основой появления разнообразных конфликтов,
для задач формирования коллектива летательных аппаратов все ос-
новные ресурсы индивидуальны, что упрощает переговоры. Однако
требование, чтобы каждый агент учитывал интересы других агентов,
безусловно, сохраняется, что предопределяет зависимость стратегии
действий одного агента от поведения других.
Коллективные фотороботы указанного типа можно использо-
вать также для описания обликов группировок разнотипных лета-
тельных аппаратов с тем, чтобы оценивать их возможности и вклады
в выполнение коллективных миссий.
8. НАЗНАЧЕНИЕ НА РОЛЬ И ИДЕНТИФИКАЦИЯ
АГЕНТА С РОЛЬЮ В КОЛЛЕКТИВЕ
ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Эта роль ругательная,
и я прошу ее ко мне не применять!
Стоматолог Шпак в фильме
«Иван Васильевич меняет профессию»
8.1. Значение и функции роли
в коллективе летательных аппаратов
Эффективность функционирования коллектива летательных ап-
паратов как под руководством лидера, так и в случае самоорганизации
существенно зависит от распределения в коллективе задач. Такое рас-
пределение связано с определением необходимости и назначением ро-
лей, делегированием полномочий соответствующим ролям и др. Рас-
пределение задач означает идентификацию агента, исходя из его прежде
всего функциональных возможностей, с некоторой ролью. Роль же тесно
связана с обязанностями агента перед коллективом и самим собой. Поэ-
тому значение роли состоит в том, что, будучи выбранной, назначенной,
принятой и далее сообщенной всем агентам коллектива, она позволяет
предсказывать поведение как отдельных ЛА, так и всего коллектива, а
другим ЛА-агентам - планировать свое поведение и действия.
Однако четкого определения понятия «роль» в технических си-
стемах не существует. В коллективах, состоящих из людей, в слож-
ных ситуациях принятия решений часто говорят: «Определите ваше
место и роль» I Но гораздо чаще эти понятия используются в обще-
1 В военных кругах говорят просто: «Тут двух мнений быть не может. Роль - основная, ме-
сто - центральное!» (прим, автора).
Глава 8
109
употребительном смысле. Понятие «место» обычно связывается с
положением объекта в некоторой иерархии и определяет его статус.
В русском языке существует много значений и синонимов понятия
«занять место». Среди понятных синонимов «разместиться», «засту-
пить», «расположиться» и др. выделим термины «сменить», «подме-
нить», «заменить», «заместить». Их осмысление приводит к понимаю
многозначности ролей ЛА в коллективах.
«Роль» и «статус» объекта тесно связаны друг с другом. В иерар-
хических структурах, как правило, статус определяет соответствую-
щую роль. Для самоорганизующихся структур, где иерархия не за-
креплена, наблюдается обратная картина - статус определяется после
распределения ролей.
Дальнейшее изложение проведем для ЛА, представляемых и фор-
мализуемых как интеллектуальные агенты. Зафиксируем следующее:
• ЛА создается для определенных целей и$ значит, обладает опре-
деленным функционалом;
• реализуемость функционала ЛА зависит от ресурсов, которыми
он обладает;
• ресурсы описываются совокупностью технических характеристик.
С другой стороны:
• для коллектива задается (формируется) определенная миссия;
• миссия может быть декомпозирована на задачи;
• каждая конкретная задача может быть отождествлена с ролью,
требуемой для исполнения миссии;
• у каждой роли есть отображающие ее сущность ролевые задачи
и характеризующие их атрибуты (параметры), соответствовать
которым необходимо для исполнения роли.
Таким образом, роль по существу инициирует тот конкретный
функционал, который должен реализовывать ЛА-агент при решении
определенной ему задачи во имя выполнения коллективной миссии.
У ЛА-агента, обладающего заданным при его создании функци-
оналом и ресурсами, есть два принципиально различающихся вари-
анта занять роль в коллективе: быть назначенным на роль, например,
Лидером коллектива или быть выбранным среди подобных на конку-
рентной основе. С математической точки зрения процесс назначения
или конкурентного выбора ЛА на роль целесообразно рассматривать
с позиций многоагентного подхода [66-71]. Действительно, представ-
ление ЛА как интеллектуальных агентов оказывается очень удобным
по
В. К. Абросимов
[89, 91]. Интеллектуальные агенты могут обладать свойствами, при-
сущими и интеллектуальным системам управления ЛА: наличием
целей, знаний, автономностью. В отличие от социальных агентов,
ролевые функции которых в основном связываются с понятием «вза-
имодействие агентов» для изучения их социального поведения [92],
здесь рассматриваются агенты, описывающие технические системы.
Для таких агентов известная концепция BDI (вера, желание, намере-
ния) формулируется через понятия «возможности» и «потребности»
[12]. Поэтому функционал современных ЛА как объектов управле-
ния можно представить как возможности агентов; особенности по-
строения системы управления - как свойства агентов, а особенности
функционирования, включая ограничения и критерии выполнения
задач - как потребности агентов. В эту схему укладываются и про-
цессы конкуренции агентов при занятии роли, особенно в контексте
самоорганизации.
Под ролевой задачей при-
менительно к ЛА будем пони-
мать совокупность действий,
приводящих к заданному ре-
зультату. Так, например,роль
«разведчика» при мониторин-
ге местности может заклю-
чаться в реализации конкретных ролевых задач поиска, обнаруже-
ния, распознавания, информирования и др.
Таким образом, реализуется следующий алгоритм.
1. Осознание коллективной проблемы.
2. Формирование (задание) цели создания коллектива в виде вы-
полняемой миссии для решения коллективной проблемы.
3. Декомпозиция миссии на набор ролей, необходимых для ее вы-
полнения.
4. Установление условий замещения ролей, а именно: формирова-
ние ролевых задач1 и определение их атрибутов.
Кто не исследует движение своих мыс-
лей» не может быть счастлив.
Марк Аврелий,
римский император и философ
1 Де-факто ролевая задача определяет и функцию роли (так, ролевая задача «поиск» роли
«разведка» может быть названа и функцией «поиск»). Однако понятие «функция» более
применимо к объектам управления, чем к ролям как абстрактным сущностям. Поэтому
ниже мы используем при описании ролей формулировку «ролевая задача», но «функция
агента» при описании объекта управления.
Глава 8
111
5. Определение потребностей в функционале и характеристиках
ЛА-агентов исходя из условий замещения ролей и необходимо-
сти выполнения ролевых задач.
6. Подбор ЛА-агентов на роли исходя из их функционала и воз-
можностей (идентификация ЛА-агентов с ролями).
7. Определение соответствия функционала ЛА-агента ролевым
задачам.
8. Определение соответствия характеристик функционала ЛА-
агента атрибутам ролевых задач.
9. Назначение на роли и распределение задач в коллективе в соот-
ветствии с ролями.
10. Фиксация уровня взаимных обязательств: коллектива перед
агентами, агентов перед коллективом, агентов по отношению
друг к другу и, как следствие, назначения агента на роль.
Подчеркнем, что необходимо отличать вводимое выше понятие
«идентификация агента с ролью» от понятия «идентификация ролей»
[93]. Идентификация ролей по существу означает формирование
перечня ролей (задач), необходимых для выполнения коллективной
миссии. Идентифицировать же агента с ролью означает выбрать из
совокупности агентов такого (таких), которые в наибольшей степени
отвечают ролевым требованиям.
8.2. Методические подходы к представлению ролей
В научной литературе по исследованию ролей в многоагентных
системах в различных аспектах исследуется связь ролей с целями,
правами, обязанностями и протоколами, определяющими взаимо-
действие с другими ролями. Несмотря на то, что встречается множе-
ство статей, посвященных исследованию ролей в многоагентных си-
стемах, в большинстве из них в качестве предмета рассматриваются
роли агентов-программ.
В работе [93] роль агента рассматривается просто как набор
функций. Понятие роли определяется с помощью трех атрибутов:
ответственности, тесно связанной с функциональными характери-
стиками, разрешения, протоколов. Для реализации ответственности
роли предоставляются определенные права (ресурсы). Набор прото-
колов определяет взаимодействие роли с другими ролями. Роли же
агрегируются в типы агентов.
112
В. К. Абросимов
В работе [94] рассматривается иерархическая структура агентов,
при которой слои агентов способны иметь коммуникации и перего-
воры друг с другом. При этом агенты могут иметь одинаковые роли,
находясь в различных слоях.
В работе [95] подчеркивается, что большинство существующих
моделей процесса разработки многоагентых систем не поддерживает
динамическое назначение роли для агентов, однако многие приложе-
ния требуют, чтобы агенты могли изменять свои роли во время вы-
полнения. Выделяются три ключевых положения: организация ролей,
пространство ролей, непосредственно роли агентов.
Организация ролей содержит концептуальные роли и связы-
вается с понятиями «наследование, агрегация, ассоциация и несо-
вместимость». Концептуальная роль (которая может быть и целым
классом) определяется как шаблон ролевых экземпляров, имеющий
их атрибуты: знания о предметной области (необходимые для дости-
жений целей); собственно цели; планы (дерево функций для дости-
жения целей); действия (функции); ресурсы для достижения целей;
протоколы взаимодействия между ролями.
Пространство ролей определяется как множество ролей-экзем-
пляров L На основе введенных понятий «концептуальная роль» и
«экземпляр роли» (реализация концептуальной роли в конкретном
проекте) строится трехуровневая архитектура. В этой архитектуре
назначение ролей осуществляется следующим образом:
1. Пользователь создает ведущего агента в группе.
2. Ведущий агент группы объявляет все роли, необходимые для
достижения целей группы.
3. Роли ожидают агентов, которые их смогут занять.
4. Если агент выражает готовность занять роль, то проверяются
его реальные потенциальные возможности.
5. Роль может быть как назначена агенту, так и «отобрана» у агента.
В работе [96] предлагается построить ролевую библиотеку как
перечень и характеристики ролей, которые по существу определяют
правила поведения и взаимодействия в группе. В указанной библио-
теке классы ролей описываются в терминах атрибутов и ассоциаций.
1 Здесь явно прослеживается определенная аналогия с концепцией фреймов-прототипов и
фреймов-экземпляров как реализаций прототипов в конкретных проектах.
Глава 8
113
К атрибутам отнесены имя роли и обязанности, связанные с ролью. К
ассоциациям относятся:
• принадлежность роли к определенной группе;
• способность решать определенный класс задач;
• применимость роли к конкретному агенту;
• способность быть источником действия в схеме отношений
между ролями;
• способность быть выполнимой рядом агентов;
• способность подразделяться на более мелкие роли;
• способность быть основой онтологий.
Рис. 12 иллюстрирует три определяющих условия идентифика-
ции роли: административную составляющую, по существу определя-
ющую роль и агента, который взял эту роль; ответственность по роли,
определяющую ожидаемое поведение агента при выполнении данной
роли; так называемые «необходимости» (Necessities), т.е. потребности
агента, выполняющего эту роль - по существу, требуемые ресурсы и
ограничения.
Важно отметить, что, как основные, выделяются функционал
роли и возможность взаимодействия роли с другой ролью. Поэтому
в ролевой библиотеке должны быть установлены соответствия между
ролями и агентами, которые могут или не могут исполнять соовет-
ствующие роли.
В работе [97] дается простое определение группы агентов как
совокупности агентов, связанных ролями. Группа в этом случае рас-
сматривается как обобщенная функция ролей, а роли без группы не
имеют смысла. Основное внимание уделяется процессам самоорга-
низации при назначении ролей. Определяющей при этом является
функция полезности агентов, занимающих соответствующие роли
в группе. Для определения сущности роли вводятся два параметра:
«ширина» и «глубина». «Ширина» связывается с возможным функци-
оналом роли и определяет разнообразие функций роли; «глубина» - с
уровнем возможного взаимодействия с другими ролями, управлени-
ем ими и связанными с этим ограничениями.
В работе [98] вводятся и описываются восемь принципов форми-
рования ролей. К ним, в частности, относятся использование ролей для
формирования различных интерфейсов агентов, определение посред-
ством роли позиции агента в группе и набора обязанностей и др.
Рис 12.К идентификации ролей в многоагентных системах
(из работы [96])
Глава 8
115
Основные аспекты ролей формулируются в виде следующих по-
ложений:
1. Роль не зависит от агентов. 2. Роль может предоставлять услу-
гу. 3. Роль может быть создана, изменена и удалена. 4. У роли есть пра-
ва. 5. Роль включает в себя обязанности после того, как агент начинает
исполнять эту роль. 6. Роль может быть интерфейсной (фильтровать
сообщения агентам) и процессной (строго функциональной). 7. Роль
может выражать или ограничивать доступность агента системе.
В работе [99] предложено перераспределять роли агентов в за-
висимости от их нагрузки. В основу положено предположение, что
нагрузка может меняться в процессе выполнения роли, что может
приводить к превышению нагрузки на отдельных агентов и даже к
отказу функционирования в силу недостатка ресурсов. Процесс пере-
мещения ролей агента во время выполнения задачи называется «ре-
факторингом». Предполагается, что задачи поступают в систему как
пуассоновский поток с заданными характеристиками - числом задач
и интенсивностью их поступления. Разработана формула загрузки
агента, в которую входят интервал выполения задачи и характеристи-
ки пуассоновского распределения.
В прекрасном обзоре [100], охватившем 177 публикаций по дан-
ной тематике, анализируются многочисленные вопросы, связанные
с ролями агентов: координация и взаимодействие ролей; иерархия
и обучение ролей; ролевое моделирование; обмен ролями; переходы
с одной роли на другую в робототехнике, социологии и др. Однако
практически нет публикаций, в которых описывались бы конкретные
механизмы назначения на роли.
Наиболее близкой к данной тематике является работа [101], где
подчеркивается, что большинство существующих моделей процесса
разработки многоагентных систем не поддерживает динамическое
назначение роли для агентов. Однако многие приложения требуют,
чтобы агенты могли изменять свои роли во время выполнения.
Таким образом, вопросы назначения агентов на роли с учетом
динамики функционирования коллектива агентов в режиме on-line
остаются очень актуальными.
116
В. К. Абросимов
8.3. Определение и атрибуты ролей
в коллективах летательных аппаратов
8.3.1. Определение роли в коллективе летательных аппаратов
Каждая ролевая задача характеризуется своими атрибутами (далее
для упрощения - атрибуты роли). Атрибуты роли можно рассматривать
как множество требований к ресурсам, необходимым для решения роле-
вой задачи. Так, беспилотный летательный аппарат, назначенный в груп-
пе на роль «разведчика», при решении ролевой задачи «поиск» должен
обладать такими атрибутами роли, как реализуемая дальность, высота,
продолжительность полета и др. Таким образом, всегда можно зафик-
сировать последовательность: Роль - Ролевая задача - Атрибуты роли.
Введем следующее определение.
Определение. Роль в коллективе летательных аппаратов есть не-
которая виртуальная сущность, описываемая кортежем:
Role: <IR, IRR, RR, RZ, RZA, RP >, (2)
где IR - идентификатор роли; IRR - множество идентификаторов
других ролей, с которыми данная роль связана коллективными отно-
шениями; RR - статус роли как множество прав роли; RZ - множе-
ство ролевых задач роли; RZA - множество атрибутов ролевых задач,
необходимых для качественного исполнения роли; RP - множество
специфических особенностей исполнения роли.
Раскроем содержание некоторых входящих в выражение (2) обо-
значений.
Статус роли RR как множество ее прав определяет отношения
подчиненности в коллективе ЛА. Поскольку количество ролей всег-
да ограничено, можно построить отношение подчиненности в виде
матрицы ролей, в ячейках которой разместить отношения подчинен-
ности (табл. 7).
Символ «-» в таблице означает, что отношения подчиненности
RM-RN не установлены, что может быть, например, в условиях от-
сутствия связи.
Символ «>» в выражении RM > RN означает, что роль RM нахо-
дится на более верхней ступени иерархии и доминирует над ролью RN.
Символ «<» в выражении RM < RN означает, что роль RM на-
ходится на более низкой ступени иерархии и является доминируемой
ролью RN, т.е. зависимой от нее.
Глава 8
117
Таблица 7
Отношения подчиненности ролей
Роли R1 R2 RN
R1 - >
R2 < - >
RM - <
Символ «~» означает, что роли RM ~ RN не связаны отношения-
ми подчиненности.
Количество ролевых задач RZ, которые связываются с сущно-
стью роли, на самом деле довольно ограничено. Выделим, как типо-
вой пример, основные классы таких ролей и соответствующие им ро-
левые задачи для коллектива ЛА (табл. 8).
Таблица 8
Типовые роли ЛА-агентов в коллективе ЛА
Роль Требуемый функционал Описание ролевых задач
Руководитель (Лидер) Управление Организация распределения ролей, распределение задач в коллективе агентов, контроль выполнения задач агентами
Аналитик Анализ Анализ уровня ситуационной осведомленности, распознавание ситуаций, оценка угроз выполне- ния коллективной миссии
Исполнитель Выполнение задачи Реализация поставленной задачи, формирование требуемой пространственно-временной структу- ры ЛА
Наблюдатель Наблюдение Получение информации о наблюдаемом объекте (местности). Поиск объекта
Помощник Обеспечение Обеспечение исполнителей других ролей требуе- мой для качественного выполнения задач инфор- мацией и ресурсами (при необходимости)
Связист Организация связи Организация связи между исполнителями других ролей
Контролер Контроль Контроль выполнения отдельных элементов кол- лективной миссии
В табл. 8 выделены целые группы ролей, так как в зависимости от
ситуации они могут декомпозироваться на более частные роли, более
четко отражающие их содержание. Так, для конкретных предметных
областей в группы ролей включают роли, которые могут иметь само-
118
В. К. Абросимов
стоятельное и крайне важное для коллектива значение. Например, в
группе «Исполнитель» в задачах типа «диффузной бомбы» [8] могут
быть выделены роли: «ударный», «постановщик помех», «прикрыва-
ющий основную группу ударных средств», «ложный», «ретрансля-
тор», «разведчик», «контролер ущерба», «заправщик топливом» и др.
RZA - множество атрибутов роли, необходимых для ее каче-
ственного исполнения, содержательно существенно зависит от типа
роли и в меньшей степени - от типа решаемой задачи. Для летатель-
ных аппаратов используются такие показатели, как наличие необхо-
димой аппаратуры для выполнения роли, диапазон скоростей ЛА,
условия движения, боевые характеристики и др.
RP - множество специфических особенностей исполнения роли.
Они вытекают из анализа среды функционирования ЛА и стратегии
движения коллектива; они могут, например, учитывать области про-
странства, в которых движение ЛА-агента разрешено или запрещено.
Так, например, роль Лидера предполагает движение Лидера в про-
странстве, недоступном для средств перехвата и уничтожения. Роль
«жертвы», напротив, предполагает совпадение в заданный момент
времени географического положения ЛА и некоторого подлежащего
нейтрализации объекта на местности и др.
Обобщим информацию относительно ролей с точки зрения ЛА-
агента.
1. Один ЛА-агент может выполнять множество ролей.
2. Права роли определяются ее местом в иерархии коллектива.
3. Обязанности роли выражаются в виде обязательства решения
определенного класса ролевых задач.
4. Важнейшими атрибутами ролевой задачи являются требуемые
ресурсы и технические характеристики ЛА, необходимые для
ее эффективного выполнения.
Обобщим информацию относительно ролей с точки зрения кол-
лектива.
1. Роль в многоагентной системе, как в коллективе, неразрывно
связана с целью коллективной миссии.
2. Каждой коллективной миссии должна соответствовать сово-
купность ролей, необходимых для ее решения.
3. Одна и та же роль может выполняться различными ЛА- агентами.
4. Допускаются назначение ЛА-агента на роль, снятие ЛА-агента
с роли и изменение роли ЛА-агента на другую роль. Указанное
Глава 8
119
может осуществляться как Лидером коллектива, так и в резуль-
тате процесса самоорганизации.
5. ЛА-агент, выполняющий роль, автоматически приобретает как
права, так и обязанности роли.
6. При распределении ролей должна проводиться проверка нали-
чия и достаточности у ЛА-агентов ресурсов и характеристик
для выполнения роли.
7. Взаимодействие ЛА-агентов основано на их ролях.
8.3.2. Концептуальный уровень представления роли
Заметим, что в литературе при исследовании ролей в той или
иной форме всегда упоминается связь роли с целью, правами, обя-
занностями и некоторыми протоколами, определяющими взаимо-
действие с другими ролями (по существу, с функциями). В этом кон-
тексте интересно рассмотрение понятия роли с точки зрения модели
Джорджа Захмана [102]. Предложенные Дж. Захманом общий словарь
и набор структур для описания современных сложных систем свиде-
тельствуют о высоком уровне абстракции архитектур. Основная идея
заключается в том, чтобы обеспечить возможность последовательно-
го описания каждого отдельного аспекта системы в связи со всеми
остальными. Для любой достаточно сложной системы общее число
связей, условий и правил обычно превосходит возможности для од-
новременного рассмотрения. В то же время отдельное, в отрыве от
других рассмотрение каждого аспекта системы чаще всего приводит
к неоптимальным решениям как в производительности, так и в стои-
мости реализации [103].
Легко распространить подход Дж. Захмана на исследование ро-
лей в коллективах ЛА. Действительно, очевидно, что цель роли от-
вечает на вопрос «Зачем?» (вводится данная роль). Права роли свя-
заны с вопросом «Кто?» (основной по принятию решений в данной
иерархии); атрибуты как необходимые ресурсы - с вопросом «Что?»
(в смысле - что требуется для исполнения роли?). Мы рассматрива-
ем коллективы летательных аппаратов, движущиеся в агрессивных
противодействующих средах и образующие определенную простран-
ственно-временную структуру, в которой каждый объект в заданное
время должен занимать определенное положение. Поэтому добавим
в описание атрибутов роли требуемое местонахождение ЛА-агента в
120
В. К. Абросимов
пространстве (ответ на вопрос «Где?»). Обязанности роли можно рас-
сматривать как ее функции и связать с вопросом «Как?». Включив в
рассмотрение фактор времени, мы зафиксируем вопрос «Когда?». И,
наконец, связь роли с ролевой задачей отобразим термином, отвеча-
ющим на вопрос «Зачем?», тем самым полностью охватывая позиции,
предписываемые матрицей Захмана (табл. 9).
8.3.3. Логический уровень представления роли
Рассмотрим понятие роли на логическом уровне. Для задач рас-
пределения ролей в коллективе типовая роль упрощенно может быть-
формализована в виде:
Role: {RZ, Z', А'}, (3)
где RZ - множество (количество) ролевых задач роли Role; Z' - наи-
менование /-й ролевой задачи роли Role (Z’gRZ); А': {а^, а2\..а^..ар}
- кортеж атрибутов /-й ролевой задачи роли Role.
Как правило, точные значения атрибутов роли сформулиро-
вать трудно. Практический опыт показывает, что весьма эффективно
представлять атрибуты роли в виде нечетких чисел с собственными
функциями принадлежности рА(ар либо в виде лингвистических пе-
ременных. В последнем случае они могут быть преобразованы в не-
четкие числа посредством операции фаззификации [90, 104]. Для бо-
лее простой интерпретации указанные нечеткие числа целесообразно
представлять в виде нечетких чисел L-R типа [104] и задавать посред-
ством наиболее предпочтительных значений (по терминологии L-R
чисел - «моды») и функций, описывающих нечеткости в окрестности
моды. Тогда каждый/-й атрибут a'eRZ функции Z' роли Role может
быть записан в виде тройки
а- = (mf, af, Pf), (4)
где mf - мода нечеткого числа; a afn коэффициенты нечеткости,
характеризующие его левую и правую границы. При таком представ-
лении функция принадлежности/-атрибута записывается в виде:
рА (ар = I/ [(mf - x)/af] V х < mf, af> 0,
pA(ap = Rf[([x-mp/ftf\V x>mf,fif>Q.
Таблица 9
Типовая матрица Захмана для ролевой задачи (на примере: ролевая задача «поиск» роли «разведчик»)
Глава 8
Уровни моделирования роли Кто? Что? Где? Как? Когда? Зачем?
Люди, организа- ции, объекты Данные География, сеть Функции, процессы Время, расписание Мотивация
Организаци- онный Объект управ- ления Информация для исполнения роли География испол- нения роли Функции для испол- нения роли Время исполнения роли Задача роли
Понятийный Летательный аппарат Описание актуальности процесса раз- ведки Описание гео- графии области- разведки Определение атри- бутов роли Общий временной план проведения разведки Представление о сущности роли
Концептуаль- ный Агент как пред- ставление в модели ЛА Общие требо- вания к процес- су разведки Требования к представлению географии об- ласти разведки Требования к харак- теристикам агента как к источнику дан- ных разведки Согласование времени проведения разведки с другими планами агента Описание статуса агента при полу- чении данной роли
Логический Идентификатор агента Свойства агента Область возмож- ного использова- ния ЛА Определение соот- ветствия харак- теристик агента атрибутам роли Согласование вре- мени исполнения роли с текущими временными плана- ми коллектива Обоснование на- значения именно выбранного ЛА-агента на вы- бранную роль
Программный Идентификатор роли Коды инфор- мационных данных Коды геграфиче- ских данных Протоколы функций Временные характе- ристики реализации роли Реализация в ПО системы управле- ния ЛА
Физический Управление процессом раз- ведки (пилотом или автономно) Фотокамера для фиксации обли- ка обнаружен- ных объектов Область про- ведения разведки в географических координатах Движение на точку, зависание в точке, барражирование в области Временная схема полетного задания на проведение раз- ведки Реализация по- летного задания летательного аппарата
122
В. К. Абросимов
8.4. О возможности и готовности агента
занимать и исполнять роль
Пусть перед коллективом, состоящим из ЛА-агентов, сформули-
рована определенная миссия. Миссия декомпозирована на задачи, и
каждой задаче поставлена в соответствие роль Role.
С одной стороны, агент, назначаемый на роль Role, должен иметь
требуемую по роли функциональность, с другой - по каждой роле-
вой задаче характеристики ЛА-агента должны также соответствовать
атрибутам (3)-(5), требуемым для исполнения роли. Таким образом,
по аналогии с требованиями по атрибутам роли можно зафиксиро-
вать последовательность: ЛА-агент - функция ЛА-агента - характе-
ристика функции ЛА-агента (табл. 10).
Таблица 10
Таблица соответствия функционала ЛА-агентов
и их характеристик ролевым задачам и их атрибутам (примеры)
Роль Role Имя роли: Разведчик Взаимо- связь к-й ЛА-агент, назначаемый или занимаемый роль Z’ Пример
Ролевые за- дачи RZ Поиск. Об- наружение. Распознавание образов Fk - множе- ство функций, реализуемых ЛА- агентом, претендующим на роль Role БАК разведывательного типа: мониторинг, поиск, наблюдение, распознава- ния объектов, информиро- вание по каналом связи
i-я ролевая задача роли RoleZ* Задача «Поиск объектов на местности» <=> Fkd - d-функция к-го агента Функция «поиск» по- средством установленной на БАК видео и фото аппаратуры
А': {а/, а'У ..., а/} кортеж атрибутов 1-й ролевой задачи Role Движение в ди- апазоне высот полета и скоро- стей полета, способность к распознаванию предметов и людей (?: {с/, с/, ..., cd,..., cd} кортеж характеристик d-функции агента Высота полета, скорость полета, направление по- лета, продолжительность полета, точность распозна- вания образов
а! -f-й атри- оутролевой задачи Z* Высота полета <=> сd - j-я ха- рактеристика d-функции /с-того ЛА-агента Высота полета
Глава 8
123
Для определения соответствия реализуемых агентом функций
z-й ролевой задаче Z введем специальную логическую переменную О.
Назовем такой параметр «признаком ролевой функциональности».
Пусть агент к е К обладает совокупностью Fk функций, определяю-
щих его возможности по реализации ролевых задач Z. Пусть среди
множества функций реализуемых fc-агентом, находится функция
Fdy соответствующая ролевой задаче (Fd <=> Z’). В этом случае будем
считать параметр О = 1, в противном случае -0 = 0.
В свою очередь, каждая d-функция fc-ro агента Fd может описы-
ваться кортежем собственных характеристик. Эти характеристики
также могут выражаться в виде нечетких переменных. Так, например,
беспилотный летательный аппарат, назначаемый на роль «разведчи-
ка», при выполнении целевой задачи «поиск» должен иметь соответ-
ствующие возможности по движению в зоне противодействия про-
тивника (скорость, высоту, время движения, малые отражательные
характеристики, соответствующую фото-, видео-, тепловизорную
аппаратуру для наблюдения и др.). Понятно, что /характеристика
d-функции агента должна по смыслу соответствовать атрибуту/ро-
левой задачи (j ~f).
Тогда возможности ЛА как агента по получению роли по анало-
гии с (3) запишем в виде:
Agent: {Ft, F/> Cd}, (6)
где Fk - множество функций, реализуемых агентом, претендую-
щим на роль Role, выраженных количественно; Fd - наименование
d-функции fc-агента; (У:{с^, c2d...cd...cd} - кортеж J характеристик
d-функции агента.
По аналогии с (2)-(5) можно для j-й характеристики d-функции
fc-агента записать:
^С(с/) = U[(m. - х)1у^ V X < т., у. > 0, (7)
= Я'[([х - V х > т., 6. > 0.
Одним из важнейших вопросов при назначении на роль явля-
ется сравнение агентов между собой по степени готовности занять
и исполнить роль. Сравнить объекты управления можно только по
их характеристикам. Определить соответствие нечетких характери-
стик агента нечетким атрибутам ролевых задач можно было бы путем
124
В. К. Абросимов
анализа степени пересечения интервалов изменения функций при-
надлежности /-атрибута и /й характеристики агента. Однако необ-
ходимо подчеркнуть, что в теории нечетких множеств в большинстве
случаев используются «жесткие» операции определения функций
принадлежности таких пересечений - в виде максиминных или ал-
гебраических операций. Результат не только существенно зависит от
выбора типа операции, но так же ввиду отсутствия однозначных ре-
зультатов теории требует обоснования применения того или иного
типа операций для каждого нового класса задач. На практике указан-
ное не очень удобно, и не всегда такую операцию можно строго обо-
сновать. Более удобно задавать атрибуты и характеристики, как это
было представлено в (4) и (5) в виде нечетких чисел L-R типа. Тогда
оценку соответствия по /-атрибуту можно определить по правилам
операций над нечеткими числами L-R типа простым вычитанием
а' - с* = {mh, 0h, 0/} = { mf- m., af + 8., + y.} (8)
с функциями принадлежности:
pH(h) = min{U [(mh - x)/0h], - x)/0h ]} V x < mh, 0h > 0
pH(h) = min{# ([x - 0/]), Rf([(x - mh)/0h+]},V x > mh, 0* > 0
Введем, наконец, обобщенную оценку готовности агента к заня-
тию и исполнению роли Role по функции Z' и конкретному атрибуту
а'. Будем ее представлять в виде
H/=Q-^(A)<1. (10)
Числовое значение функции можно рассматривать как готов-
ность k-агента занимать роль Role по каждому/-атрибуту. Параметр
является нечеткой переменной; при этом он принимает значение
«1», если соответствующая характеристика функций ЛА-агента пол-
ностью соответствует требуемому по роли Role /-атрибуту; «0» - в
противном случае. Можно ввести дополнительные ограничения; на-
пример, если то не рассматривать такого ЛА-агента в виде
кандидата на роль; в этом случае значение параметра обнулять.
Понятно, что k-агент с большей оценкой Н{ имеет наилучшие шансы
занять роль с точки зрения/-атрибута.
Числовое значение оценки в терминах теории принятия ре-
шений можно рассматривать как критерий полезности решения роле-
вой задачи по каждому/-атрибуту. Обобщение по всем F-атрибутам
и /-характеристикам позволяет получить комплексную оценку по за-
Глава 8
125
даче Z. Поэтому можно ввести понятие «кортеж готовности» к-агента
занимать роль Role вида
Redk = {Н1, И2, Н3, ..., Н/}. (п)
Если хотя бы один элемент кортежа (11) обращается в ноль, то
это означает, что либо агент не обладает требуемым функционалом
для решение Z' задачи (например реализованы функции поиска и
обнаружения объекта на местности, но не реализована функция рас-
познавания), либо характеристики ЛА-агента по исполнению роли не-
достаточны или не соответствуют требованиям роли. Использование
такого «кортежа готовности» позволяет выбрать из множества К под-
множество G о К, в котором все агенты g е G о К обладают требуемым
функционалом и имеют требуемые ресурсы для занятия роли Role.
Опыт решения практических задач показал, что целесообразно
вводить по каждому атрибуту/условные веса определяющие его зна-
чимость для исполнения роли. Кроме того, целесообразно учитывать
в виде преимуществ при назначении на роль и наличие определенных
свойств, присущих агенту. К таким свойствам можно отнести, например:
• квалификацию агента при исполнении выбранной или анало-
гичной роли в другом проекте (коэффициент квалификации ¥^);
• ценность [iv агента для коллектива (стоимость агента, способ-
ность замещать агентов в других ролях);
• степень обученности агента необходимой функции (например,
«жертвенности», со степенью рк готовности к самопожертвова-
нию [165]) и др.
8.5. Ролевая идентификация агентов
в коллективах летательных аппаратов
Будем исходить из аналогов в социальных процессах, где мак-
симальное слияние с ролью называется ролевой идентификацией, а
среднее или минимальное - дистанционированием от роли [15]. Ро-
левая идентификация агентов сущностно означает назначение аген-
тов на роли и имеет очень важное значение, так как от этого процесса
существенно зависит сама структура коллектива. Для сложных задач,
решаемых группой, да еще и для состоящей из разнотипных агентов,
требуется четкое распределение их функций и задач между агентами.
В литературе подчеркивается, что часто распределение задач в кол-
Рис. 13. К занятию роли ЛА-агентами
Глава 8
127
лективе агентов, например, роботов, рассматривается лишь деклара-
тивно. Лишь иногда упоминаются некоторые физические модели, ме-
тоды распределенного планирования, оптимизации и другие общие
механизмы [41]. Еще сложнее дело обстоит, если коллектив представ-
ляет собой рой. Распределение ролей и задач считается одним из наи-
более проблемных мест роевой робототехники; это связано с тем, что
дифференциация функций и распределение задач не рассматривают-
ся здесь как актуальные проблемы; считается, что рой должен решать
лишь простые, массовые задачи типа согласованного движения [15].
Интересный, хотя и не бесспорный, способ организации рас-
пределения ролей в статическом рое изложен в работе [106]. Претен-
дентом на роль управляющего центра становится узел сети (агент),
имеющий максимальное количество связей. Его ближайшее окруже-
ние - анализаторы информации, подготавливающие ее для принятия
решения. Узлы, расположенные на периферии сети, отвечают за сбор
информации. Наличие связей, безусловно, - очень важный фактор.
Для статического роя указанное имеет смысл. Но для более общих за-
дач распределение ролей в коллективе агентов не может определяться
только связями; необходимо учитывать как функциональность, так и
наличие соответствующих возможностей для исполнения роли.
Выше отобрано множество G о К-агентов, которые могут рас-
сматриваться как кандидаты на роль Role. Задача состоит в том, что-
бы в группе из G агентов найти такого geG о К-агента, который был
бы наиболее адекватен требованиям, предъявляемым ролевой зада-
чей Role по функционалу, и соответствовал ее атрибутам. Следова-
тельно, требуется разработка алгоритма предпочтительности одних
агентов перед другими при назначении на роли.
Основная проблема назначения на роль состоит в том, что для
исполнения роли необходимо соответствовать не одному, а многим
требованиям. Таким образом, задача становится многокритериальной.
Действительно, по каждому сравниваемому атрибуту /для пары аген-
тов g и gy нечеткое отношение строгого предпочтения PFe имеет вид:
PF' (^,^): c/V) > cyV),
с функцией принадлежности ///(#*, gy), g, gy е G.
Задача состоит в том, чтооы выбрать такого g агента, который мог
бы иметь максимальные оценки предпочтительности по всем крите-
риям. Наиболее эффективным в данном случае следует считать выбор
агента g е G, который обладает свойством оптимальности по Парето:
128
В. К. Абросимов
/(#) >№r)> Pf‘(g> gy} = max V/ 6 F, V gy e G.
В практических задачах назначения на роли в группах целесоо-
бразно вводить нестрогие отношения предпочтения. В свою очередь
в силу существенной нечеткости атрибутов ролей среди нестрогих
удобно рассматривать нечеткие отношения предпочтения [140]. Если
PFS - нечеткое отношение предпочтения на множестве агентов G, то
для любой пары агентов (g*, gy) е PFS степень доминирования агента
g* над агентом gy (g* > gy) по характеристике/можно определить с ис-
пользованием соотношения
gy) = gy) - Ff(gy> если gy) > Ff(gy> ^)> /12)
0, если gy) < pf(gy> g*).
Однако для агентов, которые ассоциируются с ЛА, сравнение
вида (12) по доминированию характеристик не вполне удобно \ Целе-
сообразно не сравнивать агентов по характеристикам непосредствен-
но между собой, а искать предпочтения по степени соответствия име-
ющихся у них характеристик атрибутам ролевой задачи. При таком
подходе при представлении атрибутов и характеристик в виде нечет-
ких L-R чисел доминирует тот ЛА-агент, для которого одновременно
выполняются два условия:
а) мода характеристик ЛА-агента в наибольшей степени близка к
моде атрибутов роли;
б) значения функций принадлежности L-R чисел, описывающих-
характеристики ЛА-агента, превышают аналогичные значения
у других ЛА-агентов. При этом в качестве точек, где необходи-
мо проводить сравнение, правильно и необходимо использо-
вать критичные точки, соответствующие левой границе нечет-
кости, моде и правой границе нечеткости атрибута роли.
Близость моды /й характеристики g-агента и моды /-атрибута
роли определяется из выражения:
= VgeG. (13)
Тогда ранг по первому условию (близость моды характеристики
агента и атрибута роли) по /й характеристике определяется из вы-
ражения
1 Действительно, сравнивать можно только объекты управления одного класса. Как срав-
нить, например, самолет и беспилотник?
Глава 8
129
Р1^1) - 1> если Ат , = min (Am .)
g1 geG V gj'
P1^?2) = 2, если Am 2 = min . (Дт .)
gl #6 G кроме #1 g) (14)
P1^/) = k, если Дт к = min z, n (Am .).
7 g geG кромеgl ...g(k~V v gj'
Значения функций принадлежности L-R чисел, описывающих
^-характеристику d-функции агента в критичных точках можно для
g g G определить из выражений:
/P(left) = L>(mf- af) или Rj(mf-af)
ц’(т) = Lg’(mf) или Rj(mf) (15)
^/(right) =Lg(mf + ty или R^mf+lty-
Тогда ранг агента по второму условию (доминанта функции при-
надлежности) для j-й характеристики определяется как сумма рангов
по трем составляющим выражения (15):
P2(g1<?) = 1 при = max q = а, т, ft,
Р2(^) = 2прИ^ = ^т^1^, q = a,m,fi, (16)
PV?) = G при = x€CKmin q = a,m, fi.
В выражении 16 первый (наивысший) ранг присваивается аген-
ту, для которого функция принадлежности для соответствующей
критичной точки максимальна. При этом у каждого агента могут
быть различные ранги по различным критичным точкам.
Суммарный ранг по первому и второму условиям позволяет оце-
нить приоритетность fc-агента по степени близости моды и функций
принадлежности j-й характеристики d-функции агента в критичных
точках к аналогичным требованиям атрибута/с учетом его значимо-
сти ^для выполнения коллективной задачи.
Ранг доминирующего агента по каждой j-й характеристике опре-
деляется из условия
1В выражении (16) используется оператор «тах», так как приоритет агента определяется по
максимальной величине функции принадлежности, что соответствует наибольшему соот-
ветствию характеристик агента атрибутам роли. Однако в выражениях (17) и (18) исполь-
зуется оператор «min», так как здесь уже суммируются ранги, и приоритет получает агент,
имеющий «соответствующее место»: первое, второе и др.
130
В. К. Абросимов
PV7) = пнп^. [P'(g*> + 2^ W)]}. (17)
Простое суммирование рангов по всем ролевым задачам Z
позволяет, наконец, выделить доминирующего агента по всем j =
= 1, 2,..., J характеристикам. При необходимости в зависимости от
коллективной миссии при определении рангов могут учитываться и
свойства агента за счет введения корректирующих коэффициентов
(например, коэффициента квалификации агента):
= тт{Х, 2..• Р^)]}• (18)
Агент g1 становится наилучшим претендентом на занятие роли
Role.
Дальнейшее ранжирование (второй и далее по очереди агенты-
кандидаты на занятие роли) осуществляется по аналогии с алгорит-
мом (13)—(18).
8.6. Алгоритм выбора агента для назначения на роль
Исходя из изложенного, алгоритм выбора агента для назначения
на роль имеет следующий вид.
1. Задание требований роли. Формализуется понятие «роль»
в виде набора (2) требуемых ролевых задач Z (/ = 1, 2, ..., I) и их
/-атрибутов (6) в виде нечетких L-R чисел вида (4)-(5).
2. Определение подгруппы агентов, обладающих требуемой функ-
циональностью для исполнения роли Role в задаче Z'. Для всех агентов,
V кеК, V deFk определяются признаки О ролевой функциональности:
0=1, если находится такая d, что функция F/ соответствует
требуемой по задаче Z’,
0 = 0, если Fd не соответствует Z’ ни для одной d.
Группа В □ К агентов, для которых 0 = 0 хотя бы для одной за-
дачи Z’, исключается из дальнейшего рассмотрения.
3. Определение подгруппы агентов, обладающих требуемыми
для исполнения роли Role характеристиками. Для всех кеК, за ис-
ключением кеВ агентов, определяется степень соответствия харак-
теристик агентов по всем z-атрибутам каждой ролевой задачи Z’ по
формулам (4), (5) и (7).
4. Построение «кортежа готовности» агентов к занятию роли.
Для всех кеК за исключением кеВ агентов разрабатывается «кортеж
готовности» занимать роль Role по формулам (10) и (11).
Глава 8
131
5. Определение множества «претендентов» на роль. Из мно-
жества агентов К выбирается подмножество агентов G □ К, «кортеж
готовности» которых не содержит нулей. Таким образом, каждый
входящий в кортеж готовности ЛА-агент geG о К принципиально
обладает набором необходимых функций для занятия роли и необхо-
димыми характеристиками для исполнения роли.
6. Определение предпочтений агентов по атрибуту/с использо-
ванием рангов P^G) и P2(G), определяемых по формулам (14)-(16).
7. Определение доминирующего агента как наилучшего «пре-
тендента» на роль по всем /-атрибутам задачи Z' с учетом их значимо-
сти с использованием свертки (17).
8. Определение наилучшего претендента на занятие роли Role с
учетом всех задач роли и возможностей агента занимать роль с ис-
пользованием выражения (18).
8.7. Выбор агента на роль разведчика
в задаче о «диффузной бомбе»
В задачах класса «диффузная бомба» (групповое проникновение
через систему обороны [8]) выделяются роли лидера, разведчика, связи-
ста, боевого элемента и др. Важнейшее значение имеет роль разведчика.
Разведчик осуществляет мониторинг местности, обнаружение целей, их
распознавание, информирование других объектов управления о ситуа-
ции и др. В последнее время эта роль все чаще отводится беспилотным
авиационным комплексам - БАК. Определяющими атрибутами роли
при выборе являются дальность, высота, продолжительность полета
БАК, разрешающая способность фото- и видеоаппаратуры и др.
Пусть набор атрибутов i-й ролевой задачи «поиск» роли «развед-
чик» имеет вид А’:{дальность, скорость полета, продолжительность
полета} со следующими исходными данными, выраженными L-R чис-
лами (табл. И).
Пусть на роль разведчика претендуют пять беспилотных авиа-
ционных комплексов, обладающих всеми тремя необходимыми для
исполнения роли характеристиками (способность обеспечивать даль-
ность, скорость и продолжительность полета), с условной квалифика-
цией ¥к и параметрами этих характеристик, представленными в виде
нечетких чисел L-R типа (табл. 12).
132
В. К. Абросимов
Таблица 11
Параметры атрибутов задачи «поиск» роли «разведчик»
Описание атрибутов Атрибуты ролевой задачи
Дальность, км Скорость, км/ час Продолжительность полета, час
Параметры L-R числа adf ftf vf « с vf a'f ft,
Числовое значение 100 20 30 40 10 20 6 1 3
Таблица12
Параметры характеристик функции «поиск» БАК,
претендующих на занятие роли «разведчик»
Претенденты на роль «разведчик» Квалифика- ция БАК Характеристика функции «поиск» роли «разведчик»
Дальность, км Скорость, км/ час Продолжитель- ность полета, час
ft «а ft ГПу av ft at р,
Атрибуты ролевой задачи «поиск» роли Role
100 20 30 40 10 20 6 1 3
Характеристики функции «поиск»агентов БАК
БАК 1 2 95 25 15 30 10 10 5 1 2
БАК 2 1 70 10 50 35 15 35 4 1 6
БАКЗ 2 90 30 50 50 20 10 7 3 4
БАК 4 3 120 30 20 30 10 30 5 2 3
БАК 5 1 90 10 20 20 20 40 3 1 1
Даже не проводя вычислений по выражениям (Ю)-(П) из
табл. 12 видно, что у БАК 5 будет присутствовать значение «ноль» в
одной из составляющих «кортежа готовности» агента, а именно: не-
возможность выполнения требований по продолжительности полета
(интервалы изменения функций принадлежности (5) атрибутов ро-
левой задачи и характеристик (7) агента не пересекаются). Поэтому
БАК 5 исключается из дальнейшего рассмотрения.
