/







































































































































































































































































































































































































































































































































































































































































Author: Денисенко А.Н.
Tags: электротехника общая радиотехника электроника радиотехника сигналы
ISBN: 5-93517-214-3
Year: 2005




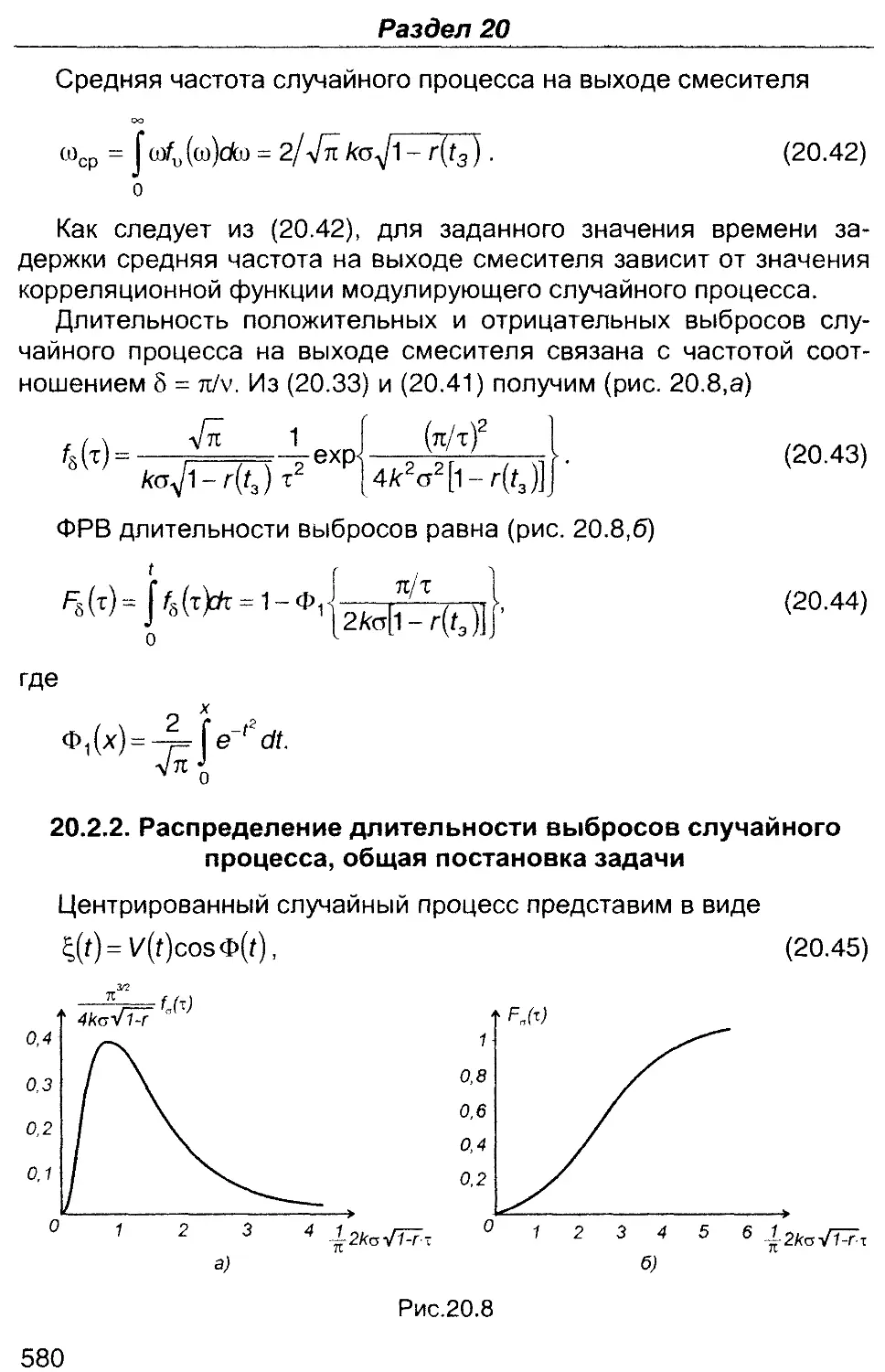
Text
СПРАВОЧНОЕ ПОСОБИЕ
A. H. Денисенко
СИГНАЛЫ
Теоретическая
радиотехника
СПРАВОЧНОЕ ПОСОБИЕ
Москва
Горячая линия - Телеком
2005
УДК 621.398.97(031)
ББК 32.84
ДЗЗ
Денисенко А. Н.
ДЗЗ Сигналы. Теоретическая радиотехника. Справочное пособие. -
М: Горячая линия-Телеком, 2005. - 704 с.: ил.
ISBN 5-93517-214-3.
В сжатой, приемлемой для инженерной и исследовательской практики
форме обобщены и достаточно полно изложены методы анализа детерми-
нированных сигналов (часть 1) и случайных сигналов и шумов (часть 2), ис-
пользуемые в теоретической радиотехнике. В каждом разделе теоретиче-
ская часть заканчивается расчетными выражениями и примерами расчета
по ним.
Для инженеров и исследователей, работающих в области радиотехни-
ки, преподавателей, студентов старших курсов радиотехнических факульте-
тов вузов, аспирантов.
ББК 32.84
Адрес издательства в Интернет www.techbook.ru
e-mail: radios_hl@mtu-net.ru
Справочное издание
Денисенко Александр Николаевич
СИГНАЛЫ
ТЕОРЕТИЧЕСКАЯ РАДИОТЕХНИКА
Справочное пособие
Редактор А. Е. Павлов
Корректор В. П. Петрова
Художник Л. Г. Летинов
Подготовка оригинал-макета Ю. Н. Рысина
Лицензия ЛР № 071825 от 16.03.99 г.
Подписано к печати 02.10.2004. Формат 60x90 1/16.
Усл. печ. л. 44. Изд. №214. Тираж 1500 экз.
ISBN 5-93517-214-3
© А. Н. Денисенко, 2005
© Оформление издательства
«Горячая линия-Телеком», 2005
С глубочайшим уважением и благодарностью
Т.В.Козыловой и Д.С.Малисову,
моим феноменальным школьным учителям.
ПРЕДИСЛОВИЕ
Настоящее время - время информационных технологий и ком-
муникационных систем. Интернет, системы связи (в том числе нахо-
дящиеся в стадии интенсивного развития - мобильные системы),
телевизионные системы, системы мониторинга и другие различного
назначения, менее распространенные, но не менее важные, это все
проявления тенденций развития цивилизации. Основным носителем
информации всех известных и мыслимых систем описанного плана
являются сигналы. (Сигнал и определяется как физический процесс,
предназначенный для переноса информации или содержащий ее).
В этих условиях теория сигналов, методы их исследования пред-
ставляют несомненный интерес не только для радистов, как это час-
то считалось до последнего времени, но и для специалистов самых
различных областей. Особое внимание уделяется цифровой обра-
ботке сигналов. Именно цифровая обработка предоставляет наи-
большие возможности при разработке и совершенствовании различ-
ного рода систем.
Книга «Сигналы», представляющая справочное пособие, по-
священа описанию и методам анализа детерминированных и слу-
чайных сигналов и шумов. Методы исследования сигналов находят-
ся в динамике, обусловленной прежде всего технологическим про-
грессом. К настоящему времени накоплен достаточно большой
объем материала по исследованию различных видов сигналов;
список работ, посвященных этой тематике, обширен. Однако явно
ощущается недостаток в литературе, где в достаточно сжатой и
приемлемой для инженерной и исследовательской практики форме
обобщенно излагались бы методы анализа сигналов различного
вида. Тем более есть необходимость проведения анализа как де-
терминированных, так и случайных сигналов в рамках единого ме-
тодического подхода. Автор полагает, что в книге нашли отражение
все известные направления исследований основных видов сигна-
лов как детерминированных, так и случайных.
Основу книги, как указывалось, составляют известные методы
анализа детерминированных и случайных сигналов; они обобщены
3
Предисловие
и дополнены оригинальным материалом, полученным автором. Ка-
ждый законченный фрагмент книги содержит расчетные выраже-
ния, которые могут быть использованы для получения алгоритмов и
программ расчета основных характеристик сигналов. Однако рас-
четные выражения сами по себе не всегда позволяют оценить
влияние различных параметров на характеристики сигналов. Такую
оценку в определенной степени могут дать многочисленные приме-
ры и графики, построенные по результатам расчета. Этим объяс-
няется то обстоятельство, что книга содержит большое число таб-
лиц и рисунков (графиков).
В последнее время проявляется повышенный интерес к вейв-
лет-преобразованиям. Вейвлеты представляют семейство функций,
описывающих сигналы и используемых главным образом для пре-
образований изображений, в первую очередь их сжатия и переноса.
Содержание вейвлет-преобразований выходит за пределы пред-
ставляемой книги, поскольку они находятся уже в области приме-
нения сигналов. Однако материал книги является той теоретиче-
ской базой, которая лежит в основе этого сравнительно нового ме-
тода обработки сигналов.
Книга содержит две части: часть 1 «Детерминированные сигна-
лы» и часть 2 «Случайные сигналы и шумы».
Первая часть посвящена методам исследования детерминиро-
ванных сигналов. В разд. 1 рассматриваются различные формы
представления сигналов, дается геометрическая интерпретация
сигналов. Приводится краткая классификация сигналов, которая
позволяет более четко понять логику построения книги.
В разд. 2 изложены основы обобщенного спектрального анали-
за сигналов. Рассматривается разложение сигналов по элементар-
ным составляющим (представленных временных функций, описы-
вающих сигналы,в виде обобщенного ряда Фурье). Приведены
примеры такого разложения с использованием многочленов Ле-
жандра, Чебышева, Лагерра, Эрмита и функций Уолша. При анали-
зе сигналов и цепей указанные функции могут иметь и другое при-
ложение, в том числе при аппроксимации и интерполяции сигналов
и их характеристик. Поэтому рассмотрение ортогональных систем
функций дает не только примеры обобщенного спектрального ана-
лиза, но имеет и самостоятельное значение.
В разд.З излагаются основы гармонического анализа сигналов:
временная функция, описывающая сигнал, раскладывается в три-
гонометрический ряд Фурье или используется ее преобразование
Фурье. При анализе сигналов наряду с преобразованием Фурье
может найти применение и его модификация - преобразование
4
Предисловие
Хартли. Совместное рассмотрение этих двух видов преобразова-
ний дает возможность сравнительной оценки их эффективности.
Широкое применение при анализе сигналов находит и преобра-
зование Лапласа. Оно используется, прежде всего, при анализе
сигналов в линейных цепях. Особенности преобразования Лапласа
и его применения рассматриваются в разд. 4.
Содержание разд. 5 составляет корреляционный анализ де-
терминированных сигналов. Определены корреляционные функции
периодических и непериодических сигналов. Даны соотношения,
связывающие корреляционные функции со спектрами сигналов.
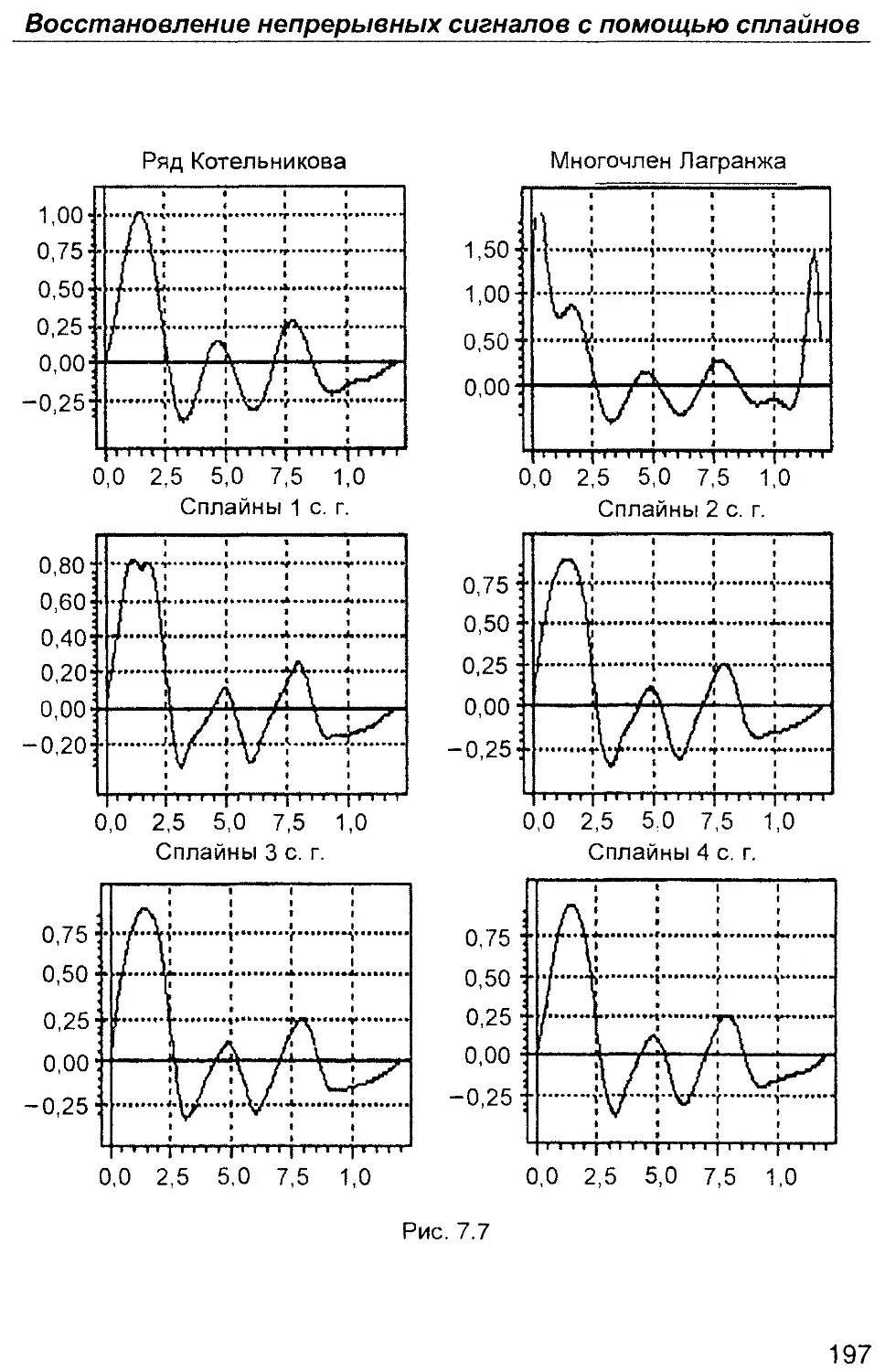
Дискретизации и восстановлению непрерывных сигналов посвя-
щены разд. 6 и 7. Дискретизация и восстановление сигналов лежат
в основе цифровой обработки. Этим во многом определяется объем
и содержание разделов. Рассматриваются дискретные преобразова-
ния (преобразование Фурье, z-преобразование, дискретное преобра-
зование Хартли) и их применение при анализе сигналов. Дается об-
щая постановка задачи восстановления непрерывного сигнала по его
дискретным значениям. Как пример рассматривается интерполяция
непрерывного сигнала с помощью многочленов Лагранжа и ряда Ко-
тельникова. Содержание разд. 7 составляет сплайновая интерполя-
ция сигнала. Приводятся расчетные выражения для получения вре-
менных функций непрерывных сигналов по их дискретным значениям
с помощью различных видов сплайнов, которые могут использовать-
ся при цифровой обработке сигналов.
Описанию и анализу узкополосных сигналов посвящен разд 8.
В нем рассмотрены характеристики и методы анализа в общей по-
становке, безотносительно к видам узкополосных сигналов.
В последующих разделах проведен анализ различных видов узко-
полосных сигналов: с амплитудной модуляцией - разд. 9; с угловой
модуляцией - разд. 10; импульсных с частотной линейной и нелиней-
ной модуляцией - разд. 11; кодированных сигналов - разд. 12.
Вторая часть книги посвящена описанию случайных сигналов
и шумов, объединенных общим понятием «случайные процессы»,
и методам их анализа. В соответствии с общим замыслом книги
основной целью является обобщение методов исследования слу-
чайных сигналов и шумов, нашедших наиболее широкое примене-
ние в статистической радиотехнике, изложение их в виде, доступ-
ном для инженерной и исследовательской практики.
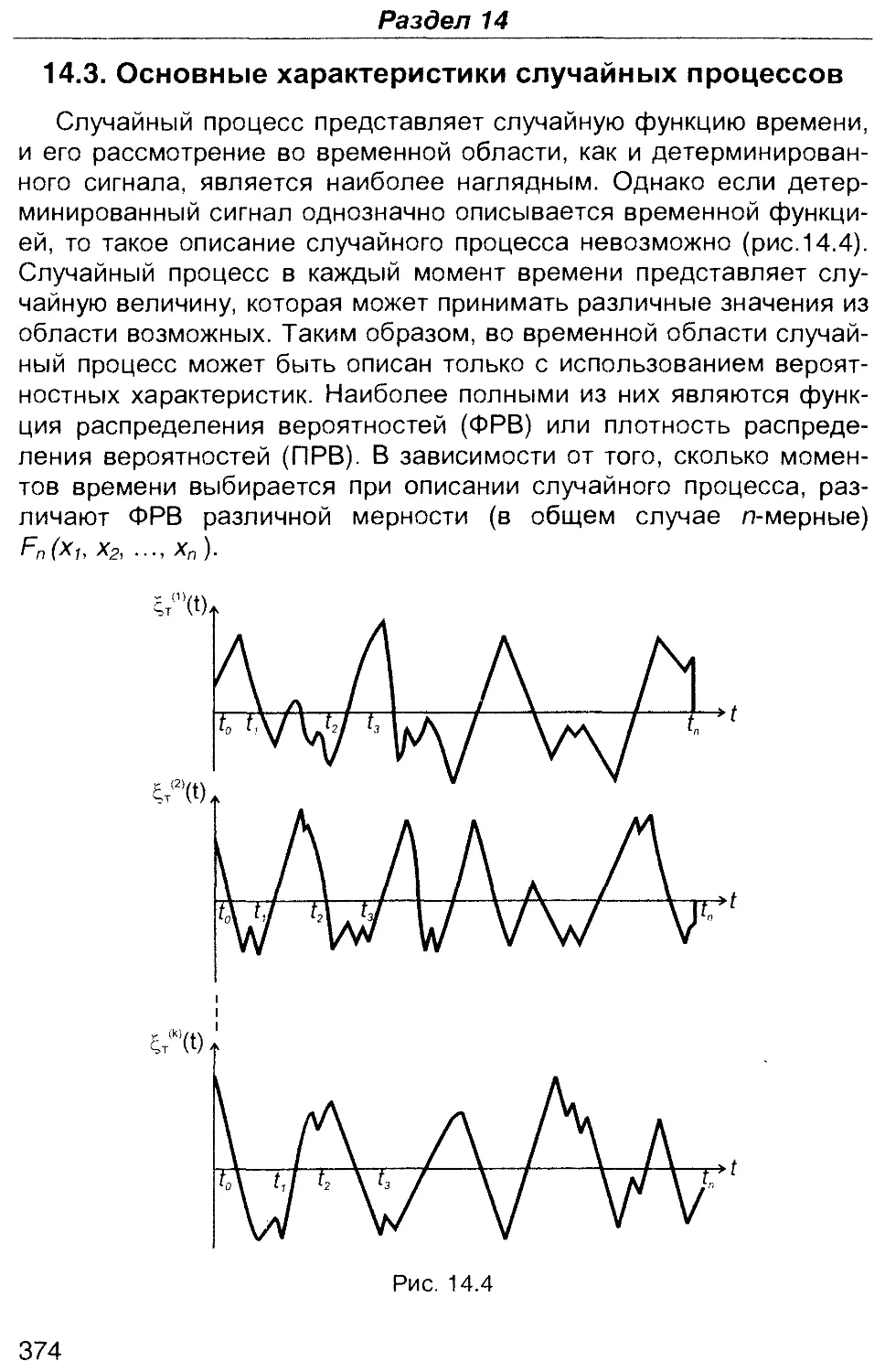
В разд. 14 приводится краткая классификация случайных про-
цессов, описание их характеристик. Одномерному распределению
случайных процессов посвящен разд. 15, многомерное распределе-
ние случайных процессов рассматривается в разд. 16. Совместное
5
Предисловие
распределение случайных процессов и распределение их функцио-
нальных преобразований рассмотрено в разд. 17. Спектральный ана-
лиз случайных процессов составляет содержание разд. 18. Методы
анализа узкополосных случайных процессов изложены в разд. 19.
Эти методы используются при анализе модулированных случайных
процессов: с амплитудной и угловой модуляцией. В разд. 20 рас-
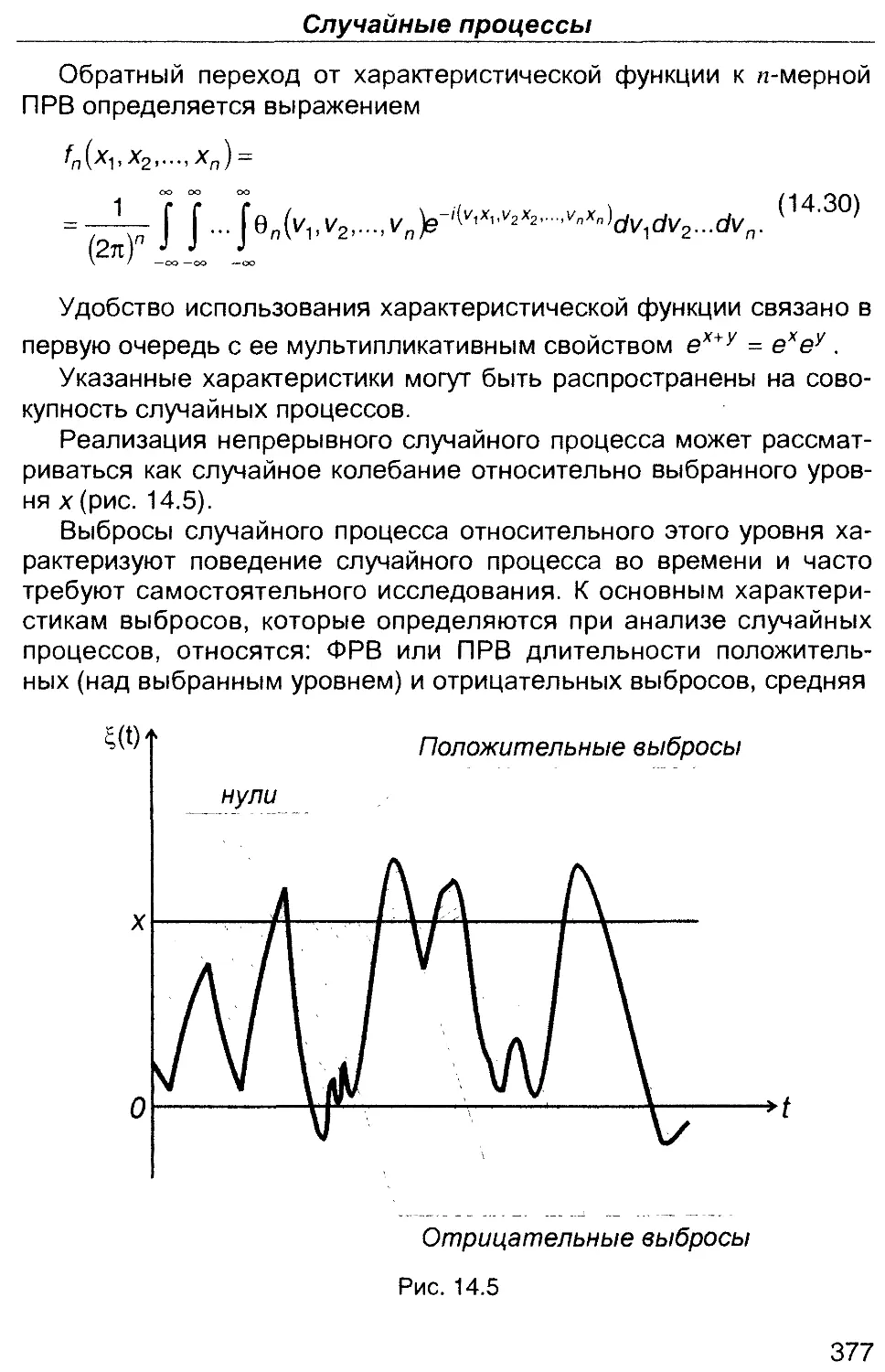
сматриваются выбросы случайных процессов, их характеристики,
методы описания и исследования. Методы анализа прохождения
случайных процессов через линейные цепи изложены в разд. 21.
В разд. 22 приводятся методы анализа нелинейных преобразований
случайных процессов. Как иллюстрация методов анализа линейных и
нелинейных преобразований в разд. 23 проводится анализ случай-
ных процессов на выходе аналогового коррелятора.
Список литературы по каждой части книги включает книги, из-
данные на русском языке за последние десятилетия. В него также
включены несколько ранних работ, которые в силу несомненных дос-
тоинств представляют не только исторический, но и практический
интерес. В их числе работы на английском языке, не переведенные
полностью на русский. Более полная, а точнее, просто библиогра-
фия, в книге по такому широкому направлению, которое определено
ее названием, в условиях развитой информационной системы пред-
ставляется нецелесообразной. Тем более, что число работ, связан-
ных с выбранной темой, увеличивается с нарастающим темпом, и
любая библиография к моменту издания книги будет неполной.
Использованные во 2 части справочного пособия термины, оп-
ределения и обозначения по возможности приводились в соответст-
вии с общепринятыми и рекомендованными ГОСТ 21878-76 «Слу-
чайные процессы и динамические системы», термины и определе-
ния. Однако вследствие неполноты и несовершенства указанного
ГОСТа и отсутствия установившейся терминологии и определений
ряда понятий, используемые в пособии, кому-нибудь могут показать-
ся не совсем удачными.
Книга рассчитана на широкий круг читателей: студентов стар-
ших курсов вузов радиотехнических специальностей, аспирантов,
преподавателей вузов, радиоинженеров и исследователей. Приня-
тая последовательность изложения материала от простого к более
сложному позволяет использовать книгу как справочное, так и учеб-
ное пособие по дисциплинам радиотехнического профиля, где объ-
ектом изучения являются сигналы.
Автор выражает искреннюю благодарность Р.С.Плотникову
и В.В.Гритченко за помощь при компьютерном построении графи-
ков, приведенных в книге, и ее оформлении.
6
ЧАСТЬ 1.
ДЕТЕРМИНИРОВАННЫЕ СИГНАЛЫ
7
Раздел 1.
СИГНАЛЫ И ИХ ПРЕДСТАВЛЕНИЕ
Сигналом будем называть физический процесс, несущий ин-
формацию или предназначенный для ее передачи. В зависимости
от частоты несущего колебания различают сигналы звукового, ра-
дио, оптического и других диапазонов. Объектом изучения радио-
техники являются радиосигналы. Их частоты лежат в интервале от
3 кГц до 3000 ГГц. Этот интервал разбит на девять диапазонов, ка-
ждый из которых занимает полосу от 0,3-10п до ЗЮТц (4 < п < 12)
(табл. 1.1).
Математический аппарат, используемый при анализе сигналов,
позволяет проводить исследования без учета природы сигналов.
Однако для понимания содержания характеристик сигналов удоб-
нее обращаться к их физическому наполнению. С учетом этого в
дальнейшем сигнал будем рассматривать как колебание в радио-
технической цепи.
Математическая модель сигнала, как правило, представляет
функцию времени, задаваемую в виде аналитического выражения,
графика или таблицы. Термин «сигнал» обычно и используется как
эквивалентный временной функции, описывающей колебание. Та-
кое описание сигнала является наиболее распространенным, но
оно не исключает и другие формы представления сигналов.
Полезным является представление сигнала в виде взвешенной
суммы более простых составляющих - разложение временной
функции, описывающей сигнал, в ряд по системе базисных функ-
ций. Такое разложение позволяет свести анализ сложного сигнала
к анализу его более простых составляющих. С другой стороны,
представление сигнала в виде ряда может использоваться и как
исходное при его описании.
Для временной функции, описывающей сигнал и удовлетворяю-
щей некоторым условиям, возможно интегральное преобразование.
Интегральное преобразование позволяет перейти от временной
области определения сигнала к области выбранного параметра.
8
Сигналы и их представление
Таблица 1.1.
Классификация диапазонов частот
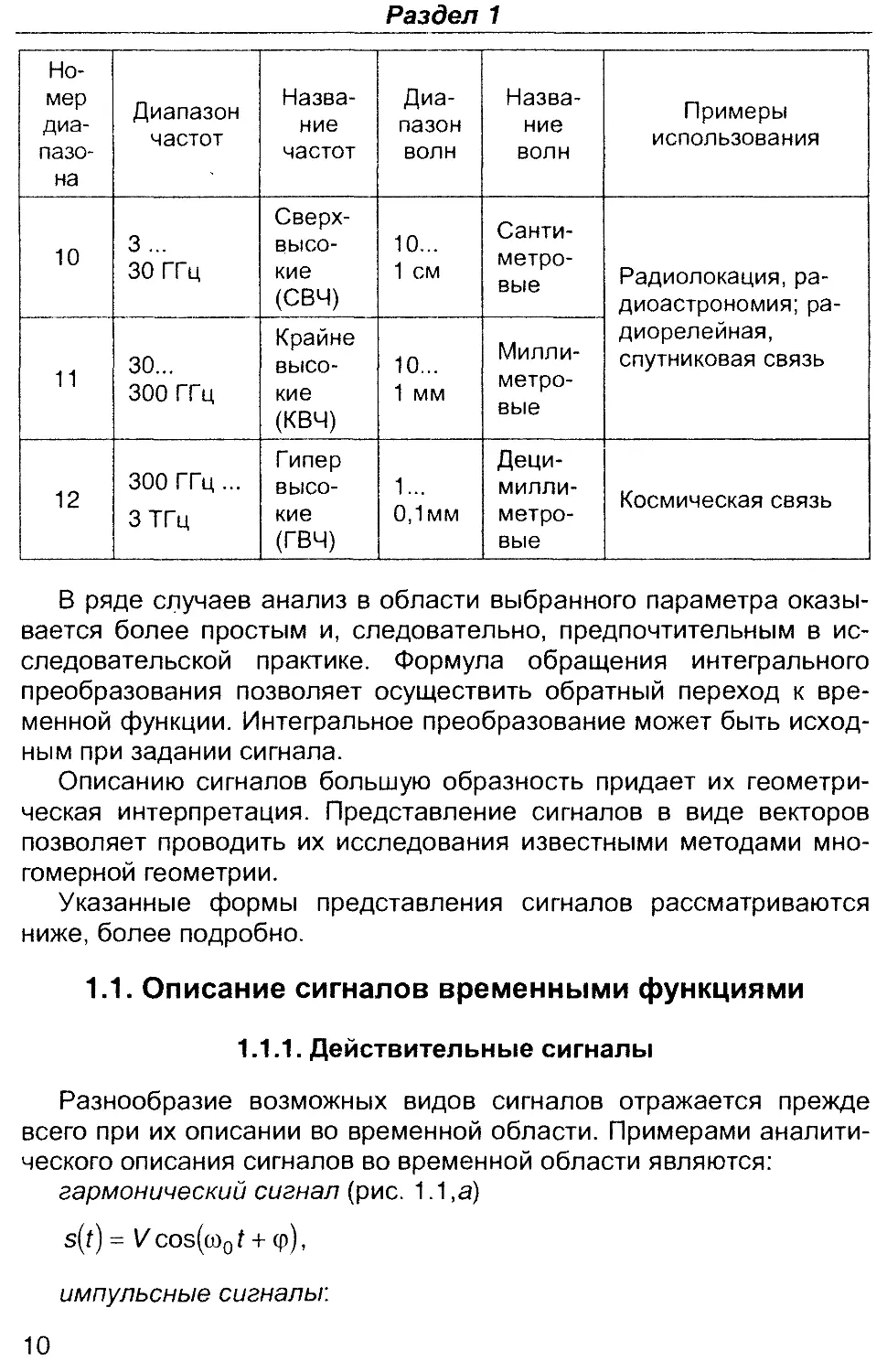
Но- мер ' диа- пазо- на Диапазон частот Назва- ние частот Диа- пазон волн Назва- ние волн Примеры использования
4 3 ... 30 кГц Очень низкие (ОНЧ) 100... 10 км Мириа- метро- вые (сверх- длин- ные) Дальняя навигация, связь с подводными лодками
5 30... 300 кГц Низкие (НЧ) 10... 1 км Кило- метро- вые (длин- ные) Радиовещание, на- вигационные систе- мы, маяки
6 300 ... 3000 кГц Сред- ние (СЧ) 1000... 100 м Г екто- метро- вые (сред- ние) Морские радиостан- ции, радиоканалы, сигналы бедствия; радиовещание
7 3 ... 30 МГц Высо- кие (ВЧ) 100... 10 м Дека- метро- вые (корот- кие) Радиовещание, связь, телеграфия, телефония
8 30 ... 300 МГц Очень высо- кие (ОВЧ) 10... 1 м Метро- вые Радиовещание, те- левидение, назем- ная подвижная связь, управление воздушным движе- нием, такси, навига- ционные средства, радиолокация, ра- диоастрономия
9 0,3 ... 3 ГГц Ультра- высо- кие (УВЧ) 100... 10 см Деци- метро- вые Телевизионные, навигационные сис- темы, спутниковая связь, радиовысо- томеры, радиоре- лейная связь
9
Раздел 1
Но- мер диа- пазо- на Диапазон частот Назва- ние частот Диа- пазон волн Назва- ние волн Примеры использования
10 3 ... 30 ГГц Сверх- высо- кие (СВЧ) 10... 1 см Санти- метро- вые Радиолокация, ра- диоастрономия; ра- диорелейная, спутниковая связь
11 30... 300 ГГц Крайне высо- кие (КВЧ) 10... 1 мм Милли- метро- вые
12 300 ГГц ... ЗТГц Гипер высо- кие (ГВЧ) 1... 0,1 мм Деци- милли- метро- вые Космическая связь
В ряде случаев анализ в области выбранного параметра оказы-
вается более простым и, следовательно, предпочтительным в ис-
следовательской практике. Формула обращения интегрального
преобразования позволяет осуществить обратный переход к вре-
менной функции. Интегральное преобразование может быть исход-
ным при задании сигнала.
Описанию сигналов большую образность придает их геометри-
ческая интерпретация. Представление сигналов в виде векторов
позволяет проводить их исследования известными методами мно-
гомерной геометрии.
Указанные формы представления сигналов рассматриваются
ниже, более подробно.
1.1. Описание сигналов временными функциями
1.1.1. Действительные сигналы
Разнообразие возможных видов сигналов отражается прежде
всего при их описании во временной области. Примерами аналити-
ческого описания сигналов во временной области являются:
гармонический сигнал (рис. 1.1 ,а)
s(t) = Vcos((ja0t + ср),
импульсные сигналы:
10
Сигналы и их представление
s(f)= Ve~at, t >0 (рис. 1.1,6), s(f)=l/e~pf2 (рис. 1.1,в),
модулированные сигналы:
с амплитудной модуляцией
s(t) = l/[l + Мcos Qf]cos со ot, (рис. 1.1 ,г),
с частотной модуляцией
s(t)= l/cos[o)0f + msinQf], (рис. 1.1,6).
Число примеров описания сигналов временными функциями
увеличивают последующие разделы и табл. 3.1.
При описании сигналов полезными оказываются разрывные
функции, приведенные в табл. 1.2.
Единичная ступенчатая функция.
Определяется как скачок от 0 до 1 в момент t = 0 (рис. 1.2,а)
(0, t < 0
o(t) = . (1.1)
1, t > О
Скачок в момент убудет обозначаться как (рис. 1.2,б).
Единичную ступенчатую функцию называют также функцией
включения, так как умножение о(0на временную функцию s(t)
(рис. 1.2,в)
*i(0 = o(t)s(t) (1.2)
означает начало сигнала в момент t = 0. Для сигнала, начинающе-
гося в момент t0, можем записать (рис. 1.2,г):
Sl(t) = o(t - f0)s(f). (1.3)
Сигнал, ограниченный во времени с двух сторон, может быть
представлен в виде (рис. 1.2,6)
= (1.4)
Выражение в квадратных скобках в (1.4) описывает прямо-
угольный импульс, имеющий амплитуду, равную единице,
s(t) = o(t-t})-o(t-t2). (1.5)
11
Раздел 1
Рис. 1.1
Единичный импульс.
Для функции, описывающей прямоугольный импульс, иногда
вводят специальное обозначение
rect (х) =
1,-1/2<х<1/2
О, при остальных зачениях х
(1-6)
12
Сигналы и их представление
Таблица 1.2.
Разрывные функции
№ п/п Функция График функции
1 1 0
1, t >0 0, t<0 k
t
2 0, t < t0 G(t-to) 1 -
o(t-t0 J —-
0 t0 t
3 8(f) = • “ t = 0 0, t * 0 0 oo w__
4 8(f-f0) = . O,^fo I 1 °? ](1) io i
5 sign(t) = < k. 1, t >0 -1, t<0 -/1 0 t
6 . . [1,|Г/т1<1/2 rect(t/x)=< . . [0,|Г/т|>1/2 rect t
Ihcm 1 о нем 1
7 . . Г0|/т<1/2 rect([t- f0]/x ) = . U ° J [O,|f-fo|/T>1/2 red 1 -
0 to~^ t0 t0-^T t
Прямоугольный импульс длительности хи
(рис. 1.3,а)
rect(t/xu)
\iul2<t <iu/2
О, при остальных значениях t
определяется как
(1-7)
13
Раздел 1
Обозначение запаздывающего на время t0 импульса имеет вид
(рис. 1.3,6)
reef (7-f0/Tj =
1, t0 - ти / 2 < t < t0 + ти/2
О, при остальных значениях t'
(1-8)
Знаковая функция.
Функция знака sign(x) (сигнатура) равна единице, знак которой
изменяется при переходе t через нуль (рис. 1.4)
14
Сигналы и их представление
sign(t) =
-1, t <0
' 1, t>0
(1.9)
Очевидно, функция знака связана со ступенчатой функцией со-
отношением
(1.10)
Импульсная функция.
Импульсная или 6-функция представляет импульс бесконечно
малой длительности в точке t = 0, имеющий бесконечно большую
амплитуду и площадь, равную единице:
Z- <х>
ОО, t — 0 Г
, 5(t)(# = 1.
0, t * о J
—оо
(1-11)
Импульсную функцию можно рассматривать как предел, к кото-
рому стремится прямоугольный импульс длительностью т и ампли-
тудой 1/т при (рис. 1.5).
Импульсная функция представляет производную ступенчатой
функции
do(0/^ = 5(0, (1.12)
и наоборот, ступенчатая функция может рассматриваться как инте-
грал от импульсной функции
(1.13)
Из определения импульсной функции следует
оо оо
J s(t)8(t - t0)dt = s((0) |8(t - tQ)dt = s(f0).
— oo —-oo
(1.14)
Соотношение (1.14) отражает фильтрующее свойство импульс-
ной функции.
15
Раздел 1
б)
а)
Рис. 1.3
1.1.2. Комплексные сигналы
При описании и анализе некоторых видов сигналов (в первую
очередь узкополосных) используется понятие комплексного сигнала
s(f) = |s(0|e^(f), (1-15)
где |s(f)|, (p(t) - модуль и аргумент комплексной величины s(t).
Комплексная величина s(t) может быть также представлена
в виде
s(f)= Re[s(f)]+ /lm[s(t)], (1-16)
где Re, Im - действительная и мнимая части комплексной
величины.
Из (1.15) и (1.16) получим:
|s(f)| = yj Re2[s(t)] + lm2[s(t)]; ф (f) = arctg
He s(f)
(1-17)
16
Сигналы и их представление
Комплексный сигнал можно рассматривать как вектор на ком-
плексной плоскости с действительной осью - осью абсцисс и мни-
мой осью - осью ординат (рис.1.6). Такое рассмотрение подключа-
ет пространственное воображение, расширяет рамки анализа сиг-
налов.
Длина вектора равна модулю комплексной величины, угол между
вектором и осью абсцисс равен аргументу ф(ф Проекции вектора на
оси координат равны действительной и мнимой частям комплекс-
ной величины.
Комплексная форма описания сигнала позволяет в ряде случа-
ев упростить математические операции, проводимые с сигналами.
Иллюстрацией удобства, связанного с использованием комплекс-
ной формы описания сигналов при их анализе, служат последую-
щие разделы (начиная с разд. 8).
1.2. Представление сигналов ортогональными рядами
Временная функция, описывающая сигнал s(t), может быть
представлена в виде взвешенной суммы, как правило, более про-
стых базисных функций (рп(0
оо
3(0 = £спфп(0,
л=0
(1-18)
где сп - постоянные коэффициенты.
Такое представление сигнала означает, что сигнал рассматри-
вается как совокупность элементарных колебаний, взятых с соот-
ветствующими коэффициентами. Разложение функции s(t) по сис-
теме базисных функций {<рп(0} особенно удобно, если система
функций является ортогональной. Система функций {(рп(0) называ-
17
Раздел 1
ется ортогональной с весом р(0 на интервале [ta, tb], если выпол-
няется следующее равенство:
L fll II2
[ч>т(О<р„(Ор(О<*= м ,т~п. (1.19)
• [0, т * п
1а
где фп - норма функций фл(0-
При ||фп|| = 1 система функций {<pn(f)} называется ортонормиро-
ванной.
Коэффициенты ряда (1.18) (с учетом (1.19) ) определяются вы-
ражением
ls(t)(pn(t)p(t)dt, л = 0,1, 2...,
(1-20)
Разложение s(t) по ортогональной системе функций называется
обобщенным рядом Фурье, а коэффициенты ряда - обобщенными
коэффициентами Фурье. Совокупность коэффициентов разложения
называется спектром сигнала в выбранной системе базисных
функций. В обобщенный ряд Фурье может быть разложена любая
функция, квадратично интегрируемая на интервале tb].
Некоторые виды ортогональных систем базисных функций, ко-
торые могут быть использованы при описании и анализе сигналов,
приведены в табл. 1.3. Примеры их применения при спектральном
анализе сигналов даны в разд. 2.
В практике анализа периодических сигналов наибольшее при-
менение получил тригонометрический ряд Фурье, в котором в каче-
стве базисных функций выбраны тригонометрические функции
s(t) =
^(ап cos ло)^ + t^sinno)^)
л=1
(1-21)
где оси - частота сигнала.
Коэффициенты тригонометрического ряда Фурье (1.21) опреде-
ляются выражениями
2 Т/2 2 7/2
ап = — J s( t) cos ло)1 tdf, bn — — J s(t) sin пы1 tdt,
-7/2 ^-7/2
(1-22)
18
Сигналы и их представление
где Т = 2л- период сигнала.
Форма записи тригонометрического ряда может быть несколько
иной
s(t) = ^ + ^Ancos(n^t + (pn), (1.23)
где
А^а^А^а^ + Ь2 ; <рп = -arctg(bn/ап), п = 1,2,... (1.24)
При представлении сигнала в виде (1.23) он определяется сово-
купностью амплитуд Ап и фаз <рп. Совокупность амплитуд Ап на-
зывается амплитудным спектром, а совокупность фаз <рп- фазо-
вым спектром.
Тригонометрический ряд Фурье описывает разложение сигнала
на гармонические составляющие, позволяет проводить анализ сиг-
нала в частотной области. Анализ с его использованием называет-
ся гармоническим.
, В качестве примера рассмотрим сигнал, представляющий пе-
риодическое колебание пилообразной формы (рис. 1.7,а). Для него
тригонометрический ряд (1.23) имеет вид:
s(t)= 2/n(s/n(D1f-1/2s/n2(D1f + 1/3s/n3(D1f-1/4s/n4(D1f +...),
где ш}=2к/Т -частота, Г—период сигнала.
Таблица 1.3.
Ортогональные системы функций
№ п/п п = 0,1,2,.... (Wb) р(х) II 1|2 ы
1 1 cosnx sinnx ——i ——п = 1,2,... у2л ул \Л [-л, л] 1 1
2 -Д=е'пх, л = 0,±1,... у2л [-л, л] 1 1
3 Многочлены Лежандра „ / х 1 dn / 2 > R(x) = х -1/ 2пп! dxn v ! [-1-1] 1 2 2л+1
19
Раздел 1
№ п/п Ф„(х) л = 0,1,2,.... р(х) и<м2
4 Многочлены Чебышева 1 -го рода Тп(х) = cos(narccos х) [-11] 1 Ji-x2 п, п-0 Л —, л ф 0 2
5 Многочлены Чебышева 2-го рода ( \ sin[(n + l)arccosx] z? [-1,1] yh-X2 го | Й
6 Многочлены Лагерра £ (х)= е* (е~ххп] [0,0°) е^х 1
7 Многочлены Эрмита dx V ) - оо^ оо -хг е 2пл!-/л
8 Функции Радемахера г0(х) = 1, rn(x) = sign(s\n2n их) л = 1,2,... [0,1] 1 1
9 Функции Хаара 2к-2 2/Г-1 у2, — < х < — У(Х)\ 2 1 2+1 LJF < 2к ’ 2n+1 ' 2п +1 0 при других значениях х /г= 1,2, 4,..., 2п; п = 0, 1,2, ... [0,1] 1 1
20
Сигналы и их представление
№ п/п Фп(х), п = 0,1,2,.... р(х) II 1|2 м
10 Функции Уолша pa/(n,x)= JJ[rfc(x)] fc=1 пк - к-й разряд представления п в двоичном коде; гк(х)- функции Радемахера [0,1] 1 1
т (пк 1 had(n, х) = [гк (х)] К=1 (пД- к-й разряд представления п в инвертированном двоичном коде [0,1] 1 1
т ' <пк) wal(n, х) = [гк (х)] к=1 (лк) = пк Ф nk+1, Ф - символ поразрядного суммирования по модулю 2 [0,1] 1 1
Амплитудный спектр сигнала приведен на рис. 1.7,6. Спектр да-
ет представление о распределении амплитуд сигнала по частоте.
А-
0,5-
III!________>
О а, 2а, За, 4а, а
б)
21
Раздел 1
1.3. Интегральное представление сигналов
Одним из представлений сигналов, нашедших применение при
их описании и анализе, является интегральное представление сиг-
налов.
При некоторых условиях для функции, описывающей сигнал во
временной области s(t), существует интегральное преобразование
S(x) = ^{x,t)s(t)dt, (1.25)
г
где - заданная функция (ядро интегрального преобразова-
ния); Т - область определения функции s(t).
Интегральное преобразование позволяет осуществить переход
от временной области определения функции к области параметра
х. Операциям над сигналом во временной области соответствуют
операции в области параметра х. Операции в области параметра х
могут быть проще, следовательно, расширяются возможности про-
водимого анализа.
Формула, позволяющая восстановить сигнал s(t) по известной
функции S(x), называется формулой обращения интегрального
преобразования
s(t) = J <p(f, x)S(x)dx, (1.26)
х
где ф(Л х) - базисная функция.
Выражения (1.25) и (1.26) устанавливают взаимно однозначное
соответствие между функцией s(t) и ее интегральным преобразова-
нием S(x). Функция S(x) является интегральным представлением
сигнала, может быть исходной при описании сигнала.
Из известных интегральных преобразований одним из наиболее
часто используемых при анализе сигналов является преобразова-
ние Фурье
S(w)= Js(f)e K,,tdt, (1.27)
где 0) - параметр преобразования, частота.
Ему соответствует обратное преобразование
22
Сигналы и их представление
s(t) = — f S(co)efef do. (1.28)
2л J
— GO
Интеграл Фурье (1.28) дает описание сигнала в виде суммы гар-
монических составляющих с непрерывной последовательностью
частот со. Спектральный анализ сигналов с использованием такого
представления входит в понятие гармонического. Функция S(w) на-
зывается спектральной плотностью или спектром сигнала s(t).
С помощью (1.28), имея спектральную плотность, можно перейти
к описанию сигнала во временной области.
В общем случае 8(ш) является комплексной величиной. Как ком-
плексная величина она записывается в виде
S(co) = |S(co)| (1.29)
где |S(co)|, ср(со) - модуль и аргумент комплексной величины,
амплитудный и фазовый спектры сигнала.
Примером служит преобразование Фурье временной функции,
описывающей сигнал, экспоненциального вида
s(X) = Veat,t>0-
Преобразование Фурье s(t):
V
S(W) = —— .
а + ко
Амплитудный и фазовый спектры сигнала описываются выраже-
ниями
। । V
S(co) = —5---ср(со) = -arctg (со/а).
(а +со )
Графики амплитудного и фазового спектров сигнала представ-
лены на рис. 1.8. Они дают представление о плотности распреде-
ления амплитуд и фаз сигнала по частоте.
Другим интегральным преобразованием, широко используемым
при анализе сигналов, является преобразование Лапласа
S(p) = Js(0e ptdt, (1.30)
о
где р = о + ко - комплексная величина.
23
Раздел 1
Преобразование Лапласа в ряде случаев расширяет возможно-
сти анализа сигналов по сравнению с преобразованием Фурье, ча-
ще используется при анализе прохождения сигналов через цепи.
Переход от изображения сигнала S(p) к оригиналу s(t) осуществ-
ляется с помощью обратного преобразования Лапласа
= \s{p)^dp. (1.31)
2л/ J
0-Ю)
При о = 0 выражение (1.30) переходит в интеграл Фурье для
функции s(t), равной нулю при t < 0.
Возможны и на практике используются другие виды интеграль-
ных преобразований. Некоторые из них, наиболее распространен-
ные, приведены в табл. 1.4.
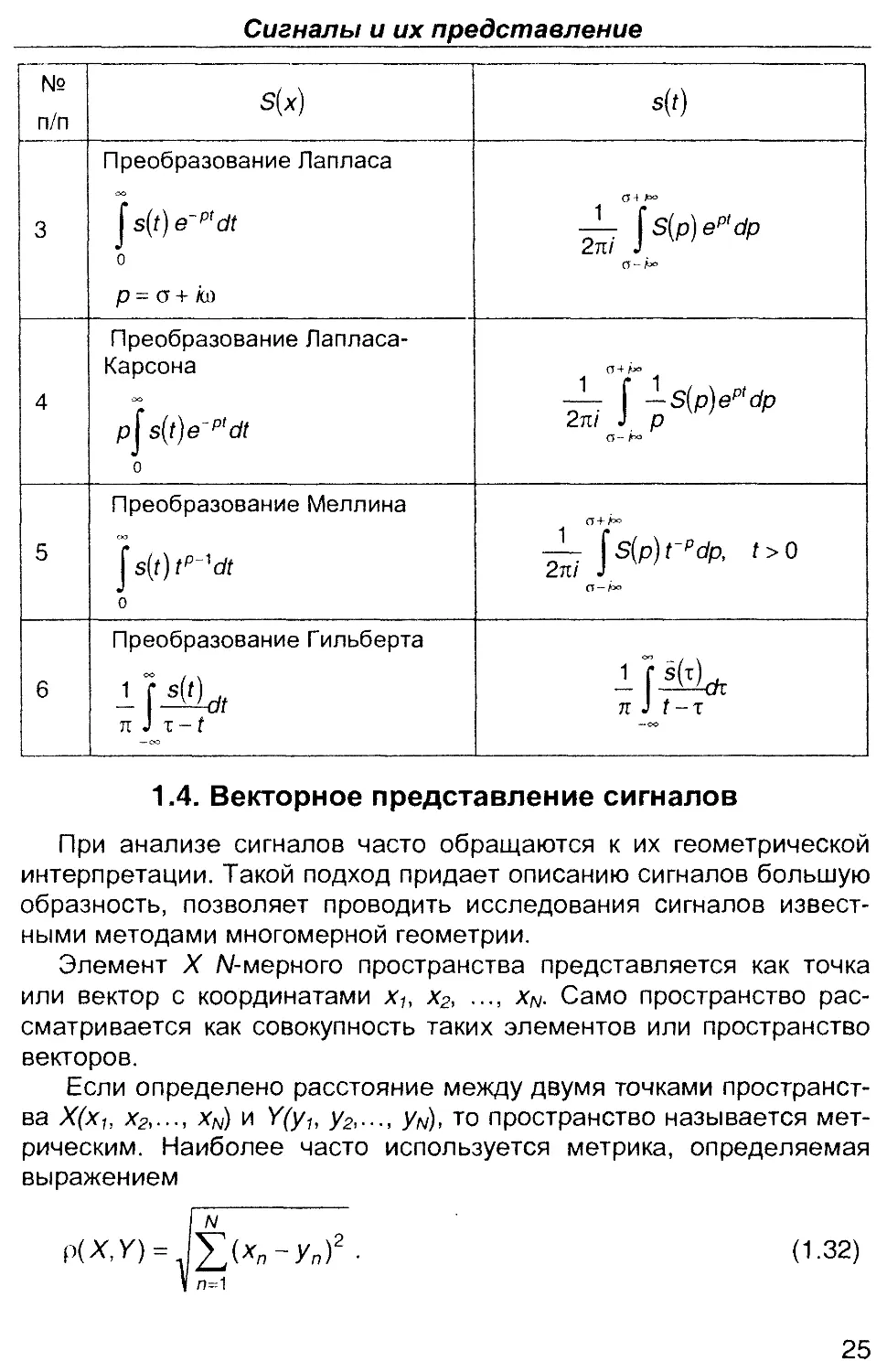
Таблица 1.4.
Интегральные преобразования
№ п/п S(x) s(f)
1 Преобразование Фурье j s(t)e~Kotdt ~ | S(<o) e^’do) — oo
2 Преобразование Хартли J s(t) case) tdt, — оо casiet = coso) t + sinш t oo — 1 S(co) casco t da) 2л J v ’ — oo
24
Сигналы и их представление
№ п/п S(x) s(f)
3 Преобразование Лапласа j s(t) e~ptdt 0 р= О+ кй СН -h \s^eHdp
4 Преобразование Лапласа- Карсона pj s(t)eptdt 0 ач а» 2л7 I о-
5 Преобразование Меллина J s(t)tp ~'dt 0 ^fs(P)r₽*. f>0
6 Преобразование Гильберта л J т-Г 1 7 з(т) , Л J t — T
1.4. Векторное представление сигналов
При анализе сигналов часто обращаются к их геометрической
интерпретации. Такой подход придает описанию сигналов большую
образность, позволяет проводить исследования сигналов извест-
ными методами многомерной геометрии.
Элемент X /V-мерного пространства представляется как точка
или вектор с координатами х?, х2, .... xN. Само пространство рас-
сматривается как совокупность таких элементов или пространство
векторов.
Если определено расстояние между двумя точками пространст-
ва Х(хъ х2,..., xN) и Y(yh у2,..., yN), то пространство называется мет-
рическим. Наиболее часто используется метрика, определяемая
выражением
(1.32)
25
Раздел 1
Пространство с метрикой (1.32) называется /У-мерным евклидо-
вым пространством. Оно обычно и рассматривается при векторном
представлении сигналов.
При геометрической интерпретации множеству сигналов ставит-
ся в соответствие векторное пространство. Сигналы изображаются
векторами, а операции с сигналами заменяются операциями с век-
торами.
Сигнал, описываемый выражением
N
SM = ^Cn4>ntt)>
л=1
(1.33)
может рассматриваться как /У-мерный вектор (рис. 1.9). Ортонор-
мированная система базисных функций {<pn(f)} образует коорди-
натную систему в /У-мерном евклидовом пространстве. Функции
Фп(0 представляют единичные векторы (орты), коэффициенты
сп- проекции вектора s(t) на оси координат.
Координаты вектора определяются скалярным произведением
фл(0
tb
сп = $s(t)4>n(t)dt. (1.34)
Длина вектора определяется как
(1.35)
Рис. 1.10
26
Сигналы и их представление
Векторы можно рассматривать лишь тогда, когда они имеют ко-
нечную длину. Из (1.35) следует, что геометрическую интерпрета-
цию допускают только сигналы с ограниченной энергией
tb
J s2(t)dt < оо
(1-36)
Совокупность сигналов с ограниченной энергией образует про-
странство сигналов (рис. 1.10). В нем сумме сигналов
(1-37)
соответствует сумма векторов. Если сигналы s^(t) и 82(f) заданы
на интервале времени [ta, tb] в единой системе координат
$i(0 = Xc1n<pn(0; 52(0 = ^с2пфп(0-
(1-38)
то суммарный вектор s(t) определяется координатами с1п +с2
Его длина равна
tb Гл/
hs}(t)+s2(t)]2dt = Jjqn + c2nf .
* 1
(1.39)
Скалярное произведение двух векторов S-i(t) и 82(f) определя-
ется выражением
^(t)s2(t)dt = ^c}nc2n.
(1-40)
Величина, описываемая (1.40), представляет взаимную энергию
сигналов.
Путем поворота системы координат относительно начала коор-
динат можно получить бесчисленное множество координатных сис-
тем. Замена координатной системы означает замену системы ба-
зисных функций, используемых при разложении сигнала, изменяет-
ся спектр сигнала. Свойства же векторов, отражающие свойства
сигналов, остаются неизменными, в том числе длины векторов,
расстояния и углы между векторами.
27
Раздел 1
Все понятия Л/-мерного евклидова пространства при
обобщаются на бесконечномерное гильбертово пространство.
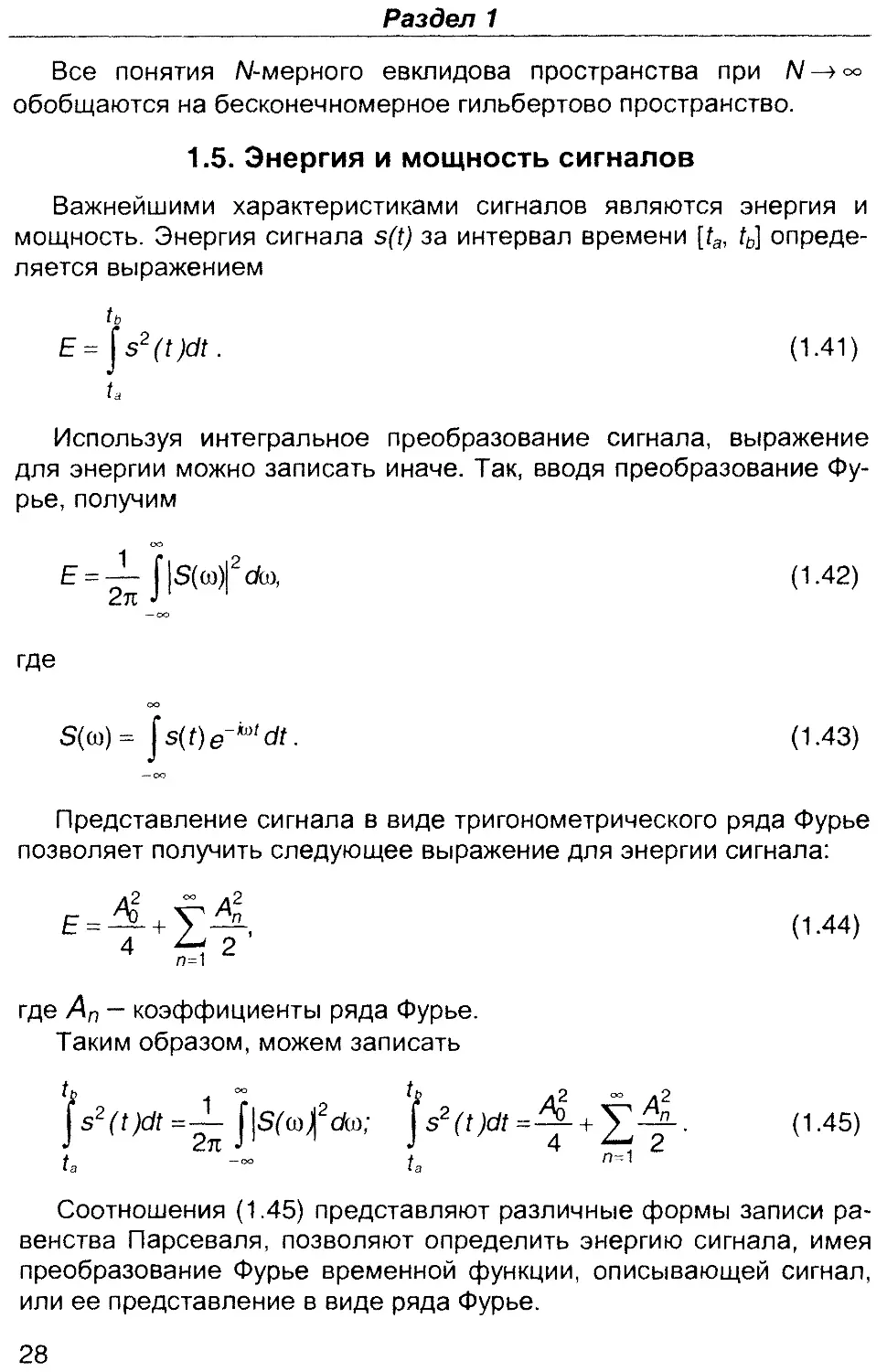
1.5. Энергия и мощность сигналов
Важнейшими характеристиками сигналов являются энергия и
мощность. Энергия сигнала s(t) за интервал времени [ta, tb] опреде-
ляется выражением
tb
Е = J s2(t)dt.
(1-41)
Используя интегральное преобразование сигнала, выражение
для энергии можно записать иначе. Так, вводя преобразование Фу-
рье, получим
1 Г । i2
Е = ~- Г S(to) oto,
2л J '
где
S(co)=
(1-42)
(1-43)
Представление сигнала в виде тригонометрического ряда Фурье
позволяет получить следующее выражение для энергии сигнала:
где Ап — коэффициенты ряда Фурье.
Таким образом, можем записать
. s Л 00 А £.
s2(t)dt-—J|S(tojpofo; J s2(t)dt =— +
— CO t П—1
(1-45)
Соотношения (1.45) представляют различные формы записи ра-
венства Парсеваля, позволяют определить энергию сигнала, имея
преобразование Фурье временной функции, описывающей сигнал,
или ее представление в виде ряда Фурье.
Сигналы и их представление
Энергия суммы двух сигналов за интервал времени (7а, tb] равна
Е = [ [s,(t)+ sz(t)]zdt = f s2(t)dt + 2 f s,(t)s2(t)dt + f sl(t)dt =
J J J J (1.46)
ta ta ta tb
= E. + 2E}2+E2,
где E1t E2 - энергии сигналов s2(t) и s2(t)\ E12 - взаимная энергия
двух сигналов.
Если сигналы ортогональны и выполняется условие
tb
$ s}(t)s2(t)dt = 0, (1.47)
ta
то их энергии аддитивны:
Е=Е? + Е2. (1.48)
Степень взаимозависимости двух сигналов в общем случае опи-
сывается корреляционной функцией
сю
Я12(т) = js1(f)s2(f+ T)df,
— оо
(1-49)
где т - смещение во времени одного сигнала относительно другого.
Выражение (1-49) записано для непериодических сигналов с ог-
раниченной энергией. Подчеркивая то, что рассматриваются два
сигнала, функцию Я12(т) называют взаимной корреляционной
функцией. При т = 0 взаимная корреляционная функция описывает
взаимную энергию сигналов
оо
Я12(0) = fat)s2(t)dt = Е12.
— сю
•(1.50)
С учетом (1.50) выражение (1.46) можем записать в виде
Е= E-f + 2Ri2(0) + Е2. (1.51)
Корреляционная функция может также характеризовать взаим-
ную зависимость двух значений одного сигнала s(t), разнесенных во
времени
29
Раздел 1
Нп(т)= \ s(t)s(t + n)dt.
(1-52)
В этом случае она называется автокорреляционной функцией.
При т = 0
R„(0)= Js1 2(f)dt,
(1.53)
автокорреляционная функция равна энергии сигнала.
Средняя мощность сигнала за интервал времени [ta, tb] опреде-
ляется выражением
tb-ta
Средняя мощность суммы двух сигналов за интервал времени
[ta, tb] равна
1 'f
Р = —!— \ls,(t) + s2(t)]2dt = P,+2P,2+P2. (1.55)
la
где
1 ?
Pi2 =~—~ \s}(t)s2(t)dt
lb ~ ra .J
‘a
- взаимная мощность.
Для периодического сигнала, имеющего период, равный Т,
средняя мощность определяется выражением
1 Т
Р = - \s2(t)dt. (1.56)
-Т/2
Для двух периодических сигналов srft) и s2(t), имеющих один и
тот же период Г, взаимная корреляционная функция описывается
выражением
30
Сигналы и их представление
Т/2
Я,2(т) = у j s,(t)s2(t + г)СЙ. (1.57)
-Т/2
При Si(t)=s2(t)=s(t) из (1.57) получим выражение для автокорре-
ляционной функции периодического сигнала
Т/2
Ri,(T) = y Js(f)s(t + T)df. (1.58)
-Т/2
Прит = Оимеем
R11(Q)=P. (1.59)
Таким образом, автокорреляционная функция периодического
сигнала при т = 0 описывает среднюю мощность сигнала.
Рассмотренные энергетические характеристики сигналов явля-
ются основными, к ним приходится обращаться в дальнейшем при
анализе различных видов сигналов.
1.6. Основные виды сигналов
Все возможное разнообразие сигналов можно свести к несколь-
ким видам, которые составляют основу их классификации.
Одним из основных признаков, по которым различаются сигна-
лы, является предсказуемость сигнала (его значений) во времени.
Различают детерминированные и случайные сигналы. К детерми-
нированным (регулярным) относят сигналы, которые описываются
функциями времени, или для которых задано правило их получе-
ния. Такими сигналами, например, являются периодические после-
довательности импульсов определенной формы, высокочастотные
колебания, модулированные по заданному закону, двоичные по-
следовательности символов, формируемые заданным способом, и
т. д. Значения детерминированного сигнала определены в каждый
момент времени. К случайным сигналам относятся сигналы, значе-
ния которых в любой момент времени невозможно предсказать с
вероятностью, равной единице. К ним относятся высокочастотные
колебания, модулированные шумом, колебание на входе приемни-
ка, источником которого является космическое излучение, и др.
Строго говоря, все сигналы, которые встречаются на практике, яв-
ляются случайными. Даже при формировании сигнала определен-
ного вида всегда имеются случайные изменения во времени его
31
Раздел 1
параметров. Другие сигналы, такие как речевые, имеют случайный
характер вследствие самого содержания передаваемой информа-
ции. С этой точки зрения детерминированные сигналы представ-
ляют только математическую модель реальных сигналов. Однако
принятые модели часто достаточно хорошо описывают реальные
сигналы (в первую очередь, когда флуктуации имеют малые значе-
ния) и удобны при их анализе.
Передача информации с помощью сигналов может произво-
диться непрерывно во времени или в некоторые фиксированные
моменты. В зависимости от характера передачи информации (не-
прерывно или дискретно) различают непрерывные или аналоговые
и дискретные сигналы. Аналоговые сигналы повторяют или зависят
от закона непрерывного изменения физических величин, информа-
цию о которых они содержат; описываются непрерывными или ку-
сочно-непрерывными функциями времени. Дискретные сигналы
представляют последовательность коротких импульсов, амплитуды
которых соответствуют мгновенным значениям непрерывного сиг-
нала или соответствующей физической величины. Значения сигна-
ла в выделенные моменты времени называются выборочными зна-
чениями или отсчетами. Дискретные сигналы (дискретные во вре-
мени), квантованные по уровню и представленные цифровым ко-
дом, называются цифровыми сигналами. В связи с широким приме-
нением цифровой обработки цифровые сигналы становятся все
более распространенным видом сигналов. При анализе цифровые
сигналы чаще всего заменяются дискретными, а их отличие от
цифровых интерпретируется как шум.
В зависимости от ширины спектра выделяют узкополосные и
широкополосные сигналы. Узкополосным называют сигнал, спектр
которого сосредоточен в относительно узкой (по сравнению со
средней частотой) полосе. Понятие узкополосного сигнала являет-
ся довольно условным. Однако с его введением связано удобство
описания и анализа сигналов.
Для передачи информации на расстояние и в ряде других слу-
чаев используются высокочастотные колебания. Непосредствен-
ным носителем информации, как правило, является низкочастот-
ный сигнал. Перенос информации на высокочастотное, несущее
колебание производится в процессе модуляции. В качестве несу-
щего, кроме высокочастотного колебания, может быть использова-
на также периодическая последовательность импульсов. Таким об-
разом, можно выделить немодулированные и модулированные сиг-
налы. Модулированные сигналы представляют несущее колебание
32
Сигналы и их представление
(гармоническое колебание или периодическую импульсную после-
довательность), параметры которого изменяются под воздействием
модулирующего (управляющего) сигнала. Возможна амплитудная,
угловая и смешанная виды модуляции гармонического колебания.
Понятие угловой модуляции объединяет два вида модуляции: фа-
зовую и частотную. При модуляции импульсной последовательно-
сти выделяют: амплитудную, фазовую, частотную и модуляцию
длительности импульсов (широтно-импульсную модуляцию). Воз-
можны смешанные виды модуляции.
В качестве модулирующего сигнала может использоваться кодо-
вая последовательность различных символов. Сигнал, получаю-
щийся в результате модуляции несущего колебания такой последо-
вательностью, называется кодированным сигналом.
Приведенная краткая классификация сигналов не рассчитана на
полноту охвата всего их разнообразия. Однако, помимо системати-
зации сигналов, она позволяет уяснить и принцип выбора структуры
книги.
33
Раздел 2.
ОБОБЩЕННЫЙ СПЕКТРАЛЬНЫЙ АНАЛИЗ СИГНАЛОВ
Спектральный анализ сигналов основан на представлении сиг-
нала в виде взвешенной суммы элементарных составляющих,
в математическом плане - разложении функции, описывающей сиг-
нал во временной области, в ряд по системе базисных функций.
Такое разложение позволяет свести анализ сложного сигнала
к анализу его более простых составляющих.
При разложении сигналов чаще всего используются: система
тригонометрических функций, ортогональные системы многочле-
нов, в первую очередь, Лежандра, Чебышева, Лагерра, Эрмита,
функций Уолша и др. При их применении для сигналов с ограни-
ченной энергией обеспечивается средняя квадратичная сходимость
ряда, в который раскладывается функция, описывающая сигнал.
Ортогональные системы функций полезны также при аппрокси-
мации и интерполяции сигналов и их характеристик, находят при-
менение при кодировании передаваемых сообщений, в вейвлетных
преобразованиях и в ряде других случаев. Таким образом, анализ
сигналов с использованием ортогональных систем функций имеет
широкое приложение, является неотъемлемой частью общего ана-
лиза сигналов. Описание ортогональных систем функций использу-
ется в дальнейшем - в других разделах книги, частей 1 и 2.
В этом разделе рассматриваются наиболее распространенные
ортогональные системы функций и их применение при спектраль-
ном анализе сигналов.
2.1. Обобщенный ряд Фурье
Функция, описывающая сигнал во временной области s(t), мо-
жет быть представлена в виде взвешенной суммы базисных функ-
ций ортогональной системы {ф„(0)
s(0 = ^cn(pn(0, (2.1)
л=0
34
Обобщенный спектральный анализ сигналов
где сп - постоянные коэффициенты.
Такое представление сигнала означает, что сигнал рассматри-
вается как совокупность элементарных колебаний, взятых с соот-
ветствующими коэффициентами.
Для ортогональной на интервале [ta, tb] системы функций {фп(01
выполняется следующее равенство
tb
^m(t)<pn(t)p(t)clt =
||ср||2, т = п
0,т* п
(2.2)
где р (t) — весовая функция; ||фп|| - норма функций фп(Г).
При ||фл|| = 1 система функций {фп(0} называется ортонормиро-
ванной. Коэффициенты ряда (2.1) с учетом (2.2) могут быть опре-
делены как
1 г
cn = ij—й SW ФпЙрИ dt’ п = (2.3)
1а
Ряд, в который раскладывается функция s(t), сходится в сред-
нем квадратичном, если выбранная система базисных функций яв-
ляется полной. Ортогональная система считается полной, если не
существует никакой другой функции, не входящей в систему, кото-
рая была бы ортогональна ко всем функциям данной системы.
В обобщенный ряд Фурье может быть разложена любая функ-
ция, квадратично интегрируемая на интервале [ta, fb]. Это означает,
что анализ с использованием обобщенного ряда Фурье может про-
водиться для сигналов с ограниченной энергией на рассматривае-
мом интервале. Разложение функции s(t) по ортогональной системе
функций (2.1) называется обобщенным рядом Фурье. Совокупность
коэффициентов разложения называется спектром сигнала в вы-
бранной системе базисных функций.
Коэффициенты Фурье обладают следующим свойством. Любая
частичная сумма ряда Фурье
N
sM=Xcn*M
п=0
(2.4)
наилучшим образом аппроксимирует функцию s(t). Это означает,
35
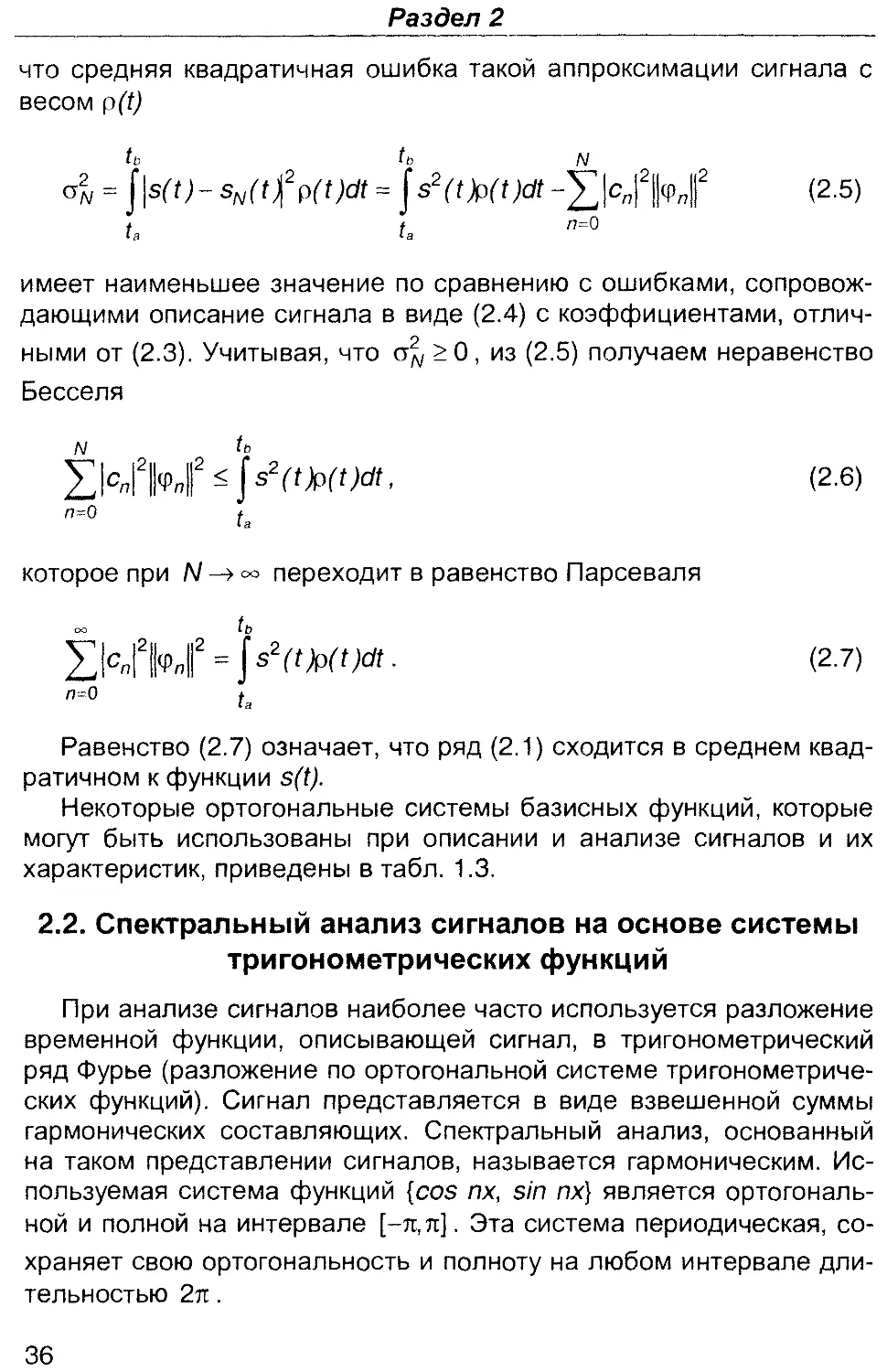
Раздел 2
что средняя квадратичная ошибка такой аппроксимации сигнала с
весом p(t)
tb tb N
<4 = J |sf t) - sN( t)dt = J s2(t)p( t)dt |сл|2||фл||2 (2.5)
fa fa Л=0
имеет наименьшее значение по сравнению с ошибками, сопровож-
дающими описание сигнала в виде (2.4) с коэффициентами, отлич-
ными от (2.3). Учитывая, что c>2N >0, из (2.5) получаем неравенство
Бесселя
Л/ tb
У |сл|2||фп||2 < fs2(t)p(t)dt, (2.6)
п--0 f
la
которое при Nпереходит в равенство Парсеваля
ОО tb
YKlW= pw'M- (2.7)
JMawaf 1 I II и J
n=0 f
la
Равенство (2.7) означает, что ряд (2.1) сходится в среднем квад-
ратичном к функции s(t).
Некоторые ортогональные системы базисных функций, которые
могут быть использованы при описании и анализе сигналов и их
характеристик, приведены в табл. 1.3.
2.2. Спектральный анализ сигналов на основе системы
тригонометрических функций
При анализе сигналов наиболее часто используется разложение
временной функции, описывающей сигнал, в тригонометрический
ряд Фурье (разложение по ортогональной системе тригонометриче-
ских функций). Сигнал представляется в виде взвешенной суммы
гармонических составляющих. Спектральный анализ, основанный
на таком представлении сигналов, называется гармоническим. Ис-
пользуемая система функций {cos пх, sin пх} является ортогональ-
ной и полной на интервале [-л,л]. Эта система периодическая, со-
храняет свою ортогональность и полноту на любом интервале дли-
тельностью 2л.
36
Обобщенный спектральный анализ сигналов
Периодический сигнал s(t), имеющий частоту повторения соь
можно представить в виде
s(f) =
— + 22(an cos nw^t + bn sin лш-] ?),
n=1
(2.8)
где (п1 = 2п/Т; T- период сигнала.
Ортогональность базисных функций приводит к следующим ра-
венствам:
Т/2
J cos лещ1 sin mco1 tdt = 0 при любых лит,
-Т/2
(2-9)
Т/2 Т/2
Jcos nw^tcos iTKj^tdt = J sin nu^tsin mw,tdt = <
-T/2 -T/2
О,
Т/2,
n ф m
n = m
С учетом (2.9) определяются коэффициенты разложения (2.8)
-Т/2
m^tdt;bn
Т/2
J s(f)sin n^tdt
-T/2
(2.10)
Предполагается, что функция s(t) является квадратично интег-
рируемой на интервале периодичности [-Т/2, Т/2]. Такие функции
описывают сигналы с конечной мощностью.
От (2.8) можно перейти к несколько иной форме записи тригоно-
метрического ряда Фурье
Л °°
5(0 = у- + 2^ AnCQS(n^t + ^>n\
п=1
(2-11)
где
I.....—.....
Ао=аыАп = \an + Ь2П; (рп = -arctg—.
ап
Периодический сигнал рассматривается как сумма гармониче-
ских составляющих с амплитудами Ап, и начальными фазами фп.
Совокупность амплитуд {Дп} - амплитудный спектр, а совокупность
начальных фаз {фп} - фазовый спектр сигнала. Спектры сигналов
37
Раздел 2
Рис. 2.1
в базисе тригонометрических функций называются частотными
спектрами.
Как следует из (2.11), спектры периодических сигналов являются
дискретными или линейчатыми, интервал дискретизации по частоте
определяется частотой сигнала (или его периодом Т,
а)1 = 2л/Т), рис. 2.1.
В качестве примера рассмотрим прямоугольное колебание (ме-
андр), рис. 2.2,а. Для него из (2.10) получим
~ 0 Т/2
2 г 2 г
ап = 0, Ьп = — sin rx^tdt + — sin nw^^tdt =
-Т/2 0
Т/2
Jsin rKDytdt = 2/лл(1-cosrm).
о
4/ л
Т 41/™ 417п
.. I . Т . т>
01 234567П
Рис. 2.2
38
Обобщенный спектральный анализ сигналов
Таким образом,
Ьп
4/nn, п = 1,3,5,.
О, л = 0,2,4,...
s(t) = 4 / 7t(sin +1 / 3 sin Зш^ +1 / 5 sin 5ш^ + ...).
Переходя к форме записи (2.11), имеем (рис. 2.2,6)
An = bn,<pn = -n/2.
2.3. Спектральный анализ сигналов на основе
многочленов Лежандра
Система многочленов Лежандра {Pn(t)} ортогональна на интер-
вале [-1, 1] с весом p(t) = 1. Многочлены Лежандра определяются
выражением
РпМ =
1 dn
ri.2n dtn
(f2 -1)л, п = 0,1, 2,...
(2.12)
Многочлены первых порядков (рис. 2.3):
Po(t) =1,
Pi(t)=t,
P2(t)=1/2(3t2- 1),
P3(t)= 1/2(5t3-3f),
P4(t)= 1/8(35/4- 30/2+ 3),
P5(t)= 1/8(63/5- 70/3+ 15/).
(2-13)
Условие ортогональности многочленов Лежандра записывается
в виде
1 0, т ф п
1 pm(t)pn(t)dt= 2
-1 12л + 1’
т = п
(2-14)
Функция s(t) раскладывается в ряд по многочленам Лежандра
оо
s(o=2Lcnpn(/).
п=0
с коэффициентами
(2-15)
39
Раздел 2
(2.16)
-1
Совокупность коэффициентов (2.16) представляет спектр сигна-
ла s(t) в базисе многочленов Лежандра.
В качестве примеров рассмотрим некоторые виды функций, опи-
сывающих сигналы во временной области.
1. Сигнал описывается степенным многочленом
N т
л=0 Ти
где ап - постоянные коэффициенты.
Переходя к безразмерной величине х = 2f/ти, запишем
N
s(x) = ^anxn,|x|<1.
л=0
Разложим функцию в ряд по многочленам Лежандра
N N
л=0 п=0
40
Обобщенный спектральный анализ сигналов
Приравнивая в левой и правой частях равенства коэффициенты
при слагаемых с одинаковыми степенями х, получим систему урав-
нений для определения коэффициентов сп.
При N = 2; а0 = 1; а^ = 0; а2 = -1, находим с0 = 2/3; Ci = 0; с2 = -2/3.
2. Косинусоидальный импульс
s(t) = cos—, л < —.
Ч 1 ' 2
Переходя к безразмерной величине х = 21/ти, запишем
/ \ ПХ I J / и
s(x) = cos—,|х| < 1 .
Коэффициенты сп определяются выражением
2л+ 1 1г лх_ . . . _
сп =----cos—Pn(x)dt, n = 0,1,2,...
-1 х
Вычисляя интеграл получаем
сп - 2/тг; Ci = 0; с2 = -0,68 ; с3 = 0; с4 = -0,03.
2.4. Спектральный анализ сигналов на основе
многочленов Чебышева
Многочлены Чебышева первого рода определяются выражением
W = cos(narccosf) = |^7l-f2 ^[(1 - Г2)пЧ/2]. (2.17)
Многочлены Tn(t) первых порядков (рис. 2.4):
T0(t) = t
Ty(t) = t,
Г2(0 = 2f2 - 1, (2.18)
Тз(0 = 4f3 - 3t,
T4(f) = 8t4 - 8t2 + 1,
Г5(0 = 16f5-20f3 + 5t
41
Раздел 2
i/7i-t2
-1 <h-t2
0, mt n
< n/2, m = ntO.
[тс, m = n = 0
(2.19)
Многочлены Чебышева второго рода Un(t) определяются через
многочлены первого рода
и„(0 = 1 dT"*'W . (2.20)
л+ 1 dt
Функция s(t) раскладывается в ряд по многочленам Tn(t)
(2.21)
л=0
с коэффициентами
1 Г s(t) 21fS(0Tn(0^
сa = — .? = dt, сп = — dt, л = 1, 2,...
’tJ1VTF
(2.22)
Совокупность коэффициентов (2.22) представляет спектр сигна-
ла s(t) в базисе многочленов Чебышева.
42
Обобщенный спектральный анализ сигналов
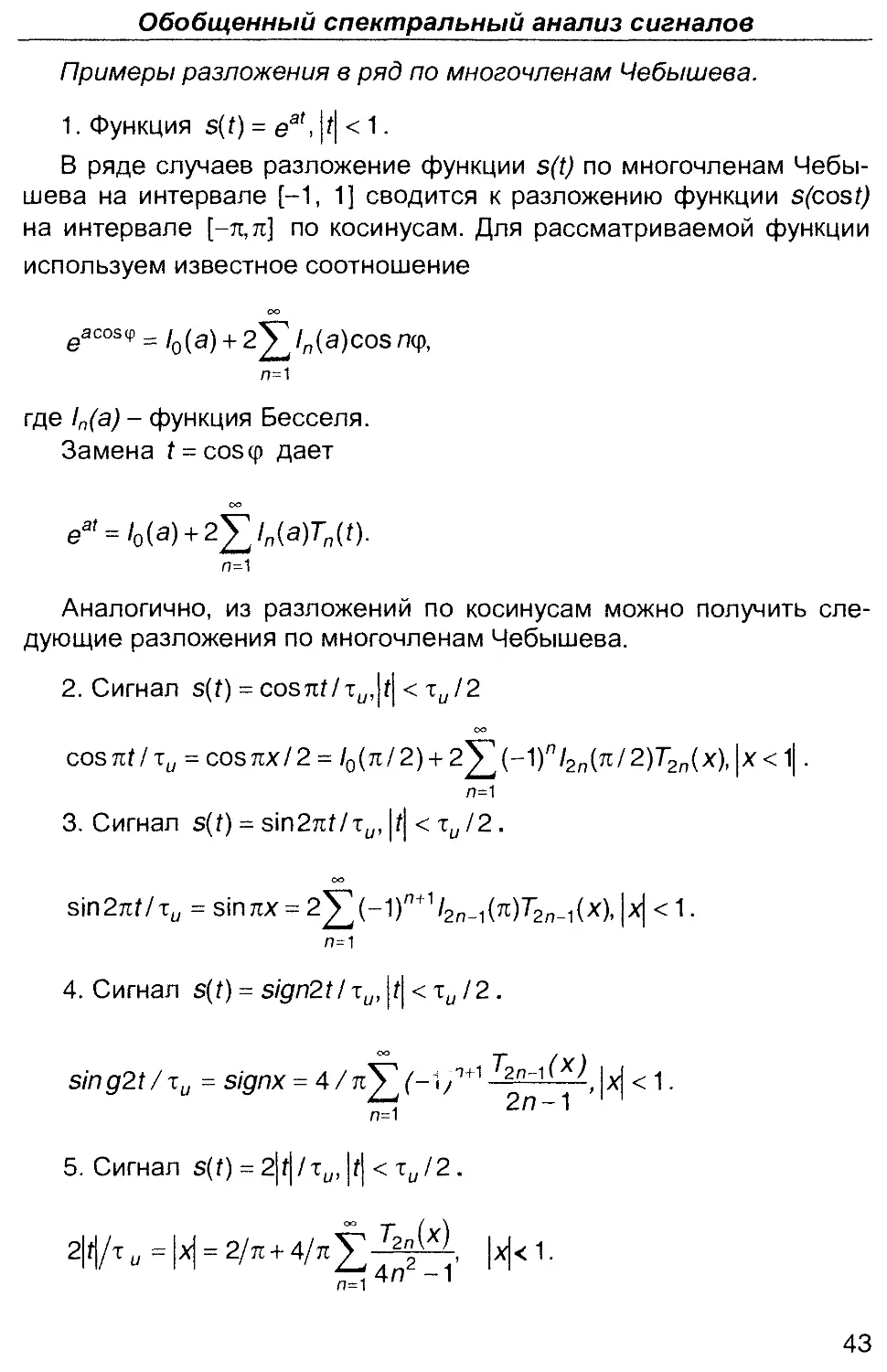
Примеры разложения в ряд по многочленам Чебышева.
1. Функция s(t) = eat, р| < 1
В ряде случаев разложение функции s(t) по многочленам Чебы-
шева на интервале [-1, 1] сводится к разложению функции s(cost)
на интервале [-л,п] по косинусам. Для рассматриваемой функции
используем известное соотношение
eac0S(₽ = /0(a) + 2^T/n(a)cosn(p,
Л = 1
где 1п(а) - функция Бесселя.
Замена t = cos<p дает
ea' = /0(a) + 2^/n(a)7n(f).
П=1
Аналогично, из разложений по косинусам можно получить сле-
дующие разложения по многочленам Чебышева.
2. Сигнал s(t) = cosnf/xlz,p| < /2
оо
соблГ/т^ = соблх/2 = /0(л/2) + 2^(-1)п/2п(л/2)72п(х), |х<1| .
л=1
3. Сигнал s(t) = Б1п2л?/хи, р| < ти /2 .
Б1п2л?/ти = б!плх = 2^(-1)п+1/2пЧ(л)7'2п_1(х), |х| < 1.
л=1
4. Сигнал s(f) = sign2t! xu,\t\<Tu!2.
sing2t/iu = signx = 4/л^(-1 /f1 |x| < 1.
5. Сигнал s(f) = 2^/1^, p| < T^/2.
2|t|/x u = |x| = 2/л+ 4/л^...^1*1 |x|<1.
n=1 ~ 1
43
Раздел 2
2.5. Спектральный анализ сигналов на основе
многочленов Лагерра
Многочлены Лагерра Ln(T) ортогональны на полуоси (0,^) с ве-
сом p(t) = е’. Определяются выражением
dn
LJt) = (-1)nef n = 0,1, 2,... (2.23)
dtn
Многочлены Ln(t) первых порядков имеют вид:
Lo(t) = 1,
L,(t)= t- 1,
L2(t) = t2 - 4t + 2, (2.24)
L3(t) = t3 - 9t2 + 18Г-6,
L4(t)=t4- 16f3 + 72f2-96f + 24,
L5(t)= t5-25t4+200t3-600t2+600t- 120.
Условие ортогональности многочленов Лагерра:
о
j 0, т ф п
|(л!)2,т = п.
При f->oo многочлены Ln(t) расходятся. Поэтому при разложе-
нии сигналов обычно используют функции Лагерра
/„(/) = (2.25)
Графики Функций ln(t) первых порядков показаны на рис. 2.5.
Функции ln(t) ортогональны и нормированы
ОО f
г 0, т ф п
\lm(t)ln(t)dt = \ (2.26)
J \т= г
о
Функция s(t) раскладывается в ряд по функциям Лагерра
оо
s(o=2Lcn/n(o
п 0
(2-27)
с коэффициентами
44
Обобщенный спектральный анализ сигналов
<х>
Сп=р(Г)/п(О^
О
(2.28)
Совокупность коэффициентов (2.28) представляет спектр сигна-
ла s(t) в базисе функций Лагерра.
Пример.
Сигнал описывается выражением s(t) = e~at - e~bt, f £ 0.
Из (2.28) находим
оо оо
cn = \e-atln(t)dt-^e-btln(t)dt
о о
ла-1/2У 1
а +1 /2, а + 1/2
Г Ь-1/2 У 1
^6 + 1/2; Ь + 1/2
2.6. Спектральный анализ сигналов на основе
многочленов Эрмита
Многочлены Эрмита Hn(t) ортогональны на всей оси (-оооо)
_/2
с весом е , определяются выражением
г dne~*2
Hn(t) = (-1)” ef n = 0,1, 2,.... (2.29)
dt
Многочлены Hn(t) первых порядков:
45
Раздел 2
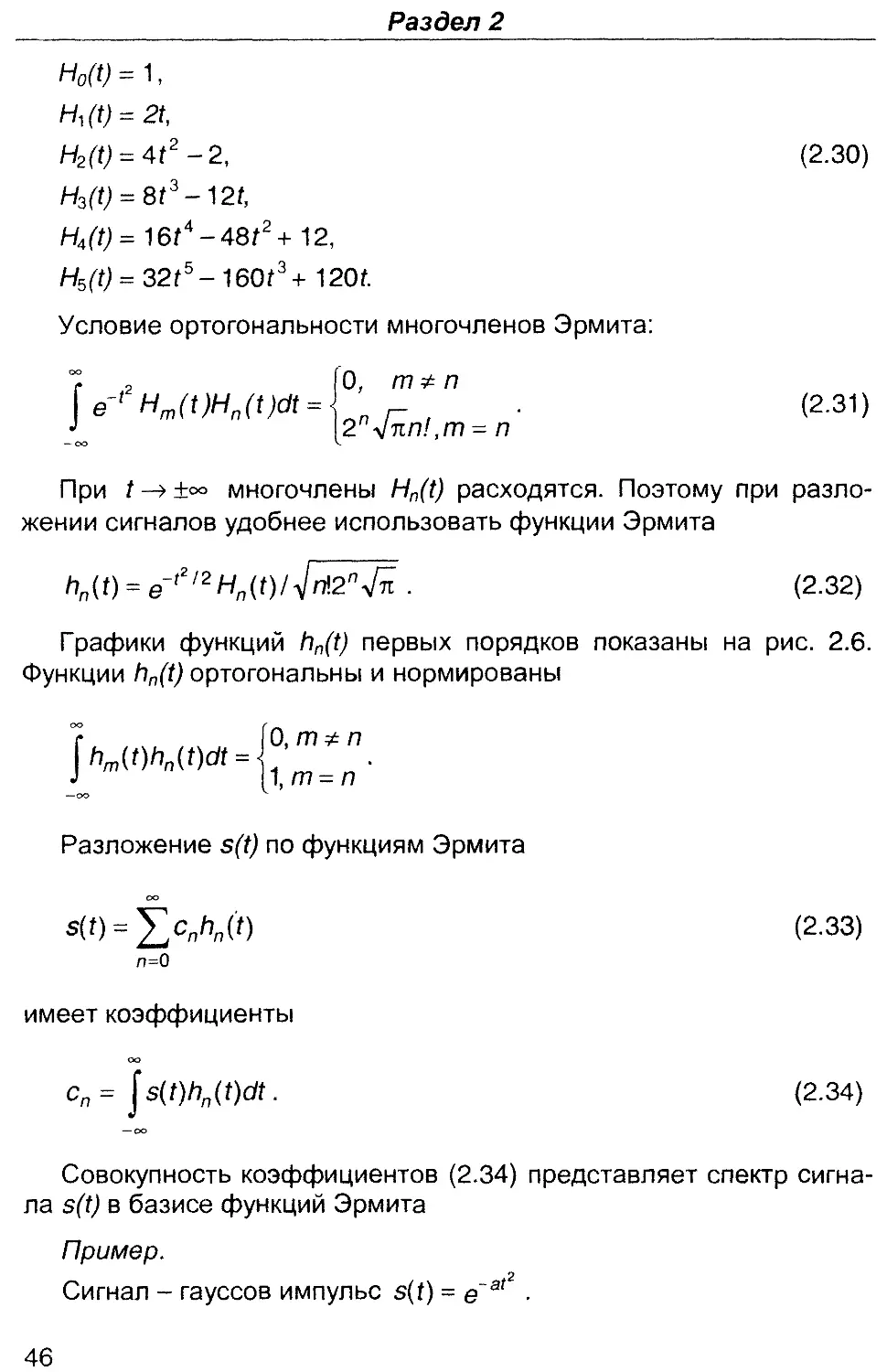
H0(t) = 1,
H.(t) = 2t,
H2(t) = 4t2 -2, (2.30)
H3(t) = 8t3-12t,
H4(t) = 16f4-48/2+ 12,
H5(t) = 32t5 - 160Г3 + 120Г.
Условие ортогональности многочленов Эрмита:
оо
2
J е' Hm(t)Hn(t)dt =
— ОО
0, т* п
2nJn.n!,m =
(2-31)
При многочлены Hn(t) расходятся. Поэтому при разло-
жении сигналов удобнее использовать функции Эрмита
h„(f) = e_'2'2Hn(0/1/ri2n^ .
(2.32)
Графики функций hn(t) первых порядков показаны на рис. 2.6.
Функции hn(t) ортогональны и нормированы
оо
—оо
0, т * п
1т = п '
Разложение s(t) по функциям Эрмита
оо
s<f)=Xc"h"(/)
л=0
имеет коэффициенты
(2.33)
сп=
— оо
(2.34)
Совокупность коэффициентов (2.34) представляет спектр сигна-
ла s(t) в базисе функций Эрмита
Пример.
Сигнал - гауссов импульс s(t) = e~af2 •
п
46
Обобщенный спектральный анализ сигналов
Коэффициенты разложения определяются выражением
оо
cn = Je~at hn(t)dt, n = 0,1, 2,...
— оо
Вычисление интегралов дает
с -М<'2 Г^~(1~2аТ (2п)!
V1 + 2aU + 2aJ 2п(л!)7(2^У
п = 0,1, 2,...,
^2л+1 0-
2.7. Спектральный анализ сигналов на основе функций
Уолша
Спектральный анализ сигналов на основе функций Уолша нахо-
дит практическое применение прежде всего при исследовании сиг-
налов, формируемых в цифровых устройствах.
2.7.1. Системы функций Уолша
Функции Уолша являются кусочно-постоянными знакоперемен-
ными функциями, принимающими значения 1 или -1. Они опреде-
ляются с помощью функций Радемахера rn(t) (рис. 2.13)
rn(x) = s/gn[sin(2n7tx)], 0 < х < 1,
(2.35)
где п =1,2,... - порядок функции; х= t/T, Т- интервал времени.
Функции Радемахера имеют вид меандра, ортонормированы.
