/
















































Tags: electrical engineering electronics software computer science
Year: 2002




Text
PICMG 2.9 R1.0
CompactFCI
System Management Specification
February 2, 2000
including:
ECN 2.9-1.0-001: Slot Connectivity Data
May 20, 2002
PICMG 2.9R1.0: ECN 2.9-1.0-001
PICMG Specification
Engineering Change Notice ECN 2.9-1.0-001
Topic: Slot Connectivity Data
Affected Specification: PICMG 2.9 R1.0
Sponsor(s): Software Interoperability Subcommittee
Participants in Final Ballot Group:
APW Electronic Solutions, Artela Systems, Astec Power, Brooktrout, Hybricon,
Ibus/Phoenix, Intel, Interphase, Motorola Computer Group, Pentair, Pigeon Point
Systems, Rittal/Kaparel, Sanmina, StarGen, Sun Microsystems
Description
The focus of this ECN is to enable hardware-independent software to determine the
following connectivity for slots within a CompactPCI chassis:
• Geographic addresses (or physical slot numbers)
• Logical PCI addresses (based on the bus, device and function numbers) by which
operating systems and device drivers access the boards in those slots
• PCI and H. 110 bus connectivity
• HA Hot Swap capabilities
• PICMG 2.16 fabric and/or node connectivity
• PICMG 2.17 fabric and/or node connectivity
This ECN addresses systems with any combination of CompactPCI buses, H. 110 buses,
PICMG 2.16 fabrics and PICMG 2.17 fabrics.
Although the ECN is focused on backplane connectivity, the text and data structures are
defined such that future revisions of the PICMG 2.9 specification can easily add other
types of descriptive information.
Justification
Software access to the above information is crucial to achieving three higher level goals:
• For systems based on PICMG 2.9, the CompactPCI System Management
specification, enabling integration of information from two critical domains. The
system management domain is based on the Intelligent Platform Management
Interface (IPMI) and inherently uses physical slot numbers to identify boards.
Meanwhile, the operating system domain typically uses PCI logical addresses to
refer to boards on a CompactPCI bus. PICMG 2.9 R1.0 does not provide a
mechanism for hardware-independent software to correlate information between
ADOPTED May 20, 2002
1
PICMG 2.9R1.0: ECN 2.9-1.0-001
these domains, each of which may contain unique information critical to the
overall management of a system.
• Enabling application and system software to communicate with an operator about
specific boards in the system by designating them in a simple and precise manner
that is consistent across systems and vendors. Currently there is no hardware-
independent method of determining physical slot numbers for specific boards for
the different architectural configurations that vendors are building today and in
the near future. The consequences of operator action on the wrong slot can be
severe.
• Enabling application and system software to determine the various capabilities of
specific slots. Currently there is no hardware-independent method of determining
the types of connectivity provided by a slot. This information may be crucial to
overall management of the system.
In summary: the overall situation is that there are many possible combinations of features
that a slot may implement, but there is no hardware-independent means for software to
determine which features are implemented. Additionally, there are many possible ways
that logical addresses may be mapped on a backplane, but there is no hardware-
independent means to map logical address to physical slot numbers for all the possible
backplane configurations.
The Software Interoperability subcommittee intends to develop some simple supporting
material that may be helpful to implementers. This material could include, for instance, a
few examples of backplanes and boards, showing how they could be described by the
data structures specified in this ECN. Interested PICMG members can check for this
material in the “Software Interoperability Materials” directory on the members-only side
of the PICMG website.
Style
Specific proposed changes are provided in the next section, in the style
described below.
ECN text describing changes in the affected document uses this font.
Text intended for inclusion in the body of the specification uses this font.
Section headers for text intended for inclusion in the body of the specification are
preceded with the notation:
<Header Level x> y.z Title
ADOPTED May 20, 2002
2
PICMG 2.9R1.0: ECN 2.9-1.0-001
where: x indicates the level of header to be used, and y.z indicates the
anticipated number that would be automatically generated by Microsoft Word by
the inclusion of this new section named Title.
Newly inserted Figure and Table items are assigned numbers in a special series
for this ECN. Figures are numbered E01-Fn, with Tables numbered E01-Tn.
Specific Proposed Changes
Section 1.5 Supporting Documents
Update the reference to PICMG 2.1 for the current release number.
• PICMG 2.1 R2.0 CompactPCI Hot Swap Specification
• PICMG 2.0 R3.0 CompactPCI Core Specification, as amended by ECN
2.0-3.0-002
Add references to IPMI V1.5 Revision 1.1, PICMG 2.5, 2.7, 2.16, 2.17, and the
PCI-to-PCI Bridge spec.
• Intelligent Platform Management Interface Specification Vl. 5 Document Revision
1.1.'
• PCI-to-PCI Bridge Architecture Specification. PCI Special Interest Group, 5200
N.E. Elam Young Parkway, Hillsboro OR 97124-6497, Phone: (503) 696-2000
http://www.pcisig.com/
• PICMG 2.5 R1.0 CompactPCI Computer Telephony Specification
• PICMG 2.7 R1.0 CompactPCI Dual System Slot Specification
• PICMG 2.16 R1.0 CompactPCI Packet Switching Backplane Specification
• PICMG 2.17 R1.0 CompactPCI StarFabric Specification
New Chapter 5 IPMI Extensions
Add a new chapter to specify optional commands and FRU information records,
introduced by this ECN, to describe the connectivity supported by the backplane
and boards.
<Header Level 1 > 5 IPMI Extensions
This section defines IPMI extensions to provide additional functionality needed for
CompactPCI systems. These extensions are implemented via commands and FRU
information records.
<Header Level 2> 5.1 Command Extensions
1 The IPMI vl .5 reference is in addition to the IPMI vl .0 reference. IPMI vl .5 provides necessary context
for some of the additions made by this ECN. This ECN, however, does not change the original focus of the
other chapters from IPMI vl.0.
ADOPTED May 20, 2002
3
PICMG 2.9R1.0: ECN 2.9-1.0-001
This section describes commands to provide functionality beyond that defined by the
Intelligent Platform Management Interface Specification that is useful for CompactPCI
systems.
<Header Level 3> 5.1.1 Standard Command Format
The Intelligent Platform Management Interface Specification VI.5 Document Revision
1.1 defines Group Extension network functions (2Ch/2Dh). Within the Group Extension
network function, is a value to identify the defining body. A value of OOh is used to
identify PICMG2 as the defining body. Refer to the Intelligent Platform Management
Interface Specification for more details.
All commands defined in this specification shall be sent using a network function of 2Ch
and a defining body identifier of OOh (PICMG). All responses shall be sent using a
network function of 2Dh and a defining body identifier of OOh (PICMG). Table E01-T1
shows the standard command and response formats.
Table E01-T1 — Standard Command and Response Formats
Request Data
Response Data
byte data field
1 PICMG Identifier (OOh)
2:n Optional command specific data
1 Completion Code
2 PICMG Identifier (OOh)
3:n Optional command specific response data
Table E01-T2 lists the PICMG-defined command values.
Table E01-T2 - PICMG Command Values
Command Name Value Section PICMG Spec
Get PICMG Properties OOh 5.1.2
Get Address Info Olh 5.1.3 2.0/2.5/2.16/2.17
Get Shelf Address Info 02h 5.1.4 2.0/2.5/2.16/2.17
<Header Level 3> 5.1.2 Get PICMG Properties Command
The Get PICMG Properties command returns miscellaneous properties about the
implementation of PICMG-defined commands and FRU information. IPM devices and
BMCs should implement the Get PICMG Properties command.
The Get PICMG Properties command can be used to facilitate reducing the amount of
polling for FRU Device IDs behind a given IPM Device or BMC, especially if the IPM
Device developer allocates FRU Device IDs densely and with lower numerical values.
Table E01-T3 shows the format of the Get PICMG Properties command.
2 The IPMI Specification vl.5 defines a value of 0 to indicate the defining body as “CompactPCI.” PICMG
has arranged with the IPMI organization to rename this value to “PICMG.”
ADOPTED May 20, 2002
4
PICMG 2.9R1.0: ECN 2.9-1.0-001
Table E01-T3 - Get PICMG Properties Command
Request Data
Response Data
byte data field
1 PICMG Identifier - Indicates that this is a PICMG-defined group extension command. A value of OOh shall be used.
1 Completion Code
2 PICMG Identifier - Indicates that this is a PICMG-defined group extension command. A value of OOh shall be used.
3 PICMG Extensions Version — Indicates the version of PICMG extensions implemented by the IPM device or BMC. 7:4 = BCD encoded minor version 3:0 = BCD encoded major version This specification defines version 1.0 of the PICMG extensions. IPM devices and BMCs implementing the extensions as defined by this specification shall report a value of Olh. The value OOh is reserved.
4 Max FRU Device ID — The numerically largest FRU Device ID implemented by this IPM Device or BMC.
5 FRU Device ID for 1PM Device - Indicates a FRU device ID for the FRU containing the IPM device or BMC.
<Header Level 3> 5.1.3 Get Address Info Command
The Get Address Info command returns addressing information for the FRU containing
the specified FRU device. IPM devices and BMCs should implement the Get Address
Info command. Multi-board sets that include a BMC or IPM device implementing the
Get Address Info command shall:
• Implement a BMC or IPM device on only one of the boards in the set,
• Implement a FRU device for each board in the set,
• Return the valid hardware address for the board containing the specified FRU
device, and
• Return the IPMB address(es) of the single BMC or IPM device.
Table E01-T4 shows the format of the Get Address Info command.
Table E01-T4 - Get Address Info Command
Request Data
byte data field
1 PICMG Identifier Indicates that this is a PICMG-defined group extension command. A value of OOh shall be used.
2 FRU Device ID - Indicates an individual FRU device. This byte is optional. If this byte is not present, the command shall return addressing information for the FRU containing the IPM device or BMC.
ADOPTED May 20, 2002
5
PICMG 2.9R1.0: ECN 2.9-1.0-001
Response Data
1 Completion Code
2 PICMG Identifier - Indicates that this is a PICMG-defined group extension command. A value of OOh shall be used.
3 Hardware Address — The hardware address of the FRU containing the specified FRU device. For PICMG 2.x boards this is the geographic address for the slot in which the FRU is installed.
4 IPMB0 Address - Indicates the 1PMB address for IPMB0 if implemented. This address applies to the IPM device or BMC that implements this command and is the same irrespective of the FRU Device ID specified in the request. A value of FFh indicates that IPMB0 is not implemented.
5 IPMB1 Address - Indicates the IPMB address for IPMB1 if implemented. This address applies to the IPM device or BMC that implements this command and is the same irrespective of the FRU Device ID specified in the request. A value of FFh indicates that IPMB 1 is not implemented.
A normal Completion Code shall be returned when the command executes successfully.
A “Parameter out of range” Completion Code shall be returned for any FRU device IDs
that are not implemented. A “Requested data not present” Completion Code shall be
returned for FRU device IDs that are implemented but not populated.
The Hardware Address field is defined as 8 bits to allow for future expansion. If an
address is less than 8 bits, the lower bits shall be used and the upper bits shall be set to
zero (0).
<Header Level 3> 5.1.4 Get Shelf Address Info Command
The Get Shelf Address command returns the shelf address information known by the IPM
device or BMC. IPM devices and BMCs that support a method of determining shelf
geographic address information should implement the Get Shelf Address Info command.
Table E01-T5 shows the format of the Get Shelf Address Info command.
Table E01-T5 - Get Shelf Address Info Command
Request Data
Response Data
byte data field
1 PICMG Identifier - Indicates that this is a PICMG-defined group extension command. A value of OOh shall be used.
1 Completion Code
2 PICMG Identifier - Indicates that this is a PICMG-defined group extension command. A value of OOh shall be used.
3:4 Shelf Address - Indicates the shelf address of the IPM device or BMC. LS-Byte first. For PICMG 2.x systems this is the shelf geographic address.
ADOPTED May 20, 2002
6
PICMG 2.9R1.0: ECN 2.9-1.0-001
The Shelf Address field is defined as 16 bits to allow for future expansion. If an address
is less than 16 bits, the lower bits shall be used and the upper bits shall be set to zero (0).
<Header Level 2> 5.2 FRU Information Extensions
This section defines FRU information records to describe various features of backplanes,
chassis, boards, and other modules. Some of the FRU information records defined by
this specification are oriented towards backplanes and chassis, while other records are
oriented towards boards or other modules. It is expected that a given module will only
implement an appropriate subset of the defined records.
This specification does not define the physical location of any supported chassis or
backplane FRU information. System designers should implement backplane and/or
chassis FRU information as appropriate for their specific design.
<Header Level 3> 5.2.1 Standard Record Format
The IPMI Platform Management FRUInformation Storage Definition defines the format
for FRU information, and more specifically, the MultiRecord area. Within the
MultiRecord area there are provisions for OEM-defined records. This specification uses
OEM records within the MultiRecord area to describe various properties of the
backplane, chassis and boards. A specific “manufacturer ID” (12634d / 00315Ah) is
used within the OEM records to identify the records as PICMG defined. Refer to the
IPMI Platform Management FRUInformation Storage Definition for more details.
Each FRU information record defined in this specification begins with a standard
MultiRecord header as shown in Table E01-T6.
Table E01-T6 - Standard MultiRecord Header
Byte Offset Name Description
0 RTI Record Type ID- Defined in the IPMI Platform Management FRU Information Storage Definition. For all the records defined in this specification, a value of COh (OEM) shall be used.
1 EOL/VER End of List / Version - Indicates the record format version and if this is the last record in the MultiRecord area.. 7:7 - End of List, 0 if more records exist, 1 if this is the last record. 6:4 - Reserved, write as 000b 3:0 - Record format version (=010b unless otherwise specified)
2 RL Record Length - The length of the data following the standard header in bytes.
3 RC Record Checksum - Used to calculate a zero checksum of the data following the header.
4 HC Header Checksum — Used to calculate a zero checksum of the standard MultiRecord header.
ADOPTED May 20, 2002
7
PICMG 2.9R1.0: ECN 2.9-1.0-001
Immediately following the standard header is the record-specific data. The record-
specific data follows the format shown in Table E01-T7.
Table E01-T7 - General Format of Record-Specific Data
Byte Offset Name Description
0:2 PID PICMG ID--A three byte ID assigned to PICMG. For all records defined in this specification, a value of 12634 (00315Ah) shall be used. This value is stored LS-Byte first.