Определим близость моды атрибутов и характеристик, а также
значения функции принадлежности в трех критических точках по со-
ответствующим атрибутам роли (расчет по формулам (5), (7)) (табл. 13).
Соответствующие ранги приведены в табл. 14 и 15.
Глава 8
133
Таблица 13
Сравнительная оценка характеристик агентов и атрибутов задачи «поиск»
Агенты Разность «моды» нечетких чисел Значения функции принадлежности в трех критических точках
Мода Левая граница Правая граница
Атрибуты дальности полета; = 1 ^(т«) ' df df' и }(т.,+ в..)
Требуются по роли 100 80 130
БАК 1 5 0,7 0 0
БАК 2 30 0,4 0,8 0
БАКЗ 10 0,8 0,67 0,2
БАК 4 20 0,5 0 0,5
Атрибуты скорости полета ; = 2 mv ~ mvf и 2(т f - а ()
Требуются по роли 40 10 20
БАК 1 10 0 1 0
БАК 2 5 0,85 0,66 0,57
БАКЗ 10 0,5 0 1
БАК 4 20 0,5 0,7 0,22
Атрибуты продолжительности полета;= 3 mt - "V
Требуются по роли 6 1 3
БАК 1 i 0,5 0,67 0,18
БАК 2 2 0,66 0,74 0
БАКЗ 1 0,66 0,5 0,47
БАК 4 1 0,8 0,85 0,2
Таким образом, приоритетность назначения агентов на роль
«разведчика» следующая: БАК 2, БАК 3, БАК 4, БАК 1 (без учета ква-
лификации БАК при решении задачи разведки) и БАК 2, БАК 3, БАК 1,
БАК 4 (с учетом квалификации БАК при решении задачи разведки).
Рассмотрим, как меняется указанное распределение при выделе-
нии приоритетности различных атрибутов функции роли (табл. 16).
Пусть, например, оборона объекта разведки организована таким об-
разом, что приоритетность отдается скорости движения агента в об-
ласти возможного поражения объекта. Введем характеристики прио-
134
В. К. Абросимов
ритетности - условные веса функций определяющие их значимость
для исполнения роли. В нашем случае для определенности допустим,
что £.:{£, = 0,2; = 0,6; = 0,2}.
Таблица 14
Распределение рангов агентов
БАК-агент Ранги Суммарный ранг Ранг для за- нятия роли
По моде °^f
Дальность полета
БАК 1 1 2 3 3 9 2
БАК 2 3 4 1 3 11 3
БАКЗ 2 1 2 2 7 1
БАК 4 4 3 3 1 11 3
Скорость полета
БАК 1 2 3 1 4 10 3
БАК 2 1 1 3 2 7 1
БАКЗ 2 2 4 1 9 2
БАК 4 3 2 2 3 10 3
Продолжительность полета
БАК 1 1 3 3 4 11 4
БАК 2 2 2 2 3 9 3
БАКЗ 1 2 4 1 8 2
БАК 4 1 1 1 2 5 1
Таблица 15
Перераспределение рангов с учетом квалификации агентов
Агент Дальность Скорость Время Ранг по всем характе- ристикам Ранги без учета квалифи- кации Л Ранг с учетом Л Очередность занятия роли с учетом ква- лификации
Исходные ранги Результирующие ранги
БАК 1 2 3 4 9 3 2 18 3
БАК 2 3 1 3 7 2 1 7 1
БАКЗ 1 2 2 5 1 2 10 2
БАК 4 3 3 1 7 2 3 21 4
Глава 8
135
Таблица 16
Перераспределение рангов при учете приоритетности
различных атрибутов функции роли и квалификации агентов
Агент Дальность < = 0,2, Скорость < = 0,6 Время < = 0,2 Ранг с учетом приори- тетности атрибутов Ранги без учета квалифи- кации Ранги сучетом квали- фикации Очеред- ность занятия роли
БАК1 0,4 1,8 0,8 2 3 2 4 3
БАК 2 0,6 0,6 0,6 1,8 1 1 1,8 1
БАКЗ 0,2 1,2 0,4 1,8 1 2 3,6 2
БАК 4 0,6 1,8 0,2 2,6 4 3 7,8 4
Проанализируем результаты, полученные в табл. 16.
В конкуренцию за занятие роли «разведчика» вступили четыре
БАК, каждый их которых обладал требуемыми и совпадающими по
сущности с атрибутами функции «поиск» роли «разведчик» характе-
ристиками: дальностью, скоростью и продолжительностью полета.
БАК 1 имел наилучшую близость к атрибутам функции «поиск» по
дальности и сравнительно хорошие характеристики по продолжи-
тельности полета, но более слабые, чем у остальных БАК, оценки по
скорости. Кроме того, БАК 1 уступал БАК 2 по квалификации. Одна-
ко даже при сравнении БАК по дальности ему не удалось получить
приоритет в силу слишком узкого диапазона функции принадлежно-
сти; он занял лишь второе место. При учете высокого приоритета для
решения задачи «поиск» атрибута «скорость» (в 3 раза выше, чем по
остальным атрибутам), определяемого особенностями объекта обо-
роны, БАК 2 и БАК 3 стали равнозначными. Однако определяющее
значение приобрела квалификация БАК. Поэтому наивысший при-
оритет по занятию роли разведчика получил БАК 2. На второе место
переместился БАК 3, имеющий сравнительно неплохие характери-
стики по всем трем атрибутам. По существу дальнейшее ранжирова-
ние уже малозначимо.
В заключение можно этой главы сделать следующие выводы.
Человеческое общество выработало многочисленные алгоритмы
назначения людей в коллективах на роли. Будущего кандидата прове-
ряют на профессиональную пригодность по резюме, учитывают его
образование, предыдущий опыт, рекомендации, кандидат выполняет
тестовые задания, проходит испытательный срок. Сложнее обстоит
136
В. К. Абросимов
дело с техническими системами, в частности, с объектами управле-
ния, которые изначально создаются для решения определенных задач
(в авиации - истребитель, бомбардировщик и др.), но могут быть и
многоцелевыми.
Выше был предложен алгоритм назначения летательных аппара-
тов как объектов управления на роли при формировании группы для
выполнения коллективной миссии. Объекты управления представля-
ются в виде агентов. Каждый агент имеет возможности по выполне-
нию определенных функций. В процессе анализа групповой задачи
выделяются подзадачи, которым в соответствие ставятся роли. Роли
связываются с требуемыми для их исполнения функциями, атрибуты
которых выражаются нечетким образом (в рассмотренных примерах
в виде L-R чисел). Аналогичным образом представляются возможно-
сти агентов и их характеристики. Таким образом, устанавливается со-
ответствие: функционал агентов должен соответствовать требуемым
для исполнения роли функциям, а атрибуты функций - реализуемым
характеристикам функционала агентов.
Алгоритм выбора агента для назначения на роль основан на
формализации количества и вида функций, требуемых для исполне-
ния роли, а также формальной записи их атрибутов. Общим критери-
ем является наилучшее удовлетворение требованиям ролевой задачи.
На первом этапе среди агентов исключаются из кандидатов те, кото-
рые не обладают функционалом и ресурсами, требуемыми для ис-
полнения роли. Далее по определенным правилам строится таблица
предпочтений, где агентам назначаются ранги сначала по отдельным
атрибутам и далее по их совокупности, отражающие степень доми-
нирования агентов друг над другом. Обобщенно по всем функциям
роли ранги объединяются путем свертки в виде суммы. В процессе
выбора могут учитываться квалификация агента при исполнении
аналогичной роли в другом проекте, степень обученности агента не-
обходимой функции, значимость агента для группировки.
Полученная ранговая последовательность позволяет выбирать
агента для назначения на роль и замещать его следующим по рангу
агентом при необходимости (например, при гибели агента, исполня-
ющего выбранную роль).
9. РЕКУРРЕНТНАЯ ЗАДАЧА МАРШРУТИЗАЦИИ КАК
ОСНОВА ЦЕЛЕРАСПРЕДЕЛЕНИЯ В КОЛЛЕКТИВАХ
ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Каждый шаг действительного движения
важнее дюжины программ
Карл Маркс
9.1. Ограниченность классической задачи коммивояжера
для задач коллективного движения
Одной из важнейших задач в процессе выполнения коллектив-
ной миссии после ее декомпозиции на подзадачи и назначения ЛА на
роли является распределение ЛА по объектам обследования на мест-
ности или в пространстве (по целям). Этот класс задач называется
задачами целераспределения. Их решение фактически означает фор-
мирование маршрута движения ЛА, реализуемого в виде полетного
задания ЛА.
Классическая задача коммивояжера (Trevelling Salesman Problem)
является одной из самых известных задач комбинаторной оптимиза-
ции для решения задач целераспределения. Она состоит в отыскании
самого выгодного маршрута, проходящего через заданные города хотя
бы по одному разу с последующим возвратом в исходный город. В по-
становке и условиях задачи коммивояжера указываются критерий
оптимальности маршрута (кратчайший, наиболее незатратный, слож-
ный составной и др.), а также соответствующие матрицы расстояний,
«стоимостей» посещения и других характеристик между городами.
138
В. К. Абросимов
Постановка этой задачи, как и большинство ее частных случаев,
относится к классу так называемых NP-трудных задач. Кроме того,
она также относится к классу так называемых «трансвычислитель-
ных»: уже при относительно небольшом числе городов (несколько де-
сятков) она не может быть решена методом перебора вариантов даже
современными компьютерами за обозримое время! В силу этого для
получения приближенного субоптимального решения в постановку
задачи вносится ряд ограничений и условий.
Методы решения задачи коммивояжера хорошо отработаны и по
ним имеется многочисленная литература. Однако при решении задачи
коммивояжера коллективами ЛА использование классической задачи
коммивояжера ограничено, прежде всего по следующим причинам.
1. Типовым ограничением задач коммивояжера является про-
хождение маршрута через каждый город только один раз. В процессе
решения коллективных задач это ограничение является довольно силь-
ным, так как часто требуется посещение города неоднократно, напри-
мер, для контроля эффективности действий после первого посещения.
2. Постановки задач коммивояжера часто относятся к классу
«плоских геометрических», где матрица расстояний отражает рас-
стояния между точками на плоскости. Однако в задачах, связанных
с коллективами ЛА-агентов, требуются многочисленные переходы
между точками в пространстве, что существенно расширяет количе-
ство вариантов для перебора.
3. В классической задаче коммивояжера часто встречаются упро-
щающие предположения, связанные с матрицей стоимостей (метриче-
ская задача коммивояжера, в которой матрица стоимостей является тре-
угольной, симметричная и асимметричная задачи коммивояжера и др.).
В рассматриваемых задачах такие предположения также не работают.
Известны также постановки и обобщения задачи коммивояже-
ра на несколько коммивояжеров. За рубежом они получили название
Vehicle Routing Problem. Исторически эти задачи вытекают из практи-
ческих проблем прикладной логистики, характеризуются большим
количеством ограничений, что вызывает дополнительные трудности
для получения оптимальных решений.
В настоящей главе рассматриваются задачи нескольких ком-
мивояжеров в применении к пространственным случаям. При этом
формулируются нетривиальные ограничения и условия решения та-
ких задач, определяющие их инновационную постановку для граж-
данских и оборонных приложений.
Глава 9
139
9.2. Задачи маршрутизации транспорта
Практика своевременной доставки разнообразных товаров по-
требителям выдвинула на первый план так называемые задачи марш-
рутизации. Они являются ключевыми в задачах логистики. Это объ-
яснимо: во многих рыночных областях доставка товара добавляет к
его стоимости сумму, сравнимую со стоимостью самого товара. Зада-
чи маршрутизации транспорта (Vehicle Routing Problems - VRP) фор-
мулируются следующим образом: для парка транспортных средств
(Vehicles), расположенных в одной или нескольких областях («депо»),
должен быть определен набор маршрутов до нескольких отдаленных
точек-потребителей (клиентов). Количество потребителей превыша-
ет количество транспортных средств.
В отечественной литературе, к сожалению, постепенно закрепи-
лись иностранные названия сущностей в этих задачах. Нам представ-
ляется правильным вводить термины, более соответствующие классу
решаемых задач, и обобщающие постановки. Вместо «парка» далее
в наших постановках введем понятие «группа», вместо «транспорт-
ных средств» - «объекты управления», вместо «точек-потребителей-
заказчиков-клиентов» - «цели» или «объекты». Сохраним при этом
удачный термин «маршрут». Впрочем иногда вместо слова «маршрут»
будем использовать термин «задание» которому присвоим смысл
«предварительный маршрут», т.е. последовательность обхода целей,
выбранная еще до реализации движения.
Задачи класса VRP лежат на пересечении двух хорошо изучен-
ных задач: задачи коммивояжера (TSP) и задачи об упаковке рюкзака
(ВРР). Действительно, если грузоподъемность каждого транспортно-
го средства принимается достаточной, то задача VRP сводится к так
называемой множественной задаче коммивояжера (Multiple Traveling
Salesman Problem - MTSP) путем добавления к исходному графу т-1
(только здесь т — количество маршрутов) копий нулевой вершины и
ее ребер. Решение же задачи об упаковке рюкзака (Bin Packing Problem -
ВРР) по сути эквивалентно решению задачи VRP при условии, что все
расстояния принимаются равными нулю (при этом эффективность
всех подходящих решений будет одинакова). Использование компью-
1 Для таких объектов управления, как летательные аппараты, будет использоваться термин
«полетное задание».
140
В. К. Абросимов
терных методов оптимизации доставки товара (как прикладного со-
держания задач VRP) часто выражается в экономии порядка 15-20%
от его общей стоимости. Но VRP как задача целочисленного програм-
мирования, также относящаяся к классу NP-трудных задач, сложна
для решения; вычислительная сложность ее зависит от размера вход-
ных данных экспоненциально. Для таких задач обычно достаточно ис-
кать приближенные решения (эвристики или метаэвристики).
9.3. Общие постановки
и методы решения задач маршрутизации
9.3.1. Разнообразие постановок
и методов решения задач класса VRP
В литературе по решению задачи VRP достаточно подробно опи-
сывается комплекс ограничений, которые необходимо учитывать при
решении таких задач. Существует свыше десятка задач класса VRP,
различающихся особенностями постановок (см., например, [107]).
Ценно то, что все они получены из практически встречающихся огра-
ничений (табл. 17).
Таблица 17
Различные постановки задачи VRP (с использованием данных [107])
Условное сокращение Название постановки Условия решения задачи Ограничения
CVRP Capacitated VRP Ограничения по грузоподъемности (классическая постановка)
VRPTW VRP with Time Windows Ограничения по времени доставки грузов (более 50 % публикаций статей посвящено методам решения задач в этой постановке)
MDVRP Multiple Depot VRP Маршрутизация с несколькими депо
VRPPD VRP with Pick-Ups and Delivering Маршрутизация с немедленным воз- вратом товаров
VRPB VRP with Backhauls Маршрутизация с возвратом товаров после полной доставки
SDVRP Split Delivery VRP Маршрутизация с разбиением заказа на несколько машин
HVRP Heterogeneous VRP Маршрутизация с различными видами- транспорта
Глава 9
141
Окончание таблицы 17
Условное сокращение Название постановки Условия решения задачи Ограничения
FSMVRP Fleet Size and Mix VRP Маршрутизация с неограниченным раз- мером и составом группы
PVRP Periodic VRP Периодическая маршрутизация - доставка может осуществляться не сразу, а в течение нескольких дней
SVRP Stochastic VRP Маршрутизация со случайными дан- ными
PDPVRP Pickup-and-delivery Problems Доставка из одного места в другое
CARPVRP Capacitate Darcrouting Problems Обслуживание клиентов в пути (на участках дорог)
LRP Location-routing Problems Маршрутизация с определением место- положения (склад и т.п.)
IRPVRP Inventory Routing Problems Задачи распределения товара
Кратко проанализируем такие постановки, обращая особое вни-
мание на решение задач с ограничениями применительно к построе-
нию пространственно-временных структур движения ЛА в агрессив-
ной среде.
В задачах типа Capacitated VRP (CVRP) предполагается, что каж-
дое транспортное средство имеет ограниченную грузоподъемность.
Это сводится к условию, что объем грузов на каждом маршруте не
должен превышать заданной величины. Такое условие позволяет ми-
нимизировать количество транспорта, необходимого для выполне-
ния задания, а также общее время выполнения задачи. Применитель-
но к задаче построения ПВС это условие становится важным, если в
полетное задание включается несколько целевых точек, и доставляе-
мый груз, например, должен быть распределен по этим точкам.
В задачах типа VRP with Time Windows (VRPTW) предполагает-
ся, что каждый клиент должен быть обслужен в определенное «вре-
менное окно» - известный интервал времени (так называемый «наме-
ченный горизонт» (Scheduling Horizon). Указанное условие в задачах
ПВС является весьма важным, так как само название ПВС означает
синхронизацию по времени прихода летательных аппаратов к задан-
ным целям. Это означает, что в пространстве должны совершаться
некие маневры, с тем чтобы обеспечить заданный временной график.
В задачах типа Multiple Depot VRP (MDVRP) используется не-
сколько так называемых «депо» (мест размещения транспорта) для
142
В. К. Абросимов
обслуживания клиентов. Клиенты распределяются по разным депо.
В каждом депо располагается парк транспорта. Каждая машина вы-
езжает из своего депо, обслуживает потребителей, прикрепленных к
данному депо, и затем возвращается обратно. Такие условия в задачах
построения ПВС являются типовыми. Если рассматривать «депо» как
аэродромы, а потребителей - как наземные цели, то распределение
ЛА различных классов (беспилотники, истребители, бомбардиров-
щики и др.) по целям образует важную составляющую общей задачи
построения ПВС.
В задачах типа Split Delivery VRP (SDVRP) каждый клиент может
обслуживаться одновременно различным транспортом. Данная зада-
ча расширяет VRP, позволяя обслуживать одного клиента различны-
ми видами транспорта, если это уменьшает общую стоимость задачи.
Задача SDVRP сводится к VRP разбивкой каждого заказа клиента на
несколько неделимых заказов, обслуживаемых различными транс-
портными средствами. Для построения ПВС в зависимости от целей
может потребоваться реализовать такую структуру, когда в опреде-
ленные области пространства приходят различные ЛА с одинаковы-
ми или близкими возможностями; следовательно данная постановка
может стать интересной.
Наиболее интересным классом задач являются задачи типа
Stochastic VRP (SVRP), когда некоторые компоненты задачи (коли-
чество и запросы клиентов, длина пути) могут иметь случайное зна-
чение. Случайность при построении ПВС является довольно рас-
пространенным явлением. Возможны ситуации непреднамеренного
возникновения новой цели, нового объекта для посещения, случай-
ного времени посещения объекта, случайности прихода к объекту
(вероятно возникновение самых различных погрешностей прихода в
заданную точку как пространства, так и цели) и др.
Самый полный обзор публикаций, исследующих задачи класса
SVRP, приведен в работе [108]. Ценность ее состоит в том, что в ней
на основе изучения 3000 ссылок (с 1963 г.!) и 49 статей последнего вре-
мени проведена классификация возможных подходов и определены 8
различных групп параметров, рассматриваемых как вероятностные,
в том числе количество объектов управления, возможности объектов
управления, используемые критерии, прикладные модели использу-
емых решений, графическое представление, а также 29 различных
атрибутов этих групп. При этом среди изученных источников 44%
статей посвящено различным аспектам задачи SVRP для нескольких
Глава 9
143
объектов управления. В работе также показано, что в большинстве
публикаций разрабатываются разнообразные эвристические и мета-
эвристические подходы для решения задач класса SVRP на основе хо-
рошо себя зарекомендовавших методов оптимизации. Однако публи-
каций, в которых бы оптимизировалось количество используемых
объектов управления, количество обслуживаемых ими объектов,
получаемые преимущества (за исключением стандартно используе-
мого критерия минимизации стоимости перевозок, времени и длины
пути), практически нет. Кроме того, в большинстве публикаций ис-
пользуются смоделированные вероятностные данные, но нет обра-
ботки реальных вероятностных характеристик.
Необходимо подчеркнуть, что ряд авторов указывает не на веро-
ятностную, а на нечеткую природу различных ограничений в задачах
VRP. Так, в работе [109] нечеткостью предлагается описывать время
доставки груза. Для решения используется генетический алгоритм.
Показано, что использование такого подхода обеспечивает сокраще-
ние числа транспортных средств, требующихся для доставки задан-
ного количества грузов. Вообще введение нечеткости вместо веро-
ятности является довольно распространенным приемом (см. также,
например, [110]). В работе [111] для решения задачи VRP предложен
метод «оптимизации роя частиц» в условиях нечетких ограничений.
Нечетким числом описываются потребности в доставке груза клиен-
ту, причем они формулируются в виде таких понятий, как возмож-
ность, необходимость и достоверность. Предполагается, что все кли-
енты разбиваются на кластеры, внутри которых номера клиентов,
обслуживаемых одним транспортным средством, обозначаются как
номера частиц. В силу этого каждый клиент представляется нечет-
ким номером. Поскольку требования по сервису клиентов являются
также нечеткими, то после обслуживания нескольких клиентов эта
нечеткость проявляется и переходит на остатки груза доставляющего
транспорта. Оценка такой нечеткости позволяет оценить момент воз-
вращения транспортного средства в парк.
Отдельные авторы вводят дополнительные классы задач VRP
исходя из видов критериев оптимизации. Так, в работе [112] вводится
сложный критерий стоимости и такая задача называется Cumulative
VRP I Здесь указывается, что часть важных параметров может не за-
1 Автору пока не удалось отыскать адекватный российский перевод.
144
В. К. Абросимов
висеть от длины дуги маршрута (расход топлива; время, проведенное
на объекте назначения и др.). Идея состоит в том, чтобы включить
эти переменные в целевой оптимизируемый функционал. Поэтому
собственно целевая функция формируется как обобщенная функ-
ция расстояния (времени) и дополнительных факторов, выбранных
и указанных в соответствующем представлении. В качестве примера
целевая функция строится как произведение загрузки автомобиля на
проходимый этим автомобилем путь. Показано, что при этом опти-
мизируется не длина маршрута, а «суммарная энергия», затрачивае-
мая на реализацию задачи доставки груза по назначению.
Интересным классом задач являются задачи класса Dynamic
VRP. Появление задач этого типа связано с развитием информаци-
онно-коммуникационных технологий, которые позволяют информа-
ции быть полученной и обработанной в режиме реального времени.
Особенно проблемными являются задачи составления транспортных
расписаний, так как новые возникающие on-line-задачи должны быть
включены в расписание и сообщены лицам, ответственным за до-
ставку. В работе [113] подчеркивается, что широко обсуждаемые ме-
тоды, основанные на случайных алгоритмах маршрутизации, не со-
всем подходят для работы алгоритмов в режиме реального времени.
Показывается, что более предпочтительным в этих условиях являют-
ся простые эвристики, основанные на on-line-политике. Предлагается
измерять так называемую степень динамичности маршрута, которая
непосредственно связывается с длиной проходимого пути, и закла-
дывать ее в основу оценки.
В работе [114] формулируется еще одна постановка задач клас-
са VRP - задача с так называемой «требуемой областью» (VRP with
Demand Range - VRPDR). Основной ее особенностью является то, что
доставляемый груз может варьироваться в пределах от d до величины
ad, где 0 < а < 1. Это позволяет получить эффективное решение, если
требуется доставить значительное количество груза несколькими
объектами в близлежащие точки.
Интересным с точки зрения обобщения методов решения задач
класса VRP является обзор, проведенный в работе [115]. Авторы де-
лят все разработанные методы на группы: метод ветвей и границ и
его разновидности, эвристические, метаэвристические методы и их
сочетания. Однако эта работа существенно проигрывает российской
публикации [107], где такой обзор проведен наиболее полно. Следуя
этой работе, опишем основные методы решения задач класса VRR
Глава 9
145
Точные методы *. Точность может обеспечиваться при значи-
тельном времени решения задачи. При ограниченном времени мож-
но получать лишь приближенные решения. К ним относятся методы
полного перебора, метод ветвей и границ и его разновидности.
Конструктивные методы. Данные методы используются для
построения первоначального приближения и основываются на так
называемом «жадном» алгоритме. «Жадным» называется эвристиче-
ский алгоритм, который на каждой отдельной стадии решения задачи
выбирает локально оптимальный в том или ином смысле вариант. К
«жадным» относятся методы «ближайшего соседа», Savings-based Al-
gorithm, Insertion Algorithm, Minimum Spanning Tree, Degree of Free-
dom 1 2 и др.
Методы кластеризации. Этими способами можно сгруппиро-
вать цели по «кластерам» - группам объектов, близких по свойствам
(расположению на местности, времени доставки и др.). Понятно, что
достижение целей, принадлежащих одному кластеру, удобно планиро-
вать вместе и включать в один или близкие маршруты. Способы кла-
стеризации включают кластеризацию по углу и длине дуг (Sweep), ди-
хотомическое сбалансированное разделение вершин, методы Location
Based Heuristic, Generalized Assignment, Fast Clusterisation и др.
Методы поиска. Эти методы представляют собой процедуры по-
иска улучшения решения. Они основываются на итерационном улуч-
шении решения в окрестности текущего найденного (Local Search),
поиске с запретами (Tabu Search), усеченном методе ветвей и границ
(Branch&Bound) с эвристической оценкой ветвей и отсечением неэф-
фективных на ранних стадиях.
К методам поиска также относятся методы улучшения первона-
чального решения, основанные на так называемых природных алго-
ритмах (см. п. 9.3.2).
Методы улучшения решения. Эти способы широко использу-
ются в методах поиска решения в окрестности уже существующего.
Здесь ищется соседнее решение, улучшающее предыдущее, но находя-
щееся рядом с ним. К ним относятся такие методы, как Relocate (пере-
нос точки в другой маршрут), k-opt (перенос дуги в другой маршрут);
Swap (обмен одной точки между маршрутами); String-relocate (пере-
1 Конечно, термин «точные» в силу NP-сложности задач является условным.
2 Соответствующая литература приведена в обзоре [195].
146
В. К. Абросимов
нос сегмента в другой маршрут); Cross/string-exchange (обмен двумя
сегментами между маршрутами); A-interchange (обмен А точек между
двумя маршрутами); Cyclictransfers (перенос к точек из 1 маршрута во
2-й, из 2-го в 3-й и т.д.); Crossover (объединение маршрутов из разных
решений); Inversion (инверсия части маршрута) и др. Все эти методы
иногда объединяют под общим названием Relocation Methods.
Способы выбора соседнего решения. Количество соседних ре-
шений может быть огромным. В работе [107] приводится такой при-
мер: при использовании метода Relocation для размещения 100 зака-
зов на 10 машинах для любого решения существуют 9900 соседних
решений. Поэтому используют специальные методы выбора реше-
ния, такие, как First Improvement (по очереди рассматриваются со-
седние решения, первое улучшение принимается); Best Improvement
(рассматривается сразу несколько соседних решений, выбирается са-
мое лучшее из них); Random Neighbor Selection (выбирается случай-
ное соседнее решение) и др.
Комбинированые методы. В их основе лежит последовательное
или параллельное использование различных методов. Из стратегий
комбинирования используют поэтапный запуск (например, сначала
кластеризация, далее - «жадный» и затем - «локальный» поиск), ите-
ративный запуск и др.
9.3.2. Краткий обзор подходов к решению задач класса VRP
с использованием природных алгоритмов
В последнее время все большее внимание уделяется подходам,
основанными на природных алгоритмах [116-123]. К ним прежде все-
го относят:
• генетические алгоритмы (Genetic Algorithm - родители скрещи-
ваются и мутируют, каждое новое поколение потомков лучше
предыдущего);
• муравьиные алгоритмы (Ant Colony Algorithm - муравьи (агенты)
оставляют феромоновый след и выбирают случайные решения);
• стайные алгоритмы (SwarM Algorithm).
Многими работами экспериментально подтверждено, что в
сравнении с точными методами комбинаторной оптимизации (ди-
намическое программирование, метод ветвей и границ и др.) при-
родные алгоритмы имеют значительное преимущество по времени
Глава 9
147
решения задач и для сравнительно небольшой размерности задачи
коммивояжера находят решение, довольно близкое к оптимальному,
за значительно меньшее время.
При разработке решений с использованием муравьиных алго-
ритмов обычно используется и корректируется тем или иным образом
известная формула, предложенная основным идеологом муравьиных
алгоритмов М. Dorigo [120]. Она определяет вероятность перехода
муравья из одной вершины в другую с учетом так называемого «зре-
ния» муравья (величины, обратно пропорциональной длине прохо-
димого пути) и оставляемого им на следе феромона, характеризую-
щего стремление муравья пройти по данному пути. Корректируются
величина откладываемого феромона, степень его испарения, струк-
тура «зрения» муравья и др. Так, например, в работе [121] вводятся
два вида формул для определения величины феромона: стандартная
и учитывающая феромон на самом коротком получившемся маршру-
те. В работе [122] для задач класса VRP впервые используются груп-
пы «избранных» муравьев (по образу и подобию того, как в природе
муравьи разделяются на разведчиков, охранников, фуражиров и др.).
Муравьи в этой задаче соответственно выбирают собственные пути в
зависимости от своего класса и назначения. В работе [119] предлага-
ется использовать нечеткий подход для описания поведения муравьев
во время их движения. По существу стандартная вероятностная функ-
ция, согласно которой муравей выбирает путь к пище, заменяется не-
четкой. Вероятность выбора пути ставится в зависимость от наличия
феромона, а значение феромона и степень его испарения описываются
в виде нечетких функций. Предполагается, что такая модель наиболее
адекватна реальности. В работе [118] рассматривается система много-
параметрического отбора маршрутов движения в городских условиях
с использованием нечеткой логики и динамической муравьиной ко-
лонии. Параметрами системы являются как важные для цели данные
(расстояние, вероятность дорожно-транспортного инцидента и др.),
так и дополнительные элементы: ширина полос движения, количе-
ство светофоров и пр. Все эти характеристики рассматриваются как
функции, по существу, двух переменных - расстояния между точками
перемещения и времени перемещения, которое отражает движение
потока транспорта как цепочки муравьев. На время движения также
влияет вероятность инцидента.
Одной из наиболее интересных работ в этом направлении явля-
ется работа [123]. Основными компонентами архитектуры описыва-
148
В. К. Абросимов
емого подхода являются агенты задачи, агенты ресурсов и окружаю-
щая среда. Среда представляет собой ориентированный граф. Узлами
в графе являются ресурсы, ребра представляют связь между различ-
ными ресурсами. От ресурса к ресурсу могут перемещаться мобиль-
ные объекты. Мобильный объект, который находится на узле в графе,
может общаться с ресурсом на этом узле. Когда мобильный объект
находится на конкретном узле, соответствующий ресурс может вы-
полнять действия по заданию этого мобильного объекта. У каждого
ресурса есть свой агент. Агент ресурса представляет информацию о
функциональных возможностях ресурса в окружающей среде. Аген-
ты ресурсов составляют расписание на основе запросов от агентов за-
дач и отвечают на вопросы «что-если»: агент задачи может спросить
агента ресурса, когда и по каким стандартам качества конкретная опе-
рация может быть выполнена. Это позволяет агентам задачи оценить
общее время до завершения и ожидаемое качество решения задачи.
Агент задачи несет ответственность за выполнение своих задач и за
общение с агентом ресурса для выполнения требуемых операций. На
основе вариантов, которые доступны агенту задачи, и их оценки агент
задачи выбирает конкретный путь, которым он намеревается следо-
вать. Так как принятие намерения имеет последствия для агентов ре-
сурсов, которые будут посвящены в рамки намерения, агент задачи
должен общаться с этими агентами ресурсов и информировать их о
том, когда и какие действия агенту ресурса нужно будет выполнить.
Агентам ресурсов необходимо зарезервировать это время и действия
как предварительный заказ. Для оперативной передачи информации
между агентами задачи и агентами ресурсов используются «легкие»
агенты-посланники, рассматриваемые и моделируемые как муравьи.
Предполагается, что они управляемы основными агентами (агента-
ми задачи и агентами ресурса). Агенты-муравьи предназначены для
быстрой передачи информации между основными агентами. В пред-
лагаемом подходе используются в основном два типа легких агентов,
подобных муравьям: муравьи-разведчики и муравьи-намерения.
Агенту задачи важно узнать, каким образом он может достичь
своей цели. Для этого агент задачи генерирует муравьев-разведчи-
ков с определенной частотой, которые исследуют возможные пути на
ориентированном графе. Каждый из муравьев-разведчиков исследует
возможный маршрут в окружающей среде и оценивает этот маршрут.
Такая оценка обычно касается времени достижения цели и критери-
ев качества решения задачи, но может также включать оценку затрат
Глава 9
149
на использование дорогих или критических ресурсов. Для того чтобы
сделать оценку, муравей-разведчик проходит путь по окружающей
среде и взаимодействует с агентами ресурса на различных узлах, за-
давая агенту ресурса вопрос «что-если»: какие были бы сроки, каче-
ство и затраты, если задание ресурсу пришло в тот или иной момент
времени. Муравей-разведчик собирает таким образом информацию
по всему маршруту выполнения задания. Собранную информацию
муравей-разведчик передает агенту задачи. Агент задачи создает трех
муравьев-разведчиков для разведки возможного пути. Информация,
которую агент задачи собирает от всех своих муравьев-разведчиков,
отфильтровывается, для того чтобы сохранить приемлемые варианты
решения. Вариант является приемлемым, если помимо достижения
требуемой цели, она будет достигнута в срок и с приемлемым каче-
ством и затратами. Список маршрутов-кандидатов регулярно об-
новляется, так как новые муравьи-разведчики постоянно оценивают
свои маршруты.
Агентам ресурсов необходимо обладать адекватной оценкой
своей будущей нагрузки. Для того чтобы агенты ресурсов знали о
такой нагрузке, агенты задачи генерируют муравьев-намерений, ко-
торые информируют о намерении агентов задачи выполнить задание
тем или иным образом. Этот процесс происходит следующим обра-
зом. После того как агент задачи составил набор приемлемых марш-
рутов, он выбирает наиболее подходящий из этих маршрутов в каче-
стве своего намерения. Затем агент задачи генерирует с определенной
частотой муравьев-намерений, чтобы проинформировать агентов
ресурсов, которые участвуют в операциях на выбранном им марш-
руте. Муравьи-намерения следуют выбранному пути и информируют
агентов ресурсов о том, что их агент задачи, вероятно, посетит ре-
сурс в определенное время для выполнения конкретной операции.
Как следствие, агенты ресурса смогут предсказать их загруженность
и производительность более точно для посещающих их в будущем
муравьев-разведчиков. Оценки кандидатов предлагаемых решений
постоянно обновляются муравьями-разведчиками. Если требуется,
агент задачи может изменить свое намерение и перейти к другому,
более приемлемому маршруту.
Таким образом, предложенный в [123] многоагентный подход
позволяет оптимизировать управление сложными процессами. При
этом агенты как создают знания о внешней среде, в которой они функ-
ционируют, так и используют эти знания. Поведение многоагентной
150
В. К. Абросимов
системы динамическое: агенты отслеживают и изменения во внешней
среде, и динамику намерений агентов. Прекрасная публикация!
9.3.3. Возникновение итерационности в задачах коммивояжера
Для работ, описанных выше, характерным является рассмотре-
ние задач класса VRP на плоскости. И хотя добавление еще одной
координаты на первый взгляд принципиально не меняет постановок
задач, но, как будет показано ниже, существенно усложняет алгоритм
их решения.
Заметим, что ограничения рассматриваемого класса задач часто
являются следствием влияния антагонизма среды - влияния как при-
родных факторов, так и функционирования систем, противодейству-
ющих движению (радары, обнаруживающие объекты управления,
системы ПВО/ВКО, средства радиоэлектронного противодействия и
др. [124]). Ограничения также возникали исходя из естественных ус-
ловий (ошибки, поломки, погрешности, естественные препятствия и
др.), но не предполагалось, что такие ограничения могут создаваться
специально для затруднения или даже невозможности выполнения
коллективной миссии.
Все рассмотренные выше задачи предполагали нахождение оп-
тимального, но однократного решения. Вместе с тем практика демон-
стрирует необходимость определенных итераций. Прежде всего, это
связано с потребностью пересмотра исходного целераспределения,
которое по тем или иным причинам не может быть реализовано в
варианте, ранее согласованном между всеми участниками выполне-
ния коллективной миссии. Действительно, изменяемость ситуаций
на маршруте требует порой существенного изменения первоначаль-
но спланированных маршрутов объектов управления. Требуются не
только перераспределение задач в процессе движения, но и дополни-
тельные итерации, например, по обследованию (разведке) одних и тех
же объектов с определенными временными интервалами.
Действительно, пусть в процессе движения появляются новые
ограничения для объектов управления. Появление таких ограниче-
ний существенно меняет саму постановку задачи. В зависимости от
степени их враждебности система управления ЛА может и должна
выработать следующие варианты действий:
• совершить маневр по обходу/облету области ограничений;
Глава 9
151
• воздействовать на область ограничений, если такие возможно-
сти есть;
• сделать попытку продолжить выполнение своего полетного за-
дания в условиях ограничений с возможно вероятностным ре-
зультатом;
• отказаться от продолжения выполнения полетного задания.
Во всех таких случаях заранее сформированная пространствен-
но-временная структура движения будет нарушаться. При этом ситу-
ация, когда отдельные объекты управления окажутся неспособными
выполнять ранее поставленные задачи, неизбежно спровоцирует не-
выполнение и коллективной миссии.
Задача коммивояжера «в итерациях» как самостоятельная еще,
как нам представляется, не ставилась. Она имеет ряд существенных
отличий от традиционной. Прежде всего это касается условий, при ко-
торых она решается. Основные отличия систематизированы в табл. 18.
Таблица 18
Ключевые отличия итерационной задачи коммивояжера
от традиционных постановок
Условия решения задачи коммивояжера для N объектов управления
Традиционная постановка Итерационная постановка
Загрузка транспортного средства ограни- чена и не превышает заданной величины Возможности объекта управления могут быть как ограничены, так и не ограничены
Каждый маршрут начинается и заканчива- ется в одной точке Допускается завершение маршрута либо в точке, соответствующей последней цели, либо в месте базирования, ближайшем к последней обслуженной цели
Каждая точка (клиент) посещается только один раз Объект может посещаться неограни- ченное количество раз до выполнения заданного условия
Транспортное средство не может обслу- жить больше клиентов, чем позволяет его грузоподъемность Для практических задач (например, мони- торинг территории) ограничения на объ- ект управления могут не накладываться
Ограничения соответствуют условиям и имеют вид, воспринимаемый на плоскости Ограничения накладываются не на пло- скости, а в пространстве
Ограничение по времени: прибытие транспортного средства к клиенту должно быть в пределах временного окна Могут накладываться дополнительные ограничения по прибытию нескольких объектов управления к одним и тем же це- лям в заданное время (интервал времени)
152
В. К. Абросимов
Окончание таблицы 18
Условия решения задачи коммивояжера для N объектов управления
Каждое транспортное средство обслужи- вает собственные точки (клиентов) Избранные точки могут обслуживаться несколькими объектами управления
Целевая функция строится из условия минимизации времени решения задачи, длины маршрута, количества задейство- ванных транспортных средств При формировании целевой функции должна учитываться ситуация как в точке цели, так и при движении к цели. Целевая функция может включать параметры, описывающие ситуацию на маршруте движения
В одной из наиболее общих постановок задача функциониро-
вания ЛА в условиях агрессивной среды сводится к последователь-
ному облету одним или несколькими ЛА зоны потенциальной агрес-
сивности (возможно прохождение в этой зоне с соответствующими
рисками), обнаружению или появлению новых объектов для обсле-
дования, необходимости принятия решений в реальном масштабе
времени, смене обследуемых областей и объектов, повторному облету
областей. При этом ЛА могут вылетать на действия в зоне враждеб-
ности не одновременно, а по мере необходимости. Они должны вы-
полнять различные задачи - от разведки территории до сброса гру-
зов, посадки, повторного взлета, поиска или взятия на борт людей и,
следовательно, обладать различными возможностями. Не исключены
ситуации, когда отдельные средства не смогут выполнить свои задачи
из-за, например, нехватки топлива, непредсказуемых условий движе-
ния (дым, радиоактивность) и др. Тогда коллектив должен принимать
решения об их замене боеспособными ЛА.
Выделим еще один класс практических задач, связанных с ана-
лизом пространственно-временных ситуаций, возникающих в зоне
возможной агрессивности средств противодействия движению. В
этой области могут двигаться ЛА различного назначения, выпол-
няющие задачи как разведки местности, так и прямого или косвен-
ного воздействия на защищаемые объекты потенциального интере-
са. В зависимости от построения системы противодействия могут
потребоваться приход ЛА в одно и то же время на заданный про-
странственный рубеж, организация боевых порядков и других оп-
тимальных для выполнения коллективных миссий структур [89]. По
существу, у каждого ЛА из коллектива должно формироваться соб-
ственное полетное задание. Его целесообразно представить в виде
совокупности точек пространства, которые в заданное время (или
Глава 9
153
интервал времени, если учесть естественную неопределенность) дол-
жен «посетить» летательный аппарат. Нетрудно видеть, что указан-
ные задачи сводятся к решению многомерных задач коммивояжера,
но с другими, нетрадиционными ограничениями. К числу основных
новых вопросов отнесем разработку механизмов целераспределения
для объектов управления, обладающих различными возможностями
и функциональностью, в условиях враждебности среды. Важнейшей
особенностью таких задач является итерационность, но не в смысле
приближения к наилучшему решению (хотя такие итерации также
требуются), а в смысле периодического, непрерывного, многократ-
ного решения одних и тех же задач, но с новыми условиями, с учетом
результатов предыдущих решений.
Такие задачи в дальнейшем выделим в отдельный новый класс
постановок задач коммивояжера. Чтобы отличать процессы итераци-
онности при выборе наилучшего решения от процессов повторного
решения задач в новых условиях, будем называть этот класс задач
рекуррентными задачами обслуживания заданного числа клиентов
группой объектов управления, обозначать аббревиатурой RVRP и
расшифровывать как Recurrent Vehicle Routing Problem I
По своей постановке задачи класса Recurrent Vehicle Routing Prob-
lem наиболее близко подходят к задачам класса VRP следующих типов:
• Dynamic VRP (возникновение новых целей в процессе движения);
• Split Delivery VRP (посещение одного и того же клиента различ-
ными объектами управления);
• Fleet Size and Mix VRP (учет различного состава группы);
• Stochastic VRP (вероятность и/или нечеткость возникновения
ограничений в процессе движения в силу антагонизма среды).
9.3.4. Стратегия корректировки маршрута
методом релокации
К числу довольно распространенных методов решения задач
VRP, относящихся к эвристикам, можно отнести методы, основанные
на перенесении отдельных точек или групп точек в другой маршрут.
1В английском варианте предлагается: Recurrent service a number of customers with a fleet of
vehicles.
154
В. К. Абросимов
В зарубежной литературе они получили название методы релокации
(Relocation Methods). Распространенность методов релокации обу-
словлена относительной простотой реализации алгоритмов и высо-
кой степенью визуализации способов решения задач.
Релокация является развитием методов решения задач комби-
наторной оптимизации. Она осуществляется между маршрутами
и соответствует перемещению целевой точки (или группы точек)
из одного маршрута в другой. Общими подходами являются пере-
мещение точки в новое положение на маршруте, удаление точек из
маршрута, замена части точек новыми из другого маршрута. Одной
из важных разновидностей метода релокации явились методы клас-
са N-opt, которые сводятся к удалению целого кластера (N дуг-ребер
целевого графа) из маршрута и вставке N новых дуг, не нарушающих
корректности решения. В этом случае маршрут считается оптималь-
ным с локальным минимумом, если в нем не существует ни одной
пары дуг, замена которых привела бы к улучшению решения. В ал-
горитмах типа 2-opt удаляются два, а в алгоритмах З-opt - три ре-
бра. При этом часто требуется сохранить направление дуг маршрута,
что является важным условием для задач с асимметрией маршрута.
Существуют естественные модификации 2-opt и З-opt алгоритмов,
дополнительно включающие поиск оптимальных вершин внутри из-
меняемых кластеров.
В библиотеке локальных эвристик для решения задач класса
VRP [125] методам Relocation уделяется особое внимание. Такие зада-
чи обозначают аббревиатурой VRPH (VRP Heuristics). Впервые в этом
контексте такие материалы рассмотрены в работе [126], в которой
описаны алгоритмы класса Relocation, основанные на обмене положе-
ния р целевых точек одного маршрута на тг целевых точек другого. Как
правило, рассматриваются механизмы, позволяющие искать решение
в окрестности уже существующих. Из-за вычислительной сложности
значения р и п принимаются меньше трех. Отсюда и возникают раз-
новидности методов - одноточечный, двухточечный и трехточечный
(one-point, two-point, three-point).
В работе [196] концепция Relocation дополняется стратегией
ожидания объекта в некотором текущем (зафиксированном) состо-
янии, для того чтобы были выполнены временные ограничения на
посещение точки. Предполагается также, что запросы на посещение
точек могут появляться динамически. В качестве критерия задает-
Глава 9
155
ся максимизация количества обслуживаемых объектов. Ключевой
идеей ожидания являются включение алгоритма ожидания для уже
назначенных объектов и обслуживание вместо этого вновь появляю-
щихся объектов. Ключевой идеей замены точек является движение от
первой посещенной по плану точки к той, которая в данный момент
минимизирует общий функционал. Подчеркивается, что такие стра-
тегии не преследуют цели минимизировать время решения общей за-
дачи, так как при таком функционале возможно движение к точке,
относительно которой не будет возникать запроса на посещение.