Все они являются нечетными относительно середины интервала
47
Раздел 2
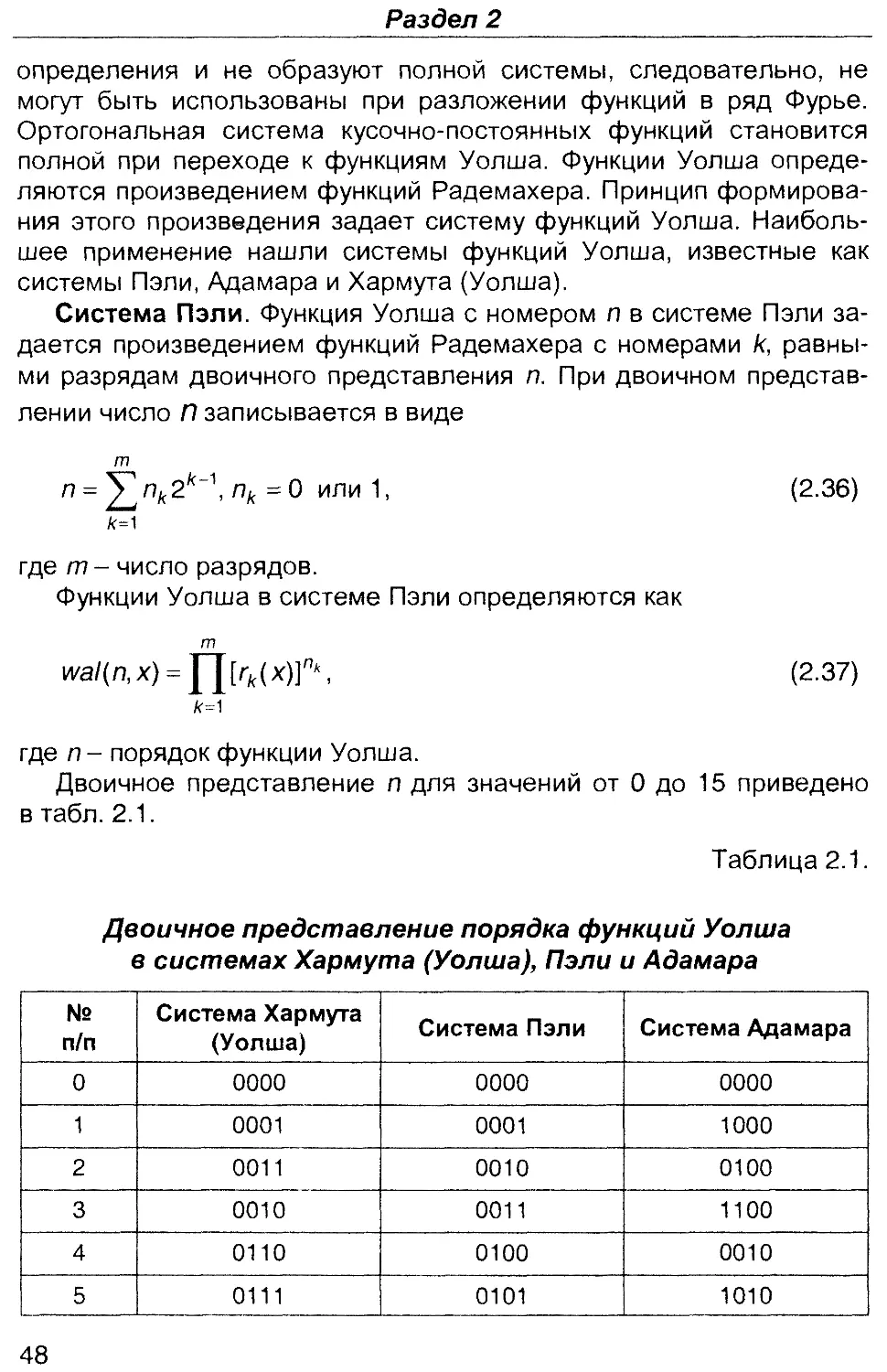
определения и не образуют полной системы, следовательно, не
могут быть использованы при разложении функций в ряд Фурье.
Ортогональная система кусочно-постоянных функций становится
полной при переходе к функциям Уолша. Функции Уолша опреде-
ляются произведением функций Радемахера. Принцип формирова-
ния этого произведения задает систему функций Уолша. Наиболь-
шее применение нашли системы функций Уолша, известные как
системы Пэли, Адамара и Хармута (Уолша).
Система Пэли. Функция Уолша с номером п в системе Пэли за-
дается произведением функций Радемахера с номерами к, равны-
ми разрядам двоичного представления п. При двоичном представ-
лении число П записывается в виде
т
п = ^пк2к~', пк =0 или1,
/<•=1
где т - число разрядов.
Функции Уолша в системе Пэли определяются как
т
Мп,х) = ПШ]\
к=1
(2.36)
(2.37)
где п - порядок функции Уолша.
Двоичное представление п для значений от 0 до 15 приведено
в табл. 2.1.
Таблица 2.1.
Двоичное представление порядка функций Уолша
в системах Хармута (Уолша), Пэли и Адамара
№ п/п Система Хармута (Уолша) Система Пэли Система Адамара
0 0000 0000 0000
1 0001 0001 1000
2 0011 0010 0100
3 0010 0011 1100
4 0110 0100 0010
5 0111 0101 1010
48
Обобщенный спектральный анализ сигналов
№ п/п Система Хармута (Уолша) Система Пэли Система Адамара
6 0101 0110 0110
7 0100 0111 1110
8 1100 1000 0001
9 1101 1001 1001
10 1111 1010 0101
11 1110 1011 1101
12 1010 1100 0011
13 1011 1101 1011
14 1001 1110 0111
15 1000 1111 1111
Система Адамара. Получается из системы Пэли записью раз-
рядов двоичного представления номера функции Уолша п в обрат-
ном порядке
wal(n, х) = гк(х)Пт-к". (2.38)
к=1
Комбинации пт-к+1, соответствующие первым номерам функции
Уолша, приведены в табл. 2.1.
Система Хармута. Эту систему можно получить из системы Пэ-
ли, представляя номер соответствующей функции Уолша в коде
Грея. Код Грея получается последовательным суммированием по
модулю два соседних разрядов двоичного разложения п, начиная с
младшего.
Обозначив /с-ый разряд кода Грея <пк>, запишем
< пк >= пк Ф пк+,, (2.39)
где знак Ф означает операцию поразрядного суммирования по мо-
дулю два
(0Ф0 = 0,0Ф1 = 1,1Ф0 = 1,1Ф1 = 0).
Выражение для функции Уолша в системе Хармута имеет вид
wal(n,x) = JJ[^(x)]<nk> . (2.40)
/<=1
49
Раздел 2
q (х)
1
о
х
1
2
-1
2
Г2 (х)
2 1
О
------1.1
гз(х)1
1(ц_
х
О
-1
х
г4 (X)
О
X
Рис. 2.7
Комбинации <пк>, соответствующие нумерации Функций Уолша,
приведены в табл. 2.1. Определение функций Уолша первых по-
рядков п < 15 в системе Хармута через функции Радемахера в со-
ответствии с (2.40) дано в табл. 2.2.
Таблица 2.2.
Функции Уолша в системе Хармута (Уолша)
№ п/п (л4 лЗ п2 л1) wal(n,fc) = П [гк(х)]пк
0 0000 wal (0,х) = 1
1 0001 wal (1,х) = r-i(x)
2 0011 wal (2,х) = г2(х)
3 0010 wal (3,х) = г2(х)
4 0110 wal (4,х) = г2(х) г3(х)
5 0111 wal (5,х) = ri(x) г2(х) г3(х)
6 0101 wal (6,х) = ri(x) г3(х)
7 0100 wal (7,х) = г3(х)
8 1100 wal (8,х) = гз(х) г4(х)
9 1101 wal (9,х) = г,(х) г3(х) г4(х)
50
Обобщенный спектральный анализ сигналов
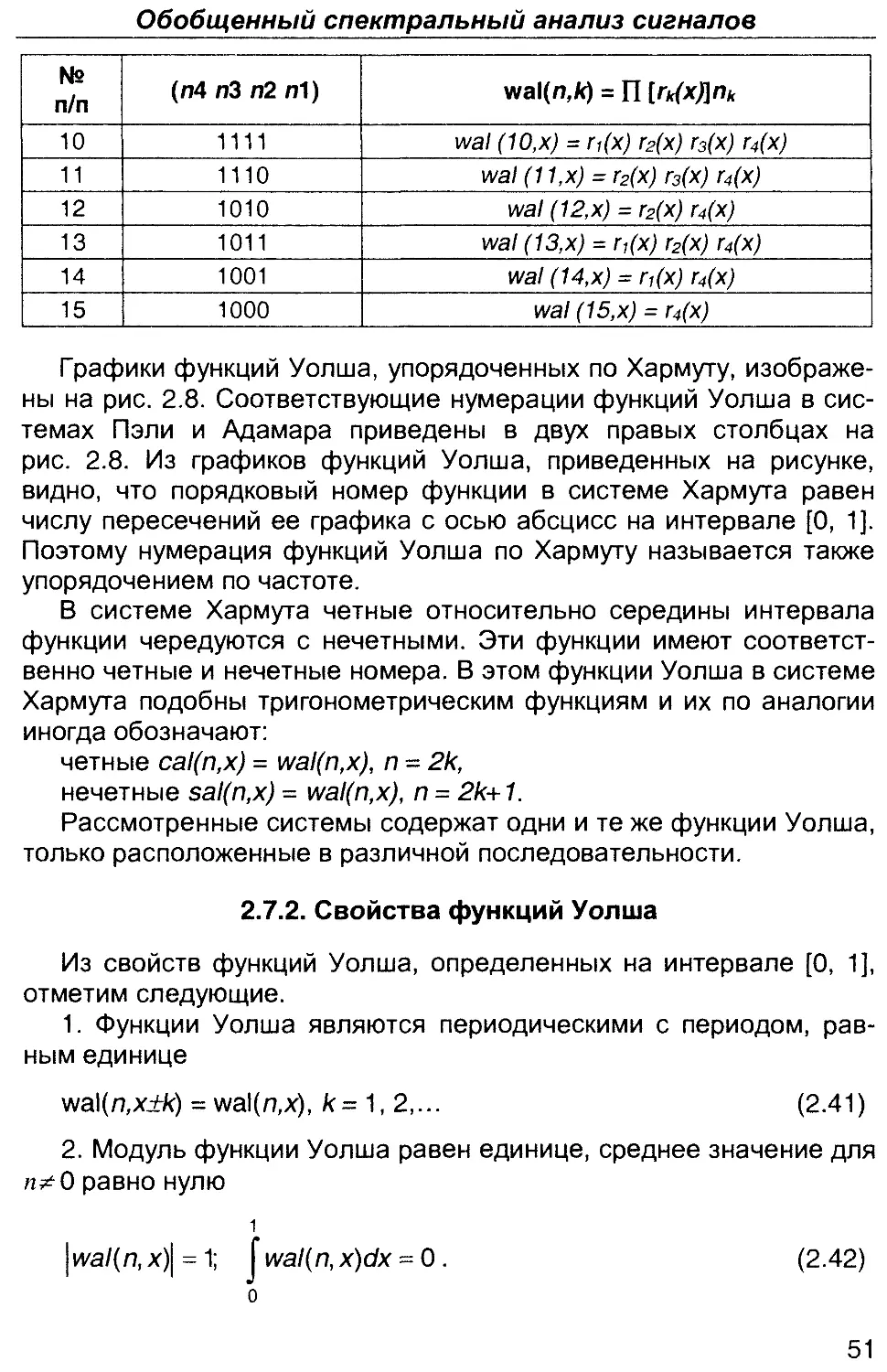
№ п/п (л4 лЗ п2 п!) wal(n,k) = П [г^хДл*
10 1111 wal (10,х) = Гч(х) г2(х) г3(х) г4(х)
11 1110 wal (11,х) = г2(х) г3(х) г4(х)
12 1010 wal (12,х) = г2(х) г4(х)
13 1011 wal (13,х) = Г](х) г2(х) г4(х)
14 1001 wal (14, х) = ri(x) г4(х)
15 1000 wal (15,х) = г4(х)
Графики функций Уолша, упорядоченных по Хармуту, изображе-
ны на рис. 2.8. Соответствующие нумерации функций Уолша в сис-
темах Пэли и Адамара приведены в двух правых столбцах на
рис. 2.8. Из графиков функций Уолша, приведенных на рисунке,
видно, что порядковый номер функции в системе Хармута равен
числу пересечений ее графика с осью абсцисс на интервале [0, 1].
Поэтому нумерация функций Уолша по Хармуту называется также
упорядочением по частоте.
В системе Хармута четные относительно середины интервала
функции чередуются с нечетными. Эти функции имеют соответст-
венно четные и нечетные номера. В этом функции Уолша в системе
Хармута подобны тригонометрическим функциям и их по аналогии
иногда обозначают:
четные cal(n,x) = wal(n,x), n = 2k,
нечетные sal(n,x) = wal(n,x), n = 2k+1.
Рассмотренные системы содержат одни и те же функции Уолша,
только расположенные в различной последовательности.
2.7.2. Свойства функций Уолша
Из свойств функций Уолша, определенных на интервале [0, 1],
отметим следующие.
1. Функции Уолша являются периодическими с периодом, рав-
ным единице
wal(n,x±k) = wal(n,x), k= 1,2,... (2.41)
2. Модуль функции Уолша равен единице, среднее значение для
«хО равно нулю
1
|wal(п, х)| = 1; J wal(n, x)dx = 0 . (2.42)
о
51
Раздел 2
Нумерация функций в системе
Хармута Пэли Адамара
0 0 0
1 1 8
2 3 12
3 2 4
4 6 6
5 7 14
6 5 10
7 4 2
8 12 3
9 13 11
10 15 15
11 14 7
12 10 5
13 11 13
14 9 9
15 8 1
52
Обобщенный спектральный анализ сигналов
3. Функции Уолша ортонормировании! на интервале [0, 1]
L f 1 п — к
\wal(irx)wal(k,x)dx=l’ . (2.43)
J О, п ф к
о 1
4. Произведение двух функций Уолша является также функцией
Уолша
wal(n,x)wal(k,x) = wai(m,x). (2.44)
Для систем Пэли и Адамара
т = п®к, (2.45)
для системы Хармута
т =< <п>®<к> >, (2.46)
где символ < > означает преобразование кода Грея в двоич-
ный код.
5. Параметры лих симметричны: любые выводы относительно
п справедливы для х и наоборот.
Такой вывод следует непосредственно из выражений (2.37),
(2.38) и (2.40).
2.7.3. Спектры сигналов в базисе Уолша
Сигнал, описываемый интегрируемой функцией s(t) и опреде-
ленный на интервале [О, Т], можно разложить в обобщенный ряд
Фурье по функциям Уолша
s(t) = ^cnwal(n,t/T),O<t/T<}, (2.47)
л-0
где
1
сп = 1/rjs(f)iva/(n,f/T)df.
о
Совокупность коэффициентов сп представляет спектр сигнала в
базисе Уолша или спектр Уолша. При вычислении спектров Уолша
выражение для сп целесообразно представить несколько в иной
форме. Разобьем интервал значений t/T на N участков, в пределах
которых функция wal(n,t/T) постоянна. С учетом этого выражение
для сп запишем в виде
53
Раздел 2
Д/-1^ + 1
cn=-^ ^s(t)wal(n,t/T)dt. (2.48)
Т k -Q tk
Из (2.48) получим
д/-1 tk+1
сп=~У^wal(n,k/N) Js(t)dt. (2.49)
T k=0 tk
С учетом того, что функции Уолша равны ±1, выражение (2.49)
запишем в виде
tk+i
сп = -^~^ап{к} !sWdt’ (2-50)
' k=0 tk
где an(k) = 0 или 1, определяет знак функции Уолша на интервале
^к = ^+1 ~ tk-
Примеры спектров Уолша.
1. Спектр Уолша прямоугольного импульса s(t) = 1, 0 < t < т
(рис. 2.9)
Из (2.50) находим
1 Л/-1
Сп=7^(-1)ал(Мд^-
1 к=0
Спектр Уолша прямоугольного импульса зависит от соотноше-
ния между т и Т. При т/ Т - 2V, где v - целое положительное число,
с учетом значений функций Уолша получим
cn=1/2v,n = 0,1,...,2v-1.
s(0 = —2^/(n,f/T)
Разложение прямоугольного импульса по функциям Уолша име-
ет вид
4 2V-1
,0< t<T.
Спектр состоит из 2V составляющих с одинаковыми амплитуда-
ми, равными 1/2V. Спектр содержит конечное число составляющих.
При т/Т* 2V структура спектра изменится.
54
Обобщенный спектральный анализ сигналов
s(t)
Сп
1
1
........ " >»
О т t
01 2 3 4 5 6 7 л
1=16
т
Сп
ih пш шиш п
012 15 п
Рис.2.9
2. Спектр Уолша треугольного импульса (рис. 2.10)
При описании треугольного импульса
s(f) =
t/T,0<t<T/2
1-t/T,T/2<t<T
удобно перейти к безразмерному времени х = t/T
s(x) =
fx,0<x<1/2
[1-х, 1/2< t<1
В соответствии с (2.50) находим:
О п
55
Раздел 2
Рис. 2.10
1/2 1
с0 = Jxdx + J(1-x)dx = 1/4,
0 1/2
1/2 1
q = J xdx - J(1 - x)dx = 0,
0 1/2
1/4 1/2 3/4 1
c2 = ^xdx- Jxdx- J(1-x)dx+ J(1-x)dx = -1/8
0 1/4 1/2 3/4
Cg = C4 — Cg — 0, Cg = 1/16.
Спектры Уолша при нумерации Хармута и Пэли изображены на
рис.2.10, бив.
3. Спектр Уолша синусоидального импульса (рис. 2.11)
Для синусоидального импульса
s(f) = sinyf, 0< t <Т,
переходя к безразмерному времени х = t/T, запишем
s(x) = sin7rx, 0< х<1.
Из (2.50) в системе Хармута находим (рис. 2.11):
1
с0 = JsinTtxdx =
о
2.
п ’
56
Обобщенный спектральный анализ сигналов
Сп
2...
к
Рис. 2.11
П—«Л.X., ||.| Хину—у—JL—
01 2 4 17b
в)
1/2 1
= J sin nxdx - J sin nxdx = 0;
0 1/2
1/4 3/4 1
C2 = |Sin7TXC/X- |Sin7TXC/X+ fsinnxc/x = —(1-V2);
J J J n
0 1/4 3/4
C3 = C5 = C7 ~ 0’
2 Л 77 ?
c4 = —(1-2cos—+ 2sin—) = —0,089;
n 8 8л
2 i— л л 2
c6 = —(1 + V2-2cos—-2sin—) =—0,198.
л 8 8л
Спектры Уолша рассматриваемого сигнала при нумерации Хар-
мута и Пэли приведены на рис.2.11,6 и в.
2.7.4. Свойства спектров Уолша
При анализе сигналов с использованием функций Уолша полез-
но учитывать свойства разложения сигналов в базисе Уолша -
спектров Уолша.
1. Спектр суммы сигналов равен сумме спектров каждого из сиг-
налов.
Спектр сигнала в системе функций Уолша определяется коэф-
фициентами разложения (2.47). Для суммы сигналов коэффициен-
ты разложения определяются выражением
57
Раздел 2
N
сп — п — 0,1,2,...,
к=0
(2.52)
где апк- коэффициенты разложения сигнала sk(t).
2. Умножение сигнала на функцию Уолша с номером П изменяет
номера коэффициентов разложения ск по закону двоичного сдвига
по модулю два
s(t)wal(n,t/T) = ^~ckwal(k@ n,t/T) = ^ck9nwal(k,t/T). (2.53)
k=0 k=0
3. Спектр Уолша произведения сигналов srft) и s2(t). определен-
ных на интервале [0, 7) и имеющих спектры с1к,ск , равен
оо со
Сп = ^Ск°2п®к •
k=0 к0
4. Свертку сигналов sf(t) и s2(t)
т
s(t) = J S|(t- T)S2(T)t/t
о
можно представить в виде
оо
s(O = T^cJc^ ,
k=0
(2.54)
(2.55)
(2.56)
где с1к,ск - спектры Уолша сигналов Sj(t) и s2(t).
Рассмотренные разложения по ортогональным системам при-
менимы к любым функциям, удовлетворяющим некоторым услови-
ям, сформулированным ранее. Они могут использоваться как при
анализе сигналов, так и их характеристик. Ряды с ограниченным
числом членов могут рассматриваться как аппроксимирующие. Ко-
эффициенты разложения, определенные как коэффициенты Фурье,
обеспечивают оптимальность такой аппроксимации.
58
Раздел 3.
ГАРМОНИЧЕСКИЙ АНАЛИЗ СИГНАЛОВ
В основе гармонического анализа детерминированных сигналов
лежит представление временной функции, описывающей сигнал, в
виде тригонометрического ряда Фурье или ее интегральное преоб-
разование Фурье - сигнал рассматривается как бесконечная или
конечная совокупность гармонических составляющих. В радиотех-
нике из всех видов спектрального анализа сигналов гармонический
анализ получил почти исключительное применение. Поэтому поня-
тия спектральный и гармонический анализ часто имеют одно со-
держание. Широкое применение гармонического анализа при опи-
сании сигналов объясняется рядом причин, главные из которых
связаны с распространением гармонических колебаний в природе и
простотой аппаратурной реализации методов их анализа.
3.1. Гармонический анализ периодических сигналов
Гармонический анализ периодических сигналов основан на раз-
ложении временной функции s(t), описывающей сигнал с периодом
Т и частотой со1 = 2л/Т, по ортогональной системе тригонометри-
ческих функций {cosnahf, sinner ф Для периодической функции s(t)
тригонометрический ряд Фурье имеет вид
s(f) = — + ^(апcos+ bn sin лю.
л=1
Коэффициенты ряда определяются выражениями
2 т/2 2 7/2
ап=— Js(t)cos лсо }tdt; bn=-~ j*s(f)sin поз }tdt.
-Т/2 -Т/2
(3.2)
Функция s(t) должна быть квадратично интегрируемой на ин-
тервале периодичности [-Т/2, Т/2\. Такие функции описывают пе-
риодические сигналы с ограниченной мощностью.
59
Раздел 3
Для четной функции s(t), как это следует из (3.2),
„ Т/2
4 г / \
ап = — s(f)cos лю Jdf, bn = 0, (3.3)
о
для нечетной функции s(t):
4 7/2
an=0; bn =— Js(f)sinnco ddt. (3.4)
о
Обычно при анализе сигналов используется разложение s(t)
в виде
s(0 =
со
^2>4nCOs(niD J + ФП
Л=1
где
4)=^; 4 = + <pn = -arctg^-.
ап
(3-5)
(3-6)
Периодический сигнал представляется в виде суммы гармони-
ческих составляющих с амплитудами Ап и начальными фазами фл.
Совокупность амплитуд {Дп} определяет амплитудный спектр,
а совокупность начальных фаз {фп} - фазовый спектр сигнала
(рис.3.1,а). Как следует из (3.5), спектры периодических сигналов
являются дискретными или линейчатыми, интервал дискретизации
по частоте равен частоте сигнала = 2л/Т .
Тригонометрический ряд Фурье можно записать в комплексной
форме
s(f)=£c„e"M’', (3.7)
П = СО
где
Т/2
с„=- js(t)e (3.8)
-Т/2
Переход от (3.1) к (3.7) очевиден с учетом формулы Эйлера
е1ш f =cosa)f + /sina)f. (3.9)
60
Гармонический анализ сигналов
Фл
а)
Рис.3.1
Коэффициенты сп в общем случае являются комплексными ве-
личинами
сп = |сл| = Re[cJ+ /1т[сл]. (3.10)
При использовании комплексной формы ряда Фурье сигнал оп-
ределяется совокупностью комплексных амплитуд {сл}. Модули
комплексных амплитуд |сл| описывают амплитудный спектр, аргу-
менты <рл - фазовый спектр сигнала (рис. 3.1,6).
Представив (3.8) в виде
Т/2 Т/2
сл=— s(t)cos гкд }tdt - i — Js(f)sin лсо-jfctt, (3.11)
-Т/2 -Т/2
получим
Т/2 Т/2
Re[cn] = — |s(f)cos nco^df; lm[cn] = — . (3.12)
-Т/2 -Т/2
Как следует из записанных выражений, амплитудный спектр об-
ладает четной, а фазовый - нечетной симметрией
61
Раздел 3
|^п| |^~ п\> Фп Ф-Л’
Из сопоставления выражений (3.2) и (3.11) следует
an=2Re[cJ; bn = - 2lm[cn]; /4п = 2|сп|.
(3.13)
(3-14)
В качестве примера рассмотрим периодическую последователь-
ность прямоугольных импульсов (рис. 3.2,а). При разложении пе-
риодической последовательности прямоугольных импульсов в три-
гонометрический ряд Фурье из (3.2) получим амплитудный и фазо-
вый спектры в виде (рис.3.2,б):
Ап = |ап| = —y-|sinc neo /2|,
. Ьп
Фп = -arctg— =
ап
О, sine лсо /2>0,
±л, sincnco1Tu/2< 0.
При использовании комплексной формы ряда Фурье
сю
s(f)= ^спе^‘
из (3.8) следует:
Т/2 М
сп=— Г s(t)e^irK'3 'fdt =— [ е-/ла) = T0/Tsinc лсо, т0/2.
~J“ J ' ~J“ J V • i U f
-TI2 ~T'ui2
Амплитудный и фазовый спектры сигнала равны
|сп| = Ty/Tjsinc ти/2|;
0, sine лсо 1ти/2> 0,
± 7t, sine лсо ^ти/2 0.
Предельным видом ряда Фурье является интеграл Фурье. Пе-
риодический сигнал при Т->оо становится непериодическим. Под-
ставив (3.8) в (3.7), запишем
оо ( Т/2
s(r) = 21 Js(x)e“/nra
л=-оо^г/2
'Xdx einw 'f ю 1
2ti ’
(3.16)
где €ог = 2п/Т.
62
Гармонический анализ сигналов
о 2тг 4 л 6л (О
Ту Ти ти
б)
Рис. 3.2
Преобразуя (3.16), при Г-»оо (в этом случае со dw и лсо^со),
получаем
s(f) = [ е“'
Js(x)e K'>xdx
do.
(3-17)
В квадратных скобках записан интеграл Фурье, он описывает
спектральную плотность сигнала
S(co)= js(f) е K,tdt.
— сю
63
Раздел 3
Выражение (3.17) примет вид
s(t) = — f S(o>) е*’’ .
2л J
Записанные соотношения представляют прямое и обратное
преобразования Фурье. Они используются при гармоническом ана-
лизе непериодических сигналов.
3.2. Гармонический анализ непериодических сигналов
Прямое и обратное преобразования Фурье устанавливают вза-
имно однозначное соответствие между сигналом (временной функ-
цией, описывающей сигнал s(t) ) и его спектральной плотностью
S(co):
е K!ltdt, s(t)= — f S(co) o'® fcfco.
2л J
Соответствие по Фурье обозначим:
s(f) о S((d) .
(3.18)
(3.19)
Условием существования преобразования Фурье является аб-
солютная интегрируемость функции s(t)
J|s(f)| dt < оо.
— оо
(3.20)
В практических приложениях более удобным является условие
интегрируемости квадрата этой функции
оо
J s2 (t) dt < оо.
— оо
(3.21)
Для реальных сигналов условие (3.21) эквивалентно условию
(3.20), но имеет более очевидный физический смысл: условие
(3.21) означает ограниченную энергию сигнала. Таким образом,
можем считать возможным применение преобразования Фурье к
сигналам с ограниченной энергией. Это непериодические (импульс-
ные) сигналы. Для периодических сигналов разложение на гармо-
64
Гармонический анализ сигналов
нические составляющие производится с помощью ряда Фурье.
Функция S(co) в общем случае является комплексной
S(co) = Re[s(co)] + / lm[s(co)]; S(co) = |S(co)|eAp(w), (3.22)
где Re, Im - действительная и мнимая части комплексной величины;
|S(co)|, ф(со)- модуль и аргумент комплексной величины:
|S(co] = -^Re2 [s(co)] + Im2 [s(co)];
ф(со) = arctg
Im
Re
S(co)]
S(co)]
Модуль спектральной плотности сигнала |S(co)| описывает рас-
пределение амплитуд гармонических составляющих по частоте, на-
зывается амплитудным спектром. Аргумент (р(со) дает распределе-
ние фазы по частоте, называется фазовым спектром сигнала. Ам-
плитудный спектр является четной функцией, а фазовый спектр -
нечетной функцией частоты
|S(co)| = |S(- со)|; ф(со) = -ф(- со). (3.23)
С учетом формулы Эйлера (3.9) выражение для S(co) запишем в
виде
(3.24)
Если s(t)четная функция, то из (3.24) получим
(3.25)
о
Функция S(co), как следует из (3.25), является действительной
функцией. Фазовый спектр определяется как
, . [О, S(co))O,
ФИ = 1 7 X
[± 71, S(co) ( 0.
Для нечетной функции s(f) из (3.24) получим
(3.26)
(3.27)
о
65
Раздел 3
Функция S(co) является чисто мнимой, фазовый спектр
ф((о) =
тг/2, lm[s(co)]>0
-л/2, lm[s(co)]<O
(3.28)
Любой сигнал можно представить как сумму четной s4(t) и нечет-
ной sH(t) составляющих
(3.29)
Возможность такого представления становится ясной с учетом
следующих равенств:
S4 (?) = s4 (-t) = [s(?) + s(-t)] sH (?) = -sH (- ?) = ^ [s(?)- s(- ?)].
Из (3.24) и (3.29) получим
S(co) = 2J s4(?)cosco tdt - /2J sH(?)sinco tdt.
о 0
(3.30)
Следовательно, для действительной и мнимой частей спек-
тральной плотности сигнала можно записать:
Re[s(o))] = 2J s4(?)cos w tdt; lm[s(w)] = -2J sH(?)sin «tdt.
о о
Таким образом, действительная часть спектральной плотности
представляет преобразование Фурье от четной составляющей,
мнимая часть - от нечетной составляющей сигнала. Действитель-
ная часть комплексной спектральной плотности сигнала является
четной, а мнимая часть - нечетной функцией частоты.
Спектральная плотность сигнала при а) = 0
оо
s(o)= Js(?)c/?
— оо
(3.31)
равна площади под кривой s(?).
В качестве примеров получим спектры некоторых сигналов.
1. Прямоугольный импульс (рис. 3.3,а)
66
Гармонический анализ сигналов
Тц 0 t
2 2
Рис. 3.3
где ти - длительность импульса.
Спектральная плотность сигнала
2
S(w)= Je~,<ofc# = ти sine соти /2 .
2
67
Раздел 3
Графики амплитудного и фазового спектров сигнала приведены
на рис. 3.3,б,в.
2. Сигнал, описываемый функцией
fn-1
s(t) = ----e~at, t>0, л = 1,2,....
(л-1)!
Спектральная плотность сигнала определяется выражением
Интегрируя по частям л-1 раз, получаем
S(«) =--------le^a+k^dt = -—, л = 1,2,....
(a + /со) J (a + /«)
Сигнал (рис. 3.4,a)
s(t)=eat, t>0
имеет спектральную плотность
S(w) =
a+ /to
Г рафики амплитудного и фазового спектров изображены на рис.
3.4,б,в.
Сигнал (рис. 3.5,а)
s(t)=te~at, t>0,
имеет спектральную плотность
S(“) = ^-LV
(а + код
Графики амплитудного и фазового спектров - рис. 3.5,б,в.
Число примеров увеличивает табл. 3.1.
Сравнение (3.18) и (3.8) показывает, что спектральная плотность
одиночного импульса при т«Т отличается от коэффициентов ряда
Фурье периодической последовательности импульсов только мно-
жителем 1/7".
68
Гармонический анализ сигналов
Рис.3.4.
С учетом указанного соотношения определение спектра периоди-
ческого сигнала в ряде случаев можно упростить, используя преобра-
зование Фурье (3.18). Коэффициенты ряда Фурье находятся как
cn=ys(na)i)> (3.32)
где S(co) - спектральная плотность одного импульса.
Таким образом, при определении амплитудного и фазового
спектров периодических сигналов полезно иметь в виду следующие
равенства:
2
Ап = 2|cn| = y|S(na)1)|; фп=<р(по)1). (3.33)
69
Раздел 3
Коэффициент 1/7“ может рассматриваться как интервал частот
между соседними составляющими спектра, а спектральная плот-
ность как отношение амплитуды составляющей сигнала к интерва-
лу частот, которому соответствует амплитуда. С учетом этого ста-
новится более понятным термин «спектральная плотность». Не-
прерывные амплитудный и фазовый спектры одиночного импульса
являются огибающими дискретных амплитудного и фазового спек-
тров периодической последовательности таких импульсов.
С помощью соотношений (3.33) результаты, приведенные
в табл. 3.1, можно использовать для определения спектров перио-
дических последовательностей импульсов. Такой подход иллюст-
рируют следующие примеры.
70
Гармонический анализ сигналов
Рис.3.6
1. Периодическая последовательность прямоугольных им-
пульсов (табл. 3.1, п.1), рис. 3.2.
д _ ^Ти
- -г
ПО) iT.,
Sine------—
2
sine
гтти
Фп =
О,
гтх..
sme-----±
. ппхи п
±71, Sine-----<О.
2ти
Записанное выражение повторяет результат примера п.3.1.
2. Периодическая последовательность меандровых импульсов
(табл. 3.1, п.2), рис. 3.6, рис. 3.2.
71
Раздел 3
. 8 . 2 ПО)^,. 4 . 2 77ЯТ.. 71
Ап =------Sin ---— =----Sin ----- , Фп = —
п пщТ 4 пл 4 п 2
3. Периодическая последовательность экспоненциальных
импульсов (табл. 3.1, п.8), рис. 3.7.
2 2
Т^о2 + л2о) 2 yJa2T2 + 4тг2л2
4 2кп
Фп = -arctg—
Рис. 3.7
72
Гармонический анализ сигналов
Таблица 3.1.
Сигналы и их спектры
№
п/п
s(f) = ^— j S(w)e'll,! cfco
— оо
1
2
3
73
Раздел 3
7
-1,00 -0,50 0,00 0,50 1,00
-1,00 -0,50 0,00 0,50 1,00
-5,00 -2,50 0,00 2,50 5,00
s(t}-sec h2(at)
74
Гармонический анализ сигналов
№
п/п
s(f) = ~~ J S(bi)eKotcfco
8
s(t) = е at, f > О
9
10
s(t) = e at - e bt, t>Q
s(t) = teat, t > 0
1
(a + kof
75
Раздел 3
№
п/п
S(co)= Js(f>
s(r)=f2e-»', Г>0
(a + ла)3
76
Гармонический анализ сигналов
77
Раздел 3
3.3. Частотные спектры сигналов, представленных
в виде обобщенного ряда Фурье
При представлении сигнала в виде обобщенного ряда Фурье
полезно иметь преобразование Фурье базисных функций. Это по-
зволит от спектра в базисе различных ортогональных систем пе-
рейти к частотному спектру. Ниже приведены примеры частотных
спектров некоторых видов сигналов, описываемых базисными
функциями ортогональных систем.
1 .Сигналы Лежандра.
Преобразование Фурье многочлена Лежандра (разд. 2) имеет вид
(3.34)
л = 1,2, ... - многочлен Лежандра; /л+1 (со) - функция Бесселя.
Т
Используя (3.34), от сигнала, представленного в виде ряда
со
sW=£c„P„(f)
л=0
78
Гармонический анализ сигналов
с коэффициентами
-1
можно перейти к спектральной плотности сигнала
S(to) = cnSpn(a)). (3.35)
л=0
Выражение (3.35) описывает спектральную плотность сигнала
s(f) в виде ряда.
Графики составляющих спектра с номерами 1 - 3 приведены на
рис.3.8.
2. Сигналы Лагерра.
Преобразование Фурье функции Лагерра имеет вид
00 / . , \ п
sln(a))=p„(f)e-“'df = [^|] —(3.36)
J ^кл + у2) /cd-+-1/2
где
/ (А-—е'/2—
1 т dr>
п = 1,2, ... - функции Лагерра.
Используя (3.36), от сигнала, представленного в виде ряда раз-
ложения по многочленам Лагерра (разд. 2)
п=0
с коэффициентами
о
можно перейти к спектральной плотности сигнала
S(to) = ^cnSln(w). (3.37)
nO
79
Раздел 3
Рис.3.8
3. Сигналы Эрмита.
Преобразование Фурье функции Эрмита имеет вид
Shn(co) = J hn(t)e~^dt = (- /)пл/2л/7п(со),
(3.38)
где
80
Гармонический анализ сигналов
п= 1,2, ..функции Эрмита.
Из (3.38) следует, что функции Эрмита обладают свойством
трансформируемости, т.е. функции и их преобразования Фурье
равны (с точностью до постоянных коэффициентов). Используя
(3.38), от сигнала, представленного в виде ряда разложения по
многочленам Эрмита
оо
s(t)=^cnhn(t)
п=0
с коэффициентами
оо
cn = \s(t)hn(t)dt,
о
можно перейти к спектральной плотности сигнала
(3.39)
п-0
4. Сигналы Уолша.
Частотные спектры сигналов Уолша (сигналов, описываемых
функциями Уолша) определяются следующим преобразованием
Фурье:
1
= J wal(n, x)e~K,'xdx,
о
(3.40)
где wal(n,x) - функция Уолша.
Так как функции Уолша имеют Л/участков постоянных значений,
то
(3-41)
/с=0 Xk k=Q Xk
где Хд,- значение хна k-ом интервале.
81
Раздел 3
Из (3.41) получим
Swn(o))= ^Twal(n, xkfi.xk sine (l)A-k е~к^Хк+Хк^2, (3.42)
к-0 2
где &хк = хк+1 - хк.
Так как функции Уолша принимают значения ±1, то (3.42) можем
записать в виде
/V-f a п(к)
3„п((о) = У (-1) (3.43)
к=о 2
где ап(к) = 0или 1 определяет знак функции wal(n,xk).
На рис. 3.9 приведены графики амплитудных спектров первых
шести сигналов Уолша.
3.4. Спектры сигналов, описываемых
неинтегрируемыми функциями
Преобразование Фурье существует только для сигналов с ко-
нечной энергией (для которых выполняется условие (3.21)). Расши-
рить класс сигналов, анализируемых с использованием преобразо-
вания Фурье, позволяет чисто формальный прием, основанный на
введении понятия спектральной плотности для импульсной функ-
ции. Рассмотрим некоторые из таких сигналов.
1. Импульсная функция.
Импульсная функция (или 5 - функция) определяется как
-о (344)
Из определения импульсной функции следует ее фильтрующее
свойство
оо
^(t-t0)s(t)dt = s(t0). (3.45)
— со
Спектральную плотность импульсной функции определим как
S(ro) = ^(t-t^e'^dt = e^)to. (3.46)
82
Гармонический анализ сигналов
|w0(w)|
201
15-=
13
|W3(C0)|
12q
8:
Рис.3.9
Амплитудный спектр равен единице, фазовый спектр
ф(о)) = -со t0 (рис. 3.10).
Обратное преобразование Фурье дает
оо оо оо
5(f-t0) = -l [s((o)eb,ato=— feb(f ,o)oto=— f (3.47)
2л J 2л J 2л J
— oo —oo —oo
83
Раздел 3
s(t)
Рис. 3.10
По аналогии с (3.47) для частотной области запишем
оо оо
J_ =J_ [e'^^dt.
2л J 2л J
(3.48)
Используя полученные выражения, определим спектральные
плотности некоторых видов сигналов, описываемых функциями,
для которых не существует преобразования Фурье.
2. Постоянный сигнал s(t)=s0 .
С учетом (3.48) получим (рис. 3.11)
S(co) = Jsoe Katdt = $02л8(«).
— оо
(3.49)
3. Гармонический сигнал.
s(t)= U0cos(w0f + (p) = -^-(eKU°'e*₽ + е w°fe *₽). (3.50)
Спектральная плотность сигнала получится с учетом (3.48)
S(co)
Рис. 3.11
84
Гармонический анализ сигналов
S(oj) = л (со - а)0) + л Voe кр8 (со + соо).
При (р = 0 (рис. 3.12)
8(со) = л 1/08 (ад - а)0) + л У08 (со + а)0).
Для сигнала
s(f) = VQsina)of
по аналогии с (3.52) найдем
S(co) = -/л 1/08 (о) - о)0) + /л 1/08 (со + о)0).
4. Единичная ступенчатая функция.
(3-51)
(3.52)
(3.53)
(3.54)
(3.55)
1,
О,
t >0,
t <0.
Единичную ступенчатую функцию o(f) будем рассматривать
как предельный вид экспоненциального импульса
o(f) = lim e“af, t > 0 .
<z->0
Экспоненциальный импульс представим в виде суммы четной и
нечетной составляющих (3.29)
eut = s4(t)+sH(t). (3.56)
При a -» 0
s4(t) —1/2 для всех значений t;
-0,5, t<0.
85
Раздел 3
Действительная часть спектральной плотности соответствует
четной составляющей сигнала, мнимая часть - нечетной состав-
ляющей. Переходя к пределу при а -» 0, получим
s4(t)<^> 0,58(a),),
/со
Таким образом,
о (0*-* 0,58 (со)+ —
ко
(3.58)
(3.59)
где символ соответствия по Фурье.
Спектральные плотности некоторых сигналов, описываемых
неинтегрируемыми функциями из наиболее часто встречающихся
на практике, приведены в табл. 3.2.
Таблица 3.2.
Спектральные плотности неинтегрируемых функций
№ п/п s(f) S(co)
1 1 2n8(f)
2 3(t) 1
3 sO±t0)
4 sign(t) 2 ko
5 o(f) O,58(co) + — to
6 COSO)0/ sincoof л8(со - coo) + л8(со + coo) - m:8(co - coo)+ отб(со + coo)
86
Гармонический анализ сигналов
3.5. Свойства преобразования Фурье
и их использование при анализе сигналов
3.5.1. Свойства преобразования Фурье
При анализе сигналов полезно учитывать свойства преобразо-
вания Фурье. Основные из них следующие.
1. Аддитивность.
Спектр суммы сигналов равен сумме спектров сигналов, т.е.
k}s^(t) + k2s2(t) +... + knsn(t)^> к^((л) + k2S2(ca) + ...knSn[(a), (3.60)
где С-» - символ соответствия по Фурье,
S2(f) ^2 (tt)),'...Sn(w).
2. Смещение во времени.
Сигнал при смещении на время t0 определяется выражением
s2 (О = si (t ~ to)= ~ f ^1 (со) е f° = —
2V 7 1V 07 2л J 1V 7 2л
где ^-смещение сигнала во времени.
Таким образом,
s(t-t0)<^> S^coje |S1(co)|e^<₽ ю'°).
S1 (co) e
-ы0
(3.61)
Как следует из записанных выражений, спектр сигнала, запаз-
дывающего на время t0, равен произведению спектра исходного
сигнала и множителя запаздывания е“'ю,° . Амплитудный спектр
такого сигнала равен амплитудному спектру исходного сигнала, фа-
зовый спектр - сумме фазового спектра исходного сигнала и ли-
нейной функции времени (рис. 3.13).
3. Изменение масштаба времени.
При сжатии (растяжении) сигнала во времени s2(t)=s}(kt)
(рис. 3.15) спектр определяется выражением
S2(oj)= Js2(Oe K>tdt= Js,(/rf)e ™*dt.
Переходя к новой переменной, получаем
87
Раздел 3
Рис. 3.13
s(t)e~^ktdt
или
' S2 (со) = — S| (со/к), s(kt)
к
^/к).
(3.62)
Таким образом, сжатие (расширение) сигнала в к раз приводит
к расширению (сжатию) его спектра в к раз (рис. 3.14).
4. Смещение спектра сигнала.
Если спектр сигнала смещен по частоте на величину со, то
оо оо
S2((o)= S1(co-coo)= .
88
Гармонический анализ сигналов
Таким образом,
S(oj-o)o), (3.63)
т.е. произведению сигнала на множитель фазового сдвига
соответствует смещение всех составляющих спектра по частоте на
величину соо.
5. Дифференцирование и интегрирование.
Для первой производной s(t) имеем
= — [S(co)— )dco = — [ /соS((o)e^cka .
dt 2л J v 7 сУГ ’ 2л J v
— oo —oo
Для n -й производной получим
dns(t) 1 fz. V7 / X
----— = — (/gj S((o) e cka ,
dtn 2л J 7 v ’
— oo
т.е. дифференцированию n раз сигнала no t соответствует умно-
жение спектра на (b)n
' <-> (ко) S(co) . (3.64)
Аналогично для интеграла от s(f)
оо
s2(f) = ^(t)dt
о
получим
S2((o) = — SJoj). (3.65)
/(О
6. Произведение двух сигналов.
Для сигнала, равного произведению двух сигналов
s(0 = Si(0s2(O
89
Раздел 3
запишем
S(co) = Js(f)e шс# = Js^fJsgWe K,itdt.
— oo — oo
Подставляя в записанное выражение
оо
Sg (f) — — Г Sg (co) e ch)
2n J
получаем
dx
В полученном выражении имеем
j s1 (t)e x^dt - S1 (cd - x).
— oo
Спектральная плотность произведения двух сигналов определя-
ется как
Таким образом,
S-, (t(t) — f S2 (x)S-j (co — x)dx — — Si (co) ® §2
2л J 2л
—oo
(3.66)
где ®- символ свертки; спектр произведения двух сигналов равен
свертке их спектров с коэффициентом 1/2я.
Аналогично можно показать, что произведение двух спектров
S|((d)S2(со) соответствует свертке функций s^f) и 82(f)
оо
S1 (a))S2 (ш) J s1 (T>1(f-T)dr = s1(f) ® s2(f),
— 00
(3.67)
7. Корреляционная функция сигналов.
90
Гармоническийанализ сигналов
Для интеграла
оо
J s, (т) s1 (f + x)dt,
— оо
где т - смещение во времени, по аналогии с (3.66) получим
S? (co)S2 (со).
Таким образом,
оо
J s1 (т) Si (t + x)dt (u))S2 (co). (3.68)
Для s1(f)=s2(f) = s(f) имеем
(3.69)
Величина |S(w)|2 = И/(со) представляет спектральную плотность
энергии сигнала. Таким образом, корреляционной функции сигнала
соответствует спектральная плотность энергии.
При т = 0
js2(f)tf = ^ j|S(to)|2db). (3.70)
—оо —оо
Выражение (3.70) представляет равенство Парсеваля. Каждая
часть равенства описывает энергию сигнала.
Основные свойства преобразования Фурье отражены в табл. 3.3.
Таблица 3.3.
Свойства преобразования Фурье
№ п/п -{-©о s(t) = 1/2л Js(a)/)e'wt dw -оо S(a))= Js(OeiMt dt
1 s(t) |S(co)| = |S (-<o)|, argS(a)) = - argS(-co)
91
Раздел 3
№ п/п s(t) -1 /2л JS(co) е'“‘ ch S(co) = Js(?)eiwt dt -oo
2 s(t) = s(-t) 4 oo S(co) = S(-co) = 2 J s(t) cosco? dt -oo
3 s(t) = - s(-t) S(co) = - S(-co) = -/2 Js(?)sinco? d?
4 kiSi (t) ± kzS2 (t) kiSi (ш) ± k2S2 (w)
5 s(at), a > 0 1/a S (ш/а)
6 s (t ± t0) S((j))e±k,)t°
7 s(t)e±h)ot S(co ± coo)
8 S(at)et*’,°l, a > 0 I a j
9 fs(t) U}n dnS№ dwn
10 dns(t) dtn (K,))nS(w)
11 j s(t )dt 1/КО S ((й)
12 s.(t)s2(t) 1 / 2л J S^x) S2(co - x) dx = — oo = 1/2nJS^co- x) S2(x)dx = = 1/2nS/co;®S2fco;
92
Гармонический анализ сигналов
№ п/п -f-oo s(t) =1/2л Js(w)el")t Л) S(w)- Js(f)e’iwt dt -oo
13 J Si(t)s2(t + x)dt S 1 (di) S2 (di)
14 J s^(x)s2(t-x)dt = + co = ^s1(t-x)s2(x)dx = Si (di) S2 (di)
3.5.2. Примеры использования свойств преобразования Фурье
при определении спектров сигналов
1. Сигнал, изображенный на рис. 3.15.
Спектральная плотность прямоугольного импульса единичной
амплитуды, симметричного относительно начала координат, опи-
сывается выражением
S(u))= ти sinc^^-,
v ’ и 2
где ти - длительность импульса.
Сигнал можно рассматривать как совокупность (сумму) двух
прямоугольных импульсов. Используя свойство 1, запишем
93
Раздел 3
S(co) = S| (co) + S2 (to)
С учетом свойства 2 и решения примера 1 п. 3.2 получим
S(to) = 1/1ти1 sine еМХи^2 + 1/2ти2 sine е-т^/2.
Амплитудный и фазовый спектры определяются выражениями
| S(w)| = ^Re2[s(w)] + lm2[s(to)]; ф(ад) = arctg >
где
п [/->/ \1 ।/ • torui (пт.и .. . шт..? torи2
Re[S(to)j = sine —~ cos —+ 1/2ти2 sine cos ,
lm|S(to)j = V{iuA sine —sin—£ - 1/2ти2 sine sin .
2. Периодический сигнал.
Используя выражение для спектральной плотности гармониче-
ского сигнала, определяем спектральную плотность периодического
сигнала. Периодический сигнал s(t) представим в виде ряда Фурье
s(t) = 4/2 + Ап cos(n^t + фл) = ^спе1Пш^,
Л = 1 Л=-°°
(3.71)
где ад1 - частота сигнала.
Преобразование Фурье (3.71) дает
S(to) = Aq л5(ад) + Ап7че*₽п ) +
е ^5(w+ nwj
(3.72)
Л=1
или
ОО
(3.73)
Таким образом, спектральная плотность периодического сигнала
представляет бесконечную сумму импульсных функций, умножен-
ных на соответствующие коэффициенты и расположенных на час-
тотах, кратных частоте сигнала.
94
Гармонический анализ сигналов
3. Произведение сигнала и гармонического колебания.
u(t) = s(t)cos(w0t + 0)= 5(г)^(ею,о/ей + е^”о/ей). (3.74)
Преобразование Фурье левой и правой частей (3.74) с учетом
п.8 табл. 3.3 дает
е/0 е~,в
Su (ы)= ~ (|)о)+..... S(co + о)0). (3.75)
При 0 = 0 (рис. 3.16)
1 1
Su (со) = — S(co — u)n) н— S(u) + u)0)
2 2 . (3.76)
Так, если s(f)= Ve "4 (рис. 3.17,а)
t/(f) = Ve~at cosu)0f,
из (3.75) получим
S (w) = v + v
и 2[а + /(со-соо)] 2[а +/'(о) + со0)]
Амплитудный спектр
2 2
|С / м _ ОС +0)
|SiAa)J V / 2 2v? >
Ца + соо - to ) + 4а со
s(cn)
95
Раздел 3
Рис.3.17
фазовый спектр
! 2 2 2^
а -ок, +0) w
a + u)q + w ) a
На рис. 3.17,6 изображены амплитудные спектры сигнала при
различных значениях w0.
4. Треугольный импульс.
При определении интеграла Фурье некоторых видов сигналов
часто удобнее сначала произвести дифференцирование сигнала,
найти преобразование Фурье производной, а затем перейти к пре-
образованию Фурье исходного сигнала. Удобство такого приема
связано с тем, что в результате дифференцирования некоторых
видов сигналов появляется последовательность импульсных функ-
ций, для которых известно преобразование Фурье. Метод приведе-
ния к импульсным функциям поясним на примере определения
спектра сигнала в виде треугольного импульса (рис. 3.18,а).
<
|f|stu/2,
> т„/2.
96
Гармонический анализ сигналов
г)
Рис. 3.18
Дважды продифференцировав функцию s(t), получим (рис. 3.18 б,в)
ds2(t) _ 2
dt2 ти
+ Ty/2)-25(f) + 5(f-Tu/2)].
Преобразование Фурье левой и правой частей записанного вы-
ражения дает
2
кжи кохи
е 2 -2 + е 2
где S(w) - спектральная плотность сигнала s(f).
После преобразования получим
= — sine
2
2 '
Ти(1)2 ч
. (>JTu
1 - COS---
2 )
Амплитудный спектр сигнала показан на рис.3.18,г.
2
97
Раздел 3
5. Пачки импульсов.
Пачки идентичных сигналов (импульсов) составляют достаточно
обширный класс сигналов, встречающихся в инженерной практике.
Поэтому спектральный анализ таких сигналов, помимо иллюстрации
методического подхода, представляет самостоятельный интерес.
Спектральная плотность пачки импульсов определяется как
сумма спектральных плотностей каждого из импульсов. При иден-
тичной форме импульсов, обозначив спектральную плотность пер-
вого импульса S0(o>), для пачки импульсов запишем
S(w) = So (<о)+ S„ (о>) е +... + So (ш) е ,
(3.77)
где Т - период следования импульсов в пачке; N - число импуль-
сов в пачке.
В (3.77) множитель е~КйТ учитывает смещение во времени каждо-
го последующего импульса по отношению к предыдущему. Из (3.77)
с учетом формулы суммы геометрической прогрессии получим
Q-iNwT _
S(co) = Sn(co)——=-
e"“r-1
или после преобразования
S(co) — So (со)
sin(/VcoT/2)
sin(co7/2)
-;(Л/-1)о)Т/2
(3.78)
При Л/ оо
S(co) — Sri (со) :—— .
(3.79)
С учетом (3.78) результаты, приведенные в табл. 3.1, можно ис-
пользовать для определения спектров пачек различных импульсов.
1. Пачка прямоугольных импульсов (табл. 3.1, п.1), рис. 3.19.
о/ \ 0)1
S(co) = T^sinc —
sin(A/(o7~ 2) е /(л/ 1 .г-2
sin(coT/2)
2. Пачка меандровых импульсов (табл. 3.1, п.2), рис. 3.20.
/ 4 Ып2 0Пи 3'П(Мо772) -/(Л/-1)о>Т/2
О \ — / — Olli--------------с?
со 4 sin(co7/2)
98
Гармонический анализ сигналов
3. Пачка треугольных импульсов (табл. 3.1, п.З), рис. 3.21.
ЧМ- т“ 4inX™«lsin(WwT/2)p-'(«-iM2
K-J\UL/ J — Oil tv ”/ \ Cz
2 4 J sin(u)T/2)
4. Пачка косинусоидальных импульсов (табл. 3.1, п.4), рис.3.22.
S(u)) =
2т.
Ц2т^ 1С0/ o)T^sin(AbT/2)
2л J I 2 J sin(coT/2)
е-/(Л/-1)а)Г/2
л
3.6. Спектральный анализ сигналов на основе
преобразования Хартли
Преобразование Хартли является одним из интегральных пре-
образований, которые могут найти применение при анализе сигна-
лов, представляет модификацию преобразования Фурье. Отличи-
тельная особенность преобразования Хартли состоит в том, что
оно является действительным интегральным преобразованием.
Практически для всех сигналов, для которых существует
преобразование Фурье, существует и преобразование Хартли.
99
Раздел 3
Рис. 3.21
100
Гармонический анализ сигналов
-ти/2 0 Tu/2 Т 2Т t
Рис. 3.22
3.6.1. Преобразование Хартли
Интегральные преобразования Хартли (прямое и обратное)
имеют вид
оо
Н(ш) = J s(f) casw tdt,
— оо
s(f) = ~ J /-/(cd) casco tdco,
(3.80)
(3.81)
где casx = cos x + sin x.
Прямое (3.80) и обратное (3.81) преобразования Хартли явля-
ются действительными и обладают взаимной симметрией.
Представляя сигнал как сумму четной и нечетной составляющих,
преобразование Хартли запишем в виде
Н((о) = Нч (w) + Нн (со) (3.82)
Если сигнал описывается четной функцией s4 (t), то из (3.80)
101
Раздел 3
получим
/7ч(со)= 2j*s4(f)cosco tdt (3.83)
о
Для нечетной функции sH(t) имеем
/7н(со) = 2JsH(7)sinсо tdt (3.84)
о
Сравнение выражений для преобразований Фурье и Хартли по-
зволяют установить взаимосвязь между ними - между /-/(cd) и S(cd) :
/-/(со) = Re[s(co)] - lm[s(w)], (3.85)
S(co) = Нч (со) - iHH (cd) .
Из (3.85) следует, что для сигнала, описываемого четной функ-
цией,
/7(cd)=S(cd) (3.86)
а для сигнала, описываемого нечетной функцией,
/-/(со) =-/S(co). (3.87)
Свойства преобразования Хартли отражены в табл. 3.4. Там же
для сравнения приведены соотношения, характеризующие свойст-
ва преобразования Фурье.
Таблица 3.4.
Свойства преобразования Хартли
№ п/п Сигнал s(0 Преобразование Фурье S(oi) Преобразование Хартли H(oi)
1 si(t) + s2 (0 Si(co) + 82(01) H^oi) + //2(01)
2 s(nt) 11n S (oi/n) 11n H ((!)lri)
3 s(-t) S(-oi) H (-oi)
4 S (t-to) S(oi) е’ы° sinoifo/-/(-oi)+cosoifo H(oi)
5 S (t) COSWof 1/2S(oi-oio)+ +1 /2S(oi+oio) 112 Н(в)-(л0)+1 /2 H(ai+oio)
102
Гармонический анализ сигналов
№ п/п Сигнал s(f) Преобразование Фурье S(co) Преобразование Хартли H(co)
6 Si (t)® s2 (t) ^(co^co) (1/2)H1(co)H2(co)-H1(-co)+ +Hi(co)H1(-co)H1(-co)bfe (co)]
7 Si (0s2 (0 1/2л Si(co)®S2(co) 1 /2(^(0))® H2((a)+Hf (-co) ®H2(co)+Hi (co)®H2(-co)~ (-co) ]
8 oo J s1 (f) s2(r + i) dt —oo №)|2 1/2[Нг(со) + H2 (-co)]
9 s'(t) icoS(co) -coH(-co)
10 s" (t) -co2S(co) -co2H (co)
3.6.2. Примеры преобразований Хартли некоторых сигналов
Особенности преобразования Хартли иллюстрируют следующие
примеры.
1. Прямоугольный импульс.
Р,пя симметричного прямоугольного импульса из (3.83) находим
(рис. 3.23)
V2
/7(ш) = 2 Jcoscofc/f = Tusinc((oru/2).
о
При смещении импульса на интервал т/2 его преобразование
Хартли определяется как
Ту
/7(ш) = JcasMtdt = (sinarru - coscor^ + 1)/ш.
о
2. Меандровый импульс.
Для меандрового импульса из (3.84) получим (рис. 3.24)
103
Раздел 3
-ти/2 0 ти/2
Рис. 3.23
Рис. 3.24
104
Гармонический анализ сигналов
/7(ш) = -2 sintofc# =-------------.
J (osin (odtu/4)
Рассмотрение преобразования Хартли, его особенностей, по-
зволяет сделать выводы о практике его применения при анализе
сигналов. Действительные величины, получающиеся при использо-
вании преобразования Хартли, дают определенные удобства при
анализе сигналов и расчете их характеристик на инженерном уров-
не. К удобствам преобразования Хартли следует отнести и его
симметричность.
Однако преобразование Фурье является более физичным -
в большей степени отвечает установившимся представлениям
о спектре как о совокупности гармонических колебаний. Преобразо-
вание Хартли дает разложение по сумме двух составляющих, одна
из которых сдвинута по фазе относительно другой на 71/2.
Преобразование Хартли приводит к более сложным выражени-
ям прежде всего для произведения и свертки функций. Указанные
операции встречаются довольно часто при анализе сигналов, и это
обстоятельство нельзя не учитывать.
105
Раздел 4
АНАЛИЗ СИГНАЛОВ НА ОСНОВЕ ПРЕОБРАЗОВАНИЯ
ЛАПЛАСА
При анализе прохождения сигналов через цепи широкое приме-
нение нашло преобразование Лапласа. Это объясняется, в част-
ности, тем, что класс функций, для которых существует преобра-
зование Лапласа, шире, чем тот, для которого существует преобра-
зование Фурье, а односторонность преобразования Лапласа при
анализе линейных цепей практически не накладывает дополни-
тельных ограничений.
Особенности преобразования Лапласа и его применение при
анализе сигналов описываются в настоящем разделе.
4.1. Преобразование Лапласа и его свойства
Преобразование Лапласа функции s(t) имеет вид
S(p) = ^s(t)eptdt, (4.1)
о
где р = о + ко - комплексная или действительная величина.
Интеграл Лапласа отображает функцию s(t) в функцию ком-
плексной переменной р. Функция s(t) называется оригиналом, S(p) -
изображением. Обратное преобразование позволяет вернуться во
временную область, перейти от изображения к оригиналу, описывае-
мому временной функцией. Соответствие функций по Лапласу обо-
значим тем же знаком, который использовался ранее при рассмот-
рении преобразования Фурье
s(f) <-^> S(p).
Операциям, проводимым над сигналами во временной области, со-
ответствуют операции в области комплексной переменной р.
В ряде случаев они оказываются проще, и перевод анализа в область
комплексной переменной р позволяет упростить анализ.
106
Анализ сигналов на основе преобразования Лапласа
Функция s(t), описывающая сигнал, является кусочно-
непрерывной, равна нулю при отрицательных значениях t. Условие
существования преобразования Лапласа устанавливается нера-
венством
\s(t)\<Meat, (4.2)
где Ми а - постоянные.
Неравенство (4.2) ограничивает скорость нарастания функции
s(t). При выполнении (4.2) интеграл (4.1) абсолютно сходится для
всех р, у которых Fte[p]>a.
Сравнивая преобразования Лапласа и Фурье, отметим, что если
преобразование Лапласа существует для функций, удовлетворяю-
щих условию (4.2), то для существования преобразования Фурье
требуется сходимость интеграла
J|s(f)| dt<^ (4.3)
о
Условие сходимости интеграла является более жестким. Таким
образом, если для функции s(t) существует преобразование Лапла-
са, то для нее не обязательно должно существовать преобразова-
ние Фурье. Условию (4.2) удовлетворяют, в частности, функции
cosatf и sincof (t > 0). Для них а можно положить равным нулю:
\s(t)\<M. Указанному условию удовлетворяет и степенная функция tn
(л > 0), так как такая функция растет медленнее er(lim tn/e! = 0 при
При равенстве действительной части р нулю (р = ка) интеграл
Лапласа переходит в интеграл Фурье для сигнала, обращающегося
в нуль при t < 0. Односторонность преобразования Лапласа часто
не ограничивает класс рассматриваемых сигналов, прежде всего
при анализе их прохождения через цепи.
При анализе сигналов с использованием преобразования Лап-
ласа полезно учитывать его свс.'ства. Они аналогичны свойствам
преобразования Фурье.
1. Аддитивность.
Если
«АО S,(p),s2(t) S2(p),
то
107
Раздел 4
k^(t) + k2s2(t) k&(p) + k2S2(p), (4.4)
где кь к2 - постоянные коэффициенты,
т. е. линейной комбинации оригиналов соответствует такая же
комбинация изображений.
2.Запаздывание.
s(t- tQ) <-> J s(t — t0)ep'dt
° (4-5)
= e~p?0 Js(f-fo)e~p(r~?o)d(f-fo) = S(p)ept°.
о
3. Подобие.
s(kt) Js(kt)ep,dt = 1/kJs(t)ep,/l<dt = l/kS(p/k). (4.6)
о о
4. Смещение.
eats(t) Jea,s(t)ep,dt - Js(t)e~{p~a}dt = S(p-a). (4.7)
о о
5. Дифференцирование оригинала.
s’(t) <-» Js(t)eptdt = - s(0) + pS(p).
о
Аналогично можно получить
s(n)(f) <-> ~s(n1)(0) - ps(n2)(0) -... - pn1s(0) + pnS(p). (4.8)
При s(0) = s(0) = S”(0) =... = s(n"1)(0)
s{n\t) <-» pnS(p). (4.9)
6. Интегрирование оригинала.
По аналогии с. п. 5 при s(0) = 0 получим
108
Анализ сигналов на основе преобразования Лапласа
оо
|s(0 dt <н> 1/pS(p).
о
(4.Ю)
7. Свертка функций.
Свертке функций h(t) и s(t) соответствует произведение изобра-
жений
t t
Jh(x)s(t-x)dx = Jh(t- x)s(x)dx H(p)S(p).
о 0
(4.12)
Произведению оригиналов соответствует свертка изображений
в комплексной плоскости.
Приведенные основные свойства преобразования Лапласа от-
ражены в табл. 4.1.
В качестве примеров рассмотрим преобразования Лапласа не-
которых видов сигналов. При этом будем предполагать, что функ-
ция, описывающая сигнал, при t < 0 равна нулю.
1. Сигнал s(t) = eat.
Преобразование Лапласа
S(p) = J eate pidt =
о
1
p-а ’
При а = 0 получим изображение ступенчатой функции
S(p) = 1/p.
Интеграл Лапласа для ступенчатой функции сходится при
Не[р} > 0.
2. Сигнал s(t) = sin о t = l/2i(e™! - е~™*).
Преобразование Лапласа получим с учетом результата первого
примера
S(p) =
CD
2 2"'
Р + СО
Для сигнала
s(t) = cos со t= 1/2(еы+е'ы)
109
Раздел 4
найдем
S(p)=
Р +0)
3. Прямоугольный импульс.
Рассматривая s(t) как разность ступенчатой функции и ступенча-
той функции, смещенной нат, с учетом результата первого приме-
ра получим
Таблица 4.1.
Свойства преобразования Лапласа
№ п/п s(0 = 1/2n/ Js(p)epfdp g-л» S(p) = ^s(t)eptdt 0
1 k^(t) + k2s2(t) k1S1(p) + k2S2(p)
2 s(t-tQ),tQ>0 S(p)e
3 s(kt),k>0 к к
4 ts(t) S(p)
5 eats(t) S(p-a)
6 s(n)(f) pnS(p) - pn 's{0) -... - s{n~}} (0)
7 J s(t)dt 0 ЭД p
8 J s1(x)s2(f - x)dx = s^t) ® s2(f) Sdp)S2(p)
S(p)~ —- — е =—(1-е рт).
Р Р Р
При задержке импульса относительно начала координат на
время t0 с учетом п.2 табл. 4.1 найдем
110
Анализ сигналов на основе преобразования Лапласа
S(p) = — (Т- е pz}e pt°.
Р
4. Периодическая последовательность прямоугольных им-
пульсов.
Используя свойства преобразования Лапласа - аддитивности и
запаздывания, получим преобразование Лапласа периодической
последовательности идентичных импульсов прямоугольной формы
в виде
S(p) = J_(1-e +рт ₽')е 2₽г+ ... =
Р Р Р
1 Т о -г 1 —
= _ (1- е-р*у-] + еРт + е"2рт +...) =----у-,
р p(1-ep')
где первое слагаемое представляет изображение первого прямо-
угольного импульса, второе - изображение прямоугольного импуль-
са, задержанного на время, равное одному периоду Т, и т. д.
5. Периодическая последовательность меандровых импульсов.
Решение получим аналогично решению предыдущего примера.
Число примеров преобразований Лапласа увеличивает табл. 4.2.
Таблица 4.2.
Сигналы и их преобразования Лапласа
№ п/п Оригинал, s (t) Изображение, S (р)
1 1 Vp
2 eat М p-а
3 COS(3)t р! р2 + to2
111
Раздел 4
№ п/п Оригинал, s (t) Изображение, S (p)
4 sinwt ш/p2 + co2
5 eat cosco t P-a \p ~ a) + co
6 eat sincot co (p-af +co2
7 t 1/ p2
8 e n!/p'7+1
9 feat n\ /(p-a)n'
10 t coscot „2 < ,2 p - CO /„2 , , ,212 \ p + CO )
11 t sincot 2pco [p2 + CO2)2
4.2. Обратное преобразование Лапласа
Переход от изображения S(p) к оригиналу - временной функции,
описывающей сигнал s(t), производится с помощью обратного пре-
образования Лапласа
а + А»
s(t) = ^— ^S(p)eptdp.
(4.13)
112
Анализ сигналов на основе преобразования Лапласа
Интегрирование в (4.13) происходит по любой бесконечной пря-
мой Re[p] = о, лежащей в области абсолютной сходимости интегра-
ла Лапласса от s(t).
Вычисление интеграла (4.13) производится с использованием
теоремы о вычетах:
СУ + A*' р/
s(f) = ~ js(p)e₽'dp = £Res[S(p)e₽';aJ, (4.14)
а-Ао ^=1
где ак - особые точки функции S(p)-, Res[f(z),a] - вычет функции f(z)
относительно точки а.
Суммирование в (4.14) производится по всем особым точкам.
В особой точке а предел функции f(z) либо равен бесконечности,
либо функция вообще не имеет предела. В первом случае эту точку
называют полюсом функции f(z) , во втором - существенно особой
точкой. Если точка z = а является полюсом функции f(z), то она яв-
ляется нулем функции l/f(z).
Рассмотрим применение (4.14) к достаточно общему случаю
описания сигналов в области параметра р простой рациональной
дробью
ад = ^£1,
ад
где А(р), В(р) - многочлены, степень многочлена А(р) меньше сте-
пени В(р).
Предполагается, что многочлены А(р) и В(р) не имеют общих кор-
ней, и дробь не сократима. Функция S(p) имеет конечное число осо-
бых точек. Эти точки являются нулями знаменателя В(р), следова-
тельно, полюсами функции S(p). Использование выражения для вы-
чета в полюсе любого порядка приводит к следующему выражению:
s(f) = V—?— lim [(p-ак)Пк -^^-ept]nK~1, (4.15)
^(^-1)!р=>а, к> В(р)
где ак- нули знаменателя В(р); пк- их кратность.
Формула (4.15) называется формулой разложения.
Знаменатель В(р) содержит множитель (р-ак)пк , и его можно
представить в виде
В(р) = (р-ак)л"В1(р). (4.16)
113
Раздел 4
Тогда
lim [(Р ~ ак)п*-------------ept ]Пк 1
р-^аК (р-ак)Пк В}(р)
г Ар) Pt, п^л
[В.(р) ip=a*
(4.17)
В том случае, когда полюсы простые, выражение (4.15) упроща-
ется
(4.18)
Если корнь знаменателя равен нулю, то В(р) можем представить
в виде
В(р) = рВ1(р), (4.19)
где Bi(Q)^ о.
С учетом (4.19) запишем
В'(р) = ВА(р) +рВ\(р). (4.20)
При этом 8(0) = 8^0), а В'(ак) = акВ (ак). При записи последне-
го равенства учтено, что В^Эк) = 0, так как все ненулевые корни
многочленов В(р) и В^р) совпадают.
Таким образом, получим
о, \ Ар)
S Р = ЪГТ
6р
-Лек „ S(t) ,A0)_ + y.W e.,t
рВ^Р) fy(Q) ^акВу{ак)
(4.21)
Сумма в (4.21) берется по всем ненулевым корням многочлена
В(р) или по всем корням В^р).
В качестве примера рассмотрим изображение
1
S(p) =
р(р + а)(р+Ь)
В записанном выражении имеем Д(р,)=1, В(р)=р(р+а)(р+Ь), В^р)-
=(р+а)(р+Ь). Производная В11(р)=(р+а)+(рч-Ь). Корни знаменателя:
р?=0, р2=-а, р3=-Ь.
В соответствии с (4.21), получим
s(t) = — + —-— eat + —— е bt
ab a(a-b) b(b~a)
114
Анализ сигналов на основе преобразования Лапласа
При нахождении оригинала по его изображению возможен
и иной подход, который наиболее часто используется в инженерной
практике. Он заключается в том, что выражение
S(P) = ^£1
ЕЦр)
раскладывается на простые дроби. Оригинал находится с помощью
известных формул однозначного соответствия оригинала и изобра-
жения, сведенных в таблицу. В частности, рассмотренное выше:
А/(р - a) Aeat.
Для условий приведенного выше примера запишем
ч 1 1111 11
S( р) —----------—------1------------1------------.
р(р+а)(р+Ь) аЬ р а(а-Ь)(р+а) Ь(Ь-а)(р+Ь)
Используя формулы соответствия для слагаемых, найдем
1 1 — at "1 — ht
s(t) = — +-----е +---------е ° ,
ab a(a-b) b(b-a)
что совпадает с ранее полученным результатом.
Сигналы (оригиналы), соответствующие наиболее часто встре-
чающимся преобразованиям Лапласа (изображениям) в виде дроб-
но-рациональных выражений, приведены в табл. 4.3. Более полная
таблица дана в [ 28 ].
Таблица 4.3.
Обратные преобразования Лапласа
дробно-рациональных функций
№ п/п Изображение Оригинал (сигнал)
1 1 Тр+1 ae~at, где а = у
2 1 Р(Тр+1) 1 - e“af, где а = у
3 тр+1 Р(Тр+1) 1 + (ат - 1)e "f, где а = у
115
Раздел 4
№ п/п Изображение Оригинал (сигнал)
4 тр-1 МТр+1) -1 + (ат + 1)е "', где а = у
5 1 р2(Тр+1) — (-1+ e-“f) +t где а = -1 а Т
6 тр + 1 р2(Тр+1) С(1 - ellt) +1, где С = т - —; а = — а Т
7 Ь^р2 + Ь^р+1 р2(7р+1) С, + C2e ut +t, где С, = Ь. - — ; а г Ь^2 +1 ~ 1 L/o — , IX — а Т
8 1 р3(Тр+1) 1 -at. t t2 1 __(1-е “f)— + ГДеа = - а а 2 Т
9 1 (Тр+1)2 a2te~at, где а = у
10 1 р(Тр +1)2 1-(1 + ат)е-"\гдеа = у
11 1 р2(Тр+1)2 — (-1 + e~“f) + ?(1 + е1'7), где а = а Т
12 1 р3(Тр+1)2 ч г г2 _±(1_e-^)_±(2 + e^f) + —, а а 2 1 где а - у
116
Анализ сигналов на основе преобразования Лапласа
№ п/п Изображение Оригинал (сигнал)
13 Р (Тр + 1)2 а2(1 - at)e~at, где a = у
14 тр + 1 (Тр + 1)2 а2[т + (1 - ат)?]е~“\ 1 где a = —
15 тр+1 р(Тр+ 1)2 1 - [1 + а (1 - ат)Г]е~аГ, где a - ~
16 Ь^р2 + Ь,р + 1 р (Тр + 1)2 1 + (С - Bt)e at, где С = в bQ-b,T + T2 1 S= ;а=г
17 1 (Тр+1)3 а3 Г2 _af 1 -у- е “г, где а = —
18 1 р(Тр+1)3 1 - (1 + at + Je"'11, где а = — 2 /
19 1 р2(Тр +1)3 3 t ,3 at2. -at + f + (— + 2t ч )e , a a 2 1 где a = у
20 р (Тр + 1)3 а3^(1--у)е““\гдеа = у
117
Раздел 4
№ п/п Изображение Оригинал (сигнал^
21 р2 с/2Г2 1 а3 (1 - 2af + —— )е "!, где а = —
(Тр+1)3
22 1 a4f3 -at 1 е , где а = — 6 Т
(7р+1)4
23 1 a2t2 a3t3 -at 1 - (1 + at + + —— )e , 1 где а = у
р(7р+1)4
24 Р а4 /х2 « t3 ч -at 1 -—(Г ——)е , где а = —
(Тр+1)4
25 р2 4/, а а2Г3. -at 1 a (t ~ar + )e ,гдеа = — 6 T
(Тр+Ъ4
26 рЗ ^Ci2t2 c/3f3 a4 (1 - 3af + )eaf, 2 6 1 где a = у
(Тр+^4
27 1 (e a’f eU2t),rpeak = 't '2 ' к
(7‘1р + 1)(7‘2р + 1)
28 Р qe aif -C2e
(7‘1р+1)(7‘2р+1)’ где Ту ф 1~2 I Uz ч , r (7-2-7;) c 1 a - 1 2 T2(T2-Ty)’ k Tk
118
Анализ сигналов на основе преобразования Лапласа
№ п/п Изображение Оригинал (сигнал)
29 тр+1 Сув^ + С2е“"2', р _ 7^ — т где 1 - ^(7- _т^> С - -а -А Т2(Ту-Т2) к тк
(WW)’ где Ту ф Т2
30 1 г? II I • Ф ,v- * 04 Ь~ S у К 1 1 . см Ь- V- Г" U04 1 в |, К 1 1 11 , СМ ф г— <5 ° и + § ср
pt^p+Mp+i)' где Ту ф Т2
31 тр+1 1 + Сува< + Ж"2', где Су = ; Ъ - Т2 С - ^~т-д - — 2 Ту-т2 к тк
p^p + W + l)’ где Ту ф Т2
32 ^р2 + Ь,р + 1 1 + Суе-а'( - C2e~azt, bQ-byTy+Ty2 где Су = ; Ту(Т2-Ту) С ^Ьо-ЬЛ + Т2 _ 1 Т2(Т2-Ту) к тк
р^р+ЖР+П’ где Ту ф Т2
33 1 - А + Сув^ - С2е a?t + t, где А = Ту + Т2; т-2 т-2 Г - Г - 2 Ту -Т2 2 Ту-т2 1 СХь —
р2(Т1р+1)(Т2р+1)’ где Ту ф Т2
119
Раздел 4
№ п/п Изображение Оригинал (сигнал)
34 1_ р3(Т,р+1)(Т2р + 1)’ где Т, * Т2 t2 А Bt +~ С,е С2е , где А = Tf + TJ2 + Т22; В = Г, + Т2; т-З т-З С = ' с _ 2 Т“ Т" ’ '""''2 ~Г "Г ’ '2 - /1 /2 - /1 1 ак = — 'к
35 1 (Т,р+1)(Т2р + 1)2' где Г, * Т2 С}е '+ (С2 + Bt)e-azt, п 1 где В = ; ад-то Т 1 C-i — С 2 — „ , о.к — (Тг-Т,? Г„
36 (Т,р+1)(Т2р + 1)2' где ф Т2 С.е~И1' + (С2 + Bt)e иг>, где В = - Т ; С --С - ~ Т a - 1 (T'-Trf тк
37 bQp2 + fyp + 1 (Т,р+1)(Т2р + 1)2’ где 7^ ф Т2 Ср и^ + (С2 + Bt)e "2', „ Ьо - Ь.Т2 + Т22 где в = ^---±-2 2-; С ^ьо~ь^ + т" 1 (Т.-ТР2^ ’ с - b0(T^2T2) + bJ2~TJ2 _ 2 (т2-тр2т2 1 «к = 7“ 1 к
120
Анализ сигналов на основе преобразования Лапласа
№ п/п Изображение Оригинал (сигнал)
38 1 р^р + Жр + П2' где 1} * Т2 1-0,6"^ + (С2 + Bt) e~azt, 1 Т2 где В = ; С. = 3—~; Ъ~Т2' 1 (T,-^)2’ _(2Т1-Т2)Т2 __ 1 2" (7,-Г,)2 ’“‘-7,
39 тр+1 tfWXW)2’ где 7; * Т2 1 + С.е^’ - (С2 + Bt)e~U2', п т-Т2 ~ (т - Г )Т, Гле в = 2—: С, = l-1-L- (Ъ-Т2)Т2' 1 (Т\-Т2)2' С - + ^2 ~ п = 1 (т,-^)2 Т„
40 bpp? + t\p + 1 M^p + IXT^+I)2’ где 1\*Т2 1-C1e"aif +(C2 + Bt)e~az1, + Ш-b^2 (Ъ~Т2)Т2 1 (Ъ-Т2)2 ' С - ^о~ + ~ ^2)^2 . п _ 1 (Ъ-Т2)2 тк
41 1 р2(Т1р + 1)(Т2р+1)2 ’ где Г, * Т2 A+t + C2e~a'‘ -(С2 + Bt)e~a2', . (ЗТ.-2Т2)Т^-Т2 гдеД= (Г,Лг)2 : В = -Ь-;С,= -Т'- ; т\-т2 (Т,-Т2)2 .(ЗТ,-27-г)Тгг Д (Ti~T2)2 к тк
121
Раздел 4
№ п/п Изображение Оригинал (сигнал)
42 Р - qe^Xlf + (С2 + Bt)e п 1 где В = (Т^Т2)Т2 С - С - -а - 1 2 /-у- -у- ^2 ’ к ~j~ Ul " f2f Z*
(7,р +1)(72р +1)г' где Т, * Т2
43 р2 С1е"“1? + (C2 + Bt)eaz’, где B = (T2--p)T2 c ц_. {T2-T,)2T, 7,-27, _ £ (7г-7,)г72г 7,
(т.р+Шр+К2' где 7, * Т2
44 1 C.e^’-(C2 + B,t+B2t2)ett2t, гдев, = Ъ^—; ^-T2fT2 B 1 . 2(Ty-T2)T2 T2 1 c - c J ; а = _L (T,-T2)3 k Tk
(Т,р+Т)(Т2р+1)3' где 7, # Т2
45 тр + 1 -(C2 + B,t+B2t2)e^2t, где В, = ——; (7,-72)27, в = т2~х
(7,р + 1)(72р+1)3 ’ где Т, # Т2 ~2 2(T1-T2) Г23 ’ r - r -IZkllZr- (t;-t2)3 1 ak = — Tk
122
Анализ сигналов на основе преобразования Лапласа
№ п/п Изображение Оригинал (сигнал)
46 Ь0р2 + Ь,р + 1 (Т,р+1)(Т2р+1)3’ где Ту * Т2 Cye^-^ + Byt+B^e11^, {Ty-T2fTl В - + ~ • 2 2(Ту ~Т2)Т2 с - г _ ^ь-^ + т;2 _ 1 L/< — L/n — о ,OU — (т,-т2)3 тк
47 1 р(7-1Р+1)(7-гр + 1)3' где Л Т2 1 + Сув^ - (С2 + Byt + B2t2)ea*', D 7’2-27'1 где By = — b; n -Ttf 1 T3 B, =. C = 2(T2-Ty)T2 (T2-Ty)3 r . T?+(T2-Ty)3 _ 1 (T2-Ty)3 Tk
48 тр+1 р(Т,р + 1)(Т2р+1)3 ’ где Ту * Т2 1 + Cy ea'1 - (C2 + Byt + в/ )ettzl, rfle^=lL±<2»; (Г, - T2)2T2 2(T1~T2)T2’ ' (7>7-2)3' Аг-Т,)Т?+(Т,-Т2Г __1_ (T.-^)3 Tk
49 Р (7-,р+1)(7-2р + 1)3' где Т, * Т2 Сув^' - (C2 - Byt + B2t2)eazt, где By = —3—; (Тг-Шг 1 T B2 = ! Cy = Zi^-T^T3 (r2-T,)3 c2 = c,;«,=!- ’k
123
Раздел 4
№ п/п Изображение Оригинал (сигнал)
50 1 (С. + B.t)e^ + (С2 + B2t)eU2t, г' Г' 27"|72
(7;р + 1)2(Т2р+1)2 ’ где ф Т2 где с^ — С/2 ~ о , (^2-Г) В< — В2 — , се к — Гг-Л)2 Тк
51 тр+ 1 (С. + B,t)e^ - (С2 + B2t)e~U2t, х(Т\+Т2)-2Т\Т2 где С, = С2 = — — (^-Тг)3 я =_2izl—• (7-1-Гг)2^ о т_72 . 1 В2 — „ , ик — (Т,-Г2)гТ2 т„
(Т,р+1)г(Тгр+1)г’ где 1] ф Т2
52 Ь0р2 +Ь,р+1 (Q + В^е*' + (С2 + B2f)ea< Ьо +(Т^ -Ьу)Ту где в = ,..^л 1 R = ^0 + (^2 ~ Pl)7~2 . 2 (Т2~Т^2Т2 ’ г --Г 2b0-^ + T2) + 2TJ2 . С/р л j (Т2-Ъ)3 1 =у- к
(7'1р+1)г(Т2р+1)2 ’ где Т, * Тг
53 1 1 + (Q - В^)е^ + (С2 - B2t)e (i2t, где В, = —г-; В2 = Ь— (J]-T2)2 (Ъ-Т2)2 С Д^2-1)Т2, 1 Ъ-Т2)3 ’ (Т2-ЗТ,)Т2, __1_ v-/p л j vA Р (Л-т-2)3 тк
р(Т1р + 1)2(7'2р+1)2 ’ где ф Т2
124
Анализ сигналов на основе преобразованияЛапласа
№ п/п Изображение Оригинал (сигнал)
54 Р (Cy-Byt)eait -(С2 +B2t)e''2', где В2~ Ц—; <т;-т2)г7-2 С -с - Ъ+т2 . =1 (Т,-7-2)3 Тк
(T,p + T)2(T2p+tf’ где Ту * Т2
55 р2 (Су + Byt)ea'1 + (С2 + В^е"2', где В' ~ (Т2 - Ту )2 Т2 'В'г (Т2-Ту у2 Т22 ’ Q _ _Q _ • a _ 1 (Гг-Г,)3 Тк
(ТуР+1)2(Т2р + Т)2 ’ где Ту * Т2
56 1 Суе0'1 + С2еаг' + С3еПз', Ту где Су = 7 —57 v; °г~ (тг-т,1т2-т3)’ с т3 _ 1 3 (т3-т,\т3-т2у к тк
(T.p+lX^P + lX^P+l) ' где Ту , Т2 и Т3 различны
57 1 }-Cye^'~C2e-azt-C3e-a3t, Т2 гяе с’ (Т, - Т2\т, - т3) с т* 2 (.Т2-Т,\Т2-Т3)' г- Т3 - 1 3 (т3~т,\т3~т2уа" Л
P^P + lfop + lXTsP+l)' где Ту, Т2 и Т3 различны
125
Раздел 4
Ns п/п Изображение Оригинал (сигнал)
58 1 - A + t + C^1 +C2e <l21 +C3e ,l'jt, где А = 1\+Т2+Т3; -гЗ С = '
р2(Г1р + 1Хг2Р + 1)(7'зР + 1)’ где Т\, Т2 и Т3 различны ’ (Л - ТгХЛ-Т3) ' С г (л-хХл-л)’ Сз ” (Л-ЛХЛ-Лг) ’ “"’Л
59 Р - - С2е’"2' - С3е'^, Гяе с’'(7-,-лХг-Л)' Сг “ (Л - ЛХЛ ~ Л)'
(rlP+iXr2p+iXnp+i) где Т\, Т2 и Т3 различны
60 р2 +С2е^г1 +С3е^; где С' “ (Л-Ш-ЛХ, ' Сг’(4-т,Хл-Л)Л ’ г - 1 - 1 3_(Л-ГХЛ-Л)Л ‘“Л
(T.p + iXTiP + iXTaP+l) где Т\ , Т2 и Т3 различны
126
Раздел 5.
КОРРЕЛЯЦИОННЫЙ АНАЛИЗ СИГНАЛОВ
Понятие корреляции первоначально появилось применительно
к случайным процессам. Позднее корреляционная функция была
использована как характеристика детерминированных сигналов.
Она описывает свойства сигналов во временной области, связана
со спектральными характеристиками сигналов. Для радиолокаци-
онных сигналов корреляционная функция является важнейшей ха-
рактеристикой, определяющей потенциальные возможности раз-
решения системы.
5.1. Корреляционные функции периодических сигналов
Корреляционная функция периодического сигнала s(t), имеюще-
го период Г, определяется выражением
1 7/2
Я(т) = - js(?)s(f + T)c/f. (5.1)
-Т/2
Корреляционная функция одного сигнала называется автокор-
реляционной функцией.
При т = 0 автокорреляционная функция
1 Т
Я(0) = - Js2(Oc/f (5.2)
-Т/2
равна средней мощности сигнала.
Нормированная величина
т(т) = ——
Я(0)
носит название нормированной корреляционной функции.
В качестве примера рассмотрим автокорреляционную функцию
гармонического сигнала
s(t) = Усоз(о)0Г + (р).
127
Раздел 5
Она равна
1 Т/г2 V2
Я(т)= — VcOS(G)0f+ (р) VcOS[(J.)0(f+ т) + ф]с/Г =------------COS(D0T,
-Т/2
Г(т) = COS CD0T,
где Т - 2л/(о0 .
Как следует из полученного результата, автокорреляционная
функция гармонического сигнала представляет косинусоидальную
функцию переменной т с тем же периодом и амплитудой, равной
средней мощности сигнала.
Очевидно такую же автокорреляционную функцию имеют все
гармонические сигналы той же частоты независимо от их началь-
ной фазы.
Корреляционная функция периодических сигналов Si(t) и s2(t),
имеющих одну и ту же частоту (период Г = 2л/(оо), определяется
выражением
1 ?f
Я12(т) = у Js1(f)s2(f + x)c/f,
-Т/2
(5.3)
называется взаимной корреляционной функций. При т = 0 она рав-
на взаимной мощности сигналов
1 Т
^12(0) = у JSl(0s2(0^‘
-Т/2
(5.4)
Нормированная взаимная корреляционная функция определяет-
ся как
г12(т) =
А?12(Т)
Я12(0)
В качестве примера рассмотрим взаимную корреляционную
функцию гармонических сигналов
s^f) = V|COS(D0f и s2(t) = V2 sincoof.
Она определяется как
128
Корреляционный анализ сигналов
1 Tf1 2 ЦК
Н12(т) = — coswgfV^ sino)0(f + = —I—^-sino)0T,
-T/2
t12(t) = sino)0T.
Если изменить порядок следования рассматриваемых функций
под знаком интеграла, получим
^21 (т) = —sino)0T = Я12(-т).
5.2. Соотношение между корреляционной функцией
и спектром периодического сигнала
Соотношение между автокорреляционной функцией периодиче-
ского сигнала и его спектральной плотностью мощности описывается
рядом Фурье. Чтобы получить его, запишем выражение для периоди-
ческого сигнала s(t) с периодом Т = 2л/о)о в виде ряда Фурье
s(0= ^C(n)e'w, (5.5)
Л = -°0
где
1 7/2
С(л) = - §s(t)einaotdt. (5.6)
-Т/2
Подставляя (5.5) в выражение для автокорреляционной функ-
ции, получим
Я(т) = ^|С(л)|2е/пм°т. (5.7)
П--00
Выражение (5.7) представляет ряд Фурье, в который расклады-
вается автокорреляционная функция сигнала. Коэффициенты ряда
Фурье определяются как
1 772
|C(n)|2 = W(n) = 2 J Я(т)е“"”°'Л. (5.8)
-Т/2
При т = О
129
Раздел 5
Я(0) = У |C(n)|2 . (5.9)
П“-оо
I |2
Величина описывает среднюю мощность сигнала, |С(п)|
характеризует распределение мощности сигнала по частоте, пред-
ставляет спектральную плотность мощности. Как следует из запи-
санных выражений, спектр является дискретным, включает состав-
ляющие, описывающие мощности гармоник на частотах, кратных
частоте сигнала.
С учетом четности автокорреляционной функции выражения
(5.7) и (5.8) можно записать в виде
Я(т) = С2(0) + 2^Г|С(л)|2 cos n<D0T,
Л=1
(5.10)
। |2 2 r/f2
1СИ =7 р
о
Переходя к тригонометрическому ряду Фурье, получим
“+ ? X + cos П(1)°т =
4 2 Л=1
R(t) =
— + — У Д2 cos Л(вот, (5.12)
4 2 л^
где
Т/2
J s(t) cos n(ootdt;
-Т/2
При т = 0 имеем
. Т/2 .о
Ьп
2 7/2
— Js(f) sin nwofc/f.
-Т/2
J 4 2
-Т/2
(5-13)
Л=1
2
Выражение (5.13) представляет равенство Парсеваля для пе-
риодического сигнала.
Как следует из записанных выражений, автокорреляционная
функция периодического сигнала является периодической функ-
цией т.
130
Корреляционный анализ сигналов
Соотношения между взаимной корреляционной функций перио-
дических сигналов, имеющих один и тот же период, и их спектрами
могут быть получены аналогично (5.7) и (5.8).
Я,2(г)= £с;(л)С2(п)ейш»’, (5.14)
Л=-оо
1 Т/с2
С;(п)С2(п) = Л/12(п) = у JR12(T)e-/n“°W (5.15)
-Т/2
Величина C*i(n)C2(n) = N12(n) представляет взаимный спектр
мощности сигналов Si(t) и s2(t).
5.3. Корреляционные функции
непериодических сигналов
Корреляционная функция непериодического сигнала определя-
ется выражением
Я(т) = Js(0s(f + T)<#,
—оо
(5.16)
где т— смещение во времени.
Для действительного сигнала корреляционная функция является
действительной четной функцией
Я(т) = Js(t)s(f + x)dt = Js(t-t)s(0<# = Я(-т).
(5.17)
Максимального значения корреляционная функция достигает
при т - 0. К этому выводу можно придти, рассмотрев выражение
J [s(f) - s(t + x)]2dt = 2 J
oo
s2(t)di -2 Js(0s(t + x)cft>0 ,
из которого следует:
R(0) - Я(т) > 0 или Я(0) > Я(т).
Корреляционная функция непериодического сигнала при т = 0
равна энергии сигнала
131
Раздел 5
хи/2 О т(7/2 t
Рис. 5.1
и *
Я(0)= \s2(t)dt = E.
(5.18)
Нормированная корреляционная функция непериодического
сигнала определяется как
, х Rtf)
г(т) = -~г-
В качестве примеров рассмотрим корреляционные функции не-
которых сигналов, описанных в табл. 3.1.
1. Прямоугольный импульс (табл. 3.1, п.1), рис. 5.1.
s(f) = recf(—).
ОО 2
R(t)= $ s(t)s(t - tfdt = (dt = ти -т = ти(1 - —).
tu Хи
2
2. Экспоненциальный импульс (табл. 3.1, п.8), рис. 5.2.
s(t) = е at
При т>0
- 1 e'at
2а
т
132
Корреляционный анализ сигналов
Рис.5.2.
3. Гауссов импульс (табл. 3.1, п.15), рис. 5.3.
s(t) = e~af2,
R(t) = j s(t)s(t - T)dt = j e~atZ e~a(t~^2 dt,
e 2 .
Корреляционные функции непериодических сигналов, приведен-
ных в табл. 3.1, сведены в табл. 5.1. Так как корреляционная функ-
ция является четной, графики построены только для т > 0.
4. Пачка из двух прямоугольных импульсов (рис. 5.4).
При т>0
Т+т0
Т+ти
на интервале 0<т<ти.
s(t)‘<
т Т+т
О
Рис. 5.3
133
Раздел 5
-Т+^и -т -т+^и<и о *uT-tuT Т+Хи т
Рис. 5.4
т+ти
Н(т) = jcft = ти-Т + т на интервале ти < т< Т.
т
Т+ти
Я(т)= |б# = ти + Т-т на интервале Т < т < Т + ти.
т
Таблица 5.1.
134
Корреляционный анализ сигналов
№
п/п
J s(t)s(t - x)dt
2
3
4
s(t) = -rect
-1,00 -0,50 0,00 0,50 1,00
-1,00 -0,50 0,00 0,50 1,00
Я(т) =
М1 + т3/т2-2т7т;0 0 <|т| <7
0 C
x
m
135
Раздел 5
№
п/п
s(0
5
~1,00 ~0,50 0,00 0,50 1,00
Я(т) = 2|т| cosh h(ar)
-3,00-2,00-1,00 0,00 1,00 2,00 3.00
136
Корреляционный анализ сигналов
№
п/п
s(f)
s(t)= е at -е bt, t>0
b-a aN a-b
2a(a + b) 2b(a + b)
12
s(t)=teat, t>0
137
Раздел 5
-3,00-2,00-1,00 0,00 1,00 2,00 3.00
R(t) = s(t)s(t - n)dt
R(t)= 3/8 (l5a 7 + 15|т|а 6 +
+ 6т2а"5 +|т|3а4 ]е' а^
fi(t) = 3/4(l 05а"9 +10 5| т| а"8 +
138
Корреляционный анализ сигналов
№
п/п
16
s(t) = te~afZ
17
-3,00-200-1,00 0,00 1,00 2,00 3,00
18
s(t) = 1-4
2
139
Раздел 5
№
п/п
s(0
19
-6,00 -4,00 0,00 4,00 8,00
20
5. Пачка из N прямоугольных импульсов (рис. 5.5).
При т>0
оо
Я(т)= J s(t)s(t - z)dt,
— оо
Л/-1
R№ = ^u^(N-n)tr(
n=0
т — nT
где tr(x) - треугольная функция;
140
Корреляционный анализ сигналов
Сравнивая выражения для автокорреляционных функций оди-
ночных и периодических сигналов одного и того же вида, отметим,
что при длительности сигнала значительно меньшей периода авто-
корреляционную функцию периодического сигнала можно получить,
взяв автокорреляционную функцию одиночного сигнала с коэффи-
циентом 1/7“- периодическим ее повторением на оси т.
Корреляционная функция двух непериодических сигналов s^t) и
s2(t) определяется выражением
оо
Я12(т)= Js1(f)s2(r + T)dr
(5.19)
где т - смещение одного сигнала относительно другого во времени.
Выражение (5.19) имеет смысл только для сигналов, имеющих
ограниченную энергию, для которых выполняются неравенства:
оо оо
JSi(t)dt < о°, Js%(t)dt < оо.
— оо —оо
При т = 0
Я12(0)= Js,(t)s2(t)dt
141
Раздел 5
определяет взаимную энергию сигналов.
Нормированная взаимная корреляционная функция определяет-
ся как
г, (т)= Я,2<т). (5.20)
Н,2(0)
Как и для периодических сигналов, если корреляционная функ-
ция определена для двух сигналов, она называется взаимной кор-
реляционной функцией, в отличие от автокорреляционной, опреде-
ляемой для одного сигнала.
Для взаимной корреляционной функции имеет значение порядок
следования функций под знаком интеграла. Для Я12(т) и Я12(т)
получим следующее соотношение:
оо оо
Я12(т)= Js1(f)s2(f + T)df = - T)s2(f)ctt = H2i(-t) . (5.21)
Примеры взаимных корреляционных функций.
1. Сигналы - экспоненциальный и прямоугольный импульсы
(рис. 5.6,а.)
1,0< t <ти,
0, t <0,t >ти.
s}(t) = е at, t>0; s2(t) = <
Я12(т) = \ S^t)S2(t + x)dt.
При т<0
При т > 0
Я12(т)= [eatdt =-e^aT(1-e^u).
J a
T
Если изменить порядок следования функций в выражении для
корреляционной функции
142
Корреляционный анализ сигналов
Я21(т) = s2(t)s^t + x)dt
получим при т < О
H2i(^)= J
е atdt=—e ат(1-е 310),
а
равно Я12(т) при т > 0.
При т > О
равно Я12(т) прит<0.
Графики Я12(т) и Я21^ приведены на рис. 5.6,6.
2. Сигналы - треугольный и прямоугольный импульсы (рис.
5.7,а.)
s^(t) = t/xu,O<t<xu и s2(f) =
1,0< t<xu,
О, t <O,t>xu,
Рис. 5.6
143
Раздел 5
Я12(т) = Js}(t)s2(t + x)dt.
При т < 0
RM = — bdt = ^-(ru-rf.
r„ J 2т,.
и о и
При т>0
1 Tr 1
Я12(т) = — | fdf = —— (ти2 — т2),
{ 2TU
Изменяя порядок следования функций, получаем.
При т<0
1 Tf 1
Я21(т) = — pdf = -—-(т/ -т2),
' 2ти
эта функция равна Я12(т) при. т>0.
При т > О
1 V 1
Я21(т) = — hdt = -— (ти-т)2,
т J 2т
и Q
равна Я12(т) при т>0.
Графики Я12(т) и Я21(т) приведены на рис. 5.7,6.
