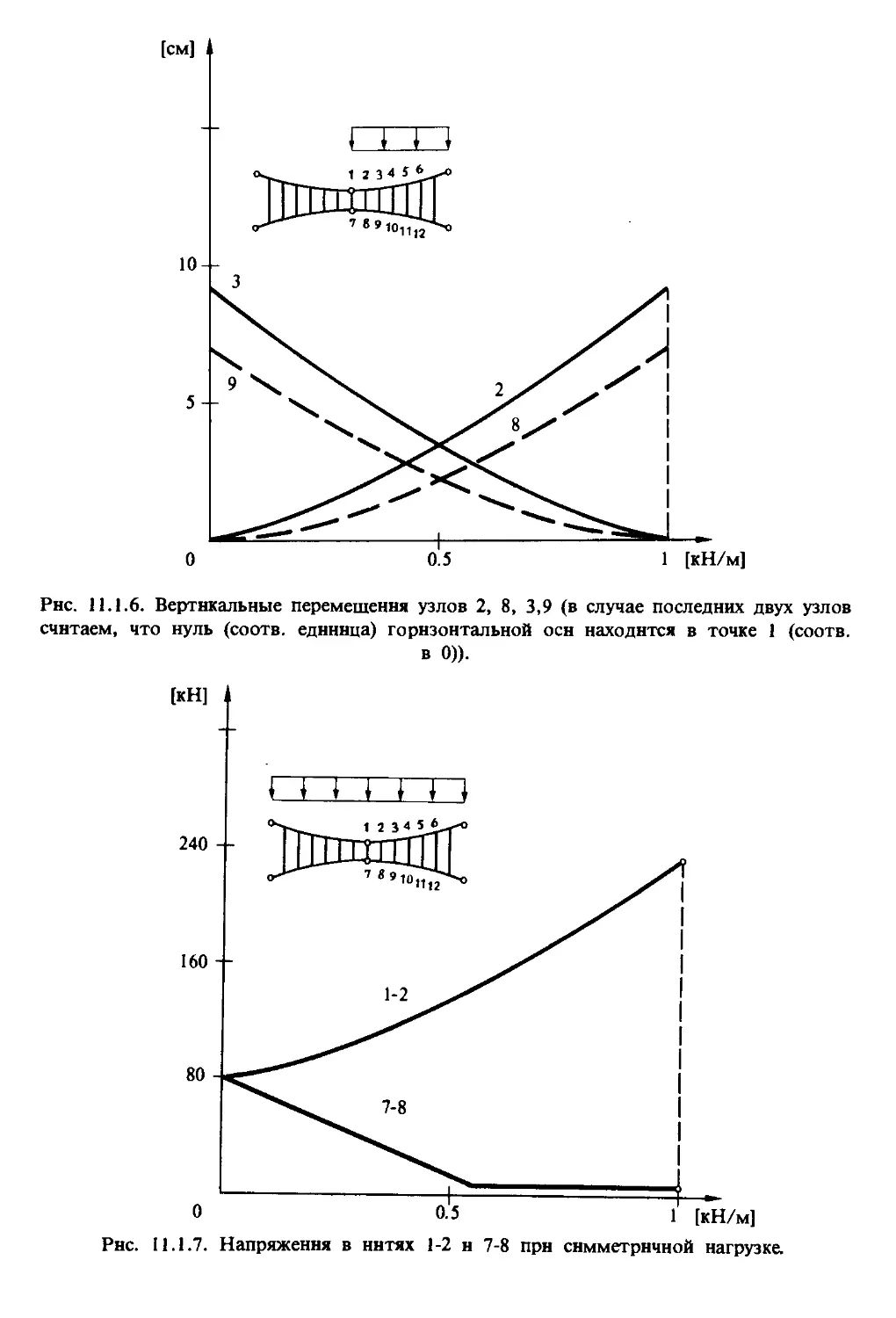
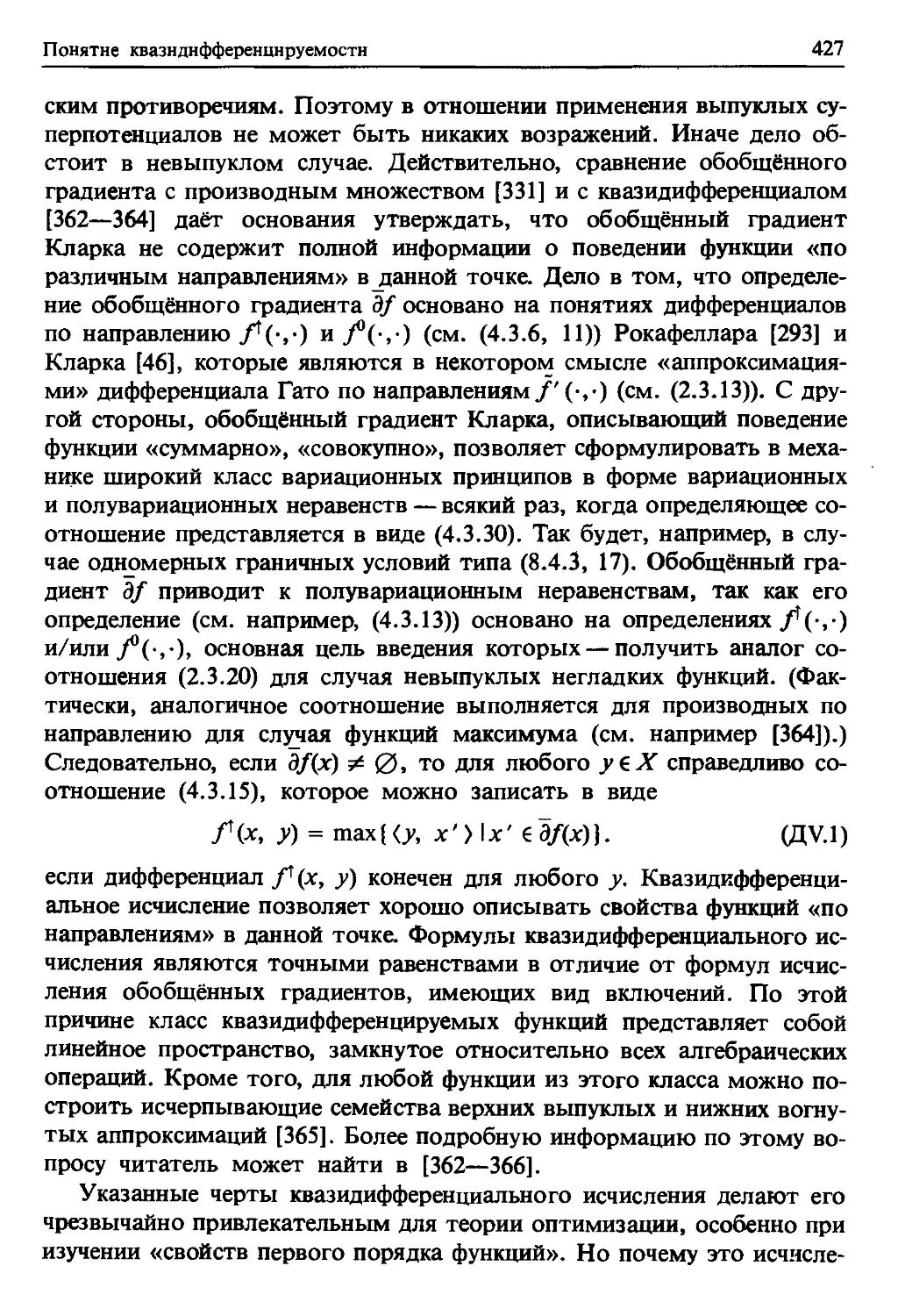
/

































































































































































































































































































































































































































































































Author: Панагиотопулос П.
Tags: общая механика механика твердых и жидких тел механика математический анализ функциональный анализ математика
ISBN: 5-03-000498-X
Year: 1989




Text
Неравенства в механике
и их приложения
Inequality Problems in
Mechanics and Applications
Convex and Nonconvex
Energy Functions
PANAGIOTIS D. PANAGIOTOPOULOS
Aristotle University
Department of
Civil Engineering
Thessaloniki, Greece
RWTH Aachen
Lehrstuhl und Institut
fur Technische Mathematik
Aachen, F.RG.
1985
Birkhauser
Boston • Basel • Stuttgart
П. Панагиотопулос
Неравенства
в механике
и их приложения
Выпуклые и невыпуклые
функции энергии
Перевод с английского
И. Р. Шаблинской и Р. А. Арутюнова
под редакцией
В. Ф. Демьянова
ВИ В ЛИО""W а
КОЛОХЗА
ОСКОР^А
Москва «Мир» 1989
ББК 22.2+22.16
П16
УДК 531 + 517
Панагиотопулос П.
П16 Неравенства в механике и их приложения. Выпуклые и не-
выпуклые функции энергии: Пер. с англ.— М.: Мир, 1989.—
494 с., ил.
ISBN 5-03-000498-Х
Монография греческого ученого, в которой отражены современные исследования вариационных
задач механики для случая негладких функций. Используемый автором подход позволяет изучить но-
вые задачи теории упругости и пластичности, а также получить новые результаты в классических за-
дачах. Книга написана на высоком математическом уровне, причем необходимый математический ап-
парат изложен во вступительных главах.
Для математиков-прикладников, инженеров-исследователей, аспирантов и студентов вузов.
1703040000—021 „ во
041(01)—89
ББК 22.2+22.16
Редакция литературы по математическим наукам
ISBN 5-03-000498-Х (русск.)
ISBN 3-8176-3094-5 (англ.)
© 1985 Birkhauser Boston Inc.
© перевод на русский язык, с добавлениями,
«Мир», 1989
От редактора перевода
Здание современной теоретической механики покоится на вариацион-
ных принципах, сформулированных в 18-м и 19-м веках. Практическое
применение этих принципов к решению конкретных задач потребовало
развития соответствующей математической теории оптимизации, и
такая теория — вариационное исчисление — появилась, стала разви-
ваться и превратилась в одну из основных математических дисциплин.
Но как, по любимой присказке Ж.-П. Обена, самая красивая девушка
Парижа не может дать больше, чем имеет7, так и вариационное исчис-
ление не могло дать механике больше того, чем обладала математика
того времени. А в математике хорошо изученными объектами были
гладкие функции и функционалы. Это привело к тому, что ставились
и решались задачи, которые можно было описать с помощью диффе-
ренцируемых функций. Поскольку таких задач достаточно много,
большой потребности в негладких постановках не ощущалось, и по-
степенно, исподволь у механиков создалось впечатление, что в жизни
всё сводится к гладким вариационным задачам. Такой стереотип мыш-
ления, сложившийся в течение многих поколений, стал мощной опо-
рой консерватизма в среде механиков.
В настоящее время теория оптимизации, и вариационное исчисле-
ние в том числе, бурно развиваются, получены новые фундаменталь-
ные результаты, которые могут — и должны!—найти приложение
в технических науках, и в механике в первую очередь. В частности,
можно считать сложившейся теорию негладкого анализа и негладкой
оптимизации.
1 По-французски эта фраза звучит так: La plus belle fille de Paris ne pdut donner
plus qu’elle a.
6
От редактора перевода
Предлагаемая вниманию читателя книга греческого учёного Пана-
гиотиса Панагиотопулоса представляет собой первое, вполне может
быть и не самое совершенное, монографическое изложение результа-
тов (в основном принадлежащих автору), связанных с приложением
современной теории негладкой оптимизации к решению задач механи-
ки. Книга имеет подзаголовок «Выпуклые и невыпуклые функции
энергии», который отражает её основную направленность — изучение
вариационных принципов механики в предположении негладкости со-
ответствующих функций. Французский учёный Ж.-Ж. Моро, один из
создателей выпуклого анализа, впервые изучал вариационные задачи
механики с негладкими выпуклыми потенциалами. Автор монографии
впервые применил к решению вариационных задач механики аппарат
негладкого невыпуклого анализа, построенный Р.Т. Рокафелларом,
Ф. Кларком и Дж. Варгой.
В ходе работы над переводом переводчики поддерживали постоян-
ный контакт с автором, который внёс в текст ряд изменений, написал
для русского издания добавление V, посвящённое применению в меха-
нике понятия квазидифференцируемости, и дополнил список литерату-
ры (переводчики также добавили к нему ряд работ).
Ценность настоящей книги не столько в решённых до конца кон-
кретных задачах, сколько в самом подходе к их решению. Здесь ещё
очень многое предстоит сделать. И если среди наших механиков по-
явятся люди, готовые пойти в новую неизвестную область, чтобы ста-
вить и решать более сложные и практически более важные задачи,
используя тот новый математический аппарат, который уже разрабо-
тан или разрабатывается, то цель перевода настоящей монографии бу-
дет достигнута.
В. Демьянов
Моим родителям
Предисловие
J удивительно короткий срок на наших глазах задачи на неравенства
заняли важное место в математике и теоретической механике. Плоды
этого бурного прогресса пожинают прикладная механика и инженер-
ные дисциплины, где многие нерешённые проблемы были решены и
>ыл открыт и исследован совершенно новый класс задач.
Настоящая книга выросла из семинаров и курсов лекций по зада-
чам на неравенства в механике, которые я вёл и читал в течение семи
лет для самых разных категорий слушателей в Аахенском техническом
университете, Аристотелевском университете в Фессалониках, Гам-
бургском университете и в Миланском техническом университете. Кни-
га адресуется широкому кругу читателей, как математикам, так и
инженерам, о чём подробнее сказано в разделе «Указания для чи-
тателя».
Излишне говорить, какое сильное влияние оказали на зту книгу пи-
онерские работы Г. Фикеры, Ж.-Л. Лионса, Г. Майера и Ж.-Ж. Моро,
создавших и развивших теорию решения указанных задач.
Я благодарен за полезные замечания К. Бисбосу, И. Хаслингеру,
Б. Каволю, X. Мэттизу, Х.О. Мэю, Д. Таласлидису и Б. Вернеру. Мне
хочется выразить признательность Г. Кириакопулосу и Т. Мандопулу
за их исключительную старательность при подготовке рисунков, а так-
же Т. Финнегану и Дж. Гейтли за дружескую помощь в лингвистиче-
ских вопросах. Наконец, я хотел бы поблагодарить редакторов
8
Предисловие
издательства «Биркхойзер», трудившихся над моей книгой, и всех, кто
принимал участие в подготовке рукописи.
Заранее прошу прощения у тех, чьи работы неумышленно упущены
при составлении списка литературы. Я буду признателен читателям
за любые замечания и поправки.
Аахен,
январь 1983
П.Д. Панагиопюпулос
Введение
Цепь настоящей книги — изучение задач механики, вариационная фор-
мулировка которых представляет собой выражение принципа вирту-
альной мощности в форме неравенства. *
Такие задачи, названные здесь задачами на неравенства или одно-
сторонними задачами, коренным образом отличаются от задач, в ва-
риационной формулировке которых фигурируют равенства. Последние
задачи будем называть двусторонними.
Выражение принципа виртуальной мощности в форме неравенства
обычно связывают с именем Фурье. С тех пор и до самого недавнего
времени в области задач на неравенства мало что было сделано, пре-
жде всего потому что не существовало достаточно развитой матема-
тической теории таких задач. Математическое изучение задач на
неравенства было начато в начале шестидесятых годов работами
Г. Фикеры, Ж.-Л. Лионса и Г. Стампаккьи. Ж.-Ж. Моро связал тео-
рию вариационных неравенств с выпуклым анализом, и в частности
с теорией субдифференцируемости, введя понятие суперпотенциала.
Затем была обнаружена связь теории задач на неравенства с теорией
максимальных монотонных операторов. Независимо от упомянутых
выше авторов, которые рассматривали в основном математические ас-
пекты теории задач на неравенства, Г. Майер ставил и изучал такие
задачи в прикладной механике, используя методы теории опти-
мизации.
Вплоть до последнего десятилетия все изучавшиеся задачи на нера-
венства относились к случаю выпуклых функций энергии. Поскольку
градиент (или, более общим образом, субдифференциал) выпуклой
функции является монотонным отображением, ясно, что теория таких
задач неразрывно связана со свойством монотонности, т. е. можно
было рассматривать лишь монотонную зависимость между напряже-
10
Введение
ниями и деформациями и монотонные граничные условия. Чтобы пре-
одолеть это ограничение, автор предложил подход, не связанный с
предположением о выпуклости функций энергии и основанный на ис-
пользовании двух новых понятий — обобщённого градиента Кларка и
производного множества Варги. В случае невыпуклых функций энер-
гии получаются вариационные соотношения, которые мы назвали по-
лувариационными неравенствами. Если в выпуклом случае статичес-
кие вариационные неравенства обычно приводят к задачам минимиза-
ции потенциальной и дополнительной энергий, в невыпуклом случае
возникают задачи о субстационарности.
Заметим, что все задачи на неравенства могут быть также описаны
в терминах многозначных операторных уравнений.
Следует подчеркнуть, что если в двусторонних задачах мы имеем
дело с дифференцируемыми функциями энергии, то в задачах на не-
равенства фигурируют недифференцируемые функции. В первом случае
обобщённые силы получаются из соответствующего потенциала (взя-
тием градиента), а во втором случае — из выпуклого суперпотенциала
(взятием субдифференциала) или невыпуклого суперпотенциала (взяти-
ем обобщённого градиента Кларка или производного множества Вар-
ги). Ввиду многозначности субдифференциалов и негладкости супер-
потенциалов можно было бы говорить о «многозначной механике»
или о «негладкой механике».
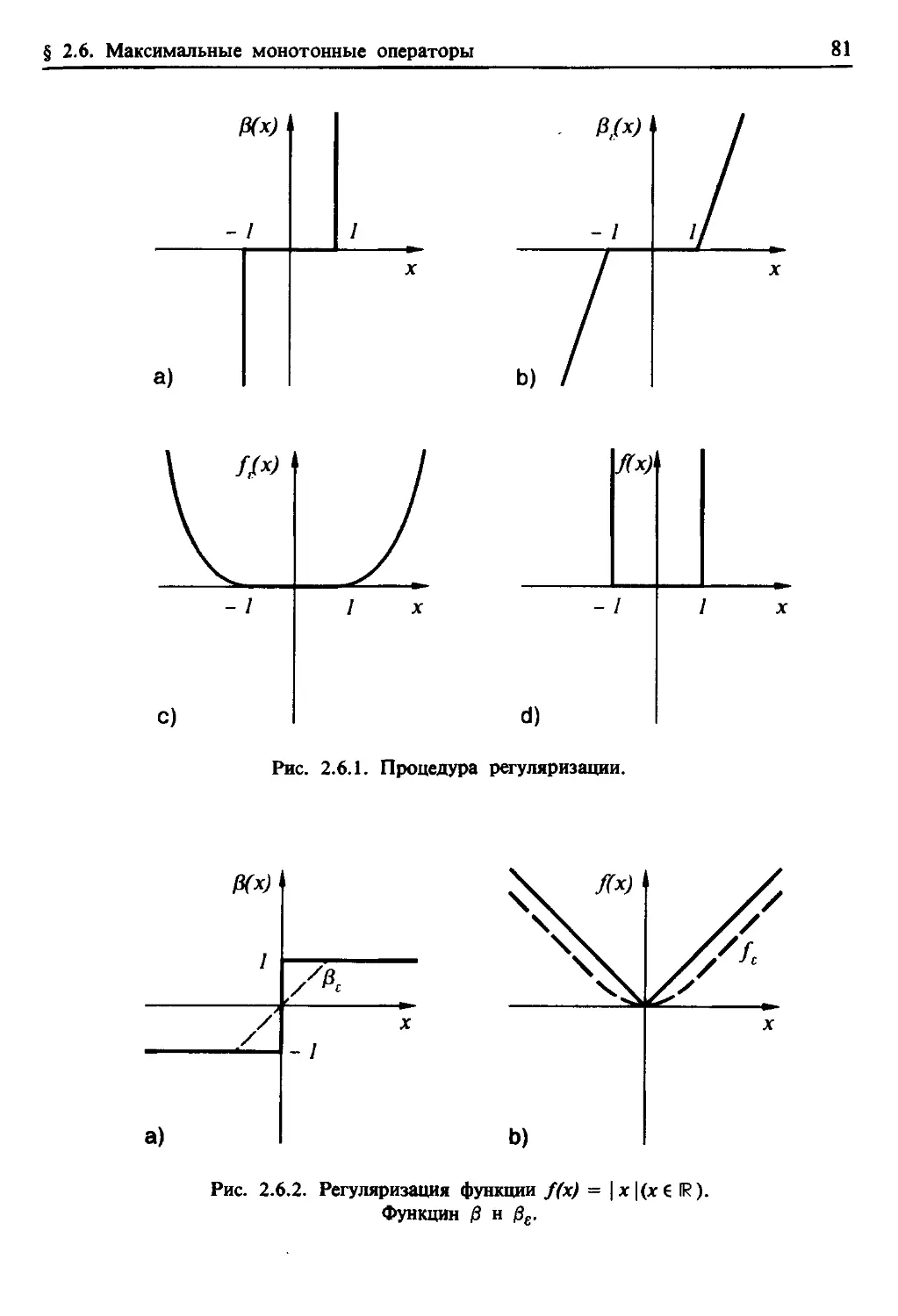
Что касается численного решения задач на неравенства, то следует
различать динамические и статические задачи. Для решения динамиче-
ской задачи можно провести дискретизацию по времени, сводя задачу
к последовательности статических задач. Можно также «сгладить» не-
дифференцируемые функции энергии с помощью той или иной проце-
дуры регуляризации, сводя задачу к последовательности динамических
задач на равенства, приводящих к нелинейным дифференциальным
уравнениям. Что касается решения статических задач, то здесь имеют-
ся две возможности. Если задача может быть поставлена как задача
минимизации, то используются подходящие алгоритмы оптимизации;
в противном случае применяется процедура сглаживания, приводящая
к последовательности нелинейных алгебраических уравнений.
Настоящая книга разделена на три части, носящие соответственно
названия «Предварительные сведения» (главы 1 и 2), «Задачи на нера-
венства» (главы 3 — 9) и «Численные приложения» (главы 10 и 11).
В первых двух главах излагается необходимый математический ап-
парат. В главах 3 и 4 рассматриваются выпуклые и невыпуклые супер-
потенциалы в различных областях нерелятивистской механики. В этих
Введение
11
двух главах подчёркивается связь теории задач на неравенства с теори-
ей многозначных дифференциальных или интегральных уравнений, а
также с теориями минимизации и субстационарности. Остальные гла-
вы части 2 посвящены математическому исследованию односторонних
краевых задач. Вначале обсуждаются задачи с трением (глава 5), за-
тем краевые задачи, возникающие при рассмотрении субдифференци-
альных граничных условий и определяющих соотношений для
деформируемых тел (глава 6). Далее формулируются и изучаются за-
дачи на неравенства, возникающие в теории пластин (а именно, в тео-
рии Кармана), в связи с чем особое внимание уделяется задачам на
собственные значения для вариационных неравенств (глава 7). В гла-
вах 8 и 9 речь идёт о задачах на неравенства, возникающие в теориях
термоупругости, пластичности и вязко-пластичности. Тот факт, что во
второй части основной упор сделан на выпуклых задачах, объясняется
тем, что математическая теория полувариационных неравенств роди-
лась лишь совсем недавно и ещё далека от завершения.
Последние две главы книги написаны в другом ключе — они имеют
прикладную направленность, хотя мы и старались избегать излишних
технических подробностей. В этих главах численные методы решения
задач на неравенства иллюстрируются реальными примерами из тех-
ники. При выполнении численных расчётов использовались хорошо
известные алгоритмы оптимизации, которые входят в состав стан-
дартного программного обеспечения ЭВМ; мы исходим из того, что
это может оказаться практически полезным для инженеров.
Указания для читателя
Выбор материала в части 1 определялся потребностями последующих
частей. Каждое из определений и каждое из предложений части 1 ис-
пользуется где-нибудь далее в монографии. Предполагается, что чита-
тель владеет элементами функционального анализа. Читатель, знако-
мый с теорией пространств Соболева, может не читать главу 1. Каж-
дую из глав 5—9 можно изучать независимо.
Несмотря на то что мы всюду стремились к математической стро-
гости изложения, при написании книги имелся в виду и читатель, не
знакомый с функциональным анализом, а заинтересованный лишь в
механике и её приложениях. В таком случае главу 1 надо пропустить
совсем, а в главе 2 не следует обращать внимания на доказательства,
предполагая везде, что X—это просто л-мерное пространство, а
( • , •) обозначает обычное скалярное произведение. Главу 3 следует
тогда читать до п. 3.3.4, а в главе 4 нужно опустить пп. 4.1.1 и
4.1.2. В остальных главах не надо обращать внимания на результаты
о существовании решения. Каждое вариационное выражение можно
понимать в «инженерном смысле» (ср. с книгой Васидзу [333}). В гла-
вах 10 и 11 все задачи дискретизованы, и эти две главы рассчитаны
на обе категории читателей.
В заключение одно замечание по поводу терминологии. Термин
«поточечно» обычно обозначает, что рассматриваемое условие вы-
полняется почти всюду (см., например, конец п. 3.3.4), однако во всех
классических формулировках граничных условий (как, например, в
п. 3.3.1) оно означает «в каждой точке». Во всех сомнительных случа-
ях делаются необходимые уточнения.
ЧАСТЬ 1
Предварительные сведения
ГЛАВА 1
Основные понятия и результаты
функционального анализа
В этой главе излагаются основные сведения из функционального ана-
лиза, которые понадобятся в дальнейшем при изучении неравенств в
механике. Мы начинаем с понятия топологического векторного про-
странства и связанного с ним понятия двойственности. Затем приво-
дятся некоторые свойства ряда функциональных пространств. Особое
внимание уделено пространствам Соболева и пространствам функций
ограниченной деформации, для которых доказывается теорема о следе
и устанавливаются некоторые свойства вложения. Приведены также
неравенства Корна и теорема Грина—Гаусса. В заключение главы из-
лагаются элементы теории векторнозначных функций и распределе-
ний, а также дифференциального исчисления.
При написании этой главы использовались многие широко извест-
ные руководства, среди них:
Адамс [2], Бурбаки [24—26], Сьярле [41], Дьёдонне [70], Данфорд
и Шварц [79], Фикера [98], Гельфанд и Шилов [109], Кёте [164], Лионе
[179; 182; 183], Лионе и Мадженес [181], Нечас [231], Робертсон и Ро-
бертсон [284], Л. Шварц [297], Смирнов [302], Трев [320], Вайнберг
[324], Виленкин [325], фон Кверенбург [277], Иосида [337].
§ 1.1. ТОПОЛОГИЧЕСКИЕ ВЕКТОРНЫЕ
ПРОСТРАНСТВА И СМЕЖНЫЕ ВОПРОСЫ
1.1.1. Топологические пространства
и непрерывные отображения
Топологическое векторное пространство (сокращённо ТВП) — эго
множество, наделённое двумя структурами — топологического про-
странства (ТП) и векторного пространства (ВП). Эти две структуры
14
Гл. 1. Основные понятия н результаты функционального анализа
согласованы в том смысле, что алгебраические операции, связанные
с наличием структуры векторного пространства, являются непрерыв-
ными. Вначале дадим краткий обзор определений и элементарных
свойств ТП и ВП.
Топологическое пространство — это множество ST, наделенное
структурой, которая даёт возможность определить понятия сходимос-
ти и непрерывности. Для задания такой структуры достаточно опре-
делить в SF открытые подмножества. А именно, всякое семейство 5
подмножеств множества Й*',' которое содержит
(i) объединение любого числа своих элементов,
(ii) пересечение любого конечного числа своих элементов,
(iii) пустое множество 0 и само ST,
называется топологией в (или на) SF.
Подмножества, входящие в S, называются открытыми множест-
вами, а пара X = [ SF, S ] — топологическим пространством. Гово-
рят, что подмножество А пространства X замкнуто, если его
дополнение Х\ А открыто. Множества 0 и й^оба замкнуты. Множе-
ство F С X называется окрестностью точки х, если существует от-
крытое множество О € S, такое что х € О С F (случай F = О не
исключается). Точка х € А С X называется внутренней точкой множе-
ства А, если у неё существует окрестность F, такая что F С А. Множе-
ство всех внутренних точек А называют внутренностью множества
А и обозначают int А. Замыкание множества А, обозначаемое А,_____
это множество всех тех точек х € X, для которых любая окрестность
точки х имеет непустое пересечение с А. Такие точки называются точ-
ками прикосновения множества А. Очевидно, что множество А откры-
то (соотв. замкнуто) тогда и только тогда, когда А = int А (соотв.
А = А). Границей множества А называется множество А \ int А. Гово-
рят, что множество В плотно в А, если А С В. В частности, В плотно
в SF (или всюду плотно), если В = SF. ТП X называется сепарабель-
ным, если содержит конечное или счётное всюду плотное множе-
ство. Точка х€Л называется предельной точкой множества А, если
любая её окрестность содержит хотя бы одну точку из А, отличную
от х. Говорят, что точка хСА есть предел последовательности [х,-]
(запись: х,- -> х), если любая окрестность точки х содержит все элемен-
ты этой последовательности, за исключением разве лишь конечного
их числа. В таком случае говорят также, что последовательность [х;]
сходится к х.
§ 1.1. Топологические векторные пространства
15
Заметим, что определение топологии, эквивалентное приведённому выше, можно
дать и с помощью понятия окрестности. Система Fx всех окрестностей точки х, называ-
емая также фильтром окрестностей этой точки, обладает следующими свойствами:
(i) х € F VFe Fx;
(ii) если Fi € Fx и Fz € Fx , to Fi П Fz € Fx;
(iii) если Fi € Fx и Fi C Fz C SC, to Fz € Fx,
(iv) если Fi € Fx , то существует окрестность Fz € Fx, такая что Fi € Fy , vy € Fz .
Обратно, если для каждой точки х € SCзадано некоторое семейство подмножеств Fx мно-
жества причём выполнены условия (i) — (iv), то существует ровно одна топология
в такая что для любого х € ST семейство Fx есть система окрестностей точки х в
этой топологии. Всякая подсистема Gx системы Fx, обладающая тем свойством, что
для любого F € Fx найдется G € Gx, такое что G С F, называется фундаментальной сис-
темой окрестностей точки х нли базисом окрестностей точки х.
На данном множестве SFможно рассматривать различные тополо-
гии. Будем говорить, что топология Si тоньше (или сильнее) тополо-
гии S2, a Sz грубее (или слабее), чем Si, если S2 С Si. В этом случае
любое подмножество ЭС, открытое в топологии Sz, будет открытым
и в Si. Может оказаться, что в Э?заданы две топологии, ни одна из
которых не сильнее другой, т. е. они несравнимы. Дискретная тополо-
гия в г? (топология, для которой Fx состоит из всех подмножеств мно-
жества SF, содержащих х), является сильнейшей топологией в Й,' а
тривиальная топология (Fx - [ЭЭ для любого х) — слабейшей. Пусть
X — ТП и Эл С ЭС. Тогда в Эл можно ввести топологию, взяв в каче-
стве открытых множеств в Эл пересечение открытых множеств в SF
с Эл. Такая топология называется индуцированной топологией в Эл.
Пусть [%„], а€Г, — семейство топологических пространств, Ха =
= [SFa, Sa], а€Г, и П Ха — их декартово произведение. Топология
произведения — это слабей1ная среди топологий, содержащих все мно-
жества вида П Оа, где Оа € Sa, причем Оа = ЭСа для всех, кроме
«ег
конечного числа, индексов а € Г.
Топологическое пространство X называется отделимым (или хаус-
дорфовым) топологическим пространством (сокращенно ОТП), если
для любых двух различных точек х и у из X найдутся непересекающи-
еся окрестности F и G точек х и у соответственно. ОТП обладают
тем свойством, что в них последовательность может сходиться не бо-
лее чем к одной точке. В таком пространстве всякое множество, состо-
ящее из одной-единственной точки, замкнуто.
Введем теперь важные понятия непрерывности отображения и по-
лунепрерывности функционала. Пусть X = [Э^ S} и Y = [ЗС, Г] — два
16
Гл. 1. Основные понятия и результаты функционального анализа
ТП. Функция f-.X У называется непрерывной в точке хе SZ, если для
любой окрестности G точки f(x) € У найдётся такая окрестность F точ-
ки х, что f(F) С G. Если f непрерывна в любой точке х € X, то гово-
рят, что f непрерывна (на X). Если существует (обратное к f
отображение) и оба отображения f и f~1 непрерывны, то f называется
взаимно-непрерывным. Отображение f'.X-* У, являющееся биекцией
и взаимно-непрерывное, называется гомеоморфизмом.
Функционал f:X -»IR = [ - °о, + оо] называется полунепрерывным
снизу (соотв. сверху) в точке х (для краткости будем далее использо-
вать сокращения п.н.сн. и п.н.св.), если выполнено следующее условие:
для любого а € IR, такого что /(х) > а (соотв. /(х) < а), можно указать
окрестность F точки х, для которой f(y) > а (соотв. f(y) < а) при всех
ytF. Говорят, что функционал f п.н.сн. или п.н.св. (на X), если он
обладает этим свойством в любой точке х€Х.
Важный класс топологических пространств образуют метрические
пространства. Функционал .'ЗГх IR называется метрикой (или
функцией расстояния) на 3£, если
(i) d(x, у) 0, причем d(x, у) = 0 тогда и только тогда, когда
х = у;
(ii) d(x, у) = d(y, х) vx, у € SF-,
(iii) d(x, у) < d(x, z) + d(z, у) у x, у, z € ЙГ.
Множество B(x, a) = [у | у € S£, d(x, у) < (соотв. ) а] называется от-
крытым (соотв. замкнутым) шаром с центром в точке х и радиу-
сом а. Множество F (ZSF, содержащее точку х, объявляется окрест-
ностью точки х, если при некотором а > 0 оно содержит открытый
шар В(х, а). Так определённая система окрестностей Fx порождает
метрическую топологию в X. Топологическое пространство X = {SF,
S] метризуемо, если на нём можно определить функцию расстояния
d(x, у), которая задаёт метрическую топологию, совпадающую с S.
Любое метризуемое пространство отделимо. В метрическом простран-
стве множество А называется ограниченным, если существует а € IR,
такое что с?(х, у) а для всех х, у € А . Подмножество А метрического
пространства X называется полным, если любая последовательность
Коши, лежащая в А, имеет в А предел. Напомним, что последова-
тельность [х,] С X называется последовательностью Коши (или схо-
дящейся в себе, или фундаментальной), если для каждого £ > 0 най-
дется натуральное число N(e), такое что с?(х„ Xj) £ для всех i,
j N(e). Для метрического пространства X непрерывность отображе-
ния f:X -* У в точке х эквивалентна условию f(xj) -> f(x) при xj -> х
(здесь У —произвольное ТП).
§ 1.1. Топологические векторные пространства
17
1.1.2. Локально-выпуклые топологические
векторные пространства, нормированные
пространства и линейные отображения
Множество 3? называется векторным пространством (ВП) (или ли-
нейным пространством (ЛП)) над полем вещественных чисел, если
на нём заданы две функции Ay: ST х ЗГи Ms: IR х 33, запи-
сываемые в виде
А у(х, у) = х + у V х, у € 33
и
Msifl, х) = ах V а € IR V х € 33,
причём эти функции обладают следующими свойствами:
(i) х + j = j + х V х, у € 33',
(ii) х + (у + z) = (х + у) + z v х у, z€ 33',
(iii) существует «нулевой» элемент, обозначаемый 0 и назы-
ваемый началом в 33, такой что х + 0 = х Vх€ S3;
(iv) для каждого х € 33 существует единственный элемент множе-
ства 33, обозначаемый -х, такой что х + ( -х) = 0;
(v) а(/3х) = (а/3)х Vx€ va, /3€ IR;
(vi) (a + /3) x = ax + /Зх, vx€ 33 v a, 0 € IR;
(vii) lx = x v x € 33;
(viii) a (x + y) = ax + ay Va€lR.
Функции Ay и Ms называются соответственно операциями сложения
(векторов) и умножения (вектора) на число.
Векторным подпространством векторного пространства 33 назы-
вается всякое его подмножество 33, для которого х + у € 33\
v х, у € 33 и ах € 33 v х € 33\ v a € IR. Пусть А, В — подмно-
жества векторного пространства 33. Положим
ХЛ + цВ = [Хх + р.у\х€А, у^В, X, IR}.
Если srf— заданное семейство подмножеств векторного пространства
33, то, по определению, £/+ х = [х + А | А € •£/]. Подмножество А век-
торного пространства 3" выпукло тогда и только тогда, когда
Хх + цу € А для всех х, у € А и всех чисел Х>0, ji>OcX + fi=l.
Подмножество векторного пространства называется линейно-
п
независимым, если соотношение вида 2 = 0 возможно лишь
/ = I
при Xi = Хг = ... = Хи = 0, каково бы ни было и € IN и каков бы ни был
набор xi,..., хп элементов из А. Линейно-независимое множество А
18
Гл. 1. Основные понятия и результаты функционального анализа
образует базис Гамеля (или просто базис) векторного пространства ЗГ,
если любой элемент х € ST может быть представлен в виде линейной
комбинации элементов из А. Любое ВП обладает базисом. Если ка-
кой-то базис ВП содержит конечное число векторов, скажем п, то и
любой другой его базис содержит п элементов и .^'есть «-мерное ВП.
Важную роль при изложении дальнейшего материала играет поня-
тие факторпространства, которое мы сейчас и напомним.
Пусть М-—линейное подпространство пространства 333 Для
х, у € 33условие х - у € М задает отношение эквивалентности. Фактор-
множестом 333/М называется множество соответствующих классов эк-
вивалентности. Каждому х € ST отвечает класс х + М. Это соответст-
вие называется каноническим отображением пространства >?на 33/М.
Обозначим класс эквивалентности, содержащий элемент х, через [х].
Фактормножество 33'/М можно превратить в ВП, введя операции сло-
жения векторов и умножения на число по правилам
[х] + [j] = [х + j], Х[х] = [Хх].
Отображение /: 3333, где 33 и 33— векторные пространства, на-
зывается линейным, если
f(x + у) = /(х) + f(y),
f(ax) = af(x) чх,у^33 v € fR . (1-1.1)
Множество [x|/(x) = 0] называется ядром отображения f и обознача-
ется ker f Это — линейное подпространство в 33 Множество всех ли-
нейных отображений из 33 в 33, обозначаемое 33, 3/), превращается
в векторное пространство, если определить сложение и умножение на
вещественное число следующим образом:
(/ + #)(Х) = /(х) + g (х), Х/(х) = /(X х), X € IR . (1.1.2)
Рассмотрим подробнее топологию S на векторном пространстве 33
Говорят, что топология S согласована с линейной структурой 33, если
отображения Ар и Ms непрерывны. При этом предполагается, что
33 х 3/3 и IR х 3/3 наделены топологиями произведения. Векторное
пространство, снабжённое топологией, согласованной с векторной
структурой, называется топологическим векторным пространством
(ТВП). Легко убедиться, что в ТВП операция сдвига /:х -* х + хь явля-
ется гомеоморфизмом пространства X на себя. Таким образом, если
Go — базис окрестностей нуля, то Go + х—базис окрестностей точ-
ки х. Подмножество А топологического ВП 33 называется ограничен-
ным, если для любой окрестности F нуля в X существует число а > 0,
такое что А С aF. Линейное отображение f:X -> У, где X и У— ТВП,
§ 1.1. Топологические векторные пространства
19
непрерывно в том и только в том случае, если оно непрерывно в нуле.
Если f принадлежит 3\Х, У) и биективно, то 1 : Y -> X есть линей-
ное сюрьективное отображение. Если, кроме того, f взаимно-
непрерывно, то оно является линейным гомеоморфизмом (называе-
мым изоморфизмом) между заданными двумя топологическими ВП;
при этом сами пространства называются изоморфными. ТВП с отде-
лимой топологией называется отделимым (или хаусдорфовым) топо-
логическим векторным пространством (сокращенно ОТВП). Особый
интерес представляют ТВП, в которых существует фундаментальная
система (или базис) выпуклых окрестностей нуля. Такие пространства
называются локально-выпуклыми топологическими векторными про-
странствами или просто локально-выпуклыми пространствами
(ЛВП). Если X отделимо, то оно называется отделимым локально-
выпуклым топологическим векторным пространством (сокращённо
ОЛВП).
Пусть ST— ВП. Функция р : IR называется полунормой на SC,
если
(i) р(х) > О
(ii) р(\х) = |Х|р(х) vX € IR;
(iii) р(х + у) р(х) + р(у) V х, у € SZ
Полунорма, для которой из соотношения р(х) = 0 следует х = 0, назы-
вается нормой и обычно обозначается | х |. Пусть &— семейство по-
лунорм на ВП ST. Тогда множества вида
[х | Pi (X) ^ £, £ > 0, Pi € 9s]
образуют базис замкнутых окрестностей нуля и задают локально-
выпуклую топологию в Это слабейшая из топологий, согласован-
ных с линейной структурой ££ для которой любая полунорма из 3s
непрерывна.
Топологическое ВП X называется нормируемым, если его тополо-
гия порождается метрикой d, порождаемой некоторой нормой | • | по
формуле d(x, у) = | х - у |. Такая топология называется нормирован-
ной топологией; она отделима. Пара, состоящая из векторного про-
странства ST и нормы | • | на ST, называется нормированным про-
странством. Нормированное пространство наделяется топологией,
определяемой нормой. Две нормы | • | и | • | на векторном простран-
стве X называются эквивалентными, если существуют постоянные
Ci, <?2 > 0, такие что
ci |х| |х| с2|х| vx€^7 (1-1-3)
20
Гл. 1. Основные понятия и результаты функционального анализа
Любые две нормы в конечномерном ВП эквивалентны. Пусть X и
У—нормированные пространства и/€ -/’(Х, У). Оператор/является
ограниченным, т. е. переводит ограниченные множества в ограничен-
ные, тогда и только тогда, когда
|/(х) I Y С | х|х VX6X, (1.1.4)
где с > 0 — некоторая константа.
Линейный оператор /:Х-> Y, где X и У—заданные нормирован-
ные пространства, непрерывен тогда и только тогда, когда он ограни-
чен. Пространство всех таких операторов обозначается L(X, У).
Говорят, что нормированные пространства X и У изометричны, если
существует биекция f:X -> У, называемая изометрией, такая что
|х|х = |/(х) | у для всех х€ X. Полные нормированные пространства на-
зывают банаховыми (или В-пространствами). Если данное нормирован-
ное пространство X неполно, с ним можно связать В-пространство Я,
такое что существует линейная изометрия между X и некоторым всю-
ду плотным линейным подпространством пространства X. Простран-
ство X определяется однозначно с точностью до линейной изометрии
и называется пополнением пространства X. Любое замкнутое линей-
ное подпространство В-пространства само является В-пространством.
Будем говорить, что В-пространство У вложено в В-пространство X,
если У С X алгебраически и
|х|% с|х| Y VX€ у (1.1.5)
где с > 0 — некоторая константа, т. е. если инъекция У в X_является
непрерывной. Вложение называется (всюду) плотным, если У = X, и
компактным, если оно переводит ограниченные множества в относи-
тельно компактные. Напомним, что в В-пространстве множество А
называется компактным (соотв. относительно компактным), если
любая последовательность в А (соотв. в Л) содержит подпоследова-
тельность, сходящуюся (в топологии, определяемой нормой) к элемен-
ту множества А (соотв. А).
Пусть X—банахово пространство и М—его замкнутое линейное
подпространство. Факторпространство Х/М, снабжённое фактор-
нормой
|[х]|х/м= inf |х-у|, (1.1.6)
у € М
также является В-пространством. Некоторые призеры ТВП будут
приведены в § 1.3.
§ 1.2. Двойственность в топологических векторных пространствах
21
§ 1.2. ДВОЙСТВЕННОСТЬ В ТОПОЛОГИЧЕСКИХ
ВЕКТОРНЫХ ПРОСТРАНСТВАХ
1.2.1. Двойственность. Слабая и сильная топологии
Пусть ST—векторное пространство. Линейные отображения /: IR
называются линейными функционалами или линейными формами на
ST. Пространство -/’С S3', IR) всех линейных функционалов на S3 называ-
ется алгебраическим сопряжённым к ^и обозначается Если f—
ненулевой линейный функционал на ТВП X, то уравнение f(x) = О
(соотв. f(x) = а, а € IR) задаёт в X гиперплоскость (соотв. аффинную
гиперплоскость) Н (соотв. На). Отметим, что любая гиперплоскость
ъХ является либо замкнутой (т. е. Н = Н), либо всюду плотной (т. е.
Н = X). Множества [х € X| f(x) < а] и [х € X| f(x) > а} соответствен-
но называются открытыми полупространствами, ограниченными
аффинной гиперплоскостью На. Соответственно множества
[х|/(х) а] и [x\f(x)^a\ называются замкнутыми полупростран-
ствами, ограниченными гиперплоскостью На.
Говорят, что аффинная гиперплоскость разделяет (соотв. строго
разделяет) два подмножества А и В ТВП X, если
/(х) а (соотв. /(х) < a) vx€ А ,
f(y) > о (соотв. /(у) >а) Чу^В .
Среди элементов пространства S3* важную роль играют непрерыв-
ные линейные функционалы. Они образуют подпространство в S3*,
называемое топологическим сопряжённым к А и обозначаемое S3'.
Известная теорема Хана—Банаха гарантирует существование нетриви-
ального (т. е. ненулевого) непрерывного линейного функционала на
отделимом ЛВП. Эта теорема является одним из основных результа-
тов функционального анализа. У этой теоремы существует много ва-
риантов; мы приведём её здесь в аналитической и геометрической
формах.
(а) Аналитическая форма. Пусть р — полунорма на ВП ST, S3 — ли-
нейное подпространство в ST и элемент /6ЙГ* таков, что |/(х)|
р(х) v x€^i. Тогда существует продолжение/б S3* функционала
f (т. е. /(х)=/(х) vxeSJ), такое что |/(х)| ^р(х) чх^ЗЗ.
(Ь) Геометрическая форма. Пусть А — открытое выпуклое непус-
тое подмножество ТВП X и М— линейное подпространство в X, не
имеющее с А общих точек. Тогда существует замкнутая аффинная ги-
перплоскость На, содержащая М и не имеющая с А общих точек.
Одним из следствий этой теоремы является тот факт, что два непе-
ресекающихся выпуклых непустых подмножества ТВП, одно из кото-
22
Гл. 1. Основные понятия и результаты функционального анализа
рых открыто, могут быть разделены замкнутой аффинной гипер-
плоскостью. Если оба множества открыты, они строго разделимы.
Если Xi и Х2 — две различные точки отделимого ЛВП X, то их можно
разделить замкнутой аффинной гиперплоскостью, которая задает на
X непрерывный линейный функционал.
Другое следствие состоит в том, что любое замкнутое выпуклое
подмножество ОЛВП можно представить как пересечение всех содер-
жащих его замкнутых полупространств. Пусть X — ЛВП, a 02' — со-
пряжённое к нему. Далее через х' будем обозначать элементы
пространства 02', а через (х',х)— значение х' в точке х. Как будет
видно ниже, это значение можно обозначать также (х, х'). Используя
эти обозначения, можно выявить некоторую симметрию, существую-
щую между X и 02'. Каждому элементу х^Х отвечает линейный
функционал на 02', определяемый соотношением х(х') = х' (х),
х' Это — линейное отображение из .i/ в Если, кроме того,
X наделено отделимой топологией, то это отображение инъективно.
Таким образом, X отождествляется (с точностью до изоморфизма) с
некоторым подпространством $2 пространства 02 ’ *. Итак, существует
определённая симметрия между пространствами X и 02' в том смыс-
ле, что каждое из них изоморфно некоторому подпространству алге-
браического сопряжённого к другому. Из определения пространств X
и 02' вытекает, что (х', х)— билинейная форма на ST х 02. Ввиду
теоремы Хана — Банаха она обладает следующими свойствами:
(i) vx€.y^ х#0, существует элемент х' € 02’, такой что (х',
х)#0; (1.2.1)
(ii) vx'eT', х' # О, существует такой элемент х^О2, что
(х', х)#0. (1.2.2)
Рассмотрим теперь векторные пространства 02 и 02' и билинейную
форму (х', х) на 02' х 02, обладающую свойствами (1.2.1), (1.2.2).
Из этих свойств вытекает, что существует линейное инъективное ото-
бражение 02' в 02* (соотв. 02 в 02’*), при котором образом элемента
х' 02' (соотв. х€ 02) служит линейная форма (х', х) на 02(соотв.
на 02'). Таким образом, 02' (соотв. 02) изоморфно некоторому под-
пространству пространства 02* (соотв. 02'*). Пара {02, 02'} векторных
пространств 02 и 02' называется дуальной парой или парой вектор-
ных пространств в двойственности1, а форма (х', х) — спариванием
или канонической билинейной формой, приводящей пространства О2и
02' в двойственность. До сих пор мы рассматривали 02' независимо
' Ср. с понятием двойственности в проективной геометрии.
§ 1.2. Двойственность в топологических .векторных пространствах
23
от его топологии; теперь наряду с алгебраической симметрией между
пространствами 33 и ЙГ' рассмотрим и «топологическую симмет-
рию». Можно показать, что существуют топологии в 33', в которых
' является ОЛВП, причем .^ служит топологическим сопряжённым
к 3"'. Пусть А — подмножество ТВП X. Подмножество
А° = [х' |х' $33', supl (х', х) I 1} (1-2.3)
А
пространства ЙГ' называется полярой множества А. Пусть 3—
семейство ограниченных подмножеств пространства А, обладающее
свойствами:
(i) если Ai, АгСЗ, то существует Лз€^, такое что
(ii) если Л1€с^и X € IR, то существует Аг € 3, такое что X A i С
С Аг.
Локально-выпуклая топология на 33', получающаяся, если в качестве г
базиса окрестностей нуля взять совокупность поляр элементов из
называется 3-топологией.
Некоторые примеры .^-топологий приведены ниже Если 3—
семейство всех конечных подмножеств пространства X, то
топология в ЙГ' называется слабой топологией, порождённой 33, и
обозначается Е(.2'', 33). Слабое сопряжённое [33', Е(ЙГ', 33)] к
пространству X будем обозначать через Х£. Топология Е (33', 33) мо-
жет быть также задана с помощью семейства полунорм вида
Pi(x') = | (х', х,) |. В таком случае в качестве фундаментальной сис-
темы замкнутых окрестностей нуля можно взять совокупность мно-
жеств вида 1
[х'\х'$33', I (х', Xi) I е, i = 1, 2,..., п], (1.2.4)
где е пробегает положительные вещественные значения, a [xi,
..., Хп] — все конечные подмножества пространства X.
Определим теперь сильную топологию S на 33'. Она порождается
семейством 3 всех ограниченных подмножеств пространства X. Такая
топология называется также топологией ограниченной сходимости,
так как последовательность элементов пространства Xs = [33', S] схо-
дится к нулю, если она сходится к нулю равномерно на всяком ограни-
ченном подмножестве пространства X.
В случае когда X—нормированное ВП, сильная топология на X'
задается нормой
1^1= Х>|. (1.2.5)
1 Ср. с (1.2.3). Заметим, что <х', х) < е тогда и только тогда, когда (х\ х/е} С 1-
24 Гл. 1. Основные понятия и результаты функционального анализа
Аналогично можно определить слабую топологию £ (97' ) в 797.
Топология £ (.% 797' ) порождается фундаментальной системой
окрестностей, образованной множествами вида
[х\х$7% (xf, х) С е, г - 1,2,п]. (1.2.6)
Здесь [х{, ...,х„} произвольное конечное подмножество пространства
97', а е — любое положительное число. Будем обозначать {97, £ (97,
97')] через Х„.
Отметим, что на всяком конечномерном ВП 797 имеется только
одна топология7.
1.2.2. Топологически дуальные пары
векторных пространств
Пусть 797 и 797'—векторные пространства, а (х', х)— каноническая
билинейная форма, т. е. форма, удовлетворяющая условиям (1.2.1) и
(1.2.2). Тогда [79", 797'] является дуальной парой. Предположим, что
в 97 введена слабая топология £ (% 97'). Эта топология является са-
мой слабой локально-выпуклой отделимой топологией в 97, для кото-
рой 797' служит сопряжённым к S77 Введём в 797' слабую топологию
£ (797', 797). Эта топология является самой слабой локально-выпуклой
отделимой топологией в 797', для которой X служит сопряжённым к
7977,. Отсюда следует, что значение функционала х (соотв. х') на эле-
менте х' (соотв. х) можно записывать как (х', х) или (х, х') и что
роли пространств X и X' в дуальной паре взаимозаменяемы.
Пусть X—отделимое ЛВП с топологией Т, а 97'—сопряжённое
к нему пространство. Возникает вопрос, как описать все локально-
выпуклые отделимые топологии Т в X, при которых сопряжённое к
X = [9", Т] в точности совпадает с97'. Говорят, что такие топологии
согласуются с двойственностью между 797 и 797'. По теореме Мак-
ки — Аренса, все топологии Т в 97, согласующиеся с двойственностью
между 97 н 97', сильнее, чем слабая топология £(797, 97'), и слабее,
чем некоторая топология £м, называемая топологией Макки1 2, т. е.
£(97, 97') <7 Т <7 £м на 97. (1.2.7)
1 Согласованная со структурой векторного пространства. — Прим. ред.
2 Zm есть топология равномерной сходимости на множестве всех абсолютно выпук-
лых компактных (относительно топологии £(.Z', г/")) подмножеств 19’ [284].
§ 1.2. Двойственность в топологических векторных пространствах
25
Аналогично все топологии Т" в ST', согласующиеся с двойственное- 11
тью между ST и ST', сильнее, чем Е (ST, ST'), и слабее, чем топология
Макки Ем, т. е.
'е(^,' ST) С Т' С Ejif на ST’. (1.2.8)
Дуальная пара [ ST, SF'} является топологически дуальной и обо-
значается [X, X'], если в йГи ST введены топологии, согласующиеся
с двойственностью между S? и S?'.
В заключение напомним понятие рефлексивности. Отделимое ЛВП
называется рефлексивным, если
X=(Xfo. (1.2.9)
1.2.3. Двойственность в нормированных
и гильбертовых пространствах
Пусть X — нормированное пространство с обычной топологией, опре-
деляемой нормой, SF' — сопряжённое к нему пространство, т. е. про-
странство всех непрерывных линейных функционалов на X. В ЙТ мо-
жет быть введено много топологий, но, имея дело с нормированным
пространством, мы всегда будем, если не оговорено противное, рас-
сматривать естественную топологию, определяемую нормой в S?
(т. е. пространство Х$). Пространство Х$, обозначаемое просто X', явля-
ется В-пространством с нормой |х' |, заданной соотношением (1.2.5).
Оно называется сильным сопряжённым к X.
Как и в общем случае ТВП, введём естественную каноническую би-
линейную форму (х', х) = х'(х), х$Х, х' Но так как X и
X' — нормированные пространства, то здесь мы уже не имеем топо-
логической и алгебраической симметрии, какая наблюдается в случае
общих ОЛВП, а именно X не будет сопряжённым к X', если X' не
является рефлексным в смысле (1.2.9). Сопряжённое к X' обозначает-
ся через X" и называется вторым сопряжённым к X. Как и в случае
отделимых ЛВП (см. (1.2.4, 6)), можно определить топологии
Е(Й' ;2") в Т и Е(ST', ST) в Первую из них будем называть
слабой топологией в ЙТ, а вторую ♦ -слабой (читается «звёздочка-сла-
бой») топологией в ЗУ, чтобы отличить её от слабой топологии
Е(ST', Sf” ) в ST'. Обе эти топологии локально-выпуклы и отделимы;
они слабее, чем топологии, определяемые нормой.
Говорят, что последовательность [хп] элементов нормированного
пространства X слабо сходится к элементу Хо€Х, если
Jim х'(хи) = х'(хо) *х' € X'. (1.2.10)
Л —» СО
26
Гл. 1. Основные понятия и результаты функционального анализа
Последовательность [х„] элементов пространства X', сопряжённого к
нормированному пространству X, ♦ -слабо сходится к элементу
х' tX', если
lim х„{х) = х0'(х) УхеХ. (1.2.11)
п -* ос
Если слабый предел существует, то он единствен.
Сильная сходимость в X (соотв. в X') всегда влечёт слабую (соотв.
♦ -слабую).
Приведём некоторые важные для последующего изложения ре-
зультаты.
Если В-пространство X рефлексивно (т. е. X = (Хз)з)> то всякая
сильно ограниченная последовательность в этом пространстве содер-
жит подпоследовательность, слабо сходящуюся к некоторому элемен-
ту из X. (Этот результат будет использоваться весьма часто.)
Если X—сепарабельное нормированное пространство, то любая
ограниченная последовательность в Xi содержит подпоследователь-
ность, слабо сходящуюся к некоторому элементу из Xi-
В-пространство рефлексивно тогда и только тогда, когда всякая
сильно ограниченная последовательность в X содержит подпоследова-
тельность, слабо сходящу&ся к некоторому элементу из X {теорема
Эберлейна — Шмульяна).
Пусть М—замкнутое линейное подпространство В-пространства
(М также является В-пространством), М’ — сопряжённое к нему про-
странство. По определению, для х' \м$М' имеет место соотношение
(х', х) = (х' |м, х) УхеЛ/ ух' еХ'. (1.2.12)
Теория двойственности В-пространств применима и к гильберто-
вым пространствам. Напомним определение гильбертова простран-
ства. Пусть X—ВП, {х, у)— симметричная билинейная форма
{скалярное произведение) на 9? х SX, которая является положительно-
определённой, т. е.
(х, х) > О VX6^X?£O. (1.2.13)
Векторное пространство 9?с такой билинейной формой называется ве-
щественным отделимым предгильбертовым пространством. Величи-
на (х, х)1/2 является нормой на 9Z Если билинейная форма лишь
неотрицательно-определённа, т. е.
{х, х)^б Ух$9Г, (1.2.14)
то соответствующее пространство уже не будет отделимым, а {х, х)1/2
будет полунормой на Ж Полное отделимое предгильбертово про-
странство называется гильбертовым пространством (сокращенно Н-
§ 1.2. Двойствеииость в топологических векторных пространствах
27
пространством). Далее, норма | х | на нормированном пространстве
является гильбертовой нормой (т. е. существует положительно-
определённая симметричная билинейная форма (х, у), такая что
| х| = (х, х)1/2) тогда и только тогда, когда справедливо тождество
М2+ М2 = 4-(|х + Л2+ k-Jl2) vx ytX. (1.2.15)
Если М—замкнутое векторное подпространство //-пространства, то
Х\ м с нормой, определённой формулой (1.1.6), также является //-про-
странством.
Говорят, что два вектора х, у гильбертова пространства X ортого-
нальны друг другу, если (х, у) = 0. Ортогональным дополнением
подмножества М С X называется множество
Л/1 = [у|уеX, (х, у) = о vxeМ}.
Если Xi — замкнутое линейное подпространство пространства X, то
X = Хх © Х± Каждый вектор х е X можно единственным образом
представить в виде х = Xi + х/-, где Xi е Xi, х^е Х±
Обратимся к вопросу о двойственности //-пространств. Рассмот-
рим //-пространство X и сопряжённое к нему пространство X'. Значе-
ние функционала х' ьХ' в точке х€Х обозначим через (х', х):
(х', х) = х'(х). (1.2.16)
В сопряжённом пространстве X' введена норма (1.2.5). Определим
отображение двойственности ^£L(X, X') соотношением
Ух:у->/хО) = (Z*» У') = У> Ух> УЬХ. (1.2.17)
По известной теореме Рисса ZflBJI5,eTcH сюръективной изометрией X
на X', которая называется канонической изометрией между ХяХ'.
Пространство X', снабжённое скалярным произведением
(*', J') = (Z-1*', Z-1Z) = (*', Z-1Z vx', y'eX', (1.2.18)
также является //-пространством. Если //-пространство X отождест-
вляется со своим сопряжённым X', то каноническая изометрия ZCTa"
новится тождественным отображением. В этом случае каноническая
билинейная форма (х, у) совпадает со скалярным произведением
(х, У)4 а X называется поворотным (или центральным)1 гильберто-
вым пространством.
В оригинале pivot. — Прим, перев.
28
Гл. 1. Основные понятия и результаты функционального анализа
1.2.4. Транспонирование непрерывного линейного отображения.
Шкалы гильбертовых пространств.
Теорема Лакса — Милгрэма
Пусть X и У—гильбертовы пространства, X' и У'—их сопряжён-
ные, (х', х)х и {у', у)у—соответствующие канонические билиней-
ные формы, А:Х-> Y—непрерывный линейный оператор, AtL(X,
У). Транспонированным к А оператором называется оператор
A'-.Y' -* X', определённый соотношением
(Л'у', х)х = {у', Ax}y Vy'tY' VxtX. (1.2.19)
Если X и У—поворотные пространства, то А' совпадает с операто-
ром А* сопряжённым к А. Последний определяется соотношением
(А*у, х)х = (у, A x)y VytY (1.2.20)
где ( , • )х и ( • , • )у—скалярные произведения в X и У соответ-
ственно. Как следует из (1.2.17), между А' и А* существует следую-
щая связь:
Л^/Л*^-1, (1.2.21)13
где у и Л"—канонические изометрии между % и %' и между У и У'
соответственно.
Нам часть придётся сталкиваться с такой ситуацией: заданы два
//-пространства X и Y, такие что X С Y, причём это вложение непре-
рывно и плотно. Тогда сопряжённое пространство У' плотно вложено
в X'. Каноническая билинейная форма (х', х)х на X' х X отождест-
вляется с однозначно определённым продолжением канонической би-
линейной формы {у',у)у на У' х X. Если У—поворотное
пространство, то
XcY=Y’CX', (1.2.22)
причём эти вложения непрерывны и плотны, и однозначно определён-
ное продолжение скалярного произведения в У отождествляется с ка-
нонической билинейной формой на X' х X. Пусть М—замкнутое
линейное подпространство //-пространства X. Через А/1 обозначим
замкнутое линейное подпространство сопряжённого пространства X',
определяемое формулой
A/J- = [х' |х' €X', (х', х)=0 VxtM}. (1.2.23)
Пространство, сопряжённое к М, изометрично факторпространству
X'/ML, а пространство, сопряжённое к Х/М, изометрично Л/1.
Во многих задачах будут рассматриваться семейства //-про-
странств где параметр а принимает вещественные значения, об-
§ 1.3. Некоторые функциональные пространства и их свойства 29
падающие тем свойством, что при аг < аз пространство Ха1 вложено
в Хаг. Такие семейства называются шкалами гильбертовых про-
странств. Для наших целей окажутся полезными шкалы //-про-
странств, удовлетворяющие следующим условиям:
(i) если ai < аг, a, €lR, то Xai С Ха1, причем это вложение
плотно;
(ii) если ai < аг < аз, то
I х I аг < | XI to - to - «О | XI to - ai)/(a3 - ai) v x 6 Хаз, (1.2.24)
где |х|„, —норма в Ха;,
(iii) сопряжённым к Ха служит X _а-, пространство Хо является
поворотным, а каноническая билинейная форма на Х_ахХа ото-
ждествляется с однозначно определённым продолжением скалярного
произведения в Хо.
Пусть X и X'—гильбертовы пространства и задан оператор
А 6 L(X, X’). Ему отвечает непрерывная билинейная форма а на X,
определяемая соотношением
а(х, у) = {Ах, у) Ух, уеХ. (1.2.25)
Обратно, если на X задана непрерывная билинейная форма д(х, у),
то она определяет оператор AtLfX, X') по правилу Ах'.у^а
(х, у) УхеХ. Оператор А называется коэрцитивным, если найдется
константа с > 0, такая, что
а(х, х)>с|х|2 УхьХ. (1.2.26)
По теореме Лакса — Милгрэма любой коэрцитивный оператор
А:Х->Х' является изоморфизмом X в X'. Мы будем использовать
эту теорему в такой эквивалентной форме: существует единственное
решение задачи
для заданного в feX' найти х^Х, такое что
а{х, у) = {f, у) У у t X. (1.2.27)
§ 1.3. НЕКОТОРЫЕ ФУНКЦИОНАЛЬНЫЕ
ПРОСТРАНСТВА И ИХ СВОЙСТВА
1.3.1. Пространства C*"(ft), Cm(H), D(Q) и LP(Q)
Ниже кратко описываются свойства функциональных пространств, ис-
пользуемые в этой книге. Все они определены, если не оговорено про-
тивное, на некотором открытом ограниченном связном подмножестве
О пространства IR" с границей Г. Везде предполагается, что Г облада-
30
Гл. 1. Основные понятия и результаты функционального анализа
ет всеми свойствами гладкости, нужными для того, чтобы можно бы-
ло поставить и изучать рассматриваемую задачу. Заведомо доста-
точно предположить, что Г является (п - 1)-мерным бесконечно глад-
ким многообразием, причём 0 локально лежит по одну сторону от
Г, но эти условия чересчур ограничительны. Очевидно, что их можно
обобщать и изменять, так что 0 и Г могут иметь и более общий вид
в зависимости от природы рассматриваемой задачи. Размерности, фи-
гурирующие в задаче, вид изучаемых операторных уравнений, гранич-
ные условия, функции, с которыми приходится работать, теоремы,
привлекаемые к исследованию задачи, — все эти факторы и определя-
ют свойства 0 и Г.
Например, в случае теорем о следе для пространств Соболева и
в случае неравенств Кориа, которые будут часто использоваться, до-
статочно липшицевости границы Г. Это означает, что (i) некоторая
окрестность F любой точки х € Г является липшицевой непрерывной
гиперповерхностью (см. (1.3.3), п = 1) и (ii) Г разделяет F на два мно-
жества— «внешнее» и «внутреннее» (подробнее см. [2; 98; 231]). Об-
суждение наиболее общего вида 0 и Г для каждой задачи выходит
за рамки настоящей монографии. Далее мы просто предполагаем, что
Г достаточно регулярна.
Введём следующие функциональные пространства.
(а) Для всякого неотрицательного целого числа т < °° обозначим
через Cm(Q) ВП всех вещественнозначных функций <р, заданных на В
и имеющих там непрерывные частные производные ГР# порядка
| а | т. Здесь использованы следующие обозначения:
х = (Х1..хп), а = (ои..ап),
| а | = ai + ... + аи,
Z>Mx) = Z)ai Z)avW
= Э“‘+ ••• + аУ(хь-.,хл) ' =
d“>xi... д“"Х„
(а,, 1= !,...,«— целые неотрицательные числа).
Далее, через обозначим подпространство в Ст(0), состоящее
из всех функций <р € Ст(0) с компактным носителем. Под носителем
функции <р (обозначаемым supp <р) понимается наименьшее замкнутое
подмножество 0, вне которого <р равна нулю. Положим
С“(0) = П Cm(Q).
т = О
Для любого компактного подмножества А множества 0 через
§ 1.3. Некоторые функциональные пространства и их свойства
31
рл(12) обозначим множество всех функций <р € С^°(12) 1, для которых
slippy С А. Оно становится ОЛВП при наделении топологией, порож-
дённой множеством полунорм
Рл.т{<р)= sup \Da<p(x)\, т < со. (1.3.1).
| а | < т, х € А
Строгий индуктивный предел2 пространств £>л(12), когда А пробегает
все компактные подмножества 0, тоже представляет собой ОЛВП.
Пространство С^°(12) с введённой таким образом топологией обозна-
чим через .0(12). В пространстве 0(12) последовательность [^>л] сходится
к нулю, если
(i) существует подмножество А С 12, такое что supp^„ С А для всех
л = 1, 2,...;
(ii) все последовательности [О“^>л(х)], а 0, равномерно сходятся
на А к нулю.
(Ь) Пусть й — замыкание й. Через С”(й) обозначим ВП всех функций <р € (^"(й), та-
ких что для каждого а = (oti,..., а„) с |_а | т производная ГР<р обладает единствен-
ным непрерывным продолжением на Й (т. е. если Ef<p ограничена и равномерно
непрерывна на й для | а | т ).
Отметим, что С”(Й) # С”(Й). Можно превратить С”(Й) в В-пространство, введя в
нём норму
|^| = max sup | LA</>(x) |. (1.3.2)
_ О с I а I < т X 6 О
Пространство С7-функций на й обозначим через С7(й). Аналогично пространству D((I)
можно ввести пространство D(0)L
Пусть 0 < л 1. Через С'"’ "(й) обозначим пространство всех функций <р € С”(й),
для которых производные 1Р<р с | а | т удовлетворяют неравенству
\£Рч>(х) - иРч>(у)\ ^с\х - у\п У^у€й, (1.3.3)
где с > 0 — некоторая константа. Условие (1.3.3) называется условием Гёльдера с пока-
зателем п. При л = 1 условие (1.3.3) превращается в условие Липшица3. Пространство
С”1' "(й) становится В-пространством, если
। max
h»c"'=h’C*+.xl , _
О С а <«
ввести в нем норму
sup | - DPyfy) I
х, yea । х - у |"
х * у
(с) Через £₽(12) (где р € IR +) обозначим множество всех веществен-
нозначных измеримых функций f на 12, таких что ( |/(х) | pd& < <®.
‘ Здесь СТ = П СТ(Й). — Прим. ред.
т = О
2 См., например, [337].
3 Липшицевы границы называют также (^’“-границами. Аналогично определяются
С™' "-границы.
32
Гл. 1. Основные понятия и результаты функционального анализа
Точнее, мы отождествляем элементы из £₽(0), которые почти везде
(п. в.) равны на 0, и Lp(£l) в действительности состоит из соответ-
ствующих классов экивалентности измеримых функций (две функции
fi и ft эквивалентны, если fi - /2 = 0 п. в. на 0). Для 1 р < <®
|/Ip = (J |/(x)|W/₽ (1-3-5)
о
является нормой на Lp. С введённой таким образом нормой Lp(fl) ста-
новится В-пространством. Пространство £2(0) является //-простран-
ством, в котором скалярное произведение задаётся формулой
(/ь/2) = J/i/zrfB. (1.3.6)
Q
Говорят, что измеримая на 0 функция f в существенном ограниче-
на, если |/(х)| Ссп. в. на 0. Точная нижняя грань таких констант
с обозначается ess sup I f(x) I. Векторное пространство всех классов
X £ О
эквивалентности в существенном ограниченных на 0 функций обозна-
чим через £“(0) (две функции fi и /2 отождествляются, если f - /2 = О
п. в. на 0). Пространство Z“(0) является В-пространством с нормой
|До= esssup|/(x)|. (1.3.7)
«О
Здесь везде имеется в виду мера Лебега на 0. Аналогично можно опре-
делить пространства £₽(0) (1 р < <ю) для произвольного простран-
ства с мерой (0, /0 (см. [330, 337]).
Напомним, далее, неравенство Минковского:
1/1 +fi\p^ 1/11₽+ \fi\p, I Ср< «, (1.3.8)
и неравенство Гёльдера: если fi£Lp‘(fl) и 1/pi>= 1/г, где pt,
г € [1,оо], i = 1, 2,..., т, то fifi ...fm € Lr(Q) и
1/1/2.../m|r^ |/1Ь,... \fm\P.. (1.3.9)
Если 1 ^p q ^oo и mes 0 < to L9(£l) вложено в LP(Q). Более
того, Р(0) плотно в LP(SI) при 1 р < <ю. Будем говорить, что р и
р' являются (взаимно) сопряжёнными показателями, если
р, р' € [1, <ю] и 1/р + 1/р' = 1.
Пусть 1 р < оо. Тогда каждый непрерывный линейный функционал
g на Lp(fl) имеет вид
(&/) = £(/)= i (1.3.Ю)
о
где gtLP'ffl). При 1 р < оо пространство [£₽((!)]' изометрически
§ 1.3. Некоторые функциональные пространства и их свойства 33
изоморфно £₽'(8) и потому можно писать [£р(8)]' = LP' (В). Следует
заметить, что [£“(8)]' Г1 (В). При 1 < р < «> пространство £р(8) яв-
ляется рефлексивным, а при 1 р < «> — сепарабельным. Нам часто
будут встречаться ограниченные последовательности в £“(8) =
= ^’(В)]'. В силу сепарабельности £’(В), у каждой такой последова-
тельности существует подпоследовательность, ♦ -слабо сходящаяся
(см. п. 1.2.3) к некоторому элементу из £“(0).
1.3.2. Пространства распределений
Линейные функционалы f, определённые на пространстве £>(В), назы-
вают обобщёнными функциями или распределениями на О. Таким об-
разом, распределение f — это элемент пространства ^'(0), сопряжён-
ного к £)(Q). Значение f(<p) (обозначаемое также {f <р) называется зна-
чением распределения f на пробной функции <р. Линейная форма на
£)(Q) является распределением тогда и только тогда, когда она удов-
летворяет одному из следующих двух условий:
(i) если последовательность € £)(8) сходится к нулю в тополо-
гии £)(Q), то последовательность [(/ #>„)} также сходится к нулю;
(ii) для любого компактного множества Bi С 8 существует неотри-
цательное целое число т, такое что для всякой функции ^е£)П1(8)
К/ и>)| <ф|.
где с > 0 — некоторая константа, а | задана соотношением (1.3.2).
Говорят, что два распределения fi и /г равны на 8, если
(Л, = (Л, У £>(8). (1.3.11)
На ^'(8) вводится слабая топология, и тогда это пространство стано-
вится ОЛВП. При этом fn~*f в ^'(В) тогда и только тогда, когда
{fn, V^6£>(8). (1.3.12)
Отметим, что если fn-> f в слабой топологии пространства ^'(В). то
fn~^f также в сильной топологии ^'(В) (см. [337]). Классическим при-
мером распределения служит распределение Дирака (или дельта-функ-
Ция) 6^; она определяется для хь 6 8 соотношением
~ *<*») v Ч> € Г>(8).
Функция f, определенная п. в. на 8, называется локалъно-интегрируе-
м°й (запись: /с £1„с(8)), если /е £1 (81) для любого измеримого множе-
ства 81, для которого 81 содержится в 8. Всякой такой функции f
f ИнВ № 33 7}
ОСКОРКА
34
Гл. 1. Основные понятия и результаты функционального анализа
(в частности, всякой непрерывной функции /) отвечает распределение
J, определённое по формуле
(Z д V^€D(fl). (1.3.13)
о
Она называется распределением, эквивалентным функции f Обычно
не делают различия между функциями и отвечающими им распреде-
лениями (и говорят просто о распределении f, опуская волну).
Если распределение эквивалентно локально-интегрируемой функ-
ции, то оно называется регулярным; в противном случае — сингуляр-
ным (таково, например, распределение Дирака). Сингулярные рас-
пределения часто записывают как обычные функции. Так, для/€^'ф)
и ^eZJ(fl) пишут
{f <f>) = \fvdQ. (1.3.14)
о
Отметим, что в общем случае нельзя говорить о значении распре-
деления в данной точке х
Важный класс распределений образуют меры. Мера / на Я — это
непрерывный линейный функционал на пространстве С?(Я) непрерыв-
ных функций с компактным носителем в Я. Пусть 6 С?(Я). Через
{f, <р) обозначим значение меры f на функции </>; его обычно называют
интегралом от относительно (или по) f Кроме обозначений (f, <р)
и используются также обозначения J pdf и \<p(x)df(x). Простран-
о
ство всех мер на Я обозначается (Я). Примером меры может слу-
жить распределение Дирака. Другой пример — классическая мера Ле-
бега. Будем говорить, что f является ограниченной мерой на Я, если
существует вещественное число с > 0, такое что
|(/ ^)| ^CSU]> k(x)| VX6C?(fi). (1.3.15)
Пространство всех ограниченных мер на Я обозначим Л '(Я). Оно яв-
ляется сопряжённым к пространству С?(Я), если в последнем введена
норма sup | р(х) |. Пространство .л/1 (Я) с нормой
1/Ь‘(0)= SUP , | = sup | <р(х) | , (1.3.16)
₽6С?(О) |р| хе0
является нерефлексивным В-пространством.
Распределение f называется неотрицательным, если
(f, р)>0 V^>0, ^6В>(Я). (1.3.17)
Всякое неотрицательное распределение является мерой (см., скажем,
[297]).
§ 1.3. Некоторые функциональные пространства н нх свойства 35
Произведение распределения fe3>'(Q) и функции ^6 Z)(fl) определя-
ется формулой
<Р) = {f, &р). (1-3.18)
Произведение двух распределений, вообще говоря, не определено.
Производная D*f распределения f определяется соотношением
{D“f, = ( -1) । “ । {/, (1.3.19)
Она является непрерывным линейным функционалом на 0(0) и,
следовательно, распределением на 0. Операция взятия производной
распределения задаёт непрерывное линейное отображение в
0'(Q).
Отметим, что пространство £₽(Й) вложено в ^>'(0). Пусть р и
р'—сопряженные показатели. Легко видеть, что если/е^'(Й) и
К/ ^кЬ'(0) (1.3.20)
где с > 0 — константа, то /6 £₽(Й).
Аналогично ^'(Й) можно определить пространство распределений
^'(IR"). Важным подпространством пространства ^'((₽") является про-
странство распределений медленного роста Обозначим через
S(IR") подпространство в C“(IR"), состоящее из всех функций f таких
что для любых а = (oti,..., ап) и /3 = (/3./Зп)
sup f(x)l < оо.
х s R‘
При наделении топологией, определяемой семейством полунорм
р(/)= Stig |Р(х)О“/(х)|, (1.3.21)
где Р(х)— полином, S(IR") становится ЛВП, в котором CJ°(IR") пред-
ставляет собой плотное подпространство. Пространство S(IR") являет-
ся пространством С°°-функций на IR", быстро убывающих на
бесконечности. Для любой функции f e S(IR") определим её преобразо-
вание Фурье / по формуле
/О') = j е -2т'^ y}J\x)dx, dx = dxi... dxn, (1.3.22)
Л
где (х; у} = Е xiy,. Преобразование / / является изоморфизмом
* •= I
S(IR") на себя. Обратное преобразование Фурье задается соотно-
шением
f(x) = f e2r,'x- yf(y)dy, dy = dyi ...dyn. (1.3.23)
36
Гл. 1. Основные понятия н результаты функционального анализа
Сопряжённое пространство <У'(1РЯ) представляет собой подпростран-
ство в &'(!Rn). Оно называется пространством обобщённых функций
медленного роста или пространством умеренных распределений.
«Умеренное» распределение — это распределение, которое «не растет
на бесконечности слишком быстро». Для умеренных распределений f
можно определить преобразование Фурье / положив
= V <Р 6 S(IR"). (1.3.24)
1.3.3. Пространства Соболева
Весьма важный класс В-пространств образуют пространства Соболе-
ва. Они оказались чрезвычайно удобным инструментом при матема-
тическом исследовании краевых задач.
Пусть 1 р оо и / — целое число. Обозначим через W1, ₽(Й) про-
странство всех функций /6 Lp(О), обобщённые (или слабые) производ-
ные Daf которых до порядка / включительно также принадлежат
LP(Q), т. е.
И^₽(Й) - [f\ftLp(Q), DaftLp(Q), |ск| </]. (1.3.25)
Введём в этом пространстве норму
\f\i.P= ( S , \D“f\pp]l/p. (1.3.26)
Тогда W1, p(Sl) становится сепарабельным В-пространством (рефлексив-
ным при р > 1). Ясно, что W°’p = Lp. Вложение W1, Р(Й) в LP(Q) непре-
рывно, и для /1 > /, pi > р мы имеем Wlb р> С W1' р. Вообще говоря,
D(Q) # W1’ P(Q), за исключением случаев О = IR" или I = 0. Обозначим
через W1, р замыкание О(Й) в И//,р(0) относительно нормы (1.3.26).
Это — замкнутое векторное подпространство в И^’^Й), а потому В-
пространство. Пространство W1, 2(Й) (соотв. W*' 2(Й)) обычно обозна-
чается /^(Й) (соотв. /г (Й)), а вместо | • | /, 2 пишут просто | | /. От-
метим, что О(Й) плотно в/^(й)). Норма | • 11 превращает пространство
Я'(Й) (соотв. Н1 (Й)) в гильбертово пространство со скалярным произве-
дением
((/ь Л))/ = S Daf2) , (1.3.27)
О < | а | < I
где (/ь /2) = J fifidQ — скалярное произведение в £2(Й). В простран-
. °
стве Я*(Й) скалярное произведение
(Л /2)/ = S (£>"Л В>“Л) (1.3.28)
I«I = >
§ 1.3. Некоторые функциональные пространства н их свойства
37
определяет норму I • I/, которая эквивалентна норме (1.3.26) (лемма
Фридрихса). В /?(Я)
1/1/ = ( S |D“/|i)1/2 (1.3.29)
I = I о I
есть просто полунорма. Функция / 6 //(Я) со свойством I /1 / = О
п. в. равна некоторому полиному от х степени I — 1. Все такие
функции образуют замкнутое линейное подпространство ^?/-1(Я) в
//(Я). Величина
Ill/Ш = ( 1/1 ?+ I/ г)1/2 (1.3.30)
есть норма в //(Я) (/ > 1), эквивалентная обычной норме. Рассмотрим
теперь факторпространство (У (Я) = //(Я)/^ _ 1 (Я) с нормой (см.
(1.1.6))
I [/11/ = inf |/- g|/, g€^/-i(fi). (1.3.31)
Можно показать [41], что полунорма 1/1/ является нормой в про-
странстве (У(Я), эквивалентной норме | [/] |/.
Пространства Соболева W1, ₽(Я) могут быть определены и для от-
рицательных / (отрицательные порядки дифференцирования!). Пусть
1 ^.р' оо, 1 I, \/р + \/р' = 1. Через Ж“/,₽'(Я) обозначим про-
странство распределений / на Я, таких что
/= S D“ga, ga6L''(R). (1.3.32)
I а | < I
Пространство W~ p (Я) для p' < оо является В-пространством отно-
сительно нормы
|/l-/,₽= sup , (1.3.33)
V £ г'я I V11, Р
где
</,?) = S J (-1)1«1&,Я“^Я.
I О I - I о
Можно доказать, что (PK/,₽(fl))' при р>1 является пополнением
Lp (Я) относительно нормы (1.3.33) (где теперь <р принадлежит W1, р,
а не W1- ру и что для р > 1
(^'•w = И/,р'(О). (1.3.34)
В случае р - 2 часто используются плотные и компактные вложения
ЗДсВДсН'Ш (1.3.35)
38
Гл. 1. Основные понятия н результаты функционального анализа
Теперь определим пространства /Г(1₽л) и /Г(Я), где s — произволь-
ное вещественное число. Для этого воспользуемся понятием умеренно-
го распределения. Пространство Соболева s 6 IR — это
пространство всех умеренных распределений f, для которых произве-
дение преобразования Фурье / на (1 + №)s/2 является элементом из
L2(IR"). В /F(IR") вводится норма
1/1 = I (1 + И Ww 12. (1.3.36)
Эта норма превращает №(IR") в //-пространство. В случае когда s —
положительное целое, норма | • эквивалентна обычной норме
(1.3.26). Сопряжённым к пространству //*(IR") служит Н~ *(IR"), и для
целых положительных s топология на Н~3(№), определяемая нормой
(1.3.36), эквивалентна топологии, порождённой нормой (1.3.33). Опре-
делим теперь пространства /Г(Я) для произвольного вещественного s.
Для S6 IR+ будем говорить, что /6 Н3(Я), если f есть сужение на Я
некоторого элемента / из №(1₽л). Норма
IZI. = inf 1/1^, (1.3.37)
где / = f п. в. на Я, превращает //’(Я) в //-пространство. Если
s > п/2 + а (а — целое > 0), то /Г(Я) С С“(Я), причём это вложение
непрерывно. Обозначим через /Г (Я) замыкание £>(Я) в Н3 (Я) (где
s > 0). При s 1/2. справедливо равенство //*(Я) = //’(Я), а при s >
> 1/2 мы имеем //’(Я) С /Г(Я).
Можно показать, что прн s > 1/2 для достаточно регулярных границ
НЧО) = {/|/€ /Г(0), -Ц- = 0, на Г для 0 у < 5 - 4-], (1.3.38)
д nJ 2
где tff/dn1 — это j-я нормальная производная от f (в смысле теории распределений),
определённая на Г.
Далее, для s€lR+ пространство определяется как сопряжённое к
т. е.
Н’(й) = (Д’(Я))'. (1.3.39)
Семейство пространств 771(IR") для s t IR доставляет пример шкалы гильбертовых про-
странств, удовлетворяющей условиям, указанным в п. 1.2.4. В качестве //°(IR") выступа-
ет пространство £2(IR"). Для пространств /Г(0) прн любом целом положительном N
можно построить шкалу гильбертовых пространств [HJ40)], которая для 0 s N со-
держит все пространства /Г(0). Норма в пространстве Н*(0) может быть выражена
формулой
= S J l-LP°'Z^1) -°“/(Хг)|2 tWlA , (1.3.40)
У | а | = I 0 0 |Х1 — х2 | п + 2 I» I
где j = I + /х, /— положительное целое, а 0 < ц < 1. Норма в s > 0, определя-
ется по формуле (1.2.5). Для произвольного ограниченного множества индексов про-
странства Н’(О) обладают свойствами (i) — (iii) шкалы гильбертовых пространств (см.
п. 1.2.4).
§ 1.3. Некоторые функциональные пространства и нх свойства
39
1.3.4. Теорема о следе.
Вложения пространств Соболева
В рамках гильбертовой теории исследование неоднородных краевых
задач для дифференциальных операторов на Я приводит к необходи-
мости рассмотрения следов функции /€ Н1 (Я) и её производных на
границе Г и соответственно к классу пространств Соболева на границе
Я’(Г).
Мы лишь бегло наметим определение пространств Н* (Г) для s 6 IR
(см. [181, 231]). Рассмотрим вначале покрытие границы Г конечным
числом открытых ограниченных подмножеств {Uj\, j = 1,2,..., v; за-
тем соответствующее множество достаточно гладких отображений7
= [у', у„]€ IR", у' 6 IR"-1, |j'| < 1, |jn| < 1),
для которых обратное отображение j существует и достаточно
гладко, и, наконец, разбиение единицы (g/j, подчинённое этому покры-
тию. Для всякой заданной на Г функции определим функцию wj(f) на
IR" _ 1 по формуле
0) = )(У'> 0)). (1.3.41)
Обозначим через Я*(Г) множество всех функций f, таких что
Wi(/) еЯ1(Л?" “ *) для 1 С / С г. Это определение не зависит от выбора
открытого покрытия, отображений ф и разбиения единицы. Норма
\ 1/2
Е (1.3.42)
J=1 /
превращает Я1 (Г) в //-пространство. Если Я0 (Г) = А2 (Г)— поворот-
ное пространство, то
Я-1(Г) = (Я1 (Г))' (1.3.43)
для каждого s 6 IR. Можно показать, что С? (Г) плотно в Я1 (Г) при
О 0 и что вложения
Я1 (Г) С £2(Г) С Я- ’(Г) (1.3.44)
плотны и компактны.
Важную роль играет следующая теорема о следе для пространств
Я7 (Я). Пусть у— линейное отображение
7/ = h/}. = -fr ^(Г), 0 -3-45)
дп г
где i = 0,1,..., I - 1. Тогда
1 Если граница Г равномерно (/"-регулярна, то этн отображения должны принадле-
жать классу (/" (см. [2]).
40
Гл. 1. Основные понятия н результаты функционального анализа
(i) у,- единственным образом продолжается (по непрерывности) до
непрерывного линейного отображения, по-прежнему обозначаемого у,,
из Н1 * *^) на /7,-/-1/2(Г) (0 < i I - 1); мы сохраняем обозначение
yf= [vf], * = 0,1.../- 1;
(ii) у — непрерывный линейный оператор из Н1^) на 1/2(Г);
(iii) всякому элементу g = [gt] € Д1 /7/_'-1/2(Г) можно сопоставить
_ _ i = 0
элемент g € rffQ) так, что g -> g есть непрерывное линейное отображе-
ние из fe1 -Н,“,-1/2(Г) в //'(Я) и
= O^i^/- 1; (1.3.46)
(iv) ядром оператора у служит 7У(Я).
Итак, можно записать
7У(Я) = [/|/6^(Я), yf/=0, 1]. (1.3.47)
Для простоты вместо у,/ мы часто будем писать d‘f/dn‘ | г (в
смысле предыдущей теоремы о следе). Заметим, что аналогичные тео-
ремы о следе имеют место и для других классов пространств Соболе-
ва (см. [2]). Упомянем здесь теорему о следе Гальярдо [108], согласно
которой существует непрерывное линейное отображение следа уо из
И4-1 (Я) на Г?(Г).
Наконец, отметим некоторые важные свойства пространств Собо-
лева. Для «регулярных» Я С IR" имеют место следующие вложения7
(теорема вложения Соболева). Пусть у > 0, л» > 0 и 1 р < оо.
(i) Если тр < п, то
WJ + т’ ₽(Я) С WJ> «(Я) для 1 q <—(1.3.48)
п - тр
(ii) Если тр = л, то (1.3.48) выполняется для 1 q < оо.
(iii) Если тр > п > (т - 1 )р (соотв. п = (т - 1 )р), то
WJ + т- ₽(Я) с CJ> Х(Я) для 0 < X т - — (соотв. 0 < X < 1).
Р (1.3.49)
Отметим также полезное вложение
/Г(Я) С LP(Q) при у = у - „ > 0, $ >0. (1.3.50)
1 Точнее, приводимые ниже утверждения (i), (i'), (ii), (ii') имеют место если Q удов-
летворяет условию конуса, а утверждения (iii) н (iii') — если Q удовлетворяет сильному
локальному условию Липшица (см. [2]).
§ 1.3. Некоторые функциональные пространства и их свойства
41
По теореме Реллиха — Кондрашова, при j > О, тэт > 1, °°
справедливы следующие утверждения:
(iz) Пусть тр п. Тогда вложение
WJ + т‘ Р(П) С W*’ «(Й) (1.3.51)
компактно, если п> тр и 1 q < пр/(п - тр) или если п = тр и
1 q < <ю.
(iiz) Если тр > п, то вложение (1.3.51) компактно для 1 q со.
(iii') Если тр > п, то компактно вложение
WJ + т, Р(й) с cJ(Q), (1.3.52)
а если тр>п^(т-1)ри0<\<т - п/р, то и вложение (1.3.49)
тоже компактно.
Как теорема вложения, так и теорема о компактном вложении
остаются справедливыми для произвольных Й и соответствующих
пространств W.
Наконец, напомним о компактности вложений
№(Й)CH5' “(Й) У а > О (S6 IR) (1.3.53)
и
Hl(O)CL2^). (1.3.54)
Систематическое изложение свойств пространств Соболева можно
найти в [181; 2; 231].
1.3.5. Пространство функций ограниченной деформации
В теории пластичности важную роль играет недавно введённое про-
странство BD(tl) функций ограниченной деформации на Й С IR" (см.
[304; 200; 314]). По определению,
BD(Q) = [f\f = ftLl($),
eijtf) = fj. 0 6 Ш i,j = 1............«]. (1-3.55)
Пространство BD{ty является нерефлексивным В-пространством с
нормой
l/lBD(0)= ,.S 1/И1+ ,S, (1.3.56)
Очевидно, ’^’‘(fl) С В£)(Й). Всякое распределение f, для которо-
Го £<>(/) € ^‘(Й), i,j = 1,... ,п, является элементом пространства
42
Гл. 1. Основные понятия и результаты функционального анализа
[ЛЛ(Л+1)(Й))Л. Предположим, что Г является ^-границей. НаВ£)(Й) име-
ет место следующая теорема о следе. Существует единственное сюръек-
тивное непрерывное линейное отображение уо: В£)(Й) -> [L 1(Г)]Л, такое
что
уо(/)=/|г ¥/€ВР(Й)П[С°(Й)]л. (1.3.57)
Вложение
В£>(Й) С [1/(Й)]л (1.3.58)
компактно при 1 $ р $ п/(п — 1), а при р = п/(п - 1) непрерывно. Та-
ким образом, для случая Й С IR3 любая ограниченная последователь-
ность в BD(Q) имеет подпоследовательность, которая сильно сходится
в [Г1 («Г-
§ 1.4. НЕКОТОРЫЕ ДОПОЛНИТЕЛЬНЫЕ СВЕДЕНИЯ
1.4.1. Элементы теории векторнозначных функций и распределений
Ниже рассматриваются векторнозначные функции, определённые на
вещественном интервале [О, Т}, Т < оо. Пусть X—банахово простран-
ство. Говорят, что функция/: [О, Г] -> X абсолютно непрерывна на
[О, Т], если для любого е > 0 найдутся <5 (с) > 0 и натуральное п, такие
что
s 1/(0') -/(0)1
J = 1
для всякого набора попарно непересекающихся интервалов (tj, tj),
удовлетворяющих условию
Д |0'- 01 ^5(с).
Справедлива следующая теорема о дифференцируемости. Если X—
рефлексивное В-пространство, то всякая абсолютно непрерывная
функция /: [0, Г] -+ X почти везде дифференцируема на (0, Г); при
этом
t
f(t) = /(0) + | -^(t)dt, (1.4.1)
Здесь производная (df/dt)(t) (называемая также сильной или обыкно-
венной производимой) от функции /: [0, Т] -»X — это, по определе-
j 1.4. Некоторые дополнительные сведения 43
«- ~ ' - I I IB
нию, сильный предел разностного отношения
/а + 5т)-ло (14 2}
Обозначим через Т, X) пространство всех непрерывных линей- 23
вых отображений из D(0T) в X. Элементы X) называются
Х-значными (или векторными) распределениями на (О, Т). Для
f£^"(0T, X) определим производную 7?“/ порядка а по формуле
W <р) = ( -1)“ If, ^-\ v <р 6 77(0Т). (1.4.3)
Обозначим, далее, через LP(OT, X) пространство всех (классов эквива-
лентности) Х-значных измеримых функций из [О, Т] в X, таких что
|/(0 | х € Lp(fiT), 1 оо.
Относительно нормы
1/1 LP(PT, X) ~ (] \f(t)\pxdt\1/p (1.4.4)
\ о /
оно является В-пространством для 1 < <ю. При р = оо LP(OT, X)
будет В-пространством относительно нормы
1/1 х) = ess sup |/(0|х. (1.4.5)
(О, Г)
Отметим, что LP(OT, LP(Q)) = LP((OT) х fl).
Если X—гильбертово пространство, то и L2(0T, X) тоже стано-
вится гильбертовым пространством при наделении скалярным произ-
ведением
(Л, /2)z,2(ot; х) = I (/1(0» filfihxdt. (1.4.6)
О
Если X—рефлексивное В-пространство, то LP(OT, X) при 1 < р < оо
также рефлексивно, а сопряжённое к нему может быть отождествлено
с LP'(ОТ, X'), где р'—сопряжённый с р показатель. Если X нере-
флексивно, то сопряжённым к нему служит L^(0T, X'). Здесь индекс
w указывает, что ££,(07? X') состоит из слабо (weakly) измеримых1
функций / таких что |/| х') < °0- Нам часто придётся иметь
Дело с ограниченными последовательностями [/„] в £“(07? X), где
X — гильбертово пространство. Всякая такая последовательность со-
В том смысле что веществеииозиачиая функция t -»(/(0, измерима для любого
xtX.
44
Гл. 1. Основные понятия и результаты функционального анализа
держит подпоследовательность, ♦ -слабо сходящуюся к некоторому
элементу /о €£“(О Т, X):
[(/„, j (Го, <p)xdt X'). (1.4.7)
о о
Каждой функции f£Lp(0T, X), где X—банахово пространство и
р 1, отвечает единственное распределение, снова обозначаемое через
f, которое задаётся соотношением
O=f/(MO<« V?€^(0T). (1.4.8)
О
Если ftLl(0T, X), то функция F(t) = \f(f)dt п. в. дифференцируема
на (О, Т) и 0
-^(0=/(0п. в.на(О,Т). (1.4.9)
Далее, теорема Лебега утверждает, что
lim I f(t)dt =f(t) п. в. на (О, Г). (1.4.10)
St - О 01 1
6t 5* 0 t
Пусть X — банахово пространство, т — положительное целое чис-
ло и 1 р оо. Введём пространство
W^OT, X) = lf\D‘f^Lp(QT, X), О sj i т}. (1.4.11)
Обозначим через АСт,р(0Т, X) пространство всех %-значных абсо-
лютно непрерывных функций, у которых производные d'f/dt\ опреде-
лённые п. в. на [О, Г], при 1 i ^.т - 1 абсолютно непрерывны, а
при 0 i т принадлежат LP(OT, X). Если f € Wm' р(0Т, X), то суще-
ствует функция А Ст,р (О Т, X), такая что
7(0 = 7(0 п. в. на (О, Т), (1.4.12)
и справедливо обратное утверждение. Пусть X и Y—банаховы про-
странства, для которых в (1.2.22) имеют место плотные вложения.
Рассмотрим пространство
W1' 2(0Т; X) = (7|/€ L2(0T, X), DftL2(0T, X)]. (1.4.13)
Можно доказать, что существует функция /^АС1,2(0Т, X), удовлетво-
ряющая условию (1.4.12). Поэтому Df может рассматриваться как
производная df/dt от функции f Справедлива следующая теорема о
непрерывности: любая функция /€ |Г1,2(ОЗС X) из [0, Г] в Y п. в.
непрерывна, т. е. ftC°(0T, У). Если/ь fi € X), то функция
§ 1.4. Некоторые дополнительные сведения 45
/->(//(0, /г(0)х абсолютно непрерывна на [О, Г] и
at \ ai / х \ си I л
п. в. на (0, Г). (1.4.14)
Эта теорема показывает, что для указанных / имеет смысл начальное
условие / = fj^Y при t = 0. Вот почему теорема о непрерывности
играет важную роль при исследовании краевых задач динамики.
1.4.2. Элементы дифференциального исчисления
Пусть F:X~* Y—нелинейный оператор, X и Y—два В-пространства.
Графиком оператора F называется множество
^(F) = [(х, у)\х$Х, Y, у = Г(х)]. (1.4.15)
Пусть # — открытое подмножество в X. Будем говорить, что графики
операторов F:&-> Y, F:0~* Y касаются в точке хь€^, если
Мы ищем линейные функции, графики которых касаются графика не-
линейного операторов данной точке хо € 0. Существует не более одной
линейной функции F:X -+ Y вида F(x) = F(xb) + L(x - Хо), где L — ли-
нейное отображение, график которой касателен к графику F в х». Гово-
рят, что отображение F: & -> Y дифференцируемо по Фреше (или
просто дифференцируемо) в точке хь, если существует непрерывный
линейный оператор из X в Y, обозначаемый (dF/dx)(xo), такой что гра-
фик ^(F) касателен в хь к графику ^(F) оператора F.X -» У, определен-
ного соотношением
— dF
F(x) = F(x0) + (х0)(х - хо). (1.4.17)
Если оператор дифференцируем по Фреше в каждой точке хь € то
говорят, что он дифференцируем по Фреше на Величина
(dF/dr)(xo)(x - хь) называется дифференциалом Фреше, а отображение
(dF/dx)(xo):X-» Y—производной Фреше в точке хь (последняя являет-
ся элементом пространства L(X, У)). Нетрудно проверить, что произ-
водная Фреше для постоянного отображения /(х) = с равна нулю, а
Для непрерывного линейного отображения совпадает с ним самим.
Далее, пусть X—отделимое ЛВП, У—банахово пространство,
— открытое подмножество в X, F-.&-+Y, хь € Для всякого h € X
46
Гл. 1. Основные понятия и результаты функционального анализа
можно найти с > 0, такое что хь + у h е^при | у | < с. Допустим, что
lim II + № ~ F(Xo) - F’(Хо, h) II =0. (1.4.18)
м - ° || fl || У
Оператор й -» F' (хь, Л) называется дифференциалом Гато оператора
F в точке хь при приращении h. Если предел в (1.4.18) существует для
любого й € %, то говорят, что оператор F дифференцируем по Гато
в точке Хо, и оператор й -»F' (хь, Л) называют дифференциалом ГЪто
в точке хь. Это однородный по h оператор, т. е.
F'(xo, ah) = aF'(xb, Л) Va€lR. (1.4.19)
Если, кроме того, оператор й -»F’ (хь, й) линеен и непрерывен по й,
то его можно записать в виде F'(xo)h. Тогда F'(xo)tX-> Y называют
производной Гато отображения F в точке хь.
Если отображение F дифференцируемо по Фреше в хь, то оно .
дифференцируемо в этой точке и по Гато. Если производная Гато F’
существует и непрерывна в некоторой окрестности точки хь, то F диф-
ференцируемо по Фреше в хь. В обоих случаях
dF
(хо) = F'(Хо). (1.4.20)
Предположим, что у функционала f: IR существует производная
Гато У' (хсь) Она называется градиентом f в точке хь и обознача-
ется grad /(хь). Ясно, что
(grad /(х), й) = -^-/(х + fih) vht^fitR. (1.4.21)
U /4 /4 = 0
Оператор ST', для которого существует функционал / такой
что при каждом х€^
JT(x) = grad /(х), (1.4.22)
называется потенциальным', а функционал / называется в этом случае
потенциалом оператора ^(подробнее см. [324]).
1.4.3. Некоторые дополнительные понятия и результаты
Ниже приводится ряд дополнительных определений и результатов, ко-
торые будут иногда использоваться в последующих главах.
(а) Пусть X и У—два В-пространства, F—нелинейный оператор
из X в У. Будем говорить, что оператор F ограничен, если он перево-
дит ограниченные множества в ограниченные. Если F переводит по-
следовательности, слабо сходящиеся в X, в последовательности
§ 1.4. Некоторые дополнительные сведения
47
сильно сходящиеся в X то он называется вполне непрерывным. Опера-
тор F:Xi -* Y, где Xi С X называется компактным, если он непреры-
вен и переводит ограниченные подмножества в Xi в относительно
компактные подмножества в К Если X — рефлексивное В-простран-
ство, то всякий вполне непрерывный оператор F является компакт-
ным. Вполне непрерывные линейные операторы f:X -* Y, где X,
Y—гильбертовы пространства, всегда компактны.
Оператор F:X -» X', где X' — сопряжённое к рефлексивному В-
пространству, называется псевдомонотонным, если
(i) он ограничен;
(ii) для любой последовательности [хл] € X, такой что хп хь слабо
в X и lim sup (F(xn), хп — Хо) 0, выполнено неравенство
liminf (F(x„), хп - х) (F(x0>, хь - х) V х$Х. (1.4.23)
(Ь) Если I — тождественный оператор, X — банахово пространство, А — непрерыв-
ный линейный оператор X -* X, то множество всех вещественных чисел X, таких что
оператор А - X / не имеет ограниченного обратного, называется спектром оператора
А и обозначается а (А). Если ker (А - X 7) # 0 н X € а(А), то X называется собственным
значением А. Всякий ненулевой элемент х € X, принадлежащий ker (А - X /), назы-
вается собственным вектором, отвечающим собственному значению X. Более общим
образом, рассмотрим уравнение
f(x, X) = 0, х € X, X € IR. (1.4.24)
Точка (хо, Хо) называется точкой бифуркации уравнения (1.4.24), если, во-первых,
(хо, Хо) лежит на кривой решений х = x(s), X = X(s) (где s — параметр), проходящей че-
рез (хь, Хо), и, во-вторых, в любой окрестности точки (хь, Хо) существует решение уравне-
ния (1.4.24), отличное от (x(s), X(s)).
(с) Наконец, приведём ещё некоторые результаты из теории про-
странств Соболева, играющие существенную роль при изучении задач
на неравенства. Предположим, что Я — открытое ограниченное связ-
ное подмножество пространства IR 3 с липшицевой границей Г. Рас-
смотрим на нём //-пространства [Z2(fl)]3 и [Я1 (Я)]3, снабжённые
обычными нормами. Пусть £ = (ay), i,j = 1,2, 3, — симметричный тен-
зор, определённый на [£2(Я)]6 соотношениями
£у = £ij(u) = у (и,. j + Uj,,) V и = [и,-} € [Я1 (Я)]3. (1.4.25)
Далее, рассмотрим конечномерное подпространство
Л = [t> I v € [Я1 (Я)]3, J £у(0£у(0(/Я 0]. (1.4.26)
о
Всякая функция г € Js5 представима в виде
г = г(х) = а + ЬАх, a, b € IR3, х€Я. (1.4.27)
48
Гл. 1. Основные понятия и результаты функционального анализа
Имея в виду деформируемое тело (теория малых деформаций), зани-
мающее в иедеформированном состоянии объём 0, мы рассматриваем
и как вектор перемещений, £ — как тензор деформаций, г — как вектор
перемещений твёрдого тела.
Приведём два важных неравенства.
Первое неравенство Корна. Пусть Ко — замкнутое линейное под-
пространство пространства [Я1 (О)]3, причём К0А^ - [0]. Тогда су-
ществует константа с > 0, такая что
j Eij(u)Eij(u)d0 > с II и И? V и € Ко, (1.4.28)
о 3
где II • II1 — норма в (№(0)]3, т. е. II и II2 = S II и,- II 2.
/ = 1
Второе неравенство Корна. Существует такая константа с > 0, что
j Etj(u)Eij(u)dQ + | и 12 > с I«11 V и € [Я1 (fl)]3 , (1.4.29)
0
где | и 12 = ( . | Mi 12) 1/2 — норма пространства [L2(ft)]3.
Доказательства этих неравенств можно найти в [98].
Далее, на Г определены пространства (Т2(Г)]3 и (Я1/2(Г)]3. Вложе-
ние (Т2(Г)]3 D [Я1/2(Г)]3 компактно и плотно. По теореме о следе для
пространств Соболева можно для любого U € [Я1/2(Г)]3 найти (ие
единственное) [Я1 (fl)]3, такое что2
у(и) = U и II и lb ell (/II [Л1/2(Г)]з, (1.4.30)
где с > 0 — константа. Кроме того2,
?(м) = м|г V и € [Я(б)]3 . (1.4.31)
Пусть а = [oyj, i,j = 1,2,3, — другой тензор (например, тензор напря-
жений). Векторные пространства
Я = (о | а = [оу], оу - ал, ау € £2(Я)} (1.4.32)
и
Е = [а | а € Я, ау, j € L2(fl)}, (1.4.33)
снабжённые соответственно нормами
|а|н = [ I aijaijdQ]1/2 (1.4.34)
3
' I UI . S I W l ^/2(Г), н аналогично для I FI
2 Ввиду приводимого ниже соотношения мы вместо у и часто будем писать просто
"1г-
§ 1.4. Некоторые дополнительные сведения 49
И
| ff | Е = [ J oijUijdQ + J Oij, jOik, kdQ\1/2 , (1.4.35)
D Q
являются //-пространствами. Обозначим через п = [л,] орт внешней
нормали к Г. Существует следовое отображение у € Е(Е, [Н~ 1/2(Г)]3),
обладающее тем свойством, что для любого Fe [Н~1/2(Г)]3 можно
определить а € Е, такое что
у(а) = аи | глу V а € [/?(П)]6 ,
-f X Е- I I / I г-1 (1.4.36)
у(а) = F, |а|Е с|Г|[Я-1/2(Г)]з .
Здесь с > 0 — константа, ay — следовое отображение. Для любых
а € Е и и € [№ (О)]3 справедлива формула Грина — Гаусса
\ oiiEii(v)dQ + j а„, = <7(а),7(и)) . (1.4.37)
Q Q
Здесь (-,-)— каноническая билинейная форма на [Т/-1/2(Г)]3 X
х [№/2(Г)]3. Формула (1.4.37), называемая также обобщённой форму-
лой Грина — Гаусса, легко получается продолжением по непрерывнос-
ти из стандартной формулы Грина — Гаусса для т € [Z)(fl)]6. Для этого
достаточно принять во внимание, что [О(О)]6 плотно в Е (см., напри-
мер, [13]). Из (1.4.37) следует, что если а€ Е, то у а однозначно опре-
делено как элемент [№/2(Г)]3.
Для простоты в настоящей книге мы часто опускаем у и у при
записи следов, если это не может вызвать недоразумений.
Векторы U и F, определённые на границе Г, могуть быть разложе-
ны на нормальную и тангенциальную (относительно Г) составляющие
Un, Ut и Fn, Ft. Очевидно, что если а € [Е2(Г)]3, то fl^=fl^Лi,
ат = а - аяп. Сложнее случай а € [№/2(Г)]3. Предположим, что грани-
ца Г регулярна2. Положим
Нт = {и | и € [Я1/2(Г)]3, vim = 0 п. в. на Г). (1.4.38)
Для а € [№/2(Г)]3 отображение а -> [on, ат] является изоморфизмом
[№/2(Г)]3 на Я1/2(Г) х Нт. В сопряжённых пространствах составляю-
щие ак и ат однозначно определяются соотношением
{а', а) = {ok, aN)i/2 + <Дг> ат)нт Vа е [Я1/2(Г)]3, (1.4.39)
где (•, -)1/2 и (•, •) Нт—канонические билинейные формы на
Н~ 1/2(Г) х Я172 (Г) и Нт х Нт соответственно. Отображение а' -> [afc,
ef] является изоморфизмом ((Я1/2(Г)]3)' на Я-1/2(Г) х Hf. Существу-
1 Достаточно, чтобы Г была С1,‘-границей [150].
50
Гл. 1. Основные понятия н результаты функционального анализа
ет непрерывное линейное отображение 7N (соотв. 7Г) из [Я1 (О)]3 на
Я1/2(Г) (соотв. Нт), такое что
7n(u) = щ | гя„ ути = и | г - уы{и) п V м € [Р(0)]3 (1.4.40)
и
у{и) = yN(u) + 7г(м) V и € [Я1 (О)]3 . (1.4.41)
Аналогично существует непрерывное линейное отображение yN
(соотв. 7т) из Е на Я “1/2 (Г) (соотв. Нт), такое что
Уы(°) ~ au\rnjni, Ут(а) = - ум(о) п [Z)((])] (1-4.42)
и
(7(0), U) = (уЖ), Un) 1/2 + (ут(а), Uj)Ht
VoCS V(/€ [Я1/2(Г)]3. (1.4.43)
Пусть задана пара [С7лг, t/r] € Я,/2(Г) х Нт (соотв. {/w, Fr] €
€ Я,/2(Г) х Н?- Тогда можно найти (не единственную) функцию
и € [Я1 (О)]3 (соотв. а€Е), такую что
Уы{и) = Un, 7y(w) = Ut (соотв. yN(a) = Fn, Ут(а) ~ Ft)- (1.4.44)
Отображения [Un, Ut]~* и и [Fn, Ft}~* о непрерывны и линейны. Для
любых 7€Е и ибГЯ1^)]3 справедлива формула Грина — Гаусса
J TijEij(v)dQ + f Tu,jVid£l = (7^(7), 7Jv(t’))i/2 + (77(7), ут(р))Нт . (1.4.45)
В вышеприведенных формулах мы часто будем писать просто (., •)
вместо (•, • )i/2 или (• , • )Нг, если это не может привести к недоразу-
мениям. Отметим, что указанные выше результаты можно обобщить
на случай границ класса С0,1; в этом случае требуется незначительная
модификация пространств Un и Ut [132].
Для и€ВР(П) формула Грина — Гаусса справедлива в следующем
виде [304, 314]. Пусть
Я(0( = (т | 7 = {7,7], 7у = ту, ту € Я(П), i,j = 1, 2, 3 ].
Тогда имеет место соотношение
j TijdEtjfj) + J TU'jvidQ
о a _
= 5 (7ov).7y7i7(/r V7fO(8) Vu€BZ>(0). (1.4.46)
г
Если S — некоторая поверхность, делящая 0 на два непустых множе-
ства 0 + и 0 -, то существуют два непрерывных линейных отображе-
ния 7+ и 7- из BD(Q) на [LJ(s)]3, такие что для т € Я(О) и для функций
v с supp v С 0
§ 1.4. Некоторые дополнительные сведения
51
( Tij,jViBQ + J Tijd£ij(v) = J (у_ v)nijnjds V v € BD(Q), (1.4.47)
Q- Q- S
J Tij, jVidSl + j TijdEij(y) = J (y+ v)iTijnjds V p € BD(Q). (1.4.48)
D. D. $
Функции 7+ v и 7- j называются соответственно внешним следам ивнут-
ренним следом функции v на S относительно 0. Если v€C°(0), то
y+v = y-v = u\s, но в общем случае эти два следа не равны. Если р —
непрерывная полунорма на В D(0), являющаяся одновременно нормой
на то норма
III will = р(и) + ( II Eij(u) И.^'(й) (1.4.49)
эквивалентна исходной норме (1.3.56) [314].
ГЛАВА 2
Элементы выпуклого анализа
В настоящей главе приведены некоторые понятия и основные резуль-
таты выпуклого анализа, используемые в дальнейшем изложении.
Вначале определяется понятие выпуклости, затем сообщается ряд све-
дений о выпуклых и полунепрерывных снизу функционалах, а также
о минимизации функционалов на выпуклых множествах. Вводится по-
нятие субдифференциала и описывается его связь с понятием односто-
ронней дифференцируемости по Гато. Далее следует определение со-
пряжённого функционала и некоторые теоремы об операции сопряже-
ния. Глава завершается изложением элементов теории максимальных
монотонных операторов. Особое внимание уделено максимальным
монотонным операторам на IR, поскольку они позволяют записать в
компактной форме основные классы вариационных неравенств. Выяс-
няется также связь между выпуклым анализом и теорией вариацион-
ных неравенств.
Изложение в этой главе основано главным образом на статьях Ди-
тера [69], Фенхеля'[95], Моро [209] и Моско [215; 216], а также на
монографиях Ауслендера [15]-, Барбу и Прекупану [17], Брезиса [29],
Экланда и Темама [91], Рокафеллара [288; 289] и Янга [338].
§ 2.1. ВЫПУКЛЫЕ МНОЖЕСТВА И ФУНКЦИОНАЛЫ
2.1.1. Определения
Пусть X — отделимое ЛВП и К — подмножество в X. Напомним, что
К называется выпуклым, если
Xxi + (1 — Х)х2 € К (2.1.1)
для всех Xi £ К, ХгЪ К vl G < \ < \ (рис. 2.1.1). Все линейные подпро-
странства пространства X (включая само X) выпуклы. Условимся пус-
§ 2.1. Выпуклые множества и функционалы
53
Рис. 2.1.1. Выпуклое и невыпуклое множества в IR2.
тое множество 0 также считать выпуклым. Характеристическим
свойством выпуклых множеств является то, что вместе в любыми дву-
мя точками Ху и х2 они содержат весь отрезок, соединяющий эти точ-
ки (рис. 2.1.1). Любое пересечение выпуклых множеств выпукло; для
произвольного объединения выпуклых множеств это уже не так.
Пусть дано произвольное множество Ку С X. Совокупность всех ко-
нечных линейных комбинаций 2Х(х;, xi^Ky, i = 1, 2.....п, удовлет-
i
воряющих условию 2Х; = 1, называется аффинной оболочкой множе-
i
ства Ку. Если дополнительно потребовать, чтобы выполнялось усло-
вие X/ 0, i = 1, 2, ..., п, то получающееся множество называется
выпуклой оболочкой множества Ку и обозначается со Ку. Это — на-
именьшее выпуклое подмножество в X, содержащее Ку. Точка хе Ку
называется относительно-внутренней точкой множества Ку, если она
является внутренней точкой Ку, рассматриваемого (топологически) как
подпространство своей аффинной оболочки. Множество всех относи-
тельно-внутренних точек множества Ку называется его относительной
внутренностью и обозначается rel int Ку. Особый интерес представля-
ют выпуклые конусы. Множество К С X называется конусом, если
вместе с любой своей точкой х оно содержит точки Хх для всех X 0.
Конус К является выпуклым, если Ху + х2 € К для любых Ху € #, х2 € К.
Вещественнозначный функционал f: А" —♦ IR называется выпуклым
(соотв. строго выпуклым) на К, если для любых Ху € К, хгеК и
0 < X < 1 справедливо неравенство
/(Xxi + (1 - Х)х2) (соотв. <)X/(xi) + (1 - Х)/(х2). (2.1.2)
Геометрическая интерпретация этого определения дана на рис. 2.1.2.
Функционал f называется вогнутым (соотв. строго вогнутым), если
-/является выпуклым (соотв. строго выпуклым). Линейные функцио-
налы одновременно и вогнуты, и выпуклы, но не строго. Определение
54
Гл. 2. Элементы выпуклого анализа
Рис. 2.1.2. Геометрический смысл определения выпуклой функции.
выпуклости, данное в (2.1.2), можно обобщить таким образом, чтобы
охватить случай выпуклых функционалов^ принимающих и бесконеч-
ные значения. Такой функционал f: К -* IR называется выпуклым на
К, если неравенство (2.1.2) выполнено для любых Xi € К, и хг € К, для
которых правая часть этого неравенства имеет смысл. Очевидно, что
эта правая часть не определена, если f(xi) = -f(xi) = ± оо. Поскольку
допускаются выпуклые функционалы, принимающие бесконечные зна-
чения, можно ограничиться рассмотрением функционалов, определен-
ных на всём пространстве X. Действительно, если /: К -»IR — выпук-
лый функционал на К, то можно определить его выпуклое продолже-
ние f на X, положив /(х) = f(x) для х$К и f(x) = оо для х$К.
Каждому выпуклому множеству К можно сопоставить выпуклый
функционал Ik- Х-+ IR, задаваемый формулой
/к(х)=[° при (2.1.3)
^оо при х$К
и называемый индикатором (или характеристической функцией) мно-
жества К. Пусть /: X -> IR — выпуклый функционал. Тогда множество
{(х, X) 1/(х) С X, X € IR, х € X] (2.1.4)
называется надграфиком f и обозначается epi f. Нетрудно проверить,
что эквивалентное общее понятие выпуклости получится, если под вы-
пуклым функционалом понимать функционал, для которого epi f явля-
ется выпуклым множеством в X х IR.
Эффективная область определения D(f) выпуклого функционала f
на X определяется соотношением
D(f) = {х\х€Х, f(x) < оо), (2.1.5)
§ 2.1. Выпуклые множества и функционалы
55
Функционал f называется собственным, если f: %->(—», + <ю] и
f ф оо. Если f— выпуклый функционал, то и функционал X/ (X > 0) то-
же выпуклый. Если /1 и/г — выпуклые функционалы, то и их сумма
/1 + ft тоже выпукла (мы принимаем7, что (Л + /г)(х) = - оо, если
/1(х) = -fi(x) = ±оо).,
2.1.2. Полунепрерывные снизу выпуклые функционалы
Дадим теперь определение полунепрерывных снизу (соотв. сверху)
функционалов (ср. с п. 1.1.1). Функционал/: Х-* IR, X = Т} назы-
вается полунепрерывным снизу (п.н.сн.) на X, если для любого X € IR
множество
{х\х$Х, /(х)О) (2.1.6)
замкнуто в X. Функционал / называется полунепрерывным сверху
(п.н.св.), если функционал -/ п.н.сн. Из этих определений следует, что
функционал /: X -* IR п.н.сн. (соотв. п.н.св.) на X тогда и только тог-
да, когда
lim inf f(xn) f(x) Ух 6 X, (2.1.7)
x„ -»X
(соотв. lim sup/(хи) </СО Ух€Х) (2.1.8)
x„ -»x
для любой последовательности (хп), сходящейся к точке х в ^тополо-
гии пространства X.* 2 Если условие (2.1.7) (соотв. (2.1.8)) выполнено
в данной точке х, то / называется п.н.сн. (соотв. п.н.св.) в этой точке.
Свойство полунепрерывности снизу функционала / тесно связано с
замкнутостью множества epi/. Справедлив следующий результат:
Предложение 2.1.1. Функционал/: X-»lR полунепрерывен снизу тогда
и только тогда, когда множество epi/ замкнуто в X х IR.
7 См. [91].
2 Для произвольной последовательности [ а„) в R мы полагаем
lim inf а„ = lim ( inf а„,р),
П х> п -» ОО р > о
lim sup а„ = lim ( sup а„+р)
п -» <ю п -* ОО р > О
и аналогично
lim inf/(x„) = lim ( inf /(x„+p)),
x, — x n — <» p > о
lim sup/(x„) = lim ( sup /(xn+p)).
x, - X л - » p > 0
Отметим, что lim inf f(xn) = -lim sup(-/(x„)).
56
Гл. 2. Элементы выпуклого анализа
Это утверждение легко следует из того наблюдения, что f п.н.сн.
тогда и только тогда, когда функционал F(x, а) = f(x) - а п.н.сн. на
X х IR. Подробное доказательство предоставляется читателю в каче-
стве упражнения.
Пусть X — отделимое ЛВП с топологией Т, согласованной с
двойственностью между SFvi SF' (см. (1.2.7)). Следующее важное ут-
верждение часто используется при доказательстве теорем сущест-
вования:
Предложение 2.1.2. Выпуклое подмножество пространства Хх замкну-
тое в топологии Т, замкнуто и в любой другой топологии, согласован-
ной с двойственностью между SF и SF'.
Доказательство. В силу теоремы Хана — Банаха любое замкнутое вы-
пуклое подмножество пространства X представимо как пересечение
всех содержащих его замкнутых полупространств. Но замкнутые аф-
финные гиперплоскости и замкнутые полупространства одни и те же
для любой топологии Т в X, согласованной с указанной двойственнос-
тью. □
В нормированном ВП выпуклое множество замкнуто (в нормиро-
ванной топологии) тогда и только тогда, когда оно слабо замкнуто.
Из этого утверждения и предложения 2.1.1 вытекает следующее инте-
ресное свойство выпуклых п.н.сн.' функционалов /: X -> IR:
Предложение 2.1.3. Если выпуклый функционал f п.н.сн. в топологии
Т, он п.н.сн. и в любой другой топологии, согласованной с двойствен-
ностью между ЙГ и SF'.
В нормированном векторном пространстве X функционал f: X — R
п.н.сн. (на X) тогда и только тогда, когда он слабо п.н.сн.
Функционалу f мы сопоставляем его надграфик epi/, а всякому
множеству К можно сопоставить его индикатор 1к. Легко показать,
что К замкнуто тогда и только тогда, когда его индикатор п.н.сн.
Отметим ещё два свойства непрерывных выпуклых функционалов
(доказательства можно найти в [17; 91]).
Предложение 2.1.4. Выпуклый функционал /: X—R является соб-
ственным и непрерывным на множестве int D(f) & 0 тогда и только
тогда, когда у некоторой точки хь € X найдётся такая окрестность F,
что /(х) £ -«> на F и /(х) < а < оо Vx € F (а € IR).
Предложение 2.1.5. В банаховом пространстве X выпуклый п.н.сн.
функционал /: X -* IR непрерывен на множестве int D(J).
§ 2.2. Минимизация выпуклых функционалов
57
§ 2.2. МИНИМИЗАЦИЯ ВЫПУКЛЫХ ФУНКЦИОНАЛОВ
2.2.1. Существование минимума
Как мы сейчас покажем, понятие выпуклости играет существенную
роль в задачах оптимизации.
Рассмотрим задачу минимизации выпуклого функционала f на вы-
пуклом множестве К С X, где X—отделимое ЛВП. Требуется найти
точку хь, такую что
У(Ло) = inf{f(x) I х € Кj = inf f(x). (2.2.1)
хек
Если в точке хь € К функционал f достигает своего инфимума на К,
то можно написать
/(х0) = min(/(x) lx € A") = min/(x). (2.2.2)
хек
Любая точка хь, удовлетворяющая (2.2.2), называется решением зада-
чи оптимизации.
Пусть К—непустое выпуклое замкнутое подмножество в X, f:
К~> IR — выпуклый п.н.сн. собственный функционал. Очевидно, что f
можно продолжить на всё X, поэтому задачу (2.2.2) можно ставить
на всём пространстве X. Следующее предложение, являющееся одним
из фундаментальных результатов в теории оптимизации, даёт усло-
вия, гарантирующие, что f достигает своего минимума на К.
Предложение 2.2.1. Пусть X—рефлексивное банахово пространство с
нормой 11-11. Если
Нт /(х) = оо при 11x11 —* оо, х 6 К С X, (2.2.3)
или
множество К ограничено, (2.2.4)
то задача (2.2.2) имеет хотя бы одно решение. Если, кроме того, f—
строго выпуклый функционал, то это решение единственно.
Доказательство. Пусть {хи}—какая-либо минимизирующая последо-
вательность для /, т. е. хп 6 К Уп и
/(хя) = inf' f(x) = I. (2.2.5)
х е к
Очевидно, что - оо I < оо. Далее, из (2.2.3) следует, что Нхл II с, где
с — некоторая постоянная. Действительно, если бы это было не так,
то у последовательности {х^} нашлась бы подпоследовательность (x„J,
такая что йх„-II -> оо при п' -» оо. Но тогда мы имели бы f(xn>) -> оо
58
Гл. 2. Элементы выпуклого анализа
и, следовательно, I = оо. Аналогично последовательность (хп) ограни-
чена в случае, когда вместо (2.2.3) выполнено условие (2.2.4). Но в
рефлексивном банаховом пространстве из любой ограниченной после-
довательности можно выделить подпоследовательность (обозначим её
снова {х„-)), слабо сходящуюся к некоторой точке х^Х (ср. с
п. 1.2.3). Множество К замкнуто и выпукло; следовательно, оно также
слабо-замкнуто (см. п. 2.1.2), и, значит, х^К. Как выпуклый п.н.сн.
функционал f слабо полунепрерывен снизу на К, поэтому
/(х) lim inf/(x„,)'. (2.2.6)
п ' -* со
Следовательно, в силу (2.2.5),
/(х) I, (2.2.7)
откуда следует, что Z# - оо и х = хь. Пусть теперь f— строго выпук-
лый функционал и Xi, х2— два различных решения задачи (2.2.1). Тог-
да (Xi + х2)/2 € К, и в силу строгой выпуклости f справедливо нера-
венство
f (Xi + х2)) < | (/(xi) + /(х2)) = inf /(х).
\2 /2 xi К
Следовательно, Xi = х2. □
Из выпуклости и полунепрерывности снизу функционала f следует,
что решения задачи (2.2.2) образуют замкнутое выпуклое подмноже-
ство пространства X. Если выполнены условия предложения 2.2.1, то
это множество непусто.
2.2.2. Вариационные неравенства
В этом пункте будут получены некоторые вариационные неравенства,
эквивалентные условию (2.2.1). Пусть X—отделимое ЛВП и <•,•> —
каноническое спаривание.
Предложение 2.2.2. Пусть f = J\ + /2 — собственный функционал, при-
чём /1 и/2 выпуклы и п.н.сн. на К. Предположим, что на X существу-
ет grad/i. Для любого х0$К следующие утверждения равносильны:
/(хь) = inf/(x), (2.2.8)
К
(grad/1 (хь), х - хь> + /2(х) - /2(х0) >0 Vx € К, (2.2.9)
<grad/i(x), х - х0> +/2(х) -/2(х0) > 0 vx€ А. (2.2.10)
§ 2.2. Минимизация выпуклых функционалов 59
Доказательство. Положим Xi = (1 - Х)хо + Хх, X € (0, 1). Из (2.2.8) вви-
ду выпуклости ft следует, что
/(хо) /(х.) / (xi) + (1 - Х)/2(х0) + Уг(х) vx € К, (2.2.11)
или
V L/i((1 - Х)хо + Хх) - / (хо)] + /г(х) - /2(хо) 0 VxU. (2.2.12)
Л
Устремив здесь X к нулю, получим (2.2.9). Обратно, из (2.2.9), исполь-
зуя известное неравенство7
/i(x) - /i(xo) > <grad/i(x), х - хь> УхёХГ, (2.2.13)
получаем
/(х) - /(хо) >0 Vx € К, (2.2.14)
что эквивалентно (2.2.8). В силу выпуклости / справедливо условие
монотонности
<grad/(x) - grad/i(x0), х - х0> > 0. (2.2.15)
Складывая (2.2.15) с (2.2.9), приходим к (2.2.10). Пусть теперь выпол-
нено неравенство (2.2.10). Возьмем в нём х = (1 - Х)хо + Xxi, xi € К,
X е (0, 1). Из выпуклости /2 следует неравенство
<grad/j((l - Х)хь + Xxi), xi - хь> + /2(х0 - /2(хь) >0 VXj ё А.(2.2.16)
Положив
Л(Х) = /((1 - Х)хо + Хх0 + X(/2(xi) - /2(хь)), (2.2.17)
получим выпуклый функционал X -»й(Х), причём
Л'(Х) = <grad/((l - Х)х0 + Xxi), xi - хь>
+ /г(Х1)-/2(х0) 0 VX € (0, 1]. (2.2.18)
Таким образом, справедливо неравенство й(1) > й(0+). Из него выте-
кает (2.2.14), а значит, и (2.2.9). □
В [300] показано, что и в тех случаях, когда grad / (х) не существу-
ет, можно указать два вариационных неравенства, эквивалентных
(2.2.8) (см. также [66]).
' Каждое из соотношений (2.2.13) и (2.2.15) является необходимым и достаточным
Условием выпуклости функционала /: К -» IR, если grad f существует на К (см. [91]).
60
Гл. 2. Элементы выпуклого анализа
§ 2.3. СУБДИФФЕРЕНЦИРУЕМОСТЬ
2.3.1. Определения и основные результаты
Если функционал f дифференцируем, его дифференциальные свойства
могут быть описаны с помощью гиперплоскостей, касательных к гра-
фику f. В случае когда f — выпуклый не обязательно дифференцируе-
мый функционал, его дифференциальные свойства можно описать с
помощью опорных гиперплоскостей к надграфику /, что очевидно в
одномерном случае (для IR)). Это приводит к понятию субдиф-
ференциала, обобщающему понятие классического дифференциала.