В работе [197] в задачах класса Relocation вводятся три типа
различных операторов: релокации, разрывной релокации, замены,
обмена и «2-орЪ>-оператор. Оператор релокации - стандартное пере-
мещение точки из одного маршрута в другой. Оператор разрывной
релокации (замены) «разрывает» маршруты двух объектов и произ-
водит обмен точками: точку i перемещает из маршрута Мк в маршрут
и точку; - из маршрута в маршрут Мк, но на те же самые, «ра-
зорванные» места маршрутов, не меняя последовательности обхода.
Оператор обмена аналогичен оператору замены, но не накладывает
ограничений на положение точки в последовательности маршру-
та. Оператор «2-opt» заменяет целые цепочки в последовательности
маршрутов: по существу, объект управления следует сначала по марш-
руту Мк до точки i и далее, переходя к точке j «чужого» маршрута Мр
следует от точки j до конца маршрута Мг
В работе [127] вводятся детализация методов и операторы для
изменения точек внутри маршрута и между маршрутами. Они имеют
вид, представленный на рис. 14 и 15.
Рис. 14. Операторы для изменения маршрутов [127]
156
В. К. Абросимов
с) Cross-Exchange
d) Icross-Exchange
e) 2-Opt*
Рис. 15. Операторы для изменения точек между маршрутами [127]
При этом вводятся разновидности операторов обмена: «пере-
крестный обмен» и «перекрестный обмен с изменением последова-
тельности обхода точек». Заметим, что в существующей литературе
рассматриваются не более пяти точек в каждом сегменте.
Для практики может представлять интерес и так называемая
кластерная оптимизация [198]. Проблема возникает при необходи-
мости обслуживания из одного порта очень значительного количе-
ства (несколько тысяч) известных точек. В этом случае точки логично
объединяются в кластеры по критерию их сравнительной близости и
возможности быть обслуженными одним «грузовиком». Суть таких
алгоритмов заключается в нахождении кратчайшего пути, но уже не
через точки, а через заданную последовательность кластеров. Основ-
ная идея состоит в добавлении виртуального произвольно большого
расстояния между кластерами и дальнейшем рассмотрении задачи
как типовой задачи VRP с соответствующими методами решения.
К числу наиболее интересных практических применений раз-
новидностей методов релокации относятся действия группировки
интеллектуальных объектов управления в условиях потери объекта.
Глава 9
157
Так, в работе [124] рассматриваются вопросы движения группы бес-
пилотных летательных аппаратов в динамической и недоопределен-
ной среде. Моделирование осуществляется с учетом вероятности по-
тери БАК. Основная идея стратегии поведения группировки БАК в
условиях ПВО сводится к следующим действиям: одна группа БАК
«открывает коридор» для другой, атакующей цели группы активных
объектов управления, с тем чтобы снизить потери более значимых и
дорогих атакующих средств. При этом целевая функция формулиру-
ется как аддитивная: время выполнения коллективной задачи сум-
мируется и с временем выполнения задачи каждым БАК из состава
группировки с соответствующими весами. Рассматриваются три типа
задач: появление новой точки, потеря БАК и появление новых пре-
пятствий/ограничений. При этом моделирование учитывает два типа
БАК (обладающих технологией невидимости Stealth и высокими ско-
ростями и не обладающих такими характеристиками) и два типа огра-
ничений (естественные - горы, строения, и целенаправленные - зоны
действия радаров ПВО). Вероятность уничтожения ЛА внутри опас-
ной зоны вычисляется пропорционально длине пути БАК в опасной
зоне. При малых вероятностях уничтожения БАК средствами ПВО
основная коллективная миссия выполняется. При высокой степени
такой вероятности появляются так называемые «необслуженные
точки» и возникают новые цели для группировки. «Оптимистичный»
план учитывает посещаемость каждой точки лишь один раз. «Песси-
мистичный» план включает в суммарный критерий вероятность по-
ражения БАК средствами ПВО и, таким образом, часть точек остает-
ся «необслуженными». «Реалистичный» план предполагает создание
в зоне ПВО специального коридора, для того чтобы сохранить в про-
цессе атаки дорогостоящие объекты. Исходя из этого, определяется
время прохождения опасных зон разнообразными БАК. Понятно,
что в результате моделирования реалистичный план оказывается не-
сколько лучше других, и степень его эффективности тем выше, чем
более мощная ПВО образует ограничения по движению.
Обратим внимание также на то, что в работе [124] все вычисле-
ния производятся исходя из вероятности поражения БАК средствами
ПВО. В модельных экспериментах здесь можно набрать определенную
статистику для последующей обработки. Однако на практике пользо-
ваться вероятностными характеристиками не вполне корректно. Воз-
никновение вследствие антагонизма среды запретных для движения
областей носит, скорее, возможностный, нечеткий характер. Поэто-
158
В. К. Абросимов
му ограничения в задаче Relocation удобнее задавать в виде функций
принадлежности соответствующим нечетким множествам.
Подчеркнем также сходство и отличие постановок рассматри-
ваемых в книге задач от существующих. В существующих методах
Relocation удаление и замена точек осуществляются из достаточно
малой локальной области, и основной целью является получение
более улучшенного, оптимального решения в окрестности уже полу-
ченного. В нашем случае новая точка появляется неожиданно (как го-
ворится, «не от хорошей жизни»), и поиск приходится вести в более
широкой области. Более того, она может не принадлежать ни одному
предварительно просчитанному маршруту. При этом результирую-
щий функционал оптимальности может существенно изменяться. Но
хорошо исследованные приемы удаления и включения в маршрут как
узлов, так и дуг графов, естественно, могут быть использованы.
В работе [124] предполагается переход в перспективе от прин-
ципа управления каждым БАК собственным оператором к переходу
к управлению всей группировкой одним оператором, что расширяет
степень самостоятельности отдельных БАК. Подробности реализа-
ции такой интересной «самостоятельности», к сожалению, не раскры-
ваются. Мы же ставим более амбициозную задачу - перейти к полно-
стью автономным системам управления группировками летательных
аппаратов с управлением ЛА автономно, совместно и самоорганизо-
ванно непосредственно в процессе полета.
9.4. Упрощенный метод релокации
Введем ряд определений.
Определение 1. Уровень включения. Уровнем включения будем
называть величину ресурса ЛА, которую он должен затратить на по-
сещение дополнительного объекта.
Рассмотрим следующую упрощенную ситуацию (рис. 16). Пусть
агент следует по маршруту аэродром-1-2-3-4-аэродром, и необходи-
мо добавить в маршрут объект 5. Примем условную скорость агента
за единицу. Тогда добавление объекта 5 на маршруте между точками
1 и 2 будет стоить (3+2-2)/1 = 3 единицы ресурса агента. На маршру-
те между объектами 2 и 3 стоимость добавления также будет равна
четырем единицам ресурса ((2+5-3)/1 = 4), а между объектами 3 и 4
будет стоить (5+3-4)/1 = 4 единицы ресурса. В итоге минимальная
стоимость добавления объекта 5 составит три единицы ресурса. В
Глава 9
159
принципе безразлично, на каком этапе прохождения маршрута вклю-
чать объект 5 в маршрут. Однако ясно, что включение объекта 5 после
точки 2 или 3 нецелесообразно из-за более высокой стоимости.
Рис 16. Иллюстрация понятия «уровень включения»
Исходя из изложенного, для маршрута Мк:(пк1,..., ..., nkJ) к-го
ЛА-агента при присоединении к маршруту объекта nkh уровень вклю-
чения можно рассчитывать по формуле:
. , ч {d(n,,> п.) + d(n.., п . ,) - d(n.., п.. ,)} , ч
ДЕ (nJ = min---------------- kh -------- V (19)
kh' j у > у /
при 1 <j < J-l
где J - количество объектов маршрута к-го ЛА-агента.
Физически уровень включения характеризует наиболее эффек-
тивные условия включения объекта nkh в маршрут и отражает мини-
мальный ресурс, который необходимо затратить при уходе ЛА-агента
с маршрута Мк с целью мониторинга объекта nkh и последующего воз-
вращения на тот же маршрут.
Определение 2. Запас временного ресурса агента. Запасом времен-
ного ресурса ЛА-агента будем называть промежуток времени активно-
160
В. К. Абросимов
го движения ЛА-агента, который остается у него после выполнения им
маршрута Mk+(t) по мониторингу закрепленных за ним объектов. Ука-
занный запас временного ресурса вычисляется по формуле:
&t. -t.- т,, т, - Lf/v., (20)
к к к7 к к к7 ' '
где tk - располагаемое максимальное время движения ЛА-агента,
определяемое из условия запасов и расхода топлива; тк - время, кото-
рое должен затратить ЛА-агент на движение по заданному маршруту;
L^+ - суммарное расстояние маршрута M^+(t); vk - скорость движения
ЛА-агента.
Таким образом, с учетом того, что величина уровня включения
&Fk(nkh) имеет размерность времени, для произвольного объекта nkh
всегда можно вычислить требуемый минимальный ресурс (в данном
примере - время) его достижения:
т,, = At - AF,(n,,). (21)
kh к к' kh' v 7
Понятно, что если |tJ < 0, то агент не обладает ресурсами для
достижения объекта nkh. В переговорах по решению вопроса релока-
ции в коллективе принимают участие лишь те ЛА-агенты, у которых
этот ресурс в наличии и уровень включения AFJnfc/j) > 0.
Определение 3. Уровень исключения. Уровнем исключения бу-
дем называть величину временного ресурса агента, полученного
после присоединения необследованного объекта nkh к выполняемо-
му маршруту и исключения из перечня необследованных объектов
маршрута Мк наиболее неэффективного по расходованию ре-
сурса объекта.
Снова рассмотрим рис. 16. Пусть ЛА-агент следует по маршру-
ту аэродром-1-2-3-4 - аэродром, и необходимо, как и в предыдущей
ситуации, добавить в маршрут объект 5. Вычисление уровня включе-
ния показывает, что наиболее целесообразно присоединить объект 5
на маршруте между точками 1 и 2; стоимость присоединения состав-
ляет три единицы ресурса. Пусть у агента при этом запаса времен-
ного ресурса нет, т.е. \rkh\ < 0. Тогда целесообразно из назначенного
для агента маршрута исключить объект, достижение которого требу-
ет максимального количества ресурса. При исключении объекта 1 и
включении объекта 5 потребуется 18 единиц ресурса. При исключе-
нии объекта 4 и включении объекта 5 потребуется 14 единиц ресурса.
Таким образом, дополнительного ресурса при исключении объекта 1
Глава 9
161
оказывается недостаточно для включения в маршрут дополнительно-
го объекта 5. Но исключение объекта 4 решает задачу.
Уровень исключения рассчитывается по формуле:
AG,(n,r,) = {d(n, ,, п,.) 4- d(n,п,. ,) -
kj kh' 1 v k,)-V kj' v k.f k,j+l' (22)
- d(n.. .,n. ,)}/v, + t, > 0
v k,j-\ k,j+\'J к kh
при 1 < j < k-1.
Определение уровня исключения необходимо в ситуации, когда
по требованиям корректировки маршрута целесообразнее включить
в маршрут дополнительный объект и исключить из него объект, ранее
входящий в маршрут, но на мониторинг которого не хватает ресурса.
Физически уровень исключения определяет те объекты мониторинга,
от исключения которых из маршрута выигрыш превышает уровень
включения нового объекта nkh.
Пусть в процессе движения по маршрутам в момент времени ffix
обнаружились технические или иные проблемы, не позволяющие ре-
шать задачу по мониторингу объекта пкг. В этом случае агент обнуляет
фиксированный на ИРК признак своей текущей активности (Ак := 0),
а показателям a”i объектов из группы M~(t) присваивается значение,
равное нулю. Таким образом, отдельные объекты обследования пк1,
пк2, пк? '",nki становятся незакрепленными за ЛА-агентом и подлежат
новому распределению.
Переговоры остальных ЛА-агентов в такой ситуации можно
осуществить разнообразными способами. Анализ показывает, что
наиболее приемлемой для решения задачи является модель аукцио-
нов. Ресурсом в данном случае предлагается считать оставшийся за-
пас временного ресурса fc-ro ЛА-агента по маршруту движения Atk на
момент L .
fix
10. СТРАТЕГИЯ РАСПРЕДЕЛЕНИЯ КОЛЛЕКТИВА
ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПО ЦЕЛЯМ
Ставьте перед собой большие цели,
ведь в них легче попасть.
Ф. Шиллер,
немецкий поэт и философ
эпохи Просвещения
10.1. Постановка задачи целераспределения
для коллектива агентов
Рассмотрим задачу распределения целей между объектами
управления, входящими в коллектив, как задачу транспортной логи-
стики. Роль «транспортных средств» возложим на объекты управле-
ния (в практических задачах - разнообразные ЛА: самолеты, верто-
леты, беспилотные средства и др.). «Городами» будут как точечные
объекты (на практике - удаленные от жилья населенные пункты,
группы людей, терпящих бедствие, военные объекты и др.), так и про-
тяженные участки (трубопроводы, труднопроходимые дороги, лес-
ные массивы и др.), состояние которых необходимо оценить. В обо-
ронных приложениях такой мониторинг можно интерпретировать
как разведку территории противника, а ограничения - как противо-
действие противника.
Пусть имеется N = {пр п2, ...} территориальных объектов мони-
торинга, размещенных в географической области и заданных GPS-
координатами. Для решения задач мониторинга создан коллектив,
состоящий из К летательных аппаратов ЛАк (fee [1;JC]). Группировка
ЛА базируется и обслуживается (заправка топливом, восстановление
Глава 10
163
работоспособности) на базах-аэродромах В = {Ьр Ь2,...}, расположен-
ных на некотором расстоянии от области мониторинга. Каждый ЛА*
обладает собственными эксплуатационными характеристиками и
функционалом:
ЛА^.К^}, (23)
где v* - средняя скорость движения; Rk - запасы ресурсов ЛА; F* -
функционал ЛА*, определяющий его возможности (наблюдение, рас-
познавание, возможность оказания помощи, измерение уровня ин-
тенсивности (опасности) ситуации и др.).
Группировка ЛА* проводит мониторинг текущей ситуации в
выделенной области мониторинга. Процесс мониторинга разбива-
ется на циклы qeQ. В каждом цикле мониторинга осуществляются
облет и обследование всех объектов. В процессе обследования в q-м
цикле мониторинга как множества объектов N, так и на маршрутах
Мк движения ЛА измеряется интенсивность ситуации на самом п-м
объекте [0,1], а также на маршруте {п. -> и.} между объектами
[0,1]. Такая интенсивность может интерпретироваться различны-
ми смыслами: масштабом и категорией пожара; размерами наводне-
ния и разлива реки; уровнем радиоактивности заражения местности;
степенью опасности движения в зоне противодействия противника
и др. Задачи мониторинга связаны со значениями целевых функций
WN = XNXqBnq и WM = Мониторинг считается завершенным,
когда параметры функций находятся в заданных пределах.
Логически понятно, что
если на маршруте следова-
ния в q-м цикле обследова-
ния объектов интенсивность
ситуации (например, лесно-
го пожара) возрастает, то в
q+1-м цикле требуется по-
высить вероятность движения по этому пути. Маршрут становится
зависим от факторов и результатов, определенных на предыдущих
циклах, что эквивалентно как возможному появлению новых объек-
тов посещения, так и возникновению ограничений на движение по
некоторым ветвям общего графа маршрутов.
Тогда особенность задачи состоит в том, чтобы на каждом после-
дующем этапе движения учесть ситуацию на маршруте, полученную
на предыдущем этапе. Поэтому важнейшим и определяющим при-
Пусть летят N самолетов,.. Нет, N -
явно мало. Пусть летят М самолетов...
Из лекции по математике
в военной академии
164
В. К. Абросимов
знаком задач целераспределения становится итерационность, но не
в смысле приближения к наилучшему решению (хотя такие итерации
также требуются), а в смысле периодического решения одних и тех же
задач, но с новыми условиями и с учетом текущей ситуации.
Введем условия выполнения коллективной миссии.
1. Мониторинг объекта. Пусть cpj = 1, если ЛА^ обследует объ-
ект; после объекта i и 0 - в противном случае. Тогда каждый объ-
ект мониторинга обследуется только одним летательным аппаратом и
только один раз в цикле q:
X. = 1 Vn eN.
кеК n.eNuB' у j
2. Формирование маршрута. Для каждого ЛА^ в каждом q-м ци-
кле мониторинга формируется маршрут движения Мк, который на-
чинается и заканчивается на одной из баз (начальная и конечная базы
могут отличаться).
3. Возможность мониторинга. Для каждого объекта монито-
ринга nt существует ЛАк, который может его обследовать и вернуться
на базу, используя свой ресурс гк:
3 ЛА, и 3 b (ЬеВ) г>г, + г n.eN
к о ' ' к b п. n.,b i
о. I I
4. Достаточность топлива на прохождение ЛAfc заданного марш-
рута:
Х^к г < г z.
J-2 7-1,7 к
5. Обработка информации мониторинга. Информация, полу-
ченная на каждом цикле мониторинга, накапливается. В начальном
цикле q = 0 информация относительно интенсивности ситуации
на и-м объекте и по маршруту движения {п.^ п^} определяется по
априорным данным. В очередном цикле q она корректируется по ре-
зультатам наблюдений на величину полученной техническими сред-
ствами информации Д^ для очередного объекта и на величину Д^
на маршруте между объектами:
и = и q + Дп я VhgN, z ч
•и ‘и * п (24)
;+1 = рЧ + Д^ VieN, VjeN.
6. Режимы мониторинга. Мониторинг осуществляется в трех
основных режимах. В режиме патрулирования осуществляются стан-
дартные действия по облету объектов в соответствии с заданным
Глава 10
165
маршрутом. Для режима патрулирования вводится критерий Ftar за-
вершенности построения маршрута в виде условия:
F, =1. „Е. ЫЕ. M[d.. ©.’] ->£L.£->min. (25)
tar к&К igN jgNl у > у J к к v 7
Здесь L? - длина маршрута Мк. Условие (25) определяет требо-
вание минимизации протяженности маршрутов всех ЛА в q-м цикле
мониторинга.
В режиме тревоги требуется высокая оперативность обследова-
ния объектов, поэтому время решения коллективной миссии стано-
вится критичным. Критерий Ftar записывается в виде:
F =Е, Jt.. (p q] T,z^min. (26)
tar keK igN jgNl у 'у J к к v 7
Здесь [0,T/] - интервал времени, за который ЛА^ проходит
маршрут Мк. Условие (26) определяет требование минимизации вре-
мени прохождения маршрутов всех ЛА в q-м цикле мониторинга.
В режиме опасности в первую очередь должны обследовать-
ся объекты с самой высокой степенью интенсивности ситуации. На
практике режим опасности характеризуется принятием решений на
повторное обследование объектов (возможно по новым маршрутам),
введением запрета на пролет по опасным участкам маршрутов движе-
ния, выделением на обследование другого ЛА с необходимыми харак-
теристиками, требованием обхода опасных зон и др. Режим опасности
вырабатывается тогда, когда интенсивность чрезвычайной ситуации
превышает допустимые пределы (на практике - горят большие площа-
ди леса, например). Особенно это важно для объектов, представляю-
щих высокую значимость (города, опасные в техногенном отношении
объекты - нефтехранилища, заводы и др.). Именно эти объекты долж-
ны выбираться первыми для обследования, и им присваивается мак-
симальный вес. Критерий Ftar здесь формируется сложным образом в
зависимости от ситуации с учетом значимости объектов, интенсив-
ности ситуации на объектах, интенсивности ситуации на маршрутах
следования между объектами, значимости объектов и др.
Из изложенного выше следует, что целевая функция может быть
ориентирована на экономию ресурсов (патрулирование), на миними-
зацию времени обследования (тревога) и на приоритетность обследо-
вания наиболее значимых объектов (опасность).
Требуется определить оптимальные маршруты Мк движения
каждого ЛАк в каждом q-м цикле мониторинга таким образом, чтобы
выполнялось условие:
166
В. К. Абросимов
\/п. g N3 к g [1; К]: п. G Мк, (27)
т.е. все объекты мониторинга закреплены за соответствующими ЛА.
В качестве основного критерия качества алгоритма целесообраз-
но рассматривать качество сформированного маршрута. Эта харак-
теристика будет меняться в зависимости от режима мониторинга. В
режиме патрулирования и тревоги сравниваются соответственно
пройденные расстояния на маршрутах и затраченное время. В режи-
мах опасности качество решения упрощенно можно свести к миними-
зации расстояния (при заданной скорости - к минимизации времени)
до объектов, на которых интенсивность ситуации максимальна.
Рассматриваемые задачи мониторинга территории на практике ча-
сто решаются в интересах прогноза возникновения, анализа и устране-
ния последствий ЧС [129,130]. В работе [129] анализируется класс задач
VRP в условиях различных ЧС (как примеры, приводятся землетрясе-
ния и тайфуны). Подчеркивается сложность постановок таких задач,
вызванная неопределенностью ситуаций, необходимостью получения
информации в реальном времени, перераспределения ресурсов и др. В
работе [130] освещаются вопросы логистики при чрезвычайных ситуа-
циях. В качестве метода решения предлагаются эволюционные алгорит-
мы. Показывается, что они более эффективны, чем другие природные
алгоритмы, в частности, по времени расчета оптимального пути.
Анализируя постановки и
потенциально возможные мето-
ды решения задач мониторинга,
можно предположить, что в них
будет весьма эффективно ис-
пользование муравьиных ал-
горитмов. Действительно, муравьиная колония в поисках пищи со-
вершает многократный поиск оптимальных маршрутов, откладывая
соответствующий фермент (ферамон). Если есть несколько источни-
ков пищи (в нашей постановке - объектов мониторинга), то муравьи
распределяют колонию по ним, исходя из размеров области пищи и
ее привлекательности. Уже доказана эффективность муравьиных ал-
горитмов для задач с большими размерностями областей поиска. В
нашей постановке необходимо учитывать также и факт возможной
существенной динамики параметров интенсивности ситуаций. В му-
равьиных алгоритмах при появлении нового источника пищи также
происходит перераспределение: менее привлекательные источники
В муравейнике всякое умствование -
подрывная деятельность.
Владимир Шойхер,
изобретатель афоризмов
Глава 10
167
постепенно оставляются колонией, и она переориентируется на более
привлекательные.
Рассмотрим известные основные формулы типового муравьи-
ного алгоритма определения вероятности Р перехода муравья из
точки i в точку;, на которые в разных обозначениях ссылаются мно-
гие авторы [131]:
Р^ = WK если;е/ц, (28а)
P..k(t) = 0, если j<£j.k. (28b)
ftp + 1) = (1 - p)X/f) + А/Д (29)
Общим подходом при разработке муравьиных алгоритмов яв-
ляется корректировка при вычислении вероятности Р..к перехода из
точки i в точку; количества феромонаД и скорости его испарения р,
величины rj.., обратной длине перехода, а также подбор коэффициен-
тов а (определяет так называемую «жадность» алгоритма) и ft («стад-
ность» алгоритма), усиливающих или ослабляющих как величину фе-
ромона, так и «зрение» муравья.
10.2. Методика формирования маршрутов агентов
в цикле мониторинга
Введем дополнительно к Мк обозначение Км как множество ЛА-
агентов, для которых построение маршрута уже завершено. Задача
формирования маршрутов ЛА для каждого q-го цикла мониторинга
решается итерационным образом с использованием муравьиного ал-
горитма. Итерационная процедура включает четыре алгоритма:
А: поиск и формирование оптимального маршрута;
Б: обновление феромона;
В: завершение формирования маршрутов ЛА в цикле мониторинга;
Г: завершение выполнения миссии в цикле мониторинга.
В начальной итерации (г = 0) исходя из текущей обстановки за-
дается режим мониторинга и связанная с ним целевая функция Ftar,
отражающая критерий завершенности построения маршрута. Ите-
рационная процедура запускается заданием случайного значения на-
чального феромона^(О) из некоторого заранее определенного интер-
вала на пути следования ЛА-агента {п. -> n.}e(NUB).
168
В. К. Абросимов
А. Алгоритм поиска и формирования оптимального маршрута
А1. Если J(г) Ф N, то выполняется шаг А2.
А2. Случайным образом из всей группировки выбирается ЛА^,
для которого маршрут еще не построен (к<ёКм).
АЗ. Определяются объекты ne(N\JB) и п. в которые ЛА^
может переместиться из объекта п., где он находится в данный мо-
мент, с проверкой условия достаточности ресурса:
г, > г. + г., , (30)
k tj jb 7 v 7
где гк запас ресурса ЛА^, г - расход на движение к объектам {п->и},
а г - расход ресурса на движение от объекта и до ближайшей базы.
Выражение (30) отражает условие достаточности ресурса ЛА, кото-
рый находится на объекте п., для достижения объекта и и возможно-
сти дальнейшего возврата из объекта п. на ближайшую базу. Множе-
ство всех объектов, удовлетворяющих условию (30), обозначим далее
через RN.
А4. Для всех и gRN осуществляется расчет вероятности перехо-
да от объекта i к объекту):
Л“(г) * Пц(г) * [1 + И? Г * [1 + nJ )]
Pi, (г) = ---------------ь-----------------i——
SjeRN^W * ng(r) * [1 + Ц? )f * [1 + nJ)] } (3D
Рц (г) = 0 если j £ RN
Сомножитель f*(r) отражает наличие и уровень феромона на
маршруте Сомножитель «взвешивает» расстояния до объ-
ектов и способствует выбору объекта с минимальным расстоянием до
него. Третий сомножитель в числителе выражения (31) учитывает ин-
тенсивность е [0,1 ] ситуации на)-м объекте в q-м цикле рекуррент-
ного алгоритма, а четвертый - интенсивность [0,1] на пути следо-
вания между объектами. Параметры я, /3, у, А > 0 представляют собой
эмпирические коэффициенты для учета особенностей движения и
складывающейся практической ситуации мониторинга. Посредством
коэффициента а можно усиливать или ослаблять влияние феромона
(«пахучесть следа») на маршруте {nt -> и}. Коэффициент /3 позволяет
влиять на приоритетность длины маршрута («зрение муравья») к объ-
екту. Выбор комбинаций параметров а и /? оказывает существенное
влияние на качество получаемого решения. В ряде практических задач
Глава 10
169
количество потребных итераций для получения решения существен-
но (до 2-3 раз) снижается при значительных параметрах а, /?; решение
при этом часто получается быстро сходящимся, но субоптимальным.
Эмпирически установлено, что наилучшие результаты достигаются
при значениях (5 в 3-5 раз больших, чем а [132]. Иными словами, «зре-
ние» все же оказывается важнее «пахучести» следа.
С помощью коэффициентов у и Л можно учитывать степень ин-
тенсивности ситуации на конкретных рекуррентных циклах монито-
ринга. Так, например, в пожароопасных районах уже потушенный по-
жар через некоторое время может снова разгораться. В такой ситуации
коэффициенты у и Л необходимо на очередном цикле увеличивать. К
сожалению, пока не удалось найти четких теоретических рекоменда-
ций по вопросам выбора настраиваемых параметров муравьиных ал-
горитмов, поэтому они обычно выбираются опытным путем.
Рис. 17. К построению муравьиного алгоритма
А5. С использованием метода пропорционального отбора на ос-
нове рассчитанных в шаге А4 вероятностей Р (г) выбирается и -й объ-
ект из множества RN как очередной объект маршрута ЛА^ из условия:
п: Р..[г) = т?хР..(г), (32)
170
В. К. Абросимов
что означает выбор объекта, вероятность перехода к которому мак-
симальна.
Если выбранный объект пеВ , то маршрут для ЛАк считается
построенным, и оператором (Км := KMUk) обновляется множество
ЛА, для которых маршрут построен. Далее осуществляется переход
к шагу А2.
Если выбранный объект п.еМк, то он добавляется в множество
уже обследованных объектов J(r) := J(r)Uj.
А6. Определяется количество ресурса, оставшегося у ЛАк после
прохождения части маршрута
г=г- г. ,
к к tj
А7. Объект п. добавляется в маршрут ЛА^ и i :=j.
А8. Если J(r) = N, то все объекты в данном цикле закреплены за
ЛА. Осуществляется переход к алгоритму обновления феромона (Ал-
горитм Б). Иначе осуществляется переход к шагу АЗ.
Б. Алгоритм обновления феромона
Величина изменения значения феромона на условном маршруте
длиной L(r) определяется по формуле
ДД.(г) =f;/F^ если (и., и.)е/(г) и 0 в противном случае. (33)
В выражении (33) константа f.. в начальной итерации г = 0 опре-
деляет величину откладываемого на маршруте феромона и вы-
бирается опытным путем. В последующих итерациях г > О значения
феромона уточняются на величину «испарения»по формуле:
/..(г+1) = (1 - ip^r) + A^(r), (34)
где ip - коэффициент испарения (0 < ip < 1).
Далее осуществляется переход к алгоритму В.
В. Алгоритм завершения формирования маршрутов ЛА
в q-м цикле мониторинга
В1. Рассчитывается значение целевой функции Ftar, соответствую-
щей выбранному режиму мониторинга по одной из формул (25), (26).
В2. Проверяется условие завершения алгоритма формирования
маршрута для ЛАк:
если г = 0, то Ft =F (0),К = Н(0),М = {М(0)},
’ tar tarv tar \ tar i \
Глава 10
171
еслиг>0ир >F (г), toF := F (г), К := KM(r), М М,(г).
tar tarv 7 tar tar' 7’ tar tar k' 7
Здесь M - множество наборов маршрутов, соответствующее мини-
муму целевой функции Ftar для выбранного режима мониторинга; Каг
- множество ЛА^, для которых построены маршруты Mtaf
Далее осуществляется переход к алгоритму Г.
Г Алгоритм завершения выполнения миссии
в q-м цикле мониторинга
П. Выполнение миссии считается завершенным, если целевая
функция Ftar < С, где С - константа, которая задается из условий удов-
летворенности заказчика (например, сниженный до приемлемого
уровень наводнения в задачах мониторинга чрезвычайной ситуации
«наводнение»). Если константа С не задана или значение Ftar не до-
стигает заданного уровня С, то алгоритм завершается, если на протя-
жении /fc-итераций целевая функция не улучшается (из практических
соображений принято ik = 500).
Г2. Если условие П не выполнено, то г := г + 1; J(r) := 0,
Км(г) := 0 и осуществляется переход к алгоритму А для формирова-
ния новых маршрутов в рамках данного цикла мониторинга.
10.3. Пример. Мониторинг группировкой
летательных аппаратов зоны
резкого «всплеска» радиоактивности
Для проверки работоспособности предложенных алгоритмов
разработана специальная программа коллективного мониторинга
объектов на местности группой ЛА при чрезвычайной ситуации.
Рассмотрим вполне реальный, к сожалению, пример - аварию на
атомной станции при значительном ветре.
Моделирование проводилось для территории (рис. 18), на кото-
рой размещены объекты высокой степени ответственности (объект 2
- атомная станция, объект 4 - крупный город), менее высокой степени
ответственности (объект 1- сельское поселение) и природные объек-
ты (объект 3 - озеро, объект 5 - лесной массив). По сценарию вслед-
ствие взрыва на атомной станции 2 на значительной части территории
(площадь около 45% начальной области расположения объектов) на-
блюдался сильный «всплеск» радиоактивности с основным «лепест-
ком» зоны радиоактивного заражения в сторону озера 3 и города 4.
Рис. 18. Перераспределение маршрутов летательных аппаратов
в зависимости от текущей ситуации
(непрерывная линия - маршруты обычного патрулирования,
пунктирная линия - маршруты режима тревоги,
точечная линия - маршруты режима опасности)
172 В. К. Абросимов
Глава 10
173
Мониторинг ситуации в трех различных режимах осуществлял-
ся группой двух выполняющих коллективную миссию мониторинга
ЛА, базирующихся на двух базах (первоначально вертолет ЛА1 - на
базе А, самолет ЛА2 - на базе В). Скорость самолета задавалась в 4
раза больше, чем скорость вертолета. На всех итерациях начальный
уровень феромона генерировался случайным числом в отрезке от
[1,7; 2,2], а уровень феромона был ограничен отрезком [1;3]. В при-
веденном примере приняты значения а = 1, /3 = 4, у = 1, А = 1.
Моделирование осуществлялось с использованием системы
имитационного моделирования AnyLogic с формированием маршру-
тов по приведенному выше алгоритму в трех указанных выше режи-
мах мониторинга.
Исходные данные и результаты решения задачи систематизиро-
ваны в табл. 19-22.
Таблица 19
Матрица расстояний между объектами
А 1 2 3 4 5 В
А - 30 44 50 35 25 60
1 30 - 20 24 37 38 35
2 44 20 - 18 32 42 38
3 50 24 18 - 22 32 43
4 35 37 32 22 - 15 51
5 25 38 42 32 15 - 65
в 60 35 38 43 51 65 -
Таблица 20.
Маршруты движения ЛА в зависимости от уровня радиоактивности
на объектах и на маршрутах движения между ними
Режим Маршруты ЛА( (вертолет) Маршруты ЛА2 (самолет)
Обычное патрулирование q = 1 (экономия топлива) А-1-А B-2-3-4-5-A
Режим тревоги q = 2 (минимизация времени выполнения коллективной миссии) A-2-4-3-B B-5-1-B
Режим опасности q = 3 (оперативный облет наиболее опасных объектов) А-4-5-А B-2-3-1-A
Таблица 21
Интенсивность чрезвычайной ситуации (уровень радиоактивности)
на объектах и между объектами в последовательных циклах мониторинга
Режим ^(г)
Объекты Между объектами
1 2 3 4 5 1-2 1-3 1-4 1-5 2-3 2-4 2-5 3-4 3-5 4-5
Обычное патрулирование q = 1 0 0,7 0,3 0,2 0 0,1 0,2 0 0 0,2 0,4 0 0,3 0,1 0
Режим тревоги q = 2 0 1 0,4 0,7 0 0,1 0,7 0,5 0,1 0,4 0,7 0,2 0,7 0,2 0,1
Режим опасности q = 3 0,2 1 0,2 1 0,3 0,7 0,2 0,8 0,2 0,5 1 1 0,8 0,1 0,4
174 В. К. Абросимов
Глава 10
Таблица 22
Пример динамики изменения феромона (в терминах вероятности перехода из точки в точку). Режим опасности q = 2
Итерация А 1 2 3 4 5 В
0 450 750 0 450 750 0 450 750 0 450 750 0 450 750 0 450 750 0 450 750
А - - - 1,9 2,12 1,32 2,0 2,37 2,98 1,7 1,27 1,01 1,8 1,17 1,00 1,7 1,73 1,03 - - -
1 1,8 1,66 1,1 - - - 2,0 1,28 1,00 2,1 1,58 1,09 1,9 1,37 1,04 2,2 1,54 1,04 1,7 2,81 3,00
2 2,0 1,62 1,05 1,7 1,51 1,11 - - - 2,2 1,72 1,13 1,9 2,46 2,89 1,9 1,44 1,04 1,8 1,65 1,12
3 1,8 1,43 1,04 2,2 2,22 1,21 1,8 1,42 1,10 - - - 2,0 1,32 1,00 2,0 1,6 1,03 1,7 1,99 2,94
4 1,9 1,44 1,02 2,0 1,35 1,02 1,9 1,66 1,06 1,8 2,24 2,90 - - - 1,7 1,57 1,08 2,1 2,32 1,34
5 1,7 1,61 1,08 2,0 2,62 2,99 1,8 1,45 1,04 2,2 1,36 1,01 1,8 1,29 1,29 - - - 1,9 1,73 1,16
В - - - 1,9 2,06 1,17 2,2 1,62 1,10 2,1 1,4 1,06 1,7 1,39 1,39 1,7 2,57 2,57 - - -
176
В. К. Абросимов
Проанализируем полученные результаты.
В обычном режиме патрулирования для самолета с учетом его
высокой скорости из исходной базы В выбирается маршрут облета
четырех объектов. При этом приоритетом явилась атомная станция 2
с уровнем феромона 2,99 единицы. Вертолет с аэродрома А совершил
лишь вылет в ближайшее сельское поселение 1 также с высоким уров-
нем феромона (около 3,00 ед.).
После получения информации о возникновении чрезвычайной
ситуации на атомной станции 2 был объявлен режим тревоги. По сце-
нарию максимальная степень опасности зафиксирована на атомной
станции 2 и вследствие ветра и смещения радиоактивного облака - в
городе 4, на озере 3, а также между объектами 1-3,2-4 и 3-4. Алгоритм
отреагировал на эту информацию увеличением значений уровня фе-
ромона для атомной станции 2 почти в 3 раза, на маршрутах между
атомной станцией 2 и городом 4 - соответственно в 2,7; а между горо-
дом и озером - в 2,4 раза. В результате маршруты были перераспре-
делены: самолет получил маршрут: атомная станция-город-озеро, а
вертолет продолжил обследование объектов 5 и 1, которые, находясь
далеко от баз, хотя и характеризовались высоким уровнем феромона
(увеличение почти в 3 раза из базы В), но не являлись важными для
решения коллективной миссии (кратчайшее время, отведенное на мо-
ниторинг). Наконец, в режиме опасности атомная станция 2 и город 4
остались самыми важными, но повысился уровень радиоактивности
в сельском поселении 1 и в лесном массиве 5, а также между объекта-
ми 1-4 и 3-4. В соответствии с этим самолет был направлен в город
4 и далее в лесной массив 5, как наиболее удаленные точки монито-
ринга, а вертолет обследовал атомную станцию 2 и далее озеро 3 и
сельское поселение 1.
Исследована сходимость разработанного алгоритма к получен-
ным решениям (рис. 19, для варианта q = 3). Маршруты по мере ра-
боты муравьиного алгоритма изменяются как внутри цикла, так и в
каждом цикле (см. табл. 19), но внутри цикла сходимость к получен-
ному решению обеспечивается гарантированно. При этом зачастую
уже на 400-500-й итерациях начальная часть маршрута по существу
успевает сформироваться (см. рис. 19), что соответствует теории му-
равьиных алгоритмов. В целом, несмотря на то что распределение
вероятностей переходов от объекта к объекту менялось не только в
итерациях внутри одного цикла рекуррентного алгоритма, но и меж-
ду циклами, сходимость к полученным решением отмечалось уже на
Глава 10
177
700-800-й итерации, и далее решение, как правило, не улучшалось. К
1000-й итерации сходимость обеспечивается гарантированно.
Рис. 19. Иллюстрация сходимости решения
по мере накопления итераций муравьиного алгоритма
Получение дополнительной информации о ситуации на объ-
ектах Д/^9 и на маршрутах движения между объектами Д/^? суще-
ственно влияет на изменение маршрутов. Указанное объяснимо, ибо
физически означает влияние существенного повышения приорите-
та фактора интенсивности ситуации в определенных районах обла-
сти мониторинга (такое явление наблюдалось, например, во время
Чернобыльской катастрофы, когда радиоактивные элементы распре-
делялись по области неравномерно, т.е. «пятнами»). При вариациях
параметров у, Л, усиливающих влияние ситуации, маршруты могут
измениться очень принципиально. При этом происходит не только
замена объектов мониторинга по маршруту следования для выбран-
ного ЛА, но и перераспределение объектов между ЛА. Это подтверж-
дает динамичность разработанного алгоритма.
В целом разработанный муравьиный алгоритм формирования
маршрутов успешно адаптируется к изменяющимся условиям обста-
новки и различным режимам мониторинга. Он позволяет в режиме
178
В. К. Абросимов
реального времени пересчитывать маршруты ЛА в зависимости от
интенсивности текущей ситуации (в рассматриваемом примере - от
опасности радиоактивного заражения местности). Основным пре-
имуществом муравьиного алгоритма следует считать высокую сте-
пень оперативности перераспределения маршрутов, что важно при
реализации таких алгоритмов непосредственно в бортовых систе-
мах управления ЛА при требовании оперативного решения задачи в
формате on-line. Кроме того, практически интересна и возможность
включения в муравьиный алгоритм настраиваемых параметров (по
характеристикам как феромона, так и эмпирических). Это может
стать эффективным при возникновении особых условий решения
задач, в частности, при построении пространственно-временной
структуры движения ЛА с учетом агрессивности среды.
К наиболее очевидным методам решения рекуррентных задач
маршрутизации следовало бы отнести традиционный метод ветвей и
границ. Вместе с тем расчеты для аналогичных рекуррентных задач
показали слишком длительный процесс ветвления дерева вариантов
при значительных размерностях областей поиска (условное модель-
ное время при количестве объектов мониторинга свыше 50-70 единиц
примерно на 25-35% больше по сравнению с муравьиным алгорит-
мом). В ряде случаев алгоритм даже зацикливается. Как представляет-
ся, это может вызываться существенной нестабильностью процессов
в рекуррентных задачах маршрутизации и, возможно, значительной
изменяемостью параметров интенсивности ситуации на объектах.
Найденное оптимизационное решение может быть распро-
странено на формирование групповых стратегий управления ЛА-
агентами в процессе выполнения коллективных миссий. Приведен-
ный алгоритм целесообразно также использовать в практических
задачах логистики в рассмотренных выше условиях.
11. ИССЛЕДОВАНИЕ СВОЙСТВА
«ЖЕРТВЕННОСТИ» АГЕНТА
Сами не летаем и другим не дадим.
Неофициальный девиз
Войск ПВО России
11.1. Требование «жертвенности» агента и ее проявление
Оценка практических возможностей использования много-
агентных систем неразрывно связана с изучением их свойств. По
умолчанию, часто предполагается, что одним из основных свойств
агентов является их рациональность. Рациональное поведение аген-
тов связано с оценкой ситуации, принятием решений и оптимальны-
ми действиями для достижения наилучшего ожидаемого результата.
В теории принятия решений широко распространены подходы,
связанные с рациональным выбором. Рациональность ассоциируется
с выбором оптимального решения из множества альтернатив и, как
следствие, с эффективностью. В игровых задачах всегда предпола-
гается, что обе стороны действуют рационально. Однако этот тезис
иногда сокращает область возможных решений. Действительно, если
сторона А конфликта предполагает, что другая сторона В действует
рационально, то, устраняя, насколько информационно возможно,
объективную неопределенность ситуации, сторона А может постро-
ить необходимые модели «за другую сторону», имитируя, моделируя
и прогнозируя поведение стороны В как рационального игрока. Но
при этом мера адекватности принятых решений не всегда велика.
Автор убедился на практике, что в задачах принятия решений могут
180
В. К. Абросимов
возникать ситуации, когда следствием рациональности бывает пред-
сказуемость, что не всегда эффективно.
Антиподом рациональности является термин «жертвенность».
Свойство «жертвенности» пока еще исследовано довольно слабо.
Толковый словарь Даля определяет «жертву» как «...нечто ...унич-
тожаемое, что отдается невозвратно...» [133]. Применительно к ЛА-
агентам это свойство связано с решением задач группой в сложных
условиях, когда в интересах выполнения коллективной миссии воз-
никает необходимость решения природной или специально создава-
емой проблемы ценой прекращения активного функционирования
одного или нескольких ЛА-агентов.
Пример 1. В задачах ликвидации последствий чрезвычайных
ситуаций группой автономных интеллектуальных роботов при
опасности обрушения конструкций в зону потенциальной угрозы
может быть направлен один из роботов для мониторинга и оцен-
ки обстановки. При гибели робота из-за обрушения конструкции в
процессе мониторинга зоны опасности задачи, ранее возложенные
на погибшего робота, должны перераспределяться между другими
роботами группы.
Пример 2. В задачах преодоления воздушно-космической обо-
роны противника группировкой разнотипных средств (беспилотных
средств, разведывательных и ударных самолетов, крылатых ракет и
др.), исходя из критериев выполнения коллективной миссии, могут
оказаться эффективными намеренно организованные маневры для
«вскрытия» возможностей и определения угроз системы обороны про-
тивника. Частью средств атаки при этом необходимо пожертвовать.
«Жертвенность» с общеупотребительной точки зрения всегда
связывается с потерями эффективности, качества, оперативности и
др. При выполнении группой коллективной миссии необходимость
«жертвы» всегда связана с возникновением проблемы во враждеб-
ной среде.
Свойство «жертвенности» в теории многоагентных систем в
прямой постановке пока еще не выделялось и не исследовалось. Од-
нако в ряде случаев оно может оказаться полезным. Так, в упоминав-
шейся задаче о «диффузной бомбе» при групповом проникновении
на защищаемый объект посредством «жертвы» можно повысить ве-
роятность безопасного движения в пространстве, нейтрализуя вли-
яние системы обороны и создавая своего рода «окна безопасности».
Глава 11
181
Пусть, например, в сложных условиях враждебности среды в
интересах выполнения коллективной миссии возникает необходи-
мость решения возникающей природной или специально создава-
емой проблемы ценой прекращения активного функционирования
или направленного, осознаваемого снижения возможностей (функ-
циональности, ресурсов и др.) одного или нескольких агентов. Ины-
ми словами, возникает потребность «жертвы». Конечно, представить
ситуацию самопожертвования со стороны пилотируемых средств
достаточно сложно. Однако для класса активно развиваемых в на-
стоящее время беспилотных летательных аппаратов, процессов по-
строения систем групповой атаки с использованием дешевых боевых
и/или ложных элементов постановка такой задачи уже имеет смысл.
Особенно перспективно исследование возможности «жертвенности»
при роевой и стайной структуре группировки ЛА.
Сформулируем важное для дальнейшего обсуждения положе-
ние в виде А: «к-й агент готов к самопожертвованию в s-й проблемной
ситуации». Сама формулировка такого практически ориентирован-
ного утверждения предполагает, однако, нечеткость его конкретного
использования. Возможны различные трактовки как готовности к
«жертве», так и ситуации, требующей «жертвенности». Формализуем
предикат А нечетким числом с функцией принадлежности рке [0,1].