3 PRI PICMG Record ID — Indicates the record type as defined in this specification.
4 RFV Record Format Version - Indicates the version of the record format.
5:(RL-1) Data Record type specific data. Variable length.
PRI indicates the specific record type. Values for PRI are defined in Table E01-T8.
Table E01-T8 - PICMG Record ID Values
Record Type Value Section PICMG Spec
PCI Connectivity OOh 5.2.2 2.0
PCI Device Mapping Olh 5.2.3 NA
HA Hot Swap Connectivity 02h 5.2.4 2.1
H. 110 Connectivity 03h 5.2.5 2.5
Backplane Point-to-Point Connectivity 04h 5.2.6 2.16/2.17
On-board StarFabric Connectivity 05h 5.2.7 2.17
<Header Level 3> 5.2.2 PCI Connectivity Record
The PCI Connectivity record describes PCI bus segmentation and IDSEL connection as
implemented on the backplane. For each slot a descriptor is provided that describes the
PCI connectivity for the associated slot.
Backplanes that have PCI buses should provide FRU information containing a PCI
Connectivity record in the MultiRecord area. If the backplane FRU information does not
include a PCI Connectivity record, but does include other backplane connectivity records
defined in this specification, software may assume that the backplane does not support
backplane PCI buses.
The format of the PCI Connectivity record data is shown in Table E01-T9.
ADOPTED May 20, 2002
8
F
|>1Г АЛП
PICMG 2.9R1.0: ECN 2.9-1.0-001
Table E01-T9 - PCI Connectivity Record Data
Byte Offset Name Description
0:2 P1D PICMGID-A three byte ID assigned to PICMG. For all records defined in this specification, a value of 12634 (00315Ah) shall be used. This value is stored LS-Byte first.
3 PRI PICMG Record ID — Indicates a PCI Connectivity record (OOh).
4 RFV Record Format Version — Shall be 0 for this version of the PCI Connectivity record.
5 EPS DC Extended PCI Slot Descriptor Count — Indicates the number of Extended PCI Slot Descriptors (EPSDs) present in this record.
6:(я+5) PSD[l..n] PCI Slot Descriptor - An array of n PCI Slot Descriptors indexed by GA, starting with GA=1, where n is the number of slots. Each PCI slot descriptor describes a single slot’s PCI connectivity.
(и+6):(н+2пг+5) if present EPSD[l..w] Extended PCI Slot Descriptor — If present, an array of m EPSDs. Each EPSD provides additional PCI slot connectivity information for an individual slot.
Each PSD entry provides bit-fields indicating the segment to which they belong as well
as the ADxx signal that is connected to the slot’s IDSEL pin. The combination of these
two identifiers and the PCI Device Mapping record data from the board that hosts the
segment allows a full physical/logical (PCI device number) mapping. Table E01-T10
shows the format of PSD entries.
Table E01-T10 - PCI Slot Descriptor
Bits Name Description
3:0 IC IDSEL Connection - Indicates which ADxx line is connected to the IDSEL pin. IC is set to xx minus 16, where xx is the number of the address line. A value of 0 indicates a standard system slot (which has no IDSEL connection). If the slot is either: 1) system slot capable with a non-zero IC value or 2) a dual system slot, one or more EPSDs for the slot shall be present. In the dual system slot case, one EPSD shall be present for each of the P1/P2 and P4/P5 segments.
7:4 SID Segment ID - Indicates the physical backplane PCI bus segment. A value of OFh in this field indicates no PCI bus connectivity.
If present, each 16-bit EPSD entry provides bit-fields indicating the slot to which they
apply and additional information about the PCI connectivity of that slot.
Table E01-T11 shows the format of EPSD entries.
ADOPTED May 20, 2002
9
PICMG 2.9R1.0: ECN 2.9-1.0-001
Table E01-T11 - Extended PCI Slot Descriptor
Bits Name Description
4:0 GA Geographic Address - Indicates the geographic address of the slot to which this EPSD applies. Also identifies the PSD that this EPSD extends, when used as an index into the PSD array.
5 SSC System Slot Capable - A value of 1 indicates that the slot is system slot capable.
9:7 SI Segment ID - Identifies the physical backplane PCI bus segment to which this EPLD refers.
10 IN Interface Number - Identifies the backplane interface in this slot that hosts the Segment ID bus segment: O = P1/P2 1 = P4/P5
15:11 RSVD Reserved - Shall be 0
<Header Level 3> 5.2.3 PCI Device Mapping Record
Boards that host one or more backplane segments implement a specific mapping from
PCI device numbers to ADxx lines for Type 0 configuration cycles targeting each
segment. Refer to PICMG 2.0 R3.0 ECN02 for more details.
PCI Device Mapping records describe how the board maps PCI device numbers into
ADxx lines during PCI configuration cycles, along with other board-specific information
about the backplane segment(s) hosted by the board. Boards that provide the
enumeration service for backplane PCI segments should provide FRU information
containing a PCI Device Mapping record in the MultiRecord area for each hosted
backplane segment. The combination of the PCI Connectivity record data from the
backplane and the PCI Device Mapping record data from the board enable a full
physical/logical (PCI device number) mapping. Each PCI Device Mapping Record is
associated with a board in a specific slot that provides enumeration services for a
backplane segment through an interface in that slot. The Geographic Address of the slot
can be determined by issuing the Get Address Info command to the IPM Device
responsible for the board.
The format of the PCI Device Mapping record data is shown in Table E01-T12.
Table E01-T12 - PCI Device Mapping Record Data
Byte Offset Name Description
0:2 PID PICMG ID - A three byte ID assigned to PICMG. For all records defined in this specification, a value of 12634 (00315Ah) shall be used. This value is stored LS-Byte first.
3 PRI PICMG Record ID — Indicates a PCI Device Mapping record (Olh).
4 RFV Record Format Version — Shall be 0 for this version of the PCI Device Mapping record.
5:6 BPID Backplane PCI Interface Descriptor — This field describes how
ADOPTED May 20, 2002
10
PICMG 2.9R1.0: ECN 2.9-1.0-001
PCI device numbers are mapped into ADxx lines during PCI configuration cycles to the backplane PCI segment.
7 if present RI Root ID — This byte is only present if RL is greater than 7. This byte indicates the PCI root from which the slot path (SP) is based. The interpretation of this byte depends on the value of the On-Board Host (OBH) field. For a segment that is hosted on-board (OBH =1): This value will be 0 for board sets with a single PCI tree. For board sets with multiple PCI trees, this value will be 0 for the first PCI tree, and will be unique and different from 0 for additional PCI trees. For a segment that is hosted by a J1/J2 interface to a peripheral slot (OBH = 0): This value is a FRU Device ID for the board that implements the J1/J2 interface.
8:(RL-1) if present SP Slot Path - These bytes are only present if RL is greater than 8. Each byte identifies a PCI to PCI bridge device by encoding the device number and function number by which that bridge is accessed on its primary bus. The device number is in bits 7:3. The function number is in bits 2:0. Successive bytes identify bridges successively further from the root of the on-board PCI tree and closer to a leaf bridge. A zero length slot path indicates that there are no PCI to PCI bridges between the root of the on- board PCI tree and the backplane interface. Multi-board sets shall report the entire PCI slot path on the combined board set as a single on-board PCI slot path.
The 16-bit BP1D field provides bit-fields indicating how the board connects to the
backplane PCI segment. Table E01-T13 specifies the format of the BPID field.
Table E01-T13 — Backplane PCI Interface Descriptor Field
Bits Name Description
4:0 AC ADxx Constant - This 5-bit field provides the constant that is combined with the PCI device number to determine xx and thereby the ADxx line used to select a device on this segment
5 AO ADxx Operator — This 1 -bit field indicates whether a PCI device number is added to (AO=1) or subtracted from (AO=0) the ADxx Constant to determine xx on this segment. That is, ADxx Operator determines “oper” in xx = ADxx Constant oper Device Number.
6 IN Interface Number - Indicates the interface to which this record applies: 0 = J1/J2 interface 1 = J4/J5 interface
7 OBH On-Board Host - Indicates whether this bus segment is hosted on-board or by a J1/J2 backplane interface: 0 = This bus segment is hosted by a J1/J2 backplane interface to a peripheral slot.
ADOPTED May 20, 2002
11
PICMG 2.9R1.0: ECN 2.9-1.0-001
15:8
RSVD
1 = This bus segment is hosted by an on-board host.
Reserved - Shall be 0.
<Header Level 3> 5.2.4 HA Hot Swap Connectivity Record
The HA Hot Swap Connectivity record identifies the high availability hot swap
capabilities supported by the backplane. For each slot a descriptor is provided that
describes the hot swap capabilities for the associated slot.
The standard backplane as defined in PICMG 2.0 R 3.0 supports Full Hot Swap
operation. The absence of a HA Hot Swap Connectivity record in the backplane FRU
information implies a standard backplane.
Table E01-T14 specifies the format of the HA Hot Swap Connectivity record data.
Table E01-T14 — HA Hot Swap Connectivity Record Data
Byte Offset Name Description
0:2 PID PICMG ID- A three byte ID assigned to PICMG. For all records defined in this specification, a value of 12634 (00315Ah) shall be used. This value is stored LS-Byte first.
3 PRI PICMG Record ID — Indicates an HA Hot Swap Connectivity record (02h).
4 RFV Record Format Version — Shall be 0 for this version of the HA Hot Sw ap Connectivity record.
5:(л7~ь4) HSCD Hot Swap Connectivity Descriptor — An array of n Hot Swap Connectivity Descriptors (HSCDs) indexed by GA, starting with GA=1, where n is the number of slots. Each HSCD describes a single slot’s hot swap connectivity as follows: 0 = No radial slot control signals 1 = Radial BDSEL# and HEALTHY# 2 = Radial BDSEL#, HEALTHY#, and PCI RST# 3 = Radial BD SEL#, HEALTHY#, PCIRST#, and M66EN
<Header Level 3> 5.2.5 H.l 10 Connectivity Record
The H.l 10 Connectivity record describes the H.l 10 bus connectivity implemented by the
backplane. For each slot a descriptor is provided that specifies the H. 110 bus segment
connectivity for the associated slot.
Backplanes that implement H. 110 buses should provide FRU information containing an
H.l 10 Connectivity record in the MultiRecord area. If the backplane FRU information
does not include an H.l 10 Connectivity record, but does include other backplane
connectivity records defined in this specification, software may assume that the
backplane does not support backplane H.l 10 buses.
The format of the H.l 10 Connectivity record data is shown in Table E01-T15.
ADOPTED May 20, 2002
12
PICMG 2.9R1.0: ECN 2.9-1.0-001
Table E01-T15 - H.l 10 Connectivity Record Data
Byte Offset Name Description
0:2 PID PICMGID- A three byte ID assigned to PICMG. For all records defined in this specification, a value of 12634 (00315Ah) shall be used. This value is stored LS-Byte first.
3 PRI PICMG Record ID — Indicates an H.l 10 Connectivity record (03h).
4 RFV Record Format Version - Shall be 0 for this version of the H.l 10 Connectivity record.
5:(я+4) SID[1..«] Segment ID - An array of n Segment Ids indexed by GA, starting with GA=1, where n is the number of slots. Each segment ID indicates to which H. 110 bus segment the associated slot is connected. A value of FFh in this field indicates no H. 110 bus connection.
<Header Level 3> 5.2.6 Backplane Point-to-Point Connectivity Records
Backplane Point-to-Point Connectivity records describe the point-to-point connections as
implemented on the backplane.
Backplanes that support point-to-point links should provide FRU information containing
Backplane Point-to-Point Connectivity records in the MultiRecord area. If the backplane
FRU information does not include a Backplane Point-to-Point Connectivity record, but
does include other backplane connectivity records defined in this specification, software
may assume that the backplane does not support point-to-point connectivity.
The format of the Backplane Point-to-Point Connectivity record data is shown in Table
E01-T16.
Table E01-T16 - Backplane Point-to-Point Connectivity Record Data
Byte Offset Name Description
0:2 PID PICMG ID — A three byte ID assigned to PICMG. For all records defined in this specification, a value of 12634 (00315Ah) shall be used. This value is stored LS-Byte first.
3 PRI PICMG Record ID — Indicates a Backplane Point-to-Point Connectivity record (04h)
4 RFV Record Format Version - Shall be 0 for this version of the Backplane Point-to-Point Connectivity record.
5:(m+4) PTPSDL Point-to-Point Slot Descriptor List — A list of variable length Point-to-Point Slot Descriptors (PTPSDs) totaling m bytes in length. Each PTPSD describes the number of links and the connectivity for a specific type of point-to-point links in one slot.
ADOPTED May 20,2002
13
PICMG 2.9R1.0: ECN 2.9-1.0-001
Each variable length PTPSD provides fields indicating a specific type of point-to-point
connectivity for the corresponding slot. Slots with multiple types of point-to-point
connectivity should have one PTPSD for each type of point-to-point connectivity. Table
E01-T17 shows the PTPSD format.
Table E01-T17 Point-to-Point Slot Descriptor
Byte Offset Name Description
0 PTPLT Point-to-Point Link Type — Indicates the type of point-to- point connectivity described by this PTPSD, as follows: 0 — Indicates a PICMG 2.16 Ethernet Node Slot 1 — Indicates a PICMG 2.16 Ethernet Fabric Slot 2 — Indicates an OEM-defined Ethernet slot 3 — Indicates a PICMG 2.17 StarFabric Basic Node Slot 4 — Indicates a PICMG 2.17 StarFabric Multi- Segment Node Slot 5 — Indicates a PICMG 2.17 StarFabric Fabric-Native Node Slot 6 — Indicates a PICMG 2.17 StarFabric Fabric Slot 7 — Indicates an OEM-defined StarFabric slot All other values are reserved.
1 SA Slot Address - Indicates the hardware address for this slot. For PICMG 2.x systems this is the geographic address for the slot.
2 PTPLC Point-to-Point Link Count — Indicates the number of point- to-point links in this slot of the type specified in PTPLT.
3:(3w+2) PTPLD[l..n] Point-to-Point Link Descriptors — An array of n Point-to- Point Link Descriptors (PTPLDs) where n is specified in the PTPLC byte.
Each PTPLD describes a point-to-point link within the associated slot.
Each 24-bit PTPLD entry provides bit-fields indicating the remote slot and the remote
link within the remote slot to which the local link is connected. The term ‘remote’ refers
to slots and links of the specified type in slots other than the slot associated with the
PTPLD. The term ‘local’ refers to links of the specified type within the slot associated
with the PTPLD. Table E01-T18 shows the format of PTPLD entries.