В данном параграфе мы предполагаем, что X—отделимое ЛВП,
X' —сопряжённое к нему, <•,•> — каноническое спаривание X с X' и
f: Х~> IR. Всякий вектор х' 6 X', для которого выполнено неравенство
/(*1)-/(*)> <*', *i - *> VX16X, (2.3.1)
называется субградиентом функционала f в точке х € X (предполагает-
ся, что значение Дх) конечно). Множество всех х' € X', удовлетворяю-
щих (2.3.1), называется субдифференциалом функционала f в точке х
и обозначается ЭДх). Условие (2.3.1) можно записать так:
х'ёЭДх). (2.3.2)
Множество D(df) = (х I ЭДх) # 0) называется областью определения
df. Многозначное отображение df: X -> X' будем называть субдиффе-
ренциалом функционала f.
Определим аффинную функцию L соотношением L(xi) = Дх) +
<х', Xi - х> Vxi € X. Она задаёт гиперплоскость, называемую опорной
к надграфику функционала f в точке (х, Дх)). Из (2.3.1) видно, что
для тех х, в которых Дх) конечно, опорная гиперплоскость к множе-
ству epi f в точке (х, Дх)) не является «вертикальной». Если ЭДх) # 0,
то f называется субдифференцируемым в точке х. Из (2.3.1) непосред-
ственно вытекает, что необходимым и достаточным условием того,
что хь есть точка минимума функционала f на X, является включение
0 € ЭДх0). (2.3.3)
Это объясняет роль субдифференциала в теории оптимизации. Ниже
приведены некоторые свойства субдифференциалов.
Предложение 2.3.1. Множество ЭДх) выпукло и замкнуто в топологии
Е(^', ST).
Доказательство. Если ЭДх) = 0 или ЭДх) - (х' ), х' € X', то наше утверждение оче-
видно. Пусть х{, хг € ЭДх). Из (2.3.1) следует, что Хх/ + (1 - Х)х/ е ЭДх) VX € (0, 1), т. е.
ЭДх)— выпуклое множество. Предположим, что ЭДх) не замкнуто в топологии Е(.'У',
§ 2.3. Субдифференцируемость
61
и пусть Хо $ df(x) — предельная точка множества Э/(х). Можно подобрать вектор
Х1 е X, такой что
f(xi) - f(x) < <х0', Xi - х). (2.3.4)
Так как функционал <•, xi - х> непрерывен в топологии Е(.Т', SF), то у точки х0' суще-
ствует окрестность F, такая что (2.3.4) справедливо для всех х' 6Е Таким образом,
FCidf(x) = 0, а это противоречит предположению, что х0'— предельная точка множе-
ства д/(х). □
Следующие два предложения дают достаточные условия существования субднффе-
ренциала выпуклого функционала.
Предложение 2.3.2. Пусть ft X -* R — выпуклый функционал, конеч-
ный и непрерывный в точке хо € X. Тогда df(xo) & 0.
Доказательство. В силу непрерывности функционала f при х = хо, точка (хь, /(хь) + е) €
int epi / для всех е > 0. Точка (хь, /(хь)) является граничной для выпуклого множества
epi /. По теореме Хана — Банаха существует замкнутая аффинная гиперплоскость
проходящая через точку (хь, /(х0)) и отделяющая (хь, /(хь)) от множества int epi /. Пусть
^ задаётся уравнением
<х', х> + а'а = b, х€ X, х' € X', a, a', Ь € IR, (2.3.5)
где
<х', х) +a'a~^b V(x, а) € epi / (2.3.6)
и
<х', хь> + «'/(хь) = Ь. (2.3.7)
Число а' отлично от нуля, т. е. гиперплоскость <^не является «вертикальной». Действи-
тельно, если бы а' = 0, то в силу (2.3.6) и (2.3.7) мы имели бы <х - хь, х'> 0
Vx f D(j) и, следовательно, х' = 0, что невозможно. Таким образом, а’ > 0. Из
(2.3.5—7), поделив на а', получаем
/(х) - /(хь) > ( - — , х - хь) Vx € X, (2.3.8)
\ а' /
т. е.
- — € Э/(хь), (2.3.9)
а'
а это и означает, что Э/(хь) # 0. □
Можно усилить этот результат:
Предложение 2.3.3. Если выполнены предположения предложения
2.3.2, то df(x) 0 для всех х€ int D(J).
Доказательство. Так как функционал f конечен и непрерывен в точке
•*0, то по предложению 2.1.4 у точки хь найдётся окрестность, в которой
62
Гл. 2. Элементы выпуклого анализа
он не равен тождественно - оо и ограничен сверху некоторой постоян-
ной а < оо. Таким образом, f конечен и непрерывен на int D(f). Для
завершения доказательства остаётся применить предложение 2.3.2. □
Представляет особый интерес частный случай выпуклых функцио-
налов f - 1к, где 1к — индикатор (см. (2.1.3)) непустого выпуклого
множества К в отделимом ЛВП X. В этом случае для х^К
д1к(х) = {х' - 1к(х) <х’, xi - х> VXi $Х}, (2.3.10)
или, что то же самое,
д1к(х) = (х' I <х', xi - х> 0 Vxi € XJ. (2.3.11)
Геометрический смысл вариационного неравенства
<х', xi - х> 0 VxiCA", х$К (2.3.12)
заключается в том, что вектор х' является внешней нормалью к мно-
жеству К в точке х. Совокупность всех векторов х', удовлетворяющих
условию (2.3.12), образует внешний нормальный конус к множеству
К в точке х. Этот конус
(а) пуст для х$К,
(Ь) содержит по крайней мере нулевой элемент для х$К,
(с) состоит из одного нуля для х € int К
(см, [213, 288]).
Понятие субдифференцируемости тесно связано с понятием одно-
сторонней дифференцируемости по Гато. Эта связь дает возможность
конструктивно описать субдифференциалы выпуклых функций.
2.3.2. Односторонний дифференциал Гато по направлениям
Пусть X — отделимое ЛВП. Будем говорить, что функционал /:
X IR односторонне дифференцируем (по Гато) по направлениям в
точке Хо, если для любого h € X существует предел
lim/(» + M)-/(»>)
А-0+ А
Отметим, что в качестве пределов в (2.3.13) допускаются значения
+ оо и -оо. Величина/'(хо, й) называется односторонним дифферен-
циалом Гато функционала f в точке хь при приращении й. Если /' (хо,
й) = (хь, - й) Уй ё X, то f является дифференцируемым (по Гато)
в точке хь по направлениям. Легко показать, что /' (хь, й) — выпуклая
§ 2.3. Субдифференцируемость 63
положительно-однородная функция от й. Одно из важнейших свойств
выпуклых функционалов их односторонняя дифференцируемость по
направлениям [122, 288]:
Предложение 2.3.4. Пусть f: X-> R — выпуклый функционал. Тогда/
односторонне дифференцируем по направлениям во всякой точке х € X,
где /(х) # ±оо.
Доказательство. Очевидно, что для любого й разностное отношение
в (2.3.13) не убывает, на полуоси 0 < ц < оо. Следовательно, предел
в (2.3.13) существует, причём
7'(х, й) = inf/(Х + ~ /(Х) . □ (2.3.14)
А>0 Ц
Предложение 2.3.5. Для всякого выпуклого функционала /: X -»IR в
точках, где /(х) # ±оо, выполнены неравенства
/(Xi) - /(*) > f' (*, X] - X) VX1 € X,
7' (х, Xi - х) > -/' (х, - (Xi - X)) VX1 € X.
Доказательство. Положив в (2.3.13) й = Xi - х, 0 < д 1,
(2.3.15). Из выпуклости / следует, что
/'(х, Х1 - х) = lim —---—------”—^/(Х1) -/(х).
А->о+ д
Чтобы, устддовить (2.3.16), достаточно показать, что
/(х + дй) - /(х) ( /(х - дй) - /(х) р yh^x
Д д
для д > 0. Действительно, положив й = Xi - х и перейдя к пределу при
д —> 0, придем к (2.3.16). Неравенство (2.3.18) получается из (2.1.2) при
Xi = х + дй, Х2 = х - дй и А = 1/2. □
В одномерном случае (/: IR -» R) неравенства (2.3.15) и (2.3.16) име-
ют простой геометрический смысл (см. рис. 2.3.1).
Связь между субдифференциалом выпуклого функционала и его од-
носторонним дифференциалом Гато по направлениям ясна из следую-
щего предложения.
Предложение 2.3.6. Пусть /: X -> (R— выпуклый функционал и /(хь) #
±оо. Если х' 6 Э/(хо), то
7'(х0, й) ><х', й> ¥й€Х. (2.3.19)
(2.3.15)
(2.3.16)
получим
(2.3.17)
(2.3.18)
64
Гл. 2. Элементы выпуклого анализа
Рис. 2.3.1. Геометрический смысл неравенств (2.3.15) и (2.3.16).
Доказательство. Это неравенство получается, если в определении суб-
градиента (2.3.1) положить Xi = х + ХЛ, X > 0, и перейти к пределу
при X -* 0 +. □
Этот результат можно усилить:
Предложение 2.3.7. Пусть f: X -> R — выпуклый функционал, ограни-
ченный в некоторой окрестности точки хь 6 X. Тогда
/'(хь, й) = тах(<х', й> 1х' 6д/(хь)} УйбХ. (2.3.20)
Доказательство. Из предложения 2.1.4 следует, что f непрерывен в точке Хо. Легко про-
верить, что для любого X > 0 точка (Хо + ХЛ, /(хь) + Х/'(хо, Л)) принадлежит int epi f
Для любого фиксированного Хо > 0 найдётся замкнутая аффинная гиперплоскость Л7,
проходящая через точку (Хб, а) = (Хо + ХоЛ, /(хь) + Хо/' (хь, Л)), отделяющая int epi / от
этой точки. В случае Хо = 0 получим (2.3.9). Если же Хо > 0, то
<х', Хо - Хо> + а’(в - а) 0 (2.3.21)
для всех (хь, а) ё epi/. Полагая а = f(xo) и учитывая, что в' > 0, заключаем на основа-
нии (2.3.21), что
<-х'/в', Л> >/'(%, Л). (2.3.22)
Из (2.3.22) и (2.3.19) следует (2.3.20). □
Доказанные два предложения позволяют просто описать множе-
ство д/(х) в одномерном случае. Нетрудно видеть, что для /: IR -> IR
точка х', принадлежит д/(х) в том и только в том случае, если х'
есть тангенс угла наклона невертикальной прямой, проходящей через
точку (хь, /(Хо)) и не пересекающейся с int epi/. Положим /'(х, 1) =
= f + (х), /'(х, -1) = ~/1(х). Это соответственно правосторонняя и
левосторонняя производные в точке х. Очевидно, что
/-(х) <х' (х).
§ 2.3. Субдифференцируемость
65
Пусть f—выпуклый п.н.сн. собственный функционал на IR. В этом
случае можно определить правостороннюю и левостороннюю произ-
водные и для x$D(f), положивЛ = Л = 00 (соотв. -оо) ДЛЯ
точек, лежащих справа (соотв. слева) от множества D(f). Тогда
для /: IR -> IR можно написать
df(x) = {х' €.IR I f- (X) < x' < Л (x)). (2.3.23)
Для право- и левосторонних производных выпуклого функционала на
[R справедливы следующие два предложения:
Предложение 2.3.8. Пусть f—выпуклый п.н.сн. собственный функцио-
нал на IR. Тогда функции Л и Л не убывают на IR и принимают ко-
нечные значения на множестве int D(f), и если Xi < х < х2, то
f'+ (xi) < f- (х) < Л (х) < Г- (х2). (2.3.24)
Доказательство. В силу предложения 2.3.4 производные Л (*) и Л (*)
существуют для всех xtD(f), и f'_ (х) <Л (*)• Конечность производ-
ных Л и Л на ^(/) следует из монотонности разностных отноше-
ний, определяющих соответственно правостороннюю и левосторон-
нюю производные. Если Xi < Хг и хь x2t.D{f), то неравенство
Л (*i) < Л (хг) очевидно. Если же Xi, Хг то это неравенство вы-
полнено по определению. □
Предложение 2.3.9. Пусть f — выпуклый п.н.сн. собственный функцио-
нал на IR. Тогда для всех х справедливы предельные соотношения
lim Л (г) = Г+ (*). Нт Л («) = Л (*)•
z-»x-
Доказательство. Из (2.3.24) вытекает, что функции f'+ и f'_ не убыва-
ют и
Л (•*) < lim f_ (z) < lim f'+ (z). (2.3.25)
z-*x+ z-*x+
Но, в силу предложения 2.1.5, Пт /(z) = /(х). Если х, Xi то до-
казываемое утверждение очевидно. Если же х, Xi6D(/) и х < Xi, то
Л^>.итЛМ>итЛ(г) (2.3.ад
и, следовательно,
lim Л U) < Нт ~Х^ _ = Л (*)• (2.3.27)
Соответственно lim f'± (z) = Л (*)• Второе равенство доказывается
аналогично. □
66
Гл. 2. Элементы выпуклого анализа
Теперь предположим, что на IR задана функция /3, удовлетворяю-
щая условию
Г- (х) < 0(х) < /; (х) Vx 6 IR.
(2.3.28)
Из (2.3.24) следует, что /3— неубывающая функция. Далее (предложе-
ние 2.3.9),
0+ (х) = lim H(z) = f'+ (х), 0- (х) = lim f3(z) = f- (x). (2.3.29)
Z-‘X+ Z“* X-
Из этих соотношений и из (2.3.23) вытекает, что /3 (соотв. df) полнос-
тью определяет df (соотв. /3). Таким образом,
Э/(х) = (xz € IR 1/3- (х) < х' <0+ (х)).
(2.3.30)
В заключение рассмотрим случай, когда субдифференциал состоит
из одного-единственного элемента.
Предложение 2.3.10. f: X -> IR — выпуклый функционал. Предполо-
жим, что в точке х существует grad Дх). Тогда df(x) = (grad Дх)). Об-
ратно, если функционал f конечен и непрерывен в точке х и df(x) со-
стоит из одного-единственного элемента, то существует grad Дх) и
ЭДх) = (grad/(x)J.
Доказательство. Из известного неравенства
/(xi) - Дх) > <grad Дх), xi - х> vxi € X
(2.3.31)
следует, что grad Дх) € df(x). Пусть х' — ещё один элемент множества
df(x). Так как градиент функционала f в точке х существует, то
/'(х, й) = <grad/(x), й). Из (2.3.19) получаем
<х' - gradДх), й> < 0 Уйе X.
(2.3.32)
Положим Й1 = х' - grad Дх). Неравенство (2.3.32) справедливо, в
частности, при й = ±Й1, откуда следует, что hi - 0, т. е. х' =
= grad Дх). Обратно, из предложения 2.3.7 вытекает, что
Д(х, й) = <х', й> VheX,
(2.3.33)
где х' —единственный элемент субдифференциала ЭДх). Следователь-
но, х' = grad/(x). □
Проиллюстрируем понятие субдифференциала на ряде простых
примеров.
(i) Пусть функционал /:• IR -> IR задан формулой
'-g(x - а) при х < Д1,
Дх) = 0 при ai<x<a2,
^оо при х > аг.
(2.3.34)
§ 2.4. Субдифференциальное нсчнсленне
67
Тогда (см. рис. 2.3.2)
э/(х) =
-g
[-g, 0]
«о
[0, оо]
0
при х < ai,
при х = а{,
ПРИ Д] < X < 02,
при х = 02,
при х>в2.
(2.3.35)
(ii) Пусть У: IR —> IR задается формулой
_ 2,1/2
да- ." х)
при 1x1 а,
в остальных точках.
(2.3.36)
Тогда
W) =
при 1x1 < а,
в остальных точках.
(2.3.37)
Заметим, что д/(±д) = 0, хотя ±д €£)(/). (См. [288].)
§ 2.4. СУБДИФФЕРЕНЦИАЛЬНОЕ ИСЧИСЛЕНИЕ
2.4.1. Субдифференциал суммы и композиции
В этом пункте мы докажем некоторые утверждения об операциях над
субдифференциалом. Пусть X, как и раньше, — отделимое ЛВП.
Предложение 2.4.1. Пусть /: X -> IR и X > 0. Тогда для всех x^D(df)
3(V)(x) = ХЭ/(х). (2.4.1)
Доказательство. Это немедленно следует из (2.3.1). □
68
Гл. 2. Элементы выпуклого анализа
Предложение 2.4.2. Пусть Д: %-> IR, /2: Х-> IR. Тогда для всех хб
6D(d/i)nD(d/2)
Э/1(х) + Э/2(х) С д(Л + /2)(х). (2.4.2)
Доказательство. Если х' = х{ + х{, где х{ 6 d/i(x) и x2€d/2(x), то
(fi + f2)(z) = fi(z) + f2(z)
>/1(х) + Л(Х) + <X1, z - x> + <x2', z - x>
= (fi + f2)(x) + <x', z - x> Vz 6 X. (2.4.3)
Следовательно, x' 6 d(f\ + /2)(х), чем (2.4.2) и доказано. □
Включение (2.4.2) превращается в равенство, если выполнены неко-
торые дополнительные условия:
Предложение 2.4.3. Пусть Д: Х-* R и /2: Х-> R — выпуклые функцио-
налы и в точке х существует grad/2(x). Если x$D(df\), то
d(fi + Л)(х) = d/i(x) + Э/2(х). (2.4.4)
Доказательство. Достаточно показать, что любой элемент х ' 6 d(f +
+ Л)(х) можно представить в виде х' = х{ + grad/2(x), где х{ 6 d/i(x),
д/2(х) = {grad /2(х)}. Если в неравенстве
fi(z) + fi(z) - fi(x)-/2(х) <х', z - х> vz€% (2.4.5)
заменить z на х + n(z - х), ц > 0, поделить на ц и устремить ц к 0 +,
то мы получим
Л'(х, z - х) > <х' - grad/2(x), z - х> Vz6 X. (2.4.6)
Из (2.3.15) и (2.4.6) вытекает, что
х' - grad/2(x) 6 d/i(x). □ (2.4.7)
Этот результат можно обобщить (см. [91]):
Предложение 2.4.4. Пусть /1: %->(-», + оо] и/2 :%->(-оо, +оо] —
выпуклые П.Н.СН. функционалы и существует точка xb6D(A)A D(fz),
в которой функционал f непрерывен. Тогда
d(fi + Л)(х) = d/,(x) + d/2(x) vx 6 X. (2.4.8)
Доказательство. Достаточно показать, что любой элемент х' € d(fi + fi)(x) представим
в виде х' = х{ + Xz, где х{ 6 dfi(x) и х{ 6 dfz(x). Найдём для данного х’ такие х{ н х{.
Рассмотрим следующие выпуклые подмножества пространства X х IR:
= l(z, e)l/i(z) - /i(x) - <х', z - х> < л),
Лг = I(Z, a)l/2(z) - /2(х) С -«). (2'4’9)
§ 2.4. Субднфференциальное исчисление
69
Из неравенства
/i(z) + /z(z) - fi(x) - f2(x) <х', z - х> (2.4.10)
следует, что у и .Л? общими могут быть лишь граничные точки. Кроме того,
int Ж # 0, так как Л! есть надграфик выпуклого функционала
g(z) = /i(z) - /i(*) - <.х', z - х>, (2.4.11)
непрерывного в точке хо. Поэтому множества Л! и можно разделить замкнутой аф-
финной гиперплоскостью Ж, которая не является «вертикальной» (см. доказательство
предложения 2.3.2). Следовательно, найдутся функционал z' € X' и число b € IR, такие
что
f2(x) - f2(z) <z', z> + b
/i(z) - /i(x) - <x', z - x> vz € X. (2.4.12)
Положив z = x, получим, что b = - <z', x>. Тогда из (2.4.12) следует, что -z' € bf2(x)
и z' + x' € d/i(x). Таким образом, x{ = z' + x', a x2 = -z'. □
Вычислим теперь субдиффереициал композиции. Пусть X (соотв.
У)— отделимое ЛВП и X' (соотв. У') — сопряжённое к нему. Пусть,
далее, /: Х~* У—непрерывный линейный оператор, а Г: X' -> У' —
его сопряжённый.
Предложение 2.4.5. Пусть /: У-» (- оо, + оо] — выпуклый п.н.сн. функ-
ционал и существует точка уо = 1хо, в которой этот функционал коне-
чен и непрерывен. Тогда
d(f°l)x = l'df(lx) VxtX. (2.4.13)
Доказательство. Пусть у’ € bf(lx). Очевидно, что суперпозиция /• /: х~* f(lx) имеет те
же свойства, что и /. Поэтому
/(у) - f(lx) > <_у', у - lx}Y Чу € У. (2.4.14)
Таким образом,
W° D(z) ~ (f ° Г)(х) > <у', /(z - х)>у = </>', z - х)х 4z € X. (2.4.15)
Следовательно,
/'д/(/х) с d(f• /)(х) чх € X. (2.4.16)
Установим теперь обратное включение. Пусть х' ° 1)(х). Рассмотрим в Y х R аф-
финное подпространство
Л= ((/z, <х', z - х)х + (/»/)(х)) для zeX]. (2.4.17)
Так как х' € d(f • /)(х), из определения субдифференциала (2.3.1) следует, что у множеств
-Z и epi f общими могут быть только граничные точки. В силу условий, наложенных
на/ имеем int epi/# 0. Следовательно, epi/и -/’можно разделить «невертикальной»
замкнутой аффинной гиперплоскостью содержащей -Z Поэтому существует функцио-
нал у' € У', такой что
Су', Iz>y + b = <х', z - х)х + W- l)(x) Vz € X. (2.4.18)
70
Гл. 2. Элементы выпуклого анализа
Положив z = 0, получим b = (f«/)(*) - <х', х>. Таким образом, из (2.4.18) следует,
что х' = Гу'. Далее, поскольку пересечение JTc int epi/ пусто, то
<у', у>г+(/>/)«-/О) vyeK (2.4.19)
или,
<У У - lx>Y f(y) - f(lx) Vy € Y. (2.4.20)
Последнее неравенство означает, что у' € Э/(/х), т. е. х' = Гу' € /'Э/(/х), что н требова-
лось доказать. □
Следующий пример иллюстрирует правило вычислен.^ субдиффе-
ренциала суммы. Пусть f— выпуклый функционал, причём grad f су-
ществует на всём пространстве X, и пусть К и* 0 — выпуклое подмно-
жество в X. Задача минимизации функционала f на множестве К экви-
валентна задаче минимизации функционала f + 1к на X. Для того
чтобы точка хь была решением этой задачи, необходимо и достаточно,
чтобы
О€Э(/(хо) +/к(х0)) (2.4.21)
(см. (2.3.3)). Согласно предложению 2.4.3, включение (2.4.21) эквива-
лентно тому, что
- grad /(хь) € д!к(хь). (2.4.22)
2.4.2. Относительная внутренность множества R(df)
Обозначим через R(df) образ суб дифференциала df, т. е. множество
[х' 1х' е Э/(х), х' еХ', хеХ]. Ниже мы формулируем результат об
относительной внутренности множества R(df), который может ока-
заться полезным при решении «нелинейных» задач на неравенства.
Доказательство этого результата, основанное на применении одной
«неклассической» теоремы об отделении выпуклых множеств, можно
найти в [268; 296].
Предложение 2.4.6. (а) Пусть Q — конечномерное пространство и/—
выпуклый п.н.сн. собственный функционал на Q. Для того чтобы
0 € rel int R(df), (2.4.23)
необходимо и достаточно, чтобы Q было прямой суммой векторных
пространств Qi и Од, удовлетворяющих следующим условиям: функ-
ционал /постоянен на Qi, и существуют постоянные Ci > 0 и сг, такие
что
f(q) и I<71 q + С2 vqtQi. (2.4.24)
§ 2.5. Сопряжённые к выпуклым функционалам 71
(Ь) Пусть X — банахово пространство, Q. — конечномерное подпро-
странство в X, Q.'— сопряженное к нему, х' $Х' и x'Iq€Q.' (см.
(1.2.12)). Далее, пусть Ф— выпуклый п.н.сн. собственный функционал
на X. Для того чтобы
х' I й € rel int Я(ЭФД, (2.4.25)
где Фх — выпуклый п.н.сн. собственный функционал на Q., заданный
соотношением
ФД<7) = Ф(х + q) для хеВ(Ф), (2.4.26)
необходимо и достаточно, чтобы Q. разлагалось в прямую сумму век-
торных пространств Q.1 и Ог» удовлетворяющих следующим условиям:
функционал F: х Ф(х) - <х', х> постоянен на Од, и существуют та-
кие постоянные Сз > 0 и ci, сг, что для любого X € Q., где Q. замкнуто
и X = Q. © Q., выполнялось неравенство
Ф(Я + q) - <х', q)x > ci - ft»Jfllx + СзМх V<? € Ог- (2.4.27)
Заметим, что из этого предложения следует, что множества
rel int Л(ЭФД и Л(ЭФД не зависят от х, если хб£>(Ф). Действительно,
условие, характеризующее rel int R(ЭФД, не зависит от выбора хе
Т)(Ф). Далее, легко убедиться, что замыкание множества 7?(ЭФ) совпа-
дает с замыканием множества rel int Л (ЭФ) (см. [288]). То же верно
и для Л(ЭФх).
§ 2.5. СОПРЯЖЁННЫЕ К ВЫПУКЛЫМ ФУНКЦИОНАЛАМ
2.5.1. Классы Г(А) и ГоС¥)
Пусть {X, X') —пара ОЛВП в двойственности и <х', х) — соответ-
ствующее спаривание. Для заданного функционала /: X — IR естествен-
но поставить вопрос, существует ли непрерывная аффинная функция
<х',-> - ц, /4€ IR, служащая минорантой f, т. е. такая что
/(х) > <х', х> - ц УхеХ. (2.5.1)
Необходимым и достаточным условием существования такой мино-
ранты является выполнение неравенства
ц sup Цх', х> — У(х)). (2.5.2)
х«Х
Этим соотношением вводится сопряженный с f функционал f — функ-
ционал на X', определяемый по формуле
fix') = sup «х', х> -/(х)). (2.5.3)
xiX
72
Гл. 2. Элементы выпуклого анализа
Ясно, что супремум в (2.5.3) можно брать по множеству D(j). Сопря-
женный функционал f можно рассматривать как результат взятия по-
точечного супремума семейства непрерывных аффинных функциона-
лов g(-) = <•, х> - ц, где (х, ^)€epi/. Обозначим через Г (Д') множе-
ство всех функционалов /: X -> IR, которые представимы как
поточечные супремумы семейств непрерывных аффинных функциона-
лов <х',-> + а, я€1₽, заданных на X. Справедливы следующие ре-
зультаты.
Предложение 2.5.1. Пусть/: X-+ R — выпуклый п.н.сн. функционал.
Если найдётся хотя бы одна точка хь, такая что /(хь) = - со, то / не
может принимать конечных значений.
Доказательство. Рассуждая от противного, предположим, что найдёт-
ся точка Xi, такая что /(Xi) € IR. Тогда, в силу выпуклости /, /(Ххь +
+ (1 - X)xi) = - со для всех 0 < X < 1. Устремив X к нулю, в силу по-
лунепрерывности / снизу получим /(xi) = - со, что противоречит на-
шему предположению.
Предложение 2.5.2. Класс Г (ДО состоит j точности из выпуклых
п.н.сн. собственных функционалов /: X -> IR и констант + а> и - а>.
Доказательство. Пусть f € Г(Х). Очевидно, что f — выпуклый п.н.сн. функционал. Если
Г(Х) = 0, то поточечный супремум семейства Г(Х), как обычно, считается равным
-со. При Г(Х) # 0 этот супремум не может быть равен
Обратно, пусть/а ±». Очевидно, что f € Г(Х). Пусть теперь/—выпуклый п.н.сн.
собственный функционал. Выберем точку (хь, во) € X х IR, такую что /(хь) > во. Множе-
ство epi / выпукло и замкнуто в X х IR, следовательно, (ль, во) ^epi /. Поэтому epi /
и (хь, во) можно строго разделить замкнутой аффинной гиперплоскостью описывае-
мой уравнением
<х', х> + а'а = Ь, (2.5.4)
где х€ X, х' € X' ив, в', b € IR. Тогда
<х', хь> + в'вв < Ъ (2.5.5)
и
<х', х> + в'в > b v(x, а) € epi/., (2.5.6)
Если хь € D(f), то, положив, х = хь н а = /(хь), получим, что в' > 0 и, значит,
Ь <х', ль>
во <------------< /(хь). (2.5.7)
в' а'
Тем самым мы построили непрерывный аффинный функционал X IR, значения кото-
рого лежат между /(ль) и во. Следовательно, / € Г(Х). Аналогичный функционал может
быть построен и для хь D(f). В этом случае, если в' # О, рассуждаем, как и прежде.
Если же в' = 0, то из (2.5.5) следует, что <х',-> < b в точке хь. С другой стороны,
§ 2.5. Сопряжённые к выпуклым функционалам
73
из (2.5.6) следует, что <х',-> >Ь на D(J). Таким образом, можно выбрать х{(Х',
bi € IR и с > 0 так, чтобы
ев < bi - (х/, хв> + с(Ь - <х’, лв» </(лв). □ (2.5.8)
Обозначим через Го (Д') множество всех функционалов Г (Л), таких
что f(x) Ф ±<». Очевидно, что Го(АЭ — это множество выпуклых
п.н.сн. собственных функционалов на X.
Пусть Fi и F2 — две функции X -* IR. Если F2 является поточечным
супремумом непрерывных аффинных функций, каждая из которых для
всех х не превосходит F\, то F2 служит наибольшей минорантой функ-
ции F\ в классе Г (Л), и наоборот. В таком случае F2 называется Г-
регуляризацией функции F\. Очевидно, что если F\ € Г (Л), то Fi совпа-
дает со своей Г-регуляризацией. Аналогично можно определить на-
ибольшую п.н.сн. миноранту функции Fr. Х-> IR, которая называется
п.н.сн.-регуляризацией функции F\ и обозначается F2. Если функция Л
выпуклая и обладает непрерывной аффинной минорантой, то Fi = F2.
Можно показать [91], что в общем случае (без предположения о вы-
пуклости Fi)
F2 < Л Л. (2.5.9)
Докажем теперь ряд важных утверждений о связи между выпук-
лым функционалом f и сопряжённым с ним функционалом /с.
Предложение 2.5.3. Пусть f— выпуклый функционал на X. Тогда f
является выпуклым п.н.сн. функционалом на X'. Если при этом функ-
ционал f собственный, то и / — также собственный функционал, и на-
оборот.
Доказательства Так как f € Г(А")> то, по предложению 2.5.2, f —
выпуклый п.н.сн. функционал на X'. Доказательство второй части
предложения тривиально. □
Определим теперь функционал fc на X формулой
/*(х) = (/Т(Х) = sup «х', х> - fix')) УхеХ. (2.5.10)
х'ех'
Функционал f* является сопряжённым с /с. Ясно, что есть Г-регу-
ляризация функционала f.
Предложение 2.5.4. Для любого /€ Г (Л) имеет место равенство
/*=/. (2-5.11)
74
Гл. 2. Элементы выпуклого анализа
Доказательство. Из предложения 2.5.2 следует, что f представляет со-
бой поточечный супремум аффинных функций <*',•>-д с д =
= Jc(x'). Поэтому из (2.5,10) вытекает (2.5.11). □
Очевидно, что если /i < fz на X, то fi > fz на X'. Так как fc явля-
ется Г-регуляризацией /, то на X выполнено неравенство f^fc, и,
следовательно, f fccc на X. С другой стороны,
Jccc(x') = sup «х'( х) -fc(x)) </(*'), (2.5.12)
xiX
откуда
fcc=f. (2.5.13)
Пусть X — нормированное пространство. Если f— произвольный
функционал на X, принимающий значения в IR, то f и fc — выпуклые
функционалы. Кроме того, f является «-слабо п.н.сн. на А", & fc—
слабо п.н.сн. на X [17].
2.5.2. Операция сопряжения
Из доказанного в предыдущем пункте вытекает, что если /€ Г(Л) и
#€Г(А"), то f = gc влечёт g - f, и наоборот. Такие функционалы f
и g называются взаимно-сопряжёнными или двойственными друг дру-
гу. Исключим из рассмотрения взаимно-сопряженные функционалы
/s ±оо и g = too, т. е. рассмотрим классы Го (А) и Г0(А")- Опера-
цию сопряжения f-^f можно рассматривать как взаимно-однознач-
ное соответствие между классами Го(Л) и Го(А"). Эта операция f f
называется преобразованием Фенхеля1. Она тесно связана с преобра-
зованием Лежандра для выпуклых дифференцируемых функционалов
(см. [288; 338]). Из определения (2.5.3) функционала f следует нера-
венство
f(x) + f(x') ><х', х> VxgX Vx'tX', (2.5.14)
которое справедливо для любого выпуклого собственного функциона-
ла f и сопряженного с ним функционала f. Это неравенство называют
неравенством Фенхеля [95]. Заметим, что двойственные друг другу
функционалы естественно возникают при решении следующей простой
задачи. Пусть W—множество всех пар собственных функционалов f:
Х->(-<х>, оо] и g: X’—>(—<», оо], для которых
fix) + g(x') ><х', х> VxtX Vx'tX'. (2.5.15)
1 Её называют также преобразованием Фенхеля — Юнга, преобразованием Лежан-
дра — Фенхеля, преобразованием поляризации.
§ 2.5. Сопряжённые к выпуклым функционалам
75
Требуется найти пару функционалов (/о, go) € W, таких что из соотно-
шений (Д g) € W и f <fo, g < go, следует f = f0, g = go. Легко прове-
рить (см. (2.5.3)), что/о = go и go = Jo, т. е. пары (/о, go) —это в точ-
ности пары двойст'венных функционалов /о€Го(Л) и go€ro(A").
Установим связь между dj и djc.
Предложение 2.5.5. Пусть J—выпуклый собственный функционал на
X. Следующие утверждения эквивалентны:
(i)x'€3/(x); (2.5.16)
(ii) супремум sup «х', z> - /(г)) достигается при z = х; (2.5.17)
zex
(iii) /(х) +Z(x') < <х', х>; (2.5.18)
(iv) /(х) + Jc(x') = <х', х>. (2.5.19)
Если, кроме того, J п.н.сн., то эти утверждения эквивалентны еще
двум:
(v) хеЭЛх'); (2.5.20)
(vi) супремум sup (<z', х> - Jc(z')) достигается при z' = х'.
z’iX’ (2.5.21)
Доказательства Эквивалентность условий (2.5.16) и (2.5.17) немедлен-
но следует из определения субградиента (см. (2.3.1)). Из (2.5.3) выте-
кает, что (2.5.17) эквивалентно (2.5.18), а также (2.5.19). Рассуждая
аналогично, получаем, что (2.5.20) эквивалентно условию (2.5.21), ко-
торое в свою очередь эквивалентно неравенству
Jcc(x) +Jc(x') = <х', х>.
Но последнее в силу (2.5.11) эквивалентно (2.5.19). □
(2.5.22)
Мы заключаем, что в условиях предложения 2.5.5 еубдифференциал
djc совпадает с обратным отображением (Э/)-1. То же справедливо
в случае, когда X—рефлексивное банахово пространство. Проиллю-
стрируем операцию сопряжения следующими двумя примерами:
(i) Пусть J = 1к, где К — непустое выпуклое подмножество про-
странства X. Тогда 1к задаётся на X' равенством
1к(х') = sup <х', х>. (2.5.23)
хек
Функционал 1к называется опорной функцией множества К. Пусть те-
перь К — линейное подпространство М пространства IR". Тогда супре-
мум в (2.5.23) отличен от +оо, только если <х', х> = 0 Vx€A/. Следо-
вательно, 1к = IMi, гДе Л/1 — ортогональное дополнение к М.
76
Гл. 2. Элементы выпуклого анализа
(ii) Пусть X = X' = Н, где Н— гильбертово пространство. Функ-
ционал /о: х -> lxlif/2 является единственным решением уравнения
f = f. Действительно, легко видеть, что /о = Уо- Далее, если f—дру-
гой выпуклый функционал, такой что f = f, то он тоже собственный.
Тогда из (2.5.14) следует, что /(х) > 11x11^/2 =/о(х). Но операция со-
пряжения обращает неравенства, поэтому f < jo, следовательно,
Уо=/.
§ 2.6. МАКСИМАЛЬНЫЕ МОНОТОННЫЕ ОПЕРАТОРЫ
2.6.1. Определения и основные результаты
Пусть ЙГи ЙГ' — векторные пространства и А — отображение из ЙГв
множество всех подмножеств пространства SF'. Такие отобра-
жения называют многозначными. Для многозначного отображения из
условий A(xi) Эх/ и A(xi) Эу{ не следует, что х{ = у[, как это было
в случае однозначных функций. Рассматривая А как подмножество в
3WT, можно написать А(х) = [уе^~' 1(х, у)€А]. Множество
D(A) = [xlx € SF, А (х) # 0} называется областью определения ото-
бражения А, а множество R(A) = (J Л(х)— его образом. В случае
«х
многозначных отображений запись у € А (х) подразумевает, что
х€£>(Л).
Если А и В — два многозначных оператора на то ХЛ + цВ, X,
д € IR — многозначный оператор, переводящий х в ХЛ (х) + дВ(х) =
= [Xj> + /д1у€А(х), z€B(x)). При этом £>(ХЛ + цВ) = £>(Л)С|Д(В).
Предположим, далее, что ЙГи ЙГ' приведены в двойственность с
помощью спаривания <х', х>, х€Й>7 х' Многозначное отображе-
ние A: называется монотонным, если
<71 - Уг, Х1 - х2> > О
Vxi, х2€Д(Л) У71€Л(Х1) УУ2^А(хг). (2.6.1)
Если в (2.6.1) знак > заменить знаком > , то Л называется строго
монотонным. Ниже под монотонным оператором, если не оговорено
противное, мы будем понимать многозначный монотонный оператор.
Предложение 2.6.1. Пусть f—выпуклый собственный функционал на
ST. Тогда Э/—монотонный многозначный оператор изУв ^(^').
Доказательство. Предположим, что yi € 3/(xi), уг € Э/(х2). Если сло-
жить соответствующие вариационные неравенства, фигурирующие в
определении 3/(xi) и Э/(х2), то получим (2.6.1). □
§ 2.6. Максимальные монотонные операторы
77
Графиком многозначного оператора A: ST-*называется
множество
= {(х, y)l(x, j)€Z>(t4) X ST', у$А(х)}.
Ясно, что с^(Л1) С ^(Аг) тогда и только тогда, когда Ai(x) С Аг(х)
чхгЗГ. Множество .с/ всех монотонных операторов из ST в
можно частично упорядочить по включению графиков. Можно пока-
зать, что при этом любое вполне упорядоченное подмножество в &Г
имеет верхнюю грань. Тогда по известной лемме Цорна (см. [277;
337]) ^содержит по крайней мере один максимальный элемент. Такие
элементы называются максимальными монотонными операторами.
Таким образом, монотонный оператор A: ST-+ является макси-
мальным монотонным тогда и только тогда, когда для любого моно-
тонного оператора В: из включения -3(A) с -3(B) следует,
что А = В. Другими словами, монотонный оператор А максимален
тогда и только тогда, когда -3(A) не является собственным подмноже-
ством никакого другого монотонного подмножества в ST у. ST'. Мож-
но дать ещё одно эквивалентное определение максимального монотон-
ного оператора: оператор A: 8Г-+называется максимальным
монотонным, если (i) А — монотонный оператор и (ii) для любых
x^STn у^ЗГ', таких что
<У - У1, X - Х1> О У.У1€Л(Х1), (2.6.2)
выполнено соотношение
у€А(х). (2.6.3)
Пусть А: Н Н, где Н — гильбертово пространство, и Г. Н -» Н — тождественный
оператор.
Предложение 2.6.2. Если оператор А + I сюръективен, т. е. R(A + 7) = Н, и А — моно-
тонный оператор, то Л — максимальный монотонный оператор.
Доказательство. Рассуждая от противного, предположим, что существует такой опера-
тор В: Н -»Н, что Тогда если (х, y)i^(B), то найдётся элемент
Xi € D(A), такой что х + у € (Л + 7)(xi). Отсюда следует, что х + у € х + В(х) и х + у €
€ Xi + B(xi). Так как В — монотонный оператор, то
(Zi - Z, Х1 - х)н > О Vzi € B(xi) Vz € В(х). (2.6.4)
Полагая zi = х + у - xi, z = у, получим неравенство
(х - xi, xi - х) > 0 (2.6.5)
откуда следует, что xi = х, у € Л(х). □
Справедливо н обратное утверждение [29]. По поводу обобщения этих результатов
см. [17].
78
Гл. 2. Элементы выпуклого анализа
Следующее предложение устанавливает связь между понятиями
максимального монотонного оператора и субдифференциала. Для эко-
номии места мы приводим его без доказательства (см. [17; 29]).
Предложение 2.6.3. Пусть X—банахово пространство. Субдифферен-
циал df всякого выпуклого п.н.сн. функционала f на X является макси-
мальным монотонным оператором.
2.6.2. Максимальные монотонные графики в fR* 2 *
Рассмотрим класс всех монотонных отображений /3: IR ->c/([R). Всякое
подмножество за/этого класса можно упорядочить с помощью обыч-
ного покоординатного отношения порядка на плоскости. Подмноже-
ство в IR2 вполне упорядочено в смысле этого отношения порядка тог-
да и только тогда, когда для любых пар (xi, х{) и (хг, х{) из этого
подмножества выполнены либо неравенства Xi хг и х{ х2', либо не-
равенства xi > хг и Xi > Хг- Всякая полная неубывающая кривая7 в IR2
является графиком некоторого максимального монотонного ото-
бражения fi: [R -> .^([R). В декартовой системе координат такой график
напоминает график непрерывной неубывающей функции, с той лишь
разницей, что он может содержать и вертикальные участки. Макси-
мальные монотонные графики в IR2 широко будут использованы в
дальнейшем для формулировки односторонних граничных условий.
Сейчас мы докажем один результат, касающийся связи полных неубы-
вающих кривых в IR2 и субдифференциалов выпуклых п.н.сн. функций
на IR.
Предложение 2.6.4. Пусть fi: IR-»^(IR) — максимальный монотонный
оператор. С точностью до постоянного слагаемого существует един-
ственный выпуклый п.н.сн. собственный функционал /: IR -»IR, удов-
летворяющий соотношению
fi = df. (2.6.6)
Доказательство. Предположим, что для некоторого а € IR значение 0(a) конечно.
Положим
Лх) = j P(f)dt.2 (2.6.7)
‘Полные неубывающие кривые — это подмножества в IR2 вида Г = ((х, x')i
€ IR21<р-(х) х' С <Р+ (х)), где <р: IR -» IR — неубывающая функция, <р & оо, а <р_ и <р+ —
отвечающие ей п.н.сн. и п.н.св. функции. — Прим, перев.
2 Проблем с существованием этого интеграла не возникает, поскольку отображение
0 п.в. однозначно. — Прим. ред.
§ 2.6. Максимальные монотонные операторы
79
/(z) - f(x) = 1
Z - X z - х
Интеграл в (2.6.7) определен н конечен для х нз того интервала г, где функционал /3
конечен, так как /3 не убывает. Далее, этот интеграл определён7 на замыкании г интер-
вала г. Ясно, что f(x) = оо для х г. Пусть xi, х2 € г, хз = Xxi + (1 - Х)х2, X € (0, 1) и
Xi < х2. Тогда
Хз
/(«) - /(Xi) = j /3(0* $ (хз - х,)/3(х}) (2.6.8)
Х1
Н
Х2
f(xi) - Дхз) = j /3(0* « (хз - х})/3(х2). (2.6.9)
Xj
Выпуклость / на г следует из (2.6.8) и (2.6.9). В силу непрерывности / иа г, / является
выпуклым П.Н.СН. собственным функционалом на (R. Для всех х из г и всех z > х выпол-
нено соотношение
Z
/3(0* > /8(х). (2.6.10)
X
Устремив z к х+, получим f'+ (х) > /3(х). Проведя аналогичное рассуждение и устремив
z к х-, получим /1 (х) /3(х). На основании (2.3.29) заключаем, что Л = /3+ и Л =
= /3- Vx€lR. Таким образом,
Г- = /3- С0 CI3+ = f+ Vx 6 IR, (2.6.11)
и из (2.3.30) следует, что /3 = df.
Предположим теперь, что существует другой функционал /* € Го(1К), такой что
0 = df*. Тогда в силу (2.3.28)
Л'С/З^Л (2.6.12)
и, следовательно,
/•-' = /3- = Л. Л* = = Л • (2.6.13)
Но, как легко видеть (см. предложение 2.3.8), int D(f*) = int D(f) = int г. Это следует
из того, что Л (соота. Л) конечны иа int D(f) (соотв. иа int D(f*)) и г С D(f) С г.
Ввиду того что f и Л п.н.сн., значения f и f* на IR определяются их значениями на int г.
Из (2.6.13) ясно, что если1 2 int г # 0, то
ЛМ-Л'(к) = 0 и f'.(x) - f*l(x) = 0 Vx€intr.
Следовательно, f = f* + а иа int г, где а — постоянная. □
Предложение 2.6.5. Графики субдифференциалов df, ft Го(1₽), — это в
точности полные неубывающие кривые в IR2.
1 Как предел интегралов Римана или как интеграл Лебега.
2 Случай, когда г состоит из одной-едннствеииой точки, тривиален.
80
Гл. 2. Элементы выпуклого анализа
Доказательство. Это сразу следует из предложений 2.3.8, 2.3.9 и
2.6.4. □
Заметим, что доказательство предложения 2.6.4 даёт метод нахож-
дения функционала /, отвечающего заданному отображению /3. Другой
метод восстановления функционала по отображению /3 иллюстрирует-
ся следующими простыми примерами.
(i) Пусть отображение /3 задано на IR соотношением
£(*) =
0 при X < -1,
(-00, 0] при X = -1,
0 при -1 < X
[0, + оо) при X = 1,
0 при х> 1.
(2.6.14)
Тогда /3 является максимальным монотонным оператором (см.
рис.2.6.1, (а)). Чтобы построить/, определим сначала непрерывную
однозначную функцию /3£ (называемую регуляризованным операто-
ром), зависящую от параметра £ > 0 и при малых £ «близкую» к /3.
Это можно сделать, например, так (см. рис. 2.6.1(b)):
&(х) =
* + - при х < -1,
£
0 при -1 х 1,
-—- при X > 1.
(2.6.15)
Ясно, что /3£ € C°([R). Можно применить и другую процедуру регуля-
ризации, выбирая jSe € f1(IR) и т. д. При £->0+ график <^(/3£) «стре-
мится» к графику <^(/3). Функция /£ получается из fie путём интегри-
рования (см. рис. 2.6.1(c)):
fe(x) =
(х + I)2
2£
о
(X - I)2
2fi
при Х< -1,
при - 1 X s^l,
при х^ 1.
(2.6.16)
§ 2.6. Максимальные монотонные операторы
81
Рис. 2.6.2. Регуляризация функции f(x) = | х |(х € IR).
Функции 3 н /3£.
82
Гл. 2. Элементы выпуклого анализа
Функционал f получается из fs предельным переходом при £->0+.
Таким образом,
О при Ixl 1,
оо при 1x1 > 1.
(2.6.17)
(см. рис. 2.6.1(d)).
Метод регуляризации тесно связан с методом аппроксимации мак-
симальных монотонных операторов, принадлежащим К. Иосиде (см.
п. 7.2.2 и [29]).
(ii) Пусть отображение 0: [R->^([R) задаётся соотношениём
/3(х) =
f -1
[-1,
I +1
1]
при х < О,
при х = О,
при х > 1.
(2.6.18)
Очевидно, что /3 — максимальный монотонный оператор. Методом ре-
гуляризации или непосредственным вычислением можно показать, что
3 = df, где /(х) = 1x1 (см. рис. 2.6.2).
ЧАСТЬ 2
Задачи на неравенства
ГЛАВА 3
Вариационные
неравенства и суперпотенциалы
Цель настоящей главы — объяснить, как появляются задачи на нера-
венства в механике. С этой целью мы введём некоторые понятия вы-
пуклого анализа в механику. Точнее, будут рассмотрены определяю-
щие соотношения и граничные условия, в которые входят субдиффе-
ренциалы выпуклых функционалов.
В § 3.1 определяются специальные классы многозначных законов
механики, приводящие к вариационным неравенствам и выпуклым за-
дачам минимизации. В § 3.2 вводится понятие суперпотенциала и об-
суждается двойственность вариационных принципов. В § 3.3 приведе-
ны примеры субдифференциальных определяющих соотношений и гра-
ничных условий, сначала в эвклидовом пространстве, а затем и в
некоторых функциональных пространствах.
§ 3.1. ЗАКОНЫ МЕХАНИКИ И СВЯЗИ
3.1.1. Обобщённые силы и принцип виртуальной мощности
Метод виртуальной мощности исторически был первой попыткой опи-
сания сил, действующих на механическую систему. Некие намёки на
этот метод можно найти еще у Аристотеля7, который пытался найти
связь между силами и скоростями.
В новое время этот метод был впервые примене Д’Аламбером (см.
[3; 130]). По сравнению с классическим подходом векторного анализа
метод виртуальной мощности считается более абстрактным и более
сложным при практическом применении. Тем не менее большое его
достоинство состоит в том, что он отражает внутреннюю природу по-
нятия силы.
7 См., например, [10].
84
Гл. 3. Вариационные неравенства и суперпотенциалы
Рассмотрим механическую систему Е. Для того чтобы определить
силы, действующие на Е, рассмотрим для Е пространство всех по-
лей возможных скоростей или возможных перемещений на данном
временндм интервале. В зависимости от рассматриваемой задачи эле-
ментами служат либо скорости, либо перемещения, обозначаемые
в этой главе « и и соответственно. Пусть SF— некоторое вещественное
векторное пространство, элементы которого [} будем называть силами
и <9, 0, —билинейная форма, обладающая следующими
двумя свойствами (мы считаем, что —линейное пространство):
(i) для каждого 9 # 0 из существует элемент [} € У такой что
<v, 0*0; (3.1.1)
(ii) для каждого { # 0 из У существует элемент v € % такой что
<9,0*0. (3.1.2)
В случае когда —пространство перемещений, в (3.1.1, 2) нужно 9
заменить на и. Билинейная форма <•,•> называется мощностью (со-
отв. работой) силы £ при скорости » (соотв. на перемещении и). Из
(i) и (ii) следует, что билинейная форма <•»•> задаёт локально-выпук-
лые отделимые топологии на и У а пара {У превращается в
дуальную пару отделимых ЛВП (см. п. 1.2.1). Соответственно можно
определить силу ( как непрерывный линейный функционал на ty, вводя
в топологию, удовлетворяющую соотношению (1.2.7). Простран-
ство называют пространством виртуальных скоростей (соотв. пе-
ремещений), a <•,•> —виртуальной мощностью (соотв. работой). Та-
ким образом, можно сказать, что задана сила {J, действующая на Е,
если на задана виртуальная мощность (соотв. работа) <9, 0 (соотв.
<и, 0)> удовлетворяющая условиям (i) и (ii), или если на задан ли-
нейный функционал, непрерывный в топологии, которая не сильнее,
чем топология Макки, и не слабее, чем слабая топология. Тройка Г =
= <v, 0, .У], состоящая из векторных пространств и Уи били-
нейной формы <9, 0 со свойствами (i) и (ii), называется механическим
элементом [229]. Если система Ео состоит из подсистем Ei.....Ел
и если для каждой из подсистем Е,, i = 1, 2.п, известен механиче-
ский элемент Е,- = {%, <9,, £,>, У), то можно положить П
п i= 1
У= П
1=1
G, 0 = П Р. (3.1.3)
1 = 1
Очевидно, что Г = <v, {[>, &].
§ 3.1. Законы механики и связи
85
Рассмотрим в качестве примеров материальную точку m и твёрдое
тело □ в IR3 [197]. Для материальной точки IR3, и виртуальная
мощность силы (J, действующей на ш, определяется соотношением
Р = vift- Для твёрдого же тела <% = IR6. Действительно, скорость
v в точке Р € 2 вычисляется по известной формуле
vp = ил + <оЛ АР , (3.1.4)
где va — скорость некоторой фиксированной точки А € IR3, а ы — угло-
вая скорость тела Q. Пространство состоит из сил f и моментов
Мр, таких что
Мр = Ма+ РА Kf. (3.1.5)
Это тоже пространство IR6. Каноническая билинейная форма <9, р,
задающая виртуальную мощность, имеет вид
<9, Р = vpifi + Мч, i = 1, 2, 3. (3.1.6)
Рассмотрим теперь непрерывную механическую систему (сплош-
ную среду), которая в момент времени t занимает открытое ограни-
ченное подмножество Q пространства IR3. Пусть —векторное про-
странство виртуальных скоростей системы. Движение тела подчиняет-
ся следующему принципу виртуальной мощности:
(Hi) В любой момент времени t для любого поля виртуальных ско-
ростей виртуальная мощность всех внутренних и внешних сил, прило-
женных к системе, равна виртуальной мощности инерциальных сил.
Тело (сплошная среда) рассматривается в некоторой инерциальной
системе отсчёта. Среди всех полей скоростей на Q особую роль играют
жёсткие поля скоростей (см. добавление И). Векторное пространство
этих полей обозначим через Постулируем следующее правило
[ИО]:
(Нг) Виртуальная мощность П< внутренних сил, действующих в те-
ле, равна нулю для любого жёсткого поля скоростей в любой момент
времени.
В силу линейности П, значение виртуальной мощности ГЦ») не из-
менится, если v заменить на v + 90, где «о € %. Далее, если записать
П,(р) в виде <v, р, то (Н2) эквивалентно утверждению, что П/(9) =
= <9, Р = 0 V9€%. Таким образом, мы пришли к факторпростран-
ству которое называется пространством объективных вир-
туальных скоростей (см. добавление II). Все инерциальные силы
можно рассматривать как непрерывные линейные функционалы на
86
Гл. 3. Вариационные неравенства и суперпотенциалы
1. Обозначим пространство всех_таких функционалов через Оче-
видно, что элементы пространств и ^являются объективными вели-
чинами; это легко следует из инвариантности отображения двойст-
венности.
Для дальнейшего описания механики сплошных сред надо помимо
пространства уточнить вид линейного отображения » -♦ <», р, выра-
жающего виртуальную мощность системы. Так, в рамках локальной
теории можно рассматривать выражения для <9, р, в которые входят
последовательные производные векторного поля », т. е. величины 7,
vj, jk и т. д. Таким образом, мы приходим к градиентным теориям
первого, второго и т. д. порядков соответственно. В качестве про-
странства можно взять декартово произведение 9/(0) х (1) х ...
х^(т), где ^(т) = jk... (производные порядка т)\.
В механике сплошных сред наиболее распространённой является
градиентная теория первого порядка, в которой мощность системы за-
висит от скоростей и, и их первых градиентов и,, j. В предположении
что мощность П| внутренних сил, действующих в Q, может быть вы-
ражена в интегральной форме
П,(и) = - \pi(v)dQ, (3.1.7)
D
можно показать, что в любой точке Q
Pi(u) = tijDij, Dij = (и/, j 4- и/, i). (3.1.8)
At
Действительно, в любой точке О значение p,(v) можно записать в об-
щем виде
Р<(ч) = tijDij + Г|/йу + QiVi, Qij = (Vi, j — Vj, i). (3.1.9)
Очевидно, что Лу— компоненты некоторого симметричного тензора.
Если бы gi # 0 в некоторой окрестности данной точки Afg Qt с О, то
можно было бы определить подсистему системы Q, содержащую точ-
ку М, и переносную виртуальную скорость, такие что pt(v) # 0 в этой
окрестности. Но это противоречило бы (Нг). Аналогично, используя
вращательную виртуальную скорость, заключаем, что Лу = 0. Тензор
t = (/у) называется тензором внутренних напряжений [ПО], а сим-
1 Ha_J2< рассматривается фактортопология. В этой топологии фильтр окрестностей
нуля в является образом системы окрестностей нуля в при каноническом отображе-
нии (см. п. 1.1.2).
§ 3.1. Законы механики и связи
87
метричный тензор D = [Dy} — тензором скоростей деформации. Чи-
тателя, интересующегося градиентными теориями второго порядка и
соответствующими теориями материалов, имеющих микроструктуру,
отошлём к [ПО; 111; 197].
Принимая во внимание сказанное выше, можно рассматривать про-
странство (соотв. 59 как состоящее из тензоров D (соотв. (). Оче-
видно, что градиентные теории высших порядков приводят к тензо-
рам высших порядков. Соответственно можно обобщить классическое
понятие силы и трактовать элементы пространства 5^как обобщённые
силы. Для элементов же пространства можно использовать термин
обобщённые скорости.
Далее, определим виртуальную мощность внешних и внутренних
сил, действующих в Q. Различаются объёмные внешние силы (напри-
ме, гравитационные, электромагнитные) и поверхностные (или кон-
тактные), силы, действующие на границе Г множества Q. В первом
случае они определяются как непрерывные линейные функционалы на
пространстве а во втором — на некотором векторном пространстве
^7. Предполагается, что последнее пространство содержит следы на
Г всех элементов из <%. Элементы пространств и %, не обязательно
объективны. Наконец, виртуальная мощность всех инерциальных сил
представляет собой линейный функционал на пространстве эле-
менты которого не являются объективными. Обозначим через П„, Пс
и П« виртуальные мощности объемных, контактных и инерциальных
сил соответственно. Из (Hi) следует, что в любой момент времени t
для любого поля виртуальных скоростей справедливо равенство
П, + П„ + Пс = Пв. (3.1.10)
Это равенство справедливо также для любой подсистемы, занима-
ющей в данный момент времени t область Qi С Q.
В рамках градиентной теории первого порядка будем предполагать, что для 01 вели-
чины Ши), П„(и) и Ц,(и) (соотв. Пс(ти)) можно выразить через интегралы по 01 (соотв.
по Г1) от р,(и), р„(у) н pa(v) (соотв. pc(yv)). Легко убедиться, что в обоих случаях р„(у)
и Pc(yv) представимы соответственно в виде
Рв(и) — flVl + bijDij + CyQ,j, blj — bji, Cij — — Cji, (3.1.11)
Pclyv) = Si(yv)i, (3.1.12)
гДе I//), (bij} и (Сц) —соответственно объёмная сила, «двойная симметричная» сила
и парный тензор в Qi, a (Si) —вектор напряжений на Гь В «чистой» механике7 плот-
7 По поводу применения принципа виртуальной мощности к электромагнитной
сплошной среде отсылаем читателя к [197J и приведенной там литературе. Заметим,
что при наличии максвелловских полей величины by, Сц в (3.1.11) отличны от нуля.
88
Гл. 3. Вариационные неравенства и суперпотенциалы
ность мощности инерциальной силы вычисляется по формуле
dvt
Pa(v) = Q — Vi, (3.1.13)
at
где q — плотность тела, a dv/dt — материальная производная скорости и. Если все рас-
сматриваемые величины являются достаточно гладкими, то можно воспользоваться
формулой Грина — Гаусса. Применив хорошо известную методику сведения основных
законов механики в глобальной форме к законам в локальной форме (см., например,
[112]), получим
dvt
aU.J+fi=Q-j-> оу - ajt + сц = 0 в Oi, (3.1.14)
dt
Si = a„nj на Г1. (3.1.15)
Здесь л = [л,) —орт внешней нормали к поверхности Г1,
«у = tij - by - су в 01, (3.1.16)
а = [<ту) —тензор напряжений Коши. Ниже мы часто будем использовать (3.1.11, 14)
прн
6у=су = 0. (3.1.17)
Для статических задач пространство представляет собой про-
странство виртуальных обобщённых перемещений. Принцип виртуаль-
ной мощности превращается в хорошо известный принцип виртуаль-
ных перемещений. Читателя, более глубоко интересующегося прин-
ципом виртуальной мощности и виртуальных перемещений, можно
отослать к классическим трудам по механике [6; 112; 130; 171; 321].
Подчеркнём, что принцип виртуальной мощности не включает в се-
бя первое и второе начала термодинамики. Они должны быть посту-
лированы независимо. Следует, однако, заметить, что уравнение со-
хранения энергии можно вывести из принципа виртуальной мощности,
если виртуальные скорости учитывают также вариацию времени (см.
[133; 253]).
3.1.2. Многозначные определяющие соотношения и связи в механике
Сопоставим данной механической системе Е, для которой определена
тройка Е = <9, р, 3^), некоторое отображение А: вообще
говоря многозначное. Этим отображением задаётся определяющее со-
отношение (закон) для Е, которое можно записать в виде
^А(.)сЗ (3.1.18)
Область определения и образ многозначного оператора А называются
соответственно областью определения и областью значений опреде-
B(v) =
§ 3.1. Законы механики и связи 89
ляющего соотношения. Например, если A(v) = [<?} для любого
то определяющее соотношение имеет вид {j = [#]. Предположим, что
£=-gradPK(w), (3.1.19)
где W: IR — некоторый функционал на <%, имеющий градиент в
любой точке v € Такое определяющее соотношение называется по-
тенциальным, а функционал W—потенциалом.
Как правило, механические системы подчинены связям, т. е. гра-
ничным условиям. В этом случае для механической системы допусти-
мы лишь определённые подмножества пространств и 5V и мы при-
ходим к определяющему соотношению вида В: Sfc.^. Гово-
рят, что В задаёт ограничение (налагает связь) на Е, и пишут
VvtSF, (3.1.20)
£ называется реакцией связи. Предположим, например, что некоторая
материальная точка в IR3 должна всё время иметь скорость, равную
нулю. Тогда реакция связи может принимать любое значение из IR3 и
IR3 если и€ЗГ= (0), zj j 2j\
0 в противном случае.
Множества
{vlvear, B(v)*0} и (J В(и))
называются соответственно областью определения и областью значе-
ний связи. Аналогичные законы и связи получаются, если в (3.1.18—
20) заменить » на « (т. е. для статических задач). Очевидно, что в аб-
страктной постановке, с которой мы имеем дело, не всегда можно
точно разграничить определяющие соотношения и связи.
Рассмотрим задачу о равновесии системы Е, подчинённой некото-
рым законам и связям, определённым на и 3Q с помощью операто-
ров At и Bj соответственно. Здесь i = 1, 2, ..., п, a j = 1, 2, ..., т.
Из принципа виртуальных перемещений следует, что в положении рав-
новесия
п т
S £ + S & = 0, (3.1.22)
1=1 7=1
&6Л|(«) ^бВ/и) у = 1, 2 т.
Итак, в положении равновесия имеем и € Q 3% и
J
п т
0€ £Л(«)+ SBj(«). (3.1.23)
1=1 7=1
90
Гл. 3. Вариационные неравенства н суперпотенциалы
Особый интерес представляют субдифференциальные законы и свя-
зи. В этом случае А = —дФ или В = — дФ, где Ф — выпуклый п.н.сн.
собственный функционал на Следуя Моро [211], будем называть
Ф суперпотенциалом. Соотношения (3.1.18) и (3.1.20) принимают тог-
да вид
-£€дФ(и) или -£€дФ(»). (3.1.24)
Очевидно (см. п. 2.1.1), достаточно, чтобы Ф был определён лишь на
некотором выпуклом замкнутом подмножестве пространства ty.
В гл. 4 суперпотенциальный закон распространяется на случай невы-
пуклых функционалов путём введения нового понятия — обобщённого
градиента Кларка. Другое обобщение (3.1.24), состоящее в рассмотре-
нии соотношений вида (3.1.18), где А — максимальный монотонный
оператор, обсуждается в [245].
При помощи сопряжённого функционала Фс, который является вы-
пуклым п.н.сн. собственным функционалом на ^(см. п. 2.5.2), можно
переписать, скажем, первое из соотношений (3.1.24) в таких эквива-
лентных формах:
и€дФс(-а (3.1.25)
Ф(и) + Фс(-£) + <и, р = 0, (3.1.26)
Ф(и) + Фс(~£) + <», 0 0 Vu€^. (3.1.27)
Функционалы Ф и Фс можно рассматривать как потенциальную и до-
полнительную энергии, отвечающие определяющему соотношению
или связи. По определению, для и £€включения (3.1.24) и
(3.1.25) эквивалентны вариационным неравенствам
Ф(и*) - Ф(и) > - <£, u* - u> Vu*€^ (3.1.28)
и
Фс(-£°) - Фс(-Р > -<«, f-0 (3.1.29)
Далее, пусть Ф является индикатором 1 * некоторого выпуклого
замкнутого подмножества пространства Тогда
-^ат^и) или -geaz^G). (зл.зо)
Связь, отвечающая (3.1.30), называется идеальной односторонней
связью. Согласно п. 2.3.1, — £ представляет собой элемент внешнего
нормального конуса к множеству -Л^в точке и или «. Термин «односто-
ронний» становится понятным, если для и € .^рассмотреть вариацион-
ное неравенство
<£, и* - и> > 0 (3.1.31)
§ 3.1. Законы механики и связи
91
которое вытекает из первого включения (3.1.30) по определению суб-
дифференциала. Действительно, если разность и* - и является допу-
стимой вариацией и в том смысле, что она удовлетворяет (3.1.31), то
разность и - и* будет допустимой только в случае, если Ж— линейное
подпространство в В этом случае (3.1.31) выполнено как равенство,
и потому
Из (3.1.30) следуют обратное соотношение
и€Э7^(-0 или РбЭ2^(-р (3.1.32)
и соответствующие вариационные неравенства.
Понятие идеальной односторонней связи может быть проиллю-
стрировано простым примером. Предположим, что на материальную
точку m действует сила /€ IR3, и точка принуждена находиться в вы-
пуклом замкнутом подмножестве К пространства IR3, в котором введе-
на декартова система координат 0х1Х2хз. Если К = (xlx€ IR3, F(x)
^0), где F—непрерывно дифференцируемая на IR3 функция, и если
материальная точка взаимодействует с границей множества К без тре-
ния, то сила реакции R задается соотношением
R = -X grad F(x), X 0, (3.1.33)
где X — неизвестный коэффициент пропорциональности. Очевидно, что
если материальная точка находится в относительной внутренности
множества К, то сила реакции равна нулю и X = 0. В противном слу-
чае X 0. Такой тип связи описывается соотношением
-RtdIK(x). (3.1.34)
Так как m находится в состоянии равновесия тогда и только тогда,
когда
f + R = 0, (3.1.35)
то
/€Э^(х), (3.1.36)
и наоборот. Для х€ К включение (3.1.36) эквивалентно вариационному
неравенству
Z(x,‘- Xi) 0 Vx* € К, (3.1.37)
выражающему принцип виртуальных перемещений.
3.1.3. Задачи минимизации и вариационные неравенства,
характеризующие положение равновесия
Рассмотрим систему Е, на которую воздействуют силы i = 1, 2,
..., п, и реакции &> 7 = 1, 2...т. Пусть —пространство (обо-
бщённых) перемещений. Эти силы определяются соответственно су-
92
Гл. 3. Вариационные неравенства н суперпотенцналы
перпотенциалами Ф, и Ф7, определёнными на пространстве Условие
равновесия (3.1.23) принимает вид
0 6 S ОФ,(u) + S ЭФ7(и). (3.1.38)
1=1 7=1
Заметим, что если является пространством обобщённых скоростей
и если в (3.1.38) заменить и на v, то (3.1.38) описывает движение Е
без учёта сил инерции. Решение и € 1>(дФ1)Г)... П£>(ЭФт) включения
(3.1.38) удовлетворяет условию
0 € 0Фо(и), Ф0(и) = 2 Ф1(и) + У Фу(и); (3.1.39)
(=1 7=1
обратное, вообще говоря, неверно. Предложения 2.4.3 и 2.4.4 дают
следующее достаточное условие эквивалентности (3.1.38) и (3.1.39):
если
(i) найдётся I (0 I п + т) суперпотенциалов Ф, и Ф7, у которых
градиенты существуют для любого и 6^
(ii) существует ио € такое что из оставшихся т + п - I функцио-
налов т + п - I - 1 в точке ио конечны и непрерывны в топологии,
согласованной с двойственностью между Ф и У;
(iii) (т + п - /)-й функционал конечен в точке ио,
то любое решение включения (3.1.38) будет решением включения
(3.1.39), и наоборот. Включение (3.1.39) эквивалентно условию (см.
п. 2.3.1)
Фо(и) = min{Фо(и*)Iи* 6^). (3.1.40)
Таким образом, и минимизирует Фо на для каждого положения рав-
новесия. Если (3.1.38) и (3.1.39) эквивалентны, то любое решение
(3.1.40) отвечает положению равновесия.
Предположим теперь, что некоторые из связей являются идеальны-
ми односторонними связями, г.е. Ф7 = IXj для 1 < т, и что
субградиенты ЭФ(, 1 < i л, и ЭФ7, р + 1 < j; т, аддитивны. Пусть
Фо(и) = S Ф,(и) + £ Ф7(и), (3.1.41)
1=1 7=Р+1 7=1
Тогда каждому положению равновесия соответствует решение следую-
щей задачи минимизации:
Фо(и) = min{Ф0(и*)Iи* 6^6). (3.1.42)
Обратное верно, если ЭФ0 и аддитивны. Для этого достаточно,
чтобы выполнялось любое из приводимых ниже трёх условий:
§ 3.1. Законы механики и связи
93
(i) градиент функционала Фо существует для любого и€^6;
(ii ) существует «о €^б, такое что Фо конечен и непрерывен в точке «о;
(iii) т1^6П£>(Фо) 0.
Первое условие следует из теоремы 2.4.3, второе и третье — из теоре-
мы 2.4.4. Доказать это представляется читателю в качестве
упражнения.
Предположим, что в (3.1.23) первые q операторов Л, (1 i q <
< п) постоянны, т. е. АМ = [^) Vu € Таким образом, на систе-
му действуют заданные силы i^, 1 q. Предположим, что остав-
шиеся операторы At и Bj удовлетворяют соотношениям А, = -ЭФ/,
q + 1 i л, и Bj = -ЭФ„ 1 пг. Тогда (3.1.23) можно перепи-
сать в виде
S ЭФ,(и) + £ ЭФу(и). (3.1.43)
1=1 1=9+1 7=1
Всякое решение включения (3.1.43) является решением алгебраического
включения
^бЭФо(и), Фо(«)= S Ф;(и) + S Фу(и). (3.1.44)
1=9+1 у=1
Обратное верно в случае, если субдифференциалы аддитивны. Как и
выше, нетрудно сформулировать достаточные условия эквивалентнос-
ти (3.1.43) и (3.1.44). Соотношение (3.1.44) эквивалентно для и ва-
риационному неравенству
Фо(и*) — Фо(и) -3 u* — u) Vи* € (3.1.45)
Очевидно, что любое решение неравенства (3.1.45) служит решением
задачи минимизации
П(и) = тш[П(и*)1и* 6^), (3.1.46)
где
П(и*) = Фо(и*) — и* ), (3.1.47)
и обратно.
Функционал П в (3.1.46) выражает потенциальную энергию систе-
мы. Это будет показано в следующих пунктах на конкретных приме-
рах. Выше в задаче о равновесии системы в качестве неизвестного рас-
сматривалось (обобщённое) перемещение и. В § 3.2 при помощи тео-
рии двойственности мы сформулируем задачу о равновесии как задачу
относительно сил, действующих на систему.
94
Гл. 3. Вариационные неравенства и суперпотенциалы
3.1.4. Диссипативные законы. Замечания о задаче
на собственные значения для суперпотенциальных законов
Рассмотрим механический элемент Е = {‘2г, <», f> ], 3е] и определяющее соотношение
А: ЙГ-» 5Г STC на Е. Оно называется диссипативным, если для g ё Л (v) выполнено
неравенство
<«, Р С 0. (3.1.48)
Один общий класс диссипативных законов описывается следующим образом: если
А — монотонный оператор и 0 € /1(0), то закон А является диссипативным. Это немед-
ленно следует из условия монотонности <»> - «г, (Ji - {Jz> С 0, если взять <п = 0 и fa = 0.
Следовательно, (3.1.24) задаёт диссипативный закон, если ОёЭФ(О).
Предположим, что в некоторой механической задаче положение равновесия описыва-
ется соотношением
«€/!(«), (3.1.49)
где А — многозначный оператор, £ — заданная сила. По аналогии с классической теори-
ей задач на собственные значения назовём число X собственным значением оператора
А относительно оператора G: Сё-Л(^, если
ХС«ёЛ(и). (3.1.50)
Соответствующий вектор и, если он существует, называется собственным вектором
оператора А. Подмножество 3х С Сбудем называть собственным множеством1 опера-
тора А, если для некоторого X
Л (39 Э ХС(Й/). (3.1.51)
Если Л = - ЭФ, то задача на собственные значения принимает вид: найти X ё R и и ё%
такие что
Ф(и») - Ф(«) > -<XGu, «• - u> Vu* €^. (3.1.52)
Так как задачи иа собственные значения для вариационных неравенств будут подробно
изучены в гл. 7 прн рассмотрении теории пластин Кармана, мы не будем здесь вдавать-
ся в детали. Для полноты изложения сформулируем лишь некоторые результаты из [1]
и [68]. Рассмотрим задачу иа собственные значения, отвечающую закону (3.1.24), и
предположим, что и ^совпадают с некоторым гильбертовым пространством Ж Тог-
да справедлив следующий результат (доказательство см. в [1])
Предложение 3.1.1, Предположим, что выполнены условия:
(i) Ф(«) >0 V« ё < Ф(0) = 0;
(ii) множество Л = <и!иё Л^1 luL^C с, Ф(и) < с) компактно для любой постоянной
с > 0;
(iii) существует замкнутый выпуклый конус Л^С Л"с вершиной в нуле, такой что пе-
ресечение ЛП (и!Ф(и) = 0) ограничено;
1 Это понятие для случая монотонных процессов и конечномерных пространств изу-
чалось Рокафелларом [286].
§ 3.2. Суперпотенциалы и двойственность
95
(iv) существует ненулевой вектор и € -Ж такой что Ф(и) < оо;
(v) если Pj^‘. Л'—проектор7 из «^'на то Ф(Рл,и) С Ф(«)
Vu€^f
Тогда найдутся X < О н и € и # 0, служащие решением задачи на собственные
значения
-Хи € ЭФ(и).
(3.1.53)
§ 3.2. СУПЕРПОТЕНЦИАЛЫ И ДВОЙСТВЕННОСТЬ
3.2.1. Гйпотеза нормальной диссипации
Выше были введены субдифференциальные соотношения типа (3.1.24)
между обобщёнными скоростями »€ '2 и силами £ € Более общим
образом, можно ввести аналогичные многозначные соотношения меж-
ду «потоками» и «силами», в терминологии теории необратимых тер-
модинамических процессов Онзагера. Будем обозначать через » пото-
ки, а через £— силы. Например, » может быть вектором теплового
потока, скорости химической реакции и т. п., а в роли соответствую-
щей «силы» ( может выступать градиент температуры, химическое
сродство и т. п. Простейшей связью между потоками и силами слу-
жит линейный закон
& = AyVj, (3.2.1)
где 2 = IR" и выполнены соотношения симметрии Казимира —
Онзагера
Aij = Aji. (3.2.2)
Хотя соотношения (3.2.1), (3.2.2) и подтверждаются во многих реаль-
ных физических задачах, их часто подвергали критике. Дело в том,
что, как правило, в физической системе очень трудно провести разли-
чие между потоком и силой (см., например, [323]). Соотношение
(3.2.1) можно записать в виде
U = | grad лэ/(О, 3^(v) = Aijvivj. (3.2.3)
Здесь э/может также зависеть от других термодинамических парамет-
ров [113]. Внутреннюю удельную диссипацию srf можно выразить в
1 Для любого замкнутого выпуклого множества Л'с 2', где 2~— гильбертово про-
странство, можно определить отображение нз .^в.'/, ставя в соответствие каждому
xf.9'элемент Р^х^.Х, ближайший к х, т. е. inf lx - yl = Их - Р^(х)1. Из предло-
жения 2.2.1 следует, что Р^х существует и единствен. Нелинейный оператор P# назы-
вается проектором на Л(
96
Гл. 3. Вариационные неравенства и суперпотенциалы
виде (см. [112] и добавление III)
jaf= (3.2.4)
Из второго начала термодинамики следует, что для необратимого
процесса
0. (3.2.5)
Соответственно
J2/(v) — Aijvivj = фв/ 0. (3.2.6)
Следующая гипотеза нормальной диссипации является обобщением
(3.2.3):
(Hi) Для любого реального термодинамического процесса суще-
ствует суперпотенциал, т. е. выпуклый п.н.сн. собственный функцио-
нал на ty, такой что
Ijea^G). (3.2.7)
Это обобщение7 основано на идее Циглера [342; 343; 344], предло-
жившего для обобщения соотношений Онзагера некий принцип орто-
гональности. Эту идею применили в выпуклом анализе Моро [212] и
Жермен [112; 113], которые и ввели соотношение вида (3.2.7): Функци-
онал ^называется суперпотенциалом диссипации. Из (3.2.7) вытекает
обратное соотношение
(3.2.8)
где вместе с ^является выпуклым собственным п.н.сн. функциона-
лом. Справедлив следующий результат:
Предложение 3.2.1. Гипотеза (Hi) эквивалентна каждому из приводи-
мых ниже утверждений:
(i) для заданного потока » соответствующая ему сила £ минимизи-
рует функционал .^сф) - на SF\
(ii) для заданной силы ( соответствующий ей поток » доставляет
минимум функционалу ^(и*) - на
Это очевидным образом вытекает из определения -4е (см. п. 2.5.1).
Из второго начала термодинамики следует, что неравенство
Ь > 0 (3.2.9)
1 Соотношения между потоками н силами рассматриваются здесь как феноменоло-
гическое, возможно грубое описание некоторых физических процессов. Во всяком случае,
автор книги не собирается вступать в дискуссию между сторонниками Онзагера и его
противниками.
§ 3.2. Суперпотенцналы. н двойственность
97
должно выполняться в течение всего термодинамического процесса.
Заметим также, что для любого » (соотв. g) вектор (£, -1} (соотв.
(v, -1}) нормален к epi (соотв. к epi г^с) в точке (», ^(»)) (соотв.
(£, -^сф). Этим объясняется название гипотезы (Hi). Следует также
отметить, что гипотеза нормальной диссипации вместе с предположе-
нием о термодинамическом потенциале (см. [112]) позволяет описать
широкий класс определяющих соотношений при помощи двух выпук-
лых функционалов — суперпотенциала диссипации и термодинамиче-
ского суперпотенциала [113]. Эти соотношения должны помимо при-
нципа объективности удовлетворять неравенству (3.2.9). В §4.3 приве-
дено обобщение гипотезы (Hi) на случай невыпуклых диссипативных
функционалов.
3.2.2. Двойственность вариационных принципов
Задача (3.1.43) о равновесии механической системы порождает выпук-
лую задачу минимизации (3.1.46) относительно (обобщённых) переме-
щений и. Понятие двойственности в теории выпуклой минимизации
позволяет свести подобную задачу к задаче оптимизации относитель-
но обобщённых сил £. Есть много подходов к понятию двойственнос-
ти в теории выпуклой оптимизации. Ниже будет использован подход,
предложенный Фенхелем [95] и Рокафелларом [285; 288] и разработан-
ный Экландом и Темамом [91], поскольку он непосредственно приме-
ним к краевым задачам, изучаемым ниже.
Задача (3.1.46) называется прямой (или исходной) задачей (или, в
пределах данного параграфа, задачей Г). Напомним, что П — выпук-
лый п.н.сн. собственный функционал на Далее, пусть &— некоторое
отделимое ЛВП, W— сопряжённое к нему, и пусть рбЗ^, р' 6^'.
Обозначим через <<р, р'>> соответствующую каноническую билиней-
ную форму. Определим теперь функционал Р: х IR, такой что
Р(«*, 0) = П(«*). (3.2.10)
Рассмотрим задачу: найти
infP(«*, Р). (3.2.11)
Будем называть её задачей 1Р. Очевидно, что при р = 0 задача 1Р пре-
вращается в задачу /. Далее, пусть 7х — сопряжённый с Р функционал
на пространстве Рассмотрим задачу: найти
sup (-7х(0, р'*)). (3.2.12)
98
Гл. 3. Вариационные неравенства и суперпотенциалы
Её будем называть задачей Iе. Задачу 1Р называют возмущённой фор-
мой задачи I, а задачу Iе — задачей, двойственной к I относительно
возмущения р. Будем обозначать через inf I и sup Г инфимум и супре-
мум в задачах I и Iе соответственно. Ясно, что inf I и sup Iе — это
вещественные числа, равные П(и) и sup {-7х (О, р'*)1р'*€^'} соот-
ветственно. Используя (2.5.3), легко проверить, что
-7х (О, Р'*) s? Р(«*, 0) Vp'*6^' (3.2.13)
Отсюда
- оо sup Iе inf I < оо. (3.2.14)
Для р € 3^ положим
g(f>) = inf Ip = inf P(«*, p). (3.2.15)
«• iv
Предположим, что
P(«*, p) € Го(^ X 3/). (3.2.16)
Предложение 3.2.2. Если выполнено (3.2.16), то g: R — выпуклый
функционал.
Доказательство. Покажем, что для любых р и справедливо (2.1.2).
Если g(p) или g(<|) равно + оо, то (2,1.2) выполняется очевидным обра-
зом. Пусть теперь g(p) < оо и g(^) < оо. Нам надо проверить, что мно-
жество epi g выпукло над отрезком, соединяющим точки р и Пусть
«1 и «2 — элементы пространства такие что для некоторых a, b € IR
справедливы неравенства
g(p) ^*(«ч» р) о, (3.2.17)
gfo) Р(«2, я) Ь. (3.2.18)
Тогда точки (р, а) и (<^, Ь) принадлежат epi g. Для того чтобы убедить-
ся, что Х(р, а) + (1 - Х)(<^, b) € epi g, 0 < X < 1, достаточно показать,
что
g(XP + (1 - Х)<0 \а + (1 - Х)Ь. , (3.2.19)
Но, действительно,
g(Xp + (1 — Х)а) = inf Р(и*, Хр + (1 — X)<j)
Р(Х«1 + (1 — Х)«2, Хр + (1 — Х)<|)
ХР(«1, р) + (1 ~ X)/J(u2, <|) Х<7 + (1 — Х)6. О
§ 3.2. Суперпотенциалы и двойственность 99
Предложение 3.2.3. Пусть gc — сопряжённый с g функционал. Тогда
ge(P') = 7x(0, Р') VP'€^' (3.2.20)
и
sup Iе = sup (-gc(P'*)) = gee(0). (3.2.21)
Доказательство. Оба равенства следуют из (3.2.12), если заметить, что
для любого Р.'
gc(P') = sup [<<Р', Р>> - g(P)]
Ре
= sup sup [<<PZ, Р>> - P(u*, Р)] = 7х (0, р'),
«*€'//
и вспомнить определение функционала gcc. □
Возмущённая задача supf-P^, Р'*)1Р'* €3^'} связана с зада-
чей I. Поэтому задача, двойственная к Iе относительно возмущения
g, имеет вид
.inf (^(u*, 0)}. . (3.2.22)
«• €'//
Обозначим ее 7СС. Если выполнено (3.2.16), то 7хе(и*, 0) = Р(«*, 0) для
всех «* (см. (2.5.11)), т. е. задача 7СС совпадает с исходной зада-
чей 7. Далее, так как 7хее = 7х (см. (2.5.13)), то задача Гсс, полученная
применением ещё одной процедуры сопряжения, совпадает с Iе. В сле-
дующем предложении сформулированы условия, при которых inf I =
= sup Г.
Предложение 3.2.4. Если выполнено предположение (3.2.16), то сле-
дующие утверждения эквивалентны:
(i) - оо < inf I = sup Iе < оо;
(ii) значение g(0) конечно и g п.н.сн. при р = 0 (нормальность зада-
чи 7 [91]);
(iii) задача Iе нормальна.
Доказательство. Пусть выполнено (i). Используя (3.2.21) и (3.2.15),
можно записать (i) в виде
g(0) = gee(0) € IR. (3.2.23)
Если g — п.н.сн. регуляризация g (см. п. 2.5.1), то справедливо (см.
(2.5.9)) неравенство
gcc g g-
(3.2.24)
100
Гл. 3. Вариационные неравенства н суперпотенциалы
Таким образом, gcc(0) = g(0) = g(0) и выполнено (ii). Предположим те-
перь, что (ii) верно. Из (ii) и (3.2.24) следует, что g(0) = g(0) € IR. Функ-
ционал g является выпуклым и п.н.сн., в силу выпуклости g, а так
как g(0) € IR, то g€ Г°(:^ (см. предложения 2.5.1 и 2.5.2), т. е. gcc = g.
Переход к двойственным объектам меняет знак неравенства:
gccc>gc>gc. (3.2.25)
Но gccc = gc, следовательно, gc = gc, откуда вытекает, Что g(0) =
= #(0) = gcc(0) = gcc(0). Последнее равенство означает, что выполнено
(О-
Осталось показать, что (ii) эквивалентно (iii). Но это сразу следует
из того, что задача I совпадает с задачей Гс. □
Легко проверить, что множество решений задач» Iе совпадает с
dgcc(O). Действительно, если р' € 3/' есть решение задачи Iе, то, в силу
(3.2.12, 20),
-£с(р')^-£с«) (3.2.26)
Но
-gc(P') = sup «0, <> - gc^'D = gcc(9) (3.2.27)
ч'е»
и, следовательно,
p'€dgcc(O). (3.2.28)
Предложение 3.2.5. Пусть значение g(0) конечно. Тогда dg(O) / 0 в
том и только том случае, если g п.н.сн. при р = 0 и задача Iе имеет
хотя бы одно решение.
Доказательство. Так как dg(O) # 0, то gcc(0) = g(0) € IR, g п.н.сн. в ну-
ле и dgcc(O) = dg(O) # 0. Действительно, если x€dg(0), то непрерыв-
ный аффинный функционал /, задаваемый формулой /(«*) = {х, «*) +
g(0), ограничен сверху функционалом g. Но gcc является Г-регуляриза-
цией фунционала g (см. п. 2.5.1), следовательно,
/(«•) gcc(**) g(«*) VM* 6^. (3.2.29)
Поскольку /(0) = g(0), из (3.2.29) получим
gcc(0) = g(0), (3.2.30)
Значит, g п.н.сн. в нуле (см. (3.2.24)). Далее,
9gcc(0) = 9g(0) * 0. (3.2.31)
Так как dgcc(O) есть множество решений задачи Г, из (3.2.31) следует
существование хотя бы одного решения задачи Г.
§ 3.2. Суперпотенциалы и двойственность
101
Для доказательства обратного утверждения покажем, как и в пред-
ложении 3.2.4, что g(0) = gcc(0)€ IR. Тогда если задача Iе имеет хотя
бы одно решение, то dg(O) # 0. □
Предложение 3.2.6. Предположим, что у задач I и Iе существуют ре-
шения и что
- оо < inf I = sup Iе < оо. (3.2.32)
Тогда любое решение « задачи I и любое решение р' задачи Iе удов-
летворяют соотношению
(О, р') С ЭР(«, 0). (3.2.33)
Обратно, если « и р' удовлетворяют (3.2.23), то « служит решением
задачи I, а р'—решением задачи Iе, и, значит, выполнено (3.2.32).
Доказательство. Справедливы равенства
inf I = Р(«, 0) = sup Iе = -Р^О, р'). (3.2.34)
Поэтому
Р(«, 0) + Р^О, р') = <(«, 0), (0, р')> = 0, (3.2.35)
что эквивалентно (3.2.33). Обратно, если « и р' удовлетворяют
(3.2.33), то из (3.2.35) и (3.2.13) следует (3.2.32). Очевидно, что и (со-
отв. р') есть решение задачи / (соотв. Iе). □
Соотношение (3.2.35) называют условием экстремума для рассмат-
риваемой задачи. Из предложения 3.2.5 следует, что условия — оо <
< g(0) < оо и dg(O) # 0, называемые условиями устойчивости, очень
важны, ибо они гарантируют существование решения двойственной
задачи.
В задачах механики часто встречается следующая ситуация. Пусть
пространство (обобщённых) перемещений имеет вид <^(°) х <^(1)
(см.
п. 3.1.1), причём элементы « € (0) и е € (1) связаны некоторым усло-
вием совместимости
£ = Л«. (3.2.36)
Здесь е — трактуется как внутреннее, а «— как внешнее обобщённое
перемещение. В обозначениях данного параграфа, предположим, что
« € е € где 3/ и отделимые ЛВП с сопряжёнными .Уи ' со-
ответственно. Пусть Л€£(^, &). Рассмотрим сопряжённый оператор
Л' , 3}. Этот сопряжённый оператор отображает пространство
внутренних обобщённых сил о в пространство SF внешних обо-
бщённых сил g. Например, для деформируемого тела в рамках теории
102
Гл. 3. Вариационные неравенства н суперпотенциалы
малых деформаций (см. гл. 5) и (соотв. g) задаёт поле перемещений
(соотв. объёмных сил), е (соотв. а) — поле деформаций (соотв. напря-
жений), а Л — оператор деформации, т. е. Ли = (и,,7 + «у,<)/2. Предпо-
ложим, что функционал энергии П, который надо минимизировать
(см. (3.1.46)), можно записать в виде
П(«) = П(и, Ли), (3.2.37)
где П: IR. Тогда можно задать функционал Р равенством
Р(«, р) = П(и, Ли — р), р = £. (3.2.38)
Если функционал П выпуклый, то Р —тоже выпуклый функционал,
а если П € Го(^ X 3/), то и Р € Го(^ X &)
Рассмотрим вариационную формулировку двойственной задачи
(3.2.12) относительно обобщенных сил (р' - а) [91]:
,sugz, (-nc(A'F'*, -р'*)). (3.2.39)
р *
Чтобы получить (3.2.29), заметим, что
Рс(0, р') = sup [<<Р', р*>> - П(и*, Ли* - р*)]
р*
и*
= sup sup [<<р', Ли*>> - < <р ', >> - П(и*, а*)]
+ р* — Ли*
= Пс(Л'р', -р'). (3.2.40)
Продолжим изучение достаточных условий устойчивости прямой
задачи I, а также достаточных условий существования решения задач
I и Г.
Предложение 3.2.7. Пусть П — выпуклый функционал, inf I конечен и
хотя бы для ОДНОГО иц €
П(«ц, Лиц) <оо и функционал р -> П(иц, р)
непрерывен в точке Лиц. (3.2.41)
Тогда прямая задача
inf П(и*, Ли*) (3.2.42)
устойчива.
Доказательство. При сделанных предположениях найдётся ио € та-
кое что функционал р -»Р(«о, р) конечен и непрерывен при р = 0. Сле-
довательно, в ^существует такая окрестность нуля stf, что для любого
р € ^функционал Р(«о, р) ограничен сверху. Тогда (см. (3.2.15)) функци-
§ 3.2. Суперпотенциалы и двойственность
103
онал g(p) также ограничен сверху для всех р € srf. Следовательно, g не-
прерывен в нуле (предложение 2.1.4), и, в силу предложения 2.3.2,
dg(O)# 0. □
Из устойчивости задачи I следует, что
inf I = sup Iе (3.2.43)
и задача I имеет хотя бы одно решение (см. предложения 3.2.4 и
3.2.5). Условие экстремума (2.3.35) превращается в соотношение
П(«, Ли) + ПС(Л'Р', -р') = 0, (3.2.44)
а (3.2.33) принимает вид
(Л'р', — р')€дП(и, Ли). (3.2.45)
Предложение 3.2.8. Пусть — рефлексивное банахово пространство и
П€ Г0(^хЗ/). Пусть, далее, выполнено условие (3.2.41) и
П(и, Ли) оо при Hull-» оо, и€^. (3.2.46)
Тогда прямая и двойственная задачи имеют решения, удовлетворяю-
щие (3.2.43) и (3.2.44) (или (3.2.45)).
Доказательство. Применение к П(и, Ли) предложения 2.2.1 показывает,
что решение прямой задачи существует. Остальное следует из предло-
жений 3.2.6 и 3.2.7. □
Если вклад, который вносят в энергетический функционал П внеш-
ние и внутренние обобщённые перемещения, можно разделить (слу-
чай, с которым мы часто будем встречаться), то
П(и, Ли) = Л(и) + В(Ли). (3.2.47)
Если А и В выпуклы, то П и Р также выпуклы, а если А € Го(^<) и
В € Го(^), то Р € х 3/). Легко убедиться, что двойственная зада-
ча (3.2.39) принимает вид
sup [-Лс(-Л'р'*) - Вс(р'*)], (3.2.48)
р'*
а (3.2.45) распадается на два включения
-Л'р'€ ЭЛ (и), (3.2.49)
р'€дВ(Ли). (3.2.50)
Аналогично условие экстремума (3.2.44) заменится двумя соотно-
шениями
Л(и) + Лс(-Л'р') = -<Л'р', и>, (3.2.51)
В(Ли) + Вс(р') = <<р', Л«>>. (3.2.52)
104
Гл. 3. Вариационные неравенства и суперпотенциалы
§ 3.3. СУБДИФФЕРЕНЦИАЛЬНЫЕ ГРАНИЧНЫЕ УСЛОВИЯ
И ОПРЕДЕЛЯЮЩИЕ СООТНОШЕНИЯ
3.3.1. Субдифференциальные граничные условия
Как и выше, можно определить субдифференциальные граничные ус-
ловия, связывающие между собой величины, «отвечающие за энергию
(или мощность)»7. Классические граничные условия в механике полу-
чаются из этих граничных условий как частный случай.
Мы считаем, что деформируемое тело занимает некоторое откры-
тое ограниченное подмножество 0 пространства IR3. Границу Q обозна-
чаем через Г. Координаты точек х€ 0, х = {xj, i = 1, 2, 3, ..., берут-
ся в некоторой декартовой системе координат. Обозначим 5 = [S,-}
вектор напряжений на Г, 5, = otjnj, где а = {Ду} —надлежащим обра-
зом определённый тензор напряжений, а п = («, ) —орт внешней нор-
мали к Г. Разложим вектор 5 на нормальную и тангенциальную со-
ставляющие Sn и St относительно границы Г:
Sn = (Jijnjni, St = aijnj - (аищп^т. (3.3.1)
Аналогично un и ut обозначают нормальную и тангенциальную со-
ставляющие вектора перемещений и относительно границы Г, a vn
и vt—нормальную и тангенциальную составляющие скорости и. Век-
торы Sjv, un и vn считаются положительными, если они параллельны
вектору п.
Введём некоторый максимальный монотонный оператор fit:
IR ->.9i(IR) и рассмотрим граничное условие в направлении i-й коорди-
натной оси
-$,•€&(«,). (3.3.2)
Из предложения 2.6.4 следует, что с точностью до постоянного слага-
емого можно определить такой выпуклый п.н.сн. собственный функ-
ционал jt на IR, что
Si = dji. (3.3.3)
Тогда (3.3.2) можно переписать в виде
-Sitdjiiui). (3.3.4)
Это соотношение представляет собой субдифференциальное граничное
условие; оно понимается поточечно, т. е как соотношение между
-Si(x) € IR и ц;(х) € IR в каждой точке х€ Г. Таким образом, (3.3.2) за-
1 В том смысле, что их произведение выражает энергию (или мощность).
§ 3.3. Субидфференциальные граничные условия
105
Рис. 3.3.1. Иллюстрация к определению
функционалов ji и jct.
даёт, если пользоваться терминологией п. 3.1.2, локальную связь, при-
чём IR, У= IR и {St, и,) = Siu, (суммирования нет!).
В п. 3.3.4 этот закон распространяется на более общие простран-
ства. Очевидно, что (3.3.4) можно также записать в обращенном виде
ut€djf(-Si), (3.3.5)
или
Uittf(-Si), (3.3.6)
где Si = djt — снова максимальный монотонный оператор на IR, обрат-
ный к оператору /3. Как указывалось в п. 2.6.2, график оператора /3;
в декартовой системе координат Оху есть полная неубывающая кривая
в [R2, как правило многозначная. Так, график может включать участки,
параллельные осям координат (рис. 3.3.1), что соответствует идеаль-
ной пластичности, эффектам скачка и старения. Суперпотенциал ji (со-
отв. jf) называется локальным суперпотенциалом (соотв. сопряжён-
ным суперпотенциалом) и выражает потенциальную (соотв. допол-
нительную) энергию локальной связи. Описанную связь можно
наглядно представить себе как условную пружину нулевой длины в
точке х в направлении /-й координатной оси. Предполагается, что пру-
жина подчинена соотношению (3.3.2).
Аналогично (3.3.2) можно определить граничное условие вида
-Sn€ @n(un) = SJn(un) . (3.3.7)
Предположим, что J — выпуклый п.н.сн. собственный функционал
на IR3. Тогда на Г можно задать поточечное соотношение вида
-Stdj(u), (3.3.8)
106
Гл. 3. Вариационные неравенства и суперпотенциалы
т. е. монотонное отношение между 5(х) и и(х). Можно записать вклю-
чение, эквивалентное (3.3.8):
uedf(-S), (3.3.9а)
j(u)+Jc(~S) = uiSi. (3.3.9b)
Очевидно, что для (3.3.8) мы имеем = IR3, 5^= IR3 и <«, /> = Uif.
Аналогично (3.3.8) можно рассмотреть субдифференциальный закон
— St € д]т(цт)- (3.3.10)
Для некоторых классов задач механики можно выписать аналогич-
ные граничные условия, связывающие между собой 5 и частнук? про-
изводную по времени от перемещения du/dt или же скорость и, а
именно:
с _ а. (ди\
-sedj(v).
(3.3.11)
(3.3.12)
Приведём некоторые примеры, иллюстрирующие эти граничные
условия.
(i) Классическое граничное условие и, = ию можно записать в виде
(3.3.2) с помощью оператора
о г \ f IR,
[ 0
если щ = ию,
в противном случае
(3.3.13)
(см. рис. 3.3.2(a)) или с
помощью функционала
если Ui = и,о,
в противном случае.
Ji(Ui) =
Рис. 3.3.2. Некоторые простые граничные условия.
§ 3.3. Субидфференциальные граничные условия
107
Граничное условие 5/ = С, записывается в виде (3.3.2) или (3.3.4), если
положить
i8«(W/) = -Q (С, задано)
или
ji(ud = -CtUi (не суммировать!)
для любого u( € (R (см. рис. 3.3.2(b)).
(ii) Граничное условие
— Sw = кип,
(3.3.14)
где к > 0 — константа, можно записать в виде (3.3.7), положив
1 2
Mun) = kuN, Jn(un) = (3.3.15)
Это закон Винклера, который описывает при некоторых упрощающих
предположениях взаимодействие между деформируемым телом и
основанием. Соответствующая фиктивная пружина называется линей-
ной пружиной Винклера. Несмотря на чрезмерную упрощённость этой
модели, она находит широкое применение при строительных расчётах.
Для улучшения модели можно предположить нелинейную монотон-
ную связь между напряжением и деформацией пружины Винклера
(пунктирная линия на рис. 3.3.2(c)), которая также может быть записа-
на в виде (3.3.7).
(iii) Указанные выше граничные условия не учитывают возмож-
ность потери контакта между телом и основанием [103; 241]. Чтобы
её учесть, рассмотрим следующие соотношения:
если un < 0, то Sn = 0; (3.3.16)
если un 0, то Sn + kuN = 0, (3.3.17)
где к > 0 — константа. Соотношение (3.3.16) отвечает случаю отсут-
ствия контакта, а (3.3.17) — его наличию. Области наличия и отсут-
ствия контакта заранее не известны, следовательно, (3.3.16, 17) приво-
дят к свободной краевой задаче. Соответствующие $n и Jn задаются
соотношениями
Mun) = £
при
при
un 0,
Un < 0,
Jn(un) =
| ки^ при un 0,
0 при un < 0.
(3.3.18)
(3.3.19)
108
Гл. 3. Вариациоииьде неравенства и суперпотенциалы
Рис. 3.3.3. Граничные условия одностороннего контакта.
Кратко можно записать Jn(un) = ku2N+ /2, где i^+ обозначает положи-
тельную часть un, т. е. un+ = sup[i/N, 0}. Соотношения (3.3.16, 17)
называют условиями одностороннего контакта для линейного закона
Винклера, а (3.3.14) — условием двустороннего контакта (см. [241]).
Более общим образом, рассмотрим операторы
Pn(un) = f прИ Un J °’ (3.3.20)
0 при Un < 0
и
0n(un) = f ^UN ~ A) ПРИ UN h' (3.3.21)
(^ 0 при un < n
(см. рис. 3.3.3). Здесь /3j — максимальный монотонный оператор на IR,
такой что 0 € /31(0). Операторы (3.3.20) и (3.3.21) также приводят к ус-
ловиям одностороннего контакта, но уже для нелинейного закона
Винклера. Во втором случае основание находится на заданном рассто-
янии Л = й(х) от рассматриваемого тела.
Выписанных соотношений недостаточно для того, чтобы сформу-
лировать краевую задачу; их надо дополнить краевыми условиями,
относящимися к St или ит или к обеим этим величинам. Например,
можно рассмотреть условие St = Ст, где Ст = Ст(х) — заданная функ-
ция, или условие ит - 0 (означающее, что нет скольжения), или, более
общо, условие (3.3.10). Возможен также случай, когда &n меняется от
точки к точке; тогда &n = 0n(un(x), х). Заметим, что разложение усло-
вий контакта по касательному и нормальному направлениям сущест-
венно упрощает рассматриваемую задачу.
(iv) Если деформируемо только тело, а основание — нет, то имеют
место граничные условия Синьорини — Фикеры. Они таковы (см.
рис. 3.3.4):
если uN < 0, то SN = 0, (3.3.22)
если uN = 0, то Sn 0,
§ 3.3. Субидффереициальиые граничные условия
109
а) UN b)
Рис. 3.3.4. Граничные условия Синьорини — Фикеры.
или, что то же самое,
Sn 0, wn 0 и SnUn = 0.
(3.3.23)
Соответствующий оператор Sn имеет вид
Sn(Un) =
[0, + оо)
0
при
при
при
Un < 0,
Un = 0,
un > 0,
(3.3.24)
0
а суперпотенциал —
Jn(un) -
при
при
i/ту 0,
Un > 0.
(3.3.25)
Контакт между двумя деформируемыми телами может быть опи-
сан граничными условиями, аналогичными (3.3.22), в предположении
что перемещения достаточно малы (см. рис. 3.3.5). Так как тела не мо-
Рис. 3.3.5. Контакт двух деформируемых тел.
110
Гл. 3. Вариационные неравенства и суперпотенциалы
гут проникать друг в друга, то можно считать, что сумма переме-
щений и® и этих тел и имеющегося между ними расстояния
Л = Л(х) должна быть не меньше величины их взаимного сближения
в результате их движения как твёрдых тел. Обозначим через Un ве-
личину
и$ + uW + h- и0,
и пусть Rn — соответствующая контактная сила. Тогда условия кон-
такта имеют вид
если uv > 0, то Rn = 0; (3.2.26)
если un = 0, то Rn 0.
Аналогичные условия описывают статическое поведение трещины в
сплошной среде (см. [233]).
(v) Следующий пример касается граничных условий с учётом тре-
ния. Рассмотрим такие граничные условия:
если I St I < julSvl, то ит, = 0, / = 1, 2, 3; (3.3.27)
если ISrl =/iISnI, то найдётся X 0, такое что ит,= -\St.
(3.3.28)
Здесь ц = ц(х) > 0 обозначает коэффициент трения, а 1-1 — обычная
норма в IR3. В случае когда Q — двумерное тело, Г есть кривая и, та-
ким образом, St и ит можно задать в локальной правой системе коор-
динат (л, т) на Г, где т—касательный орт к Г. Тогда (3.3.27, 28) мож-
но переписать в виде
— 5т£ Рт(ит), (3.3.29)
где (см. рис. 3.3.6)
iSt(wt) = [- glSNl, 4-glSvl] при glSvl при -glSvl при ит = 0, ит > 0, ит < 0. (3.3.30)
Предположим /iICnI через 5т0. далее, что Sn = Cn, где Cn задано, Тогда iSrfwr) = Э(5т01«т1). и обозначим (3.3.31)
В случае когда 0 — трехмерное тело, (3.3.27, 28) можно записать лишь
в виде (3.3.10), где
]т(ит) = 5т01«т1.
(3.3.32)
§ 3.3. Субидфференциальные граничные условия
111
ST
а)
Рис. 3.3.6. Граничные условия, учитывающие трение.
Легко проверить, что
7r<-Sr)=f0’ если ISrl<Sr- (ззед
q оо в противном случае,
и, таким образом, (3.3.27, 28) можно переписать в эквивалентной
форме
uTedjcT(-ST). (3.3.34)
Эти две двойственные субдифференциальные формулировки приводят
к вариационным неравенствам («т, ST£ IR3)
Jt(ut) - Л(«т) > -StXut: ~ ит,) IR3, (3.3.35)
-ut,(St, - St,) < 0 VS°€ IR3 c IS°I < ST„ (3.3.36)
для I Sri St0-
В задачах динамики часто рассматривают соотношения, учитываю-
щие трение, вида
-Sr€ аЛ(иг) = 3(Sr01 иг1) (3.3.37)
{закон трения Кулона). Если перемещения достаточно малы, то каса-
тельную скорость vt можно заменить на дит/dt.
Опишем одно обобщение закона (3.3.37). Оно получается, если суперпотенциал (дис-
сипативную функцию) jT заменить следующим функционалом:
Jt(i>t) = ICjvl(p*ur4 + р*1>7ь)1/2. (3.3.38)
Здесь а и b — два ортогональных направления, определённые в каждой точке на поверх-
ности тела, называемые ортотропными, ита и ип — компоненты скорости ит в локаль-
ной системе координат (о, Ь), а д« и ць — соответствующие коэффициенты трения. Соот-
112
Гл. 3. Вариационные неравенства и суперпотенциалы
ношения (3.3.37, 38) приводят к
закону ортотропного трения, который имеет вид
если
если
(3.3.39)
(3.3.40)
Комбинируя граничные условия с трением и условия односторонне-
го контакта, получим следующие соотношения:
если un < 0, то S,v = 0, St; = 0, i = 1, 2, 3,
(3.3.41)
если Un 0, то Sn + kuN = 0,
где к > 0 — константа, и выполнены (3.3.37, 38). В этом случае, одна-
ко, не удается записать граничные условия в виде (3.3.38).
Приведём теперь некоторые субдифференциальные граничные усло-
вия, возникающие в теории пластин. Здесь 0 — открытое ограничен-
ное подмножество в IR2, определённое срединной поверхностью пла-
стины. Как обычно, Г обозначает границу 0. Оси xi и хз совпадают
со срединной поверхностью пластины, а ось хз — с направлением нор-
мали к этой поверхности. Положительное направление оси хз — вверх.
Перемещения пластины в своей плоскости обозначаются из, а в
вертикальной плоскости — через f. Обозначим через М и Q изгибаю-
щий момент и полную перерезывающую силу [116] на границе пласти-
ны (рис. 3.3.7) и возьмём граничные условия в виде
М €/3i
\дп/
(3.3.42)
-2 €&(() = ал(Г), (3.3.43)
где /3/ (соотв. j,), i = 1, 2, — максимальный монотонный оператор (со-
отв. выпуклый п.н.сн. собственный функционал) на IR. Эти соотноше-
ния выполнены поточечно.
Ниже приведены некоторые примеры, иллюстрирующие (3.3.42).
Соотношение (3.3.43) аналогично (3.3.8), поэтому примеры, иллюстри-
рующие (3.3.8), могут служить и для иллюстрации (3.3.43).
(vi) Граничные условия при вращении пластины с трением задают-
ся соотношениями:
если \МI < Л/о, что ^- = 0,
on
§ 3.3. Субидфференциальные граничные условия
113
Рис. 3.3.7. Изгибающие моменты и полная перерезывающая сила на границе
пластины.
если IA/I = Мо, то существует X > О,
такое что М = Х^ . (3.3.44)
Их можно записать в виде (3.3.42), где /31 задается формулой (см.
рис. 3.3.8(a)) [-Мо, Мо] при 0П = 0,
\дп) Мо при оп > 0, (3.3.45)
-Мо при дп < 0;
114
Гл. 3. Вариационные неравенства и суперпотенцналы
А/о — заданный изгибающий момент. На рис. 3.3.8(b) изображён чуть
более общий случай. Эти граничные условия допускают полезную фи-
зическую интерпретацию: на границе пластины образуется пластиче-
ский шарнир. Тогда A/о или Afi, Мг — пластические моменты попереч-
ного сечения пластины.
(vii) Граничные условия одностороннего вращения пластины имеют
вид, аналогичный граничным условиям Синьорини — Фикеры (3.3.22),
а именно:
О, М О, М = 0. (3.3.46)
дп дп
Вид (3 и j очевиден (см. (3.3.24, 25)).
В теории пластин может быть рассмотрен и другой тип субдиффе-
ренциальных соотношений. Предположим, что вектор нагрузки f в
каждой точке х 6 Оо С 0 разлагается на заданный вектор f и вектор
/, связанный с перемещением рассматриваемой точки соотношением
вида
-/€ ft(O = Эуз(Г). (3.3.47)
Здесь ft и уз имеют те же свойства, что ft и у, в (3.3.42, 43).
(viii) В качестве примера рассмотрим пластину, которая в точках
Хо € Оо С 0, ОоГ)Г = 0, отстоит от деформируемого основания на рас-
стояние h = й(х) (рис. 3.3.9). Предположим, что основание развивает
силу реакции, которая пропорциональна его деформации (опора Винк-
лера). Справедливы соотношения
-/€ /3(0 в Оо С О,
/=0 в 0 \ Оо.
(3.3.48)
(3.3.49)
§ 3.3. Субидфференциальные граничные условия
115
Здесь 3 — максимальный монотонный оператор, задаваемый фор-
мулой
3(Г) = [ ~ h} ПРИ t ? h’ (3.3.50)
( 0 при f < h,
где к > 0 — константа.
В динамических задачах могут быть рассмотрены граничные усло-
вия вида
"Ма-СО)’ <3-351>
а также соотношения, связывающие реакцию и перемещение, вида
-7з € Эуз . (3.3.52)
При изучении задач теплопроводности можно сформулировать суб-
дифференциальные граничные условия, связывающие между собой
вектор теплового потока q = \qt\ и абсолютную температуру 9 на
границе тела. Они имеют вид
qinitW), (3.3.53)
где (3: IR ->.^S(IR) — максимальный монотонный оператор. Более об-
щим образом, можно считать, что 3 = @(9(х, f), х, t). Из закона Фурье
следует, что
Ф=-М,Л (3-3.54)
где И = (Ку), причем K,y = Ку,-,— тензор теплопроводности. Для изо-
тропной среды Ку = Кбу. Поэтому (3.3.53) можно переписать в виде
- Д€/3(0) = ау(0), (3.3.55)
где у —функционал, отвечающий 3> а дв/дп^ = bijriiOj.
116
Гл. 3. Вариационные неравенства н суперпотенциалы
Рнс. 3.3.10. Примеры (ix) и (х).
Проиллюстрируем (3.3.53) двумя примерами.
(ix) Рассмотрим тело, граница которого полупроницаема для тепла, т. е. тепло мо-
жет втекать в тело, но не может вытекать из него. Предположим, что температура
на Г меняется мгновенно. Пусть 0о = 0о(х), х € Г, — температура внешней среды,
в = 0(х, t) — температура тела. Если 0 > во, то ввиду полупроницаемости границы теп-
лового потока не возникает, следовательно, фл,- = 0. Если же 0 0о, то тепловой поток
имеет место и ф-л,- 0. Из предположения о мгновенности изменения температуры на
границе следует, что 0 = 0о- Это граничное условие записывается в форме (3.3.53), где
Д определяется по формуле (см. рнс. 3.3.10(a))
V 0 при
/3(0) = < [0, -оо) ,при
( 0 при
0 > 00,
0 = 00,
0 < 00.
(3.3.56)
(х) Граничные условия, соответствующие графику на рис. 3.3.10(b), возникают в за-
дачах управления температурой. Температура 0 на Г не должна превосходить 01. При
0 > 01 тепловой поток фи,- должен быть направлен наружу, с тем чтобы сохранялось
соотношение 0^01. Этот тепловой поток является монотонной функцией от 0 при 01
0 02, а при 0 02 остаётся постоянным (равным g).
3.3,2. Субдифференциальные определяющие соотношения. I
В этом пункте мы изучим определяющие соотношения, описываемые
субдифференциальными законами. Некоторые из этих соотношений
носят чисто феноменологический характер, но тем не менее оказыва-
ются полезными при изучении определённых классов задач приклад-
ной механики и техники. Это замечание относится к приведенным в
предыдущем пункте граничным условиям.
Рассмотрим соотношение
a£dw(e), (3.3.57)
для деформируемого твёрдого тела в рамках теории малых деформа-
ций. Здесь а = (сту) —тензор напряжений, е = (еу] —тензор деформа-
ций, w — выпуклый п.н.сн. собственный функционал на [R6. Соотноше-
ние (3.3.57) понимается поточечно, т. е. выражает связь между а(х) и
§ 3.3. Субидфференциальные граничные условия
117
е(х) в каждой точке 0. Его можно переписать в обращённой форме
£бам’с(<т). (3.3.58)
Функционал w (соотв. wc) есть потенциальная (соотв. дополнительная)
энергия на единицу объёма. Эти удельные энергии удовлетворяют сле-
дующим вариационным неравенствам: для £ € IR6
мЧс*) - »v(e) aij(e*j - Еу) Ve* € IR6; (3.3.59а)
для а g IR6
м’с(<т°) - wc((t) £v(4 - € IR6- (3.3.59b)
Как и в п. 3.1.2, можно считать, что w, wc — локальные суперпотенци-
алы, которые задают в каждой точке тела соотношения (3.3.57) или
(3.3.58). Ниже приведены некоторые примеры.
(i) Пусть w задано соотношением
м’(е) = СункВуе^, (3.3.60)
причём компоненты тензора С = [Суьк) (/, j, h, к = 1, 2, 3) обладают
свойствами симметричности:
Cijhk = Cjihk = Ckhijt (3.3.61а)
и эллиптичности:
CijhkByEhk CEyEhk VC = (Су) € IR^, (3.3.61Ь)
где с > 0 — константа. В этом случае (3.5.57) превращается в закон Гу-
ка из теории упругости
(Ту = CijhkBhk- (3.3.62)
(ii) Если функционал w в (3.3.57) является непрерывно дифференци-
руем, то мы получаем соотношение
(Ту =
Эм'(е)
Эбу ’
(3.3.63)
которое описывает нелинейно-упругий материал.
(iii) Рассмотрим на IR суперпотенциал w вида
1 -> 1
2ае +2 Ь(е ~ е°) при е е°’
w(e) =
при 0 Е Со,
(3.3.64)
О
при е < О
118
Гл. 3. Вариационные неравенства и суперпотенциалы
Рнс. 3.3.11. Нелинейно-упругий ннтевой элемент.
(а, Ь > О). Тогда
[ае + Ь(е - £о) при е во,
ае при 0 в Ео, (3.3.65)
О при £ < О
(см. рис. 3.3.11). Такая зависимость между напряжениями и деформа-
циями характеризует поведение нелинейно-упругого стержневого эле-
мента, не выдерживающего отрицательного напряжения (сжатия), на-
пример нитевого элемента [243].
(iv) Пусть (см. рис. 3.3.12)
1 2 _
2 ае при £ £0,
11 1 2
' 2 &(£ “ ео) + (е - Ео)(аео + с) + ае^ при в0 е е0',
w(e) =
§ 3.3. Субидфференциальные граничные условия
119
где а, Ь, с — положительные константы. Тогда
а 6 8w(e) =
ОЕ при е < ео,
[Д£О, Д£о + С] при Е = Ео,
Ь(Е — Ео) + ОЕо + С при Ео < Е < Ео, (3.3.68)
[Ь(е0' - Ео) + аЕо + с, со) при е = Ео,
0 при Е > Ео.
Определяющее соотношение (3.3.68) описывает поведение стержневого
элемента, который при е < Ео является линейно-упругим, при е = Ео
имеет конечный скачок напряжений, между ео и е0' вновь является ли-
нейно-упругим, а при е = Eq имеет бесконечный скачок напряжений,
называемый эффектом старения [272]. Отметим сходство между эф-
фектом скачка (рис. 3.3.12(b)) и эффектом Массона—Савара1 [21]
(рис. 3.3.12(c)).
(v) Упруго-идеалъностареющие материалы. Пусть функционал w
задан на IR6 соотношением
w(e) = м’о(е) + 1к(е), е = [еу], (3.3.69)
где wo — непрерывно дифференцируемый выпуклый функционал, а
1к — индикатор выпуклого замкнутого подмножества:
К = (е 10(e) СО] (3.3.70)
в IR6. Здесь Q — некоторый выпуклый непрерывно дифференцируемый
функционал на IP6, такой что ОеК. Из (3.3.57) и (3.3.69) получаем
ау€ [Эи-(е)]у = + д!к(е),
(3.3.71)
или
_ dwo(s) _
еу)^О Ve*tK
(3.3.72)
для е g К. Но а = {ау ] представляет собой элемент внешнего нормаль-
ного конуса к множеству К в точке е, поэтому (3.3.72) можно перепи-
сать в такой эквивалентной форме:
_ 3w0<£) 8Q(e)
aU-----а-----1" Д —Б >
дЕу деу
Р<2(е) = 0, Q(e) < 0. (3.3.73)
1 Более общепринятым является термин эффект Ле Шателъе. — Прим. ред.
120
Гл. 3. Вариационные неравенства и суперпотенциалы
Рнс. 3.3.13. Зависимость между напряжением н деформацией для одномерного рези-
нового элемента: (а) реальная зависимость (схематически); (Ь) идеализированная за-
висимость.
Таким образом, если Q(e) < 0, то д = 0, и материал ведёт себя как
нелинейно-упругий материал. Если Q(e) = 0, то никакое, ни конечное,
ни бесконечное, приращение напряжений не может вызвать возраста-
ния функции Q(e). Этот эффект называется эффектом идеального ста-
рения [184; 272]. Функцию Q(e) можно взять в виде
<2(е) =| х2, (3.3.74)
где ed = { £&} — девиатор деформации, или в виде
2(e) = (еи - к2). (3.3.75)
В обоих случаях х — положительная константа, характеризующая ма-
териал. Материалы, подчиняющиеся критерию старения (3.3.75), на-
зываются материалами ограниченной сжимаемости. Поведение рези-
ны и некоторых других пластичных материалов достаточно хорошо
описываются определяющим соотношением для стареющих материа-
лов (см. рис. 3.3.13 и [127]). Легко проверить, что если wo определено
равенством (3.3.60), где Cijhk, i, j, h, k = 1, 2, 3, принадлежат L°°(0)
и удовлетворяют (3.3.61a, b), то w — строго выпуклая непрерывная
функция от е, удовлетворяющая соотношению
м’(е) > cEijEij V£ € IR6, (3.3.76)
где с > 0 — константа. Это неравенство будет использовано в гл. 6 при
доказательстве существования решения одной краевой задачи для
упругих идеально стареющих материалов.
(vi) Кусочно-линейная зависимость между напряжением и деформа-
цией. В одномерных примерах на рис. 3.3.14 и 3.3.15 материал харак-
теризуется более чем одним модулем упругости. Такие законы обычно
§ 3.3. Субидфференциальные граничные условия
121
Рис. 3.3.14. Одномерные кусочно-линейные законы.
являются упрощением более сложных зависимостей между напряжени-
ем и деформацией (штриховые линии на рис. 3.3.14(b), (с)). Законы,
представленные на рис. 3.3.14(a), (Ь), можно рассматривать как упру-
гие аналоги упруго-упрочняющегося и жёстко-упрочняющегося мате-
риалов. Закон, представленный на рис. 3.3.14(c), упрощённо описывает
поведение основания при одноосном сжатии. Разномодульный закон
упругости, йзображённый на рис. 3.3.14(d), возникает в волокнистых
композитах, которые ведут себя по-разному при растяжении и сжатии
из-за эффекта потери устойчивости волокон [219]. Диаграммы на
рис. 3.3.15(a), (Ь) описывают поведение недилатирующего элемента в
механике горных пород. Этот элемент моделирует поведение интер-
фейсов в горной породе; он называется недилатирующим, если можно
принять упрощающее дело предположение о независимости между
сдвигом (£т, ат) и сжатием (en, on).
Приведём обобщение закона, представленного на рис. 3.3.14(a),
для трёхмерной сплошной среды. Введём выпуклое множество
Рис. 3.3.15. Зависимость между напряжениями и деформациями для недилатирующе-
го материала в механике горных пород.
122
Гл. 3. Вариационные неравенства и суперпотенциалы
К = (£ I £ Ео) и оператор
ЛЮ-Р "Р" ‘«к.
(^ £0 ПРИ Е$К,
проектирующий IR6 на это выпуклое множество. Тогда диаграмму на
рис. 3.3.14(a) можно описать равенством
а = £ tg <pi + (/ - Px)(£)(tg <Р2 - tg <pi), (3.3.77)
где I— тождественный оператор. В трёхмерном случае К— замкнутое
выпуклое подмножество пространства IR6 тензоров деформации е, та-
кое что 0 € К, и Рк — оператор проектирования на К. Рассмотрим те-
перь суперпотенциал
w(E) = | CijhkEijEhk + (Eij - [Рк(е)](/)(Ец - [Рк(Е)]и), Д > 0. (3.3.78)
2 2д
Это приводит к следующему закону:
<Т,у = CijhkEhk + — [(/- Pk)e]ij. (3.3.79)
д
Аналогично можно записать разномодульный закон упругости для
трёхмерного тела. Соотношение (3.3.71) формально получается из
(3.3.79) при д->0, если vv0 выразить из (3.3.60). Заметим, что (3.3.77)
можно также записать в виде
Е = — а + (I - Р~к)а f!-------1-Л, (3.3.80)
tg \tg tg.pl/
где К = {а I а <т0) • Тогда плотность дополнительной энергии згдтисы-
вается в общем виде
™с(°) = у CijhkOijahk + (оц - [Рк(о)]и)(ои ~ l^(ff)lv). Д > О, (3.3.81)
где с= {с,ул*]—обратный тензор Гука, удовлетворяющий условиям
симметричности и эллиптичности, аналогичным (3.3.61). Множество
К является замкнутым выпуклым подмножеством пространства IR6
тензоров напряжения а, а Д > О — константа. Множество К и констан-
та Д должны быть согласованы с К и д. Если Д -♦ 0, то формально
получаем определяющее соотношение
£ g dwc(a) = 30 Cijhkdijdhk + Лк(ст)^ » (3.3.82)
которое служит обобщением на случай трёхмерной сплошной среды
§ 3.3. Субидфференциальные граничные условия
123
определяющего соотношения, изображенного на рис. 3.3.15(a). Дей-
ствительно, если К = (a I F(a) 0], где F: IR6 -> IR — непрерывно диф-
ференцируемая функция, то (3.3.82) превращается в
Ец = ciJhkahk + X , X О, F(a) 0, XF(<r) = 0. (3.3.83)
0<Ту
Такой материал является упругим аналогом упругого идеально-плас-
тичного материала. Поскольку (3.3.83) не содержит скоростей дефор-
маций и напряжений, такой материал называют ещё «голономным»
упругим идеально-пластичным материалом (см. п. 3.3.3). Если в
(3.3.83) с = [сцкк] = 0, то мы получаем зависимость между напряже-
нием и деформацией для материала Хенки [275]. Выражения для трёх-
мерных аналогов кусочно-линейных законов, изображённых на
рис. 3.3.14(b), (с), могут быть получены соответственно из (3.3.81) и
(3.3.78) отбрасыванием «упругих» членов
~ (°и - [Р^(<т)]//),
- [РкШ- (3.3.84)
Наконец, трёхмерные обобщения кусочно-линейных зависимостей,
имеющих более одного излома, получаются примерно так же, как и
в случае (3.3.78), — надо рассмотреть не одно, а несколько выпуклых
множеств и соответствующие проекции. Другой метод описания ку-
сочно-линейных законов (напряжение — деформация) можно найти в
[182; 219]. Используя (3.3.78), можно также убедиться, что отображе-
ние е-> 1е - Рк(с)12 (здесь 1-1 обозначает норму в IR6) удовлетворяет
неравенству
0 1е - Рк(£)12 - le° - Рк(е°)I2
- 2(е° - Рк(£°), е - £°) I е - е° I2. (3.3.85)
Таким образом, функционал w является непрерывно дифференцируе-
мым и строго выпуклым и удовлетворяет (3.3.76).
(vii) Деформационная теория пластичности [333, 156]. Пусть определяющее соотно-
шение имеет вид
Е
ай = 3.№(и), .*' = —, (3.3.86)
а?(и) = а(Г)е,>), g2 = Г2 = е?е°. (3.3.87)
Здесь J'— объёмный модуль материала, g — однозначная функция на Г, удовлетворяю-
щая условиям
124
Гл. 3. Вариационные неравенства н суперпотенциалы
= а(Г) сь = 3(Г) > С2, (3.3.88)
Г2 </Г
где Ci, С2 — положительные константы, а — непрерывно дифференцируемая функция на
Г. Это соотношение можно переписать в виде (3.3.57)
Е У
= 27,—+ *<r>dr- <3-3-89)
6(1 - 2р) J
Очевидно, что функционал w является строго выпуклым и непрерывно дифференцируе-
мым и удовлетворяет (3.3.76).
3.3.3. Субдифференциальные определяющие соотношения.II
В этом пункте изучается ещё один класс определяющих соотноше-
ний, а именно соотношения, которые можно записать в виде
atdw(D). (3.3.90)
Предполагается, что (3.3.90) выполняется поточечно в течение всего
процесса деформации. Здесь w— суперпотенциал (и> € Fo(fR6)), а =
= а(х, t) — тензор напряжений Коши, a D = D(x, t) — тензор скоро-
стей деформации в точке х.
При лагранжевом описании движения можно задать субдифферен-
циальные соотношения между производной по времени от тензора на-
пряжений Грина Е и тензором напряжений Пиолы — Кирхгофа Е (см.
добавление I). Производная по времени от тензора напряжений Грина
в декартовой системе координат имеет вид
Ёу = (vij + vjj + vkjukj+ Vk,juktr), (3.3.91)
где
Vij= dvt/dXj, vt = dXj(X, f)/dt = Vi(X, t).
В случае малых перемещений и малых градиентов перемещений эй-
лерово описание движения совпадает с лагранжевым, и из (3.3.91) сле-
дует, что (см. добавление I)
Ёу = £у = ^ = Dij. (3.3.92)
В этом случае (3.3.90) принимает (неголономный) вид
а€ди-(г). (3.3.93)
Соотношения, обратные к (3.3.90, 93), можно записать при помощи
сопряженного суперпотенциала
D(,dwc(o) и £€dwc(a). (3.3.94)
§ 3.3. Субидфференциальные граничные условия
125
Рис. 3.3.16. Поведение различных вязких материалов (одномерный случай): (а) жест-
ко-идеально-пластичный материал; (Ь) жестко-вязкопластичный материал (жидкость
Бингама) [274]; (с) жидкость с двумя значениями вязкости.
Если w также зависит от х и t, то (3.3.90) и (3.3.93) можно переписать
соответственно в виде
о € dw(D, х, t) и а € dw(e, х, f). (3.3.95)
Ниже приведены некоторые примеры, иллюстрирующие законы
(3.3.90, 93).
(i) Идеально-пластичные материалы. Зададим замкнутое выпук-
лое содержащее нуль подмножество К пространства IR6 формулой
К= (oIF(i7) 0}, где F— некоторая непрерывно дифференцируемая
функция, называемая функцией текучести материала. Рассмотрим со-
отношение
DedIK(o), (3.3.96)
которое также может быть записано в виде (см. (3.3.83))
Dy = X , X > 0, F{a) < 0, \F(a) = 0. (3.3.97)
0(7,7
Таким образом, мы получили определяющие соотношения для жёстко-
идеальнопластичного материала (см. рис. 3.3.16). В случае малых де-
формаций D в (3.3.97) заменяется на тензор скоростей пластической
деформацией ёр.
(ii) Для того чтобы получить закон Прандтля — Рейсса для упруго-
идеальнопластичных материалов, достаточно взять определяющее
соотношение вида
с = ёЕ + ёр € сё + д!к(о), (3.3.98)
126
Гл. 3. Вариационные неравенства и суперпотенциалы
Рис. 3.3.17. Геометрическая интерпретация ер.
где со = {CijhkOhk}. Тогда
* F *Р * & F
£ij ~ £ij + £ij — CijhkOhk + X -5— ,
OOij
X > 0, F(p) < 0, XF(o) = 0. (3.3.99)
Рассматриваемый как вектор пространства IP6 тензор £р является эле-
ментом внешнего нормального конуса к множеству К в точке о
(рис. 3.3.17). Если граница множества К имеет угловые точки, скажем,
если К = {о I Fk(o) <0, к = 1, 2, ..., т}, то в угловой точке
т
£v - £ij + / J х* , Xfc > 0,
к = 1
Fk(o)^0, XkFk(a) = 0, к=\,...,т. (3.3.100)
Очевидно, что тензор скоростей пластической деформации удовлетво-
ряет для оьК неравенству
е£(4 - oij) <0 Va° € К', (3.3.101)
это хорошо известный постулат устойчивости Друккера1, или прин-
цип Хилла максимума пластической работы [141; 142; 278] (см. также
§ 4.3). По поводу возможных видов критерия текучести F(o) < 0 адре-
суем читателя к руководствам по теории пластичности. Вообще гово-
ря, критерий текучести может зависеть от времени и от простран-
ственных координат, тогда в (3.3.96, 97) следует записать К = К(х, Г).
1 Точнее, постулат ограниченной устойчивости в челом [266].