Перед агентом, которому необходимо принимать решение в s-й про-
блемной ситуации, возникают следующие три альтернативы [138]:
• жертвовать собой, отказавшись от выполнения собственных за-
дач (АА: агент-«альтруист» рк = 1) в любых ситуациях;
• не жертвовать, а продолжать выполнять возложенные задачи в
рамках выполнения коллективной миссии (АЕ: агент-«эгоист»
^ = 0);
• жертвовать собой при выполнении определенных условий (АР:
агент-«прагматик» [0,1]).
«Жертвенность» в любом случае связана с прекращением функ-
ционирования агента или ограничением его функциональности. В от-
личие от живых, обладающих разумом существ технический объект
управления, представляемый и моделируемый как агент, может приоб-
рести свойство «жертвенности» лишь извне: либо при разработке алго-
ритма его поведения или путем обучения (самообучения) по аналогии
с обучением таким, например, функциям, как эмоции [134, 135]. При
182
В. К. Абросимов
обучении в системе управления агента формируется мотивация пове-
дения в сложной ситуации, отражающая свойства самопожертвования
и самосохранения. У агентов, функционирующих в группах с коллек-
тивным поведением, мотивацию на «жертвенность» можно формиро-
вать как стремление обеспечить наилучшие условия выполнения кол-
лективной миссии при пренебрежении собственными интересами.
Если агент предназначен для принесения в «жертву» при воз-
никновении проблемной ситуации, то он выполняет только эту зада-
чу, и самопожертвование есть его основное целеполагание. Такие слу-
чаи достаточно просты (например, использование в составе боевого
оснащения стратегических ракет разнообразных ложных целей для
усложнения условий работы противоракетной обороны противника
[136]). В этом случае вклад «жертвы» в решение общей задачи изна-
чально не предполагается и «жертва» лишь обеспечивает выполнение
задач остальным коллективом агентов. При переговорах коллекти-
ва агент-«жертва» выбирается по результатам обмена информацией
между агентами и оценки последствий «жертвенности» для целей
всей группировки. Поэтому необходимо различать свойство «само-
пожертвования» (в зарубежной литературе обозначается термином
«Self-sacrifice») и своего рода «жертвенности при необходимости» (ав-
тором предлагается термин «Sacrifice on demand»).
Важным является понимание отношения «жертвенности» к
эмоциональности или темпераменту [15, 137]. Очевидно, что к тем-
пераменту «жертвенность» не относится. Однако «жертвенность»,
видимо, может быть отнесена к эмоциям роботов как форма пред-
ставления внутреннего состояния для обеспечения прежде всего дру-
жеского человеко-машинного интерфейса в сложных ситуациях.
11.2. Постановка проблемы
Определим способность враждебной среды противодействовать
функционированию к-го ЛА-агента через рк (рк = 1 будет означать ве-
роятность гибели к-го агента в s-й проблемной ситуации). Введем в
рассмотрение функцию вклада (полезности) к-го агента в выполнение
общей коллективной миссии 6wf(t). Коллективная целевая функция
Wz(t) в каждый текущий момент времени t формируется как алгебра-
ическая сумма функций вклада отдельных агентов Wz(t) = £k=l 8wf(t).
Поскольку современная среда противодействия является сетецентри-
ческой, то процесс увеличения Wz(t) можно прогнозировать на неко-
Глава 11
183
торый интервал времени [t-Г]. Если агент будет жертвовать собой,
то часть возложенных на него группировкой задач останется невы-
полненной, что можно описать потерями 6w~(t) вклада fc-ro агента в
Wx(t). Тогда целевую функцию можно построить так, чтобы произво-
дная функции Wz(t+) была всегда строго положительной, а невыполне-
ние этого условия означало бы возникновение проблемы.
В проблемной ситуации у группировки возникает необходи-
мость выбрать агента-«жертву», который добровольно или при-
нудительно выполнит действия, несовместимые с его дальнейшим
функционированием, но решит проблему. Выбираемый в качестве
потенциальной «жертвы» к-й агент должен:
• обладать функционалом Fk для решения проблемы (так, беспи-
лотный летательный аппарат-разведчик не может уничтожить
радар ПВО, но может обнаружить его местонахождение);
• иметь ресурсы Rk для решения проблемы (применительно к
БАК: топливо, скорость, боевой заряд, аппаратуру и др.)
Группировка при этом должна решить проблему с минимальны-
ми допустимыми потерями Д Ws(f) -> min.
В процессе выполнения группой интеллектуальных агентов коллек-
тивной миссии в сложной враждебной среде сначала осознается потреб-
ность в «жертвенности», и далее либо отыскивается агент, обладающий
такой функциональной возможностью, либо он назначается из числа
агентов группы. Алгоритм принятия решений сводится к следующему:
• агент в соответствии с парадигмой предварительного обучения
определяет свою степень ответственности перед группой;
• у агента возникает желание решить проблему;
• агент анализирует потенциальные ограничения, связанные с
решением проблемы и ограничивающие желание (прежде все-
го недовнесенный вклад в коллективную целевую функцию
8wk~(f) и прогнозируемые потери коллективной целевой функ-
ции Д Ws(f);
• вырабатывается убежденность агента в его способности реше-
ния проблемы;
• желание агента преобразуется в намерение решить проблему;
• намерение формально выражается в виде определения значения
рк - величины функции принадлежности нечеткого утвержде-
ния «готовность к самопожертвованию».
184
В. К. Абросимов
Указанный алгоритм проиллюстрирован на рис. 20 для различ-
ных парадигм обучения.
Во всех случаях проявления и использования свойства «жерт-
венности» агентов необходимо решение следующих задач:
• оценка ситуации с принятием решения о действительной необ-
ходимости «жертвы» агента;
• проведение переговоров и выбор агента из состава группы, на-
значаемого «жертвой» или добровольно соглашающегося по-
жертвовать собой;
• разработка стратегии поведения агента-«жертвы»;
• перераспределение задач в группе, с тем чтобы задачи, ранее ре-
шаемые агентом-«жертвой», передать другим агентам с провер-
кой их реализуемости имеющимися у агентов ресурсами.
В наиболее общем случае лингвистическая нечеткость в формули-
ровке понятия «жертвенность» выражается в степени учета собствен-
ных интересов по отношению к интересам группы и влияния решения
о «жертвенности» на коллективную целевую функцию. Действительно,
при принятии решения агент анализирует различные факторы:
• уровень доверия к другим агентам;
• собственные выгоду и потери от факта самопожертвования;
• возможность гибкости в принятии решения о «жертвенности» в
зависимости от обстоятельств;
• информацию о решениях, принимаемых другими агентами, и др.
Однако и группа анализирует последствия «жертвы» агента.
Прежде всего она оценивает степень значимости агента для выполне-
ния коллективной миссии. При этом учитываются такие аспекты как:
вероятность/возможность решения агентом возникшей проблемы
посредством «жертвы»; степень ущерба группировки от потери аген-
та для выполнения коллективной миссии; преимущества, которые
получает группа от факта «жертвы» агента. Во многом определяющее
значение для принятия решения о «жертве» приобретает коллектив-
ная целевая функция. Оценка потерь и вклада в эту функцию опреде-
ляет выбор агента, назначаемого «жертвой».
Таким образом, можно предположить, что «жертвенность» как
свойство является синергетическим синтезом [139] проявлений в
конкретных условиях различных свойств (обязательств, убеждений,
намерений, рациональности и др.) поведения агента по отношению к
Глава 11
185
RDBIE - Архитектура
Анализ обязательств
перед группой
Возникновение
желания решить
проблему
Выработка
убежденности в
возможности решения
проблемы
~--------------1
Формирование
намерения решить
проблему
Я готов отказаться
от своих задач
Я не смогу решить
проблему
Я буду выполнять
только собственные
задачи
Формирование
эмоции
Рис. 20. Схематическая диаграмма архитектуры RDBIE
186
В. К. Абросимов
другим агентам и группе в целом. Готовность к самопожертвованию
существенно зависит: от среды, в которой агент функционирует; ситу-
ации, в которой необходимо принимать решение; парадигмы, реали-
зованной в процессе обучения агента выполнять роль «жертвы».
11.3. Анализ литературы
Как российскими [66], так и зарубежными [141,142] исследовате-
лями многоагентных систем свойство «жертвенности» не выделяется
отдельно среди основных свойств агентов. Это не случайно. Действи-
тельно, рассмотрение этого свойства, например, в рамках наиболее
активно используемой архитектуры BDI (Belief-Desire-Intention), в
которой в процессе принятия решения агент выбирает конкретную
цель, определяет план ее достижения и самостоятельно выполняет
этот план на основе собственных «интеллектуальных» возможностей
[142], ограничивает понимание «жертвенности», так как такая архи-
тектура не учитывает отношений агента внутри группы, прежде всего
его обязанностей по отношению к группе.
Не улучшает ситуацию и использование архитектуры EBDI
(Emotion-Belief-Desire-Intention), учитывающей эмоциональность
агентов [142, 143]. Действительно, в архитектуре EBDI эмоции аген-
та являются первоначальным «толчком» рассуждений агента [144]. В
рассматриваемой же постановке источником действий агентов в кон-
тексте принятия решения о «жертвенности» является возникновение
проблемы при выполнении группой коллективной миссии.
Введем в рассмотрение обязательства агента по отношению к
группе (Responsibility) I Возникновение эмоции1 2 «готовность к само-
пожертвованию» здесь не начинает, а завершает процесс принятия
1 Среди многих английских терминов, обозначающих «обязательства» (obligation, commit-
ment, undertaking, liability, engagement, responsibility и др), нам представляется наиболее
удачным последний термин, который несет еще и смысл «ответственности», «обязанно-
сти», что более всего отражает отношение агента, решившегося на «жертву», к выполнению
коллективной миссии группы.
2 В классической психологии выделяется всего пять чувств, к которым приводят эмоции
как реакция на возбуждение: 1) злость (досада, недовольство, возмущение, раздражение,
гнев, ярость); 2) страх (растерянность, беспокойство, испуг, тревога, боязнь, паника, ужас);
3) печаль (грусть, тоска, огорчение, уныние, страдание, горе, отчаяние) ; 4) радость (до-
вольство, умиротворение, веселье, удовольствие, восторг); 5) любовь (влечение, обожание,
наслаждение, блаженство, эйфория, нирвана, счастье).
Глава 11
187
решения, т.е. является проявлением результата решения агента и су-
щественно зависит от того, какова его мера ответственности перед
группой. Переставляются и другие этапы; так, после анализа обязан-
ностей агента по отношению к группе должно логически возникать
желание решить проблему, а намерение возникает лишь после опре-
деления возможностей осуществления этого желания. Таким образом,
принятие решения здесь осуществляется в архитектуре, которую по
аналогии с концептуальными результатами работ [141-144], и раз-
вивая их можно обозначить как RDBIE (Responsibility-Desire-Belief-
Intention-Emotion).
В отечественной литературе свойство «жертвенности» практи-
чески не рассматривалось. В той или иной мере вопросы движения в
агрессивной среде затрагиваются в работах [8, 145, 146 и др.], однако
формулировки задач были направлены больше на образование и ис-
следование так называемых формаций [145]. В зарубежной литерату-
ре вопросы «жертвенности» также освещаются довольно ограничен-
но. Наиболее близкие по тематике работы связаны с исследованием
различных аспектов эмоций агентов и обмена ролями между объек-
тами [147, 148] при возникновении конфликтов.
Основные результаты сводятся к следующему.
Для решения задач много-
агентных систем в конфликт-
ных средах за рубежом активно
используется указанная выше
архитектура BDI (Belief-Desire-
Intention), впервые введенная
в работе [150]. В такой архитектуре рассуждения агента происхо-
дят с использованием классических механизмов логического выво-
да на основе его ментальных понятий, представленных некоторыми
структурами знаний. При этом, однако, следует отметить, что BDI-
архитектура ориентирована на описание модели индивидуального
поведения агента, но не на описание группового поведения много-
агентной системы в целом.
В работе [142] вводится в рассмотрение архитектура EBDI, где в
архитектуру BDI дополнительно включаются эмоции (Emotion) и пред-
полагается обучение агента, с тем чтобы при принятии решений учиты-
вались так называемые первичные и вторичные эмоции агентов (вторич-
ные - для уточнения решения при наличии времени). Подчеркивается,
Критикуешь чужое - предлагай свое.
Предлагая - делай!
С. П. Королев
188
В. К. Абросимов
что существует свыше 90 определений эмоционального состояния, но
общего определения эмоций не разработано. Построен алгоритм влия-
ния эмоций на решения; при этом показано, что первичные эмоции вы-
зывают убеждения и далее - намерения и желания. Вторичные эмоции
переосмысливают этот процесс, уточняя полученное первоначальное
решение. На примерах показано, что эмоциональный агент (в примере
- получающий наслаждение, когда ему говорят правду, и сердящийся,
когда ему говорят ложь) более эффективен, чем рациональный агент,
так как он оказывается более адаптивным к окружающей среде.
Архитектура EBDI обобщается также в работе [151], где рас-
сматриваются механизмы организации переговоров эмоциональ-
ных агентов. Доказывается, что интеллектуальный агент не может не
иметь эмоций. И эффект эмоциональности - удовольствие, возбуж-
дение и доминирование (так называемая PAD-модель) - не может не
учитываться при принятии решений.
Различные аспекты учета эмоциональности агентов при приня-
тии ими решений (в том числе и в процессе переговоров) приведены
в работах [143, 153]. Так, в работе [143] агенты размещаются в узлах
некоторой двумерной решетки, не перемещаются в пространстве, но
могут менять свое эмоциональное состояние в диапазоне +1; 0; -1 в
дискретном времени (позитив, нейтральность, негатив). Предпола-
гается, что эмоции агентов спонтанно распространяются в процессе
внутреннего взаимодействия между ними. Групповая эмоция форми-
руется как взвешенная сумма отдельных эмоций агентов. Построены
и исследованы соответствующие модели, описывающие процессы
возбуждения и затухания эмоций.
В работе [153] подчеркивается, что кооперативное поведение
всегда требует от агентов определенного альтруизма. Указанное огра-
ничивает использование традиционных теоретико-игровых моделей,
основанных на концепции выигрыша/проигрыша игрока, так как ра-
циональный агент всегда будет стремиться сохранить эффективность
своей целевой функции. Вводится понятие «категорического альтру-
изма» как специального свойства агента. Категорический альтру-
ист всегда ведет себя альтруистично, даже если его помощь другим
агентам не дает никаких преимуществ. В противоположность этому
агент со свойством «условного альтруизма» в полной мере реализует
собственные интересы прежде, чем интересы других агентов. Прежде
чем принять решение о «жертвенности», он анализирует различные
факторы: уровень доверия (или готовность к сотрудничеству с кон-
Глава 11
189
кретными агентами); вероятность того, что другие агенты получат
выгоду от факта «жертвенности»; возможность гибкости в решении о
«жертвенности» в зависимости от обстоятельств; решения, принима-
емые другими агентами, и др. Условный альтруизм позволяет агенту
балансировать между корпоративными и собственными интересами.
На примере воздушного движения показано, что если два самолета,
идущие навстречу друг другу, «альтруистичны», то вероятность стол-
кновения между ними уменьшается (!).
Аналогичные выводы получены в работе [154], в которой вво-
дится понятие «ситуационного альтруизма» в задачах исследования
трафика самолетов в воздушном пространстве. Существенным яв-
ляется предложение о том, чтобы самолеты, находящиеся в некото-
ром близком воздушном пространстве, оценивали конфликтность
не только с помощью определения местоположения и скорости, но и
путем «переговоров» друг с другом и уступок в зависимости от воз-
можной конфликтности и знания окружающей среды с получением
различной информации, в том числе о намерениях остальных само-
летов в этом же воздушном пространстве.
В работе [155] рассматриваются методы преодоления конфлик-
тов между собственными и корпоративными целями агентов. При
этом предполагается, что конфликты возникают из-за наличия вре-
менных ограничений на выполнение задач. При этом цели агента раз-
деляются на обязательные (которые недопустимо не выполнить) и
дискретные, которые можно отложить, например, по времени выпол-
нения. Вводятся две функции: «жертвенность» и Diligence1. Функция
«жертвенности» дает возможность агенту исключить задачи, которые
имеют более низкий приоритет по сравнению с задачами корпоратив-
ного типа. Функция Diligence позволяет с большей эффективностью
достичь корпоративных целей. Характерным является событие, когда
агент идет на «жертву», но при этом стремится получить некоторые
преимущества («награду»). Для агента вводится ряд событий, связан-
ных с выполнением или невыполнением некоторого действия и на-
граждением или наказанием за это. При этом функции «жертвенно-
сти» и Diligence представляются посредством временных интервалов,
когда нужно выполнить ту или иную работу в зависимости от ее важ-
1 Ни одно из доступных слов в русском языке - старательность, усердие, тщательность, при-
лежность, щепетильность и др. - не дает адекватного термина для описания этой сущности.
190
В. К. Абросимов
ности. Результаты моделирования подтверждают, что если не вводить
функцию «жертвенности», то возникшие конфликты в выполнении
корпоративных и личных задач разрешить невозможно, что негатив-
но влияет на результат.
В работе [156] вопросы «жертвенности» анализируются с точ-
ки зрения вклада агентов в общественные блага. Все рассмотрение
производится на графике зависимости общественных благ от личной
выгоды - чем больше личная выгода, тем меньше вклад в общество.
Вводится мера «жертвенности» агента как величина его потерь при
различных принятых решениях о своей личной выгоде. При описа-
нии свойств меры «жертвенности» подчеркивается, что такая мера
увеличивается, если увеличивается вклад агента в общественное бла-
го, и уменьшается, если его отношение к этому вкладу становится бо-
лее ответственным.
В работе [157] вводится новый класс переговоров агентов, на-
зываемый Л-кооперацией, при которой переговоры основываются на
риске агентов. Метод частичной кооперации состоит в готовности
агента на переговорах к персональным потерям, на которые агент
готов для удовлетворения требованиям выполнения коллективной
миссии. Суть предлагаемого метода в том, что в процессе перегово-
ров агент может отказаться от вариантов, которые влияют на его соб-
ственную выгоду. Таким образом, ищется компромисс между Парето
- оптимальными решениями для всей группы и выгодными решени-
ями для агента, которые он прогнозирует в процессе переговоров; это
позволяет исключить из переговоров варианты с низкой эффектив-
ностью как для агента, так и для группы.
В работе [158] свойство альтруизма рассматривается как приоб-
ретаемое в процессе эволюции. Вопросы обсуждаются применительно
к эволюции свойства альтруизма для групп роботов, ищущих пищу.
Наиболее близкой к тематике «жертвенности» относятся работы
[148,149], в которых анализируется обмен ролями между агентами.
Так, в работе [148] в основу принятия решений положена теория по-
лезности. Описываются условия, при которых обмен ролями стано-
вится возможным; в частности, при N-агентах и N-ролях обмен роля-
ми производится по схеме «один к одному», каждый агент выполняет
только одну роль, общая полезность группы агентов равна сумме
полезностей каждого агента, а при уменьшении общей полезности
обмен считается незначимым. Вводятся числовые характеристики
Глава 11
191
«величина обмена ролями» Role Exchange Value (REV) и «индивиду-
альная полезность» Individual Utility Gain (IUG). С их использованием
разработан алгоритм обмена ролями между агентами, в основу кото-
рого положены разделение группы агентов на пары и поиск пары для
соответствующего агента, с которым полезность обмена ролями была
бы максимальной.
В работе [149] для анализа поведения в сложных комплексных
системах управления рекомендуется использовать так называемую
социопсихолого-культурную модель (MOTL). В этой модели вводит-
ся шкала «коллективизма-индивидуализма», на которой фиксируют-
ся разнообразные индексы (Uncertainty Avoidance Index, Power Distance
Index и др. ), отражающие поведение агента. Основная цель статьи
формулируется как исследование коллективного поведения агентов
с различной социальной культурой в среде разведки и наблюдения
(Intelligence, Surveillance and Reconnaissance). Предполагается, что у
каждого агента имеется совокупность оборудования и средств, ответ-
ственных за достижение заданных возможностей агента. Предполага-
ется, что агент обладает комбинацией различных возможностей. Для
увеличения коллективных преимуществ предложен и развивается
подход, основанный на ролевом обмене; при этом под ролью, выпол-
няемой агентом, подразумевается совокупность его возможностей
для выполнения некоторой задачи.
Мера неопределенности в работе рассматривается как обрат-
ная функция суммарных возможностей агента. Поскольку возмож-
ности связаны с выполняемой ролью, то предполагается, что заме-
на роли способна уменьшить соответствующую неопределенность.
При анализе конкретных сценариев рассматриваются четыре воз-
можности агентов: атака (Attack), патрулирование (Patrol), разведка
(Reconnaissance) и общение (Communicate). «Жертвенность» опреде-
ляется как потеря возможностей или ресурсов агентов, сопутствую-
щих процессу обмена ролями. Для оценки «жертвенности» рассчиты-
ваются индивидуальные потери как разница между возможностями
до и после обмена ролями по каждой характеристике агента.
Таким образом, по результатам проведенного обзора работ, свя-
занных с выбранной тематикой, можно заключить следующее.
Публикации по данной тематике часто рассматривают «жертвен-
ность» исходя из социальных, но не технических процессов. «Альтру-
изм», «эгоизм» и другие свойства, приводящие к идее «жертвенности»,
192
В. К. Абросимов
неявно связываются с эмоциональностью агентов, но в явном виде не
следуют из рассматриваемых в литературе видов эмоций. Различные
архитектуры многоагентных систем (как BDI, так и EBDI) не позво-
ляют выбрать стратегию поведения группы при возникновении про-
блемы при движении во враждебной среде. При этом непосредственно
понятие «жертвенность» агента не определяется, и ее мера по отноше-
нию к группе в целом и другим агентам группы не вводится. Указанное
подтверждают и выводы работы [141], в которой рассмотрено более
400 материалов международных конференций по агентным техноло-
гиям и искусственному интеллекту. В ней выделяются 18 функцио-
нальных требований-свойств к агентам и 11 типов нефункциональных
требований-свойств. Но свойство «жертвенности» не фиксируется.
11.4. Определение понятия «жертвенность»
В качестве практической задачи будем рассматривать монито-
ринг группой агентов некоторой территории, на которой расположены
объекты обследования. Если в зоне мониторинга появляются области
пространства, запретные для движения, в которых функциональность
агентов нарушается, то это представляет проблему для группы.
Пусть группа включает К агентов. Для каждого k-го агента фор-
мируется маршрут движения Мк как совокупность объектов, кото-
рые агент должен посетить в определенной последовательности Мк =
= и2, ..., п. , и, и , ..., пг>. Придадим каждому и-му объекту мо-
ниторинга собственную «значимость». Под «значимостью» (рп будем
понимать степень важности и-го объекта применительно к конкрет-
ной задаче мониторинга (примеры: поле с посевами - минимальная
значимость, городское поселение - средняя значимость, атомная
станция - максимальная значимость).
При посещении и-го объекта мониторинга может быть получе-
на определенная информация об интенсивности ситуации на этом
объекте. Затрачивая имеющийся свой ресурс rkxeR, каждый k-й агент
после посещения объекта п. вносит свой вклад Swk в выполнение
коллективной миссии. Такой вклад можно рассматривать как произ-
ведение «значимости» объекта срп на полученную о нем информацию
По результатам прохождения агентом маршрута Мк общий вклад
можно разделить на две составные части: уже внесенный k-м агентом
к моменту времени t вклад 8wk+(f) и вклад, который агенту еще пред-
стоит внести 8wk(t) ,так что
Глава 11
193
5<(r) = 8wk+(t) + 8w~(f). (35)
Понятно, что
8w,+(f) - £N^'X<p • p ) и 8w~(t) = • P )• (36)
к v ' n-\ 'T n г n' к v ' п-/уч+1 VT n in' '
Коллективная целевая функция для всей группировки формиру-
ется как сумма вкладов всех агентов, что отражает требование полу-
чения полной информации о всех объектах мониторинга:
W) = tf=l 8wf(t). (37)
Если коллективная целевая функция связана с исследованием
опасности, то сигнал тревоги вырабатывается при превышении зна-
чения заданного порога Wz(t) > Wz*(t).
Определим s-ю проблему, возникающую в момент f, как множе-
ство ситуаций, при которых коллективная целевая функция Wz(t) не-
достижима или ограниченно достижима. Обозначим возможные по-
тери целевой функции Wz(t) в s-й проблемной ситуации к моменту ее
возникновения f через AWs(f). Учтем, что каждый k-й агент обладает
определенной ценностью рк\ например, его стоимостью. Если через
область S, где возникает s-я проблемная ситуация, проходят траекто-
рии определенного числа J < К летательных аппаратов-агентов и они
не смогут выполнить свои задачи, то такие потери к моменту f вклю-
чают две основные составляющие:
• по потерям целевой функции AWLA(f) = XJk=l 8w~(ty (38)
• по ценности потерянных агентов Ф*(Г) = Як=1 рк. (39)
Указанные составляющие необходимо рассматривать отдельно,
так как они представляют различные сущности.
Пусть k-й агент обладает основными агентскими ментальными
свойствами: знаниями, намерениями, убеждениями, рационально-
стью, мобильностью, правдивостью и др. [66]. Степени проявления во
внутреннем состоянии k-го агента определенных свойств (для даль-
нейшего важнейшими являются три: обязательства, убежденность и
намерения) в s-й ситуации целесообразно рассматривать как нечеткие
переменные с функциями принадлежности ^os(a), ^/(/3), ^/(у) и носите-
лями О (Obligations), В (Beliefs) и I (Intentions) соответственно.
Под «готовностью к самопожертвованию» агента кеК будем по-
нимать одновременное существование и проявление в момент f воз-
никновения s-й проблемы:
s©
4^
Рис. 21. К определению понятия «жертвенность агента»
В. К. Абросимов
Глава 11
195
а) обязательства pos(a) е [0,1] перед группой решить s-ю проблему;
б) убежденности ^bs(/?)g [0,1] агента в том, что его возможности
смогут решить s-ю проблему;
в) намерения [0,1] агента решить s-ю проблему так, что
A Ws(f) -> 0 при t > f.
В силу необходимости одновременного наличия у агента указан-
ных свойств целесообразно в качестве меры «жертвенности», отража-
ющей готовность k-го агента стать «жертвой» в s-й проблемной ситуа-
ции, использовать сумму или произведение указанных нечетких чисел.
В соответствии с принципом обобщения теории нечетких мно-
жеств [104]
К = U«+/J+y К/И и Рв^ и (40)
Введем понятие «эффект жертвенности», под которым будем по-
нимать влияние факта «жертвы» данного агента на результат выпол-
нения коллективной миссии, т.е. влияние на коллективную целевую
функцию Wz(t).
Для формирования такой оценки проведем следующие рас-
суждения. Понятно, что возникновение проблемной ситуации в за-
висимости от условий ее возникновения и возможного воздействия
на объекты может различным образом повлиять на решение группой
задачи и величину прогнозируемых потерь коллективной целевой
функции AW5(t). Так, возможно затруднение решения групповой за-
дачи, например, более длительное время ее выполнения, незавершен-
ность мониторинга отдельных участков обследуемой местности и др.
Учесть указанное можно введением эмпирического коэффициента тг\
отражающего вероятность/возможность того, что s-я проблемная си-
туация повлияет на выполнение коллективной миссии. В предельных
случаях проблемная ситуация может сделать решение группой задачи
невозможным (пример: A IVs = ©о как проявление факта наличия си-
стемы ВКО, уничтожающей всех ЛА-агентов).
С учетом различного воздействия pks на проходящие через про-
блемную область маршруты J <К летательных аппаратов-агентов вы-
ражения (38) и (39) приобретают вид:
&Ws(f) = 7f • {S'=1 [pks (41)
196
В. К. Абросимов
ДС(Г) = ^1[р/-^]}. (42)
В дальнейшем агента, выбранного группой в качестве «жертвы»,
будем обозначать индексом «as» {agent-sacrifice). Логически также
ясно, что чем больше вклад такого агента Sw^. в решение общей за-
дачи, тем он более ценен. Потеря ценного агента как «жертвы» опасна
для группы тем, что им будет недовнесен (на величину 8w~s > 0) ранее
предполагаемый вклад в коллективную целевую функцию. Однако, с
другой стороны, если «жертва» as-vo агента будет осуществлена, то
потери AWs(f) -> 0.
Логично полагать, что эффект 3as от «жертвы» я$-го агента по
существу совпадает по величине и противоположен по знаку потерям
коллективной целевой функции: чем меньше потери, тем больше эф-
фект. При этом надо учитывать, что эффект снижается за счет недо-
внесенности в целевую функцию части прогнозируемого вклада а$-го
агента-«жертвы». Таким образом, можно записать
эг(Г) = (43)
С учетом необходимости сохранения наиболее ценных для кол-
лектива ЛА-агентов можно говорить о необходимости достижения
следующего эффекта «жертвенности»:
Эаs(f): min Э (f) и min A(?(f). (44)
ДЬ К L К ' '
12. МОДЕЛИ АГЕНТОВ-ПОТЕНЦИАЛЬНЫХ «ЖЕРТВ»
12.1. Формализация понятий «обязательства»,
«убежденность», «намерения» агента
12.1.1. Обязательства агента
В стандартной ситуации обязательства агента перед группой за-
ключаются в совокупности задач, которые готов взять или берет на
себя агент по просьбе и/или по поручению других агентов [161]. В
нашем случае при определении обязательств в контексте «жертвенно-
сти» необходимо в первую очередь оценивать предпочтения агента,
имеющего собственные задачи, по отношению к группе, выполняю-
щей коллективную миссию.
Как известно, любые предпочтения формируются на основе по-
лезности альтернатив. «Жертвенность» как эмоциональное состоя-
ние также характеризуется известной парой «потеря-выгода», доста-
точно исследованной в теории полезности и принятия решений [162].
Возникновение проблемы для группы означает потенциальную поте-
рю интегральной коллективной целевой функции. «Жертвенность»
призвана снизить такую потерю и даже нивелировать ее; в этом со-
стоит ее выгода для группы.
Наш анализ показывает, что перед любым агентом в составе
коллектива в условиях появления проблемы, требующей для свое-
го разрешения «жертвенности», возникают две четкие, по существу
противоположные альтернативы («самопожертвование» и «отказ от
жертвы») и множество находящихся в промежутке между ними аль-
тернатив (рис. 22), которые имеют явно нечеткую природу. При выбо-
ре нечеткой альтернативы агент объективно стремится предпочесть в
определенной мере собственные интересы интересам группы.
198
В. К. Абросимов
Готовность к жертве лишь при условиях
непротиворечивости собственным целям
Роль I
«жертва» ;
Роль
(«прагматик»)
Роль
«эгоист»
Рис. 22. К определению множества альтернатив
поведения агентов в группе
Степень обязательств агента перед группой будет зависеть от
мотивации на жертвенность, которая может формироваться в про-
цессе его обучения.Понятно, что максимальная степень обязательств
во время обучения придается агенту-«альтруисту», минимальная
- агенту-«эгоисту». Обязательства же агента-«прагматика» можно
поставить в зависимость от отношения потерь целевой функции
группы и собственных потерь агента при принятии им решения о
«жертве». На рис. 23 условно отражаются области возможного при-
нятия решений в координатах время t, ценность агента pkv и потери
целевой функции всей группировки ДWs(f) (построить соответству-
ющие строгие графики очень проблематично в силу многозначности
возможных вариантов s-проблем и существенной зависимости реше-
ний от выбранного маршрута движения агента).
Если в группировке ка агентов, обученных в парадигме «альтру-
ист» (АА), кр агентов, обученных в парадигме «прагматик» (АР), и ке
агентов, обученных в парадигме «эгоист» (АЕ), то обязательства аген-
тов перед группой pos(a) можно сформулировать в виде нечеткого от-
ношения предпочтения:
if Д Ws(f) > 0 и 6wk’(f) > 0, then
а) V fcaeN pos(a) = 1 (45а)
b) V i efcpeN (45b)
if Д W5(f)»6w.'(f) then ^05(a) = {1 - 6w."(f)/A Ws}'
else ^os(«) = Д Ws(f)/6w._(f)
с) V ke eN pos(a) = 0. (45c)
Глава 12
199
Л AWS (t*)
Рис. 23. Области поиска решений в координатах время t,
потеря целевой функции A Ws(^) и значимость pkv ЛА-агента для коллектива
12.1.2. Убежденность агента
Убежденность агента определяется главным образом адекватно-
стью представлений агента о ситуации и среде. Она формируется при
наличии и за счет опыта агента, а также посредством правильной об-
работки получаемой о ситуации информации I Несмотря на неопре-
деленность, связанную с враждебностью среды, количество потен-
циально необходимых действий-реакций агента при разрешении s-й
проблемной ситуации, как и количество таких проблемных ситуаций,
ограничено. Поэтому опыт можно накопить в процессе имитацион-
ного моделирования и зафиксировать путем введения в базу знаний
агента правил действий в различных ситуациях.
В работе [163] предлагается простая эмпирическая формула для
расчета степени убежденности агента1 2:
1В настоящей работе мы трактуем английский термин «belief» именно как «убежденность».
2 В обозначениях работы [163].
200
В. К. Абросимов
Su=uua(l-S)b G [0, l],a + b = 1,
где Su - степень убежденности; Uua - уровень убежденности, опреде-
ляемый прошлым опытом; S - степень сомнения агента в правиль-
ности его представлений о ситуации выбора; а, b - коэффициенты
значимости, которые агент придает своему опыту и необходимости
поиска доказательств. Однако использовать такую формулу трудно
из-за многозначности трактовок входящих в нее понятий.
Целесообразно каждой s-й проблеме поставить в соответствие
совокупность потребностей (ресурсов, технических приборов, усло-
вий движения объектов и др.), необходимых для ее решения \ По тер-
минологии работы [96], взвешенная сумма различных возможностей
определяет «роль» агента при выполнении коллективной миссии. Но
потребности могут охватывать сущности из различных предметных
областей, и суммировать их в такой ситуации некорректно. Поэтому
целесообразно определять понятие «решение s-й проблемы» не как
арифметическую, а как логическую сумму потребностей. Тогда ут-
верждение «требования RQS по решению s-й проблемы» логично за-
писать в виде конъюнкции:
RQS = rq^ Arq2s Л rq3 ^...rq\... ^rq*, (46)
где rqts - i-я потребность в решении s-й проблемы, а Л - знак логиче-
ской суммы.
По аналогии с (46) можно записать и утверждение относительно
существования возможностей k-го агента по решению s-й проблемы:
РВ5 = рЬ^ ^pb2s ^pb3s... лрЬ*... *pbjS. (47)
Строго говоря, количество возможностей J может не соответство-
вать количеству I потребностей (I > J, I < J). Кроме того, для коррект-
ности соответствия возможностей агента потребностям решения про-
блемы значения rq* иpb.5 должны принадлежать одному множеству, т.е.
принципиально должны быть сравниваемыми (rq* ~ pbp. Как возмож-
ности, так и потребности могут выражаться в количественном (напри-
1 Определение потребностей решения возможных проблем является предметом отдельного
рассмотрения. Так, для разведки в ночных условиях необходимо наличие приборов ночно-
го видения, для обнаружения системы ПВО противника - возможности по ее «вскрытию»;
для ее уничтожения - наличие огневых средств. Необходимо иметь топливные ресурсы для
перемещения из точки, фиксирующей положение агента на момент возникновения пробле-
мы, к месту возникновения проблемы и т.д.
Глава 12
201
мер, количество топлива достаточно для достижения опасной зоны),
а также в логическом виде (например, необходимая для наблюдения в
тумане аппаратура есть/нет). Вычисление результата целесообразно
осуществлять: для нечисловых, логических переменных - по таблице
истинности, для числовых - сравнением соответствующих значений.
Если возможности агента позволяют не только решить пробле-
му, но и избежать его гибели, то функционал агента частично сохра-
няется. Так, например, если вероятность hks функционирования к-го
ЛА-агента, определяемая его возможностями, в зоне действия систе-
мы ВКО превышает вероятность рк поражения агента (hk > рк), то
степень выживания агента условно можно оценивать как разность
\hk ~ Рк\- ПРИ необходимости или по ситуации эти характеристики
можно также вводить как нечеткие.
Тогда факт «решение s-й проблемы k-м агентом» можно записать
в виде условия:
V к: = к лк ,
* р
если J > /, то V к
или
если J < /, то V к, для которых rqk ~ pbk
V нечисловых переменных:
^„„(£) = {1 (False), O(True)}
V числовых переменных:
= №№ при PbL <
^) = 1прир^>гд/
(48)
Чк:=к
е
(49)
12.1.3. Намерение агента
В предлагаемой архитектуре RDBIE решение агента стать жерт-
вой определяется как желание, реализованное агентом в соответствии
с обязательствами по отношению к группе, - максимально сократить
202
В. К. Абросимов
потери коллективной целевой функции. Такое желание реализуется в
виде намерения.
Намерения агентов-«альтруистов» и агентов-«эгоистов», сфор-
мированные при положительном результате оценки возможностей
решения проблемы, очевидны. Агент-«альтруист» объявляет о своем
намерении /^с5(у) = 1 изменить маршрут и включить в него обследо-
вание проблемной зоны S. Агент-«эгоист» свое намерение выражает
утверждением рс5(у) = 0. Решение агента-«прагматика» зависит от
многих факторов. В общеупотребимом смысле прагматизм как кон-
цепция связан с построением системы реакций на воздействие окру-
жающей среды в интересах получения практически полезных резуль-
татов. «Жертвенность» в любом случае не лучшее решение для агента,
обученного в парадигме «прагматизм». Поэтому на переговорах аген-
тов по выбору «жертвы» он обусловливает свое решение рядом усло-
вий. К числу основных отнесем следующее.
1. Наличие в группе ка агентов-«альтруистов», способных ре-
шить проблему. Если такие агенты есть в составе группы, то
агент-«прагматик» будет уклоняться от самопожертвования.
2. Влияние факта «жертвы» на решение собственных задач. Здесь
указанное заключается в оценке возможности реализации за
счет оставшихся у k-го агента-«прагматика» к моменту време-
ни f ресурсов rjf) на решение как собственных задач, так и
задач, оставшихся нерешенными агентом-«жертвой». В задачах
мониторинга указанное означает необходимость прохождения
агентом-«прагматиком» оставшейся непройденной к моменту
(f) части маршрута агента-«жертвы».
В работе [167] развиты положения подраздела 9.4 по решению та-
кого класса задач с использованием упрощенного метода релокации.
Он позволяет с использованием «уровня включения» и «уров-
ня исключения» , rkh) изменять маршрут ЛА-агента для обсле-
дования проблемной зоны с учетом его оставшихся ресурсов. Тогда
при принятии решения о жертвенности:
• для каждого k-го агента рассчитывается величина оставшегося к
моменту времени f ресурса rk(t*) на прохождение собственного
маршрута и решение собственных задач;
• для каждого k-го агента рассчитываются уровни включения
&Fk(nkh) и исключения AGJrz^., rkh) объектов проблемной области
S в маршрут k-го агента;
Глава 12
203
• для каждого k-го агента как потенциальной жертвы (as) рассчи-
тываются уровни включения AFfls и исключения AGfls объектов
мониторинга проблемной зоны непройденного М~$(t) маршрута
агента-«жертвы» в маршрут k-го агента1.
Таким образом, намерения k-го агента, обученного в соответ-
ствующих парадигмах «жертвенности» запишутся в виде:
а) V к := к ,
7 а
(Ук+а) = 1 еСЛИ AFfls < ) ИЛИ AGas < (50а)
b) V к := к ,
р
= (1 - Ч'.) <1 - 10 (1 - А’) >-,((*)]; (50b)
с) И,‘(yb„) = о. (50с)
Выражение (50а) свидетельствует о том, что агент-«альтруист»
выражает намерение о «жертвенности» в любом случае при доста-
точности ресурсов по решению s-й проблемной ситуации. Агент-
«эгоист» в любом случае отказывается от самопожертвования (50с).
Агент-«прагматик» (50b) обусловливает свое намерение не стать
«жертвой» необходимостью учета вероятности возможной гибели рк,
своей ценностью для коллектива рк, уровнем своей квалификации {Рк
и недостаточностью ресурсов для самопожертвования.
12.2. Условия принятия решения агентом
о «жертвенности»
В ряде работ отмечается, что описать поведение группы стро-
гими математическими зависимостями достаточно сложно. Поэтому
наиболее целесообразно использовать для моделирования процессов
с участием ЛА-агентов-«жертв» методы имитационного моделирова-
ния. Среди различных средств имитационного моделирования вы-
брана среда AnyLogic [164, 184].
1 Здесь выражения для расчета AFaj и AG^ не приводятся в силу их существенной зависимо-
сти от условий задачи. Действительно, если количество оставшихся для обследования объ-
ектов значительно, то расчет AF s и AG^ лучше производить методом перебора последова-
тельно для каждого объекта вместо того, чтобы делать универсальную формульную схему.
204
В. К. Абросимов
Во многих задачах в качестве одного из важнейших условий
предполагается, что агент ведет себя рационально, т.е. он адекватно
осознает собственные и корпоративные цели и способен выбирать
лучшие решения для их достижения мгновенно и безошибочно. Ра-
циональность также часто отождествляется с максимизацией соб-
ственной выгоды. В условиях появления проблемы группировка, со-
Если идея не кажется абсурдной -
она безнадежна.
Альберт Эйнштейн
стоящая из одних рациональных
агентов, принципиально неэффек-
тивна. Для таких задач она долж-
на состоять из агентов с различ-
ной мотивацией поведения, т.е.
К^{ка, кр, ке}. В наших предположениях агенты-«альтруисты» пол-
ностью иррациональны, агенты-«эгоисты» полностью рациональны.
Агенты-«прагматики» не стремятся стать «жертвой», но допускают
целесообразность или вынуждены пойти на это при соответствую-
щих условиях.
Кратко опишем и формализуем модели поведения соответству-
ющих агентов в контексте наличия и реализации свойства «жертвен-
ности».
«Интеллектуальный агент». Согласно [66], он автономен и спо-
собен ради достижения поставленной цели решать эвристические
задачи, обучаться, осуществлять коммуникацию и сотрудничать с
другими агентами. В контексте настоящей работы он функционирует
в соответствии с определенной ему или взятой самостоятельно подза-
дачей в рамках коллективной миссии. С остальными агентами группы
до появления проблемной ситуации его связывает отношение безраз-
личия. Все агенты до появления проблемной ситуации и необходи-
мости «жертвования» проявляют себя как интеллектуальные агенты.
Агент-«альтруист» (Agent-Altruist - АА). Мотивация к «жертвен-
ности» осмысленная, высокая. Готов к самопожертвованию и отказу от
решения собственных задач. Строго предпочитает интересы группы
собственным интересам. При обучении в систему управления в виде
стейчартов [164] закладываются правила (45а), (48), (50а). При появ-
лении проблемы всегда объявляет на переговорах о готовности жерт-
вовать собой для достижения коллективной цели рк5 = рАА = 1) при на-
личии соответствующих ресурсов и возможностей. При отсутствии
ресурсов - берет на себя любые задачи в пределах своих возможностей.
Глава 12
205
Агент-«прагматик» (Agent-Pragmatist - АР). Допускает «жерт-
венность» лишь при необходимости и при определенных условиях.
Мотивация к «жертвенности» - необходимая целесообразность. Оце-
нивает необходимость «жертвенности» исходя из своей ценности для
коллектива, практической полезности - вклада в выполнение целевой
миссии, опасности лишиться функциональности вследствие воздей-
ствия агрессивной среды; решение собственных задач предпочитает
коллективным. В переговорах стремится возложить необходимость
«жертвы» на других агентов. При обучении в систему управления в
виде стейчартов закладываются правила (45b), (48), (50b). В процессе
переговоров при оценке отношений предпочтения представляет ве-
личины меры «жертвенности» из интервала 0 < ps < 1, которые опре-
деляются в зависимости от ситуации.
Агент-«эгоист» (Agent-Egoist - АЕ). Свою подзадачу (в задачах
мониторинга - прохождение маршрута) он рассматривает как более
важную, чем коллективную миссию, но участвует в ее выполнении.
Мотивация к «жертвенности» отсутствует. Свой вклад в выполнение
коллективной миссии оценивает как неоценимый. Стремится ис-
ключить свое участие в решении проблем коллектива. Безразличен
к интересам коллектива. При обучении в систему управления в виде
стейчартов закладываются правила (45с), (49), (50с). На переговорах
по решению проблемы объявляет об отказе от самопожертвования
(pks = psAE - 0), хотя может иметь возможности и ресурсы по разреше-
нию s-й проблемной ситуации.
12.3. Назначение Лидером агента на роль «жертвы»
Снова рассмотрим для примера задачу группового проникнове-
ния через систему обороны [8], решаемую группой объектов управле-
ния. Система обороны создает для атакующих активную враждебную
среду. В результате в пространстве и во времени образуются области,
где выполнение поставленной коллективной миссии становится за-
труднительным, если вообще возможным. Эти области для атакую-
щих неизвестны и могут лишь прогнозироваться, исходя из рацио-
нальности поведения обороняющейся стороны. Типовым подходом
является определение оптимальных траекторий обхода атакующими
объектами таких потенциально опасных зон. Однако можно предло-
жить и иное решение - намеренно направить в неизвестную область
206
В. К. Абросимов
один или нескольких атакующих объектов для «вскрытия» возмож-
ностей системы обороны, нейтрализации ее влияния и создания сво-
его рода «окон безопасности». Таким образом, возникает нетриви-
альная задача выбора из коллектива агентов представителя на роль
«жертвы».