ADOPTED May 20, 2002
14
PICMG 2.9R1.0: ECN 2.9-1.0-001
Table E01-T18 — Point-to-Point Link Descriptor
Bits Name Description
7:0 RS Remote Slot — Indicates the hardware address of the remote slot to which this point-to-point link is connected. In PICMG 2.x systems, this is the GA of the remote slot.
12:8 Remote Link - Indicates the link number within the remote slot to which this point-to-point link is connected. For PICMG 2.16 links, a value of IFh is used to indicate connection to link port T of the remote slot. For PICMG 2.17 links, links shall be referenced in accordance with the numbering defined for the relevant slot type, except for the special treatment of FabricA and FabricB links defined in this section. A value of IFh is used to indicate connection to the FabricA link of the remote slot. A value of 1 Eh is used to indicate connection to the FabricB link of the remote slot.
17:13 LL Local Link - Indicates the link number within the local slot. For PICMG 2.16 links, a value of IFh indicates that the local link is link port T of the local slot. For PICMG 2.17 links, links shall be referenced in accordance with the numbering defined for the relevant slot type, except for the special treatment of FabricA and FabricB links defined in this section. A value of 1 Fh is used to indicate the FabricA link of the local slot. A value of lEh is used to indicate the FabricB link of the local slot.
23:18 RSVD Reserved — Shall be 0
- END -
ADOPTED May 20, 2002
15
PICMG 2.9 R1.0
ComuactPCl
System Management Specification
February 2, 2000
©Copyright 1995, 1996, 1997, 1998, 1999, 2000 PCI Industrial Computers
Manufacturers Group (PICMG).
The attention of adopters is directed to the possibility that compliance with or adoption of
PICMG ® specifications may require use of an invention covered by patent rights. PICMG shall
not be responsible for identifying patents for which a license may be required by any
PICMG specification, or for conducting legal inquiries into the legal validity or scope of those
patents that are brought to its attention. PICMG specifications are prospective and advisory only.
Prospective users are responsible for protecting themselves against liability for infringement of
patents.
Special attention is called to the fact that implementation of an IPMI-based system requires a
royalty-free, reciprocal patent license. Additional information on the licensing requirements for
IPMI through the IPMI adopter’s agreement can be found in section 1.5 of this document.
I2C is a trademark of Philips Semiconductors. I2C is a two-wire communications bus/protocol
developed by Philips. IPMB is a subset of the I2C bus/protocol and was developed by Intel.
Implementations of the I2C bus/protocol or the IPMB bus/protocol may require licenses from
various entities, including Philips Electronics N.V. and North American Philips Corporation.
NOTICE:
The information contained in this document is subject to change without notice. The material in
this document details a PICMG specification in accordance with the license and notices set forth
on this page. This document does not represent a commitment to implement any portion of this
specification in any company's products.
WHILE THE INFORMATION IN THIS PUBLICATION IS BELIEVED TO BE ACCURATE,
PICMG MAKES NO WARRANTY OF ANY KIND, EXPRESS OR IMPLIED, WITH
REGARD TO THIS MATERIAL INCLUDING, BUT NOT LIMITED TO ANY WARRANTY
OF TITLE OR OWNERSHIP, IMPLIED WARRANTY OF MERCHANTABILITY OR
WARRANTY OF FITNESS FOR PARTICULAR PURPOSE OR USE.
In no event shall PICMG be liable for errors contained herein or for indirect, incidental, special,
consequential, reliance or cover damages, including loss of profits, revenue, data or use, incurred
by any user or any third party.
Compliance with this specification does not absolve manufacturers of CompactPCI equipment,
from the requirements of safety and regulatory agencies (UL, CSA, FCC, IEC, etc.).
PICMG and the PICMG and CompactPCI logos are registered trademarks of the PCI Industrial
Computers Manufacturers Group. All other brand or product names may be trademarks or
registered trademarks of their respective holders.
February 2, 2000
CompactPCI® System Management Specification PICMG 2.9 R 1.0
Page 2 of 32
Table of Contents
1. Overview (Environment)............................................................................6
1.1 Description and Goals of the Specification...................................................6
1.2 Justification................................................................................6
1.3 Using this Specification.....................................................................7
1.3.1 The Developers..........................................................................7
1.3.2 The I2C bus and capacitive loading......................................................8
1.3.3 Hot-swap................................................................................9
1.3.4 The BMC.................................................................................9
1.3.5 Intelligent versus non-intelligent devices.............................................10
1.4 Definitions.................................................................................10
1.5 Supporting Documents........................................................................11
2. Electrical Characteristics.......................................................................13
2.1 Standard Node...............................................................................13
2.1.1 Standard Node Parameters...............................................................13
2.1.2 Hot-swap Capability....................................................................14
2.1.2.1 Initialization.....................................................................14
2.1.2.2 Signal Transient Rejection........................................................ 14
2.1.2.3 Transmission Violations............................................................14
2.1.2.4 Protocol Violations................................................................15
2.1.3 Node Power.............................................................................15
2.2 Non-Standard Node...........................................................................16
2.3 Management Bus Topology.....................................................................16
2.3.1 Line Loading Limitations...............................................................16
2.3.2 Line Biasing Requirements..............................................................17
3. System Management Requirements...................................................................18
3.1 Chassis.....................................................................................18
3.1.1 Backplane..............................................................................18
3.1.1.1 IPMBO..............................................................................18
3.1.1.2 IPMB 1.............................................................................18
3.1.1.3 Treatment of ALERT#............................................................... 19
3.1.1.4 IPMB Extension connector...........................................................19
3.1.2 System Management Power................................................................19
3.1.3 Bridging and Extending.................................................................20
3.2 System Board Computer and BMC...............................................................20
3.2.1 Baseboard Management Controller........................................................21
3.2.1.1 System Interface...................................................................21
3.2.1.2 Single-ported IPMB.................................................................21
3.2.1.3 Dual-ported IPMB...................................................................21
3.2.1.4 Optional and Private Busses........................................................22
3.2.1.5 Repository Storage.................................................................22
3.2.1.6 1PMI Compatibility and Interoperability............................................22
3.2.2 BMC Deployment..........................................................................22
3.2.2.1 BMC Power..........................................................................23
3.2.2.2 System Interface...................................................................23
3.2.2.3 Single-ported BMC..................................................................23
3.2.2.4 Dual-ported BMC....................................................................23
3.2.2.5 Ancillary BMC Support..............................................................23
3.3 Address Allocation for Peripherals..........................................................24
3.3.1 General Allocation Principles...........................................................24
3.3.2 Programmatic Allocation of Peripheral Addresses.........................................24
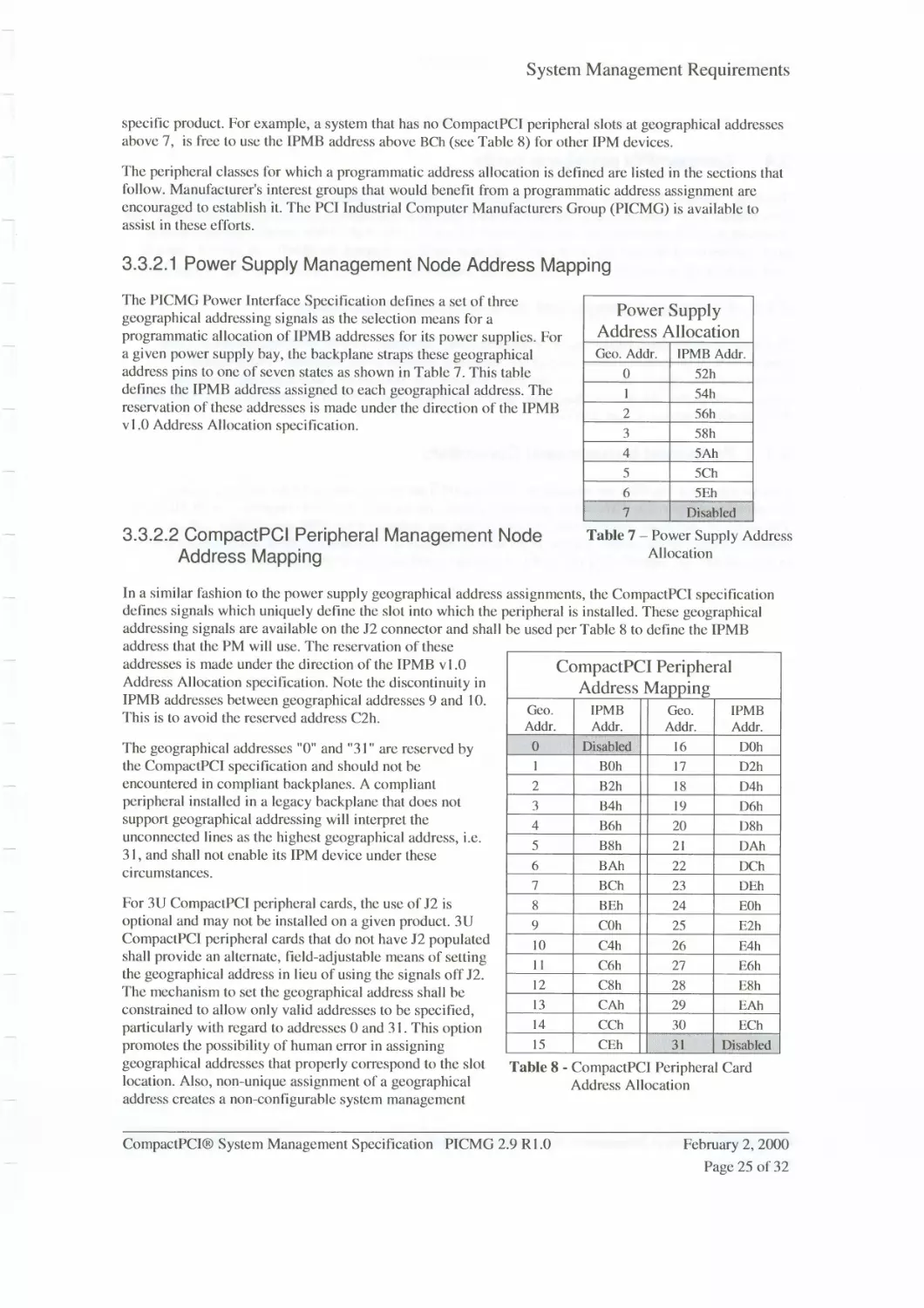
3.3.2.1 Power Supply Management Node Address Mapping.......................................25
3.3.2.2 CompactPCI Peripheral Management Node Address Mapping..............................25
3.4 CompactPCI peripheral cards.................................................................26
CompactPCI® System Management Specification PICMG 2.9 R1.0
February 2, 2000
Page 3 of 32
3.4.1 Peripheral Management Node Minimum Functionality.....................................26
3.5 Peripheral Management Controllers........................................................26
4. IPMI Functional Requirements..................................................................27
4.1 BMC Functional Requirements..............................................................27
4.1.1 BMC Management of Message Transfers..................................................27
4.1.1.1 System Interface to IPMB transfers................................................27
4.1.1.2 IPMB to System Interface Transfers................................................28
4.1.1.3 IPMB to IPMB transfers............................................................28
4.1.1.4 System Interface to Optional Bus Transactions.....................................28
4.1.2 IPMI Requirements for the BMC........................................................29
4.1.3 Hot-swap Requirements for the BMC....................................................29
4.1.4 I2C Error Recovery Requirements of the BMC...........................................29
4.1.5 Optional BMC Functions.................................................................29
4.1.5.1 Local sensor support..............................................................29
4.1.5.2 FRU Commands......................................................................29
4.1.5.3 ALERT# Function...................................................................30
4.1.6 IPM Command Functions................................................................30
4.2 Peripheral Management Controller Functional Requirements.................................31
4.2.1 PM Address Configuration.............................................................31
4.2.2 Hot-swap Transient Tolerance.........................................................31
4.2.3 IPM Device Functions.................................................................32
4.2.4 Sensor Device Functions..............................................................32
4.2.5 FRU Device Functions.................................................................32
February 2, 2000
CompactPCI® System Management Specification PICMG 2.9 R1.0
Page 4 of 32
Figures
Figure 1 - CompactPCI System Management Block Diagram....................................8
Figure 2 - Idealized Schematic of a Standard Node........................................13
Figure 3 - BMC Block Diagram.............................................................21
Tables
Table 1 - Standard Node Parameters.......................................................13
Table 2 - I2C Transmission Violation Timeout Limits......................................14
Table 3 - System Management Line Parameters..............................................16
Table 4 - CompactPCI Backplane Pin Assignments for IPMBs.................................18
Table 5 - IPMB Connector.................................................................19
Table 6 - General Address Allocation per IPMB............................................24
Table 7 - Power Supply Address Allocation................................................25
Table 8 - CompactPCI Peripheral Card Address Allocation..................................25
Table 9 - Reference to IPMI defined commands.............................................30
Table 10 - Dummy Message Format..........................................................32
CompactPCI® System Management Specification PICMG 2.9 RLO
February 2, 2000
Page 5 of 32
Overview (Environment)
1. Overview (Environment)
1.1 Description and Goals of the Specification
This document defines an implementation of a system management bus in a CompactPCI system. The bus
uses an I2C hardware layer, and is based on the Intelligent Platform Management Interface (IPMI) and
Intelligent Platform Management Bus (IPMB) specifications. The remainder of this chapter is devoted to a
survey of the architecture, theory, and issues behind system management with guidance on how best to use
this specification. The following chapters are organized to present first hardware then software
specifications, requirements, and options.
The main goal of this specification is to provide the PICMG community with the minimum requirements
necessary to guarantee interoperability of the system management components that each of them develops.
A secondary goal of this specification is to define these requirements in such a way as to allow the
maximum use of commercial components. In so doing, developers will have the opportunity to capitalize
on the economies of scale provided by the mainstream computer markets. A significant aspect of this
specification is the requirement that system management operate in an environment where CompactPCI
peripheral cards can be hot-swapped. The additional requirements in both hardware and firmware to
achieve this are a key component of this specification.
The target audience for this specification is described in section 1.3.1. Readers of this document should be
familiar with the specifications referenced in section 1.5
1.2 Justification
The Intelligent Platform Management Interface (IPMI), was announced by Intel, Dell, Hewlett-Packard
Company, and NEC on February 17, 1998 to provide a standard interface to hardware used for monitoring
a server’s physical characteristics, such as temperature, voltage, fans, power supplies and chassis.
The IPMI specification defines a common interface and message-based protocol for accessing platform
management hardware. IPMI is comprised of three specifications: Intelligent Platform Management
Interface, Intelligent Platform Management Bus (IPMB) and Intelligent Chassis Management Bus (ICMB).