§ 3.3. Субидфференциальные граничные условия
127
До сих пор рассматривался лишь случай нагружения. Для того что-
бы охватить случай разгрузки, дополним (3.3.99) условиями
X = 0, если F(a) < 0 или если F(o) = 0 и F(o) < 0, (3.3.102)
X 0, если F(a) = 0 и F(a) = 0. (3.3.103)
Соответственно мы можем записать определяющее соотношение в ви-
де (3.3.98), где
~ 0 Va°€/f, если F(a) < 0, (3.3.104)
Egaij = 0, если F(o) = 0. (3.3.105)
Поверхность текучести может менять форму в процессе деформации
(эффект упрочнения). Таким образом, в общем случае можно считать,
что критерием текучести служит условие F(o, К(ср), А) < 0, где К —
тензор, А — скаляр.
(iii) Жёстко-вязкопластичные материалы. Используя метод, с по-
мощью которого мы изучали кусочно-линейные законы напряже-
ние — деформация в предыдущем пункте и введённые там обозначения
(см. (3.3.81-84)), рассмотрим суперпотенциал
/Да) = _L |ff - рк(а)|2, д > 0, (3.3.106)
где К -♦ {ff I F(ff) < 0 ] — выпуклое замкнутое подмножество в IR6, такое
что Об К, F—непрерывно дифференцируемая функция. Константа ц.
называется коэффициентом вязкости. Определяющее соотношение
ШЗ/Да) (3.3.107)
является обобщением на трёхмерный случай закона, изображённого на
рис. 3.3.16(b). Оно описывает жёстко-вязкопластичный материал, на-
зываемый также жидкостью Бингама. Это соотношение можно запи-
сать в виде
D = ± («г - (3.3.108)
2/4
Если F(ff) < 0, то материал ведёт себя жёстко, а если F(o) 0, то вяз-
ко. Предполагая, что F(a) имеет вид
F(o) = | - g2 = ап - g2 < 0 (3.3.109)
(такие функции впервые рассматривал Мизес), получим7
1 Ясно, что наш материал является несжимаемым: div и = D** = 0.
128
Гл. 3. Вариационные неравенства и суперпотенциалы
О если on2 < g,
(1 - оу, если ап2 g.
2/4 \ оц /
(3.3.110)
Соотношение (3.3.107) можно записать в обращённой форме
o€d^(Z>), (3.3.111)
откуда получаем следующую зависимость между о и D:
оу = ~pby + g -^£2 + 2pDy, если Du 0, (3.3.112)
Du
an2 < g, если Du = 0.
Здесь Z>ii = | DijDij, a p — скаляр, который можйо интерпретировать
как давление жидкости.
Существуют материалы, поведение которых хорошо согласуется с
приведенным выше законом, например жидкий бетон, некоторые сма-
зочные вещества. Если имеет место термомеханическое взаимодейст-
вие, то коэффициент ц, является функцией температуры. Более подроб-
ную информацию о жидкостях Бингама можно найти в [224; 274].
(iv) Упруго-вязкопластичные материалы. Пусть определяющее соотношение имеет
вид
ё = ёЕ + ёур € са + Д/Да),
(3.3.113)
где /д задано равенством (3.3.106). Это соотношение описывает упруго-вязко-пластичное
тело.
(v) Упруго-вязко-пластичные материалы [59]. Для таких материалов тензор скорос-
ти деформации есть сумма упругой части е£, вязкой части ёу и идеально-пластичной
части ёр. Определяющие уравнения можно записать в виде
ао
ё = ёЕ + ёу + ёр tea + ---+ д!к(а). (3.3.114)
(vi) Упруго-вязко-вязкопластичные материалы [106]. Аналогично (3.3.113) имеем
gD
ё = ёЕ + ёу + ёур € са + — + а/„(<7), (3.3.115)
2д1
где, вообще говоря, щ # да.
(vii) Упруго-пластично-вязкопластичные материалы1 [59]. Для таких материалов
1 С помощью субднфференциалов можно получить обобщение определяющих соот-
ношений для вязкоупруго-пластичных материалов [59], например можно обобщить за-
кон Нортона — Хоффа [105; 107] для задачи об установившемся режиме ползучести.
§ 3.3. Субидфференциальные граничные условия
129
тензор скоростей деформации записывается следующим образом:
е = еЕ + ер + еур € cis + д!к(о) + (3.3.116)
Описание процессов нагружения и разгрузки для материалов последних трёх типов
можно найти в [59]. В §4.3 будет изучен другой'важный класс материалов, которые
подчиняются субдиффереициальным определяющим соотношениям.
Для задач в приращениях можно рассматривать определяющие со-
отношения вида
o€dw(i) или E€dwc(<j). (3.3.117)
Пример такого определяющего соотношения будет приведен при изло-
жении теории пластического течения.
(viii) Предположим, что сплошная среда дискретизована соответ-
ственно подобранными конечными элементами. Скорости напряжения
и деформации /-го элемента будем обозначать через s, и ё(. Упруго-
пластическая зависимость в приращениях между напряжением и де-
формацией рассматривалась в [190; 191]. Предполагается, что эта за-
висимость линейна; следуя Майеру [188], будем считать, что она име-
ет вид (по i не суммировать!)
ё,-= ef+ef= F0,s, + ё/; ёГ= V,X„ (3.3.118)
F; = Nfs, - Н(Х,-, Х, ^0, Fi < 0, ХГЁ = О. (3.3.119)
Здесь Foi — матрица гибкости /-го элемента, a N( — матрица, состав-
ленная из градиентов = (dF?/dsfa)) I sj«> (j = 1, 2, ..., т) функций те-
кучести Fj, которые равны нулю для напряжённого состояния sj“*.
Матрица Vi составлена, как и матрица N,-, из градиентов V{ = (dRJi
/dsf“>)l s(»> пластических потенциалов. Вектор F, образован из произ-
водных от функций текучести F}, Fl, ...,/?] вектор X, — из т произ-
водных коэффициентов пластичности X/, X,2, ..., Хь матрица Н, — это
(т х ш)-матрица взаимоупрочнения; индекс Т обозначает операцию
транспортирования вектора или матрицы. Данная теория включает в
себя случай неассоциированных законов течения (отсутствие нормаль-
ности: V, # N,), случай упрочнения в соответствии с гипотезой Койте-
ра (Н, = diag(/Z/, ..., Hf), Н{> 0, j = 1, .... т) или с гипотезой Ман-
деля (Hi — симметричная положительно-полуопределённая матрица), а
также случаи разупрочнения. С помощью субдифференциатов соотно-
шения (3.3.118, 119) можно записать в виде
ёГ€ -Vi{dk(HiX, - N&), К = (у; 1у, 0], (3.3.120)
т. е - if есть результат применения оператора V,- к элементу Н,Х( -
- N,%, внешнего нормального к множеству К конуса. Тогда определи-
130
Гл. 3. Вариационные неравенства и суперпотеициалы
ющее соотношение примет вид
ё, € Fo/s,- - V/ {- N&) 1. (3.3.121)
Это соотношение можно обобщить, вводя в рассмотрение допол-
нительные суперпотенциалы, описывающие вязко-пластические эффек-
ты, например так:
е
ё, € FoiSj - V/ {dlK(HiXi - N&)] + S dw“(s',)]. (3.3.122)
Ct = 1
В механике сплошных сред мы часто сталкиваемся с более сложными законами. При
помощи понятия суперпотеициала их удаётся записать в форме, позволяющей учиты-
вать разрывы непрерывности феноменологической природы, возникающие во многих
прикладных задачах. Так например, хорошо известно, что если в определяющем соот-
ношении
о = + <piD + + т, т€ 3Zk(D), (3.3.123)
где К — выпуклое замкнутое подмножество в IR6, a <р,, i = 0, 1,2, — функции плотности
и главные инварианты девиатора D [20], отбросить г, то получится описание жидкости
Райнера—Ривлииа. Если же г присутствует, то (3.3.123) описывает ту же жидкость,
но с учетом эффекта старения. Такое эвристическое расширение строго обоснованного
определяющего соотношения для жидкости Рнвлена — Эриксена приводит к задаче изу-
чения многозначных законов методами рациональной механики.
3.3.4. Распространение субдифференциальных соотношений
на функциональные пространства
В трёх предыдущих пунктах были введены поточечные субдифферен-
циальные определяющие соотношения и граничные условия. Суперпо-
тенциалы задают зависимость между величинами, скажем о и с или
S и и, в каждой точке множества й или его границы Г. В этом пункте
мы распространим субдифференциальные соотношения на функцио-
нальные пространства. Это необходимо для постановки и изучения
любой краевой задачи, связанной с субдифференциальными граничны-
ми условиями и определяющими соотношениями. С точки зрения ме-
ханики это необходимо для вывода и изучения соответствующих
вариационных принципов. Грубо говоря, ниже изучается следующий
важный вопрос: если w(e(x)) € Го(0?6), то каковы свойства j w(e(x))cKI‘!
п
Как мы увидим, этот вопрос тесно связан с теорией интегрирования
выпуклых функций [34; 287; 290].
Пусть, вообще, (Е, ц) — некоторое пространство с положитель-
ной конечной мерой, ц(Е) < оо. Если А: — многозначный
оператор и Н— гильбертово пространство, отождествлённое со своим
§ 3.3. Субидфференциальиые граничные условия
131
сопряжённым, то можно определить оператор А на £2(£, Н) (продол-
жение А на L2(E, Н)), положив
/€Л(и)« /(х) € Л(и(х)) д-п.в. на Е.
(3.3.124)
В [29]^доказано, что если А — максимальный монотонный оператор,
то и А тоже максимальный монотонный оператор.
Предложение 3.3.1. Пусть А = д<р, где — выпуклый п.н.сн. соб-
ственный функционал на Н. Для и € Ь2(Е, Н) определим функционал
Ф формулой
Ф(м) =
j <p(u(x))dfi, если <р(и) е Ll(E),
Е
оо в противном случае.
(3.3.125)
Тогда Ф является выпуклым п.н.сн. собственным функционалом
на L2(E, Н), причём А = ЭФ, т. е. ЭФ служит продолжением д<р на
L\E, Н).
Доказательство. Так как п.н.сн., то функционал $о(и(-)) измерим на
Е для любой функции и, интегрируемой на Е. Очевидно, что Ф являет-
ся выпуклым и собственным. Для того чтобы доказать его полунепре-
рывность снизу на L2(E, Н), достаточно показать, что надграфик epi Ф
замкнут, т. е. что замкнуто множество {(и, X)) lu€ L2(E, Н), X € IR,
Ф(м) < X). Пусть (ил] —последовательность элементов из L2(E, Н)Г]
0Р(Ф), такая что Ф(мл) < X и ип -> и € L2(E, Н). Тогда у неё найдется
подпоследовательность, которую снова обозначим (мл], такая что
мл(х) -> и(х) д-п.в. на Е. Покажем, что Ф(и) < X. Пусть atD(d<p),
b € др(а), а, Ь^Н. Тогда
g(un) = <р(мл) - <р(а) - (Ь, и„ - а)н^0 д-п.в. на Е, (3.3.126)
а поскольку g п.н.сн., то
lim inf g(u„) g(u) = <p(u) - <p(a) - (b, и - а)н д-п.в. на Е (3.3.127)
g(u) О Vu € Н.
(3.3.128)
Чтобы применить лемму Фату, надо убедиться, что функционал g(u)
измерим, т. е. что множество (xlxe#, g(u(x)) а) измеримо для лю-
бого а€1Р. Но это действительно так, ибо множество (й(х)1 й(х) € Н,
g(u(x)) > а) открыто. Из леммы Фату следует, что
132
Гл. 3. Вариационные неравенства и суперпотенциалы
j g(u(x))dfi С j lim inf g(un(x))dfi
E E
lim inf j g(un(x))dfi, (3.3.129)
E
и, значит,
j <p(u(x))dfi C lim inf j <p(un(x))dfi
E E
= lim inf Ф(и„) < X. (3.3.130)
Следовательно, Ф(и) С X. Для того чтобы показать, что А = ЭФ, дока-
жем эквивалентность следующих двух условий: для и, ft L2(E, Н)
(i) Ф(у) - Ф(и) j (/, v - u)Hdn VvtL2(E, Н); (3.3.131)
Е
(ii) цо(и(х)) - <р(и(хУ) (f(x), v(x) - и(х))н
д-п.в. на Е VvtL2(E, Н). (3.3.132)
Из (ii) немедленно следует (i). Докажем обратное. Пусть S — произ-
водное ft-измеримое подмножество в Е. Положим в (3.3.131)
_ ( и(х) на Е \ S,
{ w(x) на S.
Тогда
j МИ*)) - <p(u(x)) - (f(x), w(x) - u(x)))/fd/i 0. (3.3.133)
s
Так как (3.3.133) справедливо для любого S, то (ii) выполнено. □
Для полноты изложения докажем еще следующий результат:
Предложение 3.3.2. Каждое из вариационных неравенств (3.3.131, 132) эквивалентно сле-
дующему условию:
(iii) найдётся А с Е, такое что д(Л) = 0
и
<р(у) - ^(u(x)) > (f(x), и - и(хУ)н Ух € Е \ A Vu е Н. (3.3.134)
Доказательство. Для того чтобы установить эквивалентность (ii) и (iii), рассмотрим в
[L2(E, Н)\2 монотонные графики ^(Ai) н .ДЛг) операторов At и Аг, задаваемых следую-
щим образом: ftAi(u) (соотв. /€ Аг(и)) тогда и только тогда, когда/и и удовлетворя-
ют (3.3.132) (соотв. (3.3.134)). Очевидно, £(Аг) С .$(А\). Покажем, что Аг — максималь-
ный монотонный оператор и, следовательно, .ДЛг) = -^(Ai). Для этого, в силу предло-
жения 2.6.2, достаточно показать, что оператор I + Аг сюръективен, т. е что для
§ 3.3. Субидфференциальные граничные условия
133
каждого f € L2(E, Н) найдётся и € £2(£, Н), такое что /€ (Лг + Г)и. Для любого f € Н
вариационное неравенство
(и, v — и)н + <p(v) — <р(и) > (f, v - и)н 'iv t Н (3.3.135)
имеет решение ut Н. Действительно, функционал П(и) = UuHjf/2 + <р(и) - (J, и)н дости-
гает минимума на Н (см. предложение 2.2.1). Далее, этот минимум единствен, и отобра-
жение f и переводит сильно сходящиеся последовательности {f,) в Н в слабо сходя-
щиеся в Н последовательности (ия) [28]. Поэтому для любого /ё£2(£, Н) найдётся
элемент и, такой что
(и(х), и - и(х))н + <p(v) - <р(и(х)) и - и(х))н
д-п.в. на £ Vv ё Н. (3.3.136)
Но это и означает (см., например, [28]), что функция и измерима и принадлежит
£2(£, Я). □
В случае когда Е = В (связное множество, с мерой Лебега) и
Н = IR6, из предложения 3.3.1 вытекает, что функционал W, заданный
на [А2 (В)]6 формулой
И-(е) =
j w(e(x))dO, если и>(£) € /?(В),
я
оо в противном случае,
(3.3.137)
будет выпуклым, п.н.сн. и собственным, если w обладает теми же
свойствами на IR6. Далее, из доказанной выше эквивалентности усло-
вий (i) и (ii) следует, что
<г€д1Г(£), £, [Z2(O)16 (3.3.138)
тогда и только тогда, когда для а(х), е(х) € IR6 выполнено включение
а(х) € ди>(£(х)) п.в. в В. (3.3.139)
Аналогично соотношения
£(х) € ди>с(а(х)) п.в. в В (3.3.140)
и
^(^(х)) + И»(£(х)) = £,у(х)а(у(х) П.В. В В (3.3.141)
выполнены тогда и только тогда, когда соответственно
£€д1Г(а), £, <г€[£2(В)]6
и (см. предложение 2.5.5)
^(а) + Ж(£) = (£, а),
(3.3.142)
(3.3.143)
134
Гл. 3. Вариационные неравенства и суперпотенциалы
где
=
j wc(a(x))dO, если wc(a) € £*((!),
n
оо в противном случае.
(3.3.144)
Функционалы W и выражают потенциальную и дополнительную
энергии внутренних сил рассматриваемого тела. Аналогичным обра-
зом могут быть распространены на [£2(О)]6 поточечные соотношения
(3.3.90) и (3.3.93).
Для того чтобы обобщить субдифференциальные граничные усло-
вия на п. 3.3.1, применим предложение 3.3.1, положив Е = Г (с обыч-
ной мерой Лебега) и Н = IR3, если, скажем, рассматривается, соотно-
шение (3.3.8), или Н = IR, если рассматривается (3.3.7) или (3.3.55), и
т. д. Ниже мы дадим обобщение соотношения — S(x) € dj(u(x)) на
£2(Г). Аналогичный метод применим и к другим типам субдифферен-
циальных граничных условий.
Функционал7
f j(u(x))dV, если j(u) € L1 (Г),
Ф(м) = г (3.3.145) оо в противном случае
к
является выпуклым п.н.сн. собственным функционалом на [£2(Г)]3.
Для и, S € (£2(Г)]3 соотношение
- S € дФ(и)
(3.3.146)
выполнено тогда и только тогда, когда (3.3.147)
-S(x) € д/(и(х)) п.в. на Г.
Очевидно, что (3.3.146, 147) эквивалентны обратным соотношениям
и иедФс(-8) (3.3.148)
u(x)€djc(-S(x)) п.в. на Г, (3.3.149)
а также соотношениям
Ф(и) + Фс(-5) = - j Ui(x)Si(x)dr (3.3.150)
г
7 Для простоты мы часто будем опускать х в тех выражениях, которые предполага-
ются выполненными поточечно.
§ 3.3. Субидфференциальиые граничные условия
135
И
j(u{x)) + jc(-S(x)) = -Ui(x)Si(x) п.в. на Г, (3.3.151)
где
Фс(-5) =
j /(-S(x))JT, если /(-$)€ ^(Г),
г
оо в противном случае.
(3.3.152)
Мы часто будем предполагать, что и € [У/1 (О)]3. Тогда и -> Ф(м1г) яв-
ляется выпуклым п.н.сн. собственным функционалом на [У/1 (О)]3, в си-
лу непрерывности следового отображения. Обозначим через Ф суже-
ние ФI [Я1/2(г)]3 Функционала Ф на [УУ1/2(Г)]3, предполагая, что Ф не ра-
вен тождественно + оо на УУ1/2(Г). Тогда ЭФ и ЭФ задают макси-
мальные монотонные графики в
[£2(Г)]3 х [£2(Г)]3 и [УУ1/2(Г)]3 х [УУ-1/2(Г)]3
соответственно. Во многих краевых задачах встречаются граничные
условия, записанные для w€[№(0)]3 и S € [У/-1/2(Г)]3 в виде
Ф(7и) - Ф(7м) <-S, yv - уи) Уи € [У/1^)]3. (3.3.153а)
Так как следовое отображение v _> yv является сюръекцией [У/1 (О)]3
на [УУ1/2(Г)]3, из (3.3.153а) следует неравенство
Ф(и) - Ф(7и) < -S, и - уи) Уи € [УУ1/2(Г)]3, (3.3.153b)
которое эквивалентно включению
-5€ЭФ(7м) или уи € ЭФс(-5). (3.3.154)
Напомним, что <•,•> обозначает каноническое спаривание между
[УУ1/2(Г)]3 и [У/“1/2(Г)]3, которое для Se [£2(Г)]3 задаётся интегралом
jS,(u( - Ui)cfT. Далее черту над Ф и символ у мы будем опускать, если
г
это не может привести к недоразумениям. Условие (3.3.154) — ослаб-
ленная форма граничного условия (3.3.8), ибо полная их эквивалент-
ность гарантируется, только если S € [£2(Г)]3.
Предложения 3.3.1 и 3.3.2 можно обобщить на случай, когда вме-
сто Н берётся банахово пространство X с сопряжённым X',
utLp(E, X), f$Lp'(E, X') где 1 р оо, р'
— сопряжённый с р показатель [28]. Дополнительные сведения по это-
му вопросу можно найти в [126].
Пусть Ф — собственный функционал на [УУ1/2(Г)]3. Будем говорить,
что Ф разложим, если существуют два собственных функционала: Ф/v,
136
Гл. 3. Вариационные неравенства н суперпотенциалы
заданный на №/2(Г), и Фт, заданный на Нт(Г) (см. п. 1.4.3), таких что
Ф(и) = Ф^у(р^у) + Фт(ут) Vu € [№/2(Г)]3, (3.3.155)
где
V = ( Vi = VN/li + VTi-
Предложение 3.3.3. Пусть граница Г достаточно регулярна7, а функ-
ционал Ф на [№/2(Г)]3 является собственным и разложимым. Если Ф
выпукл (соотв. п.н.сн.), то Ф^ и Фт также выпуклы (соотв. п.н.сн.)>
и наоборот.. Далее,
Фс(7) = Ф^(Л) + ФИТ’т) VT€ [Н 1/2(Г)]3, (3.3.156)
где
<Т, и> = {Tn, un>i/2 + {Тт, vt>ht Vu € [№/2(Г)]3. (3.3.157)
Доказательство. Так как Ф п.н.сн., то для любой последовательности
{и„), сильно сходящейся кив [№/2(Г)]3, справедливо неравенство
Фдг(М + Фт(ут) = Ф(у) lim inf Ф(ип)
= lim inf [Ф^Рлдг) + Фт(и„т)]. (3.3.158)
Рассматривая последовательность (ил) = + ит)> где и ° фиксиро-
вано и таково, что ФДут) < оо, устанавливаем полунепрерывность
снизу функционала Ф/v. Аналогично доказывается полунепрерыв-
ность снизу функционала Фт. Обратные утверждения верны, так как
[№/2(Г)]3 изоморфно Нт(Г) х /71/2(Г). Утверждение о выпуклости
очевидно. Замечая, что
Фс(7) = sup [<Т, и) - Ф(и)]
и е [я,/2(Г)13
= sup [<?N, UN) 1/2 — Ф*(™)] + sup [{Тт, ит)нт - Фт(ит)]
vNiHl'\V) VTi Нт
= Ф^(7)у) + Фт(7т)>
получаем (3.3.156). □
Приведём ослабленные формы некоторых граничных условий.
(i) Предположим, что заданы ст^Нт и Cn£ Н~ 1/2(Г), и рассмот-
рим граничные условия
ит — Ст и Sw = Cn- (3.3.159)
1 Годится, чтобы она была С1,'-регулярна [150].
§ 3.3. Субидфференциальные граничные условия
137
Зададим на [№/2(Г)]3 функционал
'J’nCi’n) = ~ {Cn, Un) 1/2
Ф формулами (см. (3.3.155))
(un €Я1/2(Г)), (3.3.160а)
ФДит) = [ ° прИ vt~Ct> (ут^Нт). (3.3.160b)
00 при VT # Ст
Функционал Ф принадлежит классу Го([№/2(Г)]3) и разложим. В силу
предложения 3.3.3 выполнено (3.3.156). Так как для 7n € № 1/2(Г)
Ф^(7лг) = } °’ если Tn ~ Cn’
I оо в противном случае
(3.3.160с)
и для Ту € Нт
Ф^7У) = {Тт, ст>Н1
(3.3.160d)
то
фс(гп - f ^т' Ст^Нт' 601111 ?N =
оо в противном случае.
Используя Ф и Фс, можно записать граничные условия (3.3.159) в фор-
ме (3.3.154). Если Cn €Е2(Г), то условия (3.3.159) эквивалентны пото-
чечным граничным условиям
ит{х) - ст(х) и Sn(x) = Cn(x) п.в. на Г. (3.3.161)
(ii) Пусть задано Ст€ Щ . Рассмотрим граничное условие Синьори-
ни — Фикеры
Un 0 п.в. на Г,
{Sn, mn>i/2 = 0, Sn 0 в Н,/2(Г),
(3.3.160е)
(3.3.162)
(3.3.163)
Следует отметить, что последнее из соотношений (3.3.162) по опреде-
лению эквивалентно неравенствам (см. (1.3.17))
{Sn, un) 1/2 О Vun€ №/2(Г), vn 0 п.в. на Г. (3.3.164)
Далее, функционал Ф определяется на [№/2(Г)]3 с помощью (3.3.155),
причём для vn € №/2(Г)
если vn 0 п.в. на Г, 3
если un > 0 на Г1 с Г с mes Г1 > О,
Ф^М =
а для vt € Нт
St = Ст.
Фт(ит) = — {Ст, vt)ht-
(3.3.166)
138
Гл. 3. Вариационные неравенства н суперпотенцналы
Для Tn$H 1/2(Г) имеем
&n(Tn) = [ °’ если (3.3.167)
q оо в противном случае,
а для 7т € Нт
ФНТт)= [°’ еСЛИ Тт= ~Ст' (3.3.168)
(^ оо в противном случае,
Следовательно, ФС(Т) удовлетворяет (3.3.156). Если Sn€ [£2(Г)]3, то
(3.3.162) эквивалентно поточечному условию (3.3.22). Таким же обра-
зом можно рассмотреть случай одностороннего контакта с деформи-
руемым основанием.
(iii) Пусть St0 € £°°(Г), причём ess inf Stv > 0. Обозначим через
yf', Л и Л соответствующие инъективные отображения:
771/2->£2(Г), /'. £2(Г)-*Я"1/2(Г),
Ht~*Lt= {v € [£2(Г)]3, vint = 0 п.в. на Г),
,/т'. Lt~* Нт.
Очевидно, что v -> (идг, ит) является изометрией [£2(Г)]3 на £2(Г) х
х Lt. Рассмотрим следующие граничные условия:
если St£ Нт, St = ,^т§т, St£Lt и ISrl < St0 п.в. на Г,
(3.3.169)
то ит = 0 (так что ит^Нт)’,
если St^Ht, St = ^tSt, St^.Lt и I St I = St9 п.в. на Г,
то найдётся X О, такое что
ит = — XSr, Ut^ Нт, (3.3.170)
SN=CN в Я‘1/2(Г). (3.3.171)
Легко проверить, что соотношения (3.3.169, 170) эквивалентны соот-
ношениям
-§т£дРт<^ит), St = Л§т, (3.3.172)
где
Ft(v) = j St0 I и I dT для v € Lr. (3.3.173)
г
Условия (3.3.172) можно сформулировать в такой эквивалентной
форме:
St = IStI Sto п.в. на Г,
St0IwtI + Stut = 0 п.в. на Г. 1 • • )
(3.3.175)
положим
fr(T) =
(3.3.176)
§ 3.3. Субидфференциальные граничные условия 139
Функционал Ft задаётся на Lt соотношением
О, если Т€ Lt, I Т\ St<> п.в. на Г,
«з в противном случае.
Для того чтобы записать (3.3.169, 170) в виде (3.3.154),
Фт = Ft ° ^г. Тогда
'О, если Т€ Нт, где Т = /тТ, Те Lt,
iTrl STa п.в. на Г,
ФДг) =
«з в противном случае.
Следовательно, (3.3.169, 170) можно переписать в эквивалентной фор-
ме (см. (2.4.13))
— St € дФт(ит), или мт€дФт(~ St) (3.3.177)
на Нт х Нт для St = /'tSt- В некоторых случаях, используя специфику
рассматриваемых суперпотенциалов, можно сделать полезные заклю-
чения. Например, используя вид суперпотенциала Фт, можно вывести
из (3.3.177), что
€ [Л~(Г)]3 и ||И $1, (3.3.178)
даже если St не принадлежит образу оператора /т [84]. Действитель-
но, из неравенства
(St, vt — ит)нт + j St„(IutI — 1мт1)</Г ^0 Vvt^Ht (3.3.179)
г
вытекает, что
{St, и) + j StoIu lt/Г — «St, ut)ht + j St0 I ttrlt/T) 0
г г
Vu € [Я1/2(Г)]3, (3.3.180)
так как I и I 1ит1 и {St, vt)ht- (St, v). Заменив в этом неравен-
стве v на ±Xui, X 0, и поочередно полагая X = 0 и Х-»«, получим
соответственно
{St, ut)ht+ j STolwrlt/T 0 (3.3.181)
г
и
«St, р>1 j 5т0Ы</Г Vu € [Я1/2(Г)]3. (3.3.182)
г
140
Гл. 3. Вариационные неравенства и суперпотенцналы
Из (3.3.182) следует, что линейная форма v -> (StSTo ’, Stov) непре-
рывна на [№/2(Г)]3 в топологии, индуцированной из [£'(Г)]3 (предпо-
лагается, что это пространство снабжено нормой [St0 I v I с?Г). Но
[№/2(Г)]3 плотно в [£3(Г)]3, следовательно, (3.3.178) выполнено. Та-
ким образом,
ISyl St0 п.в. на Г.
(3.3.183)
Из (3.3.181) и (3.3.183) вытекает, что
St^t, + 5т01“г1 = 0 п.в. на Г.
(3.3.184)
Отсюда и из (3.3.183) получаем поточечные соотношения (3.3.27, 28).
Если определяющие соотношения зависят от х и, возможно, от t, как например в
теории упруго-пластичности при К = К(х, t), то предложение 3.3.1 неприменимо. Для
полного описания поточечных субдифференцнальных определяющих соотношений необ-
ходимы элементы теории интегралов от выпуклых функций [152; 287; 290]. Сформули-
руем без доказательства некоторые результаты, получающиеся применением этой тео-
рии к определяющему соотношению
а(х) € dwo(x, D(x)).
(3.3.185)
Введём функционал
W(D) =
jw(x, D(x))cKl, если w(-, D( )) € £'(Q),
а
оо в противном случае.
(3.3.186)
Если w — нормальная выпуклая подынтегральная функция на 0 х IR6
в смысле Рокафеллара, удовлетворяющая некоторому условию роста,
то We Го([£2(О)]6) и функция <т€ [£2(0)]6 принадлежит dW(D) тогда и
только тогда, когда а(х) € 3w(x, £>(х)) п.в. на 0. Если W зависит ещё
и от /, то в (3.3.186) можно заменить 0на0х(0, Г), и в этом случае
получаются аналогичные результаты.
ГЛАВА 4
Вариационные неравенства
и многозначные выпуклые
и невыпуклые задачи в механике
В первом параграфе этой главы изучаются два общих типа вариацион-
ных неравенств и предлагается общая схема вывода вариационных
«принципов», записанных в форме неравенств. Во втором параграфе
при помощи понятия субдифференцируемости изучаются задачи о со-
существующих фазах. Рассматриваются также задачи минимизации
для гиббсовых состояний. В третьем параграфе представлена попытка
обобщить понятие суперпотенциала на невыпуклые функционалы
энергий при помощи понятий обобщенного градиента Кларка и произ-
водного множества Варги. Далее вводятся полувариационные неравен-
ства, для них доказываются условия субстационарности, обсуждаются
некоторые специальные классы определяющих соотношений и гранич-
ных условий, приводящих к подобным задачам. Завершается глава па-
раграфом, в котором задачи на неравенства изучаются с привлечением
многозначных интегральных уравнений.
§ 4.1. ДВА ОБЩИХ ТИПА ВАРИАЦИОННЫХ
НЕРАВЕНСТВ И ВЫВОД ВАРИАЦИОННЫХ ПРИНЦИПОВ
МЕХАНИКИ В ФОРМЕ НЕРАВЕНСТВ
4.1.1. Вариационные неравенства типа фикеры
Пусть V — вещественное гильбертово пространство им, v € V. Рас-
смотрим симметричную непрерывную билинейную форму а(и, v) и ли-
нейную форму (f, v). Предположим, что/€ И', и пусть Н — поворот-
ное гильбертово пространство, такое что
КС ЯС К',
причём эти вложения непрерывны и плотны. Каноническую билиней-
ную форму будем обозначать через (•, •)» норму на Н — через | |,
142
Гл. 4. Вариационные неравенства
а на И — через !•!. Рассмотрим следующую задачу: найти и^К, та-
кое что
а(и, v - и) - (f, v - и) О WCX, (4.1.1)
где К — заданное замкнутое выпуклое подмножество в V. Это вариа-
ционное неравенство будем называть неравенством типа Фикеры в
честь итальянского математика Г. Фикеры, который основательно его
изучал [96, 97, 99].
Известно, что существует симметричный ограниченный линейный
оператор А : V -* И', такой что
а(и, v) - (Au, v) Vu, ve V (4.1.2)
Согласно предложению 2.2.2, решение иеК неравенства (4.1.1), если
оно существует, служит решением задачи минимизации
П(и) = min [П(и)|и€К}, (4.1.3)
где П(у) = (Av, v)/2 — (f, v), и обратно. Следует отметить, что экви-
валентность задач (4.1.3) и (4.1.1) доказана лишь при условии, что a(v,
v) 0, что означает выпуклость a(v, v). Предположим сначала, что
билинейная форма а(и, v) коэрцитивна на V, т. е.
а(и, и) с Hull2 Vug И, (4.1.4)
где с > 0 — константа. Условие (4.1.4) означает, что функционал а(и,
и) — сильно выпуклый.
Предложение 4.1.1. Если выполнено условие (4.1.4), то вариационное
неравенство (4.1.1) имеет единственное решение.
Доказательство. Из (4.1.4) вытекает, что функционал а(и, и) + (J, и)
тоже является сильно выпуклым. Поэтому у него существует един-
ственная точка минимума. Но условие минимума этого функционала
на множестве К и есть условие (4.1.1). □
Рассмотрим, далее, полукоэрцитивный случай. Пусть
ker Я = {v € V, Av - 0) (4.1.5)
и Q (соотв. Q) — ортогональный проектор И на кегД в Н (соотв.
V). Положим Р = I — Q (соотв. Р — I — Q), где I — тождественное
отображение, и предположим, что
a(v, v) c|Pv|2 W€E, (4.1.6)
где с > 0 — константа. Очевидно,
kerЛ = {v|v€ И, a(v, v) = 0).
§ 4.1. Два общих типа вариационных неравенств
143
Предположим ещё, что
кегЛ конечномерно (4.1.7)
и
ci(a(u, и)1/2 + |и|) НиН С2(а(и, и)1/2 + |и|), (4.1.8)
где Ci, С2 — положительные константы. Тогда а(и, и)1/2 является полу-
нормой на V, а
III will = а(и, u)1/2 + |и|
— нормой на V, эквивалентной Hull. Пусть U — некоторое подмноже-
ство пространства V, содержащее ненулевые элементы, и пусть для
ненулевых и € U
Р(и, U) = sup (ф о, € [/}. (4.1.9)
Из (4.1.6) и (4.1.8) вытекает, что
a(v, v) сIIРг>112 Vt>€ V, (4.1.10)
где с > 0 — константа, и что для v € V норма llPt> II эквивалентна нор-
ме HPfll.
Рассмотрим теперь ядро функционала f:
ker/ = {€ V, (f, v) = 0}.
Обозначим через L пересечение пространств ker А и ker f, и пусть L\ — под-
пространство в кег А, такое что
кегЛ = £©£ь (4.1.11)
Далее, обозначим через Q и Q соответственно ортогональные проек-
торы_И на L и/ (в V), а через Р — оператор I - Q. Очевидно, что
Q - Р - Р, a Qv ортогонально Pv. Зафиксируем ио € К и обозначим
через Ки„ множество € V, v + Uo^K}. Докажем следующий ре-
зультат (см. [99]):
Предложение 4.1.2. Пусть выполнены условия (4.1.6—8) и существует
По € К, такое что
(i)C£ е)<0 для Q € кег ЛПЛГИо, p(Qe, Q(ker А ПКи11)) = оо, (4.1.12)
(ii) множество P(KUa) замкнуто в V. (4.1.13)
Тогда неравенство (4.1.1) имеет решение.
144
Гл. 4. Вариационные неравенства
Доказательство. Так как (4.1.1) эквивалентно (4.1.3), достаточно рас-
смотреть задачу минимизации. Обозначим через I инфимум функцио-
нала П(п) на К, и пусть {ип) — минимизирующая последовательность
для П(с) в К, т. е.
П(ил) -» inf П(п) = I при п -» оо. (4.1.14)
к
Очевидно, что = {и„ — ио) будет минимизирующей последова-
тельностью для функционала П(с + и0) при v€Ku„. Так же как и при
доказательстве предложения 2.2.1, покажем, что последовательность
{Ри'л) ограничена в пространстве V. Предположим, что llPwnll-* оо
при п -» оо. Тогда
cllPw„ll2 a{wn, wn) = 2П(м„) - 2П(ио) + 2(/ w„) - 2д(и0, wn), (4.1.15)
откуда, полагая Zn = wn/llPwnll, получаем
cllPvvnll2llPznll2 ci + 2(ll/llr + IWmoMII^„IIIIPz„II. (4.1.16)
Из (4.1.16) с учётом (4.1.8) вытекает, что
lim UPzJI = lim llPznll = 0. (4.1.17)
П-*<Ю П-*оо
Ho
11Рг„И2 = IIPzJ2 + \\Qzn\\2 = 1. (4.1.18)
Следовательно, lim IIQzJI2 = 1 и IIQzJ! с. Так как 0гпёкегЛ, при-
чём кегЛ в силу (4.1.7) конечномерно, из последовательности {zn}
можно извлечь подпоследовательность, которую также будем обозна-
чать {zn), такую что {Qzn} сильно сходится к некоторому вектору
q € <2(кегЛ) с II е II = 1. Покажем теперь, что для />0 справедливо
включение
/е€Р(^Мо). (4.1.19)
Действительно, из того что wn ё Ки„ и (0) ё Ки„, следует, что для лю-
бого Г_> 0 и всех достаточно больших п мы имеем tZn € Ки„. Тогда
t_Pzn£ Р(Ки„), и из (4.1.13) вытекает (4.1.19). Если а€ Ки„ таково, что
Ра = q, то а = q + (а - е), q ё Q(ker Л) и а - q ё <2(ker Л). Следова-
тельно, дё кегЛ П.йГМ(, и (f, q) = (f, q) + (f, а - q) = (J, а) < 0, в силу
(4.1.12). Ввиду (4.1.8, 15)
§ 4.1. Два общих типа вариационных неравенств
145
О lim inf (IIPwn II llPZn В2)
< lim sup Г -jj- [П(и„) - II(Uo)]
L llPWnll
+ 2(f, Pzn) - 2a(uo, Pzn) - 2(f, q) < О (4Л.20)
—_ пришли к противоречию. Таким образом, последовательность
(Pw„) ограничена в пространстве V, поэтому можно извлечь из после-
довательности (w„j подпоследовательность, которую опять_ будем
обозначать {w„j,_cna6o сходящуюся к некоторому пределу Pw. Так
как множество Р(Ки<) замкнуто, оно является также слабо-замкну-
тым, и, значит, Pw ё Р(Ки„). Для завершения доказательства пока-
жем, что для
П(и) = I. (4.1.21)
Действительно, (/, Qw) = 0, и потому
H(w„ + uo) = n(Pw„ + uo). (4.1.22)
Но, как хорошо известно, для всякой ограниченной неотрицательной
симметричной билинейной формы а(и, v) на V справедливо такое ут-
верждение: если vn -> v слабо в V, то
lim inf a(vn, vn) > a(v, v)
n -*oo
Поэтому
I = lim n(Pw„ + Uo) > n(Pw + Uo) = П(и).
Л-*00
(4.1.23)
(4.1.24)
Отсюда и из (4.1.14) вытекает (4.1.21). □
Это соотношение легко проверить. Пусть vn -» v слабо в V. Тогда
lim inf a(v„, v„) = lim inf [a(v, v) + 2a(v, v„ - v) + a(v„ - v, u„ - v) > a(v, v),
n~*CO n~*CO
так как a(v, v„ - v) -» 0 и a(v„ - v, v„ - v) > 0.
146
Гл. 4. Вариационные неравенства
Неравенство (4.1.1) имеет решение, если К ограничено. В этом случае
(4.1.6) можно заменить условием
a(v, v) > 0 Vv€ К (4.1.25)
Следующее предложение даёт необходимое условие существования ре-
шения задачи (4.1.1).
Предложение 4.1.3. Пусть (4.1.1) имеет решение. ^Гогда для любого
иоШ и любого g € кег такого что p(Qq, Q(ker А Г\ KUa)) = оо,
должно выполняться неравенство
(f, е)<0- (4.1-26)
Доказательство. Предположим, что и есть решение (4.1.1). Положим
в (4.1.1) v = Xg + Uo, X > 0, где g таково, что Xg € ker Л для
X > 0. Тогда
а(и, ио - и) + (f, и - wo) > Х(/ g) # О, (4.1.27)
откуда и следует (4.1.26). П
Рассмотрим, далее, факторпространство V/kerА.
Предложение 4.1.4. Каждое решение и задачи (4.1.1) определяет один
и тот же класс [и] € V/ker А. Если и и и' — два решения неравенства
(4.1.1), то и' = и + g, где g удовлетворяет условиям
(/ g) = 0, g € ker Л ПК„. (4.1.28)
Доказательство. Пусть wi € К и иг € К — два решения неравенства
(4.1.1). Положив в (4.1.1) и - ui, v = иг и и = иг, v = wi, получаем из
(4.1.10)
cllP(wi - w2)02 0, (4.1.29)
откуда следует, что Pui = Риг, т.е. Ри, а тем самым и [и] определены
однозначно. Если и ’ минимизирует П на К, то [и] = [и' ] и, следова-
тельно, и' = и + g, где g € ker А. Но
П(и') = П(и) - (/ g), (4.1.30)
следовательно, g удовлетворяет и первому из соотношений (4.1.28).
Обратно, если и’ = и + g и выполнено (4.1.28), той', очевидно, тоже
решение задачи (4.1.1). □
§ 4.1. Два общих типа вариационных неравенств
147
Обобщение этой теории на случай несимметричных операторов
можно найти в [99]. Применим теперь доказанные выше предложения
к изучению краевой задачи Синьорини — Фикеры в теории упругости.
Рассмотрим линейно-упругое тело, которое в недеформированном
состоянии занимает открытое ограниченное связное подмножество О
в IR3. Область О задаётся в фиксированной декартовой системе коор-
динат OxiXjXj; её граница Г предполагается регулярной (см. п. 1.3.1).
Пусть Г = Гс/иГ.5иГ0, где Гу и Г5 — открытые непересекающиеся
множества, mes Г0 = 0, mes Г$ > 0, а для Гу возможны два случая:
mes Гу > 0 и Гу = 0. Предположим, что на Г? выполнено граничное
условие Синьорини — Фикеры (3.3.22), а также тангенциальное гра-
ничное условие St= Ст, где Ст€ [L2(Fs)]3. Для простоты будем счи-
тать, что на Гу перемещения и равны нулю. Для случая mes Гу > О
эта краевая задача порождает (см. пп. 4.1.3 и 6.2.1) вариационное не-
равенство вида (4.1.1) с
V = Ио = [//'(О)]3, у = 0 п.в. на Г<у}, (4.1.31)
Н = [L2(fi)]3, К = [у|у€ Ио, un 0 п.в. на Г? ]
и
а(и, v) = j CijhkEij{u)ehk{v)(Kl, i, j = 1, 2, 3; (4.1.32)
Q
здесь С = {Ctjhk) — тензор упругих констант с Cijhk € L“(fi), а е = {е</) —
тензор деформаций, связанный с вектором перемещений и = [и,} соотно-
шениями
е</(“) = j (.Uij + uj.i), (4.1.33)
и
(f, v)= [fiVidQ, (4.1.34)
Q
где f = [fi] — вектор объёмной силы.
Из (4.1.32) и свойств (3.3.61) тензора упругих констант с учётом
первого неравенства Корна (1.4.28) очевидным образом следует, что
а(и, и) > cllull2 vu € Ио, (4.1.35)
где с > 0 — константа. Поэтому (а(и, и))1/2 является эквивалентной
нормой на Ио. В силу предложения 4.1.1, при mes Гу > 0 вариационное
неравенство для задачи Синьорини — Фикеры имеет единственное ре-
шение и€ Ио. Если же Гу = 0, то И = [№(0)]3 и kera(v, v) = где
148
Гл. 4. Вариационные неравенства
— пространство перемещений тела как твёрдого, а форма a(v, v)
полукоэрцитивна1 на V. Рассмотрим факторпространство V = V/-H.
Из второго неравенства Корна (1.4.29) следует, что
а([и], [и]) > с11[и]И* V, 2 (4.1.36)
где с > 0 — константа,
а([и], М) = а(и> v) Уи€[и] Vt> € [г]. (4.1.37)
Из второго неравенства Корна следует также, что для всякого ц > О
найдётся такое с > 0, что
а(и, и) + > сВиВ? Vu € [№(Q)]j, (4.1.38)
1 То есть (а(у, и)),/2 является полунормой на V.
2 Для проверки (4.1.36) достаточно показать (см. (4.1.6)), что
£(и) = j eij(u)eij(u)dQ > и|и - Q'uf2 vu € [//‘(О)]3, (1.1.35a)
n
где ci > 0 — константа, Q' — ортогональный проектор [£2(0)]3 на .а? в I? норме. Дей-
ствительно, в силу (1.4.29) можно принять
С\ 1/2
j е(,(и)£и(г/)йЮ + |и|г ]
п '
за эквивалентную норму в [//’(И)]3. Таким образом, (4.1.36) эквивалентно неравенству
е(и) > c[inf |и - г|| + £(«)],
где с > 0 — константа. Из (4.1.35а) с учётом того, что
inf |д - r|l = \P'v\2, Р’ - I - Q',
следует (4.1.36) (см. (1.1.6)).
Если бы (4.1.35а) не было выполнено, то можно было бы построить последователь-
ность (й„) = (и„ / |ия - Q' ыя|2 J, такую что £(й„) -> 0 н |йя - 8'йп|г = 1- Положим
й„ - 2'йл = Р'йп = vnf IW)]3.
Из (4.1.29) следует, что последовательность норм Ий„111 ограничена. Ввиду (1.3.53), из
(йя) можно извлечь подпоследовательность, также обозначаемую (v„), такую что
vn v слабо в [//'(П)]3 и сильно в (£2(Л)]3 (см. п. 1.2.3). Легко проверить (см. (4.1.23)),
что если -* v слабо в [Я1 (Я)]3, то
lim inf j £ц(уя)ец(й„)^Я > j £у(й)£у(й)4О. (4.1.35b)
n n
Поэтому e(v) = 0. Отсюда заключаем, что v е 1Я. Но v„ = ип - Q'u„ = Р'йп, а это эле-
мент ортогонального дополнения Я 1 к пространству Я (в £2-норме). Следовательно,
v е 1, откуда v = 0. С другой стороны, сильная сходимость v„ к v в [£2(Я)]3 вле-
чёт |Р| = 1, и мы приходим к противоречию, из которого и следует справедливость
(4.1.35а).
§ 4.1. Два общих типа вариационных неравенств
149
Заметим, что (4.1.36) эквивалентно (4.1.10), где Р = I - Q, a Q — ор-
тогональный проектор [№(Q)J3 на Положим
^1 = &Г\К, (4 । 39)
^i= (е| ± е }.
Следующий результат непосредственно вытекает из предложений
4.1.2—4.1.4:
Предложение 4.1.5. Предположим, что
(f, е) с о Vq €^, (4.1.40)
(/, е)<0 (4.1.41)
Тогда вариационное неравенство для задачи Синьорини — Фикеры
имеет хотя бы одно решение и. Любое другое решение щ представимо
в виде Ui = и + q, где q удовлетворяет условиям
(/, е) = 0, u+q€K. (4.1.42)
Доказательство. Применимо предложение^. 1.2 с и0 = 0. Поэтому до-
статочно заметить, что Р(К) замкнуто (Q — проектор V на .$й). □
С другими применениями изложенной выше теории, а также с ре-
зультатами, касающимися регулярности задачи (4.1.1), читатель мо-
жет ознакомиться по работе Фикеры [99].
4.1.2. Вариационные неравенства других типов
В этом пункте будут изучены вариационные неравенства вида
a(u, v - и) + Ф(г) - Ф(и) > (/, v - и) Vt>€ V (4.1.43)
для и € V, где Ф — выпуклый п.н.сн. собственный функционал на V,
ftV’, а а(и, v) — непрерывная симметричная билинейная форма на
V (неравенства такого типа описаны в [27; 28]). В случае Ф = где
1к — индикатор выпуклого замкнутого подмножества К в V, (4.1.43)
совпадает с (4.1.1). В случае Ф = Ф + fa неравенство (4.1.43) для и (.К
эквивалентно неравенству
а(и, v - и) + Ф(г) - Ф(и) > (/, v - и) Xv € К. (4.1.44)
Если и является решением неравенства (4.1.43), то
П(и) = тт[П(ц)|цё К], (4.1.45)
150
Гл. 4. Вариационные неравенства
где
П(у) = J a(v, v) + Ф(п) - (/, v), (4.1.46)
и обратно. Это легко следует из предложения 2.2.2, при условии что
а(и, и) >0 УмёИ. (4.1.47)
Мы изучим более общий тип вариационных неравенств, в которые
входят нелинейные псевдомонотонные операторы. Неравенства этого
тйпа включают в себя (4.1.43) как частный случай. Пусть V — вещест-
венное гильбертово пространство и И' — сопряжённое к нему. Рас-
смотрим следующую функциональную постановку задачи (4.1.1). Тре-
буется найти и ё И, такое что для У ё V
(Th, v - и) + Ф(п) - Ф(м) > (У, v - и) Vv(K (4.1.48)
Здесь (•, •) — каноническая билинейная форма на Их V', а Т — неко-
торый, вообще говоря, нелинейный оператор. Справедлив следующий
результат (см. Шатцман [296] и Потье-Ферри[269]):
Предложение 4.1.6. Предположим, что
(i) норма llvll на V эквивалентна p(v) + |v|, где p(v) и |v| — некото-
рые полунорма и норма на V и Н соответственно;
(ii) ё V, p(q) = 0} является конечномерным подпростран-
ством пространства V, Q — ортогональный проектор V на 3 относи-
тельно | • |, Р = I - Q, и
|Рп| cp(v) Vt/ё V, (4.1.49)
где с > 0 — константа;
(iii) Ф — выпуклый п.н.сн. функционал на V, такой что
-О(Ф) # 0, Ф * - °о;
(iv) оператор Т: V-* V псевдомонотонен (см. п. 1.4.3);
(v) (Tv, q) = 0 УиёИ v<ye^; (4.1.50)
(v) существует b > 1, такое что неравенство
T(v, v)^c(p(v))b, (4.1.51)
где с > 0 — константа, справедливо для всех V, для которых полунор-
ма p(v) достаточно велика.
(а) Если выполнены предположения (ii) и (п), то включение
У1> ё К(ЭФИо) VUo ё Л(Ф) (4.1.52)
является необходимым условием существования решения неравенства
(4.1.48).
§ 4.1. Два общих типа вариационных неравенств
151
(Ь) Если выполнены предположения (i)—(vi), то достаточным усло-
вием существования решения неравенства (4.1.48) служит существова-
ние хотя бы одного «о € -О(Ф), такого что
/|у?ёге1ти?(ЭФИо). (4.1.53)
Доказательство. Подставляя и-и = <7€Й)в (4.1.48), получим в силу
Л:-50)
Ф(и + q) - Ф(и> (f, q); (4.1.54)
следовательно,
/€ ЭФ„ (0). (4.1.55)
Учитывая, что Л(ЭФ„) не зависит от и, получаем из (4.1.55) искомое
необходимое условие (4.1.52).
(с) Пусть у — произвольное положительное вещественное число,
и пусть Ф(0) = 0. Будем искать решение и неравенства (4.1.48), такое
что Ии II < у. Такое решение существует, если
(T(v), v) + Ф(и) > (f, v) (4.1.56)
для любого f ё V с Ilf II = у (см. [27; 40]). Рассмотрим пространство
3® -Й, где Ди ^Й определены в предложении 2.4.6. Из (i) и (ii) следу-
ет, что p(v) является нормой на Д, эквивалентной норме Ilf II. Из пред-
ложения 2.4.6 и условия (4.1.51) вытекает, что для любого ЦтЛ® и
любого йёДс достаточно большой нормой IIиII справедливо нера-
венство
(Т(й + q2), й + q2) + Ф(й + q2) - (/, й + q2)
сИйО* - 11/Пг 11Й11 + о - сгИйИ + cjll^zll. (4.1.57)
Таким образом, для достаточно больших II и II и II <72 II выполнено нера-
венство (4.1.56), чем доказано существование решения (4.1.48) для
и ёД© 3k. Используя предложение 2.4.6 и условие (4.1.50), заключа-
ем, что то же верно и для v ё V. Если Ф(0) # 0, то соответствующим
сдвигом можно свести дело к уже разобранному случаю. □
4.1.3. Вывод вариационных принципов механики
в форме неравенств
Под вариационным принципам1 понимают утверждение о том, что
решение данного операторного уравнения с заданными граничными
я. или начальными условиями удовлетворяет некоторому вариацион-
’ Употребление термина «принцип» в литературе по механике — дань традиции
:м например, [130]).
152
Гл. 4. Вариационные неравенства
ному уравнению или вариационному неравенству. В первом случае бу-
дем называть соответствующую задачу двусторонней, а во втором
— односторонней.
Краевые задачи, приводящие к вариационным неравенствам, мы
будем называть задачами на неравенства. С точки зрения механики
формулировка задач в виде вариационных уравнений или неравенств
соответствует принципу виртуальной мощности или виртуальных пе-
ремещений в форме неравенств. Как было отмечено ещё Фурье [171],
вариационный принцип записывается в виде неравенства, если вариа-
ции некоторых величин в рассматриваемой задаче являются односто-
ронними. Например, если бы (4.1.1) было выполнено для и, v$V, то
подстановка и — v = привела бы к вариационному уравнению.
Но у нас и, v € К, где К — лишь замкнутое выпуклое подмножество
пространства V, поэтому такая подстановка недопустима. То же спра-
ведливо и в отношении вариационного неравенства (4.1.43) (в этом
случае из-за разности Ф(и) - Ф(м)).
В прикладной механике выводу вариационных принципов уделяется
большое внимание. Тонти [318; 319] показал, что задачу получения ва-
риационного принципа в форме равенства можно рассматривать как
задачу нахождения потенциала для некоторого заданного векторного
поля. Конечно, выбор соответствующих функциональных пространств
и в особенности выбор канонической билинейной формы, приводящей
в двойственность пространство (обобщённых) скоростей или переме-
щений и пространство (обобщённых) сил, существенно влияет на фор-
му вариационных уравнений. Аналогично обстоит дело и для односто-
ронних задач. В этом случае, как уже отмечалось в [245], вывод вари-
ационного принципа можно рассматривать как поиск суперпотенциала
заданного векторного поля. В § 4.3 будет дано обобщение этого ут-
верждения на случай невыпуклых потенциалов.
Чтобы покороче ввести читателя в курс дела, рассмотрим дефор-
мируемое тело. Используя обозначения п. 1.4.3, можно, в предполо-
жении малых деформаций, записать соотношение
j aij{u)Eij(y - u)dQ + j aijj(u){Vi - Ui)dQ = (.atjnj, (vi - ui)) we [№(й)]3
n n
(4.1.58)
для
we [//'(Й)]3, <Ty€L2(Sl), Oijj€ L2{Q\ i, j= 1, 2, 3.
Это соотношение получается из операторных уравнений рассматрива-
емой задачи применением теоремы Грина — Гаусса и является выра-
жением принципа виртуальных перемещений в случае свободного те-
§ 4.1. Два общих типа вариационных неравенств
153
ла, т. е. при отсутствии связей на границе тела Г. Заметим, что при
выводе (4.1.58) используется лишь соотношение (4.1.33) между напря-
жениями и перемещениями.
Предположим, далее, что выполнено граничное условие (3.3.8).
Пусть, кроме того, выполнено условие равновесия
°tj.j + f, = 0, (4.1.59)
где/€ [Г2(П)]3— вектор объёмной силы. Витоге(4.1.58,59)и(3.3.145) при-
водят к следующей вариационной задаче: найти и € [№(П)]3, такое что
Ф(р) - Ф(и) + j a,j(w)£,y(p - u)c?Q
a
\ fi(Vi - Ui)dQ Vvt[Hl(Q)]3. (4.1.60)
n
Будем считать, что с помощью соотношения (3.3.57) тензор напря-
жений о выражается через некоторый суперпотенциал w. Из (4.1.60)
и (3.3.59а) вытекает вариационное неравенство
Ф(р) - Ф(и) + W(v) - fP(u) > j fi(vi - Vt>€ [ЯШ3, (4.1.61)
n
где W задаётся формулой (3.3.137). Решение и неравенства (4.1.61) бу-
дем искать в [№(П)]3. Из сказанного выше можно заключить, что для
формулировки вариационного принципа в форме неравенства для за-
дач механики необходимо, во-первых, выбрать соответствующее
функциональное «обрамление», для которого справедлива теорема
Грина — Гаусса, и, во-вторых, определить суперпотенциал, описыва-
ющий изучаемое физическое явление. Зависимость формы вариацион-
ного неравенства от выбранного функционального обрамления, в
частности от вида канонической билинейной формы, ясна из следую-
щего примера.
Пусть Н — гильбертово пространство, V — банахово простран-
ство, V — сопряжённое к нему. Предполагается, что V С НС V',
причём эти вложения непрерывны и плотны. Пусть то же самое
выполнено для = L(₽)(0T, V), Hr = L2(0 Т, Н) = L^'^OT, V'),
где 2 р оо (все пространства снабжены обычными нормами).
Рассмотрим следующую задачу: найти многозначный оператор
и: [0, 7] -» V с u(f)tK п.в. на [0, 7], такой что
du , ,
J ~ -rff- + Au + Хи е Ык(и) + ЭФ(и) п.в. на [0, 7], и(0) = ио € И,(4.1.62)
где К — замкнутое выпуклое подмножество в V,
Ф € Го(Г). X € IR, A:V~+ V, ft V и du/dt € V п.в. на [0, 7].
154
Гл. 4. Вариационные неравенства
Зададим на К/ х И каноническую билинейную форму
if, и) = j (f u>e~2Xtdt (4.1.63)
о
<здесь (, •) — каноническая билинейная форма на V х И') и опреде-
лим Ф на V\, положив
Ф(м) =
j е 2Х'Ф(г/)гЙ, если Т),
о
(4.1 64)
оо в противном случае.
Формально интегрируя (4.1.62) в пределах от 0 до Г и учитывая
(4.1.63), получаем следующую задачу: найти w€ И, такое что
u(f) € К п.в. на [0, 7]
и
v - и^ + Ф(р) - Ф(м) - \(v, v - w> - (Au + f v - w>
> -1 |p(0) - wo|i (4.1.65)
для любой функции И, удовлетворяющей условиям
V{, v(t)£K п.в. на [О, Т\.
Исходя из общих свойств суперпотенциалов, можно сказать, что вари-
ационные принципы в форме неравенств позволяют описывать более
сложные, более «реалистические» физические явления, чем принципы,
записанные в форме вариационных уравнений.
§ 4.2. СОСУЩЕСТВУЮЩИЕ ФАЗЫ.
МОРФОЛОГИЯ МАТЕРИАЛЬНЫХ ФАЗ
4.2.1. Неоклассические процессы и гиббсовы состояния.
Сосуществующие фазы
При помощи понятия субдифференциала можно изучать морфоло-
гию и устойчивость материальных фаз2. Здесь мы следуем в основном
идеям Данна и Фосдикка [78], которые в духе работ Гиббса [115] и
' Под фазами понимаются, например, для воды твёрдое, жидкое и газообразное
её состояния. Заметим, что в инженерных задачах, скажем в теории упруго-идеально-
ш.астичных конструкций, термин «сосуществующие фазы» часто означает одновремен-
ное наличие упругой н идеально-пластической областей (Упругое и пластическое состо-
яния, как правило, не трактуются как фазовые переходы в классическом смысле. —
§ 4.2. Сосуществующие фазы
155
Колемана и Гринберга [54, 55] построили общую теорию сосуществу-
ющих фаз для однокомпонентной материальной системы.
Обозначим через й подмножество в IR3, занимаемое рассматривае-
мым телом в начальном положении (при t = 0), которое предполага-
ется фиксированным. Граница Г множества Й предполагается доста-
точно гладкой. Пусть на Й определён некоторый процесс П, т. е. зада-
но упорядоченное множество функций {у, х, £, в, a, q, f, Q},
зависящих от положения X € Й (см. добавление I) и времени t € IR. Да-
лее, процесс П должен удовлетворять уравнениям сохранения энергии
и импульса, а также неравенству Клаузиуса — Дюгема, которые мы
запишем соответственно в виде
-4- I (£ + у ViVi)dm = I (Vidjnj - дм)с1Г + I (fvt + Q)dm, (4.2.1)
I X I I
n' r; a’
j Vjdm = j OijnjdT + j fidm, i = 1, 2, 3, (4.2.2)
n’ r; tr
~ j -ndm > j Я dm - ^^LdV. (4.2.3)
n' a' r;
Здесь Й' — подмножество в Й с границей Г'; г) = i)(X, t), £ = е(Х, f)
и f = f(X, t) обозначают соответственно энтропию, внутреннюю энер-
гию и вектор объёмной силы на единицу массы; т — масса (мера)
тела; 6 = 6(Х, f) — температура, предполагаемая положительной;
о = [до], Oij = otj{X, t), — симметричный тензор напряжений; q =
= {<?<)> di ~ dt(X> f), — вектор теплового потока; Q = Q(X, t) — коли-
чество теплоты на единицу массы; п = [л/ ] — орт внешней нормали
к Г/. Если движение тела описывается функцией х = хСй f) € IR3, то
мы полагаем
й;=х(й', о, г;=х(Г', о, г, = х<г, а
Объём, занимаемый телом Й' в момент времени t, обозначается
через Иг(Й'). Для заданного движения х можно ввести функцию
v: й х IR -* IR +, такую что
К(Й')= j v(X, t)dm. (4.2.4)
й
Это удельный объём (на единицу массы).
Совокупность всех процессов П, определённых на й, обозначим че-
рез П(Й).
156
Гл. 4. Вариационные неравенства
Следуя [78], примем следующую реологическую гипотезу. Она но-
сит весьма общий характер и позволяет рассмотреть широкий класс
определяющих соотношений. Материал не обязан быть ни жидким,
ни твёрдым, допускаются любые типы затухающей памяти [322]. Ре-
ологическая гипотеза определена для некоторого подмножества П' (П)
множества П(П), элементами которого являются так называемые нео-
классические процессы. Эти процессы подчинены некоторым слабым
условиям, дающим возможность изучать изменения энтропии, энер-
гии и удельного объёма. Реологическая гипотеза формулируется с
привлечением новых понятий многообразия статических состояний и
отображения покоя. Процесс П€П'(П) называется неоклассическим,
если
(i) f(X, t) = Q(X t) = 0, i = 1, 2, 3 VXe Й W > 0; (4.2.5)
(ii) существуют два вещественных числа д' и р', называемые соот-
ветственно внешней температурой и внешним давлением, такие что
rfr > - f (4.2.6)
ui J 1 (7 и 1
п г, г,
и
р' Рг(П) = -р' j vdm = j ViOijnjdV. (4.2.7)
n г,
Здесь j qin,dV называется суммарным нагревом тела и обозначается
г,
9t, a j ViOijnjdP — суммарной работой на границе и обозначается 3D?,
г,
Из (4.2.1), (4.2.3) и (4.2.6) следует, что
rf Г %
4 J (4.2.8)
Q
И
4 j (£ + р' v + | ViVi)dm = 9?(0 (4.2.9)
п
для любых П € П' (П) и t > 0. Для любого заданного процесса
П t П' (П) введём для функцию
У(Х, •)= {г)(Х, •), v(X, •), е(Х )):[0, ~) ~> IR3
§ 4.2. Сосуществующие фазы
157
и множество всех таких функций
U
ПеП'(О)
(4.2.10)
назовём множеством всех динамически реализуемых триад.
Пусть с/ — непрерывная поверхность в IR3 и р € Определим функ-
цию I? формулой
... СО, если р €
Ыр) = | (4.2.11)
^оо в противном случае
и положим
Э(Р) = {g|g € IR3, <g, а) = -1, -gedl^P)], (4.2.12)
где а — вектор (1, 0, 0), а <•, > обозначает (в данном пункте) скаляр-
ное произведение в IR3. Множество (4.2.12) можно описать иначе так:
д(р) = {g|g€ IR3, <& а) = -1, <р* - р, g) 0 Vp*e^J. (4.2.13)
Легко показать, что если д(р) 0, то д(р) замкнуто и выпукло. Да-
лее, если поверхность — гладкая в точке р, то д(р) состоит из одно-
го элемента — вектора g, нормального к поверхности в точке р
и удовлетворяющего условию {g, а} = -1. В дальнейшем будем
писать
^€Э(^),
(4.2.14)
если существует хотя бы одна точка р € d?, такая что g € д(р).
Теперь мы можем сформулировать реологическую гипотезу (см.
рис. 4.2.1 и 4.2.2):
Рис. 4.2.1. Интерпретация реологической гипотезы.
158
Гл. 4. Вариационные неравенства
(Hi) Предположим, что в IR3 существуют непрерывная поверхность
3 и непрерывное отображение г: такие что
(i) (r(s) - s, g)^0 Vst3 Vg£d(.3), s = (t), v, e), (4.2.15)
и
(ii) r(s) = s (4.2.16)
Поверхность 3 и отображение г называются соответственно много-
образием статических состояний и отображением покоя. Всякая точ-
ка р$3 называется точкой термостатической фазы для й. Точки
р € -X такие что g € д(р), называются термостатически опорными
точками для 3. Эти понятия применимы ко многим классам материа-
лов, например к линейно-вязким сжимаемым жидкостям, для которых
3 s -X аг — тождественное отображение; они применимы также к
классу материалов с затухающей памятью [54; 55].
Далее, пусть — некоторое множество кусочно-непрерывных ин-
тегрируемых функций р(Х) = (ij(X), i>(X), ё(ХУ)€3. Будем
называть их состояниями. Здесь волна над буквой ставится для того,
чтобы подчеркнуть, что р, ij, v, ё зависят только от X. Множество
й может быть разбито на подобласти й/, такие что на множествах
int й; функция р непрерывна. Совокупность всех точек непрерывности
р обозначим через йс- Множество р(йс) С 3называется эффективным
множеством значений р, а любой элемент этого множества — эффек-
тивным значением р. Множество всех Х€ Йс, таких что р(Х) = р$3
§ 4.2. Сосуществующие фазы
159
для р£<$р, называется p-фазой для й. Пусть 0 € IR и -у € IR. Положим
г^(0, т) = {р = (n> v, S) j vdm = 3, j Edm = 7). (4.2.17)
a a
Состояние po = (ijo, ?o, So) € 7) назовем гиббсовым, если
j fjodm = max { j fjdm\p 7)]. (4.2.18)
n 0
Далее введём проектор stf, определяемый соотношением
S^p = ''/(Pi, P2, Рз) = (P2, Рз) для любого IR3.
Тогда (4.2.17) можно записать в виде
^>(3, у) = <Р j pdmj = ((3, 7)|, (4.2.19)
< \о / J
а (4.2.18) — в виде
(a, j podm\ (a, J pdm\ Vp 7). (4.2.20)
\ n / ' a '
Последнее неравенство характеризует гиббсовы состояния ро.
Если для непрерывной (соотв. непрерывно дифференцируемой) по-
верхности отображение (соотв. дифференциал отображения) (?(•)>
£(•)) является гомеоморфизмом (соотв. изоморфизмом) для любой
точки р' из окрестности точки р на то говорят, что собственно-
(соотв. идеально-) (у, ^-проектируема в точке р г. Проще говоря, по-
верхность ./’является собственно (?, ^-проектируемой в точке р, если
у этой точки существует окрестность, проекция которой на (?, £)-
плоскость не «накладывается сама на себя» (см. [78, рис. 1]); она яв-
ляется идеально (?, ^-проектируемой в точке р, если ^-компонента
нормального вектора к в точке р отлична от нуля. Введённые выше
определения и обозначения позволяют сформулировать необходимые
и достаточные условия, при которых д(/) # 0 и гиббсовы состояния
существуют. Так как наша главная задача — изучить следствия реоло-
гической гипотезы, мы не будем вдаваться здесь в подробности.
Однако для полноты изложения сформулируем основные результаты
(доказательства которых читатель может найти, например, в [78]).
‘ Очевидно, что все данные выше определения могут быть распространены на слу-
чай общих топологических векторных пространств. В этом случае <•, > обозначает
каноническую билинейную форму.
160
Гл. 4. Вариационные неравенства
(а) Если /3 и у заданы, р € <^,(/3, у) — гиббсово состояние, функция
р непрерывна в точке X€ П, а поверхность ^идеально (д, ^-проекти-
руема в точке р(Х), то существует единственный вектор g € IR3, такой
что
g € д(р(Х)). (4.2.21)
(Ь) Для существования гиббсова состояния в у) необходимо,
чтобы существовали (i)p(Xg), Хц € Пс, ц = 1, 2, ..., т [из (а) следует,
что если ^"идеально (у, 5)-проектируема в точке р(Хд), то Э(р(Хд)) # 0],
т
(п)ад€(0, 1), 2 «д = 1> такие что (/3, y)/m(Q) есть й^образ эле-
д = 1
т
мента 2 адр(Хд).
Д = 1
(с) Любому гиббсову состоянию р€^,(/3, у), где р(Х) не является
т- п.в.-константой (т. е. п. в. постоянной по отношению к мере т),
можно поставить в соответствие некоторое гиббсово состояние
PsZ^ptft, у), являющееся ступенчатой функцией от X. Эффективная об-
ласть ps есть подмножество множества p(Qc).
(d) Если ро — термостатически опорная точка для и з/ро = ((5,
то постоянная функция, всюду равная ро, есть гиббсово со-
стояние в ^,(/3, у). Если, кроме того, хотя бы для одного g € д(ро)
<Ро ~ Р, g> < 0 [до] (4.2.22)
то ро является единственным m-п.в.-гиббсовым состоянием В ^,(3, V).
Если же ро не удовлетворяет (4.2.22), то существует и другое гиббсово
состояние в ^,(/3, у), а именно ступенчатая функция, которая ни на
одном из своих участков постоянства не совпадает га-п.в. с ро.
(е) Предположим, что ^,(/3, у) содержит гиббсово состояние р, об-
ладающее тем свойством, что поверхность ^идеально (v, ^-проекти-
руема в образах р(Х) € точек непрерывности X функции р. Такое
состояние называется нормальным. Тогда точки р(Х) являются тер-
мостатически опорными точками для Д имеющими некоторую един-
ственную общую опорную гиперплоскость, и .^образом их выпуклой
оболочки служит (j8, y)/m(Q). Верно и обратное: если интервал у)
таков, что (/3, у)/ш(П) есть й^образ выпуклой оболочки множества
[Д] термостатически опорных точек для поверхности обладающих
свойством Q д(Д) #0, то в ^,(/3, у) существуют гиббсовы со-
J
1 То есть гиперплоскость, проходящая через точку рп и имеющая g своей нормалью,
не имеет других общих точек с поверхностью .У.
§ 4.2. Сосуществующие фазы
161
стояния. Число различных гиббсовых состояний не меньше числа раз-
личных множеств термостатически опорных точек для с вышеука-
занными свойствами.
(f) Для любой термостатически опорной точки р € и для любого
g € д(р) рассмотрим множество
Ар, g) = \d\d$A <Р - Р, g> =0], (4.2.23)
называемое g-сечением поверхности А, это — пересечение поверхности
А с гиперплоскостью, проходящей через точку р и нормальной к g.
Назовём множество Ар, g) аффинно-независимым, если нельзя ука-
зать конечного набора точек рЛАр, g) и чисел aM€lR, ц= 1, 2, ...,
т, не обращающихся одновременно в нуль, таких что
т т
= 0, oig ~ 0.
д = 1 д = 1
Следующие результаты касаются числа сосуществующих фаз в й. Фа-
зовые точки, принадлежащие эффективной области хотя бы одного
нормального гиббсова состояния, называются сосуществующими. Ес-
ли р€^,(0, у) — нормальное гиббсово состояние, то существует дру-
гое гиббсово состояние ps у), являющееся ступенчатой функци-
ей, у которой имеется не более трех эффективных значений, принадле-
жащих р(0с). Ступенчатая функция, являющаяся нормальным
гиббсовым состоянием, не может иметь более трёх эффективных зна-
чений (т. е. существует не более трёх сосуществующих фаз). Предпо-
ложим, что поверхность А всюду идеально (у, е)-проектируема, каж-
дое ее сечение аффинно-независимо и ^(/3, у) содержит гиббсово со-
стояние р. Тогда р является ступенчатой функцией, определённой
однозначно с точностью до перестановки7 и имеющей не более трёх
эффективных значений.
4.2.2. Задачи на минимум для гиббсовых состояний
Любое гиббсово состояние из удовлетворяет помимо условия мак-
симума (4.2.18) многим другим условиям экстремума. Некоторые из
них будут сформулированы в данном пункте.
Пусть р$Ар — нормальное гиббсово состояние. Тогда существует
единственный вектор g(. IR3, такой что (4.2.21) выполнено для любого
‘ Ступенчатая функция pt t<i’p называется перестановкой другой ступенчатой функ-
ции если pi(0c.) = Ро(Ясо) и m(pi\s)) - m(po'(s)) Vs t pofflcj.
162
Гл. 4. Вариационные неравенства
В этом случае <g, р(Х)> постоянно для Хейс, т. е.
<g, р(Х')> = (g, р(Х")> VX', X" € Ос- (4.2.24)
Все точки множества p(tic) имеют общую касательную плоскость,
нормальную к g. Пусть р: U -* [R3, U С IR2 — локальная С ‘-паоаметпи-
зация поверхности в точке р(Ху, если а(т) — кривая класса С1 в
17, причём р(а(0» = р(Х) и а' = «/а(т)/<7т|т=о, то, как легко проверить,
справедливо следующее соотношение: для любого X € Ос
(g, а'\ =0 при а = р~1(р(Х)). (4.2.25)
\ да /
Если положить g = (-l, Я, I) (напомним, что <& a) = -1, а =
(0, 0, 1)), то (4.2.21) примет вид
1(й{Х) - ?) + Я(£(Х) - £) - (ij(X) - ч) 0
V(ij, V, УХеИс. (4.2.26)
Аналогично (4.2.24) и (4.2.25) можно переписать соответственно в
виде
&(у(Х') - ад*)) + Л(£(Х') - Е(Х")) - (ад') - КХ”)) = 0
УХ', Х"€0с. (4.2.27)
I v(X) + Я А ад = 4- ЮО *Х € Вс. (4.2.28)
O3L O3L о а
В последней формуле (d/da)i>(X) = (д/да)и(р~1(р(Х))); аналогично и
для других производных.
Введём термостатическую температуру
Я - (,Л’ если ‘ * °’ (4.2.29)
t±°°, если Я = 0,
и термостатическое давление
- СЯ/Я, если Я # 0,
О = 1 - - (4.2.30)
q ± оо, если Я = О и Я # О,
и будем впредь считать, что д > 0, или, что то же самое, 0 < Я < оо.
Тогда соотношения (4.2.26—28) перепишутся соответственно в виде
-а(ч - ад) + р(? - ад) + (£ - ад) > о
Vp = (ч> ’’> (4.2.31)
-Ъщх1) - rj(X")) + р(р(Х') - Р(Х")) + (ад') - Е(Х")) = О, (4.2.32)
+ <4.2.33)
§ 4.2. Сосуществующие фазы
163
для всех X, X', X" € Ос. Далее, аналогично (4.2.17) будем использо-
вать обозначения
ifp(ct) = {(ij, v, j rjdm = a€ IR),
о
4(0) = {(4, v, ё) €4| J vdm = 0 € IR),
4(a, /3) = {(ij, v, ё) €41 j V^m = «» j = 0> “> 0 € IR),
о о
4(«, v) = Кч> *'> О €41 j = a> j ~ V, a> ?€ IR).
о о
До сих пор мы предполагали, что р — нормальное гиббсово состо-
яние. Теперь примем более общее предположение, а именно что для
всякого р€4 найдётся хотя бы один вектор g€ IR3, удовлетворяющий
условию
g€3(p(X)) vX€fic. (4.2.34)
Такое состояние называется собственно-опорным. Из этого предпо-
ложения следует, что р(-) является гиббсовым состоянием в
4(^( j pdm)). Для того чтобы выполнялось (4.2.34), достаточно, что-
0
бы многообразие статических состояний было непрерывным. Как ра-
нее для случая нормального гиббсова состояния, назовём О термоста-
тической температурой, ар — термостатическим давлением соб-
ственно-опорного состояния р, если g = (-1, К, Я) удовлетворяет
£4.2.34). Каждому элементу множества соответствует пара {О,
р], т. е. для собственно-опорного состояния мы имеем целый набор
р и 0.
Предложение 4.2.1. Любое нормальное гиббсово состояние р€бр с
0 > 0 служит решением следующих задач минимизации:
(i)min j Sdm\p e£p(a, 0) I, в J (4.2.35)
(ii)min ] j (ё - dfj + pv)dm[p J, < о J (4.2.36)
(iii) min j (£ - dfj)dm\p €4(0)J . (4.2.37)
(iv) min f ( (£ + pi>)dmlp£i^(a)l, (4.2.38)
о
164
Гл. 4. Вариационные неравенства
а если р > 0, то и задачи
(v) min^j vdm\p €^>(а, y)J. (4.2.39)
Аналогичным образом, любое собственноюпорное состояние
р е^р, такое что $ > О для некоторого g = (-1, Я, Я), удовлетворяюще-
го (4.2.34), удовлетворяет (4.2.35—39). Если р е£р — другое решение
одной из задач (4.2.35—39), то
gedp(X) VX€Oc. (4.2.40)
Доказательство. В случае когда р — нормальное гиббсово состояние,
(4.2.35—39) получаются из (4.2.31) интегрированием по области 0. В
случае же когда р — собственно-опорное состояние, (4.2.35—39) следу-
ют из (4.2.34). Соотношение (4.2.40) эквивалентно неравенству
<g, р{Х) -р> 0 vXt Йе чре^. (4.2.41)
Предположим, что для некотррого Хе Ос неравенство (4.2.41) не вы-
полнено. Тогда, в силу (4.2.34), в некоторой окрестности точки X
{g, p(XY)-р(Х)) vA'igOc VXgOc, (4.2.42)
где
<g, р(Х1) - p(XY) <0 V%1 e 0c. (4.2.43)
Из (4.2.43) следует, что
(S - £)dm - 0 j (ij - if)dm + p j (v - i)dm < 0, (4.2.44)
ODD
где p = (ij, v, £) и p = (ij, v, £). Ho (4.2.44) противоречит предположе-
нию, что p является решением одной из задач (4.2.35—39). □
Очевидно, что р также гиббсово состояние в
Следует отметить, что поскольку Я и Я в (4.2.29, 30) — вещественные
числа, из (4.2.26, 27) следует, что никакое нормальное гиббсово состо-
яние не может соответствовать ни случаю 0 = 0, ни случаю р = ± оо
при Ъ # ±оо. Поэтому мы и приняли предположение, что О > 0. Сле-
дуя Данну и Фосдикку, интегралы в (4.2.36) и (4.2.37) называют полу-
свободной энергией Гиббса и полусвободной энергией Гельмгольца, а
интеграл в (4.2.38) — полуэнтальпией, чтобы подчеркнуть их связь
с соответствующими понятиями классической термостатики.
§ 4.2. Сосуществующие фазы
165
4.2.3. Сравнение гиббсовых состояний.
Некоторые результаты для динамических задач
В этом пункте предполагается, что pi и pi — два собственно-опорных
состояния. Пусть 3Q51) # d(pi). Предположим, что gi € 9(pi), gi $ d(pi),
gi € d(pi) или gi € d(pi), gi € d(pi), gi^d(pi). Тогда можно записать сле-
дующие соотношения:
<gi, А(Х)-Л(У)> ^0 УХбЯю УУбЯгс, (4.2.45)
<&, Р2(Х) - pi(X)} 0 VX€ Яю УУ€ Я2с, (4.2.46)
где flic (соотв. Ягс) — множество всех точек непрерывности функции
pi (соотв. pi). Ясно, что найдётся либо Уо € Яге, для которого неравен-
ство (4.2.45) является строгим, либо %о€Я1С, для_ которого будет
строгим (4.2.46). Для Pi = (rjiy vt, £,), gi = (-1, fe), p, = Vfe (/ =
1, 2) неравенства (4.2.45, 46£ принимают при дополнительном предпо-
ложении, что температура ft = 1/Я, конечна и положительна, следую-
щий вид:
j (£2 — Si)dm + pi j (fa. — vi)dm — ft j Gj2 — rji)dm 0, (4.2.47)
ODD
( (£i — £i)dm + pi j (Pi — vi)dm — ft j Gji — iji)dm 0, (4.2.48)
ODD
причём одно из неравенств является строгим. Из (4.2.47, 48) следуют
неравенства
(Pi - Рг)( ( (й - vi)dm ) < (ft - ft) Г Од - in)dm, (4.2.49)
х о / о
(Pift -P20i)( f (Pi - v2)dm\ < (ft - ft) [ (£i - S2)dm. (4.2.50)
\о / о
Если, кроме того, Pi > 0 и Рг > 0, то справедливо неравенство
(Pift - p2ft)( J Gji - ni)dm^ < (^ - pi) j (gi - Si)dm. (4.2.51)
Аналогичным образом могут быть рассмотрены случаи
{ft >0, Pi < 0), {ft < 0, Pi < 0), {ft <0, р{ > 0), /=1, 2,
{ft > 0 или <0, ft = ±oo, p &%>(£)}.
Предположим сперва, что ft # ± oo, i = 1, 2. Тогда, если ft > 0 (со-
отв. ft < 0), i = 1, 2, to
(ft - ft) ( (m - Hi)dm (соотв. !$) (pi - p2) f (Pi - vi)dm, (4.2.52)
0 D
166
Гл. 4. Вариационные неравенства
(t?i - д2) j (£1 - S2)dm > (соотв. (pub - Pz^i) j (Pi - n)dm. (4.2.53)
a о
Если, кроме того, ThTh. > 0, ftp, > 0 (соотв. ftp,- < 0), i = 1, 2 (сумми-
рование не производится!), то
(Pift - Pzft) ( (rji - ifodm (соотв. >)(Pi - Рг) ( (Si - £i)dm. (4.2.54)
Если вектор gi, отвечающий [ft, Pi), не является элементом Э(рг)
или вектор g2, отвечающий {ft, Рг), не принадлежит 3(pi), то приве-
денные выше неравенства выполнены строго.
Далее, пусть р°° = (jj°°, £°°) €^,(/3) — собственно-опорное состоя-
ние, быть может, с бесконечной термостатической температурой, т. е.
с 0 = ±оо. Тогда если Д и р2 — два собственно-опорных состояния,
таких что температура д, отвечающая Д, конечна и отрицательна, а
температура О, отвечающая Д, конечна и положительна и
Pi &%>(&), /3 = ( vidm, i = 1, 2,
то
j (Ч/ “ v°)dm <0, f (Si - S^)dm < 0,
о о
j (S2 - t°)dm > 0. (4.2.55)
a
Соотношения (4.2.47—55) имеют ряд важных следствий. Напри-
мер, из (4.2.52) следует, что если ft > О, ft > О и pi = Р2 или
j (й - V2)dm = 0, то
(ft - Ъг) ( j (41 “ V2)dm ) > 0. (4.2.56)
X п /
Из (4.2.52) следует, что если t?i = th. > 0 или j (iji - ipydm = 0, то
о
(Pi - Рг) И (й - v2)dm ) < 0. (4.2.57)
X п /
Если неравенство (4.2.52) — строгое, то и (4.2.56, 57) являются
строгими.
Неравенство (4.2.56) представляет собой интегральную форму хо-
рошо известного принципа Вант Гоффа, а (4.2.57) — интегральную
форму принципа Ле Шателъе1 (см., например, [321]). Вводя обозначе-
Обычно оба принципа записывают в дифференциальной форме, в которой они
применимы липп> локально. Эти принципы получаются из принципов в интегральной
форме, выведенных выше, при некоторых более сильных предположениях.
§ 4.2. Сосуществующие фазы
167
ного V; (с) f-диаграмма для постоянного V (Собственно-опорные состояния.)
См. [78].
ние К = j ~vidm, i = 1, 2, для любых собственно-опорных состояний
О _ _
Pi, Рг^р с 01 = 0г > О, неравенство (4.2.57) можно записать в виде
(Pi - ₽2)(И1 - К2) О (<0, если Pi # рг). (4.2.58)
Из (4.2.52, 53) также следует, что если = Vi и 0,- > 0 (соотв. <0),
z = 1, 2, то
(01 - 02)(/Л - Нг) > 0 (соотв. ^0), (4.2.59)
(01 — 02)(£’i - Ег} 0 (соотв. ^0), (4.2.60)
где _ ________________
Hi = j ijidm, Ei = j Sidm, i = 1, 2.
о о
На рис. 4.2.3(a) приведён график зависимости давления р (которое
считается положительным) от полного объёма V для некоторого мно-
жества гиббсовых состояний с фиксированной температурой 0 > 0. На
рис. 4.2.3(b), (с) представлены графики зависимости изменения полной
энтропии Н и полной энергии Е в зависимости от 0 для некоторого
множества гиббсовых состояний с фиксированным полным объёмом
V (см. (4.2.55)).
Рассмотрим теперь неоклассический процесс П € П(П). Для этого процесса тройка
(»;, г, е) является функцией от X и t и, вообще говоря, не принадлежит $. Будем предпо-
лагать, что для I = to тройка to), v(-, to), e(-, /о)) принадлежит^ и является гнбб-
совым состоянием. В таком случае будем говорить, что процесс П проходит через
гиббсово состояние.
168
Гл. 4. Вариационные неравенства
Обозначим через р') подмножество в П(П), состоящее из всех неоклассических
процессов с внешней температурой d' и внешним давлением р'.
Предложение 4.2.2. Пусть П € ^(d', р'), где d / 0 и р / О — заданные числа. Предпо-
ложим, что для некоторого момента времени те [0L ®) тройка sT = (т)(-, т), >>(•, т),
£(•, т)) является собственно-опорным состоянием с д = д' и р = р'. Тогда
(а) —— (Я(0 - Я(т)) I <Sr - slt g">dm О vt т, (4.2.61)
д' J
о
где St = (ч(-, 1), >'(•, t), е(-, I)), ®(0 = j ViVjdm — кинетическая энергия тела В в про-
цессе П в момент времени t и п
g’ = (-1, К', &’), (4.2.62)
где Л', V соответствуют д = д' и р = р'.
(Ь) Если д’ > 0, то
Я(1) sS Я(т) VI > т, (4.2.63)
а если д’ < 0, то
№(t) У? й(т) VI > т. (4.2.64)
(с) Если д’ > 0 и Я(т) = 0, то
Я(1) =.0 VI > т (4.2.65)
и
<s.{Y), g’} = <,r(st(Y)), g'> = <хт(АЭ, g'>
vxeHTC vrente
(4.2.66)
где (соотв. Site) — множество всех точек непрерывности функции sT (соотв. st). Далее,
для всех 1 > т
r(st(Y))ft^lsr)(-), g') VK€П,С.
(4.2.67)
(d) Если, кроме того, р' > 0 и r(s) = (fj, i>, таково, что
Vs = (ч, >>, е) е 2>,
(4.2.68)
то справедливы (4.2.66, 67) и
St(Y) = r(s,(Y)) VYlQt
(4.2.69)
для всех t > т.
Доказательство, (а) В силу (4.2.8, 9)
ДН-т
О
или, что то же самое,
4(J
п
p' 1 ) , 1
- ii +------v + — £} dm + —
д' д' I д'
J 1
dm +----
д'
(4.2.70)
(4.2.71)
§ 4.3. Невыпуклые суперпотенциалы
169
Интегрируя (4.2.71) от т до t, получим первое из неравенств (4.2.61). Теперь покажем,
что
j <Sr - Л, g")dm 0 V2 > r.
Предположим, что состояние sT является собственно-опорным и пара (д, р) совпадает
с парой (1)', р'). Тогда
g'td(sT(Xy) vXeS2„, (4.2.72)
и так как $((У) € 2, r(st(Y)) € то
Ш(У)) - 5,(У), g'} < 0 УУё (2. (4.2.73)
Следовательно,
<sT(X), g'> < (r(st(Y)), g'} < <.st(Y), g’> VXeBy *У€Й, (4.2.74)
чем неравенство (4.2.61) и доказано.
(b) Это утверждение очевидным образом следует нз (4.2.61).
(с) Пусть Я(т) = 0. Так как d' > 0, то из (4.2.61) следует равенство (4.2.65), а также
равенство
j <sT - sh g')dm = 0 VZ > т. (4.2.75)
о
Из (4.2.74, 75) вытекает (4.2.66). Поскольку r(st(Y))£.4! УУё(2, справедливо также
(4.2.67).
(d) Левую часть (4.2.66) можно записать в виде
(ч - ч) + *'(>- - ?) + *'(е - Е) = 0. (4.2.76)
Так как р' > 0 и выполнено (4.2.68), из (4.2.76) следует, что ч = Ч> v = v, е = Е, т.е.
s = r(s), откуда и вытекает (4.2.69). □
Следует отметить, что, как следует из (4.2.64), если i)' <0 и Я(т) # 0, то тело (2
не придёт в состояние покоя в ходе процесса П ни при каком t > т, независимо от
возможного развития механизма диссипации. Этим до некоторой степени оправдывает-
ся факт, что в механизме сплошных сред не рассматривают отрицательные темпе-
ратуры.
В заключение сформулируем без доказательства (см. [78]) результат о числе сосу-
ществующих фаз в динамическом случае:
Если множество y\sr, g') аффинно-независимо, то оно содержит самое большее три
точки, скажем точки р,, i= 1, 2, ..., п, где п 3. Рост массы m(s,_1(p;)), д-с/
(s„ g'), при однозначно определяется суммарным нагревом 92(2).
§ 4.3. НЕВЫПУКЛЫЕ СУПЕРПОТЕНЦИАЛЫ
4.3.1. Введение и краткий обзор
основных математических результатов
Понятие суперпотенциала было введено Ж.-Ж. Моро [211] для выпук-
лых, но, вообще говоря, недифференцируемых и неконечных функцио-
налов энергии. Как было показано в гл. 3, рассмотрение суперпотен-
циалов приводит к вариационным неравенствам и соответствующим
170
Гл. 4. Вариационные неравенства
выпуклым задачам минимизации. С точки зрения механики вариаци-
онные неравенства можно интерпретировать как выражение принципа
виртуальной мощности (или перемещений). Из классических трудов по
механике известно, однако (см., например, [6; 130]), что этот принцип
носит общий характер и не связан с понятием выпуклости. Субдиффе-
ренциальные граничные условия, введенные в п. 3.3.1, задают некото-
рые неубывающие соотношения, как, например, соотношение (3.3.7)
между Sn и un в каждой граничной точке тела. В то же время суще-
ствует обширный класс контактных задач, например задач о контакте
между упругой конструкцией и гранулированной средой, в которых
взаимодействие между двумя телами описывается немонотонной кри-
вой Sn - un, т. е. появляются невыпуклые функции энергии. В теории
пластичности встречаются также случаи, когда поверхность текучести
является невыпуклой; так бывает, когда существует взаимосвязь меж-
ду упругими и пластическими деформациями, т. е. когда упругие свой-
ства зависят от пластической деформации (см., например, [239; 151;
341; 240]). Экспериментально было установлено [341], что в таком
случае поверхность текучести может быть вогнутой, на возможность
чего ранее указывал Ильюшин (см. [239; 151]). Как показано у Грина
и Нахди [123], допустимы звездообразные поверхности текучести7.
Аналогичные звездообразные области допустимых напряжений недав-
но были рассмотрены в механике грунтов [298].
Подобные задачи подтверждают необходимость обобщения поня-
тия суперпотенциала на невыпуклый случай [260]. Это обобщение тре-
бует распространения понятия субградиента д/(х), используемого в
выпуклом анализе, на случай невыпуклых функционалов. Такое рас-
пространение было осуществлено Кларком [45; 46], который обобщил
понятие субдифференциала на произвольные п.н.сн. функционалы
f: IR" -> (— оо, +оо]. Это новое понятие — обобщённый градиент (в
настоящей книге мы используем для него обозначение Э/(х)) — было
с успехом применено во многих задачах оптимального управления, в
вариационном исчислении и в невыпуклых задачах оптимизации [45—
51; 144; 145; 292; 293; 12; 14; 37; 175]* 2.
Определив 3/ для липшицевых функций, Кларк ввёл понятие кону-
са, нормального к замкнутому множеству. Применив это понятие к
надграфикам п.н.сн. функций, он пришёл к понятию обобщённого гра-
диента df для п.н.сн. функций. Непосредственное определение обо-
' Как объясняется в [123], выпуклость поверхности текучести можно считать допол-
нительным определяющим предположением.
2 Подробный обзор результатов по этому вопросу можно найти в [123].
§ 4.3. Невыпуклые суперпотенциалы
171
бщённого градиента для произвольных функций в терминах соответ-
ствующим образом определённых производных по направлениям бы-
ло совсем недавно дано Рокафелларом [292; 293], который ввёл
понятия верхней субпроизводной7 и субстационарности. Ниже мы
приводим краткий перечень основных математических понятий, кото-
рые понадобятся нам при дальнейшем изложении. Доказательства
формулируемых результатов читатель может найти в [47; 293].
Пусть X — отделимое ЛВП, X' — сопряжённое к нему, <•, •> —
каноническая билинейная форма, приводящая X и X' в двойствен-
ность, и S — некоторое топологическое пространство. Вначале введём
некоторые новые понятия предела, используемые при определении
верхнего субдифференциала. Пусть А : S -+ X — многозначный опера-
тор. Тогда множество
lim inf A (S)
состоит из всех точек х € X, таких что для любого Y € Fx найдётся
UzFs, обладающее тем свойством, что YC\A(s)A0 для любого
s^U. Здесь Fx (соотв. Fs) — фильтр окрестностей точки х (соотв. точ-
ки $). Если lim inf A (s) = A(s) для всех s€ S, то многозначное отобра-
жение А называется полунепрерывным снизу. Аналогично можно
дать определение lim sup A (s). Для функции g: S х X-> [- оо, +□©]
определим теперь lim sup inf соотношением
h(s, х) = lim sup inf g(s, x) = sup inf sup infg(s, x). (4.3.1)
s-s x—*x YiF, UtF, SiS xer
Для заданных множества С С % и точки х € X определим касатель-
ный конус Тс(х) к С в точке х следующим образом:
Тс(х)= liminf- (С \ (х)). (4.3.2)
Я-ex Д '
д-*0+
Здесь запись х -+ сх означает, что х -»х, причём х € С. Эквивалентное
определение касательного конуса таково:
7с(х) = (у|у € X; если рп -+ 0+ и х„ -> сх, то найдётся последователь-
ность уп -+ у, такая что уП + м„х„ € С]. (4.3.3)
Очевидно, что Г<(х) = Тс(х) для всех х € С. Можно показать, что
Тс (х) — замкнутый выпуклый конус, содержащий нуль. Нормальный
' Для согласования с введённой ранее терминологией (см. п. 1.4.2) мы в дальней-
шем будем употреблять термин верхний субдифференциал.
172
Гл. 4. Вариационные неравенства
Рнс. 4.3.1. Касательный н нормальный конусы.
конус Nc(x) к множеству С в точке х определяется так (см. рис. 4.3.1):
Nc(x) = [х'|х' €X', <z, х'>^0 Vz€ 7с(х)). (4.3.4)
Очевидно, что
Тс(х) = (у, z'> о vz'€ДГс(х)) '. (4.3.5)
В случае когда С выпукло, определение (4.3.4) совпадает с определени-
ем (2.3.11) нормального конуса к выпуклому множеству. Пусть на X
задана функция/со значениями из [-оо, +оо]. Верхним субдифферен-
циалом fix, у) функции f в точке х (в которой значение /(х) конечно)
при приращении у называется предел
ztz \ v . с fix + иу) — а
fix, у) = bin sup inf ———^2.-------f (4.3.6)
где lim sup inf вычисляется при (x. a) -+ (x, /(x)), причём fix) a,
/*->0+ и y~+y1 2. Если f п.н.сн. в точке x, то (4.3.6) упрощается, а
именно lim sup inf вычисляется при х -»х, /(х) -+ /(х), у -* у и ц -» 0+.
Функция g: у~*fix, у) выпукла, п.н.сн. и положительно-однородна
(т. е. giay) = agiy) для любых у € X и а > 0). Далее,
epig= repi/(x, /(х)). (4.3.7)
В случае когда функция / выпукла,
fix, У) = lim inff (х, у) vytX, (4.3.8)
У~*У
1 Это означает, что Nc(x) = -Т'с(у).— Прим.ped.
2 Это lim sup inf, определённый в (4.3.1),
. . _ ((Л* + цу) - а)/ц при н > 0,
§ 4.3. Невыпуклые суперпотенциалы
173
где 7' (х, у) — односторонний дифференциал Гато функции f в точке
х при приращении у (см. п. 2.3.2). Если, кроме того, существуют а > О
и ц, такие что Дх) а для любого х из некоторой окрестности точки
х + цу, то
Р(х, у) =f'(x, у). (4.3.9)
Аналогично верхнему субдифференциалу нижний субдифференциал
у -*/(х, у) определяется по той же формуле (4.3.6), только lim sup inf
заменяется на lim inf sup, который вычисляется при (х, а) -»(х, Дх)),
причём а Дх), 0+ и у у. Если функция f липшицева в некото-
рой окрестности точки х, то
Р(х, у) = -Д(х, -у)=Р(х, у) УуСХ, (4.3.10)
где у -+ /°(х, у) — дифференциал Кларка в точке х при приращении
у, который задается соотношением
f(x, у) = limsup + -й>>) ~ ° . (4.3.11)
И
Здесь lim sup вычисляется при (х, а) -* (х, Дх)), причём а Дх), и
Н -»0+. Напомним, что функция f называется липшицевой в точке х,
если у этой точки существует окрестность U, такая что f конечна на
U и для некоторой непрерывной на X полунормы р справедливо нера-
венство
|/(Xi) -/(*2)1 ср(х\ - Хг) VX1, Х2 € и, (4.3.12)
где с = c(U) > 0 — константа. Функция / липшицева в точке х, если
она непрерывно дифференцируема в ней, или если она выпукла (вогну-
та) и конечна в х, или если она является линейной комбинацией функ-
ций, липшицевых в х.
Дадим два эквивалентных определения обобщенного градиента
dj\x) функции /: X -+ [ - оо, + оо] в точке х, где значение Дх) конечно:
(i) Э/(х) = (х' |х' € A", f(x, xi - х) > <х', xi - x>vxi € %), (4.3.13)
(ii) Э/(х) = (х'|х'€%', (х', -1)€Аеру(х, Дх))}. (4.3.14)
Если f4x, 0) = - оо, то ЗДх) = 0; в противном случае ЗДх) # 0 и
для любого у^Х
f\x, у) = sup {{у, х'>|х' € а/(х)}. (4.3.15)
Отметим, что ЗДх) — выпуклое замкнутое подмножество простран-
ства X’, наделённого Е(ЙГ', 5Г)-топологией. Если, кроме того, суб диф-
ференциал У1 (х, у) конечен для любого у, то ЗДх) — непустое Е(ЙГ',
^/компактное подмножество в X’, и наоборот. В этом случае sup в
174
Гл. 4. Вариационные неравенства
(4.3.15) можно заменить на max. Если 1с — индикатор множества С,
то, как легко проверить,
Э7с(х) = Nc(x), (4.3.16)
Гс(х, у) = /тсмСу). (4.3.17)
Если функция f выпукла, то
ЭДх) = 8/(х) (4.3.18)
в любой точке х, где f конечна; если /вогнута, ограничена снизу в неко-
торой окрестности точки х и конечна в этой точке, то
Э/(х) = -Э(-/)(х). (4.3.19)
В случае когда градиент grad/(-) непрерывен в точке х,
Э/(х) = (grad/(x)J. (4.3.20)
Используя (4.3.6) н (4.3.13), легко проверить, что если /имеет в точке
х локальный минимум, то
0 € Э/(х). (4.3.21)
Далее мы ограничимся рассмотрением липшицевых функций / и ба-
нахова пространства X. Пусть /, g: Х-* IR — Липшицевы функции.
Тогда
J(/ + g)(x)_C а/(х) + ag(x), (4.3.22)
d(X/)(x) = Хд/(х) для X € IR +. (4.3.23)
Аналоги равенства (2.4.8) для 8/(х) можно найти в [292].
Пусть X и Y — банаховы пространства, такие что X С Y, причём
это вложение непрерывно и плотно и X рефлексивно. Если функция /
задана на У и /1 — её суждение на X, то
dfi(х) С Э/(х) vx € X. (4.3.24)
Если /выпукла, то (4.3.24) выполнено как равенство [37]. Заслуживает
внимания случай, когда X = IR", а/липшицева на X; именно этот случай
был впервые изучен Кларком. Тогда 8/(х) можно определить как выпук-
лую оболочку всех точек у вида
у = lim grad/(x), (4.3.25)
/—►со
где (х,) — любая последовательность, сходящаяся к х и такая, что
grad /(xj) существует в каждой точке х, [46].
Важную роль играет и понятие субстационарности [292]. Направ-
ление у € X (где X — отделимое ЛВП) называется направлением при-
§ 4.3. Невыпуклые суперпотенцналы
175
ближённо равномерного спуска (сокращённо, направлением п.р.с.) в
точке х € X, если для некоторого q > 0 выполняется следующее усло-
вие: для любой окрестности U точки у существуют окрестность V
точки х и положительные числа б и X, такие что для всех 0 < н < X
и х € V, для которых Дх) - Дх) 6, выполнено неравенство
inf Дх + нУ) Дх) - не- (4.3.26)
ytu
Предполагается, что f п.н.сн. и конечна в точке х. Функция f называ-
ется субстационарной в точке х, если в этой точке не существует ни
одного направления п.р.с.
Обозначим через G функцию, задаваемую равенством
G(Xi) = ДХ1) - <Xi - z'>, Z' €%',Xi€%. (4.3.27)
При помощи этой функции можно дать эквивалентное определение
ЭДх) для конечной в х п.н.сн. функции /:
ЭДх) = {z'|G субстационарна в точке Xi = х). (4.3.28)
Будем говорить, что у является точкой субстационарности функ-
ции /относительно замкнутого множества#, если сумма/ + Д-субстаци-
онарна в точке х.
В заключение приведём ряд примеров. Пусть/ — функция максимума,
т. е. Дх) = max (<^i(x).<f>m(x)], гдех€ IR”, ^(х), i = 1, ..., т, — гладкие
функции (рис. 4.3.2). Положим 21(х) = {/ € {1.т)|<^;(х) - Дх)). Тогда
аДх) - со {grad <pt(x)\i € 3I(x)). (4.3.29а)
Если (4.3.9) выполнено для любого X, то функция / называется
д-регулярной. Примерами таких функций служат выпуклые функции и
функции максимума. Если / и g обе З-регулярны, то (4.3.22) выпол-
Рнс. 4.3.2. Функция максимума.
176
Гл. 4. Вариационные неравенства
нено как равенство. Приведём ещё один результат, важный для прило-
жений. Пусть
С= {x€lR"|/(x) ^0).
Если f(xo) = 0, f липшицева в окрестности точки ль и О$д/(хэ), то
М?(ль) С (Хх' |х' € IR", X > 0, х' € а/(лъ)). (4.3.29b)
Если, кроме того, f является d-регулярной в точке Хэ, то (4.3.29b) выпо-
лнено как равенство.
4.3.2. Невыпуклые суперпотенциалы.
Полувариационные неравенства и
принципы субстационарности
Пусть механическая система Е описывается тройкой Е = {^, <«, 0,
5П. Определяющие соотношения между обобщёнными силами g и обоб-
щёнными перемещениями и можно задать в виде (см. п. 3.1.2)
-g€d$(u), (4.3.30)
где Ф — функционал со значениями в расширенной вещественной прямой,
определенный на %. Мы будем называть Ф невыпуклым суперпотенциа-
лом или суперпотенциалом в смысле Кларка. Приведённое выше соотно-
шение по определению эквивалентно неравенству
Ф^(а, а* — а) и* — а) Vu* € // (4.3.31)
для всех и € а также включению
(-£,-!)€ А^Р1ф(и, Ф(и)). (4.3.32)
В дальнейшем будем называть неравенство (4.3.31) полувариационным
неравенством. Очевидно, что если Ф — выпуклый функционал, то (4.3.31)
совпадает с (3.1.28). Для липшицевых функционалов Ф можно Ф1 в (4.3.31)
заменить на Ф°.
Обобщения теории двойственности на невыпуклые функции пока не су-
ществует, тем не менее будем рассматривать также и определяющие соот-
ношения вида
и€дФ1(-р; (4.3.33)
при этом следует подчеркнуть, что (4.3.33) и (4.3.30), вообще говоря, не
связаны друг с другом.
Включение (4.3.33) приводит к полувариационному неравенству
"£° + <)><--. £°-Р (4.3.34)
§ 4.3. Невыпуклые суперпотенциалы
177
В случае когда Ф есть индикатор fc-некоторого множества^7, включение
(4.3.30) означает, что
-{€%•(«) *=№(«), (4.3.35)
т. е. -{J является элементом нормального конуса к множеству^в точке и.
Аналогичные результаты получаются, если рассматривать обобщённые
скорости.
Для иллюстрации включения (4.3.35) вернёмся к примеру (3.1.33). Бу-
дем теперь считать, что Zf = (х|/(х) 0, i = 1.т) — замкнутое, но не
выпуклое подмножество в IR3; функции / предполагаются непрерывно
дифференцируемыми.. Множество К можно записать в^ виде К -
(x|F(x) 0},где^= max (/ fm}-ФункцияFлипшицеваид-регулярна.
Очевидно, что сила реакции R удовлетворяет (3.1.33) на любом гладком
участке границы множества К. В каждой угловой точке границы вектор
-R является линейной комбинацией с неотрицательными коэффициен-
тами градиентов тех функций/, которые в этой угловой точке обращают-
ся внуль. Поэтому из (4.3.29а,Ь) следует, что если 0 0F(x), то выполнено
включение
-/?€№(х). (4.3.36)
Отсюда видно, что для того, чтобы система находилась в состоянии рав-
новесия, необходимо и достаточно, чтобы
/€ Э1к(х). (4.3.37)
Включение (4.3.37) эквивалентно неравенству (см. (4.3.17))
Z7i(x)(x* - х) > f(x?~ х/) Vx* € IR3 (4.3.38)
длях€ IR3. Неравенство (4.3.38) сводится к (3.1.37), если (х* - х) 6 7jr(x).
В «вогнутых» угловых точках границы Zr<(x)(x* - х) может обратиться в
оо, если (х* - х) $ 7к(х).
Предположим теперь, что условие равновесия записано в форме,
аналогичной (3.1.38), т. е.
0€ S ЭФ,(«) + S 3¥J(«). (4.3.39)
1 = 1 7=1
Пусть Ф/ и Ф; липшицевы, очевидно, что если
О € ЭФ0(«), Фо(«) = S Ф<(“) + S Фу(и)» (4.3.40)
1=1 7=1
то выполнено (4.3.39). Обратное верно не всегда. Точки и, удовлетво-
ряющие условию (4.3.40), называются критическими точками функ-
ционала Фо. Для рассматриваемой механической системы критические
178
Гл. 4. Вариационные неравенства
точки и функционала Фо будут её состояниями равновесия. Напомним,
что если и является точкой локального минимума или максимума
функционала Фо, то она будет его критической точкой.
Пусть теперь мы находимся в ситуации, описанной в § 3.3. Пусть
j, ji и w, wi — функционалы со значениями в IR, определённые соот-
ветственно на IR3 и на [R6. На границе Г множества 0 рассмотрим
поточечные граничные условия вида
-seay(M). (4.3.41)
Если j меняется на Г от точки к точке, то, разумеется, (4.4.41) следует
заменить включением - S € ^uj(x, и) (обобщённый градиент берётся по
и). Мы предполагаем, что в каждой точке О выполнено определяющее
соотношение
<7 еМе)- (4.3.42)
В некоторых задачах вместо (4.3.41, 42) могут возникать соотношения
вида
uedh(-S), (4.3.43)
£€3wi(a). (4.3.44)
Все субдифференциальные граничные условия и определяющие соот-
ношения пп. 3.3.1 и 3.3.2 могут быть записаны и для невыпуклых
функционалов энергии; надо просто заменить д на Э. Так же как и
в выпуклом случае, зти соотношения можно распространить на слу-
чай сепарабельного гильбертова пространства.
Справедлив следующий результат (по поводу используемых ниже
обозначений см. п. 3.3.4.):
Предложение 4.3.1. Пусть Н — сепарабельное гильбертово простран-
ство и функционал j: Е х Н -+ IR таков, что (i) функционал х -+ j(x, и)
измерим при любом и, (ii) функционал и -+ j(x, и) локально-лишпицев
при любом х, (iii) функционал х j(x, 0) интегрируем (с конечным ин-
тегралом). Пусть р = 2 и существует такое с > 0, что для любых х,
и и любого /€ duj(x, и) справедлива оценка
|/| с(1 + |«|). (4.3.45)
Тогда функционал Ф: L\E, Н) -+ [R, задаваемый формулой
Ф(и) = j J(x, u(x))dn, (4.3.46)
Е
является липшицевым на каждом ограниченном подмножестве про-
странства L2(E, Н). Всякий элемент f£L2(E, Н) множества ЭФ(и)
§ 4.3. Невыпуклые суперпотенциалы
179
удовлетворяет соотношению
/(х) € duj(x, u(x)) /t-п.в. на Е, (4.3.47)
а если j„(x, и, v) = ju(x, и, v) /t-п.в. на Е для любого vtH (условие
d-регулярности), то справедливо и обратное.
Доказательство этой теоремы читатель может найти в [14], где
фактически рассмотрен более общий случай u$Lp(E, Н), р 1, где
Н — сепарабельное банахово пространство. В связи с этим см. также
[37]. Сформулированное выше предложение можно записать в виде
ЭФ(и) С j duj(x, u(x))dn(x), (4.3.48)
Е
причём в Э-регулярном случае (4.3.48) выполнено как равенство. Так
будет, например, в случае, когда функционал j является непрерывно
дифференцируемым или выпуклым.
Если Е = 0 и Н = IR, то (4.3.48) в сочетании с (4.3.24) позволяет
вычислить ЭФ на ^(0).
Ниже мы «формально» получим некоторые вариационные неравен-
ства. Как и в п. 4.1.3, считаем, что для деформируемого тела выпол-
нены граничные условия (4.3.41), а (4.3.42) описывает поведение мате-
риала. Предполагая все функции достаточно гладкими, равенство
(4.1.58) для и € (/доп можно переписать в виде
j aij(u)Eij(v - u)dQ = j fi(Vi - ut)dQ
о 0
+ j Si(Vi - Ui)dT Vv 6 (/доп. (4.3.49)
г
Здесь (/доп — множество достаточно гладких механически допусти-
мых перемещений, a v - и — кинематически допустимая вариация пе-
ремещений.
Рассмотрим неравенства
/(и, v - и) -Si(Vi - и.) Vve IR3 (4.3.50)
и
WT(£(u), E(v) - E(u)) <Jij(Eij(v) - Eij(u)) V£(V) 6 IR6. (4.3.51)
Из (4.3.49—51) следует, что для и € (/доп справедливо полувариацион-
ное неравенство
j wT(£(u), e(v - u))dQ + j yT(u, v - u)dT
о г
j fi{Vi - Ui)dQ yv 6 (/доп (4.3.52)
180
Гл. 4. Вариационные неравенства
при условии, что все записанные выше интегралы существуют и конечны.
Если выполнены допущения, при которых справедливо (4.1.58), то мы
приходим к следующей задаче (см. 4.1.61):
Задача 1. Найти и€[№(0)]3, удовлетворяющее (4.3.52) для любого
v € [№(0)]3.
Очевидно, что любое решение исходной задачи является решением
задачи 1, но не наоборот. Если вместо (4.3.41, 42) выполнены соотно-
шения (4.3.43, 44), то можно аналогичным образом рассмотреть вари-
ации напряжений. Возьмём вместо (4.3.49) соотношение
j <Jy)dQ + j Ut(Tij,j — j Ui^Tijnj aynj)dr. (4.3.53)
о 0
Обозначим через Едоп множество всех достаточно гладких полей на-
пряжений т = {Ту), удовлетворяющих условию равновесия (такие поля
будем называть статически допустимыми). Из (4.3.53) следует, что
для ст € Едоп справедливо полувариационное неравенство
j Ч(ст, т - a)dQ + jyl(-S, -T+ S)dT 0 Ут€Едоп. (4.3.54)
о г
Считая, что выполнены предположения, при которых справедливо не-
равенство (4.1.58), приходим к следующей задаче:
Задача 1'. Найти ст€ Едоп = {ст|ст€ [£2(П)]6, сту,у + ft = 0), удовлетворя-
ющее (4.3.54) для всех т€Едоп.
Для динамических задач в предположении малости деформаций
следует добавить силы инерции Q(d2Ui/dt2) и учесть начальные условия
для и и du/dt. Таким образом, движение тела описывается неравен-
ством (см. (4.3.52)).
J (Я
□
+ j j\u,
□
j wf(£(u), s(v - u))dQ
v - u)dQ
J fi(vi ~ ui)dQ
Vf € (Aon
(4.3.55)
где
U: [0, л - (/доп, * : [0, Т\ - £2(й).
01
Рассмотрим линейно-упругий материал. Тогда
wT(e(«), e(v - u))dQ = j Сул*£у(и)£л*(ц - u)dQ = a(u, v - u)(4.3.56a)
a
§ 4.3. Невыпуклые суперпотенциалы
181
и
J wfta, т - <j)dQ = j Cijhk<Hj(Tij - = A(a, т - a), (4.3.56b)
a о
где a(u, v) и A(a, т) обозначают билинейные формы из теории линей-
ной упругости.
Далее, предполагая, что у, д п.н.сн., рассмотрим функционал по-
тенциальной энергии
П(1?) = j a(v, v) + j j(u)rfT - j fiVidQ, (4.3.57a)
г a
и функционал дополнительной энергии
Пс(т) = ~А(т, т) + р1(-Т)Л\ (4.3.57Ь)
г
Сформулируем следующие задачи:
Задача 2. Найти перемещение и € [№(й)]3. такое что
функционал П на [№(й)]3 является субстационарным
в точке и. (4.3.58а)
Задача 2'. Найти напряжение a€Enon> такое что
функционал Пс на Едоп является субстационарным
в точке a. (4.3.58b)
Изучим связь между решениями задач 1 и 2 для линейно-упругого
материала.
Задача 2 эквивалентна (см. (4.3.28)) утверждению, что
/€ ЭНДИ), и € [Н1 (й)]3, /€ [Т2(Й)]3, (4.3.59)
где
П1(и) =~а(и, и) + j j(u)dT.
г
Предположим, что J j(u)dT удовлетворяет условию Липшица,
г
Тогда, в силу (4.3.22),
f - ~ grad а(и, и) € д j j(u)dT,
г
182
Гл. 4. Вариационные неравенства
и если для Ф(и) = j j(u)dT выполнено соотношение
г
Фт(и, f) = j j\u, v)dT, (4.3.60)
г
то мы получаем задачу 1. Это легко проверить в случае, когда функ-
ционал j удовлетворяет условиям теоремы 4.3.1 и d-регулярен. Обрат-
но, пусть и € [У/1 * (Q)]3 служит решением задачи 1 и j является d-регу-
лярным. Тогда имеет место (4.3.60) и
j grada(u, и) + д j j(u)dT = dlli(u),
г
откуда следует (4.3.59), т. е. и является решением задачи 2.
Аналогичные субстационарные задачи можно сформулировать, ес-
ли на Г заданы классические граничные условия, а в О выполнено
определяющее соотношение (4.3.42) (соотв. (4.3.44)). Тогда функ-
ционал
П(ч) = j w(v)dQ - j fiVidSl (4.3.61a)
о n
на С/доп стационарен в точке и, а функционал
Пс(т) = j Wi(r)dQ (4.3.61b)
а
на Едоп субстационарен в точке а.
Сделанные в п. 4.1.3 замечания также можно модифицировать, с
тем чтобы охватить невыпуклый случай. Фактически полувариацион-
ные неравенства можно рассматривать как выражение принципа вир-
туальных перемещений в виде неравенства, а задачу нахождения соот-
ветствующего полувариационного неравенства — как задачу вычисле
ния невыпуклого суперпотенциала для заданного векторного поля.
В действительности исследования по теории обобщённых градиен-
тов и её приложениям ещё далеко не завершены. До настоящего мо-
мента изучено лишь небольшое число краевых задач с оператором д/
(а именно, такие задачи приводят к полувариационным неравенствам);
см., например, [37]. Пока здесь много открытых вопросов.
Приведём теперь несколько примеров, иллюстрирующих примене-
ние обобщённых градиентов.
(i) Рассмотрим сперва одномерный элемент, у которого функция
энергии деформаций имеет вид, изображенный на рис. 43.3(a). Функ-
ция f липшицева, и на рис. 4.3.3(b) представлен график df. Он имеет
вертикальные скачки и не является монотонно возрастающим, как бы-
§ 4.3. Невыпуклые суперпотенциалы
183
Рис. 4.3.3. Суперпотенциал в смысле Кларка (одномерный случай).
ло бы в выпуклом случае (который изображён пунктиром). Зависи-
мость между напряжением и деформацией, подобная приведённой на
рис. 4.3.3(c), наблюдается в опытах с одноосным монотонным нагру-
жением гранулированной среды (например, горных пород, грунта).
Вид графика определяется эффектами локализации хрупкого разруше-
ния и образования трещин.
184
Гл. 4. Вариационные неравенства
С помощью (4.3.42) этот результат можно обобщить на случай
трёхмерного тела. То же можно сказать о рис. 4.3.3(d), на котором
представлен график зависимости между напряжениэм и деформацией
при одноосном нагружении бетона [125]. Заметим также, что графики,
приведённые на рис. 4.3.3(e),(f), описывают соответственно поведение
железобетона при растяжении [346] и поведение связующего элемента
между арматурой и бетоном [125; 310].
(ii) Пусть L — замкнутое подмножество пространства напряжений
и II — его индикатор, т. е.
... f 0 при е€1, .. .
Л(е) =| jr (4.3.62)
1 оо при £
Тогда соотношение
о - Се € Э7д(£) = №(е) (4.3.63)
является обобщением (3.3.71); это критерий старения, определённый
замкнутой, но, вообще говоря, невыпуклой поверхностью в простран-
стве напряжений. Здесь С — тензор упругих констант, а Се =
[CijhkShk}- Действительно, если граница множества L достаточно
гладка, то справедливо соотношение типа (3.3.73), что и подтвержда-
ет наше предположение. Определяющее соотношение вида
е - са € д1к(о), (4.3.64)
где К — замкнутое подмножество пространства напряжений, описы-
вает в рамках голономной теории пластичности упруго-пластичный
материал с невыпуклой функцией текучести. Если а € rel int К, то мате-
риал является упругим, в противном случае — пластичным. Включе-
ние (4.3.64) обобщает голономный упруго-идеально-пластический за-
кон (3.3.83) на случай невыпуклого критерия текучести. Когда К =
{а^а) к2 ] и F — непрерывно дифференцируемая функция, из
(4.3.64) следует, что (см. (4.3.29b))
х / 9F \
&ij ~ CijhkOhk — X < - I ,
\ аа« / (4.3.65)
X О, F(cr) 0, XF(or) = 0.
Последний пример представляет, пожалуй, чисто академический инте-
рес, ибо в теории пластичности поверхность текучести почти всегда
предполагается выпуклой. Однако, если упругие свойства меняются в
зависимости от пластических деформаций, невыпуклые поверхности
текучести исключить нельзя. И такие поверхности, действительно,
возникают в теории течения.
§ 4.3. Невыпуклые суперпотенциалы
185
Рнс. 4.3.4. Обоснование
определяющего соотношения (4.3.66).
(iii) Введём определяющее соотношение вида
е € dw(o).
(4.3.66)
Опишем одну ситуацию, в которой может иметь место такой закон.
Пусть К — подмножество пространства напряжений, определяемое
критерием текучести F(o) к2, такое что 0 € К. Слегка видоизменим
«наглядное» доказательство, при помощи которого Друккер [77] обо-
сновывал выпуклость поверхности течения. Рассмотрим напряжённое
состояние а* = [ а*) на или внутри поверхности текучести и некоторое
внешнее воздействие, вызывающее изменение напряжений до тех пор,
пока не будет достигнуто напряжённое состояние о = [ ), такое что
F(o) = к2. Далее, предположим, что это воздействие порождает при-
ращение пластической (соотв. упругой) деформации dep (соотв. dee)
и соответствующее приращение напряжений do (вектор ВС на
рис. 4.3.4), направленное вовне К. Штриховой линией на рисунке пока-
зано новое положение поверхности текучести. Вернёмся в начальную
точку О по произвольному пути CDO. Предположим, что вследствие
пластической деформации упругие свойства претерпевают некоторые
изменения, и обозначим через W часть невозвращённой упругой рабо-
ты. Мы считаем, что W зависит от а, а* и выбранного пути и что
для о = о* будет W = 0. Работа, произведённая при обходе замкнуто-
186
Гл. 4. Вариационные неравенства
го пути OACDO предполагается положительной (см. [156, с. 99]):
(ay - + defjdoij + W(a, а*, путь OACDO) > 0. (4.3.67)
Это неравенство справедливо для любого о* € К и любого пути
OACDO. Для а* = а выполнено также (4.3.67). Следовательно,
dEijdojj > 0. Но это выражение можно сделать сколь угодно малым,
и потому, в силу (4.3.67),
(ay - a^)d£fj + РИ(сг, а*, путь OACDO) 0. (4.5.68)
Предположим теперь, что (i) W зависит только от а и а — а* и (ii)
существует функция Wi: IR6 -> [ — оо, +оо], такая что
°' ~ "iK' (4.3.69)
) оо в противном случае.
Тогда из (4.3.68) следует, что для о$.К справедливо включение
dcp ZdW^a). (4.3.70)
Вместо приращения de11 можно рассмотреть производную ёр. Тогда
получим соотношение вида (4.3.66).
(iv) Предположим, что контакт между линейно-упругим телом и
деформируемым полупространством описывается следующим услови-
ем одностороннего контакта, выполненным на Г, С Г:
если uN < 0, то =0; j
если un > 0, то Sn + k(uN) = 0.
График (k(UN), un) аналогичен изображенному на рис. 4.3.3(c). Это
граничное условие можно записать в виде
-SNidj(uNy, J(uN)= j k(a)d(a), (4.3.72)
о
где uN+ = sup [0, i^v).
(v) Пусть М — измеримое подмножество вещественной прямой IR,
такое что для любого открытого непустого подмножества I прямой
IR меры множеств 1С\М и 7D(IR х М) положительны. Положим
(см. [292])
+6i при £ € M,
-bl при £
и
/(£) = J g(e)de.
о
(4.3.73)
(4.3.74)
§ 4.3. Невыпуклые суперпотенциалы
187
Рис. 4.3.5. График <3/(е) для функции / из примера (v).
Функция f липшицева, и, как легко проверить, используя (4.3.25),
W) = [-fe, 61] (4.3.75)
для любого £ € IR, т. е. имеется бесконечное множество скачков
(рис. 4.3.5). Объединяя (4.3.75) с каким-либо классическим определяю-
щим соотношением, получаем «идеально пилообразную» диаграмму
напряжение — деформация.
Как уже упоминалось выше, в теории обобщённых градиентов нет
обобщения операции сопряжения, так что нельзя сформулировать
двойственные результаты. Стоит заметить, что изучались функции,
сопряжённые квазивыпуклым (см., например, [60]), и была построена
теория двойственности для невыпуклых функций, которые могут
быть представлены в виде разности выпуклых п.н.сн. собственных
функционалов [317].
4.3.3. Обобщения гипотезы нормальной диссипации
В п. 3.2.1 рассматривались нелинейные соотношения между пото-
ками v и силами £, представимые при помощи выпуклых суперпотен-
циалов в виде (3.2.7). Используя невыпуклые суперпотенциалы, мож-
но сформулировать следующие более общие гипотезы [258; 261]:
(Н) Для любого реального термодинамического процесса существу-
ет п.н.сн. функционал .Я : IR" -> IR, такой что поток v € - IR", отвеча-
ющий силе IR", удовлетворяет соотношению
<€a^iG). (4.3.76)
188
Гл. 4. Вариационные неравенства
Этот функционал будем называть обобщённым суперпотенциалом
диссипации. Согласно второму началу термодинамики должно выпол-
няться неравенство
gw 0 (4.3.77)
(см. добавление III). Соотношение (4.3.76) по определению эквива-
лентно полувариационному неравенству
^Ti(v, V* - v) > <g, V* - О Vv* 6 IR", (4.3.78)
а также и включению
(g, -1)€AU«, -^M). (4-3.79)
означающему, что вектор (g, -1) нормален в смысле Кларка7 к epi.^j
в точке (v, ^(v)). В частности, если ^(v, -v)^0, то выполнено
(4.3.77). Справедливы следующие два предложения.
Предложение 4.3.2. Для того чтобы любому потоку v отвечала по
крайней мере одна сила g, необходимо и достаточно, чтобы нуль не
был направлением п.р.с. для функционала & в точке «.
Доказательство. Легко проверить, что v является направлением п.р.с.
для в точке v в том и только том случае, если ^(у, 7) < 0. Если
0 не является направлением п.р.с. для в точке то ^(«, 0)^0
и, следовательно, d^(v) & 0. Если &Л(е) # 0, то, в силу (4.3.13),
0) 0, т. е. 0 не является направлением п.р.с. для./i в точке v. □
Предложение 4.3.3. Обобщённая гипотеза нормальной диссипации эк-
вивалентна следующим трём утверждениям:
(i) при любой заданной силе g вектор потока « служит точкой суб-
стационарности для функционала
ХИ = Х(Н - <v*> g>; (4.3.80)
(ii) Oea^G); (4.3.81)
(iii) X(v, ?) 0 Vv* € IR". (4.3.82)
Доказательство. Равносильность обобщённой гипотезы нормальной
диссипации утверждению (i) следует из (4.3.28), утверждению (ii) —
из (4.3.13) и определения верхнего субдифференциала, утверждению
(iii) — из (4.3.13, 81). □
'Для произвольно заданного множества € может оказаться, что 0.
§ 4.3. Невыпуклые суперпотенциалы
189
Если механизм диссипации задается соотношением
(4.3.83)
то для любого заданного потока v отвечающая ему сила g является
точкой субстационарности функционала
^(^ = - <V, 0.
Как было показано в п. 3.2.1, для выпуклого случая гипотеза нор-
мальной диссипации в сочетании с некоторыми результатами из тер-
модинамики для упруго-пластичных и упруго-вязко-пластичных мате-
риалов приводит к понятию обобщённого стандартного материала
[128; 129]. К этому классу материалов принадлежат пластичные и вяз-
ко-пластичные материалы, описываемые с помощью выпуклых супер-
потенциалов. С помощью невыпуклых суперпотенциалов можно опи-
сать материалы, имеющие невыпуклые функционалы энергии7. На
этом пути получается класс материалов, которые мы будем называть
обобщёнными стандартными материалами в смысле Кларка.
Используя обозначения, введённые в добавлении IV, определим
обобщённый стандартный материал в смысле Кларка как упруго-
вязко-пластичный материал, для которого выполнено (4.3.83) при
v = ({dFp/dtyFp1, -d[aj]/dt) и g= [/?, [Л,]}, т. е.
€а^(/?, (А)). (4.3.84)
В случае когда — собственный п.н.сн. выпуклый функционал,
(4.3.84) описывает обобщённый стандартный материал, как он опре-
делён в [128, 129]. Предположим, что = 1^, где Zr — индикатор
непустого выпуклого замкнутого содержащего нуль подмножества Ж
в IR", а л — размерность вектора (/? [Л;}). Тогда (4.3.84) эквивалентно
вариационному неравенству
tr (F~p \r -R^-^. (Aj - Af) > О
¥(/?*, (Л*))€^ (4.3.85)
для (/?, [Л,]) которое называется обобщённым принципом Хилла
1 Следует отметить, что понятие обобщённого градиента Кларка позволяет дать
обобщение реологической гипотезы из п. 4.2.1. При этом некоторые нз задач на мини-
мум, о которых идёт речь в предложении 4.2.1, превращаются в задачи субстацио-
нарности.
190
Гл. 4. Вариационные неравенства
максимума пластической работы [14], (этот случай соответствует
пластичному материалу).
Если Л = 1у, где Л" — непустое замкнутое содержащее 0 подмно-
жество в IR", то (4.3.84) можно переписать в виде
dFp
dTFp ’
(4.3.86)
т. е. вектор в левой части нормален в смысле Кларка к Л? ь точке
(/?, (Л71). В таком случае, в силу (4.3.17), справедливо неравенство
W.Mj)((i?*, И/)) - (Я, ИЛ)) > tT[(^Fp - л)
--^-(Л*-Л7) ¥(/?*, M*])€lRn. (4.3.87)
Очевидно, что (4.3.87) совпадает с (4.3.85) в том и только том случае,
если
(/?*, [Л/]) - (/?, {Aj])eT^(R, ИЛ)-
Если исключить возможность вогнутых угловых точек, то можно
утверждать справедливость принципа Хилла для невыпуклых поверх-
ностей текучести. Из (4.3.28) следует, что (4.3.86) эквивалентно тому
факту, что точка (/?, ИЛ) является точкой субстационарности отно-
сительно Л? функционала
F(/?*, А *) = -tr (А- + л; (4.3.88)
Предположим, далее, что ^(7?, Л) = Ф(7?, Л), где Ф — непрерывно
дифференцируемый на IR" функционал. Тогда (4.3.84) можно перепи-
сать в виде системы
3FP 1 ЭФ
= ая-
daj ЭФ
~~dF = 1AJ’J=1
(4.3.89)
(4.3.90)
Уравнение (4.3.89) — обобщение уравнения из теории вязко-пластиче-
ских потенциалов Райса, а уравнения описывают поведение внутрен-
них параметров. Функция ,^> = Ф + 1# соответствует упруго-вязко-
пластичному материалу с мгновенной пластической деформацией.
Пусть для определяющего соотношения (4.3.86)
[(/?, ИЛ)|Л(Я, ИЛХО, /= 1, ..., т},
§ 4.3. Невыпуклые суперпотенциалы
191
где F — непрерывно дифференцируемые функционалы на IR". Тогда
если 0^dF(/?, Л), где F = max [Fi, Fm], то (4.3.86) эквивалентно
соотношениям
~ т <4’’» 1=1 ~ т '• <4-3-’2> 1= 1
X.F = 0, X, > 0, F < 0, i = 1, 2, ...» т. (4.3.93)
Предположим, что деформации достаточно малы и являются изотер-
мическими. Тогда (4.3.84) можно записать в виде
(е₽, -{4,))€М(а, {Л;}). (4.3.94)
Это — обобщение закона пластичности (3.3.94/.