5.4. Соотношение между корреляционной функцией
и спектром непериодического сигнала
Автокорреляционная функция непериодического сигнала s(t)
связана со спектральной плотностью энергии kV(co) преобразова-
нием Фурье
Я(т) = — [ W^e^dw = — [|S(w)| ekmcka, (5.22)
2л J 2л J1 1
— со —оо
144
Корреляционный анализ сигналов
t
а)
«21(Т)
б)
Рис. 5.7
Ти X
оо
И/(а))= J R(T)e-™dt.
(5.23)
Соотношение (5.23) может быть получено из (5.16)
оо оо
~ J[ Js(0 еыоВДсо)ет
1
oto = —
2тг
J S*(oj)S(w)e^Tc/oj,
— оо —оо
— оо
(5.24)
где S*((o )S(w )= I S (со) 12 = И/(ш).
Учитывая четность функций Я(т) и кУ(оо), (5.22) и (5.23)
записать в виде:
оо
W(cd) = 2J Я(т)со8(втсЛ:, Я(т)
о
— [ kV(a))COS(DTCfa).
71 J
О
При т = 0
Я(0)= (s2(t)dt = — [W(w)ato = — flS(w)| ato.
J 2тг J 2тг J1 ’
можем
(5.25)
(5.26)
145
Раздел 5
Выражение (5.26) представляет равенство Парсеваля. Каждая
из частей этого равенства определяет энергию сигнала. Как следу-
ет из (5.26), энергия сигнала численно равна площади под кривой
W(co). Кривая LVfco) характеризует распределение энергии сигнала
по частоте.
Так как преобразование Фурье автокорреляционной функции
равно квадрату модуля спектральной плотности сигнала, то авто-
корреляционная функция не содержит информации о фазовом
спектре. Имея автокорреляционную функцию сигнала, можно вос-
становить только амплитудный спектр, но нельзя получить фазово-
го спектра сигнала.
Примеры определения автокорреляционных функций с исполь-
зованием спектральных плотностей сигналов приведем для некото-
рых сигналов, включенных в табл. 3.1.
1. Сигнал s(t) = sech(at), (табл. 3.1, п.6 ).
S((o) = — sec h—.
а 2а
При т>0
Я(т) = 2xcosh(ar).
2. Сигнал s(t) = eat, t>0 , (табл. 3.1. п.8).
S(w) = —.
а + /со
При т>0
2
3. Сигнал s(t) = te at (табл. 3.1. п.16).
olio) =------\п/ае ,
2а
I--- зт
Я(т) = JL —0 - атI 2)е 2
4а У 2а
146
Корреляционный анализ сигналов
Аналогично (5.22) и (5.23) можно подучить соотношения, связы-
вающие взаимную корреляционную функцию непериодических сиг-
налов s,(t) и s2(t) с взаимной спектральной плотностью энергии
W12(cd)
Я12(т) = — Г И/12(ш)е*°т<Ло
2л J
—оо
J S1i («)S2((t))efc)Tdo,
(5.27)
W12(a))
|я12(т)е^тс/Г.
(5.28)
5.5. Интервал корреляции и эффективная ширина
спектра сигнала
Для каждой корреляционной функции непериодического сигнала
можно определить такое минимальное значение смещения во вре-
мени тк, при котором абсолютное значение корреляционной функ-
ции будет меньше заданной величины (близко к нулю). Величину тк
называют интервалом корреляции. Интервал корреляции пред-
ставляет наибольший интервал задержки (смещения), на котором
корреляционная функция имеет значение, существенное для ре-
шаемой задачи.
Интервал корреляции, как и понятие корреляции, первоначально
был введен в рассмотрение для случайных процессов (разд. 18). Для
детерминированных сигналов он определяется по аналогии. В ряде
практических приложений корреляционного анализа он оказывает-
ся полезным понятием.
Наиболее часто используют следующие определения интервала
корреляции.
1. Интервал корреляции, определяемый по заданному значению
нормированной корреляционной функции
|г(тк)|>е, (5.29)
где е - заданное значение (например, е = 0,05 ); тк- максимальный
интервал, на котором выполняется записанное неравенство.
2. Интервал корреляции, определяемый значением интеграла
нормированной корреляционной функции или ее абсолютного зна-
147
Раздел 5
чения
тк = j г(т)дт или тк = j |г(т)|<Л.
о о
(5.30)
При таком определении интервал корреляции численно равен
основанию прямоугольника, высота которого равна максимальному
значению нормированной корреляционной функции г(0) = 1, а пло-
щадь равна площади под кривой г(т) или |г(т)|. Второе определе-
ние интервала корреляции чаще используется при явно выражен-
ном колебательном характере корреляционной функции.
3. Интервал корреляции, определяемый значением интеграла от
квадрата нормированной корреляционной функции
г2(т)Л.
(5.31)
о
Значения тк, определяемые из приведенных выражений, близки
друг другу. Выбор их, как правило, диктуется удобством при реше-
нии конкретной задачи.
Если для определения ширины корреляционной функции ис-
пользуется понятие интервала корреляции, то для определения
ширины спектра сигнала вводится понятие эффективной ширины
спектра. Эффективную ширину спектра определим как длину наи-
большего интервала на оси частот, на котором спектральная плот-
ность энергии еще имеет существенное для решаемой задачи зна-
чение.
При определении эффективной ширины спектра сигнала можно
использовать, как и при определении интервала корреляции, не-
сколько подходов.
1. Эффективная ширина спектра Д определяется из условия,
аналогичного (5.9), - максимальная полоса частот, внутри которой
значение нормированной спектральной плотности энергии сигнала
еще превосходят заданное значение
—J—(5.32)
W(o)0)
148
Корреляционный анализ сигналов
2. Эффективная ширина спектра определяется заданным значе-
нием интеграла нормированной спектральной плотности энергии
сигнала
А =
1
Ж)
оо
J W((o)ato.
о
(5.33)
Величина А, определяемая (5.33), представляет ширину равно-
мерного спектра энергии сигнала, имеющего энергию, равную энер-
гии рассматриваемого сигнала.
149
Раздел 6.
ДИСКРЕТИЗАЦИЯ И ВОССТАНОВЛЕНИЕ НЕПРЕРЫВНЫХ
СИГНАЛОВ
Непрерывные сигналы могут задаваться выборочными значения-
ми, взятыми через определенные интервалы времени. Такое пред-
ставление непрерывного сигнала называется дискретизацией. Дис-
кретизация сигнала позволяет сократить время работы канала пере-
дачи информации, лежит в основе цифровой обработки сигналов.
Обратная операция - восстановление непрерывного сигнала по
его дискретным значениям. В математическом плане она означает
интерполяцию временной функции, описывающей сигнал, по ее
выборочным значениям.
В разделе изложены методы анализа дискретных сигналов и
восстановления непрерывных сигналов по их выборочным значе-
ниям. Дискретизация и интерполяция, рассматриваемые примени-
тельно к сигналам, могут быть использованы и в отношении раз-
личных характеристик сигналов.
6.1. Дискретные и цифровые сигналы
Передача информации с помощью сигналов может произво-
диться непрерывно или в некоторые фиксированные моменты вре-
мени. В зависимости от характера передачи информации различа-
ют непрерывные и дискретные сигналы. Непрерывные (аналого-
вые) сигналы повторяют закон изменения физических величин, ин-
формацию о которых они содержат, описываются непрерывными
или кусочно-непрерывными функциями времени (рис.6.1,а). Дис-
кретный сигнал представляет последовательность коротких им-
пульсов, амплитуды которых соответствуют мгновенным значениям
непрерывного сигнала или физической величины (рис. 6.1,6).
Дискретные сигналы чаще всего формируются при цифровой
обработке для использования в ЭВМ: непрерывные сигналы дис-
кретизируются во времени и квантуются по уровню, (рис. 6.1,в). Та-
кие сигналы, представленные цифровыми кодами, называются
цифровыми.
150
Дискретизация и восстановление непрерывных сигналов
Рис. 6.1
При квантовании по уровню значение сигнала округляется до
ближайшего дискретного значения. Ошибка, сопровождающая
квантование, представляет случайную величину, не превышающую
половину шага квантования. При постоянном шаге квантования
распределение ошибки подчиняется равномерному закону. После-
довательность ошибок при каждом шаге дискретизации аналогово-
го сигнала во времени можно рассматривать как случайный дис-
кретный процесс. Вследствие этого обычно квантованный сигнал
представляют в виде суммы дискретного сигнала и шума квантова-
ния, а анализ цифровых сигналов сводится к анализу прежде всего
дискретных сигналов, значения которых соответствуют значениям
исходного непрерывного сигнала.
6.2. Спектр дискретного сигнала
При дискретизации непрерывный сигнал заменяется совокупно-
стью его значений, взятых в заданные моменты времени. Как пра-
вило, интервал между выбранными моментами времени интервал
дискретизации - берется постоянным. Это условие предполагается
и в дальнейшем. Выборка осуществляется с помощью стробирую-
щего сигнала, представляющего последовательность импульсов
малой длительности, в пределе - описываемых импульсной функ-
цией. Примеры дискретных сигналов приведены в табл. 6.1.
Если непрерывный сигнал представлен выборочными значе-
ниями, взятыми через заданный интервал времени, то получаю-
щийся дискретный сигнал может быть записан в виде
оо оо
s3(() = s(f)^8(f-n7-)= ^5(л7-)8((-п7-), (6.1)
/7-—оо П—~ оо
где s(t) - непрерывный сигнал; Т- период дискретизации.
151
Раздел 6
Стробирующая последовательность 5-функций
g(f)= ^(t-nT)
(6.2)
называется выборочной функцией (рис. 6.2,а). Ее как периодиче-
скую функцию можно представить в виде ряда Фурье
/7^-00
ЛЧ . Т/2
jg
-Т/2
(6.3)
Спектральная плотность выборочной функции определяется
преобразованием Фурье (6.3)
<3(®) = у
(6.4)
Таблица 6.1
Дискретные сигналы
№ п/п Сигнал График сигнала
1 2л cos—п N 1Ж cos-fh Л 0 , пт т /ГЧГЛ'Х
2 ( г\ о(лТ) = / v 7 (0, л < 0 б(птЦ 1 0 ИИ11. , Т и пт пт
3 / _ (1,л>т olnT - тТ)=< [0, п < т б(пТ-т1 / А Г, ,нп. , 0 т тт пт ПТ
152
Дискретизация и восстановление непрерывных сигналов
№
п/п
Сигнал
График сигнала
4
1, n = Q
О, п * О
fi(nTh
1 -
О Т ZT
ПТ ПТ
б(л7-т7) =
1, п = т
О,п* т
Б(пТ-тТ)
I1-
О I
тпТ пт пТ
rect(nT')
1, n = 0; 1
О, п < О, п > 1
пт пт
rect(nT - тТ) -
1, п = nr, т + 1
О, n < т, п > т +1
пт
Как следует из (6.4), периодической последовательности им-
пульсных функций на временной оси соответствует периодическая
последовательность импульсных функций на оси частот (рис. 6.2,6).
д(0
ОО СО СО СО оо 00 со
ь(1) "(1) |(1) |(1) |(1) |(1) |(1)
-27 -т О 7 27 t
а)
G((o)
СО 00 00 00 00 00
(2к1Г) |(2л/7) (2л1Г) (2Л/7) |(2Х/Т) |(2л/7)
-2ы1 -со1 0 Wi 2о)1 ш
б)
Рис. 6.2
153
Раздел 6
Используя свойства преобразования Фурье, из (6.1) получим
спектральную плотность дискретного сигнала sg(t). Она определя-
ется с учетом (6.1) как свертка спектральных плотностей сигналов
s(t) и g(t) под знаком суммы
sg(0 = s(t) - пТ) «1 = S9(<0). (6.5)
Л=~<х> Л=-оо
Как показывает (6.5), спектр дискретного сигнала - периодиче-
ский, бесконечный, получается периодическим повторением спек-
тра исходного сигнала (с коэффициентом 1/Т) на оси частот с ин-
тервалом ta}=2n/T (рис. 6.3,6).
При описании дискретного сигнала стробирующий сигнал в (6.1)
рассматривается как последовательность бесконечно узких им-
пульсов, описываемых 5-функцией. На практике же этот сигнал
представляет последовательность импульсов конечной длительно-
сти. Периодическая последовательность видеоимпульсов, полу-
чающаяся при формировании выборки из непрерывного сигнала, в
этом случае может быть описана как (рис. 6.4,а)
sg(f) = s(0u(0, (6-6)
где s(t) - непрерывный сигнал; u(t) - периодическая последова-
тельность прямоугольных импульсов единичной амплитуды, дли-
тельности т, с периодом Т.
Рис. 6.3
154
Дискретизация и восстановление непрерывных сигналов
Рис. 6.4
Представляя стробирующую последовательность прямоуголь-
ных импульсов в виде ряда Фурье
u(t) = ±
sine—— cosn^t ,
n=\ 2
(6.7)
где
2л
wi ” Т’
дискретный сигнал (6.6) запишем в виде
sg(t) = s(t)^
Zrw
sine——COS IKd^t
n=1
(6.8)
Спектральная плотность сигнала s(t) найдется как преобразова-
ние Фурье (6.8) (см. разд. 3)
Sg(co) = у S(co) + у ^2sin с n(1)lT[^((t)~ ) + S(w + гкщ)], (6.9)
л=1
где Sfw) - спектральная плотность сигнала s(t).
155
Раздел 6
Как следует из (6.9), спектр дискретного сигнала получается по-
вторением спектра исходного непрерывного сигнала через интер-
вал, кратный со1 = 2л/ Т. Огибающая спектра дискретного сигнала
определяется спектром стробирующих импульсов (рис. 6.4,6).
Одной из важных задач, решаемых при дискретизации сигналов,
является выбор интервала дискретизации. Увеличение интервала
может привести к безвозвратной потере информации о сигнале. С
другой стороны, при уменьшении интервала дискретизации теряют-
ся преимущества дискретизации. Представление о максимально
допустимом интервале дискретизации можно получить из анализа
спектра дискретного сигнала (рис. 6.3 и рис. 6.4). Непрерывный сиг-
нал можно восстановить, пропуская дискретный сигнал через
фильтр нижних частот. Верхняя частота полосы пропускания
фильтра должна превышать максимальную частоту в низкочастот-
ной части спектра сигнала. В то же время соседние составляющие
спектра сигнала не должны перекрываться. Таким образом, интер-
вал дискретизации должен выбираться из условия:
2а>т < или Г < 1/2/т = л/шт , (6.10)
где o)m = 2nfm - максимальная частота в спектре сигнала.
Интервал дискретизации сигнала, определяемый (6.10), называ-
ется интервалом Найквиста или Котельникова.
Возможна дискретизация и спектра сигнала. По аналогии с (6.10)
условие дискретизации на оси частот может быть записано в виде
Q<2n/Tc, (6.11)
где Тс - длительность сигнала.
При выполнении условия (6.11) восстановление спектра сигнала
по его дискретным значениям производится без потерь.
6.3. Дискретное преобразование Фурье и его свойства
Спектральная плотность непрерывного сигнала определяется его
преобразованием Фурье. Обратное преобразование позволяет найти
временную функцию сигнала по его спектральной плотности. Дискре-
тизация позволяет получить дискретный сигнал и соответствующий
дискретный спектр. Однако для дискретного сигнала переход от вре-
менного описания к спектру и обратно более удобно производить,
используя дискретное преобразование Фурье (прямое и обратное).
Выражение для спектральной плотности дискретного сигнала,
заданного на интервале [0,Тс], при достаточно малом значении ин-
156
Дискретизация и восстановление непрерывных сигналов
тервала дискретизации Тможем записать в виде
7 w-i
S(co) = | s(t)e K,tdt = Т^5{кТ)е к,)кТ
-оо к=0
(6.12)
где N - число интервалов дискретизации, N = Тс/Т; Тс - длитель-
ность сигнала; Т- интервал дискретизации.
Если спектральная плотность сигнала S(co) определяется для
выборочных значений частоты w= nQ., то (6.12) примет вид
Л/-1
S(nQ) = T^s(kT)e4n-lkT
k=0
(6.13)
Выражение (6.13) представляет дискретное преобразование Фу-
рье (ДПФ). Аналогично для обратного ДПФ можно получить
s(kT) = ^yS(nQ.)eikTna = ^YS(jiQ)eikTnU
2л тс to
В (6.12) и (6.13) N= Тс/Т. С учетом (6.11) получим
т=—.
N
(6.14)
(6.15)
Формулы ДПФ с учетом (6.15) обычно записываются в виде:
-ink2n
ske N
k=0
Sk^
(6-16)
Sn является периодической функцией частоты с периодом, равным
NQ-.
Л/-1
k=0
Л/-1 , 2л
mN)Qkt = ^SkQ~l{n+mN)k N
к=0
/У-1
.. 2.71 .
--/(л—+т2п)/с
ske N
Дискретное преобразование Фурье связывает дискретный сиг-
нал с его дискретным спектром, является удобным алгоритмом для
численного расчета спектра сигнала по его временной функции
157
Раздел 6
и сигнала (временной функции) по его спектру. При использовании
ДПФ полезно учитывать его свойства. Они аналогичны свойствам
преобразования Фурье - табл. 6.2.
Таблица 6.2
Свойства дискретного преобразования Фурье
№ п/п S(n)
1 Si(/c)+s» S^n)+ S2(r?)
2 s(k - m) -г- П -i2nT m — > < e N s(n)
3 s,(k)-s2(k) Si(n)® S2(n)
4 ^s,(k)®s2(k) S^n)S2(n)
В качестве примера рассмотрим ДПФ сигнала в виде симмет-
ричного треугольного импульса (рис. 6.5). Сигнал может быть пред-
ставлен пятью выборочными значениями
s(0) = 1, s(±T) = 1/2, s(±2T) = 0.
Подставляя выборочные значения в (6.13), запишем
S(nQ) = Т[1 + 1/2(е/П71/2 + em/2)] = Т(1 + cos rm/2)
Таким образом,
2Т, S(±Q)= Т, S(±2&) = 0,
где Q. - 2п/Тс = л/2т .
158
Дискретизация и восстановление непрерывных сигналов
Спектральная плотность исходного импульса описывается вы-
ражением (разд. 3)
S(co) = 2Т sinc2wT .
Из него получим
8(0) = 27, S(±Q) = 0,81 37, S(±2£2) = 0.
Отличие значений спектра, полученных с использованием пре-
образования Фурье и ДПФ, определяет ошибку, появляющуюся при
использовании ДПФ в качестве алгоритма расчета спектра сигнала.
6.4. Алгоритмы быстрого преобразования Фурье
Дискретное преобразование Фурье представляет алгоритм расче-
та спектральных характеристик сигнала. Однако его использование
часто связано с большим объемом вычислительных операций, что
может приводить к значительной затрате времени. Сократить объем
вычислительных операций при расчете ДПФ позволяет переход
к алгоритмам быстрого преобразования Фурье (БПФ). Предложено
несколько алгоритмов БПФ. В дальнейшем в качестве примера рас-
смотрим алгоритм БПФ, обычно используемый при числе отсчетов
N= 2^, где п - целое число.
Исходную последовательность выборочных значений сигнала
разобьем на две части - с четными 8пчи нечетными номерами SnH
Л//2-1
(6.17)
Сомножитель qn = е in2n/N перед суммой второго слагаемого
учитывает задержку skH относительно sk4 на один временной ин-
тервал.
Выражение (6.17) представим в виде
S„ = Sm + QnS„„, л = 0,1,2..^-1.
(6.18)
159
Раздел 6
Выражение (6.18) записано только для п<
---1. Чтобы опреде-
лить Sn для больших значений п, используем свойство периодично-
сти ДПФ
Sn - S N - (S4) N + q (SH) N.
л— n— n
2 2 2
. 2л
-in—
Для qn = e N можем записать
(6.19)
N
П—
qn = -q 2.
(6.20)
С учетом (6.20) выражение для Sn при
Л/<
2 ~
л< Л/-1
получим
в виде
N
п-~—
S„ = (SJ N-q 2(S„) „•
л— л---
(6.21)
Таким образом, записаны выражения для расчета Snt при
л<Л//2-1 выражение (6.18), при Л//2<л<Л/-1 выражение (6.21).
В соответствии с записанными выражениями процесс вычисления
ДПФ можно представить схематически как показано на рис. 6.6. Ум-
ножение на cf обозначено стрелкой с множителем, сложение - кру-
жочками.
160
Дискретизация и восстановление непрерывных сигналов
Линии вверх от точки соответствуют сумме, вниз - разности вели-
чин на входе. Дальнейшее уменьшение объема вычислений можно
достичь разбиением каждой из последовательностей Sm и SnH и т.д.
до получения простейших двухэлементных последовательностей.
Найдя ДПФ двухэлементных последовательностей, можно опре-
делить ДПФ четырехэлементных, восьмиэлементных и т.д. после-
довательностей. Очевидно, что N должно быть равным 2П (л - це-
лое число). Программы расчета ДПФ с использованием алгоритмов
БПФ приведены во многих работах.
6.5. Дискретное преобразование Хартли и его свойства
По аналогии с ДПФ может быть введено в рассмотрение и дис-
кретное преобразование Хартли (ДПХ). Прямое и обратное дис-
кретные преобразования Хартли записываются в виде
H(n) = 2^s(k)cas-—-; s(k) = —^H(n)cas-——, (6.22)
n=0 N N n=0 N
где casx = cosx + sinx.
ДПФ S(n) и ДПХ H(n) связаны между собой достаточно очевид-
ными соотношениями
S(n) = H(n) = Re[S(n)]-lm[S(n)], (6.23)
где Нч(п) и Нн(п) - четная и нечетная составляющие преобразова-
ния Хартли:
Нч(п) = 1 (H(n) + H(N - л)]; H„(n) = ±[H(n)-H(N- л)]. (6.24)
При использовании ДПХ целесообразно учитывать его свойства.
Основные свойства ДПХ приведены в табл. 6.3.
С целью сокращения времени расчетов при использовании пре-
образования Хартли предложены алгоритмы быстрого преобразо-
вания Хартли.
Преобразование Хартли для действительных функций s(t) дает
действительные функции, что позволяет говорить об определенных
удобствах ДПХ при использовании преобразования на инженерном
уровне. К удобствам применения ДПХ следует отнести и симмет-
ричность прямого и обратного преобразований. Усложнение выра-
жений для ДПХ свертки и произведения функций по сравнению
с ДПФ является отрицательным моментом.
161
Раздел 6
6.6. Z-преобразование и его использование при анализе
дискретных сигналов
6.6.1. Z-преобразование
Преобразование Лапласа, используемое при анализе непрерыв-
ных сигналов, полезно и при анализе дискретных сигналов.
Для непрерывного сигнала преобразование Лапласа имеет вид
оо
S(p) = | s(t)e“₽'dt,
О
где р - комплексная величина.
(6.25)
Таблица 6.3
Свойства дискретного преобразования Хартли
№ п/п s(k) H(n)
1 Si(k)+s2(k) Ц(п)+Н2(л)
2 s(k - т) 2itmn \ . 2 лmn x cos H(n)-sin——H{N-n) N N
3 s'(k) 2nnH(-n)
4 s-(*) -4nznzH(n)
5 Si(k)-s2(k) ^Л/[Н1(л)®Н2(л)-Н1(-л)®Н2(-л)+ + Ц (л) ® H2 (- n) + Ц (- n) ® H2 (n)]
6 s1(k)®s2(k) H2(n)~ n)-H2(- n)+ + H^n)-H2(- n)+ Ц(- n)- H2(n}]
162
Дискретизация и восстановление непрерывных сигналов
Для дискретного сигнала
sg(f) = ^s(nT)S(f-nT), (6.26)
л=0
из (6.25) получим
Sg(p) = ^s(nT)e^nT. (6.27)
л=0
Выражение (6.27) является дискретным преобразованием Лап-
ласа. Обозначив ерТ =z, выражение (6.27) запишем в виде
S(z) = ^s(nT)z-n. (6.28)
л=0
Записанное выражение представляет z-преобразование дис-
кретного сигнала s(nT). Исходя из условия существования преобра-
зования Лапласа (разд. 4) можно записать условие существования
и z-преобразования. Z-преобразование существует, если величина
|sfnT)| возрастает медленнее степенной функции
\s(nT)\ < M-rn. (6.29)
Область сходимости ряда (6.28) включает всю плоскость, за ис-
ключением круга радиуса г. Величина г называется радиусом схо-
димости.
Примеры z-преобразований некоторых видов сигналов.
1. Сигнал, описываемый экспоненциальной функцией.
s(nT) = е~апТ,
S(z) = У e-mTz~" =----V-p
п=о 1 е z
2. Гармонический сигнал.
s(nT) = cos сопТ = ^(е1ПшГ + e~imT),
_ 1 , 1 1 _ 1 -cosco 7" • z-1
2 1-e*°rz~1 1-e^Tz“1 1-2coscoT-z-1 + z“2
163
Раздел 6
3. Сигнал, описываемый степенной функцией.
s(nT) = an,
л=0 1 aZ
Расширяет число примеров табл. 6.4.
Имея z-преобразование дискретного сигнала, можно получить
спектр сигнала. Для этого необходимо сделать подстановку
z=e*“T
(6.30)
в z-преобразование сигнала.
Определение сигнала s(nT) по S(z) производится с помощью об-
ратного z-преобразования. Обратное z-преобразование получается
подстановкой е? = zb обратное преобразование Лапласа
^Js(z)z"dz-
(6.31)
При решении (6.31) используются различные методы, чаще все-
го метод вычетов и метод разложения на простые дроби (разд. 4).
Метод вычетов. Если S(z) является действительной функцией
переменного z, то (6.31) можно решить с помощью теоремы о выче-
тах (разд. 4)
1 г N
s(nT) = —J S(z)zn’dz = "У Res[(z- ak)S(z)zn ’].
c *=1
(6.32)
Таблица 6.4
Z-преобразования сигналов
№ п/п s(nr) п=0
1 8(nT) 1
2 ст(лТ) 1 1-z^1
3 ctnT 1 1 - aTz“1
164
Дискретизация и восстановление непрерывныхсигналов
№ п/п s(n?) S(z) = ^s(nT)z n n=0
4 sina)onr sino)o7z~1 1-2cos(d07z~1 + z2
5 costo0n7" 1-cos(d07z~1 1-2cosoj07z~1 + z2
6 anT sina)onr a7sinojorz1 1 - 2ar cosoj0Tz~1 + a27z~2
7 anT cos (Don T 1-gr cos (D0Tz~1 1 - 2aT cos ©0Tz-1 + a2Tz^2
8 e~anT 1 1 - e~arz-1
9 e~anT sina)onT e~ar si na)07z~1 1 - 2e~aT coso)07z-1 + e~2aTz~2
10 eanT cos (£>onT 1 - e~aT cos(d07z-1 1 - 2e~aT cos (o07z‘1 + e~2aTz^2
Пример. z-Преобразование имеет вид:
S(z) = -^ = ~.
1-az1 z-a
Подставляя выражение для S(z) в (6.32), получаем
s(nT) = (z- a)S(z)zn-1 z=a= zn\z=a = an .
Метод разложения на простые дроби.
Если S(z) представляет рациональную функцию z или z-1, ее
разложение на простые дроби имеет вид
S(z) = —+--------&2 + + —, (6,33)
1 - &z 1 - p2z 1 - PnZ
где полюсы рк. различны, т.е. рк * рт при к * т,
Сигнал s(nT) получается суммированием обратных z-
165
Раздел 6
преобразований каждого члена (6.33). Таким образом,
N
s(nT) = ^ЬкР; . (6.34)
к=1
Z-преобразование, являясь одной из форм преобразования Ла-
пласа, обладает аналогичными свойствами. Использование
свойств z-преобразования позволяет упростить анализ дискретных
сигналов.
6.6.2. Свойства z-преобразования
Из свойств z-преобразования прежде всего отметим следующие.
1. Аддитивность.
к^(пТ) + k2s2(nT) +... + kNsN(nT) (6.35)
<-» k^S^(z) + k2S2(z) +... + kNSN(zj,
где кп - постоянные коэффициенты; <-» - знак соответствия вре-
менной и z-функций.
s^rTT) <-» S1(z),s2(nT) S2(z),...,sN(nT) Sw(z). (6.36)
2. Задержка во времени.
Для
s2(nT) = s^nT - п0Т) (6.37)
имеем
S2(z) = ^s2(nT)z-n = ^s^nT-nJ)z~n =
л=0 л=л0
= ^s1(rnT)z’(m+n°) = SA(z)z~n°,
m=0
где n - n0 = m.
Таким образом,
s(nT-nQT)^ S(z)z~n°.
(6.38)
(6.39)
При n0 = 1
166
Дискретизация и восстановление непрерывных сигналов
s(nT-Т) S(z)z-1. (6.40)
Как следует из (6.40), задержке сигнала на интервал дискрети-
зации Т соответствует умножение z-преобразования сигнала на z1.
С учетом (6.40) можем получить z-преобразование разности
s(nT)-s(nT-T)
s(nT)-s(nT-T)<^S(z)-S(z)z~' =^~S(z). (6.41)
3. Свертка дискретных сигналов.
Свертка дискретных сигналов описывается выражением
^s1(/cT)s2(/7T - kT) = ^(лТ - kT)s2(kT) (6.42)
/с=0 к=0
или
^2s1ks2n-k = ^!S^n-kS2k (6.43)
к=0 к=0
Выражение для z-преобразования свертки
°° П
S(z) = ^(XsikS2n-k)z~n (6.44)
n=0 k=Q
запишем в виде
°° П
ЭД = ^^sikS2n-kZ~kz~{n~k} (6.45)
n=0 k=0
При k> n, s2n_k = 0, верхний предел второй суммы можно заме-
нить на оо. После обозначения п - к = т, выражение для S(z) при-
мет вид
оо оо оо оо
S(z) = XXs^~^z~m = <6-46>
m=0k=0 k=0 m=0
Таким образом, получим
167
Раздел 6
^s^kT)s2(nT-kT) = ^s^nT-kT)s2(kT)^S^z)S2(z). (6.47)
к=0 к=0
Рассмотренные свойства z-преобразования и некоторые другие
приведены в табл. 6.5.
Таблица 6.5
Свойства z-преобразования
№ п/п s(nT) oo S(z)=^ s(nT)z~n n=0
1 k}s}(nT)+ k2s2(nT) k&(z)+ k2S2(z)
2 s(nT - mT) z-mS(z)
3 s(nT+T) ' I r*"~ Г1 ^O, W) 1 co
4 s(nT + T)-s(nT) 7T i TT XT
5 s(nT)~ s(nT + 7") <0 1 N N
6 nTs(nT) -r dS(z) dz
7 X~ns(nT) S(Xz)
168
Дискретизация и восстановление непрерывныхсигналов
№ п/п s(nT) оо S(z) = y^s(nT)z~n n=0
8 п ^s,(/<7-)s2(n7- - kT) к=0 S1(z)S2(z)
9 К. к. с. f e f 2ni J n \x) x c
6.7. Восстановление непрерывного сигнала
по дискретным значениям
Задача восстановления сигнала по его дискретным значениям
в математическом плане сводится к отысканию функции, описы-
вающей сигнал, которая в заданные моменты времени принимает
заданные значения (равные дискретным значениям сигнала), а в
остальные моменты описывает сигнал с какой-то степенью точно-
сти. Указанная операция без конкретизации физического содержа-
ния рассматриваемой функции составляет содержание общей за-
дачи интерполяции. К интерполяции временной функции сигнала
приходится прибегать и тогда, когда известно аналитическое опи-
сание сигнала, но функция, описывающая сигнал, является слож-
ной, имеются определенные трудности ее расчета. В этом случае
вычисляют значения сигнала для нескольких моментов времени и
по ним строят более простую (интерполирующую) функцию, с по-
мощью которой определяют значения сигнала в остальных точках.
Так же можно поступать и при задании сигнала с помощью графика
(осциллограммы).
6.7.1 Интерполяционные многочлены
Определение непрерывного сигнала по его дискретным значе-
ниям означает восстановление сигнала. В математическом отно-
шении эта операция сводится к описанию временной функции
сигнала s(t), заданной своими значениями в заданные моменты
времени, с помощью функции (р(Г), принимающей те же значения
169
Раздел 6
Рис. 6.7
в указанные моменты времени (рис. 6.7). Функцию <p(f) называют
интерполирующей, точки, в которых заданы значения функции, уз-
лами интерполяции.
Чаще всего интерполирующую функцию задают в виде много-
члена
N
ф(0 = ^акфк(0, (6.48)
к=о
где (pk(f) - базисные функции; ак-постоянные коэффициенты.
При заданной совокупности базисных функций фк(0 интерполи-
рующая функция ф(0 определяется только коэффициентами ак.
Найти коэффициенты можно, составив систему уравнений, исполь-
зуя (6.48), записанных для заданных моментов времени (для кото-
рых известны значения сигнала)
N
(6‘49)
К=0
Матрица системы уравнений имеет вид
Фо(^о)Ф1(^о)---Фл/(^о)
Фо(МФ1(М-Фл/(М
(6.50)
Ф о ( ) Ф 1 ( ) • • Ф N ( )
170
Дискретизация и восстановление непрерывных сигналов
При написании матрицы учтено, что для однозначного опреде-
ления коэффициентов необходимо, чтобы число строчек матрицы
было равно числу столбцов.
Выражение для ак получится в виде
ак=^, (6.51)
А
где А - определитель матрицы; Ак получается из А путем замены
к-ro столбца столбцом s(tk).
Таким образом, интерполирующая функция будет определяться
выражением
ф(0 =
Раскладывая определитель Ак по элементам к-ro столбца, вы-
ражение для ак получим в виде
(6.52)
" А
(6.53)
где Akn - соответствующее алгебраическое дополнение.
С учетом (6.53) из (6.52) получим другую форму записи
интерполяционного многочлена
N
^t) = ^s(tk^k(t). (6.54)
k=Q
Коэффициенты ряда (6.54) представляют значения s(t) в узлах
интерполяции. Функции <Dk(t) определяются базисными функциями
Фк(0 и узлами интерполяции Очевидно равенство
N
s(f„) = л = о, 1.2.W . (6.55)
к=0
Как следует из (6.55), функция Фк(1) должна удовлетворять
условию
171
Раздел 6
(6.56)
Форма представления интерполирующей функции (6.54) являет-
ся наиболее удобной для практического использования; в ней в ка-
честве коэффициентов многочлена фигурируют выборочные значе-
ния сигнала.
Качество интерполяции функции при заданных узлах интерполя-
ции зависит только от выбора интерполяционных многочленов. Ин-
терполяционными многочленами могут быть степенные многочлены,
ортогональные многочлены и сплайновые функции. В радиотехнике
чаще используется ряд Котельникова. Одно из основных его досто-
инств связано с тем, что в качестве коэффициентов ряда использу-
ются дискретные значения, которыми задается сигнал.
В настоящем разделе рассматриваются интерполирующие
функции на основе степенных многочленов, многочленов Лагранжа
и функций Котельникова. В разд. 7 рассматривается сплайновая
интерполяция.
6.7.2. Степенные многочлены, многочлены Лагранжа
В выражении для интерполирующей функции (6.48) в качестве
интерполяционного многочлена может быть использован степенной
многочлен. Степенной многочлен, описывающий сигнал, запишем в
виде
N
ф(0 = 2а^к-
k=Q
(6.57)
Графики базисных функций многочлена даны на рис. 6.8. Они
определены на всей оси времени, неограниченно возрастают
с увеличением порядкового номера.
Матрица системы уравнений (6.50) в этом случае примет вид
1 f ft
I r0 r0 ... Iq
-I # #2 tN
172
Дискретизация и восстановлениенепрерывных сигналов
Рис. 6.8
Матрица дает определитель Вандермонда или степенной опре-
делитель. Переходя к форме записи многочлена (6.54), выражение
для базисных функций получим в виде
A t-t
<Ы') = Пттг
л=0 1п
{n*k)
(6.58)
(6.59)
Таким образом, интерполирующая функция (p(f) будет описы-
ваться выражением
N ,N. t-t
ф(0 = 2>(гк)П-ГТГ
k=0 л=0
(n±k)
Многочлен (6.59) называется интерполяционным многочленом
Лагранжа. При постоянном шаге по оси t, когда
“ ?о = ?2 “ fi = ••• = tN ~ In-i = 11 - обозначив t-tQ/ h= x, запишем
= xh(xh-h)...[xh-(k-1)h][xh-(k + 1)h]...(xh-Nh) =
k ~ kh(k-A)h...[-(N-k)h]
x(x-1)...(x-/V) (-1)"'* = }}N-kcK 1 x(x-1)-(x-/V)
x-k k\(N-k}l N x-k M
(6.60)
173
Раздел 6
Таким образом, выражение для интерполяционного многочлена
Лагранжа примет вид:
(p(x) = (-1)w
х(х-1)...(х-/V) у к CkNs(tk)
Л/! ^х--к
(6.61)
Интерполяционный многочлен Лагранжа cp(f) совпадает с ис-
ходной функцией, описывающей сигнал s(t) в узлах интерполяции
. В остальных точках он будет отличаться от s(t). Исключе-
ние составляет тот случай, когда сигнал описывается степенным
многочленом степени не выше N. В этом случае <p(f) и s(t) будут
тождественно равны.
Многочлен Лагранжа обладает хорошими интерполяционными
сойствами при сравнительно небольшом числе узлов интерполя-
ции. При большой степени многочлена (на практике Л/> 5) возника-
ют трудности вследствие "раскачки" полинома между узлами ин-
терполяции.
Отличие ф(0 от s(t) определяет погрешность интерполяции. По-
грешность оценивается неравенством
Ism-vwl м. (6.62)
где Mw+1 = max s(W+1)(f) ; te [t0,tN].
Как следует из (6.62), погрешность интерполяции сигнала опре-
деляется значениями (N+1) -производной интерполируемой функ-
ции и многочлена
(6.63)
Многочлен W(t) обращается в нуль в узлах интерполяции
t0,tb...tn. Переходя через нули, меняет знак, принимая в интерва-
лах между ними экстремальные значения (рис. 6.9), значения экс-
тремумов будут различны. В районе больших экстремумов можно
ожидать больших погрешностей. Погрешность будет особенно ве-
лика для значений вне интервала [f0, tN], т.е. в том случае, когда
многочлен Лагранжа используется для экстраполяции функции.
Примеры интерполяции функций с использованием многочлена
Лагранжа приведены в конце разд. 7.
174
Дискретизация и восстановление непрерывных сигналов
Nчетное
Nнечетное
Рис. 6.9
6.7.3. Ряд Котельникова
Для восстановления непрерывного сигнала s(t) по его дискрет-
ным значениям в радиотехнике чаще всего используется ряд Ко-
тельникова
оо
s(t) = y^s(nT)sinocom(f- nT),
п=-°°
(6.64)
где Т- интервал дискретизации, Т <- максимальная час-
тота в спектре сигнала;
sincfx) = sinfx)/x.
Записанное выражение может рассматриваться как разложение
непрерывного сигнала в ряд по ортогональной системе функций
(рис.6.10)
<pn(t- nT) = sin cum(t- nT) (6.65)
с коэффициентами, равными значениям сигнала в выбранные мо-
менты времени.
Если сигнал определен на интервале [0, Тс], то число интерва-
лов разбиения равно
Т л
а ряд Котельникова примет вид
N-1
s(t) = ^s(nT)sinaom(f- nT). (6.67)
л=0
Ряд Котельникова может быть записан и для частотной области
175
Раздел 6
N-M2 j-
S(oj) = S(nQ)sinc—(co-nQ.), (6.68)
n=-{N-1)/2
где Sf(o ) - спектральная плотность сигнала s(t); Q.-2n/Tc - интер-
вал дискретизации по частоте.
Общее число выборочных значений определяется как
A/ = 2ojm/Q. (6.69)
Примеры восстановления спектров сигналов по их дискретным
значениям с использованием ряда Котельникова приведены в кон-
це разд. 7.
Взяв выборочные значения сигнала, можно произвести его сту-
пенчатую аппроксимацию
s(O),O<f<T,
s(f) =
s(T),T<t<2T,
(6.70)
s(nT), nT <t <(n + 1)T,
где T- интервал дискретизации сигнала по времени.
Выражение для спектральной плотности сигнала запишем в виде
Рис. 6.10
176
Дискретизация и восстановление непрерывных сигналов
°° оо (Л+1)Т
S(w)= j s(t)e~Kotdt = Js(t)coswtdt-
— OO П=—OO f)7~
oo (n+1)7
- /' Js(f)sina)fc#
n=—°° n7”
(6.71)
Из (6.71) с учетом (6.70) получим
оо —»
S(co) = Гs(nT) sin cos о)( л + 0,5)Т
л=0 2
оо _
-iT ^2 s(nT)sinc^|-sina)(n + 0,5)T
(6.72)
Для четной функции s(t) запишем
S(co) = 2T^s(nT)sinc
л=0
0)7* . —
—^-cos(j^n + 0,5)T.
(6.73)
Аналогично можно подучить выражение, связывающее сигнал с
выборочными значениями спектральной плотности
s(f) = _1_ JS(o))e'to/oto = — ^Re[S(nQ)]sinc—cos(n + 0,5)Qf+
71 -00 71 л=0
(6.74)
,Q
+1 —
y^lm[S(nQ)sinc—
sin(n + 0,5)QL
Для действительной функции S(nQ) получим
s(0 = — V S(nQ) sin c—cos(n + 0,5)Qf.
л “J 2
л=0
(6.75)
Выражения (6.72) - (6.75) аналогичны ряду Котельникова. Они
позволяют восстановить сигнал по дискретным значениям спектра
и спектр по дискретным значениям сигнала.
177
Раздел 7.
ВОССТАНОВЛЕНИЕ НЕПРЕРЫВНЫХ СИГНАЛОВ
С ПОМОЩЬЮ СПЛАЙНОВ
Одним из видов интерполирующей функции является сплайно-
вая функция, или сплайн. Сплайн описывает интерполируемую
функцию на каждом частном интервале дискретизации. Так, если
функция задана на интервале [t0, tN], который выборкой разбит на
частные интервалы [tk, tk+1], то сплайны дают описание функции на
каждом частном интервале [tk, tk+i], а их совокупность описывает
функцию на всем интервале ее задания (рис. 7.1). Обычно сплайн
представляет степенной многочлен. Такого вида сплайны и рас-
сматриваются в дальнейшем.
Интерполирующая функция фк(?) называется сплайном степени
л дефекта v, если она удовлетворяет следующим условиям:
на каждом интервале [tk, tk+1] функция является многочленом
степени п;
п
(7.1)
/=0
непрерывна и имеет на концах интервала (п - v) непрерывных про-
изводных, т.е.
178
Восстановление непрерывных сигналов с помощью сплайнов
ф!Г)(^~^) = ф(кц)(?/(. + 8) при 5-> 0, ц = О,
Говорят, сплайн обладает n-v степенью гладкости.
Предельный вариант сплайна - кусочно-линейная функция,
применяемая при линейной интерполяции. Такую функцию можно
рассматривать как сплайн первой степени (л = 1) дефекта 1
(v = 1/ Простейшими сплайнами, пригодными для использования
на практике, являются кубические сплайны третьей степени де-
фекта 2 или 1. На их примере рассмотрим общий подход к по-
строению сплайнов.
В дальнейшем излагаются методы построения сплайнов более
сложной структуры, приводятся выражения для различных видов
сплайнов, даются примеры их применения при восстановлении не-
прерывных сигналов - интерполяции временной функции, описы-
вающей сигнал.
Одним из достоинств сплайновой интерполяции является то,
что не требуется равномерной сетки интерполяции функции. В то
же время на практике чаще всего используется постоянный интер-
вал дискретизации сигнала. Вследствие этого в дальнейшем рас-
сматривается вариант с равномерной сеткой интерполяции. Сплай-
ны, построенные на равномерной сетке интерполяции, называются
стационарными. Целесообразность такого рассмотрения подкреп-
ляется еще и тем, что в этом случае выражения, описывающие
сплайны, и приводимые в качестве иллюстрации методы, получа-
ются проще.
7.1. Кубические сплайны первой степени гладкости
Сплайны третьей степени дефекта 2 называются кубическими
сплайнами первой степени гладкости или эрмитовыми кубическими
сплайнами. Исходными данными для их получения являются зна-
чения сигнала s(tK) и его первых производных в узлах интерполяции
(ds/dt)tk. На каждом частном интервале [tK, сплайн описывается
выражением
ФИО = ако +ak1(t- tk) + ak2(t - tk)2 + ak3(t- tkf . (7.2)
В точках дискретизации сплайн и его первая производная равны
значениям сигнала и его производной
<pk(tk) = s(tk );<₽*((*) = S’((k). (7.3)
179
Раздел 7
Из (7.2) и (7.3) для начала и конца каждого частного интервала
[tK, tK+i] получим четыре уравнения, которые позволяют определить
четыре коэффициента (ако, аК1, аК2, ак3), задающие сплайн. С уче-
том значений этих коэффициентов выражение для сплайна (7.2)
примет вид
= s(tk)(1 - т)2(1 + 2т) + s(?k+1 )т2(3 -2т) + (7
+ s(tk - т)2 - s-(fk+1 )/тт2(1 - т),
где T^(t~tk)/h,h = tM-tk.
Если функция задана только своими значениями (наиболее рас-
пространенный на практике случай), для задания значений на кон-
цах частного интервала [tK, tK+1] можно использовать следующее
выражение:
g \ — ) ~~ ^(fyc-1) ^/с+1 ~ ?к + ^(^к+1) ~ $(?к ) ^к ~ ^к-1 (7 5)
^к ~ tk_} tk+y - tk^ tk+i ~ tk tk+j -
На границах интервала задания функции:
S’(f0) = s’(fN) = . (7.6)
h tN- tN_.^
В практике интерполяции сигналов и их характеристик наиболее
удобной формой представления интерполирующей функции явля-
ется следующая (разд. 6)
N
<p(f) = ^SkO»(t), (7.7)
k=1
где sk = s(tK) - дискретные значения сигнала (значения интерполи-
руемой функции в узлах интерполяции).
Приводя выражения для сплайнов к виду (7.7), для случая
tk+1 - tk= h, s0= sN= 0 получим:
на первом интервале
ФЛт) = т(1 + т-т2),
(7.8)
Ф2(т) = т (1 —т)2,
где т = t - tk / h,
на к-м интервале [tk, tk+1]
180
Восстановление непрерывных сигналов с помощью сплайнов
Фк_,(т) = 0,5(1 - г)2,
Фк(т) = 1-2,5т2 + 1,5т3,
Фл+1 (т) = т(О,5 + Зт -2,5т2),
Фк+2(т) = 0,5т2(1 - т).
на последнем интервале
Фдм(т) = 1-2т2+т3,
ФЛ/-2(Т) = т(1“2т + т2)-
(7.9)
(7.Ю)
7.2. Кубические сплайны второй степени гладкости
Большую гладкость интерполяции обеспечивает кубический
сплайн второй степени гладкости (дефекта 1). Он представляет
многочлен третьей степени (7.2), его значения в узлах интерполя-
ции равны значениям сигнала
(p(tk) = sk, (7.11)
имеет в узлах интерполяции непрерывные первые две производ-
ные
Фц(Гк-5) = фц(Гк+5),5-»0, ц = 1, 2.. (7.12)
При описании сплайна на частном интервале [tk, tk+1] использует-
ся его запись в виде (7.7).
Чтобы выполнить условие (7.12), продифференцируем дважды
(7.4) и для tk- левой границы интервала [fo, tk+1] (т = 0) получим
Ф’(^) = 6(sk+1 ~sk)/h2- 2(2sk + sk+^/h. (7.13)
Аналогично для правой границы интервала [tk.h (т = 1) найдем
Ф”(^) = 6(sk - sk^!rf + 2{2sk + sk^)lh. (7.14)
Приравнивая (7.13) и (7.14), получаем
^(^-1 + 4sk + Sk+1) = 3(sk+i - Sk_}). (7.15)
181
Раздел 7
Такие уравнения могут быть получены для узлов интерполяции
при к = 2,..., N - 1. Полученная система уравнений должна быть до-
полнена соотношениями для производных на границах общего ин-
тервала [t0, tN], позволит однозначно определить все производные
s’k. Таким образом, сплайн на каждом частном интервале опреде-
ляется всей совокупностью значений sk и краевыми условиями. В
этом смысле такой сплайн называется глобальным. Он требует
большого объема вычислений, особенно при большом значении N.
Рассмотренные кубические сплайны дефекта 1 обладают дос-
таточно хорошими интерполяционными свойствами. Однако син-
тез таких функций связан с определенными трудностями и для
них характерен большой объем вычислений. Поэтому при интер-
поляции функций (восстановлении непрерывных сигналов по их
дискретным значениям) более удобными могут оказаться локаль-
ные сплайны.
7.3. Подход к построению локальных сплайнов
Одним из достоинств сплайновой интерполяции является воз-
можность решения задачи при неравномерной сетке интерполяции.
Однако более простыми являются стационарные сплайны - сплай-
ны, формируемые на равномерной сетке. На их примере и рас-
смотрим принцип построения локальных сплайнов.
Для построения локальных сплайнов могут использоваться раз-
личные подходы. В настоящем разделе дается достаточно простой,
изложенный в [38]. Ограничимся рассмотрением случая, когда
сплайны представляют степенные многочлены.
Рассмотрим функцию s(t), заданную своими значениями s(tK) = sK
в точках дискретизации {tk},k = 0,1, 2,...,Л/, на интервале [t0, Ц. Вы-
делим интервал [Т1г Т2], границы которого: 1\ е [tk_vtk]
и T2<=[tk,tk+}] (рис. 7.2). В окрестности точки Т1 возьмем симмет-
рично (N^l) точек дискретизации t^, tk, tk.2, tk+1,..., построим много-
член L1(t)f проходящий через соответствующие значения функции
sk.i, sk, sk.2l sk+1,... и содержащий членов.
Аналогично построим многочлен L2(t) на точках, выбранных
симметрично Т2, проходящий через значения функции sk, sk+1, sk.b
sk+2,... содержащий (N2+1) членов.
На интервале [Т?, Т2] построим многочлен <pk(t), содержащий
Л/?+Л/2+3 членов.
Коэффициенты многочлена найдем из условий:
многочлен проходит через точки L^TJ, sk ,.L2 (Т2);
182
Восстановление непрерывных сигналов с помощью сплайнов
производные многочлена на границах интервала совпадают с
производным и L^t) и L2(t)\
Фк(?к) ~ sk>
..«!, (7.16)
ФкС^г) = М?2)>
ф'(;,)(7-2)=М(г2),ц = 1.л/2.
Уравнения, составленные исходя из условий (7.16), позволяют
определить коэффициенты многочлена <рк(0- Преобразовав его к
виду (7.7), получим сплайн, описывающий функцию на интервале
[Ть Т2], имеющий требуемый вид.
Аналогично выделим интервал, примыкающий слева к [Т1г Т2] и
на нем построим многочлен <р^-|(0 так же, как строился qk(t). За-
тем на интервале, примыкающем справа к [Тф Т2], построим много-
член <pR+1(0 . Таким образом, получим совокупность многочленов на
всем интервале задания функции, многочлены проходят через за-
данные точки, имеют определенное число производных на грани-
цах выделяемых интервалов. На первом интервале [f0, 7i] и по-
следнем [Т2, tN] интерполирующая функция совпадает с многочле-
нами Ц(1) и L2(t) соответственно.
Используя изложенный подход к синтезу локальных сплайнов
и обеспечивая заданное число непрерывных производных, можно
получить различные виды сплайнов, описывающих заданную
функцию.
183
Раздел 7
7.4. Локальные сплайны нечетной степени гладкости
Ниже рассматривается метод синтеза локальных стационарных
сплайнов, имеющих нечетное число непрерывных производных.
Синтез сплайнов производится с использованием общего подхода,
описанного в п. 7.3.
7.4.1. Локальные сплайны первой степени гладкости
Кусочно-линейная интерполяция не имеет большого практиче-
ского значения. Чаще используются сплайны более высокого по-
рядка. Однако на ее примере проще рассмотреть подход и основ-
ные особенности интерполяции на основе локальных сплайнов.
Функция, описывающая сигнал, задана дискретными значениями
на интервале [t0, tN] с равномерной сеткой и постоянным шагом h
(рис. 7.2).
Выделим интервал [Ть Т2], где 1\ = 0,5(fk_1 + tk) и Т2 = 0,5(fk + fk+1).
Определим значения функций L^t) и L2(t) и их первых производных
на границах интервала [Ть Т2] с использованием линейной интер-
поляции
) = 0,5(s^_-| + ), (7 17)
щт=uh(sk-sk^,
L^(T2) = 0,5(sk+sk+1),
L2(T2) = 1//7(Sk+i-Sk).’
На интервале [Т?, Т2], построим степенной многочлен четвертой
степени
4
m=0
(7-18)
так, как это описано в п.7.3: на границах интервала значения много-
члена и его первых производных совпадают со значениями, опре-
деляемыми (7.17), а в точке tk - значением sk
чШ)=ад).
184
Восстановление непрерывных сигналов с помощью сплайнов
Ф/ЛТг) ~ ^2(^2)’
Фк(7-2) = Ш2)> (7-19)
Ф/№) = Sk-
Из (7.17) - (7.19) получим выражения для коэффициентов мно-
гочлена (7.18)
а0 = Sr,
a, = V2h(sk+,-sk_,),
а2 = 3/2h2(sk^ -2sk + sR+1), (7.20)
аз =0>
а4 — 2/h {~sk_^ + 2sk — sk+1).
Таким же образом можно построить многочлены cpk(f) на всех
частных интервалах. На первом интервале и последнем функция
восстанавливается линейно.
Преобразуя полученную совокупность многочленов {фк(/)} к виду
ф(о=Х®*ф*<л
к=1
для базисных функций Фк(/) получим следующие выражения.
На первом интервале:
Ф^т) = 1 — т,
Ф2(т) = т, (7.21)
Фк(т) = 0,/г>3,т = 1//7(/-/1).
На к-м интервале [fk -0,5/7,tk +0,5/7], к = 2,...,Л/-1, Л/>3:
Фк_-|(т) = -0,5т + 1,5т2 - 2т4,
Фл(г) = 1-3г2 + 4г4, (722)
Фк+1 (т) = 0,5т + 1,5т2-2т4,
Ф,(т) = 0, / < к-2, / > к + 2, т = 1/h(t-tk).
На последнем интервале:
185
Раздел 7
= 1 + т,
0l(x) = Q,l<N-2,x = 1/h(t-tN).
(7.23)
Графики базисных функций приведены на рис. 7.3 - 7.5 (в конце
раздела). Примеры восстановления непрерывных сигналов по их
дискретным значениям с помощью степенных локальных сплайнов
приведены на рис. 7.6 - 7.8 (интервал дискретизации - единица).
Сплайны с одной непрерывной производной являются наиболее
простыми. Качество интерполяции функций с их использованием
такое же, как и при использовании эрмитовых сплайнов. Оно может
оказаться достаточным при интерполяции относительно простых
зависимостей.
7.4.2. Локальные сплайны третьей степени гладкости
Используя общий подход, проведем построение локальных
сплайнов третьей степени гладкости. Для этого выделим интервал
[Т1г Т2], с границами на серединах смежных частных интервалов
разбиения (рис. 7.2):
Д = 0,5(fk_1 + tk), Т2 = 0,5(/k + tk+J.
Через точки sk.2,...,sk+1 проведем многочлен Lrft) третьей степе-
ни. Выражение для него будет иметь вид:
= sk-1 + t/6(-2s,_2 -3sk_.| + 6s, -sk+1) +
о о (7-24)
+ т /2(s,-2-2s,„1 + s, ) + т /6(-sk_2 + sk_} -3sk + sk+1),
где т = 1/h(t-tk_}).
Для левой границы интервала [Т?/ Т2], получим:
L| (т^ — 0,5/7) = 1/16(—sk__2 + 9s,_1 + 9sk — sk+}),
/^(тк — 0,5/7) = 1/24/7(s,_2 -27s,_-| +27s, -sk+1),
1фк -0,5h) = 1/2h2(sk_2-sk^-sk +sk+}),
L^(Tk~ 0,5/7) = 1 / /73 (-s,_2 + 3s,_1 - 3s, + s,+1)
Через точки sk^,...,sk+2 проведем многочлен L2(t) третьей степени
(аналогично многочлену L^t)). Так же, как для L\(t), получим зави-
симости для значения L2(t) и трех его производных на правой гра-
186
Восстановление непрерывных сигналов с помощью сплайнов
нице интервала [Ть Т2], в точке tk+ 0,5/7. Эти значения описываются
(7.25) при увеличении индекса s на единицу.
В соответствии с общим подходом, изложенным в п.7.3, на интер-
вале [ТЬТ2], строится многочлен 8-й степени <рк(/), N-^ = N2 = 3. Так же
строятся многочлены на всех остальных интервалах. На первом и
последнем интервалах для интерполяции используются многочлены
Lift) и L2(t), проведенные через первые и последние четыре точки
соответственно. Полученная таким образом совокупность степенных
сплайнов осуществляет интерполяцию функции на всем заданном
интервале, плавно соединяя исходные дискретные значения. Преоб-
разуя полученную совокупность многочленов к виду (7.7), получим
следующие выражения для базисных функций Фк(Х).
На первом интервале:
Ф, (т) = -0,3333т + 0,5т2 - 0,1667т3,
Ф2(т) = 1 -0,5т- т2 + 0,5т3,
Ф3(т) = т + 0,5т2-0,5т3,
(7-26)
Ф4 (т) = -0,1667т + 0,1667т3,
Ф/(т) = 0,/>5, т = 1 //7(/—/2).
На/с-ом интервале [/к-0,5/7, tk+Q,5h], k = 3,...,N-2, N>5:
ФкМ = 0,0625т - 0,3516т2 + 0,0702т3 + 1,6146т4 -
- 0,3684т5 -3,7083т6+ 0,3509т7+ 3,5т8,
Ф^т) = -0,625т + 1,9062т2- 0,1404т3 - 6,4583т4
+ 0,7368т5 + 14,8333т6 -0,7018т7 - 14т8.
Ф^т>1-3,1094т2+9,6875т4-22,25т6+21т8 , (7.27)
Фк+1 =
Фк+2= Фк-2(~^)1
Ф,(т) = 0 , /< к-3, l> k+3,x=1/h(t-tk).
На последнем интервале базисные функции определяются
(7.26) с учетом следующих соотношений:
Фл/-к(т) = Фк(1-т), /с = 1,...,4,
Ф/(т) = 0,/<Л/-4,т = 1//?(/-^2). ( ‘ }
187
Раздел 7
Рассматриваемые сплайны могут быть получены только при N >4.
Графики базисных функций при некоторых значениях Л/изобра-
жены на рис. 7.3 - 7.5. Примеры восстановления непрерывных сиг-
налов по их дискретным значениям с помощью степенных локаль-
ных сплайнов приведены на рис. 7.6 - 7.8.
7.5. Локальные сплайны четной степени гладкости
На основе общего подхода (п. 7.3) получим расчетные выраже-
ния для стационарных многочленных моделей, имеющих четное
число непрерывных производных. Это наиболее простые локально-
сплайновые модели.
7.5.1. Локальные сплайны второй степени гладкости
Функция, описывающая сигнал (или его характеристику), задана
дискретными значениями на интервале [f0, М с постоянным шагом
(рис. 7.2). Выделим частный интервал [tk, ki] и определим значения
первых двух производных на границах выделенного интервала. Для
этого проведем через точки sk.bsk и sk+1 степенной многочлен вто-
рой степени
2
(7.29)
m=0
Коэффициенты многочлена определяются из следующей систе-
мы функций:
bo = S*,
b, = 1/2h(-sk_, + sk+1), (7.30)
tfe = 1/b2(sk_1-2sk + sk+1).
Из (7.29) с учетом (7.30) найдем производные на левой границе
выделенного интервала:
L,(fk) = 1/2h(sk+1-sk_,),
L)(fk) = 1//j2(sk_1-2sk + sk+1).
Аналогично построим степенной многочлен второй степени L2(t),
проходящий через точки sk, sk+1, sk+2. Производные L2(t) на правой
границе выделенного интервала найдутся так же, как (7.31):,
188
Восстановление непрерывных сигналов с помощью сплайнов
(7.32)
(7.33)
(7.34)
(7.35)
L,(fk+1) = 1/2/?(sk+2-sk),
^(?k+1) = 1//72(sk-2sk+1 + Sk+2).
Построим на интервале [tk, tk+1] степенной многочлен qk(t) пятой
степени
Фк(о=Ха^т
т=0
где т = 1/h(t-tk), tE [fk,fk+1], удовлетворяющий граничным условиям
Фк (~ $к>
Фк(^к + 1) ~ Sk + 1i
<₽<<>%) = Z«(fk), И = 1,2,
С учетом (7.34), (7.31) и (7.32) получим следующие выражения
для коэффициентов многочлена (7.33):
^0 ~ $к’
a. = 1/2(-sk_1 + sk+1),
а2 =1/2(8^-2sk+sR+1),
аз = 3/ 2(sk_^ — 3sk + 3sk+-\ — sk+2),
a4 ~ 2(Sk_^ ~~ ^$k + — S/(+2),
a5 = sk_j — 3s k + 3sk+j — sk+2-
Аналогично получим всю совокупность многочленов {cpk(f)} • На
первом частном интервале и последнем функция описывается мно-
гочленами Lrft) и L2(t), проведенными через первые три и последние
три точки. Преобразуя полученную совокупность многочленов к виду
(7.7), получим следующие зависимости дли базисных функций Фк(1).
На первом интервале:
Ф1(т) = 1-1,5т + 0,5т2,
Ф2(т) = 2т- т2,
Ф3(т) =-0,5т + 0,5т2,
Ф;(т) = 0, />4,T = 1//7(f-?2).
На к-м интервале [^,^+1], к = 2,...,Л/-2, Л/>4:
(7.36)
189
Раздел 7
(7.37)
(7.38)
Фк^ (т) = -0,5т + 0,5т2 + 1,5т3 - 2,5т4 + т5,
Фк(т) = 1 - т2 - 4,5т3 + 7,5т4 - Зт5,
Фк+1 (т) = 0,5т + 0,5т2 + 4,5т3 - 7,5т4 + Зт5,
Фк+2(т) = -1,5т3 + 2,5т4 -т5,
ФДт) = 0,1<к-2; l> k + 3,T = l/h(t-tk).
На последнем интервале:
ФЛ/_2 (т) = -0,5т + 0,5т2,
ФЛ/_1(т) = 1-т2,
ФдДт) = 0,5т + 0,5т2,
Ф,(т) = 0, / < Л/-3, т = 1/A7(f-f/v).
Графики базисных функций при некоторых значениях N изобра-
жены на рис.7.3 - 7.5. Примеры восстановления непрерывных сиг-
налов по их дискретным значениям с помощью степенных локаль-
ных сплайнов приведены на рис. 7.6 - 7.8.
7.5.2. Локальные сплайны четвертой степени гладкости
При переходе к сплайнам, имеющим непрерывными четыре
первые производные, качество интерполяции (гладкость) улучша-
ется. Принцип их построения описан в п. 7.3. Операции построения
сплайна аналогичны описанным в п. 7.5.1.
Выделим интервал [tk, tk+1] (рис. 7.2), и на левой границе интер-
вала через пять точек sk.2, sk.i,..., sk+2степенной многочлен
4
т=0
(7.39)
Приравнивая значения функции и многочлена (7.39) в выбран-
ных точках, получаем следующие выражения для коэффициентов:
— sk,
bi = 1112/7(sk_2 - 8sk4 + 8sk+1 - Sk+2),
b2 = V24h2(-Sk_2 +165^ -30sk +16sk+1 -sk+2), (7.40)
t>3 = 1 /12/73 (~sk_2 + 2sk_, - 2sk+1 + skt2),
b4 = 1/24/74(sk_2-4sk_, + 6sk-4sk+1+skt2).
Дифференцирование (7.39) с учетом (7.40) дает выражения для
первых четырех производных на левой границе рассматриваемого
интервала в виде:
190
Восстановление непрерывных сигналов с помощью сплайнов
Ц^к) = 1/12/7(5^-85^ +8Sk+1 ~Sk+2),
цук ) = l/12h2 (-sk_2 +165^ - 3Qsk +16sk+1 - sk+2).
ЦМ = ^l^3(~~sk-2 + 2sfc-1 “2sk+1 +sk+2)>
^-Г(^) = 1/ ^4(s/c-2 “4sfc-1 +6sk -4s/c+1 +sk+2)-
(7-41)
Аналогично задается степенной многочлен L2(t) на правой границе
выделенного интервала, который проходит через точки sk-i,...,sk+3
Для него получим:
^2^ к+1) — 1 /12/7(Sk_1 — 8Sk + 8Sk+2 — Sk+3),
^2(^+1) = 1/12/7 +16S^. — 30Sk+1 +16S/f+2 — Sk+3). (7 42)
Lm(tk+1) = 1 /2/73 (-S^ + 2sk - 2sk+2 + Sk+3 ),
/-2U/C+1) = 1/fr4(sfc-1 “4sk + 6sk+1 -4sk+2 +Sk+3).
На интервале [tk, tk+i] строим степенной многочлен девятой
степени
9
<Рк(Т)=^атг'", (7.43)
т=0
где т = 1/h(t-tk).
Многочлен проходит через точки sk и sk+1, на границах интервала
имеет производные, равные (7.41) и (7.42). Из этих условий опре-
деляются коэффициенты в (7.43):
Йо ~ $к'
а1 =1/12/7(sk_2 -85^ +8sk+1 -sR+2),
а2 = 1/24/72(-sk_2 + 16S/f_1 -30sk +16sk+i -sk+2),
^3 =1/12/7 (—sk_2 +2sk_j — 2sk+j + sk+2),
a4=1/24h4(sk_2-4sk_]+6sk-4sk+]+sk+2), (7.44)
a5 = -10/3(sk_2 -55^ +10sR -10sk+1 +5sk+2-sk+3),
ag = — 3,4129a5,
a7 = 4,425a5,
a8 =-2,5875a5,
a9 =0,575a5.
Аналогично строятся многочлены (pk(f) на всех частных интер-
валах [tk, tk+i] при к = 3,...,N-2. На первом и последнем интервалах
интерполируемая функция описывается многочленами L^t), прохо-
191
Раздел 7
дящим через первые пять ее значений, и L2(t), проходящим через
последние пять значений функции.
Преобразуя полученные многочлены к виду (7.7), получаем сле-
дующие выражения для базисных функций.
На первом интервале:
Ф^т) = 1 - 2,0833т + 1,4583т2 - 0,4167т3 + 0,0417т4,
Ф2 (Т) = 4т - 4,3333т2 + 1,5т3 - 0,1667т4,
Ф3(т) =-Зт +4,75т2 - 2т3 + 0,25т4, /7 лсч
' (7.45)
Ф4(т) = 1,3333т-2,3333т2+1,1667т3 -0,1667т4,
Ф5(т) = -0,25т + 0,4583т2 -0,25т3 +0,0417т4,
Ф/(т) = 0,/>6,т = 1/Л(Г-Г1).
На к-м интервале [tk,tM],k = 3,...,N-2, N>6 :
Фк.2(т) = 0,0833т -0,0417т2 + 0,0833т3 +0,0417т4-
-3,3333т5 +11,375т6 -14,75т7 +8,625т6 - 1,9167т9,
Фк.^т) = - 0,6667т + 0,6667т2 + 0,1667т3 - 0,1667т4 +
+16,6667т5 - 56,875т6 + 73,75т - 43,125т8 + 9,5833т9,
Фк(т)=1 - 1,25т2+ 0,25т4- 33,3333т5 + 113,75т6- 147,5т7+
+ 86,25т3-19,1667т9,
Фк+1 =
Фк+2 = ® К-1 (1“^),
Фк+3 = ®K-2^~т)>
Ф/ = 0,1 </с-3,1 >/с +4, т = 1/h(t-tk). (7.46)
На последнем интервале базисные функции симметричны функ-
циям на первом интервале, вычисляются по (7.45) с учетом сле-
дующих соотношений:
Ф^5+М = Фк(т),к = 1,...,5,
ФДт) = 0,/с<Л/-5,т = 1/Ъ(Г-^4).
Рассматриваемые сплайны могут быть получены только при N> 5.
Графики базисных функций при некоторых значениях Л/изобра-
жены на рис. 7.3 - 7.5. Примеры восстановления непрерывных сиг-
налов по их дискретным значениям с помощью степенных локаль-
ных сплайнов приведены на рис. 7.6 - 7.8.
Анализ приведенных на рис. 7.6 - 7.8 интерполяционных функ-
ций, построенных с использованием ряда Котельникова, многочле-
нов Лагранжа и сплайновых функций, дает возможность сравнить
качество интерполяции для различных видов исходных сигналов.
192
Восстановление непрерывных сигналов с помощью сплайнов
Ряд Котельникова
Сплайны 1 с. г.
Многочлен Лагранжа
Сплайны 2 с. г.
0.0 1,0 2,0 3,0 4,0
0,0 1,0 2,0 3,0 4,0
Сплайны 3 с. г.
|ГТ'||"1ТГГ"|""1'ТТТу"1.14 "I.|.ГТ4 f 'f'T I
0,0 1,0 2,0 3,0 4,0
Сплайны 4 с. г.
Рис. 7.3
193
Раздел 7
Ряд Котельникова
0,0 1,0 2,0 3,0 4,0 5,0
Многочлен Лагранжа
0,0 1,0 2,0 3,0 4,0 5,0
Сплайны 1 с. г.
0,0 1,0 2,0 3,0 4,0 5,0
Сплайны 2 с. г.
Сплайны 4 с. г.
Сплайны 3 с. г.
0,0 1,0 2,0 3,0 4,0 5,0 0,0 1,0 2,0 3,0 4,0 5,0
Рис. 7.4
194
Восстановление непрерывных сигналов с помощью сплайнов
Ряд Котельникова Многочлен Лагранжа
0,0 2,0 4,0 6,0 8,0 0,0 2,0 4,0 6,0 8,0
Сплайны 1 с. г. Сплайны 2 с. г.
0,0 2,0 4,0 6,0 8,0 0,0 2,0 4,0 6,0 8,0
Сплайны 3 с. г. Сплайны 4 с. г.
I j Ч' ГТ"Т"| I I Г Г,(*Т*Т~Г'Т‘{*,ГГТЧ‘]Г* *т ' I Г j"TT 1 '"1" у'1' ГТ"1.|.ГГГ7[Т’
0,0 2,0 4,0 6,0 8,0 0,0 2,0 4,0 6,0 8,0
Рис. 7.5
195
Раздел 7
Ряд Котельникова
0,0 2,0 4,0 6,0
Сплайны 3 с. г.
Многочлен Лагранжа
0,0 2,0 4,0 6,0
Рис. 7.6
196
Восстановление непрерывных сигналов с помощью сплайнов
Ряд Котельникова
Сплайны 1 с. г.
Многочлен Лагранжа
0,0 2,5 5,0 7,5 1,0
0,0 2,5 5,0 7,5 1,0
Сплайны 3 с. г.
Сплайны 4 с. г.
0,0 2,5 5,0 7,5 1,0
Рис. 7.7
0,0 2,5 5,0 7,5 1,0
197
Раздел 7
Ряд Котельникова
Многочлен Лагранжа
0,0 5,0 10,0 15,0
Сплайны 2 с. г.
0,0 5,0 10,0 15,0
0,0 5,0 10,0 15,0
Сплайны 3 с. г.
Сплайны 4 с. г.
Рис. 7.8
198
Раздел 8.
УЗКОПОЛОСНЫЕ СИГНАЛЫ
Узкополосные сигналы составляют широкий класс сигналов, ко-
торые формируются и обрабатываются в различных радиотехниче-
ских системах. Это прежде всего различные виды модулированных
сигналов. Особенности структуры узкополосных сигналов опреде-
лили возможность, а часто и необходимость, особого подхода к их
описанию и анализу, а, следовательно, целесообразность их от-
дельного рассмотрения.
8.1. Описание узкополосного сигнала
К узкополосным сигналам относятся сигналы, спектры которых
сосредоточены в относительно узкой по сравнению со средней час-
тотой полосе (рис. 8.1,а). Узкополосный сигнал описывается выра-
жением
и(0 = V(Ocos[co0f + (p(0] = У(0собФ(0 , (8.1)
где V(t), 0>(t) - амплитуда и фаза сигнала; (Ор- несущая частота.
Амплитуда V(t) и фаза cpff) содержат передаваемую информа-
цию, являются функциями времени и представляют модулируемые
параметры сигнала. Это медленно меняющиеся функции времени,
их изменения за период 2тг/соо незначительны, таким образом, вы-
полняется условие узкополосности сигнала.
Для описания узкополосного сигнала используется и комплекс-
ная форма записи
u(0 = Re[V(0eb°f], (8.2)
где
V(t) = (8.3)
- комплексная огибающая сигнала.
199
Раздел 8
Как следует из (8.2), узкополосный сигнал определяется несу-
щей частотой (До и комплексной огибающей V(t).
Комплексная огибающая сигнала может быть представлена
в виде
V(t) = Vc(t) + iVs(t) = V(t)coscp(t) + /V(t)sinф(t), (8.4)
где Vc(t) = V(f)cos(p(f); Vs(t) = V(f)sin<p(O - квадратурные состав-
ляющие сигнала.
С учетом (8.4) получим
V(t) = |V(f)|e^(0,
где
= ^V2(t) + V2(t) = V(t), Ф(0 = arctg
Vs(t)
vc(t)’
200
Узкополосные сигналы
Графически комплексный сигнал V(t) изображается в виде век-
тора на комплексной плоскости длины V(t) (рис. 8.1,6). Вектор со-
ставляет угол q(t) с действительной осью. Длина вектора V(t) и угол
между вектором и действительной осью (р(7) изменяются во време-
ни. Сама система координат вращается по часовой стрелке с угло-
вой скоростью (По- Узкополосному сигналу соответствует проекция
вектора на действительную ось.
8.2. Сумма и произведение узкополосных сигналов
При анализе узкополосных сигналов, в частности, при анализе
прохождения их через цепи, в ряде случаев приходится рассматри-
вать сумму узкополосных сигналов и их произведение. Запишем
выражения, описывающие их.
Сумма двух узкополосных сигналов с одинаковой несущей час-
тотой 00о
Ц(0 = Ц(Ocos[a)0f + (PHOL ,q 5)
n2(0 = ^2(0cos[a)0f + (p2(0]’
представляет также узкополосный сигнал с той же частотой Шо
u(t) = Ui(t) + u2(t) = V(Ocos[a)0f + (p(0]- (8.6)
Выражение для u(t) с использованием комплексной формы мож-
но записать в виде
u(t) = Re[V(0eb°'] = Re[Vi (f )е*°0'] + Re[ ^(Ое™0'], (8.7)
где Vi(t), Уг(0 - комплексные огибающие сигналов urft), u2(t).
Комплексная огибающая суммарного сигнала равна сумме ком-
плексных огибающих исходных сигналов
V(t) = Vi(t) + V2(t). (8.8)
Огибающая суммарного сигнала определяется выражением
40 = 17,(0 + 40 =7'/12(0 + 42(0 + 2Ц(04(0со5[ф,(0-ч>2(0] (8.9)
Произведение двух узкополосных сигналов с несущими частота-
ми (От И (3)2
201
Раздел 8
ц(0 = ^(OcosKf + cp^f)],
u2(t) = У2(ОС08[0)2Г+ ф2(01
запишем в виде
u1(0^2(0 = Re[V<i(0ekjM]Re[V<2(0ekO2/]. (8.10)
Для произвольных комплексных величин z7 и z2 имеет место
следующее равенство:
Re[z1]Re[z2] = -lRe[z1z2] + -lRe[z/'z2], (8.11)
где z - комплексно-сопряженная величина.
С учетом (8.11) для произведения узкополосных сигналов получим
= (8.12)
Произведение узкополосных сигналов представляет сумму двух
сигналов (8.12), один из которых имеет несущую частоту, равную
сумме частот со, и а>2 , а второй имеет несущую частоту, равную
разности частот и (Ог.
8.3. Спектр узкополосного сигнала
Спектральная плотность узкополосного сигнала u(t) определяет-
ся его преобразованием Фурье
S(w) = ^u(t)eK,>tdt = jRe[y(Oe*v]e^fatt . (8.13)
— оо —оо
Действительную часть комплексной величины z можно предста-
вить в виде
Re[z] = -^(z+z*), (8.14)
где z*~ комплексно-сопряженная величина.
С учетом (8.14) из (8.13) получим
S(w) = — |*[l/(f)e'oV + V (t)e~IUiot]e~Kotdt =
,2' (8.15)
J [l/(Oe’/(w“(,,°K]df+-Jl/\t)e~i{(0+(3)°}tdt.
202
Узкополосные сигналы
Величина
(/(w) = (8.16)
представляет спектральную плотность комплексной огибающей
сигнала. Таким образом, спектральная плотность узкополосного
сигнала определяется спектральной плотностью комплексной оги-
бающей, соотношением, которое следует из (8.15)
S(co) = ^t/(w-w0) + ^t/‘(<D + <D0). (8.17)
Спектральную плотность комплексной огибающей можно пред-
ставить в виде
t/(w) = |С/(а))|е^у , (8.18)
где |Цсо)|, <ру(о)) - амплитудный и фазовый спектры комплексной
огибающей сигнала (рис. 8.2,а).
Спектр комплексной огибающей сосредоточен в области низких
частот. Спектр узкополосного сигнала S(w) получается путем пере-
носа спектра комплексной огибающей Цсо) из окрестности нулевой
частоты в окрестность несущей частоты ±wq (с коэффициентом 1/2),
рис. 8.2,6.
= Зт<о(и) = 1и(Ш + Шо). (8.19)
Спектры в области положительных и отрицательных частот не
должны заходить за начало координат, что и определяет условие
узкополосности.
Примеры.
1 .Спектральной плотности комплексной огибающей сигнала
(рис. 8.3,а)
С/(со) = ти sinc-—^-,
где ти - параметр зависимости (длительность сигнала),
соответствует спектральная плотность сигнала (О) > 0), рис. 8.3,6,
S(w) = 1 / 2ти sin с--0/ “ .
203
Раздел 8
Рис. 8.2
2 . Спектральной плотности комплексной огибающей сигнала
(рис. 8.4,а)
и2
U(w) = UoeTa,
где а - параметр зависимости,
соответствует спектральная плотность сигнала (со >0), рис. 8.4,6,
S(cd) = 1/2L/0e 4а .
204
Узкополосные сигналы
2
б)
Рис. 8.3
205
Раздел 8
8.4. Корреляционные функции узкополосных сигналов
Автокорреляционная функция сигнала определяется выражением
/7(т) = J u(t)u(t + x)dt.
Для узкополосного сигнала
u(t) = Re[V(t)ek'iot]
с учетом (8.11) из (8.20) получим
Я(т) = Re[e*1,oT V(t)V(t + x)ei2motdt +
— oo
+ Re[e*,oT (t)V(t + т)сУД
(8.20)
(8-21)
(8.22)
Функция V(t) является низкочастотной, медленно меняется в
течение периода несущего колебания 2л/о)о. Вследствие этого зна-
чение первого интеграла в (8.22) может быть принято равным нулю.
Таким образом, выражение для автокорреляционной функции узко-
полосного сигнала запишется в виде
Я(т) = Re[e*°°T (Г)1/(ит)сУП = Re[Rv(x)e^°T], (8.23)
где
ЯДт) = 1/2 ^V*(t)V(t + x)dt.
(8.24)
Величина Rv(x) представляет автокорреляционную функцию
комплексной огибающей сигнала. Так как V(t) является комплекс-
ной величиной, то в общем случае Rv(r) представляет комплексную
функцию. Автокорреляционная функция узкополосного сигнала R(t)
является действительной. Соотношение, связывающее ее с авто-
корреляционной функцией комплексной огибающей (8.23), анало-
гично тому, которое связывает узкополосный сигнал с его ком-
плексной огибающей. Часто целесообразно сначала определить
206
Узкополосные сигналы
автокорреляционную функцию комплексной огибающей сигнала,
а затем перейти к корреляционной функции узкополосного сигнала.
Примеры.
1. Корреляционной функции комплексной огибающей сигнала
(рис.8.5)
= F?v(O)(1-t/tu),
где Ту - длительность сигнала,
соответствует корреляционная функция узкополосного сигнала (т > 0)
Я(т) = fy(0)(1 - t/tu)cosoj0t .
2. Корреляционной функции комплексной огибающей сигнал
(рис.8.6)
ат2
Rv(T) = Rv(0)e^,
где а - параметр зависимости, соответствует корреляционная
функция узкополосного сигнала
Рис. 8.5
207
Раздел 8
Взаимная корреляционная функция двух узкополосных сигналов,
имеющих одинаковую несущую частоту too,
ц(0 = Re[V<(t)e К',А], u2(t) = Re[l/2(t)е~^] (8.25)
определяется выражением
R12(t) = \ u}(t)u2(t + r)dt.
Подставляя (8.25) в (8.26), с учетом (8.11) получаем
оо
Я,2(г) = Не[е"°т JiV", (t)V2(t + T)dt] = Re[Rvl2(T)e“’«’l.
— оо
(8.26)
(8.27)
В (8.27) величина
208
Узкополосные сигналы
оо
— оо
(8.28)
представляет взаимную корреляционную функцию комплексных
огибающих сигналов. Соотношение, связывающее ее с взаимной
корреляционной функцией рассматриваемых узкополосных сигна-
лов, имеет вид, аналогичный (8.23)
Я12(т) = Ае[Яи2(т)е^]. (8.29)
При использовании свойства преобразования Фурье, можно по-
лучить соотношение, связывающее автокорреляционную функцию
комплексной огибающей сигнала Rvft) со спектральной плотностью
энергии
оо
“1 . о /•
И/Дсо) = -2.|cZ(cd)| = J R^e^di, (8.30)
—оо
1
2л
J H/V(co)emdo.
(8.31)
При г= 0 имеем
(8.32)
С учетом (8.24) и (8.32) можем записать
о оо
' 1 fi |2
1/(0 dt = ~ (/(со) do,
2л J
(8.33)
что представляет равенство Парсеваля для комплексных огибаю-
щих узкополосных сигналов.
Выражение для спектральной плотности энергии узкополосного
сигнала запишем в виде
оо оо
И/(со) = R(T)e~K,>xdz = jRe[Rv(T)ek0oX]ekaTch:.
— оо — оо
(8.34)
209
Раздел 8
Из (8.34) аналогично (8.17) получим
И/(а)) = ^И/Ла)-(Оо) + ^И/До) + а)0), (8.35)
где Wv((a)~ спектральная плотность энергии комплексной огибаю-
щей
сх>
Wv(w>)= j ЯДт)е~тdr.
— оо
(8.36)
Спектральная плотность энергии комплексной огибающей явля-
ется действительной величиной, поэтому в (8.35) отсутствует обо-
значение комплексно сопряженной величины второго слагаемого.
Как следует из (8.36), спектральная плотность энергии узкополосно-
го сигнала имеет две составляющие - в области положительных
частот 1/2UVv(cd — соо) и отрицательных частот 1/2И4(а) + (о0).
Соотношения, аналогичные (8.30) и (8.31), связывают взаимную
корреляционную функцию с взаимной спектральной плотностью
энергии комплексных огибающих узкополосных сигналов
= j Яу1г(г)е-‘"Л, (8.37)
ОО
^И2(т) = ^- [wv12(w)emato.
2л J
~~<х>
(8.38)
8.5. Аналитичесий сигнал
При анализе узкополосных сигналов в ряде случаев пользуются
понятием аналитического сигнала. Аналитический сигнал опреде-
ляется как
Z(0 = u(O + /t/(O, (8.39)
где u(f) - узкополосный сигнал, описываемый (8.1); u(t)~ сигнал,
сопряженный с u(t) по Гильберту
Л J t — r
(8.40)
210
Узкополосные сигналы
Аналитический сигнал, как комплексная величина, определяется
модулем fZ(t)l и аргументом <pz(t)
Z(t) = |Z(O|e^(o. (8.41)
Для сигнала
u(0 = l/(f)cosa>(f) (8.42)
сопряженный сигнал, определяемый (8.40), равен
u(t) = V(t) sin Ф( f). (8.43)
С учетом (8.42) и (8.43) выражение для аналитического сигнала
(8.39) получим в виде
Z(f) = l/(f)cos0(f) + /V(f)sinO>(0. (8.44)
Модуль аналитического сигнала равен огибающей узкополосного
сигнала
\Z(t)\=yu2(t) + u2(t)=V(t), (8.45)
а аргумент фазе
<Pz = агс/р^ = Ф(/). (8.46)
С учетом (8.45) и (8.46) выражение (8.41) можем записать в виде
Z(f) = . (8.47)
Таким образом, аналитический сигнал представляет комплекс-
ный сигнал, введенный при описании узкополосного сигнала (8.2).
8.6. Обобщенная корреляционная функция сигнала
Для характеристики точности и разрешающей способности ра-
диолокационных систем используется обобщенная корреляционная
функция. Она определяется как корреляционная функция ком-
плексных огибающих узкополосных сигналов с различной частотой
(как правило, без коэффициента 1/2).
Комплексные огибающие узкополосных сигналов u^t) и u2(t), от-
личающихся только сдвигом несущей частоты Q, при Q «соо, пред-
ставим в виде
211
Раздел 8
= m l/2(t) = l/(f)ee'.
(8.48)
С учетом (8.48) от определения взаимной корреляционной
функции комплексных огибающих узкополосных сигналов перейдем
к выражению для обобщенной корреляционной функции
оо
R(x,Q)= $V(t)V*(t-x)e<dt.
— оо
(8.49)
Функция F?(t,Q) связана со спектральными плотностями огибаю-
щих сигналов соотношением
сю
F?(t,Q) = J- jQ)(T(a))e*OTato .
—оо
(8.50)
Функция R(t, Q) характеризует разрешающую способность сис-
темы, в которой используется рассматриваемый сигнал, поэтому ее
называют также функцией неопределенности.
При Q = 0 имеем
оо
Я(т,0) = ^V(t)V*(t-x)dt,
— оо
(8.51)
или
If. 12
Я(т,0) = — Цю) e^db.
2тс J
(8.52)
Функция R(t, 0) является функцией неопределенности по даль-
ности. Она равна удвоенной величине автокорреляционной функ-
ции комплексной огибающей сигнала. Максимальное значение по-
лучается при т = 0. Чем больше значение |Rfx, 0)1 отличается от
|F?(0, О)/, тем легче могут быть различены две цели, отличающиеся
запаздыванием отраженного сигнала т. Обычно разрешение целей
характеризуется квадратом функции неопределенности \R(T,Q.)f.
Постоянная разрешения по запаздыванию определяется как
J|F?(t,0)|2c/t
Ат =
— оо
я?2 (0,0)
(8.53)
212
Узкополосные сигналы
Используя спектральную плотность комплексной огибающей
сигнала и учитывая равенство Парсеваля, (8.53) можем записать в
виде
(8.54)
При т = 0 функция неопределенности равна
fl(0,Q) =
. 2
V(t) e^dt,
(8.55)
или
оо
F?(0,Q) = — ft/(a)-Q)L/*(w)d(o.
2л J
(8.56)
Постоянная разрешения по частоте определяется аналогично
постоянной разрешения по запаздыванию
Г । 12
]|R(0,Q)| dQ
Я2(0,0)
(8.57)
Функция неопределенности дает возможность оценить степень
различения сигналов, отличающихся значениями запаздывания Т и
частоты Q. Чем ближе |/?(т, Q)| по значению к |/?(0,0)|, тем труднее
различаются сигналы, отличающиеся запаздыванием т и частотой Q.
Мерой совместной разрешающей способности по запаздыванию
и частоте может служить эффективная площадь неопределенности
J J/?2(t,Q) drcto
Д(т, Q) = ----------------
|Я(0,0)|
(8.58)
До) =
213
Раздел 8
В качестве примеров рассмотрим функции неопределенности
некоторых видов сигналов.
1. Сигнал с прямоугольной огибающей и постоянной частотой.
V(t) = VQ,\t\<zu/2.
Выражение для функции неопределенности имеет вид:
ти/2
-т0/2+т
Из него получим
Я(т,£2) = У02ти(1 - -И)е^/2 sin - -И-), т < т
Ч 2 ти
Модуль функции неопределенности
|F?(t,Q)| = 1/02ти(1 - —)sinc
2 ч
При Q = О
|Я(т,0)| = У^(1-Л),т<
При т = О
2. Сигнал с прямоугольной огибающей и линейно изменяющейся
частотой (разд.11)
V(t) = VQeiat2/2,\t\<xu/2.
Функция неопределенности описывается выражением
F?(t,Q) =
tu/2
Ц2 Г /2+iQtdf = ц2е-'^/2
-ти/2+т
М2
Ге/(ат+£2)Г^
-ти/2+т
214
Узкополосные сигналы
Из записанного выражения получим
F?(t,Q) = \/02тие'Пт/2(1 )sinc[— (Q + ат)(1 )], т < ти .
ти т ти
Модуль функции неопределенности
|R(t,£2)| = V„4u(1-
Т Т Т
—) sin с[—— (£2 + ат)(1------)]
Т Ту
При £1=0
|Я(т,0)| = У02г„(1 -
|т| . гТуаг.. Ы
—) sin ----
т 2 т
Vy «. Vy
Т < Ту .
Ту .
При Т = 0
|F?(0,Q)| = 1/02Ту sinc[—
т
ти-
8.7. Дискретизация узкополосного сигнала
Принципы дискретизации непрерывного сигнала могут быть рас-
пространены на узкополосный сигнал
ц(Г) = l/(f)cos[o)0f + (p(f)] = Re[V'(f)eto)°f]. (8.59)
Комплексная огибающая V(t), имеющая спектр, ограниченный
частотой Дсо/2 (рис.8.7), может быть представлена рядом Котель-
никова
оо
1/(0 = Y v(nT)
п=-<^
(t-nT)
(8.60)
Коэффициенты ряда определяются как
V(nT) = V(nT)e^nT},
(8.61)
период дискретизации выбирается из соотношения
1 _ 2п
До)
(8.62)
215
Раздел 8
Рис. 8.7
С учетом (8.60) и (8.61) выражение для узкополосного сигнала
запишем в виде
оо
u(f) = Y vl-nT'l
--------COS[(D0f + ф(лГ)].
^(f-лГ)
(8.63)
Выражение (8.64) представляет ряд Котельникова для узкопо-
лосного сигнала. Он описывает сигнал, спектр которого заключен
в ограниченной полосе частот Дю. Ряд Котельникова для узкопо-
лосного сигнала включает слагаемые, которые имеют вид моду-
лированных колебаний с несущей частотой Юо, фазой (р(пТ) и оги-
бающей
sin("(f-nT))
У(лТ)—----------
(8.64)
^(f-лГ)
Если длительность сигнала равна Тс, то число интервалов раз-
биения равно N =ТС/ Т. Таким образом, ряд Котельникова для узко-
полосного сигнала можем записать в виде
216
Узкополосные сигналы
am sin — (t-nT)
u(t) = Y v(nrl—^--------cos[w»'+ ^nT)] (8 65)
nO ~ (t-nT)
Выборочные значения сигнала задаются двумя параметрами
V(rn:) и (рфТ/
8.8. Модулированные сигналы
Узкополосными сигналами чаще всего являются модулирован-
ные колебания. Модулированные колебания представляют высоко-
частотные колебания, на которые накладываются низкочастотные,
несущие информацию. Выбор несущей частоты высокочастотного
колебания производится исходя из условий распространения ра-
диоволн, приема их антеннами и ряда других факторов. Переда-
ваемая информация содержится в сигнале, накладываемом на вы-
сокочастотное колебание. Наибольшая частота спектра сигнала,
содержащего информацию, должна быть значительно меньше не-
сущей частоты. Процесс наложения сигнала, содержащего инфор-
мацию, на высокочастотное колебание называется модуляцией.
Сигнал, содержащий передаваемую информацию, называется мо-
дулирующим. Модулируется несущее колебание путем изменения
одного или нескольких параметров. Наиболее часто несущим коле-
банием является гармоническое. Однако могут использоваться и
другие виды колебаний, например, периодическая последователь-
ность импульсов или шум. Гармоническое колебание можно моду-
лировать по амплитуде, фазе или частоте. Модуляция по фазе или
частоте носит название угловой модуляции. В дальнейшем рас-
сматриваются гармонические колебания с различными видами мо-
дулями.
217
Раздел 9.
АМПЛИТУДНО-МОДУЛИРОВАННЫЕ СИГНАЛЫ
При амплитудной модуляции (AM) под воздействием модули-
рующего (управляющего) сигнала,- несущего информацию, изменя-
ется амплитуда сигнала. Как правило, AM сигнал является узкопо-
лосным, относительное изменение амплитуды за один период не-
сущего колебания мало. Такие сигналы, узкополосные амплитудно-
модулированные, и рассматриваются в настоящем разделе.
9.1.Описание AM сигнала
Узкополосный AM сигнал с гармоническим несущим колебанием
описывается выражением (рис. 9.1,а)
u(t) — V(f)cos(w0f + (p0), (9.1)
где V(t) - амплитуда; а)0,(р0 - частота и начальная фаза несущего
колебания.
Выражение для AM сигнала может быть записано также в ком-
плексной форме
u(f) = Re[V(0e“°f], (9.2)
где 1/(0 = V(f)e*Po - комплексная огибающая сигнала; при ср0 = О
комплексная огибающая сигнала V(t) совпадает с амплитудой V(t).
Графически комплексный сигнал можно изобразить в виде век-
тора на комплексной плоскости. Длина вектора равна V(t), изме-
няется во времени (рис. 9.1,6). Угол между вектором и действи-
тельной осью постоянен и равен <р0. Система координат враща-
ется по часовой стрелке с угловой скоростью со0. Проекция векто-
ра на действительную ось в каждый момент времени описывает
AM сигнал u(t).
218
Амплитудно-модулированные сигналы
Рис. 9.1
9.2. Тональная амплитудная модуляция
При амплитудной модуляции амплитуда зависит от модулирую-
щего сигнала s(t). Эта зависимость, как правило, линейная
1/(Г) = 1/о + МО, (9.3)
где к - коэффициент пропорциональности.
Вид модулирующего сигнала определяет спектр AM сигнала.
Простейший модулирующий сигнал - гармонический. При гармони-
ческой или тональной модуляции AM сигнал описывается выраже-
нием (рис. 9.2,а)
a(f) = Ц)[1 + Mcos(Q? + 0o)]cos((Dof+ (р0), (9.4)
где М = ksQ /1/0 - коэффициент модуляции, М < 1, Q, 0О - частота
и начальная фаза гармонического модулирующего сигнала, Q « оэ0.
Исходя из (9.4), AM сигнал можно представить в виде суммы
гармонических составляющих и определить спектр тонально AM
сигнала
u(t) = Ио cos(o)0/ + Фо) + - cos[(D0f + ф0 + 0О) +
Vq/V7 n 1
+ ^-с°8[(й)0 - Q)f + ф0 - 0О].
(9.5)
219
Раздел 9
а)
Ап . I
О
’’о
б)
Л+в0
-О
% и
V0O
О
О)0 - £2 со0 (!)о + £2
в)
(о
Рис. 9.2
Из (9.5) следует, что тонально AM сигнал включает три гармониче-
ские составляющие: несущее колебание и два боковых с частотами AM
сигнал включает три гармонические составляющие: несущее колеба-
ние и два боковых с частотами а)0 ± Q.. Г рафики амплитудного и фа-
зового спектров приведены на рис. 9.2,б,в. Амплитудный спектр
имеет четную симметрию относительно несущей частоты, а фазо-
вый - нечетную относительно начальной фазы. Ширина спектра
равна удвоенной частоте модуляции 2Q .
220
Амплитудно-модулированные сигналы
Средняя мощность тонально AM сигнала может быть определе-
на из (9.5) как сумма средних мощностей спектральных состав-
ляющих
р = р0 + рд = р0(1 + М2 /2), (9.6)
где Ро - мощность несущего колебания; Рб - мощность боковых
составляющих.
Мощность боковых составляющих Рб равна А//2 от мощности
несущего колебания Ро.
9.3. Многотональная амплитудная модуляция
Модулирующий сигнал, как правило, имеет сложный спектраль-
ный состав (рис. 9.3). В этом случае AM сигнал можно записать
в виде
N
u(t) = V0[t + ^Mn cos(Qnf + 6n)]cos(o)0f + ф0)
п=1 , (9.7)
где Q.n,Qn - частоты модуляции (Q^ Q2<... < Q.n «(о0) и началь-
ные фазы составляющих модулирующего сигнала;
N
£/Wncos(Qnf + 0n) <1
n=1 . (9.8)
Из (9.7) после преобразования получим представление сигнала
в виде суммы 'армонических составляющих
u(t) = Vq cos(co0f + ф0)+
w (g g^
+ Vo/2^/Wn{cos[(w0 + £2л)? + ф0 + 0n] + cos[(coo -Qn)t + ф0-0n]}
n=1
Анализ (9.9) показывает, что при многотональной модуляции AM
сигнал содержит несущее колебание и полосы верхних и нижних
боковых составляющих. Амплитудный спектр сигнала имеет четную
симметрию относительно ш0, фазовый - нечетную симметрию, от-
носительно ф0 (рис. 9.4). Ширина спектра AM сигнала равна удво-
енной максимальной частоте модуляции
221
Раздел 9
о
-»------а».
12 N (о
О £2
Л-------
12w со
Рис. 9.3
2До) = 2QW.
(9.Ю)
Выражение (9.9) и график спектра, приведенный на рис.9.4, по-
казывают, что спектр модулирующего сигнала полностью отобра-
жается в боковой полосе спектра AM сигнала. Боковые полосы яв-
ляются зеркальными копиями одна другой. Это свидетельствует об
избыточности передачи информации двумя боковыми полосами.
Средняя мощность AM сигнала при многотональной модуляции
определяется из (9.9) как сумма средних мощностей несущего ко-
лебания и боковых составляющих
Р = Ро + Р8 = Ро(1 + 1/2^М2).
(9.11)
Уо М^/2
VQ MJ2
V0Mn/2
(d0 - £2д/ w0 - £2^ 0)0 со0 + £21 О)0 + £2д/
Фо+ % .
Ф()+
(i)q - £2д/ (i)q - 12 j
со0 О)0 + £2 j (о0 + £2д/ со
Vе
<po-ew
Рис. 9.4
222
Амплитудно-модулированные сигналы
На долю всех боковых составляющих приходится
N
Л=1
от мощности несущего колебания.
9.4. Амплитудная модуляция периодической
последовательностью импульсов
Одним из видов многотональных AM сигналов является перио-
дическая последовательность радиоимпульсов (рис. 9.5). Такой AM
сигнал удобнее записать в виде
i/(f) = s(f)Vg cos(w0f + ф0), (9.12)
где s(t) - модулирующая периодическая последовательность ви-
деоимпульсов.
Модулирующий сигнал s(t) описывается рядом Фурье (раздел 3)
s(f) = s0/2 + Хлп COS(nQf+ 0П),
Л=1
(9.13)
где Q = 2л / Т, Т- период последовательности импульсов.
223
Раздел 9
Амплитуды sn и начальные фазы 0Л определяются следующи-
ми выражениями:
о
sn=y|S(nQ)|,9n=<p(n£2),
(9-14)
где S(co) - спектральная плотность одного импульса модулирующей
последовательности.
Подставив (9.13) в (9.12), получим
u(O = [so/2 + ^SnCOS(nQ.t+ Qn)]V0COS((^0t + ф0) = AoCOS(G)0f+ ФО) +
Л=1
N
+ У^Ап{соз[(со0 + n£l)t + <р0 + 0Л] + cos[(co0 - nQ.)t + ф0 -0Л]}, (9.15)
л=1
где Aq = VqSq/2, An = V0sn/2, n = 1,2,.