The IPMI specification defines the interface between system software and platform management hardware,
the IPMB specification defines the internal Intelligent Platform Management Bus, and the ICMB
specification defines the Intelligent Chassis Management Bus, an external bus for connecting additional
IPMI-enabled systems.
Although IPMI is not tied to a specific operating system or management application, it is complementary to
higher level management software interfaces such as:
• the Simple Network Management Protocol (SNMP);
• Desktop Management Interface (DMI);
• Common Information Model (CIM);and
• Windows Management Interface (WMI),
which facilitates the development of cross-platform solutions. By incorporating this technology into
CompactPCI, PICMG leverages off the work being done by the IPMI consortium, and expands it to include
management of the CompactPCI cards themselves; something not being done in standard PCI. For
telecommunications applications that require alarming of the type found in the central office
telecommunications environment, IPMI is a natural building block.
CompactPCI® System Management Specification PICMG 2.9 R1.0
Page 6 of 32
February 2, 2000
Overview (Environment)
1.3 Using this Specification
To succeed, this specification must coordinate the design efforts of various parties involved in the design of
computer systems that support system management. This section defines and assigns the design
responsibilities for the several types of developers whose activities must be coordinated. It concludes with a
general discussion, for the benefit of all developers, of the architecture, design requirements, and
considerations addressed by the specification.
1.3.1 The Developers
The term developer is used throughout this document as a collective noun for those who create a system or
subsystem through design effort, integration of existing designs, or some combination of the two. Within
the broad community of developers, the following types are defined here on the basis of the unique goals
and responsibilities each has. The developer is a virtual entity. It is quite likely that an actual company
fulfills the role of several if not all of the following types of developers. It is just as likely, particularly in
the case of the system developer, that more than one company participates in a development function.
System developers are the designers or integrators of the mechanical enclosures, backplanes, and
manageable subsystems such as power supplies and peripheral cards that comprise a CompactPCI based
product. Commonly, more than one company in a vendor-client relationship may participate in system
development. These companies must communicate amongst each other the decisions each has made as part
of the overall system development effort. This group is responsible for ensuring that the system
management network functions in accordance with this specification and with the intended management
applications for all configurations envisioned for the product. This group relies on all the other developers
to deliver compliant subsystems or products for incorporation in the final product. Members of this group
should direct particular attention to the electrical characteristics in section 2.3 and the system management
requirements of section 3.1.
Software developers, in this specification, are the authors who write the management applications,
services layers, device drivers, and related code that manages the system. The boundary between system
management code and the management network is the system interface of the BMC (see below). Members
of this group should direct particular attention to the IPMI functional requirements of section 4.
BMC developers are the designers of the Baseboard Management Controller (BMC) that interfaces the
host processor running a management application to the system management network. The BMC developer
is working at the IC level, principally as a firmware designer. This document and the IPMI and I2C
specifications define the interface between the BMC and the system management network. Peripheral
developers rely on BMC adherence to these specifications to ensure compatible operation with the BMC.
The interface between the BMC and the host processor is the system interface and is largely defined by the
IPMI specification. The developer of the subsystem, usually the SBC, in which the BMC is used is most
concerned with this facet of the BMC. BMC developers should direct particular attention to the electrical
characteristics in section 2.1 and the system management requirements of section 3.2.1.
SBC developers are the designers and manufacturers of the System Board Computer (SBC). In many
cases, the SBC is the host for the BMC so this group represents the designers of any subsystem that is host
to the BMC. Accordingly, this specification only addresses the design requirements for deploying a BMC.
Members of this group should direct particular attention to the electrical characteristics in section 2.1 and
the system management requirements of section 3.2.2.
Peripheral Developers are the designers and manufacturers of the manageable subsystems that contain
IPM devices presented to the management network. Developers of standard peripherals, such as
CompactPCI add-in cards, implement a standard node as in defined in section 2.1. Developers of other
manageable subsystems, e.g. power supplies, fans, etc., are not required to implement a standard node in
their product although it is recommended that they do. Developers that elect to implement non-standard
nodes are obligated to publish relevant information for the benefit of the system developer seeking to use
their product (see section 2.2 ). In additional to these electrical characteristics, members of this group
should direct particular attention to the system management requirements of sections 3.5 and 4.2.
CompactPCI® System Management Specification PICMG 2.9 R1.0
February 2, 2000
Page 7 of 32
Overview (Environment)
Figure 1 - CompactPCI System Management Block Diagram
The figure above presents a generic block diagram of a CompactPCI system with system management. The
glossary provides an explanation of the acronyms used in the figure. This block diagram and the remainder
of this section present the technology and design considerations for CompactPCI System Management. As
the design considerations are presented, the need for decisions on feature set and technical tradeoffs will
become apparent. The guiding principle of this specification is that architectural requirements placed on
the chassis, of which the backplane is a significant component, are minimal in order to provide maximum
flexibility in defining products. Conversely, functional requirements placed on the manageable subsystems
are comprehensive to ensure operability over a broad range of implementations.
1.3.2 The l2C bus and capacitive loading
The electrical foundation for CompactPCI System Management is the Inter-IC (I2C) bus developed by
Philips Semiconductor. The relevant features of this bus are:
• Two wire serial interface, (clock and data);
• Open-collector/drain drivers, the bus is pulled up by biasing;
• Multi-mastering capability, devices arbitrate for the bus using a collision detection
scheme; and
• 100 Kilobit data rate, 400 Kilobit rate is defined but not used in this specification.
The I2C bus is protected by patents held by Philips Semiconductor. IC manufacturers that sell devices
incorporating the technology will already have secured the rights to use it, relieving the purchaser of that
burden.
Regarding this specification, the most significant technical issue with the I2C bus is that it has a defined
limit to the capacitive load it is required to drive. The capacitive load is composed of loading presented by
the devices as well as loading presented by the transmission medium (signal traces) of the bus itself. For
large systems, tradeoffs between device count and transmission line type and length may be required. The
system developer is ultimately responsible for establishing how much of the load budget is allocated to the
interconnection and how much goes to devices. To manage this requirement, this specification defines a
’’standard node” (section 2.1.1) which establishes a common unit for which system developers can budget
and to which peripheral developers can design.
The system developer may elect to use non-standard-node-based subsystems and even discrete devices. In
such cases, the system developer is obligated to establish the electrical and functional suitability of the non-
standard nodes and devices. For this reason, peripheral developers that offer subsystems which do not
February 2, 2000
CompactPCI® System Management Specification PICMG 2.9 R1.0
Page 8 of 32
Overview (Environment)
implement a standard node must assist this process by providing the information a system developer will
need to properly incorporate the subsystem into their product (section 2.2).
The open-collector nature of the I2C line drivers requires that each line of the 12C bus be biased by a pull up
resistor. The pull-up biasing is distributed among the various physical elements that comprise the
management network. The amount of line biasing required of each element is that which is necessary to
drive the capacitive loading that the element brings. Because of this pay-as-you-go approach, the
management network exhibits a relatively uniform rise time regardless of how much or little the network is
loaded.
1.3.3 Hot-swap
Besides ensuring the electrical integrity of the I2C bus during normal operation, section 2.1.2 also defines
the requirements for a system management node such that it may be plugged into an active system
management network. This requirement comes from the desire to support system management on hot-
swappable CompactPCI peripherals without compromising their capacity for hot-swapping. This is
achieved by a combination of limiting the line transients during the insertion event as well as having the
connected devices tolerate a certain amount of glitch energy. The additional constraints placed on the
device to make it hot-swap capable - and tolerant - are not difficult to achieve, however, existing devices
may not satisfy those constraints. The system developer must be mindful of the potential incompatibility
between pre-existing devices and a hot-swap capable system management bus segment.
Only the system developer knows whether or not a product requires hot-swap capability. Therefore only the
system developer is allowed to compromise the hot-swap capability of the system management bus. As
such, both BMC developers and peripheral developers implementing the standard node are obligated to
support hot-swapping. CompactPCI peripherals that are system-management capable must implement a
standard node if they are also designed to be hot-swap capable. In cases where the system developer
perceives a requirement to use a pre-existing device and to support hot-swap activity on the system
management bus, then the system developer must make architectural accommodations. For example:
• Verify first that the pre-existing device does not already satisfy the constraints for hot-swap;
• If not, place the device behind a hot-swap capable IPM device which can bridge from the system
management bus to the device's I2C interface; or
• Use a BMC with dual ports and use one bus for hot-swap activity and the other for the non-hot-
swap activity.
In any case, the system developer must recognize that any device which does not satisfy the constraints for
hot-swap renders the bus on which it resides incapable of reliably supporting hot-swap activity.
1.3.4 The BMC
Section 3.2 defines the architectural requirements for the BMC, which is responsible for interfacing
between the host of the system management application and the management network. The BMC definition
in this specification is an extension of that in the IPMI specification, which defines, but does not require, an
IPMB port on the BMC. Indeed, this specification requires one IPMB port and provides for a second IPMB
port as an option. Since both a single-ported and a dual-ported BMC are allowed, the system developer
must consider the tradeoffs of specifying a system management network around a single IPMB or dual
IPMBs when deciding on the architecture of a system.
System management networks designed around a single IPMB may use System Board Computers based on
either type of BMC and would therefore work with the largest population of SBCs. Systems designed to
use dual IPMBs can segregate devices that are incompatible, e.g. legacy devices and hot-swap capable
devices (see below). Also, the electrical constraints imposed by the I C bus are less confining when two
busses are available.
CompactPCI® System Management Specification PICMG 2.9 R1.0
February 2, 2000
Page 9 of 32
Overview (Environment)
1.3.5 Intelligent versus non-intelligent devices
The IPMI specification is a layer on top of the I2C interface protocol and uses only "Master Transmitter"
data transfer formats. The IPMI specification maintains backward compatibility with pre-existing I2C
devices by tasking the BMC with low-level communications with such devices. The term "legacy device" is
used in this document to refer to those devices, sometimes referred to as non-intelligent or dumb devices,
which do not support the full interface protocol of the IPMI specification.
Two issues in using legacy devices are the inflexibility in their addressing and the method of exposing them
to the management application. Legacy devices were originally hardwired to respond to a particular
address. Subsequent versions offered a choice of several predetermined addresses and recent designs allow
address configuration. Intelligent devices provide for address configuration, which gives greater flexibility
in managing addressing allocation. This specification defines in sections 3.3.1 and 3.3.2 the address
allocation method for System Management that avoids addressing conflicts among standard nodes. The
system developer must ensure against address conflicts when deploying legacy devices of limited
addressing flexibility within CompactPCI system management networks.
The IPM] specification provides two methods to interface with legacy devices residing on the system
management bus. The first is to have the management application be specifically aware of the device and to
have it manage the device using IPMI commands; the IPMI specification defines commands which can
direct the BMC to pass messages between the management application and a legacy device. The second
method has the BMC created with specific awareness of the device. The BMC is then responsible for
managing the device and presenting it as a virtual IPM device to the application. This second approach
requires a knowledge of the specific devices to be managed prior to developing the BMC. This
specification does not require the existence of any legacy devices but neither does it prohibit them. As such,
the BMC is not required to support any legacy devices although custom BMCs may elect to do so. The
decision to develop a custom BMC with legacy device support must be coordinated with the hot-swap
objectives of the system in which it is to be deployed. In order to promote a market for a "standard" BMC,
this specification recommends that, where possible, legacy devices be located on private I2C busses off the
BMC and, in any case, that the system management application be responsible for managing these devices.
1.4 Definitions
Glossary
BMC Baseboard Management Controller
FRU Field Replaceable Unit
ICMB Intelligent Chassis Management Bus
IPM device Intelligent Platform Management compliant device
IPMB Intelligent Platform Management Bus
IPMI Intelligent Platform Management Interface
PM Peripheral Management controller
RAID Redundant Array of Inexpensive Drives
SBC System Board Computer
SDR Sensor Data Record
SRT Synchronous Receiver / Transmitter
CompactPCI® System Management Specification PICMG 2.9 R1.0
Page 10 of 32
February 2, 2000
Overview (Environment)
Terms used in this document
Shall - Indicates a mandatory requirement in order to claim conformance with this specification.
Should - Indicates a preferred implementation but with a flexibility of choice.
May - Indicates a flexibility of choice with no implied preference.
Peripheral Management Controller - (PM) is any intelligent IPM device that is not the BMC and resides
within the chassis. A special class of PMs are those that reside on the CompactPCI peripheral cards.
Management Network - refers to the full extent of interfaces to which the peripheral management
controllers and the BMC are connected. The management network consists of at least one IPMB but may
refer to more than one IPMB.
Management Bus - refers to a single, physical interconnection of management controllers. In the electrical
section of the specification, the term "line" is used interchangeably. This specification contemplates an
implementation where multiple bus segments may be electrically buffered together into a single functioning
IPMB. The IPMB consists of at least one management bus but may refer to more than one such bus.
Standard Node - A parametrically defined connection to the management network which includes an
IPMI compliant device.
System Board Computer (SBC) - The computer that runs the system management application software
and acts as host for the management network's BMC. Traditionally, this is the hardware that resides in the
system slot of the CompactPCI chassis. While a product with more than one system board can be
contemplated, only one system board (at least, at a time) will serve as the host for the BMC.
1.5 Supporting Documents
PICMG maintains a System Management Website with additional supporting documentation, application
information, updates to CompactPCI specific commands, industry links and other up-to-date information.
As of the date of issue of this document, this website is located at
http://www.picmg.org/gcompactpcisms.htm.
As of the date of issue of this document, the following specifications can be found at
http://developcr.intel.com/design/servers/ipmi/spec.htm
• IPMI Specification Vl.O Document Revision 1.1—Defines the messages and system interface to
platform management hardware. (August 26, 1999)
• IPMB Specification V1.0—Defines an internal management bus for extending platform
management within a chassis.(September 16, 1998)
• Platform Event Trap Specification Vl.O, revision 1.00—Defines a common format for SNMP
Traps generated by platform management hardware, BIOS, or system boot agents. (December 7,
1998)
• IPMI Platform Management FRU Information Storage Definition Vl.O Document Revision 1.1 -
Defines and describes the common format and use of the FRU (Field Replaceable Unit)
Information storage in platforms using IPMI. ( September 27, 1999)
• IPMB Address Allocation Vl.O—Presents the allocation and use ofI2C slave addresses for devices
on the IPMB. (September 16, 1998)
As of the date of issue of this document, the following specification can be found at
http://developer.intel.com/design/servers/ipmi/tools.htm
• IPMI Developer's Guide (Draft rev 0.7) - A companion document for the IPMI Specification, this
manual contains a brief introduction to the key elements of IPMI and provides information on how
to use the IPMI Specification and implement IPMI as part of a management system. (September
16, 1998)
CompactPCI® System Management Specification PICMG 2.9 R1.0
February 2, 2000
Page 11 of 32
Electrical Characteristics
As of the date of issue of this document, instructions for executing the IPMI adopters agreement can be
found at http://developer.intel.com/design/servers/ipmi/index.htm - contributor and copies of the agreement
are available at http://developer.intel.com/design/servers/ipmi/adopter.pdf
As of the date of issue of this document, the following specification can be found at
http://www-us.semiconductors.philips com/i2c/support/ - general
• The I2C-bus specification version 2.0 - ( December 1998)
As of the date of issue of this document, the following specifications are available from PICMG at
https://www.picmg.org/gspecorderformsec.htm or by contacting PCI Industrial Computer Manufacturers
Group (PICMG), 401 Edgewater Place, Suite 600, Wakefield, MA 01880 USA, Tel: 781.246.9318,
Fax: 781.224.1239.