Выше мы обобщали понятие суперпотенциала Моро на случай не-
выпуклых функционалов энергии при помощи обобщённого градиента
Кларка. Возможно иное обобщение понятия суперпотенциала, при ко-
тором используется понятие производного множества, предложенное
Варгой (см., например, [327—332]). Определим это понятие. Пусть f
— Липшицев функционал на некотором открытом подмножестве V в
IR". Производным множеством2 функционала f в точке х € V называ-
ется всякое ограниченное семейство
[А£/(х)|£ > 0, х€ К] (4.3.95)
непустых замкнутых подмножеств пространства -/(IR", IR), обладаю-
щее следующими свойствами:
(i) Ае/(х) С Ае'/(х) при £' > £; (4.3.96)
(ii) для любого компактного множества V' С V найдётся последо-
вательность {ft} непрерывно дифференцируемых функционалов, опре-
‘ В [196] была доказана выпуклость поверхности текучести, а также и выпуклость
вязко-пластического потенциала вначале для некоторого монокристалла, затем для не-
которых поликристаллов. Тем не менее мы можем допустить их невыпуклость, обоб-
щая предположения из [196], как это было сделано в п. 4.3.2 в связи с друккеровым
доказательством выпуклости поверхности текучести. С физической точки зрения невы-
пуклость можно объяснить наличием примесей, упруго-пластическим взаимодействием
или гранулированной структурой материала [201]. Во всех этих случаях вязко-пластиче-
ский потенциал перестает быть выпуклым.
2 В оригинале derivate container. — Прим. ред.
192
Гл. 4. Вариационные неравенства
делённых на некоторой окрестности множества V', обладающая тем
свойством, что
f-> f при i -> оо (4.3.97)
равномерно на V и для любого е > 0 существуют /(£; V') и
6(е, V') > 0, такие что при i > i(e, К'), Xi € V' и |xi - х| 6(£, К')
grad/Xx) € Л£/(Х1). (4.3.98)
Определим теперь Л/(х) как пересечение всех производных мно-
жеств Лс/(х):
Л/(х) € П А‘/(х). (4.3.99)
£>0
Тогда можно рассмотреть соотношения, связывающие поток « и силу
g, вида [260]
£ёЛЛ(*), (4.3.100)
где 3 — некоторый функционал, определенный на множестве Ус IR"
и называемый суперпотенциалом в смысле Варги. Соотношение
(4.3.100) представляет собой другое обобщение гипотезы нормальной
диссипации. В [331] показано, что если .М является выпуклым либо
вогнутым в точке « или если Д: IR -»• IR, то
(ИМ С ЛД(«), (4.3.101)
т. е. Э.^1 — «наилучшее» производное множество. В общем случае это
не так — может выполняться и обратное включение7.
§ 4.4. НЕРАВЕНСТВА И ИНТЕГРАЛЬНЫЕ ВКЛЮЧЕНИЯ
Хорошо известно, что большинство задач механики, описываемых
дифференциальными уравнениями, можно сформулировать в виде ин-
тегральных уравнений. Имеется обширная литература, посвященная
этому вопросу (в частности, применительно к теории упругости), к
которой и может обратиться читатель1 2. В теории упругости существу-
ют два основных метода вывода интегральных уравнений — прямой
1 В [32] дано интересное обобщение понятия операции дифференцирования на случай
функций, имеющих скачки. При этом производная уже не имеет локального характера.
Вопрос о применимости этого понятия в нелокальных механических теориях остается
пока открытым.
2 См., например, [252, 199, 137, 279, 36, 63, 282, 221].
§ 4.4. Неравенства и интегральные включения
193
и непрямой. В первом используются формула Грина или, что эквива-
лентно, уравнение Бетти — Максвелла; при этом подходе сначала по-
лучаются некоторые функциональные уравнения [167, 168, 160, 39], а
затем после соответствующего предельного перехода — интегральные
уравнения [283, 61, 62]. При втором подходе подыскивают сингуляр-
ные решения типа слоя уравнений эластостатики для бесконечной (в
большинстве случаев) упругой среды так, чтобы удовлетворить гра-
ничным условиям рассматриваемой задачи7.
Подход, связанный с использованием интегральных уравнений, мо-
жет быть применен и в задачах на неравенства. Однако здесь в силу
многозначности операторов получаются не интегральные уравнения,
а интегральные включения [262]. Кратко опишем этот метод.
Предположим, что рассматривается упругое тело с граничным ус-
ловием
-Sea/(M) на Г. (4.4.1)
Если бы на границе Г должно было выполняться условие S = 0 или
и = 0, то можно было бы выразить S и и как функции неизвестного
вектора, скажем q:
S = ®s(q), и = ®u(q), (4.4.2)
где ©s и ©и — соответствующим образом определённые операторы.
Затем надо решать полученное интегральное или функциональное
уравнение S)s(<7) = 0 или S)u(<?) = 0. Аналогично в случае (4.4.1) q явля-
ется решением включения
-®s(<7)ea/(®«(<7)). (4.4.3)
Проиллюстрируем описанный метод на примере. Пусть й — под-
множество в IR2, занимаемое данным двумерным линейно-упругим те-
лом (рис. 4.4.1), на которое действуют силы / (г = 1, 2). Выразим и
и S как функции от R = (Ri, R2) — неизвестного силового слоя на
Г. Можно показать (см., например, [136]), что и и S в точке (J?i, Jfe),
порождаемые R в точке (xi, хг), задаются соответственно формулами
(ниже v' = 1/v)
и = ГМ11 = —1
U2J SirGv'
~(3v' - 1)]пг
'См., например, [135, 136, 198, 238, 280, 334].
194
Гл. 4. Вариационные неравенства
и
Рис. 4.4.1. Вывод интегрального включения для плоского случая.
1 ( п#‘ G / 1 Ji °'
Ио 1
2(р' + 1) Г xi
Г2 1*2X1
(4.4.5)
Если точки (xi, хг) и (xi, Хг) на Г отвечают значениям длины дуги
s и s соответственно, то (4.4.4, 5) можно кратко записать в виде
Л = [ЦЛ(5, S)]0/?,(s),
sf°(5) = [$.*(s. W?j(s).
В результате внешнего нагружения в точке (Xi, хг) для u,(s) и St(s) по-
являются дополнительные члены соответственно вида
Uj°\s) = (U,r(Xi, Хг, Х1, X2))ufj,
1 = = (4.4.7)
Sj0)(s) = (S,«(Xi, Хг, Xi, х2))^.
Интегрируя7 по Г и по О, получаем
Ui(s) = j u?\s)ds + j u/0)(s)rffi + uP = (©«(/?)),-,
(4.4.8))
Q
' Здесь интегрирование сочетается с надлежащим предельным переходом, почему
ниже в (4.4.9) и появляется главное значение в смысле Коши (см., например, [134]).
§ 4.4. Неравенства и интегральные включения 195
где иР —перемещение тела как твёрдого, и
S,(s) = | Ri(s) + (j) + j $°\s)dQ = (©s(/?))i, (4.4.9)
г ft
где обозначает главное значение интеграла в смысле Коши. Таким
образом, если на Г выполнено граничное условие (4.4.1), то нужно
решить включение (4.4.3) с q, заменённым на R, взяв в качестве ©и
и ©s интегральные операторы, задаваемые формулами (4.4.8) и (4.4.9).
В качестве неизвестного слоя в рассматриваемой задаче можно
также брать краевые дислокации или же одновременно силы и крае-
вые дислокации на разных кусках границы. В каждом случае получа-
ются свои операторы ©« и SX и соответственно разные формы инте-
гральных включений. В теории упругости существует много методов
построения операторов ©„ и ©$, и, вообще говоря, каждый из этих
методов приводит к своему виду интегрального или функционального
включения. Ещё один способ получать интегральные включения для
односторонних задач теории упругости, а именно при помощи функ-
ции Грина, описан в [252].
Интегральные включения приводят к интересным математическим
задачам. Например, для задачи Синьорини — Фикеры (см. п. 4.1.1)
задача решения включения (4.4.3), очевидно, эквивалентна ещё не ре-
шённой задаче о линейной дополнительности (см. [352]7) вида
®sN(q) О, 0, ©Sw(9)©u«(9) = 0, ®sr(?) = 0. (4.4.10)
Здесь мы не касаемся задач, которые остаются пока не решёнными
как в теоретическом аспекте, так и численно. Заметим также, что
строгое математическое изучение многозначных интегральных уравне-
ний, основанное на использовании теоремы о неподвижной точке для
многозначных операторов, было начато лишь совсем недавно (см.,
например, [4, 35, 38, 117, 311]).
А также п.11.1.1. — Прим. ред.
ГЛАВА 5
Задачи с трением в теории упругости
Данная глава посвящена рассмотрению двух типичных задач на нера-
венства— статической и динамической, в контексте линейной теории
упругости. Это задачи с граничными условиями, учитывающими тре-
ние, которые впервые были изучены Дюво и Лионсом [84, 83]. Ввиду
наличия граничных условий, учитывающих трение, вариационные не-
равенства возникают как в статическом, так и в динамическом случа-
ях. После вывода этих вариационных неравенств мы изучаем вопрос
о существовании и единственности решения в соответствующей функ-
циональной постановке. Для статического случая получены результа-
ты о минимизации потенциальной и дополнительной энергии и
доказана их двойственность. В заключение рассматриваются некото-
рые другие типы краевых задач с учётом трения и выводятся соответ-
ствующие вариационные неравенства.
§ 5.1. СТАТИЧЕСКАЯ КРАЕВАЯ ЗАДАЧА
5.1.1. Классическая постановка
Рассмотрим упругое тело, которое в недеформированном состоянии
занимает некоторую открытую связную ограниченную область
й С IR 3. Граница Г _множества й предполагается «регулярной», а ко-
ординаты точек х € й берутся в некоторой фиксированной декартовой
системе координат ОХ1Х2Х3. Пусть граница Г разбита на три части Гу,
Г/ и Г$. Точнее, пусть Г^, Г/? и Г$ попарно не пересекаются и
Г = Г^иГгиГх. Пусть на Гу заданы перемещения:
и, = Ui (Ui = t4(x)) на Г</, (5.1.1)
на Г/г—поверхностные силы:
St = aynj = Ft (Fi = F,(x)) на rF, (5.1.2)
§ 5.1. Статическая краевая задача
197
(i,j = 1,2,3,), а на Гх— граничные условия, учитывающие трение.
В обозначениях §3.3 последние имеют такой вид:
если | Sr | < д. | Sat |, то uTl = 0, (5.1.3)
если | Sr | = д | Sn |, то существует X 0, такое что
uTl= -XSTl (5.1.4)
и
Sn=Cn, (5.1.5)
где ц = ц(х) > 0 — коэффициент трения, a Cn = Cn(x) — заданное рас-
пределение сил на границе. Можно считать, что Ги = 0 или
Гг = 0 , или оба эти множества пусты. Но Гх # 0 . В предположе-
нии малости деформаций уравнения равновесия и сплошности имеют
вид
ffu,j+fi в й, (5.1.6)
Су = у (“Л j + Щ, t) в й, (5.1.7)
где /={/]— вектор объёмной силы. В предположении линейной
упругости можно записать определяющее соотношение в виде
(Ту = CijhkShk В й, (5.1.8)
где i,j,h,k= 1,2, 3, а Сда € £°°(й) — это компоненты тензора упругих 130
констант С. Они удовлетворяют условиям симметричности (3.3.61а)
и эллиптичности (3.3.61b). Предполагается, что все функции в соотно-
шениях (5.1.1 — 8) обладают необходимыми свойствами гладкости2.
Эти соотношения представляют собой классическую постановку крае-
вой задачи. С помощью теоремы Грина — Гаусса из уравнений (5.1.1,
6—8) получаем соотношение
а(и, v - и) = J fi(vi - Ut)dQ + J Si(vi - ui)dV +
О Гг
+ S [Sn(un — Un) + Sj;(ur( — иГ()](7Г (5.1.9)
rs
для всех и, таких что v, = U, на Г^. Здесь
а(и, и) = j Ctjkkeij(u)ehk(v)dQ. (5.1.10)
о
Из (5.1.3 — 5) следует неравенство
Sr,(uT( - иГ/) + д | Cn| (| гг| - |иг|) ^0 на Гх , (5.1.11)
' В этом смысле мы будем далее использовать термин «регулярные функции».
198
Гл. 5. Задачи с трением в теории упругости
которое с учётом (5.1.9) даёт вариационное неравенство
а(и, v - и) + Ф(и) - Ф(и) > (f, v - и) +
+ j Fi(yi — u*)rfr + j Cn(vn — Un)cIV (5.1.12)
Гг Ts
для всех v, таких что v, = U, на Г^. Здесь
(f, v)= \fiVtdO, (5.1.13)
о
Ф(и)= j a|Gv| Ы<7Г . (5.1.14)
Ts
Квадратичная форма а(и, v)/2 выражает упругую энергию, а Ф(и) —
энергию трения на границе тела.
5.1.2. Вариационная постановка
Приступая к строгому изучению задачи, будем считать, что и и и яв-
ляются элементами из [№(й)]3. Далее, будем считать, что f € Z2(fi),
F, €Z2(Tf), Cn€Z2(Ts), m|Cn| € Г°(Г5), Ui € Н1/2(Ги). Тогда Ф —вы-
пуклый непрерывный (по теореме о следе), но не дифференцируемый
функционал на [№(й)]3. Относительно множества граничных переме-
щений будем предполагать, что Ui € /71/2(Г^)> где //1/2(Г[/) обозначает
множество всех U = [ Ut], для которых существует [№(й)]3, такое
что w | Г(7 = U.
Было бы естественным предположить, что U принадлежит множе-
ству сужений на Ги элементов из №/2(Г). Обсудим это предпо-
ложение.
Обозначим через №/2(Ги) сужение Н1/2(Г) на Гу. Основной крите-
рий при выборе пространства, которому должны принадлежать U, —
применимость теоремы о следе. Чтобы пояснить возникающие здесь
вопросы относительно надлежащей регулярности Ui, продолжим
Я1/2(Гс/) нулём на всю границу. Такое продолжение должно бы быть
элементом №/2(Г). Но это не так, поскольку продолжение может
иметь скачки, например в граничных точках множества Гу. (Указан-
ное продолжение будет элементом из №/2 - С(Г) для любого е > 0.)
Рассмотрим для простоты случай О С IR 2 и на этом примере пока-
жем, как строго определить пространство функций Введём на
Г и шкалу гильбертовых пространств (см. п. 1.2.4) с ЛЬ = £2(Гс/) и
О
Xi = Н (Ги). Далее, рассмотрим пространство Л1/2, которое обозна-
чим Я1/2(Гс7). Здесь FF (Г и) — замыкание D(Tu) в Н*(Ги) для s > 0.
§ 5.1. Статическая краевая задача
199
Тогда (см. [181]) Я1/2(Гс7) С //1/2(Г[/) = Н|/2(Г^). Отметим, что если
Xi - Н1(Ги), то ^1/2 = //1/2(Г^). Если функция U, принадлежит
/?1/2(Г^), то её продолжение нулём (4 принадлежит Н1/2(Г), и соот-
ветствующие нормы эквивалентны (см. [335, лемма 1.1]). Поэтому
можно применить теорему о следе к U. Значит, существует такое
w € [/^(П)]3, что w | г = U* на Ге/ и w | г = 0 на Г \ Гу. Более под-
робно всё это обсуждается в [335; 263]. Мы не затрагиваем здесь ряд
вопросов технического характера, касающихся граничных условий,
многие из которых к тому же пока остаются открытыми. Например
(см., скажем, [159]), на поверхностях раздела различных частей грани-
цы должны выполняться условия согласованности. Так, «между» Гу
и Гх предписанные перемещения должны быть согласованы с условия-
ми, учитывающими трение.
Рассмотрим случаи mes Гу>0 и Гу = 0. Введем множество до-131
пустимых перемещений
идоп = [ о I о € [^/‘(О)]3, Vi= Ui на Гс] . (5.1.15)
Задача 1. Найти такое и € С/доп, что
а(и, v - и) + Ф(и) - Ф(и) (f, v - и) +
4- J Fj(vi - ui)dr + J Cn(vn - UN)dV V i> € Uaon. (5.1.16)
IV r$
В более общем случае, когда F, € Н~1/2(Гг) и Cn € Н~'/2(Г$), инте-
гралы j Ft(vi - Ui)dr и J Cn(vn - UN)dr следует заменить на
rF Ts
{F, v - и)Гр и (См vn - un)vs соответственно (см. п. 1.4.3).
Обсудим, в каком смысле решение вариационного неравенства
(5.1.16) (называемое также вариационным решением рассматриваемой
краевой задачи) удовлетворяет граничным условиям и уравнению рав-
новесия. Уравнения (5.1.7,8) дают еу и ау. Положив v-u =
= ± <р €[D(0)]3, из (5.1.16) получаем равенство (5.1.6) в смысле теории
распределений. Применяя обобщённую формулу Грина — Гаусса в вы-
бранной функциональной постановке (см. (1.4.37)), выводим из (5.1.6)
вариационное неравенство (5.1.9). Из (5.1.16) и (5.1.9) вытекает нера-
венство
I AI Cn | (| vr | - | кт | )dr + ( St, vt - ит)г3 +
+ {Sn- Cn vn - UN)r, + (S - F, v~u)rF^0 V v € Uaon . (5.1.17)
Полагая vi - щ = ± € /71/2(Г), с носителем в int Гг, из (5.1.17) полу-
чаем гпаничное условие (5.1.2) в смысле «следов», т. е. как равенство
200
Гл. 5. Задачи с трением в теории упругости
в Н 1/2(Г). Если и €/7* (12), то 1ту€/71/2(Г) и vt^Ht (см. (1.4.38)).
Беря vT. = uTt и Si = Fi, для vn — un = ± <pNZ №/2(Г) с носителем в
int Гу получаем из (5.1.17) граничное условие (5.1.5) в смысле следов.
Тогда (5.1.17) превращается в неравенство
J д | Ск| (| vr| - | «т| )dr + (St, vt — ut)ts 0 V и € Цюп, (5.1.18)
rs
являющееся слабой формой (5.1.3,4) на Нт У. Нт- Соотношения
(5.1.3,4) следуют из (5.1.18) (см. п. 3.3.4).
Чтобы преодолеть трудности, связанные с недифференцируемос-
тью функционала Ф, возникающие, в частности, при численном реше-
нии задачи, рассмотрим регуляризованную задачу, которая
получается при замене недифференцируемого члена Ф в (5.1.16) неко-
торым дифференцируемым функционалом Ф£, зависящим от е > 0. А
именно, введем регуляризованный функционал Ф£, заданный на
[№(П)13 формулой7
Ф£(0 = S l.v^1 + e dr, £ > 0 . (5.1.19)
г» (1 + е)
Функционал Ф£ — дифференцируемый и выпуклый. Далее, как легкой
проверить, при е -> 0
Ф£/Ъ) - Фfu) V и € [Н1 (Й)]3, (5.1.20)
lim inf Ф£(и£) Ф(и) , (5.1.21)
если иЕ -> и ♦ -слабо в (7Д0П. Положим, далее v = v - w, й = и - w, где
w|r = U (см. (1.3.46)) на Гс/ и
й, и€ Ко = ( v | v € [ЯЧй)]3, и = 0 на Ги] . (5.1.22)
Регуляризованная задача имеет такой вид:
Задача 1 е. Найти такое йЕ € Ко, что
а(й£, v - йе) + Ф£(и + w) - Ф£(й£ + w)
> (f, v - йе) + j Fi(vt - йЕ)<1Г +
Гг
+ J CN(yN - u£N)rfr - a(w, v - uE) Vu€K0. (5.1.23)
___________г»
' Аналогично можно рассмотреть функционал
$£(v) = ] ц | Cn I л/vr + F dr, e > 0.
§ 5.2. Теоремы существования и единственности
201
Полагая и - йе = ±Xvi и учитывая дифференцируемость Фе, за-
ключаем, что (5.1.23) эквивалентно вариационному равенству (см. до-
казательство теоремы 2.2.2).
/ d$E(up + w) \ _
а(й£, ui) + (___________, vi ) = (f, vi)+
\ dv /г’
+ J FivndV + J Gvvytfr — a(w, vj) V vi € Vo- (5.1.24)
Вариационное неравенство (5.1.16) выражает принцип виртуальных
перемещений для рассматриваемой краевой задачи с трением. По-
скольку граничные условия в нашей задаче носят односторонний ха-
рактер, неудивительно, что этот принцип принимает форму нера-
венства (см., [130; 171]).
§ 5.2. ТЕОРЕМЫ СУЩЕСТВОВАНИЯ И ЕДИНСТВЕННОСТИ
5.2.1. Эквивалентная задача на минимум.
Случай mes Ги > 0.
Решение рассматриваемой нами краевой задачи, если таковое суще-
ствует, является решением некоторой задачи минимизации, как видно
из следующего предложения:
Предложение 5.2.1. Задача решения вариационного неравенства
(5.1.16) эквивалентна следующей минимизационной задаче:
П(м) = min (П(и) | и 6 1/доп], (5.2.1)
где
П(и) = а(и, и) + Ф(и) — (f, v) — j FtVidV — j Cyuxtfr . (5.2.2)
2 Гг rs
Это верно как в случае mes Гц > 0, так и в случае Гс = 0. В послед-
нем случае Uaon = [№(П)]3.
Доказательство. Применяем предложение 2.2.2, взяв в качестве /1133
функционал и -» а(и, и)/2 - (f, и) - (F, и)Гг - ( Сц vjy)rs, а в качестве
/г— функционал и-+Ф(и). В силу (1.4.21)
(grad /1(и), v - и} = а(и, v - и) - (f, v - и)
- j Fi(Vi - Ui)dV - j CN(vN - uN)dr . □ (5.2.3)
Tf Г$
Отметим, что в этом доказательстве использовались лишь сим-
метричность формы а(и, v) и тот факт, что а(и, и) > 0 У и ё [№((1)]3.
202
Гл. 5. Задачи с трением в теории упругости
Последнее свойство обеспечивает выпуклость П, а первое позволяет
вывести равенство (5.2.3). Функционал П выражает потенциальную
энергию тела и представляет собой сумму упругой энергии, энергии
внешнего нагружения и недифференцируемой энергии трения. Предло-
жение 5.2.1 можно рассматривать как обобщение теоремы о миниму-
ме потенциальной энергии в классической теории упругости.
Перейдём к доказательству существования и единственности реше-
ния. Вначале разберём случай mes Гу >0.
Предложение 5.2.2. Если mes Гц > 0, то решение задачи (5.2.1) суще-
ствует и единственно.
Доказательство. Так как функционал П является непрерывным и вы-
пуклым на С7доп, достаточно показать (см. предложение 2.2.1), что
П(у) -» со При I и I! -» со, V € (7ДОП. (5.2.4)
Ввиду наложенных на U условий существует такое we[№(fl)]3, что
w = U на Ги. Как и в (5.1.23), положим v = v- Vq. Тогда П запи-
шется в виде
П(и) = ~ а(у, у) + a(v, w) + -i- a(w, w) + Ф(у + w) - (f, v + w) -
- j Ft(v + w)idr - j CN(yN + w)dr . (5.2.5)
Гг Г,
Поскольку mes Ги > 0, справедливо первое неравенство Корна, из ко-
торого следует (см. п. 4.1.1), что
а(у, v) с | v 11 V й € Ко , (5.2.6)
где с > 0 — константа. Учитывая неотрицательность Ф(й + w) и не-
прерывность рассматриваемых линейных форм, из (5.2.5) и (5.2.6) по-
лучаем (5.2.4). Итак, существование по крайней мере одного решения
гарантировано. Строгая выпуклость функционала П обеспечивает
единственность решения.
5.2.2. Случай Гц = 0
В случае Ги = 0 доказательство существования решения усложняет-
ся, так как тело может перемещаться так твёрдое.
Для вывода необходимого условия существования решения нам по-
надобится следующий результат:
Предложение 5.2.3. Если Гу = 0, то задача решения вариацион-
ного неравенства (5.1.16) эквивалентна следующей задаче: найти
§ 5.2. Теоремы существования и единственности
203
и € [Я1 (fl)]3, такое что
1 Fiv.dr - j CNvNdr | Ф(у) Vuf [№(fl)]3,
I> Ts
(5.2.7)
причём для v = и должно иметь место равенство.
Доказательство. Подставляя в (5.1.16) и = О и v = 2и, получим
а(и, й) + Ф(м) = (f,u) + J FiUtdT + J CNuNdT , (5.2.8)
Ff Fs
t. e. (5.1.16) эквивалентно (5.2.8) и неравенству
a(u, v) + ф(р) > у) + j FiVidr + j CNvNdr V и € [Я1 (fl)]3. (5.2.9)
Ff Fs
Заменяя в (5.2.9) у на -и, приходим к (5.2.7). □
Это предложение позволяет вывести одно необходимое условие су-
ществования решения. Действительно, если в (5.2.7) положить
v = г € где — пространство перемещений тела как твёрдого, и
г не равно нулю, то (см. (1.4.27)) мы получаем
Ъ(г) \(f,r) + J Ftndr + J CNrNdV | Vr€ r 0; (5.2.10)
Ff Fs
это и есть интересующее нас необходимое условие существования по-
ложения равновесия. Неравенство (5.2.10) можно переписать в эквива-
лентном виде
Ф(г) > I />Пб(А + J Find? + ] CNrNdr Vrt r # 0. (5.2.11)
о rF r.
Существование решения в случае Ги = 0 мы установим при более
сильном условии, что
Ф(г) > (f, г) + J FirtdV j CNrNdV Vr£&,r*0. (5.2.12)
ГЛ Г,
Предложение 5.2.4. Если Гу = 0 и имеет место (5.2.12), то у вариа-
ционного неравенства (5.1.16) существует по крайней мере одно
решение.
Доказательство. Задача решения неравенства (5.1.16) эквивалентна за-
даче минимизации (5.2.1), в которой минимум разыскивается на
[Я1 (fl)]3. Поэтому применим предложение 2.2.1 в факторпространстве
[Я1 (fl)]3/ <%. Пусть Q'—ортогональный проектор [Я1 (fl)]3 на в
[£2(А)]3-норме, а -1----ортогональное дополнение к Положим
Р' = I - Q' (где I—тождественный оператор) и
V = V + г, r€ V = V - Q' V = Р' vi. . (5.2.13)
204
Гл. 5. Задачи с трением в теории упругости
С учётом (4.1.36) без труда устанавливаем соотношение 135
<z(u, и) с| и | ? (5.2.14)
где О 0 — константа (см. п. 1.1.2). Из непрерывности рассматривае-
мых линейных форм, условия (5.2.14) и неравенства (5.2.12), записан-
ного в виде
(f, г) + j Findr + j CNrNdV X Ф0 - с | г 12
(с = const > 0) Vr€ г # 0, (5.2.15)
следует, что
П(и) = П(и + г) = -у а(и, и) + Ф(и + г) - (f, v + г)
- j Fj(vj + ri)dr - j Cn{vn + rN)dV
rF rs
a(v, v) + ф(и + Г) - Ф(г) - (f,v) ~ J FiVidr
- I CNvNdV + с|г|2^С1(|и|1+ I r I 2) + СI V 11 , (5.2.16)
Гз
где ci > 0 — константа. При выводе (5.2.16) мы учли также, что функ-
ционал Ф — выпуклый, конечный и непрерывный на [/^‘(О)]3, и пото-
му, согласно предложению 2.3.2, дФ(и) # 0 для всех и 6 [/f*(0)]3.
Итак,
Ф(и + г) - Ф(г) (X u)i -c|u|i, (5.2.17)
где с>0 — константа. Но (|и|2 + |г12)1/2 — норма, эквивалентная
стандартной норме | и 11 на [/f*(0)]3. Действительно, норма | uj 1 эк-
вивалентна норме (е(и) + | и 12)1/2’ Далее, е(и) + | v | 2__= е(и) + | v 12 +
+ | г 12 и (е(и) + | и 12)1/2_есть норма, эквивалентная | и 11. Значит, при
| и 11 —► оо будет либо | и 11 оо, либо | г 12 °°, либо и то и другое
одновременно. Поэтому из (5.2.16) следует, что П(и) -* оо.
Следует отметить, что дело не исчерпывается разобранными выше
двумя случаями mesIY >0 и Гу= 0. Например, если заданы пере-
мещения на некотором множестве точек границы, имеющем меру
нуль, то IW 0, но mesIY = 0. В этом случае необходимо уточне-
ние функциональной постановки задачи.
В следующем предложении рассматривается вопрос о единствен-
ности решения.
Предложение 5.2.5. Если Гц = 0, то поля напряжений и деформаций
определены однозначно, а поле перемещений — однозначно с точнос-
тью до перемещений тела как твёрдого.
§ 5.2. Теоремы существования и единственности
205
Доказательство. Пусть щ и иг — два решения неравенства (5.1.16).
Положим в (5.1.16) вначале и = иг, v = ui, а затем и = wb i? = иг.
Получим
«(wi - и2, wi - иг) 0 , (5.2.18)
т. е.
(5.2.19)
Следовательно, наши два решения различаются лишь на перемещение
тела как твёрдого, и потому
c(wi) = c(w2), o(wi) = o(w2) , (5.2.20)
что и требовалось доказать. □
5.2.3. Некоторые дальнейшие результаты
Решение и неравенства (5.1.16) зависит от коэффициента трения g и
от | Cn |. Обозначим через b член ц | Cn |, а через w* — соответствую-
щее решение, в предположении что mes Гц > 0. Характер указанной
зависимости проясняет следующее
Предложение 5.2.6. Если Ъ € /.“(Гу), то функция Ъ -»иь липшицева (см.
п. 1.3.1).
Доказательство. Пусть 62 € £°°(Гх) и ubt, ub2— соответствующие
решения неравенства (5.1.16). Полагая в (5.1.16) поочередно v = иЬг,
v = иЬ1 и складывая получающиеся неравенства, приходим к нера-
венству
a(wfe - ubi, Ub2 - wftl) + (b2 - bi)( | иПг | - | uTbi | )dV 0, (5.2.21)
из которого, ввиду коэрцитивности а(у, и) на Ко, вытекает, что
с I иЬг ~ иь, 11 I Ъг - Ь\ | L2(rs) | Ufa - ubl | [z,2(r$)]3 • (5.2.22)
Поэтому, в силу (1.3.54),
- w*.|i - MbVs) , (5.2.23)
где c > 0 — константа. □
Можно также показать, что если b имеет постоянное значение на
Гу, то функция b -»j | ить | dr является липшицевой и убывающей, а
функция Ъ -» а(иь, иь) — выпуклой убывающей (см. [120]). Регуляризо-
ванная задача (5.1.24) допускает единственное решение, если
mesFi/>0 (предложение 5.2.2). Связь между и и иЕ дается следую-
щим предложением:
206
Гл. 5. Задачи с трением в теории упругости
Предложение 5.2.7. Пусть mes Г и > 0. Тогда при е -»0
u£ ~* и в С^доп • (5.2.24)
Доказательство. В силу монотонности d$E/d v,
d* \ (5-2.25)
-А- (йЕ + w), (wE + w)\ > 0 .
dv / г$
Ввиду коэрцитивности а(и,и), из (5.1.24) вытекает, что | иЕ 11 с.
Поэтому можно выбрать последовательность {иЕ], слабо сходящую-
ся в (7ДОП к некоторому элементу и. Чтобы убедиться в том, что и
является решением неравенства (5.1.16), перейдём в (5.1.33) к пределу
при е -»0. Из (5.1.20, 21, 23) получим (5.1.16); поскольку
lim а(ие, w£) = а(и, и), то справедливо (5.2.24). □
е -> 0
До сих пор рассматривались лишь вариационные принципы, свя-
занные с перемещениями. В следующем параграфе будут изучены ва-
риационные принципы для напряжений и их связь с вариационными
принципами для перемещений.
§5.3. ДВОЙСТВЕННАЯ ПОСТАНОВКА ЗАДАЧИ.
ДОПОЛНИТЕЛЬНАЯ ЭНЕРГИЯ
5.3.1. Минимизация дополнительной энергии
Введём пространство
н= [т|т= [ту], 7у= 7у, 7y€L2(fl), i,j= 1,2,3] (5.3.1)
и множество допустимых напряжений
£доп = [ т | 7 € Я, ту, 7 + / = 0 в fl, TN = CN,
|Tr| O|CN| на Г5, Tt = Fi на rF], (5.3.2.)
где T, Tn, Тт— векторы, соответствующие 5, SN и Sr, TN€ Н~ 1/2(Г),
ТгСЯЯГ) (см. (1.4.39) и п. 1.4.3), а сужение Тт на Гх представляет
собой элемент пространства [£°°(Гх)]3. Множество 2ДОП — выпуклое
замкнутое подмножество пространства S, снабженного нормой
(1.4.35). Нам понадобится также соотношение, обратное к (5.1.8):
£у = cijhkOhk • (5.3.3)
Тензор с обладает теми же свойствами симметричности и эллиптич-
ности, что и тензор С. Ясно, что Едоп непусто, если mes Гц # 0 или
если Ги = 0 и выполнено (5.2.12). Тогда существует решение и нера-
§ 5.3. Двойственная постановка задачи
207
венства (5.1.16) (или, что то же, задачи (5.2.1)), т. е. существует поле
перемещений, из которого можно получить поле напряжений
ff(w) € ^доп*
Предложение 5.3.1. Пусть неравенство (5.1.16) имеет решение и. Тог-
да поле напряжений o(w) удовлетворяет вариационному неравенству
А (а, т - а) > (U, Т - 5)Гц V т € 2ДОП, (5.3.4)
где
А{о,т) = \ CijhkOijThkdto. (5.3.5)
а
Доказательство. Обозначим через с (и) € [Z2(0)]6 отвечающее и поле
деформаций, из которого с помощью (5.1.8) получается o(w). Умно-
жая (5.1.7) на /у - оу, где т, а€Хдоп, и применяя теорему Грина —
Гаусса (см. 1.4.45)), приходим к равенству
А(о,т-а) = (U,T-S)ru+{ит, Тт-S^rs *т€2доп. (5.3.6)
Но из граничного условия, учитывающего трение, вытекает
(см. (3.3.177)), что на Нт* Нт выполнено соотношение
{ит, Тт — St)ts 0- (5.3.7)
Отсюда и из (5.3.6) получаем (5.3.4). □
С физической точки зрения вариационное неравенство (5.3.4) выра-
жает принцип дополнительных виртуальных перемещений. Этот при-
нцип принимает форму неравенства, грубо говоря, потому, что такую
форму имеет вспомогательное условие | St | ц | Cn |.
Предложение 5.3.2. Пусть 2д0П # 0. Тогда вариационное неравен-
ство (5.3.4) имеет единственное решение. Кроме того, (5.3.4) эквива-
лентно задаче минимизации
Пе(<7) = min (1Г(т) | те 2Д0П), (5.3.8)
где
1Г(т) = Л(т, т) - {U, Т}Ги. (5.3.9)
Доказательство. Билинейная форма А (т, т) коэрцитивна на Н вследст-
вие эллиптичности тензора [сулл]. В силу непрерывности у
(см. п. 1.4.3.) и того факта, что теЕд0П, имеем
208
Гл. 5. Задачи с трением в теории упругости
Пс(т) = ^-Л(т,т)- (U, Т}Ги
2 С1 |т|А - ftl r|z + ci(|/|2 - |/| 2) =
= Г1(|т|н+ nj, k-nj, kdQ) - C2 I r|z + сз • (5.3.10)
Для завершения доказательства остается применить предложения
2.2.1 и 2.2.2. □
Функционал IF выражает дополнительную энергию тела. Мы
ищем её минимум на некотором выпуклом замкнутом множестве. За-
дачи минимизации (5.3.8) можно рассматривать как обобщение хоро-
шо известного из классической теории упругости принципа минимума
дополнительной энергии [236].
5.3.2. Двойственность
В этом пункте мы рассмотрим двойственность между задачами мини-
мизации потенциальной энергии и минимизации дополнительной энер-
гии в духе общей теории двойственности механических систем,
развитой в п. 3.2.2.
Перепишем (5.2.1) в эквивалентной форме
П(и) = min [П(и) | и € [Н1 (Q)]3}, (5.3.11)
где П(и) = П(и) + /цдоп(и)- Напомним, что 7[/доп — индикатор множе-
ства (7ДОП. В соотношении (3.2.47), определяющем исходную задачу,
в качестве А возьмём
Л(и) = А(и) + IUaaa(u)
= Ф(и) - (f, и) - ] FtUidV - j CNuNdV + IUaon(u) . (5.3.12)
Гр Г$
Покажем, что для а € Н
Ас{ - Л' а) = /2доп(а) - (5, (7)г„ (5.3.13)
где Л'—оператор, транспонированный к оператору А'.и -> Л(и) =
= [£,7(и) WW-
Действительно,
Ас( - А'а) = sup [( — A'a, v) - Л(и)]
(Я'(О)]3
= sup [(-а, Л и) - Л(у)]
§ 5.3. Двойственная постановка задачи
209
= ( - cr, Aw) + (f, w) + {F, w)rf
+ {Cn, wn)vs + SUP К Ail) + (f,v)
+ (F> v)rF + (Cn, vn)vs - Ф(й + w)]. (5.3.14)
Здесь мы воспользовались заменой v = v - w, где v € Vo и w | Гг = 0.
Ho KoCl[Z>(fl)]3 плотно в Ко в -норме (см. доказательство теорем
1.1 и 1.3 в [312]). Поэтому в (5.3.14) супремум по Vo можно заменить
супремумом по KoCl[Z>(fl)]3, который, очевидно, не меньше супремума
по [Z>(fl)]3. Следовательно,
Лс(-Л'а)> sup [ — {a, Av) + (< и)]
и С 10(0)]’
+ ( - а, Л w) + (f, w) + {F, w)Yf + (Cn, wn)?s • (5.3.15)
Но для
- (a, A v ) + (f, v) = {aij, j + f, v), (5.3.16)
так что супремум в (5.3.15) равен нулю, если + f, v) = 0 в fl, и
бесконечности — в противном случае. Из (5.3.16), применяя теорему
Грина — Гаусса (см. (1.4.37)), получаем
(a, Av) = (5, у)г + (f, v) Vy€[^(fl)]3. (5.3.17)
Поэтому
Ас( - А'а) = ( - а, Л w) + (f w) + j FtWtdV j Cnwn(1V
Tf Г,
+ sup_ [-(5, у)Г\Г + j FiVidV
И,ПЙ(О)1 1L Гг
+ j Cnvn<1V - Ф(у + w)]
= Д) t ~ [<S - VN)Vs
+ ((Sr, vt + M'r)rs + Ф(у + w))]] + {St, wt)ys
+ { - a,Aw) + (f,w) + j FiWidV + j CNwNdV. (5.3.18)
Гг Ts
Но этот супремум не меньше, чем супремум по линейному подпро-
странству
[ v | v € Ко AD(fl), v = 0 на Ts] .
который равен нулю, если St = Fi на Гг, и бесконечности в противном
•210
Гл. 5. Задачи с трением в теории упругости
случае. Аналогично получаем, что Sn = Cn на Г$. Далее (ср. с
(3.3.176) —8)), z-
0, если | St | ц | Cn |,
sup [ - ((St, vt + wr)rs + $(«> + w))l = "
K<’nD<Q) оо в противном случае.
(5.3.19)
Отсюда видно, что
Ас( - А'а) =
(- a,Aw) + (f,w) + J FiWidr
г,
+ J CNwNdr + (Sr, wr)rs> если a e ^доп,
оо в противном случае, (5.3.20)
а это по теореме Грина — Гаусса эквивалентно (5.3.13).
Согласно закону Гука, В (А и) в (3.2.47) имеет вид
5(Aw) = 4* i CijhkeutuyEhktuyda, (5.3.21)
Z Q
поэтому
В?(а) = sup [(a, Av) -B(A p)] = A(ff, ff), если ffy = Су**е**. (5.3.22)
Таким образом, двойственная задача sup[ -Ас( - Л'а) - Вс(о)] экви-
валентна задаче (5.3.8) на минимум дополнительной энергии.
Связь между исходной и двойственной задачами описывается сле-
дующими предложениями:
Предложение 5.3.3. Решение и исходной задачи и решение а двойст-
венной задачи связаны соотношением
П(и) + Пе(а) = 0 (5.3.23)
и удовлетворяют условиям
= Са**е*л(и), (5.3.24)
^TtuTi + РI Cn| I ит | =0. (5.3.25)
Доказательство. Равенство (5.3.23) непосредственно вытекает из пред-
ложения 3.2.7, и легко проверяется, что условия оптимальности
(3.2.52, 51) принимают в рассматриваемом случае вид (5.3.24, 25). □
§ 5.4. Динамическая краевая задача
211
Итак, имеет место следующее соотношение:
П(р)>П(и)= -Пс(а)> - Пе(т) Уи€(7доп УтбЕдоп. (5.3.26)
Если Гу = 0 и выполенено (5.2.12), то в (5.3.26) можно заменить
Цлт, на [№(0)]э. Соотношение (5.3.26) обобщает аналогичный резуль-
тат классической линейной теории упругости.
Предложение 5.3.4. Следующие утверждения эквивалентны:
(i) и минимизирует потенциальную энергию П на множестве (7ДОП,
а минимизирует дополнительную энергию Пс на Едоп и выполнено
(5.3.23);
(ii) и 6 С/доп и а 6 2Д0П удовлетворяют условиям экстремума
(5.3.24, 25).
Доказательство. Это непосредственно вытекает из предложе-
ния 3.2.6. □
К рассматриваемой задаче можно применить и подход, основан-
ный на понятии седловой точки. А именно, можно показать (см., на-
пример, [91]), что решение (и, а) нашей пары двойственных задач —
это седловая точка некоторой подходящей функции Лагранжа.
§5.4. ДИНАМИЧЕСКАЯ КРАЕВАЯ ЗАДАЧА '
5.4.1. Классическая и вармщнониая постановки
Динамическое поведение упругого тела при наличии трения на части
его границы описывается (в предположении малых перемещений и де-
формаций) соотношениями
aii.j + ft = QU'i'-в Q x (0, 7), (5.4.1)
МО = у (Wi.y + Uj.d в О х (0, 7), (5.4.2)
ОЦ = CiJhkEhk В О X (0, 7), (5.4.3)
Ui = Ui на Гу X (0, 7), (5.4.4)
S, = Ft на Гл х (О, 7), (5.4.5) .
если | Sr| < ц | Sn| , то uj- = 0 на Г« X (0, 7), (5.4.6)
если | Sr| = д | , то существует X > О, такое что
ит = - \ST на Гх х (0, 7), (5.4.7)
SN = CN на Г5 X (0, 7). (5.4.8)
212
Гл. 5. Задачи с трением в теории упругости
Здесь время меняется на интервале [О, Г] и штрихи обозначают произ-
водную по времени д/д t. Плотность q - q(x), xefi, предполагается
положительной функцией из L°°(Q) с ess inf q(x) > 0. Заданные силы
и перемещения /.F.CnvlU зависят от х и t. На первых порах все функ-
ции в (5.4.1 — 8) предполагаются достаточно гладкими. К приведён-
ным выше соотношениям добавляются еще начальные условия
и, = Moi, и/ = ии для х € fi, t = 0.
Здесь ио, и ии — заданные функции от х, описывающие поля перемеще-
ний и скоростей при t = 0. Разумеется, ио и Ui должны быть согласо-
ваны с кинематическими граничными условиями на Г и. Появление uj-
вместо ит в (5.4.6, 7) приводит к необходимости рассмотрения вариа-
ционных соотношений для скоростей. Введём множество
t/доп = (Н V € v> = и/ на Гц). (5.4.10)
Тогда нашу краевую задачу можно представить в следующей вариаци-
онной постановке: найти u;[0, Т] -> [№(fi)]3, удовлетворяющее вариа-
ционному неравенству
(qu", v - и') + а(и, v - и') + Ф(и) - Ф(и') (f, v - и')
+ J Ft(vi — Ui)dr + J Cn(vn - u^)dV V v € Ua0Tl, (5.4.11)
гЛ rs
начальным условиям (5.4.9) и такое, что u'(t)eUaon, u"(t)t.
€[£2(П)]3 l.
Это вариационное неравенство получается из (5.4.1 — 8), если ум-
ножить (5.4.1) на и - и', проинтегрировать по fi и формально приме-
нить теорему Грина — Гаусса, а затем учесть граничные условия (как
в статической задаче). Здесь стоит обратить внимание на то, что
функциональная постановка задачи в её окончательном виде ещё не
дана, поэтому вариационная постановка (5.4.11) носит «предваритель-
ный» характер. Далее, более точно учитывая зависимость данных за-
дачи от времени, мы установим, в каком смысле решение
вариационной задачи удовлетворяет соотношениям (5.4.1 — 9). Вариа-
ционное неравенство (5.4.11) физически выражает принцип виртуаль-
ной мощности в виде неравенства.
Для динамической задачи случаи mes Ги > 0 и Гу = 0 можно изу-
чать одновременно при дополнительном предположении, что если
Гц = 0 , то соотношение (5.2.11) выполняется для всех t > 0. Это со-
1 Точнее было бы написать «'(/, • )€ 1/доп и т. д.
§ 5.4. Динамическая краевая задача
213
отношение гарантирует, что не появится «твёрдых» движений тела,
несовместимых с граничными условиями. Введём подпространство
Ио = [u| u€[№(Q)]3, v = 0 на Г</]. (5.4.12)
Подставляя в (5.4.11) v = v - w и й = и - w, где w;[0, Г] -»
-»[№ (В)]3 —функция, такая что и'(/)|Ги = ^(0 € [Я1/2(Ги)]3 (см. [181,
т. 2, гл. 4, теоремы 2.1 и 5.3]), приходим к следующей формулировке
задачи:
Задача 1. Найти функцию Т] -* Ио с U'(t)^Vo, U"(t) € [£2(В)]3,
такую что
(ей", v - й) + а(й, v - й') + Ф(й + w') - Ф(й' + w')
(ф, v — й') V v € Ио (5.4.13)
и при t = 0 выполнены условия
й = йо = ио - w(0), и’ = Й1 = Ui - w'(0). (5.4.14)
Здесь
(ф, v - й') = (f, v - й') + j Fi(vt — й/)</Г
г,
+ J Cn(vn - - (ew"> v ~ й') - a(yv, v - й'). (5.4.15)
5.4.2. Существование решения
Чтобы установить существование решения, рассмотрим регуляризо-
ванную задачу — вариационное неравенство (5.4.13) в сглаженной фор-
ме. Она получится, если в (5.4.13) заменить Ф на Фе, где Фе задано
формулой (5.1.19):
Задача 1£. Найти функцию йе:[0, Т] -» Ио с й«'(0 € Иь йе"(0 € [£2(В)]3,
которая удовлетворяет неравенству
/ ^ф \
(QUe'.v) + а(йЕ,о) + /—А(йг'+ w'),v) =w,v) vile Ио (5.4.16)
\ u V I Fs
и начальным условиям (5.4.14).
Сначала мы «построим» решение задачи (5.4.13, 14) как предел ре-
шений йе задачи (5.4.14, 16) при е->0, в предположении что йе суще-
ствует. Затем докажем (в п. 5.4.3), что йЕ на самом деле существует.
Предложение 5.4.1. Пусть
f.f’.f" ZL2(0T, [£2(В)]3), (5.4.17)
Cn, Cn, CfK L2(0T, [£2(Ts)]3), (5.4.18)
214
Гл. 5. Задачи с трением в теории упругости
F, F',F" € Z2(0 Т, (Л2(Г?)]3), (5.4.19)
w, w', w", w"', w"" е L2(0 Т, [Н1 (О)]3), (5.4.20)
w(0) € [Я2(Й)]3, (5.4.21)
р. | Cn | не зависит от t, (5.4.22)
Йо € [Я2(О)]3, Й1 6 [^(Й)]3, (5.4.23)
Mir + Wr(0) = 0 на Г$. (5.4.24)
Предположим, что линейный функционал
v -> a(w(0), й) - (Sr(0), йт)Г$ + 1 [0/л*ел*(йо)]ж jVidQ (5.4.25)
о
непрерывен на Ко в [£2(й)]3-топологии. Тогда решение й£ регуляризо-
ванной задачи удовлетворяет следующим соотношениям:
й£ -* й * -слабо в Z“(0 Т, Ко), (5.4.26)
й£'->й' »-слабо в £“(0 7;ро), (5.4.27)
й£"-й" ♦-слабо в Л°°(07; [Т2((1)]3, (5.4.28)
и й есть решение задачи (5.4.13, 14).
Доказательство, (а) Будем считать (см. предложение 5.4.2), что суще-
ствует единственное решение й£ € Z°°(0 Т, Ко) задачи 1с, такое что
й/ € Г°(0 Т, Ко), й 7 € L“(0Т. [L2(Й)]3). (5.4.29)
(Ь) В силу монотонности d$s/dv, из уравнения (5.4.16), в которое
вместо v поставлено й£ + w', получим неравенство
(б й£',' й£' + w') + в(й£, й£' + w') 0J-, й£' + w’). (5.4.30)
Из (5.4.30) вытекает, что
4- 41 ( f е(««)2^О + «(й£, й£)
о
(^, й£ + w') - (е й'£, w') - а(й£, w'). (5.4.31)
Комбинируя (5.4.31) с (4.1.38) и интегрируя от 0 до t, приходим к
неравенству2
I Й£'|^ + С1|ц£| 1 - С2 1 й£ | 2 С | Й1 \1 + С I ЙО I I
+ 2 J (^, й' + w')dt - 2(е й', w')
О
+ 2(ейь w'(0)) + 2 J (ей' w")dt - 2 f а(й, w')dt. (5.4.32)
о о
1 Более точно, ниже следовало бы писать j (^(Z, • ), (й£ + w‘) (t, • )dt и т. д.
о
§ 5.4. Динамическая краевая задача
215
Поскольку ф, ф' 6 L2(0T, Ио'), из (5.4.32) и неравенства
1“£|г с J |г
О
следует, что
I «е I 2 + | “J 1 «S С (1 + I ( I й’ | I 4
С С(<‘1 + । "е । 2 +
- 2(^(0),
а значит,
1“£'|2 + |й£|?< с(1 •
Применяя неравенство Гронуолла
|й;|2 с,
(с) Дифференцируя (5.4.16) по t
(QUe',’Ue"+ w") + а(йе, йс"+ w")
/ / d Ф£ \ '
+ \(-dF(^' + w,)) йс "
''\idt+ |йо|! (5.4.33)
Iй£12dt) + 2 I W,u^)dt
| й£ | Id + 2(ф, й£)
fc) + 2j (5.4.34)
о
1- Н|й£'|22+ |и£|1)<М. (5.4.35)
о /
[29; 326], заключаем, что
I й£ 11 с. (5.4.36)
и полагая v = й7 + w", получаем
’ w" )rs = (1А', й/'+ w"). (5.4.37)
Отметим, что дифференцирование по времени проведено здесь фор-
мально. Проводимые ниже выкладки остаются справедливыми, если
вместо производных по времени взять разностные отношения. Из
(5.4.22) и монотонности d$E/dv следует неравенство
/ / d Ф \ 9 \
(( —(й; + w') 1 й''+w") о.
\\ dv е ), £ /rs
(5.4.38)
Это легко проверить, записав производные по времени как пределы
соответствующих разностных отношений. Ввиду (5.4.38), равенство
(5.4.38) даёт неравенство
( J е(й'<Э2<*й + *(й£',й;)
(ф', йё'+ w") - (q йе", w") - (5.4.39)
Интегрируя (5.4.39) в пределах от 0 до t и учитывая (4.1.38) и нера-
венство
|Й£'||^С J \te'\ldt + I Й11(5.4.40)
216
Гл. 5. Задачи с трением в теории упругости
получаем
I &"|г + |«£'|1 «S ll + l «'e(0)|i + j |й£"|^^
+ 2 J (^', йё')dt - 2 j (qu'e", v/")dt. (5.4.41)
о о
Из (5.4.17—21) следует, что ф" € L2(0 Т, vq), поэтому
j (^',й£'')Л = (<Д',й;) - (^'(0), Й1) - W",H')dt
с( I rd йг'| I + 1) + i Н" I d й£'1 idt. (5.4.42)
О
В силу (5.4.41, 42) и соотношения
t t
J (qUe", w")dt = (e«£'z, w") - (q Йе'(О), w"(0)) - j (qUe", w"')dt,
о 0
(5.4.43)
имеем
I йё'\ 2 + I «;| 1 ss c( I «111 + I йе"(0) I 2) (
+ c j (|й£'|?+ \u't\%dt. (5.4.44)
(d) Полагая в (5.4.16) t = 0 и используя (5.4.24), получаем
(q й'г(О), й) + a(iUo, v) = (’/'(О), v)
= (/(0), v) + J Fi(0)vidV + J CN(0)vNdV
If Ts
- (e w " (0), v) - a(w (0), v). (5.4.45)
Ho
а(йо, v) = СуА*£1/(й0)£л*(й)ЗЙ
= — J (Сул*£л*(йо)), jVidQ
+ J Fi(0)i>idr + J CN(P)vNdV + {ST(0), vT)rs, (5.4.46)
rF rs
поэтому
(q H'e, V) - (СуЛ*£л*(Йо)), jVid fi + (Sr(0), VT)rs
= «(0), v) - (e W"(O), u) + <z(w(0), v). (5.4.47)
§ 5.4. Динамическая краевая задача
217
Ввиду (5.4.17, 21), из (5.4.25, 47) вытекает, что
| й7(0) 12 С с (5.4.48)
Неравенства (5.4.44) и (5.4.48) дают
|й£'|1 + |й'г'Ц^с(1 + Н|Й7|?+ |«;R)dO. (5.4.49)
о
Используя неравенство Гронуолла, заключаем, что
| йе"\ 2 < С, I йё 11 с. (5.4.50)
(е) Из (5.4.36) и (5.4.50) следует, что последовательности [йЕ],
[й^] и [й£"] ограничены, первые две — в пространстве £“(0 7? Ио), а
последняя — в £“(0 Т, [£2(П)]3). Поэтому из них можно выбрать ♦ -сла-
бо сходящиеся подпоследовательности, которые по-прежнему будем
записывать как [йе], [fi'j, [й/'j. Соответствующие пределы обозна-
чим й, й', й". Ниже будет показано, что й, й' и й" удовлетворяют
вариационному неравенству (5.4.13) и начальным условиям (5.4.14).
(f) Вариационное неравенство (5.4.16) остаётся верным, если вме-
сто и подставить и — й'е Из полученного таким образом неравенства
и неравенства
/ е/Ф(й' + w') \
Фе(й + w') - ^г(й£' + w') > /- - -----, v - й'\ (5.4.51)
вытекает, что
(б й^'й - й£) + aifig, v - й') + Ф£(й + w’) - Ф£(й£' + w')
v — й') УйбИо. (5.4.52)
Предположим, теперь, что v зависит от t, причём v 6 £2(0 Т, Vo).
Интегрируя (5.4.52) от 0 до Т, приходим к неравенству
Gie^G2e, (5.4.53)
где
G1 £ = J [(е й£", и) + д(й£, д) + Ф£(й + w') - СД, V - й£')]Л, (5.4.54а)
G2e = J ((е й£", й£) + д(й£, й£') + Ф£(й£' + w'))dt. (5.4.54b)
Поскольку
G2e = Г 1 6 (й£'(7))2^ + а(йс(Т), й£(Т))1
X I д I
- 4-Г I 0 (й/)2бК2 + а(йо, й0)1 + J Ф£(й£' + w')dt, (5.4.55)
•4 1 Q 1 0
218
Гл. 5. Задачи с трением в теории упругости
при е-»О получаем, ввиду (5.1.21),
lim inf G2e > 4 I 1 e (H'(T))2dQ + а(й(Г), й(Т))
X I u I
i Г . , 1?
—v I J e Go) dQ + a(«o, йо) + J Ф(й' + w')dt
2 L о J 0
= I [(e й", й') + а(й, й') + Ф(й' + w')]tff. (5.4.56)
о
С другой стороны,
lim G] £ = j [(е“"» й) + a(fi> и) + Ф(й + w') - (ф, v - u')]dt. (5.4.57)
е-»0 о
С учётом того что
lim G1£ = lim inf G1£^lim inf G2£, (5.4.58)
из (5.4.57) и (5.4.56) вытекает вариационное неравенство
т
[ [(ей”, v - й') + а(й, и - й') + Ф(й + w') - Ф(й' + w')
о
- GA, v- U')]dt^O V й € L2 (0 Т, Vo), (5.4.59)
которое можно рассматривать как выражение принципа Гамильтона
для настоящей задачи7. Далее, в силу (5.4.26 — 28), й и й' удовлетво-
ряют начальным условиям (5.4.14).
(g) Теперь выведем из (5.4.59) поточечное неравенство (5.4.13). Для
этого рассмотрим последовательность [0х] интервалов вида
Ок = (t0 - 1/К, t0 + 1/К) С' [О, Т]
и возьмем в (5.4.59)
й' при t^QK,
v при t € 0х.
Здесь v — произвольный фиксированный элемент из Ио Тогда (5.4.59)
сведётся к неравенству
Гд1 . J [(е й”, й - й') + а(й, V - й')
I 0х I е*
+ Ф(й + w') - Ф(й' + w') - (ф,й - й' )]dt 0. (5.4.60)
' Рассуждения, с помощью которых было получено неравенство (5.4.59), весьма на-
поминают рассуждения, которые используются в аналитической механике или линейной
эластодииамике при выводе классического принципа Гамильтона.
§ 5.4. Динамическая краевая задача
219
Устремляя К к бесконечности и применяя (1.4.10), заключаем, что
найдутся множества нулевой меры 0',0" С (0, Г), такие что
-| J I S [(е W7 й) + а(й, v) - (ф, v)]dt
I 0к | ек
->(6u"(to),v) + a(u(t0), v) - (№), v) (5.4.61)
для любого /о 0 ' и
, J . ( [(о й','й') + а(й, й') + Ф(й' + w') + (^, й' )]dt
I 0к | ек
-> (Qd"(to),u'(to)) + <z(w(/o), w'(fo)) + Ф(й'(Г0) + ^'(/0))+ (гД(Го), й')
(5.4.62)
для любого to$6” Из (5.4.60—62) следует, что_для ?o?0'U0" мож-
но в (5.4.60) перейти к пределу при В результате полу-
чим (5.4.13). □
Кратко обсудим, в каком смысле вариационное решение задачи
удовлетворяет соотношениям (5.4.1 — 8). Рассуждая, как и в статиче-
ском случае, легко убедиться, что вариационное решение удовлетворя-
ет соотношению (5.4.1) в смысле теории распределений, а
соотношениям (5.4.4 — 8)— в смысле следов. Учитывая, что
й € L“(0 Т, Vo) и й' € L“(0 Т, Vo) на основании теоремы о непрерывнос-
ти (п. 1.4.1) заключаем, что й.-[0, Т] -* У—непрерывная функция, и,
следовательно, начальное условие й = йо при t = 0 имеет смысл. То
же верно и в отношении других граничных условий.
5.4.3. Регуляризованная задача
Чтобы завершить доказательство существования решения задачи
(5.4.13), осталось установить существование ие.
Предложение 5.4.2. В предположениях предложения 5.4.1 существует
решение йс€ Lx(0T, Vo) уравнения (5.4.16), удовлетворяющее началь-
ным условиям (5.4.14) и такое, что
й/ € L“(0 Т, Vo), й ’’ € L“(0 Т, £(i) 2(ОД3). (5.4.63)
Доказательство. Воспользуемся методом Галёркииа. Пусть [ vi.....vm,... ] —
последовательность элементов нз Vo, таких что
(i) для любого m элементы [ vi.um ] линейно-независимы; обозначим порождаемое
нмн m-мерное векторное пространство через Vm ;
220
Гл. 5. Задачи с трением в теории упругости
т
(ii) линейные комбинации S ат, где т конечно и а, € IR, i = 1, 2.......т, плотны
i = 1
в Vo .
Существование такой последовательности (называемой базисом Галёркина) вытека-
ет из сепарабельности пространства Vo . Без ограничения общности можно считать, что
Но, Hii VmQ для некоторого фиксированного то.
Теперь рассмотрим следующую задачу Коши: найти такие функции gm.
(i = 1, т, т т0), что
“s m(f) = s i Vm п. в. на (0, T). (5.4.64)
i = 1
I die \
<e^'m,vp) + a(uem,vp) + ( ——(u’m + w'), up) =(^,vp), p=\....m,
\ a v / Г$
(5.4.65)
acm = ЙО. й'ет = Й1 при t = 0. (5.4.66)
Из теории дифференциальных уравнений известно, что для любого т то найдется
tmo € [0, 7], такое что иа [0, t„ ] существуют непрерывные функции gm., i = 1,..., т, ко-
торые удовлетворяют уравнениям (5.4.65 , 66). В действительности tm = Т, как это выте-
кает из приводимых ниже априорных оценок. А именно, из (5.4.65) вытекает
вариационное уравнение
/<7Ф£ \
{Qa".i} + a(aenPv\+ (-----------5)г = W.v') V5€K„. (5.4.67)
. \ d v f Гз
Дальнейшие рассуждения напоминают рассуждения из доказательства предложения
5.4.1. Полагая в (5.4.67) 5 = + w', получим соотношение, аналогичное (5.4.30), из
которого следуют неравенства
<5-4-68)
Дифференцируя (5.4.65) по t, получаем для й£т неравенство (5.4.44). Далее, легко про-
верить, что
(5.4.69)
откуда
и мы заключаем, что при т -» «>
“£Я1 «е * -слабо в L“(0 Т, Vo), (5.4.71)
й'ст “6' * -слабо в £"(0 Т, Vo), (5.4.72)
й"т “г" * -слабо в £"(0 Т, (£2(Я)]3). (5.4.73)
Как следует из (5.4.66) и (5.4.71 —73), йе удовлетворяет начальным условиям (5.4.14).
Осталось показать, что йе— решение уравнения (5.4.16). Из (5.4.67) видно, что после-
довательность [ (di/d v) (й£m + >*')) ограничена в пространстве £"(0 7; Ио')- Поэтому
§ 5.4. Динамическая краевая задача
221
при т -* о»
d Ф£
(й'Ст + •*') • -слабо в £“(0 Т, Ио'). (5.4.74)
Фиксируя р и переходя в (5.4.65) к пределу при т -» оо, получаем
(б й'с', ир) + а(йе, vp) + {уе, vp}rs = Vp). (5.4.75)
м
Но линейные комбинации S gmpVp плотны в Vo, поэтому
р •= •
(б йс> + а(“е> £) + (Ус< ")г, = (& ») Vn€K0. (5.4.76)
Наконец, докажем, что
ЛФ£
Уг = -Т~(^+ w'). (5.4.77)
d v
Для этого возьмём произвольную функцию z 6 1/(0 Т, Vo). Из монотонности d ie/d v
вытекает неравенство
г /di, di, \
Ат= J —(“£т + ~— <г +»*''). “£'т ~ z) dt^O. (5.4.78)
о \ d v е т a v /г&
Используя (5.4.65), можно преобразовать Ат следующим образом:
= - J [(е й'Е т) - а(йе й'с т) - (*, й'ст )]dt
О
Г / Фе \ Т / \
" ! » )'*] dt - j _(г+Л
о \ «и / i s q \ a и / i $
= - v I е1/2й;т(П 12 + -|-1 e1/2“i 122 - ^ст(Г), йст(Т))
1 /«Фс \
+ —а(йо,йо)+ j W,iVm)dt - —(u£'m + w'), z) dt
0 0 \ “ v / rs
T / d i, \
- ! (—— (z + W), й' - z) dt. (5.4.79)
0 \ a i> / rs
Поскольку й^т(Т) -» й£(Т) и йе т(Т) -* й,(Т) слабо в Vo , легко поверить, что
lim sup ( - 11 Ql/2iVm(T) | f) < - | е1/2“ДП I 2. (5-4-80)
lim sup ( - а(йст(Т), Hcm(T))) < - а(йе(Т), йс(Т)). (5.4.81)
Полагая m -* <x>, получаем
0 < lim sup Am < - j [(q й" ip + а(йс, й^) - й'с) ]dt
r T /dic ’
- iO'rW'- i \~i—(z + V)'), (fi'~ z)
о о \d» t
rs
dt.
(5.4.82)
222
Гл. 5. Задачи с трением в теории упругости
Но, в силу (5.4.76),
J Ке й”, йр + а(й е, и') - й' )]d t = - j (у£, u^dt. (5.4.83)
о о
Отсюда и из (5.4.82) вытекает, что
f / d*, \
I \У* ~ “й “ Ч dt'Zb (5.4.84)
J \ dv s ] Г$
о
для любой функции z 6 £2(0 Т, Ко). Возьмем z = й'с - \ z, где X > 0, z € £2(0 Т, Ко), и
устремим X к 0. В результате получим
И у. - (Д' + *'), z\ dt^O VZ € Ь2(0 Т, Ко), (5.4.85)
‘ dv 1 /г,
О
откуда и вытекает (5.4.77). □
5.4.4. Единственность решения
Предположим, что выполнены предположения предложения 5.4.1 и
что существует решение и неравенства (5.4.13), удовлетворяющее на-
чальным условиям (5.4.14).
Предложение 5.4.3. При указанных предположениях поле перемещений
и, удовлетворяющее (5.4.13, 14), определено однозначно.
Доказательство. Пусть Ui и иг — два решения (5.4.13, 14). Подставляя
(в 5.4.13) сначала й = «ь v = иг, а затем й = иг, v = ui и складывая по-
лучающиеся неравенства, заключаем, что
- (е (« 7 - И 'г)> «1 - «2) - о(и/ - U2, и{ - и£) 0, (5.4.86)
или
W [ 1 ® ~ M^2rfn + a(U1 ~ U2> U1 ~ °- (5.4.87)
В силу начальных условий, при t = 0 имеем Ui - иг = 0 и и{ - и/ = 0.
Отсюда и из (5.4.87) следует, что и/ = иг. □
§5.5.0 НЕКОТОРЫХ ДРУГИХ ТИПАХ ЗАДАЧ С ТРЕНИЕМ
Математическая модель с кулоновским трением, которую мы изучали выше, описывает
заведомо упрощенную ситуацию. В большинстве реальных задач нормальная сила Sv
на Ts не известна, а должна быть вычислена. Допустим, что задано нормальное переме-
щение, скажем
uv = 0 на Ts.
(5.5.1)
§ 5.5. О некоторых других типах задач с трением
223
Положим
t/доп = [v I v € [/^(О)]3, и = 17 на Гр, un = 0 на Гх].
Тогда для и € t/доп формально получаем вариационное неравенство
а(и, и - и) + j д | Sn | (| ит | - | ит | )dT
rs
> (f, V - и) + j Fi(vi - ui)dr V и € С/доп- (5.5.2)
r>
Заметим, что в (5.5.2) появляется SN, а зависимость Sn от и не задана. Как исследовать
(5.5.2), остаётся пока открытым вопросом. Аналогичное (5.5.2) неравенство имеет ме-
сто и для динамической задачи.
Если вместо (5.5.1) задано граничное условие - Sn€ Э j(un) (скажем, граничное ус-
ловие одностороннего контакта), то, как легко показать, решение и удовлетворяет вари-
ационному неравенству
а(и, и - и) + j д | Sn | (| vr I — | ит | )d Г + Ф(илг) - Ф(илг)
rs
^(f,v-u)+ V и € t/'доп» (5.5.3)
rs
где
U'ion = [v | v € [Я‘(0)]3, v = U на Ги)
и
j Лилг(х)ИГ. если /(«J*) « L'<Ts),
rs
Ф(М =
(5.5.4)
оо в противном случае.
Теперь предположим, что на выполнено граничное условие Синьорини для un.
В этом случае Ф(|^у) = Ik(vn) (где 1к — индикаторная функция выпуклого замкнутого
множества [i»n| un( Я1/2(Г$), vn С 0]). Задача сводится к решению вариационного не-
равенства (5.5.3) без членов $(vn) и Ъ(ии), причём в определении пространства U'ion
надо добавить условие 0. Вопрос о существовании решения в этой задаче изучался
в [90; 232]. В [232] было доказано с помощью теоремы о неподвижной точке, что реше-
ние существует для малых значений коэффициента трения. Если Sn считать известным,
то (5.5.3) сводится к вариационному неравенству вида (2.2.9), которое в случае, когда
форма а(и, и) коэрцитивиа (mes Ги > 0), имеет единственное решение. Полукоэрцитив-
ный случай (Го = 0) будет рассмотрен в § 6.2.
Выше мы имели дело лишь со случаем изотропного трения, определяемого условием
вида | St | < ц | Cn |. Этот закон трения напоминает голономные законы пластичности,
и потому было предпринято много попыток обобщить этот закон в духе современной
теории пластичности (ассоциированные н неассоциированные законы трения, см., на-
пример [202]). Здесь мы кратко обсудим случай ортотропного трения.
Обозначим через Л и Ti главные оси ортотропии в касательной плоскости к поверх-
ности rs и пусть STi, ST1 и uTl, иТ1 — компоненты векторов St и ит вдоль этих осей.
Соответствующие коэффициенты трения обозначим щ и д2. Введём статический закон
224
Гл. 5. Задачи с трением в теории упругости
трения вида
если [(5Г1/д1)2 + (5у2/ц2 )2]1/2 < | Cn | , то ит = 0;
если [(5Г1/д1 )2 + (5Г2/д2 )2]'/2 = | Cn | , то существует X > 0,
X Sfi X Sf2
такое что uTl = --------—, иТ1 ----------—
Mi W
(5.5.5)
(5.5.6)
Соотношения (5.5.6) соответствуют голономному закону пластичности с условием те-
кучести
F(S) =
2 1/2
|Gv| <0.
(5.5.7)
В динамической задаче ит надо заменить на Э ит/д t. Вариационные неравенства для обе-
их (статической и динамической) задач остаются теми же самыми, только функция Ф
теперь имеет вид
Ф(«)= j |Сх|((щ«Г1)2 + (дг«Г2)У/2*Г;
rs
(5.5.8)
функция диссипации Ф для динамической задачи получается аналогична Рассмотрения,
проведенные в настоящей главе для законов трения (5.1.3 — 5) и (5.4.6 — 8), могут быть
перенесены, с незначительными видоизменениями, на соответствующие ортотропные
законы трения. Также и закон трения, отвечающий общему предельному условию вида
f(STl, ST1, Cn) < 0, может быть изучен методом, применённым в § 6.2. Таким путём
можно исследовать любой случай анизотропного трения.
ГЛАВА 6
Субдифференциальные определяющие
соотношения и граничные условия
В настоящей главе изучаются следующие три задачи о деформируе-
мом теле при малых деформациях:
(i) Тело удовлетворяет определяющему соотношению вида a€dw(e),
а на его границе выполнены классические граничные условия.
(ii) Тело является линейно-упругим, а на его границе выполнено
граничное субдифференциальное соотношение вида — Stdj(u).
(iii) И определяющее соотношение, и граничные условия носят суб-
дифференциальный характер.
Формулируются и соответствующие динамические задачи. Кроме
того, обсуждаются немонотонные определяющие соотношения, опи-
сываемые суперпотенциалами. По поводу механического смысла рас-
сматриваемых здесь краевых задач отсылаем читателя к гл. 3.
При написании данной главы были использованы среди других сле-
дующие работы: Дюво и Лионе [84], Фикера [99], Фремон [103], Хюн-
лих и Науманн [150], Ленэ [177] и Шатцман [296].
Вариационные неравенства, обсуждаемые в этой главе, часто воз-
никают в технике, например при статическом или динамическом ана-
лизе нелинейных упругих тел с односторонним контактом или с гра-
ничными условиями, учитывающими трение. Мостовые опоры, осно-
вания пластин и колонн, сдерживающие стенки — вот типичные
примеры такого рода задач.
§ 6.1. СУБДИФФЕРЕНЦИАЛЬНЫЕ ОПРЕДЕЛЯЮЩИЕ
СООТНОШЕНИЯ И КЛАССИЧЕСКИЕ ГРАНИЧНЫЕ УСЛОВИЯ
6.1.1. Постановка задачи
Пусть в недеформированном состоянии рассматриваемое тело занима-
ет открытую связную область В в IR3. В В вводится фиксированная
декартова система координат OxiXiXa. Предположим, что граница Г
226
Гл. 6. Субдифференциальные определяющие соотношения
множества О разбита на две непересекающиеся части IV и Гг, точнее,
Г = Гц и Гг.
В обозначениях глав 3 и 4 рассмотрим следующую краевую задачу:
Oijj + fi = 0 в В, (6.1.1)
£v<w) = (utj 4- uj,i) в й, (6.1.2)
а € dw(f) в Q, (6.1.3)
ut = Ui на Гц, (6.1.4)
S, = F, на Гг. (6.1.5)
Здесь Ut = Щх), х € Г и, Fi = Ft(x), х € Г>. Включение (6.1.3) выполня-
ется поточечно, w — некоторый выпуклый п.н.сн. собственный функ-
ционал на IR6. Кроме того, предполагается, что для каждого е
Cl^ijSij) < W(6) С1(£0£у), (6.1.6)
гду ci и ci — положительные константы.
Считая все функции в (6.1.1—5) достаточно гладкими и применяя
теорему Грина — Гаусса, получаем соотношение
j <Ti/[£v(y) - £у(п)]с?й = \fi(Vi-Ui)dO+ j Ft(Vi - Ui)dT, (6.1.7)
q о rF
справедливое для любой функции v, такой что Vi = U на Гц. Включе-
ние (6.1.3) эквивалентно вариационному неравенству
w(e(y)) - w(£(w)) <Ti/[£i/(y) - £y(w)], (6.1.8)
выполняющемуся поточечно в Q для всех е(у) = (£у(у)} € IR6. Дадим
вариационную формулировку этой задачи в соответствующим образом
определённом подпространстве пространства [//'(й)]3. А именно,
предположим, что f € [Г2(й)]3, U € [ЬГ1/2(Гц)]3, F € [Г2(Гг)]3 (см. п.
5.1.2), и введём следующее множество допустимых перемещений:
Uaon = {у | [Н'(Й)]3, v = U на Гс/}. (6.1.9)
Далее, для £ € [Г2(й)]6 положим
Г w(f)cK2, если w(£) € L\Q),
J (6.1.1U)
оо в противном случае.
Согласно предложению 3.3.1, W — выпуклый п.н.сн. собственный
функционал на [Г2(й)]6, позволяющий распространить поточечное со-
отношение (6.1.3) на а, £ € [Г2(й)]6.
§ 6.1. Классические граничные условия
227
Отправляясь от (6.1.7, 8) и используя (6.1.10), приходим к следую-
щей задаче:
Задача 1. Найти поле перемещений и € С/ДОп, такое что
lF(£(y)) - 1F(£(w)) > (f v - и) + ^Fi(vt - Ui)dT Vt>€ С/ДОп. (6.1.11)
Гг
Здесь С/Доп — некоторое замкнутое выпуклое подмножество про-
странства [//'(й)]3, a W как функция от и — выпуклый собственный
п.н.сн. функционал. Его полунепрерывность снизу следует из непре-
рывности отображения е: [/^(й)]3 -> [Г2(й)]6.
Вариационное неравенство (6.1.11) может рассматриваться как по-
становка краевой задачи; её решение удовлетворяет условиям (6.1.1—
5) в обобщённом смысле. Поясним это для случая, когда функционал
w непрерывно дифференцируем. В этом случае (6.1.11) приводит к ра-
венству
Г
(£(w))(y - w)rffl = if, v - и) + I Fi(Vi - Ui)dT Uaon. (6.1.12)
rF
Полагая v - и = ± <p € Г)(й), получаем, что (6.1.1) выполнено в смыс-
ле теории распределений, если а удовлетворяет соотношению (6.1.3).
Применяя теорему Грина — Гаусса, заключаем (см. п. 5.1.2), что
(6.1.5) выполняется как равенство в Н~1/2 (Г). В случае когда функци-
онал w недифференцируем, (6.1.11) эквивалентно включению
-I € a(lT(£(w))) (6.1.13)
для и € С/доп, где I — непрерывная линейная форма на [/^(й)]3, опре-
деленная соотношением
l(v) = [f, v) + \FiVidT. (6.1.14)
Задача 1 приводит к следующей задаче минимизации:
Предложение 6.1.1. Каждое решение и € 17доп неравенства (6.1.11) (ес-
ли таковые существуют) служит решением задачи минимизации
П(п) = шш{П(у) | v € С/доп), (6.1.15)
где П — функционал на [№(й)]3, определённый соотношением
П(у) = 1К(£(у)) - /(у), (6.1.16)
и справедливо обратное утверждение.
228
Гл. 6. Субдифференциальные определяющие соотношения
Доказательство. Это немедленно следует из (6.1.11).
Функционал П выражает полную потенциальную энергию рассматри-
ваемого тела, которая состоит из энергии деформации и потенциаль-
ной энергии внешних нагрузок. Ясно, что П — выпуклый п.н.сн. со-
бственный функционал йа [№(В)]3.
Предложение 6.1.2. Каждое решение и€ (7ДОп краевой задачи (6.1.1—5)
(если таковые существуют) удовлетворяет вариационному неравенству
(6.1.11) и является решением задачи минимизации (6.1.15).
Доказательство. Первое утверждение уже было доказано выше (см.
(6.1.7—10)), а второе следует из предложения 6.1.1. □
Теперь перейдём к вопросу о существовании и единственности ре-
шения и задачи (6.1.11) или (6.1.15).
6.1.2. Существование и единственность решения
Предложение 6.1.3. Пусть шее Гу > 0. Тогда векторы и € С/ДОп, мини-
мизирующие функционал П на С/ДОп, образуют непустое замкнутое
выпуклое множество. В случае когда функционал w строго выпуклый,
решение этой задачи минимизации единственно.
Доказательство. Чтобы применить предложение 2.2.1, надо показать,
что
П(у) -» оо при IltHli -> оо, v € С/Доп. (6.1.17)
В силу наложенных на U условий (см. п. 5.1.2) существует вектор
fo € [№((1)]3, такой что Vo = U на Гу. Используя замену
V = v - Vo € Ко={у|у€ [№(В)]3, v = 0 на Гу),
неравенство Шварца и неравенство (1.4.28), заключаем, что
j eij(v)Ea(v)dQ сП Dll? + с
о
+ 2 j Etj(t))Eij(vo)dQ > CiIICHi - PzIlDlli + c3, (6.1.18)
о
где с, — неотрицательные константы, причём Ci > 0. Из (6.1.6),
(6.1.18) и непрерывности формы l(v) следует, что
П(у) > c(llylli - ally|li - Ь), (6.1.19)
где а, Ь, с — константы, причём с > 0. Тем самым (6.1.17) установле-
но. Далее рассуждаем, как при доказательстве предложения 2.2.1. □
§ 6.1. Классические граничные условия
229
Теперь разберём случай Ги = 0- В этом случае возможно переме-
щение тела как твёрдого, 1/доп = [№(В)]3 и Г> совпадает с Г. Конеч-
но, данная система сил {/<} и (Л) должна быть статически эквива-
лентна нулю, т.е.
(>,€/«+ \FindT = 0 vr € ^, (6.1.20)
й Л
где^— пространство «твёрдых» перемещений. Условие (6.1.20) явля-
ется необходимым условием существования решения; оно непосред-
ственно следует из (6.1.11), если положить там v = и ± г, где и — ре-
шение задачи.
Введём факторпространство [Н1(О)]3/&я определим на нём линей-
ную форму /(•) формулой
7([у]) = /(f) Vy € [f] (6.1.21)
и билинейную форму j £у(-)£у(-)с/О — формулой
а
j «u([f])£y([«])dn = j ey(v)eij(u)dO vv € [у], и € [и]. (6.1.22)
а о
Из (4.1.36) вытекает, что
J еу(М)ММ)^ > dl[f]II2, (6.1.23)
а
где с> 0 — константа, II [у] II — норма в пространстве [Н1^)]3/^.
Определим на этом пространстве функционал П, положив
П([у]) = П(у). (6.1.24)
Это определение корректно в силу соотношений (6.1.20—22).
Предложение 6.1.4. Пусть выполнено (6.1.20). Тогда у вариационного
неравенства (6.1.11) существует решение [и] € [№(В)]3/.Ж Если, кроме
того, w — строго выпуклый функционал, то это решение един-
ственно.
Доказательство. Ясно, что П — выпуклый п.н.сн. функционал на
(№(В)]3/^?. Покажем, что
П([у]) <® при II[у]II -> со. (6.1.25)
Применяя (6.1.23), получаем
Щ[у]) > с(Н[у]Н2 - II[у] II), (6.1.26)
230
Гл. 6. Субдифференциальные определяющие соотношения
где с > 0 — константа, откуда и следует (6.1.25). Единственность ре-
шения [и] в случае, когда функционал w строго выпуклый, устанавли-
вается так же, как и в предложении 2.2.1. □ 1
Приведенные выше результаты справедливы, в частности, для ма-
териалов, удовлетворяющих определяющему соотношению (3.3.86—
87), и для упруго-упрочняющихся материалов. Как отмечалось в
п. 3.3.2, функционал w в этих случаях является непрерывно дифферен-
цируемым и строго выпуклым и удовлетворяет первому из неравенств
(6.1.6). Отметим, что пока мы только его и использовали. Таким об-
разом, для тгйсих материалов обеспечено существование единственно-
го поля перемещений и соответствующих полей напряжений и дефор-
маций. Для упруго-идеальностареющих материалов функционал w об-
ладает теми же свойствами, за исключением того, что он является
лишь непрерывным. Для таких материалов тоже можно утверждать
существование единственного поля перемещений. Отметим, что для
них второе неравенство (6.1.6) не выполняется.
6.1.3. Двойственность
Сформулируем теперь вариационную задачу для напряжений. Для
этого воспользуемся пространствами Н и Е (см. 1.4.32, 33). Опреде-
лим множество допустимых напряжений Едоп формулой
ЕДОп = (т| т € Н, nj,j + fi = 0 в Q,T, = Ft на Гг}. (6.1.27)
Оно является замкнутым выпуклым подмножеством Е. Соотношение
(6.1.3) может быть переписано в обращённой форме (3.3.58). Далее,
как легко проверить с помощью (2.5.3), из второго неравенства (6.1.6)
вытекает, что
с(тц, ту) < wc(f), (6.1.28)
где с > 0 — константа. Чтобы сформулировать вариационную задачу
для напряжений, введём функционал
и-(г) = f i W‘Mda’ ",‘(г) 6 £1(И)’ (6.1.29)
в противном случае.
' В [176, 177] предложения 6.1.3 и 6.1.4 доказаны при более общем предположении,
что
w(e) > с(еиеиУ/2, р > 1.
§ 6.1. Классические граничные условия 231
Он является выпуклым п.н.сн. собственным функционалом на про-
странстве [Л2((1)]6 и позволяет распространить на это пространство
соотношение (6.1.3) (см. предложение 3.3.1). Справедливо следующее
Предложение 6.1.5. Предположим, что всякому решению и € (7ДОП за-
дачи (6.1.1—5) отвечает поле напряжений а € Едоп, удовлетворяющее
определяющему соотношению (6.1.3). Это поле напряжений удовлет-
воряет вариационному неравенству
№с(т) - Wc(a) > <JJ, Т-S)Vu УтбЕдоп, (6.1.30)
задача решения которого эквивалентна задаче минимизации
!Т(<т) = пйп{Пс(г) | т € Едоп}, (6.1.31)
где
Пс(т) = 1Г(т) - <U, Т)Ги. (6.1.32)
Доказательство. Умножая (6.1.2) на тц - оц, т, а € Едоп и применяя
теорему Грина — Гаусса, получим
j ®у^)(т</ - otj)dQ = {U, Т — S)ru Vr € Г доп. (6.1.33)
а
Это равенство в сочетании с вариационным неравенством
1Г(т) - 1Г(а) [ еи(тц - aij)dQ Ут € [Г2(Й)]6 (6.1.34)
а
даёт вариационное неравенство (6.1.30), задача решения которого оче-
видным образом эквивалентна задаче минимизации (6.1.31). □
Функционал Пс выражает дополнительную энергию тела, соотно-
шение (6.1.31) — принцип минимума дополнительной энергии для рас-
сматриваемого определяющего соотношения, а (6.1.30) — принцип до-
полнительных возможных (виртуальных) перемещений. Поскольку
речь идёт о вариациях напряжений, можно, как обычно, говорить, что
мы имеем дело с задачей, двойственной к (6.1.15). Остаётся исследо-
вать связь между решениями задач (6.1.15) (прямая) и (6.1.31) (двой-
ственная). Прежде всего установим существование решений зада-
чи (6.1.31).
Предложение 6.1.6. Предположим, что Едоп # 0- Тогда зада-
ча (6.1.31) имеет хотя бы одно решение <т€ЕДОп- В случае когда
функционал wc — строго выпуклый, это решение единственно.
Доказательство. В силу (6.1.28)
1^(т) cWrWjf Ут£Н, (6.1.35)
232
Гл. 6. Субдиффереициальные определяющие соотношения
где с > 0 — константа. Далее рассуждаем так же, как при доказатель-
стве предложения 5.3.2. □
Для рассматриваемой в этом пункте задачи функционал Л(-) из
(3.2.47) имеет вид
А(и) = -(f, и) - J FiUidT + Л/доп(и). (6.1.36)
Как и в п. 5.3.2, можно проверить, что
Лс(-А'а) = /Едоп(а) - <5, <7>Ги. (6.1.37)
Далее, В(Аи) (см. (3.2.47)) имеет здесь вид
В(Аи) = 1К(£(и)), (6.1.38)
и поэтому
ВЧа) = 1Г(а).
Таким образом, двойственная задача
sup[—Лс( —А'о) - Вс(а)]
Е
(6.1.39)
(6.1.40)
совпадает с (6.1.31). Общая теорема двойственности (см. п. 3.2.2) поз-
воляет сформулировать следующие результаты:
Предложение 6.1.7. Пусть существует «о € ^доп, такое что функцио-
нал W конечен и непрерывен в «(ио). Тогда любое решение и прямой
задачи (6.1.15) и любое решение а двойственной задачи (6.1.31) связа-
ны соотношениями
П(м) + Пс(а) = 0 (6.1.41)
и
W(e(u)) + ir(a) = (c(u), а) (6.1.42)
(условие экстремума).
Доказательство. Это непосредственно вытекает из предложения
3.2.7. □
Отметим, что соотношение (6.1.42) является обобщением поточеч-
ного определяющего соотношения (6.1.3) (см. предложения 2.5.5 и
3.3.1). Для и € l/доп и а € Едоп из (6.1.41) вытекают энергетические не-
равенства
П(У) > П(и) = - Пс(а) > - Пс(т) Vt; € L7flOn Vr € Едоп (6.1.43)
§ 6.2. Линейно-упругое определяющее соотношение
233
Предложение 6.1.8. Следующие утверждения эквивалентны друг
другу:
(i) и минимизирует потенциальную энергию П на {7ДОп, о миними-
зирует дополнительную энергию Пс на Едоп, и имеет место (6.1.41);
(ii) u€ Сдоп и Едоп удовлетворяют условию экстремума (6.1.42).
Доказательство. Это непосредственно вытекает нз предложения
3.2.6. □
Возникает также вопрос, есть ли связь между полями деформаций
и перемещений, удовлетворяющими определяющему соотношению и
кинематическим условиям (6.1.2) и (6.1.4), с одной стороны, н решени-
ем о двойственной задачи — с другой. На этот вопрос даётся утверди-
тельный ответ в [177] при условии, что функционал wc непрерывно
дифференцируем. Для материалов, удовлетворяющих соотношению
(3.3.83), вопросы существования решения исследовались в [313] и [5]
с привлечением пространства функций ограниченной деформации. Та-
кой функциональный подход принят и в настоящей книге в гл. 9 при
изучении задач, возникающих в теории течения.
§ 6.2. ЛИНЕЙНО-УПРУГОЕ ОПРЕДЕЛЯЮЩЕЕ СООТНОШЕНИЕ
И СУБДИФФЕРЕНЦИАЛЬНЫЕ ГРАНИЧНЫЕ УСЛОВИЯ
6.2.1. Формулировка граничных условий
В этом пункте предполагается, что рассматриваемое тело линейно-
упруго, т.е. что
0у = Cijhk^hk, (6.2.1)
где тензор упругости С = {Сде), Ctjhk € Z°°(0), i, j, h, к = 1, 2, 3, удов-
летворяет условиям симметричности и эллиптичности (3.3.61а) и
(3.3.61 Ь). Пусть граница Гмножества 0 разбита на три части Г и,
Гр и Г$, т.е. Г = Ге/ U Гр U Г$, причём множества Гц, Гр и Г$ откры-
ты в Г и попарно не пересекаются. Не исключается возможность, что
Г и = 0 и/или Гр = 0, но Г$ всегда предполагается непустым. На Г с/
заданы перемещения, а на Гр — поверхностные силы (см. (6.1.4) и
(6.1.5)). На Гж должно поточечно выполняться субдифференциальное
граничное условие вида
-S€dj(u), (6.2.2)
где j — выпуклый п.н.сн. собственный функционал на IR3. Итак, клас-
сическая постановка краевой задачи включает в себя соотношения
234
Гл. 6. Субдифференциальные определяющие соотношения
(6.1.1, 2), (6.2.1) и граничные условия (6.1.4, 5), (6.2.2). Как было по-
казано в п. 3.3.1, граничное условие (6.2.2) может отвечать различным
классам задач на неравенства. В отличие от предыдущего параграфа
здесь граничное условие «ответственно» за односторонний характер
задачи и за получающиеся вариационные неравенства. Можно поста-
вить ещё две аналогичные задачи. Во-первых, можно предположить,
что на Гж задано соотношение вида
-Sit-in), i = 1, 2, 3, (6.2.3)
где 0,: IR -» IR — максимальные монотонные операторы. Во-вторых,
можно рассмотреть случай, когда энергетический функционал j разло-
жим (см. (3.3.155)) и выполнены включения
— Sn € djN(uN), —8т€д}т(ит)- (6.2.4)
Метод, который ниже будет использован для случая граничных усло-
вий (6.2.2), применим также и в случаях (6.2.3) и (6.2.4).
Предполагая, что все интересующие нас функции достаточно глад-
ки, можно, по теореме Грина — Гаусса, записать
(<тц(ду(у) - fiy(u))rffi = \fi(Vi - Ui)dQ
Q О
+ j Fi(vt - ut)dT + j St(Vi - Ui)dT (6.2.5)
Гг Is
для каждого v, такого что Vi = Ui на Г и-
Для того чтобы дать функциональную постановку задачи (как в
предыдущем параграфе), определим на (£2(Г)]3 функционал Ф
формулой
♦(„) = П “ЛИ (6 2 6)
(^оо в противном случае.
и, как и в п. 3.3.4, рассмотрим его сужение на [//1/2(Г)]3, обозначая
это сужение снова через Ф. Ясно, что Фь и -» Ф(и | г) — выпуклый
п.н.сн. собственный функционал на [/^(Я)]3. Отправляясь от (6.2.2),
(6.2.5) и (6.2.6), мы можем теперь сформулировать следующую задачу
(вместо Ф(и | г) будем писать просто Ф(и)):
Задача 1. Найти поле перемещений и € {7ДОП, такое что
а(и, v - и) + Ф(д) - Ф(м)
>(А v - и) + j Fi(yt - Ui)dT Vt?€ L/доп, (6.2.7)
If
где a(u, v) задано соотношением (5.1.10).
§ 6.2. Линейно-упругое определяющее соотношение
235
Можно поставить ещё две задачи:
Задача 2. Найти и € L/flOn, такое что
П(и) = шш[П(у) | v € L/доп}, (6.2.8)
где
П(у) = | a(v, v) + Ф(у) - if, у) - (FiVtdT. (6.2.9)
2 Л
Задача 3. Найти и€ (7ДОП и а€Едоп, такие что выполнено (6.2.1) и
Ф(и) + Фс(-$) = - <5, u>rs. (6.2.10)
Между этими задачами существует следующая связь:
Предложение 6.2.1. (а) Любое решение задачи 1 является также реше-
нием задачи 2, и наоборот.
(Ь) Если поле перемещений и € 1/доп и поле напряжений а € Едоп
дают решение задачи 3, то и служит решением задач 1 и 2.
(с) Если поле перемещений и € С7Д0П является решением задачи 1,
то соответствующее поле напряжений <т(а(м)) принадлежит Едоп и
{и, о) будет решением задачи 3.
Доказательство. Утверждение (а) непосредственно вытекает из пред-
ложения 2.2.2. Утверждение (Ь) следует из соотношения (6.2.5) (т.е.
формулы Грина — Гаусса, записанной для принятой нами здесь функ-
циональной постановки (ср. с (1.4.37)) и неравенства
Ф(у) - Ф(и) > - <S, v - u>rs vy € [Я1/2(Г)]3, (6.2.11)
справедливого для UitH1/2(T). Напомним, что (6.2.11) эквивалентно
(6.2.10).
Докажем утверждение (с). Беря и€ {7ДОП и подставляя у - и =
€ [^(0)]3 в (6.2.7), заключаем, что равенство (6.1.1) выполнено в смыс-
ле [^'(0)13, а поскольку /}€£2(0), то оно выполнено и в смысле
[Г2(О)]3. Из (1.4.37) и (6.2.7) вытекает, что
(S - F, v - u)rF + Ф(у) - Ф(и) + <5, у - M>rs > 0
vy € L7flon. (6.2.12)
Если в (6.2.12) взять у,- - и, = ± щ € №/2(Г), с носителем в intFr, то
мы получим равенство (6.1.5), которое выполняется как равенство в
L2(Tf). Учитывая сюръективность следового отображения, неравен-
ство (6.2.12) можно записать для щ, у, € №/2(Г). Отсюда вытекает
(6.2.11), а значит, и (6.2.10). □
236
Гл. 6. Субдиффереициальные определяющие соотношения
Функционал П выражает потенциальную энергию тела, а соотно-
шение (6.2.8) — тот факт, что в положении равновесия потенциальная
энергия достигает своего минимума. Вариационное неравенство (6.2.7)
представляет собой принцип виртуальных перемещений в форме нера-
венства.
В следующем пункте мы приведём дальнейшие результаты о су-
ществовании и единственности решения рассматриваемой задачи.
6.2.2. Теоремы существования и единственности
Снова рассмотрим отдельно случаи шезГи > О и Ги= 0.
Предложение 6.2.2. Если тезГи > 0, то задача 1 имеет единственное
решение.
Доказательство. Чтобы применить предложение 2.2.1, надо прове-
рить выполнение условия (2.2.3). Рассуждаем, как при доказательстве
предложения 5.2.2. Полагая 0 = v - w € Vo, где w = U на Г и, по-
лучаем
П(у) = П(С + w)
> a(w, С) + 1 а(0, 0) + Ф(у) - (f, у) - (FiVidV. (6.2.13)
г.
По теореме Хана — Банаха найдутся константы а, Сг> 0, такие что
Ф(у) > - (cillvlli/2 + Ci) vt?€ [Я1/2(Г)]3. (6.2.14)
Замечая, что все рассматриваемые (см. предложение 2.3.3) линейные
формы непрерывны, заключаем на основании (6.2.13), (6.2.14) и нера-
венства Корна (1.4.28), что
П(у) > с(11у111 + cillylli + б), (6.2.15)
где с > 0, с, 0 — константы. Следовательно,
П(у) -» оо при Hulli -» оо, v € идаа. (6.2.16)
Тем самым существование по крайней мере одного решения обеспече-
но. Докажем единственность решения. Пусть щ и иг — два решения
задачи 1. Полагая в (6.2.7) и = щ, v = иг и и = иг, v - и\, получим
а(и\ - иг, ut - иг) 0, (6.2.17)
откуда вытекает, что щ = иг. □
Рассмотрим теперь случай Ги = 0. Вначале докажем результат о
единственности.
§ 6.2. Линейно-упругое определяющее соотношение
237
Предложение 6.2.3. Пусть Ги = 0. Предположим, что ui и ад — два
поля перемещений, являющиеся решениями задачи 1, а щ и аг — соот-
ветствующие поля напряжений. Тогда
ui - иг€^, c(ui) = с(иг),- a(ui) = а(иг).
(6.2.18)
Доказательство. Как и в случае предложения 6.2.2, устанавливаем
справедливость неравенства (6.2.17), откуда следует (см. (5.2.14))
включение (5.2.19). □
Предложение 6.2.4. Пусть Ги= 0. Предположим, что
Ф = Ф1 + Фг,
(6.2.19)
где Ф1 и Фг — собственные выпуклые п.н.сн. функционалы, такие что
Р(Ф1) П Р(Фг) # 0. Предположим также, что для некоторого a > 1
Ф1(0) = 0, Ф1(/у) /“Ф1(у) Va € [Я1 (О)]3 (6.2.20)
при любом t > 0 и что
Ф1(г) >0 vr € г # 0. (6.2.21)
Тогда у неравенства (6.2.7) существует по крайней мере одно решение.
Доказательство. Ввиду предложения 2.2.1 нам надо доказать, что вы-
полнено (2.2.3). Допустим противное. Тогда найдётся последователь-
ность {уи), vn € [№(0)]3, такая что llv„lli -» ® при л -> со и
П(у„) с,
(6.2.22)
где с > 0 — константа. Поделив это неравенство на llanlli и обозначив
через wn отношение ии/|| vn II i, получим, что (при достаточно боль-
ших л)
иъ) +
Ф(^)
Игл. Hi
(6.2.23)
1 .
2
1 \
где с>0 — константа. Так как Ф1 и Фг удовлетворяют (6.2.14), из
(6.2.23) следует, что ____
a(w„, w„) с' (-Д- + -т-Цл) >
\IIVnlll 11уи111/
(6.2.24)
где с' > 0 — константа. Так как II w„lli = 1, у последовательности ()
найдётся подпоследовательность (}, слабо в [№(0)]3 и сильно в
[Z2(O)]3 сходящаяся к некоторому элементу и». Из (4.1.23) и (6.2.24)
вытекает, что
0 > lim inf a(wn', wn') a(w, w). (6.2.25)
П '-*oo
238
Гл. 6. Субдиффереициальные определяющие соотношения
Значит, w € 3?. Но (см. (1.4.29))
a{wn', W) + ft | W | 2 > ft, (6.2.26)
где ci, ft — положительные константы. Переходя к lim inf, получаем
| w | г > c, (6.2.27)
где c > 0 — константа.
Поскольку для Фг (см. (6.2.19)) выполнено (6.2.14), из (6.2.23) и
(6.2.20) следует, что
ф1(М < и на — 1 (1 + IД--) • (6-2.28)
1|У„Н? \ ИУлИ1 /
откуда
ФДв») lim inf ФДм'л) 0. (6.2.29)
Но это противоречит (6.2.21), так как w € 3$ и w # 0. □
Предложение 6.2.5. Пусть = 0. Предположим, что
Ф(у) = Ф0(у) - <Л, у>, (6.2.30)
где Л € (Я-1/2(О)]3 задано, а Фо — собственный выпуклый п.н.сн.
функционал, такой что
Фо(О) = 0, Фо(/У) = /Фо(У) V/ > 0 Vy € [ЯЧО)]3. (6.2.31)
Тогда:
(а) выполнение неравенства
Ф0(г) > (f, г) + jFir-idT + <Л. r> Vr€.9? (6.2.32)
rF
является необходимым условием, а
(Ь) выполнение неравенства
Ф0(г) > (f, г) + (Fr.dT + <й, r> vr€^, г # 0 (6.2.33)
Л
— достаточным условием существования решения неравенств^ (6.2.7).
Доказательство. Утверждение (а) доказывается так же, как (5.2.10)
(см. также (5.2.8, 9)). Утверждение (Ь) доказывается, как и в случае
предложения 6.2.4, рассуждением от противного. Вначале мы показыва-
ем, что w € .9? и что имеет место (6.2.27). Затем с помощью (6.2.31)
устанавливаем, что
Фо(и'л’) (f. Wn-) + \FiWn-idT + <й, wn-) + , (6.2.34)
§ 6.2. Линейно-упругое определяющее соотношение
239
где с > 0 — константа. Перейдя к lim inf, получим
$o(w) [f, w) + jFtWjdr + <й, w), w* 0, (6.2.35)
rF
что противоречит (6.2.33). □
Ясно, что этот результат применим к исследованию задач с тан-
генциальными или нормальными граничными условиями с трением
(см. предложение 5.2.4), с граничными условиями Синьорини —
Фикеры и т.д.
С помощью теоремы 4.1.6. можно получить необходимые и доста-
точные условия существования решения для общего случая. Пусть I
задано соотношением (6.1.14), а Ф1 определено, как в п. 6.2.1.
Предложение 6.2.6. Пусть = 0. Для того чтобы у вариационного
неравенства (6.2.7) существовало решение, необходимо, чтобы выпол-
нялось условие
/|^€/?(дФ1ио) Умо€£>(Ф1). (6.2.36)
Если, кроме того, найдётся такое ио € Р(Ф1), что
I l-г € rel int R(d^\u^, (6.2.37)
то по крайней мере одно решение неравенства (6.2.7) заведомо суще-
ствует.
Доказательство. Положим р(у) = а(у, у)1/2 и введём линейный непре-
рывный монотонный оператор A:[№(0)]3---([Я1 (О)]3)' (см. (1.2.25)),
такой что
(Au, v> = а(и, v) Vu, v € [Я1 (О)]3. (6.2.38)
Тогда, как нетрудно проверить, выполнены условия (1)—(vi) предложе-
ния 4.1.6, откуда и следуют сделанные утверждения. □
Применяя доказанное 6.2.6 к задаче с трением (п. 5.1.1), получаем
необходимые и достаточные условия (5.2.10) и (5.2.12). Аналогично
и предложение 6.2.5 — частный случай предложение 6.2.6.
6.2.3. Двойственность
Чтобы получить принцип минимума дополнительной потенциальной
энергии, введём (как и в п. 6.1.3) функционал
Фс(—7)= sup «7; у>п-Ф(у)), (6.2.39)
и(<Я1/2(Г)
который является выпуклым п.н.сн. собственным функционалом на
[Я-1/2(Г)13.
240
Гл. 6. Субдифференциальные определяющие соотношения
Предложение 6.2.7. Пусть поле перемещений и и поле напряжений а
дают решение задачи 3. Тогда о € Едоп является решением вариаци-
онного неравенства
Л(а, т - а) + Фс(-7) - Фс(-5) > <Г-S, С7>ги Ут€ЕДОп, (6.2.40)
где А задано соотношением (5.3.5). Неравенство (6.2.40) эквивалентно
задаче минимизации
Пс(о) = тш{Пс(т)|т€Едоп}, (6.2.41)
где
П‘(т) =1 А(т, т) + Фс(-7) - <Т, U)ru. (6.2.42)
Доказательство. Умножая (6.1.2) на ту - оу и применяя (1.4.37), полу-
чаем для о € Едоп вариационное уравнение
^£у(и)(ту — 0y)dQ — {Т — S, u)ruurs Vt€ Едоп. (6.2.43)
Но в силу (6.2.39)
Фс( - 7) - Фс( - S) - < Т - S, u)rs Vr € Едоп. (6.2.44)
Поэтому (6.2.40) вытекает из (6.2.43, 44) и (6.2.1). Наконец, из предло-
жения 2.2.2 следует (6.2.41), и обратно, из (6.2.41) следует (6.2.40). □
Вариационное неравенство (6.2.40) выражает принцип дополни-
тельных виртуальных перемещений, а (6.2.41) — принцип минимума
дополнительной энергии в положении равновесия.
Предложение 6.2.8. Если Едоп # 0, то существует единственное поле
напряжений а € Едоп, удовлетворяющее (6.2.41).
Доказательство. Для того чтобы применить теорему 2.2.1, надо про-
верить выполнение соотношения (2.23) для случая, когда П задаётся
формулой (6.2.42). По теореме Хана — Банаха существуют неотрица-
тельные константы ci, съ > 0, такие что
Фс( —7) > - ci 117’11 -1/2 - ft. (6.2.45)
Используя (6.2.45) и непрерывность следового отображения у
(п. 1.4.3), заключаем, как в доказательстве предложения 5.3.2, что
пс(т) > СзНтН! - mllrlls - С5, (6.2.46)
где Сз, с4, с$ — неотрицательные константы, причём сз > 0. Таким об-
разом, (2.3.3) выполнено. Единственность решения обеспечивается
строгой выпуклостью А(т, т)
§ 6.3. Субдифференциальные граничные условия
241
В дальнейшем будем называть задачу (6.2.41) задачей 4. Из теоре-
мы 6.2.1 следует, что Едоп # 0. если у задачи 1 существует решение.
Покажем теперь, что задача минимизации потенциальной энергии и
задача минимизации дополнительной энергии двойственны друг другу
в смысле математической теории двойственности.
Функционал Л(-) (см. (3.2.47)) для первой из этих задач имеет вид
Л (у) = Ф(у) - (f, у) - j^y/dT + (6.2.47)
rF
Отсюда следует, что
Лс( —Л'а) = 7Едоп(а) + Фс(-Т) - <5, <7>Ги. (6.2.48)
Кроме того, выполнены соотношения (5.3.21) и (5.3.22) и, таким обра-
зом, (6.2.41) представляет собой задачу, двойственную к (6.2.8). Из
предложений 3.2.6 и 3.2.7 вытекают следующие результаты:
Предложение 6.2.9. Предположим, что 2ХФ1 #0. Тогда каждое реше-
ние и исходной задачи (6.2.8) и каждое решение а двойственной задачи
(6.2.41) связаны соотношением
П(и) + Пс(а) = 0 (6.2.49)
и удовлетворяют условиям экстремума (6.2.10) и
Oij = Cijhk£hk(a}' (6.2.50)
Предложение 6.2.10. Следующие утверждения эквивалентны:
(i) и минимизирует П на (7ДОП, о минимизирует Пс на ЕДОп, и вы-
полнено (6.2.49);
(ii) u€ L/доп и а€ ЕдоП удовлетворяют условиям экстремума (6.2.10)
и (6.2.50).
Очевидно, что для рассматриваемой краевой задачи справедливы
также и неравенства (6.1.43), что позволяет получить глобальные
оценки погрешности.
§ 6.3. СУБДИФФЕРЕИЦИАЛЬНЫЕ ОПРЕДЕЛЯЮЩИЕ
СООТНОШЕНИЯ И СУБДИФФЕРЕНЦИАЛЬНЫЕ
ГРАНИЧНЫЕ УСЛОВИЯ.
НЕМОНОТОННЫЕ ОПРЕДЕЛЯЮЩИЕ СООТНОШЕНИЯ
6.3.1. Постановка и исследование задачи
Изучаемая в этом параграфе задача описывается соотношениями
(6.1.1—3) и граничными условиями (6.1.4), (6.1.5) и (6.2.2), которые
должны выполняться на Г^, Гр и Г$ соответственно. Если, кроме то-
242
Гл. 6. Субдифференциальные определяющие соотношения
го, имеет место (6.1.6), то можно дать функциональную постановку
задачи, представленную в § 6.1. Определяя функционалы W и Ф соот-
ношениями (6.1.10) и (6.2.6) и используя теорему Грина — Гаусса,
приходим к следующей вариационной постановке:
Задача 1. Найти поле перемещений и € Uaon, такое что
1F(£(v)) - 1Г(£(и)) + Ф(у) - Ф(и)
(f, v - и) + J Fj(vi - Ui)dT Vv€ t/доп. (6.3.1)
Гг
Можно считать, что это вариационное неравенство выражает
принцип виртуальных перемещений.
Как видно из следующего предложения, задача 1 эквивалентна не-
которой задаче минимизации.
Предложение 6.3.1. Любое решение и € Uaaa неравенства (6.3.1) (если
таковые существуют) является решением задачи минимизации
П(и) = min{n(v) | t/доп), (6.3.2)
где П — функционал на [№(0)]3, определённый соотношением
П(у) = 1F(£(v)) + Ф(у) - (f, v) - j FiVidT. (6.3.3)
Гг
Справедливо и обратное утверждение.
Доказательство. Подставляем П(у) в (6.3.1). □
Задачу (6.3.2) будем называть задачей 2. Рассматриваемую крае-
вую задачу можно записать и в следующем виде:
Задача 3. Найти и€1/яоп и а€ЕдОП, для которых выполнены (6.1.42)
и (6.2.10).
Предложение 6.3.2. Если поле перемещений и € t/доп и поле напряже-
ний (тСЕдоп дают решение задачи 3, то и является решением задач
1 и 2.
Доказательство, Соотношения (6.1.42) и (6.2.10) эквивалентны, в силу
предложения 2.5.5, двум субдифференциальным соотношениям, из ко-
торых, по определению, вытекают два соответствующих вариацион-
ных неравенства, откуда с учётом неравенства (1.4.37) и следует ут-
верждение теоремы.
Существование решения задачи (6.3.1) или (6.3.2) мы можем дока-
зать лишь для случая шевГи > 0. Для случая Гу = 0 вопрос о сущест-
вовании решения остаётся открытым.
§ 6.3. Субдиффереициальные граничные условия
243
Предложения 6.3.3. Пусть тевГц > 0. Тогда множество решений нера-
венства (6.3.1) непусто, выпукло и замкнуто. В случае когда w —
строго выпуклый функционал, это множество состоит из одного
элемента.
Доказательство. Из (6.1.6) следует оценка (6.1.18). Справедливо также
неравенство (6.2.14), и легко проверить, что
П(ц) > Cillvlli - c2llvlli - сз, (6.3.4)
где ci, ci, Сз — неотрицательные константы, причём ci > 0. Поэтому
применимо предложение 2.2.1. □
Как и выше, задача о напряжениях также допускает вариационную
постановку, которая выражает принцип минимума дополнительной
энергии. Эта задача минимизации является двойственной к задаче 2,
выражающей принцип минимума потенциальной энергии в положении
равновесия.
Пусть функционалы W* и Фс заданы соотношениями (6.1.29) и
(6.2.39). Справедлив следующий результат:
Предложение 6.3.4. Пусть и€ Uaon и <т€Едо11 дают решение задачи 3.
Тогда а служит решением вариационного неравенства
ТГ(т) - ТГ(<т) + Фс(-Т) - Фс( —S) > <Т - S, (7>rt, Vr€ Едоп. (6.3.5)
Задача решения неравенства (6.3.5) эквивалентна задаче минимизации
Пс(<т) = тт{1Т(т) | т € Едоп}, (6.3.6)
где
Пс(т) = 1Г(т) + Фс(-Т) - <7? U)Yv. (6.3.7)
Доказательство. Из (6.2.43), (6.2.44) и неравенства
И^(т) - И^(а) (е(и), т - а) ЧтЬН (6.3.8)
следует неравенство (6.3.5), эквивалентное (6.3.6). □
Предложение 6.3.5. Если Едоп # 0, то неравенство (6.3.5) имеет по
крайней мере одно решение.
Доказательство. Достаточно показать, что функционал 1Г, заданный
формулой (6.3.7), удовлетворяет условию (2.2.3). Но в силу (6.1.28),
(6.2.45) и предложений 6.1.6 и 6.2.8 справедлива оценка (6.2.46). □
Чтобы установить указанную выше двойственность между задача-
ми минимизации потенциальной энергии и дополнительной энергии,
244
Гл. 6. Субдифференциальные определяющие соотношения
предположим, что Л (и) и В(Ли) в (3.3.47) заданы соотношениями
(6.2.47) и (6.1.38) соответственно. Как и в предыдущих параграфах,
можно проверить, что задача (6.3.6) является двойственной к задаче
(6.3.2). Непосредственно применяя общую теорию, развитую в
п. 3.2.2, получаем следующие результаты:
Предложение 6.3.6. Пусть существует такое «о € £>(Ф), что функционал
W конечен и непрерывен в точке е(«о). Тогда для любого решения и
исходной задачи 6.3.2 и любого решения а двойственной задачи 6.3.6
справедливо равенство
П(и) + Пс(о) = 0, (6.3.9)
а также выполнены условия экстремума (6.1.42) и (6.2.10).
Предложение 6.3.7. Следующие утверждения эквивалентны:
(i) и минимизирует П на СДОп, о минимизирует Пс на ЕДОп, и вы-
полняется (6.3.9);
(ii) и € С/доп и Едоп удовлетворяют условиям экстремума (6.1.42)
и (6.2.10).
Сформулированные в этом пункте результаты имеют многочис-
ленные и важные приложения в технике. Упомянем, например, задачи
с трением и односторонним контактом для стареющих материалов
или упруго-пластичных материалов (в теории деформаций).
6.3.2. Немонотонные определяющие соотношения
Все возможные комбинации определяющих соотношений и гранич-
ных условий, схематически изображенные на рис. 6.3.1, допускают
формулировку в виде задачи минимизации [257]. В каждом из случаев
могут быть выведены соответствующие выражения для потенциаль-
ной и дополнительной энергий. Учитывая вариационные неравенства,
которые по определению имеют место для суперпотенциальных опре-
деляющих соотношений, в случаях (1а)—(2Ь) (см. рис. 6.3.1) мы полу-
чаем для потенциальной энергии П выражение
П(г) = ИЧ±е(г)) + Ф(±г) - (/ v) - jF/tWT, (6.3.10)
Гг
а в случаях (Зс)—(4d) — выражение
П(г) = W(±e(v)) + Ф(±г) + (f, v) + ^FiVidT. (6.3.11)
Гг
Соответствующие выражения для дополнительной энергии имеют вид
Пс(т) = Wc(±t) + Фс(=г7) - <7? и>Ги (6.3.12)
Рис. 6.3.1. Возможные комбинации определяющих соотношений и
(1a) W(c(v)) - W(c(u)) + Ф(и) - Ф(и) 5г
(1Ь) W(t(v)) - W(c(u)) + Ф(-и) - Ф(-и)
(f V-U) + Srf,(и, - u,)dr
(2а) W(-c(v)) - W(-c(u)) + Ф(и) - Ф(и)
(2b) W(-c(v)) - W(-c(u)) + Ф(-и) - Ф(-и)^
(Зс) W(c(v)) - W(c(u)) + Ф(и) - Ф(и)
(3d) W(t(v)) - W(l(u)) + Ф(-и) - Ф(-и)
-(/. t'-wJ - SrF,(4-иt)dr
(4с) W(-l(v)) - W(-r.(u)) + Ф(и) - Ф(и) >
(4d) lV(-c(v)) - W(-c(u)) + Ф(-ь) - Ф(-и)^
граничных усло вий и соответствующие вариационные неравенства.
246
Гл. 6. Субдиффереициальные определяющие соотношения
И
пс(т) = 1T(=ft) + ФС(±Т) + <Т, U>rv. (6.3.13)
Знак при тв 1Г в случаях (1а)—(2Ь) совпадает со знаком при е в Ж,
а в случаях (Зс)—(4d) — противоположен ему. С другой стороны, знак
при Т в Фс в случаях (1а)—(2Ь) противоположен знаку при v в Ф, а
в случаях (Зс)—(4d) — совпадает с ним. Если потенциальная или до-
полнительная энергия строго выпукла, то решение соответствующей
задачи (если оно существует) единственно (ср. с доказательством
единственности в предложении 2.2.1).
Наконец, что касается существования решения сформулированных
задач минимизации, то отметим следующее. Чтобы было применимо
предложение 2.2.1, надо, чтобы функционал П был выпукл и п.н.сн.
на [№(П)]3. Помимо случая неубывающих определяющих соотноше-
ний, эти два условия могут выполняться для любых комбинаций
определяющих соотношений и граничных условий. Однако проверка
предположений предложения 2.2.1 требует более детальной информа-
ции о виде функционалов ПК Ф и т.д. и в каждом отдельном случае
проводится с учётом характера изучаемой задачи.
§ 6.4. СООТВЕТСТВУЮЩАЯ ДИНАМИЧЕСКАЯ ЗАДАЧА
В предположении малых перемещений можно сформулировать динамическую задачу,
соответствующую статической краевой задаче (6.1.1—5). Для этого надо заменить
(6.1.1) на (5.4.1) и ввести начальные условия (5.4.9). Величины Ft, Ui зависят от вре-
мени, и Ui должны быть согласованы с начальными условиями задачи. Приводимые
ниже вариационные постановки получены для достаточно гладких функций. Вопрос о
существовании решений для сформулированных динамических задач остается откры-
тым, за исключением одного случая, в котором существование решения установлено.
Отметим также, что многие из этих задач относятся к классу некорректно поставлен-
ных задач (см. [295]).
Умножая (5.4.1) на Vi - ui и интегрируя по О, получаем
j ММ’) - eu(“))rfO = j (ft - QUi^Vi - Ui)dQ + j St(vi - ui)dT (6.4.1)
о о rF
для каждого v, для которого Vi = Ui на Го. Это равенство выражает принцип Даламбе-
ра. Соотношения (6.4.1) и (6.1.8, 10) приводят к вариационному неравенству
j е“Г(у> _ “>)40 + П(у) - П(и) > 0, (6.4.2)
о
где П задано соотношением (6.1.16). Неравенство (6.4.2) имеет место для всех и, таких
что vi = Ui на Го- Должны быть также выполнены начальные условия (5.4.9).
Аналогично можно показать, что динамическая краевая задача, соответствующая
статической задаче, изученной в § 6.2 (соотв. в § 6.3), приводит к вариационному иера-
§ 6.4. Соответствующая динамическая задача
247
венству вида (6.4.2), с той лишь разницей, что функционал П задан равенством (6.2.9)
(соотв. (6.3.3)). Для этих задач справедливы следующие неравенства:
j QU”(Vi - ui)dQ + a(w, v - и) + Ф(и) - Ф(и) - (X v - и)
а
- j Fiivt - UijdT > 0, (6.4.3)
rf
j eUi"(Vi - ui)dQ + W(e(v)) - W(e(u)) + Ф(а) - Ф(и) - (/ v - и)
а
- j Fi(vi - Ut)dV > 0 (6.4.4)
r,
для каждого v, такого что Vi = Ut иа Гу. Эти неравенства выводятся формально. Они
выражают принцип Даламбера в форме неравенства.
Если вместо (6.1.3) и (6.2.2) выполнены соотношения (3.3.93) и (3.3.11) (в которых
в соответствии с используемыми нами сейчас обозначениями надо заменить е н du/dt
на е' н и'), то применимы те же рассуждения, что и ранее, надо только вместо вариа-
ций перемещений рассмотреть вариации скоростей v - W. Таким способом мы фор-
мально получаем вариационное • неравенство
j qu’(vi - + ГЦ и) - П(и') > 0 (6.4.5)
о
для каждого v, такого что v = U' на Ги. Здесь П(и) задано формулой (6.1.16) или (6.3.3)
в зависимости от типа рассматриваемой задачи. Если тело подчиняется линейно-упруго-
му определяющему соотношению с субдифференциальиыми граничными условиями, то
вариационное неравенство, описывающее динамическое поведение тела, имеет вид
j qu'(vi - ul)dQ + а(и, v - и') + Ф(и) - Ф(и') > (f, v - и')
о
+ j Fi(vi - и!)сГГ (6.4.6)
Г,
для каждого v, для которого vi = Ul на Гу. Исследуем вопрос о единственности реше-
ния неравенства (6.4.5) (в предположении что таковые существуют). Пусть щ и и2 —
два решения неравенства (6.4.5). Подставляя в него vi = ий, и! = u{i и vi = w21, и{ = ий,
получим
j е(“й - - u{i)dQ С 0, (6.4.7)
о
или
I -Jr je(U1 _ “2^2rfn с °’ (6.4.8)
о
Из (6.4.8) и (5.4.9) вытекает, что щ = и2.
Для доказательства единственности решения неравенства (6.4.6) рассуждаем, как в
случае предложения 5.4.3. Решение и этого неравенства мы ищем среди элементов мно-
жества
</доп = [р| v € [Н’(П)]3, V = U' на Ги). (6.4.9)
Вводим подпространство Го (см. (5.4.12)) и, полагая Р = v - w, й = и - w, где w опре-
делено, как в § 5.4, получаем из неравенства (6.4.6) следующую задачу:
248
Гл. 6. Субдифференциальные определяющие соотношения
Задача 1. Найти й: (О, Т] -* Ко с u‘(t) € Ко и й'(Г) € (£2(П)]3, которое удовлетворяет
вариационному неравенству
(ей’, 0 - й') + а(й, С - й') + Ф(С + w') - Ф(й' + w')
0 - й') V0 € Ко (6.4.10)
и начальным условиям (5.4.14).
Снова
поставить
семейство
условиям:
определим функционал ф по формуле (5.4.15), но теперь с Gv = 0. Чтобы
соответствующую регуляризованную задачу,
дифференцируемых функционалов Фе, е > 0,
предположим, что существует
удовлетворяющее следующим
(i) ( Фе(0 + w')dt —( Ф(С + w')dt
J £-0 J
о о
(6.4.11)
(ii) существует ограниченная последовательность (у£| в Ко, такая что
(йе) = О
dv
(6.4.12)
для каждого е;
(ш) если у£ -» v и Уе'-»у' «-слабо в Л"°(07’, Ко) и значения интегралов
j Фс(0е + w')dt
о
ограничены в совокупности, то
lim inf j Фб(Ре + w')dt j Ф(0' + w')dt.
о о
(6.4.13)
Тогда регуляризованная задача имеет вид (5.4.16).
Предложение 6.4.1. Предположим, что выполнены (6.4.17, 19, 20, 21, 23).
Ф(й1 + w'(0)) < оо,
Пусть
(6.4.14)
и пусть
/ d$e \
v -» а(«о, v) + <------ (й, + w (0)), у)
\ dv /rs
(6.4.15)
— непрерывный линейный функционал на Ко в [Л2(0)]3-топологии. Тогда если ие — ре-
шение регуляризованной задачи, то при е
• -слабо
* -слабо
• -слабо
в
в Х“(07;
в Л"°(0Т,
Ко),
Ко),
(Лсд3).
(6.4.16)
(6.4.17)
(6.4.18)
У0Иг(ОГ, Ко);
0
lim йе = й
lim йе' = й
lim йе’= й
и функция й служит радением вариационного неравенства (6.4.10).
Доказательство мы опустим, поскольку оио аналогично доказательству предложе-
ний 5.4.1 и 8.2.3, где рассматривается более сложное вариационное неравенство, возни-
кающее в теории термоупругости.
§ 6.4. Соответствующая динамическая задача 249
Предположения (6.4.11—13) приняты здесь для того, чтобы упростить доказатель-
ство. Рассуждая в духе работы [28], можно дать доказательство, в котором зти предпо-
ложения не используются. Динамические вариационные неравенства можно получить
н при более сложных связях между а (соотв. S) и е или е' (соотв. и или и'), а именно
для комбинаций, указанных на рис. 6.3.1. Для каждой из комбинаций получается свое
вариационное неравенство, имеющее, по существу, тот же вид, что и ранее, т.е. (6.4.2)
или (6.4.5), только теперь функционал П задаётся формулой (6.3.10) для комбинаций
(1а)—(2Ь) и формулой (6.3.11) — для комбинаций (Зс) и (4d). В последних случаях перед
инерциальными членами появляется знак минус.
ГЛАВА 7
Неравенства
в теории тонких упругих пластин
Эта глава посвящена изучению некоторых классов статических и дина-
мических задач на неравенства, встречающихся в теории тонких упру-
гих пластин. Мы рассмотрим модель, предложенную Карманом для
случая, когда прогибы пластин велики по сравнению с их толщиной.
Теория Кирхгофа, относящаяся к случаю малых прогибов, является
частным случаем теории Кармана. Однако для исследования задачи
об устойчивости пластин в духе рациональной механики нужна полная
теория Кармана, поэтому в данной главе ей отдано предпочтение.
Первый параграф, в котором формулируются и изучаются неко-
торые статические односторонние задачи, написан на основе работ
Дюво и Лионса [87], Франчу [102], Хесса [140], Йона [154], Науманна
[225], Потье-Ферри [268; 269] и др. Во втором параграфе при изучении
задачи об изгибе рассматривается соответствующая задача на соб-
ственные значения. В связи с этой задачей формулируются некоторые
общие теоремы о собственных значениях для вариационных нера-
венств. Эта новая область, которой начали заниматься лишь недавно,
и многие вопросы здесь остаются неясными. Мы опирались в своём
изложении на следующие работы: Абеасис, Диас и Лопес-Пинто [1],
Бергер [22], Бергер и Файф [23], Симетьер [43; 44], Доу [71—74], Куче-
ра, Нечас и Соучек [165], Мирземанн [203], Науманн и Венк [226],
Потье-Ферри [270; 271]. Третий параграф посвящён динамическим од-
носторонним задачам Кармана и основан на работах [88; 248].
§7.1. СТАТИЧЕСКИЕ ОДНОСТОРОННИЕ ЗАДАЧИ КАРМАНА
7.1.1. Предварительные сведения
Пусть точки пластины отнесены к некоторой заданной правой декар-
товой системе координат 0 Xi xi Хз. Предполагается, что недеформи-
рованная пластина имеет постоянную толщину и её срединная
§ 7.1. Статические односторонние задачи Кармана
251
плоскость совпадает с плоскостью 0 Хг *з (см. рис. 3.3.7). Материаль-
ные точки х = (Xi, хг, 0) недеформированной пластины образуют от-
крытое ограниченное связное подмножество □ С IR* 2 с регулярной2
границей Г. Обозначим через и = (ui, иг) — горизонтальное, а через
f — вертикальное перемещения точки х € 0. Теория Кармана (см.
[172]) приводит к следующей системе дифференциальных уравнений
(см. [172]; более строгое обоснование дано в [142]):
КДДГ - й(оа^,з),а = /з в 0, (7.1.1)
Oa£,a = 0 в 0, (7.1.2)
в 0, (7.1.3)
~ "Ь Ц8,а) в 0, (7.1.4)
где а, /?, у, d = 1, 2; й — толщина пластины2; ДА — бигармонический
оператор; К = Ей2/12(1 - р2) — изгибная жёсткость пластины с моду-
лем упругости Е и коэффициентом Пуассона v. Пластина нагружена
распределённой нагрузкой f = (0, 0, /з), где /з = /з(х) (на единицу пло-
щади срединной поверхности). Далее, а = (<та(з} (соотв. е = {£а(з}) —
это тензор напряжения (соотв. тензор деформации), С = {Са/з7а} —
тензор упругих констант. Предполагается, что компоненты тензора
С, во-первых, являются элементами из £°°(0) и, во-вторых, удовлетво-
ряют условиям симметричности и эллиптичности. При нашем обыч-
ном предположении о достаточной гладкости функций, умножая
(7.1.1) на z - f, интегрируя по 0 и используя теорему Грина—Гаусса,
получаем
«(f> z - f) + j h0aflt,a(z - (KI
Q
= j haa^ ,anB(z - ftdT + j Q(f)(z - f)dr
- jM(f)^J3dr + \f3(z - &KI,
где n = (ль Л2) — орт внешней нормали к Г,
a(f, z) = К j [(1 - v)£,ap z,a0 + i»AfAz]dO, 0 < v < j,
(7.1.5)
(7.1.6)
Достаточно липшицевостн.
2 Для рассмотрения случая h = h(x) > 0 требуются лишь незначительные видоиз-
менения.
252
Гл. 7. Неравенства в теории тонких упругих пластин
Af(f) = — К[рДГ + (1 — ?)(2П1П2$,12 + И1Г.11 + Л2^,22)]. (7.1.7)
<2(Г) = - кГ^ + (1 - [Л1И2(Г,22 - Г.11) + (nl - ^Г,12]1 . (7.1.8)
|_ on от J
Здесь через т обозначен касательный орт к Г, такой что тройка векто-
ров п, т и Охз образует правую систему. Аналогично, если умножить
два уравнения (7.1.2) соответственно на vi - ui и иг - иг, сложить их
и затем проинтегрировать по Q, то, используя теорему Грина—
Гаусса, получим
j a«0£a(3(l> - «)С® = j Ир(уа ~ иа)(1Г, Ct, 0 = 1,2. (7.1.9)
о г
Соотношения (7.1.5) и (7.1.9) выражают принцип виртуальной работы
соответственно для изгиба и растяжения свободной пластины; М —
это изгибающий момент, a Q — обобщённая перерезывающая сила
на границе пластины Г (см. п. 3.3.1). В следующем пункте мы сначала
сформулируем одностороннюю коэрцитивную граничную задачу, а за-
тем — общую одностороннюю полукоэрцитивную краевую задачу.
7.1.2. Граничные условия и соответствующие
вариационные постановки
Предположим, что на Г должны выполняться (поточечно) следующие
граничные условия: Г = 0, (7.1.10) Ы1 = и2 = 0, (7.1.11) (7ЛЛ2) \дл/ уол/
где 3 задаётся формулой (3.3.46). Соотношения (7.1.1—4) и (7.1.10—12)
определяют краевую задачу (в классической постановке), изучением
которой мы займёмся в первую очередь и которую будем в этом па-
раграфе называть первой краевой задачей. (Можно сформулировать
аналогичную краевую_задачу, предполагая, что выполнены сходные
соотношения между Q и f на всей границе Г или на какой-нибудь её
части.)
Граничные условия
= ы(зг1 на Г> (7-1.13)
\дп/ \уп/
-Qtfa(t) = dj2(n на Г, (7.1.14)
ai„Wa = огЛа = 0 на Г (7.1.15)
§ 7.1. Статические односторонние задачи Кармана 253
определяют другую (более общую) краевую задачу, которую будем
изучать в этом параграфе и которую будем называть второй.
Предположим, более, что /з можно представить в виде
/з=7з+7з, (7.1.16)
где 7з € £2(й), а 7з удовлетворяет условиям
-7з€3з(г) = ал(Г) в О', (7117)
7з = 0 в Й\Й',
где О' СО таково, что О' ПГ = 0? Здесь ft: IR -* IR — максимальные
монотонные операторы, а у,- — выпуклые собственные п.н.сн. функ-
ционалы на IR (см. предложение 2.6.4). Соотношения (7.1.1—4) и
(7.1.13—17) задают классическую постановку нашей второй краевой
задачи. Соотношения (7.1.13 — 17)_допускают обобщение, например,
можно предположить, что Г = ГзСГг и М€ 0{(д$/дп) на Гз,
М € 01(д^/дп) на Гг. Это относится и к Q. решения задачи в такой
постановке требуются незначительные видоизменения в последующих
рассуждениях.