Как следует из (9.15), спектр сигнала является дискретным, рас-
положен в окрестности несущей частоты соо. Огибающая дискрет-
ного спектра периодической последовательности радиоимпульсов
по форме совпадает с непрерывным спектром одиночного видео-
импульса модулирующей последовательности.
Используя табл.3.1, из (9.14) можно найти спектры периодиче-
ских последовательностей радиоимпульсов различной формы. Та-
кой подход иллюстрируют следующие примеры.
1. Периодическая последовательность прямоугольных
радиоимпульсов.
Модулирующий сигнал описывается выражением (табл. 3.1, п.1).
т 2тА ж
s(f) = — + —> sine---cosnco^,
Л=1 7”
где т,Т = 2л:/со1 - длительность и период следования периодиче-
ской последовательности прямоугольных импульсов.
Подставляя выражение для s(t) в (9.12), при ф0 = 0 получим
s(t) = —COS(D0f + -^ У Sine--[COS((D0 - + COS((D0 + nw,)?].
7” 7” Л=1 T
Амплитудный спектр описывается выражением
224
Амплитудно-модулированные сигналы
пят
sine
, П = 0,1,2
А =
" Т
т
На рис. 9.6 спектр изображен при со > 0.
2. Периодическая последовательность симметричных тре-
угольных радиоимпульсов.
Амплитудный спектр описывается выражением (табл. 3.1, п.З),
рис. 9.7
4 =
УЬт
2Т
sinc2(
пят.
3. Периодическая последовательность косинусоидальных ра-
диоимпульсов.
225
Раздел 9
Амплитудный спектр описывается выражением (табл. 3.1,п.4),
рис. 9.8
А
п пТ
4п2т21 ллт
“Fl cos-f-
9.5. Амплитудная модуляция непериодической
последовательностью импульсов
Одиночный радиоимпульс описывается выражением
u(t) = s(t)V0cos(a0t + (p0), |f|<T,
(9.16)
где s(t) - модулирующий импульс; т - длительность модулирующе-
го видеоимпульса.
В (9.16) s(t) представляет огибающую модулирующего импульса.
Спектральная плотность сигнала (9.16) определяется преобразова-
нием Фурье (разд. 3)
SAM(a) = 1 / 2 Voe^° S(co - coo) +112V0e^ S(co + coo), (9.17)
где S(w) - спектральная плотность модулирующего сигнала s(t).
При ф0 =0 (рис. 9.9, а,б)
S^(co) = 1 / 2l/oS(co - соо) +1 /2l/0S((o + соо). (9.18)
Примеры одиночных радиоимпульсов взяты для модулирующих
сигналов, описанных в табл. 3.1, при ф0 = 0.
Рис. 9.8
226
Амплитудно-модулированные сигналы
(О
Рис. 9.9
1 .Прямоугольный радиоимпульс (табл. 3.1, п.1), рис. 9.10 (со > 0)
о . . Кт. . ((0-(00)Т . ((0+(00)Т.
$xw(w) = -^-[sin —^- + sin с-—.
2. Гауссов радиоимпульс (табл. 3.1, п.15), рис. 9.11 (со > 0)
Vo
2
-(о)-С1)0 )2 /4а
+ e-(a)-a)0)2/4aj .
Рис. 9.10
227
Раздел 9
Рис. 9.11
Аналогично могут быть получены спектры пачек радиоимпуль-
сов. Модулирующим сигналом является пачка видеоимпульсов.
Спектральная плотность пачки радиоимпульсов может быть полу-
чена из (9.17) с учетом выражений, приведенных в разд. 3.
|S™M = ~|^Ь(ю-ю0)|IfП(Ю Ю°)Л/-Т/^+
1 АМ 1 2 1 °' 0,1 sin(co-co0)772
. 1 , (9.19)
+Y&.So(м+и ;
2 ° ° |sin(w + со0)Т/2|
где S0((o) -спектральная плотность одного видеоимпульса в пачке;
Т- интервал следования импульсов в пачке.
Амплитудный спектр в области положительных частот описыва-
ется выражением
, , уп. . |sin(co-coo)/VT/2|
$ам (а)) = ~ So (w - мо) I . , \т ю\
1 1 2 1 1 sin(co - со0 )Т / 2
(9.20)
Используя (9.21) и табл. 3.1, можно найти спектры пачек радио-
импульсов различной формы. Такой подход иллюстрируется сле-
дующими примерами.
1. Пачка прямоугольных радиоимпульсов (табл. 3.3, п.1), рис. 9.12.
|Л , . VAti . , , । |sin(co-(o0)/VT/2|
S^m(co) = -— sinс(со-о)0)т/2 ~р—--------.zzT" ।
1 1 2 ' ' sm(co-(D0)T/2
228
Амплитудно-модулированные сигналы
1$АЛ4 ^1
а)/(1)0
1$АЛ4
Рис. 9.12
2. Пачка треугольных радиоимпульсов (табл. 3.1, п.З), рис. 9.13
I I VbT
sinc2(co-coo)T/4
|sin(w- w0 )NT /2|
|sin(<D — соо)7" / 2|
3. Пачка гауссовых радиоимпульсов (табл. 3.1, п.15), рис. 9.14
I с I, Л - /4а lSin<“- “o)NT/2I
рam iмл - -~r- e т-;---------.
1 2д/ a |sin(co - w0)7/2|
229
Раздел 9
|5дм (0)Л
Рис. 9.13
9.6. Балансная амплитудная модуляция
Балансная модуляция (БМ) является одним из видов амплитудной
модуляции. Ее можно рассматривать как операцию, при которой
производится перемножение модулирующего сигнала и несущего
колебания. При балансной модуляции сигнал не содержит не-
сущего колебания, это положительный момент при формировании
AM сигнала.
Выражение для БМ сигнала записывается в виде
u(t) = s(t)V0cos(w0t + ф0).
Для тонально БМ сигнала
s(t) = Mcos(Qf + 0О)
(9.21)
(9.22)
имеем
230
Амплитудно-модулированные сигналы
<А)/СОО
lS/w (со)|
Рис. 9.14
и(Г) = VQMC0S(O.t + 0o)COS((Dof + ФО) =
VnM VnM (9.23)
= -y-cos[(w0 +Q)f + (p0 + 0o] + -^-cos[(a>o -Q)f + (p0 — 0O].
Как следует из (9.23), при балансной модуляции спектр модули-
рующего сигнала переносится в окрестность несущей частоты.
Однако сама несущая отсутствует (подавляется). Вследствие этого
такой вид модуляции называется амплитудной модуляцией без не-
сущей.
Выражение для многотонального БМ сигнала получится из (9.21)
с учетом (9.9)
N
u(t) = ^o^^ncos(^n^ + 0n)cos(a)o^ + (Po) = (9.24)
Л=1
у v'* V'
- COS[(w0 + Q.n)t + Фо + 0n] + -77COS[((1)0 - Qn)t + (p0 — 0n],
231
Раздел 9
Рис. 9.15
Амплитудный спектр сигнала (9.24) показан на рис. 9.15.
Спектр включает две симметричные полосы верхних и нижних бо-
ковых составляющих. Ширина спектра БМ сигнала определяется вы-
ражением (9.11). Средняя мощность многотонального БМ сигнала
Р=Р0^М2п/2 (9.25)
Л=1
значительно меньше, чем при обычной амплитудной модуляции
(9.12).
Спектральная плотность БМ сигнала может быть определена
исходя из (9.21). При (р0 = 0 получим (рис. 9.16),
SBM Асо) ~ VqM/2. S((i) g)0 ) + VqM/2 S(a) + cd0 ). (9.26)
Как указано, при балансной модуляции уменьшается мощность
передатчика по сравнению с обычной амплитудной модуляцией. В то
же время необходимая полоса частот остается такой же. В обоих
случаях получаются две боковые полосы, каждая из которых несет
информацию, содержащуюся в модулирующем сигнале. Сузить не-
обходимую полосу частот можно, если подавить в спектре AM сигна-
ла несущую и одну боковую полосу.
-0)о 0 o)q to
Рис. 9.16
232
Амплитудно-модулированные сигналы
Ап
i !
О
Рис. 9.17
Такой вид амплитудной модуляции называется однополосной ам-
плитудной модуляцией с подавленной несущей или просто однопо-
лосной амплитудной модуляцией.
9.7. Однополосная амплитудная модуляция
При однополосной амплитудной модуляции (ОМ) сигнал содер-
жит только одну боковую полосу частот. Выражение для многото-
нального ОМ сигнала получаем из (9.9)
ИО = cos[(wo ±&n)f + Фо ± 0л)] • (9-27)
г Л=1
Знак плюс в (9.27) соответствует сигналу с верхней боковой по-
лосой частот (рис. 9.17), а знак минус - с нижней боковой полосой.
При однополосной амплитудной модуляции ширина спектра
Дю = Q,n - ~ Q,n , ‘ (9.28)
где - максимальная частота модуляции, что вдвое уже, чем при
обычной амплитудной модуляции, описываемой (9.10).
Средняя мощность многотонального ОМ сигнала равна
<Й0 0 too «о
Рис. 9.18
233
Раздел 9
N
P = Pq'£m2„/4.
n=1
(9.29)
Спектральная плотность ОАМ-сигнала описывается выражением
SOM(<o) = V0M/2{1 /2[ S(<o - w0) + S(<o+<о0)] ±
± 1 / 2[S(o) - <о0 )sign(a) - <о0) - S((o + <о0 )sign(w + <о0)]}'
(9.30)
Знак плюс в (9.30) соответствует описанию спектра с подавленной
нижней боковой полосой, а минус - с подавленной верхней полосой
(рис. 9.18).
234
Раздел 10.
СИГНАЛЫ С ФАЗОВОЙ И ЧАСТОТНОЙ МОДУЛЯЦИЕЙ
Сигналы с угловой модуляцией, как правило, являются узкопо-
лосными. Ширина их спектра значительно меньше несущей часто-
ты. Такие сигналы и рассматриваются в разделе.
10.1. Описание сигналов с угловой модуляцией
Узкополосный сигнал с угловой модуляцией описывается выра-
жением (рис. 10.1 ,а)
u(t) = У0со5[со0? + <р(0] = У0СО5ф(0 (Ю.1)
или в комплексной форме
u(t) = Re[V(t)eka°t], (10.2)
где V(t) = VQe^ - комплексная огибающая сигнала; У0,со0,ср(0-
амплитуда, частота и фаза сигнала.
Комплексный сигнал может быть представлен в виде вектора дли-
ны Уона комплексной плоскости (рис. 10.1,6). Вектор составляет с дей-
ствительной осью угол <р(0, который изменяется во времени. Сама
система координат вращается по часовой стрелке с угловой скоростью
СО). Проекция вектора на действительную ось описывает сигнал u(t).
Понятие угловой модуляции включает фазовую и частотную мо-
дуляцию. При фазовой модуляции (ФМ) под воздействием модули-
рующего сигнала s(t) изменяется непосредственно фаза ф(?).
Обычно обеспечивается линейная зависимость фазы от модули-
рующего сигнала:
Ф(О = фо + ks(t), (10.3)
где ф0 - начальная фаза; к - коэффициент пропорциональности.
Мгновенная частота ФМ сигнала
^0 = -—= +—- = со0+ «-—т- (10.4)
dt dt dt
235
Раздел 10
Рис.10.1
При частотной модуляции (ЧМ) модулирующий сигнал воздейст-
вует непосредственно на частоту
со(0 = со0 + ks(t). (10.5)
Фаза ЧМ сигнала
t
ср( t) = ф0 + к J s( t )dt. (10.6)
о
Максимальное отклонение фазы от начальной ф0
т = тах|ф(Г)-ф0|
называется индексом модуляции. Максимальное отклонение часто-
ты o)(t) от несущей шь
соа = max|co(f)-«0|
- девиацией частоты, или девиацией.
Отличие ФМ от ЧМ легче просматривается при простейшем -
тональном (гармоническом) законе модуляции:
s(t) = sQ cos Q.t, (Ю.7)
где s0, Q - амплитуда и частота модулирующего сигнала.
При тональной ФМ (рис. 10.2)
ф(0 = фо + mcosQ.t, (10.8)
236
Сигналы с фазовой и частотной модуляцией
сигнал описывается выражением
u(t) = Vo cos(w0f + mcosQf + ф0),
(10.9)
(10.11)
(10.12)
(10.13)
(10.14)
частота равна
OXO = о)0 - mQsinQf. (10.10)
Девиация определяется произведением индекса модуляции и
частоты модуляции
= mQ..
При тональной ЧМ частота (рис. 10.3)
оХО = % +wacosQf,
фаза
(i)a
ф(0 — sin Qt + фа = т sin + фа.
Сигнал описывается выражением
u(t) = Vgcos((o0f + msinQf+ ф0).
Индекс модуляции определяется отношением девиации к часто-
те модуляции. Таким образом, тонально модулированный ФМ сиг-
нал с индексом модуляции т описывается аналогичным выражени-
ем, что и ЧМ сигнал с девиацией, равной тО.. Отличие заключается
в том, что фаза ФМ сигнала изменяется по закону т cosQf, а фаза
ЧМ сигнала - по закону (og/QsinQf.
237
Раздел 10
При ЧМ девиация пропорциональна амплитуде модулирующего
сигнала и не зависит от его частоты. При ФМ индекс модуляции
пропорционален амплитуде модулирующего сигнала и не зависит
от частоты этого сигнала.
10.2. Сигнал с тональной угловой модуляцией
Простейший вид модуляции - тональный. Сигнал с тональной
угловой модуляцией запишем в виде
1/(0 = У0соз(а)0Г + msinQ + (p0) = Re[\Z(f)e/a>0? ], (10.15)
где V(t) = = msinQf + ф0.
Спектр сигнала определяется при разложении в ряд Фурье ком-
плексной огибающей сигнала. При ф0 = 0
V(t) = Voe'msmQt.
Используя соотношение, известное из теории Бесселевых функций
izsinx
&
inx
(10.16)
где /n(z) - функция Бесселя первого рода л-го порядка от аргумента z,
l_n(z) = (-1)nln(z),
для комплексной огибающей сигнала получим
(10.17)
238
Сигналы с фазовой и частотной модуляцией
Подставляя (10.17) в (10.15), запишем
оо оо
u(t) = V'0Re[e*°°f ^1п(т)е,пШ] = VQ ^/n(m)cos(«0 + ntyt. (10.18)
n=-oo n=—°°
Анализ (10.18) показывает следующее. Спектр сигнала с угловой
тональной модуляцией является дискретным. Гармоники спектра
отличаются друг от друга на частоты, кратные частоте модуляции.
Амплитуды составляющих спектра определяются функциями
Бесселя. Функции Бесселя являются специальными функциями,
описываются выражением
оо
/„(х) = X
к=0
М(к + л)!
(10.19)
Графики функций Бесселя изображены на рис. 10.4.
Рис. 10.4
239
Раздел 10
Как следует из (10.18), сигнал с угловой тональной модуляцией
включает несущее колебание с амплитудой Volo(m) и бесконечное
множество парных боковых составляющих с частотами соо ± nQ. и
амплитудами Voln(m). Причем фазы верхних и нижних составляю-
щих сигнала нечетных номеров п отличаются на величину п. Ам-
плитудные спектры сигналов для некоторых значений т приведены
на рис. 10.5. Наибольшее значение амплитуды имеет составляю-
щая, номер которой определяется эмпирическим выражением [20]
1 _1
п = т - 0,8086m3 - 0,0606m 3 - 0,0316m4 . (10.20)
По мере увеличения номера п амплитуды боковых составляю-
щих убывают, стремясь к нулю. Ширина спектра определяется эм-
пирическим выражением
2Ао) = 2(1 +m +Vm)Q. (10.21)
Рис.10.5
240
Сигналы с фазовой и частотной модуляцией
Как следует из (10.21), при увеличении индекса модуляции ши-
рина спектра стремится к величине 2mQ. (или 2сод). Следовательно,
при больших индексах модуляции ширина спектра сигнала, можно
считать, равна удвоенному значению девиации. При малом индексе
модуляции ширина спектра стремится к удвоенному значению час-
тоты модуляции (2Q/
При малом индексе модуляции (т«1) можно принять
/0(/л) = 1;(т) ~ т/2; при п>2,1п(т) ~0. (10.22)
С учетом (10.22) выражение (10.18) запишется в виде
u(t) = Vq COS (l)ot + ——^-COS((1)0 +Q)f--^S-COS((D0 - Q.)t. (10.23)
^/2* ^/2*
Спектр такого сигнала подобен спектру AM сигнала и включает:
несущее колебание с амплитудой Уо и две боковые составляющие
с частотами w0± й и амплитудами Причем фаза нижней со-
ставляющей смещена по отношению к верхней на величину л. Ши-
рина спектра равна удвоенной частоте модуляции (2Q).
Средняя мощность сигнала с угловой модуляцией может быть
определена из (10.18) как
Р = Pot'o (т) + 2/,2(т) + ...] = Ро, (10.24)
О Vo
где Ро = — средняя мощность несущего колебания;
/2 (/л) + 2/12(/л) + ... = 1. (10.25)
Как следует из (10.24), средняя мощность сигнала с угловой мо-
дуляцией равна средней мощности несущего колебания.
10.3. Сигнал со сложным периодическим
законом модуляции
Любой периодический модулирующий сигнал можно разложить в
ряд Фурье, представить в виде взвешенной суммы гармонических
составляющих. Условия, необходимые для такого разложения, обыч-
но выполняются. Однако использование разложения при определе-
нии спектра сигнала с угловой модуляцией (путем подстановки в
(10.1) или (10.2) разложения q(t) в ряд Фурье) приводит к выражению,
неприемлемому для целей анализа и расчета спектра сигнала. Ис-
241
Раздел 10
ключение составляют законы угловой модуляции, которые приводят
только к изменению огибающей сигнала. К таким модулирующим сиг-
налам относится меандр. В других случаях более удобным оказыва-
ется подход, при котором определяется спектр импульсного ЧМ сиг-
нала с длительностью, равной периоду непрерывного сигнала, а за-
тем выполняется переход к спектру периодического сигнала. Ниже
дано определение спектра сигналов с некоторыми достаточно рас-
пространенными законами угловой модуляции.
10.3.1. ФМ сигнал с модуляцией меандром
При модуляции гармонического колебания меандром происходит
скачкообразное изменение модулируемого параметра - манипуля-
ция; при ФМ - скачкообразное изменение фазы (рис. 10.6,а)
ф(0 =
0,-T/2<t<0
‘ n,0<t<T / 2
(10.26)
где Т- период модуляции.
Комплексная огибающая такого сигнала определяется как
(рис.10.6,б)
V(t) = Voe^t} =
V0,-T/2<t<0
~Vo,O<t<T/2
(10.27)
Спектр сигнала удобнее определить через спектр огибающей.
Раскладывая в ряд Фурье огибающую сигнала, запишем (разд. 3)
V(t) =——sin2—sinnQf,
n , n 4
n=1
(10.28)
где Q = 2nJT- частота модуляции.
Рис.
242
Сигналы с фазовой и частотной модуляцией
С учетом (10.28) из (10.2) получим следующее выражение для
ФМ сигнала:
м 4^0 V 1 • 2 х
U(t) =---- > —Sin ---SIR HQfCOS(Dnf =
n 4 0
n=1 . (10.29)
= —sin2 —[sin(co0 + nQ)f-sin(co0 - nQ.)t],
n=1
Спектр сигнала (10.29) изображен на рис. 10.7.
Аналогичный подход позволяет получить спектр ФМ сигнала, ог-
раниченного N периодами огибающей (ФМ пачкой прямоугольных
импульсов), рис. 10.8. Спектральная плотность такого сигнала дли-
тельности NT, где N - число импульсов в пачке, Т - период следо-
вания импульсов в пачке, определяется выражением
S(co) = 1 / 2£Д со - со0) +1 / 2С/(со + со0), (10.30)
где и(оз) - спектральная плотность огибающей сигнала.
Огибающая сигнала V(t) представляет отрезок меандра (рис.
10.8,5).
Спектр пачки меандровых импульсов описывается выражением
(разд. 3)
и(ы\ = j 4^0 gin2 5in(/VcoT/2) с-/(/У-1)мТ/2
со 4 sin(coT/2)
(10.31)
где ти - длительность импульса; Т - период следования импульсов
в пачке.
Так как Т = 2ти, (10.31) можем переписать в виде
243
Раздел 10
О Т/2 Т NT t
р
II/ \ гм/ л/-г <$NT sin соТ/4 -i(N-i)wT/2
U(co) = i2V0NTs\nc----------------e ( г
2 sincoT/2
(10.32)
Таким образом, выражение для спектра ФМ сигнала, модулиро-
ванного пачкой меандровых импульсов, примет вид
S(cd) = iV0NT sin с 71 +
2 -п(со-со0)Г/2 (w33)
+ /V NT sin с(со + соо)^7' sin2(co + co0)T/4 e-i^+^0
0 2 sin(w + w0)772
Первое слагаемое в (10.33) описывает спектральную плотность
сигнала в области положительных частот, второе в области отри-
цательных, частот. Амплитудный спектр сигнала в области положи-
тельных частот определяется как
|S(w)| = l/0/VTsinc
(со-со0)Л/Т sin2(w-w0)7"/4
(10.34)
2 sin(w-w0)772
Он симметричен относительно несущей частоты со0, |S(co0)| = 0
(рис. 10.9).
244
Сигналы с фазовой и частотной модуляцией
10.3.2. ЧМ сигнал с модуляцией меандром
При ЧМ меандром изменяется скачкообразно мгновенное значе-
ние частоты (рис. 10.10)
(0(t) =
со1, — 7"/2 < f < 0
со2, 0 < Г < Т/2
где Т- период модуляции.
Частотно-модулированный сигнал представим в виде суммы
двух сигналов
1/(0 = ц(? + Т/4) + u2(t-Т / 4), (10.35)
где Ui(t), u2(t) - периодические последовательности прямоуголь-
ных радиоимпульсов с несущими частотами оь и (Ог , периодом Т
и длительностью Т/2, смещенные относительно начала координат
на ± Т/4.
245
Раздел 10
Рис. 10.10
Спектры ui(t) и u2(t) определяются выражениями (разд. 3)
1 x-'1 . rm
2 ‘
... 1 V'1 Гт Ж
Ц(0 = Ц) — + > sine—cosnQt cosco^,
2 2
\ n=1 J
(10.36)
1 V’’ • rm
2
.. 1 Пн .
U2(f) = V0 —+> Sine—cos nQt cosco2t.
2 2
k n=1 >
Из (10.35) с учетом (10.36) получим выражение для периодиче-
ского ЧМ сигнала
u(t) = cosсо1 (t + Т/4) + —cosco2(t- Т/4) + ~^sinc— •
2 2 2 п=1 2
•[cos(co1 - nQ.)(t + Т/4) + cos(co1 + nQ)(t + 7"/ 4) + cos(co2 -nQ)-(10.37)
• (t-7/4) + cos(co2 + nQ)(t - T/4)].
Графики амплитудного спектра сигнала при различных соотно-
шениях CD-i и (02 приведены на рис. 10.11. Частоты (0i и (02, как пра-
вило, выбираются кратными частоте модуляции Q = 2rt/T, что и от-
ражено на графиках. Как следует из (10.37), спектр сигнала включа-
ет два несущих колебания с частотами 0^ и и бесконечное число
боковых составляющих с частотами он ± nQ и ±nQ.
246
Сигналы с фазовой и частотной модуляцией
Рис. 10.11
Аналогичный подход используем при определении спектра ЧМ
сигнала, модулированного пачкой прямоугольных импульсов
(рис. 10.12).
При ЧМ пачкой прямоугольных импульсов сигнал можно пред-
ставить в виде (10.35), где u,(t) и u2(t) обозначают пачки из N пря-
моугольных радиоимпульсов с несущими частотами ш1 и Спек-
тральная плотность такого сигнала описывается выражением
(свойства преобразования Фурье)
S(co) = 8,(со)е“г/4 + S2(co)e~*°r/4 , (10.38)
где S7fco/ 82(09 - спектральные плотности сигналов u^t) и u2(t).
Спектральные плотности S/fco^, S2(ai) определяются как
S,(со) = 1 /2U(co - со,) +1 /2Цсо + со,), (10.39)
S2 (со) = 1 / 2U(со - со2) +1 / 2U(co + со2), (10.40)
где U(u) - спектральная плотность пачки из N прямоугольных ви-
деоимпульсов (разд. 3).
С учетом (10.38) - (10.40) выражение для спектра сигнала запи-
шем в виде
247
Раздел 10
S(co) = ^[L7(co - co,) + L7(co + Wl )]e*l,r/4 +
+ “[L7(co - co2) + L7(co + co2 )]e^Kt)T/A
Выражение для U(w) имеет вид
U(0>) = ^lsinc— Sin(A/Oi7'/2) e-X>V-1)<..T/2
2 4 sin(io772)
ИЛИ
U(M\ = sin(Mo7"/2) c-i(n-i)mT/2
2 cos(co7"/4)
Подстановка (10.43) в (10.41) для co > 0 дает
5(ю\ _ Ч)М7~ sin(co — cOj )Л/7~/2 )(/у^1)+О)]7-/4 +
4 cos(co-co1)7"/4
+ sin(M ~ cog)NT/ 2 ^/[((0-0)2)(/v-i)-o)]T/4
4 cos(co-co2)7" /4
(10.41)
(10.42)
(10.43)
(10.44)
Г рафики амплитудного спектра |S(co)|, построенные при различ-
ных соотношениях частот соъ сог приведены на рис. 10.13. Ампли-
тудный спектр имеет максимумы на несущих частотах оси и сог.
cuff)
($2
со1
_______I______L
0 Т/2 Т
NT
Рис. 10.12
248
Сигналы с фазовой и частотной модуляцией
Рис. 10.13
249
Раздел 10
10.3.3. ЧМ сигнал с пилообразным несимметричным
законом модуляции
Чтобы определить спектр непрерывного периодического ЧМ
сигнала с пилообразным несимметричным законом модуляции
(рис. 10.14,а), рассмотрим импульсный сигнал с внутриимпульсной
ЧМ по линейному несимметричному закону (рис. 10.14,6). Длитель-
ность импульсного сигнала равна периоду следования непрерывно-
го сигнала. Частота такого сигнала описывается выражением
(10.45)
2сод _
где а = -у2-; шд,Т - девиация и период изменения частоты.
Фаза сигнала
(10.46)
Спектральная плотность комплексной огибающей импульсного
ЧМ сигнала определяется выражением
Цю) = Vo J eiW}^t]dt.
(10.47)
Определение интеграла (10.47) через интегралы Френеля дано
в разд. 11
U(o)) = -^Le 4 {[C(z1) + C(z2)]+/[S(z1) + S(z2)]},
2В
(10.48)
где В = = 2m; C(z), S(z) - интегралы Френеля;
л Q
z ^2 z
C(z} = Jcos^|-dx; S(z) = Jsin^|-dx;
(10.49)
(10.50)
250
Сигналы с фазовой и частотной модуляц и ей
Спектральная плотность импульсного ЧМ сигнала S(w) опреде-
ляется через спектральную плотность его комплексной огибающей
U((a) соотношением (разд. 8)
S(co) = -i-t/(CD-CD0) + -i-L/X(CD+CD0). (10.51)
Для со> 0
S(cd) = -|u(cd-cd0).
Переход от спектра импульсного сигнала к спектру периодиче-
ской последовательности импульсов описан в разд. 3. Комплексный
коэффициент ряда Фурье Сп связан со спектральной плотностью
одиночного импульса равенством
Сп = ±S(nQ.) = ~S(nQ.), (10.52)
Т 2п
251
Раздел 10
где Q, Т-частота и период модуляции.
Графики спектров периодического ЧМ сигнала с пилообразным
несимметричным законом модуляции при различных значениях ин-
декса модуляции m приведены на рис. 10.15.
со - О)0
Рис. 10.15
252
Сигналы с фазовой и частотной модуляцией
Спектры дискретные, интервал дискретизации равен частоте
модуляции Q = 2 л/7". Пунктирной линией изображены огибающие
спектров. Спектры симметричны относительно несущей частоты спо,
поэтому графики приведены только для со > соо.
10.3.4.ЧМ сигнал с пилообразным симметричным
законом модуляции
График зависимости частоты сигнала от времени изображен на
рис. 10.16,а. Чтобы получить спектр периодического сигнала с таким
законом ЧМ, рассмотрим импульсный сигнал с внутриимпульсной
ЧМ, длительность которого равна периоду модуляции непрерывного
сигнала (рис. 10.16,6). Частоту такого сигнала определим как
co(f) = соО1 +
(10.53)
4с0л
где а = -у2-; соа- девиация, соО1 = соо - cod.
Фаза сигнала описывается выражением
ср(О =
(10.54)
Рис. 10.16
253
Раздел 10
Спектральная плотность комплексной огибающей сигнала опре-
деляется выражением
0 X м 7/2 ;^г м
с -/(---+cof) г /(—-wf)
L/(co) = VQ j e 2 dt + VQ J e 2 dt.
-T/2 0
(10.55)
Решение интеграла имеет вид (разд. 11)
С/(со) = Ц(со) + Цх(со),
(10.56)
со — со0
if’M'
со ~ (О0
1
i е = юо
Рис. 10.17
254
Сигналы с фазовой и частотной модуляцией
где
Ц(<о) = ^=е ' s {[C(z,) + C(z2)]+/[S(z,) + S(z2)]}; (10.57)
8 = -^ = 2m; z1=Vs(1——); z2=Vs—. 71 2cod cod (10.58)
Выражение (10.56) запишем в виде (разд. 11)
L/(co) = 2|Ц(со)| cos cpv1 (co), (10.59)
где |Ц(со), (ри(со) - модуль и аргумент Ui((a).
Спектральная плотность импульсного ЧМ сигнала для со > 0 оп-
ределяется как
S(co) = -lu((D-(o01). (10.60)
Комплексные коэффициенты ряда Фурье, описывающие спектр
непрерывного ЧМ сигнала, равны
C„=yS(nQ) = -^S(nQ), (10.61)
где Q, Т-частота и период модуляции.
Графики амплитудных спектров ЧМ сигнала с симметричным
пилообразным законом модуляции приведены на рис. 10.17. Они
получены по результатам расчета спектров импульсных ЧМ сигна-
лов (разд. 11). Пунктирной линией изображена огибающая спектра
импульсного сигнала, дискреты показаны условно.
255
Раздел 11.
ИМПУЛЬСНЫЕ СИГНАЛЫ С ЧАСТОТНОЙ МОДУЛЯЦИЕЙ
Импульсные сигналы с внутриимпульсной ЧМ находят широкое
применение в радиолокации, связи, измерительной технике и дру-
гих областях. Привлекли они внимание прежде всего в связи с по-
исками способов сжатия импульсных радиолокационных сигналов,
что позволяет повысить разрешающую способность систем. Им-
пульсные сигналы с линейной ЧМ (ЛЧМ) были первыми сигналами
такого вида, их сжатие осуществляется с помощью согласованных
фильтров.
Стремление к улучшению вида сигнала на выходе согласован-
ного фильтра стимулировало исследования более сложных сигна-
лов с нелинейной ЧМ (НЧМ). Указанные виды импульсных ЧМ сиг-
налов и рассматриваются в дальнейшем - ЛЧМ и НЧМ сигналы,
даются их описание и характеристики.
11.1. Описание ЛЧМ сигналов
Импульсный ЧМ сигнал в общем случае описывается выражени-
ем
u(t) = Vo cos[(o0f + (p(f)] = Re y(f)e*°°r ,
(11.1)
где Vq, coo,<p(f)l — амплитуда, несущая частота, фаза и длитель-
ность сигнала; V(t)=Voe^- комплексная огибающая сигнала.
Мгновенная частота сигнала
(11-2)
где ф (г)— переменная составляющая частоты.
Функция to(f) описывает закон изменения частоты во времени -
закон модуляции.
256
Импульсные сигналы с частотной модуляцией
Обычно формируются ЛЧМ сигналы, имеющие нечетную сим-
метрию функции co(t) относительно (оо (рис. 11.1)
co(f) = соо + а?, И<у,
(11.3)
где а = 2(1)^/%; - девиация частоты.
Фаза сигнала (рис. 11.1)
<р(0
at2
(11-4)
Возможна четная симметрия закона модуляции (рис. 11.2)
257
Раздел 11
2
(p(O=^-s'gnW
(11-6)
где
Зависимость co(f) (или <p(f)) для нечетного или четного законов
ЛЧМ полностью определяют характеристики сигналов - спектр
и корреляционную функцию.
11.2. Спектр ЛЧМ сигнала с нечетносимметричным
законом модуляции
Спектр ЛЧМ сигнала S(co) удобнее определять через спектр его
комплексной огибающей 17(со) (разд. 8)
1 1
S(co) = — и(ш - (оо) + — U (со + со0), (11.7)
2 2
где
/ 2
L/((o)= j V(t)e^dt. (11.8)
- т„ / 2
Подставляя в (11.8) V(t) = выражение для спектральной
плотности комплексной огибающей с учетом (11.4) запишем в виде
т„/2 М2
U((o)=l/O ^e^K!}tdt^V0 J 2 ’dt. (11.9)
-T,/2 -T„/2
Используя интегралы Френеля
Z n Z о
. . л тт , \ Г ТГ X
C(z)= cos----dx, S(z) =sin------dx, (11.10)
V 7 J 2 V J 2
о о
из (11.9) получаем
258
Импульсные сигналы с частотной модуляцией
и(ы) =
,пВ( со
^Оти „ ' 4
—, и
J2B
{[C(zi) + C(z2)] + /[S(z1) +
где
В ~ 2fdx
- база сигнала;
z2
b со
2 \ у
Амплитудный спектр комплексной огибающей
ется выражением
^lc(zi)+c(z2jf + ls(z,)+s(z2f,
\2В
фазовый спектр
+ arctg
S(z1)+ S(z2)
C(Z1) + C(z2)
Для сигналов с большим значением базы
(zA = z2) можем принять
С(^) = C(z2) = 0,5 и S(zA) = S(z2) = 0,5,
С учетом (11.15) из (11.13) получим
При со = со5
C(zJ= S(zJ= 0,5 и C(z2)= S(z2)= 0,
из (11.13) найдем
М). (ню
(11.12)
сигнала описыва-
(11.13)
(11-14)
(В»1) при со = 0
(11-15)
(11-16)
(11.17)
(11.18)
259
Раздел 11
Таким образом, можно считать, что при больших значениях ба-
зы ширина спектра равна удвоенному значению девиации частоты.
Выражение для спектра комплексной огибающей сигнала (11.9)
представим в виде
ги/2 _ го/2
17(d)) = J V^e^dt = ^V(t)cos(p(t)coscotdt-
-ги/2
ти/2 хи/2
-i J V^(f)cos (p(f)sincofcyf + Jv^jsincpffjsinwfcft + (11.19)
-tJ2 -xu!2
xJ2
+ i |v'(f)sin(p(f)cos(ji)fcft.
-tu/2
При нечетной симметрии закона модуляции, как следует из
(11.4), фаза является четной функцией времени, т.е.
ф(0=ф(- о
Учтем также, что произведение двух четных или двух нечетных
функций дает четную функцию, а произведение четной функции и
нечетной - нечетную. Для нечетной функции интеграл в сим- мет-
ричных относительно нуля пределах равен нулю. Таким образом, в
(11.19) второй и третий интегралы равны нулю. Выражение для
17(d)) запишется в виде:
Т,/2 г„/2
17(со) = J У(f)cosф(f)cosd)fcft + / J y(f)sin(p(f)coso)fc/t (11.20)
х„!2 -xJ2
Функция 17(d)) является четной
17(d)) = 17(- со). (11.21)
Четными функциями частоты являются амплитудный и фазовый
спектры
|l7(d))| =|l7(-d))|; <pv(d)) = фД- со). (11.22)
О характере амплитудного спектра сигнала можно судить по гра-
фикам, приведенным на рис. 11.3 для различных значений базы В.
Так как амплитудный спектр является четной функцией частоты,
260
Импульсные сигналы с частотной модуляцией
графики приведены только для (о)0. Как следует из анализа гра-
фиков, амплитудный спектр при достаточно больших значениях
базы является довольно равномерным в полосе частот, ограни-
ченной значениями |о)д|, быстро спадает за пределами указанной
полосы, амплитуда пульсаций спектра уменьшается при увеличе-
нии базы сигнала В.
11.3. Приближенное определение спектра ЛЧМ сигнала
Упрощение расчета и анализа спектра ЧМ сигнала дает метод
стационарной фазы. Он основан на использовании приближенного
решения интеграла вида
I = j e^dt. (11.23)
-с
Значение интеграла (11.23) в основном определяется интерва-
лом, на котором скорость изменения колебаний, описываемых по-
динтегральной функцией, является минимальной. Этот интервал
определяется окрестностью той точки, в которой функция q/(f) ста-
ционарна или скорость ее изменения ф (t) минимальна. Функция
представляет фазу колебания, поэтому описываемый метод
называется методом стационарной фазы.
Минимальное значение цг (t) будет около точки, которая нахо-
дится из уравнения
v('o) = O. (11.24)
Раскладывая в ряд Тейлора в окрестности точки t0 и огра-
ничиваясь в разложении двумя первыми слагаемыми, запишем
#М(*о) + -!~(1-1о)2. (11-25)
Подставляя (11.25) в (11.23), получаем
У'УоХ^-^о Y
/ = еми е dt (11.26)
-с
261
Раздел 11
№)L
U(0)
U,OO U, и/ |,UU |,JO 1,0/ Z,U0
|U(co)| °)/o)d
Ц0)
co/(od
Рис. 11.3
262
Импульсные сигналы с частотной модуляцией
Как правило, замена пределов интегрирования в (11.26) на
не оказывает заметного влияния на результат и в рамках прини-
маемых допущений вполне оправдана. С учетом известного равен-
ства
(11-27)
из (11.26) получим
/ =
(11.28)
Знак перед 71/4 в показателе степени совпадает со знаком
Если уравнение (11.24) имеет несколько решений, то инте-
грал (11.28) равен сумме интегралов, взятых для каждого из реше-
ний.
Используя метод стационарной фазы, описанный выше, опре-
деляем спектральную плотность комплексной огибающей ЛЧМ сиг-
нала, описываемую (11.9). Интеграл в (11.9) идентичен (11.23) при
y(f) = (p(t)-(Dt. (11.29)
Равенство, из которого определяется точка стационарной фазы,
имеет вид
(p'(?o)-(D = O.
С учетом выражения для cp(f) получим
2оЫо
—- о = 0.
Точка стационарной фазы равна
t -
° 20)д
Таким образом, имеем
(11.30)
(11.31)
(11.32)
263
Раздел 11
(11.33)
спектральная плотность описывается выражением
.71 В/ W
^0~и с 4
4в
(11.34)
Амплитудный спектр
4в
(11.35)
2
' . Я
4
что совпадает с (11.16).
11.4. Спектр пачки импульсов с внутриимпульсной ЛЧМ
Пачка радиоимпульсов с внутриимпульсной ЧМ описывается
выражением
°w=Xu"W=ZRe
(11.36)
/7=1
Л=1
N N
где Vn(t) - комплексная огибающая л-го импульса; Vn(t) = Уое*Рп^;
Чь^о-ФлЮ “ амплитуда, несущая частота и фаза колебания л-го
импульса.
Как узкополосный сигнал u(t) может быть представлен в виде
u(f) = Re V(t)ekaot
(11-37)
где - комплексная огибающая сигнала; <p(f) - фаза
сигнала.
Из равенства (11.36) и (11.37) получим
N
Л=1
(11.38)
Как следует из (11.38), спектральная плотность комплексной
огибающей пачки импульсов определяется суммой спектральных
плотностей импульсов, входящих в состав пачки. Спектральную
264
Импульсные сигналы с частотной модуляцией
плотность комплексной огибающей любого из Л/ идентичных им-
пульсов с внутриимпульсной ЧМ определим как спектральную
плотность комплексной огибающей первого импульса, умноженную
на множитель смещения (разд. 3)
ип(ы)= иМ е-^п^Т, (11.39)
где и0(ы) - спектральная плотность комплексной огибающей пер-
вого импульса; Т - период следования импульсов в пачке.
С учетом (11.39) из (11.38) получим
• Гл/О)-Г1
sin N—T
I о
U(to) =U0 (со—
. I 0) _ ]
sin — Т
12
е 2
(11.40)
Таким образом, спектральная плотность комплексной огибаю-
щей пачки из Л/ радиоимпульсов с внутриимпульсной ЧМ получает-
ся умножением спектральной плотности комплексной огибающей
одиночного импульса на множитель
sinf N—T
2
/(n-i}|t
(11.41)
учитывающий число импульсов и период их следования в пачке.
При нечетносимметричном законе ЛЧМ функция U0(w) описыва-
ется (11.11). На рис. 11.4, 11.5 представлены графики амплитудных
спектров комплексной огибающей пачки импульсов с внутриим-
пульсной ЛЧМ для базы сигнала В = 100 и различных значений па-
раметров: N и q = Т/ти, где ти - длительность импульса, Т - пери-
од следования импульсов в пачке. На рис. 11.4,а и 11.5,а спектры
приведены для достаточно широкого диапазона частот. Но структу-
ра спектра такова, что из рис. 11.4,а и 11.5,а можно получить пред-
ставление только об огибающей спектра. О структуре спектра можно
судить по его фрагментам, выделенным для довольно узкой полосы
частот - рис. 11.4,6 и 11.5,6.
Переход от спектральной плотности комплексной огибающей
к спектральной плотности сигнала определяется ранее приведен-
ным выражением (11.7).
265
Раздел 11
б)
Рис. 11.4
266
Импульсныесигналы с частотной модуляцией
\Un(u>)\
Un(Q)
lUn(Gi)\
Un(Q)
1,2
0,8 b
0 0,02 0,04 0,06 0,08 1,00
б)
Рис. 11.5
267
Раздел 11
11.5. Корреляционная функция ЛЧМ сигнала при нечет-
ной симметрии закона модуляции
Корреляционная функция ЛЧМ сигнала связана с корреляцион-
ной функцией его комплексной огибающей следующей соотноше-
нием (разд. 8)
Я(т) = Ае[яДт)е*°оТ
(11.42)
где ЯДт) - корреляционная функция комплексной огибающей сиг-
нала V(t) = Voe^.
Корреляционная функция комплексной огибающей сигнала оп-
ределяется выражением
т“/2. . 1/2 т“/2
Я(т) = J V(t)V*(t-T)dt = -Q- J (11.43)
-т„/2 -ти/2+т
где т - смещение во времени.
Для ЛЧМ сигнала с учетом (11.4) запишем
о ги /2
£ f е
2 J
-ти/2+1
*dt.
Решая интеграл в (11.44), получим
1/2— ( IJ \ Г 1тР
Я„(т) = °....- 1-— sine (ОдТ 1- —
2 I Xu'J I /
(11.44)
(11.45)
где
При малых значениях т « ти разность фаз в (11.43) может быть
определена как
<р(г)—<p(f — т) = -ф(т)т, (11.46)
а нижний предел интегрирования принят равным -т„/2. С учетом
этого выражение для ЯДт) запишем в виде
268
Импульсные сигналы с частотной модуляцией
Выражение (11.47) представим как
М2
J cos[t(p (t) dt -
-т„/2
V'2 г ,
/-2- sin|r(p (t)\ dt
2 -tu/2
(11.47)
(11.48)
Подынтегральное выражение первого слагаемого представляет
четную функцию, второго слагаемого - нечетную функцию време-
ни. Учитывая, что интеграл в симметричных пределах от четной
функции равен удвоенному интегралу от нуля до верхнего преде-
ла, а от нечетной функции равен нулю, выражение для Rv(r) мо-
жем записать в виде
9 TJ 2
У2 Г Г , 1
Rv(т)= J cos[T(p (t)j dt.
(11.49)
С учетом равенства <р (/) = af получим
ть./2
Rv (т) = У02 | cosfarf] dt =
о
= —У—^-sinc нВ— .
2 т
-У—— sinc((D,yr
2 v d
(11.50)
К такому же результату придем исходя из (11.45), пренебрегая
вторым слагаемым в круглых скобках. Как следует из (11.45)
и (11.50) корреляционная функция имеет главный и боковые мак-
симумы. Ширина главного максимума определяется из соотноше-
ния
пВ— = л,
и равна
(11.51)
(11.52)
269
Раздел 11
Таким образом, при больших значениях В » 1 ширина главного
максимума значительно меньше длительности импульса и при-
ближение, принятое при нахождении корреляционной функции
(11.50), выглядит вполне оправданными. Отношение длительности
сигнала к ширине главного максимума (корреляционного пика) на-
зывается коэффициентом сжатия. Для рассматриваемого сигнала,
как следует из приведенных соотношений, он равен базе сигнала
В. Графики модуля корреляционной функции комплексной оги-
бающей ЛЧМ сигнала для некоторых значений В приведены на рис.
11.6.
\Ftvfr)VRv(O) \Rv(x)\/Rv(Q)
11.6. Спектр и корреляционная функция ЛЧМ сигнала с
четносимметричным законом модуляции
При четной симметрии закона модуляции выражение для спек-
тральной плотности комплексной огибающей ЛЧМ сигнала (11.8)
примет вид
0 —+a>rl т‘Т2 /——
и(ш) = l/0 J е 1 2 'dt +1/0 J е 2 'dt =
~tJ2 ° (11.53)
Tu/2 —<:>Г
= Vo j е 2 dt + VQ f е 2 dt = Ц(оз)+
о о
270
Импульсные сигналы с частотной модуляцией
где
т /2 (af2 Л
Ц(со)= VQ j е 2 ’dt.
о
Представим (11.53) в виде
L/(co) = |Ц(со)|еА₽1/1^ + |Ц(ю)|е = 2|ц(си)|cos<pv1(co),
(11.54)
(11.55)
где фу^со) - аргумент Ц(со).
Как следует из (11.55), спектральная плотность комплексной
огибающей ЛЧМ сигнала является действительной функцией час-
тоты. Чтобы определить ее, найдем Ц(со).
По аналогии с (11.11) получим
Ц(со) =
vq4
г4в
,лЕ)( со )
е 8 {[c(z1)+C(z2)]+/[s(z1)+S(z2)]},
(11.56)
где В = - база сигнала; С(х), S(x) - интегралы Френе-
л
ля;
Модуль и аргумент Ц(со) описываются выражениями
|Ц(ы)| = 7 [Фт) + C(z2 )]2 + [S(z,) + S(z2 )]2, (11.57)
2<В
/ \ пВ
Фи(со) = ——
+ arctg
S(z)) + S(z2)
C(zi) + C(z2)
(11.58)
С учетом (11.57) и (11.58) из (11.55) можно определить ампли-
тудный и фазовый спектры комплексной огибающей сигнала
|С/(со| = 2|Ц (w)||cos фи (со)|; ф(со) =
О, cos ф^ (cd) > О
± л, cos фи (го) < О
(11.59)
271
Раздел 11
Графики амплитудного спектра, рассчитанные по приведенным
выражениям, изображены на рис.11.7-11.9. Амплитудный спектр
описывается осциллирующей функцией (выражение для |u(co)| со-
держит косинус), поэтому его изображение не всегда возможно
(особенно при больших значениях В). На рис. 11.8,а и 11.9.а пока-
заны огибающие спектров. Характер осцилляций спектра иллюст-
рируется рис. 11.8,6 и 11.9,6, где даны фрагменты графиков спек-
тров.
Характер спектра отражает и приближенное решение, получае-
мое методом стационарной фазы. Асимптотическое выражение
для спектра найдем с учетом равенства
#)= — -®t. (11.6O)
Точку стационарной фазы получим из уравнения
af0-a) = ^-f0-(o = 0. (11.61)
Она равна
<0=-^- (11.62)
В этом случае
/ \ 2
/ ч кВ со "/. X 4лВ ...
--- > ф V0/~-----2~ (11.63)
8 Ти
Выражение для спектральной плотности Ц(со) получим с уче-
том (11.28) и (11.63) в виде
ц (ю) -
VoTu
г.....—.... tz
V2B
7 х2
71В 0) 71
---- ---- _|----
8 ( шд ) 4
(11.64)
Спектральная плотность комплексной огибающей ЛЧМ сигнала
при четносимметричном законе модуляции будет описываться вы-
ражением
272
Импульсныесигналы с частотной модуляцией
№21
U(0)
Рис. 11.7
(11.65)
Имея спектральную плотность одиночного импульса с четно-
симметричной ЛЧМ, можно получить спектральную плотность пач-
ки идентичных импульсов, используя подход, описанный в п.11.3,
умножая (11.55) на (11.41).
Корреляционную функцию комплексной огибающей определим,
исходя из (11.48). Расчеты показывают, что вторым слагаемым в
(11.48) можно пренебречь. Это объясняется тем, что под знаком
интеграла - синус с малым значением аргумента. Выражение для
корреляционной функции будет аналогичным (11.50).
11.7. Влияние искажений закона модуляции
на характеристики сигнала
При формировании ЛЧМ сигнала возможны искажения закона
модуляции, которые, как правило, носят колебательный характер.
При нечетносимметричном законе ЧМ такие искажения могут быть
учтены при описании оэ(г) следующим выражением (рис. 11.10):
273
Раздел 11
и(0)
а)
U(0)
б)
Рис. 11.8
274
Импульсные сигналы с частотной модуляцией
275
Раздел 11
co(f)=co0 + at + Acosin(Qf+ 0), (11.66)
2юа д _
где a = —шд - девиация частоты; Дсо, 0 - параметры зависи-
т
мости; Q - частота искажений.
Обозначим О.} =2тс/ти и примем <2= р<2п р = 1, 2,... Фаза сиг-
нала <p(f) с учетом (11.66) равна
(p(f) = -^--A<pcos(Qf+ 0), (11.67)
где Дф = Дсо/ Q.
Спектральная плотность комплексной огибающей сигнала опи-
сывается выражением
ти/2 ти/2 af2 / V
, . Г -г /Л л (• i---/ДфСОЗ(Ш + 0)-К1Я
(Дсо)=У0 J = VQ J е 2 dt. (11.68)
-Ту/2 -ти/2
Рис. 11.10
276
Импульсные сигналы с частотной модуляцией
Используя известное разложение
+ /zsinx __ j
П——°°
(11.69)
где /n(z) - функция Бесселя первого рода n-го порядка,
выражение (11.68) представим в виде
ти/2 at2 . .
, . с I------------/д<рсоэ(ш+еьш
U(co)=VQ J е 2 dt =
-ч'*
ru /2 .at2 . ( n't . .
u- i——+/A<psin Qf+0— -лиг
= Vo J e 2 dt =
-ru/2
(11.70)
. f _ л т„ /2 , . at2
1П\ Г -/ w-nQ f+/—
' 1 2j J е 2 dt.
-ги/2
Вводя интегралы Френеля C(z) и S(z), получим
ГТ °° /nfe-—)
Ф) = 1 2а х
х {[C(z}) + C(z2)]+ /[sfo) + S(z2)]},
где
z 2 z 2
C(z) = cos-----dx; S{z) = sin------с/х;
о 0
(11.71)
При отсутствии искажений закона модуляции (Дсо = 0) выраже-
ние (11.71) описывает спектральную плотность комплексной оги-
бающей ЛЧМ сигнала, совпадает с ранее приведенным выраже-
нием.
При малых искажениях (малое значение Дсо) можно принять
/0(Дф) = 1, /0(Дф) = 4г>
при л>2 /п(д<р) = О.
277
Раздел 11
В этом случае (11.71) примет вид
L/(co) = UQ(со) + Ц(со)е 2у+С/_1(со)е к ,
где Uo(co), Ц(со) и (Л^со) определяются из выражения
I — оо i{w-n£if
Jjn(A<P> 2а х
х {[C(z}) + C(z2 j] + i[s(z^) + S(z2)]},
(11.72)
(11.73)
при Л = О, П = 1 и л = -1.
Графики модуля спектральной плотности комплексной огибаю-
щей ЛЧМ сигнала с искажениями закона модуляции приведены на
рис. 11.11. Сравнение приведенных графиков и графиков, полу-
ченных для ЛЧМ сигнала без искажения закона модуляции (рис.
11.4), показывает появление при искажении закона дополнитель-
ных пульсаций амплитудного спектра. Амплитуда и частота пуль-
саций зависят от параметров, характеризующих искажение закона
модуляции Дш и О..
Корреляционная функция комплексной огибающей рассматри-
ваемого сигнала получается подстановкой в исходное выражение
2 ти /2
flv(T) = _o_ J (11.74)
-ти/2+т
фазы, описываемой (11.67),
t/2 j31 Tu/2 iart +2A<psin^ sin
fe 2
7 2 J
-tu/2+t
Q f-- +0
I 2
Используя разложение (11.69), запишем
J g/(aT+nQ ) f
-tu/2+т
278
Импульсные сигналы с частотной модуляцией
U(0)
U(Q)
co/iod
Рис. 11.11
279
Раздел 11
После интегрирования в (11.76) получим при т) О
(11-77)
При Дсо = О (искажения отсутствуют) выражение (11.77) совпа-
дает с выражением для корреляционной функции комплексной оги-
бающей ЛЧМ сигнала.
При малых значениях т (т « ти), что при больших значениях ба-
зы сигнала В практически не накладывает ограничений на рас-
сматриваемый интервал т, можно принять
/0 2A(psm-~
< г J
( Qh
ln\ 2A(psin—
I 2 ,
при n>2
( . Qt
/J 2A(psm—
= Доя;
Выражение для корреляционной функции запишем в виде
1/2 °° г
Rv W =........“../„(Acorje'^sinc (ат + пО. )—
п=-<х> L
V0^u
2
атт., « . ar-Q
sine —- + е sine-------------т„
2 2 и
(11-78)
_й . ат - Q
-е sine---------т„
2 и
или
р М-р М , И) Tu f r^sinc + т cosine аТ т 1 М 1 79)
Пу у Су — Пд \ V/ ’--& ОII IV-------- Ьц & 011 IV------ 1ц , I I . / оу
2 I 2 2 J
где Я0(т) - корреляционная функция комплексной огибающей ЛЧМ
сигнала (без искажений).
Графики модуля корреляционной функции комплексной оги-
бающей сигнала при 0 = 0 и различных значениях Дш и р приве-
дены на рис. 11.12. Анализ графиков показывает, что искажение
закона ЧМ приводит к увеличению р-го бокового лепестка корреля-
280
Импульсные сигналы с частотной модуляцией
ционной функции. Этот рост заметен только, начиная с некоторого
(порогового) значения Дсо.
Практический интерес представляет взаимная корреляционная
функция комплексных огибающих ЛЧМ сигнала и ЛЧМ сигнала
с искажением закона модуляции. Она позволяет оценить огибаю-
щую сигнала на выходе фильтра, согласованного с ЛЧМ сигналом
при искажении закона модуляции. Выражение для взаимной корре-
ляционной функции комплексных огибающих ЛЧМ сигнала без ис-
кажения закона модуляции и сигнала с искажением может быть
записано в виде
ЯЦг(т) = 2 j 2(t- r)dt = ^- (11.80)
-тц/2+т -ти/2+т
где 1/^)= Уое*₽1^; У2(г) = Vo - комплексные огибающие сиг-
налов с искажением и без искажения закона модуляции.
Фазы сигналов с искажением и без искажения закона модуляции
описываются (11.67) и (11.4).
При 0 = 0
at2
4)20 = —-AcpcosQf; Ф2(0 = —•
Подставляя (11.81) в (11.80), получаем
at^
<Pi(0-(P2^~T)= —— + aTt- ДфсоэШ,
2 . хи / 2
Я (т) = 2L е'~2 f g/art-zAcpcosQf^ = Vo.
\ / 2 J 2
-тц/2+т
Т„ / 2 . . . ( „ 7Г|
и - larf-iAmsin ЙГ—
• Г е 2^dt.
(11-81)
.ат2
е'~г
(11.82)
-тц/2+т
Используя (11.69), выражение для Rv (т) представляем в виде
t/2 _ 3x2 « _ . л xu /2
ЯМт) = ’уе<2 2?п(дф)е'"2 Jе/(ат+лй),<Я.
п=-°° -ти/2+т
(11.83)
Из (11.83) для т > 0 найдем
281
Раздел 11
R(0)
R(0)
\R(x)l
R(0)
Рис. 11.12
282
Импульсные сигналысчастотной модуляцией
•sine
Ve
2
ат+ пО.
2
т
ти 1- —
. т<.
и
. ( ЙТ Л
in\-------------
I 2 2
(11.84)
и
получим
л=
. n
-in—
1 2sinc
ат + пО.
--------
2 и
(11.85)
Подставив в (11.85)
Q = —p, 0 = 1,2,...,
(11.86)
запишем
Ур2^
2
inK
» 2sinc
атт..
(11.87)
п=
ИЛИ
л
2 п-
Е, . -in—
ln(&p)e 2 sine пВ
т
— + при. ,
(11.88)
где В = ° u .
it
При малых искажениях (Дф « 1) можно принять
/0(Дф) = 1, /0(Дф) = —, /п(Дф) = 0 при п >2.
В этом случае (11.88) запишется в виде
V I и —------
М2 V 7 2
sincnB—+ —
ти 2
Гт
е 2sinc tiB— + pn -
< ги ?
Дф '? • о
——е 2 sine нВ
2
т
----рп
(11.89)
где Дф = Дсо/Q.
283
Раздел 11
График модуля взаимной корреляционной функции комплекс-
ных огибающих сигналов при Д(р = 0,2 (В = 100) приведен на рис.
11.13.
11.8. Влияние ступенчатой аппроксимации закона изме-
нения фазы на спектр сигнала
Преимущества цифровой техники заставляют обращаться к ней
и при формировании ЧМ сигналов. Обычно модуляция производит-
ся изменением фазы, закон изменения фазы получается ступенча-
тым. Ступенчатый характер изменения фазы приводит к искажени-
ям характеристик ЛЧМ сигнала.
При несимметричном законе ЧМ фаза описывается четной
функцией (11.4)
<p(t)=bt2, |f|<y, (11.90)
где ти - длительность сигнала; Ь = ыд/ти; - девиация частоты.
284
Импульсные сигналы с частотной модуляцией
При использовании цифровой техники фаза изменяется скачко-
образно через заданный интервал времени Т, описывается кусоч-
но-постоянной функцией
<р(пТ) = b(ntf, п = 0,1,..., Л/ = —.
(11-91)
С учетом шага квантования фазы
ф(лТ)= Дф entier
Ьл2Т2)
(11.92)
л-0,1,...,Л/,
где entier(x) - целая часть х.
Точность аппроксимации закона изменения фазы (11.90) зави-
симостями (11.91) или (11.92) определяется выбором параметров
Т и Д(р. Выражение для спектра комплексной огибающей ЛЧМ сиг-
нала при нечетносимметричном законе модуляции, исходя из
(11.9), можем записать как
ти/2 тц/2
и(ы) = 2l/0 Jcos(p(f)cosa) tdt + i2VQ Jsin(p(r)cosa) tdt. (11.93)
о о
Переходя в (11.93) от непрерывной функции <p(f) к кусочно-
постоянной ф(лТ), интегралы в (11.93) представим в виде
гц/2 N_, (п+1)Т
|созф(?)соза) tdt = ^Гсозф(лТ) J cos wTdt =
О n=o пТ
-г Л/-1
т . си т
= Tsmc—
2
л=0
М N_^ (п+$Т
|з1Пф(^со5а) tdt = ^Гз!пф(лТ) J cos cd Tdt =
О п=о пТ
= Tsinc
Л/-1
У sin ф(л Т )соэ(л + О.б)со Т.
(11.94)
(11.95)
Подстановка (11.94) и (11.95) в (11.93) дает
285
Раздел 11
и(ы) = 2l/0 7sinc
Л/-1
cos(n + 0,5 )а) Те^пТ^
п=0
(11.96)
Амплитудный спектр описывается выражением
|U((o)| = 2V0rsinc^
д/ А2 («)+ В2(ы),
(11-97)
где
Л/-1
А(ю) = cos(n + 0,5 )со Т cos ф( п Т\
п=0
Л/-1
В(ю) = cos(n + 0,5 )о) Т sin (p(n7")
п=0
(11.98)
(11.99)
Выражение (11.97) позволяет рассчитать амплитудный спектр
ЛЧМ сигнала с учетом дискретизации по времени фазы (при циф-
ровом методе формирования фазы). Результаты расчета ампли-
тудного спектра с различными значениями интервала дискретиза-
ции Т в виде графиков представлены на рис. 11.14. На рис. 11.14,а.
приведен график спектра при значении интервала дискретизации
То, выбранного из условия Найквиста и практически не влияющего
на спектр формируемого сигнала. На рис. 11.14,6 приведен график
спектра ЛЧМ сигнала, сформированного с интервалом дискретиза-
ции 2,5Г0. Влияние дискретизации во времени на спектр сигнала
при задании закона изменения фазы заметно уже при Т = 1,25 То и
значительно - при Т = 2,5Т0 .
11.9. Прохождение ЛЧМ сигнала через согласованный
фильтр
Передача сигналов сопровождается шумами, которые искажают
передаваемую информацию. Обнаружение сигнала на фоне шума,
определение его параметров является одной из важных задач при
передаче информации при помощи радиосигналов. Уменьшение
влияния шумов достигается различными способами, в том числе
выбором характеристик цепей, через которые проходит смесь сиг-
нала и шума. Цепи, обеспечивающие обнаружение сигнала на фо-
286
Импульсные сигналы с частотной модуляцией
не шума наилучшим образом, называются оптимальными цепями
или оптимальными фильтрами. Описываются оптимальные фильт-
ры с помощью импульсной или частотной характеристик. Выбор в
качестве критерия оптимальности максимального отношения сиг-
нал/шум на выходе цепи определяет импульсную характеристику
оптимального фильтра как (часть 2)
h(t)=ks(t0-t),
(11.100)
где s(t) - сигнал на входе фильтра; к , t0 - нормирующий коэффи-
циент и задержка.
Как правило, в (11.100) постоянная задержка опускается
и выражение для h(t) записывается в виде
h(t)=
(11,101)
Соответствующая частотная характеристика оптимального
фильтра определяется как
H(w)=kS (ш)е^'и°
(11.102)
где S((d) - спектр сигнала на входе цепи.
Как и при записи выражения для h(t) постоянная задержка обычно
опускается, нормирующий коэффициент к приравнивается единице
Н(ш) = S (со).
(11.103)
Таким образом, характеристики оптимального фильтра опреде-
ляются характеристиками обнаруживаемого сигнала. Поэтому та-
кие фильтры называются согласованными. Фильтры, согласован-
ные с ЧМ сигналами, выполняют и операцию сжатия импульсов.
С учетом сказанного рассмотрение характеристик сигнала на вы-
ходе согласованного с ЛЧМ сигналом фильтра представляет осо-
бый практический интерес.
ЛЧМ сигнал при нечетной симметрии закона модуляции описы-
вается выражением
где Ц, ,со0,тц - амплитуда, несущая частота и длительность сигнала;
(11.104)
287
Раздел 11
б)
Рис. 11.14
288
Импульсные сигналы с частотной модуляцией
а - скорость изменения частоты; Ц (?) = 1/0 е,а(2^2 - комплексная
огибающая сигнала.
Согласованный фильтр имеет импульсную характеристику, оп-
ределяемую (11.101)
/?(?) = д/2а/л1/0 соз ш0?-а?2/2,
(11.105)
где д/2а/л - нормирующий коэффициент.
Сигнал на выходе согласованного фильтра определяется сверт-
кой импульсной характеристики цепи и сигнала
u2(t) = | h(t- x)u^x)dx.
(11.106)
В радиолокационных системах, в которых производится сжатие
импульсов, особый интерес представляет влияние эффекта Доп-
плера, вызываемого движением обнаруженного объекта, на вы-
ходной сигнал. Выражение для сигнала с учетом частоты Допплера
записывается в виде
ц(?) = 1/0 соэ[(ш0 + Q.)t + at2/2 - Re l/i (?)e*°°r
(11.107)
где V'i (?) = l/0 e'arZ/2+Qr; q _ частота Допплера.
Подставляя (11.105) и (11.107) в (11.106), для ?>0 запишем
т0/2
и2(г)=7йЛ1/02 [cos[o)0(
-ти/2
cos (о)0 + Q)x + ах2dx.
(11.108)
Преобразуя (11.108) и опуская члены с удвоенной частотой,
найдем
/2
u2(t) = y/a/2nV2
cos[Qx + ю0? - at2 / 2 + atx\ dx.
(11.109)
289
Раздел 11
Решая интеграл в (11.109) и преобразуя полученное решение,
запишем
sin
£2 + at
2...
Q. + at
cos(w0 +^/2) t =
(11.110)
u2(t,Q.) = Л/а/2лУ02
Q + at
2
где sincx = sin x/x.
cos(w0 +Q/2) t,
При Q = 0
u2(t) = ja/2n
V0\
2
sine
2
COSO)0L
(11.111)
Огибающая u2(f) с точностью до постоянного коэффициента
совпадает с (11.45). Таким образом, корреляционная функция ЛЧМ
сигнала позволяет описывать огибающую сигнала на выходе со-
гласованного фильтра (при подаче на вход ЛЧМ сигнала).
Анализ выражения, определяющего u2(t,O.), и расчетного вы-
ражения, полученного для ЛЧМ сигнала, показывает, что они сов-
падают с выражениями для обобщенной корреляционной функции
(разд. 8).
Учитывая следующее равенство
а = (од/ти,
где сод - девиация частоты,
(11.110) можем переписать в виде
2
u2 (t,Q.) = ^a/2n
•cos(w0 +Q/2) t.
При больших значениях wd (при
нала В = (Лдти/п) можно принять
I-11- sine
T„
z Qt..
-------1- Шд
2 д
— + codf 1—U-
больших значениях
(11.112)
базы сиг-
______1/2
о2 (?,□) = уа/2л t ; sine
Q.tu
~2~
+ udt cos((o0 + Q./2)t.
(11.113)
290
_______Импульсные сигналы с частотной модуляцией__________
Максимум функции i/2(f,Q) достигается при значении t, полу-
чаемом из следующего уравнения:
QTu/2 + (odf = О,
т.е. при t = -О.ти/2(лд, где - девиация частоты.
11.10 Импульсные сигналы с нелинейной частотной мо-
дуляцией
Для сигналов с внутриимпульсной ЧМ нелинейный закон модуля-
ции - наиболее общий случай. Рассмотрение НЧМ сигналов расши-
ряет рамки анализа импульсных ЧМ сигналов, позволяет исследовать
влияние закона модуляции на характеристики сигнала.
11.10.1. НЧМ сигналы со степенным законом модуляции
Импульсный ЧМ сигнал описывается выражением
u(t) = Re V(t)eK,’ot
(11.114)
где V(t) - комплексная огибающая сигнала;
l/(t)=Voe*’, |f|<i
V'q.o) о,ф(0 - амплитуда, несущая частота и фаза сигнала; ти-дли-
тельность импульса.
Частота сигнала определяется как
o)(f) = a)0+-^. (11.115)
Достаточно общей нелинейной зависимостью для переменной
составляющей частоты, можно считать, является степенная зави-
симость. Поэтому при рассмотрении НЧМ целесообразно рассмот-
реть ее в первую очередь.
При нечетной симметрии закона модуляции (наиболее распро-
страненный на практике случай) выражение для частоты запишем
в виде (рис. 11.15)
ш(г) = ш 0 + /э |f|Psign(f), р|<^-, (11.116)
291
Раздел 11
/
где b = ыд
к
хи 7
шд - девиация частоты; р - показатель степени,
определяющий характер изменения частоты;
Фаза сигнала в этом случае
(11.117)
Спектральная плотность комплексной огибающей сигнала опре-
деляется выражением
-ти/2 -ти/2
(11.118)
Рис. 11.15
292
Импульсные сигналы с частотной модуляцией
Интегрирование в (11.118.) с использованием известных решений
возможно только при р = 1 (линейный закон модуляции). В общем
случае решение может быть получено только численным методом.
Спектральную плотность комплексной огибающей сигнала пред-
ставим в виде
ти/2 т„/2
и((л) = Vo J = 2V0 J cos(p(f)cos co tdt +
~Tu/2 ° (11.119)
tu/2
+ i2VQ J sincp(f)cos co tdt.
о
Разобьем интервал [0, Тц/2] на N участков длительностью
\t = хи / 2N. Аппроксимируем <p(t) кусочно-постоянной функцией,
значения которой совпадают с (p(f) в точках разбиения. При такой
аппроксимации фаза на л-м участке разбиения описывается выра-
жением
(p(nAf) = —~(n&t)p'\ п = 0,1, 2,...,Д/-1.
(11.120)
Подставляя (11.120) в подинтегральные выражения (11.119),
получим
ти/2 (п+1)ы
J coscp(f )cos со tdt = cos ф(лАГ) J cos co tdt
0 л=о лДГ
2 . a) At
— sin------
А/-1
У cos ф(лА^соз[(л + О.б)(о AtJ
л=0
(11.121)
М2 N-1
Jsir*p(t)cos со tdt = У^зтф(пАГ) J cos со tdt =
0 Л=О лД/
2 . coAt
—sin----
со 2
N-1
У sin ф(лА^соз[(л + 0.5)со AtJ.
л=0
(11.122)
С учетом (11.121) и (11.122) расчетное выражение для L/(co)
представим в виде
293
Раздел 11
L/(w)= 21/0Д/51пс ------ У cos[(n + О.5)ош] е^лД^ =
< 2 'п?О
I/ / \W-1 г
VnT.. . f (от., iv'1 ( г. r-\^n
—~81ПС ------- У cos (n + 0.5)—-
N I N L 2Л/
(11.123)
, / \₽+i
i ь f пти )
~ Р+Ч 2NJ
G
Графики амплитудного спектра комплексной огибающей сигнала
при различных значениях р, полученные в результате расчета
(11.123), приведены на рис. 11.16. Анализ графиков показывает,
что при р =1 (ЛЧМ) спектр является достаточно равномерным в
полосе частот |(о| (сод. При уменьшении р (р<1) максимум спектра
появляется на |(о| = (од. При увеличении р (р>1) максимум спектра
появляется на частотах близких к со = 0 . Чем больше р отличается
от единицы, тем более выражен максимум.
Корреляционная функция комплексной огибающей сигнала мо-
жет быть определена с использованием выражения (11.49) с под-
становкой в него
(p(t)=btp. (11.124)
После подстановки выражение для Яу(т) примет вид
т„/2 т,/2
Hv (т) = Vq J cos[r(p'(f)] dt —Vq J cos(br tp) dt.
о 0
(11.125)
Решение (11.125) в конечном виде возможно только при р =1 -
выражение (11.50) и р = 2. Для р = 2 из (11.125) получим
(11.126)
где С(х) - интеграл Френеля; В - база сигнала.
В общем случае (при произвольном значении р) решение инте-
грала (11.125) возможно только численно. Используя кусочно-
постоянную аппроксимацию
ф'(лДГ)= Ь(пМ)р, п = 0,1,...,Л/-1,
(11.127)
294
Импульсные сигналы с частотной модуляцией
интеграл в (11.115) представим в виде
М2 д/_1
J cos[x(p'(f )]dt = cos[T(p'(nA t)]. (11.128)
О л-0
С учетом (12.15) выражение (12.12) представим в виде
Ц/(т) =
Л/-1
Scos
п-0
Г ПТ
"'и
2N
(11.129)
Ч)4
N
Графики модуля корреляционной функции |/7v(t^, полученные
при расчете (11.129) при различных значениях р, приведены на
рис. 11.17. Для сравнения дан и график |Hv(t)| для ЛЧМ - сигнала
(р = 1). Анализ графиков показывает, что при р < 1 огибающая
имеет лепестковую структуру. По мере уменьшения р главный
максимум сужается, а уровень боковых лепестков растет. При
р >1 лепестковая структура огибающей пропадает, колебания
огибающей сглаживаются, появляется «пьедестал». Сравнение
корреляционной функции комплексной огибающей сигнала со
степенным законом модуляции и ЛЧМ сигнала показывает, что
при р > 1 уровень боковых лепестков уменьшается. Корреляцион-
ная функция становится более удобной при использовании ее в
системах, где необходимо повысить разрешающую способность
при сжатии сигнала.
11.10.2. НЧМ сигналы с законом модуляции, описываемым
тригонометрическими функциями
Рассмотрим зависимость ©(f), описываемую выражением
(рис. 11.18)
cuff) = (i)0+ (od sin Ш, , (11.130)
где ш0,(1)д - несущая частота и девиация; ти - длительность им-
пульса; Q = л/ти .
Фаза сигнала
(p(f)= 8(l-cosQt), , (11.131)
295
Раздел 11
со/о)^
ILWI
296
Импульсные сигналы с частотной модуляцией
Ш
U(Q)
1
0,75
0,5
0,25
0,33 0,67 1,00 1,33 1,67 2
(О/О)д
mi
297
Раздел 11
\Ry
Rv(V
298
Импульсные сигналы с частотной модуляцией
\Ry Гт)1
Ry(O)
0 0,01 0,02 0,03 0,04 0,05
Рис. 11.17
299
Раздел 11
— СОл е-
где В = — =.....-.~ - база сигнала.
Q п
Спектральная плотность комплексной огибающей сигнала опре-
делим, подставив (11.131) в (11.118),
ти/2 ти/2
t/(a))=l/0 = Vo JeilB(^c0SQt)-^t]dt (11.132)
-ти/2 -ти/2
Используя (11.69), из (11.132) получаем
Тц/2 ”
U((a)=VoelB J ^ln(B)e u ' dt =
(11.133)
= Voru e '^sinc^"^".
Л=-оо
Полученное выражение представляет разложение спектральной
плотности комплексной огибающей сигнала в ряд по базисным
функциям
sine
(со - nQ.)iu
Коэффициенты слагаемых определяются произведением функ-
. п
f х ”/Л—
ций Бесселя /П(В) и множителя е 2 . Число членов ряда
300
Импульсные сигналы с частотной модуляцией
бесконечно. Однако при расчете, учитывая свойства Бесселевых
функций, можно ограничиться числом слагаемых N, зависящим от
В (разд. 10).
Корреляционная функция комплексной огибающей сигнала оп-
ределяется (11.43)
V2 . . 2 ти/2
Rv (т) = — J V(t)V*(t - т)сУг = — J .
-ти/2+т -ти/2+т
(11.134)
Подставляя в (11.134) выражение для ф(?), (11.131), запишем
1/2 V2
Ге"
2 J
-ти/2+т
.. _ . Sit . t . T I
/2Ssin—sinQ t—
2 I 2)
dt.
(11.135)
Воспользовавшись разложением (11.69), выражение для Hv(t)
представим в виде
т/2 ( т \
У ln 2Bsin— Г е 2'dt.
2 ) *
(11.136)
~ти/2+т
Решая (11.136), получаем для т>0
1--
У ln 28sin— sine
\ 2 .
пО.ти
(11.137)
1-_L
11
2 п.
2
2
При т « ти ( при больших значениях В , это условие практиче-
ски не накладывает ограничений, о чем указывалось ранее ) можно
принять
28 sin— = Wat .
2 д
301
Раздел 11
Выражение для Hv(t) запишется в виде
D / \ '/0TU V" I ( к’ П^Хи
Ъ(т) = 2^/пНфпС =
П=-оэ
= In Кт) + vbu £ <2п Кфпс = (1 1.138)
л=1
VqTu . , \ 1/2 Х^/ / V- П7Г
= о Нт) + ^Хи У t1гп Кфпс—.
П=1
Имея спектральную плотность импульсного ЧМ сигнала, можно
получить спектр соответствующего периодического сигнала (сигна-
ла, получающегося периодическим повторением импульсного сигна-
ла с периодом Т = ти). Проиллюстрируем это положение на приме-
ре тонально модулированного ЧМ сигнала (разд. 10). Для этого рас-
смотрим импульсный ЧМ сигнал с законом модуляции, описывае-
мым зависимостью
o)(f) = соо+o)d cosQf, ,
2 (11.139)
где а)0,а)д - несущая частота и девиация; ти - длительность им-
пульса; Q = п/ти.
Фаза сигнала
<p(f)=msinQf, (11.140)
где
(Оа _
/77 = — = И
(11.141)
Спектральная плотность комплексной огибающей такого сигна-
ла равна
ти/2 ти/2
t/((o) = Vo J eiMt)-(,it]dt = VQ J =
-^/2 -tu/2 (11.142)
Z, / \ . (co - nQ}tu
ln(m) smc^------
302
Импульсные сигналы с частотной модуляцией
Полученное выражение представляет разложение функции
t/(co) в ряд по базисным функциям
(co-nQk,.
smc-------—,
2
с коэффициентами, определяемыми функциями Бесселя /п(т).
Перейдем к непрерывному, периодическому сигналу с тональ-
ной модуляцией, который получается периодическим повторением
рассмотренного импульсного сигнала. Период сигнала Т = ти.
Спектр такого сигнала определяется из соотношения
О
Ап = - |S(nQ)|, (11.143)
где S((X>) - спектральная плотность исходного импульсного сиг-
нала.
Как следует из (11.142), функции Бесселя /п(т) определяют
значения спектральной плотности S((d) и спектра непрерывного
сигнала Ап на частотах соо ± nQ. С учетом этого получим
An = Vol„(m). (11.144)
Следовательно, для непрерывного ЧМ сигнала можем записать
u(t)=V0^ln(m)cos(o)Q-nQ.)t, (11.145)
П=-оо
что совпадает с ранее полученным выражением (разд. 10). Таким
образом, используя спектральную плотность импульсного ЧМ сиг-
нала, перешли к известному разложению тонально модулирован-
ного сигнала.
11.10.3. НЧМ сигналы с законом модуляции, описываемым
суммой линейной и тригонометрической функций
Рассмотрим зависимость co(t), описываемую выражением
(рис. 11.19)
co(f) = (о0 +at + AcosinQf,
, т (11.146)
303
Раздел 11
где а = 2ыд/т:и, шд -девиация частоты; Дш - параметр зависи-
мости; Q = 2n/zu.
Зависимость (11.146) может рассматриваться как один из видов
нелинейных зависимостей co(f), встречающихся на практике, может
описывать и линейный закон ЧМ с искажениями. Фаза сигнала, со-
ответствующая (11.146), определяется выражением
- mcosQf,
(11.147)
где
Да) Да) В п аьт.. _
т = — =--------; в = -..g._ база сигнала.
Q о)д 2 л
Спектральная плотность комплексной огибающей сигнала
Рис. 11.19
304
Импульсные сигналы с частотной модуляцией
ти/2 М2 .at2
, х f [ /*1 с ---/mcos£2f
U[(d)=V0 Г = Vo J e 2 dt. (11.148)
-тц/2 -ru/2
С учетом (11.69) выражение (11.148) перепишем в виде
оо . n .at2
, v W ."Ч / ч — 1П-— /• ~ n£l)t +1-
ф)=1/0^/п(т> 2 Ге 2 dt. (11.149)
П=— -Tu/2
Решая интеграл (11.149), получим
/ \г
,яВ m-nQ. I . л
1/_ °° -I— ----- -in—
UM = ~^^Jln(m)e 4 2’ (11.150)
{(Фш) + C(z2n)] + /[S(z1n) + S(z2n)]},
где
Графики амплитудного спектра |U(w)|, полученные в результате
расчета по (11.150) при различных значениях Дш , приведены на
рис. 11.20 (Дсо < 0) и на рис. 11.21 (Дм > 0). Как следует из анализа
графиков, спектр комплексной огибающей сигнала сосредоточен в
полосе частот си| < . Вид спектра определяется зависимостью
w(f). На частотах, для которых скорость изменения co(f) увеличи-
вается, величина |t7(co)| уменьшается.
Корреляционная функция комплексной огибающей сигнала оп-
ределяется выражением (т > 0)
./2 Т-и'*.
Rv(t) = ^~ ГeiMt^-x}]dt.
2 J
/2+т
(11.151)
305
Раздел 11
С учетом (11.151) выражение для /?(т) запишем в виде
Va “f /—[f2-(/-r)2]-/A(p[cosQZ-cosQ(f-T)]
— е2 dt.
2 J
~ти/2+т
Преобразовав (11.152), получим
ти/2 ... . Qt . Qf т
и „ iart+i2msm—sin— t—
I „ 2 2
Т j
2 'с/f .
-ти/2+т
С учетом разложения (11.69) запишем
1/2 00 ( о Л •л&г т°/2
Я^(т) = ^-е-"2 V/„ 2msin—е ' 2 Г е'(в1+п£2)'<Л
2 „к 2 ) *
n=-°° • 7 -Тц/2+т
Решая интеграл в (11.154), находим
, ч I/2 ( т А
^v(x)-~Z~xu 1 ’
2 у хи)
f nd
ln 2m sin— sine
(11.152)
(11.153)
(11.154)
(11.155)
Для малых значений т«ти выражение для Hv(t) может быть
упрощено
I/2 “
(т) - хи У, /п(Дсот) sinc(coflr + mt
(11.156)
Графики модуля корреляционной функции комплексной оги-
бающей сигнала, построенные для различных Дсо, приведены на
рис. 11.22 и рис. 11.23 (на рис. 11.22 при Дсо < 0, на рис. 11.23 при
Дсо > 0). Модуль корреляционной функции имеет характерную ле-
пестковую структуру, которая изменяется при изменении как знака,
так и абсолютного значения Дсо. При достаточно больших значе-
ниях (по абсолюной величине) Дсо > 0 лепестковая структура на-
рушается.
306
Импульсные сигналы с частотной модуляцией
№21
Рис. 11.20
307
Раздел 11
ЕМ
Рис. 11.21
308
Импульсные сигналы с частотной модуляцией
Т/Тц
Рис. 11.22
309
Раздел 11
\Ry
\Ry
Рис. 11.23
310
Раздел 12.
КОДИРОВАННЫЕ СИГНАЛЫ
Особую группу модулированных сигналов составляют коди-
рованные сигналы, которые получаются путем модулирования
гармонического колебания упорядоченной последовательностью
импульсов. Такие последовательности называются кодовыми.
Наибольшее применение нашли двоичные кодовые последова-
тельности, которые описываются символами 0 и 1 или -1 и 1
(рис. 12.1). В зависимости от параметра несущего гармонического
колебания, на который воздействует кодовый сигнал, различают
амплитудно-кодированные, фазо-кодированные и частотно-
кодированные сигналы.
Кодовые последовательности используются в различных радио-
технических системах. Некоторые виды кодовых последовательно-
стей - при формировании радиолокационных сигналов с требуе-
мыми корреляционными свойствами. Такие сигналы называют шу-
моподобными.
В разделе дается описание и анализ основных характеристик
кодированных сигналов.
1110 0 10
NT
Рис. 12.1
311
Раздел 12
12.1. Описание кодированных сигналов
Кодированные сигналы имеют вид последовательности (пачки)
радиоимпульсов одинаковой формы и длительности, отличающих-
ся друг от друга значениями амплитуд, начальных фаз или частот
гармонического несущего колебания.
Одиночный радиоимпульс последовательности описывается
выражением
un{t) = anrn(t)cos[(M0 + Mn)t + (pn], (12.1)
где ап, о)0 + соп, (рп - амплитуда, частота и начальная фаза гармо-
нического колебания длительности Т на интервале времени (п-1)Т
< t < пТ; со0 - центральная частота последовательности радиоим-
пульсов; rn(t) - функция, описывающая форму импульса.
Обычно используются прямоугольные импульсы, для которых
rn(t)= rect[t-(n-i)T] = < tfT_t_nT, (12.2)
(О, при других значениях t.
Кодированный сигнал описывается выражением
N
u(t)= ^Tanrn(f)cos[(o)0 +(Dn)f + (pn], 0<t<NT. (12.3)
n=1
Последовательности символов амплитуд {an}, фаз {(pn}
и частот {о)п} составляют кодовые последовательности; N - число
символов (длина) кодовой последовательности. Кодовые последо-
вательности определяют закон изменения амплитуды, фазы и час-
тоты гармонического несущего колебания.
В зависимости от вида модуляции различают:
амплитудно-кодированные сигналы (изменяется ап; (рл = 0, а)п = 0);
фазо-кодированные сигналы (изменяется <рп; ап = 1, о)п = 0);
частотно-кодированные сигналы (изменяется o)n; ап = 1, <рп = 0);
сигналы со смешанными видами модуляции (изменяются одновре-
менно несколько параметров).
Кодированный сигнал, как правило, узкополосный. Выражение
для него может быть записано в комплексной форме
u(f) = Re V(t)ebot
0<t<NT,
(12.4)
312
Кодированные сигналы
где
N
= (13.5)
Л=1
- комплексная огибающая кодированного сигнала;
Vn(t) = OLnrn(t)e^nt+^ (12.6).
- комплексная огибающая одиночного радиоимпульса (12.1).
Таким образом, кодированный сигнал описывается как последо-
вательность радиоимпульсов, которые отличаются друг от друга
лишь комплексными амплитудами.
Основными характеристиками кодированных сигналов являются
спектр и корреляционная функция. Их удобнее определять через
соответствующие характеристики комплексной огибающей сигнала.
Для комплексной огибающей (12.5) эти характеристики описывают-
ся следующими выражениями:
спектральная плотность
U((o) = jV^e^dt =£ jVn(t)e^l)tdt, (12.7)
— oo П— 1 —OO
корреляционная функция
oo N N «
RvW = - I V(f)V-(t-r)dt = -££ JVn(t)v\ (12.8)
-oo г Л=1 k=1 -oo
С учетом очевидности перехода от L/(w) и Rv(t) к спектральной
плотности и корреляционной функции кодированного сигнала, ана-
лиз кодированных сигналов в дальнейшем ограничен рассмотре-
нием характеристик только комплексной огибающей. Указанные
характеристики определены применительно к различным видам
модуляции несущего колебания кодовой последовательностью.
12.2. Амплитудно-кодированные сигналы
Амплитудно-кодированный (АК) сигнал получается в результате
амплитудной модуляции несущего гармонического колебания ко-
довой последовательностью.
313
Раздел 12
N
uaM^ ]Tanrn(f)cos(00f, 0 < t < NT .
n=1
(12.9)
Кодовая последовательность {an} определяет закон скачкооб-
разного изменения амплитуды сигнала. При двоичном коде осп
принимает только два значения: 0 и 1. Таким образом, АК сигнал
(12.9) представляет последовательность радиоимпульсов, которые
отличаются лишь значениями амплитуд.
Комплексная огибающая сигнала
N
= Х“"Г"И 0 й ‘s NT
п=1
(12.10)
совпадает с его огибающей и представляет последовательность
видеоимпульсов rn(t) с амплитудами ап (0 или 1).
На рис. 12.2 и 12.3 приведены примеры АК сигналов.
12.2.1. Спектр комплексной огибающей АК сигнала
Спектральная плотность комплексной огибающей АК сигнала
определится путем подстановки (12.10) в (12.7)
0 0 1 1 1 0 1 1 0 0 0 1 0 1 0
V(t)t
Рис. 12.2
314
Кодированные сигналы
V(t)
1 0 0 0 0 0 1 0 0 0 1 1 0 1
Рис. 12.3
UM= XX J rn(t)e~btdt = 50(ш)]>Хе~'(п’1^Г > (12.11)
n=1 (п-1)Г n=1
где
т
So (co) = Jr,
о
- спектральная плотность первого импульса.
Для прямоугольного импульса имеем (разд. 3)
т
S0(co) = Tsinc-^— е 2 ,
Выражение (12.11) запишем в виде
Uak (г°)= $0 (co)S^ (со).
(12.12)
(12.13)
(12.14)
Здесь Зд(со) описывает спектральную плотность кодовой по-
следовательности {ссп}
315
Раздел 12
N
Л=1
(12.15)
Как следует из (12.14), спектр сигнала определяется спектром
первого импульса и спектром кодовой последовательности с пе-
риодом 2п/Т.
Амплитудный и фазовый спектры комплексной огибающей АК
сигнала находятся из (12.14) как
|17дк(со)| = |30Ы||Зд(со)|, (рдк(со) = (р0(со) + (рдН (12.16)
где
2 ;<Ро(ш)=-^±-
О, sinc-^- > О
2
л, sinc-^-<0
2
(12.17)
|Зд(со)| =
N N
anakcos(n- к)шТ,
л=1 К=1
(12.18)
/(л-1)шГ
шТ
N
y^ocnsin(n-l)coT
ФД (о) = -arctg-^-------------
y^QCnCQs(n-l)coT
Л=1
(12.19)
Графики амплитудного спектра |Зд(со)| для кодовых последова-
тельностей {ап} (рис. 12.2 и 12.3) приведены на рис. 12.4,а и
12.5,а. Графики изображены для со>0, так как амплитудный спектр
симметричен относительно нулевой частоты. Амплитудный спектр
кодовой последовательности |S4(w)| является периодическим с
периодом 2л/Т, имеет осциллирующий характер. Спектр АК сигна-
ла представляет результат наложения на спектр прямоугольного
импульса (штриховая линия) спектра кодовой последовательности
(рис. 12.4,6 и 12.5,6).
316
Кодированные сигналы
|SA((oJ|
81
о-----------1---------1--------’---------’---------1
U 0,5 1 1,5 2 шТ/271
а)
is4(co;i
8-|
6- Л/=15
М = 7
4 4
Рис. 12.4
При (о = 0 значения амплитудных спектров равны
N N
|S0(0)| = r, |ЭД(О)| = £а„, |и(0] = 7-£а„.
П=1 П=1
317
Раздел 12
|SA (Чо)|
б)
Рис. 12.5
318
Кодированные сигналы
Для двоичной кодовой последовательности, имеющей М еди-
ниц,
\SA(O] = M,\U(O] = TM.
Ширина спектра АК сигнала может быть определении как
ДсодК = 2п/Т.
База АК сигнала - произведение длительности сигнала NT на
ширину спектра Дсод/<
В=Л/Т^^ = Л/, (12.20)
2п
равна длине кодовой последовательности.
12.2.2. Корреляционная функция комплексной огибающей
АК сигнала
Корреляционная функция комплексной огибающей АК сигнала
определяется (13.8) с подстановкой в него (13.10)
4 N N “
W = р Z Za чг" (1221)
П=1 к=1 -оо
Интеграл в (12.21) с учетом (12.2) запишется в виде
оо оо
J rn (fyk ~ = J rectlt ~(п~ 1)Т]recf[f - т - (к - 1)7"] dt =
(12.22)
оо
= J rect(t)rect(t - ) dt,
— оо
где
= [t - (л -1 )Т] - [t - т - (к -1)7"] = т - (л - к)Т . (12.23)
Вводя корреляционную функцию одиночного импульса
оо
/?0(т) = j* rect(t) rect(t - x)dt, (12.24)
— oo
выражение (12.21) перепишем в виде
319
Раздел 12
1 N N
F^) = ^^a„akR0\i-(n-k)T], (12.25)
где все ап и ак, индексы которых находятся вне диапазона
{1,2,...,Л/}, равны нулю.
Замена в (12.25) индекса суммирования на т = п-к приводит к
выражению для Rv(r) в виде
1 Л Л
я^т)=2 £ Е“"а"-'Л<т“т7’)- (12-26)
Ш=-°о л = —“°
Величина
N
(12.27)
П=-о°
представляет корреляционную функцию кодовой последователь-
ности. В (12.27) все cxn,an.m с индексами вне диапазона {1,2,...,Л/}
равны нулю. Подставляя (12.27) в (12.26), получим
т=-<х>
(12.28)
Очевидно, что RA(m) = 0 при m>N и m<-N. С учетом этого
выражение для корреляционной функции может быть записано
в виде
1 Л/-1
- У RA(m)R0(T-mT\
где
N
^(-т)=Яд(т).
л—ш+1
(12.29)
(12.30)
Выражения (12.29) и (12.30) показывают, что корреляционная
функция комплексной огибающей АК сигнала представляет сумму
повторяющихся с интервалом Т корреляционных функций одиночно-
320
Кодированные сигналы
го импульса (12.24), максимальные значения, которых определяются
корреляционной функцией кодовой последовательности НА(т).
Для прямоугольного импульса (разд. 5)
Я0(т)=Т 1-
При т = О
0(2
м.л,
для двоичной кодовой последовательности
ТМ
2
При значениях т = тТ
2
(12.31)
(12.32)
(12.33)
(12.34)
На рис. 12.6 приведены графики корреляционных функций
Rv(x) для АК сигналов, изображенных на рис. 12.2 и 12.3 (для
т>0). Корреляционные функции получены как результат наложе-
ния треугольных импульсов (12.31), обозначенных на рисунке
штриховыми линиями, с амплитудами (12.34), длительностью 2 Г,
следующих с интервалом Т.
12.3. Фазо-кодированные сигналы
12.3.1. Описание ФК сигнала
Фазо-кодированный сигнал представляет последовательность
прямоугольных радиоимпульсов с одинаковыми амплитудами
и получается в результате модуляции фазы гармонического несу-
щего колебания кодовым сигналом (последовательностью).
Они описываются выражением
u(t) = Vo cos[(D0f + ф(0] , 0 < f < Л/Т, (12.35)
или в комплексной форме
321
Раздел 12
О 1 2 3 4 5 6 7 8 9 10 11 12 13 т/Т
а)
*.Х"‘1"Л" ".Л.л л /г-\ л
/' х х х х х х \ /Х\Л
к УуууууХХ_________Z.Z.X..AZ_X.
О 1 2 3 4 5 6 7 8 9 10 11 12 13 14т/Т
б)
Рис. 12.6
1/(0 = Re V(t)e^ot
,0<t<NT,
(12.36)
где V(t)= V'oe*₽^ - комплексная огибающая кодированного сигнала;
322
Кодированные сигналы
V0,ci)o,(p(f) - амплитуда, несущая частота и фаза сигнала; Т - дли-
тельность одного импульса; N - число радиоимпульсов кодирован-
ного сигнала.
За время одного импульса фаза может быть постоянной, меня-
ясь скачком от импульса к импульсу. Кодированный сигнал в этом
случае представляет гармоническое колебание с фазовой манипу-
ляцией (рис.12.7).
Возможны сигналы с фазой, непрерывно изменяющейся в течение
определенного интервала времени - сигналы с непрерывной фазой.
Появление таких сигналов связано прежде всего со стремлением по-
лучить лучшие спектральные характеристики сигнала, обеспе- чи-
вающие более высокое качество передачи информации
и помехоустойчивость системы.
В общем случае выражение для фазы кодированного сигнала
на одном интервале записывается в виде
ф(0 = 2л]Г ckhkq{t -кТ\пТ <t<(n + i)T, (12.37)
к-0
где {ск} - кодовая последовательность; hk называют индексом
модуляции на к-м интервале.
Различают сигналы с постоянным индексом модуляции и с цик-
лически изменяющимся индексом модуляции. Функция q(t)
в (12.37) называется фазовым импульсом. На интервале [0,L7] она
изменяется от 0 до 1/2 L - длина фазового импульса (часто L = 1).
Фаза при этом изменяется в пределах nckhk .
Выражение для частоты сигнала запишется в виде
с/ г А
«W = W + ф(01 = «о + 27122 Ckhk9^ ~кТ^ (! 2 38)
пТ<1<(л + 1)Т
323
Раздел 12
Функция g(t) описывает частотный импульс. Его длительность
равна LT. На рис. 12.8 изображены графики некоторых видов фа-
зовых и частотных импульсов. На рис. 12.8,а приведен график сту-
пенчатой функции, на рис. 12.8,6- линейной функции q(t). Линей-
ной зависимости q(t) соответствует ступенчатая функция g(t) -
частотная манипуляция. Более плавное изменение фазы может
быть описано различными функциями. Примером такой зависимо-
сти является зависимость, описываемая тригоно- метрической
функцией (рис. 12.8,в)
nt
Гл 1Г« nt\
q[t) = — 1 — cos— .
(12.39)
Изменение фазы сигнала во времени поясняется фазовой диа-
граммой (рис. 12.9). График на рис. 12.9 иллюстрирует возможные
изменения функции <р(7), описываемой линейной (более тонкие
линии) и тригонометрической функциями.
g(t) со
(1/2)
О’—-----------
t
Рис. 12.8
324
Кодированные сигналы
Рис. 12.9
Характеристики ФК сигналов удобнее определять через харак-
теристики их комплексных огибающих:
спектральная плотность
оо
С/(со) =
корреляционная функция
Яу(т) = ~ J V(t)V* (t - x)dt.
— оо
(12.40)
(12.41)
Указанные характеристики при различных законах изменения
фазы: скачкообразном и линейном (скачкообразный закон измене-
ния частоты) и описываемом тригонометрической функцией, опре-
делены в [16]. Ниже рассматриваются характеристики ФК сигнала
только со скачкообразным изменением фазы и частоты.
12.3.2. Спектр ФК сигнала со скачкообразным изменением
фазы
Сигналы со скачкообразным изменением фазы нашли практиче-
ское применение в радиолокации, связи, системах управления и
других областях техники. Кодированный сигнал представляет по-
325
Раздел 12
следовательность радиоимпульсов, у которых от импульса к им-
пульсу скачком изменяется только фаза (рп.
N
u(t) = rJ^cos[<j)0f -+- Фп], 0 < f < NT , (12.42)
П = 1
где rn(t) - огибающая одиночного, как правило, прямоугольного
импульса.
Кодовая последовательность {<рп} задает закон изменения фа-
зы. Комплексную огибающую сигнала удобнее представить
в виде
N N N
V(t) =^Vn(t) = =£г„(;К (12.43)
П=1 П=1 П=1
где Ьп = ек?п = етСп.
При использовании бинарного кода фаза принимает значение О
или л. В этом случае:
. /1 Фп=0
[-1, фп = Л
Спектральная плотность комплексной огибающей ФК сигнала
может быть определена из (12.40) подстановкой (12.43). При
гп(0=1 имеем
А/ пТ
С/(со) = 22 Ьп j e~Katdt. (12.44)
п=1 (П-1)Г
Спектральная плотность последовательности импульсов опре-
деляется как сумма спектральных плотностей идентичных по фор-
ме импульсов, смещенных во времени каждый относительно пре-
дыдущего на интервал времени Т. Используя свойства преобра-
зования Фурье, (12.44) запишем в виде
N
и(ш) = S0(to)22bne~'(n“l)wr, (12.45)
П=1
где
326
Кодированные сигналы
т
S0(to)= ^e^'dt
о
- спектральная плотность первого импульса.
Для прямоугольного импульса
_ ьт
So(o))= Tsmc-^-e 2 .
Выражение для С/((о) перепишем в виде
U((o)= S0(w)Sk(oj),
(12.46)
(13.47)
где
N
Sk((o)=£b„e'/<"-*r
Л=1
- спектральная плотность кодовой последовательности.
Квадрат модуля кодовой последовательности определим из
(12.48) как
N N
|SkH2=££bAe-'<"-^. (12.49)
Л=1 /с=1
Используя формулу Эйлера и учитывая, что косинус является
четной функцией, а синус - нечетной, из (12.49) получим
]T]Tbnbkcos( (n-k)a)7" ). (12.50)
л=1 к=1
Выражение для фазового спектра найдется из (12.48) в виде
N
y^bnsin((n-l)o)T)
ФкН = -arctg-^--------------. (12.51)
^bncos((n-l)coT)
л=1
Амплитудный спектр комплексной огибающей получается из
(12.47) как произведение модулей |So(co)| и |Sk(<o)|:
327
Раздел 12
t/(to) = |S0(a)]||S/(. (co)[,
а фазовый спектр - как сумма аргументов ф0(со) и фк(а>):
ф(со) = ф0 (со) + фДсо).