• PICMG 2.0 R3.0 CompactPCI Core Specification
• PICMG 2.1 R1.0 CompactPCI Hot Swap
• PICMG 2.11 R1.0 Power Interface Specification
February 2, 2000
CompactPCI® System Management Specification PICMG 2.9 R1.0
Page 12 of 32
Electrical Characteristics
2. Electrical Characteristics
This section defines electrical parameters, limitations, and requirements for all the components of the
system management network. The peripheral developer is the target audience for sections 2.1 and 2.2. The
system developer is the target audience for section 2.3.
2.1 Standard Node
The standard node establishes generic limits within which a peripheral developer can deploy a PM. The
standard node is defined by its electrical characteristics and also by certain functional requirements. The
functional requirements are necessary to extend IPMI to the hot-swap environment and to establish a
convention for managing chassis with power faults.
2.1.1 Standard Node Parameters
The elements of the standard node are
depicted in Figure 2. Standard nodes
shall be implemented within the
parametric limits supplied in Table 1.
Additional explanatory text follows.
The ”I2C Transceiver (Xcvr)" in Figure
2 represents only the line interface
portion of one of the IPMB signals of
the PM. The term ’’driver” may be used
to refer to the transceiver, particularly
when describing its output behavior.
The transceiver shall comply with the
electrical characteristics of the I2C
specification. Additionally it shall
comply with the hot-swap
requirements of section 2.1.2
Connector
Figure 2 - Idealized Schematic of a Standard Node
^IPMBPWR
IPMB_SDA
» Or
IPMB_SCL
RP is the pull-up resistor for the standard node. R]
shall be connected directly to VSM so that line
biasing is not effected by a load fault local to the
node.
P
The node series resistor Rs is optional as indicated
in Table 1. It is provided for controlling electrical
transients that may occur during insertion
associated with hot-swapping. It also may be used
to keep strong drivers at or above the minimum
node fall time. The location of the series resistor
along the interconnection has negligible effect on
the performance of the node and is therefore not
specified.
Standard Node Parameters
Min Max Units
Sys Mgl. Voltage (VSM) 4.85 5.25 Volts
VSM Ramp Time (TSLEW) 100 ms
DC Node Current (Ism) 100 mA
Peak Node Current (Ismpk) 500 mA
Pull-up (RP) 34000 72000 Ohms
Series resistor (Rs) 0 200 Ohms
Capacitive Loading 10 20 PF
Node Fall time 5 250 ns
Input Glitch rejection 50 ns
Table 1 - Standard Node Parameters
The maximum capacitive load that the standard
node can present is specified in Table 1. This
figure includes the capacitive loading of the I2C
transceiver, the transmission line (PCB trace) between the device and the connector, any vias associated
with the PCB trace and the connector itself. The amount of allowable interconnection is therefore derived
from the available capacitance remaining after accounting for all the capacitive loading except for that of
the PCB trace. Nominally, device capacitance is half the capacitive load of the node. It is the responsibility
CompactPCI® System Management Specification PICMG 2.9 R1.0
February 2, 2000
Page 13 of 32
Electrical Characteristics
of the peripheral developer to account for the effects of transmission line segments on his board when
computing total capacitive loading. Since line loading is a function of the transmission line geometry the
peripheral designer must know the distributed loading of the transmission line used and must determine the
implementation-specific length limitation. This effective length limit applies to the sum of the lengths of
the interconnection segments.
The standard node is powered from the system management voltage domain as detailed in section 2.1.3.
2.1.2 Hot-swap Capability
The requirement to maintain stable system management operation in a hot-swap environment places
additional constraints on devices joining the system management network as well as devices already
resident on the network during an insertion event. The standard node is required to be hot-swap capable. To
be hot-swap capable, a device shall minimize line disturbance as defined in section 2.1.2.1 and shall
tolerate insertion anomalies as defined in section 2.1.2.2 below. Additionally the device shall recover from
irregular bit streams as defined in sections 2.1.2.3 and 2.1.2.4 below. Power requirements for hot-swap
capability are defined in section 2.1.3.
2.1.2.1 Initialization
The standard node shall implement adequate safeguards against excessive disturbance of the system
management network as the node is being inserted into a live system. This requirement is met by ensuring
that the clock and data lines of the I2C device are held in their high impedance state from the time the node
is powered until the node is initialized and ready to initiate a transaction on the bus. Protection against
excessive disturbance of the system management power domain is addressed in section 2.1.3.
2.1.2.2 Signal Transient Rejection
The design limits for signal transients produced by the insertion and extraction events associated with hot-
swapping are defined in Table 1. Hot-swap capable I2C devices are required to reject any line transient
within these limits. Rejecting the transient means the device makes the same interpretation of the signaling
level as it would if the transient were not there.
This requirement is essentially the same as the glitch rejection requirement for fast-mode I2C devices.
Although this specification is based on the 100 Kilobit/sec data rate of standard-mode I2C devices, the fact
that 400 Kilobit/sec, fast-mode devices can be clocked at the lower rate suggests one means of achieving
the glitch rejection required by this section. In any case, peripheral developers are responsible for selecting
the appropriate I2C device in implementing their standard management node.
2.1.2.3 Transmission Violations
Transmission violations are signal sequences that will cause management controllers to behave abnormally,
blocking or corrupting some or all transmissions on the I2C bus. These sequences do not occur normally but
could occur as a result of a device being removed at an inopportune time. These violations rely on a
timeout mechanism for detection and recovery. Table 2 lists nominal values for the timeout parameters for
which the I2C and IPMB specifications are the controlling documents. Hot-swap capable I2C devices are
required to recover from the violations defined below.
Min Max Units Source Specification
Overall Message Duration T1 20 ms IPMB Chapter 4
Time-out waiting for bus free T2 60 ms IPMB Chapter 4
T8 3 ms IPMB Chapter 4
I2C Clock Low hold T8 4.7 |US I2C Table 5
Table 2 - I2C Transmission Violation Timeout Limits
February 2, 2000
CompactPCI® System Management Specification PICMG 2.9 R1.0
Page 14 of 32
Electrical Characteristics
Aborted Transfer is the case when the bus goes dormant any time after a start condition and before a
corresponding stop condition. Normally, once a master asserts the start condition, all other devices not
already arbitrating for the bus will recognize the bus as being busy until a stop condition is detected. The
master, having won the arbitration, is required to complete the transmission within the maximum timeout
parameters of chapter 4 of the IPMB specification. The bus is in a busy state immediately after the start
condition. The bus is dormant if, before a stop condition occurs, the SDA and SCL lines are high for a
period of time greater than the minimum ’’Time-out waiting for bus free" period, T2, specified in chapter 4
of the IPMB specification. A master shall be capable of detecting a dormant bus and shall not consider a
dormant bus to be busy; i.e. the master is free to arbitrate for a dormant bus.
The selection of the base device used to implement the standard node will have a bearing on the means
used to tolerate an aborted transfer. See the implementation note in section 4.2.2. If the standard node uses
a dummy transaction to resynchronize the bus, the means for transmitting the dummy transaction (e.g.
connecting additional ports of a microcontroller to SDA and SCL) shall not cause the standard node to
violate the electrical loading requirements of section 2.1.1.
Stuck Line is the case when either the clock or data line is held active low beyond its respective limit. An
I2C device shall not hold the clock low longer than the maximum "I2C Clock Low hold" limit, T8, specified
in chapter 4 of the IPMB specification. It shall not hold the data line low longer than the maximum
"Overall Message Duration" limit, Tl, in the IPMB specification. See the implementation note in section
4.2.2
It has been observed that some devices with integrated I2C hardware (Synchronous Receiver/Transmitter or
SRT) can lock up when exposed to a clock signal with an extended active low duration. Accordingly, all
I2C devices are required by this specification to function properly when either the clock or data line is held
low up to its respective maximum limit. It is recommended that IPM devices be capable of isolating their
clock and data lines from the bus. Devices with the capability of isolating their clock and data lines should
remove themselves from the bus if they have reason to believe they are the offending device.
2.1.2.4 Protocol Violations
Protocol violations are message sequences that do not follow the format prescribed by the IPMB
specification. These anomalies occur above the I2C protocol, i.e. protocol violations can occur with
perfectly valid I2C transactions. The Functional Specification chapter of the IPMB specification describes
various protocol violations from which intelligent devices are required to recover. In several cases, the
protocol violation is defined in terms of a time limit on expected actions. The Timing Specifications
chapter of the IPMB specification sets these timeout limits. Hot-swap IPM devices are required to meet the
protocol violation recovery requirements of the IPMB specification.
2.1.3 Node Power
The standard node powers its PM from the system management power domain denoted as VSM in Figure 2.
The VSm power domain is separated from other power domains in order to enable the system developer to
supply power from an auxiliary source, such as a battery, during a failure of chassis power. It is the
responsibility of the system developer to provide a stable, non-interrupted, VSM power domain. If the
power domain is battery-backed, or otherwise powered from an auxiliary source, VSM shall not be
interrupted any time system management is intended to operate. If no auxiliary power is provided, the
system developer shall connect VSM to a 5V power source. System developers and backplane designers
refer to section 3.1.2 for additional information on providing VSM. Figure 2 illustrates a typical application
of VSm to a standard node. Take special note that the connection of pull-up resistor RP to VSM shall be
directly to the pin of the connector. This is done in order to retain the integrity of the pull-up function in
the face of an on-board VSm fault. All other components of the node shall be isolated from VSM through the
protection circuitry.
Table 1 specifies the limits for maximum D.C current ISm and peak instantaneous current Ismpk that may be
drawn by the PM. Maximum D.C. current defines the limit for average current draw over an appreciable
February 2, 2000
Page 15 of 32
CompactPCI® System Management Specification PICMG 2.9 R1.0
Electrical Characteristics
period of time. Maximum peak instantaneous current limit is defined to protect the connector, to bound
system startup current, and to budget for power decoupling required for hot-swap transient limiting.
Current that exceeds the DC limit constitutes a load fault. Any current in excess of Ism but less than Ismpk is
considered surge current and the peripheral shall ensure that the VSM domain is only subjected to surge
current for a limited amount of time. The duration of a surge is unspecified and is a function of the current
limiting circuitry described below. The peripheral shall never subject VSm to current draws in excess of
Ismpk, particularly during hot-swap insertion. Note that for this reason, decoupling capacitance for the node
shall be isolated through the protection circuitry from VSM and should be kept to a minimum.
The VSm domain shall be guarded from the load faults defined above by means of appropriate current
limiting circuitry. The current limiting circuitry should be designed as much as practical to minimize surge
current duration, e.g. through careful sizing of a fuse or through active means such as a FET switch. The
current limiting circuitry shall ensure that instantaneous current draw never exceeds Ismpk , e.g. through
appropriate series resistance.
The less current load the node presents, the more quickly VNOde will ramp to a useable level on board. This
is desirable in that the node will more quickly begin its monitoring chores. However, the node may also be
exposed to relatively slow ramp rates of VSm during global power up of the system. The worst case
(maximum) ramp-on time TSLEW is defined in Table 1. The standard node shall implement a power-on reset
circuit that operates within the limits of TSLEW.
2.2 Non-Standard Node
Any device resident on the management network that does not meet all the requirements of section 2.1 is
defined to be a non-standard node. All non-complying electrical characteristics, including non-compliant
loading presented by the non-standard node shall be made available to the system designer for this purpose.
As such, the peripheral developer that produces a product containing a non-standard management node
shall publish those characteristics of section 2.1 with which the node does not comply. In the case where
non-compliance results from exceeding a parametric limit (e.g. line loading), the peripheral developer shall
publish the new value of the parametric limit, which the product will meet. Note that this section is not
applicable to CompactPCI peripheral cards, as they are required to have standard nodes.
2.3 Management Bus Topology
This section specifies the electrical requirements the system developer shall meet to produce a compliant
management network within which the nodes of the previous sections will function properly. In the course
of allocating load budget to devices and network interconnection, the system developer shall comply with
the loading requirements of section 2.3.1 and the biasing requirements of section 2.3.2.
2.3.1 Line Loading Limitations
Table 3 lists the maximum capacitive loading for each
signal of the management network. The parameter is
called signal loading and is defined as the capacitive
loading resulting from devices connected to the trace as
well as capacitive loading of the trace itself. The signal
loading value in Table 3 is included here for reference
only. The I2C specification is the controlling document
for maximum capacitive loading.
Line Parameters
Min Max Units
Signal Loading 400 PF
Line resistance 1 ohm
Current Capacity 5 mA
Bias Time Const. 700 1400 ns
Table 3 - System Management Line
Parameters
The system management network shall be designed such
that the signal loading shall be less than or equal to the
maximum signal loading value of the I2C specification as referenced in Table 3. The total capacitive load
shall be calculated from the worst-case device loading plus the line loading of the network. The worst-case
February 2, 2000
CompactPCI® System Management Specification PICMG 2.9 R1.0
Page 16 of 32
System Management Requirements
device loading is determined from all intended configurations of the product that affect the system
management network including build options and intended installations of removable subsystems.
In addition to the line loading constraints discussed above, each line of the system management bus shall
provide satisfactory conducting capabilities as follows. No path between any two nodes of the management
network shall exhibit a resistance in excess of the line resistance defined in Table 3. All signal lines of the
management network shall be capable of carrying no less than the current capacity defined in Table 3 over
the temperature range defined for the product.