Вводя обозначения
R(h, к) = [ Ca0yiha0kySdQ, а, 0, у, 6 = 1, 2, (7.1.18)
п
Р(Г, z) = Z.0], Р«, Г) = Р(Г), (7.1.19)
где Л = {Ла(з} и к = {куъ}, можно представить (7.1.5) и (7.1.9) соответ-
ственно в виде
«(Г. z - Г) + ЛР(е(и) + |Р(Г), Р(Г, z - Г))
= f haa^,an^z - + j Q(f)(z -
г г
- f М(Г)Э(г ~ r)dT + {/з(х- Г)С® (7.1.20)
J on J
г в
и
Л(е(ц) + jP(D. £{v - и)) = j aaffn^va - UcijdT, a, 0=1, 2. (7.1.21)
г
В случае первой краевой задачи предположим, что
v € [^(Й)]2, z € H2(Q) ПЯ^Й). (7.1.22)
' Контрпример, показывающий, что это не всегда возможно, приведён в [269].
254
Гл. 7. Неравенства в теории тонких упругих пластин
Напомним (см. (1.3.52)), что тогда z€ С°(Й), а значит, z = 0 во всех
точках Г. Далее, введём следующее выпуклое замкнутое подмноже-
ство пространства H2(Q):
К= {z I z€ Я2(Й) АЛ^Й), ^0 на Г], (7.1.23)
оп
и предположим, что /з €Z2(fl). Неравенство в (7.1.23) имеет смысл по-
чти везде на Г, так как dz/dn € Т/1/2(Г). Легко показать, что R(h, к)
является непрерывной симметричной коэрцитивной билинейной фор-
мой на [£2(й)]4. По теореме вложения Соболева вложение
H2(Q) С И^1,4(Я) компактно (см. (1.3.51)). Используя неравенство Гёль-
дера, можно доказать, что оператор Р: [Т/2(й)]2 -* [£2(й)]4 вполне не-
прерывен (см. п. 1.4.3). Учитывая (7.1.20, 21), вариационное
неравенство
(7.1.24)
\оп оп/
которое выполняется на Г для достаточно регулярных функций, и
остальные граничные условия, приходим к следующей вариационной
формулировке задачи:
Задача 1. Найти и€ [Р71(й)]2 и f €*, удовлетворяющие соотношениям
а(Г, Z - Г) + ЛР(£(и)) + |р(Г),Р(Г, « - Г)) > СГз, Z - Г) Vz€ *(7.1.25)
и
Р(£(ц) + |р(Г), £(у — и)) = 0 Vt, € [7?(Й)]2. (7.1.26)
Интересно выяснить, в каком смысле вариационное решение и, f
задачи (7.1.25—26) удовлетворяет уравнениям (7.1.1—4) и условиям
(7.1.10—12). Полагая z = Г ± <р€К, ^€^(Й), заключаем на основании
(7.1.25), что (7.1.1) выполняется как равенство в То же отно-
сится и к уравнению (7.1.2). Теперь дополнительно предположим, что
(аазГ.^а € Ь2(Й). В этом случае ДД£ € £2(й), и поэтому (см. [181]) для
М и Q справедливы включения
/И(Г) € Н~ 1/2(Г), б(Г)€Я_3/2(Г), (7.1.27)
а для Г € H2(Q) выполняется равенство
а(Г, z) = К f (Д2Г)гЛ2 + <ё(Г), z>3/2 - /w), |Л1/?
J \ ОП[ 1/2
О
VZ € Я2(Й). (7.1.28)
§ 7.1. Статические односторонние задачи Кармана
255
Это соотношение выражает теорему Грина—Гаусса для задачи о пла-
стине. Комбинируя (7.1.28) с (7.1.1, 25), приходим к неравенству
/М(Г). < О Vz € К, (7.1.29)
\ on onl 1/2
которое представляет собой ослабленную формулировку граничного
условия (7.1.12). Легко показать, что в случае Af(f) € Л2(Г) из неравен-
ства (7.1.29) вытекает, что равенство (7.1.12) выполняется п.в. на Г.
Чтобы дать вариационную формулировку нашей второй краевой
задачи, определим на пространстве /72(0) функционал Ф формулой
Ф(х) =
р (Д) + J2(z)j сТ + j j3(Z)dD,
если л , J2(Z) € Ll(T), j3(z) € L^Q), (7.1.30)
\ои/
оо в противном случае.
Этот функционал является выпуклым, п.н.сн. и собственным (см.
предложение 3.3.1). Предположим, далее, что множество Г>(Ф) непу-
сто. Как и в гл. 6, использование вариационных неравенств, эквива-
лентных (7.1.13, 14, 17), приводит к следующей вариационной
формулировке рассматриваемой краевой задачи:
Задача 2. Найти и € [//'(О)]2 и Г € Т/2(П), удовлетворяющие вариацион-
ному неравенству
а(Г, z - Г) + hR(t(u) + |р(Г), Р(Г, z - Г)) + Ф(х) - Ф(Г)
^(Л>г-Г) Vz€/f2(Q) (7.1.31)
и вариационному уравнению
Р(е(и) + |Р(Г), е(у - и)) = О W € [№(0)]г. (7.1.32)
7.1.3. Существование решения
Рассмотрим вопрос о существовании решения (и, вариационной сис-
темы (7.1.31, 32). Очевидно, что задача 1 является частным случаем
задачи 2.
Предложение 7.1.1. Каждому прогибу f € H2(Q) отвечает согласно
уравнению (7.1.32) некоторое плоское перемещение и(Г) € [№(0)]2. Тен-
зор деформации e(w(f)): Н2(0) -»[Z2(fi)]4 является однозначно опреде-
лённой и вполне непрерывной квадратичной функцией.
256
Гл. 7. Неравенства в теории тонких упругих пластин
Доказательство. Из неравенства Корна (1.4.28) следует, что R(e(u),
с(у)) является билинейной коэрцитивной формой на факторпростран-
стве [/^(О)]2/.^, где & обозначает пространство плоских «твёрдых»
перемещений, т. е.
0 = (г | г€ [ЯЧО)]2, е(г) = 0)
= (г I r€ [H'(fi)]2’ Г1 = ai + Ьх2, г2 = 02 - bxi, ai, 02 € IR). (7.1.33)
Используя этот факт, легко показать, что уравнение (7.1.32) для каж-
дого Г имеет решение u(f) (см. теорему Лакса—Милгрэма в п. 1.2.4),
ибо отображение v -»R 07ХГ), е(у)^ линейно и непрерывно на
[/^(О)]2. Перемещение u(f) определено с точностью до элемента из
поэтому деформация с(и(Г)) определена однозначно. Из (7.1.32)
следует также, что £(м(Г)) является непрерывной линейной функцией
от P(f), а значит, вполне непрерывной квадратичной функцией
от f. □
Введём теперь функцию G: H2(fi) -»[Z2(fi)]4 по формуле
G(f) = £(и(Г)) + |р(Г). (7.1.34)
Очевидно, что это вполне непрерывная квадратичная функция, удов-
летворяющая уравнению
7?(G(r), £(M(f)) = 0. (7.1.35)
Таким образом, задачу 2 можно сформулировать следующим
образом:
Задача 2'. Найти поле перемещений f€/f2(Q), такое что
«(Г, z - Г) + hR(G(V, P(f, z - Г)) + Ф(?) - Ф(Г) (Д - Г)
Vz€tf2(Q). (7.1.36)
Введём конечномерное пространство
2= {q[qtH2(Q), a(q, q) = 0); (7.1.37)
это — пространство всех полиномов степени <1. В силу (1.3.30) нор-
ма llflh на H2(Q) эквивалентна норме р(?) + | f |г, где p(f) — полу-
норма на Т/2(0), определяемая формулой
= 2 (7Л,38)
\«,д J \SxtdxfiJ /
Й
Если <7 € J?, то p(q) = 0, и обратно. Пусть (H2(Q))' — пространство,
сопряжённое к Т/2(П), и <•, •> — каноническая билинейная форма.
§ 7.1. Статические односторонние задачи Кармана
257
Пусть, далее, — сопряжённое к 2. Тогда для всякого /€(/72(0))'
ограничение f\s будет элементом из 2' и
<П) = </М v/€(W2(Q))' vg€^. (7.1.39)
Условия существования хотя бы одного решения для задачи 2' дают-
ся следующим предложением:
Предложение 7.1.2. (а) Для существования решения неравенства
(7.1.36) необходимо, чтобы
f3\^R(d$r) уГ€£>(Ф). (7.1.40)
(Ь) Если существует такое Го € О(Ф), что
Л rel int Л(аФГо), (7.1.41)
то (7.1.36) имеет решение.
Доказательство. Покажем, что применимо предложение 4.1.6. Прежде
всего докажем, что для каждого Г € H2(Q) выполняется условие
inf | Г - q | 2 ср(Г), (7.1.42)
qi.3
или, эквивалентно,
| Г - ПГ 12 ср(Г), (7.1.43)
где с > 0 — константа, П — ортогональный проектор /72(0) на 2 от-
носительно /.2-нормы. Заменяя Г на Г | Г - ПС |"1/2, видим, что доста-
точно доказать существование константы с > 0, такой что р(£) > с
для | Г - ПС | 2 = 1. Предположим, что такой константы не существу-
ет. Тогда найдётся последовательность {Гл} в /72(П), для которой
| Гл - ПГ„ I 2 = 1 И р(Гл) - о. (7.1.44)
Очевидно, что f л = Гл - ПГл € 21, где 21 — ортогональное дополне-
ние к 2 в £2-норме. Из (7.1.44) следует, что
| Гл|2 = 1 И р(Г„)^О. (7.1.45)
Поэтому последовательность (Гл) ограничена в /72(0) и, значит, у неё
существует подпоследовательность, которую по-прежнему будем обо-
значать {Гл}, слабо сходящаяся в /72(0) к некоторому элементу Г- Из
компактности вложения /72(0) С £2(0) вытекает, что
Гл-* Г сильно в Z2(fi), (7.1.46)
и потому | Г | 2 = 1. Поскольку Гл - Г слабо в Я2(0), то
р(Г) lim inf p(f„) = 0. (7.1.47)
258
Гл. 7. Неравенства в теории тонких упругих пластин
Следовательно, p(f) = 0, т. е. f С другой стороны, f eJ?-1 и поэ-
тому Г = 0, что противоречит сделанному предположению.
Рассмотрим теперь линейный непрерывный монотонный оператор
А и вполне непрерывный оператор С, такие что (см. (1.2.25))
а(Г, z) = <ЛГ, z> (7.1.48)
и
Й/?(О(Г), Р(Г, z)) = <С(Г, z)>. (7.1.49)
Легко проверить, что оператор Т = А + С является псевдомонотон-
ным. Предоставим читателю самостоятельно убедиться в этом в ка-
честве упражнения.
Покажем, далее, что для любых f€Н2(О) и q^2>
<Т(Г), q) = 0. (7.1.50)
Достаточно доказать, что это справедливо для оператора С. Нетруд-
но проверить, что
ЛГ + <7) = Р(Г) + P(q) + Р(Г, 9) + P(q, П- (7.1.51)
По Р(Г), P(q) и P(f + q) можно определить соответственно G(f), G(q)
и G(f + q) с помощью соотношений
/г(е(и(Г)) + |Р(Г), ф)) = 0 vt, € [№(0)]2, (7.1.52)
ЖИ?)) + |Л<7), е(0) = 0 Vy € [№(0)]2, (7.1.53)
Ж«(Г + q)) + 1Р(Г + q), e(v)) = 0 W € [НЧОД2. (7.1.54)
Последнее из них совместно с (7.1.51—7.1.53) даёт
Р(е(й) + |(Р(Г, q) + P(q, Г)), e(v)) = 0 Vy € [№(< (7.1.55)
где е(й) = e(u(q + Г) - и(Г) - u(q)). Положим
G(f, q) = е(й) + 1(Р(Г, q) + P(q, Г)). (7.1.56)
Тогда
G(f + q) = G(D + G(9) + G(f, q) . (7.1.57)
Как и в предложении 7.1.1,_уравнение (7.1.55) имеет единственное ре-
шение в ЗР = [Р7'1(П)]2 0 -%. Поэтому для q = pixi + Р2Х2 + Рз вектор
й = (-Р1Г + кхг + к', -р2$ - kxi+ к')£&-, (7.1.58)
§ 7.1. Статические односторонние задачи Кармана
259
где pi, pi, рз, к, к' и к’ — произвольные вещественные числа, удов-
летворяет уравнению
О(Г, <7) = 0 (7.1.59)
и, следовательно, уравнению (7.1.55). Таким образом, (7.1.59) выпо-
лняется для любых Г € H2(Q) и Аналогично для каждого q € S
G(q) = 0. (7.1.60)
Отсюда следует, что для каждого Г € H2(Q) и каждого q € S
|<С(Г, ?)> = 7?(С(Г), Р(Г, 9)) = 7?(G(O),
е(0 + j(P(r, 9) + Г)) = *(G(O, G(f, 9)) = 0.
Остается показать, что для всех Г, для которых полунорма р(?) до-
статочно велика,
<Т(П, о > с(р(Г))а, (7.1.62)
где с > 0 и а > 1 — константы. Но, действительно,
<Т(Г), г> = а(г, г) + Л7?(С(Г), 2G(f)) с(р(Г))2. (7.1.63)
Итак, выполнены все условия предложения 4.1.6, и его применение
завершает доказательство. □
Рассмотрим два приложения предложения 7.1.2.
(i) Предположим, что Q = 0 и аае па$ = 0 (а, /3 = 1, 2) на Г и вы-
полнено граничное условие (7.1.13) с функцией /31, заданной формулой
(3.3.45). Далее, пусть /з = /з^Ь2($1). Тогда
сТ. (7.1.64)
г
Чтобы получить необходимое условие и достаточное условие сущест-
вования решения, воспользуемся предложением 2.4.6, позволяющим
описать rel int 7?(дФ(й> + •)) (см. также [296]). Для q = до + qix2 +
+ qix2 € s
dq
= qin} + q2n2. (7.1.65)
Введём подпространства J?i = [q | q = qo € IR) и Si - [q | q = q\x2 +
Ф(Г) =
dn
260
Гл. 7. Неравенства в теории тонких упругих пластин
+ 72X2, qi, <72 € [R}. Функция /з удовлетворяет соотношениям
(Л <7) = 0 Vqt<2i, (7.1.66)
так как Ф(<?) = 0 Vq€.&i, и (см. (2.4.27))
Ф(?) - (/з, q) > CH9II2 Vqt^L. (7.1.67)
Поэтому достаточное условие (7.1.41) принимает вид
(/з, q) < j Мо dT
г
V9€^i\{0) и (/з, 1) = 0,
(7.1.68)
а необходимое условие (7.1.40) записывается в виде
(/з, Ж j Мо
г
дп
dT Vqt.^. я. (fa, 1) = 0.
(ii) Предположим, что М = Мо € Ь2(Г1) на Г1 С Г, М = О
(7.1.69)
на Г\П
и_на всей границе^ выполнены соотношения оа& па = 0 (а, 3 = 1, 2),
0(Г) О, Г > О, ГО(Г) = 0. В этом случае выполняется вариационное
неравенство (7.1.36) с
Ф(П =
Мо dT + ЩП,
on
где 1к — индикатор множества К = {f | f € H2(Q), f 0 на Г). Функ-
ционал Ф равен 0 на.^1= [0|. Поэтому из (2.4.27) следует, что
(/з, q)~ ( Мо dT ci - C3II7II2 VqtKOg, (7.1.70)
1 on
существования решения (см.
где ci и сз — постоянные, причём сз > 0. Таким образом, приходим
к следующему достаточному условию
также [154]):
(/3, Q) - f Mo dr < 0
J °n
r,
и к необходимому условию
(Л, 9) - f Мо dr < О
J "п
г.
Vq € (2СП^)\[0],
VqtKC\Q .
(7.1.71)
(7.1.72)
Ввиду геометрической нелинейности физической модели формули-
ровка односторонних задач для пластин Кармана в виде вариацион-
ных неравенств не эквивалентна какой-либо задаче минимизации. Тем
не менее справедлив следующий результат:
§ 7.1. Статические односторонние задачи Кармана
261
Предложение 7.1.3. Решение Г € H2(Q) задачи минимизации
П(Г) = inf (П(г) | z€ Я2(0)}, (7.1.73)
где
П(г) = z) + jtf(Gtf), G(D) + Ф(Г) - (Л z), (7.1.74)
удовлетворяет вариационному неравенству (7.1.36).
Доказательство. Применяя (1.4.18) и (7.1.32), можно показать, что
/?(G(f), P(f, z)) является дифференциалом Гато функционала P(G(f),
G(f))/2 в точке f. Дальше рассуждаем, как при доказательстве пред-
ложения 2.2.2 □
Вообще говоря, решения рассматриваемых задач определены не
однозначно. Так обстоит дело и в случае классических (двусторонних)
граничных условий [22]. Вопрос о единственности решения будет об-
суждаться в § 7.2. Вариационное неравенство (7.1.36) является весьма
общим, и его изучение включает в себя рассмотрение коэрцитивного
случая. Заметим также, что если, например, пластина защемлена на
части границы Г1 С Г, т. е. там f = д^/дп = 0, то либо это условие
должно быть учтено в Ф, либо Г и z должны рассматриваться как
элементы пространства
Z= {Г | Г € H2(Q), Г = 0и|£ = 0на Г1].
оп
Выше считалось, что Уз € L2(Q). Немного видоизменив рассуждения,
можно принять, что /€[С(0)]', поэтому имеется возможность рас-
смотреть также случай нагрузки, сосредоточенной на некоторой кри-
вой или в некоторой точке в 0 (см. [227]).
Другое полезное замечание касается случая пластин с угловыми
точками. В этом случае появляется дополнительная реакция в каждой
угловой точке [116; 236]. Чтобы не учитывать соответствующий допо-
лнительный прогиб пластины, мы предполагаем, что эти реакции рав-
ны нулю. Если пластина лежит на жёстком основании, то можно
сформулировать задачу Синьорини—Фикеры для вышеуказанных ре-
акций [154]. Напомним, что эти реакции возникают из-за того, что
крутящие моменты, действующие вдоль Г, дают вклад в перерезыва-
ющие силы_и приводят к появлению соответствующей перерезываю-
щей силы Q [116].
262
Гл. 7. Неравенства в теории тонких упругих пластин
7.1.4. Случай односторонних граничных условий,
заданных в плоскости пластины
В этом пункте мы дадим вариационную формулировку задачи, которая возникает при
замене условия (7.1.15) поточечным условием вида
-Stdjt(u) на Г, (7.1.75)
где S = [ а„я Лр] (а, 0 = 1, 2) и л — выпуклый п.н.сн. собственный функционал на
IR2. Условие (7.1.75) описывает односторонний контакт в плоскости пластины („по и“),
трещину на границе или силы трения, действующие в плоскости пластины, и т. п. Для
простоты будем считать, что f = 0 на Г. В соответствии с (7.1.20, 21) мы приходим
к следующей вариационной постановке:
Задача 3. Найти и € [№(Я)]2 и ff Я2(Я)ПД1(Я), удовлетворяющие неравенству (7.1.31)
с л = 0 в (7.1.30) для каждого z € Н2(О) А //'(Я) и вариационному неравенству
R(e(u) + e(v - и)) + Ф(у) - Ф(и) >0, W € [Я‘(й)]2, (7.1.76)
где
Ф(р) =
r j j4(P)dT, если j4(v) € Г'(Г),
г
(7.1.77)
оо в противном случае.
Результаты настоящего параграфа можно также применить к изучению задач на не-
равенства, возникающих в теории пластин Кирхгофа, т. е. для случая малых перемеще-
ний. В этом случае изгиб и растяжение пластины независимы и поэтому R(e(u) + P(i)/2,
Р(£, z)) = 0. Решение коэрцитивных задач определено однозначно, а для полукоэрци-
тивных справедлив лишь следующий общий результат: если А и Гг — два решения,
то fi - Сг € 9 (см. [84]).
§ 7.2. ЗАДАЧА НА ОДНОСТОРОННИЙ ИЗГИБ.
ЗАДАЧИ НА СОБСТВЕННЫЕ ЗНАЧЕНИЯ
ДЛЯ ВАРИАЦИОННЫХ НЕРАВЕНСТВ
7.2.1. Постановка задачи
На практике встречается много ситуаций, когда необходимо изучать
продольный изгиб пластин, на которые наложены односторонние свя-
зи, как, например, в контактных задачах для панельных конструкций,
туннелей и некоторых конструкций фундаментов. Теория, основанная
на малых перемещениях, не годится для адекватного описания явле-
ния выпучивания, здесь надо использовать теорию Кармана. Про-
дольный изгиб возникает в результате приложения на границе сил,
действующих в плоскости пластины и описываемых граничным усло-
вием вида
= X ga (а = 1, 2) на Г, (7.2.1)
§ 7.2. Задача на односторонний изгиб
263
где g = g(x) (х € Г) — самоуравновешивающаяся сжимающая нагрузка,
распределённая на Г, т. е.
j gadT = 0 и j (gix2 - g2Xi)dT = 0, (7.2.2)
г г
а X — вещественное число, характеризующее амплитуду этой распре-
деленной нагрузки.
Рассмотрим, например, пластину с заделанными краями, лежащую
без трения на жёстком основании 0' € О. Если значение X превосходит
некоторую величину, называемую критической, то пластина теряет
устойчивость — выпучивается.
В соответствии с результатами § 7.1, для случая #€£2(Г) получае-
тся следующая вариационная формулировка задачи, определяемой со-
отношениями (7.1.1—4, 13, 14, 16, 17) с/з = 0 и (7.2.1, 2):
Задача 1. Найти £ € 772(О), и € [№(0)]2 и X € IR, удовлетворяющие нера-
венству
а(Г, Z - Г) + Ф(2) - Ф(Г) + уиыХМ ~
^Х j W,«(z - Г)бТ Vz € Я2(П) (7.2.3)
Г
и уравнению
j aa0Sa0(v)dQ = X j gaVadT Vv € [№(0)]2, (7.2.4)
п г
где a= {<rap) и £ = [£ap| заданы формулами (7.1.3, 4).
При этом тройка ((", и\, иг) называется вариационным решением,
отвечающим значению X. Из механического смысла задачи ясно, что
Г = 0 будет решением для любого значения X, поэтому можно счи-
тать, что в (7.1.13, 14, 17) 0 € дл(О) (/ = 1, 2, 3). Для упрощения форму-
лировки задачи введём вспомогательные величины а° = [dap],
£° = {р} и и° = {Ua|, удовлетворяющие уравнениям (7.1.2, 4), опре-
деляющему соотношению между напряжениями и деформациями
Лр = С«р7б£°б (и0) (7.2.5)
и граничным условиям (7.2.1) при X = 1. Ввиду (7.2.2), для этой пло-
ской задачи теории упругости существует (см. [98] и п. 4.1.1) един-
ственное решение и° € [№(0)]2 G такое что
j o^0€afi(u)dtl = jgaivZT Vu€ [//’(О)]2. (7.2.6)
п г
264
Гл. 7. Неравенства в теории тонких упругих пластин
Любое другое решение можно представить в виде м° + г, где
Кроме того, <Та/з(и°) принадлежат Z2(0) и определены однозначно.
Рассмотрим, далее, тензоры напряжения и деформации а= {аа(з) и
£= {ёаз) и вектор перемещения и- (йа), удовлетворяющие (7.1.2—4)
и граничным условиям (7.1.15). Согласно предложению 7.1.1, £ = £((")
является однозначно определённой и вполне непрерывной функцией из
Я2(0) в [£2(0)]4, и аналогичное утверждение верно для функции а =
<т(("). Таким образом, можно сформулировать следующую вариацион-
ную задачу:
Задача 2. Найти f € Я2(0) и и € [№(0)]2G^, такие что
а(Г, Z - Г) + Ф(2) - Ф(Г) + j haa^,a(z - ^,0dQ
о
- X j h<£f£,a(z - D.pdO + X j hga£,a(z - MT
Q Г
Vz€/72(Q)^ (7.2.7)
pa3£«3(0dn = o Vu€ [№(O)]20^, (7.2.8)
где а«з и ёаз(й) удовлетворяют соотношениям (7.1.3, 4).
Следуя [226], будем называть решение (f, Й1, йг) задачи 2 приведён-
ным вариационным решением. Легко показать, что для всякого задан-
ного X тройка (f, Mi, ui) будет решением задачи 1 тогда и только
тогда, когда является приведённым вариационным решением тройка
((", Й1, ui), где и и й связаны соотношениями
иа = йа + \Ua (а = 1, 2), (7.2.9)
= вар + Ха2з 0=1, 2). (7.2.10)
Следует заметить, что для каждого X тройка (0, 0, 0) служит решени-
ем задачи 2. Нетривиальное приведённое вариационное решение вида
(0, Й1, йг) невозможно ни для какого X, так как если f = 0, то и й = 0,
в силу (7.2.8).
Мы видим, что любое нетривиальное (т. е. с f # 0) решение нашей
задачи на продольный изгиб может быть записано в виде суммы не-
тривиального приведённого вариационного решения (£, Й1, ui) и пло-
ского перемещения Х(0, и? + и, и° + ri) (см. (7.1.33)).
Соотношения (7.2.3, 4) или (7.2.7, 8) определяют некоторую задачу
на собственные значения для вариационных неравенств. Здесь мы рас-
смотрим лишь случай коэрцитивной задачи на собственные значения.
Будем считать, что заданы граничные условия (7.1.10). Введём про-
§ 7.2. Задача на односторонний изгиб
265
странство
Z= {z | z € Я2(0), z = 0 на Г). (7.2.11)
Функционал a(f, f) коэрцитивен на Z (см., например, [225]). Из нера-
венства ciIIflli a(f, Г) Cillflli (о, ci — положительные константы),
которое выполняется для каждого f € Z, следует, что (a(f, f))1/2 явля-
ется нормой в Z, эквивалентной норме IlfII2. Введём в Z скалярное
произведение a(z, Г), которое будем обозначать (г, f)z. Соответ-
ствующую норму обозначим II-Hz-
Далее, определим (см. п. 1.2.4) нелинейный вполне непрерывный
оператор С: Z -»Z соотношением
(<?(Г), Z)z = R(e(u(i;)) + Ыг), Р(Г, *)) Vf, z€ Z (7.2.12)
и линейный оператор В: Z~> Z — соотношением
(Bf, z)z = ~ jAa°3f,a z.0 dQ Vf, Z(Z. (7.2.13)
п
Тройка (f, «1, «2)€Z х ([H’(Q)]2G^) является приведённым вариаци-
онным решением, если м = «(f) (см. предложение 7.1.1) и
((/ + С) (f), z - f)z + Ф(«) - Ф(Г) X(Bf, z - ?)z
VZCZ, (7.2.14)
где I — тождественный оператор в Z. Здесь функция Ф определена
соотношением (7.1.30) с ji = 0.
7.2.2. Один общий результат о существовании решения
Рассмотрения предыдущего пункта приводят к следующей общей за-
даче на собственные значения:
Задача 1'. Найти X € IR и f € Z (где Z — некоторое гильбертово про-
странство), удовлетворяющие неравенству (7.2.14).
Примем следующие предположения:
(i) оператор T=I+Ch3ZbZ является псевдомонотонным;
(ii) для каждого z € Z, z # 0,
(П, f) > 0; (7.2.15)
(iii) существуют два функционала F-.Z -+ IR и £:Z -> IR с
F(O) = Е(0) = 0, такие что для любого Zo € Z их графики касаются при
z ~ zo (см. п. 1.4.2) соответственно графиков функционалов
F(z) = F(zb) + (T(zo), Z - Zb)z (7.2.16)
266
Гл. 7. Неравенства в теории тонких упругих пластин
И __
E(z) = E(zo) + (.Bzo, Z - Zo)z; (7.2.17)
(iv) F слабо п.н.сн.;
(v) F(z)-> оо при llzllz “* <»; (7.2.18)
(vi) В — компактный линейный оператор в Z;
(vii) Ф является выпуклым п.н.сн. собственным функционалом на
Z, обладает тем свойством, что для каждого д > 1 найдётся вещест-
венное число а(д) > 0, такое что
Ф(дг) а(д)Ф(г) Vz € Z, (7.2.19)
и, кроме того, удовлетворяет условиям
О € ЭФ(О) (7.2.20)
и
Ф(0) = 0. (7.2.21)
Далее, введём
А1 = {Г | Г € Z, F(f) + Ф(Г) = 0), (7.2.22)
A2 = [Г | Z, F(f) + Ф(Г) 0), (7.2.23)
где 0 € IR, 0 > 0.
Справедлив следующий результат [226]:
Предложение 7.2.1. Пусть выполнены условия (i) — (vii) и, кроме то-
го, существует Го€Лг, такое что
Е(Го) > 0. (7.2.24)
Тогда найдётся по крайней мере одна пара (f, X) с X > О, которая яв-
ляется решением неравенства (7.2.14). Далее, для Г€Л2
Е(Г) = max{E(z) |z€ А2}. (7.2.25)
Доказательство. Воспользуемся хорошо известной процедурой регуля-
ризации. Введём регуляризованный функционал Ф£ на Z, определён-
ный для с > 0 соотношением
Ф£(Г) = шт{Ф(г) + Hz - fllz | z € Z). (7.2.26)
Этот функционал выпукл, дифференцируем по Фреше и удовлетворяет
неравенству Ф£(Г) Ф(Г) V(" € Z. Производная Фреше </Ф£/</Г, явля-
ющаяся монотонной и липшицевой, совпадает с приближением Иоси-
ды (ЭФ)£ для ЭФ:
^ = (ЭФ)£ = |(/-Л). (7-2.27)
§ 7.2. Задача на односторонний изгиб
267
где £ обозначает отображение (I + сЭФ) *. Выполняется также со-
отношение
ФД) = *( Л (О) + 2£ И - ЛШН^ (7-2.28)
Обозначим через А1е и множества, определяемые соотношениями
(7.1.22, 23) с Ф, заменённым на Ф£. Ясно, что для любого е > 0 мно-
жество А^ непусто. Если функционал F слабо п.н.сн., то множество
А^ слабо замкнуто, и поэтому, в силу (7.2.18), для любого £>0
llzllz С (7.2.29)
где с > 0 — константа. Далее, для всякого £ > 0 найдётся f£ € А^,
такое что
E(Q = max[E(z) [ztA^]. (7.2.30)
Из условия (7.2.24) и вложения Аг С А^ вытекает, что
E(f£) > maxlE^z) | Л2) = с > 0 V£ > 0. (7.2.31)
Легко проверить, что для любого подмножества Zo С Z, на кото-
ром значения E(z) ограничены снизу положительной константой, су-
ществует некоторая другая положительная константа с, такая что
(Bz, z)z > с для всех Zo. Беря Zo = {f£ | £ > 0), заключаем, что
(Bf£, U>c>0 V£>0. (7.2.32)
Все фигурировавшие выше постоянные не зависели от £. Из неравен-
ства (7.2.32) и непрерывности функционала F + Ф£ следует, что
Г£€ А1е и f£ # 0 для любого £ > 0. Поэтому
Е(^е) = max{E(z)\z^A2£] = max{E'(z) | AJe}. (7.2.33)
Поскольку, кроме того, (d&E/d$) = 0 для всех £ > 0, имеем, в силу
(7.2.15),
(г + (Г£) #0 V£ > 0. (7.2.34)
Применяя теорему Браудера7, заключаем, что существует Х£ € IR, та-
кое что
я*
nU + ^(Q = X£BC£ V£ > 0, (7.2.35)
' См., например, [30, теор. 4].
268
Гл. 7. Неравенства в теории тонких упругих пластин
или, эквивалентно,
(Г(С£), z - C)z + Ф£(г) - Ф£(С£) > , z - C)Z vz € Z. (7.2.36)
Умножая (7.2.35) на Г£, получаем
Х£ > О vs > 0. (7.2.37)
Для всех w € Z и ц > 1
Ф£(/а) - wllz + «(д)Ф(м') sup(/?, a(ji))(^llz - wllz + Ф(м')}.
Поэтому
Ф£(/«) sup(/42, а(д))Ф£(г). (7.2.38)
Полагая в (7.2.36) z = 2f£ и принимая во внимание условия (7.2.29, 32)
и тот факт, что оператор Т ограничен, приходим к неравенствам
cXg С (ЛГДГРг + sup(4, а(2))ФД)^' V£ > 0, (7.2.39)
где с и с' не зависят от £. Из оценки
с > ^£(U = Г£ - + Ф((7.2.40)
где с > 0 — константа, следует, что при е ->0
Г£ “ -> 0 сильно в Z. (7.2.41)
На основании (7.2.29, 37, 39) заключаем, что существуют последова-
тельности (f£j и [XJ, такие что
f£ -> f слабо в Z, (7.2.42)
Х£ -> X. (7.2.43)
Тогда
Л(Г£) Г слабо в Z (7.2.44)
и, следовательно,
ЯГ) + Ф(Г) lim inf [ЯГ£) + Ф(Л(Г£))1 (7-2.45)
а значит, Г€Лг. Далее, из (7.2.31) следует, что
Е(Г) = max(E(z) | z € Аг} . (7.2.46)
Остаётся доказать, что Г и X удовлетворяют вариационному неравен-
ству (7.2.14). Для этого воспользуемся псевдомонотонностью опера-
тора Т. Полагая z = Г в (7.2.36), получаем
(ДГ£), Г£ - r)z Ф(Г) - Ф(Л(Г£)) + Х£(ВГ£, Ге - r)z. (7.2.47)
§ 7.2. Задача на односторонний изгиб
269
Из (7.2.42 — 44) и компактности оператора В следует, что
Um sup (f(f£, f£ - f)z «= 0. (7.2.48)
Так как T псевдомонотонен, мы заключаем, что
(ЛГ), Г - Z)z С lim inf (f(f£), f£ - z)z
Ф(?) - Ф(Г) + X(B(f), z - f)z Vz € Z. □ (7.2.49)
Это предложение гарантирует существование по крайней мере од-
ного «выпученного» решения [f, X). Если, кроме того, оператор Т
непрерывен на Z и для любого f € Z отображение д -> Ф(д£) является
непрерывным и неубывающим при ц > 0, то решение f задачи (7.2.25)
принадлежит Ai.
В следующем предложении, которое формулируется здесь без доказательства, речь
идёт о существовании бесконечной последовательности собственных значений. Примем
дополнительные предположения относительно f, В и Ф:
(i') существует вещественнозначная функция b = Ь(у, 6) на [0, +оо) х [0, + <»), огра-
ниченная на ограниченных множествах, такая что
(ii')
IIЙГ) - Йг)Иг =£ *(llzllz, llfllz)llz - rilz Vz, ftZ; (7.2.50)
(ЙГ), Dz > cllflli VftZ, (7.2.51)
где c > 0 — константа (эта оценка заменяет оценку (7.2.15));
(iii') Й-П=-ЙГ) VftZ; (7.2.52)
(iv') (Bf, f)z > 0 Vf € Z, f # 0; (7.2.53)
(v') 0 € int Й(Ф), Ф непрерывен в точке f = 0, (7.2.54)
Ф(дГ) > Ф(Г) V/» >1, Vf € Z, (7.2.55)
Ф(-Г) = Ф(Г) VftZ. (7.2.56)
Предложение 7.2.2. Пусть Г, В н Ф удовлетворяют предположениям (i), (iii), (vi), (vii)
и (i') — (v'). Тогда существует бесконечная последовательность [f„, Х„] (л = 1, 2, ...,)
решений неравенства (7.2.14), таких что
Гл € ^4z, Гл # 0, Хл > 0. (7.2.57)
Если (Гл, Хл) — решение рассматриваемой задачи на собственные значения, то н ( - Гл,
Х„) тоже будет решением.
Ввиду дополнительных по сравнению с предложением 7.2.1 предположений приложе-
ния данного результата в механике довольно ограничены. Доказательство предложения
7.2.2, основанное на использовании теории Люстерника—Шиирельмана, читатель мо-
жет найти в [226]. Следует заметить, что это предложение не позволяет сделать заклю-
чение о существовании бесконечной последовательности различных решений, т. е.
таких, что и, # и„ для л' # п.
п
270
Гл. 7. Неравенства в теории тонких упругих пластин
7.2.3. Приложение к задаче о выпучивании
Чтобы проиллюстрировать возможные приложения приведённых вы-
ше результатов, рассмотрим пластину с граничными условиями
Г = 0 и М(Г) € на Г’ (7-2.58)
Где /3 задаётся соотношением (3.3.45). Для некоторого О' СО
(О'ПГ# 0) реакция /з удовлетворяет соотношению вида (7.1.17):
/з = 0 в 0\0', а в 0'
\ [~/о, +/о] при С = 0,
-/з € 0(0 = 2 /о при (" > 0, (7.2.59)
/ -/о при ("СО.
Эффекты трения описываются вторым условием (7.2.58) и условием
(7.2.59), учитывающими соответственно вращение границы и изгиб
пластины.
Как и для случая (7.1.73), можно доказать, что С((") равняется про-
изводной Гато функционала
Л(О = 1л(е(м(П) + ^Р(О, Р(О)
в точке (". Фактически, как мы сейчас покажем, С(-) является непре-
рывной функцией от (", и потому С(-) будет и производной в смысле
Фреше. Действительно, справедлива следующая оценка:
Н(?(Г1) - <?(("2)llz «S С(НMli + II Mli)ll Cl - MI1.4
v("i, ("г € Z, (7.2.60)
где c > 0 — константа7. Здесь мы только наметим доказательство не-
равенства (7.2.60) (см. [226]). Применяя неравенство Корна (п. 1.4.3)
к (7.1.32) и используя вложение Я1 2(0) С заключаем, что «1(0
и «2((") удовлетворяют оценке
llw(fi) — «(("2)111 c(ll("illz + IIГг11г)Н$"1 — ("2111,4
V("1, ("2 6 Z, (7.2.61)
1 Пусть f = 0 на Г, и пусть fi и f2 — два решения неравенства (7.1.36). Тогда в
обозначениях настоящего параграфа имеет место неравенство
(ЙГ1) - ЛГг), Г1 - fr)z 0,
из которого, ввиду (7.2.60) и вложения H2(Q) С ИЛ1,4((1), вытекает, что fi = f2, если
величина llfillz + llfzllz достаточно мала.
§ 7.2. Задача на односторонний изгиб
271
где с > 0 — константа. Поэтому
| /?(£(м(Г1)) + |р(М, Р(Г1, Z)) - Я(е(и(М) + |р(М, Р(М Z)) |
c(llnlli + II М11)Н n - MlmIIzIIz VM fc € z (7.2.62)
(где с > 0 — константа), откуда и следует (7.-2.60). Таким образом,
Т - I + С является производной Фреше функционала
F(z) = yllzllz + Fi(z). (7.2.63)
Легко проверяется, что выполнены и все остальные условия на Т, фи-
гурирующие в предложениях 7.2.1 и 7.2.2.
Примем следующее дополнительное предположение относительно
напряжений а0: усилия, приложенные к границе Г] каждой подобласти
01 С П пластины, являются сжимающими, т. е. почти везде на Г1
удовлетворяется неравенство
a^jninj 0, (7.2.64)
где п = (ль пг) — орт нормали к Г1, направленный наружу от 01. Яс-
но, что все предположения относительно В удовлетворены. Поэтому
предложения 7.2.1 и 7.2.2 гарантируют существование бесконечной по-
следовательности вариационных решений {Хп, fc, ип] с Хл 0 и
Гл 5й 0.
Легко показать, что Г = 0 является единственным решением, если
X X*, где X* — наименьшее положительное собственное значение
оператора В. С этой целью положим в (7.2.14) z = Г/2 (Г # 0). Прини-
мая во внимание (7.2.53), неравенство (Cf, Dz > 0 Vf«Z и вид
функционала Ф, получаем
ЦВ[, Dz> НГН1, Г #0, (7.2.65)
откуда следует, что X > 0 и
Далее, В является линейным самосопряженным компактным операто-
ром в Z, поэтому, согласно классическому результату о таких опера-
торах, у него существуют собственные значения X € IR, удовлетво-
ряющие соотношению z = XBz, z * 0. Наименьшее положительное со-
бственное значение X* оператора В задаётся правилом Рэлея
l = sup
(Bz, Z)z
iiziii
(7.2.67)
272
Гл. 7. Неравенства в теории тонких упругих пластин
Поэтому, если f # 0, то X* < X, и значит, если X < X*, то единствен-
ным решением служит f = 0.
Приведем без доказательства некоторые результаты из работы [72], касающиеся би-
фуркации ненулевых решений из тривиального решения f = 0. Обозначим через (fg, Xg 1
нетривиальное решение, отвечающее /3 > 0 (см. (7.2.25)). При (3 -» <» имеем llfollz 00
и Хр -> оо; при 3 -»0 имеем -> 0. Далее, пусть Zo — замкнутое линейное подпростран-
ство в Z, определяемое условием: Ф(г) = 0 тогда и только тогда, когда z 6 Zo. Возмож-
ны два случая:
(i) Zo = (0). Пусть [Xm, fm) — последовательность нетривиальных решений, такая
что -» 0. Тогда
Хт - ОО. (7.2.68)
(ii) Zo # 0. Тогда при —► О выполняются соотношения fв -»0 и
• Xg - Х‘, (7.2.69)
где X* — первое положительное собственное значение оператора В.
В качестве приложения рассмотрим защемлённую пластину с граничными условиями
типа (7.1.17) на О' С О. Предположим, что ja(f) = 0 тогда н только тогда, когда f = О,
так что Zo = [0). В этом случае тривиальное решение не допускает бифуркаций, и един-
ственным бифуркационным значением является X = оо. В качестве другого примера
возьмём пластину с граничными условиями (7.1.10, 13), rnejz(d$/dn) = 0 тогда и только
тогда, когда df/dn = 0. Если вместо условия (7.1.13) наложить условие д£/дп = 0 на
Г, т. е. рассмотреть защемлённую пластину, то существует значение Хо, для которого
тривиальное решение f = 0 допускает бифуркации [22]. Это Хо определяет критическую
нагрузку для защемленной пластины. Покажем, что Хо будет бифуркационным значени-
ем и для односторонней задачи. Действительно, так как Zb = Н2(0), то при 0 -»0 мы
имеем Cg -* 0 и Xg -* X* = Хо. Мы заключаем, что рассмотренные выше субдифференци-
альные граничные условия, связывающие изгибающие моменты с поворотами, с точки
зрения бифуркаций обнаруживают сходство с защемлением пластины.
7.2.4. Обобщение правила Рэлея на односторонние задачи
Хорошо известно, что для линейных самосопряженных компактных операторов в гиль-
бертовом пространстве собственные значения можно вычислять по правилу Рэлея. Для
общего вариационного неравенства (7.2.14) аналогичный результат пока не установлен.
Он доказан лишь для частного случая пластины, опирающейся на жёсткое основание.
Предполагается, что пластина защемлена по контуру Г1 С Г, а по контуру Г2 = Г\Г1
свободно опёрта. Поэтому
Z = (z|z«H2(0), z = 0 на Г, — = 0 п.в. на П), (7.2.70)
Эл
а Ф в неравенстве (7.2.14) является индикатором 1к выпуклого замкнутого множества
Х= (z|zeZ, z >0 на О). (7.2.71)
Следовательно, задачу 1 п. 7.2.2 можно сформулировать следующим образом: найти
§ 7.2. Задача на односторонний изгиб
273
$ t К, X e IR, такие что
((Z + 0(f), z - f)z - X(Sf, z - Пг 2 0 Vz € К. (7.2.72)
Для этой задачи на собственные значения справедлив следующий результат (см. [43]):
Предложение 7.2.3. Определим числа Xi и Х{ формулами
1 (Bz, z)z 1 . , (Bz, z)z
— = sup 5-----, — = mf ——=Д_ .
Xi к llzllz X[ к llzllz
(7.2.73)
Если Xi X Xi, то вариационное неравенство (7.2.72) допускает лишь тривиальное
решение f = 0, и обратно; если X > Xi и X < Х{, то (7.2.72) имеет по крайней мере одно
ненулевое решение такое что
lim llfxllz = 0, lim llfxllz = 0.
X~*Xi Х-»Х(
(7.2.74)
Доказательство. Ограничимся тем, что наметим основные идей доказательства. Фикси-
руется некоторый базис Галёркина, и конус К аппроксимируется последовательностью
конечномерных выпуклых замкнутых конусов Кт с вершинами в нуле пространства Z,
которые при т -» оо стремятся к К. Пусть fт е К„ — решение вариационного нера-
венства
((Z + C)(fm), z - Mz - Х(В[т, z - fm)z >0 Vz ё Кт. (7.2.75)
Последовательность решений ограничена, и поэтому из неё можно выбрать подпо-
следовательность, сильно стремящуюся к некоторому решению f неравенства (7.2.72).
Полагая z = 0hz = 2£b (7.2.72), получим
((Z + 0(f), f)z - X(Sf, f)z = 0. (7.2.76)
Из граничных условий на Г следует, что f = 0, если (C(f). f)z = 0 [270]. Если f # О,
то (Of), f)z > 0, и потому из (7.2.76) с учётом определения Xi и Х[ (см. (7.2.73)) следует
справедливость первого утверждения теоремы. Чтобы доказать (7.2.74), убеждаемся,
что для каждого решения fx неравенства (7.2.72) и для каждого X, удовлетворяющего
условию Xi X 2X1, существует постоянная с > 0, такая что
llfxlli<c(^- 1 ) , (7.2.77)
\Х1 J
и аналогично для Х[. □
Из предложения 7.2.3 очевидно, что величины Xi и Х[ являются соответственно по-
ложительной и отрицательной критическими нагрузками. Решающим моментом приве-
дённого выше доказательства является тот факт, что (Of), f)z = 0 влечёт f = 0. Этот
вопрос обсуждается в работе [270], где указан класс граничных условий, для которых
отмеченный факт справедлив.
Предположим, далее, что пластина лежит на линейном упругом основании Qi € IR3,
отнесённом к координатной системе Qxixye пластины [44]. Будем считать, что вектор
перемещений U основания fij принадлежит [№(Й1)]3. Пусть (7; = 0 (i = 1, 2, 3) на неко-
торой части Г{ границы Г1 множества 0>. Выпуклое множество Ку допустимых переме-
щений имеет следующий вид (см. (3.3.26)):
Ki = [(z, И) |z ё Z, Vt [ZZ'(fii)]3, z - Из > 0 п.в. в О, И = 0 на Г1). (7.2.78)
274
Гл. 7. Неравенства в теории тонких упругих пластин
Поэтому для (Г, U) t Ki выполняется вариационное неравенство
((/ + (?)(Г), z - f)z + X(Bf, z - f)z + a(U, И - I/) > 0
V(z, Vyt.Ku
(7.2.79)
где a(U, И) — билинейная форма энергии деформации для области fii (см. (5.1.10)).
В этом случае критическая
нагрузка задается формулой
l = sup________(Bz, z)z
Xi “P Hzllz + a(U, K)
Aj
(7.2.80)
Если 0 < X < Xi, to f = Ui = Ui = U3 = 0 является единственным решением неравен-
ства (7.2.79). Если X > Хь то существует решение с f # 0.
Слабым местом теории Кармана является предположение о линейной зависимости
между напряжениями и деформациями. Нетрудно дать формальное обобщение изло-
женной выше теории иа случай голономных субдифференциальиых определяющих соот-
ношений между тензором напряжений Б клссеости пластины н тензором деформаций,
а также сформулировать соответствующую задачу на собственные значения. Заметим
в этой связи, что уже получены некоторые результаты, касающиеся устойчивости пла-
стин Кармана для случая материале, подчиняющегося хорошо известному закону
(3.3.83), при условии растяжения пластины (см. [74; 205]).
§ 7.3. ДИНАМИЧЕСКИЕ ОДНОСТОРОННИЕ ЗАДАЧИ
ДЛЯ ПЛАСТИН КАРМАНА
7.3.1. Граничные условия и вариационные неравенства
В обозначениях п. 7.1.1 динамическое поведение пластин Карма-
на описывается следующей системой дифференциальных уравнений
(а, 0=1, 2):
СГ + КДДГ - ОДГ - й(<7азГ,з)>и = /з в Я х (0, Т), (7.3.1)
QUa - <Та0, 3 = fa В fl X (0, Т), (7.3.2)
ОаВ = C„37j(e7«(u) + jr,Tr.i) в fl х (0, Т), (7.3.3)
fiafi(u) = («а.З + ие,а) В fl X (0, Т). (7.3.4)
Эта система формально получается из (7.1.1—4) при добавлении инер-
циальных членов (членами, выражающими инерцию вращения, связан-
ную с перемещениями щ, иг, мы здесь пренебрегаем). В уравнениях
(7.3.1—4) использованы обозначения: t — время, [0, Т] — временной
интервал, q — плотность пластины (p€L°°(fl), ess inf р(х) > 0),
f - (fi, fi, fi), ft - f(x, t) — вектор нагрузки, D = gft3/12 — произведе-
ние плотности пластины на момент инерции элемента пластины с
основанием единичной площади. При t = 0 заданы начальные условия
§ 7.3. Динамические односторонние задачи для пластин Кармана
275
haa^,ane(z - Г')^Г +
и = ио, (7.3.5)
и' = ui, (1.3.6)
Г = Го, (7.3.7)
Г' = h, (7.3.8)
где «о, «ь Го и fi — функции х. Прежде всего выпишем аналоги соот-
ношений (7.1.20—21), в предположении достаточной регулярности
рассматриваемых функций:
j q{”(z - Г'*® + «(Г", z - Г') + «(Г, z - Г')
о
+ j h<jarf,a(z - Г'),^
о
Q(DU - ПОГ - f Af(D d(z ~ r)dT
jl dn
+ (f3(z - Г')<® + D f ^(z - ndT, (7.3.9)
J J оП
Q Г
где а (Г, z), M($) и Q(D определяются по формулам (7.1.6—8) и
а(Г", Z) = D j Г,«2,аЛ1 (a = 1, 2). (7.3.10)
Q
Аналогично из (7.3.2) следует соотношение
j qu”(v - u')dO + j aafi£ae(v - u’)dO
о a
= jfa(Va - Ua)dQ + j <Jafirtff(Va - Ua)dT. (7.3.11)
о г
Предполагается, что для каждого t € [0, Т} на Г поточечно выполня-
ются следующие граничные условия:
М€ & ’ (7-3-12>
\дп у \оП у
-Q€02(r') = ал(Г'), (7.3.13)
<Т1аЛа = агрПр = 0. (7.3.14)
Разобьём /з на /з и fi, где /з считается заданным, а /з удовлетворяет
условиям
-7з€/Зз(Г') = а;з(Г') в
(7.3.15)
/з = о в a\az,
276
Гл. 7. Неравенства в теории тонких упругих пластин
где О' СО, О'Г)Г = 0. Операторы ft и функционалы j} — такие же,
как в п. 7.1.2. Дадим вариационную формулировку краевой задачи,
определённой уравнениями (7.3.1—8) и граничными условиями
(7.3.12—15). Будем считать, что p€Z“(O), z€7/2(O), i?e[№(Q)]2,
/1(0 € L2(0) (i = 1, 2, 3) V/ ё [0, Т]. Определим функционал Ф на
Т/2(0) формулой (7.1.30). Принимая во внимание (7.1.18, 19) и вариаци-
онные неравенства, вытекающие из (7.3.12, 13, 15), приходим к следу-
ющей вариационной задаче:
Задача 1. Найти и: [0, Т] [№(0)]2 и f: [0, Т]^>Н2(0) с
u'(t) € [77i(0)J2, Г(/)€ Я2(0), и”(I) € [£2(0)]2, Г(/)б£2(0), удовлетво-
ряющие соотношениям
(еГ *» z-n + а(Г. z-n + а(Г, Z - Г')
+ Л/?(£(и) + 1р(Г), Р(Г, Z - Г')) + Ф(2) - Ф(Г) > (7з, z - f')
+ D f (z - Г)б/Г VZ € Я2(0), (7.3.16)
J
г
(ри", V - и’) + Р(е(и) + JР(Г), e(v - и')) = (ft, V- и')
vvel#1^)]2 (7.3.17)
и начальным условиям (7.3.5—8). Здесь
/е = (fi, fl). (7.3.18)
Можно также рассмотреть односторонние граничные условия от-
носительно S = (ft) = [аа/зпр} и и'; например, можно предположить,
что на Г выполнены условие (7.3.12) и условия
-е€ЭЛ(Г') на Г, Г = 0 на Г\Г1, (7.3.19)
5 = 0 на Г1, -Sidj4(u’) на Г\Гь (7.3.20)
Кроме того, предположим, что выполнено ещё и условие (7.3.15). При
этом /4 снова будет выпуклым п.н.сн. собственным функционалом на
IR2. Введём пространства
Z= {z | Z € Я2(0), z = 0 на Г\Г1), V= {v | v € (№(0)]2)
и определим функционалы Ф и Ф соотношением (3.3.125) (см. (7.1.30)).
Пара (и, является вариационным решением этой краевой задачи
тогда и только тогда, когда она является решением следующей
задачи:
§ 7.3. Динамические односторонние задачи для пластин Кармана
277
Задача 2. Найти и: [О, Т} -» V и Г: [О, Т]~* Z с u'(t) € V, {'(t) € Z и
и " (0 6 [£2(0)]2, 6 £2(О), удовлетворяющие системе неравенств
(бГ’ Z - Г') + а(Г, Z - Г') + а(Г, Z - Г')
+ Л/?(е(«) + |Р(Г), ЛГ, Z - Г'))
£
+ ф(£) - Ф(Г) > (7з, Z- Г) + D (ДРи- Г)<*Г Vz€Z, (7.3.21)
J on
г
(qu", v - и') + R(e(u) + у P(f), e(v - и')) + Ф(у) - Ф(и')
>(fe,v-u') W6K (7.3.22)
и начальным условиям (7.3.5—8).
7.3.2. Существование решения
Существование и единственность решения сформулированной выше
общей односторонней краевой задачи до сих пор не доказаны. В этом
пункте мы рассмотрим систему (7.3.16, 17) с граничным условием
(7.3.13), заменённым условием f = 0 на Г. Вначале сформулируем не-
которую абстрактную задачу, для которой будут доказаны существо-
вание и единственность решения. Эта задача охватывает широкий
класс односторонних краевых задач динамической теории пластин
Кармана.
Пусть V, Vo, Z, Zi и Zo - £2(0) таковы, что вложения
КС Ко = Уб С V (7.3.23)
и
Z С Zi С Zo = Z6 С Z{ С Z' (7.3.24)
являются плотными. Далее, предположим, что вложение Z С Zo ком-
пактно, а формы a(z, z) и a(z, z) симметричны, непрерывны и коэр-
цитивны соответственно на Z и Zi. Определим R(h, к), как в п. 7.1.2,
и допустим, что отображения е, Р и R обладают следующими
свойствами:
(i) е: К-*[£2(0)]4 линейно и непрерывно; (7.3.25)
(ii) Р: Z х Z-* [£2(0)14 билинейно и вполне непрерывно; (7.3.26)
(Ш)НЛГ. П11[2?(0)] ^clirllzlirilz, VJ-6Z; (7.3.27)
278
Гл. 7. Неравенства в теории тонких упругих пластин
(iv) если Г,- -* f »-слабо в L^ffXT, Z) и J7 -* f' «-слабо в Lx(pi\ Zo),
то
>(лг.), лг«, zwm лг. z)) в ^'(<ю
Vz€L2(OT, Z). (7.3.28)
Предположим также, что существует последовательность выпуклых
дифференцируемых функционалов Фе(е > 0) на Z, удовлетворяющая
условиям:
т т
(i) \&Az)dt —> \<b(z)dt Vz£L2(0r, Z); (7.3.29)
б 6
(ii) существует ограниченная последовательность (fe) в Z, такая
что
(fe) = 0 ve > 0; (7.3.30)
т
(iii) если zE~*z и zE~*z' «-слабо в Z) и ^E(z')dt^c, то
о
г г
lim inf j$e(ze')A> ^<b(z')dt. (7.3.31)
о о
Сформулируем теперь упомянутую «абстрактную» задачу:
Задача 3. Найти и: [0, Т] -> V и f: [0, 7]-»Zc u'(t)£ V, u”(t)£ Vo
и f'(?)6Z, f'(/)€ Zi, удовлетворяющие соотношениям
(ef". Z - f') + a(f, z - f') + a(f", z - f') + hR(e(u) +
+ ЛГ, z - D)
+ Ф(?) - Ф(Г) > (/з, z - f') Vz€Z, (7.3.32)
(qu", v- u') + R(e(u) + yP(f), e(i> - «')) = (/«. v - u')
(7.3.33)
и начальным условиям (7.3.5—8).
Соответствующая регуляризованная задача формулируется так:
Задача Зе. Найти ие: [0, Т] -> V и fe: [0, Т} -> Z с u'(t) € V, u”(t) € Vo
и ^'(t) iZ, ^£"(t)eZi, удовлетворяющие уравнениям
(Ct; z) + a(fe, z) + Й(Г;, z) + hR(e(ue) + lp(fe), P(fe, Z))
ld& \
+ ZJ = V^€Z, (7.3.34)
§ 7.3. Динамические односторонние задачи для пластин Кармана
279
(qu;, v) + R(e(ue) + e(v)) = (ft, v) V (7.3.35)
и начальным условиям
u€ = «о, ue' = ui, Г€ = Го, Г£' = h. (7.3.36)
Принятые нами предположения выполняются для весьма широко-
го класса задач из теории пластин Кармана. Рассмотрим, например,
граничные условия f = 0 и (7.3.12, 14) и предположим, что условие
(7.3.15) выполнено в О. В этом случае
Z = Я^П^О), Zi=^(a), Zo = L2(0), (7.3.37)
V = [№(0)J2, Ко = [£2(П)12. (7.3.38)
Ясно, что предположения о пространствах Z, Zi, Zo, V и Ио и били-
нейных формах a(z, z), a{z, z) и R(h, к) выполняются равно, как и
свойства (7.3.25, 26). Проверим, что выполнено (7.3.27). Применяя
(1.2.24) с ai = O, аг = 1/2, а3 = 1 к Г>а, найдём, что
IIГ.«Н 1/2 С | Г.а | 2/211Г,«Н1/2 € Н1(О). (7.3.39)
С учетом вложения (1.3.50) (для п = 2) это неравенство дает
| Г,а I 4 С Cllr.Jli72 I Г,а I ¥2 € Н\й), (7.3.40)
где с > 0 — константа. Поэтому, в силу неравенства Гёльдера,
| Г.аГ,|3 | 2 С | Г,<х | 4 | | 4
Cll r,alllZ2IIMIl/21 г,a I ¥21 и I ¥2 С сП гы nil
VfCZ, (7.3.41)
где с > 0 — константа. Тем самым свойство (7.3.27) установлено. Для
доказательства свойства (7.3.28) надо показать, что
т
0 О
Т
- j j C^^^.yZ.KiOdt VztL2(OT, Z), (7.3.42)
о a
если Г,- -* f «-слабо в L°°(OT, Z) и -♦ f' «-слабо в Zo). Но при
этих предположениях Г,а ( соотв. -* Г,а) «-слабо в L^tQfT,
Н\О)) (соотв. в L“(GT, Н ’(О))). Вложение №(0) в £₽(0) является ком-
пактным для 1 Ср < 00 (см. (1.3.51)). Применяя одну теорему Лионса
280
Гл. 7. Неравенства в теории тонких упругих пластин
о компактности7, заключаем, что
Й.<х “* Г,а сильно в £₽(0 х (073)
для каждого конечного р > 1, (7.3.43)
чем (7.3.42) и доказано.
Справедлив следующий результат:
Предложение 7.3.1. Пусть
Л. Л' € £2(07, Ко), г) = о W€(0, Т), (7.3.44)
/з, Л €£2(0Т, Zo), (7.3.45)
Wo, ui € V, (7.3.46)
Го, fiCZ, (7.3.47)
Ф(ГО < оо, (7.3.48)
линейная форма
z -> F^z) = - <х(£0, z) - hR(e(u0)
+ WoX Жо, z)) - (СД Л (е > 0) (7.3.49)
\ «4 /
непрерывна на Z в топологии Zi, а линейная форма
v - F2(v) = - /?(е(и0) + у Р(Го), fi(v)) (7.3.50)
непрерывна на Ив топологии Ко. Тогда у задачи Зе существует реше-
ние (и£, Г£). Далее, существуют Г€£”(0£ Z) и и€£°°(0Т, Ко), такие
что при е -* О
Г<НГ «-слабо в £оо(0Т, Z), (7.3.51)
Г/- Г' «-слабо в £“(0Т, Zi), (7.3.52)
«£-* и', и'-» и’ «-слабо в £°°(07; Ко) (7.3.53)
и
е(и£)-»e(u), e(u£3-»e(u') .-слабо в £"(0Т, [£2(0)]4). (7.3.54)
Доказательство, (а) Применяя метод Галёркина, как и при доказатель-
стве предложения 5.4.2, можно показать, что регуляризованная задача
допускает решение (u£, Г£), такое что f£, Г£ € £°°(0Т, Z), £”(0Т, Zi)
и u£, и’, u”€L°°(CT, Ко).
(Ь) Подставим z = f£, z = ГЕ в (7.3.34) и и = и' в (7.3.35). Исполь-
зуя (7.3.30), получим 1
1 См. [182, р. 58, theor. 5.1].
§ 7.3. Динамические односторонние задачи для пластин Кармана
281
(er;, г; - q + «(r£ о + а(г;, г; - и + w(«£)
+ p(f£), PG£ f£')) + 0^)-^(?£). f£'-f£)z
= (/з, г; - ?£) + а.Т£, ?£) + Л/?(е(и£) + 1р(Г£), ЛГ£, ?£)) (7.3.55)
и
(е<, u£') + R(e(u£) + lp(f£), е(и')) = (fe и£”) . (7.3.56)
Ввиду тождества
W + р(Г£), Р(г£, ГР) = 1 £r(c(ue) + p(Q, £(u£)
+|~ R^(u£) + 1 Р(Г£), e(u£% (7.3.57)
интегрирование уравнения (7.3.55) от 0 до t даёт
| (и г; - f£nio + ciir£iii + dir; - ?£н1>
+ hR{E{u£) + 1Р(Г£), e(u£) + p(f£)) + Л11и£11и0)
[ КГз, Г,' - f£) + h(ft, uffldt + j c[llr£llzllf£llz
о 0
+ lle(«£) + у•^>(Г£)11[£2(о)]4И^>(Г£.»
+ у(llfl - f£llz0 + cllfollz + cllfl - ?£llzi
+ Z?(£(Wo) + |р(Го), £(wo) + IP(fo)) + Alluillib). (7.3.58)
При выводе этого неравенства были использованы монотонность
d$£/dz и тот факт, что все рассматриваемые здесь билинейные фор-
мы непрерывны и коэрцитивны, а все линейные непрерывны. Из
(7.3.58) следует неравенство
llr£llz + НГ£ - f£llii + IlWgllГо + Пе(«£) +
О
+ Не(«£) + + С2, (7.3.59)
1
282
Гл. 7. Неравенства в теории тонких упругих пластин
где ci, Сг — положительные константы. Используя неравенство Гро-
нуолла, заключаем, что
HLiiicc, iir;iiz, < с,
(7.3.60)
Не(мв) + p(QHI£W с.
Таким образом, последовательности (Г£), 1Г£)> {w£), [w£'J и [«(м£))
ограничены соответственно в пространствах £“(0Т, Z), L°°(ffT, Zi),
L^OT, Ко), £°°(0Т, Ко) и £°°(0Т, (£2(0)]4).
(с) Дифференцируя (7.3.34, 35) (см. предложение 5.4.1) по t, полу-
чим систему вариационных уравнений
(еГ£Т 2) + а(Г£', г) + й(Г* z) + hR(e(u')
+ Р(Г£, Гр, Р(Г£, Z)) + йР(«(м) + р(Г£), Р(Г£', г))
+ ((^ (□) ’ г = <Л» г) vz € Z, (7.3.61)
(е«; v) + /?(£(И;) + Р(г£', r£), £(v)) = цг, v) we к. (7.3.62)
Вследствие монотонности d&e/dz имеем
№ + 6r>~di ад)» w + - т\г
= Пт -------------------—-----------------------L— 0. (7.3.63)
и - о (602
Подставляя z = f * и v = и * в (7.3.61—62), приходим к неравенству
у ~F{t) < (fj, W + h(fi, и?) + hR(e(u') + Р(Г£, ГД Р(Г£'))
- hR(e(ue) + | P(Q, 1 Р(Г£')), (7.3.64)
где
р(0 = j tm2da + «(?;, гр + «(г; гр
о
+ йР(е(Ир + Р(Г£, ГР, «(«Р + Р(Г£, ГР) + h j е(«Р2Л1- (7.3.65)
§ 7.3. Динамические односторонние задачи для пластин Кармана
283
Интегрируя (7.3.65) от 0 до t и используя (7.3.27, 60), получаем
F(t) < 2F(0) + с j F(t)dt + с J (1(/з II z. + 1(4' II v^dt
о о
< 2F(0) + с j F(t)dt + с. (7.3.66)
о
Из непрерывности линейных форм (7.3.49) и (7.3.50) вытекает, что су-
ществуют zi £ Z{ и Vi е Ко, такие что
Fi(z) = <Zi, Z>z, VzeZ, (7.3.67)
F2(v) = (Vi, v)r0 WC И (7.3.68)
Ввиду (7.3.67) вариационное уравнение (7.3.34) давт
(еГДО), Z) + »(ГДО), z) = -а(Го, Z) - М?(«(ио) + уР(Го), Р(Го, Z))
- СО» Az + (/з(0), z) = </з(0) + zi, Z>z (7.3.69)
\ az /
при t = 0, и, следовательно,
llzllz, <с. (7.3.70)
Аналогично, при t - 0 из (7.3.68, 35) получаем неравенство
К(0)11ио^с- (7.3.71)
Следовательно,
Р(0) < с, (7.3.72)
и потому к (7.3.66) применимо неравенство Гронуолла. Отсюда следу-
ет, что F(t) с, или, что то же,
lire'llz<c, lire*llz, < с, IIm£'U<c,
< с. (7.3.73)
Таким образом, последовательности {Ге'), lf£"}, Iи*} и {«(ме')} огра-
ничены соответственно в пространствах £“(0Г, Z), £“(0Г, Zi), £“(0Г,
Ио) и /.“(ОТ, [£2(0)]4).
(d) Используя (7.3.60, 84) и переходя, если надо, к подпоследова-
тельностям, заключаем, что
г и г'
г;- г
ие -> и, и'и’, и*-> и"
•-слабо в £°°(0!Г, Z),
•-слабо в £“(0Т, Zi),
♦-слабо в £“(0Т, К»)
284
Гл. 7. Неравенства в теории тонких упругих пластин
И
е(и.) -* е(и), е(и') е(и') «-слабо в £°°(0Т,
[Ь2(0)]4).
Наконец, нетрудно проверить, что начальные условия (7.3.5—8) так-
же выполнены. □
Следующее предложение завершает доказательство существования
решения.
Предложение 7.3.2. Функции и, f, удовлетворяющие условиям
(7.3.51 — 54), служат решением задачи 3.
Доказательство. Переходя к пределу при е -> 0, покажем, что и, f
удовлетворяют как соотношениям (7.3.32, 33), так и начальным усло-
виям (7.3.5—8). Заменяя в (7.3.34) z на z - fg, где z€L2(OT, Z), нахо-
дим, что
Ai А2, (7.3.74)
где
А1 = j [(er; z) + а(Ге, Z) + а(г; z) + hR(e(ue)
о
+|р(Г£), Р(Г£, г)) + Ф£(г) - (/з, Z - (7.3.75)
т
=И [ I e(f£°2da+а(Гг’и+л
О Q
т т
+ j йл(«(м£) + 1р(г£), Р(г£, грл + j Ф£(Г;)Л. (7.3.76)
о о
т
Пусть zi € L2(OT, Z) таково, что j Ф(г1)Л < оо. Подставив в (7.3.74)
о
т
z = Zi, получим j Ф£(("£)Л < с. Принимая во внимание (7.3.31),
о
заключаем, что при е -> О
lim inf Аг > j КвГ, Г) + «(Г, Г') + «(Г". Г')
О
+ ЙЛ(а(И) + |Р(Г), Р(Г, Г')) + Ф(Г')]Л, (7.3.77)
§ 7.3. Динамические односторонние задачи для пластин Кармана
285
т
lim Л1 = j Kef", z) + a(f, z) + 5(f ", z)
0
+ hR(e(u) + |p(f), P(f, z)) + Ф(2) - (/з, z - П№. (7.3.78)
Из (7.3.74, 77, 78) следует, что
j Kef", z - f') + «(f, Z - f') + a(f". z - f')
о
+ hR(E(u) + lp(f), P(f, z - f'))
+ Ф(г) - Ф(Г) - (Л, z - f')]* > о vzeiAar, z). (7.3.79)
Рассуждая, как при доказательстве предложения 5.4.1, из (7.3.79) по-
лучаем поточечное неравенство (7.3.72).
Дав вариационную постановку нашей краевой задачи с помощью
предложений 7.3.1 и 7.3.2, мы видим, в каком смысле решение задачи
в вариационной постановке удовлетворяет дифференциальным уравне-
ниям (7.3.1, 2) и граничным условиям краевой задачи. Например,
пусть граничные условия имеют вид f = 0, (7.3.12) и (7.3.14), а реак-
ция /з равна нулю на Оь Тогда легко проверить, как и в п. 5.4.2, что
уравнения (7.3.1) и (7.3.2) удовлетворяются в смысле теории распреде-
лений, а граничные условия (7.3.12, 14) — в смысле следов. Кроме
того, ввиду (7.3.51—53), выполняются и начальные условия (7.3.5—8).
Отметим, что при замене вариационного уравнения (7.3.33) вариа-
ционным неравенством (7.3.22) предложение 7.3.1 остаётся в силе, с
незначительными видоизменениями. Однако доказать, что пределы и,
f удовлетворяют системе начальных вариационных неравенств, уже
не удается [248].
7.3.3. Единственность решения
Предложение 7.3.3. В предположениях предложения 7.3.1 вариацион-
ная система (7.3.32, 33) с начальными условиями (7.3.5—8) допускает
единственное решение.
Доказательство. Пусть ui и fi — два решения задачи 3. Положим
Mi - 1/2 = w, fi - fz = ч- Из (7.3.32, 33) следует, что
— (еч", v’) ~ «(ч> ч ) _ “(ч", v') hR(e(ui)+~P(fi), P(fi, чЭ)
-й/?(£(м2)+ lp(f2), P(f2, ч')), (7.3.80)
286
Гл. 7. Неравенства в теории тонких упругих пластин
(qw", v) + R(e(w) + - Р(Гг)), «(V)) = 0 W€ V. (7.3.81)
Ввиду равенства
Р(Гь ч') = Р(Гь ) - Р(Гг, Гг) - Р(ч, Гг) (7.3.82)
и соответствующего равенства для Р(Гг, ч')> из неравенства (7.3.80)
вытекает, что
Т ] е(ч')2<:® + «(ч, ч) + а(ч', ч')1 + hB 0, (7.3.83)
u о
где
В = у ^[^(£(w) + 1 (ЛГ1) - Р(Гг)), «(w)
+ | (Р(Г1) - Р(Гг))) + Л(«(«г) + | Р(Гг), Лч))]
- R(e(w) + |(Р(Г1) - Р(Гг)), «(*'))
- R(e(w) + 1 (P(fi) - Р(Гг)), Р(ч, Гг'))
- Л(«(«2') + | Р' (Гг), ^Р(ч)). (7.3.84)
Полагая v = w', из (7.3.81) получаем
(qw", w') + R(e(w) + j(P(fi) - Р(Гг)), e(w')) = 0. (7.3.85)
Соотношения (7.3.85) и (7.3.84) дают
В = у ~ p?(«(w) + 1(Р(Г1) - Р(Гг), «(w) + 1(Р(Г0 - P(f2)))
+ Л(«(«2) + уР(Гг), Р(ч)) + j e(w')2<«|
- P(£(W) + у(Р(Г1) - Р(Гг)), Лч, Гг'))
- R(e(u{) + у Р'(Гг), jP(4))- (7.3.86)
Далее воспользуемся оценками
| R(e(ui) + lp(f2), Р(Ч)) | cll«(«2)
+ j-p(r2)llt£2(0)]«IIP(4)llI£j(0)]< < cIMzWz,
1 1 *
< у«(ч, Ч) + clli/llzi ^2 “to’ + cj“to', (7.3.87)
§ 7.3. Динамические односторонние задачи для пластин Кармана
287
j r(£(W) + 1(Р(Г1) - p(h)), р(Ч, гп)л
< j P(£(W) + 1(Р(Г1) - P(h)), £(W)
+ |(Р(Г1) - Р(Г2)))Л + с j 11,11111 ft'Н1Л, (7.3.88)
2 о
P(£(i/2z) + |Р'(Г2), |Р(,))Л с II,|ЦЛ. (7.3.89)
о 2 2 о
Из (7.3.86—89) с учетом (7.3.83) вытекает, что
5(0 с j S(t)dt, (7.3.90)
О
где
S(0 = j Q(7)')2dQ + а(т)9 т]) + a(7]f, if) + hR(£(w)
q
+ 1(Р(Г!) - P(h)), £(W) + 1(Р(П) - P(h))) + h [ e(w')2dO. (7.3.91)
В силу (7.3.90, 91), , = ,' = w = w' = 0, чем единственность решения
и доказана. □
В заключение отметим, что динамический анализ односторонних
задач для модели Кармана применим, в частности, к динамическим
односторонним задачам для модели Кирхгофа. В этом случае опуска-
ются члены, учитывающие влияние растяжения пластины на изгиб,
и вариационная формулировка задачи сводится к одному вариацион-
ному неравенству. Можно конкретизировать предложения 7.3.1—7.3.3
для этого случая. Если пренебречь ещё и инерциальным членом ",
учитывающим вращение, то мы получим вариационное неравенство
вида
(еГ, z - Г') + а(Г, z - Г') + Ф(х) - Ф(Г) > (A, z - Г')
VzeZ. (7.3.92)
К этому неравенству непосредственно применимы многие результаты,
полученные в работе [28].
ГЛАВА 8
Вариационные и полувариационные неравенства
в теории линейной термоупругости
В настоящей главе изучаются некоторые односторонние краевые зада-
чи линейной теории термоупругости. Предполагается, что на границе
рассматриваемого тела выполняются субдиффереициальные соотно-
шения, во-первых, между температурой и вектором теплового потока
и, во-вторых, между скоростью и вектором напряжения. Выводятся
соответствующие вариационные неравенства, и затем доказываются
некоторые теоремы о существовании и единственности решения; эти
задачи впервые изучались Дюво и Лионсом [85]. Далее с помощью
метода п. 4.1.3 формулируются некоторые общие вариационные нера-
венства. Они возникают при замене закона линейной упругости и за-
кона теплопроводности Фурье на соответствующие нелинейные зако-
ны, описываемые суперпотенциалами. В конце главы изучается одно
полувариационное неравенство.
§ 8.1. РАССМАТРИВАЕМЫЕ КРАЕВЫЕ ЗАДАЧИ
И ИХ ВАРИАЦИОННЫЕ ПОСТАНОВКИ
8.1.1. Классические постановки
Область, занятая термоупругой средой, считается вложенной в эвкли-
дово пространство IR3. Общая точка этого пространства обозначается
через х, а её координаты относительно фиксированной декартовой
системы координат Oxix2x3 — через х>, i = 1, 2, 3. Время t меняется
в интервале [0, 7]. Через и = и(х, t) обозначается перемещение мате-
риальной точки х в момент времени t по отношению к естественному
состоянию тела, которое характеризуется нулевыми напряжениями и
некоторым постоянным значением абсолютной температуры 0о > 0.
Плотность тела в точке х в естественном состоянии обозначается
6 = eW- Открытое ограниченное связное подмножество в IR3, занима-
§ 8.1. Рассматриваемые краевые задачи
289
емое телом, обозначается через 0. Граница Г области 0 считается ре-
гулярной. Поведение линейно-термоупругого тела задаётся следующи-
ми определяющими соотношениями для тензора напряжений а = (ау)
(/, j = 1, 2, 3) и отклонения ч - ijo удельной энтропии т) от удельной
энтропии i/о естественного состояния тела:
= fy ~ mij(@ ~ #о) = CjjhkEhk ~ mij(6 ~ во), (8.1.1)
Т) — i сд(0 — во) + — mij£ij, (8.1.2)
О Q
где в = 9(х, t) — абсолютная температура, е = {«у} — тензор дефор-
маций для случая малых деформаций, связанный с перемещениями со-
отношениями
£</(«) = j (ии + «лО- (8.1.3)
Здесь С = {Qjhk I (4 j, h, к = 1, 2, 3) — тензор упругих констант,- удов-
летворяющий условиям симметричности и эллиптичности (3.3.61а, Ь),
т = [ту] — симметричный тензор (коэффициентов) теплового расши-
рения, a cd = со(х) >0 — удельная теплоёмкость тела при нулевых де-
формациях. Значения С(х), т(х) и со = со(х) берутся для естественного
состояния тела. Уравнения движения в предположении малых дефор-
маций и закон сохранения энергии записываются соответственно в
виде
qu"= ayj + f (8.1.4)
и
qOov' = - +-S’, (8.1.5)
где f= (/], fi = f(x, f) — вектор объёмных сил, q = [<7,], q, = q,(x,
t) — вектор теплового потока и 3 = 3(х, t) — количество теплоты
на единицу объёма. Запись системы уравнений линейной термоупру-
гости завершает закон теплопроводности Фурье
q, = - Mj, (8.1.6)
где к = [Агу), kij - kij{x) — симметричный тензор теплопроводности.
Его коэффициенты вычисляются для естественного состояния тела и
удовлетворяют условиям
Хуадт/> cfli® Ver € (д, ) € !R3, (8.1.7)
где с > 0 — константа. Предполагая, что все функции, входящие в
уравнения (8.1.1—6), достаточно гладкие, мы приходим к следующей
системе дифференциальных уравнений (см. [65]):
QUi — fi + (Cijhk£hk),j ~ (my(0 ~ &o)),j В 0 X (0, Т), (8.1.8)
QcdO - (tij0,j),i + rnijdoEiJ = 3 В 0 X (0, T). (8.1.9)
290
Гл. 8. Вариационные неравенства в теории линейной термоупругости
Эти два дифференциальных уравнения описывают поведение линейно-
термоупругого тела, в общем случае неоднородного и неизотропного.
Далее предполагается, что при t = 0 выполнены следующие на-
чальные условия:
и, = uoi в Q, (8.1.10)
и{ = uu в 0, (8.1.11)
е = е в 0, (8.1.12)
где иь = иь(х), ui = ui(x) и в = в(х) — заданные функции на Q.
Первая краевая задача, которую мы будем рассматривать, возни-
кает в предположении о следующей зависимости между температурой
на границе и вектором теплового потока:
qirii = - ^ijOjrii е /3(0) на Г х (0, Г); (8.1.13)
для перемещений примем следующие простые условия:
и, = 0 на Г х (0, Т). (8.1.14)
Здесь п = (л,) обозначает, как обычно, орт нормали к Г, направлен-
ный вовне области 0, а /3 — некоторый максимальный монотонный
оператор. Граничные условия (8.1.13) описывают широкий класс задач
о полупроницаемости (см. п.3.3.1).
Другая граничная задача, которой мы будем заниматься, возника-
ет при замене условий (8.1.13, 14) на следующие граничные условия:
е = 0о на Г x (0, Т), (8.1.15)
ui = Ui на Ги х (0 Т), (8.1.16)
-S= (-$} = I [ - ayni} С дф(и') на П X (0, Г); (8.1.17)
здесь Г = Ги U Гх, где Гу и — непустые непересекающиеся откры-
тые в Г множества; Ut - Щх, t) — заданный на Гу вектор перемеще-
ний, удовлетворяющий условиям (8.1.10, 11); — выпуклый п.н.сн.
собственный функционал на IR3. Заменяя условие (8.1.15) на (8.1.13),
получим более общую краевую задачу, в которой учитываются как
односторонние кинематические, так и односторонние термические
эффекты.
Для упрощения записи введём следующие обозначения:
а(и, и) = j CnhkEu(u)£iik(v)dQ, о (8.1.18)
(и, г) = j UiVidSl, о (8.1.19)
М(0, v) = (8.1.20)
о
§ 8.1. Рассматриваемые краевые задачи
291
Мг(и, <р) = ^m.ijUij<pdQ,
К(0, = j
п
(в, <р) = j 0<pdfl.
(8.1.21)
(8.1.22)
(8.1.23)
Предполагается, что разности v - и ’ и <р - в достаточно гладки. Ум-
ножая (8.1.8) и (8.1.9) соответственно на v - и' и <р — 0, интегрируя
по области 0 и используя теорему Грина — Гаусса, приходим к следу-
ющим вариационным уравнениям:
{qu", v - и") + а(и, v - и') + Afi(0 -0о, v - и')
= (f, v - и') + j turijiVi - Ui)dT в О х (0, 7), (8.1.24)
г
(gcD0', <р — 0) + К(0, <р — 0) + Miffiou', <Р — 0)
= (£> <Р - 6) + (Иу0,}т(<р - 0)4Г в 0 х (О, Т). (8.1.25)
8.1.2. Вариационные постановки
Предположим, ЧТО Сцкк, "4j, Q И cd являются
(8.1.26)
элементами из
L"(Q)l, j\t) е [1?(0)]3 и i?(0 € £2(0). Возьмём пространства [Я1^)]3
для v, и' и Hl(Q) для <р, 0. Так как 0 — максимальный монотонный
оператор на R, то однозначно с точностью до аддитивной постоянной
определён выпуклый п.н.сн. собственный функционал <р, такой что
/3 = д<р (см. предложение 2.6.4). Далее, определим выпуклый п.н.сн.
собственный функционал Ф на £2(Г) формулой (см. предложение 3.3.1)
(f ф(„)Д\ если ф(<р) е L'fT),
Ф(р) = ) f.
(^со в противном случае.
Как и в п. 3.2.1, сужение Ф на 771/2(Г) снова обозначим через Ф. Рас-
сматривая вариационные равенства (8.1.24, 25) совместно с граничны-
ми условиями (8.1.13, 14), для qt, п,, 0, принадлежащих £2(Г) (или бо-
лее регулярных), получим вариационное неравенство
Ф(?) - Ф(0) > j - fLijOjn^ - 0)dT € £2(Г), (8.1.27)
' Причем ess inf cd > 0, ess inf g(x) > 0.
292
Гл. 8. Вариационные неравенства в теории линейной термоупругости
которое вместе с (8.1.24, 25) позволяет сформулировать следующую
вариационную задачу:
Задача 1. Найти функции и: [О, Г] -* [^(й)]3 и 0:[О, Г] -* №(й) с
и'(1) € [/^(й)]3, и'(/) € [£2(й)]3, 0'(/)ёЛ2(й), удовлетворяющие вариа-
ционному уравнению
(gw", v - и') + а(и, v - и') + М1(0 -в0, v - и')
= (f, v-u’) [ЯЧй)]3, (8.1.28)
вариационному неравенству
(gcp0/, <р — 0) + К(в, <р — 0) + MzfOou’t <р — в)
+ ФОо) - Ф(0) > (2, <р- в) V<p € Я’(й) (8.1.29)
и начальным условиям (8.1.10—12).
В § 8.2 мы установим один результат о существовании и един-
ственности решения этой задачи при более точных предположениях
относительно зависимости данных задачи от времени. Кроме того,
мы обсудим там, в каком смысле решение задачи 1 удовлетворяет
(8.1.8—14). А сейчас продолжим рассмотрение краевой задачи, опреде-
лённой соотношениями (8.1.8—12, 15—17).
Пусть V, и' € [№(й)]3 таковы, что v = и’ = U'(f) на Го и <р, в €
7/х(й) таковы, что <р = в = во на Г. Определим выпуклый п.н.сн. со-
бственный функционал ¥ на [£2(Г)]3 формулой
*(у) =
j t(v)dr, если ^(у)ё£1(Г),
г»
^оо в противном случае.
(8.1.30)
Сужение V на [/71/2(Г)]3 снова обозначим через V. Рассуждая, как вы-
ше, и используя заданные граничные условия, из (8.1.24, 25) получим
(gw", v - и') + а(и, v - и') + М1(в - 0о, v - и') + ^(у) - ^(w')
>(f,v-u') [/Лй)]3 c v = U'(t) на Го, (8.1.31)
(gcp0', <р — 0) + К(в, <р — в) + МгЦвои', tp — 0)
= (-^,?-0) У^€ЯХ(Й) с <р = во на Г. (8.1.32)
Рассмотрим функцию w: [0, 7] -* [№(й)]3, такую что w(t) = U(f) на
Го и Ui{t) € 771/2(Го) (см. п.5.1.2), и сделаем подстановку
й' = и' - w', 0 = v - w' (соотв. в = в - во, <р = <р - <ро). Для просто-
ты волну далее опустим. В результате из (8.1.31, 32) получим вариа-
ционную систему
(gw", у - w') + а(и, v - и') + Л/1(0, у — w') + 4r(y+M’') — t(u' + w')
v-u') Vvt Vo, (8.1.33)
§ 8.2. Результаты о существовании и единственности решения
293
(gc/>0, <р — ff) + K(ff, <р — ff) + Mzifio, и', <р — ff)
= (2, <р- ff) V95€ ЛЧй), (8.1.34)
где Ко = {v | f € [/^(й)]3, v = 0 на Г^) и / ^определяются следующим
образом:
(Z_ v) = (J, v)- a(w, v) -(qw", v), (8.1.35)
(-2, 95) = (J2, 95) - Af2(0ow', 95). (8.1.36)
Начальные условия (8.1.10—12) принимают вид
и, = ио, - и’ДО), Ui = ии - и’ДО), в = ff - 0o. (8.1.37)
Поэтому можно поставить следующую вариационную задачу:
Задача 2. Найти функции и: [О, Т\ -> Ко и 0: [О, Г] -* /7*(й) с u'(t) € К>,
u"(t) € [L2(ft)]3, 0'(O€L2(fl), удовлетворяющие (8.1.33, 34) и началь-
ным условиям (8.1.37).
Далее будет рассматриваться краевая задача, определённая соотно-
шениями (8.1.8—13, 16—17). Рассуждая, как выше, и используя обо-
значения задачи 2, придём к следующей вариационной постановке за-
дачи (мы по-прежнему пишем и, v вместо й, 0):
Задача 3. Найти и: [0, 7] -* Ко и 0: [0, 7]-*№(ft) с u'(t)€Vo,
и " (0 € [L2(ft)]3, ff' (0 € £2(й), удовлетворяющие вариационным неравен-
ствам
(qu", v - и') + а(и, v - и') + Л/1(0 - 0о, v - и') + ^(v + w') - У(и'
+ w')^(f, v - и') + jmy(0 - 0o)(v< - Ui')njdT Vv€ Ко, (8.1.38)
г»
(gc£>0', <p — 0) + K(ff, <p — 0) + Mz(ffou', tp — 0)Ф(^>) — Ф(0)
>(^95-0) V95 € H\Q), (8.1.39)
первым двум из начальных условий (8.1.37) и начальному условию
(8.1.12).
§ 8.2. РЕЗУЛЬТАТЫ О СУЩЕСТВОВАНИИ
И ЕДИНСТВЕННОСТИ РЕШЕНИЯ
8.2.1. Исследование задачи 1
Для того чтобы доказать существование решения у задачи 1, предпо-
ложим, что имеется семейство дифференцируемых функционалов Ф«,
такое что
т т
(i) \*e(<p)dt }Ф(95)Л V95€£2(07; №(Й)); (8.2.1)
о £->0 о
294
Гл. 8. Вариационные неравенства в теории линейной термоупругости
(ii) существует ограниченная последовательность ($ре) в №(0), та-
кая что для каждого е > О
(?Е) = 0; (8.2.2)
dtp
(iii) если <ре <р, <р' слабо в Л2(0Т, №(Я)) при £ -»0 и значе-
т
ния интегралов J ФЕ(^Е)Л ограничены сверху, то
о т т
lim inf j $e(<pe)dt j $(<p)dt. (8.2.3)
о о
С помощью семейства (ФЕ) можно сформулировать регуляризо-
ванную задачу (см. п. 5.4.3):
Задача 1Е. Найти мЕ: [О, Г] [^(Й)]3 с мЕ'(0 € [Л1 (ft)]3, мЕ"(/) € [£2(Й)]3
и 6е: [0, Г]-* №(й), с Oe(f) € £2(Я), удовлетворяющие вариационной
системе
(ем", v) + а(ие, v) + Mi(0e-0o, v) = (4 v) w € [Й’ЧОД3, (8.2.4)
(бс£>0Е, <f>) + К(0е, <р) +
M2(60u'e, v) + (0Е), Л = (^ <р) УфеН^О) (8.2.5)
\ ои /г
с начальными условиями
ие = Мо, мЕ = Mi, 0Е = 0. (8.2.6)
Для точной вариационной постановки краевой задачи предполо-
жим, что
f f 6 L2{(JT, £2(Я)), (8.2.7)
€£2(0Т, [£2(й)]3, (8.2.8)
мо € [/72(Я) П Й1 (Я)]3, (8.2.9)
Mi € [ЯЧй)]3, (8.2.10)
0 € №(Я), Ф(0) < °о. (8.2.11)
Справедлив следующий результат:
Теорема 8.2.1. Пусть выполнены (8.2.1—3, 7—11) и
m,7,, €£”(fl) (i, j = 1, 2, 3). (8.2.12)
Допустим также, что
= К(ё, <р) + /~Ф*^ , Д + Л/2(0ОМ1, <р) (8.2.13)
\ d" /г
§ 8.2. Результаты о существовании и единственности решения
295
является непрерывным линейным функционалом на H* l(Q) в топологии
£2(й). Тогда при е -» О
wE-*w ‘-слабо в L°°(PT, [7?(fl)]3), (8.2.14)
wE-*w' ‘-слабо в L“(0T, [Я^Й)]3), (8.2.15)
wE"->w" ‘-слабо в L“(0T, [L2(ft)]3) (8.2.16)
н
бе-*б, 6i-*6' слабо в т?(от, н\п))
н ‘-слабо в £°°(0Т, £2(й)). (8.2.17)
Полученная таким образом пара [и, 0} является решением задачи 1.
Доказательство. Ввиду принятых предположений регуляризованная
задача допускает решение (ие, бе], такое что
wE, u^L^OT, [ЯЧй)]3),
Меж6£2(0Т, [£2(й)]3),
бЕ, 6ieL2(UT, №(fl))nL“(07; L2(fl)).
Это можно доказать с помощью метода Галёркина, как при доказа-
тельстве предложения 5.4.2. Полагая v = wE в (8.2.4) и = 0Е - рЕ в
(8.2.5), получим
(QUe, ui) + <z(wE, ui) + Mi(6E - 00, ui) = (f, Ui), (8.2.18)
g > 6E ~ + ~a— ^(0e> — <Ps) + Mlfui, 6E — <pE)
\ 00 /00
1 / — \ / (j) \
+ 4- (6E), 6E - <pe) = 1-^, 0e-(8.2.19)
0o \ <70 / г \ 0o /
Складывая эти равенства и используя (8.2.2), приходим к равенству
1 Г (е(«е)2^й + а(иЕ, иЕ) + f (0Е - ?е)2<7й1
Z at [_ J J “о J
я о
+ Л/1(0Е — 0о, ui) + Af2(wE', 0Е — <fle)
+ ~Л~ К(бе, 9е - Фе) + -j— / (0Е) - Е (<Ре), бе — фе\
“о vo \ UU Clu ! г
= (J, ui) + , 0Е - . (8.2.20),
\ 0о /
Так как ui(t) = 0 на Г, то применение теоремы Грина — Гаусса даёт
Л^1(0Е — 00, ui) + Mzfui, бе — <pi) = A/i(0o, ui) — Mifai, <pi)- (8.2.21)
296
Гл. 8. Вариационные неравенства в теории линейной термоупругостн
Используя условие монотонности
~ > °- (8-2.22)
\ аи ии /г
коэрцитивность форм a(v, v) и К(<р, <р) + | tp 11 и непрерывность рас-
сматриваемых линейных форм, из (8.2.20, 21) получаем
[ | Ue | 2 + llUell 1 + | 0е — <Ре | 2^ + С J ||0е111<Й
t О
Cl J ( | иё I 2 + IlWelll + I Ое — <Ре | l)dt + Q, (8.2.23)
О
где с, Ci, С2 — различные положительные константы, зависящие от
данных задачи (0о, ess infog, ess supog и т.д.); символ ll-lli в этом пара-
графе обозначает норму и в [Т/1^)]3, и в Н'((1). Применяя к (8.2.23)
неравенство Гронуолла, заключаем, что
| иё | 2 «С С, llwjli С, | 0е - Ре | 2 с> (8.2.24)
поэтому, полагая t = Т, имеем
т
(8.2.25)
о
Беря t = 0 в (8.2.4,5), получаем
(е“Д0), v) + д(иь, v) + М1(0 - 0о, v)
= (/(0), е) Ууер/Чй)]3, (8.2.26)
откуда
| Ме"(0) 12 С. (8.2.27)
Аналогично, в силу (8.2.5)
- / /УФ. \
(есд0е'(О), р) + К(0, р) + M2(0O, W1, р)( (fi), р\
= (ЭД, р) Vp € №(Я). (8.2.28)
Ввиду (8.2.13) существует такое т € Ь2(Я), что для всех р € №(0)
Др) = (т, ф), (8.2.29)
и легко показать, что
| 0е'(О) 12 С. (8.2.30)
Дифференцируя (8.2.4, 5) по t (см. доказательство предложения 5.4.1),
получим
§ 8.2. Результаты о существовании и единственности решения
297
(qUe" V) + a(wE', v) + Afi (0/, v) = (f', v) Vv € [T/^fl)]3,
\ + 1 K{e,t + M2(M„
\ "o /00
+ 4- ((4йГ = (4-’ v^€№(fl).
Vo \\ av / /г \ Vo /
(8.2.31)
(8.2.32)
Сделаем замену v = we"b (8.2.31) и = 0E в (8.2.32). Вследствие моно-
тонности <7Фе/<70, как нетрудно проверить, имеет место неравенство
= lim
st-» о
/ /г ,
(0Е(О), ee(t+dt)-eE(t)
ии ии
Поэтому из (8.2.31, 32) вытекает,
1JL Г|
2 dt L&
что
J e(wE")2dO + a(wE', и/) + j (0e')2cK11
Q Q V° -I
+ M1(0E', UE") + M(ME", 0/) + J *(0E', 0/)
Vo
>0. (8.2.33)
(8.2.34)
Отсюда, применяя теорему Грина — Гаусса к Afi(0E, wE") + Мг(иЕ, (Ц)
и интегрируя от 0 до t, получаем
Cl [ I МЕ"| 2 + IlWe'll? + I 0Е' | 1] + ( 4- e^dt
J 00
^С2([|Г I2M2 + -J- 1^' I 2 I 0Е'| 2]dt
0
+ С1( | мДО) I i + ||Ы1 II? + I 0Е'(О) I ?), (8.2.35)
где с, — положительные константы. Используя (8.2.27, 30), неравен-
ство Гронуолла и положительную полуопределенность К(<р, <р), заклю-
чаем на основании (8.2.35), что
| U”E | 2 С, llwElli < С,
| 0Е | 2 С.
Подстановка в (8.2.35) t = Т даёт
о
(8.2.36)
(8.2.37)
298
Гл. 8. Вариационные неравенства в теории линейной термоупругости
Принимая во внимание (8.2.24, 25, 36, 37), можно извлечь из последо-
вательностей и£, иё, и£, б£, 6ё подпоследовательности (которые будем
обозначать теми же символами), такие что при е -* О
wE -* и, иё~>и' *-слабо в £“(0Т, [27’1(£2)]3), (8.2.38)
wE"-* w" *-слабо в £“(0Т, [£2(Я)3]),
бв б, бё^б' слабо в £2(0Т, №(Й))
и *-слабо в L“(0T, £2(й)). (8.2.39)
Остаётся доказать, что полученные функции w, в удовлетворяют вари-
ационным неравенствам (8.1.28, 29) и рассматриваемым начальным
условиям. Из (8.2.4, 5) следует, что
(е«е" v - иё) + a(wE, v - иё) + М1(б£ - 6о, v - иё)
= (/,и-иё) УУёЯЧЯ), (8.2.40)
(вс-О^е> <Р - б£) + К(6£, <f> ~ б£) + М2(боиё, <Р — бе)
+ Фг(^) — Фе(б£) ~ (^, <Р ~ б£)
= ФеМ - Фе(бе) - (б£), <р - б£\ > О € №(й). (8.2.41)
\ w / г
Т
Пусть ^ = ^i€L2(0T, Hl(Q)) таково, что j $(<pi)dt < <ю. Полагая в
о
(8.2.41) <р = pi и учитывая (8.2.1), а также установленные ранее оцен-
ки, получим
j ^e(6£)dt J [(ecj>0e\ — бе) + К(б£, <р1 — б£)
О О
+ М2(б0иё, <f>l - бе) ~ (^, <f>i ~ бе) + Фе(?1)]Л С. (8.2.42)
Поэтому, в силу (8.2.3),
т г
lim inf ( $e(6e)dt Г $(6)dt. (8.2.43)
«-о о о
Возьмём теперь в (8.2.40, 41) v = v(t) и <р = <р(1), где v(t) и p(t) — про-
извольные функции из £2(0Т, [^‘(й)]3) и £2(0Т, Н\Ъ)) соответственно.
В силу (8.2.40)
т
j [(е“е" V) + a(We, v) + М1(бе ~ бо, V) - (f, V - иё)](Н
о
т
= j [(ем<Г> “е) + a(Ue, иё) + М1(бе ~ б0, иё)]Л
О
§ 8.2. Результаты о существовании и единственности решения
299
= j j (М/(Т))2</Й- j j (Mi)2C®
т
+ j [a(ue, иё) + - 0o, wE')]rft (8.2.44)
о
Учитывая, что и и 0 удовлетворяют начальным условиям, при е -> О
получим
т
j [(емЛ v - и') + а(и> v - и') + М1(в - 0о, v - и')
о
- (f, v - и'}\dt = О W € £2(0Т, ^(Я)). (8.2.45)
Аналогично из (8.2.41) вытекает, что
т
j [(ecD0E, <f>) + K(9g, tp) + Мг(6оиё, <р) + Ф£(<р) ~ (-2, <p - 6e)]dt
°
j l(.Qcn^ej 9e) + ^(0E, 0e) + A^(0oUE, 0e) + Фе(0Е)]<Й
0
= ( 4 cd(^(D)2c® - f 4 cD (0)2c®
Q Z Q £
T
+ j [K(ee, 0e) + M2(eQu[, 6e) + ФЕ(0Е)]Л. (8.2.46)
о
Обозначим правую часть (8.2.46) через Ge. Используя (8.2.43), легко
доказать, что
lim inf Ge > [[(бсл0', 0') + tf(0, 0) + Л£>(0ои', 0) + Ф(0)]Л. (8.2.47)
s-О g
Поэтому, переходя в (8.2.46) к lim inf, получим вариационное нера-
венство
т
J [(еад0', <р ~ 9) + к(9, <р — 0) + M2(fiou', <р — 0)
о
+ ФМ - Ф(0) - (^, р - 0)]Л >0 Vp € £2(07; //‘(Я)). (8.2.48)
Из (8.2.45, 48) можно вывести поточечные вариационные неравенства
(8.1.28, 29), рассуждая, как и при доказательстве предложения 5.4.1. □
Осталось рассмотреть вопрос, в каком смысле найденные функции
и, 0 являются решением исходной краевой задачи. Принимая во вни-
мание (8.1.3) и беря в (8.1.28) v - и’ € [D(fl)]3, видим, что уравнение
(8.1.8) удовлетворяется в смысле распределений на Я. Аналогично на
300 Гл. 8. Вариационные неравенства в теории линейной термоупругости
основании (8.1.29) заключаем, что при <р - 0€D(&) имеет место (8.1.9)
в смысле распределений на Я. Так как hjOj и (Hy0j),j принадлежат
Л2(Я), то HyOj/ti можно однозначно определить как элемент из
Я-1/2(Г). Поэтому применима теорема Грина — Гаусса (см. (1.4.37)).
Как и в предыдущих главах, мы получаем соотношение
-М,^€0Ф(0), (8.2.49)
которое выполняется на №/2(Г) х Н~ 1/2(Г). Это — слабая форма гра-
ничного условия (8.1.13). Поскольку w€L“(0T? [//^Я)]3) и и' €L°°(0T,
[27’1(Я)]3), заключаем (см. п. 1.4.1), что м€С(0Г, [27’1(Я)]3) и потому
начальное условие (8.1.10) имеет смысл. Аналогичные заключения
справедливы и для других начальных условий (8.1.11, 12).
Докажем теперь единственность решения задачи 1.
Теорема 8.2.2. Решение [и, задачи 1 является единственным.
Доказательство. Пусть (м, 0} и {м, 0}_— два решения задачи 1. Пола-
гая в (8.1.28, 29) v = й', и = и, <р = 0, 0 = 0 и v = и' , и = й, <р = 0,
0 = 0 и складывая получающиеся соотношения, заключаем, что
-(e(w" - w"), (й' - й')) - д(м - и, й' -V') -
М1(0-0, м' - и') = 0, (8.2.50)
(0' - 0'), 0-0} - -J- К(0 -О, 0 — 0) -
00 / 00
М2(й' - и’, 0 - 0) > 0.
Отсюда
(0- 0)2<7Я]
0о
+ К(0 - 0, 0 - 0) 0, (8.2.51)
0о
и поэтому
г
с( | Й' - и' 11 + Нй - мН? + I 0 - 011) + j- f к(0 - 0, 6 - ^dt < 0.
00 J
о
(8.2.52)
Из последнего соотношения следует, что м = м, 0 = 0. □
j q(u' - u’)2(Kl + д(м - и, и - и) + (
о о
§ 8.2. Результаты о существовании и единственности решения
301
8.2.2. Исследование задачи 2.
Некоторые замечания о родственных задачах
Предположим, что существует семейство {¥<:}, обладающее теми же
свойствами, что и семейство {ФЕ} (см. (8.2.1—3)):
т т
(i') \Уе(у + w')dt —► f ¥(v + w')<7z Vv€L2(0T, Ko); (8.2.53)
о о
(ii') существует ограниченная последовательность {v£) в Ко, такая
что для всех £ > 0
(vE) = 0; (8.2.54)
(iii') если vE~*v, vE~+ v' *-слабо в LX(QT, Ко) и значения инте-
гралов
J ¥£(v£ + w' )dt (8.2.55)
о
ограничены сверху, то
т т
lim inf Г^£(f£'+ w')dt^ (Ф(р' + w')dt. (8.2.56)
с-о о о
С помощью такого семейства сформулируем регуляризованную за-
дачу, отвечающую задаче 2:
Задача 2£. Найти w£: [0, 7]-> Ко и 0£: [О, Г] -> Н\й) с u^(t)eV0,
uE(t) € [L2(O)]3 и 0£'(Z) € L2(0), удовлетворяющие вариационной системе
(е«£", v) + а(ие, v) + v)
+ W + "')> = W v) Ш Ко, (8.2.57)
\ ut? / г
(q^dOs, <р) + К(6Е, >р) + Mz(0oiiE, <р) = {S, € /7*(0) (8.2.58)
и такие, что при 1 = 0
ие = ио - w(0), w£ = Ui - w'(0), 0e = 6-0o- (8.2.59)
Предполагается, что
f, f, f" €L2(0T, [L2(O)]3), (8.2.60)
S' ^L2{f3T, (8.2.61)
w, w’, w", w”, eL2(OT, [//’(fi)]3), (8.2.62)
302 Гл. 8. Вариационные неравенства в теории линейной термоупругостн
w(0) € [772(Й)]3, (8.2.63)
мо € [772(Й)]3, (8.2.64)
Ui € [Я1 (Й)]3, t(«i) < оо. (8.2.65)
Справедлив следующий результат:
Предложение 8.2.3. Пусть выполнены (8.2.53—56, 12, 60—65) и
Fi(v) = а(ио - w(0), v) + Mi(9, v) + (ui), A (8.2.66)
\ ClV I Г
является непрерывным линейным функционалом на Ко в топологии
£2(й). Тогда при е -* 0
Ue и ‘-слабо в £“(07, Ко), (8.2.67)
и/-и' ‘-слабо в £”(07, Ко), (8.2.68)
иг"^и" «-слабо в £“(07, [£2(Й)]3), (8.2.69)
6е-^0 и ве-^О’ слабо в £2(07, 7/’(й))
и «-слабо в £”(07, £2(Й)) (8.2.70)
(где пара [ие, 0£) — решение задачи 2е). Полученная таким образом
пара [и, 0) служит решением задачи 2.
Доказательство. Задача 2£ соответствует некоторой системе нелиней-
ных дифференциальных уравнений. С помощью метода Галёркина
можно, как и в предложении 5.4.2, показать, что существует решение
{мс, 0£} задачи 2е, такое что
Ue, u^L°°(VT, Ко), ме"€£°°(07, [£2(Й)]3),
0е, 0ёеЬ2(ОГ, Н1(Я)) П £”(07, £2(Й)).
Теперь подставим v = иё + W - vE в (8.2.57) (где, в силу (8.2.54),
(d^/rfu)(v£) = 0) и <р = ве в (8.2.58). Рассуждая, как в случае (8.2.19),
получим следующие оценки:
т
\иё\2^С, IlMelli < с, | 6Е I 2 sS С, j H0£llfrft С. (8.2.71)
о
Теперь положим в регуляризованной задаче 1 = 0. Принимая во вни-
мание сделанные выше предположения, и в частности (8.2.66), заклю-
чаем на основании (8.2.57, 58), что
| «ДО) | 2 sS с, (8.2.72)
| Оё(0) I 2 < С. (8.2.73)
§ 8.2. Результаты о существовании и единственности решения
303
Дифференцируя (8.2.57, 58) по t, используя монотонность dbjdv, ко-
эрцитивность а(у, v) и К(<р, <р) + | <р | 2, оценки (8.2.71—73) и интегри-
руя от 0 до t, получаем
| Ue\ 2 С, II «г II 1 <5 С, | 0е | 2 <5 С, .j Hue'll idt <5 С. (8.2.74)
О
В силу (8.2.71, 74), из последовательностей [ие], {иё}, {иё}, {(М,
(0/} можно выбрать подпоследовательности (для которых мы сохра-
ним те же обозначения), такие что
иЕ — и, иё—и' «-слабо в £°°(0Г, Ко), (8.2.75)
и?-и" «-слабо в £”(0Г, [£2(Й)]3),
еЕ-е, её-в' слабо в ь2(ог, й\о))
и «-слабо в £”(0Г, 12(Й)). (8.2.76)
Аналогично тому как это было сделано при доказательстве предложе-
ния 8.2.1, можно проверить, что пара {и, 0) является решением зада-
чи 2. □
Как и в случае задачи 1, легко доказать, что полученные функции
и и 0 удовлетворяют (8.1.8,9) в смысле распределений на й. Далее,
с помощью стандартных рассуждений, многократно использовавших-
ся ранее в аналогичных ситуациях, получаем вариационное нера-
венство
*(v + w') - *(и’ + w') - (.atjnj, v - u'>r Vt>€ Vo, (8.2.77)
которое может быть переписано так:
-S = - {aynj} € d¥(«') (8.2.78)
на [Я,/2(Г)]3 х [Н 1/2(Г)]3. Это — слабая форма граничного условия
(8.1.17). Наконец, рассуждая, как и в случае задачи 1, приходим к вы-
воду, что и начальные условия имеют смысл и выполняются.
Предложение 8.2.4. Решение (ц, 0) задачи 2 единственно.
Доказательство этого предложения аналогично доказательству пред-
ложения 8.2.2.
Используя тот же метод, можно рассмотреть термоупругое тело,
для которого на некоторой части Г$ границы задана нормальная (со-
отв.тангенциальная) компонента Sn (соотв. St) вектора напряжения,
a St (соотв. Sn) и тангенциальная (соотв.нормальная) компонента Ут
(соотв. Vn) скорости связаны между собой суб дифференциальным гра-
ничным условием, как, например, в случае граничных условий с тре-
304
Гл. 8. Вариационные неравенства в теории линейной термоупругости
нием. Наконец, что касается общего случая задачи 3, в которой фигу-
рируют два вариационных неравенства (8.1.38, 39), то, по имеющимся
у автора сведениям, вопрос о существовании решения остаётся пока
открытым. Можно, конечно, и здесь сформулировать регуляризован-
ную задачу, однако не удаётся получить результаты, аналогичные
(8.2.14—17).
Другой класс вариационных неравенств, представляющий извест-
ный методический интерес, получается, если (8.1.13) заменить соотно-
шением
ф-л/ = - ЯхДуЛ, €/3(0') иа Г х (0, Т). (8.2.79)
Следует заметить, что в рамках теории линейной термоупругости
предположение (8.2.79) не может быть обосновано. Очевидно, что со-
ответствующую вариационную формулировку можно получить, заме-
нив в неравенствах (8.1.29) или (8.1.30) <р - в на <р - в', а Ф(0) на
Ф(0'). Вопрос о существовании решения тоже остаётся открытым.
§ 8.3. НЕКОТОРЫЕ ОБОБЩЕНИЯ
И СООТВЕТСТВУЮЩИЕ ВАРИАЦИОННЫЕ НЕРАВЕНСТВА
В заключение настоящей главы выведем некоторые общие вариационные неравенства в
предположении, что линейный закон упругости и/или закон теплопроводности Фурье за-
меняются некоторым нелинейным законом, формулируемым с помощью суперпотенциа-
лов. Таким образом, вместо (8.1.1) рассматривается закон
а = t - «(в - во), где t = (Гу) € Эиф), (8.3.1)
а вместо (8.1.6) — соотношение
q € — <5/?(grad 0), (8.3.2)
где w и К — выпуклые п.н.сн. собственные функционалы соответственно иа IR6 и IR3.
Сомнительно, чтобы соотношения (8.3.1) или (8.3.2) были приемлемы в рамках ка-
кой-либо содержательной физической теории. Например, соотношение (8.3.2) несовмести-
мо с линейными связями между потоками и силами в термодинамике. Однако оба соот-
ношения (8.3.1) и (8.3.2) могут быть использованы в ряде случаев при описании сильных
физических нелинейностей типа скачков, которые часто возникают в технических задачах
и которыми нельзя пренебречь после линеаризации.
Рассмотрим краевую задачу, определяемую соотношениями (8.1.2—5), (8.3.1—2), гра-
ничными условиями (8.1.14, 15) и начальными условиями (8.1.10—12). Предполагая, что
все рассматриваемые функции являются достаточно гладкими, умножая (8.1.4) на и - и,
где v = 0 иа Г, и используя теорему Грииа — Гаусса, получаем (формально) соотношение
(е“"> v - и) + j <ty[«v(i0 - «и(н)]«Л1 - (f, v - и) = j aynjivi - Ui)dr = 0. (8.3.3)
о г
Аналогично, умножая (8.1.5) на ч> - 9 (где <р = (?о на Г), принимая во внимание (8.1.2)
§ 8.3. Некоторые обобщения
305
и используя снова теорему Грина — Гаусса, получим
(qcd0', <р — в) + Мг(вои', <р — в) — j qi(tp — 0),idQ — <р - 0)
о
= - j <7i(y> - 9)ntdT. (8.3.4)
Г
Пусть/(0 € [£2(fl)]3, 3(t) g £2(fl), v g [ri‘(fl)]3, <piWo= | ч> e H‘(fl), Ч> = 00 иа Г). Тогда
можно определить функционалы Yt и У2 на [£?*(fl)]3 и на Hi (fl) соответственно, такие что
f Г »v(e(y))dfl, если »v(e(y)) g £*(fl),
Г1(у) = | о (8.3.5)
/ оо в противном случае,
С j 7?(grad^)dfl, если /?(grad<^) g £‘(fl),
YzM = ] о (8.3.6)
/ оо в противном случае.
Из соотношений (8.3.3,4), используя субдиффереициальные неравенства
У1(ц) - У (и) > j ttJ(eiAv) - etJ(u))dQ Vv e (#‘(fl)]3. (8.3.7)
о
Y2(p) - Yz(0) > - j 9i(y>,/ - 0.,)Jfl € H^fl), (8.3.8)
Q
получаем следующие вариационные неравенства:
(qu", v - и) + Fi(v) - Yi(u) + Mi(0 -во, v - и) - (f, v - и) О
W < [H‘(fl)]3, (8.3.9)
(@сг>0', р — 0) + У2(р) — У2(0) + M2(0ou', <р — 0) — (^, р — 0) О
М^о. (8.3.10)
Таким образом, вариационная задача состоит в отыскании решения и: [0,Т] -» [А*(О)]3,
0: [О, Г] -> системы (8.3.9—10) с u'(t) g [ТУ* (fl)]3, и'(() £ (£2(fl)]3 и 0'(O S £2(0)> удов-
летворяющего начальным условиям (8.1.10—12). Если для линейного термоупругого те-
ла условие (8.1.17) заменить голономным граничным условием на Г,$
-SgaV-(u), (8.3.11)
то краевая задача, определяемая соотношениями (8.1.8—13,16) и (8.3.11), приводит к
следующей вариационной задаче: найти и: [0, 7]-» 1/ДОп = (у| ve (H‘(fl))3, и/ = Ui на
Ги) и 0 g H’(fl) с u'(0 € [H*(fl)]3, “’(0 € (£2(О)]3 и 0'(t) g £2(fl), удовлетворяющие вари-
ационным неравенствам
(g“", v - и) + а(и, v — и) + Mi(0 -0о, v - и) + ♦(у) - ¥(и)
> if, v - и) + j *4j(0 - 0o)(vi - ui)njdT W g t/aon, (8.3.12)
rs
(gcD$', tp — 0) + K(0, <p — 0) + Mz(0oU', *p ~ 0) + 4*(^>) — Ф((?)
>(^₽-f) VpeH'fO) (8.3.13)
и начальным условиям (8.1.10—12).
306
Гл. 8. Вариационные неравенства в теории линейной термоупругости
Предположим, далее, что вместо закона линейной упругости и закона Фурье вы-
полняются соотношения (8.3.1, 2). В этом случае неравенства (8.3.12, 13) заменяются
неравенствами
(ей', v - и) + rt(y) - У1(и) + Mt(0 - 0о, v - и) + +(О - *(и)
> (f, v - и) + j тц(0 - 0o)(Ui - Ui)njdT yv € UaoB, (8.3.14)
rs
(qcd0', <p — 0) + lz(₽) — Уг(0) + M2(0qu', <p — 0) + Ф(^>) — Ф(0)
V^eW’d)). (8.3.15)
Если рассмотреть определяющее соотношение (8.3.1), но с
ГеЭи’(е') (8.3.16)
и, кроме того, считать, что удовлетворяется граничное условие (8.1.7), то надо перейти
к вариациям v - и', и соответствующие вариационные формулировки получаются из
(8.3.9, 12, 14) просто заменой и иа и'.
§ 8.4. ПОЛУВАРИАЦИОННЫЕ НЕРАВЕНСТВА
В ТЕОРИИ ЛИНЕЙНОЙ ТЕРМОУПРУГОСТИ
8.4.1. Формулировка некоторых общих задач
В § 4.3, используя понятие обобщённого градиента, мы ввели невы-
пуклые суперпотенциалы и использовали их для изучения некоторых
определяющих соотношений и граничных условий. В данном пункте
будем считать, что граничные условия заданы с помощью невыпук-
лых суперпотенциалов, и сформулируем соответствующие полувариа-
ционные неравенства. Прежде всего рассмотрим случай, когда (8.1.13)
заменяется условием
фл, = - € дф(0) на Г х (0, Т], (8.4.1)
где ф — функционал на IR со значениями на расширенной веществен-
ной прямой IR. Как и в примерах (ix) и (х) из п. 3.3.1, условие (8.4.1)
может возникнуть, скажем, в задачах, связанных с явлением полупро-
ницаемости, или задачах управления температурой с заданной немо-
нотонной диаграммой [ф-л,-, 0}. Далее, можно рассмотреть следующее
условие во внутренних точках тела: предполагается, что
^=^1+^1, (8.4.2)
где &2 является заданной величиной, а связано с 0 соотношением
-Qtdjte) в 0 х [0, 71. (8.4.3)
где j — функционал на IR со значениями в IR. Как и в случае (8.4.1),
соотношение (8.4.3) может описывать условия полупроницаемости
§ 8.4. Полувариационные неравенства
307
или условия управления температурой во внутренних точках тела,
имеющие немонотонный характер. Функции ф и j, вообще говоря, не
выпуклы и не дифференцируемы. Если они выпуклы, то соотношения
(8.4.1, 3) становятся субдифференциальными и соответствуют моно-
тонной зависимости между фл, и 0 или между -^i и 0 (см. [84]).
Граничное условие (8.1.17) также может быть заменено более об-
щим условием
-5€д^(м') на Г х [0, 7], (8-4.4)
где $ — функционал на [R3 со значениями в IR.
Рассмотрим теперь краевую задачу, определяемую уравнениями
(8.1.8—12) и граничными условиями (8.1.14) и (8.4.1). Заметим, что
для конечного функционала ф(0) по определению выполняется нера-
венство
ф'(0, <р- 0)^ qinfa - 0) € IR
(8.4.5)
(см. (4.3.13)). Комбинируя (8.4.5) с (8.1.24, 25), придём к задаче, ана-
логичной задаче 1 п. 8.1.2, с той лишь разницей, что вариационное
неравенство (8.1.29) заменяется на полувариационное неравенство
вида
(qcjj0', — 0) + К{0, <р — 0) + М2(0ои' > <р — 0) + j ФЦ0, <р ~ 0)dT
г
> (Д <р - 0) € Я1(О), (8.4.6)
в предположении, что интеграл (Ф1(9, <р - 9)dV существует и коне-
чен. Можно поступить таким же образом и тогда, когда на Г выпол-
няются классические граничные условия (8.1.14, 15), а в Q х (0, 7) до-
лжны быть выполнены условия (8.4.2, 3). В этом случае, если инте-
грал , <р - 9)dQ существует и конечен, может быть поставлена
следующая задача: найти и: [0, Г] -* [/^(О)]3 и 0: [0, Г] -» Wo с
u'(t) €[7^1(£2)]3, и"(Г)€ [Z2(0)]3, O'(f)eL2(Q), удовлетворяющие уравне-
нию (8.1.28), неравенству
(qcd0' , — 0) + К(9, <р — 0) + M2(0ou', <р — 0) + jjt(0, ~ 9)dQ
о
г? {Зг, <р — 0) V<p € Wo
(8.4.7)
и начальным условиям (8.1.10—12).
Пусть на Г выполняются граничные условия (8.4.1, 4) и интегралы
j ФЦ0, <p-0)dT, j $*(«', v - u')dT существуют и конечны. Тогда
г г
308 Гл. 8. Вариационные неравенства в теории линейной термоупругости
можно рассмотреть следующую задачу: найти и: [0, Т] -»(У/1 (О)]3 и
0: [0, Т] -> №(0) с и' (О € [Я1 (О)]3, и " (t) € Z2(0) и 0' (О € Z2(0), удовлет-
воряющие неравенствам
(е«", v - и') + а(и, v - и') + М1(в - Оо, v - и') + ^(и', v - u')dT
(f, v - и) + jmy(0 - 0o)(u, - Ui)njdr Vt> € (^(O)]3, (8.4.8)
г
(qcd0', <p - 0) + K(0, <P - 0) + Af2(0o«', <P - 0) + j ФД0, <P - MT
г
> (J2, <p - 0) (8.4.9)
и начальным условиям (8.1.10—12).
Если во всех этих задачах функционалы ф, j и ф липшицевы и
d-регулярны, то можно определить функции Ф У и I по формулам
Ф(?) = рМсТ, \fa>)dQ, Ф(у)= р(у)оТ. (8.4.10)
ГОГ
В этом случае (см. предложение 4.3.1) члены, ответственные за одно-
сторонний характер вариационных соотношений (8.4.6—9), т. е.
j ФД0, <р - 0)dT, j _Л(0, <р - 0)dil и т. д., могут быть заменены на
г о
Фт(0, <р - 0), Л(0, <р - 0) и т. д. Легко доказать, что из (8.4.6) следу-
ет выполнение равенства (8.1.9) в смысле распределений на 0 и гра-
ничных условий (8.4.1) в следующей ослабленной форме:
ФД0, <р - 0) > < -Яу0>ул,-, <р - 0>г V? € №(0). (8.4.11)
Нетрудно дать и соответствующие вариационные формулировки за-
дач для случая, когда в (8.3.1) и/или (8.3.2) w и R являются невыпук-
лыми суперпотенциалами.
В выпуклом случае каждой максимальной монотонной функции /3:
IR-*^(IR) отвечает выпуклый суперпотенциал f, для которого имеет
место (2.6.6). Аналогичный результат справедлив также и в невыпук-
лом случае.
Пусть функция /3: IR -♦ IR такова, что для каждого ограниченного
интервала I её сужение /3 1/ принадлежит £“(/). Для любых q > 0 и
$ € IR положим
Зе(0 = ess inf /3(Ь), Зе(9 = ess sup /3(9), (8.4.12)
|€i-€|<e lfi-f|<e
3(Э = lim /3e(Q, 3({) = lim &(£). (8.4.13)
Q-*0 Q-*0
§ 8.4. Полувариациоииые неравенства
309
Существование последних пределов следует из свойств монотонности
0е и /Зе как функций от q; функции 0 и /3 являются соответственно
п.н.сн. и п.н.св.
Теперь введём [347] многозначную функцию /5
0(9 = [/5(9, /3(9]. (8.4.14)
Например, если /3 имеет в точке $ конечный скачок и 0($+) > 0($~)
(соотв. /3($+) </3($-)), то
0(9 = [0($-)> 0«+)] (соотв. [/3(£+), 0(«-)]), (8.4.15)
так как /3(9 = sup{/3($+), 0($-)} н /5(9 = inf{/3(£+), 0(£-)}. Опреде-
лим локально-липшицеву функцию J соотношением (см. (4.3.11))
f + Л + fiz
J°(£, Z) = lim sup — f 0(9)<79- (8.4.16)
И-0+ g J
*-0 (+h
Тогда 3/(9 C /3(9 [37]. Если, кроме того, 0(£±) существуют для каж-
дого $ € IR, то
0/(9 = 0(9- (8.4.17)
В следующем пункте мы опишем метод доказательства существо-
вания решения для полуварнационных неравенств, основанный на не-
которой процедуре регуляризации. Этот метод иллюстрируется на
примере простого статического полувариационного неравенства, полу-
чающегося из (8.4.7) в предположении о независимости упругих де-
формаций и термических эффектов. Кроме того, мы примем для про-
стоты, что во = 0 на Г.
8.4.2. Один результат о существовании решения
для полувариационного неравенства (модельная задача)
Рассмотрим следующую задачу:
Задача 1. Для € L2(O) найти в € У/^й), удовлетворяющее нера-
венству
К(в, <р - в) + > (^2, <р - 6) V^/^O). (8.4.18)
Здесь j удовлетворяет (8.4.17), а /3 задается соотношением (8.4.14).
К неравенству (8.4.18) применяется следующий метод регуляриза-
ции. Пусть функция р€^(-1, +1) неотрицательна н такова, что
310
Гл. 8. Вариационные неравенства в теории линейной термоупругости
j p(j-)dt- = 1. Положим для е > 0
и введём свёртку
0е=Ре*0. (8.4.19)
Функции /3£ 6 C“(IR) — это регуляризации функции /3. Регуляризован-
ная задача формулируется так:
Задача 1£. Для 2г € Ь2(й) найти 0£ € Я*(й)> такое что
К(0Е, <f>) + (0е(0£), <р) = (2г, <р) У^€/?'(Й). (8.4.20)
Справедлив следующий результат:
Предложение 8.4.1. Пусть для некоторого £
ess sup /3($) 0 ess inf (8.4.21)
(-».-«) («<»)
Тогда задача 1 имеет по крайней мере одно решение.
Доказательство. Рассмотрим какой-нибудь базис Галёркина, и пусть
Vn — соответствующие л-мерные подпространства. Можно считать,
что УпС. Йх(й)Г\Ь°°(й) (ибо Йх{й)Г\Ь'х‘{й) плотно в ЙХ(О)). Рассмот-
рим задачу: найти 0£ЛС Vn, такое что
К(0Еп> <р) + (0£(0£л), <р) = (22, <р) V<p € Vn. (8.4.22)
Эта конечномерная задача имеет решение, в чём легко убедиться, при-
менив теорему Брауэра о неподвижной точке 1. Для этого запишем
(8.4.22) в виде
(Т(0еп, <р) = 0 V<ptVn (8.4.23)
где Т; Уп—> V„. Можно подобрать такие положительные числа pi и
Q2, что (см. (8.4.21))
1 Эта теорема утверждает, что если А — ограниченное выпуклое открытое подмно-
жество в IR" и функция Т: А -» А непрерывна, то Т имеет по крайней мере одну непод-
вижную точку в А [153]. С помощью этой теоремы можно показать, что если функция
Т: IR" -» IR" непрерывна и такова, что для некоторого г > 0
(Г(1г))рй >0 vx € IR”, | х | = г,
то существует точка ль с |ль| $ г, такая что ГЦь) = 0 (см., например, [182]).
§ 8.4. Полувариациоииые неравенства
311
&($) > 0 При £ > Q1,
&($)sSO при £<-©>. (8.4.24)
1/Зе($)1^ 62 ПРИ | < gi-
Отсюда следует, что
(/Зе(0еп)> 9еп) = j Pe(0en)f)endQ j Pe(0cn)6cndQ
IM*)l>ei IM*)! «Sei
— 6162 | Й | • (8.4.25)
Используя тот факт, что форма К(<р, <р) коэрцитивна на HX(Q), можно
показать, что
(Т(0£Л), 0ел) > cilIM? - ftllflUi - d, (8.4.26)
где ci, С2, Ci — положительные константы. Поэтому найдётся такое
г > 0, что (Г(0£П), Оеп) > о при Н0£ПН1 = г. Следовательно, найдётся
0еп: lltfenlli г, для которого Т(0ЕП) = 0, т. е. уравнение (8.4.22) имеет
решение. Поскольку последовательность (0£п) ограничена в Н1 (fi), из
неё можно выделить подпоследовательность, которую снова обозна-
чим {0£Л], такую что при е -♦ 0, п -* 00
0ЕП - 0 слабо в Й1(О) (8.4.27)
и (см. (1.3.53))
0еп -♦ в сильно в L2(Q), (8.4.28)
а значит,
0еп 0 п.в. в 8. (8.4.29)
Покажем теперь, что последовательность (/3£(0£Л)] относительно сла-
бо .компактна в Ll(Q). Это эквивалентно утверждению: для каждого
ц > 0 существует 6 > О, такое что если w С 8 и | ш | < 6, то
j | 0е(0«п) | dQ ц (см. [91]). Для доказательства воспользуемся сле-
дующей оценкой для j I OenMen) I dQ [347]:
о
J | емвгп) |с?8 = j 0M9En)dQ + j I е^гп) I dQ
a IM*)l>ei IM*)l«Sei
?s (/Зг(0Ел), 0£Л) + 2 j | 0en0e(0en) | dQ
IM*)l«Sei
= (&2, 0en) ~ K(0Ent 0en) + 2 j | 0ai0e(0en) | dQ
|M*)|sSei
sj c + 2eie2 I 8 I. (8.4.30)
312
Гл. 8. Вариационные неравенства в теории линейной термоупругости
Выберем а, такое что с + 2qiQ2 | 0 | < ад/2 для всех п, е, а затем 6,
такое что
ess sup | | . (8.4.31)
|£|<а+1 20
Тогда при | ы | < 6
| Ре(@ек) | d£l | OenPeffien) | d£l + Sup | @е(6Еп) | d£l
Ш ы Ctf|0en(x)| (X
- f | емееп) \d0 + 6 ess sup I /3(f) I Д- (8.4.32)
“ J |£|<a+l
Тем самым установлена относительная слабая компактность последо-
вательности [/3£(0£л)] в L\Q). Поэтому у неё найдётся подпоследова-
тельность, для которой мы сохраним то же обозначение, такая что
при е -* 0 и л -> оо
/3£(0£л) -> х слабо в Ll(Q). (8.4.33)
Учитывая, что Vn С £"(0)П7/1(0), мы можем перейти к пределу и,
используя свойство плотности галёркинских аппроксимаций, получить
К(6, <р) + (х, <р) = (&, <р) У^бЯ'ЧО), (8.4.34)
где х€ L1(O)n/f-1(O). Для завершения доказательства надо показать,
что _
X € Э/(0) п.в. в О. (8.4.35)
Из (8.4.29) следует, что для любого у > 0 можно выбрать ы С О с
| ы | < у, такое что
Оеп -* 0 равномерно в О \ ы, (8.4.36)
причём 0 € L°°(Q X ы). Поэтому для любого q > 0 можно указать такие
no > 2/q и со < q/2, что при и > по и с < со для любого х € 0 X ш выпо-
лняется неравенство
| 0£л(х) - 0(х) | < в/2. (8.4.37)
Поскольку
/Зе(О = ( № - t)pE{t)dt ess sup /3(f - t) (8.4.38)
Л ki<e
и аналогично
ess inf /3(f - О &($), (8.4.39)
ТО
ess inf /3(f) 0£(0£Л)х)) ess sup /3(f). (8.4.40)
§ 8.4. Полуварнацнонные неравенства
313
Из (8.4.37) и (8.4.40) следует, что при е < Ео и п > по
0е(0(х)) = ess inf 0(£) 0£(0£Л(х))
|{-в«|<е
ess sup 0(£) = Ре(в(рс)). (8.4.41)
|{ - в(х)| <е
Для любой п.в. неотрицательной функции е€£”(Д\ы)
j Qe(e)edQ j MMedQ j fafiedQ. (8.4.42)
0\w 0 \ w 0 \ w
Переходя к пределу при е -* 0, п -> оо, получим
j 0e(0)ecK) j xedil j 0e(0)ed«. (8.4.43)
Q\u> O\w
В силу произвольности e, переходя в (8.4.43) к пределу при q -> 0, по
теореме Лебега получим
0(0) X 0(0) п.в. в (Ла. (8.4.44)
Поскольку у может быть выбрано сколь угодно малым, отсюда и из
(8.4.14, 17) вытекает (8.4.35). □
Решающий момент доказательства — установление относительной
слабой компактности последовательности (0£(0£Л)). Подчеркнём от-
личие проведённого доказательства от аналогичных доказательств для
случая вариационных неравенств, где, ввиду имеющейся выпуклости,
можно использовать соображения монотонности.