Подробный анализ литературы по рассматриваемому вопросу
проведен в работе [165]. Кратко резюмируя, можно заключить сле-
дующее:
а) при анализе свойств агентов «жертвенность» как свойство
практически не исследована;
б) «жертвенность» в литературе рассматривается главным обра-
зом с точки зрения социальных, но не технических процессов;
в) различные архитектуры многоагентных систем (как BDI,
EBDI) не позволяют выбрать стратегию поведения группы при
возникновении проблемы при функционировании во враж-
дебной среде.
Подчеркнем, что важно не распространять объективно возника-
ющие аналогии поведения живых существ, связанные с жертвенно-
стью, на технические объекты. «Жертвенность» для объектов управ-
ления, представляемых в виде агентов, - не что иное, как просто одно
из свойств, которому система управления агента обучается заблаго-
временно. Далее это свойство реализуется как необходимое поведе-
ние агента в соответствующей ситуации.
Пусть перед коллективом агентов возникла s-я проблема. За-
дача разрешения этой проблемы характеризуется определенными
требованиями. Агент, назначаемый на роль «жертвы», должен этим
требованиям соответствовать. Важно зафиксировать три основных
положения.
1. Ценность агента. Агент, как технический элемент, обладает
определенной ценностью /^v, например, стоимостью. Очевидно,
что жертвовать ценным агентом неразумно, следовательно, при
выборе «жертвы» необходимо обеспечивать условие min pkv.
2. Вклад агента в выполнение коллективной миссии. Каждый i-й
агент вносит свой вклад в выполнение общей коллективной
миссии [165, 167]. Если агент будет жертвовать собой, то часть
возложенных на него коллективом задач останется невыпол-
ненной (см. выражения (35)-(38)). Свяжем факт потери агента
с величиной недовнесенного им вклада 8wk(t) в В ряде
Глава 12
207
практических ситуаций такой вклад численно рассчитать труд-
но, поэтому его удобно фиксировать в виде лингвистической
или нечеткой переменной с функцией принадлежности р".
3. Возможность выполнения задачи «жертвенности». Возмож-
ность выполнения агентом задачи «жертвенности» представ-
ляется ресурсами, имеющимися у агента для выполнения та-
кой задачи, и возможностями выполнения задачи в опасной
зоне, т.е. необходимым функционалом (для задач подавления
средств противовоздушной обороны, например, наличием
средств радиоэлектронного противодействия). Определим
наличие ресурсов у k-го агента функцией принадлежности ркг
множеству Rs необходимых для решения s-й проблемы ресур-
сов, а возможности - функцией принадлежности рр функцио-
нала k-го ЛА-агента множеству необходимого для решения s-й
проблемы функционала F5.
Таким образом, атрибутами k-го агента, используемыми для на-
значения его на роль «жертвы», будет кортеж функций принадлежно-
сти, описывающий его обученность самопожертвованию рк, ценность
для группировки рк\ ресурсы рг для выполнения роли «жертвы», не-
обходимую функциональность рр и недовнесенный вклад pkw в кол-
лективную целевую функцию:
Cort := <fiks, ркг, рР, (51)
Все элементы такого кортежа являются нечеткими числами с со-
ответствующими функциями принадлежности.
Понятно, что в коллективе, состоящем из разнородных аген-
тов, они обладают различными характеристиками кортежа (51). По-
этому для выбора агента-«жертвы» необходимо сравнить агентов
между собой. Задача состоит в том, чтобы в коллективе найти тако-
го кд^еК-агента, который наиболее адекватен требованиям «жерт-
венности» в смысле системы критериев (51) и подготовлен к такому
действию в s-й проблемной ситуации. В терминах теории принятия
решений необходимо разработать систему предпочтений и найти не-
доминируемую альтернативу k”d в группе из К альтернатив.
В силу нечеткости исходных данных («ценность», «жертвен-
ность» и др. - явно нечеткие понятия) целесообразно рассматривать
нечеткие отношения предпочтения [104]. Если PFS - нечеткое от-
ношение предпочтения на множестве агентов К, то для любой пары
208
В. К. Абросимов
агентов (кх, ky)ePFs - степень доминирования агента кх над агентом ку
(кх> ку) по критерию/по аналогии с (12) описывается функцией при-
надлежности (кх, ку):
Ррр ку) = {pf(kx, ку) - ц{(ку, £*)}, если pf(kx, ку) > ц{(ку, кх),
0, если Pj(kx, ку) < р^(ку, кх).
Нечеткими отношениями предпочтения вида (52) можно оцени-
вать степень доминирования агента кх над агентом ку по каждому из
пяти выделенных выше/-критериев. Но основная проблема назначе-
ния на роль «жертвы» состоит в том, что для ее исполнения необхо-
димо соответствовать не одному, а многим требованиям. Таким об-
разом, задача становится многокритериальной.
Сформулируем следующий тезис о предпочтительности агентов
с точки зрения назначения на роль «жертвы». Агент кх предпочти-
тельнее агента ку при одновременном выполнении пяти условий:
• степень готовности к самопожертвованию агента кх выше, чем у
агента ку\
• вклад агента кх в коллективную целевую функцию меньше, чем
вклад агента ку;
• у агента кх ресурс для выполнения задач «жертвенности» выше,
чем у агента ку\
• возможность выполнения задачи «жертвенности» агентом кх
превышает такую возможность агента ку\
• ценность агента /сх для группировки ниже, чем ценность агента ку.
Тогда интегральное условие предпочтительности запишется в
виде:
FAV(fc\ ку):{^х > ^)П(^ < ^)П(^х > /^)Л
(53)
Условие предпочтительности (53) построено так, что приори-
тетом является не столько трудновычисляемое значение вида (52),
сколько сам факт превышения одной характеристики над другой. В
этих условиях оказывается полезным использование ранговой шкалы
отношений.
Введем в рассмотрение ранги предпочтительности по отдельным
атрибутам агента. Для этого проведем сравнение характеристик агентов
Глава 12
209
по всем атрибутам и ранжируем агентов по отдельным составляющим
условия (53). В итоге получим таблицу разнообразных рангов (табл. 23).
Суммарный ранг G по столбцу позволяет определить приоритетность
агента для назначения на роль «жертвы» по всем атрибутам-критериям.
Таблица 23
Ранги агентов по различным атрибутам
Критерии f Агенты
1 2 3 j К
f=W (вклад) к Рк
Rank W Е;. E2W E,w Ew Ekw
f=S (готовность) р/ Pl Pl V Pn
RankS E2S E,s EiS Eks
f=R (ресурсы) Pl Pl Pl p: Pn
Rank R E-iP Ekr
f=P (возможность) Н,'
RankP Е„ E2P E,r E1P EKP
f=V (ценность) Piv Plv К p; Pn
Rank V E.v E>v E>v E,v Ekv
Сумма рангов G, g2 G1 G
Часто бывает необходимым для учета конкретной ситуации
функционирования коллектива во враждебной среде ввести также
и коэффициенты значимости £ различных составляющих (53). При
этом возможно большое разнообразие вариантов. Так, если коллек-
тив может дорожить агентом, тогда более высокие коэффициенты
предпочтения получают атрибуты ценности агента V и вклада в кол-
лективную целевую функцию Ж Однако в ситуации, когда для более
эффективного выполнения коллективной миссии «жертва» неизбеж-
на, приоритеты отдаются ресурсоемкости R и функциональности F.
Поэтому на практике не всегда приходится жертвовать агентом, кото-
рый более всех готов к самопожертвованию; он может иметь недоста-
точно ресурсов или функциональности для разрешения проблемы.
Во всех случаях агент, являющийся наилучшим претендентом на
роль «жертвы», определится из условия свертки нескольких критериев:
(54)
210
В. К. Абросимов
12.4. Необходимые и достаточные условия
«жертвенности» агента
Как известно, необходимыми условиями истинности предиката
А называются условия, без соблюдения которых А не может быть ис-
тинным. Тогда к необходимым условиям «жертвенности» агента це-
лесообразно отнести обученность агента жертвовать собой в интере-
сах выполнения коллективной миссии. При этом система управления
агента должна понимать термин «жертвенность», что можно осуще-
ствить в результате специального обучения (с учителем, без учителя,
путем самообучения и др.). Обучение агента действию определяется
формированием стратегий его поведения в определенных типовых
ситуациях. Такие ситуации существенно зависят от онтологии пред-
метной области, в которой решается задача. При формировании кол-
лектива агентов для выполнения коллективной миссии первичной
является та роль (1*, которая отводится к-му ЛА-агенту в коллективе.
В свою очередь роль определяет требуемый функционал Rof, а функ-
ционал в свою очередь - требуемые ресурсы Ror агента для исполне-
ния роли. Иными словами, реализуется взаимосвязь событий:
(\z^Ro^Ror. (55)
Достаточными условиями истинности предиката А называются
такие, при наличии которых утверждение А является истинным. В
s-й проблемной ситуации к достаточным условиям «жертвенности»
можно отнести два условия:
а) наличие функциональных возможностей к-то ЛА-агента Fk по
решению s-той проблемы (примеры для ЛА: способность воз-
действия на систему обороны, возможность маневрирования в
зоне действия системы обороны и др.);
б) наличие необходимых ресурсов к-то ЛА-агента Rk для решения
s-й проблемы (примеры для ЛА: топливо; запас характеристи-
ческой скорости для достижения цели; запас аэродинамики
при движении в режиме планирования в воздушном простран-
стве и др.).
Рассмотрим случай существования необходимых, но не доста-
точных условий «жертвенности». Это означает, что в складываю-
щейся пространственно-временной ситуации у агента, обученного
парадигме «жертвенности» отсутствуют необходимые ресурсы и/или
Глава 12
211
функционал для решения проблемы. В ситуациях, когда сформирова-
ны лишь достаточные условия самопожертвования, агент имеет со-
ответствующие ресурсы и возможности, но не был обучен «жертвен-
ности». Ситуация характеризуется необходимыми и достаточными
условиями «жертвенности», когда к-й агент обучен «жертвенности»
в парадигме рке [0,1]), имеет ресурсы Rk и возможности Fk по реше-
нию s-й проблемы.
При наличии в коллективе Лидера при получении информации
по s-й проблеме, угрожающей выполнению коллективной миссии,
все к агентов коллектива связываются с Лидером и объявляют свою
степень готовности к самопожертвованию. При отсутствии Лидера
коллектив в процессе переговоров для решения s-й проблемы либо
отыскивает агента к^ обладающего максимальной готовностью к са-
мопожертвованию (свойством p5as =1), либо as-агент выбирается из
числа агентов-«прагматиков», обладающих свойством [0,1) с уче-
том различных критериев (его ценность, наличие требуемого функ-
ционала, ресурсоемкость, готовность к самопожертвованию и др.),
если иначе задача неразрешима. При этом используется алгоритм,
приведенный в разделе 12.6.
Кроме функционала и ресурсов, /с^-агент должен оценить воз-
можность своего дальнейшего функционирования hk после разреше-
ния проблемы. Тогда достаточное условие самопожертвования будет
выражаться в виде логического выражения:
F5 (= Fs A Rs > Rs A hs > ps. (56)
as — as as * as X-''-'/
Исходя из возможности самопожертвования, исключительно
важно знать, могут ли агенты по своим ресурсам и функциональным
возможностям заменять друг друга. Действительно, /с^-агент, жерт-
вуя собой, объективно не выполняет часть своих собственных задач;
они должны быть перераспределены среди других агентов. Для этого
могут быть задействованы как функциональные возможности других
агентов, так и их ресурсы. Распределение ресурсов других агентов
по невыполненным задачам /с^-агента может быть реализовано с ис-
пользованием подхода «потребности-возможности» [187] и методов
релокации (см. главу 9).
Обучение агента «жертвенности» включает два основных аспек-
та: создание образов ситуаций, в которых будет приниматься реше-
ние о «жертвенности», как обучающих примеров, и направленное
212
В. К. Абросимов
указание о выборе одной из трех стратегий поведения в таких ситу-
ациях. Для обучения «жертвенности» предлагается использовать ап-
парат нейронных сетей. Сформируем многослойную нейронную сеть
с ансамблевой организацией [166], придавая нейронам и ансамблям
нейронов различных слоев определенный смысл. На первом уровне
разместим нейроны-акторы, описывающие враждебную среду (при-
меры: туман, средства ПВО и др.); на втором - нейронные ансамбли,
описывающие характеристики враждебной среды (для тумана: раз-
меры облака, плотность, ожидаемое время рассеивания; для системы
ПВО: дальность обнаружения, точность сопровождения объектов,
высоты перехвата и скорости противоракет); на третьем - ансамбли
нейронов с описанием пространственно-временных областей, в ко-
торых враждебная среда создает угрозы, и их последствия (примеры:
характеристики эллипсоида, в котором высокая вероятность пораже-
ния самолетов, ошибки в распознавании объектов вследствие про-
блем в работе оптической аппаратуры РЛС и др.). При описании s-й
проблемной ситуации нейроны каждого слоя возбуждают нейроны-
представители ансамблей следующего слоя. Возбуждение организует-
ся за счет заранее заданных нейронных связей. Таким образом, вся
область пространства, в которой могут возникнуть угрозы для вы-
полнения коллективной миссии, заполняется нейронными ансамбля-
ми, возбужденными с разной степенью активности; степень возбуж-
дения ассоциирована с вероятностью невыполнения задач агентами
данного вида в выбранной области пространства.
Образ объекта управления как агента может создаваться на ос-
нове принципа фоторобота [3]. Это позволяет синтезировать раз-
личные необходимые для моделирования летно-технические обли-
ки объектов управления, задавать их требуемые характеристики и
функциональные возможности. В качестве одной из характеристик
системы управления закладывается признак «готовности к самопо-
жертвованию».
Осуществим, наконец, необходимое движение объекта управле-
ния синтезированного облика по нейронным траекториям в различ-
ных практически интересных ситуациях [166]. В качестве исходных
данных при этом используется потенциально возможная роль Qkz
ЛА-агента (пример: разведка (z = 1), постановщик радиопомех (z = 2);
ударное средство (z = 3); командный пункт-Лидер группировки (z = 4)
и др.), его функционал и стоимость (ценность).
Глава 12
213
В результате такого моделирования будут вырабатываться пра-
вила типа:
Ru: for dk /\Fk/\Rk/\ рк в ситуации $ -> pksz£ [0,1], (57)
где zeZ - потенциально возможная роль ЛА-агента; Fk - множество
функций ЛА-агента k-го облика; Rk - множество ресурсов ЛА-агента
k-го облика;рк - ценность (стоимость) ЛА-агента;pkz - нечеткая мера
«жертвенности» кого агента в z-роли в s-й ситуации.
Таким образом, в результате обучения каждой роли, функции,
ситуации будет поставлена в соответствие степень готовности агента
с данной ценностью к самопожертвованию. Обобщенные возможные
результаты такого обучения систематизированы в табл. 24.
Таблица 26
Результаты обучения агента свойству «жертвенности»
Результаты обучения «жертвенности»
«Альтруист» «Эгоист» «Прагматик»
Ценность ЛА Низкая Высокая Средняя
Функционал ЛА
Ресурсы ЛА Rk^Rk Rk - !*к Rk
Возможность продолжать функционирование после факта «жертвенности» ^ = 0
Обязательства перед группировкой ^о’(а) = 0 pos(a)e [0,1]
Убежденность в способности решить проблему ^)е[0,Ц
Намерение решить проблему tiW = 1 = о р;(у)е[о,1]
Степень готовности к «жертвенности» Л‘ = о
Стратегия поведения в процессе переговоров агентов «self-sacrifice» «self- preservation» «sacrifice on demand»
Типовая роль в коллективе (примеры) Ложный объект управления Лидер Исполнитель
214
В. К. Абросимов
12.5. Алгоритм реализации стратегии «самопожертвования»
Предлагается следующий алгоритм выбора агента-«жертвы» в
парадигме самопожертвования.
1. В процессе выполнения коллективной миссии прогнозируется
характер изменения производной коллективной целевой функ-
ции Wx'(t+). Если Wx'(t+) < 0, то принимается решение о возник-
новении s-й проблемы. Проблема фиксируется парой {Fs, Л5}.
2. Оцениваются потери коллектива AWx(f) вследствие возник-
новения s-й проблемы. Если потери превышают допустимые
&Wx(t) > AWx*(t), то принимается решение о поиске агента-
«жертвы».
3. Выбирается группа агентов К, функционал которых удовлетво-
ряет условию
PczF/VfcGK.
— к
4. Из группы К выбирается группа ЛА-агентов Re К из условия
R,s >RSV keR.
к
5. Из группы R выбирается группа ЛА-агентов HeR из условия
h,s > p.s V /се V.
к г к
6. Из группы Н выбирается группа ЛА-агентов I с заданной вели-
чиной готовности к самопожертвованию из условия сравнения
с заданной
^s>^s*e[0,l],/ceI.
7. Если количество агентов I > 1, то в качестве «жертвы» выбира-
ется тот агент, у которого ценность минимальна
Fflvs = mKin^-
В практических приложениях важность свойства «жертвенно-
сти» становится еще более актуальной в связи с использованием в раз-
личных целях так называемых ложных летательных аппаратов. Так, в
работе [168] вводится понятие имитационного беспилотного авиа-
ционного комплекса, под которым понимается «...комплекс..., ими-
тирующий летно-технические характеристики и информационные
признаки (отражательные и излучательные характеристики) целей...
для решения учебных и боевых задач ВВС и ПВО, а также для испы-
Глава 12
215
таний перспективных образцов вооружения и военной техники...».
Под боевым имитационным беспилотным авиационным комплексом
понимается «...БАК, системообразующими элементами которого яв-
ляются авиационные ложные цели, ...предназначенные для создания
на экранах радиолокаторов контуров целераспределения противни-
ка информации, подобной информации от отечественных ЛА». Этот
вид ложных целей предназначен для решения таких задач, как вскры-
тие системы ПВО противника, усложнение воздушной обстановки и
отвлечение на ложные цели активных средств ПВО, провоцирование
и истощение средств поражения системы ПВО, размножение боевых
порядков ЛА в зоне действия ПВО противника, имитация действий
ЛА на ложных направленияхи др. [168].
12.6. Организация переговоров агентов по выбору
потенциальной «жертвы» в коллективе без Лидера
Для ИРК в каждый момент времени каждый агент предостав-
ляет информацию о своем состоянии и получает информацию о гео-
графии миссии, о ситуации в зоне выполнения миссии и о текущем
состоянии остальных агентов коллектива.
Информация об агенте. Состояние каждого k-го агента на каж-
дый момент времени t представляется в виде следующего кортежа:
STk(t) := {TS,8wk\t), 8w-(t),М~, rk(t), F/}, (58)
где к - условный номер агента; TS - тип мотивации агента, сформи-
рованный при обучении (АА, АР, АЕ); рк - степень готовности агента
к самопожертвованию; 8wk+(t) - вклад, внесенный агентом в коллек-
тивную целевую функцию к моменту времени t; 8wk(f) - вклад, не-
довнесенный агентом в коллективную целевую функцию к моменту
времени t; Mk+(f) - пройденный агентом к моменту времени t марш-
рут; Mk(t) - оставшийся непройденным к моменту времени t агентом
маршрут; rk(t) - текущие ресурсы агента; Fk5 - существующий функци-
онал агента по решению s-й проблемной ситуации.
Информация об области мониторинга. На практике вся область
мониторинга разбивается на отдельные подобласти. Они описывают-
ся следующим кортежем:
{п, X, у, z, Л/, акп},
(59)
216
В. К. Абросимов
где п - идентификатор обследуемого объекта в области мониторин-
га; х, у, z - координаты объекта в выбранной системе координат;
Лмс - степень опасности движения в е-окрестности и-го объекта;
а” - идентификатор факта обследования и-го объекта мониторинга
к-м ЛА-агентом.
Информация о проблемной ситуации. Проблемная ситуация
(наличие области запрета S; снижение эффективности функциониро-
вания агентов вследствие наличия средств противодействия; обнару-
жение повышенной интенсивности опасности ситуации в некоторой
зоне и др.) в общем виде представляется в виде кортежа:
s:{^S,7T^p;, AW*)}, (60)
где t* - момент возникновения s-й проблемной ситуации; S - описание
проблемной области (местонахождение в пространстве, геометрия,
размеры); rt - вероятность/возможность того, что s-я проблемная
ситуация повлияет на выполнение коллективной миссии; рк - веро-
ятность/возможность прекращения функционирования (например,
поражения средствами ВКО) к-то агента в s-й проблемной ситуации;
&Ws(t*) - величина прогнозируемых потерь коллективной целевой
функции Wz(f) на момент t* вследствие s-й проблемной ситуации.
Наличие информации (58)-(60) обеспечивает проведение пере-
говоров агентов.
Алгоритм выбора «жертвы» в процессе переговоров группы
представим в виде следующей логической последовательности.
1. Группа из К агентов выполняет коллективную миссию с задан-
ной целевой функцией используя информацию об об-
ласти мониторинга в виде (59).
2. В дискретные моменты времени все агенты группы с исполь-
зованием ресурса ИРК в интернет-пространстве как площадки
переговоров обновляют кортеж информации (58).
3. В момент времени t* фиксируется s-я проблемная ситуация.
Оценивается степень влияния проблемы на выполнение кол-
лективной миссии (л6 > 0?). Определяется величина прогнози-
руемых потерь коллективной целевой функции A Ws(t*) на мо-
мент t*. Обновляются данные вида (58).
4. Каждый агент кеК вырабатывает собственное решение о про-
блемной ситуации, фиксируя на поле переговоров свое состоя-
Глава 12
217
ние в форме (58), включая рассчитанное значение pks готовно-
сти к самопожертвованию.
5. Коллективом на основании информации, представленной аген-
тами, определяется в виде (41) уровень потери Д Ws(t*) целевой
функции на момент времени t* с учетом потери k-го агента при
назначении его «жертвой» и эффект (43) от «жертвенности».
6. Все агенты коллектива разбиваются на три группы:
1) ЛА-агенты-«альтруисты»; 2) ЛА-агенты-«прагматики»;
3) ЛА-агенты-«эгоисты».
7. Агент-«жертва» V е К выбирается последовательно сначала сре-
ди агентов-«альтруистов», далее среди агентов-«прагматиков»
и, наконец, среди агентов-«эгоистов». При этом реализуется
следующий алгоритм.
7.1. Агент-«жертва» выбирается с учетом его ценности для
коллектива:
4/ /4 = max V к: (61)
7.2. Агент-«жертва» выбирается среди агентов, наиболее уве-
ренных в решении проблемы, за исключением ценных
агентов:
4?^Ш = тМЖ
если ^(/3) > кроме к: > ц».
7.3. Агент-«жертва» выбирается с учетом его вклада в выпол-
нение коллективной миссии, за исключением ценных и
неуверенных в решении проблемы агентов:
4; m,in Swk
кроме к: [p* > и ^(/3) >
8. Выбранный агент-«жертва» V включает объекты проблемной
области S в свой маршрут и решает проблему.
9. Коллектив перераспределяет задачи, ранее возложенные на
агента-«жертву» ks, между собой Алгоритмы нового целера-
спределения разрабатываются на основе методов релокации.
10. Коллектив продолжает выполнять коллективную миссию в но-
вых условиях отсутствия или снижения влияния s-й проблем-
ной ситуации.
218
В. К. Абросимов
Таким образом, коллектив выбирает «жертву» из условия мак-
симальной готовности агента к самопожертвованию; если такой
агент ценен для коллектива, то «жертва» выделяется из агентов с
максимальной степенью уверенности в решении проблемы, исходя
из их возможностей и, если таких агентов оказывается несколько, то
«жертвой» выбирается агент, степень ущерба от потери которого для
выполнения коллективной миссии минимальна.
12.7 . Примеры выбора агента на роль «жертвы»
12.7.1 . Выбор агента-«жертвы»
при мониторинге зоны возгорания
Рассмотрим пример решения задачи мониторинга зоны возгора-
ния коллективом ЛА-агентов с учетом возможности их «жертвенно-
сти». До появления s-й проблемы все агенты реализуют рациональное
поведение и движутся по заданным маршрутам. В некоторый момент
времени случайным образом в области прохождения маршрутов воз-
никает s-я проблема в виде области пространства S, проблемной для
движения. ЛА-агенты, маршруты которых проходят через область
S, в данном примере считаются уничтоженными и исключаются из
дальнейшего рассмотрения.
В состав группы входят также агенты с тремя типами обученно-
сти «жертвенности» - «альтруисты» (АА), «эгоисты» (АЭ) и «прагма-
тики» (АР). При появлении области S осуществляются переговоры по
выбору агента-«жертвы». Выбранная «жертва» V движется в область
S, после чего прекращает свое функционирование; но ограничения по
движению остальных ЛА-агентов в области S при этом снимаются.
Задачи мониторинга, ранее возлагавшиеся на агента-«жертвы», пере-
распределяются среди остальных агентов.
Модель мониторинга разрабатывалась в среде имитационного
моделирования «AnyLogic» [164, 184]. При этом модель движения
ЛА-агентов была существенно упрощена до линейных зависимо-
стей. Вводилось также ограничение на ресурс агента, выражаемое в
виде максимального времени движения в зоне мониторинга (аналог
ограничения, например, на запас топлива авиационных средств мо-
ниторинга).
Глава 12
219
Обследование семи объектов мониторинга на местности
(и = [1,7] с различной степенью интенсивности рп пожара на них (ус-
ловно от 1 до 5 единиц) производилось тремя самолетами. Системы
управления самолетов были обучены в различных парадигмах «жерт-
венности» (ЛА-1 - как «альтруист»; ЛА-2 - как «эгоист» и ЛА-3 - как
«прагматик»). Задавалась различная ценность ЛА для группировки.
Заданные первоначальные маршруты мониторинга представлены на
рис. 24 (а, Ь, с, d). В эксперименте варьировались область возникно-
вения проблемы и возможность устранения проблемы различными
ЛА-агентами.
Исходные данные и результаты систематизированы в табл. ’25.
Проведем анализ результатов.
В первом варианте расчетов, несмотря на высокую готовность
ЛА-1 пожертвовать собой, «жертвой» выбран ЛА-2 («эгоист») как
средство мониторинга, дающее значительный эффект «жертвенно-
сти» при самой низкой цене для коллектива и высокой вероятности
решения проблемы.
Во втором варианте расчетов «жертвой» снова выбран ЛА-2
(«эгоист»), несмотря на отсутствие у него мотивации к «жертвенно-
сти» и низкую эффективность «жертвы». Но в процессе переговоров
агентов установлено, что при «жертвенности» ЛА-1, несмотря на его
альтруизм, коллектив теряет аппарат с высокой ценой при низкой
вероятности решения проблемы. При «жертвенности» ЛА-3 эффект
отрицательный. При «жертве» ЛА-2 коллектив теряет «эгоиста», но
получает в итоге среднюю вероятность решения проблемы, не теряя
при этом ЛА с высокой ценой.
В третьем варианте «жертвой» назначается ЛА-3 (агент-
«прагматик»). Определяющим снова стала высокая вероятность ре-
шения проблемы при средней величине эффекта.
Агент-«альтруист» ЛА-1, более всех готовый к самопожертвова-
нию, во всех трех вариантах остался в составе коллектива. Это связа-
но с тем, что, во-первых, он обладает для коллектива самой высокой
ценностью и, во-вторых, несмотря на высокую возможность решения
проблемы в одном из вариантов (Вариант 1), - незначительными ре-
сурсами для оперативного достижения пространственной области,
где возникла проблема.
220
В. К. Абросимов
Рис. 24а. Пример географии мониторинга.
Первоначально сформированные маршруты
Обозначения: белые круги (1-7) - точки мониторинга;
темные квадраты (1-5) - важность точек мониторинга
(степень опасности пожара).
Рис. 24b. Пример географии мониторинга. Вариант 1
Глава 12
221
Рис. 24с. Пример географии мониторинга. Вариант 2
Рис. 24d. Пример географии мониторинга. Вариант 3
Таблица 25
Результаты модельного эксперимента
Вариант 1. Опасность на маршруте ЛА-«эгоиста» Вариант 2. Опасность на маршруте ЛА-«альтруиста» Вариант 3. Опасность на маршруте ЛА-«прагматика»
ЛА 1 ЛА 2 ЛАЗ ЛА 1 ЛА 2 ЛАЗ ЛА 1 ЛА 2 ЛАЗ
Тип «жертвенно- сти» ЛА АА АЕ АР АА АЕ АР АА АЕ АР
Исходный маршрут 1-2 3-4 6-5-7 1-2 3-4 6-5-7 1-2 3-4 6-5-7
Зона Z 4 4 4 2 2 2 5 5 5
Момент t* возник- новения зоны S Между 1 и2 ДоЗ Между 6и5 Между 1 и 2 ДоЗ Между 6и5 Между 1 и2 ДоЗ Между 6и5
Готовность статьжертвой 1 0 0.5 1 0 0.5 1 0 0.5
Д№(Г) 3 3 3 5 5 5 2 2 2
5wfc-(r*) 5 0 6 0 4 6 5 3 4
Э/Г) -2 3 -3 5 1 -1 -3 -1 -2
Цена ЛА для груп- пировки/ 3 1 2 3 2 1 3 2 1
222 В. К. Абросимов
здесь знак, что ЛА-агент погиб в процессе «жертвы».
Новый маршрут Старый маршрут Выбран «жертвой» Аргументы на переговорах. Обоснование выбора «жертвы»
АА-1-2-3- 4-АА АА-1-2-АА Низкий эффект при малой возможности устранения проблемы и высокой цене ЛА 1 Вариант 1. Опасность на маршруте ЛА-«эгоиста»
АЭ-4Х1 АЭ-3-4- АЭ ¥ Значительный эффект жертвы при высокой вероятности решения проблемы 1 ЛА2 1
АП-6-5-7- АП АП-6-5-7- АП Низкий эффект 1 ЛАЗ 1
АА-1-4-3- 2-АА АА-1-2-АА Высокий эффект но при высокой цене ЛА и малой вероятности решения проблемы 1 1 Вариант 2. Опасность на маршруте ЛА-«альтруиста»
АЭ-2Х АЭ-3-4- АЭ ¥ Низкий эффект, но при средней цене ЛА и среднейвероятности решения проблемы | ЛА 2
АП-6-5-7- АП АП-6-5-7- АП Отрицательный эффект 1 ЛАЗ 1
АА-2-7-1- АА АА-1-2- АА Низкий эффект при малой вероятности решения проблемы 1 ЛА1 1 Вариант 3. Опасность на маршруте ЛА-«прагматика»
АЭ-3-4-5- АЭ АЭ-3-4- АЭ Самыйвысокий эф- фект, но при малой- вероятности решения проблемы | ЛА 2
АП-6-5Х АП-6-5-7- АП ¥ Средний эффект, но при высокой вероят- ности решения про- блемы | ЛАЗ |
Окончание таблицы 25
О вяв1Ц
224
В. К. Абросимов
12.7.2 . Выбор агента-«жертвы » в задаче
о «вскрытии» характеристик системы обороны
Пусть перед коллективом ЛА-агентов поставлена известная за-
дача «вскрытия» характеристик системы обороны противника. Ука-
занное можно реализовать, в частности, с помощью специально об-
ученных и оснащенных необходимым оборудованием беспилотных
летательных аппаратов (дронов). Введем в состав коллектива пять раз-
личных дронов, обладающих различными характеристиками и обу-
ченностью к «жертвенности». Рассмотрим три варианта. В вариан-
те А «жертва» выбирается без учета приоритета атрибутов агентов.
В варианте В коллективу необходима «жертва» и высокие приорите-
ты получают характеристики наличия ресурса и функциональности
агентов. В варианте С коллектив в процессе переговоров назначает
«жертву» с минимальной значимостью (например, стоимостью) и по-
терями целевой функции вследствие «жертвы».
Рассмотрим случай коллектива агентов с четким распределени-
ем ролей (табл. 26). Для выбора «жертвы» применим метод ранжиро-
вания атрибутов (п. 12.3). Проанализируем полученные результаты.
«Жертвой» выбран во всех вариантах Дрон-3 - агент, который
обладает достаточно высокой степенью обученности «жертвенности»
и сравнительно высокими характеристиками атрибутов, необходи-
мыми для решения проблемы (ресурсом и функциональностью). При
этом он наименее других значим для коллектива, а потеря целевой
функции в случае невыполнения им ранее запланированных задач
незначительна. Дрон-1, максимально обученный «жертвенности»,
оказался довольно ценным для коллектива, а его ресурсы и функцио-
нальность не слишком велики, чтобы ему было отдано предпочтение
выбора в качестве «жертвы». Он «разделил» второе место с Дроном-5,
который уже выполнил возложенную на него часть коллективной
миссии, и его вклад в выполнение целевой функции минимален. Есте-
ственным является отказ во всех случаях в выборе «жертвы» Дрона-4,
решающего ударные задачи; определяющим здесь явилась его высо-
кая значимость для коллектива.
При учете приоритетности атрибутов ситуация меняется, но не
очень значительно. Распределение первых и вторых рангов сохраняется.
Рассмотрим вариант коллектива однотипных агентов, когда рас-
пределение ролей осуществляется в процессе переговоров агентов. Такая
Таблица 26
Атрибуты и ранги дронов, входящих в состав разнородного коллектива агентов
Атрибуты дронов Обозначение Приоритеты атрибутов Значения атрибутов дронов/ранги дронов в вариантах А-В-С
Дрон-1 Дрон-2 Дрон-3 Дрон-4 Дрон-5
Варианты Роль дронов в коллективе
А В С Ложный Разведчик Транспорт- ный Ударный Многоце- левой
Обученность «жертвенности» К 1 3 5 1 0,5 0,8 0 0,3
1-3-5 3-9-15 2-6-10 5-15-25 4-12-20
Наличие ресурса К 1 2 4 0,6 0,7 0,9 0,4 0,6
3-6-12 2-4-8 1-2-4 4-8-16 3-6-12
Наличие функционала 1 1 3 0,5 0,8 0,6 0,5 0,9
4-4-12 2-2-6 3-3-9 4-4-12 1-1-9
Значимость агента для коллектива К 1 5 1 0,7 0,8 0,4 1 1
2-10-2 3-15-3 1-5-1 4-20-4 4-20-4
Вклад в целевую функцию 1 4 2 0,6 0,7 0,3 0,9 0,1
3-12-6 4-16-8 2-8-4 5-20-10 1-4-2
Сумма рангов в вариантах (А-В-С ) 13-35-37 16-46-40 9-24-28 22-67-67 13-43-47
Распределение рангов дронов как потенци- альных «жертв» А. Без приоритета атрибутов 2 3 1 4 2
В. Приоритет функциональности и ресурсоемкости агента 2 4 1 5 3
С. Без приоритета сохранения ценного агента 2 3 1 5 4
Глава 12 225
226
В. К. Абросимов
ситуация возникает в процессе мониторинга коллективом обширных по
площади пространств с обменом информацией между собой и взаим-
ными обязательствами распределения невыполненных агентом задач
между другими агентами [167]. Примем, что агенты для коллектива рав-
нозначны. Приоритеты атрибутов при этом несколько изменим, придав
максимальную значимость выполнению коллективной миссии. Исход-
ные данные и результаты таких вариантов систематизированы в табл. Тк
В варианте коллектива однородных агентов без предварительно-
го распределения ролей на роль «жертвы» выбран Дрон-5. Он имеет
максимальную готовность к «жертвенности», необходимый функци-
онал и значительный ресурс для решения проблемы. Второе место в
очередности на «жертвенность» получил Дрон-4 по причине самого
низкого вклада в целевую функцию. При учете приоритетов атрибу-
тов (варианты В и С) очередность, однако, может перераспределить-
ся. В варианте В произошло перераспределение рангов Дронов-1;2;3;
причиной этого стала прежде всего приоритетность обученности
агентов «жертвенности», но учитывались и ресурсоемкость, и функ-
циональность - последнее место занял Дрон-5 с наименьшим функ-
ционалом. В варианте С обученность агента «жертвенности» не стала
определяющей, и Дрон-5 переместился на второе место.
Таким образом, разработан достаточно простой алгоритм выбора
агента на роль «жертвы» на основе ранжирования агентов по степени
удовлетворения различным условиям «жертвенности». На нескольких
примерах выбора «жертвы» в упрощенной задаче «вскрытия» системы
обороны объекта показана применимость разработанного подхода.
Как правило, «жертвой» выбирается агент, обладающий более высо-
кой степенью обученности «жертвенности», ресурсом и функциональ-
ностью для решения возникшей проблемы. Однако в зависимости от
ситуации с учетом различных влияющих факторов «жертвой» могут
назначаться и другие агенты. При этом высокая значимость агента для
коллектива и его значимый вклад в коллективную целевую функцию
существенно снижают возможность его назначения на роль «жертвы».
12.8 . О «жертвенности» в технических системах
Таким образом, одним из важных свойств агентов является сла-
бо исследованное свойство «жертвенности». Способность к самопо-
жертвованию не является свойством, присущим интеллектуальным
агентам. Свойство «жертвенности» проявляется в группе агентов при
Таблица 27
Атрибуты дронов, входящих в состав однородного коллектива агентов
Атрибуты дронов Обозначение Приоритеты атрибутов Значения атрибутов дронов/ранги дронов в вариантах А-В-С
Дрон-1 Дрон-2 Дрон-3 Дрон-4 Дрон-5
Варианты Роль дронов в коллективе
А В с Разведка Разведка Разведка Разведка Разведка
Обученность жертвен- ности К 1 1 3 0,1 0,3 0,6 0,5 0,8
5-5-15 4-4-12 2-2-6 3-3-9 1-1-3
Наличие ресурса К 1 2 2 0,4 0,8 0,9 0,6 0,7
5-10-10 2-4-4 1-2-2 4-8-8 3-6-6
Наличие функционала 1 3 1 0,3 0,8 0,6 0,7 0,8
4-12-4 1-3-1 3-9-3 2-6-2 1-3-1
Значимость агента для коллектива я,- 1 3 4 0,7 0,7 0,7 0,7 0,7
1-3-4 1-3-4 1-3-4 1-3-4 1-3-4
Вклад в целевую функцию 1 3 4 0,3 0,9 0,8 0,1 0,7
2-6-8 5-15-20 4-12-16 1-3-4 3-9-16
Сумма рангов в вариантах (А-В-С ) 17-36-41 13-29-41 11-28-31 11-23-27 9-22-29
Распределение дронов как потенцииальных жертв А. Без приоритета атрибутов 4 3 2 2 1
В. Приоритет обученности жертвенности агента 5 4 3 2 1
С. Приоритет функциональности агента 4 4 3 1 2
Глава 12 227
228
В. К. Абросимов
Суть не в том, каков ответ,
а в том, каков вопрос.
Бурбаки,
Псевдоним группы
французских математиков
выполнении коллективной миссии в условиях возникновения про-
блемной ситуации, негативно влияющей на достижение коллективной
целевой функции. Для его реализации необходимо и достаточно, чтобы
летательный аппарат как агент был обучен (с помощью специальных
процедур, описывающих и характеризующих мотивацию агента) соот-
ветствующим стратегиям поведения, имел необходимый функционал
и ресурсы в ситуации, когда группировкой в процессе переговоров или
Лидером будет принято решение о «жертвенности». Принципиально в
систему управления агентом, определяющую его поведение, можно за-
ложить алгоритмы, реализующие широкий спектр парадигм «жертвен-
ности», как альтруистическое, так и эгоистическое поведение.
На результат переговоров агентов
по выбору «жертвы» влияют многие
факторы. К числу основных относят-
ся: парадигма готовности стать «жерт-
вой», закладываемая при обучении
системы управления ЛА; ценность ЛА
для группировки; ожидаемые потери
коллективной целевой функции от факта «жертвы» ЛА; имеющиеся
ресурсы ЛА по решению дополнительных задач, ранее возлагаемых
на агента-«жертву»; точка маршрута, в которой находится ЛА в мо-
мент возникновения проблемы.
Способность к самопожертвованию формируется как компози-
ция других свойств, основными из которых являются: высокая сте-
пень обязательств по отношению к другим агентам, выражающаяся в
приоритетности решения задач коллектива; обоснованная оценками
вера агента в свои возможности; реализуемость «жертвы» и ее эффек-
тивность и в конечном итоге формирование намерений отказаться от
выполнения собственных задач и возможно даже ценой прекращения
собственного функционирования разрешить возникшую проблем-
ную ситуацию в интересах коллектива.
Итак, выше были предложены отдельные алгоритмы, которые
позволяют при возникновении проблемы, вызванной антагониз-
мом среды, выбрать агента из группы на роль «жертвы», с учетом его
оставшихся к этому критическому для коллектива моменту времени
ресурсов, наличия необходимой функциональности и, самое главное,
готовности агента к самопожертвованию, приобретаемой в процессе
предварительного обучения.
Глава 12
229
В процессе публикации предварительных результатов моногра-
фии в зарубежной печати [91, 103, 165] специалисты отмечали ори-
гинальность и, вместе с тем, дискуссионность такого подхода.
Об этом же пишет и один из рецензентов данной работы, д.ф-
м.н., профессор А. А. Жданов:
«...Автором предлагается модель автоматических робототех-
нических комплексов, в частности беспилотников, с интеллектом и
личностными, биологически-инспирированными свойствами-знани-
ями, намерениями, убеждениями, рациональностью, правдивостью,
жертвенностью и т.п. В моей книге «Автономный искусственный ин-
теллект» [86] показано, что интеллект биологических систем управ-
ления (систем «автономного адаптивного управления») основан не на
совокупности рефлексов, а на свободе выбора действий из множества,
доступных в текущей ситуации, информация о которых накоплена
системой управления организма в его «базе знаний». «Знания» состо-
ят в обнаруженных закономерных переходах из одних состояний в дру-
гие. При этом все состояния снабжаются эмоциональными оценками,
максимизация суммы которых (сумма эмоциональных оценок образов
состояния, в которое планируется перейти) и является главной мо-
тивацией активной системы управления. Аппарат эмоции является
системообразующей подсистемой в системе управления живых ор-
ганизмов, а алгоритм управления состоит из двух противоречивых
составляющих, обеспечивающих и случайный поиск знаний, и приня-
тие неслучайного оптимального решения. Такого рода управление, ко-
торое в книге названо «естественным управлением», подразумевает
постоянное естественное стремление организма к максимально воз-
можным положительным эмоциональным оценкам, которых, вообще
говоря, далеко не всегда можно достигнуть в текущей ситуации. Со-
циальное же поведение вырабатывается именно по мере формирова-
ния таких сложных образов, как образы себя, других индивидов, стаи,
своего места в стае, образ ответственности перед стаей, поощрения
стаи, наказания со стороны стаи, вожака, его приказов, поощрений
за выполнение и наказаний за невыполнение приказов и т.п. Это очень
сложные образы, но механизм их использования абсолютно такой же,
как простых образов, поскольку любой образ физически представлен
просто выходным сигналом некоторого нейрона. Появление в систе-
ме управления сложных образов автоматически обеспечивает такие
эффекты социального поведения как подчиненность, жертвенность,
230
В. К. Абросимов
начальственность и др. Поэтому воспроизведение таких социальных
эффектов, как «жертвенность», «правдивость» и т.п., не требует
особых дополнительных устройств, кроме как простого обеспечения
формирования образов высокого порядка.
В исследуемых автором «силовых» средствах, с целями как защи-
ты, так и атаки, на мой взгляд, не очень уместны аналогии с живы-
ми системами. Такого рода системы проще образовывать не по типу
дружного коллектива с повышенной рефлексией и «возвышенными»
чувствами, а по типу группы с железной дисциплиной и по возможно-
сти детерминированным управлением всех входящих в нее объектов.
Соответственно, методы и алгоритмы управления должны быть
не биологически-инспирированными, a ad hoc - просто уместными и вы-
сокоэффективными. Поэтому описанные выше алгоритмы, имеющие
в виду антропоморфные свойства - «жертвенности», «намерений»,
«убежденности» и некоторых других - следует еще раз проанализиро-
вать на предмет оценки их необходимости и эффективности, а так-
же возможности замены на детерминированные решения. Они имеют
весьма малое отношение к аналогичным свойствам людей, а имитация
может оказаться ненужной или даже вредной, так как будет отни-
мать ресурсы на всех этапах проектирования, создания и работы тех-
нических систем...» [избранный раздел рецензии А.А. Жданова].
В обоснование авторской позиции хотелось бы добавить два
возможно пока еще слабых аргумента.
Ключевым моментом в биологически инспирированных системах
является накопление информации системой управления организма. На
это требуется определенное, порой очень значительное время. В пред-
лагаемых постановках время ограничено временем выполнения коллек-
тивной миссии летательных аппаратов-агентов, возможно однократ-
ным. Таким образом, опыт может быть приобретен лишь в результате
предварительного моделирования и обучения на основе примеров. Но
здесь при наличии специально организованного противодействия среды
мы попадаем в «засаду» принципиально ограниченного понимания про-
исходящих процессов. Это, не в последнюю очередь, является причиной
пока еще скромных возможностей использования экспертных систем,
так как лишь изредка удается отыскать реальных «инженеров по зна-
ниям», способных извлечь знания из специалистов в выбранной сфере
деятельности, правильным образом их формализовать и сформировать
базу знаний. В условиях существенной неопределенности среды ситуа-
ция становится своего рода «гордиевым узлом»; тогда факт жертвенно-
Глава 12
231
сти агента, как простого технического элемента, становится неординар-
ным, но креативным решением возникшей для коллектива ситуации.