(12.52)
(12.53)
График амплитудного спектра сигнала, модулированного кодо-
вым сигналом, изображенным на рис. 12.1, приведен на рис.
12.10,6.
Рис. 12.10
328
Кодированные сигналы
Спектр комплексной огибающей сигнала представляет резуль-
тат перемножения амплитудного спектра прямоугольного импульса
(штриховая линия) и амплитудного спектра кодовой последова-
тельности (рис. 12.10,а).
При со = 0 имеем
N N
|5»>(0)| = ^b„;|U(0)| = 7-^b„. (12.54)
Л=1 П=1
Ширину спектра определим как
Да) = 2л/ Т. (13.55)
Произведение длительности сигнала и ширины его спектра -
база сигнала, равна
В = д/т|^ = д/. (12.56)
Таким образом, база рассматриваемого ФК сигнала определя-
ется длиной кодовой последовательности.
12.3.3. Корреляционная функция ФК сигнала
со скачкообразным изменением фазы
Корреляционная функция комплексной огибающей ФК сигнала
определяется (12.41) с учетом (12.43)
. Л/ Л/ °°
= _ ^dt- о2-57)
г л-1 к=1
Интеграл в (12.57) запишем в виде
Jrn(t) rk(t-x)dt = Jr[t-(n-l)T]it-T-(k-l)T]dt =
— oo —oo
oo
— oo
(12.58)
где r(t) - огибающая одиночного импульса,
т1 = [f - (n - l)7~]-[f - x- (к - 1)т] = x- (n - k)T.
329
Раздел 12
Обозначим Я0(т) корреляционную функцию одиночного им-
пульса,
оо
Я0(т) = J r(t) r(t - т) dt,
—оо
(12.59)
а выражение (13.57) запишем в виде
1 N N
Rv^) = ^'£'Lbnb^-(n-k)T]. (12.60)
п = -оо к=-оо
В (12.60) все Ьп и Ьк, индексы которых находятся вне диапазо-
на {1,2,..., Л/}, равны нулю. Произведя замену индекса суммирова-
ния т = п - к , запишем
1 N N
т=-°о к=-°о
В (12.61)
N
Rk(m)= Yjbnbn-m> (12.62)
л = -оо
представляет корреляционную функцию кодовой последо- ватель-
ности. С учетом (12.62) получим
1 N-1
Rv(z) = - £як(тН(г-тТ),
Функция Rk(m) - четная, т.е.
Rk(m) = Rk(- т).
(12.63)
(12.64)
Обычно импульсы кодированного сигнала имеют прямоуголь-
ную форму
г(0 =
(12.65)
330
Кодированные сигналы
В этом случае
Н0(т)=Т 1-
|т| < Т.
(12.66)
Как следует из (12.61) и (12.62), корреляционная функция ком-
плексной огибающей ФК сигнала представляет сумму корреляци-
онных функций одиночных импульсов, максимальные значения
которых определяются значениями корреляционных функций ко-
довой последовательности.
При т = 0
R0(0)=7-; Rk(0) = ^b„2 = M; Я„(о) = ^
п=1 г
При т = тТ
„ / к Г „ / X
%(п7Т) = -ЯДп?).
(12.67)
(12.68)
Для бинарных кодов функцию Rk(m) удобно определять сле-
дующим образом [40]. Составляется таблица с верхней строкой,
описывающей кодовую последовательность {bn}, и левым столб-
цом, описывающим ту же кодовую последовательность, если, чи-
тать ее сверху вниз {Ь_п}, рис. 12.11. В средней части таблицы за-
писывается результат перемножения элементов {bn} и {Ь_п}. При
этом, если элемент {b_n} имеет знак плюс, то элемент {bn} запи-
сывается в строку без изменения, если знак минус - то со сменой
знаков всех элементов. Запись производится со смещением на
один элемент вправо по отношению к предыдущей строке. Сумма
элементов каждого вертикального столбца дает значение Rk(m).
На рис. 12.11 составлена таблица, а по результатам расчета по-
строен график корреляционной функции комплексной огибающей
ФК сигнала, промодулированного кодовой последовательностью,
изображенной на рис. 12.1.
12.3.4. Коды Баркера
Кодовые сигналы, используемые при фазовой модуляции, могут
быть самыми разнообразными. Их выбор зависит в первую оче-
редь от того, в какой радиотехнической системе используется сиг-
331
Раздел 12
нал, какие функции выполняет система. Не проводя анализа воз-
можных видов кодов, используемых при угловой модуляции, оста-
новимся на наиболее известных и рассмотрим их как иллюстрацию
общих положений.
В радиолокации хорошо известны коды Баркера и /W-после- до-
вательности. Модуляция ими высокочастотных сигналов обеспечи-
вает высокую разрешающую способность системы. Корреляцион-
ная функция кодированных сигналов имеет узкий центральный пик
и напоминает корреляционную функцию шума. Такие сигналы на-
зываются шумоподобными.
Коды Баркера {bn} определяются как двоичные последователь-
ности, имеющие корреляционную функцию вида
Ьп
О-п + + + — + + —
— — — — + + — 4-
+ + + + — — + —
— — — — + 4“ — +
— — — — + 4“ — +
+ + + 4- — — 4- —
+ + 4- + — — 4“ —
+ 4“ 4- 4- — — + —
-1 0 -1 0 -1 0 7 0 -1 0 -1 0 -1
332
Кодированные сигналы
Rk(m) =
N, т = 0,
±1илиО, m* О
(12.69)
Существует всего девять кодов Баркера (табл. 12.1).
Таблица 12.1
Коды Баркера
№ bi Ьг Ьз b4 ь5 Ьб Ь7 Ьз Ьэ Ью bn t>12 bi3
2 1 1
2 -1 1
3 1 1 -1
4 1 1 -1 1
4 1 1 1 -1
5 1 1 1 -1 1
7 1 1 1 -1 -1 1 -1
11 1 1 1 -1 -1 -1 1 -1 -1 1 -1
13 1 1 1 1 1 -1 -1 1 1 -1 1 -1 1
Определив корреляционную функцию кода Баркера, найдем со-
ответствующую спектральную плотность энергии
N
2 -sr-
(12.70)
т=
Функция Rk(m) является четной. С учетом этого и (12.69) выра-
жение (12.70) запишем в виде
/V-1
| Sk (со] = N + 2Rk cos /77(0,
m=0
(12.71)
где Rk = ±1.
Используя известное соотношение [12]
л + 1
п „COS-----X
El пх 9
cos kx = cos-----—,
2 • x
k=0 Sin —
2
(12.72)
333
Раздел 12
Io /
выражение для |Sk(co)| представим в виде
. N .г
к, „а (N^Tsm2aT
1 к 2 «Г
sin-
2
При Rk = 1 (коды с N , равным 4,5,13)
N
~r sin — co7
I / м2 .. o \N — 1J/77CO T О
S J co 1 = N + 2 cos --------------.
I kV * 2 mcoT
sin—-----
2
При Rk = -1 (коды с N , равным 3,4,7,11)
. N -r
,2 Л, „ !N-lHsln2“T
1 2 wT
sin —
2
(12.73)
(12.74)
(12.75)
Корреляционные функции комплексных огибающих сигналов с
кодами Баркера определяются (12.63), их графики приведены в
[15]; там же приведены графики амплитудных спектров комплекс-
ных огибающих сигналов.
12.3.5. /И-последовательности
Из кодовых последовательностей, нашедших практическое
применение, особое место занимают последовательности, полу-
чаемые с помощью генераторов, выполненных на регистрах сдви-
га; из них в первую очередь - линейные последовательности мак-
симальной длины или ^-последовательности. Стремление улуч-
шить корреляционные свойства сигналов привело к созданию на
основе М- последовательностей других последовательностей, сре-
ди которых особое место занимают последовательности Голда,
Кассами и некоторые другие.
Схема генератора, формирующего /W-последовательность, в са-
мом общем виде изображена на рис. 12.12. Основой генератора яв-
ляется регистр сдвига, выполненный на триггерах (Т). Выходы неко-
торых каскадов регистра через сумматоры по модулю 2 подключены
к входу первого каскада. Двоичная последовательность
334
Кодированные сигналы
Рис. 12.12
на выходе генератора зависит от числа каскадов регистра, их
начального состояния и вида обратной связи.
Формируемая двоичная последовательность является периоди-
ческой, подчиняется принципу суперпозиции. Вследствие этого та-
кая последовательность может рассматриваться как линейная, а
генератор называется линейным. Максимальное число символов
последовательности за один период составляет
N~2m-1,
(12.76)
где т - число каскадов.
Зависимость N от числа каскадов генератора т приведена в
табл. 12.2 (т<13). Число N определяет период кодовой после-
довательности
То = NT,
(12.77)
где Т - длительность одного символа.
Таблица 12.2
Число М-последовательностей, формируемых
т -каскадным генератором
Число каскадов регистра т Период ^-последовательности Л/ = 2т-1 Число М-последовательностей L _ <pW т
2 3 1
3 7 2
4 15 2
5 31 6
6 63 6
335
Раздел 12
Число каскадов регистра т Период М-последовательности N = 2m Число /^-последовательностей L _ <pW т
7 127 18
8 255 16
9 511 48
10 1023 60
11 2047 176
12 4095 144
13 8191 630
Последовательность, имеющая максимально возможный для
выбранного способа генерирования период, называется макси-
мальной или /W-последовательностью. Последовательность,
имеющая меньший период, называется немаксимальной.
Генерируемую двоичную последовательность можно получить,
если записать уравнения каждого из триггеров регистра. Символ на
входе первого триггера в n-ом такте определяется уравнением
х0к ~ х1к + х2к + + Х(т-Т)к + хтк • (12.78)
В уравнении (12.78) х1/с представляет символ на выходе 1-го
триггера в /с-ом такте. Учитываются только те триггеры, которые
входят в состав обратной связи. Символ хок в следующем /с+1-м
такте переходит на вход триггера Т\
*U+1 = х1к + х2к + + х(т-1)/с + хтк (12-79)
На входе остальных триггеров регистра в к + 1 такте будут сим-
волы
Х2к+1 - х1к,
ХЗк+1 = х2к<
(12.80)
хтк+1 х(т-1)к-
В качестве примера приведем шестикаскадный генератор
(рис. 12.13). Он формирует следующую двоичную М-последователь-
ность:
336
Кодированныесигналы
Рис. 12.13
(12.81)
111111000001000011000101001111010001110010010110111101
1001101010
Число /W-последовательностей, формируемых m-каскадным ге-
нератором, определяется выражением
L_ фН_ ф(2П? -1)
т т
где <р(х) - функция Эйлера.
Если число N раскладывается на простые множители, то cp(/V)
можем представить в виде
ф(Л/)=Л/П-5с111 (12/82)
?к
где Рк - простой множитель N.
Если N простое число, то
ф(Л/)= Л/-1.
(12.83)
/W-последовательности довольно подробно исследованы, со-
ставлены таблицы, позволяющие для заданного периода опреде-
лить структуру генератора.
Спектры и корреляционные функции ^-последовательностей
могут быть получены с использованием вышеприведенных выра-
жений.
Схема линейного генератора /W-последовательностей не допус-
кает одновременного появления нулей во всех каскадах, включен-
ных в обратную связь. При установлении нулей в этих каскадах
337
Раздел 12
сигнал на входе первого каскада отсутствует, происходит срыв в
работе генератора. Указанного ограничения лишены генератора,
формирующие нелинейные последовательности (для которых не
выполняется принцип суперпозиции).
Генерирование нелинейных последовательностей может произ-
водиться различными устройствами, в том числе с помощью гене-
ратора на основе регистра сдвига с нелинейными операциями.
Анализ нелинейных генераторов затруднен вследствие большого
их разнообразия и математических трудностей, возникающих вслед-
ствие нелинейного характера описывающих их уравнений. При опи-
сании спектральных и корреляционных характеристик нелинейных
двоичных последовательностей, могут быть исполь-зованы соотно-
шения, приведенные выше для кодовых сигналов.
12.4. Частотно-кодированные сигналы
Частотно-кодированный сигнал представляет последователь-
ность радиоимпульсов, которые отличаются друг от друга только
значениями несущей частоты. Закон изменения частоты определя-
ется модулирующей кодовой последовательностью.
Частотно-кодированный сигнал описывается выражением
N
u(t)= гп (f)cos(co0 + con) t, 0<t<NT, (12.84)
л=1
или в комплексной форме (12.2). Комплексная огибающая ЧК сиг-
нала
N
0<t<NT. (12.85)
Л=1
Изменяющаяся частота соп может быть представлена в виде
соп = спАсо, (12.86)
где {сп} - модулирующая кодовая последовательность (частотный
код); Дсо - шаг квантования по частоте.
На рис. 12.14 приведен пример бинарной кодовой последова-
тельности {сп} и соответствующий ЧК сигнал.
Спектральная плотность комплексной огибающей ЧК сигнала
определяется (12.6). С учетом (12.85) выражение для спектральной
плотности запишется в виде
338
Кодированные сигналы
N “ N чТ
и(ш) = J гп (0 ^dt = ^ J rn (t) е~'^ш~Шп dt.
Л=1 -оо Л=1 (л-1)Т
(12.87)
Спектральная плотность сигнала определяется как сумма спек-
тральных плотностей радиоимпульсов кодированного сигнала, от-
личающихся несущей частотой и положением на временной оси.
Спектральную плотность комплексной огибающей ЧК сигнала пред-
ставим в виде
N
Л(и) = £ So (и - о>„) е-'Ч-’-’Х»-».)''.
Л=1
(12.88)
При прямоугольной огибающей радиоимпульса спектральная
плотность первого импульса определяется выражением
/ _ \т- _ -(^Ч, )т
So (со - сол) = Г sin с - л е 2 . (12.89)
Из (12.88) определим амплитудный спектр
и фазовый спектр комплексной огибающей ЧК сигнала
339
Раздел 12
(p(w) = -arctg
. (со - О) Л)Т . / \
> SIП С —------------- SIП фп (со)
п=1 2
Л . (со
у Sioe-
ns
СОП)Т / х
^-coscpn(co)
(12.91)
где
/ \ 1п 4х(сО-СОп)Т
срп(со)=(2л-1р---
График амплитудного спектра комплексной огибающей ЧК сигнала
(кодовая последовательность рис. 12.14) приведен на рис. 12.15.
№)|
Рис. 12.15
Спектр симметричен относительно со = 0. Как показывают при-
веденные выражения, спектр ЧК сигнала определяется кодовой
последовательностью {сп} и шагом квантования.
Минимальный шаг квантования выбирается как
Дсо = 2л/Г (12.92)
При выборе шага квантования и бинарной модуляции база ЧК
сигнала равна
В = NT^ = д/,
2л
(12.93)
т.е. определяется длиной кодовой последовательности.
340
Раздел 13.
АНАЛИЗ СИГНАЛОВ В ЛИНЕЙНЫХ ЦЕПЯХ
Методы анализа сигналов основаны на использовании различных
преобразований, рассмотренных выше. Однако некоторые преобра-
зования, такие, как преобразование Лапласа, z-преобразование, ис-
пользуются в основном при анализе сигналов в линейных цепях
(цифровых фильтрах).
Вследствие этого целесообразно рассмотреть сигналы в ли-
нейных аналоговых цепях и цифровых фильтрах. Без такого рас-
смотрения изложение методов анализа сигналов с использовани-
ем преобразований Лапласа и z-преобразования носило бы фор-
мальный характер.
В разделе рассматривается прохождение сигналов через анало-
говые линейные цепи и цифровые фильтры только как иллюстра-
ция методов анализа сигналов, и не затрагиваются задачи, связан-
ные с анализом и синтезом самих цепей.
13.1. Прохождение сигнала через линейную цепь
Одной из основных характеристик линейной цепи является им-
пульсная характеристика h(t). Она определяется как отклик линей-
ной цепи на воздействие сигнала в виде импульсной функции.
Представив сигнал на входе цепи s^t) в виде последовательности
импульсных функций (с соответствующими коэффициентами) и
используя принцип суперпозиции, для сигнала на выходе цепи по-
лучим:
t t
s2(f) = J/7(T)Si(f-т)<Л = J h(t - T)s^T)dt = (13.1)
о 0
Интеграл (13.1) представляет свертку импульсной характери-
стики и сигнала на входе цепи. Знак ® в (13.1) и означает свертку
h(t) и s^t). Интеграл свертки иногда называют также интегралом
Дюамеля. Выражение (13.1) позволяет проводить анализ прохож-
дения сигнала через линейную цепь при известной импульсной ха-
рактеристике цепи.
341
Раздел 13
В качестве примеров рассмотрим прохождение экспоненциаль-
ного и прямоугольного импульсов через НС-цепь. Импульсная ха-
рактеристика цепи имеет вид
ад = 1/7е^/г,
где Т- постоянная времени цепи.
1. При подаче на вход цепи экспоненциального импульса (рис.
13.1 ,а)
s.(t) = Veat, t>Q,
сигнал на выходе цепи определяется выражением (рис. 13.1 ,б)
г 1/
s2(t) = V/Ti ех1Тea(t~x)dx =----(e~at- e t/T).
j 1 - aT
о
2. При подаче на вход цепи сигнала в виде прямоугольного им-
пульса (рис. 13.2,а)
s}(t) = V,O<t<Tu. Сигнал на выходе цепи (рис. 13.2,6): при 0 < t < ти: t s2(t) = V/т]e~(t~x)/Tdx = V(\ - e t/T) 0 при t> : Tu s2{t)^V 1Т^е{^х}1Т dx^V(e^'T-V) 0 V 0 ’t a) s2(t). V, \ \ / X 0 6)
342
Анализ сигналов в линейных цепях
а)
Рис. 13.1
s2(t).
V
б)
Рис. 13.2
В частотной области линейная цепь описывается комплексной
частотной характеристикой. Комплексная частотная характеристи-
ка (частотная характеристика) определяется преобразованием Фу-
рье импульсной характеристики
/-/(ш)= J h(t) е ^dt.
(13.2)
Обратное преобразование Фурье позволяет перейти от Л/(ш)
к Ъ(г):
h(t) = 1/2тг J Н(ш) ex'JfcfcD.
(13.3)
Учитывая, что /i(f) = 0 при Г<0, условие существования преоб-
разования Фурье импульсной характеристики записывается
в виде
]>(гИ<0-
(13.4)
о
Записанное условие является условием устойчивости линейной
цепи.
В общем случае частотная характеристика является комплекс-
ной величиной и ее можно представить в виде
Н(со) = Re[/-/(&))]+ /1гп[н(со)]
(13.5)
343
Раздел 13
или
Н(а)) = |/-/((о)|е*р^’\
(13.6)
где
|Н((о)| = -^Re2 [н(ш)]+1 гп2 [н(со)];
ф(со) = arctg
Im Н(со)
Re[/-/(to)
Модуль |Н(со) | представляет амплитудно-частотную характери-
стику, аргумент <р(оо) - фазо-частотную характеристику цепи.
Частотная характеристика позволяет проводить анализ прохож-
дения сигнала через цепь, используя спектральную плотность сиг-
нала. Преобразование Фурье левой и правой частей (13.1) дает
(свойство преобразования Фурье)
S2(co) = (13.7)
где S^co) и S2(cd) - спектральные плотности сигналов на входе и
выходе цепи.
OtS2(oj) можно перейти к сигналу на выходе цепи
s2(f) = 1/2л: JS2(cd) e^cfco = 1/2л J Н(ш) S^co) e^cka. (13.8)
— оо —оо
Таким образом, имея частотную характеристику, можно прово-
дить анализ цепи в частотной области. Простота выражения (13.7)
обуславливает простоту спектрального метода анализа.
Примеры.
1. Прохождение экспоненциального импульса через ЯС-цепь.
Сигналу на входе цепи
s1(f)=e“af, t>Q,
соответствует спектральная плотность
1
a + ki)
Частотная характеристика ЯС-цепи имеет вид
344
Si (со)
Анализ сигналов в линейных цепях
где Т = RC - постоянная времени цепи.
Спектральная плотность на выходе цепи описывается выраже-
нием
S2 (со) = (со) = 7777-77——т
(1 + /со / да+ /со)
Сигнал на выходе цепи определяется обратным преобразова-
нием Фурье S2(co)
S2 (0 = —- [ $2 Ы e^'cfco = —I— f 7------J-------T e^cka.
2n J 2ла J (1 + koTYl + ko/a)
—00 —00 '
Для вычисления интеграла разложим подынтегральную функ-
цию на элементарные дроби
г, / \ 1 А В
Ьр (0) — / \ / \ — F
(1 + /соТд1 + ко/a) 1 + коТ 1 + л»/а
Из записанного равенства получим
А =
В =
1
1-аТ
С учетом выполненного разложения найдем
s2(f) = —-—(е at -е VT\
l-aT1 ’
что совпадает с ранее полученным результатом.
Практика анализа прохождения сигналов через линейные цепи
показывает, что спектральный метод анализа особенно удобен
в том случае, когда при описании сигнала можно ограничиться его
спектром.
Выражение для спектральной плотности энергии сигнала на вы-
ходе линейной цепи можно получить с учетом (13.7) в виде:
И/2(со) = |/-/(со^2И/1(со),
(13.9)
/ \ । / м2 / \ I / м2
где H/1(co) = |S1(co)| и И/2(со) = |S2(co)| - спектральные плотности
энергии сигналов на входе и выходе цепи.
345
Раздел 13
Преобразование Фурье спектральной плотности энергии
представляет автокорреляционную функцию сигнала
Я (т) <-» W,(co). (13.10)
I «2
Величине |/-/(со)| соответствует по Фурье функция
оо
Я„(т) = +
=оо
(13.11)
которая может рассматриваться как автокорреляционная функция
импульсной характеристики цепи. Таким образом,
ЯЛ(т) |Н(со)|2. (13.12)
С учетом (13.11) и (13.12), переходя к временной области, из
(13.9) получим
Я2(т) = |я1(х)Я/7(т-х)о!х=Я/7(т)®Я1(т). (13.13)
— оо
Выражение для взаимной корреляционной функции сигналов на
выходе и входе цепи записывается в виде
Я21(т)= s2(f)s1(f + T)df.
(13.14)
Преобразование Фурье левой и правой частей (13.14) дает
Я21(т) Sj»^) = W21(w) = H*(co)|S1(co)|2 = Н*(со) 1%(ш). (13.15)
Переходя к временной области, получим
оо
Я21(т) = ^h(t)R^t + r)dt. (13.16)
В записанных соотношениях важно соблюдать требуемую по-
следовательность функций. При изменении последовательности
имеем
Я12(т) S^S2(<a) = И/12(ш) = A¥(cd)|S1(cd)|2 = Н(ы)УЩш). (13.17)
346
Анализ сигналов в линейных цепях
Таким образом,
оо
Hi2(t) = H2i(-t) = J FW)h(t + T)dt. (13.18)
-оо
Одной из основных характеристик линейной цепи является пе-
редаточная функция. Она определяется аналогично частотной ха-
рактеристике - как преобразование Лапласа импульсной характе-
ристики цепи
Н(р) = j h(t)e ptdt. (13.19)
о
Свертке во временной области, определяющей сигнал на выхо-
де линейной цепи
( t
s2(f) = J/?(x)zj1(f — x)dx = Jh(t- x)s}(x)dx, (13.20)
о о
соответствует произведение передаточной функции и изображения
сигнала на входе (свойство преобразования Лапласа)
S2(p) = H(p)S1(p), (13.21)
где Srfp), S2(p) - преобразования Лапласа сигналов на входе и вы-
ходе цепи.
Обратное преобразование Лапласа (13.21) позволяет опреде-
лить сигнал на выходе цепи
и2(Г) = 1/2ш js2(p)epfdp. (13.22)
Подходы к решению интеграла (13.22) описаны в разд. 4.
Метод анализа линейных цепей, основанный на использовании
преобразования Лапласа, называется операторным методом. При-
ведем примеры его применения.
1. Прохождение прямоугольного импульса через ЯС-цепь.
Передаточная функция цепи
1 R + MpC 1 + рТ’
где Т = НС - постоянная времени цепи.
347
Раздел 13
Чтобы определить h(t), разложим Н(р) на простые дроби:
Н(р) = 1--^~.
1 + рТ
Учитывая, что
1 <-> 5(f), —
1 + рТ Т
получим
ад = 5(0-1/7’е-,/г.
Изображение сигнала (прямоугольного импульса) на входе име-
ет вид
S,(p) = —(1-е"рт ),
Р
где т-длительность импульса,
сигнала на выходе:
г 1 т т ~( Гт)
S2(p) = H(p)S,(p) = -e——(1-е~,п)=----------— е г .
1 + рТ р 1 + рТ 1 + рТ
Полученному изображению соответствует оригинал
s2(0 = e-r/r-e-(^ )/г.
2. Прохождение прямоугольного импульса через LCR- цепь.
Передаточная функция цепи
Н( \ =
R + pL + М рС р2 + 2ар + (Од '
где сод = 1/VLC,a = H/2L, R, С, L - параметры цепи.
Соответствующая импульсная характеристика имеет вид
Р\ + а Рг + з
где рк - корни знаменателя Н(р).
После преобразования получим
/?(0 = 2ae-a/(cosco0f-a/(0g sincoo0.
348
Анализ сигналов в линейных цепях
При достаточно большой добротности цепи (а«соо), можно при-
нять
h(t) = 2ae af coso)0?.
Изображение сигнала на выходе цепи с учетом изображения
сигнала на входе (прямоугольный импульс, амплитуда равна еди-
нице) получим в виде
с / \ 2ар 1 . -pt х
S2(p) =.2........-—(1-е ) =
р + 2ар + o)q р
2а 2а
-------------------------е р*
р2 + 2ар + Wq р2 + 2ар + «о
Оригинал, соответствующий первому слагаемому, определяет-
ся как
—-—e₽,f +—-—eP2t <-> 2a/coosincoot.
р1 + а р2 + а
Оригинал, соответствующий второму слагаемому, отличается
только смещением во времени на интервал т . Таким образом,
получим
^(0 = 2а/а)0[е afsina)of-e a(f T)sincoo(f-T )].
Одним из важных применений преобразования Лапласа являет-
ся решение линейных дифференциальных уравнений с постоян-
ными коэффициентами, описывающих прохождение сигналов че-
рез линейные цепи
anu2 + an_^du2 /dt + an_2d2u2 /dt2 +... + а^пи2 / dtn = u^(t). (13.23)
Преобразование Лапласа левой и правой частей (13.23) приво-
дит к следующему выражению
anU2 (р) + an_1 [pU2 (р) - и2 (0)] +
ап-21Р2Ц> (Р) ~ Ри2 (0) - и2 (0)] +... = Ц (р)
(13.24)
Перепишем (13.24) в виде
1У2(р)[ап + an_^p+ an_2p2 +...]- u2(0)[an_, + an_2p +...] -
-^№п_2+-]-- = Ц(р)
349
Раздел 13
Из (13.25) получим изображение сигнала на выходе цепи
= Ц(р) + о2(0Ж-1 + а^2р + -] + а2(0)[ал-2 +-] + (13 26)
2 ап + ап_^р+ап_2р2 +... + аоРп
Если все начальные значения равны нулю, то
и2(р) =----------. (13.27)
ал + рап_, + ап2р г+... + аорп
По изображению (13.27) можно получить оригинал - сигнал на
выходе цепи.
Рассмотрим пример использования преобразования Лапласа
при решении дифференциального уравнения
d2u2 du2 n о 3f
—Л. _ з—<L + 2u? = 2е
dt2 dt
при нулевых начальных условиях.
Переходя к изображению левой и правой частей уравнения, за-
пишем
? 2
рЧ(р) - зри2(р) + ги2(р) = —-.
р-3
Для изображения сигнала на выходе имеем
2 2
U9 (р) =------=--------=-----------------.
(р-3)(р2-Зр + 2) (р-1)(р-2)(р-3)
Переходя от изображения к оригиналу - сигналу на выходе, по-
лучим
u2{t) = е - 2е +е .
13.2. Прохождение сигнала через узкополосную цепь
13.2.1 Узкополосные цепи, их низкочастотные эквиваленты
Для передачи узкополосных сигналов, как правило, используются
узкополосные цепи. Радиотехническая цепь называется узкополос-
ной (избирательной), если ее частотная характеристика отлична от
нуля в полосе частот, ширина которой значительно меньше средней
частоты (рис. 13.3,а). Такие цепи находят применение в различных
системах и их анализ занимает важное место в общем анализе сиг-
налов, цепей и систем.
350
Анализ сигналов в линейных цепях
В качестве основных характеристик линейной цепи выше рас-
сматривались импульсная и частотная характеристики, связанные
парой преобразований Фурье
h(t) = — Г Н((й)еыско, = Г h(t)e~kl)tdt. (13.28)
2л J J
— оо — оо
При описании узкополосной цепи целесообразно ввести поня-
тие низкочастотного эквивалента. Использование этого понятия
позволяет упростить анализ узкополосных цепей.
Для определения низкочастотного эквивалента рассмотрим
цепь, частотная характеристика которой получается смещением
частотной характеристики узкополосной цепи Н(ш) в область низ-
ких частот на значение средней частоты Шо (рис. 13.3,6). Тогда для
области положительных частот можем записать
Н(со) = Нэ(со-оэо). (13.29)
Цепь с частотной характеристикой, полученной таким образом,
представляет низкочастотный эквивалент цепи. Частотной харак-
теристике низкочастотного эквивалента соответствует импульсная
характеристика
= f Нэ(<»)е'"'с*ч. (13.30)
2л J
351
Раздел 13
Обычно частотная характеристика узкополосной цепи является
симметричной относительно средней частоты Шо:
|/-/(соо+ со)| = |/-/(соо-со)|, ф(соо +(о) = -ф(соо -со), (13.31)
где |Н(со)|, ф(со) - амплитудно-частотная и фазо-частотная характе-
ристики цепи.
Для симметричной частотной характеристики с учетом того, что
импульсная характеристика является действительной функцией
времени, можно записать
/7(f) = 2Re[—| Н(со)еысЯ]. (13.32)
о
Подставляя (13.29) в (13.32), получаем
/7(f) = 2Re[—7 Нэ(со-соо)еысЬ] =
2л J
° (13.33)
= 2Re[—Гнэ(со-со0)- e/(“~“°)fd((o-coo)].
2л J
о
С учетом узкополосности цепи нижний предел в (13.33) можем
заменить на
/?(/) = 2Re[~e^f [H3(x)eixtdx] = 2Re[/?3(f)e4f]. (13.34)
2л J
—оо
Таким образом, записано соотношение между импульсными ха-
рактеристиками узкополосной цепи и ее низкочастотного эквива-
лента. Соотношение между частотными характеристиками узкопо-
лосной цепи и низкочастотного эквивалента для всей оси частот
получим из преобразования Фурье
Н(со) - J/7(f)efordf = 2jRe[/?3(f) eko°(]dt. (13.35)
— ОО 0
Используя соотношение для комплексной величины
Re[z] = 1/2(z+z*), (13.36)
352
Анализ сигналов в линейных цепях
где z*~ комплексно сопряженная величина.
Из (13.35) получим
оо
H(w) = J [/7э(Г)е4' + h^tje^e'^dt =
(13.37)
= Mc}tdt+ ^h(t)e '^^'dt.
—oo —oo
Таким образом,
H((D) = Нэ(й)-й)0) + H*(<jD + (D0) .
(13.38)
Низкочастотный эквивалент узкополосной цепи является мате-
матической моделью цепи, описываемой импульсной и частотной
характеристиками. Его использование при анализе узкополосной
цепи является приемом, который часто позволяет упростить про-
водимый анализ. Соотношения (13.34) и (13.38) описывают пере-
ход от характеристик низкочастотного эквивалента к характеристи-
кам узкополосной цепи.
В качестве примера рассмотрим характеристики LRC - цепи
(рис. 13.4,а). Частотная характеристика цепи имеет вид
Я + ftoL + V/coC
Рис. 13.4
353
Раздел 13
При выполнении условия узкополосности M^LC » R/2L можно
принять
а выражение для Н(из) преобразовать к виду
1 + /(со - соо )7" ’
где T = 2L/R.
Переходя к эквивалентной низкочастотной цепи (рис. 13.4,6),
получаем
Импульсная характеристика эквивалентной низкочастотной це-
пи имеет вид
h3(t) = 1/Te~t/r.
От h3(t) можем перейти к импульсной характеристике узкополос-
ной цепи (рис. 13.4,а)
h( t) = 2 Re[y е т еы ] = 2 / Т еит cos (о01.
13.2.2 Прохождение узкополосного сигнала
через узкополосную цепь
Анализ прохождения сигнала через узкополосную цепь наибо-
лее удобно проводить с использованием комплексного представ-
ления сигналов:
на входе
u1(0 = Re Ц(0еЧГ
на выходе
u2(0 = Re V2(t)e^
(13.39)
(13.40)
где 1/1(0 = Ц(0еА₽1(О, V2(t) = V2(t)e^{t)
354
Анализ сигналов в линейных цепях
Спектральная плотность сигнала на выходе цепи S2(w)
определяется выражением
S2((0) - .
(13.41)
Спектральная плотность сигнала на входе St (со) определяется
через спектральную плотность его комплексной огибающей Uy (со)
S1(co) = 1/2U1((o-co0) + 1/2U1!((d + (d0). (13.42)
Как правило, несущая частота сигнала совпадает со средней
частотой полосы пропускания цепи. С учетом этого условия выра-
жение для частотной характеристики цепи можем записать в виде
/-/(со) = Нэ(ш- (Oq) + Нэ((£ + со0). (13.43)
Подставляя (13.43) и (13.42) в (13.41), получаем
S2(co) = 1/2[Нэ(со-со0) + Нэ(со + соо)]
(13.44)
[Ц(со— (Do) + Ц ((0+ (Од)]-
Для узкополосного сигнала (13.44) перепишется в виде
S2(co) = 1/2/-/э(со-(оо)Ц((в-(оо) + 1/2/-/э((о + (оо)Ц*((о + соо). (13.45)
Учитывая соотношение между спектральной плотностью сигна-
ла и спектральной плотностью комплексной огибающей
S2(co) = 1/2L/2(cd-coo) + 1/2L/2(co +соо), (13.46)
можем определить спектральную плотность огибающей сигнала на
выходе цепи как
U2(co) = Нэ(со)Ц(со). (13.47)
Соотношения, аналогичные (13.45), можно получить для спек-
тральной плотности энергии l/V2f(o) на выходе узкополосной цепи
1 I |2
W2(co) = -|H3((O-(OO)| Wv1(co-co0)
1 I |2
+ — |Нэ(о) +соо)| W/Vi(со + со0),
где 1/Ии(со) — спектральная плотность энергии комплексной оги-
бающей сигнала на входе цепи.
(13.48)
355
Раздел 13
Переходя к временной области, для комплексной огибающей
сигнала на выходе цепи запишем
V2(t) = j Vi(x)h3(t - x)dx. (13.49)
о
Сигнал на выходе узкополосной цепи описывается выражением
u2(t) = Re[U2 e*°°f ] = Re[e*°°fpi(x)ft3(f- x)dx]. (13.50)
о
Таким образом, записаны выражения, описывающие сигнал на
выходе узкополосной цепи при подаче на ее вход узкополосного
сигнала.
В качестве примера рассмотрим прохождение экспоненци- аль-
ного радиоимпульса
ц(0 = Voeatcosco0f = Re[l/i(0e*°°4 t > 0 ,
где Ц(Г) = Voeat - огибающая сигнала,
через LCR-цепь (рис. 13.4).
Импульсная характеристика эквивалентной низкочастотной це-
пи имеет вид
h3(f) = 1/Te,IT,
где T=2L/R.
Для огибающей сигнала на выходе цепи запишем
356
Анализ сигналов в линейных цепях
Ц>(Г) = J Ц(х)Лэ(Г - x)dx = V/fJ e~axe~(t^x},Tdx =
о о
= -^—(еа,-е-"т}.
1-аТ ’
Сигнал на выходе цепи описывается выражением (рис. 13.5)
и2(0 - у У ^- (е <3? - e'/r)cosco0f.
13.3. Прохождение сигнала через цифровой фильтр
При анализе дискретных сигналов и при описании цифровой обра-
ботки сигналов наиболее широкое применение нашло
z-преобразование. Линейная цепь в цифровом выполнении (соответ-
ствующая программа ЭВМ) называется цифровым фильтром. Одной
из основных характеристик цифрового фильтра (как и аналоговой ли-
нейной цепи) является импульсная характеристика. Она представляет
отклик цифрового фильтра на воздействие единичного импульса. Ис-
пользуя импульсную характеристику фильтра, для каждого входного
сигнала можно определить сигнал на выходе. Сигнал на выходе опи-
сывается дискретной сверткой импульсной характеристики h(kT) и
сигнала на входе s^kT)
s2(nT) = ^s}(kT)h(nT - кТ) = ^s^nT - kT)h(kT). (13.51)
k=0 k=0
Записанное выражение представляет алгоритм цифровой
фильтрации во временной области. Графическое отображение ал-
горитма дано на рис. 13.6.
357
Раздел 13
На рис. 13. 6 элемент задержки обозначен в терминах z-преобра-
зования как z1 (свойство z-преобразования). Схема показывает по-
следовательность вычислительных операций. При расчете значе-
ний выходного сигнала используются только значения входного
сигнала. Фильтры, в которых для расчета выходного сигнала ис-
пользуются только значения входного сигнала (отсутствует обрат-
ная связь), называются простыми или нерекурсивными. Для прак-
тической реализации таких фильтров необходимо, чтобы импульс-
ная характеристика содержала конечное число членов (или можно
было бы ограничиться конечным числом членов).
При анализе цифровых фильтров наряду с импульсной харак-
теристикой используется системная функция. Она играет такую же
роль, как частотная характеристика при анализе аналоговых цепей.
Системная функция определяется как z-преобразование импульс-
ной характеристики цифрового фильтра
H(z) = ^h(nT)z n . (13.52)
л=0
Системная функция описывает свойства цифрового фильтра в
области переменного z.
В качестве примера рассмотрим цифровой фильтр, соответст-
вующий аналоговой ЯОцепи. Импульсная характеристика фильтра
имеет вид
h(nT) = е~пТ,х,
где т - постоянная времени. Ей соответствует системная функция
Z-преобразование дискретной свертки (13.51) дает следующее
равенство (свойство z-преобразования)
S2(z) = H(z)S1(z). (13.53)
Таким образом, z-преобразование сигнала на выходе цифрово-
го фильтра равно произведению системной функции фильтра и z-
преобразования сигнала на входе. Обратное z-преобразование
позволяет перейти к сигналу на выходе фильтра. Часто такой под-
358
Анализ сигналов в линейных цепях
ход - с использованием z-преобразования позволяет упростить
анализ прохождения сигналов через цифровые фильтры.
Одним из методов анализа прохождения сигналов через анало-
говые цепи является метод составления и решения дифференци-
альных уравнений.
Примером такого уравнения является уравнение, описывающее
прохождение сигнала через RС-цепь
ds2 1 1
--- + -Sn = -s1,
dt т 2 т 1
где s?, s2- сигналы на входе и выходе цепи;
т = RC.
Для дискретных сигналов дифференциальному уравнению 1-го
порядка соответствует разностное уравнение
s2(nT) - bs2(nT ~Т) = as^nT), (13.54)
где Т- интервал дискретизации.
Преобразуя уравнение (13.54), запишем
s2(nT) = as}(nT) + bs2(nT -Т). (13.55)
Как следует из (13.55), в цифровом фильтре значение выходно-
го сигнала может использоваться при расчетах последующих зна-
чений. Такие фильтры называются рекурсивными.
В общем случае разностное уравнение N-ro порядка имеет вид
s2(nT)-fys2(nT-T)-...- bNs2(nT- NT) =
= aQS^nT) + a^(nT -T) + ...+ aMs^nT - MT).
(13.56)
Перепишем его в виде
s2(/?T) = aos^nT) + а^ДпТ - Т) +... + aMs,(nT - МТ) +
+ Ь^82(пТ-Т) +... +bNs2(nT - NT).
Схема рекурсивного фильтра, реализующая алгоритм (13.57),
представлена на рис. 13.7.
Системная функция такого фильтра найдется, если в (13.56) пе-
рейти к z-преобразованию левой и правой частей
359
Раздел 13
Рис. 13.7
S2(z) - b^S2(z) -... - bNz~NS2(z) =
= a0S^z) + a^S^z) + ... + aMz~MS^z).
Таким образом, получим
H(z) = S^z) = ао + а^+- + ам^М
S,(z) 1 - bz^ -... - bNz N
(13.58)
(13.59)
Анализ (13.59) показывает, что коэффициенты слагаемых чис-
лителя определяют нерекурсивную часть фильтра,
а коэффициенты слагаемых знаменателя определяют рекурсивную
часть фильтра.
В качестве примера рассмотрим цифровой фильтр, соответст-
вующий аналоговой цепи с импульсной характеристикой (колеба-
тельный контур)
h(t) = е at cosw0t.
Импульсная характеристика цифрового фильтра имеет вид
h(nT) = еапТ cosw0nT = 1/2(е'апТко°п'г + е~апТ^пТ).
Системная функции, соответствующая h(nT), может быть най-
дена как.
H(z) = 1 / 2(---------г +------j . F -) =
' ' e-aT+b0Tz-' 1 _ е-аТ-ко0Т^ '
1- е~аТ cos co07z~1 _ а0+а^~1
1 - 2е~аТ cos w0Tz~1 + e~aTz~2 1 - fyz1 - b2z'2
360
Анализ сигналов в линейных цепях
Рис. 13.8
Системной функции соответствует уравнение
s2(nT) = s1(nT) + a1s1(nT -T) + b1s2(nT ~Т) + b2s2(nT -2Т),
где 3q = 1; = -е~аТ cosw0T; = 2еаТ cosw0T; b2 = -е~аТ.
Схема цифрового фильтра, отражающая полученный алгоритм,
приведена рис. 13.8.
Фильтр, схема которого приведена на рис. 13.7, может быть реа-
лизован несколько иначе. Запишем (13.59) в виде
S2(z) = а° +У -+":+.aMZMM S,(z). (13.60)
1-^z -...-bNz N
Представим (13.60) как
S2(z) = W(z)(ao + a^ + ... + aMz~M), (13.61)
Рис. 13.9
361
Раздел 13
где
W(z)^
(13.62)
Преобразование, соответствующее W(z), осуществляется с по-
мощью рекурсивного фильтра Л/-го порядка. Выражению (13.61)
соответствует нерекурсивное преобразование сигнала. Таким об-
разом, может быть изображена общая схема цифрового фильтра,
включающая нерекурсивную и рекурсивную части. Дублирующие
элементы схемы (элементы задержки) объединены (рис. 13.9). Та-
кая схема фильтра называется канонической.
Приведенные примеры иллюстрируют практику применения
z-преобразования, его полезность при анализе дискретных сигна-
лов.
362
СПИСОК ЛИТЕРАТУРЫ К ЧАСТИ 1
1. Араманович И.Г., Лунц Г.Л., Эльсгольц Л.Э. Функции комплексного
переменного. Операционное исчисление. Теория устойчивости. -М.: Нау-
ка, 1965.
2. Баскаков С.И. Радиотехнические цепи и сигналы. -М.: Высшая шко-
ла, 1988.
3. Бейтмен Г,, Эрдейи А. Высшие трансцендентные функции. -М. :
Наука, 1966.
4. Бендат Дж., Пирсол А. Применения корреляционного анализа. - М.:
Мир, 1983.
5. Бокс Дж., Дженкинс Г. Анализ временных рядов. Вып.1 и вып.2. -
М.: Мир, 1974.
6. БрейсуДанилэлл Р. Преобразование Хартли. -М.: Мир, 1990.
7. Варакин Л.Е. Системы связи с шумоподобными сигналами. -М.: Ра-
дио и связь, 1985
8. Варакин Л.Е. Теория сложных сигналов. -М.: Сов. радио, 1970.
9. Гиллемин Э. А. Синтез пассивных цепей. -М.: Связь, 1970.
10. Гольденберг Л.М., Матюшкин Б.Д., Поляк М.Н. Цифровая обра-
ботка сигналов. -М.: Радио и связь, 1985.
11. Гоноровский И. С. Радиотехнические цепи и сигналы. -М.: Радио и
связь, 1986.
12. Градштейн И.С., Рыжик И.М. Таблицы интегралов, сумм, рядов и
произведений. -М.: Госиздат физико-математической литературы, 1963.
13. Данилов В.Л. и др. Математический анализ. -М .: Изд. Физ. мат.
литературы, 1961.
14. Денисенко А.Н., Стеценко О.А. Теоретическая радиотехника. Сиг-
налы. -М.: Изд. Стандартов, 1993.
15. Денисенко А.Н. Сигналы с фазовой и частотной модуляцией. -М.:
Изд. Стандартов, -1994.
16. Диксон Р.К. Широкополосные системы. -М.: Связь,1979.
17. Диткин В.А., Прудников А п. Интегральные преобразования и
операционное исчисление. -М.: Изд. Физ. мат. литературы, 1961.
18. Каганов В.И. Радиотехника, компьютер, mathcad. -М.: Горячая ли-
ния-телеком, 2001.
19. Карташов В.Г. Основы теории дискретных сигналов и цифровых
фильтров. -М.: Высшая школа, 1982.
20. Картьяну Г. Частотная модуляция. -М.: Изд. АРНР, 1961.
21. К.Де.Бор. Практическое руководство по сплайнам. -М.: Радио и
связь, 1985.
363
22. Кузнецов Д.С. Специальные функции. -М.: Высшая школа, 1965.
23. Кук Ч., Бернфельд М. Радиолокационные сигналы. -М.: Сов. ра-
дио, -1974.
24. Лезин Ю.С. Оптимальные фильтры и накопители импульсных сиг-
налов. -М. : Сов. Радио, 1963.
25. Лэм Г. Аналоговые и цифровые фильтры. -М.: Мир, 1982.
26. Люк Ю. Специальные математические функции и их аппроксима-
ции. -М.: Мир, 1980.
27. Люстерник Л.А. и др. Математический анализ. -М.: Изд. Физ. мат.
литературы, 1963.
28. Макаров И.М., Менский Б.М. Линейные автоматические системы. -
М.: Машиностроение, 1982.
29. Пестряков В.Б., Афанасьев В.П. и др. Шумоподобные сигналы в
системах передачи информации. -М.: Сов. радио, 1973.
30. Петрович Н.Т., Размахнин М.К. Системы связи с шумоподобными
сигналами. -М.: Сов. радио, 1989.
31. Пышкин И.М., Дежурный И.И. и др. Системы подвижной радио-
связи. -М.: Радио и связь, 1986.
32. Рабинер Л., Гоулд Б. Теория и применение цифровой обработки
сигналов. -М.: Мир, 1978.
33. Свистов В.М. Радиолокационные сигналы и их обработка. -М.:
Сов . радио, 1977.
34. Сиберт У.М. Цепи, сигналы, системы, ч.1 и ч.2. -М.: Мир, 1982.
35. Современная радиолокация. -М.: Сов. Радио, 1969.
36. Стейн С., Джонс Дж. Принципы современной теории связи и их
применение к передаче дискретных сообщений. -М.: Связь, 1971.
37. Справочник по специальным функциям. Под ред. М. Абрамовица и
И. Стиган. -М.: Наука, 1979.
38. Сухорученков Б.И. Математические модели и методы анализа ха-
рактеристик летательных аппаратов. -М.: Изд.МО, 1989.
39. Трахтман А.М. Введение в обобщенную спектральную теорию сиг-
налов. -М.: Сов. радио, 1972.
40. Тузов Г. И. Статистическая теория приема сложных сигналов. -М.:
Сов. радио, 1977.
41. Тузов Г.И., Сивов В.А. и др. Помехозащищенность радиосистем со
сложными сигналами. -М.: Радио и связь, 1985.
42. Шумоподобные сигналы в системах передачи информации. Под
ред. Пестрякова В.Б. -М.: Сов. радио, 1973.
43. Френке Л. Теория сигналов. -М.: Сов. радио, 1974.
44. Хармут Х.Ф. Передача информации ортогональными функциями. -
М.: Связь, 1975.
45. Хармут X. Теория секвентного анализа. Основы и применения. -М.:
Мир, 1980.
46. Хеминг Р.В. Цифровые фильтры. -М.: Сов. радио, 1980.
47 Янке Е., Эмде Ф., Леш Ф. Специальные функции. -М.: Наука, 1988.
364
ЧАСТЬ 2.
СЛУЧАЙНЫЕ СИГНАЛЫ И ШУМЫ
365
Раздел 14.
СЛУЧАЙНЫЕ ПРОЦЕССЫ, ИХ ХАРАКТЕРИСТИКИ
И КЛАССИФИКАЦИЯ
Все сигналы, формируемые или выделяемые в цепях радиотех-
нических систем, являются случайными. Случайный характер сиг-
налов обусловлен воздействием на источники сигналов различных
по своей природе и проявлениям таких, факторов, как случайный
характер модуляции, разброс параметров элементов передатчика и
др. Когда влияние случайных факторов является незначительным и
им можно пренебречь, сигнал можно рассматривать как детерми-
нированный, как колебание, закон изменения во времени которого
задан. Случайный сигнал описывается случайной функцией време-
ни. Такой же характер имеют и шумы - сторонние колебания не
несущие информации. Анализ случайных сигналов и шумов должен
проводиться с привлечением методов теории случайных процес-
сов. Примеры случайных процессов приведены на рис. 14.1.
14.1. Детерминированные и случайные сигналы
Детерминированный сигнал задается функцией времени или
правилом его получения. Применительно к детерминированным
термин «сигнал» обычно и используется как эквивалент временной
функции, описывающей колебание. Примерами детерминирован-
ных сигналов являются (см. часть 1):
импульсный сигнал
s(f) = 1, |?| < т/2, s(t)=e~at, 0<t<x, (14.1)
гармоническое колебание
u(t)= l/0cos(a)0f + (ро), (14.2)
где Vo,«о-Фо “амплитуда, частота и начальная фаза;
гармонический модулированный сигнал
u(t)= l/(r)cos[«0f+ фр)], (14.3)
366
Случайные процессы
Рис. 14.1
где V(t), ф(0 - изменяемые во времени параметры;
кодированный сигнал
N
"W = Wcos[((00 + 0Jn ) t + <рп],
п=1
(14.4)
где ап, а)0 + соп, <рп- амплитуда, частота и начальная фаза гармо-
нического колебания длительности Т на интервале (n-1)T<t < пТ,
со0 - несущая частота; rn(t) - функция, описывающая форму им-
пульса.
367
Раздел 14
Последовательности символов: амплитуд {ап}, фаз {<рп} и частот
{о)п} составляют кодовые последовательности, которые определяют
закон изменения параметров колебания.
Функция, описывающая сигнал s(t), может быть представлена в
виде взвешенной суммы более простых (базисных) функций <рп(0
оо
sW=ycn<PnW
п=0
(14.5)
где сп - постоянные коэффициенты.
Разложение s(t) по ортогональной системе функций {<рп(0}назы-
вается обобщенным рядом Фурье. Совокупность коэффициентов
разложения представляет спектр сигнала.
Возможно также интегральное преобразование s(t). Наиболее
часто при анализе сигналов применяется преобразование Фурье
оо
S(w)= dt.
— оо
Ему соответствует обратное преобразование
s(f) = — f S(id) e'“foto .
2тг J
(14.6)
(14.7)
Функция S((d) называется спектральной плотностью, или спек-
тром сигнала.
Непрерывные сигналы могут задаваться выборочными значе-
ниями - значениями, взятыми в определенные моменты времени
(как правило, через заданный постоянный интервал времени). По-
лучаемый таким образом сигнал называется дискретным. Дискрет-
ные сигналы имеют вид последовательности коротких импульсов,
амплитуды которых соответствуют мгновенным значениям непре-
рывного сигнала s(t)
оо
sa(f)=2s(nT)8(f-nT), (14.8)
л=0
где Т- интервал дискретизации; 8(0 - импульсная функция.
Случайный сигнал представляет случайное изменение во вре-
мени параметра колебания, случайный процесс. На выходе иден-
368
Случайные процессы
тичных источников случайный сигнал, в отличие от детерминиро-
ванного, имеет различный вид. Случайное колебание на выходе
одного источника называется реализацией случайного процесса.
Примером реализации может служить осциллограмма случайного
сигнала при однократной развертке ЭЛО (рис. 14.2,а). Совокупность
реализаций, полученных на выходе идентичных по своим характе-
ристикам источников, представляет множество, или ансамбль реа-
лизаций. Ансамбль реализаций имеет вид осциллограммы случай-
ного сигнала при периодической развертке ЭЛО (рис. 14.2,6).
Рис. 14.2
Описать случайный сигнал с помощью временной функции не-
возможно - любая временная функция, описывающая отрезок реа-
лизации на выходе одного источника сигнала, не соответствует
сигналу на выходе другого идентичного источника. Случайные сиг-
налы поддаются описанию только статистически - с использовани-
ем вероятностных характеристик или характеристик, функциональ-
но с ними связанных. Такими характеристиками являются функция
распределения, плотность распределения вероятностей или мо-
менты распределения.
Особенности случайных сигналов не позволяют применить к ним
непосредственно интегральные преобразования. Преобразование
Фурье, как инструмент анализа, используется применительно к кор-
реляционной функции, определяет спектральную плотность мощ-
ности случайного сигнала. Такое же положение сохраняется
и в отношении дискретных случайных сигналов - по дискретным
369
Раздел 14
значениям можно восстановить только реализацию (отрезок реали-
зации) случайного сигнала.
Отразить общие черты и отличия детерминированных и случай-
ных сигналов позволяет и их геометрическая интерпретация. При
обобщенном спектральном анализе детерминированный сигнал
представляется в виде ряда по ортогональной системе функций
s(f)=
(14.9)
где ск - постоянные коэффициенты; {срДО}- ортонормированная
система функций.
Свойство ортогональной системы функций:
4>k(tM)dt =
1, п = к
О, п ф к
(14.10)
позволяет получить выражения для коэффициентов разложения в
виде
С к = J s(t)$k(t)dt,
(14.11)
где [ta, tb ] - интервал ортогональности функций cpk(f).
Ортонормированная система базисных функций {фк(/)}образует
координатную систему в /V-мерном евклидовом пространстве. Функ-
ции фк(Г) представляют единичные векторы, коэффициенты ск -
проекции вектора s(t) на оси координат. Сигнал, описываемый
(14.9), рассматривается как Л/-мерный вектор (рис. 14.3,а).
Выбор базисной системы функций определяет систему коорди-
нат. Замена системы базисных функций означает смену системы
координат.
Векторы определены только тогда, когда они имеют конечную
длину
Гл/ fa
(14.12)
370
Случайные процессы
Из (14.12) следует, что геометрическую трактовку допускают
только сигналы с конечной энергией.
Рассматривая случайный процесс, выделяем отрезок реализа-
ции ^(0 (рис. 14.3,6). На выделенном интервале времени ^(t)
можем рассматривать как заданную функцию времени. При выпол-
нении некоторых условий ее можем представить в виде обобщен-
ного ряда Фурье, аналогичного (14.9). Ограничиваясь конечным
числом членов ряда, запишем
(14.13)
где ск - коэффициенты разложения; {(pk(f)} - система ортонорми-
рованных функций.
Коэффициенты разложения определяются, как и в (14.11)
ск =
(14.14)
где [fa, - интервал ортогональности функций (pk(t).
Для выделенного отрезка реализации коэффициенты разложе-
ния ^определяются (14.14) однозначно. Они описывают вектор в
евклидовом пространстве (рис. 14.3,6). Для другой реализации ко-
эффициенты будут уже иными, они описывают другой вектор в том
же пространстве. При рассмотрении множества реализаций коэф-
фициенты должны рассматриваться как случайные величины, кото-
рым соответствует случайное множество векторов. Нахождению
конца вектора в заданной области пространства соответствует оп-
ределенная вероятность.
14.2. Шумы
Формирование, передача и прием сигналов всегда сопровожда-
ются сторонними колебаниями (колебаниями, не несущими инфор-
мации) - шумом. Источниками шума являются все типы резисторов,
полупроводниковые приборы (диоды, триоды и др.), электронные
и газоразрядные приборы, фотоэлементы, фотоумножители и т.д.,
т.е. активные и пассивные элементы радиотехнических цепей.
Шум в резисторах представляет флуктуации напряжения (тока),
объясняется случайным характером теплового движения электро-
371
Раздел 14
S(t)
Рис. 14.3
нов. Поэтому эти флуктуации называются тепловым шумом. Квад-
рат эффективного напряжения теплового шума в полосе частот Af
определяется формулой Найквиста
Р = 4А'ТЯД/', (14.15)
где к - постоянная Больцмана (/с= 1,38-10'23 Дж/град); Г- темпера-
тура источника шума; Я - сопротивление нагрузки.
Более точно формула Найквиста может быть записана в виде
P-4/c7Hp(f)Af, (14.16)
где p(f) - коэффициент Планка:
(14.17)
где h - постоянная Планка (h = 6,62-10'34 Дж- с).
Источником флуктуаций, возникающих в вакуумных приборах,
является случайный характер эмиссии и движения электронов
372
Случайные процессы
в этих элементах. Такой шум называется дробовым. Мощность шу-
ма электровакуумного диода в полосе частот Af на нагрузке Я опре-
деляется формулой
P = 2ql0R&f, (14.18)
где q - заряд электрона (q =1,6-10’19 К); /0 - среднее значение тока,
протекающего через диод; Af- полоса шума на выходе.
В полупроводниковых приборах различают несколько состав-
ляющих внутреннего шума, основными из которых являются тепло-
вой и дробовый шумы. Как и в других элементах, природа появле-
ния теплового шума связана с хаотичностью теплового движения
заряженных частиц. Квадрат эффективного значения напряжения
этой составляющей определяется формулой Найквиста. Причина
появления дробового шума в полупроводниковых приборах во мно-
гом такая же, что и в вакуумных приборах.
Спектральные плотности мощности шумов различных источни-
ков отличаются весьма сильно. Так для проволочного резистора
спектральная плотность мощности при комнатной температуре
имеет порядок 10"21 Вт/Гц, а для тиратронов 10’4 -10'5 Вт/Гц. Полоса
частот, занимаемая спектром шума различных источников, изменя-
ется в широких пределах. Спектр теплового шума - сплошной и
достаточно равномерный в полосе до 1013- 1014 Гц.
В процессе исследования шум должен рассматриваться как слу-
чайный процесс, и к нему применимы методы исследования слу-
чайных процессов. Случайные сигналы и шумы объединяет их слу-
чайный характер и, следовательно, для них характерны свои, спе-
цифические методы исследования. Вследствие этого в дальней-
шем случайные сигналы и шумы будут объединены терминологиче-
ски и называться случайными процессами.
Содержание второй части справочного пособия определяется
интересами исследования случайных колебаний в радиотехниче-
ских цепях. Поэтому в ней излагаются не просто методы теории
случайных процессов, а только те из них, которые в большей сте-
пени отвечают интересам анализа случайных сигналов и шумов, и в
виде, наиболее удобном для рассмотрения случайных сигналов.
Специфика рассмотрения случайных процессов в справочном по-
собии заключается прежде всего в выборе их характеристик и
очерченного круга задач исследований. Это сказывается на фор-
мировании разделов второй части книги и методике их изложения.
373
Раздел 14
14.3. Основные характеристики случайных процессов
Случайный процесс представляет случайную функцию времени,
и его рассмотрение во временной области, как и детерминирован-
ного сигнала, является наиболее наглядным. Однако если детер-
минированный сигнал однозначно описывается временной функци-
ей, то такое описание случайного процесса невозможно (рис.14.4).
Случайный процесс в каждый момент времени представляет слу-
чайную величину, которая может принимать различные значения из
области возможных. Таким образом, во временной области случай-
ный процесс может быть описан только с использованием вероят-
ностных характеристик. Наиболее полными из них являются функ-
ция распределения вероятностей (ФРВ) или плотность распреде-
ления вероятностей (ПРВ). В зависимости от того, сколько момен-
тов времени выбирается при описании случайного процесса, раз-
личают ФРВ различной мерности (в общем случае л-мерные)
Fn(xb х2, ..., хп).
374
Случайные процессы
От ФРВ можно перейти к ПРВ
dnFn(x}, х2,
dx} dx2 ...dxn
(14.19)
При описании случайных процессов используются и менее пол-
ные характеристики - моменты распределения
х*' хк/ ...xknnfn{xA,x2,...xn)dxAdx2...dxn.
(14.20)
Начальный момент первого порядка - математическое ожидание
)} = а = J xf} (t)dx
(14.21)
описывает постоянную составляющую случайного сигнала. Второй
центральный момент - дисперсия
оо
ИШ-а]2}= j(x-a)2f1(f)c/x (14.22)
—оо
- мощность переменной составляющей.
Важное место при анализе случайных процессов занимает второй
смешанный центральный момент распределения вероятностей -
корреляционная функция.
)}fc(f2) - Mfc(f2)}]} = R(f„ f2) =
f fz V X / X (14.23)
= J -a}\x2-a2)f2(x},x2)dxAdx2.
— oo —oo
Корреляционная функция описывает степень статистической
связи значений случайного процесса или двух случайных процес-
сов, взятых в два различных момента времени.
Характеристики распределения для широкого класса случай-
ных процессов (эргодических случайных процессов) могут быть
получены в результате обработки одной реализации. Так матема-
тическое ожидание и дисперсия случайного процесса могут быть
определены как
375
Раздел 14
a = №k\t)\ = lim №k}(t)dt,
\ / T->oo £ I J
-T
a2 = a]2\ = lim —f[^k)(f)- af dt,
\ T/ J
(14.24)
(14.25)
где £w(0 - реализация случайного процесса; <..> - символ усред-
нения по времени.
Корреляционная функция эргодического случайного процесса
описывается выражением
lim“ ffc(M-aiM2)-a2]df. (14.26)
/ —>оо г/ j
-т
Полезной характеристикой при описании случайного процесса
является характеристическая функция, она определяется как сред-
нее значение функции где v - действительная величина, вы-
ражением
оо
©1 (v) = J f^x)elvxdx.
—оо
(14.27)
Выражение (14.27) представляет преобразование Фурье ПРВ.
Следовательно, от характеристической функции можно осущест-
вить переход к ПРВ с помощью обратного преобразования
f(x) = — f 01 (v) е lvxdv.
п ’ 2л J v 7
(14.28)
Распространив понятие характеристической функции на сово-
купность случайных величин выражение для
n-мерной характеристической функции запишем в виде
0n(vi,v2,...,vn)-
ОО ОО ОО . —
f f ...re'(1ww +''Л>/П(х1,х2.....х„) dx,dx2...dxn. ( ’
— ОО —оо —оо
376
Случайные процессы
Обратный переход от характеристической функции к «-мерной
ПРВ определяется выражением
= —Г f ... [en(y<,v2,...,vn)e '(V^V2X2’ <vnx^dV dV2_dV
/— \ n I I I П \ I' С ' П f I fC. II
(2л) J J J
Удобство использования характеристической функции связано в
первую очередь с ее мультипликативным свойством е*+у = ехеу .
Указанные характеристики могут быть распространены на сово-
купность случайных процессов.
Реализация непрерывного случайного процесса может рассмат-
риваться как случайное колебание относительно выбранного уров-
ня х(рис. 14.5).
Выбросы случайного процесса относительного этого уровня ха-
рактеризуют поведение случайного процесса во времени и часто
требуют самостоятельного исследования. К основным характери-
стикам выбросов, которые определяются при анализе случайных
процессов, относятся: ФРВ или ПРВ длительности положитель-
ных (над выбранным уровнем) и отрицательных выбросов, средняя
377
Разоел 14
частота следования выбросов, средняя частота экстремумов и др.
Анализ выбросов, определение их характеристик является одной
из составных частей общего анализа случайных процессов.
При анализе детерминированных сигналов исключительно по-
лезным оказалось использование преобразования Фурье времен-
ной функции, описывающей сигнал. Исследование переводится в
частотную область, математические операции часто упрощаются.
Преобразование Фурье непосредственно случайных процессов, как
правило, невозможно, не выполняется условие существования
преобразования Фурье. Используется преобразование Фурье кор-
реляционной функции случайного процесса. Оно определяет спек-
тральную плотность мощности случайного процесса. Корреляцион-
ная функция и спектральная плотность мощности связаны друг с
другом парой преобразований Фурье
Л/(ш)= |я(т)е“'1,)Тс/т, Я(т) = ^-|л/(ю)е'0Я(Л. (14.31)
Соотношения (14.31) лежат в основе спектрального анализа
случайных процессов. Спектральный анализ - важная часть общего
анализа случайных процессов.
С учетом изложенного в дальнейшем проводится описание
и анализ основных характеристик случайных процессов во времен-
ной и частотной областях. При их рассмотрении необходимо иметь
в виду, что все характеристики случайных процессов взаимосвяза-
ны, они отражают одни и те же свойства случайного процесса,
только описываются с использованием различных подходов.
14.4. Классификация случайных процессов
В зависимости от природы (источника) колебаний, характеристик
устройства, на выходе которого наблюдается колебание, и ряда
других факторов случайные процессы могут обладать разными
свойствами. Из всего возможного разнообразия случайных процес-
сов выделим только те, которые наиболее часто встречаются в ин-
женерной и исследовательской практике, и проведем их классифи-
кацию по основным признакам. Такая классификация позволяет
определить место каждого вида случайного процесса среди воз-
можного их разнообразия и ввести терминологию, которая будет
использована в дальнейшем.
Различают непрерывные и дискретные случайные процессы
(рис. 14.6). Непрерывный случайный процесс (его реализация) может
378
Случайные процессы
tjth
c(t)]
6)
-WUHAJ
" D__п П n ।
t
t
t
t
Рис. 14.6
иметь любое значение из области возможных (рис. 14.6,а). Приме-
ром непрерывного случайного процесса служит шум в радиотехни-
ческой цепи. Дискретный случайный процесс принимает только оп-
ределенные значения. Примером такого процесса является коле-
бание на выходе идеального ограничителя при подаче на его вход
непрерывного случайного процесса (рис. 14.6,6).
Возможен случайный процесс смешанного типа, например, слу-
чайный процесс на выход ограничителя с заданными порогами огра-
ничения (рис. 14.6,в). Как сложилось на практике, дискретными будем
также называть случайные процессы, получающиеся при дискрети-
зации непрерывных случайных процессов во времени. Такие случай-
ные процессы представляют периодическую последовательность
379
Раздел 14
коротких импульсов, амплитуды которых соответствуют мгновенным
значениям исходного непрерывного случайного процесса. Отдельно
выделяются импульсные случайные процессы (рис. 14.6,г).
Одним из важных признаков, по которым проводится классифи-
кация, является вид распределения вероятностей случайного про-
цесса. Широкий класс случайных процессов составляют гауссов-
ские процессы - случайные процессы с нормальным распределе-
нием мгновенных значений (рис. 14.7,а). Нормальное распределе-
ние является тем предельным видом, к которому при определенных
условиях стремятся все другие виды распределения. Указанным
обстоятельством в большой степени объясняется то важное место,
которое занимают гауссовские процессы в практике исследований.
Некоторые виды распределений получаются при преобразовании
нормального закона распределения. Так можно получить релеев-
ский закон распределения (рис. 14.7,6) и другие.
Наиболее полной характеристикой случайного процесса являет-
ся его n-мерная ФРВ, или n-мерная ПРВ, описывающие случайный
процесс в различные моменты времени. Из общего класса случай-
ных процессов выделяют случайные процессы, которые полностью
характеризуются ФРВ (ПРВ) первого и второго порядков (от них
можно перейти к ФРВ (ПРВ) любого порядка). Если случайный про-
цесс полностью описывается одномерной ФРВ (ПРВ), то он назы-
вается совершенно случайным.
х t Ш
Рис.14.7
380
Случайные процессы
б)
Рис.14.8
Рис. 14.9
Рис. 14.10
381
Раздел 14
Рис. 14.11
382
Случайные процессы
Одним из признаков классификации случайных процессов явля-
ется постоянство их характеристик во времени. Различают стацио-
нарные (рис. 14.8,а) и нестационарные (рис. 14.8,6) случайные про-
цессы. Случайный процесс называется стационарным, если его
ФРВ любого порядка не зависят от выбора начала отсчета на оси
времени.
В классе стационарных случайных процессов особое место за-
нимают эргодические случайные процессы. Случайный процесс
называется эргодическим, если любая его характеристика, полу-
ченная усреднением по ансамблю реализаций, равна характери-
стике, подученной при обработке одной реализаций - усреднением
по времени. Выполнение этого условия означает, что поведение
каждой реализации случайного процесса статистически такое же,
как и всего ансамбля реализаций. Случайные процессы, не обла-
дающие указанным свойством, называются неэргодическими.
В частотной области случайные процессы описываются спек-
тральной плотностью мощности, или спектром (рис. 14.9,а). В зави-
симости от ширины спектра выделяют (как и среди детерминиро-
ванных сигналов) узкополосные и широкополосные случайные про-
цессы. Случайный процесс называется узкополосным, если его
спектр сосредоточен в полосе частот, значение которой значитель-
но меньше средней частоты (рис.14.9,6). Из широкополосных слу-
чайных процессов особо выделяют белый шум. Белым шумом на-
зывается случайный процесс, имеющий равномерный на всех час-
тотах спектр (рис. 14.9,в). Белый шум физически не реализуем, яв-
ляется идеализацией, удобной моделью случайных процессов, с
которыми приходится иметь дело на практике.
Из узкополосных процессов следует выделить модулированные
случайные процессы. Они могут иметь шумоподобную несущую,
модулированную как детерминированным, так и случайным сигна-
лами, и случайные процессы с гармоническим несущим колебани-
ем, модулированным случайным процессом. Второй вид наиболее
распространен. По виду модуляции различают: случайные процес-
сы с амплитудной (рис. 14.10,а), фазовой и частотной модуляцией
(рис. 14.10,6).
Краткая классификация случайных процессов, приведенная вы-
ше, в обобщенном виде представлена на рис.14.11. Понятия раз-
личных видов случайных процессов, введенные при классифика-
ции, раскрываются полнее в дальнейшем.
383
Раздел 15.
ОДНОМЕРНОЕ РАСПРЕДЕЛЕНИЕ ВЕРОЯТНОСТЕЙ
СЛУЧАЙНОГО ПРОЦЕССА
Случайный процесс в каждый момент времени представляет
случайную величину и наиболее полно описывается одномерной
ФРВ или ПРВ. Менее полными характеристиками, но в ряде случа-
ев достаточными для описания и анализа случайного процесса,
являются моменты распределения вероятностей. Моменты позво-
ляют судить только о некоторых свойствах случайного процесса, но
как характеристики часто бывают более простыми и удобными при
его описании. Преобразование Фурье связывает ПРВ с характери-
стической функцией случайного процесса. Использование характе-
ристической функции в ряде случаев позволяет упростить анализ
случайных процессов.
В разделе рассматриваются характеристики случайного процес-
са, описывающие его в выбранный момент времени: одномерные
ФРВ и ПРВ, соответствующие моменты распределения вероятно-
стей и одномерная характеристическая функция.
15.1. Одномерная функция распределения и плотность
распределения вероятностей случайного процесса
Случайный процесс в выбранный момент времени t представля-
ет случайную величину, принимающую значения, равные значениям
реализаций (рис. 15.1). ФРВ этой величины определяется как
F}(x,t)= P{^t)< х} (151)
где Р{...} - символ вероятности.
Значения F^x, t) лежат в диапазоне 0...1 (рис. 15.2), могут быть
определены с учетом следующего предельного равенства
F,(x.f)= lim (15.2)
No--> ОО No
384
Одномерное распределение вероятностей
Рис. 15.1
где Л/о - общее число реализаций случайного процесса, наблюдае-
мых в момент времени t, N(x) - число реализаций случайного про-
цесса не превышающих уровень хв момент времени t.
Выражение (15.2) поясняет содержание ФРВ и является исходным
при ее определении в процессе обработки ансамбля реализации.
385
Раздел 15
Производная от ФРВ
^^ = fi(x,0, (15.3)
дх
если она существует, называется ПРВ случайного процесса
(рис. 15.2). Соответственно, имея ПРВ, можно перейти к ФРВ слу-
чайного процесса
F^x,t) = jfi(x,t)dx. (15.4)
— оо
Вероятность нахождения значений случайного процесса между
уровнями х1 и х2 равна
Х2
Р{х1 < ^ < х2} = F1(x2, t) - F^x^t) = J ^(x, t)dx. (15.5)
XI
ФРВ и ПРВ зависят от заданного уровня х и момента времени t,
в который рассматривается случайный процесс. Для стационарных
случайных процессов одномерные характеристики распределения
от выбора момента времени t не зависят. Они зависят только от х.
В дальнейшем рассматриваются стационарные случайные процес-
сы, характеристики которых зависят только от х.
ФРВ дискретного случайного процесса изменяется скачкообраз-
но и определяется как (рис. 15.3)
п
к=1
где рк- вероятность появления значения случайного процесса, рав-
ного хк; п - число заданных значений случайного процесса.
386
Одномерное распределение вероятностей
Zp*=1’
/с=1
где /V- число возможных значений случайного процесса.
ПРВ дискретного случайного процесса содержит импульсные
функции
^\)=рЛх~хЛ
(15.7)
Вероятность нахождения значений дискретного случайного про-
цесса между хп и хт равна
п
Р{Хт<&Хп} = ^Рк-
к=т
(15.8)
387
Раздел 15
Менее полную, но в ряде случаев достаточную информацию о
случайном процессе содержат моменты распределения вероятно-
стей. Начальный момент n-го порядка непрерывного случайного
процесса определяется выражением
г.? г л г п
гпп = М{^ (t)}= х dF^x)= х f<(x)dx,
(15.9)
где М{...} - символ усреднения по ансамблю реализаций.
Для дискретного случайного процесса, принимающего значения
х?, х2,..., хд/с вероятностями рь р2Pn, имеем
(15.10)
Начальный момент первого порядка - математическое ожидание
или среднее значение непрерывного случайного процесса
/л1 = М{ф)} = | х^(х) dx = а .
(15.11)
Математическое ожидание дискретного случайного процесса оп-
ределяется выражением
N
’Г"—"'
/77 = > X р
1 1\ к
к^
(15.12)
Случайный процесс с математическим ожиданием, равным ну-
лю, называется центрированным, его обозначим с0 (t). Переход к
центрированному случайному процессу очевиден £,0 (t) = 'c(t) - а.
Моменты распределения вероятностей центрированного слу-
чайного процесса называются центральными
(15.13)
Для дискретного случайного процесса
(15.14)
388
Одномерное распределение вероятност ей
Центральный момент первого порядка, очевидно, равен нулю.
Центральный момент второго порядка называется дисперсией. Для
непрерывного случайного процесса она определяется как
со
/л0 = Г(х — т )2f (x)dx = oz.
2 J V V 1V '
(15.15)
Для дискретного случайного процесса
Л/
/с=1
Дисперсия характеризует степень отклонения случайного про-
цесса (его мгновенных значений) от математического ожидания.
Величина ст называется средним квадратическим отклонением
случайного процесса. Дисперсия связана с начальными моментами
соотношением, получаемым из (15.15) или (15.16)
о2 = т2 - т2 = т2 - а2. (15.17)
В общем случае центральные моменты распределения вероят-
ностей’связаны с начальными следующими выражениями:
О 2
/77 = /77 - /77 ;
2 2 1
/77° =/77 - 3/77 /77 +2/773;
3 3 2 1 1
(15.18)
т° = т -4т т + 6т т2-3т4-
4 4 3 1 2 1 1
/77° = /77 - 5/77 /77 + 10/77 /772 —10/77 /773 + 4/775
5 5 4 1 3 1 2 1 1
Приведенные равенства, а также продолжение их ряда могут
быть получены из (15.13)
Исходные данные, необходимые для определения характери-
стик распределения, приведенных выше, получаются в результате
обработки ансамбля реализаций случайного процесса. Такой под-
ход к определению характеристик не всегда удобен и возможен.
Вследствие этого особый интерес представляют случайные про-
цессы, позволяющие получить те же характеристики при обработке
одной реализации - эргодические случайные процессы .
389
Раздел 15
15.2. Эргодические случайные процессы ,
их характеристики распределения
Среди случайных процессов особое место занимают эргодиче-
ские случайные процессы. Случайный процесс называется эргоди-
ческим, если его характеристики распределения вероятностей, по-
лучаемые усреднением по ансамблю реализаций, равны характе-
ристикам, получаемым усреднением по времени при обработке од-
ной реализации. Необходимым условием эргодичности является
стационарность случайного процесса. Свойством эргодичности об-
ладают практически все стационарные случайные процессы, с ко-
торыми приходится встречаться на практике. В некоторых случаях
эргодичность случайного процесса принимается гипотетически.
Для эргодического случайного процесса одномерная ФРВ может
быть определена как (рис. 15.4)
FJ (х) = lim —, (15.19)
т—Т
где Т- интервал времени наблюдения; Тк - интервал времени, на
котором мгновенные значения случайного процесса не превыша-
ют уровень х (на рис. 15.4 - длительности незаштрихованных уча-
стков).
Моменты распределения вероятностей эргодического случайно-
го процесса также могут получаться усреднением по времени. Ма-
тематическое ожидание находится как
Рис. 15.4
390
Одномерное распределение вероятностей
где ^K\t) - реализация случайного процесса; <..-> - символ усред-
нения по времени.
Величина (15.20) представляет постоянную составляющую слу-
чайного процесса (рис. 15.4).
Второй начальный момент
™ = (НОГ) = Jim “ f \t)f dt. (15.21)
Z \ / Z I J
-T
описывает среднюю мощность случайного процесса. Средняя мощ-
ность переменной составляющей (центрированного случайного
процесса) определяется центральным моментом второго порядка -
дисперсией
т°2 = о2 = /[^(0- = Jim “J dt. (15.22)
Рассмотренные характеристики и другие, получаемые усредне-
нием по времени для эргодических случайных процессов, идентич-
ны получаемым из ансамбля реализации. Однако физическое со-
держание характеристик эргодического случайного процесса (по
крайней мере моментов распределения вероятностей первых по-
рядков) является более очевидным.
15.3. Некоторые виды случайных процессов
В качестве примеров рассмотрим некоторые виды случайных
процессов, их характеристики распределения вероятностей.
1. Гауссовский процесс
Одним из наиболее важных законов распределения случайных
процессов является нормальный. Случайный процесс, имеющий
нормальное распределение, называется гауссовским. Важное ме-
сто, занимаемое гауссовским процессом, объясняется рядом при-
чин, из которых следует отметить:
• гауссовский процесс принимается как математическая модель
для большого числа случайных процессов с достаточно строгим
обоснованием;
• нормальный закон представляет тот предельный вид, к кото-
рому при некоторых условиях, часто выполняемых на практике,
приближаются другие законы распределения. Это связано в первую
391
Раздел 15
очередь с тем, что в соответствии с центральной предельной тео-
ремой теории вероятностей распределение суммы большого числа
независимых случайных величин стремится к нормальному;
• математический аппарат анализа гауссовских процессов наи-
более (или достаточно) прост; стационарный гауссовский процесс
полностью описывается, если известны его математическое ожи-
дание и корреляционная функция.
Нередко анализ удается провести только для гауссовских про-
цессов.
Одномерная ПРВ гауссовского процесса описывается выраже-
нием
(15.23)
Как следует из (15.23), одномерная ПРВ определяется двумя
параметрами: а и о. Параметр а представляет математическое
ожидание случайного процесса
=» оо (х-а)2
т = xf<(x)dx =—=|хе 2ст dx = a,
1 J <ту2л J
(15.24)
2
о является дисперсией
со оо ^7
т° = f(x-m})2f}(x)dx = —}= f(x-a)2e 2°г dx = o2. (15.25)
2 J лт./Отг J
Кривая ПРВ гауссовского процесса приведена на рис. 15.5,а.
Она симметрична относительно математического ожидания, имеет
максимум при х = а
^тах(*) г~—
<2710
= 0,39894/о.
Максимальная крутизна кривой (точка перегиба) при х = а±п.
ФРВ гауссовского процесса определяется как (рис. 15.5,6)
х (и-а)г
1 Г
Fjx) = —== е 2 du.
cry 2 л J
(15.26)
392
Одномерное распределение вероятностей
Рис. 15.5
Расчет ПРВ и ФРВ гауссовского процесса может производиться
с использованием табулированных функций:
~2 .хи2
г= [ е 2 du .
2л
(15.27)
2л
При расчете ФРВ гауссовского процесса может также использо-
ваться табулированная функция
оо ц2
(е 2 du.
2л J
(15.28)
Из сравнения (15.27) и (15.28) следует, что
Q(x) = 1 - ф(х).
Составлены также таблицы интеграла вероятностей (функции
ошибок)
(15.29)
Функция Ф}(х) часто используется в решениях интегралов.
Для малых значений х функция Ф(х) может быть аппроксимиро-
вана рядом
Ф(х) = —+
1 у (~1)ПХ2Л+1
л/2л “о ^2л(2п +1)
393
Раздел 15
При достаточно большом значении аргумента полезна следую-
щая аппроксимация:
Ф(х)= - + ф(х)У---------------.
2 1 3 • 5...(2л + 1)
Из (15.13) с учетом (15.23) можно получить центральные момен-
ты распределения гауссовского процесса
п [0, для нечетных л
ш° = . (15.30)
п [135...(п-1рп, для четных п
2. Релеевский процесс
Преобразование гауссовского процесса может привести к случай-
ному процессу, имеющему обобщенное распределение Релея. ПРВ
такого случайного процесса описывается выражением (рис. 15.6,а)
Ла2
2а2
^0
х)0,
(15.31)
где а, о - параметры распределения; /0(х) - модифицированная
функция Бесселя первого рода:
(х/2)п+2А
к!(п + /г)!
ФРВ релеевского процесса определяется как
Рис. 15.6
394
Одномерное распределение вероятностей
1 Г
—— I и е
2 2
и
2°г /
'о
аи
ст
du.
(15.32)
Используя известное соотношение
г хп
unln_, (au)du = — 1п (ах} а} О,
j а
о
выражение для ФРВ запишем в виде
(15.33)
(15.34)
При малых значениях отношения ос/ст, раскладывая функцию
Бесселя в (15.31) в степенной ряд и ограничиваясь первыми двумя
членами разложения, получим
а2х2>
4ст4 ,
(15.35)
При больших значениях ос/ст можно воспользоваться следую-
щим разложением:
^о(*) ~
ех (. 1 9
.7==--;.~ 1 + ——।----7
72лхк 8* 128х2
(15.36)
Ограничиваясь первыми двумя членами разложения, выражение
для ПРВ запишем в виде
—
8ахJyа
(15.37)
При а/ст >>1 обобщенный закон распределения Релея перехо-
дит в нормальный с параметрами аист.
Моменты распределения вероятностей при обобщенном законе
Релея определяются выражением
я2
« оо
тп = ~е 2°z Гхп+1/0
ст <
ах
ст2
е 2°г dx.
(15.38)
о
395
Раздел 15
Решение интеграла в (15.38) дает
где Г(х) - гамма-функция; ^(х^ х2,х3)- вырожденная гипергео-
метрическая функция.
Если а = 0, то из (15.31) получим распределение Релея
(рис. 15.6,6)
fi(x) = -^-e 2°2, х>0 , (15.40)
F^x)=1-e 2о\ х>0. (15.41)
Моменты распределения вероятностей релеевского случайного
процесса определяются выражением
тп = (2o2)2rfl + -l (15.42)
среднее значение
дисперсия
т2 - = (2 --^)о2 = 0,429о2.
Некоторые наиболее известные виды распределений непрерыв-
ных случайных величин приведены в табл. 15.1.
3. Телеграфный сигнал
Примером дискретного случайного процесса может служить слу-
чайный процесс, реализация которого изображена на рис. 15.7,а.
Случайный процесс принимает только два значения Д и
а моменты перемены значений случайны. Такой случайный процесс
получается, например, на выходе идеального ограничителя при по-
даче на вход непрерывного случайного процесса . Его ФРВ равна
396
Одномерное распределение вероятностей
Таблица 15.1.
Характеристики распределения вероятностей
случайных величин
№ Характеристики распределения
п/п вероятностей случайной величины
Нормальное распределение
(x-af iav-™
- сю < х < ооД1 (х) = —=_ е 2°2 , т, = а, п?2 = о2, 0,(о)= е 2
V271O
хЮ'1
2
397
Раздел 15
398
Одномерное распределение вероятностей
№ Характеристики распределения
п/п вероятностей случайной величины
Показательное распределение
0<х<°°, /i(x) = Ae"Xx,
m'=r e'(b)=7^
Распределение Лапласа (двустороннее показательное)
2 ~кг
^1=0, т°=—, 0,(1)=—------------
к X + v
399
Раздел 15
№
п/п
Характеристики распределения
вероятностей случайной величины
Распределение крайних значений (Фишера-Типпета 1 типа)
— ОО < X < оо
, / \ 1 Lv_e-y) x-cl л
f}(x) = — e[y >, у = ——т^а + уЗ
р р
(у - постоянная Эйлера, у = 0,57721...),
/77° = ( 01 = 50 _ /j3i))e«v
6
7
400
Одномерное распределениевероятностей
Ns
п/п
Характеристики распределения
вероятностей случайной величины
9
Логистическое распределение
Распределение Вейбулла
401
Раздел 15
№
п/п
Характеристики распределения
вероятностей случайной величины
Показательно-степенное распределение
хт
0<х<°=>, £(*) =— ех, т. = т + Х
1V 7 Z7T» 1
/7?°z=/7? + 1, 0,(t))= (1 -/иУ 'т+1!
11
Равномерное распределение
Л <
2 '
h и 1 1
—, fAx) =—, т.=а,
2 Л ’ h 1
m? = —, 0. (ъ) = — s/f—)e'av
2 12 n 7 /Д) I 2 )
402
Одномерное распределение вероятностей
403
Раздел 15
№ п/п Характеристики распределения вероятностей случайной величины
Распределение Накагами (т-распределение)
т/ о Г -^х2 1 1П7 + -" 0 < х<•>-, L(х) = —т-т -ДМ х2тЧе "г , т>—, т, =-^=- А -- ' ,
1V ’ r(m)U2J 2 г(т)
15 of 1 f 2 г \ m+ o / ч «V / .x о 2 k 2/ A / \ Г 2m) ~ йт- юо 2 m r(m) 2 г(т) Д Jim) Dp(z}- функция параболического цилиндра
-5-4-3-2-10 1 2 3 4 5 х
404
Одномерное распределение еероятностей
№
п/п
Характеристики распределения
вероятностей случайной величины
Распределение Снедскора
(F-распределение)
ь
т -----
1 Ь-2
а ( 34 Ь)
а V . а П г I
— № 1 + —х
b { ь
о 2Р2 (а + Ь - 2)
2 a(b - 2)2(b - 4)’
17
18
Распределение хи-квадрат
405
Раздел 15
ПРВ случайного процесса описывается с помощью импульсных
функций
^(х)= р§(х-(15.44)
Начальные моменты получаются из выражения
тл
J хп /](х) dx
— оо
с подстановкой (15.44). Они равны
™п^А"Р +Ап2(^р,).
(15.45)
Математическое ожидание
406
Одномерное распределение вероятностей
т} = Др+4(1-р).
(15.46)
Центральные моменты описываются выражением
оо
m° = J(x-m1)nf1(x)dx = (/41-т1)лр + (Д2-^7i)n(l-p)- (15.47)
— оо
Частным случаем рассматриваемого дискретного случайного
процесса является телеграфный сигнал. Телеграфный сигнал
представляет случайный процесс, принимающий значения: -А и А,
моменты перемены знака подчиняются закону Пуассона
Р _ СМ”
п~ т
(15.48)
где Рп - вероятность п перемен знака на интервале времени т;
Хт = ц - среднее число переменых знака.
Вероятность числа перемен знака на рассматриваемом интер-
вале времени не более п определяется как
(15.49)
С увеличением значения ц = Хт распределение Пуассона при-
ближается к нормальному со средним и дисперсией, равны-
ми ц.Это означает, что для больших значений ц можем записать
следующее выражение:
Р{к< т}=
( 1
и2 т + — ц
2 du -Ф----8=—
7 и
(15.50)
Поправка 1/2 в (15.50) не является обязательной, но она улуч-
шает аппроксимацию нормальным законом при сравнительно не-
больших значениях ц.
Для телеграфного случайного сигнала р = 0,5
(х) = 0,55(х - А) + 0,55(х + А). (15.51)
407
Раздел 15
Моменты распределения вероятностей тп = 0 .
Вероятность того, что на интервале т не будет перемены знака
(отсутствует пересечение случайным процессом нулевого уровня)
найдется из (15.48)
Ро =
(15.52)
Значение Ро определяет вероятность того, что интервал между
пересечениями случайным процессом нулевого уровня будет не
меньше т. Величина
F5(t) = 1 - Ро = 1 - е^Лт(т> 0)
(15.53)
представляет одномерную ФРВ длительности интервалов между пе-
ресечениями случайным процессом нулевого уровня (рис. 15.7,6).
Полученный результат относится только к случайному процессу с
пуассоновским распределением нулей (точек пересечения с нуле-
вым уровнем).
ПРВ интервалов между точками пересечения:
(т) = dF8(y)/dr=Xe Лт(т > 0).
(15.54)
Полученное распределение называется показательным с пара-
метром Я . Математическое ожидание и дисперсия равны
/7?1 = —,о2= —
X' X2
(15.55)
15.4. Представление плотности распределения
вероятностей случайного процесса с помощью
ортогональных многочленов
Плотность распределения вероятностей случайного процесса
представляет функцию, которая, как абсолютно интегрируемая,
может быть разложена в ряд по ортогональной системе многочле-
нов. В некоторых случаях такое представление ПРВ бывает удоб-
ным как при анализе самой функции ПРВ, так и при ее расчете.
Примеры применения разложения ПРВ при анализе случайного
процесса на выходе нелинейного устройства приведены в разд. 17, 22.
Ряд, в который раскладывается ПРВ, записывается в виде
408
Одномерное распределение вероятностей
(15.56)
л=0
где {фл(х)} - система базисных функций; сп - постоянные коэф-
фициенты.
В качестве базисных функций фл(х) обычно берутся ортого-
нальные многочлены. Это связано прежде всего с удобством опре-
деления коэффициентов разложения. Система функций {фп(х)}
называется ортогональной с весом р (х) на интервале [а, Ь], если
выполняется равенство
г / ч / х / х [0, п,
(15.57)
a UI "и
где ||(рл || - норма базисных функций фл(х).
Из (15.56) с учетом (15.57) можно определить коэффициенты сп
как
1 г
с„ =------------1
п II l|2 J
||Ф л || а
(15.58)
В качестве ортогональных многочленов могут быть выбраны мно-
гочлены Лежандра, Чебышева, Эрмита, Лагерра и др. Их краткое
описание и примеры применения при анализе различных функций
даны в первой части книги. При разложении ПРВ случайных процес-
сов наиболее часто используются многочлены Эрмита и Лагерра.
15.4.1. Разложение ПРВ в ряд по многочленам Эрмита
(ряд Грама - Шарлье)
Удобство применения многочленов Эрмита при разложении ПРВ
связано с тем, что от них достаточно просто перейти к нормальной
ПРВ и ее производным. Разложение же ПРВ в ряд с использовани-
ем нормальной ПРВ позволяет оперировать с хорошо известной
функцией и, кроме того, судить о степени приближения рассматри-
ваемой ПРВ к нормальной, установить условия, при которых это
приближение будет более близким.
Многочлены Эрмита, применяемые при разложении ПРВ, обыч-
но определяются как
409
Раздел 15
№ dn(е
Нп (х) = (- 1)л е 2 —----
v dxn
(15.59)
Они ортогональны на всей оси (-<*>; <*> ) с весом е
0,т/п
л/2л л!, т = п.
Первые шесть многочленов:
Н0(х)=1,
(х) = х,
/-/2 (х) = х2 -1,
Н3(х)= х3 -Зх,
Н4(х)= х4 -6х2 +3,
Н5(х) = х5 -10х3 +15х.
х/2
Нт(х) Нп(х) е х dx = <
(15.60)
Многочлены Эрмита связаны с нормальной ПРВ
ср(х) =
"I -№/2
Г Cz
\/2п
и ее производными ф(л\х) соотношением
е 2 Нл(х).
(15.61)
Функции Нп(х) и ф(л\х) являются ортогональными, для них
справедливо равенство
оо
J Hm(x^n\x)dx
— оо
0, т* п,
(- 1)лл!, т = п'
(15.62)
Вследствие этого возможно представление /1(х)в виде ряда
разложения по функциям ф(л)(х)
410
Одномерное распределение вероятностей
(15.63)
п-0
Умножение левой и правой частей (15.63) на Нп(х) и интегриро-
вание от -оо до оо приводят к следующему выражению для коэф-
фициентов ряда:
— оо
(15.64)
где М{...} - символ усреднения.
Таким образом, коэффициенты ряда определяются математиче-
ским ожиданием многочленов Эрмита, а с учетом выражений для
них (15.60) - начальными моментами случайной величины (случай-
ного процесса в выбранный момент времени)
— оо
(15.65)
Функция ф(х) представляет нормальную ПРВ случайной вели-
чины с нулевым математическим ожиданием и единичной диспер-
сией. При переходе к ПРВ с произвольными значениями ма-
тематического ожидания и дисперсии выражение (15.63) должно
быть заменено следующим (см. п.15.5.):
оо
fM=^cn^n\y\ (15.66)
п=0
а (15.64):
Сп = f , (15.67)
n! J л! J < о J о
— оо —оо
2 W
где т1 о - математическое ожидание и дисперсия случайной ве-
личины,
о 2 Х-ГПл
ст = т2- rtf; у =----1.
о
Первые коэффициенты разложения равны
411
Раздел 15
со -
о
С] = — 0,
О
1 з
Со — Z-,
3 3! а3
(15.68)
1
с4 = —
4 4!
т°
4+3
о4
1
Сс — —
5 5!
т° т°
—-10—-
о5 ст3
Таким образом, выражение для ПРВ примет вид
1^2
3! о3
ф
4!
т°
-4 + 3 Ф(4)(у)-
сг
(15.69)
2
о
1
5!
т°
-4-10
о5
з
~7з~
о
ПРВ в виде (15.69) представляет ряд Грама-
х- т<
где у =-----к
о
Разложение
Шарлье. Последовательность получения такого разложения - сле-
дующая: находятся начальные моменты распределения случайного
процесса; в соответствии с (15.18) определяются центральные мо-
менты и определяются коэффициенты разложения (15.67); записы-
вается ряд в виде (15.69).
Функции ф(п)(у) табулированы. Пример разложения ПРВ в ряд
Грама-Шарлье дан в разд. 17.
15.4.2. Разложение ПРВ в ряд по многочленам Лагерра
Многочлены Лагерра при описании ПРВ определяются выраже-
нием
412
Одномерное распределение вероятностей
£.а х =^Л----Е_ е~ххп+а , (15.70)
п т dxn к ’
первых порядков:
La(x) = 1,
o'
La(x) = 1 + а - х,
1
L"(x) = -|- (а + 1)(а + 2)-2х(а + 2)+ x2] (15.71)
L a (x) = — [(a + lX« + 2Xoc + З) - 3x(a + 2)(a + 3) +
3 6
+ 3x2(a + 3)-x3 .
Многочлены Лагерра ортогональны на полуоси [о, )с весом
е“хха
л! г «/ \ а/ \ v « , Го, т ф п;
--------г L [x)L (х) е xadx = (15.72)
r(a + n + l)J т п- [\т = п,
где Г(х) - гамма-функция.
Разложение ПРВ неотрицательной случайной величины в ряд по
многочленам Лагерра записывается в виде
~xxaLan(x), (15.73)
п=0
где коэффициенты сп определяются выражением
^Lan(x^(x)dx. (15.74)
о
n г(а + п + 1)
Выражение (15.74) получается из (15.73) с учетом (15.72). При
х
переходе к новой переменной у - — запишем
^i(y) = Scne"yya^naW
п=0
(15.75)
где
413
Раздел 15
Сп
п\
г(а + п +1)
jL"(yX(y)dy =
О
оо / \
П! Г , а X ,( \ dx
____________I [_ ____/Ах)_____
r(a + n + l)J \PJ 3
(15.76)
Из (15.76) с учетом (15.71) найдем
1
рг(а +1)’
(15.77)
Сз = И« + 4) (а + 1Ха + 2Х« + 3)-^(а + 2Ха + 3) +
Константы а и (3 выбираются таким образом, чтобы коэффици-
енты с, и с2 были равны нулю. Это условие выполняется при
2 2 2
т? - т 2 т т
2 1 О 1 4 1
-------- = -- Q —-----------"J — -
mi mi’ т,-т2 °2
г 1
(15.78)
2 «
где о - дисперсия случайной величины.
Таким образом, имеем:
(15.79)
1
Сз ~ ₽г(а + 4)
414
Одномерное распределение вероятностей
Коэффициенты разложения, начиная с с3, определяются до-
вольно сложными выражениями. Вследствие этого представление
ПРВ в виде ряда Лагерра обычно используется только в том слу-
чае, когда можно ограничиться только одним первым членом.
В этом случае
(15.80)
\ 7
Пример использования приведенного представления ПРВ дан
в разд. 17.
15.5. Одномерное распределение вероятностей функции
случайного процесса
В цепях радиотехнических систем происходит преобразование
случайного колебания - случайного процесса. Появляется необхо-
димость определения характеристик случайного процесса после
его преобразования.
Если случайные величины £(0 и r|(f) связаны однозначным со-
отношением (рис. 15.8,а)
У = фМ х = (15.81)
где ф 1(у) - функция, обратная ф(х),
то это означает, что каждому значению х, принимаемому случайной
величиной £(Г), соответствует единственное значение у, прини-
маемое т|(0. Вероятность попадания случайной величины ^(0 в
интервал [х, х + dx] равна вероятности попадания случайной вели-
чины т|(0 в интервал [у, у+ dy]. Таким образом, (рис.15.8,б)
^i(x)dx=fni(y)dy,
(15.82)
где ^ (х), fni(y) - одномерные ПРВ случайных величин £,(0 и т|(0 -
От (15.82) можно перейти к следующему соотношению, связы-
вающему ПРВ случайной величины ^(0 с ПРВ т|(?),
415
Раздел 15
f,}M=w'W.
(15.83)
Если обратная функция х = ф”1(у) неоднозначна, то одному зна-
чению у соответствует несколько значений х: х^у), х2(у),..... хл(у).
В этом случае выражение (15.83) должно быть записано в виде
(15.84)
С учетом (15.83) можно получить моменты функции случайной
величины. Если обратная функция Ф1(у) однозначная, то с учетом
(15.82) можно записать
оо оо
{пп(о}= j У^М^У = J <9n(x^x)dx. (15.85)
—оо — оо
В качестве примеров рассмотрим некоторые виды преобразова-
ний случайных процессов, с которыми приходится иметь дело на
практике.
416
Одномерное распределение вероятностей
1. Линейное преобразование (табл. 15.2, п.1).
При линейном преобразовании случайной величины
у = с + Ьх
(15.86)
имеем взаимно однозначное соответствие £,(0 и т|(?) • Из (15.83)
получим
<15'87)
Как следует из (15.87), при линейном преобразовании случайной
величины происходит смещение кривой ПРВ на с и изменение
масштаба по осям координат в b раз.
Для гауссовского процесса
(15.88)
получим
[/-(с+а)]2
(15.89)
Таким образом, линейное преобразование гауссовского процес-
са не изменяет закона распределения - случайный процесс остает-
ся гауссовским.
2. Квадратичное преобразование (табл. 15.2, п.4).