ГЛАВА 9
Вариационные неравенства в теории
пластичности и вязкопластичности
В этой главе изучаются краевые задачи, возникающие во-первых, в
геометрически линейной теории упруго-вязко-пластичных и упруго-
идеально-пластичных тел и, во-вторых, в теории жестко-вязко-
пластических течений. Мы формулируем эти задачи с помощью вариа-
ционных неравенств, а затем обсуждаем вопросы существования и
единственности их решений.
При написании главы были использованы, в частности, следующие
работы: Джонсон [155], Мэттиз, Стренг и Кристиансен [200], Темам
и Стренг [313], Сюке [305—307], Дюво [89], Дюво и Лионе [82; 84;
86], Анцеллотти и Джаквинта [5], Мосолов и Мясников [217].
§ 9.1. УПРУГО-ВЯЗКОПЛАСТИЧНЫЕ МАТЕРИАЛЫ
9.1.1. Постановка динамической задачи.
Существование и единственность решения
В этом пункте изучается динамическое поведение упруго-вязко-
пластичного тела. Предполагается, что в недеформированном состоя-
нии тело занимает открытое ограниченное связное подмножество О
пространства IR3 с регулярной границей Г. Как обычно, точки х =
(xi ] € О отнесены к фиксированной системе декартовых координат. В
предположении о малости перемещений и их градиентов поведение
упруго-вязко-пластичного тела постоянной плотности q определяется
следующими уравнениями:
QUi = (Jij.j + ft в 0 x (0, T), (9.1.1)
£U = 2 + Чм) в 0 X (0, Т), (9.1.2)
z ,E , ,VP f-ij — Eij + £ij в 0 X (0, Г), (9.1.3)
§ 9.1. Упруго-вязкопластичные материалы
315
где (см. (3.3.113))
е'Е = со’, с = (СуА*}, (9.1.4)
e,vp(x, tyedJ^x, а(х, 0). 1*>о, х = {Xi) €□, Г€[0, Т\. (9.1.5)
В этих соотношениях штрих обозначает частную производную по вре-
мени, а = [<nj] (соотв. е - (су) — тензор напряжений (соотв. дефор-
маций), и = (и, | — вектор перемещений, f = {//), f = fi(x, t), — век-
тор объёмных сил. Тензор Гука с = {Сул*], сцьк € ISXQi) (/, j, h, к = 1,
2, 3), связывающий скорость упругих деформаций е'е со скоростью
изменения напряжений а', удовлетворяет условиям симметричности и
эллиптичности (3.3.61а, Ь). Суперпотенциальное соотношение (9.1.5)
для тензора скоростей вязко-пластической деформации e'vp является
обобщением соотношения (3.3.113). Действительно, по предположе-
нию суперпотенциал является функцией от х, что позволяет рас-
сматривать неоднородные материалы. Для каждого х суперпотенциал
является выпуклой дифференцируемой функцией от а. Предполо-
жим, что Г состоит из двух непустых частей Ги и Г^, на которых
обращаются в нуль соответственно перемещения и силы:
щ = 0 на Ги х (0, Т), (9.1.6)
Si = ац nj = 0 на Гг х (0, Т). (9.1.7)
При t = 0 выполняются начальные условия
Ut = Uoi в О, (9.1.8)
и-; = ии в П, (9.1.9)
ац = ooij в О, (9.1.10)
где Uo, Ut, ао зависят только от х и на Г удовлетворяют граничным
условиям (9.1.6, 7). Далее, пусть оо удовлетворяет уравнению рав-
новесия
aouj = 0 (9.1.11)
(мы считаем, что £(0) = 0 при t = 0). Пусть при t = 0 тело деформи-
руется упруго и в нём могут иметься начальные деформации, т. е.
возможно, что
сао # е(«о). (9.1.12)
Будем считать, что тензоры напряжений принадлежат пространству
Н (см. (1.4.32)), и пусть
(а, т) = j aijTijdSl и Пай2 = j CijOijdQ (9.1.13)
о о
316
Гл. 9. Вариационные неравенства в теории пластичности
— скалярное произведение и норма в Н. Далее, введем множества
Ео = [t|tG/Z, Ttj,jeL2(Q), Tijnj = 0 на Гг, i, J = 1, 2, 3}, (9.1.14)
Uo = {«|«€ [£2(0)]3, Еи(и) еН, Ui = 0 на Гс/, i, j = 1, 2, 3 J.(9.1.15)
Для каждого и € Vo, где
Ио = {ы|ы€ [Я1^)]3, и = 0 на Гс/},
и для каждого т G Ео справедлива формула Грина — Гаусса
( ту€у(1/)(/П + j UiTyjcKl = 0. (9.1.16)
a а
Динамическая задача для упруго-вязко-пластичных тел ставится так:
Задача 1. Найти а ЦО, Т] -+ Ео и и: [0, Т] -+ Uo, удовлетворяющие
уравнениям (9.1.1—5) и начальным условиям (9.1.8—10). Предполага-
ется, что /G И/1’2(0Т, [£2(О)]3), uo, Mi G Ио и а0 € Н.
Докажем следующий результат:
Предложение 9.1.1. Задача 1 имеет единственное решение (о, и), обла-
дающее следующими свойствами:
а€ЛС1>оо(0Т, Н), (9.1.17)
а'сГЦОТ.Я), (9.1.18)
и€АС2х(0Т, [£2(О)]3), (9.1.19)
u'еЛС1’0О(0Т, [£2(П)]3), (9.1.20)
u"ZL°°(0T. [Х2(П)]3). (9.1.21)
Доказательство, (а). Дискретизуем задачу 1 по t. Разобьём временной
интервал [0, 7] на N подынтервалов точками t(n) = пк, п = 0, 1, ...,
N, к = T/N, и введём обозначения
V = и', и™ = u(tM), v<n> = v(t(n)),
J™ =AtW), ca(n) = (Cy^J,
Da(n) = {<$>•}, {Tyj}, (Da(n), w) = j 0®WidQ.
Определим a("+ ° G Eo и v("+ ° G Vo с помощью рекуррентных соот-
ношений
c(a(" + ° - a(n)) + к -Q- (a(n + °) = ke(v(n + °), (9.1.22)
ao
QV{n +1} - ev(n) = Wa(n + ° + kfn + °, (9.1.23)
§ 9.1. Упруго-вязкопластичные материалы
317
о(0) = оо, v(0) = Mi. (9.1.24)
(Ь) Для 1) > 0 рассмотрим ^-регуляризацию задачи 1 — вариацион-
ную систему
(с(о<п + 1) - 4°) + А:4^(а<п + 1)), T)(D^n + 1\ Dt)
\ /
= Це(^" + 1)), т) VrGEo, (9.1.25)
(e(i4"+1) - e^n)) - kDa" + l) - kfn + l\ w)
+ ч(е(«4" + 1)), £(w)) = 0 VwG Vo (9.1.26)
(<4" + 1)GEo, vj"+ ° G Vo). Для каждого q > 0 она имеет решение в
Ео х Vo
(с) Положив г = о$” + 1) в (9.1.25) и w = t4" + 1) в (9.1.26), получим
z (п + 1) (п+1). । г, (п +1)|2 , 1r( dJ* , (п + 1). (п + 1)\ , 1 (п + 1)|2
(со, а, ) + ч|Е>о, "2 + М)> Iz
+ ч11£(^п + 1))112 = (е^п) + А/п + 1>, 14"+ °) + (с<4п), о<" + 1)). (9.1.27)
Принимая во внимание монотонность отображения oj"+
(dJ^da)^"+ °) и неравенство
( [Л(4п + °) - Л(О)]/Я) > (-%- (4" + °), <4" + . (9.1.28)
J у «а /
заключаем, что
11<4" + 1)11 ^с, |t4" + 1)|2 ^С, j Л(о<" + 1))(Л2Сс, (9.1.29)
о
' Это можно доказать методом перевала или с помощью априорных оценок. Восполь-
зуемся здесь первым методом. Решение, если оно существует, является седловой точкой
для функции Лагранжа
L(j, w) = у (ст> г) + КФ(т) - (сам, т) - lc(e(w), т)
еН* + ((е"1"’ + */"+1)), w) + - |Dt|| - чН-еОЯ2
z 2
на £о х Ко, где Ф(т) = j /,(х, r(x))dO, 1-1 обозначает норму в Н, а |-|2 — норму в
о
[£2(0)]3. Согласно одной теореме о седловых точках (см. [91], гл. VI, теор. 2.2]), L
имеет седловую точку (<т(л + ,), y(n + 1))e£o X Ко, которая удовлетворяет (9.1.25, 26).
318
Гл. 9. Вариационные неравенства в теории пластичности
где с > 0 — константа. Отсюда следует, что
||>(^ + 1))| (9-1-30)
+ % с, h1/2e(t4n + °)| с. (9.1.31)
Поэтому существуют </" +° е Н, t/" +€ [L2(Й)]3 и ф € Н, такие что
при tj -> О
4* + 1) -> о(я + 1) слабо в Н, (9.1.32)
4" + 1) у(я + 1) слабо в [£2(й)]3> (9.1.33)
(<Г °) -> Ф слабо в Н. (9.1.34)
ао
Теперь перейдем в (9.1.25, 26) к пределу при т?-> 0. Заметим, что
lim че(«4п + 1)) = 0 в Н. (9.1.35)
ч-о
Действительно,
ч(е(«4" + 1))) = ч1/2(4" + 1>)6j1/2II£(i4b + °)!), (9.1.36)
где
о(п + о _ £(«4" + °)
”|1£Й"+1,)11 •
Следовательно, последовательность (4" + 1)) ограничена. Поэтому
(9.1.36) совместно со вторым из неравенств (9.1.31) даёт (9.1.35). Из
(9.1.25, 26) следует (устремляем ij к 0), что a(n + 1), г/" + 1) и ф удовлет-
воряют уравнениям
с(о(" + *> - а(п)) + кф = Jte(v(" + °), (9.1.37)
e(i/"+1> - t/n> _ jt£>o(n + 1) - V(n + 1) = 0 (9.1.38)
в смысле 3>'$1). Значит,
e(v(" + °) € Н, Do<n + *> е [L2(Й)]3.
Применяя теорему Грина — Гаусса, получаем равенство
(i^n + 1), Dt) + (e(i£"+1)), т) = 0 VrCEo, (9.1.39)
из которого вытекает (при т? -»0), что
(i/n + 1), Dt) + (e(v(n + 1)), т) = 0 Vr€ Eq. (9.1.40)
Таким образом, и<п + 1) = 0 п.в. на Ги и потому v(n + 1) е Vo. С помощью
аналогичных рассуждений устанавливается, что а(п + 1)€Ео.
§ 9.1. Упруго-вязкопластичные материалы
319
Наконец, стандартное рассуждение с использованием свойства мо-
нотонности (см. доказательство формулы (5.4.77)) показывает, что
ф = 4^(^(" + 1)). (9-1.41)
аа
Тем самым доказано существование решения дискретизованной
задачи.
(d) Чтобы исследовать поведение решения (</" + °, v(n + °) дискрети-
зованной задачи при N -* °° (где N — число подынтервалов, на кото-
рые разбивается интервал [0. 7]), рассмотрим соответствующие ку-
сочно-линейные функции onGL“(0T, Н) и vnGL“(0T, [L2(O)]3), кото-
рые линейно зависят от времени внутри каждого из подынтервалов
разбиения
МО = а(п) + « (а(п + ° - р(л)) Vt G [Лп), t(n + °], (9.1.42)
К
vN(t) = vw + (v(n + ° - vM) Vt € t(n + °]. (9.1.43)
К
Как уже было доказано, </" +13 и i/" +удовлетворяют вариационным
неравенствам
(с(о(" + ° - а(л)) + к (а(п + °), т) = fc(e(t/n + °), т) Ут € Ео, (9.1.44)
аа
( е (v(n + 1) - v(n)) - kDa(n + 1) - kfnJri\ w) = 0 vw G Ко. (9.1.45)
Полагая т=</" + 1), w = t/”'+l) и суммируя по n € (1...............т - 1),
получим
1 (co(m), o(m)) + 1 С|г/т)|22 С с, (9.1.46)
откуда следует, что
II Ml С с, |wy|2 С с. (9.1.47)
Теперь запишем (9.1.44) для t = пк и t = (п + 1)к и вычтем друг из
друга полученные вариационные равенства. Проделав аналогичную
процедуру и для (9.1.45), придём к равенствам
(с(о(л + 2) - 2а<"+ *> + <7(и)) + к(-^- (а(п + 2)) - (*(" + °)
\ аа аа
- ke(v<n + 2) - v(n + °), т) = 0 Vr G Ео, (9.1.48)
(e(v(n + 2) - 2ц(п + 1) + Vм) - к(Ра(п + 2) +/п + 2>
-£>о(п + 1)-/n + 1)), w) = 0 VwGKo. (9.1.49)
320
Гл. 9. Вариационные неравенства в теории пластичности
Далее, положим т = п(" + 2) - </" + п и w = v(n + 2) - v(n + ° и воспользу-
емся соотношениями
(со(п + 2) - 2со(п+1) + сам, о(п + 2) - а(п + 1>)
= 1 (c(ff<n + 2> - ff<n + О), (а<" + 2) - а(п + °))
- | (с(</" + 1> - </">), (<у(п + 1) - а<">))
+ | (c(o(n + 2) - 2o(n + п + о(п)), (п(п + 2) - 2о(" - п + </">)), (9.1.50)
(ег/п + 2) _ 2ev(n + 1) + qvw, v(n + 2) - v(n + 1))
= 1 e|i/n + 2) - v(n + 1)|2 -1 e|v(n+1) - vM\22
+ | e|i/n + 2> - 2v(n + 1) + (9.1.51)
Разделив (9.1.50—51) на к2 и просуммировав по [0, 1...........т - 1}
получающиеся уравнения, найдём, что
Применяя известную лемму Гронуолла в дискретной форме, заключа-
ем, что
llo/JI С с> |^|2 С с. (9.1.53)
Таким образом, последовательность ограничена в L“(0T, Н), а
последовательность — в L“(0T, [L2(Q)]3). В силу полученных
оценок и уравнений (9.1.44, 45), последовательность
(а<" П)’ ff(" + 1))] (9.1.54)
ограничена в /.“(ОТ). Из непрерывности dJ^/do следует, что последо-
вательность
(94.55)
do )
ограничена в L“(0T, Н). Поэтому из последовательностей [w] и {^)
можно выбрать подпоследовательности, которые мы будем обозна-
чать теми же символами, такие что
§ 9.1. Упруго-вязко-пластичиые материалы
321
vN~*v, v„-> v' «-слабо в L”(0T, [L2(Q)]3), (9.1.56)
oN->o, о' «-слабо в L”(0T, H), (9.1.57)
-^-(on)-V' «-слабо в Lm(0T, H). (9.1.58)
Таким образом, существуют ctG W',x(OT, H), vt lVi,x(0T, [£2(П)]3) и
^GL”(0T, H), удовлетворяющие соотношениям
CijhkO^ + = Eij(v), (9.1.59)
QV,'~ ouj = fi- (9.1.60)
Из (9.1.42—45) вытекают неравенства
1|£(илг)Н с с, |т>олг|2 С С. (9.1.61)
Далее, можно проверить, что on и vn удовлетворяют граничным усло-
виям на Гг и Г и соответственно. Значит, atLn(QT, Ео) и f €£”(0Т,
Ио) (см. доказательство того факта, что г/" + 1) Е Ио и а(" + ° е Ео). Лег-
ко установить, что о и v также удовлетворяют начальным условиям.
Остается показать, что
*=4^ (*>• <9л-62)
а а
Справедливость этого соотношения можно доказать, используя свой-
ство монотонности. Для этого достаточно установить неравенство
г
j (^(т)-^, V7GL°°(0T, Н). (9.1.63)
о
Сделать это нетрудно: следует начать с соответствующего дискретно-
го неравенства и затем перейти к пределу при N-* оо. Из (9.1.56, 57)
и теоремы о непрерывности, приведённой в конце п. 1.4.1, получаем
(9.1.19—21).
(е) Наконец, докажем единственность решения. Пусть (<и, Ui) и (иг,
иг) — два решения задачи 1. Из (9.1.59, 60, 62) следует, что для лю-
бых 7 € Ео и wt Vo
(соi - a2), 7) + (q(v; - vfi, w) + (-Q- (Oi) - ~~ (a2), 7)
\ da da f
+ (fi - f2, Dt) + (ffi - аг, £(w)) = 0. (9.1.64)
Подставляя в (9.1.64) т = pi - аг, w = fi - f2 и используя (9.1.16) и
монотонность (dJ^/da^a), получим
(с(а( - а2'), oi - аг) + (q(v[ - v£), vt - fz) С 0. (9.1.65)
322
Гл. 9. Вариационные неравенства в теории пластичности
При t = 0 имеем
<71(0) - <72(0) = 0, 171(0) - 172(0) = 0. (9.1.66)
Из (9.1.65, 66) следует, что аг- <72 = 0, гл - гтг = 0, а это и означает
единственность решения. □
Предложение 9.1.1 справедливо и при более общих предположениях.
(А) Во-первых, можно считать, что граничные условия на Г с- и на Гр неоднородны,
т.е.
и, = Ui на Ги х (0, Т),
(9.1.67)
Si = aynj = Ft на Гр X (0, Т).
(9.1.68)
В этом случае введём новые неизвестные функции v = v - v° и а = а - <т°, где v° и
а0 удовлетворяют граничным условиям (9.1.67, 68) и начальным условиям (9.1.8—10).
Функции v и а удовлетворяют однородным граничным и начальным условиям, а также
полевым уравнениям
ClJhitOik +
—(а + а0) I - ёу(й) = gij в О X (0, Г),
U0 I ij
(9.1.69)
(9.1.70)
evt - °uj = А<
в О х (0, Т),
где
gij = Му°) - Си**®**. А>' =fi- е(<7?)' + (9.1.71)
Что касается регулярности функций g и Л, то можно предположить, например, что g,
g' е L2(0T, Н), h, h' е £2(0Г, [£2(О)]3). Разумно рассматривать пару (у0, <т°) как реше-
ние соответствующей чисто упругой задачи (достаточно регулярной).
(В) Можно также считать, что вместо (9.1.5) выполнено включение
е'ур(х, t, ape, /)), (9.1.72)
где J — выпуклая неотрицательная конечная функция от а для любых фиксированных
t е [0, 7]. х € О, и измеримая функция от х и t для каждого фиксированного а. Таким
образом, J удовлетворяет стандартным условиям теории интервалов от выпуклых
функций (см. п. 3.3.4. и [287]). Пусть соотношение (4.3.48) выполняется для пары (Ф,
J) как равенство, а функционал Ф, заданный для т е Н, формулой
Ф(7, т) = J J(x, t, трс, t))dQ, (9.1.73)
о
является выпуклым, п.н. сн. и конечным при почти всех t. Обозначим область опреде-
ления Ф в Н через Й Ф служит продолжением J на Й. Очевидно, что для J = J,, мы
имеем Й = Н. Предположим, что Й, снабжённое нормой 11-11#, является рефлексив-
ным банаховым пространством, вложенным в Н. Кроме того, пусть В = (т|т = (ту),
ту = 7». ту € 0(0)) плотно в Н в сильной топологии, и пусть £" С Й (вложение), 9^3,
где £" = [ т[т € [ту), ту е £’(0), ту = ту,). Обозначим через Й' пространство, сопряжён-
ное к Й, а через (а, т) — соответствующую каноническую билинейную форму (см.
(9.1.13)). Введем теперь множества
Едоп = (т|т е Й, Tijj € £3(0), Tijnj = Fi на Гг), (9.1.74)
1/Доп = (и|и € [£3/2(О)]3, «у СЙ', ut = Ui на Гс/), (9.1.75)
§ 9.1. Упруго-вязкопластичные материалы
323
Гдоп = [Z.3'2(G)]3, еи^Й', V. = Ui на Г^), (9.1.76)
Оо = (ф е [Z.3/2((l)]3, еа е Й', и, = 0 на Ги). (9.1.77)
Очевидно, что соотношение (9.1.16) удовлетворяется для каждого v е Оо и каждого
т € £о, где
Ёо = (т|т€ Й, Tijjt L3((2), гулу = 0 на Гр),
и так как L4 С Й С Н, то граничные условия определены корректно'. Примем следую-
щие предположения относительно Ф:
(i) каждая последовательность (а„) € Й, ограниченная в Н и такая, что Ф(1, о„) < с,
тоже ограничена в Й,
(ii) d’b/da является непрерывным оператором из Й в Й' в том смысле, что суще-
ствует функция г € C°(IR, IR) r(0) = 0, такая что
Idb , . НФ II
— (И) - — (та) || < г(Лп - пЛй); (9.1.78)
аа аа II#'
(Ш) для те Н операторы Ф(Л т) и d<b(t, r)/dr удовлетворяют условию
d$(ti, т) d$(t2, т)
- Ф(/г, т)|
< С1|Л - ?г|(Ф(/2> т) + Ф)-
(9.1.79)
(С) Наконец, можно считать, что тензор упругих констант зависит от времени:
Суи € ^’“(ОТ, Т“(П)) (i, j, h, к = 1, 2, 3) (9.1.80)
и удовлетворяет, помимо условий симметричности и эллиптичности, неравенству
|^| «Ы пн.
где с > 0 — константа, а = 0, 1, 2.
(9.1.81)
Введение зависимости тензора упругих констант с и/или суперпотенциала диссипации
J от t позволяет рассмотреть и более сложные эффекты, например зависимость с и
J от температуры, при условии что последняя считается известной функцией времени.
Предположения (i)—(iii) относительно Ф не являются ограничительными; например, ес-
ли имеет место (3.3.110), a g и ц являются липшицевыми функциями от t, то неравен-
ства (9.1.78) и (9.1.79) выполняются. При постановке краевой задачи могут быть ис-
пользованы любые комбинации условий (А)—(С). Обсудим кратко самый общий слу-
чай, когда сочетаются все три условия. Мы приходим тогда к следующей краевой
задаче:
Задача 2. Найти а: [0, 7] -♦ Едоп и и: [0, 7] -> 1/доп, удовлетворяющие уравнению
(9.1.1) (с) /€ И/|,2(0 Т, [Z.3((2)]3)), соотношению
(су**(0а**)' + { g) ) = су(и') (9.1.82)
\ /у
и начальным условиям (9.1.8—10), где «о € l/доп, Ui € Гдоп и оо € ЕдОп.
' Скажем, можно считать, что € Z.2(0T, Ь2(Гр)); 1/доп С FK’’3/2(O), поскольку
X = (И,|и; € LP(O), €ij(u) е LP(O) Vz, j € 1, 2, 3) = Wl p(Q), p > 1 [306]. Теорема о следе
для Ил1,3/2(0) позволяет описать возможное пространство функций (Л.
324
Гл. 9. Вариационные неравенства в теории пластичности
Эта задача может быть изучена тем же методом, что и задача 1, и справедлив сле-
дующий результат:
Предложение 9.1.2. Задача 2 имеет единственное решение, обладающее свойствами
а ( АС'-~(0Т, Н)ПЬ~(0Т, Й), (9.1.83)
a' eL“(0T. И), (9.1.84)
и е AC^fOT, (£2($1)]3), (9.1.85)
v € АС'-°°(0Т, (£2(Й)]3), (9.1.86)
д'€£”(07, (£2(П)]3). (9.1.87)
Доказательство аналогично доказательству предложения 9.1.1 (см. также (307]). Здесь
мы лишь наметим основные различия; в качестве упражнения читатель может сам про-
вести полное доказательство. Вводя функции а° и и0, сводим задачу к однородной.
Определяем новый функционал Ф, полагая Ф(/, а) = Ф(/, а + о0). Регуляризованная фор-
ма дискретизованной по времени задачи незначительно отличается от (9.1.26): теперь
вместо членов ч(е(«^л + 1)), £(>*)) используются члены ч<.^й(у*л +'’), e(w)>. Здесь Л:
Н' -* Й — оператор, удовлетворяющий условиям
<.^й:, е> = 1е1гй. = (9.1.88)
О^ае) = а^е) Va € IR (9.1.89)
для всех е € Й'. Он называется отображением двойственности для пространств Й и
Й’. Далее, мы определяем выпуклый функционал Фм,_полагая на каждом временном
подынтервале, скажем для I € (?<л), /<л + ’*], Флг(Л г) = Ф(6>, г).
9.1.2. Квазистатическая задача
В этом пункте изучается квазистатическая задача, соответствующая
задаче 1. Она формулируется следующим образом:
Задача 3. Найти и: [0, Т] -> Uo и о: [0, 7] -» Ео, удовлетворяющие
уравнениям
CijhkOHk + (А = £у(«'), (9.1.90)
у аа / и
ffijj + fi = о (9.1.91)
и начальным условиям (9.1.8, 10).
Вначале мы докажем существование и единственность решения, а
затем исследуем поведение решения динамической задачи при g -»0.
Будет показано, что в случае отсутствия начальных деформаций при
t = 0 (т.е. в случае, когда выполняется соотношение (9.1.12) со знаком
равенства) решение задачи 1 стремится при g -> 0 к решению задачи
3. Имеет место следующий результат:
§ 9.1. Упруго-вязкопластичные материалы
325
Предложение 9.1.3. Квазистатическая задача имеет единственное ре-
шение (ст, и), обладающее свойствами
<т = Г°(0Т, Н), (9.1.92)
ст'€ £”(07', /7), (9.1.93)
v € Loo(07', [Ь2(Й)]3). (9.1.94)
Доказательство. Используем процедуру дискретизации по времени,
примененную при доказательстве предложения 9.1.1. Введём мно-
жества
Е(0 = {т|т€Ео, Tij,j+fi = 0 в □), (9.1.95)
Ео = (т|т€Ео, 7VJ = 0 в □). (9.1.96)
Дискретизованная задача формулируется так: для заданных (ст(л), м(л)
найти ст(л+1)€Е0 и м(л + 1)€17о, такие что
с(ст(л + ° - ст(л)) + к (<т(л + °) = е(м(л + °) - е(м(л)), (9.1.97)
аа
£>ст(л+,) +/л+1) = 0. (9.1.98)
Существует единственное ст(л+1) (см. предложение 2.2.1), минимизи-
рующее на Е(/(л + 1)) функционал
F(t) =~-(ст, т) - (сст(л), т) + кФ^т) + (е(ы(л)), т). (9.1.99)
Легко видеть, что (см. предложение 2.2.2)
е(л + ° = сст(л+ ° - сст(л) + к (ст(л + ’>) + £(м(л)) (9.1.100)
ао
удовлетворяет вариационному неравенству
(е(л + 1), т - ст(л + 1)) > 0 V7€E(Z(n+1)), (9.1.101)
и поэтому (е(л+1), т) = 0 V7€Eo. (9.1.102)
Следовательно, е(л + 1)€(Ё0)±. (9.1.103)
Положим Но = {е|е = {ец],
существует и € Uo, такое что ец = &>(«) 1 (9.1.104)
326
Гл. 9. Вариационные неравенства в теории пластичности
и покажем, что __
(Ео)±=Яо. (9.1.105)
Очевидно, Но С (Ео)-1-. Докажем, что (Ео)-1 С Но, или, что то же,
Н^С Ео. Пусть те/ЛЛ Тогда
(Е(и), т) = 0 VU€Uo. (9.1.106)
С учётом (9.1.106) теорема Грина — Гаусса даёт
j TvjU/rffl = <у(т), у(м)> VM € Uo, (9.1.107)
a
и поэтому для м€ Uo = (м|м€ Uo, м = 0 на Г}
j TijjUidQ = 0 vu€ Uo = [^'(Й)]3. (9.1.108)
a
Снова используя теорему Грина — Гаусса, получаем
<у(т), ?(«)> = 0 VM € 170- (9.1.109)
Из (9.1.108, 109) вытекает, что т€Ео. Тем самым равенство (9.1.105)
доказано.
Таким образом, е(п + 1) является тензором деформаций, отвечаю-
щим полю перемещений м(л + ° € Uo. Далее доказательство проводится
буквально так же, как в случае предложения 9.1.1 □
Предложение 9.1.4. Предположим, что выполнено условие (9.1.12) со
знаком равенства. Обозначим через (<те, ме) решение динамической за-
дачи (задачи 1) для заданного q. Тогда при е -> 0
ое а сильно в С°(0Т, Н), (9.1.110)
Og o' ♦-слабо в L°°(0T, Н), (9.1.111)
ив-+ и ♦-слабо в L°°(0T, [£2(Й)]3), (9.1.112)
Ug = ve -> v = и' ♦-слабо в Г°(0Т, [£2(й)]3, (9.1.113)
Доказательство проводится так же, как во всех случаях использования
процедуры регуляризации для динамических вариационных нера-
венств, поэтому мы лишь наметим основные этапы доказательства
и результаты каждого этапа. В вариационной постановке задача 1
имеет такой вид: найти а: [0, Г]-> Ео и м: [0, Т] -+ Uo, удовлетворяю-
щие начальным условиям (9.1.8—10) и вариационным равенствам
со' + (а) - Е(и), т) = 0 Vt€ Ео, (9.1.114)
(Qv'-Da-f, w) = 0 Vwet/o.
(9.1.115)
§9.1. Упруго-вязкопластичные материалы
327
Запишем уравнения (9.1.114—115) для функций ов и ve. Интегрируя от
О до t и используя лемму Гронуолла, получим
11<твП<с, |е1/21лв|г < с, [ j с. (9.1.116)
О О
Далее, рассмотрим вариационные уравнения2
(со* + _ e(v'), Т) = 0 Vt€E«, (9.1.117)
у ао /
(qv" - Do’ — f, w) = 0 Vh'C Uo, (9.1.118)
в которых положим т = Oq и w = Ug. Интегрируя, учитывая монотон-
ность dJ^/do, лемму Гронуолла и оценки
Ь'(О)И < с, е|и'(0)|2 с, (9.1.119)
получим
11<те'11 С, Ie1/2i>e'|2 S? С. (9.1.120)
Из этих оценок следует, что
с, 11е(ц>)11 с, |Г>ае|2 с. (9.1.121)
Z ,
Переходя при необходимости к подпоследовательностям, заключаем,
что существуют
a€L“(0T, Ео), «€Г“(0Г, Uo) и ^€L“(0T, Н),
такие что при q ->• 0
ав а ♦-слабо в L“(0T, я), (9.1.122)
0g -> о' ♦-слабо в L“(0T, я), (9.1.123)
Ug~+U, Vg~+ V ♦-слабо в L“(0T, [Г2(Й)]3), (9.1.124)
♦-слабо в L°°(0T, Я). (9.1.125)
Чтобы установить сильную сходимость ое к о в Г°°(0Г, Н), приме-
ним следующее рассуждение. Используя свойство монотонности
dJp/da, из (9.1.114) и (9.1.115) получаем неравенство
(с<те1 C0g2, Og, 0gi) + 01(^01’ yei ^ег)
- Q2(Vg2; vei - Vg2) 0. (9.1.126)
' Как уже отмечалось в п. 5.4.2, более корректным было бы использовать вместо
производных по времени v’ и а’ разностные отношения [«(/ + &) - и
[а(/ + &) - a(Z)]/5Z.
328
Гл. 9. Вариационные неравенства в теории пластичности
Интегрируя (9.1.126) от 0 до t и применяя лемму Гронуолла, устанав-
ливаем неравенство
«МО - МО» CiVlei - ег| еЧ (9.1.127)
где ci > 0, с-i > 0 — константы. Это неравенство показывает, что [сте)
является последовательностью Коши в £“[07’, Н], и поэтому в
(9.1.110) имеет место сильная сходимость. Переходя к пределу в
(9.1.114, 115) при g -»0 и замечая, что по соображениям монотоннос-
ти $ = dJ^/do заключаем, что (ст, и) является решением квазистатиче-
ской задачи. □
Если выполняются неоднородные граничные условия (9.1.67, 68) и
общее соотношение (9.1.72) и, кроме того, тензор упругости зависит
от времени, то последние два предложения будут по-прежнему спра-
ведливы, с некоторыми видоизменениями. Точнее, в предположении,
что выполнены условия (А)—(С) п. 9.1.1, справедлив следующий ре-
зультат для квазистатической задачи (называемой здесь задачей 4), со-
ответствующей задаче 2:
Предложение 9.1.5. Задача 4 имеет единственное решение (ст, и), такое
что
ст€С°(0Т, Я)П£“(0Т, Я), (9.1.128)
ст'€£“(0Т, Я), (9.1.129)
v€£“(0T, [£2(Й)]3). (9.1.130)
Далее, если (сте, ив) есть решение задачи 2 для заданного q и выполне-
но (9.1.12) со знаком равенства, то при q -> 0
сте -+ а сильно в С°(0Т, Я) и «-слабо в 1?(0Т, Й), (9.1.131)
и справедливы соотношения (9.1.111—113).
Доказательство. Вначале сводим дело к случаю однородных гранич-
ных условий, а затем рассуждаем по существу так же, как при доказа-
тельстве предложений 9.1.3 и 9.1.4. □
§ 9.2. УПРУГО-ИДЕАЛЬНОПЛАСТИЧНЫЕ МАТЕРИАЛЫ
9.2.1. Постановка квазистатической задачи
В этом параграфе мы рассмотрим упруго-пластичные тела, подчиняю-
щиеся закону Прандтля — Рейсса, и изучим соответствующую крае-
вую задачу. При этом предполагается, что мы имеем дело с квазиста-
тическим поведением тела, что соответствует процессу медленного
§ 9.2. Упруго-идеальиопластичные материалы
329
нагружения. Вариационные принципы для упруго-идеальнопластичных
тел были сформулированы Хиллом, Ходжем, Прагером и др. По это-
му вопросу рекомендуем читателю статью Койтера [163]. Для упроч-
няющихся и разупрочняющихся материалов вариационные постановки
рассматривались Майером и итальянской школой2. Дюво и Лионе [84]
исследовали некоторые математические аспекты задачи; при изучении
свойств поля напряжений они применяли процедуру регуляризации.
В связи с той же проблемой Моро [214] развил некоторую геометриче-
скую теорию, касающуюся динамических задач с движущимся выпук-
лым множеством. Свойства поля скоростей изучались Джонсоном
[155], который использовал процедуру дискретизации по времени, ана-
логичную примененной нами в предыдущем параграфе.
Основные затруднения при исследовании среды Прандтля—Рейс-
са связаны с нерегулярностью тензора скоростей деформации s(v), по-
скольку, согласно экспериментальным данным, поле скоростей имеет
разрывы. Поэтому, следуя Сюке [306; 307], будем считать, что поля
скоростей представляют собой элементы пространства ЯО(Й) (см.
п. 1.3.5). Это пространство рассматривалось в работах [200; 304; 305;
306; 314] и является подходящим инструментом для изучения материа-
лов Прандтля — Рейсса.
Решение квазистатической краевой задачи для упруго-идеально-
пластичного тела с граничными условиями (9.1.6, 7) будет аппрокси-
мироваться с помощью решений краевой задачи, рассмотренной в
предложении 9.1.5. С этой целью мы аппроксимируем суперпотенци-
альное соотношение (см. (3.3.98))
ёр(х, t)£dIK(x, а(х, /)), (9-2.1)
где К — выпуклое замкнутое множество (зависящее от х и t), опреде-
ляющими соотношениями вида (9.1.5) (или, более общо, вида
(9.1.72)), которые зависят от параметра е, стремящегося к нулю.
Предположим, далее, что тензор упругости не зависит от t. Введём
множество
P(t)~ {т\т$Н, т(х}еК(х, t) п.в. в Й]. (9.2.2)
Сформулируем следующую задачу, в которой множество Ео задано
формулой (9.1.14), но с Dre [£3(й)]3.
Задача 5. Пусть f € Wi’a>(0T, [£3(Й)]3) и <то€Р(О)ПЕо, причём Da0 =
-/(0) = 0 при t = 0. Найти а: [0, Т] -> Р(Г) Г) Ео и v: [0, Т] -> BD(Q), такие
' См. также [33, 57, 76, 186—189, 192—194].
330
Гл. 9. Вариационные неравенства в теории пластичности
ЧТО
((со)', т - а) + j Vt^Tijj - atjj^dO 0 Ут€Р(/)Г)Ео, (9.2.3)
о
uyj +ft = 0, (9.2.4)
ст = сто при t = 0. (9.2.5)
Эта квазистатическая задача для упруго-пластичного тела в ослаблен-
ной формулировке, получаемой формальным применением теоремы
Грина — Гаусса. Для изучения задачи 5 примем следующие предполо-
жения в дополнение к тем, что использовались при доказательстве
предложения 9.1.3:
(i) (предположение о допустимой нагрузке) существует поле напря-
жений а = {бу}, такое что б€До, 6(0) = сто,
бу € И,1’оо(07’, Г°(Й)), Da + f = 0 п.в. на [0, 7] (9.2.6)
И ДЛЯ каждого 7 = {ту} € L" = {т|т = {ту}, ТЦ = Tji, с
IItIIl- < q
ст + t€P(Z) п.в. на [0, 7]; (9.2.7)
(ii) 0 € int P(t)vt € [0, 7], и Q P(t) содержит некоторую окрест-
t
ность нуля;
(iii) существует последовательность конечных суперпотенциалов
Ф£(?, т) на 77, удовлетворяющих условию (В) п. 9.1.1, а также
условию
ФДЛ т) = 0 п.в. на [0, 7] Vr€P(0, (9.2.8)
такая что
т
если j Фс(/, re)dt < а для некоторого а и
о
тЕ т *-слабо в L°°(0T, Н), то т€Р(?) п.в. на [0, 7]; (9.2.9)
(iv) тензор упругости удовлетворяет условиям (3.3.61а, Ь) и обыч-
ным условиям симметричности и эллиптичности.
Например, в качестве Ф£ можно взять j J^dQ, и в этом случае
о
£ - /4. Решение соответствующей квазистатической задачи обозначим
через (ст£, ve).
§ 9.2. Упруго-идеальнопластичные материалы
331
9.2.2. Существование и единственность решения
В этом пункте мы рассмотрим вопрос о существовании и единствен-
ности решения задачи 5.
Предложение 9.2.1. Пусть выполнены предложения (i)—(iv) предыду-
щего пункта. Тогда задача 5 допускает решение (ст, v), такое что
a € L°°(0T, Н), (9.2.10)
ст' € L2(0T, Н), (9.2.11)
veLU.0T, BD(Q)). (9.2.12)
Далее, это решение (ст, v) можно аппроксимировать решениями (сте,
vE) так, чтобы
аЕ ->а «-слабо в L°°(0T, Н), (9.2.13)
аЕ~^ а' слабо в L\0T, И), (9.2.14)
ve -> v «-слабо в Z^(0T, BD(£l)). (9.2.15)
Доказательство. Пусть (сте, vE) — решение задачи
Г (1ФЕ 1
ipijhkaEhk) + , (G Og) £ij(VE), (9.2.16) u(J J ij
= {92X1)
сте(0) = сто; (9.2.18)
существующее и единственное согласно предложению 9.1.5;. Рассмот-
рим вариационное уравнение, отвечающее (9.2.16) (см. (9.1.114)), и
введём функцию аЕ = аЕ - а. Подставляя в это вариационное уравне-
ние т = аЕ, получим D^, = (0),
——(t, аЕ), сте) = (£(ие), сте) + (vE, DaE). (9.2.19)
аа /
Используя соотношение
(с(ие), аЕ) + (Ve, Dae) = 0 (9.2.20)
1 В задаче 5 начальное условие на v задавать ие нужно. Решение (ае, vE) берётся
в предположении, что на Г и и Гг заданы однородные граничные условия, а условие
(9.1.8) выполняется для произвольного ио. Следует отметить разницу между (9.2.16)
и (9.1.22, 9.1.90) н т.д. (см. также п. 3.3.4). Вопрос об оптимальных предположениях
относительно зависимости К от t остаётся пока открытым. Доказательство предложе-
ния 9.2.1, с небольшими видоизменениями, остаётся в силе н для случая, когда (сул*)
зависит от t н выполнены (9.1.80, 81).
332
Гл. 9. Вариационные неравенства в теории пластичности
и интегрируя (9.2.16) от 0 до t, придём к неравенству
с11ае(/)И2 +
(t, аЕ), aE\dt c
Иса' IIII aElldt.
(9.2.21)
Применяя лемму Гронуолла и учитывая предположения относительно
Фе, находим, что
IlaJI с, (9.2.22)
т 1
J (”^7 (G ffe)’ С' (9-2.23)
О
Принимая во внимание неравенства Фе(/, а£) > 0 и
Ф£(Л а) —Фе(/, aE)>(-^(t, аЕ), а - аЛ = - (^- (t, ае), аД (9.2.24)
у da J у da /
получаем
т
j Фс((, aE)dt с. (9.2.25)
о
Если т= [Tij], ту = TjiL°°(0T, и Ит11г“ < q п.в. на [О, Т\, то
т + а € Р(0 п.в. на [О, Т]. Используя неравенство
т т
(t, аЕ), т - aE)dt I (Ф£(а + т) - Фг(ае))Л, (9.2.26)
аа J
о о
приходим к заключению, что для каждой функции т € L°°(0T, L°°), для
которой ИтИг" < q п.в. на [0, 7], выполняется оценка
т
/ 6Фе \
(Z, аЕ), T]dt с. (9.2.27)
у da )
о
(При её выводе используются неравенства (9.2.23, 24) и предположе-
ния (i) и (iii).) На основании полученных оценок можно заключить,
что последовательность {<те) ограничена в L°°(0T, Я), а последова-
Г <7Фг 'J
тельность 1—-—((, ас)5 ограничена в L*(0T, L1).2
у da j
1 Мы используем (для случая р = ») следующую теорему (см., например, (2]).
Пусть 1 р со яр' — сопряжённый показатель. Для каждого geZ.₽'(Q) можно
определить g € (L^D)]* по формуле
«(/) = j g(x)f(x)dQ, fiLp(a).
n
Тогда
§ 9.2. Упруго-идеальнопластичные материалы
333
Возьмём аё в качестве пробной функции. Получим
/ d&F \
((сае)', аё) + \ <ъ), оё\ = Ш), 5/) - ((са)', 5/). (9.2.28)
Используя соотношения
(с(ц-), оё) = 0, (9.2.29)
(t, аЕ) = (t, аЕ) + (t, аЕ), аД (9.2.30)
и интегрируя от 0 до Т, найдём, что
т т
cj 115£112Л + Ф£(Т, ст£(7)) — Ф£(0, ао) < j Иса'II 115/(0 ПЛ
о о
т
(t, аЕ) dt + j ff£)’
о
(9.2.31)
Ввиду (9.2.27) и (9.1.79), из (9.2.31) вытекает, что
т
j П5/||2Л с, (9.2.32)
о
т. е. последовательность (5/), а значит, и последовательность (а/)
ограничены в L2(0T, Н). Для доказательства ограниченности
[((<7Фе/Л0(0 аЕ), аЕ)} в L2(0, Т) возьмём в качестве пробной функ-
ции аЕ. Тогда (9.2.19) даёт
аё), 5?) = -((са£)', ас), (9.2.33)
у ао 1
откуда, в силу ограниченности (а/) в L2(0T, Н) и (а£) в Z,“(0T, Н),
и следует требуемое. Рассуждая, как и выше (см. доказательство
ограниченности [d$E/da] в 1?(0Т, £’)), можно показать, что после-
довательность {(d$E/da)(t, а£)) ограничена в L2(0T, L1). Из (9.2.16)
вытекает, что последовательность (c(i>£)) ограничена в L2(0T, L1).
Полагая р(м) = j |и|</Г (часть Гц границы Г должна быть такова,
Гс
чтобы р(м) было нормой на -^) и используя (1.4.49), получаем, что
для каждой функции v € BD(Q), равной нулю на Гц, выполняется нера-
венство
3
иvIIbzko) < С 2 П£у(1>) 11^1(0). (9.2.34)
U=i
334
Гл. 9. Вариационные неравенства в теории пластичности
Если последовательность (£(ve)J ограничена в L2(0T, L1), то она
ограничена и в L2(0T, лё") (где Л" определяется аналогично /?). По-
этому из (9.2.34) следует, что
последовательность (сте) ограничена в £2(0Т, ВП(Й)). (9.2.35)
Рассматривая подпоследовательности, из (9.2.22) и (9.2.32) получаем
сте -> ст *-слабо в L°°(07’, Н), (9.2.36)
сте'->ст' слабо в L2(0T, Н), (9.2.37)
ve~* v *-слабо в Lw(0T, BD(£l)). (9.2.38)
Остается доказать, что (ст, v) является решением нашей краевой зада-
чи. Из (9.2.36, 37) непосредственно вытекает, что (9.2.4, 5) выполне-
ны. Далее, на основании (9.2.36) заключаем, с учётом (9.2.9, 25), что
ст(Г) € P(t) при почти всех I. Для доказательства неравенства (9.2.3) ум-
ножим (9.2.16) на т - ст£, где т(1) € Р(/)АЕ0, и проинтегрируем от О
до Т. В результате получим
т т
((сст£)', т — Oe)dt + ^~с/ст~ °®)’ 7 ~
о о
т
+ j (ve, Dt - Doe)dt = 0. (9.2.39)
о
Так как В£>(й) С [£3/2(й)]3, легко проверить, что
т г -] т г 1
Пш ( I ( Vei(TijJ I dt = f I f У|'(7у.у ^ij,j)dQ Idt, (9.2.40)
J I J I J I J I
0 о Lo J о Lq J
т т
limsup ( ((cct£)', г - ae)dt = ( ((ест)', т- a)dt, (9.2.41)
6 о
((t, сте), T - ст?) С Фе(6 7) - фе(6 сте) 0. (9.2.42)
\ /
Из (9.2.38—42) следует (9.2.3). □
Предложение 9.2.2. Поле напряжений ст, служащее решением задачи 5,
определено однозначно.
Доказательство. Пусть (сть t>i) и (стг, Уг) — два решения задачи 5. Тог-
да, в силу (9.2.3),
(с(ст/ - ст2'), Ст] - ст2) 0.
(9.2.43)
§ 9.2. Упруго-идеальнопластичные материалы
335
Интегрируя это неравенство от 0 до t и принимая во внимание
(3.3.61а, Ь), получим
ИстДО - СТ2(0»2 cIIcti(0) - О2(0)И2. (9.2.44)
Отсюда и из того факта, что crj(O) = стг(О), вытекает утверждаемая
единственность. □
Использование пространства BD(Q) для полей скоростей позволяет
рассматривать разрывы непрерывности у этих полей на поверхностях
S, лежащих в й. Среди этих разрывов различаются касательные, от-
вечающие явлениям скольжения, и нормальные. Если, однако, крите-
рий текучести зависит лишь от девиатора напряжений, как, например,
в случае металлов, то разрывы возникают только вследствие сколь-
жения. Для доказательства этого утверждения используем свойства
поверхностей 5 в Q с нормалью п = (л,), описанные в п. 1.4.3. Если
поверхность S разделяет область й на й+ и й~, то, в силу (1.4.47)
и (1.4.48), выполняется соотношение
(7+ v - 7- v)injnjds = j Ttjdeij(u) Ут€Й(й), (9.2.45)
s s
которое даёт математическое объяснение того, как появляется скачок
скорости 7+у - 7-у вдоль S. Поскольку критерий текучести зависит
лишь от девиатора напряжений, то в (9.2.3) можно положить ту =
ay + Р^ь где Р € Hl(Q). Из теоремы Грина — Гаусса следует, что для
всех р € fdl(Q)
((са)', г - а) + j Vi(rij,j - aijj)dQ
о
= j (ctihkahk)'pdQ + j ViPjdQ = 0. (9.2.46)
0 0
Следовательно,
divv = Vi,i = (cuhkahk)' в Л2(й), (9.2.47)
и поэтому множество тех точек, где v = ей, имеет нулевую меру
на S. Подставляя в (9.2.45) nj = рбц, заключаем, что
(y+v)in, = (y-v)int в L^S), (9.2.48)
т. е. возможны только разрывы, вызванные скольжением. Этот ре-
зультат согласуется с экспериментальными данными, свидетельствую-
щими о появлении концентраций деформации в тонких полосках. Та-
кие полоски могут рассматриваться как поверхности разрыва.
Нормальные разрывы возникают в том случае, когда критерий те-
кучести зависит от полного тензора напряжений. Подобная картина
336
Гл. 9. Вариационные неравенства в теории пластичности
имеет место, например, для некоторых типов грунтов. Существуют
различные теории, объясняющие природу таких разрывов. Более под-
робную информацию читатель может найти в соответствующей лите-
ратуре (см., скажем, [306]).
Вследствие возможных разрывов, поля скоростей приходится огра-
ничиться «слабой» постановкой краевой задачи для упруго-пластич-
ных тел. Более «сильная» постановка, например как для вязко-упруго-
го случая, связана с допущением о непрерывности поля скоростей. Из
вышеизложенного ясно, что и сама граница Г тела может быть по-
верхностью скольжения, и поэтому граничное условие на Ги налагает-
ся на «внешний след» поля скоростей. Таким образом, в теории пла-
стичности краевую задачу следует формулировать, строго говоря, не
для области й, как обычно, а по крайней мере для Q.
Итак, допустимые поля скоростей можно определить, вводя про-
странство BZ)(IR3) и считая Vi эквивалентным иг, если
= Уг|о в |1?(й)]3, £у(щ)|о = в .^/’(й). (9.2.49)
Следовательно, 7+tn = 7+»2 на Г. Теперь можно ввести соответ-
ствующее^угношение эквивалентности Р и получить фактор-простран-
ство BD(Q) = BZ)(IR3)//? Таким образом, множество кинематически
допустимых полей скоростей задаётся следующим образом:
ВТ)доп(й) = (v € BD(Q), 7+v = 0 на Ги]. (9.2.50)
Можно_ показать, что решение задачи 5 является элементом из
В£>доп(Й) [307].
Как было отмечено в [314], с точки зрения функциональной поста-
новки рассматриваемая здесь задача в некотором смысле обнаружива-
ет известное сходство с задачей о минимальных поверхностях, где ис-
пользуется пространство функций ограниченной вариации ВИ(Й). Ме-
тоды, разработанные при решении этой последней задачи, в
частности подход к вопросу о выполнении граничных условий, были
в некотором смысле «перенесены» на краевую задачу теории пла-
стичности.
§ 9.3. ЗАДАЧИ О ЖЕСТКО-ВЯЗКО-ПЛАСТИЧЕСКОМ ТЕЧЕНИИ
9.3.1. Классическая постановка общей динамической
задачи
В этом параграфе изучаются неравенства, возникающие в теории
жестко-вязко-пластических течений. При этом температурные эффек-
ты не учитываются и рассматриваются только поля скоростей и на-
§ 9.3. Задачи о жёстко-вязко-пластнческом течении
337
пряжений. Для простоты будем считать, что плотность жидкости е
постоянна, т.е.
е(х, t) - Qo = const. (9.3.1)
Пусть й — открытое ограниченное7 связное подмножество в Я?» и Г
его граница. Мы ищем поле скоростей v = (v,) и поле напряжений
о = 1оу) (iJ = 1,2,3), удовлетворяющие в й х (О, Г) уравнениям движения
б?/ = vij.j + fi, (9,3,2)
где yt = dvi/dt + vtjVj и f = f(x, f), уравнению несжимаемости
div п = 0 (9.3.3)
и определяющему соотношению (3.3.10). На Г задаётся граничное
условие
Vt = 0 для каждого t € (О, Т), (9.3.4)
а при t = 0 — начальное условие
Vi(x, 0) = voi, где voi = vot(x). (9.3,5)
Предполагается, что коэффициент вязкости д и предел текучести g,
входящие в (3.3.10), являются положительными константами. (Можно
рассмотреть и общий случай ц = ц(х, t) и g = g(x, t).) Введём обо-
значения
A,(v) =|Py(p)Z>v(v), (9.3.6)
Ф(н) = 2 j g(Ai(v)),/2dfi, (9,3.7)
О
a(v, w) = 2 | nDij(v)Dij(w)dQ, (f, v) = j fiVtdQ. (9.3,8)
□ 0
Если u — достаточно гладкое решение задачи (9.3.1—5), (3,3,110),
то при каждом t € (0, Г) оно удовлетворяет вариационному нера-
венству
a(u, v - и) + Ф(н) - Ф(м) > (/- е7, v - u) we Кдоп, (9,3.9)
уравнению несжимаемости и граничному и начальному условиям, По-
ля скоростей v, удовлетворяющие этим трём условиям, образуют ПОД-
1 Предположение об ограниченности Q снимается, когда изучают задачу об обтека-
нии заданного препятствия. Здесь предполагают, что v(x, t) -» (с, 0, 0J при х -* «о, где
с — некоторая константа. Для этого случая можно доказать результат, аналогичный
приводимому ниже 9.3.1 (см. (84]).
338
Гл. 9. Вариационные неравенства в теории пластичности
в точке
« € Вдоп
тельно,
множество ИдОП в пространстве полей скоростей; остаётся только
выбрать это пространство. Неравенство (9.3.9) получается непосред-
ственно из уравнения (9.3.2), если умножить его на v, - и„ просумми-
ровать по i и формально применить теорему Грина — Гаусса. Это
даст равенство
j Сту(и) [Dij(v) - Dij(u)]dQ = (f - еу, v - и) Vv € Кдоп, (9.3.10)
о
из которого, используя неравенство Шварца и соотношения (3.3.112),
мы и выводим (9.3.9). Обратно, если функционал Ф дифференцируем
и и Du (и) & 0, то формально можно показать, что в случае
неравенство (9.3.9) эквивалентно исходной задаче. Действи-
вычисляя градиент от Ф(и), из (9.3.9) получаем соотношение
+ UM»)] + f - етА VidQ = о W € Кдоп, (9.3.11)
Щп(«)) />< /
О
а так как div v = 0, мы заключаем, что существует скалярная функция
р, такая что член в скобках в (9.3.11) равен grad р. Это завершает дока-
зательство нашего утверждения.
9.3.2. Выбор подходящих функциональных пространств
и результаты о существовании решения
Рассмотрим более общий случай О С IR". Обозначим через про-
странство
Г= {<р|<р€ (£>(Й)]П, divy> = 0 в Й) (и > 2). (9.3.12)
Замыкание W в [77“ (Й)]" представляет собой гильбертово простран-
ство . Обозначим через [•, • ]« и | • соответственно скалярное
произведение и норму в W№ Очевидно,
[ц, w]„/2 = ((Ui, Wi))H^{Q), (9.3.13)
[v, Mo = ((Vi, = (Vi, Wj), |v|0 = |v|2.
Заметим, что если v € №п/ъ то
Vij^Ln(Q) (i, j= 1, 2, 3). (9.3.14)
Действительно, для Wn/2 имеем и потому выполнено
(9.3.14) (см. (1.3.50)). Если Wn/2 — пространство, сопряжённое к Wn/2,
то, как легко проверить, пространства а > 1, образуют
шкалу гильбертовых пространств с центральным элементом Во = В»
Далее, вложение Wa в Во является компактным, так как компактно
§ 9.3. Задачи о жёстко-вязко-пластическом течении
339
вложение FKi С Но. Введем теперь обозначение
Е(и, v, w) - j QUiVj.tWjdO. (9.3.15)
о
Для функционала Е выполняется равенство
Е(и, v, w) + Е(и, w, v) = 0 Vw, V, Й'С (9.3.16)
которое можно соответствующим образом распространить по непре-
рывности. Применяя неравенство Гёльдера, из (9.3.14) и (9.3.15) полу-
чаем неравенство * 1
IE(u, v, w)| с|и|р Im'IpS \Vij\n
” 2 1
с\и\р Мд 1у1«/2 для = 1. (9.3.17)
Отсюда видно, что отображение (и, v, w) -> Е(и, v, w) непрерывно на
Lp X WS1/2 X LP(LP = [£₽(й)]л). Переходя к скоростям и используя со-
отношения
Е(и, и, и) = 0, Е(и, и, v) = -Е(и, v, и), (9.3.18)
запишем неравенство (9.3.9) в виде
(qu', v - и} + а(и, v - и} - Е(и, v, и) + Ф(ц) - Ф(и)
>(Л v-u) W € Идоп. (9.3.19)
Мы будем различать задачу о плоском течении (п = 2) и задачу об
объёмном течении (и = 3). В последнем случае изучается более слабая
вариационная формулировка задачи. Интегрируя (9.3.19) от 0 до Г и
предполагая, что v является функцией t, получаем неравенство
т
j ((q v v - и) + а(и, v-u) - Е(и, v, и)
о
+ Ф(ц) - Ф(ы) - (f, v - u))dt
+v(0) - w(0)|2 > О (9.3.20)
его решение будем искать на множестве которое вводится ниже.
Предложение 9.3.1.(а) Пусть й С IR3 (или IR" с п 3),
f$L2(0T, W{), (9.3.21)
Vo € Wo. (9.3.22)
1 Если и i Wn/z C ИЛ, то, в силу (1.3.8), и, ё L4(Q), 1^9^ 2n/(n - 2) при п > 2,
1 q < 00 при п = 2.
340
Гл. 9. Вариационные неравенства в теории пластичности
Обозначим через множество
#= (ф€Л2(07; Wn/г), v'eL2(0T, Wo), v(0) = v0}. (9.3.23)
Существует и, такое что 1
ueL2(0T, И'ОПГЧОТ; Wo), (9.3.24)
u'6£2(07; Wtsz), (9.3.25)
удовлетворяющее вариационному неравенству
т
j [(@v', v - и) + а(и, v - и) + Е(и, и, v-u)
о
+ Ф(и) - Ф(м) - (Л v - u)]dt > О Т (9.3.26)
и начальным условиям (9.3.5).
(Ь) Пусть й С IR2. Предположим, что выполняются (9.3.21, 22).
Тогда существует единственное и, такое что
u€£2(0T, И^ПС^Т, Wo), м'€£2(0Т, W{), (9.3.27)
удовлетворяющее п.в. на [0, 7] вариационному неравенству
(qu', v - и) + а(и, v - и) + Е(и, и, v - и)
+ Ф(ц) - Ф(м) > (/, v - и) Vve Wi (9.3.28)
и начальным условиям (9.3.5).
Доказательство, (а) Для простоты будем считать, что Vo - 0. (Если
vo # 0, то можно сделать замену v - v - Vo, й - и - и0.) Применим
метод конечных разностей, который был использован при доказатель-
стве предложения 9.1.1. Пусть к - Т/N, где N > 0 — целое, tM = vk,
v = 0,1, = a(tM), им = u(tw), Фм = Ф(и(^)),^ = f(t(v)). Ре-
гуляризуем функционал Ф. А именно, положим
Фе(0 = -3- ( (JD^v)~)l + EdQ. (9.3.29)
1 + 6 о
Тогда
/ б/Ф (иУ \ г_____
(- j ,v) =g (V АКи))8-1^^)^!^, (9-3.30)
\ dv / 6
' При выполнении приводимых ниже включений справедливо также (см., например,
[182]) включение и € £4(OT,[£₽(0)]"), где 1/р + 1/2лг = 1/2. Из теории интерполяцион-
ных пространств [181] следует, что тогда и является п.в. непрерывным как отображение
[0,Т] -
§ 9.3. Задачи о жёстко-вязко-пластическом течении
341
и можно показать, что для Ф£ выполняются соотношения, аналогич-
ные (5.1.20, 21).
Поставим теперь следующую задачу: найти и^+ п € Wn/ъ такое
что и£0) = 0 и для v = 0,1...N
/ _ „<») ч
(б Е - ------v) + a(u<r + 1\ v) + E(u<F+1), uir+l\ v)
\ К j
/ б/ф \
+ (“^7-(м^+1))> v) "(ЛЧ У) = 0 yveWn/z (9.3.31)
Для решения этой задачи проведём ещё одну регуляризацию, вводя
«вязкий» член v]»zz, ч > 0, где ij, равно как и £, стремится к
нулю. Таким образом, мы рассматриваем вариационное уравнение
/ / ц? + 1) - u(F) \ \
(q(— , ч. И +>М+1), v]„/2
\ \ к / /
+ v) + E(u<^\ <+1), V)
/ с(Ф fu(F+°) \
+ (---Л - (/<”+1>, у) = 0 Vy€ Wn/2. (9.3.32)
Доказательство проведём в два этапа. Вначале докажем существова-
ние решения и(”еч1) € И7/2 уравнения (9.3.32) и перейдём к пределу
при к -* 0. Далее покажем, что если £ и ij стремятся к нулю, то we,
стремится к решению уравнения (9.3.26).
Пусть Wi, wz, ... — базис в HSi/j, определённый следующим образом
[182]:
M v]n/2 = Xi(Wj, v) VvtWn/2, М2 = 1. (9.3.33)
Функции Wj являются собственными функциями оператора В канониче-
ской изометрии между Wn/2 и W„/2, Из свойств компактности вложе-
ний пространств HS1/2 следует, что данная задача на собственные
значения имеет последовательность ненулевых решений (Wj ], соответ-
ствующих последовательности собственных значений Х7 > 0 (см.
п.7.2.4). Пусть Wjfy обозначает конечномерное подпространство, на-
тянутое на Wj, 1^у^ т. Обозначим через ит = € W%7% решение
системы
/ / ит - \
( е(-----Е---Wj]n/2 + a(um, Wj) + E(Urn, Um, Wj)
\ \ К J
+ (—Wjj - С/*"*1*, Wj) = 0 (1 j m). (9.3.34)
342
Гл. 9. Вариационные неравенства в теории пластичности
Используя монотонность d$E/du и коэрцитивность а(ит, ит) на Wi
(последняя имеет место ввиду (9.3.4)), заключаем, что
\ит\г с, ч1/2|ит|л/2 «С С, (9.3.35)
где константа с не зависит от т, е, ij, к. Покажем, что v -»
-»Е (ит, ит, V) — непрерывный линейный функционал на Wn/i> Воспо-
льзуемся неравенством
|v\P с|<2 Hull1/2 уц€/?(й), (9.3.36)
которое выполняется для 1/р + 1/2п = 1/2. Действительно, полагая в
неравенстве (1.2.24) oj = 0, аг = 1/2, аз = 1 и используя вложение
№/2(й) в £₽(й) (см. п. 1.3.4), приходим к (9.3.36). Ввиду (9.3.36), из
(9.3.17) вытекает, что
!£(«, и, w)| c|w|}/2 |ц|Г2 |w|}/2 |w|2/2 |v|n/2. (9.3.37)
Так как Е(ит, ит, v) - -Е(ит, V, ит), из (9.3.37) с учётом (9.3.35) сле-
дует, что v -> Е (ит, ит, V) — непрерывный линейный функционал на
Wn/2, Поэтому найдётся такое- Л (wm) € Wn/г, что
Е(ит, ит, v) = (h(um), v) vvtWn/г, (9.3.38)
I(ит)| w,/z с\ит\р.
Функция v->a(u, v) непрерывна на Иь поэтому, используя (1.2.25),
можно написать
а(и, v) = (Au, v), (9.3.39)
где отображение A: Wi -» W{ является линейным и непрерывным. Та-
ким образом, (9.3.34) принимает вид
((Um — /УФ \
е - . Е1>) + чВит + Аит + Л(М + (М - ”, Wj\ = о
к ии /
(1 т). (9.3.40)
Существование решения wm€ уравнения (9.3.40) легко доказать,
применяя теорему Брауэра о неподвижной точкеу. Из (9.3.35) и
1 См. п. 8.4.2. В нашем случае берём
Um = £ i
/»1
(14, </Ф.(14п) / , . uS! \ \
е —£~ + уВи™ + Аит + —----(/<’’+ 4 - hm + е ’ Wij ’
где hm - h(Um).
§ 9.3. Задачи о жёстко-вязко-пластическом течении
343
(9.3.40), рассматривая соответствующие подпоследовательности, вы-
водим, что при т -> оо
Urn -* М(''еч1) слабо в W1, (9.3.41)
UmiUmj к%+ ° слабо в Lp/2(О), (9.3.42)
(Um) - V ° слабо в W{. (9.3.43)
du
(Соотношение (9.3.42) получается применением неравенства Гёльдера
к |«mi umj\p/2, с учетом (9.3.36, 35).) Поэтому
\Umi Umj\p/2 С. (9.3.44)
Из компактности вложения Wi в Ио вытекает, что
«т -* м^+ ° сильно в Ио. (9.3.45)
Значит, согласно известной теореме анализа (см., например, [302]), у
последовательности {ит} существует подпоследовательность, сходя-
щаяся п.в. в 0. Следовательно,
Umi Umj - В 3) ’ (0), (9.3.46)
и, таким образом, кц = и^^ u(vE^. Поэтому
E(Um, Um, v)^E(u<"'\ «%1’, 0 W € Wn/2r (9.3.47)
В силу полноты базиса {и^} в И^/ь из (9.3.34) следует неравенство
(е(-^-------И + 0<+1), v]n/2 + a(u^, v)
+ Е(и^\ м<;+1), 0 + (^"+1), V)
- (Л+1), 0 = 0 we Wn/2. (9.3.48)
Ввиду монотонности d^L(v)/dv,
НФ
^+1)=^Г(^+1))- (9.3.49)
Тем самым доказано существование решения и^+ °. Переходя теперь
к пределу при к-* 0 и полагая в (9.3.32) v = м^+1), получим
16 £ , UEJI j + Г) I Ug4 | л/2 + СI и£ч 11
<с|/,+ 1)|ж1'1<1)|ь (9-3.50)
344
Гл. 9. Вариационные неравенства в теории пластичности
(Здесь мы учли монотонность d$f.(v)/dv, коэрцитивность a(v, v) на
(Ft, а Также тот факт, что Е(и, и, и) = 0.) Заметим, что
(е(«<;+°- MW), н<;+’>)
= |el^+1)li -~q№I22 + | el^+1) - (9.3.51)
Суммируя неравенства (9.3.50) по v и используя (9.3.51) при
v 0,1 1
1
2
и а > 0, приходим к неравенству
1 nll/O'+D _ ,,(>) I?
2 QI “cn 12
М- 1 ,
S (a*|<+1)|b^|/'+1)|2^, (9.3.52)
которого следует, что существует независящая от е, т/, к константа
такая что
м-1
el<|h 2
1> = 0
ИЗ
max|u^|i
м
M- 1
E кт)\и%+ ° I ^/2
Л/- 1
S
(9.3.53)
(9.3.54)
(9.3.55)
Далее, в силу (9.3.30)
м-1
к
2
dv
W{
(9.3.56)
а в силу (9.3.55, 38)
М- 1
S ^|A(^+1))|2^ С.
v = 0
Из (9.3.32) и полученных оценок вытекает, что
(9.3.57)
2
________£д_
к
(9.3.58)
Win
М — 1
S к
v = Q
Продолжим решение и^+1) на весь интервал [0,Т]- Проведя линей-
ную интерполяцию между точками tM, получим
it _ /wVu(,,+ ° - uw\
< +(-------W ПРИ '€ I'W> '('+1)l- (9-3-59)
+ 1) _ ftp)
§ 9.3. Задачи о жёстко-вязко-пластическом течении
345
Приведённые выше оценки позволяют заключить, что при изменении
е, г), к
и™ пробегает ограниченное множество
в г°(07; иг)П£2(от, (9.3.6O)
n1/2MW пробегает ограниченное множество
в £2(07; PK„/2), (9.3.61)
--------- пробегает ограниченное множество
в £2(07; И^л/2), (9.3.62)
(и^)' пробегает ограниченное множество
в £2(07; И'л'/г). (9.3.63)
Поэтому существуют
м£,€£”(0Т, Ж))0£2(ОТ, И',), п1/2Ма; € £2(0Т, (Гл/2),
^€£2(07; ^/2), u'^L2(0T, ^/2),
такие что при к 0
-> иЕ1, *-слабо и слабо в £”(07; в £2(07; иг) Wi), (9.3.64)
слабо в £2(07', иг/2), (9.3.65)
d$e(u™)/dv -> ф слабо в £2(07; ^/2), (9.3.66)
(«О' - и'ч слабо в £2(от; (9.3.67)
Используя монотонность d$/dv, можно показать, что
Таким образом, иЕ, удовлетворяет вариационному уравнению
(е«сч. у) + у]«/2 + a(usn, v) + E(ueri, иЕп, v)
+ (иеч), v\ -(f, v) = 0 VV€ WS1/2 (9.3.69)
и начальному условию
и£,(0) = 0. (9.3.70)
Переходя ко второму этапу, устремим е и г) к нулю и покажем,
что lim uEli (обозначим его через и) обладает свойствами (9.3.24, 25)
346
Гл. 9. Вариационные неравенства в теории пластичности
и удовлетворяет вариационному неравенству (9.3.26). Для фиксирован-
ного v из W рассмотрим выражение
т
D£„ = j [(ei>v - u£,) + a[uSli, v - u£,)
о
+ E(uev UC1), V - i/£,) + T)[u£n, V - u£,]„/2
+ Ф£(н) - ФЕ(н£,) - (f, V - u£J\dt. (9.3.71)
Ввиду (9.3.69),
т T
Den = ! - <)» f |
0 (! L
- V - u£„) j dt = le|p(D - u£,(DI2
T
+ j [ф£(0 - Ф£(ие„) - v - u£^ p 0. (9.3.72)
0
Из (9.3.71) следует, что
т
j [(ev', V - u£v) + a(w£,, v) + E(u£r], u^, v)
0
+ n[uSy, v]n/2 + ФД0 - (f, V - u£ri)]dt
> j [a(uEv, usJ + Фе(ие,)]Л. (9.3.73)
о
В силу (9.3.60—63), найдётся подпоследовательность (w£,), такая что
при е -♦ 0 и г) -♦ 0
u£,.-слабо в L°°(0T, Wo) (9.3.74)
и слабо в L2(0T, Wi),
и^-и' слабо в Л2(0Т; И^л'/г). (9.3.75)
В силу (9.3.73),
т
j [(ev#> v - и) + а(и, v) + Ф(н) + Е(и, и, v) - (f, v - u)]dt
о
> liminf j [a(u£v, u£y) + Ф£(н£,)]Л. (9.3.76)
о
§ 9.3. Задачи о жёстко-вязко-пластическом течении
347
К E(uEtl> иЕГ1, v) снова применимы рассуждения, приведенные при до-
казательстве соотношения (9.3.47). Имеет место неравенство
т т
lim inf j [а(иЕг/, uEri) + Ф£(ие,)]Л > j [а(и, и) + Ф(и)]Л, (9.3.77)
О о
т
поскольку отображение v~* j a(v, v)dt п.н.сн. на L2(QT, Wi) и
о
т т
lim inf {Ф£(и£,)Л > { Ф(и)Л.
(9.3.78)
Действительно [84],
j Ф(и)Л 2 fj(#V £>п(и))1 + £ё/П^ л! ’ П (\du\dt
о Lo Хп / J Lo Хп / .
.3.79)
откуда
т г-Т
(1 + 8)(2g)s j Ф£(и£,)Л (|7-|mesQ)-£ \Ф(иЕ^
о Lo
Поэтому
г т т
liminf j Ф£(и£1))Л > lim inf j Ф(и£,)Л > j Ф(и)Л,
О 0 0
(9.3.80)
(9.3.81)
т
так как отображение v~>$<l>(v)dt непрерывно и выпукло на
о
т
L2(0T, Wi). Следовательно, функционал j $(v)dt п.н.сн. в слабой
о
топологии L2{0T, Wi).
Из (9.3.72—75, 77) вытекает, что и является решением неравенства
(9.3.26) и удовлетворяет начальному условию (9.3.5).
(Ь) Для случая О С IR2 вводить вязкий член r)[u, v]i необязательно,
так как Wn/2 = Wi и коэрцитивности билинейной формы a(v, v) на Wi
достаточно для доказательства существования решения. С помощью
метода, примененного в части (а) доказательства, можно установить
существование иЕ) удовлетворяющего вариационному уравнению
{que, v- иЕ) + а(иЕ, v- иЕ) 4- E(ue, иЕ, v)
+ -U f-«e) = 0 Wi (9.3.82)
348
Гл. 9. Вариационные неравенства в теории пластичности
и начальному условию (9.3.5). Далее, можно показать (см. 9.3.74), что
и£ -» и слабо в L2(0T, B^i),
и .-слабо в £”(07; ИЪ), (9.3.83)
и£'-> и’ слабо в £2(07; И'О, (9.3.84)
ис(Т)-*и(Т) слабо в W& (9.3.85)
Тот факт, что пространства £2(0Г, Wi) и L2(0T, W{) являются сопря-
жёнными друг к другу, позволяет доказать, что и удовлетворяет вари-
ационному неравенству (9.3.28). Рассмотрим для р€£2(0Г, Wi)
величину
т
= j [(ем/> V - иг) + «(“е, v ~ “г)
0
+ Е(и£, и£, v - и£) + Ф£(у) - Ф£(иЕ) - (f, v - u£)]dt. (9.3.86)
Ввиду (9.3.82),
т Г* / б/Ф (и} \ ”1
D£ = ( |Ф£(!,) - ф£(и£) - (j v-ucjjdt^ 0. (9.3.87)
Поэтому
т
J [(е«£. ”) + «(«<;> 0 + v> + фЕ(0 - (Л У - U£)]dt
О
т
> [ [(ем£> ме) + ме) +
о
т
= I е - j ekoli + j [а(иЕ, и£) + ФЕ(иЕ)]Л. (9.3.88)
Взяв lim inf от обеих частей неравенства (9.3.88), получим (см. доказа-
тельство соотношения (5.4.59))
т
J [(ewv - и) + а(и, v - и) + Е(и, и, v)
о
+ Ф(и) - Ф(н) - (/, v - u)]dt ^0 VP € £2(0Т; ^). (9.3.89)
Из (9.3.89) следует поточечное неравенство (9.3.28) (см. 5.4.60—62)).
Далее, в силу (9.3.83, 84) решение и удовлетворяет начальному усло-
вию (9.3.5).
Доказательство единственности решения и проведём от противно-
го. Предположим, что i/i и иг — две функции, удовлетворяющие
§ 9.3. Задачи о жёстко-вязко-пластическом течении
349
(9.3.27,28). Полагая в (9.3.28) v = ui, и = «2 и v = и2, и = Ui и склады-
вая получающиеся неравенства, находим, что
- (qz', z) - a(z, z) - E(ui, ui, z) + E(u2, u2, z) 0, (9.3.90)
где z = U\ - u2. Отсюда вытекает, что
|-^-e|z|i + alzl?^£(Z, z, ut), (9.3.91)
где a > 0 — константа. Можно указать положительные константы а,
с2, такие что (см. (9.3.37))
\E(z, z, Ui)| ci Iz 11 • |г|г • lui 11 С alz 11 + c2 I Mi I i|z|l. (9.3.92)
Из (9.3.91, 92) следует, что
ekli Cellini, (9.3.93)
а так как I mi 12€ L2(0T), то, интегрируя (9.3.93) от 0 до t, получаем
z = u\ - u2 = 0. □
Для задачи об объёмном течении единственность решения остается
пока недоказанной. Легко показать, что при и = 2 решение неравен-
ства (9.3.26) удовлетворяет (9.3.28) и потому является единственным.
Действительно, (9.3.26) справедливо для каждого v€ ^i, где
Л = {м[и€Г2(07; JPi), v'€£2(0T, И7), v(0) = 0),
поскольку все функционалы, фигурирующие в (9.3.26), непрерывны на
ТЕ (при условии что W снабжено топологией, индуцированной из М)
и плотно в %. Замечая, что «€ %, подставим в (9.3.26)
v = (1 - Х)и + Xvi, где 0<Х<1и1>1€М. Деля на X и переходя к пре-
делу при Х->0+, убеждаемся (см. доказательство предложения 2.2.2)
в справедливости вариационного неравенства (9.3.89) для каждого
v€ %. Так как плотно в £2(0Т, Wt), то и удовлетворяет (9.3.89),
а следовательно, и (9.3.28) (см. [84]).
В работе [84] дано доказательство предложения 9.3.1, в котором
дискретизация по времени не привлекается. Сравнение доказательства
предложения 9.3.1 с доказательством существования решения для ди-
намического вариационного неравенства в п. 5.4.2 показывает, что
здесь мы не использовали оценку для производной по времени от ско-
рости и' при t = 0 и поэтому в предложении 9.3.1 не фигурирует
Однако, предполагая в задаче о плоском течении, что /, f €
€£2(0Т, W{), /(0) € Ио, vo € Wi A [//2(0)]2, и используя оценку для
и'(0), вытекающую из того факта, что H2(Q) вложено в £°°(0), можно
показать, что u€£2(0T, Wi) и u'€£2(0T, Ил1)А£“(0Т, Wo) [84].
350
Гл. 9. Вариационные неравенства в теории пластичности
9.3.3. Связь между полями скоростей и напряжений
В п. 9.3.1 была установлена формальная эквивалентность вариацион-
ного неравенства (9.3.9) и исходной задачи. Для задачи о плоском те-
чении подобную эквивалентность можно доказать строго, установив
вдобавок ещё связь между полями скоростей и напряжений.
Предложение 9.3.2. Пусть п = 2 и
/€Z?(07; Wi'), добИЪ (9.3.94)
Пусть, далее, и = (и,), = (<ру) и р таковы, что
u$L2(0T, Wi), u'€L2(0,T, W{), (9.3.95)
u(0) = v0, (9.3.96)
= Vi, *i = 0, € £“(0 X (07)), (/, j=l,2, 3), (9.3.97)
± g2 п-в- в 0 X (07), (9.3.98)
ЧуО/Ди) = V2 glDij^DtAu))172 п.в. в О X (07), (9.3.99)
p€^' (0 X (07)), (9.3.100)
QU,' - pAut + QUijUj - <pj,j = f - pj в ' (0 x (07))- (9.3.101)
Тогда и является решением задачи (9.3.28, 5). Справедливо и обрат-
ное: если и удовлетворяет (9.3.28, 5), то существует у. = {и р, кото-
рые удовлетворяют соотношениям (9.3.97—101).
Доказательство. Прямое утверждение очевидно. Для обратного дадим
два доказательства, одно с использованием теоремы Хана — Банаха
и другое — с использованием теории двойственности. Рассмотрим
пространство
Е = = {«у ], «у = U «у € L1 (0 X (07))) (9.3.102)
с нормой
т
Н«Не = j j (Мо)1/2^»Л (9.3.103)
о п
и сопряжённое к нему пространство Е'. Обозначим через Л линейное
отображение д-»{/)</(д)} из L2(0T, WT) в Е. Поскольку функция
т
v-> j Ф(д)Л непрерывна на L2(0T, ИЛ), из равенства
о 1
т
j Ф(д)Л = gV2IIA(0llE (9.3.104)
о
§ 9.3. Задачи о жёстко-вязко-пластическом течении
351
следует, что отображение Л тоже непрерывно. Обозначим, далее, через
В функционал на Е, заданный формулой
В(Л(0) = gV2 11Л(у)НЕ. (9.3.105)
Вариационное неравенство (9.3.28) можно перевисать в виде
т
j [(Д(и), v - и) + Ф(ц) - Ф(и)]Л о W(L2(0T, Wi), (9.3.106)
О
где (см. (9.3.38, 39))
R(u) = qu' - дДи + h(u) — f€L2(0T, W{). (9.3.107)
При первом способе доказательства воспользуемся тем, что задача ре-
шения неравенства (9.3.106) эквивалентна следующей задаче: найти
u€£2(0T, Wi), такое что
т т
\(R(u), v)dt ^$(v)dt Vt>€£2(0T, Wt) (9.3.108)
о 0
и
т т
J (R(u), u)dt + j Ф(н)<Л = 0. (9.3.109)
о 0
Это утверждение легко доказать, используя специальный вид Ф и рас-
суждая, как при доказательстве предложения 5.2.3. Из (9.3.104, 108)
следует неравенство
т
о
(R(u), v)dt С gV2IIA(v)IIe.
(9.3.110)
Поэтому, согласно теореме Хана— Банаха (см. п. 1.2.1), существует
q. € Е' (т. е. <^, для которого «к/ € £°° (О X (0,£))), такое что
т т
(R(u), v)dt = - J J dfjDij(v)<Kldt (9.3.111)
о on
и
<1
gV2
(9.3.112)
Принимая во внимание условие несжимаемости D„(v) = 0, можно в
(9.3.111) считать = 0. Из (9.3.109, 111) следует равенство
т т
[ VjDij(u)dQdt = [ j gy/2(Dij(u)Dij(u))1/2dQdt. (9.3.113)
on on
352
Гл. 9. Вариационные неравенства в теории пластичности
Применяя теорему Грина — Гаусса, из (9.3.111) получаем соотношения
(9.3.100, Ю1)\ а оставшиеся соотношения (9.3.98, 99) следуют из
(9.3.112, 113). Этим завершается первое из двух обещанных доказа-
тельств, впервые приведённое в работе [84].
Переходя ко второму доказательству, заметим, что вариационное
неравенство (9.3.106) не эквивалентно какой-либо задаче минимизации,
однако если считать R заданным, то (9.3.106) уже эквивалентно неко-
торой задаче оптимизации, и можно воспользоваться результатами
теории двойственности. Как легко проверить, эта задача имеет вид
т
inf (В(Л0 + A(v)), A(v) = J (R(u), v)dt, (9.3.114)
z?(or, w,) о
и и является её решением. В силу (3.2.48) двойственная задача запи-
шется в виде
sup [-^(i) - ЛС(-ЛЧ)1 = mf IW + Ш (9.3.115)
Е' S'
где = 0, а Ц и Ig — индикаторы множеств
~ Г llallr' 'J
А = UkeE', —1 (9.3.116)
С gV2 J
и
Ё = £', ч- удовлетворяет (9.3.101)] (9.3.117)
соответственно. Это легко доказать прямым вычислением сопряжён-
ных функционалов. Предложение 3.2.7 утверждает, что при заданном
R решение двойственной задачи существует н выполняются соотноше-
ния (3.2.43, 45). В силу (9.3.109) инфимум в (9.3.114) и супремум в
(9.3.115) равны нулю, поэтому условия (9.3.97—101) выполнены.
Одним из условий экстремума является условие (9.3.113), из которого
следует (9.3.99). □
С физической точки зрения у = (<1у) представляет собой некоторый
тензор напряжений, ар — давление жидкости, поэтому
с у = + 2fiDij(u) + <|у (9.3.118)
— тензор напряжений для рассматриваемой жидкости. Ясно, что
(9.3.97—99) эквивалентны определяющему соотношению (3.3.110), а
(9.3.101) соответствует уравнению движения (9.3.2).
1 Здесь используется следующий результат: если S € [2 ' (Q х (0, Г))]" и (S, ?) = 0
в [ 2 ' (0, Г)]" то S = - grad р, где р € 2 ' (Q х (0, Г)).
§ 9.4. Другие задачи для жидкостей Бингама
353
При g -♦ 0 + жидкость Бингам# «превращается» в ньютонову жид-
кость. Обозначим через ug поле скоростей, отвечающее данному значе-
нию g. Для задачи о плоском течении можно показать (см. [84]), что
(в условиях предложения 9.3.1) при g-*0 +
ug-*u слабо в £2(0Т, Wi), (9.3.119)
и^и' слабо в £z(0T, И7). (9.3.120)
Здесь и — решение уравнений Навье — Стокса, т. е. решение вариаци-
онной задачи: найти u€£2(07’, Wi) с и' €£2(0Т, W{), и(0) = ио, такое
что
(б«'(0> v) + a(u(t), v) + E(u{t), u(t), v) = (f(t), v) W€ Wi. (9.3.121)
В заключение этого пункта приведём один результат, касающийся
задачи о стационарном течении жестко-вязко-пластичного материала.
В этом случае ищется решение и € Wi, удовлетворяющее вариационно-
му неравенству
а(и, v - и) + Е(и, и, v) + Ф(у) - Ф(и) > (/, v - и) we Wi (9.3.122)
(как для задачи о плоском течении, так и для объёмной задачи).
Предложение 9.3.3. Если /€ W{, то у неравенства (9.3.122) существует
решение и € W\.
Доказательство этого предложения аналогично доказательству пер-
вого утверждения предложения 9.3.1, и мы его опустим.
§ 9.4. ДРУГИЕ ЗАДАЧИ ДЛЯ ЖИДКОСТЕЙ БИНГАМА
9.4.1. Ламинарное течение в цилиндрической трубе
Рассмотрим цилиндрическую трубу с направляющими, параллельны-
ми оси Охз декартовой системы координат Ол^ХгАз- Обозначим попе-
речное сечение цилиндра через Е и положим 0 = Е X [0, /], где
/ — некоторая заданная длина. Будем изучать течение при перепаде
давлений:
р = 0 при х = 0, р = -pol при х = /, (9.4.1)
где ро > 0 — падение давления на единицу длины. Предположим, что
v = 0 на Г X [0, Z], (9.4.2)
где Г — граница Е. Далее, пусть выполняются условия (9.3.1—-3, 5)
и (3.3.110). Ограничимся здесь случаем ламинарного течения. Тогда
скорость имеет лишь одну компоненту, параллельную оси Охз, которая
354
Гл. 9. Вариационные неравенства в теории пластичности
зависит только от xi и Х2, а именно у = (0, 0, «з(Л Xi, Х2)). Легко пока-
зать, что единственными ненулевыми компонентами тензора D будет
Рз1 = D13 = изд/2 и D23 = D32 = «3,2/2. То же самое верно и в отноше-
нии компонент девиатора напряжений. В предположении что f = О,
уравнение движения (9.3.2) запишется в виде
Рл = О, Рл — 0, e«3 —2 («31,1 + «32,2) = Р.з- (9.4.3)
Так как правая часть уравнения (9.4.3) зависит от хз, а левая — от xi
и Х2, производная р,з является постоянной. Поэтому из (9.4.1) следует,
что
р(хз) = -Р0Х3. (9.4.4)
Будем искать решение данной задачи в пространстве Hl (Е). Таким об-
разом, ставится следующая задача: найти и: [О, Т] -*//'(£), удовлет-
воряющее вариационному неравенству
(е«', « - и) + ца(и, v - и) + #Ф(«) - #Ф(и) (ро, v - и)
v«€/?(E) (9.4.5)
и начальному условию
«з(0, xi, х2) = uo(xt, х2). (9.4.6)
Мы ввели . здесь обозначения
а(и, «) = j u,tv,idL, (ро, «) = j poveTE, (9.4.7)
е e
Ф(«) = j |grad«|cE. (9.4.8)
E
Соответствующая стационарная задача формируется так: найти
и€#’(Е), такое что
ца(и, v - и) + #Ф(«) - #Ф(ы) (ро, v - и) Vw€//'(E). (9.4.9)
Следующий результат справедлив даже при нереалистичном предполо-
жении, что функция ро не является постоянной.
Предложение 9.4.1. (а) Пусть
Д)€£2(Е). (9.4.10)
Тогда (9.4.9) имеет единственное решение, которое минимизирует
функционал
П(«)=^да(«, «) + #Ф(«) - (ро, «) (9.4.11)
на
§ 9.4. Другие задачи для жидкостей Бингама
355
(Ь) Если
д>€£2((0, Т) х Е), и0ё£2(Е), (9.4.12)
то существует единственное и, удовлетворяющее (9.4.5, 6), такое что
и€£2(07; H'WnC^OT, L2W (9.4.13)
и
и'€£2(07; Я-1(Е)). (9.4.14)
Доказательство. Так как форма a(v, v) коэрцитивна на Н1^), из
(2.2.3) следует, что функционал П(у) имеет единственный минимум на
Н1(Е) в точке и. В силу предложения 2.2.2 выполнено вариационное
неравенство (9.4.9).
(Ь) Это утверждение — частный случай предложения 9.3.17. □
Так как рассматриваемый материал является вязким, то для того,
чтобы началось течение, необходим перепад давлений. В работе [119]
показано, что если ро — положительная константа, то для случая ста-
ционарного течения выполняются следующие утверждения:
(i)u = 0, если g ро/А, (9.4.15)
(ii) и # 0, если g < ро/А, (9.4.16)
где
А = inf [Ф(у)|у€Я'(Е), |у|л>(Е)= 1}- (9.4.17)
Доказательство этих утверждений аналогично доказательству предло-
жения 7.2.1 (см. также (7.2.65—67)) и предоставляется читателю в ка-
честве упражнения. Аналогичный результат можно получить и для
случая нестационарного течения. Пусть ро и и0 являются элементами
из £2(Е). Обозначим норму | • |Л2(Е) через | • |2. Если
|д>|г < gAгде А ' = inf {Ф(и)|и € |у|2 = 1), (9.4.18)
то
и(?) = 0 при / 7с - In Г1 + 1, (9.4.19)
Ход L A g — |д>|2 J
где u(t) — решение неравенства (9.4.5), а Хо — наименьшее собствен-
ное значение оператора -Д в Н1^).
Для доказательства соотношения (9.4.19) положим в (9.4.5) v = О
и v = 2и. Используя (9.4.18), получим, что п.в. на [0, 7’]
1 Этот результат можно получить и непосредственно, используя регуляризацию.
356
Гл. 9. Вариационные неравенства в теории пластичности
+ WMOI2 + (gA' - |Д)|2)|«(0|2 «S 0. (9.4.20)
Если u(t) # 0 для почти всех / 0, то интегрирование неравенства
(9.4.20) даёт
♦
|и(/)|2 + А ' (|«о|2 + А ')е е»° 'it 0,
где
А' = 8А' ~ . (9.4.21)
Мо
Для достаточно больших значений t, а именно для t Тс, где Тс опре-
деляется формулой (9.4.19), соотношение (9.4.21) не может выпол-
няться. Поэтому для таких t мы имеем u(t) = 0, т. е. течение прекра-
щается. Этот результат физически вполне понятен, поскольку мы рас-
сматриваем материал, обладающий свойством вязкости.
9.4.2. Теплопередача при жестко-вязко-пластическом течении
Рассмотрим термомеханические задачи для жидкости Бингама. Будем считать, что вяз-
кость ц зависит от температуры в = в(х, f). (Естественное состояние жидкости, к кото-
рому отнесена температура, характеризуется нулевыми напряжениями и нулевой
температурой.) Более точно, предположим, что функция в -» д(Й) является непрерывно
дифференцируемой и 0 < до ц(9) С Д1 < 00 для всех fl € IR. Помимо соотношений
(9.3.1—5) и определяющего соотношения (3.3.110Х поля скоростей и температуры удов-
летворяют уравнению сохранения энергии (см. (Д III.1)), а вектор теплового потока
q = ((?;) и температура 9 подчиняются закону Фурье (8.1.6), где СцСЬ^О). Предполо-
жим, далее, что внутренняя энергия е и температура 9 связаны линейной зависимостью
е = у9, (9.4.22)
где у > 0 — константа. Для температуры введём граничное условие
9 = 0 на Г X (0, Т) (9.4.23)
и начальное условие
9(х, 0) = 90(х) при t = 0. (9.4.24)
Положим
и) = 2д(0)Рц(и) + S(Dn(y))1/2, (9.4.25)
hj — &ц/у> 2 = 2/у. Тогда уравнение сохранения энергии запишется в виде
- Х(9, и) + (WAj + 3. (9.4.26)
at у
Введем ещё обозначение
а(в, и, у) = 2 j д(9)Р4/(«)Ру(у)Л). (9.4.27)
о
§ 9.4. Другие задачи для жидкостей Бингама
357
Заметим, что
о(9, и, и) + Ф(м) = 2 j Х(в, u)dQ.
а
(9.4.28)
Рассмотрим случай плоского течения. Как и в п. 9.3.1, будем искать поле скоростей
и € которое п.в. на [О, Г] удовлетворяет условию (9.3.5) и вариационному нера-
венству
(pw', v - и) + а(в, и, v - и) + Е(и, и, v - м) + Ф(1>) - Ф(м)
> (A v - и) Wi. (9.4.29)
Пусть 1/а + 1/а' = 1. Введём пространство
у = (*>1^ е £«'(!) х (О, 73), <р(х, Т) = 0, <р = о иа Г х (О, 73). (9.4.30)
Умножая (9.4.26) на ip € У и интегрируя, получим соотношение
J f VW ~ vdOdt = J j (- *(9, u)v +
оо' Z о о V
J cKldt.
(9.4.31)
Для того чтобы не создавать излишних математических затруднений, предположим,
что 9,juj = 0 и поэтому d6/dt = в'. Интегрируя по частям, из (9.4.31) получим вариаци-
онное уравнение
-у- + (<!vS».i)j'j
о/ /
dddt
т Г1 _ 1
= j j — Х(в, иур + I dQdt + (90, y>(x, 0))
о о J
о 0
ё У. (9.4.32)
Поставим теперь следующую вариационную задачу: найти и ё Wt и в ё £"(Я X (О, Т)),
удовлетворяющее вариационному неравенству (9.4.29), начальному условию (9.3.5) и ва-
риационному уравнению (9.4.32).
Существование решения этой задачи гарантируется следующим предложением:
Предложение 9.4.2. Пусть 1 < а < 3/2 и
/ё£2(0Т, ^ё£'(Ях(О, 73), uoiWo, 90ё7.‘(Я). (9.4.33)
Тогда существуют и н 9, удовлетворяющие (9.4.29, 32) и (9.3.5), такие что
мё£2(0Т, W,), u’eL2(0T, W{), 9ё£“(Ях(0, 73). (9.4.34)
Доказательство. Дадим лишь схему доказательства. Заменим в неравенстве (9.4.29) ар-
гумент 9 в функции а (в, и, v - и) на у е La((i х (0, 73). Если считать у заданным, то,
согласно предложению 9.3.1, вариационное неравенство (9.4.29) допускает единственное
решение и(у) ё L2(0T, ИЗ). Если в вариационном уравнении (9.4.32) вместо Х(в, и) взять
Х(у, и (у)), то из этого уравнения можно определить в как функцию от у. С помощью
теоремы Шаудера о неподвижной точке можно показать, что отображение у -> 9 (у) име-
ет неподвижную точку во, которая и является решением нашей задачи. (Полное доказа-
тельство см. в [86].) □
Вопрос о единственности решения для случая плоского течения, равно как и вопрос
о существовании и единственности решения объёмной задачи, остаётся открытым.
В то же время может быть доказан результат, аналогичный предложению 9.3.2:
358
Гл. 9. Вариационные неравенства в теории пластичности
Предложение 9.4.3. Пусть выполнено (9.4.33) и и = (и,), в, i = («#) и Р удовлетворяют
(9.3.96—100) и (9.4.24, 32, 34), а также соотношению
ей/- + QUt.juj - 4j.j =f~ f.i(i = 1.2). (9.4.35)
Тогда (и, fl) является решением рассматриваемой задачи. Обратно, если (и, fl) является
решением задачи (9.4.29, 32), (9.3.5), то существуют «.= (»<;) и р, удовлетворяющие
(9.3.97—100) и (9.4.35).
Доказательство этого предложения аналогично доказательству предложения 9.3.2 и
потому здесь не приводится.
9.4.3. Вариационные неравенства
в случае общего закона на а € dw(D)
В этом пункте обсуждаются задачи, возникающие при рассмотрении общего закона
(3.3.90), где функция w является неотрицательной и удовлетворяет условию »(0) = 0.
Этот закон является обобщением закона Бингама для жидкостей. Из (9.3.10) и (3.3.90)
следует неравенство
W(v) - W(u) >(f- ет, v-u) W € Кдоп, (9.4.36)
где
w(D(v))dQ, если w(D(v)) € L' (О),
W(v) = “ (9.4.37)
/ оо в противном случае.
Мы изучим эту задачу, предполагая, что
(Г (г) = 1 а(у, у) + Ф(у), (9.4.38)
где a (v, v) — билинейная непрерывная коэрцитивная форма на ИЛ, а Ф — выпуклый
п.н.сн. собственный функционал на Wi. В этом случае мы приходим к вариационным
неравенствам вида (9.3.26, 28). Предположение (9.4.38) выполняется, например, когда
w(D) представимо в виде суммы w(D) и w(D), где w(D) — квадратичная положитель-
но-определенная форма на IR6, aw — выпуклый п.н.сн. собственный функционал иа IR6.
Далее, предполагается, что функционал Ф можно аппроксимировать на ИЛ с помощью
последовательности выпуклых дифференцируемых по Фреше функционалов Фс, таких
что
т т
(i) j Ф£(г)Л -► j Ф(у)Л W € Г2 (ОТ, Wi); (9.4.39)
о о
(ii) d$c(O)/dv = 0 Ve > 0; (9.4.40)
(iii) для любой последовательности (ve), для которой vc -» и слабо в Г2 (ОТ, ИЛ) при
т
е -> 0, а значения интегралов j ic(vc)dt ограничены, в совокупности справедливо не-
равенство 0
т т
lim inf j Ф£(ус)Л > j Ф(у)Л. (9.4.41)
о о
§ 9.4. Другие задачи для жидкостей Бингама
359
Имеет место следующий результат:
Предложение 9.4.4. Если выполнены предположения (i) — (iii), то предложение 9.3.1
справедливо также для общего закона (3.3.90), где W задаётся формулой (9.4.38).
Доказательство то же, что н для предложения 9.3.1 (см. также доказательство пред-
ложения 8.2.1), и поэтому мы его опустим.
Если представить W(v) в виде (9.4.38) нельзя, то по-прежнему можно получать вари-
ационные неравенства (9.3.26, 28), но с а(и, v - и) + Ф(г) - Ф(м), заменённым на
K'(v) - W(u). Однако вопросы существования и единственности решения в этом случае
остаются открытыми.
Соответствующие стационарные задачи очень напоминают задачи, изученные в § 6.1.
Рассмотрим здесь стационарную задачу ламинарного течения жидкости в цилиндриче-
ской трубе прн заданном градиенте давления. Предполагается, что
w(D) > cfDijDij), (9.4.42)
где с > 0 — константа. Будем искать решение и € Й' (Е), такое что
1Р(ц) - W(u) >(р0, v - и) Й‘(Е), (9.4.43)
где W определяется формулой (9.4.37), в котором интеграл берётся по области Е. Это
вариационное неравенство имеет ту же природу, что и (6.1.11), н эквивалентно следую-
щей задаче минимизации:
П(м) = тт(П(г)|у€Й‘(Е)), (9.4.44)
где
П(у) = W(v) - (ро, v). (9.4.45)
Справедлив следующий результат:
Предложение 9.4.5. У вариационного неравенства (9.4.43) существует хотя бы одно ре-
шение и € Й' (Е). Если функция w является строго выпуклой, то это решение един-
ственно.
Доказательство совпадает с доказательством предложения 6.1.3 н потому здесь не
приводится.
Для рассматриваемой задачи можно установить результаты, аналогичные результа-
там § 6.1. Если вместо (9.4.42) выполняется соотношение вида
w(D) > с(Р^п, (9.4.46)
где с > 0 — константа, 1 < р < оо, то можно поставить задачу решения неравенства
(9.4.43) для и, v € Й'1,Р(Е). В этом случае удаётся доказать существование решения, а
также некоторые двойственные утверждения. В этой связи отсылаем читателя к работе
{177], где задача § 6.1 изучается в пространствах Lp.
ЧАСТЬ 3
Численные приложения
ГЛАВА 10
Численное исследование
статических задач на неравенства
Цель последних двух глав — описать некоторые конкретные примеры
приложения развитой выше теории. В настоящей главе обсуждаются
вычислительные аспекты статических задач на неравенства.
Вначале рассматриваются задачи об одностороннем контакте и за-
дачи с трением для материала, подчиняющегося как закону Г\ка,. так
и общему субдифференциальному голономному соотношению (3.3.57).
Далее для последнего случая изучается задача о кручении циллиндри-
ческих или призматических стержней. В заключительном параграфе
главы обсуждается применение линейной теории к некоторым классам
неравенств.
Во всех приложениях необходимо решать квадратичную или, в об-
щем случае, произвольную нелинейную задачу оптимизации. В этой
связи заметим, что, начиная с работы Фикеры [97], посвящённой мате-
матическому исследованию односторонней контактной задачи для ли-
нейно-упругого тела с жёсткой опорой, многие авторы применяли ал-
горитмы квадратичного программирования для численного решения
задач на неравенства, возникающих в прикладной механике и при ана-
лизе конструкций, в то самое время как авторы, упоминавшиеся в пре-
дыдущих главах, разрабатывали математические аспекты решения
этих задач.
Здесь следует подчеркнуть, что уже давно Майер [184; 185; 190;
191], Дюпюи и Пробст [80], Нитсиотас [235], Конри и Сейрег [56],
Калькер и ван Ранден [157], Сэйех [299] и Фишер [100] и ряд других
авторов пришли к пониманию необходимости нового численного под-
хода, а именно подхода, основанного на использовании алгоритмов
оптимизации, при исследовании задач на неравенства. Действительно,
Введение
361
статические односторонние задачи формулируются как вариационные
неравенства или как задачи минимизации с ограничениями, а также
задачи не эквивалентны системе дифференциальных уравнений, как
это имеет место в случае статических двусторонних задач, В послед-
нем случае после дискретизации мы получаем систему алгебраических
уравнений, в первом же случае — задачу квадратичного -или нелиней-
ного программирования (в зависимости от степени нелинейности соот-
ветствующих функций энергии). При этом в некоторых задачах прихо-
дится применять алгоритмы нелинейного программирования, не ис-
пользующие производных (если подлежащая минимизации функция
энергии является недифференцируемой).
Конечно, наивно ожидать, что все односторонние задачи можно ре-
шить с помощью одного и того же алгоритма оптимизации. Выбор
алгоритма существенно зависит от природы задачи, т. е. от миними-
зируемой функции и дополнительных условий. Этот факт и вычисли-
тельные трудности, связанные с применением алгоритмов оптимиза-
ции, объясняют, почему и сейчас исследованиям в области численного
решения задач на неравенства уделяется большое внимание. В наши
цели не входит подробное описание всех применяемых алгоритмов
оптимизации. Интересующийся читатель может обратиться к много-
численным руководствам по квадратичному и нелинейному програм-
мированию (см., например, [143; 166]). Для проведения численных рас-
чётов непрерывные задачи дискретизуются с помощью метода конеч-
ных элементов, и чтение настоящей главы предполагает некоторое
знакомство с этим методом (см., например, [101, 67, 345]).
Всё сказанное выше относится к выпуклым функциям энергии. Не-
выпуклые функции энергии приводят к полувариационным неравен-
ствам, которые после регуляризации и дискретизации приводят в свою
очередь к нелинейным дифференциальным (соотв. алгебраическим)
уравнениям для динамических (соотв. статических) задач [348].
При. использовании любого метода аппроксимации фундаменталь-
ной проблемой является доказательство сходимости и вывод оценок
погрешности для приближённого решения. Однако эти вопросы (равно
как и многие другие вопросы, связанные с процессом дискретизации)
выходят за рамки настоящей монографии. К тому же строгая матема-
тическая теория аппроксимации развита пока лишь для некоторых уз-
ких классов вариационных неравенств, имеющих ограниченное практи-
ческое применение и заведомо не охватывающих все рассмотренные
в предыдущих главах задачи. По этому вопросу отсылаем читателя
к работам [120; 121; 131; 354; 355] и приведённой там литературе.
362
Гл. 10. Численное исследование статических задач на неравенства
§ 10.1. ЗАДАЧИ ОБ ОДНОСТОРОННЕМ КОНТАКТЕ
И ЗАДАЧИ С ТРЕНИЕМ
10.1.1. Дискретные формы задач на минимум потенциальной
и дополнительной энергий
В различных областях техники часто используются конструкции, кото-
рые находятся в контакте с опорой, но не прикреплены к ней. При
эксплуатации конструкции не исключена возможность того, что нару-
шится её контакт с опорой и/или конструкция начнет скользить по
опоре; соответственно мы будем говорить об одностороннем контакте
или о контакте с трением между конструкцией и опорой. Краевая за-
дача с трением для линейно-упругого тела обсуждалась в гл. 5, а зада-
ча об одностороннем контакте представляет собой частный случай за-
дачи, рассмотренной в § 6.2. В данном параграфе проводится числен-
ное исследование смешанной задачи об одностороннем контакте с
трением, вначале для линейно-упругого тела, а затем для тела, удов-
летворяющего соотношению (3.3.57).
В этой задаче области нагрузок, при которых конструкция сохраня-
ет контакт с опорой, и области, где возможно скольжение, заранее
не известны и, следовательно, подлежат определению.
Вначале мы обсудим отдельно задачу об одностороннем контакте
и задачу с трением. Как и в п. 6.2.1, на некоторой части Гз границы
конструкции рассмотрим граничное условие (3.3.7) (соотв. (3.3.10)),
где Jn (соотв. /г) задаётся формулой (3.3.20) (соотв. (3.3.32)). Условие
(3.3.7) вместе с условием
St = Ст на Гз (10.1.1)
(где Ст задано) образует полный набор граничных условий для задачи
об одностороннем контакте, а (3.3.10) вместе с условием
Sn = Cn на Гз (10.1.2)
(где Cn задано) — полный набор граничных условий для задачи с тре-
нием. Вместо (10.1.1) (соотв. (10.1.2)) можно было бы наложить на
Ut, St (соотв. un, Sn) и другие граничные условия, например ит = 0
(соотв. un = 0). Далее, разобьём тело на т элементов. Соответствую-
щие векторы напряжения и векторы деформации обозначим s, и е;
(/ = 1, ..., т). Чтобы единообразно формулировать дискретные вари-
ационные принципы, будем описывать напряжения и деформации каж-
дого элемента в терминах естественных обобщенных компонент на-
пряжений и деформаций [7—9]. Обобщённые деформации не зависят
от «твёрдых» движений, а обобщённые напряжения самоуравновеши-
§ 10.1. Задачи об одностороннем контакте и задачи с трением
363
ваются в каждом элементе.7 Этот подход оказался плодотворным
при выводе дискретных вариационных принципов в теории пластич-
ности (см. [190]).
Конфигурация конструкции описывается вектором перемещений в
узлах и (в фиксированной декартовой системе координат). На части
Гц (соотв. Г/г) границы вектор заданных перемещений в узлах (соотв.
сил) обозначается через U (соотв. F). Компоненты U интерпретируют-
ся как начальные деформации в дополнительных жёстких стержнях,
расположенных в узлах Гу в соответствующих направлениях. Вектор
U входит как составная часть в вектор начальной деформации ео, а
F — в вектор нагрузки р, который состоит из вектора р внешних на-
грузок и вектора S реакций в узлах Гх, т. е. р = [рг, Sr]r.
В геометрически линейной теории предполагается, что дискретизо-
ванная задача об одностороннем контакте описывается следующими
соотношениями:
Gs = р, (10.1.3)
е = Gru, (10.1.4)
е = ео + Fos, (10.1.5)
— Sn € An(un) на Гх, (10.1.6)
Sr = Ст на Гх. (10.1.7)
Здесь G — матрица равновесия, GT—транспонированная к ней матри-
ца, Fo — естественная матрица гибкости,
Sn = [Sn,, ..., Sn„], Un = [UNi> • • • , Их,],
где п — число узлов на Гх, и
An(ujv) = [(d/vJiiN,))7, ..., (3y’N„(u№))r]r.
Для задачи с трением соотношения (10.1.6—7) следует заменить соот-
ношениями (3.3.10) и (10.1.2), записанными для дискретизованной кон-
струкции в виде
— St€At(ut), Sn = Cn, (10.1.8)
где
Ar(ur) = [(аЛ,(иг1))г, .... (a/r„(ur„))r]r.
В качестве дополнительных условий следует взять уравнения, связыва-
1 См. также [276], где указаны векторы s<, е,- для шарнирно соединённых стержней,
балок, треугольных и четырёхугольных элементов (силы действуют в плоскости элемен-
тов), пластин, тетраэдров (сплошных) н т. д.
364
Гл. 10. Численное исследование статических задач на неравенства
ющие un, uy и Sn, St с и и S соответственно. Запишем эти уравнения
в виде
Sn = Qs, Sr = Rs, un = Nu, ur = Tu, (10.1.9)
где Q, R, N и T — соответствующие матрицы. Как и выше, можно
проверить7, что для дискретной задачи об одностороннем контакте
условие минимума потенциальной энергии (см. (6.2.8)) записывается
в виде
П1(и) = min{ni(v)ljNXvN() < °о V/ers, vn = Nv, vr = Tv}. (10.1.10)
Здесь
IIi(v) = j vrKv + $(vn) - frv - CrVr, (10.1.11)
где К = GFo^'G7—матрица жёсткости конструкции, 4>(vn)— потенци-
альная энергия опоры, определяемая по формуле
<>(vn) = S Jn,(vn), (10.1.12)
i = 1
а
f = fi + fo = + fo, fo = GF<71e0. (10.1.13)
Отметим, что условие (10.1.10) выполняется для всех моделей пере-
мещений (скажем, для модели с обобщёнными координатами для ин-
терполяционной модели). Значения К и f0, соответствующие данной
модели (см., например, [67; 345]), будут учтены в (10.1.11). Условие
минимума дополнительной энергии (см. (6.2.41)) принимает вид2
nj(s) = min (Ilf (t) I Gt = р, Tr = Сг, Д( - Tn) < «>
V/eTs, Tn = Qt, Tr = Rt}, (10.1.14)
где G = [GrlGr]r и
n[(t) = 1 trFot + ФЧ-Tn) + ejt. (10.1.15)
1 Либо переписывая (6.2.8) в дискретной форме, либо исходя непосредственно из
(10.1.3—7) и используя тождество pr(u* - u) = sr(e* - е) (теорема Грина— Гаусса для
дискретизованной свободной конструкции), которое справедливо для любых е*, и*,
удовлетворяющих (10.1.4).
2 Формулу (10.1.15) можно вывести непосредственно, используя тождество er(s° -
- s) = ur(p° — р), справедливое для всех s°, р°, которые удовлетворяют условиям рав-
новесия.
§ 10.1. Задачи об одностороннем контакте и задачи с трением
365
Здесь Фс есть часть дополнительной энергии, связанная с граничными
условиями на Г$ и задаваемая формулой
Фс(-Т^ = ЕЛ(-Тм). (10.1.16)
i = i
Дополнительные условия jn( wf) < 00 и - Tni) < °° эквивалент-
ны условиям vn, 0 и Tn, 0 соответственно, если на Г$ выполнены
условия Синьорини — Фикеры (т. е. если опора жёсткая). В этом слу-
чае в (10.1.10) и (10.1.14) не появляются соответственно члены Ф(ид)
и Фс( —Тдг). Для краевой задачи с трением условие минимума потенци-
альной энергии (см. (5.2.1)) для дискретизованной конструкции имеет
вид
Пг(и) = min{Il2(v)l vn = Nv, vr = Tv), (10.1.17)
где
n2(v) = 1 vrKv + £/JCnJ W - frv - c£vn. (10.1.18)
2 , = i
Аналогично условие минимума дополнительной энергии (см. (5.3.8))
записывается в виде
II£(s) = min(II£(t) I Gt = р, TN = CN, I TT, I д.1 CNi I
Vz€rs, TN = Qt, Tr=Rt), (10.1.19)
где
П£(1) = 1 trFot + eort. (10.1.20)
Если для каждого элемента вместо закона Гука выполняется неко-
торое субдифференциальное соотношение, т. е. если
s, € dwi(d - eoi), (10.1.21)
где w; — выпуклый п.н.сн. собственный функционал, то утверждения
о минимуме потенциальной и дополнительной энергий по-прежнему
справедливы (см. § 6.3). Потенциальная и дополнительная энергии П1
и для задачи об одностороннем контакте равны соответственно
fli(v) = FK(v) + Ф(¥дг) - ffv - Crvr (10.1.22)
и
flj(t) = IT(t) + ФЧ-Tn) + eort, (10.1.23)
где
IF(v) = S Wi(e,(v) - eot) (10.1.24)
366
Гл. 10. Численное исследование статических задач на неравенства
Vе (t) = Е wf(ti). (10.1.25)
i= 1
Решение и (соотв. s) задачи минимизации ищется на тех же допу-
стимых множествах, что и в задаче (10.1.10) (соотв. (10.1.14)), но дол-
жно ещё удовлетворять соотношению
wz(ez(v) - ео/) < оо (соотв. wf(t,) < оо), / = 1, ..., т.
Для граничных условий с трением потенциальная энергия равна
д о
fl2(v) = FK(v) + £ /iICnJ IvrJ - ffr - C£vn. (10.1.26)
i = i
Решение задачи минимизации должно удовлетворять дополнитель-
ным условиям из (10.1.17), а также неравенствам Wi(ei(v) - во») < оо,
г=1, ..., т. Дополнительная энергия имеет вид
Ш(0 = 1Г(1) + ejit. (10.1.27)
В точке её минимума должны быть выполнены дополнительные усло-
вия из (10.1.19), а также неравенства wf(t/) < оо, i = 1, ..., т. Гранич-
ные условия, учитывающие одновременно оба фактора — односторон-
ний контакт и трение, — имеют следующий вид (см. п. 3.3.1):
если mn < 0, то Sn = 0 и St = 0, (10.1.28)
если un >0, то - Sn € /?i(«n);
если ISrl C/JSnL то Wr=0, (10.1.29)
если I St I = д I Sn I, то существует такое X > 0, что ит = - XSr.
Эти условия означают, что в тех точках, где контакта между телом
и опорой нет, нет и силы реакции, а в точках контакта имеются нор-
мальная реакция Sn€ -jSi(mn) и сила трения, действующая в касатель-
ном к опоре направлении. Для этой задачи сформулировать вариаци-
онное неравенство относительно перемещений или напряжений нельзя,
поскольку Sn в (10.1.29) не задано. В [241; 249] предложен эвристиче-
ский алгоритм для численных расчётов. На первом шаге мы предпола-
гаем, что SV° = 0 на Гх, и, решая задачу об одностороннем контакте,
получаем нормальную реакцию Sn на Гх. На втором шаге мы решаем
задачу с трением для Cn = Sjp и получаем соответствующее значение
Sr, которое обозначим через Теперь снова решаем задачу об одно-
стороннем контакте для Сг= и т. д., пока разности S# + 1) -
и S^ + 1) - S?) не станут достаточно малыми. В этой связи см. также
[90; 232].
§ 10.1. Задачи об одностороннем контакте и задачи с трением
367
10.1.2. Приложения
В качестве первого приложения рассмотрим задачу о контакте для ли-
нейно-упругой пластины, изображенной на рис. 10.1.1. Пластина поко-
ится на жёсткой опоре, так что должны быть выполнены граничные
условия Синьорини — Фикеры. Задача минимизации потенциальной
Рис. 10.1.1. Задача Синьориии — Фикеры для квадратной пластины (Е = 4,5 • 103
кН/см2, у = 0.20, Ст = 0).
энергии приводит к квадратичной задаче оптимизации, которая реша-
ется с помощью алгоритма Хильдрета и д’Эсопо (см. [166]). Этот ал-
горитм пригоден для нахождения минимума строго выпуклых квадра-
тичных функций при дополнительных условиях вида равенств и нера-
венств и представляет собой итеративный метод, являющийся по
существу модификацией классического алгоритма Гаусса — Зайделя
для решения систем линейных уравнений. Результат применения алго-
ритма представлен на рис. 10.1.2.
Рис. 10.1.2. Диаграмма контактных напряжений.
368
Гл. 10. Численное исследование статических задач на неравенства
6.0м
8.0м
Ь)
(АЕ) \ (CD) — область контакта
(АВ) —трение скольжения
(ВС) и (DE) — статическое трение
Рис. 10.1.3. Односторонняя контактная задача с треннем для вертикальной рамы
(рг = 2pi = 2 • 104 Н/м; Е = 2.05 • 103 кН/см2 прн в 5%о; Е = 1.80 • 103 кН/см2
прн в > 5%о; для перекладин и стоек F = 0.40 • 0,45 м2, для опорной перекладины
I = 10“2 м4, F = 2 м2, д = 0.50).
В качестве второго приложения рассмотрим задачу о контакте с
трением для нелинейно-упругой рамы, изображённой на рис. 10.1.3(a)
[249]. Балочные элементы рамы имеют кусочно-линейную диаграмму
деформация — напряжение, а балка, лежащая в основании, находится
в одностороннем контакте с грунтом, воздействие которого на раму
описывается SwUw-диаграммой, приведённой на рис. 10.1.4. Численные
расчёты были проведены с помощью алгоритма гибкого допуска Па-
виани и Химмельблау [143]. Необходимость применения алгоритма
минимизации, в котором не используются производные, связана с на-
§ 10.1. Задачи об одностороннем контакте и задачи с трением
369
-Sn
Балочный элемент (см. рис. 10.1.3) 10"4Л/ (кНм!
(1) (2) (3)
1 - 17 -83.38 -37.28 -70.63 -20.60 -50.03 -31.39
17 - 18 -48.07 0.00 -39.24 0.00 -44.14 - 1.96
18 - 19 81.42 90.25 74.56 93.20 78.48 93.20
6-16 -69.65 -68.67 -70.65 -63.76 -73.58 -68.67
10 - 11 -48.07 - 8.83 -44.14 -17.66 -34.34 -19.62
Рис. 10.1.4. График зависимости Sn от un и сравнительная таблица значений М для
некоторых балочных элементов рамы, изображенной на рис. 10.1.3, при различных
предположениях о контакте: (1) односторонний контакт с трением; (2) односторон-
ний контакт без трения; (3) классический метод.
личием недифференцируемых членов в выражении для потенциальной
энергии. Главная особенность указанного алгоритма состоит в том,
что улучшение значения целевой функции проводится как с помощью
допустимых, так и с помощью почти-допустимых точек (точек, не
принадлежащих области допустимых значений). Одно из достоинств
этого метода состоит в том, что мы не тратим машинное время на
то, чтобы следить,не вышли ли мы из области допустимых значений.
На рис. 10.1.3(b) изображены получающиеся диаграммы нормальных
и касательных перемещений.
Здесь рассматривались только выпуклые потенциалы (см. § 4.3.).
Обширная литература посвящена исследованию различных классов за-
дач о контакте с помощью метода конечных элементов. В этом случае
вначале с помощью связующих элементов приближённо моделируются
условия контакта, а затем применяется метод приращений или метод
проб и ошибок. Более подробную информацию по этому вопросу чи-
татель может найти, например, в [139; 114].
370
Гл. 10. Численное исследование статических задач на неравенства
§ 10.2. КРУЧЕНИЕ ЦИЛИНДРИЧЕСКИХ
ИЛИ ПРИЗМАТИЧЕСКИХ СТЕРЖНЕЙ
С ВЫПУКЛОЙ ЗАВИСИМОСТЬЮ ПЛОТНОСТИ
ПОТЕНЦИАЛЬНОЙ ЭНЕРГИИ ОТ ДЕФОРМАЦИИ
10.2.1. Постановка задачи
В этом параграфе изучается задача о кручении цилиндрических или
призматических стержней, удовлетворяющих общему суперпотенци-
альному определяющему соотношению (3.3.57). Проводимые ниже
рассуждения представляют собой конкретизацию рассуждений §6.1
применительно к задаче о кручении. Классы материалов, описывае-
мые рассматриваемым здесь суперпотенциальным соотношением, об-
суждались в п. 3.3.2.
Пусть й — открытая ограниченная односвязная область в IR3, зани-
маемая стержнем в недеформированном состоянии. Стержень отнесён
к фиксированной декартовой системе координат ОХ1Х2Х3. Обозначим
через Е поперечное сечение стержня, параллельное плоскости 0Х1%2, а
через Ге — его границу, которая предполагается регулярной. Пусть
Г/ — боковая поверхность стержня, а Го и Г* — поперечные сечения,
отвечающие хз = 0 и Хз = h, vjis h — длина стержня (рис. 10.2.1).
Стержень скручивается под действием момента М, приложенного
к верхнему концу Г» стержня; нижний конец стержня закреплён. Что-
бы упростить задачу, предположим, что возможно свободное искрив-
Рис. 10.2.1. Задача о кручении цилиндра.
§ 10.2. Кручение цилиндрических или призматических стержней
371
ление поперечного сечения в Хз-направлении. Краевая задача о круче-
нии ставится так: найти для данного угла кручения а поле напряжений
а = <ау}, поле деформаций £ = {су) и поле перемещений и = (м7) (/,
J = 1, 2, 3), удовлетворяющие соотношениям (6.1.2, 3) и
<Hj,j = 0 (10.2.1)
в й и граничным условиям
О11Л1 + О12П2 = 0 (z = 1, 2, 3) на Г,, (10.2.2)
азз = 0 на ГоиГА, (10.2.3)
Ml = М2 = 0 на Го, (10.2.4)
Ml = -0X2, м2 = oxi на Г», (10.2.5)
где п = {ль пг} — орт внешней нормали к Г/. Эта краевая задача явля-
ется частным случаем задачи, рассмотренной в п. 6.1.1, и потому при-
менимы предложения 6.1.4 и 6.1.5 о минимуме потенциальной и
дополнительной энергий7. Отсюда следует, что поле перемещений и
минимизирует потенциальную энергию
П(м) = j w(e(u))dD (10.2.6)
a
на множестве (7ДОП всех кинематически допустимых полей перемеще-
ний (см. (6.1.9)), а поле напряжений а минимизирует дополнительную
энергию
ГГ(а) = j м^(а)<Я2 - a j (хкьз - X2ffi3)dxidx2 (10.2.7)
о г*
на множестве Едоп всех статически допустимых полей напряжений
(см. (6.1.27)). Множество 17доп (соотв. Едоп) определяется дополни-
тельными условиями (10.2.4, 5) (Соотв. (10.2.1—3)), а также неравен-
ством w(£(m)) < оо (соотв. ^(а) < оо) (обратите внимание на различие
между (10.2.6, 7) и (6.1.10, 29)). Случай упруго-идеально-пластичного
материала (см. (3.3.83)) подробно изучен в [118; 170; 316]. Для одно-
родного и изотропного материала, подчиняющегося критерию текуче-
сти Мизеса, поле напряжений а, минимизирующее ГГ, удовлетворяет
(см. [170]) соотношениям
все оц (/, j - 1, 2, 3), кроме ав и <тгз> равны 0 в й, (10.2.8)
ау.з = 0 в 0. (Ю.2.9)
1 В нашем случае Г и U Гг # 0, но этот факт не использовался при доказательстве
указанных предложений.
372 Гл. 10. Численное исследование статических задач на неравенства
Этот факт позволяет ввести функцию напряжений феН1^), что при-
водит к простой вариационной постановке задачи. Для общего опреде-
ляющего соотношения (6.1.3) такой результат пока не установлен, и
потому для того, чтобы ввести функцию напряжений, мы предполо-
жим, что выполнены соотношения (10.2.8). В большинстве техниче-
ских приложений такое предположение оправдано7. Из (10.2.1, 8) по-
лучаем (10.2.9) и
<лз, 1 + 023,2 = 0, (10.2.10)
и, значит, можно ввести функцию напряжений 0 = 0(xi, Хг), такую
что
^ = 013, ^=-023 В Е. (10.2.11)
дхг 3X1
Поскольку вектор напряжений касателен к Гц, то d-ф = 0 на Ге, и из
(10.2.11) следует, что можно считать ф - 0 на Ге. Далее, определим
функционал wc , положив wc(^) = и'с(о(^)). Задача минимизации до-
полнительной энергии записывается так:
ТО) = min{TO°)l € Ёдоп), (10.2.12)
где
Пс(0) = j wcW)cKl - 2а j (10.2.13)
о е
Ёдоп= €#(£), ТО°)<°0). (10.2.14)
В частном случае упруго-идеально-пластичного материала, подчи-
няющегося критерию текучести Мизеса, задача (10.2.12) принимает
вид
ШМ = тт{ТО0Х0€Я1(Е)> Igrad 0° I g], (10.2.15)
где
П?(^) = h j (grad ^)2сЕ - pfo- j ^(П2. (10.2.16)
Е Е
Для этой задачи между областями упругости (Igrad < g) и пластич-
ности (I grad ф I = g) в поперечном сечении образуется свободная гра-
ница. Если ф получено для данного а как решение задачи минимиза-
ции (10.2.12), то соответствующий крутящий момент М выражается
1 См. (278].
§ 10.2. Кручение цилиндрических или призматических стержней
373
формулой
Af=2j^E. (10.2.17)
Е
Обобщение полученных выше вариационных принципов на случай
многосвязных поперечных сечений требует лишь незначительной мо-
дификации проведённых выше рассуждений (см. [169]).
10.2.2. Дискретизация и численные примеры
Численные расчёты проводятся путём применения того или иного
алгоритма минимизации к функционалам энергии после дискретизации
непрерывной задачи с использованием метода конечных элементов.
Поперечное сечение Е разбивается на Q элементов Eq, 1 g Q.
Пусть N— общее число узлов Рп, 1 n N, из которых N' лежат
внутри сечения Е, а остальные N - N'—на его границе Гд
(рис. 10.2.2).
*2
Рис. 10.2.2. Дискретизация поперечного сечения.
374 Гл. 10. Численное исследование статических задач иа неравенства
В разбираемых ниже примерах выбраны треугольные элементы, и
в каждом из них функция напряжений аппроксимируется линейным по-
линомом. Пусть фд (X = 1, 2, 3) — значения ф в вершинах элемента Eq.
Тогда имеет место соотношение
з
^(хъ х2) = S4(X1, х2)^, (10.2.18)
Х= 1
где 4 = 1 в Х-м узле и = 0 в остальных узлах элемента Eq и вне
него. Надо найти значения $q, которые минимизируют Пс. Подста-
вим в (10.2.12) функцию \[/d из (10.2.18) и рассмотрим векторы
Ф = WL .... ^]г и * = .... \МГ,
которые связаны соотношением
ф = Sf.
Здесь S — матрица размера 3Q х N' из нулей и единиц, учитывающая
связи между элементами и граничные условия. Если записать (10.2.18)
для всех элементов в виде
^d(xi, х2) = f’V, (10.2.19)
где f = |/i(xi, Хг), ..., Jq(xi, хг)], то дискретизованная форма (10.2.12)
выглядит так:
W) = minfftrf^o) I € ЁдОП), (10.2.20)
где
W) = ftc(frS^), (10.2.21)
а Ёд0П — дискретизованный вариант множества Ёдоп. Дополнительное
условие wc(^) < оо в Е в дискретизованной задаче может выполняться
в определённых точках элемента Eq, или в его центре тяжести, или
в какой-нибудь интегральной форме, например:
f j lwc(^d(xi, X2))\dxidxi\ lE'gl-1 < co,
\я, /
где I Eq I —площадь элемента Eq.
Вопрос о сходимости решения полученной конечномерной задачи
обсуждался [120] лишь для случая голономного упруго-идеально-
пластического закона. Численное решение задачи (10.2.20) получено с
помощью алгоритма нелинейной оптимизации. Как и в § 10.1, приме-
нялся метод гибкого допуска Павиани и Химмельблау.
§ 10.2. Кручение цилиндрических или призматических стержней
375
Рис. 10.2.3. Данные для двух разбираемых в тексте примеров: St 42/50, в = 12 см,
Л = 1 м, G = £/2(1 + г>) = 83.36 кН/мм2, g = 23.78 кН/см2.
В качестве численных примеров рассмотрим стальные стержни, у
которых поперечное сечение представляет собой соответственно рав-
носторонний треугольник и квадрат (рис. 10.2.3). Пусть материал
стержня является упруго-идеально-пластичным и удовлетворяет крите-
рию текучести Мизеса (голономная теория).
Итак, мы имеем дело с задачей минимизации (10.2.15). После дис-
кретизации применяем метод гибкого допуска. Условие I grad ф I q
выполнено для каждого элемента. Для данного угла кручения а вы-
числяем функции напряжений ф и крутящий момент М. На рис. 10.2.4
представлены графики зависимости крутящего момента М от угла
кручения на единицу длины D = a/h для обоих случаев. Момент МЕ
(соотв. Мр), для которого в некоторых точках поперечного сечения
достигается предел текучести (соотв. всё сечение становится пластиче-
ским), в случае треугольного сечения равен 20.80 кНм (соотв.
33.75 кНм). Эти моменты отвечают углам кручения на единицу длины
De = 0.06 рад/м и Dp = 0.20рад/м. В случае квадратного сечения
МЕ = 88.25 кНм для DE - 0.04 рад/м и Мр = 136.30 кНм для Dp =
= 0.22 рад/м.
Для проверки полученных численных результатов вычислим значе-
ния МЕ и Мр по формулам прикладной теории упруго-пластичности
[278]. В случае треугольника получаем МЕ - ga3/20 = 20.54 кНм,
М [кНм}
О 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.0 2.2 103 D [рад/см]
М [кНм]
D М
0.0002 7.20
0.0004 13.90
0.0006 20.80
0.0008 25.70
0.0010 28.95
0.0012 30.51
0.0014 31.23
0.0016 31.90
0.0018 32.50
0.0020 33.75
Ы
Рис. 10.2.4. Графики зависимости М от D (а) для
треугольного, (Ь) для квадратного сечения.
D М
0.0002 47.55
0.0004 88.25
0.0006 118.95
0.0008 126.35
0.0010 129.52
0.0012 131.05
0.0014 132.10
0.0016 133.55
0.0018 134.80
0.0020 135.40
0.0022 136.30
М = 20.80 М = 25.70 М = 28.95
D = 0.0006 D = 0.0008 О = 0.0010
Рис. 10.2.5. Области пластичности и упругости.
М = 126.35
D = 0.0008
M = 132.10
M = 133.55
D = 0.0014
D = 0.0016
Sk ^5
risk ЛГ.
'ISkJSF
'ISSF
^SSk
^SF'ISk
JBIF ^Sk
W 'IS
M = 129.52
D = 0.0010
M= 134.80 M= 136.30
D = 0.0018 D = 0.0022
Рис. 10.2.6. Области пластичности и упругости.
378
Гл. 10. Численное исследование статических задач на неравенства
Мр - gcf/Yl = 34.24 кНм, а в случае квадрата МЕ = (1/1.585) ga3/3 =
= 86.42 кНм, Мр = ga'^/З = 136.98 кНм.