Создание репрезентативной базы знаний можно и нужно осу-
ществлять на основе обучения (или самообучения). При этом системе
предъявляются не только сценарии ситуаций, в которые может «по-
падать» объект, но также соответствующие им решения и, что, навер-
ное, самое важное, оценка эффективности таких решений. В природе
такие сценарии называются «жизнь», решения принимаются на осно-
ве предыдущего, заложенного поколениями опыта, а неправильные
решения приводят к естественному отбору. В предлагаемых в работе
постановках опыт является однократным действием - реальной си-
туацией противоборства «атакующий агент - защищающийся агент».
Проигравший в противоборстве не может пополнять свою базу зна-
ний, так как просто выбывает из игры.
Поэтому процесс обучения осуществляется в ходе создания моде-
лей противоборства агентов. Сценарии таких моделей должны предус-
матривать множество возможных вариантов действий в различных си-
туациях. Но часто бывает так, что предусмотреть стратегии поведения
антагонистической среды очень трудно в силу неопределенности даже
ее структуры, не говоря уже о параметрах. В таких ситуациях мы встре-
чаемся уже не с техническими, а с интеллектуальными системами. При
реализации принципов самоорганизации поведения таких систем в ус-
ловиях направленно противодействующей среды переговоры агентов
по поиску и выбору наилучщего для выполнения коллективной миссии
решения становятся весьма жесткими. Тогда вариант «жертвенности»
может стать эффективным, особенно в ситуации, когда потенциаль-
ные «жертвы» специально обучаются и вводятся в состав группировки,
чтобы быть задействованными в самых критических случаях.
Вместе с тем, предлагаемые алгоритмы - лищь первый, пробный
шаг. Эффективность «жертвенности» и ее принципиальную необходи-
мость целесообразно оценивать при сравнении с другими вариантами
выполнения коллективной миссии - изменением состава группировки
агентов, получением дополнительной информации о противодействую-
щей среде с использованием всего спектра имеющихся возможностей, в
том числе и других систем, смещением времени организации простран-
ственно-временной структуры движения, целенаправленным воздей-
ствием на среду для снижения эффективности противодействия и др.
Тогда в решениях и появится рекомендуемый рецензентами детерми-
низм. Но эти вопросы - предмет дальнейших исследований.
13. РАЗРАБОТКА СТРАТЕГИЙ
МОНИТОРИНГА ТЕРРИТОРИЙ
ГРУППИРОВКАМИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
У каждой проблемы всегда есть простое
и красивое решение - неверное.
Генри Менкен,
американский журналист XIX в.
13.1. Основные условия эффективного
группового мониторинга
Одной из важных практических задач является проблема мо-
ниторинга территорий - исследование и анализ текущей ситуации в
некоторой географической области. На практике мониторинг необ-
ходим при обследовании удаленных от жилья населенных пунктов,
поиска людей, терпящих бедствие, оценки состояния протяженных
объектов (трубопроводов, труднопроходимых дорог), лесов и запо-
ведников. Важными являются задачи мониторинга в условиях чрез-
вычайных ситуаций - пожаров, наводнений, стихийных бедствий и
др. В качестве наблюдаемых и оцениваемых параметров используют-
ся различные характеристики ситуации на маршруте мониторинга:
уровень интенсивности ситуации, масштаб распространения, про-
должительность и др. Мониторинг также активно используется и в
военной сфере, главным образом в целях разведки. Мониторинг мо-
жет осуществляться различными техническими средствами, на прак-
тике - разнообразными ЛА: самолетами, вертолетами, беспилотными
ЛА, на которых установлено соответствующее оборудование для об-
следования так называемой «подстилающей» поверхности.
Глава 13
233
Процессы мониторинга характеризуются различными особен-
ностями. Обследуемые территории могут существенно различаться по
значимости, масштабам, требованию периодичности проведения на-
блюдений. Часто требуется несколько ЛА для реализации мониторинга
[138, 169, 172]. Понятно, что на первых этапах мониторинга основным
критерием является обследование максимальной площади при мини-
мизации суммарного времени движения всех ЛА, что по существу от-
ражает стремление к экономии топлива как основного ресурса. Но на
последующих этапах необходимо использовать другой критерий - мо-
ниторинг в первую очередь тех объектов, где интенсивность наблюдае-
мой ситуации на объектах и на пути к объектам максимальны.
Участвующие в мониторинге ЛА могут различаться по техниче-
ским возможностям реализации миссии мониторинга. Так как группи-
ровкой выполняется коллективная миссия, то ЛА становятся несвобод-
ными в своих действиях. Они должны посредством соответствующих
взаимодействий коллективно обсуждать и решать общую задачу, осу-
ществляя при необходимости перераспределение и перезакрепление за
ЛА объектов мониторинга в процессе движения в режиме on-line либо
с заданной периодичностью. Однако основная особенность задач мо-
ниторинга территорий часто заключается в необходимости повторного
обхода точек. На практике часто складывается ситуация, когда часть
ЛА еще продолжает решение поставленных задач, но в то же время не-
обходимо выделять дополнительные ЛА для повторного обследования
отдельных точек и областей на территории. Таким образом, можно
сформулировать первое условие эффективного группового монито-
ринга: необходимость многократного решения задач обследования
территории с изменяемыми в каждом цикле маршрутами.
Наиболее интересны ситуации, в которых в результате воздей-
ствия враждебной среды, поломок ЛА или его оборудования, от-
дельные ЛА оказываются неспособными выполнить поставленные
им задачи. В таких случаях остальные работоспособные ЛА должны
быть проинформированы о сложившейся ситуации, совместно обсу-
дить ее и сформировать новые стратегии действий по достижению
целей коллективной миссии. Таким образом, можно сформулировать
второе условие эффективного группового мониторинга: необходи-
мость обмена информацией ЛА между собой в режиме on-line при
сохранении их полной самостоятельности в принятии решений.
В процессе мониторинга могут возникнуть разнообразные по-
тенциальные препятствия как для наблюдения, так и для движения
234
В. К. Абросимов
по маршрутам мониторинга. В ряде случаев можно получить априор-
ную информацию о таких возможных препятствиях (прогноз погоды,
данные разведки и др.). Иногда такие препятствия неявны, возника-
ют спонтанно, их заранее трудно предсказать. Как указывалось выше,
внешняя среда, в которой реализуются функции мониторинга, по отно-
шению к ЛА может быть дружественной, безразличной или враждеб-
ной. Среда может вносить существенные ограничения на движение ЛА
и выполнение им поставленных задач. Антагонизм среды может быть
как пассивным, так и активным. Пассивной можно считать среду с объ-
ективно возникающими факторами, затрудняющими мониторинг. Это
могут быть дым от пожара, туман, дождь, высокая радиоактивность и
др. Активными являются действия среды по целенаправленному сниже-
нию эффективности функций мониторинга, вплоть до невозможности
его проведения. Активная антагонистическая среда часто сопровожда-
ет процессы мониторинга при решении военно-технических задач. Это
может быть, например, радиоэлектронное противодействие средствам
мониторинга, устанавливаемым на ЛА. Еще одним источником актив-
ного противодействия среды могут быть системы противовоздушной
или противоракетной обороны. Активная враждебность всегда являет-
ся специально создаваемой, организованной, регулируемой и противо-
действующей. Основным последствием проявления враждебности яв-
ляется снижение эффективности мониторинга. В результате отдельные
ЛА могут не выполнить свои задачи. При максимальном проявлении
враждебности ЛА уничтожается. Это требует перераспределения задач
между оставшимися ЛА и уточнения маршрутов. Таким образом, к ука-
занным выше двум важнейшим условиям можно добавить третье усло-
вие эффективного группово-
го мониторинга: допущение
возможности невыполнения
отдельными ЛА задач мони-
торинга вследствие ограниче-
ний, налагаемых враждебной
средой движения.
Современные системы мониторинга строятся главным образом
по принципу «око в небе». Каждой компоненте системы мониторинга,
обеспечивающей получение информации о чрезвычайной ситуации,
предписывается определенный класс задач. В качестве критериев эф-
фективности мониторинга предлагаются площадь, обследуемая в еди-
ницу времени, оперативность обнаружения очагов чрезвычайной си-
Никто не может предугадать в точно-
сти характер чрезвычайных ситуаций,
с которыми мы, возможно, столкнемся.
Франклин Рузвельт
Глава 13
235
туации и др. Но целостное представление о размерах и последствиях
чрезвычайной ситуации получить в этих условиях не всегда возможно.
Так, например, в такой предметной области, как охрана лесов, отмеча-
ется, что «в силу технических особенностей космический мониторинг
всегда останется лишь дополнительным инструментом в авиационной
охране лесов... применение беспилотных летательных аппаратов для
патрулирования лесного фонда является одной из самых сложных за-
дач с технической точки зрения... применение малой авиации с от-
носительно низкой стоимостью летного часа ограничено малым коли-
чеством таких средств с массой 1-2,5 т» [170]. Указанное выдвигает
необходимость создания систем мониторинга таких значимых для
техносферной безопасности событий, как чрезвычайные ситуации, на
новых, прежде всего информационных принципах. Очевидно, что при
формировании группировки средств для осуществления мониторинга
необходимо включать в группу ЛА с различными возможностями по
наблюдению и распознаванию чрезвычайных ситуаций [172].
13.2. Программный комплекс «Агентный мониторинг»
При выполнении задач группировкой ЛА перспективным явля-
ется придание каждому ЛА высокой степени самостоятельности в ре-
шении общей коллективной миссии. При такой парадигме каждый ЛА
функционирует автономно, с самоконтролем своих действий и вну-
треннего состояния, принимает решения в зависимости от условий сре-
ды, учитывая цели и намерения других ЛА, выполняющих аналогичные
или смежные задачи. Возникающие проблемы он преодолевает либо са-
мостоятельно, либо используя информацию от других ЛА, полученную
в ходе обмена сообщениями через специально организованный ресурс.
Вместе с тем каждый ЛА одновременно действует и в рамках коллек-
тивного поведения. Он информирует другие ЛА о возможности и/или
невозможности выполнения им поставленной задачи; участвует в «пе-
реговорах» ЛА; запрашивает при необходимости помощь; объявляет о
готовности жертвовать собой или просит пожертвовать собой другие
ЛА, а также активировать функции других ЛА, сценарии решения задач;
объявляет свои полномочия; передает или инициирует передачу своих
обязательств по выполнению задач другим агентам и др. Все эти данные
должны отображаться на информационном ресурсе коллектива.
В такой постановке ЛА можно рассматривать как интеллектуаль-
ного агента и использовать при моделировании его функционирования
236
В. К. Абросимов
многоагентный подход [91]. Типовая задача для отдельного ЛА в этих
условиях может рассматриваться следующим образом: двигаясь в груп-
пе себе подобных ЛА от заданной начальной позиции, при использова-
нии собственной базы знаний об окружающей среде, в условиях потен-
циальных пространственно-временных ограничений (невозможность
пролета в определенных пространственных зонах и др.), при активном
обмене информацией друг с другом относительно изменений окру-
жающей среды, своего целеполагания, с учетом поведения других ЛА,
выполняющих аналогичные задачи, исходя из своих летных возмож-
ностей, построить оптимальную пространственно-временную траекто-
рию последовательного облета некоторого количества объектов (целей)
заданного пространства, выполняя необходимые действия по их обсле-
дованию в интересах выполнения коллективной миссии мониторинга.
Для исследования стратегий группового мониторинга разра-
ботан программный комплекс (ПК) «Агентный мониторинг» для
мониторинга зоны ЧС группировкой летательных аппаратов [172].
Пространство мониторинга и сами средства мониторинга представ-
ляются в виде агентов. Это позволяет разработать два типа эффек-
тивных моделей: образования и распространения чрезвычайной си-
туации и виртуальных переговоров летательных аппаратов-агентов
для корректировки маршрутов в случае возникновения непредвиден-
ных ситуаций. В качестве программной среды для построения модели
мониторинга выбрана среда AnyLogic [164, 184].
Модель реализует эстафетный алгоритм разнонаправленной пе-
редачи параметров ЧС от источника ЧС (агента-источника возмуще-
ния) к соседним участкам (агенты-акцепторы). При этом граф состоя-
ний имеет только прямые переходы с заданной интенсивностью между
агентами. Неопределенность описания ситуации, объективно вызывае-
мая негативными факторами, затрудняющими наблюдение (дым, обла-
ка, дождь и др.), моделируется введением нечеткости в характеристики
ЧС и задержками взаимодействия между агентами как по времени, так
и по скорости изменения параметров агентов. Указанные характери-
стики реализуются через стейчарты (в терминах AnyLogic) параметра-
ми описываемых ими закономерностей и значениями данных.
Программный комплекс позволяет моделировать процессы воз-
никновения и распространения ЧС и решения задачи мониторинга
ЧС группировкой ЛА при их коллективной стратегии поведения. На
рис. 25 представлена главная видеоформа ПК.
Глава 13
237
Рис. 25. Главная видеоформа ПК «Агентный мониторинг»
В модели реализуются следующие основные функции.
1. Моделирование образования и распространения чрезвычай-
ной ситуации на основе зависимостей направления и скорости
распространения параметров ЧС от внешних факторов.
2. Формирование маршрута ЛА в зависимости от текущей ситуа-
ции и задач мониторинга в режимах стандартного облета, тре-
вожной и опасной ситуаций.
3. Моделирование движения ЛА по маршруту.
4. Моделирование виртуальных «переговоров» ЛА в случае воз-
никновения непредвиденных ситуаций и выработка решений
по корректировке маршрутов при необходимости.
Для выполнения таких функций в модели вводятся два типа аген-
тов: «агенты-территории», описывающие элементарные зоны («ячейки»)
в пространстве ЧС, и «ЛА-агенты», осуществляющие мониторинг.
238
В. К. Абросимов
При моделировании образования и распространения ЧС дву-
мерное пространство мониторинга представляется в виде прямоу-
гольного массива «ячеек», полностью или частично занятых «агента-
ми-территории». Поддержка такого типа представления в AnyLogic
включает в себя возможности по распределению агентов по ячейкам,
их перемещению в соседние или любые другие ячейки, определению
того, какие агенты являются соседями (согласно выбранной модели
соседства), нахождению свободных ячеек и т.д. Поведение «агентов-
территории» - пассивное; агенты не имеют собственных событий и
реагируют только на реакцию соседей. В ПК реализована так назы-
ваемая модель «соседства Мура», согласно которой каждый участок
пространства с вероятностями, определяемыми характеристиками
этого пространства и окружающей среды, способен вызывать опре-
деленные реакции соседних участков (рис. 26).
Размерности и типы соседства в дискретном пространстве
Рис. 26. Представление участка мониторинга
в виде двумерного дискретного пространства с распространением ЧС
по моделям Мура и Евклида
Глава 13
239
При формировании маршрута ЛА-агенту присваивается номер
и в зависимости от текущей ситуации и задач мониторинга в режимах
стандартного облета, тревожной и опасной ситуаций определяются
условные возможности по проведению мониторинга (прежде всего
по наличию ресурсов в виде запаса топлива). Маршрутизация осу-
ществляется с использованием муравьиного алгоритма (см. главу 10).
При этом в зависимости от ситуации, информацию о которой ЛА-
агент получает через ИРК, может меняться как порядок движения,
так и маршрут (включение и исключение объектов для обследова-
ния). Поведение ЛА-агентов - активное; динамика агента определя-
ется происходящими событиями. ЛА действуют автономно, но с уче-
том общих коллективных целей. ЛА воспринимают среду с помощью
датчиков/сенсоров либо получают информацию о среде от внешних
источников. ЛА обмениваются информацией друг с другом и с внеш-
ней средой (условно Центром мониторинга) с использованием спе-
циальных протоколов коммуникации. Моделирование движения ЛА
по маршруту в модели реализовано упрощенно при том понимании,
что алгоритмы такого движения можно сколь угодно усложнить, если
добавить в рассмотрение тип ЛА, его особенности и характеристики,
параметры среды и др.
В процессе выполнения общей задачи ЛА проводят «перегово-
ры» с помощью ИРК, на котором каждый ЛА размещает информацию
о результатах мониторинга и своих возможностях по выполнению
задач. Разработаны алгоритмы проведения «переговоров», позволя-
ющие осуществить перераспределение задач между ЛА при невыпол-
нении отдельными ЛА своих функций [167].
13.3. Стратегия действий коллектива
при мониторинге территории во враждебной среде
Стратегия действий коллектива при мониторинге территории во
враждебной среде формируется как общее решение коллектива до на-
чала мониторинга по распределению объектов между ЛА-агентами и
как совокупность индивидуальных действий отдельных ЛА-агентов в
процессе движения по решению задач мониторинга.
240
В. К. Абросимов
13 .3.1. Общее решение коллектива до начала мониторинга
Типовая стратегия коллектива ЛА до начала мониторинга имеет
следующий вид.
1. Определение матрицы |D| с элементами d{j расстояний между
объектами пипс использованием GPS координат хп, ун для
п = пр и, п, ...^территориальныхобъектов.
2. Задание первой группы исходных данных в виде кортежа
ISn: {(рп, А"} V neN с элементами, описывающими значимость
(рп п-го объекта, интенсивности рп ситуации на нем и опасности
в с-окрестности п-го объекта Anf.
3. Задание второй группы исходных данных в виде матриц |U| с
элементами степени интенсивности ситуации и |Р| с элемен-
тами рг. опасности ситуации на пути следования между объек-
тами п. и п..
» j
4. Формирование для каждого ЛА-агента маршрута Мк в виде по-
следовательности обхода объектов мониторинга с учетом ма-
триц |D|, |U|, |Р| и элементов кортежа ISn:
М. = {и,., п._, ..., и,., ... пИ } V кеКу V ieL, £.1, = N. (64)
к 1 к1 к2 ki kl,j к к к v 7
к
При этом наиболее приоритетные объекты назначаются пер-
выми по порядку обхода.
5. На мониторинг объектов, где степень опасности превышает
заданную (Х£ > Anf*), а также в случае, если степень опасно-
сти движения между объектами и и п превышает заданную
(р. > р. *), назначаются ЛА-агенты, которые имеют для этого со-
ответствующие возможности Fk.
6. По результатам решения задачи целераспределения объекты
закрепляются за ЛА, и параметру акп для каждого п присваива-
ется значение, равное единице. Если в результате формирова-
ния маршрута хотя бы для одного объекта а" = 0, то выделен-
ной группировке ЛА по составу коллектива, либо по ресурсам
не хватает возможности для решения задач мониторинга. В
этом случае необходимо увеличить мощность множества К (на-
ращивание коллектива ЛА дополнительными ЛА).
Глава 13
241
13 .3.2. Стратегия действий летательного аппарата-агента
Типовая стратегия действий ЛА по решению задач мониторинга
имеет следующий вид.
Алгоритм реализации маршрутов мониторинга
1. Моделирование движения ЛА-агента V кеК по определенному
в п. 13.3.1 (п. 4) маршруту Мк из объекта и на очередной объект
и со скоростью vk, определяемой конструктивными характери-
стиками ЛА.
2. Получение в процессе движения с помощью установленных на
ЛА технических средств наблюдения информации цп об интен-
сивности ситуации на п-м объекте и информации о степени
интенсивности ситуации по маршруту движения из объекта и
на очередной объект и.
3. Корректировка значений элементов матрицы интенсивности
ситуаций |U| по маршруту движения и значений кортежа ин-
тенсивности ситуации {17} на всех объектах мониторинга по
формулам:
^ = ^ + о^^ = рп‘±орп\ (65)
4. Размещение полученной информации в ИРК.
5. Оценка завершенности корректировки маршрутов посред-
ством анализа показателей, определяющих факт обследования
объектов акп (V neN).
6. Если хотя бы для одного объекта ah = 0, то объявляется аук-
цион за включение необследованного объекта nheN в маршрут
любого имеющего ресурсы ЛА-агента.
7. Для каждого nheNk(t) и для каждого задействованного в мо-
ниторинге ЛА-агента Vk рассчитывается уровень включения
ДЕДи^). Точка nh включается в маршрут того Vk, для которого
одновременно выполняются условия:
= mKin №Fk(nk>)} и Рк ~ ^Fk(nkh> - °- (66)
8. Если ак" =1 V neN, то вырабатывается признак завершения
корректировки маршрутов (все neNобъектов мониторинга за-
креплены за соответствующими ЛА-агентами кеК).
242
В. К. Абросимов
9. Если ак =0 хотя бы для одного heN, то процесс корректировки
маршрутов продолжается по следующему алгоритму.
Алгоритм корректировки маршрутов мониторинга
1. Для каждого Vk рассчитываются уровни включения AFk(nkh) и
ресурс для достижения объекта nh
rkh = (67)
2. Определяется Vp для которого rlh = min|rj. Если такой мини-
мум существует хотя бы для одного V, то объект nh закрепляет-
ся за Vt и af := 1.
3. С помощью уровня исключения AG(nk., rkh) формируется новый
маршрут, в который включается объект nh, но исключаются те
объекты, для обследования которых недостаточно ресурсов Vk.
В качестве примера рассмотрим процесс мониторинга чрезвы-
чайной ситуации - пожара в лесной зоне большого масштаба, прибли-
жающегося к важному объекту - к атомной станции (NPP) в районе
условного города Desnogorsk. Мониторинг осуществляют беспилот-
ные летательные аппараты, оснащенные специальными средствами
фиксации огня и дыма. В соответствии с задачей требуется также об-
следовать ситуацию в городах Prismara и Novoselki и ряд очагов по-
жара, обозначенных белыми кружками.
Моделирование проводилось с использованием программного
продукта AnyLogic. На рис. 27 показан скриншот экрана с распреде-
лением маршрутов следования ЛА. Тонкими пунктирными линиями
показаны маршруты каждого из трех ЛА, заблаговременно распреде-
ленные среди соответствующих ЛА-агентов. По ним был начат процесс
обследования территории. В процессе движения фиксируется неис-
правность ЛАЗ, маршрут которого проходит над атомной станцией.
ЛАЗ представляет на ИРК информацию о том, что объект «атомная
станция» более не закреплена ни за каким ЛА. Остальные ЛА (1 и 2)
проводят «переговоры» по указанному выше алгоритму, перераспреде-
ляют объекты мониторинга между собой и следуют по новым маршру-
там (показаны сплошными линиями). Толстые пунктирные линии при
этом отражают участки маршрутов, по которым должен был следовать
один ЛА, но в результате перераспределения проследовал другой. Тон-
кие пунктирные линии с крестиком показывают участки маршрутов,
которые в процессе «переговоров» были исключены из рассмотрения.
Глава 13
243
Рис. 27. Изменение маршрутов мониторинга
зоны чрезвычайной ситуации по результатам переговоров
ЛА-агентов 1 и 2 при внезапной неисправности ЛАЗ,
следующего к важному объекту - атомной станции NPP
Представленный подход к мониторингу территорий разработан
в условиях враждебности среды, которая предполагается неизвестной
для каждого ЛА из группы. Здесь среда делает невозможным выпол-
нение своей функции одним или несколькими ЛА-агентами. Вместе с
тем изучение враждебности среды в процессе движения представля-
ется достаточно интересной задачей. В этих целях* как нам кажется,
эффективно использование концепции окружающей среды, развива-
емой в работе [174]. Она вводится как виртуальная среда для агентов
для обмена информацией и координации действий. Кроме того, такая
среда обслуживает обмен информационными сообщениями и физи-
чески контролирует поведение объектов.
Враждебность среды можно оценить только с помощью пред-
варительной разведки. Для этого представляется эффективным ис-
пользование идеи «муравьев-разведчиков» («Feasibility Ants», по
терминологии работы [195]). Они могли бы исследовать возможные
маршруты в окружающей среде на графе, узлы которого являются
объектами обследования, а ветви - путями к ним, и оценить их враж-
дебность. Роль таких «муравьев-разведчиков» еще более повышается
244 В. К. Абросимов
на второй и последующих итерациях процесса мониторинга терри-
торий, так как они могли бы отслеживать не только враждебность
среды, но и интенсивность ситуаций на путях следования между объ-
ектами. Собранную информацию Feasibility Ant могли бы передавать
на ИРК, корректируя соответствующие значения Хп£ и Указанное
можно учесть при формировании маршрутов и использовать при
формировании стратегий переговоров. При этом за счет использо-
вания таких Feasibility Ants можно было бы также сократить количе-
ство ЛА, требуемых для мониторинга, направить их по маршрутам,
предварительно оцененным по степени интенсивности ситуации, и
исключить из них ветви, где опасность движения высока.
14. ЗАДАЧА О ТРАНСГРАНИЧНОМ МОНИТОРИНГЕ
Единственный способ определить границы возможного -
выйти за эти границы.
Артур Кларк,
английский писатель-фантаст
14.1. Актуальность и основные принципы
трансграничного мониторинга
В современном мире границы, исторически рассматриваемые
как некоторые преграды для другого государства, теряют свое зна-
чение. Приграничные территории стали восприниматься как эконо-
мические, социальные, культурные зоны, в которых решаются неко-
торые общие для двух и более стран задачи. Система границ стала
эволюционировать от физически прочерченных географических
линий к множеству пространств взаимодействия, в которых реали-
зуются взаимосвязи приграничных социумов. Так, например, общие
интересы, связанные с реками, по которым проходят государствен-
ные границы, включают рыболовный промысел, орошение, функци-
онирование экосистемы, отдых, гидрогенерацию, мероприятия по
предотвращению паводков и защите от наводнений и др. По суще-
ству, при этом осуществляется совместное управление бассейнами
рек [175]. Появился и используется сравнительно новый термин для
описания деятельности в приграничных территориях - трансгранич-
ность. Важнейшими свойствами трансграничности являются про-
ницаемость и прозрачность границы, а следовательно, ее условность.
Трансграничный регион (trans - от латинского trans-border - прости-
рающийся через пространство) разделен суверенитетом соседствую-
246
В. К. Абросимов
щих государств, обладает комплексом национальных, региональных,
информационных элементов с собственными характеристиками, от-
ражает их историко-культурное своеобразие, взаимодействует между
сопредельными приграничными регионами для сохранения управле-
ния и развития своего «жизненного» пространства, форматируется
государственной административно-территориальной границей.
В настоящее время существует тенденция усиления тяжести
последствий, вызванных чрезвычайными ситуациями техногенного
характера. В условиях трансграничности зона ЧС может захватывать
сферу ответственности нескольких государств. На пограничных тер-
риториях особое внимание следует уделять лесным пожарам, авари-
ям на атомных и гидроэлектростанциях, наводнениям, ЧС биолого-
социального характера (радиоактивное заражение местности, засуха,
распространение болезней и др.). Вместе с тем эффективность нацио-
нальных систем мониторинга при ЧС на приграничных территориях
может существенно снижаться. Действительно, зона ТЧС захватыва-
ет сферу ответственности нескольких государств. Особенность за-
ключается в том, что обеим сторонам необходима информация, но
национальными техническими средствами можно получить лишь
часть ее. Основную неопределенность вносит объективный недоста-
ток информации о конкретных условиях ТЧС, часть которой может
фиксироваться лишь в регионе, недоступном для наблюдения нацио-
нальными техническими средствами. Но на эти процессы оказывают
также воздействие разнообразные факторы, в числе которых может
быть объективная неопределенность ситуации, невозможность реше-
ния задачи оценки последствий ЧС собственными национальными
силами, объективно обоснованное нежелание сторон информиро-
вать друг друга о происходящих событиях и др.
Национальным организациям, отвечающим за ликвидацию по-
следствий ЧС, все чаще приходится сталкиваться с природными и
техногенными условиями возникновения и развития ЧС, которые
могут иметь трансграничные последствия. В такой обстановке не-
обходимо организовывать трансграничное взаимодействие государ-
ственных служб различных государств. В ситуациях, когда нацио-
нальная система реагирования на ЧС недостаточно развита, или если
масштаб ЧС превосходит возможности ликвидации собственными
национальными силами и средствами, организация взаимодействия
с сопряженными государствами по защите населения, осуществле-
ние взаимообмена оперативной информацией, создание межгосу-
Глава 14
247
дарственных систем помощи и др. являются необходимыми и обя-
зательными элементами оказания гуманитарной помощи, доставки
различных грузов и эффективного решения задач по предупрежде-
нию и устранению последствий ЧС.
«Трансграничной чрезвычайной ситуацией» (ТЧС) будем на-
зывать ситуацию, в которой произошли необычные, как правило,
природные события значительной важности, последствия которых
затрагивают экономические, природные, демографические и иные
интересы приграничных государств, и требующие срочного вмеша-
тельства для их преодоления. Под «зоной потенциальной трансгра-
ничной чрезвычайной ситуации» будем понимать географические
пространства вдоль границы, захватывающие как географические об-
ласти, так и населенные пункты в соседних государствах, в пределах
которых наблюдаются процессы и явления, связанные с возможно-
стью возникновения чрезвычайной ситуации и необходимостью вза-
имодействия соседних стран с учетом их национальных интересов.
При анализе трансграничной чрезвычайной ситуации должны
учитываться следующие факторы: страны, на границах которых про-
изошла ТЧС, степень влияния масштабов ТЧС на соседнее государ-
ство, возможности отдельных государств по самостоятельной ликви-
дации ТЧС на своей территории, готовность к образованию коалиции
для совместной ликвидации ТЧС и др.
«Трансграничным мониторингом» будем называть процессы на-
блюдений и анализа с целью получения достоверной информации о
текущей ситуации в приграничном регионе, возникновении, разви-
тии и ликвидации последствий ТЧС с обменом информацией между
сопредельными странами. Суть задач мониторинга традиционна: в
основу закладываются сбор и анализ информации о чрезвычайной
ситуации, последующее информирование лиц, ответственных за при-
нятие решений, обеспечение оперативной информацией для коррек-
тировки действий аварийно-спасательных служб.
По масштабам произошедшей ТЧС трансграничный регион
можно описать тремя основными характеристиками: протяженно-
стью (длиной вдоль границы), шириной (глубиной от границы) и на-
сыщенностью (плотностью на данный момент и интенсивностью во
времени возможных последствий ТЧС). Характерными особенностя-
ми также являются: существенная неравномерность распределения
опасности в зоне ТЧС; возможность распространения ЧС на терри-
тории двух и более приграничных государств, высокая вероятность
248
В. К. Абросимов
возникновения областей со значительной плотностью последствий
ТЧС; наличие источников ЧС на территориях соседних государств;
значительные масштабы распространения ЧС, информацию о кото-
рых не всегда выгодно раскрывать.
Достаточно интересны результаты исследований по методам ре-
шения таких задач. В работе [176] рассматриваются вопросы выбо-
ра состава вертолетов и путей их движения к местам аварий для до-
ставки требуемых материалов. В работах [177-179] при оптимизации
выбора маршрутов в условиях дорожных пробок и физического раз-
рушения дорог используются генетические алгоритмы для оптимиза-
ции длины маршрутов. Разработана также модель доставки грузов в
таких ситуациях с учетом заданных временных интервалов. В работе
[180] рассматривается класс задач логистики в условиях различных
ЧС (как примеры, приводятся землетрясения и тайфуны). Подчерки-
вается сложность постановок таких задач, вызванная неопределенно-
стью ситуаций, необходимостью получения информации в реальном
времени, необходимостью перераспределения ресурсов и др.
В работе [181] систематизированы 20 требований к трансгранич-
ному сотрудничеству. Среди основных отмечаются необходимость
проведения совместных исследований и мониторинга, разработка
межнациональных документов и протоколов и др. Изложение прово-
дится в аспекте сохранения национальных парков на трансграничных
территориях, но разработанные положения можно легко распростра-
нить и на задачи МЧС.
Вместе с тем в указанных публикациях подчеркивается очень
малое количество источников по этой теме, несмотря на ее актуаль-
ность. В изученной литературе не разрабатываются инженерные
подходы к коллективным действиям стран в условиях, когда ЧС рас-
пространяется на территорию нескольких государств. Отсутствуют
и решения по совместным действиям групп летательных аппаратов
в зонах ЧС, что повышает актуальность рассматриваемых вопросов.
Применяемые в настоящее время традиционные меры (расшире-
ние приграничного сотрудничества, совершенствование и углубление
профессионального взаимодействия между службами предупрежде-
ния и ликвидации чрезвычайных ситуаций государств, взаимообмен
оперативной информацией об обстановке на территориях, организа-
ция межгосударственного уведомления и оповещения о чрезвычай-
ных ситуациях и др.) являются, безусловно, важными, но недоста-
Глава 14
249
точными, так как степень доверия к получаемой информации должна
быть максимальной, но объективно не может являться таковой.
В связи с этим возникает задача построения системы трансгра-
ничного мониторинга, отвечающей интересам всех приграничных
государств.
По аналогии с подходами работы [182] определим пять ключе-
вых принципов создания такой системы.
1. Государства решают задачи предупреждения и мониторинга
ТЧС совместно.
2. Государства создают единое хранилище информации о ТЧС с
согласованным составом и объемами данных по результатам
мониторинга.
3. Каждое государство проводит мониторинг своей области при-
граничной территории самостоятельно, но непрерывно обмени-
ваясь информацией с другими приграничными государствами.
4. Для реализации процессов мониторинга государства создают
международную группировку средств мониторинга, включая в
нее национальные технические средства (космические, авиаци-
онные и др.).
5. Государства в процессе мониторинга реализуют меры доверия
и контроля, предоставляя противоположной стороне возмож-
ность периодического осмотра объектов на национальной тер-
ритории в зонах ТЧС в согласованных объемах и в согласован-
ное время.
Основная идея здесь заключается в том, чтобы задача транс-
граничного мониторинга ТЧС решалась не отдельными националь-
ными техническими средствами, а совместными международными
группировками национальных средств с обменом информацией в
режиме on-line и использованием единой базы данных по ТЧС. Такая
группировка должна быть достаточно динамичной для оперативно-
го отслеживания ситуации и гибкой для оперативной реакции на ее
изменения. Как представляется, наилучшим решением, по крайней
мере на первом этапе, является группировка авиационных средств,
состоящая из самолетов, вертолетов, беспилотных летательных аппа-
ратов и др. Ключевыми возможностями авиации являются четкая и
всесторонняя проработка объективной картины ТЧС, оперативное
обновление данных об обстановке в воздухе и на земле, гибкое реа-
250
В. К. Абросимов
гирование на непрогнозируемые изменения окружающей обстановки
и минимизация человеческих ресурсов для решения задач монито-
ринга. Особенно интересным является использование дистанционно
управляемых или даже автономных беспилотных летательных аппа-
ратов [183]. Эффективность применения таких средств для монито-
ринга трансграничных ситуаций выше, чем у систем, основанных на
пилотируемых средствах (меньшие затраты на топливо, возможность
более продолжительных полетов, обеспечение безопасности людей в
сложных условиях и др.), и у космических средств мониторинга (по-
следние недостаточно эффективны в условиях, например, темноты,
задымленности, облачности).
Логически можно определить основные задачи отдельного на-
ционального авиационного средства (летательного аппарата), осу-
ществляющего мониторинг и входящего в состав международной
группировки. Он должен, выполняя общую международную кол-
лективную миссию, осуществлять автономное функционирование в
пределах собственной территории, обмениваться информацией с ЛА
другой страны, выполнять функции контроля информации, предо-
ставляемой другим государством, принимать оперативные решения
в процессе полета и при необходимости выполнять задачи ЛА друго-
го государства, если он по каким-либо причинам оказывается неспо-
собным к функционированию. Группировка, состоящая из совокуп-
ности таких ЛА, должна, с одной стороны, управляться коллективно,
а с другой - каждый ЛА должен быть достаточно самостоятельным в
своих действиях.
При движении пространственно-временная ситуация может
сложиться благоприятно для одних ЛА и неблагоприятно для других,
что потребует отказа от ранее решаемых задач и переориентации на
решение других. В обязательства ЛА может включаться готовность
взять на себя задачу мониторинга, которую по различным причинам
другой ЛА не может выполнить. Обязательства могут также выстра-
иваться как своего рода иерархическая структура, когда между объ-
ектами устанавливается некоторая иерархия по управлению; тогда
обязательства определяются из условий подчиненности. Указанное
не исключает определенной автономности ЛА, что зависит, однако,
от задач, выполняемых всей группировкой.
Глава 14 251
14.2. Меры транспарентности в зоне
трансграничной чрезвычайной ситуации
В настоящее время принципиальным подходом при возникно-
вении ТЧС в приграничных территориях является самостоятельное
решение проблем каждым государством с дополнительным (при на-
личии договоренностей или доброй воли) режимом информацион-
ных уведомлений другой стороны. Однако для выработки наиболее
эффективных мер по снижению последствий от ТЧС информации
уведомительного характера может быть недостаточно; в ряде случаев
объективные погрешности и ошибки другого государства в предо-
ставлении данных могут даже стать критическими.
В связи с изложенным возникает ряд вопросов, важных для каж-
дого из участников процесса мониторинга. К числу основных и наи-
более труднорешаемых отнесем следующие.
1. Необходимость получения качественной и достоверной ин-
формации о характеристиках ТЧС на территории другого госу-
дарства.
2. Необходимость организации взаимодействия между государ-
ствами по мониторингу трансграничных территорий с высо-
ким доверием к достоверности информации друг друга.
3. Проведение мониторинга национальными силами и средства-
ми, возможно, несоизмеримыми как по возможностям, так и
по качеству предоставляемой информации.
4. Принятие решений и осуществление всех действий в условиях
крайне ограниченного времени.
В современных международных отношениях все большее значе-
ние придается такой относительно новой форме взаимодействия госу-
дарств, как транспарентность (меры открытости, доверия). В диплома-
тической практике разнообразные меры доверия применяются давно.
Английский термин «transparency» в русском языке имеет много си-
нонимов: прозрачный, ясный, отчетливый, откровенный, искренний,
честный. Транспарентность часто связывается с некоторой юридиче-
ски закрепленной системой мер доверия, которые стороны доброволь-
но принимают к исполнению. В ситуациях, когда декларируемые цели
и задачи сторон совпадают, а реальные - расходятся, когда стороны
решают, по существу, общие задачи, но при этом отстаивают собствен-
ные интересы, меры транспарентности являются необходимыми.
252
В. К. Абросимов
В международной переговорной практике существует термин
«меры доверия и контроля». «Мерами трансграничного контроля»
будем называть технические и организационные верификационные
механизмы, подтверждающие достоверность информации о ЧС на
территории пограничного государства. По существу, меры контроля
сводятся к разрешению (в случае озабоченности относительно досто-
верности информации о ЧС) инспекций территории другого государ-
ства с использованием разнообразной аппаратуры.
«Меры трансграничного доверия» - коллективные или одно-
сторонние акции государств, направленные на повышение качества
предоставляемой сопредельным государствам информации о ЧС. Вы-
полнение мер доверия не требует обязательного контроля либо они
объективно не поддаются такому контролю. В этом контексте меры
доверия преследуют цель существенно снизить требования к ин-
спекционно-контрольному механизму проверки выполнения обяза-
тельств сторонами, не устраняя, однако, такие механизмы.
В задачи трансграничного мониторинга должны входить следу-
ющие меры доверия и контроля.
1. Инспекции. Обеспечение регулярного доступа специалистов в
зону ЧС, расположенную на территории другого государства.
2. Уведомления. Заблаговременное уведомление сопредельного
государства о событиях, фактах, действиях другой стороны,
касающихся ЧС.
3. Информация. Предоставление сопредельному государству за-
благовременно согласованных конкретных фактических дан-
ных (обмен информацией) о ЧС и его характеристиках.
4. Наблюдение. Обеспечение для другой стороны возможности
наблюдения с помощью соответствующих национальных тех-
нических систем контроля за зоной ЧС, находящейся на терри-
тории другого государства.
5. Гарантии. Предоставление определенных письменных или уст-
ных гарантий стороне в вопросах взаимодействия в процессе
мониторинга и ликвидации последствий ЧС.
Если исключить все меры, применяемые до начала появления
ТЧС, то наилучшими техническими средствами, реализующими в
процессе мониторинга меры контроля, являются, как уже отмена-
Глава 14
253
лось, авиационные и космические средства - самолеты, вертолеты,
беспилотная авиация, космические аппараты.
14.3. Агентная архитектура построения
международной группировки летательных аппаратов
в составе системы трансграничного мониторинга
Технически систему трансграничного мониторинга можно стро-
ить как распределенную сеть ЛА-агентов (источников информации),
соединенных каналами с национальными центрами управления кри-
зисными ситуациями и общающихся между собой посредством не-
которой модели кооперации (рис. 28).
Рис. 28. Архитектура построения международной группировки
технических средств трансграничного мониторинга
254
В. К. Абросимов
При движении в зоне ТЧС пространственно-временная ситуа-
ция может сложиться благоприятно для одних ЛА и неблагоприятно
для других. Определяющим преимуществом мониторинга в трансгра-
ничной зоне ТЧС посредством международной группировки является
возможность изменения целей движения национальных ЛА в услови-
ях, когда ЛА другой стороны по тем или иным причинам (отсутствие
необходимых приборов для проведения исследования, сложные усло-
вия наблюдения, нехватка топлива, поломка и др.) не способны вы-
полнять коллективную миссию с требуемой степенью достоверности.
В этом случае задачи решаются теми средствами, которые имеют соот-
ветствующие технические возможности независимо от национальной
принадлежности. Такие решения, конечно же, тесно связаны с высо-
кой мерой доверия сторон друг к другу.
14.4. Разработка мер доверия для совместной работы
в зоне трансграничной чрезвычайной ситуации
Разнообразные внешние условия, особенности политических,
экономических, национальных особенностей в отношениях между
сторонами могут приводить к недостоверности информации, полу-
чаемой стороной А от стороны В. Для учета таких ситуаций целесо-
образно ввести специальный коэффициент доверия £аЬ. Естественно,
коэффициент доверия следует вычислять по соотношению доли по-
лученной от стороны В информации 1(B) к той же информации, оце-
ниваемой стороной А, т.е.:
е=кв)/1(А) (68)
Основная наша идея заключается в том, чтобы систему транс-
граничного мониторинга построить на основе обмена информацией
между сторонами с учетом мер доверия и контроля. В таких условиях
задача трансграничного мониторинга должна решаться системно, со-
вместными международными группировками национальных средств
мониторинга (космические аппараты, самолеты, вертолеты, беспи-
лотные летательные аппараты и др.) с обменом информацией в ре-
жиме on-line и использованием единой базы данных по ТЧС. Такая
группировка призвана стать достаточно динамичной для оператив-
ного отслеживания ситуации и гибкой для оперативной реакции на
ее изменения
Глава 14
255
Для повышения степени доверия при трансграничном мо-
ниторинге, если одна из сторон имеет озабоченность относитель-
но действий или информации другой стороны, то ей необходимо
предоставить право запросить облет соответствующих объектов на
территории сопредельной стороны. Пусть для части объектов ин-
формация подтверждается, а в других нет. Такая ситуация может от-
ражаться при моделировании коэффициентом доверия. Методы рас-
чета такого коэффициента в зависимости от наличия информации
могут быть различными. Так, в работе [182] предлагается поставить
этот коэффициент в зависимость от суммарного количества собы-
тий/фактов предоставления информации одной стороной и степени
их подтвержденности другой стороной.
Рассмотрим класс мер доверия при работе в зонах трансгранич-
ных ТЧС. Это меры доверия, основанные на предоставлении заранее
согласованной определенной информации о ТЧС. На практике такой
информацией являются информационные сообщения о возможно-
сти ТЧС (j = 1), начале ТЧС (j = 2) и масштабах ТЧС (J = 3). В рам-
ках информации каждой j-и группы сторона В должна предоставить
информацию стороне А об оговоренных условиями соответствую-
щих соглашений, связанных с событиями ТЧС. При этом нельзя ис-
ключать, что сторона В будет скрывать часть информации (причины
такого возможного поведения являются предметом отдельного рас-
смотрения). Предполагается, что другая сторона А с помощью нацио-
нальных технических средств имеет возможность получать информа-
цию по этим же событиям и сравнивать ее с информацией стороны В,
подтверждая или опровергая ее.
Показателем эффективности указанных мер доверия j-й группы
может служить отношение
Э.-X^A../X^B.., (69)
где ZtNBtj - суммарное количество i-x фактов j-й группы мер доверия
относительно ТЧС, предоставленных стороной В, ZtNA - суммарное
количество i-x фактов j-й группы мер доверия относительно ТЧС,
подтвержденных стороной А.
Если сторона А в процессе контроля установила, что сторона В
информировала ее неправильно, то показатель эффективности мер
доверия будет снижаться. Отразим это введением коэффициента до-
256
В. К. Абросимов
верия ^аЬ стороны А к стороне В по j-й группе мер. Тогда формула (69)
приобретет вид:
Э=£^-А.)!£"В... (70)
Рис. 29. К формированию коэффициента доверия
По всем J группам мер доверия (j = 1, 2, 3 для рассматриваемого
случая) можно записать выражение для суммарного показателя эф-
фективности мер доверия, например, в виде:
ХаЬ = X’ {Х^-ь • A.)/XtNB.}IJ. (71)
Коэффициенты доверия стороны А к стороне В ХаЬ и ^аЬ могут
выражаться либо числовыми (детерминированными, вероятностны-
ми, нечеткими), либо лингвистическими переменными. В последнем
случае они стандартно сводятся к числовым переменным с помощью
операций фаззификации и дефаззификации [104].
Глава 14 257
14.5. Алгоритм функционирования
международной группировки авиационных средств
Сформируем международную группировку авиационных
средств для проведения трансграничного мониторинга. Включим в
нее с каждой стороны технические средства мониторинга (самолеты,
беспилотные летательные аппараты, космические аппараты и др.).