При квадратичном преобразовании случайной величины
2
у = X
каждому значению у соответствуют два значения х
(15.90)
(15.91)
Из (15.84) с учетом (15.91) найдем
'гч,(у)=-^ук(7у) + ^<-7у) ].
(15.92)
417
Раздел 15
Таблица 15.2
Плотность распределения вероятностей функции
случайной величины
№
п/п
Функциональная зависимость. Плотность распределения
вероятностей функции случайной величины
у = с + Ьх
ПРВ функции случайной величины (общее выражение)
1
ПРВ функции нормально распределенной случайной величины
418
Одномерное распределение вероятностей
№
п/п
Функциональная зависимость. Плотность распределения
вероятностей функции случайной величины
[х, х>0
У [о, X«Q
2
ПРВ функции случайной величины (общее выражение)
Цу)=
ПРВ функции нормально распределенной случайной величины
(/-а)2
Цу) = фГ-Ь(у) + -тХ-е 20 , у>0
419
Раздел 15
№ Функциональная зависимость. Плотность распределения
п/п вероятностей функции случайной величины
ПРВ функции случайной величины (общее выражение)
^(у)=^(у)+^(-Иу^°
ПРВ функции нормально распределенной случайной величины
420
Одномерное распределение вероятностей
№
п/п
Функциональная зависимость. Плотность распределения
вероятностей функции случайной величины
2
у = X
ПРВ функции случайной величины (общее выражение)
ПРВ функции нормально распределенной случайной величины
421
Раздел 15
Ns Функциональная зависимость. Плотность распределения
п/п вероятностей функции случайной величины
„ Ьх2, х>0
у = (
[О, X<Q
ПРВ функции случайной величины (общее выражение)
4,,(У)= F5i(O)8(y)+
5
ПРВ функции нормально распределенной случайной величины
/Г- \2
tп1(у) = б(у)+—г -1 е 2а
W 2j2nbyo
422
Одномерное распределение вероятностей
№
п/п
Функциональная зависимость. Плотность распределения
вероятностей функции случайной величины
у = bsinx
ПРВ функции случайной величины (общее выражение)
b
6
ПРВ функции равномерно распределенной случайной величины
423
Раздел 15
№
п/п
Функциональная зависимость. Плотность распределения
вероятностей функции случайной величины
1
7
ПРВ функции случайной величины (общее выражение)
У \У /
ПРВ функции нормально распределенной случайной величины
424
Одномерное распределение вероятностей
№ Функциональная зависимость. Плотность распределения
п/п вероятностей функции случайной величины
у = 1пх
425
Раздел 15
№
п/п
Функциональная зависимость. Плотность распределения
вероятностей функции случайной величины
у = еЛ
ПРВ функции случайной величины (общее выражение)
9
ПРВ функции нормально распределенной случайной величины
Ппуа)2
426
Одномерное распределение вероятностей
Для гауссовского процесса из (15.92) получим
, Цу~ ~а}2 (^ + а)2
ехр{ - —----} + ехр{- ----—} =
2<у2 2о2
1 , у + а2. ..aJy
— ехр{- 2^_}C/T(_jyj
2 лV 2о о
При а = 0 (рис. 15.9,6)
fni(y) = —7==е г’г
. (15.93)
(15.94)
Для релеевского процесса
2а2
_2
(15.95)
получим (рис. 15.9,в)
____________У
f (у)= е 2ст
о
(15.96)
Случайный процесс r|(f) в этом случае имеет экспоненциальное
распределение (табл. 15.1).
3. Преобразование (табл. 15.2, п.6)
y = 6sinx. (15.97)
Каждому значению у соответствует бесчисленное множество
значений к.
хк = пк + (-1)к arcsin-^, к = 0 +1, ±2,...
(15.98)
Из (15.84) с учетом (15.98) найдем
Му) =
1
=L=- У 4,^* + (-!)*
V I ।
arcsin —), у \< Ь.
b’ и 1
(15.99)
427
Раздел 15
Наибольший интерес представляет равномерное распределе-
ние £ на интервале |х| < п
^=1/2л. (15.100)
В этом случае в (15.99) необходимо учесть три члена - при к = -1,
к = 0 и к~ 1 ПРВ случайной величины r|(f) примет вид
<,,(/) =-j 1 - . И<й- (15.101)
V [ь)
ФРВ, соответствующая (15.101), равна
ГДу)= 0,5 + —arcsin—, |у|<Ь.. (15.102)
п b '
Некоторые наиболее простые функции случайных величин и со-
ответствующие ПРВ приведены в табл. 15.2.
15.6. Характеристическая функция случайного процесса
Удобной характеристикой случайных процессов, широко исполь-
зуемой при их анализе, является характеристическая функция. Ха-
рактеристическую функцию случайного процесса ^(Г) обычно опре-
деляют как математическое ожидание функции где v- про-
извольная действительная величина
м{е/Ч(?)}= ^(x)eivxdx = e{v), (15.103)
где fi(x) - ПРВ случайного процесса ^(Г).
Как следует из (15.103), характеристическая функция является
обратным преобразованием Фурье ПРВ случайного процесса (без
привычного коэффициента 1/2л). Прямое преобразование Фурье
характеристической функции (с коэффициентом 1/2 л) дает ПРВ
случайного процесса.
^(х) = — Г e~lvxdv. (15.104)
2л J
428
Одномерное распределение вероятностей
Таким образом, ПРВ и характеристическая функция случайного
процесса связаны преобразованием Фурье (прямым и обратным).
Характеристическую функцию можно также определить как обратное
преобразование ПРВ случайного процесса (случайной величины).
Так как | = 1 при всех действительных v, интеграл (15.103)
существует для всех ПРВ, следовательно, характеристическая
функция может быть определена для каждой случайной величины.
Для характеристической функции справедливы следующие соот-
ношения:
е^о) = 1, < 1, (-оо < v < oo)i (15.Ю5)
Если ПРВ четная, то соответствующая характеристическая
функция является действительной функцией.
В качестве примера определим характеристическую функцию га-
уссовского процесса. Она получается подстановкой (15.23)
в (15.103)
O^v) = —— f eivxe 2°г dx = e 2
оу2тг J
— co
Для центрированного гауссовского процесса имеем
0^1/)= е 2
(15.106)
(15.107)
Выражения для характеристических функций при некоторых других
видах распределения случайной величины приведены в табл. 15.1.
Если т| = &> + а, (Ьиа - постоянные), то
(15.108)
где OpJv) и 0л1(у) - характеристические функции случайных вели-
чин <; и г|.
Действительно,
м{е/И1}= M{eiv^+a}}= eivaM{eivt^}= eivaQ^(bv). (15.109)
Удобство использования характеристической функции при ана-
лизе случайных процессов следует из свойств преобразования Фу-
рье. В частности, характеристическая функция суммы независимых
429
Раздел 15
случайных величин равна произведению их характеристических
функций.
Производные характеристической функции по параметру v оп-
ределяются выражением
о%(у)
dvn
оо
= /п J xnf^x)elvxdx.
—оо
(15.110)
Если существует начальный момент л-го порядка случайного
процесса, то из (15.110) получим
dnejy)
dvn
= in J xnf1(x)dx = inmn.
V=0 —oo
(5.111)
Таким образом, начальные моменты случайного процесса мож-
но определить через производные характеристической функции при
у=0
mn
in
d%(y)
dvn
(15.112)
v=0
Раскладывая характеристическую функцию в ряд Тейлора, Запи-
шем
п
оо
п=0
dn01(v)
dvn
v-0
л!
(15.113)
у
С учетом (15.113) получим
(15.114)
Следовательно, характеристическая функция случайного про-
цесса определяется моментами распределения. Учитывая связь
характеристической функции с ПРВ, можно сказать, что моменты
распределения вероятностей определяют и ПРВ случайного про-
цесса. Чем большее число начальных моментов распределения
случайного процесса известно, тем точнее может быть определена
характеристическая функция и ПРВ случайного процесса.
Математическое ожидание и дисперсия случайного процесса
430
Одномерное распределение вероятностей
достаточно просто определяются через производные логарифма
характеристической функции.
Обозначим
itj(v) = lnO1(v).
Получим
0’(у)
гМ = -Л-т, (15.115)
ОДу)
I2
0 (1/^(1/)- 0’ (vj
v’M= —-------------—L. (15.116)
Учитывая, что 0ДО) = 1, и (15.111), находим:
i|j’(o)= 0’(О)= (15.117)
Таким образом,
МИ = ~7м- (15-118)
Л|г(0)
M^2}-M2fc}=o2=-i|/(0)- (15.119)
Производная n-го порядка логарифма характеристической функ-
ции при v= 0, умноженная на in , называется семиинвариантом п-го
порядка случайной величины.
Соотношения, аналогичные полученным выше, позволяют убе-
диться в том, что семиинварианты любого порядка п представляют
действительную функцию п первых моментов.
431
Раздел 16.
МНОГОМЕРНОЕ РАСПРЕДЕЛЕНИЕ ВЕРОЯТНОСТЕЙ
СЛУЧАЙНОГО ПРОЦЕССА
Наиболее полное описание случайного процесса на интервале
времени дает n-мерная ФРВ или ПРВ. Они характеризуют стати-
стически поведение случайного процесса в выбранные моменты
времени. Используя л-мерные ФРВ и ПРВ, можно получить мо-
менты распределения вероятностей и другие характеристики слу-
чайного процесса. Среди них особое место занимает второй сме-
шанный центральный момент - корреляционная функция. Корре-
ляционная функция характеризует статистическую связь между
значениями случайного процесса в два различных момента вре-
мени. Преобразование Фурье связывает ее со спектральной
плотностью мощности случайного процесса. Это соотношение
между корреляционной функцией и спектральной плотностью
мощности лежит в основе корреляционного и спектрального ана-
лиза случайных процессов.
В разделе рассматриваются л-мерные вероятностные характе-
ристики случайного процесса.
16.1. Многомерная функция распределения и плотность
распределения вероятностей случайного процесса
Двумерная ФРВ описывает случайный процесс ^(f) в два момен-
та времени и t2 (рис. 16.1)
(Х1 ’х2) _ - х1> х(^г) - х2 Ь
(16.1)
где Р{...} - символ вероятности.
Функция F2(x1,x2) определяет вероятность того, что случайный
процесс £(Г)в момент времени не превышает уровень хь а в мо-
мент времени t2 - уровень х2.
Рассматривая ансамбль реализаций случайного процесса, для
двумерной ФРВ можно записать следующее предельное соотношение
с/ \ г ^(X1>X2)
F2(xvx2)= im ..........2-<,
N0-^O= Nq
(16.2)
432
Многомерное распределение вероятностей
где No - общее число реализаций случайного процесса; N(xv х2) -
число реализаций, значения которых не превышают х? в момент
времени и х2 в момент времени t2.
В общем случае двумерная ФРВ зависит от двух выбранных
значений уровня и двух моментов времени, в которые рассматри-
вается случайный процесс. Для стационарного случайного процес-
са ФРВ зависит не от рассматриваемых моментов времени, а от
интервала между ними: т = t2 - •
Двумерная ПРВ случайного процесса определяется как
, , . a2F2(x1,x2) пх
lz(Xi.x2) = ,г'1’ . (16.3)
(7Х-|(7Х2
если ФРВ имеет вторую производную. Она, как и ФРВ, зависит от
значений х}, х2, , t2 (для стационарного случайного процесса - от
интервала т между двумя моментами времени, в которые рассмат-
ривается случайный процесс).
433
Раздел 16
ФРВ л-го порядка случайного процесса t>(t) определяется как
Fn(xvx2,...,xn)=P{^)< x^(t2)< x2,...,^(tn)<xn}.
(16.4)
Ей соответствует л-мерная ПРВ
ФРВ и ПРВ л-го порядка в общем случае зависят от л моментов
времени .Для стационарного случайного процесса указанные ха-
рактеристики зависят только от интервалов времени между рас-
сматриваемыми моментами - всего л-1 интервал. В дальнейшем
фигурируют только стационарные случайные процессы.
Чем выше порядок ФРВ (ПРВ), тем более детально она описы-
вает случайный процесс. Однако в полной мере это справедливо
только тогда, когда случайный процесс рассматривается на задан-
ном ограниченном интервале времени.
Обозначим длительность выделяемого интервала времени Т
(рис. 16.2). Если ФРВ описывает случайный процесс на заданном ин-
тервале в моменты времени, отстоящие друг от друга на М = Т/(п - 1):
, t2 = Ь + At,...,tn = 4i-i + At, то в этом случае л-мерная ФРВ (ПРВ)
представляет тем более полную характеристику случайного про-
цесса, чем больше п.
При п сю
FT [x(f)] = I i m Fn [xfo), x(t2 J..., x(tn)],
(16.6)
если предел в (16.6) существует. Величина FT[x(t)] представляет
функционал распределения вероятностей случайного процесса на
интервале времени. При x(t) = const функционал описывает вероят-
ность непревышения случайным процессом заданного уровня на
выбранном интервале времени.
От n-мерной ФРВ можно перейти к ФРВ более низких порядков
и т. д.
434
(16.7)
Многомерное распределение вероятностей
ФРВ и ПРВ л-мерные позволяют получить моменты распределе-
ния вероятностей случайного процесса:
начальные моменты распределения
^к^ + кг +...+к,
Y Y к2 Y кп
Х1 х2 Лп
:2,...,хп )dx}dx2...dxn;
(W.8)
центральные моменты распределения
т;,+«г+...+«„ = МЙ,)-а, )*’ fc(»2) - а2]‘г -Ш-aj" }=
ОО оо оо
= J J ••• J(X1 _aiT1(X2 ~32)кг...
— ОО —оо —оо
(16.9)
где аъ а2,..., ап - математические ожидания случайного процесса в
моменты времени
, h > • • . dn >
для стационарного случайного процесса
a-i = а2=... = ап = а.
Важную роль при анализе случайных процессов играет второй
смешанный центральный момент распределения вероятностей -
корреляционная функция.
435
Раздел 16
16.2. Корреляционная функция случайного процесса
16.2.1. Определение корреляционной функции
Второй смешанный начальный момент распределения вероят-
ностей случайного процесса называется ковариационной функцией
(J2) }= K(t^2)= ^xAx2f2{xbx2)dxAdx2. (16.10)
— co — co
Она получается усреднением произведения значений случайно-
го процесса, взятых в моменты времени и t2 . Второй централь-
ный момент распределения называется корреляционной функцией
И ад-м{ад)} fc(f2)-Mfc(f2) }]}= R(f„f2) =
7 7 (16.11)
= J j(x1-a1)(x2-a2)/2(xi,x2)c/xic/x2,
где a^M^t,) J a2 = M{^(t2) } - математическое ожидание случай-
ного процесса в моменты времени и t2.
Подчеркивая, что характеристики относятся к одному случайно-
му процессу, их называют автоковариационной и автокорреляцион-
ной функциями.
Исходя из приведенных определений получим следующее соот-
ношение между корреляционной и ковариационной функциями
R(t^2) = K^t2)-a,a2. (16.12)
При = t2 - t (16.12) описывает дисперсию случайного процесса
в выбранный момент времени R(t, t) = v2.
Нормированная величина центрального момента второго порядка
,, Mfel-a, ]fe(»2)-a2 ] }_ R(f„t2)
Г\‘1 > ‘2 / ~ “ > (16.10)
0^2 0^2
где ак,вк- математическое ожидание и дисперсия случайного про-
цесса в к-й момент времени, называется нормированной корреля-
ционной функцией или коэффициентом корреляции случайного
процесса.
436
Многомерное распределение вероятностей
Корреляционная функция в общем случае зависит от двух мо-
ментов времени и t2, для стационарного случайного процесса -
только от их разности т = t2 - t1t т. е. R(t, t + т) = Я(т). Для стационар-
ного случайного процесса R(x) = К(т) - а2.
Нормированная корреляционная функция стационарного про-
цесса равна
г(г) = ^>. (16.14)
СГ
Она является четной функцией (рис. 16.3) г(т) = г(-т), имеет
максимальное значение при т = 0, т.е. г(т) < г(0) = 1, при т->оо
имеем ^т) > 0 .
Вследствие четности R(x) или г(т) их графики в дальнейшем
приводятся только для т >0.
Корреляционная функция эргодического случайного процесса
может определяться усреднением по времени произведения значе-
ний одной реализации случайного процесса, взятых в моменты
времени, смещенные -один относительно другого на интервал вре-
мени т .
Я(т) = ([ад-а Ш(Г + т)-а ] ) =
1 L 1Г , (16.15)
= lim — |[ад-а Ш(Г + т)-а ]dt,
Т X I J
437
Раздел 16
где <...>- символ усреднения по времени.
Корреляционная функция является одной из основных характе-
ристик случайного процесса, широко используемых при его описа-
нии и анализе. Она определяет степень статической связи между
значениями случайного процесса, взятыми в момент времени и t2;
для стационарных случайных процессов - в моменты времени,
разнесенные на интервал т. Сказанное может быть проиллюстри-
ровано примерами реализаций случайных процессов и графиками
их корреляционных функций, выполненными в одном масштабе, на
рис. 16.4. Чем более осциллирующий характер имеет реализация,
тем уже корреляционная функция.
Ширина корреляционной функции может быть оценена интерва-
лом корреляции.
438
Многомерное распределение вероятностей
16.2.2. Интервал корреляции
Для каждой корреляционной функции можно определить такое
минимальное значение смещения во времени тк, при котором аб-
солютное значение нормированной корреляционной функци будет
меньше заданной величины (близко к нулю). Значения случайного
процесса £(/) и Ш + Тк) в этом случае можно считать некоррели-
рованными; величину тк называют интервалом корреляции. Иными
словами, интервал корреляции представляет длину наибольшего
интервала времени, на котором корреляционная функция ещё име-
ет значение, существенное для решаемой задачи.
Используют различные определения интервала корреляции^,
наиболее часто - следующие.
• Интервал корреляции, определяемый по заданному абсолют-
ному значению нормированной корреляционной функции (рис.
16.5,а)
|Г(ТЛ<!£,
где е - заданное значение (например, е= 0,05).
• Интервал корреляции, определяемый интегралом от нормиро-
ванной корреляционной функции или её абсолютного значения
(рис. 16.5,6)
оо оо
Тк = J г(т)с/г или Тк = J| г(т) | с/г .
о о
При таком определении интервал корреляции численно равен
основанию прямоугольника, высота которого равна максимальному
значению нормированной корреляционной функции т(0) = 1, а пло-
щадь равна площади под кривой г(т) или | г(т) | (при т > 0).
• Интервал корреляции, определяемый интегралом от квадрата
нормированной корреляционной функции (рис. 16.5,в)
оо
Ч =jr2(x)ch:.
о
Значения тк , получаемые из приведенных определений, близки
друг к другу, выбор же определения, как правило, диктуется удобст-
вом при решении конкретной задачи, где понятие интервала корре-
ляции используется.
439
Раздел 16
Рис. 16.5
16.2.3. Корреляционная функция телеграфного сигнала
В качестве примера корреляционной функции случайного дис-
кретного процесса приведем корреляционную функцию телеграф-
ного сигнала (разд. 15). Случайный процесс принимает значения 1
или -1. Переход от одного значения к другому происходит скачком
(рис. 16.6,а). Вероятность того, что в интервале времени т проис-
ходит к скачков, описывается ПРВ Пуассона.
Р' (16.16)
kl
где Z - среднее число скачков в единицу времени.
Корреляционная функция телеграфного сигнала в соответствии
440
Многомерное распределение вероятностей
Произведение + т) может быть равно либо 1, либо -1, в
зависимости от того, будет ли выполняться равенство £(0 = £(? + т)
или £,(0 = -£(Г + т). Равенство £(Г) = £(Г + т) означает, что на интер-
вале т произошло четное число перемен знаков. Вероятность тако-
го события
оо
Pfc(t) = «( + T) }=ХР2*
к=0
у (^)2к
2/d
к=\
= е Mch(kT).
(16.18)
Равенство £,(?) =-^(? + т) означает, что на интервале г произош-
ло нечетное число перемен знаков. Вероятность такого события
Pfc(0 = 4(f + T) }=£Рг(м = . (16.19)
k=1 k=1 №
С учетом (16.18) и (16.19) выражение для корреляционной функ-
ции получим в виде
Я(т) = MhW + т) }=Pfc(f) = ^(1 + T) }-Р{ВД = Ч(Г + т) } =
= е ЛтсЛ(лт) - е-Л18/1(Лт) = е'!и .
Равенство получено для т > 0 . Учитывая четность корреляцион-
ной функции, для всех значений т запишем
/?(т)=е~2Х|т1. (16.20)
График корреляционной функции телеграфного сигнала приве-
ден на рис. 16.6,6.
16.3. Многомерное распределение вероятностей
гауссовского процесса
В качестве примера n-мерных характеристик распределения
случайного процесса приведем характеристики гауссовского про-
цесса: двумерные и в общем случае л-мерные ПРВ и ФРВ.
16.3.1. Двумерные ПРВ и ФРВ гауссовского процесса
Двумерная ПРВ стационарного гауссовского процесса для мо-
ментов времени и t2 = ^+т описывается выражением
441
Раздел 16
^2(Xi,x2) =---Г7=7‘
2ла V1- г
ovnL (^-а)2 -2r(x,-a)(x2- а)+ (х2
exp< no
2о2(1- г2)
а)2]
(16.21)
2
где а, <з , г - математическое ожидание, дисперсия и нормирован-
ная корреляционная функция случайного процесса.
Как следует из (16.21), двумерная ПРВ определяется двумя ве-
личинами: математическим ожиданием а и корреляционной функ-
цией Н(т) = о2г(т), где т = ?2-^; для центрированного случайного
процесса - только корреляционной функцией.
При расчете f^x}, х2) удобнее перейти к нормированным вели-
чинам и рассматривать функцию
<P2(Xi,x2) =-----т==ехр<
2лд/1 - г2
х2 - 2гх1х2 + х2
2(1-г2)
(16.22)
Двумерная ФРВ описывается выражением
. Л1 л2 2 п 2
х 1 Г Г г и-i~ 2.гщи2 + и2. , ,
Ф2(х11Х2) =-----= ехр{- ..........1-... 2}du,du2. (16.
гллАьТ2!! 2(1-г2)
Функция (16.23) табулирована.
Для частного случая х^ = х2 = 0 из (16.23) получим
Ф2(0,0) = 0.5 arccosr, (0 < arccosr < п). (16.24)
2тс
При\г = 0
Ф2(х, х) = Ф2(х). (16.25)
При г = 1
Ф2(х, х) = Ф(х). (16.26)
Для расчета Ф2 (хь х2) от (16.23) удобнее перейти к несколько
иному выражению. Производя в (16.23) замену переменных
"1=^ = (16.27)
л/1 - г2
выражение для Ф2 (хъ х2) получим в виде
442
Многомерное распределение вероятностей
Ф2(х1> х2) ~
*2 ^1
. 1 Vi-/
—= f e~v'12 —,= [l2dv} dv2 .
л/2л J J
— СО —ОФ
(16.28)
Из (16.28) найдем
сУФ2 _ _L
dr 2nVl-r2
ехр<
х2 - 2rx}x2 + х2
2(1-г2)
(16.29)
что позволяет иметь достаточно простое выражение для расчета
двумерной ФРВ гауссовского процесса
Ф2(хь х2) = Ф}(х})Ф}(х2) +
х^ - 2ихух2 + xf
(16.30)
Используя (16.29), можно придти и к другому выражению для
расчета двумерной ФРВ
(16.31)
Выражения (16.30) и (16.31) позволяют получить достаточно
удобные алгоритмы расчета двумерной ФРВ гауссовского случай-
ного процесса.
Исходя из двумерной ФРВ, полезно найти выражение для веро-
ятности-совпадения (или несовпадения) знаков (полярностей) слу-
чайного процесса в два выбранных момента времени. Эта вероят-
ность функционально связана с корреляционной функцией случай-
ного процесса и используется при её экспериментальном опреде-
лении (знаковые корреляторы).
Вероятность несовпадения знаков стационарного центрирован-
ного случайного процесса определяется выражением
ОО 0 0 00
Рнс = f / Ш- *2)d*i dx2 + J j f2(xv x2)dx} dx2,
0 — oo — oo 0
(16.32)
где f2(xi> *г) - двумерная ПРВ, описывающая случайный процесс в
моменты времени t и t + т.
443
Раздел 16
Преобразуя (16.32), для гауссовского процесса получаем
»= О 0 0
Рнс = J Jdx' dX2 ~ J Jdx^dx2 +
— оо —оо —оо —оо
->• 0 0
+ J j f2(xvx2)dx1dx2 - J j f2(xvx2)dx1dx2 = (16.33)
— CO—CO —00—00
0 0 0
= 2Jf1(x)dx-2 J If2(x1,x2)dx1dx2 = 1-2Ф2(0,0).
— oo —oo —oo
С учетом (16.24) запишем
Рнс = — агссоэг(т), (16.34)
71
где г(т) - нормированная корреляционная функция гауссовского
процесса.
Вероятность совпадения знаков значений случайного процесса,
разнесенных на интервале т, равна
Рс = 1 - Рнс = 1 -—arccos г(т).
71
(16.35)
Как следует из (16.34) и (16.35), вероятность несовпадения (сов-
падения) знаков функционально связана с нормированной корре-
ляционной функцией гауссовского процесса. Измеряя эту вероят-
ность, можно определить корреляционную функцию гауссовского
процесса. В ряде случаев схемная реализация анализатора совпа-
дения полярностей случайного процесса оказывается проще, чем
множительного коррелятора.
16.3.2. л-мерная ПРВ гауссовского процесса
ПРВ л-го порядка стационарного гауссовского процесса описы-
вается выражением
• ехр<
1
2Da2
п п
Dk,(xk-a)(Xi-a) >.
к=1 /=1
(16.36)
444
Многомерное распределение вероятностей
В (16.36) обозначено: а, о2 -математическое ожидание и дис-
персия случайного процесса; D - определитель n-го порядка
г 1 г12 . <1п’
D = Г21 1 • Г2п
<П1 Гп2 1
(16.37)
гк1 - нормированная корреляционная функция случайного процесса
в моменты времени tk и ti, DM - алгебраическое дополнение эле-
мента гм в определителе.
Как следует из (16.36) с учетом определителя D, n-мерная ПРВ
(ФРВ) гауссовского процесса полностью определяется математиче-
ским ожиданием а и корреляционной функцией Р(т).
Конкретизируя (16.36) для трехмерной ПРВ, запишем
f3(x}, х2, х9) =-.....•
2 (2л)3/27Ро3
ехр< -
1
2 По3
D^(x, - а)2 + D22(x2 - а)2 + D33(x3 - а)2 +
+ 2D12(x1 - а) (х2 - а) + 2D23(x2 - а)(х3 - а) + >
+ 2D31(x3-a)(x1-a)
(16.38)
где D = 1 - г2(т12 ) - г2(т23 ) - г2(т31) + 2г(т12)г(т23 )г(т31);
^11 = ~ f2(T23)>' ®22 = “ г2(т31 )>' РзЗ = ~ f2(T12)j Tkl ~ ^1 ~^к ^g gg)
^12 = Г23 “ ^12 )’ ^23 = Г31Г12 ~ Г23> ^31 = Г12Г23 ~ Г31>
а, о2, г(т) - математическое ожидание, дисперсия и нормирован-
ная корреляционная функция случайного процесса.
16.4. Разложение двумерной плотности распределения
вероятностей в ряд по ортогональным
системам функций
При использовании двумерной ПРВ случайного процесса бывает
полезным её представление в виде ряда разложения по ортого-
нальной системе функций, аналогично тому, как это было сделано
в отношении одномерной ПРВ. Такое представление двумерной
445
Раздел 16
ПРВ используется, например, при определении корреляционной
функции случайного процесса на выходе нелинейного преобразо-
вателя (разд. 22).
В качестве базисных функций выбираются многочлены орто-
нормированных систем {ф1п(х1)} и {ф2п(х2)}, имеющие в качестве
весовой функции одномерную ПРВ случайного процесса (х)
оо
— оо
f<P2m(^l)<P2n(^2)M^2) ^2 =
mtn
т= п
mt п
т = п
(16.40)
Двумерная ПРВ стационарного случайного процесса записыва-
ется в виде ряда
оо
Ш-*2) = Г1(х1)Г1(х2)^спф1п(х1)Ф2п(х2).
л=0
(16.41)
С учетом (16.40) коэффициенты сп в (16.41) определяются вы-
ражением
оо оо
Сл= [ [^2(Х1-Х2)ф1л(Х1)ф2л(Х2)^1^2-
Выберем (р10(х1) = ф20(х2) = 1, тогда из (16.40) получим
оо
J f1(x)dx = 1,
(16.42)
(16.43)
что соответствует определению /> (х) как ПРВ.
Из (16.42) следует:
с0 = 1, = -^-/WfcO~m1] fe(f + i)-mJ} = г(т). (16.44)
о
В соответствии с (16.42) определяются и другие коэффициенты
разложения.
Для гауссовских процессов в качестве базисных функций целе-
446
Многомерное распределение вероятностей
сообразно выбрать нормированные многочлены Эрмита /7П (х)
Фт(^) /—? НгМ
V л!
(16.45)
В этом случае ряд, в который раскладывается ПРВ, примет вид
(ту= 0, о = 1)
(16.46)
Пример использования разложения двумерной ПРВ приведен
в разд. 22.
16.5. Условные характеристики распределения
вероятностей случайного процесса
Выражение для двумерной ФРВ случайного процесса £,(?) может
быть записано в виде
хг) = - X1>£>(^) - хг}= (1647)
= Pfe(f,)<x,}pfc(f2)<x2/«f1)<x,},
где Р(А/В) - условная вероятность.
В правой части (16.47) первый сомножитель представляет од-
номерную ФРВ - Fy(Xy). Второй сомножитель - условную ФРВ
^>(х2/х^). Таким образом, (16.47) можно записать в виде
/^(х^х2) =/=j(Xi)/^(x2/Xi). (16.48)
Из (16.48) получим выражение для условной ФРВ случайного
процесса
Pg(x2/X1)=^’^). (16.49)
Функция F2(x2! ху) определяет вероятность того, что случайный
процесс ^(0 в момент времени t2 не превышает уровень х2 при ус-
ловии, что в момент времени он не превышает уровень Ху .
Аналогично (16.49) определяются ФРВ л-го порядка.
С помощью условных ФРВ выражение для л-мерной ФРВ слу-
447
Раздел 16
чайного процесса можно записать в виде
Fn(x1,x2,...,xn) = Fi(x1)F2(x2/x1)...Fn(xn/x1,xn_1)) (16.50)
где
Х2)
F^) ’
(16.51)
...,Fn(xn/x1,x2,...,xn_1) =
F(x31 х„ x2) -
F^x^,...^
Такое представление л-мерной ФРВ может оказаться полезным
при её оценке с использованием ФРВ меньшей мерности.
Исходя из условных ФРВ можно определить и условные ПРВ
случайного процесса. Условная ФРВ величены £(?2), при условии,
что значение величины ^(fj лежит внутри интервала [х^ + Дх],
определяется выражением
х, + Дх х2
J faxiX2)dx,dx2
Pfyt2) < х2 / х, < ) < х. + Дх} =.-*1.-~^х---------
k(Xi)dXi
(16.52)
Дифференцируя (16.52) по х2 и переходя к пределу при Дх-> 0 ,
получим выражение для условной ПРВ случайного процесса
= (16.53)
^х,)
Аналогично можно определить и другие условные ПРВ.
Если значение случайного процесса в момент времени t2 не за-
висит от того, какое значение принял случайный процесс в момент
времени , то говорят о статистической независимости £(^) и £(f2).
Для независимых случайных величин ^(fjn £(f2) выполняется ра-
венство
р{ад < х„ ад < хг}= р{ад < х,}р{ад < хг} (16.54)
ИЛИ
448
Многомерное распределение вероятностей
/^(Х1,Х2)- .
(16.55)
n-мерная ФРВ независимых значений случайного процесса в мо-
менты времени t2, tn равна произведению подномерных ФРВ
(16.56)
Переходя к ПРВ такого случайного процесса, запишем
(16.57)
Если равенства (16.56) или (16.57) выполняются для любых мо-
ментов времени то случайный процесс полностью описы-
вается одномерной ФРВ (ПРВ). Такой случайный процесс называ-
ется совершенно случайным.
Условные ФРВ или ПРВ позволяют получить условные моменты
распределения вероятностей. Так условное математическое ожи-
дание случайного процесса в момент времени t2 при заданном зна-
чении случайного процесса в момент времени t1 = х^) опреде-
ляется выражением
<(f2)/^) = xj= | x2f2(x2/x1)dx2.
(16.58)
В качестве примеров приведем условные характеристики рас-
пределения гауссовского процесса. Для стационарного гауссовско-
го процесса условную двумерную ПРВ получим из (16.49)
(х1 - а)2 -2г(Х) -а)(х2 - а)2 +(х2 -а)2]+ (16.59)
2о
Преобразовав (16.59), запишем
449
Раздел 16
1 Г 12
exp 2; 2;[(х2-а)-(х1-а)г] = (16.60)
[ 2а (1-r ) J
Таким образом, условная ПРВ гауссовского процесса является
нормальной; математическое ожидание равно ау = гх^ + а(1 - г),
дисперсия о2=а2(1-г2). График условной ПРВ приведен на
рис. 16.7. (а = 0). При г = 0 условная ПРВ переходит в одномерную
ПРВ.
Условное математическое ожидание гауссовского процесса равно
/Wfc(f2)/^(f1) = x1}=a+r(x1-a). (16.61)
Если г=0, то условное математическое ожидание совпадает с
безусловным.
Условная дисперсия определяется из (16.60) с учетом (16.61)
м{|Ш-т,Г/ад) = а2(1 -г2). (16.62)
Как следует из (16.62), дисперсия не зависит от значения ЭД), а
зависит только от корреляционной функции случайного процесса.
При г = 0 условная дисперсия совпадает с дисперсией случайного
процесса
450
Многомерное распределение вероятностей
16.6. Распределение случайного процесса
на интервале времени
Одной из задач, решаемой при анализе случайного процесса, яв-
ляется получение оценки ФРВ на заданном интервале времени - ве-
роятности того, что случайный процесс внутри заданного интервала
времени Т не превысит установленного уровня х (рис. 16.2). Такой
оценкой может служить (п + 1 ^-мерная ФРВ случайного процесса
= i(t2)<x,...,^tn^<x}, (16.63)
где tbt2,...,tn+] - точки разбиения интервала
^+il> - ^-1 = - = Af, к = 1, 2,..., л +1.
л
ФРВ (п + 1 )-го порядка представим с помощью условных ФРВ
Fn+M = ^[x(t^]F2[x(t2)/x(fi)J..Fn+i[x(fn+i)/x(fi),...,x(fn)]. (16.64)
Условные ФРВ в (16.64) можем приближенно вычислить с помощью
ФРВ меньших порядков. При этом учтем следующее неравенство:
Pfe(f„+1)< xli,(tj< x,Z,(t2)< x,...,ytn)< x}<
<pfc(tn+,)<x/yt„.k)<x......«f„)<x},/t = 0,1,2,...,n-1. ' • >
Ограничиваясь в (16.64) ФРВ мерности не выше второй, полу-
чим оценку ФРВ (л+1 )-го порядка в виде
Рп+М<^[х^)]Р2[х(12)/x(t)J..F2[x(tn+1)/x(fn)]. (16.66)
Для стационарного случайного процесса выражение (16.66) мо-
жет быть записано как
г- , х ' г-< ч f Fn[x(t), x(t + Af]l °
р„.,(х)<р;(х) -21 Ц’ Vj—Ц (16.67)
ИЛИ
n
Fn+1(x) < Fj(x)
F2(x,x)
Fi(x)
(16.68)
Неравенство (16.68) дает оценку сверху (п+ /^-мерной ФРВ ста-
ционарного случайного процесса с помощью двумерной ФРВ.
Оценка может быть уточнена при использовании ФРВ третьего,
четвертого и т. д. порядков.
451
Раздел 16
Конкретизируем выражение (16.68) для гауссовского процесса.
С целью упрощения записи будем рассматривать центрированный
случайный процесс с ст = 1
Рл+1(х) = Ф(х)
Ф2(Х,Х)
Ф(х)
(16.69)
где Ф(х), Ф2 (х, х) - табулированные функции, описываемые (15.27)
и (16.23).
При достаточно малом значении At двумерную ФРВ можно раз-
ложить в ряд Тейлора. Ограничиваясь в ряде Тейлора (16.31) пер-
выми двумя членами, запишем
Ф2(х,х) = [Ф2(х,х)]дг=0
ЭФ2(х,х) 1 м
Эг Af-Л
(16.70)
Учитывая (16.29), выражение (16.70) получаем в виде
Ф2(х,х) = ф(х) —
г
271^1- г2
ехр<
At.
дг=о
(16.71)
Рассмотрим следующее предельное соотношение
г г .. r(At)
hm 7==.,==== = hm---------— ---.
J-|_ г2(д?) r(At)f’(At)
7l-r2(A0
Для него получим
lim r(At) = lim r(At)'
ДГ->0 Vl-r2(AO ДГ->0 r(At) J
Таким образом, имеем
.. г (At) / ~
hm ....L;..L= = г(0).
дг^° ^1- г2 (At)
С учетом (16.72) выражение (16.71) запишем в виде
J- г(0) х2
Ф2(х, х) = Ф(х) + ------ехр(----)At.
271 2
(16.72)
(16.73)
452
Многомерное распределение вероятностей
Подставив (16.73) в (16.69), получим
Fn+1(x,x) = Ф(х) 1 +
Г(0) /
-----ехр( Af
2п---2
п
УТ
= Ф(х)(1 + —)п, (16.74)
п
где
У-Г (0)
2тгФ(х)
ехр(-
(16.75)
Х =
Переходя к пределу при п->~, уточним оценку распределения
случайного процесса на интервале Т
FT(x)= lim Fn+1(x).
Из (16.74) получим
FT(x) = Ф(х) lim (1 + —) = Ф(х)е-Хт,
л->~ Л
(16.76)
(16.77)
где
Л J-r(O)
2тгФ(х)
ехр{- х2 /2}.
В общем виде выражение для ФРВ гауссовского процесса на ин-
тервале времени Т (её оценки) представим как
Fr(x) = , (16.78)
ст
где
V- '•(0) I
—-----^-ехр<
2лФ(^а) 1
о
(х-а)2
9 2
2d
(16.79)
Здесь а, о, г(т) - математическое ожидание, дисперсия и нормиро-
ванная корреляционная функция случайного процесса.
При Т = 0 случайный процесс рассматривается для одного мо-
мента времени; из (16.78) следует
у — я
^(х) = Ф(-----),
ст
(16.80)
453
Раздел 16
что соответствует ожидаемому результату. Чем больше интервал
времени Т, тем меньше FT(x), что также очевидно. Уменьшение
5-(х)при увеличении Т описывается экспоненциональной зависи-
мостью (с отрицательным показателем степени). Графики FT(x)
в зависимости от Г(ХГ) представлены на рис. 16.8.
16.7. Многомерная характеристическая
функция случайного процесса
Понятие характеристической функции, введенное для одной
случайной величены, может быть распространено на совокупность
случайных величин: - значений случайного про-
цесса в различные моменты времени, л-мерная характеристиче-
ская функция случайного процесса определяется как среднее зна-
i[v£(t})+v2^(t2)+...+vn^tn)]
Ку j
где vbv2,...,vn -действительные величины.
Таким образом, л-мерная характеристическая функция случай-
ного процесса определяется выражением
On(vi,v2,...,vn) =
00 00 00 / 4 Г* О 4 \
= J J... J 1"'ЛЧп(х„х2....xn)dx,dx2...dxn. ( '
— ОО —оо —оо
Как следует из (16.81), л-мерная характеристическая функция
представляет л-кратное обратное преобразование Фурье л-мерной
ПРВ случайного процесса (без учета коэффициента). Прямое пре-
образование Фурье позволяет перейти от характеристической
функции к ПРВ случайного процесса
f„(x1,x2,...,x„) = —
оо с» оо (16.82)
J J ...^en(v1,v2,...,vn)e~l{v^+VzXz+ ’+VnXn)dv1dv2...dvn.
— 00 — 00 —оо
Из характеристической функции л-го порядка можно получить
характеристические функции меньших порядков
454
Многомерное распределение в ероятностей
Qm(v],v2,...,vm) = Qn(v]lv2,...,vm,Q,0,...,Q).
(16.83)
Характеристическая л-мерная функция позволяет определить
моменты распределения вероятностей случайного процесса. Про-
изводная л-го порядка характеристической функции определяется
выражением
оо оо
—оо —оо
е/(Ик1+и2к2+.... + ипкл)^1(Уу2.^
(16.84)
Из (16.84) получим выражение для начальных моментов рас-
пределения вероятностей случайного процесса
(МЛкг (t2),...,^kn (tn)}=
^k+k2l+... + kn
dvk'dv2z ...dvkn
Q(vbv2,...,vn)
(16.85)
Таким образом, имея характеристическую функцию, можно оп-
455
Раздел 16
ределить ПРВ и начальные моменты распределения вероятностей
случайного процесса.
Если случайные величины независимы, то математическое ожи-
дание их произведения равно произведению математических ожи-
даний каждой из них. Исходя из этого, для независимых случайных
величин можем записать
п
en(v1,v2,...,vn) = p[e/f(v1).
к=\
(16.86)
Справедливо и обратное утверждение: если л-мерная характери-
стическая функция равна произведению одномерных характеристи-
ческих функций, то случайные величины являются независимыми.
Для гауссовского процесса выражение для n-мерной характери-
стической функции получим с учетом (16.36) в виде
= ехр<
'L
ал-
[ /с=1
(16.87)
п
2
где ак, ак, гк1 - математическое ожидание, дисперсия и нормиро-
ванная корреляционная функция случайного процесса.
При л = 2 получим выражение для двумерной характеристиче-
ской функции стационарного гауссовского процесса
= еХР< + 2г12'/1'/2 + V2i •
(16.88)
16.8. Марковские процессы
Одной из полезных для практики исследования моделей случай-
ных процессов является процесс Маркова или случайный процесс
без последствия. Марковским процессом называют такой случай-
ный процесс, для которого условную ПРВ можно записать в виде
fn(xn/х},х2,..., xn_i) = f2(xn/xn_i), (16.89)
где хк — значение случайного процесса в момент времени tk.
Равенство (16.89) означает, что значение случайного процесса в
выбранный момент времени tn зависит только от того, какое значе-
ние случайный процесс принял в предыдущий момент времени fn-i,
456
Многомерное распределение вероятностей
и не зависит от того, какие значения принимал случайный процесс в
предыдущие моменты времени. Таким образом, вся информация о
марковском процессе содержится в двумерной ПРВ. С учетом
(16.89) и исходя из определения условной ПРВ для марковского
процесса л-мерную ПРВ можно определить как
(16.90)
Если ПРВ зависит только от интервала времени между сосед-
ними моментами tk- tk^, то процесс Маркова является стационар-
ным. При х}= х2=..= хп= хдля стационарного марковского процесса
запишем
л-1
fn(x,x,...,x)=f}(x)
(16.91)
L
что соответствует равенству в (16.68).
Запишем выражение для ПРВ марковского процесса при п = 3
в виде
f3(xl5 x2,x3,f1,f2, f3) = ^(x1,f1)f2(x2,f2 /x1,f1)f2(x3,f3 /х2,t2). (16.92)
Интегрируя по холевую и правую части равенства, получаем
f2(xv х3, f3) - J /2(х2, t2 / xv )f2(х3, Г3 / х2, t2)dx2 . (16.93)
Учитывая определение условной ПРВ
..4^;М^ = 4(УзЛ/У1Л)| (16.94)
‘1/
выражение (16.93) запишем в виде
= f ^(^2> ^2 / *i> М^(*з>h!х2' t2)dx2 . (16.95)
Уравнение (16.95) называется уравнением Смолуховского, или
обобщенным уравнением Маркова. Для стационарного марковского
процесса уравнение Смолуховского записывается в виде
457
Раздел 16
(16.96)
Из уравнения Смолуховского может быть получено дифферен-
циальное уравнение перехода непрерывного марковского процес-
са. С учетом обозначений
t2 = t , t} = t- &t, t3 = T, x^ = x, x3 = y, x2= z
дифференциальное уравнение запишется в виде
df2(y,T / x,t)
dt
Л, м df2(y,T / x,t)
+ A (x, +
7 dx
(16.97)
ч
2
dx
= 0
где
A(y,T) = lim —
п АГ->0Д/
(z-y)f2(z,T/y,T-M)dz,
(16.98)
/^(уЛ)^ lim —• \ (z- y)2f2(z,T/ y,T - Af)dz.
At—>0 Af J
— oo
(16.99)
Уравнение (16.97) называется первым уравнением Колмогорова.
Плотность распределения вероятностей марковского процесса
удовлетворяет и второму уравнению Колмогорова
= _ А [^(у, т)4 (у, т/х, о]
2 dy
(16.100)
Второе уравнение Колмогорова известно также как уравнение
Фоккера-Планка.
При рассмотрении непрерывных случайных процессов исполь-
зование марковской модели связано с определением шага по вре-
менной оси: Af = tn - tn_}. При AJ -> 0 марковский процесс переходит
в пуассоновский.
458
Раздел 17.
РАСПРЕДЕЛЕНИЕ ВЕРОЯТНОСТЕЙ НЕСКОЛЬКИХ
СЛУЧАЙНЫХ ПРОЦЕССОВ И ИХ ФУНКЦИОНАЛЬНЫХ
ПРЕОБРАЗОВАНИЙ
Характеристики распределения вероятностей, рассмотренные
для одного случайного процесса, могут быть распространены на
совокупность случайных процессов. В разделе рассматриваются
характеристики распределения вероятностей нескольких случай-
ных процессов, а также характеристики распределения вероятно-
стей функций случайных процессов.
17.1. Совместное распределение вероятностей
двух случайных процессов
Функция распределения вероятности двух случайных процессов
^(t) и c2(t) определяется как
^n+m(^X2,:.,Xn,y1,y2,...,ym) = P^1(t1)<X1,...
-^l(U < Хт^) < уь...,^’т) Ут} >
где Р{...} - символ вероятности.
Функция распределения вероятностей (л+т)-порядка зависит от
(п+т) значений случайных процессов хь х2,...,хп, Уъ у2,...,ут,ъ также
от моментов времени t1t t2,..., tn, t1t t2,..., tm, в которые рассматри-
ваются случайные процессы. Для стационарных случайных про-
цессов ФРВ зависит не от моментов времени, а от интервалов ме-
жду ними.
Функции распределения вероятностей, определяемой (17.1),
соответствует (л+гф-мерная ПРВ
fn+m(x],x2,...,xn,y],y2,...,ym) =
= d{n+m}Fn+m{x},x2,...,xn,y„y2,...,ym) (17.2)
dx,dx2...dxndyydy2...dy т
Если ФРВ (ПРВ) двух случайных процессов может быть пред-
ставлена в виде произведения ФРВ (ПРВ) каждой из них
459
Раздел 17
Fn+m(^X2,...,Xn,yvy2,...,ym) = з)
“ 6:1л (х1> х2’-> хп)^2т(У1’У2>--’Ут)
при любом выборе моментов времени, то такие случайные процес-
сы называются независимыми.
Моменты распределения вероятностей случайных процессов
определяются выражениями:
начальные (порядка р = Хк, -/-£/,)
тр = J ...xr,k"y,’'y2=...ym!-f,ltrr\x,:x2,... (
—оо —оо —оо
...,xmyby2,...,ym)dxAdx2...dxndy^dy2...dym,
центральные (того же порядка)
оо оо оо
тр= f J...|(x1-a1)*’(x2-a2)*2...
— 00 —00 — оо
-(хп - ^п)кп (У1 - (у2 - Ь2 )'2... <17-5)
(ym-bm)/m/n+m(x1,x2,...,xn,y1,y2,...,ym)dx1dx2...
...dxndy^dy2...dym,
где ак, Ьк — математические ожидания случайных процессов ^(t) и
^2(t) в соответствующие моменты времени.
Для стационарных случайных процессов а1 = а2 =...= ап = а, Ь1 =
b2=...= bm = b.
Начальный момент второго порядка совместного распределе-
ния вероятностей представляет ковариационную функцию случай-
ных процессов
^12(^^2)= J Ху^(Х,у)(/Х(/у,
(17-6)
где f^2(x, У) - двумерная ФРВ случайных процессов ^(^и ^2f().
Подчеркивая, что ковариационная функция определена для
двух случайных процессов, ее называют взаимной ковариационной
функцией.
Центральный момент распределения второго порядка пред-
ставляет взаимную корреляционную функцию
460
Распределение вероятностей случайных процессов
(x-a)(y-d)^2(x,y)dxdy,
(17.7)
где а, b - математические ожидания случайных процессов в мо-
менты времени t2.
Взаимная корреляционная функция стационарных случайных
процессов (также, как и ковариационная функция) зависит не от
моментов времени t1f t2, в которые рассматриваются случайные
процессы, а от интервала между ними, т.е.
Я12(Г1Л2) = Я12(Г2-М = Я12 (т),
гдет= t2~tv
Нормированная взаимная корреляционная функция стационар-
ных случайных процессов определяется как
Г12(Т) = . (17 8)
°1°2
2 2
где , о2 - дисперсии случайных процессов.
Если ^(0, ^2(t) - независимые случайные процессы, то из (17.7)
получим
оо
2 (V2) = / (* - а)(У - b)f^2 (х, y)dxdy =
(17.9)
со со
= J (x-a)^(x)dxJ(y-d)^2(y)dy = 0.
— оо —оо
Как следует из (17.9), корреляционная функция независимых
случайных процессов равна нулю. Однако обратное утверждение
неверно.
Взаимная корреляционная функция эргодических случайных
процессов может быть определена как среднее по времени произ-
ведения их реализаций
< Т.
«i2(T)=<^(f)§’(t + r)>= lim-!- h«(%«(r + T)d(, (17.10)
I —>oo d! J ’
-T
где <...>- символ усреднения по времени.
Если задана (п + m^-мерная ПРВ случайных процессов ^(t) и
t2(t), то может быть определена условная ПРВ - ПРВ совокупности
461
Раздел 17
случайных величин ^(^), ^(t2), ^(tn), при условии, что случай-
ные величины ^(Ь), ^2(tm ) принимают заданные значения
У1 , Уг , ---Ут
fn+m{XbX2,...,Xnly^ ^2>-<Ут) =
_ ^п+т(’ *2’~• > *n’У1 ’У2’• • • ’ Угп ) )
^(У1-У2-->Ут)
Для независимых случайных процессов ^(t) и ^(t) из (17.11) по-
лучим
^+т^^->Хп/УьУ2^-^Ут) = ^,Х2,...,Хп). (17.12)
Для нескольких случайных процессов могут быть определены
и другие условные характеристики распределения аналогично то-
му, как это было сделано для одного случайного процесса.
17.2. Распределение вероятностей функций
случайных процессов
Ниже приводятся постановка и решение задачи нахождения ха-
рактеристик распределения функций двух и более случайных ве-
личин. Рассматриваемые случайные величины - это совокупность
значений случайных процессов в выбранные моменты времени.
Результаты такого анализа могут быть использованы при рассмот-
рении преобразований случайных процессов в радиотехнических
цепях различного вида.
17.2.1. Функция двух случайных величин
Рассмотрим случайные величины ти и т]2, определяемые как
функции случайных величин и
П1 =Ф1(^Л2).П2 = Ф2(^Л2)- (17.13)
Случайные величины и представляют значения двух слу-
чайных процессов ^(t) и ^2(t) в различные моменты времени:
и с2 = Ык)- Рассмотрение и выводы могут быть отнесены
и к одному случайному процессу в различные моменты времени -
^=^), t,2^(t2).
Зависимости, обратные (17.13), запишем в виде
£1 = ФГ1 (ПкП2), = Ф21(П1.П2)- (17.14)
462
Распределение вероятностейслучайных процессов
Выражение для двумерной ПРВ случайных величин /у? , ij2 име-
ет вид
d(xbx2)
^(УъУг)
(17.15)
где f^2 (Xi, х2), (Уъ У2) - двумерные ПРВ случайных величин с2
итп-Пг;
d(x^x2]
d(y^,y2)
dx< dxy
dyA dy2
dx2 dx2
dy, dy2
(17.16)
- якобиан преобразования.
Выражение (17.15) записано для однозначных обратных зави-
симостей (17.14). Для неоднозначных зависимостей необходимо
произвести суммирование по числу обратных соотношений, по
аналогии с тем, как это сделано при рассмотрении одного случай-
ного процесса в разд. 15.
Часто встречается зависимость одной случайной величины от
двух случайных величин
П = ф(^Л2)- (17.17)
Чтобы получить характеристики распределения т] в этом случае,
рассмотрим прежде всего частный случай зависимости (17.17)
П1 =<Pi(bi)>n2 = Ф2(^Л2)
при однозначных обратных зависимостях
£1 = Ф1~1(П1)Л2 =Ф2~1(П1,П2)-
(17.18)
(17.19)
Якобиан преобразования в этом случае равен
^(УуУ2)
d(x1,x2)
Ф1
dx1
dcp2 dcp2
dx< dx2
(17.20)
463
Раздел 17
В соответствии с (17.15) выражение для двумерной ПРВ запи-
шется в виде
^2(У1»У2) =
1
.^-фДф^уО]
dxy
1
(17-21)
-^Ф2(Ф1~1(У1)Ф2'1(У1!У2)
dx2
^2(ФГ1 (УО-Фг 1(У1>У2)]-
Плотность распределения вероятностей одной случайной вели-
чины т|2 определяется как
оо
^ДУг) = /МУпУгЖ-
—оо
(17.22)
Подставляя (17.21) в (17.22) и вводя обозначение и = ф, \уЛ),
получим
^(^Ф2~1[Ф1(^),У2])
—Ф1(и,ф2"1[ф1(и),у2])
<2
(17.23)
Применительно к зависимости (17.18): ф^х) = х, из
(17.23) найдем
Му)= /
/ЦцФгЛцу)]
^Ф2[и,Ф2”1(и.у)]
<2
(17.24)
Таким образом, записано выражение для плотности распреде-
ления вероятности случайной величины, являющейся функцией
двух случайных величин.
В общем случае, когда в результате функционального преобра-
зования случайных величин с2...получается совокупность слу-
чайных величин т]1( т]2, ...Щл. выражение для ее ПРВ записывается
в виде
4R4
Распределение вероятностей случайных процессов
^(У1’У2--Уп) = ^(Х1.Х2.->Хп)
d(xbx2,...,xn]
о'(У1-У2--Уп
(17.25)
где
d(xbx2,...,xn)
^(У1.У2>-.УЛ)
dx} dx^ dxA
dyy dy2 " ’ dyn
dx2 dx2 dx2
dy} dy2 ‘ " dyn
dxn dxn dxn
dyy dy2 ‘ " dyn
(17.26)
- якобиан преобразования.
При неоднозначности обратных зависимостей в (17.25) необхо-
димо произвести суммирование по их числу.
Если из совокупности п случайных величин £1г .ьп получается
совокупность т случайных величин т]1} г\2,...,г[п, (т < п), то чтобы
воспользоваться (17.25), необходимо дополнить систему п - т
функциональных зависимостей равенствами г}к = к = т + 1,
т + 2,..., п. ПРВ случайных величин гц, г\2,...,г\п, получится из
(17.25) интегрированием по ут + ъ..., Уп-
Моменты распределения вероятностей функции случайных ве-
личин
п = ф(^Л2—Лп)
(17.27)
определяются выражением
оо со оо
М{г]п} = J J...J(pn(x1,x2,...,xn)fn(x1,x2,...,xn)dx1,dx2...dxn . (17.28)
—00—00 — оо
При получении выражений для характеристик функций случай-
ных величин говорилось о нескольких случайных процессах. Од-
нако приведенные выражения справедливы и для функций значе-
ний одного случайного процесса, взятых в различные моменты
времени.
465
Раздел 17
17.3. Некоторые виды функциональных преобразований
случайных процессов
В качестве иллюстрации общего подхода к нахождению распре-
деления случайного процесса, получающегося в результате преоб-
разования, рассмотрим некоторые виды функциональных зависи-
мостей. Выбранные примеры представляют и самостоятельный
интерес, некоторые результаты используются в дальнейшем.
17.3.1. Сумма случайных величин
Для суммы (разности) двух случайных величин
n=4i±^> (17.29)
имеем
^£2 =1, х2 ^y + Xl. (17.30)
dx2
С учетом (17.30) получим
оо
^(У) = fau,y+u)du, (17.31)
—со
где f2 (хь х2) -- двумерная ПРВ случайных величин £,2-
Если случайные величины <2 являются независимыми,
(17.31) примет вид
^(У) = ]kS^2(y+u)du, (17.32)
где (х), (х) - ПРВ случайных величин и
Используя свойства преобразования Фурье, для суммы двух не-
зависимых случайных величин получаем следующее выражение
для характеристической функции
On(v) = O^(v)0^(v). (17.33)
Вывод из полученного результата распространим на любую ко-
нечную сумму случайных величин: характеристическая функция
суммы независимых случайных величин
п = ^Л+...+ ^
равна произведению характеристических функций каждой из них
466
Распределение вероятностей случайных процессов
п
е^) = П0^)-
fc=1
(17.34)
Отмеченное свойство часто используется для получения ПРВ
суммы независимых случайных величин - определяется характе-
ристическая функция суммы (как произведение характеристических
функций слагаемых), а от нее переходят к ПРВ. Пример такого
подхода к определению ПРВ суммы независимых случайных вели-
чин приведен в п.17.5.
Математическое ожидание г\ = ^}±^2 определяется выраже-
нием
Лф]} = (х, ±x2jf2(x,,x2)dxdx = M{^}±M{t)Z},
где f2 (хь х2) - двумерная ПРВ и £2-
Для п слагаемых запишем
л л
М{^} = ^МЦк}.
fc=1 К=1
(17.35)
(17.36)
Таким образом, математическое ожидание суммы случайных
величин равно сумме математических ожиданий каждой из них.
Дисперсия суммы двух случайных величин определяется выра-
жением
т0г{т]} = М{(^±^г)2}-М2{^±^г} =
2 (17.37)
= т°{^} + т°{^2}±2Я12т.
Полученное выражение запишем в виде
т2°{т|} = о2 = о2 + о2 ±20^2^2, (17.38)
где ,о2 , гх2 - дисперсии случайных величин ;<и ^и их норми-
рованная взаимная корреляционная функция.
При ъ2(т) = 0 (£ ! и некоррелированные) из (17.38) получим
o2 = of + o2. (17.39)
Для суммы п некоррелированных случайных величин имеем
467
Раздел 17
(17.40)
Таким образом, дисперсия суммы некоррелированных случай-
ных величин равна сумме их дисперсий.
Конкретизируем полученные результаты для некоторых видов
распределений случайных величин.
1. Нормальное распределение
Для случайной величины
П = ^1 + ^2 -
когда случайные величины и £2 имеют нормальное распреде-
ление
- 4
(^ -aj* 2 +2г12(х1 -а1)(х2 -а2) + (х2 -а2)2
20^2(1-4)
(17.41)
2 2
где аь а2, сп ,о2 , г12 - математические ожидания, дисперсии и
нормированная корреляционная функция случайных величин £2,
из (17.31) получим
(У-а)2
2ст2
где
2 2
а = а1 ± а^ о2 = о, + °2 ± 2о^2^2-
(17.42)
(17.43)
Таким образом, сумма двух нормально распределенных слу-
чайных величин имеет также нормальное распределение.
С учетом того, что линейное преобразование не изменяет нор-
мального закона распределения, сделанный вывод можно расши-
рить: любая линейная комбинация нормальных случайных величин
(гауссовских процессов) представляет собой нормальную случай-
ную величину (гауссовский процесс).
Плотность распределения вероятностей гауссовского процесса
любого порядка определяется математическим ожиданием и кор-
реляционной функцией. Следовательно, чтобы определить ПРВ
468
Распределение вероятностей случайных процессов
случайного процесса, являющегося линейной комбинацией гаус-
совских процессов, необходимо только определить математиче-
ское ожидание и корреляционную функцию. Так для суммы двух
гауссовских процессов
П(0 = ^1(0 + ^(0 (17.44)
получим
а = а^+а2, (17.45)
R(t) = R1(t) + 2R12(t) + R2(t), (17.46)
где аь а2, R^(t), R2(t) - математические ожидания и автокорреля-
ционные функции случайных процессов ^(t) и ^(t); R}2 (т) - взаим-
ная корреляционная функция ^(t) и
2. Релеевское распределение
Плотность распределения вероятности суммы двух независи-
мых случайных процессов, имеющих релеевское распределение с
одним и тем же параметром о
4(х) = —х2/2°2,х>о,
2о2
(17.47)
определяется как
4(у) =
У л-У2/2О2
2о2
— 1
)
0.5
е-у2/4а2 (17 48)
3. Показательное распределение
Плотность распределения вероятностей случайных величин и
^2, имеющих показательное распределение, описываются выраже-
ниями
f., (х) = 42(х) = (17.49)
где и Х2 - параметры распределения.
Для суммы т] = +^2 -из (17.32) найдем
<,(/) = •.—< (е (17.50)
А»! Л.2
Распространяя результат на сумму п случайных величин с пока-
469
Раздел 17
зательным распределением, можно получить
(У) = + q2e-^ +... + q^}, (17.51)
где
_____________1____________
Ч‘"(Х1-Лк)(Х2-Лк)...(Х„-Лк)'
17.3.2. Произведение случайных величин
Для произведения двух случайных величин
П = ^2 (17.52)
в (17.24) имеем ckp2/dx2 = хь х2 = у2/х^. Из (17.24) получим
, . . г , ( V\du
У = Н2\и’- ТТ’ (17.53
J к и 7 И
где f2 (х\, х2двумерная ПРВ случайных величин.
Если случайные величины и £,2 являются независимыми,
г ( du
W = I Ци)^2 -рр (17.54)
—оо ' •
где (х), (х) - одномерные ПРВ случайных величин и £2.
Выражение для ПРВ произведения двух случайных величин
конкретизируем для нормального и релеевского распределений.
1. Нормальное распределение
Двумерная ПРВ нормально распределенных случайных величин
описывается (16.22). Подставляя (16.22) в (17.53), для произведе-
ния двух центрированных случайных процессов получим
W =---------\----- ехр ------Г12У 2
710^2^1-r22 1а1а2(1-Г12 ) .
^1^2(1-^12)2
(17.55)
\К0
где Ко (х) - функция Бесселя второго рода.
470
Распределение вероятностей случайных процессов
Для некоррелированных случайных величин и с2 (^2 = 0)
1
ТС СУ СУ 2
|У
А
(17.56)
2. Релеевское распределение
Плотность распределения вероятности произведения двух не-
зависимых релеевских процессов с одним и тем же параметром
может быть получена из (17.53) с подстановкой в него (17.47)
(17-57)
17.3.3. Частное случайных величин
Для частного случайных величин
П = -г- (17.58)
§2
(17.24) запишется в виде
(17.59)
Для независимых и £2
^(у) = |
(17.60)
При нормальном распределении случайных величин, имеющих
математические ожидания, равные нулю, для их частного получим
, , , =
П 7Г[(Т^ -20^2^2/+ <Т2у2]
(17.61)
Выражения для ПРВ рассмотренных функций двух случайных
величин и их графики при нормальном распределении случайных
величин сведены в табл. 17.1.
471
Раздел 17
Таблица 17.1.
472
Распределение в ероятностей случайных процессов
№
п/п
Функциональная зависимость.
ПРВ функции случайных величин
П = ^2
3
4
ПРВ функции
(общее выражение)
оо
ПРВ функции нормально
распределенных случайных
величин
(а, = а2 = 0)
Цу) =
1
” г12
62У
О,О2(1-4)
ехр-
ПРВ функции
(общее выражение)
оо
J f2(u,yu^du
ПРВ функции нормально
распределенных случайных
величин
(а1 = а2 = О)
473
Раздел 17
17.4. Распределение вероятностей производной
случайного процесса
Характеристики распределения вероятностей производной слу-
чайного процесса могут быть получены, исходя из определения
производной
(17.62)
Математическое ожидание производной равно
= M{q (t)} = hm М<—-----—
At—>0 ( Af
= ,.т ^ + *0-^0
At>o Af
(17.63)
где a; (t) - математическое ожидание случайного процесса %(t) в
момент времени t.
Таким образом, математическое ожидание производной слу-
чайного процесса равно производной математического ожидания
случайного процесса в рассматриваемый период времени. При
этом предполагается, что случайный процесс в этой точке диффе-
ренцируем. Если случайный процесс является стационарным, его
математическое ожидание постоянно, не зависит от времени: ма-
тематическое ожидание производной случайного процесса равно
нулю.
Корреляционная функция производной центрированного слу-
чайного процесса определяется выражением
Я(М2) = lim М
At—>0
+Af)-^(t,)] K(f2 + Af)-^t2)]
Af Af
(17.64)
Чтобы определить корреляционную функцию производной слу-
чайного процесса, сначала запишем выражение для корреляцион-
ной функции разности - ^(t).
+Л/)Ч(Ш('г +Л')Ч('2)1} =
= +ДО2 + &t)} - + Д1))- (17.65)
474
Распределение вероятностей случайных процессов
Представим (17.65) в виде
НД(М2) = ОД + Ы, t2 + АГ) - R^tv t2 + Af) -
-Я(^ + M,t2) + R^tpt2).
(17.66)
Разложим первые три слагаемых в правой части (17.66) в ряд
Тейлора
R^ + Af, t2 + АО — 0) +
'dRt
ч dti
dR^
dt2 ,
Af +
d2R, d2R.
----A + 2------i-
dt2 dt.dt2
d2R^M2
4---— ----
dt22 J 2
+ 0,,
dR. d2R. At2
J2 + At) = R{(MJ + -^Af + —1—+ 0
ui2 UI2 *-
(17.67)
+ Af,0) - ^(Мг) +
dR-r d2R? At2
—-Af +----------
dty dt? 2
+ 03.
Подставляя (17.67) в (17.66), получим
+ 0.
(17.68)
Из (17.64) с учетом (17.68) найдем
(17.69)
Корреляционная функция стационарного случайного процесса
зависит от разности моментов времени т = t2 - р,пя нее получим
^(т) = -Я^(т). (17.70)
Таким образом, корреляционная функция производной стацио-
нарного случайного процесса равна второй производной корреля-
ционной функции случайного процесса, взятой со знаком минус.
Корреляционная функция л-ной производной стационарного
случайного процесса равна
475
Раздел 17
= (-1)"R12") (т). (17.71)
Так же можно показать, что взаимная корреляционная функция
n-ой и /с-ой производных стационарного случайного процесса опре-
деляется как
= <П+*’(Т). (17.72)
Исходное выражение для определения взаимной корреляцион-
ной функции случайного процесса и его производной записывается
в виде
%(f1,f2) = lim м\^.....+-Af)". (17.73)
1 г дг^о At J
Аналогично тому, как это было сделано раньше, предваритель-
но рассмотрим взаимную корреляционную функцию случайного
процесса gfa) и разности £(f2 + At) - t,(t2):
Нд(?1,Г2) = М№1Ш?2 + А0-^2)]} =
= М{^^2 + Ы)-ШШ}= (17.74)
= R^,t2 + M)-R^,t2).
Раскладывая первое слагаемое правой части (17.74) в ряд Тей-
лора, запишем
dR^U,t?)
Я'(М2)- At + O. (17.75)
С учетом (17.74) выражение для взаимной корреляционной
функции случайного процесса и его производной получим в виде
оЯ(М2)
%(M2) = (17.76)
°‘2
Для стационарного случайного процесса имеем
RAr + At)- НЕ(т) _
—st - (17'78)
Изменив порядок следования случайного процесса и его произ-
водной в (17.73), установим
476
Распределение вероятностей случайных процессов
(17.79)
Из выражения для определения взаимной корреляционной
функции получим
%(0) = Я(0) = 0.
(17.80)
Таким образом, взаимная корреляционная функция случайного
процесса и его производной для одного и того же момента времени
равна нулю.
Линейное преобразование не изменяет нормального закона
распределения. Следовательно, если существует производная от
гауссовского процесса, то она имеет нормальное распределение -
представляет также гауссовский процесс. Его одномерная ПРВ
описывается выражением
(17.81)
2
где - дисперсия производной гауссовского процесса,
< =
Используя корреляционную функцию гауссовского процесса,
можно записать выражение и для л-мерной ПРВ производной лю-
бого порядка.
Гауссовский процесс и его производная, рассматриваемые
в один и тот же момент времени, как это следует из (17.80), имеют
взаимную корреляционную функцию, равную нулю, являются неза-
висимыми. Выражение для их совместной ПРВ запишется в виде
--^==ехр<
(17.82)
где
г{(т) = -^,о2 = ^(0).
о
(17.83)
Аналогично можно записать выражение и для совместной
л-мерной ПРВ гауссовского процесса и его производной любого
порядка.
477
Раздел 17
17.5. Распределение вероятностей интеграла
от случайного процесса
Интеграл от случайного процесса запишем в виде
t
T|(f) = J h(t,v)^(v)dv,
о
(17.84)
где h(t,v) - заданная функция.
Такой интеграл обычно встречается при анализе прохождения
случайного процесса через линейную цепь.
Интеграл представляет функцию случайного процесса, к кото-
рой сходится интегральная сумма. Таким образом, интегрирование
представляет линейное преобразование случайного процесса.
Математическое ожидание случайного процесса, описываемого
(17.84), равно
an(f) = M(n(f)) = M{J h(t,V)t,(v)dv} =
, °, (17.85)
= J h((,v)M{^(v))diz - j h(t, v}a(v)dv.
0 0
Для стационарного случайного процесса получим
t
a^(t) = h(t,v)dv, (17.86)
о
где а - математическое ожидание случайного процесса.
Корреляционная функция интеграла от случайного процесса
определяется выражением
Яп(^2) = М{п(МпО =
t, t2
= M{J J h(tv v^h(t2, v2)^(v^(v2)dv}dv2} = (17.87)
о 0
tz
= J J Vi )h(t2,v2 )£(v2 )}dvydv2.
о 0
478
Распределение вероятностей случайных процессов
Интегрирование как линейная операция не изменяет закона
распределения гауссовского процесса. Одномерная ПРВ интеграла
от гауссовского процесса t/t) имеет вид
х / х 1
Му) =...............""i=- ........ехр-{
(У-aJ2
2a2n
(17.88)
2
где an„ on - математическое ожидание и дисперсия интеграла от
гауссовского процесса
h(t,v)a(v)dv, о2 = ^h(t^)h(t2,v2)R(vpv2)dv}dv2 . (17.89)
О 0 0
17.6. Характеристическая функция случайных процессов
Понятие характеристической функции может быть распростра-
нено на любую конечную совокупность случайных процессов. Так
характеристическая функция случайных процессов и с,2, имею-
щая порядок п+т, определяется выражением
®п+т(И’^2>”->^п+т) —
оо оо оо
_ J J J + '/2х2 + --- + vnxn +'/n+1xrn1 +vn+2xn+2Y2 +"' + '/гитУт ) . (17 90)
— СО — 00—00
fn+m(xvx2,...,xn,yvy2,...,ym)dx,dx2...dxndy}dy2...dym,
где fn+m(--) - n+m-мерная ПРВ случайных процессов ^(t) и ^2(t).
Для независимых случайных процессов можем записать
®п+т (И> ^п+т)
J J ... Jel{v'x',V2X^"Vr,Xn}f^n(xbx2,...,xn)dx^dx2...dxn
—со — оо —оо
ОО ОО оо
J ...^el(v'^y^Vn-2y^ -+Vn -ymU12Jyby2,...,ym)dy^dy2...dym =
где f^n (...) - n-мерная ПРВ случайного процесса ^(t); f^2m (...) -
m-мерная ПРВ случайного процесса ^2(t).
479
Раздел 17
Таким образом, характеристическая функция независимых слу-
чайных процессов равна произведению характеристических функ-
ций каждого из них.
Если характеристическая функция случайных величин с,2
равна v2,...,vn), то характеристическая функция случайных
величин
02^2+ э2,..-,+ оп£,п+ ап,
где вк, ак- действительные постоянные, определяется выражением
ехр
п
ак vk
Gn(<W,o2v2,
(17.92)
^гУп) •
Характеристическая функция п случайных величин %2,...,%п ,
имеющих нормальное распределение, описывается выражением
0n(i/1,i/2,...,i/n) = exp[/k=1
2 -
где ак ,ак - математическое ожидание и дисперсия случайной ве-
личины £к; гм - нормированная корреляционная функция случай-
ных величин
Использование характеристических функций при анализе слу-
чайных процессов в ряде случаев позволяет упростить операции и
сделать анализ более эффективным.
17.7. Метод характеристических функций
Одной из прикладных задач теории случайных процессов яв-
ляется определение характеристик распределения суммы не-
скольких независимых случайных величин - выборочных значе-
ний случайных процессов.
Такая задача решается, например, при оценивании помехо-
устойчивости системы обнаружения сигнала. Решение ее с полу-
чением непосредственно выражения для ПРВ функции случайных
величин связано с большими, часто непреодолимыми, трудно-
стями.
Более удобным оказывается подход к определению ПРВ через
характеристическую функцию. Характеристическая функция сум-
мы независимых величин определяется как произведение харак-
теристических функций каждой из них. Переход к ПРВ от характе-
ристической функции представляет преобразование Фурье.
480
(17.94)
(17.95)
Распределение вероятностей случайных процессов
17.7.1. Содержание метода
Характеристическая функция случайной величины г/, представ-
ляющей сумму Л/независимых случайных величин
Л = ^1 +
имеет вид
сю оо сю
©Л/С*') = j |...|exp[/V(x14-x2+...4-x/v)]-
— оо —сю —оо
N
fN(x1,x2,...,xN)dx]dx2...dxN=Y[Qk](v),
к=1
где Qk1 (v) - характеристическая функция случайной величины
Если случайные величины имеют одинаковое распределение,
например, представляют выборку из одного стационарного случай-
ного процесса, то
е„(И = 021(и) =... = ewl(H = е,(и), (17.96)
(17.95) записывается в виде
е«(П = е?'(и), (17.97)
где 01 (v) - одномерная характеристическая функция случайной
величины, определяется выражением
оо
^(1/)= |e/Wf^(x)dx.
— оо
(17.98)
От BN(v) можно перейти к соответствующей ПРВ
сю
Q"{v)eivxdv.
(17.99)
Таким образом, чтобы получить ПРВ суммы N независимых
случайных величин, имеющих одинаковое распределение, необхо-
димо получить характеристическую функцию одной случайной ве-
личины, возвести ее в Л/-ную степень и найти соответствующее
преобразование Фурье.
481
Раздел 17
Рассмотрим пример нахождения ПРВ суммы независимых слу-
чайных величин с помощью характеристической функции. Опреде-
лим ПРВ суммы выборочных значений гауссовского случайного
процесса на выходе квадратичного детектора.
17.7.2. ПРВ суммы независимых выборочных значений слу-
чайного процесса с обобщенным релеевским
распределением
Случайный процесс, представляющий смесь гармонического
сигнала и узкополосного шума с нормальным распределеньем,
имеет огибающую, распределение которой подчиняется обобщен-
ному закону Релея (разд. 19)
иг i-A
Ци) = ~е /0
(17.100)
где А - амплитуда сигнала; о - эффективное значение шума; 10(х) -
модифицированная функция Бесселя первого рода.
Обозначив и/в = х, А/a = q, выражение для ПРВ огибающей бу-
дем рассматривать в виде
хг +qz
Цх) = хе 2 l0(qx), х>0.
(17.101)
Случайный процесс подается на квадратичный детектор с ха-
рактеристической
(17.102)
Плотность распределения вероятности случайного процесса,
выделяемого на выходе детектора, описывается выражением
(разд. 15)
^(У) = е^а/0(2Тау),
(17.103)
где а = ф/2.
Получим ПРВ суммы N независимых выборочных значений слу-
чайного процесса, ПРВ которого описывается (17.103). Такая зада-
ча возникает при описании процесса накопления при некогерент-
ной обработке принимаемых колебаний.
Характеристическая функция, соответствующая ПРВ (17.103),
482
Распределение вероятностей случайных процессов
определяется выражением
0! = J eyalQ(2y[ay)epydy, (17.104)
о
где р = iv.
Решение интеграла (17.104) имеет вид [35]
а
0! =—— е~аер+]. (17.105)
р + 1
Характеристическая функция суммы N независимых выбороч-
ных значений определяется (17.97)
Na
BN=----^-e”Waep+1. (17.106)
(p + 1)w
Преобразование Фурье характеристической функции 0W дает
ПРВ суммы Л/независимых случайных величин
N-1
Cn(z) = [-+-'| 2 e’/--№V,(2%/'Maz),z>0. (17.107)
[Naj
При а - 0
f”(z)=W17' (17J08)
Графики fi;(z) при значениях а, равных 0, 1 и 2, приведены на
рис. 17.1.
Выражение для ffJ(z) можно представить в виде ряда Грама -
Шарлье (разд. 15).
Начальные моменты распределения случайной величины,
имеющей характеристическую функцию, описываемую (17.106),
определяются как
1 dP Jp=O Na dn dpn (p + 1)N (17.109) p=0
483
Раздел 17
Рис.17.1
Из (17.109) получим
(Л/+/7 —1)! _л/я г- ,, .
тп = ------------ е (N + п, N, Na),
(Л/-1)!
или
т (N П 1)! -Д/а с-( д/ Л/о\
m =---------------Q -|R(-л, N,—Na),
п (Л/-1)! П
(17.110)
(17.111)
484
(17.113)
Распределение вероятностей случайных процессов
где )- гипергеометрическая функция.
Первые начальные моменты распределения вероятностей равны
т1 = Л/(1 + а),
т2 = (Л/а)2+ 2Л/а(Л/ + 1) +Л/(Л/ + 1),
т3 = (Л/а)3+3(Л/а)2(Л/ + 2) + ЗЛ/а(Л/ + 1)(Л/ + 2) + (17 112)
+ Л/(Л/ + 1)(Л/ + 2),
т4 = (Na)4 + 4(Л/а)3(Л/ + 3) + 6(Л/а)2(Л/ + 2)(Л/ + 3) +
+ 4Л/а(Л/ + 1)(Л/ + 2)(Л/ + 3) + Л/(Л/ + 1)(Л/ + 2)(Л/ + 3).
Центральные моменты распределения вероятностей находятся
из (15.18) с учетом (17.112)
mJ -1,
т° = 0,
т2 = Л/(2а +1) = Стд,,
т3 = 2Л/(За +1),
т4 =12(Л/а)2 + 12Л/а(Л/+ 2) + ЗЛ/(Л/+ 2),
= 120(Л/а)2 + 20Л/а(5Л/ + 6) + 4Л/(5Л/ + 6) ....
Коэффициенты ряда Грама-Шарлье определяются
тральные моменты следующими выражениями:
с0 — 1, Cj — с2 ~ 0 j
- За + 1
Сз ~ ЗЛ/1/2(2а +1)3/2 ’
4а +1
Q _ ,
4N(2a +1)2
с (За + 1)2
5 18Л/(2а + 1)3 ’
Ряд Грама-Шарлье для (z) запишется в виде
W = — [с0Ф(У) + СзФ(3)(У) + с4Ф(4)(у) + с5ф(5)(у) +...],
через цен-
(17.114)
(17.115)
485
Раздел 17
где ф(у) = 1 /л/2тге у2/2, у - z- тА = Л/(1 + a), aN = -у]N(A + 2а) .
Записанное выражение позволяет определить степень прибли-
жения f^z) к нормальной ПРВ. Выражение(17.115) показывает, что
при увеличении числа N вес второго и последующих членов в об-
щей сумме уменьшается: все коэффициенты разложения стремят-
ся к нулю, за исключением с0. При достаточно большом значении N
распределение случайной величины стремится к нормальному
(г-гт^)2
или
(17.116)
, . . 1 Г [z-N(1 + а)]2
t (z) = —===== exp - ----—
” V2?tW(1 + 2W) [ 2N(1 + 2a)
Вывод о приближении распределения суммы случайных вели-
чин к нормальному иллюстрируют и графики на рис. 17.1.
Плотность распределения вероятности суммы N независимых
случайных величин, имеющих ПРВ, описываемую (17.107), можем
представить также в виде ряда Пагерра. С учетом равенств:
Ш-1 = N(1 + а), о д/ = N(2a + 1)
выражение для fr} (z) получим в виде
1 + а 1Г 1 + а
--------------
1 + 2а 1 + 2а
у L_
М1+а)2 1
1+2а
Z
(17.117)
При а = 0 имеем m1 = N, g2n = N.
Подставляя (17.117) в (15.78), получим
1
Г(Л/)
е zzN 1
(17.118)
N
При рассмотрении суммы независимых случайных процессов,
имеющих распределение, отличное от нормального, необходимо
иметь в виду центральную предельную теорему теории вероятно-
стей. В соответствии с ней при достаточно общих условиях распре-
488
Распределение вероятностей случайных процессов
деление центрированных и нормированных случайных величин с
увеличением числа слагаемых стремится к нормальному, независи-
мо от законов распределения исходных случайных величин. Приме-
нительно к случайным процессам это означает, что распределение
суммы независимых выборочных значений одного или нескольких
случайных процессов при увеличении числа слагаемых стремится к
нормальному. Примером такого приближения служит полученное
выражение (17.115) для рассмотренных в п.17.7.2 условий.
17.7.3. Характеристика помехоустойчивости системы
обнаружения сигналов с накоплением
При обнаружении импульсных сигналов на фоне шума с целью
повышения помехоустойчивости системы используется накопление
импульсов. Накопление может рассматриваться как суммирование
амплитуд принимаемых коротких импульсов, поступающих на вы-
ход устройства обработки в определенные моменты времени.
При наличии на входе системы помехи (случайного процесса -
шума) ПРВ колебания будет описываться функциями (рис. 17.2):
f/c+n)(x) - когда принимается сигнал, и f/n)(x)- когда сигнал отсут-
ствует.
О наличии сигнала судят с помощью порогового устройства -
при превышении значения порога V принимается решение о нали-
чии сигнала, в другом случае - о его отсутствии (рис. 17.2). При
обнаружении сигнала возможны два вида ошибок: пропуск сигнала
(принимается решение об отсутствии сигнала при его наличии на
входе) и ложная тревога (принимается решение о наличии сигнала
при его отсутствии на входе). При уменьшении порога уменьшает-
ся вероятность пропуска сигнала, но увеличивается вероятность
ложной тревоги.
487
Раздел 17
При анализе помехоустойчивости системы обычно рассматри-
ваются вероятность обнаружения сигнала р0 и вероятность ложной
тревоги рл. Увеличивая значение порога решающего устройства У
уменьшаем значения как рп, так и р0. Зависимость вероятности об-
наружения сигнала от вероятности ложной тревоги и характеризует
помехоустойчивость рассматриваемой системы. Чем выше распо-
ложен график указанной зависимости при заданном отношении
сигнал/помеха на входе, тем выше помехоустойчивость системы.
Как указывалось, одним из путей повышения помехоустойчивости
системы является метод накопления.
Зависимость р0(рл) для системы с накоплением можно получить,
если известна ПРВ случайного процесса на выходе накопителя при
наличии сигнала на входе и его отсутствии. Определение такой
характеристики помехоустойчивости системы является иллюстра-
цией использования описанных методов анализа случайных про-
цессов при решении одной из задач, поставленных практикой.
При аддитивной помехе в виде гауссовского шума t,(t) (коге-
рентная обработка) колебание на входе:
n(f) = sff) + W
где s(t) - сигнал.
Выражения для ПРВ случайного процесса на входе накопителя
записывается как:
при наличии сигнала на входе
^с+п)(х) = -=^-е 2°2 , (17.119)
v2no
в отсутствие сигнала
х2
^л)(х) = —е 2п2, (17.120)
д/2тш
где А - амплитуда сигнала на входе; о2 ~ дисперсия случайного
процесса (квадрат эффективного значения) на входе.
Сумма N независимых выборочных значений (случайный про-
цесс на выходе накопителя) имеет также нормальное распределе-
ние с математическим ожиданием NA и дисперсией Ncf. Таким об-
разом, ПРВ случайного процесса на выходе накопителя будет опи-
сываться выражениями:
488
Распределение вероятностей случайных процессов
при наличии сигнала на входе
(у- NA)2
2Ato2
(17.121)
в отсутствие сигнала
(17.122)
Исходя из (17.121) и (17.122) запишем выражения для
вероятности обнаружения сигнала:
Ро =]^c+n4y)dy =
V
вероятности ложной тревоги:
Рл
р(п)п(у)сУу = 1-Ф
(17.123)
(17.124)
*Гп)(у) =
1 •
^2tzNo
4n<5 у
V
t/N(5 J
где V - заданный порог; Ф(х) - табличная функция нормального
распределения.
Из (17.123) и (17.124) получим зависимость р0(рп) в явном виде
д, = 1-ф[ф-’(1-р„.)-
] = 1-Ф[ф’(1-р„,)-7мд],
(17.125)
где ф'(х) - функция обратная Ф(х), q = А/и.
Графики р0(рп) при отношении сигнал/шум q = 1 и некоторых
значений /V приведены на рис. 17.3.
При /V = 1
р0 = 1-Ф[Фч(1-рл)-д]
(17.126)
Сравнение (17.125) и (17.126) дает основание рассматривать
когерентное накопление как улучшение отношения сигнал/шум
в Jn раз.
При некогерентной обработке принимаемых колебаний, накоп-
лении на выходе детектора, ПРВ случайного процесса на выходе
накопителя описывается (17.107) или (17.108)
489
Раздел 17
х Л/-1/2
С+Л)(у)
Na
e-y-Na/N ^Nay),
(17.127)
N -y
11 (Л/-1)! ’
(17.128)
где a =cf/2, q = A/c> - отношение сигнал/шум.
При заданном уровне V на выходе накопителя выражение для
вероятности ложной тревоги запишется в виде
(17.129)
Вводя неполную гамма-функцию
(17.130)
выражение для рл запишем в виде
(17.131)
В [35] решение (17.129) получено в виде ряда
490
Распределение вероятностей случайных процессов
Ро
Рис. 17.4
Рис.17.5
491
Раздел 17
Рп
vN^ _Vr. Л/-1 (Л/-1)(Л/-2) .
-------е 1 +-------+ -----Ц:------- +
(Л/-1)! v v2
(17.132)
Вероятность обнаружения сигнала определяется с учетом
(17.127) как
хЛ/-1/2
Ро = [ -—“j е у NalN-№^ Nay )dy.
* i Na j
V
(17.133)
Решение (17.135) получено в виде ряда [35]
Ро = 1 - e~V'Na
у < v \N ^2
/Пи(2л/Л^)
(17.134)
Выражение (17.131) и (17.134) определяют зависимость р0(рл)-
Графики указанной зависимости для некоторых значений Л/ приве-
дены на рис. 17.4.
Как указывалось, накопление эквивалентно улучшению отноше-
ния сигнал/шум. Однако в отличие от предыдущего случая это
улучшение будет различным в разных точках зависимости ро(рл)-
Его можно оценить, сравнивая зависимости ро(рл) при заданном
значении Л/ и Л/ = 1 (рис. 17.5). Так при q =1 и рл = 10'2 накопление
при Л/ = 10 эквивалентно улучшению отношения сигнал/шум, рав-
ному 1,7; при Л/ = 50 - 2,6; при Л/ = 100 - 3,5.
492
Спектр случайного процесса
Раздел 18.
СПЕКТР СЛУЧАЙНОГО ПРОЦЕССА
Спектральный анализ является основой исследования детер-
минированных сигналов. Это делает целесообразным обращение к
методам спектрального анализа и при исследовании случайных
процессов. Однако особенности случайных процессов делают не-
возможным простой перенос методов анализа детерминированных
сигналов на случайные процессы. Спектральный анализ случайных
процессов несет особенности, которые требуют отдельного рас-
смотрения.
18.1. Понятие спектральной плотности мощности
случайного процесса
Рассматривая реализацию случайного процесса как функцию
времени, формально для нее можем записать преобразование Фу-
рье. Однако чаще всего такое преобразование не существует, по
крайней мере, для непрерывных случайных процессов £(Z): не вы-
полняется условие абсолютной интегрируемости
оо
— оо
(18.1)
Преобразование Фурье применимо только к такой характеристи-
ке случайного процесса, для которой условие интегрируемости аб-
солютного значения выполняется.
Выделим отрезок реализации случайного процесса
£т(0
W) ,0<t<T
O,t<O,t>T'
(18.2)
Отрезок£,г(Г) представляет функцию времени на интервале [О, Т].
Если для нее существует преобразование Фурье
493
Раздел 18
т
S7.((o) =
о
(18.3)
то применительно к £,r(t) и Sr((o) можем записать равенство Пар-
севаля
(18.4)
Поделив левую и правую части равенства (18.4) на длину рас-
сматриваемого интервала времени Т, запишем
Т оо
7^2г(0* = “)у|3г(<<*о. (18.5)
О — °0
Каждая часть равенства (18.5) описывает среднюю мощность
случайного процесса на интервале Т. При Т-^со в правой части
равенства под знаком интеграла будет спектральная плотность
мощности случайного процесса. Обозначим ее A/(cd) . Тогда (18.5)
при Г—> оо запишется в виде
Т оо
lim 1|^2 (фг = _!_ Гд/((о)сЛо. (18.6)
О —ос
Спектральная плотность мощности характеризует распреде-
ление мощности случайного процесса по частоте, имеет четкое
физическое содержание, определяется как аналитически, так
и аппаратурно. Во временной области спектральной плотности
мощности соответствует по Фурье корреляционная функция слу-
чайного процесса.
18.2. Соотношение между спектральной плотностью
мощности и корреляционной функцией
случайного процесса
Рассмотрим центрированный случайный процесс £(Г). Выраже-
ние для его спектральной плотности мощности с учетом (18.3) за-
пишется в виде
494
Спектр случайного процесса
Л/(со) = lim — М
Т —>ОО ~1~
т
jUf,)®'"'’
.0
т
о
Mhdt2 >.
(18.7)
Преобразуем (18.7)
1 тт
о о
1 тт
= lim — J
0 0
(18.8)
где R(tpt2)- корреляционная функция случайного процесса.
Для стационарного случайного процесса
(18.9)
(18.10)
выражение (18.8) запишется в виде
1 тт
N((a) = lim — J J R(t2 - t,) е~^г~^сИ}сИ2 .
7" о о
В выражении
1 ТТ
—JJ^(f2 -
' о о
произведем замену переменных и t2 на t = и T = t2-t}, (18.10)
представим в виде
"от ТТ-х
J JЯ(т) e'^dtdi + J JЯ(т) e'^dtdr =
_-Т-х О О
-kxn
Т
(18.11)
Т
Переходя к пределу, из (18.9) с учетом (18.11) получим
оо
Л/((о) = J Я(т) е*,лс/г.
(18.12)
495
Раздел 18
Таким образом, спектральная плотность мощности определяет-
ся как преобразование Фурье корреляционной функции случайного
процесса. Обратное преобразование Фурье позволяет перейти от
спектральной плотности мощности случайного процесса к его кор-
реляционной функции
Я(т) = — Г Л/((о) eK,ndti).
2тг J
(18.13)
Выражения (18.12) и (18.13), связывающие спектральную плот-
ность мощности и корреляционную функцию случайного процесса,
называются соотношениями Хинчина-Винера. При их выводе не
оговаривались ограничения, накладываемые на случайные про-
цессы. Однако следует иметь в виду, что преобразование Фурье
возможно только для абсолютно интегрируемой функции, т. е. ко-
гда выполняется неравенство
J |/W{£,(f)£(f + т)]| dr < оо.
Указанное условие выполняется только для центрированного
случайного процесса - математическое ожидание которого равно
нулю. Функция же Л/(со) может быть спектральной плотностью
мощности случайного процесса только тогда, когда она является
абсолютно интегрируемой
J|/V((o)| do < оо в
С учетом четности Я(т) и Л/(оэ) выражения для них можно запи-
сать в виде
При использовании (18.14) полезно учитывать свойства косинус-
преобразования Фурье.
Мощность случайного процесса определяется R(0), из (18.14)
получим
496
Спектр случайного процесса
R(0) = -^N(a)du.
71 о
(18.15)
Она численно равна площади под кривой спектральной плотно-
сти мощности с коэффициентом 1/2тг.
Спектральная плотность мощности случайного процесса при
со = 0 определяется выражением
оо
Л/(о) = sj Я?(т) сУт,
о
(18.16)
т.е. равна площади под кривой корреляционной функции.
Соотношения (18.14) позволяют получить спектр случайного
процесса, зная корреляционную функцию, или по спектру опреде-
лить корреляционную функцию случайного процесса. Исходной при
описании случайного процесса может быть как одна, так и другая
характеристика.
Нормированная величина спектральной плотности мощности
7 Ч /V(0J) 1 Л/7 Ч
п<“) = ~w(“), м0 >
f. TlHliJ)
J A/((o)cfco
0
обладает свойствами ПРВ частоты. Величину
СО
F(co) = J n(o))cfco
о
можно рассматривать как ФРВ частоты, она обладает свойствами
ФРВ
O<F(co)<1, jF(co)cto = 1.
о
Величина n(co)cfco представляет вероятность того, что случайный
процесс обладает средней мощностью — Л/(о))сЬв полосе частот
и
[(о,о) + do].
497
Раздел 18
Рассматривая спектральную плотность мощности как ПРВ (без
учета коэффициента), корреляционную функцию можно отождест-
вить с характеристической функцией
Ja/(cd) еЮ)Тс*о = 2лЯ(т).
— оо
В качестве примеров рассмотрим характеристики случайных
процессов различного вида.
1. Спектральной плотности мощности, равномерной в полосе
частот (рис. 18.1,а)
N(a) = 1, о)1 < |(u| < о)2,
соответствует корреляционная функция случайного процесса
^2
Я(т) = — J cos((or)cfr =
«>1
At
А . j Ат) . .
= —sine------ COS(O)0t),
7Г { 2 J
<2
(D< + (Do
где A = (D2 - (D1, (Do = ——-.
Графики г(т) при различных соотношениях cd^ cd2 приведены
на рис. 18.1,6. Как следует из графиков, чем уже полоса частот,
занимаемая спектром (точнее, чем меньше значение отношения
Д/(о0), тем более выражен осциллирующий характер корреляци-
онной функции.
2. Спектральной плотности мощности случайного процесса
(рис. 18.2,а)
= COS ТТН}/ 2(DV |(1)| < (D1
соответствует корреляционная функция (рис. 18.2,6)
1 f
Я(т) = — C0SraD/2(D< COStoTCfo =
7Г j
о
= ад—^1^-2.
1 -4(D^T2/7l2
498
Спектр случайного процесса
3. Спектральной плотности мощности случайного процесса
(рис. 18.3,а)
N(w) = sin2 тио/(о^ |w| <
соответствует корреляционная функция (рис. 18.3,6)
0>1
Я(т) = 2 j"sin2 тоо/о^ cos (отdo =
о
= Я(0)
sinco^T
1-(о2т2/4л2
499
Раздел 18
Рис. 18.3
4. Корреляционной функции случайного процесса (рис. 18.4,6)
Я(т) = Я(О)е“т2/232
соответствует спектральная плотность мощности (рис. 18.4,а)
в-т2 /202
Cz
COSOJTCfo) =
о
= Л/(0)е~р2“2/4.
5. Корреляционная функция телеграфного сигнала описыва-
ется выражением (рис. 18.5,6)
Я(т) = Н(0)е 2Х‘т|.
500
Спектр случайного процесса
Л/(о)) = — Я(0) f е 2Хт cos cotcfco = ——.
я J 1 + (w/Z)2
Число примеров спектров случайных процессов и соответст-
вующих им корреляционных функций увеличивает табл. 18.1.
С учетом четности функций графики Л/(со) и Я(т) изображены только
для положительных значений со и т.
Условие существования преобразования Фурье, как указыва-
лось, предполагает определение спектральной плотности мощно-
сти только для центрированного случайного процесса. Расширить
понятие спектральной плотности мощности позволяет формальный
прием, основанный на определении спектральной плотности мощ-
ности импульсной функции (часть 1). Преобразование Фурье им-
пульсной функции определяется соотношением
р(т-т0)е ’ т(Л = е~™°. (18.17)
— оо
Обратное преобразование Фурье даёт
оо оо
S(t-t0) = — Ге**’’”)*) = —
' °' 2п J 2л J
— оо —оо
По аналогии с (18.18) можем записать
оо оо
8(а)-ш0) = — = — f .
2л J 2л J
— оо —оо
(18.18)
(18.19)
501
Раздел 18
Таблица 18.1
Спектральные плотности мощности и корреляционные
функции случайных процессов
Спектральная плотность Нормированная корреляционная
№ мощности случайного про- функция случайного процесса
цесса г(т) = R(r)/R(0),
п/п со 00
Л/(со) = 2J Я(т)соз (сот) dt 0 Я(т) =—J A/(w)cos (сот) do 710
(О, +(02
502
Спектр случайногопроцесса
Продолжение таблицы 18.1
503
Раздел 18
Продолжение таблицы 18.1
6
г(т)= 1-f-со,|т| — 2(со1т)2 +
3
8
1
1+а^т2
504
Спектр случайного процесса
Продолжение таблицы 18.1
505
Раздел 18
Продолжение таблицы 18.1
506
Спектр случайного процесса
Продолжение таблицы 18.1
507
Раздел 18
Окончание таблицы 18.1
508
Спектр случайного процесса
Исходя из (18.19) получим выражения для преобразований Фу-
рье некоторых неинтегрируемых функций.
1. Постоянная составляющая а (разд. 3).
ае *”тсУт = 2лаб(а)),
2. Гармоническая составляющая cosа)от (разд. 3).
J cos соот е тс/г = 1 / 2 J (ertw° + е rt“°) е тс/с =
— оо — оо
= 7t5((O-(O0)+7tS((O+(O0).
3. Произведение Я(т) и cosw0t.
Л/Л(а))= |г?(т)созо)0те *°тс/г =
— оо
ОО ,
= 1 / 2 J я(т) ) e™di =
(18.20)
(18.21)
(18.22)
= 1 / 2Л/(о) - о)0) +1 / 2Л/(о) + о)0),
где Л/(со) = 2J Я(т)со5(т:с/г.
о
4. Одним из видов случайных процессов, с которыми приходит-
ся иметь дело в практике исследований, является стационарный
случайный процесс, представляющий сумму квазидетерминиро-
ванных случайных процессов
п
TlW=2L^cos(a)k^ (18.23)
/с=1
где ^-случайная величина; а)к - постоянная величина.
Каждая составляющая l>k cos(a)kf) представляет гармоническое
колебание со случайной амплитудой, распределение вероятностей
которой не зависит от времени
509
Раздел 18
Йк}=0, М^}=^М{^} = 0. (18.24)
Из (18.23) с учетом (18.24) получим корреляционную функцию
случайного процесса r|(t) в виде
п а2
Я^У^-СОБ^т). (18.25)
k=1 г
Спектральная плотность мощности случайного процесса опре-
деляется преобразованием Фурье R(т)
Л/П(со) = 1/2^ ji<4[5((d + cok) + 5(со-(дк)], (18.26)
k=1
представляет совокупность импульсных функций на частотах ±(ак .
Рассмотренный случайный процесс называется случайным про-
цессом с дискретным спектром.
Приведенные соотношения, иллюстрирующие возможности
расширения области преобразования Фурье, использованы в
дальнейшем.
18.3.Эффективная ширина спектра случайного процесса
Если для определения ширины корреляционной функции ис-
пользуется понятие интервала корреляции, то для спектра случай-
ного процесса - эффективной ширины спектра. Эффективная ши-
рина спектра определяется как наибольший интервал на оси час-
тот, на котором спектральная плотность мощности еще имеет су-
щественное для решаемой задачи значение. По аналогии с интер-
валом корреляции эффективную ширину спектра случайного про-
цесса можно определить на основе различных подходов.