На рис. 10.2.5 и 10.2.6 показан рост областей пластичности при
возрастании D и М, а на рис. 10.2.7—10.2.10 представлены значения
I
II 12 Н 14 15
Л4В = 20.80
De = 0.0006
Рп Ч> Vх теор ЕЧ 013 013
[N 1Па]
1 40.10 40.02 1 19.90 -41.36
2 32.61 33.84 2 47.95 -41.36
3 38.70 37.96 3 47.95 -55.82
4 19.65 19.91 4 73.86 -26.42
5 28.16 28 45 5 75.30 — 55.82
6 31.80 31.20 6 123.10 -26.42
7 5.43 5.98 7 75.30 -50.85
8 13.15 13.24 8 123.10 -28.25
9 17.20 17.46 9 152.48 - 9.48
10 18-96 18.93 Ю 65.14 -50.85
11 0.00 0.00 11 152.68 -28.25
12 0.00 0.00 12 201.80 9.48
13 0.00 0.00 13 65.14 0.00
14 0.00 0.00 14 152.68 0.00
15 0.00 0.00 15 201.80 000
16 233.48 0.00
Рис. 10.2.7. Случай треугольного сечения. Значения ф, ^геор,ац и ан для М = МЕ.
MF = 33.75
Dp= 0.0020
Рп Ч> о 13 | 013
[МПа]
1 69.35 / 94.08 -39.26
2 55.30 2 167.36 -39.26
3 61.20 3 167,. 36 -39.26
4 34.85 4 235.46 0.00
5 40.80 5 167.75 -39.26
6 40.80 6 235.46 0.00
7 14.62 7 167.75 -39.26
8 20.38 8 235.46 0.00
9 20.38 9 235.46 0.00
10 20.38 10 167.75 -39.26
II 0.00 11 235.46 0.00
12 0.00 12 235.46 0.00
13 0.00 13 167.75 0.00
14 0.00 14 235.46 0.00
15 0.00 15 235.46 0.00
/6 235.46 • 0.00
Рис. 10.2.8. Случай треугольного сечения. Значения ф, ац и огз для М = Мр. Теоретиче-
ское значение получается при D1" -» «>.)
§ 10.2. Кручение цилиндрических или призматических стержней
379
НМНЙМЙ
mw wh
МЕ = 88.25
Рис. 10.2.9. Случай квадратного сечения. Значения ф, ои и а2з для М - МЕ.
Мр = 136.30
/И = 0.0022
Рп V Еа о о аи
[МПа]
1 72.31 / 36.00 -24.78
2 63.15 2 73.75 -24.78
3 66.80 3 73.75 -59.45
4 43.05 4 79.17 -19.40
5 52.00 5 10.01 -59.45
6 55.05 6 135.35 -19.40
7 17.25 7 108.11 -64.28
8 26.70 8 135.35 -32.27
9 31.62 9 144.01 -10.62
10 33.21 10 115.41 -64.28
II 0.00 11 179.72 -31.27
12 0.00 12 212.19 -10.62
13 0.00 13 115.41 0.00
14 0.00 14 179.72 0.00
15 0.00 15 212.19 0.00
16 222.69 0.00
Р„ щ £„ ° 13 Оп
[МПа]
1 130.90 / 166.87 0.00
2 105.98 2 235.40 0.00
3 105.98 3 . 235.40 0.00
' 4 70.78 4 235.40 0.00
5 70.78 5 235.40 0.00
6 70.78 6 235.40 0.00
7 35.62 7 235.40 0.00
8 35.62 8 235.40 0.00
9 35.62 9 235.40 0.00
10 35.62 10 235.40 0.00
II 0.00 11 235.40 0.00
12 0.00 12 235.40 0.00
13 0.00 13 235.40 0.00
14 0.00 14 235.40 0.00
15 0.00 15 16 235.40 235.40 0.00 0.00
Рнс. 10.2.10. Случай квадратного сечения. Значения ап и а2з для М = Мр. (Теоретиче-
ское значение получается при Dp -»«>.)
(в некоторых случаях для сравнения приведены значения ^теор, по-
лученные методами теории упругости) и значения ап, агз для МЕ и
Мр.
Отметим, что применение алгоритмов оптимизации для решения
380
Гл. 10. Численное исследование статических задач на неравенства
задачи об упруго-пластическом кручении позволяет непосредственно
определить свободную границу между упругой и пластической обла-
стями для данного угла кручения. В классической теории упруго-
пластического кручения это можно сделать, за исключением неболь-
шого числа случаев (сечений определённой формы) лишь с помощью
метода проб и ошибок или метода «аналогии с кучей песка» [275]. В
[250] эта задача решена в предположении, что геометрические и физи-
ческие параметры стержня являются случайными величинами. Для ре-
шения получающегося при этом стохастического неравенства применя-
ется комбинация детерминированного алгоритма оптимизации с мето-
дом Монте-Карло (см. [222; 247; 92], а также [223], где обсуждается
идеология такого подхода). В приведённых выше примерах использо-
вались голономные величины. Аналогичные варйационные соотноше-
ния можно получить также для случая, когда (6.1.3) заменяется на
(3.3.98) (см. [170]).
§ 10.3. ПРИМЕНЕНИЕ ЛИНЕЙНОЙ ТЕОРИИ
К НЕКОТОРЫМ КЛАССАМ НЕРАВЕНСТВ
10.3.1. Описание метода
Во многих практических приложениях возникают односторонние зада-
чи с большим числом неизвестных, скажем в случае конструкций, по-
коящихся на ненапряженных упругих основаниях, цилиндрических
труб, уложенных в грунт, нитевых конструкций и т. д. Все эти задачи
являются нелинейными даже в случае линейной упругости и неболь-
ших деформаций, поэтому методы классической линейной теории
здесь неприменимы. Предпринимались многочисленные попытки мо-
дифицировать эти методы так, чтобы они стали пригодны и для ре-
шения односторонних задач. Например, многие авторы, занимавшиеся
статическим анализом контактных задач, предполагали, что зона кон-
такта задана, или решали задачу, используя итеративные методы, ска-
жем метод проб и ошибок (см. [336; 294; 237; 149; 264]). Однако при
этом сходимость итерационной процедуры к правильному решению не
всегда обеспечена, поскольку зона контакта заранее неизвестна (соот-
ветствующий пример можно найти в [299]).
С другой стороны, метод приращений для решения односторонних
задач требует чрезмерных вычислительных затрат и к тому же даёт
весьма неточные решения, если приращения нагрузки не соответству-
ют изменениям статического состояния конструкции.
Применение метода конечных элементов к решению односторонних
задач приводит, как мы уже видели, к задачам дискретной оптимиза-
§ 10.3. Применение линейной теории к некоторым классам неравенств
381
ции с многими неизвестными, для численного решения которых нуж-
ны эффективные алгоритмы оптимизации. Однако большинство этих
алгоритмов эффективны только для задач с небольшим числом неиз-
вестных. Кроме того, существенным недостатком является и то, что
нельзя использовать программное обеспечение общего назначения,
разработанное для решения задач линейной теории упругости.
Ниже предлагается метод, позволяющий для некоторых типов од-
носторонних задач получать численное решение без использования ал-
горитмов оптимизации. Этот метод пригоден лишь для односторон-
них задач, приводящих к задаче квадратичного программирования с
дополнительными условиями в виде линейных неравенств [256]. Отме-
тим, что с точки зрения практических приложений этот класс односто-
ронних задач является наиболее важным (см. § 10.1). Метод основан
на результатах Тейля и ван де Панне (см. [166]) й состоит в замене
односторонней задачи на ряд классических двусторонних задач. Упо-
мянутые выше результаты Тейля и ван де Панне позволяют построить
итерационный процесс так, чтобы была обеспечена сходимость к ре-
шению исходной односторонней задачи. Таким образом, существую-
щее программное обеспечение для решения задач линейной теории
упругости может быть использовано без каких-либо изменений, и для
исследования односторонних задач с многими тысячами неизвестных
можно применять стандартные программы для решения линейных
уравнений, что для большинства алгоритмов оптимизации не-
возможно.
Рассмотрим следующую задачу квадратичной оптимизации7: найти
min (P(q) = 1 qrAq + qrp I a/q bj, j € <50), (10.3.1)
где 6o обозначает множество индексов 1, 2, ..., m, A — положитель-
но-определённая матрица (в [256] рассмотрен случай положительно-
полуопределённой матрицы А), например матрица жесткости или гиб-
кости, р — вектор нагрузки или начальной деформации, q — вектор не-
известных переменных. Неравенства, фигурирующие в (10.3.1), будем
называть односторонними ограничениями. В случае если должно вы-
полняться не неравенство, а равенство, соответствующее ограничение
называется ограничением-равенством (или ограничением типа равен-
1 Мы выбрали здесь обозначения q, А, р и т. д., так как q может быть либо векто-
ром перемещений (например, в задаче Синьорини — Фикеры для линейно-упругого тела,
когда минимизируется потенциальная энергия), либо вектором напряжений (например,
в задаче с трением из п. 5.1.1, когда минимизируется дополнительная энергия).
382
Гл. 10. Численное исследование статических задач иа неравенства
ства). Если условие ajq bj заменяется условием ajq g bj, то говорят,
что одностороннее ограничение заменено соответствующим двусто-
ронним ограничением. Решение задачи (10.3.1) обозначим q. Пусть
§— множество индексов, соответствующих ограничениям, которые
выполняются для q в виде равенства, т. е. таких, что аД = bj. Далее,
обозначим через q° и q6 решения задач
min(P(q)) (10.3.2)
и
min( P(q) I ajq = bj, j € 6 C 6o) (10.3.3)
соответственно. Задача (10.3.3) получается из задачи (10.3.1), если 161
односторонних ограничений выполняются в форме равенств, а
16О\61 односторонних ограничений заменены двусторонними7. На-
конец, пусть P(q) — множество индексов, соответствующих ограниче-
ниям, которые не выполнены для вектора q, т. е. таких, что ajq > bj.
Приведём следующие результаты Тейля и ван де Панне (для крат-
кости без доказательств* 2):
Предложение 10.3.1. Имеет место равенство
q = q6. (10.3.4)
Предложение 10.3.2. Если q = q5 и 6 # 0, то для всякого подмноже-
ства 6 с § (в том числе и для 6=0)
й€ P(q6) по крайней мере для одного h € 6 \ 6. (10.3.5)
Предложение 10.3.3. Если P(q6) = 0 и й € P(q54 fA!) уй € 6, то
q* = q.
Из этих теорем следует, что если для решения q° задачи без огра-
ничений (10.3.2) не выполнены некоторые ограничения, то по крайней
мере одно из этих ограничений выполняется в виде равенства для ре-
шения q задачи (10.3.1).
Если для решения q6 задачи (10.3.3) не выполнены некоторые огра-
ничения, то по крайней мере одно из этих ограничений выполняется
в виде равенства для решения q.
Решение qs задачи (10.3.3), удовлетворяющее всем ограничениям
исходной задачи (10.3.1), является искомым решением q тогда и толь-
ко тогда, когда для каждого й€б вектор q64 fA| не удовлетворяет
«опущенному» ограничению.
7 Здесь 161 обозначает число элементов множества 6.
2 Доказательства можно найти, например, в [166].
§ 10.3. Применение линейной теории к некоторым классам неравенств
383
Эти результаты дают первое приближение (а именно, решение за-
дачи без ограничений), правило получения следующих приближений и,
наконец, критерий для проверки на оптимальность различных реше-
ний q6. Отметим, что вектор q6, для которого H(q6) = 0 (т. е. вектор,
для которого выполнены все ограничения), не обязательно является
решением односторонней задачи. Это последнее замечание демонстри-
рует различие между предлагаемым методом и обычным методом
проб и ошибок.
Замена исходной односторонней задачи конечной последователь-
ностью классических двусторонних задач (которые в свою очередь сво-
дятся к задачам минимизации (10.3.2, 3) без ограничений или с ограни-
чениями типа равенства) позволяет использовать стандартное про-
граммное обеспечение, поскольку задачи вида (10.3.2, 3) приводят к
системам линейных уравнений. Односторонняя конструкция ведёт себя
так же, как и двусторонняя. Чтобы применить описанный метод, надо
в каждой задаче определить односторонние ограничения, двусторон-
ние ограничения и ограничения типа равенства. Пусть, например, речь
идет о линейно-упругой конструкции, содержащей нитевые элементы
(см. (3.3.65) и § 11.1), которые не работают на сжатие (т. е. S, > 0).
Одностороннее ограничение превращается в двустороннее заменой со-
ответствующего нитевого элемента стержневым элементом того же
сечения. Ограничение типа равенства осуществляется путём «отсече-
ния» соответствующего нитевого элемента. В задаче о контакте де-
формируемого тела с жёсткой опорой должно быть выполнено одно-
стороннее ограничение un 0 (см. (3.3.22)). Ограничение типа равен-
ства означает приведение в соприкосновение (i<v = 0), а двустороннее
ограничение — удаление опоры (м# § 0).
С вычислительной точки зрения для исследования двусторонних
конструкций можно использовать любую программу, реализующую
метод конечных элементов. Введение ограничений типа равенства в за-
дачу без ограничений (10.3.2) приводит к несимметричности матриц,
от которой можно избавиться с помощью некоторых операций, пред-
ложенных в [64].
10.3.2. Приложения
В качестве первого примера рассмотрим задачу об одностороннем
контакте для круглой линейно-упругой пластины, покоящейся на жест-
ком основании. Пластина нагружена равномерно распределённой на-
грузкой q и изгибающими моментами М вдоль края (рис. 10.3.1). Та-
кие условия имеют место, скажем, для края днища цилиндрического
384
Гл. 10. Численное исследование статических задач иа неравенства
50X0.06 м
10X0.03 м
30X0.08 м
5X0.06 м
Рис. 10.3.1. Односторонняя контактная задача для круглой плотины (t= 0.06 м, г= 6 м,
v = 0, Е = 2.1 • 108 кН/м2, q = 0.6 кН/м2, К = Eh/12 (1 - р2)).
резервуара. Пластина дискретизуется с помощью осесимметричных
двумерных элементов, а по толщине делится на два слоя. Для того
чтобы сравнить результаты вычислений с аналитическим решением,
полученным в [315], рассмотрим случай малого отношения толщины
t к радиусу г и достаточно мелкое, особенно около центра пластины,
разбиение на элементы (рис. 10.3.1). Первым шагом является вычисле-
ние для случая а = 1 решения задачи о свободно опёртой круглой пла-
стине. Здесь сняты все ограничения. На следующем шаге рассматрива-
ются ограничения-равенства одновременно во всех точках между
х = 0.0 м и х = 3.3 м. Поскольку соответствующее решение не удов-
летворяет критерию оптимальности, повторяем эту процедуру, пока
для х = 3.7 не получим решение, которое удовлетворяет критерию
оптимальности и поэтому служит решением односторонней задачи.
Далее выполняем эту процедуру для а = 2, 3, 4, 5; получающийся гра-
фик зависимости угла поворота края пластины от изгибающего мо-
мента представлен на рис. 10.3.2. При а = 5 пластина теряет контакт
с плоскостью. Зависимость угла поворота от момента является линей-
ной лишь при а 5. Для таких а контакт пластины с опорой потерян,
и задача становится линейной. Вычисления удаётся значительно сокра-
тить, если условия оптимальности проверять только там, где это
оправдано физическими соображениями. Полученные численные ре-
зультаты вполне согласуются с аналитическим решением, данным в
[315].
§ 10.3. Применение линейной теории к некоторым классам неравенств
385
Рнс. 10.3.2. График зависимости угла поворота <р от изгибающего момента М на крае
пластины (см. рнс. 10.3.1); число элементов 190, число ограничений 95, максимальное
число неизвестных 571.
На рис. 10.3.3 показано, как деформируется пластина для а = 1, 2,
3, 4, 5, 5.1. Хорошо видны особенности деформации приподнятой ча-
сти пластины. На рис. 10.3.4 приведена табличка, позволяющая срав-
нить численные результаты с аналитическими.
Далее, рассмотрим контактную задачу для цилиндрической трубы
(рис. 10.3.5). Труба замурована в бетон (который считается жёстким).
Эффекты трения и геометрические нелинейности не учитываются.
При дискретизации цилиндра используем криволинейные оболочен-
ные элементы (смешанная модель в терминах напряжений и переме-
щений [308]). Предлагаемый метод сводит дело к решению соответ-
ствующего числа двусторонних задач7 .
На радиальные перемещения наложено ограничение: движение на-
ружу невозможно, а для касательных перемещений никаких ограниче-
ний нет. На рис. 10.?.6 изображены форма деформированной оболоч-
ки, область контакта и распределение изгибающих моментов.
‘ Это — пример неявного использования смешанных моделей для численного иссле-
дования вариационных неравенств. Непосредственное использование смешанных моде-
лей для изучения вариационных неравенств основано на минимаксных формулировках
этих неравенств (в случае когда таковые возможны).
386
Гл. 10. Численное исследование статических задач на неравенства
а = 5
а = 5.1
Рис. 10.3.3. Подробности деформации пластины, изображенной на рис. 10.3.1.
а м [кНм/м] 10 5 [рад] Ь Область контакта [м]
числ. анал. ЧИСЛ. анал.
1 0.675 7.290 ~ 7.5 0.0680 3.70 3.70/3.78
2 1.35 22.236 - 23.0 0.2075 2.58 2.58/2.64
3 2.025 43.8 ~ 43.9 0.4088 1.56 1.56/1.62
4 2.7 72.379 ~ 71.5 0.6755 0.54 0.54/0.60
5 3.375 107.176 -107.14 1.0003 0.0 0.0
5.1 3.44 126.117 -126.5 1.1770
Контакта нет
Рис. 10.3.4. Сравнение численных результатов с известными аналитическими резуль-
татами: для <р полученными с помощью рис. 155 из книги [315], для области контак-
та — с помощью аналитического метода из той же книги.
§ 10.3. Применение линейной теории к некоторым классам неравенств
387
7* max
Рис. 10.3.5. Контактная задача для цилиндрической трубы (й» = 1.18 м, t = 4
Е = 60 кН/см2, v = 0.3, г = 1.315 м, Pmax = (hw + 2г) 5.8 • 10'2 кН/м2).
см,
смещения иг[см]
Рис. 10.3.6. Область контакта, форма деформированной оболочки н изгибающие момен-
ты для трубы на рнс. 10.3.5.
388 Гл. 10. Численное исследование статических задач на неравенства
Резюмируя, подчеркнём ещё раз: предложенный здесь метод соче-
тает основное преимущество подхода к решению односторонних за-
дач, построенного на базе алгоритмов оптимизации (а именно, воз-
можность эффективного определения свободных границ), с основным
преимуществом, которое даёт использование программного обеспече-
ния для решения задач линейной теории упругости, — способностью
справиться с большим числом неизвестных.
ГЛАВА 11
Задачи на неравенства, возникающие
при применении метода приращений,
и динамические задачи на неравенства
Настоящая глава посвящена численному исследованию задач на нера-
венства, возникающих при применении метода приращений, и динами-
ческих задач на неравенства. В первом параграфе проводится упруго-
пластический анализ нитевых систем, в предположении что нити мо-
гут стать ненатянутыми. На примере этой задачи мы иллюстрируем
применение метода многоуровневой декомпозиции к задачам на нера-
венства с многими переменными. Во втором параграфе рассматрива-
ется применение метода приращений для упруго-пластического анали-
за конструкций с геометрическими нелинейностями и физическими де-
стабилизирующими эффектами. Для каждого приращения нагрузки
формулируется вариационное неравенство, приводящее к соответству-
ющей задаче минимизации. В последнем параграфе изучается динами-
ческая односторонняя контактная задача. Полученное вариационное
неравенство дискретизуется по времени, и возникающая на каждом
временнбм интервале задача минимизации решается с помощью под-
ходящего алгоритма оптимизации.
§ 11.1. УПРУГО-ПЛАСТИЧЕСКИЙ РАСЧЁТ НИТЕВЫХ
КОНСТРУКЦИЙ
11.1.1. Постановка задачи как задачи о линейной дополнительности
и соответствующие формулы
В этом параграфе мы рассмотрим упруго-пластический расчёт ните-
вых конструкций в предположении геометрической нелинейности и од-
ностороннего поведения нитей. Термин односторонний означает
здесь, что нити не выдерживают сжимающих, т. е. отрицательных,
напряжений и в процессе нагружения могут «провисать». Такого рода
390
Гл. 11. Динамические задачи на неравенства
одностороннее поведение называют иногда односторонним по напря-
жению [243]. Геометрическая нелинейность, вызванная большими
перемещениями7, и физическая нелинейность, вызванная упруго-
пластическим поведением нитей, исследуются методом приращений,
т. е. нагрузки и начальные деформации заменяются последовательнос-
тью достаточно малых приращений. Это позволяет провести линеари-
зацию задачи в отношении её геометрической и физической нелинейно-
стей. Но в отношении феноменологической нелинейности, вызванной
односторонним поведением нитей, сделать то же не удаётся. Посколь-
ку эта нелинейность приводит к неравенствам, нам приходится на
каждом шаге решать задачи на неравенства.
Пусть конструкция состоит из п элементов, трактуемых как шар-
нирносоединённые стержни, т из которых являются нитями. Состоя-
ния деформации и напряжения каждого элемента описываются векто-
рами обобщённых напряжений и деформаций (см. п. 10.1.1). Прираще-
ние величины обозначается точкой над соответствующим символом.
Для z-й нити связь между приращениями деформации и напряжения
имеет вид (см. рис. 11.1.1)
ё, = Fo.tSi + eot - и/, (11.1.1)
<л = st + а, > 0, (11.1.2)
yi=Vi + bt^O, (11.1.3)
а,7, = 0. (11.1.4)
Здесь st, et, sot, eoi — напряжение, деформация, начальное напряжение
и начальная деформация соответственно; Го,,-— тангенциальная гиб-
Рис. 11.1.1. Связь между напряжением и деформацией для нитевого элемента.
1 Деформации предполагаются малыми.
§ 11.1. Упруго-пластический расчёт нитевых конструкций
391
кость для рассматриваемого шага; — и,- — ненатянутость («слабина»);
at (соотв. — Ы) — полное напряжение (соотв. полная ненатянутость) в
начале шага; наконец, а,- (соотв. — yt) — полное напряжение (соотв.
полная ненатянутость) в конце шага. Соотношения (11.1.2—4) выра-
жают тот факт, что в конце каждого шага нить.либо находится в на-
пряжённом состоянии, либо ненатянута. При и, = 0 соотношение
(11.1.1) описывает связь между приращениями напряжения и деформа-
ции для каждого из остальных п - т элементов конструкции. Соотно-
шения (11.1.1—4) для всех элементов имеют вид
ё - F6s + ё0 - v,
а = si + а > О,
у = v + b > О,
аТу = О,
(11.1.5)
(11.1.6)
(11.1.7)
(11.1.8)
где
ё = [ёь .... ё„]г, 8 = [si, . •., sj]7, о = [щ, ..., аи]г,
ё = [щ, ..., vm, 0, ..., 0]г= [vrIO]r.
Аналогично определяются у, а, Ь. Матрица F6 — это матрица танген-
циальной гибкости отдельных элементов. Часть матрицы или векто-
ра, относящаяся только к нитевым элементам, в дальнейшем помеча-
ется чертой сверху.
На каждом шаге вычислений конфигурация конструкции описыва-
ется вектором и узловых перемещений относительно фиксированной
декартовой системы координат.' На каждом шаге уравнение равновесия
линеаризуется с помощью матрицы геометрической жёсткости Kg [9].
Линеаризованное уравнение имеет вид
Gs + Kgu = р. (11.1.9)
Здесь G — матрица равновесия, Kg — матрица геометрической жёст-
кости, зависящая от геометрии конструкции и напряжений в конце
предыдущего шага, а р — приращение вектора нагрузки. На каждом
шаге мы предполагаем, что конструкция геометрически линейна, и по-
тому в пределах данного шага зависимость между деформациями и
перемещениями может быть записана в виде
ё = Grii. (11.1.10)
Все величины приращений в (11.1.9, 10) относятся к конфигурации кон-
струкции в конце предыдущего шага. Отношения (11.1.5—10) опреде-
ляют дискретную одностороннюю задачу. В терминах и и v получаем
соотношения
392
Гл. 11. Динамические задачи на неравенства
Ku + GKoV — р + GKoeo,
а = s + а = KoGru — Ково + K©v + а О,
7 = v + Ь > О,
а7? = 0.
(11.1.11)
(11.1.12)
(11.1.13)
(11.1.14)
Здесь К = К£ + KG = GKoGr + Kg, где Ко = F6“ \ — общая жёсткость
конструкции. Уравнение (11.1.11) можно заменить двумя неравен-
ствами
Ku + GKov — р - GKoeo О,
— Ku — GKov + р + GKoeo 0.
(11.1.15)
(11.1.16)
Представим щ в виде и, — и, + - м,_, где
-iit + I in I
Пусть й+ и й- —векторы с компонентами й,+ и in- соответственно.
Положим
U = [й^ I uL I ут]т, ут = [уг I 0], аг = [аг I 0], ЬГ=[ЬГЮ],
(11.1.17)
д = [(-GKob - р - GKoe)!(GKob + р
+ GKoe0)r I (-Kob - Коё + а)г]г. (11.1.18)
Вводя симметричную матрицу
GKo
-GKo
Ко
можем записать (11.1.11—14) в виде
RU + д > 0,
U > О,
Ur(RU + д) = 0.
(11.1.19)
(11.1.20)
(11.1.21)
(11.1.22)
Задача отыскания U, удовлетворяющего соотношениям (11.1.20—22),
называется задачей о линейной дополнительности (з.л.д.). Обсудим
подробнее эту интересную математическую задачу.
Вначале предположим, что матрица R является положительно-
определённой. Тогда з.л.д. (11.1.20—22) эквивалентна вариационным
неравенствам
§ 11.1. Упруго-пластический расчёт нитевых конструкций 393
y7(U* - U) > О VU*^O, U^O, у = RU + (i, (11.1.23)
Ur(y* - у) > 0 Vy* > 0, у = RU + ц > 0. (11.1.24)
Действительно, соотношения (11.1.20—22) эквивалентны включениям
-уеаДОЛ, где tf={UlU^0}, у = RU +/I, (11.1.25)
-иеЭЛгДу), где 7Г={у1у^0}, у = RU+./». (11.1.26)
Это следует из геометрического смысла д?к и д1Кс (см. п. 2.3.1). При-
меняя предложение 2.2.1 к (11.1.23), заключаем, что у рассматривае-
мой задачи существует единственное решение. Заметим, что соотноше-
ния (11.1.2—4) эквивалентны «локальным» вариационным нера-
венствам
V7‘^0, 7,^0, (11.1.27)
yt(ff* - fft) > 0 Vct‘^0, ст;^0, (11.1.28)
из которых вытекают «глобальные» вариационные неравенства
(11.1.23, 24).
В силу предложения 2.2.2, неравенство (11.1.23) эквивалентно зада-
че минимизации
П(И) = min(n(U*)lU* еК}, (11.1.29)
где
П(и*) =|u*rRU* +/irU*, tf={U*IU*^0}. (11.1.30)
Единственность решения означает, что (11.1.24) эквивалентно задаче
минимизации
nc(U) = min(nc(U*)IU* fF), (11.1.31)
где
nc(U*) =|u*rRU*, F = (U* IRU* + ц > 0}. (11.1.32)
Из теории двойственности для выпуклых функционалов (см. п. 3.22)
следует, что задачи минимизации (11.1.31) и (11.1.29) являются
двойственными друг другу. Используя специальный вид функционалов
П и Пс, можно обойтись и без привлечения общих результатов теории
двойственности. В самом деле, (11.1.29) (или, эквивалентно (11.1.25))
можно записать в виде (см. предложение 2.5.5)
иеЭ/К-у), у = RU + ц. (11.1.33)
Но, как легко проверить, это включение эквивалентно (11.1.26) и
(11.1.31).
394
Гл. 11. Динамические задачи иа<неравенства
Очевидно, что решение U нашей задачи удовлетворяет равенству
П(Ц) + IF(U) = 0, (11.1.34)
и потому
min{n(U*)IU* 6 Л + min{IIc(U*)IU* =0. (11.1.35)
Если матрица R — симметричная и положительно-полуопределён-
ная (так будет, например, если матрица Kg — положительно-
полуопределённая), то тем же методом можно установить эквивалент-
ность рассматриваемой з.л.д. каждому из соотношений (11.1.23, 25,
26, 29).
Множество решений задачи (11.1.29) выпукло7 (см. п. 2.2.1). Пока-
жем, что общее решение задачи (11.1.29) имеет вид U0 + г, где U0 —
частное решение этой задачи, а г удовлетворяет соотношениям
и0 -ю 0, Rr = 0, цтг = 0.
Действительно, пусть Ui и U2 — два решения задачи (11.1.29). Тогда
они будут и решениями задачи (11.1.23). Полагая в (11.1.23) вначале
U* = Ui, U = U2, а затем U* = U2, U = Ui, и складывая получающие-
ся неравенства, находим, что
(Ui - U2)rR(Ui - U2) 0,
откуда R(Ui - U2) = 0. Поэтому из (11.1.23) следует, что
/ir(Ui - U2) > 0 и /ir(U2 - Ui) > 0, т. е. /ir(U2 - Ui) = 0.
чем и завершается доказательство отмеченного факта.
Рассуждая аналогично, можно показать, что общее решение
двойственной задачи (11.1.31) имеет вид U0 + г, где Uo — её частное
решение, а г удовлетворяет равенству Rr = 0. Далее с помощью пред-
ложения 2.2.2 можно проверить, что справедливость соотношения
(11.1.31) эквивалентна выполнению вариационных неравенств (11.1.23,
24) для каждого U*, для которого у* = RU* + д > 0. С другой сторо-
ны, (11.1.31) эквивалентно (см. (2.4.22)) включению
-RU€ 3^(11), (11.1.36)
которое, в свою очередь, эквивалентно следующей з.л.д.:
R(U — V) = 0, V^0, Vr(RU +/1) = 0, RU + /i^0; (11.1.37)
это непосредственно вытекает из того факта, что 37^C(U) есть конус
•' Этот вопрос обсуждается в [256].
§ 11.1. Упруго-пластический расчёт ннтевых конструкций
395
внешних нормалей к Xе в U. Полагая V - U = г, получаем
Rr = О, U + г > О, (U + r)r(RU +/») = О, RU+ /» >0. (11.1.38)
Аналогично решение з.л.д. (11.1.20—22) (т. е. решение исходной зада-
чи (11.1.29)) будет решением двойственной задачи, но обратное невер-
но, за исключением случая, когда матрица R является положительно-
определённой. Из сказанного выше вытекает также, что исходная за-
дача разрешима тогда и только тогда, когда разрешима двойственная.
Если Ui — решение исходной задачи, a U2 — решение двойственной, то
Ui будет и решением двойственной задачи, а потому U2 - Ui = г.
Аналогично Пс(иг) = nc(Ui), и, значит
n(Ui) + nc(U2) = UftRUi + /i) = 0; (11.1.39)
следовательно, снова выполнено (11.1.35). Если U — допустимый век-
тор и для исходной, и для двойственной задачи, т. е. U > 0 и RU +
+ /I 0, и если имеет место (11.1.34), или, что эквивалентно,
(11.1.22), то U является решением обеих задач.
Следует отметить, что ввиду дискретного характера задачи для
вывода (11.1.29) и (11.1.31) можно было бы применить теорему Ку-
на— Таккера и теорему двойственности для квадратичного програм-
мирования [166]. В терминах й и v задачи (11.1.29) и (11.1.31) можно
записать соответственно в виде
min{n(u, v) = у ЙГКЙ + у vrKov + urGKov
- ur(GKoeo + р) + vr(a - Koeo)lv + b > 0} (11.1.40)
и
min[nc(u, v) = у йгКй + urGKov + urGKob + у vrKov
+ vrKoblu, v удовлетворяют (11.1.11, 12)}. (11.1.41)
Функции П и Пс выражают соответственно потенциальную и до-
полнительную энергии конструкции на рассматриваемом шаге. В изло-
женной выше теории принимается во внимание возможность того, что
нить может стать ненатянутой, и потому в выражениях для П и Пс
появляется член v. При v = 0 выражения для П и Пс превращаются
в классические выражения для потенциальной и дополнительной энер-
гий линейно-упругой конструкции.
При выполнении численных расчётов решаются задачи минимиза-
ции (11.1.29, 31), сформулированные либо для вектора U, либо для
других неизвестных. Вычисления проводятся с использованием алго-
ритмов квадратичного программирования.
396
Гл. 11. Динамические задачи на неравенства
11.1.2. Метод многоуровневой декомпозиции
В большинстве нитевых конструкций число нитей и узлов велико,
так что приходится решать задачи оптимизации с большим числом
неизвестных и ограничений. Ниже предлагается метод многоуровне-
вой декомпозиции, позволяющий эффективно решать такого рода за-
дачи. Исходная задача оптимизации «разлагается» на ряд подзадач.
На «первом уровне» вычислений каждая подзадача решается самосто-
ятельно, а на «втором уровне» полученные решения подзадач комби-
нируются таким образом, чтобы обеспечить оптимум в исходной
задаче.
Интересно отметить, что некоторые из этих подзадач представля-
ют собой задачи минимизации без ограничений типа неравенств7.
Они соответствуют классическим двусторонним конструкциям, и поэ-
тому их можно численно решать, используя программное обеспечение
для линейного анализа конструкций.
В рассматриваемом случае нитевых конструкций исходная задача
разбивается на две подзадачи. В первой фигурируют только члены с
перемещениями. Эта подзадача соответствует конструкции, которая
получается из данной, если рассматривать все нити как стержни (спо-
собные работать и в условиях сжатия). Во второй подзадаче фигури-
руют только члены с ненатянутостями. Эта подзадача соответствует
некоторой гипотетической конструкции. Чтобы провести декомпози-
цию, запишем (11.1.40) в виде
П(й, v) = ПЛй) + П"(у) + iirGKov, (11.1.42)
где
П/(й) = | йгКй - йг(СКоёо + р),
П^у) = | <ГКО<Г + vr(a - Коео).
Вводя ещё одну переменную w, можно переписать задачу минимиза-
ции (11.1.42) в виде
min{II(ii, v, w) = П1(й) + П"(у) + ti^GKowlv = w, v + b > 0).
(11.1.43)
Функция Лагранжа для этой задачи равна
П1(й, v, w) = П(й, v, w) + рТ(у - w), (11.1.44)
где р — вектор множителей Лагранжа.
' В этой связи заметим, что предложенный в § 10.3 метод тоже можно рассматри-
вать как метод декомпозиции.
§ 11.1. Упруго-пластический расчёт нитевых конструкций
397
(11.1.45)
(11.1.46)
Ро+1> = Р(1, + * (V(i) - w(i))
Рис. 11.1.2. Метод недопустимого градиентного спуска.
Декомпозиция может быть выполнена двумя методами (см. [19]).
Этот метод недопустимого градиентного спуска (метод Лэсдона —
Шёффлера) и метод допустимого градиентного спуска (метод Броси-
лова — Лэсдона — Пирсона) [19]. В методе недопустимого градиентно-
го спуска на первом уровне выбирается какое-нибудь фиксированное
значение р, скажем pi, и задача минимизации разлагается на две под-
задачи (рис. 11.1.2):
min (П1(й) + iirGKow - pqjw) (11.1.45)
Й, W
И
min (П1"(у) + po)Vlv + b > 0). (11.1.46)
♦
Решив эти задачи, получаем соответствующие значения ii, v, w, ска-
жем U(i), V(i>, W(i>. Ясно, что V(i) # W(i>. На втором уровне наша
цель — получить новое значение р, скажем р(2>, с помощью уравнения
Р(2> = P(i) + Ar(v(i) + W(d), (11.1.47)
где к > 0 — надлежащим образом выбранная константа (см. напри-
мер, [19]), и передать это новое значение на первый уровень. Снова
проводится оптимизация, получаются новые значения U(2>, v<2), w<2),
и т. д. пока разности v<(-) - w® не станут достаточно малыми. Если
минимум существует, то алгоритм сходится за конечное число шагов
(см. [19]).
В методе допустимого градиентного спуска на первом уровне вы-
бирается какое-то фиксированное значение w, скажем W(i>, и исходная
задача разбивается на две подзадачи (см. рис. 11.1.3):
Рис. 11.1.3. Метод допустимого градиентного спуска.
398
Гл. 11. Динамические задачи на неравенства
min (П1(й) + urGKoW(i)J (11.1.48)
й
И
min (n"(v) + pr(v - W(i))lv + b > 0]. (11.1.49)
*, p
После решения этих задач оптимизации получаем соответствующие
значения ti, v, р скажем ti(i), v<d, p<i). На втором уровне получаем но-
вое значение для w, скажем W(2>, по формуле
/ЭП1(й, v, w)\
w(2) = W(i) - к (--т------1 , (11.1.50)
\ 0W / W = w(l)
где к > 0 — выбранная надлежащим образом константа (см. [19]). Эта
оценка передается на первый уровень. Решая снова задачи первого
уровня, получаем новое множество значений U(2>, V(2>, р(2>, и так про-
должаем до тех пор, пока разность между последовательными значе-
ниями вектора не станет достаточно малой.
11.1.3. Приложение
С помощью изложенного выше метода была рассчитана нитевая кон-
струкция, изображенная на рис. 11.1.4. Верхняя и нижняя нити парабо-
лические и обе предварительно растянуты с одинаковой силой 80 кН.
Рассмотрим два варианта нагружения:
(а) симметричное нагружение (рис. 11.1.5), при котором нагрузка на
единицу длины горизонтальной оси последовательно возрастает от
0.1 кН/м до 1 кН/м;
(Ь) несимметричное нагружение (рис. 11.1.6), при котором нагрузка
на единицу длины горизонтальной оси последовательно возрастает от
0.1 кН/м до 1 кН/м.
На каждом шаге нагрузка увеличивается на 0.1 кН/м. При расчёте
учитывались лишь вертикальные перемещения узлов. На каждом шаге
вычислений решается задача минимизации (11.1.31). Был использован
алгоритм Дзвидона — Флетчера — Пауэлла, модифицированной с по-
мощью приёма создания искусственной реакции поверхности [143], с
тем чтобы учесть ограничения. Это комбинация градиентного метода
с большим шагом и обобщённого метода проекции для учёта огра-
ничений.
На рис. 11.1.5—11.1.8 приведены некоторые результаты вы-
числений.
A
В
Рис. 11.1.4. Нитевая конструкция. Размеры и диаграмма деформация — напряжение для
нитей (поперечные сечения верхней, нижней и вертикальной нитей 4.00 см2, 1.40 см2
и 1.20 см2 соответственно).
Рис. 11.1.5. Вертикальные перемещения узлов 1 и 7.
[см]
Рнс. 11.1.6. Вертикальные перемещения узлов 2, 8, 3,9 (в случае последних двух узлов
считаем, что нуль (соотв. единица) горизонтальной осн находится в точке 1 (соотв.
в 0)).
Рнс. 11.1.7. Напряжения в нитях 1-2 и 7-8 при симметричной нагрузке.
§ 11.2. Анализ упруго-пластических задач методом приращений
401
Теория с односторонними напряжениями для нитевых конструкций
позволяет рассчитывать поведение таких конструкций и в случае, ког-
да некоторые нити становятся ненатянутыми. Поэтому удается избе-
жать использования больших сил предварительного натяжения, обес-
печивающих положительные напряжения в нитях (как это в большин-
стве своём делается на практике). Расчёт поля напряжений по
предлагаемому методу приводит к более экономичным вариантам ни-
тевых конструкций, ввиду уменьшения сил предварительного на-
тяжения.
§ 11.2. АНАЛИЗ УПРУГО-ПЛАСТИЧЕСКИХ ЗАДАЧ МЕТОДОМ
ПРИРАЩЕНИЙ. ЗАДАЧИ О ЛИНЕЙНОЙ
ДОПОЛНИТЕЛЬНОСТИ, ВАРИАЦИОННЫЕ НЕРАВЕНСТВА
И УСЛОВИЯ МИНИМУМА
Одна из наиболее важных областей применения вариационных нера-
венств и соответствующих методов оптимизации к анализу конструк-
ций— это упруго-пластические задачи. С начала 50-х годов, когда ли-
нейное программирование было впервые применено для анализа и
ОС
П 1
402
Гл. 11. Динамические задачи на неравенства
проектирования конструкций, методы оптимизации систематически
используются при исследовании упруго-пластических конструкций
(см. [190; 191; 52; 40]).
В этом параграфе мы изучим одну типичную общую задачу, свя-
занную с применением метода приращений для анализа упруго-
пластического поведения дискретизованной сплошной среды, в пред-
положении больших перемещений и при наличии физических дестаби-
лизирующих эффектов (см. (3.3.120)).
Условия минимума, которые будут выведены здесь с помощью ва-
риационных неравенств, ранее были получены с помощью теории
з.л.д. Майером [190], впервые применившим методы квадратичного
программирования в теории пластичности.
Пусть рассматриваемая конструкция разбита на п конечных эле-
ментов. Поля напряжений и деформаций внутри каждого элемента бу-
дем описывать в терминах обобщённых напряжений и деформаций
(см. п. 11.1.1). Нагрузки приложены в узловых точках, и состояние
конструкции описывается вектором узловых перемещений и относи-
тельно фиксированной декартовой системы координат и заданной ис-
ходной конфигурации.
В обозначениях предыдущего параграфа и в более общей принятой
здесь постановке линеаризованные уравнения равновесия и согласован-
ности для каждого приращения нагрузки имеют вид (11.1.9) и (11.1.10)
соответственно. Для /-го элемента принимается линейный закон упру-
го-пластического течения в приращениях (3.3.118, 119). Мы лишь пред-
полагаем, что векторы N/ и V/ линейно-независимы и что V^N/ > 0
для j = 1, ..., т.
Чтобы записать (3.3.118, 119) для всей конструкции, обозначим че-
рез q число элементов, которые находятся на пределе текучести в на-
чале данного шага нагрузки, и построим векторы
Х = [ХГ, ..., X9r, F = [Ff, .... F,T
и матрицы
Н = .............. НД Fo = diag(Fo,i, ...» Fo.J,
N = diag(Ni, .... N,)7'! О7')7', V = (diag(Vb ..., V,)7'IO7)7'.
Тогда (3.3.118, 119) принимает вид
ё = ё0 + Fos + VX, (11.2.1)
F = Nrs - НХ, (11.2.2)
X>0, F^O, F’X = 0, (11.2.3)
§ 11.2. Анализ упруго-пластических задач методом приращений
403
если имеются ещё и начальные деформации ео. Соотношения линей-
ной дополнительности (11.2.3) эквивалентны (см. п. 11.1.1) вариацион-
ным неравенствам
- Fr(X* - X) > 0 vX* > 0, Х>0, (11.2.4)
-Xr(f*-F)>0 VF‘^0, F < 0. (11.2.5)
Вводя обозначения
Ко = Fo" \ В = Н + N7K0V,
GKoGr = К£, GKoV = Cv, GKoN = CN,
изДП.1.9, 10) и (11.2.1, 2) получаем соотношения (точки обозначают
производные по времени)
Кй - СГХ - (р + GKoeo) = 0, (11.2.6)
F = С^и - ВХ - N'Koeo, (11.2.7)
которые вместе с (11.2.3) (или 11.2.4, 5) полностью описывают задачу.
Выражение в правой части (11.2.6) обозначим через А. Очевидно,
что для u€ IR' и X 0 соотношения (11.2.3, 6) эквивалентны вариаци-
онному неравенству
Аг(й* - й) - Fr(X* - X) > 0 Vii* € IR', X* > 0. (11.2.8)
Здесь у — размерность вектора и. Неравенство (11.2.8) можно запи-
сать в виде
(Мх + q)r(x* - х) >0 Vx* € А, хбА, (11.2.9)
где
К= [х‘ = ("Л €lR₽lii‘€lR', Х*>0
С IX* I
Г—р — GKoeol ГКо — СИ
о = I _ I, м = I т I.
L NrKoeo J |_-С£ В]
(11.2.10)
(11.2.11)
Предположим, что матрица М — симметричная и положительно-
полуопределённая. Первое из этих предположений равносильно тому,
что V = N (условие нормальности) и Н? = Н (принцип взаимности со-
стояний текучести). Положительная полуопределённость матрицы
упрочнения Н (неразмягчающийся материал) и матрицы геометриче-
ской жёсткости Ко обеспечивает положительную полуопределённость
матрицы М. В этом случае функция хгМх выпуклая, и потому можно
применить предложение 2.2.2, из которого вытекает, что неравенство
404
Гл. 11. Динамические задачи на неравенства
(11.2.8) эквивалентно задаче минимизации (исходная задача)
П(х) = тт(П(х*)1х* €/С), (11.2.12)
где
П(х*) = ^х*гМх* + qrx*. (11.2.13)
Предыдущая задача может быть переписана в терминах а и А так:
min ^П(й, X) = 1 игКи - iirGKoNX + j ХГНХ
+ | XrNrKoNX + ejKo(NX - Grii) - ргй IX > oj. (11.2.14)
Как н п. 11.1.1, рассмотрим двойственную задачу
Пс(х) = min[nc(x*)lx* € А'), (11.2.15)
где
Пс(х‘) =1х‘гМх‘, (11.2.16)
/С = fx*lMx* + q = Г"‘ 1,
I L-f*J
A* = Kii* - CkX* - (p + GKoeo) = 0,)
F* = Cjfr* - BX‘ - NrKoCo 0 J' U1,Z*10
Согласно предложению 2.2.2, для хбХ^ задача (11.2.15) эквивалентна
вариационному неравенству
хг(Мх‘ - Мх) > 0 Vx* € /С. (11.2.18)
В терминах и и X задача (11.2.15) запишется так:
min fnc(iiX) = у urKii - urGKoNX + у ХГНХ
+ | XrNrKoNX I Кй - GKoNX - (р + GKoeo) = 0,
NrKoGrii - (Н + NrKoN)X - NrKoeo oj. (11.2.19)
Вариационные неравенства (11.2.9, 18) эквивалентны включениям
- (Мх + q) € ЭЛг(х) (11.2.20)
и
-Мх € ЭЛге(х)
(11.2.21)
§ 11.2. Анализ упруго-пластических задач методом приращений
405
соответственно. Отметим, что (11.2.9, 20) эквивалентны (11.2.3, 6, 7)
и в случае произвольной матрицы М (без предположения о симмет-
ричности и положительной определённости). В этом случае каждое ре-
шение исходной задачи удовлетворяет (11.2.18, 21), но обратное невер-
но. Действительно, при Ё<0иА = 0из (11.2.5, 6) получаем нера-
венство
йг(А* - А) - Xr(F* - F) > 0 VF‘^0, А* = 0 (11.2.22)
из которого и следует (11.2.18, 21). Обратное верно, лишь если М —
положительно-определённая матрица.
Что касается соотношения между прямой и двойственной задача-
ми, то для симметричных и положительно-определённых матриц М
справедливы результаты, совершенно аналогичные тем, которые были
установлены в п. 11.1.1 для задач минимизации (11.1.29, 31);. В слу-
чае положительно-определённых и симметричных матриц М имеет ме-
сто полная эквивалентность между прямой и двойственной задачами,
соответственно между их эквивалентными формами (см. п. 11.1.1).
Задачи минимизации (11.2.12, 15) были сформулированы Майером
в [190]. Разлагая вектор скорости перемещений й на положительную
и отрицательную части ц+ и U-, можно поставить з.л.д. вида
(11.1.20—22), и для её решения можно применить метод из предыду-
щего пункта, положив
U- + р + GKoeo +к -к + Си
и = «+ , м = X - Р ~ GKoeo N7K0e0 , R = -к +к -с£ -Су . в (11.2.23)
Заметим, что з.л.д. можно сформулировать также и для случая несим-
метричной матрицы М.
Ниже устанавливаются свойства решения неравенства (11.2.9) при
условии, что матрица М — симметричная и положительно-
полуопределённая. Мы используем предложение 4.1.2. Обозначим че-
рез kerM ядро матрицы М:
kerM= [xlx€lRp, Мх = 0]. (11.2.24)
Это — линейное подпространство пространства IRP. Пусть Q — ортого-
нальный проектор IRP на кегМ. Ядро матрицы М совпадает с ядром
квадратичной формы хгМх. Если I — единичная матрица и Р = I - Q,
1 Несколько иной вид множеств К н Xе не сказывается на рассуждениях.
406
Гл. 11. Динамические задачи на неравенства
то имеет место соотношение полукоэрцитивности1
хгМх > cIlPxll2 Vx € IR₽ (11.2.25)
(здесь с — положительная константа). Положим
Т* = {xlx 6 кегМ Г\К влечёт -х скег МАЛ'),
ker q = [xlqrx = 0); (11.2.26)
Г* — линейное подпространство в IRP.
Справедлив следующий результат:
Предложение 11.2.1. Если для каждого хобкегМАЛ
qrxo 0, (11.2.27)
причем равенство имеет место тогда и только тогда, когда Хо € Т*,
то у задачи (11.2.9) (или (11.2.12)) существует решение х и всякое дру-
гое её решение xi представимо в виде х + хо, где хо € ker М A ker q и
х + Хо € К.
Доказательство. Это немедленно следует из предложений 4.1.2 и
4.1.4. □
Из предложения 11.2.1 ясно, что если М — положительно-
определённая матрица, то решение задачи (11.2.9) единственно.2
Если <5х — разность двух решений, то из соотношения Мбх = 0
(см. п. 11.1.1) вытекает, что
KG(6ii) + G(6s) = 0, (11.2.28)
Nr(6s) - Н(6Х) = = 0. (11.2.29)
Таким образом разность скоростей напряжений, отвечающих двум ре-
шениям, «гасится» разностью скоростей напряжений, вызванных гео-
метрическим изменением конструкции, и производные от функции те-
кучести F равны для всех решений. В случае геометрически линейной
теории Kg = 0 и поэтому 6s = 0, т. е. скорости напряжений определя-
ются однозначно.
Перейдём к выводу другого класса вариационных принципов, фор-
мулируемых в терминах производных от вектора множителей пла-
1 В рассматриваемом конечномерном случае соотношение (11.2.25) легко проверить
непосредственно (см. также доказательство соотношения (4.1.36)).
2 Если матрица М — несимметричная, ио положительно-полуопределённая, то мож-
но получить достаточное условие существования решения неравенства (11.2.9), приме-
няя один общий результат Фикеры (см. [99, теор. 2.1]). В этом случае также имеет
место (11.2.25) с Р = I - Q, где Q — ортогональный проектор IR₽ иа кегхгМх =
= кег(М + Мг) Э ker М.
§ 11.2. Анализ упруго-пластических задач методом приращений 407
этичности X, в предположении что матрица К невырожденна. Из
(11.2.6, 7) получаем
F = -(Н - Nr(KoGrK-1GKo - Ko)V)X
+ NrKoGrK-1p + Nr(KoGrK-1GKo - Ко)ёо- (11.2.30)
Следуя [190], введём обозначения
Z = KoGrK-1GKo - Ко, (11.2.31)
s£ = KoGrK-1p + Zeo. (11.2.32)
Матрица Z преобразует «реальный» вектор скорости напряжений в
вектор скорости напряжений, отвечающий случаю, когда имеют место
лишь упругие деформации. Аналогично s£— это отвечающий чисто
упругим деформациям вектор скоростей напряжений, вызванных одно-
временно р и ёо. В результате получаем соотношение
F = Nrs£ - (Н - NrZV)X, (11.2.33)
которое вместе с (11.2.3) задаёт з.л.д., эквивалентную, в силу (11.2.4),
вариационному неравенству
ХГ(Н - NrZV)r(X* - X) - (Nrs£)r(X* - X) > 0
vX* > О, X > 0. (11.2.34)
Предположим теперь, что матрица Н - NrZV — симметричная
(так будет, например, если N = V и Н = Нг) и положительно-
полуопределённая. Тогда (11.2.34) эквивалентно задаче минимизации
П(Х) = тш[П(Х‘)1Х‘ > 0), (11.2.35)
где
П(Х) = | ХГ(Н - NrZN)X - (Nrs'VX. (11.2.36)
Двойственная к (11.2.35) задача имеет вид
Пе(Х) = min[nc(X‘)lNrs£ - (Н - NrZN)X‘ 0), (11.2.37)
где
ПС(Х) = | ХГ(Н - NrZN)X. (11.2.38)
По поводу численного решения этих задач и связи между решениями
прямой и двойственной задач см. п. 11.1.1 и работу [190] (а также
[158]).
Отметим, что задачи минимизации, аналогичные рассмотренным
здесь, могут быть сформулированы и в случае неассоциированных за-
конов трения [202].
408
Гл. 11. Динамические задачи иа неравенства
§ 11.3. ДИНАМИЧЕСКИЕ ЗАДАЧИ ОБ ОДНОСТОРОННЕМ
КОНТАКТЕ
Типичным классом динамических задач на неравенства служит класс
динамических односторонних контактных задач, который мы и изу-
чим в данном параграфе с вычислительной точки зрения. Эти зада-
чи — частный случай задач, сформулированных в § 6.4. Если на Is вы-
полнены граничные условия (3.3.7) и (10.1.1), то для линейно-упругого
тела решение рассматриваемой краевой задачи удовлетворяет вариа-
ционному неравенству (6.4.3), где Ф задано формулой (6.2.6), только
с j, заменённым на Jn. Для тела, подчиняющегося определяющему со-
отношению (6.1.3), имеет место вариационное неравенство (6.4.4).
Предположим теперь, что линейно-упругое тело дискретизовано
(см. п. 10.1.1). Тогда (6.4.3) принимает вид
| urK(v - и) + Ф(у.у) - Ф(и) - Cf(vr - иг)
> (f - Ми'- Cu')r(v - и) vve%*, (11.3.1)
где К — матрица жёсткости конструкции (см. (10.1.11)), Ф задано фор-
мулой (10.1.12), X*— множество кинематически допустимых переме-
щений, т. е.
X* = {vl/vXvwj) < оо V/бГз, V№ Nv, nt = TV), (11.3.2)
M — матрица масс, С — матрица затухания. Для конструкции с выпук-
лой плотностью энергии деформации вместо (11.3.1) имеет место ва-
риационное неравенство (дискретный вариант неравенства (6.4.4))
IF(v) - lF(u) + Ф(у) - Ф(и) - Cr(vr - ur)
> (f - Mu'- Cu')r(v - u) W6%*, (11.3.3)
где
X* = [v I w,(ei(v) - ео/) < oo vi g fl,
Jjv/Vjv,) < oo vig rs, Vjv = Nv, Nt = Tv) (11.3.4)
— кинематически допустимое множество, a W задано равенством
(10.1.24). Для обоих динамических вариационных неравенств рассмат-
риваются начальные условия
u = uo, u' = ui при t = 0. (11.3.5)
Численное исследование динамической задачи на неравенства про-
водится путём дискретизации по времени соответствующего вариаци-
онного неравенства (см. [120; 251; 309]). Для каждого временного ин-
§ 11.3. Динамические задачи об одностороннем контакте
409
тервала мы решаем некоторое статическое вариационное неравен-
ство. Это приводит к соответствующей задаче оптимизации, которая
решается подходящим численным методом [120; 251; 309]. Отметим,
что из множества существующих методов интегрирования по времени
для случая динамических задач на неравенства применимы лишь пря-
мые схемы интегрирования. Вычисление реакций с помощью метода
суперпозиции состояний требует вычисления собственных значений и
собственных векторов системы, которые здесь не существуют в клас-
сическом смысле, поскольку мы имеем дело с вариационным неравен-
ством (см. п. 3.1.4). Подробный численный анализ некоторых других
видов динамических вариационных неравенств читатель может найти
в [120]. Для дискретизации задачи по времени применяются /«-шаго-
вые операторы в линейных разностях (см., например, [94]). Мы пред-
полагаем, что в момент времени №
£ а«иф - ° = St £ 0wii<₽ -r) (11.3.6)
r = 0 r = 0
И
S 7(')ц<₽-') = д(6/)2 S p^q, P>\-, QA.l.T)
i-=s0 r = 0
коэффициенты а(г), 7W и ц зависят от выбранной конечно-
разностной схемы7. Будем считать, что длина шага St остаётся по-
стоянной. Далее, чтобы получить некоторую неявную схему интегри-
рования, выберем /3(0) ненулевым. Из (11.3.6, 7) следуют тогда соот-
ношения
а<%<₽) - 54?<0>й<₽) = -Ua + 6Л10 (11.3.8)
и
A*(5Z)2jS<0)u<₽) = + Uy — д(6/)2ЦЗ = + U, (11.3.9)
где
a = [a(1), ..., a(9)]r, 0 = [/?{1), ..., |8<Q)]r,
у = [7(1), ..., 7<’>]r, U=[u(₽-1), u(₽“9)].
Подставляя (11.3.8, 9) в вариационное неравенство (11.3.3), получаем
при t = №
1 й<₽) и й<₽) обозначают соответственно скорость и ускорение в момент /<₽) для испо-
льзуемой схемы дискретизации по времени.
410
Гл. И. Динамические задачи на неравенства
W(e(y)) - ^(«(u^)) + Ф(удг) - Ф(и^) - С^т(ут - и^)
(О)„(Р)Г
(f<₽> - q<₽y(v _ „<₽>) - Mr(v - u<₽>)
а(0)и(р)Т _
- ^ЙбГ С (У - и<₽)) Vv € Х*= '<₽” d1 -3-10>
(о*)Р
где
<₽) = MU _ C[W - Ua]
4 д(6/)2|в(О) 6//3(О)
(11.3.11)
Как нетрудно видеть, для любой симметричной положительно-
полуопределённой матрицы А имеет место неравенство
1 vrAv - ’ urAu > urAr(v - u).
(11.3.12)
Применяя его к квадратичным формам vrMv и vrCv (где С тоже пред-
полагается симметричной положительно-полуопределённой матрицей),
можно показать, что решение неравенства (11.3.10) является также ре-
шением задачи минимизации
Ы»®) = min {np(v)lv 6 ,<₽>), (11.3.13)
где (а<0) = 7<0) = 1)
П(р)(у) = 1F(«(V)) + Ф(удг) - vfC^
1_ угМгу _1 угСгу
2 g(6i)2/3(0) 2 (6/)/3(О)
- (f<₽> - q<₽>)ry.
(11.3.14)
Теперь рассмотрим динамическую одностороннюю контактную за-
дачу для линейно-упругого тела. В этом случае на каждом временном
интервале надо решить задачу минимизации вида (11.3.13)
п г \ - 1 тк ,1 vrMrv 1 vrCrv
П<р)( ) - 2 у Kv + 2 ^(5/)2|g(o) + 2 5/|д(о)
- vfC?” + Ф(у\) - (f00 - Q(₽))rv. (11.3Л5)
Проиллюстрируем предложенный метод на следующем численном
примере.
Пусть линейно-упругая квадратная пластина PQRS, имеющая плот-
ность q и толщину А (см. рис. 11.3.1), лежит на упругом полупро-
странстве. Для наших целей можно считать, что это полупростран-
ство моделируется дискретными односторонними пружинами Винкле-
§ 11.3. Динамические задачи об одностороннем контакте
411
Рис. 11.3.1. Динамическая односторонняя контактная задача для квадратной пластины
(Е = 4 • 105 кН/м2, v = 0.16, Л = 5 см, е = 2.5 кНс2/м4, к = 3 • 104 кН/м3).
ра с коэффициентом упругости к. Предполагается, что пружины
прикреплены к пластине верхними концами, а нижние их концы нахо-
дятся в контакте с жёсткой опорой. Таким образом, для дискретизо-
ванной конструкции надо решить задачу Синьорини — Фикеры. По
краям PQ, QS, RS, RP пластина свободно опёрта. Для простоты пред-
положим, что касательных сил взаимодействия между пластиной и
опорой не возникает, т. е. в (11.3.15) Ст = 0. В начальный момент пла-
стина находится в состоянии покоя, затем по краям пластины и в её
центре мгновенно приложены постоянные нагрузки _Р. Кроме того, в
узле Е (см. рисунок) приложена ещё одна нагрузка Р. В соответствии
с этими условиями различаются три части пластины, ведущие себя по-
разному: часть I — свободная часть пластины, лежащая вне квадрата
PQRS, на которую условия контакта не оказывают влияния; часть
II — область вблизи центра пластины А, которая ввиду нагрузки, при-
ложенной в А, находится в контакте с упругим полупространством;
412
Гл. 11. Динамические задачи на неравенства
Рис. 11.3.2. Прогиб пластины f прн х = у = 5 м.
часть III — оставшаяся часть внутри квадрата PQRS, в которой одно-
сторонние пружины перешли от активного состояния к неактивному.
Интегрирование по времени проводится методом Хоуболта' (см.,
например, [18]). На каждом временнбм интервале возникает задача
квадратичной оптимизации, поскольку член Ф(п^ в (11.3.15) можно
объединить с членом упругой энергии urKu/2. При численных расчё-
тах использовался метод, предложенный в п. 10.3.11 2. После неболь-
шого числа итераций для каждого приращения была определена зона
контакта.
1 В (11.3.6, 7) полагаем q = 3, а<0) = 11/6, а0’ = -3, ар,= 3/2, а<3) = -1/3, 0<о) = 1,
0°’ = 3® = 3® = о, v® = 1, У1’ = -2.5, у® = 2, у(3) = -0.5, ц = 0.5.
2 Каждая четверть пластины имеет 308 степеней свободы и 64 ограничения.
§ 11.3. Динамические задачи об одностороннем контакте
413
Рис. 11.3.3. Прогиб пластины при х = у = 0.
Чтобы изучить зависимость решения от длины временнбго интер-
вала, было просчитано поведение пластины для
S6 = 1.2510-3с, <5Л> = 0.55/1, 5/3 = 0.255/1
(рис. 11.3.2—11.3.5). Из рисунков видно, что длина временнбго интер-
вала незначительно влияет на результаты для точек пластины, распо-
ложенных в частях I и II. Более подробно этот вопрос обсуждается
в [309].
Упомянутые выше расчёты проводились в предположении, что
удар является абсолютно пластическим. Описанный метод можно
обобщить так, чтобы при желании учесть и другие более реалистиче-
ские предположения о характере удара. Один из способов сделать
это — рассмотреть частичное или полное обращение (по направлению)
вектора скорости в точке удара [207].
Явление удара может быть учтено в вариационной постановке за-
дачи, если ввести соответствующие функциональные пространства.
При численных расчётах, однако, удар должен рассматриваться в про-
414
Гл. 11. Динамические задачи на
Рис. 11.3.5. Прогиб пластины при х = 2.5 м, у = 1.0 м.
§ 11.3, Динамические задачи об одностороннем контакте
415
цессе интегрирования по времени отдельно. Заметим, что в динамиче-
ских односторонних контактных задачах уже нельзя, как это было в
статических задачах, для данного значения внешних сил определить
зоны, где контакт есть и где его нет (например, с помощью прямого
алгоритма оптимизации). Помимо описанного выше метода, в кото-
ром мы вначале проводим дискретизацию по времени, а затем на каж-
дом временнбм интервале решаем соответствующие задачи минимиза-
ции, можно предложить ещё следующий метод. С помощью регуляри-
зации исходное вариационное неравенство «заменяется» некоторой
последовательностью нелинейных дифференциальных уравнений, зави-
сящих от параметра регуляризации, а затем решаем эти дифференци-
альные уравнения.
В случае полувариационных неравенств можно использовать оба
указанных метода (с естественными модификациями). Метод регуля-
ризации приводит к нелинейным дифференциальным -уравнениям, а
метод дискретизации по времени — к Статическим полувариационным
неравенствам. Последние после регуляризации дают последователь-
ность нелинейных алгебраических уравнений. Во многих случаях эти
уравнения являются полулинейными и содержат лишь «малые» нели-
нейные члены, зависящие от параметра регуляризации. Отметим так-
же, что в пределах каждого временнбго интервала любая точка ло-
кального минимума невыпуклой функции потенциальной энергии дис-
кретизованной задачи (например, функции (11.3.14) с невыпуклыми W
и Ф) будет субстационарной точкой (т. е. точкой, в которой выполнено
необходимое условие минимума) и что, если выполнено (4.3.22), то
любая точка локального минимума удовлетворяет статическому полу-
вариационному неравенству. Что касается численного решения полува-
риационных неравенств, то здесь пока накоплено мало опыта (см.,
скажем, [348]).
Заключение
В этой книге мы ввели и изучили некоторые классы задач на неравен-
ства в механике, используя в качестве основного инструмента исследо-
вания понятие субградиента в выпуклом случае и понятие обобщённо-
го градиента — в невыпуклом.
Задачи на неравенства в механике — область, тесно связанная с та-
кими развившимися за последнее время разделами математики, как
выпуклый анализ, теория оптимального управления и оптимизации,
теория многозначных операторов. Изученные нами задачи являются
достаточно представительными, но не исчерпывают всех возможных
приложений; так, например, ограниченный объём монографии заста-
вил нас отказаться от рассмотрения задач со свободной границей в
механике жидкостей (отсылаем читателя к [161] и указанным там
работам).
Исследования в области задач на неравенства ещё далеки от завер-
шения. Дальнейшего изучения требуют, скажем, такие вопросы, как
регулярность решений односторонних краевых задач, задачи на соб-
ственные значения для вариационных неравенств, полувариационные
неравенства. Кроме того, остаются открытыми многие вопросы, от-
носящиеся к численному анализу односторонних краевых задач. Нако-
нец, имеются богатые возможности для приложений в различных раз-
делах механики. Наример, в аналитической механике можно изучить
дополнительные условия с неравенствами (голономной или неголо-
номной природы) и посмотреть, в какой мере влияет их введение на
справедливость основных положений классической аналитической ме-
ханики (см., скажем, [303]). Упомянем в этой связи об уравнениях Га-
мильтона, записанных в терминах субдифференциалов [349; 350]. В ка-
честве другого примера отметим новую область в теории упругости,
связанную с применением многозначных интегральных уравнений в
теории односторонних краевых задач. По этим вопросам см.
[348—361].
Заключение
417
В этой книге рассматривались вариационные и полувариационные
неравенства, возникающие в различных разделах механики сплошных
сред. Однако задачи на неравенства могут быть поставлены также и
в других областях физики, как релятивистской, так и нерелятивист-
ской, — по существу везде, где обобщённые силы получаются с по-
мощью выпуклых или невыпуклых суперпотенциалов. Как мы видели,
с помощью суперпотенциалов можно изучать более сложные явления,
чем с помощью методов классической, «гладкой» механики. Представ-
ляется также, что понятия субградиента, обобщённого градиента и
производного множества призваны сыграть существенную роль в ре-
шении одной из наиболее важных проблем физики — проблемы сосу-
ществования фаз.
Очевидно, что каждое такое обобщение понятия классической про-
изводной приводит к новому типу вариационных задач и позволяет
формулировать вариационные принципы механики, которые нельзя
получить, оставаясь в рамках классического вариационного исчисле-
ния. Таким образом, появление всё новых и новых обобщений понятия
классической производной расширяет границы «негладкой» механики.
Возникающие при этом вариационные задачи, вообще говоря, допу-
скают конкретную физическую интерпретацию — они выражают прин-
цип виртуальных перемещений (или мощности), как это уже отмеча-
лось в предыдущих главах для случая вариационных и полувариацион-
ных неравенств. «Веера» Иоффе [359] доставляют другой пример,
подтверждающий это высказывание. Таким образом, принцип вирту-
альных перемещений (или мощности) может служить тем оселком, на
котором проверяются новые обобщения понятия классической произ-
водной.
Сделаем ещё один шаг в развитие этой идеи. Вместо того чтобы
получать новые обобщения понятия классической производной, строя
новые понятия типа дифференциала Кларка по направлениям или
верхнего субдифференциала [293], можно определять выражения —
пусть даже нелокального характера, — обладающие свойствами вирту-
альной работы. Тогда, используя принцип виртуальной работы в фор-
ме неравенства, можно получить новое обобщение понятия классиче-
ской производной. Возникающий при этом объект представлял бы со-
бой множество всех х', удовлетворяющих неравенству типа (2.3.1) или
(4.3.13), но содержащему теперь в своей левой части упомянутое выше
выражение («виртуальную работу»).
С изученными здесь краевыми задачами тесно связана теория
оптимального управления и параметрической идентификации в систе-
мах, описываемых вариационными неравенствами. Поскольку изуче-
418 Заключение
ние таких задач не входило в наши намерения, ограничимся тем, что
отошлём читателя к существующей литературе по данному вопросу
(см. [339; 204; 255; 246; 193; 242; 173; 254; 195; 259; 16]).
В заключение следует ещё раз указать на разнообразие возможнос-
ти применения теории задач на неравенства в технике, в частности в
космонавтике, строительстве, машиностроении. Последние две главы
настоящей монографии позволяют составить некоторое представление
о таких возможностях.
Автор надеется, что эта книга будет способствовать дальнейшим
исследованиям, как теоретического, так и прикладного плана, в обла-
сти задач на неравенства в механике.
Добавления
Цель первых четырёх добавлений — напомнить некоторые понятия и
результаты механики и представить их в том виде, в каком они испо-
льзуются в этой книге.
ДОБАВЛЕНИЕ I. НЕКОТОРЫЕ ОСНОВНЫЕ ПОНЯТИЯ
(См. [20; 112; 321; 322].)
Пусть открытое ограниченное подмножество й СIR3 с границей Г пред-
ставляет собой область, занимаемую данным деформируемым телом,
и пусть й отнесено к фиксированной ортогональной системе коорди-
нат ОХ1Х2Х3, с помощью которой устанавливается взаимно-однознач-
ное соответствие между материальными частицами X тела и тройка-
ми (Xi, Х2, Хз) (материальными координатами частиц).
Далее мы будем обозначать деформируемое тело просто через й.
Если Oxi-V2-V3 — другая система координат, то можно записать соответ-
ствующие уравнения
xk = xk(Xi, Х2, Хз) (к = 1, 2, 3). (Д1.1)
Пусть ОХ1Х2Х3 — декартова ортогональная система. Любой процесс де-
формации, вообще говоря, может быть описан с помощью уравнений
траектории движения каждой материальной частицы X:
xi = Xi(Xk, t) (i, к = 1, 2, 3), (Д1.2)
где t € [0, 7] — время. Точка х - х(Х t) — это место, которое занимает
X в момент t. Пусть х = X при t = 0. Координаты хк(к = 1, 2, 3) на-
зываются пространственными координатами частицы X. Отображе-
ние х = {Xi}: й х [0, Т] -> fit С IR3 называют движением тела й. Мно-
жество й< представляет собой область, занимаемую телом й в мо-
420
Добавление I
мент t. Будем предполагать, что функции х> х 1 принадлежат классу
О'", где т € N достаточно велико. Пусть
g = g(X, t) (Д1.3)
— функция класса С1, описывающая изменение некоторой величины g.
Будем говорить, что (Д1.3)— это материальное описание величи-
ны g, а
g = g(x, t)
(Д1.4)
— её пространственное описание. Как принято в классической механи-
ке сплошных сред,описание движения, использующее Xi (соотв. X,) как
независимые переменные, будем называть эйлеровым (соотв. лагран-
жевым). Введём локальную (или пространственную) производную
dg(x, t)/dt функции g и её материальную производную dg(X, t)/dt, ко-
торую будем обозначать просто dg/dt. Материальная и локальная про-
изводные связаны соотношением
dg = dg(x, t) dg dxt(X, t)
dt dt дх, dt
(Д1.5)
Дифференцирование (Д1.2) no t (при фиксированном X) даёт скорость
v = v(X, t) частицы X:
Vi(X, t) = t}. (Д1.6)
Ускорение у = y(X, t) частицы X задается соотношением
dvi(X, t) dvt dvi(x, t) dvt /ГТТ-7Л
-----~~di------------di- + to V1- <ДГ7)
Обращая (Д1.2), получаем v = v(x, t). В случае эйлерова описания рас-
смотрим градиент скорости L = (Ly) = (и/,;). Его симметричная и
антисимметричная части
D = (L + LT) = sym(grad и),
2 (Д1.8)
W = — (L - LT) = asym(grad и).
называются скоростями деформации и поворота.
Для материальной частицы её положение х в данный момент связа-
но с начальным положением X при помощи вектора перемещения и,
а именно х = X + и. Назовём F = = {dxt/dXj] градиентом де-
формации. Тензор FTF (где Т обозначает транспонирование) называет-
Некоторые основные понятия
421
ся правым тензором Коши — Цзина, а
Е = FTF2 1 (Д1,9)
— тензором деформации Цзина. Здесь и далее для всякого вектора at
производную dai/dXj мы обозначаем at j. Скорость градиента дефор-
мации записывается так:
dFik(X, t) _
dt
Следовательно, скорость Е
Vi,jXj,k или —^=LE (Д1.10)
тензора деформации Грина имеет вид
Р dE 1 /dFT р,рТ dF\ E-~di = 2\JdTF + F ~dt) = 1 (FTLTF + F'LF) = FTDF (Д1 л
Таким образом, Еу = \ (uiJ + UJ.T + (Д1-12)
и dEu dt = | (viJ + vJ.t + vkjUkJ + ukjvkj). (Д1.13)
В случае пространственного описания используется тензор напряжений
Коши а = а(х, t); (второй) тензор напряжений Пиолы — Кирхгофа
Е = Е(%, 0 выражается через а по формуле
Е = (det F)F ~1 a (FT) ~1. (Д1.14)
В случае когда градиенты перемещений достаточно малы,
Еу « bj = | (uij + uj.i).
(Д1.15)
Тензор с = [еу] называют тензором (малых) деформаций, а процеду-
ру замены Е на £ — геометрической (или кинематической) линеари-
зацией.
ДОБАВЛЕНИЕ II. ЖЁСТКИЕ ПОЛЯ СКОРОСТЕЙ.
ОБЪЕКТИВНОСТЬ
(См. [112; 197; 322].)
Пусть открытое ограниченное множество С (R3 есть область, зани-
маемая телом 0 в момент t. Будем описывать Я, с помощью декарто-
вой ортогональной системы координат, связанной с телом. Пусть Р —
422
Добавление III
произвольная точка flf, имеющая координаты Хп, Хрз). Всякое
поле скоростей, представимое в виде
v(XP, t) = v0(t) + u(t)bXr VXptQt, (ДП.1)
где Xp = (i = 1, 2, 3), называется жёстким полем скоростей.
Через ио обозначается скорость начала координат. Нетрудно видеть,
что такое поле скоростей получается в результате движения, описыва-
емого уравнением
х = Q(t)X + хо(0. (ДП.2)
где QTQ = QQT = I и detQ = 1. Пусть Хо и Q— достаточно гладкие
функции t. Из (ДП.1, 2) вытекает соотношение
= | CfcyOji» (ДП.З)
где 0 — кососимметричный тензор, задаваемый формулой 0 =
= (dQ/dt)QT, а е — тензор, определяемый так: £у* = О, если какие-
нибудь два из трёх индексов совпадают между собой; £у* = £123 = 1,
если (/, j, к)— чётная перестановка набора (1, 2, 3); £ijk = -1, если
(/, j, к) — нечётная перестановка.
Пусть xt и xi (i = 1, 2, 3) — координаты данной материальной точки
в двух ортогональных декартовых системах координат. Если эти сис-
темы произвольным образом вращаются и поступательно перемеща-
ются одна относительно другой, то имеет место соотношение вида
х = Q(t)x + Xo(t), (ДП.4)
где Q — матрица с теми же свойствами, что и Q, а хо — произвольный
вектор.
Тензорное поле называется независимым от системы отсчёта или
объективным, если оно преобразуется хорошо известным тензорным
образом при преобразованиях координат (ДП.4). Аналогично зависи-
мость между тензорными полями называется объективной, если зави-
симые и независимые переменные преобразуются при заменах коорди-
нат указанным выше образом.
ДОБАВЛЕНИЕ III. ДИССИПАЦИЯ
(См. [112].)
Пусть 0 — тело, имеющее в рассматриваемой конфигурации плотность q.
Пусть е, г), ф = £ - fa) — удельные (т. е. приходящиеся на единицу мас-
сы) внутренняя энергия, энтропия и свободная энергия соответствен-
но; 6 — абсолютная температура; q {qt) — вектор теплового потока;
Диссипация
423
Q — приток тепла на единицу объёма7 внутри О (через излучение или
в результате химических реакций). Первый и второй принципы тер-
модинамики (в локальной форме) гласят:
= + Q-div?, (ДШ.1)
^+ldiv (f) - (ДШ.2)
at e V/ еч
Полагая Q = 0, получаем из (ДШ.2) (с учётом ДШ.1) и определения
V' неравенство
(d$ dff\ qte,i
aijDiJ~e {-dt+r,dt) WIIL3)
Его можно переписать в виде
О, (ДШ.4)
и
где
- № + Г) —Y (ДШ.5)
q dt dt j
я
Величина .^/называется внутренней удельной диссипацией, а величина
qi6,i/6 — тепловой диссипацией. В предположении что тепловая и
внутренняя диссипации между собой не связаны, получаем нера-
венства
,с/^ 0 и - > 0. (ДШ.6)
и
Выражая ф как функцию от переменных состояния, заключаем, что
.;/ можно представить в виде
fcw. (ДШ.7)
Члены vj обозначают потоки, а члены &— силы, зависящие от пере-
менных состояния.
1 Отметим, что в п. 4.2.1 буква Q. обозначает приток тепла на единицу массы.
424
Добавление IV
ДОБАВЛЕНИЕ IV. ТЕОРИЯ ПЛАСТИЧНОСТИ
И ТЕРМОДИНАМИКА
(См. [75; 196].)
Термодинамическое состояние в данный момент времени t — to мате-
риального элемента, обнаруживающего пластическое и/или вязко-
пластическое поведение, нельзя полностью описать, взяв в качестве
переменных состояния тензор напряжения Пиолы — Кирхгофа Е =
= Е(%, Г) и абсолютную температуру в = 0(Х, Г), как это было в слу-
чае упругого материала. Здесь надо либо задать «предысторию» этих
переменных при - оо < t to, либо ввести некоторые дополнительные
переменные состояния (называемые скрытыми, т. е. ненаблюдаемы-
ми, переменными). Первый метод не годится для классических упруго-
пластичных тел, поскольку материал ведёт себя по-разному в процессе
нагружения и разгрузки. Скрытые переменные (например, распределе-
ние дислокаций в кристалле, остаточные напряжения между микроэле-
ментами в поликристалле или в гранулированной среде, некоторые
физические и химические свойства) не обязательно являются внутрен-
ними переменными (которые всегда имеют тензорную природу) — они
могут зависеть от ориентации.
Обозначим через (I) начальную конфигурацию тела, и будем счи-
тать, что в начальный момент все напряжения равны нулю, а абсо-
лютная температура имеет некоторое фиксированное значение во. Да-
лее, обозначим через (III) конфигурацию в момент t с полем напряже-
ний а и температурным полем в, а через (II) — конфигурацию,
называемую освобождённой и получаемую из (III), когда происходит
мгновенная упругая разгрузка, а температура возвращается к исходно-
му значению во. Если F— градиент деформации «преобразования»
(I) -> (III), а; Fe и Fp — градиенты деформации «преобразований»
(II) -> (III) и (I) -♦ (II) соответственно, то имеет место соотношение
F = FeFp. (Д1У.1)
Для конфигурации (III) скорость тензора деформаций имеет вид
D = + = sym(grad и) = sym
= sym F~ + sym(Fe VPF~ ’). (Д1У.2)
1 Ниже индексы е и р — от elastic (упругий) и plastic (пластический). — Прим. ред.
Теория пластичности и термодинамика
425
Здесь Vp = (3Fp/dt)Fp 1 есть скорость пластического преобразования
для конфигурации (II) (З/dt обозначает производную по времени, вы-
численную для движения, отнесённого к направляющей тройке конфи-
гурации (II). Каждый из двух членов в правой части (Д1У.2) зависит
от того, как с течением времени меняется ориентация свободной кон-
фигурации. Поэтому удобно использовать такие свободные конфигу-
рации, для которых выбранная направляющая тройка всегда одинако-
во ориентирована по отношению к некоторой фиксированной системе
координат. Получающиеся конфигурации (II) называются изоклинны-
ми свободными конфигурациями.
Возьмём в качестве переменных состояния тензор деформации Гри-
на Ее упругого преобразования (II) -♦ (III), абсолютную температуру
6 и некоторый набор неявных переменных о,, j = 1, ..., Z, имеющих
тензорную природу. Удельная мощность напряжений равна
= tr ( — FTeDFe\ = tr {----=-) + tr( — FfFeVp), (Д1УЗ)
e \en / \en dt / \ en /
где 1г(Л) обозначает след тензора A, d/dt — производная по времени
движущегося тензора относительно направляющей тройки конфигура-
ции (II), а рп — плотность в «отсчётной» конфигурации (II). Если
= ^(Ее, aj, в), то первое неравенство (ДШ.6) принимает вид
+ tr (£- FTeFe иЛ - > 0. (Д1У.4)
\еп / oaj dt
Предположим, далее, что JEe/ dt и Зе/dt могут принимать произволь-
ные значения, а остаточные деформации, равно как и производные
daj/dt ограничены (как, например, в случае вязко-пластичного матери-
ала). Из (Д1У.4) следует, что
откуда
Е _ 5^
еп ЗЕе ’
4 де ’
tr (— FTeFe Vp
\еп
daj dt "
(Д1У.5)
(Д1У.6)
(Д1У.7)
Однако, если имеют место мгновенные пластические деформации (ска-
жем, в случае идеальной пластичности), то производные 3E^/dt, Зе/dt,
426
Добавление V
daj/dt и т. д. взаимозависимы, и проведённое выше рассуждение не
проходит. Тем не менее можно предположить, что и в этом случае
соотношения (Д1У.5, 6) остаются справедливыми, поскольку идеальная
пластичность есть предельный случай вязко-пластичности.
На основании (Д1У.7) мы соотносим потоку -da,/dt силу Aj =
= д-ф/daj, j = 1, 2, ..., I, а потоку Vp— силу
R = F^Fe , (Д1У.8)
еп
так что можно записать в виде
tr (RTVP} - Aj^~ . (Д1У.9)
ДОБАВЛЕНИЕ V. ПОНЯТИЕ КВАЗИДИФФЕРЕНЦИРУЕМОСТИ
И ЕГО ПРИМЕНЕНИЕ В МЕХАНИКЕ7
Цель настоящего добавления — указать на возможности применения в
механике понятия квазидифференцируемости.
До сих пор мы в этой книге имели дело с недифференцируемыми
потенциалами, обладающими субдифференциалами в выпуклом случае
и обобщёнными градиентами — в невыпуклом, что давало возмож-
ность получить соответствующие вариационные или полувариацион-
ные неравенства. Кроме того, мы рассмотрели возможности примене-
ния в механике понятия производного множества, которое является
(равно как и понятия субдифференциала и обобщённого градиента)
обобщением понятия дифференциала на случай негладких функций.
Очевидно, что тем, кто занимается «негладкой механикой» следует
тщательно исследовать любое обобщение понятия классической произ-
водной на предмет возможности использовать его для формулировки
и изучения задач механики с негладкими функционалами энергии. Но
это не единственная причина того, почему понятие квазидифференци-
руемости представляет интерес при изучении негладких задач механи-
ки. Обсудим этот вопрос более подробно. С точки зрения механики
такое понятие выпуклого анализа как субдифференциал является впол-
не обоснованным, и его применение не приводит ни к каким логиче-
7 Знакомством с математической теорией квазиднфференцируемых функций автор
обязан профессору В. Демьянову. Уже после появления английского издания книги автор
осознал важность этого понятия для постановки н изучения некоторых задач механики
и решил написать это добавление для русского издания.
Понятие квазнднфференцнруемостн
427
ским противоречиям. Поэтому в отношении применения выпуклых су-
перпотенциалов не может быть никаких возражений. Иначе дело об-
стоит в невыпуклом случае. Действительно, сравнение обобщённого
градиента с производным множеством [331] и с квазидифференциалом
[362—364] даёт основания утверждать, что обобщённый градиент
Кларка не содержит полной информации о поведении функции «по
различным направлениям» вранной точке. Дело в том, что определе-
ние обобщённого градиента df основано на понятиях дифференциалов
по направлению/tf,-) и/°(-, ) (см. (4.3.6, 11)) Рокафеллара [293] и
Кларка [46], которые являются в некотором смысле «аппроксимация-
ми» дифференциала Гато по направлениям/'(•,•) (см. (2.3.13)). С дру-
гой стороны, обобщённый градиент Кларка, описывающий поведение
функции «суммарно», «совокупно», позволяет сформулировать в меха-
нике широкий класс вариационных принципов в форме вариационных
и полувариационных неравенств — всякий раз, когда определяющее со-
отношение представляется в виде (4.3.30). Так будет, например, в слу-
чае одномерных граничных условий типа (8.4.3, 17). Обобщённый гра-
диент df приводит к полувариационным неравенствам, так как его
определение (см. например, (4.3.13)) основано на определениях /г(-,-)
и/или /°(-,‘), основная цель введения которых — получить аналог со-
отношения (2.3.20) для случая невыпуклых негладких функций. (Фак-
тически, аналогичное соотношение выполняется для производных по
направлению для случая функций максимума (см. например [364]).)
Следовательно, если df(x) # 0, то для любого уеХ справедливо со-
отношение (4.3.15), которое можно записать в виде
Г(х, у) = max{<y, х'> lx' € д/(х)}. (ДУ.1)
если дифференциал f1 (х, у) конечен для любого у. Квазидифференци-
альное исчисление позволяет хорошо описывать свойства функций «по
направлениям» в данной точке. Формулы квазидифференциального ис-
числения являются точными равенствами в отличие от формул исчис-
ления обобщённых градиентов, имеющих вид включений. По этой
причине класс квазидифференцируемых функций представляет собой
линейное пространство, замкнутое относительно всех алгебраических
операций. Кроме того, для любой функции из этого класса можно по-
строить исчерпывающие семейства верхних выпуклых и нижних вогну-
тых аппроксимаций [365]. Более подробную информацию по этому во-
просу читатель может найти в [362—366].
Указанные черты квазидифференциального исчисления делают его
чрезвычайно привлекательным для теории оптимизации, особенно при
изучении «свойств первого порядка функций». Но почему это исчисле-
428
Добавление V
ние важно для механики? По двум причинам. Предположим, что в
рамках некоторой механической теории сформулирована задача на ми-
нимум, в которой фигурируют не обязательно гладкие функции выпук-
лые или невыпуклые. Рассмотрим, например, задачи (6.3.2, 6) для
упруго-идеально-упругопластичного тела (или упруго-идеально-старе-
ющего тела), находящегося в одностороннем контакте с жёстким
основанием, или задачу о минимуме веса. В этом случае с алгоритми-
ческой точки зрения важно как можно точнее найти направления спус-
ка минимизируемой функции в заданных точках, а как раз такую воз-
можность даёт применение квазидифференциального исчисления
(см. [363]). Получаемые при этом необходимые и достаточные условия
оптимальности, будучи истолкованы механически, позволяют дать бо-
лее глубокое описание поведения рассматриваемой механической
системы.
Другая, и более глубокая причина, состоит в следующем. Грубо го-
воря, изучая механическую систему, мы фактически стараемся найти
соотношения между вариациями (соответствующих порядков) по на-
правлениям величин, фигурирующих в задаче. Эта общая идея уже
проникла в скрытом виде в литературу по механике гладких процес-
сов. Здесь имеются в виду наиболее простые случаи градиентных
теорий нулевого, первого, второго и т. д. порядков в механике
(см. п. 3.1.1). Хотя изучение этого аспекта связи квазидифференциаль-
ного исчисления с механикой ещё только начато, автор полагает, что
эта сторона дела является наиболее важной с точки зрения механики,
и именно здесь в будущем полностью раскроются преимущества ква-
зидифференциального исчисления.
Прежде чем приступить к основной части настоящего дополнения,
отметим ещё, что в прикладной механике принято считать, что любую
негладкую задачу можно аппроксимировать гладкими. Такой подход
бывает очень полезен при доказательстве теорем существования, но
численные результаты, полученные с помощью гладких аппроксима-
ций, могут оказаться ошибочными, ибо многие свойства исходной не-
гладкой задачи могут быть утеряны в процессе сглаживания. В связи
с этим мы отсылаем читателя к весьма поучительному примеру, при-
веденному в [365, р. 7].
Прежде всего дадим определение квазидифференциала. Это поня-
тие было введено в 1979 г. В. Ф. Демьяновым, Л. Н. Поляковой и
А. М. Рубиновым [367; 368]. Функционал /: А -» IR, где А —открытое
подмножество в IR", называется квазидифференцируемым в точке
х€А, если он дифференцируем в этой точке по любому направлению
Понятие квазидифференцируемости
429
(т. е. f'(x, й) существует для всех й/ IR", см (2.3.13)) и найдутся два
выпуклых компакта 2 'f(x) С IR" и д 'f(x) С IR", такие что
7' (х, й) = max{ <Xi, й> Ixi € 2 '/(х)}
Л-1
+ min{ <Х2, й> I х2 € Э '/(х)) Уй € IR". (ДУ.2)
Х2
Это соотношение можно записать в следующей эквивалентной форме:
7' (х, й) = min max { <Xi + Хг, й > I Xi € д '/(х), хг € д 'f(x)). (ДУ.2а)
Х2 Xl
Здесь <•,•>—скалярное произведение в IR". Пара множеств
Df(x) = {2'/(x), Э'/(х)) (ДУ.З)
называется квазидифференциалом функции / в точке х. Множества
д 'f(x) и а '/(х) будем называть соответственно Э' -субдифференциалом
и а' — супердифференциалом функции f в точке х. Штрих использован
здесь для того, чтобы подчеркнуть отличие от субдифференциала д/(х),
определенного, как это принято в выпуклом анализе (см. (2.3.2))'. Из
(ДУ.2, 3) ясно, что квазидифференциал Df(x) в точке х определён неод-
нозначно. Данное выше определение можно обобщить, заменив IR"
произвольным отделимым локально-выпуклым пространством X. В
этом случае 3'/(х) и д'/(х) являются Е (ЙГ', ^-компактными подмно-
жествами сопряжённого пространства X' (см. гл. 1), а <•, •> — кано-
ническое спаривание между X п X’. В [362] дано другое обобщение —
на случай отображений банахова пространства X в банахово простран-
ство Y, представляющее собой условно полную векторную решётку,
снабжённую монотонной нормой.
Если функция / непрерывно дифференцируема на А, то она квази-
дифференцируема в любой точке х€А и
Df(x) = (grad/(x), 0) или [0, grad/(x)). (ДУ.4)
Таким образом, / является как д '-субдифференцируемой, так и д'-су-
пердифференцируемой в каждой точке х.
Если /— выпуклая функция, определённая на выпуклом множестве
А, то (ДУ.2) можно записать в виде (2.3.20). Поэтому
Df(x) = {df(x), 0), (ДУ.5)
где Э/(х)— субдифференциал из выпуклого анализа (см. (2.3.1)). Ана-
1 В работах [363—368] штрих не ставится. Кроме того, в названиях д '-субднфферен-
циала и д'-супердиффереициала символа д' там тоже нет.
430
Добавление V
логично если f—вогнутая функция на выпуклом множестве А, то
/1 = -/ будет выпуклой функцией, и
Df(x) = {0, Э/(х)], (ДУ-6)
где
§f(x) = lx' tX' l/(xi) -f(x) <х', xi -х> Vxi€%} (ДУ.7)
— супердифференциал вогнутой функции f в точке х [288]. Далее, ока-
зывается, что для всякой Э-регулярной функции (см. п. 4.3.1), тканей
что Л(х, й) # ±оо Уй, выполняется соотношение (ср. с (4.3.15))
7'(х, h)=f(x, й) = шах[<Х1, й>1х1€Э/(х)} (ДУ.8)
и, значит,
Df(x) = (df(x), 0], (ДУ9)
где Э/(х)— обобщённый градиент. Например, если f—функция макси-
мума, скажем / = max[y>i, ..., <рт], где <pi = <pi(x), i= 1, 2, ..., т,
x€lR"— гладкие функции, то, как известно (см. п. 4.3.1), f является
Э-регулярной и, следовательно (см. 4.3.29а),
Df(x) = [со[grad <pt(x), ..., grad^t(x)}, 0} (ДУЮ)
для х€ [xl^,-=/, ..., <рк=Л-
Эту формулу можно вывести, не привлекая теорию обобщённого гра-
диента (см., например, [364]).
Рассмотрим, теперь пары множеств Г, = [А/, Д], г = 1, 2, где
Aj С X', BtCX', и определим для них операцию сложения:
Г1 + Г2 = И1 +А2, Bi + В2] (ДУ.И)
и операцию умножения на число X € [R:
[ХА, XBi]
[XBh ХА]
при X > 0
при X < 0.
(ДУ.12)
Используя эти определения, можно показать, что если f, г = 1, ...
..., п, — квазидифференцируемая в точке х функция, то и функция g =
= (о, € IR) тоже квазидифференцируема в точке х и Dg - ^a,Dfi.
i i
Далее, можно показать, что если fi и /2 квазидифференцируемы в точ-
ке х, то и g = /г/2 обладает тем же свойством и
Dg(x) = fi (x)Df2(x) + /2(х)РД(х); (ДУ.13)
если кроме того /2(х) А 0, то функция g = fi/f2 квазидифференцируема
Понятие квазидифференцируемости
431
в точке х и
Dg(x) = (/2(x)D/i(x) - /1(х)Д/2(х)]//2(х). (ДУ.14)
Очень важным является следующее свойства: если функции <pt,
i = 1, ..п. квазидифференцируемы в точке х, и функция f = max <pi
i
тоже квазидифференцируема в х, причём
3 '/(х) = со fa' <рк(х} -Sd' W(x) I к € /(х)], (ДУ.15)
I <€/(%) J
i*k
3f'(x) = s аых), (ду.16)
kti(x)
где I(x) - (zl<p,(x) = /(x)J. Аналогичная формула справедлива и для
функций минимума. В этом случае Э '/(х) (соотв. д '/(х)) задается фор-
мулой (ДУ.15) (соотв. (ДУ.16)) с заменой в правой части д' на д’, а
д' на д'. Если f = f\ + fi, где функция fi (соотв. /г) выпукла (соотв.
вогнута) и /Дх), /2(х) конечны, то /квазидифференцируема и в каче-
стве Df(x) можно взять [369]
Df(x)= (Э/Дх), 5/2(х)}. (ДУ.17)
Заметим, что из (ДУ.2а) следует, что для любых х2€3'/(х) и
xi € 5 '/(х) функции
max €х2 + £'/(х)] = Л2(-)
и
min (<<?2, • > I <?2 € Xi + Э'/(х)} = гХ1(-)
служат соответственно верхней выпуклой (и нижней вогнутой) аппрок-
симациями функции / вблизи точки х, а семейства функций
(Гх2(-)1х2€Э'/(х)) и {/>,(•) Ixi € 3'/(х)]
являются исчерпывающими семействами соответственно верхних вы-
пуклых и нижних вогнутых аппроксимаций функции / вблизи точки
х [365].
Легко показать [364], что если / квазидифференцируема на X, то
для того, чтобы задача
/(хь) = min[/(x) lx € X], (ДУ.18а)
соответствен но
/(Хо) = max {/(х) I х € X], (Д V.18b)
432
Добавление V
имела решение, необходимо, чтобы
-а'/(хь)са'/(хь), (Д¥.19а)
соответственно
-^(ХоУСд'Дхо). (Д¥.19Ь)
Соотношение (Д¥.19а) (соотв. (Д¥.19Ь)) вытекает из необходимого ус-
ловия минимума (соотв. максимума): J'(xo, у) 0 (соотв. ^0) для лю-
бого у$Х.
Всякая точка хо (соотв х), удовлетворяющая условию (Д¥.19а) (со-
отв. Д¥.19Ь)), называется inf-стационарной (соотв. зюр-стационарной)
точкой функции f на X. Можно показать, что в случае X = IR", если
точка Хо не удовлетворяет (Д¥.19а), направление
£ = - ||-*,° - w° , max min[Ни + wll I w € d 'f(xo), и € 2'(xo) j
В Vo + W()U w v
= II vo + II (Д¥.20а)
будет направлением наискорейшего спуска функции f в точке хо (такое
направление не единственно), а если хь не удовлетворяет (Д¥.19Ь), то
направление
f ~ + > max min[ Но + wll I w € d'f(Xo), v € З'Дхь))
II Vo + tVo II v w
= II Vo + Я-0II (Д¥.20Ь)
будет направлением наискорейшего подъёма функции f в точке Хо (та-
ких тоже может быть не одно).
Перейдем к приложениям понятия квазидифференцируемости в ме-
ханике.
а) Для любой механической системы Е, описываемой тройкой Е =
= (^, <и, р, 3е}, любой закон вида (4.3.30), где функция Ф является
d-регулярной, можно записать в квазидифференциальной форме
0} €£>Ф(и) = (ЭФ(«), 0). (Д¥21)
Это справедливо для всех теорий с невыпуклыми Э-регулярными по-
тенциалами. Данное замечание дает возможность использовать в слу-
чае Э-регулярных потенциалов методы квазидифференциального ис-
числения, позволяющие получать более тонкие условия оптимальнос-
ти, чем те, которые могут быть получены с помощью исчисления
обобщённых градиентов [370].
Понятие квазнднфференцируемостн
433
Ь) Для этой же механической системы можно рассмотреть более
общий закон вида
{ €ОФ(а) = (а'Ф(и), Э'Ф(и)}, (ДУ.22)
где а Ф — квазидифференцируемая функция. Чтобы пояснить
соотношение (Д V.22), предположим для простоты, что = IR" и
IR". Для всякого ограниченного подмножества А с 3^ определим
его опорную функцию sa формулой
Ул(и) = sup{<u, (ДУ.23)
Опорные функции сублинейны (т. е. субаддитивны (5л («1 + ад)
Sa (ад) + sa (ад)) и положительно-однородны), и обратно, любая суб-
линейная функция й является опорной функцией единственного выпук-
лого компактного множества, которое задается формулой
А = I <«, р й(и) Va € . (ДV.24)
Следовательно, (22) можно записать в виде (см. (ДУ.2))
Ф'(и, ») = 5а-ф(и)(») - (ДУ.25)
Очевидно, что
2'Ф(«)= ЦЩ, (ДУ.26)
Аналогичное неравенство справедливо также и для Э'Ф(и). Таким об-
разом, в правой части равенства (ДУ.25) стоит разность двух субли-
нейных функционалов. Обозначим через Q класс всех выпуклых ком-
пактных Подмножеств множества 5Г Как видно из предыдущего об-
суждения, любой функции <р, представимой в виде разности двух
сублинейных функций, можно сопоставить множества А € Q и В € Q,
такие что
<р(и) = шах{<и, р +min{<u, j)l£€B]
= Sa (и) — 5-в(и). (ДУ.27)
Введём на Q х Q отношение. следующее эквивалентности R: [Ai,
Bi\R{Ai, Bi\ тогда и только тогда, когда А\ - Вг = Аг - В\. Далее
обозначим через Q факторпространство (Q х Q)/R: класс эквивалент-
ности с представителем {А, В) будем записывать как [А, В]. Зададим
на Q структуру векторного пространства с помощью (ДУ.Н, 12). Если
ещё задать на Q норму как хаусдорфово расстояние d(A, -В,) то Q
превращается в нормированное пространство [371]. Векторное про-
странство 0 функций, представимых в виде разности сублинейных
функций, является нормированным пространством с нормой 111^111 =
434
Добавление V
= sup{I<^(u)I Iu €8«8 = 1), и в [367] показано, что соответствие
[Л, В] -» $л(-) - я-в(-) является изометрией. Сказанное выше проясня-
ет смысл соотношения (ДУ.22). Можно сложить несколько соотноше-
ний вида (ДУ.22) и получить
[-S6,- €£рф,(«) = = |э'£ф,(«), d'2>(«oj.
(ДУ.28)
Если некоторые из Ф, в (ДУ.28) являются функциями максимума или
минимума, как например в случае обобщённого закона старения, то
формулы (ДУ.15, 16) дают возможность записать рассматриваемый
закон в некоторой полезной форме с множителями, поскольку в этих
формулах фигурируют выпуклые оболочки (ср., например, с (4.3.29)
для d-регулярных функций).
Если в (ДУ28) S^(") = S’iW + ^г(«), где функция <pi (соотв. <рг)
i
выпукла (соотв. вогнута), то ввиду (ДУ.17, 28) для случая конечных
^i(u), ^г(«) мы имеем
¥>i(v) — <pi(u) v — Vvtty', (ДУ29а)
<рг(у) — 9 ~ Vv€^<. (ДУ.29Ь)
Если положение равновесия характеризуется условием + &) = О,
i
то, решив относительно и систему, состоящую из последнего уравне-
ния и вариационных неравенств (ДУ.29а, Ь), получим все возможные
положения равновесия. Аналогично можно действовать и в общем
случае (ДУ.28), если положение равновесия описывается соотношением
(или соотношениями) вида 2(а<& + Ь$) = 0, a,, bi € IR.
i
Наконец, как и в (4.3.33) можно рассмотреть вместо (ДУ.22) зако-
ны вида
{«, «}€РФ1(-р. (ДУ.30)
с) Как и в п. 4.1.3, рассмотрим деформируемое тело с фиксирован-
ной границей Г. Тогда (4.3.49) принимает вид
j aij(u)Eij(v - u)dQ - j fi(vi - Ui)dQ = 0 Vu € 1/доп (ДУ.31)
a a
Понятие квазидиффереицируемости
435
(поскольку Ui = О на Г, i = 1, 2, 3). Здесь 1/доп — множество кинемати-
чески допустимых перемещений. Рассмотрим определяющее соотно-
шение вида
оц£Ь = w'(£> £*) V£‘ = ) € r6- (ДУ-32)
Как и в п. 4.3.2, для /,€£2(й) приходим к следующей задаче:
Задача 1. Найти и € [Н1 (й)]3, удовлетворяющее вариационному ура-
внению
j (w' (£(ы), £(и - и)) - fi(Vi - ut))dQ = 0 Vu € [ti1 (Й)]3. (ДУ.ЗЗ)
Очевидно, что в случае, когда функционал w выпукл, из (ДУ.ЗЗ)
можно получить вариационное неравенство7, применив (2.3.15) к
w'(-,-). Определяющее соотношение (ДУ.32) описывает гиперупру-
гие материалы. Можно было бы рассмотреть более общий закон
(см. §3.3)
ou£ii^ w'(£, £*) V£* € IR6, (ДУ.34)
где неравенство означает, что действуют некоторые механизмы дисси-
пации. В этом случае (ДУ.ЗЗ) также превращается в неравенство. Для
d-регулярной плотности энергии деформации имеем w'(£, £*) = ^(е,
£*), и (ДУ.ЗЗ) выполнено как полувариационное неравенство. Предпо-
ложим теперь, что функционал w является квазидифференцируемым,
т. е. существуют выпуклые компактные множества А = й' w(£) и В =
= д' B’(fi), такие что
w’(e, е*) = тах{ту£у1т= {ту} €Л}
+ пйп{ту£у1т = {ту} € 2?} = $л(£*) - $-в(£*) V£*€ IR6. (ДУ-35)
Вводя обозначения ту£у = (т, £*) и т. д., можем записать
w'(e, £*) > (т, £*) + min{(r, £*)I т € дл M’(fi)}
V? € 3' M’(fi) V£* € IR6. (ДУ36)
Далее, существует т € д ’ w(e), такое что
w'(e, е*)^(т+т, е*) V£* € IR6, Vt€2'w(£). (ДУ-37)
Таким образом задача 1 принимает вид:
Задача 2. Найти и € [/^(й)]3, удовлетворяющее условию а? € д' w(e(u))
и такое что
1 То же самое можно сделать локально, если функционал w является выпуклым в
некоторой окрестности точки е.
436
Добавление V
( fi(vi ~ Ui)dQ j (Т + т, e(v - u))dQ
о о
V? € 2' w(£(w) Vu 6 [Я1 (Й)]3. (ДУ.38)
Эта задача эквивалентна следующей:
Задача 2'. Найти [/f’(fl)]3, удовлетворяющее соотношению
j [ min max (т + т, e(v)) - fiujdfl = 0 Vu € (ДУ.39)
a rtB ttA
Если выполнено (ДУ.34), то ставится та же задача с заменой «= 0»
в (Д V.39) на «> 0».
Многие реальные материалы подчиняются указанным определяю-
щим соотношениям. Например, материалы, у которых плотность
энергии деформации w представляет собой конечную функцию, являю-
щуюся суммой конечных выпуклой и вогнутой частей: w = мч + w2.
Тогда й'и’(£) = 3wi(£) и д' w(s) = dw2(e). Аналогично обстоит дело и
в случае, когда энергия деформации выпукла по некоторым компонен-
там £i тензора деформации и вогнута по остальным его компонентам
£г. Пусть, например, функция £ -+ и’(е) = w(£i, £2) конечна на Е\ х
Ег С IR0, где Ei с IR“, Е2 С IR0, а + /3 = 6, — выпуклые открытые мно-
жества. Тогда функция и’(-, £2) (соотв. w(£r) выпукла (соотв. вогнута),
и множества d£1w(-, £2) (субдифференциал) и 3£2w(£i, •) (супердиффе-
ренциал) являются непустыми выпуклыми компактами. Можно пока-
зать (см. [364, с. 232]), что отображение е -+ w(£i, £2) квазидифференци-
руемо на Ei х Е2 и
д' w(Ei, £2) = (d£l wfai, £2), 0)CIR“ x IR0,
d'w(£i, £2)= (0, 3£2m’(£i, £2)]cIR“ x IR0. (ДУ.40)
Ряд одномерных и двумерных реализаций вышеописанных определя-
ющих соотношений легко получить, комбинируя соответствующим
образом диаграммы из § 3.3.
Заметим, что аналогичные результаты справедливы для упругого
тела, удовлетворяющего граничным условиям
-Sivi = (или <)/'(“> w) Vv6lR3 (ДУ.41)
с квазидифференцируемой функцией j.
Для того чтобы привести более конкретный пример, рассмотрим
закон трения вида
— St.vt, - Snvn = j'(UT, un', vt, vn), (ДУ.42)
где функция un j(wr, un) вогнута или, более общим образом д-регу-
лярна, а функция ит J(ut, un) выпукла и конечна. Мы можем, напри-
Понятие квазидифференцируемости
437
мер, взять j(iiT, un) = cIutI —классический потенциал трения, а в ка-
честве ит -* j(ur, un) взять любую d-регулярную функцию, например
функцию, получающуюся из закона расслоений (скажем, берём диа-
грамму на рис. 4.3.3 для растяжения и линейно продолжаем её для
сжатия). Слегка видоизменив доказательство из [364, с. 232], можно
показать, что отображение (ит, uN) j(ur, un) квазидифференцируемо
и выполнено условие, аналогичное [ДУ.40], с заменой д на -д.
d) Аналогично тому, как в с) были получены выражения, отвечаю-
щие потенциальной энергии, можно получить выражения для допол-
нительной энергии, например взяв вместо (ДУ.32)
£уту = w{(o, т) Ут*€ [Ту] € IR6. (ДУ-43)
е) Грубо говоря, «слабость» обобщённого градиента проистекает
из того, что он «плохо различает» выпуклую и вогнутую «части» рас-
сматриваемой функции w. Влияние выпуклой (соотв. вогнутой) части
на вариации w по направлениям более точно описывается при помощи
квазидифференциального исчисления.
У всех рассматриваемых в этой книге задач минимизации в кото-
рых фигурируют невыпуклые функционалы энергии, имеется одно об-
щее свойство — любой локальный минимум соответствует некоторому
положению равновесия, но не наоборот (см. в этой связи п. 4.3.2).
Действительно, каждый локальный минимум является точкой субста-
ционарности и, следовательно, соответствует положению равновесия.
Аналогично обстоит дело в теории больших упругих деформаций
[372—374] (см. также п. 7.1.3). Возникающие задачи минимизации, как
правило, являются невыпуклыми и негладкими и локальные миниму-
мы могут быть найдены при помощи тонких критериев, найденных
Демьяновым (см., например, [375]), которые мы здесь не будем приво-
дить. Предоставляем читателю в качестве упражнения дать «словес-
ную» формулировку этих критериев для задач дискретной теории пла-
стичности в приращениях с разупрочняющимся поведением материала
(в этом случае матрица М из §11.2 не является положительно-
полуопределённой). Получающиеся необходимые и достаточные усло-
вия открывают новые возможности применения квазидифференциаль-
ного исчисления в теории пластичности.
f) Следуя идеям пп. 3.2.1 и 4.3.3, можно рассмотреть соотношения
между силами [§i, §2 ] € х 5F = У~= IR" и потоками и € = IR" для ре-
ального термодинамического процесса, имеющие вид
{(,, §2] €D^(u), (ДУ. 44)
где ./i — квазидифференцируемая функция.
438
Добавление V
Используя обозначения из добавления IV, можно по аналогии с
(4.3.84) рассмотреть законы вида
F/1 *, - {Л;}). WV.45)
В случае когда функция & представляет собой максимум некоторого
конечного числа квазидифференцируемых функций, формулы [ДУ.45,
15, 16] доставляют обобщение (4.3.91—93).
g) Справедливо следующее утверждение: любому замкнутому кону-
су С можно сопоставить функцию <р, представимую в виде разности
двух сублинейных функций, и такую, что С = (х 6 IR" I <р(х) < 0 ] [366].
В силу (ДУ.27) можно записать
С - {х 6 IR" I <р(х) = $л(х) - s-B(x) < 0]. (ДУ.46)
Поэтому множество всех функций удовлетворяющих (ДУ.46), есть
замкнутый выпуклый конус л [С] в пространстве 0, а множество со-
ответствующих элементов [А, В\ пространства Q образует выпуклый
замкнутый конус 1V[C] в пространстве Q. Рассмотрим теперь произ-
вольное замкнутое множество Т С IR" и точку хь € Т Говорят, что век-
тор у является касательным к множеству Т в точке хь, если найдутся
последовательность (ХлёТ) и последовательность (Z„), tn > 0,
tn -* 0 +, такие что lim (xn - Xo)/t = у. Все возможные касательные
Л-*вО
векторы к множеству Т в точке хь образуют касательный конус 5г(хъ),
который является замкнутым. Предположим теперь, что [А, В] €
€ IVfC]7. Далее, обозначим через Лт(хо) множество всех квазинормалей
к Г в точке хь. Пусть Т={х\р(х) < 0], где р — некоторая квазидиффе-
ренцируемая функция, и пусть точка хь такова, что р(хо) = 0. Обозна-
чим через /•(•) функцию (sa,piXay - s_a,piXity) (•)> и пусть выполнено ус-
ловие невырожденности
]х1т(х) < 0] = {хI т(х) < 0]. (ДV.47)
Тогда
Dp(Xo) = {З'р(хъ), д'р(хо)} (ДУАЗ)
есть квазинормаль, соответствующая 5?(хь). Теперь, после данного
выше математического введения, рассмотрим законы пластичности
вида
е* = {#, ё?} t {ХРр(л)1Х > 0]. (ДУ.49)
1 Здесь [Л, Я] € Q. Будем говорить, что [4, В] является квазинормалью к Г в точке
хь, если существует замкнутый конус С такой что С С -Я-(хо).
Понятие квазидифференцируемости
439
Этот общий закон включает в себя как частный случай неассоцииро-
ванные законы пластичности для выпуклых поверхностей текучести.
Соотношение (ДУ.49) можно рассматривать как” обобщение таких
законов.
h) Рубинов и Ягубов [376] показали, что если дифференциал
/' (х, h) непрерывен по А, то найдётся пара звёздных множеств (U,
V], таких что
f'(x, А) = тах(Х < ОIА € -ХК] + min(X > 01А € Xt/}. (ДУ.50)
Напомним, что замкнутое множество t/ С IR" называется звёздным
(или звездообразным), если Об U и все лучи вида [XxlX > О, xtU}
пересекают границу множества U не более чем в одной точке.
Как известно [123] (см. также [298]), звездообразные поверхности
образуют весьма общий класс поверхностей текучести, рассматривае-
мых в теории пластичности. Вопрос о связи соотношения (ДУ.50) и
исчисления, развитого в [376], с теорией пластичности остаётся пока
открытым.
Список обозначений
Ниже приводятся сокращения и основные обозначения, использован-
ные в книге. Там, где необходимо, мы отсылаем читателя к параграфу
или пункту, где даётся определение. Если не оговорено противное, то
действует обычное соглашение о суммировании, согласно которому по
повторяющемуся индексу производится суммирование, т. е. мы пишем
просто х,уц вместо Жирными буквами обозначены векторы и
i
матрицы, отвечающие дискретизованной сплошной среде Ввиду ха-
рактера используемых пространств функций, большинство соотноше-
ний у нас имеет место почти везде (относительно меры Лебега или
иной рассматриваемой меры д) и поэтому соответствующие сокраще-
ния («п.в.» или «д-п.в.») приводятся только тогда, когда для большей
ясности стоит напомнить читателю, что соотношение выполняется
именно в таком смысле.
0
v
IN
IR
IR +
СО при / # j,
(1 при / = j
пустое множество
каково бы ни было, для всех
множество натуральных чисел (включая
нуль!)
множество вещественных чисел
множество положительных вещественных
чисел
расширенная вещественная прямая (с добав-
ленными точками ±оо)
эвклидово л-мерное пространство
символ Кронекера
Список обозначений
441
X = (Х1, . . ., Хп)
= {Xih i = 1, ..п
(п \ 1/2
S Xi)
i = 1 /
(X, у) = S Xty,
/=1
= Xiу,
ХЛ у
Й
г
{аь 0(2, ...)
ЛОВ, ЛПВ, А \ В
^(Л)
Л х В
[а] = a/R
= {/31(а, /3) € В)
A/R = {[а] |а € Л)
int Л
А
rel int Л
ВП
ТВП
лвп
точка х € IR"
длина вектора х€ IR"
скалярное произведение в IR"
векторное произведение в IR"
открытое, обычно ограниченное и связное
подмножество в IR"
граница множества й
множество, состоящее из элементов аь аг и
т. д.; одноточечное множество {aj записы-
вается иногда просто как ai
объединение, пересечение и разность мно-
жеств Л и В
множество всех подмножеств множества Л
произведение множеств Л, В, т. е. множе-
ство всех упорядоченных пар (а, /3), таких
что a € Л, /3 € В. Подмножество R в Л х Л
называется отношением эквивалентности,
если (i) (a, a) 6 R, (ii) (a, /3) € IR (/3, a) € R,
(iii) (a, /3) € B, (/3, 7) € В (a, 7) € В Va, (3,
y€A
класс эквивалентности по модулю В
результат факторизации (фактормножество,
факторпространство) Л по В
множество всех внутренних точек множест-
ва Л {внутренность Л)
замыкание множества Л
относительная внутренность множества Л
(см. п. 2.1.1)
векторное пространство
топологическое векторное пространство
локально-выпуклое пространство
442
Список обозначений
олвп отделимое (или хаусдорфово) локально- выпуклое пространство
f: А -* В, АВ a -*f(a): А~* В функция (или отображение из Я в В. Если А и В уже оговорены, то пишем просто/, /(•) или а -+ /(а). Чтобы явно указать независи- мую переменную, пишем также / = /(а). Функция / называется инъективной (или вза- имно-однозначной), если /(ai) = /(аг) * ai = - аг; сюръективной, если /(Л) = В. Функ- ция, которая одновременно инъективна и сюръективна, называется биективной. Если В - IR, то / обычно называют функци- оналом.
Г. А -*Л тождественное отображение; отображение Г. А -* В, А С В, задаваемое правилом 1а = а, называется естественной (или канонической) инъекцией (или просто инъекцией, если не может возникнуть недоразумений) А в В
ЛЛ П аег график функции / (см. п. 1.4.2) декартово произведение множеств Ха (а при- надлежит некоторому заданному множес- тву Г). В случае Г = [1, 2 л) пишут П Ха = Xi х Хг х ... х Х„ аег
/1л. сужение (или ограничение) /: Ai -+ В функ- ции /: А -* В на множество Ai С А
sup /(о) или вел SUP f(a) А inf /(о) или вел inf /(о) А супремум (точная верхняя грань) функции /: А - IR инфимум (точная нижняя грань) функции /: А - IR
dx = dxi ... dxn dQ, dT п.в. лебегова мера в IR" лебегова мера в 0 и на Г соответственно почти везде
д-п.в. mes 0 = 101, mes Г = 1Г1 почти везде относительно меры д мера множества 0 (объём) и его границы Г (площадь)
Список обозначений
443
Ст(Й), С^(Й),
С”-в(Й)
С(й), Р(й),
Я(Й), LP(Q),
7,“(Й)
2 '(й), ^’(й)
^(Й), Я*(Й),
Й'(й), Я’(Г)
ВД(Й)
с, Сь с2, ...
С,-), М2
I • 1р
((-,))/, П-11/
К-11'm.p
ИЛИ <•,•>*>
LP(OT, X),
Lpw(0T, X),
W1' "(ОТ, X),
С'(0Т, X)
df/dt
dF/dx
F’
см п. 1.3.1
см. п. 1.3.1
см. п. 1.3.2
см. пп. 1.3.3 и 1.3.4
см. п. 1.3.5
положительные константы, если не оговоре-
но противное (фигурируют в неравенствах с
нормами вроде 1-1 <cll-ll или И • II < с)
скалярное произведение и норма в £2(й), а
также и в [Z2(fl)]n = £2(й) х ... х £2(й).
Отметим, что если и = {w), i = 1, ..., п, то
(п \ 1/2
,5 'и1д2(0))
норма в £р(й) или в [£р(й)]п
скалярное произведение и норма в Я,(й) или
в [/Лй)Г
норма в Wm'p{Q) или в [1Г"’Р(Й)]"
каноническая билинейная форма, приводя-
щая в двойственность {спаривающая) X и
X'
спаривание Wp,q и (Wp’9)'
спаривание Я* и {Н*)' (или [Я1]" и ([Я1]")'),
s€ IR
спаривание <-,->s при s= 1/2
см. п. 1.4.1
сильная производная (см. п. 1.4.1)
производная Фреше (см. п. 1.4.2)
производная Гато (см. п. 1.4.2). В динамиче-
ских краевых задачах штрих обозначает так-
же частную производную по времени
444
Список обозначений
Daf = ... Da"f = dMf/dXi' ... dx%", lai = 2 “i i= 1
f.i aiJ.J = df/dXi = day/dXj
Д = S д2/дх? i = 1 дд ker T epi/ coX" D(f) оператор Лапласа бигармонический оператор ядро оператора Т надграфик функционала / выпуклая оболочка множества К эффективная область определения функцио- нала /
Ik индикаторная функция (индикатор) множе- ства К
Pk оператор проектирования (проектор) на вы- пуклое множество К
п.н.сн., п.н.св. полунепрерывный снизу, соответственно сверху
a/(x) Э/(х) V(X) субградиент функции / в точке х обобщённый градиент функции / в точке х производное множество функции / в точ- ке X
D(df) R&f) f ToW область определения субградиента df образ субградиента df сопряжённый функционал множество всех выпуклых п.н.сн. собствен- ных функционалов на X (см. п. 2.5.1)
н.п.рх. Nc(X), TC(X) направление почти-равномерного спуска нормальный и касательный конусы к множе- ству С в точке х
Ги часть границы Г, на которой заданы переме- щения (или скорости)
rF r$ часть границы Г, на которой заданы силы F часть границы Г, на которой задано субдиф- ференциальное граничное условие
Список обозначений
445
t Е время, t € [0, 7] модуль упругости
V коэффициент Пуассона
7 вектор ускорения пространство обобщённых перемещений (или скоростей)
3F Ф, G, j, Jn, Jt, J„., w, W Фс, Gc, f, jcN, JCT, J$, wc, IVе пространство обобщённых сил суперпотенциалы сопряжённые суперпотенциалы
A &N, Pi максимальные монотонные операторы из [R в ^((R)
Фе Z>= {ZM a = Iffy) f= Ifj} n = (и,) S= (&) регуляризованный суперпотенциал тензор скоростей деформации тензор напряжений Коши вектор объёмной (массовой) силы (в §4.2) орт внешней нормали к Г вектор напряжений на Г
e Я = fad e плотность вектор теплового потока температура (абсолютная или нет)
e удельная внутренняя энергия
4 d/dt удельная внутренняя энтропия материальная производная (пп. 3.1.1, 3.3.3 и 4.2.1, добавления I и III)
Sn, St нормальная и касательная (относительно Г) составляющие вектора S
uN, ut нормальная и касательная (относительно Г) составляющие вектора и
M, Q t, z d^/dn, dz/dn к к = {Aij] изгибающий момент, перерезывающая сила прогиб пластины поворот пластины коэффициент Винклера тензор теплопроводности
m = (mu) тензор теплового расширения
446
Список обозначений
с= {Сда} С — {Cjjhk} CD тензор ГУка тензор, обратный к тензору ГУка удельная теплоёмкость при нулевых дефор- мациях
Е Е = {Еу} £ = {fiy} Ё = dEJdt тензор деформации Грина тензор напряжений Пиолы — Кирхгофа тензор деформации производная по времени от тензора дефор- мации Грина
ё = te/dt тензор скоростей деформации (кинематиче- ская линеаризация)
а a0, eD = da/dt девиаторы напряжений и деформаций
ап
£п
Dn = |йА
g П Q предел текучести процесс радиационный нагрев или приток тепла за счёт химических реакций
X V «?, Р движение характерный объём (только в §4.2) внешняя температура, внешнее давление термостатическая температура, термостати- ческое давление
Э(с/) п пс см. (4.2.13, 14) потенциальная энергия дополнительная энергия
М, /*а, ЛЗ d/dt коэффициенты трения производная по времени (см. добавление IV)
(а,) скалярные или тензорные скрытые пере- менные
Список обозначений
447
(Л) обобщённые силы, ассоциированные с [ -daj/dt}
(соотв. .Д) суперпотенциал диссипации в смысле Кларка (соотв. Варги)
d (соотв. ё>) интегральные операторы вектор деформации (соотв. вектор прираще- ния деформации или вектор скорости дефор- мации) z-го элемента
S, (соотв. S/) вектор напряжений (соотв. вектор прираще- ний напряжений или вектор скоростей на- пряжений) /-го элемента
Fo, G F6 Кд, KG, К X, F, матрица гибкости и матрица равновесия матрица тангенциальной жёсткости матрицы упругой, геометрической и полной жёсткости вектор производных от коэффициентов пла- стичности вектор производных от функции текучести
Vi, Hi, Ni Vi см. п. 3.3.3 ненатянутость (слабина) /-го нитевого эле- мента
eo p (соотв p) вектор начальных деформаций вектор нагрузки (соотв. вектор приращения нагрузки или вектор скорости изменения на- грузки)
u (соотв. u) вектор перемещений (соотв. вектор прира- щений перемещений или вектор скоростей перемещений)
I, I единичный тензор и единичная матрица
Литература7
[1] A. F. Abeasis, J. Р. Dias and A. Lopes-Pinto, Sur les valeurs-propres du
sous-differentiel d’ une fonction convexe avec un noyau non borne. C. R. Acad.
Sc. Раш. 278 A (1974) 1197-1199.
[2] R. A. Adams, Sobolev Spaces. Academic Press, New York 1975.
# [3] D’ Alembert, J. Le Rond, Traite de Dynamique, Paris 1743.
[4] R. Ansorge and K.. Taubert, Set-valued Collectively Compact Operators and
Applications to Set-valued Differential Equations. Computing 23 (1979) 333—
343.
[5] G. Anzellotti and M. Giaquinta, Existence of the Displacements Field for an
Elasto-plastic Body Subject to Hencky’s Law and von Mises Yield Condition.
Manuscripta Mathematica 32 (1980) 101-136.
[6] P. Appell, Traite de Mecanique rationelle, Tome T. Statique-Dynamique du Point.
Gauthier-Villars. Paris 1893.
[7] J. H. Argyris, Continua and Discontinua. Proc. 1st Conf. Matrix Meth. Struct.
Meeh. Wright Patterson Air Force Base, Dayton, Ohio 1965, AFFDL TR 66-80,
1966.
[8] J. H. Argyris, Three-Dimensional Anisotropic and Inhomogeneous Elastic
Media. Matrix Analysis for Small and Large Displacements. Ing. Archiv 34
(1965) 33-55.
[9] J. H. Argyris and D. W. Scharpf, Some General Considerations on the Natural
Mode Technique. Aeron. J. Royal Aeron. Soc. 73 (1969) 218-226 and 361-368.
# [10] Aristoteles, Metaphysica.
* [11] J. P. Aubin, Approximation of Elliptic Boundary Value Problems. Wiley-
Interscience, New York 1972.
1 Звёздочкой помечены работы, переведённые на русский или представляющие собой
перевод с русского; см. приводимый ниже список работ, имеющихся на русском языке. —
Прим. ред.
Литература
449
[12] J. Р. Aubin and F. H. Clarke, Multiplicateurs de Lagrange en optimization
non-convexe et applications. C. R. Acad. Sc. Paris 285 A (1977) 451-454.
[13] J. P. Aubin, Applied Functional Analysis. J. Wiley and Sons, New York 1979.
[14] J. P. Aubin and F. H. Clarke, Shadow Prices and Duality for a Class of
Optimal Control Problems. SIAM J. Control Optimization 17 (1979) 567 586.
[15] A. Auslender, Problemes de Minimax via Г Analyse Convexe et les Inegalites
Variationnelles: Theorie et Algorithmes. Springer-Verlag, Berlin 1972.
[16] V. Barbu, Necessary Conditions for Non-Convex Distributed Control
Problems Governed by Elliptic Variational Inequalities. J. Math. Anal. Appl.
80(1981) 566-597.
[17] V. Barbu and Th. Precupanu, Convexity and Optimization in Banach Spaces.
Editura Academiei, Bucuresti, Sijthoff and Noordhoff 1978.
[18] K. J. Bathe and E. L. Wilson, Stability and Accuracy Analysis of Direct
Integration Methods. Int. J. Earthq. Eng. Struct. Dyn. 1 (1973) 283-291.
[19] E. J. Bauman, Multilevel Optimization Techniques and Application to Trajectory
Decomposition. In: Advances in Control Systems (ed. by С. T. Leondes). Academic
Press, New York 1968 (vol. 6).
[20] E. Becker and W. Burger, Kontinuumsmechanik, B. G. Teubner Stuttgart 1975.
[21] J. F. Bell, The Experimental Foundations of Solid Mechanics. In: Encyclopedia
of Physics Vol. VI a/1 (ed. by S. Fliigge) Springer-Verlag, Berlin 1973.
[22] M. S. Berger, On Von Karman’s Equations and the Buckling of a Thin Elastic
Plate, I. The Clamped Plate. Comm. Pure Appl. Math. XX (1967) 687-719.
[23] M. S. Berger and P. C. Fife, Von Karman’s Equations and the Buckling of a
Thin Elastic Plate, II. Plate with General Edge Conditions. Comm. Pure Appl.
Math. XXI (1968) 227-241.
« [24] N. Bourbaki, Elements de Mathematique, Livre V. Espaces vectoriels topolo-
giques. Hermann, Paris 1953.
# [25] N. Bourbaki, Elements de Mathematique, Livre Hl. Topologie generale. Her-
mann, Paris 1958.
[26] N. Bourbaki, Elements de Mathematique, Livre VI. Integration. Hermann, Paris
1965 (2nd edition).
[27] H. Brezis, Equations et inequations non lineaires dans les espaces vectoriels
en dualite. Ann. Inst. Fourier 18 (1968) 115-175.
[28] H. Brezis, Problemes unilateraux. J. Math, pures et appl. 51 (1972) 1-168.
[29] H. Brezis, Operateurs maximaux monotones et semigroupes de contractions dans
les espaces de Hilbert. North-Holland Publ. Co., Amsterdam and American
Elsevier Publ. Co., New York 1973.
[30] F. Browder, Variational methods for nonlinear elliptic eigenvalue problems.
Bull. Amer. Math. Soc. 7 (1965) 176-183.
450
Литература
[31] F. Browder, On the Unification of the Calculus of Variations and the Theory
of Monotone Non-linear Operators in Banach Spaces. Proc. Nat. Acad. Sci.
U.S.A. 56 (1966) 419-425.
[32] P. L. Butzer and H. J. Wagner, On Duadic Analysis Based in the Pointwise
Derivative. Analysis Mathematica 1 (1975) 171-196.
[33] M. Capurso and G. Maier, Incremental Elastoplastic Analysis and Quadratic
Optimization. Meccanica 5 (1970) 1-10.
[34] C. Castaign, Integrates convexes duales. In: New Variational Techniques in
Mathematical Physics, C.I.M.E., Edizioni Cremonese, Roma 1974.
[35] C. Castaign and M. Valadier, Convex Analysis and Measurable Multifunctions.
Springer-Verlag, Berlin 1977.
[36] C.E.T.I.M., Proc. Int. Symposium on Innovative Numerical Analysis in Ap-
plied Engineering Science, Versailles 1977.
[37] К. C. Chang, Variational Methods for Non-differentiable Functionals and
their Applications to Partial Differential Equations. J. Math. Anal. Appl. 80
(1981) 102-129.
[38] Phan van Chuong, Solutions continues a droite d’ une equation integrate
multivoque. Seminaire d’ Analyse Convexe, Expose No 3, Montpellier 1979.
[39] S. Christiansen, On Kupradze’s Functional Equations for Plane Harmonic
Problems. In: Function Theoretic Methods in Differential Equations (ed. by R. P.
Gilbert and R. J. Weinacht). Pitman, London 1976.
45 [40] A. A. Chyras, Linear Programming Methods in the Analysis of Elastic-Plastic
Systems. Strojizdat, Leningrad 1969. (in Russian).
95 [41] P. G. Ciarlet, The Finite Element Method for Elliptic Problems. North-Holland
Pub. Co., Amsterdam 1978.
[42] P. G. Ciarlet, A Justification of the von Karman equations. Arch. Rat. Meeh.
Anal. 73(1980) 349-389.
[43] A. Cimetiere, Un probleme de flambement unilateral en theorie des plaques. J.
Mecanique 19(1980) 183-202.
[44] A. Cimetiere, Flambement unilateral d’ une plaque reposante sans frottement
sur un support elastique tridimensionel. C. R. Acad. Sc. Paris 290 B(198O)
337-340.
[45] F. H. Clarke, Necessary Conditions for Nonsmooth Problems in Optimal
Control and the Calculus of Variations. Ph. D. Thesis, University of Wash-
ington, Seattle 1973.
[46] F. H. Clarke, Generalized Gradients and Applications. Trans. A.M.S. 205
(1975) 247-262.
[47] F. H. Clarke, Generalized Gradients of Lipschitz Functionals. Advances in
Math. 40 (1981) 52 67 (Tech. Report 1687, Math. Res. Center. Univ, of
Wisconsin, Madison 1976).