2.3.2 Line Biasing Requirements
This specification has adopted a distributed approach to biasing the open-collector lines of the I C bus. This
pay-as-you-go approach requires that each element of the bus provide pull-up biasing proportional to the
capacitive loading that the element brings. The proportion is chosen so that, as the management network is
loaded toward its capacitive limit, it is biased more strongly to its DC drive limit. The proportion is
expressed as a time constant, which is the product of the bias resistance and load capacitance.
The line biasing requirements of this section apply to the fixed media of the system such as backplane
traces, cables and related conducting paths between field-replaceable nodes. Each line of the bus shall be
biased to the system management voltage through a resistance such that the product of the medium’s line
capacitance and the biasing resistance shall be within the minimum and maximum bias time constants
defined in Table 3.
CompactPCI® System Management Specification PICMG 2.9 R1.0
February 2, 2000
Page 17 of 32
System Management Requirements
3. System Management Requirements
This chapter contains operational requirements for the overall system and the various subsystems within a
managed chassis.
3.1 Chassis
The system developer is the target audience for this section. In this section, chassis refers to the collection
of all components in the product except for the SBC, CompactPCI add-in cards and other pluggable,
manageable subsystems. Generally, what remains is the backplane, cables and related conducting paths
between the PMs and possibly some integrated, non-removable system management devices.
3.1.1 Backplane
If a product contains an SBC and at least one CompactPCI peripheral then the backplane topology
requirements of this section apply. As discussed previously, the architectural decision to use one or both
channels of the BMC rests with the system developer and is reflected in the routing of the IPMBs on the
backplane. The management network interface between the SBC and the backplane is defined by the pinout
of Table 4.
JI J2
IPMBO Vsm IPMB 1 ALERT#
Signal - SCLK SDAT SCLK SDAT
Pin name - IPMB_SCL IPMB_SDA IPMB_PWR SMB.SCL SMBJSDA SMB_ALERT#
System Slot B17 C17 A4 D19 C19 E19
Peripheral Slot B17 C17 A4
Table 4 - CompactPCI Backplane Pin Assignments for IPMBs
3.1.1.1 IPMB 0
Routing of IPMB 0 is mandatory to all J1 connectors on the CompactPCI bus per the pinout of Table 4.
Nonetheless, the routing of IPMB 0 is still subject to the topology limitations of section 2.3 and the system
developer shall ensure both these requirements are satisfied. The topology limitations are sufficient to
support a standard CompactPCI configuration of seven peripherals and a system slot. Attention must be
paid to the topology limitations when more involved configurations are contemplated. See section 3.1.3.
Within the constraints of those same topology limitations, the system developer may elect to route IPMB 0
to additional manageable resources in the chassis. Pursuant to section 2.3.2, the chassis shall contain
appropriate biasing for the capacitive loading associated with this bus. If the management network contains
a bridge to an ICMB, locating the bridge on this IPMB segment is recommended. See section 3.1.3.
3.1.1.2 IPMB 1
Support for IPMB 1 on the backplane is optional. If the SBC in the system slot is equipped with a dual
ported BMC, IPMB 1 is available to the backplane at the J2 connector of the system slot per Table 4. The
routing of this IPMB segment is unspecified and is therefore at the disposal of the system developer subject
to the topology limitations of section 2.3. Note that the pin numbers defined in Table 4 for IPMB 1 on the
system slot correspond to reserved pins on the .12 connectors of the peripheral slots per the PICMG core
specification. Therefore a compliant backplane will not bus IPMB 1 to the J2 connectors of the peripheral
cards. This IPMB shall be electrically biased per section 2.3.2.
February 2, 2000
CompactPCI® System Management Specification PICMG 2.9 R1.0
Page 18 of 32
System Management Requirements
3.1.1.3 Treatment of ALERT#
The ALERT# signal is a low true, wire OR’ed open collector signal. This signal is generated by certain
legacy sensor devices to indicate to their management applications that they are in need of service. This
signal is used at the option of the system developer that has a requirement to support a population of this
class of device. ALERT# is routed in common from these devices to J2 as SMB_ALERT# (refer to Table
4) and ultimately connected to the ALERT# pin on the BMC. See section 4.1.5.3. Source current for
ALERT# is provided by a 4.7K 5% resistor pulled up to VSM located on the SBC as described in section
3.1.8 of the CompactPCI Core Specification.
Implementation Note
Backplane providers do not typically deploy this class of sensor device on their own behalf. For maximum
applicability of their product, these providers may elect to provide IPMB connectors for IPMB 0 or IPMB 1
(or both). If they elect to provide these connectors, they shall route ALERT# to the appropriate pins per
section 3.1.1.4. Note that regardless of which IPMB the connector supports, the ALERT# pin is always
routed to J2 per section 3.1.1.
3.1.1.4 IPMB Extension connector
The IPMB may be implemented over multiple physical segments subject to
the topology limitations of section 2.3. This section defines a common
connection method for cabling remote system management components.
The standard connector for PICMG System Management off-board
extension is the Molex 1.25mm pitch, Micro Wire-to-Board and Wire-to-
Wire series or mateable equivalent in a five-pin configuration. This
connector series is available in vertical and right angle, surface-mount and
through-hole versions. The standard extension connector for CompactPCI
system management is Molex part number 53398-0590 or equivalent. The
reference receptacle is Molex part number 51021-0500 or equivalent. Table
5 lists the pinout of the connector when used in a PICMG System
Management application.
Extension Connector Pin Assignment
Pin Signal
1 SCL
2 GND
3 SDA
4 Vsm
5 ALERT#
Table 5 - IPMB
Connector
The system developer that chooses to route an IPMB to a connector is
reminded of that, with the addition of cable and device(s) attached to the connector, the composite network
is still subject to the total loading limits of section 2.3. With this in mind, the system developer shall
determine and communicate the restrictions that apply to that which may be connected to the connector.
The maximum current through any pin shall be less than or equal to 1 Amp. Power faults (e.g. a bad cable
with a short between the power and ground wires) may be applied to the connector and appropriate
measures shall be taken to respect the per-pin current limitations.
The wiring should be so chosen that crosstalk and interference are minimized between the bus lines. The
pin-out arrangement has been chosen such that SCL can be paired with GND, and SDA can be paired with
Vsm- Bypass capacitors must be placed close to the VSM and GND pins of the connector at each end of the
extension wiring to ensure that VSm provides an effective return path for signal current.
3.1.2 System Management Power
This power domain is defined as the primary power source for all nodes on the system management bus per
section 2.1.3. At the system developer’s option, this power domain may be sustained during chassis power
failures through battery backup or similar means. While this is the intended purpose of this power domain,
those system developers not requiring this degree of system management support shall connect this domain
directly to a 5V power source. It is preferred that this domain is sustained during a chassis power outage in
which case the voltage shall remain in tolerance as chassis power transitions in and out of operation.
CompactPCI® System Management Specification PICMG 2.9 R1.0
February 2, 2000
Page 19 of 32
System Management Requirements
Voltage and current tolerances for system management power are defined in Table 1. Total power demand
for system management power is calculated by totaling the DC current draw for each node. Required surge
current capacity is calculated by adding to the total DC current the maximum surge current for one node.
Surge current is defined to provide for the clearing of a power fault e.g. by blowing a fuse or tripping a
breaker. Because the duration of the surge current is not specified, the delivery of surge current must be
coordinated between the decoupling capacitance on the backplane and the source of VSM. System
management power shall be decoupled and distributed through conductors adequately sized to allow the
surge current to flow while maintaining system management voltage at all points in the domain within the
tolerances defined in Table 1.
Implementation Note
In order to enable the development of standard backplanes, a predetermined decoupling requirement
provides for a standard allocation of surge response between the backplane and the supply for VSM. These
backplane developers should provide a minimum of 400 uF of decoupling capacitance on the VSM voltage
domain. System developers using such backplanes should use a power supply with adequate transient
response time to meet the voltage transient response to an ISmpk current load step on VSM as required in the
previous paragraph of this section. Typically, this implies a transient response time of no more than 100
microseconds on the part of the power supply. In any case, the system developer maintains the
responsibility for ensuring that the transient response of VSM is properly coordinated between the backplane
and power supply used.
3.1.3 Bridging and Extending
The existence of repeater devices for the rC bus provides a means of extending the IPMB over multiple
physical segments. Through these repeaters, the multiple electrical segments function as a single, virtual
IPMB. In such a case, the electrical constraints of section 2.3 apply to each electrical segment individually.
Conversely, the addressing requirements that follow in this section apply globally to the all the devices
connected to the one, virtual IPMB.
The IPMI spec defines a device to bridge from an IPMB to an Intelligent Chassis Management Bus
(ICMB). The bridge device allows the IPMB to join a community of IPMBs in a multi-chassis CompactPCI
system management network. The intent in bridging IPMI segments is to allow all devices to communicate
with each other. Refer to the ICMB specification for guidance on how multiple chassis can be
interconnected using this technology. Since IPMB 0 on J1 is specified to be available and bussed to all
CompactPCI cards, it is recommended that ICMB bridges reside either on IMPB 0 or on both IMPB 0 and
IMPB 1.
3.2 System Board Computer and BMC
The target audience of this section principally is the designer of the BMC. The SBC developer is included
here because the SBC is commonly the host for the BMC. Section 3.2.1 is targeted at the BMC designer
while section 3.2.2 addresses the requirements for deploying the BMC.
A chief function of the BMC is that of a bridge between the system interface and managed resources (see
Figure 3). The hardware level of the system interface is described in the IPMI specification for platforms
based on Intel-style processors. However, the CompactPCI specification does not require the use of any
particular processor. For the purpose of this specification then, the IPMI specification for the hardware
level of the system interface is considered a recommendation only.
February 2, 2000
CompactPCI® System Management Specification PICMG 2.9 R1.0
Page 20 of 32
System Management Requirements
3.2.1 Baseboard Management Controller
This section defines the interface
requirements of a BMC for the
CompactPCI system management
network. The basis for this
specification is the BMC as defined
in chapter 3 of the IPMI
specification. In summary, that
specification requires the BMC to
provide:
• a system interface,
• the capacity to receive events,
• an SDR repository and SEL,
• a watchdog timer function
capable of system reset action,
• and several other internal
functions.
The IPMI specification defines an
optional IPMB interface.
A block diagram of the BMC for
the CompactPCI system
management network is depicted in Figure 3. The interface requirements are defined below.
3.2.1.1 System Interface
As previously discussed, this specification does not define the system interface. The SBC developer is free
to define a suitable interface in view of the processor technology of the SBC. The system interface shall
support the BMC in its requirement to implement the command set defined in section 4.1. The system
interface options defined in the IMPI specification serve as examples of a compliant system interface.
3.2.1.2 Single-ported IPMB
A minimum of one IPMB interface shall be provided by the BMC. This interface shall comply with the
IPMB definition called out as an option in the IPMI specification. Per the IPMI specification, this IPMB is
accessed through the system interface as channel 0 and is referred as IPMB 0 throughout this specification.
The physical interface of IPMB 0 shall meet all the electrical specifications of section 2.1.1. In particular,
the port is hot-swap capable and I2C compliant. IPMB 0 is a standard means by which the BMC receives
events and is a component of the event receiver function.
The BMC shall locate itself at address 0x20 on IPMB 0 in accordance with the IPMI specification.
3.2.1.3 Dual-ported IPMB
A second IPMB interface may be provided by the BMC. If this option is implemented, the BMC is called
dual-ported. The dual-ported BMC shall provide the IPMB 0 per section 3.2.1.2 and a second IPMB
accessed through the system interface as channel 1. This interface shall comply with the IPMB definition
called out in the IPMI specification as well as the electrical specifications of section 2.1.1. This IPMB is
referred to as IPMB 1 throughout this specification. IPMB 1 is another means by which the BMC receives
events and is a component of the event receiver function. The BMC shall support transactions between
IPMB 1 and the system interface. The BMC is not required to support transactions between IPMB 1 and
IPMB 0. Any traffic between IPMB 0 and IMPB 1 is neither required nor forbidden. No addressing
mechanism is currently specified for any such inter-IPMB communication. See section 4.1.1.3.
February 2, 2000
Page 21 of 32
CompactPCI® System Management Specification PICMG 2.9 R1.0
System Management Requirements
The BMC shall locate itself at address 0x20 on IPMB 1 in accordance with the IPMI specification.
3.2.1.4 Optional and Private Busses
The BMC may provide additional, unspecified interfaces to resources managed by the BMC and the system
management application. An example of the use of a private bus is given by the requirements of Section
3.2.1.5. In this example, the BMC may implement repository storage as a FLASH EPROM in which the
interface is a number of address, data, and control bits suitable for controlling the storage device. Another
BMC may implement local storage as a serial EPROM on an I2C or IPMB interface. In all cases, the
specific interface is defined by the BMC developer.
3.2.1.5 Repository Storage
The BMC is required to provide access to a repository for Sensor Data Records (SDR) and to maintain a
System Event Log (SEL) per the IPMI specification. The type and location of the SDR and SEL storage
medium is unspecified except that the storage must be nonvolatile. The minimum storage requirement
specified by IPMI is to hold 16 entries in the SEL. This allows for minimal, low cost solutions. Most
systems will benefit from an SDR and a larger SEL.
The minimum storage requirements suggest the possibility of reserving storage directly in the BMC,
however, this may prove to be impractical or to yield inadequate event logging. SBC and BMC developers
are encouraged to use an auxiliary storage device to hold the SDRs and SEL. For example, a private FC bus
may be implemented out of the BMC in order to access an external serial electrically erasable PROM
(SEEPROM). In any case, the BMC developer must have a priori knowledge of non-volatile storage
devices to use them as SDR repository, SEL, or FRU storage. This a priori knowledge suggests that the
storage be located on the same board as the BMC for use in any chassis, but this location is not required by
this specification. Placing supplementary storage on the IPMBs is possible but poses its own hazards.
Pursuant to section 2.3.1, the device capacitance of the auxiliary storage on IPMBs shall be included in the
loading budget for the bus.
The IPMI specification allows repository storage to consist of SEEPROM devices residing on the IPMB.
However, because the BMC is required to support hot-swap and is required to manage storage, an
implementation of the BMC that places auxiliary storage on the IPMBs shall meet the electrical
requirements of section 2.1.1. The relevance of this requirement is underscored by IPMB 0 where system
developers are likely to require hot-swap capability. Developers are cautioned that the capability for
meeting the requirements of section 2.1.1 is unverified for non-intelligent (legacy) devices. Use of these
devices on IPMBs where hot-swapping is required places responsibility on the BMC developer and the
system developer to confirm section 2.1.1 compliance of that device.