Будем рассматривать международную группировку как совокупность
национальных ЛА. Они функционируют параллельно и взаимодей-
ствуют друг с другом. Зафиксируем количественный состав междуна-
родной группировки КА летательных аппаратов стороны А и Кв лета-
тельных аппаратов стороны В.
Определяющим преимуществом мониторинга в трансгранич-
ной зоне ЧС посредством международной группировки является воз-
можность изменения целей движения национальных ЛА в условиях,
когда ЛА другой стороны по тем или иным причинам не способны ре-
шить собственные задачи с требуемой степенью достоверности (огра-
ничения по зоне досягаемости, по количеству используемых средств,
по возможностям технических средств мониторинга и др.). В этом
случае часть коллективной миссии решается теми средствами, кото-
рые имеют соответствующие технические возможности независимо
от национальной принадлежности. Такие решения, конечно же, тесно
связаны с высокой мерой доверия сторон друг к другу.
Приведем основные положения стратегии функционирования
международной группировки технических средств мониторинга.
1. Каждая сторона самостоятельно определяет маршрут соответ-
ствующих национальных ЛА в зоне потенциальной или проис-
шедшей ЧС.
2. Каждая сторона самостоятельно исследует зону потенциаль-
ной трансграничной ЧС и формирует априорную информацию
о ЧС, выкладывая ее в единое хранилище данных о ЧС (общий
интернет-ресурс) в согласованном формате.
3. Каждый либо выбранные национальные ЛА из состава меж-
дународной группировки могут совершать согласованные
контрольные полеты над территорией другой стороны для
подтверждения доверия к данным, поступающим в единое хра-
нилище данных о ЧС.
258
В. К. Абросимов
4. В случае, если какой-либо ЛА из состава международной груп-
пировки не способен выполнить часть коллективной миссии,
он фиксирует указанную проблему (условно «погибает») и воз-
вращается на национальную базу.
5. Все ЛА проводят виртуальные «переговоры», в процессе ко-
торых выбирается ЛА, способный заменить «погибший». Осу-
ществляется перераспределение целей на ЛА, имеющие воз-
можности (ресурсы и функционал) для разрешения проблемы.
6. Если возможностей для мониторинга оказывается недостаточ-
но, то группировка наращивается дополнительными ЛА, либо
пересматриваются условия мониторинга (его масштабы, пери-
одичность облета и др.).
При трансграничном мониторинге возникает большое число
сложных проблем: формирование и синхронизация совместных пла-
нов действий; разрешение конфликтов целей; организация перегово-
ров о совместных действиях и др. В данной работе предполагается,
что ЛА-агенты не образуют иерархии и решают общую задачу мони-
торинга полностью в распределенном варианте. Тогда при разработке
стратегии ЛА-агента существенны два аспекта: движение ЛА по за-
данному маршруту и изменение маршрута ЛА при необходимости.
Трансграничный мониторинг целесообразно проводить регу-
лярно, обследуя одни и те же объекты и исследуя развитие ЧС в них.
Суммарная информация, получаемая на каждом цикле мониторинга,
складывается из следующих двух групп данных:
• кортеж интенсивности {UN } ТЧС на всех N^-объектах нацио-
нальной территорииА
• кортеж интенсивности {UN } или {Ц/} ЧС, полученной стороной
А в ходе экспертного анализа или мониторинга на маршруте Мв
всех NB (или только разрешенных NB* стороной В к обследованию
стороной А) объектов национальной территории стороны В.
Двигаясь по маршруту МА к-й ЛА-агент предоставляет инфор-
мацию (jpnT об изменении ситуации на каждом и-м объекте. Это по-
зволяет уточнить исходные оценки по формулам, аналогичным (65).
1 Строго говоря, необходимо учитывать и матрицу интенсивности | UM | ТЧС на маршруте
МА мониторинга национальной территории при следовании k-го ЛА-агента между объек-
тами. Однако здесь для упрощения ее влияние опустим.
Глава 14
259
Суммарная интенсивность ТЧС по результатам мониторинга оце-
нивается каждой стороной самостоятельно. Информация об интенсив-
ности ЧС, полученная по всем NA объектам национальной территории,
например, по оценке стороны А всеми своими КА национальными тех-
ническими средствами, с учетом приоритетности и-го объекта срп и сте-
пени интенсивности ТЧС на этом объекте по формуле:
ТО = £„N*(<P„ р„‘)- (72)
Информация о ЧС на территории другой стороны может оцени-
ваться аналогично.
Рассмотрим ситуацию, когда одна из сторон имеет озабоченность
относительно информации другой стороны. Пусть сторона В скрыва-
ет часть информации. Другая сторона А с помощью национальных
технических средств имеет возможность получить информацию по
этим же фактам или объектам и сравнить ее с информацией сторо-
ны В, подтверждая или опровергая ее. Введенный выше коэффициент
доверия %аЬ целесообразно в задачах мониторинга рассчитывать для
каждого исследуемого объекта п и оценивать отношением интенсив-
ности ЧС с точки зрения различных сторон:
C" = MB)WA)> (73)
где ^ид(А) - оценка ТЧС на пь-м объекте, оцененная apriory стороной
А; рпЬ(?) - эта же оценка, но выданная стороне А стороной В. Значе-
ние %паЬе [0,1], так как в наших предположениях ^иЬ(В) < ^ИД(А). В про-
цессе проведения мониторинга коэффициент %паЬ оценивается экспер-
тно. Если сторона В разрешает стороне А мониторинг своих объектов
национальными техническими средствами, то значения ^ИД(А) могут
уточняться по результатам такого мониторинга, и значения ^ИД(А)
apriory становятся ^ИД(А) aposteriori. При максимальной правдивости
стороны В и подтвержденности ее данных национальными техниче-
скими средствами стороны А коэффициент %nab = 1.
Информация, оцениваемая стороной А по всем NB объектам
стороны В также может учитывать приоритетность и-го объекта срп
и степень интенсивности ЧС на этом объекте. При этом логично
коэффициент доверия £паЬ использовать в составе обратной функции,
т.е. чем меньше доверия к другой стороне, тем более значимой для
стороны А должна быть информация по ситуации на территории со-
предельной стороны. Тогда получим:
260
В. К. Абросимов
^b(0 = Vb{(<p,.^X;'’}. (74)
Логично общую оценку интенсивности ТЧС формировать из
двух составляющих: оценки интенсивности ситуации U (f) на соб-
ственной национальной территории и оценки на территории СЛВ(£)
сопредельной стороны. Поэтому
= ^(t) + = {Z^(<p, • //,.)} + z^tp. • (75)
До тех пор, пока функция UAz(t) имеет положительную произ-
водную, интенсивность ТЧС усиливается. При отрицательной про-
изводной функции UAz(t) интенсивность снижается. Момент, когда
производная функции UAz(t) обращается в ноль, может служить ос-
нованием для принятия решений о стратегии дальнейшего монито-
ринга ситуации.
Формула (75) приведена для стороны А, но может быть анало-
гично записана и для стороны В (UBz(f)).
14.6. Имитационное моделирование
трансграничного мониторинга зоны наводнения
Имитационная модель совместного мониторинга трансгранич-
ных областей национальными техническими средствами двух и более
государств разработана в среде моделирования AnyLogic [164, 184].
Модель позволяет варьировать количеством объектов мониторинга;
размерами зоны трансграничной ЧС; интенсивностью ЧС в различ-
ных точках; количеством ЛА; их возможностями по мониторингу;
продолжительностью мониторинга; числом запрещенных к показу
объектов противоположной стороны и другими параметрами. Мо-
дель демонстрирует возможности использования совместных груп-
пировок для задач мониторинга трансграничных территорий.
Рассмотрим следующий пример (рис. 30). На территории двух
государств, разделенных рекой, расположены населенные пункты,
различные по своей значимости (в данном примере срА[ = 2, срВ2 = 3;
приоритетность остальных объектов принималась равной единице).
Стороны А и В обязались обмениваться информацией о наводнениях
и разливах реки, по которой проходит их государственная граница,
так как они могут угрожать или негативно влиять на ситуацию в на-
селенных пунктах. Вместе с тем пусть одна из сторон не заинтересо-
вана в полном раскрытии информации об источнике ЧС (например,
Глава 14
261
источником является внезапный прорыв плохо укрепленной дамбы
стороны В в точке В2, вызванный проливными дождями и привед-
ший к наводнению на реке) и не сообщает об этом, но национальны-
ми техническими средствами другой стороны указанный факт обна-
руживается с определенной достоверностью.
Рис. 30. К процессу мониторинга трансграничной чрезвычайной ситуации
(прорыв дамбы и последующее наводнение)
В соответствии со сценарием моделирования мониторинг осу-
ществлялся ежедневно в течение 10 дней с задачей распознать реаль-
ную степень интенсивности и угрозы наводнения, а следовательно, и
степени угрозы ЧС. В течение первых пяти дней стороны самостоя-
тельно оценивали ситуацию и формировали функции U z(t) и U z(t).
На шестой день вследствие неисправности своего самолета сторона В
запросила помощь и разрешила мониторинг своей территории техни-
ческими средствами стороны А, что привело к формированию ново-
го маршрута вертолета А и изменению маршрута самолета А. Самое
главное - уменьшился коэффициент доверия стороны А к стороне В
с 1 до 0.7, так как ранее скрываемые стороной В данные о прорыве
дамбы стали известными.
На рис. 31 представлена динамика изменения целевой функции
UAz(t) интенсивности наводнения и реальной ситуации R в динамике
262
В. К. Абросимов
процесса наводнения. Из анализа графика видно, что реальная ситуа-
ция R до момента вынужденного (в результате неисправности самоле-
та) разрешения стороны В на обследование своей территории объек-
тивно хуже, чем оцениваемая стороной А. Однако, несмотря на то, что
в процессе обследования на шестой день стороной А устанавливается
факт прорыва дамбы в точке В2 и коэффициент доверия стороны А к
стороне В резко снижается, тем не менее оценка стороной А степени
интенсивности ЧС становится ближе к реальной за счет получения
достоверных данных о текущем состоянии ЧС. Таким образом, реали-
зация мер доверия (разрешение на облет) явилась эффективной.
Рис. 31. Динамика изменения оценок интенсивности ТЧС
(R - реальная ситуация)
График на рис. 31 демонстрирует значимость коэффициента до-
верия.
Анализ поведения функции UAz(t) показывает ее существен-
ную изменяемость в зависимости от коэффициента доверия, что еще
больше повышает его значимость в общем процессе трансграничного
мониторинга. Понятны скачки функции (на седьмом шаге процесса)
в моменты, когда ТЧС распространяется на более значимые по отно-
шению к остальным объекты и удается обследовать объекты другой
стороны, информация о которых ранее была недоступна.
Глава 14
263
Как удается установить, изначально высокий коэффициент до-
верия приводит к возрастанию неточности оценок (см. пунктирную
линию на рис. 31, которая описывает поведение функции UAx(t) в ус-
ловиях = 1 для всего процесса мониторинга). Это связано с учетом
в оценках стороны А недостоверных данных стороны В; таким обра-
зом, в результирующие оценки вкрадывается некорректность.
При варьировании приоритетности обследования и значимости
объектов мониторинга характер функции интенсивности чрезвычай-
ной ситуации и степень ее приближения к реальной изменяются не-
значительно. Возрастают лишь ее абсолютные значения.
ЗАВЕРШАЮЩИЙ ВЗГЛЯД
Вы думаете, все так просто?
Да, все просто.
Но совсем не так...
Альберт Эйнштейн
В этой книге сделана попытка осмыслить несколько неожидан-
ную организационно-техническую структуру - коллектив летатель-
ных аппаратов. В такой коллектив могут объединяться самые раз-
нообразные типы летательных аппаратов, с различными обликами,
характеристиками, возможностями, функционалом, задачами. Но
важно одно: они стремятся к достижению единой коллективной цели,
выполнению коллективной миссии.
Оказалось, что такая структура если не в целом, то в деталях от-
личается от других аналогичных структур - групп, стай, роев и др.
Но дьявол, как следует из известной пословицы, кроется именно в
деталях. И основная деталь, основное отличие коллектива летатель-
ных аппаратов - их активная взаимопомощь друг другу, стремление
совместно и наиболее эффективно выполнить коллективную миссию,
пусть даже и ценой невыполнения своих личных задач.
В процессе моделирования поведения летательного аппарата в
коллективе оказалось удобным описывать его как интеллектуального
агента, обладающего соответствующими свойствами: автономностью,
целеполаганием, рациональностью, мобильностью, наличием знаний,
обязательств, убеждений, желаний, намерений. Эти свойства в опре-
деленной степени присущи всем агентам. Однако для того, чтобы ле-
Завершающий взгляд
265
ва можно как принудительно
(быть назначенным), так и до-
Человечество коллективно под руко-
водством дураков и при помощи изо-
бретательности умных рабов занято
великим делом подготовки своего соб-
ственного уничтожения,
Бертран Рассел,
английский философ
тательный аппарат-агент стал настоящим членом коллектива, его не-
обходимо обучить таким пока еще экзотическим агентским свойствам
как правдивость, благожелательность и своего рода «общественному
поведению», т.е. способности функционировать в сообществе с дру-
гими агентами, обмениваясь с ними информацией с помощью некото-
рого языка коммуникаций, учитывать интересы и ставить целеполага-
ние других агентов по рангу выше своих собственных.
Войти в состав коллекти-
бровольно, предложив в про-
цессе переговоров ЛА-агентов
свои возможности для выпол-
нения коллективной миссии
и соотнеся свои потребности
с требованиями коллектива. В любом случае определяющими явля-
ются агентские свойства, демонстрируемые летательным аппаратом
и реализуемые его системой управления, которая приобретает ярко
выраженный интеллектуальный и самообучающийся характер.
Такой коллектив летательных аппаратов способен активно и эф-
фективно функционировать в любой среде, в том числе в конфликт-
ной, стремясь к высокой степени ситуационной осведомленности,
поддерживая друг друга при выполнении коллективной миссии как
информационно, так и ресурсно. При возникновении «спусковых»
событий, существенно влияющих на выполнение коллективом по-
ставленной коллективной миссии, с их последствиями борется весь
коллектив, всеми своими ресурсами, даже жертвуя, при необходимо-
сти, отдельными своими членами.
При разработке стратегий поведения коллектива летательных ап-
паратов и стратегий поведения самих летательных аппаратов в коллек-
тиве могут быть использованы различные методологии и алгоритмы,
в целом типовые для реализации стратегий коллективного поведения.
В книге разработано несколько новых подходов. Так, целераспреде-
ление в коллективах предложено осуществлять с использованием
решений нового класса задач коммивояжера - задач рекуррентной
маршрутизации, для которой разработаны алгоритмы формирования
маршрутов для группы летательных аппаратов на основе муравьиных
алгоритмов. Новыми являются методы выполнения коллективных
266
В. К. Абросимов
миссий с использованием механизмов «жертвенности» агентов, вы-
бора «жертвы» в коллективе, обмена задачами и ролями в коллективе.
Но как моделировать облик и поведение тех летательных аппа-
ратов, которых еще нет, но которые потребуются при ответе на буду-
щие вызовы? Предложен оригинальный и неожиданный подход, ос-
нованный на идее фоторобота. Также, как из деталей лица строится
облик разыскиваемого человека, из отдельных необходимых элемен-
тов, обязательно составляющих облик объекта управления, строится
облик перспективного летательного аппарата с проверкой его непро-
тиворечивости разумному смыслу.
«По сравнению с последними двумя десятилетиями, в 2015-2035
годах существует большая вероятность вовлечения великих держав в
различные конфликты в качестве противоборствующих сторон. Они
могут оказаться невольно втянутыми в прямое вооруженное столкно-
вение в результате эскалации очередного кризиса. Этот риск относит-
ся в первую очередь к разногласиям на постсоветском пространстве
между Россией и Шанхайской организацией сотрудничества (ШОС),
с одной стороны, и США и НАТО - с другой...» [185]. Настоящая ра-
бота может быть полезной и при решении оборонных задач, в под-
тверждение чего приведены ряд примеров. Автор является убежден-
ным противником войн, но - увы! - таково веление времени.
Что же дальше?
В настоящее время и в ближнесрочной перспективе основной
тренд интеллектуализации систем и автоматизации человеко-ма-
шинного общения направлен на реализацию концепции Интернета
вещей. Эта концепция предполагает не только глобальное информа-
ционное взаимодействие, но и получение эффекта от совместного ис-
пользования информации от разнообразных устройств, объединен-
ных виртуальным и реальным взаимодействием. Таким образом, по
существу информационное взаимодействие переносится в реальное
материальное пространство. Поэтому необходимо исследовать новую
постановку - «погрузить» коллектив объектов управления в новую
информационно-управляющую Среду, формируемую в парадигме
Интернета вещей. По существу такая Среда становится не отдельно
взятой сущностью для исследования, а непосредственно входит в
общую архитектуру решения по коллективному управлению, более
того, во многом и определяет поведение группировки интеллектуаль-
ных объектов управления.
Завершающий взгляд
267
Построение такой Среды можно было бы реализовать на основе
принципов сервис-ориентированной архитектуры, но с учетом пара-
дигмы Интернета вещей. При этом объекты управления снова целе-
сообразно представлять как агентов, группировку - как многоагент-
ную систему; характеристики и возможности агентов по решению
отдельных задач - как сервисы, объединенные в on-line пополняемый
реестр; целераспределение - как результат переговоров агентов; рас-
пределение ролей в группе - как ранжирование необходимых сер-
висов по заданной системе критериев; выполнение коллективной
миссии - как механизм оркестровки сервисов, а взаимодействие объ-
ектов управления - как их хореографию.
В конечном итоге традиционное для объектов управления по-
нятие «системы управления» с входными, выходными параметрами и
обратной связью будет заменяться новым понятием «управление се-
тью систем». В отличие от традиционных методов построения интел-
лектуальных сетей и управления процессами в них, элементы такой
сети систем, выполняя собственную задачу, будут менять свои роли
в интересах выполнения коллективной миссии, предоставлять друг
другу при необходимости свои ресурсы, реализуя возможно иррацио-
нальные личные, но коллективно эффективные стратегии управления
всей группировкой. В процессе разработки сценария выполнения кол-
лективной миссии будут выработаны и реализованы различные уров-
ни коммуникаций и действий: регулирования подчиненности, кон-
троля действий и, что возможно самое важное, доверия. Понятно, что
такие сложные в зависимости от ситуаций ролевые обязательства бу-
дут определять и предписывать использование различных стандартов,
протоколов и регламентов обмена информационными сообщениями.
В такой архитектуре объект управления в группировке пред-
ставляется не как техническое устройство для реализации стратегий
управления, реализующий функции получения, передачи информа-
ции и действия, а как самостоятельная единица, способная запраши-
вать и предоставлять информацию, оказывать и просить помощь,
вырабатывать, аргументировать, отстаивать свое решение в процессе
выработки коллективного поведения и даже при необходимости идти
на самопожертвование. Объект управления сможет представляться
другим объектам посредством разных ролей и изменять свою роль в
процессе выполнения коллективной миссии по запросу других объ-
268
В. К. Абросимов
ектов управления. Объект управления сможет взаимодействовать
одновременно и независимо с другими объектами управления, как
проявленными в сети, так и информационно скрытыми в ней. Объ-
ект управления сможет реализовывать различные уровни доступа к
собственным атрибутам и функциональным возможностям в зависи-
мости от ситуации. Объект управления сможет идентифицироваться
в сети как часть другого физического или логического объекта управ-
ления, быть скрытым или идентифицироваться через иной объект
управления, образуя новые сети.
Каждый агент в интересах выполнения коллективной миссии
будет выступать одновременно в четырех ролях как а) поставщик
информации; б) регулятор-передатчик информации; в) потребитель
информации; г ) исполнитель задач.
При этом объект управления как поставщик информации для
коллектива:
• информирует другие объекты о своих реализуемых матери-
альных, эксплуатационных, интеллектуальных ресурсах;
• производит, ищет и добывает в сети, анализирует и предо-
ставляет в сеть в понятном для остальных объектов управ-
ления виде информацию об окружающей среде (данные,
знания, уведомления об опасности и др.), необходимую для
решения групповых задач;
• создает необходимые информационные связи между объек-
тами управления;
• формирует группы функций для выполнения коллективной
миссии и др.
Объект управления как регулятор-передатчик информации:
• проверяет, рецензирует, координирует, передает информа-
цию объектам управления;
• создает запросы, передает, контролирует на непротиворечи-
вость информацию, которая появляется или запрашивается
в сети;
• оценивает качество решения задач, рекомендует стратегии
поведения другим объектам управления и др.
Объект управления как потребитель информации:
• анализирует, критически оценивает и берет на себя обязан-
ности по выполнению отдельных задач в интересах выпол-
нения коллективной миссии;
Завершающий взгляд
269
• проверяет реализуемость достижения целей;
• запрашивает и вступает в «переговоры» с другими объекта-
ми управления.
Объект управления как исполнитель задач:
• определяет (осознает) свое место и роль в выполнении кол-
лективной миссии;
• исполняет возложенную на него, полученную в процессе
«переговоров» или взятую самостоятельно роль;
• использует при необходимости материальные, эксплуатаци-
онные, интеллектуальные ресурсы других объектов управ-
ления для решения собственных задач в интересах выпол-
нения коллективной миссии;
• предлагает свои реализуемые материальные, эксплуатаци-
онные, интеллектуальные ресурсы в распоряжение других
объектов управления коллектива.
Таким образом, суммарный функционал объекта управления
становится внешним сервисом для других объектов управления; его
функции могут быть запрошены и использованы другими объектами
управления. С другой стороны, и его функционал при необходимости
может быть расширен за счет функционала и возможностей других
объектов управления. В процессе выполнения коллективной миссии
роли объектов управления могут многократно меняться, объекты
управления при необходимости могут привлекаться для выполнения
задач, ранее возложенных на другие объекты управления, что при-
звано максимально эффективно задействовать функционал всех объ-
ектов управления для выполнения групповой задачи.
Возможность максимально использовать окружение объекта
управления в пределах доступности сетей связи для обеспечения его
информирования и функционирования обеспечивает моделирование
возможных вариантов развития событий за счет создания виртуаль-
ных образов различных объектов управления и их использования как
имитаторов функциональности и информационно-функциональных
аналогов. В целом при этом существенно снижаются требования к
универсальности объектов управления: они могут «затачиваться» на
специализированных профессиональных функциях с использованием
всех окружающих объектов как обеспечивающих друг друга систем.
Как представляется, указанное направление развития принци-
пов коллективного управления является перспективным.
270
В. К. Абросимов
Президент Российской Федерации В.В. Путин однажды сказал:
«...мы все должны на своем месте, как святой Франциск, ежедневно
мотыжить участок, который нам Господом отведен, тогда мы добьем-
ся успехов...». Хотя святой Франциск Ассизский не создал разрабо-
танной философской системы, но его личность и деятельность ока-
зали большое влияние на средневековое мировоззрение. Последние
несколько лет автор пытается «мотыжить» участок, связанный с про-
блемами группового движения объектов управления. Объективно он
не может оценить полезность написанного материала. Но ведущие
консалтинговые компании мира, ранжируя ключевые технологиче-
ские приоритеты на близлежащую перспективу, в числе первых семи
выделяют: мобильный интернет, автоматизацию работы со знаниями,
интернет вещей, облачные вычисления, робототехнику, автономные
и полу-автономные объекты управления. Материалы книги, пусть и
в очень скромной степени, но затрагивают часть этих направлений.
Или, как любил говорить известный разведчик Штирлиц: «Нет?»
Перед нами огромный неразработанный участок - коллективное
управление группировками интеллектуальных объектов. У нас есть
своя «мотыга» - теория многоагентных систем.
Ну что же, продолжим!
Я рад, что мы нашли точку соприкоснове-
ния. Для начала - хотя бы точку.
Сэр Уистон Черчиль
ЛИТЕРАТУРА
1. Круглов А. Железная Стая [Электронный ресурс]. Режим доступа:
http://warfiles.ru/show-9852 l-zheleznaya-staya.html].
2. Программа Агентства передовых оборонных исследовательских
проектов в структуре Министерства обороны США (DARPA)
на 2015 год [Электронный ресурс]. Режим доступа: http://zvezda.
center/photos/1423941620.pdf
3. Abrosimov V., Goncharenko V. Photofit of Perspective Vehicles: Shapes
Synthesis and Flight Parameters, Proceedings of Evaluation 2017 9th
International Conference on Computing and Automation Engineering,
ICCAE 2017, Sydney, Australia, pp. 259-263.
4. Scerri P., Pynadath D., Johnson L., Rosenbloom P, Si M., Schurr N.,
Tambe M. A Prototype Infrastructure for Distributed Robot Agent
Person Teams - Information Sciences Institute and Computer Science
Department. University of Southern California. 4676 Admiralty Way,
Marina del Rey, CA 90292.
5. Autonomous Vehicles in Support of Naval Operations I Committee
on Autonomous Vehicles in Support of Naval Operations, National
Research Council. USA: National Academies Press, 2005.
6. Модели и алгоритмы планирования действий и распределения за-
даний в мультиагентных робототехнических системах / И.М. Ма-
каров и др. // Мехатроника, автоматизация, управление. 2012. № 5
(134). С. 44-50.
7. Карпов В.Э. Процедура голосования в однородных коллективах
роботов // XIV национальная конференция по искусственному
интеллекту с международным участием КИИ-2014: Труды конфе-
ренции. Т. 2. Казань: изд-во РИЦ «Школа», 2014. 341 с. С. 159-167.
272
В. К. Абросимов
8. Корепанов В.О., Новиков Д.А., Модели стратегического поведения
в задаче о диффузной бомбе. Управление подвижными объектами
и навигация // Control Science. 2015. № 2. С. 38-44.
9. Буренок В.М., Лысенко Л.Н. Вымирающая баллистика // Военно-
промышленный курьер. Вып. 8 (526) от 5. 03.2014 г.
10. Буренок В.М., Лысенко Л.Н. О проблемах в области баллистиче-
ского обеспечения // Армейский вестник [Электронный журнал],
10.03.2014 года. Режим доступа: http://army-news.ru/2014/03/o-
problemax-v-oblasti-ballisticheskogo-obespecheniya/
11. Абросимов В.К., Синюков М.И. Информационные основы иннова-
ционного менеджмента: учебное пособие. М.: изд-во Международ-
ного Университета в Москве, 2005. 71 С.
12. Ржевский Г.А., Скобелев П.О. Как управлять сложными системами?
Мультиагентный подход для создания интеллектуальных систем
управления предприятиями. Самара: ООО «Офорт», 2015. 290 с.
13. Савин Л.В. Сетецентричная и сетевая война. Введение в концеп-
цию. М.: Евразийское движение, 2011. 130 с.
14. Имитационное моделирование боевых действий: Теория и прак-
тика / под ред. П.А. Созинова. Тверь, 2013. 528 с.
15. Карпов В.Е. Модели социального поведения в групповой робото-
технике // Управление большими системами. М.: ИПУ РАН, 2016.
Вып. 59. С. 165-232.
16. Шевяков И.А. О радиопрозрачности плазменной оболочки гиперз-
вукового летательного аппарата И Вестник Южно-Уральского го-
сударственного университета. Серия: Математика. Механика. Фи-
зика. Вып. № 2. Том 6. 2014.
17. Краснов Н.Ф., Кошевой В.Н. Управление и стабилизация в аэроди-
намике. М.: Высшая школа, 1978. 497 с.
18. Фомин В.М., Аулъченко С. М., Звегинцев В.Н. Полет гиперзвукового
ЛА с ПВРД по рикошетирующей траектории // Прикладная меха-
ника и теоретическая физика. 2010. Т. 51. № 4. С. 85-94.
19. Хилъкевич В.Я., Яновский Л.С. Использование эффектов рикоше-
тирования и кабрирования для увеличения дальности полета ра-
кет И Изв. вузов. Авиац. техника. 2005. № 3. С. 70-72.
20. Горшенин В.Ю. Синтез оптимальных траекторий движения ги-
перзвуковых ЛА в зонах риска // Известия Южного федерального
университета. Технические науки. Выпуск № 3. Том 32. 2003.
Литература 273
21. Рамм А., Корнев Д. Альбатрос мировой революции // Военно-
промышленный курьер [Электронный ресурс]. Режим доступа:
http://vpk-news.ru/articles/27160
22. Купцов И.М. Борьба с гиперзвуковыми летательными аппаратами
(ГЗЛА): новая задача и требования к системе воздушно-космиче-
ской обороны // Военная мысль. 2011. № 1. С. 11-17.
23. Купцов И.М.,Челъцов Б.Ф. Вопросы воздушно-космической обо-
роны в военной доктрине России // Военная Мысль. 2007. № 4.
С. 5-11.
24. Моисеев В.С. Основы теории эффективного применения беспилот-
ных летательных аппаратов: монография. Казань: РИЦ «Школа»,
2015. 444 с.
25. Беспилотные летательные аппараты мира. Справочник. 4-е изда-
ние, исправленное и переработанное / составители: В.Ю. Барков-
ский, Л.Р. Милованова; под ред. Н.Н. Новичкова. М.: Информаци-
онное агентство АРМС-ТАСС, 2013. 462 с.
26. Adams М. Health Rangers intelligence analysis of military drones:
payloads, countermeasures and more // www.naturalnews.com
16.07.2012 Available from URL: http://dronesurvivalguide.org
27. Яковлев КС., Петров A.B., Хитъков В.В. Программный комплекс
навигации и управления беспилотными транспортными средства-
ми // Информационные технлогии и вычислительные системы,
2013. Т.З. С. 72-83.
28. Макаров И.М., Лохин В.М., Манъко С.В., Романов М.П. Искусствен-
ный интеллект и интеллектуальные системы управления. М.: На-
ука, 2006. 333 с.
29. Reg Austin. Unmanned aircraft systems UAVS design development and
deployment, John Wiley and Sons, 2010. 365 c.
30. Аннотация к плану мероприятий («дорожной карте») по раз-
витию рынка АэроНэт [Электронный ресурс]. Режим доступа:
http://asi.ru/nti/docs/ AeroNet.pdf)
31. Малоразмерные беспилотники - новая проблема для ПВО //
Армейский вестник [Электронный ресурс]. Режим доступа:
http://army-news.ru/2015/02/malorazmernye-bespilotniki-novaya-
problema-dlya-pvo/
32. Организация системы борьбы с малоразмерными БПЛА // Ар-
сенал Отечества [Электронный ресурс]. Режим доступа: http://
arsenal-otechestva.ru/article/389-antidrone
274
В. К. Абросимов
33. Воронков Ю.С., Воронков О.Ю. Миниатюрные беспилотные лета-
тельные аппараты // Современные наукоемкие технологии. 2013.
№ 10. С. 144-147.
34. Попов Д.В., Федутинов Д.В. Развитие направления миниатюрных ле-
тательных аппаратов за рубежом. М.: ФГУП «ГосНИИАС», 2014.11с.
35. Донцов ГА. Новые подходы к задаче построения особо компакт-
ных оптических систем для микро-, нано- и пико-спутников:
дис.... канд. техн. наук. М., 2003. 119 с.
36. Овчинников М., Малые мира сего // Компьютерра. 2007. № 15. С.
37-43 [Электронный ресурс]. Режим доступа: http://old.computer-
ra.ru/2007/683/315829/.
37. Исследования солнечно-земных связей на микро-, нано- и пико-
спутниках // Материалы научной сессии Секции солнечно-земных
связей Совета по космосу Российской академии наук / под ред.
члена-корреспондента РАН А.А. Петруковича. Серия «Механика,
управление и информатика». М.: ИКИ РАН, 2015. 184 с.
38. Воробьев В.В. Логический вывод в статическом рое // Интегриро-
ванные модели и мягкие вычисления в искусственном интеллекте.
Сб. научных трудов VIII-й Международной научно-технической
конференции (Коломна, 18-20 мая 2015 г.). В 2-х томах. М.: Физ-
матлит, 2015. Т. 2. С. 539-548.
39. Карпов В.Э. Коллективное поведение роботов. Желаемое и дей-
ствительное // Современная мехатроника. Сб. научн. трудов Все-
российской научной школы. Орехово-Зуево, 2011. С. 35-51.
40. Кулинич А.А. Модель командного поведения агентов (роботов):
когнитивный подход // Управление большими системами. Вып. 51.
М.: ИПУ РАН, 2014. С. 174-196.
41. Каляев И.А., Гайдук А.Р., Капустян С.Г. Модели и алгоритмы кол-
лективного управления в группах роботов. М.: ФИЗМАТЛИТ,
2009. 280 с.
42. Капустян С.Г. Многоуровневая организация коллективного вза-
имодействия в группах интеллектуальных роботов // Известия
ТРТУ. Технические науки. 2004. № 9. С. 149-158.
43. Капустян С.Г. Децентрализованный метод коллективного распре-
деления целей в группе роботов // Известия высших учебных за-
ведений. Электроника. 2006. № 2. МИЭТ. С. 84-91.
44. Капустян С.Г, Усачев Л.Ж. Модель коллективного взаимодействия
в задаче группового управления роботами в условиях противодей-
Литература
275
ствия И Известия ЮФУ. Технические науки. 2008. № 12. Таганрог:
изд-во ТТИ ЮФУ. С. 26-36.
45. Каляев И.А., Капустян С.Г. Проблемы группового управления ро-
ботами // Мехатроника, Автоматизация, Управление. 2009. № 6.
С. 33-40.
46. Каляев И.А., Гайдук А.Р., Капустян С.Г. Самоорганизация в муль-
тиагентных системах // Известия ЮФУ. Технические науки. Таган-
рог: изд-во ТТИ ЮФУ, 2010. №3 (104). С. 14-20.
47. Каляев И.А., Гайдук А.Р., Капустян С.Г. Самоорганизующиеся си-
стемы группового управления интеллектуальными роботами //
Мехатроника, автоматизация, управление. 2010. № 12. С. 47-52.
48. Гайдук А.Р., Капустян С.Г. Концепция построения систем коллек-
тивного управления беспилотными летательными аппаратами //
Информационно-измерительные и управляющие системы. 2012.
№7. С. 8-16.
49. Каляев И.А., Гайдук А.Р., Капустян С.Г. Распределенные системы
планирования действий коллективов роботов. М.: Янус-К, 2002.
292 с.
50. Cao L., Zeng X Symeonidis A.L., Gorodetsky V., Мй11ег Yu Р. (Eds.)
Agents and Data Mining Interaction 11 Lecture Notes in Artificial
Intelligence, vol. 8316, 2014.
51. Gorodetsky V. Big Data: Opportunities, Challenges and Solutions I
In V. Ermolaev, H.C. Mayr, M. Nikitchenko, et al (Eds.) 11 Computer,
Communication and Information Technologies, vol. 469, Springer,
2014, pp. 1-20.
52. Prischepa M., Budkov V. Structural Model and Behavior Scenarios
of Information Navigation Mobile Robot 11 Springer International
Publishing Switzerland. A. Ronzhin et al. (Eds.): SPECOM 2014, LNAI
8773, 2014, pp. 444-451.
53. Крючков Б.И., Карпов A.A., Усов B.M. Перспективные подходы к
применению сервисных роботов в области пилотируемой космо-
навтики // Труды СПИИРАН. 2014. Вып. 32. С. 125-151.
54. Кулаков Ф.М., Шмыров А.С., Шиманчук Д.В. Методы управления
движением космического робота в окрестности точек либрации
// Сборник «XII Всероссийское совещание по проблемам управле-
ния ВСПУ-2014», Институт проблем управления им. В.А. Трапез-
никова РАН, 2014. С. 3792-3801.
В. К. Абросимов
276
55. Будаев Д.С., Вощук ЕЮ., Гусев Н.А., Майоров И.В., Мочалкин А.Н.
Разработка интеллектуальной системы адаптивного планирова-
ния действий групп летательных аппаратов для согласованного
выполнения задач // Труды 3-й Всероссийской научно-техниче-
ской конференции «РТИ Системы ВКО - 2015», 28 мая 2015 г. М.:
изд-во МГТУ им. Н.Э. Баумана, 2015. С. 506-514.
56. Будаев Д.С., Вощук ЕЮ., Гусев Н.А., Майоров И.В., Мочалкин А.Н.
Особенности построения программно-аппаратного комплекса
для согласованного выполнения задач группой беспилотных ап-
паратов на базе мультиагентных технологий и сетецентрического
подхода // Труды 3-й Всероссийской научно-технической кон-
ференции «РТИ Системы ВКО - 2015», 28 мая 2015 г. М.: изд-во
МГТУ им. Н.Э. Баумана, 2015. С. 486-505.
57. Скобелев П.О., Дахин О.И., Симонова Е.В., Жиляев А.А., Тра-
вин В.С. Мультиагентные технологии для оперативного планиро-
вания и обеспечения работы группировки космических аппара-
тов // Труды 3-й Всероссийской научно-технической конферен-
ции «РТИ Системы ВКО - 2015», 28 мая 2015 г. М.: изд-во МГТУ
им. Н.Э. Баумана, 2015. С. 476-485.
58. Симонова Е.В., Осипов И.В., Автоматизированная система монито-
ринга целевого применения группировки космических аппаратов
// Труды международной научно-технической конференции «Пер-
спективные информационные технологии (ПИТ-2015)», Самара,
28-30 апреля 2015 г. Самара: изд-во Самарского научного центра
РАН, 2015. Т. 2. С. 321-325.
59. Skobelev Р., Simonova Е., Ivanov A., Mayrov I., Travin V., Zhilyaev A.
Real time scheduling of data transmission sessions in the microsatellites
swarm and ground stations network based on multi-agent technology
11 Proceedings of the 6th International Conference on Evolutionary
Computation Theory and Applications (ECTA 2014), October 22-24
2014, Rome, Italy. SciTePress, 2014. pp. 153-159.
60. Skobelev P., Ivanov A., Simonova E., Travin V., Jilyaev A. Multi-agent
scheduling of communication sessions between microsatellites and
ground stations network 11 Онтология проектирования. 2014. № 2
(12). С. 92-100.
61. Соллогуб А.В., Скобелев П.О., Симонова Е.В., Степанов М.Е., Жи-
ляев А.А., ЦаревА.В. Логика работы агентов в интеллектуальной
системе распределенного управления группировкой малоразмер-
Литература
277
ных космических аппаратов // Труды XV Международной конфе-
ренции «Проблемы управления и моделирования в сложных си-
стемах», Самара, 25-28 июня 2013 г. Самара: Самарский научный
центр РАН, 2013. С. 383-390.
62. Бурый А.С., Фомичев И.Д. Мультиагентные модели управления
группами автономных летательных аппаратов [Электронный ре-
сурс] // Информационно-экономические аспекты стандартизации
и технического регулирования: Научный интернет-журнал. 2013.
№2(12).
63. Способы управления распределенной мобильной системой в ус-
ловиях неопределенности / А.В. Ахтеров и др. // Препринты ИПМ
им. М.В. Келдыша. 2012. № 67. 32 с. [Электронный ресурс]. Режим
доступа: http://library.keldysh.ru/preprint.asp?id=2012-67
64. Поиск пути мобильного робота в условиях наличия препятствий и
неполноты информации о среде / Д.Н. Алдошкин, Р.Ю. Царев II Ме-
хатроника, автоматизация, управление. 2016. Т. 17. № 7. С. 465-470.
65. Jorg Р. Muller, Klaus Fischer. Application Impact of Multiagent
Systems and Technologies: A Survey Available from URL: http://winf.
in.tuclausthal.de/winf/publications/2014/MuellerFischer2014aose.pdf
66. Городецкий В.И., Грушинский М.С., Хабалов А.В. Многоагент-
ные системы (обзор) [Электронный ресурс]. Режим доступа:
http://spkurdyumov.ru/networks/mnogoagentnye-sistemy-obzor/
67. Multiagent Systems: A Modern Approach to Distributed Artificial
Intelligence, by Gerhard Weiss (Editor). MIT Press, 2000. 644 p.
68. Multiagent Systems: Algorithmic Game-Theoretic, and Logical
Foundations, Hardcover - Cambridge University Press, 2008. 504 p.
69. Тарасов В.Б. От многоагентных систем к интеллектуальным орга-
низациям // Философия, психология, информатика. Эдиториал.
2002. 352 с.
70. Weiss G. (Ed). Multiagent Systems, MITP ress, 2013, 920 pp.
71. Shoham Y, Leyton-Brown K. Multiagent Systems: Algorithmic, Game-
Theoretic, and Logical Foundations: Cambridge University Press, 2008.
72. Мулюха В.А., Заборовский B.C., Илъяшенко A.C., Лукашин А.А. Се-
тецентрический метод организации информационного взаимо-
действия киберфизических объектов в среде облачных вычисле-
ний // Робототехника и техническая кибернетика. 2014. № 3 (4).
С. 43-47.
В. К. Абросимов
278
73. Российская армия переходит на сетецентрический принцип [Элек-
тронный ресурс]. Режим доступа: http://evrazia.org/news/12360
74. Павлиенко И.В. Анализ сетецентрических технологий и возмож-
ность их применения для разработки системы управления ин-
формационными ресурсами [Электронный ресурс]. Режим досту-
па: http://www.sworld.com.ua/index.php/ru/technical-sciences-311/
innovative-technologies-311/7993-analysis-of-network-centric-
technologies-and-their-applications-for-development-management-
information-resources.
75. Кубышкин А., Степанов В. Глобальная система ПРО США в контек-
сте стратегической стабильности // ОБОЗРЕВАТЕЛЬ-OBSERVER.
2012. № 12. С. 52-60.
76. Кудж С.А. Принципы сетецентрического управления в инфор-
мационной экономике // Государственный Советник. 2013. № 4.
С. 30-33.
77. Беленков О.В. Реализация технологии сетецентрического управ-
ления в АСУ войсками и оружием на базе ГИС «Карта 2011»
[Электронный ресурс]. Режим доступа: http://www.gisinfo.ru/item/
91.htm
78. Боев С.Ф. Сетецентрические системы регионального упровня ре-
ального масштаба времени [Электронный ресурс]. Режим доступа:
http://federalbook.ru/files/SVAYZ/saderzhanie/Tom%208/IV/Boev.pdf
79. Сетецентричность [Электронный ресурс] // Неогеография. - Ре-
жим доступа: http://www.neogeography.ru/ru/2010-05-04-20-41-25
(дата обращения 3.12.2012).
80. Hans VK Polzer. The Essence of Net-Centricity and Implications for C4I
Services Interoperability 11 The C4I Center at George Mason University.
2008. Available from URL: http://c4i.gmu.edu/events/reviews/2008/
papers/26_Polzer.pdf.].
81. OASIS Reference Model for Service Oriented Architecture V 1.0
П OASIS SOA Reference Model TC. 2009. Available from URL:
http://www.oasis-open.org/committees/download.php/19679/soa-rm-
cs.pdf.].
82. Klark A., Garstka J. Network-CentricWarfare - Its OriginandFuture»
II U.S. Naval Institute Proceedings Magazine, January 1998, Volume
124/1/1,139. Available from URL: http://www.usni.org/magazines/
proceedings/1998-01
83. Paul Valckenaers, H. Van Brussel Holonic manufacturing execution
systems. CIRP Ann Manuf Technol, in CIRP Annals - Manufacturing
Литература
279
Technology 54(1): рр. 427-432. December 2005, DOI: 10.1016/S0007-
8506(07)60137-1.
84. Иванов Д.Я. Пространственные формации в группах БПЛА. Мате-
риалы НТК // Управление в технических эргатичеких организаци-
онных и сетевых системах. Санкт-Петербург, 2012. С. 1226-1229.
85. Овчинников М.Ю. «Эх, мчится тройка удалая...». Институт при-
кладной математики им. М.В. Келдыша РАН, 2012 [Электронный
ресурс]. Режим доступа: http://www.keldysh.rU/events/3.pdf
86. Жданов А.А. Автономный искусственный интеллект. М.: БИНОМ:
Лаборатория знаний, 2013. 359 с.
87. Gibson SJ., Solomon С. Maylin I.S., Clark С. New methodology
in facial composite construction: from the ory to practice, Int. J. 11
Electronic Security and Digital Forensics, 2009, 2 (2): 156-168.
88. Frowd C.D., Pitchford M., Bruce V., Jackson S., Hepton G.M., McInty-
re A., Hancock P. J. The psychology of face construction: giving
evolution a helping hand 11 AppliedCognitivePsychology, 2010, 25 (2):
pp. 195-203
89. Абросимов B.K. Групповое движение интеллектуальных летатель-
ных аппаратов в антагонистической среде. М.: Издательский Дом
«Наука», 2013. 168 с.
90. Нечеткое моделирование и управление / А. Пегат; пер. с англ. М.:
БИНОМ. Лаборатория Знаний, 2009. 798 с.
91. Abrosimov V. Group Control Strategy for a Fleet of Intelligent Vehicles-
Agent Performing Monitoring., Agent and Multi-Agent Systems:
Technologies and Applications 9th KES International Conference,
KES-AMSTA 2015 Sorrento, Italy, Proceedings Jezic, Gordan, Howlett,
Robert J., Jain, Lakhmi C. (Eds.) v. 38, pp. 135-144.
92. Gabriela Lindemann-von Trzebiatowski, Ines Munch, The Role
Concept for Agents in MultiAgent Systems. Available from URL:
http://www.informatik.uni-hamburg.de/ TGI/forschung/ projekte/
sozionik/ journal/3/masho-3.pdf
93. Лисъев Г.А., Попова И.В. Технологии поддержки принятия реше-
ний: учебное пособие. М.: Флинта, 2011. 133 с.