Литература
451
[48] F. Н. Clarke, On the Inverse Function Theorem. Pacific J. Math. 64 (1976)
97-102.
[49] F. H. Clarke, A New Approach to Lagrange Multipliers. Math of Op. Research
1(1976) 165-174.
[50] F. H. Clarke, Inequality Constraints in the Calculus of Variations. Can. J.
Math. 39(1977) 528-540.
[51] F. H. Clarke, Multiple Integrals of Lipschitz Functions in the Calculus of
Variations. Proc. A.M.S. 64(1977) 260-264.
[52] M. Z. Cohn and G. Maier, Engineering Plasticity by Mathematical Program-
ming, Proc. NATO Advanced Study Inst., Waterloo Canada 1977. Pergamon
Press, New York 1979.
[53] B. D. Coleman, Thermodynamics of Materials with Memory. Arch. Rat. Meeh.
Anal. 17(1964)1-46.
[54] B. D. Coleman and J. M. Greenberg, Thermodynamics and the Stability of
Fluid Motion, Arch. Rat. Meeh. Anal. 25(1967) 321-341.
[55] B. D. Coleman, On the Stability of Equilibrium States of General Fluids. Arch.
Rat. Meeh. Anal. 36(1970) 1-32.
[56] T. F. Conry and A. Seireg, A Mathematical Programming Method for Design
of Elastic Bodies in Contact. J. Appl. Meeh. 52 (1971) 387-392.
[57] R. Contro, G. Maier and A. Zavelani, Inelastic Analysis of Suspension Struc-
tures by Nonlinear Programming. Comp. Meth. App. Meeh. Eng. 5 (1975)
127-143.
[58] R. W. Cottle, F. Giannessi and J. L. Lions (eds), Variational Inequalities and
Complementarity Problems, Theory and Applications. J. Wiley and Sons, New
York 1980.
[59] N. Cristescu, Dynamic Plasticity. North-Holland Pub. Co., Amsterdam 1967.
[60] J. P. Crouzeix, Conjugacy in Quasiconvex Analysis. In: Convex Analysis and
its Applications (ed. by A. Auslender). Springer-Verlag, Berlin 1977.
[61] T. A. Cruse, Numerical Solutions in Three-dimensional Elastostatics. Int. J.
Solids Struct. 5 (1969) 1259-1274.
[62] T. A. Cruse, An Improved Boundary-Integral Equation Method for Three
Dimensional Elastic Stress Analysis. Comp. Struct. 4 (1974) 741-754.
[63] T. A. Cruse and F. J. Rizzo, (eds.) Boundary-Integral Equation Method: Compu-
tational Applications in Applied Mechanics. ASME, Applied Mechanics Division
Vol. 11, 1975.
[64] J. I. Curiskis and S. Valliappan, A Solution Algorithm for Linear Constraint
Equations in Finite Element Analysis. Comp. Struct. 8 (1978) 117.
[65] C. Dafermos, On the Existence and the Asymptotic Stability of Solutions to
the Equations of Linear Thermoelasticity. Arch. Rat. Meeh. Anal. 29 (1968)
241-271.
452
Литература
[66] J. W. Daniel, The Approximate Minimization of Functionals. Prentice-Hall,
Englewood Cliffs 1971.
[67] C. S. Desai and J. F. Abel, Introduction to the Finite flement Method. Van
Nostrand Reinhold Co., New York 1972.
[68] J. P. Dias, Variational Inequalities and Eigenvalue Problem for Nonlinear
Maximal Monotone Operators in Hilbert Spaces. Am. J. Math. 97 (1976) 905-
914.
[69] U. Dieter, Optimierungsaufgaben in topologischen Vektorraumen. Zeitschr. fur
Wahrscheinlichkeitstheorie 5 (1966) 89-117.
# [70] J. Dieudonne, Elements d’ Analyse, Tome I, II Fondements de Г Analyse mod-
erne. Gauthier-Villars, Paris 1969.
[71] C. Do, The Buckling of a Thin Elastic Plate Subjected to Unilateral Con-
ditions. In: Applications of Methods of Functional Analysis to Problem of Me-
chanics (ed. by P. Germain and B. Nayroles) Springer-Verlag, Berlin 1976.
[72] C. Do, Bifurcation Theory of Thin Elastic Plates Subjected to Unilateral Con-
ditions. J. Math. Anal. Appl. 60 (1977) 435-448.
[73] C. Do, Nonlinear Bifurcation Problem and Buckling of an Elastic Plate Subjec-
ted to Unilateral Conditions in its Plane. In: Contemporary Developments in
Continuum Mechanics and Partial Differential Equations (ed. by G. M. de la
Penha and L. A. J. Medeiros). North-Holland Pub. Co., 1978.
[74] C. Do, Flambement elastoplastique d’ une plaque mince. C. R. Acad. Sc. Paris
290 В (1980) 143-146.
[75] D. Domingon, M. N. R. Nina and J. H. Whitelaw (eds.), Foundation of Con-
tinuum Thermodynamics. McMillan, London 1974.
[76] O. De Donato and G. Maier, Local Unloading in Piecewise-Linear Plasticity.
ASCE, EM3,102 (1976) 383-393.
[77] D. C. Drucker, A more Fundamental Approach to Plastic Stress-Strain Rela-
tions. Proc. First U.S. Nat. Congr. on Appl. Meeh. Chicago 1951.
[78] J. E. Dunn and R. L. Fosdick, The Morphology and Stability of Material
Phases. Arch. Rat. Meeh. Anal. 74 (1980) 1-99.
# [79] N. Dunford and J. T. Schwartz, Linear Operators Part I: General Theory.
Interscience Publishers, New York 1966.
[80] G. Dupuis and A. Probst, Etude d’une structure elastique soumise a des con-
ditions unilaterales. J. de Mecanique 6 (1967) 1-41.
[81] A. Duschek and A. Hochrainer, Tensorrechnung in analytischer Darstellung,
III. Springer-Verlag, Wien 1965.
[82] G. Duvaut and J. L. Lions, Ecoulement d’un fluide rigide viscoplastique in-
compressible. C. R. Acad. Sc. Paris 270 A (1970) 58 61.
[83] G. Duvaut and J. L. Lions, Un probleme d’elasticite avec frottement. J. de
Mecanique 10(1971) 409-420.
Литература
453
* [84] G. Duvaut and J. L. Lions, Les inequations en Mecanique et en Physique.
Dunod, Paris 1972.
[85] G. Duvaut and J. L. Lions, Inequations en Thermoelasticite et Mag-
netohydrodynamique. Arch. Rat. Meeh. Anal. 46 (1972) 241-279.
[86] G. Duvaut and J. L. Lions, Transfert de chaleur dans un fluide de Bingham
dont la viscosite depend de la temperature. J. of Funct. Anal. 11 (1972) 93-110.
[87] G. Duvaut and J. L. Lions, Problemes unilateraux dans la theorie de la flexion
forte des plaques (I). Le cas stationnaire. J. de Mecanique 13 (1974) 51-74.
[88] G. Duvaut and J. L. Lions, Problemes unilateraux dans la theorie de la flexion
forte des plaques (II). Le cas d’evolution. J. de Mecanique 13 (1974) 245-266.
[89] G. Duvaut, Problemes dynamiques en elasto-viscoplasticite et plasticite par-
faite avec conditions de frottement a la frontiere. In: New Variational Tech-
niques in Mathematical Physics. C.I.M.E. Ed. Cremonese, Roma 1974.
[90] G. Duvaut, Equilibre d’un solideelastique avec contact unilateral et frottement
de Coulomb. C. R. Acad. Sc. Paris 290 A (1980) 263-265.
# [91] I. Ekeland and R. Temam, Convex Analysis and Variational Problems. North-
Holland, Amsterdam and American Elsevier, New York 1976.
[92] S. M. Ermakov, Die Monte-Carlo-Methode und verwandte Fragen. Oldenburg
Verlag, Munchen 1975.
[93] R. S. Falk, Error Estimates for the Approximation of a Class of Variational
Inequalities. Math, of Computation 28 (1974) 963-971.
[94] C. A. Felippa and К.. C. Park, Direct Time Integration Methods in Nonlinear
Structural Dynamics. Comp. Meth. AppL Meeh. Eng. 17/18 (1979) 277-313.
[95] W. Fenchel, On Conjugate Convex Functions. Canad. J. Math. 1 (1949) 73-77.
[96] G. Fichera, The Signorini Elastostatics Problem with Ambiguous Boundary
Conditions. Proc. Int. Conf. Application of the Theory of Functions in Con-
tinuum Mechanics Vol. I, Tbilisi 1963.
[97] G. Fichera, Problemi elastostatici con vincoli unilateral!: il problema di Signo-
rini con ambigue condizioni al contorno. Mem. Accad. Naz. Lincei, VIII 7
(1964)91-140.
# [98] G. Fichera, Existence Theorems in Elasticity. In: Encyclopedia of Physics (ed.
by S. Fliigge) Vol. VI a/2. Springer-Verlag, Berlin 1972.
[99] G. Fichera, Boundary Value Problems in Elasticity with Unilateral Constraints.
In: Encyclopedia of Physics (ed. by S. Fliigge) Vol. VI a/2. Springer-Verlag,
Berlin 1972.
[100] F. D. Fischer, Zur Losung des Kontaktproblems elastischer Korper mit aus-
gedehnter Kontaktflache durch quadratische Programmierung. Computing 13
(1974) 353-384.
* [101] G. Fix and G. J. Strang, An Analysis of the Finite Element Method. Prentice
Hall, Englewood Cliff's 1973.
454
Литература
[102] J. Frandu, On Signorini Problem for von Karman Equations. The Case of
Angular Domain. Apl. Matematiky, 24 (1979) 355-371.
[103] M. Fremond, Etude de structures viscoelastiques stratifiees soumises a des
charges harmoniques et de solides elastiques reposant sur ces structures. These
de doctoral d’Etat, Univ. Paris VI, 1971.
[104] M. Fremond and M. Mucci, Comportement des chaussees rigides. Appli-
cation a leur dimensionnement. Bull. Liaison Labo. P. et Ch. 65 (1973) 125-140.
[105] M. Fremond and A. Friaa, Analyse Limite. Comparaison des Methodes Statique
et Cinematique. C. R. Acad. Sc. Paris 286A (1978) 107-110.
[106] A. M. Freudenthal, The Mathematical Theories of the Inelastic Continuum.
In: Encyclopedia of Physics. Vol. VI (ed. by S. Fliigge). Springer-Verlag, Berlin
1958.
[107] A. Friaa, La loi de Norton-Hoff generalisee en plasticite et viscoplasticite.
These de Doctoral d’Etat, Univ. Paris VI, 1979.
[108] E. Gagliardo, Caratterizzazioni delle tracce sulla frontiera relative ad alcune
classi di funzioni in n variabili. Rend. Semin. Mat. Padova 27 (1957) 284-305.
* [109] I. M. Gelfand and G. E. Schilow, Verallgemeinerte Funktionen (Distributioneri)
Vol. I. Deutscher Verlag der Wissenschaften, Berlin 1967.
[110] P. Germain, La methode de puissances virtuelles en mecanique des milieux
continus, lere partie. Theorie du second gradient. J. de Mecanique 12 (1973)
235-274.
[Ill] P. Germain, The Method of Virtual Power in Continuum Mechanics. Part 2:
Microstructure. SIAM J. Appl. Math. 25 (1973) 556-575.
* [112] P. Germain, Cours de Mecanique des milieux continus I. Masson, Paris 1973.
[ИЗ] P. Germain, The Role of Thermodynamics in Continuum Mechanics. In:
Foundations of Continuum Thermodynamics (ed. by D. Domingon, M. N. R.
Nina and J. H. Whitelaw). McMillan, London 1974.
[114] J. Ghaboussi, E. L. Wilson and J. Isenberg, Finite Element for Rock Joints
and Interfaces. ASCE, SM 10,99 (1973) 833-848.
[115] J. W. Gibbs, On the Equilibrium of Heterogeneous Substances (Trans. Conn.
Acad. 1875-1878) The Scientific Papers I (1907) 55-353. (Yale Univ. Press, New
Haven).
[116] K. Girkmann, Flachentragwerke. Springer-Verlag, Wien 1963.
[117] K. Glashoff and J. Sprekels, An Application of Glicksberg’s Theorem to
Set-Valued Integral Equations Arising in the Theory of Thermostats. SIAM J.
Math. Anal. 12(1981)447-486.
[118] R. Glowinski and H. Lanchon, Torsion elastoplastique d’une barre cylin-
drique de section multiconnexe. J. de Mecanique 12 (1973) 151-171.
[119] R. Glowinski, Sur I’ecoulement d’un fluide de Bingham dans une conduite
cylindrique. J. de Mecanique 13 (1974) 601-621.
Литература
455
¥ [120] R. Glowinski, J. L. Lions and R. Tranolieres, Analyse numerique des
inequations variationnelles. Dunod, Paris 1976.
[121] R. Glowinski, Finite Elements and Variational Inequalities. In: The Math-
ematics of Finite Elements and Applications III 1978 (ed. by J. R. Whiteman)
Academic Press, New York 1979.
[122] A. Gopfert, Mathematische Optimierung in allgemeinen V ektorrdumen. B. G.
Teubner, Leipzig 1973.
[123] A. E. Green and P. M. Naghdi, A General Theory of an Elastic-Plastic
Continuum. Arch. Rat. Meeh. Anal. 18 (1965) 251-281.
[124] S. R. De Groot, Thermodynamik irreversibler Prozesse. Bibliographisches In-
stitut, Mannheim 1960.
[125] H. J. Grootenboer, S. F. С. H. Leijten and J. Blauuwendraad, Numerical
Models for Reinforced Concrete Structures in Plane Stress. Heron 26 (1981)
1-83.
[126] M. Grun-Rehomme, Caract6risation du Sous-differentiel d’int6grandes con-
vexes dans les espaces de Sobolev. J. Math. Pures et Appl. 56 (1977) 149-156.
[127] D. W. Haines and W. D. Wilson, Strain-energy Density Function for Rubber-
like Materials. J. Meeh. Phys. Solids 27 (1979) 345-360.
[128] B. Halphen and N. Q. Son, Plastic and Viscoplastic Materials with Gener-
alized Potential. Meeh. Res. Comm. 1 (1974) 43-47.
[129] B. Halphen and N. Q. Son, Sur les Materiaux Standards Generalises. J. de
Mecanique 14 (1975) 39-63.
[130] G. Hamel, Theoretische Mechanik. Springer-Verlag, Berlin 1967.
[131] J. Haslinger, Dual Finite Element Analysis for an Inequality of the 2nd Order.
Apl. Matematiky 24 (1979) 118-132.
[132] J. Haslinger and J. Hlavacek, Approximation of the Signorini Problem with
Friction by a Mixed Finite Element Method. J. Math. Anal. Appl. 86 (1982)
99-122.
[133] C. Heinz, Das d’Alembertsche Prinzip in der Kontinuumsmechanik. Acta
Mechanica 10(1970) 110-129.
[134] U. Heise, The Calculation of Cauchy Principal Values in Integral Equations
for Boundary Value Problems of the Plane and Three-Dimensional Theory of
Elasticity. J. of Elasticity 5 (1975) 99-110.
[135] U. Heise, Formulierung und Ordnung einiger Integralverfahren fur Probleme
der ebenen und raumlichen Elastostatik unter besonderer Berucksichtigung me-
chanischer Gesichtspunkte, Habilitation thesis, Aachen 1975.
[136] U. Heise, Application of the Singularity Method for the Formulation of Plane
Elastostatical Boundary Value Problems as Integral Equations. Acta Me-
chanica 31 (1978), 33-69.
456
Литература
[137] U. Heise, Systematic Compilation of Integral Equations of the Rizzo Type
and of Kupradze’s Functional Equations for Boundary Value Problems of
Plane Elastostatics. J. of Elasticity 10 (1980) 23-56.
[138] H. Hencky, Zur Theorie plastischer Deformationen und der hierdurch im
Material hervorgerufenen Nachspannungen. ZAMM4(1924) 323-334.
[139] L. Herrmann, Finite Element Analysis of Contact Problems. ASCE. EM 5,
104(1978) 1043-1057.
[140] P. Hess, On Semi-coercive Nonlinear Problems. Ind. Univ. Math. J. 23(1974)
645-654.
[141] R. Hill, A Variational Principle of Maximum Plastic Work in Classical Plas-
ticity. Quar.J. Meeh. Appl. Math. 1(1948) 18-28.
[142] R. Hill, Mathematical Theory of Plasticity. Univ. Press, Oxford 1950.
« [143] D. M. Himmelblau, Applied Nonlinear Programming. McGraw-Hill Book Co.,
New York 1972.
[144] J. B. Hiriart-Urruty, Conditions necessaires d’Optimalite en Programmation
non differentiable. C. R. Acad. Sc. Paris 238A(1976) 843-845.
[145] J. B. Hiriart-Urruty, Contributions a la Programmation Mathematique: Cas
Deterministe et Stochastique, These, Universite de Clermont-Ferrand II, 1977.
[146] I. Hlavacek and J. Necas, On Inequalities of Korn’s Type I, II. Arch. Rat.
Meeh. Anal. 36(1969) 305-311 and 312-334.
[147] I. Hlavacek and J. Naumann, Inhomogeneous Boundary Value Problems for
the v. Karman Equations I. Apl. Matematiky 19(1974) 253-269.
[148] P. G. Hodge Jr., Numerical Applications of Minimum Principles in Plasticity.
In: Engineering Plasticity (ed. by J. Heyman and F. A. Leckie). Cambridge
Univ. Press, Cambridge 1968.
[149] T. J. R. Hughes, R. L. Taylor and W. Kanoknukulchai, A Finite Element
Method for Large Displacement Contact and Impact Problems. In: Formu-
lations and Computational Algorithms in Finite Element Analysis (ed. by K. F.
Bathe, F. T. Oden and W. Wunderlich). MIT Press, Cambridge 1977.
[150] R. Hiinlich and J. Naumann, On General Boundary Value Problems and
Duality in Linear Elasticity, I, II. Apl. Matematiky 23(1978) 208-229 and
25(1980) 11-32.
* [151] A. A. Ilyushin, On the Increment of Plastic Deformation and Yield Function.
Prikl. Math. Meeh. 24(1960) 663-666. (in Russian).
* [152] A. D. Ioffe and V. M. Tikhomirov, Theory of Extremal Problems. North
Holland. Pub. Co., Amsterdam 1975.
[153] H. Jeggle, Nichtlineare Funktionalanalysis. B. G. Teubner, Stuttgart 1979.
[154] O. John, On Signorini Problem for von Karman Equations. Apl. Matematiky
22(1977) 52-68.
Литература
457
[155] С. Johnson, Existence Theorems for Plasticity Problems. J. Math, pures et
appl. 55(1976) 431-444.
# [156] L. M. Kachanov, Fundamentals of the Theory of Plasticity. MIR Publishers,
Moscow 1974 (Engl, translation).
[157] J. J. Kalker and Y. Van Randen, A Minimum Principle for Frictionless
Elastic Contact with Application to Non-Hertzian Half-Space Contact Prob-
lems. J. Eng. Math. 6(1972) 193-206.
[158] I. Kaneko, Complete solutions for a Class of Elastic-plastic Structures. Comp.
Meth. Appl. Meeh. Eng. 21(1980) 193-209.
[159] B. Kawohl, Ober nichtlineare gemischte Randwertprobleme fur elliptische
Differentialgleichungen zweiter Ordnung auf Gebieten mit Ecken, Doct. thesis,
Techn. Universitat Darmstadt 1978.
[160] Th. Kermanidis, Kupradze’s Functional Equation for the Torsion Problem of
Prismatic Bars Part 1, 2. Comp. Meth. Appl. Meeh. Eng. 7(1976) 39-46 and
249-259.
* [161] D. Kinderlehrer and G. Stampacchia, An Introduction to Variational Inequa-
lities and their Applications, Academic Press, New York 1980.
[162] G. H. Knightly and D. Sather, On Nonuniqueness of Solutions of the von
Karman Equations. Arch. Rat. Meeh. Anal. 36(1970) 65-78.
[163] W. T. Koiter, General Theorems for Elastic-Plastic Solids. In: Progress in
Solid Mechanics I. North Holland Pub. Co. Amsterdam 1960.
[164] G. Kothe, Topologische lineare Raume, Vol. I. Springer-Verlag, Berlin 1960.
[165] M. Kufcera, J. Nedas and J. Souiek, The Eigenvalue Problem for Variational
Inequalities and a New Version of the Ljusternik-Schnirelmann Theory. In:
Nonlinear Analysis (ed. by L. Cesari, R. Kannan and H. F. Weinberger). Aca-
demic Press, New York 1978.
# [166] H. Kiinzi and W. Krelle, Nichtlineare Programmierung. Springer-Verlag,
Berlin 1962.
* [167] V. D. Kupradze, Potential Methods in the Theory of Elasticity. Oldbourne
Press, London 1965.
* [168] V. D. Kupradze, T. G. Gegelia, M. O. Baschelejschwili and T. V. Burtschu-
ladze, Three-dimensional Problems of the Mathematical Theory of Elasticity and
Thermoelasticity. Nauka, Moscow 1976 (in Russian).
[169] H. Lanchon, Sur la solution du probleme de torsion elastoplastique d’une
barre cylindrique de section multiconnexe. C. R. Acad. Sc. Paris 271A(1970)
1137-1140.
[170]H. Lanchon, Torsion elastoplastique d’un arbre cylindrique de section sim-
plement ou multiplement connexe. J. de Mecanique 13(1974) 267 320.
# [171] C. Lanczos, The Variational Principles of Mechanics. University of Toronto
Press, Toronto 1966.
458
Литература
it [172] L. D. Landau and E. M. Lifschitz, Lehrbuch der theoretischen Physik Vol. VII
Elastizitatstheorie. Akademie Verlag, Berlin 1966.
[173] H. H. E. Leipholz (ed), Proc. IUTAM Conference on Structural Control,
Waterloo 1979. Univ, of Waterloo Press and Noordhoff-Sijthoff Pub. Co. 1980.
[174] H. H. E. Leipholz and M. A. Rohman, General Approach to Active Structural
Control. ASCE, EM 6,105(1979) 1007-1023.
[175] C. Lemarechal, Bundle Methods in Nonsmooth Optimization (ed. by C. Le-
marechal and R. Mifflin). Pergamon Press, Oxford 1978.
[176] F. Lene, Sur les materiaux elastiques a energie de deformation non quadra-
tique. These de 3eme cycle, Uni versite Paris VI, 1973.
[177] F. Lene, Sur les materiaux elastiques a energie de deformation non quadra-
tique. J. de Mecanique 13(1974) 499-534.
[178] J. B. McLeod and R. E. L. Turner, Bifurcation of Non-differentiable Operators
with an Application to Elasticity. Arch. Rat. Meeh. Anal. 63(1977) 1-45.
it [179] J. L. Lions, Problemes aux limites dans les equations aux derivees part idles.
Seminaire de Mathanatiques superieures. Presses de 1’Universite de Montreal,
Montreal 1962.
[180] J. L. Lions and G. Stampacchia, Variational Inequalities. Comm, pure and
applied Math. XX (1967) 493-519.
* [181] J. L. Lions and E. Magenes, Problemes aux limites non homogenes et appli-
cations, Vol. 1, 2, 3. Dunod, Paris 1968.
» [182] J. L. Lions, Quelques methodes de resolution des problemes aux limites non
lineaires. Dunod/Gauthier-Villars, Paris 1969.
[183] J. L. Lions, Optimal Control of Systems Governed by Partial Differential Equa-
tions. Springer-Verlag, Berlin 1971.
[184] G. Maier, A Quadratic Programming Approach for Certain Classes of Non-
linear Structural Problems. Meccanica 3(1968) 121-130.
[185] G. Maier, Some Theorems for Plastic Strain Rates and Plastic Strains. J. de
Micanique 8(1969) 5-19.
[186] G. Maier, A Method for Approximate Solutions of Stationary Creep Problems.
Meccanica 4(1969) 36-47.
[187] G. Maier, Complementary Plastic Work Theorems in Piecewise Linear Elasto-
plasticity. Int. J. Solids Struct. 5(1969) 261-270.
[188] G. Maier, Linear Flow Laws of Elastoplasticity. A Unified General Ap-
proach. Rend. Acc. Naz. Lincei VIII, XLVIII (1969) 1-11.
[189] G. Maier, A Matrix Structural Theory of Piecewise Linear Elastoplasticity
with Interacting Yield Planes. Meccanica 8(1970) 54-66.
[190] G. Maier, Incremental Plastic Analysis in the Presence of Large Displace-
ments and Physical Instabilizing Effects. Int. J. Solids Struct. 7(1971) 345-372.
Литература
459
[191] G. Maier, Mathematical Programming Methods in Structural Analysis. In:
Variational Methods in Engineering (ed. by C. A. Brebbia and H. Tottenham)
Vol. II Southampton Univ. Press, Southampton 1973.
[192] G. Maier, Upper Bounds on Deformations of Elastic-Workhardening Struc-
tures in the Presence of Dynamic and Second-Order Geometric Effects. J.
Struct. Meeh. 2(1973) 265-280.
[193] G. Maier, Future Directions in Engineering Plasticity. In: Engineering Plasticity
by Mathematical Programming (ed. by M. Z. Cohn, G. Maier and D. E. Grierson)
Pergamon Press, New York 1978.
[194] G. Maier, F. Andreuzzi, F. Giannessi, L. Jurina and F. Taddei, Unilateral
Contact, Elastoplasticity and Complementarity with Reference to Offshore
Pipeline Design. Comp. Meth. App. Meeh. Eng. 17/18(1979) 469-495.
[195] G. Maier, F. Giannessi and A. Nappi, Indirect Identification of Yield Limits
by Mathematical Programming. Eng. Structures 4(1982) 86 98.
[196] J. Mandel, Plasticite classique et viscoplasticite. CISM Course No. 97, Udine
1971. Springer-Verlag Wien 1972.
[197] G. A. Maugin, The Method of Virtual Power in Continuum Mechanics. Ap-
plication to Coupled Fields. Acta Meccanica 35 (1980) 1-70.
[198] Ch. Massonnet, Resolution graphomecanique de problanes generaux de
I’elasticite plane. Bull. CERES4(1949) 3-183.
[199] Ch. Massonnet, Numerical Use of Integral Procedures. In: Stress Analysis,
(ed. by О. C. Zienkiewicz and G. S. Holister) J. Wiley and Sons, London 1965.
[200] H. Matthies, G. Strang and E. Christiansen, The Saddle-point of a Differen-
tial Program. In: Energy Methods in Finite Element Analysis, (ed. by R. Glo-
winski, E. Y. Rodin, О. C. Zienkiewicz). John Wiley and Sons, New York 1979.
[201] H. Mecking, Deformation of Single Crystal. Proc. 5th Int. Conf, on Textures of
Materials (ed. by E. Gottstein and G. Liicke) Springer-Verlag, Berlin 1978.
[202] R. Michalowski and Z. Mroz, Associated and Non-associated Sliding Rules
in Contact Friction Problems. Arch, of Meeh. (Arch. Meeh. Stosowanej} 30(1978)
259-276.
[203] E. Miersemann, Verzweigungsprobleme fur Variationsungleichungen. Math.
Nachr. 65(1975) 187-209.
[204] F. Migndt, Contrdle dans les inequations variationnelles elliptiques. J. Funct.
Anal. 22(1976) 130-185.
[205] F. Migndt and J. P. Puel, Sur un modele de flambage pour une plaque mince
elastoplastique. C. R. Acad. Sc. Paris 290A( 1980) 519-521.
* [206] S. G. Mikhlin, The Numerical Performance of Variational Methods. Wolters-
Noordhoff Pub., Groningen 1971.
[207] E. Mitsopoulou, Unilateral Contact, Dynamic Analysis of Beams by a Time-
stepping, Quadratic Programming Procedure. Meccanica 18(1983) 254-265.
460
Литература
[208] Е. Mitsopoulou and Р. D. Panagiotopoulos, On the Elastoplastic Torsion:
Mathematical Theory of the Approximation of the Solution and Numerical
Calculation. Technica Chronica 46(1976) 29-37 (in Greek).
[209] J. J. Moreau, Fonctionnelles sous-differentiables. C. R. Acad. Sc. Paris
257A(1963)4117-4119.
[210] J. J. Moreau, Fonctionnelles Convexes. Seminaire sur les equations aux
derivees partielles. College de France 1967.
[211] J. J. Moreau, La notion de sur-potentiel et les liaisons unilaterales en
elastostatique. C. R. Acad. Sc. Paris 267A(1968) 954-957.
[212] J. J. Moreau, Sur les lois de frottement, de plasticite et de viscosite. C. R.
Acad. Sc. Paris 271 A(1970) 608-611.
[213] J. J. Moreau, On Unilateral Constraints, Friction and Plasticity. In: New
Variational Techniques in Mathematical Physics, C.I.M.E. Edizioni Cremonese,
Roma 1974.
[214] J. J. Moreau, Evolution Problem Associated with a Moving Convex Set in a
Hilbert Space. J. Diff. Eqs. 26(1977) 347-374.
[215] U. Mosco, Approximation of the Solutions of Some Variational Inequalities.
Ann. Sc. Norm. Sup. Pisa 21(1967) 373-394.
[216] U. Mosco, On the Continuity of the Young-Fenchel Transform. J. Math.
Anal. Appl. 35(1972) 518-535.
* [217] P. P. Mosolov and V. P. Miasnikov, Variational Methods in the Theory of
the Fluidity of a Viscousplastic Medium. P.M.M. 29(1965) 545-577.
[218] W. Moszynski, Frottement des corps solides dans le cas de Г anisotropie
naturelie et artificielle. Bull. Acad. Polon. Sci. Lettres Serie 7 (1951) 447 450.
[219] Z. Mroz, Mathematical Models of Inelastic Material Behaviour. Univ, of
Waterloo Press, Waterloo 1973.
[220] M. Muller and J. Naumann, On Evolution Inequalities of a Modified Navier-
Stokes type, 1. Apl. Matemat iky 23(1978) 174-184.
If [221] N. I. Muskhelishvili, Some Basic Problems of the Mathematical Theory of
Elasticity. Noordhoff Int. Pub. Leyden 1975.
[222] M. A. Muspratt, Stochastic Plastic Analysis. Arch, of Meeh. (Arch. Meeh.
Stosowanej) 25(1973) Г65-177.
[223] H. Mutschmann, Die Stufen der Wahrscheinlichkeit by Carneades. Rheinishes
Museum 66(1911) 79-85.
# [224] A. Nadai, Theory of Flow and Fracture of Solids, Vol. II. McGraw-Hill, New
York 1963.
[225] J. Naumann, On Some Unilateral Boundary Value Problems for the von
Karman Equations Part 1. The coercive case. Apl. Matematiky 20(1975) 96-125.
Литература
461
[226] J. Naumann and H. U. Wenk, On Eigenvalue Problems for Variational
Inequalities. Rend. Di Matematica, Univ. Roma9 VI(1976) 439-463.
[227] J. Naumann and I. Hlavacek, Inhomogeneous Boundary Value Problem for
the von Karman Equations II. Apl. Matematiky 20(1975) 280-297.
[228] B. Nayroles, Operations algebriques en Mecanique de structures. C. R. Acad.
Sc. ParisZ13M\91\)\tfl5-\Q1Z.
[229] B. Nayroles, Point de vue algebrique. Convexite et integrandes convexes en
Mecanique des solides. In: New Variational Techniques in Mathematical Physics.
C.I.M.E. Edizioni Cremonese, Roma 1974.
[230] B. Nayroles, J. J. Moreau’s approach to a fundamental problem: the quasista-
tic evolution of a perfectly elastoplastic body. Arch, of Meeh. (Arch. Meeh.
Stosowanej) 28(1976) 115-132.
[231] J. Nedas, Les methodes directes en theorie des equations elliptiques. Masson,
Paris and Academia Prague 1967.
[232] J. Necas, J. JaruSek and J. Haslinger, On the Solution of the Variational
Inequality to the Signorini Problem with Small Friction. Bulletino U.M.I.
17B(1980) 796-811.
[233] Nguyen Quoc Son, Methodes energetiques en Mecanique de la rupture. J. de
Mecanique 19(1980) 363-386.
[234] G. Nitsiotas, Zur Bildung und Berechnung statisch bestimmter Tragwerke
mit Verbindungen aus Seilen. Bauingenieur 42(1967) 412-414.
[235] G. Nitsiotas, Die Berechnung statisch unbestimmter Tragwerke mit einseiti-
gen Bindungen. Ing. Archiv 41(1971) 46-60.
[236] G. Nitsiotas, Elastostatics. Linear Theory Vol. I, II Thessaloniki 1978 (in
Greek).
[237] N. Okamoto and M. Nakazawa, Finite Element Incremental Contact Analysis
with Various Frictional Conditions. Int. J. Num. Meth. Eng. 14(1979) 337-349.
[238] E. R. Oliveira, Plane Stress Analysis by a General Integral Method. ASCE,
EM 1,94(1968) 79-101.
[239] W. Olszak, Z. Mroz and P. Perzyna, Recent Trends in the Developments of the
Theory of Plasticity. Pergamon Press Oxford and PWN-Polish Sci. Publ.
Warszawa 1963.
[240] A. C. Palmer, G. Maier and D. C. Drucker, Normality Relations and Convex-
ity of Yield Surfaces for Unstable Materials or Structural Elements. Trans.
ASME 24(1967) 464-470.
[241] P. D. Panagiotopoulos, A Nonlinear Programming Approach to the Unilat-
eral Contact- and Friction-Boundary Value Problem in the Theory of Elas-
ticity. Ing. Archiv 44(1975) 421-432.
[242] P. D. Panagiotopoulos, Subdifferentials and Optimal Control in Unilateral
Elasticity. Meeh. Res. Comm. 3(1976) 91-96.
462
Литература
[243] Р. D. Panagiotopoulos, A Variational Inequality Approach to the Inelastic
Stress-Unilateral Analysis of Cable-Structures. Comp, and Struct. 6(1976) 133—
139.
[244] P. D. Panagiotopoulos, Convex Analysis and Unilateral Static Problems. Ing.
Archiv 45(1976) 55-68.
[245] P. D. Panagiotopoulos, A Systematic Approach to the Search for Variational
Principles of Bilateral and Unilateral Problems. ZAMM 57(1977) T246LT247.
[246] P. D. Panagiotopoulos, Optimal Control in the Unilateral Thin Plate
Theory. Arch, of Meeh. (Arch. Meeh. Stosowanej) 29(1977) 25-39.
[247] P. D. Panagiotopoulos, Analysis of the Stochastic “Unilateral Contact”
Problem. Comp, and Struct. 7(1977) 581-586.
[248] P. D. Panagiotopoulos, Ungleichungsprobleme in der Mechanik, Habilitation
thesis, Aachen 1977.
[249] P. D. Panagiotopoulos, A Variational Inequality Approach to the Friction
Problem of Structures with Convex Strain Energy Density and Application to
the Frictional Unilateral Contact Problem. J. Struct. Meeh. 6(1978) 303-318.
[250] P. D. Panagiotopoulos, Stochastische holonome elastoplastische Torsion von
zylindrischen oder prismatischen Staben. Ing. Archiv 47(1978) 421 431.
[251] P. D. Panagiotopoulos, A Variational Inequality Approach to the Dynamic
Unilateral Contact Problem of Elastoplastic Foundations. Proc. 3rd Int. Conf.
Num. Meth, in Geomechanics 1979 Aachen, Vol. I. A. A. Balkema, Rotterdam
1979.
[252] P. D. Panagiotopoulos and U. Zastrow, An Integral Equation Approach to
the Unilateral Contact B.V.P. ZAMM 54(1979) 392 393.
[253] P. D. Panagiotopoulos, Time-Space Unilateral Variations arid Variational
Inequalities in Relativistic Mechanics. ZAMM 60(1980) T264-T265.
[254] P. D. Panagiotopoulos, Optimal Control of Unilateral Structural Analysis
Problems. Proc. IUTAM Conf. 1979 on Struct. Control, Waterloo. Univ, of
Waterloo Press and Noordhoff-Sijthoff Pub. Co. 1980.
[255] P. D. Panagiotopoulos, Optimal Control in the Theory of the Unilateral
von-Karman Plates. Proc. IUTAM Conf. 1978 on Variational Methods in Me-
chanics of Solids, Evanston. Pergamon Press, London 1980.
[256] P. D. Panagiotopoulos and D. Talaslidis, A Linear Analysis Approach to the
Solution of Certain Classes of Variational Inequality Problems in Structural
Analysis. Int. J. Solids Struct. 16(1980) 991-1005.
[257] P. D. Panagiotopoulos, Dynamic and Incremental Variational Inequality
Principles, Differential Inclusions arid their Applications to Co-Existent Phases
Problems. Acta Mechanica 40(1981) 85-107.
[258] P. D. Panagiotopoulos, Non-convex Superpotentials in the Sence of F. H.
Clarke and Applications. Meeh. Res. Comm. 8(1981) 335-340.
Литература
463
[259] Р. D. Panagiotopoulos, Optimal Control and Parameter Identification of
Structures with Convex and Non-Convex Strain Energy Density. Applications
to Elastoplasticity and to Contact Problems. 5. M. Archives 8(1983) 363-411.
[260] P. D. Panagiotopoulos, Nonconvex Energy Functions. Hemivariational
Inequalities and Substationarity Principles. Acta Mechanica 48(1983) 160-183.
[261] P. D. Panagiotopoulos, Non-convex Energy Functionals. Application to Non-
convex Elastoplasticity. Meeh. Res. Conun. 9(1982) 23-29.
[262] P. D. Panagiotopoulos, A Boundary Integral Inclusion Approach to Unilateral
B.V.Ps.in Elastostatics. Meeh. Res. Comm. 10(1983) 91-96.
[263] J. Peetre, Mixed Problems for higher order Elliptic Equations in two vari-
ables, I, II. Ann. Sc. Norm. Sup. Pisa 15(1961) 337-353 and 17(1963) 1-12.
[264] H. Peterson, Application of the Finite Element Method in the Analysis of
Contact Problems. In: Finite Elements in Nonlinear Mechanics (Ed. by P. Bergan
et al.), Vol. 2, Tapir, New York 1978.
[265] A. Phillips, A Theory of ideal Locking Materials. Trans. Soc. Rheol. 3(1959)
13-26.
[266] A. Phillips and M. Eisenberg, Observations on certain Inequality Conditions
in Plasticity. Int. J. Nonlinear Meeh. 1(1966) 247-256.
[267] E. Pflaumann and H. Unger, Funktionalanalysis Vol. I, II. Bibliographisches
Institut, Mannheim 1974.
[268] M. Potier-Ferry, Problemes semi-coercifs. Applications aux plaques de von
Karman. J. Math, pures et appl. 53(1974) 331-346.
[269] M. Potier-Ferry, Problemes unilateraux en theorie des plaques non lineaires.
These de 3ime cycle, Uni versite Paris VI, 1974.
[270] M. Potier-Ferry, Sur un systeme d’ equations rencontre en theorie des plaques.
C. R. Acad. Sc. Paris 280A (1975) 1385-1387.
[271] M. Potier-Ferry, Charges limites et theoreme d’ existence en theorie des
plaques elastiques. C. R. Acad. Sc. Paris 280A (1975) 1317-1319.
[272] W. Prager, On Ideal-locking Materials. Trans. Soc. Rheol. 1(1957) 169-175.
[273] W. Prager, Elastic Solids of Limited Compressibility. Proc. 9th Int. Congress
Appl. Meeh. Brussels 1958, Vol. 5.
# [274] W. Prager, Einfuhrung in die Kontinuumsmechanik. Birkhauser Verlag, Basel
1961.
# [275] W. Prager and P. G. Hodge, Theory of Perfectly Plastic Solids. Dover Publ.,
New York 1968.
[276] J. S. Przemieniecki, Theory of Matrix Structural Analysis. McGraw-Hill Book
Co., New York 1968.
[277] В. V. Querenburg, Mengentheoretische Topologie. Springer-Verlag, Berlin
1973.
464
Литература
[278] К. A. Reckling, Plastizitatstheorie und ihre Anwendung auf Festigkeitspro-
bleme. Springer-Verlag, Berlin 1967.
[279] G. Rieder, Iterationsverfahren und Operatorgleichungen in der
Elastizitatstheorie. Abh. Braunschw. (Viss. Ges. 14(1962) 109-343.
[280] G. Rieder, Mechanische Deutung und Klassifizierung einiger Integralverfah-
ren der ebenen Elastizitatstheorie I, II. Bull. Acad. Pol. Sci. Ser. Sci. Techn.
16(1968) 101-114.
[281] G. Rieder, On the Physical Interpretation of Certain Inner Products as a
Guide to the Application of Functional Analysis. In: Applications of Methods of
Functional Analysis to Problems in Mechanics, (ed. by P. Germain and B. Nay-
roles) Springer-Verlag, Berlin 1976.
[282] G. Rieder, U. Heise, U. Pahnke, H. Antes, H. Glahn and V. KompiS, Berech-
nung von elastischen Spannungen in beliebig krummlinig berandeten Scheiben und
Flatten. Westdeutscher Verlag, Opladen 1976.
[283] F. J. Rizzo, An Integral Equation Approach to Boundary Value Problems of
Classical Elastostatics. Quar. Appl. Math. 25(1967) 83-95.
It [284] A. P. Robertson and W. Robertson, Topologische Vektorraume. Bibli-
ographisches Institut, Mannheim 1967.
[285] R. T. Rockafellar, Extension of Fenchel’s Duality Theorem for Convex Func-
tions. Duke Math. J. 33(1960) 81-90.
[286] R. T. Rockafellar, Monotone Processes of Convex and Concave Type, Mem-
oirs of the A.M.S. No. 77. A.M.S. Providence 1967.
[287] R. T. Rockafellar, Integrals which are Convex Functionals. Pacific J. Math.
24(1968) 525-539.
# [288] R. T. Rockafellar, Convex Analysis. Princeton Univ. Press, Princeton 1970.
[289] R. T. Rockafellar, On the Maximal Monotonicity of Subdifferential Map-
pings. Pacific J. Math. 33(1970) 209-216.
[290] R. T. Rockafellar, Integrals which are Convex Functionals II. Pacific J. Math.
39(1971)439-469.
[291] R. T. Rockafellar, Convex Integral Functionals and Duality. In: Contribution
to Nonlinear Functional Analysis, (ed. by E. H. Zarantonello). Academic Press,
New York 1971.
[292] R. T. Rockafellar. La theorie des sous-gradients et ses applications а Г opti-
mization. Fonctions convexes et non-convexes. Les Presses de Г Universite de
Montreal, Montreal 1979.
[293] R. T. Rockafellar, Generalized Directional Derivatives and Subgradients of
Non-convex Functions. Can. J. Math. XXXII (1980) 257-280.
[294] S. K. Shan and I. S. Tuba, A Finite Element Method of Contact Problems of
Solid Bodies-Part I: Theory and Validation. Int. J. Meeh. Sci. 13(1971) 615-627.
Литература
465
Part 11: Application to Turbine Blade Fastening. Int. J. Meeh. Sei. 13(1971)
627 638.
[295] M. Schatzman, Le Systeme Differentiel d2ujdt2 + дф(и) =J avec conditions
initiates. C. R. Acad. Sc. Paris. 284A(1972) 603-606.
[296] M. Schatzman, Problemes aux limites non-lineaires noncoercives. Ann. Sc.
Norm. Sup. Pisa XXVII, 111(1973) 641-686.
[297] L. Schwartz, Theorie des distributions. Hermann, Paris 1973.
[298] J. Salen?on and A. Tristan-Lopez, Analyse de la stabilite des talus en sols
coherents anisotropes. C. R. Acad. Sc. Paris. 290B(1980) 493-496.
[299] A. F. Sayegh, Elastic Analysis with Indeterminate Boundary Conditions.
A.S.C.E., EMI, 100(1974)49-62.
[300] M. Sibony, Sur Г approximation d’ equations et inequations aux derivees
partielles non lineaires de type monotone. J. Math. Anal. Appl. 34(1971) 502-
564.
[301] A. Signorini, Sopra alcune questioni di elastostatica. Atti Soc. Ital. per il
progesso delle Scienze 1933.
« [302] W. I. Smirnow, Lehrgang der hoheren Mathematik, Teil V. Deutscher Verlag
der Wissenschaften, Berlin 1973.
« [303] N. E. Stavrakova, The Principle of Hamilton-Ostrogradskii for Systems with
One-sided Constraints. PMM 29(1965) 738-741.
[304] P. M. Suquet, Un espace fonctionnel pour les equations de la plasticite. C. R.
Acad. Sc. Pam 286A( 1978) 1129-1132.
[305] P. M. Suquet, Un espace fonctionnel pour les equations de la plasticite. Ann.
Fac. Sc. Toulouse 1(1979) 77-87.
[306] P. M. Suquet, Plasticite et Homogeneisation. These de doctoral d’ Etat,
Univ. Paris VI, 1982.
[307] P. M. Suquet, Evolution Problems for a Class of Dissipative Materials. Quart.
Appl. Math. 8(1981) 391-414.
[308] D. Talaslidis and W. Wunderlich, Static and Dynamic Analysis of Kirchhoff
Shells Based on a Mixed Finite Element Formulation. Comp, and Struct.
10(1979) 239-251.
[309] D. Talaslidis and P. D. Panagiotopoulos, Linear Finite Element Approach to
Unilateral Contact Problem in Structural Dynamics. Int. J. Num. Meth, in Eng.
18(1982) 1505-1520.
[310] T. P. Tassios and P. J. Yannopoulos, Analytical Studies of Reinforced Con-
crete Members Under Cyclic Loading Based on Bond Stress-Slip Relationships,
ACl 7.78(1981)206-216.
[311] K. Taubert, Uber die Existenz und Approximation von Losungen von Volterra
Funktional-Differentialgleichungen mit schwacher rechten Seite. Habilitation
thesis, Hamburg 1977.
466
Литература
# [312] R. Temam, N avier-Stokes Equations. North Holland Pub. Co., Amsterdam
1972.
[313] R. Temam and G. Strang, Duality and Relaxation in the Variational Prob-
lems of Plasticity. J. de Mecanique 19(1980) 493-527.
[314] R. Temam and G. Strang, Functions of Bounded Deformation. Arch. Rat.
Meeh. Anal. 75(1980) 7-21.
* [315] S. Timoshenko and S. Woinowsky-Krieger, Theory of Plates and Shells.
McGraw-Hill, New York 1969.
[316] T. W. Ting, Elastic-plastic Torsion of Simply Connected Cylindrical Bars.
Ind. Univ. Math. J. 20(1971) 1047-1076.
[317] J. F. Toland, A Duality Principle for Non-convex Optimization and the
Calculus of Variations. Arch. Rat. Meeh. Anal. 71(1979) 41-61.
[318] E. Tonti, A Systematic Approach to the Search for Variational Principles. In:
Variational Methods in Engineering (ed. by C. A. Brebbia and H. Tottenham)
Vol. I. Southampton Univ. Press, Southampton 1973.
[319] E. Tonti, The Reason for Analogies between Physical Theories. Appl. Math.
Modelling 1(1976) 37-50.
[320] F. Treves, Topological Vector Spaces, Distributions and Kernels. Academic
Press, New York 1967.
[321] C. Truesdell and R. A. Tupin, The Classical Field Theories. In: Encyclopedia
of Physics. Vol. III/l (ed. by S. Fliigge) Springer-Verlag, Berlin 1960.
[322] C, Truesdell and W. Noll, The Non-linear Field Theories of Mechanics. In:
Encyclopedia of Physics. Vol. III/З (ed. by S. Fliigge) Springer-Verlag, Berlin
1965.
[323] C. Truesdell, Six Lectures on Modern Natural Philosophy, Springer-Verlag,
Berlin 1966.
* [324] M. M. Vainberg, Variational Method and Method of Monotone Operators in
the Theory of Nonlinear Equations. John Wiley and Sons, New York and Israel
Program for Scientific Translations, Jerusalem 1973.
# [325] N. Ya. Vilenkin eta al., Functional Analysis. Wolters-Noordhoff Pub., Gro-
ningen 1972.
[326] W. Walter, Differential- und Integral-Ungleichungen. Springer-Verlag, Berlin
1964.
[327] J. Warga, Necessary Conditions without Differentiability Assumptions in Op-
timal Control. J. Dif. Equations 18(1975) 41-62.
[328] J. Warga, Necessary Conditions without Differentiability Assumptions in
Unilateral Control Problems. J. Dif. Equations 21(1976) 25-38.
[329] J. Warga, Controlability and Necessary Conditions in Unilateral Problems
without Differentiability Assumptions. SIAM J. Control and Optimization
14(1976) 546-573.
Литература
467
< [330] J. Warga, Optimal Control of Differential and Functional Equations. Nauka,
Moskow 1978 (in Russian).
[331] J. Warga, Derivate Containers, Inverse Functions and Controllability. In:
Calculus of Variations and Control Theory (ed. by D. L. Russell) Acad. Press
New York 1976.
[332] J. Warga, On Bounding, Interior and Covering Functions (to appear).
# [333] K. Washizu, Variational Methods in Elasticity and Plasticity. Pergamon
Press, Oxford 1968.
[334] E. Weinel, Die Integralgleichung des ebenen Spannungszustandes und der
Plattentheorie. ZAMM 11(1931) 349-360.
[335] W. L. Wendland, E. Stephan and G. C. Hsiao, Integral Equations for Plane
Mixed Boundary Value Problems. Math. Meth, in the Appl. Sciences 1(1979)
265-321.
[336] E. A. Wilson and B. Parsons, Finite Element Analysis of Elastic Contact
Problems Using Differential Displacements. Int. J. Num. Meth. Eng. 2(1970)
387-395.
# [337] K. Yosida, Functional Analysis. Springer-Verlag, Berlin 1966.
# [338] L. C. Young, Lectures on the Calculus of Variations and Optimal Control
Theory. W. B. Saunders Co., Philadelphia 1969.
[339] J. P. Yvon, Etude des quelques problemes de controle pour des systemes
distribues. These de Doctoral d’ Etat, Universite Paris VI 1973.
[340] M. W. Zemansky and R. H. Dittman, Heat and Thermodynamics. McGraw-
Hill, New York 1980 (6th Edition).
* [341] A. Zhukov, Plastic Deformation of Isotropic Metals in Combined Loading.
Izv. Akad. Nauk. SSSR. OTN 12(1956) 72-87 (in Russian).
[342] H. Ziegler, A Possible Generalization of Onsager’s Theory. Advances in Solid
Mechanics, Acad. Press, New York 1962.
[343] H. Ziegler, Some Extremum Principles in Irreversible Thermodynamics with
Application to Continuum Mechanics. Progress in Solid Mechanics IV, North
Holland Pub. Co., Amsterdam 1963.
[344] H. Ziegler, Discussion of some Objections to Thermomechanical Orthog-
onality. Ing. Archiv. 50(1981) 149-164.
♦ [345] О. C. Zienckiewicz, The Finite Element Method, McGraw-Hill, London 1977
(3rd edition).
[346] H. Floegl and H. A. Mang, Tension Stiffening Concept Based on Bond Slip.
ASCE, ST 12,108(1982) 2681-2701.
[347] J. Rauch, Discontinuous Semilinear Differential Equations and Multiple Valued
Maps. Proc. A.M.S. 64 (1977) 277-282.
468
Литература
[348] Р. D. Panagiopoulos and A. Avdelas, A Hemivariational Inequality Approach
to the Unilateral Contact Problem and Substationarity Principles (to appear in
Ing. Archiv. 54,1984).
[349] H. O. May, Das Hamiltonsche Prinzip fur einseitige Probleme in einer Raum-
Zeit-invarianten Analytischen Mechanik, Doct. thesis, RWTH Aachen 1983.
[350] P. D. Panagiotopoulos, Ungleichungsprobleme und Differentialinklusionen in
der Analytischen Mechanik. Annual Publ. School of Tech. Aristotle Univ.
Thessaloniki Q' (1982) 1-30.
[351] P. D. Panagiotopoulos, Une generalization non-convexe de la notion du sur-
potentiel et ses applications. C. R. Acad. Sc. Paris 296II (1983) 1105-1108.
[352] J. Haslinger and P. D. Panagiotopoulos, The reciprocal variational approach to
the Signorini problem with friction. Approximation results. Proc. Royal Soc. of
Edinburgh 98 (1984) 250-265.
[353] E. Delassus, Memoire sur la theorie des liaisons finies unilat6rales. Ann.
Ёс. Norm (3), XXXIV (1917) 95-179.
* [354] I. Hlavacek, J. Haslinger, J. Necas and J. Lovisek, Riesenie variacnych nerovnosti
v mechanike. ALFA, Bratislava 1982.
[355] R. Glowinki, Numerical Methods for Nonlinear Variational Problems. Springer-
Verlag, New York-Berlin 1984.
[356] F. H. Clarke, Optimization and Nonsmooth Analysis. Wiley, New York 1983.
[357] V. Barbu, Optimal Control of Variational Inequalities. Pitman, Research Notes
in Math. Vol. 100. Boston-London 1984.
[358] H. O. May, Generalized Variational Principles and Nondifferentiable Potential^
in Analytical Mechanics (to appear in J. Math. Phys. 25,1984).
[359] A. D. Ioffe, Nonsmooth Analysis: Differential Calculus of Nondifferentiable
Mappings. Trans. A.M.S., 266(1981) 1-56.
[360] N. Papageorgiou, Stochastic Nonsmooth Analysis and Optimization 1 (to
appear in Trans. A.M.S.).
[361] P. D. Panagiotopoulos, Hemivariational Inequalities and Substationarity in the
Static Theory of v. Karman plates (to appear in ZA MM 65, 1985).
Добавление к списку литературы1
[362] V.F. Dpmyanov and A. M. Rubinov, On Quasidifferentiable Mapping;, Math. Opera-
tionsforsh. u. Statist. Ser. Optimization 14 (1983) 3—21.
[363] v. F. Demyanov and L. C. W. Dixon (eds), Quasidifferential Calculus, Math. Progr,
Study 29 (1986).
» [364] v. F. Demyanov and L. V. Vasil’ev, Nondifferentiable Optimization, Optimization
Software Inc., N. York 1985.
[365] v. E Demyanov, L. N. Polyakova and A. M. Rubinov, Nonsmoothness and
Quasidifferentiability, Math. Progr. Study 29 (1986) 1—19.
1 Добавлено автором для русского издания. — Прим. ред.
Литература
469
[366] A. Shapiro, On optimality conditions in quasidifferentiable optimization, SIAM J.
Control Opt. 22 (1984) 610—617.
*[367] V. E Demyanov and A. M. Rubinov, On quasidifferentiable functionals, Soviet Math.
Doklady 21 (1980) 14—17.
*[368] V. F. Demyanov, L. N. Polyakova and A. M. Rubinov, On one generalization of the
concept of subdifferential. In: All Union Conf, on Dynamic Control-. Abstracts and
Reports. (Sverdlovsk 1979) 79—84.
[369] L. N. Polyakova, On minimizing the sum of a convex function and a concave function,
Math. Progr. Study 29 (1986) 69—73.
[370] К. C. Kiwiel, A linearization method for minimizing certain quasidifferentiable func-
tions, Math. Progr. Study 29 (1986) 85—94.
[371] H. Rddstrom, An embedding theorem for spaces of convex sets, Proc. AMS 3 (1952)
165—169.
[372] J. M. Ball, Convexity Conditions and existence theorems in Nonlinear elasticity, Arch.
Rat. Meeh. Anal. 63 (1977) 337—403. ‘
[373] P. G. Ciarlet and J. Neias, Unilateral problems in nonlinear three dimensional elastici-
ty, Arch. Rat. Meeh. Anal. 87 (1985) 319—338. '
[374] P. G. Ciarlet and J. Neias, Injectivity and self-contact in nonlinear elasticity, Arch.
Rat. Meeh. Anal. 97 (1987) 171—188.
[375] V. F. Demyanov, Quasidifferentiable functions: Necessary conditions and descent
directions. Math. Progr. Study 29 (1986) 20—43.
[376] A. M. Rubinov and A. A. Yagubov, The space of star-shaped sets and its applications
in nonsmooth optimization, Math. Progr. Study 29 (1986) 176—202.
Работы из авторского списка, имеющиеся на русском языке
[3] Д’Аламбер Ж. Л. Динамика. — М.—Л.: Гостехиздат., 1950.
[6] Аппель П. Теоретическая механика, т. 1. — М.: Физматгиз, 1960.
[10] Аристотель. Метафизика. — Собр. соч. в 4-х томах, т. 1. — М.: Мысль, 1975.
[11] Обэн Ж.-П. Приближенное решение эллиптических краевых задач. — М.:
Мир, 1977.
[24] Бурбаки Н. Топологические векторные пространства.—М.: ИЛ, 1959.
[25] Бурбаки Н. Общая топология. — М.: Наука, 1968.
[26] Бурбаки Н. Интегрирование. — М.: Наука, 1970.
[40] Чнрас А. А. Методы линейного программирования в анатйгзе упругопластиче-
ских систем.—Л.: Стройиздат, 1969.
[41] Сьярле Ф. Метод конечных элементов для эллиптических задач. — М.: Мир,
1980.
[70] Дьёдонне Ж. Основы современного анализа. — М.: Мир, 1964.
[79] Данфорд Н., Шварц Дж. Линейные операторы. — М.: ИЛ, 1964.
[84] Дюво Ж., Лионе Ж.-Л. Неравенства в механике и физике. — М.: Наука, 1986.
[91] Экланд И., Темам Р. Выпуклый анализ и вариационные проблемы. — М.:
Мир, 1979.
[92] Ермаков С. М. Метод Монте-Карло и смежные вопросы. — М.: Наука, 1975.
[98] Фикера Г. Теоремы существования в теории упругости. — М.: Мир, 1974.
[101] Стренг Г., Фикс. Дж. Теория метода конечных элементов. — М.: Мир, 1977.
[109] Гельфанд И. М., Шилов Г. Е. Обобщённые функции и действия над ними. —
М.: Фнзматгиз, 1959.
[112] Жермеи П. Курс механики сплошных сред. — М.: Высш, школа, 1983.
470
Литература
[120] Гловински Р., Лионе Ж.-Л., Тремольер Р. Численное исследование вариацион-
ных неравенств. — М.: Мир, 1979.
[124] Де Гроот С. Термодинамика необратимых процессов. — М.: Гостехиздат,
1956.
[143] Химмельблау Д. Прикладное нелинейное программирование. — М.: Мир,
1975.
[151] Ильюшин А. А. О приращении пластической деформации и поверхности теку-
чести. — ПММ, 1960, т. 24, с. 663—666.
[152] Иоффе А. Д., Тихомиров В. М. Теория экстремальных задач. — М.: Наука,
1974.
[156] Качанов Л. М. Основы теории пластичности. — М.: Наука, 1965.
[161] Киндерлерер Д., Стампаккья Г. Введение в вариационные неравенства и их
приложения.—М.: Мир, 1983.
[166] Кюнци Г., Крелле В. Нелинейное программирование; — М.: Сов. радио, 1965.
[167] • Купрадзе В. Д. Методы потенциала в теории упругости. — М.: Физмагтиз,
1963.
[168] Купрадзе В. Д., Гегелия Т. Г., Башейлешвили М. О., Бурчуладзе Т. В. Трёх-
мерные задачи математической теории упругости и термоупругости. — М.:
Наука, 1976.
[171] Ланцош К. Вариационные Принципы механики. — М.: Мир, 1965.
[172] Ландау Л. Д., Лифшиц Е. М. Теория упругости.—М.: Наука, 1965.
[179] Лионе Ж.-Л. Оптимальное управление системами, описываемыми уравнения-
ми с частными производными. — М.: Мир, 1972.
[181] Лионе Ж.-Л., МадженесЭ. Неоднородные граничные задачи и их приложе-
ния.— М.: Мир, 1971.
[182] Лионе Ж.-Л. Некоторые методы решения нелинейных краевых задач. —М.:
Мир, 1972.
[206] Михлин С. Г. Численная реализация вариационных методов.—М.: Наука,
1966.
[217] Мосолов П. П., Мясников В. П. Вариационные методы в теории течения вяз-
ко-пластических сред. — ПММ, 1965, т. 29, с. 468—492.
[221] Мусхелишвили Н. И. Некоторые основные задачи математической теории
упругости. — М.: Наука, 1966.
[224] Надаи А. Пластичность и разрушение твёрдых тел. В 2-х томах: т. 1 — М.:
ИЛ, 1954; т. 2 —М.: Мир, 1969.
[274] Прагер В. Введение в механику сплошных сред. — М.: ИЛ, 1963.
[275] Прагер В., Ходж Ф. Теория идеально пластических тел. — М.: ИЛ, 1956.
[284] Робертсон А., Робертсон В. Топологические векторные пространства.—М.:
Мир, 1967.
[288] Рокафеллар Р. Т. Выпуклый анализ.—М.: Мир, 1973.
[302] Смирнов В. И. Курс высшей математики, т. 5. — М.: Физматгиз, 1959.
[303] Ставракова Н. Е. Принцип Гамильтона — Осгроградского для систем с одно-
сторонними связями. — ПММ, 1965, т. 29, с. 738—741.
[312] Темам Р. Уравнения Навье — Стокса.—М.: Мир, 1981.
[315] Ъгмошенко С. П., Войновский-Кригер С. Пластинки и оболочки. —М.: Нау-
ка, 1966.
[324] Вайнберг М. М. Вариационный метод и метод монотонных операторов в тео-
рии нелинейных уравнений. — М.: Наука, 1972.
[325] Виленкин Н. Я. Функциональный анализ. — М.: Наука, 1964.
[330] Варга Дж. Оптимальное управление дифференциальными и интегральными
уравнениями. — М.: Наука, 1977.
Литература
471
[333] Васидзу К. Вариационные методы в теории упругости и пластичности. — М.:
Мир, 1987. [пер. 3-го изд. (1982)].
[337] Иосида К. Функциональный анализ. — М.: Мир, 1967.
[338] Янг Л. Лекции по вариационному исчислению и теорий оптимального управ-
ления. — М.: Мнр, 1974.
[341] Жуков А. М. О пластических деформациях изотропного металла при сложном
нагружении. — ИАН СССР ОТН, 1956, т. 12, с. 72—87.
[345] Зенкевич О. Метод конечных элементов в техника — М.: Мир, 1975.
[354] Главачек И., Гастлингер Я., Нечас И., Ловишек Я. Решение вариационных
неравенств в механике. — М.: Мир, 1986.
[364] Демьянов В. Ф., Васильев. Л. В. Недифференцируемая оптимизация. — М.:
Наука, 1981.
[367] Демьянов В. Ф., Рубинов А. М. О квазидифференцируемых функционалах. —
ДАН СССР, 1980, т. 21, с. 14—17.
[368] Демьянов В. Ф., Полякова Л. Н., Рубинов А. М. Об одном обобщении поня-
тия субднфференциала. — В сб.: Всесоюзн. конференция «Динамическое
управление». Тез. докл., Свердловск, 1979, с. 79—84.
Литература, добавленная переводчиками
Арутюнян Р. А. Теория пластичности для среды со старением. — Проблемы прочности,
1987, № 4, с. 71—90.
Арутюнян Р. А., Вакуленко А. А. О многократном нагружении упругопластической сре-
ды. — ИАН СССР, Мех., 1985, №4, с. 53—61.
Бенсусан А., Лионе Ж.-Л. Импульсное управление и квазивариационные неравенства. —
М.: Наука, 1987.
Гиббс Дж. В. Термодинамические работы. — М. — Л.: Гостехиздат, 1950.
Гиббс Дж. В. Термодинамика. Статистическая механика. — М.: Наука, 1982.
Ивлев Д. Д. Теория идеальной пластичности.—М.: Наука, 1966.
Ивлев Д. Д., Быковцев Г. И. Теория упрочняющегося пластического тела. — М.: Наука,
1971.
Ильюшин А. А. Пластичность. Основы общей математической теории пластичнос-
ти. — М.: изд-во АН СССР, 1963.
Ильюшин А. А. Механика сплошной среды. — М.: изд-во МГУ, 1971.
Ильюшин А. А., Победря Б. Е. Основы математической теории термовязкоупругос-
ти.— М.: Наука, 1970.
Ишлинский А. Ю. Общая теория пластичности с линейным упрочнением. — Укр. мат.
ж., 1984, т. 6, № 3, с. 314—325.
Кадашевич Ю. И., Новожилов В. В. Теория пластичности, учитывающая остаточные
микронапряжения. — ПММ, 1968, т. 22, с. 78—89.
Канторович Л. В., Акилов Г. П. Функциональный анализ. — М.: Наука, 1977.
Колмогоров А. Н., Фомин С. В. Элементы теории функций и функционального анали-
за.— М.: Наука, 1972,
Кристенсен Р. Введение в механику композитов. — М.: Мир, 1982.
Круз Т., Риццо Ф. (ред.) Метод граничных интегральных уравнений. Вычислительные
аспекты и приложения в механике.—М.: Мир, 1978.
Курант Р., Гйльберт Д. Методы математической физики, т. 1. — М. — Л.: Гостехиздат,
1951.
Лоран П.-Ж. Аппроксимация и оптимизация. — М.: Мир, 1975.
Мейз Д. Дж. Теория и задачи механики сплошных сред — М.: Мир, 1974.
472 Литература
Полак Э. Численные методы оптимизации. — М.: Мир, 1974.
Пшеничный Б. Н. Выпуклый анализ и экстремальные задачи. — М.: Наука, 1980.
Работное ГО. Н. Ползучесть элементов конструкций. — М.: Наука, 1966.
Рейнер М. Реология. — М.: ИЛ, 1965.
Седов Л. И. Введение в механику сплошных сред. — М.: Физматгиз, 1962.
Соболев С. Л. Некоторые применения функционального анализа в математической фи-
зике. — Л.: изд-во ЛГУ, 1950.
СьярлеФ., Рабье П. Уравнения Кармана. — М.: Мир, 1983.
Фрейденталь А., Гейрингер X. Математические теории и механика сплошной среды. —
М.: Физматгиз, 1962.
Хилл Р. Математическая теория пластичности. — М.: Гостехиздат, 1956.
Циглер Г. Основы теории устойчивости конструкций. — М.: Мир, 1971.
Черноусько Ф. Л., Баничук Н. В. Вариационные задачи механики и управления. — М.:
Наука, 1973.
Именной указатель
Абеасис (A. F. Abeasis) 250
Адамс (R. A. Adams 13
Аицеллотти (G. Anzellotti) 314
Аристотель 83
Ауслеидер (A. Auslender) 52
Барбу (V. Barbu) 52
Бергер (М. S. Berger) 250
Бисбос (С. Bisbos) 7
Брезис (Н. Brezis) 52
Бросилов (Brosilow) 397
Бурбаки (N. Bourbaki) 13
Вайнберг М. М. 13
Варга (J. Waiga) 6,10, 191
Васидзу (К. Washizu) 12
Венк (Н. U. Wenk) 250
Вернер (В. Werner) 7
Виленкин Н. Я. 13
Гальярдо (Е. Gagliaido) 40
Гейтли (J. Gateley) 7
Гельфанд И. М. 13
Гиббс (J. W. Gibbs) 154
Грии (А. Е. Green) 170
Гринберг (J. М. Greenberg) 155
Д’Аламбер (J. L. R. d’Alembert) 83
Данн (J. Е. Dunn) 154, 164
Данфорд (N. Dunford) 13
Демьянов В. Ф. 6,426, 428,437
Джаквинта (М. Giaquinta) 314
Джонсон (С. Johnson) 314, 329
Диас (J. Р. Dias) 250
Дитер (U. Dieter) 52
Доу (С. Do) 250
Друккер (D. С. Drucker) 185
Дьёдонне (J. Dieudonne) 13
Дюво (G. Duvaut) 196, 225, 250, 288, 314,
329
Дюпюи (G, Dupuis) 360
Жермен (Р. Germain) 96
Ильюшин А. А. 170
Иосида (К. Yosida) 13, 82
Иоффе (A. D. Ioffe) 417
Йон (О. John) 250
Каволь (В. Kawohl) 7
Калькер (J. J. Kalker) 360
Карман (Th. von Karmdn) 250
Квереибург, фон (В. von Querenburg) 13
Кёте (G. Kothe) 13
Кириакопулос (G. Kyriakopoulos) 7
Кирхгоф (G. R. Kirchhoff) 250
Кларк (F. Н. Clarke) 6, 10, 170, 174, 427
Койтер (W. Т. Koiter) 329
Колеман (В. D. Coleman) 155
Конри (Т. F. Сопгу) 360
Кристиансен (Е. Christiansen) 314
Кучера (М. Киёега) 250
Ленэ (F. Ьепё) 225
Лионе (J.-L. Lions) 7, 9, 13, 196, 225, 250,
288, 314, 329
Лопес-Пинто (A. Lopes-Pinto) 250
Лэсдои (L. S. Lasdon) 397
Люстерник Л. А. 269
Мадженес (Е. Magenes) 13
Майер (G. Maier) 7, 9, 129, 329, 360, 402
Мандопулу (Т. Mandopoulon) 7
Мизес (R. von Mises) 127, 372
Мнрземанн (Е. Miersemann) 250
Моро (J.-J. Moreau) 6, 7, 9, 52, 90, 96, 169,
191, 329
474
Именной указатель
Моско (U. Mosco) 52
Мосолов П. П. 314
Мэй (Н. О. Мау) 7
Мэттиз (Н. Matthies) 7, 314
Мясников В. П. 314
Науманн (J. Naumann) 225, 250
Нахди (Р. М. Naghdi) 170
Нечас (J. NeCas) 13, 250
Нитсиотас (G. Nitsiotas) 360
Обей < = Обэи> (J.-P. Aubin) 5
Онзагер (L. Onsager) 95, 96
Павиани (Paviani) 368, 374
Панагиотопулос (Р. D. Panagiotopoulos) 5, 7
Панне, ван де (van de Panne) 381, 382
Пирсон (Pearson) 397
Полякова Л. Н. 428
Потье-Ферри (М. Potier-Ferry) 150, 250
Прагер (W. Prager) 329
Прекупаиу (Т. Precupanu) 52
Пробст (A. Probst) 360
Ранден, ваи (Y, van Randen) 360
Робертсон А. (А. Р. Robertson) 13
Робертсон В, (W. Robertson) 13
Рокафеллар (R. Т. Rockafellar) 6, 52, 94, 97,
171,427
Рубинов А. М. 428, 439
Сейрег (A. Seireg) 360
Симетьер (A. Cimetifere) 250
Смирнов В. И. 13
Соучек (J. Soudek) 250
Стампаккья (G. Stampacchia) 9
Стреиг (G. Strang) 314
Сьярле (P.-G. Ciarlet) 13
Сэйех (A. Sayegh) 360
Сюке (Р.-М. Suquet) 314, 329
Таласлидис (D. Talaslidis) 7
Тейль (Theil) 381, 382
Темам (R. Temam) 52, 97, 314
Тоити (Е. Tonti) 152
Трев (F. Treves) 13
Файф (Р. Fife) 250
Фенхель (W. Fenchel) 52, 97
Фикера (G. Fichera) 7, 9, 13, 142, 149, 225,
360,406
Финнеган (Т. Finnegan) 7
Фишер (F. D. Fischer) 360
Фосдикк (R. L. Fosdick) 154, 164
Франчу (J. Franfiu) 250
Фремон (М. Frdmond) 225
Фурье (J. В. J. Fourier) 9, 152
Хаслингер (J. Haslinger) 7
Хесс (Р. Hess) 250
Хилл (R. Hill) 329
Химмельблау (D. М. Himmelblau) 368, 374
Ходж (Ph. Hodge) 329
Хюнлих (R. Htinlich) 225
Циглер (Н. Ziegler) 96
Шатцман (М. Schatzman) 150, 225
Шварц Дж. (J. Т. Schwartz) 13
Шварц Л. (L. Schwartz) 13
Шбффлер (Schoeffler) 397
Шилов Г. Е. 13
Шиирельман Л. Г. 269
Экланд (I. Ekeland) 52, 97
Ягубов А. А. 439
Янг (L. С. Young) 52
Предметный указатель
1
абсолютно непрерывная функция (absolu-
tely continuous function) 42
алгебраическое сопряжённое (algebraic
dual) 21
алгоритм (algorithm)
— гибкого доступа (flexible tolerance ~ )
368
— Хильдрета—д’Эсопо ( — of Hildreth—
d’Esopo) 367
аффинная оболочка (affine hull) 53
аффинно-независимое множество (affinely
independent set) 161
базис (base) 18
— Галёркина (Galerkin basis) 220
— Гамеля (Hamel basis) 18
— окрестностей (base of neighborhoods) 15
банахово пространство (Banach space) 20
Бингама жидкость (Bingham’s fluid) 125,
127
бифуркации точка (bifurcation point) 47
Браудера теорема (Browder’s theorem) 267
Брауэра теорема о неподвижной точке
(Brouwer’s fixed point theorem) 310
Вант Гоффа принцип (principle of Van’t
Hoff) 166
вариационный (variational)
— неравенство ( — inequality) 151
— принцип ( - principle) 151
— решение ( — solution) 263
веер (fan) Иоффе 4Y1
вектор (vector)
— касательный (tangent ~ ) 438
— ортогональный (orthogonal ~ > 27
— собственный (eigen - > 47, 94
векторное подпространство (vector sub-
space) 17
— пространство ( - space) 17
— распределение ( - valued (или — ial) dis-
tribution) 43
верхний субдифференциал (upper subdiffe-
rential) 171, 172
взаимно-непрерывное отображение (bicon-
tinuous mapping) 16
Винклера закон (Winkler law) 107
— опора ( - support) 114
— пружина ( - spring) 107
виртуальный (virtual)
— мощность ( — power) 84
— перемещение ( — displacement) 84
— работа ( - work) 84
— скорость ( - velocity) 84
вложение (imbedding) 20
— компактное (compact - ) 20
— плотное (dense - ) 20
внешнее давление (ambient pressure) 156
— нормальный конус (outward normal
cone) 62
— след (external trace) 51
— температура (ambient temperature) 156
внутренний след (internal trace) 51
J При повторении qnoed иногда заменяются иа тире, даже если они имеют другие
окончания. На возможность изменения окончания указывает курсивный шрифт (напри-
мер, вариационный). — Прим. изд. ред.
476
Предметный указатель
— точка <interior point) 14
— удельная диссипация < intrinsic specific
dissipation) 95, 423
внутренность <interior) 14
— относительная < relative — ) 53
вогнутый <concave) функционал 53
— строго < strictly ~ ) функционал 53
возмущенная форма <perturbed form) зада-
чи 98
ВП 13, 17
вполне непрерывный оператор < completely
continuous operator) 47
всюду плотное множество < everywhere den-
se set) 14
второе сопряжённое <bidual) 25
выпуклый < convex)
— множество < ~ set) 17, 52
— оболочка < ~ hull) 53
— функционал < ~ functional) 53, 54
вязкости коэффициент < viscosity coeffici-
ent) 127
Галёрки на базис <Galerkin basis) 220
— метод <method of ~’s approximation)
219
Гамеля базис < Hamel basis) 18
ГЬмильтона принцип < Hamilton’s principle)
218
Гато дифференциал (Gateaux-differential)
46
---односторонний < one-sided ~) 62
— производная (Gate aux-derivative) 46
Гельмгольца полусвободная энергия
< Helmholtz semifree energy) 164
геометрическая линеаризация < geometric
linearization) 421
Гёльдера неравенство <H61der inequality)
32
— условие < ~ condition) 31
Гиббса полусвободная энергия < Gibbs semi-
free energy) 164
гиббсово состояние < ~ian state) 159
гибкого доступа алгоритм < flexible toleran-
ce algorithm) 368
гильбертова норма <Hilbert norm) 27
— пространство < ~ space) 26
---поворотное (центральное) (pivot ~
27
гиперплоскость (hyperplane) 21
— опорная (supporting ~ ) 60
гипотеза (hypothesis)
— KoUmepa (Koiter’s — > 129
— Манделя (Mandel’s — ) 129
— нормальной диссипации ( ~ of normal
dissipation) 96
— реологическая (constitutive ~ ) 156, 157
гомеоморфизм (homeomorphism) 16
градиент (gradient) 46
— деформации (deformation - ) 420
— обобщённый (generalized — ) 170
градиентная теория At-го порядка (k-order
gradient theory) 86
граница (boundary) 14
— липшицева (Lipschitz ~ ) 30
граничные условия (boundary conditions)
---Синьорини—Фикеры ( ~ ~ of Signo-
rini—Fichera) 108, 137
график (graph) 45, 77
Грина тензор деформации (Green strain ten-
sor) 421
Грина—Гаусса формула (Green—Gauss for-
mula) 49, 50
Гронуолла неравенство (Gronwall’s inequa-
lity) 215
Гука закон (Hooke’s law) 117
— тензор ( ~ tensor) 315
давление (pressure)
— внешнее (ambient — ) 156
— термостатическое (thermostatic ~ ) 162,
163
Д’Аламбера принцип (d’Alembert’s princip-
le) 247
двойственность (duality) 22, 24, 74
двойственная задача (dual problem) 98, 210
двусторонний (bilateral)
— задача ( — problem) 152
— контакт ( ~ contact) 108
девиатор деформации (strain deviator) 120
дельта-функция см. Дирака распределение
деформации градиент (deformation gradi-
ent) 420
— девиатор (strain deviator) 120
— ограниченной функция (function of
bounded deformation) 41
— скорость (rate of deformation) 420
— тензор (strain tensor) 421
---Грина (Green ~ - > 421
Предметный указатель
477
динамически реализуемая триада (dynami-
cally realizable triad) 157
Дирака распределение (Dirac distribution)
33
диссипативное определяющее соотношение
(dissipative mechanical law) 94
диссипации нормальной гипотеза (hypothe-
sis of normal dissipation) 96
— суперпотенциал (superpotential of — ) 96
---обобщённый 188
диссипация (dissipation)
— внутренняя удельная (intrinsic specific
- > 95, 423
— тепловая (thermal — ) 423
дифференциал (differential)
— Гато (Gateaux- ~ ) 46
---односторонний (one-sided) 62
— Кларка ( - of Clarke) 173
— Фреше (Frdchet- ~ ) 45
дифференцируемость (differentiability)
— по Гато (Gateaux-- ) 46
-------односторонняя no направлениям
(one-sided directional Gateux-- ) 62
— no Фреше (Frdchet- ~ ) 45
допустимые напряжения (admissible stres-
ses) 180, 206
— перемещения ( — displacement) 199
Друккера постулат устойчивости (Dru-
cker’s stability postulate) 126
дуальная пара (dual pair) 22
жёсткое поле скоростей (rigidifying velocity
field) 422
жидкость (fluid)
— Бингама (Bingham’s - ) 125, 127
— Райнера—Ривлина (Reiner—Rivlin — >
130
— Ривлина—Эриксена (Rivlin—Ericksen
~> 130
задана (problem)
— двойственная (dual ~ ) 98, 210
— двусторонняя (bilateral ~ ) 152
— исходная (primal — ) 97, 208
— краевая (boundary value - )
— на неравенства (inequality ~ ) 152
— о линейной дополнительности (linear
complementarity ~ > 392
— односторонняя (unilateral ~ ) 152
— оптимизации (optimization — ) 57
— прямая (primal — ) 97
закон (law) (см. также определяющее со-
отношение)
— Винклера (Winkler ~ > 107
— 1Ука (Hooke’s — ) 117
— Нортона—Хоффа (Norton--Hoff ~ >
128
— ортотропного трения ( — of orthotropic
friction) 112
— Прандтля—Рейсса- (Prandtl—Reuss rela-
tion) 125, 328
— теплопроводности Фурье (Fourier law of
heat conduction) 289
— трения Кулона (Coulomb’s law of fric-
tion) 111
замкнутое множество (closed set) 14
— шар ( - ball) 16
замыкание (closure) 14
звёздное (звездообразное) множество (star-
shaped set) 439
з.л.д. 392
значение (value)
— критическое (critical ~ ) 263
— собственное (eigen - ) 47, 94
— эффективное (effective — ) 158
идеальная односторонняя связь (ideal uni-
lateral constraint) 89
идеального старения эффект ( - -locking
effect) 120
идеально-проектируемая (perfectly projec-
table) поверхность 159
изоклинная свободная конфигурация
(isoclinic released configuration) 425
изометрия (isometry) 20
индикатор (индикаторная функция) (indica-
tor) 54
индуцированная топология (induced topo-
logy) 15
Иосиды приближение (Yosida-approxima-
tion) для дФ 266
Иоффе веер ( fan of Ioffe) 417
исходная задача (primal problem) 97, 208
Казимира—Онзагера соотношения сим-
метрии (symmetry relations of Casimir—
Onsager) 95
478
Предметный указатель
каноническая билинейная форма см. спа-
ривание
касательный вектор {tangent vector> 438
— конус < ~ сопе> 171, 438
— разрыв < — ial discontinuity> 335
касаются {are ~ial> (о графиках) 45
квазидиффереициал {quasidifferential) 429
квазидифференцируемость {quasidifferen-
tiability) 428
квазинормаль {quasinormal) 438
кинематическая линеаризация {kinematic
linearization) 421
Кларка дифференциал {differential of
Clarke) 173
Клаузиуса—Дюгема неравенство {Clausi-
us— Duhem inequality) 155
Кайтера гипотеза ( Koi ter’s hypothesis) 129
компактный {compact)
— вложение { ~ imbedding) 20
— множество { — set) 20
— оператор { ~ operator) 47
конус {cone)
— внешний нормальный {outward normal
— > 62
— касательный {tangent — ) 171, 438
— нормальный {normal — ) 171—172
конфигурация {configuration)
— изоклинная свободная {isoclinic released
->425
— освобождённая {released — > 424
координаты {coordinates)
— материальные {material - > 419
— пространственные {spatial - ) 419
Корна неравенство (первое, второе) {Korn’s
inequalitie (first, second)) 48
Коши последовательность {Cauchy sequen-
ce) 16
— тензор напряжений { — stress tensor) 88
Коши—Грина правый тензор (right Cauchy
—Green tensor) 421
коэрцитивный (coercive) 29, 142
коэффициент вязкости (viscosity coeffici-
ent) 127
краевая задача (boundary value problem)
---вторая (second - — - ) 253
---первая (first - - — ) 253
---Синьорины—Фикеры (Signorini—
Fichera - - — ) 147
кривая полная неубывающая (complete
nondecreasing curve) 78
критическое значение (critical value) 263
— точка ( — point) 177
Кулона закон трения (Coulomb’s law of
friction) 111
лагранжево описание (Lagrangian descrip-
tion) 420
Лакса—Милгрзма теорема (Lax—Milgram
theorem) 29
ЛВП 19
ЛеШателье принцип (principle of Le Cha-
telier) 166
---эффект {— — effect) 119
Лебега теорема (Lebesgue’s theorem) 44
Лежандра—Фенхеля преобразование (Le-
gendre—Fenchel transformation) 74
линеаризация (linearization)
— геометрическая (geometric — > 421
— кинематическая (kinematic - ) 421
линейно-независимое множество (linearly
independent set) 17
линейный (linear)
— дополнительность ( — complementarity)
392
— отображение ( - mapping) 18
— пространство ( - space) 17
— форма ( — form) 21
— функционал ( — functional) 21
Лионса теорема о компактности (Lions’s
compactness theorem) 279—280
Липшица условие (Lipschitz condition) 31
липшицева граница ( - boundary) 30
— функция ( - function) 173
ЛП 17
локально-выпуклое пространство (locally
convex space) 19
локально-интегрируемая функция (locally
integrable function) 33
локальный (local)
— производная ( - derivative) 420
— суперпотеициал ( - superpotential) 105
Макки топология (Mackey topology) 24
Макки—Аренса теорема (Mackey—Arens
theorem) 24
максимальный строго монотонный опера-
тор (maximal strictly monotone operator)
77
Предметный указатель
479
максимума функция < maximum-type func-
tion) 175
Манделя гипотеза <Mandel’s hypothesis)
129
Массона—Савара эффект < Masson—Savart
effect) 119
материал <material)
— вязкоупруго-пластичиый < viscoelastic
plastic ~ > 128
— жёстко-вязкопластичный frigid visco-
plastic ~ > 125, 127
— жёстко-идеальиопластичиый < — perfec-
tly plastic —) 125
— идеально-пластичный {perfectly plastic
~> 125
— обобщённый стандартный в смысле
Кларка {generalized standard ~ in the
sense of Clarke) 189
— ограниченной сжимаемости { ~ of limi-
ted compressibility) 120
— упруго-вязко-вязкопластичиый {elastic
viscous viscoplastic ~ ) 128
— упруго-вязко-пластичный < ~ ~ plastic
~) 128
— упруго-вязкопластичный < ~ viscoplastic
~) 128
— упруго-идеальиопластичиый { ~ perfect-
ly plastic — > 125
— упруго-идеальиостареющий { ~ ideally
locking ~ ) 119
— упруго-пластично-вязкопластичиый
{elastic plastic viscoplastic ~) 128
— Хенки {Henckey ~ ) 123
материальный {material)
— координаты < ~ coordinates) 419
— описание { ~ description) 420
— производная < ~ derivative) 420
— фаза { ~ phase) 154
матрица геометрической жёсткости {geo-
metric stiffness matrix) 391
медленного роста см. умеренное распреде-
ление
мера {measure) 34
метод {method)
— Галёрки на { ~ of Galerkin’s approxima-
tion) 219
— градиентного спуска {gradient controller
~) 397
-------допустимого {feasible) 397
-------недопустимого (nonfeasible) 397
— многоуровневой декомпозиции {multi-
level technique) 396
— приращений {incremental procedure) 390
— Хоуболта (Houbolt’s method) 412
метрика {metric(s)) 16
механический элемент {mechanical element)
84
Минковского неравенство {Minkowski
inequality) 32
миноранта {minorant) 71
многозначное отображение {multivalued
mapping) 76
многообразие статических состояний {sta-
tic site manifold) 158
множество {set)
— аффинно-независимое {affinely indepen-
dent ~ ) 161
— всюду плотное {everywhere dense ~ ) 14
— выпуклое {convex ~ ) 17, 52
— замкнутое {closed — ) 14
— звёздное (звездообразное) {star-shaped
~)439
— компактное (compact — ) 20
— линейно-независимое (linearly indepen-
dent ~ ) 17
— ограниченное (bounded ~ ) 16, 18
— открытое (open ~ ) 14
— относительно-компактное (relatively
compact ~ ) 20
— плотное (dense ~ ) 14
— производное (derivate container) 191
— собственное (eigen ~ ) 94
монотонный оператор (monotone operator)
76
мощность (power) 84
— виртуальная (virtual ~ ) 84
нагрев суммарный (total heating) 156
иадграфик (epigraph) 54
направление иаискорейшего подъёма (di-
rection of steepest ascent) 432
---спуска ( ~ ~ ~ descent) 432
— приближенно равномерного спуска ( ~
of approximately uniform descent) 174—
175
направления ортотропные (orthotropic
~s) 111
напряжений тензор (stress tensor)
---Коши (Cauchy ~ ~ ) 88
480
Предметный указатель
----Ниблы—Кирхгофа <Piola—Kirchhoff
---->421
напряжения допустимые (admissible stres-
ses) 206
---статически (statically ~ —>180
невыпуклый суперпотенциал (nonconvex
superpotential) 176
недилатирующий элемент (nondilatant
joint element) 121
независимость от системы отсчета ( frame-
indifference) 422
ненатянутость (slackness) 391
неоклассический процесс (neoclassical pro-
cess) 156
неотрицательное решение (nonnegative so-
lution) 34
неотрицательно-определённая форма (non-
negative (definite) form) 26—27
непрерывность (continuity) 16
неравенство (inequality)
— вариационное (variational - ) 151
— Гёльдера (Holder - ) 32
— Гронуолла (Gronwall’s - > 215
— Клаузиуса—Дюгема (Clausius—Duhem
-> 155
— Корна второе (Korn’s second - > 48
---первое ( - first - ) 48
— Минковского (Minkowski — ) 32
— полувариациоииое (hemivariational — )
176
— типа Фикеры ( - of the Fichera type) 142
— Фенхеля (Fenchel - ) 74
нижний субдиффереициал (lower subdiffe-
rential) 173
нить (cable) 390
норма (norm) 19
— гильбертова (Hilbert - ) 27
— эквивалентная (equivalent - ) 19
нормальный (normal)
— в смысле Кларка ( - in the sence of Clar-
ke) 188
— конус ( - cone) 171—172
---внешний (outward — - > 62
— разрыв ( - discontinuity) 335
— состояние ( - state) 160
нормированное пространство (normed
space) 19
Нортона—Хоффа закон (Norton—Hoff
law) 128
носитель (support) 30
область значений (range) 76
--- связи 89
---эффективная (effective — ) 158
— определения (domain) 60, 76
--- связи 89
---эффективная (effective - ) 54
обобщённая функция (generalized function)
33
оболочка (hull)
— аффинная (affine — ) 53
— выпуклая (convex — ) 53
образ (range) 76
объективный (objective) 422
— виртуальная скорость ( - virtual veloci-
ty) 85
ограничение (constraint) 89
— двустороннее (bilateral - > 382
— одностороннее (unilateral — ) 381
— типа равенства (equality--) 381—382
ограничение-равенство (equality- — ) 381
ограниченный (bounded)
— в существенном функция (essentially -
function) 32
— мера ( - measure) 34
— множество ( - set) 16, 18
— оператор ( - operator) 20, 46
односторонний (one-sided)
— дифференциал Гато ( — GSteaux-diffe-
rential) 62
— дифференцируемость по Гато по на-
правлениям ( — directional GSteaux-diffe-
rentiability) 62
односторонний (unilateral)
— задача ( - problem) 152
— контакт ( - contact) 108
— ограничение ( — constraint) 381
— по напряжению поведение (stress- —
behavior) 390
— поведение ( - behavior) 389
— связь идеальная (ideal — constraint) 90
окрестность (neighborhood) 14
ОЛВП 19
оператор (operator)
— вполне непрерывный (completely conti-
nuous - ) 47
— компактный (compact - ) 47
— максимальный строго монотонный
(maximal strictly monotone — ) 77
— многозначный (multivalued - ) 76
— монотонный (monotone — ) 76
Предметный указатель
481
— ограниченный < bounded — > 20, 46
— полунепрерывный снизу < lower semicon-
tinuous — > 171
— потенциальный < potential ~ > 46
— псевдомоиотонный < pseudomonotone
~>47
— регуляризованный (regularized ~ > 80
— сопряжённый < adjoint ~ > 28
— строго монотонный (strictly monotone
— > 76
— транспонированный (transpose ~ > 28
описание (description)
— лагранжево (Lagrangian ~ > 420
— материальное (material ~ > 419
— пространственное (spatial ~ > 420
— эйлерово (Eulerian ~ > 420
опора Винклера (Winkler support) 114
опорная гиперплоскость (supporting hyper-
plane) 60
— функция (support function) 75, 433
определяющее соотношение (mechanical
law) 88
---диссипативное (dissipative — — ) 94
---потенциальное (potential ~ ~ ) 89
ортогональный (orthogonal)
— вектор ( — vector) 27
— дополиеиие ( ~ complement) 27
ортотропного трения закон (law of ortho-
tropic friction) 112
ортотропные направления (orthotropic di-
rections) 111
освобождённая конфигурация (released
configuration) 424
отделимое пространство (separated space)
15, 19
открытое множество (open set) 14
— шар ( - ball) 16
ОТВП 19
относительная внутренность (relative inte-
rior) 53
относительно-внутренняя точка ( ~ ly inte-
rior point) 53
относительно-компактное множество ( ~ ly
compact set) 20
отображение (mapping) (см. также функ-
ция)
— взаимно-непрерывное (bicontinuous) 16
— двойственности (duality ~ ) 27, 324
— дифференцируемое no Гато (Gateaux-
differentiable ~ > 46
---по Фреше (Frechet-differentiable — )
45
— линейное (linear ~ ) 18
— многозначное (multivalued ~ > 76
— покоя (rest ~ ) 158
— следовое (trace ~ ) 49
— субдифференцируемое (subdifferentiable
~> 60
ОТП 15
перемещение (displacement)
— виртуальное (virtual — ) 84
— допустимое (admissible ~ ) 199
Пиолы—Кирхгофа тензор напряжений
(второй) ((second) Piola—Kirchhoff stress
tensor) 421
плотное вложение (dense imbedding) 20
— множество ( ~ set) 14
п.н.св. (u.sx.) 16, 55
п.н.сн. (I.S.C.) 16, 55
п.и.си.-регуляризация (l.s.c.-regularization)
73
поведение (behavior)
— одностороннее (unilateral ~ ) 389 •
---по напряжению (stress-unilateral — )
390
поворотное (pivot) гильбертово простран-
ство 27
полная неубывающая кривая (complete
nondecreasing curve) 78
— пространство ( — space) 16
положительная часть (positive part) 108
положительно-определённая форма (posi-
tive (definite) form) 26
полувариациоиное (hemivariational) нера-
венство 176
полукоэрцитивность (semicoercivity) 148,
406
полунепрерывный сверху (upper semiconti-
nuous) функционал 16, 55
— снизу (lower semicontinuous) оператор
(многозначный) 171'
---функционал 16, 55
полунорма (seminorm) 19
полусвободная энергия (semifree energy)
164
полусвободная энергия Гельмгольца
(Helmholtz semifree energy) 164
---ГЪббса (Gibbs ~ ~ ) 164
482
Предметный указатель
полуэнталышя < semi-enthalpy > 164
поляра < polar set> 23
поляризации преобразование {polarity
transformation) 74
пополнение {completion) 20
последовательность Коши (сходящаяся в
себе, фундаментальная) {Cauchy sequen-
ce) 16
постулат ограниченной устойчивости в це-
лом {restricted stability postulate in the
large) 126
— устойчивости Друккера (Drucker’s stabi-
lity ~) 126
потенциал { potential) 46, 89
потенциальный оператор {potential opera-
tor) 46
— определяющее соотношение ( ~ mecha-
nical law) 88
почти-допустимая (near-feasible) точка 369
правило Рэлея (Rayleigh quotient) 271
Прандтля—Рейсса закон (Prandtl—Reuss
relation) 125, 328
предгильбертово пространство (pre-Hilbert
space) 26
предел (limit) 14
предельная точка ( ~ point) 14
преобразование (transformation)
— Лежандра—Фенхеля (Legendre—Fenchel
~>74
— поляризации (polarity — ) 74
— Фенхеля (Fenchel — ) 74
— Фенхеля—Юнга (Fenchel—Young ~ ) 74
— Фурье (Fourier transform) 35
приближение Иосиды (Yosida-approxima-
tion) для дФ 266
принцип (principle)
— Вант Гоффа ( ~ of Van’t Hoff) 166
— вариационный (variational — ) 151
---в форме неравенства ( ~ inequality
~) 151
— Гамильтона (Hamilton’s ~) 218
— Д’Аламбера (d’Alembert’s ~ ) 247
— Ле Шателье ( ~ of Le Chatelier) 166
— максимума пластической работы Хилла
(Hill’s ~ of maximum plastic work) 126,
189—190
— термодинамики второй (second ~ of the
thermodinamics) 423
---первый (first ~ ~ — ~)423
приращений метод (incremental procedure)
390
пробная функция (test function) 33
проектор (projection operator) 95
произведение (product)
— распределения и функции 35
— скалярное (inner ~ ) 26
производная (derivative) 42
— Гато (Gateaux-~ ) 46
— локальная (local ~ ) 420
— материальная (material ~ > 420
— пространственная (spatial ~ ) 420
— Фреше (Frechet- ~ ) 45
производное множество (derivate contai-
ner) 191
пространственный (spatial)
— координаты ( ~ coordinates) 419
— описание ( ~ description) 420
— производная ( ~ derivative) 420
пространство (space)
— банахово (Banach ~ ) 20
— векторное (vector ~ ) 17
— гильбертово (Hilbert ~ ) 26
— линейное (linear ~ ) 17
— локально-выпуклое (locally convex — )
19
— метризуемое (metrizable ~ ) 16
— метрическое (metric ~ ) 16
— нормированное (normed ~ ) 19
— нормируемое (normable ~ ) 19
— отделимое (separated ~ ) 15, 19
— поворотное (pivot ~ ) 27
— полное (complete ~ ) 16
— предгильбертово < pre-Hilbert ~ ) 26
— рефлексивное (reflexive ~ > 25
— сепарабельное (separable ~ ) 14
— Соболева (Sobolev — ) 36, 38
— сопряжённое (dual — ) 21
— топологическое (topological ~ > 14
---векторное ( ~ vector ~ ) 13, 18
— хаусдорфово (Hausdorff ~ ) 15, 19
— центральное см. поворотное гильберто-
во пространство
процесс (process) 155
— неоклассический (neoclassical — > 156
— проходит через (passes through) состоя-
ние 167
п.р.с. 175
псепдомонотонный (pseudomonotone) опе-
ратор 47
Предметный указатель
483
пружина Винклера (Winkler spring) 107
прямая задача (primal problem) 97
работа (work) 84, 156
— виртуальная (virtual ~ ) 84
разделяет (separates) 21
— строго ( — strictly) 21
разложимый (decomposable) функционал
135
разрыв (discontinuity)
— касательный (tangential - ) 335
— нормальный (normal ~ ) 335
Райнера—Ривлинажидкость (Reiner—Riv-
lin fluid) 130
Райса теория вязко-пластических потенциа-
лов (viscoplastic-potential theory of Rice)
190
распределение (distribution) 33
— векторное (vectorial (или vector-valued)
— >43
— Дирака (Dirac - > 33
— неотрицательное (nonnegative - > 34
— регулярное (regular — ) 34
— сингулярное (singular - > 34
— умеренное (tempered - > 36
расстояние (distance) 16
реакция связи (reaction of the constraint) 89
регуляризация (regularization) 73, 317
регуляризованиый (regularized) оператор
80
регулярное распределение (regular distribu-
tion) 34
Реллиха—Кондрашова теорема (Rellich—
Kondrachov theorem) 41
реологическая гипотеза (constitutive hypo-
thesis) 156, 157
рефлексивное (reflexive) ЛВП 25
решение (solution)
— вариационное (variational - > 263
— приведённое (reduced - ) 264
Ривлина—Эриксена жидкость (Rivlin—
Ericksen fluid) 130
Pucca теорема (Riesz theorem) 27
Рэлея правило (Rayleigh quotient) 271
свободная изоклинная конфигурация (iso-
clinic released configuration) 425
связь (constraint) 89
— идеальная односторонняя (ideal unilate-
ral ~> 90
сепарабельное пространство (separable
space) 14
сила (force) 84
— обобщённая (generalized - > 84
сильный (strong)
— сопряжённое ( - dual) 25
— топология ( ~ topology) 23
сингулярное распределение (singular distri-
bution) 34
Синъорини—Фикеры граничные условия
(boundary conditions of Signorini—Fiche-
ra) 108, 137
---краевая задача (Signorini—Fichera
boundary value problem) 147
скалярное произведение (inner product) 26
скачка эффект (jump effect) 119
скорость (velocity)
— виртуальная (virtual ~> 84
— деформация (rate of deformation) 420
— обобщённая (generalized velocity) 87
— объективная виртуальная (objective vir-
tual - ) 85
— поворота (rate of spin) 420
скрытые переменные (hidden variables) 424
слабый (weak)
— сопряжённое ( - dual) 23
— сходимость ( - convergence) 25
— топология ( ~ topology) 23, 25
след (trace)
— внешний (external ~ > 51
— внутренний (internal - > 51
следовое отображение (trace mapping) 49
Соболева пространства (Sobolev spaces)
36, 38
собственно-опорное состояние (properly
supported state) 163
собствеиио-проектируемая (~ projectable)
поверхность 159
собственный вектор (eigenvector) 47, 94
— значение (eigenvalue) 47
---относительно (with respect to) опера-
тора 94
— множество (eigenset) 94
— функционал (proper functional) 55
совместности условие (compatibility condi-
tion) 101
согласуется с двойственностью (is compa-
tible with the duality) 24
484
Предметный указатель
сопряжённое (dual)
— алгебраическое (algebraic - > 21
— второе (bi ~ > 25
— сильное (strong ~ > 25
— слабое (weak ~ > 23
— топологическое (continuous (или topolo-
gical) —•> 21
сопряжённый оператор (adjoint operator)
28
— показатель (conjugate exponent) 32
— суперпотенциал (conjugate superpoten-
tial) 105
сопряжённый функционал (conjugate func-
tional) 71
состояние (state) 158
— гиббсово (Gibbsian - ) 159
— нормальное (normal ~ ) 160
— почтн-допустимое (near-feasible ~ ) 369
— собственно-опорное (properly supported
~) 163
сосуществующие фазы (coexistent phases)
154,161
спаривание (duality pairing) 22
спектр (spectrum) 47
стандартный обобщённый материал в
смысле Кларка (generalized standard ma-
terial in the sense of Clarke) 189
старения эффект (locking effect) 119
— идеального эффект (ideal— ~ ) 120
статически допустимое (statically admissib-
le) поле напряжений 180
статических состояний многообразие (sta-
tic site manifold) 158
строго (strictly)
— монотонный оператор ( - monotone
operator) 76
— разделяет ( ~ separates) 21
субаддитивная (subadditive) функция 433
субградиент (subgradient) 60
субдифференциал (subdifferential) 60
— верхний (upper - ) 171,172
— нижний (lower ~ ) 173
субднфференцируемость ( subdifferentiabi-
lity) 60
сублинейная (sublinear) функция 433
субстационарная (substationary) функция
175
субстационарности точка (substationarity
point) 175
суперпотенциал (superpotential) 90
— в смысле Варги ( - in the sense of
Warga) 192
-------Кларка ( ~ ~ ~ ~ ~ Clarke) 176
— диссипации ( ~ of dissipation) 96
---обобщённый 188
— локальный (local ~ ) 105
— невыпуклый (nonconvex ~ ) 176
— сопряжённый (conjugate ~ ) 105
сходимость (convergence) 14
— слабая (weak ~ ) 25
— «-слабая (weak* - ) 26
ТВП 13,18
текучести функция (yield function) 125
температура (temperature)
— внешняя (ambient ~ ) 156
— термостатическая (thermostatic - ) 162,
163
тензор (tensor)
— внутренних напряжений (intrinsic stress
— > 86
— Гука (Hooke’s) 315
— деформации Грина (Green strain ~ ) 421
— Коши—Грина правый (right Cauchy—
Green ~ ) 421
— напряжений Коши (Cauchy stress ~ ) 88
---Пиолы—Кирхгофа (второй) ((se-
cond) Piola—Kirchoff stress ~) 421
— скоростей деформации (rate of deforma-
tion ~ или stretching ~ ) 87
теорема (theorem)
— Браудера (Browder’s ~ ) 267
— Брауэра о неподвижной точке (Brou-
wer’s fixed point - ) 310
— вложения Соболева (Sobolev’s imbedding
— ) 40
— ГЪльярдо о следе (Gagliardo’s trace ~ )
40
— Лакса—Милгрэма (Lax—Milgram ~ ) 29
— Лебега (Lebesgue’s ~ ) 44
— Лионса о компактности (Lions’s com-
pactness ~ ) 279—280
— Макки—Аренса (Mackey—Arens ~ ) 24
— о дифференцируемости (differentiability
~ ) 42
— о непрерывности (continuity ~ ) 44
— о следе (trace ~ ) 39, 40, 42
— Реллиха—Кондрашова (Relhch—Kon-
drachov ~ ) 41
Предметный указатель
485
— Рисса (Riesz ~ > 27
— Хана—Банаха <Hahn—Banach ~ > 21
— Эберлейна—Шмульяна <Eberiein—
Shmulyan ~ > 26
тепловая диссипация (thermal dissipation)
423
термостатически опорная точка (thermo-
static support point) 158
термостатическое давление ( - pressure)
162
— температура ( - temperature) 162, 163
термостатической фазы точка ( — phase
point) 158
топологическое векторное пространство
(topological vector space) 13,18
— пространство ( - space) 14
— сопряжённое ( - (или continuous) dual)
21
топология (topology) 14
— индуцированная (induced ~) 15
— Макки (Mackey ~ ) 24
— метрическая (metric ~ ) 16
— ограниченной сходимости ( ~ of boun-
ded convergence) 23
— произведения (product ~ ) 15
— сильная (strong ~ ) 23
— слабая (weak - ) 23, 25
— согласованная (compatible) с линейной
структурой 18
— «-слабая (weak* ~ ) 25
точка (point)
— бифуркации (bifurcation ~ ) 47
— внутренняя (interior ~ ) 14
— критическая (critical ~ ) 177
— относительно-внутренняя (relatively in-
terior ~) 53
— почти-допустимая (near-feasible - ) 369
— предельная (limit ~) 14
— прикосновения (closure ~ ) 14
— субстационариости (substationarity -)
175
— термостатически опорная (thermostatic
support ~) 158
— термостатической фазы ( - phase -)
158
— фазовая (phase - ) 161
— inf-стациоиарная (inf-stationary - ) 432
— sup-стациоиариая (sup-stationary - )
432
ТП 13
транспонированный оператор (transpose
operator) 28
умеренное распределение (tempered distri-
bution) 36
условие (condition)
— Гёльдера (Holder ~ ) 31
— двустороннего контакта ( ~ of bilateral
contact) 108
— Липшица (Lipschitz ~) 31
— одностороннего контакта ( ~ of unilate-
ral contact) 108
— совместности (compatibility — ) 101
— устойчивости (stability — ) 101
— экстремума (extremality - ) 101
фаза (phase) 154, 159
— материальная (material - ) 154
факторпространство (quotient space) 18, 20
Фенхеля неравенство (Fenchel inequality) 74
— преобразование ( - transformation) 74
Фенхеля—Юнга преобразование (Fenchel—
Young ~) 74
форма (form)
— каноническая билинейная см. спарива-
ние
— неотрицательно-определённая (nonne-
gative (definite) — ) 26—27
— положительно-определённая (positive
(definite) ~) 26
— полукоэрцитивная (semicoercive ~ ) 148,
406
формула Грина—Гаусса (Green—Gauss for-
mula) 49, 50
Фреше дифференциал (Frdchet-differential)
45
— производная ( - -derivative) 45
Фридрихса лемма (Friedrichs lemma) 37
Фурье закон теплопроводности (Fourier’s
law of heat conduction) 289
— преобразование (Fourier transform) 35
функционал (functional)
— вогнутый (concave -) 53
— выпуклый (convex - ) 53, 54
— двойственный (dual -) 74
— квазидифференцируемый (quasidifferen-
tiable - ) 428
— линейный (linear -) 21
486
Предметный указатель
— односторонне дифференцируемый по
Гато по направлениям (one-sided direc-
tional Gateaux-differentiable ~ > 62
— полунепрерывный сверху (upper semi-
continuous ~ > 16, 55
---снизу (lower ~ ~ > 16, 55
— разложимый (decomposable — > 135
— собственный (proper — > 55
— сопряжённый (conjugate ~ > 71
— строго вогнутый (strictly concave ~ > 53
---выпуклый (~ convex ~ > 53
функция (function)
— абсолютно непрерывная (absolutely con-
tinuous ~ > 42
— индикаторная (indicator) 54
— лнпшицева (Lipschitz ~ ) 173
— локально-интегрируемая (locally integ-
rable ~) 33
— максимума (maximum-type — ) 175
— непрерывная (continuous ~ ) 16
— обобщённая (generalized ~ ) 33
— ограниченная в существенном (essential-
ly bounded ~) 32
— ограниченной деформации ( ~ of boun-
ded deformation) 41
— опорная (support ~ ) 75, 433
— пробная (test - ) 33
— слабо измеримая (weakly measurable ~ )
43
— субаддитивная (subadditive - ) 433
— сублинейная (sublinear ~ ) 433
— субстационарная (substationary ~ ) 175
— текучести (yield ~ ) 125
— Э-регулярная (Э-regular ~ ) 175
Хана—Банаха теорема (Hahn—Banach
theorem) 21
хаусдорфово пространство (Hausdorff
space) 15, 19
Ленки материал (Hencky-material) 123
Хилла принцип максимума пластической
работы (Hill’s principle of maximum plas-
tic work) 126, 189—190
Хильдрета—д’Эсопо алгоритм (algorithm
of Hildreth—d’Esopo) 367
Хоуболта метод (Houbolt’s method) 412
центральное пространство см. поворотное
гильбертово пространство
шкала (scale) гильбертовых пространств
29
Эберлейна—Шмульяна теорема (Eberlein
—Shmulyan theorem) 26
эйлерово описание (Eulerian description)
420
экстремума условие (extremality condition)
101
элемент неднлатирующий (nondilatant ele-
ment) 121
— механический (mechanical ~ ) 84
эллиптичность (ellipticity) 117
энергия (energy)
— полусвободная (semifree — > 164
---Гельмгольца (Helmholtz ~ ~ ) 164
---Гиббса (Gibbs - - ) 164
эффект (effect)
— идеального старения (ideal-locking ~ )
120
— Ле Шателье (Le Chatelier —>119
— Массона—Савара (Masson—Savart ~)
119
— скачка (jump - ) 119
— старения (locking ~ ) 119
эффективный (effective)
— значение ( — value) 158
— множество (область) значений ( ~ ran-
ge) 158
— область (определения) ( ~ domain) 54
ядро (kernel) 18
В-пространство (B-space) 20
(/’‘-граница (С0,‘-boundary) 31
(/"'"-граница (С'"'"-boundary) 31
Э-регулярность (Э-regularity) 175, 179
Э' -субднфференциал (д' -subdifferential)
429
Э'-супер дифференциал (Э '-superdifferen-
tial) 429
g-сечение (g-th planar slice) 161
Предметный указатель
487
-топология <3?-topology) 23
//-пространство (//-space) 26
inf-стационарная точка < inf-stationary
point) 432
sup-стационарная точка (sup-sfafionafy —)
432
/5-фаза (/5-phase) 159
Г-регуляризация <Г-regularization) 73
^-регуляризация {^-regularized form) 317
♦-слабая сходимость (weak* convergence)
26
— топология < - topology) 25
Оглавление
От редактора перевода ..................................................... 5
Предисловие ............................................................... 7
Введение .................................................................. 9
Указания для читателя .................................................... 12
Часть 1. Предварительные сведения ..................................... 13
Глава 1. Основные понятия и результаты функционального анализа ........... 13
§ 1.1. Топологические векторные пространства и смежные вопросы ....... 13
1.1.1. Топологические пространства и непрерывные отображения 13
1.1.2. Локально-выпуклые топологические векторные простран-
ства, нормированные пространства и линейные отображе-
ния .................................................... 17
§ 1.2. Двойственность в топологических векторных пространствах ....... 21
1.2.1. Двойственность. Слабая и сильная топологии ............. 21
1.2.2. Топологически дуальные пары векторных пространств ...... 24
1.2.3. Двойственность в нормированных и гильбертовых простран-
ствах ......................................................... 25
1.2.4. Транспонирование непрерывного линейного отображения.
Шкалы гильбертовых пространств. Теорема Лакса — Мил-
грэма .................................................. 28
§ 1.3. Некоторые функциональные пространства и нх свойства ........... 29
1.3.1. Пространства Ст(0), Cm(Q), D(Q), 0(0) и LP(Q) ........ 29
1.3.2. .Пространства распределений ........................... 33
1.3.3. Пространства Соболева ................................ 36
1.3.4. Теорема о следе. Вложения пространств Соболева ......... 39
1.3.5. Пространство функций ограниченной деформации ......... 41
§ 1.4. Некоторые дополнительные сведения ............................. 42
1.4.1. Элементы теории векторнозначиых функций и распределе-
ний ........................................................... 42
1.4.2. Элементы дифференциального исчисления .................. 45
1.4.3. Некоторые дополнительные понятия и результаты .......... 46
Глава 2. Элементы выпуклого анализа ...................................... 52
§ 2.1. Выпуклые множества и функционалы .............................. 52
2.1.1. Определения ............................................ 52
2.1.2. Полунепрерывные снизу выпуклые функционалы ............. 55
Оглавление
489
§ 2.2. Минимизация выпуклых функционалов ............................ 57
2.2.1. Существование минимума ................................ 57
2.2.2. Вариационные неравенства .............................. 58
§ 2.3. Субдифференцируемость .....;.................................. 60
2.3.1. , Определения и основные результаты ................... 60
2.3.2. Односторонний дифференциал Гато по направлениям ....... 62
§ 2.4. Субднфференциальное исчисление ............................... 67
2.4.1. Субдифференциал суммы и композиции .................... 67
2.4.2. Относительная внутренность множества Д(д/) ............ 70
§ 2.5. Сопряжённые к выпуклым функционалам .......................... 71
2.5.1. Классы Г(Л) н Го (Л) .................................. 71
2.5.2. Операция сопряжения ................................... 74
§ 2.6. Максимальные монотонные операторы ............................ 76
2.6.1. Определения н основные результаты ..................... 76
2.6.2. Максимальные монотонные графики в IR2 ................. 78
Часть 2. Задачи на неравенства ........................................ 83
Глава 3. Вариационные неравенства и суперпотенциалы ..................... 83
§ 3.1. Законы механики и связи ...................................... 83
3.1.1. Обобщённые силы и принцип виртуальной мощности ........ 83
3.1.2. Многозначные определяющие соотношения и связи в механи-
ке ........................................................... 88
3.1.3. Задачи минимизации и вариационные неравенства, характе-
ризующие положение равновесия ................................ 91
3.1.4. Диссипативные законы. Замечания о задаче на собственные
значения для суперпотенциальных законов ...................... 94
§ 3.2. Суперпотенциалы и двойственность ............................. 95
3.2.1. Гипотеза нормальной диссипации ................. 95
3.2.2. Двойственность вариационных принципов ................. 97
§ 3.3. Субдифференциальные граничные условия и определяющие соотно-
шения ................................................................ 104
3.3.1. Субдифференциальные граничные условия .................. 104
3.3.2. Субдифференциальные определяющие соотношения. I ...... 116
3.3.3. Субднфференциальные определяющие соотношения. П 124
3.3.4. Распространение субдифференциальных соотношений на фун-
кциональные пространства .................................... 130
Глава 4. Вариационные неравенства и многозначные выпуклые и невыпуклые
задачи в механике .............................,....................... 141
§ 4.1. Два общих типа вариационных неравенств и вывод вариационных
принципов механики в форме неравенств ............................. 141
4.1.1. Вариационные неравенства типа Фикеры ................. 141
4.1.2. Вариационные неравенства других типов ................ 149
4.1.3. Вывод вариационных принципов механики в форме нера-
венств ...................................................... 151
§ 4.2. Сосуществующие фазы. Морфология материальных фаз ............ 153
4.2.1. Неоклассические процессы и гнббсовы состояния. Сосуще-
ствующие фазы ............................................... 154
4.2.2. Задачи на минимум для гиббсовых состояний ............ 161
490
Оглавление
4.2.3, Сравнение гиббсовых состояний. Некоторые результаты для
динамических задач ........................................... 165
§ 4.3. Невыпуклые суперпотенциалы .................................... 169
4.3.1. Введение и краткий обзор основных математических резуль-
татов ........................................................ 169
4.3.2. Невыпуклые суперпотенциалы. Полувариационные неравен-
ства и принципы субстационариости ............................ 176
4.3.3. Обобщения гипотезы нормальной диссипации .............. 187
§ 4.4. Неравенства и интегральные включения .......................... 192
Глава 5. Задачи с трением в теории упругости ............................ 196
§ 5.1. Статическая краевая задача .................................... 196
5.1.1. Классическая постановка ............................. 196
5.1.2. Вариационная постановка ............................... 198
§ 5.2. Теоремы существования и единственности ........................ 201
5.2.1. Эквивалентная задача иа минимум. Случай mesri/>0 .... 201
5.2.2. Случай Г с/ = 0 ....................................... 202
5.2.3. Некоторые дальнейшие результаты ....................... 205
§ 5.3. Двойственная постановка задачи. Дополнительная энергия ........ 206
5.3.1. Минимизация дополнительной энергии .................... 206
5.3.2. Двойственность ........................................ 208
§ 5.4. Динамическая краевая задача ................................... 211
5.4.1. Классическая и вариационная постановки ................ 211
5.4.2. Существование решения ................................. 213
5.4.3. Регуляризованная задача ............................... 219
5.4.4. Единственность решения ................................ 222
§ 5.5. О некоторых других типах задач с трением ...................... 222
Глава 6. Субдиффереициальные определяющие соотношения и граничные ус-
ловия ................................................................... 225
§ 6.1. Субдифференциальные определяющие соотношения и классические
граничные условия .................................................... 225
6.1.1. Постановка задачи ..................................... 225
6.1.2. Существование и единственность решения ............... 228
6.1.3. Двойственность ........................................ 230
§ 6.2. Линейно-упругое определяющее соотношение и субдиффереициальные
граничные условия .................................................... 233
6.2.1. Формулировка граничных условий ...................... 233
6.2.2. Теоремы существования и единственности .............. 236
6.2.3. Двойственность ........................................ 239
§ 6.3. Субдиффереициальные определяющие соотношения и субдифференци-
альные граничные условия. Немонотонные определяющие соотно-
шения ....................................................... 241
6.3.1. Постановка и исследование задачи ...................... 241
6.3.2. Немонотонные определяющие соотношения ................. 244
§ 6.4. Соответствующая динамическая задача ........................... 246
Глава 7. Неравенства в теории тонких упругих пластин .................... 250
§ 7.1. Статические односторонние задачи Кармана ...................... 250
7.1.1. Предварительные сведения .............................. 250
Оглавление
491
7.1.2. Граничные условия и соответствующие вариационные
постановки..................................................... 252
7.1.3. Существование решения .................................. 255
7.1.4. Случай односторонних граничных условий, заданных в плос-
кости пластины ................................................ 262
§ 7.2. Задача иа односторонний изгиб. Задачи иа собственные значения для
вариационных неравенств .............................................. 262
7.2.1. Постановка задачи ...................................... 262
7.2.2. Один общий результат о существовании решения ........... 265
7.2.3. Приложение к задаче о выпучивании ...................... 270
7.2.4. Обобщение правила Рэлея иа односторонние задачи ........ 2^2
§ 7.3. Динамические односторонние задачи для пластин Кармана ......... 274
7.3.1. Граничные условия и вариационные неравенства ........... 274
7.3.2. Существование решения .................................. 277
7.3.3. Единственность решения ................................. 285
Глава 8. Вариационные и полувариациоииые неравенства в теории линейной тер-
моупругости ....................................................... 288
§ 8.1. Рассматриваемые краевые задачи и их вариационные постановки... 288
8.1.1. Классические постановки ............................... 288
8.1.2. Вариационные постановки ................................ 291
§ 8.2. Результаты о существовании и единственности решения ........... 293
8.2.1. Исследование задачи 1 .................................. 293
8.2.2. Исследование задачи 2. Некоторые замечания о родственных
задачах ............................................... 301
§ 8.3. Некоторые обобщения и соответствующие вариационные неравенства 304
§ 8.4. Полуварнационные неравенства в теории линейной термоупругостн 306
8.4.1. Формулировка некоторых общих задач ..................... 306
8.4.2. Одни результат о существовании решения для полувариаци-
оииого неравенства (модельная задача) ......................... 309
Глава 9. Вариационные неравенства в теории пластичности н вязкопластичности 314
§ 9.1. Упруго-вязкопластичные материалы .............................. 314
9.1.1. Постановка динамической задачи. Существование и един-
ственность решения ............................................ 314
9.1.2. Квазистатическая задача ................................ 324
§ 9.2. Упруго-идеальиопластичиые материалы ........................... 328
9.2.1. Постановка квазистатической задачи ..................... 328
9.2.2. Существование и единственность решения ................. 331
§ 9.3. Задачи о жёстко-вязко-пластическом течении .................... 336
9.3.1. Классическая постановка общей динамической задачи ...... 336
9.3.2. Выбор подходящих функциональных пространств и результа-
ты о существовании решения ............................ 338
9.3.3. Связь между полями скоростей и напряжений .............. 350
§ 9.4. Другие задачи для жидкостей Биигама ........................... 353
9.4.1. Ламинарное течение в цилиндрической трубе .............. 353
9.4.2. Теплопередача при жёстко-вязко-пластическом течении .... 356
9.4.3. Вариационные неравенства в случае общего закона иа ст €
dw(D) ................................................. 358
492
Оглавление
Часть 3. Численные приложения ........................................... 360
Глава 10. Численное исследование статических задач иа неравенства ....... 360
§ 10.1. Задачи об одностороннем контакте и задачи с трением ......... 362
10.1.1. Дискретные формы задач на минимум потенциальной и до-
полнительной энергий ........................................ 362
10.1.2. Приложения ........................................... 367
§ 10.2. Кручение цилиндрических или призматических стержней с выпуклой
зависимостью плотности потенциальной энергии от деформации .. 370
10.2.1. Постановка задачи .................................... 370
10.2.2. Дискретизация и численные примеры .................... 373
§ 10.3. Применение линейной теории к некоторым классам неравенств .... 380
10.3.1. Описание метода ..................................... 380
10.3.2. Приложения ........................................... 383
Глава 11. Задачи на неравенства, возникающие при применении метода прираще-
ний, и динамические задачи на неравенства ............................... 389
§ 11.1. Упруго-пластический расчёт нитевых конструкций .............. 389
11.1.1 Постановка задачи как задачи о линейной дополнительности
и соответствующие формулы ................................... 389
11.1.2. Метод многоуровневой декомпозиции .................... 396
11.1.3. Приложение ........................................... 398
§ 11.2. Анализ упруго-пластических задач методом приращений. Задачи о
линейной дополнительности, вариационные неравенства и условия
минимума ............................................................ 401
§ 11.3. Динамические задачи об одностороннем контакте ............... 408
Заключение .............................................................. 416
Добавления .............................................................. 419
Добавление I. Некоторые основные понятия ............................ 419
Добавление II. Жёсткие поля скоростей. Объективность ................ 421
Добавление III. Диссипация .......................................... 422
Добавление IV. Теория пластичности и термодинамика .................. 424
Добавление V. Понятие квазидифференцируемости и его применение в меха-
нике ................................................................ 426
Список обозначений ...................................................... 440
Литература ............................................................. 448
Именной указатель ....................................................... 473
Предметный указатель .................................................... 475
Уважаемый читатель!
Ваши замечания о содержании книги, её оформлении,
качестве перевода и другие просим присылать по
адресу: 129820, Москва, И-110, ГСП, 1-й Рижский
пер., д. 2, издательство «Мир».
। Убедительная просьба Л
| Ио всёмъ члтающинъ и раэснатриваю ’
j щимь днлгм, эстампы фотографа н т д. |
I 1) НикакИхъ ппдрисовокъ. раскраши-
| ван|й и отмЪтСкъ не делать; I
Я 2) при пере листы ваши страниц.^ пайь- ‘
а цы отнюдь не мочить; J
| 3) перелистывать медленно И аккуратно, ?
| чтобы нечаянно углы «грани цъ и накле- 9
| енныхъ рисунков ь не загнуть и ие смять, |
| а также прокладку и?ъ папиросной бума- 1
Я ги между рисунками не испортить, ?
Я 4} при рассматривай! и зставдовт^ фо- j
| То графэй и рисунковъвъ«нигахънекурить 5
о И табачным-ь дымом-ъ ихъ не обдавать,- J
| 5) лередъ начнломъ разсматрмВаНя и |
S “тент руин Тщательно мыть: потными I
Я руками такие отнюдь не брать: |
| 6) нъ самому рисунку на зстамлахъ фо !
Я таграфямъ и г. д. пальцами не прикасаться; <
Я 7) Обложку или переглетъ книги пе- 5
S редъ чгеыемъ обертывать въ бумагу; j
| S) листы книги Для памяти не загибать, !
g 9) въ карманахъ ннигъ пй носить или ;
g же употребляя при этомъ особою предосто* !
в рожност^ чтобы пниги не испачкались и j
%, не измялись.
^!ь*г»=«™<’оооаоо<хх>и»оооо<>оос»о<хи>о«»<х»«>^^
Научное издание
Панагиотис Панагиотопулос
Неравенства в механике и их приложения
Выпуклые и невыпуклые функции энергии
Заведующий редакцией чл.-корр. АН СССР В. И. Арнольд
Зам. зав. редакцией А. С. Попов
Ст. научн. редактор В. И. Авербух
Мл. научн. редактор Р. И. Пяткина
Художник О. С. Василькова
Художественный редактор В. И. Шаповалов
Технические редакторы Т. К. Такташова, Л. С. Тимофеева
Корректоры Л. Д. Панова, Р. Л. Вибке
ИБ № 6465
Подписано к печати 29.03.89. Формат 60 х 90Хв-
Бумага офсетная № 1. Гарнитура тайме. Печать офсетная.
Объем 15,50 бум.л. Усл. печ.л. 31,00. Усл. кр.-отт. 31,00.
Уч.-изд.л. 27,94. Изд. № 1/5469. Тираж 2800 экз. Зак. 217.
Цена 3 р. 20 к.
ИЗДАТЕЛЬСТВО «МИР»
В/О «Совэкспорткиига» Государственного комитета СССР
по делам издательств, полиграфии и книжной торговли.
Набрано в Межиздательском фотонаборном центре издательства «Мир»
129820, ГСП, Москва, И-110, 1-й Рижский пер., 2.
Тульская типография Союзполиграфпрома
при Государственном комитете СССР по делам издательств,
полиграфии и книжной торговли
300600, Тула, проспект им. В. И. Ленина, 109.
ИМЕЮТСЯ В ПРОДАЖЕ
КНИГИ ИЗДАТЕЛЬСТВА «МИР» ПО ТЕОРЕТИЧЕСКОЙ И
ПРИКЛАДНОЙ МАТЕМАТИКЕ
АЙГНЕР М. Комбинаторная теория. 1982, 2 р. 60 к. (О)
АЛЕФЕЛЬД Г. Введение в интервальные вычисления. 1987,
3 р. 40 к. (О)
БАННАИ Э., ИТО Т. Алгебраическая комбинаторика, 1987,
3 р. (X)
БРУС Дж., ДЖИБЛИН П. Кривые и особенности. 1988,
1 р. 20 к. (X)
БИЛЗ М. и др. Строго псевдовыпуклые области в С", 1987,
2 р. 30 к. (О)
БУРБАКИ Н. Группы и алгебры Ли. Гл. 9. 1986, 1 р. (О)
ГЛОВИНСКИ Р. и др. Численное исследование неравенств. 1979,
2 р. 50 к. (О)
ГОДЕН М. Волновая функция Бёте. 1987, 3 р. 10 к. (О)
ГРЕГОРИ Р., КРИШНАМУРТИ Е. Безошибочные вычисления. 1988,
1 р. 60 к. (X)
ГРЕНАНДЕР У. Лекции по теории образов. Т. 2. Анализ образов,
1981, 2 р. 30 к.; т. 3. Регулярные структуры. 1983,
2 р. 90 к. (X)
ДЕККЕР К. Устойчивость методов Рунге—Кутты. 1988,
3 р. 80 к. (X)
ДЕВРОЙ Л. Непараметрическое оценивание плотности. 1988,
3 р. 20 к. (ХО)
ДОНЧЕВ А. Системы оптимального управления. 1987,
1 р. 10 к. (О)
КАДИЧ А. Калибровочная теория дислокаций. 1987,
1 р. 40 к. (О)
Квантовые случайные процессы и открытые системы:
Сб. статей 1984—1986 гг. 1988, 2 р. 60 к. (X)
КЕСТЕН X. Теория просачивания для математиков. 1986, 3 р. (X)
Кибернетический сборник. Вып. 25. 1988, 2 р. 50 к. (X)
КОЭН Дж. Граничные задачи в теории обслуживания. 1987,
2 р. 70 к. (ХО)
КРАФТ X. Геометрические методы в теории инвариантов. 1987,
2 р. 'О)
ЛАКС П., ФИЛЛИПС Р. Теория рассеяния для автоморфных
функций. 1979, 1 р. 80 к. (О)
МАРТИН Н. Математическая теория энтропии. 1988,
3 р. 70 к. (X)
ОБЕН Ж.-П. Нелинейный анализ и его экономические приложе-
ния, 1988, 2 р. 90 к. (ХО)
ОБЕН Ж.-П. Прикладной нелинейный анализ. 1988, 3 р. 90 к. (О)
ПИРС Р. Ассоциативные алгебры. 1986, 3 р. 80 к. (X)
ПИЧ А. Операторные идеалы. 1982, 3 р. 80 к. (О)
РИД М., САЙМОН £ Методы современной математической фи
зики. Т. 4. 1982, 2 р. 20 к. (О)
САЛОМАА А. Жемчужины теории формальных языков. 1986,
70 к. (О)
СЕНДОВ Б., ПОПОВ В. Усредненные модули гладкости. 1988,
2 р. 20 к. (ХО)
СНЭЙТ В. Алгебраический кобордизм и Л'-теория. 1983,
1 р. 70 к. (О)
ТРАУБ Дж. и др. Информация, неопределённость, сложность.
1988,1 р. 50 к. (X)
ТРИБЕЛЬ X. Теория интерполяции, функциональные простран-
ства. 1980, 3 р. 50 к. (ХО)
ХЕЛГАСОН С. Группы и геометрический анализ. 1987,
_ 4 р. 60 к. (ХО)
ХЕЙЕР X. Вероятностные меры на локально-компактных груп-
пах. 1987, 4 р. 20 к. (X)
Ходжевы циклы и мотивы. Сб. статей. 1982—1983 гг. 1985,
2 р. (X)
ХОКНИ Р. Численное моделирование методом частиц. 1987,
4 р. 10 к. (X)
ЧАНГ X., ХАУЭС Ф. Нелинейные сингулярно-возмущённые крае-
вые задачи: Теория и приложения. 1988, 1 р. 50 к. (ХО)
ЧЭПМЕН Т. Лекции о ^-многообразиях. 1981, 1 р. (X)
ШОУ А. Логическое проектирование операционных систем. 1981,
1 р. 70 к. (X)
Заказы на приобретение этих книг направляйте в «Москов-
ский дом книги» по адресу: 121019, Москва, просп. Калинина, 26,
фирменная секция издательства «Мир» (книги отмечены знаком X)
или в магазин № 5 «Техническая книга» — опорный пункт изда-
тельства «Мир» по адресу: 191040, Ленинград, Пушкинская, 2 (книги
отмечены знаком О). Заказы высылаются наложенным платежом.