3.2.1.6 IPMI Compatibility and Interoperability
In addition to the preceding requirements, the BMC is required to comply with all requirements of the IPMI
specification with the exception of the system interface requirements as noted in section 3.2.1.1. Refer to
the IPMI specification for a definition of these remaining requirements such as watchdog timer functions,
capability of system-reset action, and so forth.
The requirements of this specification define a core functionality for the BMC and generally do not
preclude the addition of OEM-specific resources to the basic BMC. When implementing such additional
resources, channel 1 is reserved for accesses to IPMB 1 and may not be used for access to these resources.
Single-ported BMCs shall, when transactions on channel 1 are attempted, return an appropriate error code
indicating this channel is unsupported. Refer to section 4.1.1.1.
3.2.2 BMC Deployment
The target audience for this section is the SBC developer or anyone developing a subsystem that is the host
for the BMC.
February 2, 2000
CompactPCI® System Management Specification PICMG 2.9 R1.0
Page 22 of 32
System Management Requirements
3.2.2.1 BMC Power
The BMC shall draw power from the system management power domain VSm in accordance with the
standard node power requirements of section 2.1.3. In addition to those requirements, the BMC shall draw
power from its host’s local power domain in the event of a failure in the system management power
domain.
3.2.2.2 System Interface
The host processor for the system management application shall be capable of communicating with the
BMC. As previously stated, the hardware level of the system interface is described in the IPMI
specification for platforms based on Intel-style processors. However, the CompactPCI specification does
not require the use of any particular processor. For the purpose of this specification then, the IPMI
specification for the hardware level of the system interface is considered a recommendation only. Note that
the BMC, in conjunction with its host board, shall implement a standard node.
3.2.2.3 Single-ported BMC
IPMB 0 of the BMC shall be routed to the JI connector of the system slot per the pinout assignment for the
system slot IPMB 0 of Table 4. The combined electrical characteristics of the BMC IPMB interface, signal
trace and connector JI shall meet the standard node requirements of section 2.1
3.2.2.4 Dual-ported BMC
For those SBCs which elect to deploy a dual-ported BMC, in addition to the IMPB 0 requirements of
section 3.2.2.3 , IPMB 1 of the BMC shall be Routed to the J2 connector of the system slot per the pinout
assignment for the system slot IPMB 1 of Table 4. The combined electrical characteristics of the BMC
IPMB interface, signal trace and connector J2 shall meet the standard node requirements of section 2.1
3.2.2.5 Ancillary BMC Support
The SBC shall provide the capability for the BMC to reset the system per the IPMI specification.
Additional ancillary support may be specified by the BMC, e.g. use of private busses for local
management, interface to auxiliary storage, etc.
CompactPCI® System Management Specification PICMG 2.9 R1.0
February 2, 2000
Page 23 of 32
System Management Requirements
3.3 Address Allocation for Peripherals
3.3.1 General Allocation Principles
The basic principle of address allocation is
found in the IPMB vl .0 Address Allocation
specification in a note that states, in essence,
that management controllers should be
configurable for a minimum of eight possible
addresses. The total address space within
which the devices reside is so limited, and
the potential users so varied, that reserved
addresses are not practical. Instead, the
management controller is expected to
provide enough flexibility in address location
that the system developer can define resource
locations on a per-design basis. The means
by which the management controller is
configured for a given address is unspecified.
Two example methods are:
• providing pins on the management
controller to allow jumper selection
of one of a set of predetermined
addresses; or
IPMB Address Allocation Map
lOh-lEh Available for third party add-ins
30h-3Eh Available for third party add-ins
52h-60H Available for chassis-specific functions Allocable to Power Supplies
62h-6Ch Available for chassis-specific functions
80h-8Eh Reserved for Board Set manufacturer use
BOh Available for third party add-ins
B2h-C0h Available for third party add-ins Allocable to CompactPCI peripheral cards
C2h Reserved for SMBUS auto-allocation
C4h-ECh Available for third party add-ins Allocable to CompactPCI peripheral cards
EEh Reserved for Board Set manufacturer use
Table 6 - General Address Allocation per IPMB
• providing an in-circuit
programmable device, which has been programmed at manufacturing time from which the
management controller retrieves the preprogrammed address during initialization.
These and other methods may be used to achieve the flexibility in address location that the system
developer needs.
PICMG has established default address allocations for certain classes of peripherals. These are defined in
the following section. For system management nodes not addressed by the programmatic address allocation
of the next section, the assignment of addresses shall be made under the direction of the IPMB vl .0
Address Allocation specification referenced in section 1.5. That document is the controlling specification
but is excerpted here in for reference. Generally, address ranges not listed are already defined for legacy
devices or components of the IPMI specification.
3.3.2 Programmatic Allocation of Peripheral Addresses
This specification provides for the establishment of a defined, autonomous address allocation mechanism
for a given class of peripherals. For such a class of peripherals, a predetermined address range is
established and a means of selecting a unique address from the range is defined. In effect, this is a special
case of the jumper-selection method of address configuration provided in the previous section. This
specification does not define the means by which the unique address is selected but a key premise is that
the chassis drives the selection means, e.g. via selector pins on a connector. In this way the system
developer is able to manage programmatic address allocation while peripheral developers are able to design
to the defined address range.
The limited range of available addresses, however, means that these programmatic ranges must coexist
with more flexible allocation methods. Even though a programmatic allocation scheme reserves a range of
IPMB addresses for an architecturally limited, maximum number of instances of a peripheral, the system
developer is only required to reserve the IPMB addresses for the peripherals that may actually exist in a
February 2, 2000
CompactPCI® System Management Specification PICMG 2.9 R1.0
Page 24 of 32
System Management Requirements
specific product. For example, a system that has no CompactPCI peripheral slots at geographical addresses
above 7, is free to use the IPMB address above BCh (see Table 8) for other IPM devices.
The peripheral classes for which a programmatic address allocation is defined are listed in the sections that
follow. Manufacturer’s interest groups that would benefit from a programmatic address assignment are
encouraged to establish it. The PCI Industrial Computer Manufacturers Group (PICMG) is available to
assist in these efforts.
3.3.2.1 Power Supply Management Node Address Mapping
The PICMG Power Interface Specification defines a set of three
geographical addressing signals as the selection means for a
programmatic allocation of IPMB addresses for its power supplies. For
a given power supply bay, the backplane straps these geographical
address pins to one of seven states as shown in Table 7. This table
defines the IPMB address assigned to each geographical address. The
reservation of these addresses is made under the direction of the IPMB
vl.O Address Allocation specification.
Power Supply Address Allocation
Geo. Addr. IPMB Addr.
0 52h
1 54h
2 56h
3 58h
4 5 Ah
5 5Ch
6 5Eh
7 Disabled
Table 7 - Power Supply Address
Allocation
3.3.2.2 CompactPCI Peripheral Management Node
Address Mapping
In a similar fashion to the power supply geographical address assignments, the CompactPCI specification
defines signals which uniquely define the slot into which the peripheral is installed. These geographical
addressing signals are available on the J2 connector and shall be used per Table 8 to define the IPMB
address that the PM will use. The reservation of these
addresses is made under the direction of the IPMB vl.O
Address Allocation specification. Note the discontinuity in
IPMB addresses between geographical addresses 9 and 10.
This is to avoid the reserved address C2h.
The geographical addresses "0" and ”31” are reserved by
the CompactPCI specification and should not be
encountered in compliant backplanes. A compliant
peripheral installed in a legacy backplane that does not
support geographical addressing will interpret the
unconnected lines as the highest geographical address, i.e.
31, and shall not enable its IPM device under these
circumstances.
For 3U CompactPCI peripheral cards, the use of J2 is
optional and may not be installed on a given product. 3U
CompactPCI peripheral cards that do not have J2 populated
shall provide an alternate, field-adjustable means of setting
the geographical address in lieu of using the signals off J2.
The mechanism to set the geographical address shall be
constrained to allow only valid addresses to be specified,
particularly with regard to addresses 0 and 31. This option
promotes the possibility of human error in assigning
geographical addresses that properly correspond to the slot
location. Also, non-unique assignment of a geographical
CompactPCI Peripheral Address Mapping
Geo. Addr. IPMB Addr. Geo. Addr. IPMB Addr.
0 Disabled 16 DOh
1 BOh 17 D2h
2 B2h 18 D4h
3 B4h 19 D6h
4 B6h 20 D8h
5 B8h 21 DAh
6 В Ah 22 DCh
7 BCh 23 DEh
8 В Eh 24 EOh
9 COh 25 E2h
10 C4h 26 E4h
11 C6h 27 E6h
12 C8h 28 E8h
13 CAh 29 EAh
14 CCh 30 ECh
15 CEh 31 Disabled
Table 8 - CompactPCI Peripheral Card
Address Allocation
address creates a non-configurable system management
February 2, 2000
Page 25 of 32
CompactPCI® System Management Specification PICMG 2.9 R1.0
IPMI Functional Requirements
network. Therefore this exception is not a preferred embodiment for address mapping.
3.4 CompactPCI peripheral cards
The target audience for this section is the peripheral developer. Compliant CompactPCI peripheral cards
shall contain a PM deployed such that the combined electrical characteristics of the device, signal trace and
connector meet the standard node requirements of section 2.1. The PM's IPMB signals shall be routed to
the JI connector of the card per the pinout assignment for the peripheral slot IPMB 0 of Table 4. The PM
shall establish the unique address it will use in the management network in accordance with section 3.3.2.2.
3.4.1 Peripheral Management Node Minimum Functionality
The minimum functional requirements of the IPM device are defined by the IPMI specification. These
amount to little more than acknowledging ID commands targeted at the peripheral. The peripheral
developer is encouraged, therefore, to augment the minimum functionality with additional status and
control features that enhance the diagnostic and management capabilities of the product. In the main, these
features will be unique to each product.
3.5 Peripheral Management Controllers
This section applies to PMs not resident on a CompactPCI peripheral card. Its target audience is the
peripheral developer. The PMs of this section may reside on alarm cards, power supplies, fans, RAIDS, etc.
The minimum functional requirements of these devices are defined by the IPMI specification and are
identical to those of the section 3.4 except for address allocation. Allocation of IPMB addresses for devices
in this category are controlled by the IPMB vl .0 Address Allocation specification. See section 3.3.1.
February 2, 2000
CompactPCI® System Management Specification PICMG 2.9 R1.0
Page 26 of 32
IPMI Functional Requirements
4. IPMI Functional Requirements
This chapter defines the required logical behavior for each type of IPM device. The target audience for this
chapter is the firmware developer undertaking the implementation of any of these devices. Generally, these
implementations will start with some form of programmable microcontroller that must have sufficient
resources to meet the electrical and architectural requirements of chapters 2 and 3. The actual behavior and
command set capability are then added through firmware to achieve the minimum functionality defined in
this chapter. Additional functionality may be defined by the firmware developer and by the developer of the
host board upon which the IPM device will reside. These developers are encouraged to do so and are
directed to the IPMI specification for guidance on extending the feature set of their device.
4.1 BMC Functional Requirements
Fundamentally, the minimum functional requirements of the BMC are defined by the IPMI specification.
Chapter three of that document is devoted to the BMC. tn addition, this section provides clarification and
supporting requirements where needed to apply the IPMI specifications to the CompactPCI environment.
Note that IPMI requirements identified in this section are for reference only; the IPMI specification is the
controlling document for any IPMI requirements. The additional functional requirements of this section are
based on the architectural issues and resource requirements of section 3.2.1. Figure 3 may be referenced for
the context of the requirements that follow.
Pursuant to chapter three of the IPMI specification, the BMC provides the system interface between the
host processor and the system management network. In addition, the BMC provides IPM device command,
SDR repository, watchdog timer, event receiver, system event log, and internal event generation functions.
The BMC provides at least one IPMB interface for CompactPCI system boards. The BMC may optionally
support sensor and external event generator functions. A brief description of these functions is included,
but the IPMI specification governs the required functions.
4.1.1 BMC Management of Message Transfers
Section 3.1 of the IPMI specification requires the BMC to have a system interface (see section 3.2.1.1 of
this document). Chapter six of the IPMI specification, 'ВМС-System Messaging Interface’, defines the
messaging interface between the BMC and system software. To the IPMI specification, there is only one
system interface and there is only one (optional) IPMB. By defining a second IPMB, this specification
extrapolates the mechanism for transferring messages among the system interface and multiple IPMBs.
4.1.1.1 System Interface to IPMB transfers
The IPMI specification defines the format for the ’’Send Message” command used by the system interface
to send a message to the IPMBs. The IPMI specification already specifies that channel 0 in the Send
Message Command direct the message to the IPMB. This specification further specifies channel 0 to direct
the message to IPMB 0 (see section 3.2.1.2). Additionally, this specification defines channel 1 to direct the
message to IPMB 1 if it exists. (See section 3.2.1.3). Other protocol types may be supported (e.g. Ethernet,
serial, etc.), however, their messaging must take place on channels 2 through 7. The IPMI specification
defines the format for the Send Message Command Response in section 6.5 entitled ’Sending Messages to
the IPMB from System Software'. The IPMI specification also defines a list of generic completion codes
and command-specific completion codes for the response. A single-ported BMC shall respond to a "Send
Message" command addressed to channel 1 with the error code 0C9Eh, "Parameter out of range. One or
more parameters in the data field of the request are out of range.”
Access of legacy devices by system software is accomplished using the "Master Write-Read I2C"
command. The structure of this command includes fields, 'bus type' and 'bus ID’, to specify the bus to
which the message is directed. Legacy devices on IPMB 0 are accessed per the IPMI specification, i.e. with
CompactPCI® System Management Specification PICMG 2.9 R1.0
February 2, 2000
Page 27 of 32
IPMI Functional Requirements
bus type 'public' and bus ID = 0. Legacy devices on IPMB 1 shall be accessed with bus type 'public' and
bus ID = 1.
4.1.1.2 IPMB to System Interface Transfers
For messages originating on the IPMBs destined for the system interface, the BMC is required to
implement a Receive Message Queue. The BMC shall pass these messages to the system interface in the
order that they were received on each of the individual IPMB channels that it supports, however, the timing
relationship between messages received on different channels is not guaranteed. For the case where
abnormal traffic on a channel threatens to overrun the queue and block traffic from the other channel(s), the
IPMI specification suggests strategies which the BMC developer may take under advisement. In defining
the queue overrun policy, the BMC developer is expected to preserve the chronological order of the
message stream as much as possible.
The ’’Get Message” command is defined by the IPMI specification to pull a message from the Receive
Message Queue. The format of the Get Message Command Response includes the channel from which the
message came. The queuing mechanism works the same regardless of how many channels (typically
IPMBs) the BMC supports since the source channel is part of the information in the queue. For example, a
single-ported BMC will simply have no messages queued from channel 1 (IPMB 1) which is a consistent
presentation to system software.