1. Эффективная ширина спектра А определяется заданным зна-
чением нормированной спектральной плотности мощности случай-
ного процесса (рис. 18.6)
со- (D0)<e. (18.27)
Значение частоты coq принимают равной средней частоте спек-
тра, при низкочастотном спектре - равной нулю.
2. Эффективная ширина спектра определяется заданным зна-
чением интеграла от нормированной спектральной плотности
мощности (рис. 18.7).
-Д-тЛ/(
Л/(со0
510
Спектр случайного процесса
А = —Д—v [ Л/(о))сЛо. (18.28)
NMl
Величина 2 А представляет ширину равномерного спектра
мощности случайного процесса, имеющего мощность, равную
мощности рассматриваемого случайного процесса.
Аналогично соотношениям Хинчина - Винера, записанным для
одного случайного процесса - (18.12) и (18.13), можно записать
соотношения, связывающие взаимную корреляционную функцию
и взаимную плотность мощности двух случайных процессов ^(f)
и ^2(f)
511
Раздел 18
18.4. Спектр производной и интеграла
от случайного процесса
Используя свойства преобразования Фурье, установим соотно-
шения между спектральной плотностью мощности и корреляцион-
ной функцией производной и интеграла от стационарного случай-
ного процесса.
Корреляционная функция производной стационарного случай-
ного процесса равна второй производной от корреляционной функ-
ции, взятой со знаком минус (разд. 17)
^,(т) = -^(т).
Из (18.14) получим
оо
R (т) = — f(D2A/t(a))cos((0r)abo, (18.30)
£ л J s
о
где Л/^((о) - спектральная мощность случайного процесса ВД .
С учетом (18.30) можем записать соотношение, связывающее
спектральные плотности мощности случайного процесса и его про-
изводной
Л/^(со) = cd2A/^((d), (18.31)
где Л/^(о))- спектральная плотность мощности производной слу-
чайного процесса.
Средняя мощность производной случайного процесса равна
/?t(0) = -/?"(0) = -|,(D2A/^((D)ab. (18.32)
ъ 71 *
о
Нормированная корреляционная функция производной случай-
ного процесса определяется выражением
оо
J(D2/\/J(D)cOs((DT)ah
--------------• (18-33)
I (о2/\^(о))аЬо
о
512
Спектр случайного процесса
Рис. 18.8
Аналогично для л-й производной случайного процесса ВД за-
пишем
Л/^(л) (со) = со2пЛ/^((1))
(18.34)
В качестве примеров рассмотрим некоторые виды спектров слу-
чайных процессов и характеристики их производных.
1. Спектральная плотность мощности и корреляционная функ-
ция случайного процесса (рис. 18.8,а)
Л/(со) = /(0’, Я(т) = Я(0)е~^т2 /4.
Спектральная плотность мощности и корреляционная функция
производной случайного процесса (рис. 18.8,5)
513
Раздел 18
Я(т) = —fo)2e ®2/“21 cosoKC/(jj=--R(O)(1-oj2T2/2)e ®ll2/4 .
n J
о
2. Спектральная плотность мощности и корреляционная функ-
ция случайного процесса (рис. 18.9,а)
Л/(со) = Id / z, Н(т) = ^^-—cos(2arctgw}T:).
1 + oofт
Спектральная плотность мощности и корреляционная функция
производной случайного процесса (рис. 18.9,6)
N (со) = Id3 /co?e~^z®1, Я, (т) =-\ cos(4arctg^T).
(1 + (DfTZ)Z
514
Спектр случайного процесса
Используя полученные соотношения, можно получить и выра-
жение для спектральной плотности мощности интеграла от слу-
чайного процесса r|(f)
Л/ (со) — —р- ЛЛ (w) •
О)
(18.35)
Так, если спектральная плотность мощности и корреляционная
функция случайного процесса описывается выражениями (рис.
18.10,а)
Л/((о) = со2 , /?(т) =--' cos(3агсГдо^т),
+ (t^T )
то спектральная плотность мощности и корреляционная функция
интеграла от случайного процесса равны (рис. 18.10,5)
Л/(0)) = 1/(D^e 1 1 ',R(т) = —
1 + (l)f т
515
Раздел 18
Анализ графиков рис. 18.8-18.10 позволяет оценить влияние
дифференцирования и интегрирования на характеристики случай-
ного процесса.
18.5. Дискретизация случайного процесса
и его характеристик
Исходные данные о случайном процессе получаются в резуль-
тате измерений его характеристик, в первую очередь, корреляци-
онной функции и спектральной плотности мощности. Указанные
характеристики используются для определения других, необходи-
мых при анализе случайного процесса. Как правило, эти характе-
ристики определяются как дискретные функции времени (задерж-
ки) и частоты. Дискретные характеристики случайного процесса
получаются и при цифровой обработке колебаний. В связи с этим
возникнет ряд важных для практики задач:
выбор интервала дискретизации характеристик случайного про-
цесса;
установление соотношений между дискретными характеристи-
ками случайных процессов;
восстановление непрерывных характеристик случайных процес-
сов по дискретным и др.
В дальнейшем рассматриваются первые две из названных за-
дач, переход от дискретных к непрерывным характеристикам (ин-
терполяция характеристик случайных процессов) описан в первой
части.
18.5.1. Выбор интервала дискретизации
случайного процесса
Преобразование Фурье, используемое при анализе детермини-
рованных сигналов, связывает временную функцию, описывающую
сигнал, и спектральную плотность сигнала. При анализе случайных
процессов преобразование Фурье устанавливает связь между кор-
реляционной функцией и спектральной плотностью мощности слу-
чайного процесса. Эта аналогия позволяет перенести некоторые
выводы в отношении детерминированных сигналов на характери-
стики случайных процессов.
Возможность представления непрерывной корреляционной
функции случайного процесса ее дискретными значениями опре-
деляется так же, как и детерминированных сигналов. Корреляци-
онная функция полностью определяется дискретными отсчетами,
516
Спектр случайного процесса
выполняемыми через интервал времени, выбираемый из условия:
<л/(лт, где (Dm - максимальная частота в спектре случайного
процесса.
Восстановление непрерывной корреляционной функции по дис-
кретным значениям возможно, например, с помощью ряда Котель-
никова (рис. 18.11)
оо
Я(т) = ^/^(mJsincfcD^T-m^].
п=-°°
(18.36)
Дискретная корреляционная функция получается при обработке
выборочных значений случайного процесса. Для центрированного
случайного процесса
Я(^) =
1 N-k
П=1
к = 0,1,...,
(18.37)
где ^п,^п+к - выборочные значения случайного процесса ^(ш^и
£,[(л+AjxJ; - интервал дискретизации; kt} - смешение во вре-
мени; N — общее число выборочных значений.
Ограничение, накладываемое на выбор интервала дискретиза-
ции корреляционной функции, определяет интервал дискретизации
и самого случайного процесса.
Аналогичный вывод можно сделать относительно интервала дис-
кретизации по частоте при описании спектральной плотности мощно-
сти случайного процесса ее дискретными значениями (рис. 18.12).
517
Раздел 18
Интервал дискретизации по частоте выбирается из условия
со^л/т^, где тк- минимальное значение задержки, при котором
корреляционная функция может быть принята равной нулю. Ряд
Котельникова, определяющий спектральную плотность мощности
случайного процесса через ее дискретные значения, имеет вид
Л/(о))= "У Л/( ло)1) sin с[тк (о) - ло)1)].
(18.38)
В качестве предельных значений и тк могут быть выбраны;
эффективная ширина спектра и интервал корреляции. Более стро-
гий подход к их определению лишен смысла, интервалы дискрети-
зации - по времени и частоте устанавливаются неравенствами.
Общее число выборочных значений равно
2тк . 2d)m _
—- + 1 или —— + 1.
0)1
Используя дискретные значения корреляционной функции, про-
ведем ее ступенчатую аппроксимацию. Выражение для спектраль-
ной плотности случайного процесса запишем в виде
00 оо (Л+"0л
Л/((о) = 2J Н(т)соз(отс/г = 2^ J H(t)cos (отс/г =
О п=0
(18.39)
п G)r1
2
R(m} )cos[a)(n + 0,5)17-! ]
п=0
518
Спектр случайного процесса
Выражение (18.39) позволяет получить непрерывную функцию
Л/(со) с использованием дискретных значений корреляционной
функции.
Аналогично запишем выражение для корреляционной функции
случайного процесса
Т"
л
N[n(a} )cos[(n + 0,5)0)^].
л=0
(18.40)
Выражения (18.39), (18.40) могут быть применены для получения
алгоритмов расчета спектральной плотности мощности по дискрет-
ным значениям корреляционной функции и корреляционной функ-
ции - по дискретным значениям спектральной плотности мощности.
18.5.2. Дискретное преобразование Фурье (ДПФ)
Как и при расчете характеристик детерминированных сигналов,
можно записать ДПФ, связывающее дискретную корреляционную
функцию с дискретной спектральной плотностью случайного процесса.
Соотношения, связывающие корреляционную функцию и спек-
тральную плотность мощности случайного процесса
Л/(о)) = [ /?(т)е'ЬтсЛ, Я(т) = — [ Л/(о))е
J 2я J
—оо —оо
при достаточно малых значениях т1 и со1 могут быть преобразованы
к виду
л-1
*=1, (18.41)
2п^
Выражения (18.41) представляют дискретное преобразование
Фурье (прямое и обратное), связывают дискретные характеристики
случайного процесса: корреляционную функцию и спектральную
плотность мощности. Они позволяют получить удобные алгоритмы
расчета указанных характеристик.
При расчете по (18.41) можно перейти к алгоритмам, значитель-
но сокращающим объем вычислительных операций - алгоритмам
быстрого преобразования Фурье (БПФ).
519
Раздел 19.
УЗКОПОЛОСНЫЕ СЛУЧАЙНЫЕ ПРОЦЕССЫ
Узкополосные случайные процессы составляют широкий класс
случайных процессов. К ним в первую очередь относится колеба-
ние, модулированное сигналом. В качестве несущего колебания
может быть гармоническое или узкополосное случайное колеба-
ние, в качестве модулирующего - детерминированный сигнал или
случайный сигнал. Особенности узкополосных процессов, как и
узкополосных детерминированных сигналов, делают целесообраз-
ным их отдельное рассмотрение.
В разделе дается описание и методы анализа узкополосных
случайных процессов. Рассматривается наиболее распространен-
ный вид узкополосного случайного процесса - гармоническое ко-
лебание, модулированное случайным процессом.
19.1. Описание и характеристики узкополосных
процессов
19.1.1. Описание узкополосного случайного процесса
Как и детерминированный сигнал, случайный процесс называ-
ется узкополосным, если его спектр сосредоточится в узкой полосе
частот около средней частоты (рис. 19.1).
Узкополосный случайный процесс описывается выражением
£(f) = y(f)cos[w0f + <p(f)]= Vc(t)cosw0t - ys(f)sinwof, (19.1)
где w0- несущая частота; 1/(f), <p(f) - огибающая и фаза случайного
процесса;
Vc(t)= V(t)cos<p(t), Vs(t)= 1/(f)sin ф(г) (19.2)
Представление случайного процесса в виде (19.1) не ограниче-
но классом узкополосных процессов, однако для узкополосных
процессов оно оказалось наиболее удобным, V(t) и q(t) имеют на-
глядное физическое содержание. Реализация узкополосного слу-
чайного процесса представляет гармоническое колебание с мед-
ленно меняющейся амплитудой и частотой (фазой) (рис. 19.2).
520
Узкополосные случайные процессы
/¥(©)♦
Рис. 19.1
В отличие от детерминированного сигнала V(t) и <p(t) случайного
процесса являются случайными функциями.
Выражение для узкополосного случайного процесса часто удоб-
нее записывать в комплексной форме
£(f)=Re V(t)
где V(t) - комплексная огибающая случайного процесса:
(19.3)
V(t)= = Vc(t)+ iVs(t). (19.4)
Из (19.4) с учетом (19.2) получим
V(t) = 1/(П = ф(0 = arg V(t) = arctg
(19.5)
Корреляционная функция узкополосного случайного
процесса
£(0 определяется как
Я(т)=М{^Х(г + т)},
(19.6)
где М {...} - символ усреднения.
521
Раздел 19
Учитывая следующее соотношение для действительной части
комплексной величины z
RelzU- (z + z*),
2
(19.7)
где z* - комплексно сопряженная величина,
из (19.6) с учетом (19.3) получим
Я(т)=М
2
V(t) екй°{ + V* (t)
= Яе[я1/(т) еь°т
(19.8)
гдеЯДт) - корреляционная функция комплексной огибающей узко-
полосного случайного процесса:
Ru(t) = 1/2 M\V* +
(19.9)
Как следует из (19.8), при заданном значении несущей частоты
корреляционная функция комплексной огибающей полностью оп-
ределяет корреляционную функцию узкополосного случайного
процесса. Это позволяет при нахождении корреляционной функции
узкополосного случайного процесса ограничиться определением
Яи(т).
В качестве примеров приведем несколько видов функций .
1. Корреляционной функции комплексной огибающей (рис.
19.3,а)
Rv(t) = R\/(0)sinc(AT/2)
соответствует корреляционная функция узкополосного случайного
процесса (рис. 19.3,6)
Я(т) = Яе|Яу(т)ет]= Rv,(0)sinc(AT/2)cosa)0T.
2. Корреляционной функции комплексной огибающей (рис. 19.4а)
НДт) = Ru(0)e
522
Узкополосные случайные процессы
соответствует корреляционная функция узкополосного случайного
процесса (рис.19.4, б)
Я(т) = Rv (0)е°>1^ coso)0t.
3. Корреляционной функции комплексной огибающей (рис.
19.5,а)
z »2_2 / д
RvW=Ru(0)e^’’ /4
соответствует корреляционная функция узкополосного случайного
процесса (рис. 19.5 б)
Я(т) = Я\/(0)е^т2/4 coso)0t.
Спектральная плотность мощности случайного процесса опре-
деляется как преобразование Фурье корреляционной функции.
Выражение для корреляционной функции узкополосного случайно-
го процесса (19.8) с учетом (19.7) запишем в виде
523
Раздел 19
Я(т)
R(t)
Рис. 19.5
(19.10)
Преобразование Фурье левой и правой частей (19.10) дает
где Л/И((о) - спектральная плотность мощности комплексной оги-
бающей
Nv (w)= | (т)е •
(19.12)
Как следует из (19.11), спектр узкополосного процесса состоит
из двух зеркально-симметричных по форме составляющих, распо-
ложенных в области частот ±соо (рис.19.6). Спектр случайного про-
цесса в области положительных значений частоты описывается
первым слагаемым в (19.11), в области отрицательных значений -
вторым слагаемым. При заданном значении несущей частоты
соо спектр случайного процесса полностью определяется спек-
тральной плотностью мощности комплексной огибающей. Переход
от спектра комплексной огибающей к спектру случайного процесса
предполагает перенос низкочастотного спектра, описываемого
Л/И(со), в область частот ±соо(с коэффициентом 1/2). Таким обра-
зом, при спектральном анализе узкополосного случайного процес-
са достаточно исследовать только спектральную плотность мощ-
ности его комплексной огибающей.
524
Узкополосные случайные процессы
Рис. 19.6
Рассмотрим несколько видов спектров комплексной огибающей
случайного процесса.
1. Спектральной плотности мощности комплексной огибающей
(рис. 19.7,а)
Nv((i)) = 1, |оо| < А
соответствует спектральная плотность мощности случайного про-
цесса (рис. 19.7,6) при со > О
/V (со ) = 1/ 2 , | со — (Оо | < А.
2. Спектральной плотности мощности комплексной огибающей
(рис. 19.8,а)
Рис. 19.7
525
Раздел 19
Nv(g>)
Рис.19.8
соответствует спектральная плотность мощности случайного про-
цесса (рис. 19.8,6)
при со > О
3. Спектральной плотности мощности комплексной огибающей
(рис.19.9,а)
соответствует спектральная плотность мощности случайного про-
цесса (рис. 19.9,6)
при со>О (m-Mp)2 Л/(со) = 1/2е . Л/Д(о)| Л 0 ® а) — > 0 ®() co б) Рис.19.9
526
Узкополосные случайные процессы
19.1.2. Белый шум
Идеализацией широкополосного случайного процесса является
белый шум - случайный процесс с постоянной спектральной плот-
ностью мощности на всех частотах (рис. 19.10,а)
Л/(со) = Л/о = const.
(19.13)
Корреляционная функция белого шума
(19.14)
представляет импульсную функцию в начале координат
(рис. 19.10,6). Нормированная корреляционная функция белого
шума равна
r(T)=R(T)/R(0)=1, т = 0. (19.15)
Белый шум является только моделью реальных широкополос-
ных случайных процессов: мощность реального случайного про-
цесса ограничена, мощность белого шума бесконечна. Однако
введение понятия белого шума является полезным, в частности,
при анализе прохождения случайных процессов через радиотехни-
ческие цепи, и может не оказывать существенного влияния на ре-
зультаты, полученные при его использовании как модели реально-
го процесса.
19.2. Распределение вероятностей огибающей и фазы
узкополосного гауссовского процесса
Обратимся к записи узкополосного случайного процесса ^(t)
в виде
Рис. 19.10
527
Раздел 19
^(t)= V/(f)cos[(D0? + q>(r)] = Vc(t)cos(a0t- V/s(?)sin<joof, (19.16)
где
Vc(t)=V(t)cos<p(t), Vs(t)=V(t)sin^(t). (19.17)
Как следует из (19.16), Vc(t) и Vs(t) линейно связаны с E,(f). Если fyt)
представляет центрированный гауссовский процесс, то и Vc(t) и Vs(t)
являются также гауссовскими процессами с математическими ожида-
ниями, равными нулю. Вторые моменты распределения равны:
Rc(0) = = </,
Rs(0) = M{V^(t)sirf<p(t)} = <?,
Rcs(0) = M{V(t)cos<p (t)V(t)sin<p(t)} = 0.
Для гауссовских процессов равенство нулю корреляционной
функции означает независимость. Таким образом, совместная ПРВ
Vc(t) и Vs(t) равна произведению их одномерных ПРВ:
х2+уг
«г(х,у)=-^—е 2°г . (19.18)
2гат2
Квадратурные составляющие Vc(t) и Vs(t) связаны с огибающей
и фазой случайного процесса выражениями (19.17). Переход от
Vc(t) и Vs(t) к огибающей и фазе устанавливается соотношением
(раздел 17)
f2 (х, у) dx dy = f2 (рcos0,рsinб)р dp dQ = 2 (p,0) dp dQ, (19.19)
где fV(p2(p, 0}-двумерная ПРВ огибающей и фазы.
Такой переход аналогичен преобразованию прямоугольных ко-
ординат в полярные. Из (19.19) с учетом (19.18) получим
р2
UP>=-,A = e!“!. (19.20)
2 л о
Плотность распределения вероятностей огибающей найдется
из (19.20) как (рис. 19.11)
2л: Р
^i(p)= рир2(р,б)св = Л-е 2°2 • (19.21)
528
Узкополосные случайные процессы
Рис. 19.11
Таким образом, распределение огибающей узкополосного слу-
чайного процесса подчиняется закону Релея (разд. 15).
Плотность распределения вероятностей фазы
оо
Ue) = |^2(р,е)Ф = 1/271. (19.22)
О
Как следует из (19.22), ПРВ фазы является равномерной на ин-
тервале [0, 2л]. Огибающая и фаза узкополосного гауссовского
процесса в каждый момент времени являются независимыми.
19.3. Распределение огибающей и фазы смеси
сигнала и шума
Рассмотрим смесь узкополосного гауссовского процесса (шума)
^(t) и гармонического колебания (сигнала) s(t)\ частота сигнала
совпадает со средней частотой случайного процесса
T|(f) = £(f) + s(f) = ) + Vo cos (Do t. (19.23)
С учетом (19.1) запишем
r|(f) = [l/c(f)+ 1/0]соза)0Г- 1/5(/)з!п(о0?. (19.24)
Как узкополосный случайный процесс x](t) представим в виде
r|(f)= V^(t)cos[w0t + <р1(?)]= ^(fjcoswgf- l/s1(f)sincooL (19.25)
В (19.25)
529
Раздел 19
(19.26)
где VM= Vc(f)+ Vo, VM = Vs(t).
Совместная ПРВ составляющих VcA(t) и Vsi(t) равна
(х-У0)2+у2
М«.у)="г"г .
2ло
(19.27)
Переход
§19.2,
к огибающей и фазе выполняется, как показано в
f (р,е) = —2 е
Ир2 ' ' 2710
р 2+'/02-2р Уо cose
2о 2
(19.28)
Из (19.28) следует, что огибающая и фаза в рассматриваемом
случае являются зависимыми величинами. Наличие в показателе
степени члена, содержащего pcos0 не позволяет представить
fvV2(p,Q) как произведение ^(Р ) и
Плотность распределения вероятностей огибающей определим
как и раньше, интегрированием (19.28) по 0
р 2+Ур 2л pilose
ГИ1(р) = —£-—е 2°г fe 2°2 de.
27102 J
(19.29)
Из (19.29) получим (рис. 19.12)
530
Узкополосные случайные процессы
(19.30)
где 10(х) - модифицированная функция Бесселя первого рода ну-
левого порядка.
Таким образом, распределение огибающей смеси узкополосно-
го гауссовского процесса и гармонического сигнала подчиняется
обобщенному закону Релея (разд. 15).
Плотность распределения вероятностей фазы описывается вы-
ражением (получено с учетом (19.28)) [26].
оо
Цв)= рир2(р-б)Ф =
о
. -X.
= —е 2’2
2л
(У
VqCOS0
1
I/2 cos2 в
(19.31)
>е
При
К>=о ^(0)=^.
(19.32)
19.4. Модулированные случайные процессы
Узкополосными случайными процессами часто являются моду-
лированные колебания. Модулированное колебание представляет,
высокочастотное колебание (несущее), на которое наложено низ-
кочастотное - модулирующее (содержащее передаваемую инфор-
мацию). Наибольшая частота спектра модулирующего колебания
значительно меньше частоты несущего колебания. Это условие и
определяет узкополосность модулированного колебания.
Случайные процессы могут служить в качестве несущего или
модулирующего колебания. Случайный процесс как несущее коле-
бание является узкополосным, на него накладывается низкочас-
тотный сигнал (детерминированный или случайный). В качестве
модулирующего случайный процесс, как правило, используется при
модуляции гармонического колебания. Этот случай наиболее рас-
пространенный, он и рассматривается в разделе - модуляции слу-
чайным процессом гармонического колебания.
531
Раздел 19
Модулируется несущее колебание путем изменения одного или
нескольких его параметров. В зависимости от изменяемого пара-
метра различают и вид модуляции. Ниже рассматриваются коле-
бания с амплитудой и угловой (фазовой и частотой) модуляцией.
19.5. Случайный процесс с амплитудной модуляцией
Случайный процесс с амплитудной модуляцией (AM), как пра-
вило, является узкополосным и при обычной AM может быть пред-
ставлен в виде (рис. 19.13)
п(0=
(19.34)
где Vq , Wo, Фо ~ амплитуда, частота и начальная фаза несущего ко-
лебания; ^(t) - модулирующий случайный процесс; М - коэффици-
ент модуляции.
Обращение r\(t) в нуль при M^(t) < -1 означает перемодуляцию.
При AM детерминированным сигналом перемодуляция возникает
только при соответствующем выборе коэффициента модуляции.
Когда модулирующее колебание представляет случайный процесс
с неограниченным распределением его значений, всегда будет
иметь место перемодуляция. Если модулирующий случайный про-
цесс ^(t) имеет ПРВ f^(x) , то вероятность превышения уровня -
1/М(что соответствует перемодуляции) будет равна
м
рпм = [ 1 (х) &х
(19.35)
Значение Рпм определяет ту относительную часть времени, ко-
гда происходит перемодуляция несущего колебания.
Рис. 19.13
532
Узкополосные случайные процессы
При нормальном распределении модулирующего случайного
процесса из (19.35) получим
Рпм - &
к
_1_А
М<з )
ГДе 1 * Л
ф(х) = —== । е 2 du.
У2л £
(19.36)
Основными характеристиками модулированного случайного
процесса т|(0 являются корреляционная функция и спектральная
плотность мощности. Корреляционная функция случайного про-
цесса определяется как
Яп(т)=М{т](0п(г + т)}.
(19.37)
Если перемодуляцией можно пренебречь, то с учетом (19.34) из
(19.37) получим
V2 M2V2 . А
~ COS 0)0т +---^-2- F?(t)cos 0)0т,
(19.38)
где R(t) - корреляционная функция модулирующего случайного
процесса.
Спектральная плотность мощности AM случайного процесса
определяется как преобразование Фурье (19.38)
°° nV2 nV2
(ю) = Г F?n (т)е'*0Тс/г = —2- 8(w - to0) + —2- s(to + to0)+
* 2 2
(19.39)
М2У2 r . . .
+ —^-2- [A/(to - to0) + A/(to + to0 )J
где A/(to) - спектральная плотность мощности модулирующего слу-
чайного процесса.
В (19.39) первые два слагаемых представляют импульсные
функции на частотах ±«о площадью ттV^q/2; вторые два описывают
непрерывную часть спектра в области положительных и отрица-
тельных частот - около частот ±шо (рис. 19.14). Таким образом,
спектр AM случайного процесса получается наложением на дис-
кретную составляющую с частотой ±соо спектра модулирующего
случайного процесса (с соответствующим коэффициентом). Однако
533
Раздел 19
Л/(о)
/v»t
Рис. 19.14
преобразование спектра случайного процесса при AM как линейное
можно рассматривать только тогда, когда перемодуляцией можно
пренебречь.
Средняя мощность AM случайного процесса равна (0)
Мощность несущего колебания -
I/2
Рн-f- (19-41)
В качестве примеров рассмотрим различные виды модулирую-
щих случайных процессов.
1. Спектральная плотность мощности и корреляционная функция
модулирующего случайного процесса (табл. 18.1, п.1)
Л/((о) = 1, | а) | < А, Я(т) = F?(O)sinc(AT /2).
Корреляционная функция модулированного случайного процесса
Я(т) = /2 coscoqt + М2 V2o/2 F?(O)sinc( At/2)coscoot.
Спектральная плотность мощности модулированного случайно-
го процесса в области положительных частот (рис. 19.15)
534
Узкополосные случайные процессы
/Ц» = пУо2 /25 (со - wo) + М2 V02 /4 Л/(о) - соо),
где Л/(а) - соо) = 1, I со - (Оо | < А.
2. Спектральная плотность мощности и корреляционная функ-
ция модулирующего случайного процесса (табл.18.1, п.З)
м2 II
(of +ОГ
Корреляционная функция модулированного случайного процесса
Я(т) = Vo 2/2 coscoqt + M2V0 212 е coscoot.
Спектральная плотность мощности модулированного случайно-
го процесса в области положительных частот (рис. 19.16)
2
Л/п (со) = л Vq /2 8(g) - со0) + М2 V2 /4 —— -—.
G)f + (о) - 0)0 )
3. Спектральная плотность мощности и корреляционная функ-
ция модулирующего случайного процесса (табл. 18.1, п.13)
Л/(со) = , я(т) = Я(0) e^Z/4.
N(o)
Рис. 19.16
535
Раздел 19
Корреляционная функция модулированного случайного процесса
Я(т) =л Ц2 /2 coscoot + M2V02/2 Я(0) 7 4 cosc^t.
Спектральная плотность мощности модулированного случайно-
го процесса в области положительных частот (рис. 19.17)
Л/П(со) = 7iV02/2 5(со-соо) + М2 Vq2№
Когда перемодуляцией нельзя пренебречь, характеристики мо-
дулированного случайного процесса можно найти, используя мето-
ды анализа случайных процессов при нелинейных преобразовани-
ях (разд. 22).
Если модулирующий случайный процесс выходит за пределы
линейного участка модуляционной характеристики (результатом
этого нельзя пренебречь), выражение для AM случайного процесса
принимает вид
T](f)= vjl + Mg(^)]]cos[a)0f + ф0], (19.42)
где д(х) - функция, описывающая искажения модулирующего слу-
чайного процесса.
Обычно модуляционную характеристику можно аппроксимиро-
вать линейно-ломанной кривой. Для нее преобразование Лапласа
имеет вид 1//V (разд. 22). Выражение для AM случайного процесса
в этом случае можно записать в виде
т](г)= У0соз((1)0Г+ ф0)+ Ml/0cos(w0f+ ф0)|-^^(и)^у, (19.43)
где С - контур интегрирования.
Корреляционная функция r\(t) определяется выражением
536
Узкополосные случайные процессы
Ял(т) = —cosa)0T + M2V'02/2c°sa)oT[ [——^^2(vbv2)dv}dv2, (19.44)
2 J J Vi i/n
с с ' г
где 6^2 (^i,v2) - характеристическая функция Ц1).
Решение (19.44) получено в виде ряда [19]:
Ял(т) = —— cosw0t +-— cos сорт / j-o 2 г (т), (19.45)
2 2 n=i п\
где о2, - дисперсия и нормированная корреляционная функция
модулирующего случайного процесса.
Коэффициенты hn определяются выражением
hn = —— [ vn^2e~aZvZ/2dv . (19.46)
2л J
с
Как указывалось, перемодуляцию можно не учитывать при
о « А/М. В этом случае выражение Ял(т) примет вид
Ял(т) = Vq /2coscoot + М2 Vq /2 Г?(т Jcoscoqt, (19.47)
что совпадает с (19.38)
Спектр модулированного случайного процесса определяется
преобразованием Фурье
оо
Л/л (со) = J Р?л (т) e~K0Xdr.
Для ш>0 можем записать
Л/Л((о) = л Vq2/2 8(g)- cdo) + Nn1(a)),
(19.48)
(19.49)
где N^((n) описывает непрерывную часть спектра, соответствую-
щую второму слагаемому в (19.45) или (19.47).
Графики спектра модулированного случайного процесса при
спектральной плотности мощности модулирующего случайного
процесса
2 /,2
Л/(го) = е ° '
(19.50)
537
Раздел 19
приведены на рис. 19.18 [19]. Там же изображен спектр модулиро-
ванного случайного процесса, полученный без учета перемодуля-
ции (кривая, выполненная пунктиром). Сравнение приведенных
кривых показывает определенное расширение спектра модулиро-
ванного колебания при перемодуляции.
Амплитудно-модулированный случайный процесс при баланс-
ной модуляции описывается выражением (часть 1)
T](f) = V0M;(f)cos((o0f + ф0) = Ц (f)cos(cof + ф0),
(19.51)
где.^(0 - модулирующий случайный процесс.
Корреляционная функция модулированного случайного процес-
са равна
Ял(т)= M2Vq /2 H(t)cosco0t .
(19.52)
Преобразование Фурье (19.52) дает спектральную плотность
мощности (при со > 0)
Л/п (т) = M2v£ /4 Л/(со - со0), (19.53)
538
Узкополосные случайные процессы
Л/(о) t
Рис. 19.19
где Л/(со) - спектральная плотность мощности модулирующего слу-
чайного процесса ко-
спектр случайного процесса с балансной AM (рис. 19.19) со-
держит две симметричные полосы верхних и нижних боковых со-
ставляющих. Дискретная составляющая на частоте несущего коле-
бания отсутствует.
19.6. Случайный процесс с угловой модуляцией
19.6.1. Описание случайного процесса с угловой модуляцией
Случайный процесс с угловой модуляцией, как правило, являет-
ся узкополосным, описывается выражением (19.1), рис. 19.19,
r|(f) = Уо cos[co0f + i|/(f)] = Re 1/(7)е*п о/
(19.54)
где Vo ,coo , i|j(0 - амплитуда, частота и фаза; V(t) = Vo e^(t) - ком-
плексная огибающая случайного процесса.
При угловой модуляции происходит изменение фазы несущего
колебания y(t) под воздействием модулирующего случайного про-
цесса ^(t). Различают два вида угловой модуляции - фазовую (ФМ)
и частотную (ЧМ).
539
Раздел 19
Рис. 19.19
При ФМ модулирующий случайный процесс воздействует на
фазу непосредственно. Фаза определяется как
Й) = (Ро+^(0.
(19.55)
где (ро ~ начальная фаза; Щ) - модулирующее колебание - стацио-
нарный центрированный случайный процесс; к - коэффициент
пропорциональности.
Выражение (19.55) описывает линейную зависимость \y(t) от -
это наиболее часто встречающийся случай.
Частота ФМ случайного процесса определяется выражением
',(0 = ®о+^ = ®о + '<^- (19.56)
dt at
При ЧМ модулирующее колебание воздействует непосредст-
венно на частоту
v(f) =шо+ (19.57)
Фаза ЧМ случайного процесса
t
\|/(г) = ф0 + dt. (19.58)
о
Выражение для комплексной огибающей модулированного слу-
чайного процесса записывается в виде (ф0 = 0):
при ФМ
V(t) = Voe^\ (19.59)
при ЧМ
V(f)=l/Oe ° . (19.60)
540
Узкополосные случайные процессы
Таким образом, если известно распределение модулирующего
случайного процесса, можно найти распределение фазы и частоты
модулированного случайного процесса (по крайней мере такая
возможность имеется). Используя (19.59) и (19.60), получим корре-
ляционную функцию и спектральную плотность мощности ком-
плексной огибающей, а, следовательно, и модулированного слу-
чайного процесса.
19.6.2. Распределение фазы и частоты модулированного
случайного процесса
Определим ПРВ фазы и частоты модулированного случайного
процесса сначала при ФМ. Обозначив f^(x) одномерную ПРВ мо-
дулирующего стационарного случайного процесса Щ), выражение
для ПРВ фазы с учетом (19.55) запишем в виде (разд. 15)
(19.61)
Плотность распределения вероятностей частоты с учетом
(19.56) будет равна
к
Л(о-(о0 Л
4^7
(19.62)
где f^(x) - ПРВ производной модулирующего случайного процесса
£ (t) = dt/dt.
Для центрированного гауссовского процесса ^(t)
(19.63)
где о2 - дисперсия ^(t),
из (19.61) получим
(ф-Фо)2
(ф-Фо)2
2кг<зг
1
1
^ку/-РГ(р)
Q2k2R"(0)
tz ,
(19.64)
(19.65)
где R(t ) - корреляционная функция модулирующего процесса ^(t);
541
Раздел 19
а/ = к2о2 , cv2 = - I^R" (0) - дисперсии фазы и частоты.
При определении учтено, что производная гауссовского
процесса имеет нормальное распределение.
Плотность распределения вероятностей частоты fv(co} дает
представление о спектре, выражение (19.65) позволяет судить о
спектре ФМ случайного процесса при модуляции гауссовским про-
цессом.
При ЧМ выражения для ПРВ частоты и фазы модулированного
случайного процесса с учетом (19.57) и (19.58) получим в виде
Л со - (1)0 \
I к )'
^(ф) .
п
ф-фр
к
(19.66)
где f^(y) - ПРВ интеграла от %(t).
Плотность распределения вероятностей частоты, описываемая
(19.66), позволяет получить представление о спектре модулиро-
ванного случайного процесса..
Для модулирующего гауссовского процесса %(t) имеем
^(ф) =
(19.67)
(19.68)
где av2 = /с2о2; о/ = /с2оп2 - дисперсия частоты и фазы; ст/ - дис-
персия интеграла от ^(t).
Используя спектральную плотность мощности случайного про-
цесса fyt), выражения для ov2 и о/запишем в виде
2 ОО
ст2 = j/V(w)cto, о2
п о
Л/(со) / со2 chi
Сравнение характеристик распределения фазы и частоты при
ФМ и ЧМ показывает, что отличие ФМ от ЧМ при модуляции слу-
чайными процессами такое же, как при модуляции детерминиро-
ванными сигналами.
При описании угловой модуляции детерминированными сигна-
лами пользуются такими характеристиками, как индекс модуляции
542
Узкополосные случайные процессы
и девиация частоты. При рассмотрении угловой модуляции слу-
чайных процессов их определения требуют уточнения.
При ФМ случайным процессом целесообразно рассматривать
эффективный индекс модуляции, определив его как
т = ко = к
—J Л/((о)с/(о
71 о
(19.69)
и эффективную девиацию частоты
сод
= kj- R"(o) = k
- [ш2Л/((о)сЬ
л J
о
(19.70)
где R(t), о2 = R(0) - корреляционная функция и дисперсия модули-
рующего случайного процесса
При ЧМ эффективную девиацию частоты определим как
(оа = ко,
(19.71)
а эффективный индекс модуляции
т = ко^ ,
(19.72)
где
оо
о2 = — J/\/((D)/a)2cto.
71 о
Здесь N(w) - спектральная плотность мощности случайного про-
цесса ^(t).
При модуляции случайным процессом пределы изменения час-
тоты не ограничены. В то же время при соответствующем соотно-
шении эффективной девиации и несущей частоты вероятностью
того, что случайная величина - частота примет отрицательные
значения, можно пренебречь. Это условие и означает узкополос-
ность модулированного случайного процесса. В рамках этого усло-
вия и проводится рассмотрение модулированных случайных про-
цессов.
543
Раздел 19
19.6.3. Корреляционная функция и спектральная плотность
мощности комплексной огибающей ФМ случайного процесса
Корреляционная функция комплексной огибающей модулиро-
ванного случайного процесса определяется выражением (19.9)
F?v(t) = 1/2ЛЯ },
где М{...} - символ усреднения.
При ФМ с учетом (19.55) запишем
2
Яу(т) = }, (19.73)
где %(t) - модулирующий случайный процесс.
Среднее значение в (19.73) представляет характеристическую
функцию случайного процесса (разд. 15)
X(f) = 5(f)-5(f-r). (19.74)
Она определяется выражением
оо
exW= f fx(y^lkydy’
—оо
где fx (у) - одномерная ПРВ случайного процесса %(t).
Плотность распределения вероятности %(t) получим с учетом
(19.74), зная ПРВ модулирующего случайного процесса t>(t) (разд. 15)
оо
Гх(у) = ]Чг(и>У + u)du, (19.75)
—оо
где ^2^1 Лг? - двумерная ПРВ случайного процесса %(t).
При модуляции гауссовским процессом распределение %(t) яв-
ляется нормальным. Характеристическая функция %(t) равна
24
ех(к)=е 2 , (19.76)
где ох2 - дисперсия %(t).
При нормальном распределении ^(t) получим
о2 = 2[Я(0) - Я(т)] = 2о 2[1 - г(т)1 (19.77)
544
Узкополосные случайные процессы
где R(t), <з2 = R(0), г(т) = R(r)/R(O) - корреляционная функция, дис-
персия и нормированная корреляционная функция модулирующего
случайного процесса c(t).
При модуляции гауссовским процессом из (19.73) с учетом
(19.76) и (19.77) получим
Ни(т) = ^-е-/с2°2[1-гМ]. (19.78)
Используя спектральную плотность мощности модулирующего
случайного процесса N(oy), выражение для Rv(t) представим в виде
К)2
-^-ехр
/г
п
j Л/((оХ1 -coscorjcto
о
(19.79)
Полученные выражения описывают зависимость корреляцион-
ной функций комплексной огибающей ФМ сигнала от спектра мо-
дулирующего случайного процесса.
Корреляционная функция ФМ случайного процесса определяет-
ся (19.8). С учетом (19.79) запишем
Яп(т)=Пе[Ни(т)е*°оТ] =
Ч)2
= -^-ехр
J Л/(соХ1 - cos огт )cto
о
COSIDqT-
(19.80)
В качестве примеров рассмотрим некоторые виды модулирую-
щих случайных процессов.
1. Спектр модулирующего случайного процесса - равномерный
в полосе частот (табл. 18.1, п. 1), рис. 19.20.
Л/(о)) = No, 0 < I to I < А ,
корреляционная функция
г(т) = sincAx /2.
Корреляционная функция комплексной огибающей равна
R^t) = Vo2/2 ехрНАт2 (1 - sine Ат/2],
где о2- дисперсия модулирующего случайного процесса.
График корреляционной функции комплексной огибающей при-
веден на том же рис. 19.20,а.
545
Раздел 19
2. Спектр модулирующего случайного процесса вида (табл. 18.1,
п.З), рис. 19.21.
2
../ \ со,
Л/((0) =
wf + (О
нормированная корреляционная функция
Корреляционная функция комплексной огибающей
RV(T; = v02/2ехр[-^2 (1 - ем1 ы)].
График корреляционной функции комплексной огибающей при-
веден на рис. 19.21,а.
3. Спектр модулирующего случайного процесса - гауссовского
вида (табл. 18.1, п.13), рис. 19.22.
Л/И=
нормированная корреляционная функция
/<т)= е“(^2/4).
546
Узкополосные случайные процессы
Корреляционная функция комплексной огибающей равна
Rv(t)= V212е*р[-1?<з2 (1 -
График корреляционной функции комплексной огибающей при-
веден на рис. 19.22,а.
Средняя мощность модулированного случайного процесса рав-
на R^Q)
P=Vq/2. (19.81)
При имеем
t/2 Г к2 7
Яу((о) = —2-ехр----Л/(со)
2 л J
о
(19.82)
Непрерывной части спектра соответствует
2
Яу(т)-Яу(~) =
кг г
exp-------j A/(co)cos cor do)
(19.83)
2
0
Спектральная плотность мощности комплексной огибающей ФМ
случайного процесса определяется как
547
Раздел 19
Л/1/((о) = 2|я1/(т)созоксЛ = Ц)2|е cos сот eft, (19.84)
о о
где
к2 7
б(т)=к2о2[1-г(т)] = ^]Л/(а)Х1 -cosoKjdf). (19.85)
п о
В качестве примеров рассмотрим некоторые виды модулирую-
щих случайных процессов.
1. Спектр и корреляционная функция модулирующего процесса,
описываемого в табл. 18.1, п.1.
Спектральная плотность комплексной огибающей модулирован-
ного случайного процесса (рис. 19.20,6)
Л/и(о>) = У02|ехр{- к2в2 (1 - sincAr/2)}cos шгс/г,
о
2
где о - дисперсия модулирующего случайного процесса.
2. Спектр и корреляционная функция модулирующего процесса,
описываемого в табл. 18.1, п.З.
548
Узкополосные случайные процессы
Спектральная плотность комплексной огибающей модулирован-
ного случайного процесса (рис. 19.21,6)
Л/и (cd) = Vg2 J ехр{- k2o2(1 - е )}cos сит с/т.
о
3. Спектр и корреляционная функция модулирующего случайно-
го процесса, описываемого в табл. 18.1, п. 13.
Спектральная плотность комплексной огибающей модулирован-
ного случайного процесса (рис. 19.22,6).
A/u(cd) = l/02J expj- /c2o2(1-e~((^T2/4))/coswTtfr.
о
Графики корреляционных функций и спектров комплексной оги-
бающей ФМ случайных процессов, модулированных случайными
процессами, характеристики которых приведены в табл. 18.1, даны
в табл. 19.1.
Переход от спектральной плотности мощности комплексной
огибающей к спектральной плотности мощности узкополосного
случайного процесса описывается (19.11)
(19.86)
В (19.84), раскладывая г(т) в ряд Тейлора и ограничиваясь
первыми двумя слагаемыми, получим
G(t)= -к2/2Я'(0)т2 = /q2t2, (19.87)
где /q = k-yj- Я'(0)/2.
Подставляя (19.87) в (19.84), запишем
Nv(ад) = Ц2 J2 cos(dt dr = Jn /гк}e,J‘2/4^ . (19.88)
о
Спектральная плотность мощности модулированного случайно-
го процесса описывается выражением (19.11). С учетом (19.88) для
нее получим при (D > О
I— 2 о)
/у(ш) = 2^Ь_е < . (19.89)
nV 7 4к, v '
549
550
Корреляционная функция и спектральная плотность мощности
комплексной огибающей ФМ случайного процесса
Таблица 19.1.
№ Характеристики модулирующего Корреляционная функция ком- плексной огибающей ФМ Спектральная плотность мощности комплексной огибающей ФМ слу-
пп случайного процесса, Л/(ш); г(т) случайного процесса гу(т) чайного процесса
Раздел 19
Узкополосные случайные процессы
Продолжение таблицы 19.1
551
552
Продолжение таблицы 19.1
Раздел 19
Узкополосные случайные процессы
Продолжение таблицы 19.1
553
554
Раздел 19
555
Продолжение таблицы 19.1
Узкополосные случайные процессы
556
Окончание таблицы 19.1
Раздел 19
Узкополосные случайные процессы
Как следует из полученных выражений, при принятой аппрокси-
мации корреляционной функции модулирующего случайного про-
цесса спектральная плотность мощности описывается гауссовской
функцией.
При малом индексе модуляции, кс «1, в (19.78) может принять
е = 1-/с2о2[1-г(т)]
(19.90)
Спектральная плотность мощности комплексной огибающей по-
лучается с учетом (1.83) и (19.90) в виде
Nv (со) = л У025(а)) + к2 Vq /2 Л/(со).
(19.91)
Как следует из (19.91), при малом индексе модуляции непре-
рывная часть спектра повторяет (по форме) спектр модулирующего
случайного процесса.
19.6.4. Корреляционная функция и спектральная плотность
мощности комплексной огибающей ЧМ случайного процесса
Частотно-модулированный случайный процесс описывается вы-
ражением
д(0 = V/0cos[co0? + i|/(?)] = Re V/(?)e'0J°f ,
где 1/(1) = V0(t)e^^- комплексная огибающая.
Корреляционная функция комплексной огибающей ЧМ случай-
ного процесса определяется (19.9); с учетом (19.58) выражение
для нее имеет вид
2 2
' 2 1 J 2 1
(19.92)
i|/(f) = /cj - фаза случайного процесса;
о
t t-т t
Усредненная величина в (19.92) представляет характеристиче-
скую функцию %(t). Она определяется как
557
Раздел 19
оо
0х(/с)= jfx(x)elkxdx,
—оо
(19.93)
где fx(x) - одномерная ПРВ случайной величины х(0-
При нормальном распределении модулирующего случайного
процесса £,(0 случайные процессы
Q(t) = JJ(f)dt и х(0= jsWrt- (19-94)
0 0 0
имеют также нормальное распределение. С учетом определения
характеристической функции гауссовского процесса выражение
для Rv(t) по аналогии с (19.75) получим в виде
R (т)-
(19.95)
где
R;(r), ^ = R;(0), =
- корреляционная функция,
дисперсия и нормированная корреляционная функция случайного
процесса до-
определяя корреляционную функцию £(f) через спектральную
плотность мощности модулирующего процесса Л/(ш), запишем
о м 1 f N 0)
Я-(т) = — —COS(DTcto.
71J GT
0
С учетом (19.96) выражение для Яу(т) представим в виде
и?
2
Q ОО
к f\1-coswr .
— Л/(о))---------cto
71 J (D
(19.96)
(19.97)
Спектральная плотность мощности комплексной огибающей ЧМ
случайного процесса описывается выражением
оо оо
A/v((d) = 2J/?v(t)cos(dtc/t = Vq^ coswt eft, (19.98)
о о
558
Узкополосные случайные процессы
где
Q ОО
\ ,2 2k / \1 к Г.,/ \1~COSCOT ,
Git) = к of 1 - rr (т) = — Л/(со)--z----do.
b n J ш2
о
(19.99)
Выражение (19.98) аналогично выражению, описывающему
спектральную плотность мощности комплексной огибающей ФМ
случайного процесса. Отличие заключается в определении G(t).
ЧМ случайный процесс можно представить как ФМ случайный про-
цесс, имеющий иную спектральную плотность мощности. Если
спектральная плотность мощности модулирующего случайного
процесса при ФМ Л/(ш),то при соответствующей ЧМ - Л/(ш)/ш2.
Корреляционная функция ЧМ случайного процесса определяет-
ся как
Яп(т) = Ае[Я1/(т)е*й°г] =
KLxd
2 ехР
1-COS СОТ ,
CKO COSCOqT.
„2
О)
(19.100)
л
о
Средняя мощность модулированного случайного процесса равна
Р = У02/2.
При т—> имеем
к2 f .j чcos шт ,
— Л/(ш)------—do .
тг J со2
0 _
Непрерывной части спектра соответствует
^(т)- =
У02
= -^-ехр
(19.101)
(19.102)
(19.103)
В качестве примеров рассмотрим некоторые виды модулирую-
щих случайных процессов.
1. Спектральная плотность мощности и корреляционная функция
модулирующего случайного процесса описаны в табл. 18.1, п. 10.
559
Раздел 19
Рис. 19.23
Л/((о) = со2 /о^е “1, г(т) = 1/(1 + а)2т2)3/2 соз(3агс/р<о1т).
Корреляционная функция комплексной огибающей модулиро-
ванного случайного процесса (рис. 19.23,а)
и2
Яу(т) = -^-ехр<
к2 7
—- Ге и)/“1 (1 -cos(DT)cto >.
ла)1 I
График спектральной плотности мощности огибающей модули-
рованного случайного процесса (19.98) изображен на рис. 19.23,6.
2. Спектральная плотность мощности и корреляционная функ-
ция модулирующего процесса описаны в табл. 18.1, п. 11.
/V(w) = |w|3/wfe'|to|/t°1,
г(т) = 1/(1 + а)2т2)2 cos^arcfgo^T).
Корреляционная функция комплексной огибающей модулиро-
ванного случайного процесса (рис. 19.24,а)
560
Узкополосные случайные процессы
у2
Я^(т) = ехр
к2 г
—- а) е u)/“1(1-cos(Dr)ofo
ла)1 I
График спектральной плотности мощности комплексной оги-
бающей модулированного случайного процесса (19.98) изображен
на рис. 19.24,6.
3. Спектральная плотность мощности и корреляционная функция
модулирующего случайного процесса описаны в табл. 18.1, п. 12.
Л/(со) = о)4 ,
г(т) = 1/(1 + u)fr2)5/2 cos(5arc/p<D1T).
Корреляционная функция комплексной огибающей модулиро-
ванного случайного процесса (рис. 19.25,а)
и2
Яу(т) — —ехр
2 со
*
1 u)2e 0)1 (1 - cos arr)cfo)
ла)1 i
Рис. 19.24
561
Раздел 19
Рис. 19.25
График спектральной плотности мощности комплексной оги-
бающей модулированного процесса (19.98) изображен на рис.
19.25,6.
В (19.95) раскладывая г^(т)в ряд Тейлора и ограничиваясь пер-
выми двумя слагаемыми, получим
Г1\/ I V / — -С/ — ---С7
v 7 2 2
При таком представлении ЯДт) из (19.98) найдем
A/V(o))= У02 cosarccft =^^е~“2/4*2.
7 °J 2/с
(19.104)
(19.105)
Спектральная плотность модулированного случайного процесса
I о J2 /4k f
" 4к,
(19.106)
562
Узкополосные случайные процессы
Таким образом, спектральная плотность мощности случайного
процесса, модулированного гауссовским процессом, описывается
гауссовской функцией.
При малом индексе модуляции в (19.95) можем при-
нять
е-кг^ [1-г;(г)] 1 _ (19.107)
Спектральную плотность мощности огибающей определим с ис-
пользованием (19.107) и (19.103) в виде
Nv(y) = 7г1/025(о)) +
У2ок2
2л
а)2
Л/(со)
COSGKCto
COSOHCft.
(19.108)
Таким образом, при малом индексе модуляции спектральная
плотность мощности комплексной огибающей ЧМ случайного про-
цесса определяется спектральной плотностью мощности интегра-
ла от модулирующего случайного процесса.
563
Раздел 20.
ВЫБРОСЫ СЛУЧАЙНЫХ ПРОЦЕССОВ
Реализация непрерывного случайного процесса представляет
изменение случайной величины во времени - переходы от локаль-
ного минимума к локальному максимуму и наоборот (рис. 20.1).
Если установить уровень х, то можно выделить точки пересечения
реализации случайного процесса с выбранным уровнем - нули и
отрезки реализации над уровнем и под ним - положительные и от-
рицательные выбросы случайного процесса. Анализ выбросов, их
характеристик позволяет судить о поведении случайного процесса
во времени.
Наиболее полной характеристикой выбросов непрерывного
случайного процесса является ПРВ (ФРВ) длительности выбро-
сов. Она дает возможность определить и другие, менее полные,
характеристики, в частности, среднюю длительность и частоту
следования выбросов, дисперсию и др. Однако несмотря на то,
что подход к нахождению ПРВ длительности выбросов был пред-
ложен в одной из ранних работ по теории случайных процессов
[36], строгое решение задачи определения ПРВ (ФРВ) длительно-
сти выбросов в общей постановке наталкивается на трудности, не
всегда преодолимые на практике. Указанное обстоятельство яв-
ляется причиной того, что в разделе рассматриваются несколько
564
Выбросы случайных процессов
подходов к определению характеристик выбросов. Изложены наи-
более простые, дающие результаты с достаточной для инженерной
практики точностью.
20.1, Определение характеристик распределения
длительности выбросов с использованием ФРВ случай-
ного процесса
Рассмотрим стационарный случайный процесс ^(t) на интервале
времени [t, t + rj. Зададим уровень х и определим вероятность того,
что при условии не превышения случайным процессом уровня х в
точке t в остальных точках выделенного интервала времени он
также не превышает этот уровень. Чтобы определить эту вероят-
ность, разобьем интервал времени т на п участков длительностью
At = т/п.
Тогда указанная вероятность будет оцениваться как
FT(x)sF„+,(x)/^(x), (20.1)
где Fn+1(x)-(л+ 1)-мерная ФРВ случайного процесса q(t) в моменты
времени t, t + At, t + 2At,..., t + t.
Уменьшая длительность интервалов разбиения выбранного ин-
тервала, для FT(x) получим следующее предельное выражение
FT(x) = 1/Fj(x) lim Fn^(x). (20.2)
п—
Если значение случайного процесса t(t) внутри выделенного ин-
тервала времени не превышает заданный уровень х, то, следова-
тельно, пересечение этого уровня снизу вверх происходит только
в точке вне этого интервала. Вероятность того, что случайный про-
цесс не превышает уровень х на интервале т, определяет также
вероятность того, что длительность отрицательных выбросов бу-
дет не меньше т. Если обозначить F8(t) ФРВ длительности отри-
цательных выбросов относительно уровня х, то для нее с учетом
сказанного можно записать
F6(t) = 1-Ft(x), (20.3)
где FT(x) определяется (20.2).
При невозможности получить предельное значение в (20.2) оце-
нить F_8(t) можно с помощью (л + 1)-мерной ФРВ случайного про-
565
Раздел 20
цесса (20.1). Используя определение (л + 1)-мерной ФРВ через
двумерную ФРВ (разд. 16), для FT(x) запишем следующее выра-
жение;
Ft(x) = 1-[F2(x,x)/F,(x)]", (20.4)
где F2(x,x) - двумерная ФРВ, описывающая случайный процесс
в моменты времени t и t + At
Таким образом, оценку ФРВ длительности выбросов получим
в виде
F 8(т) - 1 - FT(x) = 1 - [f2(x, х)/^ (х)]п .
Для гауссовского процесса выражение для FT(x) было уточнено
при п—,С учетом ранее полученного результата запишем
F_8(t) = 1 - е с'1Т, (20.5)
где
2 ( \
а, о , г(т) - математическое ожидание, дисперсия и нормированная
корреляционная функция случайного процесса ^(t).
Аналогично получим выражение для ФРВ длительности поло-
жительных выбросов
F+5(T) = 1-e'“2T, (20.7)
где
(20.8)
На рис. 20.2 приведены графики ФРВ длительности выбросов:
20.2,а - отрицательных, 20.2,6 - положительных как функции
обобщенного параметра г "(о)т при различных нормированных
значениях уровня (х - а)/о.
566
Выбросы случайных процессов
а) б)
Рис. 20.2
Как следует из (20.5) - (20.8), оценка ФРВ длительности выбро-
сов гауссовского процесса для нормированных значений уровня
определяется второй производной нормированной корреляцион-
ной функции случайного процесса при т = 0.
При определении г "(о) полезно учитывать следующее соотно-
шение, связывающее г (о) со спектральной плотностью случайно-
го процесса (разд. 18)
г'(о) = -^---------
J Л/(о))сЬ
о
где Л/(со) - спектральная плотность мощности случайного процесса.
При х = а
(20.9)
1
«1 = «2 = а =~
71
71
j (о2Л/((о)сЬ
о
J Л/(со)сЬ
о
Функция распределения вероятностей длительности положи-
тельных и отрицательных выбросов имеют вид:
F5(t) = 1 - ё
(20.10)
567
Раздел 20
Результат, аналогичный (20.10), получен для случайного про-
цесса, имеющего распределение точек пересечения с нулевым
уровнем, подчиняющееся закону Пуассона, в разд. 15. Совпадение
результатов объясняется тем, что при выводе (20.2) и был сделан
переход к пуассоновскому распределению нулей.
Таким образом, записано выражение для ФРВ длительности
выбросов гауссовского процесса, полученное с некоторыми допу-
щениями. Ошибка при расчете по нему зависит от т, ошибка
уменьшается с ростом значений т.
Плотность распределения вероятностей длительности выбро-
сов найдется из (20.5) и (20.7):
отрицательных выбросов
(20.11)
положительных выбросов
f+5(x) = а2е-агТ. (20.12)
График 4(т) приведен на рис. 20.3, где а = а1 для отрицатель-
ных и а = а2 Для положительных выбросов случайного процесса.
Как следует из (20.11) и (20.12), распределение длительности
выбросов, полученное при принятых допущениях, подчиняется по-
казательному закону.
С учетом записанных выражений найдем математическое ожи-
дание длительности выбросов, ее среднее значение
= J
о
(20.13)
568
Выбросы случайных процессов
где а = а1 для отрицательных выбросов, a = а2 для положительных.
Таким образом, для отрицательных выбросов:
(20.14)
для положительных выбросов
(20.15)
При х = а как для отрицательных, так и для положительных вы-
бросов имеем
2л
(20.16)
Графики зависимости тср от значений уровня приведены на рис.
20.4. При увеличении значений уровня среднее значение длитель-
ности отрицательных выбросов увеличивается (рис. 20.4,а), поло-
жительных выбросов - уменьшается "(рис. 20.4,6). Поясняют ука-
занную зависимость отрезки реализаций случайного процесса,
приведенные на рисунках: на рис. 20.4,а заштрихованы отрица-
тельные выбросы, на рис. 20.4,6 - положительные, для различных
значений уровня.
С учетом (20.14) - (20.16) выражения для ФРВ и ПРВ длитель-
ности выбросов можно записать в виде
F5 (т) = 1 - е^/Тс₽ , f (т) = 1/тср етЬср, (20.17)
где тср = тср1 для отрицательных выбросов (20.14), тср = тср2 для
положительных выбросов (20.15).
Сумма средних значений длительности отрицательных и поло-
жительных выбросов представляет средний период их следования
При х = а
(20.18)
569
Раздел 20
570
Выбросы случайных процессов
(У
Рис. 20.5
Средняя частота следования выбросов равна
. 1 а/Хп д/-г (о) f х-а\2
Х = —- = .- = .о ..7 ехр - —.
Тср oq + а2 2л [ 2сг
При х = а
Тср 2 2л
(20.19)
(20.20)
Графики среднего значения периода и средней частоты следо-
вания выбросов в зависимости от нормированного значения уров-
ня приведены на рис. 20.5 и рис. 20.6.
571
Раздел 20
Как следует из анализа графиков, при увеличении абсолютного
значения уровня среднее значение частоты следования выбросов
уменьшается, соответственно, средний период увеличивается.
Результаты (20.13) - (20.20) получены исходя из приближенных
зависимостей ПРВ длительности выбросов. Однако они совпадают
с полученными при строгом подхода (п. 20.3).
Выражения для средней частоты выбросов относительно мате-
матического ожидания гауссовских процессов, характеристики ко-
торых приведены в табл. 18.1, сведены в табл. 20.1.
Дисперсия длительности выбросов с учетом (20.10) - (20.13)
(20.21)
Для отрицательных выбросов гауссовского процесса получим
(20.22)
для положительных выбросов:
(20.23)
Рассмотрим примеры характеристик распределения длительно-
сти выбросов гауссовского процесса.
1. Гауссовский процесс, имеющий спектр и корреляционную
функцию вида (табл. 18.1, п.1)
Л/(со) =1, |(о| < со2, г(т) = sincco2 —.
Для него получим
г (о) = со2/з,
F1§(х) = 1 - е
F+s(x) = 1-e^\
572
Выбросы случайных процессов
2.Гауссовский процесс, имеющий
функцию вида (табл. 18.1, п.13)
спектр и
корреляционную
Для него получим
- r"(0) = со?/2,
оц =
е 2°2 , а2 =
у-а)2
2а2
а-х
0^
I О
0)?/2
о
-а2т
3. Гауссовский процесс, имеющий спектр и корреляционную
функцию вида (табл. 18.1, п.4)
- А .и Ы
Плотность распределения вероятностей длительности выбро-
сов при х = а, полученная в соответствии с (20.11) или (20.12), име-
ет вид
4(х) = ю/ е^'х/п.
м ! /и
График 4(х) изображен на рис. 20.7. На рисунке точками нанесе-
ны результаты экспериментальных исследований для случайного
процесса с теми же характеристиками, приведенные в [20].
573
Раздел 20
Таблица 20.1.
Средняя частота следования выбросов
гауссовского процесса
№ п/п Характеристики случайного процесса Средняя частота выбросов г'(0)/2т1
1 Л/(со) = 1, со1 < |со| < w2 / \ Дт г[т) = sine—cos соот («2 + 0)^2 + М2)/2п7з
2 Л/(со) = 1 - —, led < w1 / \ .9 г(т)= sine
3 .,2 «(«>)=-г-4- г(т) = е’"’М
4 Л/М=7-^Ц- (wf + w2 г(т) = (l + (o1|'t|)e“0>|W 0^/271
5 ф) = 7— (wf + w2 У г(т) = 1+cn1['tj + -—— I 3 J 7з
6 [(0^ +(0 j г(т)= 1 + а>1|т|-2((1)1т)2 +
7 Л/(оэ) = е* 22 1 + Ojf-r mJ ^2п
574
Выбросы случайных процессов
№ п/п Характеристики случайного процесса Средняя частота выбросов X = 7- г'(0)/2я
8 л/(ш)= е-1*4 -ew"2 (иа^ + о^т2) -0)2/5/271, ш2 < CD1
9 Л/(ш) = — W ГЫ = 2 2е 1 + (>fjV e~H/wi эз(2агс?до)1т) Тб w,/2n
10 ,2 N(a>) = ^eM^ wf rW=/ , cosfaretgo^) (1 + аУ। r f л/з о^/я
11 /у(м) = Ц_е~МА’1 wf г(т)=7 —^cosUarctgo^ t) (1M4 л/б о^/я
12 Nfw)=^-e^ «i rW=/ W2 C0S(5afC^W1X) (1 + oifir f -УЗО ш^/2п
13 /V(0))=e-,,’2/w? г(т) = е^4 aj 2>/2я
14 \ W2 -o>2/w? /V(w) = — e ' ’ G)f l \ (. Ol^T2 -0)2t2/4 rM= 1-—!—e 1 1 I 2 J Зд/То со^я
15 /V(co)= cos— v 7 2w г(т) = cos ссцт/ -CD, |(й|<О)1 1 Y 4co2T2 k n2 ) Тя2 ч-Дя-всс^/зя2
575
Раздел 20
№ п/п Характеристики случайного процесса Средняя частота выбросов X =7- r"(o)/2n
16 Л/(ш) = cos2 v 7 2^ г(т) = sinewy// CD, |co| < (D1 < M2T2 ' n2 J ^п2 + бо^Д-Уз п2
17 /V(w)= sin—a w, / \ 2 T / rit) = cos w. — / 2/ », |co| < ( 2 2 n2 \ 7 ^п2 - 2(^/2tt2Jn
18 /V(w)= sin2 — w, (\ 2 / r(r) = sine о^т/ |co| < w1 ч 4я2 J
19 N(co) = sech— / \ , гал.т г(т) = sec h—— v ’ 2 “i/4
20 \ W .0) /v(w) = — cos ech— co1 w1 1 \ ,2 лжт r It = sec h —— \ ) 2
20.2. Определение характеристик распределения дли-
тельности выбросов с использованием частотных ха-
рактеристик случайного процесса
Прежде чем дать общую постановку задачи, рассмотрим част-
ный случай распределение длительности выбросов случайного
процесса с угловой модуляцией. Такое рассмотрение позволяет
лучше понять и решение задачи в общем виде.
20.2.1. Распределение длительности выбросов случайного
процесса с угловой модуляцией
Случайный процесс с угловой модуляцией описывается сле-
дующим выражением (разд. 19)
576
Выбросы случайных процессов
T|(f) = l/0 cos[co0f + v(f)], (20.24)
где l/0,co0, \|/(f) - амплитуда, несущая частота и фаза сигнала.
При фазовой модуляции (ФМ)
Й) = Фо +
где q(t) - модулирующий стационарный случайный процесс; ср0 -
начальная фаза; к - коэффициент пропорциональности.
Частота ФМ сигнала
v(0- со0 + - (О0 + к ^2 - -0 + где 7 dt (20.25)
При частотной модуляции (ЧМ) модулирующий случайный про-
цесс ^(t) воздействует непосредственно на частоту v(f) = co0 (20.26)
Зная ПРВ (ФРВ) модулирующего случайного процесса ^(t), мож-
но получить ПРВ частоты модулированного процесса (разд. 19):
при ФМ
. / \ 1 , f СО — СОл где fjy) - ПРВ производной £(?) = (20.27)
при ЧМ /X 1 (со-со0> f>)=4 к } где f^(y) - ПРВ модулирующего случайного процесса £,(t). (20.28)
Мощность модулированного случайного процесса в полосе час-
тот [со,со + cfco] равна l/02/2 fn(co)cfco. Интеграл от этой величины в
пределах возможного изменения частоты дает
Vq /2 J fv (co)cfco = Vq /2 = o2, 0 (20.29)
что соответствует мощности модулированного случайного процесса.
577
Раздел 20
(20.30)
Имея ПРВ частоты модулирующего случайного процесса, можно
получить ПРВ периода следования выбросов
Т = 2n/v
и длительности выбросов 5
5 = 7/2 = л/v. (20.31)
С учетом (20.31) выражение для ПРВ длительности выбросов
случайного процесса д (t) запишется в виде
(20.33)
Г§(т) = л/т Гп(л/т). (20.32)
Подставляя в (20.32) выражение для fv(w), найдем ПРВ дли-
тельности выбросов случайного процесса при ФМ или ЧМ.
Для гауссовского процесса
хг
f (х)- е 20 2
Ь (Л I — —г====.— с? ,
>/2ло
где о2 - дисперсия ^(t),
из (20.32) при ФМ получим
5 V2 т2®
где о2 = -к2Н"(о) - дисперсия частоты; Н(т) - корреляционная
функция случайного процесса ^(t),
то — п/ СОд .
Используя спектральную плотность мощности модулирующего
случайного процесса c/t) , выражение для о2 запишем в виде
(20.34)
2 00
Л I*
о г= — л co2/V(co)oto.
nJ
о
Для ЧМ из (20.32) с учетом (20.28) получим
1 1
где о2-дисперсия случайного процесса
(20.35)
(20.36)
578
Выбросы случайных процессов
Определенный интерес представляет рассмотрение распреде-
ления длительности выбросов на выходе смесителя ЧМ системы.
На вход смесителя подается ЧМ случайный процесс - непо-
средственно и после задержки t3. Случайный процесс на выходе
смесителя описывается выражением
т](0 = ^соз[1|/(0-1|/(Г-?з)]> (20.37)
где
t
4/(0 = Фо + kfat}dt,
о
^(t) - модулирующий случайный процесс; t3 - задержка.
Частота на выходе смесителя определяется как производная
фазы в (20.37)
(20.38)
Как следует из (20.38). несущая частота случайного процесса на
выходе смесителя отсутствует. Тем не менее случайный процесс
описывается выраженим, аналогичным выражению для узкополос-
ного случайного процесса (20.24).
ПРВ разности определяется выражением (разд. 17)
оо
f(y) - J 4 2 (и> У + (20.39)
— оо
где 2(х1,х2) - двумерная ПРВ ^(t) и ^(t-t3).
При нормальном распределении случайного процесса Щ) раз-
ность Щ) - Щ - t3). имеет также нормальное распределение с дис-
персией
в с = 2сг2[1-г(?3)], (20.40)
гдеЯ(т), о2 = Я(о), г(т) = Я(т)/Я(о) - корреляционная функция, дис-
персия и нормированная корреляционная функция £,(f).
Таким образом, для случайной величины (20.38) при нормаль-
ном распределении £(?) получим
1 [ (D2 1
Гъ(“)= VntoVl-’rfe) еХТ 4/Ат2[1 - r(t3)]] ' <20'41)
579
Раздел 20
Средняя частота случайного процесса на выходе смесителя
юср = J (n/у (to)cfco = 2/>/n - f(t3). (20.42)
о
Как следует из (20.42), для заданного значения времени за-
держки средняя частота на выходе смесителя зависит от значения
корреляционной функции модулирующего случайного процесса.
Длительность положительных и отрицательных выбросов слу-
чайного процесса на выходе смесителя связана с частотой соот-
ношением 5 = л/v. Из (20.33) и (20.41) получим (рис. 20.8,а)
(20.43)
ФРВ длительности выбросов равна (рис. 20.8,6)
(20.44)
20.2.2. Распределение длительности выбросов случайного
процесса, общая постановка задачи
Центрированный случайный процесс представим в виде
580
Выбросы случайных процессов
не накладывая на него условия узкополосности. Записанное выра-
жение аналогично тому, какое описывает случайный процесс с уг-
ловой модуляцией на выходе смесителя (п. 20.2.1). Функции V(t) и
(p(t) являются случайными функциями времени. Каждой реализа-
ции ^(t) соответствуют реализации амплитуды V(t) и частоты v(t).
Двумерную ПРВ случайных величин V(t) и v(t) обозначим f2w (и,ш).
Дисперсия
_ 2
J u2fVX)2(u,w)du
о
(20.46)
характеризует распределение мощности случайного процесса по
частоте. Такое же распределение дает и спектральная плотность
мощности случайного процесса 1/тгЛ/(ш). Однако определить ^(м),
используя (20.46), в общем случае не удается вследствие неопре-
деленности задания V(t) и v(f). Задача упрощается для случайно-
го процесса r|(f) с независимыми V(t) и ъ(?). Для него
J u2fVXj2(u,if))du = ru(w)J u2fv 2(u)du.
о о
Таким образом, для случайного процесса r|(f) имеем
. х Л/„ (to)
(to) = ——t oj > о . (20.47)
J
о
Такая зависимость справедлива для клиппированного случайно-
го процесса - случайного процесса на выходе идеального ограни-
чителя
rj(f) = sign^(f), (20.48)
где £,(?) - случайный процесс на входе.
Спектральную плотность мощности случайного процесса r|(f)
удобнее определить через корреляционную функцию Яп(м)
Л/7) (to) = 2 J Rrj (t)cos cot ch.
о
(20.49)
581
Раздел 20
Методы определения Ял(т) гауссовского процесса изложены
в разд. 22. Для гауссовского процесса имеем
гл(т) = Ял(т)/Ял(о) = 2/jtarcsin г(т), (20.50)
где - нормированная корреляционная функция исходного слу-
чайного процесса £(0.
Таким образом, зная корреляционную функцию гауссовского
процесса Я?(т) или соответствующий спектр Л/(со), можно получить
ПРВ или ФРВ частоты.
Функция распределения вероятностей частоты случайного про-
цесса определяется выражением
Fv(a)) = ри((о)ско. (20.51)
о
В качестве примера рассмотрим гауссовский процесс, имеющий
характеристики:
корреляционная функция (рис. 20.9,а)
г(т) = Ь/л/ь2 + т2 ,
спектральная плотность мощности (рис. 20.9,а)
Л/(со) = 2 j
о
Ь
Jb2 +т2
cos сот dr = 2bKQ(bo)),
где Kq(x) - модифицированная функция Бесселя.
Плотность распределения вероятностей частоты случайного
процесса описывается выражением
оо оо
г / \ 4 f ь , 4 f . 6
fv (w) = —т a resin-7= cos сот dr = arctg—coscordr =
Jo 7ь2+г2 я I т
2
— —
n
Ej (/xo) - e^'Ej (- Zxo)
(o > 0,
где E(x) - интегральная показательная функция.
Г рафик ПРВ частоты изображен на рис. 20.9,6.
На рис. 20.10 - 20.12 изображены графики ПРВ частоты гауссовских
процессов, характеристики которых приведены в табл. 18.1.
На рис. 20.10 для характеристик - табл. 18.1, п.4
582
Выбросы случайных процессов
б)
583
Раздел 20
на рис. 20.11 - для характеристик - табл. 18.1, п.5
N((d) = ~.—^1—-
(of + со2 У
на рис. 20.12-для характеристик - табл. 18.1, п.6
/v(w) = _J2i_
(of + (О2
( ( \3 I I
1 + cd-i |т| + 2(со1т)2 + .
3
В табл. 20.2 изображены графики ПРВ и ФРВ частоты гауссов-
ских процессов, характеристики которых приведены в табл. 18.1.
Период следования выбросов центрированного случайного
процесса относительно нулевого уровня Т связан с частотой v со-
отношением
Т = 2n/v .
(20.52)
Для гауссовского процесса длительности положительных и от-
рицательных выбросов в среднем равны и связаны с частотой со-
отношением
5 = Т/2 = n/v. (20.53)
С учетом (20.52) и (20.53) выражения для ПРВ периода и дли-
тельности выбросов случайного процесса определим через ПРВ
частоты в виде
fT(т) = 2л/x2fv (2 л/т), f5(т) = л/т2/, (л/т). (20.54)
584
Выбросыслу чайных процессов
Исходя из (20.54) запишем выражения для fT(r) и f5(r) с исполь-
зованием г (т)
, / \ 4 г / х 2л ,
— —— I (x)cos—xdx,
т2 Т
° (20.55)
, / х 2 ? { \ л ,
f5 (т) = — г (x)cos—xdx.
I т
Таблица 20.2.
Плотность и функция распределения вероятностей
частоты гауссовского процесса
585
Раздел 20
586
Выбросы случайных процессов
587
Раздел 20
588
Выбросы случайных процессов
589
Раздел 20
590
Выбросы случайных процессов
591
Раздел 20
Для гауссовского процесса получим
arcsin r(x)cos
<2л
--X
U J
dx,
(20.56)
(20.57)
В качестве примера рассмотрим гауссовский процесс, имеющий
корреляционную функцию вида (рис. 20.9,а)
Исходя из (20.56) и учитывая результат ранее решенного при-
мера, получим
f8(т)= (nb/т)-enb^Ej(-лЬ/т),
л т
где Ej(x) - интегральная показательная функция.
При расчете ПРВ (ФРВ) длительности выбросов гауссовского
процесса можно воспользоваться разложением arcsin г(т) в ряд
1 з/ \ 3
— г (т)+ —
6 v ’ 40
5
112
(20.58)
^2г"(п!)2(2л + 1)
После подстановки (20.58) в (20.57) получим
или
лт2 J
_0
-хк/х + 1/б|
' о
icos — хюх +
(20.59)
о
о
где
592
Выбросы случайных процессов
С тт
= 2 rk (x)cos —xdx.
J I т )
о 47
(20.60)
Так при г(т) = е
(20.60) примет вид
ехр<
ехр<
ехр<
или
^.3/2 1
71 t i \ 1
Ш) = ~т
*1
ехр-
1
—-г= ехр-^
6V3
1
4со1
1
5xf
5
-----?= exp-
11277
где т1 = tco-j / л.
Графики ПРВ и ФРВ длительности выбросов гауссовского про-
цесса с рассматриваемой характеристикой приведены на
рис. 20.13,а,б. На рис. 20.13, пунктирной линией проведены графи-
ки ПРВ и ФРВ длительности выбросов, полученный с использова-
нием методики, изложенной в п. 20.1. Сравнение графиков позво-
ляет оценить ошибку, появляющуюся при использовании прибли-
женного метода.
Графики ПРВ и ФРВ длительности выбросов центрированных
гауссовских процессов для нулевого уровня и некоторых характе-
ристик (спектра или корреляционной функции) изображены на
рис. 20.14-20.16.
Для характеристик - табл. 18.1, п.4
Л/(ш) =
на рис. 20.14.
Для характеристик - табл. 18.1, п.5
593
Раздел 20
Л/(со)
Рис. 20.13
на рис.20.15.
594
Выбросы случайных процессов
на рис.20.16.
Вид графиков ПРВ длительности выбросов (рис.20.14 - 20.16),
соответствует результатам экспериментального определения ПРВ
случайных процессов, имеющих те же характеристики [20].
Графики ПРВ и ФРВ длительности выбросов гауссовских про-
цессов с различными характеристиками (табл. 18.1), полученные с
использованием описанного подхода, включены в табл. 20.3.
Все изложенное касалось распределения длительности выбро-
сов центрированного гауссовского процесса относительно нулевого
уровня. При уровне, отличном от нулевого, необходимо учитывать
различие в длительности отрицательных и положительных выбро-
сов. Можно считать, что в среднем длительность отрицательных
выбросов относительно уровня х определяется как
2пк
v
(20.61)
где Т - период следования выбросов, определяемый как 2л/х),
к = гДх) ^(х) - одномерная ФРВ случайного процесса £(f).
Для положительных выбросов запишем
62 = IzJL = 271(у . (20.62)
Таким образом, зная распределение частоты случайного про-
цесса, можно получить и распределение длительности отрица-
тельных и положительных выбросов
595
Раздел 20
4-W=
2пк (2пку
т { т J
(20.63)
Имея ПРВ длительности выбросов,
нее значение длительности выбросов
можно определить и сред-
оо
тср = Jt . (20.64)
о
Однако сложность выражений для ПРВ длительности выбросов
заставляет выбрать несколько иной путь. Используя его, получим
выражения для средней частоты следования в ыбросов и средней
Таблица 20.3.
Плотность и функция распределения вероятностей
длительности выбросов гауссовского процесса
№
ПРВ длительности выбросов f8(r)
ФРВ длительности выбросов Р8(т)
596
Выбросы случайных процессов
597
Раздел 20
598
Выбросы случайных процессов
599
Раздел 20
600
Выбросы случайных процессов
ПРВ длительности выбросов f8(r)
№
ФРВ длительности выбросов Fs (т)
601
Раздел 20
ПРВ длительности выбросов fs(r) ФРВ длительности выбросов Fs(x)
№
602
Выбросы случайных процессов
длительности выбросов гауссовского процесса относительно нуле-
вого уровня.
20.2.3. Среднее значение длительности выбросов
Рассмотрим случайный процесс r](f) - центрированный гаус-
совский процесс на выходе идеального ограничителя в моменты
времени и t2(t2 -t, = Af). Случайный процесс в моменты време-
ни и t2 принимает значения ±1. Полная группа событий описы-
вается вероятностями:
Р++ - вероятность превышения нулевого уровня в моменты
времени и t2;
Р-----вероятность непревышения нулевого уровня в моменты
времени и t2;
Ра--вероятность превышения нулевого уровня в момент вре-
мени и непревышения в момент времени t2 ;
Р- + - вероятность непревышения нулевого уровня в момент
времени и превышения в момент времени t2 .
Очевидно,
Р++ + Я_ + Я- + Я+ = 1. (20.65)
Корреляционная функция случайного процесса T](f) определя-
ется выражением
Mnfc)nfc)}= ф, - ^=ф)=Р++ + Я_ - Я- " Я+ . (20.66)
Учитывая для гауссовского процесса равенство
Я- = я+ = Я (20.67)
из (20.65) и (20.66) получим выражение для вероятности несовпа-
дения знаков случайного процесса в моменты времени и t2:
Р = 1/4 [1 - гп(дt)] = 1/4 [rn(О) - гп (Af)]. (20.68)
Величина
р
lim — = X (20.69)
дг ,о Af
представляет среднюю частоту следования выбросов случайного
603
Раздел 20
процесса (подробнее см. п. 20.3). С учетом (20.68) запишем
р гп(м)~ гп(0) . , .
л = lim — = -1/4 lim —--------— = -1/4 rn (о).
л?- >о Af At—»o Af 1
(20.70)
С учетом (20.50) получим
2 Г (т)
I (20.71)
”ф-г2(т)
где г(т) - нормированная корреляционная функция исходного слу-
чайного процесса £,(?).
Предел в (20.71) при т —> 0 найдем, применяя правило Лопиталя
г. (0) = - lim , Г . (20.72)
П "4'-°^-г2М
Подставляя (20.72) в (20.70), запишем
X = A J-r"(Oj, (20.73)
2п *
что совпадает с результатом, полученным ранее.
Среднее значение длительности выбросов относительно нуле-
вого уровня равно
<20-74)
что совпадает с (20.16).
Приведенные соотношения, связывающие ПРВ длительности
выбросов и частотные характеристики случайного процесса, могут
быть использованы и при решении обратной задачи - определении
спектра случайного процесса по ПРВ длительности выбросов. Та-
кая задача возникает, например, при экспериментальной обработ-
ке реализации случайного процесса, когда в качестве исходной
характеристики наиболее просто получить ПРВ длительности вы-
бросов.
20.2.4. Решение обратной задачи
ПРВ частоты случайного процесса связана с ПРВ периода вы-
бросов соотношением
604
Выбросы случайных процессов
fv((o) = 2л/а)2 /т(2п/ш),
(20.75)
где fT (т) - ПРВ периода выбросов, которая может быть получена
аналогично (20.54).
Плотность распределения вероятностей частоты описывает
нормированную спектральную плотность мощности случайного
процесса на выходе идеального ограничителя
fJw) = _jyvW_! (20.76)
J Nv (о))с/о)
о
характеризует спектр исходного случайного процесса.
Для гауссовского процесса от лЦш) перейдем к корреляцион-
ной функции случайного процесса
оо
Я ((о) = — f A/v (о)) cos тот do . (20.77)
л J
о
Используя соотношение, связывающее г (т) с нормированной
корреляционной функцией исходного случайного процесса г(т):
г (т) = —arcsin г(т), (20.78)
л
можно получить корреляционную функцию и спектр исходного
случайного процесса
Л/(со) = 2J Я(о) г(т)соз(от dr
° . (20.79)
В качестве примера рассмотрим случайный процесс, для кото-
рого ПРВ периода выбросов имеет вид
4W=
т" - у
——?е 7'•
П>тГ'
где т, = const, п = 1,2,...
Из (20.75) получим
/х (2л)п+1
и л!т”+1о)п+2
605
Раздел 20
С учетом (20.76) найдем (рис. 20.17)
Л/п (и) =
гЛ(0)Г2пГ2
2/7! 1^(0^
Величина Л/П((о) дает представление о спектре случайного про-
цесса, от нее можно перейти к спектру исходного случайного про-
цесса.
606
Выбросы случайных процессов
20.3. Средняя частота следования и средняя длитель-
ность выбросов случайного процесса
Имея ФРВ или ПРВ длительности выбросов, можно определить
математическое ожидание - среднюю длительность выбросов
и другие моменты распределения. С учетом того, что ранее было по-
лучено приближенное решение для ПРВ длительности выбросов
(п. 20.1) и решение для ограниченных условий (п. 20.2), целесообраз-
но задачу по определению моментных характеристик выбросов рас-
смотреть отдельно, не связывая ее с нахождением ПРВ длительности
выбросов. Рассмотрение проводится для двух случаев: когда извест-
но совместное распределение случайного процесса и его производ-
ной, и когда известна только двумерная ФРВ случайного процесса.
20.3.1. Определение характеристик выбросов
с использованием совместного распределения случайного
процесса и его производной
Рассмотрим стационарный случайный процесс £(f) на интерва-
ле времени [f, t + 7]. Разобьем интервал Т на п участков длитель-
ностью Ы^Т/n. Обозначим вероятность пересечения случайным
процессом уровня х снизу вверх (с положительным значением про-
изводной) каждого участка р . Среднее значение числа пересече-
ний случайным процессом уровня х на всем интервале Т равно пр.
Средняя частота пересечений уровня х случайным процессом сни-
зу вверх оценивается выражением
Л = . (20.80)
ТЫ
Чем меньше значение Ы, тем точнее записанное выражение.
Точное значение Л получим при Д?->0
X=lim—. (20.81)
Af—>0 Ы
Величина р определяется вероятностью одновременного вы-
полнения следующих неравенств:
х - Дх < £(f) < х, d^t^/dt > 0 . (20.82)
Если ^п(х,у) - двумерная ПРВ случайного процесса L,(t) и его
производной T|(f) = d^(t)!dt в момент времени t, то вероятность вы-
607
Раздел 20
полнения неравенств (20.82) определяется как
р = J J (х, у) dx dy. (20.83)
0 х-Дх
При достаточно малом значении Дх внутренний интеграл
в (20.83) можно представить в виде
где у - Ах (20.84)
С учетом (20.84) выражение (20.83) примет вид
оо
р = Дг|уЦх,у)(Уу.
о
(20.85)
Из (20.81) с учетом (20.85) получим
(20.86)
о
Таким образом, зная совместную ПРВ случайного процесса
и его производной для одного и того же момента времени, можно оп-
ределить среднюю частоту следования нулей случайного процесса
(при пересечении уровня снизу вверх). Эта частота совпадает со
средней частотой положительных выбросов случайного процесса.
Аналогично получается выражение для средней частоты нулей
случайного процесса при пересечении им уровня х сверху вниз.
Оно совпадает с (20.86). Этим же выражением определяется
и средняя частота следования отрицательных выбросов.
Используя X, можно определить среднюю длительность выбро-
сов относительно заданного уровня.
Для эргодических случайных процессов среднее время непре-
вышения уровня х на интервале времени Т может быть определе-
но как TF^x), где Fj(x) - ФРВ случайного процесса. Среднее число
выбросов на интервале времени Травно УТ.
Таким образом, средняя длительность отрицательных выбросов
равна
^ = TFM/n=FM/X.
(20.87)
608
Выбросы случайных процессов
Средняя длительность положительных импульсов определяется
аналогично
ТсргМ1-»- (20.88)
Конкретизируем полученные результаты для гауссовского про-
цесса. Совместная ПРВ центрированного гауссовского процесса и
его производной в один и тот же момент времени описывается вы-
ражением (разд. 16)
1
ехр<
1
2ст2
(20.89)
У
где а, о2, г(т) - математическое ожидание, дисперсия и нормиро-
ванная корреляционная функция случайного процесса.
Подставляя (20.89) в (20.86), для средней частоты следования
выбросов гауссовского процесса получим следующее выражение
Z=JL
271
2a2
(20.91)
При х = а
2п *
Используя спектральную плотность мощности случайного про-
цесса Л/(о)), запишем
2
ос 12
1
271
J Л/(о))(Ло
о
При х = а
1
2 71
ехр< -
2о2
(20.92)
(20.93)
о
о
1
2
о
609
Раздел 20
Средняя длительность отрицательных выбросов гауссовского
процесса с учетом (20.90) определяется выражением
(20.94)
Средняя длительность положительных выбросов
(20.95)
При х = а
тср1 ~ тср2 - тср '
П
(20.96)
Таким образом, определены средняя частота следования вы-
бросов и средняя длительность выбросов с использованием со-
вместной ПРВ случайного процесса и его производной. Получен-
ные выражения совпадают с соответствующими выражениями,
приведенными в п. 20.1 и п. 20.2.2.
Средняя частота следования выбросов и средняя длительность
выбросов могут быть также определены с использованием только
двумерной ПРВ случайного процесса.
20.3.2. Определение характеристик выбросов
с использованием двумерной ПРВ случайного процесса
Как было установлено, средняя частота пересечений случай-
ным процессом заданного уровня снизу вверх определяется сле-
дующим предельным соотношением
, г Р
X = hm —,
ДГ->0 Af
(20.97)
где р - вероятность пересечения случайным процессом уровня х
снизу вверх интервала длительностью Af.
610
Выбросы случайных процессов
Вероятность хотя бы одного пересечения случайным процессом
уровня х снизу вверх на интервале времени [f, t + А/] можем опре-
делить как
p=P{^t)<x, ^t + At)>x}. (20.98)
Используя двумерную ПРВ случайного процесса £(f) для мо-
ментов времени t и t + Af, выражение для р запишем в виде
X
р= | j f2(xbx2)dx]dx2 =
/:х х х (20.99)
= J Jf2(xi> Х2^х^Х2 - J f2(xv Х2^Х^Х2 = Я|(х)-F2(x,x),
— со —со —со —оо
где f2(xi> х2 )> 6(XJ^(xv хг) “ ПРВ и ФРВ случайного процесса.
С учетом (20.97) выражение для средней частоты следования
выбросов случайного процесса примет вид
Л = lim (20.100)
At-»o Af
Таким образом, имея двумерную ФРВ случайного процесса,
можно определить среднюю частоту следования его выбросов.
Для гауссовского процесса, воспользовавшись соотношениями,
полученными в разд. 16, найдем
Л = '"(о)ехр-
271 ’
(х~а)2
2о2
(20.101)
что совпадает с (20.90).
Аналогично можно получить выражения для других средних ха-
рактеристик случайного процесса: средней частоты пересечений
случайным процессом заданного уровня сверху вниз, средней час-
тоты следования выбросов, сред ей длительности отрицательных
и положительных выбросов.
Как следует из сопоставления результатов, оба подхода (с ис-
пользованием совместной ПРВ случайного процесса и его произ-
водной и с использованием двумерной ПРВ случайного процесса)
дают идентичные выражения. Они совпадают и с результатами,
полученными на основе решения для ПРВ длительности выбросов,
приведенными в п. 20 1.
611
Раздел 20
20.4. Средняя частота следования экстремумов
случайного процесса
Подходы к определению характеристик выбросов, изложенные
в § 20.3, позволяют найти и среднюю частоту следования макси-
мумов случайного процесса. Определим ее, используя двумерную
ПРВ случайного процесса.
Рассмотрим стационарный случайный процесс £(f) на интерва-
ле времени [Г, t + 7]. Интервал Т разобьем на п участков длитель-
ностью At = T/n. Средняя частота следования максимумов слу-
чайного процесса определяется выражением, аналогичным (20.97)
= lim (20.102)
т дг -+о At
где рт - вероятность появления максимума случайного процесса
на интервале времени At.
Вероятность того, что случайный процесс имеет хотя бы один
максимум на интервале At, определяется выражением
Pm = pfe'(f))0, 5'(f + Af)<o}, (20.103)
если существует производная случайного процесса £(f). Зная дву-
мерную ПРВ производной случайного процесса, для вероятности
(20.103) запишем
p^'(i)>0,4(t+M)< о}
7 г / х z . , . (20.104)
j J 4)2(УьУг) ^У1 дУг - Р^2\р,Щ
0 — ОО
где. ^2(У’У1 Р^(у\ F^(y,y) - ПРВ и ФРВ производной случайного
процесса r|(f) = %(t).
Таким образом, для средней частоты следования максимумов слу-
чайного процесса получим следующее предельное соотношение
= «То l(0)“ F"г(0,0^ (20'105)
Уточним (20.105) для гауссовского процесса £(f). Производная
стационарного гауссовского процесса представляет гауссовский
612
Выбросы случайных процессов
процесс с математическим ожиданием, равным нулю, и корреляци-
онной функцией, равной второй производной корреляционной
функции случайного процесса со знаком минус (разд. 16). Для дву-
мерной ФРВ гауссовского процесса т](?) при х = 0 по аналогии
с (20.91) получим
(20.106)
2л * 1
где г (т) - нормированная корреляционная функция случайного
процесса т](?).
С учетом того, что
FL = Fl = (20.107)
где Я(т), Я (т), Яп'(т) - корреляционные функции случайных про-
цессов r|(f) =£'(?), T|'(f) соответственно,
из (20.106) найдем
(20-108>
2л у г (0)
где И4^(т) - четвертая производная от нормированной корреляци-
онной функции гауссовского процесса £(f).
Таким образом, средняя частота следования максимумов гаус-
совского процесса, определяется его корреляционной функцией
(значениями ее второй и четвертой производных при т = 0). Средняя
частота следования минимумов случайного процесса равна средней
частоте максимумов гауссовского процесса, определяется (20.108).
Вывод выражения для нее аналогичен выводу выражения для лт.
Определяя среднюю частоту следования максимумов (миниму-
мов) через среднюю частоту выбросов случайного процесса
(20.81), запишем
. Jr(4)(0)
т=Ъто) (2°'109)
Таким образом, средняя частота максимумов больше средней
частоты выбросов в д/М4^(о)/- г”(о) раз.
613
Раздел 20
В качестве примеров рассмотрим некоторые характеристики
случайных процессов.
1. Гауссовский процесс с характеристиками (табл. 18.1, п.1):
спектральная плотность мощности. Л/(о)) = 1, ш-. < |cd| < ш2, корреляци-
онная функция
/ х . Дт
Г(т = Sine-----COS 0)nT.
\ / 2 О
Для него имеем
5(cd2 - co1 j 3
Из (20.103) получим
. 1 /з(со§—CD?)
~ о~ЛЫЗ-------31 или
2 л у 5(cd2 - cof)
где X - средняя частота следования выбросов.
2. Гауссовский процесс с характеристиками (табл. 18.1, п.2):
спектральная плотность мощности
Л/(ш)= 1- —,|d < (ty,
ш1 1 1
корреляционная функция
г (т) = sine —К
Для него имеем
, 1 V2 . 2л/з.
д — «= ИЛИ Ат — =г—Д.,
2л v'5 V5
3. Гаусовский провес с характеристиками (табл. 18.1, п.5):
спектральная плотность мощности
корреляционная функция
614
Выбросы случайных процессов
е
o)ilTl
Для него имеем
Хт —----т= ИЛИ X т —----X.
Лд/З 3
4. Гаусовский процесс с характеристиками (табл. 18.1, п.6):
спектральная плотность мощности
(cof + (I)2 У
корреляционная функция
Для него имеем
_ 1
т ~ ~
или Хт
5
Средняя частота следования экстремумов гауссовского процес-
са равна
1 /—г(4Чо)
X =2Xm= —J—(20.110)
7Ц г (о)
Средний интервал между максимумами или минимумами опре-
деляется как
1 |-г'(о)
Ттх=2т4)’ <20-111)
а между экстремумами
Тз = ’ (20.112)
615
Раздел 21.
ПРОХОЖДЕНИЕ СЛУЧАЙНОГО ПРОЦЕССА ЧЕРЕЗ
ЛИНЕЙНУЮ ЦЕПЬ
Анализ прохождения случайного процесса через линейную цепь
предполагает прежде всего определение характеристик случайного
процесса на выходе цепи при известных характеристиках цепи и
случайного процесса на входе. Методы определения основных ха-
рактеристик случайного процесса на выходе линейной цепи со-
ставляют содержание раздела.
21.1. Характеристики линейной цепи
Радиотехническая цепь называется линейной, если в отноше-
нии нее выполняется принцип суперпозиции. Принцип суперпози-
ции означает, что прохождение сигнала (колебания) через цепь не
зависит от воздействия на цепь других сигналов. Результат воз-
действия на цепь суммы сигналов эквивалентен сумме результатов
воздействия на цепь каждого из сигналов. Цепи, для которых ука-
занное условие не выполняется, называются нелинейными. Ли-
нейные цепи, параметры которых изменяются, называются линей-
ными параметрическими. В дальнейшем рассматриваются только
линейные цепи с постоянными параметрами.
Различают временные и частотные характеристики линейных
цепей, в зависимости от того, в какой области (временной или час-
тотной) описываются свойства цепей. Из временных прежде всего
следует отметить импульсную характеристику h(t). Она представ-
ляет отклик цепи на воздействие в виде импульсной функции
5(?).При подаче на вход цепи сигнала сигнал на выходе опи-
сывается выражением
t t
s2 (0 = J h(u) s1 (t - u) du = J h(t - u) (u) du. (21.1)
о 0
Интеграл (21.1) называется сверткой, позволяет проводить ана-
лиз прохождения сигнала через линейную цепь при известной им-
пульсной характеристике цепи. Реализация случайного процесса
616
Прохождение случайного процесса через линейную цепь
на входе линейной цепи Щ) может рассматриваться как заданная
функция времени. Воздействию ^(t) соответствует отклик , реали-
зация случайного процесса на выходе цепи л ft?
t t
T](t) = j h(u) E,(t - u) du = j h(t - u) S,(u) du . (21.2)
о о
В частотной области линейная цепь описывается комплексной
частотной характеристикой. Частотная характеристика представ-
ляет преобразование Фурье импульсной характеристики
Н(ы) = ^h(t)e~katdt. (21.3)
—оо
Обратное преобразование Фурье позволяет перейти от Н(ш) к h(t)
h(t) = — f Н(ы)ек!3 * c/ш. (21.4)
2n J
—oo
Частотную характеристику цепи Н(ш), как комплексную величи-
ну, можно представить в виде
H[(d) = Яе[/7(ш)]+ /1т[н(ш)] или Н(со) = |Н(о))|
д = VRe2 Й^)]+|т2
Модуль I Н(ш)\ называется амплитудно-частотной, а аргумент
Фн(со) ~ фазо-частотной характеристикой цепи.
Частотная характеристика цепи позволяет получить спектральную
плотность мощности случайного процесса на выходе, зная спектраль-
ную плотность мощности случайного процесса на входе Л/(со)
Л/П(со) - |Л/(ш)|2Л/(со), (21.6)
Аналогично понятию частотной характеристики вводится поня-
тие передаточной функции. Она определяется как преобразование
Лапласа импульсной характеристики цепи
Н(р) = Jh(t)eptdt, (21.7)
о
где р = р + /ш- параметр преобразования.
617
Раздел 21
Ограничения, связанные с применением преобразования Лап-
ласа, являются менее жесткими, чем накладываемые условиями
существования преобразования Фурье. Поэтому использование
преобразования Лапласа расширяет рамки анализа прохождения
сигналов через линейные цепи.
Приведенные характеристики линейной цепи позволяют прово-
дить анализ прохождения сигналов через линейные цепи во вре-
менной и частотной областях. Выражения (21.2) и (21.6) связывают
случайные процессы и их спектры на входе и выходе линейной це-
пи. Они чаще всего и используются при определении характери-
стик случайного процесса на выходе цепи при известных характе-
ристиках случайного процесса на входе.
21.2. Распределение вероятностей случайного процесса
на выходе линейной цепи
Наиболее полной характеристикой случайного процесса является
ФРВ или ПРВ. Задача определения ФРВ или ПРВ случайного про-
цесса на выходе линейной цепи при известных характеристиках слу-
чайного процесса на входе должна рассматриваться одной из ос-
новных при анализе прохождения случайного процесса через цепь.
Если случайный процесс на входе является гауссовским, то
процесс на выходе будет также гауссовским. Этот вывод следует
из того положения, что любые линейные преобразования нормаль-
но распределенной случайной величины не меняют ее закона рас-
пределения вероятностей. ФРВ или ПРВ стационарного гауссов-
ского процесса описываются математическим ожиданием и корре-
ляционной функцией. Поэтому для описания прохождения гауссов-
ского процесса через линейную цепь достаточно определить мате-
матическое ожидание и корреляционную функцию случайного про-
цесса на выходе цепи.
Если линейная цепь является узкополосной, то при подаче на
ее вход широкополосного случайного процесса с любым законом
распределения, на выходе цепи происходит нормализация случай-
ного процесса - его распределение приближается к нормальному.