94. Adamand Е., Mandiau R. Roles and Hierarchy in Multi-agent
Organizations, Multi-Agent Systems and Applications IV: Proceedings
of 4th International Central and European Conf, on Multiagent Systems
(CEEMAS), 2005, pp. 539-542.
95. Haiping Xu, Xiaoqin Zhang & Rinkesh J. Patel. Developing Role-
Based Open Multi-Agent Software Systems // International Journal of
280
В. К. Абросимов
Computational Intelligence Theory and Practice, vol. 2, no. 1, June 2007,
pp. 39-56.
96. Conor Brendan Ward, Brian Henderson-Sellers. Utilizing Dynamic Roles
for Agents II Journal of Object Technology, vol. 8, no. 5, July-August
2009, pp. 177-198. Available from URL: http://www.jot.fm/issues/
issue_2009_07article5/
97. James Odell, H. Van Dyke Parunak, Mitchell Fleischer. The Role of Roles
11 Journal of Object Technology, vol. 2, no. 1, January-February 2003,
pp. 39-51. Available from URL: http://www.jot.fm/issues/
issue_2003_01 /column5
98. Haibin Zhu Meng Chu Zhou. Role-Based Multi-Agent Systems. In
the book: Personalized Information Retrieval and Access: Concepts,
Methods, and Practices, IGIGlobal, 2008.
99. Sebnem Bora, AU Murat Tiryaki, Oguz Dikenelli. Load sharing based on
moving roles in multiagent systems, Turk J Elec Eng&Comp Sci, 2008,
vol. 20, no. 2, 2012, pp. 219-229/
100. Adam Campbell, Annie S. Wu. Multi-agent role allocation: issues,
approaches, and multiple perspectives // Autonomous Agents and
Multi-Agent Systems, 2011, volume 22, issue 2, pp. 317-355.
101. Anisi D., Thunberg J. Swedish Defense Research Agency, 2007. Report
FOI-R-2266-SE. 68 p.
102. Данилин А., Слюсаренко А. Архитектура и стратегия. «Инь» и
«Янь» информационных технологий предприятия: Интернет-Ун-т
Информ. Технологий, 2005. 504 с.
103. Abrosimov V. Swarm of Intelligent Control Objects In Network - Centric
Environment, Lecture Notes in Engineering and Computer Science:
Proceedings of The World Congress on Engineering 2014, WCE 2014,
2-4 July, 2014, London, U.K., pp. 76-79.
104. Нечеткие множества в моделях управления и искусственного ин-
теллекта / под ред. Д.А. Поспелова. М.: Наука, 1986. 312 с.
105. Кравченко А.И. Социология: учебник для вузов. М.: Академиче-
ский Проект, 2001. 2-е изд., перераб. и доп. 508 с.
106. Карпов В.Э. Управление в статических роях. Постановка задачи //
«Интегрированные модели и мягкие вычисления в искусственном
интеллекте». Сб. научных трудов VII-й Международной научно-
практической конференции (Коломна, 20-22 мая 2013). В 3-х то-
мах. Т. 2. М.: Физматлит, 2013. С. 730-739.
Литература
281
107. Эйрих С.Н. Обзор различных видов задачи маршрутизации транс-
порта, Труды международного семинара по интеллектуальному
планированию / под ред. А.В. Иващенко. Самара: изд-во Самар-
ского научного Центра РАН, 2012. 68 с.
108. Birhan Е., и Beshah В., Kitaw D., Abraham A. Stochastic Vehicle Routing
Problem: Literature Survey 11 Journal of Information & Knowledge
Management, vol. 13, no. 3, 2014, pp. 1-12.
109. Radha G., Bijendra S., Dhaneshwar P. Fuzzy Vehicle Routing Problem
with Uncertainty in Service Time: Int. J. Contemp. Math. Sciences,
vol. 5, 2010, no. 11, pp. 497-507.
110. Nasser A.E. Imprecision and Flexible Constraints in Fuzzy Vehicle
Routing Problem 11 American Journal of Mathematical and Manage-
ment Sciences, volume 31, no. 1-2, 2011.
111. Peng K, Ye-mei Qian. A particle swarm optimization to vehicle routing
problem with fuzzy demands 11 Journal of Convergence Information
Technology, volume 5, no. 6, 2010, pp. 112-119.
112. Imdat K, Bahar Y, Karaand M., Kadri Y. Cumulative Vehicle Routing
Problems, Vehicle Routing Problem, Tonci Caric and Hrvoje Gold (Ed.)
11 InTech, 2008, pp. 85-98.
113. Allan L. The Dynamic Vehicle Routing Problem - Ph.D. Thesis,
Department of Mathematical Modelling at the Technical University of
Denmark, 2001. 208 p.
114. Campbell A.M. The vehicle routing problem with demand range.
Department of Management Sciences, Henry B. Tippie College of
Business, University of Iowa, Iowa City, IA 52242-1994 Springer Science
+ Business Media, LLC, 2006. 12 p.
115. Kumar S.N., Panneerselvam K. A Survey on the Vehicle Routing Problem
and Its. Variants // Intelligent Information Management, 2012, no. 4,
pp. 66-74.
116. Лебедев Б.К., Лебедев О.Б. Моделирование адаптивного поведения
муравьиной колонии при поиске решений, интерпретируемых
деревьями // Известия ЮФУ. Технические науки. 2012. № 7 (132).
С. 27-34.
117. Курейчик В.М., Кажиров А.А. Муравьиные алгоритмы для решения
тренспортных задач И Известия РАН. Теория и системы управле-
ния. 2010. № 1.С. 32-45.
282
В. К. Абросимов
118. Hojjat Salehinejad, Siamak Talebi. Dynamic Fuzzy Logic-Ant Colony
System-Based Route Selection System Applied Computational
Intelligence and Soft Computing, vol. 2010, Article ID 428270,13 p.
119. Rozin V, Margaliot M. The Fuzzy Ant, Proceedings of the 6 IEEE
International Conference on Fuzzy Systems, 2006, pp. 1679-1686.
120. Bonabeau E., Theraulaz G., Dorigo M. Swarm Intelligence: from Natural
to Artificial Systems, Oxford University Press, 1999.
121. Masaya Yoshikawa, Tomohiro Taguchia. Hierarchical Hybrid Ant
Colony Optimization for High Speed Processing Proceedings of the
World Congress on Engineering and Computer Science, 2009, vol. II.
122. John E.B., Patrick R. McMullenb. Ant colony optimization techniques
for the vehicle routing problem 11 Advanced Engineering Informatics,
Elsevier, vol. 18, 2004, pp. 41-48.
123. Holvoet T, Valckenaers P. Exploiting the environment for coordinating
agent intentions 11 Environments for Multi-Agent Systems III, Lecture
Notes in Artificial Intelligence, Springer, vol. 4389, 2007, pp. 51-66.
124. Bellingham J.S., Tillerson M., Alighanbari M., How J.P. Cooperative Path
Planning for Multiple UAVs in dynamic and Uncertain Environments
11 Proceedings of the 41st IEEE Conference on Decision and Control,
2002, pp. 2816-2822.
125. Сгоёг C., Golden B., Wasil E. A library of local search heuristics for the
vehicle routing problem. Math. Prog. Comp., 2010, vol. 2, pp.79-101.
126. Taillard E. Parallel iterative search methods for vehicle routing problems
11 Networks, vol. 23, 1993, pp. 661-676.
127. Barth 'el'emy T, Rossi A., Sevaux M.> S'orensen K. Metaheuristics for
Clustered Vehicle Routing Problems. EU/Meeting 2010, Lorient, France.
Available from URL: http://homepage.univie.ac.at/thibaut.barthelemy/
eume2010-slides.pdf
128. Braysy O., Gendreau M. Vehicle routing problem with time windows,
part I: route construction and local search algorithms 11 Transportation
Science, 39(1), 2005. pp. 104-118.
129. Pei Tang, Shanhong Zhu. Emergency Logistics Distribution VRP
Based on Differential Evolution Optimization 11 Journal of Software
Engineering, no. 9, 2015, pp. 105-113.
130. Miaomiao D., Hua Y. Research on Multi-objective Emergency Logistics
Vehicle Routing Problem under Constraint Conditions // Journal of
Industrial Engineering and Management, no. 6(1), 2013, pp. 258-266.
Литература
283
131. Dorigo М., Gambardella L.M. Ant colony system: A cooperativ elearn-
ing approach to the traveling sales man problem 11 IEEE Transctions on
Evolutionary Computation, no. 1, 1997, pp. 53-66.
132. Ignatyev A.L., Posypkin M.A., Sigal LKh. Solving the Travelling Salesman
Problem on Shared and Ditstributed Memory Systems // In Proc,
of Optimization and applications Conf. (OPTIMA-2009), Petrovac,
Montnegro, 2009, pp. 37-38.
133. Даль В.И. Большой иллюстрированный толковый словарь русско-
го языка. Современное написание. М.: ACT, Астрель, 2006. 352 с.
134. Карпов В.Е. Эмоции роботов // Двенадцатая национальная конфе-
ренция по искусственному интеллекту с международным участи-
ем КИИ-2010 (20-24 сентября 2010 г., Тверь, Россия). Труды конфе-
ренции. Том 3. Тверь, 2010. С. 354-368.
135. Пенский О.Г., Черников К.В. Основы математической теории эмо-
циональных роботов: монография. Пермь: Перм. гос. ун-т., 2010.
256 с.
136. Стратегическое ядерное вооружение России / под ред. ПЛ. Под-
вига. М: ИздАТ, 1998. 492 с.
137. Карпов В.Э. Эмоции и темперамент роботов. Поведенческие аспек-
ты // Известия РАН. Теория и Системы управления. 2014. № 5.
С. 166-185.
138. Абросимов В.К. Моделирование мониторинга местности в актив-
ной враждебной среде с использованием свойства «жертвенно-
сти» агента // Труды 7 Всероссийской научно-практической кон-
ференции «Имитационное моделирование. Теория и практика»
(ИММОД-2015). Часть 1. С. 4-9.
139. Веселов Г.Е. Синергетический синтез иерархических взаимосвя-
занных робототехнических комплексов // Синергетика и пробле-
мы теории управления / под ред. А.А. Колесникова. М.: Физматлит,
2004. С. 270-288.
140. Abrosimov V. Role Allocation in a Group of Control Objects, Recent
Developments in Intelligent Nature-Inspired Computing Chapter 10
Publisher: Springer-Verlag, Heidelberg, Germany, IGI Global 2017 pp
206 -224 DOI: 10.4018/978-l-5225-2322-2.ch010.
141. Shiva Vafadar, Ahmad Abdollahzadeh Barfourosh. Requirements
Engineering In Agent-oriented Software Engineering. Amirkabir
University of Technology (Tehran Polytechnic), no. 424, Hafez Ave.,
Tehran 15914, Iran. 2008.
284
В. К. Абросимов
142. Jiang Н, Vidal J.M., Huhns M.N. EBDI: An Architecture for Emotional
Agents П Proceedings AAMAS’07, 2007, Honolulu, Hawai’i, USA.
Available from http://jmvidal. cse.sc.edu/papers/jiang07a.pdf/
143. Czaplicka A., Chmieland A., Holyst J.A. Emotional Agents at the Square
Lattice 11 Proceedings of the 4th Polish Symposium on Econo- and
Sociophysics, Rzeszow, Poland, 2009.
144. Pereira D., Oliveira E., Moreira N., Sarmento L. Towards an architecture
for emotional BDI agents 11 Proceedings of 12th Portuguese Confer-
ence on Artificial Intelligence, Universidade da Beira Interior, 2005,
pp. 40-46.
145. Иванов Д.Я. Методы построения пространственных формаций в
группах беспилотных летательных аппаратов типа квадрокопте-
ров: дис.... канд. техн. наук. Таганрог, 2016. 216 с.
146. Чернухин Ю.В., Сапрыкин Р.В. Алгоритм поведения интеллектуаль-
ных агентов при исследовании естественной среды функциониро-
вания И Известия ЮФУ, Технические науки. 2008. Т. 81. Вып. 4.
С. 83-87.
147. Ivanov D., Kalyaev I., Kapustyan S. Formation Task in a Group of
Quadrotors. Robot Intelligence Technology and Applications. Springer
International Publishing, 2015. pp. 183-191.
148. Zhang X., Hexmoor H. Utility-based Role Exchange // From Theory to
Practice in Multi-Agent Systems, Second International Workshop of
Central and Eastern Europe on Multi-Agent Systems, CEEMAS 2001,
Cracow, Poland, September 26-29, 2001.
149. Tuli G.y Hexmoor H. Influencing Agent Group Behavior by Adjusting
Cultural Trait Values. IEEE Transactions ons ystems, CYBERNETICS 1,
2009, pp 1-12.
150. Rao A.S. Georgeff M. P. BDI agents: From theory to practice П
Proceedings of the First International Conference on Multi-Agent
Systems (ICMAS-95), San Francisco, USA, 1995, pp. 312-319.
151. Hong Jiang. From Rational to Emotional Agents, Degree of Doctor of
Philosophy. Department of Computer Science and Engineering College
of Engineering and Computing. University of South Carolina, 2007.
152. H.Jiang, From Rational to Emotional Agents, Doctor of Philosophy
Thesis, 2007. Available from URL: http://jmvidal.cse.sc.edu/papers/
jiang07b.pdf.
Литература
285
153. Jared С.Н., Johnson F.R., Archibald J.K., Frost R.L., Stirling W.C. A
Cooperative Multi-Agent Approach to Free Flight, Proceedings of
AAMAS, 2005, pp. 1083-1090.
154. Hill J.C., Archibald J.K., Stirling W.C., Frost R.L. A Multi-Agent System
Architecture for Distributed Air Traffic Control. Brigham Young Uni-
versity, Provo, Utah 84602-4099, USA, pp. 1-11.
155. Azhana A. and oth. Resolving Conflicts between Personal and
Normative Goal // Proceedings of 7th International Conference on
EEEE. Normative Agent Systems Information TechnologyinAsia (CITA
11), 2011, pp. 1-6.
156. Wolfgang B., Wolfgang P. Equal Sacrifice and Fair Burden-Sharing in a
Public Good Economy. University of Regensburg. 2007. Available from
URL: http://www.wiwi.europa-uni.de/de/lehrstuhl/fine/fiwi/team/pe-
tersZBuchholzPeters_2007b.pdf
157. Roie Zivan, Alon Grubshteiny, Michal Friedman, Amnon Meiselsy. Partial
Cooperation in Multi-agent Search (Extended Abstract) 11 Proceedings
of the 11th International Conference on Autonomous Agents and
Multiagent Systems (AAMAS 2012), Ben Gurion University of the
Negev, Beer-Sheva, Israel, 2012.
158. Waibel M., Floreano D., Keller L.A. Quantitative Test of Hamiltons Rule
for the Evolution of Altruism П PLoS Biology, vol. 9, no. 5, 2011.
159. Zhang X., Hexmoor H. Utility-based Role Exchange П From Theory to
Practice in Multi-Agent Systems, Second International Workshop of
Central and Eastern Europe on Multi-Agent Systems (CEEMAS 2001),
Cracow, Poland, 2001.
160. Gabriela Lindemann-von Trzebiatowski, Ines Munch, Kendall E.A. The
Role Concept for Agents in MultiAgent Systems. Available from URL:
http://www.informatik.uni-hamburg.de/TGI/forschung/projekte/
sozionik/journal/3Zmasho-3.pdf
161. Городецкий В.Н. Теория, модели, инфраструктуры и языки специ-
фикации командного поведения автономных агентов. Обзор // Ис-
кусственный интеллект и принятие решений. 2011. № 3. С. 34-47.
162. Подиновский В.В. Математическая теория выработки решений в
сложных ситуациях. М.: МО СССР, 1981. 211 с.
163. Виноградов Г.П. Моделирование процесса формирования пред-
ставлений интеллектуального агента о состоянии целеустремлен-
ного выбора // Проблемы информатики. 2010. № 3. С. 66-72.
286
В. К. Абросимов
164. Карпов Ю. Имитационное моделирование систем. Введение в мо-
делирование с AnyLogic 5. БХВ-Петербург, 2006. 400 с.
165. Abrosimov V. The property of agents sacrifice: definition, measure, effect
and applications, Int. J. Reasoning-based Intelligent Systems, 2016, vol.
8, no. 1/2, pp. 76-83.
166. Абросимов B.K. Нейронная пространственно-временная модель
движения объектов управления // Нейрокомпьютеры. Разработка,
применение. 2014. № 3. С. 26-35.
167. Abrosimov V, Ivanov V. Motion Strategy by Intelligent Vehicles-Agents
Fleet in Unfriendly Environment. Automation Control Theory Per-
spectives in Intelligent Systems 11 Proceedings of the 5th Computer
Science On-line Conference. (CSOC2016). Springer Series: Advances
in Intelligent Systems and Computing, Springer International Pub-
lishing Switzerland, 2016, vol. 3, pp. 315-324. Available from URL:
http://link.springer.com/chapter/10.1007/978-3-319-33389-2_30.
168. Моисеев Г.В., Моисеев В.С. Основы теории создания и применения
имитационных беспилотных авиационных комплексов. Казань:
РЦМКО, 2013. 208 с.
169. Abrosimov V. A Multiagent System for Transboundary Monitoring 11
International Journal of Emergency Management, 2017, Forthcoming
article, in press. Available from URL: http://www.inderscience.com/
info/ingeneral/forthcoming.php?jcode=ijem
170. Разработка научно-методических подходов и технологии исполь-
зования беспилотных летательных аппаратов в лесном хозяйстве
// Отчет о научно-исследовательской работе. Пушкино: ФГУ «Ави-
алесоохрана», 2010. 105 с.
171. Lughofer Edwin. Evolving Fuzzy Systems, Methodologies, Advanced
Concepts and Applications Series: Studies in Fuzziness and Soft
Computing, 2011, vol. 266, XXIV, 456 p.
172. Абросимов В.К., Гончаренко В.И. Мониторинг чрезвычайной ситуа-
ции группой разнотипных беспилотных летательных аппаратов //
Наукоемкие технологии. 2016. № 9. С. 40-48.
173. Заборовский В.С., Гук М.Ю., Илъяшенко А.С., Мулюха В.А., Селез-
нев КС. Сетецентрические алгоритмы интерактивного управле-
ния роботами с борта МКС, Труды XII Всероссийского совещания
по проблемам управления, ВСПУ2014, с 7424-7435
174. Weyns D., Holvoet Т. Architectural design of a situated multiagent
system for controlling automatic guided vehicles, Int. J. Agent-Oriented
Software Engineering, 2008, vol. 2, no. 1, pp. 90-128.
Литература
287
175. Buijs Р. Project: Development of a Transboundary Environmental
Monitoring System (2007-2011) // Society for the Protection of
Prespa, 2011. Available from URL: http://www.spp.gr/spp/index.
php?option=com_content&view=article&id=63&Itemid=68&lang=en.
176. Barbarosogu G., Ozdamar L., Cevik A. An interactive approach or
hierarchical analysis of helicopter logistics in relief operation.European
Journal of Operational Research, 2002,140, pp. 118-133. Available from
URL: http://dx.doi.org/10.1016/S0377-2217(01)00222-3
177. Barrie M.B., Ay echew M.A. A genetic algorithm for the vehicle routing
problem.Computers& Operations Research, 2003, 30, pp. 787-800.
Available from URL: http://dx.doi.org/10.1016/S0305-0548(02)00051-5
178. Miaomiao D., Hua Y. Research on Multi-objective Emergency Logistics
Vehicle Routing Problem under Constraint Conditions // Journal of
Industrial Engineering and Management JIEM, 2013, 6(1): pp. 258-266
179. Miaomiao Du, Hua Yi. Research on Multi-objective Emergency
Logistics Vehicle Routing Problem under Constraint Conditions
Journal of Industrial Engineering and Management JIEM, 2013-6(1):
pp. 258-266.
180. Che-Fu Hsueh, Huey-Kuo Chen, Huey-Wen Chou. Dynamic Vehicle
Routing for Relief Logistics in Natural Disasters in Vehicle Routing
Problem, TonciCaric and Hrvoje Gold (Ed.) // I-Tech Education and
Publishing KG, Vienna, Austria, 2008, pp. 71-84.
181. Lawrence S.H. International transboundary cooperation: some best
practice guidelines 11 From Crossing Boundaries in Park Management:
Proceedings of the 11th Conference on Research and Resource
Management in Parks and on Public Lands, The George Wright Society,
2001, pp. 204-210. Available from URL: http://www.georgewright.
org/34hamilt.pdf
182. Abrosimov V.K. Confidence-Building Measures Relating to Anti-
Ballistic Missile Defense Problem 11 Disarmament Forum, 2001, № 1,
pp. 39-45.
183. Barbarosogu G., Ozdamar L., Cevik A. An interactive approach or hier-
archical analysis of helicopter logistics in relief operation 11 European
Journal of Operational Research, 2002, 140, 118-133. Available from
URL: http://dx.doi.org/10.1016/S0377-2217(01)00222
184. Borshchev A. The Big Book of Simulation Modeling. Multimethod
Modeling with AnyLogic 6, 2013. Available from URL: http://www.
anylogic.ru/big-book-of-simulation-modeling
288
В. К. Абросимов
185. Глобальная система на переломе: пути к новой нормальности: пер.
с англ.; под ред. А. Дынкина. М.: ИМЭМО РАН, 2016. 32 с.
186. Абросимов В.К. Пешком за смыслом. М.: Карьера Пресс, 2012. 368 с.
187. Майоров И.В. Мультиагентные модели и технологии ситуационно-
го управления ресурсами предприятий в условиях неопределенно-
сти: дис. ... канд. техн. наук. Самара: СГТУ, 2017. 177 с.
188. Белоглазов Д.А., Гайдук А.Р., Косенко Е.Ю., Медведев М.Ю., Пшихо-
пов В.Х., Соловьев В.В., Титов А.Е., Финаев В.И., Шаповалов И.О.
Групповое управление подвижными объектами в неопределенных
средах / под. ред. В.Х. Пшихопова. М.: ФИЗМАТЛИТ, 2015. 305 с.
189. Pshikhopov V, Medvedev М., Gaiduk A., Kolesnikov A. Control
method for heterogeneous vehicle groups control in obstructed 2-D
environments // Lecture Notes in Computer Science (including
subseries Lecture Notes in Artificial Intelligence and Lecture Notes in
Bioinformatics), 2016, 9812, pp. 40-47.
190. Белоглазов Д.А., Гузик В.Ф., Косенко Е.Ю., Крухмалев В.А., Медве-
дев М.Ю., Переверзев В.А., Пшихопов В.Х., Пъявченко О.А., Сапры-
кин Р.В., Соловьев В.В., Финаев В.И., Чернухин Ю.В., Шапова-
лов И.О. Интеллектуальное планирование траекторий подвижных
объектов в средах с препятствиями / под ред. проф. В.Х. Пшихопо-
ва. М.: ФИЗМАТЛИТ, 2014. 450 с.
191. Gaiduk A., Kapustyan S., Shapovalov I. Self-organization in groups of
intelligent robots 11 Advances in Intelligent Systems and Computing,
2015. Vol. 345. pp. 171-181.
192. Пшихопов B.X., Медведев М.Ю., Гайдук A.P. Алгоритмы управле-
ния неоднородными группами подвижных объектов в двумерных
средах с препятствиями И Мехатроника, автоматизация, управле-
ние, 2016, Т. 17, № 8, С. 515-524.
193. Гайдук А.Р., Капустян С.Г, Меркулов В.И., Бесклубова КВ. Группо-
вое управление БЛА // Информационно-измерительные и управ-
ляющие системы, 2014. Т. 12, № 11, С. 24-36.
194. Eshetie Berhan, Birhanu Beshah and Daniel Kitaw Ajith Abraham
Stochastic Vehicle Routing Problem: A Literature Survey Journal of
Information & Knowledge Management, Vol. 13, No. 3, 2014, p. 1-12
195. Jelmer van Ast, Robert Babuska, and Bart De Schutte. Fuzzy Ant
Colony Optimization for Optimal Control, 2009 American Control
ConferenceHyatt Regency Riverfront, St. Louis, USA, 2009
Литература
289
196. Russell Bent, Pascal Van Hentenryck. Waiting and Relocation Strategies
in Online Stochastic Vehicle Routing, Procedings of the IJCAI-07,
2007. pp. 1817-1821. Available from URL: http://cs.brown.edu/people/
pvh/relocation.pdf
197. Sin C. Ho, Dag Haugland. A tabu search heuristic for the vehicle routing
problem with time windows and split deliveries. Available from URL:
http://www.ii.uib.no/~dag/publications/papers/compor04.pdf
198. Tonci Caric, Ante Galic, JurajFosin, Hrvoje Gold, Andreas Reinholz.
A Modelling and Optimization Framework for Real-World Vehicle
Routing Problems, in the book VehicleRouting Problem. Ed. by
TonciCaric and Hrvoje Gold, InTech, 2008, 142 p.
199. Корепанов B.O. Модели рефлексивного группового поведения и
управления. М.: ИПУ РАН, 2011. - 127 с.
200. Корепанов В.О., Новиков Д.А. Метод рефлексивных разбиений в
моделях группового поведения и управления И Проблемы управ-
ления. 2011. № 1. С. 21-32.
201. Новиков Д.А., Корепанов В.О. Задача о диффузной бомбе // Про-
блемы управления. 2011. № 5. С. 66-73.
202. Корепанов В.О. Имитационные модели тактического поведения
агентов // Управление большими системами. 2009. Выпуск 26.
С. 145-157.
203. Новиков Д.А., Бреер В.В., Рогаткин А.Д. Управление толпой: мате-
матические модели порогового коллективного поведения. М.: ЛЕ-
НАНД, 2016. 168 с.
204. Новиков Д.А. Кибернетика (навигатор). История кибернетики, со-
временное состояние, перспективы развития. 1-е издание на рус.
яз. М.: ЛЕНАНД, 2016. 160 с.
205. Новиков Д.А., Чхартишвили А.Г. Активный прогноз. М.: ИПУ
РАН, 2002. 101 с
206. Новиков Д.А. Институциональное управление организационными
системами. М.: ИПУ РАН, 2004. 68 с
207. Новиков Д.А. Модели формирования и функционирования не-
однородных команд ИПУ РАН, 2007 [Электронный ресурс]. Ре-
жим доступа: https://www.researchgate.net/publication/274390551_
Modeli_formirovania_i_funkcionirovania_neodnorodnyh_komand
290
В. К. Абросимов
ПЕРЕЧЕНЬ СОКРАЩЕНИЙ
Сокращение Расшифровка
БАК Беспилотный авиационный комплекс
БЛА Беспилотный летательный аппарат (в англоязычной литературе - drone - дрон)
ВКО Воздушно-космическая оборона
ВМФ Военно-морской флот
ВМС США Военно-морские силы США
ГЗЛА Гиперзвуковой летательный аппарат
ЖРД Жидкостной ракетный двигатель
ИРК Информационный ресурс коллектива
ЛА Летательный аппарат
ноим Национальное общество имитационного моделирова- ния (Россия)
ПВО Противовоздушная оборона
ПВС Пространственно-временная структура
по Программное обеспечение
ПК Программный комплекс
ПРО Противоракетная оборона
РЛС Радиолокационная станция
СМИ Средства массовой информации
СПРН Система предупреждения о ракетном нападении
ТЧС Трансграничная чрезвычайная ситуация
Перечень сокращений 291
TS Тип мотивации агента, сформированный при обуче- нии (АА - «агент-альтруист», АР - «агент-прагматик», АЕ - «агент-эгоист»).
ФК Фоторобот коллектива летательных аппаратов
ЧС Чрезвычайная ситуация
DARPA Defense Advanced Research Projects Agency - агентство передовых оборонных исследовательских проектов США
RDBIE Предлагаемая автором архитектура построения ро- левой модели агентов в коллективе (сокращения от - Responsibility-Desire-Belief-Intention-Emotion).
292
В. К. Абросимов
ТАБЛИЦА ОСНОВНЫХ ОБОЗНАЧЕНИЙ
Условное обозначе- ние Расшифровка и содержание обозначения
Обозначения, имеющие отношение к летательному аппарату (агенту)
Обозначение к-го ЛА-агента (сокращение от Vehicle)
кеК Номер ЛА-агента в коллективе, состоящем из К ЛА- агентов
Век к Обозначение множества убеждений к-го ЛА-агента (от англ. Belief)
ОЫ, к Обозначение множества обязательств к-го ЛА-агента (от англ. Obligations)
!ntk Обозначение множества намерений к-го ЛА-агента (от англ. Intentions)
rkZ&R, Исходный ресурс к-го ЛА-агента (в начале выполнения коллективной миссии - на числовой шкале)
rkW) Текущий ресурс к-го ЛА-агента (в процессе выполнения коллективной миссии - на числовой шкале) к моменту времени t
rkl, Ресурс, требуемый для достижения к-м ЛА-агентом объекта nh из занимаемого в настоящее время состояния
К г-й ресурс к-го ЛА-агента, требуемый для решения 5-й проблемы
h Скорость движения к-го ЛА-агента
Таблица основных обозначений
293
Располагаемое (максимальное) время движения к-го ЛА-агента, определяемое из условия запаса и расхода ресурса (топлива)
Фиксированный момент времени при движении ЛА- агента по маршруту движения Мк
Планируемое время движения k-го ЛА-агента по марш- руту движения Мк
Оставшийся запас временного ресурса k-го ЛА-агента по маршруту движения Мк
к Ценность к-ro ЛА-агента для коллектива (как функция принадлежности на нечеткой шкале)
F Множество функций, составляющих функционал к-го ЛА-агента
Fk d-функция k-го ЛА-агента
cd 1 j-я характеристика d-функции ЛА-агента
Ак Признак текущей активности k-того ЛА-агента
тг У/s, Параметры нечеткого числа, описывающего j-ю харак- теристику ЛА-агента при его (числа) представлении в виде нечеткого числа L-R типа
Р':(с;‘) Функция принадлежности j-характеристики d-функции к-ro ЛА-агента нечеткому множеству характеристик С
Коэффициент, отражающий квалификацию k-го ЛА- агента
Обозначения, имеющие отношение к исполнению агентом роли в коллективе
Z Множество ролей, требуемых для достижения коллек- тивной миссии
Role Роль, занимаемая ЛА-агентом либо назначаемая ЛА- агенту
RZ Множество ролевых задач роли Role
RZA Множество атрибутов ролевой задачи роли Role
RP Множество специфических особенностей исполнения роли
Z1 i-я ролевая задача Z'eRZ роли RoleeZ
294
В. К. Абросимов
af /-й атрибут z-й ролевой задачи Z' роли Role
Рл(ар Функция принадлежности атрибута а' роли Role нечет- кому множеству атрибутов А
mf, af, Характеристики нечеткости/-™ атрибута ролевой за- дачи роли Role при его представлении в виде нечеткого числа L-R типа
GziK Подмножество агентов, рассматриваемых как кандида- ты на роль Role
Rd Функционал, требуемый для исполнения роли Role
Ror Совокупность ресурсов, требуемых для исполнения роли Role
P Функционал, который требуется для разрешения s-й проблемной ситуации
Rs Ресурсы, которые требуются для разрешения s-й про- блемной ситуации
Q/GZ к z-я роль k-го ЛА-агента в коллективе
Q Признак ролевой функциональности - логическая пере- менная, отражающая наличие у k-агента функций, тре- буемых по выделенной роли Q = 0,1
Обобщенная оценка готовности агента к занятию и ис- полнению роли Role по ролевой задаче Z' и атрибуту а/
Вес, отражающий значимость /-го атрибута для испол- нения роли Role
Обозначения, имеющие отношение к объекту мониторинга
N Количество исследуемых объектов в процессе монито- ринга
п, п 1 1 z-й (/-й) объект на маршруте мониторинга ЛА-агента
<р„ Значимость («вес») и-го объекта
(ПЧ Приоритетность обследования объектов при монито- ринге к-м ЛА-агентом (движение к объекту; после объ- екта /) (р^е [0,1] в q-м цикле мониторинга
Интенсивность ситуации на и-м объекте мониторинга
Кортеж значений интенсивности ситуации на всех N объектах мониторинга
Таблица основных обозначений
295
/V Интенсивность ситуации на п-м объекте в q-м цикле мо- ниторинга
Приращение интенсивности ситуации на и-ном объекте в q-м цикле мониторинга
|и| Матрица интенсивности ситуаций на маршруте следо- вания между объектами i и j в процессе мониторинга ЛА-агентами
Элементы матрицы |U| интенсивности ситуаций на маршруте следования между объектами i wj
Элементы матрицы |U| интенсивности ситуации между объектами i и j в q-м цикле мониторинга
Приращение интенсивности ситуации между объекта- ми i и j в q-м цикле мониторинга
|Р| Матрица степени опасности ситуации на маршруте сле- дования между объектами i и j в процессе мониторинга ЛА-агентами
Р; Элементы матрицы |Р| степени опасности ситуации на маршруте следования между объектами i nj.
ак" Показатель факта обследования н-го объекта к-м ЛА- агентом (акп = 0,1)
У" Момент времени обследования н-го объекта к-м ЛА- агентом
|D| Матрица расстояний между объектами мониторинга
d V Расстояние между точками i nj на маршруте следования ЛА-агента (элемент матрицы |D|)
Г У Расход ресурса на движение ЛА-агента от объекта i к объекту;
Обозначения, имеющие отношение к построению маршрутов агентов
ч Маршрут к-го ЛА-агента
Nk Количество объектов, включенных в маршрут Мк
A?k(nkh) Уровень включения объекта nh в маршрут Мк движения к-го ЛА-агента
AGk(nkf Уровень исключения объекта nh из маршрута Мк движе- ния к-го ЛА-агента
296
В. К. Абросимов
Ч+(0 Маршрут, пройденный k-м ЛА-агентом к моменту вре- мени t
N/(t) Количество объектов, обследованных при движении ЛА по маршруту Mk+(t)
Ч-(0 Маршрут, оставшийся непройденным к-м ЛА-агентом к моменту времени t
N;(t) Количество объектов, оставшихся необследованными (включенными в маршрут M;(f))
V Суммарная протяженность маршрута Mk~(t) k-го ЛА- агента
v- Суммарное время прохождения маршрута Mk~(t) k-го ЛА-агента
F.ar Обозначение критерия завершенности построения маршрута ЛА-агента
Обозначения в отношении враждебности среды
S Область враждебности среды, опасная для движения ЛА-агента (проблемная зона),
s Условное обозначение проблемной ситуации sgS
7Г5 Вероятность/возможность того, что s-я проблемная си- туация повлияет на выполнение коллективной задачи
Л£ п Степень опасности движения в с-окрестности н-го объ- екта
рк‘ Вероятность/возможность нарушения функционирова- ния (гибели) k-го ЛА-агента в s-й проблемной ситуации
Вероятность/возможность функционирования k-го ЛА- агента в области враждебности S (в частном случае, вы- живания - Survival) после воздействия
Обозначения в отношении целевых функций при выполнении коллективной миссии
W4t) Коллективная целевая функция
Wx'(f) Заданное значение коллективной целевой функции
AWs(f) Прогнозируемые потери целевой функции Wx(t) в s-й проблемной ситуации на момент t*
Wx'(f) Производная функции Wx(t) на прогнозируемый мо- мент времени f
Таблица основных обозначений
297
Swk(t) Величина текущего вклада k-го ЛА-агента в выполнение общей коллективной задачи к моменту времени t
Суммарный вклад k-го ЛА-агента в коллективную целе- вую функцию
Вклад, внесенный агентом в коллективную целевую функцию к моменту времени t
Swk(t) Вклад, недовнесенный агентом в коллективную целевую функцию к моменту времени t
8wx as Суммарный вклад агента, выбранного «жертвой» («as» - agent-sacrifice) в коллективную целевую функцию
8w' к Вклад k-го ЛА-агента в коллективную целевую функцию по результатам обследования объекта и
w N Часть коллективной целевой функции, сформирован- ной по результатам мониторинга всех N объектов по всем q итерациям рекуррентного алгоритма
M Часть коллективной целевой функции, сформирован- ной по результатам мониторинга при следовании между объектами по маршруту Мк по всем q итерациям рекур- рентного алгоритма
AWs(f) Суммарная потеря коллективной целевой функции вследствие потери J ЛА-агентов в s-й проблемной ситу- ации к моменту f
4C(f) Суммарный ущерб коллективу ЛА-агентов по критерию «ценность агента» вследствие потери J агентов в s-й про- блемной ситуации к моменту f
Обозначения по теме «жертвенность» агентов
ks as Агент, выбранный «жертвой» («as» - agent-sacrifice) в s-й проблемной ситуации
Условное обозначение функционала k-го ЛА-агента, не- обходимого для решения s-й проблемы
Условное обозначение ресурсов k-го ЛА -агента, необ- ходимых для решения s-й проблемы
Мера «жертвенности» k-го ЛА-агента, отражающая его готовность стать «жертвой» в s-й проблемной ситуации
Э (f) Эффект от «жертвы» агента, полученный к моменту f
298
В. К. Абросимов
к Обозначение r-го ресурса к-го ЛА-агента, необходимого для реализации роли «жертвы» (на нечеткой шкале)
л(кх, ку) Функция предпочтительности агента кх над агентом ку с точки зрения назначения ЛА-агента на роль «жертвы»
РоМ Степень обязательств к-го ЛА-агента перед коллекти- вом решить s-ю проблему
Степень убежденности к-го ЛА-агента в возможности решения s-й проблемы
р,(у) Степень намерений к-го ЛА-агента решить s-ю проблему
Обозначения, имеющие отношение к муравьиному алгоритму целераспределения ЛА-агентов по объектам мониторинга
Л Величина феромона, откладываемая муравьем при дви- жении между объектами nt и п.
Величина изменения значения феромона при движении между объектами nt и и на r-й итерации муравьиного алгоритма
ф Коэффициент, отражающий скорость испарения феро- мона
% Величина, обратная расстоянию d, между объектами nt и п.
а Эмпирический коэффициент, определяющий «жад- ность» муравьиного алгоритма
р Эмпирический коэффициент, определяющий «стад- ность» муравьиного алгоритма
У Эмпирический коэффициент для учета особенностей ситуации при движении ЛА-агента на маршруте мони- торинга
Л Эмпирический коэффициент для учета интенсивности ситуации на маршруте мониторинга ЛА-агента
ЛЛ) Вероятность перехода от объекта i к объекту j при ис- пользовании муравьиного алгоритма на r-й итерации
7(г) Множество обследованных всем коллективом ЛА- агентов объектов в r-й итерации муравьиного алгоритма
К м Множество ЛА-агентов, для которых построение марш- рутов уже завершено
Таблица основных обозначений
299
Обозначения, имеющие отношение к коллективу агентов
К Количество летательных аппаратов (агентов) в коллек- тиве
п а Количество ЛА-агентов, обученных в парадигме «аль- труист»
п р Количество ЛА-агентов, обученных в парадигме «праг- матик»
п е Количество ЛА-агентов, обученных в парадигме «эго- ист»
rq* i-я потребность (функция, характеристика) в решении s-й проблемы
Pb; j-я возможность (функция, характеристика) k-го агента по решению s-й проблемы
Обозначения, имеющие отношение к доверию в коллективах агентов
Количественный состав международной группировки летательных аппаратов страны А
К» Количественный состав международной группировки летательных аппаратов страны В
£ab Степень доверия стороны А к информации, полученной от стороны В
Коэффициент доверия стороны А по отношению к сто- роне В по j-й группе мер доверия
Л"1, Суммарный показатель эффективности мер доверия стороны А по отношению к стороне В
Суммарная интенсивность трансграничной чрезвычай- ной ситуации на маршруте Мк k-го ЛА-агента между объектами мониторинга
Оценка интенсивности трансграничной чрезвычайной ситуации стороной А на собственной национальной территории
Оценка интенсивности трансграничной чрезвычайной ситуации стороной А на национальной территории сто- роны В
300
В. К. Абросимов
1^1 Кортеж суммарной интенсивности трансграничной чрезвычайной ситуации на всех объектах территории стороны А
Кортеж суммарной интенсивности трансграничной чрезвычайной ситуации на всех объектах территории стороны В
ши А Матрица интенсивности трансграничной чрезвычайной ситуации на маршруте МА мониторинга национальной территории стороны А при следовании /с-го ЛА-агента между объектами
Wt) Общая оценка интенсивности трансграничной чрезвы- чайной ситуации стороной А
Прочие обозначения
i Обозначение текущей переменной
j Обозначение текущей переменной
I Обозначение текущей переменной
s Переменная для обозначения а) параметра характери- стики функции агента; 6) проблемной ситуации
d Переменная для обозначения функции агента
f Переменная для обозначения а) атрибута ролевой зада- чи; 6) критерия оценки агента на роль жертвы
q Переменная цикла процесса мониторинга области про- странства
r Переменная для обозначения итерации муравьиного ал- горитма
nv Числовая переменная (Numeric Variable)
nnv Нечисловая переменная (Non-Numeric Variable)
301
От редакции
Настоящая публикация продолжает цикл работ автора, содер-
жащих идеи и подходы к управлению интеллектуальными объектами
в условиях неопределенности и конфликта с внешней средой.
В монографии 2012 года «Интеллектуальные методы решения
конфликтных задач» (нейросетевое измерение дипломатии) рас-
смотрены концептуальные подходы к изучению важнейших особен-
ностей и характеристик конфликтов в отношениях между государ-
ствами, образования «тупиков» в переговорных процессах и поиска
путей выхода из них, вопросы транспарентности и использования
мер доверия, а также построения специальных ситуационных моде-
лей отношений между государствами с использованием современно-
го математического аппарата - нейросетевых алгоритмов. Анализи-
руются современные зарубежные подходы к изучению конфликтов и
причины изменения природы конфликтов в современных условиях.
Предложен принципиально новый и нестандартный подход к моде-
лированию ситуаций, которые могут возникать в конфликтных отно-
шениях государств, на нейронных сетях с ансамблевой организацией
и ассоциативно-проективной структурой. Последние практические
достижения зарубежных исследовательских центров в исследуемой
области описаны на примерах типовой базы данных по конфликтам,
нескольких крупных международных исследовательских проектов в
этой области и специализированных моделей. Систематизированы
сведения о соответствующих информационных ресурсах для изуче-
ния указанного круга вопросов.
302
В. К. Абросимов
В монографии 2013 года «Групповое движение интеллектуаль-
ных летательных аппаратов в антагонистической среде» рассмотрен
новый класс задач динамики управляемого движения динамических
систем - групповое движение летательных аппаратов, а также дви-
жение отдельных летательных аппаратов в составе группы и с точки
зрения интересов группы. Предложены принципиально новые взгля-
ды на движение в недружественной объектам управления среде: не-
четкие траектории полета и маневрирования, многоагентный подход
к описанию летательного аппарата как объекта управления, нейро-
сетевая модель движения. Рассмотрены общие вопросы построения
имитационных моделей, реализующих предложенные подходы к об-
наружению, сопровождению и определению характеристик группо-
вого движения летательных аппаратов.
В настоящее время автор работает над новой книгой с рабочим
названием «Управление интеллектуальными объектами в среде Ин-
тернета вещей», в которой предполагается с современных позиций
рассмотреть групповое движение в конфликтных средах с использо-
ванием принципов самоорганизации. В предположениях, что объ-
екты управления оснащены сенсорами наблюдения окружающей об-
становки и датчиками механизмов движения, они смогут выполнять
в группах различные роли. При этом функции интеллектуальных
объектов будут представляться как внешний сервис, который может
быть при необходимости использован автоматически в режиме on-
line другими объектами. Взаимодействие и «переговоры» объектов
по выбору оптимальных решений технически предполагается стро-
ить на основе сервис-ориентированной архитектуры с соответствую-
щей оркестровкой и хореографией сервисов. В такой сети реализует-
ся коллективное поведение с реализацией стратегий взаимопомощи
для разрешения конфликтных ситуаций, связанных с влиянием сре-
ды. Участие человека при этом планируется свести к минимуму: ему
останется по существу, сама постановка группировке коллективной
задачи и контроль ее выполнения.
Научное издание
В. К. Абросимов
КОЛЛЕКТИВЫ
ИНТЕЛЛЕКТУАЛЬНЫХ
ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Корректор Л. И. Полянская
Редактор А. А. Гусаренко
Подписано в печать 24.07.2017.
Формат бумаги 60x90 1/16. Гарнитура «MinionPro, TextBookC
Объем 19 усл. печ. л. Тираж 500 экз.
Издательский Дом «Наука»
109044 г. Москва, ул. Динамовская, дом 1а, офис 519
Тел.:+7(499)271-6724
E-mail: info@idnayka.ru
www.idnayka.ru
Отпечатано в ООО «Галлея-Принт».
Москва, ул. 5-я Кабельная, д. 2Б
Вячеслав Константинович Абросимов - специалист
в области технической кибернетики и управления ин-
телектуальными системами, доктор технических
наук, приглашенный профессор ряда университетов,
в последнее время уделяет основное внимание меж-
дисциплинарным исследованиям, связанным с моде-
лированием сложных многофакторных процессов с
использованием мультиагентных технологий и прин-
ципов самоорганизации.
Что может быть общего между фотороботом, аген-
тами и ракетами? Если учесть, что фоторобот не
имеет отношения к поиску преступников, агенты не
шпионы, а ракеты настоящие?
В этой книге Вы не найдете ответы на эти вопросы.
Но в ней с помощью фоторобота синтезируется облик
беспилотника, различные летательные аппараты пред-
ставляются друг другу как агенты, объединяются в
группу, проводят переговоры, распределяют между собой
задачи, конфликтуют и дружат, и даже могут пожерт-
вовать собой во имя достижения коллективной цели.
Наука
f' •/ • ih * w н lo ч