4.1.1.3 IPMB to IPMB transfers
IPMB bridging is unspecified, i.e. neither defined nor prohibited by this specification. The system
management concept embraces scenarios where emergency management controllers and ICMB bridge
devices work to allow remote management applications to diagnose failed systems. These types of devices
are capable of accessing management devices without the intervention of the primary processor. However,
with two IPMBs, the management device population may be divided between the two busses. In order for
management controllers and ICMB bridge devices to fulfill their mission, they may require access to
devices on both busses. Consider that access to both populations of devices can be achieved by creating
emergency management controllers and ICMB bridge devices that, like the BMC, are dual-ported and can
connect to both busses subject to the constraints of section 2.1. Also, system developers may find that
access to the devices on only one IPMB might provide adequate access to diagnostic information. In view
of the variables associated with remote management access and given the complexity of defining a
messaging protocol to overlay the IPMI specification, a proper IPMB-to-IPMB bridging definition exceeds
the scope of this specification.
4.1.1.4 System Interface to Optional Bus Transactions
Section 3.2.1.4 discusses the potential benefit of optional and private busses for a given BMC. For those
busses which are controlled by the BMC and are accessible to system software, the IPMI specification
describes two methods of access. In the case where an optional bus is an I2C bus or an IPMB, access to
legacy I2C devices on it is through the “Master Write-Read I2C" command. Refer to chapter 14 of the
IPMI specification entitled ’ВМС-System Interface Support Commands’. Alternatively, ’’public busses", as
the term is defined in the IPMI specification, are defined and implemented at the option of the BMC
developer and may be based on any suitable interface protocol. Public busses are identified by channel
number and are accessed through the “Get Message” and Send Message” commands.
As the IPMI specification declares, the contents of the message data in the Get Message and Send Message
commands is dependent on the protocol associated with the target channel of the command. As such, for a
given public bus, if the bus is not an IPMB, it falls to the BMC developer to define the interface protocol
and message body for the “Get Message” and Send Message” commands. Firmware uses the channel
number in the “Get Message” and Send Message” commands to select the interface protocol and message
body template to apply. Note that channels 0 and 1 are assigned to IPMB 0 and IPMB 1 and shall not be
used for optional busses. See section 4.1.1.1
February 2, 2000
CompactPCI® System Management Specification PICMG 2.9 R1.0
Page 28 of 32
IPMI Functional Requirements
4.1.2 IPMI Requirements for the BMC
This section is offered as a reference into the IPMI specification with respect to the core requirements for
the BMC. Chapter three of that specification defines the mandatory and optional requirements for a BMC.
The following are requirements defined in that chapter that have not already been discussed.
• SDR repository - Refer to chapter 20 of the IPMI specification. The BMC shall support the sensor data
record repository functions as defined in that section. The BMC shall support SDR information access
from both the system interface and the IPMB(s).
• Watchdog timer - Refer to chapter 15 of the IPMI specification.
• Event receiver and system event log - Refer to chapter 18 of the IPMI specification. The BMC shall
allow access to the SEL through the system interface, IPMB 0 and, if present, IPMB 1. The BMC
shall act as an event receiver over these same interfaces.
• Internal event generation functions - Refer to chapter 11 of the IPMI specification.
4.1.3 Hot-swap Requirements for the BMC
The BMC is required to have the same tolerance for hot-swap transients as the CompactPCI peripheral
management controllers for both IPMB 0 and, if supported, IPMB 1. The full discussion of these
requirements as they relate to the firmware developer is presented in section 4.2.2.
4.1.4 l2C Error Recovery Requirements of the BMC
Although it is anticipated that future releases of this specification may offer more sophisticated error
detection and correction schemes, there are only two requirements of the BMC to monitor for, and attempt
recovery from, abnormal I2C related conditions. The first is the detection of a “dormant” bus condition.
This condition (described in section 2.1.2.3), and the recovery from it (described in detail in section 4.2.2),
is identical for both BMCs and Peripheral Management Controllers. The second of these is monitoring for
an I2C clock or data stuck line condition. The BMC shall periodically monitor for the stuck line condition
described in section 2.1.2.3. Upon detection, the BMC shall ensure that it’s own lines are not offending,
and secondly, place an event in the system event log describing the stuck line condition. The management
application can subsequently use the existence of the event to attempt to clear the error at the system level.
4.1.5 Optional BMC Functions
As with every management controller on the system management bus, the utility of the BMC may be
enhanced beyond the minimum requirements of this specification. The following sections present optional
functions for this purpose.
4.1.5.1 Local sensor support
It is anticipated that in many cases, the board that is hosting the BMC (e.g. the SBC) would benefit from a
BMC that is capable of monitoring various sorts of sensors local to the host. BMC developers are
encouraged to implement optional busses with which they could monitor local sensors. These sensors
require the implementation of sensor support as defined in chapter 22 of the IPMI spec.
4.1.5.2 FRU Commands
An early and important feature of system management is its inventory management capability. The IPMI
specification provides for a broad range of possible implementations although the typical approach is that
each management controller located on a field replaceable unit (FRU) would provide inventory data for that
FRU. See sections 1.5.11 through 1.5.13 of the IPMI specification for an overview of FRU principles and
implementations. Although not specifically required by IPMI, incorporation of FRU inventory
management support is highly recommended.
CompactPCI® System Management Specification PICMG 2.9 R1.0
February 2, 2000
Page 29 of 32
IPMI Functional Requirements
Generally, the BMC will be located on a field replaceable unit, e.g. the SBC. The BMC developer may
elect to implement FRU inventory functions for such a case. The BMC may provide storage for FRU
information for other devices or only for itself. The amount of FRU storage provided will be determined
by the expectation of FRU storage on other managed devices and by physical constraints of the BMC
implementation. FRU inventory functions shall comply with section 21 of the IPMI spec.
4.1.5.3 ALERT# Function
The ALERT# signal is a low true, wire or’ed open collector signal optionally generated by certain chassis
sensor devices to indicate to their management applications that they are in need of service. ALERT# is
routed on the backplane per the pin-out in Table 4, and connected to the ALERT# pin on the BMC. The
BMC should implement the ALERT# signal as a single bit, digital sensor. At the developer’s option, the
BMC may directly service the device upon receipt of the ALERT#.
Developers that elect to support ALERT# but that do not have a priori knowledge of the devices to be
supported should send an event to the system event log whenever ALERT# is detected asserted. This
event can be employed by the management application to stimulate service of the asserting device.
Deassertion of the ALERT# signal is device specific, and the responsibility of the management application.
4.1.6 IPM Command Functions
The IPMI specification defines the minimum command function set that must be supported by the BMC.
That specification also defines optional commands that may enhance the utility of the BMC. Table 9 below
lists the commands defined in the IPMI specification by functional group with reference to the relevant
chapters in that specification. For reference, the commands that are mandatory at the time of this writing
are bullet listed under the group heading. Nonetheless, the IPMI specification is the controlling document
for defining these commands and defining the optional or mandatory status of each.
Command Reference
Device Global Commands • Get Device ID • Get Self Test Results • Broadcast Get Device ID IPMI Spec Chapter 13
ВМС-System Interface Support Commands • Set BMC Global Enables • Get BMC Global Enables • Clear Message Flags • Get Message Flags • Get Message • Send Message • Master Write-Read I2C commands IPMI Spec Chapter 14
BMC Watchdog Timer Commands • Reset watchdog Timer • Set Watchdog Timer • Get Watchdog Timer IPMI Spec Chapter 15
SDR Repository Commands • Get SDR Repository Info • Reserve SDR Repository • Get SDR • Add SDR • Clear SDR Repository IPMI Spec Chapter 20
Table 9 - Reference to IPMI defined commands
February 2. 2000
CompactPCI® System Management Specification PICMG 2.9 R1.0
Page 30 of 32
IPMI Functional Requirements
Refer to the PICMG System Management Website identified in section 1.5 for the latest information on
optional commands which the BMC developer may elect to implement.
4.2 Peripheral Management Controller Functional Requirements
The minimum requirements of any Peripheral Management Controller (PM), including a CompactPCI
Management Controller, is that it shall be configurable as to the address by which it is accessed and it shall
support the mandatory IPM Device global commands as defined in chapter 13 of the IPMI specification.
The additional requirement of hot-swap tolerance is mandated for PMs that are implemented as part of a
Standard Node Device (see section 2.1.2). The remaining topics of this section are not required however the
real benefit of implementing a PM is that it can provide inventory data, or access to local sensor data, and
preferably both. Advanced uses for the PM will define OEM commands to effect implementation-specific
utilities such as in-circuit fault diagnosis and isolation.
4.2.1 PM Address Configuration
The PM shall ensure that it only responds to the address intended for it. Refer to sections 3.3.1 and 3.3.2
regarding the address allocation policy for the system management network. A CompactPCI Management
Controller is responsible for ensuring that it identifies itself by the IPMB address that is assigned to the slot
in which it is installed. Section 3.3.2.2 specifies the address assigned to each slot. The peripheral developer
is responsible for delivering the geographical address (slot ID) to the PM. The PM shall be implemented
such that it does not initiate nor respond to any IPMB transactions until it has initialized itself to the IPMB
address appropriate to its geographical address.
4.2.2 Hot-swap Transient Tolerance
A PM that is implemented as part of a Standard Node, including a CompactPCI Management Controller, is
required to be hot-swap tolerant. Section 2.1.2 of this specification defines three levels of aberrant
behavior that can result from hot-swap activity. Depending on the inherent capabilities of the hardware
upon which the PM is based, the firmware developer generally contributes at all three levels to hot-swap
transient tolerance, and is cautioned to pay close attention to the capabilities of his target hardware and
incorporate additional software filtering as required.
The lowest level of hot-swap transient is the signal transient defined in section 2.1.2.2. If the PM is based
on a microcontroller that contains an integrated I2C SRT, then the SRT must meet the criteria of section
2.1.2.2 with nothing required of the firmware developer. If, however, the serial transmission of the data is
under firmware control, then the serial receive routine is responsible for ensuring the glitch rejection of
section 2.1.2.2. A basic approach to this requirement is to oversample the data input stream so that a valid
logic level is defined by multiple successive readings at the same level.
The next level of hot-swap transients is embodied in the transmission violations defined and described in
section 2.1.2.3. The violations identified at this level are the aborted transfer and the stuck line (either
clock or data). These violations rely on a timeout mechanism for detection and recovery. Unless the PM is
based on custom hardware that automatically performs a timeout on these violations, the firmware must
perform the function of monitoring the bus, detecting these violations through a timeout mechanism, and
recovering the SRT function in the PM so as to ignore the violation.
The Aborted Transfer, defined as the bus going dormant any time after a start condition and before a
corresponding stop condition, is described in detail in section 2.1.2.3. This condition is only detected when
a management controller needs to use the IPMB bus to transmit, but is unable to get a not-busy condition
after the appropriate timeout (see Table 2). Upon detection of the dormant condition, this specification
allows the transmitting controller to transmit its message. The transmitted message will be interpreted by
other controllers on the IPMB as a legal restart condition, and the message will be properly received. This
action has the added benefit of clearing the bus-busy condition upon detection of the stop condition.
CompactPCI® System Management Specification PICMG 2.9 R1.0
February 2, 2000
Page 31 of 32
IPMI Functional Requirements
Implementation Note - It should be noted that IPM devices with integrated I2C hardware (a SRT) may not
have a means for firmware to reset the internal logic of the SRT when trying to transmit on a dormant bus.
The developer of the PM is ultimately responsible for devising a means of restoring the SRT for
transmission. Ideally, the microcontroller upon which the design is based will have a resettable SRT. When
this is not the case, the IPM device may need to implement an alternate means of sending a dummy
transaction with a stop condition onto the dormant bus to clear the SRT for transmission. This alternate
means shall not cause the PM to violate the electrical loading requirements of section 2.1.1.
The I2C specification, in Note 5 of chapter 9 ’Formats with 7-bit Addressing’, specifies that void messages
(a start condition immediately followed by a stop condition) are illegal. Accordingly, a recommendation for
the dummy transaction is shown in Table 10. As long as the IPM device targets itself for the dummy
message, no other device will try to respond. The possibility exists that two IPM devices may attempt to
send their dummy transactions simultaneously, so the I2C requirements for arbitration must be respected.
Regardless of which device transmitted the dummy command, all SRTS on the bus should indicate a free
bus once the stop condition is transmitted.
Start Master’s own 7 bit address 1 1 Stop
Clk 1 Clk 2 Clk 3 Clk 4 Clk 5 Clk 6 Clk 7 Clk 8 Clk 9
Table 10 - Dummy Message Format
The stuck line case, where either the clock or data line is stuck low, is critical because only the perpetrator
can clear the fault. Although it is anticipated that future releases of this specification may offer more
sophisticated error correction techniques, each peripheral management controller shall monitor the clock
and data lines for the stuck line condition, and if found, take whatever measures it can to ensure that it isn’t
the offending device.
The highest level of hot-swap transient is that of the protocol violations defined in section 2.1.2.4.
Recovery from these violations is required by the IPMB specification and is an integral part of the firmware
for implementing the IPMI commands for the PM in question. Refer to that specification for guidance in
handling protocol violations.
4.2.3 IPM Device Functions
The PM shall support the mandatory IPM Device global commands as defined in chapter 13 of the IPMI
specification. These commands are referenced in the Device Global Commands entry of Table 9. The IPMI
specification is the controlling document for defining the set of IPM Device global commands and defining
the optional or mandatory status of each.
4.2.4 Sensor Device Functions
As stated in the introduction to this section, it is anticipated that, in general, the system component within
which the PM is located will have sensors that the PM will be required to monitor. These sensors require
the implementation of sensor support as defined in chapter 22 of the IPMI spec.
4.2.5 FRU Device Functions
Chapter 2 of the IPMI specification, Logical Management Device Types, introduces the concept of a virtual
FRU device that is accessed through IPMI commands to yield inventory information. The peripheral
developer is strongly encouraged to support the inventory capability of the system management network by
implementing a FRU device within the peripheral management controller (PM). The PM should implement
FRU inventory storage for the host component as well as the FRU inventory functions to access it. FRU
inventory functions shall comply with chapter 21 of the IPMI specification. See sections 1.5.11 through
1.5.13 of the IPMI specification for an overview of FRU principles and implementations. Refer to the
specification, ’’Platform Management FRU Information Storage definition vl.O” for implementation details.
February 2, 2000
CompactPCI® System Management Specification PICMG 2.9 R1.0
Page 32 of 32