Явление нормализации случайного процесса на выходе узкополос-
ной цепи является следствием центральной предельной теоремы
теории вероятностей. Пояснить это положение помогает анализ
выражения (21.2). Оно может рассматриваться как предельное
дискретной свертки h(t) и ^(t)
т(пТ) = h(kT^nT ~кТ)=^ h(nT ~ кТ^(кТ) - (21 -8)
к=0 к=0
618
Прохождение случайного процесса через линейную цепь
где Т - интервал дискретизации, Т <n/(am; (am - предельная
частота спектра случайного процесса L,(t).
Чем более узкополосной является линейная цепь, тем большее
число слагаемых в (21.9) имеет достаточно большой вес и должно
учитываться при расчете. Число учитываемых слагаемых при за-
данной характеристике цепи h(t) будет и тем больше, чем меньше
интервал Т, следовательно, чем более широкую полосу занимает
спектр случайного процесса (шт). При увеличении же числа сла-
гаемых распределение их суммы стремится к нормальному (цен-
тральная предельная теорема теории вероятностей).
В общем случае задача нахождения распределения случайного
процесса на выходе линейной цепи при произвольном законе рас-
пределения вероятностей случайного процесса на входе является
довольно сложной. Из возможных подходов к ее решению остано-
вимся на подходе, основанном на определении моментов распре-
деления вероятностей случайного процесса на выходе цепи. От
моментов распределения вероятностей можно перейти к характе-
ристической функции и ПРВ случайного процесса (разд. 15).
Начальный момент n-го порядка случайного процесса на выходе
линейной цепи r/(t) определяется с учетом (21.4) выражением
0 0 о
...^tn-un)du^du2...dun
(21-9)
Меняя порядок усреднения и интегрирования, запишем
= ......
* * J 1 Л U)
ООО х }
...^п-ип)^и^и2..^ип.
Таким образом, для определения момента тц п необходимо
знать момент распределения вероятностей л-го порядка случайно-
го процесса на входе цепи. Ограничиваясь знанием одномерной
ФРВ (ПРВ) случайного процесса на входе цепи и получением с ее
помощью начальных моментов порядка до п включительно, выра-
жение для n-мерного начального момента случайного процесса на
выходе цепи запишем в виде
619
Раздел 21
0 0 0 (2'-'')
du}du2...dun
Используя моменты распределения, определяемые (21.11), мо-
жем записать выражение для одномерной характеристической
функции случайного процесса на выходе т](t)
(21.12)
От характеристической функции перейдем к ПРВ случайного
процесса
оо
/niW = T-f9niMe^ydv'-
— оо
(21.13)
Чем больше известно моментов распределения, тем точнее по-
лучим характеристическую функцию и ПРВ случайного процесса на
выходе цепи r|fO- Анализ приведенных выражений в рамках ре-
шаемой задачи, а также выражений для моментов наиболее часто
встречающихся распределений вероятностей (табл. 2.2) показыва-
ет, что описанный подход к нахождение распределения случайного
процесса на выходе линейной цепи является сложным, часто не-
приемлемым на практике. Отмеченное обстоятельство является
причиной того, что при анализе случайного процесса на выходе
линейной цепи часто ограничиваются определением математиче-
ского ожидания и корреляционной функции (или спектральной
плотности мощности). При этом берется во внимание, что указан-
ные характеристики гауссовского процесса полностью его описы-
вают, а нормальное распределение случайного процесса на выхо-
де линейной цепи - довольно распространенный случай.
21.3. Математическое ожидание и корреляционная функ-
ция случайного процесса на выходе линейной цепи
Математическое ожидание случайного процесса на выходе ли-
нейной цепи при подаче на вход стационарного случайного про-
цесса определяется выражением
620
Прохождение случайного процесса через линейную цепь
(21.14)
= J - u)}h(u)du = a J h(u)du = ka,
о 0
где a - математическое ожидание случайного процесса на входе
цепи t(t)\ h(t) - импульсная характеристика линейной цепи;
k = ^h(t)dt. (21.15)
о
Как следует из (21.14), математическое ожидание случайного
процесса на выходе линейной цепи пропорционально математиче-
скому ожиданию случайного процесса на входе.
Выражение для ковариационной функции случайного процесса
на выходе линейной цепи запишем в виде
ММг)= Ж)} =
Г Г / X 7 X Г 7 х 7 М (21-16)
= J J h(u})h(u2)M{^ -u2)}du}du2,
— СЮ—оо
где h(t) определено для t >0.
Если случайный процесс на входе c(t) является стационарным,
то (21.16) примет вид
(21.17)
где К(т) - ковариационная функция случайного процесса на входе
т
Переходя в (21.27) от переменных щ и и2 к и = щ и v = и2-и,
запишем
оо
Кл(т) = J p(v)/C(t - v}dv,
— оо
(21.18)
где
621
Раздел 21
p(iz) = J h(u)i(u + v)du. (21.19)
Таким образом, ковариационная функция случайного процесса
на выходе линейной цепи определяется сверткой K(i) ир(т). Ино-
гда р(т) рассматривают как автокорреляционную функцию им-
пульсной характеристики цепи.
Для центрированного случайного процесса на входе K(i) = Я(т)
Ят1(т)= ^p(v)R(T-v)dv, (21.20)
— оо
где Я(т) - корреляционная функция случайного процесса на входе.
Дисперсия случайного процесса на выходе цепи равна
оо
а2=Ял(0)= Jp(u)R(i/)du, (21.21)
—оо
Нормированная корреляционная функция
г(т) = лп(т)/ст=. (21.22)
При воздействии на линейную цепь белого шума, имеющего
корреляционную функцию в виде импульсной функции (разд. 18)
Я(т) = Л/05(т), (21.23)
корреляционная функция случайного процесса на выходе цепи
описывается выражением
Яп(т) = Wop(t) = Wo jh(u)h(u + z)du, (21.24)
—oo
определяется автокорреляционной функцией импульсной характе-
ристики цепи р(т).
Так автокорреляционная функция импульсной характеристики
ЯС-цепи (табл.18.1, п.1)/7(f) = Ье~ьгимеет вид (т> 0)
622
Прохождение случайного процесса через линейную цепь
При подаче на вход такой цепи белого шума корреляционная
функция случайного процесса на выходе определяется из (21.24)
как
/?п(т) = Л/0(Ь/2)е .
При решении (21.20) наибольшую сложность, пожалуй, пред-
ставляет определение пределов интегрирования.
Взаимная корреляционная функция центрированного случайно-
го процесса на входе t,(t) и выходе r|(t) линейной цепи определяет-
ся выражением
ioo
^)J4(f + T-U)/7(u)dU.
о
оо оо
= J + т - u)}h(u}du =| R(t - u}h(u}du,
о о
(21.25)
где /?(т) - корреляционная функция случайного процесса на входе.
Как следует из (21.25), взаимная корреляционная функция оп-
ределяется сверткой корреляционной функции случайного процес-
са на входе и импульсной характеристики цепи.
Изменяя порядок следования функций Щ) и r|(t), получим
Я^(т) = + т)} = М< J^(t- u)h(u)du^(t + т
,0
(21.26)
J Я(т+ u)h(u)du,
о
Как следует из сравнения (21.25) и (21.26), Ял(т) * Я^(т).
При воздействии на линейную цепь белого шума имеющего
корреляционную функцию R(x} = F?(0)5(t) , из (21.30) получим
Я^(т) = JЯ(0)5(т- u)h(u)du = F?(O)/?(t), т > 0.
о
(21.27)
Таким образом, взаимная корреляционная функция в этом слу-
чае пропорциональна импульсной характеристике цепи.
623
Раздел 21
21.4. Спектр случайного процесса
на выходе линейной цепи
Имея корреляционную функцию случайного процесса на выходе
цепи, можно получить его спектральную плотность мощности. Од-
нако часто для ее получения удобнее проводить анализ полностью
в частотной области.
Выделим отрезок реализации центрированного случайного про-
цесса ^(t) на входе линейной цепи, имеющей импульсную h(t) и
частотную Н((а) характеристики. Спектральные плотности сигнала
на выходе и входе цепи связаны соотношением
(21.28)
От (21.28) можем перейти к следующему равенству
(21.29)
Из (21.29) непосредственно следует
। 12
Л/п(ю) = |Н(ю)| Л/(ю)
(21.30)
Таким образом, спектральная плотность мощности случайного
процесса на выходе линейной цепи равна произведению квадрата
модуля частотной характеристики цепи и случайной плотности
мощности случайного процесса на входе.
Во временной области произведению (21.30) соответствует
свертка временных функций. Учитывая, что во временной области
IH((d)I2 соответствует корреляционная функция импульсной харак-
теристики р(т), a N(w) - корреляционная функция случайного про-
цесса на входе я(т), можем записать
Л/п (со) = |Н(а))|2 Л/(й)) R^ (т) =
~ (21.31)
т - vp(v)dv = I р(т — v}R(y)dv,
— оо оо
где символ <—>означает соответствие по Фурье,
что совпадает с (21.20).
В качестве примеров в табл. 21.1 и 21.2 приведены наиболее
простые, часто используемые в различных системах, цепи первого
и второго порядков.
624
Прохождение случайного процесса через линейную цепь
Таблица 21.1
Квадраты амплитудно-частотных характеристик цепей
первого порядка
Раздел 21
626
Прохождениеслучайногопроцесса через линейную цепь
627
Раздел 21
628
Прохождение случайного процесса через линейную цепь
Таблица 21.2
Квадраты амплитудно-частотных характеристик
цепей второго порядка
629
Раздел 21
630
Прохождение случайного процесса через линейную цепь
6
8
я,
1 + кла^ - w'Sq
^1^3 ^2
R, + R2
,T = R&,
а =----1_£_
1 R. + Н,
= кТ
- коз2
1 + коа} - оз2ао
к = R}R2C£2,
a, = R^(C^ + С2)+ ао =
= R^R2C^C2
,_______________
1 + koa^ - ш a0
к = R2 (C, +C2\
^1 ~ ^2(^1 + ^2)"^ ^1^1' &o =
= R}R2C^C2
l»(«r
/c2(l + ср27~2)р2
(l-ш2^^ + а2оз2
631
Раздел 21
9
1 + кла^ - со а0
= Я^,
Т2 = Я2С2, к =
_ ^3^4
“(Я1+ЯзХЯ2 + Я4)+Я1Я3’
а - Я, Я3 (Я2 + Я4 X? 1 +
1 (Я, + Я3ХЯ2 + FI4)+R,F
+ [яДя2 + Я4 + Я3Я4)]Я2С2
а0 - kl\T2
Н(ш) = J1 + fob’ ~
1 + киа} - со а0
к =-----
Я, + Я3
bi = Я2(С} + С2\ Ьо =
- R^R2^^2’
а1 = Я2 (С, + С2) +
Я1Я3С0
Я, + Я3 0
^kbo
632
Прохождение случайного процесса через линейную цепь
1. Для цепи, изображенной в табл. 21.1, п. 1,
\НЦ2
1
1 + to2?2
где Т - постоянная величина.
При
Л/(со) = Л/(0)е^',2/("?
633
Раздел 21
на выходе цепи имеем (рис. 21.1)
Ч, (<>)=
w(o)
1 + ы2Т2
2 . Для цепи второго порядка, изображенной в табл. 21.2, п.З,
!«M2
к2[\ + (о2Т2\))2
(l-ao^j+a^2 ’
При
г Л
A/(w) = Л/(0>-.....-
(D? + W
имеем (рис. 21.2)
634
Прохождение случайного процесса через линейную цепь
(wf + cd ) (1 - aow j + a^r
Преобразование Фурье позволяет перейти от спектра случайно-
го процесса на выходе цепи к его корреляционной функции
Я (т) = — Г Л/ (w)coswTd(D.
л J
о
Определение корреляционной функции случайного процесса на
выхода линейной цепи по его спектру часто бывает удобнее, чем
непосредственное определение корреляционной функции во вре-
менной области (в соответствии с выражениями, приведенными в
предыдущем подразделе), даже в том случае, когда приходится
прибегать к численным методам расчета. Иллюстрацией этого по-
ложения служат и следующие примеры, связанные с анализом
прохождения случайного процесса через ЯС-цепь с характеристи-
ками:
h(t) = be~bt, | Н(о)]| = b/b + /со.
1. Корреляционная функция случайного процесса на входе цепи
Я(т)=Я(0>'3|т|,
спектральная плотность мощности случайного процесса на входе
Л/(со) = 2? Я(т)соэ со т dt = .
I v p2W
Спектральная плотность мощности случайного процесса на вы-
ходе цепи
м ( \ \и( 12л// \ 2Я(0)рЬ2
N (w) = Н(со 1 Л/(со) = -W-5---,
п 1 1 (Ь2 + cd2X₽ )
корреляционная функция случайного процесса на выходе (рис. 21.3)
z х 17 / \
Яп (т) = — Г Л/п со cos со т скм = R(o)b-—5---, т> 0.
п % р2-ь2
635
Раздел 21
2. Корреляционная функция случайного процесса на входе цепи
R(t)=R(0> /4 .
Спектральная плотность мощности случайного процесса на
входе
Л/(со) = 2 j Я(т)созсотс/г =N(o)e .
о
Спектральная плотность мощности случайного процесса на вы-
ходе цепи
Л/п (w) = |H(w)|2 A/((d) =
Л/(0)Ь2
b2 +(D2
Корреляционная функция случайного процесса на выходе
оо
Я„(т) = — [ AC ((d) cos шт do = —eb /OJ1 •
п / ттJ / 4
о
2ch Ьт-Ф1
СР^
4(0i
Л b о^т
2
636
Прохождение случайного процесса через линейную цепь
Если случайный процесс на входе представляет белый шум, то
спектральная плотность мощности случайного процесса на выходе
цепи определяется только частотной характеристикой цепи
A/t1(o)) = A/0|H(w)|2, (21.32)
где No- спектральная плотность мощности белого шума.
При подаче на вход цепи белого шума корреляционная функция
случайного процесса на выхода определяется выражением
N с |2
Rn(w) = -5- |H(oj) coswtoto,
П J 1 1
о
(21.33)
т.е. определяется косинус-преобразованием Фурье квадрата моду-
ля частотной характеристики цепи (с коэффициентом Л/о). Ранее
эта корреляционная функция была определена с использованием
импульсной характеристики.
При описании линейных цепей используется понятие полосы
пропускания, или эквивалентной шумовой полосы. Эквивалентная
шумовая полоса определяется как полоса пропускания цепи с иде-
альной (прямоугольной) амплитудно-частотной характеристикой,
соответствующей реальной цепи. Соответствие устанавливается
по равенству среднего квадрата (дисперсии) случайного процесса
на выходе цепи при подаче на вход белого шума. Для низкочастот-
ной цепи эквивалентная шумовая полоса Д может быть определе-
на из равенства (рис. 21.4,а)
Л/л fl,./ \|2 . Л/л ।, ., _. |2 .
— H(to) с/со =—|Н(0)| Д.
Я J1 1 п 1
о
Таким образом, для Д получим следующее выражение
оо
1 fi i2
Д =--------— I Н(0)) Cfci).
kw I
(21.34)
В общем случае эквивалентная шумовая полоса определяется
как (рис. 21.4,6)
оо
1 fi ,2
Д =----------- H(to) ско.
о
(21.35)
637
Раздел 21
Рис.21.4
где о)0 - характерная точка внутри полосы пропускания цепи, на-
пример, получаемая из равенства:
Из теоремы Парсеваля следует:
оо оо
- f|H(a))|2ob) = $h2(t)dt
nJ1 1 J
(21.36)
о
о
Учитывая, что
Н(0) = J h(t)dt,
о
для эквивалентной шумовой полосы получим
(21.37)
638
Прохождение случайного процесса через линейную цепь
Таким образом, (21.37) определяет эквивалентную шумовую
полосу через импульсную характеристику цепи. Так для ЯС-цепи
(табл. 21.1, п.1) с использованием частотной характеристики (вы-
ражение (21.35)) получим
г 1
------=
J 1 + (Л2Т2
л
27”
или с использованием импульсной характеристики (выражение
(21.37))
оо
* Я f ~2t/T^ л
Л — —— I е dt — —.
Т2 J 2Т
21.5. Оптимальные линейные цепи
Передача сигналов сопровождается шумами. Поэтому при
приеме сигнала важно выбирать такие характеристики цепи, при
которых влияние сопутствующих шумов будет минимальным. Цепь
с такими характеристиками называют оптимальной цепью или оп-
тимальным фильтром. Критерии оптимальности могут быть раз-
личными, зависят в первую очередь от задач, решаемых при прие-
ме сигнала. Если решается задача обнаружения сигнала на фоне
шума, то в качестве критерия оптимальности целесообразно
принять максимум отношения сигнал/шум на выходе цепи. При из-
мерении параметров принимаемого сигнала в качестве критерия
оптимальности принимается минимум среднего квадрата разности
между сигналом на выходе цепи и его истинным значением. Воз-
можны и другие критерии оптимальности. Ниже будут рассмотрены
оптимальные линейные цепи, максимизирующие отношение сиг-
нал/ шум.
Если на вход цепи поступает аддитивная смесь сигнал s^f) и
шум £(f):
^W=siW+^W
то на выхода линейной цепи имеем
(0 = L[s^ (01 + (Oi = S2 (0 + ^2 (6
где L - оператор линейной цепи.
(21.38)
(21.39)
639
Раздел 21
В (21.57) s2(f) = (.[s^f)] представляет сигнал, a £2W = ^fciW] ~
шум на выходе цепи. Требуется определить характеристики ли-
нейной цепи, при которых отношение сигнал/шум на выходе цепи в
заданный момент времени
(21.40)
было бы максимальным.
Сигнал на выходе цепи определяется выражением
s2(t) = h(u)s^t - u)du,
(21.41)
где h(t) - импульсная характеристика цепи.
Шум на входе цепи чаще всего можно рассматривать как белый.
На практике это означает, что ширина полосы частот, занимаемая
шумом, значительно больше ширины полосы пропускания цепи.
Дисперсия шума на выходе цепи при подаче на вход белого шума
описывается выражением (21.21). Учитывая, что корреляционная
функция белого шума равна /?(т)= Л/Об(т), получим
(0}= °2 = No J h2(u)du,
(21.42)
где No- спектральная плотность мощности белого шума на входе
цепи.
Отношение сигнал/шум на выходе цепи в момент времени
^определим с учетом (21.41) и (21.42)
J h(u)s} (t0 -u)du
(21.43)
No Г h2 {u)du
Найдем такую импульсную характеристику цепи, которая обес-
печивала бы максимальное отношение сигнал/шум (21.43). Для
этого обратимся к неравенству Буняковского-Шварца
640
Прохождение случайного процесса через линейную цепь
(21.44)
Равенство в (21.44) имеет место при х(и) = ку(и), где к - посто-
янная величина. С учетом (21.44) выражение (21.43) запишем в
виде неравенства
ОФ оо
Г h2 (u)du Г s2 (t0 - u)du
S2 (^o) < о_________о______________
2 — °°
No j h2(u)du
о
(21.45)
Анализ (21.45) показывает, что максимум отношения сиг-
нал/шум получается когда выполняется равенство
&&/ = -J-fs,2(f0-u)du. (21.46)
° No i
Равенство выполняется при условии
h(t)=ks,(t0-t). (21.47)
Постоянная величина к не влияет на вид импульсной характе-
ристики и ее можно не рассматривать, т.е. полагать
h(t) = s,(t0-t). (21.48)
Таким образом, максимум отношения сигнал/шум обеспечива-
ется линейной цепью, имеющей импульсную характеристику, опре-
деляемую видом сигнала. Цепь, имеющая импульсную характери-
стику, описываемую (21.48) называется согласованной цепью или
согласованным фильтром. Как следует из (21.48), импульсная ха-
рактеристика такой цепи с точностью до постоянной величины яв-
ляется зеркальным отражением сигнала, сдвинутым на t0 по оси
времени.
Если сигнал s-j(f) имеет спектральную плотность (со), то сме-
щению во времени на t0 соответствует умножение на множитель
задержки
641
Раздел 21
s^t-tQ)^ (21.49)
где знак <н> означает соответствие по Фурье.
Величине s}(t0-t) соответствует комплексно-сопряженная ве-
личина ?0. Следовательно, частотная характеристика со-
гласованного фильтра, обеспечивающего максимум отношения
сигнал/шум, описывается выражением
H(o))=S1*(w) ek,)t°. (21.50)
В качестве примера приведем характеристики фильтра, согла-
сованного с прямоугольным импульсом. Импульсная характеристи-
ка цепи, максимизирующей отношение сигнал/шум в момент вре-
мени t0 = ти имеет вид
,/ч ( х | V приО < f < т..
/?(/)= S1 (ти —/)= <
|0 при других значениях /
Такую импульсную характеристику имеет интегрирующая цепь с
постоянной времени .
Другой пример согласованного фильтра приведен в разд. 11 -
рассматривается фильтр, согласованный с ЛЧМ сигналом.
Максимальное отношение сигнал/шум на выходе согласованно-
го фильтра определяется с учетом следующего:
- u)du = (21.51)
0
Выражение (21.51) определяет энергию сигнала за интервал
времени до момента t0. Таким образом, максимальное отношение
s2(t )
сигнал/шум на выходе согласованного фильтра равно.—907.
о
Рассмотрение проводилось для случая воздействия на цепь бе-
лого шума. Однако тот же подход может быть использован и в об-
щем случае - при воздействии на цепь шума, имеющего произ-
вольную спектральную плотность мощности.
В ряде случаев целесообразно несколько изменить постановку за-
дачи оптимизации: задана структура линейной цепи, необходимо вы-
брать параметры цепи таким образом, чтобы обеспечивалось макси-
642
Прохождение случайного процесса через линейную цепь
мальное отношение сигнал/шум на выходе. В качестве примера тако-
го подхода рассмотрим ЯС-цепь с импульсной характеристикой
h(t) = bebt,
где 1/Ь = НС- постоянная времени цепи.
При воздействии на цепь сигнала в виде прямоугольного им-
пульса сигнал на выходе цепи описывается выражением (рис. 21.5)
2 Tu<f<~.
Сигнал на выходе цепи достигает максимального значения в
момент времени t = хи . Таким образом, имеем
s2(7-J= l/(l-e br“).
Дисперсия шума на выходе цепи равна
о2 = ЬА/0/2.
Следовательно, отношение сигнал/шум определяется выраже-
нием
sf(xu) = U2(l-e^)^ или A/0s2(tu) = (l-e^
о2 ЬА/0/2 2Ту\/2о2 Ьти
Это отношение зависит от выбора постоянной времени цепи
1/Ь (рис. 21.6). Значение Ь, при котором отношение сигнал/шум
достигает максимального значения, определяется из условия
dba2
Рис. 21.5
643
Раздел 21
С учетом выражения для отношения сигнал/шум условие, по-
зволяющее находить значение Ь, соответствующее максимуму,
запишется в виде
d(sf) _ 2V2 2t>(l - е bTu )гце bTu - (l - е~ЬГи Q
dba2 bN0 b2
От записанного выражения можно перейти к следующему
1 + 2Ьти = ebTu.
Решение последнего уравнения дает следующее значение по-
стоянной времени цепи
V
/ь
= Ту/1,256.
Приведенное значение постоянной цепи соответствует макси-
мальному отношению сигнал/шум в момент времени ти. Макси-
мальное отношение получим при подстановке biu = 1,256 в выра-
жение для отношения сигнал/шум
_2
О
max
0,8145У2тц
No
644
Раздел 22.
НЕЛИНЕЙНЫЕ ПРЕОБРАЗОВАНИЯ СЛУЧАЙНЫХ
ПРОЦЕССОВ
В разделе описываются основные методы анализа случайных
процессов на выходе нелинейных устройств. Рассмотрение про-
водится для безынерционных преобразователей, отклик которых
в выбранный момент времени является функцией воздействия в
тот же момент времени. Описание методов иллюстрировано при-
мерами, полезными для практики исследования случайных про-
цессов.
В разд. 15 и 17 приведены выражения для ПРФ или ФРВ слу-
чайного процесса после его преобразования. Однако анализ на их
основе часто сопряжен с трудностями, не всегда преодолимыми на
практике. По этой причине при рассмотрении нелинейных преобра-
зований часто ограничиваются менее полными характеристиками
случайного процесса, в первую очередь, корреляционной функцией
и спектром. Описания случайного процесса на выходе преобразо-
вателя с использованием только указанных характеристик расши-
ряет число возможных подходов к анализу, которые требуют от-
дельного рассмотрения.
22.1. Прямой метод определения характеристик
случайного процесса на выходе нелинейного устройства
Прямой метод анализа основан на использовании соотношений,
связывающих характеристики распределения случайного процесса
на входе £(?) и выходе устройства т|(?). Если на вход нелинейного
устройства, имеющего характеристику
у = (р(х), (22.1)
которая задает взаимно однозначное соответствие х и у, воздейст-
вует случайный процесс ^(f), имеющий ПРВ f^(x), то ПРВ случай-
ного процесса на выходе т|(?) определяется соотношениями, при-
веденными в разд. 15.
645
Раздел 22
411(у) = ^1[ф"1(у)]
Ф~1(у)
dy
(22.2)
где ф 1 (у)-функция, обратная ф(х).
Математическое ожидание случайного процесса на выходе не-
линейного устройства может быть найдено как
оо
= M{T}(t)} = |ф(х)^ (х) dx. (22.3)
—оо
Момент л-го порядка:
оо
тПп = М{т]п(0} = Jф"(О^ (*)dx . (22.4)
Второй начальный момент (ковариационная функция) случайно-
го процесса на выходе определяется с использованием двумерной
ПРВ случайного процесса на входе ^2(x1;x2) выражением
оо оо
Кл(т) = М{т](0т](? + т)}= J \^)(p(x2)f^(x},x2)dx^dx2, (22.5)
— 00—00
где хъ х2 - значения случайного процесса £(?) в моменты времени
t и t + т.
Корреляционная функция случайного процесса на выходе нели-
нейного преобразователя равна
Я/т) = + т)} - М2{т](0) = /<л(т)- т2'. (22.6)
При определении корреляционной функции может оказаться
полезным разложение двумерной ПРВ случайного процесса £(f) в
ряд по ортонормированной системе многочленов (разд. 16)
k2 ^,x2) = f^( х,) V х2 )£ 3nQn (х} )Qn (х2), (22.7)
п=0
где {Qn(x)} - ортогональная система функций;
оо оо
an= J\k2^'x2>QnMQn{x2)dx}dx2.
646
Нелинейные преобразования случайных процессов
Подставив (22.7) в (22.5), получим
^rj(^) ' ^л^л’
л=0
где
оо
сп= |ф(х)С?п(х)^(х)с/х.
(22.8)
(22.9)
Конкретизируем полученное выражение для случая стационар-
ного гауссовского процесса на входе
4 (хьх2) =-------
2tco27i - г2
. схр[ (*^i ~ ^)2 ~2r(Xj ~ а)(х2 — з) + (х2 — а)2
2о2(1-г2)
(22.10)
9
где а, а , г - математическое ожидание, дисперсия и нормирован-
ная корреляционная функция случайного процесса ^(?).
Ковариационная функция случайного процесса на выходе нелиней-
ного устройства т|(0 определяется (22.5) с подстановкой в него (22.10)
27co2V1- г2
(22.11)
ехр[-<*' ~ а)2 '2Г(Х ~ - а)-+ (Хг---а)2 ]dx,dx2 .
2сг(1 - г2)
Переходя к нормированным величинам и обозначая a/o = q,
выражение (22.11) запишем в виде
/^(т) - .-----
2т1у1 1 - г2
J J<p(ox1)(p(ctx2) •
(22.12)
2(1-г2)
647
Раздел 22
Используя разложение двумерной ПРВ гауссовского процесса
£(/) в ряд по многочленам Эрмита (разд. 6)
1 (X, - q)2 -2г(х, - q)(x2 ~q) + (x2-q)2, =
2rtVTT ₽l~ 2(1-г2) J’
1 { Y _ П\2 -I- { Y - П\2 °° ГП ' '
= — exp[--^—^(^ _ g)Hn(x2 - q),
л=0
где Нп(х) - многочлен Эрмита, выражение для Кп(т) получим
в виде
1 7 7 00 гпм
К,#) = — J J фСо^МоХг)^—~^-Нп(х} - q)Hn(x2 - q)
--оо n=o п- (22.14)
. (х1 -q)2 +(х2 -q)2 . .
ехр[- -i—!——.—-----—^—}dx}dx2.
Разделив переменные интегрирования в (22.14), запишем
Кп(т) = L j(p(crx)Hz?(x- q)exp{-i^^-}c/x]2.
л=о П' х2л: _оо
Обозначим
1 7 (х —о)2
cn=—j== (р(ох)Нп(х-q)exp{-----^—}dx. (22.15)
V2tc j 2
—oo
Выражение для Кп(т) примет вид
К^) = ^с2^. (22.16)
Таким образом, записано выражение для ковариационной
функции на выходе нелинейного устройства в виде ряда, члены
которого содержат степени г(т) и коэффициенты сп, определяе-
мые характеристикой нелинейного устройства.
Спектральную плотность мощности случайного процесса на вы-
ходе нелинейного устройства A/n(w) определим исходя из (22.16)
A/n(w) = 2J /?п(т) cos отсей: = 2^j~ J rn(T)coscoraft. (22.17)
О л=1 П- о
648
Нелинейные преобразования случайных процессов
При расчёте (22.17) можно воспользоваться следующим при-
ближенным решением [16]
J гп(т)созсотс/г = J[1 + г"(0)т2/2]п cos (dt с/т =
о о
, ч2
оо / СО
= f enr (0)т 12 cos ап dr =.'=====—e2nf''(0^.
J 7-2r"(O)n
(22.18)
С учетом приведенного приближенного решения выражение для
спектра на выходе нелинейного устройства запишется в виде
__ ,ч2
ОО 2 Ш__
Мп(го) = -4^=У-£^е2""(0>. (22.19)
V- S п.'Л
Как следует из (22.19), спектральная плотность мощности слу-
чайного процесса на выходе нелинейного устройства описывается
выражением в виде ряда, члены которого определяются корреля-
ционной функцией случайного процесса на входе (ее второй про-
изводной при т = 0) и характеристикой нелинейного устройства.
В качестве примеров рассмотрим характеристики случайных
процессов на выходе некоторых видов нелинейных устройств, на-
ходящих достаточно широкое применение в радиотехнике. Помимо
иллюстрации возможностей изложенного подхода, рассматривае-
мые примеры представляют и самостоятельный интерес.
22.2. Случайный процесс на выходе нелинейного
устройства со степенной характеристикой
Одним из узлов радиотехнических систем различного назначе-
ния является детектор. Он представляет последовательно вклю-
ченные нелинейный элемент и фильтр. Нелинейный элемент
обычно имеет степенную характеристику, одностороннюю или дву-
стороннюю. Ниже рассматриваются нелинейные элементы с ли-
нейной и квадратичной характеристиками.
22.2.1. Односторонняя линейная характеристика
Характеристика нелинейного устройства имеет вид (рис. 22.1)
у = bx, x>Q, b>Q. (22.20)
649
Раздел 22
Функция распределения вероятностей случайного процесса на
выходе такого устройства т|(Г) определяется как
= У20,
(22.21)
где F^(x) - ФРВ случайного процесса на входе.
Переходя к ПРВ случайного процесса r|(f), получим
= + у>0,
11 S1 ь 1 ь
(22.22)
где f^(x) - ПРВ случайного процесса на входе £(f); 3(0 - им-
пульсная функция.
Моменты распределения вероятностей П-го порядка случайного
процесса на выходе устройства определяются выражением
тПп = M{x]n(t)} = bn^ х\ (x)dx . (22.23)
о
Если 4,(х) является четной функцией, то моменты распреде-
ления четных порядков случайного процесса на выходе устройства
(22.23) можем получить в виде
hZn 7
M{n2"(0) = -^- ]x2"fii(x)dx =
—оо
,2п
(22.24)
т. е. выразить через моменты распределения четных порядков
случайного процесса на входе.
Рис. 22.1
650
Нелинейные преобразования случайных процессов
Ковариационная функция случайного процесса на выходе уст-
ройства определяется как
оо оо
Кп(т) = Л4{т](0п(* + т)} = b2 J J х^г (xv x2)dx}dx2, (22.25)
о о
где (хьх2) - двумерная ПРВ случайного процесса на входе ВД;
х1;х2 - значения £(f) в моменты времени fn t+т.
Конкретизируем полученные результаты применительно к нор-
мальному и релеевскому распределению случайного процесса на
входе нелинейного устройства.
Нормальное распределение. Для центрированного гауссов-
ского процесса на входе, имеющего ПРВ
^(х) = _^ех₽("^т)'
V271O 2сг
из (22.22) получим
2
(у) = 0,58(у) + -т=—ехр{-—у>0. (22.26)
V271DO 2D о
График fni(x) изображен на рис. 22.2.
Учитывая четность функции ПРВ гауссовского процесса, момен-
ты распределения вероятностей T](f) четных порядков найдем из
(22.24)
651
Раздел 22
b2n
тПгп =—о2п[1Д...(2п-1)], л = 1,2,... (22.27)
Моменты нечетных порядков находятся непосредственно из
(22.23)
u2n+1 °? Оп гй
т = _^=_fx2n+1e2°2 == ——==-Ь2п+1<т2п+1, л = 012(... (22.28)
В частности, математическое ожидание г)(0 равно
дисперсия
о2 = M{x]2(t}} - M2{x](t)} = Ь.Q - Ь.— = -—J- b2o2 = 0,3408b2o2.
2 2л 2
Ковариационная функция случайного процесса на выходе нели-
нейного устройства определяется из (22.11) с учетом выражения
для двумерной ПРВ гауссовского процесса (а = 0)
0 ОО ОО 0 0
. b г г , х:\ - 2гх<х9 + х?, ,___
К(т) =------== Xlx2 ехр{—----------- -g 2}dx1dx2. (22.29
Л 2TO2VrVJoJo 2аг(1-г2)
Решение двойного интеграла в (22.29) дает
1-2 2 I-------
К (т) =-----{г(т)агссоэ[-г(т)] + Ji - г2(т)}. (22.30)
2л
Аналогичный результат получается при использовании разло-
жения К"п(т) в ряд (22.16). Коэффициенты ряда описываются
(22.15)
с = [ЬхНп(х)е 2 dx,
(22.31)
где Нп(х) ~ многочлен Эрмита.
Из (22.31) находятся следующие выражения для сп
652
Нелинейные преобразования случайных процессов
bo bo Ьо ы
со - г—, А - , Сп ~~ г~^п-2^}у п>2.
72 л 2 72 л
(22.32)
Подставляя (22.31) в (22.16), выражение для X- (т) запишем в
виде
^(т) =
Ь2о2
2л
°° ГП(т\
'•(т)+£^_2(о)—Ц].
п=2
(22.33)
С учетом следующих равенств для многочленов Эрмита
Н2п(0) = (-1)п(2л-1)!!, Н2п_.(0) = 0
выражение для /^(т) получается из (22.33) в виде
К^) =
Ь2о2 । лг(т) i г2(т) i у [(2л-3)!!]2
2л 1 2 2 (2л)!
г2п(т)}.
От него перейдем к следующему
2 2
К (т) = {г(т)arccos[-r(T)] + ^-г2(т)},
2л
что совпадает с (22.30).
С учетом полученного результата запишем выражения для кор-
реляционной функция и дисперсии случайного процесса на выходе
яп(т) = {Г(т)arccos[-r(T)] + ^-г2(т) -1},
гп (22.34)
Ь2сг2
о2 = Яп(0) =----(л-1) = 0,341b2 о2.
п 2л
Спектральная плотность мощности случайного процесса на вы-
ходе нелинейного устройства определяется преобразованием Фу-
рье (22.34)
оо
Л/„(Ю)=
— ОО
(22.35)
Для удобства вычисления (22.35) целесообразно Яп(т) пред-
ставить в виде ряда. С этой целью используем разложения
653
Раздел 22
arccos(-r) = — + г +
1 2
(1-г2)2 =1-у
3r6
Ограничиваясь членами, содержащими г в степени не выше
второй, выражение для Яп(т) получим в виде
i-2 2 и
= [г(т) + -г2(т)].
1 4 п
Подставляя (22.36) в (22.35), находим
Ь2 Ь2 г
д/(о) = — Л/(со) + —Л/(со-х)Л/(х)сУх,
1 4 87ГСГ J
(22.36)
(22.37)
где Л/(со) - спектральная плотность мощности случайного процесса
на входе.
В качестве примера рассмотрим случайный процесс, имеющий
спектральную плотность мощности
<м2
Л/(«) = Л/(0)е .
Ей соответствует корреляционная функция
ш2т2
Я(т) = Я(0)е~~.
Спектральная плотность мощности случайного процесса на вы-
ходе нелинейного устройства описывается выражением
2а»2
Релеевское распределение. Практический интерес представ-
ляет нелинейное преобразование (22.20) случайного процесса
ад, имеющего релеевское распределение. Такое распределение
имеет огибающая узкополосного гауссовского процесса (разд. 20).
Одномерная и двумерная ПРВ ад описываются выражениями
654
Нелинейные преобразования случайных процессов
Ь(Х)=-^6 2<У2 ’ Х-0’
о
(22.38)
xf + xf
2<т2(1 — г2)
(22.39)
Плотность распределения вероятностей случайного процесса
на выходе устройства находится из (22.22) с учетом (22.38)
у2
Мх) = -Ае У-°- (22.40)
Моменты распределения вероятностей т](0 определяются как
оо у2
mn = -Дг- f уп+1е гь2°г dy.
Пл Ьо2{
(22.41)
Моменты распределения нечетных порядков:
. °° у2 ।--------------------------------
тп =—-Гу2пе 2ьг°г dy = J— (2л-1)!!Ь2по2п-1, л = 1,3,...,
П!2л“1’ Ьсг2 •» V 2
мо 0
четных порядков:
оо у2
mn = —f у2п+1е 2ьг°г dy = л! Ь2п-1оп, п = 2,4,... .
Пгп У
Математическое ожидание и дисперсия равны
mni = ^(J, о2 = (2b3 -^b4)<y2 . (22.42)
Выражение для ковариационной функции т|(0 запишем, под-
ставляя (22.39) в (22.25)
кп(т) = -47;—гтП-ИММ г' 2 ]exp{---l-.-%;}c/x1dx2 . (22.43)
О (1-r )q0 о (1-г ) 2(5 (1-г )
655
Раздел 22
Решение (22.43) с использованием соотношения
оо О
г п-1, , . р2*2 _.ц + 2. . . а .
1/0(ах)е р dx = r<^-~-)е4р ^(-^ + 1,1,-—),
J 2 2 4р
(22.44)
где Г(х) - гамма-функция;
функция,
в виде
1 F 7(х7, х7, х 7) - гипергеометрическая
7tb2O27l-Г2
Кл(т) =------------
2^(
11 1 -_2±_)
2’2’ ’ 1-г2 ‘
(22.45)
Преобразование гипергеометрической функции приводит (22.45)
к следующему виду
Кл(т) = £>2су2{2Е[г(т)]-[1- г2(т)А<[г(т)]]} , (22.46)
где К{х} - полный эллиптический интеграл первого рода; Е ( х) -
полный эллиптический интеграл второго рода.
22.2.2. Односторонняя квадратичная характеристика
Характеристика нелинейного устройства имеет вид (рис. 22.3)
у = Ьх2, х>0. (22.47)
Функция распределения вероятности случайного процесса на
выходе определяется выражением
F^(y) = F^(
(22.48)
Плотность распределения вероятности случайного процесса на
выходе равна
656
Нелинейные преобразования случайных процессов
f^y) = F^(y) +
у>0.
(22.49)
Начальные моменты определяются выражением
т^п = Л4{т]л (f)} = bn| x2nf^(x)dx.
о
(22.50)
Ковариационная функция случайного процесса на выходе уст-
ройства
К^т) = + т)} = b2J x2x2^2(x1,x2)dx1dx2 . (22.51)
о
Конкретизируем полученные выражения для нормального и ре-
леевского распределения случайного процесса на входе £,(?).
1. Нормальное распределение.
Для гауссовского процесса на входе
из (22.49) получим (рис. 22.4)
1 --А
fn1(y) = 0,58(y) + ^=^e 2to2 . (22.52)
657
Раздел 22
Начальные моменты л-го порядка определяются выражением
hn
mnn=^-a2n(1,3...(2n-1)J, п=1,2,...
(22.53)
2. Релеевское распределение.
Плотность распределения вероятности случайного процесса на
входе определяется (22.38). Из (22.49) получим
^i(y) = —L2e2b° ’ (22.54)
2Ьсг
Момент n-го порядка:
оо
Гупе2Ь°г dy = {2Ьс2)пп\ . (22.55)
2txT J
Ковариационная функция т|(0 определяется (22.5). С учетом
(22.39) и (22.47) запишем
Кп(т) -
Ь2
а4(1-г2)
(22.56)
оо оо
2 2
Ху + Х2
2о2(1-г2)
}dxydx2.
Произведя замену переменных zy = xf, z2 = xf, (22.56) перепи-
шем в виде
Ь2
(^) _ ~ 2?
4о (1-г )
(22.57)
^ZyZ2 Zy+Z2 .. .
ехр{----J---2_у dz dz .
o2(1-r2) 2o2(1-r2)
о о
Разложение функции Бесселя в ряд
Y(~1)n(z/2)2n
2^1 / „I \2
и почленное интегрирование в (22.57) дает
658
Нелинейные преобразования случайных процессов
Кп(т) = 4Ь2о4[1 - г2(т)]3^г2п(т)(п + 1)2 .
п=0
С учетом равенства
оо
У хп(п + 1)2
п=0
1 + X
(1 - X)3
из (22.57) получим
Kn(T) = 4bV[1 + r2(T)].
Корреляционная функция r|(f)
Яп(т) = 4Ь2о4г2(т), гл(т) = г2(т).
(22.58)
(22.59)
(22.60)
Ковариационную функцию случайного процесса на выходе рас-
сматриваемого нелинейного устройства можно также определить,
используя разложение двумерной ПРВ по ортогональным много-
членам. В качестве ортогональной системы многочленов для ПРВ
целесообразно выбрать систему многочленов Лагерра, а в качест-
ве весовой функции - одномерную ПРВ.
Двумерную ПРВ случайного процесса на выходе устройства
найдем, используя подход, изложенный в разд. 17. Двумерная ПРВ
случайного процесса на входе описывается (22.39). Переходя от
переменных и х2 к переменным
У1=Ьх$, у2=Ьх%, (22.61)
получим якобиан преобразования
d(/i,y2) _ 2bxi 0
d(xbx2) 0 2bx2
Двумерная ПРВ т](t) будет иметь вид
^2 (У1 - У2) = .. 2 —27 J ехр{-
1 4£гсг(1-г2) Ьсг(1-г2) 2Ьсг(1-Г)
(22.62)
(22.63)
где 10 (х) - модифицированная функция Бесселя первого рода.
При г= 0 (т -оо ) имеем
659
Раздел 22
где одномерные ПРВ f^(y) описываются (22.38).
Разложение двумерной ПРВ (22.63) в ряд по многочленам Ла-
герра имеет вид
1 У1+Уг оо
4,2(У1.У2) = —гте 2te2 Уг2%,(;^НМ~Н- (22.64)
Используя разложение (22.64), выражение для ковариационной
функции случайного процесса на выходе устройства т|(1) запишем
в виде
оо оо
о о
оо оо оо У1+У2
= Л^У2£"(^2 W dy^ = <22’65)
4b2o4JJ 2bcr 2Zxi2
=4ь2°4Х/2Пс2,
n=0
где
oo
cn = \yl-n(y)e~ydy.
0
С учетом определения многочленов Лагерра (разд. 15) найдем
оо оо
с0 = J ye~ydy = 1, q = Jу(1 - y)e~ydy = -1, сп = О
о о
при п > 2 . (22.66)
Подставив значения коэффициентов сп в (22.65), получим
Кп(т) = 4Ь2о4[1 + г2(т)]. (22.67)
Корреляционная функция случайного процесса на выходе
660
'•"М = 2Jb^lft'lb
Нелинейные преобразования случайных процессов
Нп(т) = 4Ь2а4г2(т), гп(т)=г2(т). (22.68)
22.2.3. Двусторонняя квадратичная характеристика
Характеристика нелинейного устройства имеет вид (рис. 22.5)
у = Ьх2 . (22.69)
Плотность распределения вероятности случайного процесса на
выходе устройства описывается выражением (разд. 15)
) + 4,(-К)], у > 0. (22.70)
Момент л-го порядка:
/77пп = bn Jx2nf^(x)dx= bnm^2n, (22.71)
— оо
где т^2п - момент распределения 2л-порядка случайного процес-
са на входе нелинейного устройства.
Ковариационная функция случайного процесса на выходе уст-
ройства определяется выражением
/<п(т) = b2 J Jх2x2f^2(xvx2)dx}dx2 . (22.72)
— оо —оо
1. Нормальное распределение ^(0.
Для гауссовского процесса на входе из (22.70) получим (рис. 22.6)
661
Раздел 22
Рис. 22.6
= ехР{~7Гг-}' у£0' (22.73)
^2пЬуо 2Ьсг
Момент л-го порядка равен
/77пп = Ьп1,3,...(2л - 1)о2п . (22.74)
В частности, математическое ожидание и дисперсия:
Л7п1 = до2, о2 = 2д2о4 . (22.75)
Выражение для ковариационной функции случайного процесса
на выходе запишем в виде
Кп(т) = b2M{^2(t)^2(t + т)}. (22.76)
Для гауссовского процесса из (22.76) получим
Кл(т) = b2M2fi2(t)} + 2b2M2K(T®( + T)) = (22 77)
= Ь2с4 +2Ь2Я2(т) = Ь2а4[1 + 2г2(г)],
где г(т) - нормированная корреляционная функция случайного
процесса на входе.
Корреляционная функция т|(0
Ял(г) = 2Ь2с4г2(т), г„(т)=г2(т). (22.78)
Спектральная плотность мощности переменной составляющей
случайного процесса на выходе устройства определяется выраже-
нием
662
Нелинейные преобразования случайных процессов
оо П оо
9 Г 9 Ь2 Г
Л/п(со) = 4Ь2 R2(T)cos(wt)dr = — Л/(со-x)N(x)dx, (22.79)
J nJ
О — ОО
где Я(т), Л/(со) - корреляционная функция и спектральная
плотность мощности случайного процесса на входе.
Так для гауссовского процесса на входе, имеющего спектраль-
ную плотность и корреляционную функцию
Л/(со) = Л/(0)е ы’, /=?(т) =/=?(0)е 4 ,
получим
2 2
N Д
1 со1
22.3. Метод преобразований
При определении корреляционной функции случайного процес-
са на выходе нелинейного устройства может оказаться полезным
метод, основанный на использовании преобразования Лапласа
характеристики нелинейного устройства. Этот метод анализа не-
линейных преобразований гауссовских процессов в некоторых слу-
чаях позволяет обойти трудности, с которыми приходится сталки-
ваться при применении прямого метода.
22.3.1. Содержание метода
Второй начальный момент случайного процесса на выходе не-
линейного устройства r|(f) описывается выражением (22.5)
Кп(т) = M{ri(t)r[(t + т)} = J J ф(х1)ф(х2)^1(х1,х2)с/х1с/х2, (22.80)
— 00—00
где ф(х) - характеристика нелинейного устройства.
Если характеристика нелинейного устройства допускает преоб-
разование Лапласа:
прямое
оо
о
663
Раздел 22
обратное
ф(х) =
—- j(D(v)e'v>(dv,
(22.81)
где с - контур интегрирования, то, используя преобразование Лап-
ласа характеристики нелинейного устройства, (22.80) можем пред-
ставить в виде
___1
(2п/)2
|ф(у1)|ф(1/2)[|
(х1, х2 )dxA dx2 ]dv} dv2
(22.82)
c, c2 -®
Внутренний интеграл в (22.82) представляет двумерную харак-
теристическую функцию случайного процесса на входе
е52(И.^2)= J le'v'x'^ft2(x„x2)dx1dx2. (22.83)
— ОО —оо
Таким образом, выражение для /<п(т) запишется в виде
К^ = Т~Т2 ( [ф(И)Ф(^2)0^(И^2Ж^2- (22.84)
(2л) ; ;
С1 с2
Контуры интегрирования для некоторых распространенных ви-
дов нелинейных устройств приведены в [20].
Основные трудности при использовании (22.84) связаны с опре-
делением двумерной характеристической функции случайного
процесса на входе. Для гауссовского процесса характеристическая
функция описывается достаточно просто и метод преобразований
для ряда характеристик нелинейных устройств оказывается эф-
фективным.
Характеристическая функция центрированного гауссовского
процесса ^(0 равна (разд. 16)
о2
e^2(ui,u2) = ехр{-—(i/f + 2rv}v2 + vl)}, (22.85)
где о2, г(т) - дисперсия и нормированная корреляционная
функция случайного процесса на входе ^(1).
664
Нелинейные преобразования случайных процессов
Подставив (22.85) в (22.84) и используя разложение экспонен-
циального сомножителя в ряд
е-огп-л = у (_1)Л £112. (22.86)
получим
У(Т) = У1О2Ч2'-'’(Т), (22.87)
л=0 П'
где
a2 v2
hn = 2л/J ф<^Пе dv (22.88)
с
Таким образом, записано выражение для ковариационной
функции случайного процесса на выходе нелинейного устройства в
виде ряда по степеням нормированной корреляционной функции
гауссовского процесса на входе, коэффициенты ряда определяют-
ся характеристикой нелинейного устройства.
Преобразование Лапласа некоторых видов характеристик нели-
нейных устройств приведены в табл. 22.1. Там же даны выражения
для соответствующих коэффициентов разложения hn. Расширени-
ем табл. 22.1 является таблица в [20].
Спектральная плотность мощности случайного процесса на вы-
ходе устройства определяется преобразованием Фурье его корре-
ляционной функции.
оо ОО -
W» = Г У(г)е““'л = (22.89)
Л=1
где
Л/П(со) = j Rn (т)е_,шт dr;
— оо
Я(т) - корреляционная функция случайного процесса на входе.
Рассмотрим примеры использования метода преобразований
при получении характеристик случайного процесса на выходе не-
линейного устройства со степенной характеристикой и идеального
ограничителя.
665
Раздел 22
22.3.2. Нелинейные устройства
с односторонней степенной характеристикой
Характеристика нелинейного преобразователя имеет вид
ф(х) = Ъхи, х>0. (22.90)
Преобразование Лапласа (22.90):
= <22-91)
где Г(х) - гамма-функция.
Таблица 22.1
Характеристики нелинейных устройств.
№ п/п Характеристика нелинейного преобразователя <р(х) Преобразо- вание Лапла- са характе- ристики j <p(x)e“'v'xdx 0 Коэффиценты A
1 Степенная у = bxv, х > 0 F(v + 1) Vv+1 v Г(у + 1)2"-72 r[-(n-v-2)/2]
f 'х
2 Степенная со смещением у = b(x-a)v, x>b. ‘У -^=r(v + l)- °v
0 "'а х
666
Нелинейные преобразования случайных процессов
№ п/п Характеристика нелинейного преобразователя ф(х) Преобразо- вание Лапла- са характе- ристики оо J (p[x)e~'vxdx 0 Коэффиценты
3 Идеальный ограни- читель fa, х>0 У ~ [0, х < 0 ty а V п-2 а2 2
о П л -(*-2)/2] -нечетное
а
о
4 Идеальный ограничитель со смещением fa, х > b у [0, х < b I to to с- [- Ь2 я pxrv
4о2 „ (Ь\
а ‘У ГГ- иа 1 т/2л
С b х
5 Линейная у = Ьх, х > 0 'У b П-3 Ьо2 2
Г г(л-3)/2]
0 X
667
Раздел 22
№ п/п Характеристика нелинейного преобразователя <р(х) Преобразо- вание Лапла- са характе- ристики j(p(x>-/vxdx 0 Коэффиценты <тпЪп
6 с Линейная со мещением у = b(x-a\ х)а 'У Ь -av ~Ve V -а2 Ьое4®2 ( /—- ^п-2 j2n
а х
Примечание: г(х) - гамма-функция; 0(х) - функция Вебера,
Dn(x) = е~*2^Нп(х)-, Н(х) - многочлен Эрмита.
С учетом (22.91) из (22.88) найдем
(л-у-2)
onhn - ЬоЬа(Ц + 1)2 \ . (22.92)
/7-1)-2.
г<—Т")
При ц = 1 из (22.87) с учетом (22.92) получим
и2 2 .-------
Кп(т) =-----{г(т)агссоз[-г(т)] +J1-г2(т)} . (22.93)
2л
Выражение (22.93) совпадает с полученным ранее прямым ме-
тодом (22.32).
22.3.3. Идеальный ограничитель
Характеристика ограничителя имеет вид
y = sign(x)
1,х>0
1,х<0
(22.94)
668
Нелинейные преобразования случайных процессов
Преобразование Лапласа характеристики
Ф(у) = —
(22.95)
Для центрированного гауссовского процесса на входе выраже-
ние (22.87) принимает вид
(22.96)
Из (22.96) после ряда преобразований можно получить сле-
дующее выражение для ковариационной функции случайного про-
цесса на выходе
2
= 1 + — arcsin г(т),
(22.97)
где г(т) - нормированная корреляционная функция случайного
процесса на входе идеального ограничителя.
Корреляционная функция случайного процесса на выходе иде-
ального ограничителя описывается выражением
Нп(т) = —arcsin г(т),
(22.98)
соответствующая спектральная плотность мощности:
4 г
А/ (со) = — arcsin r(T)cos(cor)dt.
п J
о
22.4. Метод производных
Если случайный процесс на входе нелинейного устройства яв-
ляется гауссовским, в ряде случаев появляется возможность упро-
стить операции получения корреляционной функции случайного
сигнала на выходе.
Упрощения связаны с использованием выражений для произ-
водных ковариационной функции случайного процесса на выходе
устройства исходя из нормированной корреляционной функции
случайного процесса на входе.
669
Раздел 22
22.4.1. Производные корреляционной функции случайного
процесса на выходе нелинейного элемента
При подаче на вход нелинейного устройства гауссовского про-
цесса £(f) выражение для ковариационной функции случайного
процесса на выходе т](Д (22.84) имеет вид
1
(2л)2
• ||ф(и1)Ф(и2)ехр{
С1 С2
(22.99)
где о2, г(т) - дисперсия и нормированная корреляционная
функция случайного процесса на входе.
Дифференцирование (22.99) по г(т) дает следующее выраже-
ние
dnKv _ (-1)па2п
drn (2л)2
q2 (22.100)
• J J V2<P(Vi)Ф(v2)ехр{——(v2 +2^^ + vl)}dv^dv2.
C1 c2
Подставляя вместо двумерной характеристической функции га-
уссовского процесса в (22.100) ее определение через ПРВ
2 сю сю
ехр{--у(vf +2™^ +1/2)} = J jelv^x'+IVzXzf^2(x1,x2)dx1dx2,
—00 —00
запишем
dnK.
drn
(-1)no2n
(2л)2
||^п^Ф(у1)Ф(у2)-
С1 С2
(22.101)
/1/1 х, + /i/z х2 , х2 (jX} (jX2 (jV2
В (22.101) переменные интегрирования Vj и v2 разделяются.
Для каждого интеграла имеет место следующее равенство
670
Нелинейные преобразования случайных процессов
— f vn(b(y)e,vxdv = = ф(л)(х), (22.102)
2 л J dxn
с
где ф(х) - характеристика нелинейного устройства.
Это равенство получается при дифференцировании (22.81).
С учетом (22.102) из (22.101) получим
п оо оо
О •'п On Г Г / .... ...
Г = су2л I |Ф(л)(х1)ф(л)(х2)42(х1,х2)сУх1сУх2,
(22.103)
где f^2(x1tx2) - двумерная ПРВ гауссовского процесса на входе.
Записанное соотношение позволяет получить производную кор-
реляционной функции на выходе нелинейного устройства, удобно
в том случае, когда имеется достаточно простое решение двойного
интеграла (22.103). Такое решение получается, в частности, в том
случае, когда характеристика нелинейного элемента представляет
многочлен и решение интеграла в (22.103) становится очевидным.
Нелинейные устройства с такой характеристикой и рассматрива-
ются в качестве примеров.
22.4.2. Односторонняя линейная характеристика
Характеристика нелинейного устройства имеет вид
у = (р(х) = Ьх, х>0. (22.104)
Вторая производная (22.104) представляет импульсную функцию
Ф(2)(х) = Ь5(х).
Подставляя (22.105) в (22.103), получим
(22.105)
d2Kn(r) _ ь2<52
2n/l-r2
(22.106)
Решение (22.106) с учетом начальных условий при г = 0
Ь2о2
4
(22.107)
671
Раздел 22
дает
,22 ,------
К (т) = —{г(т)агссоз[-г(т)] +Ji-г2(т)}, (22.108)
2л:
что совпадает с (22.30).
22.4.3. Односторонняя квадратичная характеристика
Характеристика нелинейного устройства имеет вид
у = (р(х) = Ьх2, х>0.
Для такой характеристики
<р(3)(х) = 2Ь8(х)
(22.109)
(22.110)
из (22.103) получим
d3Kr] _ 2Ь2о4
dr3 лл/l - г2
(22.111)
Начальные условия при г = 0
dK 2b2 г 12 2 4
---L =----[ хе2а = 2b п ,
dr п j
о
. 2 “° , 2 4
I/ Ь rf 2 ^2^,2 Ь О
к =------[ х2е2° dx] =——.
1 2ло2 J 4
(22.112)
Из (22.111) с учетом (22.112) получим
2Ь2сг4 л лг2(т) 3 Г £7“
/< (Т) =------- [- + —+ - /-(т)^ - г2 (т) +
Л о 4 4
1 1 2
+ — arcsin г(т) + — г (т)arcsin г(т)].
4 2
(22.113)
672
Нелинейные преобразования случайных процессов
22.4.4. Идеальный ограничитель
Характеристика идеального ограничителя имеет вид
у = <р(х) =
1, х>0
-1, х<0
Для такой характеристики получим
dKn 2
Ф'(х) = 25(х), —-
dr 71^-Г2
Начальные условия при
г = О = 0 .
Из (22.115) с учетом (22.116) находим
/С(т) = — arcsin г(т),
п
(22.114)
(22.115)
(22.116)
(22.117)
что совпадает с (22.98) результатом, полученным методом преобразо-
ваний.
673
Раздел 23.
АНАЛИЗ ХАРАКТЕРИСТИК СЛУЧАЙНОГО ПРОЦЕССА
НА ВЫХОДЕ МНОЖИТЕЛЬНОГО КОРРЕЛЯТОРА
Широкое применение корреляторов, в первую очередь при об-
наружении сигналов и измерении характеристик сигналов и шумов,
обуславливает практический интерес к их анализу. С другой сторо-
ны, рассмотрение случайного процесса на выходе коррелятора
является хорошей иллюстрацией применения методов анализа
случайных процессов и прежде всего их линейных и нелинейных
преобразований в практике исследований.
В разделе проводится анализ случайного процесса на выходе
множительного коррелятора, представляющего последовательно
соединенные перемножитель и фильтр, на одном из входов пере-
множителя включена линия задержки (рис. 23.1).
23.1. Распределение случайного процесса на выходе
перемножителя
Случайный процесс на выходе перемножителя v\(t) представля-
ет результат перемножения случайного процесса £(f) с его копией
после задержки на интервал времени Т (рис. 23.1)
T|(f)= (231)
Зная двумерную ПРВ случайных величин £(f) и
- Г)- f^(xb х2), можно определить ПРВ их произведения д(Г).
674
Анализ характеристик случайного процесса
Используя результаты, полученные в разд. 17, для ПРВ случай-
ного процесса т|(0 запишем следующее выражение
(23.2)
В дальнейшем будем рассматривать £(f) как центрированный га-
уссовский процесс. Это наиболее часто встречающийся на практике
случай. Для гауссовского процесса ^(f), имеющего двумерную ПРВ
^2(**) =
ехр<
* го 1 ГО т)х1х2 + х2 х2
2о2 I Т".
(23.3)
где о2, г(т) - дисперсия и нормированная корреляционная функ-
ция ^(0,
выражение (23.2) примет вид
(23.4)
где Т- задержка на входе коррелятора.
Решая (23.4), получаем
(23.5)
где К0(х) - модифицированная функция Бесселя.
Графики ПРВ случайного процесса на выходе перемножителя
приведены на рис. 23.2.
23.2. Корреляционная функция и спектр случайного
процесса на выходе перемножителя
Математическое ожидание случайного процесса на выходе пе-
ремножителя т|(0 равно
, = M{n(t)} = - Г)} = Я(Д (23.6)
675
Раздел 23
где R(T) - корреляционная функция случайного процесса на входе
£(f); Т - задержка случайного процесса на одном из входов пере-
множителя.
Как следует из (23.6), постоянная составляющая на выходе пе-
ремножителя является несмещенной оценкой корреляционной
функции случайного процесса £(Г).
На постоянную составляющую накладываются флуктуации, ко-
торые представляют источник ошибок измерения корреляционной
функции (рис. 23.3).
Второй начальный момент случайного процесса на выходе пе-
ремножителя (ковариационная функция) определяется моментом
четвертого порядка случайного процесса на входе
(т) = )n(f - т)} = - T^(t - - т - T)}.
Для гауссовского процесса ^(f) имеет место следующее равен-
= M{^(t - T)}M{i(t - тХ(г - Т - 7j}+
+ - x)}/wfc(f - Tftt - т - т)}+
+ - т - - rX(f - г)}.
Таким образом, выражение для ковариационной функции слу-
чайного процесса на выходе перемножителя запишется в виде
(г)=Д2(т)+Д2(г)+Д(г+7-)Я(т-7-)1 (23 9)
где Я(т) - корреляционная функция случайного процесса на вхо-
де £(0 -
676
Анализ характеристик случайного процесса
Корреляционная функция случайного процесса r|(f)
(т) = Я2(т) + Я(т + Г)Я(Т - Г).
(23.10)
Дисперсия r](f), характеризующая «размах» флуктуаций на вы-
ходе перемножителя, определяется как
а2=Я2(о)+Я2(Т) .
Нормированная корреляционная функция T](t):
R2 (т) + Я(т + Г)Н(т - Г) _ г2 (т) + г(т + Т)г(т - Т)
Я2(о)+Я2(Г) ” 1 + г2(т)
(23.11)
(23.12)
где г(т) - нормированная корреляционная функция случайного
процесса на входе £(f).
При Т = 0
(т) = 2R2 (т), гл (т) = г2 (т). (23.13)
Спектральная плотность мощности случайного процесса на вы-
ходе перемножителя определяется преобразованием Фурье кор-
реляционной функции Яп(т)
AZn ((о) = 2J Ял (t)cos(dt ch.
о
(23.14)
При Т=0 выражение для Л/П(ш) с учетом (23.13) можем записать
в виде свертки спектра случайного процесса на входе (свойства
преобразования Фурье, разд. 3)
677
Раздел 23
(23.15)
где Л/(ш) - спектральная плотность мощности случайного процесса
на входе ^(0.
В качестве примера рассмотрим случайный процесс £,(0,
имеющий корреляционную функцию и спектр:
zii -р2о>2
Я(т) = Я(0)е2р2, Л/((о) = Т2лря(0)е 2 .
Из (23.10) и (23.14) получим (рис. 23.4)
-т2 -Т2
Яп(т) = Я2(0)ер2 (1 + е & ),
zli -pw
Л/п((о) = л/^ря2(0)(1 + езг )е 4 .
678
Анализ характеристик случайного процесса
При Т = 0
-р2ыг
Л/П((о) = 2д/лрЯ2(0)е 4 .
Как и следовало ожидать, корреляционная функция случайного
процесса на выходе перемножителя сужается, спектр - расширя-
ется.
На выходе перемножителя включен фильтр. Используя подход,
описанный выше, и результаты, полученные в разд. 21, можно оп-
ределить характеристики случайного процесса на выходе фильтра
коррелятора.
23.3. Характеристики случайного процесса на выходе
множительного коррелятора
Случайный процесс на выходе коррелятора (рис. 23.1) описы-
вается выражением
оо
n(t) = J- т - u)du. (23.16)
о
где £(f) - случайный процесс на входе перемножителя; Т - за-
держка на одном из входов перемножителя; h(t) - импульсная ха-
рактеристика фильтра.
Как правило, ширина полосы пропускания фильтра значительно
меньше ширины спектра на выходе перемножителя. Происходит
нормализация случайного процесса на выходе фильтра (разд. 21).
Таким образом, достаточно общим случаем, можно считать, явля-
ется нормальное распределение случайного процесса на выходе
коррелятора r|(f); его ФРВ или ПРВ определяются математиче-
ским ожиданием и корреляционной функцией случайного процесса
на выходе фильтра.
Математическое ожидание случайного процесса на выходе кор-
релятора равно
со
% 1 = М{п (()} = j -u^(t-T-u}}du = kR(T\ (23.17)
о
где
679
Раздел 23
оо
к = J h(u)du.
о
Как следует из (23.17), математическое ожидание случайного
процесса на выходе коррелятора пропорционально корреляцион-
ной функции случайного процесса на входе. Оно оценивается по-
стоянной составляющей колебания на выходе коррелятора.
Начальный момент второго порядка случайного процесса на
выходе коррелятора т/(Г) определяется выражением
(23.18)
процесса в
(23.19)
м{п(гН* “ т)} = J J Ми1 Ж)
- u^(t -Т - и№ - т - и2 Х(? - т - 7" - и2 )}du,du2,
где h(t) - определена для t > 0.
Для момента четвертого порядка гауссовского
(23.18) запишем
- Т - - х - u2^(t - х - Т - и2}} =
= М{^-щ %-Т-щ)}м{^-х-и2 Х(г-т-Т-и2)} +
+ M{^(t -u^t-x- и2 - Т - щ X(t - т - и2)} +
+ Mfc(t-u^(t-x-T-u2 - Т - u1 X(t - т - и2)} =
= R2 (т) + Я2 (т + и2 - Щ) + Я(т + Т + и2 + щ )r(x -Т + и2 -щ),
где Я(т) - корреляционная функция случайного процесса на входе
W-
Корреляционная функция случайного процесса на выходе кор-
релятора определяется через начальные моменты распределения
соотношением
Ял(т)= - т)}- M2{x](t)}. (23.20)
С учетом (23.18) - (23.20) выражение для Ял(т) запишется
в виде
яп(т)= j f^iHw2)h2(T+^2-ui)+ (2321)
— оо —оо
+ Я(т + Т + и2 + щ )я(т - Т + и2 - щ )]du^du2.
680
Анализ характеристик случайного процесса
Область интегрирования в (23.21) разобьем диагональю
Перейдем от переменных о7 и и2 к и = u1f v = и2- для одной по-
ловины области и к и = и2, v = и2 для другой. Тогда выражение
для корреляционной функции случайного процесса на выходе кор-
релятора получим в виде
+ R2 (у - т) + R(v + Т - t)R(v - т - Т)]с/у,
(23.22)
и
где
p(v)= jh(u)h(u + v)du или р(т) = —||Н(ю)|2созалаЬ;
— OQ О
/-/(gj) - частотная характеристика фильтра коррелятора.
Дисперсия случайного процесса на выходе коррелятора равна
оо
ст2 = (о) = 21 р(у)[я2 (v) + R(y + T)R(v - T)]dv.
(23.23)
Нормированная корреляционная функция т](0
v + т + Т )R(y + т - Т) +
V
(23.24)
2
V
Постоянная составляющая на выходе фильтра, как это следует
из (23.17), является оценкой измеряемой корреляционной функции
случайного процесса на входе £(/). Флуктуации, накладываемые
на нее, обуславливают ошибку коррелятора. Относительная вели-
чина этой ошибки может быть определена как отношение среднего
квадратического отклонения случайного процесса к его математи-
ческому ожиданию
681
Раздел 23
е_ аП(Г)
Л4{п(0} ’
(23.25)
С учетом (23.17) и (23.23) выражение для 3 запишется в виде
(23.26)
где Я(т) - корреляционная функция случайного процесса на входе;
г(т) = Я(т)/Я(О).
Как следует из (23.26), ошибка определяется: видом и парамет-
рами фильтра коррелятора, р(у); корреляционной функцией слу-
чайного процесса на входе, Я(т); задержкой на входе коррелятора, Т.
В качестве примера рассмотрим коррелятор, содержащий
фильтр, имеющий импульсную характеристику вида (например,
RC- цепь)
h(t) = be bt
где b- постоянная величина.
Корреляционная функция случайного процесса на входе £(f)
имеет вид
Я(т) = Я(0)е2р2.
Для приведенных исходных данных из (23.22) получим
I— Q Ь2 '
Ят1(г) = 1^я2(0)ет(1 + е₽2 )
682
Анализ характеристик случайного процесса
где
X
]е f2dt-
о
Дисперсия равна
ЯЛ(О) =
Нормированная корреляционная функция случайного процесса
на выходе коррелятора
Относительная величина ошибки определяется выражением
(23.26)
1
где b = bfi, Т = Т/$, т = т/р.
При Т=0
зависит от постоянной времени фильтра 1/Ь и параметра корре-
ляционной функции случайного процесса £ , от их произведения
683
Раздел 23
b = Ьр. На рис. 23.5 приведены графики зависимости 5 от обоб-
щенного параметра b в интервале значений b от 0,001 до 0,01.
При b < 0,001 можно принять 5 = 1,88-/д .
Принимая интервал корреляции случайного процесса на входе
равным тк = 2,4р (Я(тк) = 0,05Я(0)), можно считать, что при значе-
нии постоянной времени фильтра Т = (1/Ь) > 500тк значения отно-
сительной ошибки 5 не превосходят 5%.
Спектральная плотность мощности случайного процесса на вы-
ходе коррелятора т}(0 может быть определена как преобразова-
ние Фурье корреляционной функции (23.22)
оо
Л/Л(со) = 2J Ял(т)соз(сот)с/г.
о
Она может быть также получена как произведение спектральной
плотности мощности процесса на выходе перемножителя Л/л(со) и
квадрата модуля частотной характеристики фильтра Н(со):
Л/л (cd) = | Н(со)|2 Л/п ! (со),
(23.27)
где Л/л1(со) - спектральная плотность мощности случайного про-
цесса на выходе перемножителя, определяется (23.14).
Для низкочастотного фильтра коррелятора с учетом того, что
полоса пропускания фильтра значительно уже ширины спектра
случайного процесса на выходе перемножителя, можно принять
684
Анализ характеристик случайного процесса
Л/п(о)) = |н(со^2Л/п1(о)
(23.28)
Выражение для Л/п До) получим из (23.14) с учетом (23.10) в виде
со со
л/п ! (о) = 2 j R2 (т)(Л +2J Я(т + Т)Я(т - T)ch .
о о
(23.29)
Для условий рассмотренного выше примера получим
I и/ \12
Н(со) =—-------
b + со
Л/п1(0) = дЙЯ2(0) 1 + е ₽г
Как следует из выражения для Л/П(со), спектр случайного про-
цесса на выходе коррелятора, имеющего узкополосный фильтр,
определяется частотной характеристикой фильтра.
Подход к анализу случайного процесса на выходе множительно-
го коррелятора может быть использован и при анализе с учетом
ограниченного времени наблюдения (кратковременный анализ).
23.4. Кратковременный анализ случайного процесса на
выходе множительного коррелятора
Наблюдение случайного процесса на выходе коррелятора в те-
чение ограниченного интервала времени приводит к дополнитель-
ным ошибкам измерения. Подход к определению этого вида оши-
бок аналогичен рассмотренному в п. 23.3, что делает целесооб-
разным связать материал предыдущего подраздела с оценкой ха-
рактеристик случайного сигнала на выходе перемножителя и кор-
релятора при кратковременном наблюдении случайного процесса.
23.4.1. Оценка корреляционной функции случайного про-
цесса при ограниченном времени наблюдения
При наблюдении случайного процесса на выходе перемножите-
ля в течение времени tk оценкой корреляционной функции центри-
рованного процесса £(f) будет величина
685
Раздел 23
к ° (23.30)
где Т - смещение во времени на одном из входов перемножителя.
Математическое ожидание Rk(T,tk) равно
(23.31)
(23.32)
(23.33)
где Я(т) - корреляционная функция случайного процесса ^(t).
Результат усреднения (23.31) показывает, что Rk(T,tk) являет-
ся несмещенной оценкой корреляционной функции £(f). Поэтому
ошибку определения корреляционной функции по (23.30) можно
оценивать, оперируя только средним квадратическим отклонением
Первое слагаемое в (23.32) определяется выражением
tktk
J J X(r, - rXteXte - T)}dt.dt2.
k 0 0
Подставляя (23.31) и (23.33) в (23.32), запишем
<4(ГЛ) =
= 4 j j - т^2 X(r2 - тШ - М2{^ - T)}.
k о о
Для гауссовского процесса ^(t) подынтегральное выражение в
(23.34) можем записать в виде
- Г)}- - r)}=
= R fe - »i)+Rfe - 7, + T)R(t2
где Я(т) - корреляционная функция £(f).
Подставив (23.35) в (23.34), получим
(23.34)
686
Анализ характеристик случайного процесса
= 4 ([Я2(<2 -*1)+ Rfe - + T)R(t2 - f, -T)dt,dt2. (23.36)
'»i i
Производя замену переменных, как это было сделано в § 23.3,
получим
Выражение (23.37) дает зависимость дисперсии от времени на-
блюдения tk при заданной корреляционной функции случайного
процесса.
Относительная ошибка определения корреляционной функции
равна
Подставив в (23.38) выражение для ok(J,tk) и Rk(T,tk), запи-
шем
j (tk - v)[R2 (у) + R(v + T)R(v - T)pv
5 =
r(t)
(23.39)
В качестве примера рассмотрим случайный процесс, имеющий
корреляционную функцию вида
R(t) = /?(0К"и
где а - постоянная величина.
Подставив выражение для корреляционной функции в (23.39),
получим
5 =
687
Раздел 23
2
2e\
5 = ——-=т(1 - 6 2tk
|Л 'Г
где tk = atk, Т =aT.
Как следует из записанных выражений, ошибка зависит от: кор-
реляционной функции случайного процесса, Я(т); задержки слу-
чайного процесса на входе, Т; времени наблюдения, tk.
Для условий примера - ошибка определяется параметрами а,
Ти
При Т= 0 (рис. 23.6)
д
2
5=
Uk
При достаточно большом значении tk можно пользоваться сле-
дующим приближенным равенством
Принимая интервал корреляции т^З/а, (Я(тк) < 0,05Я(0)),
последнее выражение для 5 можем записать в виде
3tk
688
Анализ характеристик случайного процесса
Время наблюдения практически не влияет на определение кор-
реляционной функции случайного процесса при значении
^>300тк. При выполнении этого неравенства ошибка определе-
ния корреляционной функции составит менее 5%.
23.4.2. Аппаратурное определение корреляционной функции
случайного процесса за ограниченное время
При определении корреляционной функции случайного процес-
са за ограниченное время tk случайный процесс на выходе корре-
лятора описывается выражением
T]k(T’tk)= jh(u)^(t-ufc(t-T-u)du. (23.40)
о
Моменты первого и второго порядков x]k(T,tk) равны
м^к(Т^к)}= J h(u)M{^t-uX(t
о
-Т- u)}du = Я(т)| h(u)du,
о
^2k(T,tk)}= h(u^h(u2)-
о о
• M{^t -u^t-T-щ )£(f - u2 )^(t -T-u2 )}du}du2,
(23.41)
где Я(т) - корреляционная функция случайного процесса £(0 .
Дисперсия случайного процесса x\k(T,tk) определяется как
o2(r, fk)= (*)}- мЦг^Т, »*)}. (23.42)
Подставляя (23.41) в (23.42) и используя представление момен-
та четвертого порядка гауссовского процесса с помощью моментов
второго порядка, получим
^T,tk) =
f г / \ \ 2( \ \ \ (23.43)
= h[u1)h(u2)R (и2 - ц)+ R\u2 - ц + T)R(u2 - ц -Три^и2.
о о
Произведя замену переменных в (23.43), выражение для
oJ(T, tk) запишем в виде
689
Раздел 23
dv +
<4 (Т, tk) = J р, (и, tJR2 (v) + R(v + T)R(v - T)
-tk
о
(23.44)
где
tk tk-v
p}(y,tk)= ^h(u) h(v + u)du, p2(^, fk)= jh(u) h(y + u) du. (23.45)
-v о
Относительная ошибка оценки корреляционной функции опре-
деляется выражением
(23.46)
Ошибка зависит от времени измерения корреляционной функ-
ции, вида корреляционной функции, вида и параметров фильтра
коррелятора.
При Т = 0
(23.47)
Для RC - фильтра с импульсной характеристикой h(t) = be bt
и корреляционной функцией экспоненциального вида
690
Анализ характеристик случайного процесса
ад = Я(О)е4^
из (23.47) получим
ок(0, tk)
2
1
1 + 1 e2btk 1 c-(b+a)tk
л с а- л с а- а2
°’5 % °'5’ь °'5-7г
При tk °° имеем
0,5 + -^
I PJ
Сравнение выражений для относительной ошибки при ограни-
ченном времени измерения и неограниченно большом показывает,
что для условий примера при tk>T = (1 / b) влиянием времени из-
мерения на ошибку можно пренебречь, ошибка составляет доли
процента.
23.5. Характеристики сигнала на выходе
корреляционного транспонатора
Оценкой корреляционной функции случайного процесса являет-
ся постоянная составляющая на выходе коррелятора при фиксиро-
ванном значении задержки на входе. Изменение во времени за-
держки на входе позволяет наблюдать корреляционную функцию в
заданном интервале значений задержки (рис. 23.7). Если задержка
т изменяется во времени с постоянной скоростью
К = —, x = Kt, (23.48)
dt
то, не учитывая возможные ошибки, сигнал на выходе коррелятора
при некоторых условиях (определенных в дальнейшем) можно
представить в виде (постоянный коэффициент принят равным еди-
нице)
691
Раздел 23
Рис.23.7
(23.49)
Спектральную плотность этого сигнала определим преобразо-
ванием Фурье
со
S(to)= J R(Kt)e~ki)tdt
— со
С учетом (23.48) можно записать
-ЛОТ / ч
1 f „/ \ ~~7Г1 А/ О)
— I г?(т е Л сгс — — N — ,
К J ' 7 К \к)
о 7
(23.50)
(23.51)
где Л/(о)) - спектральная плотность мощности случайного процесса
на входе
Л/(о)) = 2 Г Я(т)соэ сот ch
(23.52)
о
Сравнение (23.51) и (23.52) показывает, что спектр сигнала на
выходе коррелятора при изменении задержки во времени повторя-
ет по форме спектральную плотность мощности случайного про-
цесса на входе; происходит изменение масштаба по оси частот:
изменяется положение спектра на оси частот и его ширина
(рис. 23.8). Этот результат вытекает непосредственно из свойств
преобразования Фурье.
Однако сделанные выводы справедливы при условии, что сиг-
нал на выходе коррелятора соответствует корреляционной функ-
ции. При аппаратурной реализации условия, выполняемые на
практике, отличаются от принятых.
692
Анализ характеристик случайного процесса
Рис. 23.8
Сигнал оценки корреляционной функции при постоянном значе-
нии задержки на входе представляет постоянную составляющую
на выходе перемножителя. При изменении задержки во времени
этот сигнал на выходе безинерционного перемножителя изменяет-
ся в соответствии с изменением корреляционной функции R(Kt).
При прохождении сигнала через фильтр коррелятора возникают
искажения, которые приводят к изменению сигнала на выходе. Ес-
ли изменение задержки во времени происходит после того, как сиг-
нал на выходе фильтра принял установившееся значение R(0), то
в момент времени t (соответствующий задержке т = Kt) сигнал бу-
дет описываться выражением
z(t) = Я(о)| h(u)du - J /7(и)/3(о){1 - r[^(t - u)]}du,
о о
(23.53)
где h(t) - импульсная характеристика фильтра.
Сигнал, описываемый (23.53), только приближенно соответству-
ет корреляционной функции (рис. 23.9). Степень соответствия оп-
ределяется соотношением параметров корреляционной функции,
фильтра и скорости изменения задержки во времени. Степень со-
ответствия (23.53) и (23.49) можно оценить относительным значе-
нием разности
5 = (23.54)
Н(т) Н(т)
Так для RC -фильтра
693
Раздел 23
h(t) = bebt
и корреляционной функции экспоненциального вида
Н(т) = Я(0)е~а|т1
из (23.53) получим
b
= ----
Ka- b
R(0) *?-ebt -eKta
Переходя к т, запишем
4т) = —R(0)
Ka-b
Ka —
к _ е-«т
b
Ошибка определения корреляционной функции найдется из
(23.54), рис. 23.10.
Как следует из записанного выражения и приведенных графи-
ков, ошибка зависит от:
Ka - крутизны корреляционной функции и скорости изменения
задержки во времени;
b/Ka - соотношения между крутизной корреляционной функ-
ции, скоростью изменения задержки и постоянной фильтра;
т - значения задержки, для которого ведется рассмотрение.
Ошибка, сопровождающая транспонирование спектра, может
быть определена как
694
Анализ характеристик случайного процесса
— оо
Я(т)сОЗ(ОТ(Л- I z(t)cOS(DT(±
оо
J z(t)coscdt ch
—оо
(23.55)
оо
J Я(т)сО8СОТ(Л
Для условий рассмотренного примера получим
1 а + со д
Д = 1----------
a-д дг + аг а
где д = b/K = 1/ТК; Т- постоянная времени фильтра.
Ошибка зависит от тех же параметров, которые влияют на точ-
ность определения корреляционной функции. При заданном виде
корреляционной функции ошибка определяется соотношением
695
Раздел 23
между скоростью изменения задержки и постоянной времени
фильтра. Для каждой корреляционной функции можно установить
такую скорость изменения задержки и выбрать параметры фильтра
таким образом, что ошибка, возникающая при транспонировании
спектра не будет превышать допустимого значения.
Если на вход перемножителя подается гармоническое колеба-
ние
s(t)= Vcoso)0t,
(23.56)
то при постоянной задержке т на выходе выделяется постоянная
составляющая, соответствующая корреляционной функции
/ \ У
R[T) =----COS(D0T .
(23.57)
При изменении задержки во времени с постоянной скоростью на
выходе фильтра выделяется сигнал (по аналогии с (23.49))
, . V2 V2
z(t) =--COS(D0K? = —cosQf,
(23.58)
где К - скорость изменения задержки во времени, Q = Кш0.
Таким образом, коррелятор с переменной задержкой на одном из
входов выполняет функции преобразователя частоты. При К = 10'3
на выходе выделяется также гармоническое колебание с частотой
на три порядка меньше частоты колебания на входе (рис. 23.11). На
рисунке изображены спектральная плотность сигнала на входе
S^w) и выходе S2(w) преобразователя.
Наряду со схемной простотой корреляционный преобразова-
тель частоты обеспечивает помехоустойчивость системы. Если на
коррелятор помимо гармонического колебания воздействует шум,
корреляционная функция которого Яп(т) = Ял(0)гл(т), то при изме-
нении во времени задержки (т = Kt) на выходе преобразователя
696
Анализ характеристик случайного процесса
выделяется непериодическое колебание zn(t) = Rn(0)rn(Kt). При
достаточно большом значении т (или t) значение zn(t) может быть
получено достаточно малым (рис. 23.12).
Помимо постоянной составляющей (при переменной задержке
т - медленно меняющаяся во времени составляющая) на выходе
коррелятора присутствуют флуктуации (рис. 23.12). При нормаль-
ном распределении шума корреляционная функция флуктуаций на
выходе перемножителя определяется выражением (23.10)
R(T, т) = R„ (т) + Rn (Т + т)Яп (Т - т) (23.59)
где Rn(x) - корреляционная функция шума на входе.
При достаточно большом значении Т имеем
R(t)=r2(t). (23.60)
Спектральная плотность мощности флуктуаций на выходе пе-
ремножителя определится выражением
Л/(ш) = J_ f - x)dx, (23.61)
2n
— оо
где Л/(о)) - спектральная плотность шума на входе.
Спектральная плотность мощности колебания на выходе
фильтра
Л/вых И = Л/Н (23.62)
Дисперсия колебания на выходе фильтра описывается выраже-
нием
697
Раздел 23
оо оо
Для узкополосного фильтра
(23.63)
I1’
о,
Q-A/2<w<Q + A/2
остальные знач. о)’
из (23.63) получим
д2 д2
о2 = — л/(а)=—л/(ка)0).
71 71
(23.64)
(23.65)
Как следует из (23.65), о2 зависит от спектральной плотности
мощности шума (на выходе перемножителя) в полосе пропускания
фильтра и ширины полосы пропускания фильтра. Сужая полосу
пропускания фильтра, можно добиться снижения уровня флуктуа-
ций шума на выходе. Ограничения, накладываемые на выбор по-
лосы пропускания, обусловлены ее влиянием на передачу гармо-
нического колебания.
698
СПИСОК ЛИТЕРАТУРЫ К ЧАСТИ 2
1. Амиантов И.Н. Избранные вопросы статистической теории связи. -
М.: Сов. радио, 1971.
2. Бакут П.А. и др. Вопросы статистической теории радиолокации. -М.:
Сов. радио, 1963.
3. Бендат Дж. Основы теории случайных шумов и ее применение. -М.:
Наука, 1965.
4. Бендат Дж., Пирсол А. Применения корреляционного и спектраль-
ного анализа. -М.: Мир, 1983.
5. Бендат Дж., Пирсол А. Измерение и анализ случайных процессов. -
М.: Мир, 1974.
6. Бокс Дж., Дженкинс Г. Анализ временных рядов. Прогноз и управ-
ление. Вып.1 и вып.2. -М.: Мир, 1974.
7. Вайнштейн Л.А., Зубаков В.Д. Выделение сигналов на фоне слу-
чайных помех. -М.: Сов. радио, 1960.
8. Градштейн И.С., Рыжик И.М. Таблицы интегралов, сумм, рядов и
произведений. -М.: Госиздат физико-математической литературы, 1963.
9. Давенпорт В.Б., Рут В.Л. Введение в теорию случайных сигналов и
шумов. -М.: Изд-во.иностр, лит, 1960.
10. Денисенко А.Н. Сигналы с фазовой и частотной модуляцией. -М.:
Изд.Стандартов, 1994.
11. Деч Р. Нелинейные преобразования случайных процессов. -М.:
Сов. радио, 1965.
12. Дженкинс Г., Ватте Д. Спектральный анализ и его приложения. -
М.: Мир, 1971.
13. Засовин Э.А. и др. Радиотехнические и радиооптические системы.
-М.: Изд. Круглый год, 2001.
14. Кокс Д., Льюис П. Статистический анализ последовательностей
событий. -М.: Мир, 1969.
15. Купер Дж., Макгиллем Вероятностные методы анализа сигналов и
систем. -М.: Мир, 1989. •
16. Левин Б.Р. Теоретические основы статистической радиотехники. -
М.: Радио и связь, 1989.
17. Лезин Ю.С. Оптимальные фильтры и накопители импульсных сиг-
налов. -М.: Сов. радио
18. Липкин И.А. Основы статистической радиотехники, теории инфор-
мации и кодирования. -М.: Сов. радио 1978.
19. Миддлтон. Введение в статистическую теорию связи. -М.: Сов. ра-
дио, т.1 1961, т.2 1962.
699
20. Некоторые проблемы обнаружения сигнала, маскируемого флюк-
туационной помехой. Сборник статей под ред. И.И. Шнер. -М.: Сов. Радио,
1965.
21. Оуэн. Сборник статистических таблиц. -М.: Изд. ВЦ АН СССР,
1966.
22. Прием импульсных сигналов в присутствии шумов. Сборник пере-
водных статей. -М.: Гос. Энергетич. Изд., 1960.
23. Романенко А.Ф., Сергеев Г.А. Вопросы прикладного анализа слу-
чайных процессов. -М.: Сов. Радио, 1968.
24. Рытов С.М. Введение в статистическую радиофизику. -М.: Наука,
1976.
25. Свешников А.А. Прикладные методы теории случайных функций. -
Л.: Судпромгиз, 1961.
26. Стейн С., Джонс Дж. Принципы современной теории связи и их
применение к передаче дискретных сообщений. -М.: Связь, 1971.
27. Стратанович Р.Л. Избранные вопросы теории флюктуаций в ра-
диотехнике. -М.: Сов. радио, 1961.
28. Тихонов В.И. Статистическая радиотехника. -М.: Радио и связь,
1982.
29. Тихонов В.И. Выбросы случайных процессов, -М.: Наука, 1970.
30. Фалькович. Прием радиолокационных сигналов на фоне флюктуа-
ционных помех. -М.: Сов. радио, 1961.
31. Феллер. Введение в теорию вероятностей и ее приложения т.1 и
т.2.-М.: Мир, 1984.
32. Худсон Д. Статистика для физиков. -М.: Мир, 1967.
33. Шахтарин Б.И. Случайные процессы в радиотехнике. -М.: Радио и
связь, 2000.
34. Янке Е., Эмде Ф., Леш Ф. Специальные функции. -М.: Наука, 1988.
35. Marcum J,l, Swerling Р. Studies of target detection by pulsed radar,
IRE Trunsections on information theory, v. IT-6, april 1960.
36. Rice S.O. Mathematical analysis of random noise. BSTJ, 1944, v 23,
N3; 1945 , v24, N1.
700
ОГЛАВЛЕНИЕ
Предисловие....................................................3
Часть 1. ДЕТЕРМИНИРОВАННЫЕ СИГНАЛЫ................................7
Раздел 1. Сигналы и их представление..............................8
1.1. Описание сигналов временными функциями....................10
1.2. Представление сигналов ортогональными рядами..............17
1.3. Интегральное представление сигналов.......................22
1.4. Векторное представление сигналов .........................25
1.5. Энергия и мощность сигналов...............................28
1.6. Основные виды сигналов ...................................31
Раздел 2. Обобщенный спектральный анализ сигналов.................34
2.1. Обобщенный ряд Фурье......................................34
2.2. Спектральный анализ сигналов на основе системы
тригонометрических функций.....................................36
2.3. Спектральный анализ сигналов на основе многочленов
Лежандра.......................................................39
2.4. Спектральный анализ сигналов на основе многочленов
Чебышева.......................................................41
2.5. Спектральный анализ сигналов на основе многочленов
Лагерра........................................................44
2.6. Спектральный анализ сигналов на основе многочленов
Эрмита.........................................................45
2.7. Спектральный анализ сигналов на основе функций Уолша......47
Раздел 3. Гармонический анализ сигналов...........................59
3.1. Гармонический анализ периодических сигналов...............59
3.2. Гармонический анализ непериодических сигналов.............64
3.3. Частотные спектры сигналов, представленных
в виде обобщенного ряда Фурье..................................78
3.4. Спектры сигналов, описываемых
неинтегрируемыми функциями.....................................82
3.5. Свойства преобразования Фурье и их использование
при анализе сигналов...........................................87
3.6. Спектральный анализ сигналов на основе использования
преобразования Хартли..........................................
Раздел 4. Анализ сигналов на основе преобразования Лапласа.......106
4.1. Преобразование Лапласа и его свойства....................106
4.2. Обратное преобразование Лапласа..........................112
Раздел 5. Корреляционный анализ сигналов.........................127
5.1. Корреляционные функции периодических сигналов............127
5.2. Соотношение между корреляционной функцией
и спектром периодического сигнала.............................129
5.3. Корреляционные функции непериодических сигналов...........131
5.4. Соотношение между корреляционной функцией
и спектром непериодического сигнала...........................144
5.5. Интервал корреляции и эффективная ширина спектра сигнала..147
Раздел 6. Дискретизация и восстановление
непрерывных сигналов.............................................150
6.1. Дискретные и цифровые сигналы............................150
6.2. Спектр дискретного сигнала...............................151
6.3. Дискретное преобразование Фурье и его свойства...........156
6.4. Алгоритмы быстрого преобразования Фурье..................159
701
6.5. Дискретное преобразование Хартли и его свойства...........161
6.6. Z-преобразование и его использование при анализе
дискретных сигналов............................................162
6.7. Восстановление непрерывного сигнала
по дискретным значениям ........................................169
Раздел 7. Восстановление непрерывных сигналов
с помощью сплайнов................................................178
7.1. Кубические сплайны первой степени гладкости...............179
7.2. Кубические сплайны второй степени гладкости...............181
7.3. Подход к построению локальных сплайнов....................182
7.4. Локальные сплайны нечетной степени гладкости..............184
7.5. Локальные сплайны четной степени гладкости................188
Раздел 8. Узкополосные сигналы....................................199
8.1. Описание узкополосного сигнала............................199
8.2. Сумма и произведение узкополосных сигналов................201
8.3. Спектр узкополосного сигнала..............................202
8.4. Корреляционные функции узкополосных сигналов..............206
8.5. Аналитический сигнал......................................210
8.6. Обобщенная корреляционная функция сигнала.................211
8.7. Дискретизация узкополосного сигнала.......................215
8.8. Модулированные сигналы ...................................217
Раздел 9. Амплитудно-модулированные сигналы.......................218
9.1. Описание AM сигнала.......................................218
9.2. Тональная амплитудная модуляция...........................219
9.3. Многотональная амплитудная модуляция......................221
9.4. Амплитудная модуляция периодической последовательностью
импульсов......................................................223
9.5. Амплитудная модуляция непериодической последовательностью
импульсов.................................................... 226
9.6. Балансная амплитудная модуляция...........................230
9.7. Однополосная амплитудная модуляция........................233
Раздел 10. Сигналы с фазовой и частотной модуляцией...............235
10.1. Описание сигналов с угловой модуляцией...................235
10.2. Сигнал с тональной угловой модуляцией....................238
10.3. Сигнал со сложным периодическим законом модуляции .......241
Раздел 11. Импульсные сигналы с частотной модуляцией..............256
11.1. Описание ЛЧМ сигналов....................................256
11.2. Спектр ЛЧМ сигнала с нечетносимметричным
законом модуляции..............................................258
11.3. Приближенное определение спектра ЛЧМ сигнала............261
11.4. Спектр пачки импульсов с внутриимпульсной ЛЧМ...........264
11.5. Корреляционная функция ЛЧМ сигнала при
нечетной симметрии закона модуляции.............................268
11.6. Спектр и корреляционная функция ЛЧМ сигнала
с четносимметричным законом модуляции...........................270
11.7. Влияние искажений закона модуляции
на характеристики сигнала.......................................273
11.8. Влияние ступенчатой аппроксимации закона
изменения фазы на спектр сигнала................................284
11.9. Прохождение ЛЧМ сигнала через согласованный фильтр.......286
11.10. Импульсные сигналы с нелинейной частотной модуляцией.....291
Раздел 12.........................................................311
12.1. Описание кодированных сигналов...........................312
12.2. Ампдитудно-кодированные сигналы..........................313
12.3. Фазо-кодированные сигналы................................321
12.4. Частотно-кодированные сигналы............................338
Раздел 13. Анализ сигналов в линейных цепях.......................341
13.1. Прохождение сигнала через линейную цепь..................341
702
13.2. Прохождение сигнала через узкополосную цепь..............350
13.3. Прохождение сигнала через цифровой фильтр................357
Список литературы к части 1....................................363
Часть 2. СЛУЧАЙНЫЕ СИГНАЛЫ И ШУМЫ.................................365
Раздел 14. Случайные процессы, их характеристики и классификация.....366
14.1. Детерминированные и случайные сигналы....................366
14.2. Шумы.....................................................371
14.3. Основные характеристики случайных процессов..............374
14.4. Классификация случайных процессов........................378
Раздел 15. Одномерное распределение вероятностей
случайного процесса...............................................384
15.1. Одномерная функция распределения и плотность
распределения вероятностей случайного процесса.................384
15.2. Эргодические случайные процессы,
их характеристики распределения................................390
15.3. Некоторые виды случайных процессов.......................391
15.4. Представление плотности распределения вероятностей
случайного процесса с помощью ортогональных многочленов........408
15.5. Одномерное распределение вероятностей
функции случайного процесса....................................415
15.6. Характеристическая функция случайного процесса...........428
Раздел. 16. Многомерное распределение вероятностей
случайного процесса...............................................432
16.1. Многомерная функция распределения и плотность
распределения вероятностей случайного процесса.................432
16.2. Корреляционная функция случайного процесса...............436
16.3. Многомерное распределение вероятностей
гауссовского процесса..........................................441
16.4. Разложение двумерной плотности распределения
вероятностей в ряд по ортогональным системам функций...........445
16.5. Условные характеристики распределения вероятностей
случайного процесса............................................447
16.6. Распределение случайного процесса на интервале времени...451
16.7. Многомерная характеристическая функция
случайного процесса............................................454
16.8. Марковские процессы......................................456
Раздел 17. Распределение вероятностей нескольких случайных
процессов и их функциональных преобразований......................459
17.1. Совместное распределение вероятностей
двух случайных процессов.......................................459
17.2. Распределение вероятностей функций случайных процессов...462
17.3. Некоторые виды функциональных преобразований
случайных процессов............................................466
17.4. Распределение вероятностей производной случайного процесса..474
17.5. Распределение вероятностей интеграла от случайного процесса.478
17.6. Характеристическая функция случайных процессов...........479
17.7. Метод характеристических функций ........................480
Раздел. 18. Спектр случайного процесса............................493
18.1. Понятие спектральной плотности мощности случайного процесса.493
18.2. Соотношение между спектральной плотностью мощности
и корреляционной функцией случайного процесса..................494
18.3. Эффективная ширина спектра случайного процесса...........510
18.4. Спектр производной и интеграла от случайного процесса....512
18.5. Дискретизация случайного процесса и его характеристик....516
Раздел 19. Узкополосные случайные процессы........................520
19.1. Описание и характеристики узкополосных случайных процессов..520
19.2. Распределение вероятностей огибающей и фазы узкополосного
703
гауссовского процесса.............................................527
19.3. Распределение огибающей и фазы смеси сигнала и шума.........529
19.4. Модулированные случайные процессы...........................531
19.5. Случайный процесс с амплитудной модуляцией..................532
19.6. Случайный процесс с угловой модуляцией......................539
Раздел 20. Выбросы случайных процессов................................564
20.1. Определение характеристик распределения длительности
выбросов с использованием ФРВ случайного процесса.................564
20.2. Определение характеристик распределения длительности выбросов
с использованием частотных характеристик случайного процесса....576
20.3. Средняя частота следования и средняя длительность
выбросов случайного процесса....................................607
20.4. Средняя частота следования экстремумов случайного процесса .612
Раздел 21. Прохождение случайного процесса через линейную цепь......616
21.1. Характеристики линейной цепи..............................616
21.2. Распределение вероятностей случайного процесса
на выходе линейной цепи.........................................618
21.3. Математическое ожидание и корреляционная функция
случайного процесса на выходе линейной цепи.......................620
21.4. Спектр случайного процесса на выходе линейной цепи..........624
21.5. Оптимальные линейные цепи...................................639
Раздел 22. Нелинейные преобразования случайных процессов..............645
22.1. Прямой метод определения характеристик случайного
процесса на выходе нелинейного устройства.........................645
22.2. Характеристики случайного процесса на выходе
нелинейного устройства со степенной характеристикой...............649
22.3. Метод преобразований........................................663
22.4. Метод производных...........................................669
Раздел 23. Анализ характеристик случайного процесса
на выходе множительного коррелятора...................................674
23.1. Распределение случайного процесса на выходе
перемножителя...................................................674
23.2. Корреляционная функция и спектр случайного процесса
на выходе перемножителя.........................................675
23.3. Характеристики случайного процесса
на выходе множительного коррелятора.............................679
23.4. Кратковременный анализ случайного процесса на выходе
множительного коррелятора.........................................685
23.5. Характеристики сигнала на выходе корреляционного
транспонатора.....................................................691
Список литературы к части 2.......................................699
704